Curtiss Wright Controls GSMK4 Geoscope Mk4 User Manual 2013 GeoScope Mk4
Curtiss-Wright Controls Inc (3d-Radar) Geoscope Mk4 2013 GeoScope Mk4
User Manual

3d-radar as
GeoScope™ User’s Manual
Model Geoscope Mk4
Document Version 2.0

3d-radar as

3d-radar as
GeoScope
TM
User’s Manual
© 2013 3d-Radar AS Page I Revision 2.0 Date: 02/07/2013
Contact Details
3d-Radar AS
Klæbuveien 196B
NO-7037 Trondheim, Norway
(+47) 7289 3200 Phone
(+47) 7289 3201 Fax
www.3d-radar.com
Copyright and Trademarks
© 2002-2013, 3d-Radar AS. All rights reserved.
3d-Radar, GeoScope
TM
is a trademark of 3d-
Radar AS. Microsoft, Windows, and Windows XP
are either registered trademarks or trademarks
of Microsoft Corporation in the United States
and/or other countries. All other trademarks are
the property of their respective owners.
Release Notice
This is the March 2013 release of the GeoScope
User’s Manual. It applies to the GeoScope Mk4
radar. The following limited warranties give you
specific legal rights.
Hardware Limited Warranty
3d-Radar warrants that this 3d-Radar hardware
product (the“Product”) shall be free from defects
in materials and workmanship and will
substantially conform to 3d-Radar’s applicable
published specifications for the Product for a
period of one (1) year, starting from the date of
delivery. The warranty set forth in this
paragraph shall not apply to software/firmware
products.
User Software and Firmware License,
Limited Warranty
This 3d-Radar User Software and/or Firmware
product (the “Software”) is licensed and not
sold. Its use is governed by the provisions of the
applicable End User License Agreement
(“EULA”), if any, included with the Software. In
the absence of a separate EULA included with
the Software providing different limited warranty
terms, exclusions, and limitations, the following
terms and conditions shall apply. 3d-Radar
warrants that this 3d-Radar Software product
will substantially conform to 3d-Radar’s
applicable published specifications for the
Software for a period of ninety (90) days,
starting from the date of delivery.
Warranty Remedies
3d-Radar's sole liability and your exclusive
remedy under the warranties set forth above
shall be, at 3d-Radar’s option, to repair or
replace any Product or Software that fails to
conform to such warranty (“Nonconforming
Product”), or refund the purchase price paid by
you for any such Nonconforming Product, upon
your return of any Nonconforming Product to 3d-
Radar in accordance with 3d-Radar’s standard
return material authorization procedures.
Warranty Exclusions and Disclaimer
These warranties shall be applied only in the
event and to the extent that: (i) the Products
and Software are properly and correctly
installed, configured, interfaced, maintained,
stored, and operated in accordance with 3d-
Radar’s relevant operator's manual and
specifications, and; (ii) the Products and
Software are not modified or misused. The
preceding warranties shall not apply to, and 3d-
Radar shall not be responsible for defects or
performance problems resulting from (i) the
combination or utilization of the Product or
Software with products, information, data,
systems or devices not made, supplied or
specified by 3d-Radar; (ii) the operation of the
Product or Software under any specification
other than, or in addition to, 3d-Radar's
standard specifications for its products; (iii) the
unauthorized modification or use of the Product
or Software; (iv) damage caused by accident,
lightning or other electrical discharge, fresh or
salt water immersion or spray; or (v) normal
wear and tear on consumable parts (e.g.,
batteries).
THE WARRANTIES ABOVE STATE 3D-RADAR'S
ENTIRE LIABILITY, AND YOUR EXCLUSIVE
REMEDIES, RELATING TO PERFORMANCE OF
THE PRODUCTS AND SOFTWARE. EXCEPT AS
OTHERWISE EXPRESSLY PROVIDED HEREIN,
THE PRODUCTS, SOFTWARE, AND
ACCOMPANYING DOCUMENTATION AND
MATERIALS ARE PROVIDED “ASIS” AND
WITHOUT EXPRESS OR IMPLIED WARRANTY OF
ANY KIND BY EITHER 3D-RADAR AS OR ANYONE
WHO HAS BEEN INVOLVED IN ITS CREATION,
PRODUCTION, INSTALLATION, OR
DISTRIBUTION, INCLUDING, BUT NOT LIMITED
TO, THE IMPLIED WARRANTIES OF
MERCHANTABILITY AND FITNESS FOR A
PARTICULAR PURPOSE, TITLE, AND
NONINFRINGEMENT.
THE STATED EXPRESS WARRANTIES ARE IN
LIEU OF ALL OBLIGATIONS OR LIABILITIES ON
THE PART OF 3D-RADAR ARISING OUT OF, OR
IN CONNECTION WITH, ANY PRODUCTS OR
SOFTWARE. SOME STATES AND JURISDICTIONS
DO NOT ALLOW LIMITATIONS ON DURATION OR
THE EXCLUSION OF AN IMPLIED WARRANTY, SO
THE ABOVE LIMITATION MAY NOT APPLY TO
YOU.
Limitation of Liability
3D-RADAR’S ENTIRE LIABILITY UNDER ANY
PROVISION HEREIN SHALL BE LIMITED TO THE
GREATER OF THE AMOUNT PAID BY YOU FOR
THE PRODUCT OR SOFTWARE LICENSE. TO THE
MAXIMUM EXTENT PERMITTED BY APPLICABLE
LAW, IN NO EVENT SHALL 3D-RADAR OR ITS
SUPPLIERS BE LIABLE FOR ANY INDIRECT,
SPECIAL, INCIDENTAL, OR CONSEQUENTIAL
DAMAGES WHATSOEVER UNDER ANY
CIRCUMSTANCE OR LEGAL THEORY RELATING
IN ANY WAY TO THE PRODUCTS, SOFTWARE,
AND ACCOMPANYING DOCUMENTATION AND
MATERIALS, (INCLUDING, WITHOUT
LIMITATION, DAMAGES FOR LOSS OF BUSINESS
PROFITS, BUSINESS INTERRUPTION, LOSS OF
BUSINESS INFORMATION, OR ANY OTHER
PECUNIARY LOSS), REGARDLESS OF WHETHER
3D-RADAR HAS BEEN ADVISED OF THE
POSSIBILITY OF ANY SUCH LOSS AND
REGARDLESS OF THE COURSE OF DEALING
WHICH DEVELOPS OR HAS DEVELOPED
BETWEEN YOU AND 3D-RADAR. BECAUSE SOME
STATES AND JURISDICTIONS DO NOT ALLOW
THE EXCLUSION OR LIMITATION OF LIABILITY
FOR CONSEQUENTIAL OR INCIDENTAL

3d-radar as
GeoScope
TM
User’s Manual
© 2013 3d-Radar AS Page II Revision 2.0 Date: 02/07/2013
DAMAGES, THE ABOVE LIMITATION MAY NOT
APPLY TO YOU.
Regulations and Safety
The GeoScope Ground Penetrating Radar
comprises a radar transmitter and receiver.
Regulations regarding the use of the radars vary
greatly from country to country. In some
countries, the unit can be used without obtaining
an end-user license. Other countries require
end-user licensing. Consult your local
communications governing agency for licensing
information. Before operating this radar,
determine if authorization or a license to operate
the unit is required in your country. It is the
responsibility of the end user to obtain an
operator’s permit or license for this Ground
Penetrating Radar for the location or country of
use.
STATEMENT ACCORDING FCC
This device complies with Part 15 of the FCC
Rules. Operation is subject to the following two
conditions: (1) This device may not cause
harmful interference, and (2) this device must
accept any interference received, including
interference that may cause undesired
operation.
