Raspberry Pi Projects For The Evil Genius 0071821589 %7B7FE71886%7D %5BNorris 2013 08 14%5D {7FE71886} [Norris 14]
User Manual: 0071821589 %7B7FE71886%7D Raspberry Pi Projects for the Evil Genius %5BNorris 2013-08-14%5D
Open the PDF directly: View PDF ![]() .
.
Page Count: 288 [warning: Documents this large are best viewed by clicking the View PDF Link!]
- Cover
- Raspberry Pi® Projects for the Evil Genius™
- Copyright Page
- Dedication
- About the Author
- Contents
- Preface
- Acknowledgments
- 1 Introduction to the Raspberry Pi
- 2 LED Blinker Project
- 3 MP3 Player Project
- 4 Camera Controller
- 5 GPS
- 6 Earthquake Detector
- 7 Home Automation
- 8 Home Security Controller
- 9 NFC/RFID Reader
- 10 1-Wire Weather Station
- 11 Local and Remote Logic Controller
- 12 Robotic Car: Part 1
- 13 Robotic Car: Part 2
- 14 Radon Detector
- 15 Serving Up Time with an RTC and NTP
- Index

Evil Genius™ Series
Arduino + Android Projects for the Evil Genius
Bike, Scooter, and Chopper Projects for the Evil Genius
Bionics for the Evil Genius: 25 Build-It-Yourself Projects
Electronic Circuits for the Evil Genius, Second Edition: 64 Lessons with Projects
Electronic Gadgets for the Evil Genius, Second Edition
Electronic Gadgets for the Evil Genius: 28 Build-It-Yourself Projects
Electronic Sensors for the Evil Genius: 54 Electrifying Projects
15 Dangerously Mad Projects for the Evil Genius
50 Awesome Auto Projects for the Evil Genius
50 Green Projects for the Evil Genius
50 Model Rocket Projects for the Evil Genius
51 High-Tech Practical Jokes for the Evil Genius
46 Science Fair Projects for the Evil Genius
Fuel Cell Projects for the Evil Genius
Holography Projects for the Evil Genius
Mechatronics for the Evil Genius: 25 Build-It-Yourself Projects
Mind Performance Projects for the Evil Genius: 19 Brain-Bending Bio Hacks
MORE Electronic Gadgets for the Evil Genius: 40 NEW Build-It-Yourself Projects
101 Outer Space Projects for the Evil Genius
101 Spy Gadgets for the Evil Genius, Second Edition
123 PIC® Microcontroller Experiments for the Evil Genius
123 Robotics Experiments for the Evil Genius
125 Physics Projects for the Evil Genius
PC Mods for the Evil Genius: 25 Custom Builds to Turbocharge Your Computer
PICAXE Microcontroller Projects for the Evil Genius
Programming Video Games for the Evil Genius
Raspberry Pi Projects for the Evil Genius
Recycling Projects for the Evil Genius
Solar Energy Projects for the Evil Genius
Telephone Projects for the Evil Genius
30 Arduino Projects for the Evil Genius, Second Edition
tinyAVR Microcontroller Projects for the Evil Genius
22 Radio and Receiver Projects for the Evil Genius
25 Home Automation Projects for the Evil Genius
Copyright © 2014 by McGraw-Hill Education. All rights reserved. Except as permitted under the
United States Copyright Act of 1976, no part of this publication may be reproduced or distributed in
any form or by any means, or stored in a data base or retrieval system, without the prior written
permission of the publisher.
ISBN: 978-0-07-181956-5
MHID: 0-07-181956-8
The material in this eBook also appears in the print version of this title: ISBN: 978-0-07-182158-2,
MHID: 0-07-182158-9.
E-book conversion by Codemantra
Version 2.0
All trademarks are trademarks of their respective owners. Rather than put a trademark symbol after
every occurrence of a trademarked name, we use names in an editorial fashion only, and to the benefit
of the trademark owner, with no intention of infringement of the trademark. Where such designations
appear in this book, they have been printed with initial caps.
McGraw-Hill Education books are available at special quantity discounts to use as premiums and sales
promotions or for use in corporate training programs. To contact a representative, please visit the
Contact Us page at www.mhprofessional.com.
McGraw-Hill Education, the McGraw-Hill Education logo, TAB, Evil Genius, and related trade dress
are trademarks or registered trademarks of McGraw-Hill Education and/or its affiliates in the United
States and other countries and may not be used without written permission. All other trademarks are
the property of their respective owners. McGraw-Hill Education is not associated with any product or
vendor mentioned in this book.
Raspberry Pi is a trademark of the Raspberry Pi Foundation.
Information contained in this work has been obtained by McGraw-Hill Education from sources
believed to be reliable. However, neither McGraw-Hill Education nor its authors guarantee the
accuracy or completeness of any information published herein, and neither McGraw-Hill Education
nor its authors shall be responsible for any errors, omissions, or damages arising out of use of this
information. This work is published with the understanding that McGraw-Hill Education and its
authors are supplying information but are not attempting to render engineering or other professional
services. If such services are required, the assistance of an appropriate professional should be sought.
TERMS OF USE
This is a copyrighted work and McGraw-Hill Education and its licensors reserve all rights in and to
the work. Use of this work is subject to these terms. Except as permitted under the Copyright Act of
1976 and the right to store and retrieve one copy of the work, you may not decompile, disassemble,
reverse engineer, reproduce, modify, create derivative works based upon, transmit, distribute,
disseminate, sell, publish or sublicense the work or any part of it without McGraw-Hill Education’s
prior consent. You may use the work for your own noncommercial and personal use; any other use of
the work is strictly prohibited. Your right to use the work may be terminated if you fail to comply
with these terms.
THE WORK IS PROVIDED “AS IS.” McGRAW-HILL EDUCATION AND ITS LICENSORS MAKE
NO GUARANTEES OR WARRANTIES AS TO THE ACCURACY, ADEQUACY OR
COMPLETENESS OF OR RESULTS TO BE OBTAINED FROM USING THE WORK, INCLUDING
ANY INFORMATION THAT CAN BE ACCESSED THROUGH THE WORK VIA HYPERLINK OR
OTHERWISE, AND EXPRESSLY DISCLAIM ANY WARRANTY, EXPRESS OR IMPLIED,
INCLUDING BUT NOT LIMITED TO IMPLIED WARRANTIES OF MERCHANTABILITY OR
FITNESS FOR A PARTICULAR PURPOSE. McGraw-Hill Education and its licensors do not warrant
or guarantee that the functions contained in the work will meet your requirements or that its operation
will be uninterrupted or error free. Neither McGraw-Hill Education nor its licensors shall be liable to
you or anyone else for any inaccuracy, error or omission, regardless of cause, in the work or for any
damages resulting therefrom. McGraw-Hill Education has no responsibility for the content of any
information accessed through the work. Under no circumstances shall McGraw-Hill Education and/or
its licensors be liable for any indirect, incidental, special, punitive, consequential or similar damages
that result from the use of or inability to use the work, even if any of them has been advised of the
possibility of such damages. This limitation of liability shall apply to any claim or cause whatsoever
whether such claim or cause arises in contract, tort or otherwise.
To Karen, my lovely soul mate and most ardent supporter.
Her faith in me never wavers and is my core strength.

About the Author
Donald Norris has a degree in electrical engineering and an MBA specializing in production
management. He is currently teaching undergrad and grad courses in the IT subject area at Southern
New Hampshire University. He has also created and taught several robotics courses there. He has over
30 years of teaching experience as an adjunct professor at a variety of colleges and universities.
Mr. Norris retired from civilian government service with the U.S. Navy, where he specialized in
acoustics related to nuclear submarines and associated advanced digital signal processing. Since then,
he has spent more than 17 years as a professional software developer using C, C#, C++, Python, and
Java, as well as 5 years as a certified IT security consultant.
Mr. Norris started a consultancy, Norris Embedded Software Solutions (dba NESS LLC), that
specializes in developing application solutions using microprocessors and microcontrollers. He likes
to think of himself as a perpetual hobbyist and geek and is always trying out new approaches and out-
of-the-box experiments. He is a licensed private pilot, photography buff, amateur radio operator, avid
runner, and, last but very important, new grandfather—here’s to you, Hudson.

Contents
Preface
Acknowledgments
1 Introduction to the Raspberry Pi
Hardware
Software
Summary
2 LED Blinker Project
Prototype Board
Soldering
Accessing the GPIO Pins
apt-get Command
LED Project
Summary
3 MP3 Player Project
Prototype Connector
Portable Stereo Speaker
Audio File Formats
Hardware Switch Inputs
Thinking in RasPi Time
MP3 Project Requirements
Summary
4 Camera Controller
Project Requirements
Camera Shutter Operation
Electronic Flash
Optoisolator Interfaces
Sound and Laser Modules
Interface Connections
Time-Lapse Function
Summary
5 GPS
Introduction
The Basics of How GPS Functions
The Ultimate GPS Receiver
NMEA Protocol
The gpsd Apps
Summary
6 Earthquake Detector
Introduction
Seismology and Earthquakes
Analog-to-Digital Conversion
Serial Peripheral Interface
Connecting and Testing the MCP3008 with the RasPi
Seismic Data Analysis
Operational System
Summary
7 Home Automation
Introduction
Z-Wave Mesh Network
RasPi and Z-Wave Interface
SSH Login
Open Z-Wave Software
Summary
8 Home Security Controller
Introduction
Webcam Selection
Laser Trip Assembly
Motion Software Package
Webcam Viewing
Laser Trip Program
Additional Sensors
Summary
9 NFC/RFID Reader
Introduction
How NFC Works
Installing libnfc
Hardware Installation
Initial Checkout
Project Program
Future Expansion
Summary
10 1-Wire Weather Station
Introduction
Weather Station Design
1-Wire Protocol
1-Wire Sniffer
Set Up the Weather Station Hardware
1-Wire File System
Viewing the Weather Data
Packet Sniffing
Future Expansion
Summary
11 Local and Remote Logic Controller
Introduction
1-Wire External Control Board
1-Wire File System (owfs) Installation and Configuration
Linux, Hardware, and FUSE
Test Sequences for the 8 Channel I/O Board
Python Test Program
Sniffer Monitoring
Android Remote Control
Testing the Web Server with a Browser
Summary
12 Robotic Car: Part 1
Introduction
Overview
Chassis and Drive Motors
Servos
13 Robotic Car: Part 2
Introduction
Robotic Car Block Diagram
I2C Software
Bluetooth Software
Robot Car Program
Operating the Robotic Car
Future Expansions
Summary
14 Radon Detector
Introduction
Radioactivity and Radon
K2645 Geiger-Muller Counter
Initial Test Configuration
Building a Portable Radiation Detector
Operating the Portable Geiger Counter

Preface
This Raspberry Pi project book is not only about building a series of interesting projects but also about
providing an education regarding the underlying project technologies. I am positive that my over-30-
years’ experience as a college educator forced me to ensure that readers could not only build the
projects but also understand why they function as designed.
Building a successful project is rewarding unto itself, but understanding why and how it functions
is far more important. The reader should expect a manifold increase in experience with the Raspberry
Pi if a commitment is made to expend the time and energy to complete most, if not all, of the projects.
I learned a lot while completing them; sometimes things worked out fine, while other times they were
not successful. But that’s the joy of experimenting. As Professor Einstein once stated, “Anyone who
has never made a mistake has never tried anything new.”
The joy of learning about and building projects is the core concept within this book. I designed and
built all of the projects, and along the way gained a lot of knowledge about the Linux OS and how it
really shines as an embedded development platform.
I will not recap the projects here other than to state that the complexity increases from the book’s
beginning to its end. And this is how it should be, as experience and confidence in dealing with Linux
and the Python language are progressively gained by proceeding through the projects.
Experienced Linux developers should feel free to jump into any of the projects; however, there are
useful hints and techniques sprinkled throughout the book, which might be missed by taking a
selective approach to reading it. I have also tried to point out the constraints and limitations of the
Raspberry Pi as I encountered them when designing and building the projects. Just keep in mind, a $35
computer simply cannot meet all expectations.
One disclaimer that I feel is warranted relates to the Python programs. These programs, while fully
functional for the respective projects, are probably not in their best form. As I tell my beginning
programming students, there are many ways to develop functional programs. Some are better than
others—not necessarily right or wrong. With this perspective, I tried to keep the programs simple and
to the point, and to avoid any unneeded complexity.
All of the book’s projects can be expanded and modified as desired. I strongly recommend that
readers do so, as that is one sure way to understand the concepts and bolster skills. The ability to
experiment has been described as one of the key attributes that modern employers are looking for in
twenty-first century employees.
Donald Norris

Acknowledgments
I thank Karen for putting up with all my experiments and enduring all the “discussions” about the
book’s projects.
I also thank Roger Stewart for his continued support and guidance as the sponsoring editor. He is the
true champion for this book.
Thanks to Amy Stonebraker for her support as editorial assistant.
Thanks also goes out to Nancy Dimitry for her fine work as the project manager.
Finally, I would like to thank all the folks at the Raspberry Pi Foundation for creating the board
and getting it to the marketplace.

CHAPTER 1
Introduction to the Raspberry Pi
THIS BOOK WILL INTRODUCE you to the Raspberry Pi and provide 12 projects that will lead you
through some simple, fundamental operations up to some fairly complex ones. The Raspberry Pi,
despite its small size, is a fully functional computer capable of running a full-fledged Linux operating
system. It is also the most inexpensive computer with this level of functionality that is presently
available to the public.
The Raspberry Pi is a small board measuring 56 by 85 mm, about the size of a standard credit card.
Nonetheless, it contains some very impressive functionality, as you will discover later in this chapter.
This new board is shown in Fig. 1–1.
Figure 1–1 The Raspberry Pi, a small Linux computer.
A look at a bit of history regarding the Raspberry Pi (or RasPi as I will now refer to it) and its
originally intended market may help you understand the constraints and limitations that subsequently
ensued. The RasPi concept began around 2006 with Dr. Eben Upton and his colleagues at the
University of Cambridge’s Computer Laboratory in Cambridge, England. They were concerned about
the decline in knowledge and skill levels of incoming computer science students as compared with
those of earlier students. Dr. Upton decided to create an inexpensive computer, reasoning that it was
likely that parents were not allowing their children to experiment with modern and relatively
expensive PCs. This idea ultimately led to the development of the very inexpensive RasPi. This
computer would provide an excellent opportunity for children to learn and experiment with
programming, while not being a concern to parents if something should go horribly wrong and the
board be destroyed.
Dr. Upton teamed with several other individuals to form the Raspberry Pi Foundation, a registered
United Kingdom charity that promotes computer literacy and enthusiasm, especially among young
children using the RasPi as their initial platform. They seem to be achieving these highly laudable
goals, since they have greatly exceeded the initial estimate of selling 10,000 RasPi’s, and at the time
of this writing, the total sales are approaching one million units. The foundation’s website is
www.raspberrypi.org, where you will find all sorts of information about the board, current news,
forums, FAQs, and so on.
A key design decision that kept costs low was to incorporate a SoC type chip on the board. SoC is
short for System on a Chip—a technology that physically places the memory, microprocessor, and
graphics processer in a type of silicon “sandwich” that in turn minimizes the printed circuit board
(PCB) space and the accompanying PCB interconnecting board traces. The foundation eventually
partnered with Broadcom to use its designs for both the microprocessor and graphics processors in the
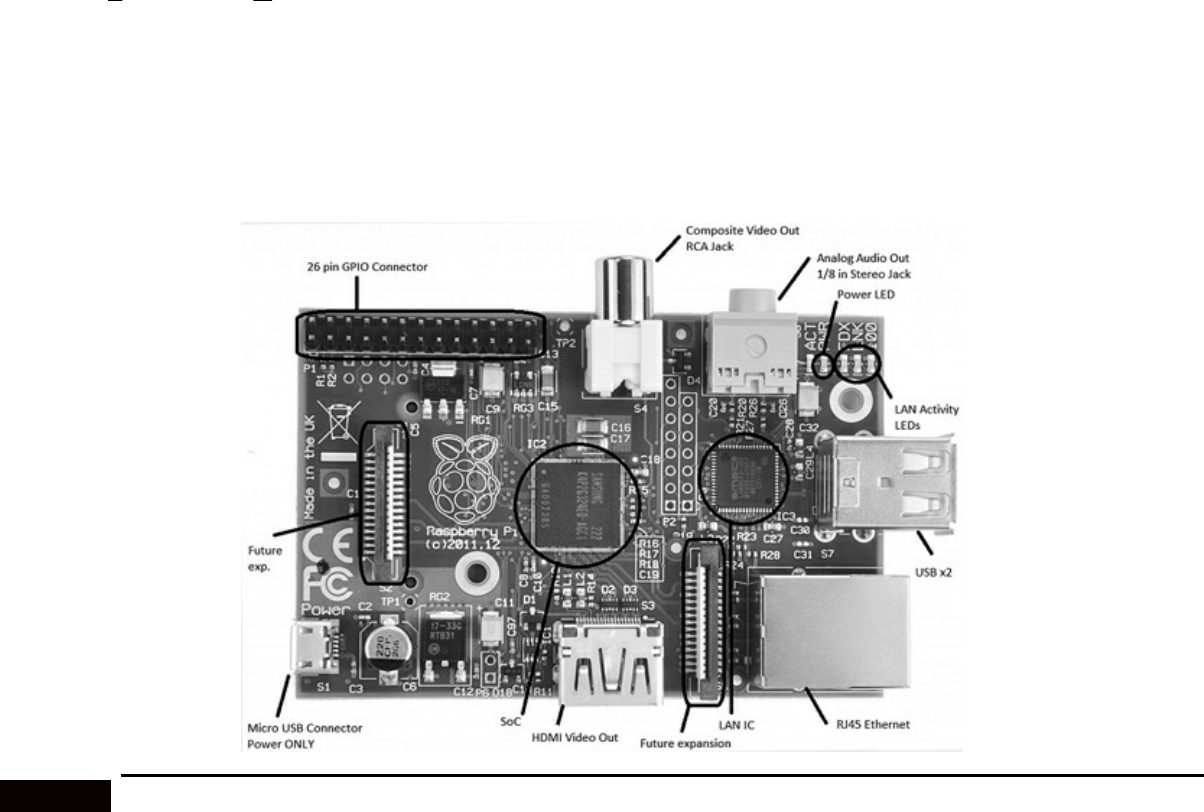
SoC. The SoC and some other key components and connections that you should know about are
identified in Fig. 1–2.
Figure 1–2 The SoC and other key components.
Although it is not critical to understand the Broadcom microprocessor in order to use the RasPi, it
is still helpful to discuss it for a bit so that you will know why the RasPi is slower than your PC and
why the low voltage of 3.3 V is used for interfacing the RasPi to the outside world. I will first cover
the hardware aspects of the RasPi, followed by the software aspect.
Hardware
Broadcom 2835 Microprocessor/Graphics Processing Unit
The SoC uses the Broadcom BCM2835 as its microprocessor and graphics processing unit or GPU.
The Broadcom company is what is known as a fabless supplier in that they provide the designs for
their product in the form of Intellectual Property (IP) and other companies actually create the real
silicon chips. Broadcom specializes in mobile-application-type processors including the type used in
smartphones. The BCM2835 portion of the SoC itself is made up of an ARM1176JZF-S
microprocessor running at 700 MHz and a Broadcom VideoCore® IV GPU.
The BCM2835 is designed for mobile applications, and hence, it needs to operate with minimal
power so as to extend battery life. A fairly low microprocessor clock speed helps lower power
consumption, and this is the reason the BCM2835 operates at 700 MHz, which is typically a quarter of
the speed of a modern PC. Lower clock speed also means the processor can operate at a low voltage,
thus decreasing the overall heat generated and extending chip life. The BCM2835 can be speeded up—
also known as overclocking—to improve performance, but this is generally not recommended because
the microprocessor can become operationally unstable and its life shortened. Be assured that the RasPi
is sufficiently fast for all the projects in this book.
Broadcom has also graciously provided software drivers to allow the BCM2835 input and output
pins to be connected to external peripherals. This software is in the form of a Python library that I will
discuss later.
The Broadcom VideoCore IV GPU handles all the video and audio processing for the SoC. This
GPU directly supports the OpenGL ES 2.0 standard that is essentially an Application Program
Interface (API) capable of running on embedded hardware, which, in this case, is the Broadcom 2835.
Loosely translated, this means the 2835 can easily display three-dimensional 3D graphics using all the
requisite shaders and texture filters normally required for modern games and high-definition (HD)
video. This chip implements in hardware a 1080p, 30 frames/sec, H.264 codec required for HD. That
is an impressive performance.
For readers fascinated with performance statistics, it is interesting to note that the
Broadcom Videocore IV GPU has the following processing capabilities:
1 gigapixel/sec (that’s one billion pixels processed per second)
1.5 gigatexels/sec (that’s one and a half billion texture elements per second)
24 gigaflops (that’s 24 billion floating point operations per second)
All of this capability translates to the equivalent performance of a first generation Xbox©,
not bad for a small embedded chip in a SoC sandwich!
I will not pursue this discussion any further other than to state that the BCM2835 is more than
adequate to display all the graphics and output all the audio streams required for all the projects in this
book.
Memory
There are two memory types used in the RasPi: dynamic random access memory (DRAM) and Secure
Digital (SD) flash. The original version, model A, of the RasPi had 256 MB of RAM installed, while
the latest, Model B, has 512 MB. The 512-MB chip is easily seen on the board as the top layer of the
SoC sandwich. The SoC chip shown in Fig. 1–2 has top DRAM marked as supplied by Samsung with a
part number K4P4G324EB ACC1, which translates to a lowpower 4-Gbit (512-MB) DRAM designed
for mobile applications. This means that it too uses low voltage while maintaining reasonable clock
speed. Having 512 MB of DRAM means the operating system will function very efficiently and
programs should also run smoothly provided they are properly created.
The SD flash memory is used to store the operating system, all programs, and all other data that
need persistence. In other words, nothing will be destroyed when the power is shut off. The RasPi uses
SD flash memory in the same manner that a PC uses a hard drive to permanently store data and
programs. You have a choice in selecting the memory size of a SD memory card that simply slides
into a holder that is located on the underside of the RasPi, as shown in Fig. 1–3.
Figure 1–3 Back side of the Raspberry Pi.
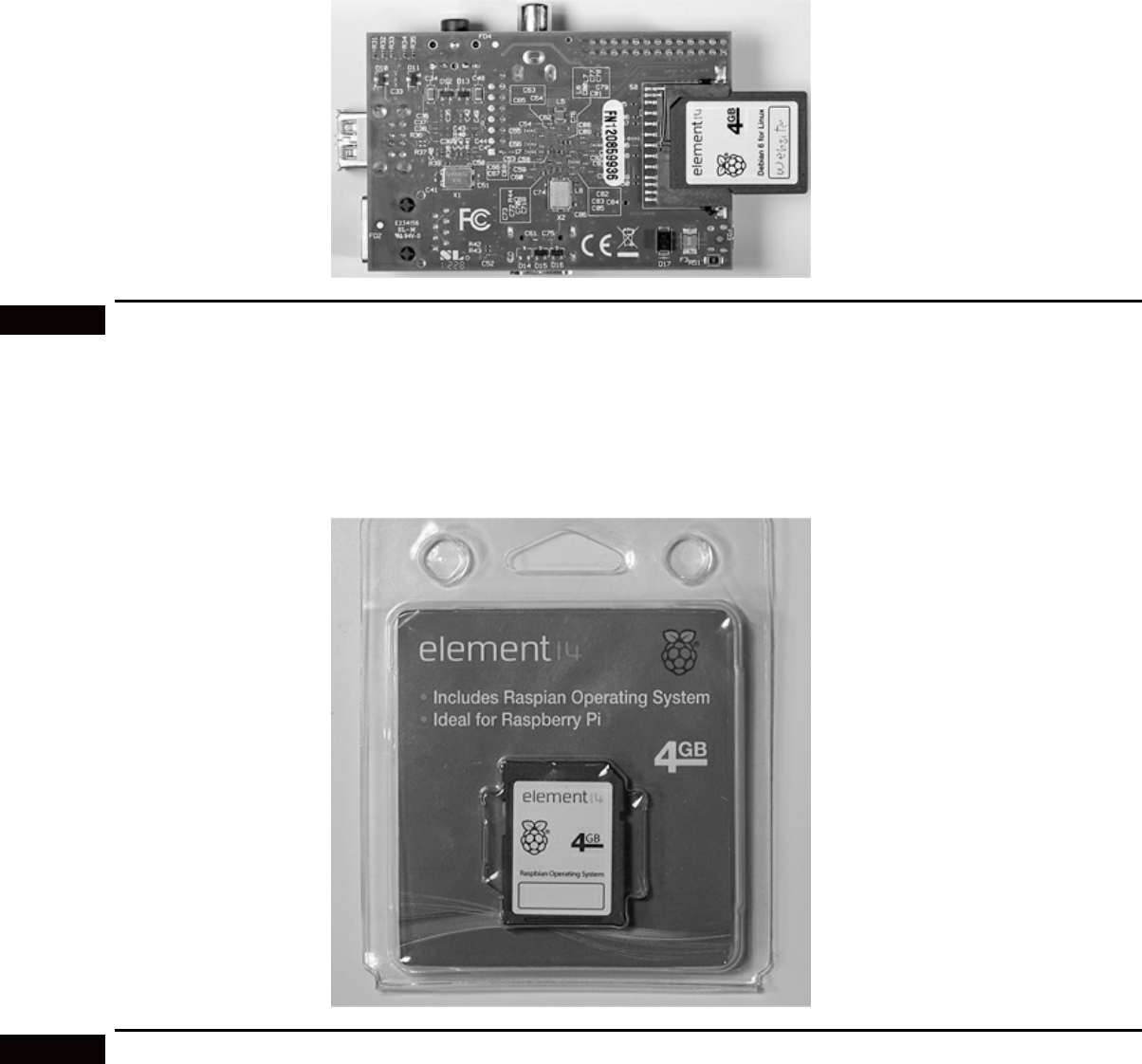
If you purchased your RasPi as part of a starter kit, you will have received a 4-GB SD card with a
Linux OS distribution already installed on the card. A picture of this preprogrammed SD card is
shown in Fig. 1–4.
Figure 1–4 Preprogrammed SD card.

I will explain later on in this chapter how to create your own memory card so you do not have to
purchase a preprogrammed SD card. Note that most SD cards also have a class designation on the
label. The one shown in Fig. 1–3 does not, as it has had a customized label attached. The class
designation relates to the minimum data-transfer speed the SD card can handle. Remember, the SD
card is taking the place of a hard drive, so the faster, the better. Class 4 is very typical of the consumer
grade SD cards that are available in most office supply stores. Class designations and their associated
minimum transfer speeds are shown in Table 1–1.
Table 1–1 SD Card Class Designations
What you should take away from this SD class discussion is that the higher the class number of the
SD card used in the RasPi, the better it will perform. The only downside is that SD cards with high
class numbers are more expensive than ones with lower numbers, sometimes more than twice the cost
for the same storage capacity. My only suggestion is to purchase a class 4 or higher; anything less and
you will be disappointed in your RasPi’s slow response.
RasPi Connectors
The RasPi has nine connectors: power, High-Definition Multimedia Interface (HDMI), analog
composite video, audio, ethernet, Universal Serial Bus (USB), two future expansion connectors, and
the General Purpose Input/Output (GPIO) interface. Each connector has specific functions that I will
discuss in the following sections, except for the expansion connectors, which are not yet used,
although I will tell you what I know about them as of this writing. There is no particular order to this
discussion although I have left the GPIO connector for last because it is by far the most complex and,
hence, requires the most explanation.
Power Connector
The power connector shown in Fig. 1–5 is a micro USB socket that is wired to pass the 5-volt (V)
direct current (DC) lines from a micro USB plug, also shown in the figure. (Since all voltage in this
project is DC, I will use just the notation V for V DC.) No data connections are wired to this socket.
You can use almost any available smartphone charger that has a micro USB connector or use the
power supply that came with the RasPi kit, if that’s what you purchased.
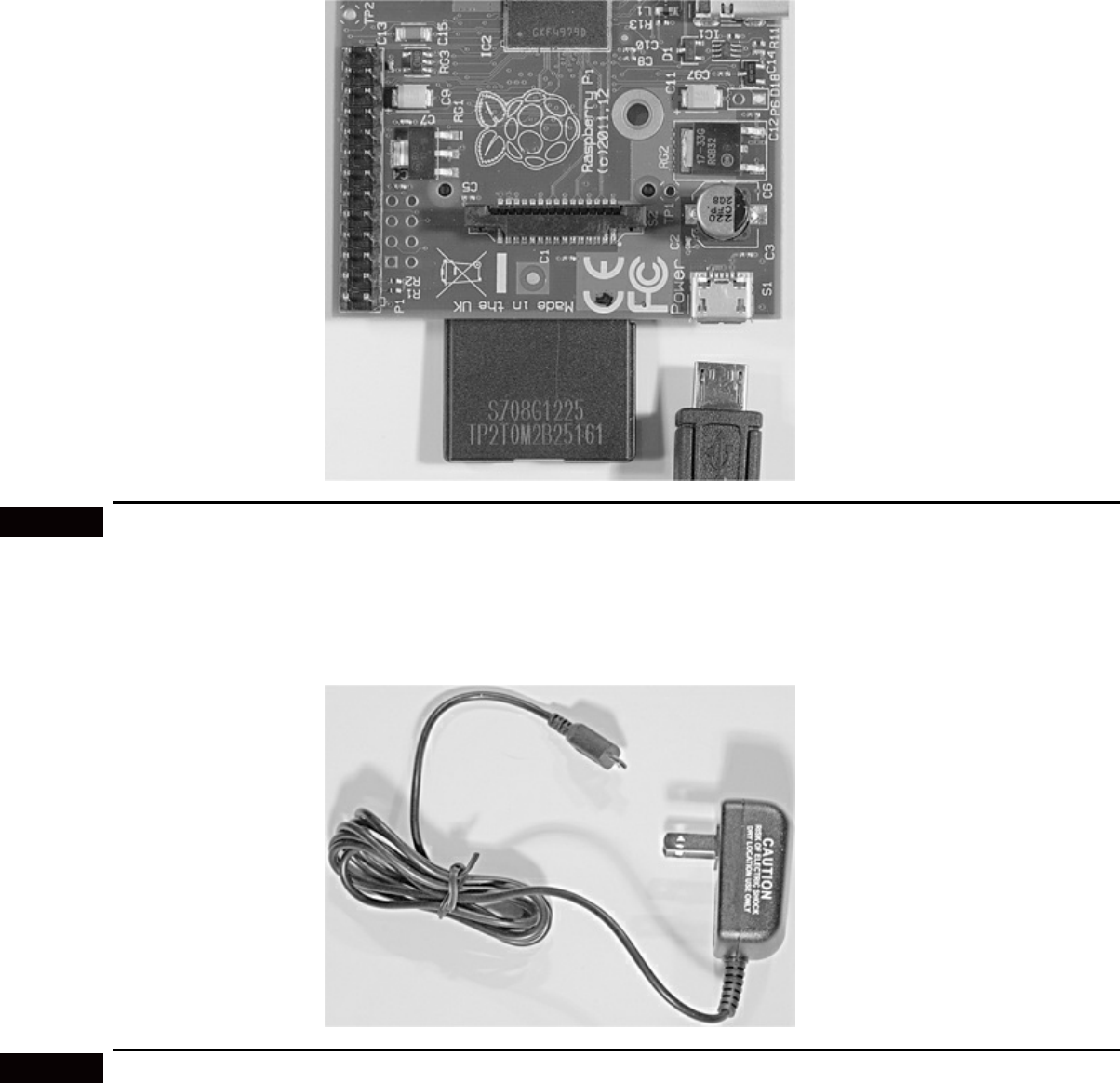
Figure 1–5 Micro USB power connector.
Figure 1–6 shows a RasPi kit power supply that is rated to supply 5 V at 1000 milliamperes (mA)
or 1 ampere (A). The regulatory compliance document supplied with this RasPi states the following:
Figure 1–6 External power supply.
This product shall only be connected to an external power supply rated at 5 V, and a
minimum current of 500–700 mA for model A and 700–1200 mA for model B.
I will have a bit more to say regarding current consumption when I discuss the USB connector.
HDMI Connector
The RasPi provides video and audio using a fully compliant HDMI, which is modern by most
standards The board socket and sample cable plug are shown in Fig. 1–7.
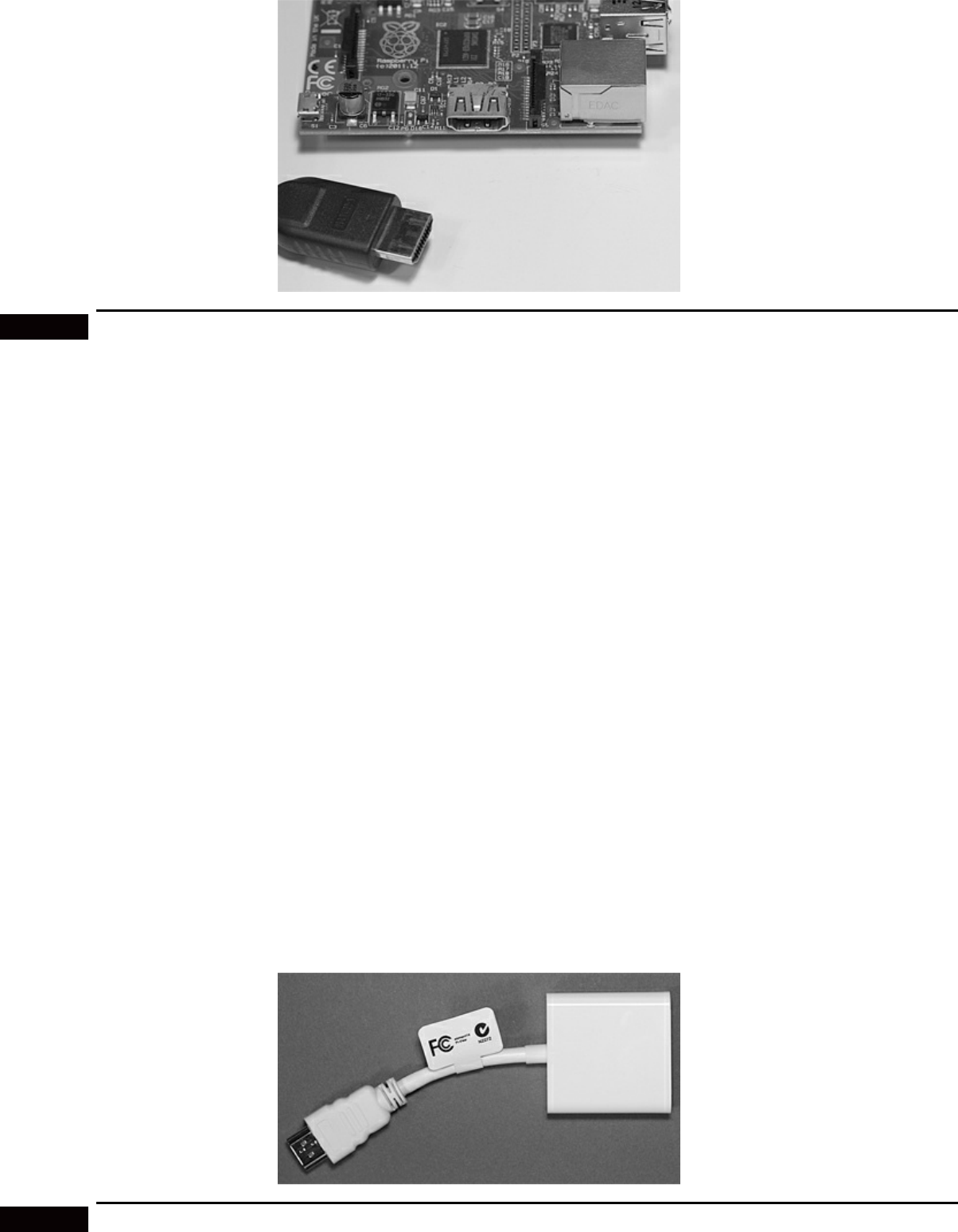
Figure 1–7 HDMI connector and cable.
I have previously discussed the Broadcom GPU chip that controls the HDMI output. To keep
things simple, the book projects will use only the “standard” type of audio/video output and will not
take advantage of the true potential of the RasPi’s multimedia capabilities. Trust a fellow Evil Genius
that you will be working hard to complete the book projects without getting involved with HDMI
development tasks.
One real problem that you will likely encounter is the lack of an HDMI input port for your
computer monitor. This leaves you with three choices for observing the RasPi video:
1. Use the composite video output with a compatible analog monitor
2. Use an adapter to convert from HDMI to Video Graphic Array (VGA) or Digital Video Interface
(DVI)
3. Take over the family’s flat panel digital TV
The first option is really not a very good choice, since the quality is diminished as compared to
what is displayed by a high-quality computer monitor. The second option is the preferred method, as it
yields the best results using your existing computer resources. Choosing the third and final option will
likely result in family discord and upheaval for which I will take no responsibility!
The choice of an HDMI to VGA or HDMI to DVI adapter will, of course, depend upon what type
of monitor input you have. Most monitors have a VGA input, and an adapter for that type of input is
shown in Fig. 1–8. The HDMI to DVI adapter is similar, and the cost for each is also similar.
Figure 1–8 HDMI to VGA adapter.

The HDMI connection also contains a very interesting surprise. The RasPi can act as a very
sophisticated remote control for HDMI-CEC compliant devices. The CEC suffix is short for Consumer
Electronics Control, which is a one-wire, bidirectional serial bus link protocol used for the control of
audio and video devices. HDMI-CEC has been implemented by many A/V manufacturers including
Sony with its Bravialink, LG with its Simplink, Sharp with its Aquos Link, Samsung with its Anynet+,
and so on. The bad news is that there is currently no RasPi software support available for HDMI-CEC
remote control functions. The good news is to simply wait for a short time because new software apps
are constantly being created, free of charge. By the time you are reading this, the RasPi should be able
to turn your digital flat-panel TV on and off as well as control your A/V receiver, DVD player, Blu-
Ray player, etc. The RasPi will become the ultimate remote control. For more information, go to
http://elinux.org/CEC_(Consumer_Electronics_Control)_over_HDMI.
Analog Composite Video Connector
The RasPi also produces an analog video output from the RCA socket, as shown in Fig. 1–9.
Figure 1–9 Analog video connector and cable.
This analog video functionality was deliberately included in the RasPi design to accommodate all
those situations where only analog monitors or analog TVs are available, especially in developing
countries. There is, however, an upside to the composite output. To monitor project parameters in real
time, you can use small analog monitors. These monitors are fairly inexpensive and can often be
battery powered, which is not a realistic option with larger computer monitors. I have included the use
of a small, battery-powered analog monitor in one of the book projects. This monitor is shown in Fig.
1–10.
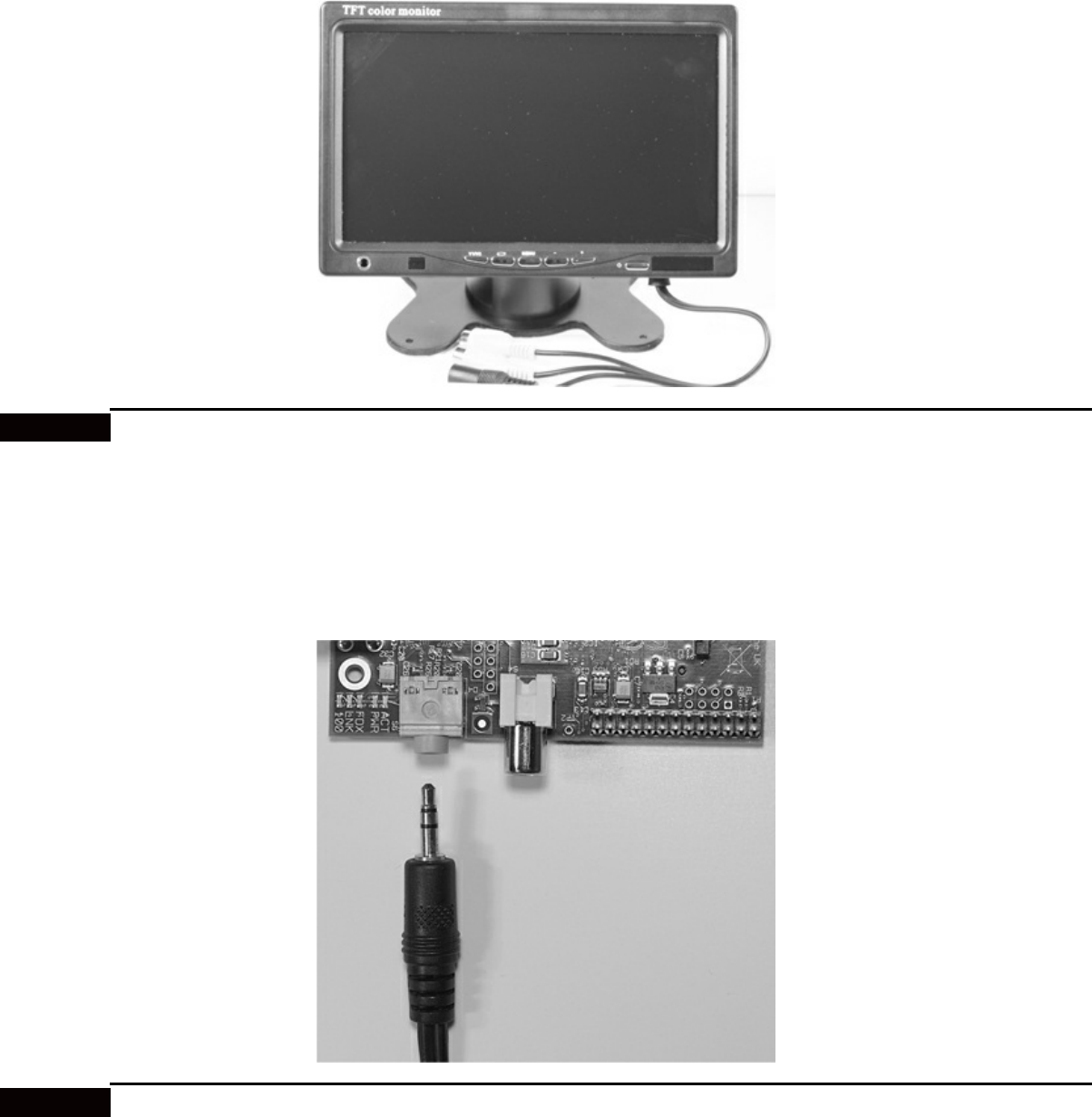
Figure 1–10 Small analog video monitor.
Audio Connector
The RasPi is also capable of creating an analog audio output in full stereo. The output is from a
standard 3.5-mm stereo jack as shown in Fig. 1–11.
Figure 1–11 Analog audio connector and cable.
This audio would normally be the analog equivalent of the digital audio outputted from the HDMI
connector. There is a book project that uses this analog output to play MP3 songs. You will need an
audio amplifier to hear the music, as the RasPi does not generate a powerful enough signal to drive an
unamplified speaker. However, a good quality set of headphones will work.
Ethernet and USB Connectors
Both the Ethernet and USB connectors are shown in Fig. 1–12. I will discuss the Ethernet connector

first, followed by the USB connectors.
Figure 1–12 Ethernet and USB connectors with cables.
The Ethernet connector shown on the left in the figure is a standard RJ45 connector. You would
simply plug your standard Ethernet patch cable into the socket and connect the other end to either your
router or switch, if that is the way you have setup your home network. The RasPi will then
automatically “negotiate” with your router to gain an Internet Protocol (IP) address in a process
known as Dynamic Host Configuration Protocol (DHCP). There are five light-emitting diodes (LEDs)
to the left side of this socket as you look at it head on. The LED furthest away from the socket is
labeled “100.” If it is shining with a yellow light, this means that a 100-megabits-per-second (Mb/s)
connection was made. The next two LEDs, just to the right of the 100 LED, are labeled “LNK” and
“FDX”. These LEDs shine with green lights to indicate that the Ethernet is alive and operating.
Checking these LEDs is a quick way to determine if your Ethernet connection is working or if
something, somewhere, has gone down.
There is a stack of two USB connectors shown on the right-hand side of the figure. These are
normal USB connectors in the sense that USB peripherals will be recognized when plugged into the
sockets. The only issue with these is that the RasPi cannot supply the standard amount of current
according to the USB specification, which is 500 mA per socket. Remember that I mentioned earlier
in Fig. 1–6 that the power supply in the RasPi kit provides up to 1000 mA. If peripherals plugged into
these sockets took 500 mA each, there would be none left for the poor RasPi! Obviously, this situation
should not be allowed to happen, and there is a good and relatively cheap solution. I use a powered
USB hub, as shown in Fig. 1–13, that can easily provide all the current that typical unpowered USB
peripherals require.
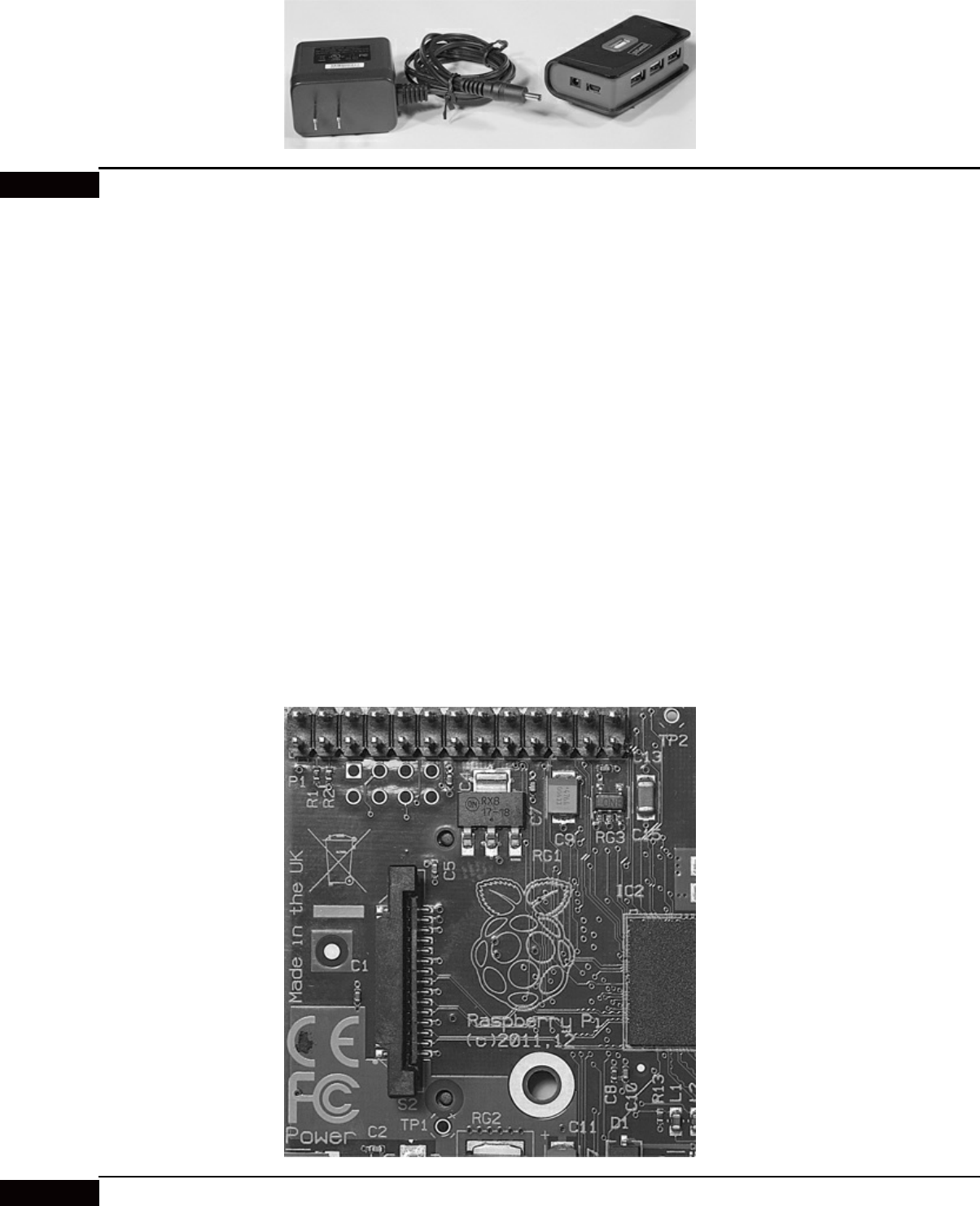
Figure 1–13 Self-powered USB hub.
There is one USB cable that connects between the hub and the RasPi. That leaves one available
USB socket on the RasPi for a low-power peripheral, such as a thumb drive. The number of USB ports
provided by the hub varies with the manufacturer; however, four or five ports are fairly common. The
power supply shown in the figure is rated for 2100 mA, which precisely matches the USB
specification for four ports and a little left over for the hub internal electronics.
Future Expansion Connectors
Two connectors prominently populated on the RasPi are not currently used. Referred to as “future
expansion” connectors, they reflect the dynamic nature of the RasPi project. Fig. 1–14 is a close photo
of one of the connectors, labeled “S2.” This connector is a 15-way, flat-flex connector designated for
use with the Camera Serial Interface (CSI-2). A prototype digital serial camera was just introduced at
an international electronics show at the time of this writing. The other flat-flex connector labeled “S5”
and located just behind the Ethernet RJ45 connector is designated as a Display Serial Interface (DSI)
that will eventually drive a Sony Low Voltage Differential Signaling (LVDS) serial display. You
should check the RasPi website for the latest news regarding the RasPi.
Figure 1–14 Expansion connectors.
GPIO Pin Interface Connector

The General Purpose Input Output (GPIO) connector has 26 pins positioned in two rows of 13 pins
each. Fig. 1–15 shows this connector with pins 0, 1, 25, and 26 pointed out.
Figure 1–15 GPIO connector.
Table 1–2 details pin assignments with both the RasPi pin designations and the BMC2835 pin
designations. Using two different sets of pin designations is confusing, but unfortunately, that is the
situation with this board. I will try to use the RasPi pin designations whenever possible; however,
there will be situations where the software will require the use of the BMC2835 pin designations. I
will try to be as clear as possible regarding the exact pin that is being used and for what purpose.
Table 1–2 GPIO Pin Descriptions
The Universal Asynchronous Receiver/Transmitter (UART), Serial Peripheral Interface (SPI), and
Inter-Integrated Circuit (I2C) functional pins listed in the table may all be reconfigured as GPIO pins.
These are shown with an asterisk in Table 1–2. This means that up to 17 GPIO pins (8 existing GPIO +
9 reconfigurable) are available for hardware interfacing, provided that the functions mentioned before
are not needed.
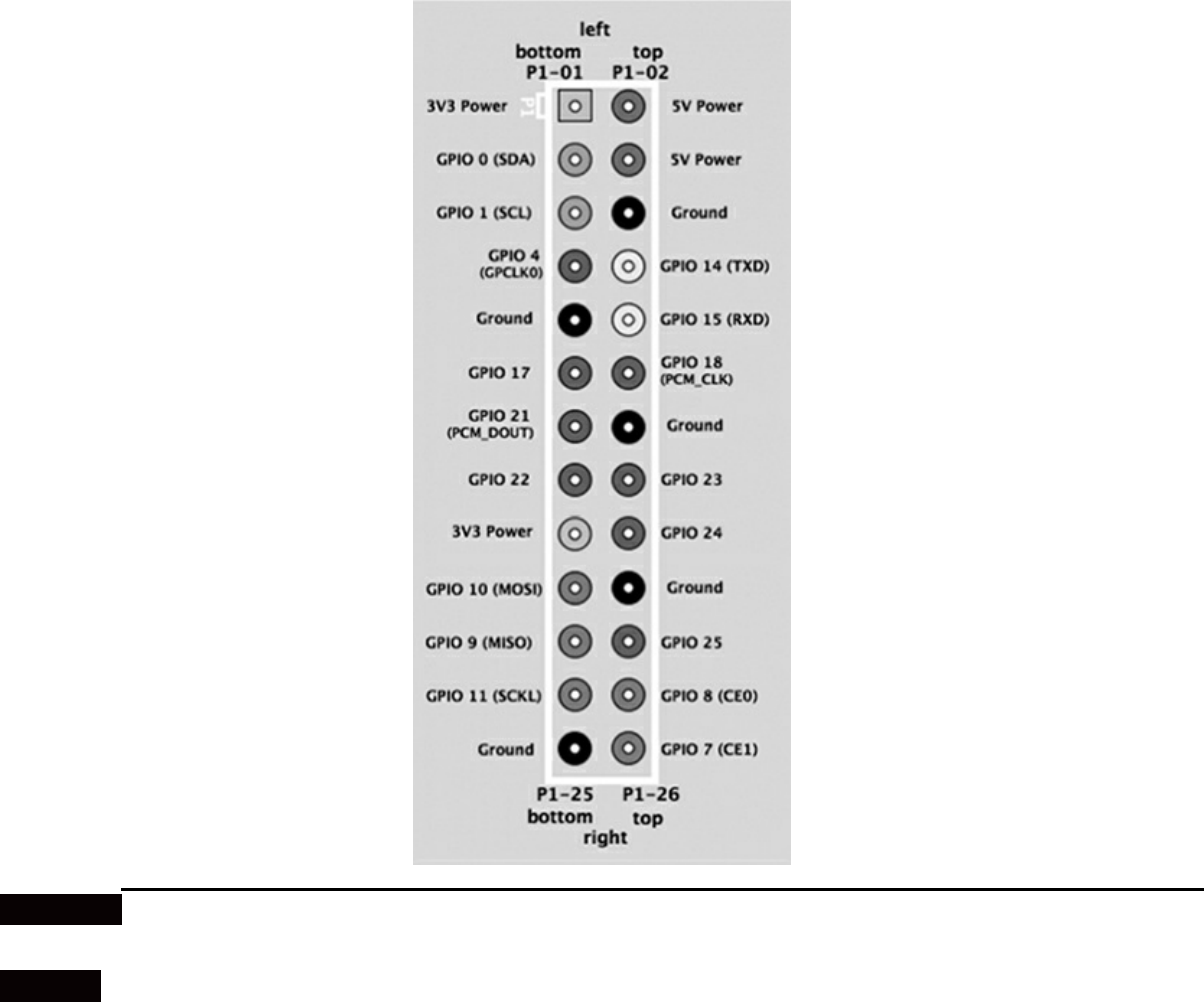
Figure 1–16 shows all the GPIO connector pins with the BCM2835 pin designations. You should
always crosscheck your connections with this figure anytime that you are directly wiring to this
connector.
Figure 1–16 GPIO connector pins with the BCM2835 pin designations.
CAUTION All GPIO voltage levels are 3.3 V, not 5 V tolerant. There is no overvoltage protection
incorporated on the RasPi; and if you inadvertently subject a GPIO pin to 5 V, you will
wreck your RasPi. I will not take any responsibility for such foolish actions, as you
have been warned!
I have incorporated hardware buffers into projects where 5-V sensors interface to the RasPi, thus
avoiding any chance of damaging the RasPi due to an input voltage overload. You must always pay
careful attention to how the projects are wired because it is easy to damage the RasPi through an
inadvertent construction mistake.
Digital Signal Voltage Level
The RasPi operates at a positive power-supply voltage (Vdd) of 3.3 V with the digital logic levels,
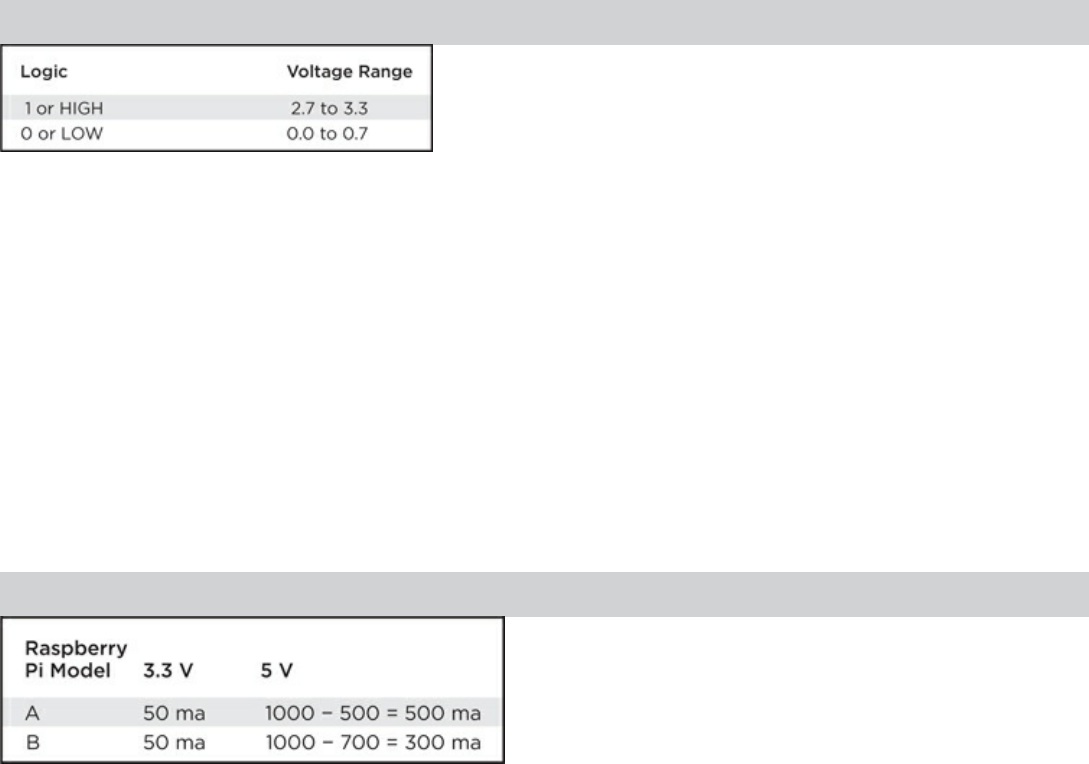
shown in Table 1–3. This means that any GPIO input voltage greater than 2.7 V will be detected as a
logical one or HIGH. Any voltage input that is less than 0.7 V will be detected as a logical zero or
LOW. However, the input voltage can never exceed 3.3 V, or it will destroy the GPIO pin circuit.
Table 1–3 Digital Signal Voltage Levels
It turns out that standard 5-V logic accepts 3.3 V as a logical one or HIGH and anything less than
0.7 V as a logical zero or LOW. This is exactly the reason that a RasPi can output to a 5-V logical
device. The difficulty happens if a 5-V device inputs into a GPIO pin. The 5-V logical device has the
logic HIGH voltage range of approximately 4.4- to 5-V that will immediately burn out the GPIO pin
input circuitry.
Current Limits
There are also some current draw limitations for both the 3.3-V and 5-V power pins. The limitations
are dependent upon the RasPi model, as shown in Table 1–4.
Table 1–4 Raspberry Pi Current Consumption vs Model
Every GPIO pin can sink or source a limited amount of current ranging from 2 mA up to 16 mA.
This means that you must be very careful about the current demands put on the RasPi as well as how
much current it will accept without causing problems.
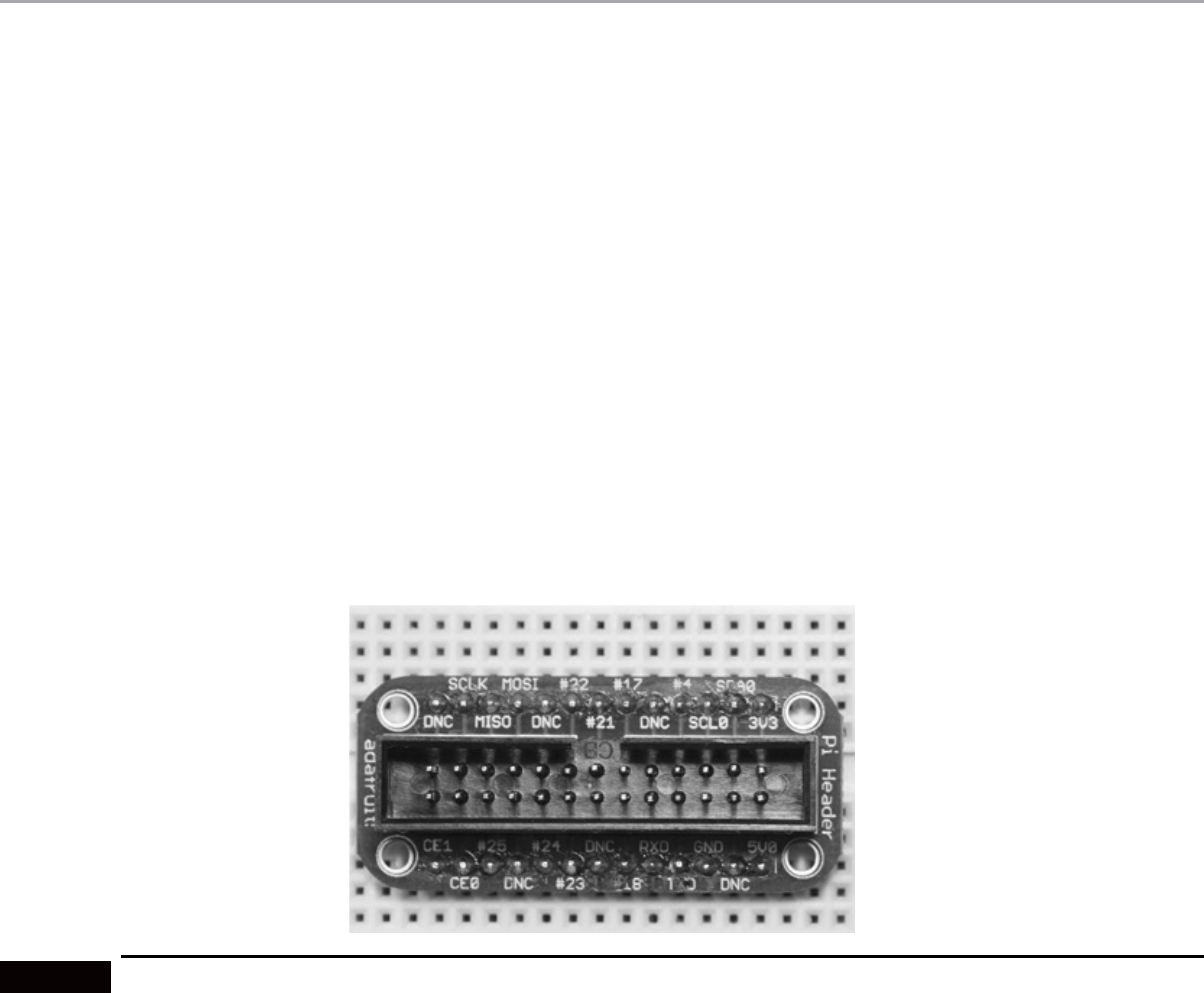
GPIO Pin Expansion
Recently, the Raspberry Pi Foundation made a revision to the Model B that added access to some
additional GPIO pins that were not available in the earlier production run. This latest board is
designated rev 2, while the earlier version is designated rev 1. The additional pins are plated PCB
holes, as shown in Fig. 1–17, and are located next to the GPIO connector.
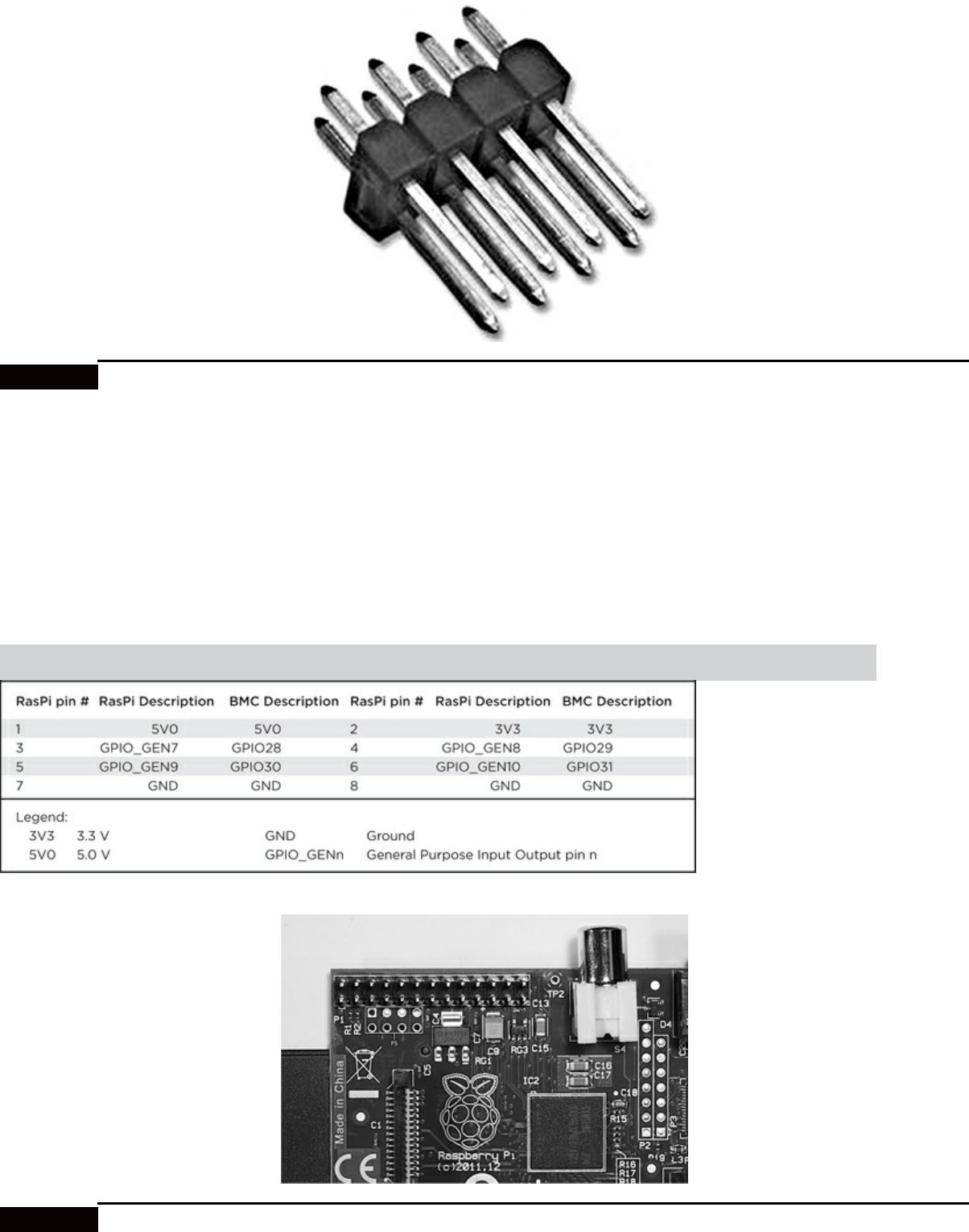
Figure 1–17 Additional GPIO pins available for expansion.
Table 1–5 shows all the additional pins with their RasPi and BMC designations. Pin 1 is the square
plated hole located in the upper left corner of P5. You will need to install a 12 pin connector to access
the pins. The connector is supposed to be installed on the board’s underside per Note 3 on the rev 2.0
board’s schematic, which is available at http://www.raspberrypi.org/wp-
content/uploads/2012/10/Raspberry-Pi-R2.0-Schematics-Issue2.2_027.pdf. A suggested connector is
shown in Fig. 1–18. You will not need any of these additional pins from P5 to build any of the projects
in this book.
Table 1–5 Additional GPIO Expansion Pins
Figure 1–18 GPIO pin expansion connector.
Interrupts
Each GPIO pin can also accommodate what are known as interrupts. An interrupt is an event that stops
or “interrupts” the normal programming flow and directs the microprocessor to execute some special
handler program, or code, for the interrupt source. Interrupts may be triggered in several ways:
HIGH level detected
LOW level detected
HIGH to LOW transition detected
LOW to HIGH transition detected
Using interrupts will certainly improve performance, but at the expense of adding a certain level
of complexity to the software.
Serial Protocols
There are several serial protocols shown in the pin descriptions that I wish to discuss briefly.
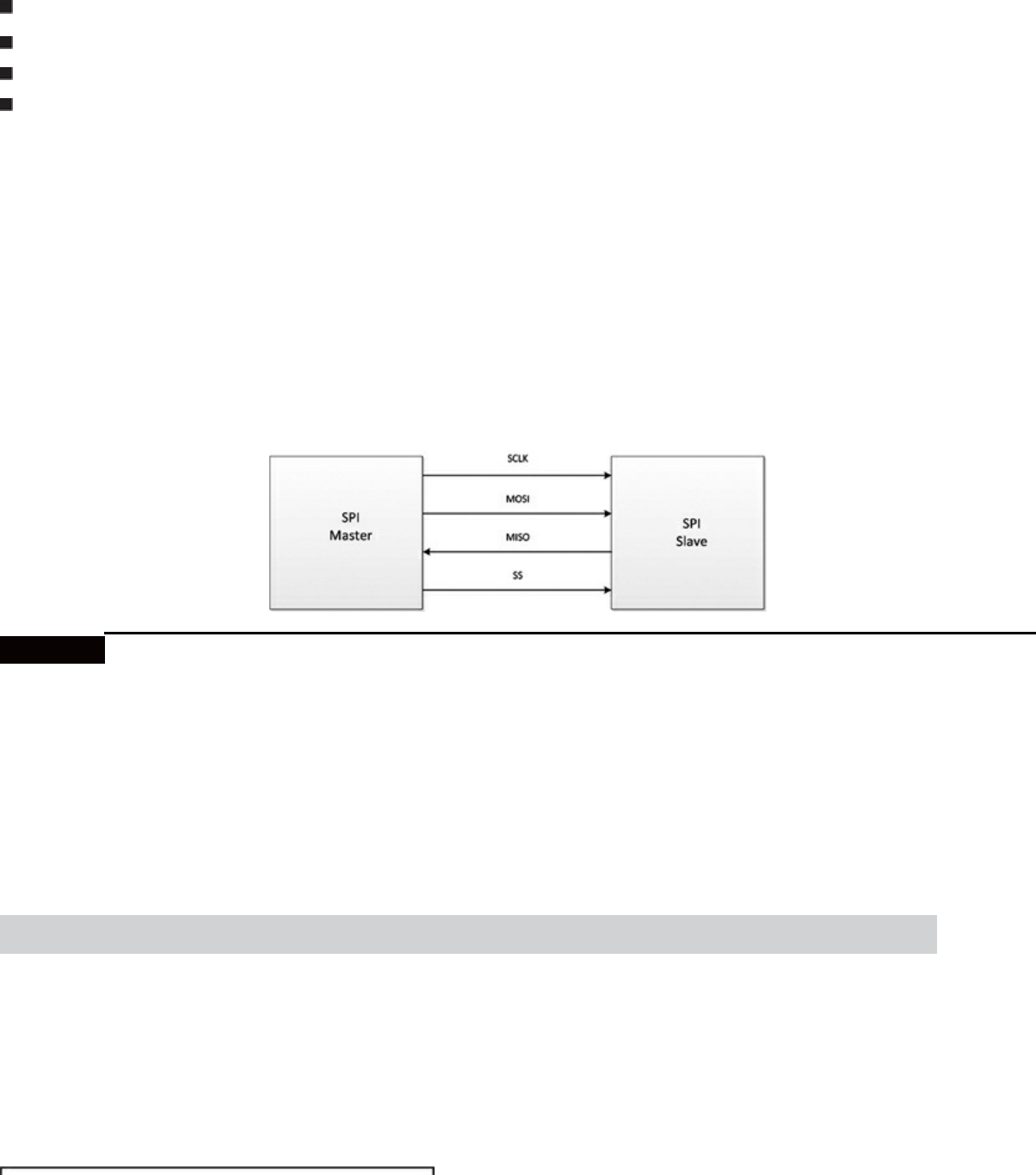
SPI Serial Protocol
The first is the Serial Peripheral Interface (SPI), which is shown in the Fig. 1–19 block diagram.
Figure 1–19 SPI block diagram.
The SPI interface (pronounced “spy” or “ess-pee-eye”) is a synchronous serial data link. A clock
signal is needed because it is synchronous. It is also a full-duplex protocol, which means that data can
be simultaneously sent and received from the host and slave. SPI is also referred to as a Synchronous
Serial Interface (SSI) or a 4-wire serial bus.
The four interconnecting signal lines between the SPI host and SPI slave shown in Fig. 1–19 are
explained in Table 1–6.
Table 1–6 SPI Signal Lines
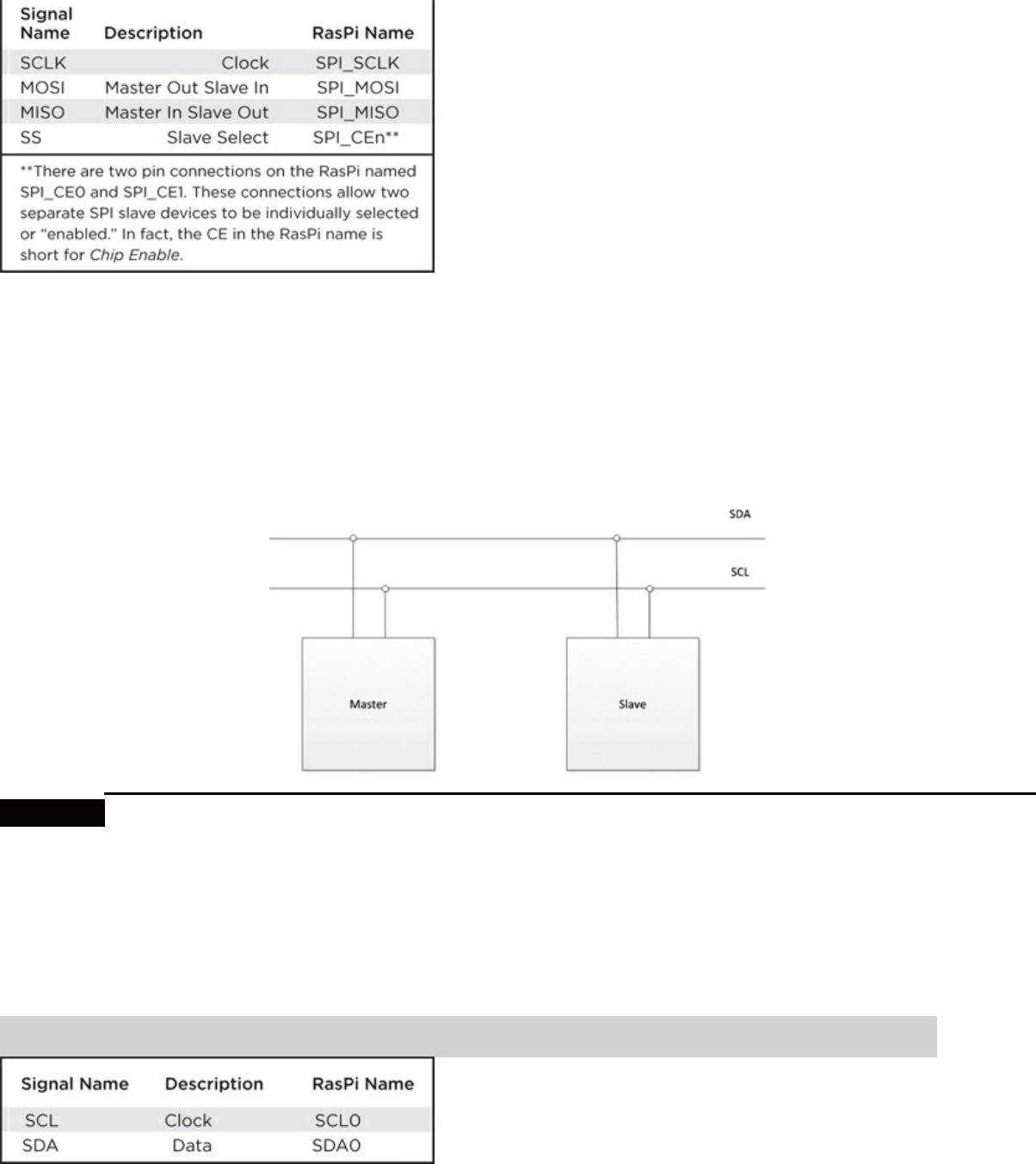
I2C Serial Protocol
The next serial protocol that I will discuss is the Inter-Integrated Circuit interface or I2C (pronounced
“eye-two-cee” or “eye-squared-cee”), which is also a synchronous serial data link. Fig. 1–20 is a block
diagram of the I2C interface, showing one master and one slave. This configuration is also known as a
multidrop or bus network.
Figure 1–20 I2C block diagram.
I2C supports more than one master as well as multiple slaves. This protocol was created by the
Philips Company in 1982 and is a very mature technology, meaning it is extremely reliable. Only two
lines are used: SCLK for serial clock and SDA for serial data. Table 1–7 shows the RasPi names for
both the clock and data lines.
Table 1–7 I2C Signal Lines
UART Serial Protocol
The last serial protocol shown in Table 1–2 is the standard Universal Asynchronous Receiver
Transmitter (UART) that uses two pins in the RasPi and is shown in the block diagram in Fig. 1–21.
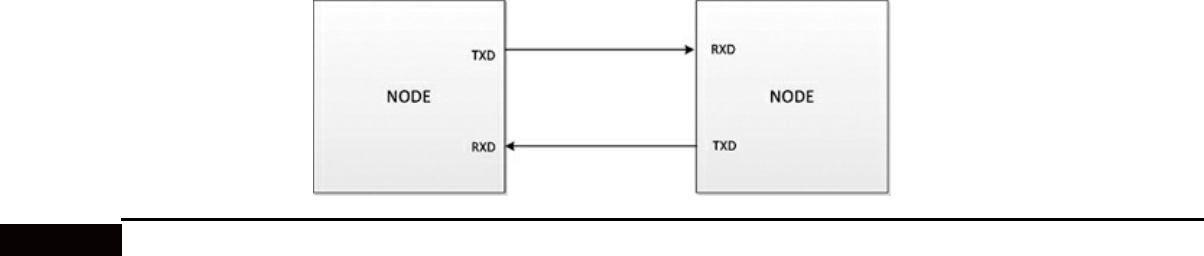
Figure 1–21 UART block diagram.
The UART protocol needs no clock signal, just as it is described by the asynchronous adjective in
its name. The RasPi transmits data on the pin named TXD0 and receives on the pin named RXD0.
There is also no concept of a master or slave in this protocol, since it is used primarily for data
communications instead of for control, which is the focus of both the SPI and I2C interfaces.
All three serial protocols described in this section are implemented in hardware, meaning that
there is actual silicon dedicated to performing the protocol functions. This is the most efficient and
fastest way to provide these serial interfaces, but it is not the only way. You can implement these
same serial interfaces by using uncommitted GPIO pins and software. Although this would provide
nearly the same functionality as the hardware implementation, it would not be as fast. The term “bit-
banging” is often used to describe this approach. Sometimes you must use bit-banging when the
hardware is not available.
I will now jump into the heady software arena; I’m sure you already sense that hardware and
software are closely linked in the RasPi.
Software
The RasPi was designed to be run with a Linux operating system. This design decision stands in stark
contrast to many other similar microprocessor boards, including the popular Arduino series, that do
not operate in this fashion. This is not to imply that an Arduino board is inferior to the RasPi but
simply to show that using the RasPi brings additional flexibility and capability to projects because of
the Linux environment.
I will not start this discussion with a Linux tutorial, since there are many good Linux resources
available on the web. Google (or your favorite search engine) will turn up many hits regarding Linux
tutorials. I will instead use Linux commands and procedures, and explain them as I go along in a
mentor capacity, as if I were standing beside you as you execute the commands. Additionally, I will be
using the Python language to program, or code, the RasPi and will provide more guidance regarding
how Python works and how it is applied with the RasPi, as it is the key to success in using the board
and in understanding its operation with the underlying project code.
Initial Startup
A suggested RasPi setup that uses the connections discussed in the hardware section is shown in Fig.
1–22. This setup will be the basis for your projects once you add some prototyping hardware to the
RasPi. Right now, I will be using the setup to get the RasPi configured in a proper manner to enable
project development. You should connect all the components as shown in the figure, leaving the USB
power connection for last. The RasPi will attempt to start up when the USB power cord is plugged in;
and if you have not finished connecting all the other components, it is entirely possible that they will
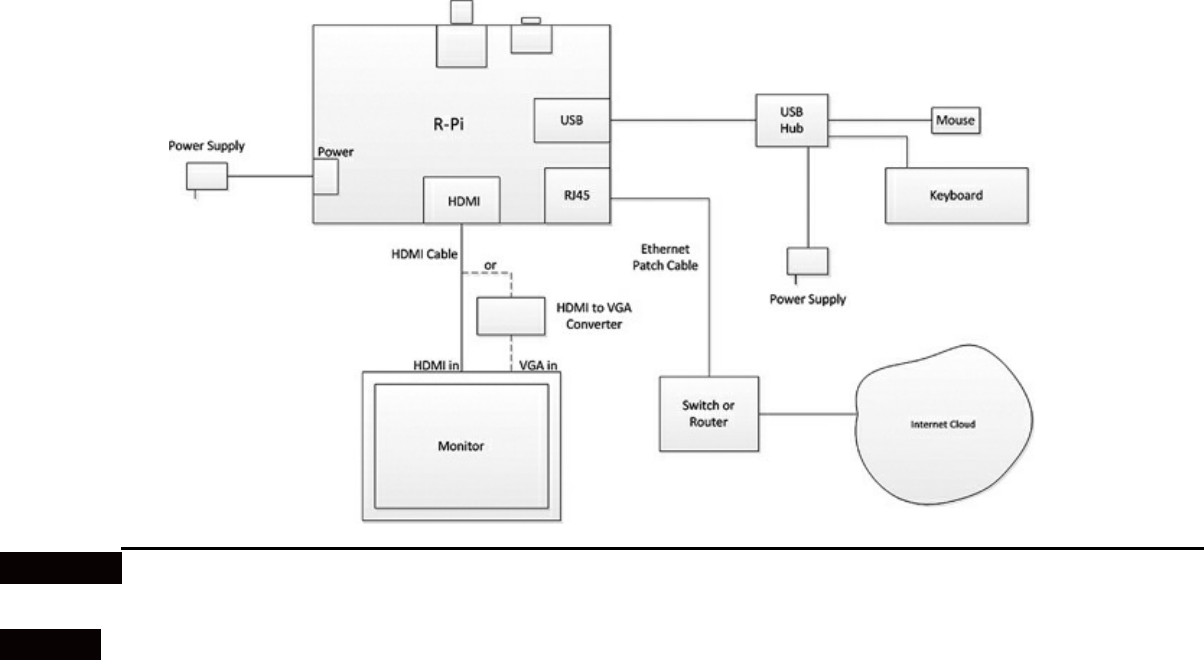
not be recognized in the startup sequence and your system will either not start or not operate correctly.
I will also assume that you are using a “prebuilt” Linux distribution that is provided with the RasPi
starter kit or purchased separately. This 4 GB card should also be plugged into the SD card holder
prior to power being applied to the RasPi.
Figure 1–22 A suggested RasPi configuration.
CAUTION Inserting or removing an SD card while the RasPi is powered on is never a good idea.
Bad things can happen including data corruption or worse.
Also, now would be a good time to skip down to the section that discusses how to load your own
Linux distribution on an SD card if you did not purchase a starter kit or a “prebuilt” SD card.
You should see the initial configuration screen, shown in Fig. 1–23, on the monitor after you
connect the USB power to the RasPi. Please be patient; it takes a while. You will at first see a massive
amount of text scrolling by on the screen, which will make absolutely no sense to you if you are not
familiar with Linux.
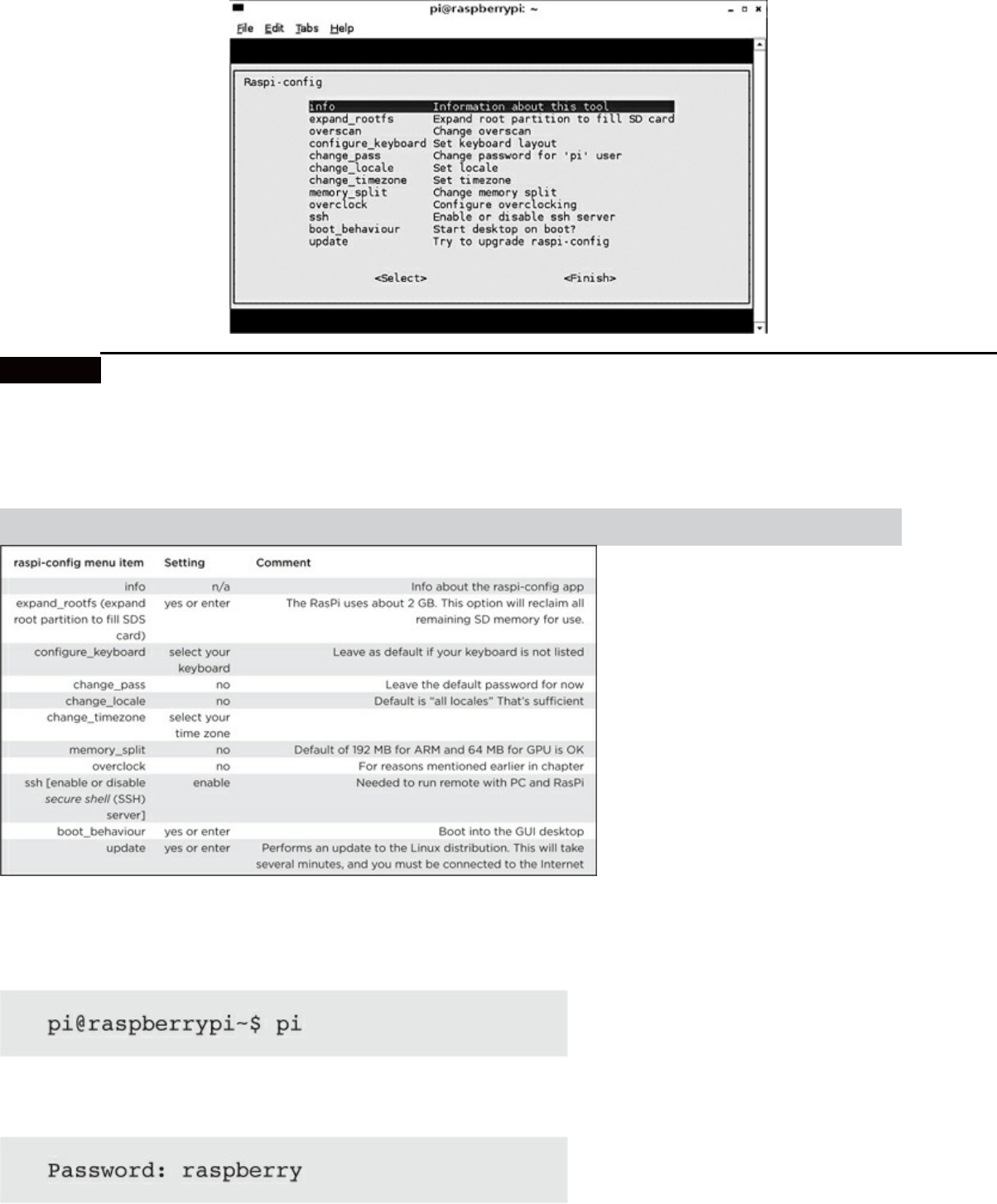
Figure 1–23 Raspberry Pi configuration screenshot.
Suggested configuration settings are shown in Table 1–8 along with some comments regarding
why a particular setting was selected.
Table 1–8 Suggested Configuration Settings
After you finish the configuration, the monitor prompt will eventually show. It is waiting for you
to enter the user name, which is pi.
Next, the password prompt shows Password:. Enter raspberry.
Please note I am not giving away any secrets, as every unmodified RasPi Linux distribution is
created with this default password. You may have changed it in the configuration menu; if so, enter
that password.
Next type startx and press Enter.
This will create the GUI desktop, as shown in Fig. 1–24.
Figure 1–24 Raspberry Pi GUI desktop.
Congratulations, it is now about 15 pages into the book, and you now have the first indication that
you have a working and useful Linux computer. Fear not; progress will be much faster from now on.
To partially accomplish this goal, I will minimize the number of screenshots and simply use text to
show you what to enter and how the computer responds.
Preparing your own SD card using a Windows PC
You will need two items other than the card itself. First you will need to download and install a
program named win32diskimager.exe. This program is available at
http://sourceforge.net/projects/win32diskimager/. The file is in a compressed Zip format from which
you have to extract the program before running it. Note that in spite of the win32 in the name, this app
works without a problem on my Win7, 64-bit laptop.
The second item you will need is the image file for the RasPi Linux distribution that you desire to
install. The current version, at the time of this writing, may be downloaded from the main Raspberry
Pi website http://downloads.raspberrypi.org/images/raspbian/2012-10-28-wheezy-raspbian/2012-10-
28-wheezy-raspbian.zip. It is a very large Zip file (647 MB) from which the Linux distribution must
be extracted before it can be used as a disk image file. The Raspberry Pi Foundation currently appears
to be updating the Wheezy-Raspian Linux distribution almost every month. This is subject to change,
so take advantage of it while it lasts.
It is now a simple matter to create your own SD card once you have the image and the disk writer
program. Insert a blank SD card into the PC, run the app, and then browse to the location where the
image is stored. Then click on Write, and you will get a warning about destroying existing data on the
card. Click OK and wait. It takes several minutes to create the image. You now have your own Linux
distribution on an SD card. Also, remember that you can rewrite an SD card as often as you want, so
feel free to experiment with different distributions.
I now need you to create a new SD card, both to ensure that you understand this process and that
you have a specific distribution available that will also support the Chap. 10 book project, which
requires what is known as the “1-Wire” serial protocol. This distribution is named Occidentalis V0.2
and is available at http://learn.adafruit.com/adafruit-raspberry-pi-educational-linux-
distro/occidentalis-v0-dot-2. This distribution was created by the kind folks at Adafruit, where I
purchase most of my RasPi goodies. The unusual name derives from the Latin name Rubus
Occidentalis for the black raspberry, which is apparent from the GUI desktop that appears when this
distribution is running, as shown in Fig. 1–25.
Figure 1–25 Occidentalis GUI desktop.
Some Linux Fundamentals
As I promised you earlier, I am not going to provide a tutorial on Linux in this book. However, you
will still need to have some very basic knowledge of it to understand what is happening with the
commands being processed. The discussion below is for readers with a very limited knowledge of
Linux. Feel free to skip this section if you already have a basic to good understanding of Linux.
The Linux operating system is based upon Unix, and it has assigned built-in privileges, which
limit most users to some extent but allow one user unlimited access. This unlimited user is named
root and essentially is equivalent to an administrator level in a Windows operating system. Some
commands can be run or executed only by root, again for security reasons. There is a fundamental
computer security principle known as “least privilege” by which users are granted only as much
access or privilege as they need to complete their task.
It is not considered a good idea to run all tasks or programs as root, so most of the time you will be
running as the user named pi. However, as I mentioned earlier, some commands can only be run as
root. The answer to this conundrum is to “promote” an ordinary user to what is known as a super user.
The sudo command accomplishes this neat feat. I will frequently use the sudo command with other
commands, and you now know why.
I will also typically use terminal windows to execute commands, as most of the time I will have
the GUI desktop running. There are two flavors of terminal windows available, the Lightweight X11
Desktop Environment (LXDE) for normal users and a root level terminal. The only effective
difference between the terminal windows is that I have to type sudo in the LXDE terminal while this
is not required in the root terminal, since it already operates at that level.
You will also need to create some Python code to program the RasPi. I use a very simple but
effective text editor named nano. All you need to run the editor is to open a terminal window and type
nano test_my_project.py if you wanted to either create or open an existing file named
test_my_project.py. The editor program has all the important commands listed at the bottom of the
editor window. For example, to save the editor buffer, you have to press and hold the control key
while simultaneously pressing the “o” key. This is shown as ^o on the help screen.
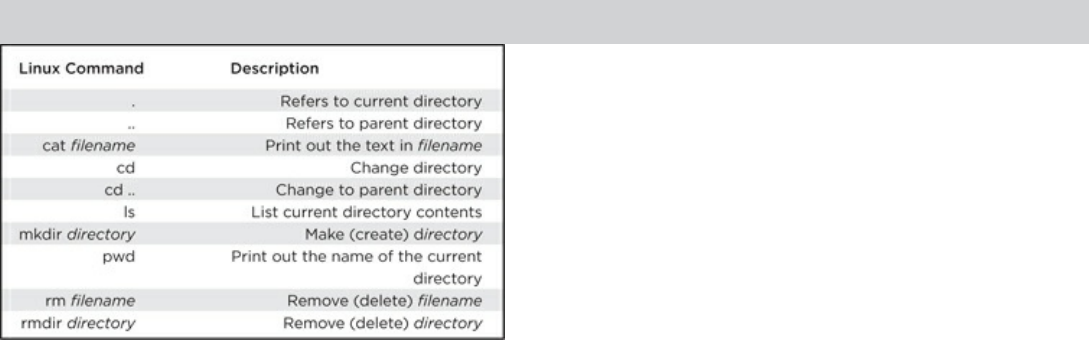
A few of the very common Linux commands are shown in Table 1–9. It might be helpful to refer
to this table when you are trying to understand why I entered a particular command as you progress
through the projects.
Table 1–9 Commonly Used Linux Commands
Python
I have chosen to use Python to program the RasPi for several reasons. First, and most importantly, it is
a simple programming language to use, and most beginners can start to use it immediately with little
to no trouble. Second, despite being simple to use, it is a real programming language and shares most
of the attributes that are common with other highlevel, high-powered languages, such as C++ or Java.
You should visit the official Python website, http://www.python.org where you will find a wealth
of information regarding Python. This site should be your primary resource to use to answer any of
your questions regarding the language. There are also many good Python books available, including
Python Programming for the Absolute Beginner, third edition by Michael Dawson and Think Python
by Allen Downey. Another useful reference would be Simon Monk’s Programming the Raspberry Pi:
Getting Started with Python. Dr. Monk’s book is concise, with a brief but thorough introduction to
Python fundamentals plus the bonus of a few projects at the end of the book.
Python is classified, in computer science terminology, as a high-level language, which, roughly
translated, means that Python users are thinking in abstract terms. The C language, in comparison, is a
fairly low-level language in which programmers must contend with bits, bytes, and memory locations.
The concept of abstractions and abstract data types will become clearer as we start developing Python
programs.
The Python language design encourages the creation and use of modules that can be reused. New
functions, modules, and classes can easily be added. Software reuse is a key goal that all programmers
should try to adopt. It makes no sense to keep reinventing the wheel when proven solutions have
already been developed and are available for reuse. We will see this reuse in action in the very first
project program.
Python is also an interpreted language, which means that the code is executed line-by-line by the
Python “engine” as it is encountered. Programs using interpreted languages typically run slower than
programs that have been compiled and linked. This performance hit will not be an issue with any of
the programs within this book. The advantage of interpreted programs is that they are considerably
easier to modify and rerun as compared to compiled programs. All you have to do is make any needed
changes in an editor, save the code, and then rerun the program in the Python shell. This significantly
reduces program development time and, at the same time, increases your productivity and efficiency.
One other detail should be mentioned before I show you how to start developing your first Python
program. The language is not named after the reptile but instead takes its name from the famous BBC
show, “Monty Python’s Flying Circus.” Apparently, the Python creators were great fans of the show,
and they currently encourage authors (or bloggers now) to incorporate related humour when writing
about Python.
IDLE
IDLE is the name of an application that creates and runs the shell environment that I will use to
develop and test your Python programs. Fig. 1–26 shows a portion of the desktop with two IDLE icons
appearing.
Figure 1–26 IDLE desktop icons.
The top icon opens a Python version 3 shell, while the icon directly underneath opens a Python
version 2 shell. I will be using the version 2 shell, as that Python version is compatible with the
software libraries that are needed to run the hardware used in the projects.
User interaction using the Python shell is intuitive; results are instantly displayed after an
operation is performed and the Enter key is pressed. Adding 7 + 5 with the sum displayed below the
input numbers is shown in Fig. 1–27.
Figure 1–27 A simple Python operation.
Displaying text in the Linux shell is also easy to accomplish; simply use the print function.
Traditionally, the first program to be run in most programming books is the so-called “Hello World”
program. I do not like to trifle with tradition and will adhere to this unwritten rule. Now it is perfectly
possible to execute the print command and see Hello World displayed below, as is shown in Fig. 1–
28.
Figure 1–28 Python print command.
As this book is printed in monochrome, I will point out the following as you observe the output in
the Python shell. The word print is reddish-orange, as it is a reserved word describing a preset
function. The words Hello World in the parentheses following the print function are shown in green
to indicate a string of characters. Character strings are enclosed between single quotes. Finally, the
words Hello World displayed below the print function are in blue, as they represent a string output.
This default color coding of program code is fairly standard with various development tools; however,
the exact colors assigned to the different elements will vary.
From this point on, I will now use text only to show the shell prompt, commands, operations, and
results to conserve valuable book space. You should also carefully observe the Linux shell because
there may be information shown that I do not transcribe.
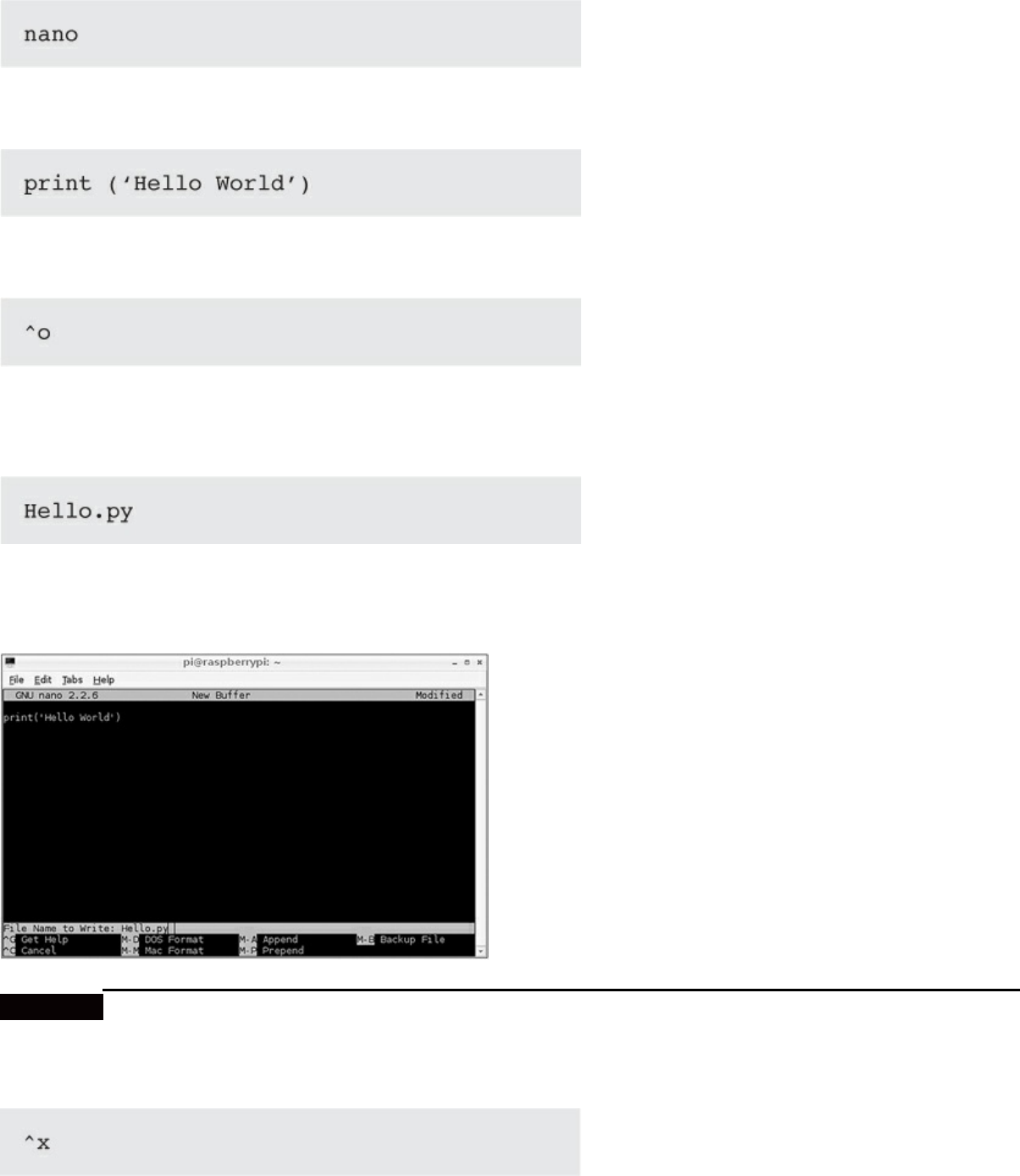
I will now show you how to create a very simple program that produces the same result as
discussed above. I will use the nano editor to write the program and save it. I will then recall the saved
program and run it from the Linux shell.
Open an LXDE terminal window and type:
Next type:
Press the key combination Ctrl and the letter o. (I will show this as ^o from now on.)
This action will bring up a prompt at the bottom of the editor, requesting the name of the file in
which to save the buffer’s contents. Type:
The .py is a standard Python program extension. Fig. 1–29 shows the nano editor at this point in
time.
Figure 1–29 nano editor.
Type

