B plus B SmartWorx WSM2400 MESH RF loT Module User Manual
B&B; Electronics MESH RF loT Module
User Manual

SmartMesh® IP Node 2.4GHz
(MESH RF IoT Module)
802.15.4e Wireless Node Module
User Manual
2
USA Headquarters
Advantech B+B SmartWorx
707 Dayton Road
Ottawa, IL 61350 USA
Phone (815) 433-5100 -- General Fax (815) 433-5105
Website: www.advantech-bb.com
support@advantech-bb.com
European Headquarters
Advantech B+B SmartWorx
Westlink Commercial Park
Oranmore, Co. Galway, Ireland
Phone +353 91-792444 -- Fax +353 91-792445
Document: SmartMeshIP_Node_2.4GH_R1_1116m.docx

3
CONTENTS
Figures ........................................................................................................................................................................... 4
Tables ............................................................................................................................................................................. 5
Features ......................................................................................................................................................................... 6
Network Features ...................................................................................................................................................... 6
505-10368-00/505-10369-00 Features ..................................................................................................................... 6
Description..................................................................................................................................................................... 7
SmartMesh Network Overview ..................................................................................................................................... 8
Absolute Maximum Ratings ......................................................................................................................................... 10
Typical Performance Characteristics ........................................................................................................................... 18
Pin Functions ............................................................................................................................................................... 24
Operation ..................................................................................................................................................................... 28
Power Supply ........................................................................................................................................................... 29
Supply Monitoring and Reset .................................................................................................................................. 29
Precision Timing ....................................................................................................................................................... 30
Application Time Synchronization ........................................................................................................................... 30
Time References ...................................................................................................................................................... 30
Relaxation Oscillator ................................................................................................................................................ 30
20MHz Crystal .......................................................................................................................................................... 31
Radio ........................................................................................................................................................................ 31
UARTs....................................................................................................................................................................... 31
API UART Protocol ................................................................................................................................................... 31
UART Mode 4 ........................................................................................................................................................... 32
CLI UART .................................................................................................................................................................. 32
Autonomous MAC ................................................................................................................................................... 32
Security .................................................................................................................................................................... 33
Temperature Sensor ................................................................................................................................................ 33

4
RADIO INHIBIT ......................................................................................................................................................... 33
Factory Installed Software ....................................................................................................................................... 33
Flash Data Retention ............................................................................................................................................... 34
Start-Up ................................................................................................................................................................... 36
Serial Flash Emulation .............................................................................................................................................. 36
Operation ................................................................................................................................................................. 36
Active State .............................................................................................................................................................. 36
Doze State ................................................................................................................................................................ 36
Applications Information ............................................................................................................................................. 37
Signal/Data Acquisition and Control ........................................................................................................................ 37
Soldering Information .............................................................................................................................................. 37
fcc, industry canada, SAFETY INFORMATION AND WARNINGS ................................................................................... 38
FCC Compliance Statement ..................................................................................................................................... 38
INDUSTRY CANADA Compliance Statement ............................................................................................................ 38
FCC RF Radiation Exposure Statement .................................................................................................................... 38