Any changes or modifications not expressly
approved by 3d-Radar may void the user's
authority to operate the equipment.
STATEMENT ACCORDING INDUSTRY
CANADA
Per RSS-Gen, Section 7.1.3 This device complies
with Industry Canada license-exempt RSS
standard(s). Operation is subject to the following
two conditions: (1) this device may not cause
interference, and (2) this device must accept
any interference, including interference that may
cause undesired operation of the device.
This Ground Penetrating Radar Device shall be
operated only when in contact with or within 1 m
of the ground. This Ground Penetrating Radar
Device shall be operated only by law
enforcement agencies, scientific research
institutes, commercial mining companies,
construction companies, and emergency rescue
or firefighting organizations.
Selon RSS-Gen section 7.1.3, cet appareil est
conforme aux normes "Industry Canada license-
except RSS standards". Son fonctionnement est
soumis aux deux conditions suivantes: (1) cet
appareil ne doit pas provoquer d'interférences,
et (2) cet appareil doit accepter toute
interférence, y compris les interférences pouvant
provoquer un fonctionnement indésirable de
l'appareil.
Ce dispositif de radar à pénétration du sol ne
doit être utilisé que lorsqu'il est en contact avec
ou à moins de 1 m du sol. Il ne doit être mis
en œuvre que par les services officiels
d'investigation, les instituts de recherche
scientifique, les sociétés minières commerciales,
les entreprises de construction et les organismes
de secours d'urgence ou de lutte contre les
incendies.
Safety
EXPOSURE TO RADIO FREQUENCY RADIATION
The radiated power of the radar antenna is
approximately 10mW. This is a very low RF
power. However, we recommend to maintain a
minimum separation distance of 10 cm
(approximately 4 in.) between yourself and the
bottom side of the radiating GPR antenna to
avoid any harmful radiation levels.

3d-radar as
GeoScope
TM
User’s Manual
© 2013 3d-Radar AS Page 1 Revision 2.0 Date: 02/07/2013
Table of Contents
Table of Contents .................................................................................. 1
Abbreviations ........................................................................................ 1
1 Introduction .................................................................................... 2
1.1 3d-Radar Technology .................................................................. 2
1.2 Collect up to 41 survey lines simultaneously .................................. 3
1.3 Multi-offset recording (optional) ................................................... 5
1.4 Accessories/options .................................................................... 6
2 Hardware Components ..................................................................... 8
2.1 GeoScope Unit ........................................................................... 8
2.2 Aux connector ........................................................................... 9
2.3 GPS input .................................................................................. 9
2.4 Distance Measurement Instrument (DMI) .................................... 10
2.5 Power Supply........................................................................... 11
2.6 Control Computer ..................................................................... 11
3 Antenna Array ............................................................................... 13
3.1 Antenna Trailer ........................................................................ 13
4 Operation ..................................................................................... 16
5 Maintenance ................................................................................. 18
5.1 Cleaning air filter ..................................................................... 18
5.2 Cleaning of connectors .............................................................. 18
5.3 Cleaning the antenna array ....................................................... 18
Abbreviations
DMI Distance Measurement Instrument (encoder wheel)
GPR Ground Penetrating Radar
SFCW Step-frequency Continuous Waves
TX Transmitter
RX Receiver
3d-radar as
GeoScope
TM
User’s Manual
© 2013 3d-Radar AS Page 2 Revision 2.0 Date: 02/07/2013
1 Introduction
This document contains the user manual for the GeoScope™ Mk4 ground
penetrating radar system, designed and manufactured by 3d-Radar AS, see
http://www.3d-radar.com. The purpose of this document is to explain how to
assemble the hardware and use the GeoScope software. GPR and signal
processing theory is not covered by this manual. Some guidelines for
configuring the waveform will be provided.
1.1 3d-Radar Technology
The GeoScope is a three-dimensional step-frequency ground penetrating
radar. The GPR transmits electromagnetic waves through an antenna array
and measures the echo from layers and objects in the subsurface. The depth
of the objects is found by measuring the travel time from the signal is
transmitted until the echo is received. A depth estimate is obtained by
multiplying this time with the wave velocity of the signal.
The GeoScope
TM
GPR is the fastest step-frequency radar on the market. By
using a digital frequency source instead of traditional phase-locked loop
technology, the GeoScope
TM
can generate waveforms from 140 MHz up to 3
GHz. The step-frequency technique has a coherent receiver which means that
the whole waveform length is used as 100% efficient integration time. By
comparison, impulse GPRs use stroboscopic sampling with significant loss of
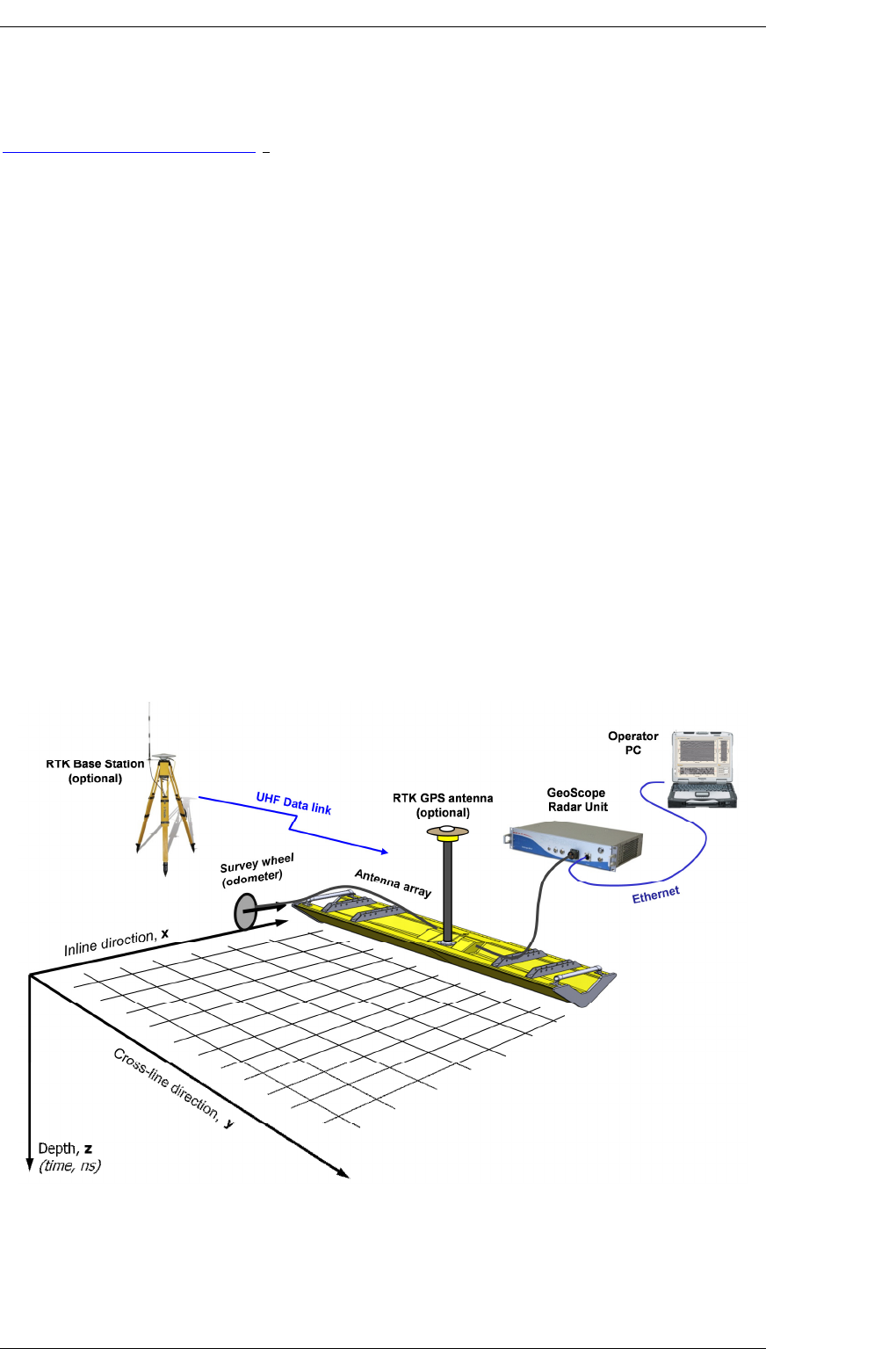
energy. Figure 1 shows an overview of the GeoScope system with optional
GPS system.