to exit nano. There will now be a Python program named Hello.py in your home pi directory.
A Python shell must now be opened to allow the file that I just created to be opened and run.
Opening the file is done by clicking on the File menu tab and then clicking on Open from the drop-
down menu. A file browser dialog box will be opened that shows the contents of the pi directory.
Select the Hello.py file, as shown in Fig. 1–30.
Figure 1–30 Opening a file in the Python shell.
Selecting the Hello.py file will cause a second window to appear on the desktop with the contents
of Hello.py shown in the window. This is very convenient in that you can modify the file contents
without affecting any of the content happening in the Python shell. To execute the program, you must
be in the second window that was just opened where you can either open the Run menu tab and select
Run or simply press the F5 function key. The Hello.py program results appear in the Python shell, as
can be clearly seen in Fig. 1–31.
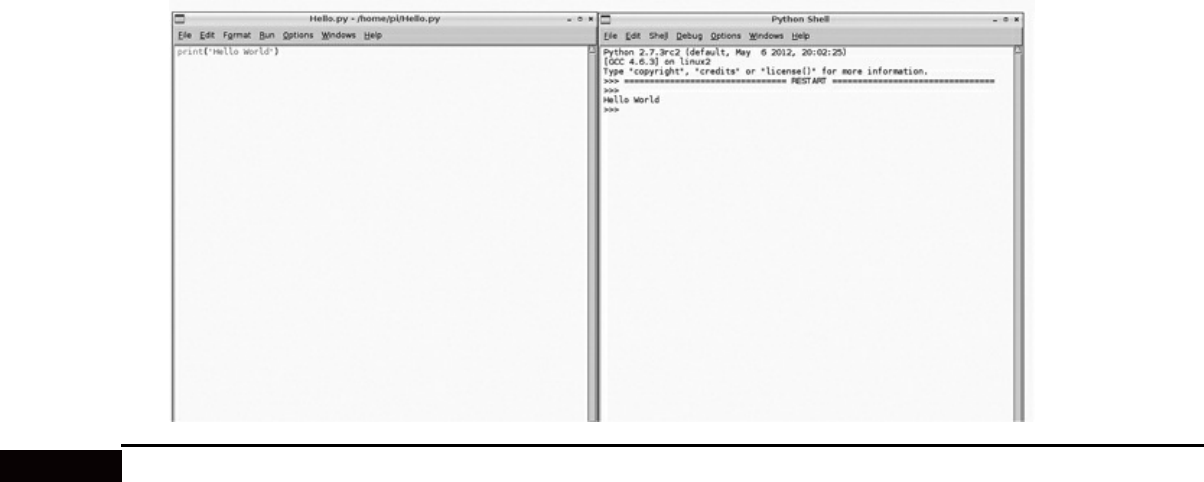
Figure 1–31 Running a program from the Python shell.
Summary
I have covered a lot of material in this chapter, from introducing the RasPi and a bit of its history to
explaining the role that its inventors would like it to fulfill. I also covered the hardware aspects, as
you need to understand the design decisions that went into the RasPi and the consequent constraints
and attributes that you must consider when incorporating this board into a real world project.
A brief Linux introduction was covered to get you started in using this great operating system.
Most people find that once they become proficient in using Linux, especially at the command-line
level, they look at MS Windows with a newfound disdain. I am not pooh-poohing Windows; I am
simply saying that Linux gives you much greater control of your programming environment than you
could achieve by using Windows.
Next I discussed Python and demonstrated how simple it is to start programming the RasPi with
the traditional “Hello World” program. Using the Python shell named IDLE just makes the whole
effort very easy and, I hope, enjoyable.
CHAPTER 2
LED Blinker Project
Now we start creating projects using the RasPi. However, I still have some preparatory steps to
discuss and information to provide about the prototype board that will be used in this and other
projects. I will also present a detailed discussion of the GPIO library, which is critical to making all of
the projects work. The first project will consist of turning on an LED connected to a GPIO pin and
then causing that LED to blink.
Prototype Board
Let’s focus on a piece of hardware that I will use to demonstrate how to blink an LED using the RasPi
and some Python code. This section is entitled “Prototype Board” and that is exactly what I will be
using. The board is called the Pi Plate and is available from Adafruit at
https://www.adafruit.com/products/801. It comes as a kit of parts; however, a fully assembled Pi Plate
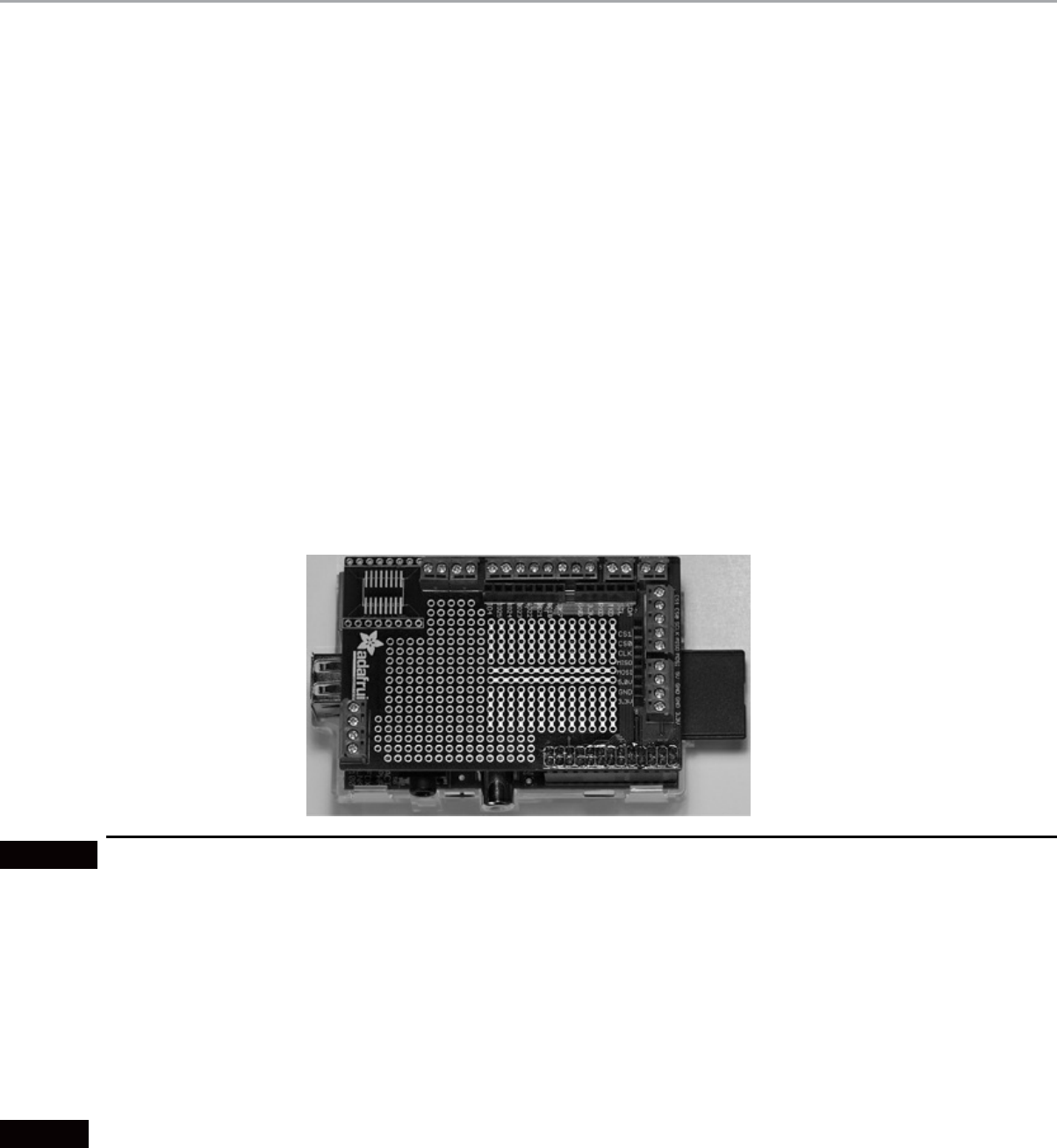
mounted on a RasPi is shown in Fig. 2–1.
Figure 2–1 Pi Plate mounted on Raspberry Pi.
The Pi Plate attaches to the 26-pin GPIO connector, as you can see in the figure. All the active
connections are brought out to the top of the Pi Plate, both to 0.1-inch, on-center, female header strips
as well as to 3.5-mm screw clamp connectors. This makes for a very easy access to the GPIO pins.
Please note that the pins on the Pi Plate are marked with both RasPi and BMC designations, which can
be confusing. Please use Table 1–2, from Chap. 1, to cross-reference all the designations and ensure
that you know what connection you are making.
CAUTION The Pi Plate does not provide any electrical buffers whatsoever, so be extremely careful
and ensure that you do not accidently apply 5 V to any RasPi pin.
Soldering
I thought this would be an appropriate time to discuss soldering, since you will need to assemble the
Pi Plate. The assembly operation is very straightforward, and Adafruit provides a step-by-step
illustrated assembly guide at learn.adafruit.com/adafruit-prototyping-pi-plate. I have also included a
photo of my trusty soldering station in Fig. 2–2.
Figure 2–2 Trusty soldering station.
It’s not the prettiest or the snazziest station available, but it has served me well. The key to quality
soldering work is to have good soldering technique, keep the soldering iron tip clean, and use the
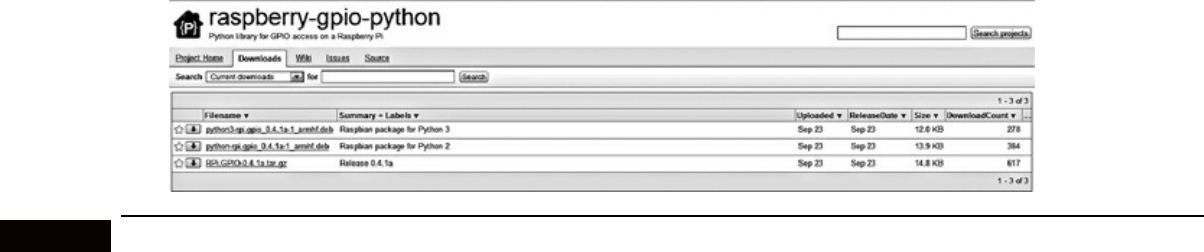
highest-quality solder available. Figure 2–3 shows the essence of good soldering technique. It is vital
that the solder joint be hot enough for the solder to flow easily. It takes practice to apply just the right
amount of solder; too little may result in a cold solder joint, and too much could lead to a short
between closely spaced components.
Figure 2–3 Good soldering technique.
Another issue regarding a good solder joint is the use of lead-free solder. Now, don’t get down on
me; I am all about maintaining a healthful environment, but the elimination of lead from solder often
produces poor solder joints unless some extra precautions are taken. The simplest and probably the
best approach is to apply a high-quality, acid-free, solder flux to the joint prior to heating the joint
with the iron. This will allow the lead-free solder to flow more freely and produce a better-soldered
connection. Again, it takes practice to perfect soldering techniques.
One final thought that relates to solder joints as well as to other types of electrical connections is
worth sharing. There is a long-running anecdotal observation that 90 percent of all
electrical/electronic malfunctions are related to connection malfunctions. This makes a lot of a sense
when you think about it. We live in an oxygen-rich atmosphere and oxygen is a great reduction agent;
it wants to oxidize every element it can possibly chemically combine with. Metal oxides are
reasonably good insulators because some of their free electrons have been “taken” up by oxygen
molecules. This leads to higher and higher resistance being built up in a connection that will
eventually cause a failure.
Of course, current flowing through a resistance produces heat, which in turn can cause a fire if the
current is sufficiently high. So what is the solution? One expensive solution is to gold-plate electrical
contact surfaces. Gold does not oxidize and is not subject to this type of failure. It is, of course, very
expensive and not practical for large-scale connectors. Another solution that the power industry
employs is what is known as gastight connections, which require the use of special components and
specialized training to produce. For the type of projects that I work on, I can only ensure that the
solder joints are sound from both a mechanical and an electrical perspective. I also inspect electrical
connections for oxidation and foreign matter and take appropriate action to replace the compromised
connection or component.
Accessing the GPIO Pins
The GPIO pins have to be made programmable in order to blink the LED. Being made programmable
means that the pins are set to either sense an input voltage or set an output voltage. The pins are
accessed by using a high-level name such as pin (18) that you can readily identify—in this case, GPIO
pin number 18. We must use a software library that contains the required high-level abstractions and
hardware associations to enable us to control the GPIO pins with a Python program. This library is
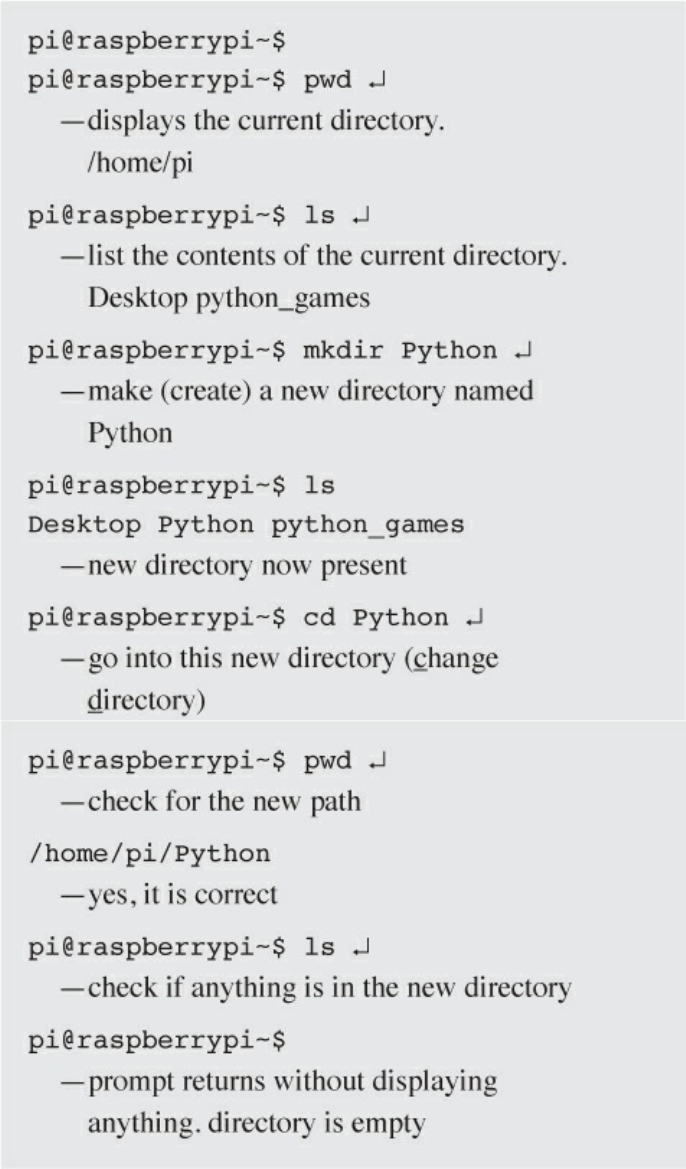
named Rpi.GPIO-0.4.1a.tar.gz and is readily available as a Linux archived file from
http://code.google.com/p/raspberry-gpio-python/downloads/list. Figure 2–4 shows this website.
Figure 2–4 GPIO library download website.
The archived file must be downloaded, extracted, and stored in an appropriate directory. I would
suggest creating a new directory named Python located in the pi parent directory.
Open an LXDE terminal window and type the following commands in the terminal window:
You should now be in your development directory, Python, ready to download the GPIO library
archive. You have several choices on how to download the archive file. You can use a browser on the
RasPi and just do a direct download, or you can use a PC and download it into a thumb drive, which
you then carry over to the RasPi and transfer it using the File Manager app. I choose to do the latter as
the PC download process is much faster. In days of “yore” this approach was called the “sneakernet”.
The archive must now be uncompressed and the contents extracted. Assuming you are still using a
terminal window in the Python directory, type the following:
Ensure that you type in the exact name with uppercase and lowercase letters as shown. Linux is
very picky in this regard and will throw an error message that it cannot find the file if you don’t enter
the name exactly as it appears. The tar app will create a new directory named RPi.GPIO-0.4.1a, where
you will find over a dozen files and directories newly created. Type the following to transfer into this
directory.
Incidentally, I will no longer explicitly show these commands, as you should now be more
comfortable using them. I will instead simply say cd into RPi.GPIO-0.4.1a, and you will instantly
know what I mean.
Let’s test this newfound confidence! ls the RPi.GPIO-0.4.1a directory. You should now be
looking at a list of all the files and subdirectories. One file should pique your interest; it is named
INSTALL.txt. cat this file to read the contents. You could also double click on it to open it in a text
editor, but I am feeling confident that you are starting to get the feel of how to operate quickly and
efficiently at the command-line level, where the pros live. Back to the INSTALL.txt file. It contains
important instructions regarding loading another module required to use the GPIO library. The key
instruction is the following:
Please read the following section before you enter the above command.
apt-get Command
The acronym apt is short for advanced packaging tool. You almost always use the command in the
form of apt-get for instructing the computer to “get” a package of software using the Internet. The
key to making this all work is a list of repositories that apt refers to in order to retrieve the requested
package. The repository list is located at /etc/apt/sources.list in the Linux distribution.
The apt-get command also wants to know what you want done with the software package once it
has been retrieved. That’s the purpose of the install portion of the command. But apt has other neat
features including the ability to update all the packages already installed in the computer. Simply type
the following:
All available updates for installed packages will now be installed. Be patient; this will take a
while, especially if there are many packages involved.
However, that’s not all apt is capable of doing on a “global” scale. You can upgrade all your
installed packages, provided upgrades are available. Type the following:
Upgrades as the name implies are new versions of installed packages. You should always update
prior to upgrading in order to lessen the chance that an inappropriate update will be applied to a newer
version.
There is a great deal of information available on apt at www.debian.org/doc/user-manuals#apt-
howto.
LED Project
I will now show you the LED project that ties together all the information that you have carefully
studied so far . I will create a program to turn on an LED connected to pin 18 using the Pi Plate as a
prototype aid. You will need a little information on how to connect the LED and limit the current
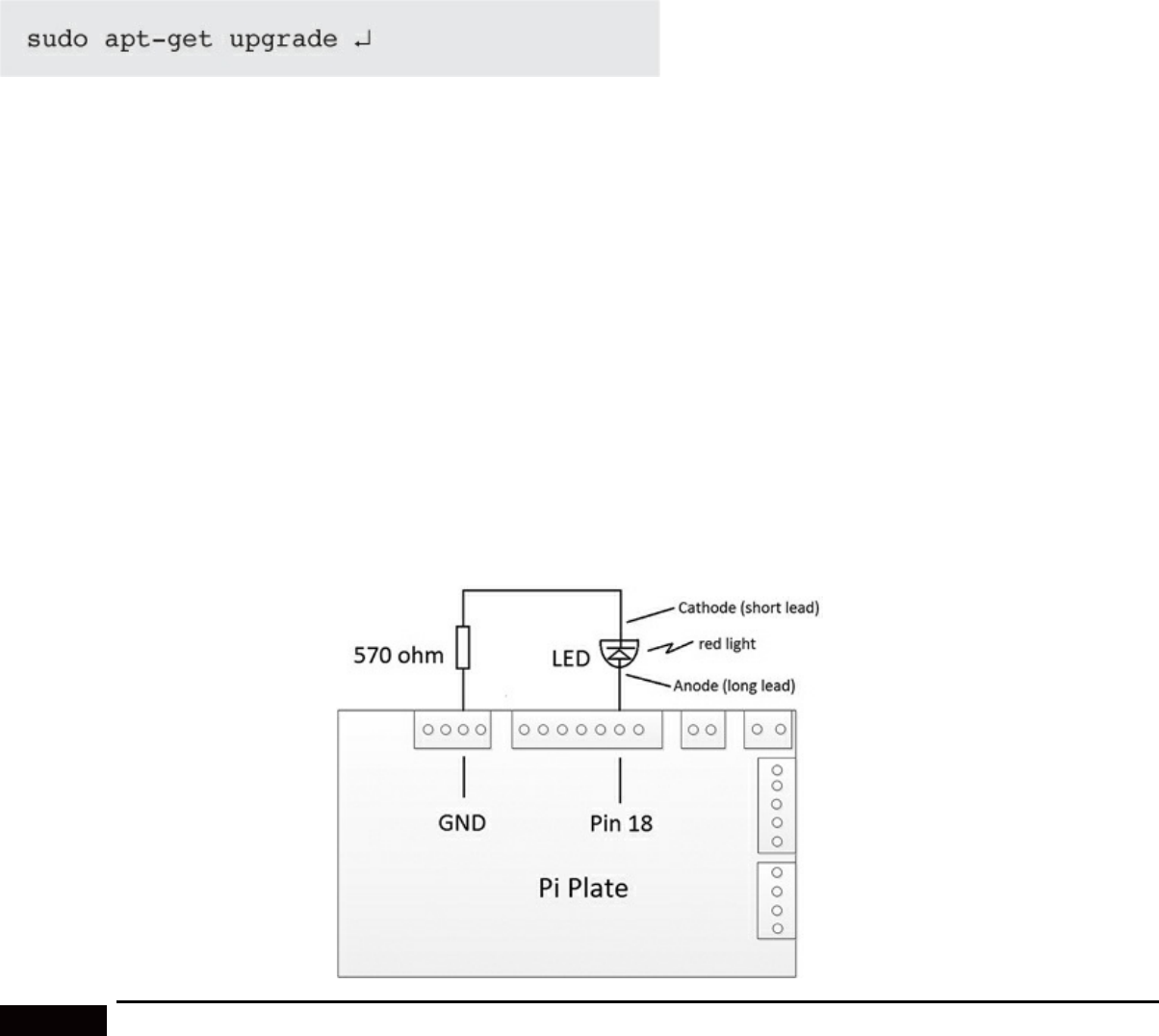
flowing through the device. Figure 2–5 is a diagram showing the LED connections as well some
physical descriptions that should be helpful to you in understanding the circuit.
Figure 2–5 Diagram illustrating LED connection to the Pi Plate.
The LED anode has a longer lead that is connected to the pin 18 screw terminal. The LED’s shorter
lead is the cathode, and it is connected to one lead of the 570-ohm (Ω) resistor. The other resistor lead
is connected to the ground screw terminal. The resistor’s value was calculated as follows:
Current range that a RasPi pin can handle is 2 mA to 16 mA. So, 5 mA was selected as a low- to mid-
range value with just enough current to operate the LED with a dim red light. No sense in
overstressing the RasPi.
The high output voltage from pin 18 is 3.3 V. The LED has a nominal drop of 0.7 V. Therefore, 3.3 –
0.7 or 2.6 V must be dropped with a 5 mA current.
Ohm’s law: R = E/I where R stands for the resistance of a conductor in ohms, E stands for the
potential difference across a conductor in volts, and I stands for the current through a conductor in
amperes . Plugging in the values for E and I, we get 2.6 V/(5 mA ÷ 1000) = 520 Ω resistance. Note
that the 5 mA had to be converted to amperes by dividing by 1000.
570 Ω is the nearest standard value resistor to 520 Ω.
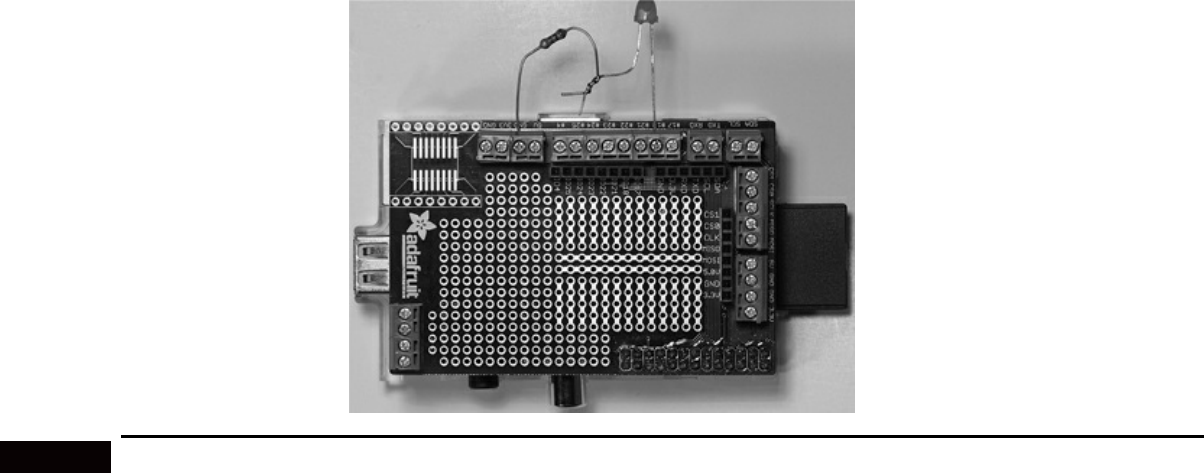
Figure 2–6 shows the actual connections. I simply twisted the cathode lead to a resistor lead and
soldered them to ensure a good connection.
Figure 2–6 Actual LED connection.
Project Software
The program to turn on the LED is very straightforward. You should realize that when the RasPi is
first powered on, all the GPIO pins are set to be in an input state, in other words, they will only sense
or detect voltage not output a voltage. Therefore, we must change the state of the pin selected to be an
output and then apply a high voltage to the pin. This is the fundamental logic behind the program.
Here is the program to be created using the nano editor. Comments are placed above each line to
inform you what the following line is doing. Comments begin with the # symbol. All comments are
ignored by the Python interpreter:

That’s it, just three lines of code not counting the import statement that is really part of the
program initialization. You should create the code in the nano editor and save it with a name that
makes sense. I saved mine as Pin18_Test.py. Remember to use the .py suffix, since IDLE checks it to
ensure that it is a valid Python program.
You need to open and run this program in the Python shell. However, there is an important action
that you need to take or Python will complain and not run the program. You must run IDLE at the root
level, not at a “normal” user level. This is needed, I believe, because the GPIO library is accessing
Linux functions or resources that can only be accessed as root. Do the following to run the IDLE
Linux shell as root:
Open a terminal window and type:
That is all that’s needed, and you will be at the exact place where you can open and run your
program, as discussed in a previous section. Running the program will turn on the LED; not very
exciting so far, as our journey begins with small steps. The next section shows you how to blink the
LED.
Blinking the LED
A variety of approaches can be taken to blink the LED. The approach I took was simple and direct.
The logic was to turn on the LED; wait a set amount of time; turn off the LED; wait a set amount of
time; and then continually repeat this process forever.
Waiting a set amount of time may be accomplished in several ways. The way I selected was to use
a function named sleep(seconds) that is part of the time library. All you need do is provide the
amount of time, in seconds, that you want the RasPi to do nothing—essentially spinning its wheels.
The seconds argument, the value put in the parenthesis, is a real number, i.e., one with a decimal
point. I used .5 second for my initial program. The modified program, with comments, is shown

below.
While you can make the modifications to the original program using the nano editor, I found it
more convenient to use the shell editor, which displays the program when you first open it. This editor
will allow you to save the program with the original or a new name.
There are a few items in the program that should be explained. The time library is accessed by
using the import statement, the same way the GPIO library was accessed.
The looping behavior is imposed by two things; First, I used what is known as a conditional
statement, while True. The while portion of this statement checks what immediately follows it, and
if the expression evaluates to a logical True, will loop or repeat all statements below the conditional
that are indented at least four spaces. The logical value of True that follows the while statement thus
causes the looping to continue forever.
Pausing the program is a result of calling or invoking the sleep function, a part of the time
library. The actual call is the statement time.sleep(.5). This is not the first time you have seen this
call type; I used it several times in the original program, i.e., GPIO. setup(18, GPIO.OUT). The
period in the statements represents a special operator known as the “member of” operator. Restating
the time. sleep(.5) call with this operator translates to “call the sleep function that is a member of
the time library with an argument of .5.” Don’t worry if this discussion is somewhat confusing; all I
am trying to do is to gently introduce you to the concept of object-oriented programming, something
that I will pursue in later chapters.
Now back to the Blinker program. Make the modifications to the original program and then run it.
You should be rewarded with a blinking LED for all your efforts. Congratulations! Show all your
family and friends!
Summary
I started this chapter with a discussion on the Pi Plate prototype plate that serves as an excellent
project experimental platform. Next, I briefly mentioned some good soldering tips that have helped
me over the years. Next, there was the discussion regarding the GPIO library that may have
overwhelmed some of you a bit, but that was necessary in order to set the stage for the LED project.
The good news is that we will simply use the GPIO library from this point on in various projects.
That’s software reuse at its best. The last sections of this chapter focused on a real world project of
first turning on an LED and then blinking that same LED.
Now we move on to bigger, better, and more interesting projects. And yes, you will still learn and
gather a good education as you progress through the remaining projects.
CHAPTER 3
MP3 Player Project
In this project, I will show you how to create a fairly simple, yet fully functional, MP3 audio player.
I will also describe how to use the GPIO pins as inputs, which will allow the player to use some
hardware push-button switches to select the MP3 songs it will play.
We will also explore the Advanced Linux Sound Architecture (ALSA) software package that drives
the Linux sound production and provides some utilities essential to helping us complete this project.
Prototype Connector
Let’s first focus on a piece of hardware that I will use to connect the project hardware switches with
the RasPi’s GPIO pins. This prototype aid is different from the Pi Plate introduced in the last chapter.
Called the Pi Cobbler, it is shown in Fig. 3–1 without the interface ribbon connector in order to show
all the pins clearly.
Figure 3–1 Pi Cobbler prototype connector.
Really just a direct extension of, or a breakout kit for, the GPIO connector, it allows all the pins to
be connected to a solderless breadboard. It is available as a kit from a variety of sources, including
Adafruit at www.adafruit.com/products/914. A fully assembled Pi Cobbler mounted on a breadboard
and connected to a RasPi is shown in Fig. 3–2.
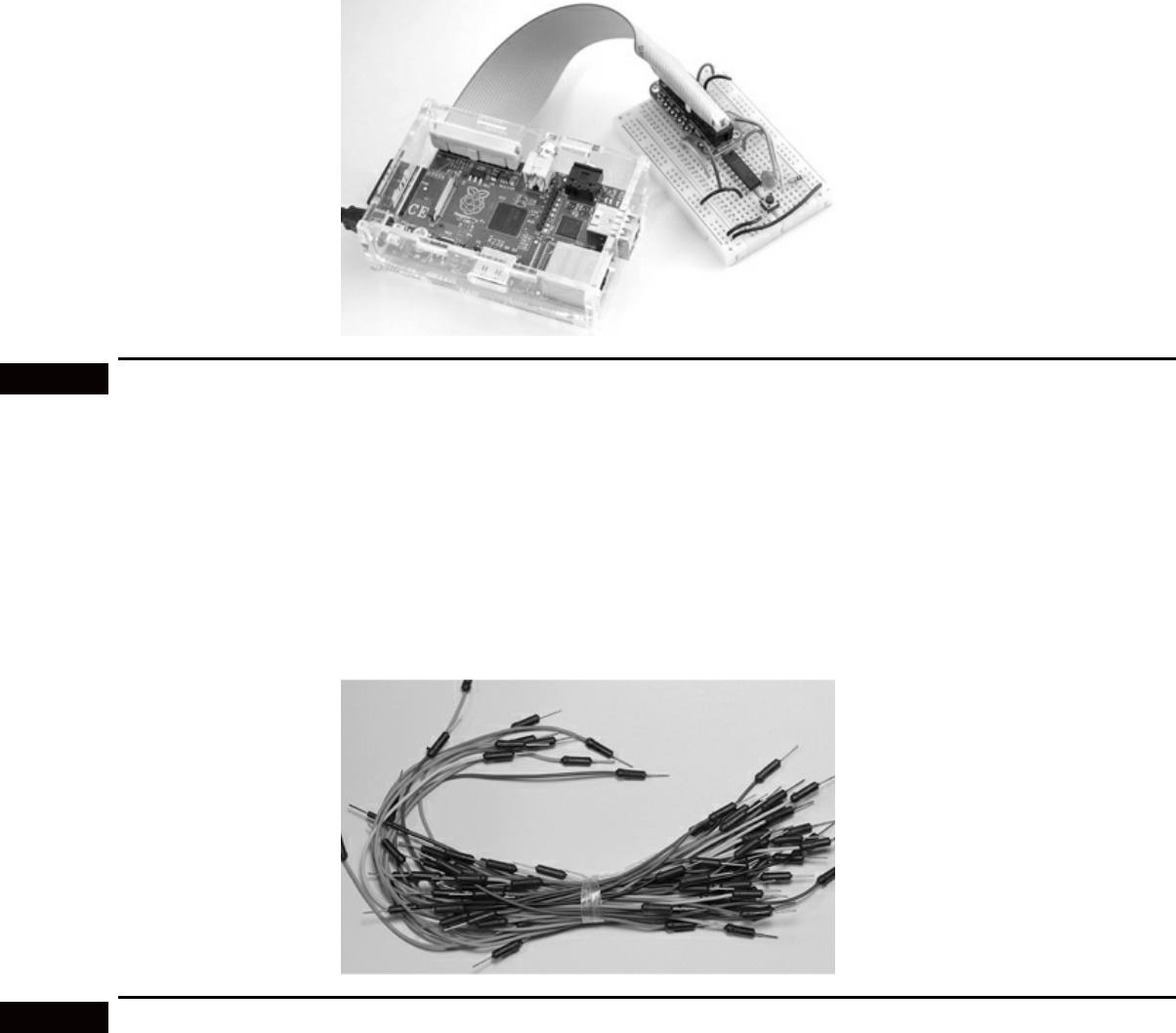
Figure 3–2 Pi Cobbler on a solderless breadboard connected to a Raspberry Pi.
Using the Pi Cobbler along with the breadboard will allow for rapid project construction and easy
modifications to the existing project. It will help you to have a variety of prestripped wire available to
use with the breadboard. You can either make your own using 22-gauge, solid pickup wire or purchase
a package from your favorite electronics components supplier. Figure 3–3 shows a package that I
bought for the book projects. These wires are actually stranded for flexibility and are also terminated
with a solid, insulated pin connection. It is well worth the cost to buy a kit of these wires.
Figure 3–3 High-quality breadboard interconnect wires.
Portable Stereo Speaker
You will need a way to listen to the MP3 recordings. I use the very small and inexpensive stereo
speaker device, the Veho360 (www.veho-uk.com) that is shown in Fig. 3–4.

Figure 3–4 Veho360 speaker.
This device has a 3.5-mm jack that you can plug into the RasPi audio-out connector. It also has a
rechargeable battery that can be recharged by plugging it into any standard USB socket. However, I
would not recommend using the RasPi USB sockets due to the current limitations that I discussed in
Chap. 1. The volume control on the speaker will allow you to adjust the volume in only two steps. All
in all, this powered speaker is fairly decent in reproducing audio; however, I would not get rid of my
home theater system for it.
ALSA
Advanced Linux Sound Architecture (ALSA) is the principal sound driver that is used in most of the
RasPi Linux distributions. It is very stable software that has been widely adopted for use in various
Linux distributions. It is totally open source and is strongly supported at www.alsa-project.org. The
eight packages that currently make up ALSA and a brief descriptions of each are listed in Table 3–1.
Table 3–1 ALSA Packages
Although the ALSA drivers should be preinstalled with the distribution, you should execute the
following command in a terminal window to ensure that the drivers are in place:
The app modprobe loads Loadable Kernel Modules (LKM), which, in this case, is the ALSA
compliant sound driver, snd-bcm2835. You should also check a file named modules located in the /etc

directory for the presence of a snd-bcm2835 item. This file is checked at boot time for all the LKMs
that are to be loaded.
You also need to install the alsa-utils package as that contains several apps that are important to
get our project working. The installation uses the aptget command that was discussed in Chap. 1.
Type the following command in a terminal window:
One more step is required to ensure that sound is produced at the analog audio jack. Type the
following in a terminal window:
The app amixer is part of the alsa-utils package that allows us to select the desired audio output
connector. The HDMI is the default audio output device when the RasPi is first booted. The audio
output is redirected using the above command. The number at the end of the above command line
represents the following:
0—auto
1—analog
2—HDMI
Testing the Analog Audio
Now, it is time to test the audio from the RasPi. Connect a powered speaker to the 3.5-mm jack and
type the following in a terminal window:
You should now be hearing a rushing noise from the speaker. This is a pink-noise signal being
created by the speaker-test app that is part of the ALSA package. (For a more detailed explanation of
pink noise, see the following section on Analog Audio Frequency Response.) If you do not hear this
noise, review the commands listed above and ensure that they were entered as shown. The speaker-test
app has many more options than just producing a noise output. Go to
http://manpages.ubuntu.com/manpages/natty/man1/speaker-test.1.html for more information.
Analog Audio Frequency Response
Having a pink noise output provides an unexpected opportunity to measure the frequency response of
the RasPi analog audio system. I have had many years of experience as an acoustical engineer, and to
me, this seemed a natural opportunity to assess the acoustic performance with this particular
subsystem. First, let us delve into a bit of background information regarding pink noise and why it is
so useful in determining a system’s frequency response. Noise, by its intrinsic nature is random, with
energy spread uniformly across the observed frequency spectrum or bandwidth. This type of noise is
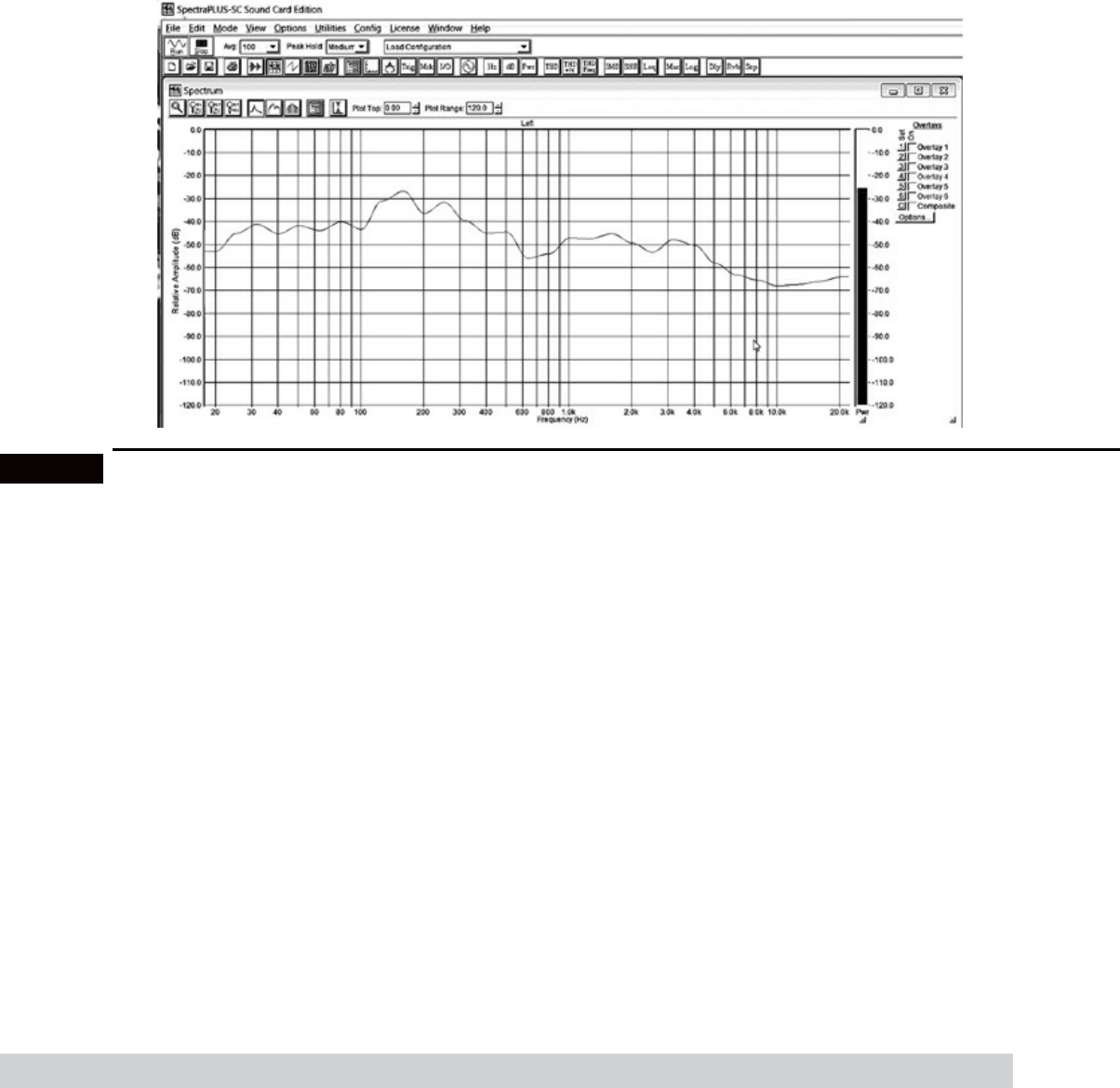
also called white noise to point out the uniformity of the energy.
Frequency analysis for acoustical systems typically uses a set of filters known as one-third octaves
that simulate to some extent the response of the human ear. This means that the filters are narrower at
lower frequencies and become wider as the frequency increases. Applying white noise to this filter
bank would result in an upward or positive sloped response. White noise is prefiltered (or predistorted
if you may) such that the conditioned noise signal that comes out of the one-third-octave filters is a
flat response. Any deviation from a flat response would, therefore, be caused by the system under test,
not the applied noise signal. This preconditioned noise is called pink noise.
Figure 3–5 is a screenshot of an acoustical analysis program measuring the analog audio output
producing pink noise from the speaker-test app.
Figure 3–5 Raspberry Pi one-third-octave acoustic analysis.
The audio output is far from being flat as you can see from the irregular curve. The good news is
the magnitude of these curves is not so severe as to appreciably distort the audio. Audio purists would
probably use a multiband equalizer to compensate for these response deviations.
Audio File Formats
A brief discussion of the audio file formats will help you understand the pros and cons of using
different formats when creating audio apps. There are three broad categories for audio file formats:
1. Uncompressed—An uncompressed storage uses the most storage of any format.
2. Lossless compression—Skips silent portions; stores audio content.
3. Lossy compression—Compresses everything; introduces a little distortion.
Table 3–2 lists some representative formats from each of these categories
Table 3–2 Audio File Formats

Table 3–2 Audio File Formats
WAV versus MP3 Formats
I will further discuss these formats, since the project uses the MP3 format. However, I have also
included a simple demonstration of the RasPi playing a Waveform Audio File Format (WAV) file. The
WAV format provides the truest reproduction of the original audio content as is possible using digital
technology. The source content is sampled at a high rate using a sufficiently large number to precisely
record the amplitude of the digital sample. High sample rates and large data-storage numbers mean
very large storage requirements. For instance, a three-minute symphonic musical score might take 30
MBs of storage. In comparison, an MP3 format of the same content might take about 2 MBs, a 15:1
compression ratio. Of course, the trade-off is the quality of the music reproduction. Most people find
the MP3 format acceptable, especially if reproduced on a device, such as a smartphone or tablet
computer. Furthermore, the RasPi audio reproduction is not the finest as previously discussed.
Playing a WAV File
It is quite easy to play a WAV file if you use another app contained in the alsa-utils package. This app
is named aplay, and all you need do is call the app along with the name of the WAV file to be played.
I have placed public domain WAV and MP3 files named class.wav and class.mp3 onto this book’s
website, www.mhprofessional.com/raspi. Please download them into the pi directory. You will use
class.mp3 in the next section.
Now, open a terminal window and type:
Ensure that your powered speaker is attached to the analog audio jack and that the jack is selected
per the amixer command line shown on page 33. You should now be hearing the beautiful sounds of a
Bach fugue. The musical score lasts for about 2.5 minutes. It can be stopped at any time by pressing
^c.
The MP3 version of the same music file is approximately 1.2 MB as compared to the WAV file
that is over 25 MB in size. You will have an opportunity to play the MP3 version in the next section
after I introduce you to a software MP3 player. That should give you an excellent opportunity to
compare the sound quality of the uncompressed WAV versus the lossy compressed MP3.
Playing an MP3 File
There are many Linux-compatible apps available to play MP3 files. I have selected a file named
mpg123, as it is very stable and is easily controlled from a command line, which is what we need for
our RasPi MP3 player. Use apt-get to load this app as follows:
NOTE There is a clone of mpg123 available on the web named mpg321. I am sure that it works just
fine; however, I prefer to stay with the original.
Now type this to play the MP3 file that you downloaded:
The MP3 will play for precisely the same amount of time as the WAV version and can be stopped
at any time by pressing ^c, as was the case for the aplay app.
I could not detect any appreciable difference between the two formats, but you may; and it might
also be fun to invite friends and family to see if they can detect differences between the audio file
formats.
mpg123 is also known as a console player app, since you interact with it by using the keyboard and
observing the app output on a terminal window. This is exactly what we need to create a RasPi-
controlled MP3 player. It is important to see what terminal controls are available and what their
respective functions are. This is easily accomplished by pressing the h key while the app is running.
Figure 3–6 shows the result of pressing this key while an MP3 was playing.


Incidentally, it is very easy to play all the MP3s in a directory by typing the following:
The v in the command line will provide a verbose output and the C puts the app into a full control
mode where all the terminal control keys are made operational. The * in the command line is a wild
card commanding the app to play all the MP3s it can find in the current directory. When all is said and
done, this is a very powerful but fairly simple MP3 player app that will suit our purposes quite well.
All we need now are some switches to select the songs and some Python code to automate it all.
Hardware Switch Inputs
Let’s take a break from the all the software discussions and focus on how to connect hardware
switches to the RasPi and how to respond when a user depresses a switch. Recall from Chap. 2 that all
GPIO connectors can be set into either an input or output mode. For the LED blinker, I set a pin 18 as
an output. In this section, I will set pin 12 as an input and leave 18 as an output. The goal is to have the
LED connected to the pin 18 light when a switch connected to pin 12 is pressed. I will be using the
3.3-V power supply to trigger pin 12; however, it is worth repeating the warning made in Chap. 1.
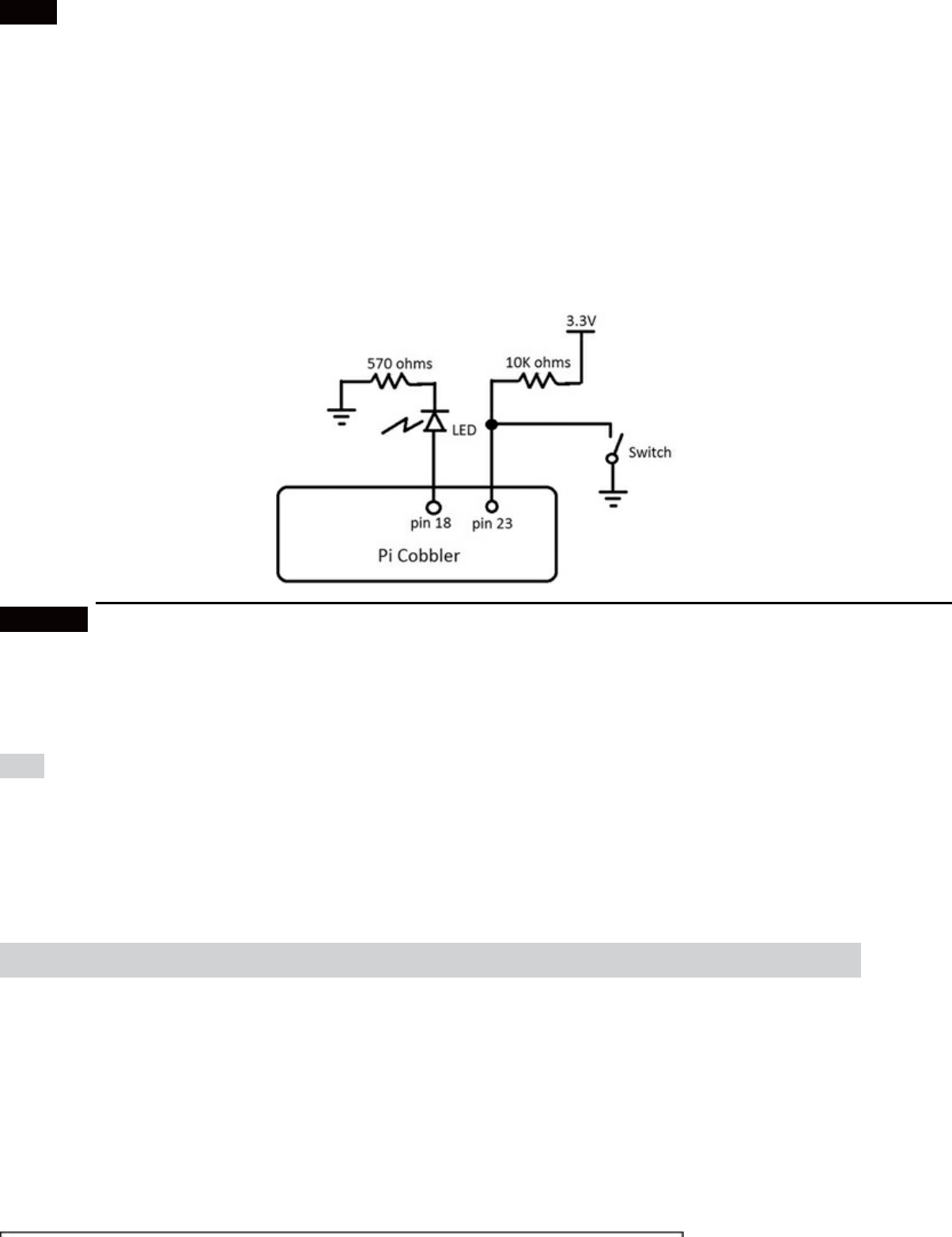
Caution All GPIO voltage levels are 3.3 V and are not 5 V tolerant. There is no overvoltage
protection incorporated on the RasPi; and if you inadvertently subject a GPIO pin to 5
V, you will wreck your RasPi.
There is 5 V present on the Pi Cobbler, and it is not too difficult to inadvertently connect to that
power supply instead of the 3.3-V power supply. Just be extra careful and recheck your connections
twice before powering up.
Use the schematic in Fig. 3–7 as a guide to connecting the LED, the switch, and the associated
resistors that make up the test circuit. Use a solderless breadboard, as it readily accommodates the Pi
Cobbler and other components.
Figure 3–7 Test circuit for switch input.
Here is the Python code that will run this little circuit. This program is available on the book’s
website as Test_Switch.py.
NOTE There are two equal signs required to do a comparison, i.e., GPIO.input(23) == False. If
you make a mistake and put only one, it will become an assignment statement, which may
or may not be evaluated to a logical state. An erroneous statement, GPIO. input(23) =
False, would likely evaluate to False, since you cannot programmatically set an input. In
any case, the program will run, but not operate as expected. This is called a logical error
and is a common occurrence with beginning programming students.
Test_Switch.py
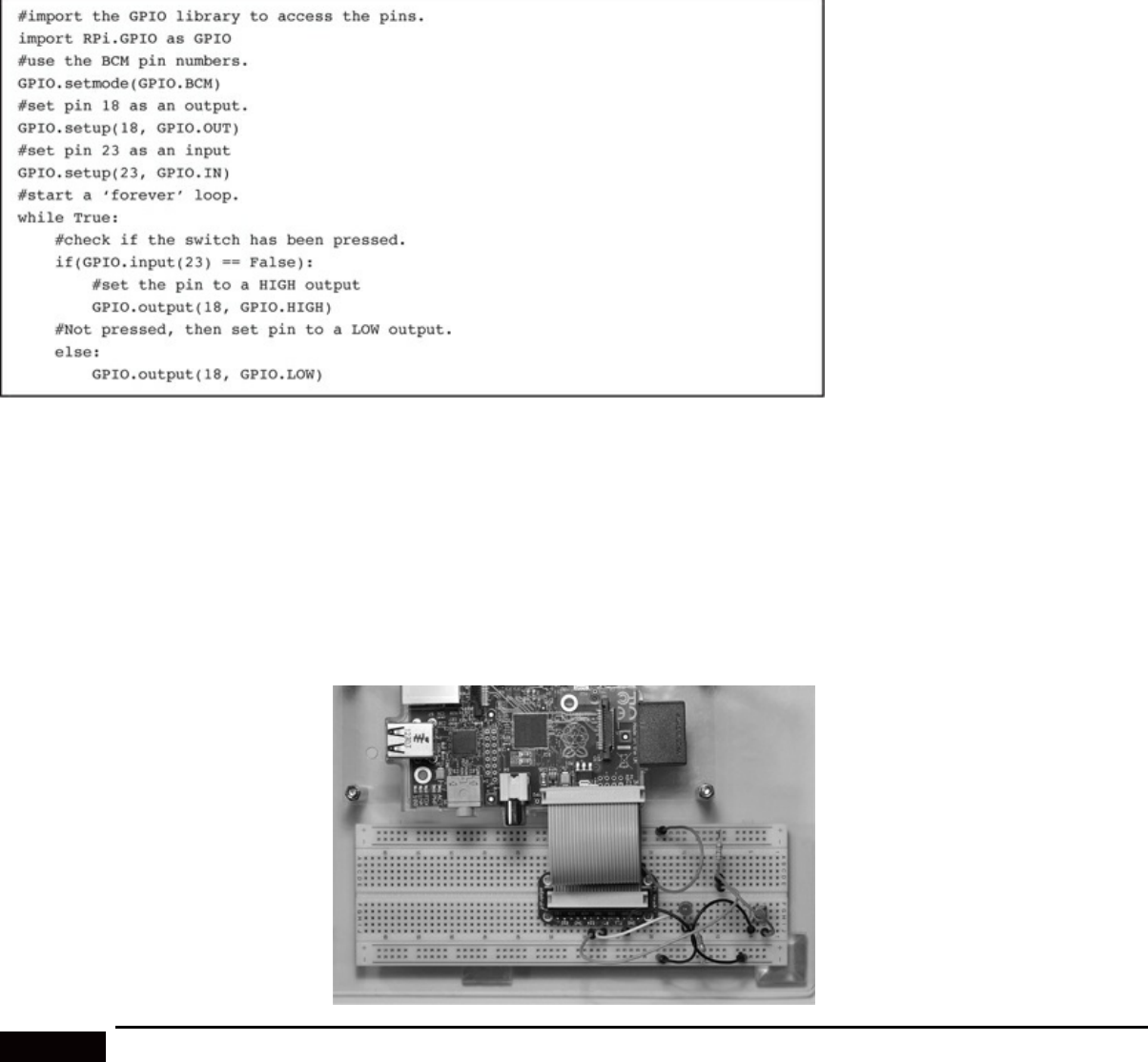
I have used an if/else conditional statement in this program that checks if pin 23 is LOW or
False, and if so, will set pin 18 to GPIO.HIGH. Otherwise, the conditional statement will go directly to
the else portion where pin 18 is set to GPIO.LOW.
Run the program and observe that each time you press the switch the LED light turns on and
continues to stay lit as long as the switch is pressed. Figure 3–8 shows the actual circuit on the
breadboard with the RasPi connected with the flat ribbon cable to the Pi Cobbler.
Figure 3–8 Actual switch test setup.
Thinking in RasPi Time
You must always think about the operational speed of the RasPi when creating a new program. The
while loop in this program repeats over a million times a second, meaning that all the commands in
the loop are constantly being repeated. That’s the reason why I used an if/else conditional test
statement to repeatedly set the pin value HIGH so that it matches the duration of the key press. If I had
neglected to add the else portion, the first time the button was pressed, it would have lit the LED, but
it would have remained on. Try deleting the else portion to confirm this behavior. But why does it
stay on?
The answer is simple: without the else portion, there is no command to turn it off. The pin
becomes latched so that it remains in the last state it was commanded to be in. That’s what I mean by
thinking in RasPi time. I have found that it is possible for new (and sometimes, not-so-new)
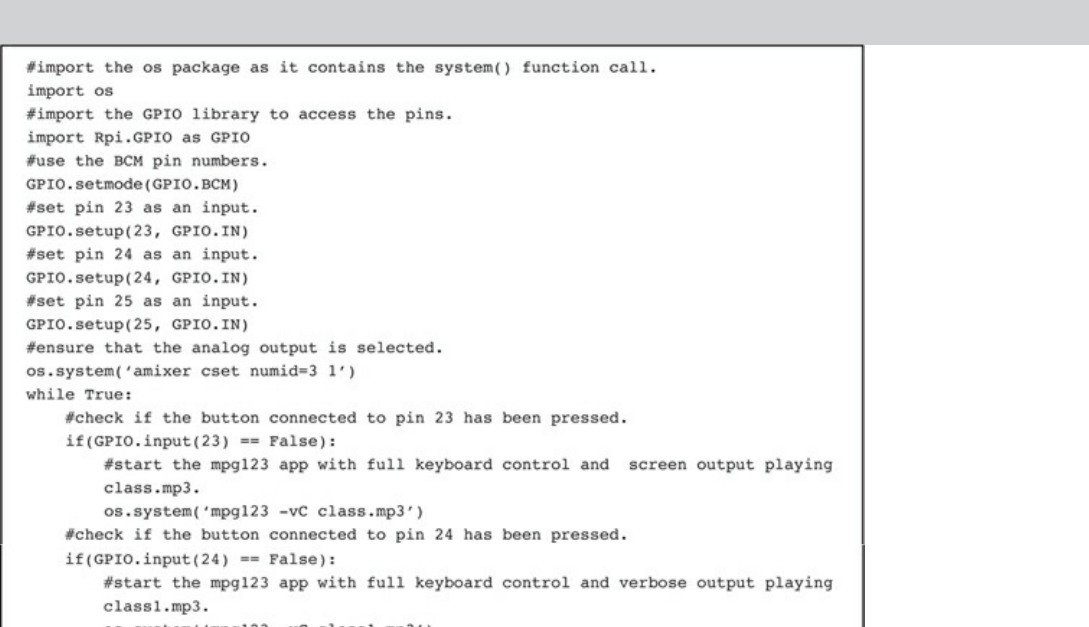
microprocessor programmers to become very confused regarding this real-time aspect of
programming. Controlling actual hardware can be a challenge. I will attempt to point out these
challenging program areas in the book projects to help avoid confusion on your part.
MP3 Project Requirements
The first step in any project is to specify the requirements that must be met to satisfy the project user.
In this case, the project requirements are rather simple. They are listed below:
Use the mpg123 app as the MP3 player
Play selected MP3 files (tracks) stored in a preset directory
Use the computer monitor to display file (track) data
Use the 3.5-mm analog audio jack for output
Use the keyboard to enter commands to control the mpg123 app while it is playing a song
Use one of three push buttons to play a preselected song
It is a straightforward process to build this project, as most of the component parts and software
have already been discussed.
Writing the Program
The key issue is to start the mpg123 app from a Python program with all the needed arguments.
Fortunately, Python provides a function named system() that allows us to do this quite easily. And, it
is part of the OS package. The following Python program I created is named MP3_Player. py, and it is
available for download from the book’s website.
MP3_Player.py

MP3 Player Schematic
All the pin and switch connections are shown in Fig. 3–9. You can simply add on the two additional
push-button switches and resistors to the existing circuit that was built according to Fig. 3–7. You can
also leave the LED connected, if you so desire, as it will not be incorporated into this circuit.
Figure 3–9 MP3 player circuit.
Figure 3–10 shows the actual circuit on the breadboard with the RasPi connected via the flat
ribbon cable to the Pi Cobbler and the Veho360 connected to the analog output jack. The three push
buttons that select one of three MP3 songs are placed on the right side of the solderless breadboard.
Figure 3–10 Actual MP3 player.
Testing the Project
Load the MP3_Player.py program into the pi directory. Then open a terminal window and type:
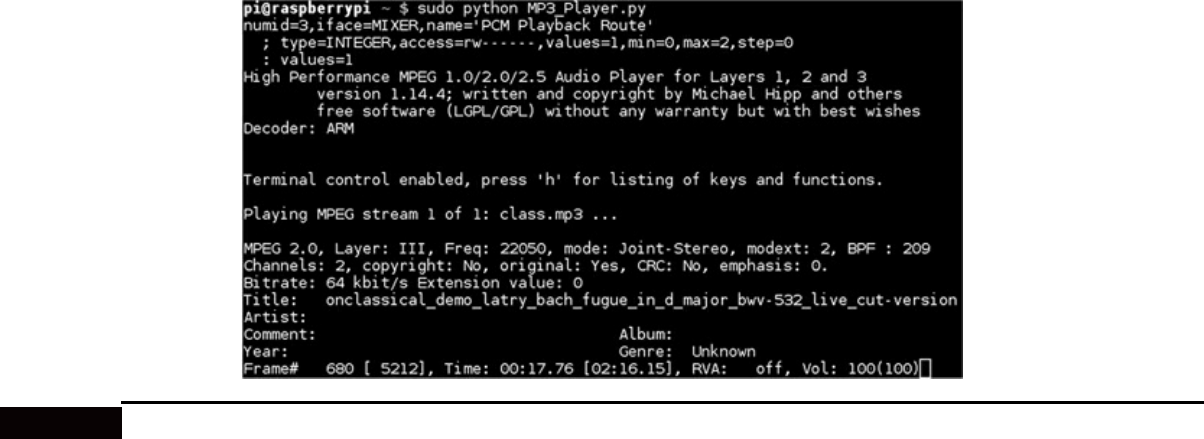
I found that trying to use a Python IDLE shell to run this program might cause unreliable operation
because the mpg123 app requires a direct keyboard input that the shell may interrupt. All the keyboard
commands shown in Table 3–3 are available for use once the program is started. You should
experiment with the various commands to gain an appreciation of the depth of functionality that the
mpg123 app possesses.
Figure 3–11 is a screenshot showing an MP3 player in operation. Its Moving Picture Experts
Group (MPEG) header tag information and the runtime data are shown on the last line in the figure.
Figure 3–11 An MP3 playing.
Project Expansion
I have shown you a basic MP3 player that can be expanded in a variety of ways to meet future
requirements. The display could be changed from a standard monitor to a multiple line serial liquid
crystal display (LCD). For now, it is sufficient to focus on the simpler aspects of using the RasPi for
project control.
Another aspect that you might have wondered about is the use of a separate push button dedicated
to a specific function, such as skip to the next track. Right now, you simply press the f key to do this.
Incorporating a unique button capability entails a lot of software rework because the mpg123 app
expects control key input from what is logically known as the stdin or standard input device, i.e., the
keyboard. Changing or paralleling the input device is not a trivial change, so I felt it was not suitable
to include it in a beginning project book.
Adding MP3 songs to be played is rather easy; as all you need to do is copy them into the default
directory using the RasPi’s USB port. The program does have to be changed to reflect the new song
names. However, the program can be modified to list all the MP3 songs in the directory so that you
can select the ones to be played, which is the essence of a play list.
Of course, you can connect a battery to power the RasPi that will make it completely portable,
assuming you are using an LCD-type display for user interaction.
Summary
I started this chapter with a discussion of the Pi Cobbler prototyping aide, which is an invaluable tool
that allows us to experiment with most of the GPIO pins that are available on the RasPi.
The Linux ALSA system discussion showed you how sound is handled by the RasPi OS. You must
install ALSA in order to use the mpg123 app that forms the basis for the MP3 player project. I also
introduced you to the principal audio file formats, including the MP3 format that is used to encode the
music played in the project. There was also a brief detour to discuss the RasPi’s audio frequency
response using a pink-noise stimulus.
I then showed you how to use push-button switches to signal the RasPi, using GPIO pins as inputs.
These switches were also used as part of the MP3 player project.
We went through a thorough discussion of the mpg123 MP3 app including a detailed list of all the
controls available for use with this versatile app.
I finished with a brief discussion on how to expand the MP3 player so that it might more readily
resemble a modern portable player.

CHAPTER 4
Camera Controller
In this chapter, I will show you how to build a camera controller by using the RasPi with several
auxiliary modules that will act as trigger sources. The controller will allow you to trigger a digital
camera and/or an electronic flash if they are inherently capable of being remotely controlled. It will
also enable you to take some very interesting pictures including stop-action photos.
The following three figures illustrate one simple experiment that demonstrates the controller’s
stop-action effect. I made a flag object out of black and white duct tape onto which I printed the
numbers 1 and 2. I attached this “flag” to a nail that I inserted into a portable drill chuck. Figure 1
shows the drill chuck with the flag at rest.
Figure 4–1 Flag at rest.
Next, I started the drill and had it rotating at approximately 500 revolutions per minute (r/min).
Figure 4–2 is a normal photograph taken with my usual studio lights and without an electronic flash.
This figure mimics what the human eye perceives in that both numbers are visible because I used a
slow shutter speed.

Figure 4–2 Flag rotating at 500 r/min.
Figure 4–3 is a picture taken with the electronic flash and a slow shutter speed in a darkened room.
You can clearly see the number 2 visible and not blurred, even though it was rotating at 500 r/min or
almost 10 times per second.
Figure 4–3 Flag captured in a stop-action photo.
The controller will assist you in making similar stop-action pictures as well as many other effects
that you may want to accomplish.
Project Requirements
I will start this project by listing the requirements that the controller system should meet. These have
been simplified to make the controller compatible with a wide variety of cameras and electronic flash
units. In order to take full advantage of all the system functions, you will need a camera that is
capable of being remotely triggered. The controller system requirements are shown in Table 4–1.
Table 4–1 Camera Controller Requirements
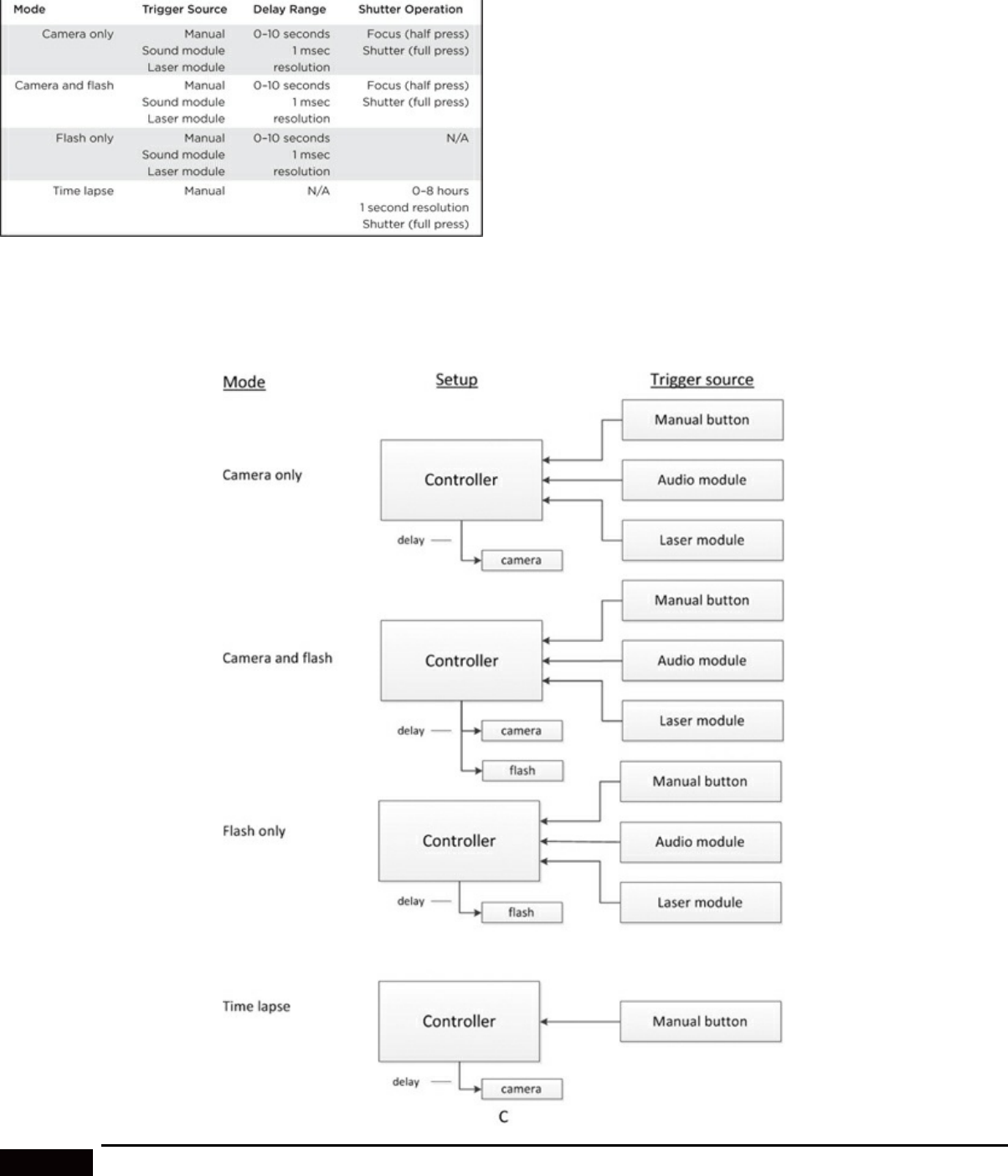

understand the interface between the RasPi and the camera. Modern DSLRs, such as the Canon 40D
that I am using in this project, have a multifunction shutter control. The camera will autofocus when
the shutter button is depressed halfway and operate the shutter with a full press. Figure 4–5 shows the
interface connector that has both the focus and shutter-control pins along with the common or ground
pin. There is 3.3 V present on both the focus and control pins, and connecting either pin to ground
completes the circuit and causes its corresponding action (focus or control) to be actuated.
Figure 4–5 Canon 40D shutter-control connector.
A special plug has to be used with this connector. I cannibalized a commercial, inexpensive,
remote shutter control in order to have a plug for this project. Figure 4–6 shows this plug with a
molded cable.
Figure 4–6 Canon shutter-control plug and cable.
You can go to the website www.doc-diy.net/photo/remote_pinout/to look up your camera’s
shutter-control pin layout and matching connector. Some of the newest DSLRs are using a standard
3.5-mm stereo jack that will make the interface connection much easier.
Do not despair if you do not have a camera capable of being remotely controlled. Simply use the
sound or light-activated functions to trigger an electronic flash with your point-and-shoot camera set

to a long exposure in a darkened room. The flash will illuminate the subject sufficiently to enable you
to do stop-action photography. You will have to experiment with different exposure times to get the
desired result, but you do have the basic equipment to be successful.
DSLR owners will learn how to activate the focus and shutter controls in the optoisolator section
after reading the electronic flash discussions, which are next.
Electronic Flash
The electronic flash, or strobe, is the unit that produces a very bright light for a very brief instant in
time. It is used to sufficiently illuminate a photographic subject where ambient light is too low in
intensity or not suitable for the subject. The electronic flash replaced the one-time-use flash bulb
many years ago and is now almost universally used in modern photography. Most digital cameras,
from one-steps to DSLRs, have a built-in flash unit that automatically activates based upon the
lighting conditions that the camera sensor detects. While this arrangement may suit most users, for
this project, we cannot make use of the built-in unit but instead must rely on an external electronic
flash that can be remotely triggered. Figure 4–7 shows the Canon 420EX electronic flash that I will
use in this project. It is several years old and has been replaced by the model 430EX. For our purposes,
however, the differences between the models are not significant.
Figure 4–7 Canon model 420EX electronic flash.
The 420EX is designed to mount into the camera’s hot-shoe connection that provides the shutter
activation as well as a series of data interconnections. The data flow between the flash and the camera
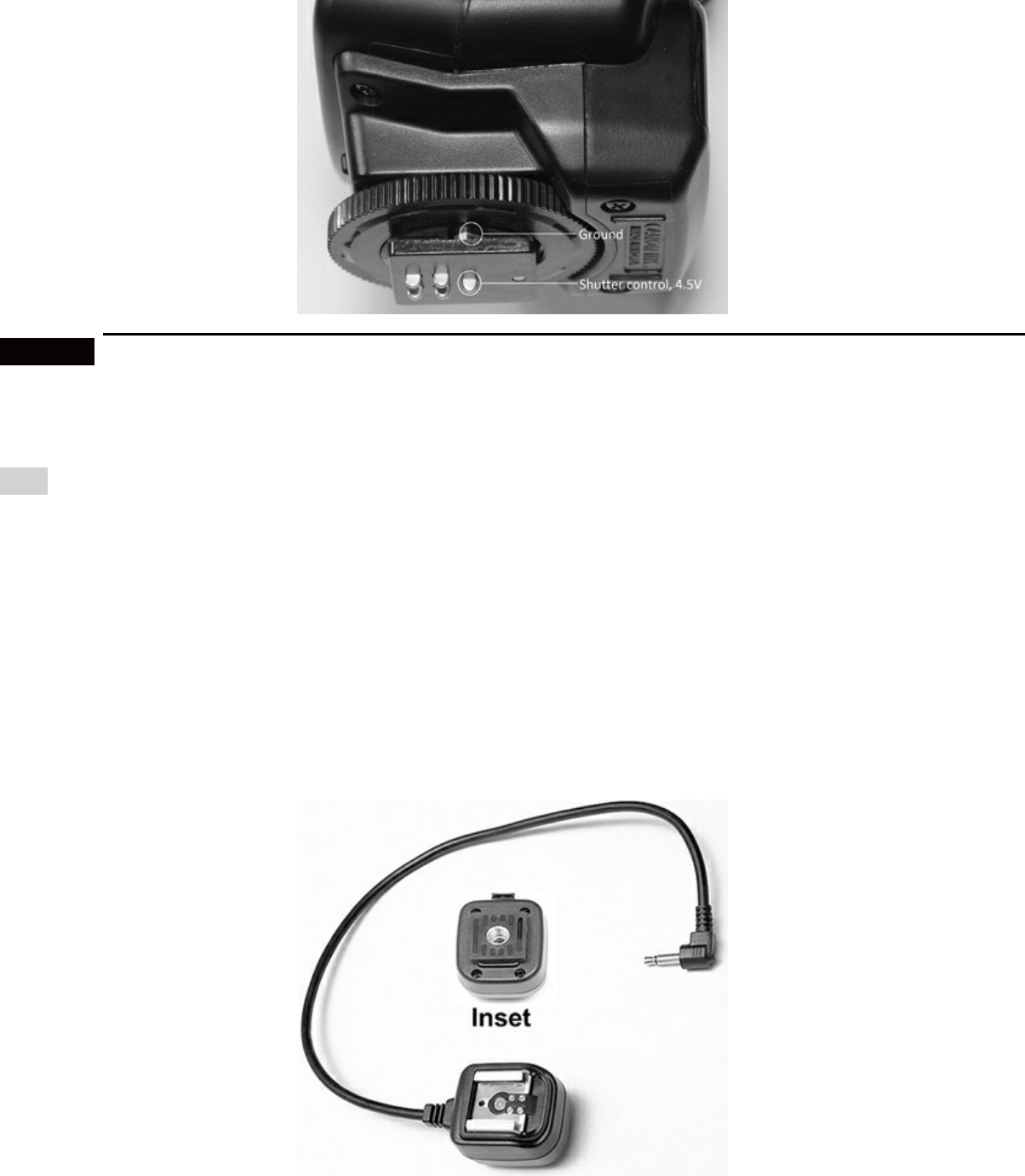
is not relevant to the project, as the flash will not be mounted on the hot shoe. However, it is important
to point out the control connections that will be used to trigger the flash. These are detailed in Fig. 4–
8.
Figure 4–8 Flash hot-shoe connections.
The flash will fire when the shutter-control pin is connected to the ground pin.
NOTE I used the descriptor, shutter control, to emphasize that the flash is fired only when the
camera shutter operates. This pin obviously triggers the flash itself.
The ground pin, in actuality, consists of two spring-loaded, cam-shaped pins located on either side
of the inner slides for the hot shoe. These make contact with the camera’s metal hot shoe. There are
five spring-loaded pins shown on the bottom of the hot shoe. As mentioned earlier, we are only
concerned with the center pin. The other four pins visible to the left of the center pin are data
connections that are not used in this project. I also used an inexpensive, commercially available hot-
shoe adapter to bring out both the shutter-control and the ground connections. This adapter is shown in
Fig. 4–9.

Figure 4–9 Hot-shoe adapter.
The adapter brings out the connections to a 3.5-mm plug that can be inserted into a standard mono
jack. The adapter also incorporates a standard tripod mount, as shown in the figure inset. This makes it
simple to mount the flash in any position as needed.
Electronic Flash Control Voltages
You may have noticed that I put the 4.5-V control voltage in the Fig. 4–8 pin description. This is a
typical voltage found on Canon electronic flash units, and it is quite compatible with this project’s
interface circuits. However, older electronic flash units may have significantly higher voltages present
on the control pin. These may range up to several hundred volts.
CAUTION Connecting an electronic flash with more than 24 V on the trigger contact to the project
interface circuit will destroy the interface and may cause further damage to the RasPi.
Modern electronic flash units are expected to conform to ISO Standard 10330:2002 entitled
“Photography—Synchronizers, ignition circuits and connectors for cameras and photoflash units—
Electrical characteristics and test methods.” One portion of the standard requires that trigger voltages
not exceed 24 V max. Canon has designed their units to operate at less than 6 V, and Nikon at less than
12 V. Older units were not designed to the standard and could conceivably have hundreds of volts
exposed that would not only destroy the interface but also present a personal shock hazard. To check
flash voltages for your electronic flash, go to the following excellent website:
www.botzilla.com/photo/strobeVolts.html.
I do discuss a possible solution for using an older flash unit in the next section on the optoisolator
interfaces. However, my earnest suggestion would be: Do not use an old flash, but instead invest in a
modern unit. Many of these are available at quite reasonable prices.
Optoisolator Interfaces
An optoisolator combines a light source with a photosensitive transistor to create a photonic coupler.
This type of isolator achieves electrical isolation between two electrical circuits that may have a
significant voltage difference present. Figure 4–10 shows a physical schematic for the NTE3041
optoisolater that is used in this project. It is in a six-pin dual in-line package (DIP) form with a
gallium-arsenide infrared LED as a light source and a silicon NPN phototransistor as the light
receiver.
Figure 4–10 NTE3041 optoisolator.
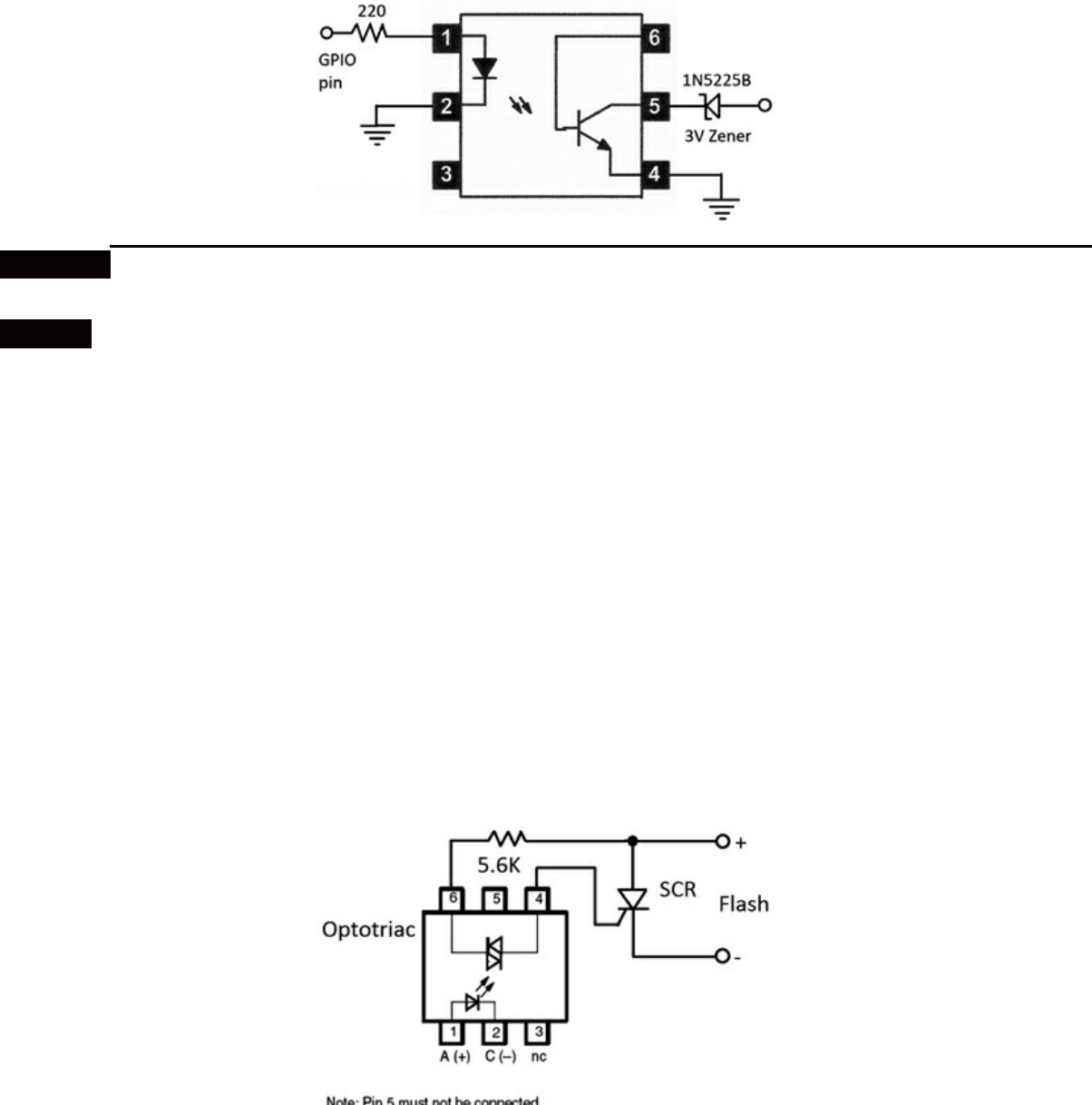
Although it might appear that an optoisolator could pass analog or continuous signals, it is only
suitable for digital or on/off signals. That is due to the on/off functional nature of the LED used as the
light source. NTE3041s are used as input and output isolators in this project. Figure 4–11 shows a very
simple circuit that is used to enable the NTE3041 to isolate one of the RasPi GPIO pins. All that is
needed is a current-limiting resistor in series with the GPIO pin. The resistor value was set at 220Ω to
provide a 10-mA drive current to the LED in the optoisolator. This current level is suitable for both
the RasPi and the optoisolator. There is also a 3-V Zener diode connected in series with the photo
transistor’s collector, which affords a bit of protection in case of excessive voltages that might be
present in the output circuit.
Figure 4–11 RasPi to optoisolator circuit.
CAUTION The NTE3041 is rated for a maximum of 30-V collector-to-emitter voltage (VCEO). Any
voltage that exceeds that maximum rating will likely damage the optoisolator;
however, the RasPi will still be protected.
I have used the NTE3041 optoisolators to connect the RasPi GPIO pins to the shutter (full press),
focus (half press), and electronic-flash control pins. The sound and light modules do not require
isolation, as they already use isolated relay contacts.
High-Voltage Optoisolator Circuit
Figure 4–12 shows a circuit that can be used if you need to control an electronic flash that has high
voltage present on the control pins. This circuit uses an optotriac (triode for alternating current)
isolator in lieu of the NTE3041 optoisolator. The optotriac, in turn, turns on a silicon-controlled
rectifier (SCR) that fires the flash unit. The SCR recommended is rated up to 400 V. I strongly
recommend you do not use a flash unit with more than that voltage.
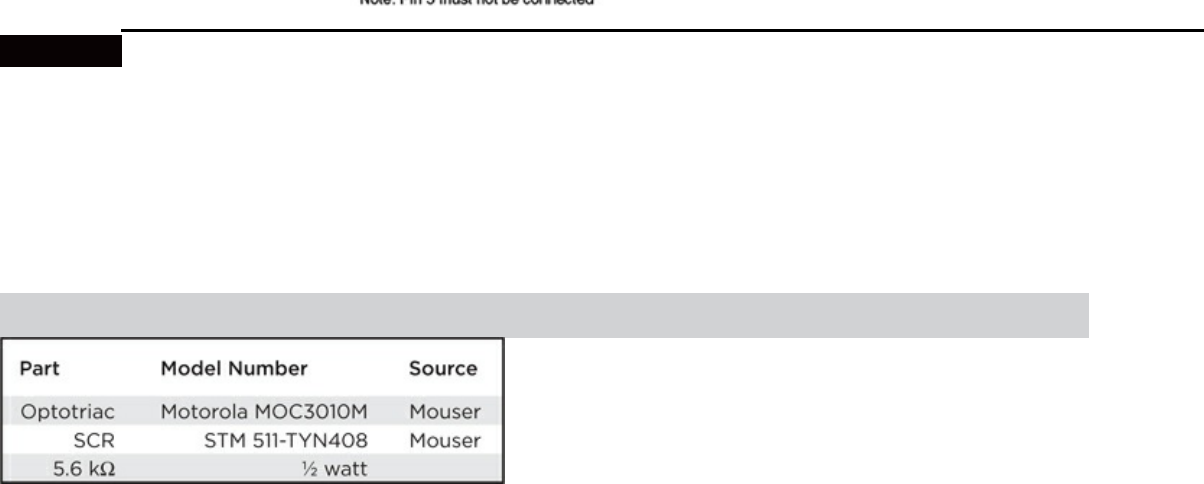
Figure 4–12 High-voltage optoisolator circuit.
Connect the RasPi GPIO pins to pins 1 and 2 of the optotriac in the same manner as shown in the
NTE3041 connections of Figure 4–11. Be sure to include the 220 Ω current limiting resistor.
Information about the suggested parts for the high-voltage optoisolator circuit is provided in Table
4.2.
Table 4–2 High-Voltage Optotriac Parts List
Sound and Laser Modules
An important part of this project is to have the capability of triggering the camera and flash by using
sound and light events. This means we need sensors to detect the sound and light as well as the
associated circuitry to generate a signal when the preset thresholds are exceeded. These requirements
raise an issue that often comes up in project planning: whether to build or buy. In this case, I decided
to incorporate two inexpensive kits for sound and light detection. My decision was based on an
estimate of how long it would take to build and test two prototypes versus buying and building two
kits and making any appropriate modifications to suit this project. Listed here are the kits I used:
Global Specialties Model GSK-409
Audio Control Switch kit $9.95
Ramsey Electronics Model LTS1
Laser Trip Sensor kit $19.95
It turned out that neither kit required any interface modifications for use in the project, since both
had output relays that could directly connect with the RasPi GPIO pins without the need for
optoisolators.
Audio Module
An assembled audio module is shown in Fig. 4–13. You will notice that I connected the microphone to
the main board with a foot-long twisted-wire pair, so that I would be able to position it for optimal
sound pickup. The microphone is normally soldered directly to the main board, which would have
made it awkward to position the board with the 9-V battery attached in order to best detect the trigger
sound.
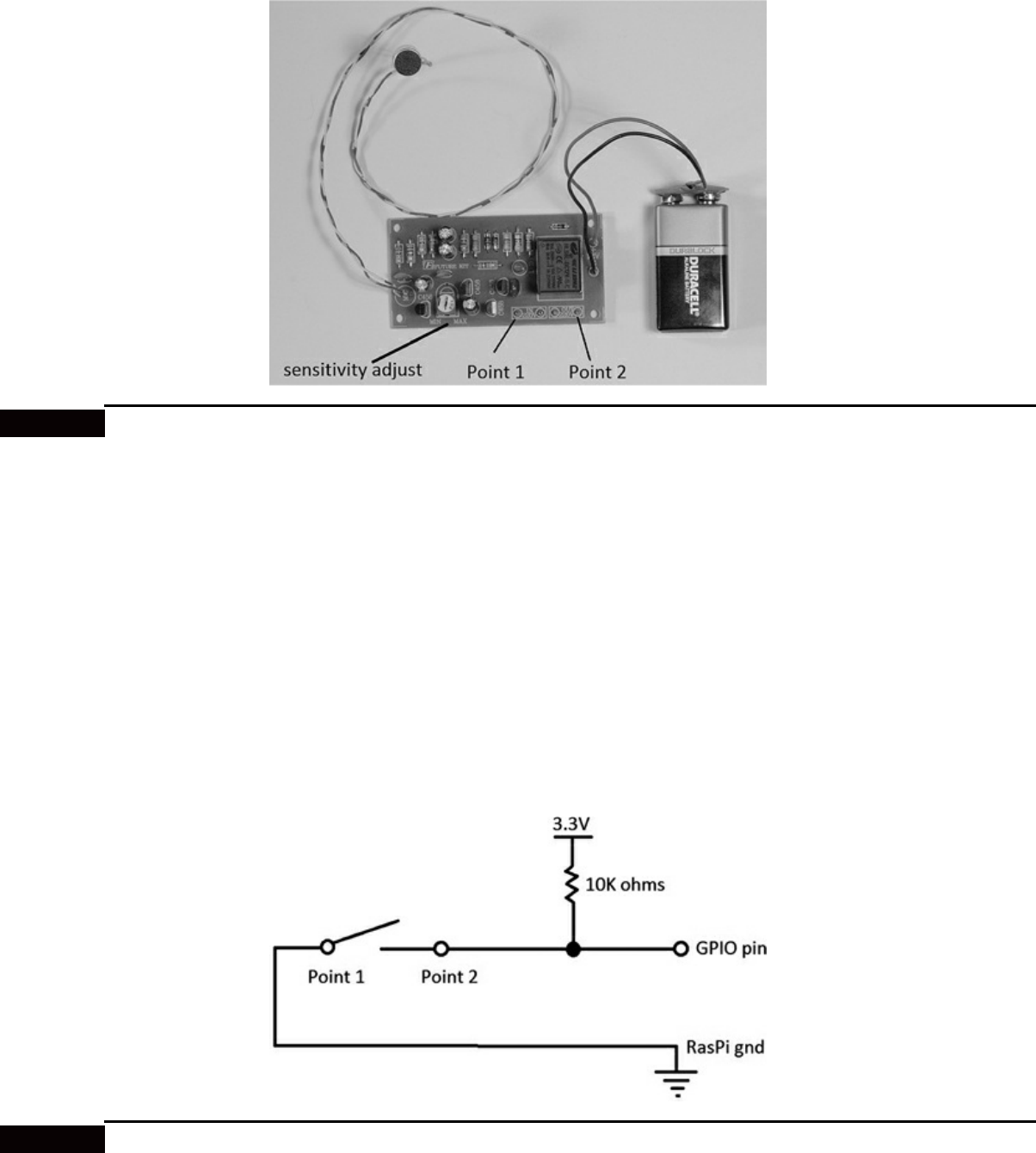
Figure 4–13 Model GSK-409 audio control switch.
This board does feature a flip-flop operation where the output relay is latched after a sound event.
This means that relay contacts will close and remain closed after the first sound event. The next sound
event will open the relay contacts, and they will stay that way until the next event, ad infinitum. This
is really not a limiting feature for the project, since you would probably have planned to manually
reset the module before any event using sound as a trigger.
Notice the sensitivity trim pot that I have pointed out in Fig. 4–13. I found that I had to adjust the
pot almost fully clockwise, in order to have a reasonable opportunity to detect low-to-moderate
volume sound events.
This module is easily connected to the Pi Cobbler prototype board using the schematic shown in
Fig. 4–14.
Figure 4–14 Sound module to Pi Cobbler interface schematic.
Point 1 shown in Figs. 4–13 and 4-14 is connected to the Pi Cobbler ground pin. Point 2 also
shown in Figs. 4–13 and 4-14 is connected to GPIO pin 24 on the Pi Cobbler. There is also a 10-kΩ
pull up resistor tied to the GPIO pin. The RasPi control program will be written to detect the high-to-
low transition on the selected GPIO pin.
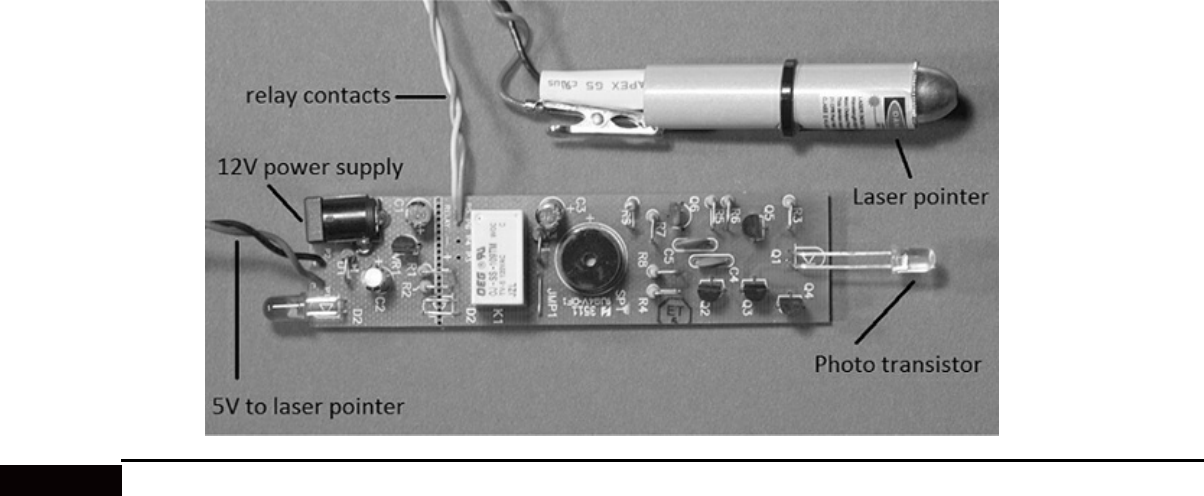
Laser Module
An assembled laser-light module is shown in Fig. 4–15. There are two assemblies, not counting the
12-V power supply, that make up this sensor module. The first is the laser pointer that acts as the light
source, and the second is the light sensor that consists of a phototransistor with some analog signal
processing circuitry. The laser pointer is a very common low-power device that is typically battery
powered. In this case, it is powered by 5 V supplied by the detector board. The power is delivered
through a pair of small alligator clips, one of which is visible in the Fig. 4–15.
Figure 4–15 Model LTS1 laser trip sensor.
The light detector component is a phototransistor that is also pointed out in the figure. It looks like
a normal LED but is a transistor with only the collector and emitter leads externally connected. It will
conduct when the laser light strikes the base-emitter region; however, it seems insensitive to normal
ambient light. I have not tried it in strong direct sunlight where I suspect it might conduct. I also
purposely left off an ambient light shield to show you the transistor. When put in place, the light
shield will help with false triggers.
The relay contacts in this module are normally closed when light is not being detected and will
open when the laser light strikes the phototransistor. This means that the RasPi program will need to
be changed to detect a low-to-high transition provided the same interface is used, as is shown in Fig.
4–14. That’s what is so nice about using the RasPi and Python: changes can easily be made in software
to accommodate hardware issues.
Interface Connections
All of the interface connections are shown in Figure 4–16. There are three input push buttons to
manually trigger focus, shutter, and flash; three output optoisolator connections that allow the RasPi
to trigger focus, shutter, and flash; and finally, there are two inputs from the sound and light modules.
This might seem to be a lot, but the circuits are quite simple and repetitive.
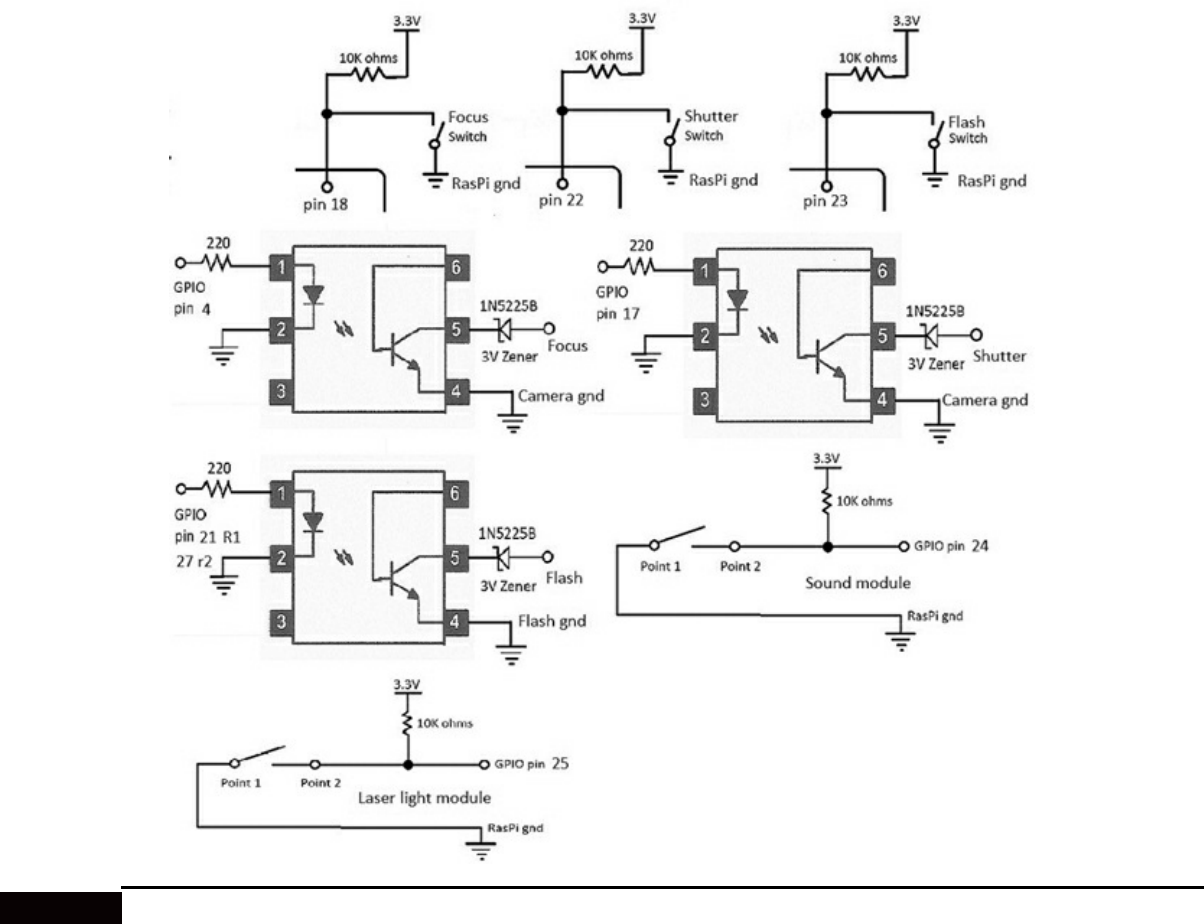
Figure 4–16 All of the interface connections.
The hardest part was to interconnect the modules, camera, and flash to the breadboards. I finally
determined that using audio cables terminating with 3.5-mm jacks was the easiest way for me to do it.
You can use whatever you have available, such as a twisted pair, because the connections are DC
based with practically no speed or bandwidth issues. The complete prototype is shown in Fig. 4–17. It
is a bit of a “rat’s nest” as far as the wiring goes, but it is totally functional and allowed me to rapidly
progress with the project.
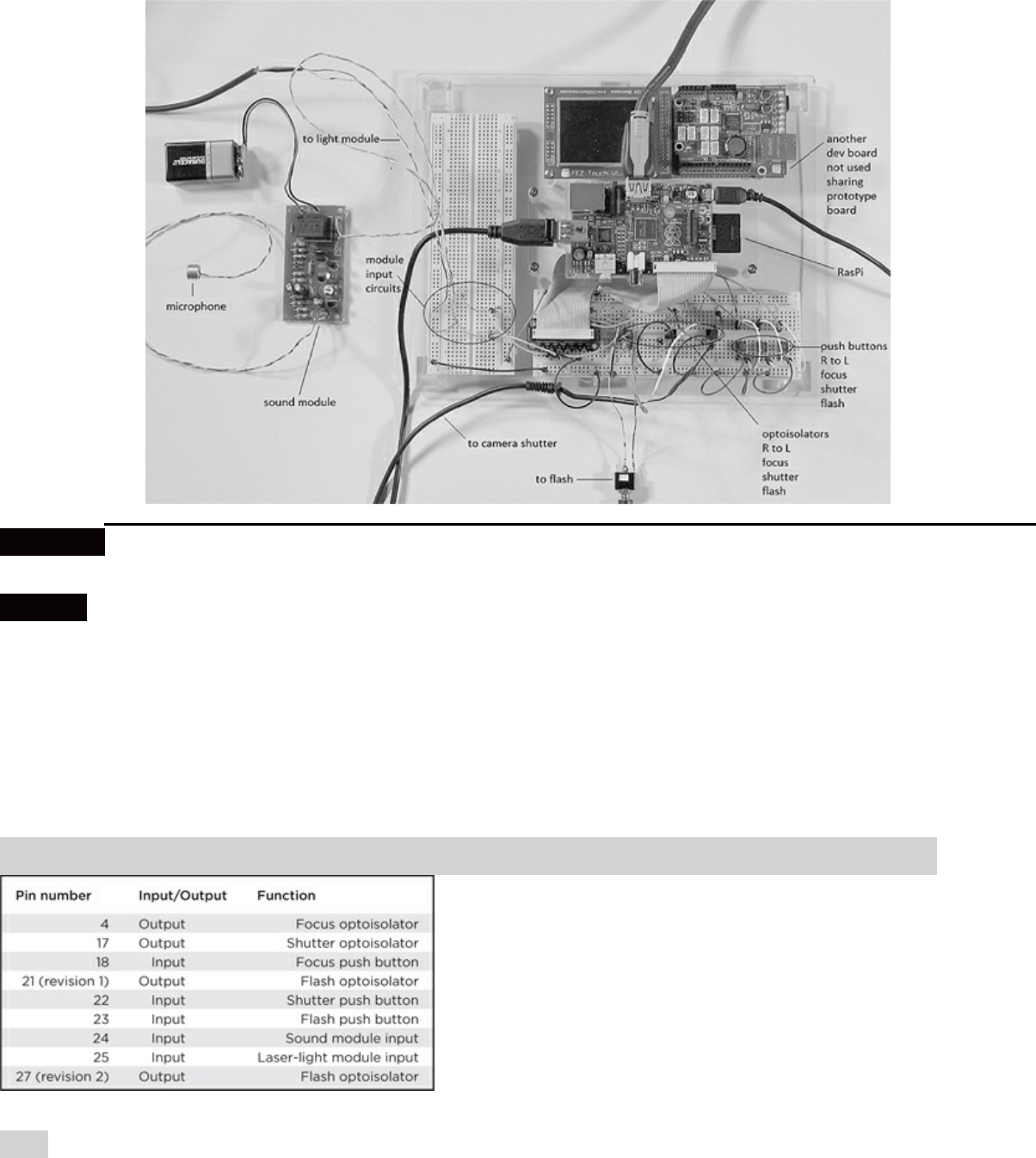
Figure 4–17 Complete camera controller prototype.
CAUTION Ensure that you use the appropriate ground connections, as shown in Fig. 4–16. For
instance, the camera ground is separate and distinct from the RasPi ground. No harm
would result if you inadvertently connected the optoisolator grounds to the breadboard
ground, but the isolators would simply not function properly.
Table 4–3 lists all the GPIO pins used in the interface with the associated functions tied to those
pins.
Table 4–3 GPIO Pin Function Interface List
NOTE Starting with revision 2 for Models A and B, pin 21 has been redesignated pin 27. It remains
pin 21 for revision 1 models A and B. The Pi Cobbler, Pi Plate, and likely other prototype
tools have pin 21 shown. I would suggest putting a piece of tape over the 21 and relabeling
it 27 if you are using revision 2 models. The GPIO library recognizes pin 27 without any
issues.
Testing the Interface Connections

You should test all the connections to ensure that everything is wired correctly. The only item you will
need is a standard volt-ohm meter (VOM) to run through all the tests. You will not require any
software to be running on the RasPi for these tests although the RasPi must be turned on in order to
provide power to the Pi Cobbler and breadboards.
First check each of the push buttons. There should be 3.3 V present on pins 18, 22, and 23. The
voltage should drop to 0 V when one of the buttons connected to the pin under test is pushed.
Next, check the camera optoisolators. First ensure that the wires going from pins 4, 17, and 21 are
temporarily disconnected. Then plug the shutter-control cable into the camera and then turn on the
camera. Using a jumper wire, connect the 3.3-V power supply on the breadboard to the 220-Ω resistor
that connects to pin 1 of the optoisolator.
CAUTION Do not touch pin 1 on the optoisolator with the 3.3-V jumper wire. You must go through
the current-limiting resistor or else the LED in the optoisolator could burn out from
excessive current.
You should observe either the camera auto-focusing or the shutter operating, depending upon
which optoisolator you are testing.
The electronic flash should be tested next. Plug the remote hot shoe into the flash and ensure that
it is also connected to its controlling optoisolator. Turn on the flash and then touch the 3.3-V jumper
wire to the 220-Ω, current-limiting resistor that is connected to the optoisolator. The flash should
operate.
Remember to reconnect all the wires between the optoisolators and their respective GPIO pins, as
shown in Fig. 4–16.
The sound and light modules are tested last. Connect the modules to the breadboard and power
them on. You do not have to disconnect the wires going between the GPIO pins and the module
interfaces for these tests. The sound module connection will be either on or off, depending upon the
state of the latched relay. Using the VOM, check to see that pin 24 switches between 3.3 V (on) and 0
V (off). This is a valid test for the sound module because it operates in the same manner as the push-
button interface.
The laser-light module is checked in a similar fashion at pin 25. However, as mentioned above, the
module-relay contacts are closed when light is not striking the phototransistor. This means that pin 25
should have 0 V when no light is on the sensor and 3.3 V when light strikes the sensor.
If you have any problems, recheck all the wiring, since it is very easy to misplace a jumper wire on
the solderless breadboards. Also, ensure that you have all the appropriate grounds connected, as shown
in the figures.
Initial Test Program
The following program tests the camera focus and shutter controls as well as the electronic flash by
using the push buttons. It is named CameraControl .py and may be downloaded from the book’s
website, www.mhprofessional.com/raspi.
CameraControl.py

I recommend running this program directly from a terminal window as follows:
Press each of the push buttons and confirm that the appropriate action occurs. When you are
finished, type ^c to exit the program.
You should note that I reset the controlling GPIO pin after making it a HIGH value. This ensures
that it is in the proper state for the next operation.
Sound Module Test Program
The following program tests the sound module to check that the focus, shutter, and flash can be
triggered when the sound module detects a sound event. The first portion of this program is identical
to the previous program. This program interacts with you through the screen by prompting a number
representing the test to be performed. The prompts are shown on the screen and are also shown here:
1—Test the shutter only.
2—Test the flash only.
3—Test the shutter and flash together.

