BM innovations BM-USBRTX4 Transceiver User Manual BlueRobin RTX IntegrationGuide V1 1x
BM innovations GmbH Transceiver BlueRobin RTX IntegrationGuide V1 1x
UserManual.wiki
>
BM innovations
>
BM USBRTX4 User Manual
user manual
Navigation menu
Upload a User Manual
Namespaces
Wiki Guide
HTML
PDF
Info
Views
User Manual
Discussion / Help
Navigation

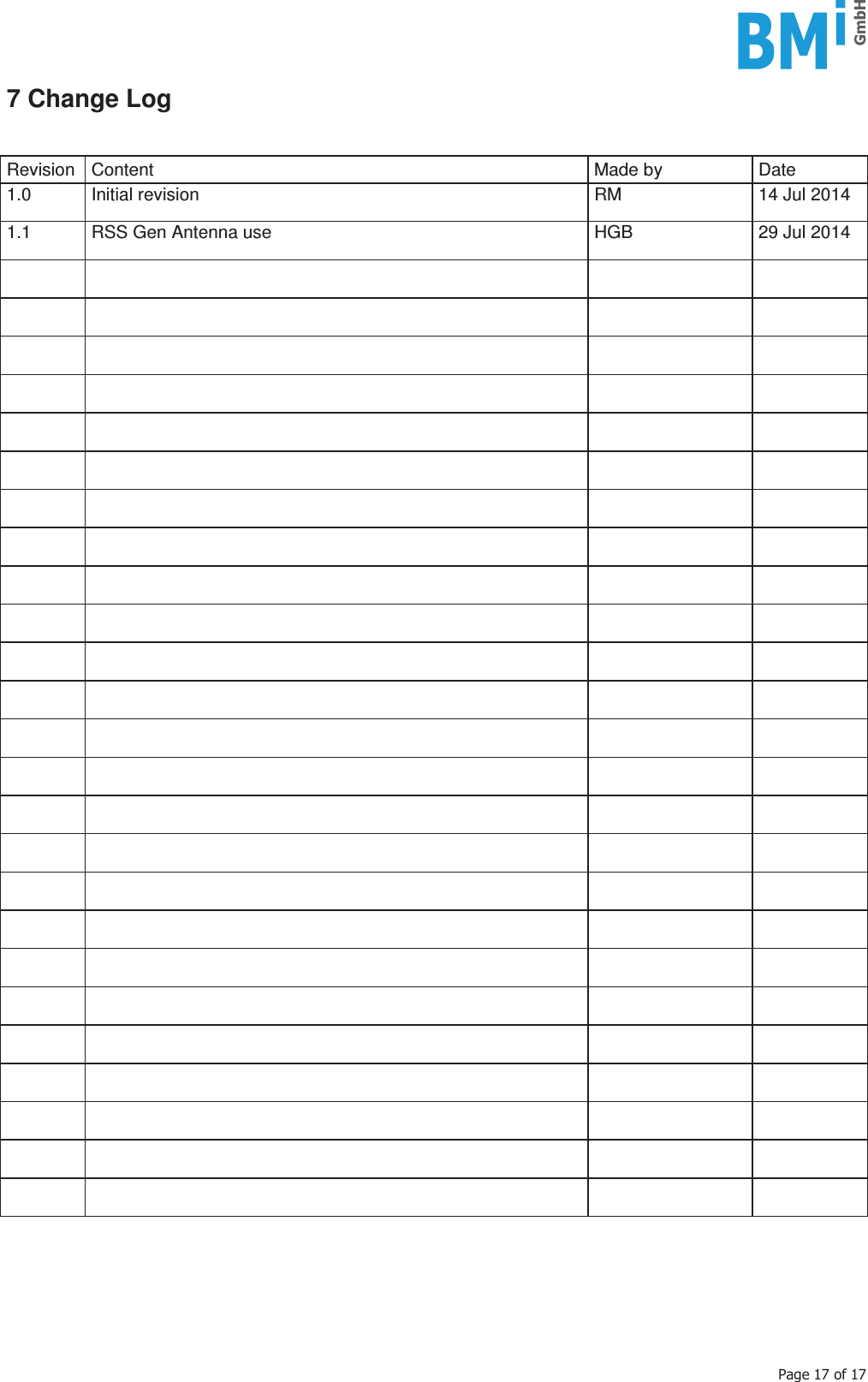
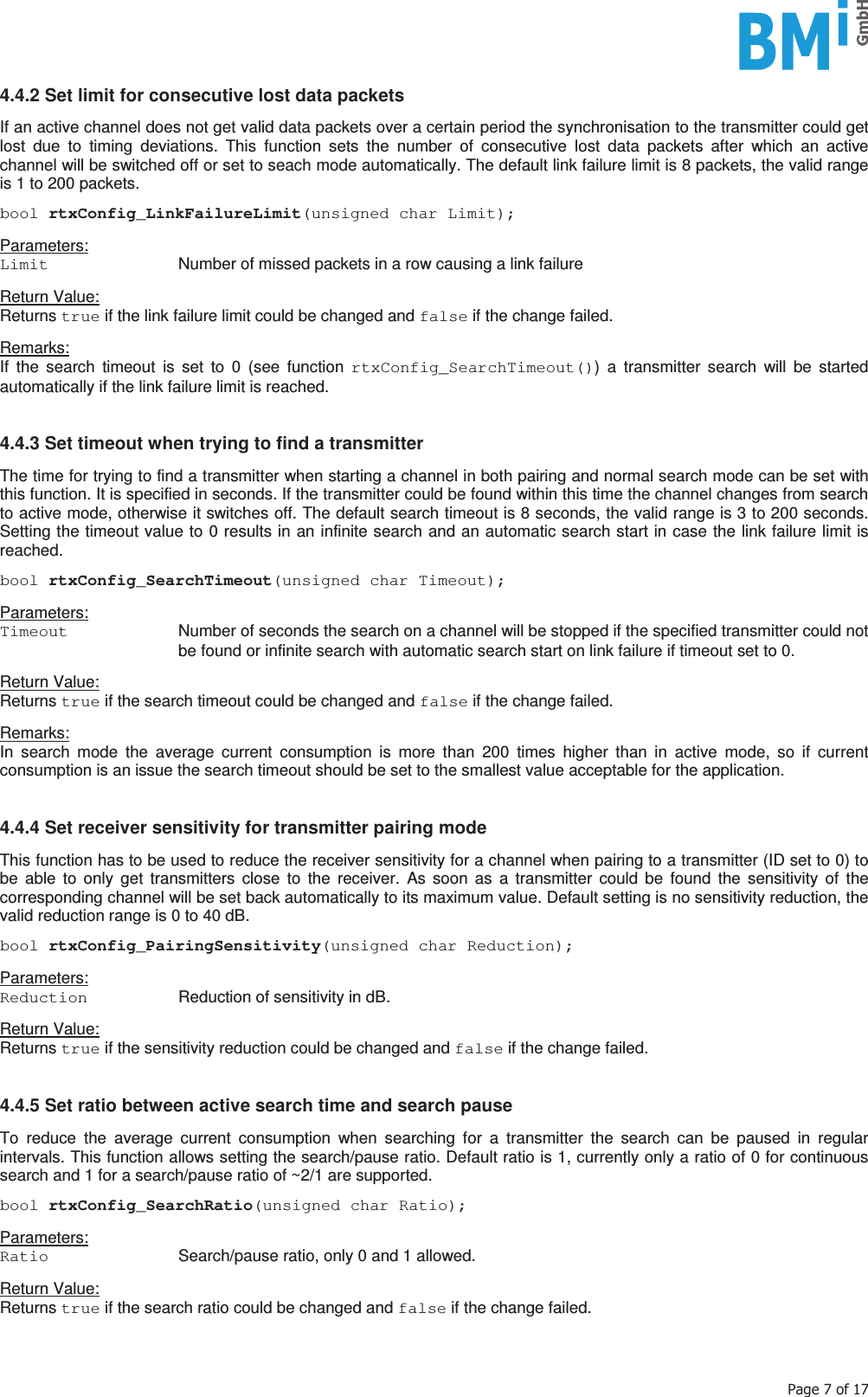
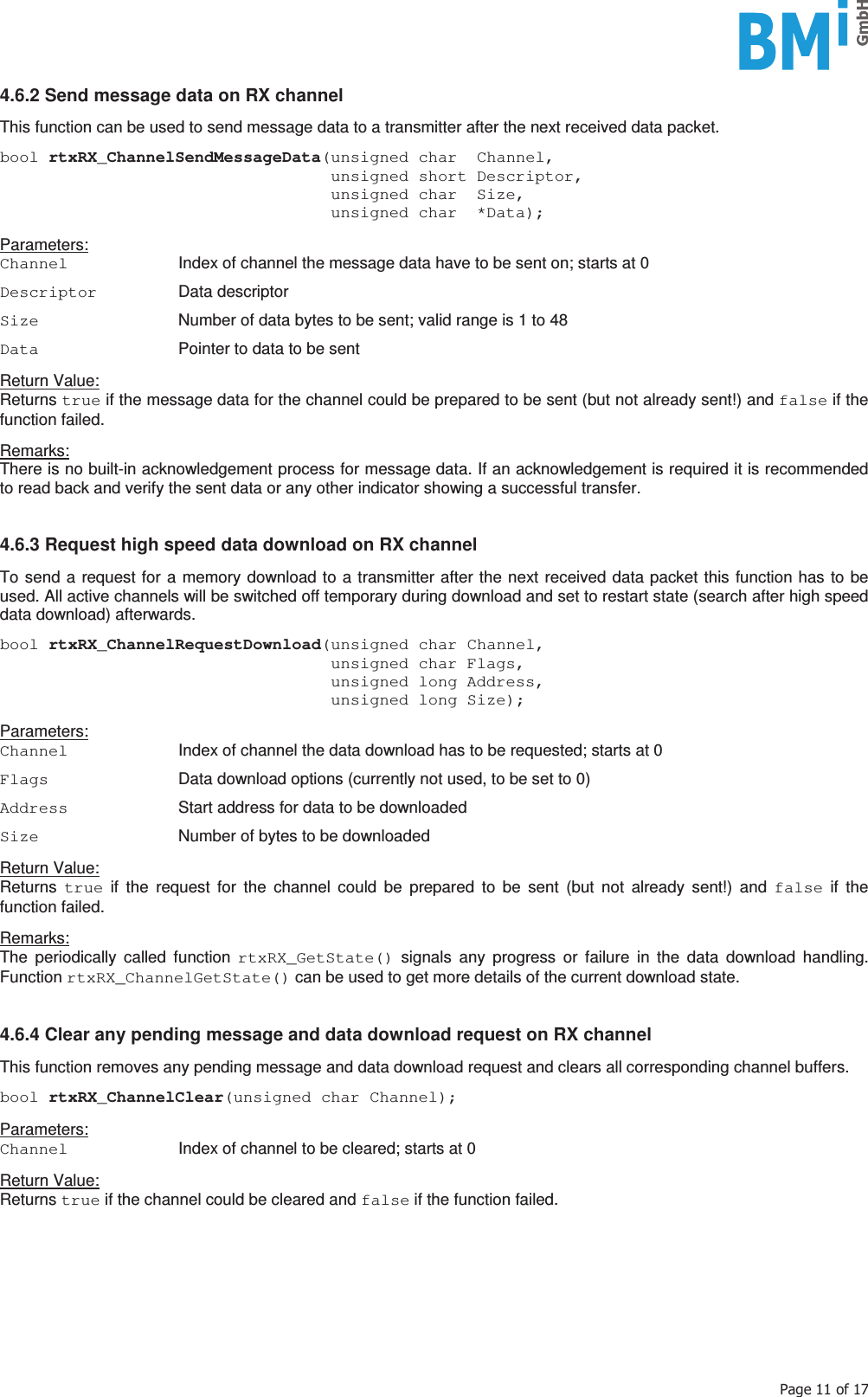
![ 3DJHRI4.2 Interface Functions 4.2.1 Scan for all BlueRobin devices on ports This function checks all ports for connected BlueRobin devices having the specified device type, it returns the number of connected devices and it generates an internal list with device details which can be accessed then using function rtxInterface_GetInfo(). bool rtxInterface_ScanForDevices(bmiDeviceType DeviceType, int &NoOfDevicesFound); Parameters: DeviceType Scanning for BM-USBD1: bmiDEVTYPE_USBD1 Scanning for BM-USBRTX3: bmiDEVTYPE_USBRTX3 NoOfDevicesFound Number of devices found with specified device type Return Value: Returns true if at least one device could be found, otherwise returns false 4.2.2 Get device information for a found BlueRobin device After having scanned all ports for connected BlueRobin devices of a specific device type using function rtxInterface_ScanForDevices() this function has to be used to get details for the found devices so that the desired device to be opened can be selected. bool rtxInterface_GetInfo(unsigned char DeviceIndex, rtxUsbDeviceInfo *DeviceInfo); Parameters: DeviceIndex Index into the device list generated by function rtxInterface_ScanForDevices(); starts at 0 and can be up to the number of found devices less 1 returned when