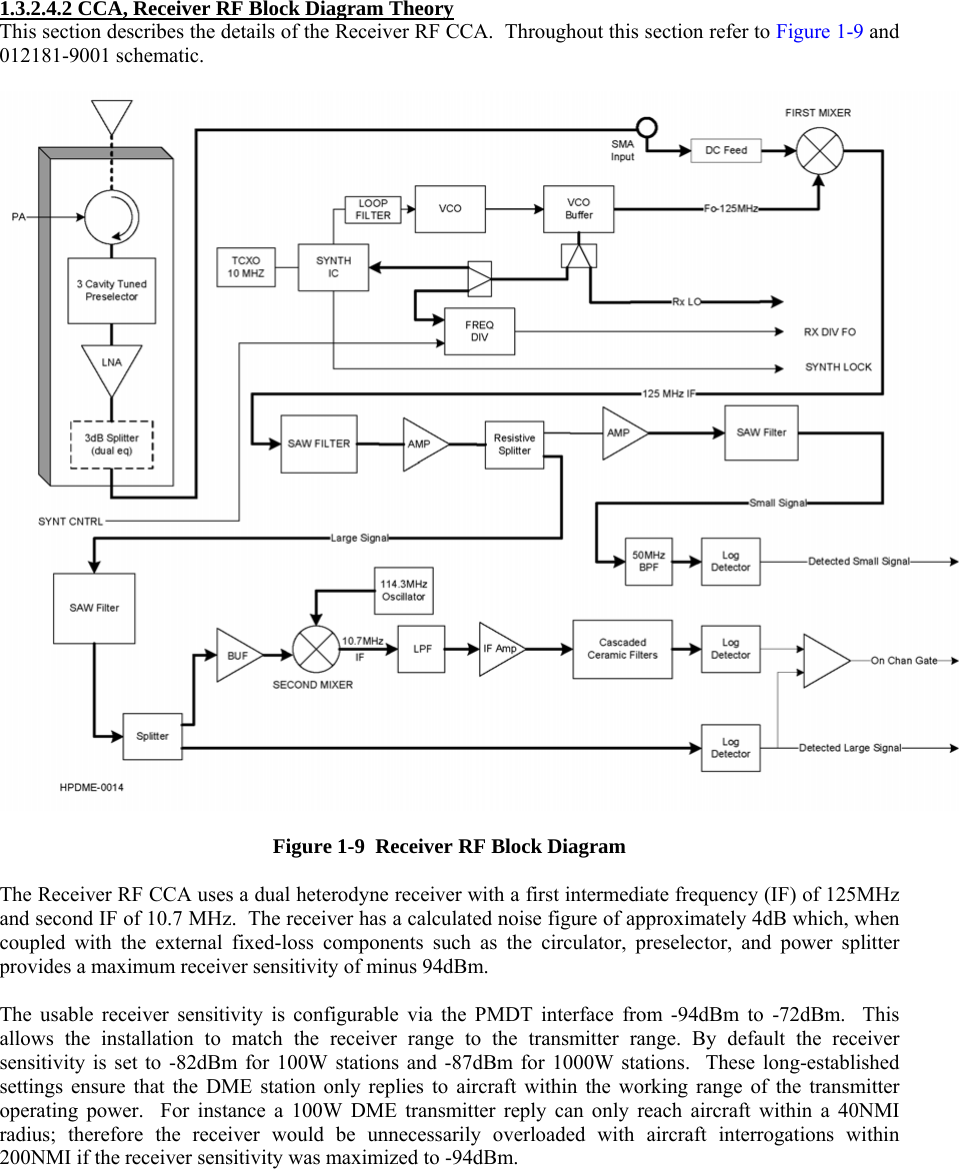
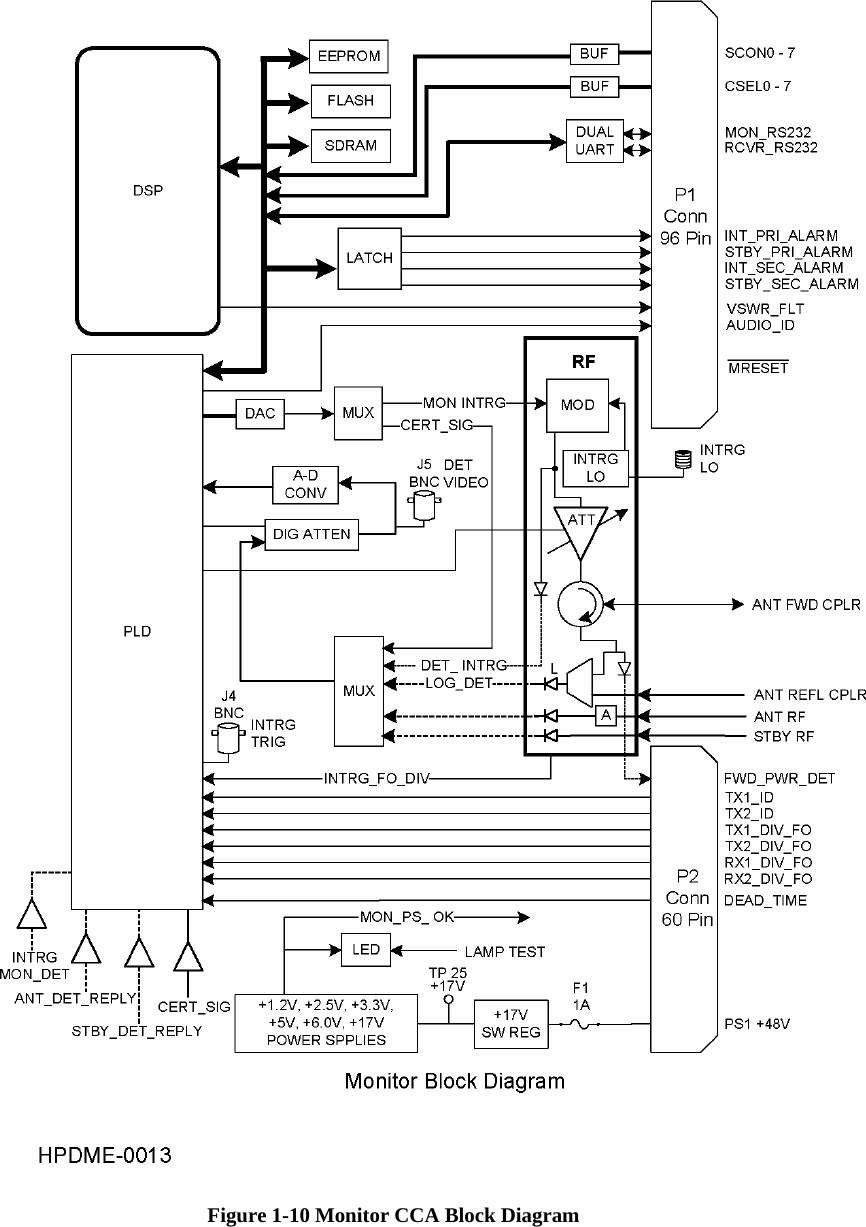
