Cytron R and D RERO Pulse Oximeter User Manual Introduction
Cytron R&D; (MSC) Sdn Bhd. Pulse Oximeter Introduction
user manual

User’s Manual
Robot Construction Kit
rero2.0
Cytron R&D (MSC) Sdn Bhd
Table of Content
Chapter
Page
1.0
Introduction
1
2.0
rero Packing List
2
3.0
Product Overview
3
3.1
rero Hardware Modules
3
3.1.1
rero controller (GC06)
4
3.1.2
rero Cube Servo (G15)
9
3.1.3
rero Head Module
11
3.1.4
rero IR sensor
16
3.1.5
rero Ultrasonic Sensor
18
4.0
Getting Started
19
4.1
Battery Installation
19
4.2
rero Controller Menu
24
4.3
Setting Cube Servo and Sensor IDs
42
4.4
Charging Battery
43
4.4.1
Charging on rero Controller
45
4.4.2
Advance Charging Method
47
5.0
Build Your Own Robot!
49
5.1
rero Hardware Construction
49
5.2
Dismantle rero into Parts
60
5.3
Wiring
64
6.0
rero Programming
67
6.1
Teach Mode
67

1
1.0 Introduction
Thank You & Congratulations!
What is rero?
Areconfigurable robotics Construction kit with flexible slide lock assembly mechanism. rero does not use screw,
bolt or nuts for assembly instead it use novel slide lock mechanism which make it so simple and time saving to
complete a robot.
rero come with loose parts which empower user’s robot building creativity and imagination. rero parts can be
combined to build up robots, redesigned, taken apart and put back together in multiple ways. There are no specific
assembly rule that limits the user to build up new robots.
rero has several programming methods. The most basic way to program a complete rero robot is Teach Mode. User
teach rero and rero replay back what it remember from the teaching. With rero animator, user can create time-lined
motion sequences similar to making an action movie for rero.
Boost Your Creativity and Imagination with rero !
2
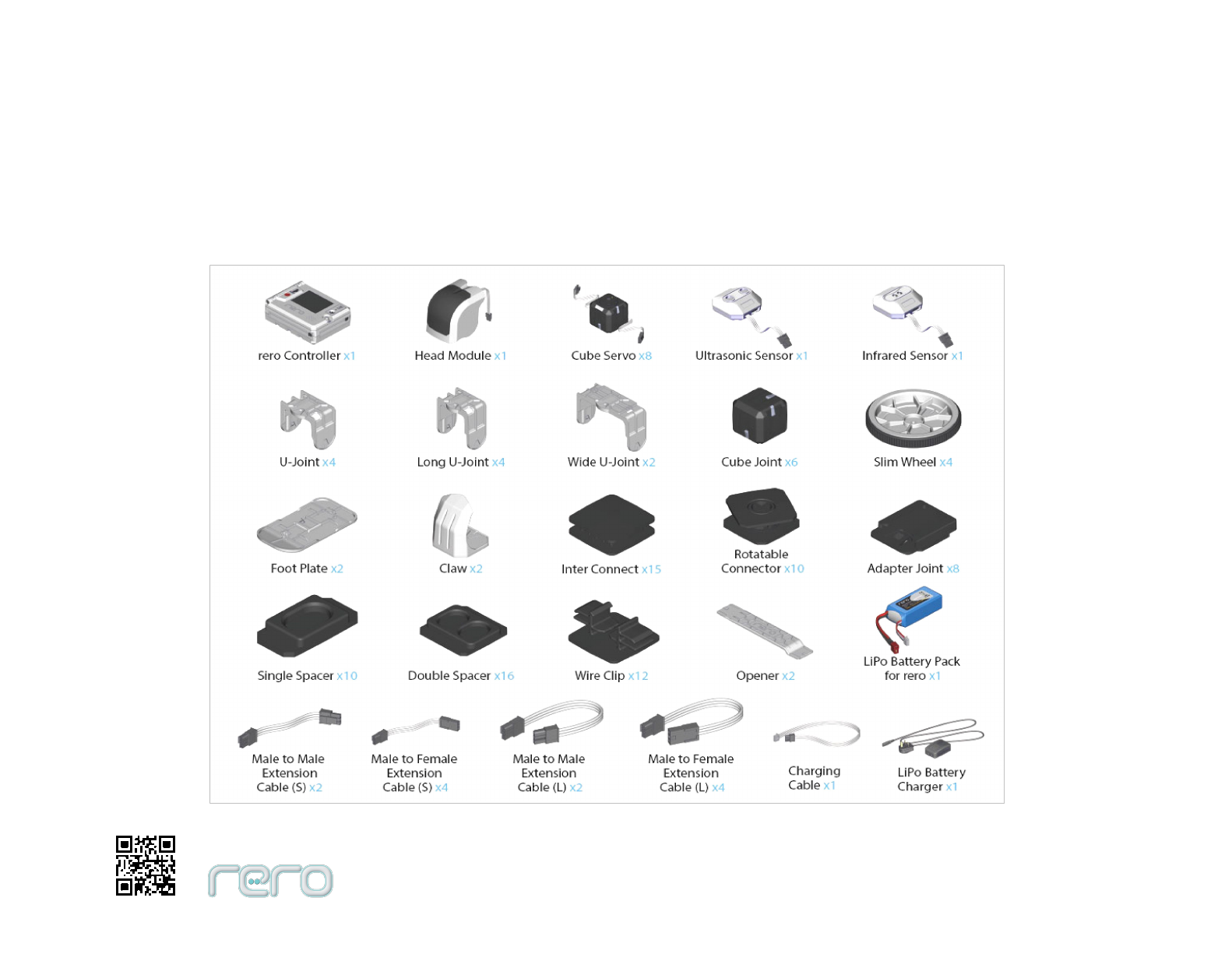
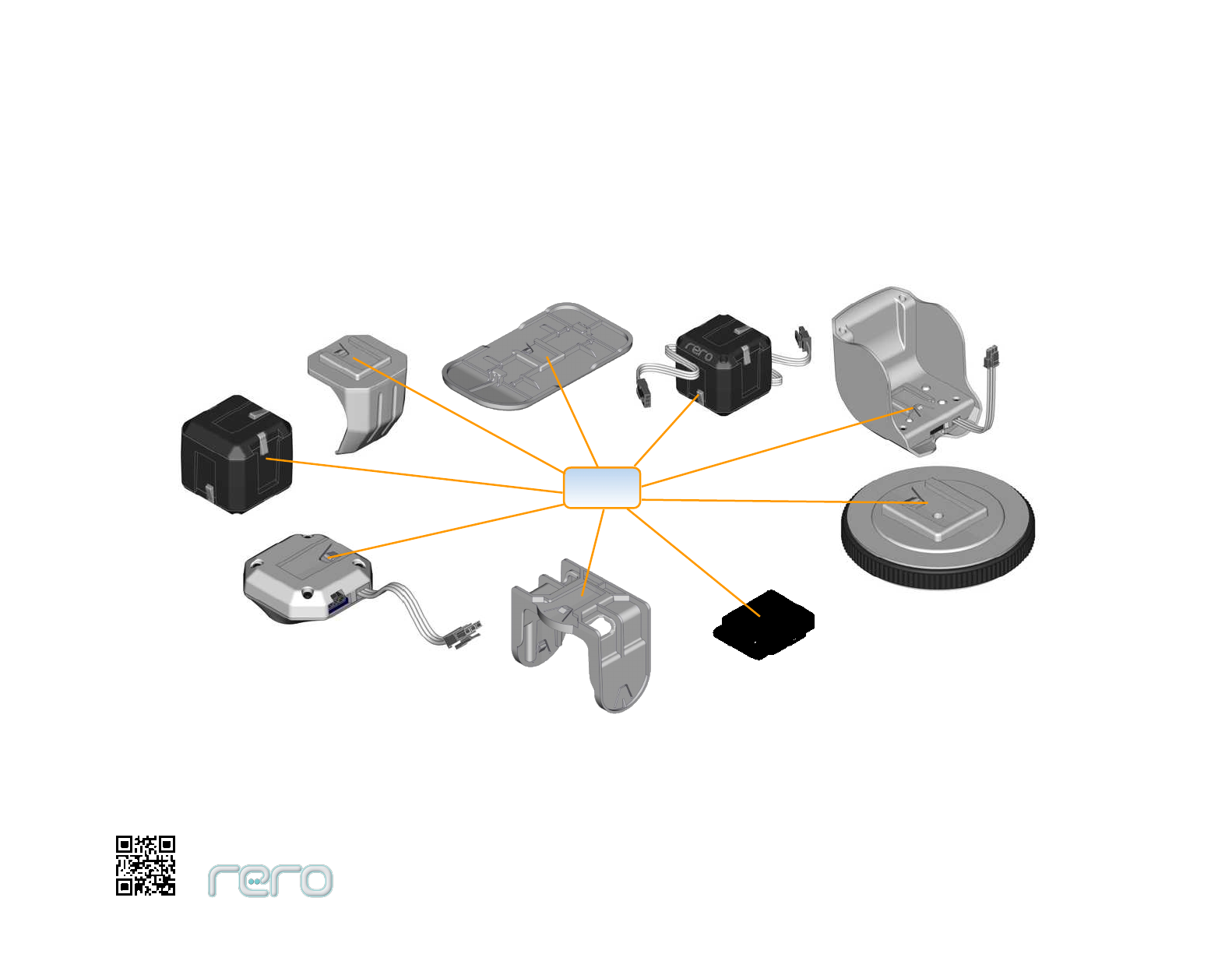
2.0 rero Packing List
rero set is packed in an elegant plastic storage box. rero standard set included modules and parts shown as
following

3
3.0 Product Overview
3.1 rero Hardware Modules
rero consists of several modules and parts which can be assembled to build up a robot. These modules are main
controller, Head Module and sensor modules. rero parts includes joints, connects, wheel, claw, footplate, spacers,
wire clips, extension wires, and rero opener.
Example robot assemblies with rero
4
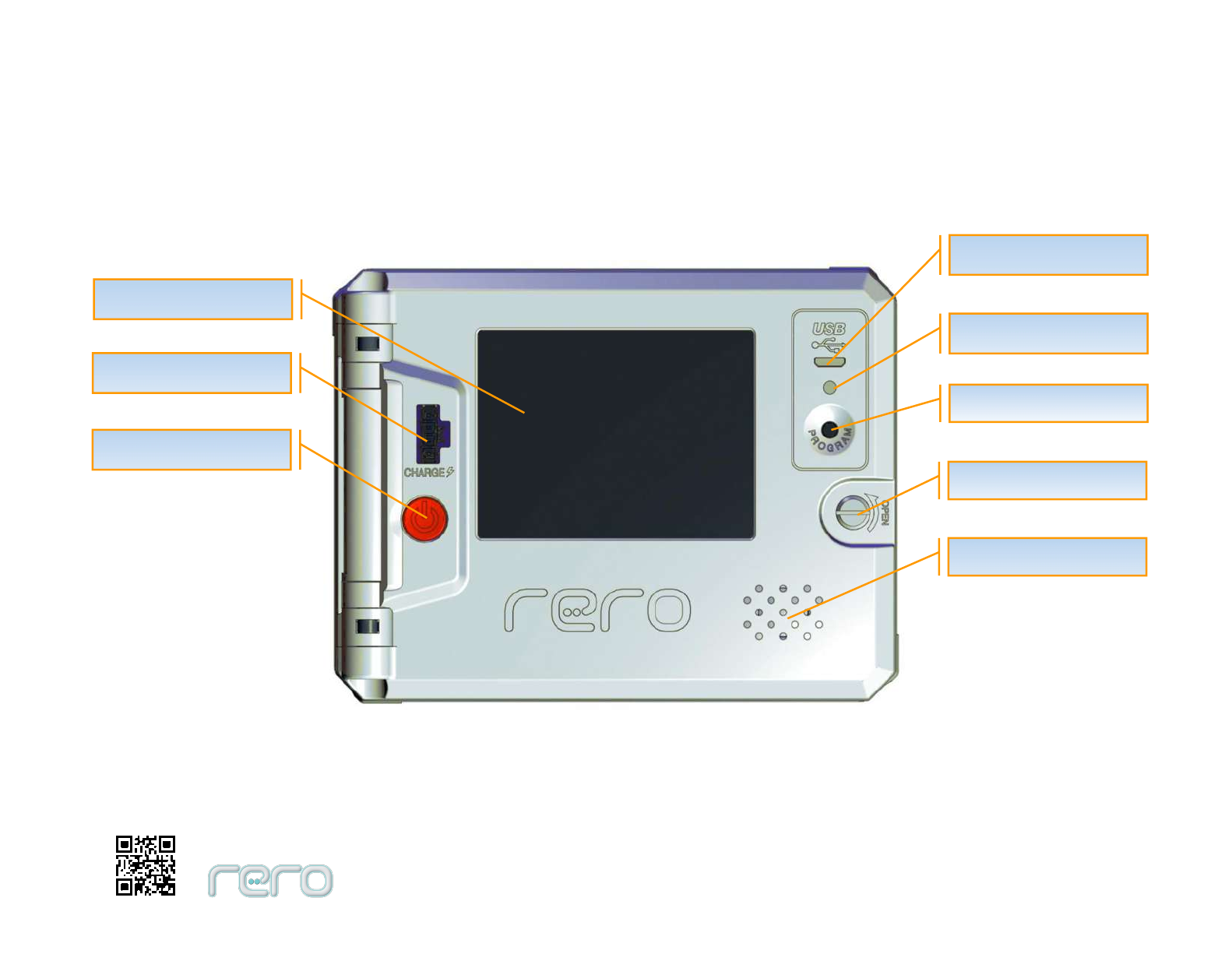
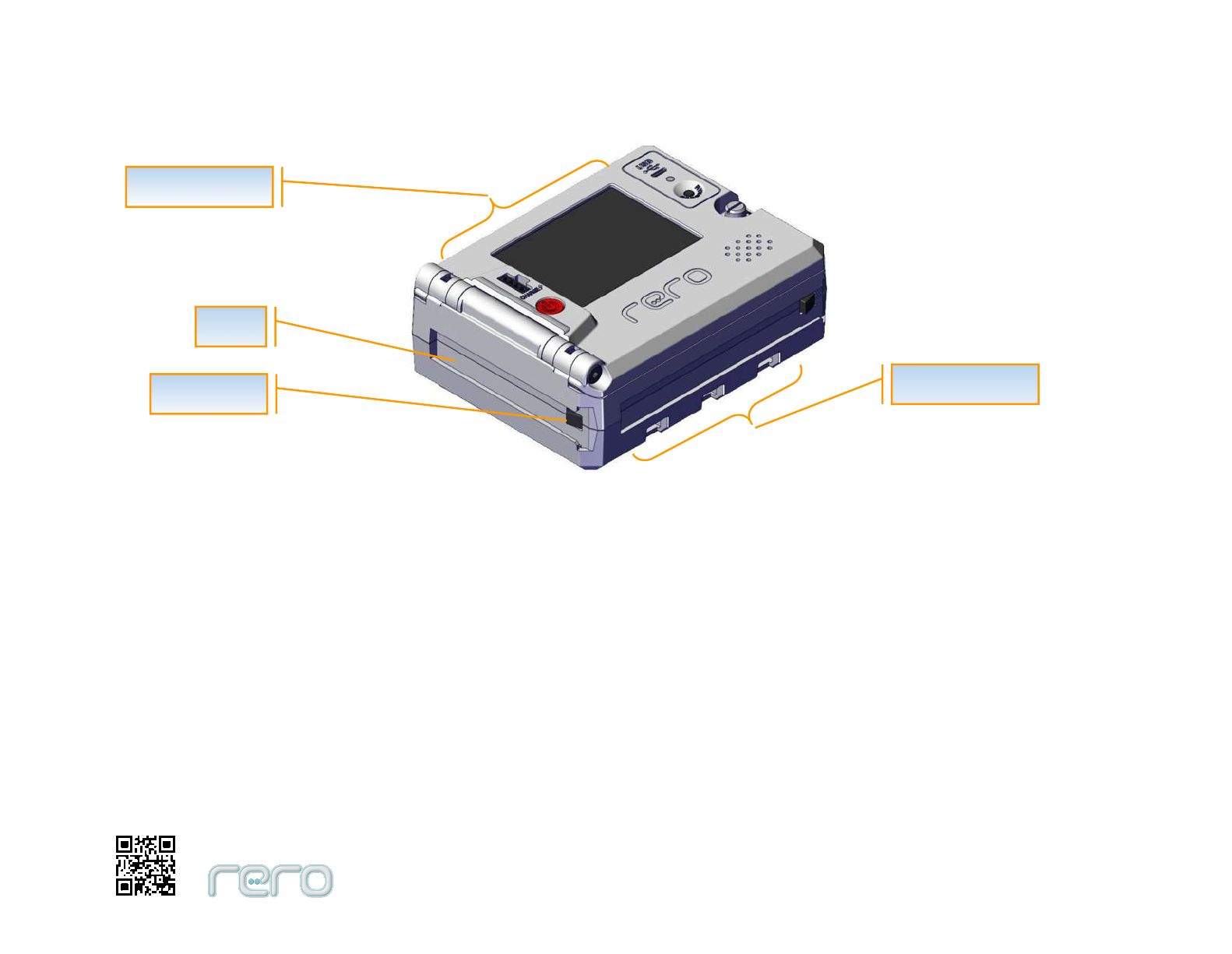
3.1.1 rero Controller (GC06)
rero controller is the brain of rero robot system. It controls all the Cube Servo movement and process all Signals from the
rero sensors.
Main Controller Top View
Touch Screen LCD
USB Micro Port
RGB LED Indicator
Thumb Screw
Bootloader Button
Loud Speaker
Charging Port
Power Button
5
Touch Screen LCD
Touch screen Graphics User Interface (GUI) to access the main controller standalone functionality.
Charging Port
Charging connector for rero battery charging.
Power Button
Turn on and off the main controller unit. Long press for 2 seconds to turn on or off the main controller unit.
USB Micro Port
USB Micro port is for computer interface. User can load the program from the computer into the main controller
through this USB connectivity.
RGB LED indicator
Status indicator of rero controller
Bootloader Button
Boot into bootloader mode by press and hold bootloader button while power on by pressing power button. User
can update rero controller firmware in bootloader mode.
Thumb Screw
Access to the battery compartment under the LCD.
Loud Speaker
Generate touch screen tone, and system sounds.
6
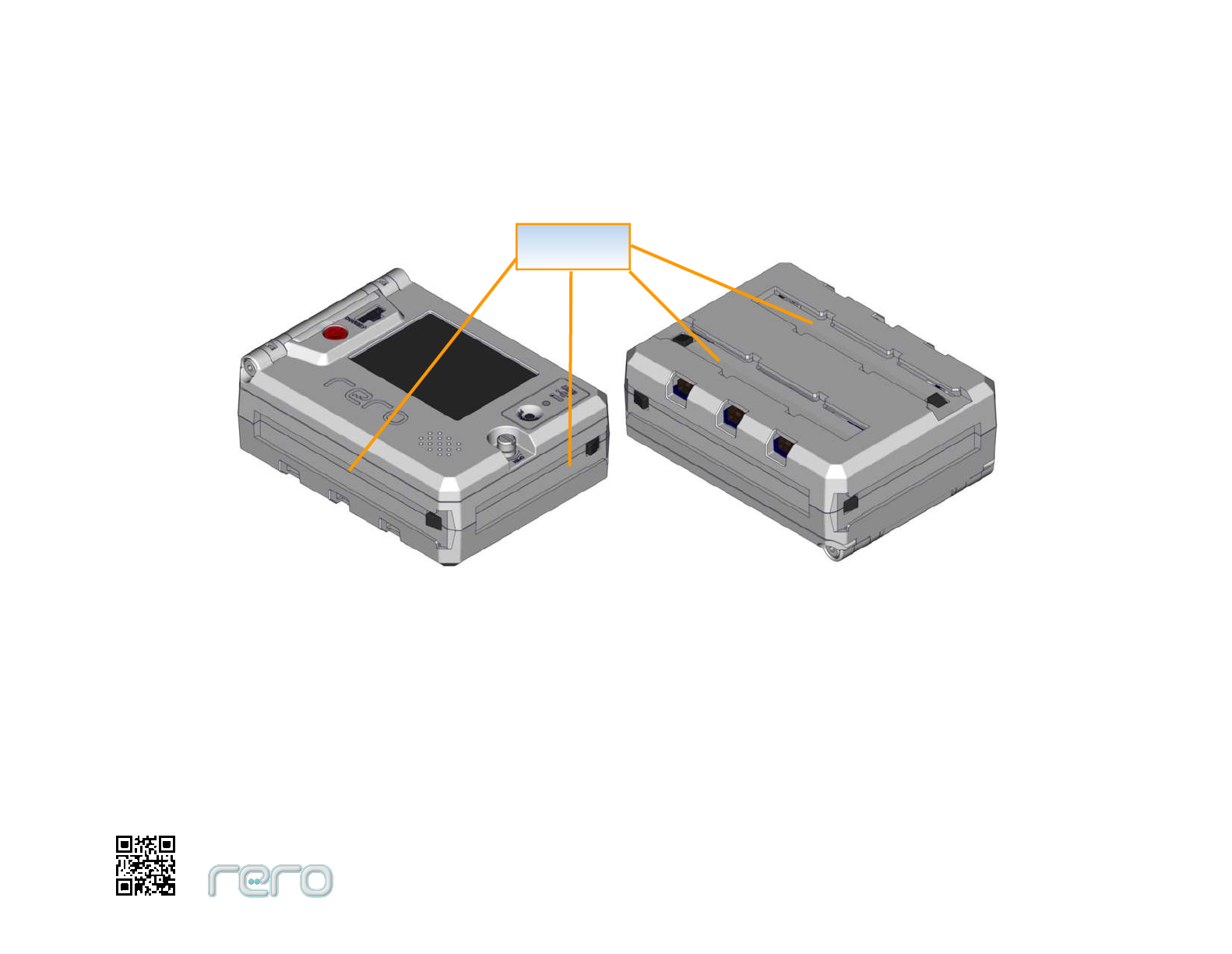
rero Controller Side View
Sliding Slot
6 Sliding slots with latch for assembly with rero parts to create a complete functional robot.
Output Ports
6 output slots at two sides or the rero controller for daisy chain servos and sensors.
Output Ports
Slot
Slot Latch
Output Ports
7
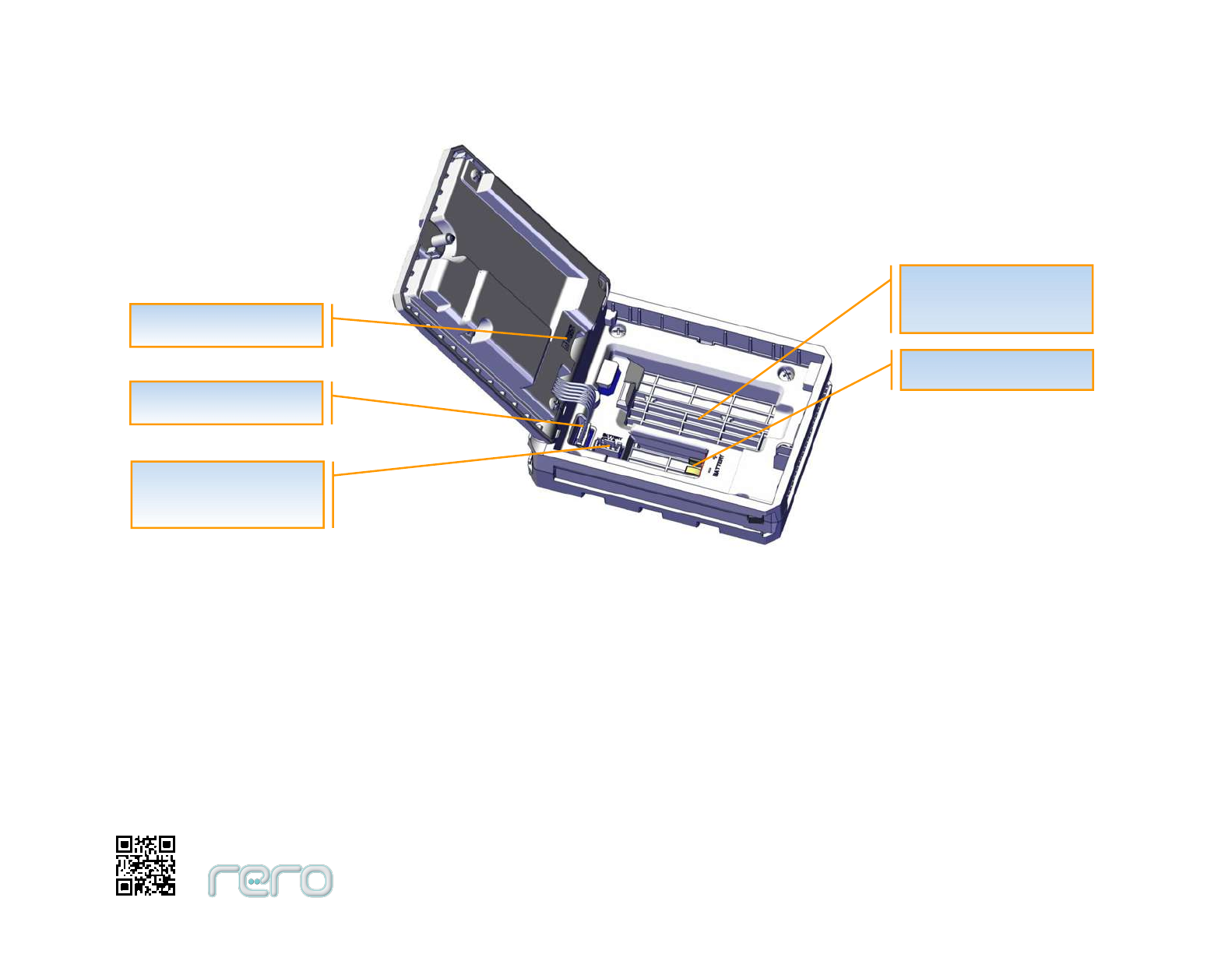
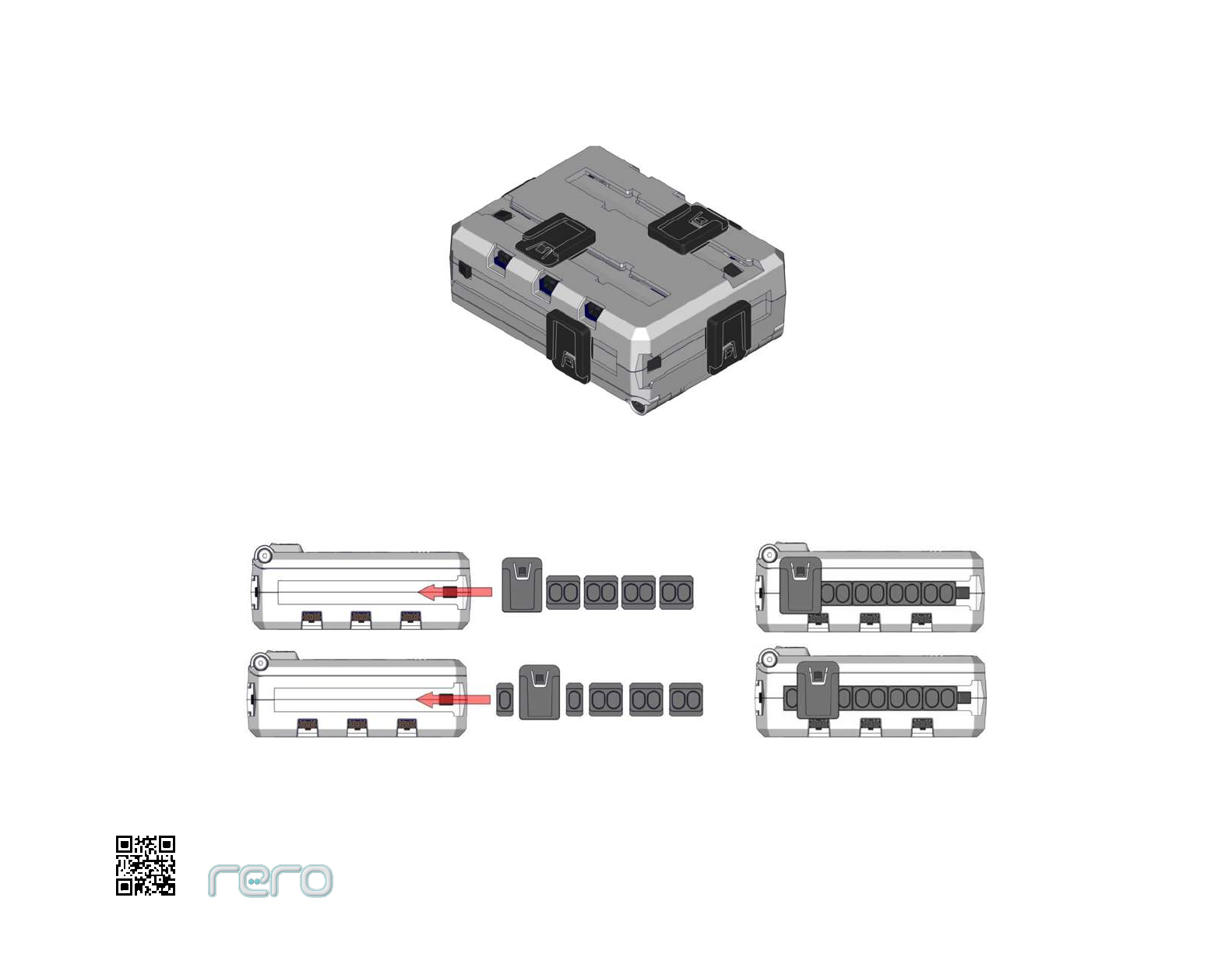
rero Controller Battery Compartment
MicroSD card
MicroSD card is used to save rero files and settings.
Rechargeable Battery Space
rero comes with rechargeable Lithium Battery as main power source.
Battery Connector
Rechargeable
Battery Space
MicroSD Card
Main connector
Main connector
Battery Cells
Connector
8
Battery Connector
High Ampere Dean-T connector to supply power for rero Cube servos and sensors.
Battery Cells Connector
Connector battery cells to main controller.
Main Connector
Battery and signal wires for rero main circuit board. Always make sure the cable is properly latched to connectors
after installing or removing battery.
9
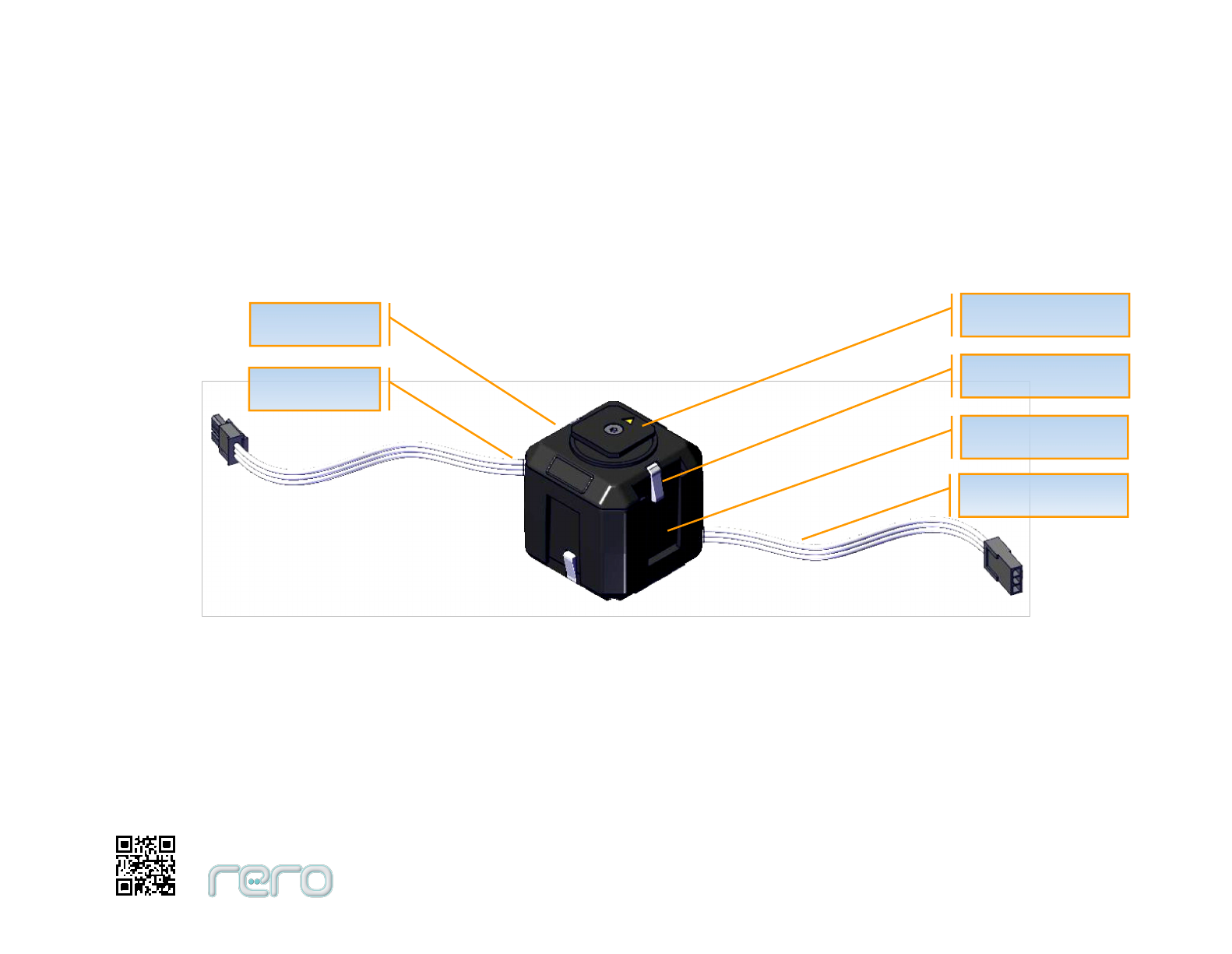
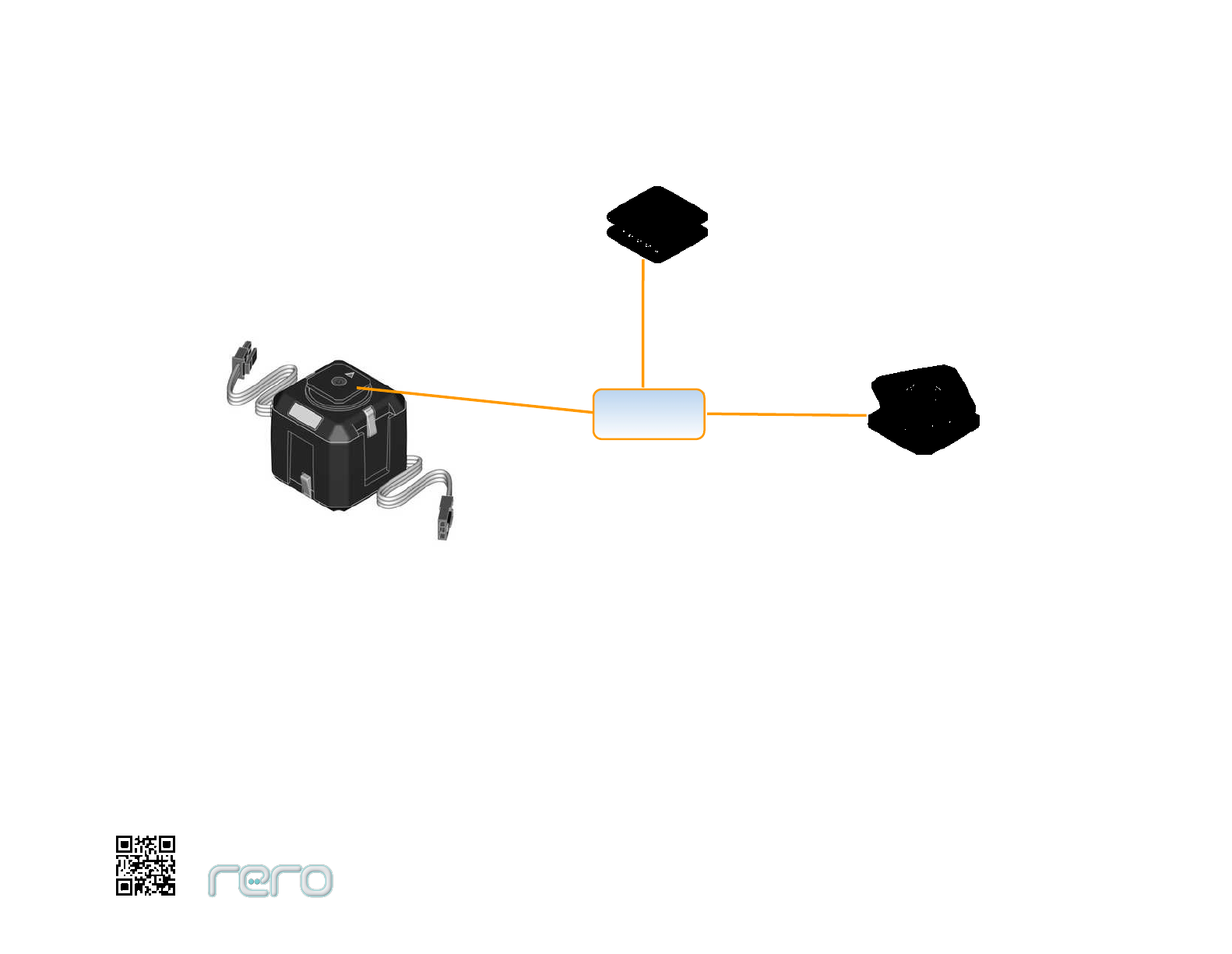
3.1.2 rero Cube Servo (G15)
Cube Servo
Cube Servo is a Servo motor that user can set it to rotate and position it to certain angle position. It can also operate
in wheel mode for continuous rotation.
Latch
Slot
LED
Output Connect
Female wire
Male Wire