scanning DeviceInfo Contains the device information for the selected device typedef struct rtxUsbDeviceInfo { unsigned short DeviceType; // Device type identifier char PortName[256]; // Port name char PhysName[256]; // Physical name char DevDescr[256]; // Friendly name char EnumName[256]; // Enumerator name char LocationName[256]; // USB bus location identifier char SerialNumber[256]; // Serial number unsigned short Vid; // Vendor ID unsigned short Pid; // Product ID } rtxUsbDeviceInfo; Return Value: Returns true if device could be found and its information is available, otherwise returns false 4.2.3 Start to detect if a BlueRobin device has been unplugged This function starts background checking if the specified BlueRobin device has been unplugged from the specified port. bool rtxInterface_UnplugDetectionStart(const char *PortName); Parameters: PortName String specifying the port name; will be returned as a part of the USB device information when calling function rtxInterface_GetInfo() Return Value: Returns true if BlueRobin device and port has been found, otherwise returns false Remarks: This function is in experimental state!](https://usermanual.wiki/BM-innovations/BM-USBRTX4/User-Guide-2373093-Page-4.png)
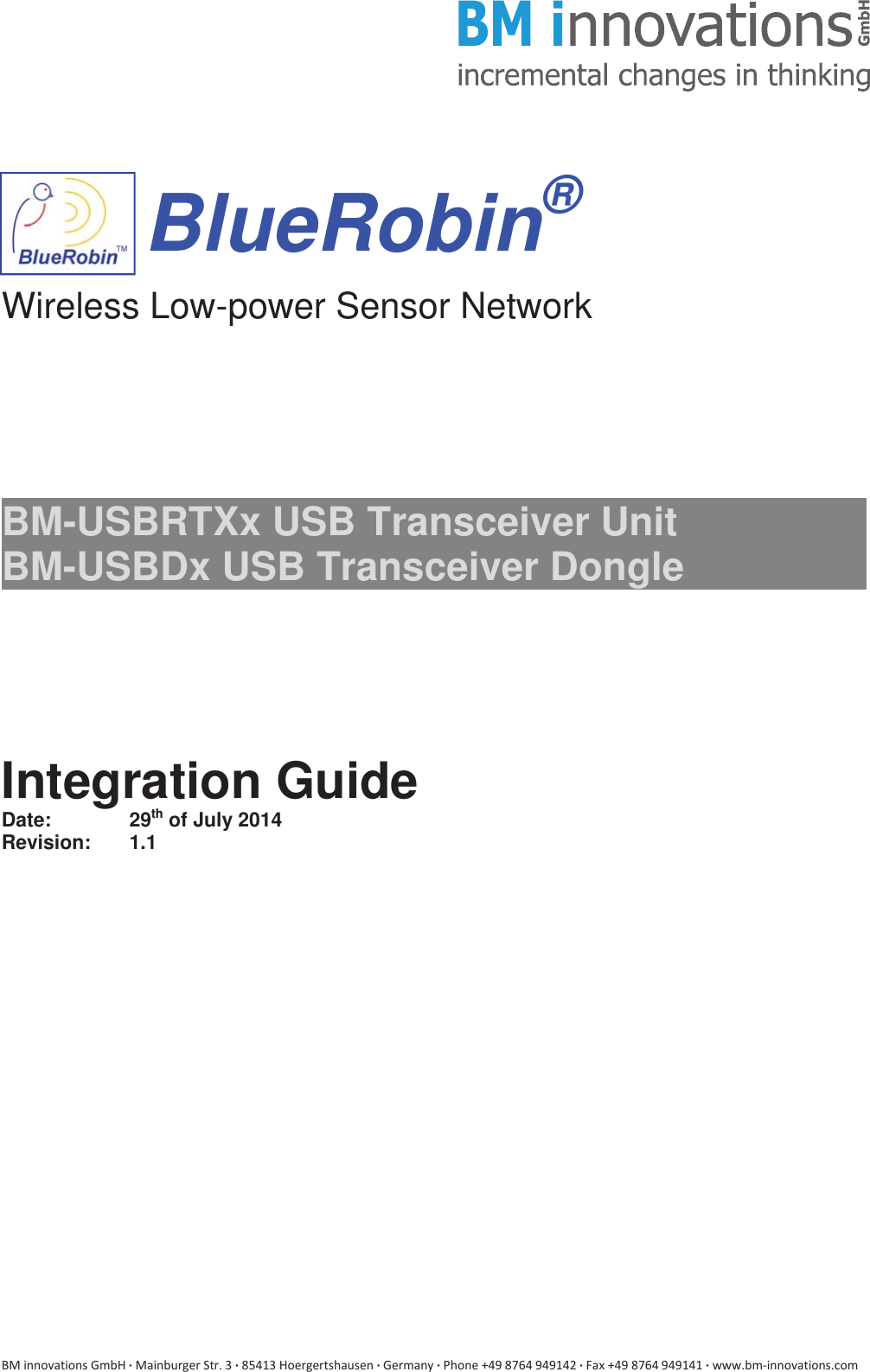
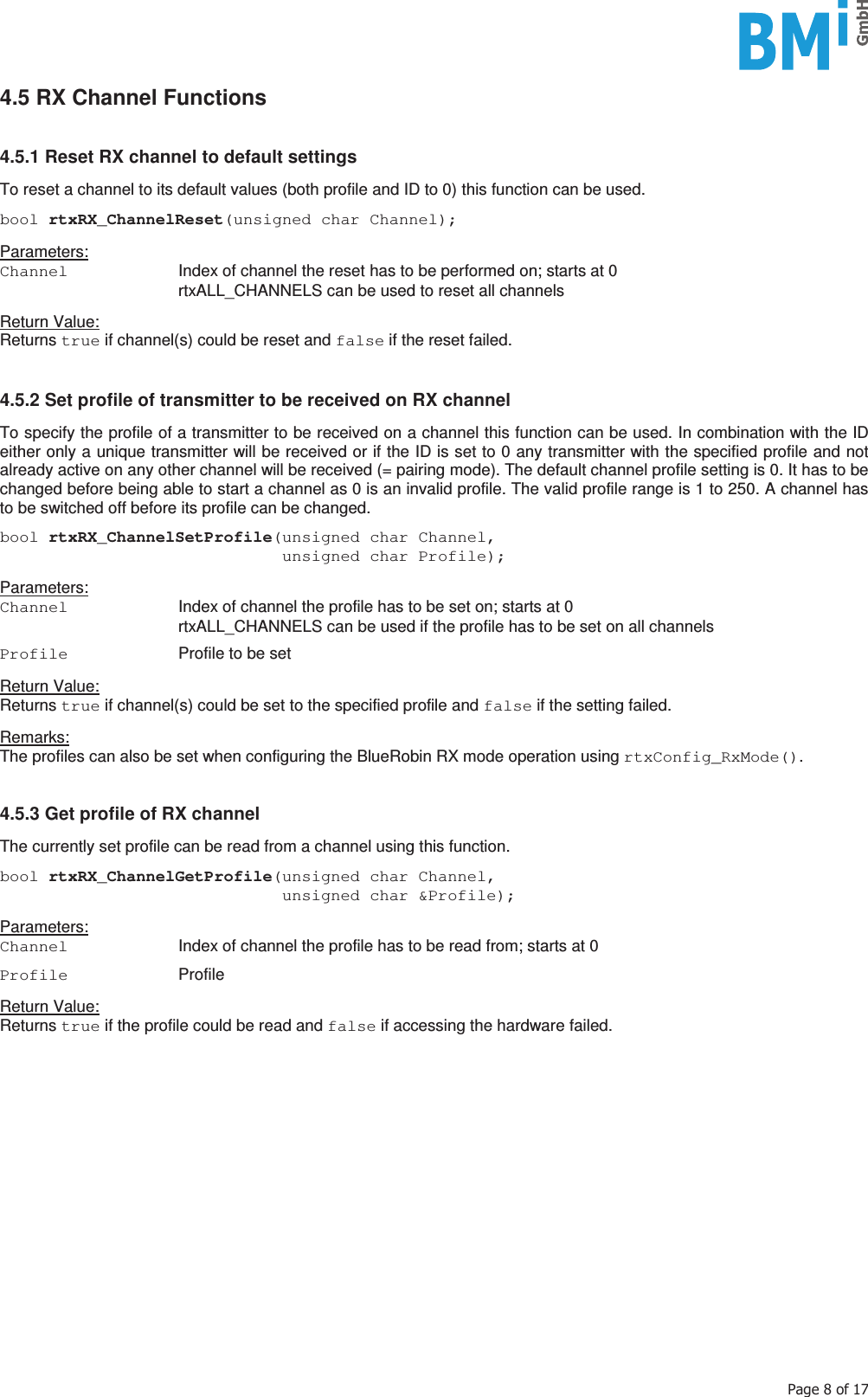
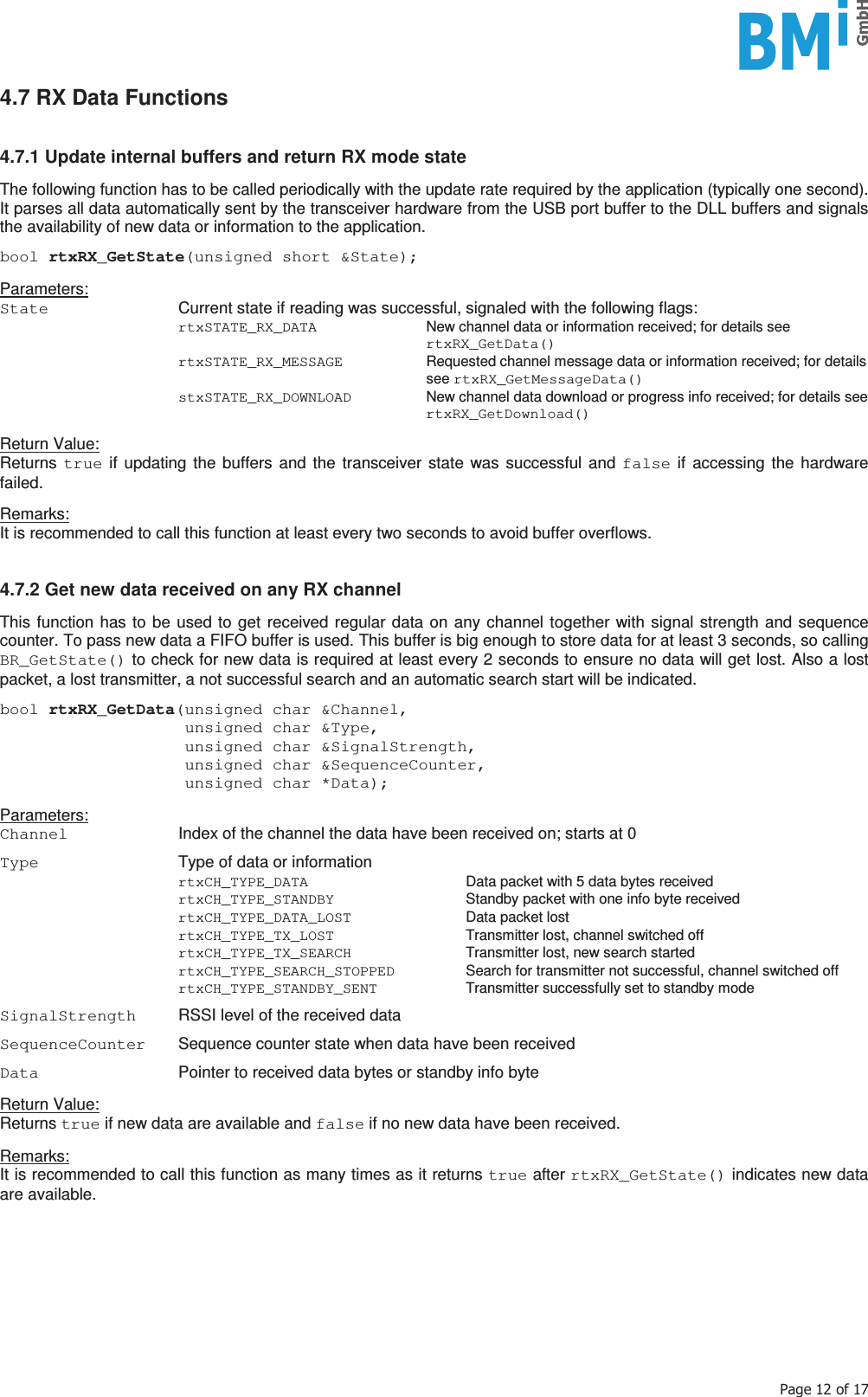
![ 3DJHRI4.3.4 Initialize BlueRobin hardware To initialize the connected transceiver hardware the following function has to be called once after opening the port and before any further access to the hardware is done. It also returns the number of available channels in RX mode. bool rtxDevice_InitHardware(unsigned char &MaxChannels); Parameters: MaxChannels Number of available channels Return Value: Returns true if the initialization was successful and false if accessing the hardware failed. Remarks: BlueRobin RX mode has to be configured first. 