Selex Sistemi Integrati DMEH2 AVIATION SERVICES DME TRANSMITTER User Manual TECHNICAL DESCRIPTION Manual
Selex Sistemi Integrati Inc. AVIATION SERVICES DME TRANSMITTER TECHNICAL DESCRIPTION Manual
Contents
- 1. USERS MANUAL 1
- 2. USERS MANUAL 2
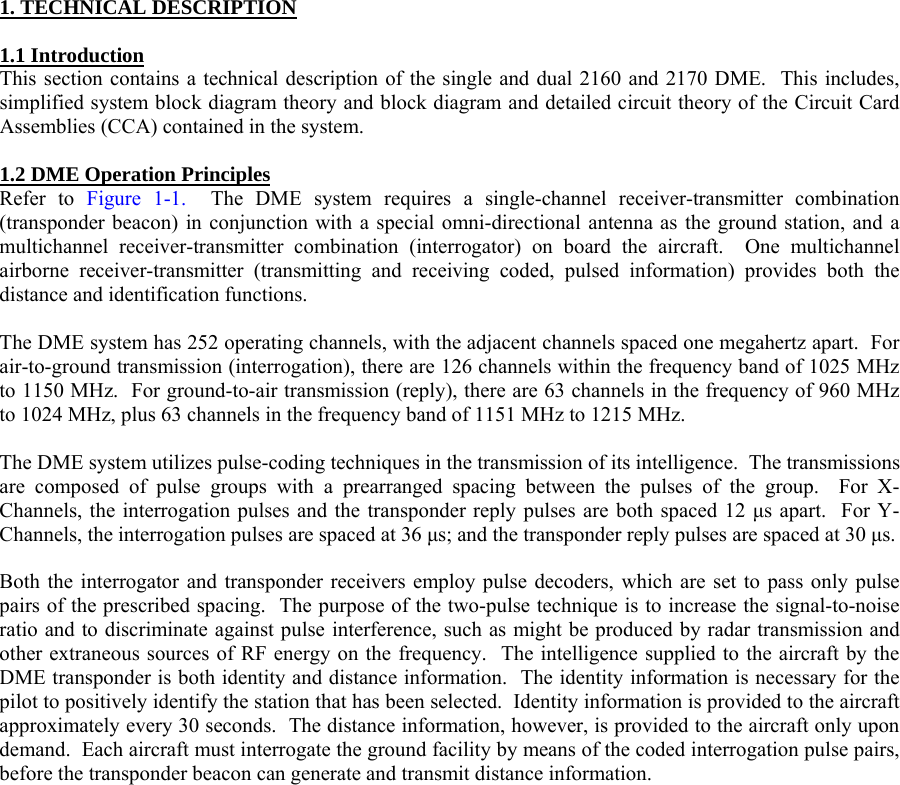
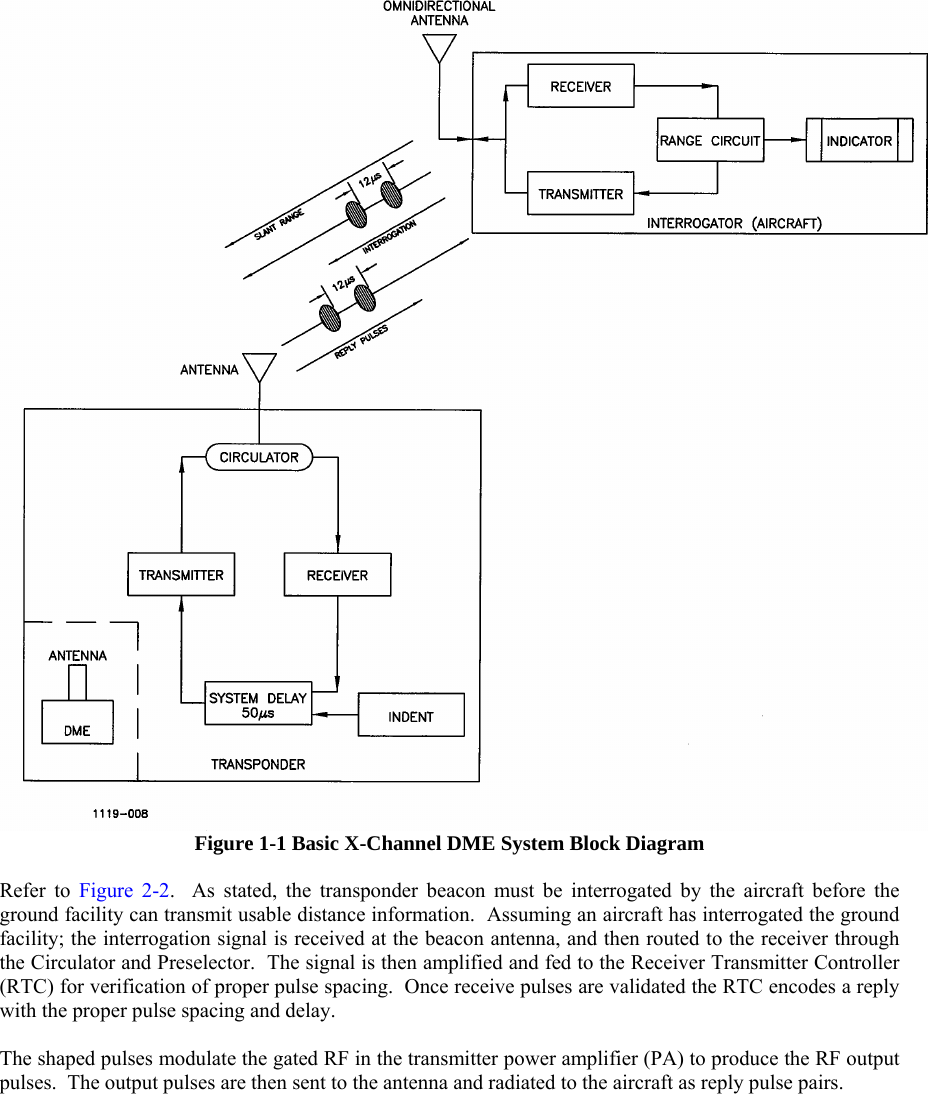