Modification warning .............................................................................................................................................. 38
Advantech B+B SmartWorx Technical Support ........................................................................................................... 39
FIGURES
Figure 1. Mesh Network ................................................................................................................................................ 8
Figure 2. Mesh network ................................................................................................................................................. 9
Figure 3. API UART Timing ........................................................................................................................................... 15
Figure 4. Timestamp Timing ........................................................................................................................................ 15
Figure 5. Radio Inhibit Timing ...................................................................................................................................... 16
Figure 6. Flash programming interface timing ............................................................................................................ 17
Figure 7. Mesh network ............................................................................................................................................... 19

5
Figure 8. Example network graphs .............................................................................................................................. 19
Figure 9. ....................................................................................................................................................................... 20
Figure 10. ..................................................................................................................................................................... 20
Figure 11. ..................................................................................................................................................................... 21
Figure 12. ..................................................................................................................................................................... 21
Figure 13. ..................................................................................................................................................................... 21
Figure 14. ..................................................................................................................................................................... 22
Figure 15. ..................................................................................................................................................................... 23
Figure 16 ...................................................................................................................................................................... 23
Figure 17 ...................................................................................................................................................................... 23
Figure 18. Analog input chain ...................................................................................................................................... 27
Figure 19. WSM2400 block diagram ............................................................................................................................ 29
Figure 20. UART Mode 4 flow control ......................................................................................................................... 32
Figure 21. Equation ...................................................................................................................................................... 34
Figure 22. WSM2400 state diagram ............................................................................................................................ 35
TABLES
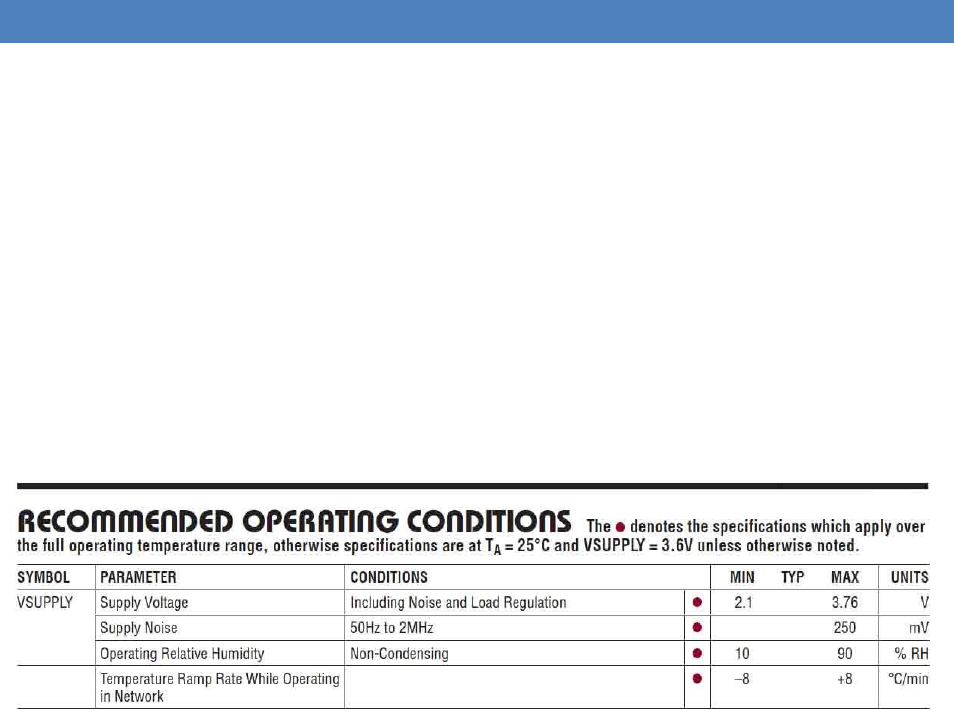
Table 1. Recommended operating conditions ............................................................................................................. 10
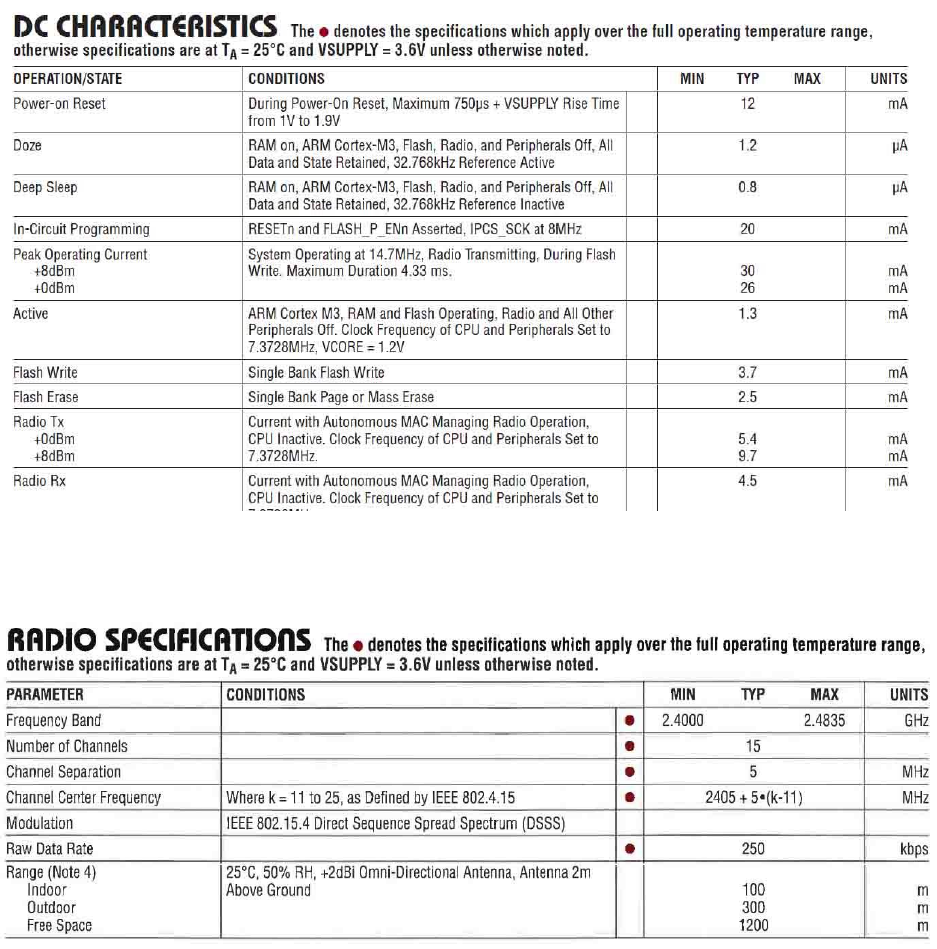
Table 2. DC characteristics ........................................................................................................................................... 11
Table 3. Radio specifications ....................................................................................................................................... 11
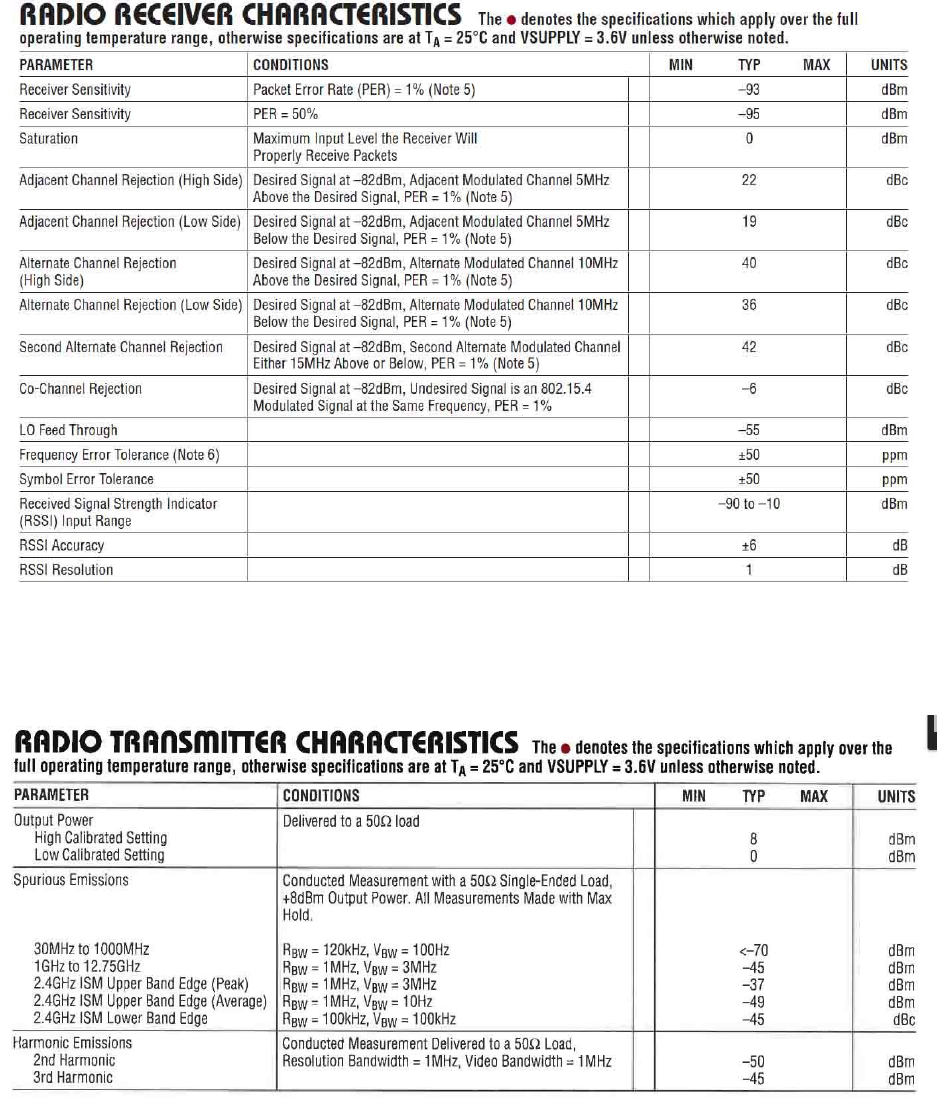
Table 4. Radio receiver characteristics ........................................................................................................................ 12
Table 5. Radio transmitter characteristics ................................................................................................................... 12
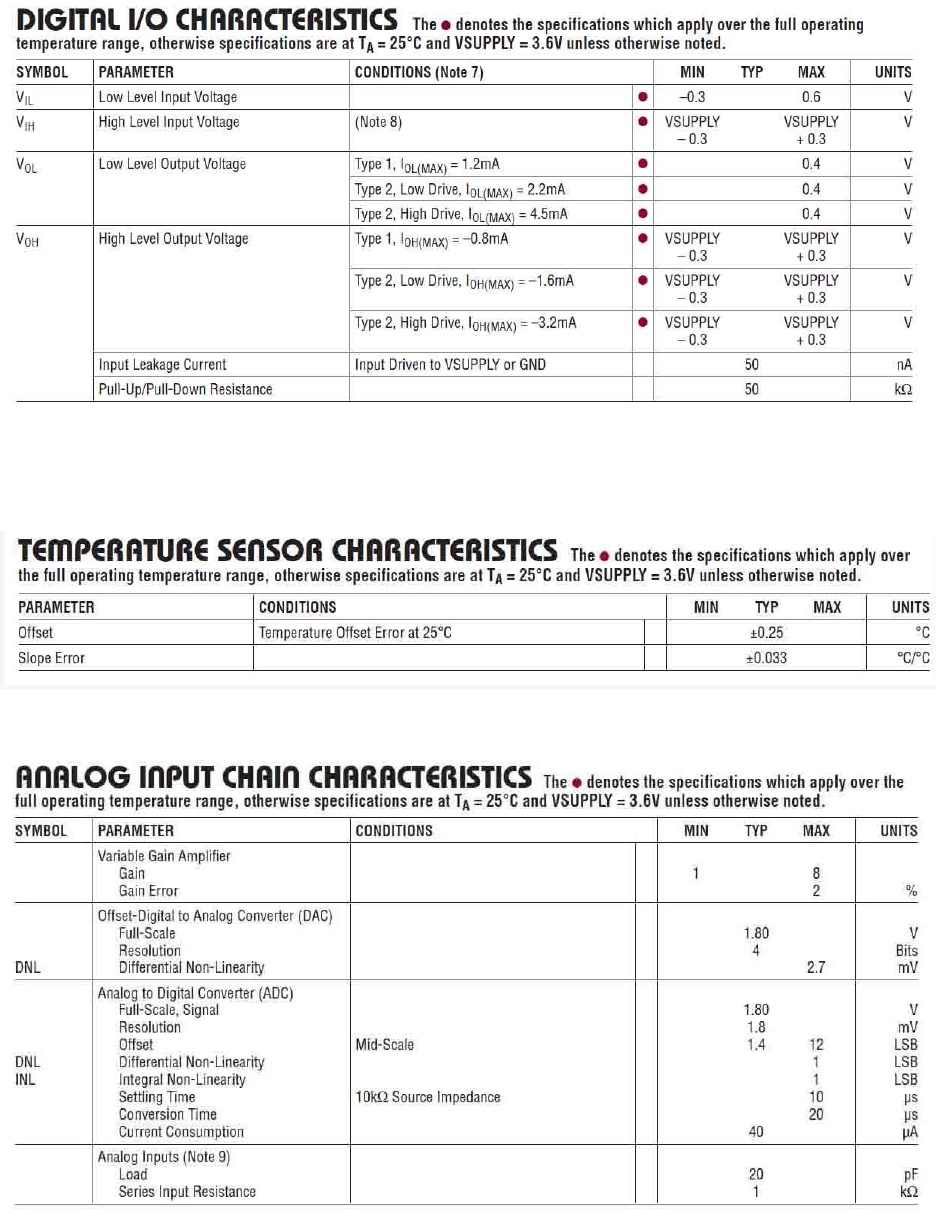
Table 6. Digital I/O characteristics ............................................................................................................................... 13
Table 7. Temperature sensor characteristics .............................................................................................................. 13
Table 8. Analog input characteristics ........................................................................................................................... 13
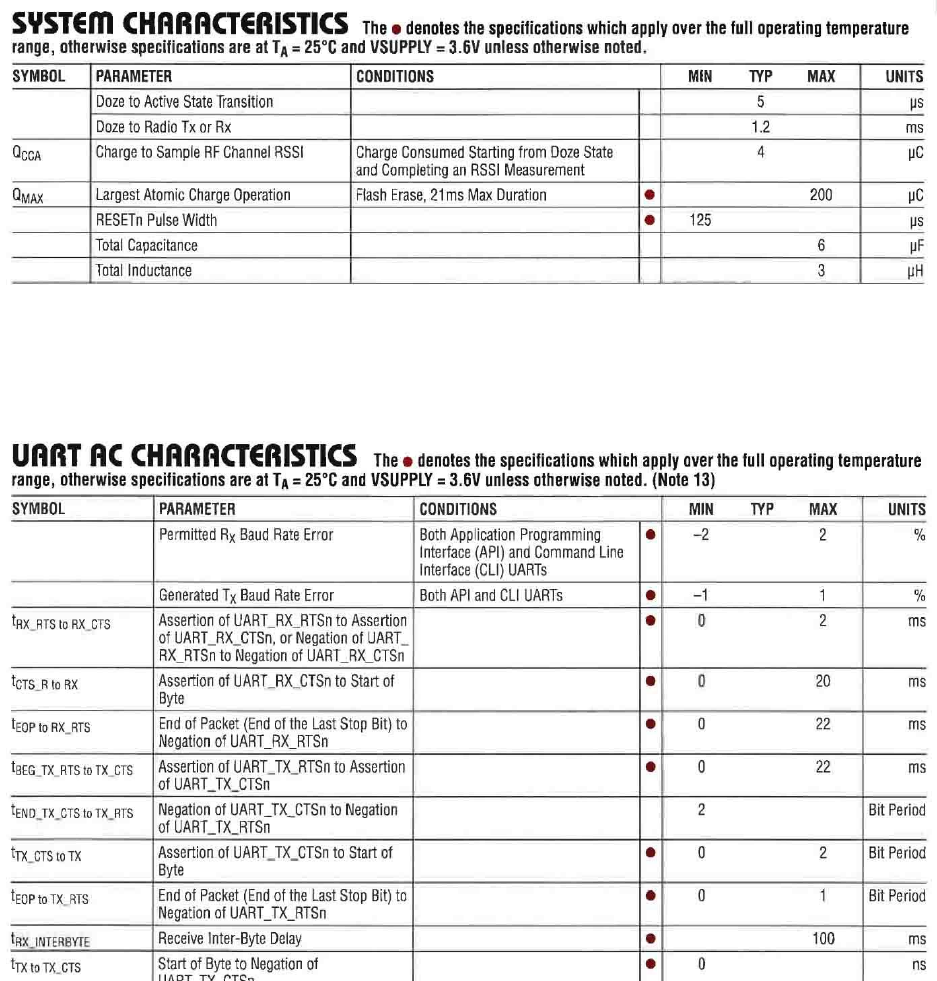
Table 9. System characteristics.................................................................................................................................... 14
6
Table 10. UART AC characteristics ............................................................................................................................... 14
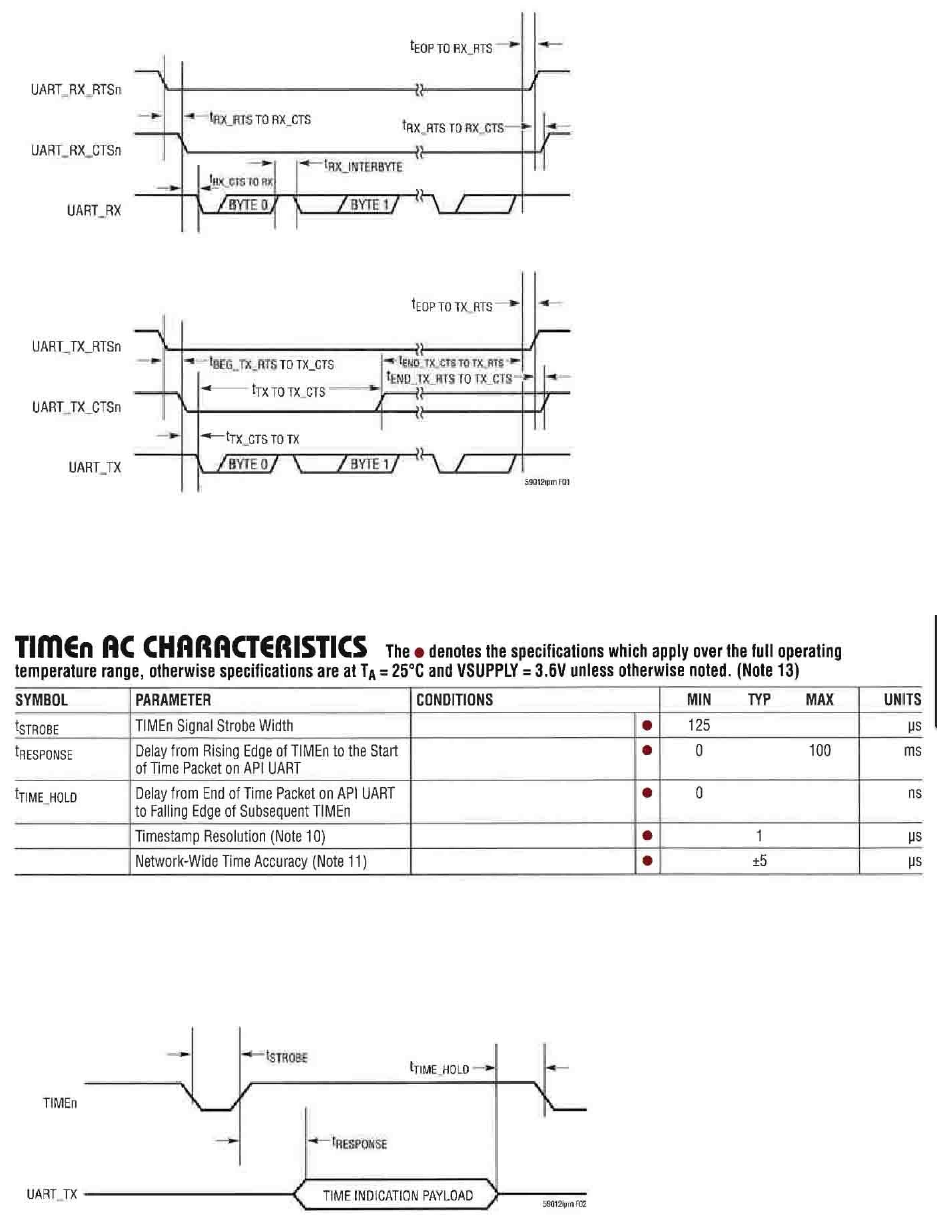
Table 11. Timen AC characteristics .............................................................................................................................. 15
Table 12. Radio inhibit ac characteristics .................................................................................................................... 16
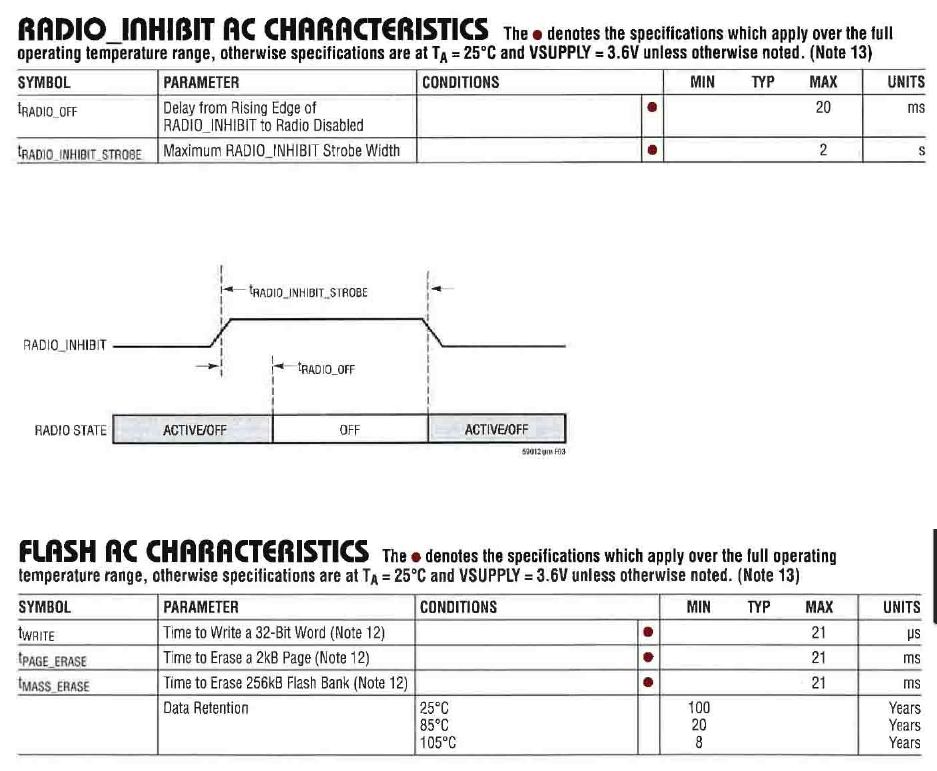
Table 13. Flash AC characteristics ................................................................................................................................ 16
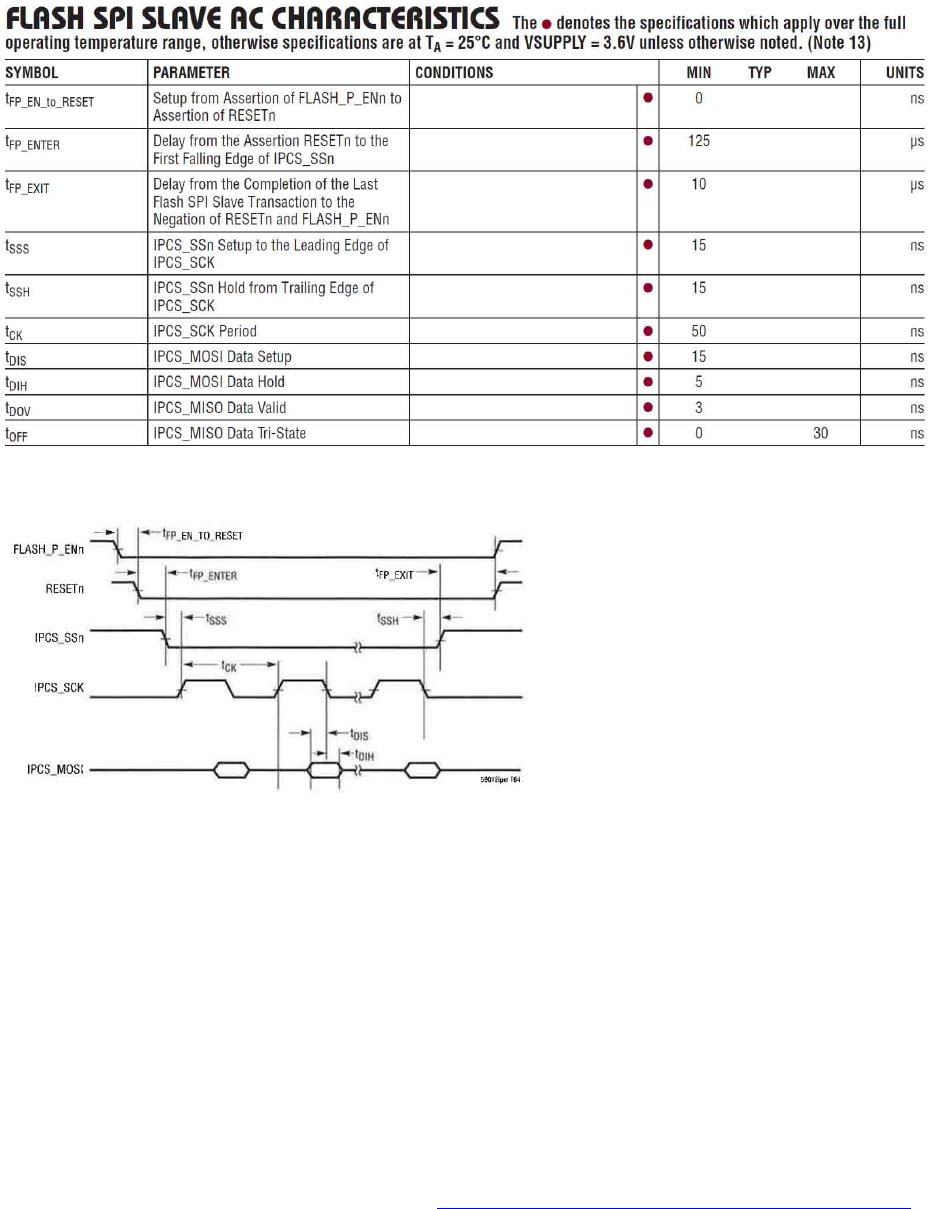
Table 14. Flash SPI slave characteristics ...................................................................................................................... 17
FEATURES
NETWORK FEATURES
Complete Radio Transceiver, Embedded Processor, and Networking Software for Forming a Self-
Healing Mesh Network
SmartMesh® Networks Incorporate:
Time Synchronized Network-Wide Scheduling
Per Transmission Frequency Hopping
Redundant Spatially Diverse Topologies
Network-Wide Reliability and Power Optimization
NIST Certified Security
SmartMesh Networks Deliver:
>99.999% Network Reliability Achieved in the Most Challenging RF Environments
Sub 50μA Routing Nodes
Compliant to 6LoWPAN Internet Protocol (IP) and IEEE 802.15.4e Standards
505-10368-00/505-10369-00 FEATURES
Industry-Leading Low Power Radio Technology with:
4.5mA to Receive a Packet
5.4mA to Transmit at 0dBm
9.7mA to Transmit at 8dBm
RF Modular Certifications include USA, Canada, EU and Japan.