4.3.5 Get transceiver unit configuration and version info To get the number of configured channels in RX mode and the profile, ID and descriptor in TX mode (currently not implemented) the following function can be used. Also the serial number and the software and hardware revisions will be returned. bool rtxDevice_GetInfo(rtxDeviceInfo *DeviceInfo); Parameters: DeviceInfo Device info if read successfully, passed in the following structure: typedef struct rtxDevInfo { unsigned char MaxChannels; // Number of available channels in RX mode unsigned char Profile; // Profile in TX mode (not used) unsigned long ID; // ID in TX mode (not used) unsigned char Descriptor; // Descriptor in TX mode (not used) unsigned long SerialNumber; // Device serial number unsigned short SwRev; // Device software revision unsigned short HwRev; // Device hardware revision } rtxDevInfo; Return Value: Returns true if the requested information could be read successfully and false if accessing the hardware failed. 4.4 Configuration Functions 4.4.1 Configure BlueRobin RX mode operation In case the maximum possible number of channels is not required the number of channels to be used can be configured with this function to increase the system performance. Optionally this function can also be used to preset channels with profiles. There is no need to call this function if the maximum available number of channels has to be used without any preset. bool rtxConfig_RxMode(unsigned char MaxChannels, rtxPresetChannelProfile *ProfileList, unsigned char NoOfProfiles); Parameters: MaxChannels Number of