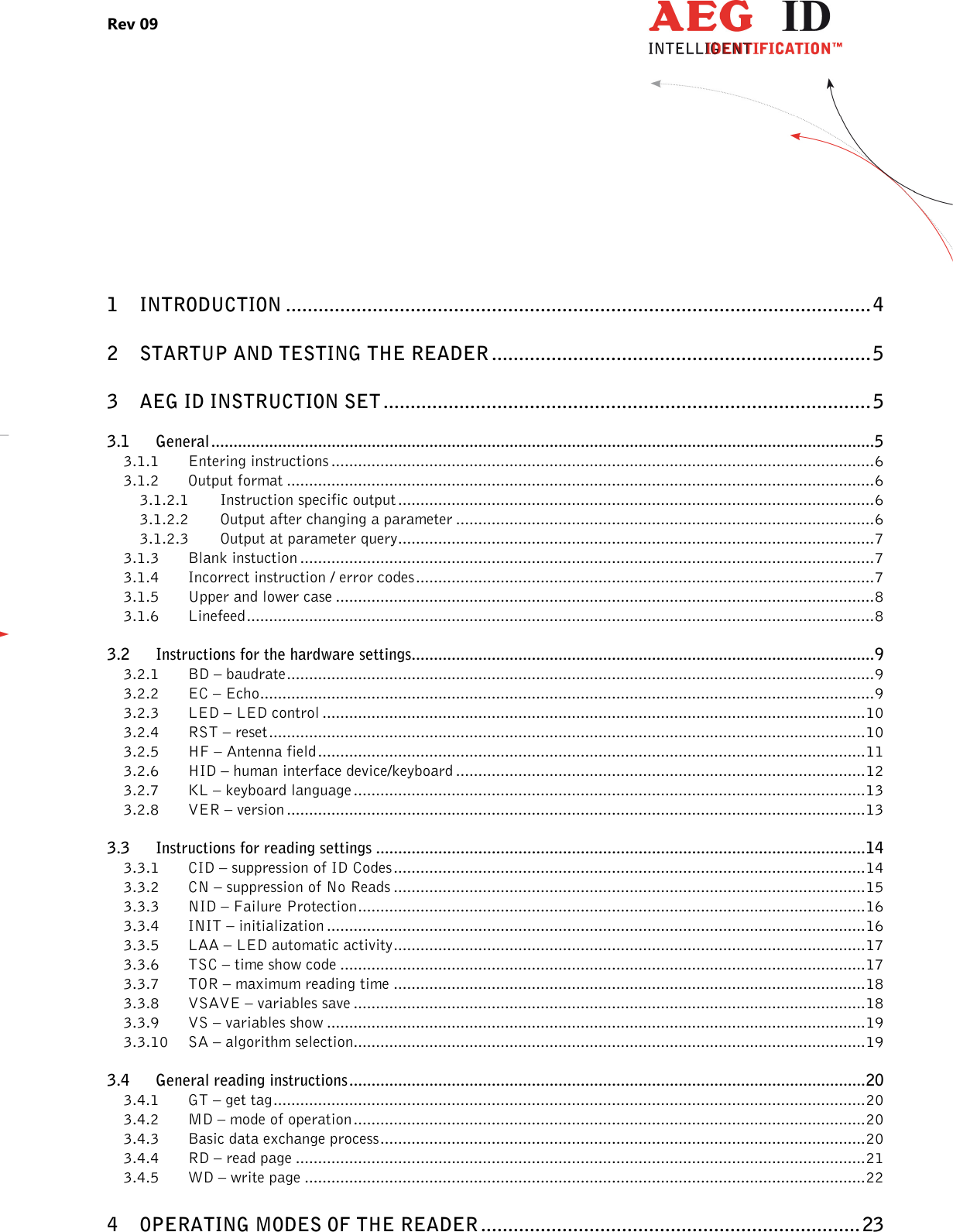
AEG Identifikationssysteme UDT100L RFID reader User Manual Installation Guide ARE DT1 LF 09 A17
AEG Identifikationssysteme GmbH RFID reader Installation Guide ARE DT1 LF 09 A17
UserManual.wiki
>
AEG Identifikationssysteme
>
UDT100L User Manual
User Manual
Navigation menu
Upload a User Manual
Namespaces
Wiki Guide
HTML
PDF
Info
Views
User Manual
Discussion / Help
Navigation