10
To test Cube Servo using rero controller, connect the Cube Servo to rero controller. Go to ‘Servo’ Menu. In the Servo
menu, select the servo you want to test from the list of connected servo. LED on Cube Servo will light on when
selected. Drag on the round meter to change the position angle of the servo.
Testing Cube Servo with rero Controller
Select a Servo
Drag here to test
11
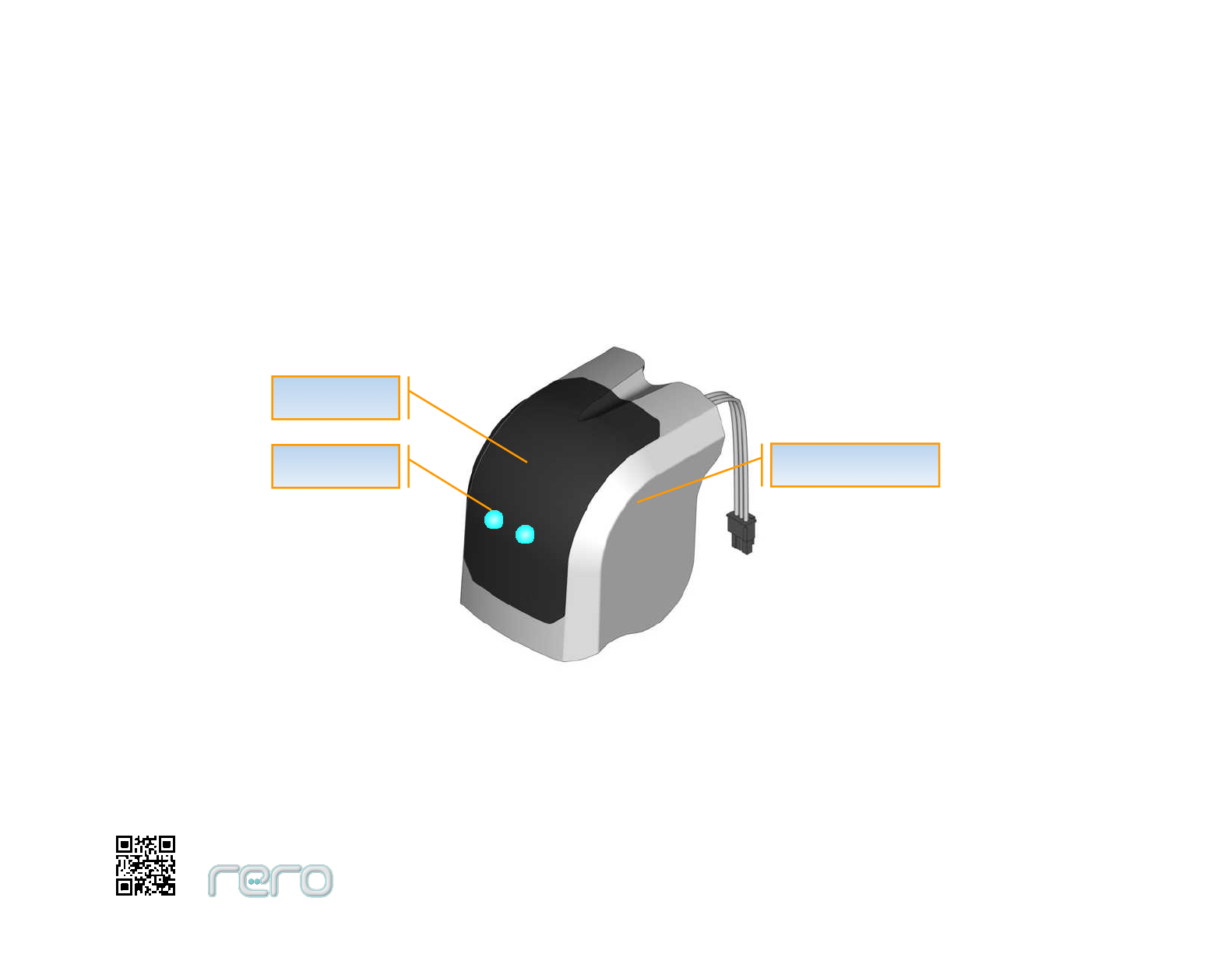
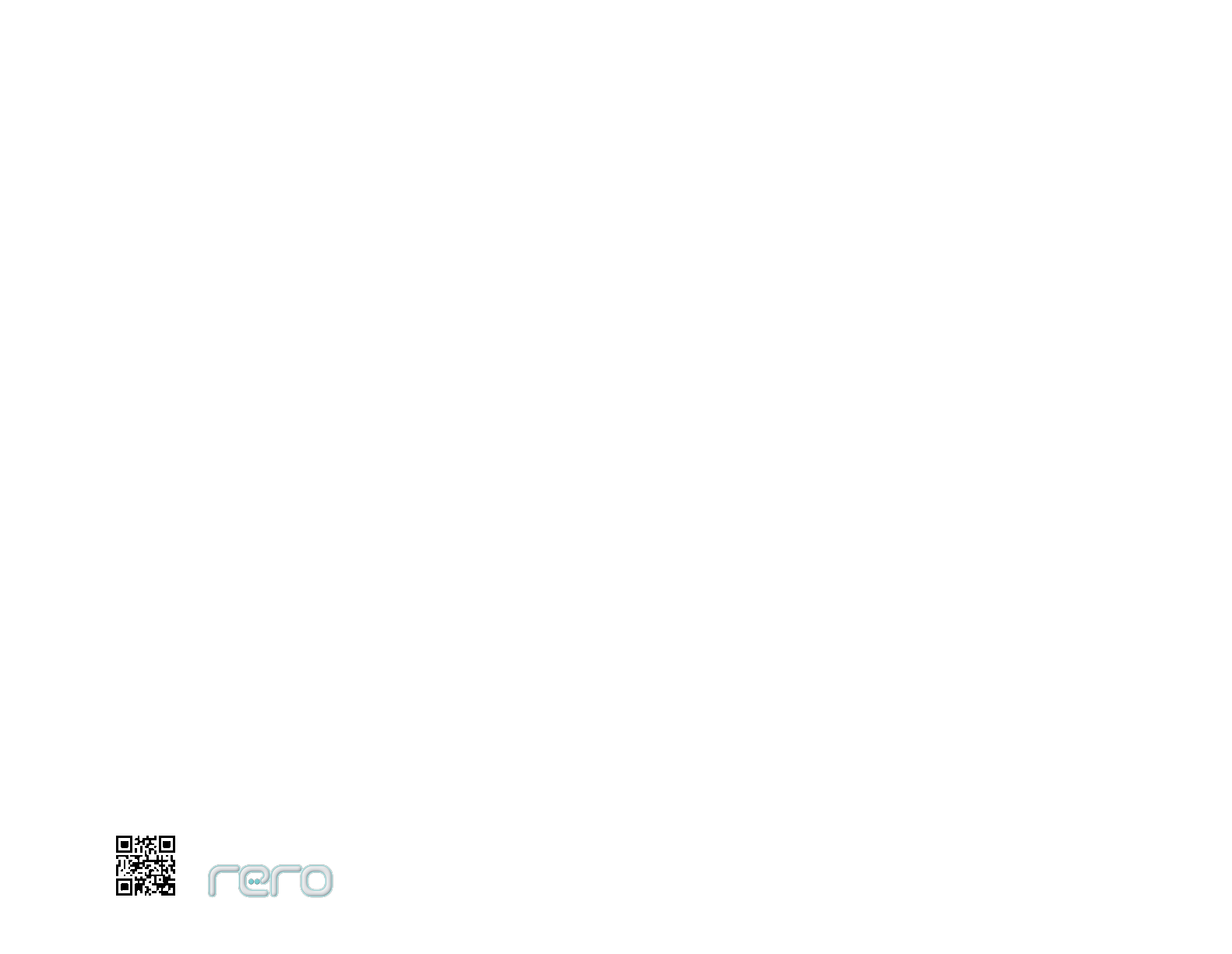
3.1.3 rero Head Module (RR-SH-01)
rero Head Module has build in sensor of IR sensor and Sound sensor. It has 2 RGB LEDs as the eyes. rero Head
module can be attached to Cube Servo give Head Module the flexibility to move or rotate.
Head Module Physical Appearance
IR Sensor
Eyes
Sound Sensor

12
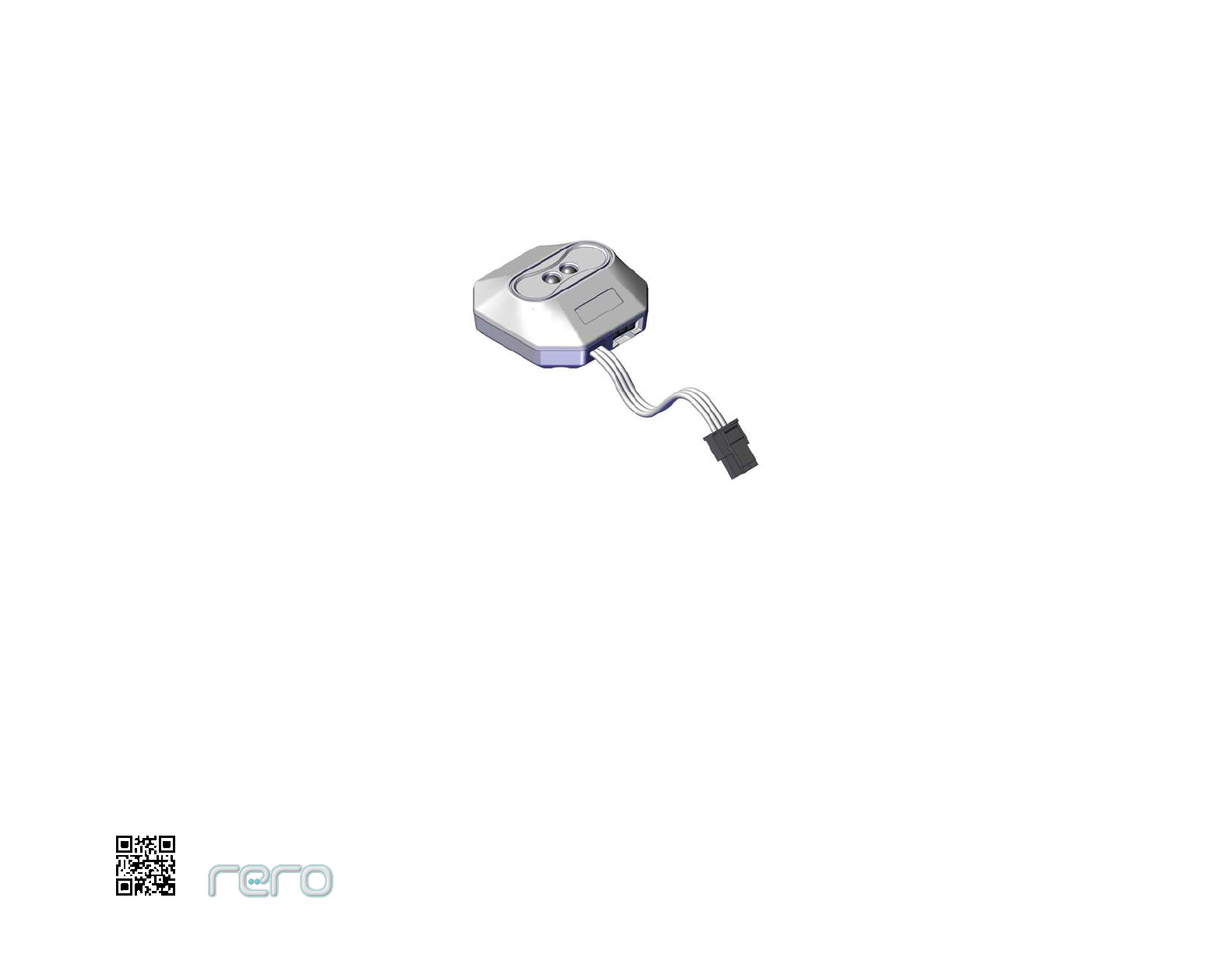
User can test rero Head Module using ‘Sensor’ menu on rero Controller. Connect the Head Module to rero controller
then go into Sensor Menu, select the ID of Head Module in the list of sensors. There are 3 features can be tested,
namely the sound sensor, IR sensor and RGB LEDs. The sound sensor value and IR sensor value is display as
scrolling bar with the value that varies from 0 to 255 depending on the surrounding sound level or the reflected IR
rays. There are 3 check boxes to turn on or off the RGB LEDs colours. User can turn on or off single or mutiple color
by checking the check boxes.
Sensor Menu and Head Module Test.
13
Head IR sensor
IR sensor is located infront of the Head Module above the eyes. IR sensor is used for trigger the robot to start when
user wave their hand infront the face of robot.
Head Sound Sensor (Microphone)
Microphone is located inside of the Head Module and it is invisible from outside. Microphone can be used to detect
maximum sound volume, trigger robot to start by hand claps.
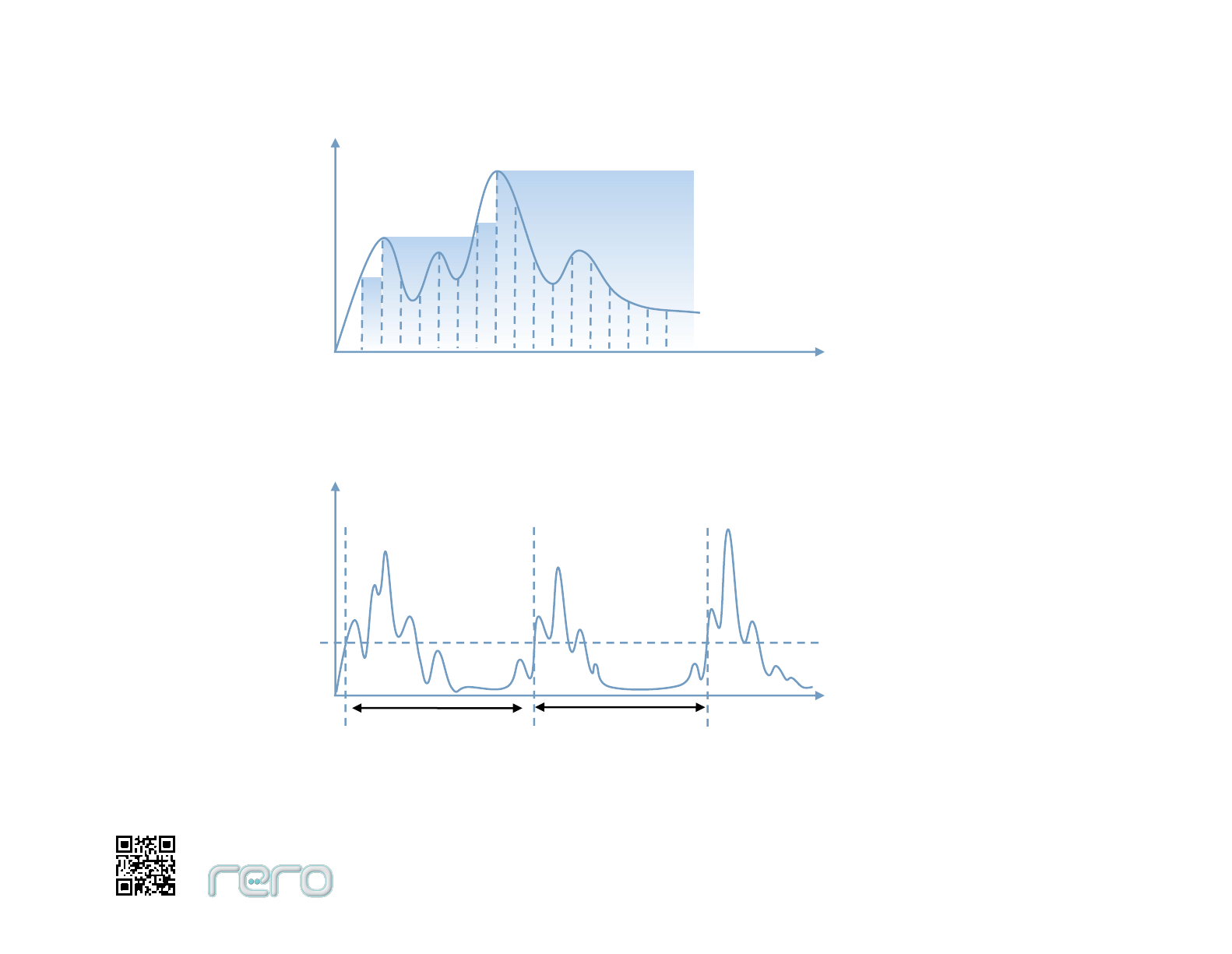
It has features of capturing maximum sound level detection, hand clap counter and current sound volume level.
Sound volume is sampled at sampling frequency of 3.9KHz. User can set threshold level for the hand clap detection.
Hand clap detection is done at interval of 800 miliseconds. This means that, when a clap has been detected, the
sensor will ignore any claps within the 800 miliseconds, sensor will only detect for second clap after 800 miliseconds.
This to prevent a single clap being detected as multiple claps.
14
Audio sampling (dashed line) and Maximum sound level (shaded) on every sampling time
Clap Threshold (dashed line) and Clap detection.
0
255
Sound Level
Time
Max Sound Level
0
255
Sound Level
Time
Clap Threshold
Clap 1
Clap 2
Clap 3
>800ms
>800ms
15
Head Eyes (RGB LEDs)
By default the eye will light on with white color when powered on. User can set different colour to the eye to give
beautiful outlook to the Head Module. Eyes are composed 2 RGB LEDs, the color of the eyes are based on 8 bit RGB
true colour set by user. User can utilize the to display different status of their robots too.
For advanced user: Internally the eyes are used by Head module to notify user of certain information too. Eyes will
blink in red colour for 4 times if user call a reset factory defaults to the Head Module. If user set alarm LED to on, the
eyes will blink when there is error packet received (range error, checksum error or instruction error).
16
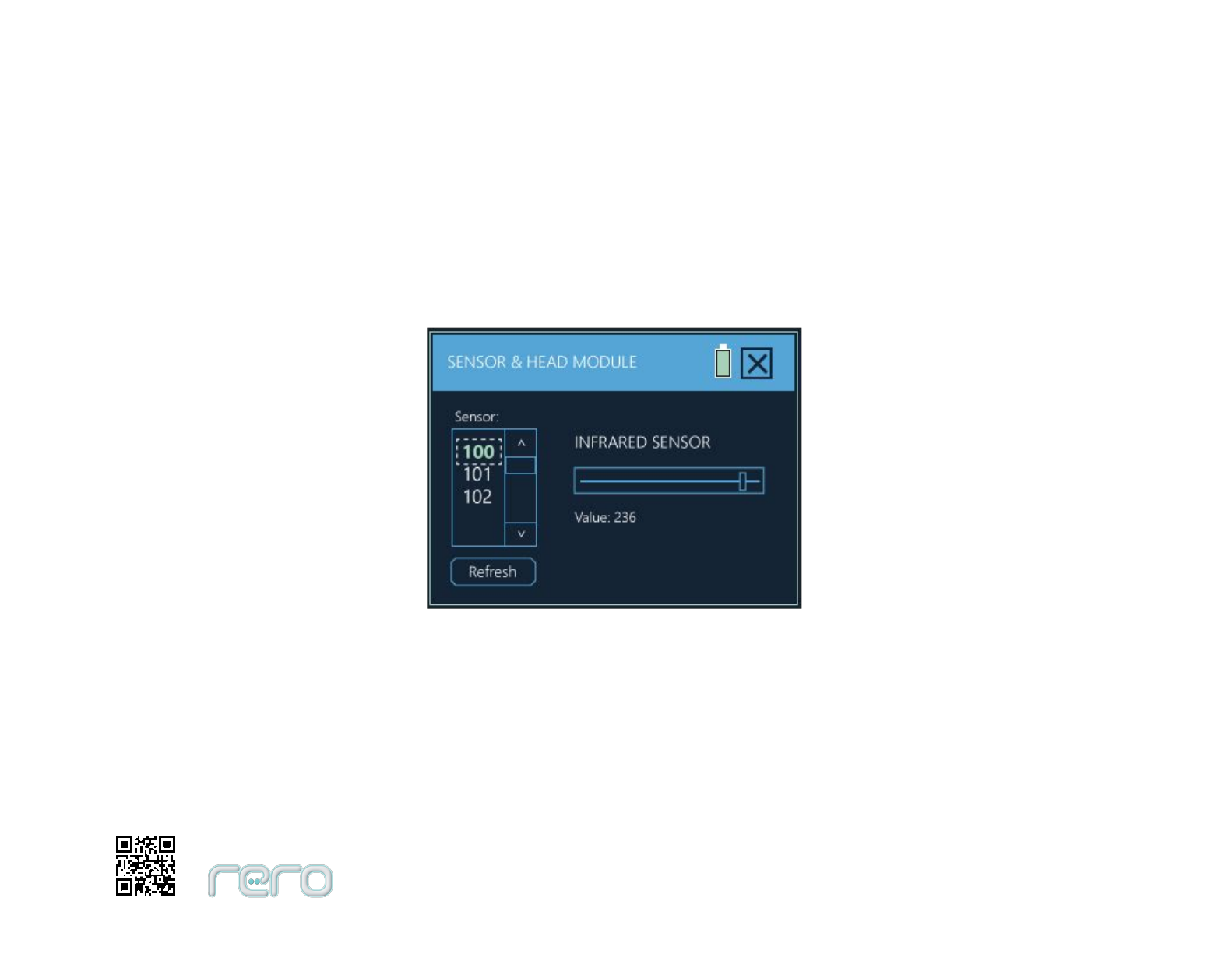
3.1.4 rero Infrared Sensor (RR-IS-01)
Infrared Sensor Physical Appearance
rero Infared Sensor is an easy to use sensor which detects obstacle and proximity. When powered on the LED will
be lighted on in blue color as power indicator.
By default the Red LED indicator of the rero IR sensor is off. User can change the LED register of the control register to make it
when the sensor detects obstacle, the red LED will light on. The IR sensor can detect a white surface obstacle up to maximum
30cm.
17
rero IR sensor has auto calibration function to calibrate the sensor detection threshold to the surface that it will operate.
User can test rero IR sensor using the rero Controller ‘Sensors’ menu. Connect the IR Sensor to rero Controller, then go into
Sensor Menu. Select the rero IR sensor ID to display the IR values. The IR sensor values is display as scrolling bar with numeric
value from 0 to 255 depending on the reflected IR ray intensity.
Testing rero IR sensor using rero Controller ‘Sensors’ Menu
18
3.1.5 rero Ultrasonic Sensor (RR-US-01)
rero Ultrasonic Sensor Physical Appearance
rero Ultrasonic Sensor is and ultrasonic ranging module which measure distance from the obstacle in front of the
sensor. rero Ultrasonic Sensor measure distance from at least 5cm up to 200cm. It detects obstacle down to 0cm
but the distance reading may be not true. User can test rero Ultrasonic sensor using the rero Controller ‘Sensors’
menu. Select the rero Ultrasonic sensor ID to display the distance. The distance is display as scrolling bar with
numeric value of distance from the object in front of the sensor. Adequate area is needed for the echoing of
ultrasonic sound especially if the object is at distance more than 30cm .