PCB Assembly with Chip Antenna (505-10368-00) or with U.FL Antenna Connector (505-10369-00).

7
DESCRIPTION
SmartMesh IP™ wireless sensor networks are self-managing, low power Internet Protocol (IP) networks
built from wireless nodes called motes. The 505-10368-00/505-10369-00 is the IP mote product in the
WSM2400®* family of IEEE 802.15.4e printed circuit board assembly solutions, featuring a highly-
integrated, low power radio as well as an ARM Cortex-M3 32-bit microprocessor running Dust’s
embedded SmartMesh IP networking software.
Both the 505-10368-00 (with chip antenna) and the 505-10369-00 (with U.FL connector), are designed
for surface mount assembly. With Dust’s time-synchronized SmartMesh IP networks, all motes in the
network may route, source or terminate data, while providing many years of battery powered
operation. The SmartMesh IP software provided with the 505-10368-00/505-10369-00 is fully tested and
validated, and is readily configured via a software Application Programming Interface.
SmartMesh IP motes deliver a highly flexible network with proven reliability and low power
performance in an easy-to-integrate platform.
8
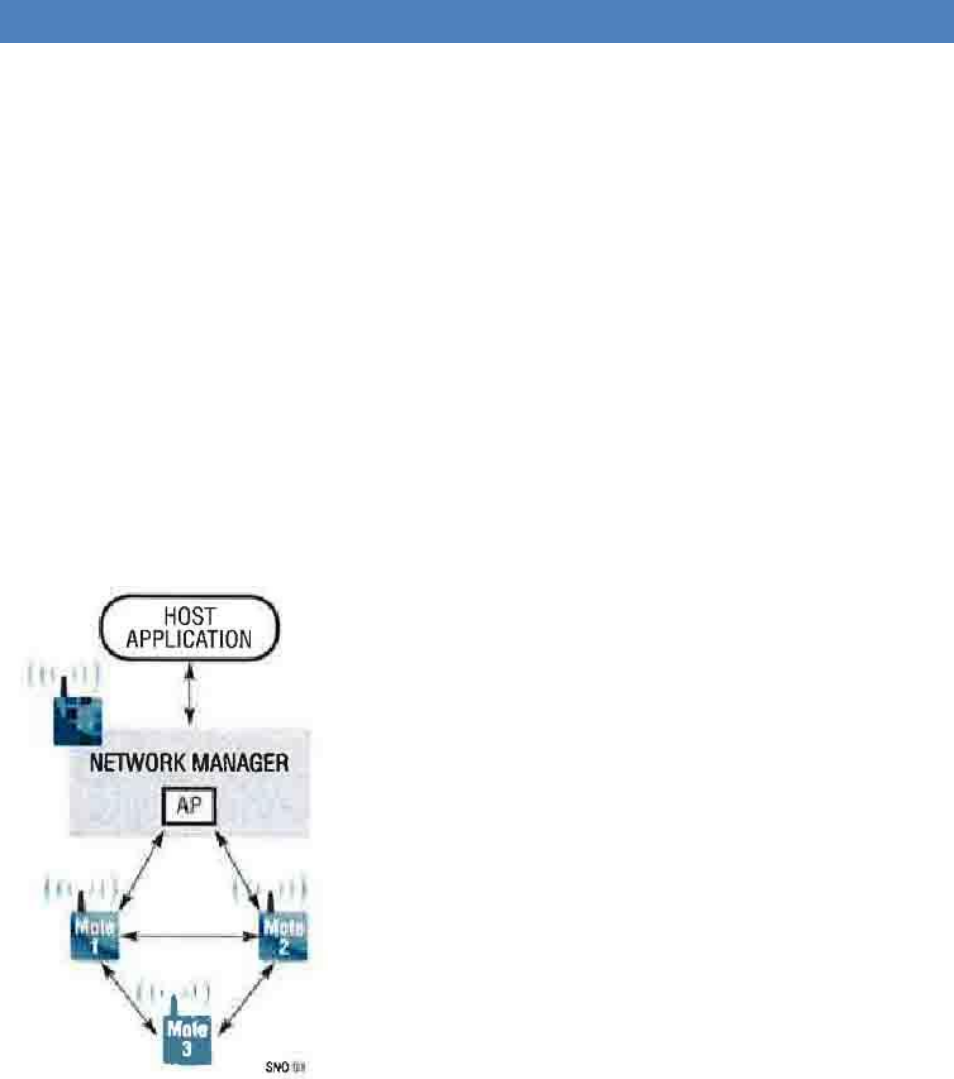
SMARTMESH NETWORK OVERVIEW
A SmartMesh network consists of a self-forming multi-hop mesh of nodes, known as motes, which
collect and relay data, and a network manager that monitors and manages network performance and
security, and exchanges data with a host application.
SmartMesh networks communicate using a time slotted channel hopping (TSCH) link layer, pioneered by
Dust Networks. In a TSCH network, all motes in the network are synchronized to within less than a
millisecond. Time in the network is organized into time slots, which enables collision-free packet
exchange and per-transmission channel-hopping. In a SmartMesh network, every device has one or
more parents (e.g. mote 3 has motes 1 and 2 as parents) that provide redundant paths to overcome
communications interruption due to interference, physical obstruction or multi-path fading. If a packet
transmission fails on one path, the next retransmission may try on a different path and different RF
channel.
A network begins to form when the network manager instructs its on-board Access Point (AP) radio to
begin sending advertisements—packets that contain information that enables a device to synchronize to
the network and request to join. This message exchange is part of the security handshake that
establishes encrypted communications between the manager or application, and mote. Once motes
have joined the network, they maintain synchronization through time corrections when a packet is
acknowledged.
Figure 1. Mesh Network
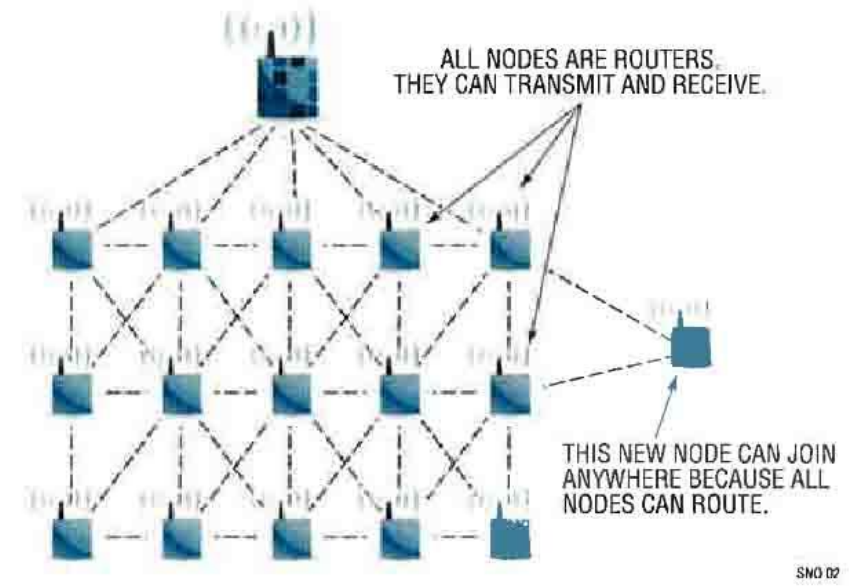
An ongoing discovery process ensures that the network continually discovers new paths as the RF
conditions change. In addition, each mote in the network tracks performance statistics (e.g. quality of
used paths, and lists of potential paths) and periodically sends that information to the network manager
in packets called health reports.
9
The Network Manager uses health reports to continually optimize the network to maintain >99.999%
data reliability even in the most challenging RF environments. The use of TSCH allows SmartMesh
devices to sleep in between scheduled communications and draw very little power in this state. Motes
are only active in time slots where they are scheduled to transmit or receive, typically resulting in a duty
cycle of < 1%. The optimization software in the Network Manager coordinates this schedule
automatically. When combined with the WSM2400 low power radio, every mote in a SmartMesh
network—even busy routing ones—can run on batteries for years. By default, all motes in a network are
capable of routing traffic from other motes, which simplifies installation by avoiding the complexity of
having distinct routers vs non-routing end nodes. Motes may be configured as non-routing to further
reduce that particular mote’s power consumption and to support a wide variety of network topologies.
Figure 2. Mesh network
At the heart of SmartMesh motes and network managers is the WSM2400 IEEE 802.15.4e System-on-
Chip (SoC), featuring Dust Networks’ highly integrated, low power radio design, plus an ARM Cortex-M3
32-bit microprocessor running SmartMesh networking software. The SmartMesh networking software
comes fully compiled yet is configurable via a rich set of Application Programming Interfaces (APIs)
which allows a host application to interact with the network, e.g. to transfer information to a device, to
configure data publishing rates on one or more motes, or to monitor network state or performance
metrics. Data publishing can be uniform or different for each device, with motes being able to publish
infrequently or faster than once per second as needed.
10
ABSOLUTE MAXIMUM RATINGS
Supply Voltage on VSUPPLY...................................3.76V
Input Voltage on AI_0/1/2/3 Inputs.......................1.80V
Voltage on Any Digital I/O pin.............................. –0.3V to VSUPPLY + 0.3V
Input RF Level....................................................... +10dBm
Storage Temperature Range (Note 3)…………...... –55°C to 105°C
Operating Temperature Range............................–40°C to 85°C
CAUTION: This part is sensitive to electrostatic discharge (ESD). It is very important that proper ESD
precautions be observed when handling the 505-10368-00/505-10369-00.