Figure 1 - GeoScope GPR system overview.
The step-frequency waveform gives optimum source signature with a uniform
frequency spectrum. The computer control allows the user to set the dwell
3d-radar as
GeoScope
TM
User’s Manual
© 2013 3d-Radar AS Page 3 Revision 2.0 Date: 02/07/2013
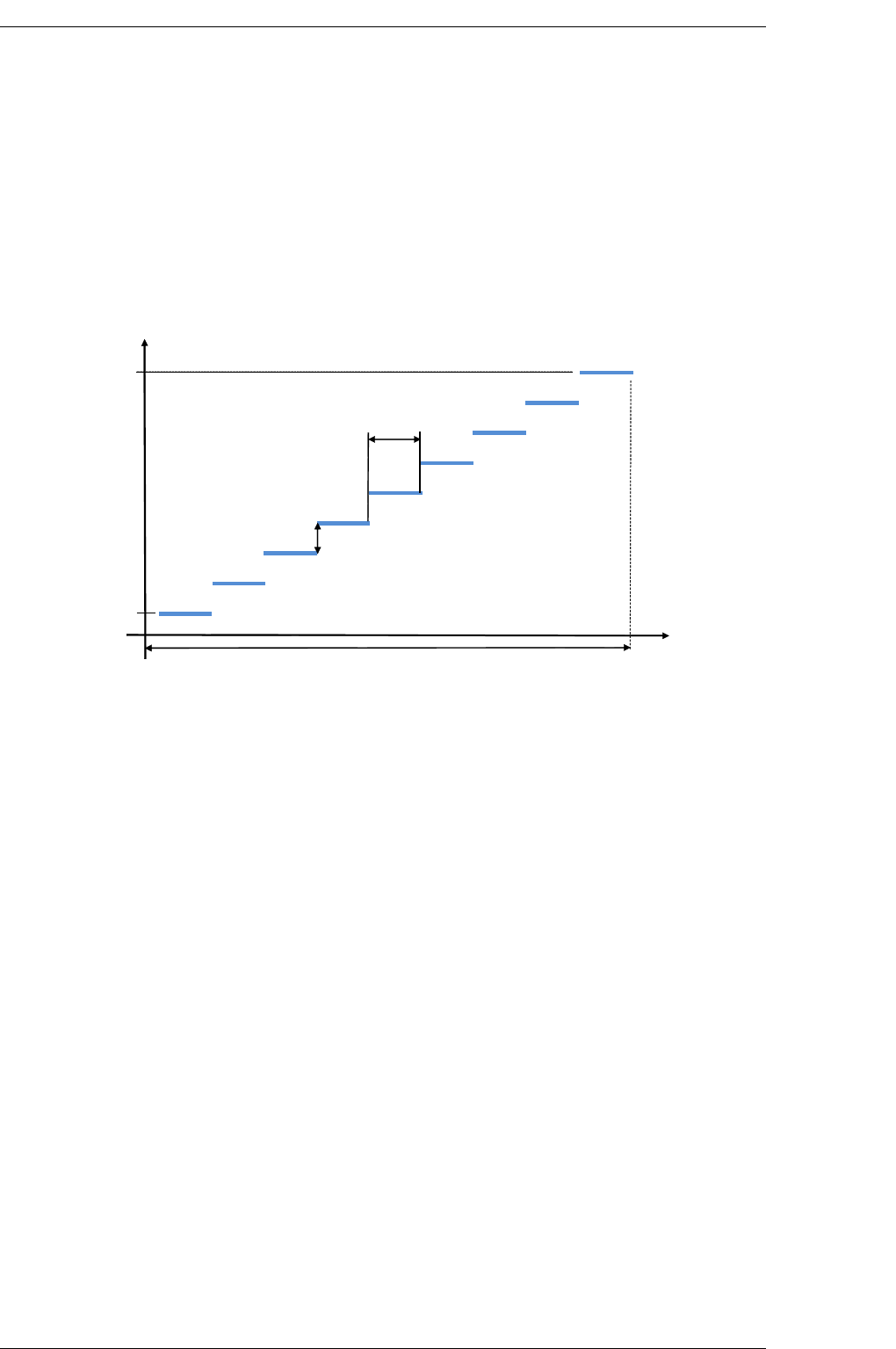
time per frequency as well as the start and stop frequencies as shown in
Figure 2. The GeoScope sequentially transmits one complete waveform on
each transmitting antenna while receiving on the corresponding receiving
antenna. The transmission of one complete waveform on one transmitting
element is called as scan. The recorded frequency domain data contain one
complex value for each frequency in the waveform.
The radar system performs real-time time domain conversion through Fast
Fourier Transform allowing the user to view radargrams from the antenna
array. These data can be imported into either 3dR Examiner software, or
RoadDoctor
TM
from Roadscanners OY.
Figure 2 - Step-frequency waveform.
The radar is controlled from a laptop computer through an Ethernet cable.
The system can also be configured with GPS/Total Station interface (option)
to allow recording of position data through the serial port (RS-232).
1.2 Collect up to 41 survey lines simultaneously
The GeoScope
TM
GPR is designed to operate with an electronically scanned
antenna array with up to 41 antennas. The antennas are scanned
sequentially by the radar. The unique antenna system consists of air-coupled
bow-tie monopole pairs as shown in Figure 3. This gives a quasi-monostatic
antenna configuration with practically zero-offset distance. The air-coupled
antenna array can be operated at elevations up to 50cm off the ground
allowing high-speed surveys.
Figure 1 shows the spatial sampling grid for a typical 3D radar survey. The
Distance Measurement Instrument (DMI) outputs a trigger signal to the
system every time the array has moved the specified interval along the x-
axis. The horizontal sampling interval determines the ∆x in the sampling grid.
The array is aligned along the y-axis. The spacing between the antenna
elements in the array gives the ∆y in the sampling grid.
time
N frequencies
frequency
Frequency step
Dwell Time
Scan Time (for one single antenna element)
3.0 GHz
140 MHz

3d-radar as
GeoScope
TM
User’s Manual
© 2013 3d-Radar AS Page 4 Revision 2.0 Date: 02/07/2013
Figure 3 - Ultra-wideband bow-tie antenna pair (cross section).
As opposed to traditional octave-band GPR antennas, the ultra-wideband
bow-tie monopoles have continuous frequency coverage from the 200 MHz
range up to 3 GHz as illustrated in Figure 4. In practice this allows the user to
collect data from 140 MHz to 3 GHz without changing antennas. By
comparison, a similar survey using impulse GPR would require use of
200MHz, 400 MHz, 800 MHz and 1600 MHz antennas.
Figure 4 - Wideband coverage of the 3d-Radar antenna array.
The antenna elements are arranged in a linear array as shown in Figure 5
where the transmitting and receiving antennas are displaced to each other.