19
4.0 Getting Started
4.1 Battery Installation (First Time Only)
rero battery is not preinstalled in rero controller. User will need to install it into the rero controller before starting
the robot building process. Follow the steps below to install the battery.
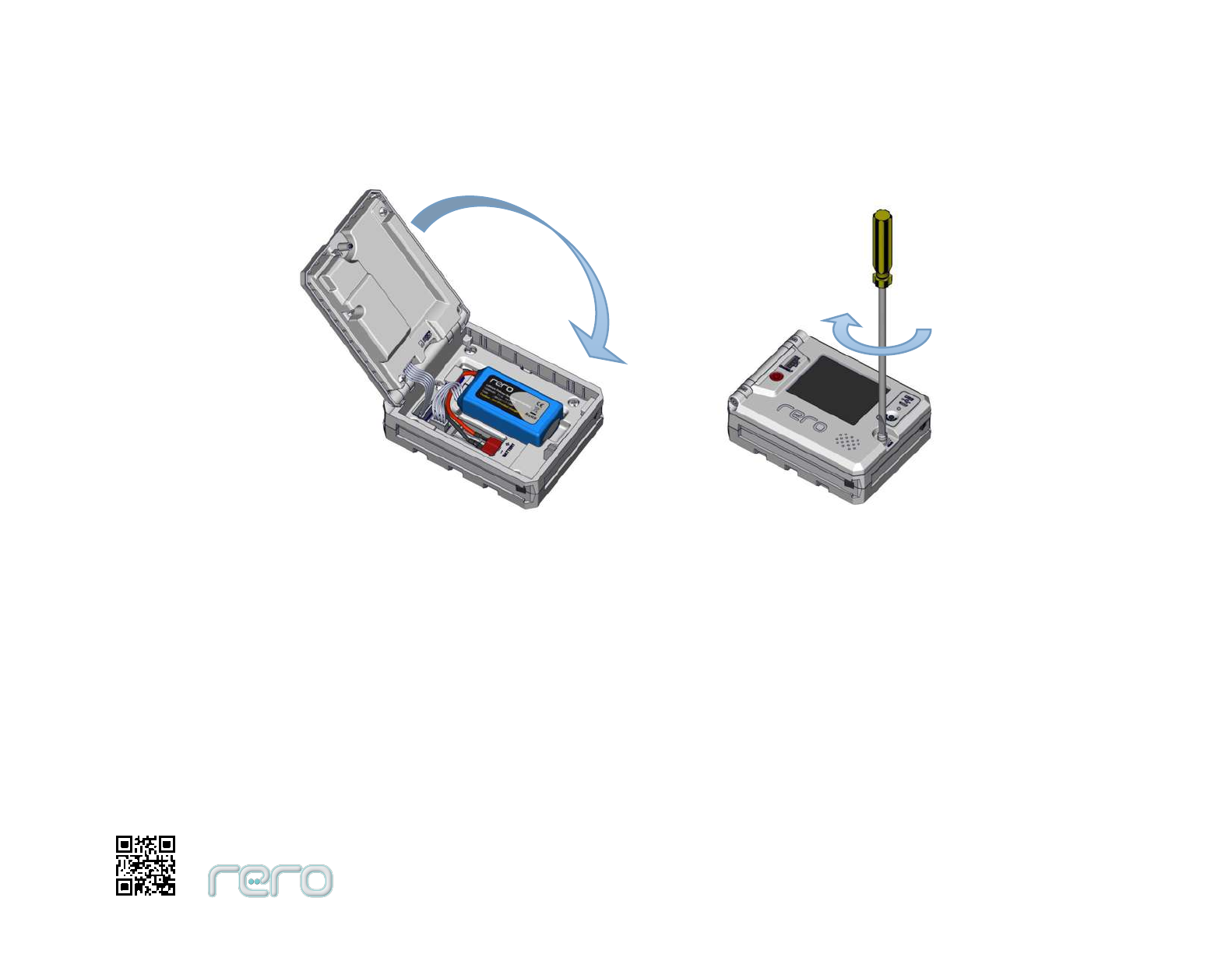
Step 1: Turn thumb screw counter clockwise to open the controller cover and reveal the battery compartment.
User can use a screw driver to help if its hard by hand.
20
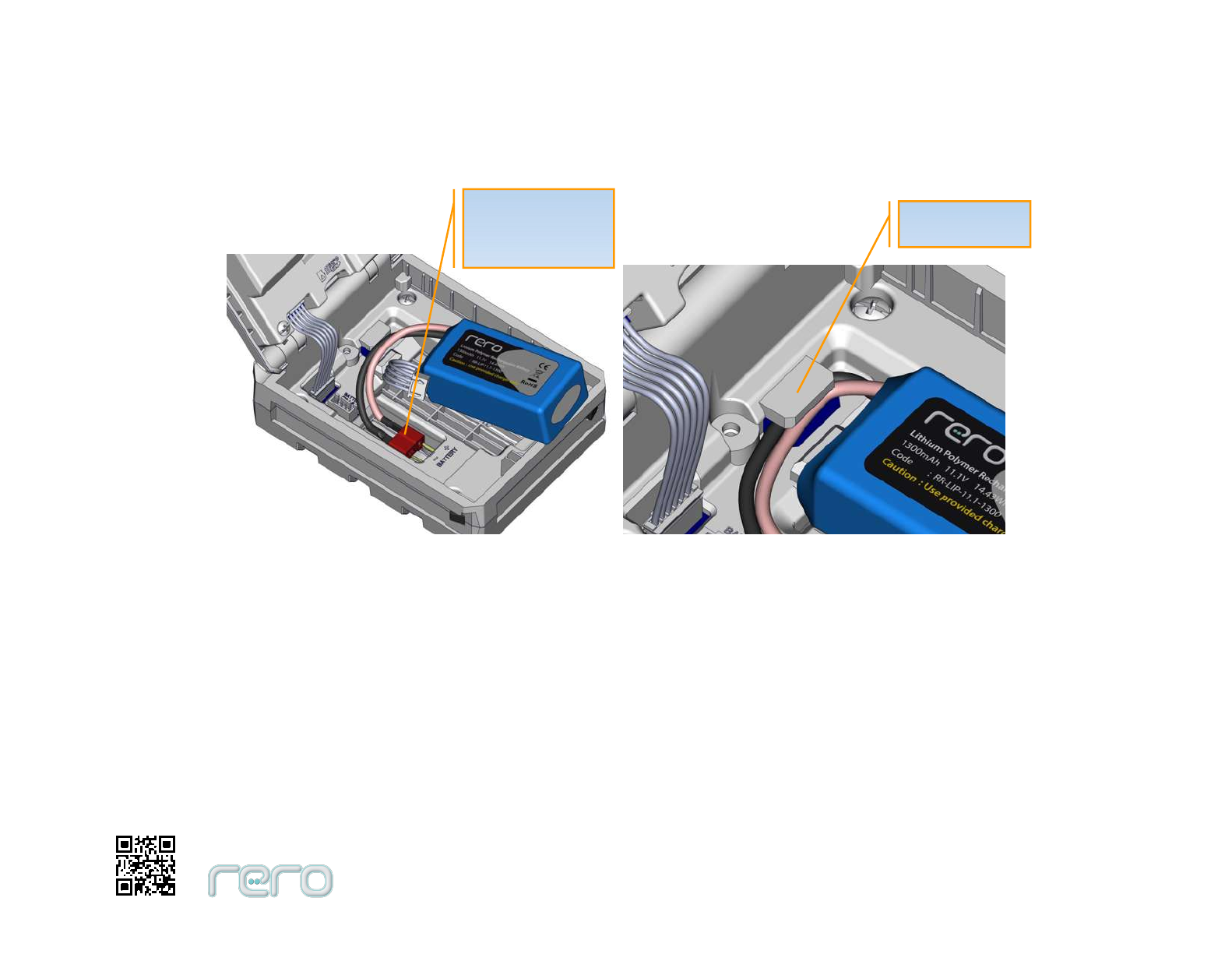
Step 2: Plug in the Dean-T connector of battery and let the wires run under the wire guide.
Plug In Dean-T
Connector
Wire Guide
21
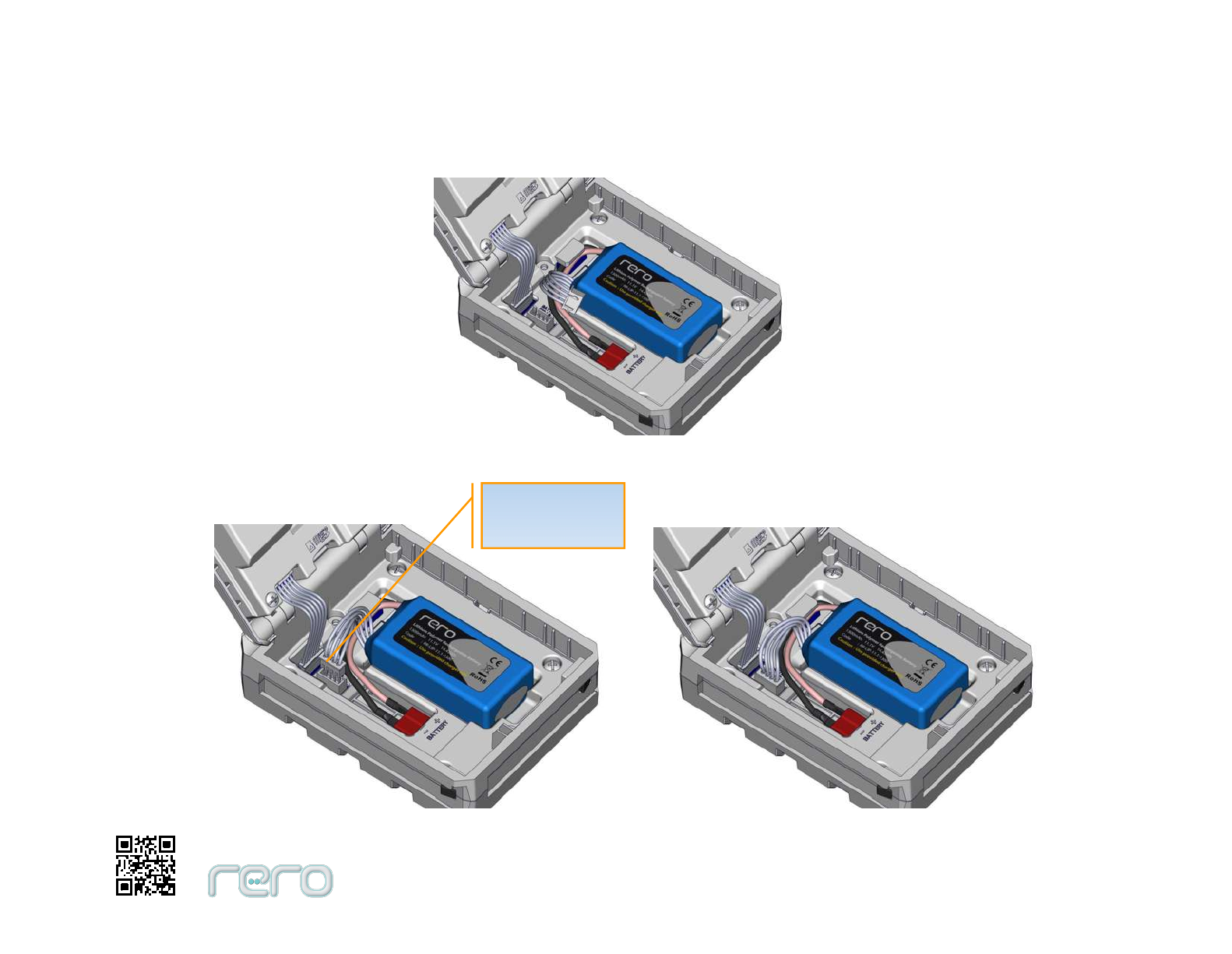
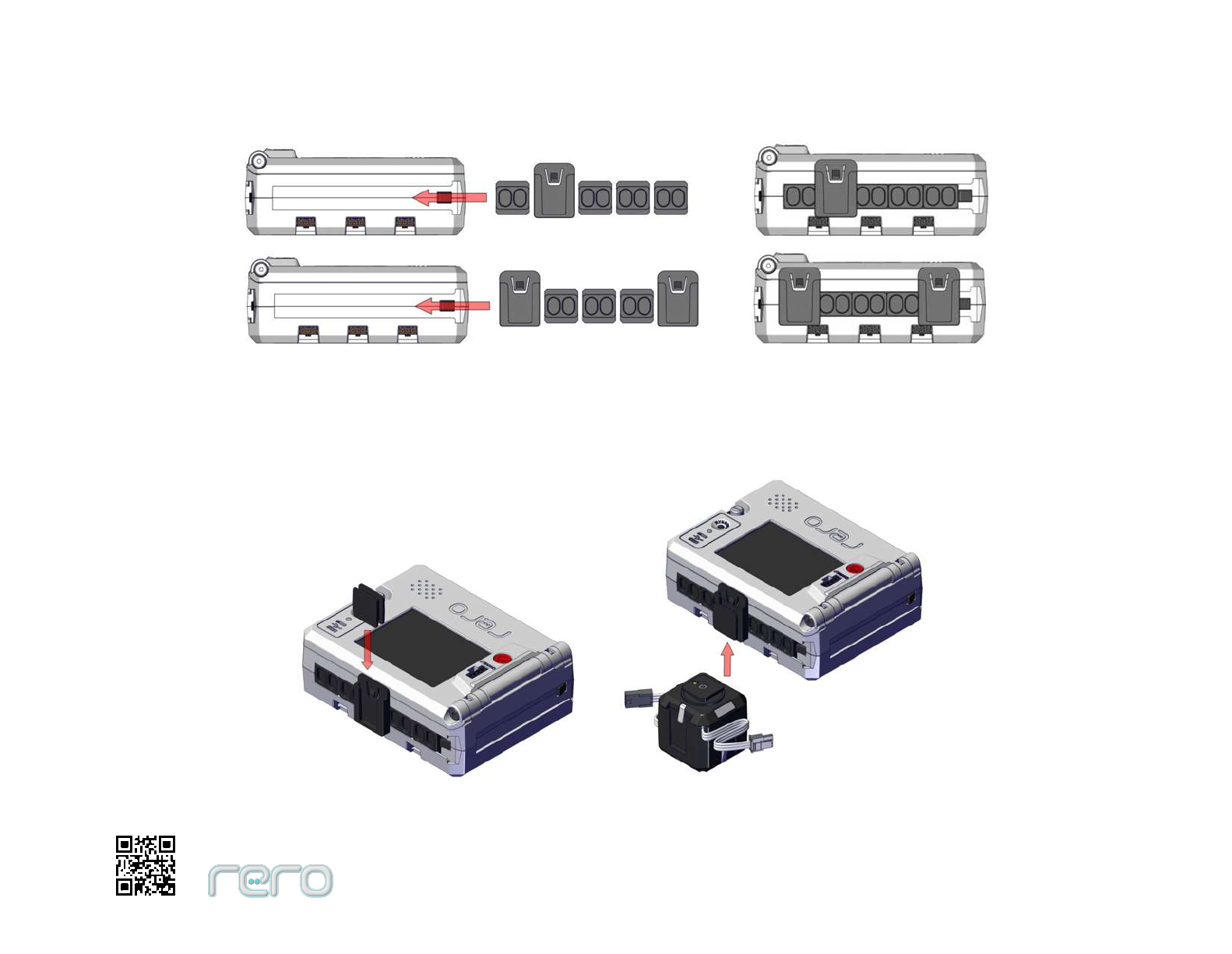
Step 3: Place the rero Battery into battery space.
Step 4: Plug in battery cells connector.
Battery Cells
Connector
22
Step 4: Close the cover and lock back the controller cover by turning the thumb screw clockwise

23
Step 5: Power on rero controller by pressing the Power Button to verify that battery is properly installed. rero
Controller will display the Main Menu after Boot Screen.
Rero controller Main Menu

24
4.2 rero Controller Menu
rero controller has embedded operating system (OS) and the firmware can be updated online through the USB
bootloader. rero controller has multiple menus that serve different functions to user.
Boot Page
When the rero controller is turned on, the rero logo is shown to indicate the system is booting up.
25
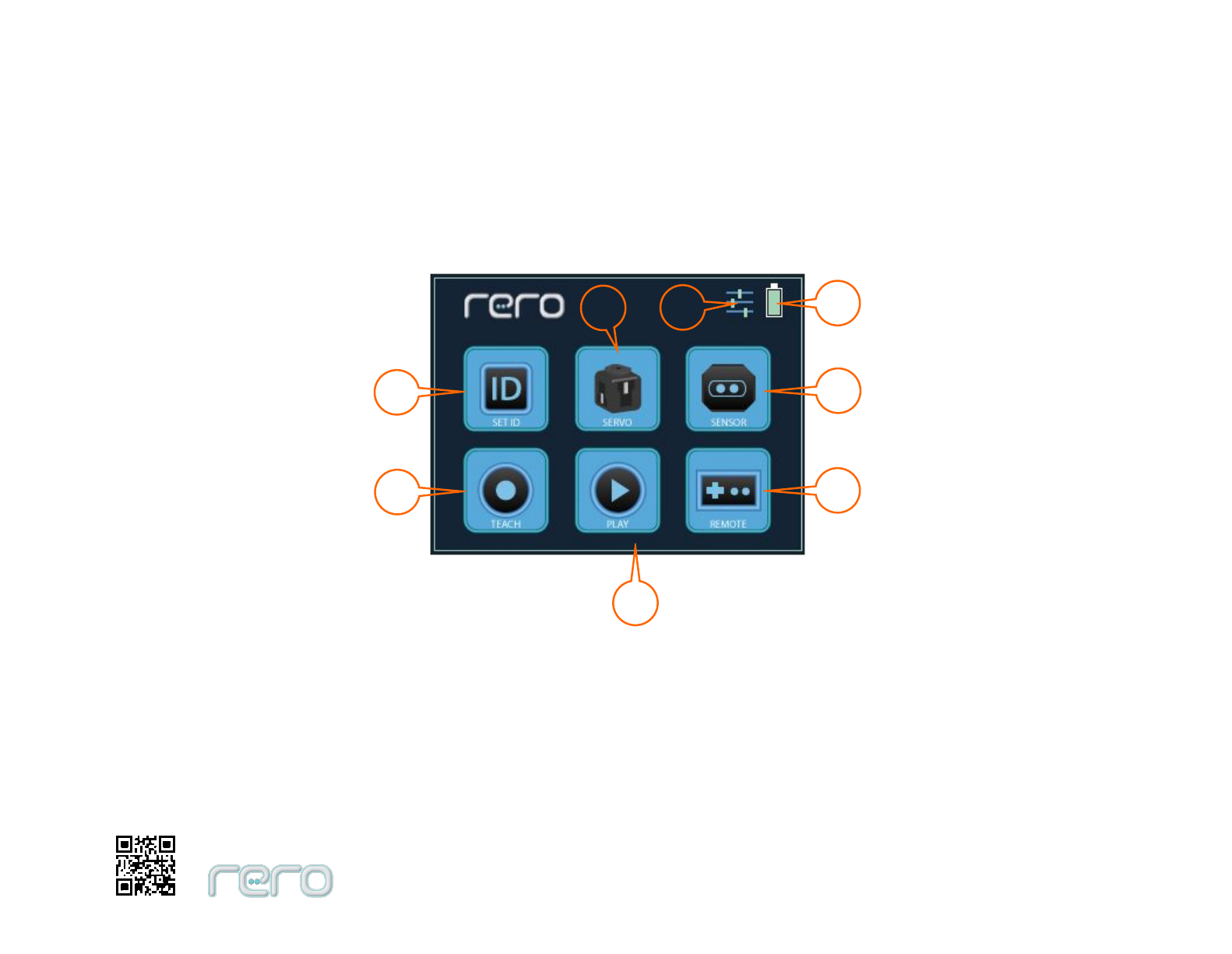
Main Menu
This is the main menu of the rero controller and will be shown after the booting process completed.
1. Set ID Button - Enter the set ID sub-menu to read or modify the servo motor and sensor ID.
2. Servo Motor Button - Enter the servo motor sub-menu to test and set the working path of the servo motor.
1
4
3
6
8
7
2
5

26
3. Sensor Button - Enter the sensor sub-menu to test the sensor and head module.
4. Teach Button - Enter the teach sub-menu to teach the motion of the robot with teach mode.
5. Play Button - Enter the play sub-menu to playback the motion of the robot.
6. Remote Button - Enter the remote sub-menu to control the robot via rero Remote.
7. Settings Button - Enter the settings sub-menu to change the settings of the rero controller.
8. Battery Indicator - Indicate the battery level of the rero controller.
27
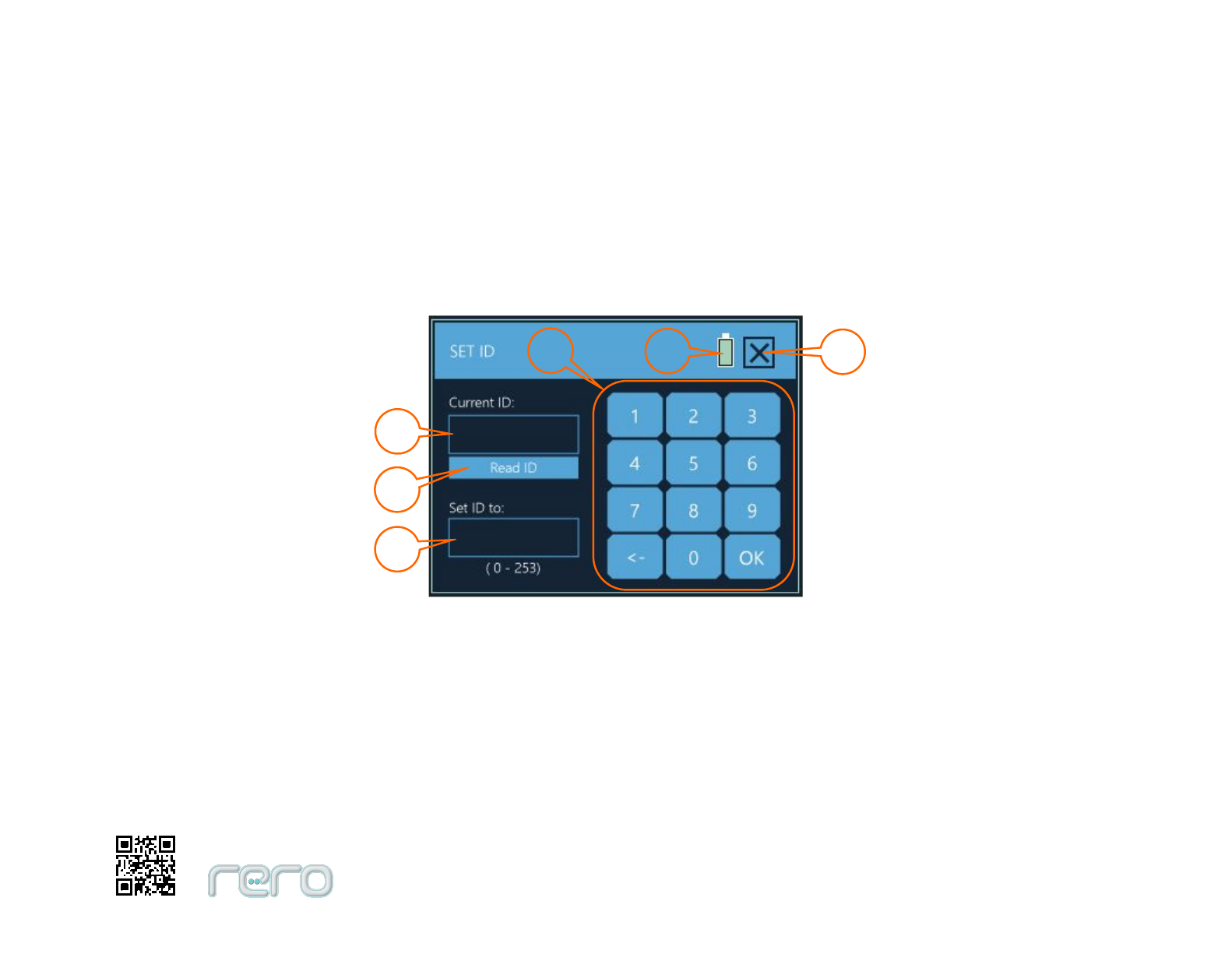
SET ID Sub-Menu
Read or modify the ID of the servo motor or sensor with this sub-menu. Only one servo motor or sensor can be
connected to the rero controller while using this function.
1. Current ID - Shows the current ID of the servo/sensor.
2. Read ID Button - Read the current ID of the servo/sensor.
5
6
1
2
4
3
28
3. Numeric Keypad - Key in the new ID of the servo/sensor.
4. New ID - Shows the new ID keyed in with the numeric keypad.
5. Battery Indicator - Indicate the battery level of the rero controller.
6. Exit Button - Go back to the main menu
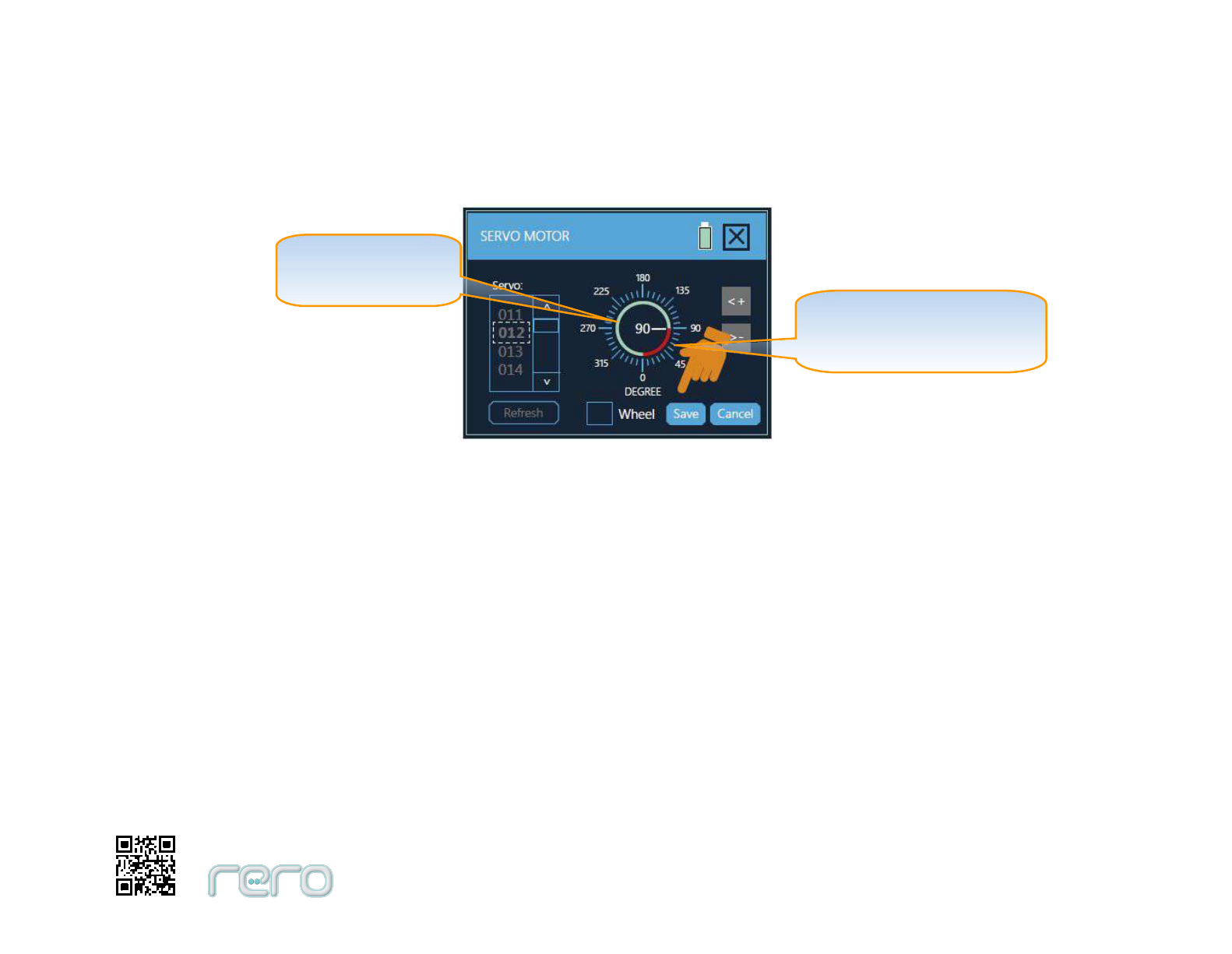
SERVO Sub-Menu
Test the movement of the servo motor, change the servo motor to wheel mode or position mode, as well as set the
path limit of the servo motor in this sub-menu.
Upon entering this sub-menu, rero controller will search for all the connected servo motor and this will take up to 1
second. All the servo motors will be listed under the servo list box. Select a servo motor from the list and the
following screen will be shown.