Table 1. Recommended operating conditions
11
Table 2. DC characteristics
Table 3. Radio specifications
12
Table 4. Radio receiver characteristics
Table 5. Radio transmitter characteristics
13
Table 6. Digital I/O characteristics
Table 7. Temperature sensor characteristics
Table 8. Analog input characteristics
14
Table 9. System characteristics
Table 10. UART AC characteristics
15
Figure 3. API UART Timing
Table 11. Timen AC characteristics
Figure 4. Timestamp Timing
16
Table 12. Radio inhibit ac characteristics
Figure 5. Radio Inhibit Timing
Table 13. Flash AC characteristics
17
Table 14. Flash SPI slave characteristics
Figure 6. Flash programming interface timing
Note 1: Stresses beyond those listed under Absolute Maximum Ratings may cause permanent damage to the device. Exposure
to any Absolute Maximum Rating condition for extended periods may affect device reliability and lifetime.
Note 2: ESD (electrostatic discharge) sensitive device. ESD protection devices are used extensively internal to WSM2400.
However, high electrostatic discharge can damage or degrade the device. Use proper ESD handling precautions.
Note 3: Extended storage at high temperature is discouraged, as this negatively affects the data retention of WSM2400’s
calibration data. See the FLASH Data Retention section for details.
Note 4: Actual RF range is subject to a number of installation-specific variables including, but not restricted to ambient
temperature, relative humidity, presence of active interference sources, line-of-sight obstacles, and near-presence of objects
(for example, trees, walls, signage, and so on) that may induce multipath fading. As a result, range varies.
Note 5: As Specified by IEEE Std. 802.15.4-2006: Wireless Medium Access Control (MAC) and Physical Layer (PHY) Specifications
for Low-Rate Wireless Personal Area Networks (LR-WPANs) http://standards.ieee.org/findstds/standard/802.15.4-2011.html.
Note 6: IEEE Std. 802.15.4-2006 requires transmitters to maintain a frequency tolerance of better than ±40 ppm.

18
Note 7: Per-pin I/O types are provided in the Pin Functions section.
Note 8: VIH maximum voltage input must respect the VSUPPLY maximum voltage specification.
Note 9: The analog inputs to the ADC can be modeled as a series resistor to a capacitor. At a minimum the entire circuit,
including the source impedance for the signal driving the analog input should be designed to settle to within ¼ LSB within the
sampling window to match the performance of the ADC..
Note 10: Network time accuracy is a statistical measure and varies over the temperature range, reporting rate and the location
of the device relative to the manager in the network. See the Typical Performance Characteristics section for a more detailed
description.
Note 11: Code execution from flash banks being written or erased is suspended until completion of the flash operation.
Note 12: Guaranteed by design. Not production tested.
TYPICAL PERFORMANCE CHARACTERISTICS
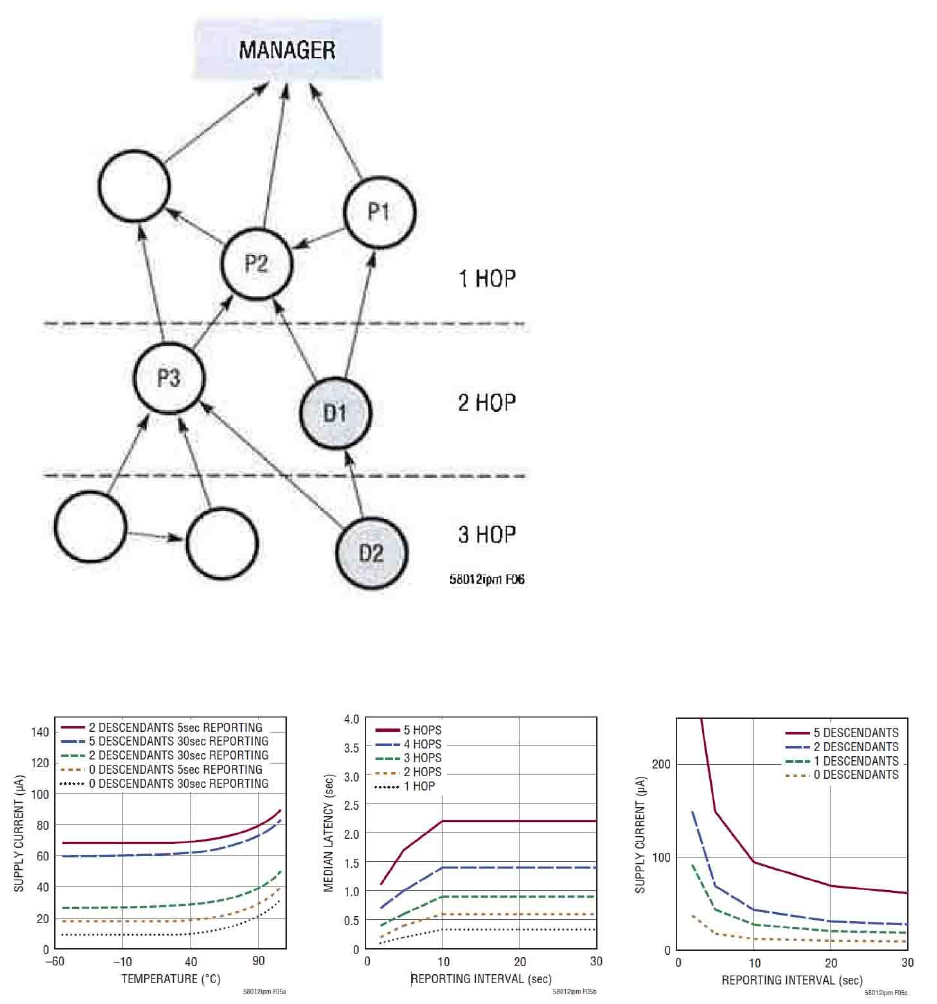
Network motes typically route through at least two parents the traffic destined for the manager. The
supply current graphs shown in Figure 8 include a parameter called descendants. In these graphs the
term descendants is short for traffic-weighted descendants and refers to an amount of activity
equivalent to the number of descendants if all of the network traffic directed to the mote in question.
Generally the number of descendants of a parent is more typically 2x or more, than the number of
traffic-weighted descendants. For example, with reference to Figure 7, Network Graph mote P1 has 0.75
traffic-weighted descendants. To obtain this value notice that mote D1 routes half its packets through
mote P1 adding 0.5 to the traffic weighted descendant value; the other half of D1’s traffic is routed
through its other parent, P2. Mote D2 routes half its packets through mote D1 (the other half going
through parent P3), which we know routes half its packets to moteP1, adding another 0.25 to the traffic-
weighted descendant value for a total traffic-weighted descendant value of 0.75
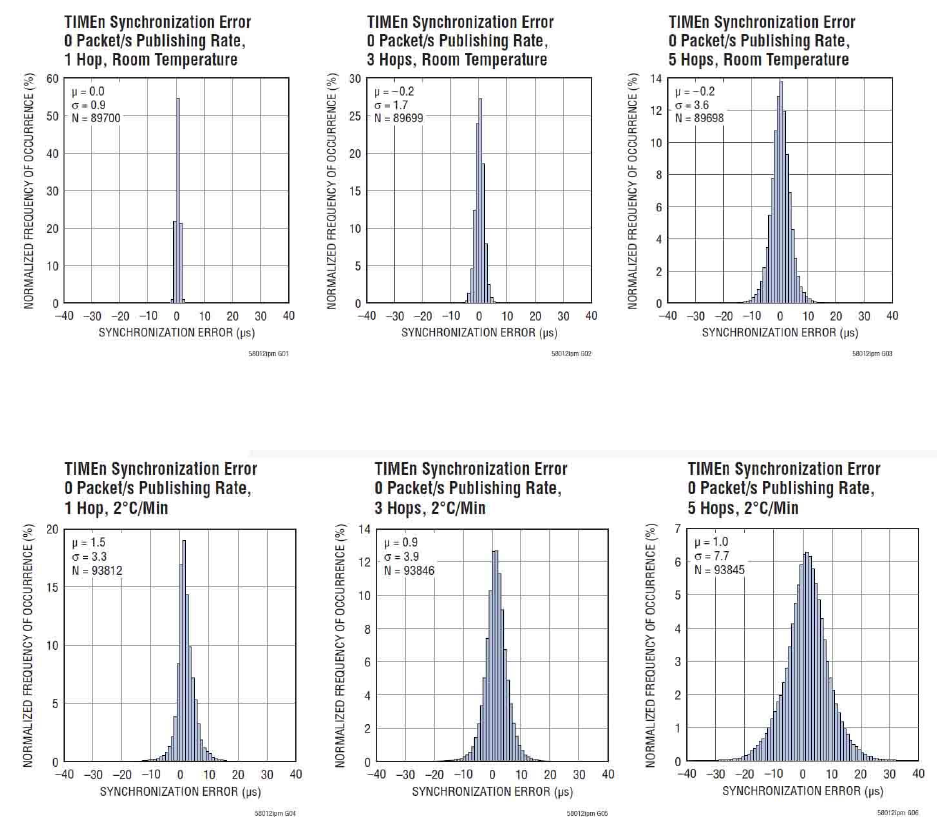
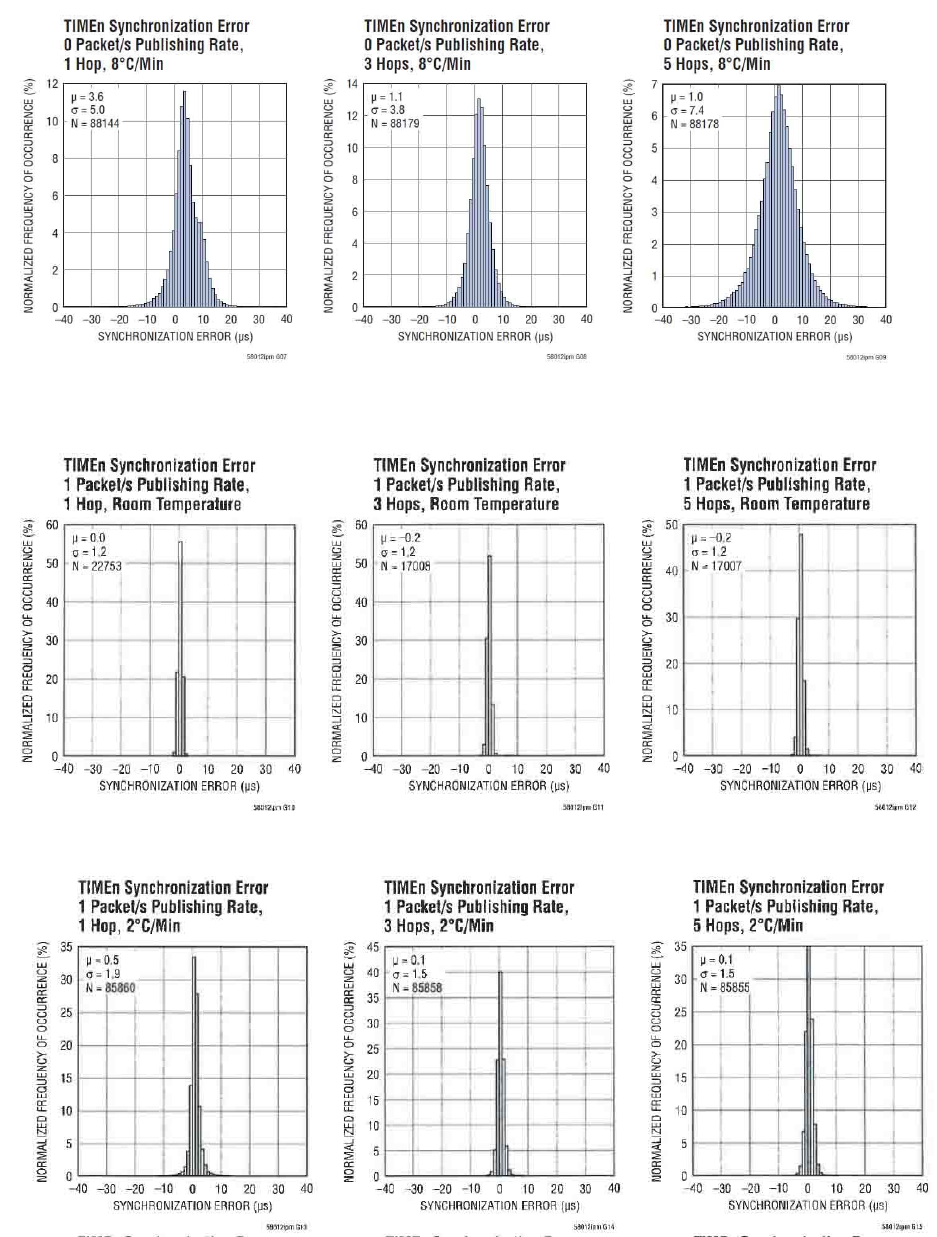
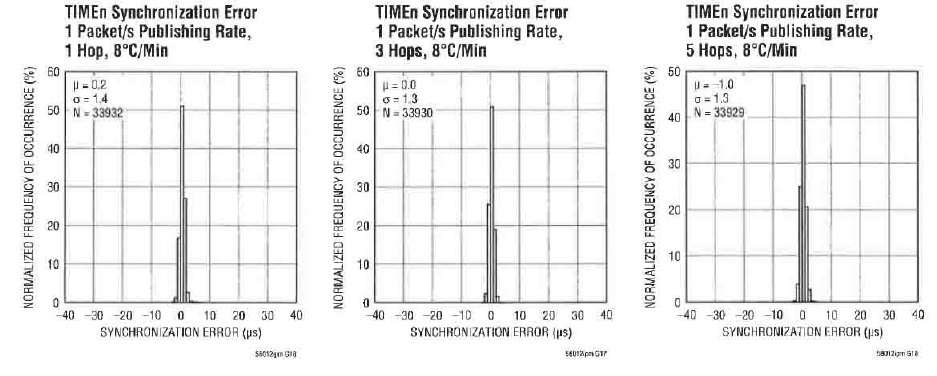
As described in the Application Time Synchronization section, WSM2400 provides two mechanisms for
applications to maintain a time base across a network. The synchronization performance plots that
follow were generated using the more precise TIMEn input. Publishing rate is the rate a mote
application sends upstream data. Synchronization improves as the publishing rate increases. Baseline
synchronization performance is provided for a network operating with a publishing rate of zero. Actual
performance for applications in network will improve as publishing rates increase. All synchronization
testing was performed with the 1-hop mote inside a temperature chamber. Timing errors due to
temperature changes and temperature differences both between the manager and this mote and
between this mote and its descendants therefore propagated down through the network. The
synchronization of the 3-hop and 5-hop motes to the manager was then affected by the temperature
ramps even though they were at room temperature. For 2°C/minute testing the temperature chamber
was cycled between –40°C and 85°C at this rate for 24 hours. For 8°C/minute testing, the temperature
chamber was rapidly cycled between 85°C and 45°C for 8 hours, followed by rapid cycling between –5°C
and 45°C for 8 hours, and lastly, rapid cycling between –40°C and 15°C for 8 hours.