required channels ProfileList Pointer to array of structures (ProfileList[NoOfProfiles]) containing channel and profile pairs to be preset; if no preset channels are required this parameter has to be set to NULL typedef struct rtxPresetChannelProfile { unsigned char Channels; // Number of channels to be preset with same profile unsigned char Profile; // Profile to be preset } rtxPresetChannelProfile; NoOfProfiles Number of channel and profile pairs contained in the array Return Value: Returns true if both setting number of channels and presetting channels was successful and false if configuring failed. Remarks: Reducing the number of used channels results in an increased system performance.](https://usermanual.wiki/BM-innovations/BM-USBRTX4/User-Guide-2373093-Page-6.png)
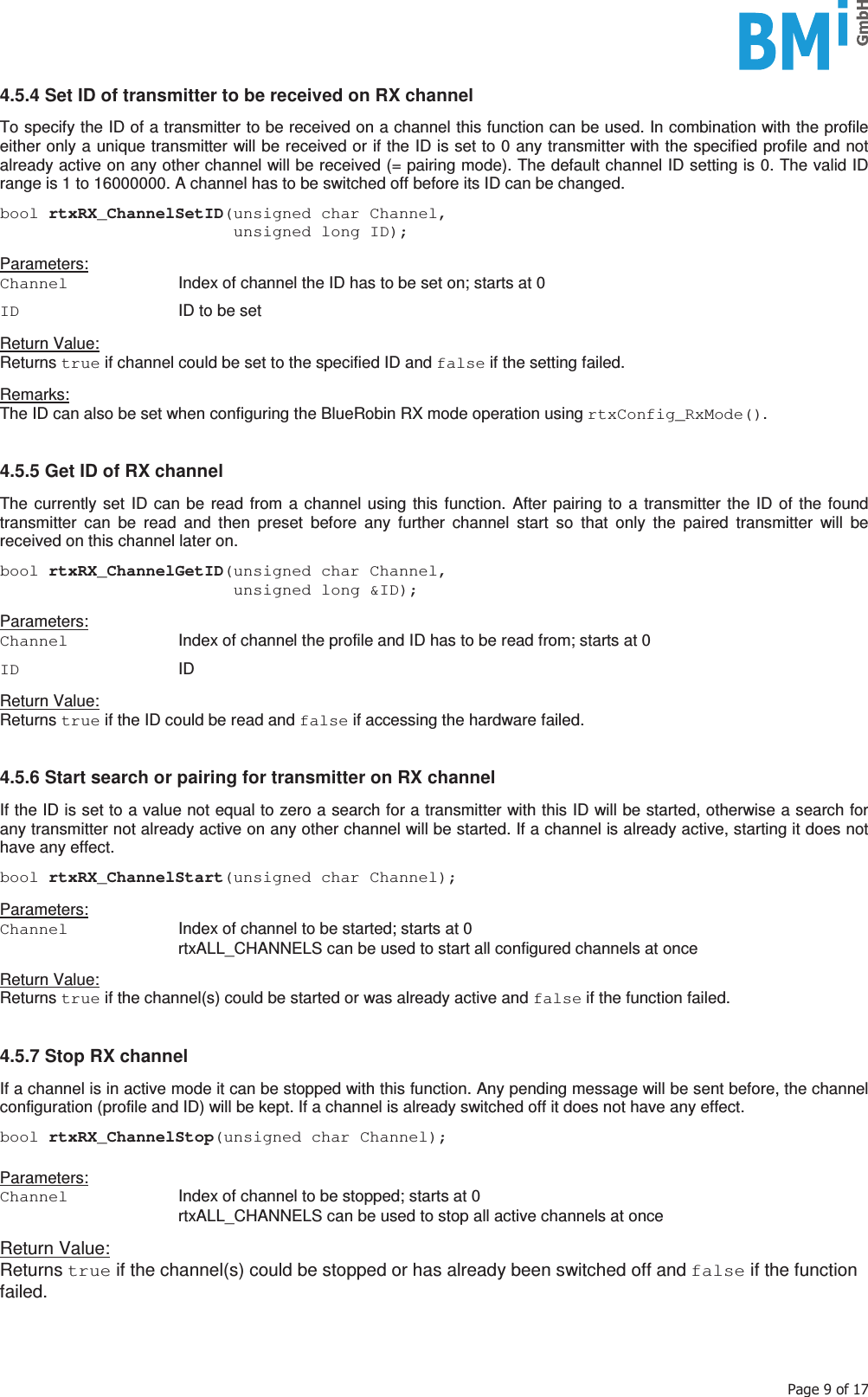
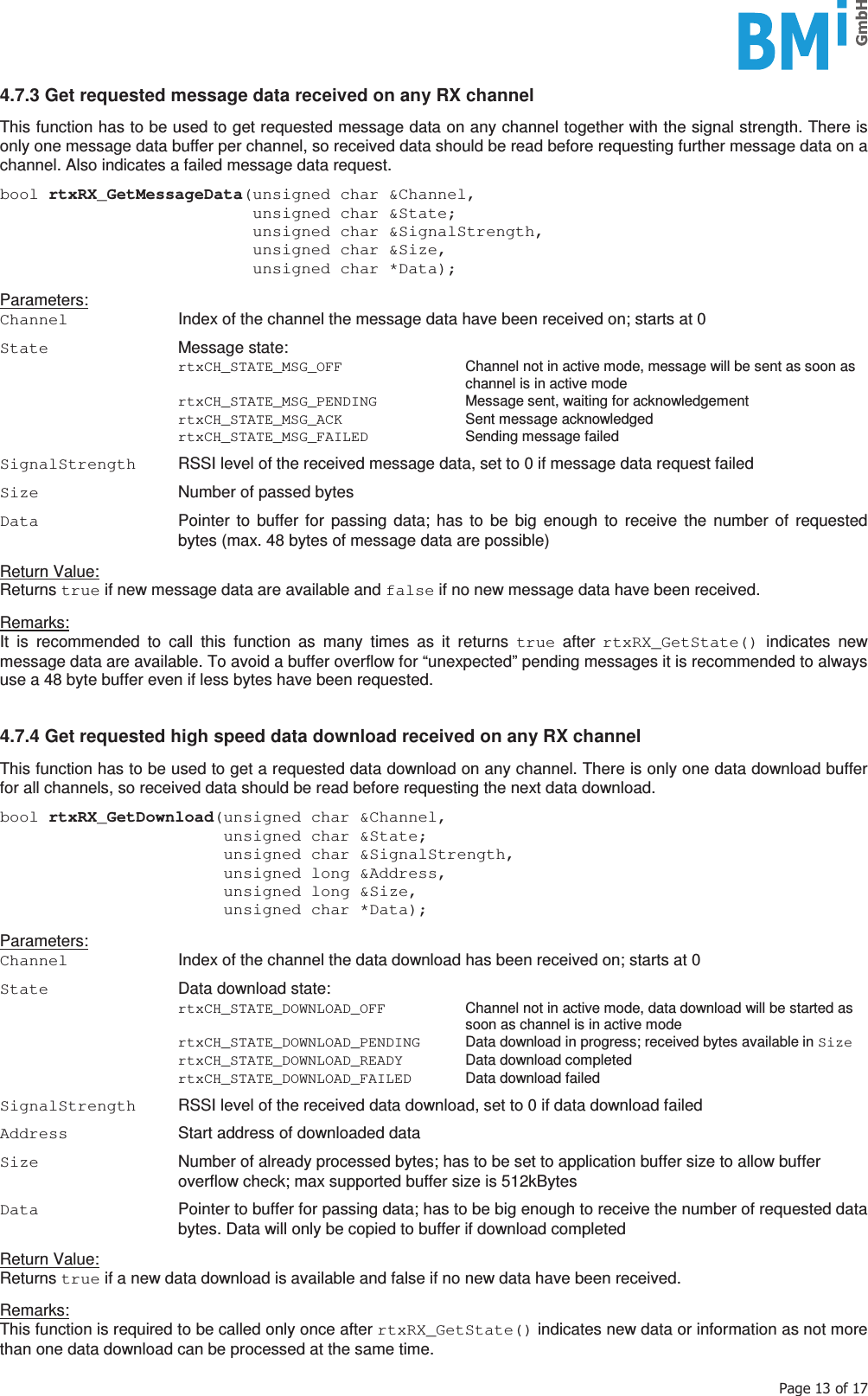
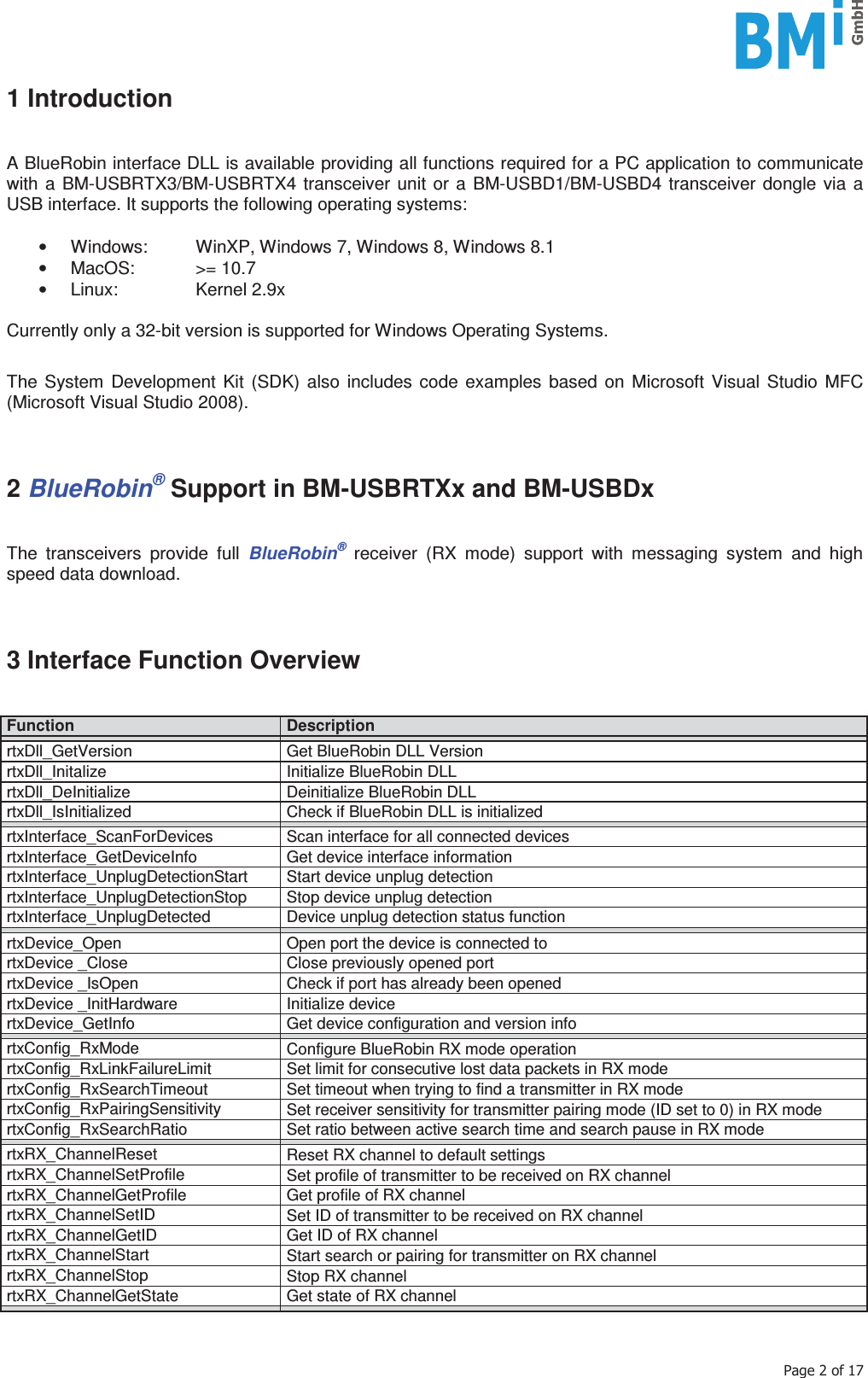
![ 3DJHRI5 Integration Steps 5.1 Initialization First of all the rtxBlueRobin DLL has to be initialized. Next steps are to scan for connected BlueRobin transceiver units or dongles, to get the USB device info of the device to be used, to open the port to that device and to initialize the device. Here is an example of how to search for and then initialize either a BM-USBRTX4 unit or if that one cannot be found a BM-USBD1 dongle: int FoundDevices; rtxUsbDeviceInfo UsbDeviceInfo; // BlueRobin DLL not already initialized? if (!rtxDll_IsInitialized()) { // Initializing DLL required before calling any further DLL function rtxDll_Initialize(); } // Check if BM-USBD1 or BM-USBRTX4 device connected rtxInterface_ScanForDevices(bmiDEVTYPE_USBRTX4, FoundDevices); // No BM-USBRTX4 connected? if (FoundDevices == 