29
1. Servo List Box - List of the connected servo motors.
2. Refresh Button - Refresh the servo motor list.
3. Angle Meter - Touch the angle meter to command the servo to move to that position. Only available when
wheel mode is not enabled and the position is within the valid path of the servo.
a) Needle - Point to the position of the servo.
b) Green Ring - Valid path of the servo.
c) Red Ring - Restricted path of the servo. In wheel mode, the whole circle will be shown as red ring.
8
9
1
2
3
4
5
6
7
30
4. Increase Button - Increase the position of the servo by 1 degree. In wheel mode, rotate the servo motor
counter clockwise or stop the motor.
5. Decrease Button - Decrease the position of the servo by 1 degree. In wheel mode, rotate the servo motor
clockwise or stop the motor.
6. Wheel Mode Check Box - Indicate whether the servo motor is in wheel mode. To change the mode, press the
Set Path button and toggle this check box.
7. Set Path Button - Set the moving path of the servo motor. When this button is pressed, it will be replaced with
Save and Cancel button.
a) Save Button - Save the moving path of the servo motor.
b) Cancel Button - Discard the moving path of the servo motor.
8. Battery Indicator - Indicate the battery level of the rero controller.
9. Exit Button - Go back to the main menu

31
SENSOR Sub-Menu
Sensor can be tested in this sub-menu. The eyes LED of the head module can be tested here too.
Upon entering this sub-menu, rero controller will search for all the connected sensor and head module. This may
take up to 1 second. All the sensors/head module will be listed under the list box.
Select a sensor from the list and the following screen will be shown.
8
9
1
2
3
4

32
If the head module is selected, the following screen will be shown.
1. Sensor List Box - List of the connected sensors/head module.
2. Refresh Button - Refresh the sensor/head module list.
3. Sensor Type - Shows the type of the sensor/head module.
8
9
1
2
3
5
6
7
33
4. Sensor Value Slider - Shows the sensor value.
5. Mic Value - Shows the microphone value of the head module.
6. IR Value - Shows the infrared sensor value of the head module.
7. LED Check Box - Toggle the RGB LED on the eyes of the head module.
8. Battery Indicator - Indicate the battery level of the rero controller.
9. Exit Button - Go back to the main menu
34
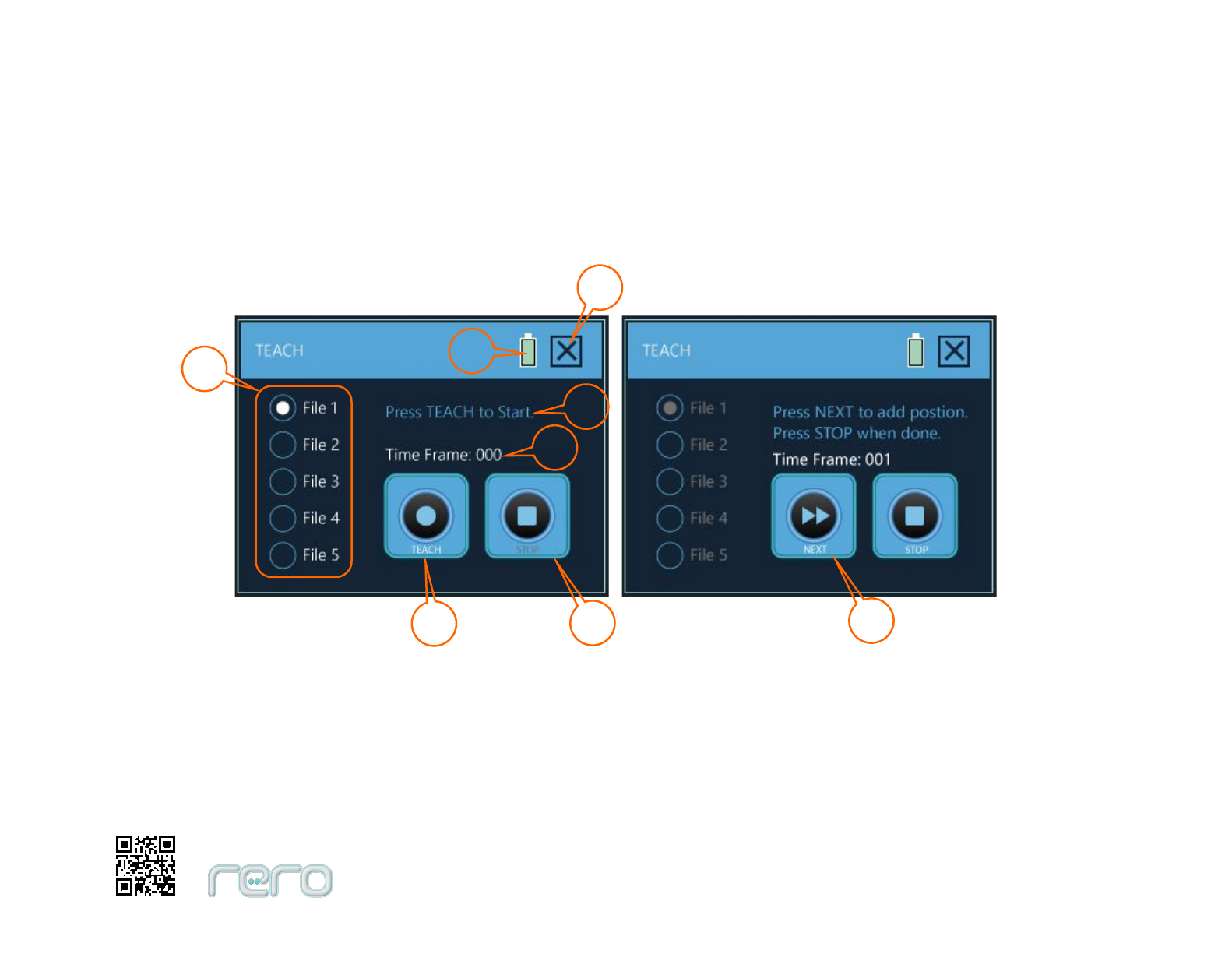
TEACH Sub-Menu
This is the sub-menu for the teach mode where the motion of the robot can be programmed without using the
computer.
1. File Radio Button - Select which file to save the robot motion.
2. Message - Shows the operation guide and tips.
7
8
1
5
6
4
2
3
35
3. Time Frame - Shows the number of recorded time frame.
4. Teach Button - Press to start teaching and this button will be changed to Next button.
5. Next Button - Press to add the current position of the servo motors to the motion.
6. Stop Button - Press to stop teaching.
7. Battery Indicator - Indicate the battery level of the rero controller.
8. Exit Button - Go back to the main menu.
36
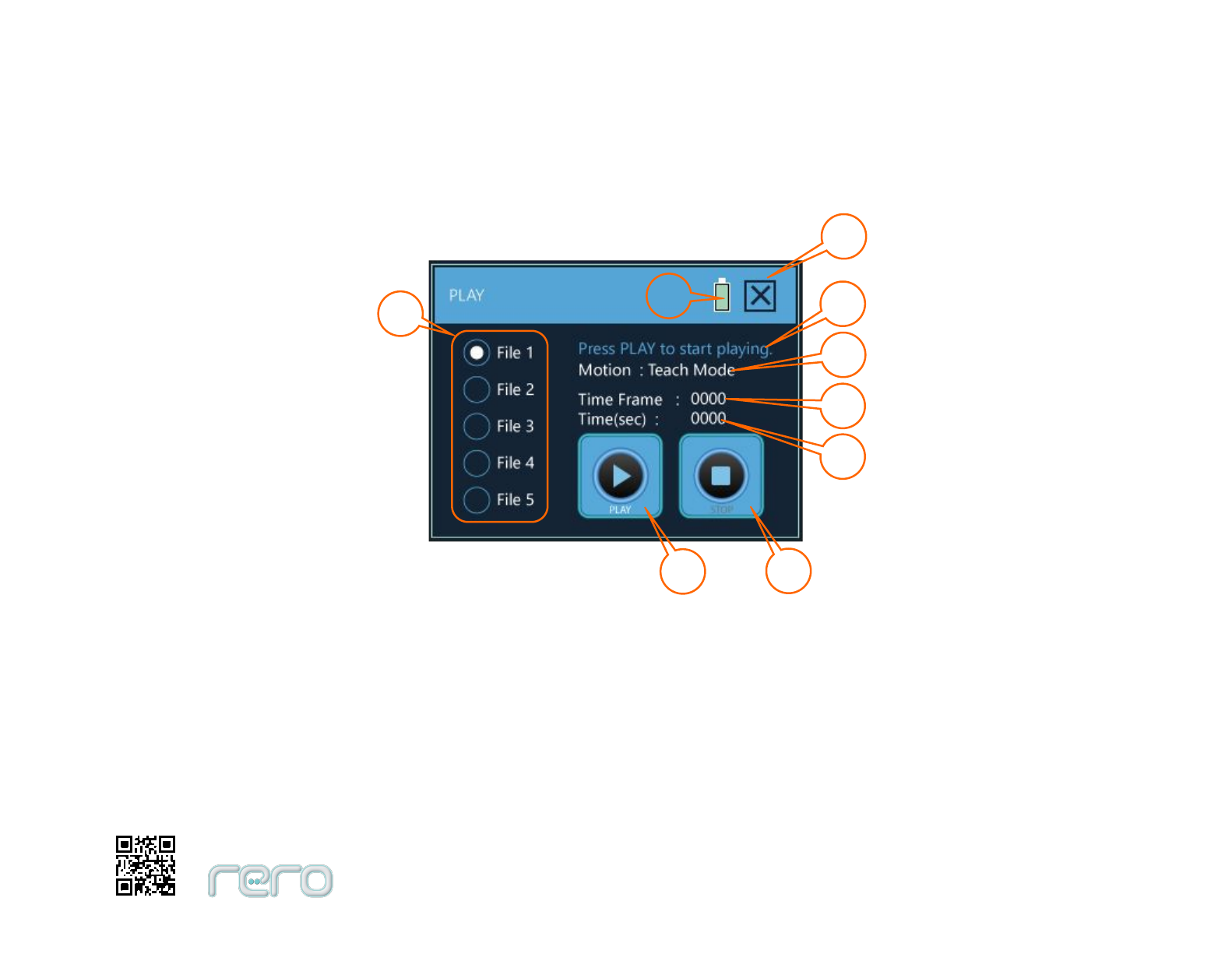
PLAY Sub-Menu
Sub-menu to playback the programmed motion.
1. File Radio Button - Select which file to play.
2. Message - Shows the operation guide and tips.
3. File Type and Name - Shows type and name for the selected file.
8
9
1
2
3
4
5
6
7
37
4. Time Frame - Shows the currently playing time frame.
5. Time - Shows the playing time in second.
6. Play Button - Press to start playing the selected file.
7. Stop Button - Press to stop playing.
8. Battery Indicator - Indicate the battery level of the rero controller.
9. Exit Button - Go back to the main menu.

38
REMOTE Sub-Menu
Enter this sub-menu to control the robot with the rero Remote Apps in your smart phone. The name of the robot
will be shown on the title bar and it can be changed by using the rero Animator.
1. Robot Name - Name of this robot.
2. Battery Indicator - Indicate the battery level of the rero controller.
3. Exit Button - Go back to the main menu.
2
3
1

39
SETTINGS Sub-Menu
Set the screen brightness and volume here.
1. Brightness Button - Reset the LCD brightness to the default level.
2. Brightness Slider - Set the LCD brightness.
3. Volume Button - Reset the system volume to the default level.
4. Volume Slider - Set the system volume.
1
3
2
4
5
6
7

40
5. Firmware Version - Shows the controller firmware date and time.
6. Battery Indicator - Indicate the battery level of the rero controller.
7. Exit Button - Go back to the main menu
Lock Screen
rero controller will lock the screen and enter standby mode when the screen is not touched for more than 2
minutes. To wake it up again, simply touch the screen and unlock it by sliding the slider bar to the right.
1. Unlock Slider - Slide from left to right to unlock the screen.
1

41
USB Screen
This screen is shown when the rero controller is connected to the computer via the USB cable.
1. USB Logo - The USB logo is shown when the rero controller is connected to the computer via USB.
2. Turn On USB Storage Button - Press to enable the USB mass storage device to access the files in the SD card
from the computer.
2
1

42
4.3 Setting Cube Servo and Sensor IDs
Every Cube Servo and Sensor has its own ID. Cube Servo and sensor are preset with ID, however user can still
change the ID to a preferred number and re-label it with the sticker provided. User will need to make sure that all
the Cube Servo or Sensors connected to a rero controller must has different ID, else communication error will
occurred and rero controller will not be able to detect the connected Cube Servos Sensor.
To change the ID, user must connect only one Cube Servo or only one sensor to rero controller. Go into SET ID
menu of rero controller and key in the ID that you want to set and press ‘OK’ button to set the ID. User can press
‘Read ID’ button to get the current ID of servo or sensor. Remember to change the ID sticker and label it with correct
ID after changing the ID. There are spare stickers provided for this purpose which comes together with rero robotics
kit.
Set ID menu
43
Info
Cube Servo and sensors can have ID as from 0to 253. Remember to label the servo on ID sticker once you done
setting ID of servo or sensor.
4.4 Charging Battery
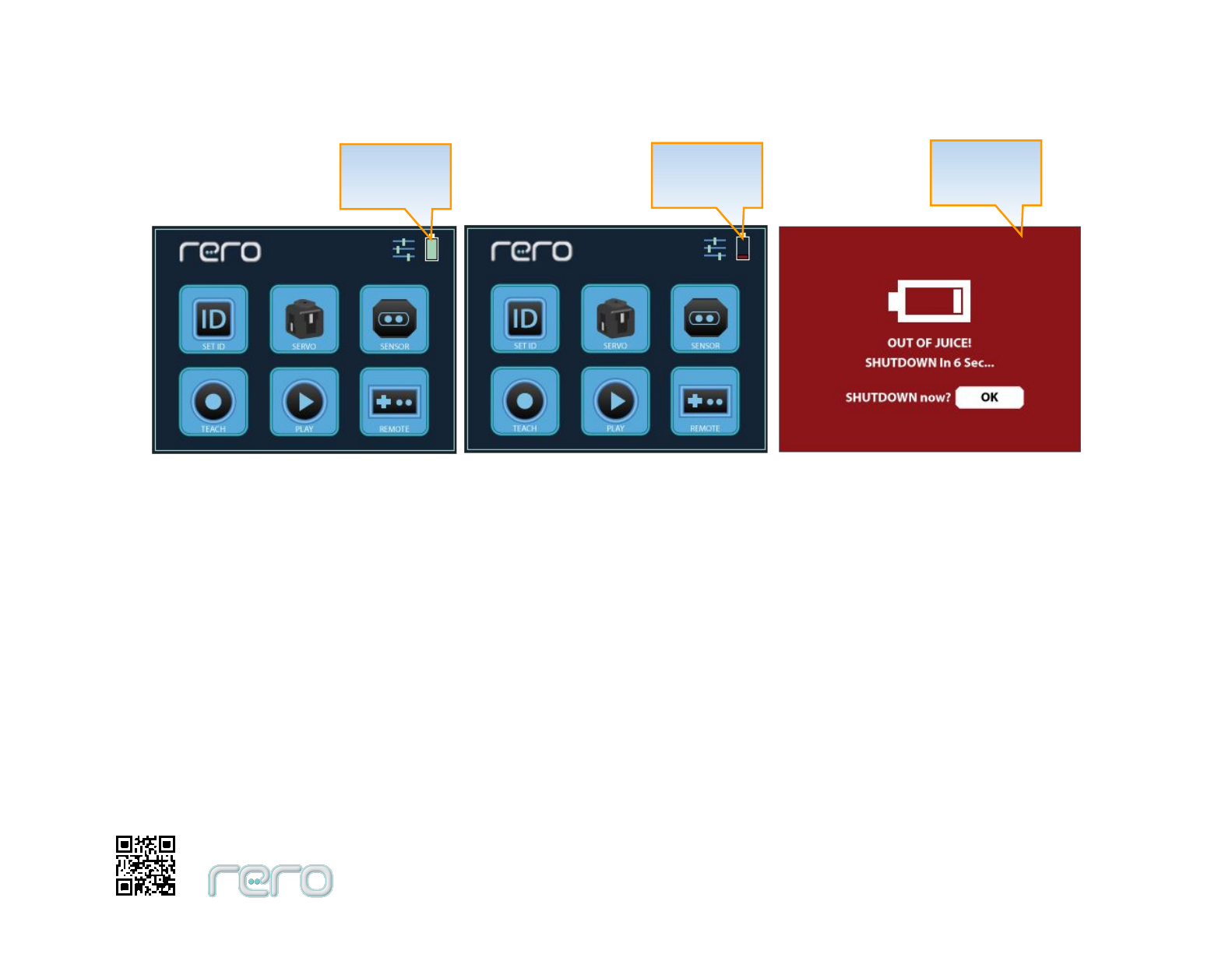
rero battery level is always monitored by rero controller and is display by the battery icon at right upper corner. The
battery level is indicated by shaded level in the icon and also the colour of the icon. The battery icon colour will
change from green to yellow and red when low battery. rero controller will display a empty battery screen when the
battery voltage is too low. It will shutdown in 6 seconds after the empty battery screen is shown. User can charge
the battery any time to keep the battery full.
44
rero battery status indicator
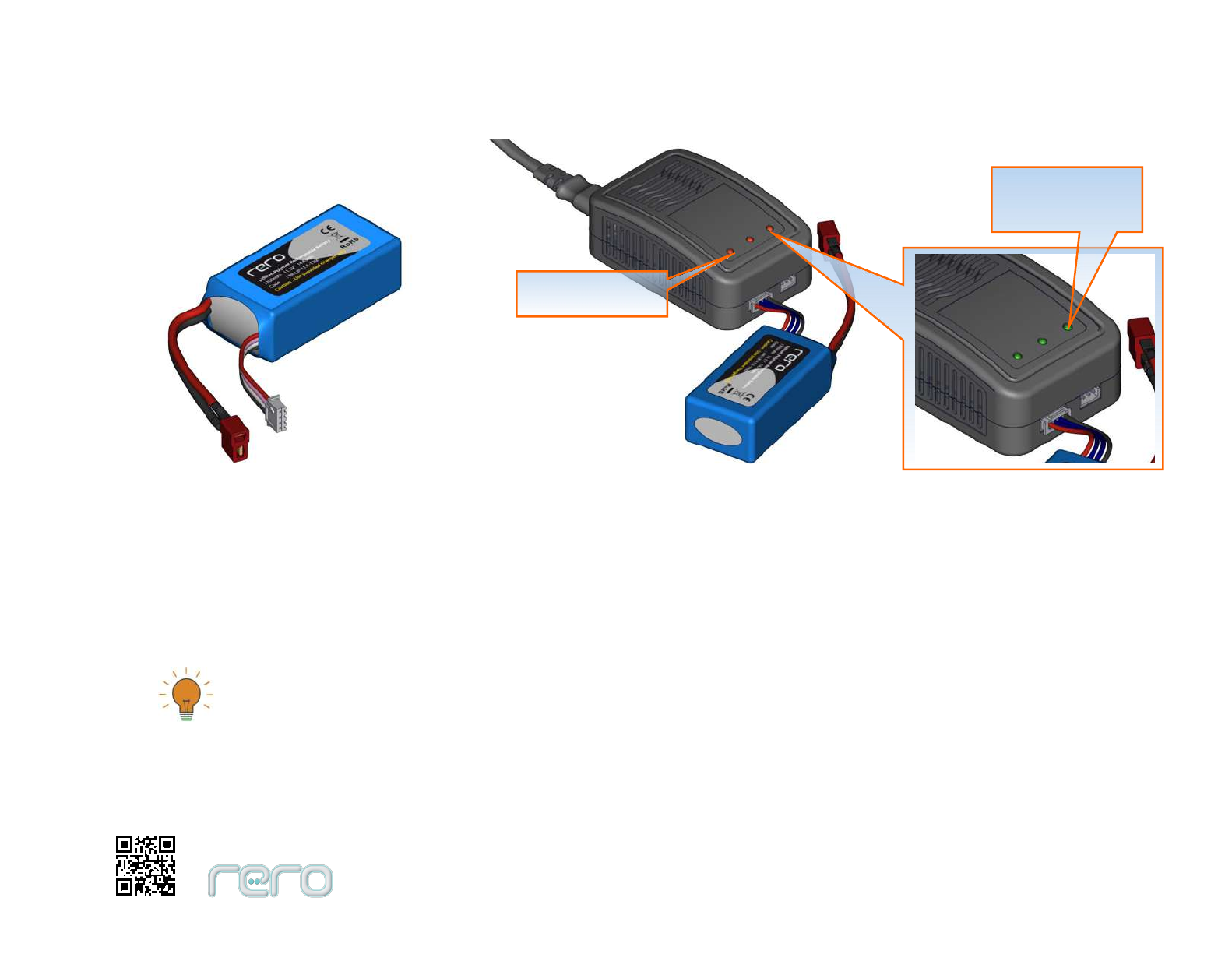
rero controller comes with Lithium Polymer Battery (LiPo) with capacity of 1300mAh at nominal voltage of 11.1V.
Please use the provided battery charger to charge rero’s battery. Incompatible battery charger can damage the
battery or even cause fire and explosion. rero robotics kit come with quality LiPo Balance Charger. Balance charger
makes sure that all the cells in battery are charged in balance to reduce the risk of cell overcharge and
undercharge .
Full
Battery
Critical
Battery
Empty
Battery