0—Exit the program.
The program is coded as a series of loops that wait for a trigger event from the sound module
before activating the requested function(s). This program is available on the book’s website as
SoundModTest.py.
Just be aware that you must reset the sound module after it has been triggered because of the
latched operation. It is a simple matter of a one-hand clap to trigger it so that the module LED turns
off and the module is in a proper ready state.
Light Module Test Program
The program to test the light module is almost identical to the sound-module test program.. The only
changes are in the three GPIO.input conditional if statements that need to be changed from
if(GPIO.input(24) == False) to if(GPIO.input(25) == True). These changes are required
because the light module is connected to pin 25 in lieu of pin 24 and its relay contacts are normally
closed instead of normally open, as I mentioned earlier in this chapter.
To save book space, I will not repeat the code listing, as the changes are minor. This program,
SoundModTest.py, is available from the book’s website and is named LightModTest.py.
SoundModTest.py

To test this module you will need to aim the laser at the phototransistor, which should turn off the
LED on the detector board. Next, block the laser light beam with an opaque item, which should trigger
the light module and initiate the requested function. There is no need to reset the light module, since it
is not latched.
Time-Lapse Function
The last camera controller function to test is time-lapse photography. This is where you set a
maximum time to take photos at a preset interval. I created the program using only the shutter
function, as I believe that will be its primary use. Normally, time-lapse photography is done outdoors
without the need of a flash. Also, it doesn’t make sense to incorporate the sound or light triggers for
this function. The program is quite simplified as compared to the previous programs and is listed
below. It is also available from the book’s website as TimeLapse.py.
NOTE The interval should be entered as a decimal if you need fractions of a minute, i.e., an
interval of six seconds would be entered as .1.
Operational Code
The four test programs, CameraControl.py, SoundModTest.py, LightModTest.py and TimeLapse.py
should serve as templates to create whatever style operational program meets your needs. It is
impossible for me to create the wide variety of control programs that are possible because there are so
many different environments that would need to be accommodated. It is easy to add additional
functionality to any of these programs by simply adding the desired input and/or output triggers. For
instance, if you needed a flash for the time-lapse function, you would add GPIO.output(27,
GPIO.HIGH) after the GPIO.output(17, GPIO.HIGH) statement and do a similar add after the GPIO
reset. Also note that I used 27 in lieu of 21 due to the rev 2 board I used.
TimeLapse.py
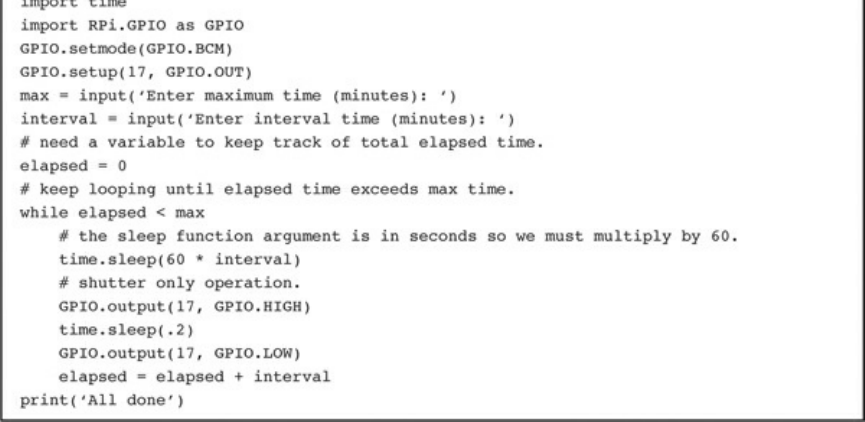
Summary
This chapter started with a project-requirements list that also served as a list of goals that you needed
to accomplish. Requirements drive all projects, and you should spend a great deal of time analyzing
and determining what the essential requirements or needs are before proceeding to any design work.
I next discussed how a DSLR camera with an electronic flash could be remotely controlled. I
elected to use optoisolators where appropriate to lessen any chance of damaging voltages being
introduced into the RasPi interface circuits. I also mentioned that you could use a non-DSLR camera,
set to a long exposure, with the electronic-flash function to capture stop-action events.
In a detailed discussion regarding optoisolators, I explained that they are very handy for
completing interface circuits that incorporate a high level of voltage isolation. I also provided a
triggering circuit for those brave souls with a high voltage electronic flash.
I went through my build-versus-buy decision regarding the sound and light modules. I was very
pleased to find that I had made the right decision, as I had no trouble incorporating these kits into the
project. You will find that your time is very valuable and finding ways to shorten a project, such as
incorporating prebuilt components and/or kits, can be a valuable tool for maximizing your
productivity.
I next went through a step-by-step testing procedure to ensure that the interface circuits were
working as designed. There was no need to run any programs on the RasPi at this stage. It is always a
prudent idea to carefully check and test all interface circuits before running any programs. Testing in
this fashion allows you to determine that any later functional problems are probably due to program
glitches, not the interface circuits.
I then introduced a series of four test programs to methodically check that all planned project
requirements were met and that all the components functioned as desired. These four programs will
serve as good templates to allow you to create your own custom programs. You can design them to
best suit your needs, or you can simply use them as they are.

CHAPTER 5
GPS
Introduction
In this chapter, I will first discuss what constitutes the Global Positioning System (GPS), a satellite-
based navigation system, and the advantages and limitations that are involved with using it. I will next
explain how a serial communication link may be set up and run between the RasPi and a laptop
computer.
Finally, I will show you how to connect a very capable GPS receiver to the RasPi and subsequently
use a series of applications to decode and display target, position, and velocity (TPV) information on
the RasPi screen.
Brief GPS History
The GPS system was initially deployed in the early 1970s by the U.S. Department of Defense (DoD) to
provide military users with precise location and time synchronization services. Civilian users could
also access the system; however, the services offered to the public were purposely degraded to avoid
national security risks. The DoD was concerned that the system might help potential enemies in their
activities. This intentional degradation was lifted by order of President Reagan in 1983 to allow
civilian use of full and more accurate GPS services. In 2000, an even higher level of accuracy without
any degradation was implemented for all users.
The current GPS system has 32 satellites in high orbits over the earth. A representative diagram of
the satellite “constellation” is shown in Fig. 5–1. The satellite orbits have been carefully designed to
allow for a minimum of six satellites to be in the instantaneous field of view of a GPS user located
anywhere on the surface of the earth. A minimum of four satellites must be viewed in order to obtain a
location fix, as you will learn in “The Basics of How a GPS Functions” section.

Figure 5–1 Diagram of the GPS satellite “constellation.”
Several other GPS systems are also deployed:
GLONASS—The Russian GPS
Galileo—The European GPS
Compass—The Chinese GPS
IRNSS—The Indian Regional Navigation Satellite System”
I will be using the American GPS system, as vendors have made many inexpensive receivers
available to purchase. All receivers function in essentially the same way and conform to the National
Marine Electronics Association (NMEA) standard discussed in the “NMEA Protocol” section.
The Basics of How GPS Functions
I made up an analogous fictional position-location system to help explain how the GPS system
functions. First, imagine a two-mile by two-mile land area where this system is set up. The land
terrain contains gently rolling hills, each no more than 30 feet in height. The subject, using a “special”
GPS receiver, may be located anywhere within this area. Also located in this area are six 100-foot
towers, each containing a beacon. The beacon atop each tower is configured to briefly flash a light and
emit a loud sound burst simultaneously. Each beacon also emits light and sound pulses once a minute
but at a specific time within the minute. Beacon one (B1) emits at the start of the minute, beacon two
(B2) at 10 seconds past the start of the minute, beacon three (B3) at 10 seconds later, and so on for the
remaining beacons.
It is also critical that the GPS receiver have an open line of sight to each beacon and that the
position of each beacon be recorded in an embedded database that is also constantly available to the
receiver. The positions of beacons B1 through B3 are recorded as x and y coordinates in terms of miles
from the origin that is shown in the upper left hand corner of Fig. 5–2.
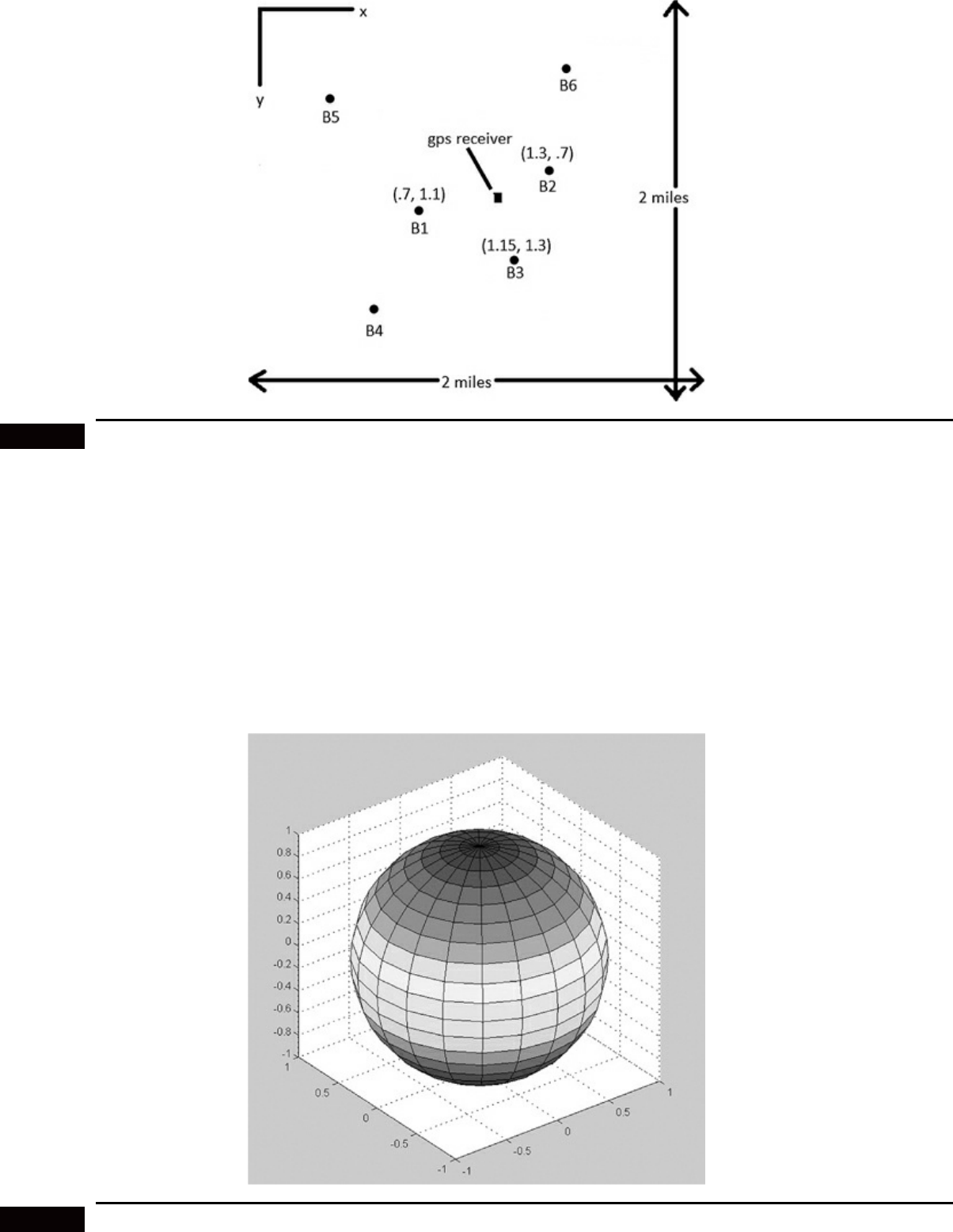
Figure 5–2 Beacon test area.
The actual position determination happens in the following manner:
At the start of the minute, B1 flashes, and the receiver starts a timer that stops when the sound pulse
is received. Since the light flash is essentially instantaneous, the time interval is proportional to the
distance from the beacon. Since sound travels at a nominal 1100 feet per second (ft/s) in air, a 5-
second delay would represent a 5500-foot distance. The receiver must then be located somewhere
on a 5500-foot radius sphere that is centered on beacon B1. Figure 5–3 illustrates this abstraction as
a graphical representation taken from a Mathworks Matlab application.
Figure 5–3 One sphere.
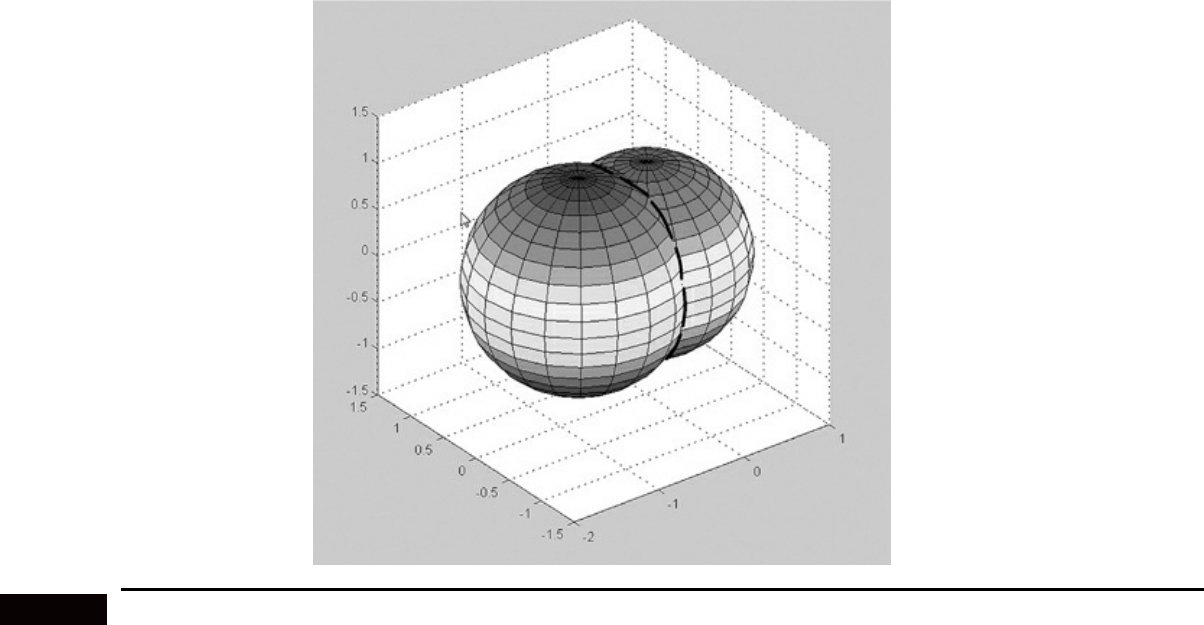
B2 flashes next. Suppose that it takes 4 seconds for the B2 sound pulse to reach the GPS receiver.
This delay represents a 4400-foot sphere centered on B2. The B1 and B2 spheres are shown
intersecting in Fig. 5–4. The heavily dashed line represents a portion of the circle that is the
intersection of these two spheres. The receiver must lie somewhere on this circle,which appears to
be a straight line when observed in a planar or perpendicular view. However, there is some
uncertainty about where the receiver is located on the circle. Thus, another beacon is still needed to
resolve the uncertainty.
Figure 5–4 Two spheres.
B3 flashes next. Suppose that it takes 3 seconds for the B3 sound pulse to reach the GPS receiver.
This delay represents a 3300-foot sphere centered on B3. The B1, B2, and B3 spheres are shown
intersecting in Fig. 5–5. The receiver must be located at the star shown in the figure. In reality, it
could be at either a high or low point, since the third sphere intersects the two other spheres at two
points. The receiver position has now been fixed with regard to x and y coordinates but not the third
or z coordinate. Guess what? You now need a fourth beacon to resolve whether the receiver is at the
high or low point. I am not going to go through the whole process again because I think you have
figured it out by now.
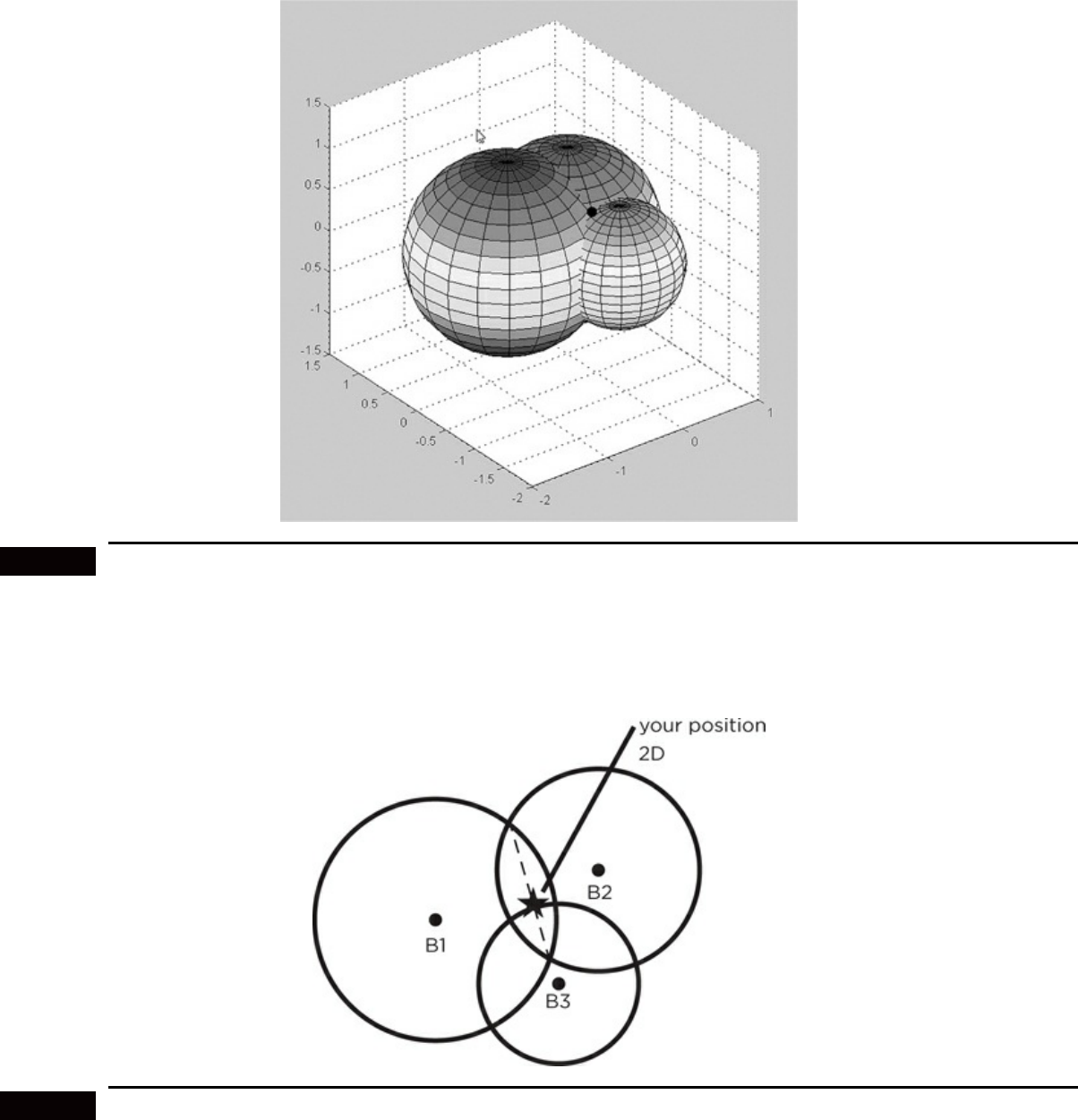
Figure 5–5 Three spheres.
Figure 5–5 shows a plane view of all three spheres with the GPS receiver position shown. You can
think of it as a horizontal slice taken at z = 0 in Fig. 5–6.
Figure 5–6 Plane view.
In summary, it takes a minimum of three beacons to determine the x and y coordinates, and a
fourth beacon to fix the z coordinate. Now translate the beacons to satellites and the x, y, and z
coordinates to latitude, longitude, and altitude, and you have the basics of the real GPS system.
The satellites transmit digital microwave radio-frequency (RF) signals that contain both
identification (ID) and timing components that a real GPS receiver will use to calculate its position
and altitude. The counterpart to the embedded database mentioned in my fictional example is called
an ephemeris or celestial almanac, and it contains all the data necessary for the receiver to calculate a
particular satellite’s orbital position. As mentioned in the history section earlier, all GPS satellites are

in high earth orbits and are constantly changing position. Because of this situation, the receiver must
use a dynamic means for determining its position fix, which, in turn, is provided by the ephemeris.
This is one reason why it may take a while for a real GPS receiver to establish a lock, as it must go
through a large amount of data calculations to determine the actual satellite positions within its field
of view.
In my fictional example, the radii of the “location spheres” are determined by the receiver using
extremely precise timing signals that are contained in the satellite transmissions. Each satellite
contains an atomic clock to generate these clock signals. All satellite clocks are constantly
synchronized and updated from earth-based ground stations. These constant updates are needed to
maintain GPS accuracy, which would naturally degrade because of two relativistic effects. The best
way to describe the first effect is to retell the paradox of the space-travelling twin.
Imagine a set of twins (male, female—it doesn’t matter), one of whom is slated to take a trip on a
fast starship to our closest neighboring star, Alpha Centauri. This round trip will take about ten years
traveling nearly at the speed of light. The remaining twin will stay on earth awaiting the return of
his/her sibling. The twin in the starship will accelerate very close to light speed and will patiently wait
the ten years it will take to make the round trip according to the clock in the ship. Now, according to
Albert Einstein, if the traveling twin could view a clock on earth he/she would observe time going by
at a much quicker rate then it was in the starship. This effect is part of the theory of special relativity
and, more specifically, is called time dilation. If the twin on Earth could see the clock in the starship,
he/she would notice it was turning much more slowly than the earthbound clock. Imagine what
happens when the traveling twin returns and finds that he/she is only ten years older but the
earthbound twin is 50 years older because of time dilation. The space-traveling twin will have time
traveled a net 40 years into Earth’s future by taking the ten-year space trip!
The second effect is more complex than time dilation, and I will simply state what it is. According
to Einstein’s theory of general relativity, objects located close to massive objects, such as the Earth,
will have their clocks moving slower as compared to objects that are further away from the massive
objects. This effect is due to the curvature of the space-time continuum and has been predicted and
experimentally verified by the general relativity theory.
Now back to the GPS satellites that are orbiting at 14,000 kilometers per hour (km/h), while the
earth is rotating at a placid 1,666 km/h. The relativistic time dilation due to the speed differences is
approximately –7 microseconds per day (μs/day), while the difference due to space-time is +45 μs/day
for a net satellite clock gain of 38 μs/day. While this error is nearly infinitesimal on a short-term
basis, it would be very noticeable over a 24-hour time period. The total daily accumulated error would
amount to a position error of 10 km or 6.2 miles (mi), essentially making GPS useless. That’s why the
earth ground stations constantly update and synchronize the GPS satellite atomic clocks.
NOTE The atomic clocks within the GPS satellites are deliberately slowed prior to launch in order
to counteract the relativistic effects described earlier. Ground updates are still needed to
ensure that the clocks are synchronized to the desired one-nanosecond accuracy.
The Ultimate GPS Receiver
I will be using the Ultimate GPS receiver breakout board available for about $40 from Adafruit
Industries. This receiver is shown in Fig. 5–7.
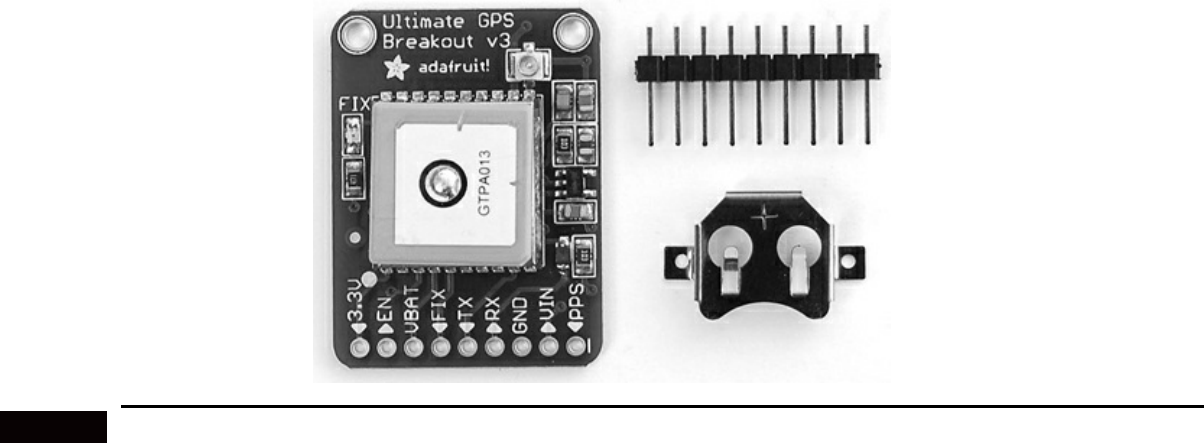
Figure 5–7 Ultimate GPS receiver breakout board.
This receiver meets the following comprehensive technical specifications that make it ideal for
this application:
Satellites: 22 tracking, 66 searching
Patch antenna size: 15 mm × 15 mm × 4 mm
Update rate: 1 to 10 hertz (Hz)
Position accuracy: 1.8 meters
Velocity accuracy: 0.1 meter per second (m/s)
Warm/cold start: 34 seconds
Acquisition sensitivity: –145 dBm
Tracking sensitivity: –165 dBm
Maximum altitude for PA6H: tested at 27,000 meters
Maximum velocity: 515 m/s
VIN range: 3.0–5.5 V
MTK3339 operating current: 25 mA tracking, 20 mA current draw during navigation
Output: NMEA 0183, 9600 baud (Bd) default
DGPS/WAAS/EGNOS supported
FCC E911 compliance and AGPS support (Offline mode: EPO valid up to 14 days)
Up to 210 PRN channels
Jammer detection and reduction
Multipath detection and compensation
Capability of an external antenna being attached
UART for data communications. (This last feature will be discussed further in the following section,
“UART Communications.”)
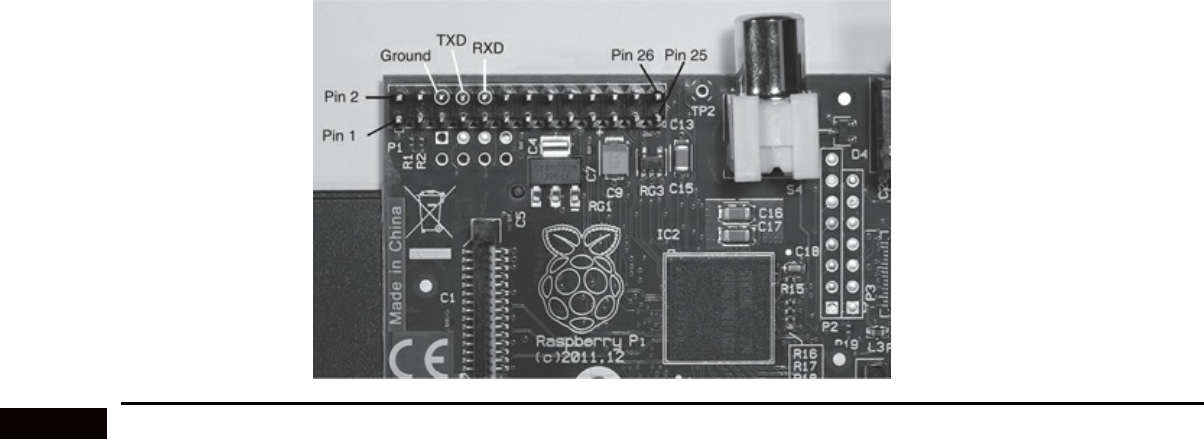
I will neither need nor use many of these features, but they are listed here to give you an
appreciation of the technical complexity and versatility of this particular GPS receiver.
There are several key specifications that are worth discussing a bit more. An acquisition
sensitivity of –145 dBm means the receiver is extremely sensitive to picking up weak GPS signals.
The –165 dBm tracking sensitivity means the signal, once acquired, can lose up to 90 percent of its
original strength, yet remain locked in by the receiver.
Having an output operating at 9600 Bd and compliant with the National Marine Electronics
Association (NMEA-0183) standard means the receiver generates standard GPS messages at a rate
twice as fast as that of comparable receivers.
The VIN range of 3- to 5.5-V matches very nicely with the RasPi 3.3-V operating voltage, thus
eliminating the need for any buffer circuitry.
The 34-second start-up time is excellent and probably due in part to the extreme receiver
sensitivity.
UART Communications
The Universal Asynchronous Receiver/Transmitter (UART) was introduced in Chap. 1 as one of the
several serial data protocols/sub-systems that the RasPi incorporates into its design. In this section, I
will explore how to set up a terminal control session, also known as a console control session, by
using the built-in serial UART protocol. A minimum of three GPIO pins are necessary to establish a
console control session. As shown in Fig. 5–8, these pins are part of the 26-pin GPIO header and have
the function of transmit (TXD), receive (RXD), and ground or common (GND).
Figure 5–8 UART pins.
A simple serial communications link between a laptop computer and the RasPi will demonstrate
how this type of communication functions. A terminal program running on the laptop will handle that
side of the link, while the built-in, serial-protocol software will handle the RasPi side. An
interconnecting cable will also be needed along with a very useful software driver. The link is set up
using a USB to serial TTL cable that is connected to the GPIO header, as shown in Fig. 5–9.
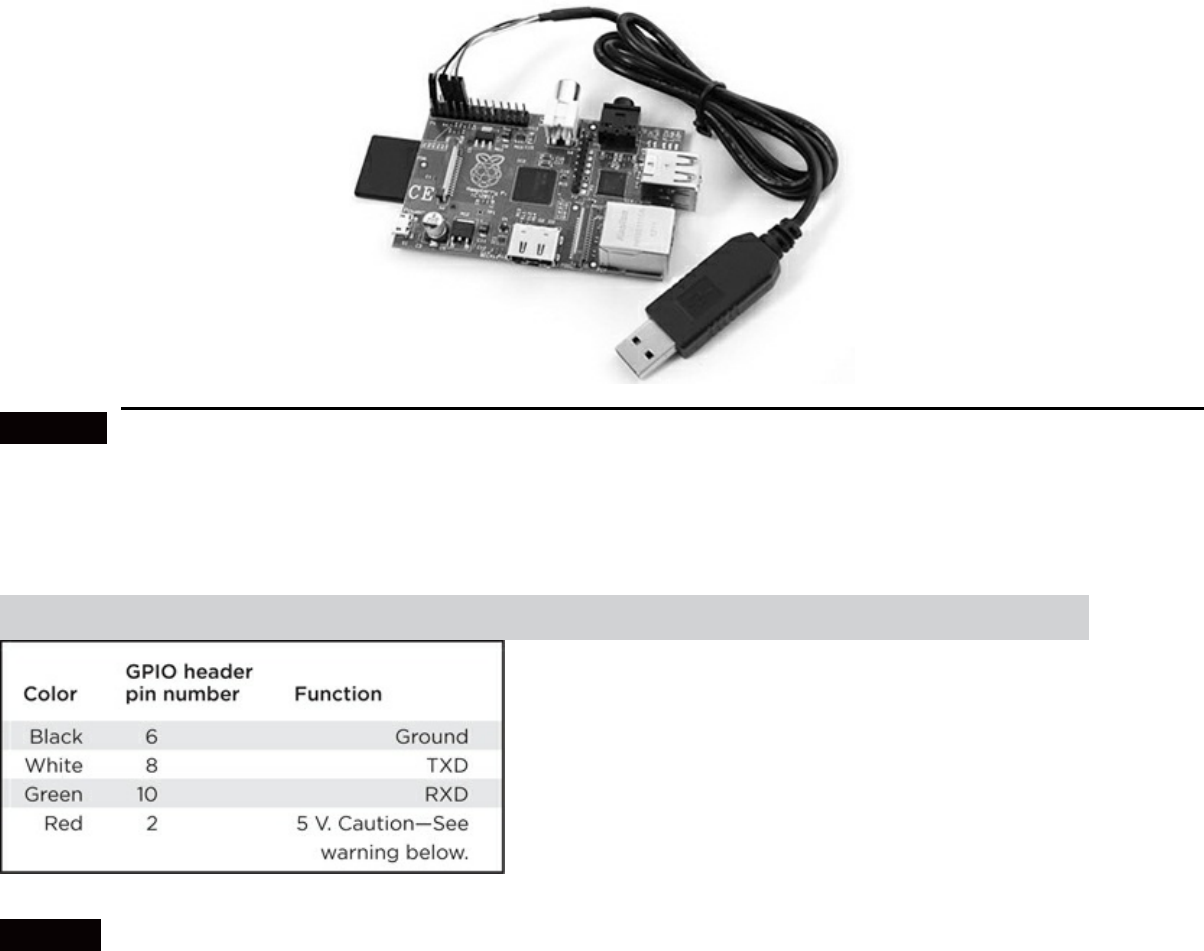
Figure 5–9 USB to Serial TTL link cable.
The cable has four pin connectors that are color-coded and attached to the GPIO header as detailed
in Table 5–1. This cable is available from Adafruit Industries as part number 954.
Table 5–1 GPIO Header to USB/TTL Cable Connections
CAUTION DO NOT CONNECT the red lead to the GPIO header if you are using the “regular”
micro-USB power supply. This red lead is provided to allow you to power the RasPi
from the host computer’s USB port; however, you cannot simultaneously power the
RasPi from the micro-USB power supply and the USB-port power supply, only one or
the other. My recommendation is: Do not use this 5-V power supply; just continue to
use the regular power supply.
There are many terminal programs available that will provide the laptop-side communications
very nicely. Two recommendations are:
Tera Term—the Tera Term Project—http://ttssh2.sourceforge.jp/index.html.en
ZOC—http://www.emtec.com/zoc/terminal-emulator.html
You will need one more vital software piece to complete the communications link. This would be
a USB driver that provides the logical connection between the RasPi UART/TTL pins and the laptop’s
USB port connection. The driver is available from the Prolific website at
http://www.prolific.com.tw/US/ShowProduct.aspx?p_id=225&pcid=41, which takes you to the
PL2303 Windows driver download page. The driver file name is
PL2303_Prolific_DriverInstaller_v1.7.0.zip. This driver creates what is known as a virtual comm port
that allows a USB port to emulate a standard RS-232 serial port. The comm port created in my case
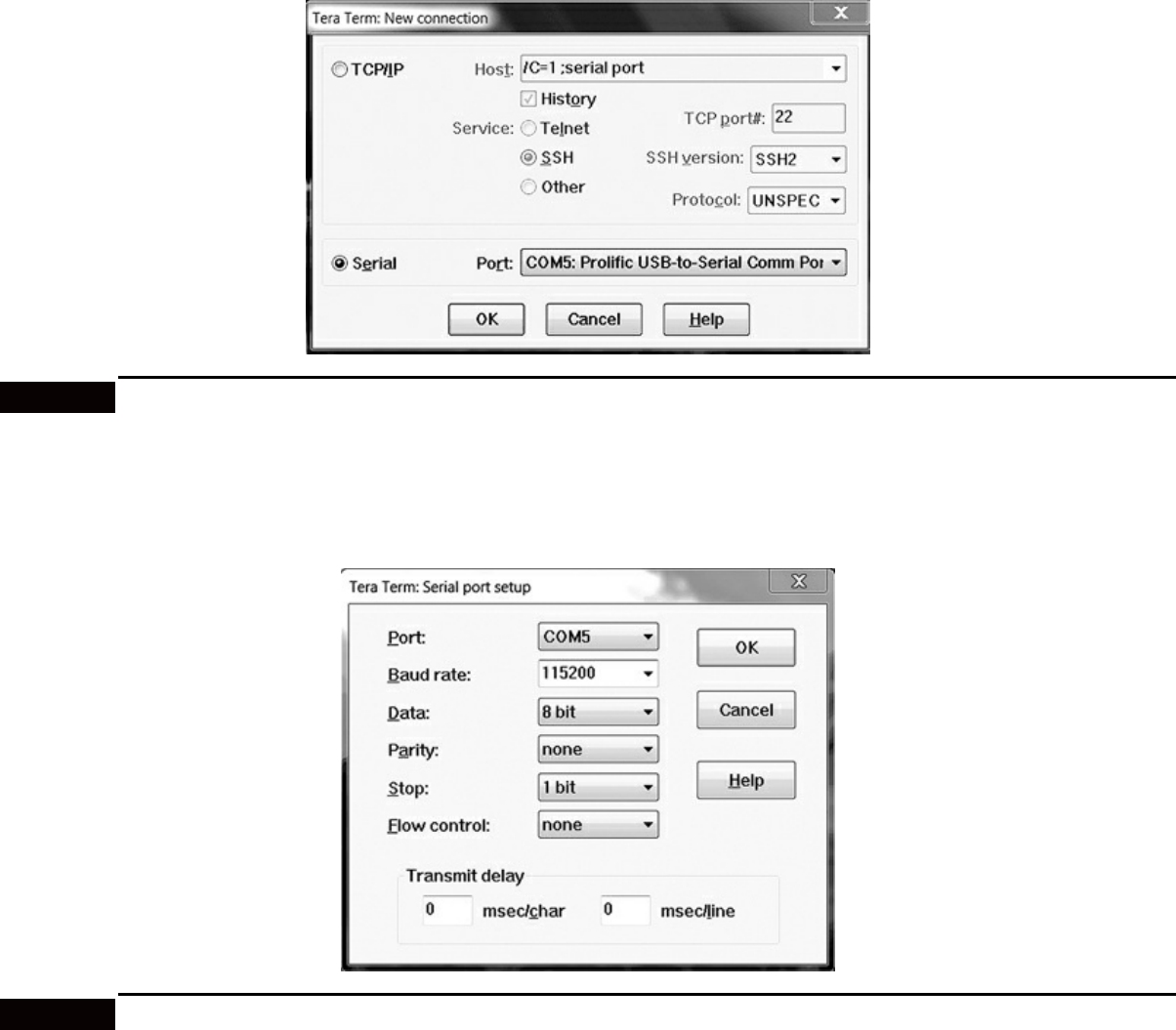
was comm5; however, yours may vary depending upon your laptop’s configuration. In any case, use
the new comm port in configuring the serial link, as I have shown in Fig. 5–10. In this screenshot, I
was using the Tera Term program.
Figure 5–10 Terminal program port selection.
The port configuration settings are shown in Fig. 5–11. You click on Setup, then Serial Port to get
to this screen, when using the Tera Term program.
Figure 5–11 Serial port configuration settings.
The key parameters to set, independent of the terminal program that you are using, are the
following:
Baud rate—115,200
Number of data bits—8
Parity—None
Stop bits—1
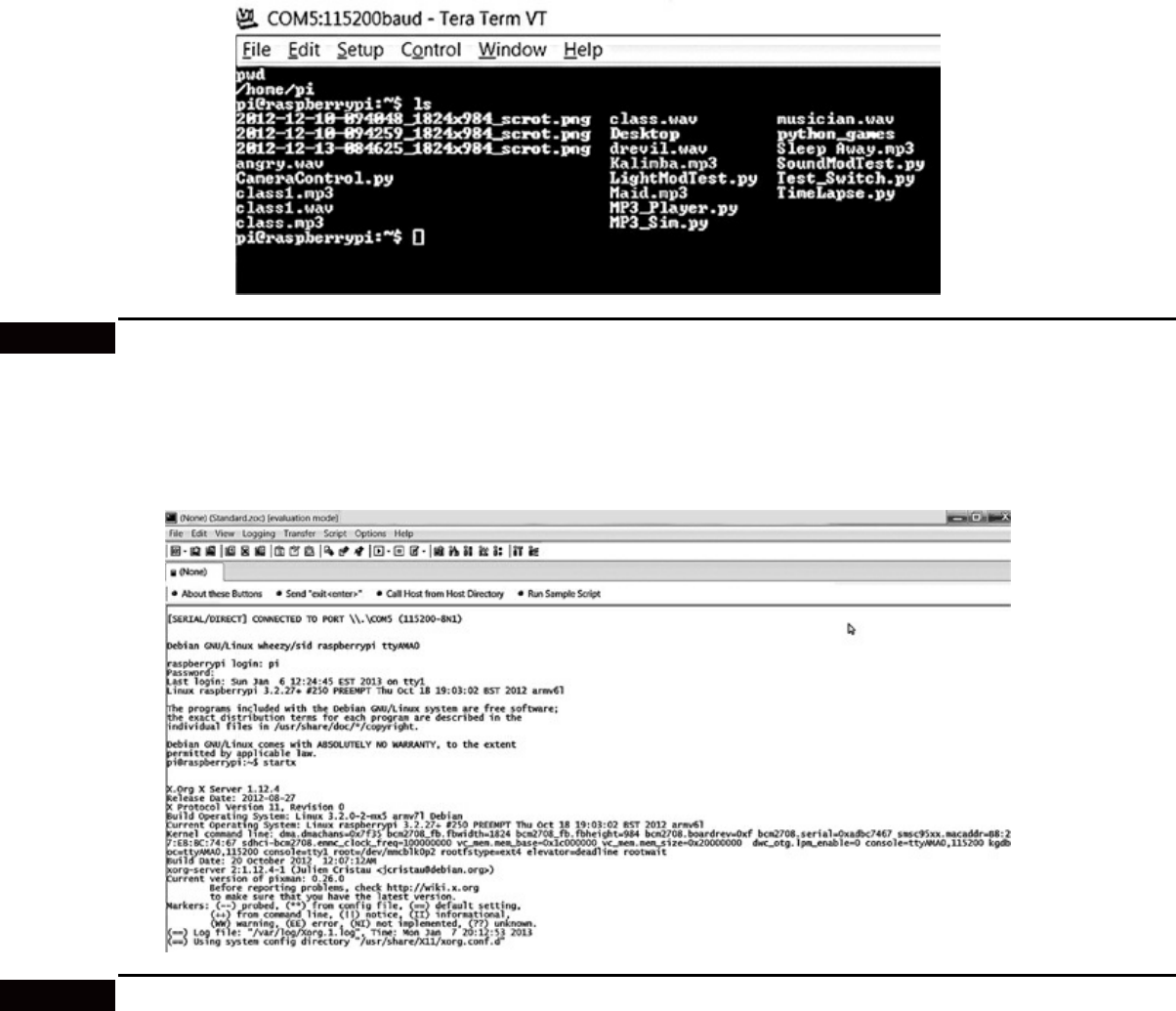
You should see a screen similar to the screenshot in Fig. 5–12, if you have setup everything
correctly including the Prolific driver.
Figure 5–12 Sample screenshot from Tera Term program connected to RasPi.
Figure 5–13 shows another screenshot using the ZOC terminal control program connected to the
RasPi.
Figure 5–13 Sample screenshot from the ZOC program connected to the RasPi.
In a later chapter, I will show you how to connect to the RasPi over a network by using another
type of terminal control program in lieu of using a direct serial cable. But for now, you have the
background and familiarity to set up a serial link with a GPS receiver.
GPS Receiver UART Communication
The Ultimate GPS receiver uses a 9600-Bd UART to communicate with the controlling
microprocessor in order to both receive and transmit data back and forth. The UART interface pins
available on the Ultimate GPS receiver are shown in Fig. 5–14. There are only three pins that we need
to use for data communication, as was discussed in the previous section.

Figure 5–14 Ultimate GPS data communication interface pins.
There is no need for a separate clock signal line, since the UART protocol is designed to be “self-
clocking.”
Next, you need to make the connections between the Pi Cobbler UART pins and the GPS receiver
pins, as shown in Fig. 5–15.
Figure 5–15 Pi Cobbler to GPS receiver connections.
CAUTION Ensure that the TX connector from the GPS receiver connects to the Pi Cobbler RX pin,
and likewise, that the RX connector from the GPS receiver connects to the Pi Cobbler
TX pin. Do not connect RX to RX or TX to TX even though that may seem like the
logical action to take. You will not damage anything, but the data communications
between the GPS receiver and the RasPi cannot be established if you make those
connections.
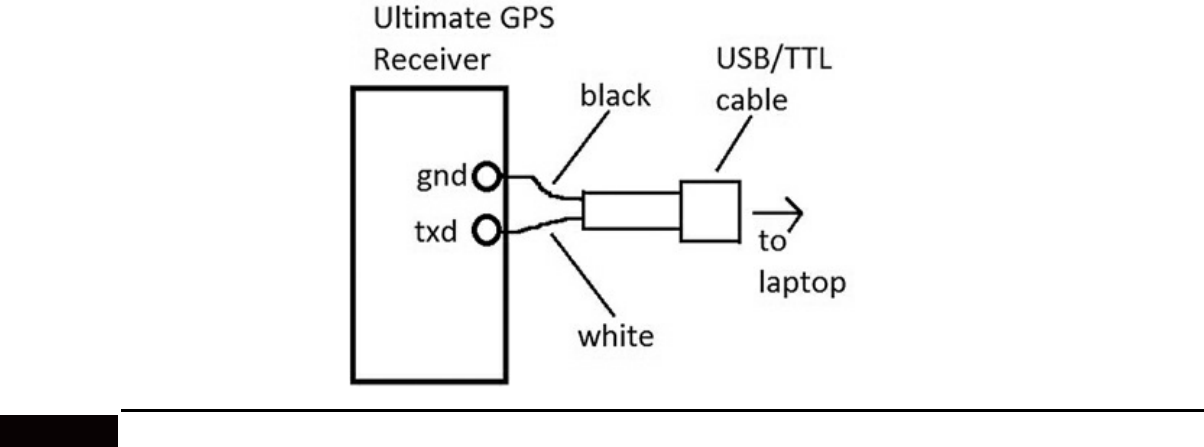
Initial GPS Receiver Test
It would be wise to check that the Ultimate GPS receiver is functioning as expected prior to running
any code on the RasPi. Ensure that you have a good line of sight with the open sky in order to receive
the GPS satellite signals. I used an external GPS antenna, since my test setup was indoors without any
reliable satellite reception. The antenna was purchased from Adafruit Industries, part number 960, and
is well worth the modest cost because erratic or unreliable satellite reception will quickly cause this
project to fail. You will also need an antenna adapter to connect the external antenna’s SMA connector
to the μFL connector situated on the Ultimate GPS receiver board. This adapter was also purchased
from Adafruit, part number 851, and is shown in Fig. 5–15. A word of caution: Be very careful when
pushing the μFL connector into the board because the inner pin appears to be quite fragile and
probably would be damaged if excessive pressure were applied.
The quickest and easiest approach for a data connection is to temporarily connect the laptop to the
GPS receiver with the USB/TTL cable using the connections shown in Fig. 5–16. You can parallel
connect to the existing TXD and GND on the solderless breadboard without a problem.
Figure 5–16 USB/TTL cable connection from GPS to laptop.
I used the Tera Term program with the baud rate set to 9600 to match the GPS receiver output.
Figure 5–17 is a screen capture of the GPS data stream showing that the GPS receiver was properly
functioning and receiving good satellite signals.

Figure 5–17 Tera Term screen capture of GPS data stream.
The next step in confirming proper GPS operation is to disconnect the USB/TTL cable and load the
RasPi with a terminal program to confirm that the RasPi can also receive the GPS data stream. I used
a very nice serial terminal control program that runs in a graphical user interface (GUI) named
CuteCom. To install this program, type the following into a terminal window:
NOTE I had to type “sudo apt-get update” prior to entering the above command because the apt-get
repository didn’t initially find the CuteCom package.
Next, you must edit the file named inittab located in /etc directory in order for CuteCom to
communicate with the GPS receiver. Change the line below into a comment line.
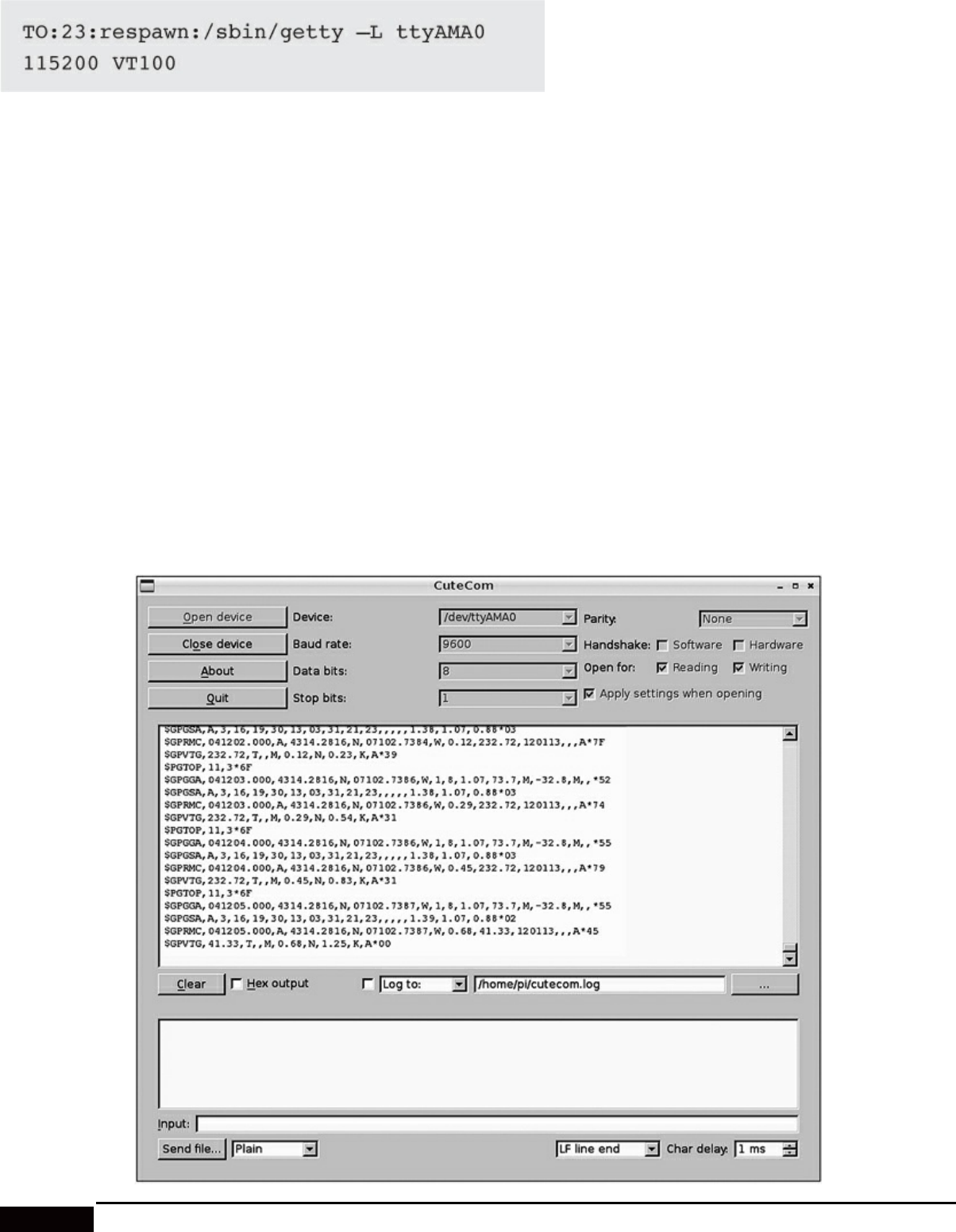
I used the nano editor to place the ‘#’ symbol at the start of this line. This action is required to
allow Linux to free up the serial console resource.
You can run the CuteCom program after editing inittab, by using File Manager and opening its
icon located in the “other” folder in the “Applications” folder. You must enter the appropriate
configuration data in the CuteCom GUI as follows:
Device—ttyAMA0
Baud Rate—9600
Data Bits—8
Stop Bits—1
Parity—none
Figure 5–18 is a screenshot taken from the RasPi display showing the CuteCom program with the
GPS data stream.
Figure 5–18 CuteCom GPS data stream.

Completing the steps just described confirms the proper operation of the Ultimate GPS receiver
and the proper functioning of the data connection between the RasPi and the receiver.
You are almost ready to start using the GPS receiver, but first I need to discuss the NMEA
protocol and the messages that are being generated from the Ultimate GPS receiver.
NMEA Protocol
NMEA is the acronym for the National Marine Electronics Association, but nobody refers to it by its
formal name. NMEA is the originator and continuing sponsor of the NMEA 0183 standard, which
defines, among other things, the electrical and physical standards to be used in GPS receivers. This
standard specifies a series of message types that receivers use to create messages that conform to the
following rules, also known as the Application Layer Protocol Rules:
The starting character in each message is the dollar sign.
The next five characters are composed of the talker ID (first two characters) and the message type
(last three characters).
All data fields that follow are delimited by commas.
Unavailable data is designated by only the delimiting comma.
The asterisk character immediately follows the last data field, but only if a checksum is applied.
The checksum is a two digit hexadecimal number that is calculated using a bitwise exclusive OR
algorithm on all the data between the starting ‘$’ character and the ending ‘*’ character but
including those characters.
There are a large variety of messages available in the NMEA standard; however, the following
subset is applicable to the GPS environment and is shown in Table 5–2. All GPS messages start with
“GP.”
Table 5–2 NMEA GPS Message Types
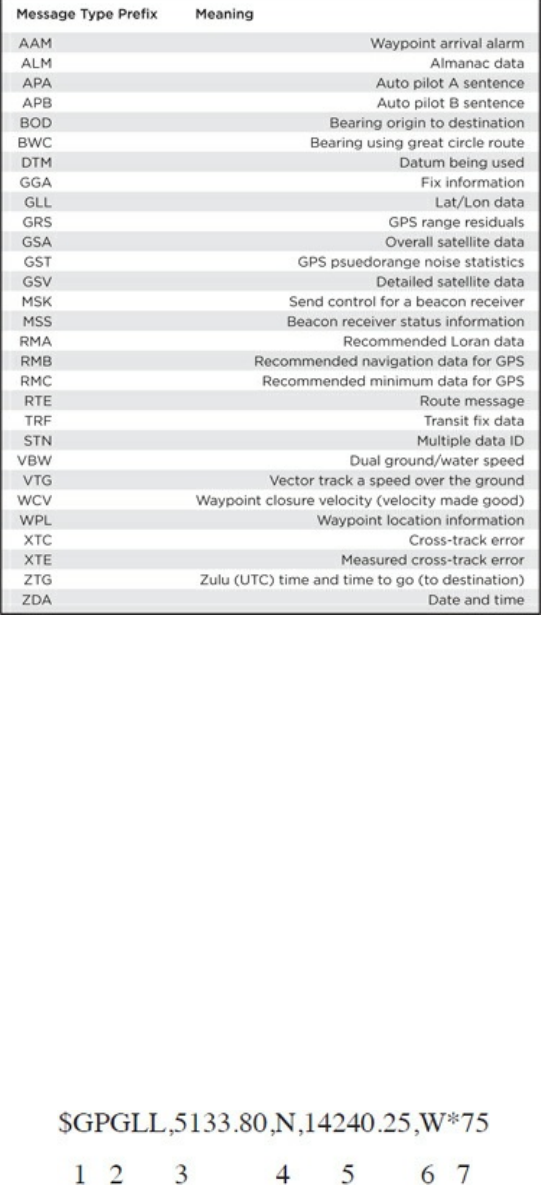
Latitude and Longitude Formats
The two digits immediately to the left of the decimal point are whole minutes, to the right are
decimals of minutes. The remaining digits to the left of the whole minutes are whole degrees.
Examples:
4224.50 is 42 degrees and 24.50 minutes or 24 minutes, 30 seconds. .50 of a minute is exactly 30
seconds.
7045.80 is 70 degrees and 45.80 minutes or 45 minutes, 48 seconds. .80 of a minute is exactly 48
seconds.
Parsed GPS Message
The following is an example of a parsed GPGLL message that illustrates how to analyze an actual data
message:
1. GP—GPS NMEA designator
2. GLL—Lat/Lon message type
3. 5133.80—Current latitude 51 degrees, 33 minutes, 48 seconds
4. N—North/South
5. 14240.25—Current longitude 142 degrees, 40 minutes, 15 seconds
6. W—East/West
7. *75—Checksum
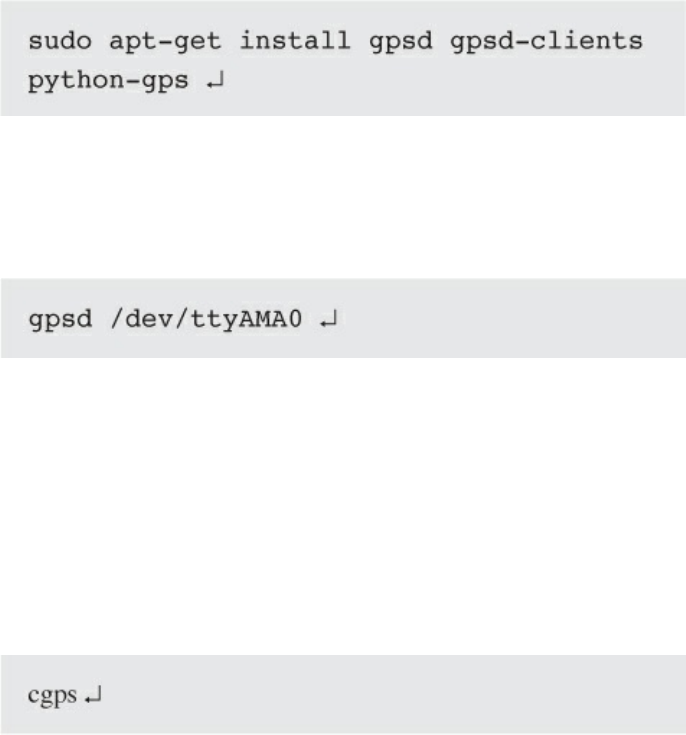
All GPS applications use some type of parser application to analyze data messages and extract the
required information to meet system requirements. This will be discussed in the next section.
The gpsd Apps
It is time to install and run the RasPi GPS application now that the GPS receiver and serial data
connection have been proved to work correctly. I will actually be using a suite of GPS tools or apps
contained in a package named gpsd. Enter the following command in a Linux terminal window to
download and install this suite:
gpsd is known as a daemon (pronounced daymon) and essentially is a program that runs in the
Linux OS background. The nice thing about daemons is that they go about their business without
needing any attention once started. To start gpsd, type the following in a Linux terminal window:
All that’s happening here is that you are telling the daemon which serial connection is being used,
in this case, ttyAMA0.
Display GPS Data
The cgps app displays the GPS information, such as speed, position, altitude, etc. To see this
information, type cgps in a Linux terminal window after starting the gpsd daemon.
You should see the screenshot shown in Fig. 5–19 appear on the RasPi screen.
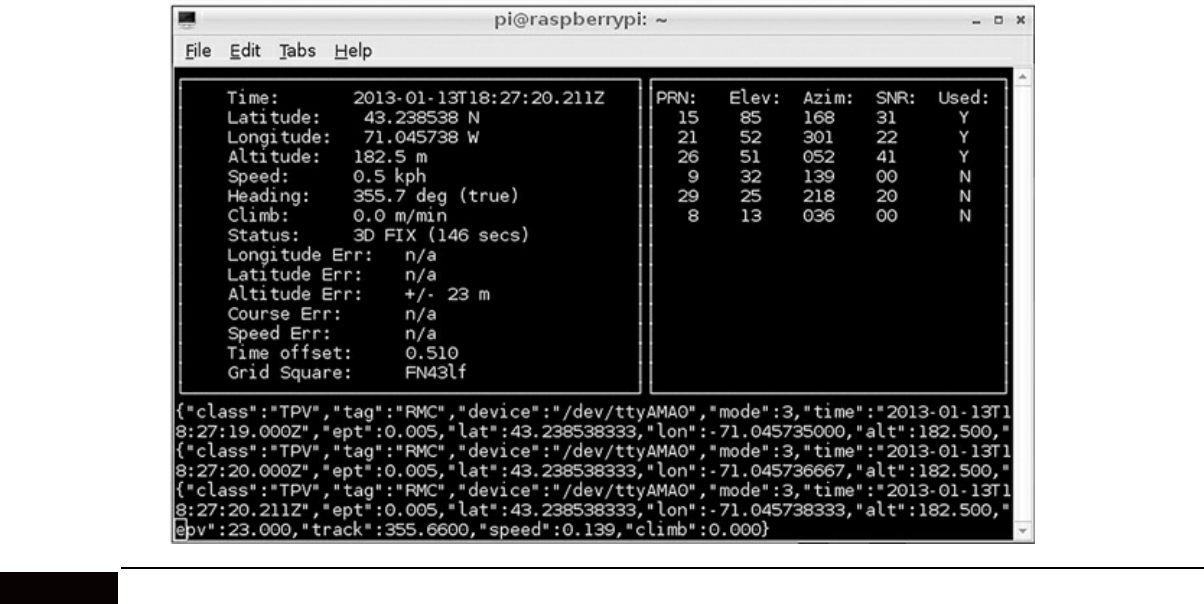
Figure 5–19 A cgps screenshot.
The figure shows the parsed, or analyzed, GPS data that is streaming in real time from the
Ultimate GPS receiver. There is a lot of information displayed, including the following on the left-
hand side:
Date—YYYY-MM-DD
Time—UTC accurate to 1 millisecond
Latitude—xx.xxxxxx N or S
Longitude—xxx.xxxxxx E or W
Altitude—Meters (above sea level)
Speed—Kilometers/hour (km/h or kph)
Heading—Degrees true (not magnetic)
Climb rate—Meters/second (applicable to aviation)
Status—Usually 3D but maybe 2D or no fix
Longitude error—Usually several meters
Latitude error—Usually several meters
Altitude error—Meters (could be 10s of meters)
Course error—Degrees (applicable to aviation)
Speed error—Usually a fraction of a km/h or kph
Time offset—Difference between GPS and UTC clocks (usually ignored)
Grid Square—The Maidenhead Locator System grid indicator
On the right-hand side is a real-time list of the GPS satellites in view. There were six satellites in
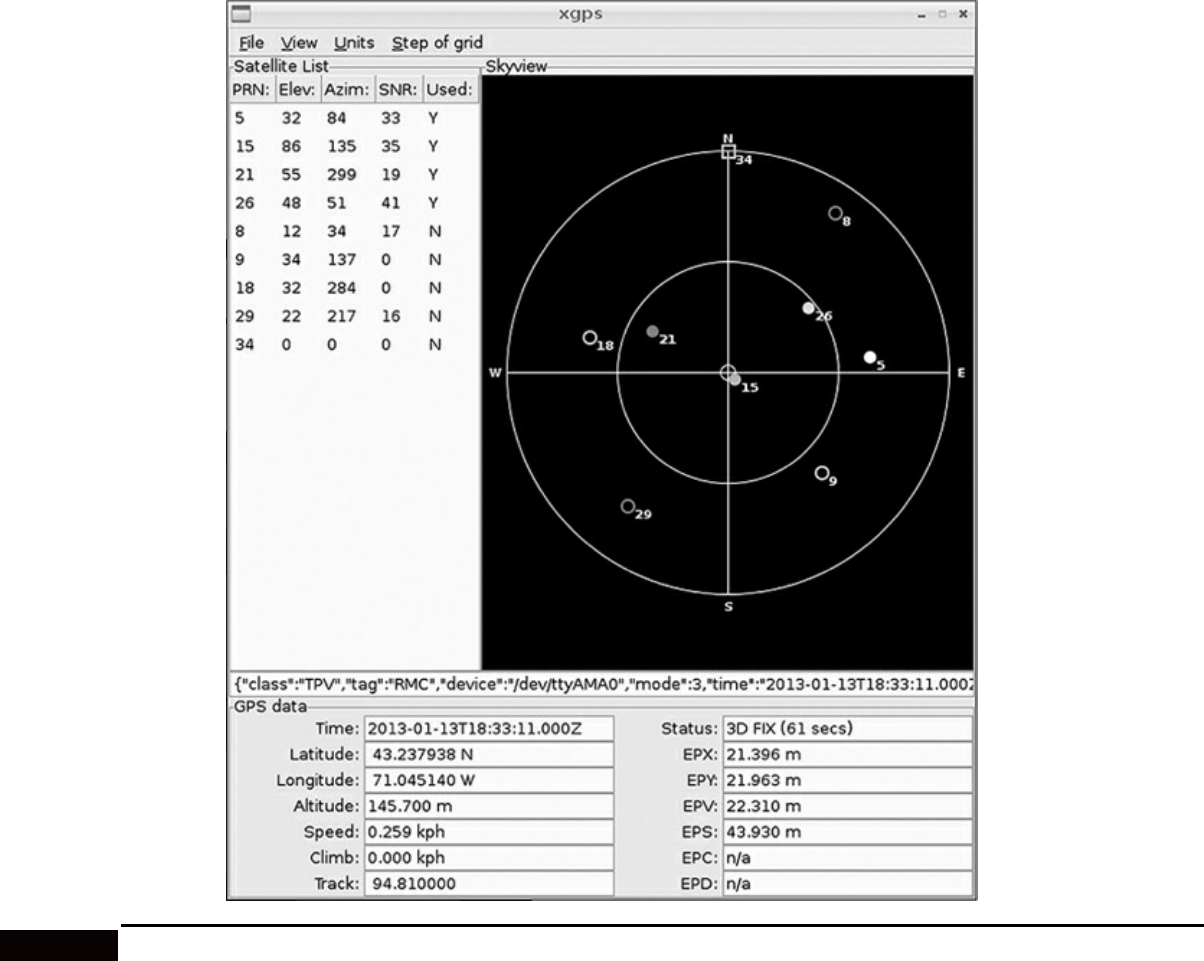
Fig. 5–19, three of which were used in computing the location fix. In all likelihood, the satellites not
used had insufficient signal strength as indicated by a low signal to noise ratio (SNR).
The bottom of Fig. 5–19 shows a portion of the raw GPS data stream that gpsd uses to parse data
for the cgps application. The TPV tag seen repeatedly in the data stream stands for target, position,
and velocity and is probably the most common tag in a GPS data stream.
There is also a graphical GPS display that can be run by typing xgps in a Linux terminal window.
Figure 5–20 is a RasPi screenshot showing this graphical display.
Figure 5–20 An xgps screenshot.
The top portion of the figure is the GPS constellation that is in a real-time sky view of the
receiver. The data shown is almost identical to the satellite data shown on the right-hand side of Fig.
5–19. In a similar fashion, the data shown on the bottom of Fig. 5–20 is nearly identical to the left-
hand side data shown in Fig. 5–19. One difference is that the error data is abbreviated as EPX, EPY,
EPV, etc., in Fig. 5–20, while it is spelled out in Fig. 5–19.
GPS Packet Monitor
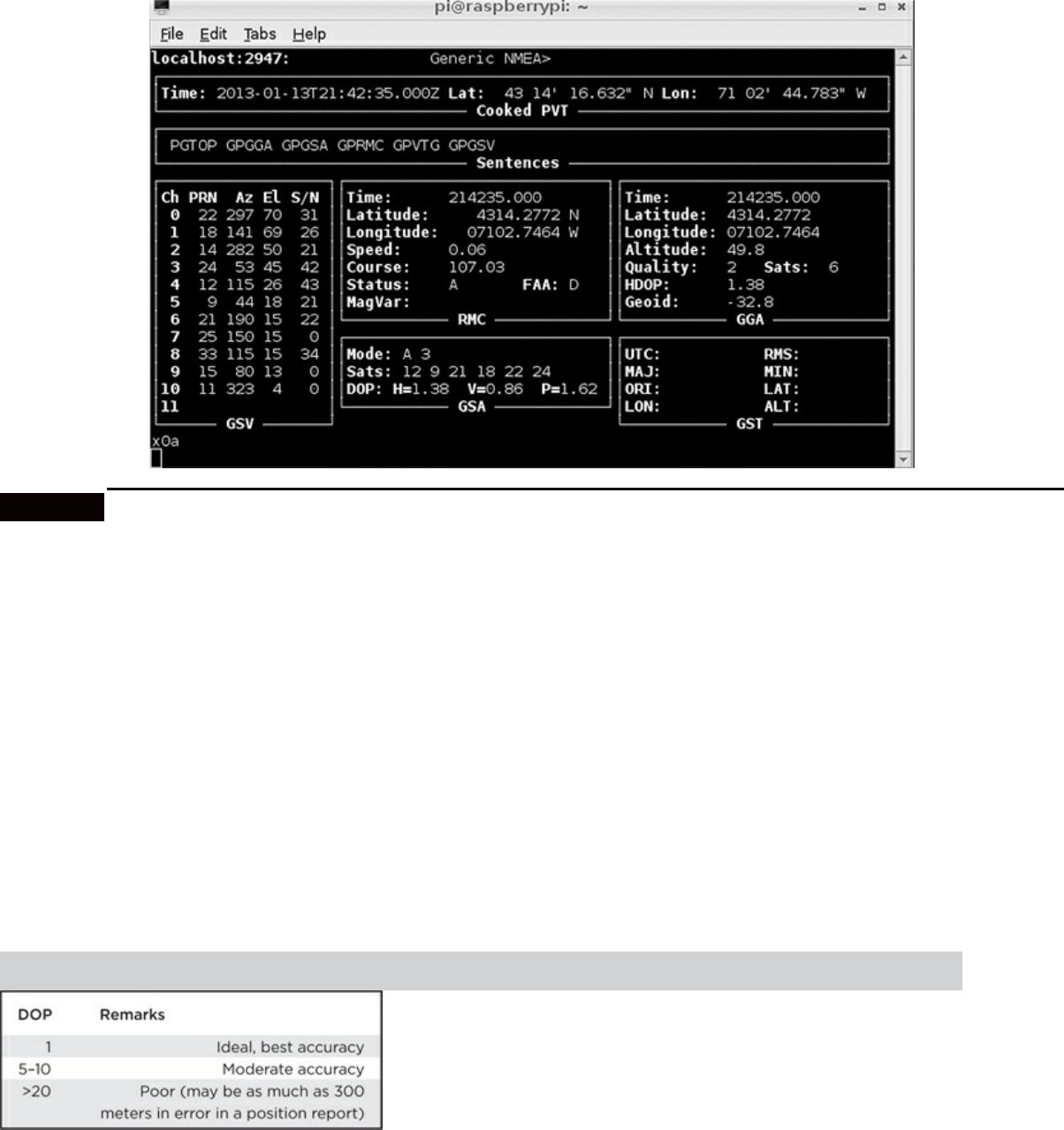
The gpsmon app allows you to monitor the GPS data stream while providing a simplified view of the
packets flowing from the receiver to the RasPi. Figure 5–21 shows a screenshot of gpsmon in
operation.
Figure 5–21 A gpsmon screenshot.
When you compare Fig. 5–21 to the previous two figures you won’t see a whole lot of new
information, but the latitude and longitude have been converted to an easy-to-read format of degrees,
minutes, and seconds. There are also some other lesser-used data shown including:
DOP H—Horizontal dilution of precision
DOP V—Vertical dilution of precision
DOP P—Total or 3D dilution of precision
Geoid—Altitude correction due to non-spheroidal earth curvature
The dilution of precision (DOP) numbers are relative indicators of GPS accuracy due to the
satellite–receiver configuration. Lower numbers are better, as shown in Table 5–3.
Table 5–3 Meaning of DOP Numbers
Summary
The chapter began with a brief history of the GPS system followed by a tutorial example that
explained the basic underlying principles governing the system.
Next, I discussed the Ultimate GPS receiver, focusing on its excellent receiver characteristics as
well as the easy serial communication link.
I discussed how to setup and test a serial console link using a USB to serial TTL cable as well as
serial terminal control programs for both a Windows laptop and the RasPi. The serial comm link
between the GPS receiver and the RasPi was setup, and a series of communication tests were
demonstrated to verify the proper operation of all system components.
The NMEA 0183 protocol was thoroughly examined to illustrate the rich set of messages that are
created by the GPS receiver. This project uses only a small subset of the data but you should be aware
of what is potentially available. A parsed GPS message was also shown along with a brief explanation
of how to interpret latitude and longitude data.
The remaining portion of the chapter concerned the gpsd suite of applications including cgps,
xgps, and gpsmon. These apps provide an excellent set of tools to display and analyze the continuing
stream of GPS data produced by the Ultimate GPS receiver.
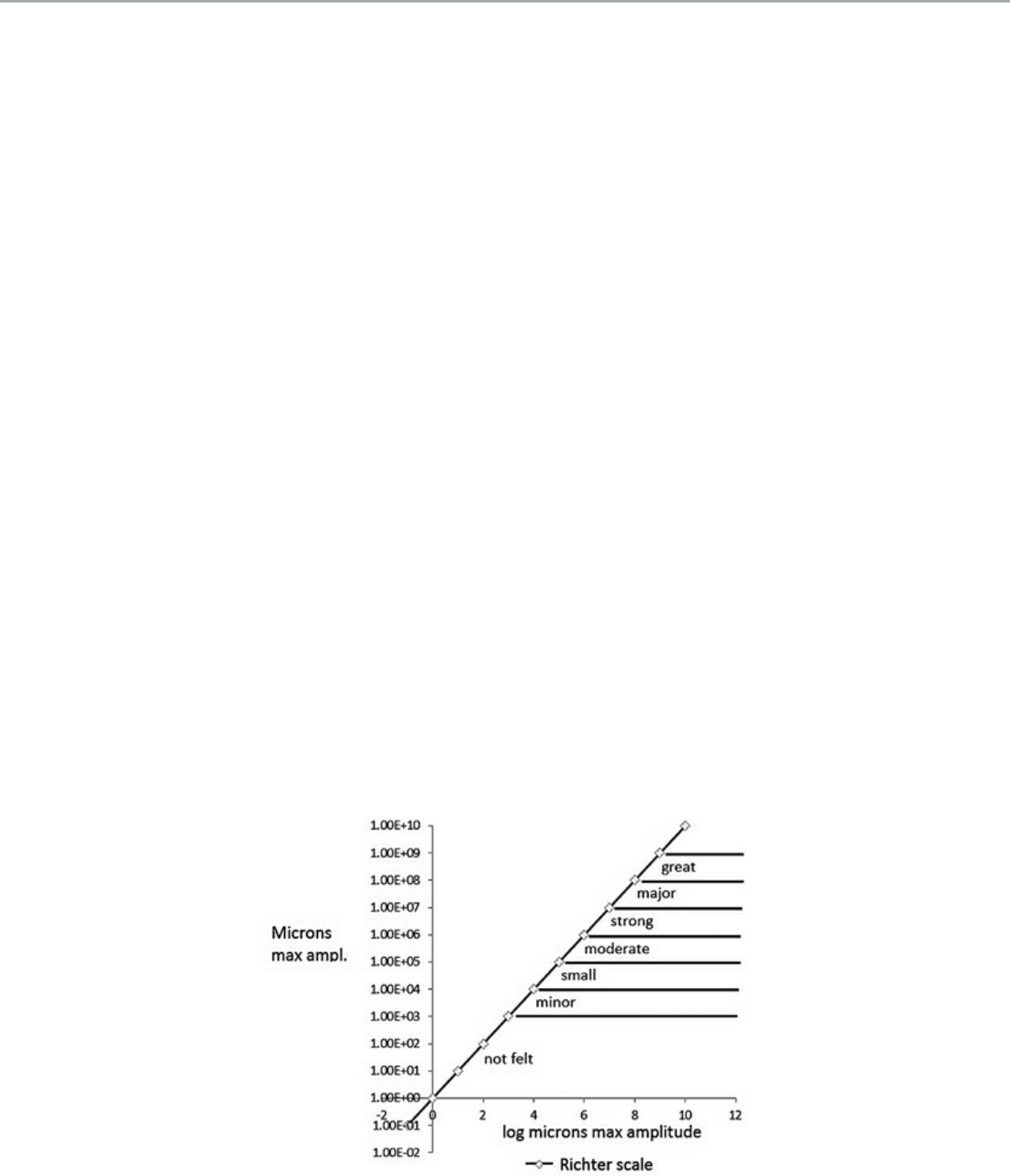
CHAPTER 6
Earthquake Detector
Introduction
I will show you how to build a sensitive earthquake detection system using the RasPi as a controller
that both processes and displays the signals generated by the detector.
Let us begin with a discussion of seismology and earthquakes, focusing on their makeup and how
they are measured. Seismology is the term used to describe the study of earthquakes. This background
section will help you understand the key concepts behind the detection-system design and what you
should realistically expect from this fairly simple system.
I have also included a section on the analog-to-digital conversion that is needed to allow the RasPi
to link to the earthquake, or more generally termed, seismic detector.
Some sample plots are also shown to help you understand the system outputs and to show you how
you might use this system to detect imminent quakes, thereby providing you and your family with a
bit more warning time in order to allow you to avoid or minimize a bad situation.
Seismology and Earthquakes
An earthquake, or more simply a quake or tremor, generally refers to any large release of energy from
within the Earth’s crust. There are a variety of sources that can cause this energy release, including a
sudden displacement or shift in the ground, often located well below the surface level. This energy is
measured in a localized area by the Richter magnitude scale, and globally, by the moment magnitude
scale. The Richter scale is considered open-ended but generally ranges between 2 and 9, with level 2
quakes not being felt and level 9 quakes creating catastrophic destruction. Figure 6–1 diagrams the
Richter scale plotted with quake severity designations.
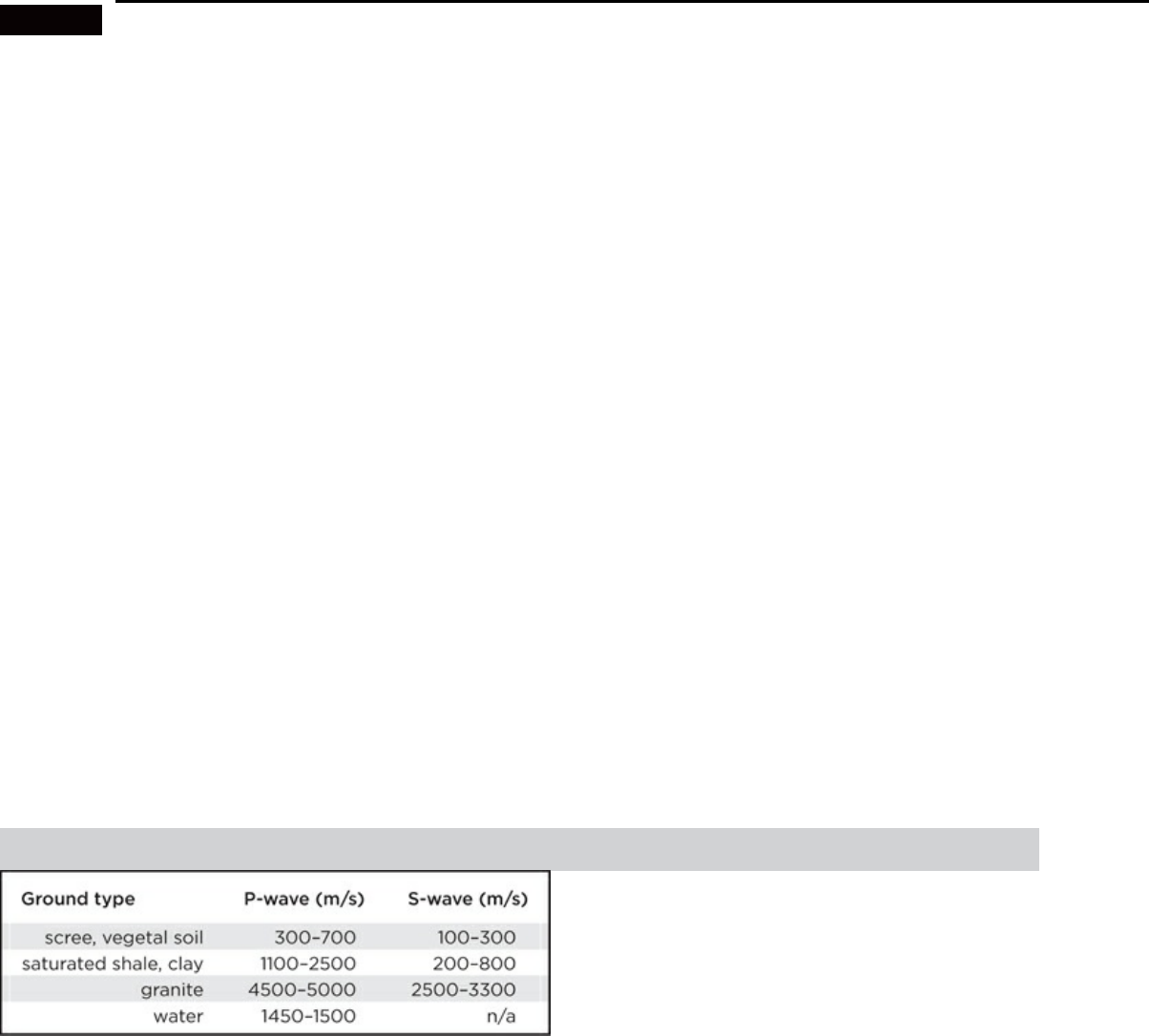
Figure 6–1 Richter scale and quake severity.
The X axis shows the actual Richter numbers, which are the base-10 logarithms of values on the Y
axis. The Y axis shows the maximum ground displacement values measured in microns, or millionths
of an inch. Therefore, each increment of the Richter number represents a 10-time increase in quake
severity. For example, going from a 5 to a 6 level means shifting from a moderate to a strong quake.
The most common type of quake is created by faults deep within the Earth’s crust that suddenly
release energy due to an almost unimaginable force build-up. This release, or ground displacement,
generates two types of energy waves that rapidly transverse through the Earth. The initial energy wave
is termed a P-wave, also known as a primary or pressure wave, and it has a velocity of approximately
1000 meters/second. P-waves, while energetic, carry far less energy than the S-wave, also known as a
secondary or shear wave. The S-wave travels at 250 meters/second, slower than the P-wave but
containing much greater ground displacements than the P-wave. The larger amplitude S-waves cause
the majority of damage to surface structures.
The seismic detector is sensitive to both P-and S-waves. The P-waves will be detected first, since
they travel faster than S-waves. The difference between the time of arrival (TOA) of the two waves
will depend upon the distance from the quake epicenter to the location of the detector. A distance of a
few kilometers will result in only a few seconds between the waves, while that of several hundred
kilometers can amount to 20 minutes or more. The RasPi can be set to generate an alarm if an initial
wave greater than a threshold amount is detected. This should provide some time to take shelter in a
secure and strong location, provided that the epicenter is not too close. The velocities of the P- and S-
waves are very much dependent upon what makes up the ground through which the waves travel.
Table 6–1 shows some typical velocities for these waves as they travel through a variety of ground
types.
Table 6–1 P- and S-Wave Velocities versus Ground Type
As you can see from the table values, both waves have higher velocities as the ground composition
becomes denser. There will not be much of a time delay if only solid granite exists between the
epicenter and the detector because the P-wave travels at approximately 5000 m/s, or about 3 mi/s.
Interestingly, S-waves do not travel through water (as is indicated by the n/a in the water velocity
column). Note that I also used average values for both P- and S-waves in the above discussion
regarding expected TOAs.
Another key parameter of all seismic waves is the period of time between amplitude peaks, which
can be seen in Fig. 6–2.