During the survey, the radar combines the transmit/receive antennas
sequentially to obtain a number of profiles (or channels) as shown in Figure
5.
TX Radiation pattern RX Radiation pattern
Common footprint
3d-Radar frequency response:
100MHz 200MHz 400MHz 800MHz
1200MHz
3d-radar as
GeoScope
TM
User’s Manual
© 2013 3d-Radar AS Page 5 Revision 2.0 Date: 02/07/2013
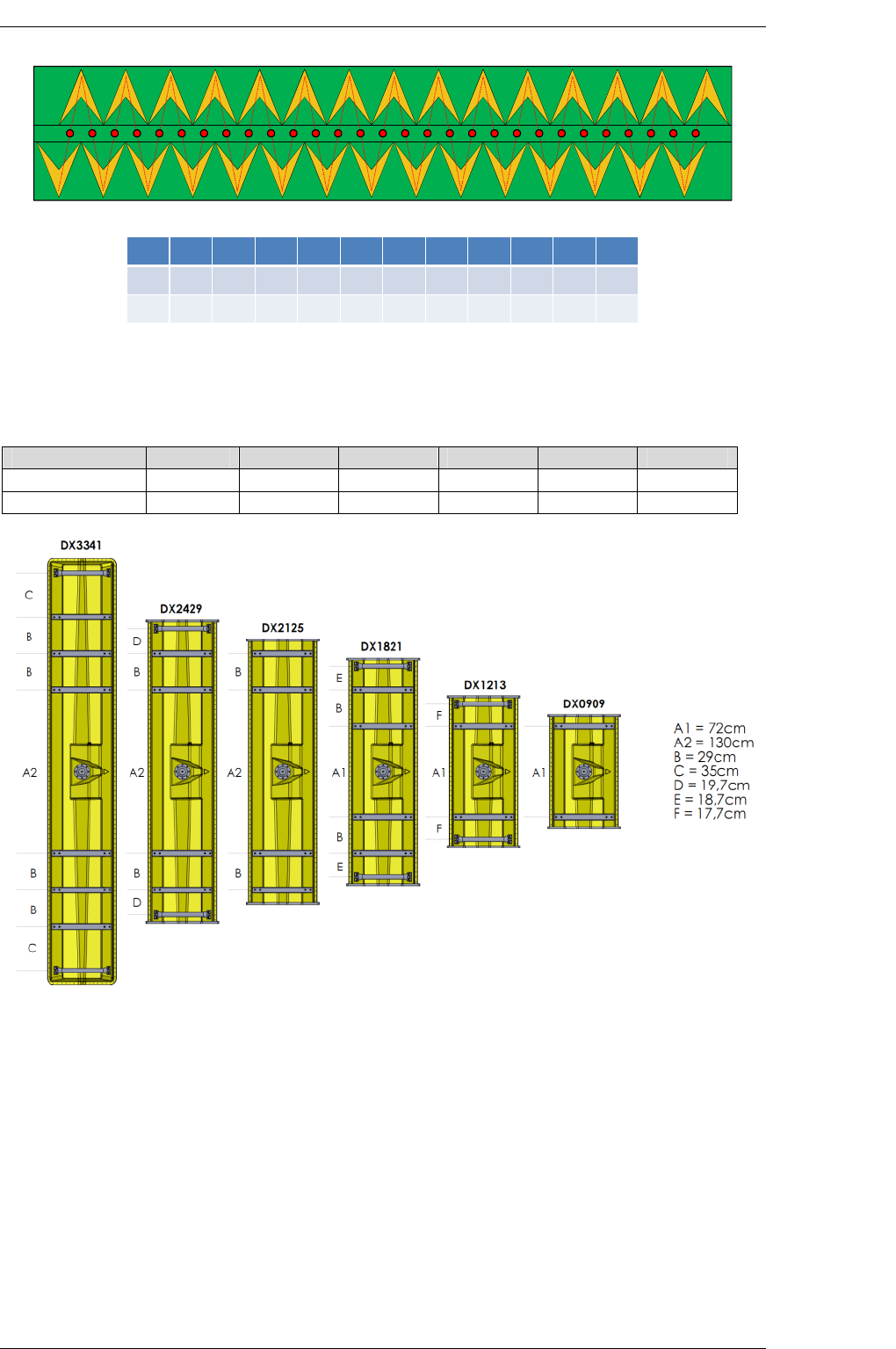
Figure 5 – Antenna layout DX2429.
The standard range of antenna arrays includes the following models:
Model DX0909
DX1213 DX1821 DX2125 DX2429 DX3341
Length (mm) 900 1200 1800 2100 2400 3300
Channels 9 13 21 25 29 41
Figure 6 – Available antenna models.
1.3 Multi-offset recording (optional)
The Multi-offset recording allows the user to set up antenna scanning
sequences with independent transmitter and receiver antenna locations.
In the standard (zero-offset) antenna scanning sequence, the GeoScope
transmits/receives sequentially on each antenna pair. Data is collected in the
1 152 3 4 5 6 7 8 9 10 11 12 13 14
Ch# 1 2 3 4 5 ... 25 26 27 28 29
Tx# 1 2 2 3 3 ... 13 14 14 15 15
Rx# 1 1 2 2 3 ... 13 13 14 14 15
1 152 3 4 5 6 7 8 9 10 11 12 13 14
3d-radar as
GeoScope
TM
User’s Manual
© 2013 3d-Radar AS Page 6 Revision 2.0 Date: 02/07/2013
transverse direction by firing the antenna pairs in a linear sequence from
Antenna Pair #1 to the highest antenna pair.
With the Multi-offset feature, the system offers a higher degree of freedom to
build more advanced scan patterns. It is for example possible to transmit at
Antenna #1 and receive at Antenna # 8, (i.e. with an offset distance along
the cross-line direction). The automatic Common-Mid-Point (CMP) gather
collects traces centered at the antenna in the center of the array with
increasing offsets (normal move-out) as shown in Figure 7. This feature is
used to estimate the wave velocity using standard methods (semblance
analysis) used in seismic processing. Other scan sequences can be
programmed as well. Note that this mode of operation works in a sequential
manner, hence using all possible combinations of transmitter and receiver
antennas will slow down the data collection speed somewhat.
Figure 7 – Common-Mid-Point Gather.
1.4 Accessories/options
The GeoScope
TM
can be used in combination with digital video camera, GPS
and CamLink
TM
software from RoadScanners for simultaneous recording of
video, GPR data and GPS data.