45
rero’s charger (AC input 100V -240V, 50/60Hz) and charging cable
4.4.1 Charging on rero Controller
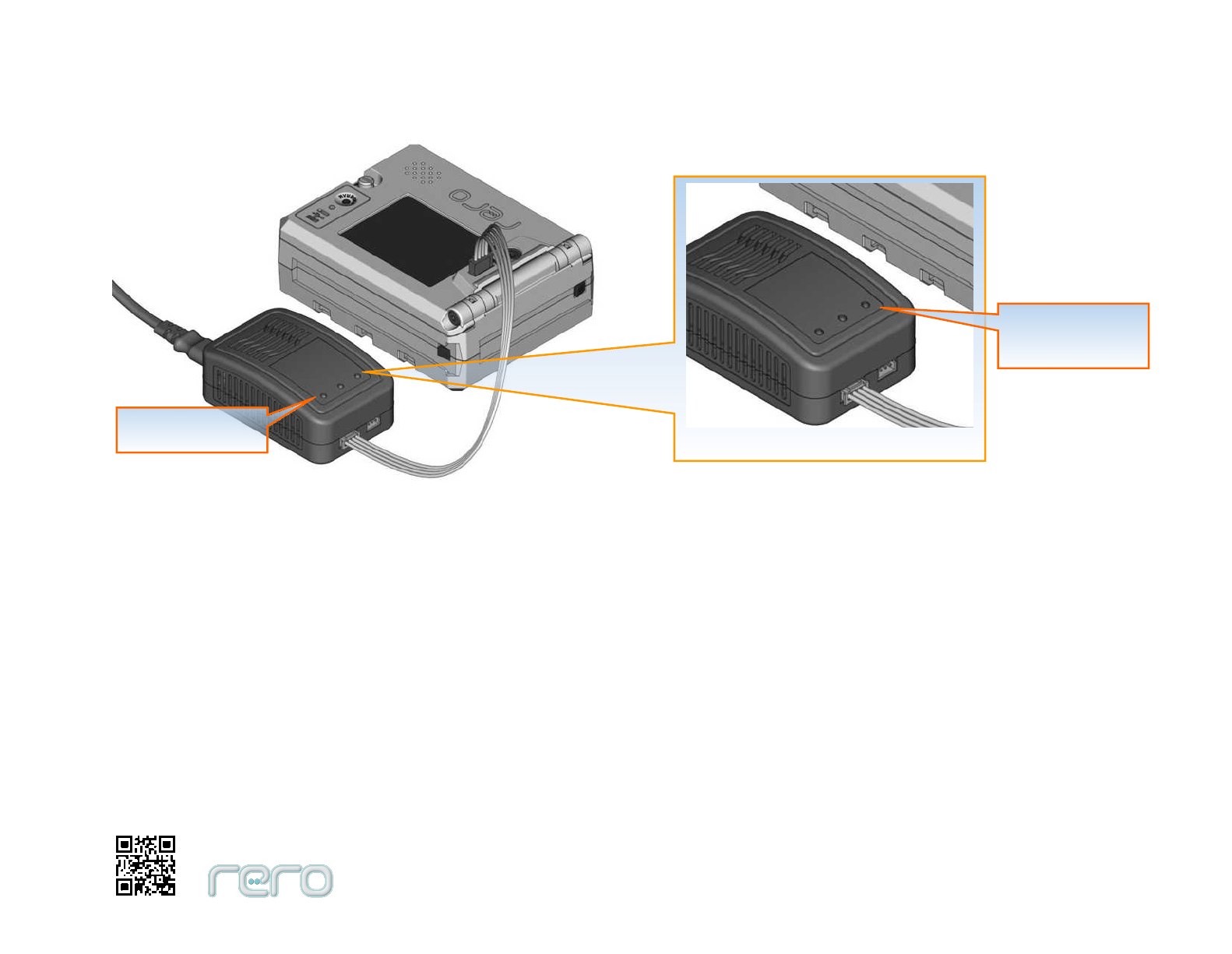
Connect the Charger to the rero controller with the charging cable provided as shown by picture following.
46
Charging rero’s battery in rero controller, wait for all Charger’s LED turn Green for full charge.
There are 3 bicolour LED on rero’s charger. After power on the LED will be green colour and red LED will blink every
2 seconds. When the charger is charging, all the LED is in red colour. Each LED indicates a battery cell in rero LiPo
Battery. The charging process is only completed when all the 3 LEDs indicator turned green colour.
Green: Finish
Charging
Red: Charging
47
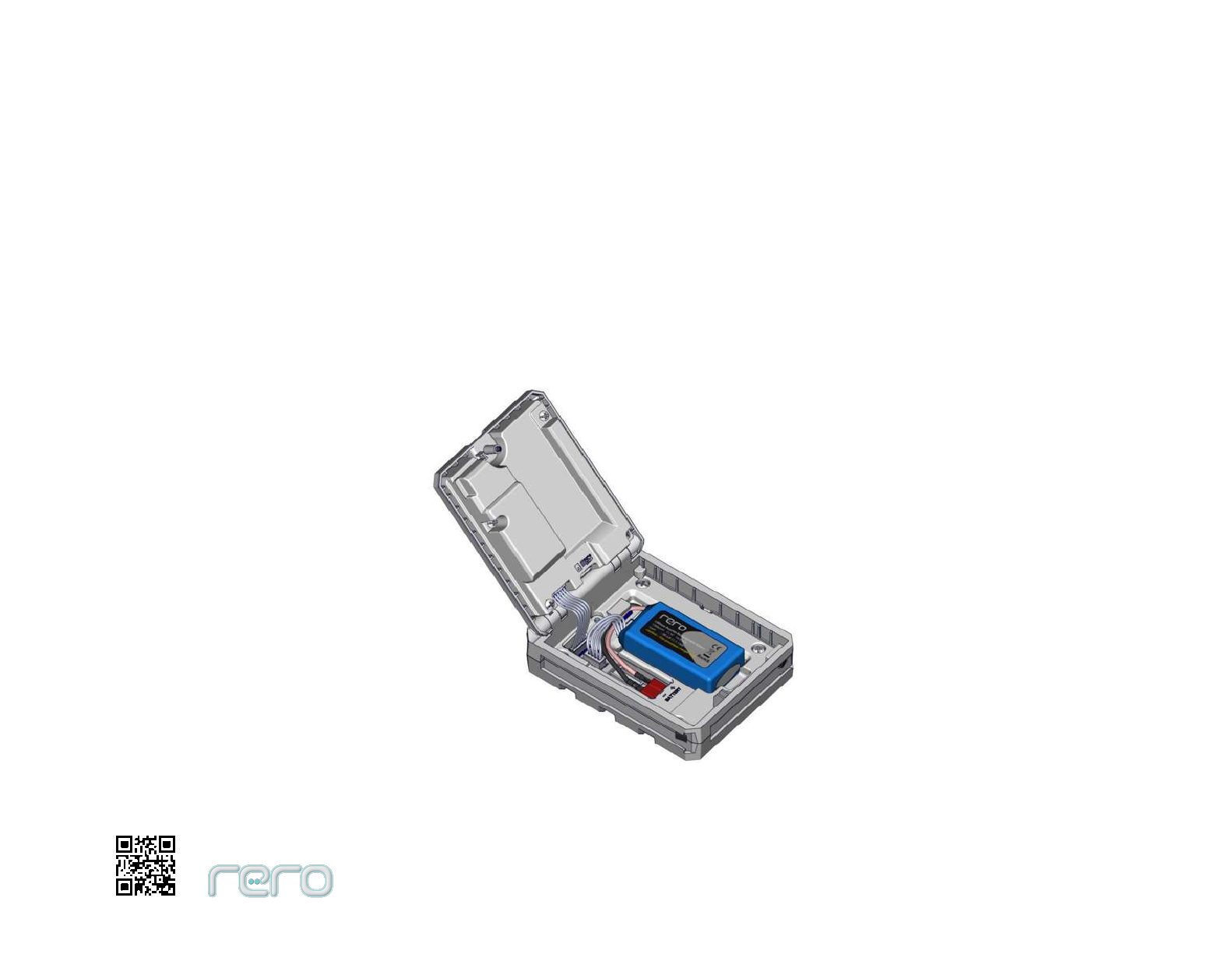
4.4.2 Advance Charging Method
Adult supervision is needed for this method of charging. This method is to charge rero battery directly from charger
without rero controller. User can get access to the battery by opening the battery compartment. To get access to
battery compartment, user will need to unlock the thumb screw on rero controller by turning it counter clockwise to
open the rero controller casing.
rero Battery Compartment
48
rero’s battery, standalone charging without rero conteroller, battery is full only if all the LEDs turn Green Color
Battery can be taken out from the rero controller after disconnecting the battery cells connector and Dean-T power
connector. Connect the battery cells connector to the charger to charge the battery. Wait for all LEDs change to
green color for a full charge.
Info
Do not attempt to short any of the battery terminals which can cause fire or explosion. For a prolonged storage of
rero controller, user is advice to keep the battery capacity at around 60 percent only for a greater battery life time.
Green: Finish
Charging
Red: Charging
49
5.0 Build Your Own Robot!
5.1 rero Hardware Construction
Joints
Most of the part has Joint as shown in figure. These Joints will be attached to connects to create robot assembly.
Joints
50
Connects
Some rero parts have Connect as shown in the figure above. These connects can be attached to rero parts that has
Joint to build robot part.
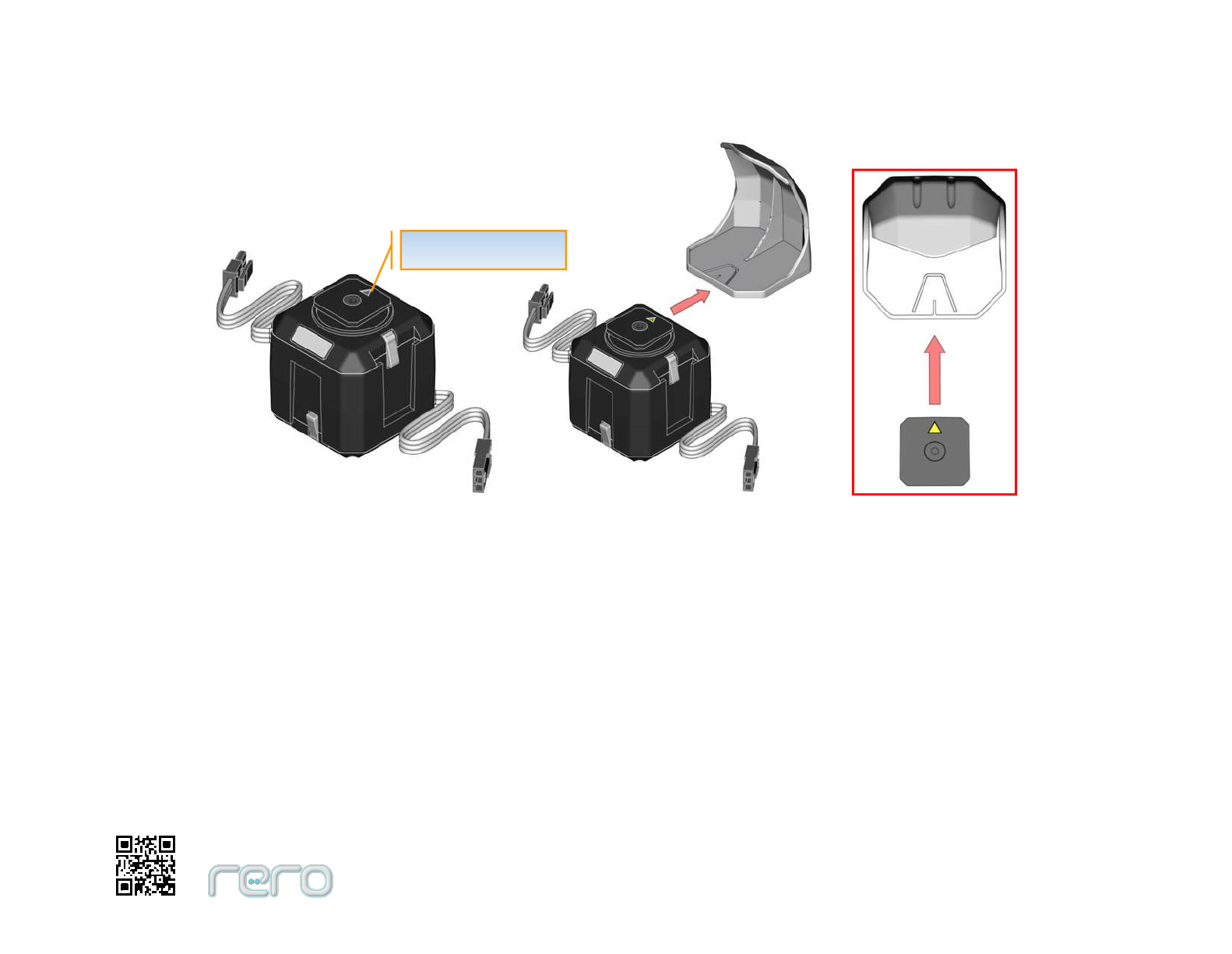
G15 Output Connect
G15 Output Connect has direction marking which user will need to follow when sliding it into the joint slot.
Connects
51
Follow the direction marking when connecting Cube Servo to joints
Direction Mark
52
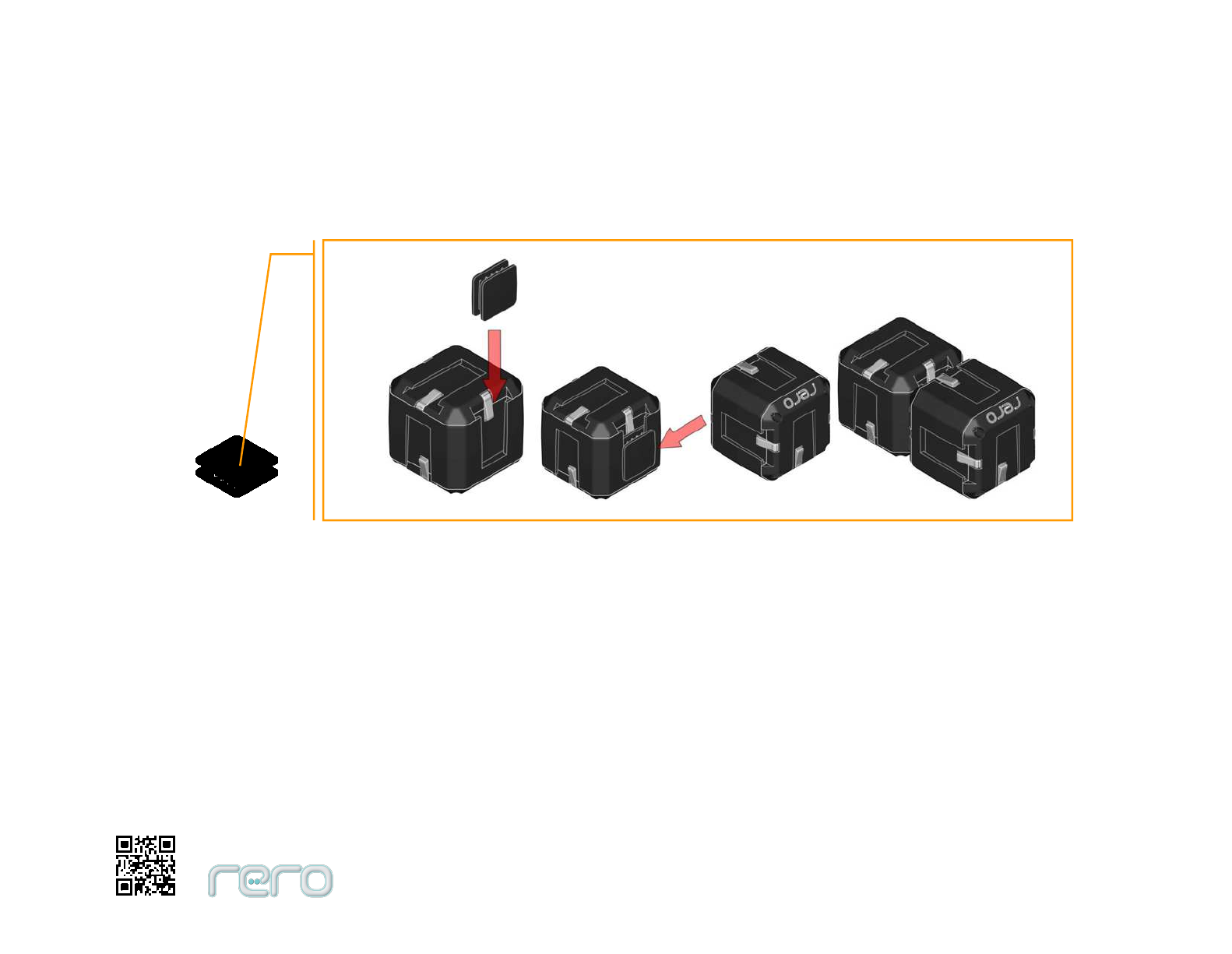
Interconnect
Interconnect can be use to attach two joints together. There is no direction constraint for interconnect.
Rotatable Connect
Rotatable connect has similar physical appearance as interconnect but has 2 free rotating surfaces . It is used to
support U-Joints connection and can be use to build free rotating wheels too. U-Joint Connected to Cube Servo are
normally used as robot’s Arms and Knees which has one rotation axis.
53
54
Wide U-Joint can be use to build a compact 2 axes rotating Joint which can be use at shoulder and ankle of robot.
55
56
rero Controller Slots
In Order to connect rero parts to rero controller, user MUST use Adapter Joint to convert rero controller slot into
Joint. Then rero part can be connected to Adaptor Joint to attach it to rero controller. Recommended Adapter
Joints direction facing on each rero Controller slot is as shown below.
Slots
57
Single and Double Spacers are used to fix the Adaptor Joint position in the rero controller slot as shown by figures
below.
58
Figure below shows example of using Adaptor Joint to connect a Cube Servo to rero controller.

59
Wire Clip
Wire clip is used to organize and tidy up dangling wire on rero robot after all the hardware setup and wiring is done.
Organizing wires and connectors using wire clip
60
5.2 Dismantle rero Into Parts
To dismantle rero parts, the basic step that apply for all parts that locked together by the latch is shown as
following:
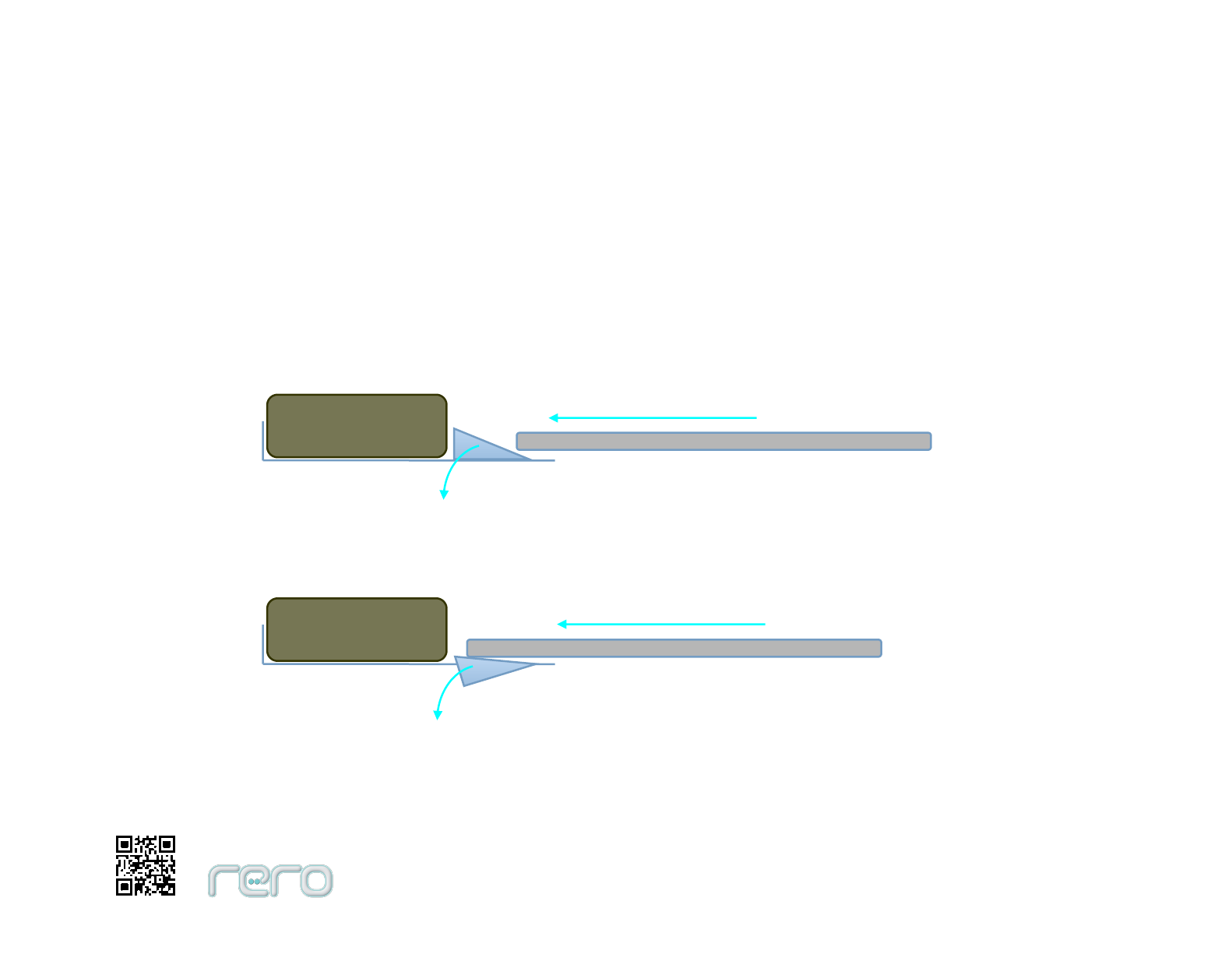
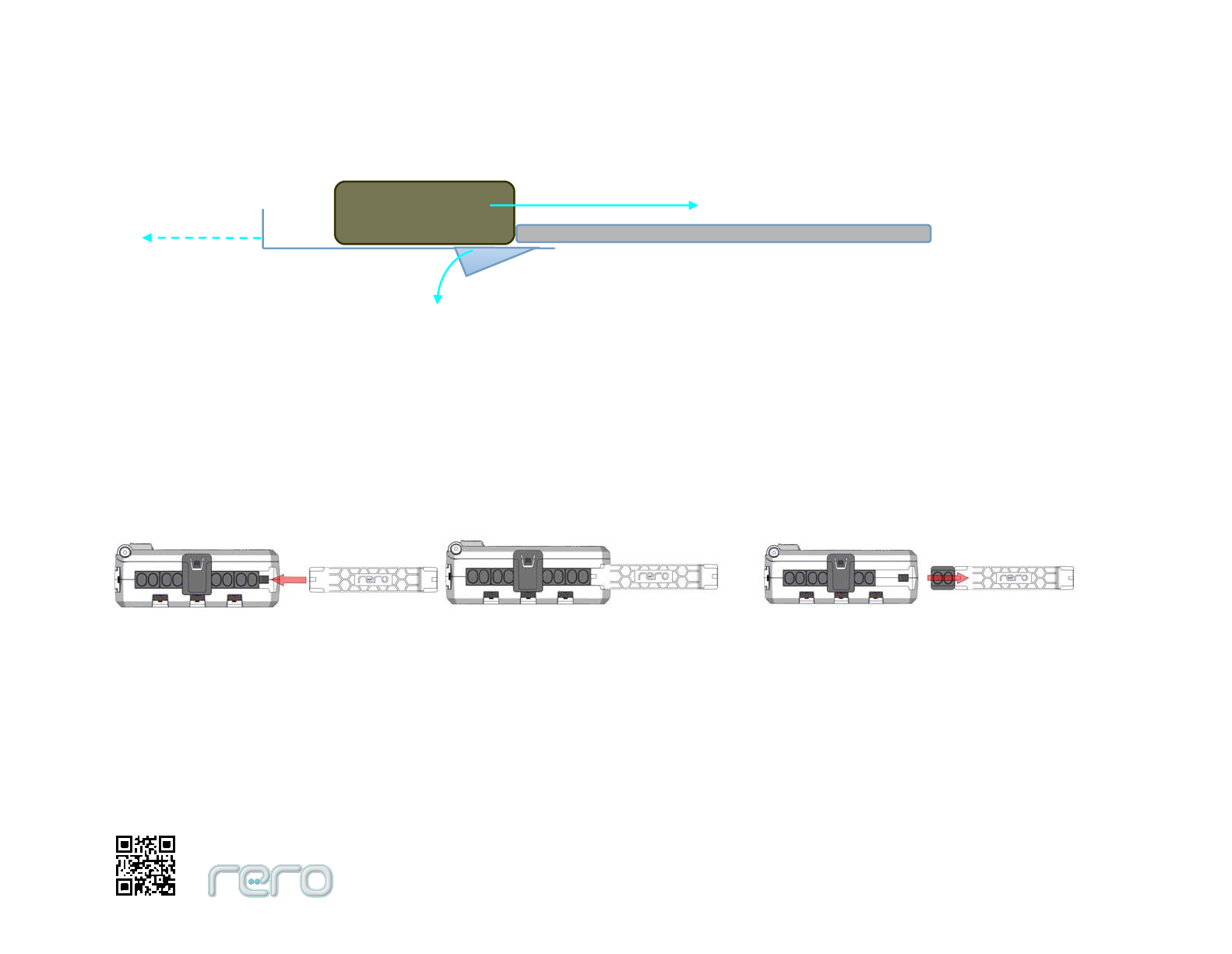
Step 1:
Push the rero opener into the slot to push down the latch to release the locked part.
rero Part
rero Part
rero Opener
rero Opener
Latcher
Latcher
Slot
Slot
61
Step 2:
Push the Connect part locked by latch in the Joint/Slot to the direction of the rero Opener to release the part
from the slot, at the same time release the force on rero Opener.
Or Push the part with Joint to opposite direction of rero opener to release the Connect parts.
Release rero spacer from rero controller slot.
rero Part
rero Opener
Latcher
Slot
62
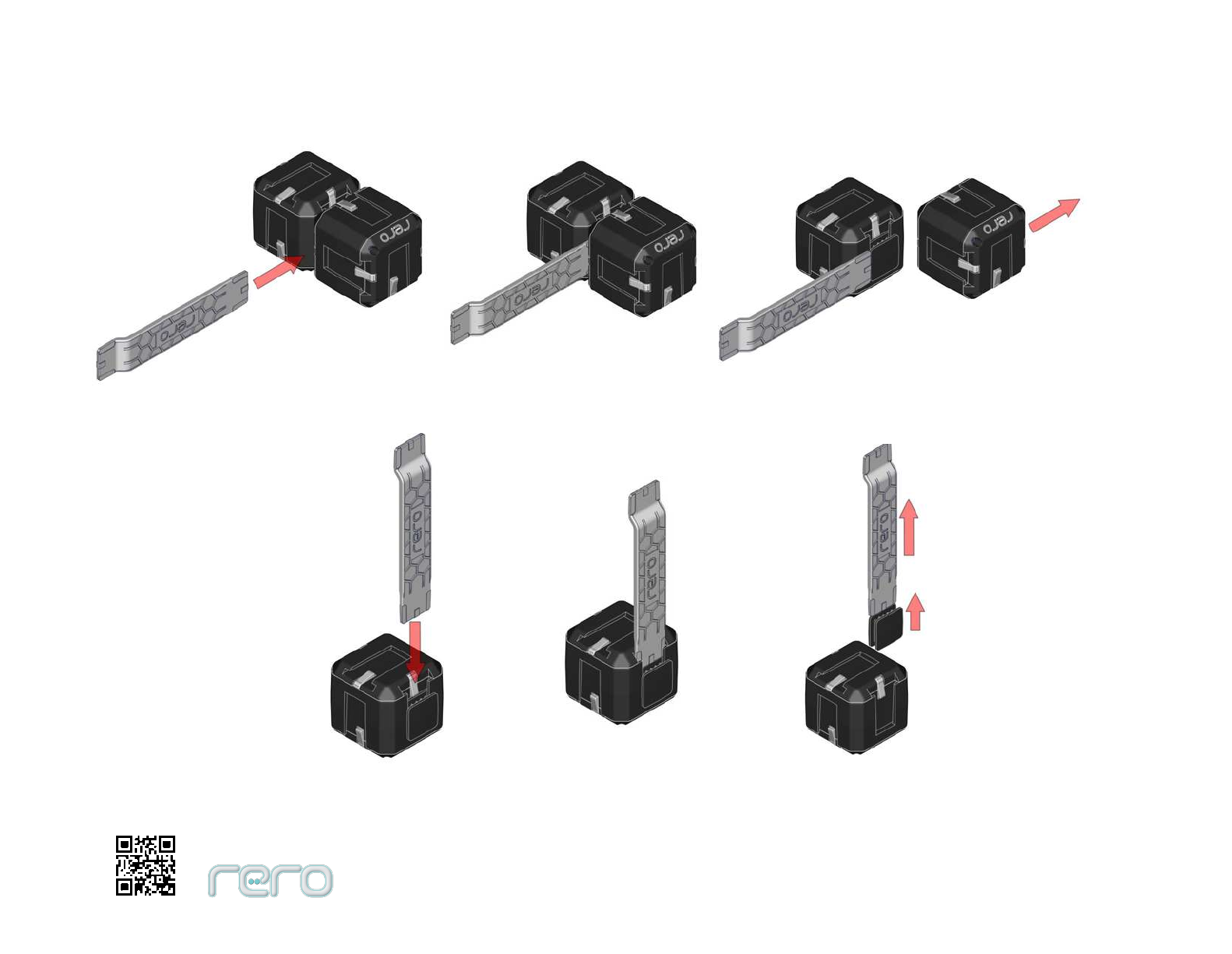
Release rero Cube joint from Interconnect
Release rero Interconnect from Cube Joint slot
63
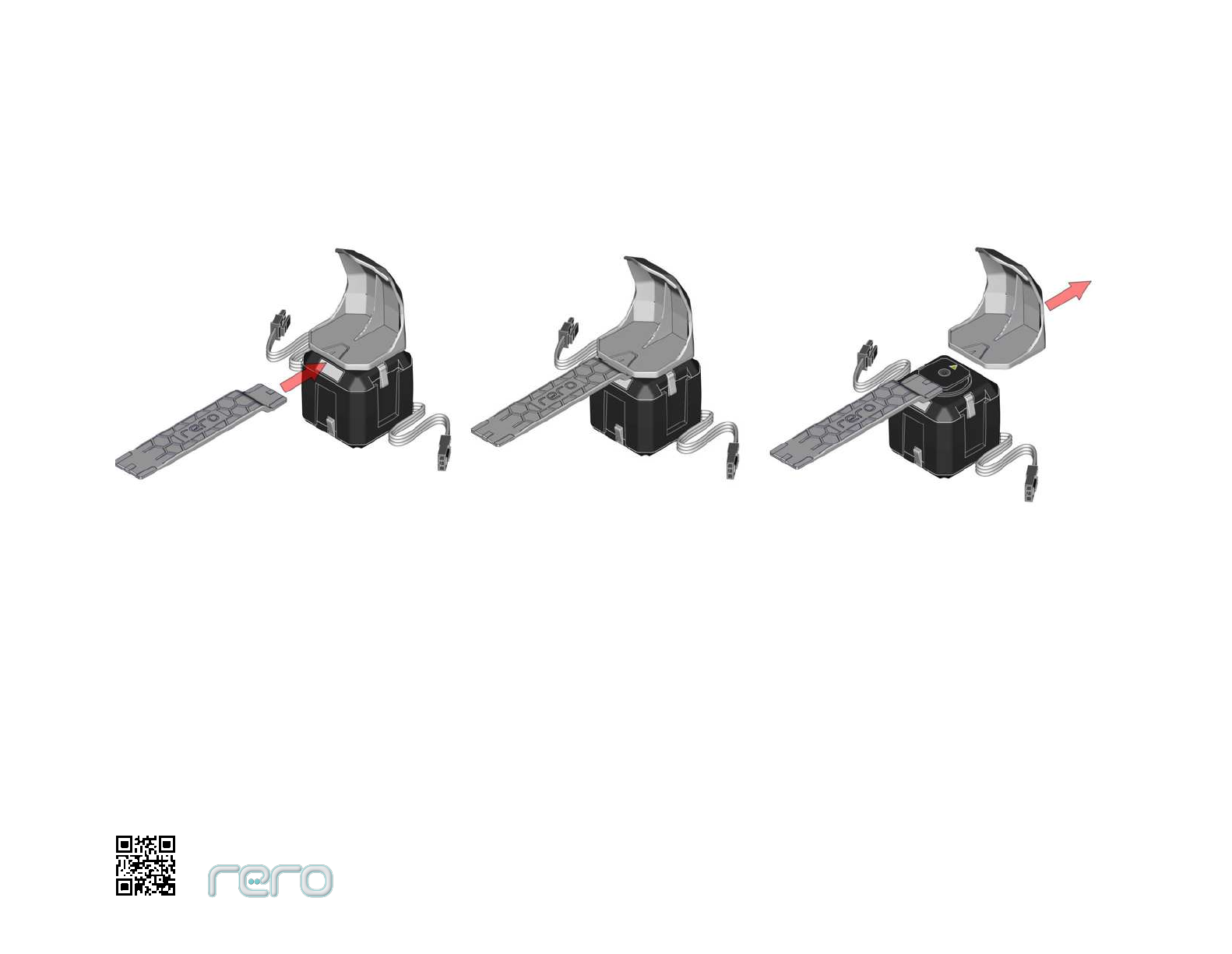
Release rero claw from Cube Servo