Figure 6–2 Seismic wave period.
The inverse of a wave period is frequency and is measured in hertz (Hz). The average seismic
frequency range is 0.5 to 5 Hz, which corresponds to a period range of 2 to 0.2 seconds respectively.
This frequency range is quite low and has a significant impact in the design of a responsive seismic
sensor, which is discussed in the next section.
Seismic Sensor Design
Figure 6–3 is a basic diagram illustrating the classic design for the garden-gate seismic sensor. It is so
named because of the two pivot points that are in vertical alignment, such as would be found in a
traditional, hinged garden gate. A mass is suspended between the pivots so that seismic-vibration
tracings can be recorded in a horizontal direction, as shown in Fig 6–3.
Figure 6–3 Garden-gate seismic sensor.
Figure 6–4 is a basic diagram illustrating the classic design for the inverted-pendulum seismic
sensor. A vertical mass is suspended from a horizontal-hinge assembly, and tracings are recorded in a
vertical direction, as shown in the figure.
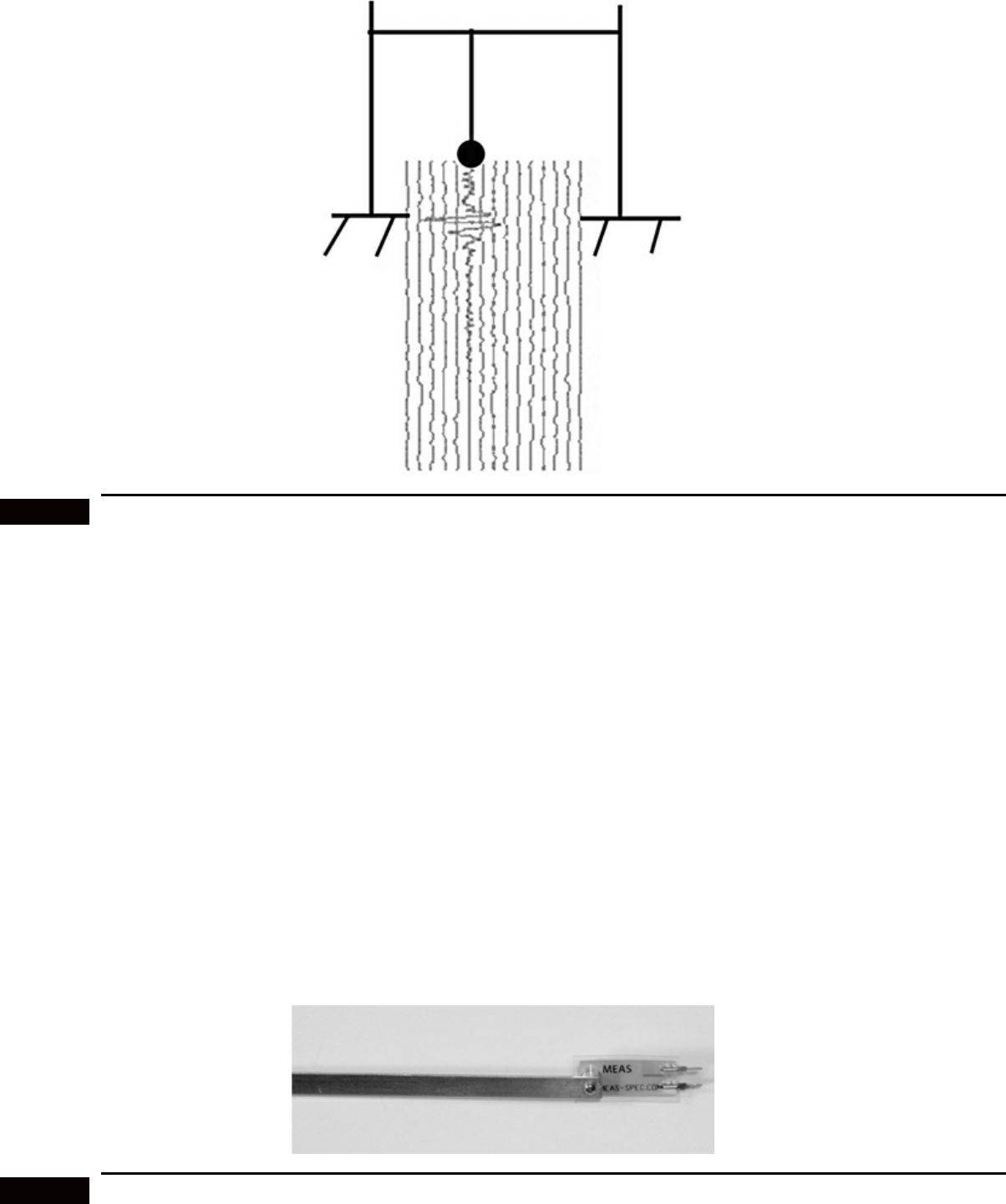
Figure 6–4 Inverted pendulum seismic sensor.
Both designs are very capable of creating mechanical paper tracings that you may have recognized
from TV news reports or even disaster movies.
The modified inverted-pendulum design used in this project is very responsive to low-frequency
seismic vibrations and is fairly inexpensive to construct. The sensor is a modification of a
seismograph project, the “Poor Man’s Seismograph” (PMS), which was described in the May 2012
edition of the Nuts and Volts magazine. Ron Newton created the sensor that I found very appealing
because it was an extremely simple design, yet highly capable of detecting low-frequency seismic
waves. The sensor produces an analog voltage representation of the seismic wave in lieu of a
mechanical tracing, as is the case in the classical design.
Figure 6–5 shows the actual sensor assembly that consists of a thin brass strip bolted to a thin-
film-piezoelectric sensor that, in turn, is attached to a circuit board. The brass strip is 1/4 inch wide by
1/32 inch thick and 9 inches long. There is a 1/16-inch diameter hole drilled 1/8 inch on center from
one end. The brass strip is bolted to the sensor using a fine-threaded #80 nut and bolt set. You should
also use a drop of adhesive, such as blue Loctite, on the nut to ensure that it does not loosen.
Figure 6–5 Seismic sensor assembly.
The thin-film-piezoelectric sensor is a model LDT0-028K manufactured by Measurements
Specialties Corp. It consists of a 28-μm thick, piezoelectric PVDF polymer film with screen-printed,

silver-ink electrodes all laminated to a 0.125-mm polyester substrate. Two crimped contacts provide
for external electrical connections. The bending forces on the piezoelectric polymer film create a very
high strain that, in turn, causes high voltages to appear across the electrodes.
The 9-inch brass strip attached to the sensor adds additional mass that lowers response frequency
when combined with the damping effect of the sensor. The pendulum response period t is determined
by the following equation:
where L = the pendulum length and
g = the standard gravity constant, which is 9.8 m/sec2.
In this case, L = 9.8 inches (the 9-inch brass strip plus the 0.8-inch-long piezoelectric sensor) or .
249 m. Plugging in the values, we get
which yields a response period of 1 second.
t = 2 × 3.14 ×.16 = 1 s
or a frequency (f) of 1 Hz. (Recall that the frequency is the inverse of the response period, or wave
period.) This value is ideal for seismic wave detection.
The piezoelectric film sensor does need some amplification to detect weak seismic signals. Figure
6–6 shows a portion of the PMS circuit, the electronic amplifier (amp), that increases the signal to
useful levels. The IC1 shown in Fig. 6–6 is a Microchip model MP601 operational amplifier (op amp)
that operates from a single power supply of 3 V and is configured as a noninverting amplifier. The
11X gain is fixed by resistors R1, with a resistance R1 of 100 kΩ, and R2, with a resistance R2 of 10
kΩ, and is calculated using the following equation:

Figure 6–6 Seismic amplifier circuit.
Gain = (R1 + R2)/R2
Plugging in the values, we get
11 = (100 kΩ + 10 kΩ) / 10 kΩ
The potentiometer, or variable resistor, R4 in combination with resistor R3 sets an adjustable DC
voltage offset so that the full range of the amplitude swing from the seismic sensor is input to the op
amp without clipping or distortion. The op amp output from pin 6 goes to both the RasPi processing
circuit and the PMS microprocessor.
The original PMS uses a Microchip PIC24HJ64GA002 microprocessor to convert and store
detected seismic waves onto an SD card, which is later processed on a PC to display the waves. My
project uses the RasPi to process the seismic waves in real time, thus making the information
immediately available. Unfortunately, the RasPi does not contain any built-in analog-to-digital
converters (ADCs), while the PIC microprocessor does have this feature. An external ADC chip must
be used to convert the analog seismic signal to the equivalent digital format, as discussed in the next
section.
Analog-to-Digital Conversion
The electrical signal generated by the thin-film piezoelectric sensor is classified as analog because it
is a continuous voltage representation of the mechanical vibrations affecting the sensor. The RasPi,
meanwhile, can process only digital signals that have just two voltage values, 0 and 3.3 V. Therefore,
an ADC process must be used to convert the seismic signal to a suitable digital representation. The
first step in the ADC process is to sample the analog signal in order to capture a voltage level that will
be converted to a number reflecting the sampled voltage level.
Sample rate is the term used to indicate how often the analog signal level is captured. The Nyquist
rate is a very specific constraint that determines the real-time sample rate. This value may be
expressed in samples per second (sps) or sampling frequency (fs) and is determined as follows:
fs = 2 × fmax
where fmax is the highest-frequency component present within the signal.
In our case, the seismic signal fmax is 5 Hz, as discussed above; therefore, fs is a minimum of 10
Hz or 10 sps. This is a very low value and provides a lot of time between samples to do the necessary
digital signal processing.
The second step in the ADC process is to convert the sample voltage to a digital number. This can
happen in a variety of ways, all of which are dependent upon the type of ADC chip that is used. I used
a Microchip model MCP3008 that is described in the Microchip datasheet as a 10-bit, SAR ADC with
SPI data output. Translated, this means that the MCP3008 uses a successive approximation register
(SAR) technique to create a 10-bit digital result that, in turn, is outputted in a serial data stream using
the SPI protocol. Figure 6–7 and a short discussion will help clarify this description.

Figure 6–7 MCP3008 functional block diagram.
The analog signal is first selected from one of eight channels that may be connected to the input
channel multiplexer. Using one channel at a time is called operating in a single-ended mode. The
MCP3008 channels can be paired to operate in a differential mode, if desired. A single configuration
bit named SGL/DIFF selects single-ended or differential operating modes. Single-ended is the mode
used in this project.
The selected multiplexer channel is then routed to a sample-and-hold circuit that is one of the two
inputs to a comparator. The other input is from a digital-to-analog converter (DAC) that receives its
input from a 10-bit SAR. Basically, the SAR starts at 0 and rapidly increments to a maximum of 1023,
which is the largest number that can be represented with 10 bits. Each increment increases the voltage
appearing at the DAC’s comparator input. The comparator will trigger when the DAC’s voltage
precisely equals the sampled voltage, and this will stop the SAR from incrementing. The digital
number that exists on the SAR at the moment the comparator “trips” is the ADC value. This number is
then outputted, one bit at a time through the SPI circuit discussed below. All this takes place between
sample intervals. The actual voltage represented by the ADC value is a function of the reference
voltage VREF connected to the MCP3008. In our case, VREF is 3.3 V; therefore, each bit represents
3.3/1024 or approximately 3.223 millivolts. For example, an ADC value of 500 would represent an
actual voltage of 1.612 V, which was computed by multiplying .003223 by 500.
Serial Peripheral Interface
The Serial Peripheral Interface (SPI) was introduced in Chap. 1 as a synchronous serial (SS) data link
that uses one master device and one or more slave devices. There are a minimum of four data lines
used with the SPI, and Table 6–2 shows the names associated with the master (RasPi) and the slave
(MCP3008) devices.
Table 6–2 SPI Data Line Descriptions

Figure 6–8 is a simplified block diagram showing the principal components used in an SPI data
link. There are usually two shift registers involved in the data link, as shown in the figure. These
registers may be hardware or software, depending upon the devices involved. The RasPi implements
its shift register in software, while the MCP3008 has a hardware shift register. In either case, the two
shift registers form what is known as an inter-chip circular buffer arrangement, which is the heart of
the SPI.
Figure 6–8 SPI simplified block diagram.
Data communication is initiated by the master, which begins by selecting the required slave. The
RasPi selects the MCP3008 by bringing the SS line to a LOW state or 0 V. During each clock cycle,
the master sends a bit to the slave that reads it from the MOSI line. Concurrently, the slave sends a bit
to the master, which reads it from the MISO line. This operation is known as full-duplex
communication, i.e., simultaneous reading and writing between master and slave. Figure 6–9 shows
the Master-Slave connection between the RasPi and the MCP3008.
Figure 6–9 Test circuit SPI master/slave connections.
The clock frequency used is dependent primarily upon the slave’s response speed. The MCP3008
can easily handle bit rates up to 3.6 MHz if powered at 5 V. Since we are using 3.3 V, the maximum
rate is a bit less at approximately 2 MHz. This is still very quick and will process the RasPi input
without losing any data.
The first clock pulse received by the MCP3008, with its CS pin held LOW and DIN pin HIGH,

constitutes the start bit. The SGL/DIFF bit follows next and then three bits that represent the selected
channel(s). After these five bits have been received, the MCP3008 will sample the analog voltage
during the next clock cycle.
The MCP3008 then outputs what is known as a low null bit that is disregarded by the RasPi. The
following 10 bits, each sent on a clock cycle, are the ADC value with the most significant bit (MSB)
sent first, down to the least significant bit (LSB), which is sent last. The RasPi will then put the
MCP3008 CS pin HIGH ending the ADC process.
Connecting and Testing the MCP3008 with the RasPi
The MCP3008 is connected to the RasPi using the Pi Cobbler prototype tool along with a solderless
breadboard. Figure 6–10 is the schematic for this circuit. The physical setup is shown in Fig. 6–11.
Figure 6–10 RasPi and MCP3008 connection schematic.
Figure 6–11 RasPi and MCP3008 test setup.
There is a temporary test setup on the left side of the breadboard consisting of a potentiometer
connected between 3.3 V and ground. The ADC channel is connected to the tap, allowing a variable

voltage that can be used in the test.
The test software that produces a continuous stream of ADC values is shown below It is also
available on the book’s companion website, www.mhprofessional.com/raspi, as Test_ADC.py. The
code follows the ADC configuration and the SPI protocols, as discussed above. The code is based upon
the sample code available from the Learn.Adafruit.com website in their discussion of the MCP3008.
Test_ADC.py
Figure 6–12 presents a screenshot of a portion of the program output with the analog voltage
adjusted to a 500 value, or count as it is sometimes called. An actual voltage of 1.629 V was measured
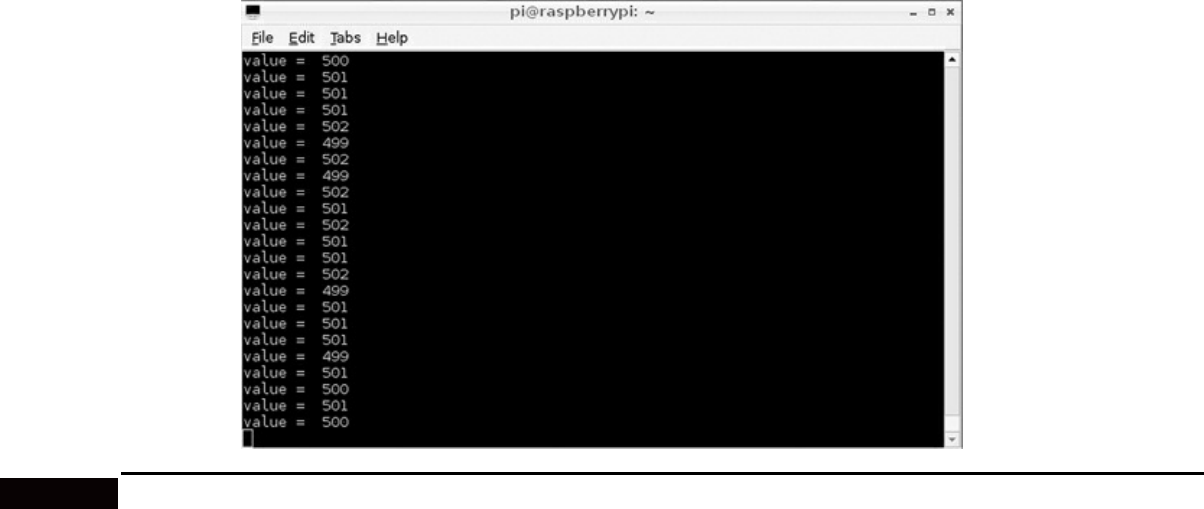
using an uncalibrated voltage output meter (VOM). This is quite close to the computed value of 1.612.
The difference was primarily due to a slightly higher supply voltage measured at 3.32 V that, when
factored into the computation, yields a 1.621 V or only a .008 V difference. This is equivalent to about
3 counts or +0.3%, which is quite normal for this type of ADC.
Figure 6–12 Test_ADC.py program output.
The sharp-eyed reader may have noticed that the program does not rely on the built-in SPI
functionality but instead implements a “bit-banged” interface that was discussed in Chap. 1 page 13.
This approach was taken because the Linux version used in this project did not directly implement the
SPI protocol. It makes no functional difference which approach is taken other than that four GPIO pins
are dedicated in the “bit-banged” version and are not otherwise available for other uses.
Connecting the Seismic Detector
It is very simple to connect the PMS detector to the MCP3008 circuit. First disconnect and remove the
test circuit that was used in the above section. Then connect the PMS op-amp output and ground to the
MCP3008 channel 0 and ground, respectively. Figure 6–13 shows the PMS connected to the MCP3008
circuit that, in turn, is connected to the RasPi through the Pi Cobbler.
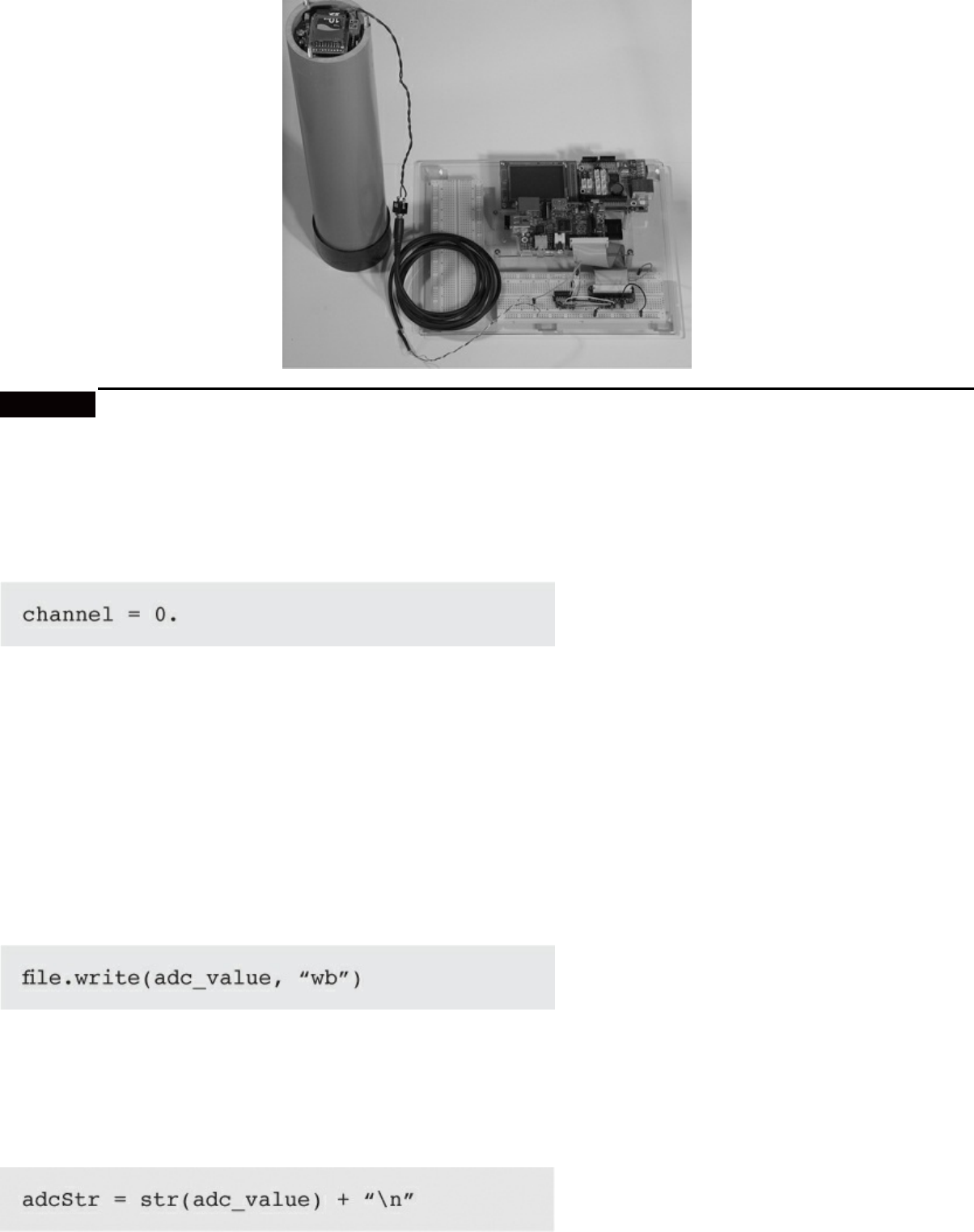
Figure 6–13 PMS connected to MCP3008/Pi Cobbler and RasPi..
The software also requires a slight modification because we are done with the initial testing and
now need to collect some actual data from the seismic sensor. The code segment in the code listing
titled “Test_ADC.py Segment (modification to allow the collection of seismic data)” on page 82
replaces all the code starting at the line shown below.
The program with the new code inserted is available on the book’s website as Test_File_ADC.py.
This new program writes 1200 adc_values to a file named “myData,” which is located in the pi
working directory, if you have not changed that location. Each value has a new-line character
appended to enable the data file to be easily imported into Excel for further analysis.
Python supports two ways to store data in a file by using either string or binary formats. The
approach taken in this program was to store the data as a sequence of strings, since we knew
beforehand that the data would be input to an Excel spreadsheet for further analysis. Storing data as
strings consumes a lot of file space as compared to storing the data in a binary format. The following
code line shows how to store the data in a binary format:
where wb is short for write binary. Of course, you would need to read in the data using the
complementary “rb”, short for read binary. Not only that, but you need to restructure the program to
keep track of the number of bytes read to ensure that you don’t mix up the byte sequence and start
reading “garbage.” You also will not need the line:

because the binary data is written in a contiguous byte stream that you, as the programmer, must
decipher. This is another reason to use strings—it is much easier to debug the file contents.
This program takes two minutes to run, as the time between samples has been reset to .1 second.
Recall that this sample frequency is 10 Hz, which was discussed earlier as an optimal value for this
application. Also note that “DEBUG = 0” is set, or you will get 1200 values displayed on your screen.
You should run Test_File_ADC.py while moderately shaking the PMS to create pseudoseismic
activity. Do not be so vigorous as to have the brass pendulum strike the PVC pipe wall. The sensor is
quite sensitive, so only gentle force is needed. We will be ready for some data analysis once the file is
generated.
Seismic Data Analysis
Copy and paste the contents of the myData file into an Excel spreadsheet. There should be exactly
1200 values in a single column. Each value represents the digitized value of a sample from the PMS
detector. The samples were taken at an interval of .1 second; hence, the entire record spans two
minutes. During this time, the PMS was subjected to some shaking, which provided the data for
analysis. My Excel file is available on the book’s companion website as Seismic.xlsx.
Figure 6–14 is a graph of an interesting portion of the data set. I selected it by visually scanning a
graph of the entire record. This portion covers the first 200 samples. I next wanted to zoom in on, and
examine in finer detail, a portion of this graph that covered X-axis numbers 139 to 168. Figure 6–15
shows this detail.
Figure 6–14 200 samples.
Figure 6–15 30 samples.
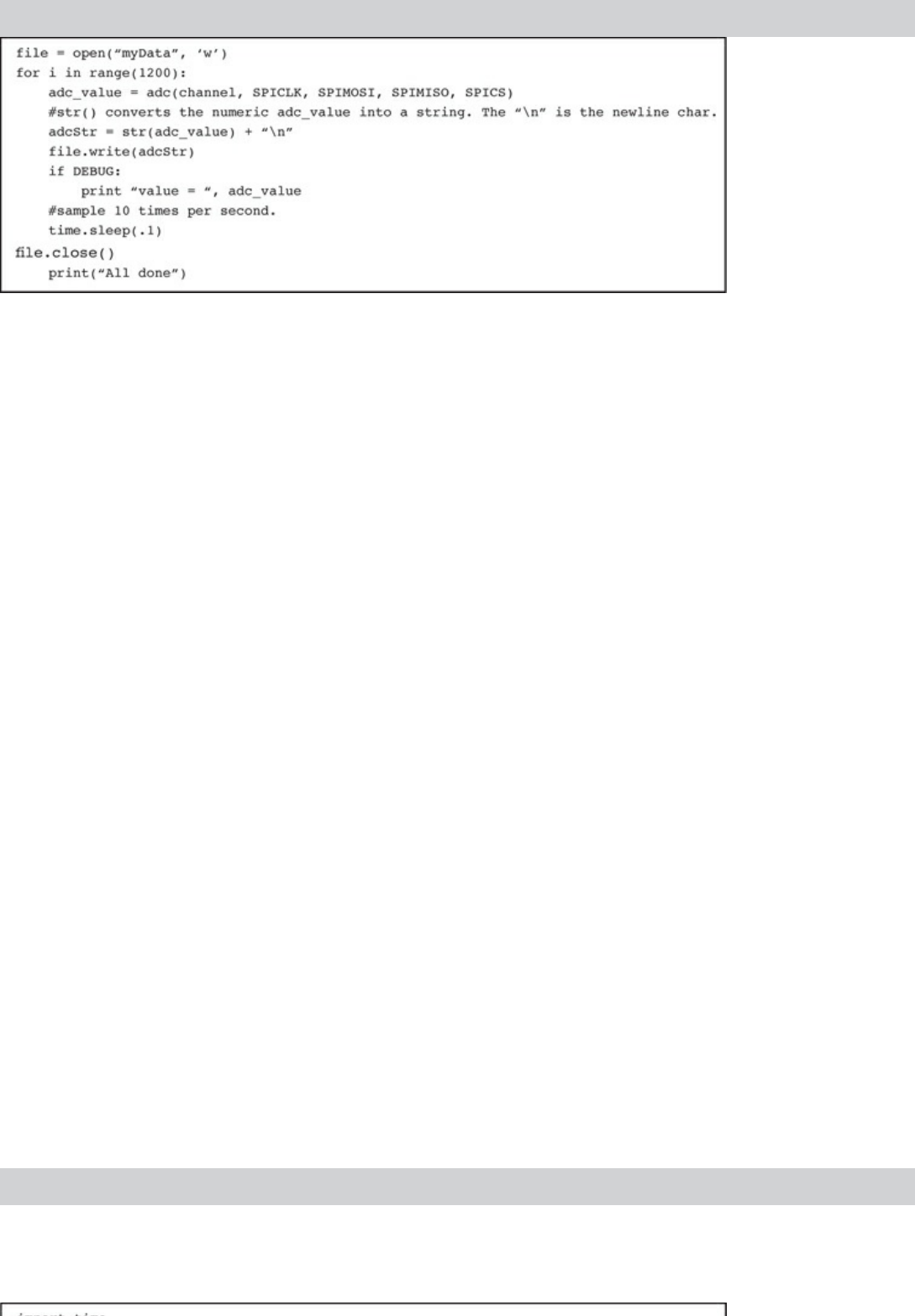
Test_ADC.py Segment (modification to allow collection of actual data)
Four peaks, located at X-axis numbers 8, 11, 14, and 18 in Fig. 6–15, are clearly visible. These
peaks are separated in time by .3, .3, and .4 second, as each X-axis number represents a .1 second
interval. The average of the peak separation is .33 second, or equivalently, 3 Hz. This frequency is the
apparent resonant frequency of this PMS detector. It falls well within the acceptable frequency span
discussed earlier and is very suitable for seismic detection purposes.
The other analysis aspect that must be considered is the seismic magnitude, or Y axis. The highest
value recorded within the two minute data record was slightly over 1000. Recall that the 10-bit
MCP3008 can measure up to 1023, using a 3.3-V reference. Again, the maximum is OK, but we do
have to be aware of the minimum value, or else the detector range will “bottom out”.
Examining the graphs indicates that the equilibrium level is around 500 counts. This is ideal in
that an equal range, both high and low, is available to capture the sampled data. You may have to
adjust your PMS if the equilibrium is not at this ideal level. That adjustment is easily done by turning
the PMS offset potentiometer R4 until the displayed level is approximately 500. Refer to Fig. 6–6 to
identify this control. Also, you can run the Test_ADC.py program to make this adjustment.
The final step in the analysis is to determine a valid warning or threshold level. This is somewhat
subjective in that you need to set the level high enough to forestall false alerts, yet low enough to
accurately capture real seismic events. Examining the data set again reveals that a level of 720 would
probably suffice. It is sufficiently high to avoid random vibrations that may be caused by heavy trucks
rolling nearby; yet it is low enough to capture real activity. In any case, the value can easily be
reprogrammed, if needed.
Operational System
The primary requirement for an operational system is to create a warning if the detected seismic
activity exceeds a preset or threshold level. I determined that a 720 level would be a good starting
point. The following program, Seismic_Monitor.py, will light an LED if a level of 720 or more is
detected. The LED will remain on until reset by restarting the program. Seismic_Monitor.py is
available on the book’s website.
Seismic_Monitor.py

The system functioned as expected with the LED being activated by a slight shake applied to the
PMS detector. Use the nano editor to change the line
to any value that you want to set as an appropriate threshold level.
Summary
This chapter began with a brief review of seismology and how earthquakes are generated. It was
pointed out that quakes produce both P- and S-waves with the P-waves being precursors to the
destructive S-waves.
Next, I covered the basics of seismic sensor designs. The inverted pendulum was selected for this
project because it is both sensitive and very inexpensive.
The analog-to-digital conversion process was discussed, as it is required in order to convert the
analog seismic signals to a digital format suitable for processing in the RasPi.
A thorough discussion of the Serial Peripheral Interface (SPI) followed. This is the interface
through which the data flows between the MCP3008 ADC chip and the RasPi.
Next the ADC chip was set up to function with the RasPi, using the Pi Cobbler prototyping tool.
Also shown was a test program using “bit-banging” to control the ADC chip and implement the SPI
protocol.
A seismic detector based on a kit called the “Poor Man’s Seismograph” (PMS) was connected and
tested with a program that collected data samples and stored them in a file on the RasPi file system.
This data file was then analyzed by using MS Excel to determine a realistic alarm level.
Finally, the project concluded with the demonstration of an operational system that lit an LED
when the seismic level went above the trip level.

CHAPTER 7
Home Automation
Introduction
In this chapter, I will cover how to effectively use the RasPi in a home automation system. But how
do you define a home automation system? The answer is after you examine the needs and
requirements of the homeowners, you design an automated system that best meets those needs. Hence,
one size or type of automated system does not serve all; instead you start with a flexible base system
that can be easily tailored to fit a specific situation.
The real purpose of a home automation system is to simplify a homeowner’s life. It accomplishes
this goal by removing repetitive and tedious tasks and relegating them to a hardware and software
system that never forgets, and accurately and consistently carries out the programmed tasks. Some of
the tasks that a home automation system could handle are shown in Table 7–1.
Table 7–1 Home Automation Tasks
There are numerous base-system technologies available that have been developed over recent
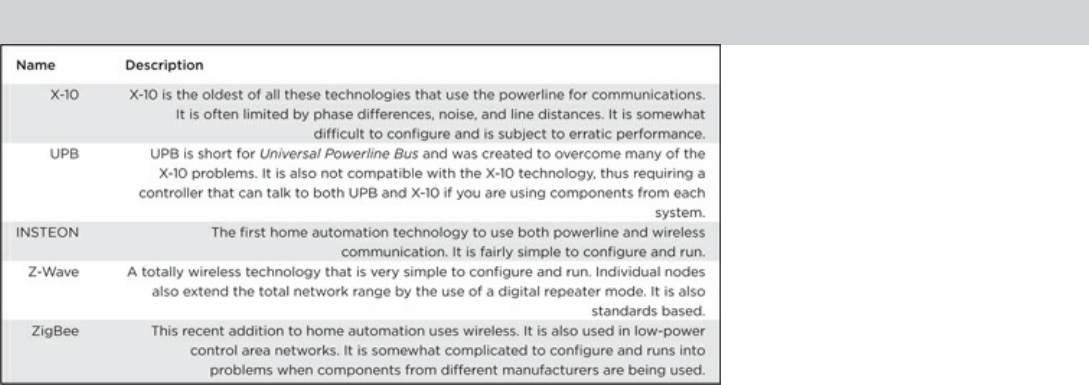
years to implement home automation. The most popular are listed in Table 7–2 with a brief
description.
Table 7–2 Popular Home Automation Technologies
I selected the Z-Wave technology to use in this project because it is wireless, very robust, based on
standards, and has components that are easily purchased and available from reliable manufacturers,
including GE, Black & Decker, Schlage, ADT, and Draper. Anyone can purchase a Z-wave remote
control and several nodes, and have an automation system functioning in a matter of minutes; the
simplicity of setting up an automation system is what attracted me to this technology. This project
replaces the remote with the RasPi and an attached Z-wave dongle. Of course, the RasPi is
programmed to suit the homeowner’s needs.
There is no hardware construction involved in this project (the only physical task is to plug in a
USB dongle), but that does not mean it is easy. A lot of software setup and configuration is involved
in making the project run successfully. Of course, that’s part of the fun of working with the RasPi and
Linux—many functions can be done in software versus building hardware peripherals.
Z-Wave Mesh Network
Each Z-Wave component or node contains a low-power radio-frequency (RF) transceiver. This radio
operates in the Industrial, Scientific, and Medical (ISM) band at a frequency of 908.42 MHz in the
United States and 860 MHz in Europe. These frequencies are far removed from other home wireless
devices that typically operate at 2.4 GHz. It is thus far less susceptible to causing, or being subjected
to, interference. The outdoor range, or line of sight, is approximately 100 m or 300 ft. The indoor
range is about 30 m or 90 ft, due mainly to attenuation caused by the interior walls. Range extension is
easily accomplished by simply adding additional nodes into the home.
Since each node is a transceiver, it both receives and transmits digital messages, acting as a digital
repeater or “digipeater.” Digipeating creates a signal hop. There is, however, one major proviso: only
four hops are allowed. After that, the communications protocol automatically terminates the signal in
a process known as hop kill. This is done presumably to limit range and probably to remain in legal
compliance with governmental regulations regarding low power, unlicensed operations.
Basics of Z-Wave Network Operation
The Z-Wave network, from its very beginning, was designed to be compliant with the ISO seven-layer
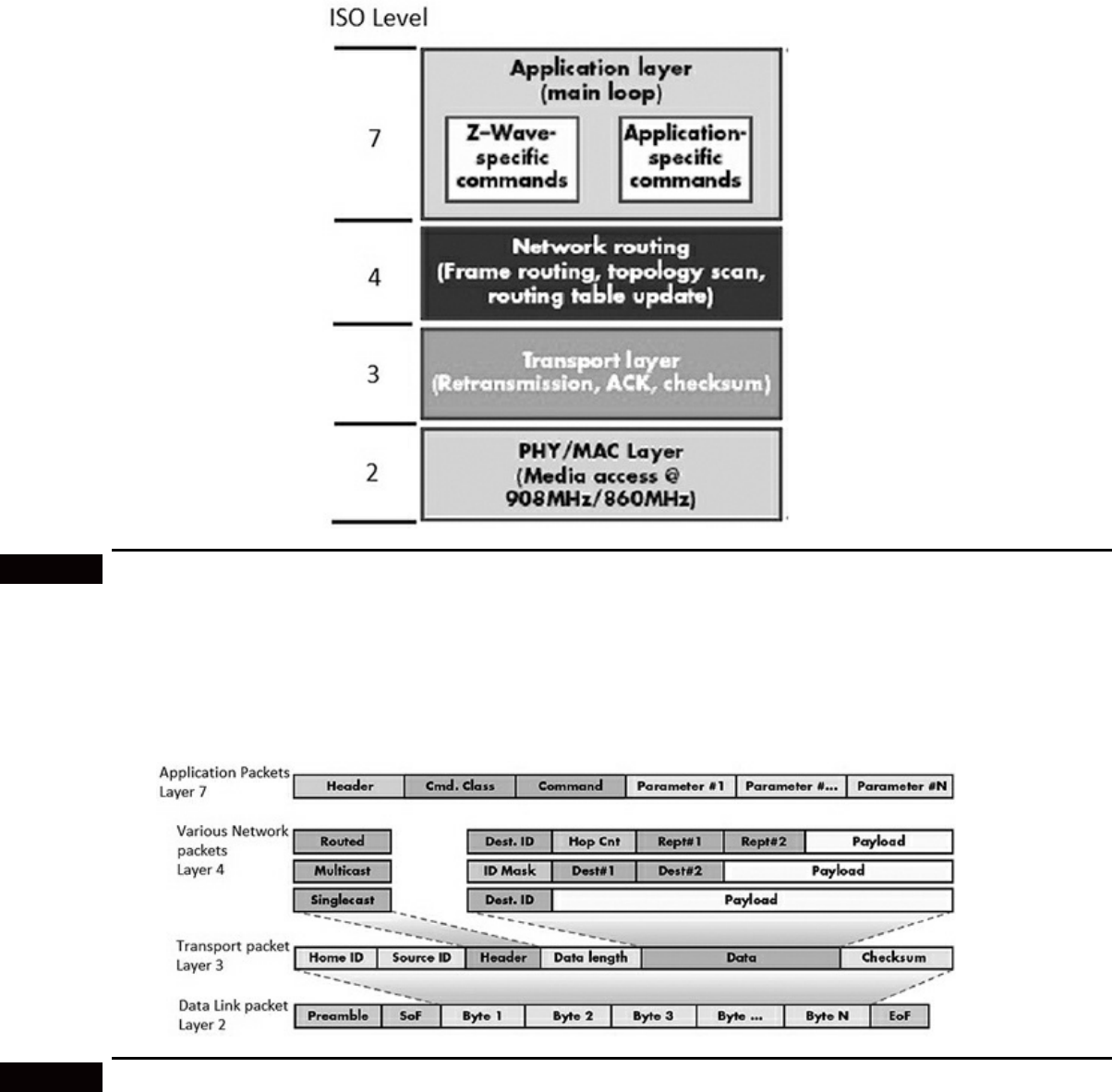
network model. As such, its inherent design is based upon proven computer network concepts that are
robust, efficient, and well understood by most system designers. Figure 7–1 shows the Z-Wave logical
network stack with the corresponding ISO layer number. All subsequent network software developed
for the Z-Wave network follows this model.
Figure 7–1 Z-Wave and ISO network layers.
Data sent through the Z-Wave network is in packets similar to the Ethernet format. Figure 7–2
shows how these packets are initially constituted at Layer 2 and subsequently modified at higher
layers, as needed to suit the real-time network communication need.
Figure 7–2 Z-Wave network packets versus model layers.
A basic packet is created at the Data Link Layer 2 that starts with a synchronization preamble
followed by a Start of Frame (SoF) byte. Next comes the payload, which can be up to 64 data bytes
and is terminated by an End of Frame (EoF) byte.
The Transport Layer 3 takes the basic packet and adds additional bytes, depending upon what is

required in the communication process. Z-Wave is a connection-type network, similar to Ethernet,
which has a very robust way of ensuring that packets get where they need to go. Layer 3 uses
Acknowledgement (ACK) and Negative Acknowledgement (NACK) packets to maintain solid
connections. A receiver node will send back an ACK packet to the sender if it successfully receives a
data packet; otherwise, it sends back a NACK. This will continue until the original data packet is
successfully sent or a preset number of retries is exceeded. Each node also uses Collision Detection
Multiple Access (CDMA) to determine when to transmit on the network signal lines. It is akin to the
old-fashioned telephone party line, where a user first listens to determine if anyone is talking and then
starts talking if the line is free. In the case where a collision does occur, each potential sender “backs
off” a random amount of time (tens of milliseconds) and then tries again. Using ACKs and NACKs
depends upon an error-checking capability, which is why two checksum bytes are included in every
data packet. These bytes are used by the receiving node in a mathematical algorithm to determine if
the received data packet was corrupted during transmission. There are many good tutorials available
on the Internet regarding checksums and error detection, if you are interested in digging further into
the subject.
Layer 3 with the help of network Layer 4 further refines the packets by identifying what the packet
type is, where it is going, and where it’s been, and then sets the data payload. There are five packet
types used in the Z-Wave network, which are described in Table 7–3.
Table 7–3 Z-Wave Packet Types
Layer 4 sets up the routing, thereby ensuring that the packets are sent along the correct paths to
reach the desired nodes. It also ensures that all nodes are repeating as configured. The routing
configuration is maintained in a table stored in the primary network controller. It is possible to have
multiple controllers on the network, but only one is designated as primary.
A simple network topology and descriptive routing table is shown in Fig. 7–3. A “1” in the routing
table indicates a node-to-node logical connection.
Figure 7–3 Network topology and routing table.
Every Z-Wave network has a four-byte ID called the Home ID. Each primary controller has this
Home ID that slave nodes acquire when they are joined to the network. Every secondary controller
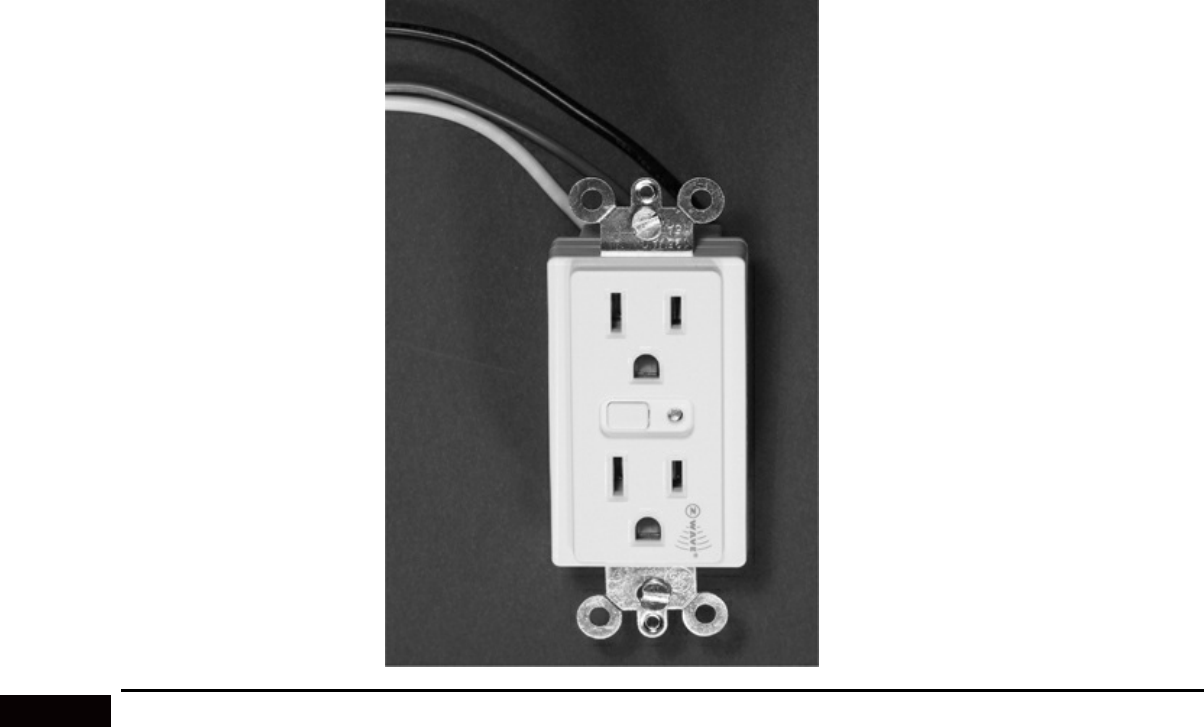
also uses this same ID when they are attached to the network. Individual slave nodes have a one-byte
ID that is assigned by the primary controller when that node joins the network.
Network Devices
There are two main device types that make up a Z-Wave network: controllers and slaves. Slaves are
also known as end-point devices because they can only respond to messages sent by the controllers.
They typically have built-in microprocessors with GPIO pins that control components, such as
TRIACs, which turn AC power on and off. Figure 7–4 shows a Z-Wave enabled duplex outlet. It would
be installed in the same way as any ordinary duplex outlet would be installed, except that this outlet is
also controllable using Z-Wave technology. The other big difference is that this outlet is much more
expensive than a regular duplex outlet; however, you don’t need many of them for most home
automation setups.
Figure 7–4 Z-Wave enabled duplex outlet.
Notice the white button to the left center of the outlet in Fig. 7–4. This is what a user presses to
join the device to the network, when prompted by the controller menu. This operation will be shown in
a later section.
Controllers have two subtypes: portable and static. Portable controllers are in the form of remote
controls, one of which is shown in Fig. 7–5. These controllers must be able to self-discover their
location within the network topology because they would not be typically placed in a fixed location.
Such self-discovery is made possible by having the portable controller “ping” nearby nodes that are
within RF range. The controller can, thus, join the network based upon the ping results. Portable
controllers are battery-powered for portability reasons and are usually used as primary controllers in

Z-Wave networks.
Figure 7–5 Portable Z-Wave controller.
The static controller is another subtype, and it so named because its logical location is fixed at the
time of the initial network configuration. It is usually powered from the AC mains and constantly
listens for network traffic. A static controller can serve as a secondary controller in an advanced
network configuration. The current network configuration may be stored in it, and if so, it is known as
a Static Update Controller (SUC).
More often, the role a static controller plays is to serve as a bridge between non Z-Wave
components such as X-10 devices. In that configuration, the static controller serves as a virtual node
between the X-10 device and the Z-Wave network. The network can have up to 125 virtual nodes that
help incorporate older technologies into the modern Z-Wave system. Static controllers may also serve
as TCP/IP gateways, thus allowing the network to connect to the Internet, if so desired. Finally, static
controllers can serve as primary controllers in the configuration where the “normal” primaries act as
proxies for the static control. This configuration type is known as an SUC ID Server (SIS). All told,
there is an incredible amount of flexibility in Z-Wave network configurations.
The Z-Wave Chip
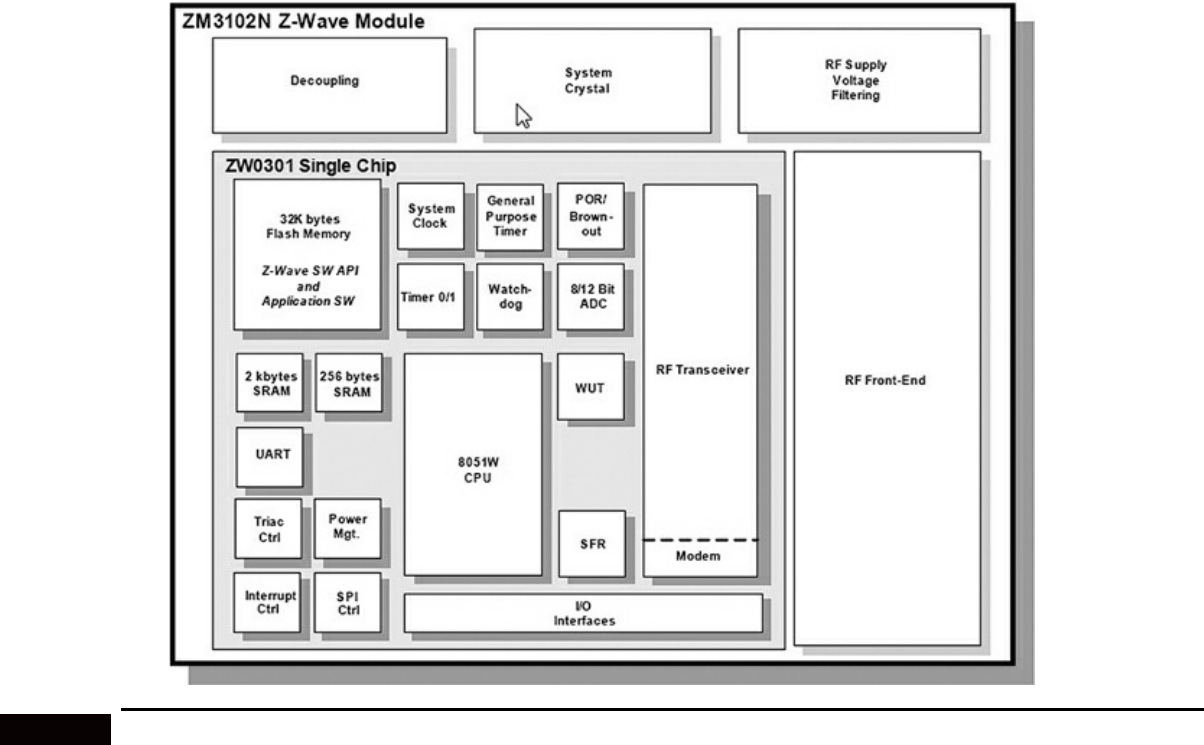
The original Z-Wave chip was designed and manufactured by Zensys, now known as Sigma Designs.
All certified Z-Wave component manufacturers must use this authentic Z-Wave chip in their devices.
This ensures that any Z-Wave node properly joins the network and communicates with other nodes
produced by other manufacturers. The Zensys chip design is discussed in this section because it forms
the basis for the whole Z-Wave concept and is important background to help you comprehend how the
RasPi can function as a controller in the network.
A recent Zensys single module is model ZW3102N, containing a ZW0301 chip that uses the
venerable 8051 core with a 32-MHz external crystal. This is a hybrid module containing a lot of
additional components, including an RF transceiver operating on either the U.S. or European ISM
frequency. There is also a built-in digital modem along with a hardware implementation of the
network stack operations that were discussed in the previous section. The ZW0301 chip has only 32
kB of Flash memory and a meager 2 kB of SRAM. It operates on a supply voltage range of 2.1 to 3.6
V and consumes a maximum of 36 mA when transmitting. Figure 7–6 is the block diagram of the
ZW3102N, showing all the components that constitute this module.
Figure 7–6 Block diagram of the ZW3102N Z-Wave module.
The ZW0301 microcontroller chip discussed above is also shown in the block diagram. It has
several of the standard functions that have been discussed in previous chapters, including the SPI and
UART serial interfaces. The chip also has timers, interrupts, a watch-dog monitor, power
management, and brownout detection. It has a four channel, 12-bit ADC, a pulse-width-modulation
controller, and an enhanced TRIAC control that has zero crossing detection. A total of 10 GPIO lines
are available, but some are multiplexed or shared with other I/O functions.
The ZW3102N module is very small; Fig. 7–7 is a photo of it compared to a U.S. 25-cent coin.
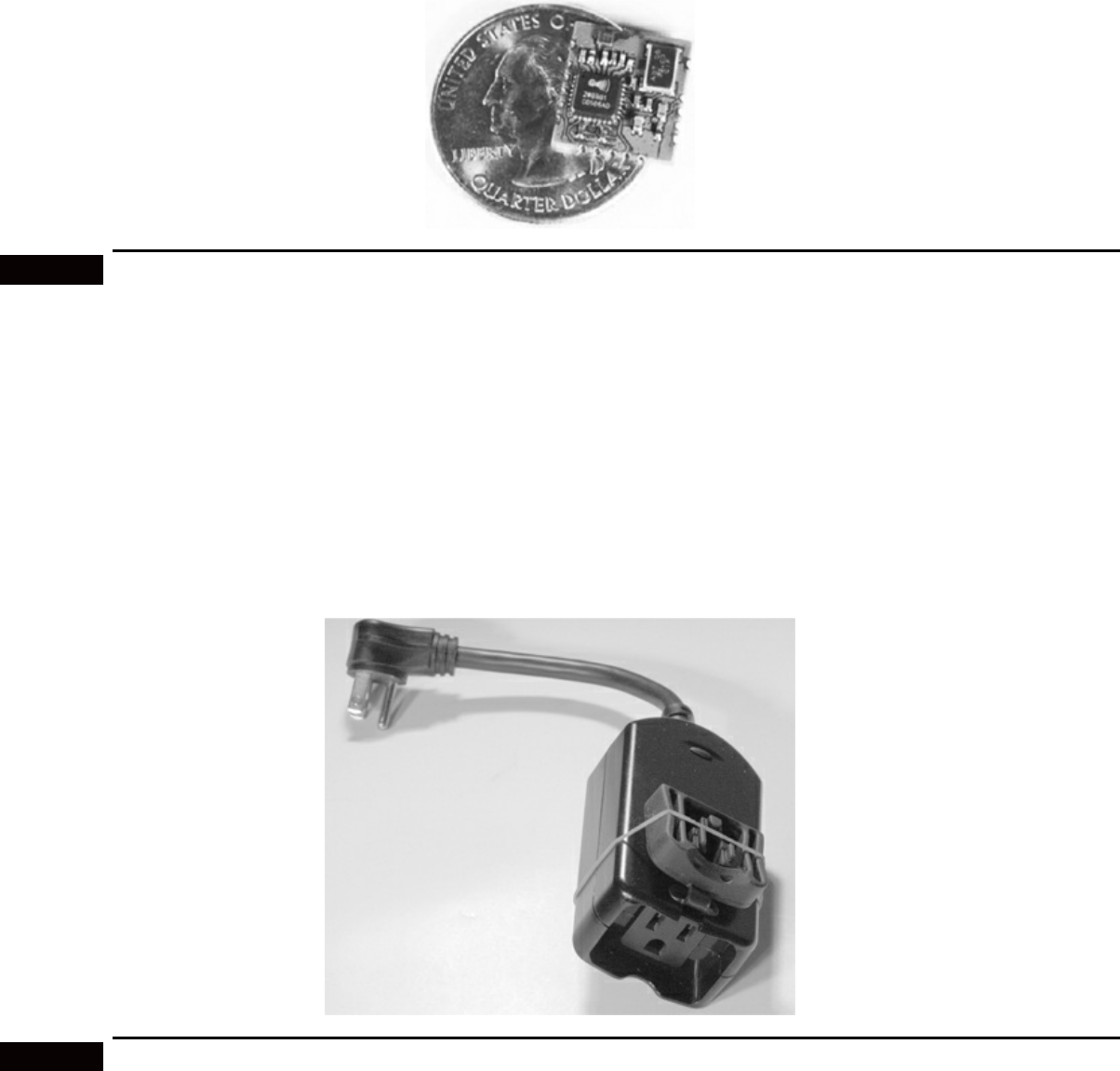
Figure 7–7 ZW3102N module compared to a U.S. 25-cent coin.
The module does need an external antenna and a few capacitors and inductors to complete a Z-
Wave device installation. The software is fixed in the flash memory and is not available for
examination or modification. This is where this RasPi project will open up the Z-Wave network so
that you have a chance to experiment with various configurations and monitor network traffic. But
first, I would like to demonstrate a simple Z-Wave network that uses a portable controller (Fig. 7–5)
along with two nodes, one being the duplex outlet (Fig. 7–4) and the other being an outdoor module
shown in Fig. 7–8. Notice the black button located on the top of the device in Fig. 7–8. The user
presses it to join the device to the network when prompted by the controller menu.
Figure 7–8 Z-Wave outdoor module.
Notice the black button located on the top of the device in Fig. 7–8. The user presses it to join the
device to the network when prompted by the controller menu.
My test network slaves will be made up of the duplex outlet and the outdoor module, each
controlling a small table lamp. The duplex outlet will actually be connected to a power cord plugged
into a regular outlet for this temporary test arrangement. Figure 7–9 shows the test setup on my dining
room table.
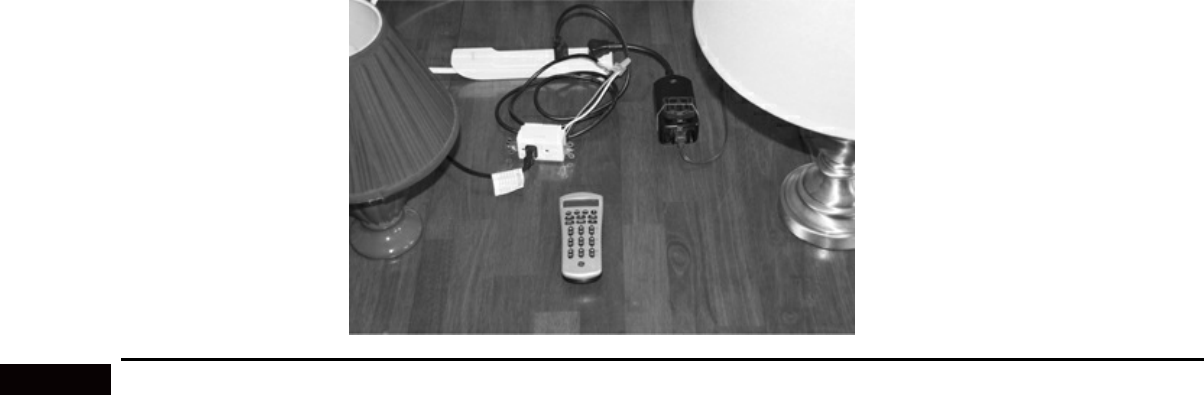
Figure 7–9 Z-Wave test system.
At first, I arbitrarily assigned a device number 4 to the duplex outlet and a device number 8 to the
outdoor module. I then proceeded to turn the lamps on and off, and everything worked just fine. I was
also able to control both devices simultaneously by selecting the “All” mode on the remote.
The next part of the test was a bit harder, as I have a smaller home with an open plan layout,
meaning fewer interior walls than in the average cape-style home. I was finally able to place the
outdoor module device in the basement and the duplex outlet on the first floor and then operated the
controller in a second floor bedroom. I was not able to turn on the basement module without having
the first-floor module plugged in. This proved that the first-floor module was digipeating and
forwarding the control packets to the module located in the basement. The controller showed “Failure”
on its LCD screen with the first-floor module unplugged, which indicated that no ACKs were being
received. Obviously, no NACKs could be sent, since the first-floor module was unpowered and the
basement module was out of range.
Setting up the test arrangement was an extremely simple process, which shows how well the high-
tech Z-Wave network functions in the “background,” while also providing the homeowner with a very
easy and useful interface. But that’s not what we are after. I want to demonstrate how the RasPi
interfaces with a Z-Wave network and what “neat” experiments can be accomplished.
RasPi and Z-Wave Interface
Connecting a RasPi to a Z-Wave network requires the use of a Z-Wave USB dongle. One such device
made by Aeon Labs, called the Z-Stick, is shown in Fig. 7–10.

Figure 7–10 Aeon Labs Z-Stick.
The Z-Stick incorporates a Zensys module and a USB interface chip along with some additional
firmware to make the two components work together. It also has an internal rechargeable battery that
enables the storage of firmware updates and configuration data. The Z-Stick has three operating
modes that you should know:
1. Inclusion—This mode adds or includes Z-wave devices into the network. To add a device:
a. Unplug the Z-Stick from the USB connector.
b. Press the large button on the Z-Stick. The Z-Stick LED will start to blink slowly.
c. Go to the device that you wish to add (while continuing to press the large Z-Stick button) and
press and release the device’s button.
d. The Z-Stick LED will blink rapidly for several seconds, then glow steadily for three seconds, and
finally return to a slow blinking state. The device has been added to the network.
2. Removal—This mode will remove or exclude Z-wave devices from the network. To remove a
device:
a. Unplug the Z-Stick from the USB connector.
b. Press and hold the large button on the Z-Stick for about three seconds. The Z-Stick LED will start
to blink slowly and then transition to a fast blink.
c. Go to the device that you wish to remove (while continuing to press the large Z-Stick button) and
press and release the device’s button.
d. The Z-Stick LED will then glow steadily for three seconds and finally return to a fast blinking
state. The device has been removed from the network.
3. SerialAPI—This is the mode where the Z-Stick acts as the portal between the RasPi and the Z-
Wave network. Simply plug it into a powered-hub USB connector. The RasPi probably does not
have sufficient power for the Z-Stick. The RasPi software will now take control of the Z-Wave
network.
I now have to take a brief detour from the Z-Wave to introduce the SSH login process, since I use
that in establishing the control software environment.
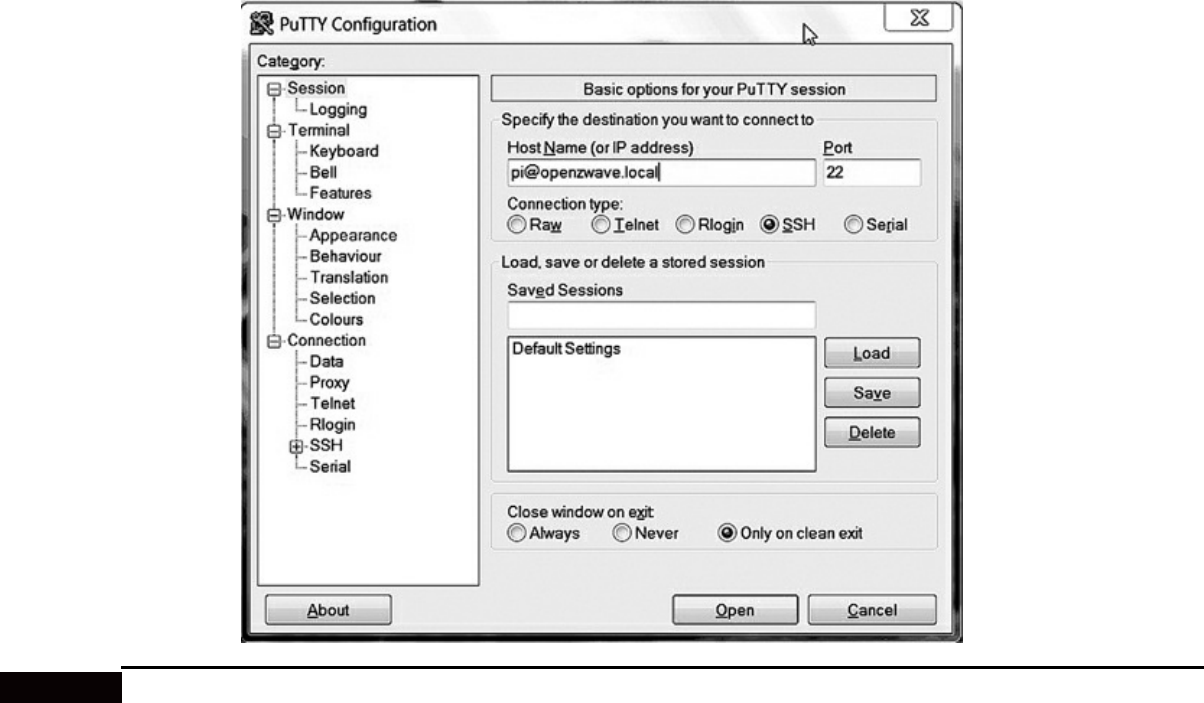
SSH Login
In this section, I will show you how to log into the RasPi by using a network connection, as I
mentioned in Chap. 5. The Wheezy Linux distribution, as well as many others, includes a great service
known as SSH, short for Secure Shell. It is a network protocol that uses cryptographic means to
establish secure data communication between two networked computers connected via a logical,
secure channel over a physical, insecure network. SSH uses both server and client programs to
accomplish the connection.
One of the questions you will be asked when first configuring your RasPi is whether or not to start
sshd upon bootup. I recommend that you answer “yes” as that automatically starts the SSH daemon
each time you start the RasPi. The second portion of the connection is the client program, which is
highly dependent upon what type of computer you are using to connect to the RasPi. I recommend
using putty.exe, since most readers will be using a Windows®-based machine. putty is freely available
from a variety of Internet sources, so I would recommend a Google search to locate a good download
mirror.
You should see the Fig. 7–11 screenshot, assuming that you answered “yes” to the sshd question
and have downloaded and are running putty on a Windows-based computer connected to the same
network that connects to the RasPi. Don’t be concerned with the host name that appears in the
screenshot; I will get to that shortly.
Figure 7–11 putty screenshot.
When you click on the Open button at the bottom of the putty screen, you will see in Fig. 7–12, a
screenshot of a RasPi terminal window asking, in this case, for a login password.
Figure 7–12 Raspberry Pi terminal window.
At this point, you are in a RasPi terminal window session. It is absolutely no different from
looking at a monitor connected directly to the RasPi and using a locally connected keyboard and
mouse. This transparency is what makes SSH so great—it allows you to login remotely to the RasPi
without being concerned with any minutia about the connection. You may type in any normal
command and have the RasPi respond as appropriate.
I will now return to the Z-Wave control software discussion, now that you are a bit familiar with
SSH.
Open Z-Wave Software
I took a very easy approach to implementing the control software between the RasPi and the Z-Wave
network. I used a prebuilt Wheezy Raspian image kindly made freely available by Thomas Loughlin at
http://thomasloughlin.com/new-open-zwave-image-for-raspberry-pi/. Simply download the image and
create a new SD, card using the procedures discussed in Chap. 1. While Thomas has carefully detailed
the steps required to get the RasPi working with a Z-Wave network, I will paraphrase and use some
figures to help clarify the somewhat involved process.
I used a “headless” approach, meaning I logged into the RasPi using putty. Headless is a bit of
network jargon meaning you don’t need a local monitor or keyboard for the RasPi because you will
login remotely using the RasPi as a server. The step-by-step procedure for starting the Z-Wave RasPi
network is:
1. First add one or two devices to the network as described above. This establishes a beginning
configuration that enables you to see and control some devices.
2. Plug the Z-Stick into a powered hub connected to an unpowered RasPi that has the downloaded
Open Z-Wave image.
3. Power on the RasPi and wait a minute or so. Remember, we are running headless and are not
looking at a monitor screen connected to the RasPi.
4. In the opening putty screen, enter
as a host name. (Fig. 7–11)

5. The password is the regular one,
6. A terminal window (Fig. 7–12) will appear.
7. You are now ready to take one of two approaches to monitor and control the Z-Wave network.
lightscontrol Server
One of two server applications may be run at this point. The first is a web app named “lightscontrol”
that was created by Conrad Vassallo and can be downloaded from the website,
http://conradvassallo.com/category/open-zwave-controller/. This will be the one that I use. The second
approach is a bare bones server app that Thomas created to test the Z-Wave network. I will discuss
that server after demonstrating the lightscontrol server. All you need to do to start this service is type
the following at the command line prompt:
This starts the lightscontrol server. Figure 7–13 shows the lengthy preamble to the lightscontrol
server web app.

Figure 7–13 lightscontrol web server preamble screenshot.
Now, you should minimize the terminal control window, keeping in mind that there is still an
underlying active SSH connection that will allow you to input commands to the RasPi. We are going
to need putty after experimenting with the first web server. Next, open a browser and enter this for the
URL:
This should take you to the initial lightscontrol server page, as shown in Fig. 7–14.
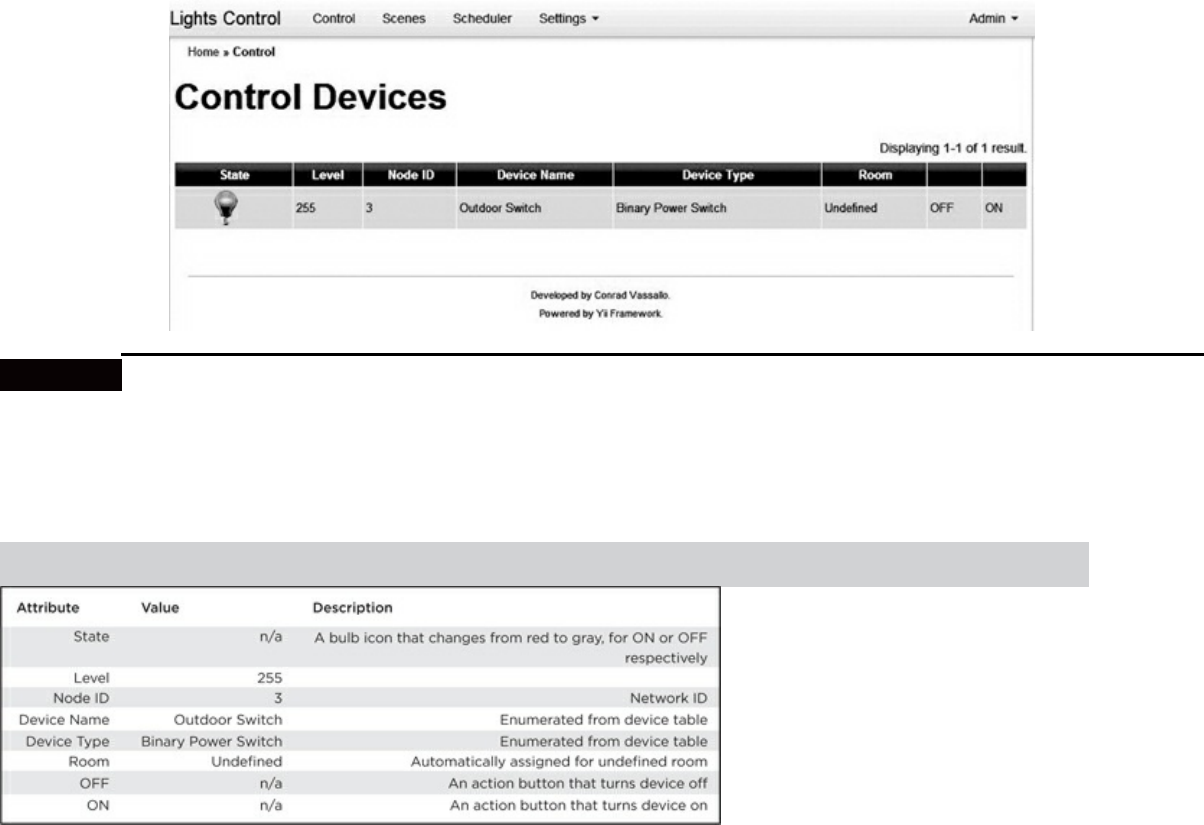
Figure 7–14 lightscontrol server page.
In my case, I had initially set up one device, a GE outdoor power module controlling a lamp, as I
discussed earlier in the chapter. Table 7–4 shows the web page attributes for this device.
Table 7–4 Z-Wave Device Attributes
Clicking on the web page ON and OFF buttons turned the corresponding Z-Wave controlled lamp
on and off, thus confirming that all the software and network connections were properly operating.
I have included some screenshots of the web app configuration pages to help illustrate how to
configure a Z-Wave network to support typical home automation tasks. There is no professional
documentation provided with this open-source project, which is often the case, but I am not
complaining and am completely appreciative of the tremendous unpaid effort that goes into such
project development done for the general good.
Figure 7–15 is a screenshot of the Scenes web page where one or more devices can be grouped
collectively to support a common event happening in the home, such as Wake Up, TV, Kids Sleeping,
etc.
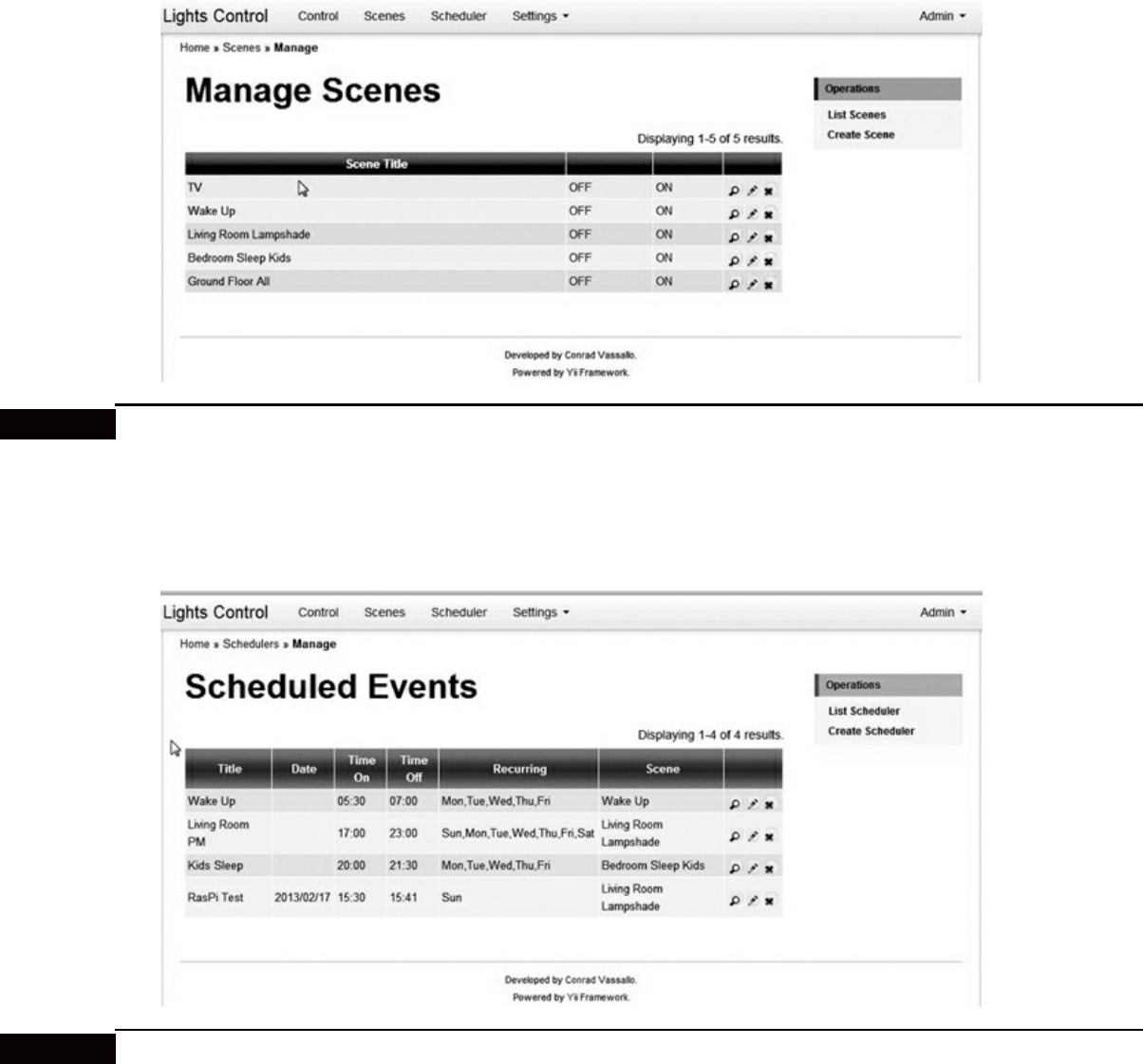
Figure 7–15 Scenes web page screenshot.
Figure 7–16 is a screenshot of the Scheduled Events page that works in conjunction with the
Scenes page, where the actual device times that support a specific scene may be programmed.
Figure 7–16 Scheduled Events web page screenshot.
My recommendation is to simply experiment with the web app, determining the appropriate inputs
to the various pages in order to execute the desired automation sequences. Figuring out the web page
inputs should not be a very hard task for you given that you already have reached this stage in building
a RasPi home automation system and have successfully loaded and run all the support software. Mr.
Vassallo has stated in his blog that the software is still evolving, so don’t be surprised if a better,
perhaps somewhat easier, version is developed and put in the public domain.
“basic” Server
The second approach mentioned above is to use the “basic” server that Mr. Loughlin created to test the
Z-Wave network functions. In order to do this, you must first kill the lightscontrol server that is
currently running, since there cannot be two Z-Wave servers running concurrently. You can also close

the browser at this time; it will need to be reopened, however, once the next service is started. Kill the
current web service by typing
at the SSH command line. This is the reason why I did not want you to stop running putty.
To start the “basic” server, simply enter the following at the command line:
Once that is done, minimize putty and open the browser going to this website:
This should take you to the “basic” server page, as shown in Fig. 7–17.
Figure 7–17 “basic” server web page.
All devices that have been added to the Z-Wave network and stored in the Z-Stick memory will be
displayed on this page. As you can see, the only device displayed is the outdoor power module that
was shown in the previous web server demo. The light may be turned on and off by clicking on the
icon. There is no provision for setting Scenes or preprogrammed times, as this is just a very functional
web test app. The essential device attributes are shown as text in the middle of the page.
I next wanted to test this system to see how a different device type would be accommodated. To do
this, I shut everything down and then added a new device to the network. This was a battery-operated,
Z-Wave enabled motion sensor, as shown in Fig. 7–18.

Figure 7–18 Battery-operated, Z-Wave motion sensor.
I next restarted the “basic” web service and loaded the appropriate web page. Figure 7–19 shows
this new page with both the outdoor module and the motion sensor displayed.
Figure 7–19 Revised “basic” server web page.
The motion sensor sends data back to the Z-Stick, which I confirmed by waving my hand in front
of the sensor and observing that the state shown on the sensor window changed from off to on. Note, I
did have to reload the page to observe this change. Also, the essential device attributes shown on the
page reflect the selected device.
Summary
I started this chapter with a definition of home automation and provided a list of representative tasks
that would fall under the broad umbrella that comprises home automation.
Next followed a discussion of the underlying base technologies that support home automation
implementations. I provided a rationale for selecting the Z-Wave protocol: it is a modern, highly
flexible system that is very easy to configure and lends itself quite well to a simple RasPi interface
connection.
Two representative Z-Wave devices were next described along with a working, small-scale Z-
Wave network. Then we conducted a network demonstration by using a commercial remote control
device.
The core Z-Wave chip was discussed to provide you with a better understanding of how the overall
network functions and how devices are highly dependent upon the chip functions, which can be added
seamlessly to the network.
The Z-Stick that enables the actual RasPi to Z-Wave interface was shown along with the driver
software. However, before discussing the software, I showed you the highly useful SSH remote login
procedure.
The open Z-Wave software package was shown with two variations for the web application side: 1)
lightscontrol and 2) “basic.”
Some simple tasks such as turning a lamp on and off were demonstrated as well as the ability to
sense motion in a room.

CHAPTER 8
Home Security Controller
Introduction
For this chapter’s project, you’ll learn how to connect a webcam to the RasPi so that a homeowner
can view a selected home area when an intrusion signal is detected by the RasPi. A laser trip device
serves as the intrusion sensor. When the RasPi detects an intrusion signal, the RasPi will send an e-
mail notification to a preset e-mail address to notify the homeowner that the laser has tripped, thus
indicating that a possible intruder is on the premises. The homeowner will then open a browser, go to
a website where the webcam video is available, and examine the ongoing activity. The homeowner
could then determine whether to call the police or simply to disregard the alarm, if it had been
innocuously tripped.
Motion is the name of the software package installed on the RasPi. It is a very sophisticated suite
of vision applications that provides the project’s webcam monitoring function. Many other features
are also available and will be discussed in the software section.
Webcam Selection
The webcam used in this project is a fairly new Logitech C920, as shown in Fig. 8–1.
Figure 8–1 Logitech C920 webcam.
The webcam has a high definition camera capable of producing excellent videos; however, the
software used with it in this project will limit its performance. With that in mind, note that many
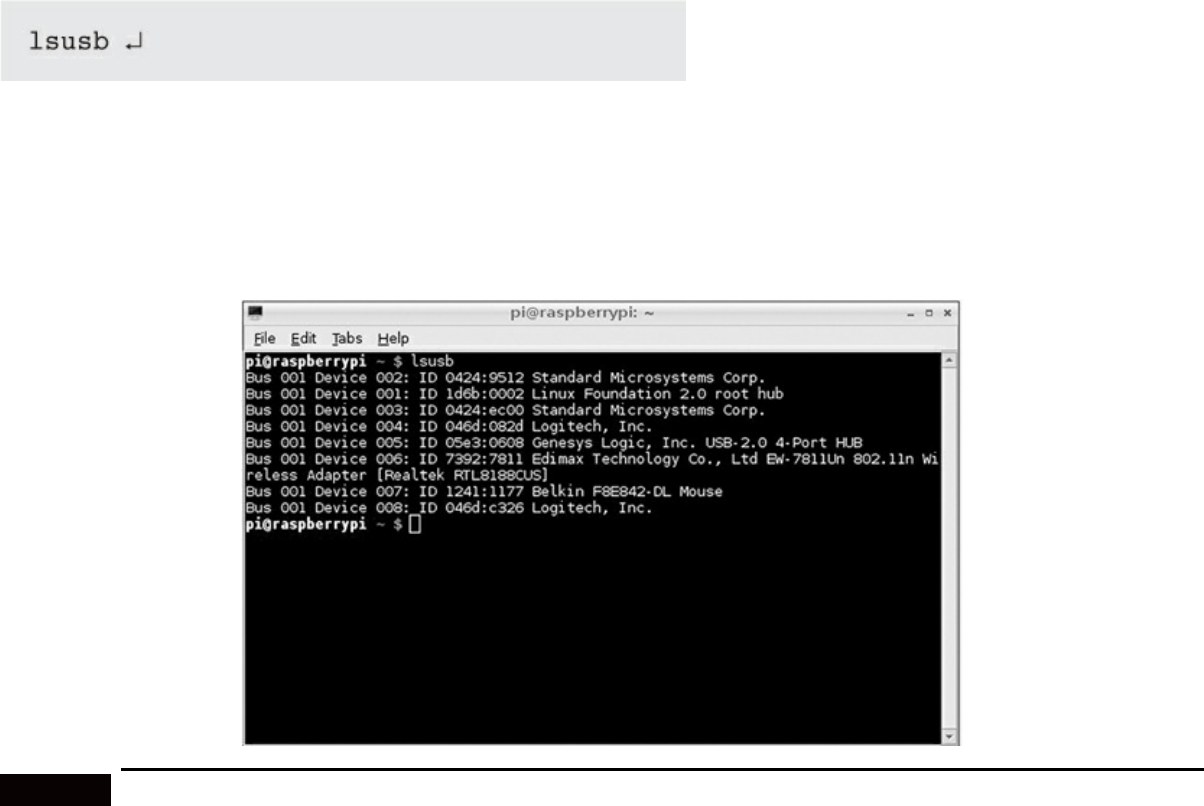
different webcams may be used. In addition, the video requirements are quite low, and the Linux
Raspian distribution will automatically detect quite a few types of webcams, including many older
ones. If you already own a webcam, my suggestion is to plug it into a USB port and then type the
following into a command line:
Figure 8–2 is a screenshot of the command’s output. Device 008 is the webcam and the other
Logitech device listed is a keyboard. If in doubt about which device is the right one, when multiple
devices from the same manufacturer show up, simply unplug the device and rerun the command to see
which one disappears.
Figure 8–2 lsusb output screenshot.
One key point I discovered in creating this project is that the webcam has to be directly plugged
into one of the two RasPi USB ports. The webcam was not detected by the software when it was
connected to a powered-hub USB connector. I am not sure why this happened but it may be related to
an issue with the hub power supply.
Protected Security Zone
Figure 8–3 is an actual image capture from the webcam. It shows the protected zone, which, in this
case, is the exit to my home’s back deck. I will discuss how images may be captured later in the
software section. It is now important to show the intended protection zone because it greatly affects
how the laser trip assembly will be deployed as part of the overall security scheme.
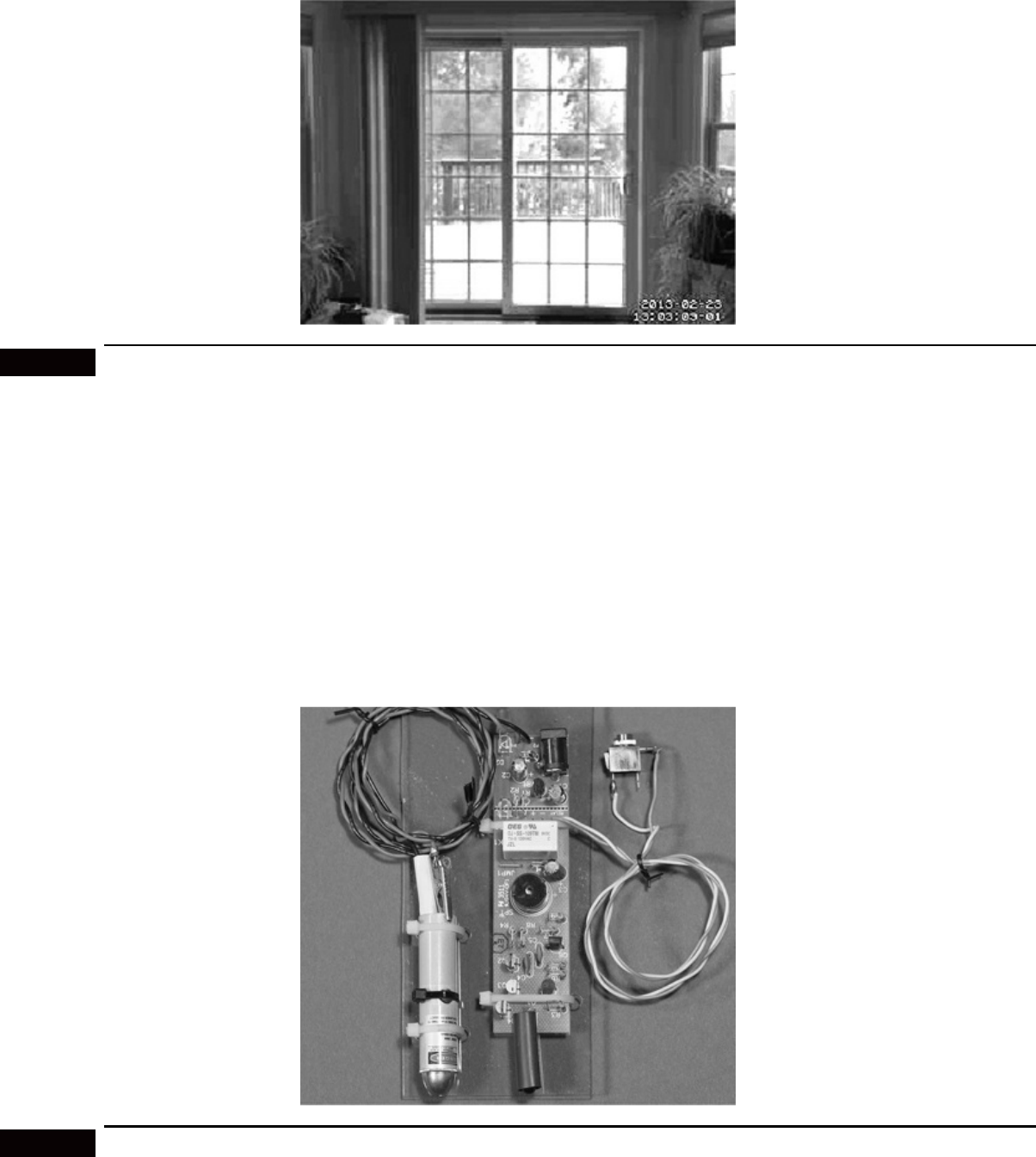
Figure 8–3 Protected Zone.
Laser Trip Assembly
I reused the same laser trip device that I used in the camera controller project. Figure 8–4 shows this
assembly mounted on a single piece of Lexan. The only difference in this trip setup is that I used a
mirror to reflect the beam back to the detector’s phototransistor when an object interrupts the beam
between the laser pointer and the detector in the protected zone. The height at which you mount the
laser and the detector board is your choice, but I found that about four inches above the floor worked
quite nicely. The total path length of the laser beam was about 14 feet, which was not an issue with
this system.
Figure 8–4 Laser trip assembly.
Figure 8–5 shows the laser trip assembly operating in the evening. This photo was taken with a
flash to clearly show all the components, including the mirror to the right.
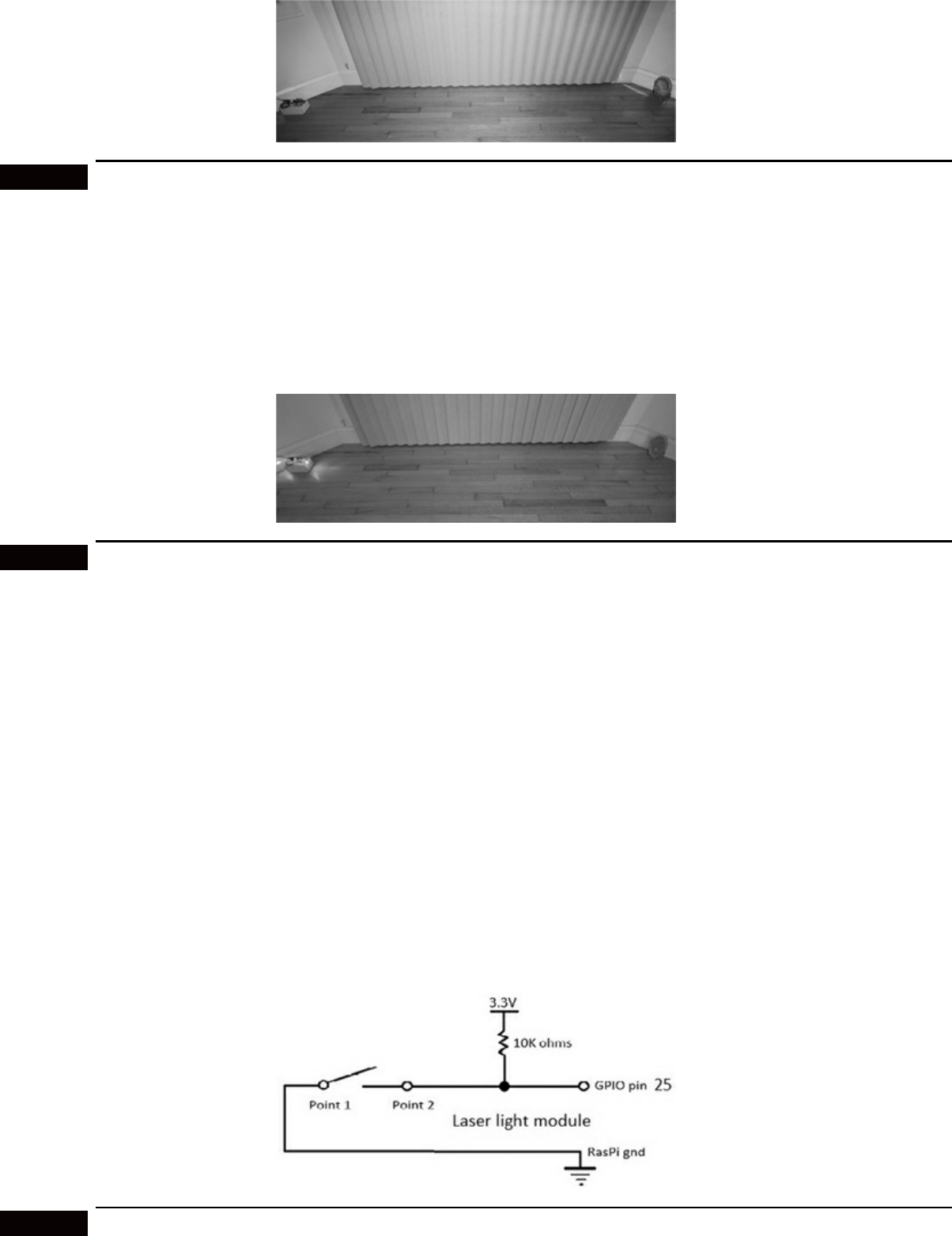
Figure 8–5 Operational laser trip assembly.
I took another photo, but this time in almost total darkness. In Fig. 8–6, you can see the emitted
laser beam and a dot of reflected light in the mirror; however, you cannot see the projected laser
beam. This, of course, conflicts with what you see in the movies when the hero (or bad guy) attempts
to get past the laser beams protecting the secret vault or whatever. I would actually have to put smoke
or dust in the beam’s path to see it, which would have caused much consternation in my household.
Figure 8–6 An elapsed-time photo of the laser trip assembly in operation.
The extra red light seen on the detector side is the returned beam reflecting off of the nearby white
trim board. You could place some black cloth behind the detector if a more stealthy installation is
desired.
The trip system functioned very well, never missing my exiting or returning. Another trip
assembly could be stationed at four feet above the floor if you are worried about intruders simply
stepping over the invisible beam. My philosophy regarding such matters is that criminals will simply
go to easier targets if they suspect or detect that a relatively sophisticated intrusion system is in place
and operational.
RasPi Interface to the Laser Trip Assembly
I have used the same relay switched circuit that was used in the camera control project. The schematic
is shown in Fig. 8–7.
Figure 8–7 Schematic of relay switched interface for the laser trip assembly.
The circuit is extremely simple, yet highly reliable—two attributes that are important in security
systems. The relay contacts are normally open, which means that the GPIO pin will be in a high state
due to the 10 kΩ resistor tied to 3.3 V. The pin will go to ground or to 0 V when the detector is
tripped. The software, thus, has to check periodically for a low state on the selected GPIO pin and then
initiate all the desired actions, which will be discussed in the software section.
Motion Software Package
I selected a software package named Motion to enable remote viewing of the webcam. This is a
comprehensive package that contains many features, far more than could be covered in this chapter.
Being able to use this package from among the others available is why the RasPi is so useful. Creating
similar software for a more traditional board, such as one from the Arduino series, would be a
substantial undertaking, if it is even possible.
Motion also has the capability of detecting changes in the images from frame to frame, thus
triggering an alarm based solely on real-time video analysis. I thought about using this feature but
eventually decided upon the simpler approach of using an external trip system. Detecting an intrusion
event based on the video alone requires the RasPi to be almost solely committed to vision processing,
which could affect the availability of the video for remote viewing. This may have been an
unwarranted decision, but remember that the Motion software was created years before the RasPi
came on the scene and probably was based on using much higher-clock-speed PCs.
The key feature that is used from the Motion package is the built-in web server. This server
receives the video stream from the webcam and sends it off in TCP/IP format over a predefined port.
All you need to remotely view the webcam video is a browser pointed to the RasPi IP address and port
number, nothing more. This feature makes the viewing exercise extremely simple. But there is more:
Motion provides for using more than one webcam. You can set up multiple webcams, each with its
own port number, so that it can monitor multiple locations throughout the home. Each webcam video
feed is handled by what is known as a thread within the Motion software. I saw provisions for four
threads in the Motion configuration file from which I presume four webcams could be handled.
However, I seriously wonder if the RasPi has the processing power to manage four simultaneous video
feeds. In any case, this project is only concerned with one feed that I know works very well.
Motion Features
Motion has a substantial number of features that enable it to accomplish an amazing number of
functions. The user manual is on-line at http://www.lavrsen.dk/foswiki/bin/view/Motion/WebHome,
and it is over 100 pages in length. It would take a complete book to document all the features.
However, the configuration file itself contains many self-documenting comments that should help you
explore some of the additional features of this software package.
A portion of the configuration file dealing with motion detection is listed on page 107 to illustrate
what I mean.
Motion Setup
You must, of course, install the Motion package before using it. I would strongly suggest that you
update and upgrade your distribution before installing Motion. Simply type the following at a
command line prompt to update and upgrade the Linux distribution in use:

Be patient, since the updates and upgrades can take a bit of time if there are many to install.
Next install Motion by typing:
Again, be a bit patient as this package is over 50 MB in size and has many component parts.
Motion will be run in the background as a daemon, which means that it will be a constantly
available service. To enable the daemon, you must edit the /etc/default/motion file. Type the
following:
You will see in the nano editor the line:
Motion Detection Settings
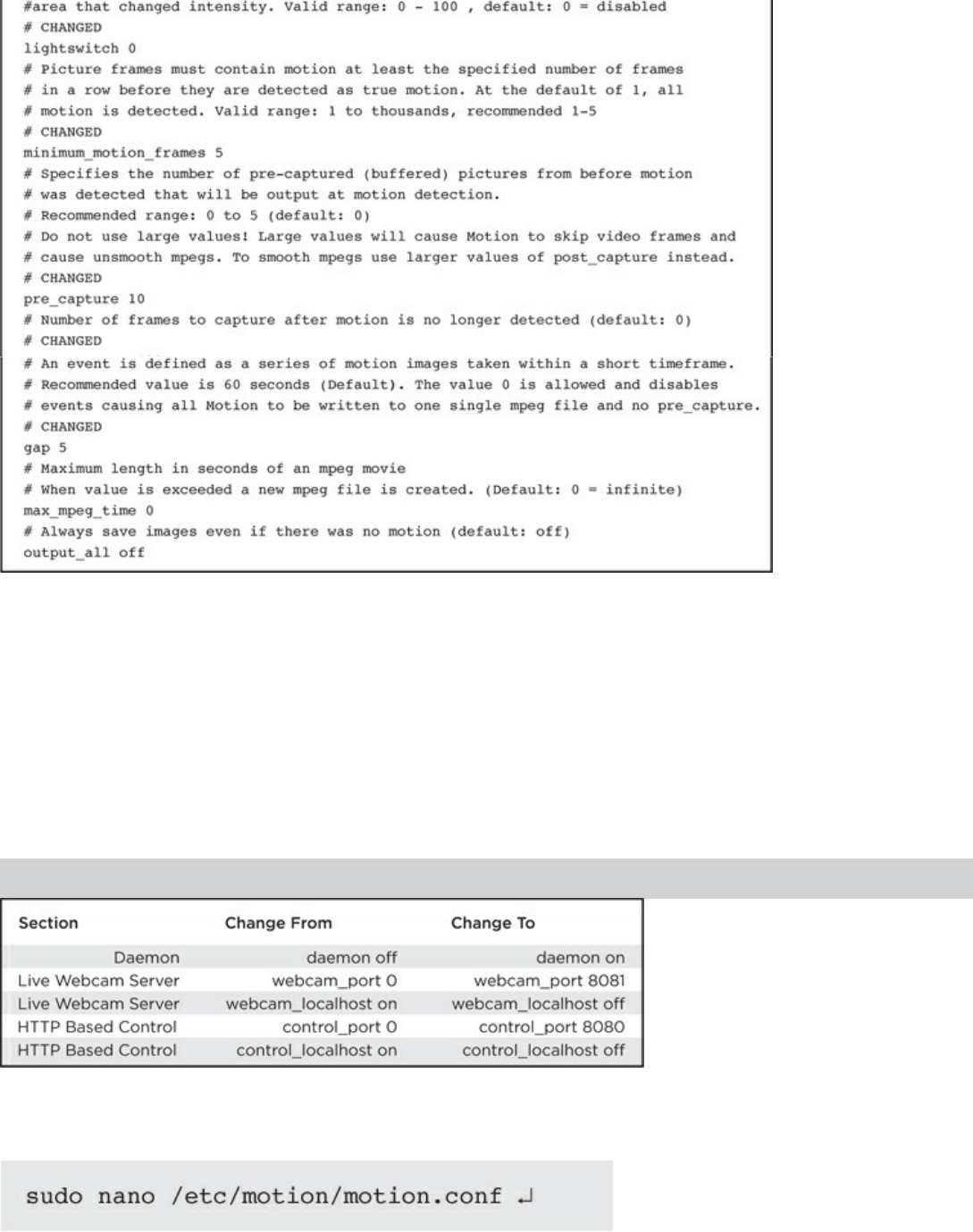
Change the “no” to “yes,” then save the nano buffer and exit the editor.
Next comes Motion’s configuration file. Motion has no GUI; it is totally configured by making
changes to its configuration file, /etc/motion/motion.conf. This is a very big text file—well over 600
lines—although much of file’s contents are comments inserted to help the user. Fortunately only a few
changes are necessary for this project. In Table 8–1, I provide the changes to be made to the
configuration file section, but I do not give you step-by-step instructions because it should be fairly
obvious by now how the editor functions.
Table 8–1 Motion Configuration File Changes
Again, start a nano editor session as follows:
Save the changes and exit the nano editor. Now, you must start the Motion server, which is done
by typing:
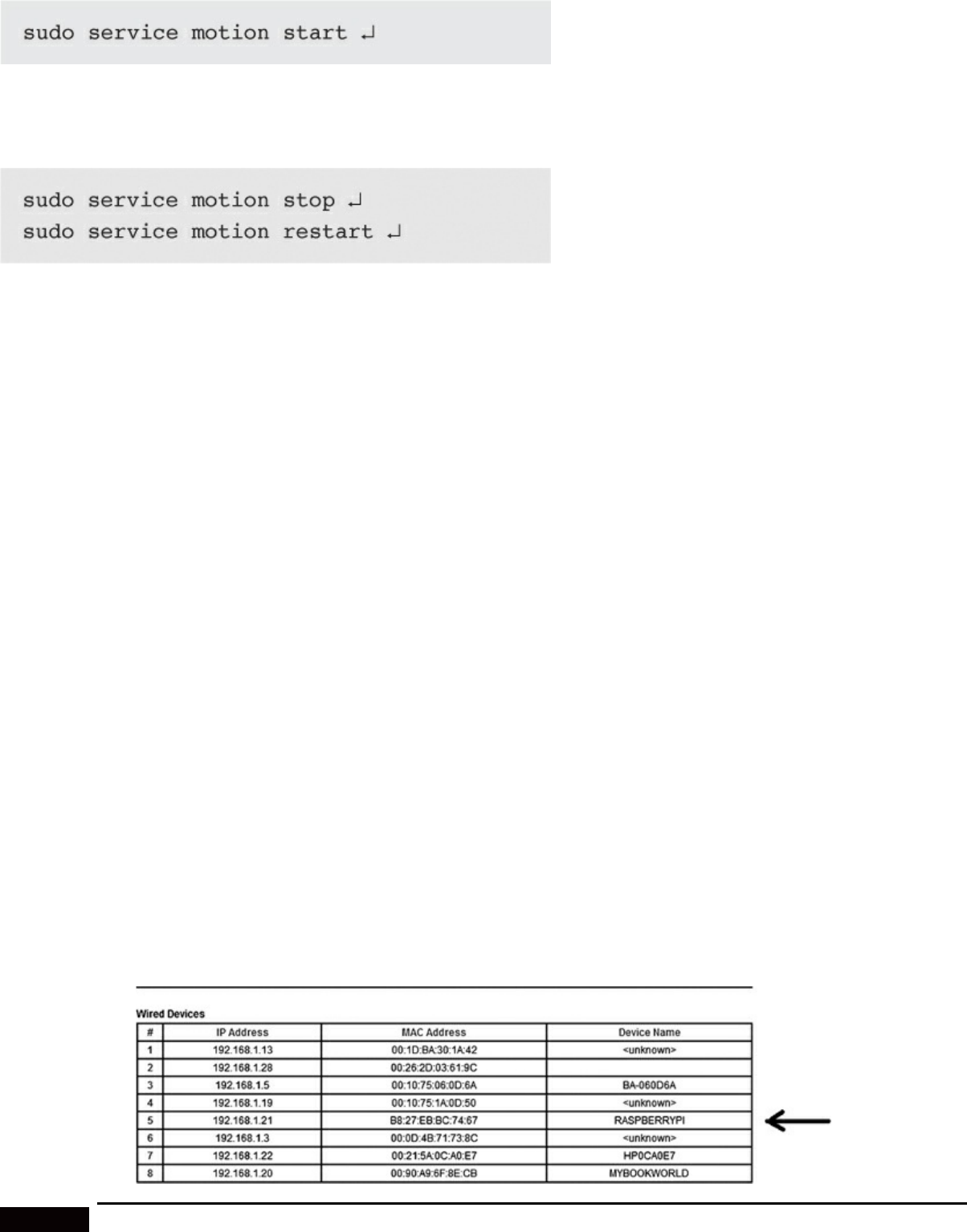
One nice feature of having the Motion web server running as a daemon is that it is automatically
started each time you boot the RasPi. You may also stop or restart the service by typing:
That’s it for the changes to make in the configuration file. I do want to briefly discuss why these
changes were made. The change from daemon off to daemon on is obvious—it was needed to run
Motion as a daemon. The next change—to make the port number 8081—is a bit historical, since the
Motion web service has traditionally been assigned to this port. It is not a required port number and
you can easily change it to any number that you desire as long as it is greater than 1024 and less than
65535. This range avoids the “well known ports” and goes to the maximum possible port number. My
recommendation is to leave it at 8081.
The next change concerns localhost operation. Localhost refers to the same machine that is hosting
the Motion web server. No other system can access the webcam if you restrict the service to localhost;
hence it must be turned off.
The next two changes are similar to what was discussed above but are concerned with the remote
control functions of the webcam. I do not enable any remote control functions, such as webcam
panning or tilting in this project, but it is certainly doable. I suggest, however, that you simply keep
the port number as assigned and disable the localhost operation.
Webcam Viewing
It is now time to test the remote webcam viewing functionality. You will need a separate computer on
the same network that the RasPi is connected to. You will also need the RasPi IP address. It does not
matter if the RasPi is connected via an Ethernet cable or by a Wi-Fi wireless adapter. My suggestion is
to login into your network router and click on “Attached Devices.” The local IP address for the RasPi
should appear in the appropriate list. My Netgear router has separate lists for wired and wireless
devices connected to the network. Yours might be slightly different but should show something
similar to Fig. 8–8.
Figure 8–8 Router attached devices list.