19
Figure 7. Mesh network
Figure 8. Example network graphs
20
Figure 9.
Figure 10.
21
Figure 11.
Figure 12.
Figure 13.
22
Figure 14.
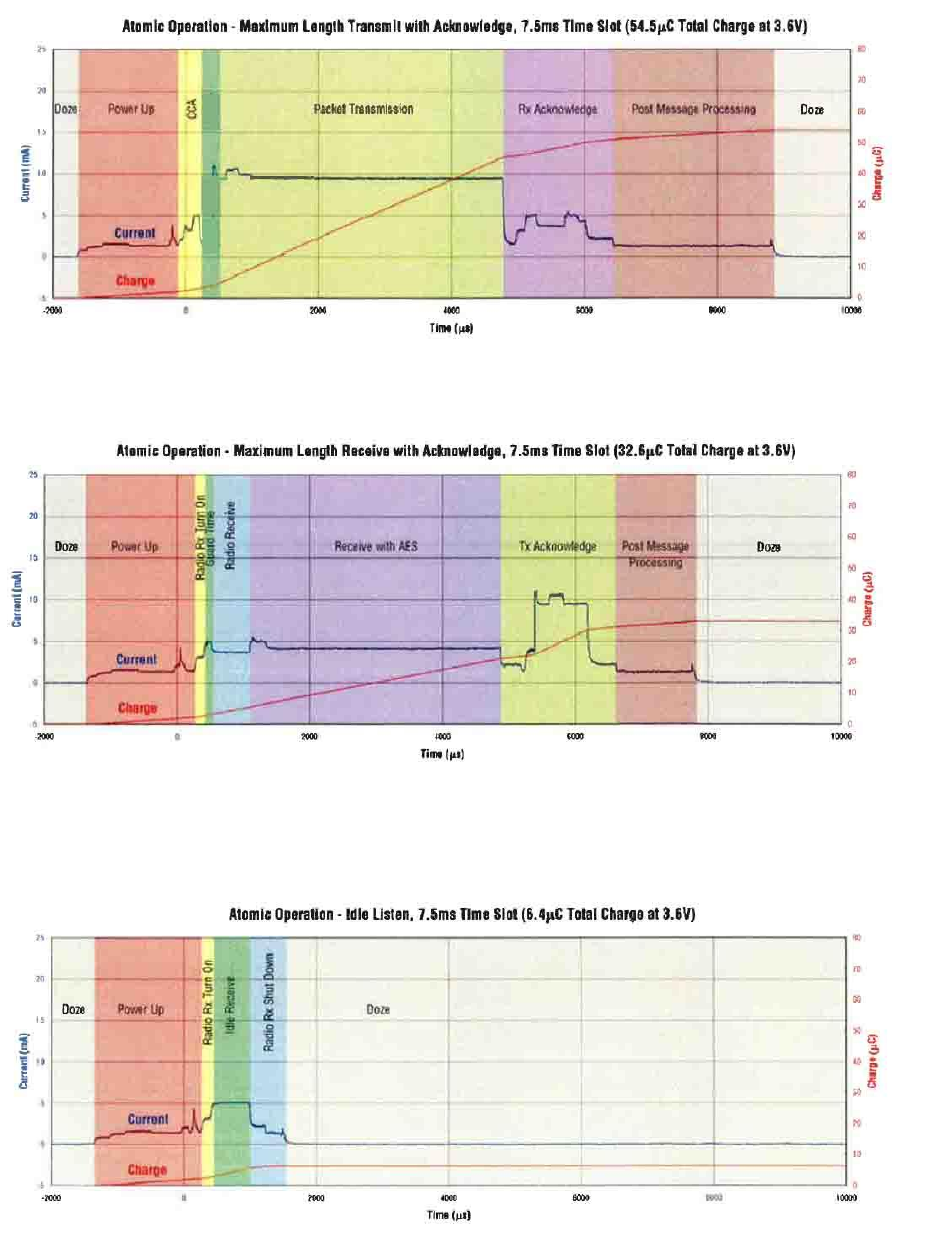
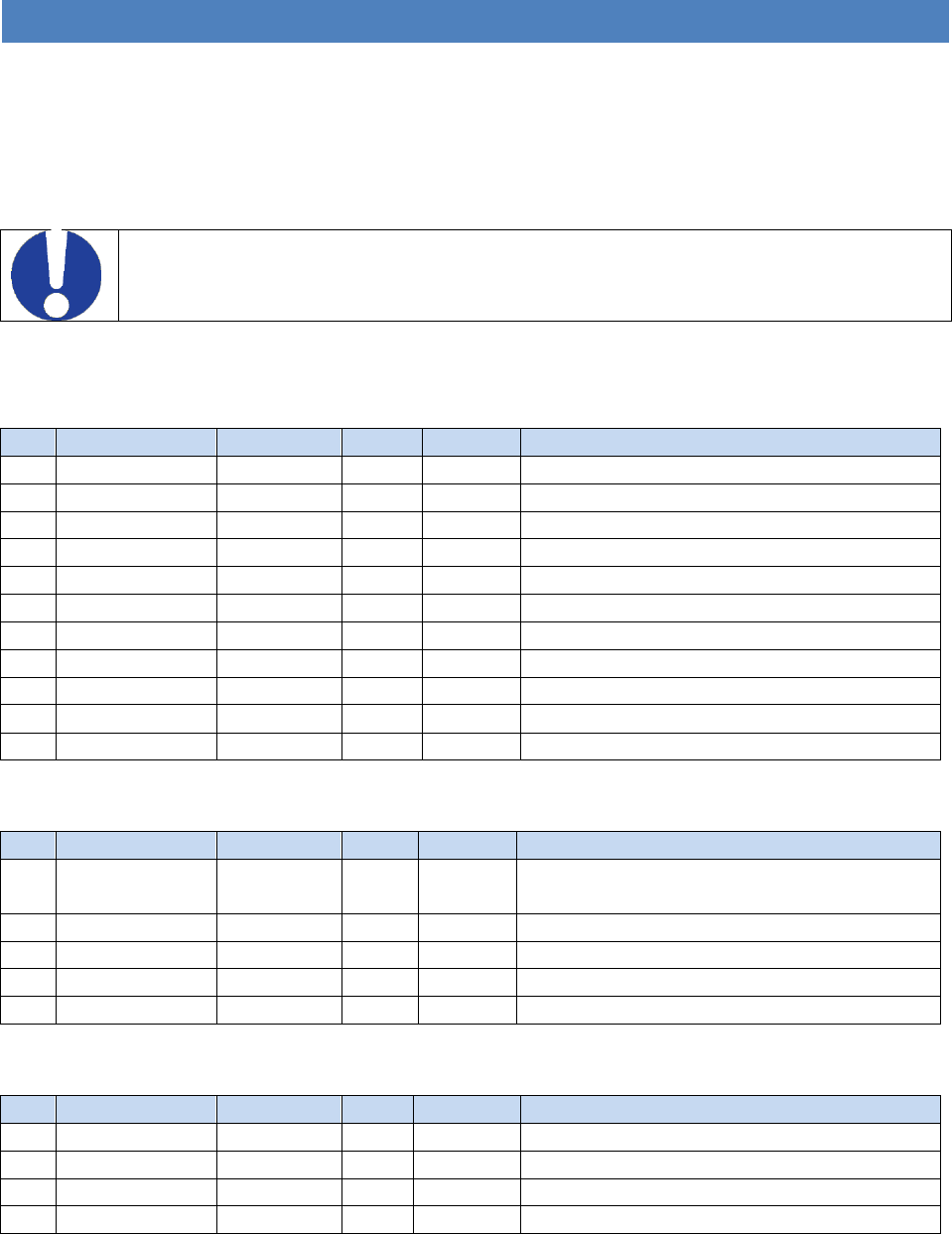
As described in the SmartMesh Network Overview section, devices in network spend the vast majority
of their time inactive in their lowest power state (doze). On a synchronous schedule a mote will wake to
communicate with another mote. Regularly occurring sequences which wake, perform a significant
function and return to sleep are considered atomic. These operations are considered atomic as the
sequence of events cannot be separated into smaller events while performing a useful function. For
example, transmission of a packet over the radio is an atomic operation. Atomic operations may be
characterized in either charge or energy. In a time slot where a mote successfully sends a packet, an
atomic transmit includes setup prior to sending the message, sending the message, receiving the
acknowledgment and the post processing needed as a result of the message being sent. Similarly in a
time slot when a mote successfully receives a packet, an atomic receive includes setup prior to listening,
listening until the start of the packet transition, receiving the packet, sending the acknowledge and the
post processing required due to the arrival of the packet.
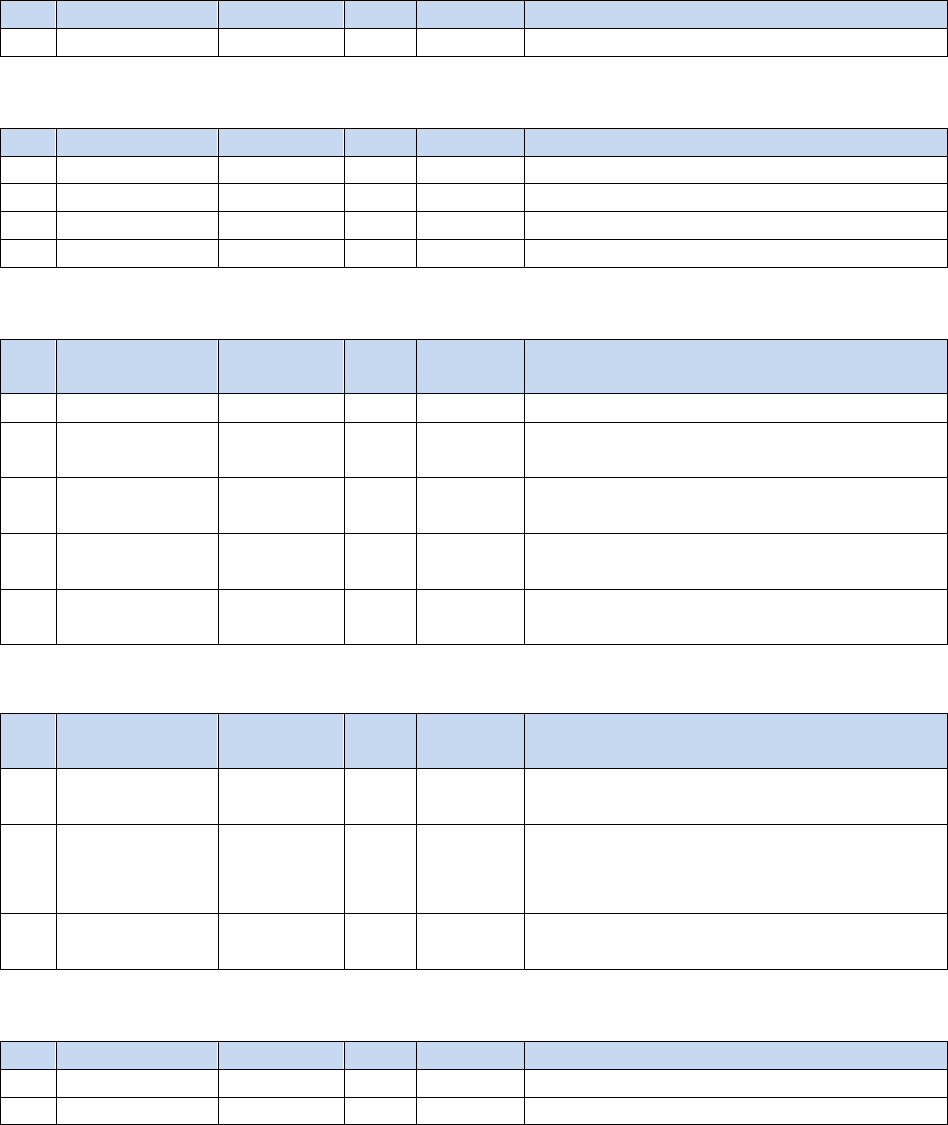
To ensure reliability each mote in the network is provided multiple time slots for each packet it
nominally will send and forward. The time slots are assigned to communicate upstream with at least two
different motes. When combined with frequency hopping this provides temporal, special and spectral
redundancy. Given this approach a mote will often listen for a message that it will never receive, since
the time slot is not being used by the transmitting mote. It has already successfully transmitted the
packet. Since typically 3 time slots are scheduled for every 1 packet to be sent or forwarded, motes will
perform more of these atomic “idle listens” than atomic transmit or atomic receive sequences.