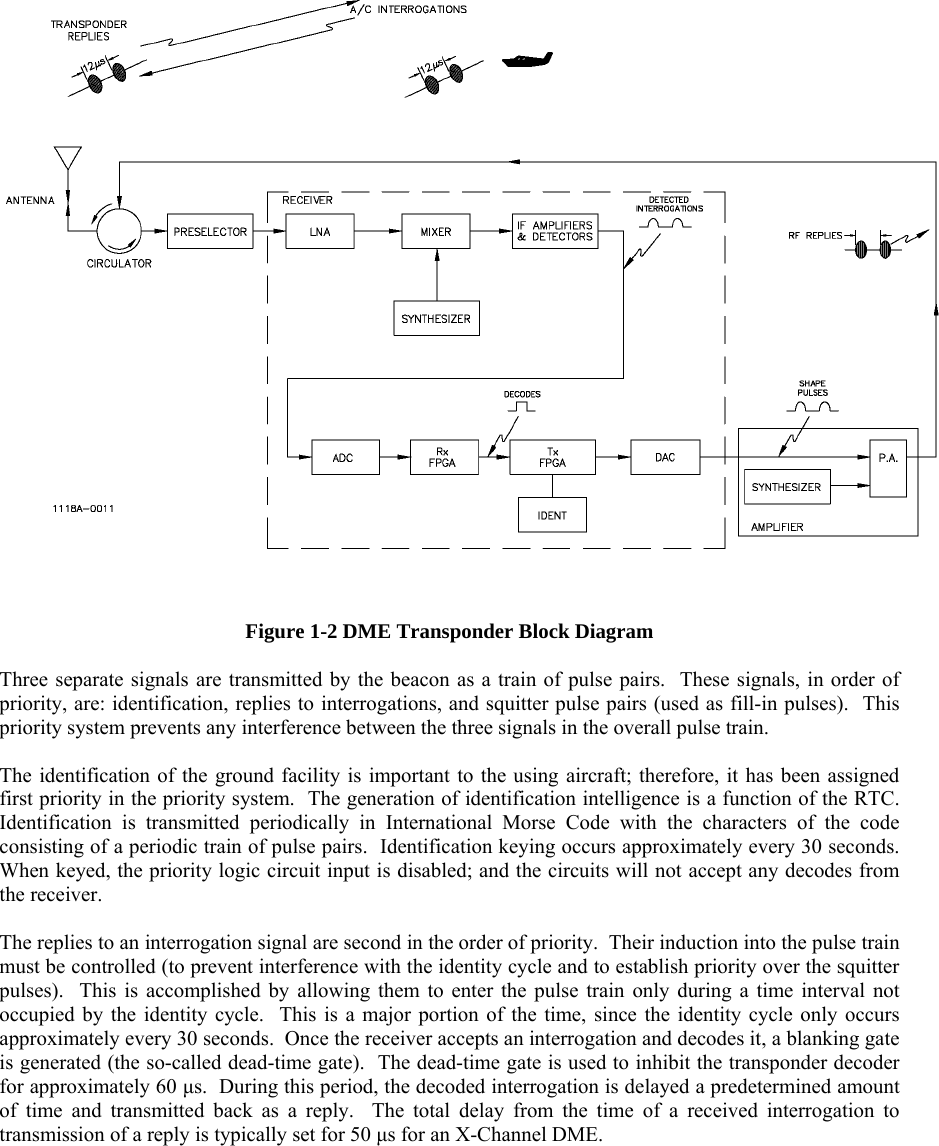
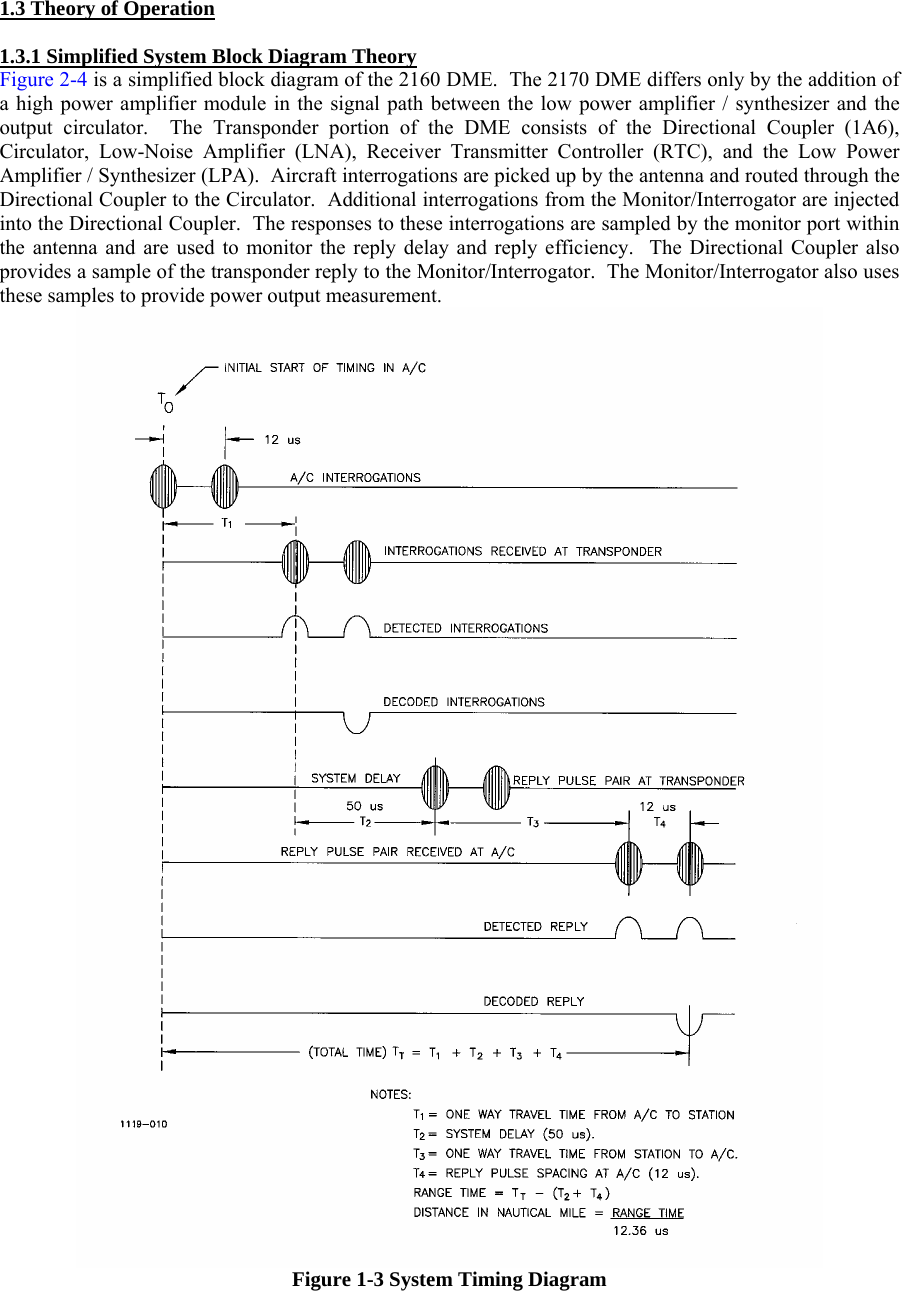