The entry RASPBERRYPI has the IP 192.168.1.21 on the wired portion of my home network. This
is all I need to remotely view the webcam. I just have to type 192.168.1.21:8081 into a browser on
another networked computer to view the real-time webcam video stream. Figure 8–9 is a screen
capture of the video feed from the RasPi webcam. I used the robot car from Chaps. 12 and 13 as the
subject.
Figure 8–9 Video stream screen capture.
E-Mail Notification
The next step in this project is to discuss the software that sends out an e-mail when the laser trip
system is triggered. You will need a working Gmail account in order to have this software function
because it uses a Python package named smtplib, which, in turn, uses Google’s freely available Gmail
smtp server. The software is also designed to run in a home network using a router. I will show you
how to obtain the public facing IP address that is dynamically assigned by your Internet Service
Provider (ISP).
The Python code that sends out the e-mail notification is shown on page 110.
Email Notification Python Code
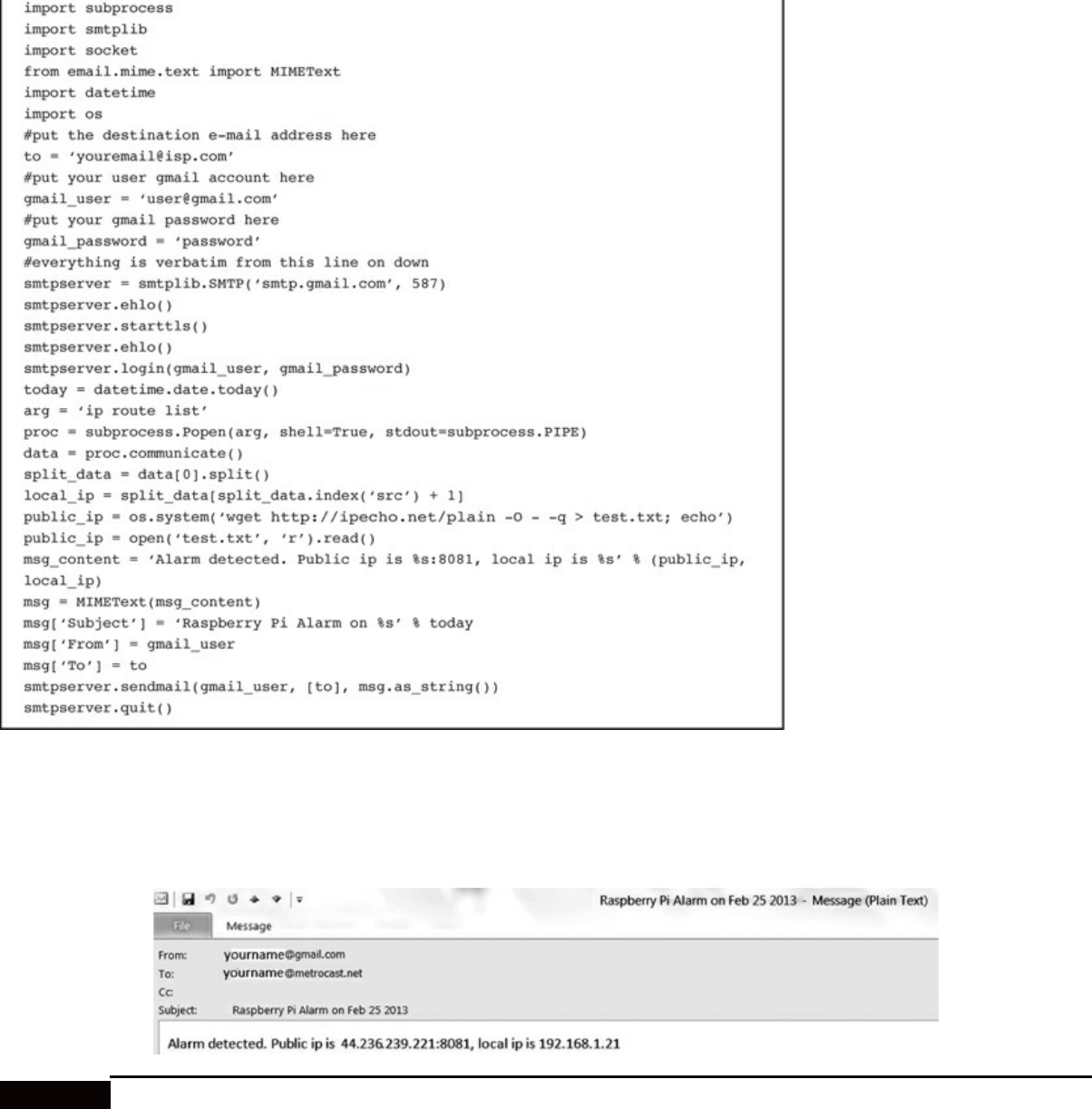
Figure 8–10 shows a slightly altered screenshot of the e-mail received after I ran this script (the
names and public IP are changed to protect my privacy).
Figure 8–10 Sample e-mail notification.
I wish to mention two items regarding this program. First, the public IP is determined by using an
external website, http://ipecho.net. There is no guarantee that this website will be operational for the
indefinite future. If it becomes unavailable, then alternate sites should be used, and appropriate
changes made to this program to accommodate the new site.
The second item is that I have not yet included the code for the GPIO trigger. This inclusion will
consist of restructuring the program as a module that will be called when the laser trip activates the
selected GPIO pin.
Laser Trip Program
The laser trip program sends the alarm e-mail when a low level on GPIO pin 23 is detected by the
RasPi. The relay contacts shown as points 1 and 2 in Fig. 8–7 will close when the laser beam is
interrupted. The contact closure puts a low voltage on pin 23, which is connected to the relay via the
Pi Cobbler and a long cable, as shown in Fig. 8–11.
Figure 8–11 Laser trip assembly connected to the RasPi.
The complete program, named alarm.py, is available on www.mhprofessional.com/raspi and is
listed on page 112.
Upon receiving the alarm e-mail, you would open a browser and type in the public IP address with
the 8081 port, for example:
This should take you directly to Motion’s webcam server that is streaming the real-time video. What
you do next is up to you, as I mentioned earlier.
I haven’t quite figured out what to do when an object, such as my cat or dog, decides to sleep in
the path of the laser beam. I could set a maximum number of e-mails to be sent, which would be the
sensible thing to do, or I could enable the RasPi to sound a loud buzzer, which might be the fun thing
to do. I will leave that modification up to you.
Additional Sensors
I am sure you realize that additional sensors may be incorporated into this minimal security system.
The software at present is designed to work with wired sensors, so it would be trivial to add additional
door and window sensors. All you need to do is to wire them to selected GPIO pins and simply add the
activation checks in the main “forever” loop. As mentioned before, up to four webcams can be
managed by the Motion software. However, it is doubtful that the RasPi can handle four webcams. I
would suggest that the send_alarm() module be modified to take an argument indicating which sensor
has been activated. The send_alarm() module could use this argument to modify the e-mail to indicate
which protected area has been tripped, for example, showing that a living room window has been
opened. You could also incorporate the sound sensor from the camera control project to indicate
suspicious sounds, such as glass breaking. There really are many ways to easily expand this security
system with little expense.
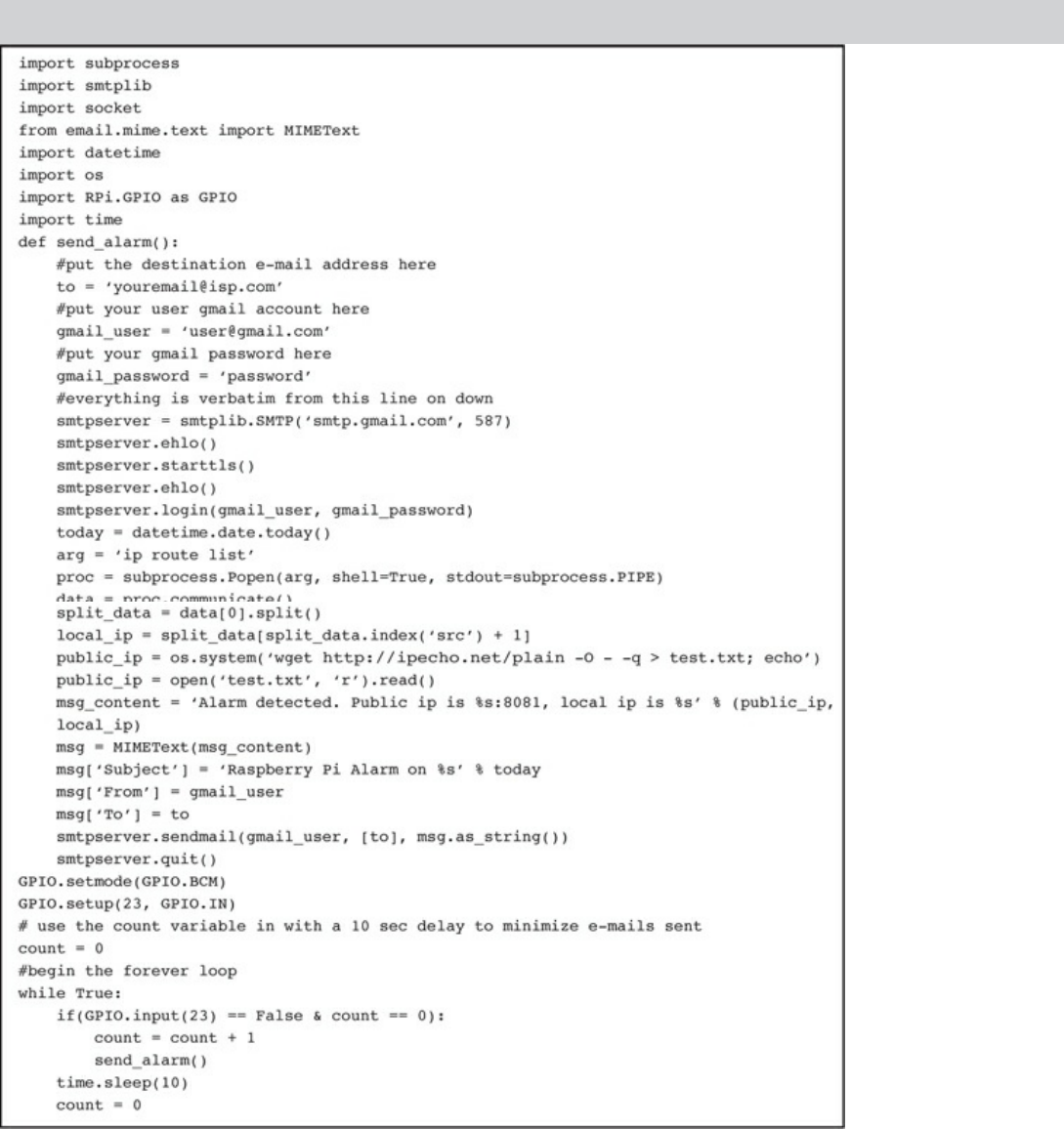
You can even include wireless sensors for readers who have built the Z-Wave project in Chap. 7.
You would need to explore the open Z-Wave software to see how a software trigger could be created
based upon a state change on one of the network nodes. I showed a window sensor being activated in
Chap. 7, but that state change was only shown in a GUI. I am certain that the underlying logical
variable representing that state could be polled and the result sent to the alarm program.
alarm.py
Summary
I started this chapter by discussing the selection of the webcam to be used in the surveillance of the
security zone. It turns out that Raspian Wheezy, the RasPi Linux distribution used, has drivers for
different manufacturers including many older models.
The laser trip assembly used in the camera controller project was shown in its new role as the
primary intrusion sensor. I reused the same interface circuit between the RasPi and the camera
controller because it was simple and functional for this project.
The key software package, Motion, was discussed next. I used only a small portion of its
capability, that being the webcam server. The Motion setup for the RasPi was discussed along with a
demonstration of an actual webcam stream.
I introduced a notification program that will send an e-mail to a designated recipient that contains
both the public and local IP addresses currently associated with the RasPi. This program was then
incorporated into an overall program that sent the e-mail when the RasPi detected an intrusion signal.
Finally, I concluded with a brief discussion about future modifications and the ease with which
additional sensors could be added to expand the system.
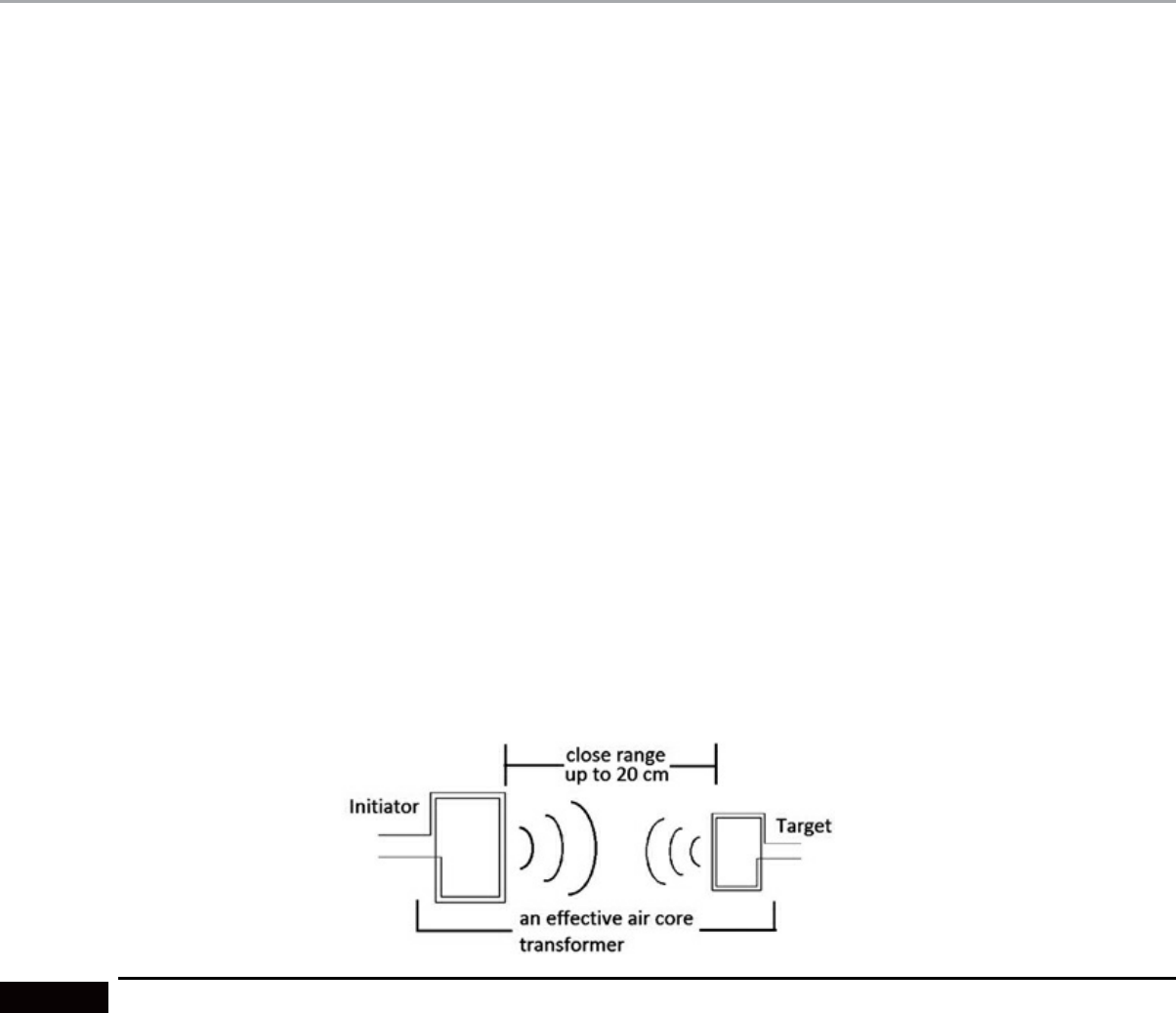
CHAPTER 9
NFC/RFID Reader
Introduction
Near Field Communications (NFC) is a contactless communication technology based upon the ISO
14443 standard. Being standards-based, NFC devices can easily interoperate with other contactless
protocols including the highly popular Radio Frequency Identification (RFID) protocol. RFID tags are
often used for building access and asset inventory. In this chapter, I will show you how to interface an
NFC/RFID reader with the RasPi. The reader will detect the nearby presence of a tag device and then
light an LED.
The reader will be controlled by a software package named libnfc and a Python program running
on the RasPi. Be forewarned: a fairly involved development process is required to install the libnfc
software.
How NFC Works
Magnetic induction is the fundamental physics principle involved with NFC/RFID. Figure 9–1 shows
a simplified diagram where the reader, or more formally Initiator, emits a radio frequency
electromagnetic field that is received by the tag, or Target.
Figure 9–1 NFC/RFID block diagram.
The RF field frequency is set at 13.56 MHz, which is in the low-frequency, low-power, Industrial,
Service, and Medical (ISM) unlicensed band. While Fig. 9–1 shows a maximum range of 20 cm, a
more realistic range is 4 cm or about 1.6 inches. The standard data rates are 106, 212, or 424 kbits/s,
which are quite suitable for reader applications and low-to-moderate volume data transfers.
There are two primary modes of operation using NFC/RFID:
1. Passive—The Target becomes energized when placed within the Initiator RF field. Only then will it
respond with its preprogrammed data.
2. Active—Both the Initiator and Target have self-energized RF fields and can establish and maintain
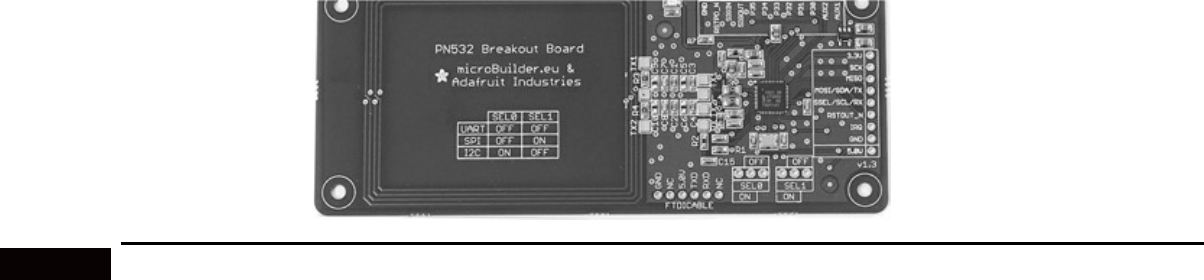
communication when in range of each other.
Until recently, the passive mode has been the most popular; however, the use of active mode NFC
among smartphone user has become widespread. Smartphone manufacturers are aggressively
marketing this new feature to enhance the data sharing capabilities of their products.
NFC Hardware
I will be using the PN532/NFC breakout board manufactured by microBuilder.eu and distributed in the
United States by Adafruit Industries, part number 364. Adafruit also sells a similar board, the NFC
Shield, part number 789, but this is designed to work with the Arduino microcontroller board and is
not the board that will be used in this project. Figure 9–2 shows the breakout board.
Figure 9–2 PN532/NFC breakout board.
The PN532/NFC breakout board has been designed to work with the open-source library libnfc,
which will be discussed in this chapter’s software section. A full board schematic may be downloaded
from the microBuilder website, http://www.microbuilder.eu/Projects/PN532.
There are other interesting links at this website, including a detailed discussion on how the board
antenna was designed and optimized for this NFC application. The board uses an NXP PN532
microcontroller (hence its name). The controller is a hybrid type in that it processes both analog RF
and digital signals. In Chap. 7, I introduced another hybrid chip, the ZW0301, which processed Z-
Wave signals. This chip is similar in operation to the NXP PN532 microcontroller and uses a
somewhat familiar ISO-layer network communications model that I discussed in previous chapters.
NFC Data Communications Flow
The information in this section is based upon the discussions and figures contained in the PN532
User’s Manual that is available from the Adafruit Industries website. Figure 9–3 shows the format of a
sample data interchange between the host computer, which would be the RasPi, and the PN532
controller.
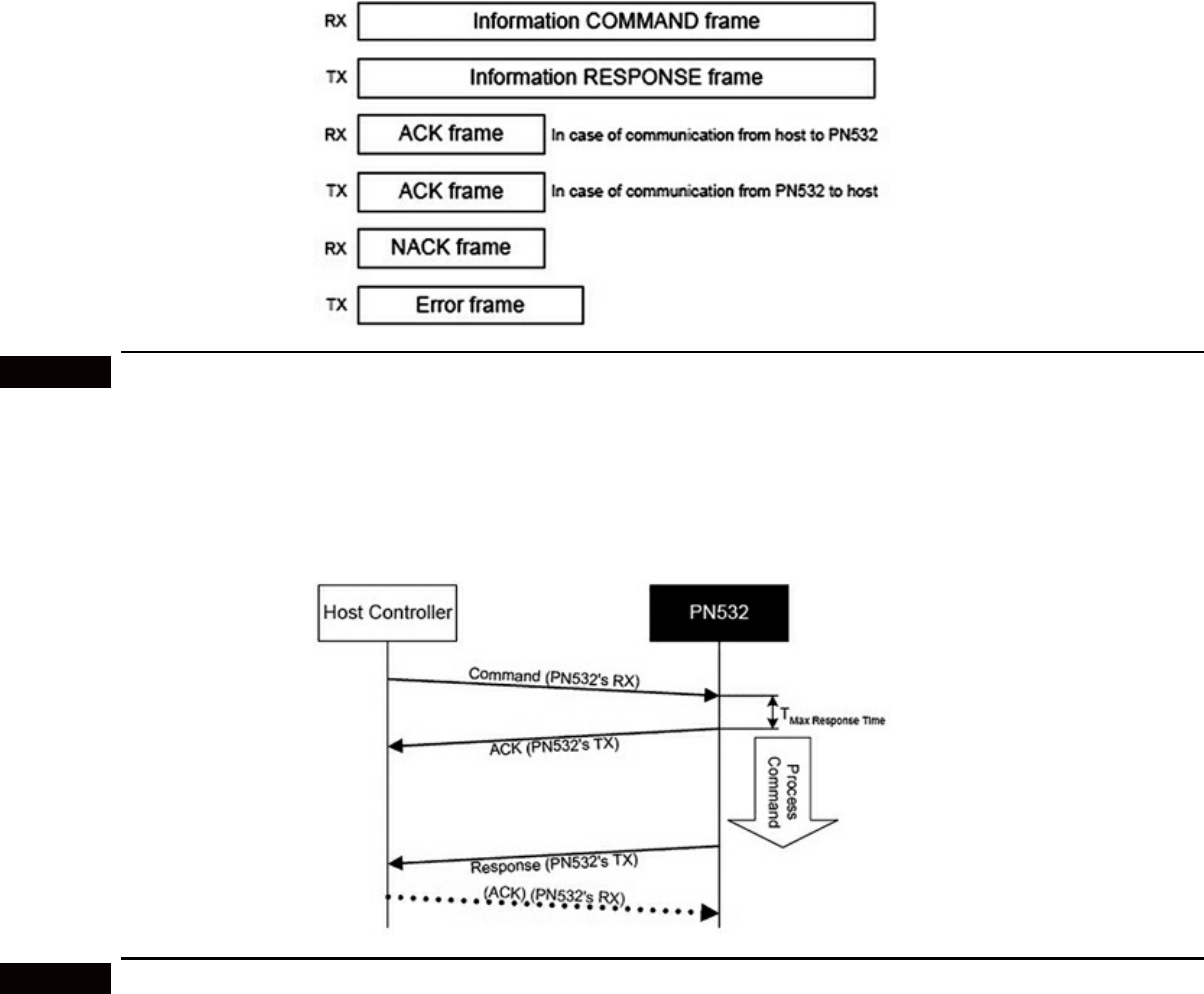
Figure 9–3 Sample data interchange between the RasPi and the PN532 controller.
You should notice that the data interchange involves not only sending and receiving commands,
but also the interchange of ACKs and NACKs. This is similar to the TCP protocol in that it ensures
error-free data communication. Figure 9–4 is a graphical representation of the same data interchange.
Figure 9–4 Graphical representation of the data interchange between the RasPi and the PN532
controller.
The libnfc software package controls all the data communication between the PN532 reader and
the RasPi. The reader’s firmware will “push” data to the RasPi when it detects the presence of a tag.
Installing libnfc
This libnfc installation is based upon an excellent tutorial created by Kevin Townsend from Adafruit
Industries. I have performed this installation using both the Wheezy 2_2013 and Occidentalis v2.0
distributions. The project Python test code uses the Wheezy distribution.
The PN532 breakout board provides hardware support for UART, SPI, or I2C communication
protocols. This project uses the UART protocol because the Wheezy distribution supports it without
any modifications as of the time of this writing.
What follows is a step-by-step process that is complemented by many screenshots to help you
navigate through this somewhat complex process. I also found it easier to use a SSH connection to
accomplish this installation. I refer you to an earlier discussion in Chap. 7 on how to run a SSH
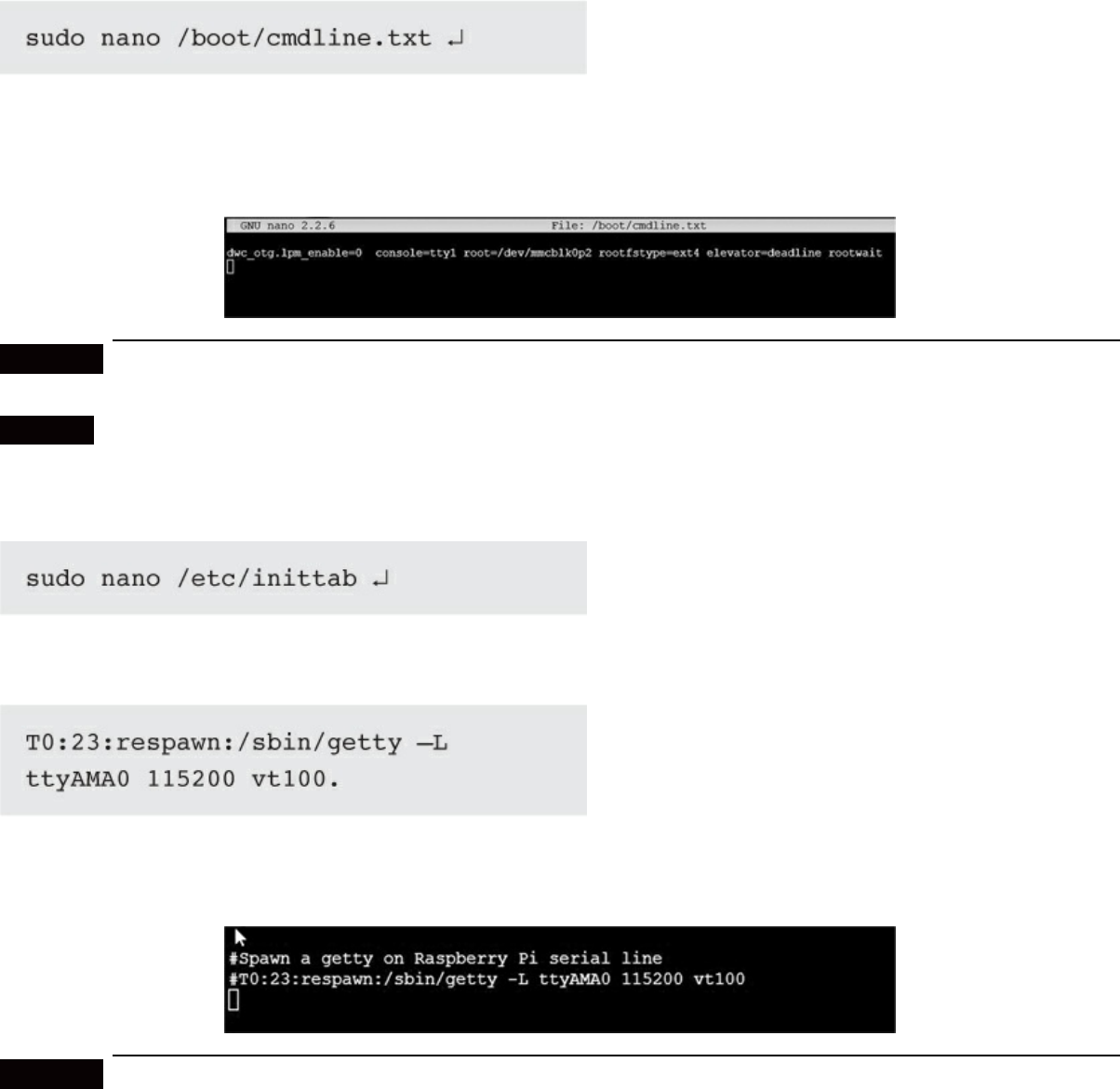
session.
The initial steps are to make the Wheezy UART logical connection available to libnfc. The default
Wheezy image has it connected to a console named ttyAMA0, which prevents it from being used by
another process.
1. Type the following at a terminal command prompt:
Edit the single line of text so that it matches what is shown in Fig. 9–5. All references to ttyAMA0
are removed.
Figure 9–5 The cmdline.txt edited content.
CAUTION Don’t change anything else or you will not be able to reboot the RasPi!
2. Type the following at a terminal command prompt:
Add a # sign in front of the line below.
Figure 9–6 shows the edited file.
Figure 9–6 The inittab edited content.
3. Type the following at a terminal command prompt:
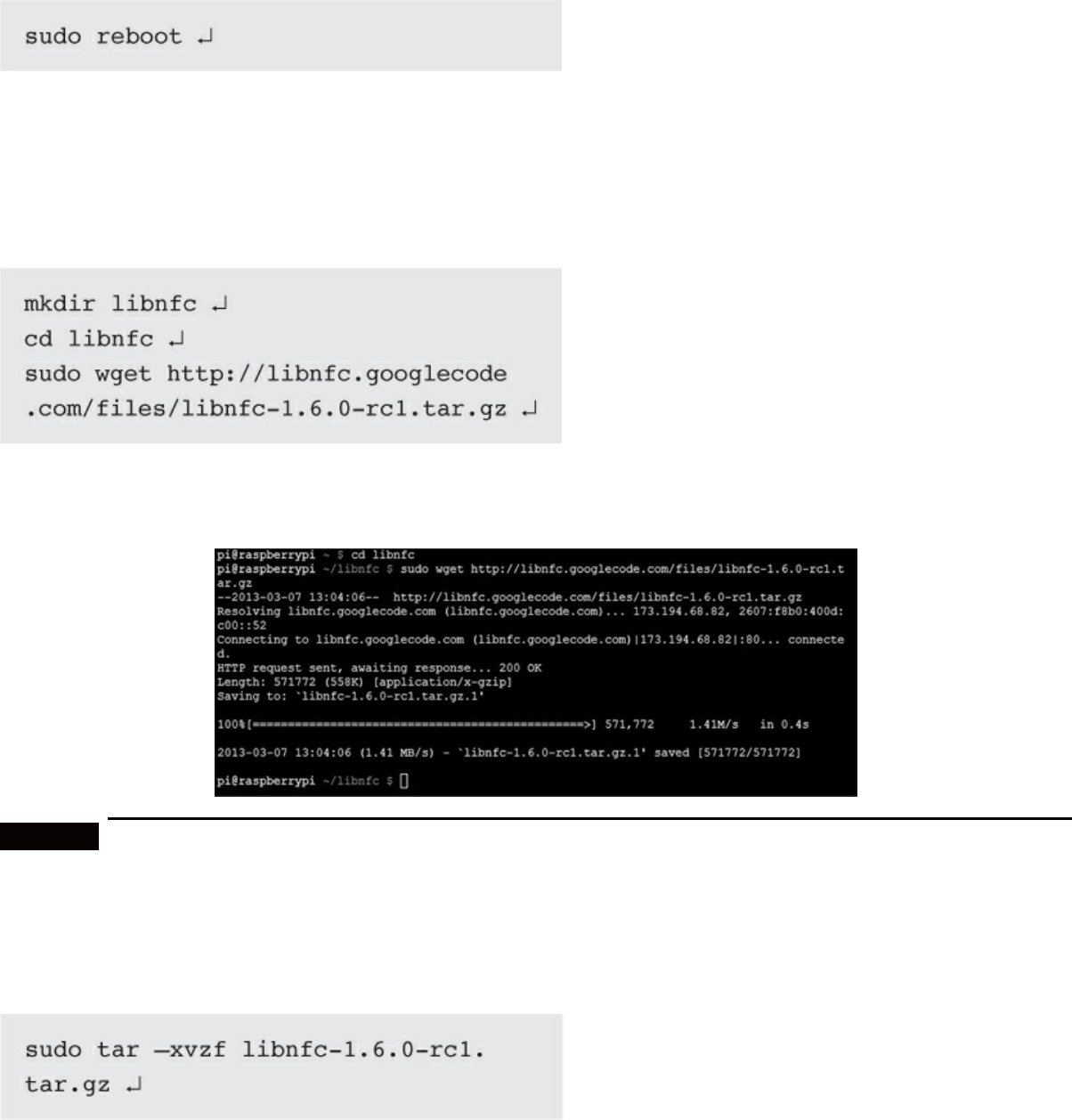
A reboot is needed to proceed with the rest of the installation.
4. The source code now needs to be downloaded into a new directory named libnfc. Ensure that you
are in the pi directory before starting this step.
Type the following series of commands:
Figure 9–7 shows a successful download of the libnfc source code.
Figure 9–7 The libnfc source code download.
5. The downloaded source needs to be “unzipped.” A new subdirectory named libnfc-1.6.0-rc1 will
automatically be created in the libnfc directory after this action is completed.
Type the following at a terminal command prompt:
Figure 9–8 shows the end portion of the display after this extract operation has finished.
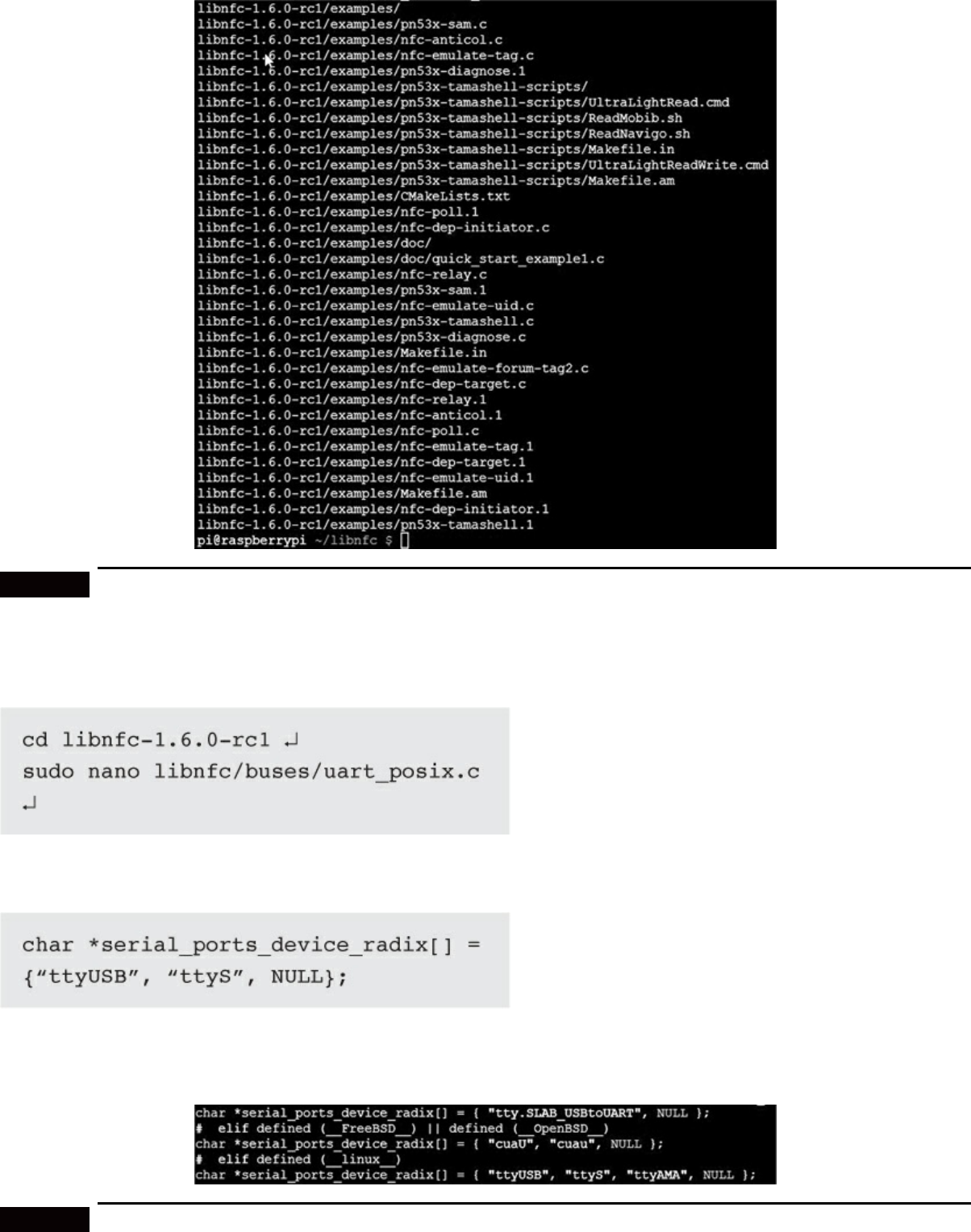
Figure 9–8 The libnfc source code extract operation.
6. One of the source code files must be slightly modified in order for libnfc to connect to the RasPi
through the ttyAMA logical device. Type the following at a terminal command prompt:
You need to add “ttyAMA” to the following line in the file:
Figure 9–9 shows the file content after the edit has been done.
Figure 9–9 The uart_posix.c source code edit.

CAUTION Ensure that you use double quotes around ttyAMA or the logical device will not be
recognized. The strange fact is that the file will compile OK, but the device ttyAMA
will never be recognized and the board will never connect. A frustrating experience to
say the least.
7. libnfc must next be configured to operate with the RasPi and the breakout board. Type the following
at a terminal command prompt:
Figure 9–10 shows the end results of the configure operation. Just confirm that the line
appears as the last line.
Figure 9–10 End of the configure operation.
8. The preparation for the actual build of the source code starts next. Type the following at a terminal

command prompt:
This preps all the source code, libraries, etc. for the actual build. Figure 9–11 shows the end of the
prep stage.
Figure 9–11 The end of the build prep.
9. The actual build happens in this stage. I have included two screenshots showing the start and end of
the process. This build will take about 30 minutes, so be patient. Type the following at a terminal
command prompt:
Figure 9–12 shows the start of the build.
Figure 9–12 The Build start.
Figure 9–13 shows the end of the build. There will now be a complete libnfc installation on the
RasPi after this screen appears.
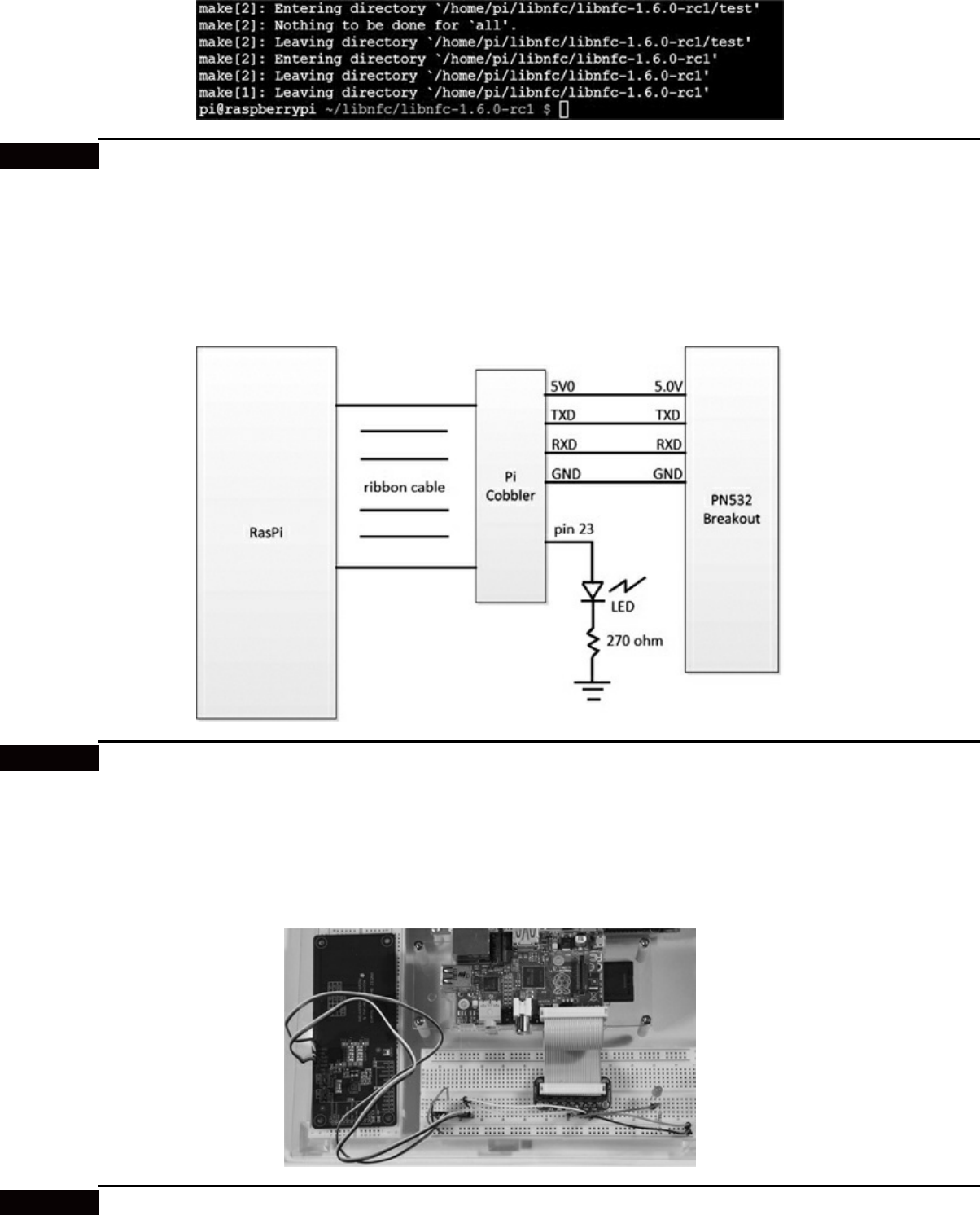
Figure 9–13 The build end.
Hardware Installation
The interface between the RasPi and the PN532 breakout board requires only four wires, as shown in
the block diagram in Fig. 9–14. The Pi Cobbler prototype tool is also used to ease this installation.
Figure 9–14 The RasPi and the PN532 interface.
I also connected an LED to pin 23 with a series-current-limiting resistor. The LED will provide a
visual indication when a tag is detected, using the Python program. Figure 9–15 is a picture of the
physical layout of the hardware.
Figure 9–15 Project hardware layout.
Do not be concerned with the fact that 5 V is being connected to the PN532 board, while there are
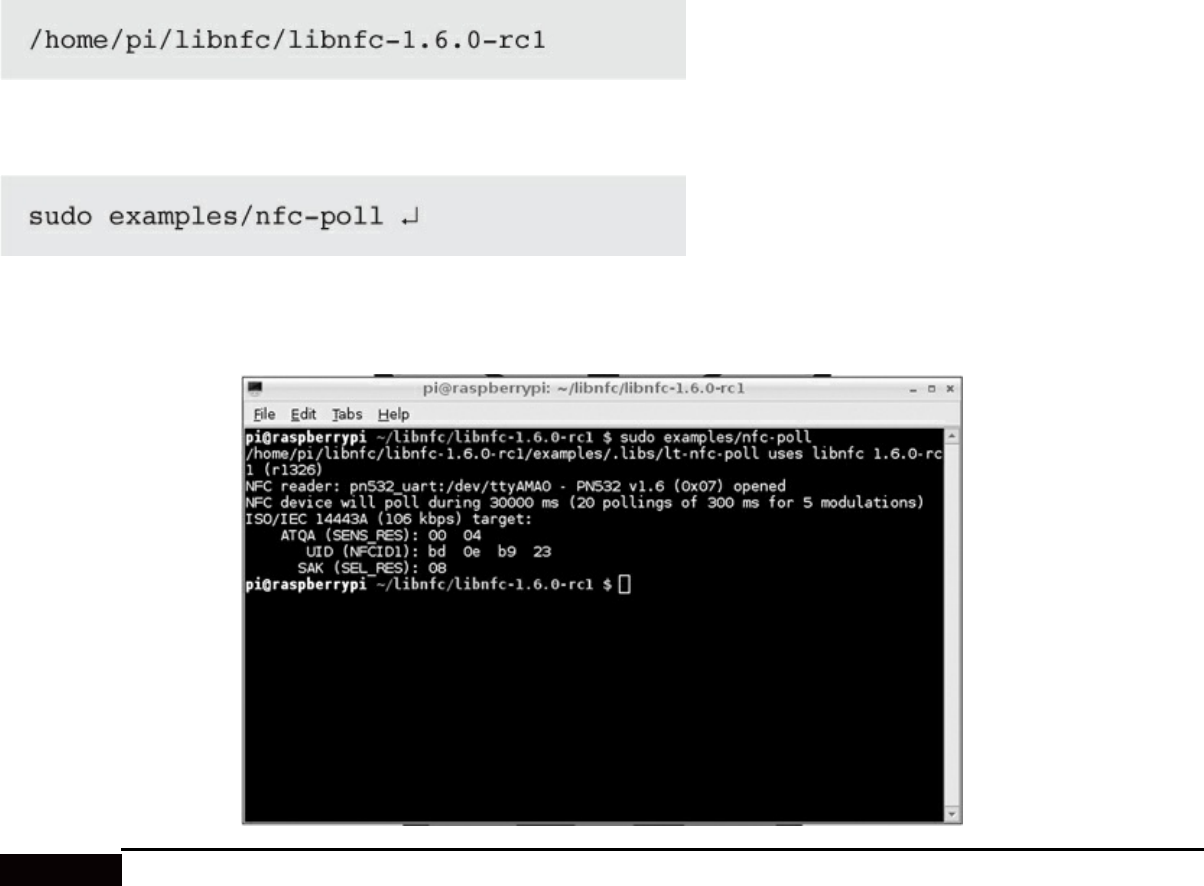
direct connections to the UART lines, TXD and RXD. The PN532 shifts the voltage such that only 3.3
V appears on the UART lines, thus protecting the RasPi from any overvoltage being applied to the
GPIO pins.
Initial Checkout
There is a very useful test program named nfc-poll, which is provided in the libnfc package and will
test the hardware and software for proper operation. First, ensure that you are in this directory:
Then enter the following at the command line prompt:
Put a tag on or near the reader, and you should see something similar to the Fig. 9–16 screenshot.
Figure 9–16 The nfc-poll test program output.
Of course, your UID tag information will be different from what is shown in the figure, but
everything else should be the same. Successful program execution means that you are now ready for
the project program.
Project Program
The project program is designed to check for a predesignated tag ID and then turn on an LED if the tag
is detected by the reader. This program provides the basic functionality of the NFC design and serves
as a template to expand the application for additional uses, which will be described later.
The Python code listing is shown on page 123. This program named extract_data.py uses the nfc-
poll program to capture the tag information and writes it to a text file named nfc_data.txt. This file is
then read and parsed to extract the tag ID data. This ID data is then compared to a hard-coded tag ID
to check if it matches. A match will turn on the LED for 10 seconds as well as display the word
“match” on the console screen. If the tag doesn’t match, the phrase “no match” appears on the console.
Run the program from the pi directory by entering the following at the command prompt:
The console display cursor will jump to a new line and wait for a tag to be placed near the reader.
Once this is done, the display will show “match” or “no match,” and the LED will light for 10 seconds
only on a match condition.
This program is quite constrained in that it must have the desired tag ID hard coded before it is
run. But as previously stated, it is only a starter or template that you can use to greatly increase the
flexibility and utility of the project. Suggested modifications and improvements are discussed in the
next section.
Future Expansion
The obvious expansion would be to have the RasPi signal an electronically controlled locking
mechanism to unlock when an authorized tag is detected. In most cases, there will be more than one
authorized tag holder who will need access to a protected area or building. This will require a list of
authorized tag IDs to be checked because each tag contains a unique ID. Python accommodates several
ways to do this function. Tag IDs could even be placed in a database that the program could query.
This is actually the way such an access function is accomplished in real-world situations that use
commercial systems. Such systems are also very expensive.
extract_data.py
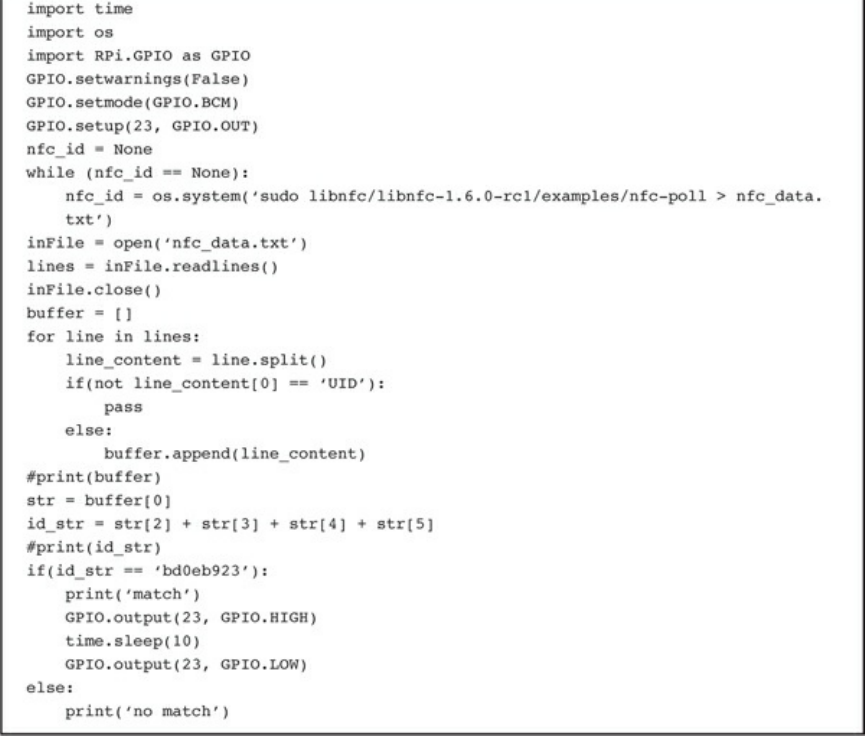
Another expansion might be to have the program send a preset e-mail when a specific tag is
detected. The e-mail program shown in Chap. 8 could easily be incorporated into this project program.
The e-mail would be automatically created and sent when a tag is detected. I could envision a situation
in which a child or perhaps a disabled person might need to send a non-urgent e-mail for help or
assistance. Obviously, calling 911 (or the international equivalent) should be used in an emergency.
All the person need do is to swipe the tag near the reader, and the e-mail will be sent. An LED should
also light to confirm that the e-mail was sent.
Other applications that might use tag-initiated activities include home tasks, such as starting an
irrigation system, pool cleaning, garage door opening/closing, home spa operations, and so on.
Summary
This chapter began with an explanation of what NFC is and how it works. The two primary operational
modes were shown.
The PN532 breakout board was discussed next, along with the rationale as to why it was selected
for this project.
This was followed by a brief overview of the NFC communication interchange, which illustrated
that it was a robust, TCP-like data flow between the RasPi and the PN532.
A comprehensive, nine-step procedure was detailed, showing how to install the open-source libnfc
software package. This package is installed in the Wheezy Linux distribution run on the RasPi.
A relatively easy hardware install was covered along with a quick test program to prove that the
PN532 could detect a tag.
The project program was discussed next and then executed, causing a preset tag ID to be detected
and an LED to be lit to show that the tag had been detected.
The chapter concluded with suggestions for further improvements, modifications, and expansions.
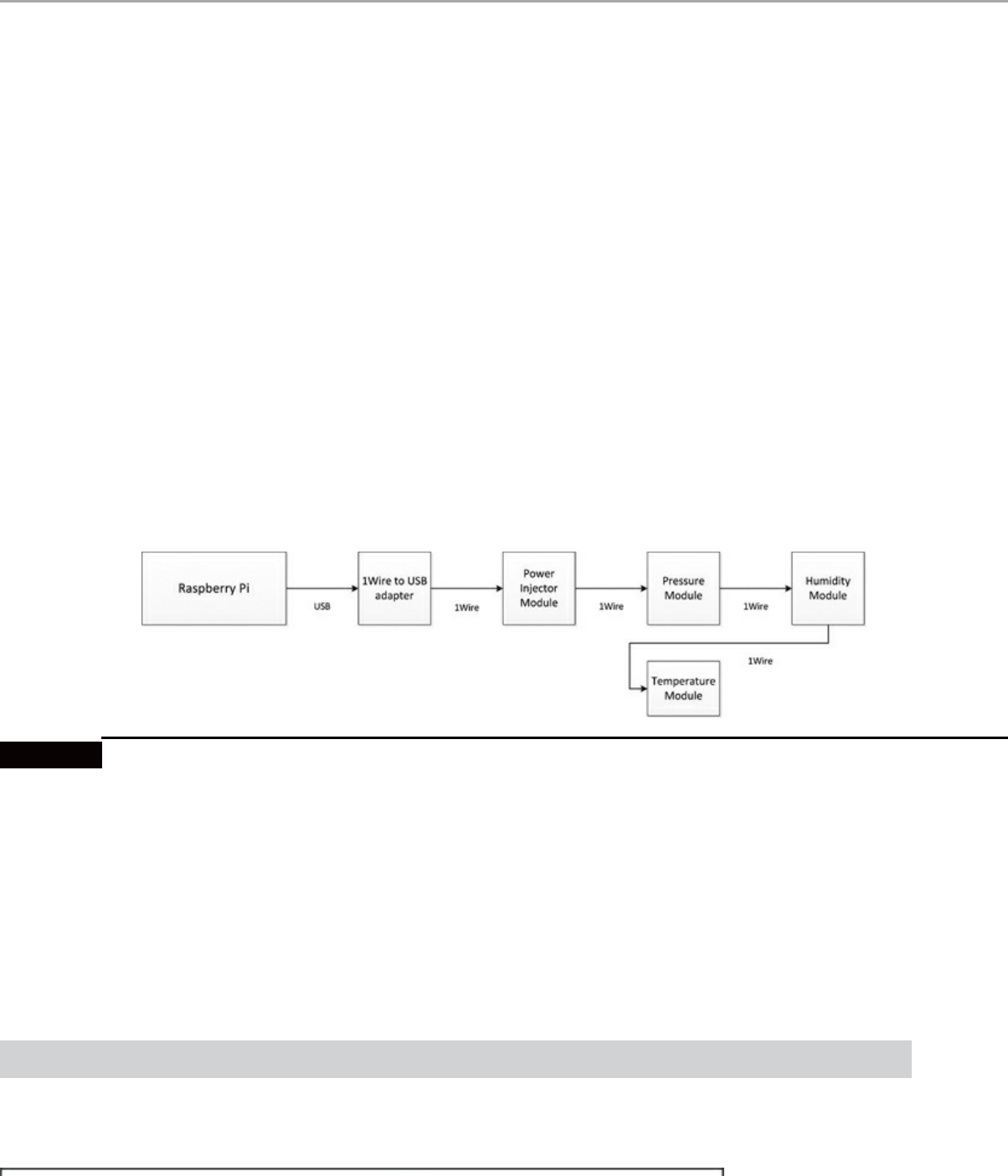
CHAPTER 10
1-Wire Weather Station
Introduction
As the chapter’s name implies, I will be showing you how to build a weather station. This station
will be quite basic, measuring only temperature, pressure, and humidity, but it may be easily expanded
to measure other weather components, such as wind speed and rainfall. All the weather sensors are
connected to the RasPi with a very clever interface known as 1-Wire™, which makes it very easy to
add additional components.
The RasPi runs on a software package named owfs, short for 1-Wire File System. This open-source
software contains every function required to interface the RasPi with all the system components used
in this project.
Weather Station Design
Figure 10–1 is a system block diagram that shows the components or modules involved in this project.
Figure 10–1 Weather station block diagram.
The system is a point-to-point interconnection, starting with the USB to 1-Wire adapter that is
plugged into a port on a powered USB hub, which, in turn, is connected to one of the RasPi USB ports.
I didn’t show the hub on the diagram because it should be considered as part of the basic RasPi
configuration.
All the modules and the USB adapter are available in the United States from www.hobby-
boards.com. Similar modules are available from www.sheepwalkelectronics.co.uk for international
readers. These items are listed in Table 10–1.
Table 10–1 Listing of Weather Station Modules and Adapters
The first element shown connected to the RasPi in the system diagram is an adapter in the physical
form of a USB dongle, as shown in Fig. 10–2. It has a USB connector at one end and a 1-Wire
connector at the opposite side.
Figure 10–2 USB to 1-Wire dongle.
The 1-Wire socket shown in the figure is a standard RJ12, six-pin, telephone-style connector. A
special RJ12 to RJ45 cable is required to go from the dongle to the first 1-Wire module, which in this
case, is the Power Injector Module. This special cable is shown in Fig. 10–3 and is typically provided
when you purchase the 1-Wire-to-USB dongle.
Figure 10–3 RJ12 to RJ45 cable.
Most 1-Wire modules use the standard eight-pin RJ45 connection standard, which is exactly the
same as a regular Ethernet patch cable. In fact, I used normal Ethernet patch cables to interconnect all
the 1-Wire modules for this project.
CAUTION Be sure that you do not inadvertently use an Ethernet crossover cable because that will
break the 1-Wire connection scheme. It will not harm the modules, but the data
connection will not work.
The next element shown in the system diagram is the Power Injector Module, which is shown in
Fig. 10–4.
Figure 10–4 Power Injector Module.
A 15-V “wall wart” power supply (a box-shaped device that plugs into the AC electrical wall
outlet and provides DC power to various electronic devices) plugs into a socket mounted on the case
top. There are also two RJ45 connectors mounted on the sides of the case that are not visible. The
cable from the USB dongle connects to the left socket, while the patch cord that goes to the next
module connects to the right socket. The 15 V are sent out through the Ethernet cable and are also
down regulated to 5 V for local use by a 78M05 regulator mounted on the internal PCB that is shown
in Fig. 10–5.
Figure 10–5 Power Injector PCB.
It turns out that some 1-Wire modules do not require a separate power supply. This is discussed in
the section describing various ways to power a 1-Wire network. In this weather station project, the
barometer, humidity, and packet sniffer modules do require the use of a power injector because their
power consumption exceeds the 1-Wire standards for parasitic power supply operation, which will be
discussed shortly.
The weather modules following the Power Injector Module do not have to be inserted in any
particular order. I will show you the Temperature Module next. Figure 10–6 shows the external case.
Figure 10–6 Temperature Module case.
The external case is the same size as the Power Injector Module except that there are two RJ45
sockets at the top but no separate power socket. The RJ45 sockets are wired in parallel, so there are no
specific “in” or “out” connections to worry about. The bottom case panel has six holes in it to allow
for airflow so that the sensor can measure the ambient air temperature, not just the air contained in the
case.
Figure 10–7 shows the PCB inside the Temperature Module.

Figure 10–7 Temperature Module PCB.
The temperature sensor, marked U1, may be clearly seen mounted near the top centerline of the
board. It appears as if it is an ordinary TO92, a three-lead, plastic-encased transistor, but it is
remarkably far more than that. It actually houses a microprocessor with a temperature-sensing
element, which is only made possible due to the nature of the 1-Wire protocol. U1 is a Maxim
DS18B20 chip, which will be further described later. You should also notice that a three-terminal
strip, located at the midpoint of the right side, allows for a separate power supply to be attached and
for the module’s digital output to be accessed via the terminal marked DQ. We do not use this
terminal strip, as all modules are interconnected via the RJ45 cables. It just allows for additional
flexibility.
The Humidity Module will be described next. I am not showing an external case picture because it
is identical to that of the Temperature Module except for the Humidity designation on the case front.
The internal PCB, however, is considerably different, as you may see from Fig. 10–8.
Figure 10–8 Humidity Module PCB.
The humidity sensor, designated as U3 (not visible in Fig. 10–8), is located at the top of the board.
It is a Honeywell model HIH-4021-001 sensor that produces an analog output based on the humidity it
senses in the ambient air. These analog sensor readings are sent to chip U1, which is a Maxim
DS2438A. This chip is also incorporated into the Barometer Module and will be discussed in a
following section. The external terminal connection strip is also present and can be seen on the right-
hand side of the board. This strip is not used here, as I mentioned in the Temperature Module
discussion.
The Barometer Module is the last sensor to be discussed. Again, no external case picture is needed,
but the PCB board is shown in Fig. 10–9.
Figure 10–9 Barometer Module PCB.
The pressure sensor, designated as U2, is located on the left side at the top of the board. It is a
Freescale Semiconductor model MPXA4115A sensor, which produces an analog output based on the
ambient air pressure within the range of 28 to 32 inches of mercury. These readings are sent to chip
U1, a Maxim DS2438A, the same chip that was used in the Humidity Module. The U1 chip is not
visible in this figure because it is surface mounted to the backside of the board. The twice-mentioned
terminal board is also visible. A potentiometer is located on the upper right side to precisely calibrate
the module to a known air pressure.
I will discuss the Packet Sniffer Module in a later section. Next, I will discuss the 1-Wire protocol,
which is the base technology for this project.
1-Wire Protocol
The 1-Wire protocol is the registered trademark name given to a digital serial communications
protocol by Dallas Semiconductor, the company that first introduced it in the early 1990s. However,
the trademark does not affect any software implementing the protocol. Dallas Semiconductor was
merged with Maxim years later but still manufactures 1-Wire products along with many other
components. This is the reason why 1-Wire products have a DS prefix.
1-Wire uses a master/slave, multi-drop architecture with an open-drain connection with pull-ups to
5 V. This means that devices may be added or removed without any change to the hardware
configuration being specified. All devices are discovered through software techniques. Also all 1-Wire
devices have a unique 64-bit identification number that is encoded in a ROM by the manufacturer.
The master and all slaves act as transceivers meaning that they can both transmit and receive, but
not at the same time. This mode of operation is known as half-duplex with data transmission being
unidirectional. The master initiates all communication on the bus with the slaves responding only to
commands sent by the master. All data is sent by serial bits in a specific timed sequence. Bit timing is

asynchronous with no external clock required, since all timing is based on the signal transitions from
the master.
All communication flow between the master and slaves involves three activities, as shown in Fig.
10–10.
Figure 10–10 1-Wire communication flow.
1. Reset—In the first phase, the bus master must issue a reset command that synchronizes all elements
on the 1-Wire bus. All slaves must respond to the reset, or the bus will not function as desired.
2. Detect and Select—A specific slave device is next selected to receive commands from the master in
the next phase. This selection is a multipart process that is started by using a binary search
algorithm to discover all the slaves currently connected on the bus. Remember, all 1-Wire devices
have a unique serial ID permanently programmed into their onboard ROM. The search algorithm
reads and records all the IDs and records these values in a dynamic table that is hosted in the
master. The master can then use a specific ID to send commands to a slave with that ID, while all
other slaves ignore the command.
3. Receive and Perform Command—In the last phase, the master and selected slave engage in half-
duplex communication in which the master issues commands and the slave responds as designed.
Maxim DS2438A Chip
The Maxim DS2438A chip is used in both the Barometer and Humidity Modules. It deserves a
separate discussion because it serves as a specialized controller between a module sensor and the 1-
Wire bus. This chip is formally designated as a Smart Battery Monitor; however, it is used in another
role for the aforementioned modules. Figure 10–11 is a block diagram illustrating the many functions
implemented by this small chip, which is only an eight-lead small-outline integrated circuit (SOIC).
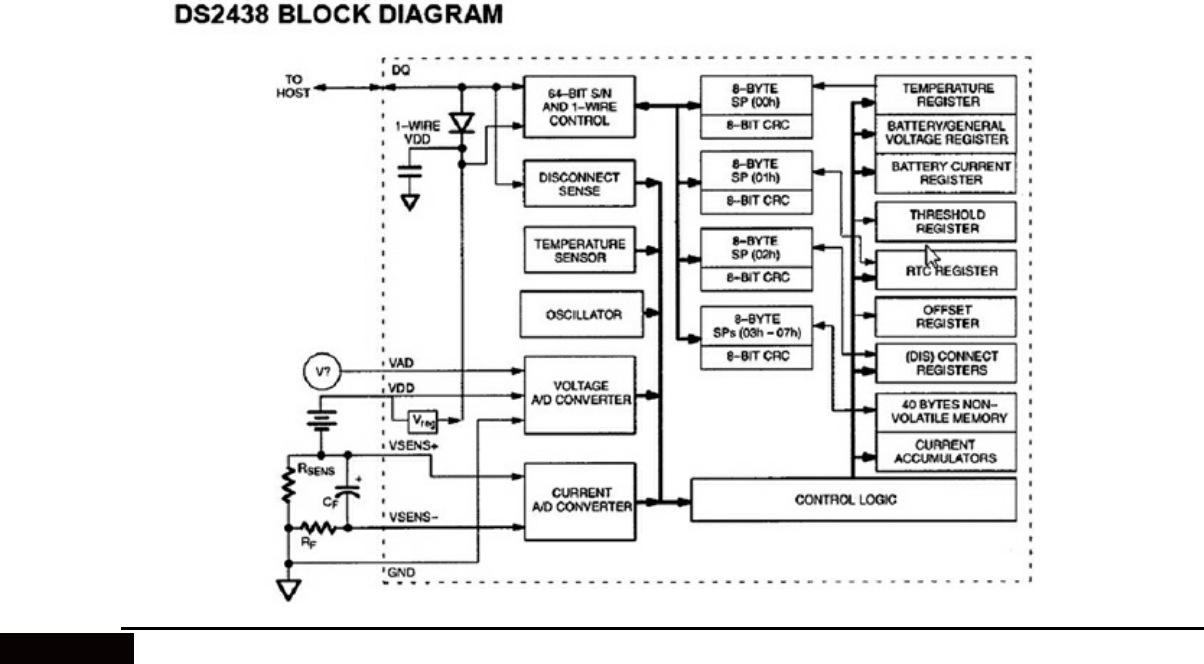
Figure 10–11 DS2438A block diagram.
The chip contains an analog-to-digital converter (ADC) that converts the sensor’s analog signals
into equivalent digital signals that can be passed over the 1-Wire network.
The module’s unique 64-bit ID is also stored in a ROM contained in this chip. The ROM contains
all the programming code needed to respond to the master’s reset command as well as to the other
commands unique to the module.
The parasitic capacitor and blocking diode discussed below are also shown in Fig. 10–11.
Maxim DS18B20 Chip
This chip is called a Programmable Resolution 1-Wire Digital Thermometer by the manufacturer.
Some key specifications are listed below:
Configurable from 9 to 12 bits
Measures –55° to +125°C
Measures –10° to +85°C with a +/– 0.5°C accuracy
Has its own 64 bit ID
Powered from 3 to 5.5 V (may be parasitically powered)
Converts 12 bits within 750 ms
Figure 10–12 shows the DS18B20 block diagram. There is an awful lot crammed into a TO92 case.

Figure 10–12 DS18B20 block diagram.
Powering the 1-Wire Bus
There are three ways that the 1-Wire bus can be powered. These are:
1. External power supply
2. Parasitic supply using a capacitor and diode
3. Powering the data line using a strong pull-up metal–oxide–semiconductor field-effect transistor
(MOSFET)
The first way, using an external supply, is the one we used in this project by incorporating the
Power Injector Module. You were also shown how to connect a local power supply to a specific
module using a terminal board located on the PCB. It should be noted that the Power Injector Module
is wired to provide power to all bus devices, while a local power supply powers only the device to
which it is wired.
The second way is called parasitic because the module power is obtained by charging a capacitor
from the 1-Wire data line while it is idling at a 5-V level. Figure 10–13 shows the simple charging
circuit.
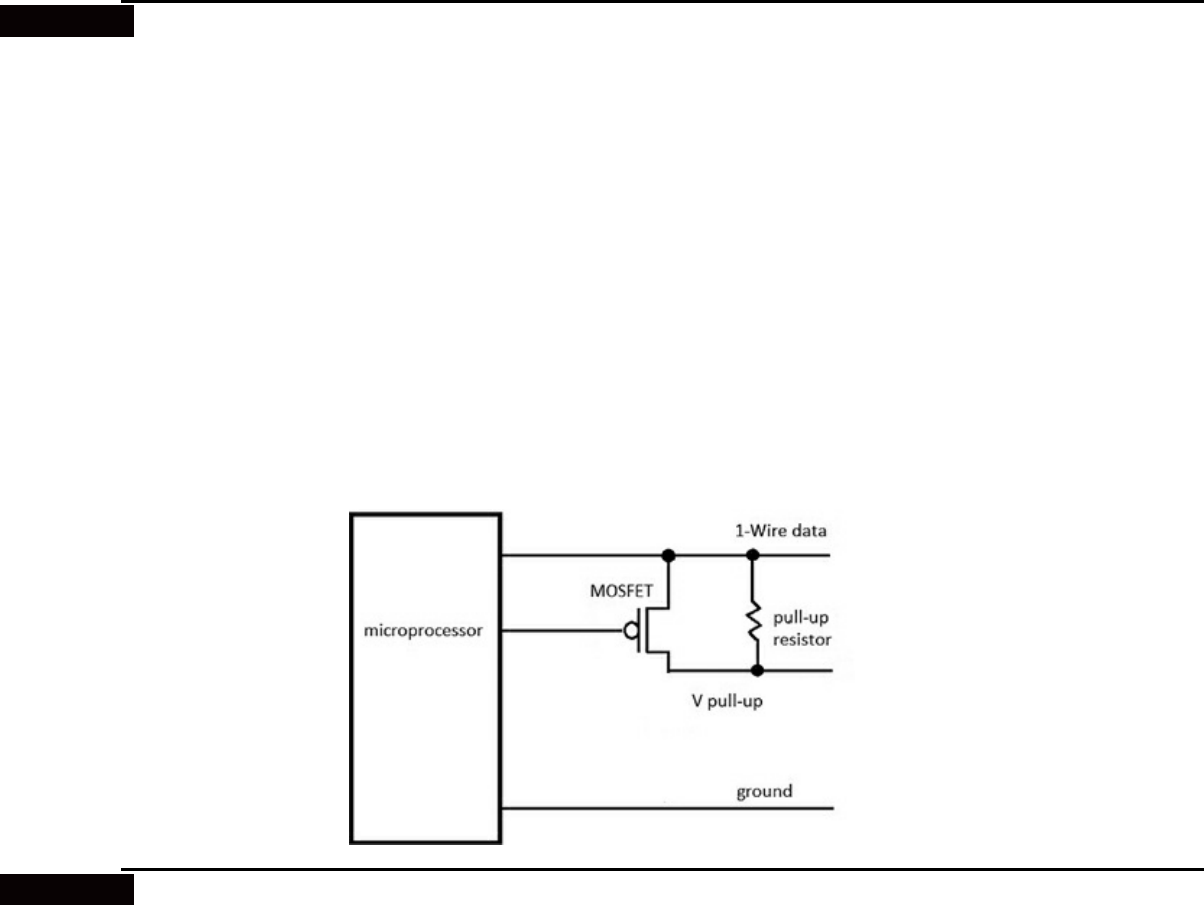
Figure 10–13 Capacitor-based parasitic power supply.
The blocking diode shown in the figure prevents the charged capacitor from interfering with the
voltage levels on the data line. There are two disadvantages to using this scheme:
1. The increased capacitive load on the bus data line decreases the effective physical length of the bus
line.
2. The capacitor charge can supply only a very small current before being discharged.
The third way, using an active device such as a MOSFET, allows for power to be supplied to the
data line during idle time. It essentially improves the parasitic power supply performance because the
master controls the MOSFET to provide a strong pull up during idle time. This circuit is shown in Fig.
10–14.
Figure 10–14 Active pull-up power supply.
The active pull up provides for extended range and a much better current supply at the expense of
requiring a dedicated microprocessor GPIO pin as well as additional programming for that GPIO pin.
1-Wire Sniffer
The 1-Wire Sniffer is a diagnostic module that connects to the 1-Wire network and provides a real-
time view of the data flow. It has an RS-232 serial port that may be seen at the top of the PCB, as
shown in Fig. 10–15.
Figure 10–15 1-Wire Sniffer PCB.
The RS-232 serial connection can be attached to any computer running a terminal control program
with a configuration of 8 data bits, 1 stop bit, no parity, and 115,200 baud. The particular sniffer board
used in this project is powered via the bus. I used an external laptop running the Tera Term program to
display the network data. The RasPi could have been used; however, it was simpler and easier just to
use another computer for the monitoring and diagnostic functions. You will see some sample
screenshots in the section describing the operating weather station.
The sniffer module is an exception to the unique ID protocol because it is not expected to operate
as a normal slave device. All of the sniffers made by this manufacturer have the same ID of 0x01,
which means that only one can be deployed into a given 1-Wire network. That’s usually not an issue
because you would never require more than one sniffer per network. The master can issue a limited
number of commands to this sniffer, including:
F—Puts Sniffer into firmware upgrade mode
S—Puts Sniffer into the sniffer mode
P—Pauses the Sniffer
H—Display help message
Set Up the Weather Station Hardware
The weather station modules should now be interconnected using Ethernet patch cables, and the USB
dongle should be plugged into a powered USB hub. Plug the cable from the USB dongle into the
Power Injector Module. All the other modules are daisy-chained from the Power Injector Module. The
15 V wall wart power supply must also be plugged into the Power Injector Module. Figure 10–16
shows the whole setup.
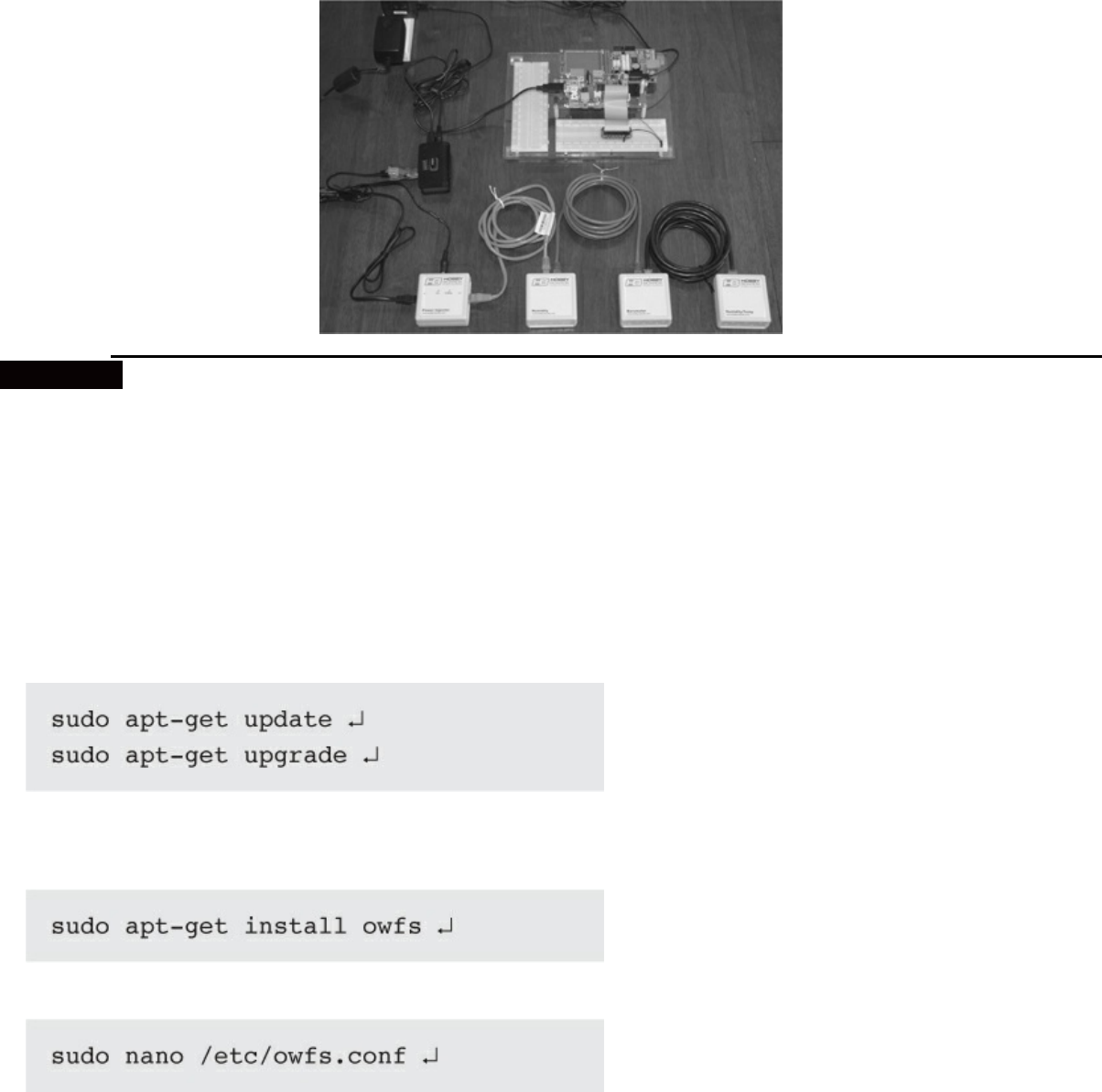
Figure 10–16 The 1-Wire weather station.
1-Wire File System
The software package that drives the whole 1-Wire network is named owfs, as mentioned in the
introduction. It is an open-source, comprehensive
set of applications that works seamlessly with the RasPi Wheezy distribution. The following are the
instructions on how to set up the RasPi to run owfs:
1. Update and upgrade the Wheezy distribution:
(this might take some time).
2. Next download and install owfs:
3. Next, edit the owfs configuration file.
There are two changes to make. Refer to Fig. 10–17 to see these changes.
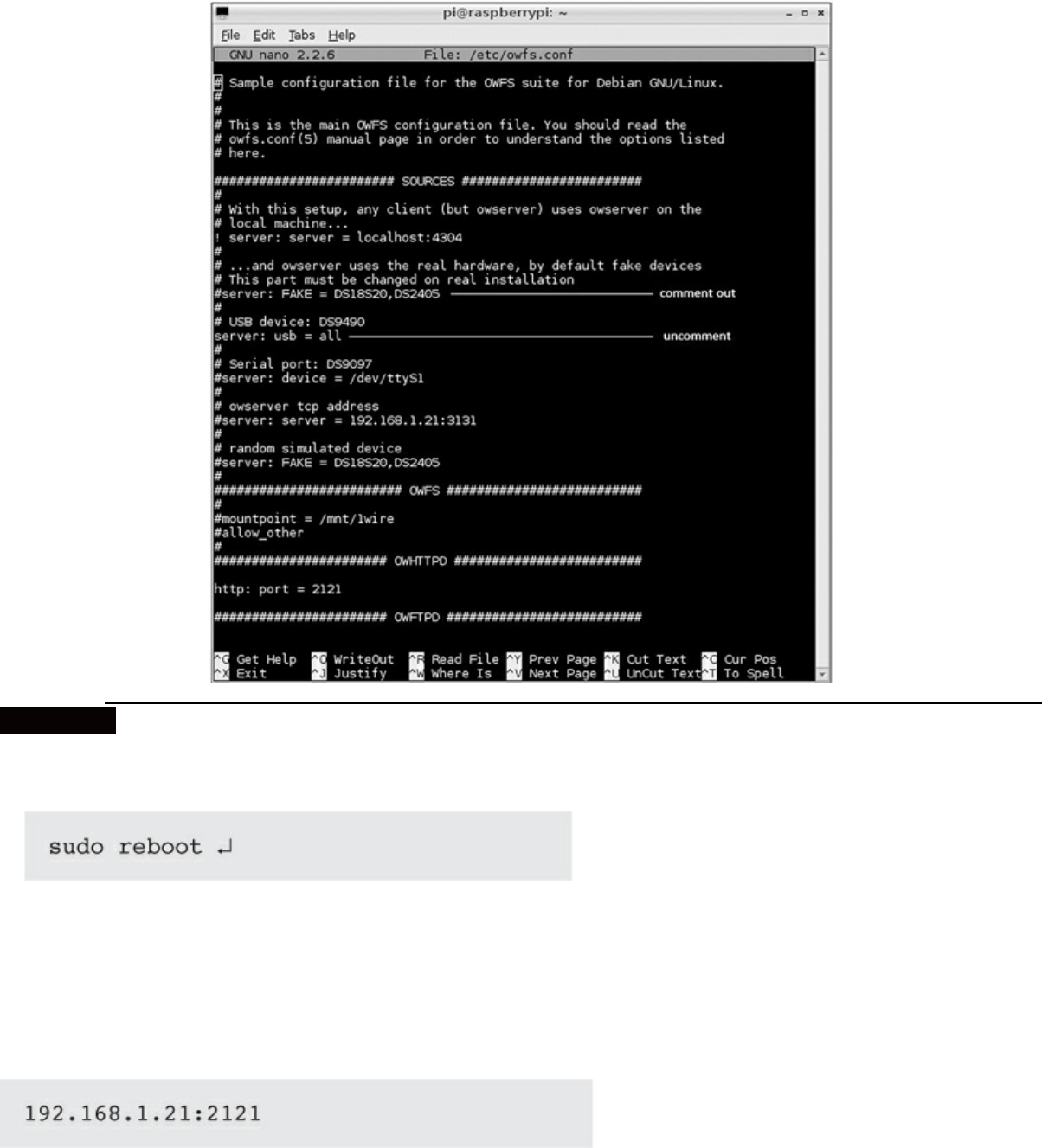
Figure 10–17 The owfs.conf file changes.
4. The last step should be to reboot the RasPi in order to put the configuration changes into effect:
Viewing the Weather Data
The real-time data from the modules may be viewed from the owfs server. Open a browser on another
computer other than the RasPi, and go to the local RasPi IP address with port 2121 appended. In my
case it was:
Figure 10–18 is a screenshot of the owfs server opening page, showing a directory name for each
of the modules from Fig. 10–16.
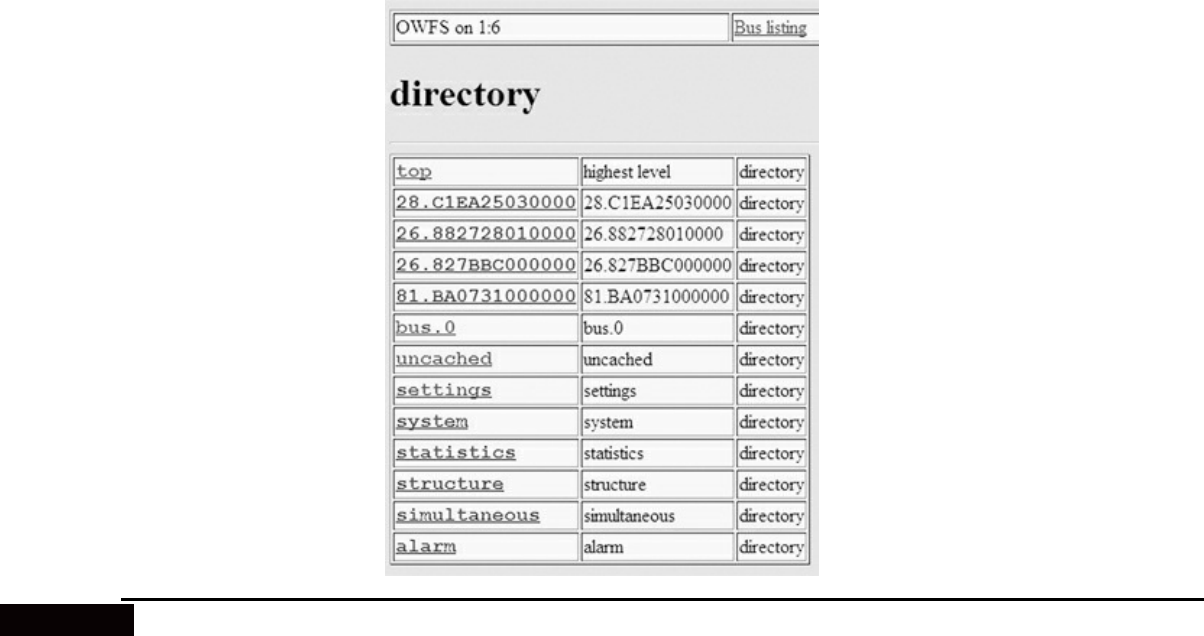
Figure 10–18 The owfs web server opening page.
The first three directory names listed in the owfs server opening page are for the actual sensor
modules, while the fourth is for the USB dongle. The rather odd directory name is how owfs interprets
the module ID. For example, by clicking on the directory named 28.C1EA25030000, you open another
page, shown in Fig. 10–19, that provides data from the Temperature Module.
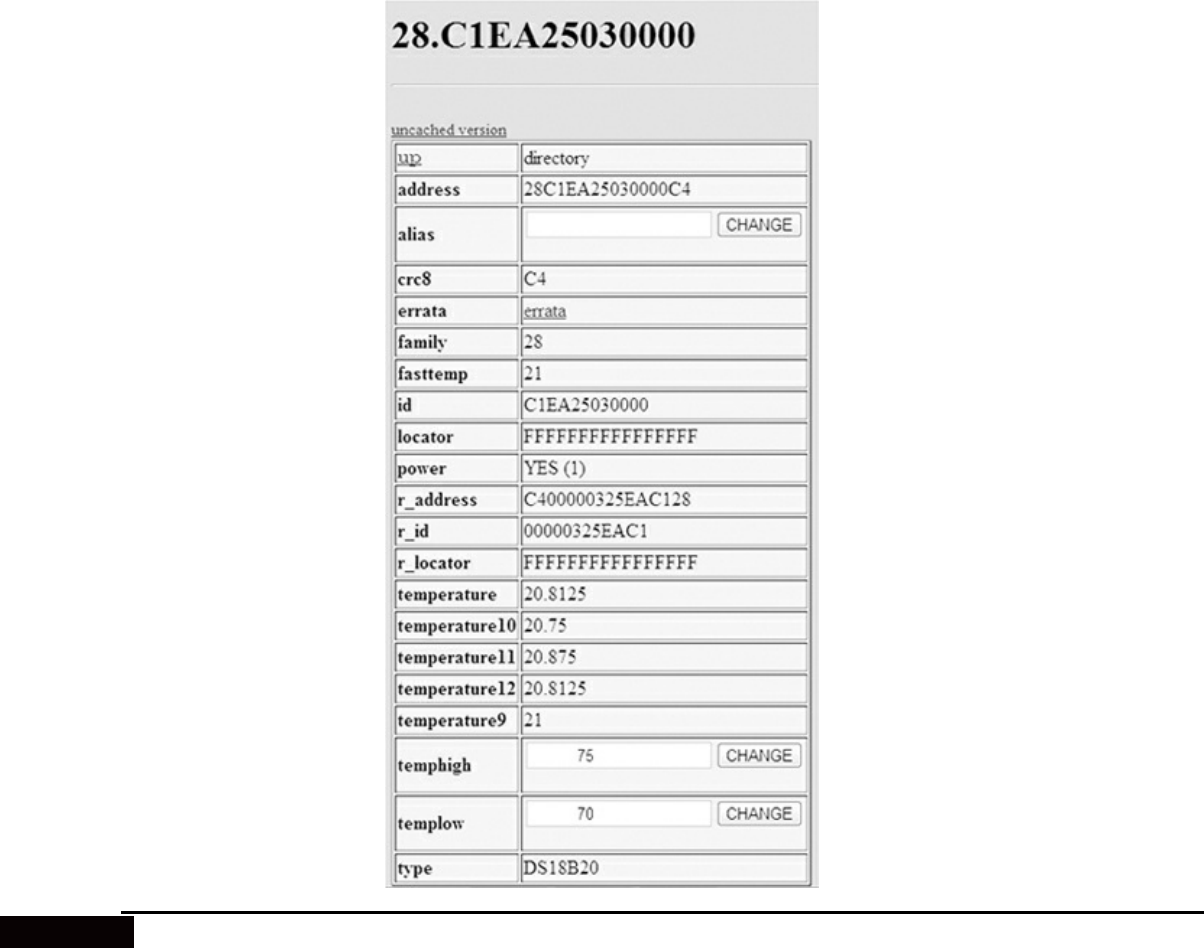
Figure 10–19 Temperature Module results.
A lot of information appears, but the key data is the temperature itself, which is shown at 20.8125
°C. You need to refer to the owfs user’s manual to determine what all the other data means except the
temphigh and templow entries, which are self-explanatory. Apparently, those readings are shown in
degrees Fahrenheit due to the owfs default configuration setup.
Clicking on the directory named 26.882728010000 opens the Humidity Module page. Figure 10–
20 shows the data on this page.
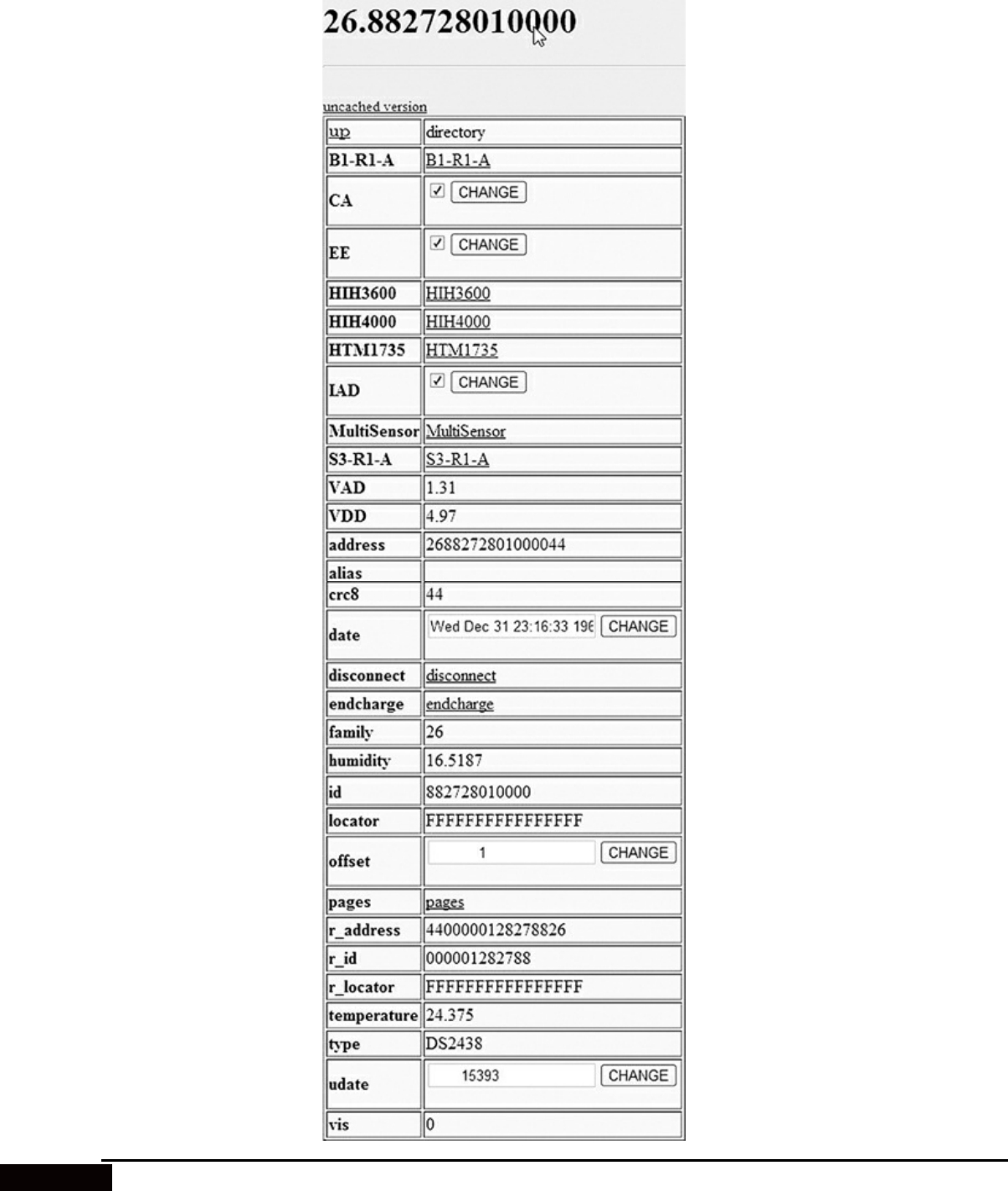
Figure 10–20 Humidity Module results.
Again, there is plenty of data shown as was the case with the Temperature Module results. The
humidity reading is near the lower middle of the list and shows a value of 16.5187. I am certain that
the sensor is nowhere near that accurate; however, the owfs software calculates a value based on the
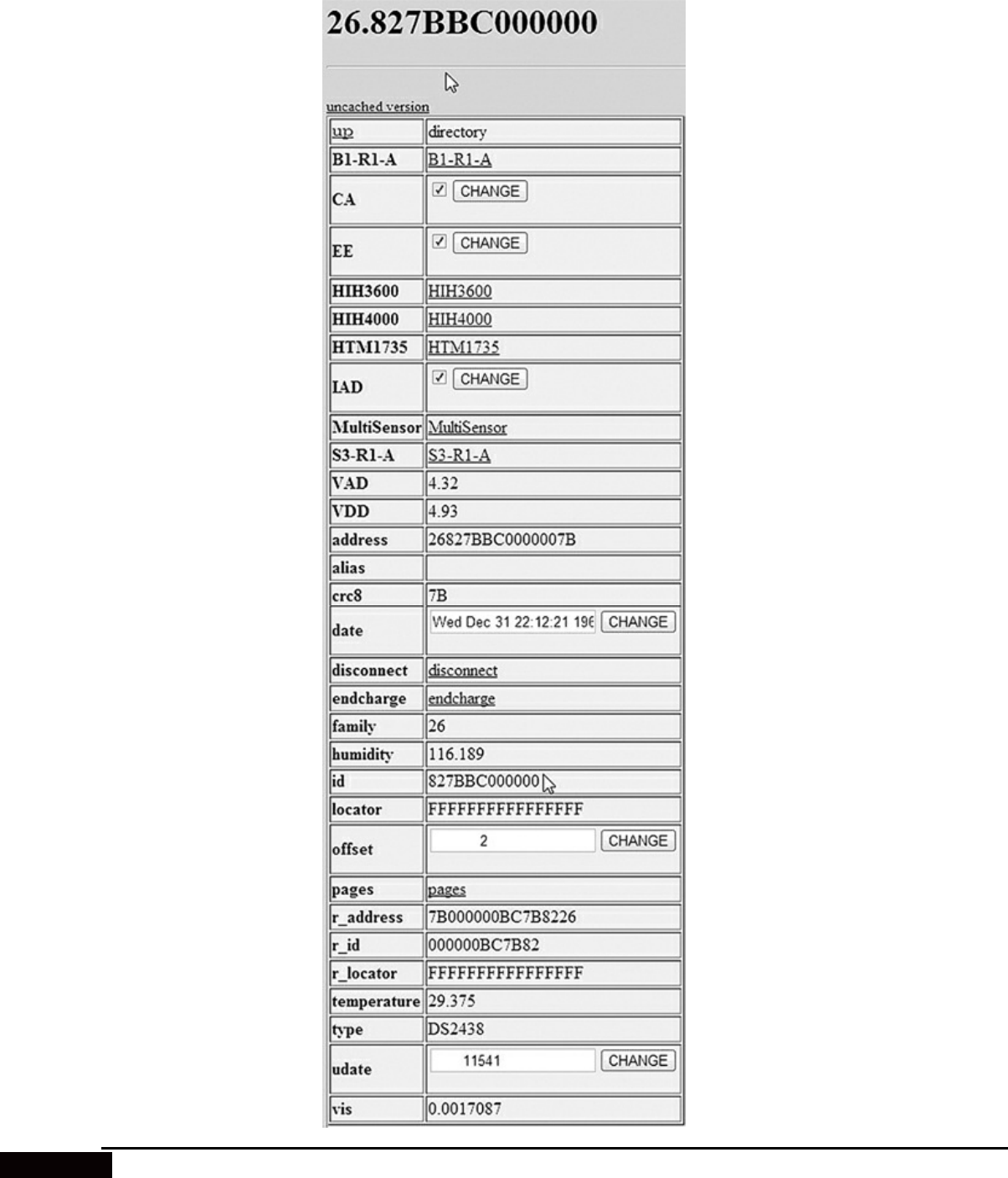
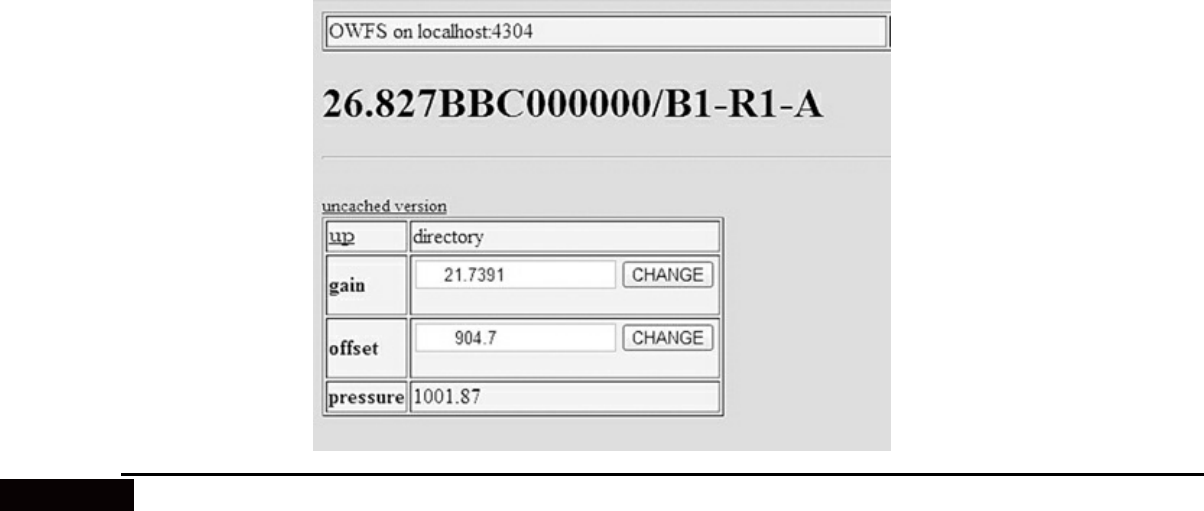
However, there is a problem here. If you look closely at all the data in this figure, you will not find
any barometric pressure value. You must click on the directory entry named B1-R1_A to view another
page with the desired data. Figure 10–22 shows this page.
Figure 10–22 Barometric pressure value.
The pressure displayed is 1001.87 millibars. The actual pressure measured at a nearby airport was
1014.6 millibars, so the Barometer Module was reading a bit low. The potentiometer mentioned in the
module discussion needs to be adjusted to properly calibrate the barometric sensor.
Packet Sniffing
I connected the 1-Wire Sniffer Module to the network to test out the functionality. The sniffer was
connected to a 64-bit laptop by using a USB-to-serial-port adapter. The laptop was running the
Windows 7 Ultimate OS. I also used the Tera Term program that I previously discussed in Chap. 5
with a terminal configuration as listed in the above sniffer module discussion. Figure 10–20 Humidity
Module results.
I also decided to test the remote login capability that required me to determine my home
network’s public IP address. The procedure detailed in Chap. 8 was used. I also set the home network
router’s port forwarding to 2121 and pointed it to the RasPi’s local address. Figure 10–23 is a
combined screenshot that shows both the owfs opening page along with the Tera Term display of
packet data that was created by this action.
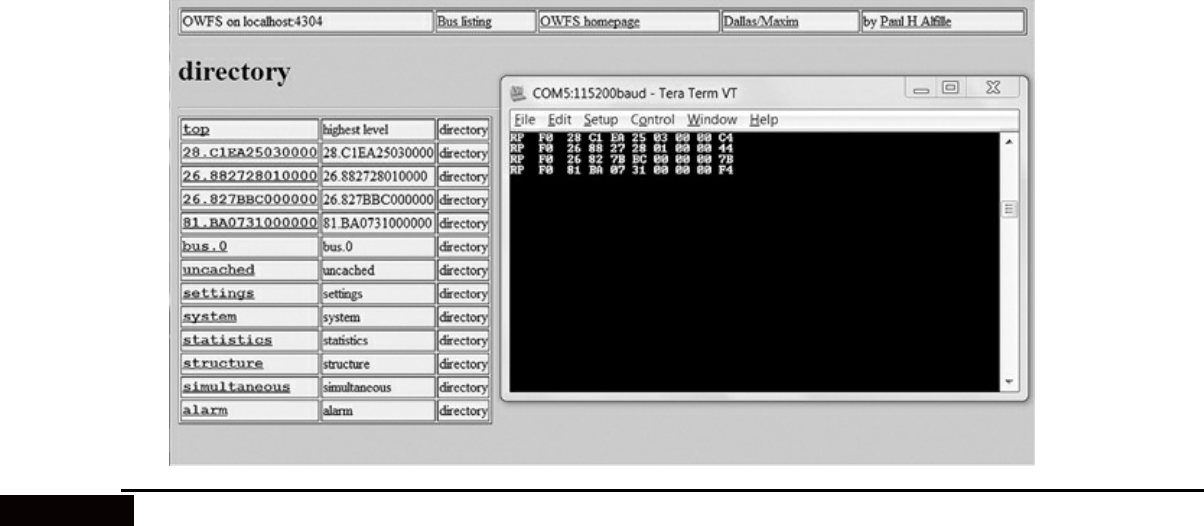
Figure 10–23 Screenshot of an owfs initial page overlaid with Tera Term packet data.
The interpretation of the first line of data follows:
First data packet = RP F0 28 C1 EA 25 03 00 00 C4
RP is short for presence pulse.
F0 is a one byte ROM command. This one returned the ROM module ID.
28 C1 EA 25 03 00 00 is the ROM ID sent back to the master.
C4 is a CRC check byte used for error checking.
The following three lines in the sniffer window performed the same action for the other three
modules in the 1-Wire network. Notice that they are displayed in precisely the same order as they are
listed in the owfs directory web page.
I then clicked on the Temperature Module directory to see what the sniffer returned. Figure 10–24
is the resulting screenshot.
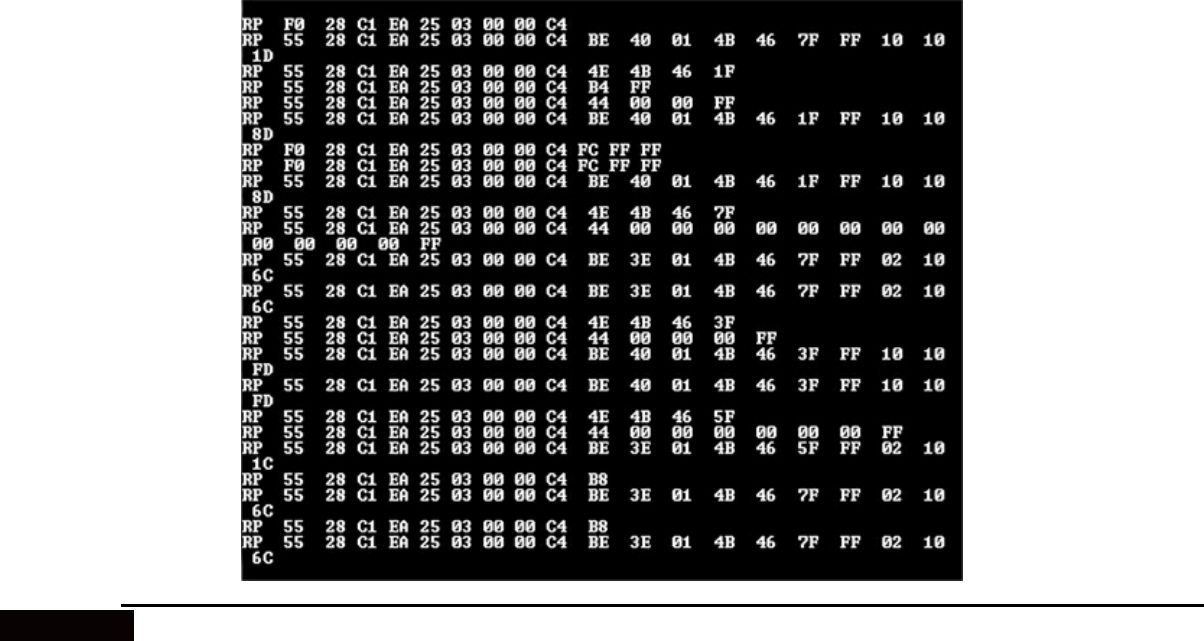
Figure 10–24 Screenshot after the Temperature Module directory was clicked.
As one might expect, there is obviously a lot more information being created so that owfs can
populate the Temperature Module’s report page (Fig. 10–19). You should notice that the module’s
ROM ID is repeated in each line of the sniffer display. This makes it quite easy to identify the specific
module that is transmitting data over the 1-Wire network. I refer you to the owfs user’s manual if you
desire to learn more about commands and returned data.
Future Expansion
Adding modules is very simple, and the owfs software will easily handle most existing 1-Wire
weather modules. You are really limited by your own resources, if you desire to add additional
modules to the 1-Wire network.
A useful module to add would be an anemometer to measure wind speed and a compass encoder to
get wind direction. The only other module that could be added to fully populate this weather station is
a rain gauge.
Summary
The chapter began with a review of the weather station design that is based upon using a series of
separate, interconnected sensor modules, all using the 1-Wire network.
Next, the components and functions of each module used in the project were discussed.
The 1-Wire protocol was then examined along with an integral controller chip, the DS2438A.
Various ways the 1-Wire network could be powered were also reviewed and the pros and cons of
each approach were pointed out.
Instructions on how to set up both the hardware and software were provided. The software package
owfs was also configured to provide Web-based weather reports. These reports were accessed both
locally over the home network and remotely over the Internet.
Finally, the Sniffer Module was discussed as a means of checking real-time data flowing over the
1-Wire network. This is a very handy tool to have available for debugging and for program
development.