Examples of transmit, receive and idle listen atomic operations are shown below.
23
Figure 15.
Figure 16
Figure 17
24
PIN FUNCTIONS
The following table organizes the pins by functional groups. For those I/O with multiple functions the
alternate functions are shown on the second and third line in their respective row. The No column
provides the pin number. The second column lists the function. The Type column lists the I/O type. The
I/O column lists the direction of the signal relative to WSM2400. The Pull column shows which signals
have a fixed passive pull-up or pull-down. The Description column provides a brief signal description.
NOTE: Pin functions shown in italics are currently not supported in software
No.
Power Supply
Type
I/0
PULL
Description
1
GND
Power
-
-
Ground Connection
2
GND
Power
-
-
Ground Connection
3
GND
Power
-
-
Ground Connection
4
GND
Power
-
-
Ground Connection
15
GND
Power
-
-
Ground Connection
28
GND
Power
-
-
Ground Connection
29
GND
Power
-
-
Ground Connection
41
GND
Power
-
-
Ground Connection
53
GND
Power
-
-
Ground Connection
54
GND
Power
-
-
Ground Connection
35
VSUPPLY
Power
-
-
Power Supply Input to WSM2400
No.
Radio
Type
I/0
PULL
Description
37
RADIO_INHIBIT
GPIO15
1(Note 14)
I
I/O
-
Radio Inhibit
General Purpose Digital I/O
39
GPIO17
1
I/O
-
General Purpose Digital I/O
40
GPIO18
1
I/O
-
General Purpose Digital I/O
42
GPIO19
1
I/O
-
General Purpose Digital I/O
-
Antenna
N/A
N/A
-
Chip Antenna/U.FL Connector
No.
Analog
Type
I/0
PULL
Description
43
AI_0
Analog
I
-
Analog Input 0
44
AI_1
Analog
I
-
Analog Input 1
46
AI_2
Analog
I
-
Analog Input 2
45
AI_3
Analog
I
-
Analog Input 3
25
No.
Reset
Type
I/0
PULL
Description
47
RESETn
1
I
UP
Reset input, Active Low
No.
JTAG
Type
I/0
PULL
Description
48
TDI
1
I
UP
JTAG Test Data In
49
TDO
1
O
-
JTAG Test Data Out
50
TMS
1
I
UP
JTAG Test mode Select
51
TCK
1
I
DOWN
JTAG Test Clock
No.
GPIOs
(NOTE 14)
Type
I/0
PULL
Description
52
DP4 (GPIO23)
1
I/O
-
General Purpose Digital I/O
5
DP3 (GPIO22)
TIMER8_EXT
1
I/O
I
-
-
General Purpose Digital I/O
External Input to 8-Bit Timer/Counter
6
DP2 (GPIO21)
LPTIMER_EXT
1
I/O
I
-
-
General Purpose Digital I/O
External Input to Low Power Timer/Counter
8
DP0 (GPIO0)
SPIM-SS-2n
1
I/O
O
-
-
General Purpose Digital I/O
SPI Master Slave Select 2, Active Low
23
DP1 (GPIO20)
TIMER16_EXT
1
I/O
I
-
-
General Purpose Digital I/O
External Input to 16-Bit Timer/Counter
No.
SPECIAL
PURPOSE
Type
I/0
PULL
Description
7
SLEEPn
GPIO14
1(Note 14)
I
I/O
-
-
Deep Sleep, Active Low
General Purpose Digital I/O
27
PWM0
TIMER16_OUT
GPIO16
2
O
O
I/O
-
-
-
Pulse Width Modulator 0
16-Bit Timer/Counter Match Output/PWM
General Purpose Digital I/O
36
TIMEn
GPIO1
1(Note 14)
I
I/O
-
-
Time Capture Request, Active Low
General Purpose Digital I/O
No.
CLI
Type
I/0
PULL
Description
9
UARTC0_TX
2
O
-
CLI UART 0 Transmit
11
UARTC0_RX
1
I
UP
CLI UART 0 Receive
26
No.
SPI MASTER
Type
I/0
PULL
Description
10
SPIM-MISO
GPIO11
1
I
I/O
-
-
SPI Master(MISO) Master In Slave Out Port
General Purpose Digital I/O
13
SPIM_MOSI
GPIO10
2
O
I/O
-
-
SPI Master(MOSI) Master Out Slave In Port
General Purpose Digital I/O
16
SPIM_SCK
GPIO9
2
O
I/O
-
-
SPI Master(SCK) Serial Clock Port
General Purpose Digital I/O
22
SPIM_SS_1n
GPIO13
1
O
I/O
-
-
SPI Master Slave Select 1, Active Low
General Purpose Digital I/O
18
SPIM-SS_0n
GPIO12
1
O
I/O
-
-
SPI Master Slave Select 0, Active Low
General Purpose Digital I/O
No.
IPCS SPI/FLASH
PROGRAMMING
Type
I/0
PULL
Description
12
IPCS_MISO
TIMER16_OUT
GPIO6
2
I
O
I/O
-
-
-
SPI_Flash Emulation, Master In Slave Out
16-Bit Timer/Counter Math Output/PWM
General Purpose Digital I/O
14
IPCS_MOSI
TIMER16_EXT
GPIO5
1
I
I
I/O
-
-
-
SPI_Flash Emulation, Master Out Slave In
External Input to 16-Bit Timer/Counter
General Purpose Digital I/O
21
IPCS_SCK
TIMER8_EXT
GPIO4
1
I
I
I/O
-
-
-
SPI_Flash Emulation, Serial Clock
External Input to 8-Bit Timer/Counter
General Purpose Digital I/O
17
IPCS_SSn
LPTIMER_EXT
GPIO3
1
I
I
I/O
-
-
-
SPI_Flash Emulation Slave Select, Active Low
External Input to Low Power Timer/Counter
General Purpose Digital I/O
20
FLASH_P_ENn
1
I
UP
Flash Programming Enable, Active Low
No.
I2C/1-WIRE/SPI
SLAVE
Type
I/0
PULL
Description
19
SPIS_MISO
UARTC1_TX
1_Wire
2
O
O
I/O
-
-
-
SPI Slave (MISO) Master In Slave Out
CLI UART 1 Transmit
1 Wire Master
24
SPIS_MOSI
UARTC1_RX
GPIO26
1
I
I
I/O
-
-
-
SPI Slave (MOSI) Master Out Slave In
CLI UART 1 Receive
General Purpose Digital I/O
26
SPIS_SCK
SCL
2
I
I/O
-
-
SPI Slave (SCK) Serial Clock
I2C Serial Clock
25
SPIS_SSn
SDA
2
I
I/O
-
-
SPI Slave Select, Active Low
I2C Serial Data
27
No.
API UART
Type
I/0
PULL
Description
30
UART_RX_RTSn
1 (Note 14)
I
-
UART Receive, Request to Send, Active Low
31
UART_RX_CTSn
1
O
-
UART Receive, Clear to Send, Active Low
32
UART_RX
1 (Note 14)
I
-
UART Receive
33
UART_TX_RTSn
1
O
-
UART Transmit, Request to Send, Active Low
34
UART_TX_CTSn
1 (Note 14)
I
-
UART Transmit, Clear to Send, Active Low
38
UART_TX
2
O
-
UART Transmit
Note 14: These inputs are always enabled and must be driven or pulled to
a valid state to avoid leakage
Note 15: See also pins 13, 18, and 23 for additional GPIO ports
VSUPPLY: System and I/O Power Supply. Provides power to the module. The digital-interface I/O
voltages are also set by this voltage.
ANTENNA: Multiplexed Receiver Input and Transmitter Output Pin. The impedance presented to the
U.FL connector should be 50Ω, single-ended with respect to ground.
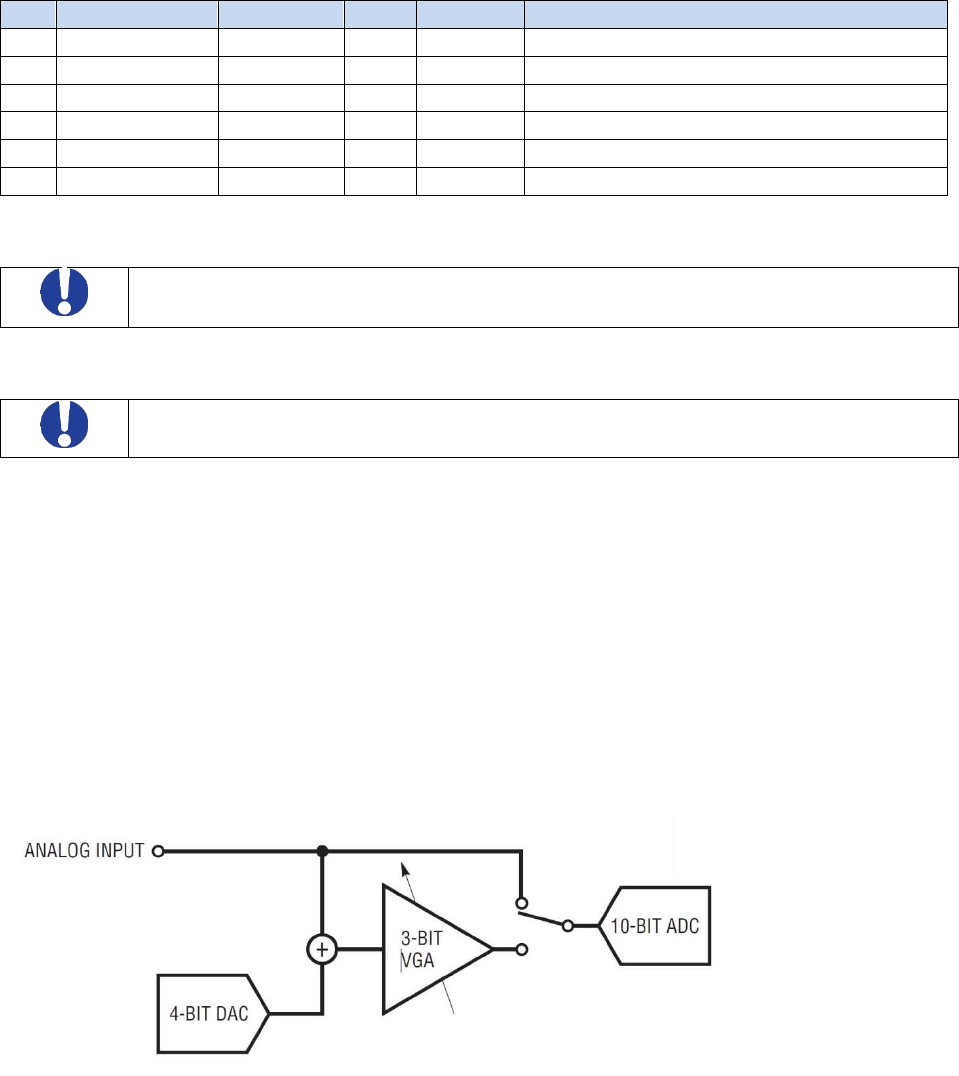
AI_0, AI_1, AI_2, AI_3: Analog Inputs. These pins are multiplexed to the analog input chain. The analog
input chain, as shown in Figure 18, is software-configurable and includes a variable-gain amplifier, an
offset-DAC for adjusting input range, and a 10-bit ADC. Valid input range is between 0V to 1.8V. Analog
inputs can be sampled as described in section Signal/Data Acquisition and Control.
Figure 18. Analog input chain
RESETn: The asynchronous reset signal is internally pulled up. Resetting WSM2400 will result in the ARM
Cortex M3 rebooting and loss of network connectivity. Use of this signal for resetting WSM2400 is not
recommended, except during power-on and in-circuit programming.

28
RADIO_INHIBIT: RADIO_INHIBIT provides a mechanism for an external device to temporarily disable
radio operation. Failure to observe the timing requirements defined in the RADIO_INHIBIT AC
Characteristics section may result in unreliable network operation. In designs where the
RADIO_INHIBIT function is not needed. The input must either be tied, pulled or actively driven low to
avoid excess leakage.
TMS, TCK, TDI, TDO: JTAG Port Supporting Software Debug and Boundary Scan.
SLEEPn: The SLEEPn function is not currently supported in software. The SLEEPn input must either be
tied, pulled or actively driven high to avoid excess leakage.
UART_RX, UART_RX_RTSn, UART_RX_CTSn, UART_TX, UART_TX_RTSn, UART_TX_CTSn: The API UART
interface includes bidirectional wake up and flow control. Unused input signals must be driven or pulled
to their inactive state.
TIMEn: Strobing the TIMEn input is the most accurate method to acquire the network time maintained
by WSM2400. WSM2400 latches the network time stamp with sub-microsecond resolution on the rising
edge of the TIMEn signal and produces a packet on the API serial port containing the timing information.
UARTC0_RX, UARTC0_TX: The CLI UART provides a mechanism for monitoring, configuration and
control of WSM2400 during operation.
GPIO3, GPIO4, GPIO5, GPIO6, GPIO20, GPIO21, GPIO22, GPIO23, GPIO26: General purpose I/Os that
can be sampled or driven as described in the Signal/Data Acquisition and Control section.
FLASH_P_ENn, IPCS_SSn, IPCS_SCK, IPCS_MISO, IPCS_SSn: The In-Circuit Programming Control System
(IPCS) bus enables in-circuit programming of WSM2400’s flash memory. IPCS_SCK is a clock and should
be terminated appropriately for the driving source to prevent overshoot and ringing.