64
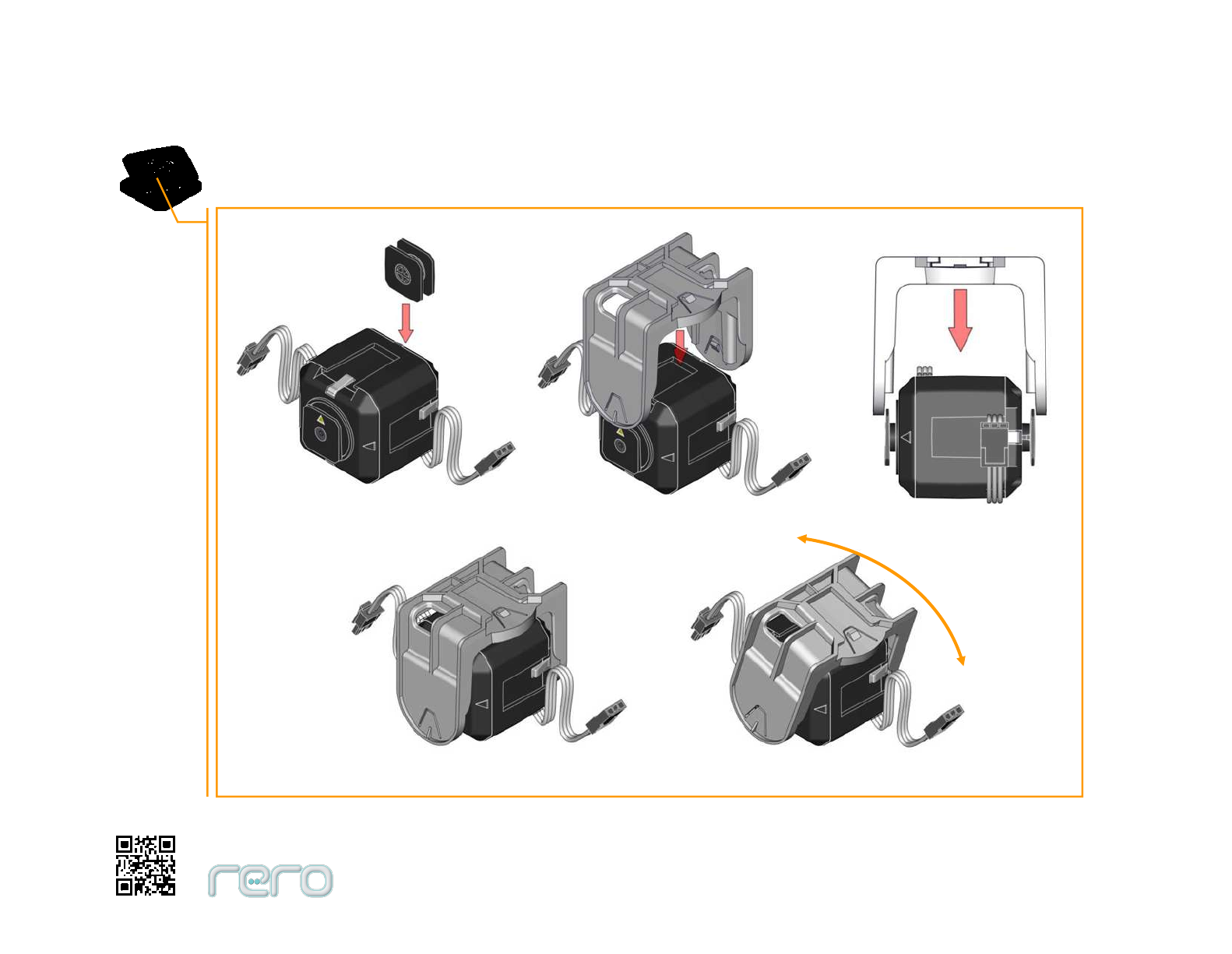
5.3 Wiring
Daisy Chained Cube Servo and Sensor
In Daisy Chain connection, multiple Cube Servo or sensors are wired together in sequence or in a ring. Power and
communication signal are transferred from one servo or sensor to another on the single serially connected line.
Hence, not all the Cube Servos or sensors need to be connected directly to rero controller’s output ports, instead it
can be connected to other Cube Servos or sensor to get power and communication line. This can save a lot of direct
connections from controller to servos and sensors and make the whole wiring simple and neater.
Connection to rero controller, connection between cube servo or sensors

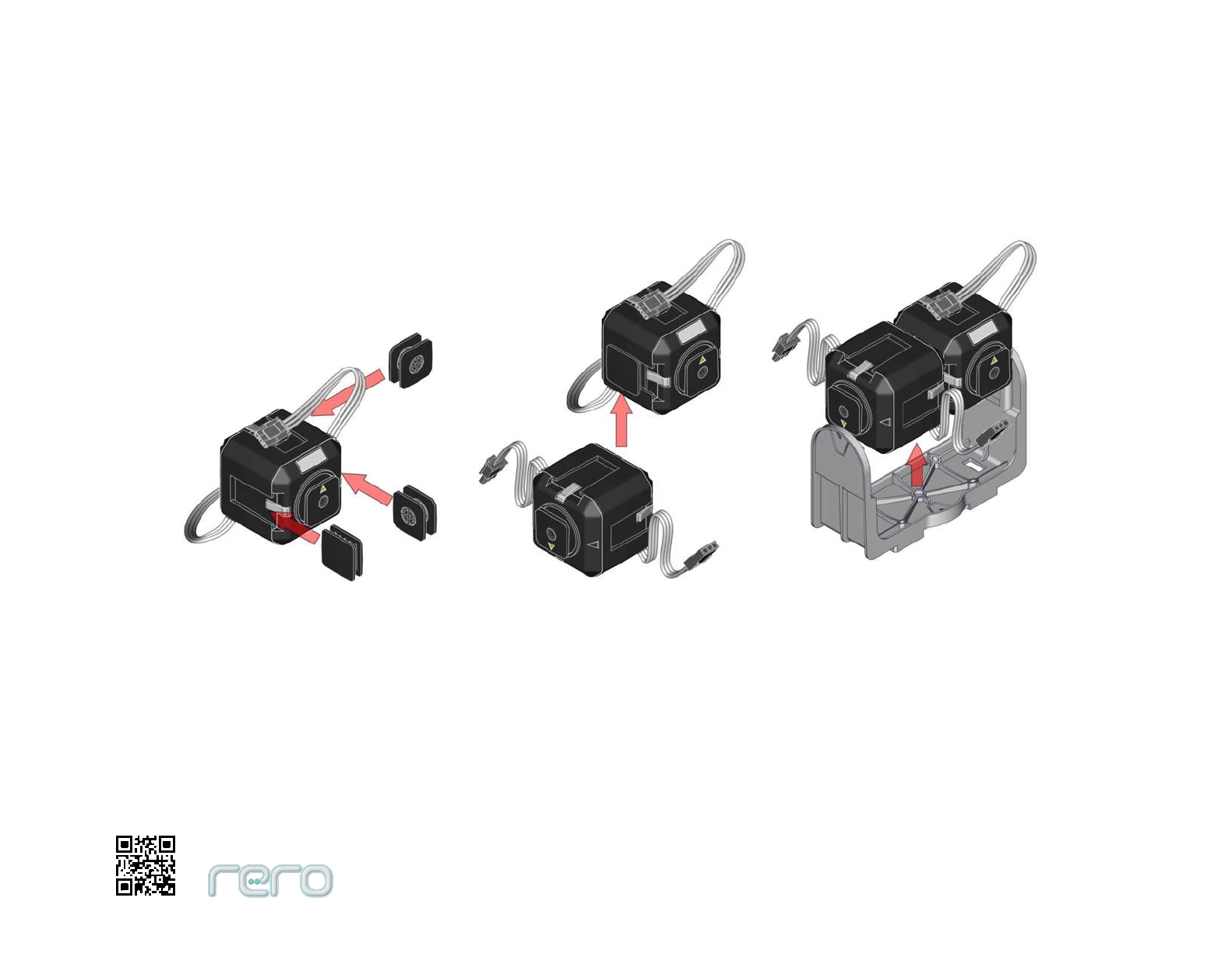
65
rero Daisy Chained Connection

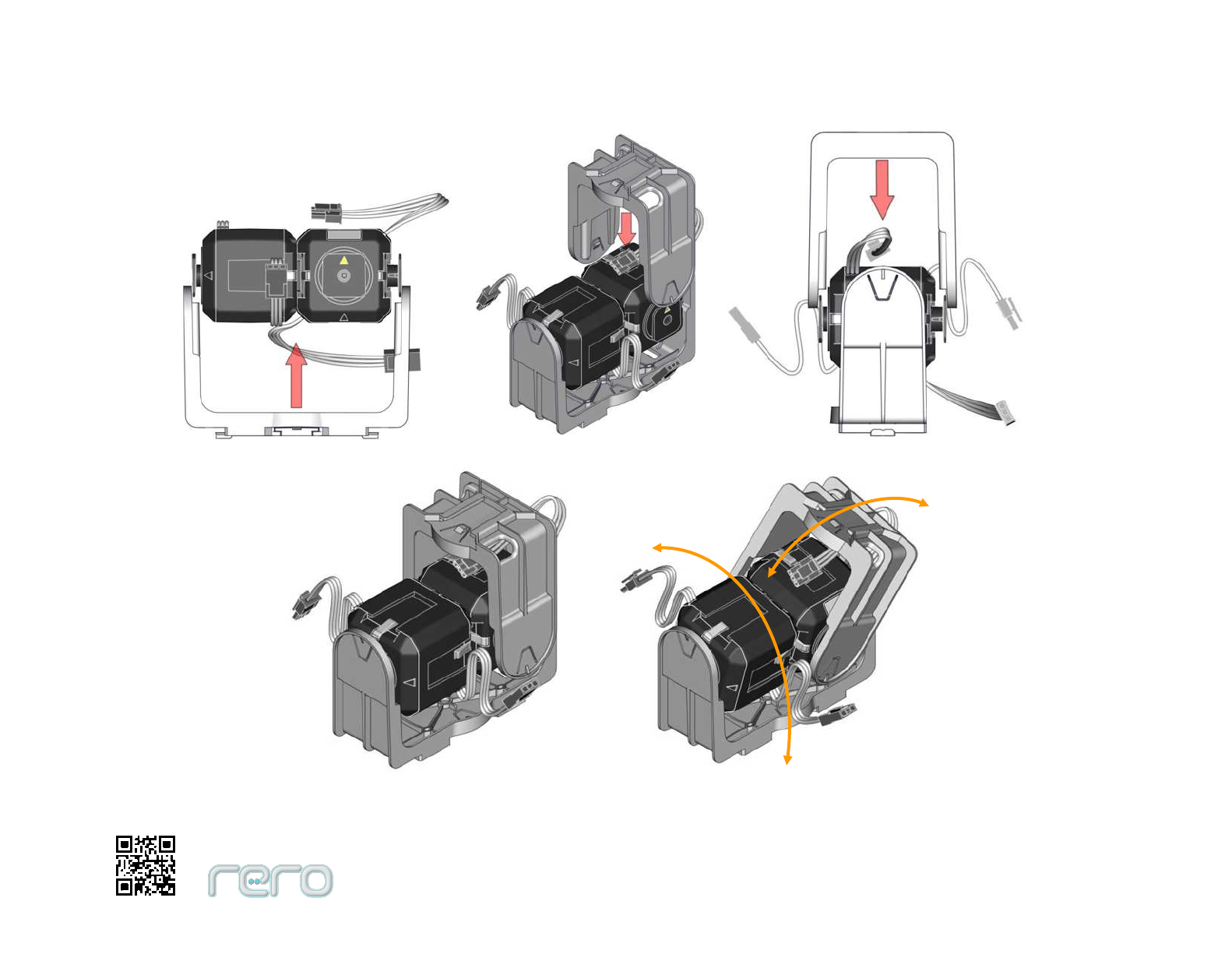
66
Wrong or Broken Daisy Connection

67
6.0 rero Programming
6.1 Teach Mode
Set Path Limit
This is an important step the make sure all the Cube Servo will only move in a safe path that does not clash on other
rero parts after it is assembled as a robot. To Set Path Limit go into Servo Menu.
Every servo will need to set it path. Select a servo from the Servo list displayed based on its ID. The selected Cube
Servo will turn on its LED when selected.

68
Select a Servo from the Servo list
Press Set Path to start setting the path limit for the selected servo. Rotate the selected Cube Servo, together with the
attached part in both movable directions to the maximum. This is to let the rero controller knows how much angle
that servo can move.

69
Set the Allowable moving Path for the Selected Servo
You will notice the green and red sector on the position meter changed. Green sector indicates the safe moving
path, and red sector shows the path that will clash and Cube Servo will not move into that region. Press ‘Save’
button to save the path limit to the selected servo. Repeat the Set Path Limit procedure for all the Cube Servos that
form the rero robot.
70
Path Limit shown by Green and Red Color on Position Meter
To set Cube Servo into wheel mode which the servo can rotate 360° continously, in the Set Path Sub-Menu tick the
‘Wheel’ checkbox. The whole arc of position meter will change to red colour indicates the Cube Servo is not in
position mode but in wheel mode.
Green Colour:
Moving path
Red Color: Path that
Cube Servo will avoid

71
Set Servo into Wheel Mode for 360° continous rotation
Teaching Motions
Teach Mode is the most basic option to program your rero. It is designed for beginner or those who wish to
program a simple movement for rero. Twist your rero robot joints or servos to the position or posture you want it to
be, then press save. Repeat it for the subsequent robot positions so that it becomes a complete series of motions
that you want the robot to move.
To enter this mode, go to main menu and then press ‘TEACH’.

72
Teach Mode on rero Controller
Select any file (File 1 to File 5) that you want to save the motion file. then press ‘Teach’.
Time Frame
Twist

73
Now, twist your rero to the first position (the initial position) you want it to be. Every Cube Servo can be rotated. You
can rotate all of them or only part of them in the same time Frame. When the rero is twisted to the desired position,
press ‘NEXT’. The 1st time frame will be saved.
Info
All servos’ LED will turn on after you have selected a file. If there is any servo’s LED does not turn on, please check the wire
connection. rero Controller does not care the path taken when you twist your rero. It will only ‘remember’ the last position before
you press ‘NEXT’. rero Controller is unable to repeat the path how you twist your rero from one position to another position in one
time frame. Instead, it will move from 1st position to next position using the shortest path. Please separate complex motion into
more multiple time frames to make perfect motion.

74
Repeat the same process for the second desired position and the subsequent positions.
Twist robot to desired position then press NEXT to record all servos’ position into time line
Twist
75
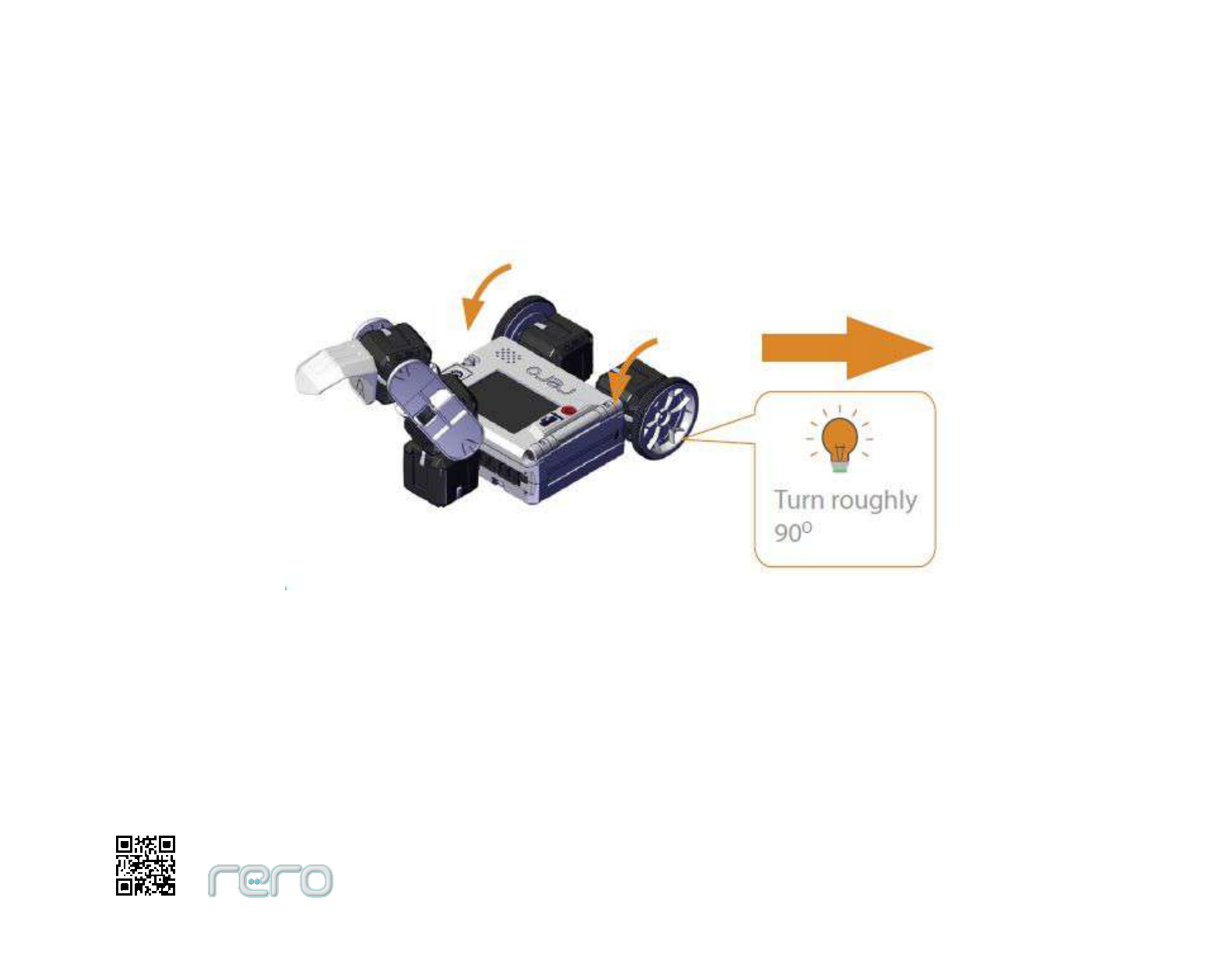
To teach the wheel mode’s servo to move forward, slightly rotate (10° to 90°) the wheel Cube Servo in the desired
direction. Do not rotate more than 1 rotation to avoid confusion to the rero Controller.
Teach wheel mode Servo to rotate in the desired direction

76
Press ‘stop’ when you have done and then ‘X’ to go back to the main menu.
Info
You can teach up to 65535 positions or time frames in 1 file. Each time frame positions will take 1 second to
complete.

77
Playing Motions
To Play the motion file that has been saved from the teach motion step. Go into ‘PLAY’ Menu
Select the file that you save the motions.

78
Press ‘Play’ to start playing all the motions that was save. Observe the running ‘Time Frame’ and Time’ on screen.
rero robot will start moving once you pressed the ‘PLAY’ button.

79
To Stop the rero robot, press the ‘STOP’ Button. If the screen is locked, slide the Slider on screen to unlock the
screen.
You can record different series of motion into all the File 1 to File 5 and play different motions by playing the
different file.

80
6.2 rero Animator
Minimum System Requirements for rero Animator Software
Prerequisites:
- Microsoft Dot Net Framework 4.5
Operating System:
- Microsoft Windows XP, Windows Vista, Windows 7 and Windows 8 (32/64 bit) with the latest updates.
System Requirements:
-Processor: 1.5GHz or faster
-RAM: 1GB or more
Software Installation
Download rero Animator software from rero website’s download page
(http://rero.com.my/downloads).
Double click on the downloaded file to initiate software installation. Follow the simple
installation steps. A short-cut will be created on your desktop. Double click on it to launch rero
Animator software.
rero Animator icon
81
Interface Overview
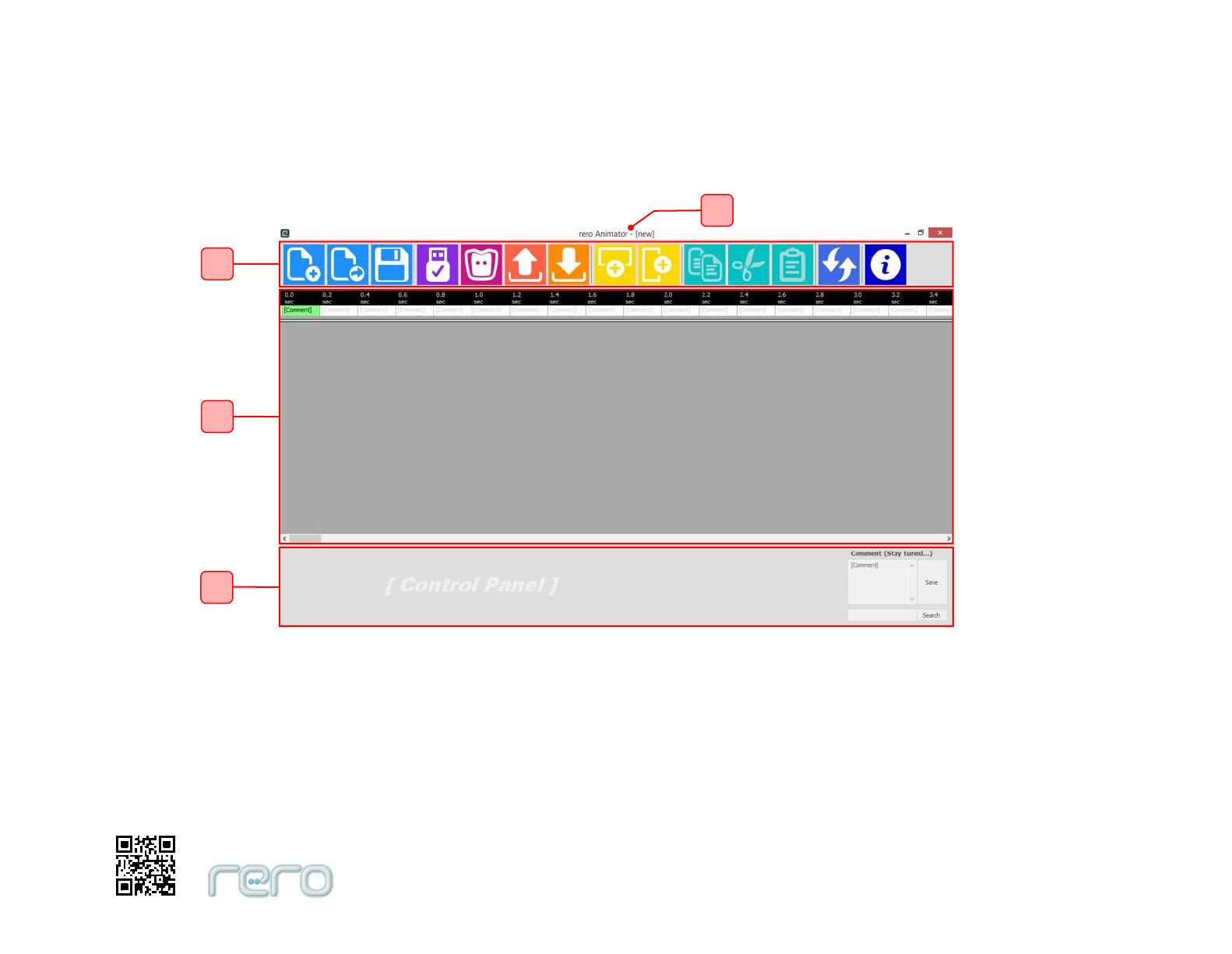
Every time you open rero Animator software, you will see the programming interface as shown below.
Interface Overview
1. Title & File name -- Software name and current motion file name are displayed here. Shows [new] if the current motion
has not been saved. Asterisk symbol (*) behind the motion file name indicates that changes has been made.
2. Menu bar -- Find basic tool for working with motion file here.
3. Motion Canvas -- Create & edit your robot motion here.
4. Control Panel -- Tune Servo1and Action1’s settings here. (1To be explained.)
2
3
1
4
82
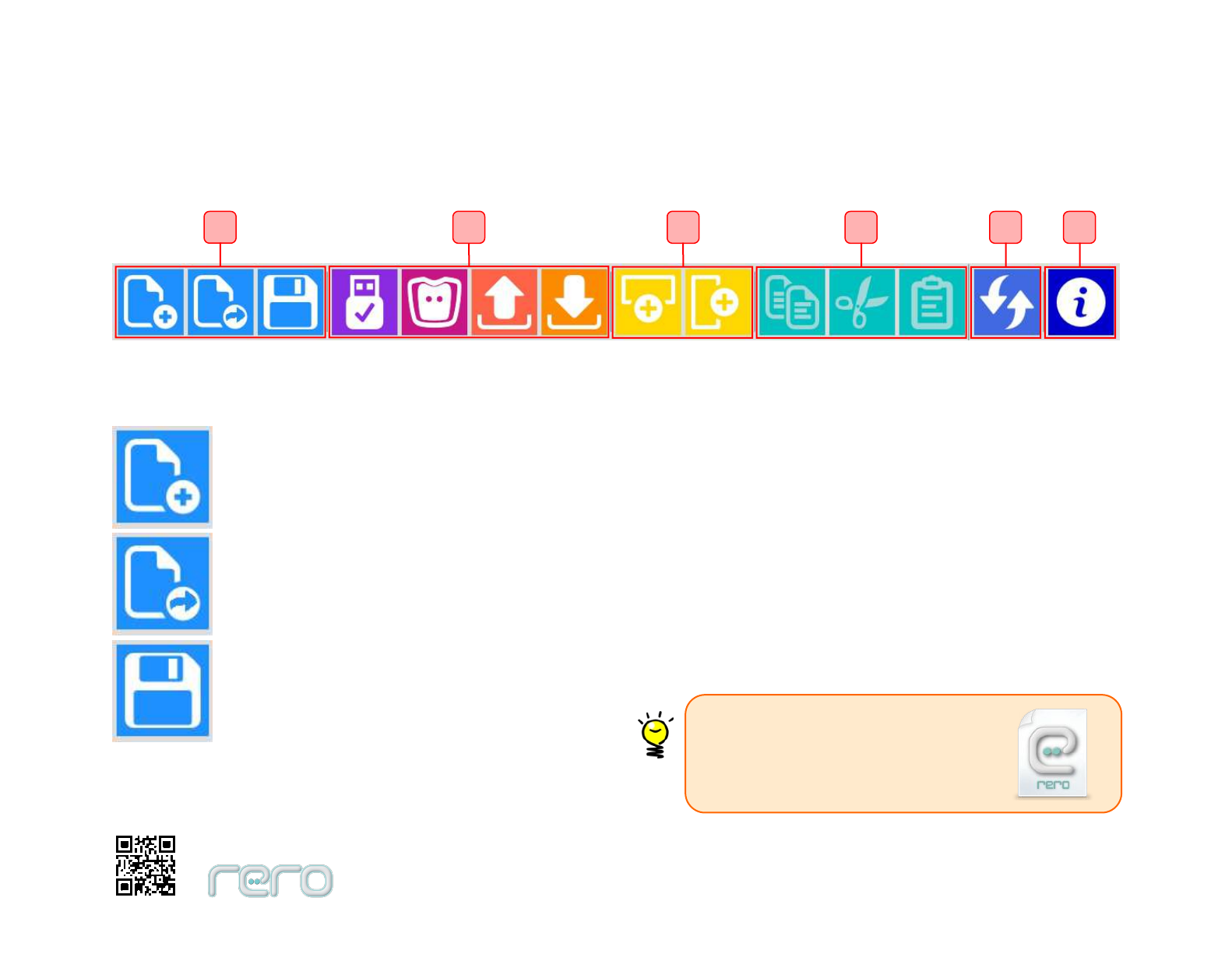
Menu Bar
The Menu Bar consists of large buttons with thumbnail image.
Menu bar
1. Motion File
New Motion file
-- Create new motion file & automatically detect Servo(s) available if rero Controller is connected & powered up.
Open Motion file
-- You can browse saved or downloaded Motion file via the file browser window.
Save Motion file
-- Saves current Motion with desired file name.
2
3
1
4
5
6
You will see this rero Motion file
icon appears as the saved file if
your system supports this feature.
Idea!

83
2. Robot Connection
Connected Not connected
Robot connection status
-- Shows USB icon with tick symbol (√) when rero Controller is connected and powered up,
otherwise shows icon with cross symbol (×).
Robot Name
-- Read & edit robot name saved in rero Controller. This name will appear in rero Remote.
Upload Motion
-- Uploads the motion to rero Controller.
Download Motion
-- Downloads the motion from rero Controller.
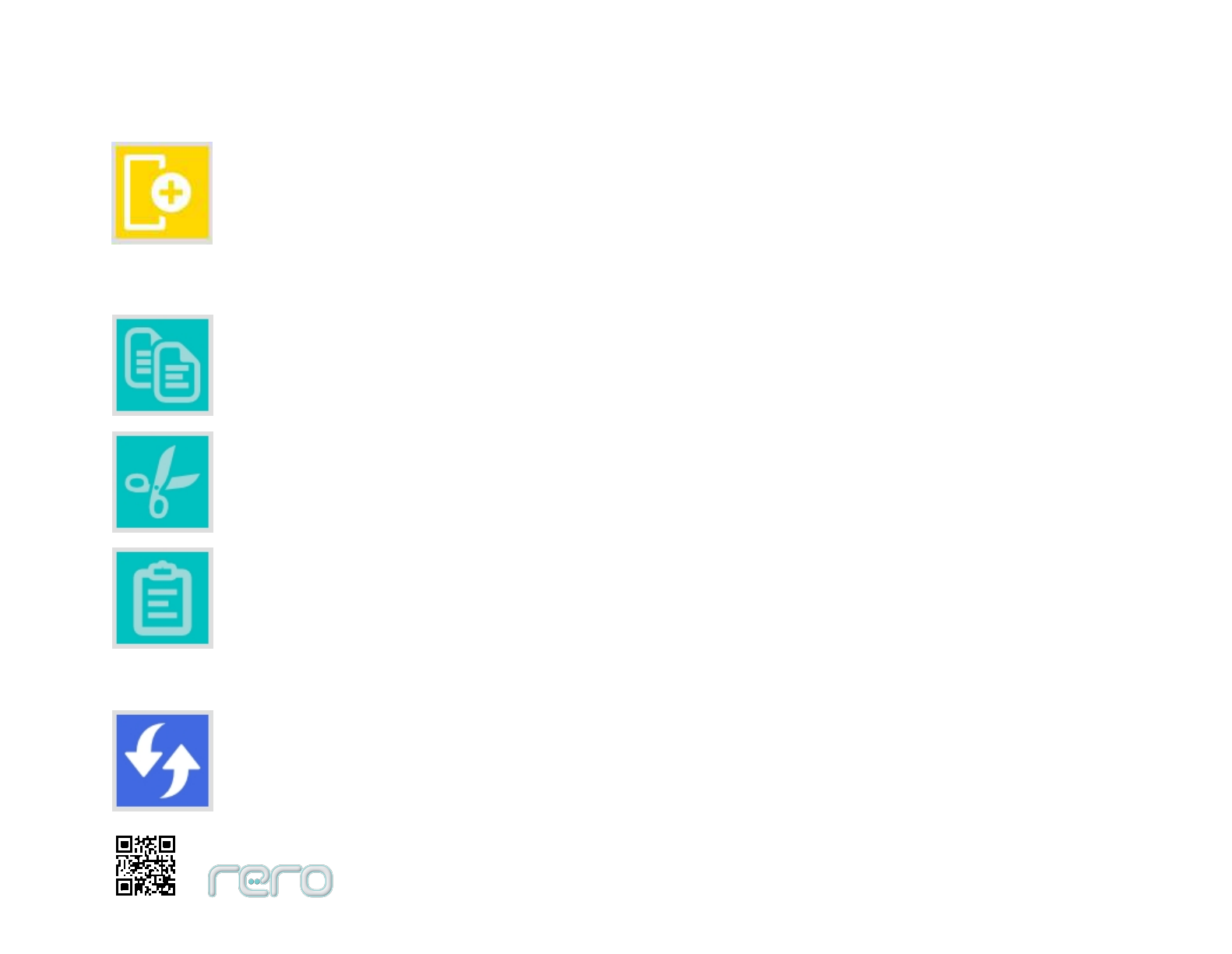
3. Add Servo & Action
Add Servo
-- Create new Action behind the last column.
84
Add Action
-- Create new Servo below the last row.
4. Editing
Copy Action
-- Copies the selected Action. Current version only supports one Action copy.
Cut Action
-- Cuts the selected Action. Current version only supports one Action cut.
Paste Action
-- Paste the copied/cut Action to the selected location.
5. Refresh
Refreshes current Motion.