CHAPTER 11
Local and Remote Logic Controller
Introduction
This project consists of two major parts both of which concern logic control, or put simply, turning
IO pins on and off. The two project parts are closely related, and both involve the control of IO pins:
one uses an external board that provides eight additional GPIO pins, and the other is based on the
RasPi itself.
The external board uses the 1-Wire protocol that was introduced in the Chap. 10 project for
building a weather station. This board may be either controlled through a program running on the
RasPi or accessed using the home network, as was demonstrated in the Chap. 10 weather project.
The other project part directly controls the RasPi GPIO pins. This part may be thought of as an
extension of the fundamental concepts that were first discussed in the Chap. 2 demonstration of a
blinking LED. In this part, the GPIO pins will be controlled from an Android smartphone client
application, with the RasPi acting as a web server. The RasPi may also be controlled from a browser,
which will also be demonstrated.
At the end of the chapter, I will discuss how both project parts can be accessed over the Internet .
The good news regarding this project is that there is very little hardware construction involved.
The more interesting (never bad) news is that a fair amount of software installation and configuration
is involved; however, at this stage in the book, you should be fairly comfortable dealing with such
activities. Now we’ll look at the 1-Wire external control board.
1-Wire External Control Board
The 1-Wire board I’m using is the Hobby Boards 8 Channel I/O v2.0 board, as shown in Fig. 11–1. It
is part of the series “29” family and is fully compliant with the 1-Wire protocol.
Figure 11–1 Hobby Boards 8 Channel I/O v2.0 board.
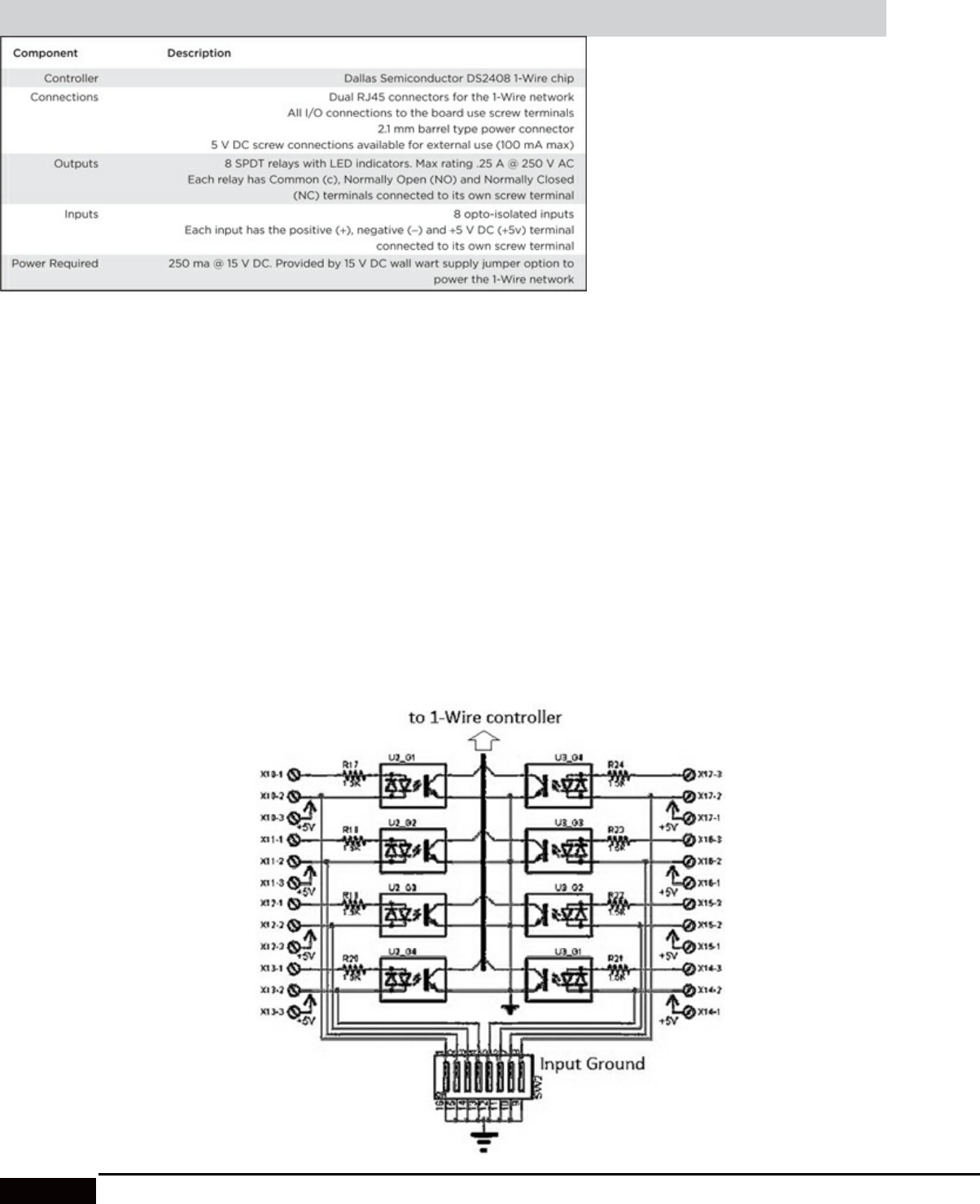
Significant board specifications are listed in Table 11–1.
Table 11–1 8 Channel I/O Board Specifications
An eight-position DIP switch labeled “Relay Control” is on the board. It can disable any of the
relays if you wish to do so. Another eight-position DIP switch labeled “Input Ground” is used in
connection with the input terminals. Inputs should be connected as follows:
1. Non-powered inputs—Connect one lead to the positive terminal marked “+.” The other lead is
connected to the powered screw terminal marked “+5v.” The corresponding “Input Ground” DIP
switch should be in the on (up) position, which is also the default position.
2. Powered inputs—Connect one lead to the positive terminal marked “+.” The other lead is
connected to the negative terminal marked “–.” The corresponding “Input Ground” DIP switch
should be in the off (down) position. The input polarity is a “don’t care” situation because the input
opto-isolators are bidirectional, as can be seen in Fig. 11–2, which shows a portion of the board’s
schematic. You can even use low-voltage AC to trigger the input.
Figure 11–2 8 Channel I/O board input schematic.
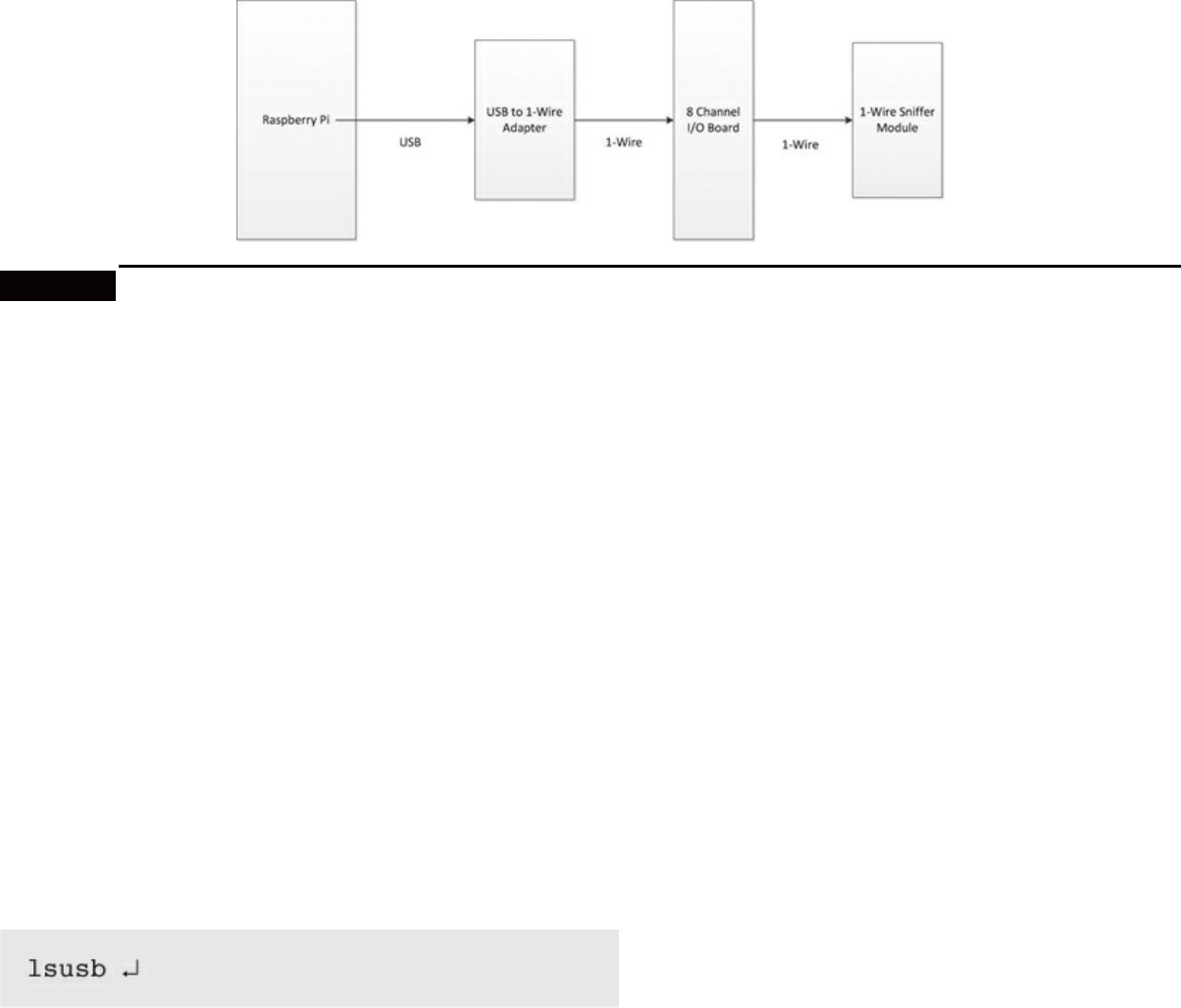
The full schematic along with the board’s user’s manual is available from www.hobby-
boards.com.
Each channel relay is connected in parallel with the 1-Wire controller and the respective input for
that channel. This means that the relay can be activated by a network command or by an input action,
such as a contact closure. I will demonstrate this dual action in a later section of this chapter.
A block diagram of the 1-Wire network used in this project is shown in Fig. 11–3. The USB to 1-
Wire adapter and 1-Wire Sniffer Module used in the Chap. 10 project are also being used in this
project. The 8 Channel I/O board is also configured to supply power to the entire 1-Wire network.
Figure 11–3 Block diagram of the 1-Wire network.
All the modules are interconnected using Ethernet patch cables except for the special RJ12/RJ45
cable that connects the USB/1-Wire adapter and the I/O board.
1-Wire File System (owfs) Installation and Configuration
The software required to control the 8 Channel I/O board needs to be built from the owfs source code
in a procedure similar to that followed in Chap. 9 for the libnfc software. This time, I will not include
the many screenshots shown in Chap. 9, since you should now be somewhat familiar with the build
process. I do caution you to carefully follow all the steps because it is quite easy to miss something,
and consequently, to be unsuccessful in creating the operational software. The prerequisite conditions
for the build are to have an Internet-connected RasPi running the latest Wheezy distribution with a
powered USB hub attached. You can also choose to login remotely by using an SSH connection, but
that is not a requirement.
1. The first step is to simply plug the USB/1-Wire adapter into the powered hub and confirm that the
Wheezy OS recognizes the adapter. You should also attach the remaining modules at this time.
Then type the following at the command line prompt:
Figure 11–4 shows what displayed on my setup. The USB/1-Wire adapter is shown as “Bus 001
Device 005: ID 04fa:2490 Dallas Semiconductor DS1490F 2-in-1 Fob, 1-Wire adapter” entry. Your
entry will vary depending on the adapter you use and the unique ID that is associated with every 1-
Wire device.
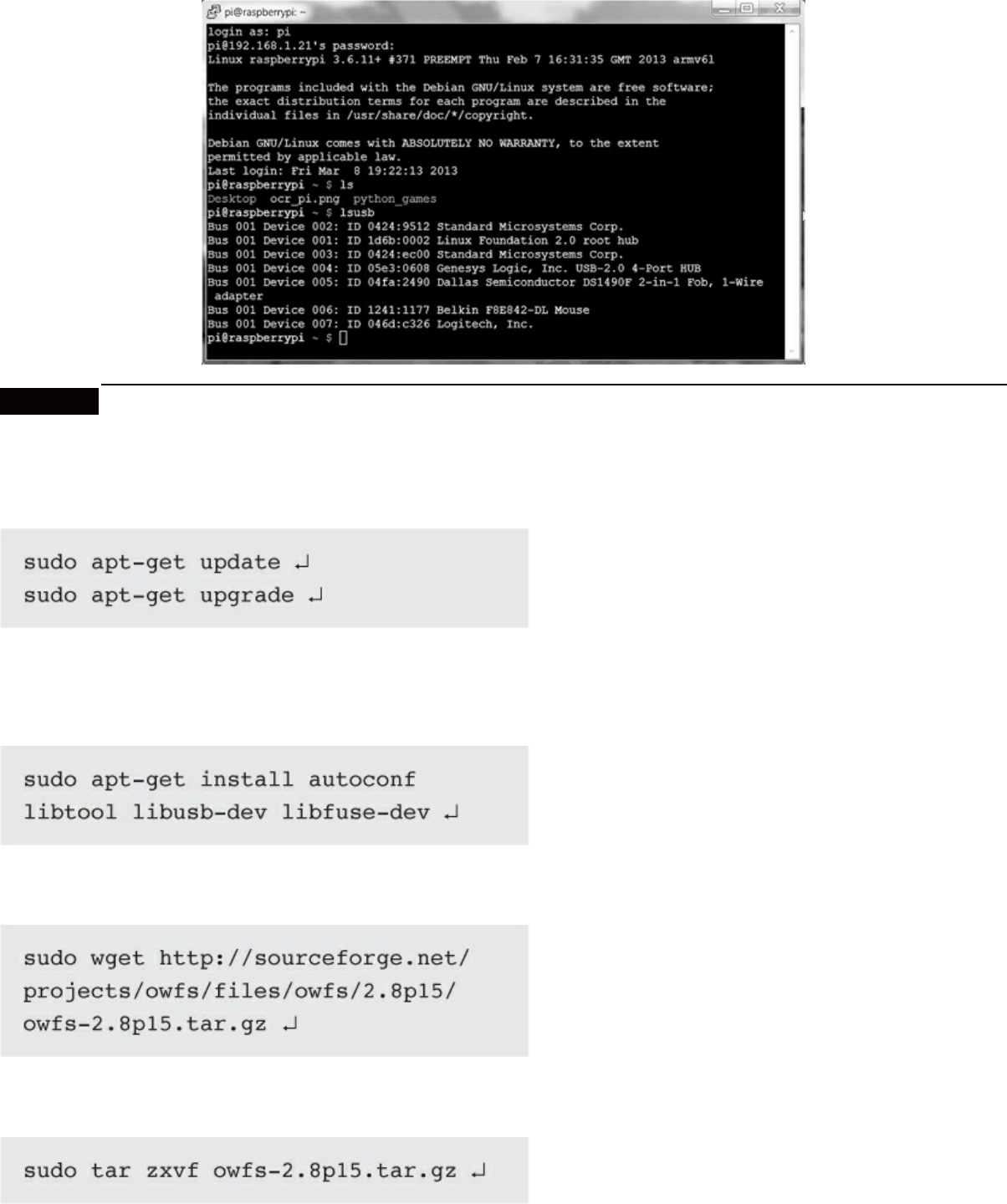
Figure 11–4 lsusb display.
2. This step is a precautionary one to ensure that the Wheezy distribution is updated and upgraded.
Type in the following commands:
(This can take some time if there are many upgrades needed.)
3. Next, the required build tools need to be installed. Type in the following command:
4. The source code has to be downloaded next. Type in the following command:
5. Extract the source code and subdirectory from the archive file by typing:
6. Change from the “pi” directory to the newly created “owfs-2.8p15” directory by typing:
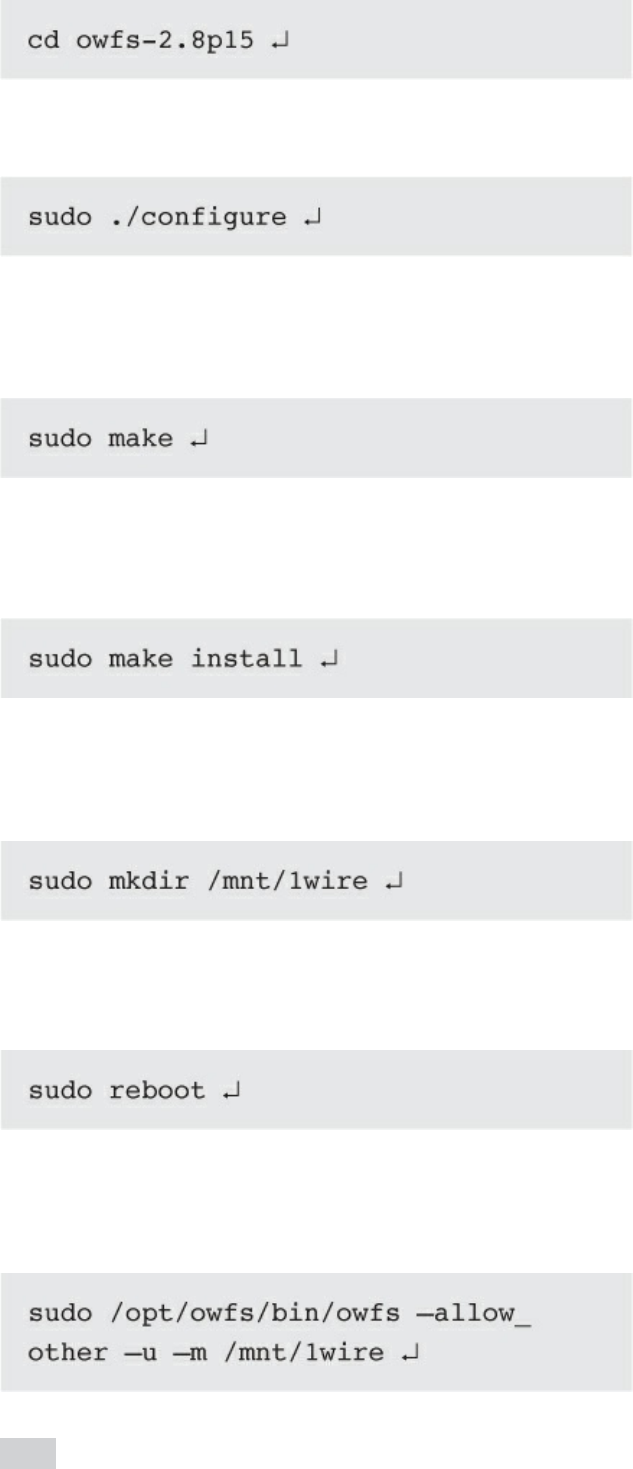
7. The source code must now be “configured.” Type:
(This step takes about three minutes to complete.)
8. The build happens next. Type:
(Be patient; this takes over 30 minutes to complete.)
9. Finish the build process by typing:
(It takes about one minute.)
10. You now need to create a directory where the device files may be accessed. Type:
11. I found the next step useful as a way to ensure that the RasPi was in a good or consistent state.
Type:
Login as you would normally, and you should be in the “pi” directory.
12. You now need to start the owfs filesystem and identify the mount point. Type the following:
NOTE This command should be done only once after the initial boot. If you try to remount the
1wire directory from the command line prompt after an initial mount operation, it
typically results in a “Permission Denied” error. However, I did find that remounts were
possible if used in a program statement. So-called “nonempty” warnings were created by
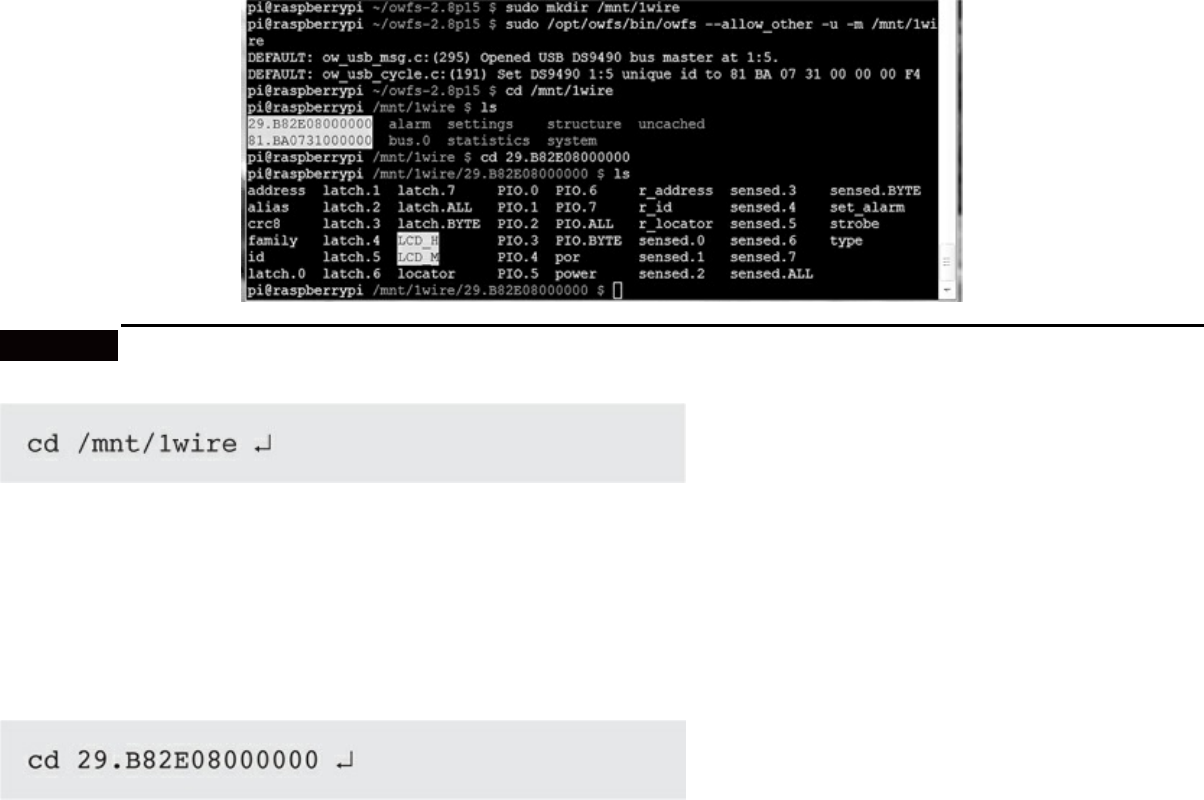
the owfs file system.
Figure 11–5 is a screenshot showing the results of the mount operation. I then changed directories
from “pi” to “1wire” by typing:
Figure 11–5 1-Wire owfs mount operation.
I did an “ls” to display the 1wire directory contents that identified the two normal 1-Wire devices
on the network (the Sniffer Module is non-conforming). The USB/1-Wire adapter belongs to the
family of 1-Wire devices beginning with the string “81.” That meant the remaining directory, starting
with the family designator of “29” must be the 8 Channel I/O board.
I changed into that directory by typing:
The directory contents are displayed at the bottom of Fig. 11–4.
I would like next to clarify an important aspect of how Linux treats hardware before proceeding
much further into this part of the project.
Linux, Hardware, and FUSE
Unix and its descendent Linux “treat everything as files” according to the old mantra. This phrase
encompasses all things, including hard drive files, serial ports, thumb drives, etc. You can read and
write to a hardware device, if it accommodates such actions, in exactly the same way as you can read
and write to an ordinary file, provided the permissions are properly set. The view that everything can
be handled as a file certainly simplifies how programs handle data to and from hardware devices.
There is also another particular file category that doesn’t appear until the OS is running. In this
category are virtual files that are dynamically created upon demand and are often-times stored in the
/sys directory. The Filesystem in Userspace (FUSE) application supports the owfs application by
creating and storing these virtual files in FUSE registered directories. The “/mnt/1wire directory” is
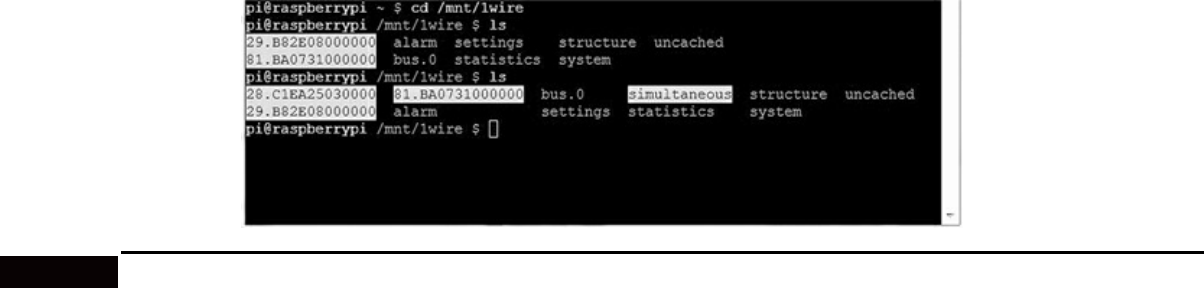
the designated site in which to store all the virtual files created for the 1-Wire network currently
operating.
You can prove to yourself that the virtual files exist. Simply reboot and do a “ls” on the
/mnt/1wire directory. Nothing will show. Next type in the mount command from step 12 and redo the
“ls” command. Then you should see a directory data display like the one shown in Fig. 11–4 for the
1wire directory. owfs applications and FUSE are integral to each other; the system wouldn’t work
without either of them.
Another very useful feature is that the 1wire directory will automatically be updated as modules
are removed from and/or added to the 1-Wire network. Figure 11–6 shows what happened before and
after I plugged a Temperature Module (family “28”) into the 1-Wire network. Note, that I did not have
to type any commands; the addition was automatically detected.
Figure 11–6 Autodetection of 1-Wire Modules.
You will see that a new directory entry named “simultaneous” appeared in the listing. This new
entry was created by owfs and FUSE after the programs recognized that the new module was part of
the Temperature Module virtual file properties. This dynamic recognition and autoconfiguration is a
very powerful concept, which contributes to making 1-Wire networks so easy to install and use.
Test Sequences for the 8 Channel I/O Board
What follows are some quick and simple terminal commands to test the basic board functions. Figure
11–7 shows the test setup, using a laptop that is controlling the RasPi with an SSH session, i.e.,
“running the Pi headless.”
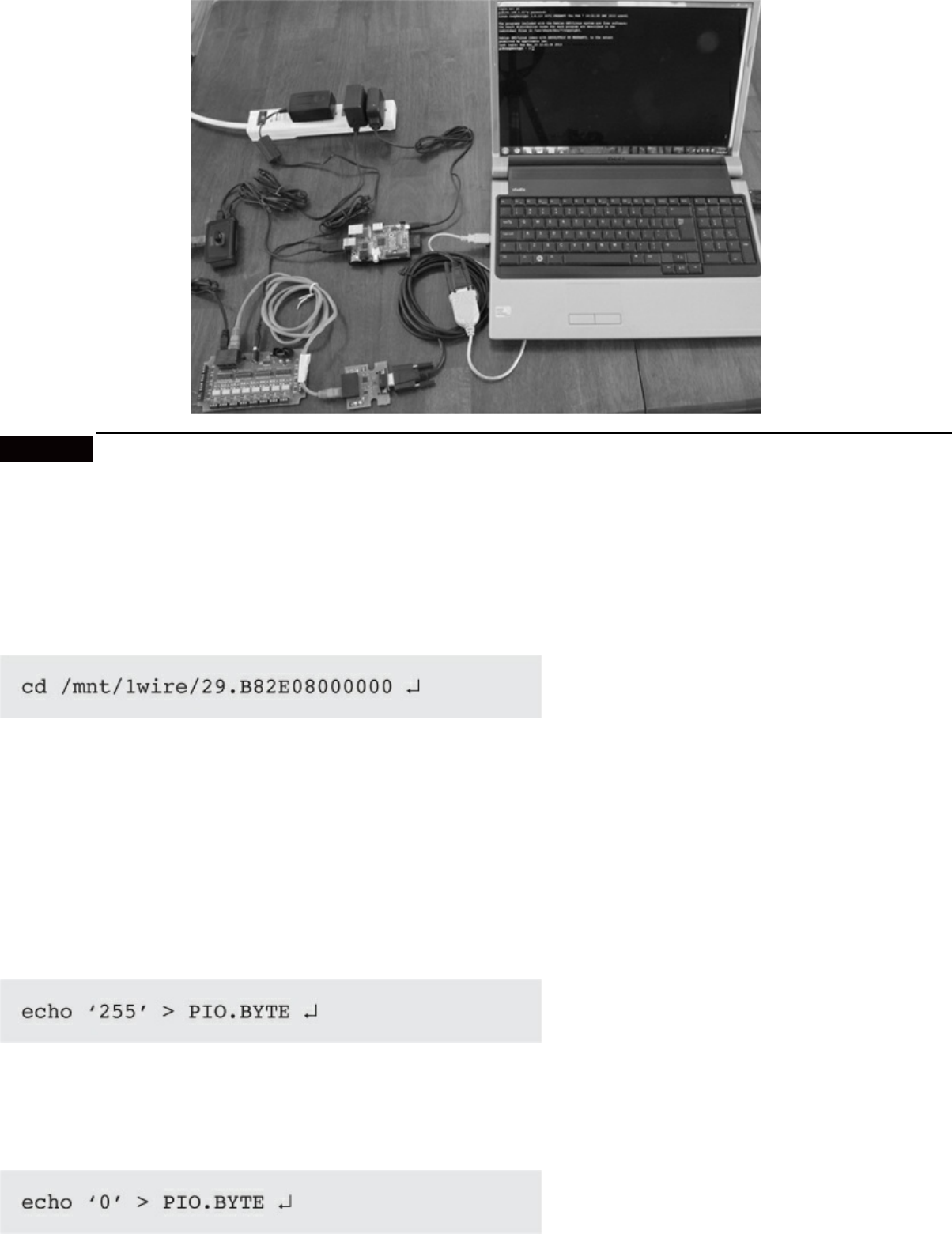
Figure 11–7 1-Wire test setup.
If you haven’t yet done it, mount the 1wire directory, using the command from step 12 shown
above. Remember: attempting to remount after doing it once will result in a Permission Denied error.
To clear the error, all you have to do is reboot the RasPi and reissue the mount command.
Next, you need to change directories to be in the 8 Channel IO board directory. For my system the
command entered was:
Your command will be slightly different because the board’s unique serial number and family
name make up the directory name. Simply “cd” into /mnt/1wire and then “ls” if you haven’t
previously recorded the board’s directory name.
Testing the Outputs
Once you are safely in the device directory, do another “ls” to see all the different files owfs and
FUSE have created. Then type the following:
You should be rewarded by hearing all eight relays click and seeing all eight LEDs light up. This
command simply sends a byte of all “1’s” into the file named PIO.BYTE that controls all eight relays
simultaneously. Tired of seeing all the LEDs lit? Type the following:
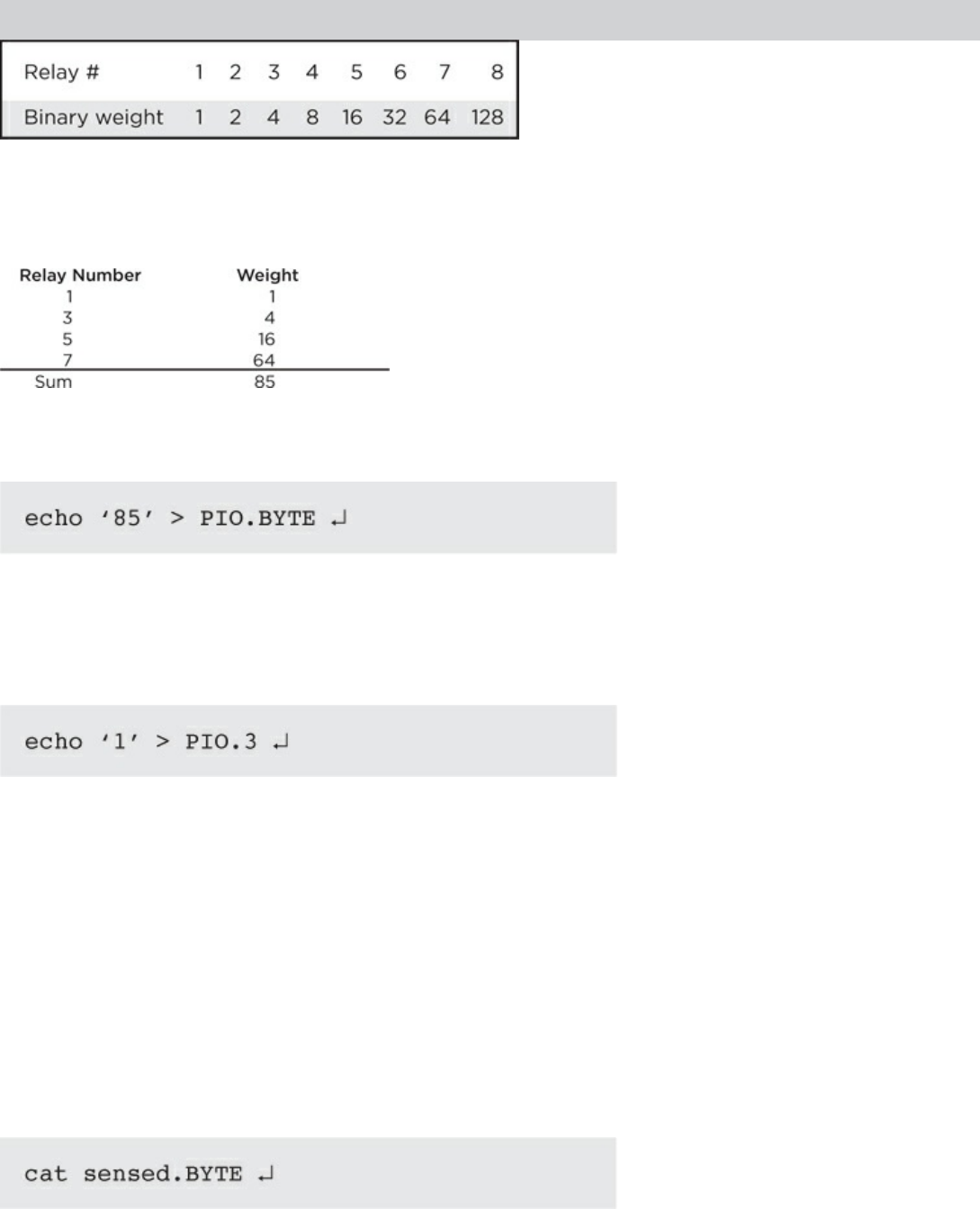
All the LEDs should be off now and all the relays deactivated.
Of course, specific relays may be activated by sending the appropriate bit pattern encoded into the
equivalent decimal number to the PIO.BYTE file. For instance, if you wanted to turn on relays 1, 3, 5,
and 7, you would need to send 85 to PIO.BYTE. The number 85 was calculated by using the binary
weights listed in Table 11–2.
Table 11–2 Relay Binary Weights
To turn on relays 1, 3, 5, and 7, all that is needed is to sum the binary weights associated with each
relay:
Type the command:
Relays 1, 3, 5, and 7 should now be activated and their LEDs on. You now know how to turn them off.
Individual relays may also be controlled by using specific files dedicated to each relay. For
example, to turn on relay 4, type the following:
Relay 4 turns on. The individual relay file names start at 0 not 1. This is not true for the board
relays, which are numbered 1 through 8. This difference is a small detail that can nonetheless cause
some confusion.
Testing the Inputs
Sensing inputs is very similar to setting outputs except for one major difference. A ‘1’ is used to
indicate that no input is present or detected. All the relays must also be disabled, by turning all the
switches on the Relay Control DIP switch to the off (down) position. This configuration is required
because an IO line cannot be both an input and an output at the same time.
Next, ensure that nothing is connected to any input and then type the following:
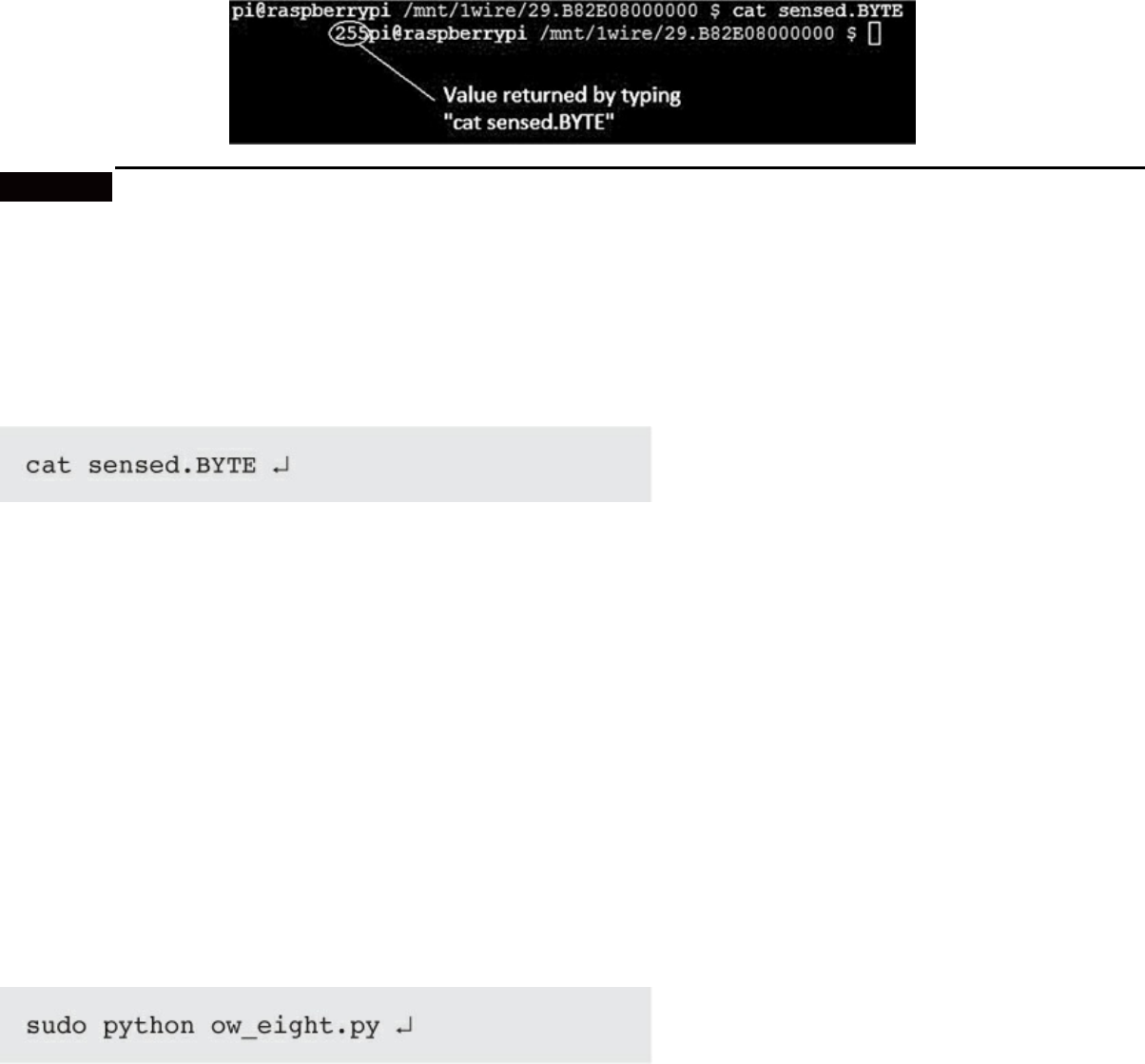
You should see the value 255 displayed just before the command line prompt, just like the circled
number in Fig. 11–8.
Figure 11–8 Result for the sensed.BYTE command.
The value 255 is the decimal equivalent of all 1’s for 8 bits or 1 byte. To test this concept out a bit
further, connect a jumper wire between the screw terminals marked “+5v” and “+” on input terminal
8. What would you expect to see displayed after you type in “cat sensed.BYTE”? A moment’s thought
might help you realize that the binary value of the bit for the number 8 input (relay binary weight of
128) would be 0; hence the value should be 255–128 or 127. Go ahead and type the command:
You should be rewarded to see the value 127, just as you expected. It’s not really too hard after all!
Now it is time to try out a Python program to exercise the 8-Channel I/O board. You first need to
enable all the relays by putting all the Relay Control DIP switches to the on (up) position.
Python Test Program
This program cycles relays 2 and 4 every 10 seconds forever unless stopped by a keyboard interrupt
that is done by pressing the ‘control’ and ‘c’ keys simultaneously (^C). I also included a statement to
autoload the 1wire directory so that the command shown in step 12 does not have to be explicitly
entered. The file object statement will have to be modified to suit your installation, since it has the
unique address for my 8-Channel I/O Board hard coded into it. This file is named ow_eight. py and is
available from the book’s companion website, www.mhprofessional.com/raspi.
Type the following at the command line prompt:
Relays 2 and 4 should click, and the associated LEDs should blink on for 5 seconds then off for 5
seconds. This program should be used as a starting point from which you can develop your own
control program to match your desired application.
Remember that a given I/O channel may be used either as an input or an output but not as both
simultaneously. This is precisely the situation with the RasPi GPIO pins where a particular pin may be
set as an output for one part of an application and then used as an input in another part. The major
difference between the RasPi and the I/O board is that a physical switch must be set on the I/O board,
while a GPIO pin may be reset by a program statement with the RasPi. It is just a bit more limiting to
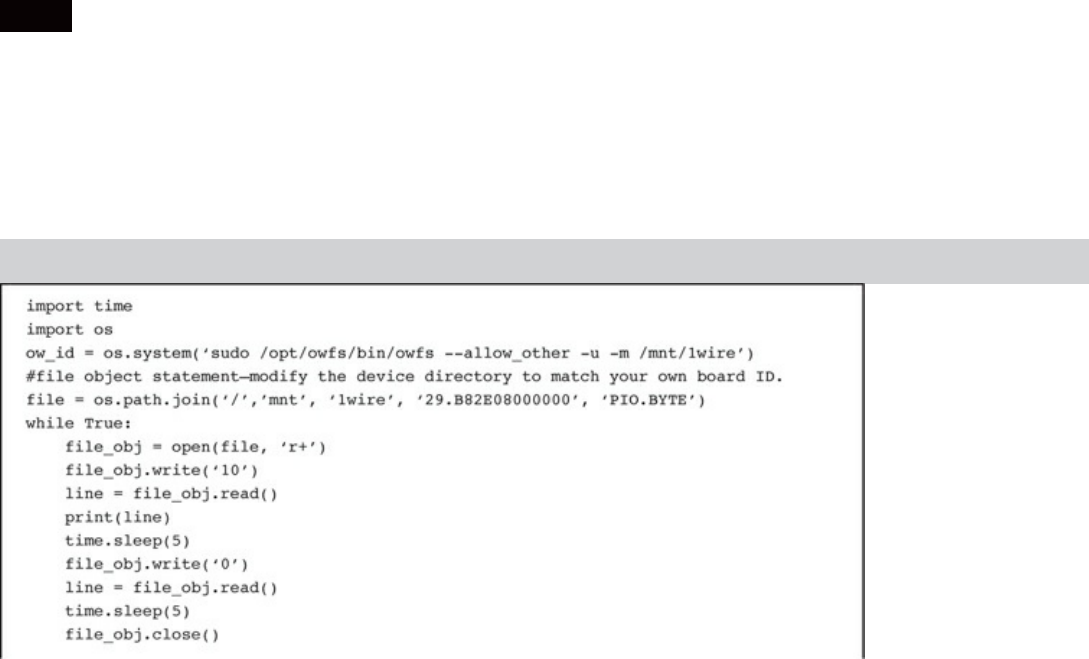
use the I/O board as compared to the pure programming situation allowed with the RasPi. However,
having eight channels available provides a good deal of flexibility.
Caution The relay contacts are rated for a maximum of 250 mA at 250 V AC, which equates to an
approximate 60-watt load. Do not attempt to switch more than a 60-watt load using
these light duty relays, and under NO circumstances should you try to control a line
voltage AC motor. If you want to control a heavy AC-inductive load, use the relay to
control a motor controller that is rated for the AC load. This is a safe practice, and one
that should be adhered to at all times.
ow_eight.py
Sniffer Monitoring
I was interested in monitoring the 1-Wire network activity while the ow_eight.py program was
running. Figure 11–9 is a screenshot from my laptop running the Tera Term program that I discussed
in Chap. 10. The laptop was connected to the Sniffer Module, using a USB-to-serial adapter and cable.
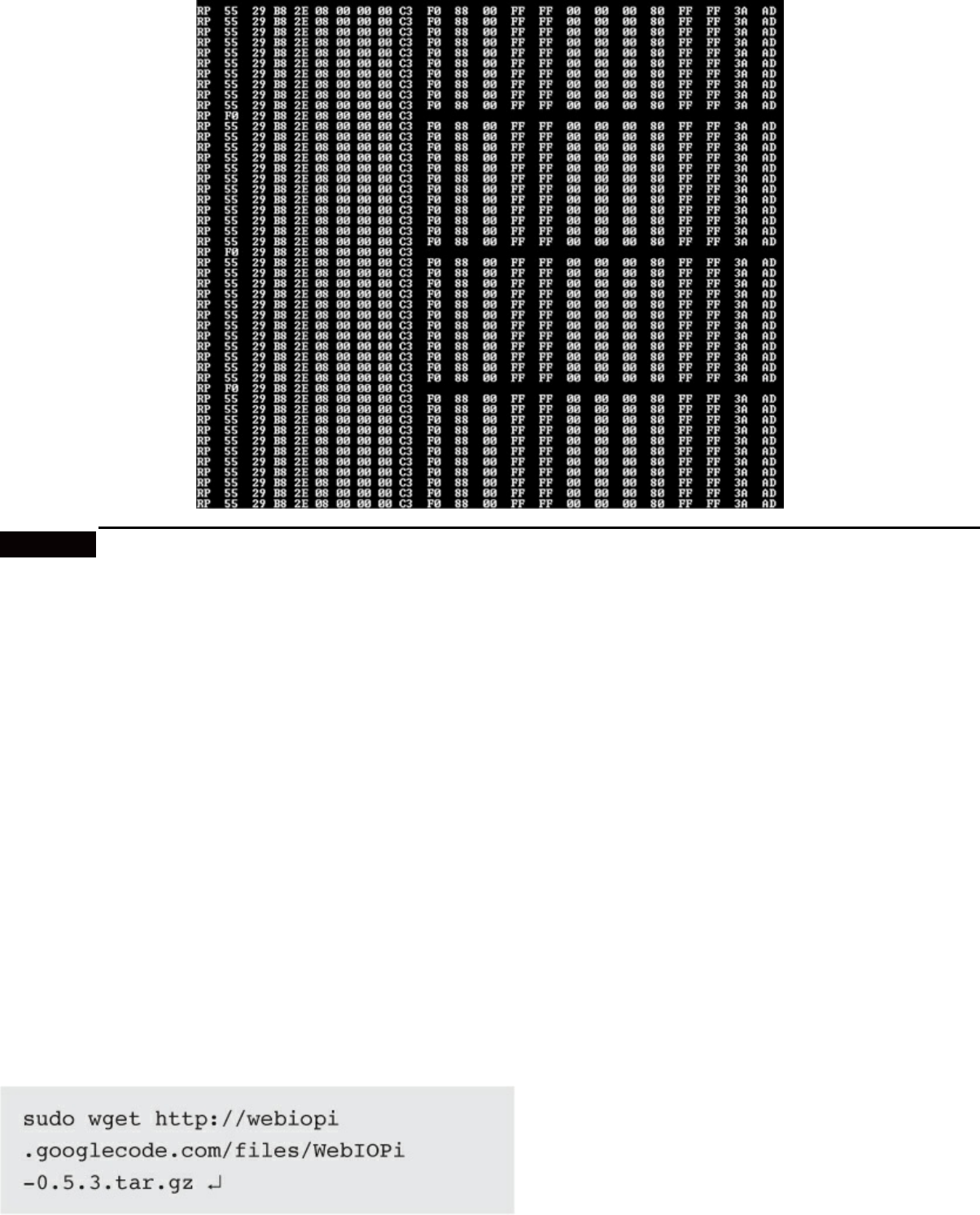
Figure 11–9 Sniffer packet activity.
The figure shows the repeated activity of switching the selected channels on and off, which was
expected. What was not expected is the periodic polling of the 1-Wire network taking place every two
minutes. That may be deduced by observing the shorter packets interspersed among the repeated
control packets initiated by the ow_eight program. The two-minute interval was calculated by
knowing that each repeat packet was issued every 10 seconds.
While not critical for program development, the sniffer is a very handy tool that helps you
understand what is occurring within the 1-Wire network.
Android Remote Control
In this section I will show you how to control the RasPi GPIO pins by using an application running on
an Android smartphone. The smartphone application is named DrGPIO and is available as
donationware from the Google’s Play Store app. Donationware, as the name implies, means that you
may donate to the author if you use it and find it useful. You must also download the web server
portion named WebIOPi. Follow this procedure to download and install the server:
1. Type the following at a command line prompt:
2. Next, extract the source code:
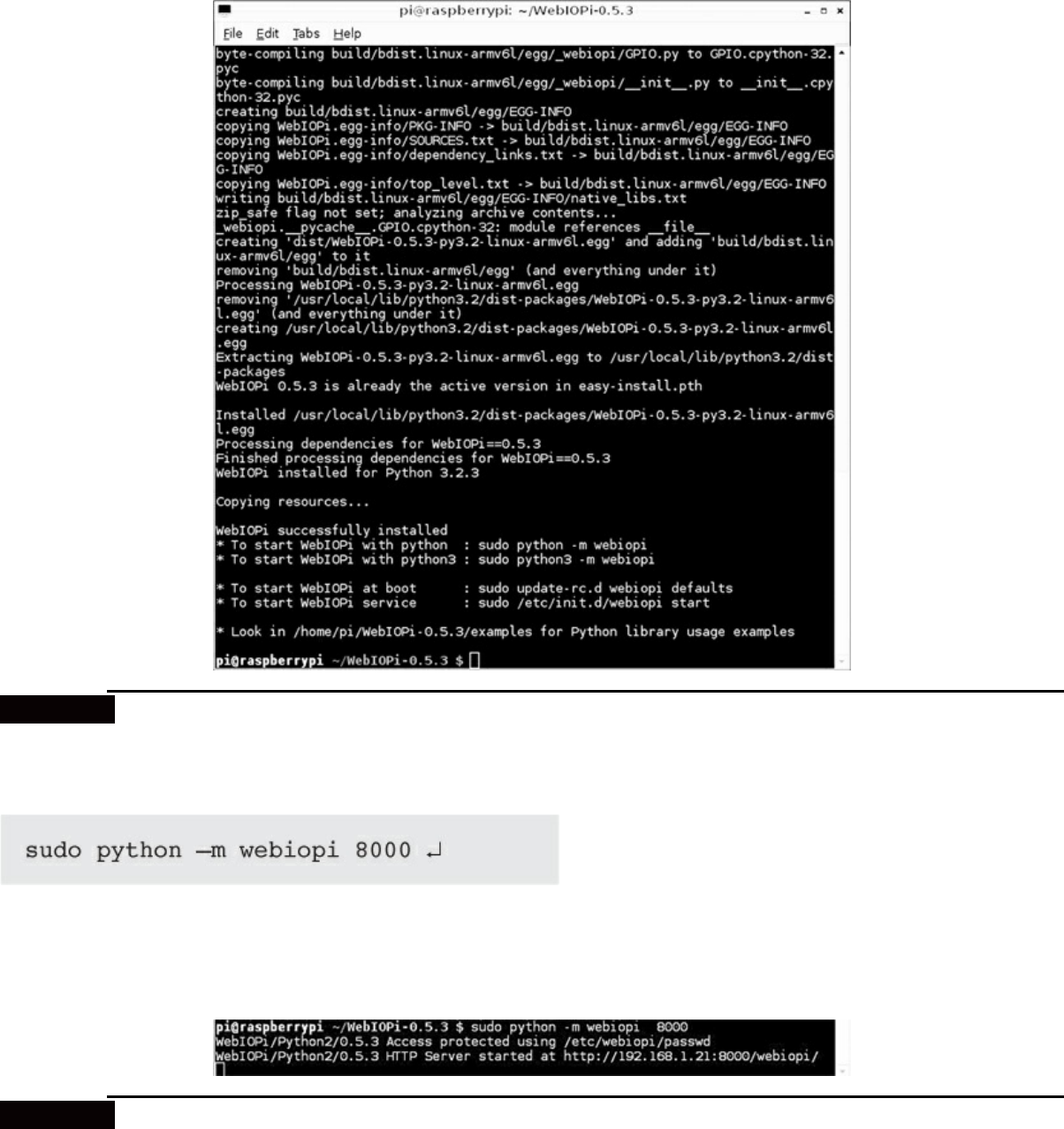
Figure 11–10 Setup command end result.
5. The HTTP web server is started using Python as follows:
The 8000 is optional because it is the default. I like to include it, since it is a reminder of the
actual port number. Figure 11–11 shows the console display for the web server starting.
Figure 11–11 Starting the WebIOPi HTTP web server.
The user name is “webiopi” and password is “raspberry” if you are asked for them by the
application. The service may be stopped by either a keyboard interrupt (^C) or closing the terminal
window in which it was started. You may also start and stop the web server as a service using these
commands:
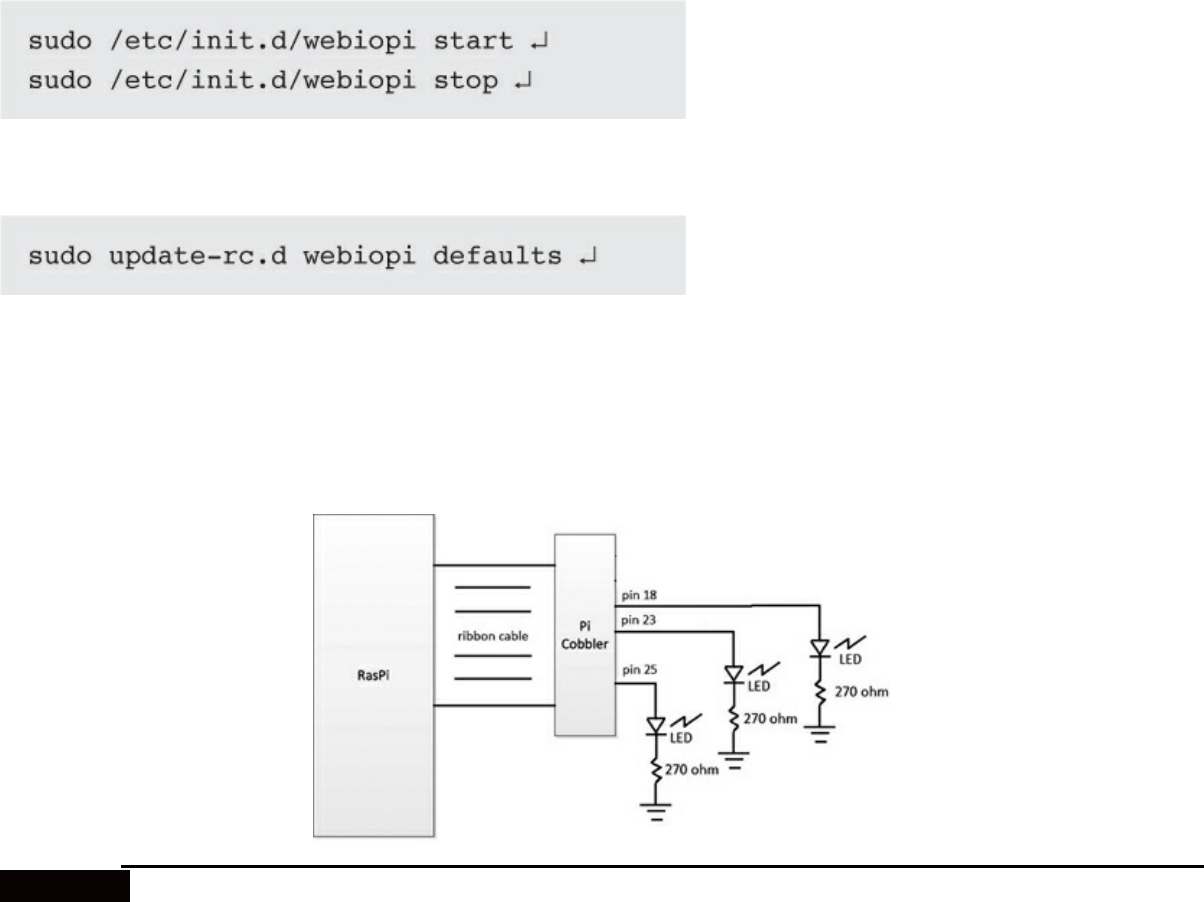
The web server can even be started during the boot process by entering the following command:
Testing the Web server with the Android App
I set up the RasPi with a Pi Cobbler prototype tool to drive three LEDs, as shown in the Fig. 11–12
diagram.
Figure 11–12 Test setup diagram.
You will need to determine the RasPi’s local IP address in order to connect the Android
application to the RasPi web server. In my case, it was 192.168.1.21. All I needed to do was type that
address into the phone, as shown in Fig. 11–13.

Figure 11–13 Android smartphone setup screen.
Scroll down to the bottom of the phone screen after you have entered the needed information. Tap
on the button “Save and continue” and a pop-up dialog box will appear stating “DRGPIO is going to
try to connect to your Raspberry Pi now.” Tap the OK button, and you should now be shown a screen
similar to the one in Fig. 11–14.
Figure 11–14 The DrGPIO control screen.

Figure 11–14 is a graphical representation of the RasPi 26-pin GPIO connector. The check boxes
shown immediately to the side of each pin box allow you to select whether the pin is to act as an input
or output. The check mark will be highlighted if it is set as an input. We need pins 18, 23, and 25
unchecked so that they are functioning as outputs. To output a 1, simply tap the pin box. The bar in the
pin box will fill in, and the label will change from “off” to “on”. The pin will now be outputting a 1, or
high level (3.3 V DC). Figure 11–15 is a picture of the test setup with the three LEDs turned on.
Figure 11–15 Functioning output test setup.
Testing the inputs is very easy. Just select the pins that you want to be used for inputs by ensuring
that the check marks are highlighted and then connect those pins to the 3.3 V DC power supply. Figure
11–16 shows the phone screen with pin 18 set as an input and also connected to the 3.3 V DC supply.
Pins 23 and 24 were left as outputs.
Figure 11–16 A phone input test screen.
Sharp-eyed readers may have spotted two additional pins that are set up as inputs and appear as if
they are “on,” yet are not connected to the 3.3 V DC. These two pins are called floating inputs,
meaning they are unconnected and can receive stray voltage that can trigger a false reading of a high
input. I deliberately left this condition in the figure to show you that you can unwittingly create a short
circuit to ground by resetting a floating input GPIO pin to output without removing the ground wire.
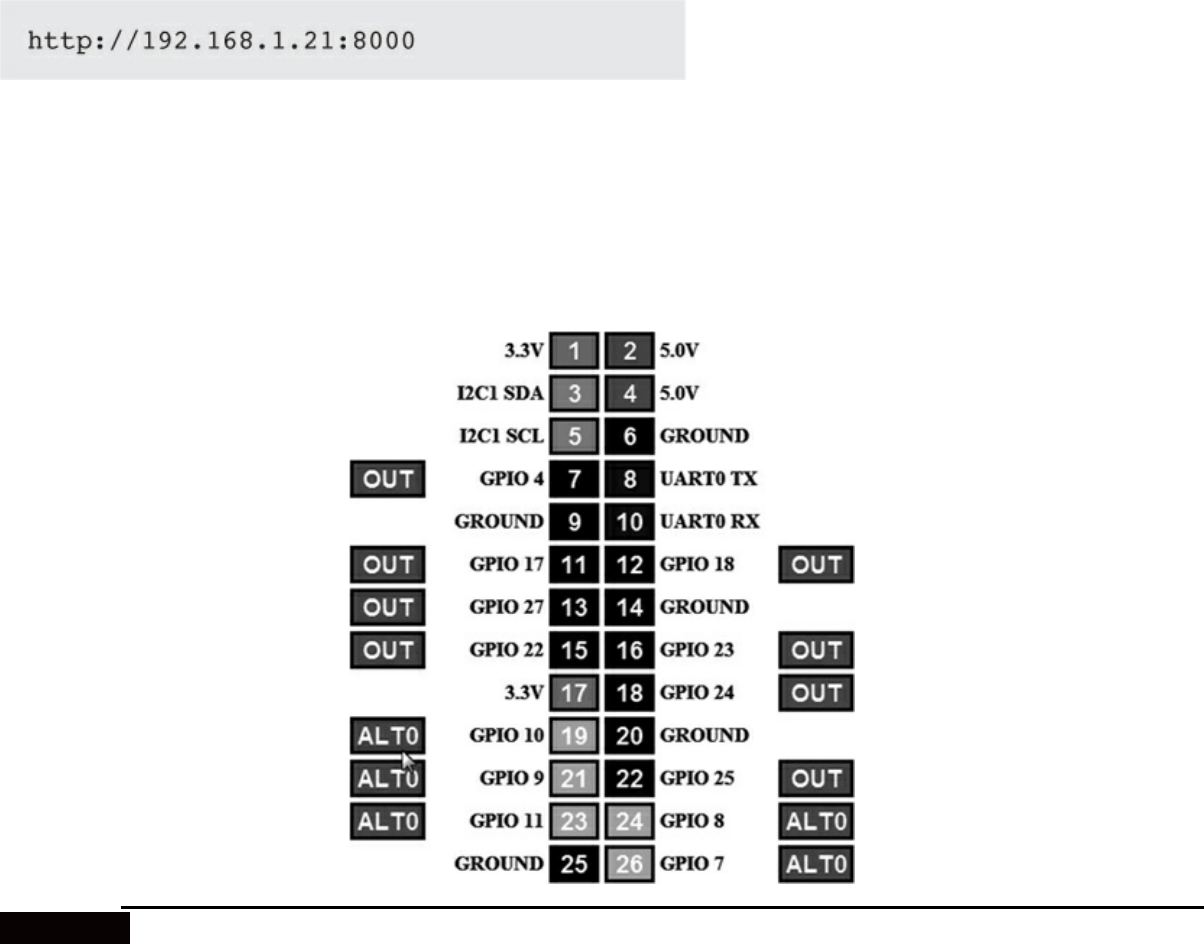
Testing the Web Server with a Browser
The HTTP web server may also be run from any local computer’s browser. Simply type in the RasPi’s
local IP address with port 8000 as a suffix. In my case this was:
Figure 11–17 is a display of the resulting web page. All the configurable GPIO pins were set as
outputs for this screenshot. All the functionality discussed in the Android section is available using a
browser. Using a browser in this manner makes configuring GPIO pins very easy without the need to
create any Python code to test basic I/O for a hardware project. I highly recommend that you consider
using this approach to speed up your project development.
Figure 11–17 WebIOPi web page using a browser.
Internet Access
You will need your router’s public IP address to be able to remotely control the RasPi’s GPIO pins.
Determining this address has already been discussed several times in previous chapters. You will also
need to enable port forwarding on the router so that any browser or smartphone using port 8000 will
automatically be forwarded to the RasPi’s local IP address. I had no problem in setting this up on the
Android smartphone and on a remote computer’s browser.
The only issue is to remember which GPIO pins are connected to which devices. It would
definitely be a problem if you wanted to turn on your home’s front outdoor light but accidently started
the lawn irrigation system. The WebIOPi GUI may be customized to use different widgets and labels
to suit your particular application. It does require a knowledge of HTML and Javascript to accomplish
this, which is well beyond this book’s scope. I refer you to the WebIOPi documentation located at
https://code.google.com/p/webiopi/. There is a lot of information at this site, including a discussion of
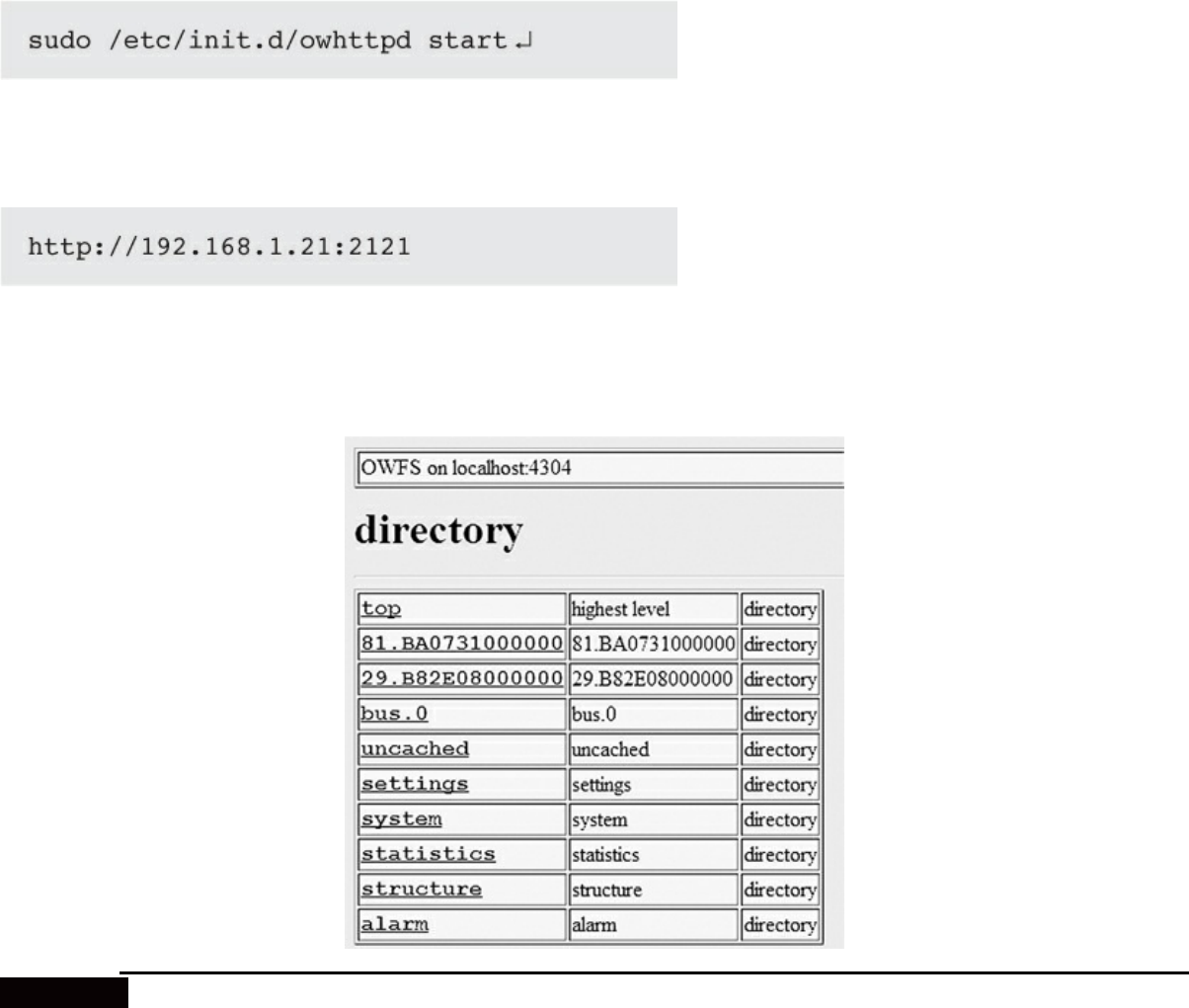
Representational State Transfer (REST), which is the underlying technology that powers the web
server. It is well worth your time to look at the content and gain an appreciation of what is happening
“behind the curtains”.
Remote Access to the 8 Channel I/O Board
The first step is to ensure that the owfs HTTP server is running. Type this at the command-line
prompt:
Next, open a browser on a computer that is part of the local network and go to the RasPi’s local IP
address with port 2121 appended. In my case, this was:
Figure 11–18 is a screenshot of the opening web page. This should look somewhat familiar, as I
described a similar operation in Chap. 10, when opening a web page to access the weather station data.
Figure 11–18 Initial web page for 8 Channel I/O board.
I then clicked on the 8-Channel I/O Board directory named 29.B82E08000000, which revealed the
web page shown in Fig. 11–19. I apologize for the fine print here, as the figure has been resized to
make it fit on a page in this book. It is definitely readable in a browser window.
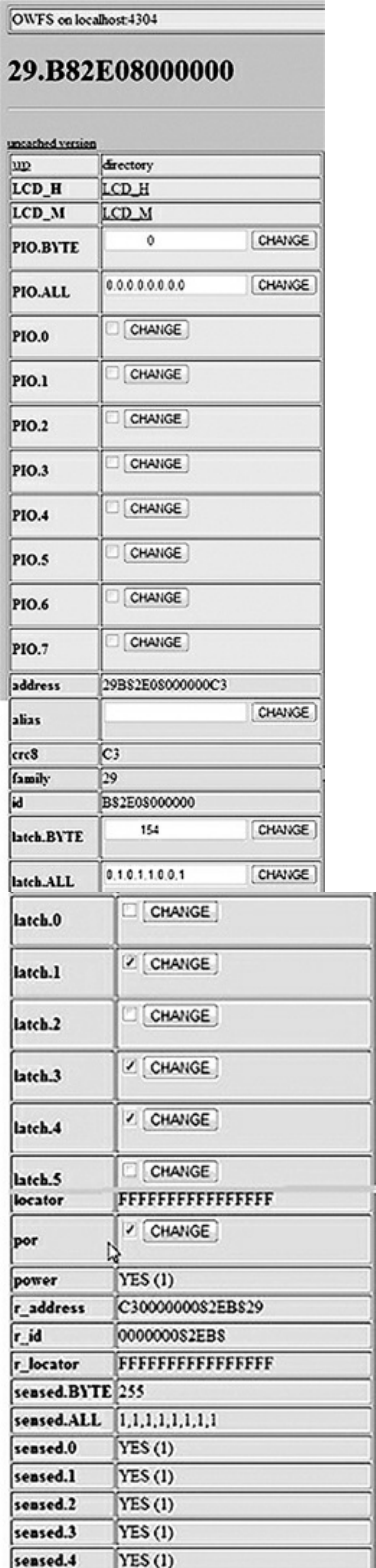
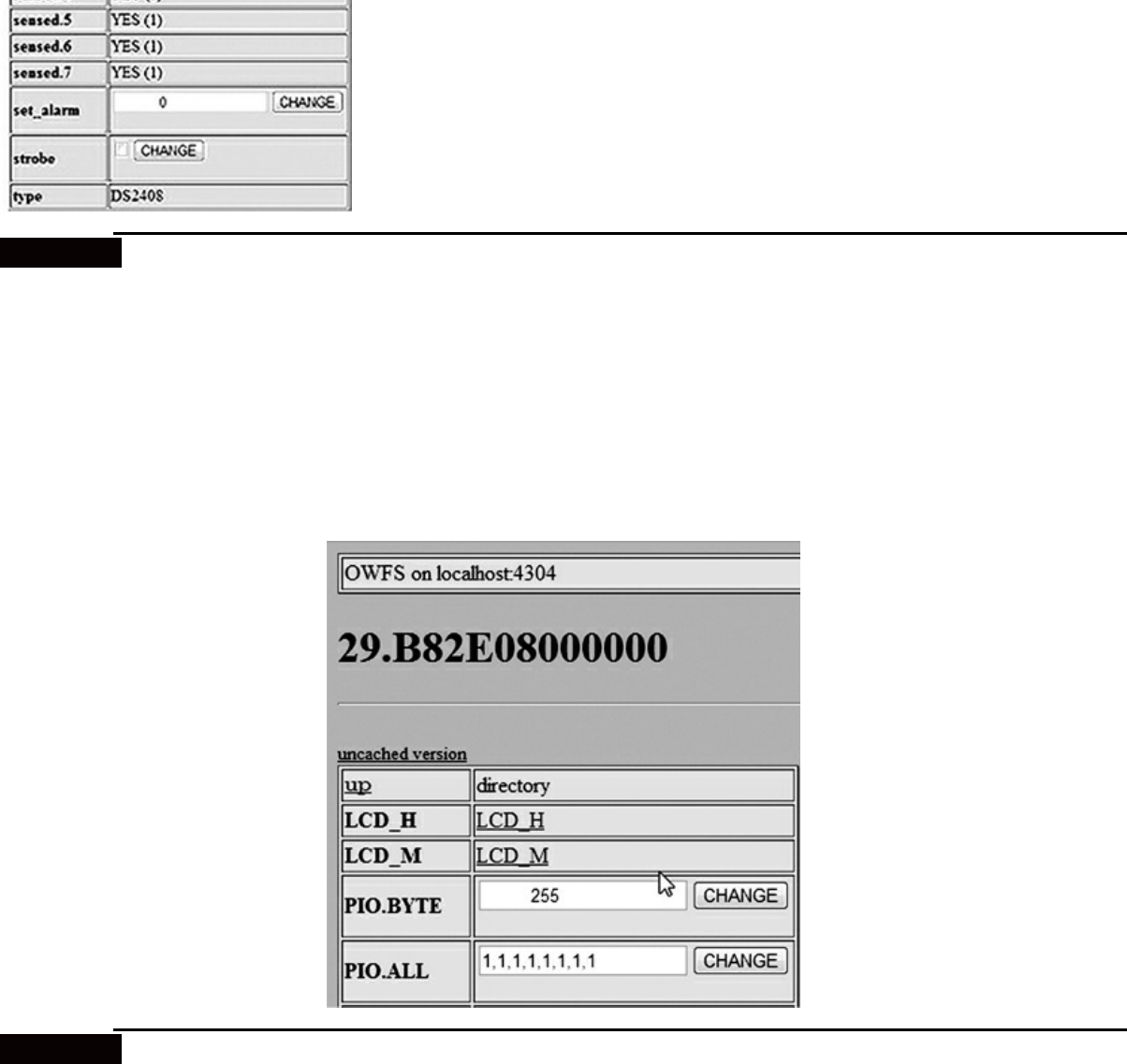
Figure 11–19 Directory 29.B82E08000000 web page.
One neat feature is that now you can enter relay control numbers directly into the box labeled PIO.
BYTE and click on the Change button. I entered 255, clicked on the Change button, and instantly
heard eight relays click and saw all eight LEDs light up. You should also review Fig. 11–5 to
understand why this web page is so big. All the files listed in the device directory are also displayed
on this web page. All the data operations discussed in the section entitled “Testing the Inputs” are
available through this web page. Figure 11–20 shows the result of entering 255 in the PIO.BYTE box.
Figure 11–20 Testing the PIO.BYTE data entry.
I did notice that starting the owfs web server stopped the owfs file system application and
unmounted the files in the 1wire directory. I do not believe this should be a real problem because you
will likely be using either one or the other but not both simultaneously.
Internet access will be done in exactly the same way as discussed above except the forwarding port
is 2121.
Summary
The 1-Wire 8 Channel I/O board was first examined with a detailed review of the board’s key
specifications. This board provides an expanded number of GPIO pins beyond the RasPi’s seven.
Next, a 12-step build and configuration process that created an owfs development environment
supporting the I/O board was carefully explained.
I then took a brief digression to explore Linux, FUSE and owfs. This explanation should help you
understand how owfs functions.
Testing the I/O board inputs and outputs came next. I used only commands entered at the terminal
prompt to exercise the board functions.
A short Python program, ow_eight.py, that controlled the I/O board through a series of output
commands was demonstrated. A brief view of the Sniffer Module output was also shown. The
ow_eight.py program should serve as an example of how to create more complex programs suited to
unique applications.
I next showed you how to control the RasPi’s GPIO pins by using an Android smartphone
application named DrGPIO along with the WebIOPi web server installed on the RasPi. I also
demonstrated how you could operate the same functions with the same WebIOPi web server by using
a regular browser.
The chapter concluded with a demonstration on how to control the I/O board using the HTTP owfs
web server from a browser.
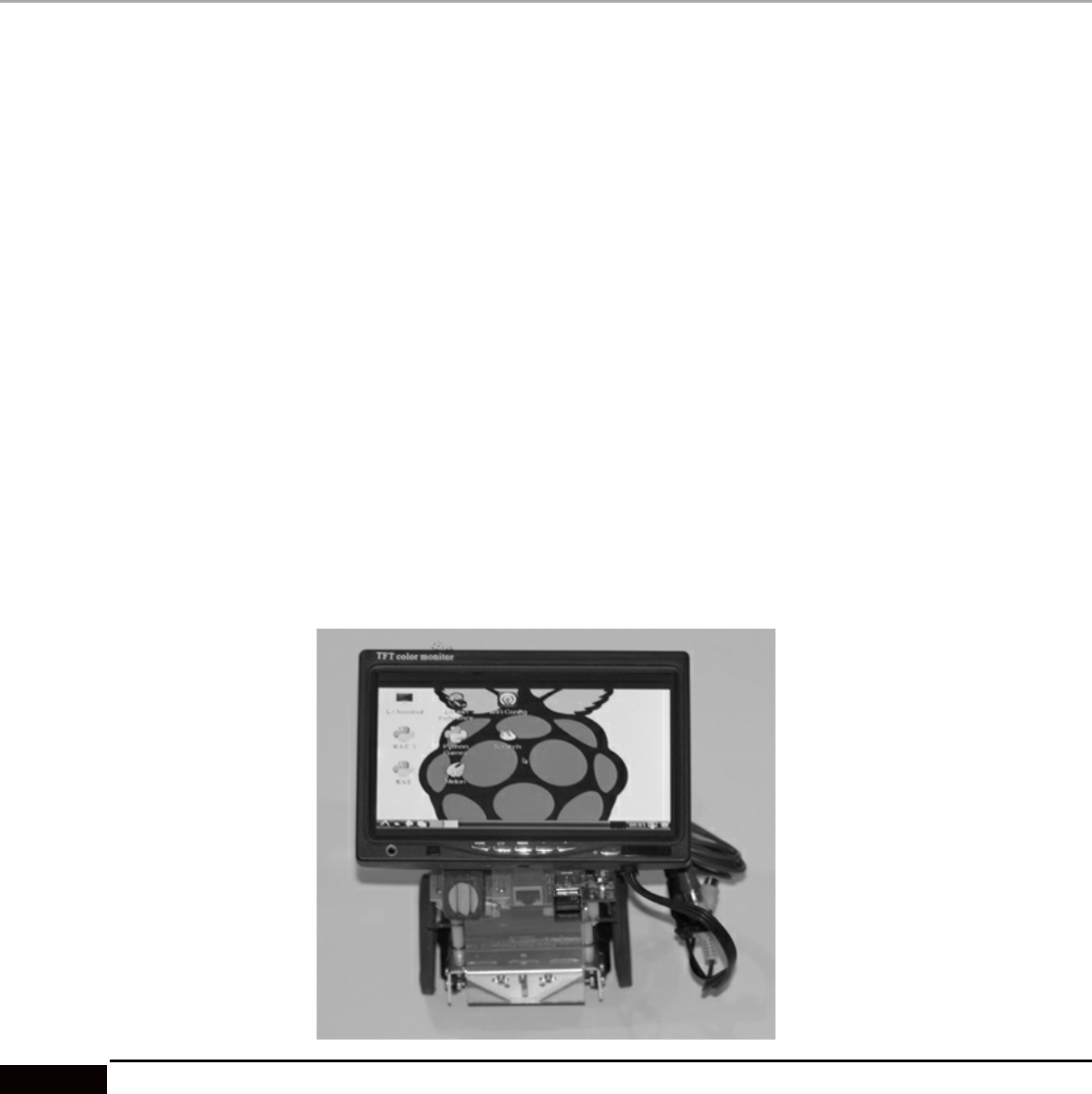
CHAPTER 12
Robotic Car: Part 1
Introduction
This chapter is one of two that will show you how to build a RasPi controlled robotic car. I’ve spread
the project over two chapters because of the build complexity and the software involved. The elements
covered here in Part 1 include the mechanical construction and the hardware and software that control
the drive system.
Developing the robotic car has been a very enjoyable experience, and the project has attracted a lot
of interest among folks who are curious about what the Raspberry Pi is and how it can be used. There
is nothing like a robotic car to stir up interest in this great little board. Now on to building the car!
Overview
I thought it would be a good idea to show you some pictures of the car all built and ready to run.
Figures 12–1 to 12-3 show the final project with the optional thin-film transistor (TFT) display
mounted.
Figure 12–1 Raspberry Pi robotic car (front view).
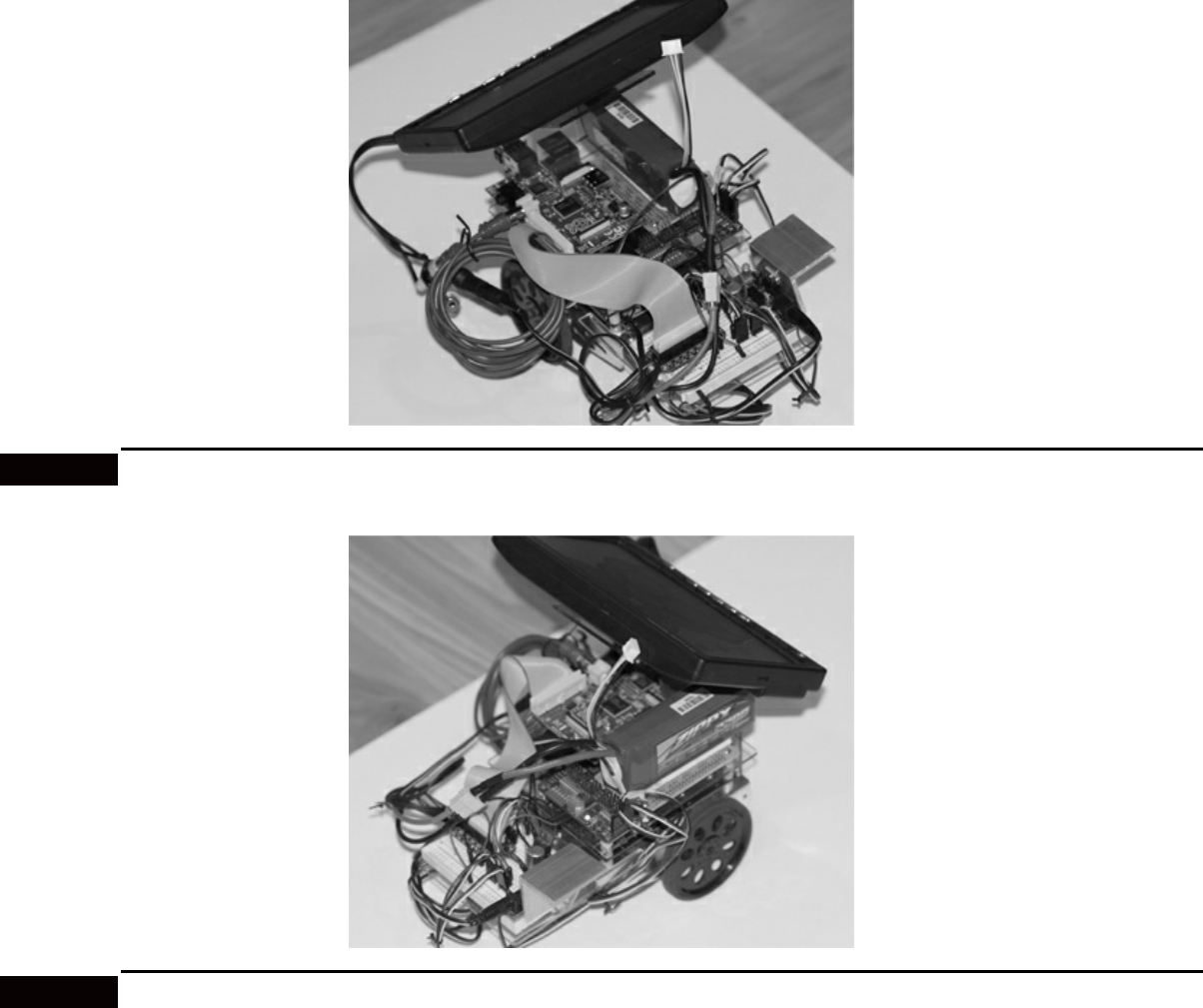
Figure 12–2 Raspberry Pi robotic car (left side view).
Figure 12–3 Raspberry Pi robotic car (right side view).
And yes, that is the Wheezy Linux desktop being displayed in Fig. 12–1. I use a wireless keyboard
and mouse to interact with the RasPi just as I would normally when sitting at my desk. This is truly a
portable computer on wheels.
The car, however, will not be controlled by keyboard or mouse commands but will instead be
handled by a Wii remote control device (Wiimote), as shown in Fig. 12–4.
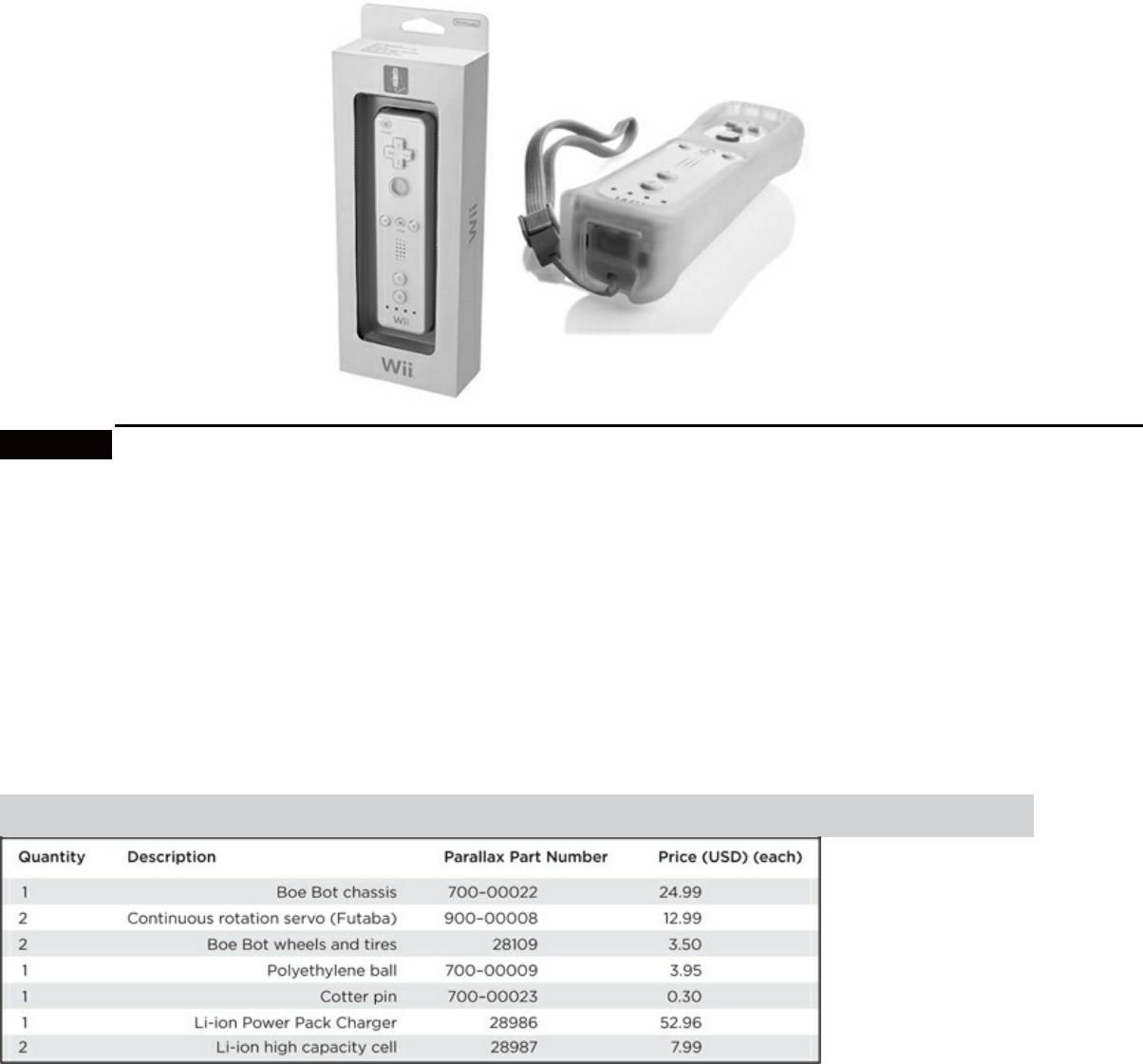
Figure 12–4 Wiimote.
The Wiimote uses Bluetooth, a wireless technology for data transfer over short distances, to
communicate with the RasPi, which will be discussed in Chap. 13.
Chassis and Drive Motors
The car uses a simple tripod configuration of two powered wheels and a third one as a free rolling ball
to provide stability and a very tight turning radius. All the chassis, drive, and power supply
components are listed in Table 12–1 and are available from www.parallax.com
Table 12–1 Chassis, Drive, and Power Supply Components
A servo control board is also required for this project. It is the 16-Channel 12-bit Pulse Width
Modulation (PWM) /Servo Driver I2C Interface board available from Adafruit Industries, part number
815.
The Boe Bot chassis is made of 1.5 mm aluminum and is shown in Fig. 12–5.
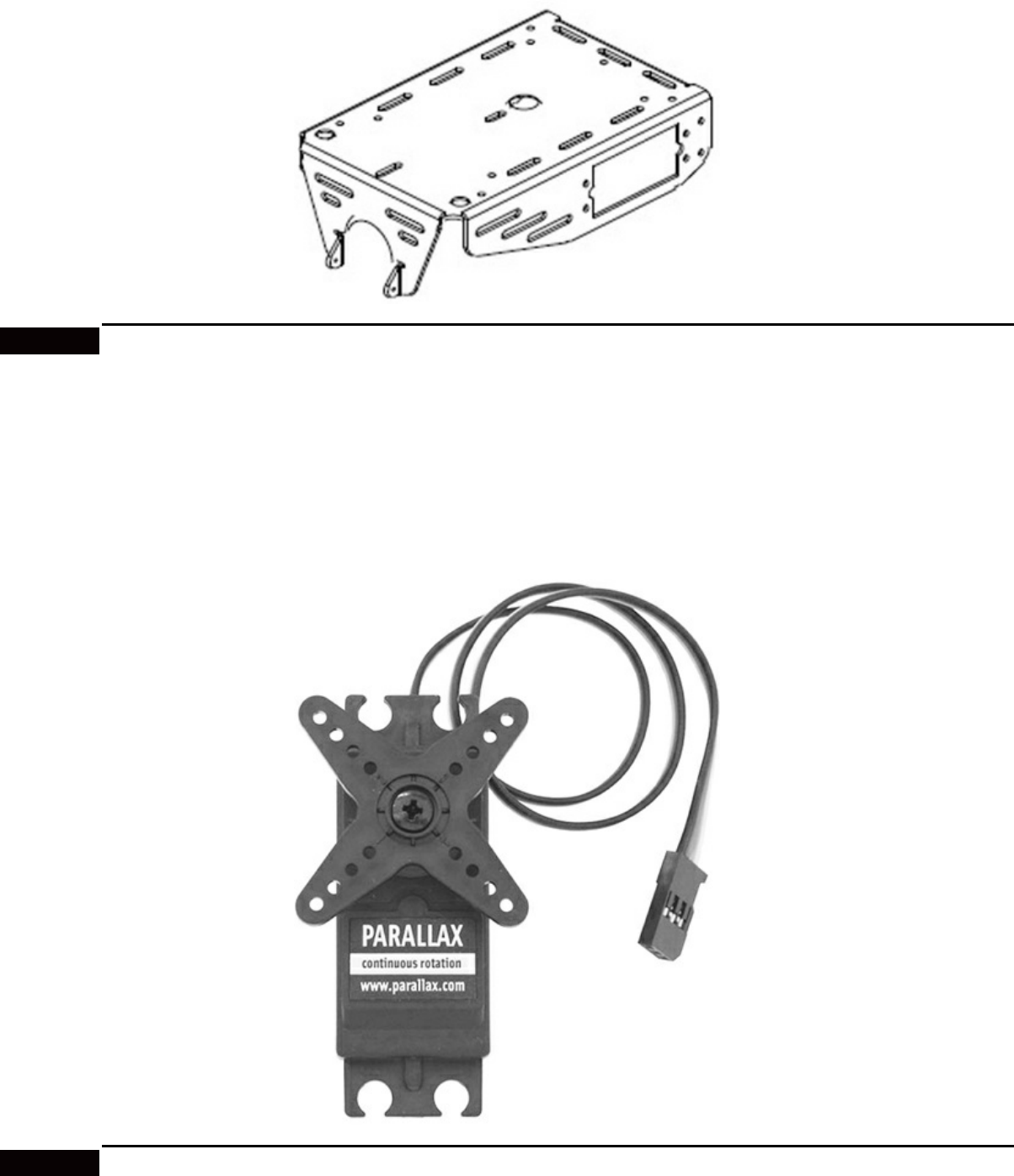
Figure 12–5 Car chassis.
A complete drawing showing all the dimensions is available on the Parallax website for readers
who are able and willing to make their own chassis. Just use the part number to look it up.
The continuous rotation servos provide the driving force for the wheels. Figure 12–6 shows a
servo, and Fig. 12–7 shows a wheel kit. Each wheel is attached to the drive servo with a 0.25-inch
screw that is also provided with each servo.
Figure 12–6 Continuous rotation servo.
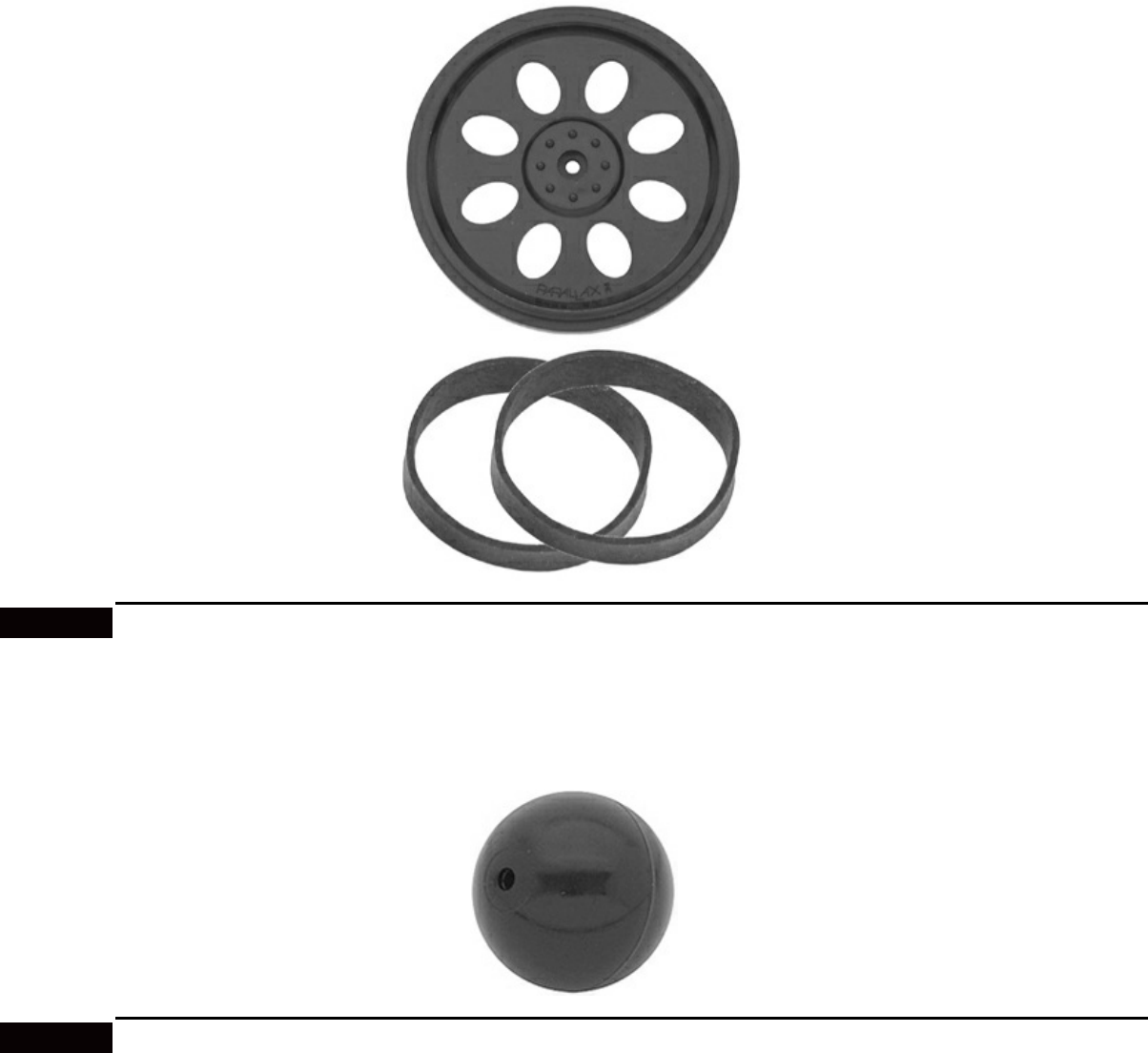
Figure 12–7 Wheel kit.
The polyethylene ball is shown in Fig. 12–8, and it is held in place with the cotter pin specified in
the parts list.
Figure 12–8 Polyethylene ball.
Figure 12–9 illustrates the bottom side of all the assembled chassis parts. The servos are mounted
through the cutouts in the aluminum chassis with 0.5-inch 4–40 machine screws and nuts. This generic
hardware should be readily available at local hardware or home supply stores.
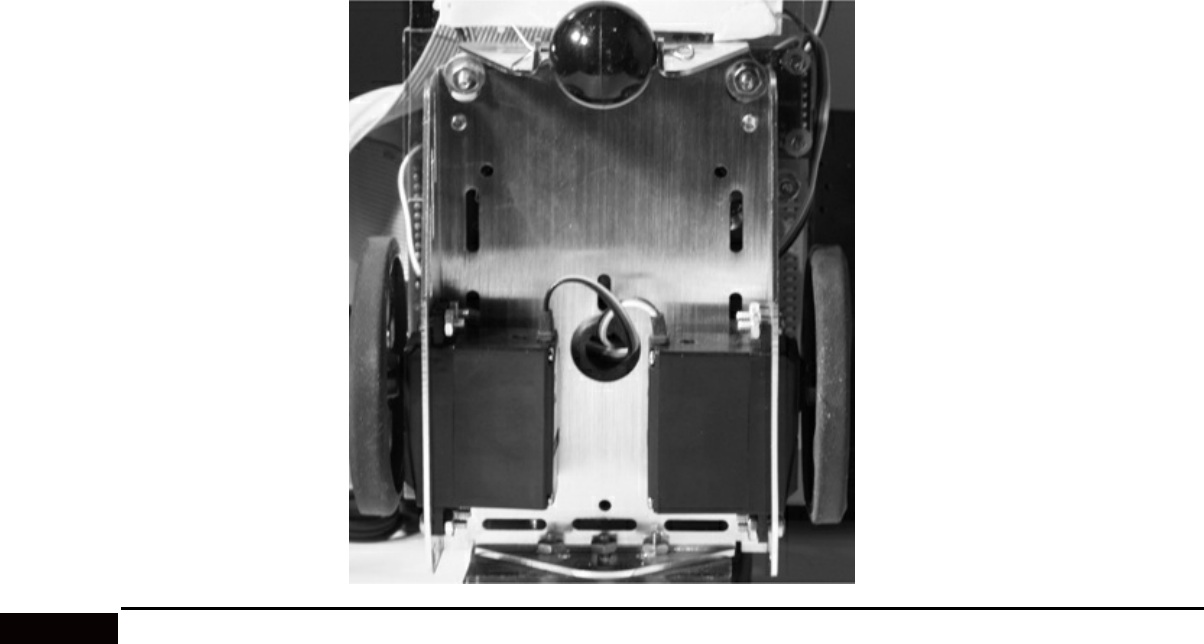
Figure 12–9 Bottom view of the assembled car chassis.
You can also see a hole conveniently placed in the middle of the chassis top that is used to thread
the servo control wires to the servo control board. The chassis assembly should be a very quick and
easy procedure if you have all the kit parts available. Parallax has Boe Bot assembly instructions
available on its website if you find that you need additional guidance.
Mounting the power source is the next step in the assembly process. I chose to use a Parallax Li-
ion power charger board because it has ample capability to power a robot car and it just happens that
its form factor precisely matches the Boe Bot chassis including the mounting holes. Figure 12–10
shows the Li-ion charger board.
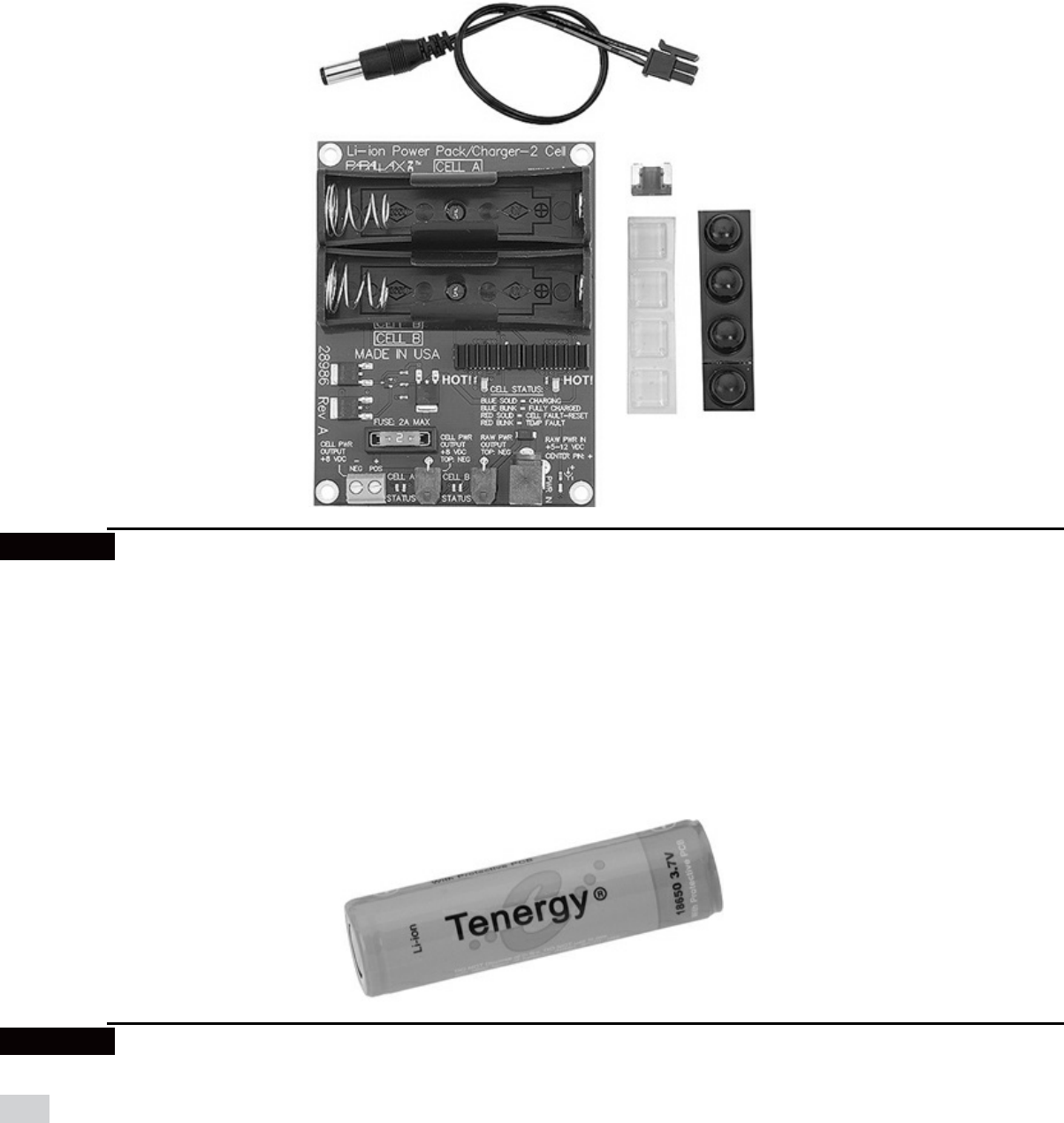
Figure 12–10 Li-ion charger board.
This board uses two high capacity Li-ion cells rated at 3.7 V DC and 2600 mAh. One cell is shown
in Fig. 12–11. These cells conform to the 18650 form factor, which is a bit like an AA battery on
steroids. Each cell also contains a protection circuit to help prevent overcharging, which could lead to
a serious situation if the cell was left unprotected. Nonetheless, these cells should be charged only
with an appropriate charger specifically designed for them, which is the main reason why I
incorporated the complete charger into the car.
Figure 12–11 Li-ion cell.
NOTE The U.S. Postal Service will no longer ship items that contain lithium batteries to
international destinations, including APO and FPO addresses.
The charger board and all the other boards, including the RasPi, are mounted in a stacked
“sandwich” arrangement. Please note that you will need to assemble and disassemble the stack several
times as you build the car. This is unavoidable because you will have to custom fit the parts to the
various mounting boards. Figure 12–12 is a Sketchup (3D modeling software once owned by Google
but now owned by Trimble) representation of the beginning of the stack with the charger board
mounted on four 0.25-inch OD nylon spacers.