OPERATION
The 505-10368-00/505-10369-00 is the world’s most energy efficient IEEE 802.15.4 compliant platform,
enabling battery and energy harvested applications. With a powerful 32-bit ARM Cortex-M3, best-in-
class radio, flash, RAM and purpose-built peripherals, WSM2400 provides a flexible, scalable and robust
networking solution for applications demanding minimal energy consumption and data reliability in
even the most challenging RF environments.
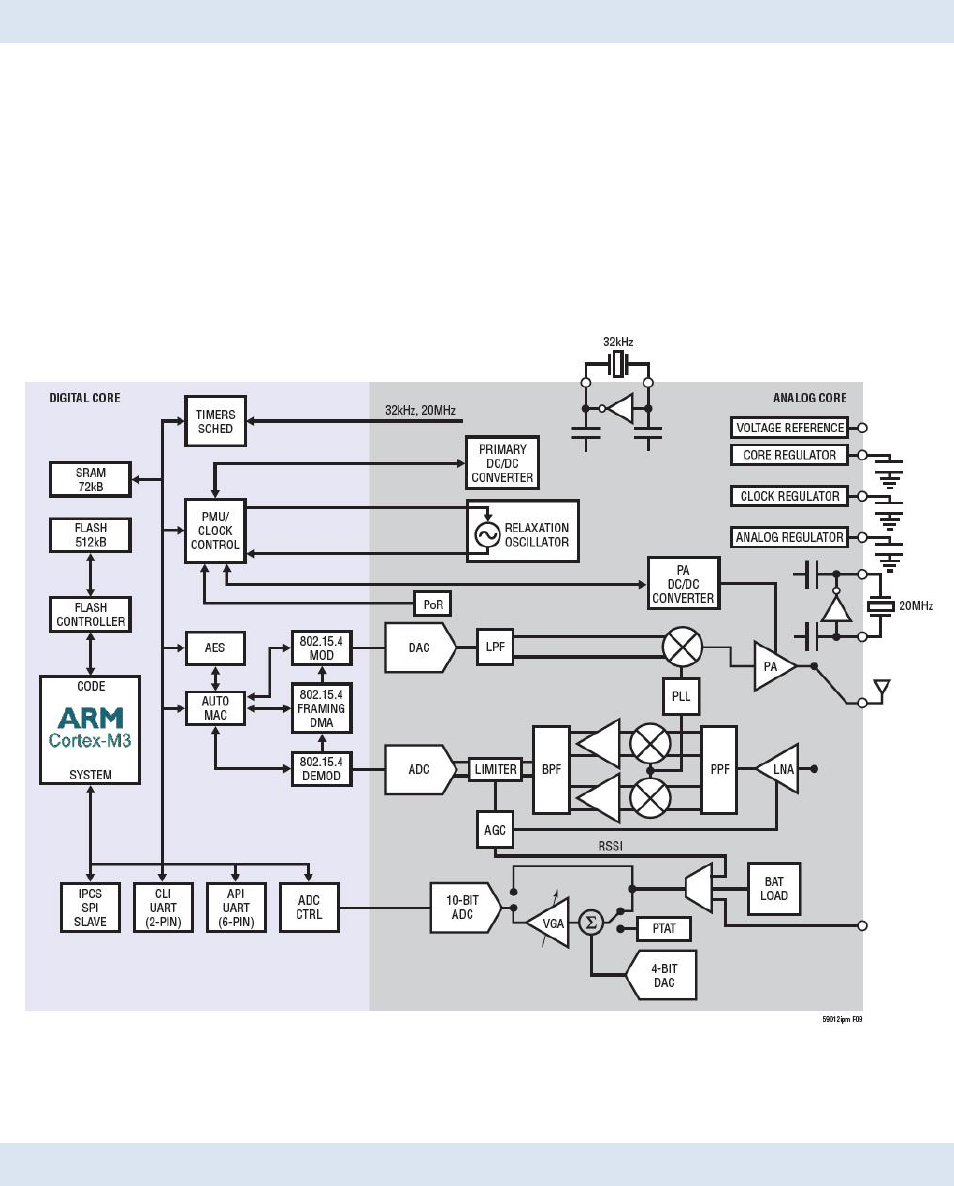
Shown in Figure 19, WSM2400 integrates purpose-built peripherals that excel in both low operating-
energy consumption and the ability to rapidly and precisely cycle between operating and low-power
states. Items in the gray shaded region labeled Analog Core correspond to the analog/RF components.
29
POWER SUPPLY
WSM2400 is powered from a single pin, VSUPPLY, which powers the I/O cells and is also used to
generate internal supplies. WSM2400’s two on-chip DC/DC converters minimize WSM2400’s energy
consumption while the device is awake. To conserve power the DC/DC converters are disabled when the
device is in low power state. WSM2400’s power supply conditioning architecture, including the two
integrated DC/ DC converters and three integrated low dropout regulators, provides excellent rejection
of supply noise. WSM2400’s operating supply voltage range is high enough to support direct connection
to lithium-thionyl chloride (Li-SOCl2) sources and wide enough to support battery operation over a
broad temperature range.
Figure 19. WSM2400 block diagram
SUPPLY MONITORING AND RESET
WSM2400 integrates a Power-on Reset (PoR) circuit. As the RESETn input pin is nominally configured
with an internal pull-up resistor, no connection is required. For a graceful shutdown, the software and
the networking layers should be cleanly halted via API commands prior to assertion of the RESETn pin.
30
WSM2400 includes a soft brown-out monitor that fully protects the flash from corruption in the event
that power is removed while writing to flash. Integrated flash supervisory functionality, in conjunction
with a fault tolerant file system, yields a robust non-volatile storage solution.
PRECISION TIMING
A major feature of WSM2400 over competing 802.15.4 product offerings is its low-power dedicated
timing hardware and timing algorithms. This functionality provides timing precision two to three orders
of magnitude better than any other low-power solution available at the time of publication. Improved
timing accuracy allows motes to minimize the amount of radio listening time required to ensure packet
reception thereby lowering even further the power consumed by SmartMesh networks. WSM2400’s
patented timing hardware and timing algorithms provide superior performance over rapid temperature
changes, further differentiating WSM2400’s reliability when compared with other wireless products. In
addition, precise timing enables networks to reduce spectral dead time, increasing total network
throughput.
APPLICATION TIME SYNCHRONIZATION
In addition to coordinating time slots across the network, which is transparent to the user, WSM2400’s
timing management is used to support two mechanisms to share network time. Having an accurate,
shared, network-wide time base enables events to be accurately time stamped or tasks to be performed
in a synchronized fashion across a network. WSM2400 will send a time packet through its serial
interface when one of the following occurs:
WSM2400 receives an API request to read time
The TIMEn signal is asserted
The use of TIMEn has the advantage of being more accurate. The value of the timestamp is captured in
hardware relative to the rising edge of TIMEn. If an API request is used, due to packet processing, the
value of the timestamp may be captured several milliseconds after receipt of the packet due to packet
processing. See the TIMEn AC Characteristics section for the time function’s definition and
specifications.
TIME REFERENCES
WSM2400 includes three clock sources: an internal relaxation oscillator, a low power oscillator designed
for a 32.768kHz crystal, and the radio reference oscillator designed for a 20MHz crystal.
RELAXATION OSCILLATOR
The relaxation oscillator is the primary clock source for WSM2400, providing the clock for the CPU,
memory subsystems, and all peripherals. The internal relaxation oscillator is dynamically calibrated to
7.3728 MHz. The internal relaxation oscillator typically starts up in a few μs, providing an expedient, low
31
energy method for duty cycling between active and low power states. Quick start-up from the doze
state, defined in the State Diagram section, allows WSM2400 to wake up and receive data over the
UART and SPI interfaces by simply detecting activity on the appropriate signals.
32.768kHz Crystal Once WSM2400 is powered up and the 32.768kHz crystal source has begun
oscillating, the 32.768kHz crystal remains operational while in the active state, and is used as the timing
basis when in doze state. See the State Diagram section for a description of WSM2400’s operational
states.
20MHZ CRYSTAL
The 20 MHz crystal source provides a frequency reference for the radio, and is automatically enabled
and disabled by WSM2400 as needed.
RADIO
WSM2400 includes the lowest power commercially available 2.4GHz IEEE 802.15.4e radio by a
substantial margin. (Please refer to the Radio Specifications section for power consumption numbers.).
WSM2400’s integrated power amplifier is calibrated and temperature compensated to consistently
provide power at a limit suitable for worldwide radio certifications. Additionally, WSM2400 uniquely
includes a hardware-based autonomous MAC that handles precise sequencing of peripherals, including
the transmitter, the receiver, and Advanced Encryption Standard (AES) peripherals. The hardware-based
autonomous Media Access Controller (MAC) minimizes CPU activity, thereby further decreasing power
consumption.
UARTS
The principal network interface is through the application programming interface (API) UART. A
Command-Line Interface (CLI) is also provided for support of test and debug functions. Both UARTs
sense activity continuously, consuming virtually no power until data is transferred over the port and
then automatically returning to their lowest power state after the conclusion of a transfer.
API UART PROTOCOL
The API UART protocol was created with the goal of supporting a wide range of companion Multipoint
Control Units (MCUs) while reducing power consumption of the system. The receive half of the API
UART protocol includes two additional signals in addition to UART_RX: UART_RX_ RTSn and
UART_RX_CTSn. The transmit half of the API UART protocol includes two additional signals in addition
to UART_TX: UART_TX_RTSn and UART_TX_CTSn. The API UART protocol is referred to as Mode 4. In the
Figures accompanying the protocol descriptions, signals driven by the companion processor are drawn
in black and signals driven by WSM2400 are drawn in blue.
32
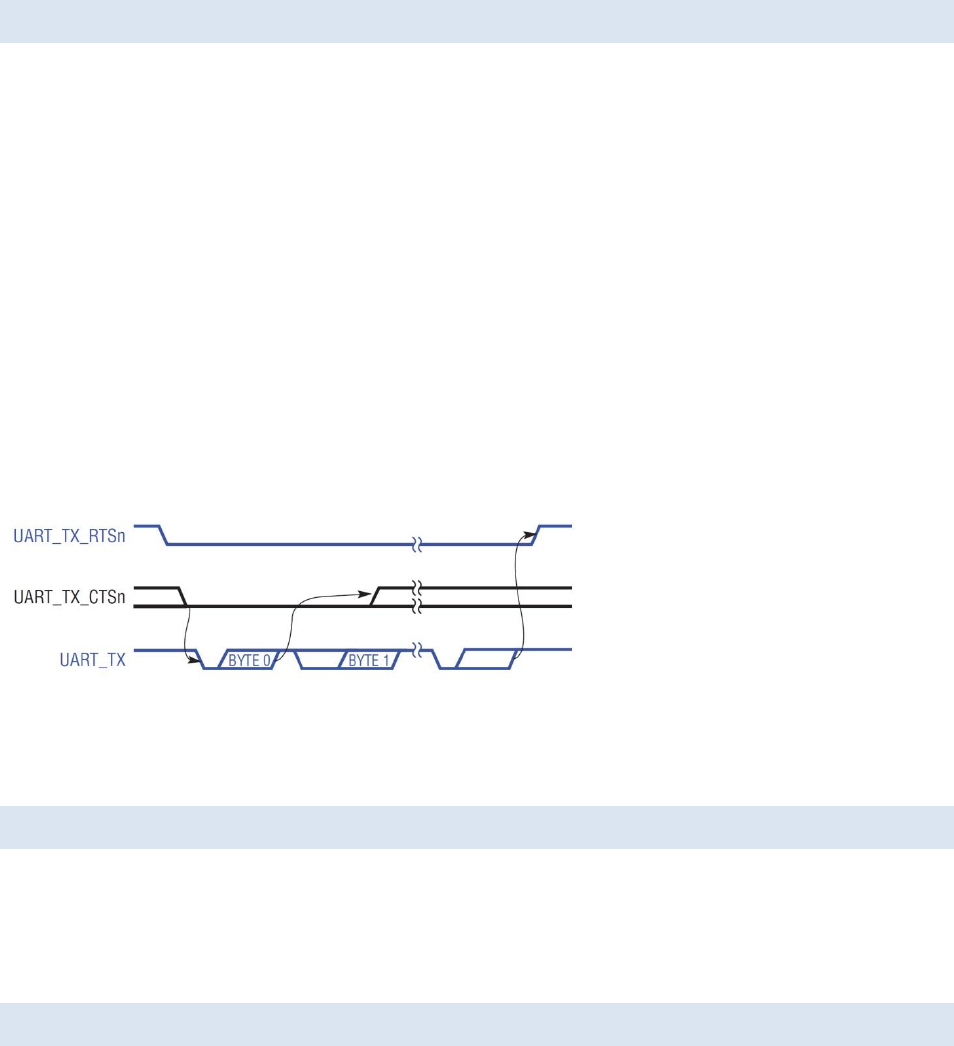
UART MODE 4
UART Mode 4 incorporates level sensitive flow control on the TX channel and requires no flow control
on the RX channel, supporting 115200 baud. The use of level sensitive flow control signals enables
higher data rates with the option of using a reduced set of the flow control signals; however, with the
companion processor must negate UART_TX_CTSn prior to the end of the packet and wait at least
tRX_RTS to RX_CTS between sending packets. See the UART AC Characteristics section for complete
timing specifications. Packets are HDLC encoded with one stop bit and no parity bit. The use of the RX
flow control signals (UART_RX_RTSn and UART_RX_CTSn) for Mode 4 are optional. The flow control
signals for the TX channel are shown in Figure 20. UART Mode 4 Transmit Flow Control. Transfers are
initiated by WSM2400 asserting UART_TX_RTSn. The UART_TX_CTSn signal may be actively driven by
the companion processor when ready to receive a packet or UART_TX_CTSn may be tied low if the
companion processor is always ready to receive a packet. After detecting a logic ‘0’ on UART_TX_CTSn
WSM2400 sends the entire packet. Following the transmission of the final byte in the packet WSM2400
negates UART_TX_RTSn and waits for a minimum period defined in the UART AC Characteristics section
before asserting UART_TX_RTSn again. For details on the timing of the UART protocol, see the UART AC
Characteristics section.