85
6. Information
Displays information like software name, software version, company and rero website link.
-- Always make sure your copy of software is up-to-date by checking on rero website download page and
this information message box.
Information message box
Software version
(build date)
Idea!
If you are not sure about the function of a button, mouse over the button shows tips
(button name and keyboard short-cut key if available).
Tips
Mouse arrow
Mouse over tips
86
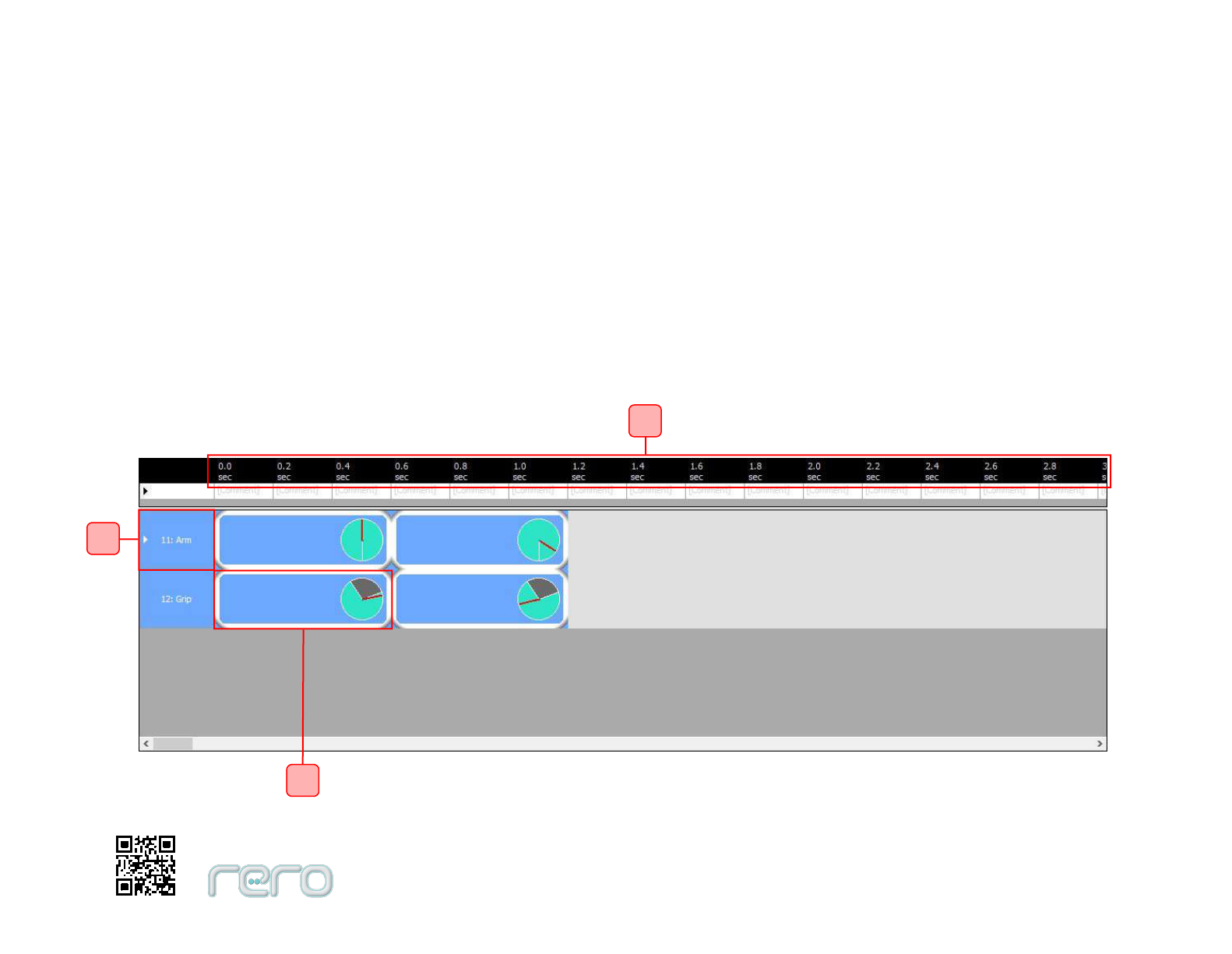
Motion Canvas
1. Time frame
-- This column indicates the starting time and duration of an Action, at the resolution of 0.2 sec/frame.
2. Servo
-- It shows the ID number and name (comment) of a servo motor and enables you to configure each servo motor. A Servo
can be configured to Position mode or Wheel mode.
-- Servo in Position mode will move to the desired position (angle in degree) and stay there until next position is updated.
-- Servo in Wheel mode can rotate 360 degree clockwise or counter clockwise continuously.
3. Action
-- gives you the control over servo motor’s position, speed, LED & etc., at different time frame and duration.
Motion Canvas
1
2
3
87
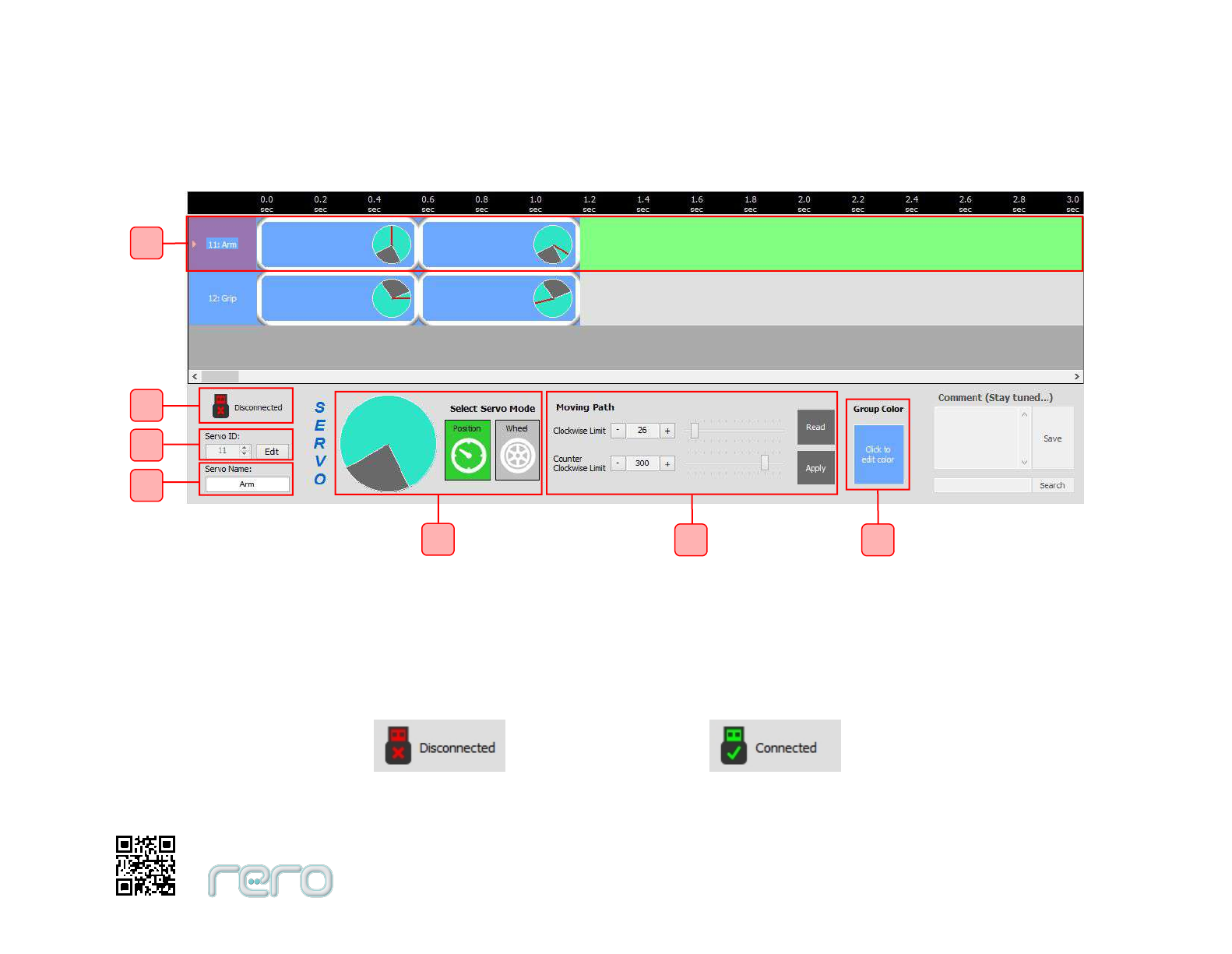
Servo Control Panel
Servo Control Panel in Position mode, without rero Controller connected.
1. Selected Servo -- Click on the Servo ID column to select a servo.
2. Robot Connection Status -- USB symbol with ‘X’ sign shows rero Controller is not powered up and/or not connected to
computer. You will see USB symbol with ‘√’ sign when rero Controller is detected.
rero Controller is disconnected rero Controller is connected
1
2
3
4
5
6
7

88
3. Servo ID -- Servo ID can be edited by click on ‘Edit’ button. Valid ID range is between 0 to 253. It’s recommended NOT to edit
the pre-set Servo ID to prevent having two Servo motors with the same ID in your rero system.
Editing Servo ID
4. Servo Name -- You can give a name to the selected servo motor to improve the readability of your program.
5. Servo Mode & Diagram -- Configures the selected Servo to Position mode or Wheel mode. The diagram shows the moving
path in when Servo is in Position mode or wheel image in Wheel mode.
Position mode
Wheel mode
Press ‘Save’
Edit Servo ID
Moving path
Restricted zone
Position mode
selected
Wheel
Wheel mode
selected
89
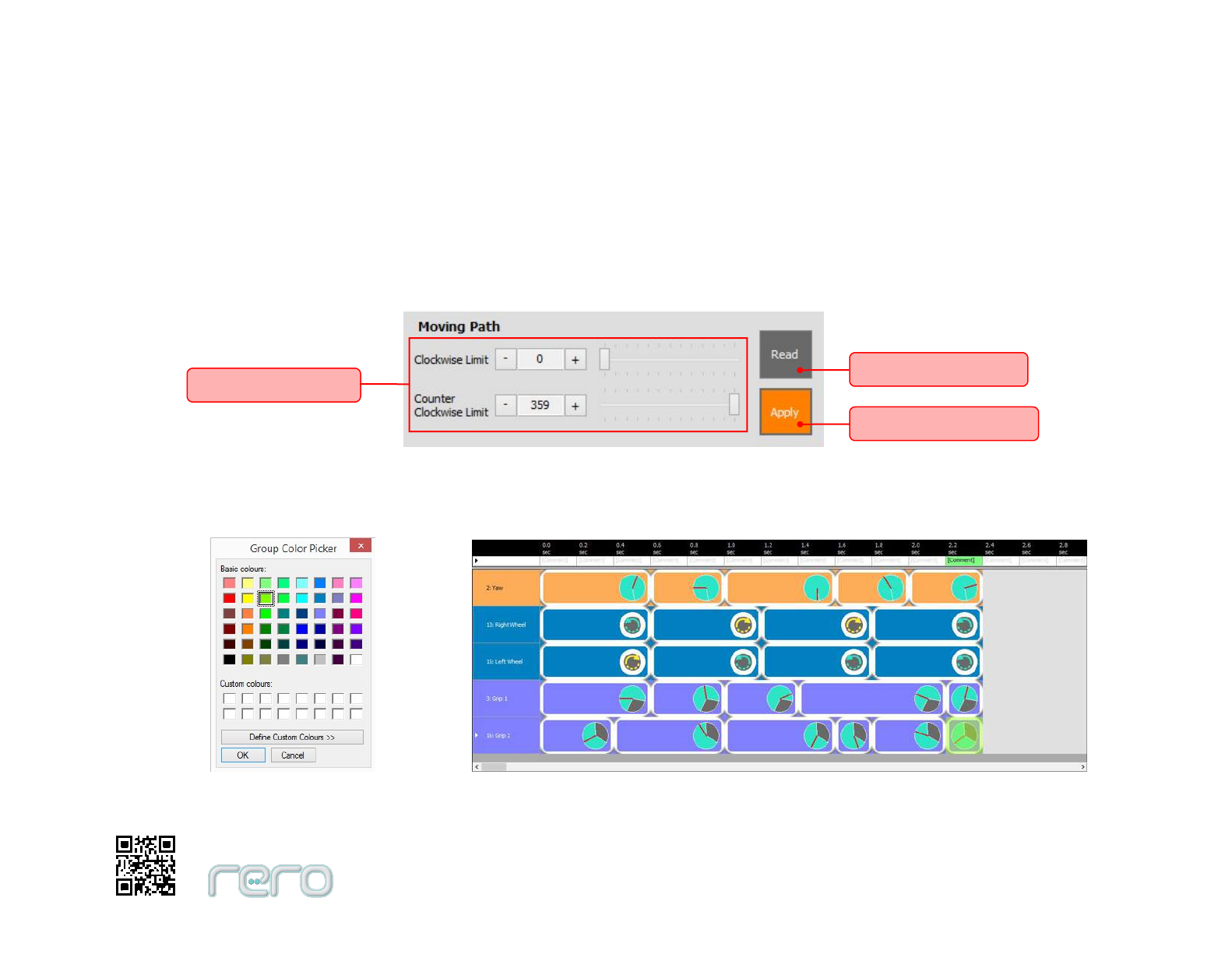
6. Moving Path -- Configures the moving path of a Servo in Position mode. Use the slider or buttons to change the values. You
will notice the green sector changes when you modify the limits. Click ‘Apply’ after setting the desired moving path for the
changes to take effect. You can read the current moving path of the selected Servo by clicking ‘Read’ too. Please note that this
facility is mainly for fine-tuning the existing moving path. It’s recommended to set new moving path using rero Controller’s on
board function.
Configure Moving Path
7. Group colour -- You can change the colour of each Servo using the colour picker to improve program’s readability.
Group Colour picker Example
Edit moving path
Read moving path
Apply moving path
90
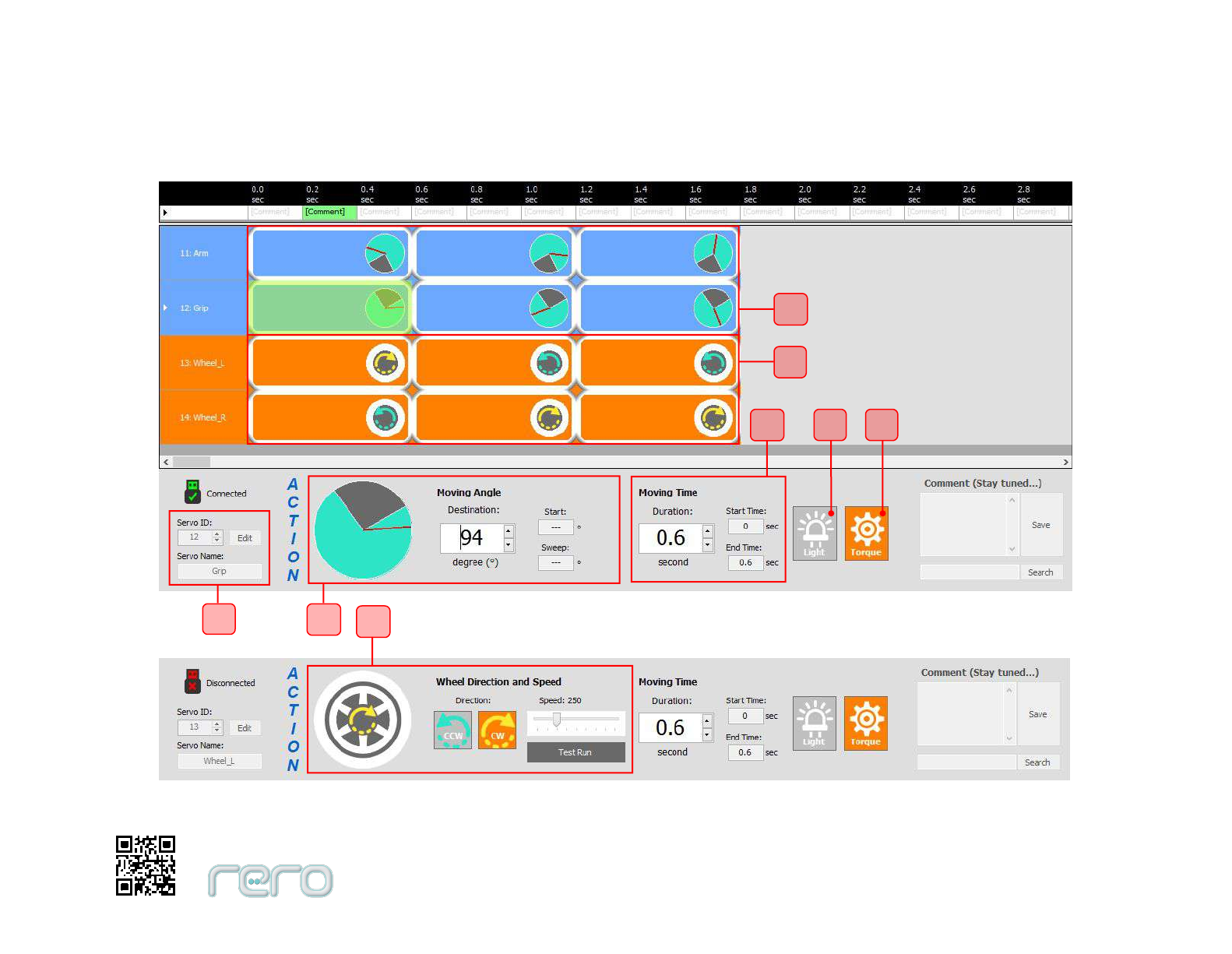
Action Control Panel
Motion Canvas & Action Control Panel in Position Mode
Action Control Panel in Wheel Mode
4
8
3
5
6
7
1
2
91
1. Actions in Position mode -- select one of the Actions to edit it.
2. Actions in Wheel mode -- select one of the Actions to edit it.
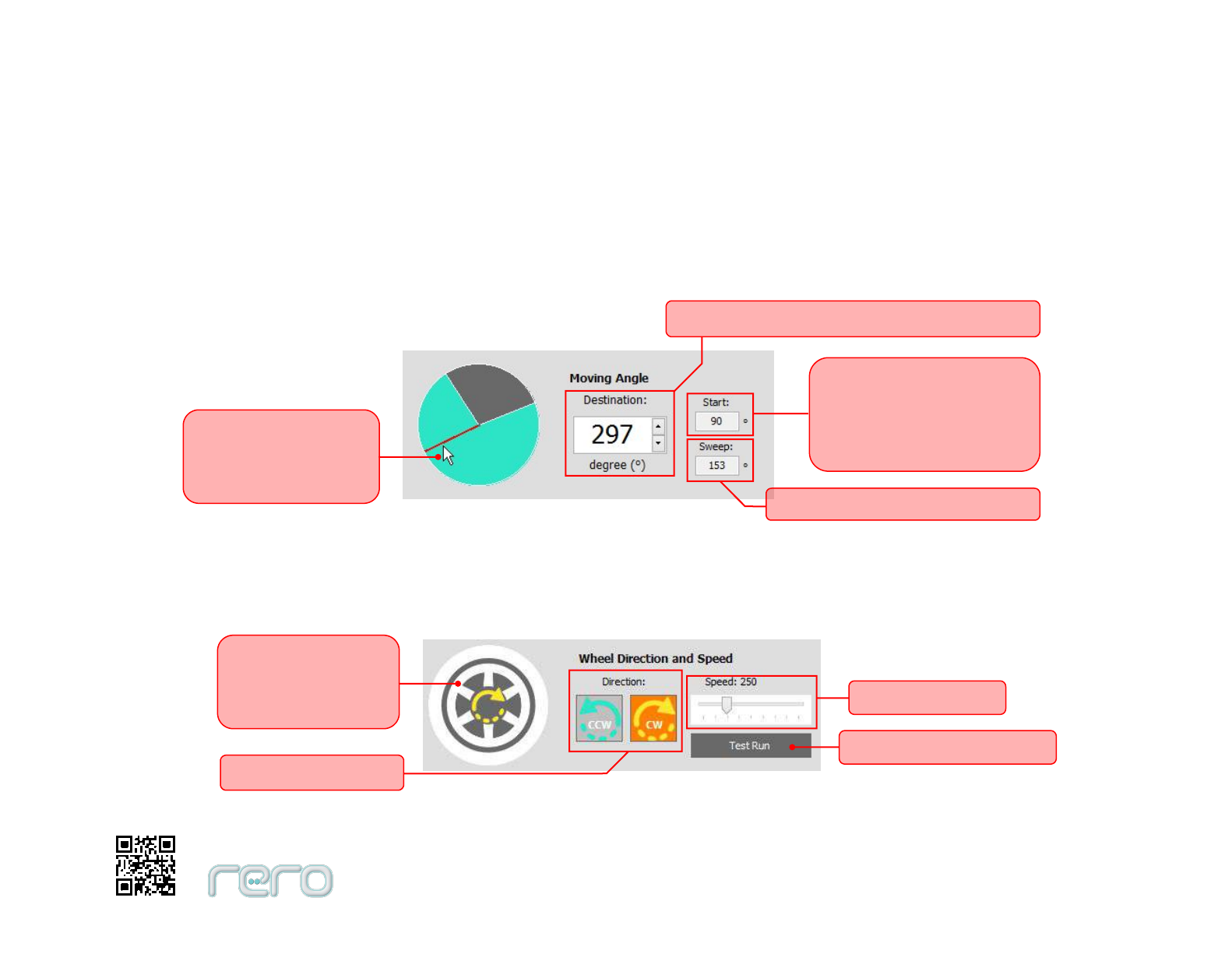
3. Moving Angle -- This appears when an Action in Position mode is selected. It sets the Action’s destination in degree. You can
edit the value in Destination box or directly click on the pie diagram to set the destination. When rero Controller and the servo
with correct ID are connected, the servo will move simultaneously.
Edit Moving Angle
4. Wheel Direction & Speed -- This appears when an Action in Wheel mode is selected. You may use it to change Servo’s
direction and speed at that time frame. Click on ‘Test Run’ to test the direction and speed.
Edit Wheel Direction & Speed
Left click & drag on
the moving path to
change destination
Destination (End position of the Action)
Start position of the
selected Action
= Destination of previous
Action.
Sweep = Destination - Start
Left click on the
diagram to change
direction
Change direction
Change speed
Test Run / Stop button
92
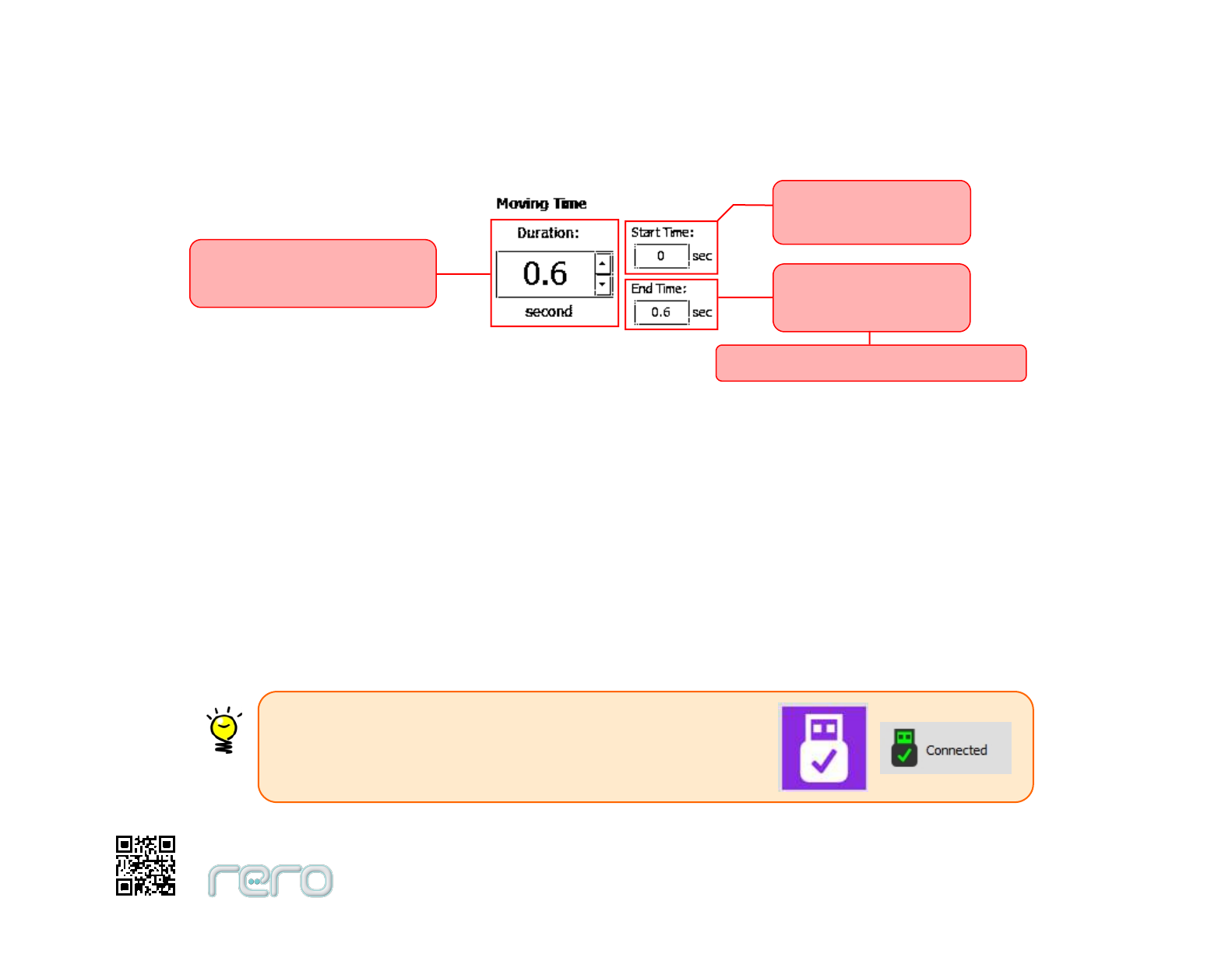
5. Moving Time -- Edit moving time of the selected Action here.
Edit Moving Time
6. Light -- Toggle on/off the servo motor’s LED for the period of time. You can control the each servo motor’s LED to blink at
different pace.
7. Torque -- Toggle on/off the torque of the servo motor for the period of time. When it’s ON, the servo motor will move to the
desired destination or rotate in the direction at the speed you set earlier. When the torque is OFF, the servo motor will not
move for that period of time regardless of the destination, direction and speed’s settings.
8. Servo ID & Name -- This section is disabled in Action Control Panel. However, you can always edit the Servo ID and name in
Servo Control Panel.
End Time = Start Time + Duration
Action starts to move
at this time frame
Action stops to move
at this time frame
Duration - Action will move
for this period of time
Idea!
Always connect rero Controller to your computer while using
rero Animator to enjoy better experience while
programming your robot’s motions.
93
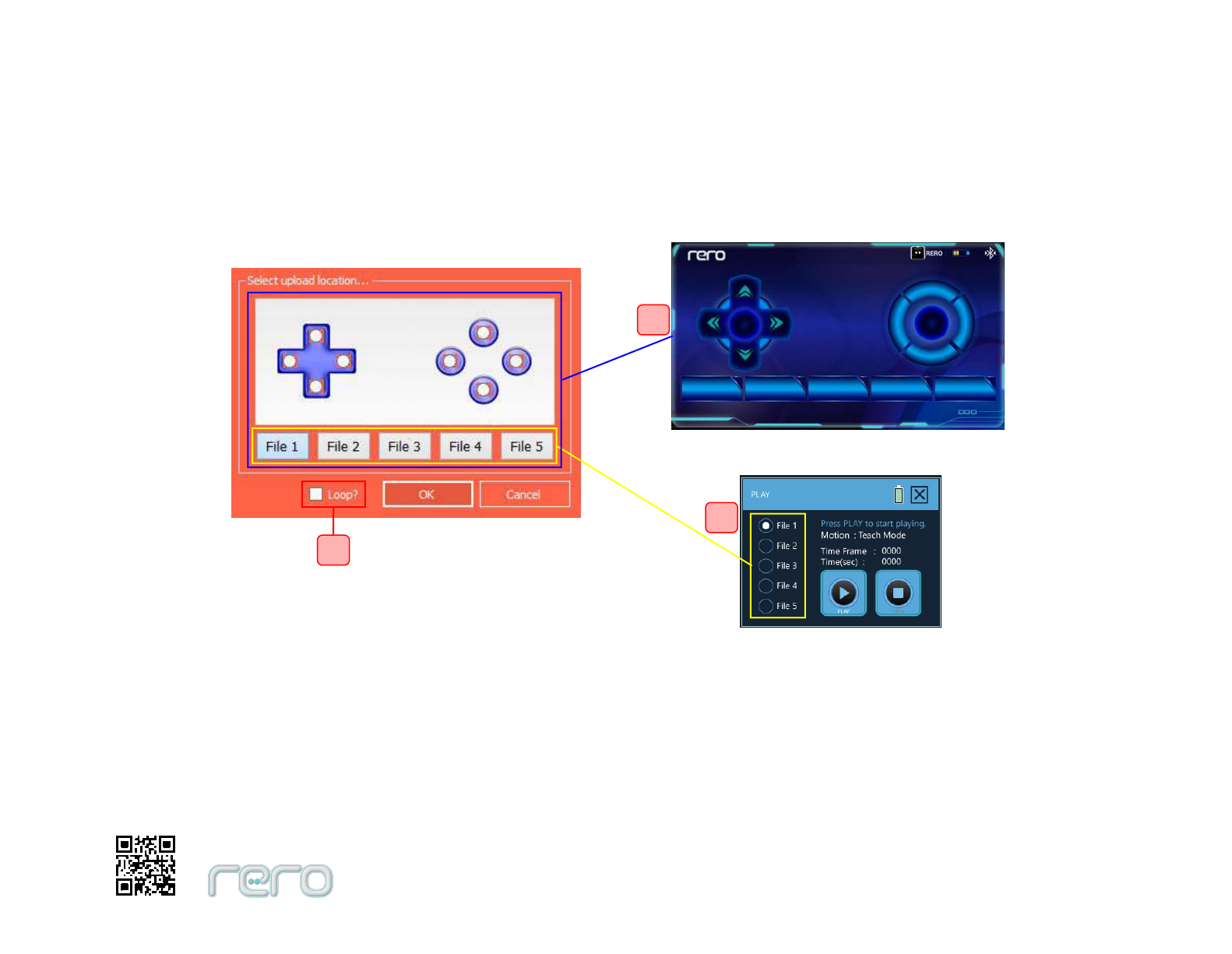
Upload Motion
After you have created your robot motion. A click on Upload button in Menu Bar will prompt you to save your Motion file (if
you haven’t do so) and the Upload Motion message box appears.
1 & 2. Select Upload Location -- Select the upload location based on where you want to play the Motion file. If you have an
Android smartphone or tablet, you can download the free rero Remote App from Google Play.
rero Remote (Android App)
rero Controller (Play)
3
2
1
Upload Motion to rero Controller message box
94
3. Loop -- Select if you want to play the Motion file repeatedly when you press and hold the button on rero Remote
(or click Play on rero Controller). You can stop the Motion by releasing the button on rero Remote (or click Stop on rero
Controller).
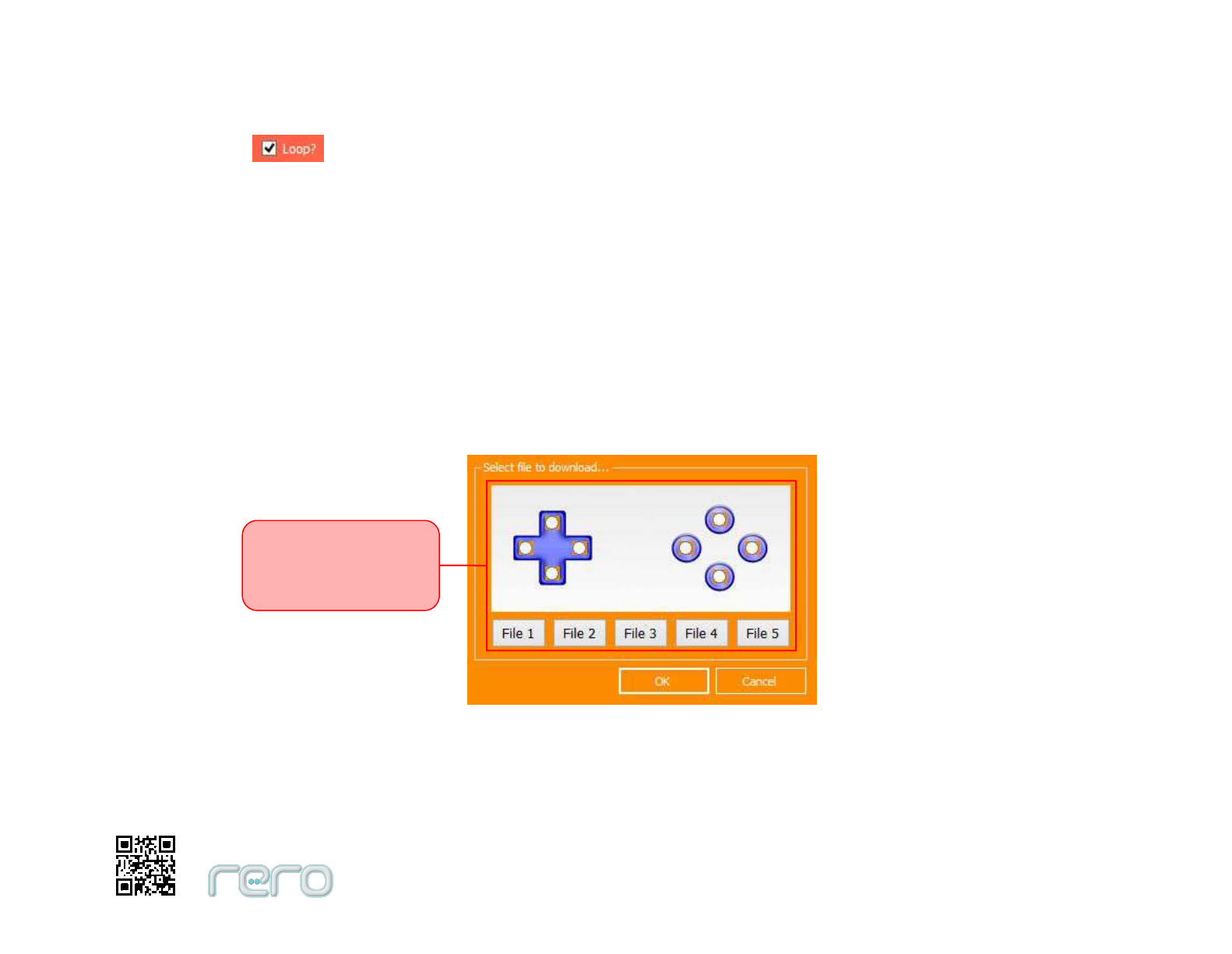
Download Motion
There are cases where you wish to read the Motion file stored in rero Controller into rero Animator software. For instance, you
have created a Motion using Teach Mode in rero Controller. Now you want to save this Motion to your computer and at the
same time improve the the Motion using rero Animator software.
You can do that with Download Motion. From the Download Motion message box, select the location of the Motion file in rero
Controller. The valid rero Motion file will be transferred to rero Animator after clicking ‘OK’ button. Servo(s) and Action(s) in the
Motion file will be displayed according to their time frame in Motion Canvas.
Download Motion from rero Controller
Select the location of
the Motion file in
rero Controller