0) { rtxInterface_ScanForDevices(bmiDEVTYPE_USBD1, FoundDevices); } // Also no BM-USBD1 connected? if (FoundDevices == 0) { // No BlueRobin transceiver device found ... } // USB device info for first found device not available? if (!rtxInterface_GetInfo(0, &UsbDeviceInfo)) { // BlueRobin transceiver device info not found ... } // Port cannot be opened? if (!rtxDevice_Open(UsbDeviceInfo.PortName)) { rtxDevice_Close(); // Opening port for BlueRobin transceiver device failed ... } // Initializing transceiver to x channels failed? if (!rtxDevice_InitHardware(x)) { rtxDevice_Close(); // Could not initialize BlueRobin transceiver device ... } // Start unplugg detection of transceiver device rtxInterface_UnplugDetectionStart(UsbDeviceInfo.PortName); Next the device information can be read from the opened transceiver, channel profiles have to be set and further parameters affecting all channels can be set: rtxDevInfo DeviceInfo; rtxPresetChannelProfile ProfileList[1]; // Get device information rtxDevice_GetInfo(&DeviceInfo); SerialNumber = DeviceInfo.SerialNumber; SoftwareRevision = DeviceInfo.SwRev; HardwareRevision = DeviceInfo.HwRev; MaxChannels = DeviceInfo.MaxChannels; // Set number of required channels to 20 and preset 10 of them with profile 33 and 10 with profile 99 ProfileList[0].Channels = 10; ProfileList[0].Profile = 33; ProfileList[1].Channels = 10; ProfileList[1].Profile = 99; rtxConfig_RxMode(20, ProfileList, 2); // Infinite search on started channels rtxConfig_SearchTimeout(0); // Set number of lost packets in a row from a transmitter causing to search for it again to 6 rtxConfig_LinkFailureLimit(6);](https://usermanual.wiki/BM-innovations/BM-USBRTX4/User-Guide-2373093-Page-14.png)
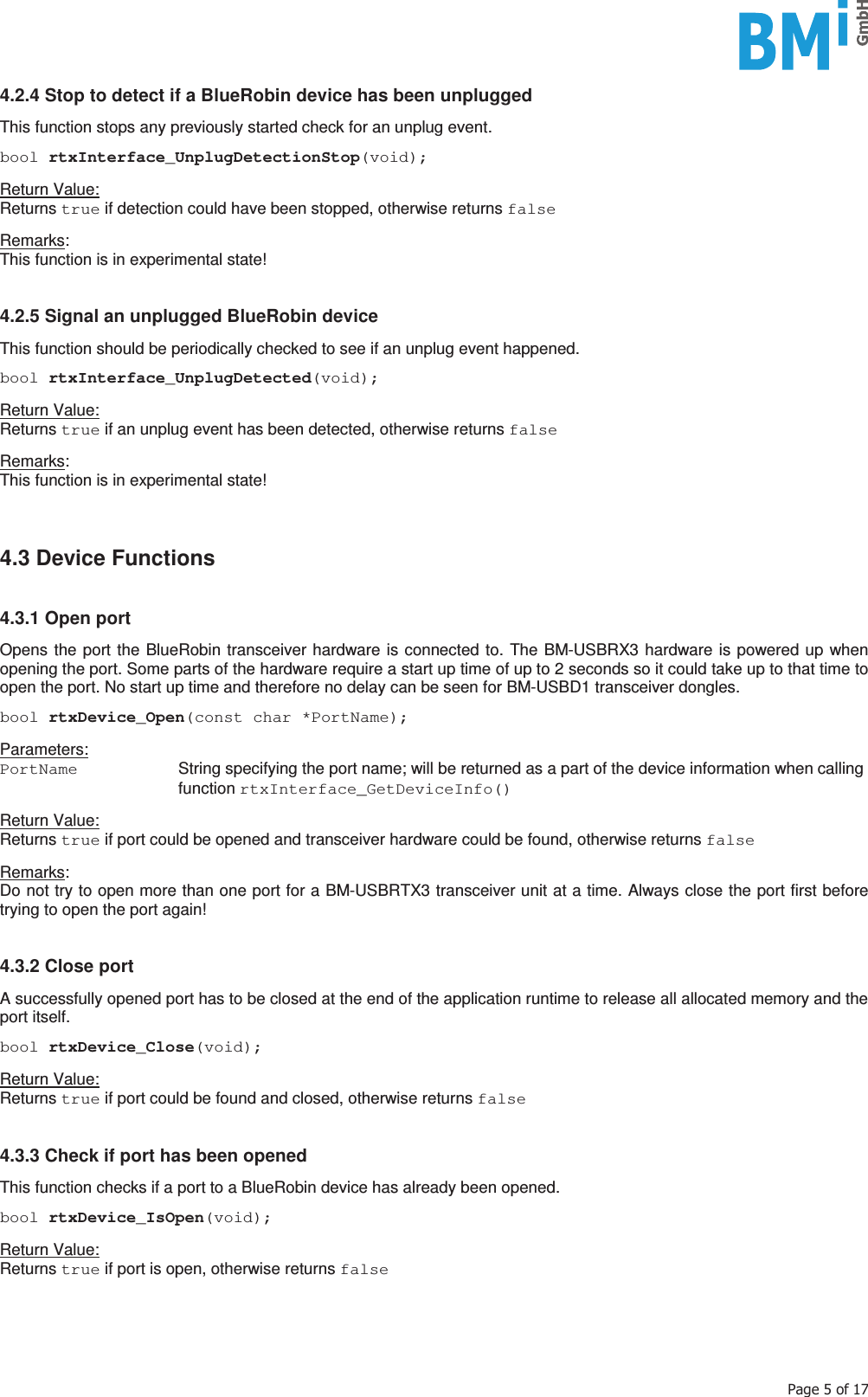