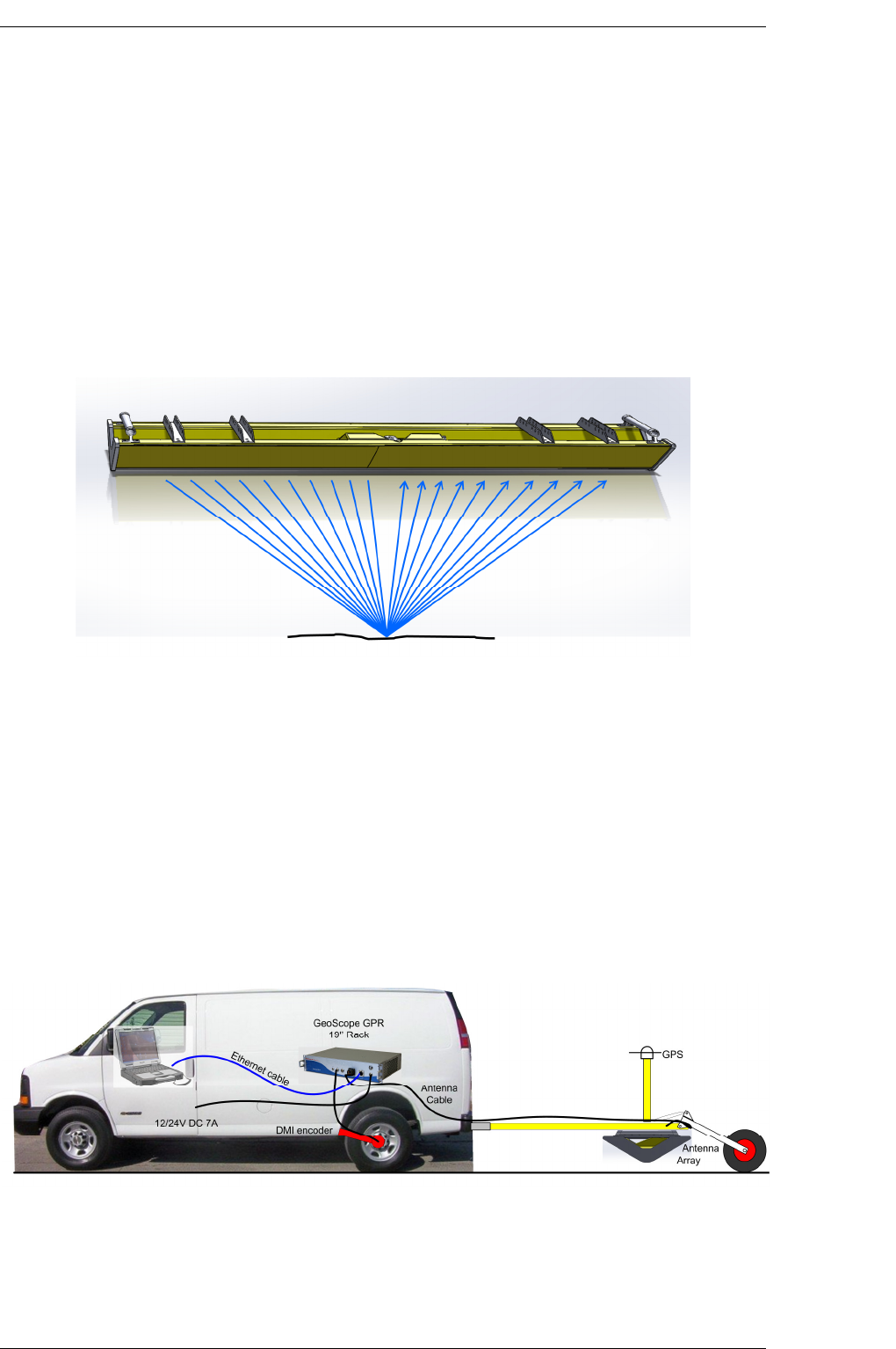
The antenna array can be equipped with a 2-wheel lightweight trailer
assembly (Figure 8). The trailer connects to a standard ISO 50mm ball hitch
used on cars. For railway operation 3d-Radar can provide railway wheels with
adjustable track width. For high-speed surveys we recommend to mount the
array directly to the vehicle
Figure 8 - Typical GPR setup with a 2-wheel trailer.

3d-radar as
GeoScope
TM
User’s Manual
© 2013 3d-Radar AS Page 7 Revision 2.0 Date: 02/07/2013

3d-radar as
GeoScope
TM
User’s Manual
© 2013 3d-Radar AS Page 8 Revision 2.0 Date: 02/07/2013
2 Hardware Components
The GeoScope system consists of four main parts:
1. GeoScope unit
2. Antenna Array
3. Distance Measurement Instrument (DMI)
4. Control computer
2.1 GeoScope Unit
The GeoScope unit is the heart of the GPR system. It contains the RF
hardware including the digital signal generator and the ADC system which
stores the collected data. The GeoScope runs off 12V or 24V DC. Figure 9
shows the GeoScope front panel with connectors.
Figure 9 - GeoScope front panel.
The front panel contains the following elements:
Item
Name Description
1 AUX Aux Ethernet for service + I/O (Section 2.2)
2 GPS RS232 port for recording NMEA0183 messages
from GPS, + Additional RS232 port, + Trig I/O
(Section 2.3)
3 DMI DMI encoder input. (Section 2.4)
4 Antenna Antenna & Control cable
5 Ethernet Ethernet connector to Operator Computer
6 Power Switch Push to turn on. LED ring is red when system is
up and running. Push again to turn off. LED ring
goes dark when system is turned off.
7 Power Input Connector for 12/24V DC Input (Section 2.5)
To turn on the GeoScope, press the power button briefly and wait for the
startup procedure to finish. This takes a few seconds.
When the GeoScope is started with an Ethernet cable connected directly to
the control computer, it will have the following TCP/IP address: 192.168.8.2.
To stop the GeoScope, press the power button briefly and wait for the
shutdown procedure to finishWhen the shutdown procedure is finished the
power button LED goes dark and fans stop.
3d-radar as
GeoScope
TM
User’s Manual
© 2013 3d-Radar AS Page 9 Revision 2.0 Date: 02/07/2013
Make sure that the side air inlet and outlet are not covered to
ensure proper cooling. The air inlet filter should be cleaned
regularly when operating in dusty environments. Insufficient
cooling might lead to system malfunction and potential loss of
data. Make sure that the GeoScope is not overheated by direct
sunlight.
2.2 Aux connector
The AUX connector (Lemo EGB.2B.312.CLL) has the following pin
configuration:
2.3 GPS input
The GPS input connector (Lemo EGA.2B.312.CLL) has the following pin
configuration:
The Geoscope reads serial data on NMEA0183 format from any GPS or GNSS
receiver. Recommended settings for the GPS NMEA output is:
Pin Signal
1 Reserved
2 Reserved
3 GND
4 Ethernet
5 Ethernet
6 Ethernet
7 Ethernet
8 Ethernet
9 Ethernet
10 Ethernet
11 Ethernet
12 N/C
Pin Signal
1 GPS RS-232 TX (output)
2 GPS RS-232 RX
3 GND
4 Reserved
5 Reserved
6 GND
7 Trig out (TTL)
8 Trig in (TTL)
9 GND
10 N/C
11 N/C
12 N/C

3d-radar as
GeoScope
TM
User’s Manual
© 2013 3d-Radar AS Page 10 Revision 2.0 Date: 02/07/2013
2.4 Distance Measurement Instrument (DMI)
The DMI consists of an optical encoder that measures the distance of
movement and generates trigger pulses to the GeoScope. The DMI outputs
quadrature TTL pulses to allow detection of forward or reverse travel
direction. The DMI should be recalibrated at least each time you change its
mounting.
The DMI input connector (Lemo EGG.2B.312.CLL) has the following pin
configuration:
The relationship between DMI Tick count and the quadrature pulses is shown
in Figure 10. One tick is counted for each rising or falling edge of pulse trains
A and B.
Figure 10 - DMI pulses.
The supplied DMI encoder has 1000 pulses/rev.
Parameter Recommended settings
Position data $GPGGA (1Hz output rate)
Velocity data $GPVTG (1Hz output rate)
Baud rate 115,200
Data bits 8
Parity None
Stop bit 1
Pin Signal
1 +5V DC to DMI-1, max 50mA
2 DMI-1: Quadrature A (TTL)
3 DMI-1: Quadrature B (TTL)
4 Reserved
5 Reserved
6 GND
7 GND
8 DMI-2: Quadrature A (TTL)
9 DMI-2: Quadrature B (TTL)
10 Reserved
11 Reserved
12 +5V DC to DMI-2, max 50mA
1
B
Tick
A
2
3
4
5
6
7
8
9
10
11
12
3d-radar as
GeoScope
TM
User’s Manual
© 2013 3d-Radar AS Page 11 Revision 2.0 Date: 02/07/2013
2.5 Power Supply
The GeoScope runs off 12/24V DC (10.5 – 36V). At maximum load, the
GeoScope power consumption is about 80W (7A @ 12V DC). During startup
the inrush current might be as high as 10A.