95
7.0 rero Remote
Installation of rero Remote App
rero Remote App Icon
To install rero Remote app, user can connect to internet and install it from Google Play Store
(https://play.google.com/store/apps). Search for ‘rero’ keyword to find rero Remote. Click install to install rero
Remote app to the phone.

96
rero remote Bluetooth Connection
rero Remote main screen
Battery
Status
Bluetooth
Status
97
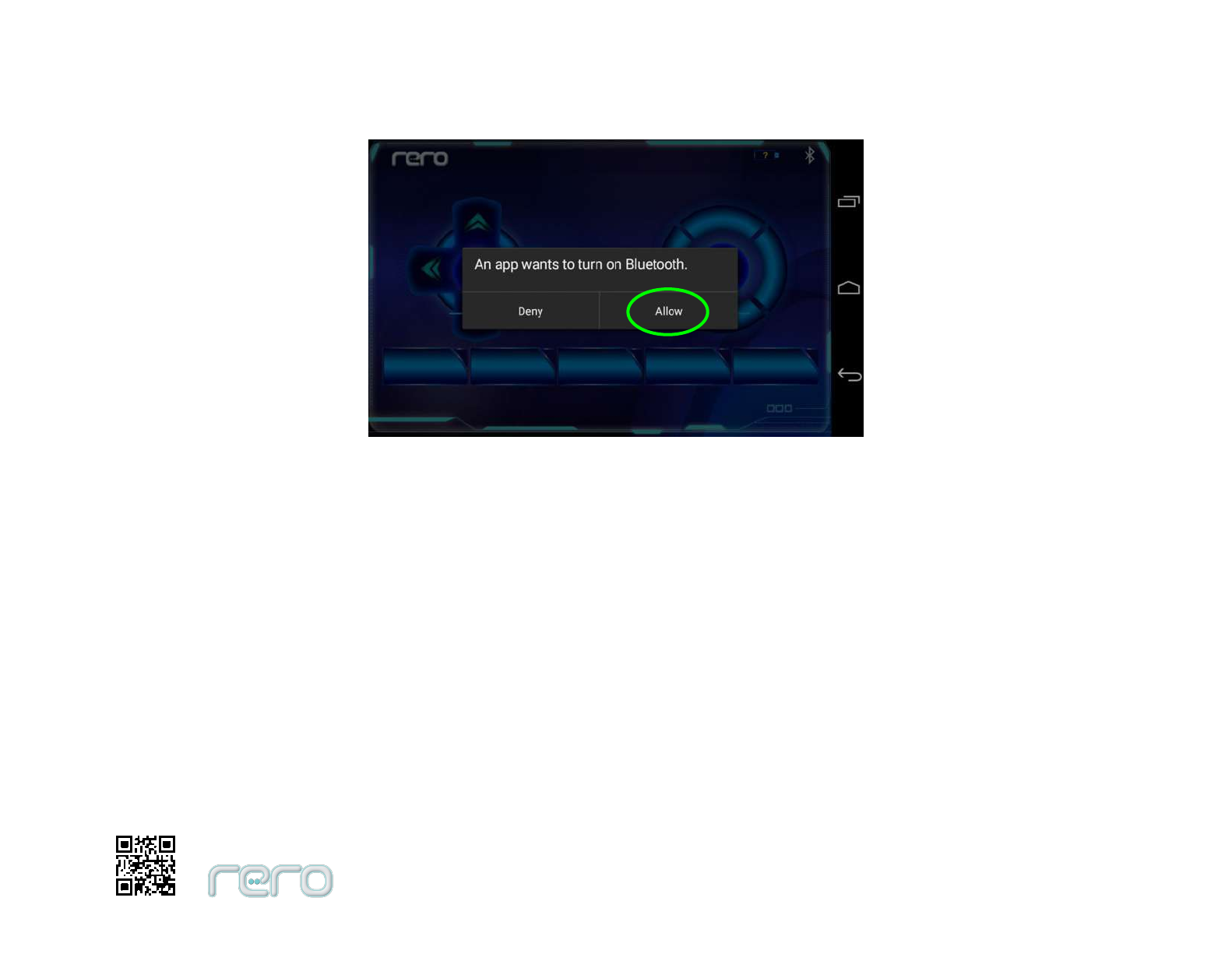
rero Remote request for Bluetooth to be turned on.
rero Remote will request user to turn on Bluetooth of the phone. Touch Allow to turn on bluetooth of phone

98
If rero remote app had previously connected to a rero controller, it will automatically search for the same rero
controller to create bluetooth connection.
rero Remote Searching for previously connected rero controller
You can press the back button of your phone to cancel searching previous rero if you do not want to connect to it.
Press the bluetooth status icon to search for new rero controller that you want to connect.
Press Bluetooth Status to
search rero Controller
99
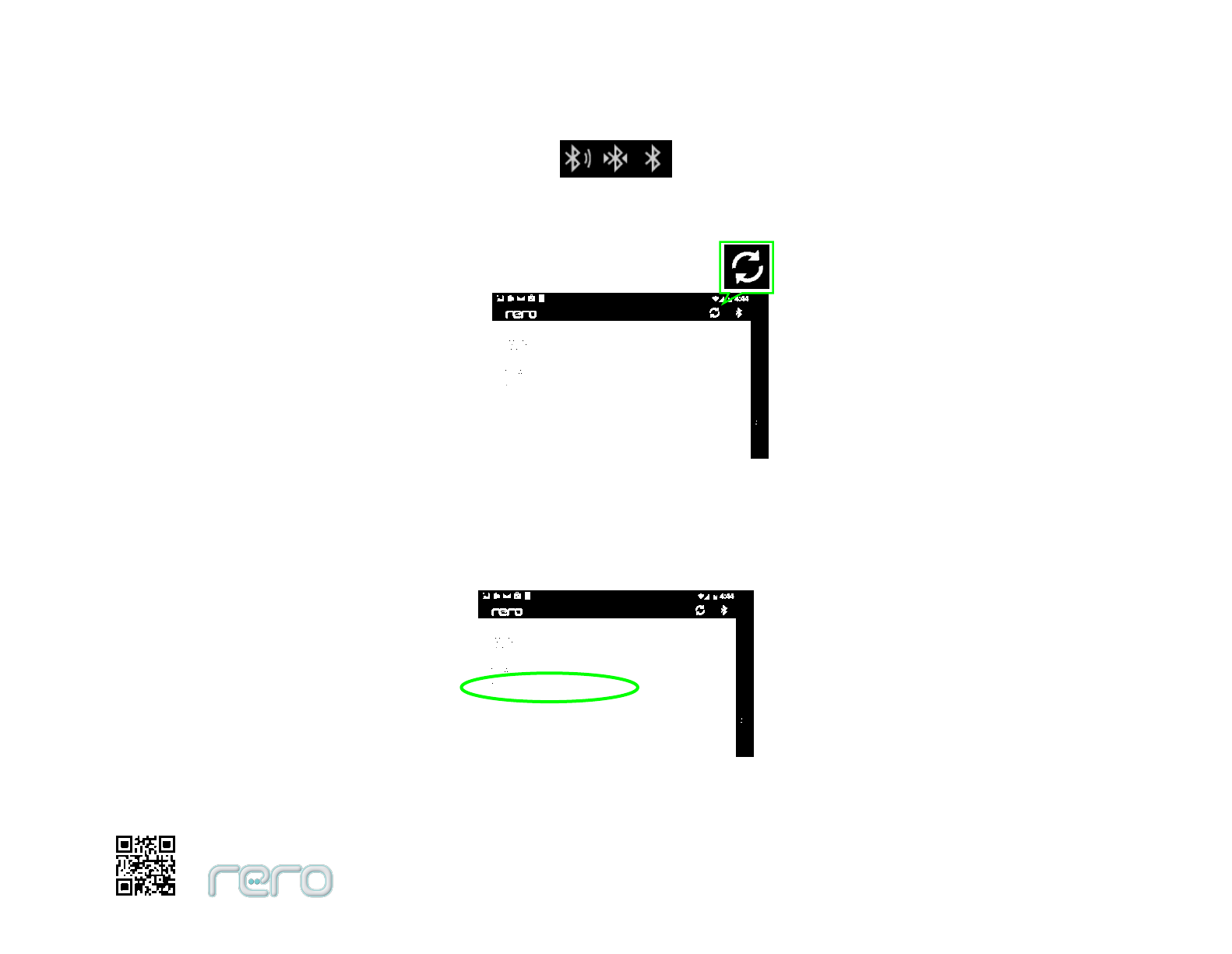
Bluetooth Connection Status: Searching, Connected, Disconnected
Refresh button to search again Bluetooth Devices around again if first search failed
Select ‘rero’ to connect

100
Select the rero controller, to connect. The bluetooth address of every rero controller is different. You can check the
bluetooth address of your rero controller from the Bluetooth Menu of rero controller.
When rero Remote is connected to rero controller, the bluetooth icon will change to show connected status, and
battery icon will shows the battery level of rero controller.
rero Remote Connected to rero controller
Battery
Level
Bluetooth
Connected

101
On rero Controller, user will need to go in the Remote Sub-Menu in order to enable bluetooth communication and
control from rero Remote.
Remote Sub-Menu on rero Controller

102
rero Remote Control Buttons
Cross Buttons, Circle Buttons, Rectangle Buttons
User use these rero Remote control buttons to run rero program that is assigned to the buttons. In order to play
file by using rero remote, rero controller must be in ‘REMOTE’ menu. By default the 5 files saved in teach mode is
assigned to the 5 Rectangle Buttons. 5 motion files by the teach mode can be directly played from rero Remote
using the rectangle buttons. For Cross buttons and Circle buttons, user can assign files to it using rero Animator
software.

103
Exit rero Remote
Swipe from edge of screen to reveal back phone navigation bar and status bar
rero remote will apply immersive full screen for Android version KitKat (Android 4.4, API Level 19) and above. To exit
the full screen, user will need to swipe from the screen edge to reveal the back button if the phone used has on
screen navigation bar. Press the back button to exit rero Remote. Remember to turn off the bluetooth of the
phone after exiting rero Remote if not using it for other app.
Navigation bar
Status bar
Back Button
Swipe from edge
Swipe from edge
104
8.0 Troubleshooting
8.1 rero LED Blink Status
rero controller
rero RGB LED will turn on or blink on several conditions as shown in table below:
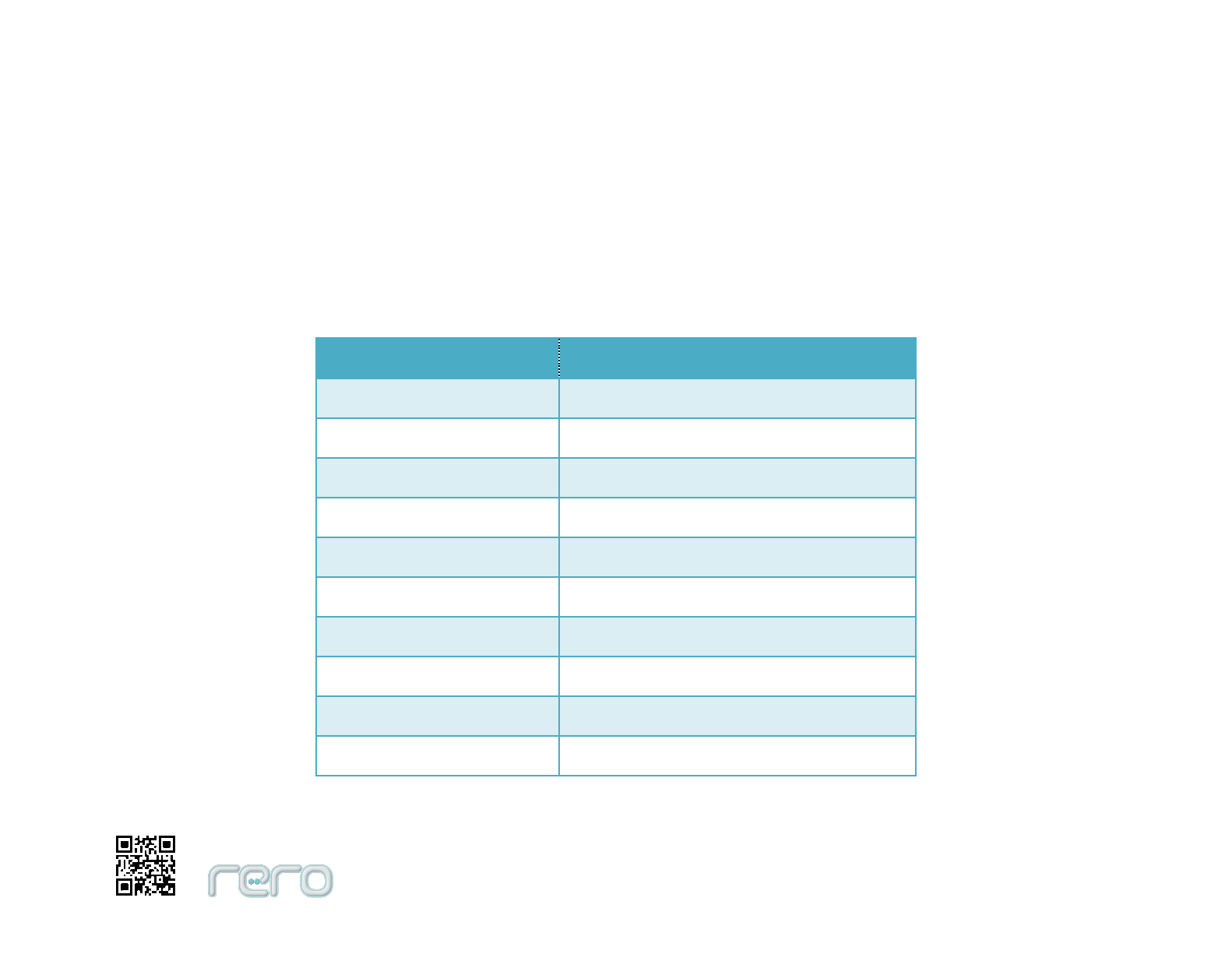
LED System State/Error
White LED blinks (1Hz) Insuffiecient memory to start RTOS
White LED blinks (10Hz) RTOS stack overflow
Red LED turns on System is shutting down
Red LED blinks 2 times Malloc error
Red LED blink 2 times RTOS stack is low
Yellow LED blinks Accessing microSD card
Blue LED turns on Bluetooth is connected
Blue LED blinks Bluetooth data transmitted/received
Green LED blinks System standby
LED off ready
105
Cube Servo and Sensor
Cube servo and rero’s sensor red LED will blink on several condition as shown below.
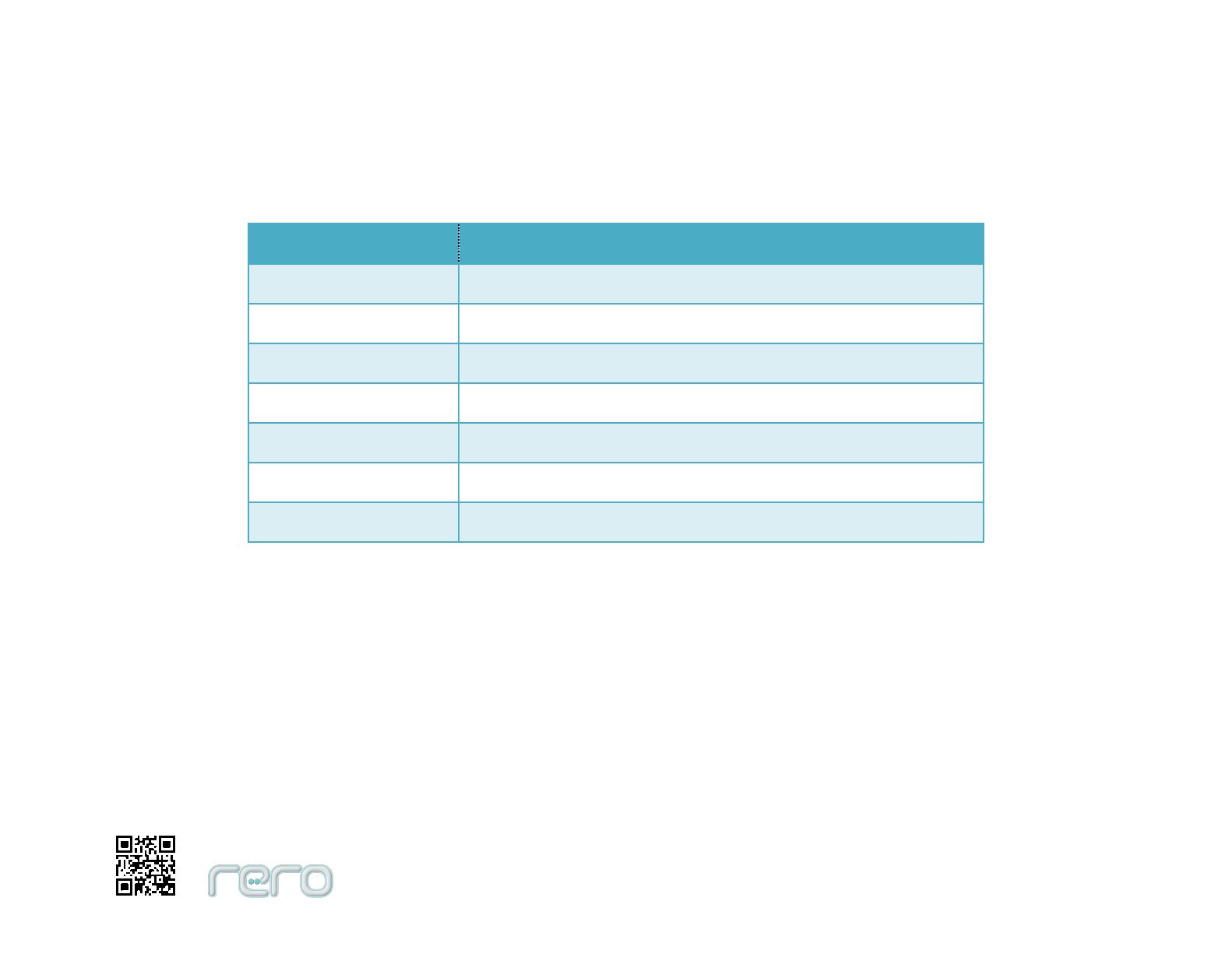
Error Description
Instruction Error Communication error (wrong instruction)
Overload Error Cube servo unable to move for more than 8 seconds
Checksum Error Communication error (Data Check error)
Range Error Communication error (Data received invalid)
Overheating Error Cube Servo overheat shutdown
Angle Limit Error Cube Servo goal position is out of allowed moving path
Input Voltage Error Input voltage is out of correct voltage range
For Cube Servo Overload Error condition, user will need to turn off the servo by removing the power to the servo or
turn off rero controller to cut off the power in order to reset the cube servo to normal condition.
For Cube Servo Overheat Error condition, user will need to turn off servo and wait for the servo to cool down.
106
8.2 FAQ
1. No Cube Servo (G15 Detected)!
Answer:
Check Cube Servo Wire Connection.
Unplug all Cube Servo and sensor, plug only one G15 to rero controller and try again.
Check if there is 2 servos with same ID.
Check if the Cube Servo’s LED blink once when the rero controller is power on. If no, check if rero Battery Dean-T
power connector is properly connected.
2. Computer does not detect rero Storage.
Answer:
Check USB cable connection.
Check if pressed Turn on Storage on rero controller touch screen.
10
7
This equipment has been tested and found to comply with the limits for a Class B digital device, pursuant
to part 15 of the FCC Rules. These limits are designed to provide reasonable protection against harmful
interference in a residential installation. This equipment generates, uses and can radiate radio frequency
energy and, if not installed and used in accordance with the instructions, may cause harmful interference
to radio communications. However, there is no guarantee that interference will not occur in a particular
installation. If this equipment does cause harmful interference to radio or television reception, which can
be determined by turning the equipment off and on, the user is encouraged to try to correct the
interference by one or more of the following measures:
• Reorient or relocate the receiving antenna.
• Increase the separation between the equipment and receiver.
• Connect the equipment into an outlet on a circuit different from that to which the receiver is connected.
• Consult the dealer or an experienced radio/TV technician for help.
Caution: Any changes or modifications to this device not explicitly approved by manufacturer could void
your authority to operate this equipment.
This device complies with part 15 of the FCC Rules. Operation is subject to the following two conditions:
(1) This device may not cause harmful interference, and (2) this device must accept any interference
received, including interference that may cause undesired operation.
IC warning statements:
-English Warning Statement:
“This device complies with Industry Canada licence-exempt RSS standard(s).
Operation is subject to the following two conditions: (1) this device may not
cause interference, and (2) this device must accept any interference, including
interference that may cause undesired operation of the device."
The digital apparatus complies with Canadian CAN ICES-3 (B)/NMB-3(B).
-French Warning Statement:
“Le présent appareil est conforme aux CNR d'Industrie Canada applicables
aux appareils radio exempts de licence. L'exploitation est autorisée aux deux
conditions suivantes : (1) l'appareil ne doit pas produire de brouillage, et (2)
l'utilisateur de l'appareil doit accepter tout brouillage radioélectrique subi, même
si le brouillage est susceptible d'en compromettre le fonctionnement."
Cet appareil numérique de la classe B est conforme à la norme NMB-003 du
Canada.
This equipment complies with IC radiation exposure limits set forth for an
uncontrolled environment and meets RSS-102 of the IC radio frequency (RF)
Exposure rules. This equipment has very low levels of RF energy that are deemed to
comply without testing of specifc absorption ratio (SAR).Cet équipement est
conforme aux limites d’exposition aux rayonnements énoncées pour un
environnement non contrôlé et respecte les règles d’exposition aux fréquences
radioélectriques (RF) CNR-102 de l’IC. Cet équipement émet une énergie RF très
faible qui est considérée conforme sans évaluation du débit d’absorption spécifque
(DAS).