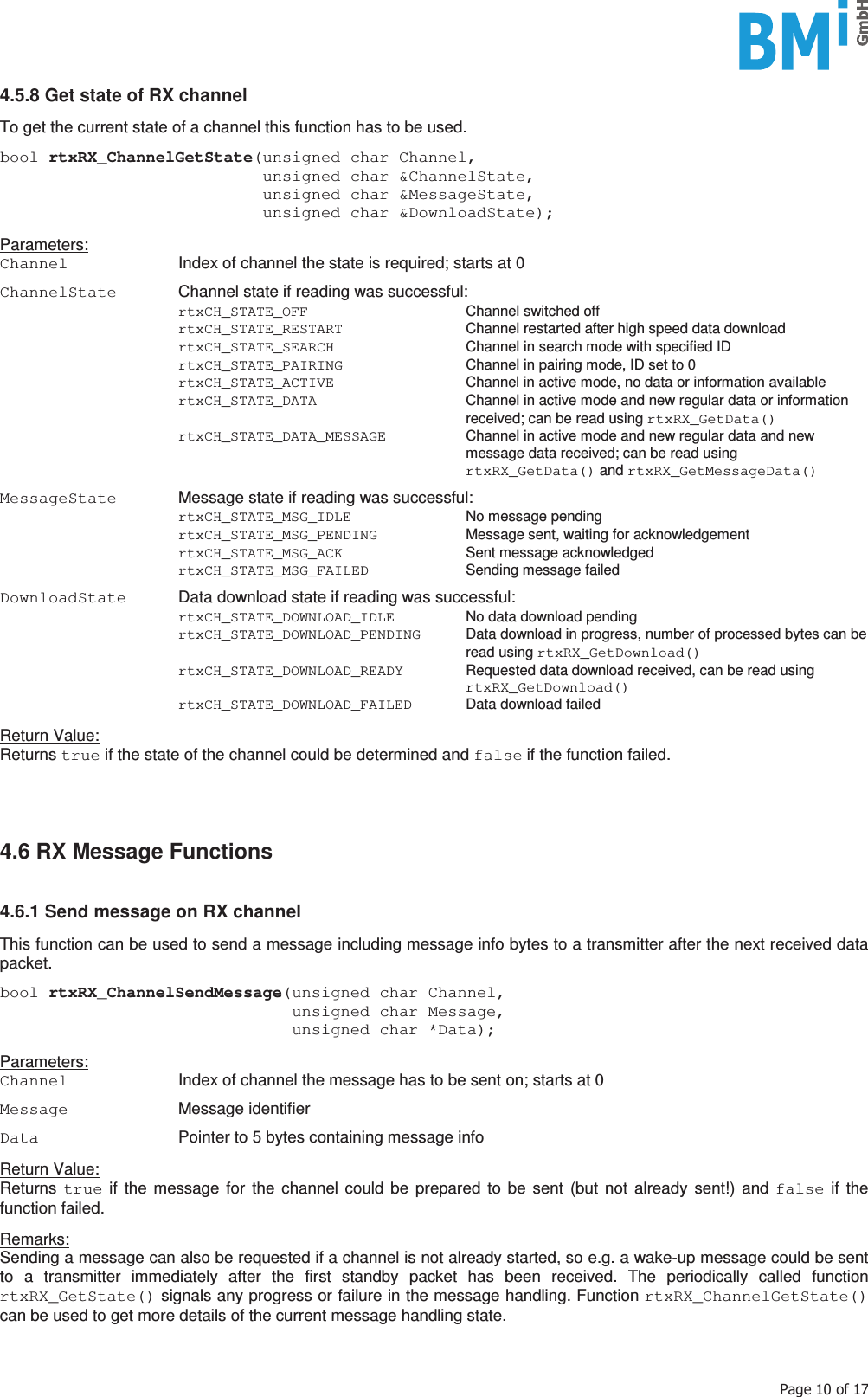
![ 3DJHRIFor receiving a transmitter on a channel it is recommended to first reset the channel, to set its ID to the transceiver ID to be received if a specific transmitter has to be received and then to start the channel: // Channel to default settings rtxRX_ChannelReset(Channel); // Set transmitter ID to be received, not needed if any transmitter has to be received rtxRX_ChannelSetID(Channel, ID); // Start channel rtxRX_ChannelStart(Channel); To stop receiving a transmitter on a channel the channel just has to be stopped: // Stop channel rtxRX_ChannelStop(Channel); As soon as at least one channel has been started the state of the transceiver device should be checked periodically WORD wState; BYTE bChannel; BYTE bType; BYTE bSignalLevel; BYTE bSequenceCounter; BYTE bData[rtxMAX_MESSAGE_DATA_BYTES]; DWORD dwID; // Getting state successful? if (rtxRX_GetState(wState)) { // New data available? if ((wState & rtxSTATE_RX_DATA) > 0) { // Process all new regular data or information while (rtxRX_GetData(bChannel, bType, bSignalLevel, bSequenceCounter, bData)) { // Next action dependent on received data/information type switch (bType) { // Data received case rtxCH_TYPE_DATA: // First get current ID of channel if not already read if (...) { // Get ID of found device if (rtxRX_ChannelGetID(bChannel, dwID)) { // Store ID ... } } // Process received data ... break; // Data packet lost case rtxCH_TYPE_DATA_LOST: // Process packet lost information ... break; // Transmitter lost case rtxCH_TYPE_TX_LOST: // Does not happen when automatic search is set break; // Automatic search started again case rtxCH_TYPE_TX_SEARCH: // Process search start information ... } } } } else // Access to port failed { // Hardware error handling ... } When ending the application the opened port has to be closed and the rtxBlueRobin DLL has to be released: // DLL already initialized? if (rtxDll_IsInitialized()) { // Device already opened? if (rtxDevice_IsOpen()) { // Stop all channels rtxRX_ChannelStop(rtxALL_CHANNELS); // Close COM port rtxDevice_Close(); } // Unload DLL rtxDll_DeInitialize(); }](https://usermanual.wiki/BM-innovations/BM-USBRTX4/User-Guide-2373093-Page-15.png)
![ 3DJHRI6 FCC and IC Statements FCC § 15.19 This device complies with Part 15 of the FCC rules. Operation is subject to the following two conditions: (1) This device may not cause harmful interference, and (2) this device must accept any interference received, including interference that may cause undesired operation. FCC § 15.21 (Warning Statement) [Any] changes or modifications not expressly approved by the party responsible for compliance could void the user’s authority to operate the equipment. FCC § 15.105 Note: This equipment has been tested and found to comply with the limits for a Class B digital device, pursuant to part 15 of the FCC Rules. These limits are designed to provide reasonable protection against harmful interference in a residential installation. This equipment generates, uses and can radiate radio frequency energy and, if not installed and used in accordance with the instructions, may cause harmful interference to radio communications. However, there is no guarantee that interference will not occur in a particular installation. If this equipment does cause harmful interference to radio or television reception, which can be determined by turning the equipment off and on, the user is encouraged to try to correct the interference by one