Figure 12–12 Charger board Sketchup mounting diagram.
Four 1-inch nylon spacers are mounted on top of the board to provide sufficient room between the
top of the charger board and the bottom of the Lexan mounting board. Figure 12–13 shows a portion of
the actual mounted charger board so that you will gain an understanding of this arrangement.
Figure 12–13 The charger board mounting.
I used a 2-mm 4- × 4.5-inch Lexan board as a mounting platform to support the RasPi and the
servo control board. Figure 12–14 shows this board along with the charger board and the nylon
spacers. The whole stack is held together by four 2.25-inch-long 6–32 machine screws that go through
the Lexan board, hollow spacers, and the Li-ion charger board. I used a 6–32 tap to prethread the four
matching holes on the Boe Bot chassis to make the installation a bit easier. You can choose to do this
or to simply use a 6–32 nut and washer to lock down the screw. I believe you will need to slightly
enlarge the chassis holes for clearance if you use screws and nuts.
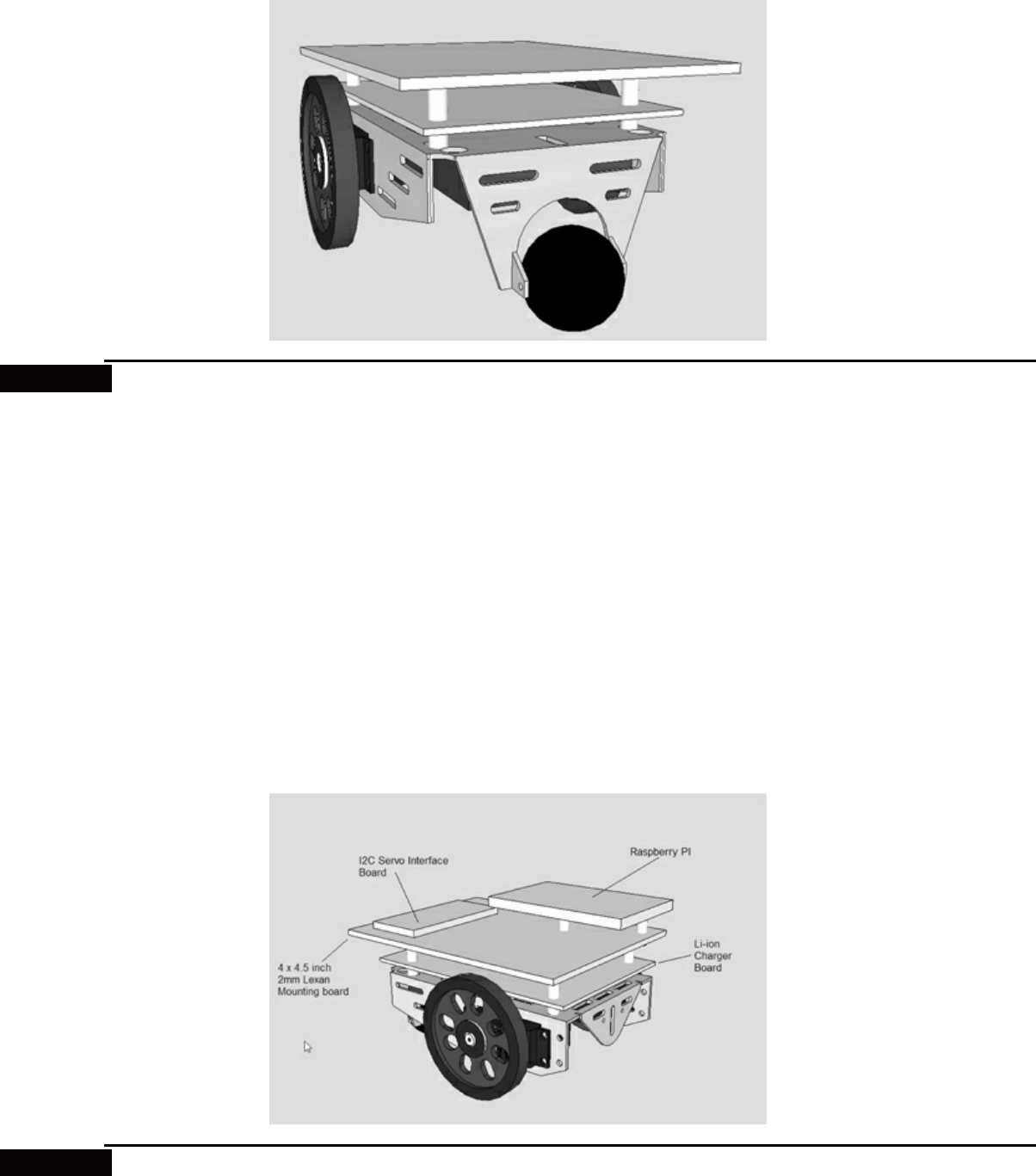
Figure 12–14 Lexan and charger boards mounting diagram.
I would also recommend using the charger board as a drill template for the Lexan mounting board.
Just ensure that the Lexan board is mounted to have the 4-inch dimension between the wheels and the
one edge flush with the charger board, as shown in Fig. 12–14. It is important to ensure that the
optional monitor support can be installed without interference.
Next, disassemble the Lexan board to mount the RasPi and servo control board. I used two 0.75-
inch 4–40 screws and nuts along with two 0.5-inch nylon spacers to mount the RasPi to the Lexan
board. Use the two mounting holes on the RasPi as drill guides for locating the holes in the Lexan
board. Ensure that the RasPi board edge lines up with the Lexan board edge, as shown in Fig. 12–15.
The servo control board is mounted as shown in the diagram except that there are four mounting holes
for that board. In addition, I used nylon washers to space the servo board from the Lexan board. The
mounting holes are very tight, so you will need four very tiny machine screws and nuts.
Figure 12–15 RasPi and servo boards mounted.
Another Lexan mounting board is needed to support the solderless breadboard used for the Pi
Cobbler and other items that can be seen in Figs. 12–2 and 12-3. This additional Lexan board is 3.5 × 4
inches and is mounted at the back of the car directly to the chassis, as shown in Fig. 12–16. You will
need to notch out the board to provide clearance for two spacers supporting the charger board. I drew
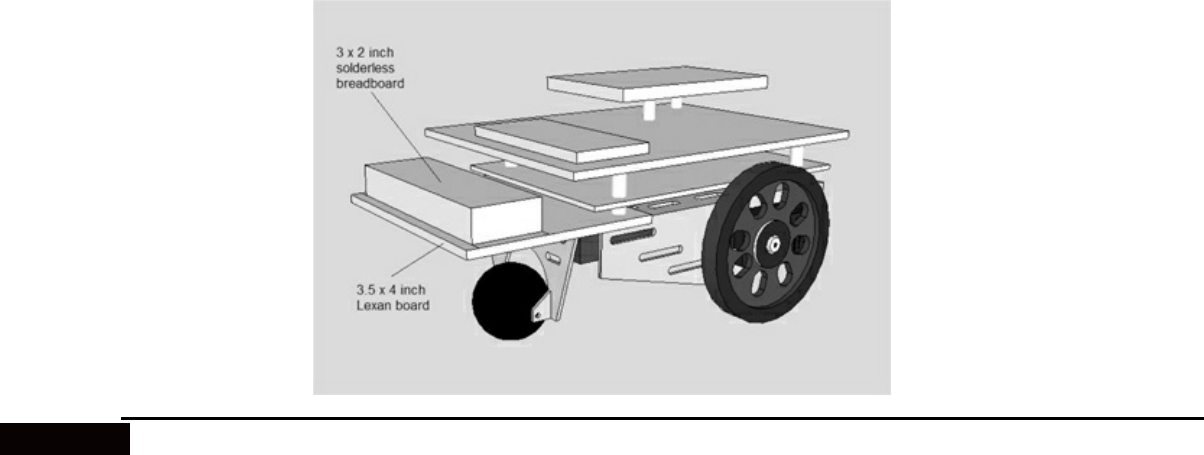
the cutouts on the board’s Lexan protective paper and used a jig saw to make them. Also, mark three
holes to be drilled in the Lexan board, using the chassis holes as a guide. These three holes are obvious
when you fit the board to the chassis. I used three 0.5-inch 4–40 machine screws and nuts to hold this
board to the chassis.
Figure 12–16 Lexan board supporting the solderless breadboard.
The solderless breadboard mounts to the Lexan board with an adhesive backing. You should
carefully align the breadboard to the Lexan plate before pressing it on. It is just about impossible to
remove the breadboard once it is attached.
The remaining mechanical piece is the Lexan support plate for the portable monitor, if you should
so choose to install it. It is a fairly simple piece to install with the only tricky part being cutting
clearance holes for the RasPi USB ports and the additional LiPo battery that is used to power the
monitor. Figure 12–17 is a dimensioned sketch of the Lexan support that I used. Your support piece
will likely vary a little from mine, since your RasPi placement may also vary from my installation.
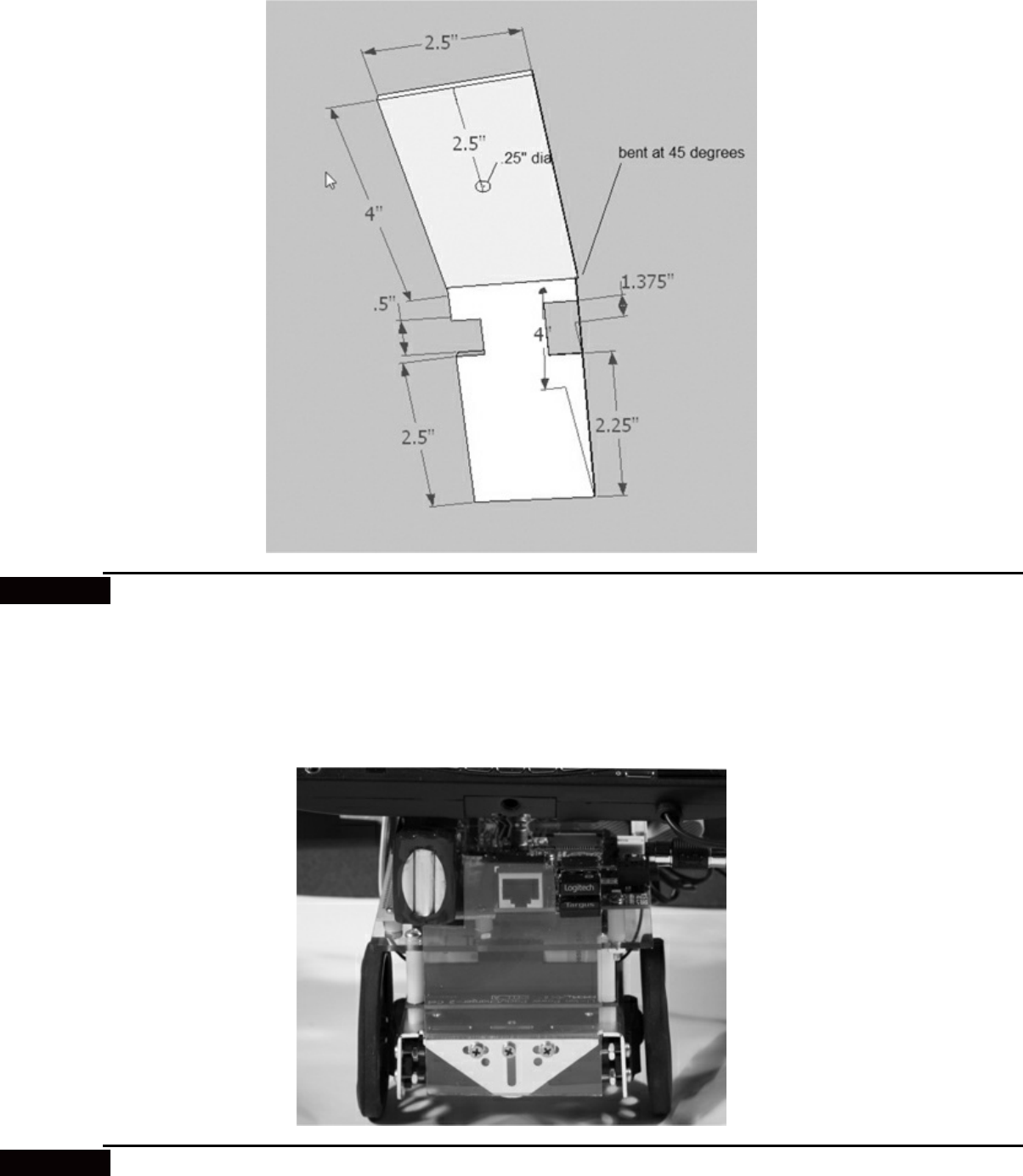
Figure 12–17 Lexan monitor support piece.
The support is made out of one 2.5- × 8-inch Lexan sheet bent at a 45° angle in the middle of the
long dimension. I used a hot-air gun to soften the Lexan so that it could be easily shaped. The support
is attached to the chassis front with three 0.5-inch 4–40 screws and nuts, as shown in Fig. 12–18.
Figure 12–18 Monitor support plate attachment.
This last step completes the robot car mechanical construction phase. The electrical connections
will be shown in Chap. 13.
You may, however, have an immediate issue if you have only one RasPi. You need to program the
RasPi to run the car, which is very hard to do when it is installed in the car. I would remove it from the
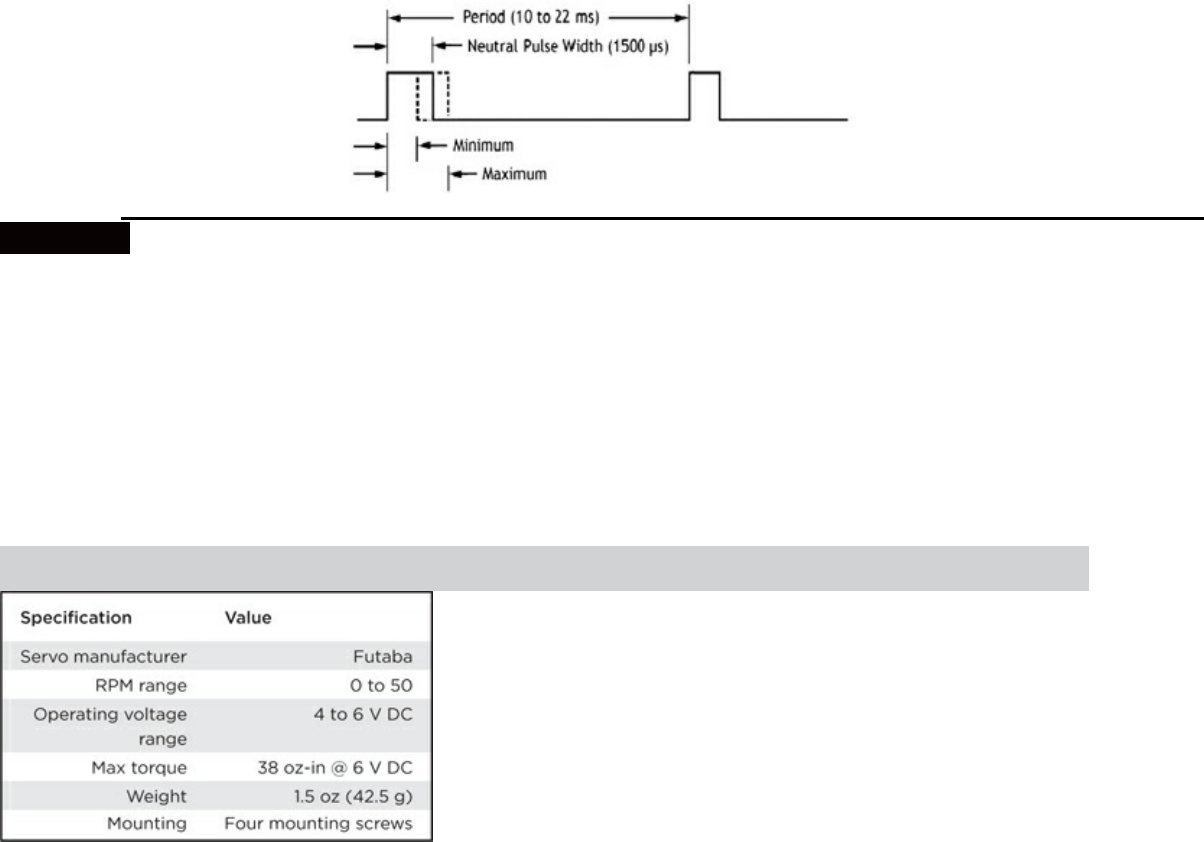
car and program it as you would normally and then reinstall it when everything is all set up.
Obviously, if you have a second RasPi, you can use that one to do all the programming and then put
the programmed SD card into the RasPi that is already mounted in the car.
The next sections are brief discussions on the servos and associated drive components.
Servos
Two analog continuous rotation servos drive the robot car. A servo differs from an ordinary motor in
that it requires a specific digital pulse train to operate. Regular or non-continuous servos are designed
to rotate a shaft a certain number of degrees based upon the pulse-width modulation (PWM) of the
control signal. Continuous rotation servos are designed to maintain a certain angular velocity based
upon the PWM control signal. In either case, the standard PWM signal frequency is set at a nominal
50Hz and operates at a nominal 5 V DC for a high level and 0 V DC for a low level. Figure 12–19
shows a typical PWM signal.
Figure 12–19 Typical PWM signal.
The neutral position, where neither a position nor a velocity is being commanded, is set to be a
1500 μs pulse width. The servo controller will increase or decrease the pulse width up to 500 μs
depending upon the new desired position or velocity. The servo motor contains an electronic circuit
that converts the PWM pulse train to the appropriate internal motor control signals that move the
servo to the commanded position or angular velocity.
Table 12–2 shows some of the specifications for the Parallax servos used in this robot car.
Table 12–2 Servo Specifications
I2C and the Servo Controller
A servo controller board is required for this project because the RasPi only has one channel that can
output PWM signals and the car needs two, one for each motor. I used the 16-channel, 12-bit
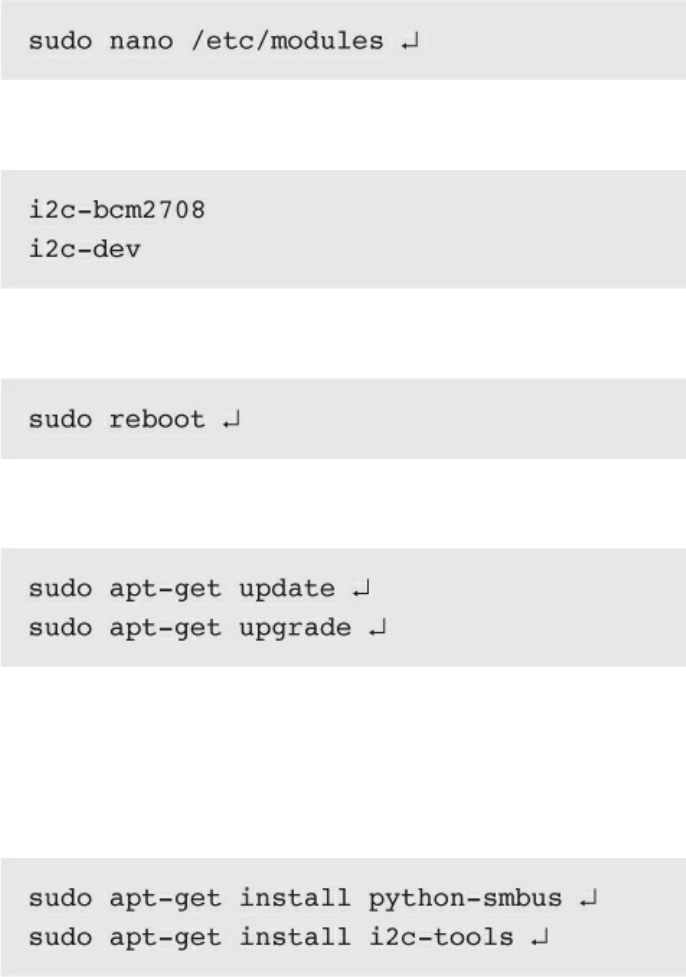
PWM/Servo Driver I2C Interface Board available from Adafruit Industries. It is a bit of overkill for
this application, but it is flawless in operation and very easy to set up.
I2C is another one of the serial protocols that was first introduced in Chap. 1. The servo control
board uses I2C to communicate with the RasPi. However, the RasPi must first be configured to operate
with the I2C protocol, which is not built into the Wheezy distribution (as of the date of this writing). It
is part of the Occidentalis v.2, if you choose to use that version, and is not very hard to setup Wheezy
with the I2C protocol.
At the command line prompt, enter the following:
Add the next two lines to the end of the file.
Reboot the RasPi for the changes to take effect.
Enter the following commands after booting the RasPi:
(Be patient, this could take a while.)
These commands ensure that the Wheezy distribution is current with all the latest changes. Next,
enter:
These commands load some useful applications that, among other things, allow you to check the
address of attached I2C modules. The i2c-tools package contains the i2cdetect application that will
display all the I2C devices connected on the bus. Using it will confirm that the servo controller is
being recognized by the RasPi.
The python-smbus package contains all the software needed to access I2C devices from Python.
This library installation is critical to ensure that the robot control program works.

The next step may not be required. It depends upon the Wheezy distribution that you are running.
Check if there is a file name /etc/modprobe.d/raspi_blacklist.conf installed. You do nothing if it
doesn’t exist; otherwise comment out these lines:
Enter the command below to edit the file, and put a “#” symbol in front of the lines shown above:
I2C Initial Test
I would defer testing the I2C bus if you have only one RasPi and it is already installed in the car.
However, if you are using a second RasPi for development, you might want to do the following test,
using the temporary setup shown in Fig. 12–20, I2C test diagram.
Figure 12–20 Temporary I2C test diagram.
Connect the servo controller board to the Pi Cobbler with four wires, as shown in the figure. I used
the Cobbler’s 3.3-V power supply to power the servo controller board to ensure that 3.3 V was the
maximum voltage that could appear on the I2C bus lines. However, I do believe that the controller
itself limits the voltage to 3.3 V even if it is powered by a 5-V source, but I could not confirm it from
any data sheet. Better safe than sorry, as the old adage goes.
CAUTION The servo control board has a two-screw terminal strip that routes power directly to the
servos. This power source takes up to 6 V DC and is separate and distinct from the VCC
supply that powers the board logic. Do not connect the servo supply to the VCC supply,
or you will destroy the servo control board.
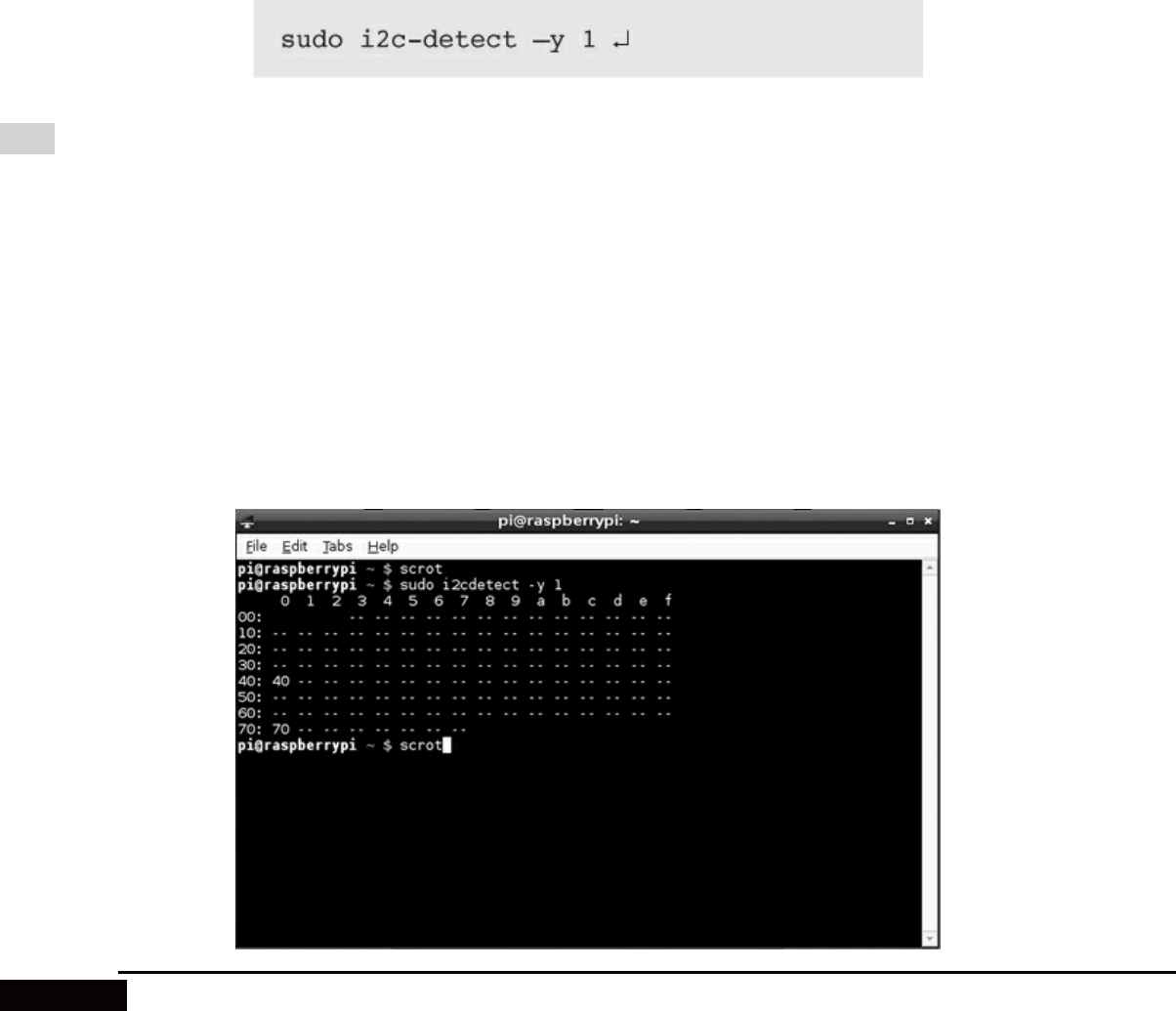
Enter the following at a terminal control prompt:
NOTE If you are using an early 256 MB RasPi model B, change the 1 to a 0 in the above command.
Figure 12–21 shows the result of this command. In the figure you will see that two I2C addresses
were detected, one at 0 × 40 and the other at 0 × 70. The 0 × 40 is the default slave address preset into
the PCA9685 chip that is the logic controller used in the servo board. I believe that 0 × 70 is another
controller address that is generated during a power-on reset. In any case, 0 × 40 is the only address
that will be used in the Python program. This address may be changed in hardware by connecting
solder bridges located on the board. These bridges are easily seen on the upper right-hand side of the
board, as shown in Fig. 12–20. Board addresses would have to be changed, if multiple servo
controllers were used on the I2C bus, to prevent addressing conflicts.
Figure 12–21 Detecting the I2C servo controller.
This chapter does not have a summary section, as the project is not yet complete. The next chapter
shows how to wire the car and program it so that it can be controlled by a Wiimote.
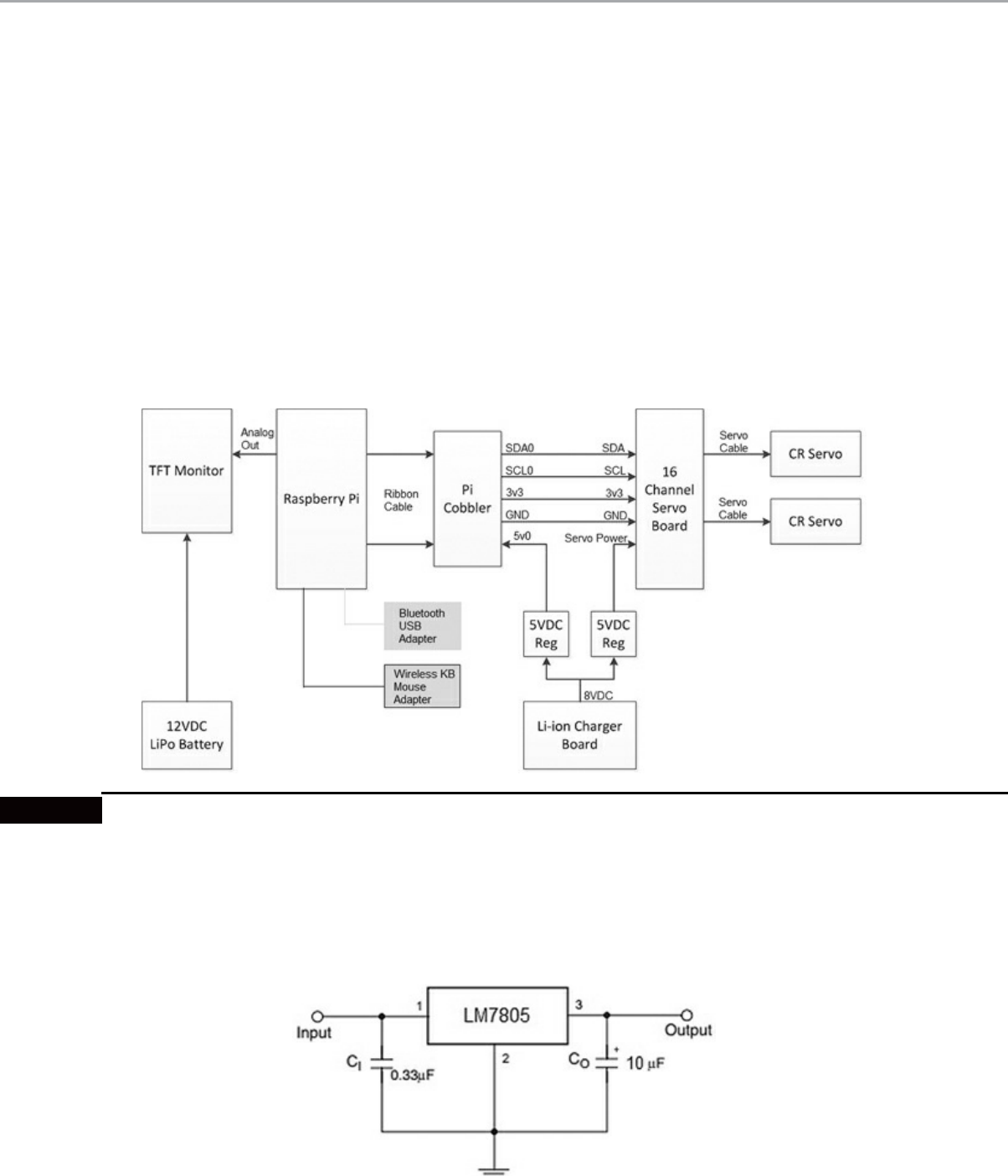
CHAPTER 13
Robotic Car: Part 2
Introduction
This is the second of two chapters that will show you how to complete the RasPi-controlled robotic
car, a project that was started in Chap. 12. This chapter deals with the electrical wiring and most of the
programming required to control the car.
Robotic Car Block Diagram
Figure 13–1 is a block diagram showing all of the robotic car electrical components.
Figure 13–1 Block diagram of the robotic car electrical components.
The RasPi is powered from the Li-ion charger board; however, that board provides only an 8-V DC
output. The voltage is converted to 5 V DC by a small regulator board that uses an LM7805 three
terminal chip with some auxiliary capacitors. Figure 13–2 shows the regulator schematic.
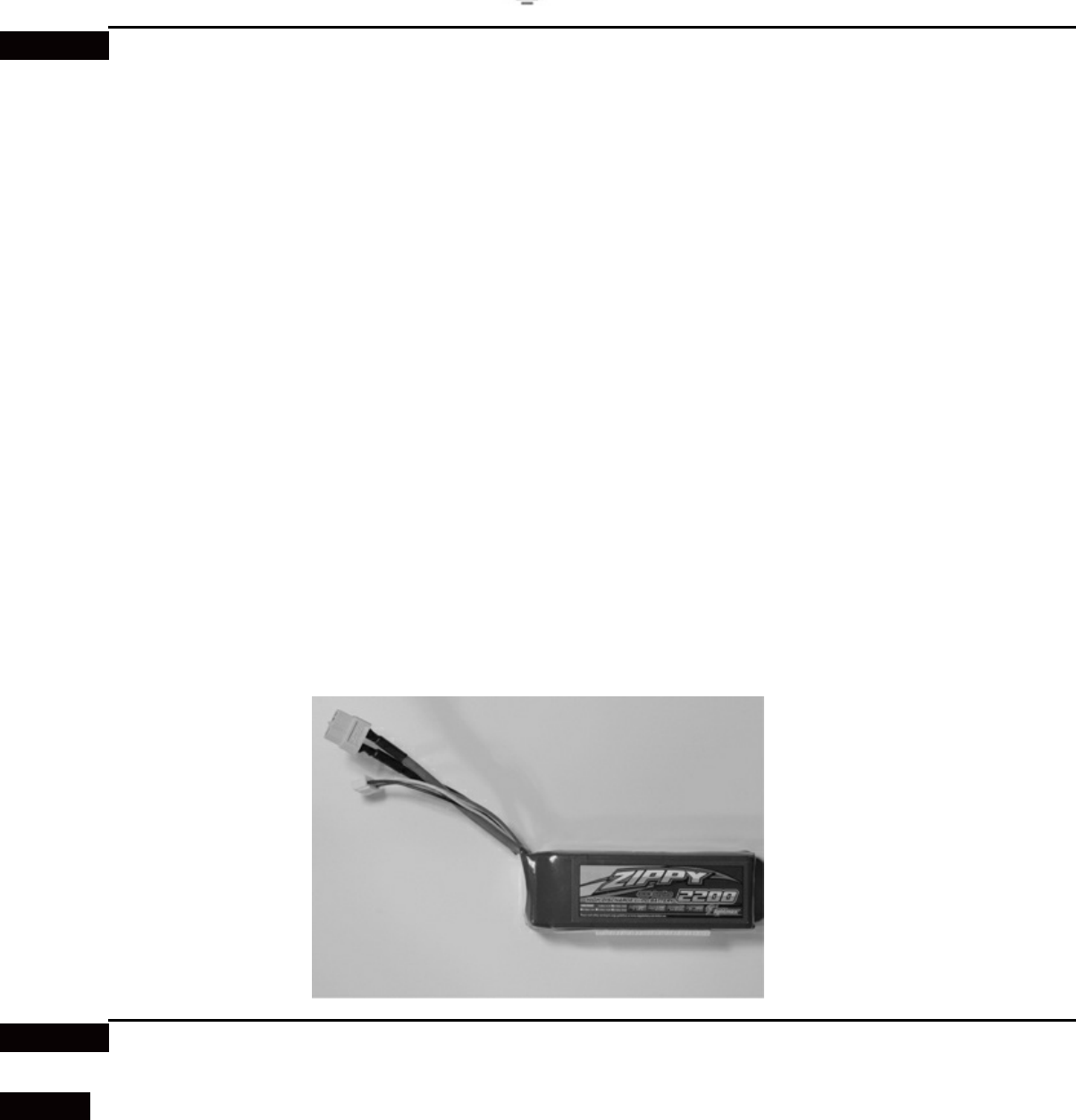
Figure 13–2 5-V DC regulator schematic.
The 5-V output is connected to the Pi Cobbler’s 5-V pin 0. Technically, this arrangement is known as
back feeding because the 5-V 0 pin is normally an output, not an input. However, it makes no
difference electrically if you supply or take off power from a parallel-connected power bus. By
following this approach, you avoid having to hack up a micro USB connector and cable through which
the RasPi is normally powered.
Shown on the block diagram is another 5-V DC regulator that provides power to the servo motor
input on the 16-channel servo control board (now simply referred to as the servo board). You might
wonder why I did this instead of paralleling the output already connected to the RasPi. The answer is
that I wanted to avoid the situation in which a brief high-current demand from the servo motors would
cause the regulator voltage output to drop below the minimally acceptable voltage for the RasPi, thus
causing it to stop running.
The logic on the servo board is fed from the Pi Cobbler’s 3-V pin 3 for reasons already stated in
Chap. 12.
The TFT monitor requires 270 mA at 12 V DC to operate. This requirement necessitated that an
additional lithium-ion polymer (Li-Po) battery be added for the sole purpose of powering the monitor.
The Li-Po battery is normally used in a radio-controlled aircraft application where it can supply fairly
high current for short time bursts. However, it fits this situation quite well, being able to power the
monitor for about eight hours, given its 2200-mA/h rating. Figure 13–3 shows this battery.
Figure 13–3 The Li-Po battery for the TFT monitor.
CAUTION The Li-Po battery must be recharged only with an approved charger designed for it.
Under no circumstances should you use an automotive 12-volt charger with this
battery. Bad things, such as a fire, will happen!
You may also have noticed a Velcro™ strip attached to the underside of the battery. I used this
strip as a convenient way to mount the battery and to allow it to be quickly removed for a recharge.
There are two Bluetooth micro USB adapters plugged into the RasPi’s USB slots. One is for the
Wiimote, and the other is for the wireless keyboard and mouse unit that I use with the car. Figure 13–4
shows this Logitech model K400r keyboard and mouse combination. I have found it to be extremely
reliable and very moderately priced.
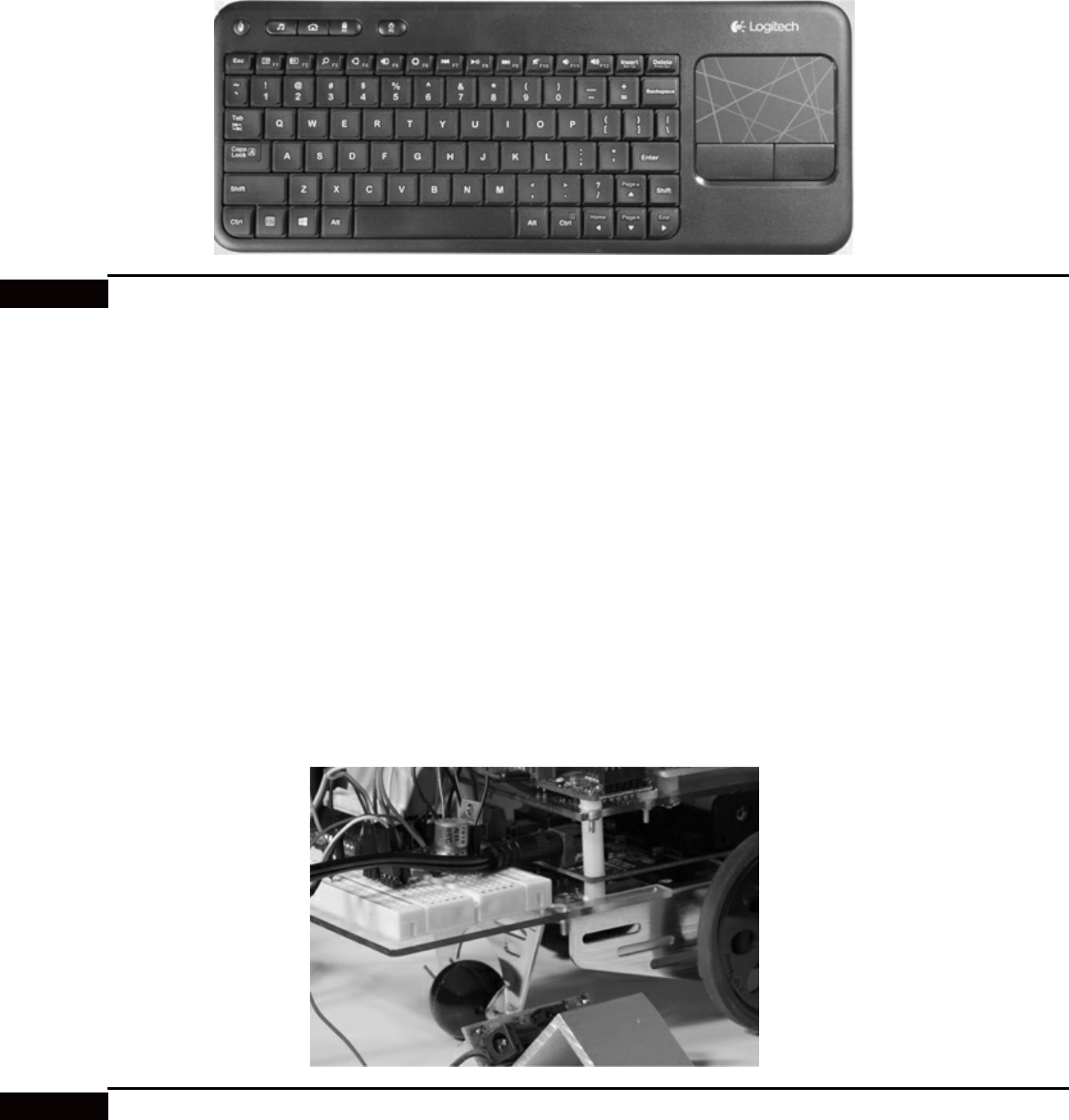
Figure 13–4 Logitech K400r wireless keyboard/mouse.
The servo motors connect to the servo board by means of the three lead cables already attached to
the motors. Each cable plugs directly into one of the 16 three pin connectors. I used connector
numbers 0 and 1 for the right- and left-hand motors, respectively. It doesn’t matter which servo
connectors are used as long as the software is appropriately modified to reflect the actual connectors.
There is a more or less standard color code used for servo cables as follows:
red = power
white = signal
black = ground
I have one last item to mention regarding the wiring: the Li-ion charger board’s power socket
should be accessible so that it can be recharged. Figure 13–5 shows such an arrangement on the
prototype robot car.
Figure 13–5 The wall wart power cord plugged into the Li-ion charger board.
Notice also that I had to remove the RasPi 5-V regulator board from the breadboard in order to
provide clearance for the power cord. I soldered two pins to the regulator so that the board plugs
directly into the 5-V and GND strips that are the outermost strips on the breadboard. It makes it very
convenient to have a pluggable regulator for use with a breadboard.

I2C Software
The servo board communicates with the RasPi using the I2C protocol. The I2C RasPi setup, which has
already been discussed in Chap. 12, must be completed before proceeding with the remaining software
installations.
Bluetooth Software
The first step in setting up the car to use Bluetooth is to plug in the Bluetooth adapter. Just make sure
the RasPi is not running. Figure 13–6 shows the V4 Targus Bluetooth adapter that I used in this
project. I am sure that similar type adapters will function equally as well, but just ensure that you
choose a high-speed class-4 device.
Figure 13–6 Targus Bluetooth adapter.
Now, start the RasPi and check that the Wheezy distribution has recognized the Bluetooth adapter.
Enter the following at a command line prompt:
The listing in Fig. 13–7 shows that the adapter has been found and an appropriate driver loaded for
it. The Targus adapter apparently uses a Broadcom chip, from the same fine company that makes the
RasPi core processor.
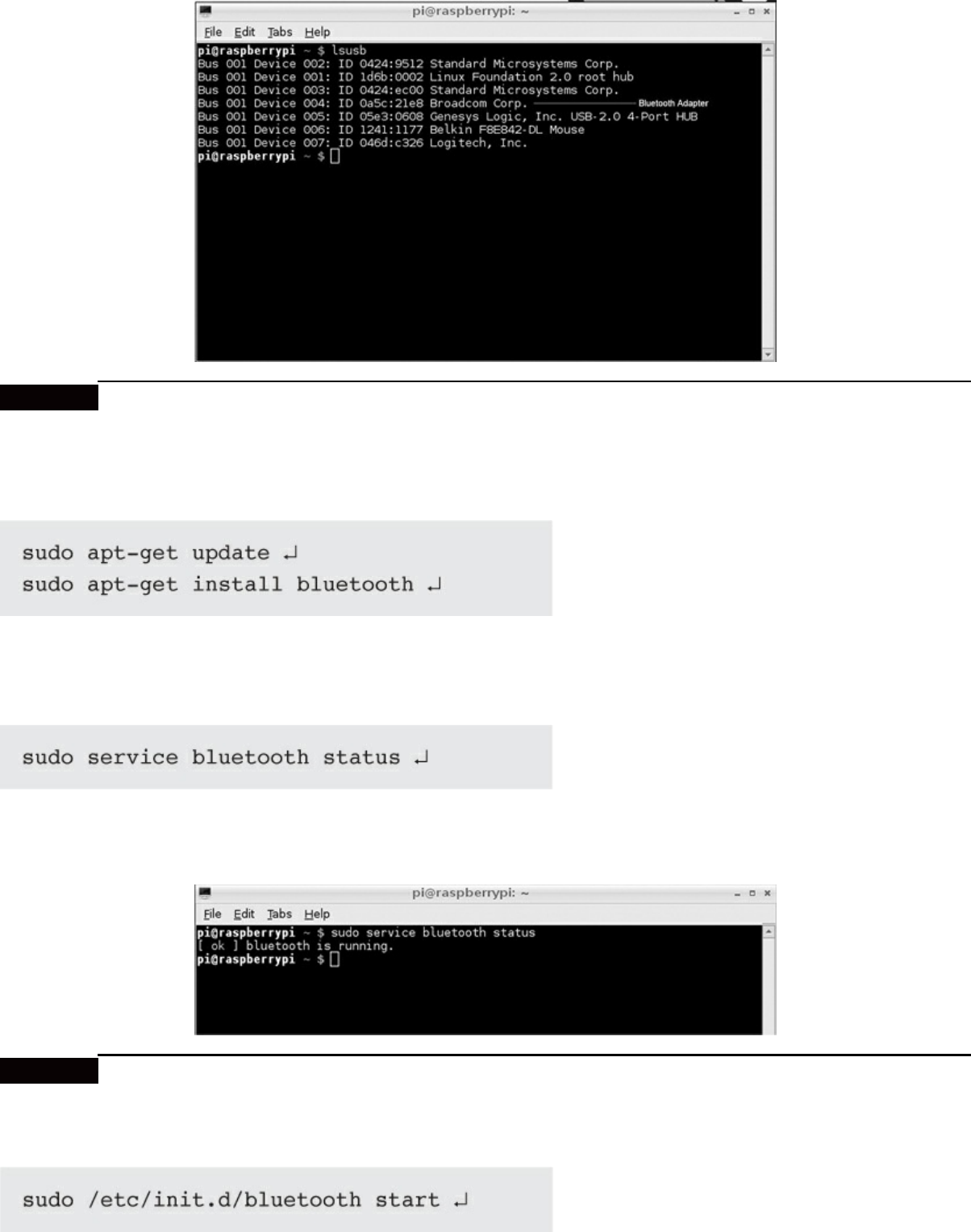
Figure 13–7 lsusb listing.
You next need to download and install the bluetooth software package. Enter the following at a
command line prompt:
(Be patient, this takes a while.)
Enter the following to check if the Bluetooth service is running:
Figure 13–8 shows the status for an up-and-running service.
Figure 13–8 Bluetooth status.
If the status shows that it is not running, enter this command:
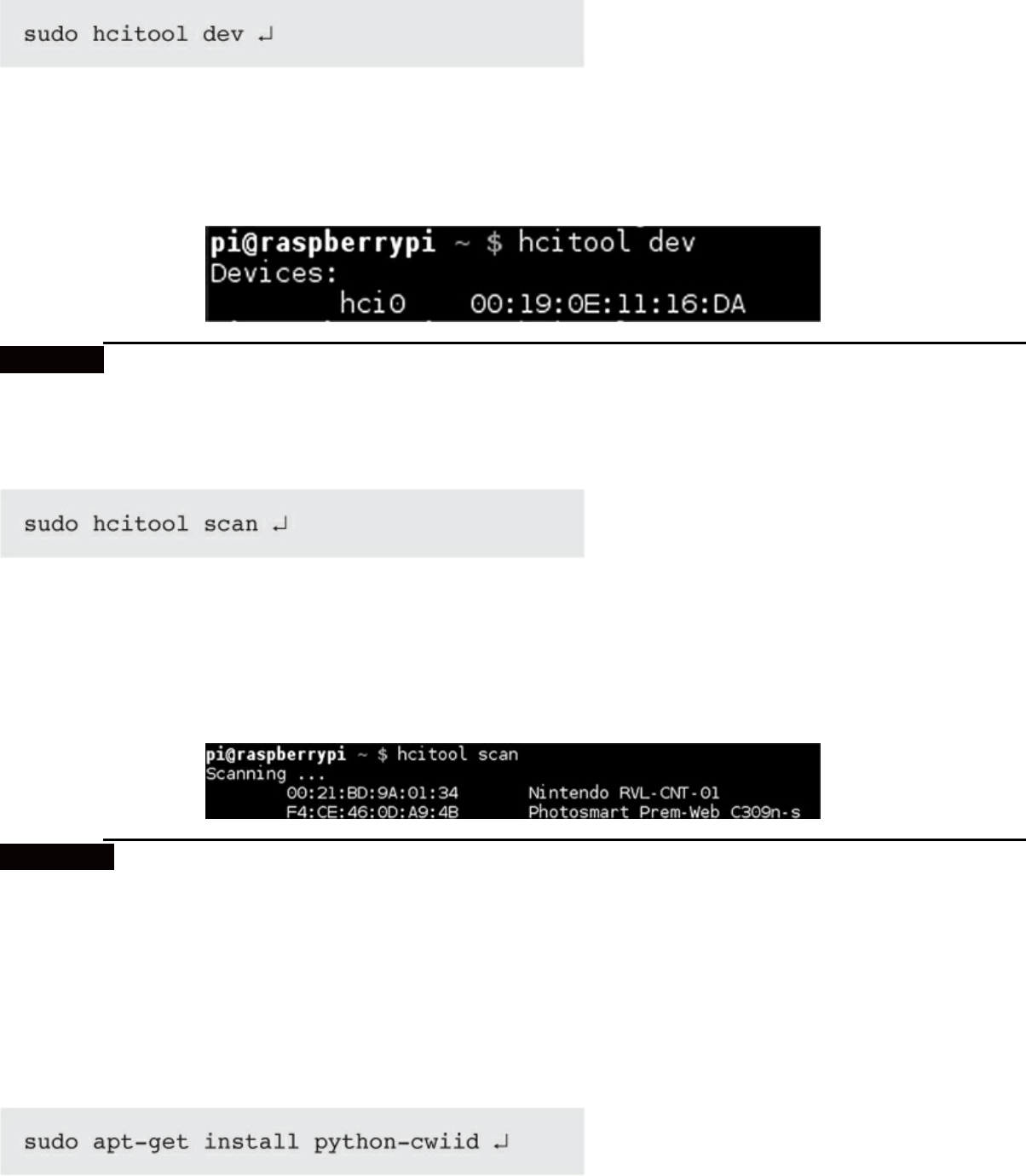
Reenter the above status command to confirm that the service is now running.
Enter the following command to check on the adapter’s address:
Figure 13–9 shows the resulting screen display of the address of the Bluetooth adapter. The
address is not really needed, but it does check that the hcitool application was loaded with the
Bluetooth package.
Figure 13–9 Bluetooth adapter address.
The stage is now set to start scanning for Bluetooth-enabled devices. Gather up your Wiimote and
ensure that it has fresh batteries installed. Enter the following command to start the scan:
You will see “Scanning …” displayed on the console screen. Simultaneously press the 1 and 2
buttons on the Wiimote to put it into the discovery mode. Don’t fret if it takes several tries to discover
the remote. The screen will show a time-out if the RasPi doesn’t discover the remote within 5 to 10
seconds. Just try again. Eventually you will be rewarded with a display, as shown in Fig. 13–10.
Figure 13–10 Wiimote discovered.
Notice that all Bluetooth-enabled devices in the immediate vicinity are discovered. In Fig. 13–10,
both the Wiimote (Nintendo RVL-CNT-01) and an HP wireless printer were discovered. Don’t be
concerned with conflicting Bluetooth devices because the protocol is quite capable of keeping track of
which device needs to be addressed by an application.
Another software package is needed to enable a Python program to interface to a Bluetooth device.
This package is named cwiid and is downloaded and installed by entering:
This package contains all the necessary applications that allow the Wiimote to interface with a