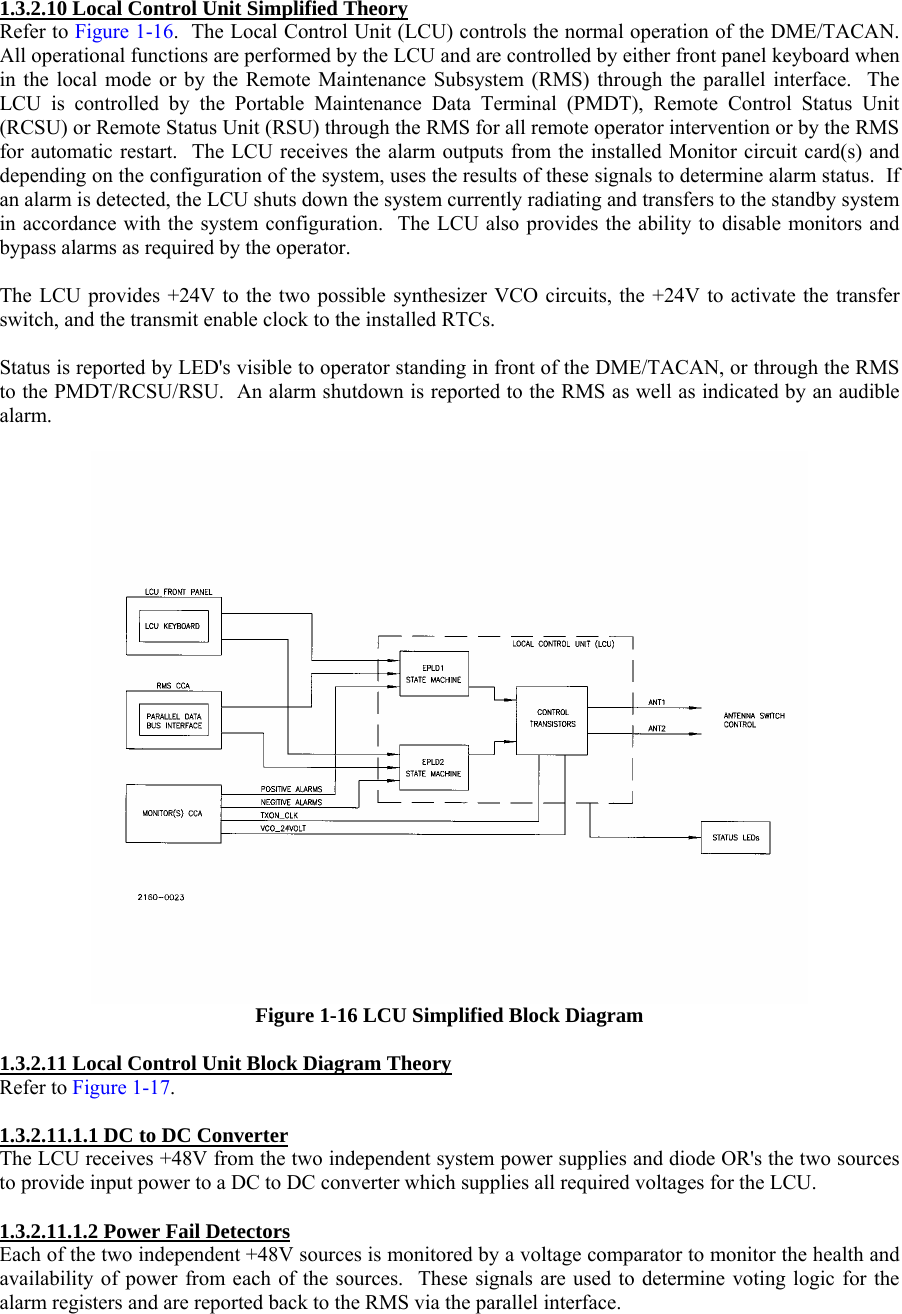
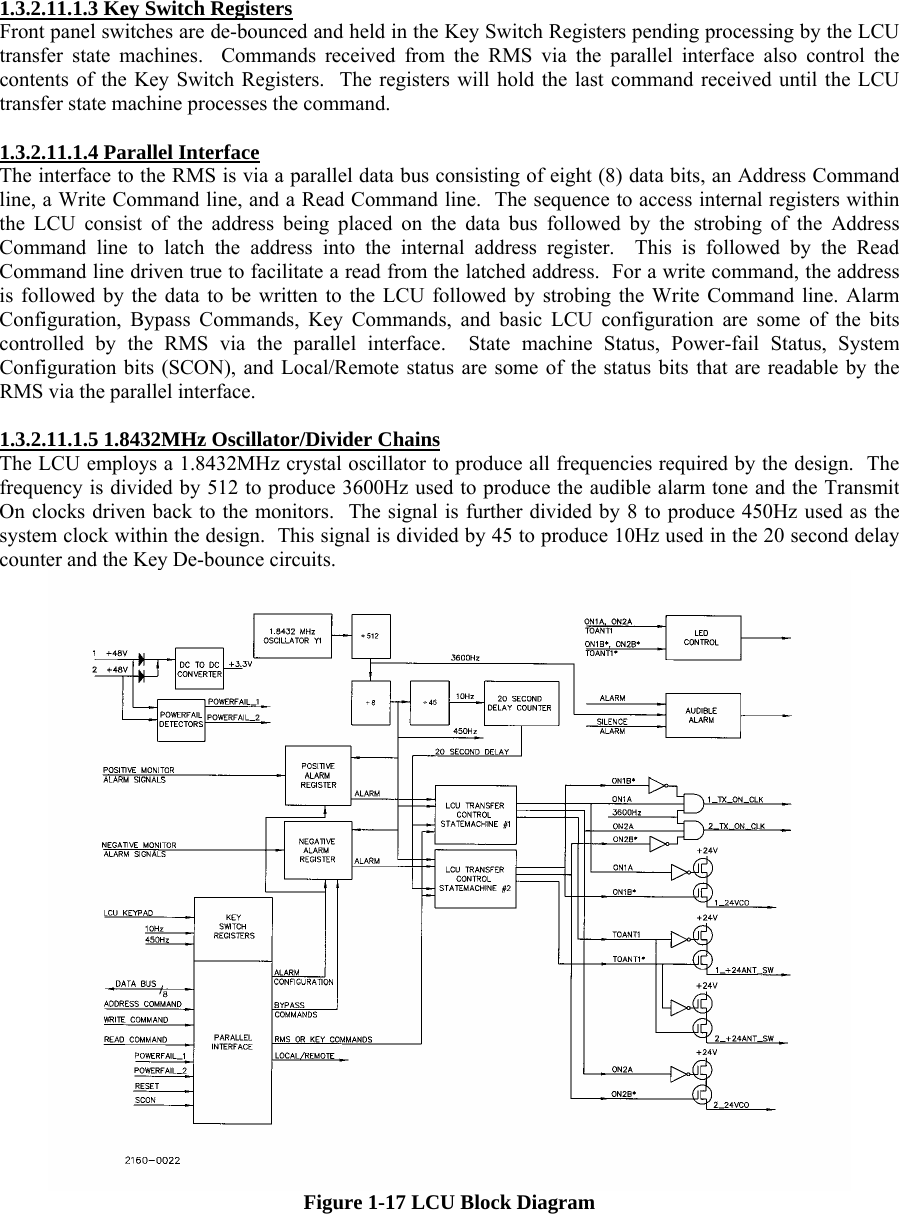
USERS MANUAL 2