Never unplug the power cable from the GeoScope when the
system is running. This may cause loss of data and insufficient
system shutdown.
The Power connector (Lemo EGJ.3B.303.CLA) has the following pin
configuration:
The GeoScope may be connected to the 12V DC system of a car, but special
care should be noted to voltage stability. Always use a separate 12V
accumulator or a DC/DC converter with galvanic isolation between the
GeoScope and the car 12V outlet to stabilize the voltage. Avoid starting the
car engine when the GeoScope is connected since the starter motor might
cause severe voltage surge.
When running the GeoScope on battery power, it is very important to use a
high quality battery. Old batteries may often appear to be fully charged when
measured without load, but when connected to load, like the GeoScope,
voltage can drop quickly.
Under normal operation, a fully charged 50Ah lead-acid accumulator with
good health, will last for approximately 5 hours. A gel-type deep-cycle
accumulator is recommended both for safety, i.e. reduced risk for acid
leakage, and for endurance. Gel accumulators are designed for supplying
power over a long period of time with repeated deep discharging. Ordinary
car accumulators on the other hand, are constructed for supplying high
currents over a short period of time during starting. They are not constructed
for being completely discharged repeatedly.
2.6 Control Computer
The control computer is usually a laptop with the GeoScope user software
installed. The control computer is used to configure the radar waveform,
calibrate the DMI, control data acquisition and manage the collected data
stored on the GeoScope. The system performance will be affected by the
speed of the client laptop. A workstation grade CPU, gigabit Ethernet and a
fast SSD is recommended.
As of 2013-05-04, the client software runs on Java 1.6 while 3drExaminer
requires Windows 7.
Pin Signal
1 Pos
2 Neg
3 Chassis GND

3d-radar as
GeoScope
TM
User’s Manual
© 2013 3d-Radar AS Page 12 Revision 2.0 Date: 02/07/2013
If the computer runs Windows XP with Service Pack 2 or newer, the Windows
firewall should be disabled when connecting to the GeoScope; otherwise you
will have problems connecting to the GeoScope. If you use other firewall
software, and experience connection problems, please turn off this as well.
An alternative to disabling the firewall completely is to enable the outgoing
ports 19005 and 19003.

3d-radar as
GeoScope
TM
User’s Manual
© 2013 3d-Radar AS Page 13 Revision 2.0 Date: 02/07/2013
3 Antenna Array
3d-Radar AS provides different antenna array solutions for the GeoScope.
Current arrays range from widths of 90 – 330 cm with number of channels
ranging from 9 to 41Figure 11 shows the DX2429 antenna array which covers
a width of 240 cm using 29 channels.
Figure 11 - Antenna Array Model DX2429.
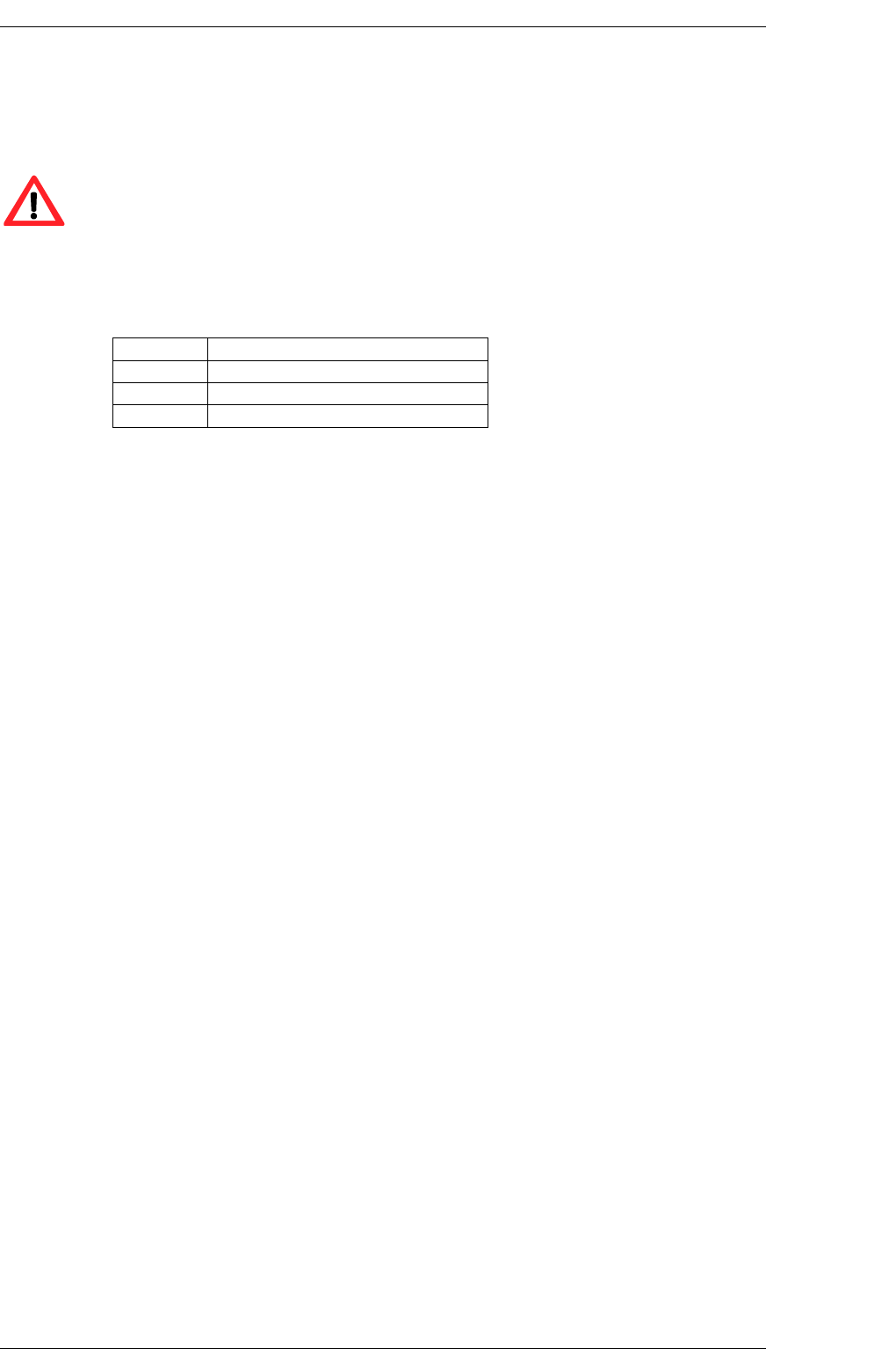
3.1 Antenna Trailer
The antenna trailer is a lightweight assembly which allows the array to be
towed behind a vehicle. Figure 12 shows a drawing (top view) of the trailer
assembly.
3d-radar as
GeoScope
TM
User’s Manual
© 2013 3d-Radar AS Page 14 Revision 2.0 Date: 02/07/2013
Figure 12 - Antenna trailer.