or more of the following measures: —Reorient or relocate the receiving antenna. —Increase the separation between the equipment and receiver. —Connect the equipment into an outlet on a circuit different from that to which the receiver is connected. —Consult the dealer or an experienced radio/TV technician for help. Canada CNR-Gen Section 7.1.3 This device complies with Industry Canada licence-exempt RSS standard(s). Operation is subject to the following two conditions:(1) this device may not cause interference, and (2) this device must accept any interference, including interference that may cause undesired operation of the device. Le présent appareil est conforme aux CNR d'Industrie Canada applicables aux appareils radio exempts de licence. L'exploitation est autorisée aux deux conditions suivantes : (1) l'appareil ne doit pas produire de brouillage, et (2) l'utilisateur de l'appareil doit accepter tout brouillage radioélectrique subi, même si le brouillage est susceptible d'en compromettre le fonctionnement. ICES-003 This Class B digital apparatus complies with Canadian ICES-003. Cet appareil numérique de la classe B est conforme à la norme NMB-003 du Canada. RSS-Gen. 7.1.2: The radio transmitter (IC: 8288A-BMUSBRTX4) has been approved by Industry Canaca to operate with the antenna types listed below with the maximum permissible gain and required antenna impedance for each antenna type indicated. Antenna types not included in this list, having a gain greater than the maximum gain indicated for that type, are strictly prohibited for use with this device. Antenna: PSKN3-925RS Rev SMA Plug (Male), Mobile Mark UNITYGAIN (0 dB) or less](https://usermanual.wiki/BM-innovations/BM-USBRTX4/User-Guide-2373093-Page-16.png)