Figure 20. UART Mode 4 flow control
CLI UART
The Command Line Interface (CLI) UART port is a two wire protocol (TX and RX) that operates at a fixed
9600 baud rate with one stop bit and no parity. The CLI UART interface is intended to support command
line instructions and response activity.
AUTONOMOUS MAC
WSM2400 was designed as a system solution to provide a reliable, ultralow power, and secure network.
A reliable network capable of dynamically optimizing operation over changing environments requires
solutions that are far too complex to completely support through hardware acceleration alone. As
described in the Precision Timing section, proper time management is essential for optimizing a solution
that is both low power and reliable. To address these requirements WSM2400 includes the autonomous
MAC, which incorporates a coprocessor for controlling all of the time critical radio operations. The
autonomous MAC provides two benefits: first, preventing variable software latency from affecting
33
network timing and second, greatly reducing system power consumption by allowing the CPU to remain
inactive during the majority of the radio activity. The autonomous MAC, provides software independent
timing control of the radio and radio related functions, resulting in superior reliability and exceptionally
low power.
SECURITY
Network security is an often overlooked component of a complete network solution. Proper
implementation of security protocols is significant in terms of both engineering effort and market value
in an OEM product. WSM2400 system solutions provide a FIPS-197 validated encryption scheme that
includes authentication and encryption at the MAC and network layers with separate keys for each
mote. This not only yields end-to-end security, but if a mote is somehow compromised, communication
from other motes is still secure. A mechanism for secure key exchange allows keys to be kept fresh. To
prevent physical attacks, WSM2400 includes hardware support for electronically locking devices,
thereby preventing access to WSM2400’s flash and RAM memory and thus the keys and code stored
therein.
TEMPERATURE SENSOR
WSM2400 includes a calibrated temperature sensor on chip. The temperature readings are available
locally through WSM2400’s serial API, in addition to being available via the network manager. The
performance characteristics of the temperature sensor can be found in the Temperature Sensor
Characteristics section.
RADIO INHIBIT
The RADIO_INHIBIT input enables an external controller to temporarily disable the radio software
drivers (for example, to take a sensor reading that is susceptible to radio interference). When
RADIO_INHIBIT is asserted the software radio drivers will disallow radio operations including clear
channel assessment, packet transmits, or packet receipts. If the radio is active in the current timeslot
when RADIO_INHIBIT is asserted the radio will be disabled after the present operation completes. For
details on the timing associated with RADIO_INHIBIT, see the RADIO_INHIBIT AC Characteristics section.
FACTORY INSTALLED SO FTWARE
This product is provided with software programmed into the device. Devices can be configured via
either the CLI or API ports.
34
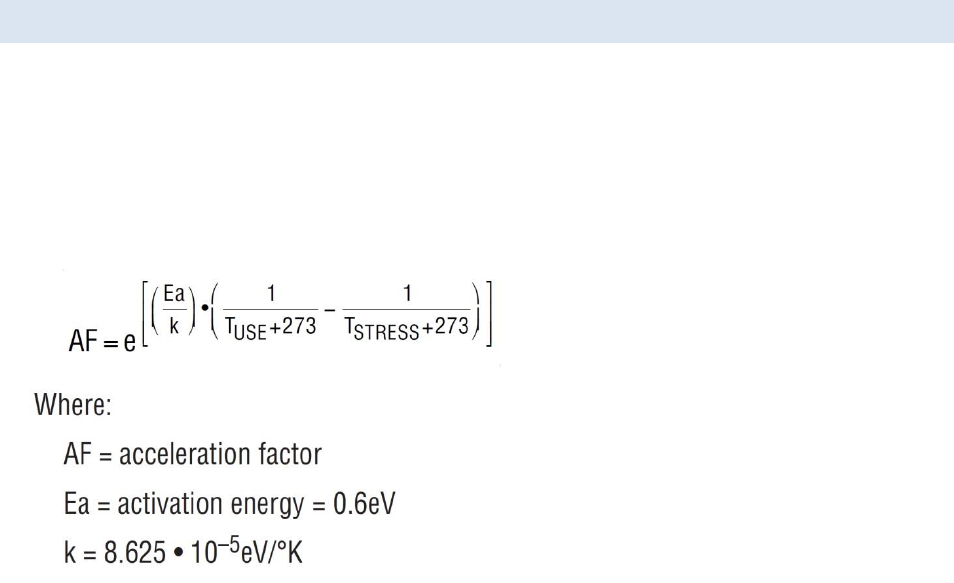
FLASH DATA RETENTION
WSM2400 contains internal flash (non-volatile memory) to store calibration results, unique ID,
configuration settings and software images. Flash retention over the operating temperature range. See
Electrical Characteristics and Absolute Maximum Ratings sections. Nondestructive storage above the
operating temperature range of –40°C to 85°C is possible; although, this may result in a degradation of
retention characteristics. The degradation in flash retention for temperatures >85°C can be
approximated by calculating the dimensionless acceleration factor using the following equation.
Figure 21. Equation
TUSE = is the specified temperature retention in °C
TSTRESS = actual storage temperature in °C
Example: Calculate the effect on retention when storing at a temperature of 105°C.
TSTRESS = 105°C
TUSE = 85°C
AF = 2.8
So the overall retention of the flash would be degraded by a factor of 2.8, reducing data retention from
20 years at 85°C to 7.1 years at 105°C.
35
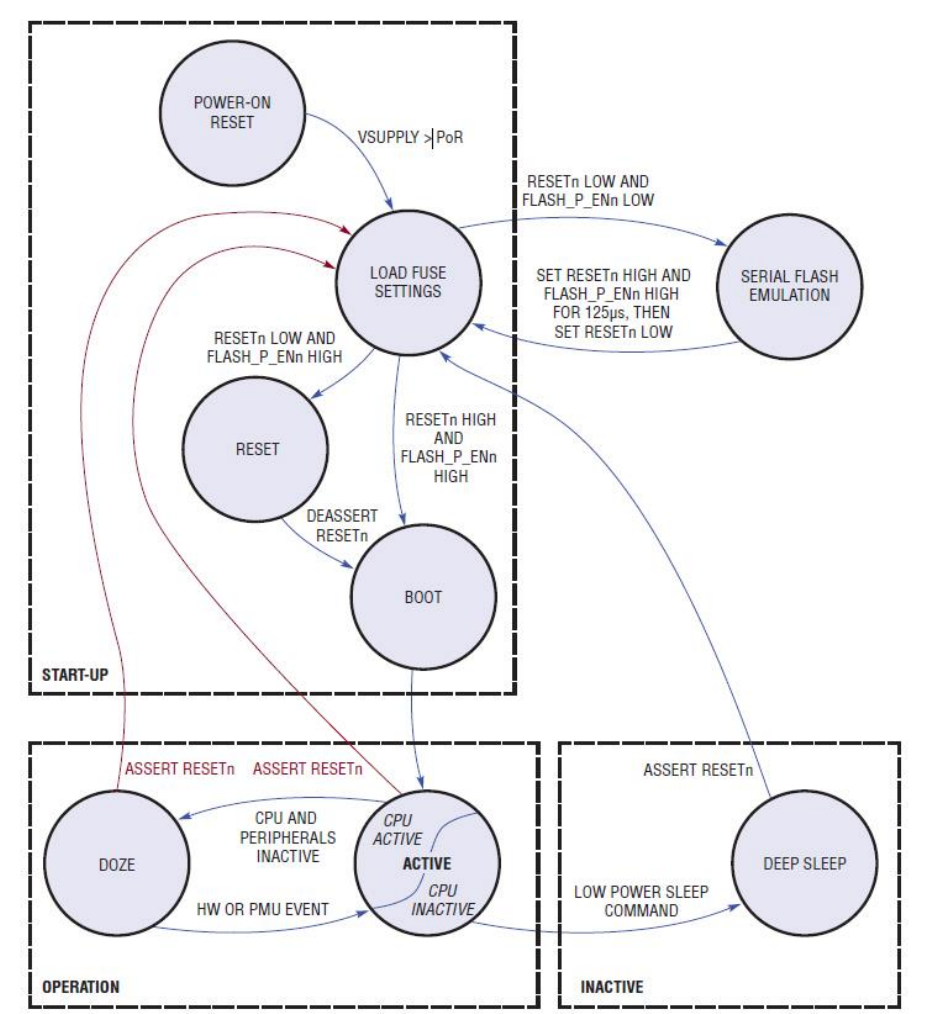
State Diagram In order to provide capabilities and flexibility in addition to ultralow power, WSM2400
operates in various states, as shown in Figure 22. WSM2400 State Diagram and described in this section.
State transitions shown in red are not recommended.
Figure 22. WSM2400 state diagram
36
START-UP
Start-up occurs as a result of either crossing the power-on reset threshold or asserting RESETn. After the
completion of power-on reset or the falling edge of an internally synchronized RESETn, WSM2400 loads
its fuse table which, as described in the previous section, includes setting I/O direction. In this state,
WSM2400 checks the state of the FLASH_P_ENn and RESETn and enters the serial flash emulation mode
if both signals are asserted. If the FLASH_P_ENn pin is not asserted but RESETn is asserted, WSM2400
automatically reduces its energy consumption to a minimum until RESETn is released. Once RESETn is
de-asserted, WSM2400 goes through a boot sequence, and then enters the active state.
SERIAL FLASH EMULATI ON
When both RESETn and FLASH_P_ENn are asserted, WSM2400 disables normal operation and enters a
mode to emulate the operation of a serial flash. In this mode, its flash can be programmed.
OPERATION
Once WSM2400 has completed start-up, WSM2400 transitions to the operational group of states
(active/CPU active, active/ CPU inactive, and Doze). There, WSM2400 cycles between the various states,
automatically selecting the lowest possible power state while fulfilling the demands of network
operation.
ACTIVE STATE
In the active state, WSM2400’s relaxation oscillator is running and peripherals are enabled as needed.
The ARM Cortex-M3 cycles between CPU-active and CPU-inactive (referred to in the ARM Cortex-M3
literature as sleep now mode). WSM2400’s extensive use of DMA and intelligent peripherals that
independently move WSM2400 between active state and doze state minimizes the time the CPU is
active, significantly reducing WSM2400’s energy consumption.
DOZE STATE
The doze state consumes orders of magnitude less current than the active state and is entered when all
of the peripherals and the CPU are inactive. In the doze state WSM2400’s full state is retained, timing is
maintained, and WSM2400 is configured to detect, wake, and rapidly respond to activity on I/Os (such
as UART signals and the TIMEn pin). In the doze state the 32.768kHz oscillator and associated timers are
active.
37
APPLICATIONS INFORMATION
SIGNAL/DATA ACQUISIT ION AND CONTROL
SmartMesh IP software includes embedded application support for sampling temperature, WSM2400’s
ADC and GPIO inputs, and support for actuating GPIO outputs. The Onchip Application Protocol (OAP)
enables these functions via data packets sent through the network manager over the air, removing the
need for a microprocessor connected to the mote or embedded software development on WSM2400.
SOLDERING INFORMATION
The 505-10368-00 and 505-10369-00 are suitable for both eutectic PbSn and RoHS-6 reflow. The
maximum reflow soldering temperature is 260°C. A more detailed description of layout
recommendations, assembly procedures and design considerations is included in the 505-10368-00 and
505-10369-00 Hardware Integration Guide.
38
FCC, INDUSTRY CANADA, SAFETY INFORMATION AND WARNINGS
FCC COMPLIANCE STATEMENT
This device complies with part 15 of the FCC Rules. Operation is subject to the following two conditions:
(1) This device may not cause harmful interference, and (2) This device must accept any interference
received, including interference that may cause undesired operation.
INDUSTRY CANADA COMPLIANCE STATEMENT
This Class B digital apparatus complies with Canadian ICES-003. Operation is subject to the following two
conditions: (1) this device may not cause interference, and (2) this device must accept any interference,
including interference that may cause undesired operation of the device.
Cet appareil numérique de la classe B est conforme à la norme IECS -003 du Canada . Le fonctionnement
est soumis aux deux conditions suivantes : (1) ce dispositif ne peut pas provoquer d'interférences et
(2) cet appareil doit accepter toute interférence , y compris les interférences qui peuvent causer un
mauvais fonctionnement de l'appareil.
FCC RF RADIATION EXPOSURE STATEMENT
WARNING: These B+B SmartWorx devices radiate radio frequency energy at a level below the United
States FCC radio frequency exposure limits. Nevertheless, this device should be used in such a manner
that the potential for human contact during normal operation is minimized.
MODIFICATION WARNING
US FCC Modification warning (FCC Part 15.21) Warning: changes or modifications to this equipment not
expressly approved by B+B SmartWorx could void the user’s authority to operate the equipment. In
addition, damage or performance problems resulting from modification may not be covered under
warranty.

39
ADVANTECH B+B SMARTWORX TECHNICAL SUPPORT
Phone: 1-800-346-3119
(Monday - Friday, 7 a.m. to 5:30 p.m. CST)
Fax: 815-433-5109
Email: support@advantech-bb.com
Web: www.advantech-bb.com