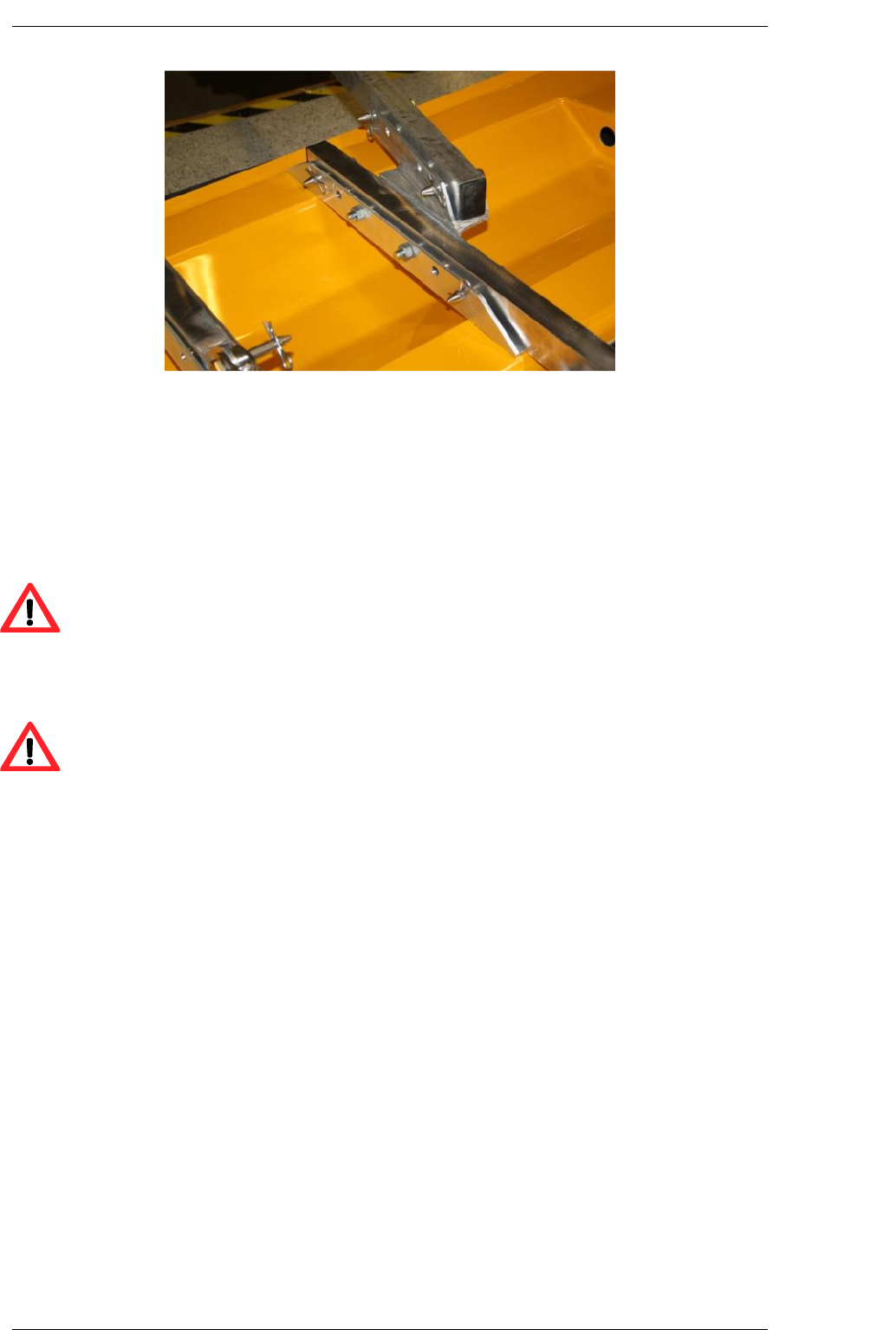
The antenna trailer is assembled by mounting the wheel brackets to the top
of the antenna array as shown in Figure 13. Mount the wheel containing the
DMI close to Antenna #1. Use the rigging screw to adjust the elevation.
Figure 13 - Wheel bracket with DMI.
3d-radar as
GeoScope
TM
User’s Manual
© 2013 3d-Radar AS Page 15 Revision 2.0 Date: 02/07/2013
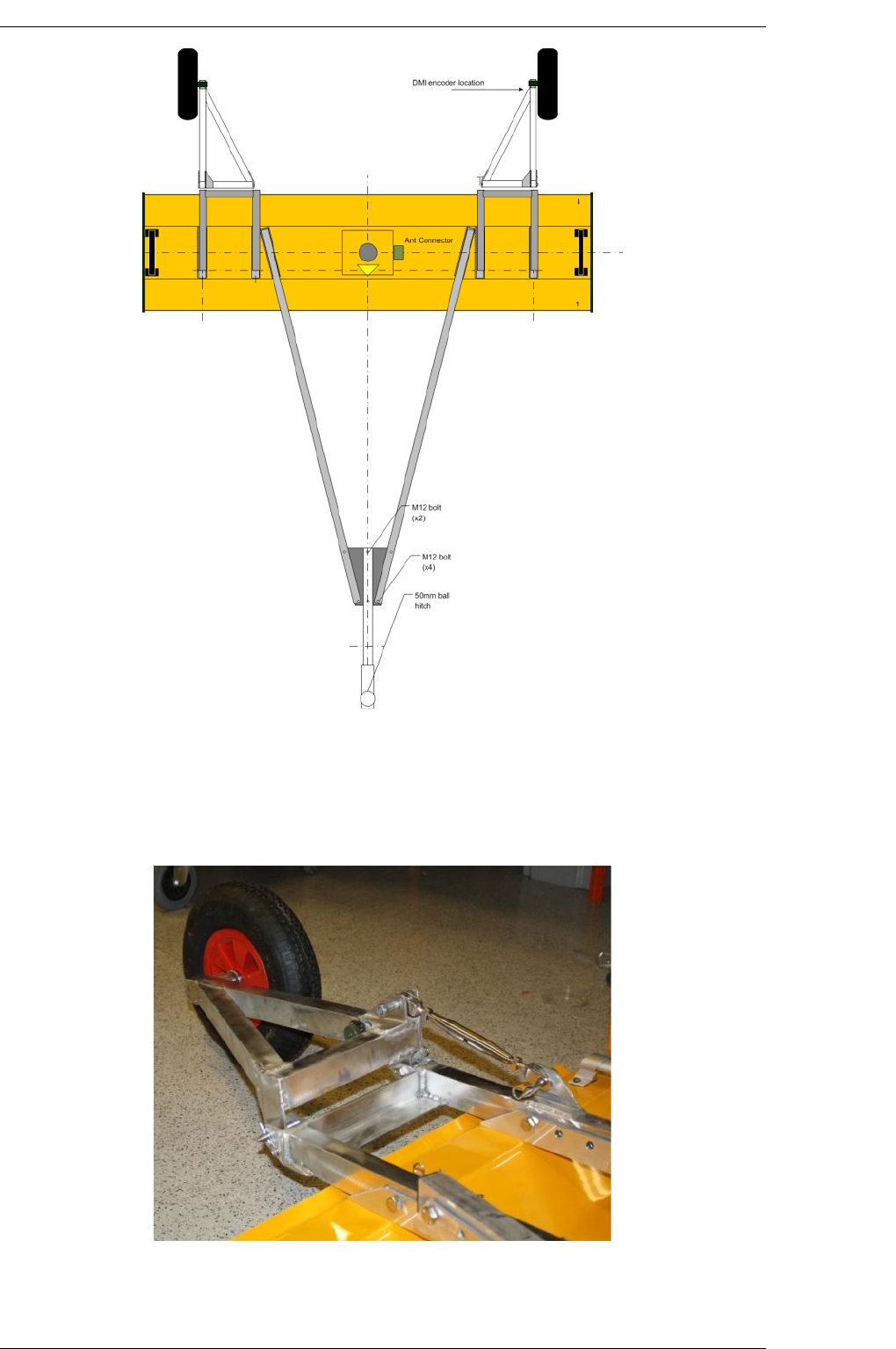
Figure 14 – Installation of tow bars.
Mount the tow bar to the top brackets on the antenna array as shown in
Figure 14.
Connect the RF cable to the main antenna connector of the array. Connect
the DMI cable to the DMI connector on the wheel bracket containing the DMI.
Note that the 2.4 and the 3.3 meter arrays (DX2429 and
DX3341) are wider than the vehicle. Use flashlights and visible
markers to the edge of the antenna array when operating at
roads with traffic. Always wear visible reflex safety west when
working at roads and railways.
Make sure that the elevation of antenna array is sufficient to
avoid that the array hits the surface during data acquisition.
Recommended elevation is 10 – 50 cm above the ground
surface.
3d-radar as
GeoScope
TM
User’s Manual
© 2013 3d-Radar AS Page 16 Revision 2.0 Date: 02/07/2013
4 Operation
By following the steps below, you are ready to collect data with the
Geoscope:
1. Connect the Antenna array, the DMI encoder and DC power to the
GeoScope. Optionally, connect the External GPS.
2. Power up the GeoScope by pushing the button at the top right of the
front panel.
3. Connect the client computer to the Ethernet interface using a standard
CAT5E twisted pair cable. Please make sure that:
a. The Local Area Network adapter on the client computer is
configured with a fixed IP address in the 192.168.8.x range,
where x is different from 2 (192.168.8.5 for example) and with
a Subnet Max value of 255.255.255.0
b. Power options of the client PC are set to “High performance”
(Win7) or “Always on” (XP).
c. There is available hard-disk space for your .3dra files which are
stored on the client computer.
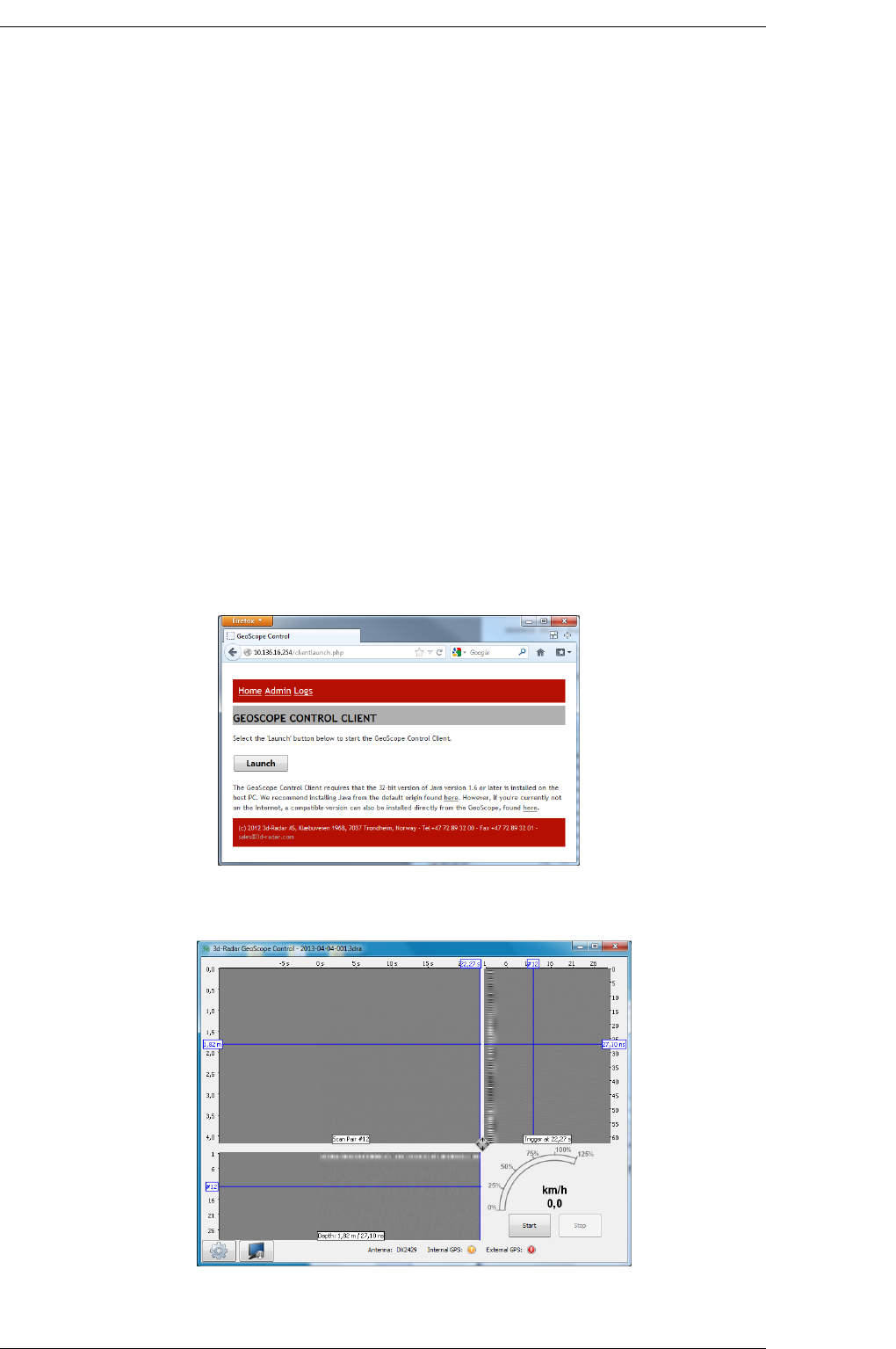
4. Open a web browser window and enter http://192.168.8.2 in the URL
field.
5. Push the “Launch” button, and the client GUI will appear:

3d-radar as
GeoScope
TM
User’s Manual
© 2013 3d-Radar AS Page 17 Revision 2.0 Date: 02/07/2013
6. Select survey settings by clicking the cog-wheel icon and selecting
“Survey Settings”.
a. Adjust the sliders. Note that the max speed changes according
to your slider settings. Depending on the “time window” setting,
you may or may not get the full depth in the quick view. The
full range is always recorded to file.
b. Select your “File Location” for storage of 3dra files.
c. Press “OK” to close the dialog.
7. Push “Start” button in the main window. Notice file name and location
in window title bar. If you are driving too fast, some scans will be lost
and vertical red stripes will be shown in the data view. When the
acquisition is done, press “Stop”. The 3dra file is now available in your
specified location.
8. Make sure the DMI Calibration values, the General DMI Settings and
the External GPS Settings are updated in the “System Settings” tab
before performing a survey task.
9. 3dR Examiner software version 2.61 or newer is required for post-
processing the .3dra files.

3d-radar as
GeoScope
TM
User’s Manual
© 2013 3d-Radar AS Page 18 Revision 2.0 Date: 02/07/2013
5 Maintenance
5.1 Cleaning air filter
Remove the air filter inlet cover at the rear right side. Open the cover and
use a vacuum cleaner or compressed air to blow dust from the filter. Mount
the filter in the same manner as opened.
5.2 Cleaning of connectors
The RF and control cables may be cleaned either using compressed air from a
can or Isopropanol based electronic cleaning spray. Never use water to clean
connectors. During field work, avoid putting connectors on the ground or in
water in order to minimize the probability of getting sand or dust inside the
connectors. Inspect connectors for corrosion at regular intervals.
5.3 Cleaning the antenna array
The antenna array top cover can be cleaned with a wet cloth with ordinary
cleaner. Never use high-pressure jet water washer on the antenna. The
bottom side can be cleaned firmly with a humid rag. Do not store the
antenna array inside the container if it is wet or humid.