user-created Python program. I would also like to extend my thanks to Brian Hensley
(www.brianhensley.net) for his fine tutorial on using the Wiimote with the RasPi. It was invaluable in
helping me to create the following programs.
However, before discussing an actual program, I need to show you how the Wiimote buttons are
set with regard to state values, which are those numbers sent to the RasPi, indicating their
corresponding buttons have been pushed. Figure 13–11 is a Wiimote with all the corresponding state
values superimposed on the image.
Figure 13–11 Wiimote with state values.
For instance, if the forward button of the four-way switch is pressed, a value of 2048 will be
transmitted via the Bluetooth connection to the RasPi. Likewise, if the “–” button is pressed, a value
of 16 is sent. The values are also cumulative in case of combination button presses. For example,
simultaneously pressing the 1 button and the home button will cause a value of 130 to be sent: the sum
of the home button value of 128 and the 1 button value of 2. The application becomes a matter of
decoding the values received and figuring out what actions to take based upon those values.
I created a simple test program named Wiimote_Test.py that establishes a Bluetooth connection
between the car and the Wiimote. The four-way switch on the Wiimote is then used to send different
values, depending upon which switch is pressed. Enter the following to run this program:
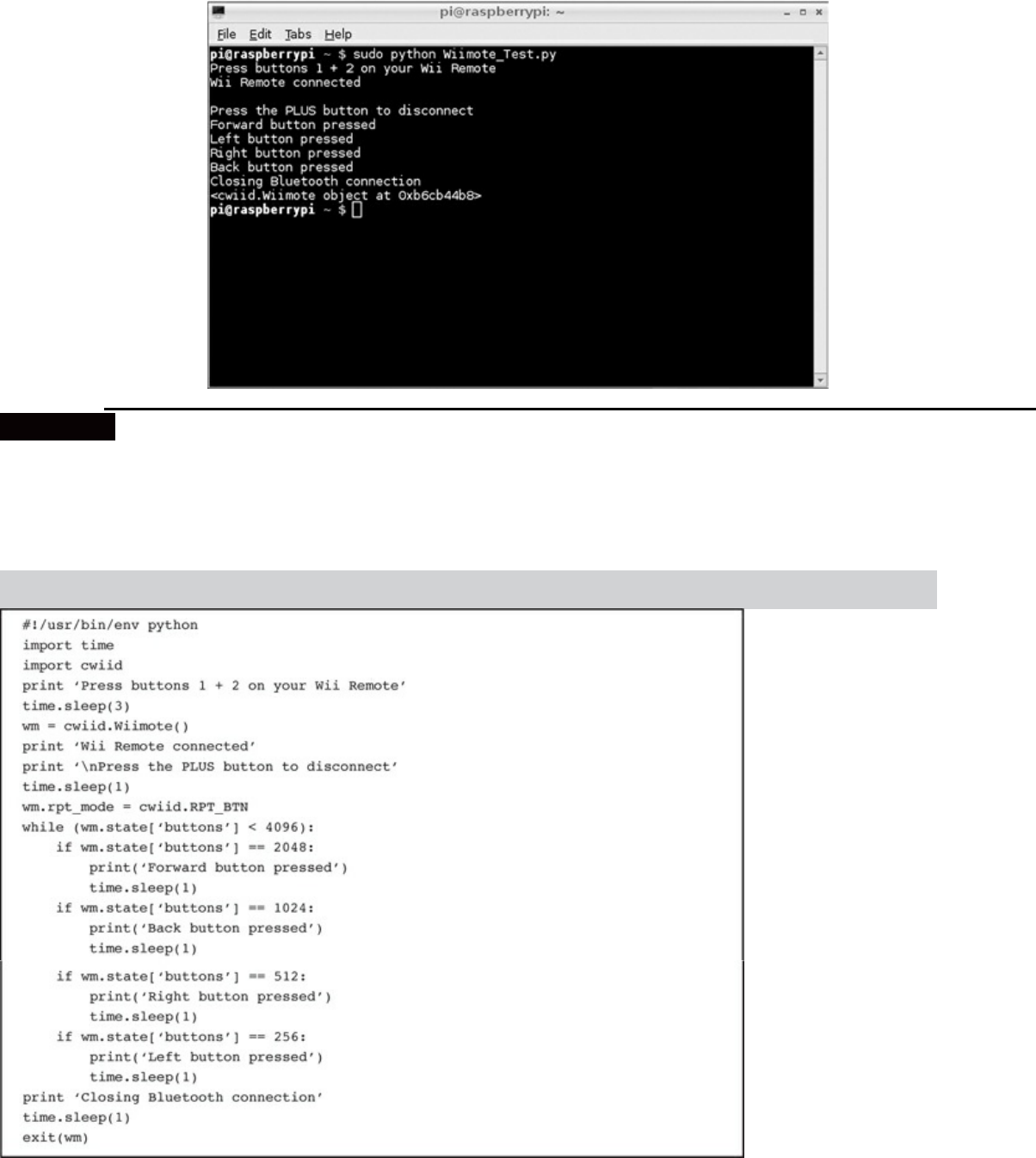
Figure 13–12 shows the result obtained by first establishing a connection and then pressing all four
switches.
Figure 13–12 Wiimote_Test.py program results.
The Python code for Wiimote_Test.py is available from the book’s website,
www.mhprofessional.com/raspi, and is also listed below:
Wiimote_Test.py
The expression “wm = cwiid.Wiimote()” is all that it takes to instantiate an object that logically
represents the Wiimote. The object is then placed in the proper state to report its state value by the
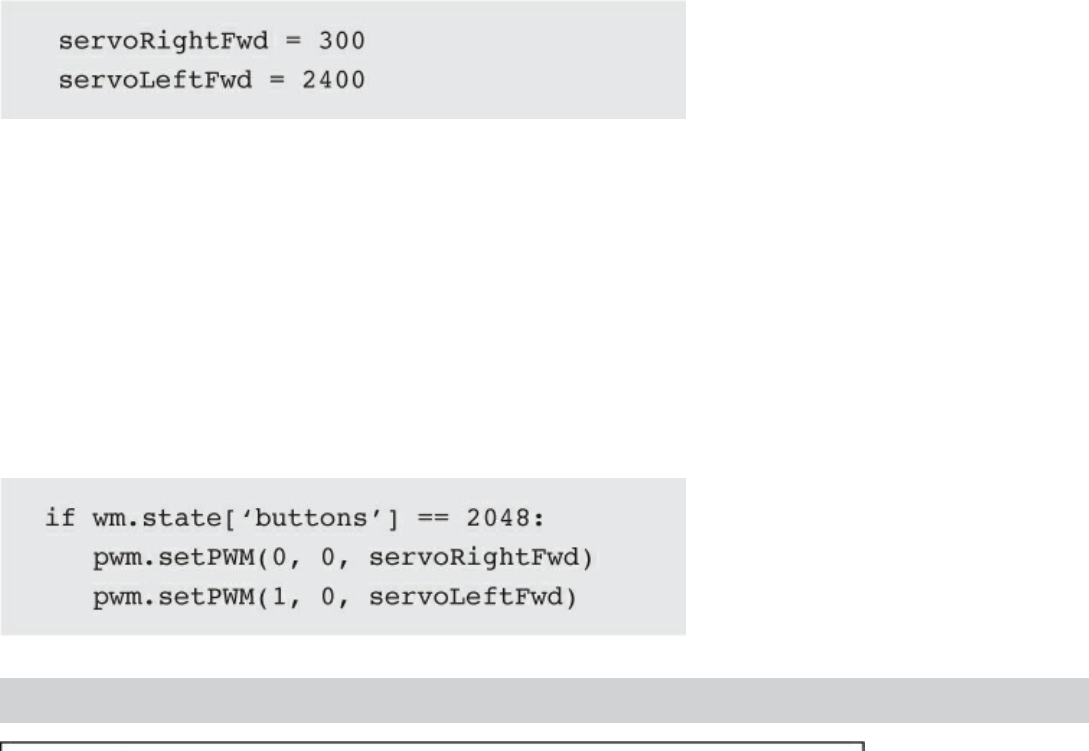
program line “wm.rpt_mode = cwiid.RPT_BTN.” From then on, all that needs to be done to retrieve
the state value is to use the expression “wm.state[‘buttons’].”
The Wiimote disconnects, and the program stops when the + button is pushed. The expression
“while (wm.state[‘buttons’] < 4096):” establishes a loop and waits for the state value to exceed
4096 to stop the looping. Using a high value for this state change precludes any unintended program
stoppage due to combination button presses, which is something to keep in mind when you start to
create your own programs.
Robot Car Program
The program requirements for controlling the car were deliberately made very simple. The car was to
go forward when the forward button on the four-way Wiimote switch was pressed. It was to turn right
when the right button was pressed and turn left when the left button was pressed. It was to stop when
the back button was pressed. Obviously, much more sophisticated control commands could be
devised, but this simple set was deemed adequate to prove out the basic car functionality.
The program follows the same state variable detection and corresponding action as was
demonstrated in the test program, only this time the commands are being sent to the servo control
board, which in turn, controls the servo motors. This program would not function except for the
brilliant PWM servo library provided by Adafruit Industries. This library enables PWM commands in
Python that directly control the servo board and indirectly control the servo motors.
The only tricky part in developing this program was determining the PWM parameters that set the
servo motors rotating at the correct angular velocity and direction. These are shown in the code as
constants:
You will have to experiment with different values if you desire to have the robot go a bit faster. I
know that these values make the robot travel in a straight line when so commanded.
The program is named Robot_Car.py and is available from the book’s website. The program
listing along with some amplifying comments can be found on page 172.
The program line “pwm = PWM(0x40, debug = True” sets up a PWM object that is at I2C address
0 × 40. This is how multiple I2C devices can be configured when they all are attached on the same bus
lines.
The program segment:
Robot_Car.py
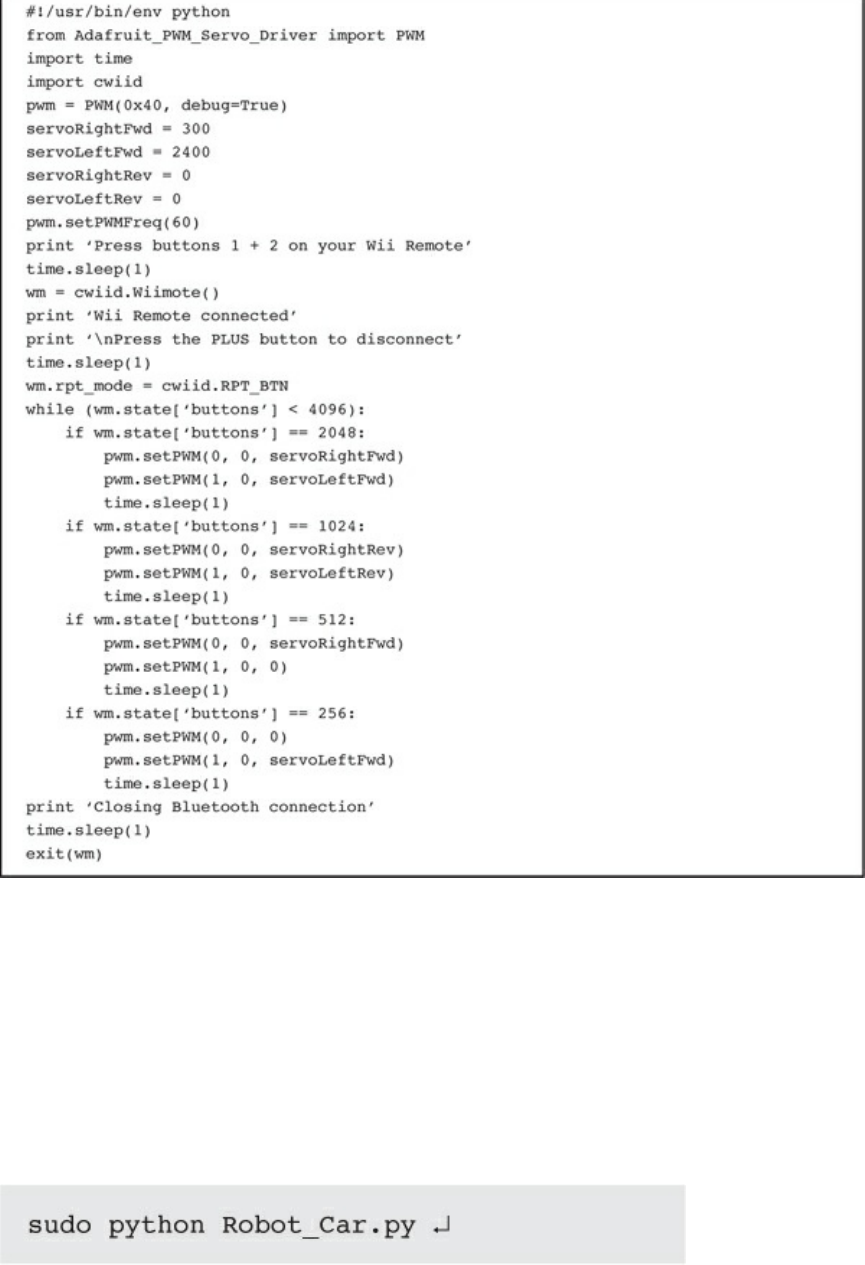
drives the car forward when the forward button is pressed. You just need to press the back button to
stop this motion. The same holds true for turning right or left.
Operating the Robotic Car
The car is essentially a peripheral for the RasPi, which means that you must start the computer as you
would normally do and simply enter the command to run the Robot_Car.py program as shown below:
You would then simultaneously press the 1 and 2 buttons on the Wiimote to connect to the RasPi
via Bluetooth. Next, you would operate the car by using the four-way switch on the Wiimote to control
the direction of the car. That’s it. Press the “+” button to disconnect and stop the Bluetooth session.
Future Expansions
The following would be interesting and exciting modifications to this project to expand its usefulness
and hopefully the learning experience:
Add a 5-V DC powered USB hub to the existing two USB ports that are both used. Adding a Wi-Fi
adapter would provide a wireless networking capability and Internet access.
Add a video camera, such as the GoPro Hero3. This unit has Wi-Fi connectivity, and is capable of
being remotely controlled by either its own remote control accessory or an Android smartphone or
tablet running the GoPro app. The remote control and Android app both have a real-time video
preview function.
Add an ultrasonic sensor that is capable of detecting objects in the forward path of the car. The
Python program can easily be modified to handle sensor inputs and modify the path accordingly.
Add an IR sensor to detect IR beams to redirect the car, basically creating an invisible fence or
barrier.
Add a GPS sensor to map the path of the car, assuming it travels more than a few meters. The
Ultimate GPS receiver discussed in an earlier chapter would be an ideal unit to install on the car.
The path taken could be recorded in the RasPi SD card and later sent to Google Earth for display in
that application.
Add swarm or hive behavior if you happen to have an additional car or know someone with one. The
RasPi can easily handle the computing challenge that it takes to enable this type of collective
behavior. The cars should be able to talk with one another using their installed adapters.
Add an IR light and an IR sensitive camera to allow the car to maneuver in total darkness. This would
be a very interesting and informative task, since rescue robots need to have this capability.
As you might imagine, many more items could be added to this list. It really is only limited by
your imagination. The robot car built in this project is only a start to bigger and much better projects.
Summary
This project commenced with an overview of the car’s final form. Next came specific build
instructions for the chassis as well as for the “sandwich” construction that holds the various boards
that make up the car.
A discussion followed regarding the servo drive motors and the associated PWM control signals.
Then we looked at the procedure for setting up the RasPi to run the I2C protocol that is necessary to
communicate with the 16-channel servo control board.
Some preliminary testing was next shown that proved the I2C interface functioned as expected.
A complete block diagram was shown to assist in connecting all the component boards and
modules that make up the car.
After that step came a detailed procedure for setting up Bluetooth to run on the RasPi. A
companion software package named cwiid was downloaded and installed to enable a Python program
to control a Wii remote control (Wiimote).
A simple Python program was shown that allowed a user to control the car using a Wiimote. The
car can go forward, turn right or left, and stop.
The project finished with many suggestions for future car expansions and modifications.
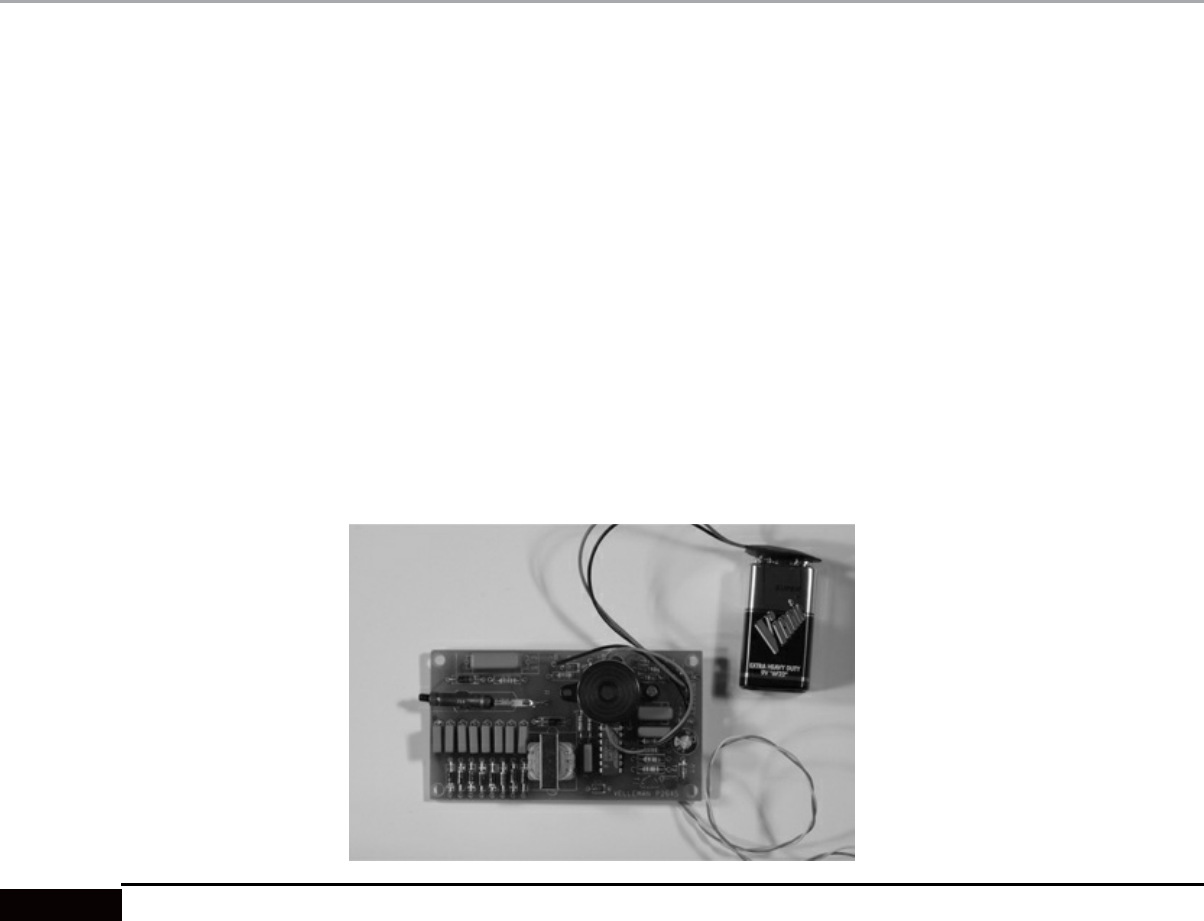
CHAPTER 14
Radon Detector
Introduction
This project could save your life. How’s that for an attention grabber! Radon, as most people know is
a radioactive gas that can be present in homes and that often goes undetected. This project couples a
Geiger counter with the RasPi to measure and display the level of radioactivity in the monitored
space. I will present plenty of background information so that you may learn precisely what radon is,
how it is created, at what levels it is acceptable, and at what levels you should take some action.
The Geiger counter used in this project was built from the Velleman kit number K2645 and is
shown in Fig. 14–1. This popular Geiger counter kit has been previously incorporated into other
microcontroller projects, including ones using the Arduino or the Parallax Basic Stamp.
Figure 14–1 Velleman K2645 Geiger-Muller counter.
Radioactivity and Radon
Radioactivity is the process in which an unstable atom loses energy by emitting particles or rays of
ionizing radiation. These particles and rays consist of:
Alpha particles—Helium nucleus
Beta particles—High-energy, high-speed electrons or positrons with a neutrino
Gamma rays—Highly energetic rays
The term ionizing radiation relates to the upset or damage a radioactive decay particle or ray can
do to a living cell. The alpha particle does the least damage because the epidermal skin layer stops it.
A beta particle is a bit more penetrating, but it can be stopped by various items, including a layer of
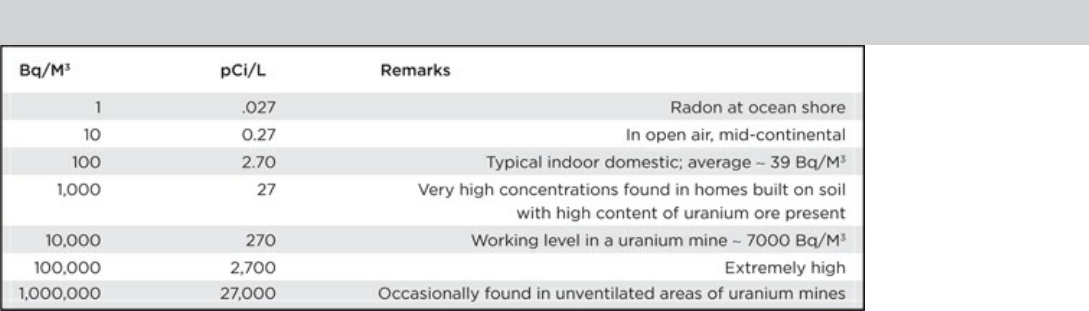
cardboard, a sheet of polyethylene plastic, aluminum foil, moderate to heavy clothing, etc. The most
damaging is the gamma ray, which can penetrate deep into the human body. Gamma sources are
normally shielded with lead, steel, concrete, etc.
The source of most natural radioactivity is uranium ore. It is the most abundant, naturally
occurring radioactive element found in nature. The prime element found in uranium ore is 238U where
the 238 is the atomic weight, i.e., the number of protons and neutrons located in the nucleus. An
associated key measure that will be mentioned in this discussion is half-life or the length of time it
takes for a specific radioactive element to lose half of its activity level. For 238U, the half-life is 4.5
billion years. Most other radioactive materials have a much shorter half-life, including radon, which
has a half-life of 3.8 days.
Radon is a colorless, odorless gas that is one of the many products of 238U radioactive decay.
Radon’s elemental symbol with atomic weight is 222Rn. It is also one of the densest gases known. The
real problem that radon poses is that it also decays and transmutes into what are known as daughters:
solid particles that stick to surfaces such as lung tissue.
Radon gas can and often does accumulate in confined spaces, such as basements and attics. It also
occurs naturally in springs, both hot and cold. High levels of radon when inhaled over a period of time
can lead to the formation of lung cancer. According to the U.S. EPA, radon is the number one cause of
lung cancer in non-smokers.
Radon, being in the 238U natural decay chain, is found wherever natural uranium ore is found.
Often, 238U is found in granite and shale deposits. I guess I am a bit unfortunate as I happen to live in
New Hampshire, otherwise known as the Granite State. However, I have measured my home basement
for radon and have not detected any activity. Nonetheless, there is a radon vent pipe installed in the
house that vents any entrapped radon gas up and out through the roof.
Measuring Radioactivity
The International System of Units (SI) unit for measuring radioactivity is the becquerel, abbreviated
as Bq. One Bq is a very tiny amount of activity. Another common unit is the curie, abbreviated as Ci.
One Ci is many orders of magnitude greater than one Bq. The exact relation is:
1 Ci = 3.7 × 1010 Bq
While the Bq and Ci are great for measuring radioactivity, the real question is, how much activity
is dangerous to humans. Table 14–1 is a comparative listing showing radon activity levels and places
where these levels might be encountered.
Table 14–1 Radon Radioactivity Levels
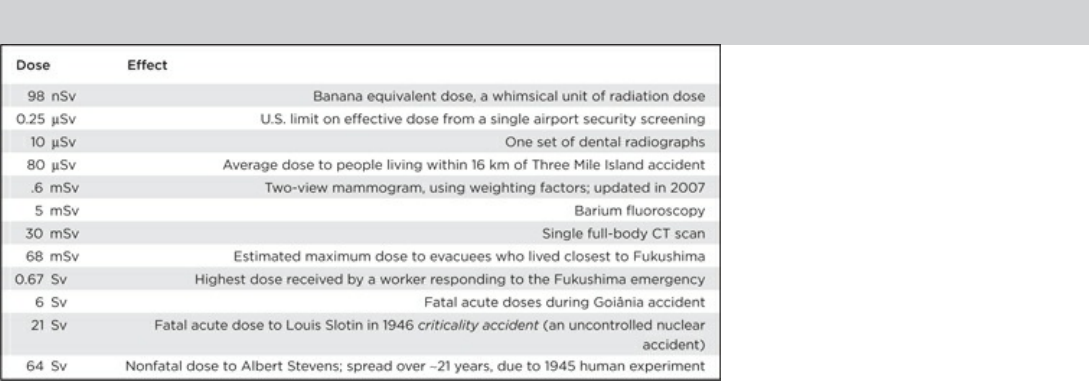
Dose
Absorbed dose, also known as total ionizing dose (TID), is a measure of the energy deposited in or
affecting a medium by energetic or ionizing radiation. It is measured in joules per kilogram and
represented in SI units by the gray (Gy). The legacy unit is the rad.
Absorbed dose (now simply referred to as dose) is a complex measurement, because it depends on
both the level of activity of the ionizing radiation and the absorbing medium, which in most cases, is
human tissue.
In the United States, a commonly applied measure of dose is the roentgen-equivalent-man or rem.
It is a complex, computed, and weighted average of dose representing the stochastic biological effects
of ionizing radiation, which is one primary risk factor in cancer formation. The sievert (Sv) is the
rem’s equivalent international SI unit. The conversion factor is 100 rem = 1 Sv, or in more realistic
units, 100 μrem = 1 μSv.
This project’s radiation detector measures dose in μrem units. I have also included the following
list in Table 14–2 to help put the whole concept of dose and effect into a reasonable perspective.
Table 14–2 Dose Examples
Converting radiation activity levels to dose is greatly simplified in this project by the use of a
calibration curve supplied by the kit provider. Figure 14–2 shows the calibration curve related to the
Geiger-Muller (GM) tube used in the K2645 GM counter.
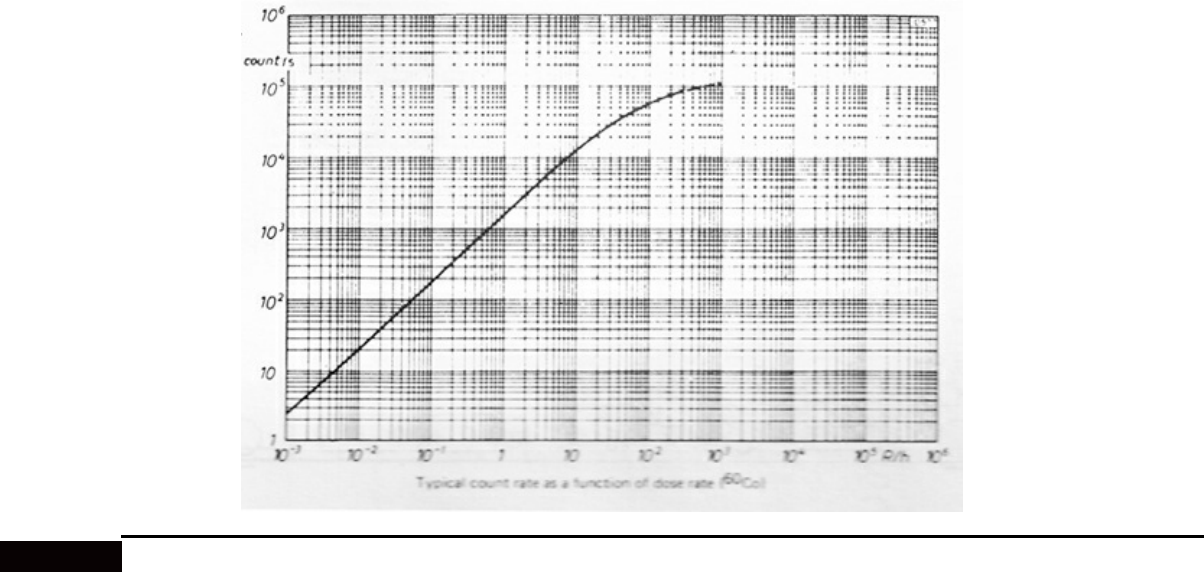
Figure 14–2 GM tube calibration curve.
The sloped portion of the curve can be easily represented by a simple equation:
dose (μrem) = (c/m × 100)/15
where c/m = counts per minute
All that needs to be done is to count the number of “clicks” or triggering events that happen in a
given minute and plug that number into the equation. Please note that a number of simplifications
have gone into formulating this equation, and it really is accurate only to ± 15 to 20 percent. That is
still sufficient to provide a realistic assessment regarding the presence of harmful radon in the
measured space.
K2645 Geiger-Muller Counter
A brief discussion of how the GM counter functions will help provide a good basis for understanding
how it was interfaced to the RasPi. The essence of the GM counter is the detector tube, which is the
approximately 3-cm tube that may be seen in the upper left-hand corner of Fig. 14–1. It is a small
metal cylinder typically filled with argon gas, along with a wire conductor supported lengthwise in the
middle of the cylinder. The wire has an approximate 600 V DC potential on it. When a charged
particle or energetic wave enters the tube, the gas breaks down or ionizes and forms a brief electrical
short circuit between the inner wire and the outer metal cylinder. This causes a momentary current
flow that is detected and results in the click from the counter. These clicks are counted for the dose
level measurement. Figure 14–3 is the schematic for the K2645 GM counter.
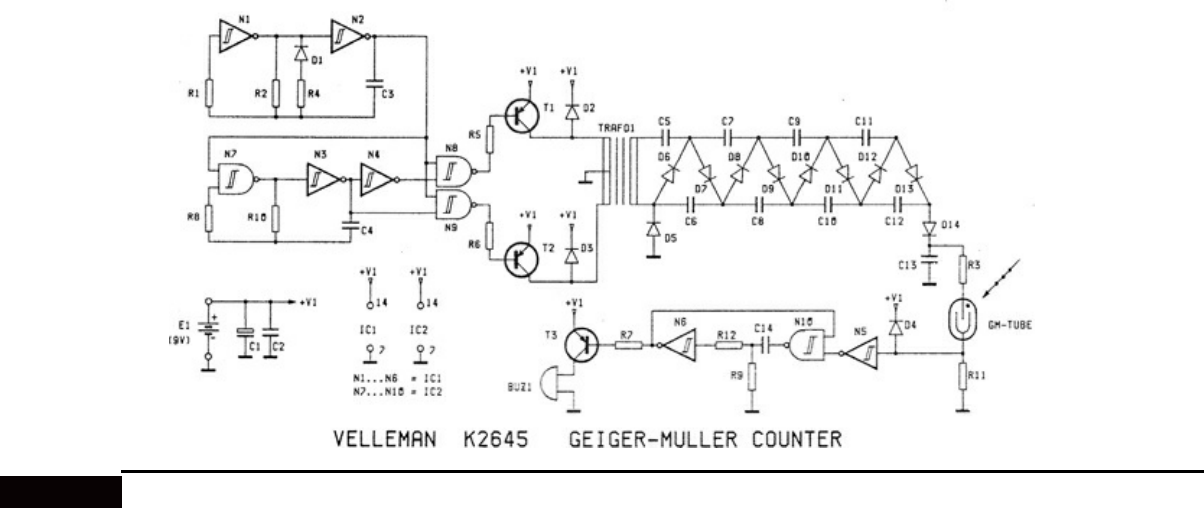
Figure 14–3 K2645 GM counter schematic.
There are four functional areas in the schematic:
1. A square wave oscillator that is connected to the transformer TRAF 01 primary.
2. A voltage multiplier array that uses diodes and capacitors, and is connected to the TRAF 01
secondary winding. This array creates the 600 V DC.
3. The GM tube.
4. A monostable oscillator that detects the momentary current pulses due to the radiation and activates
a piezo electric buzzer for the audio click.
The output from the board IC labeled N6 is used as an input to the RasPi interface, which is
discussed next.
GM Counter/RasPi Interface
The interface has two requirements:
1. To transform the click signals to pulses that may be counted
2. To count the pulses for preset intervals and output the resulting digital count to the RasPi
The block diagram/schematic for the interface is shown in Fig. 14–4.
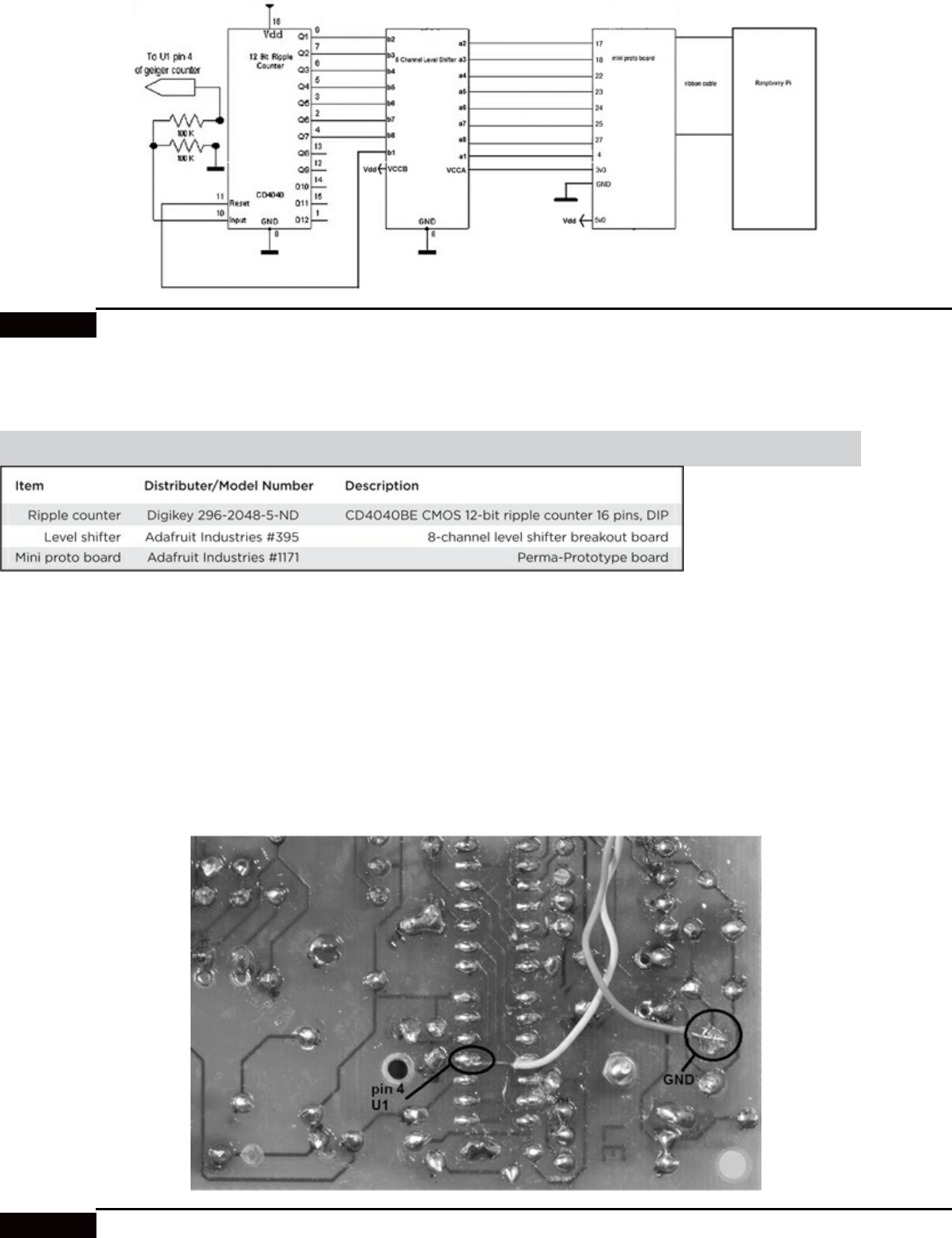
Figure 14–4 GM Counter/RasPi interface block diagram/schematic.
Table 14–3 is a parts list for the interface circuit.
Table 14–3 GM Counter/RasPi Interface Parts List
The voltage output from the GM counter is reduced by 50 percent and connected to the input of the
CD4040 chip. Counter output bits 0 to 6 are, in turn, connected to an 8-channel level shifter chip that
converts the 5-V DC counter voltages to the 3.3-V DC level, which is compatible with the RasPi GPIO
input signal lines. A single GPIO output from the RasPi is connected through the level shifter chip to
the counter reset line, thus allowing the ripple counter to be reset for the start of a new count period.
Figure 14–5 shows the bottom side of the GM counter with a white wire connected to the N6
output and a green wire connected to a ground point.
Figure 14–5 Output wire connections on the GM counter.
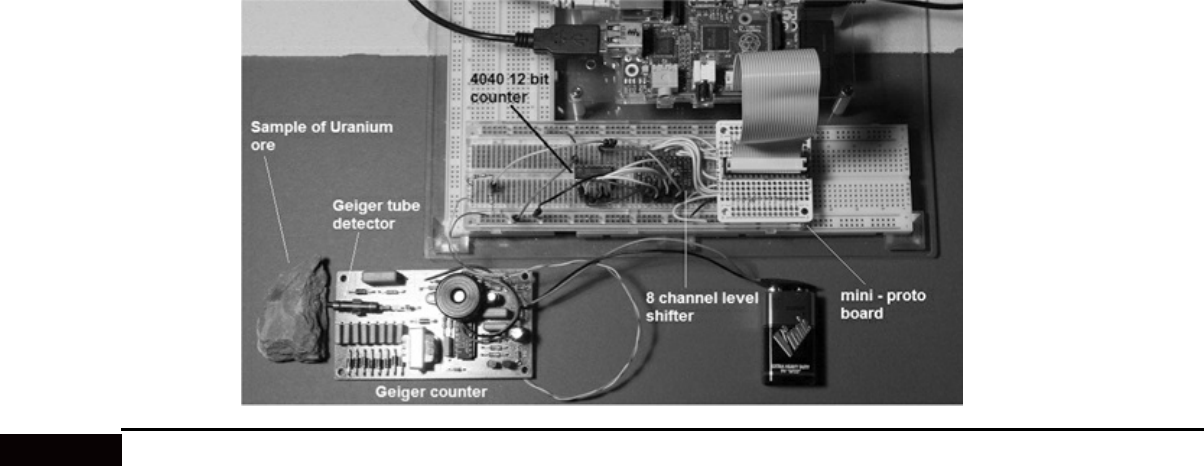
Initial Test Configuration
The interface circuit was first set up on a solderless breadboard with the GM counter connected, as
shown in Fig. 14–6.
Figure 14–6 Initial test configuration.
I also purchased a sample of uranium ore that was used to test the project. The ore sample is rather
innocuous, although it was certified to have a 6000 cpm—with most of that activity due to alpha
radiation. The certification paper is shown in Fig. 14–7, in case anyone is interested in purchasing a
sample. It is also perfectly legal to ship this type of ore sample because its activity levels fall well
below any regulations governing radioactive material transport.
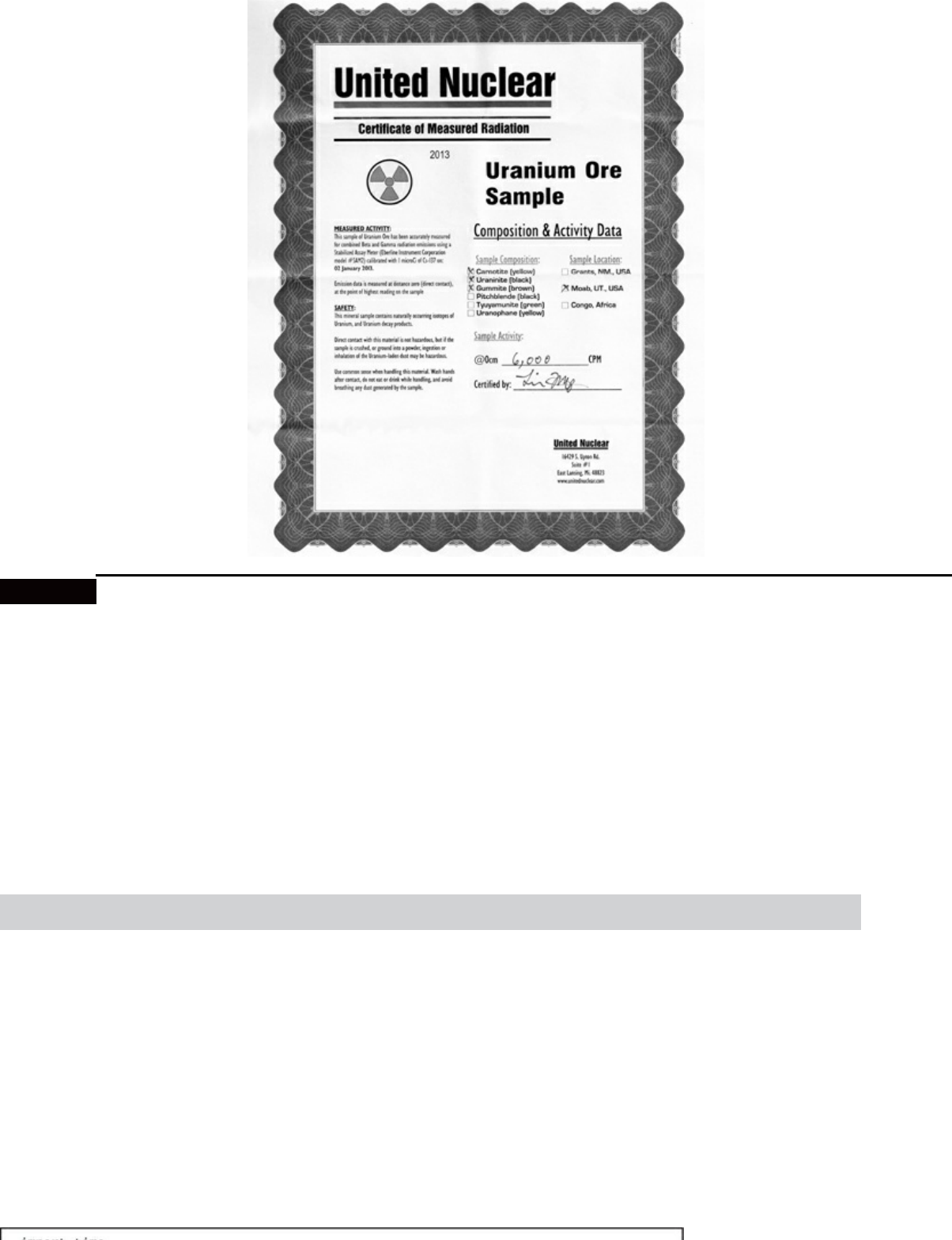
Figure 14–7 Uranium ore sample certification.
All eight of the RasPi GPIO pins were used in the interface. Seven were set up as inputs to read the
count from the 12-bit ripple counter, and the eighth was set as an output to reset the counter.
Below you will find the Python code, available on the book’s website
www.mhprofessional.com/raspi, from a program named geiger.py that was used to test the initial
configuration:
Figure 14–8 is a screenshot of the program output captured from my laptop that was on an SSH
connection to the RasPi. The ore sample was put in essentially direct contact with the GM tube in an
effort to obtain the highest readings possible.
geiger.py
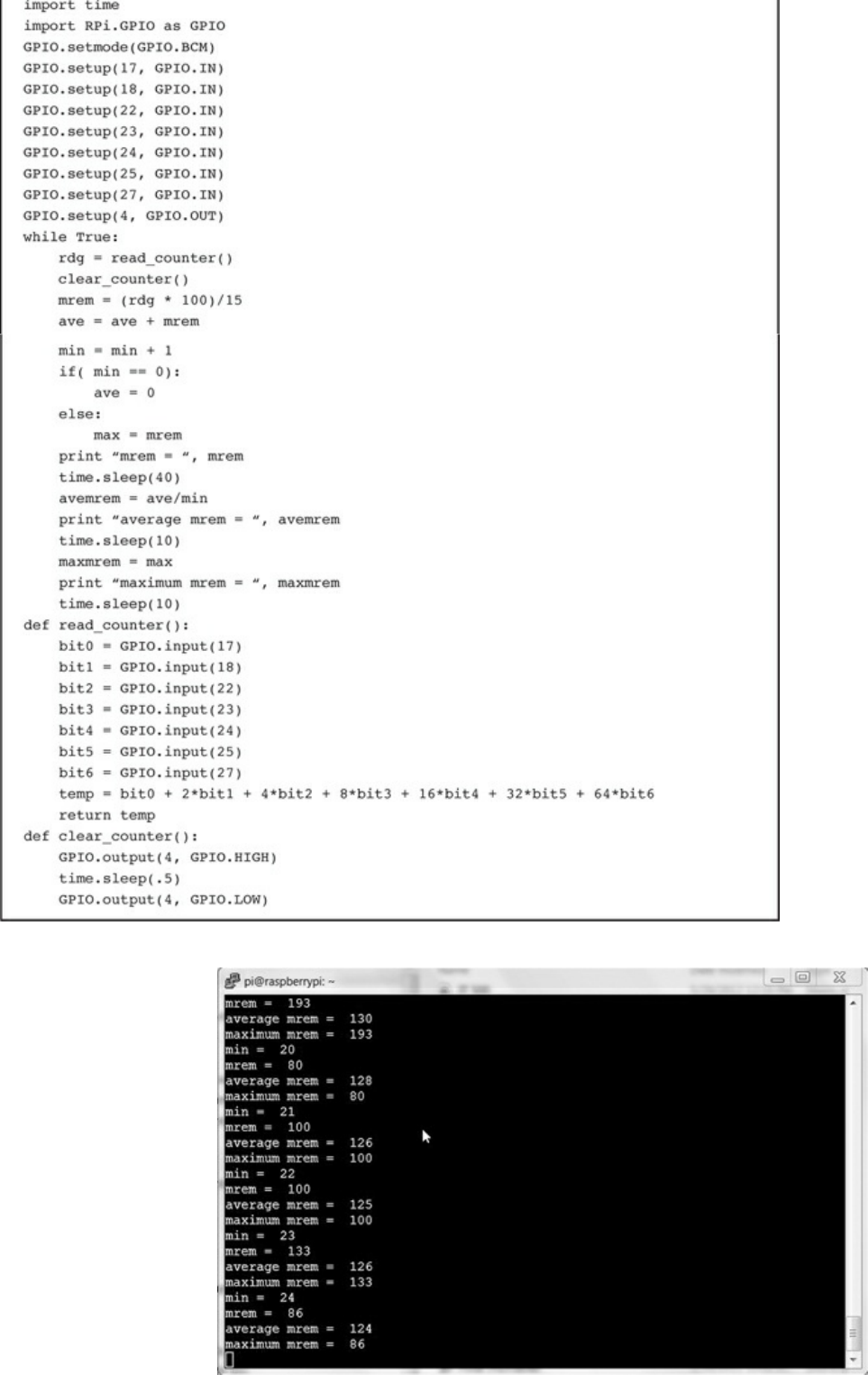
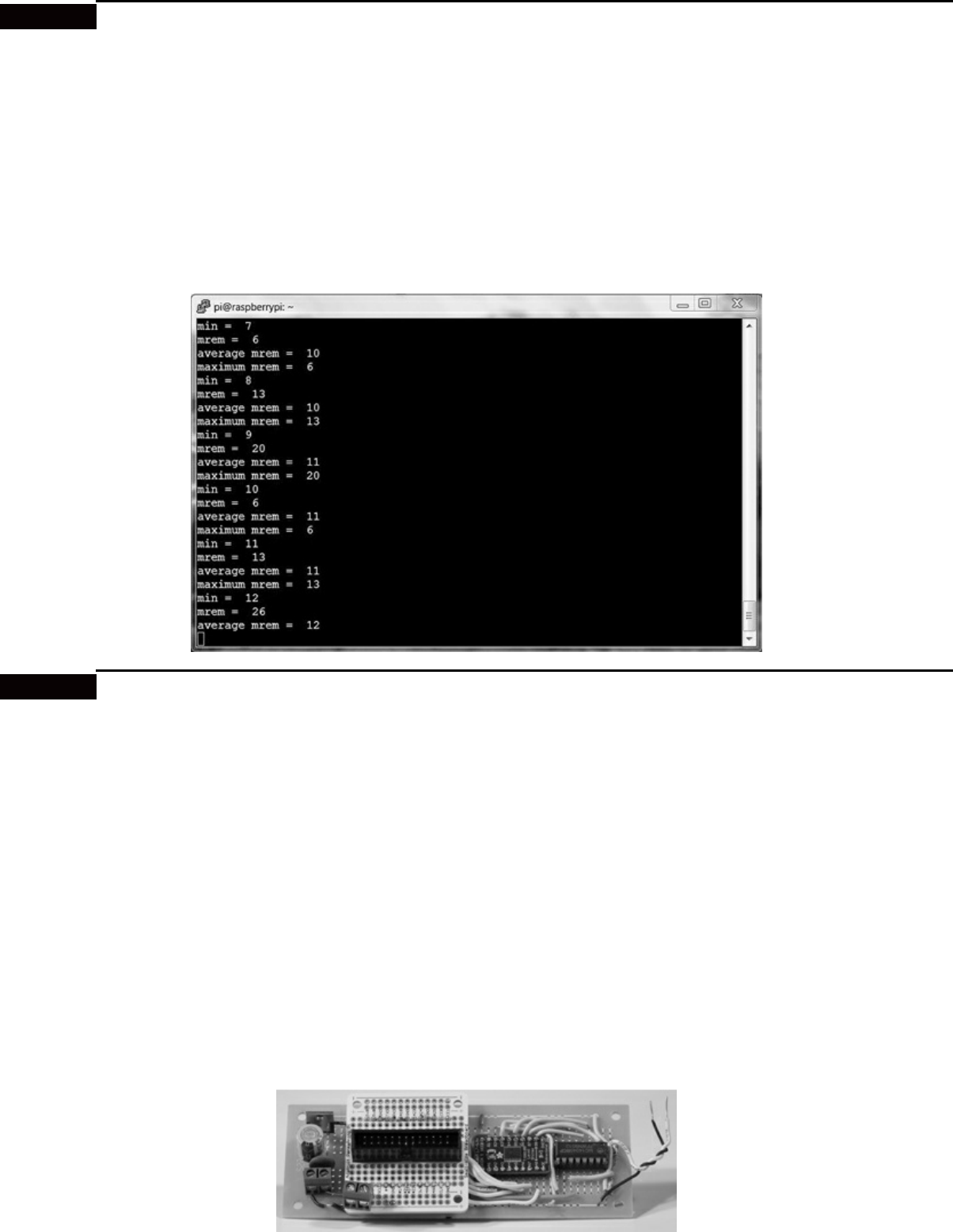
Figure 14–8 Ore sample readings.
It should be noted that the “mrem” shown on the screen should be interpreted as microrem not
millirem. I did not have the “μ” symbol available to output. On reflection, I probably should have used
“u” in lieu of “m”, a minor change that you should make to your program. In any case, the dose rate is
extremely low, about 100 μrem or 1 μSv—about the same as going through TSA screening four times,
as shown in the dose examples listing in Table 14–2.
I also tested the area for background radiation by removing the ore sample and letting the detector
simply operate for a while. Figure 14–9 shows the screenshot for background radiation.
Figure 14–9 Background radiation readings.
The average reading was approximately 11 μrem, or in the banana equivalent dose range—a non-
issue regarding exposure. I should also mention that the readings were taken in my basement, thus
reconfirming that absolutely no radon was present, or at least detectable.
Building a Portable Radiation Detector
While the Geiger counter breadboard version worked fine, it is not a very practical solution to
detecting radiation in various spaces. I thus wanted to build a portable, battery-powered version to use
in the field. The first step was to assemble a prototype board for the interface circuit that was
successfully tested as described above. I used a strip-line protoboard that I purchased from a local
electronics supply store and wired it in exactly the same configuration as the one used for the original
solderless breadboard. Figure 14–10 shows this wired board.
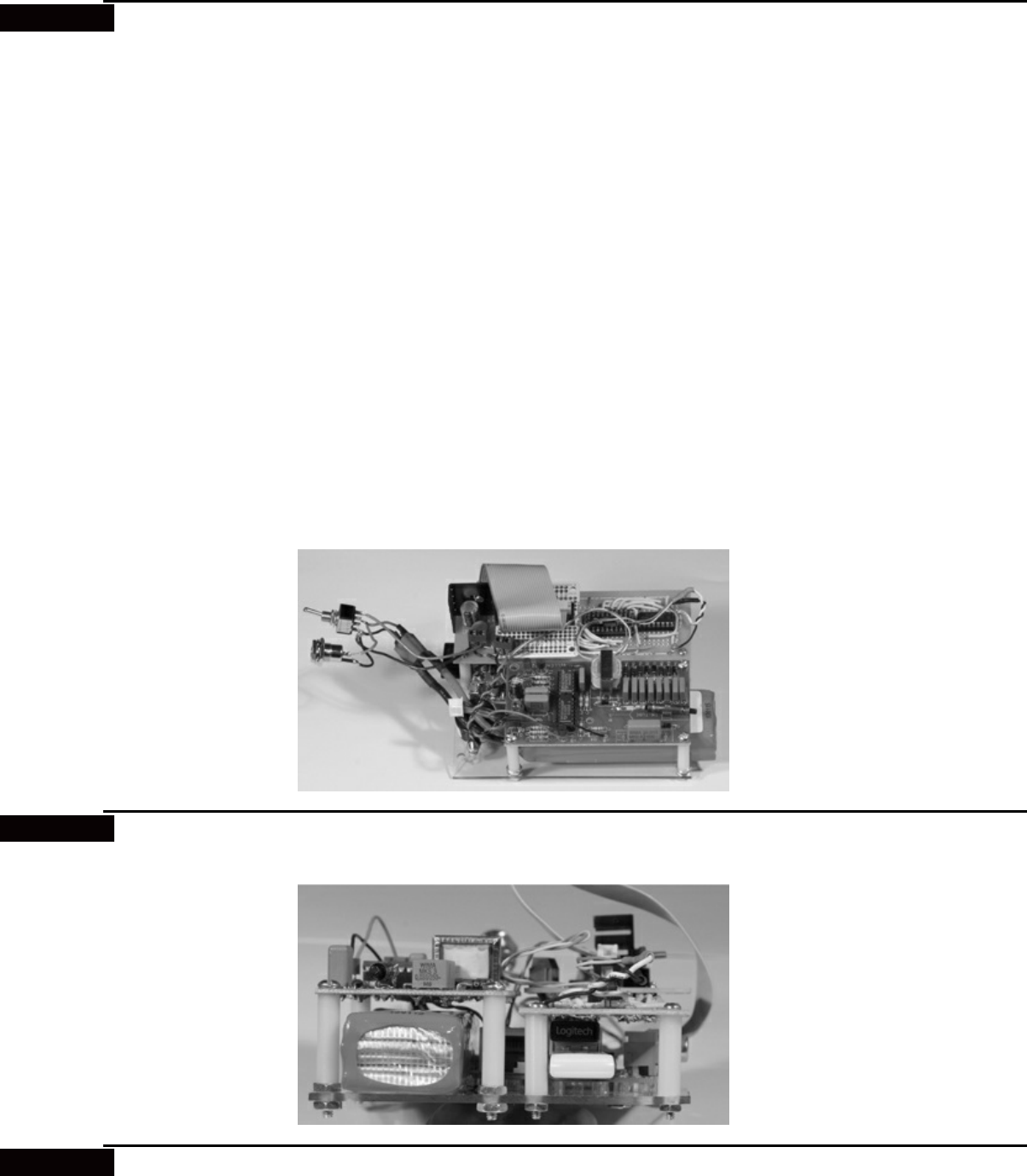
Figure 14–10 Wired interface board.
The only additions I made to the board are the 5-V DC voltage regulator that is located on the left
side of the board and the two screw terminal connectors. A 12-V DC LiPo battery is connected to the
leftmost terminal, while the Geiger counter is powered from the terminal connector just to the right. I
must confess to a slight cheat that I made in powering the Geiger counter. It is normally powered by a
9-volt battery. All I did was put in a series resistor that dropped the LiPo’s 12 V to between 9 and 9.5
V. I used a 470 Ω resistor, since the current was only a nominal 6 mA.
The black and white twisted pair of wires to the right connect to the ripple counter input and
ground. Also, the mini-proto board makes the RasPi connection extremely easy; just use the ribbon
cable as you did in previous projects with the Pi Cobbler.
Probably the most difficult part of the project was assembling all the pieces so that they fit into a
project box. I selected a box that I thought was large enough to accommodate all the parts. It did but it
was a struggle. My box is 6.25 × 4.68 × 2.25 in (15.5 × 11.5 × 6 cm), which is simply too small. I
would recommend a box no smaller than 8 × 6 × 2.75 inches in order to have everything fit
comfortably inside. Figures 14–11 to 14-13 are photos of the assembled portable Geiger counter not
yet installed in the box.
Figure 14–11 Front view of the portable Geiger counter.
Figure 14–12 Right-side view of the portable Geiger counter.
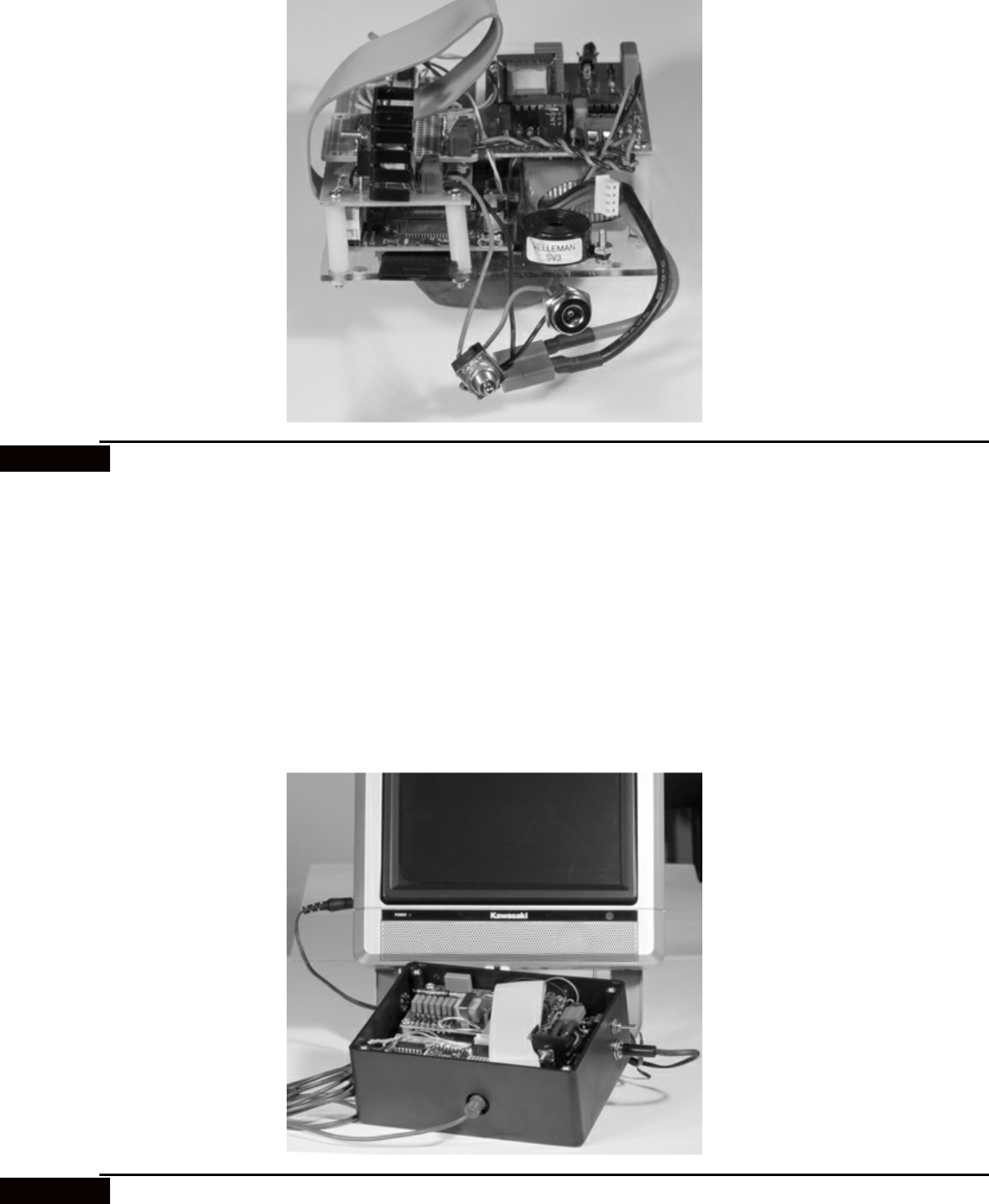
Figure 14–13 Left-side view of the portable Geiger counter.
I used a sheet of Lexan as a support plate, to which I mounted all the other components by using
nylon spacers and long machine screws and nuts. This type of assembly is definitely a cut and fit
operation where it is impossible to create a detailed plan because every installation will be slightly
different. Just take your time as you carefully fit all the boards in place, and mark all the drill holes
with a Sharpie prior to drilling. I must have assembled and disassembled this unit over a dozen times
before finishing it.
Figure 14–14 shows the unit in the box without the top attached and with a portable analog
monitor positioned behind the box.
Figure 14–14 The Geiger counter installed in a box with the monitor.
The monitor is powered directly from the LiPo battery through a type N power jack installed in the
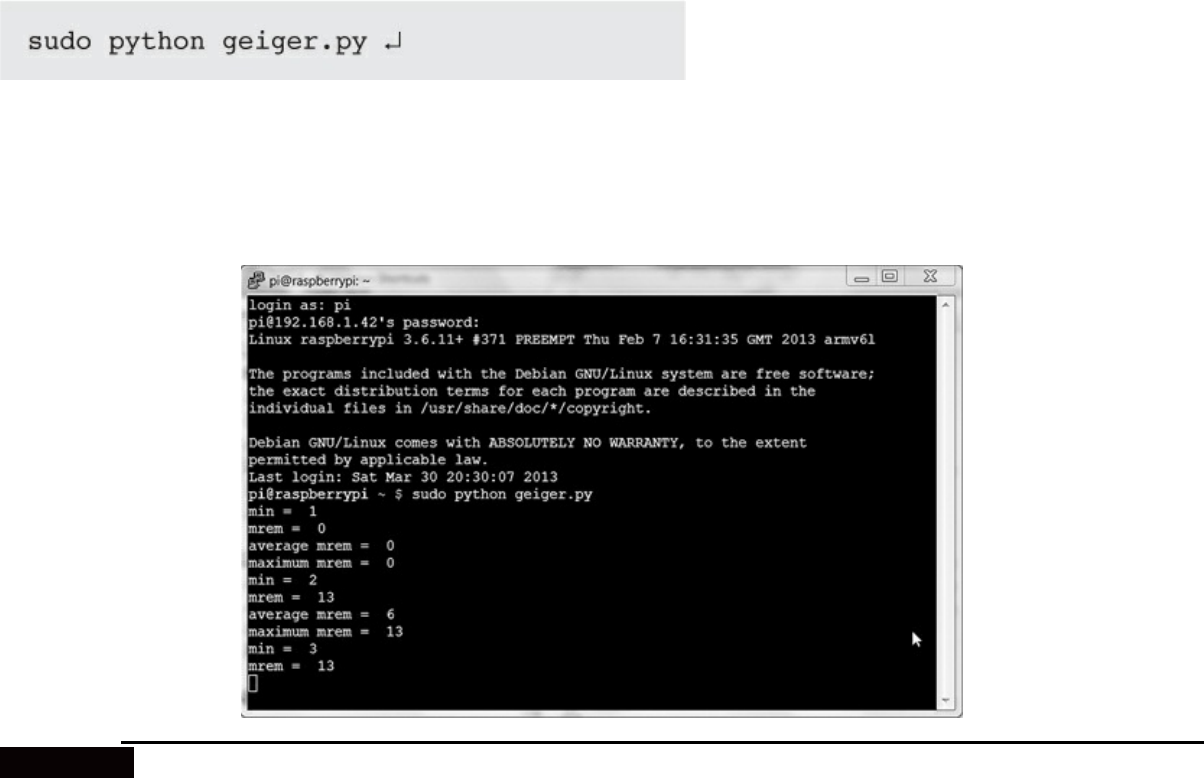
box. Also notice that I drilled a 5/8-inch hole through the box in order to have access to the RasPi’s
analog video socket. There is an on/off switch also mounted above the monitor power socket that
controls the power to every component in the box.
If you look carefully at Fig.14-14, you will notice a ½-inch hole drilled through the box just to the
left of the GM tube. This hole is also capped with a metal plug. I drilled this hole so that beta particles
could be detected by the Geiger counter if desired. Remember from the earlier discussion that beta
particles can be shielded by a thin plastic layer, so this box would certainly stop them.
Operating the Portable Geiger Counter
I installed the WiPi adapter in one of the RasPi’s USB ports and put a Bluetooth adapter in the other
one for the wireless keyboard and mouse unit that we also used in the robot car project. After you do
this, connect the analog monitor through the side hole for the video. Don’t forget to plug in the power
jack. It is then a simple task of turning on the power and doing a normal boot operation. The command
to start the program is:
That should be it; you should now be seeing the radiation readings displayed on the monitor. I also
connected to the Geiger counter remotely to capture a screenshot of the unit in action. Figure 14–15
shows a screenshot of the Geiger counter registering normal background readings.
Figure 14–15 Portable Geiger counter in operation.
Finally, you can connect to the Internet if you want, which makes this unit quite unique—not many
network-enabled Geiger counters are available, especially at the cost of this one.
Modifications and Expansions
One modification to this project that would be useful is to attach a multi-line, I2 C, LCD display to the
box and, thereby, remove the need for the monitor. You would need to make the program start
automatically upon boot up, but that is relatively easy to accomplish with the many great tutorials
available on the web.
I would definitely use a larger box in order to make it easier to have access to the LiPo battery.
Recall the warning in the robot car chapters: Never use a standard automotive or even a regular power
supply to recharge the LiPo battery. I just hope no one who builds this project is foolish enough to
plug a wall wart into the external monitor socket in hopes of recharging the battery.
The program may also be extended to report radiation readings remotely. Right now, the program
simply discards old readings, but it could be easily changed to record those readings in a log file and
to send them remotely to clients using a built-in web service.
Summary
This chapter began with a discussion on radioactivity and the origins of radon gas. A distinction was
made between activity levels and absorbed dose. Examples were provided to help you understand how
radiation activity and dose levels are related.
A brief discussion followed on how the project’s Geiger counter would function, along with a
detailed explanation of how to interface the counter to the RasPi.
We then looked at an initial test configuration with sample readings taken from both background
radiation and a uranium ore sample. The controlling Python program was also discussed.
Next came a detailed construction procedure on how to convert the test configuration into a
portable instrument. A demonstration of this portable Geiger counter along with its networking
capability followed.
Finally, I suggested some modifications and expansions to further improve the utility of this
project.

CHAPTER 15
Serving up Time with an RTC and NTP
Introduction
This project is focused on how the RasPi keeps track of time both locally and through a network. As
designed, the RasPi contains no means to set or track time. This design decision was made both to
keep the cost down and to minimize the printed circuit board (PCB) size. In addition, the capability
would be available in the rev B model because it has a network port that is able to connect to a public
Network Time Protocol (NTP) server. An automatic NTP connection is also built into the standard
Wheezy Raspian Linux distribution designed for the RasPi.
The RasPi A models and B models without Internet access do not have public NTP service and,
thus, require another means to set and track time. This is where a hardware peripheral known as a
real-time clock (RTC) becomes very handy. First we’ll discuss the RTC and then take a
comprehensive look at the NTP service.
Real-Time Clock (RTC)
The RTC module, which has been available for many years, first appeared with the advent of the PC in
the early 1980s. There were timing systems available before that period, but they were fairly complex
and expensive devices and suitable mainly for mainframe computers. The RTC introduced with the
first PC was based upon an integrated chip named the MC146818, which was manufactured at that
time by the Motorola Corporation. A modern version of that chip is used in this project. It is the
DS1307, pictured in Fig. 15–1, which is manufactured by the Dallas Semiconductor company,
previously mentioned in Chaps. 10 and 11.
Figure 15–1 DS1307 DIP.
The DS1307 is an I2C controlled device, as may be readily seen by the block diagram shown in
Fig. 15–2. It is a fairly simple peripheral that uses a quartz-crystal-controlled oscillator in conjunction
with a binary counter that is labeled as an oscillator and divider in the diagram. The crystal is rated at
a nominal 32,768 Hz frequency (equivalently 32.768 kHz), which is exactly the value of 2 raised to the
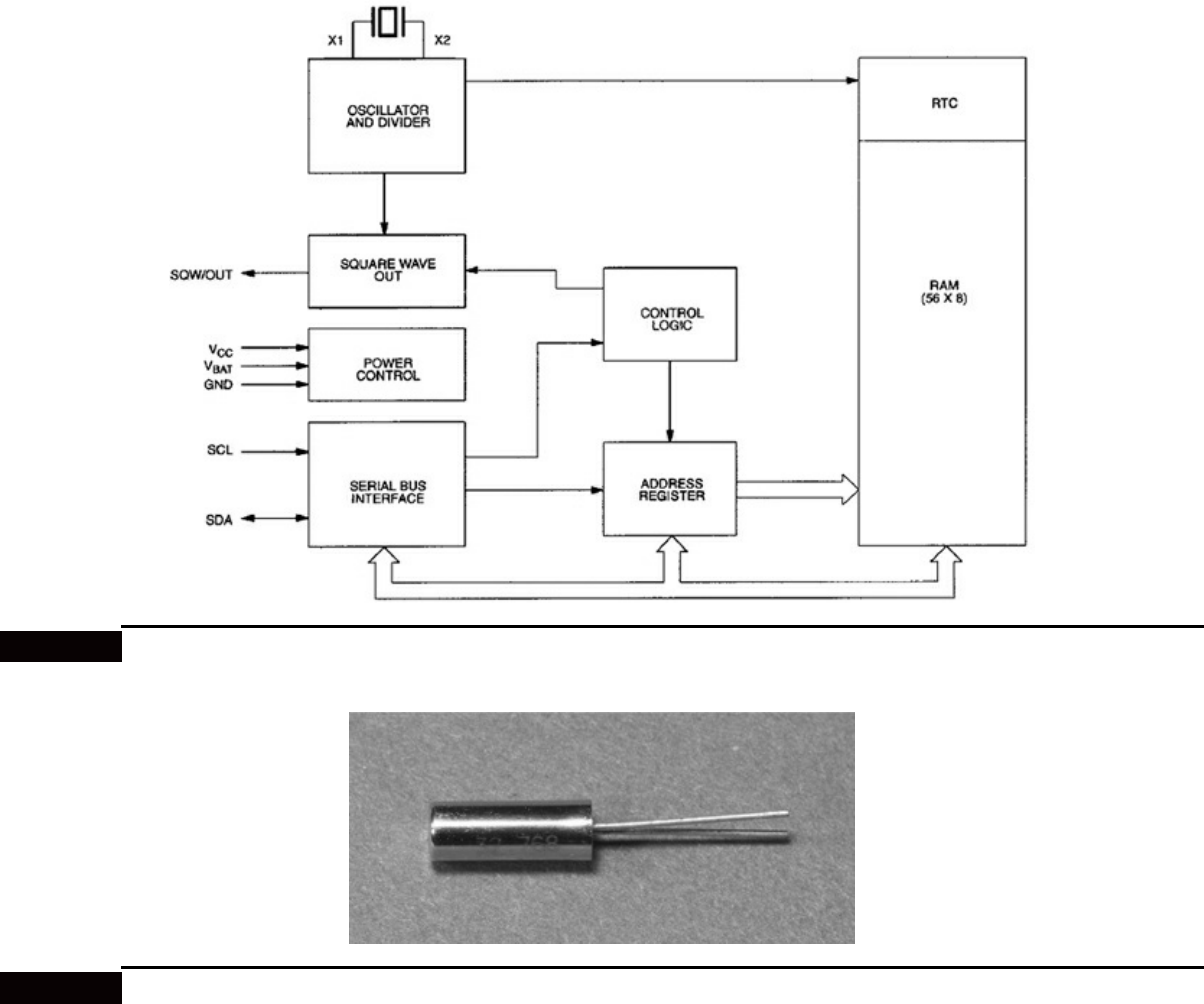
fifteenth power. Therefore, a 15-bit binary counter will overflow or reset once every second if a
32.768 kHz signal is input to the first stage of the counter. Theoretically, this setup will produce a
once per second clock tick. Notice, I used the word theoretically, as the reality is that the clock
crystals typically used with the DS1307 do not produce a perfect 32.768 kHz waveform. Figure 15–3
shows the actual crystal used in this project.
Figure 15–2 DS1307 block diagram.
Figure 15–3 RTC crystal.
You should clearly see the frequency in kHz printed on the metal can enclosing the actual piezo-
electric element. These generic type RTC crystals typically will have accuracy within ± 30
seconds/month when properly loaded with a matching 6 picofarad (pF) crystal and operated at a
nominal 23°C ambient temperature. The operating temperature is the key parameter that affects clock
accuracy, assuming the correct capacitance loading is used. Figure 15–4 shows the temperature effect
as it deviates from the standard 23°C calibration point.
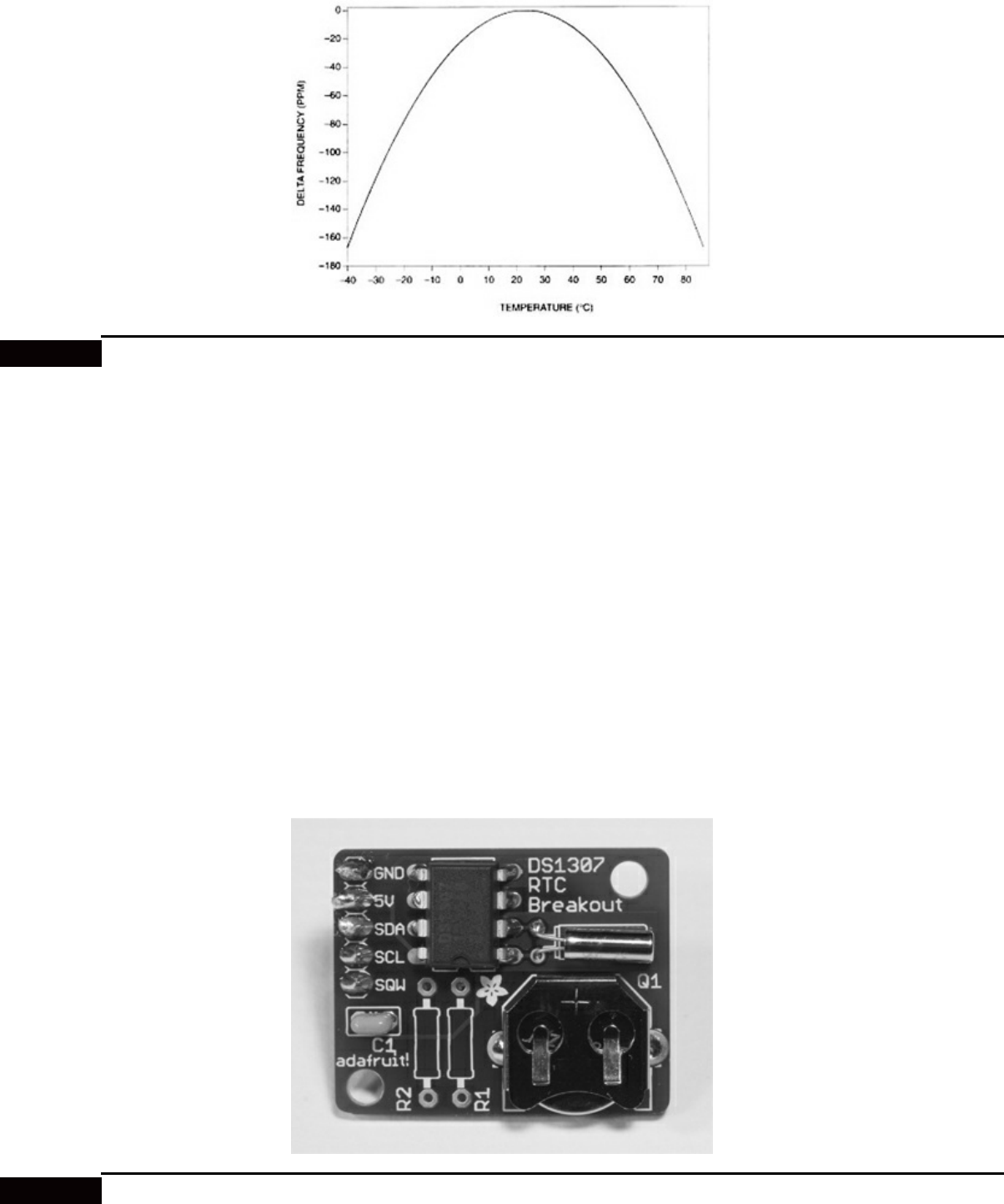
Figure 15–4 Temperature versus RTC frequency deviation.
The ± 30 seconds/month accuracy will be maintained for a RasPi operating in a home or office.
However, a RasPi that operates in severe environments should expect significant reduction in RTC
accuracy.
Another key feature of the RTC is the ability to maintain the time even if the host processor is
turned off. This is made possible by using a long-life battery to power the oscillator and non-volatile
(NV) RAM (write mode) in the DS1307 chip. A lithium coin cell battery is normally used for this
purpose after the host is powered off. A coin cell will often last for many years before exhausting its
energy. The current date and time is continually stored in the NV RAM 56-byte memory.
Figure 15–5 shows the RTC breakout board used in this project. It is built from kit number 264
purchased from Adafruit Industries. It uses the DS1307 chip along with the crystal shown in Fig. 15–3.
There are two resistors not installed, but are shown as placeholders on the PCB. This is because the
RasPi already has two pull-up resistors attached to the Serial Data Line (SDA) and Serial Clock (SCL)
control lines, negating the need for these components.
Figure 15–5 RTC breakout board.
The building kit is very easy to put together because there are only five components to install
including the coin-cell holder. Each one has a placeholder noted on the PCB. Just be very careful when
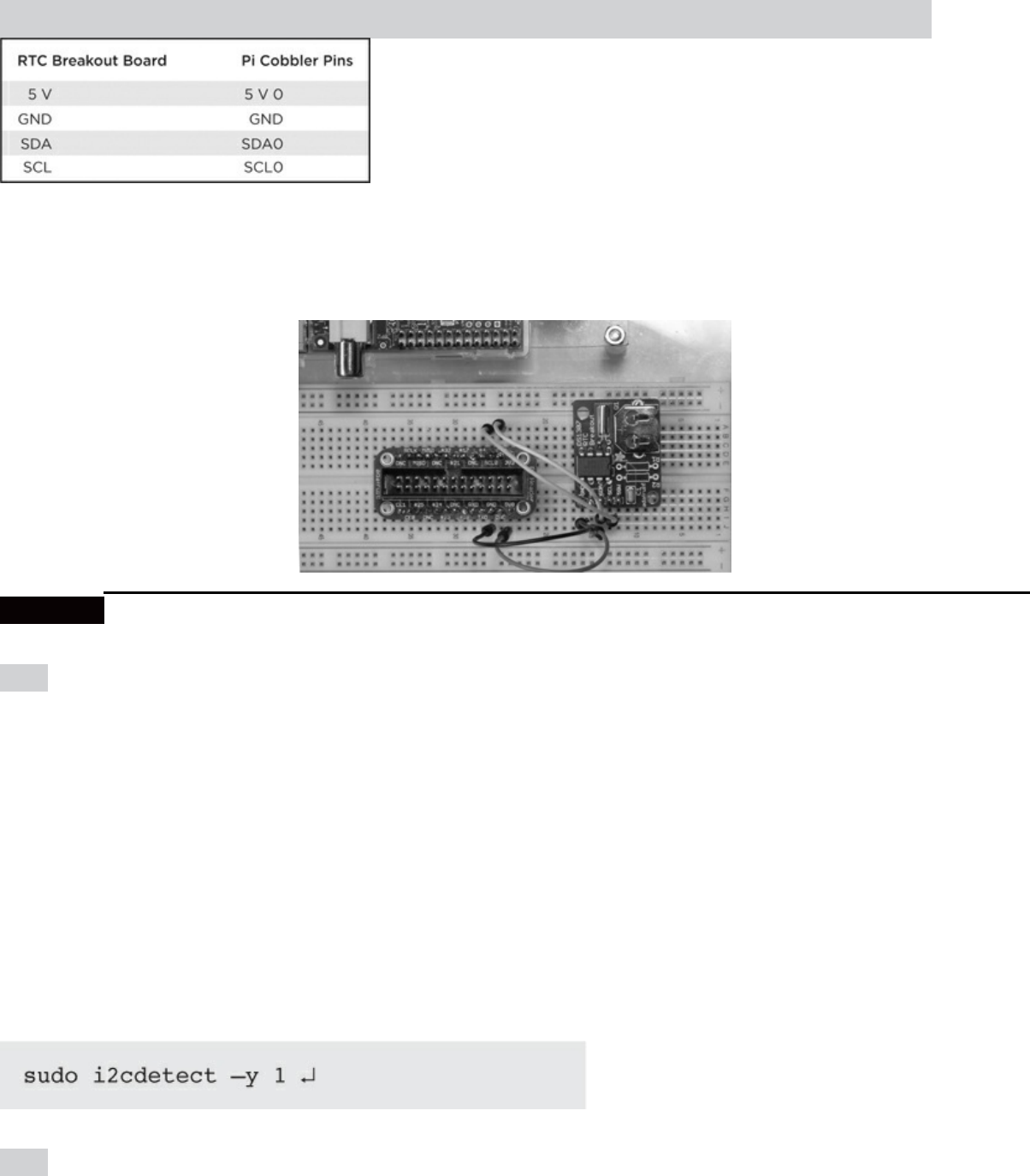
soldering the crystal to the board because you do not want to overheat it or excessively bend the
fragile leads.
The RTC breakout board is connected to the RasPi by using a solderless breadboard with the Pi
Cobbler prototype connector. The wiring connections are detailed in Table 15–1.
Table 15–1 RTC to RasPi Connections
The physical configuration is shown in Fig. 15–6 without the ribbon cable attached to show all the
jumper wires.
Figure 15–6 RasPi and RTC setup.
NOTE Even though the RTC is powered by the 5-V RasPi power supply, the I2C signal levels are
still at an acceptable 3.3-V level.
RTC Software
The procedure discussed in this section is based upon a fine tutorial developed by LadyAda on the
Adafruit website. The RTC chip uses the I2C protocol for communication with the RasPi, which means
that the basic I2C software must be installed in the Wheezy Raspian distribution. The detailed I2C
installation procedure shown in Chap. 12 should be accomplished before you proceed with the
following software instructions.
Enter the following command in a terminal window to confirm that the RTC is detected by the I2C
bus:
NOTE Note Replace the 1 with a 0 if a rev 1 RasPi is being used.

Figure 15–7 is a screenshot showing that the RTC board was detected at address 0 × 68.
Figure 15–7 Detecting the RTC board on the I2C bus.
The next step is to load the RTC module software, which is done by entering this command:
The modprobe application loads what is known as a loadable kernel module (LKM), which in this
case, is named rtc-ds1307. You may have to run the following two commands if the LKM is not
found:
The next step is to instantiate the RTC object, which you must do at the root level using the
following commands:
NOTE i2c-1 is for a rev 2 RasPi. Use i2c-0 for a rev 1 RasPi.
You may now check the time stored in the RTC by typing the following:

The RTC should report back, Jan 1 2000, if it has not been previously set. Figure 15–8 is a
screenshot showing all the previous commands as well as the time. Notice that it reported a date
different from Jan 1 2000 because I had rebooted the RasPi in the setup.
Figure 15–8 Screenshot of the RTC setup.
You will now need to set the current date and time for the RTC. This may be done in two ways.
The first and probably easiest is to connect the RasPi to an Internet accessible network in order to set
the current date and time. Simply plug in an Ethernet cable or a Wi-Fi adapter, and let the RasPi seek
out and set its clock using the NTP service. After a minute or two, the RasPi should have acquired and
set its system time to the current date and time.
The second method of setting the date and time is simply to enter it at a terminal prompt using the
following sample as guidance:
The RTC will automatically reset its internal memory based upon your manual input.
You should always check on the system time after setting it by entering:
You may also force the RTC clock to synchronize to the system date and time by entering the
following:

Next check the time reported back by the RTC by typing in the following:
Figure 15–9 is a screenshot showing the set time command as well as the time reported back by
the RTC.
Figure 15–9 Screenshot of setting and checking the RTC date and time.
The next portion of this procedure concerns how to permanently configure the RasPi to use the
RTC board. The rtc-ds1307 module must first be added to the LKM list that is stored in the
/etc/modules file. To do this, edit the modules file by adding a line, “rtc-ds1307,” at the end of the list.
Figure 15–10 shows this edit using the nano editor.
Figure 15–10 LKM module screenshot.
The last remaining step is to edit a file named rc.local that is located in the/etc directory. This file

contains scripts that are run at the end of the boot process, which is how the RTC object will be
created once the following script lines are entered into the rc.local file:
NOTE i2c-1 is for a rev 2 RasPi. Use i2c-0 for a rev 1 RasPi.
Figure 15–11 shows this edit using the nano editor.
Figure 15–11 The edited rc.local file screenshot.
I shut down the RasPi after completing the previous configuration steps and waited until the next
day to restart the system in order to check the RTC function. Figure 15–12 shows that the date
function worked perfectly, indicating that the RTC was performing as expected and accurately
tracking the passage of time.
Figure 15–12 Screenshot of the date function.

Introduction to the Network Time Protocol (NTP)
NTP is probably the most common way time is set and maintained in today’s modern networks,
including the Internet. The protocol itself was created by Dr. David Mills at the University of
Delaware in 1985. Currently, Dr. Mills is an emeritus professor at the University of Delaware, where
he was a full professor from 1986 to 2008. He, along with a team of volunteers, is still involved with
the development and maintenance of NTP.
In reality, the NTP is implemented by a layered hierarchical network of computers, each one of
which is set up as a time server running the NTP protocol. Figure 15–13 is a representative block
diagram of this hierarchy.
Figure 15–13 NTP server hierarchy.
The layers in the NTP hierarchy are referred to as strata, starting with 0 and progressing to as high
as 256. In reality, layers 16 or higher are considered unsynchronized and are probably not
implemented. The highest layer, shown in the figure, is stratum 0, which consists of clock sources
from which the actual time is referenced. There are a variety of primary clock sources available in the
public NTP network, including sophisticated atomic clocks, GPS clocks, and the National Institute of
Standards and Technology (NIST) time signal radio station WWVB to name a few. Stratum 1 connects
directly to the clock sources and usually is a high-quality clock server source, but this is not always
the case. NTP does not inherently guarantee that a server situated in the lowest-numbered stratum will
provide the highest quality or most reliable clock signal. The reason for this is that the servers are
networked and are constantly crosschecking the clock signals from other servers, both in their same
stratum as well as in the strata situated logically above them. Poor-quality clock signals will be
rejected from adjoining servers, and only quality signals will be passed on to other servers. Thus, it is
entirely possible to have a server on a lower-level stratum (with a higher stratum number) provide a
higher-quality clock signal than a server on a stratum closer to the primary clock sources. Don’t worry
if all this sounds a bit confusing; I provide it only as background to promote your awareness of the
underlying NTP structure.
A series of public NTP servers connected to the Internet are known as pool servers. The URLs for
these servers are stored in the ntp.conf file located in the /etc directory. Figure 15–14 is a screenshot
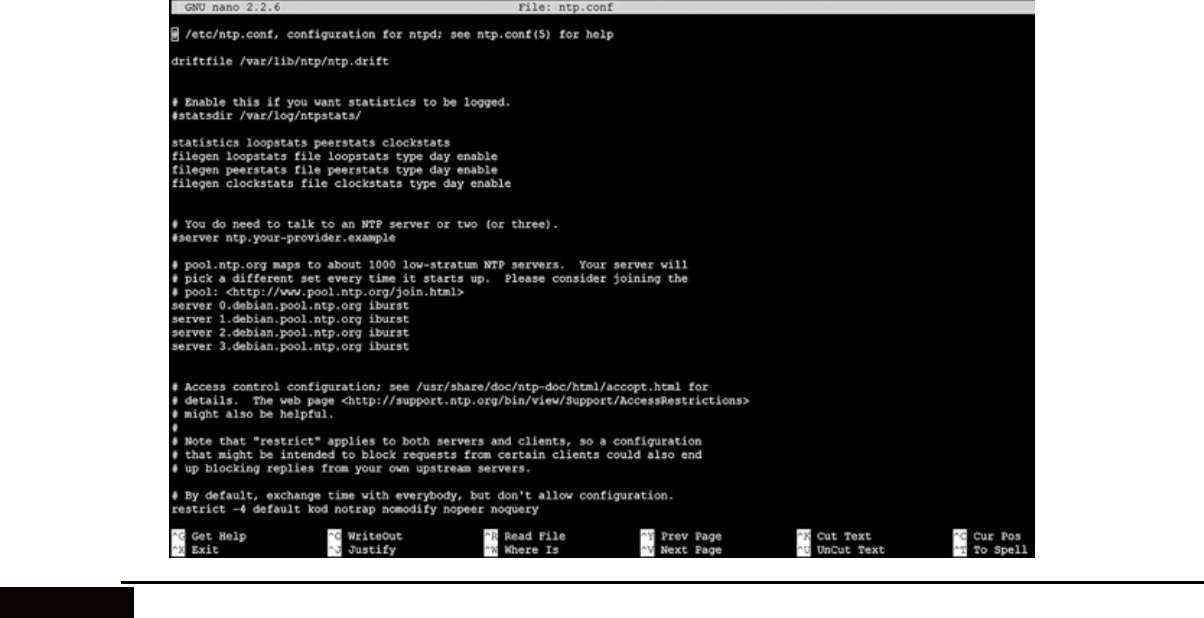
of this file.
Figure 15–14 Screenshot of the ntp.conf file.
There are four NTP servers listed, starting with 0.debian.pool.ntp.org through
3.debian.pool.ntp.org. The RasPi will typically connect to one or more of these servers each time it is
booted. I am unsure whether the lead number 0 to 3 represents a stratum level; however, it is
irrelevant, as the NTP software will automatically select the best clock signal and use it.
The RasPi NTP software is run as a daemon and requires no manual intervention for normal
operation. The software is formally named ntpd with the “d” indicating a daemon application.
Building a RasPi NTP Server
I will show you how to build an NTP server that can provide accurate clock signals without the need to
connect to one of the pool servers described above. Sometimes it is necessary to provide an
independent NTP network server that does not rely on an Internet connection and can serve as a
central clock source for all networked computers. There are commercial NTP servers available, but
they typically cost anywhere from $1500 to $2000. Using a RasPi with a GPS will drop the cost to less
than $100 and will provide the desired functionality.
The GPS used in this stage of the project is the same model previously discussed in Chap. 5. I will
not repeat all the background and setup information provided in that chapter and will simply assume
that you will follow those instructions in establishing the GPS to RasPi UART communications link.
Refer to Fig. 5–15 in Chapter 5 to see the essential wiring required to connect the GPS module and the
RasPi. You should ensure that the gpsd package is installed on the RasPi, as you will need it to process
the GPS clock data. I recommend that you also install the CuteCom terminal control program. Using
that program will enable you to easily confirm that both the UART link and the GPS module are
functioning properly. Again, simply follow the procedures detailed in Chap. 5 to set up the GPS
module and the RasPi to use the UART communications device ttyAMA0.
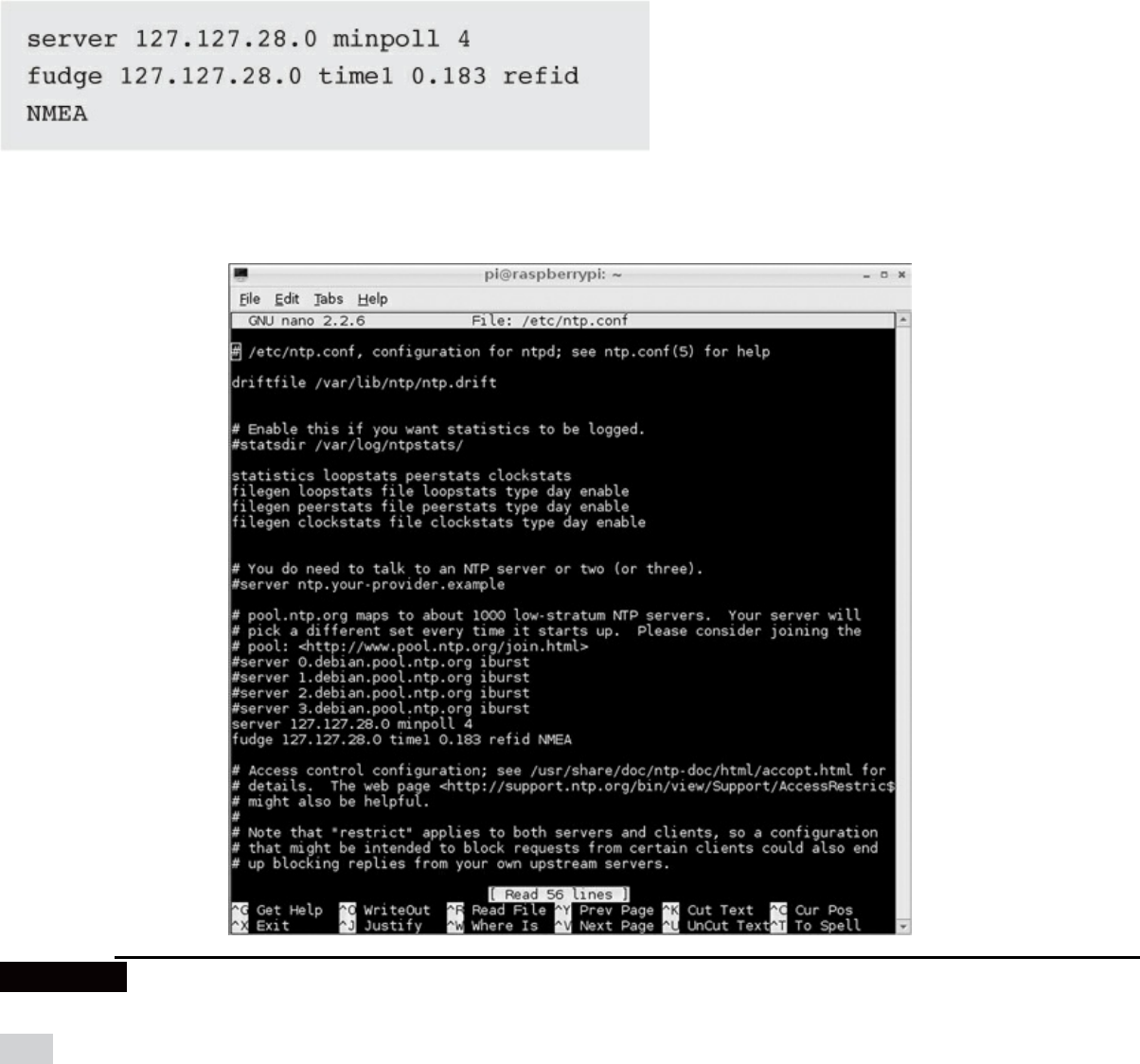
The ntp.conf file located in the etc directory must be edited to force the ntpd application to use the
GPS instead of one of the pool servers. I commented out all the pool servers and added the following
two lines to that section of the file:
Figure 15–15 is a screenshot of the edited ntp. conf file.
Figure 15–15 Screenshot of the ntp.conf file.
NOTE The pool servers will be uncommented after the GPS time server functionality has been
proven, since it is good practice to leave these servers available.
Next the following series of commands will set up and run the GPS module as a clock source for
the RasPi. Ensure that no Wi-Fi adapter or Ethernet cable is attached because they could provide a
clock source if you didn’t comment out the pool servers listed in the ntp.conf file. All the commands
should be entered in the sequence shown:

The killall gpsd command stops the gpsd daemon so that a logical socket link may be
established by the next command. The /dev/ttyAMA0 parameter in the second command specifies that
the GPS data will be sourced from the UART. The last two parameters, –F /var/run/gpsd.sock, set
up a control socket for device adds and removals with the full path description to the socket. The last
command starts the ntp daemon, at which point it will attempt to retrieve the clock signal from the
source specified in the ntp.conf file.
The GPS module will continue to blink its LED until a solid lock is obtained on four or more
satellites. A reliable time is not available until the LED stops blinking, which could take several
minutes depending on the antenna signal strength. I used an external antenna and was able to
consistently obtain a good lock in about two minutes. You may now use the date command to check on
the precision time that is obtained from the GPS system.
The ntp.conf file must now be edited if all is well at this stage in the process. The following line
indicates that the RasPi should be available as a stratum 10 server to other networked computers if
desired:
Additionally, uncomment and edit the following existing line in ntp.conf:
I changed this line to:
This line allows the NTP server to broadcast the time to all computers located on the same subnet
as the server. Your subnet may be slightly different. Type these three commands to ensure that the
NTP server is operating:

I recommend using a program named ntpdate to confirm that a client computer is connected to and
using the NTP server. Install the ntpdate program by typing:
Type the following command on the client computer (another RasPi) that is intended to use the
NTP clock signal to confirm it is being received:
The local IP address for my NTP server is 192.168.1.43. Figure 15–16 is a screenshot of the
ntpdate program output, clearly showing that the NTP service is being provided by the RasPi NTP
server.
Figure 15–16 The ntpdate program output.
Radio Receiver Clock Source
Originally there was an additional section to this chapter that dealt with a radio receiver clock
source, which was fixed tuned to WWVB, the U.S. synchronized time source located in Ft.
Collins, CO. WWVB transmits a digital clock signal on 60 kHz 24 hours per day, seven days a
week. There are several low-cost receiver kits available that can receive WWVB throughout the
lower 48 states. I used a $15 kit that is available from PV Electronics, which is actually situated
in the UK. I stated all of the above because even though the receiver functioned properly, the
RasPi itself generated so much radio frequency interference (RFI) that it literally swamped out
the WWVB signal. The RasPi is FCC certified to be compliant with class B, low-power consumer
devices; however, it is not required to be tested for signal emission interference (EMI) at levels
lower than 450 kHz. Obviously, 60 kHz is much lower than the minimum EMI requirement, and
thus, it acts as an inadvertent interference, while being perfectly compliant with all FCC
regulations for this device type. The conclusion is not to use the RasPi as a WWVB controller
unless you are willing to experiment with various shielding techniques to mitigate the inadvertent
interference, which I did without a lot of success.
Summary
The first part of the chapter covered how to set up a hardware clock to be used with the RasPi because
it does not incorporate one and would lack a time capability if not connected to the Internet. The
hardware clock was based on the DS1307 chip and used the I2C bus to communicate with the RasPi.
The clock board also incorporated a lithium coin cell battery that maintained the time even if the
RasPi was turned off.
Next, I presented a brief background about the origin and function of the Network Time Protocol
(NTP) that the RasPi uses when connected to the Internet. The NTP is implemented on the RasPi by
the ntpd daemon, which is configured by a file named ntp.conf located in the etc directory.
Finally, I presented a section on how to create your own NTP server based upon a GPS clock
source. The GPS module, first shown in Chap. 5, was the source used. It communicated with the RasPi
using the UART link. Several changes had to be made to the ntp.conf file to enable the NTP server
function. I finished the section discussion by demonstrating how to install and use the ntpdate
application to test and prove that a client computer on the local network was actually using the RasPi
NTP server.

Index
Please note that index links point to page beginnings from the print edition. Locations are
approximate in e-readers, and you may need to page down one or more times after clicking a link to
get to the indexed material.
# (comments), 27
== (equal signs), 37
. (Linux command), 17
.. (Linux command), 17
A
Absorbed dose (radiation), 176, 177
Accessing GPIO pins, 23–26
Acknowledgment (ACK) packets, 89, 90
Adafruit Industries, 16, 23, 61, 62, 65, 115–117, 156, 161, 171, 189, 190
ADC (see Analog-to-digital conversion)
Advanced Linux Sound Architecture (ALSA), 31–34
Advanced packaging tool (apt), 26
Aeon Labs, 94
alarm.py, 111, 112
Alpha particles (radiation), 175
ALSA (see Advanced Linux Sound Architecture)
amixer app, 33
Amp (electronic amplifier) circuit, 76
Analog audio output, 7
ALSA, 31–34
frequency response, 33–34
testing, 33
Analog composite video connector, 6–7
Analog-to-digital conversion (ADC):
for earthquake detector project, 76–77
on PIC microprocessor, 76
in weather station project, 130
Android, remote logic control with, 147–150
aplay app, 35
Application Layer Protocol Rules, 67
(See also NMEA 0183 standard)
apt (advanced packaging tool), 26
apt-get command, 26
Arduino series, 13
Atomic clocks, in GPS system, 60
Audio:
analog, 7, 31–34
camera controller project, 48–49, 52–54
file formats for, 34–37
HDMI for, 5–6
MP3 player project, 31–41
Audio connector, 7
B
Back feeding, 165
Battery power, 41, 158, 165, 189
BCM2835 microprocessor (Broadcom), 2–3, 20
Becquerel (Bq), 176
Beta particles (radiation), 175
Binary data storage, 81–82
Bit-banging, 13, 80
Blinking LEDs (see LED blinker project)
Bluetooth:
defined, 156
robotic car project, 167–171
Boe Bot chassis, 156, 157
Bq (becquerel), 176
Broadcom, 1, 2
Broadcom BCM2835 microprocessor, 2–3, 20
Broadcom VideoCore IV GPU, 3
Browser, testing HTTP web server with, 150–153
Bus network, 12
Buy vs. build decision, for camera controller project, 48
C
Camera:
digital serial, 8, 9
webcam, for home security, 103–104, 106, 109–111
Camera controller project, 43–56
audio module, 48–49
electronic flash, 45–47
interface connections, 50–55
laser module, 49–50
optoisolator interfaces, 47–48
project requirements, 44
shutter operation, 44–45
stop-action pictures, 43–44
time-lapse function, 55
Camera Serial Interface (CSI-2), 8
CameraControl.py, 52–53
Canon, 47
Canon 40D DSLR, 44, 45
Canon 420EX electronic flash, 45–46
cat filename (Linux command), 17
cd (Linux command), 17
cd .. (Linux command), 17
CDMA (Collision Detection Multiple Access), 89, 90
CEC (Consumer Electronics Control), 6
Celestial almanac, 60
cgps app, 69
Chassis (robotic car project), 156–160
Ci (curie), 176
Class designations (SD cards), 4
Clocks:
atomic, in GPS system, 60
radio receiver clock source, 197
real-time, 187–193
(See also Time keeping project)
Collision Detection Multiple Access (CDMA), 89, 90
Comments (#), 27
Comparisons, equal signs for, 37
Compass system, 57
Conditional statement, 29
Connections, 2
Connectors (RasPi), 4–10
analog composite video, 6–7
audio, 7
Ethernet and USB, 7–8
for future expansion, 8–9
GPIO interface, 9–10
HDMI, 5–6
power, 5
Console player apps, 36
Consumer Electronics Control (CEC), 6
Control voltages (for electronic flash), 47
Controllers:
camera controller project, 43–56
home security controller project, 103–113
local and remote logic controller project, 139–153
NFC/RFID reader project, 116
in Z-Wave networks, 91–92
CSI-2 (Camera Serial Interface), 8
Curie (Ci), 176
Current level (for optoisolators), 47
Current limits, 10–11
CuteCom, 65–67
cwiid package, 169
D
DAC (digital-to-analog converter), 77
Dallas Semiconductor, 129, 187
Data analysis (earthquake detector project), 82–83
Data storage, 81–82
Dawson, Michael, 17
DC (direct current), 5
DHCP (Dynamic Host Configuration Protocol), 8
Differential mode (ADC), 77
Digital repeater (digipeater), 88
Digital signal voltage level, 10
Digital Single Lens Reflex (DSLR) shutter, 44–45
Digital Video Interface (DVI), converting from HDMI to, 6
Digital-to-analog converter (DAC), 77
Dilution of precision (DOP) numbers, 71
DIP (dual in-line package), 47
Direct current (DC), 5
Display Serial Interface (DSI) connector, 9
DoD (U.S. Department of Defense), 57
Donationware, 147
DOP (dilution of precision) numbers, 71
Downey, Allen, 17
Downloading GPIO library, 25–26
DRAM (dynamic random access memory), 3
DrGPIO app, 147, 150
Drive motors (robotic car project), 156–160
DS18B20 chip, 128, 130–131
DS1307 chip, 187–189
DS2438A chip, 128–130
DSI (Display Serial Interface) connector, 9
DSLR (Digital Single Lens Reflex) shutter, 44–45
Dual in-line package (DIP), 47
DVI (Digital Video Interface), converting from HDMI to, 6
Dynamic Host Configuration Protocol (DHCP), 8
Dynamic random access memory (DRAM), 3
E
Earthquake detector project, 73–85
analog-to-digital conversion for, 76–77
connecting/testing MCP3008, 79–82
operational system, 83–84
seismic data analysis, 82–83
seismic sensor design, 75–76
seismology basics, 73–74
Serial Peripheral Interface for, 78
8 Channel I/O board:
for logic controller project, 139, 140, 144–146
remote access to, 151–153
test sequences for, 144–146
Einstein, Albert, 60
Electrical buffers, 23
Electronic amplifier (amp) circuit, 76
Electronic flash, 45–47, 52
E-mail notification:
home security system project, 109–111
NFC/RFID reader project, 123
End of Frame (EoF) byte, 89
Ephemeris, 60
Ethernet connector, 7–8
in local and remote logic controller project, 140
and 1-Wire connection, 126
Expansion connectors, 8–9
extract_data.py, 122–123
F
Fabless suppliers, 2
Filesystem in Userspace (FUSE), 143–144
Flash, electronic, 45–47, 52
Flip-flop operation, 49
Floating inputs, 150
4-wire serial bus, 12
(See also Serial Peripheral Interface (SPI))
Freescale Semiconductor, 128
Frequency response (of analog audio), 33–34
Full-duplex communication, 78
FUSE (Filesystem in Userspace), 143–144
Future expansion connectors, 8–9
G
Galileo system, 57
Gamma rays (radiation), 175
Garden-gate seismic sensor, 75
Gas-tight connections, 24
Geiger counter:
K2645 Geiger-Muller counter, 175, 177–179
portable, 183–185
geiger.py, 180–181
General Purpose Input/Output (GPIO) connector, 9–10
accessing pins, 23–26
current limits, 10–11
GPIO library, 25–26
input state for pins at power on, 27
interrupts, 11, 12
isolating pins, 47–48
making pins programmable, 24–25
Pi Cobbler prototype connector for, 31, 32
pin assignments, 9
pin expansion, 11
voltage levels, 10
General relativity, theory of, 60
Global Positioning System (GPS):
defined, 57
functioning of, 58–60
(See also GPS project)
Global Specialties, 48
GLONASS system, 57
Gmail, 109
Google, 147, 158
GoPro Hero3, 173
GPIO connector (see General Purpose Input/Output connector)
GPIO library, 25–26
GPIO pin expansion, 11
GPS (see Global Positioning System)
GPS module:
for NTP server, 195–196
Ultimate GPS receiver, 61–66
GPS project, 61–71
displaying data, 69–70
gpsd apps, 69–71
history of, 57–58
NMEA protocol, 66–69
packet monitor, 70–71
Ultimate GPS receiver, 61–66
GPS sensor (for robotic car), 173
gpsd apps, 69–71
gpsmon app, 70
Graphics processing unit (GPU), 2, 3
Broadcom 2835 microprocessor as, 2
Broadcom VideoCore IV, 3
on SoCs, 1
Gray (Gy), 176
GSK-409 audio control switch, 48, 49
GUI desktop, 15, 16
Gy (gray), 176
H
Half-life, 175
Hardware, 2–13
Broadcom 2835 microprocessor/GPU, 2, 3
connectors, 4–10
current limits, 10–11
digital signal voltage level, 10
GPIO pin expansion, 11
interrupts, 1, 12
Linux’s treatment of, 143
memory, 3–4
Pi Cobbler, 31, 32
prototype board (Pi Plate), 23, 24
serial protocols, 12–13
(See also individual projects)
HD (high-definition) video, 3
HDMI (High-Definition Multimedia Interface) connector, 5–6
HDMI-CEC compliant devices, remote control for, 6
Headless login, 96
“Hello World” program, 18, 19
Hensley, Brian, 169
High-Definition Multimedia Interface (HDMI) connector, 5–6
High-definition (HD) video, 3
High-level languages, 17
High-voltage optoisolator circuit, 48
HIH-4021-001 sensor, 128
Hive behavior (for robotic car), 173
Hobby Boards, 125, 139, 140
Home automation project, 87–101
Open Z-Wave software, 96–101
RasPi and Z-Wave interface, 94–95
SSH login, 95–96
Z-Wave mesh network for, 87–94
Home automation system:
defining, 87
popular technologies for, 89
tasks handled by, 88
Home ID (Z-Wave), 91
Home security controller project, 103–113
additional sensors, 111, 113
laser trip assembly, 104–105
laser trip program, 111
Motion (software package), 105–109
protected security zone in, 104
webcam selection, 103–104
webcam viewing, 109–111
Honeywell, 128
Hop kill, 88
I
I2C (see Inter-Integrated Circuit)
IDLE, 18–20
desktop icons, 18
running as roots, 28
if/else conditional test, 38
Image file, 15–16
import, 29
Industrial, Scientific, and Medical (ISM) band, 87, 115
Initial startup, 13–15
Inputs:
5-V device, 10
floating, 150
switch, 37–38
INSTALL.txt. file, 26
INSTEON technology, 89
Intellectual Property (IP), 1, 2
Inter-Integrated Circuit (I2C), 9
initial test, 162–163
robotic car project, 161–163, 167
serial protocol, 12
and servo controller, 161–162
Internet Protocol (IP) address, 8
Interpreted languages, 18
Interrupts, 11, 12
Intrusion detection (see Home security controller project)
Inverted pendulum seismic sensor, 75
Ionizing radiation, 175
IP (Intellectual Property), 1, 2
IP (Internet Protocol) address, 8
IR light (for robotic car), 173
IR sensor (for robotic car), 173
IRNSS system, 57
ISM (Industrial, Scientific, and Medical) band, 87, 115
ISO seven-layer network model, 88, 89
K
K400r keyboard/mouse combination (Logitech), 166, 167
K2645 Geiger-Muller counter, 175, 177–179
L
LadyAda, 190
Laser module (for camera controller), 49–50, 52, 53
Laser trip devices:
for camera controller project, 48–50
for home security controller, 104–105, 111
LCD (liquid crystal display), 40
LDT0-028K sensor, 75, 76
Learn.Adafruit.com, 79
“Least privilege” principle, 16
Least significant bit (LSB), 78
LED (light-emitting diode), 8
LED blinker project, 23–29
blinking the LED, 28–29
preparation for, 23–26
turning on the LED, 27–28
LG, 6
libnfc, 116–121
data communication with, 116
installing, 117–121
Light-emitting diode (LED), 8
(See also LED blinker project)
lightscontrol app, 97–99
Lightweight X11 Desktop Environment (LXDE), 16–17
Li-ion charger board, 157, 158
Linux, 1, 13
ALSA, 31–34
commonly used commands, 17
file names in, 25, 26
fundamentals of, 16–17
hardware treatment by, 143
initial startup, 13–15
preparing SD cards, 15–16
on preprogrammed SD card, 3, 4
user access, 16
Liquid crystal display (LCD), 40
Lithium-ion polymer (Li-Po) battery, 165, 166, 183, 185
LM7805 three terminal chip, 165
Loadable Kernel Modules (LKM), 32, 190
Local and remote logic controller project, 139–153
Android remote control, 147–150
FUSE, 143–144
hardware, 143
and Linux, 143
1-Wire external control board, 139–141
owfs installation and configuration, 141–143
Python test program, 146
sniffer monitoring, 147
test sequences for 8 Channel I/O board, 144–146
testing web server with browser, 150–153
Login:
headless, 96
SSH, 95–96
Logitech C920 webcam, 103
Logitech K400r keyboard/mouse combination, 166, 167
Looping, 29
Lossless compression, 34, 35
Lossy compression, 34, 35
Loughlin, Thomas, 96, 97, 99
Low Voltage Differential Signaling (LVDS) serial display, 9
Low-level languages, 17
1s (Linux command), 17
LSB (least significant bit), 78
LVDS (Low Voltage Differential Signaling) serial display, 9
LXDE (Lightweight X11 Desktop Environment), 16–17
M
Magnetic induction, 115
Master devices:
in earthquake detector project, 78
in weather station project, 129
Maxim, 129
Maxim DS18B20 chip, 128, 130–131
Maxim DS2438A chip, 128–130
MCl46818 chip, 187
MCP3008 ADC, 77
connecting/testing, 79–82
as slave device, 78
Measurements Specialties Corp., 75
Member (of an operator), 29
Memory, 1, 3–4
Metal-oxide-semiconductor field-effect transistor (MOSFET), 131–132
Micro USB power connector, 5
microBuilder.eu, 115, 116
Microchip, 76, 77
Microprocessors:
Broadcom 2835, 2–3
PIC24HJ64GA002, 76
on SoCs, 1
in Z-Wave devices, 91
Microrem (mrem), 182
Mills, David, 193
mkdir directory (Linux command), 17
modprobe app, 32, 190
Moment magnitude scale, 73
Monitors:
analog, 7
choices of, 6
Monk, Simon, 17
MOSFET (metal-oxide-semiconductor field-effect transistor), 131–132
Most significant bit (MSB), 78
Motion (software package), 103, 105–109
features of, 106
setup of, 106–109
Motorola Corporation, 187
MP3 files:
playing, 35–37
WAV files vs., 34–35
MP3 player project, 31–41
ALSA, 31–34
audio file formats, 34–37
expanding, 40–41
hardware switches, 37–38
and operational speed of RasPi, 38–39
player schematic, 40
prototype connector, 31, 32
requirements, 39–41
stereo speaker, 31–34
testing, 40
writing program, 39–40
MP3_Player.py, 39–40
MP601 operational amplifier, 76
mpg 123, 35–37, 40
mpg 321, 35
MPXA4115A sensor, 128
MSB (most significant bit), 78
Multidrop network, 12
N
NACK (Negative Acknowledgment) packets, 89, 90
nano (text editor), 17, 19–20
National Marine Electronics Association (NMEA), 58, 66
(See also NMEA 0183 standard)
Near Field Communications (NFC):
data communications flow, 116
defined, 115
functioning of, 115
hardware, 115–116
(See also NFC/RFID reader project)
Negative Acknowledgment (NACK) packets, 89, 90
Network Time Protocol (NTP), 187, 193–197
Newton, Rona, 75
NFC (see Near Field Communications)
NFC Shield, 115
nfc-poll program, 121–122
NFC/RFID reader project, 115–124
future expansion, 122–123
hardware installation, 121
initial checkout, 121–122
libnfc installation, 116–121
NFC data communications flow, 116
NFC hardware, 115–116
passive and active modes of operation, 115
project program, 122
Nikon, 47
NMEA (National Marine Electronics Association), 58, 66
NMEA 0183 standard, 66–69
GPS message types, 68
latitude and longitude formats, 67–68
parsed GPS messages, 68–69
NTE3041 optoisolator, 47, 48
NTP (Network Time Protocol), 187, 193–197
ntp.conf, 194–196
ntpdate, 196
NXP PN532 microcontroller, 116
Nyquist rate, 77
O
Object-oriented programming, 29
Occidentalis GUI desktop, 16
Occidentalis v.2, 161
One-third octaves, 33, 34
1-Wire external control board, 139–141
1-Wire File System (see owfs)
1-Wire Sniffer, 132, 135–137, 140, 143
1-Wire weather station project, 125–138
design of, 125–129
future expansion, 138
1-Wire protocol, 129–132
1-Wire Sniffer, 132, 135–137
owfs software package, 133–134
packet sniffing, 135–137
setting up, 132–133
viewing weather data, 134–135
One-wire serial protocol, 16
Open Z-Wave software, 96–101
OpenGL ES 2.0 standard, 3
Operational amplifier (op amp), 76
Operational speed (of RasPi), 38–39
Operational system, for earthquake detector, 83–84
Optoisolator interfaces (camera controller project), 47–48, 51
Optotriac, 48
Oscillator and divider, 187
Output, to 5-V logical devices, 10
Overclocking, 3
ow_eight.py, 146
owfs (1-Wire File System), 125
in local and remote logic controller project, 141–143, 152, 153
in weather station project, 133–134
P
Packet sniffing (1-Wire weather station project), 135–137
Parallax, 156, 157
Parasitic power supply, 131
Password, for initial startup, 14
PCB (printed circuit board), 1
Permission Denied error, 144
Philips Company, 12
pi (user), 16
Pi Cobbler, 31, 32, 37
connection to GPS receiver, 64
in earthquake detector project, 79, 81
in NFC/RFID reader project, 121
in remote logic controller project, 149
in robotic car project, 165
in RTC project, 189
Pi Plate (see Prototype board)
PIC24HJ64GA002 microprocessor, 76
Pink noise, 33, 34
Pink-noise signal, 34
Play Store app, 147
PMS (“Poor Man’s Seismograph”), 75
PN532/NFC breakout board, 115–117, 121
Pool servers, 194, 195
“Poor Man’s Seismograph” (PMS), 75
Portable controllers, 91
Portable radiation detector, 182–185
Portable stereo speaker, 31–34
Positive power-supply voltage (Vdd), 10
Potentiometer, 76
Power connector, 5
Preprogrammed SD card, 3, 4
Print function, 18, 19
Printed circuit board (PCB), 1
Programming languages:
color coding of code, 19
high- and low-level, 17
interpreted, 18
for RasPi (see Python programming)
Programming the Raspberry Pi (Simon Monk), 17
Prolific, 62
Prototype board (Pi Plate), 23, 24, 31, 32
Pulse-width modulation (PWM), 161
Pulse Width Modulation (PWM) /Servo Driver I2C Interface board, 156, 161–163
Putty.exe, 95, 96
PV Electronics, 197
P-waves, 73, 74
pwd (Linux command), 17
PWM (pulse-width modulation), 161
PWM/Servo Driver I2C Interface board, 156, 161–163
.py extension, 19
Python programming, 13, 17–20
comments in, 27
data storage in, 81–82
looping in, 29
modifying program, 28–29
nano text editor for, 17, 19–20
saving code, 28
shell versions, 18, 19
website for, 17
writing program in, 19–20
Python Programming for the Absolute Beginner, 3e (Michael Dawson), 17
Python programs, xi
Python shell:
opening, 20
opening/running program in, 28
versions 2 and 3, 18
R
rad, 176
Radio Frequency Identification (RFID), 115
(See also NFC/RFID reader project)
Radio-frequency (RF) signals, 60
Radio-frequency (RF) transceiver, 87
Radio receiver clock source, 197
Radioactivity, 175–178
(See also Radon detector project)
Radon detector project, 175–185
initial test configuration, 179–182
K2645 Geiger-Muller counter, 178–179
modifications and expansions, 185
portable detector, 182–185
radioactivity and radon gas, 175–178
Radon gas, 175, 176
Ramsey Electronics, 48
Raspberry Pi (RasPi), 1–21
Broadcom 2835 microprocessor on, 2–3
connectors on, 4–10
current limits with, 10–11
digital signal voltage level, 10
graphics processing unit of, 2, 3
hardware for, 2–13
history of, 1
IDLE application for, 18–20
initial startup, 13–15
interrupts, 11, 12
key components/connections on, 1, 2
Linux fundamentals, 16–17
memory used in, 3–4
Model B, 11
PGIO pin expansion, 11
preparing SD card, 15–16
Python programming for, 17–20
serial protocols, 12–13
SoC chip on, 1, 2
software for, 13–20
(See also individual projects)
Raspberry Pi Foundation, 1, 11, 16
rc.local, 191
Reagan, Ronald, 57
Real-time clock (RTC), 187–193
Relativity, theories of, 60
rem (roentgen-equivalent-man), 177
Remote control:
for HDMI-CEC compliant devices, 6
home automation system controllers, 91–92
local and remote logic controller project, 147–150
of security webcam, 109
(See also Robotic car project)
Representational State Transfer (REST), 151
RF (radio-frequency) signals, 60
RF (radio-frequency) transceiver, 87
RFID (Radio Frequency Identification), 115
(See also NFC/RFID reader project)
Richter magnitude scale, 73, 74
Richter numbers, 73, 74
rm directory (Linux command), 17
rm filename (Linux command), 17
Robot_Car.py, 171–172
Robotic car project, 155–163, 165–173
block diagram, 165–167
Bluetooth software, 167–171
chassis and drive motors, 156–160
future expansions, 173
I2C software, 167
operating the car, 172–173
overview of, 155–156
program for, 171–172
servos, 156, 157, 160–163
Roentgen-equivalent-man (rem), 177
root (user), 16, 28
Root terminal, 16–17
RTC (real-time clock), 187–193
S
Sample-and-hold circuit, 77
Sample rate, 77
Samsung, 6
SAR (successive approximation register), 77
Satellites (GPS), 57
Saving code, 28
SCL (Serial Clock) control line, 189
SCR (silicon-controlled rectifier), 48
SD cards:
class designation on, 4
inserting/removing with power on, 134
preparing, using Windows PC, 15–16
preprogrammed, 3, 4
rewriting, 16
SD (Secure Digital) flash memory, 3
SDA (Serial Data) control line, 189
seconds argument, 28
Secure Digital (SD) flash memory, 3
(See also SD cards)
Secure Shell (SSH), 95–96
login for home automation project, 95–96
for NFC/RFID reader project, 117
Seismic waves, 73, 74
Seismic_Monitor.py, 83–84
Seismology, 73–74
data analysis, 82–83
sensor design, 75–76
(See also Earthquake detector project)
Sensitivity adjustment (camera controller), 49
Sensors:
HIH-4021-001, 128
for home security controller project, 111, 113
LDT0-028K, 75, 76
MPXA4115A, 128
for robotic car, 173
seismic, 75–76
Serial Clock (SCL) control line, 189
Serial Data (SDA) control line, 189
Serial interfaces, using uncommitted GPIO pins/software, 13
Serial Peripheral Interface (SPI), 9
for earthquake detector project, 78
serial protocol, 12
Serial protocols, 12–13
I2C, 12
SPI, 12
UART, 12, 13
Servos (robotic car project), 156, 157, 160–163
S5 connector, 9
Sharp, 6
Sheepwalkelectronics.co.uk, 125
Shell editor, 29
Shutter operation (camera controller), 44–45
Sievert (Sv), 177
Sigma Designs, 92
Silicon-controlled rectifier (SCR), 48
Single-ended mode (ADC), 77
SIS (SUC ID Server), 92
Sketchup, 158
Slave devices:
in earthquake detector project, 78
in weather station project, 129
in Z-Wave networks, 91
sleep (seconds) function, 28, 29
Smartphones, 115, 147–150
Sniffers:
local and remote logic controller project, 147
1-Wire weather station project, 132, 135–137
SoC (System on a Chip) technology, 1, 2
SoF (Start of Frame) byte, 89
Software, 13–20
apt-get command for, 26
IDLE application, 18–20
initial startup, 13–15
Linux fundamentals, 16–17
preparing SD card, 15–16
Python, 17–20
reuse of, 18
updates for, 26
(See also individual projects)
Soldering, 23–24
Sony, 6
SoundModTest.py, 54
Speaker, 31–34
Speaker-test app, 33
Special relativity, theory of, 60
SPI (see Serial Peripheral Interface)
SPI serial protocol, 12
SS (synchronous serial) data link, 78
SSH (see Secure Shell)
SSI (Synchronous Serial Interface), 12
(See also Serial Peripheral Interface (SPI))
Start of Frame (SoF) byte, 89
State values, 169
Static controllers, 91, 92
Static Update Controller (SUC), 92
stdin (standard input device), 41
Stereo speaker, 31–34
Stop-action pictures, 43–44
Strings, storing data as, 81, 82
Strobe, 45–47
SUC (Static Update Controller), 92
SUC ID Server (SIS), 92
Successive approximation register (SAR), 77
sudo command, 16
Super user, 16
Sv (sievert), 177
Swarm behavior (for robotic car), 173
S-waves (earthquakes), 73, 74
Switches, 37–38, 48, 49
Synchronous serial (SS) data link, 78
Synchronous Serial Interface (SSI), 12
(See also Serial Peripheral Interface (SPI))
system() function, 39
System on a Chip (SoC) technology, 1, 2
T
Target, position, and velocity (TPV), 70
Targus Bluetooth adapter, 167–169
Tera Term, 62, 63, 65, 66, 135–137
Terminal windows, 16–17, 96
Test_ADC.py, 79–83
Test_File_ADC.py, 81, 82
Test_Switch.py, 37–38
Text, displaying, 18
TFT (thin-film transistor) display, 155, 165
Theory of general relativity, 60
Theory of special relativity, 60
Thin-film transistor (TFT) display, 155, 165
Think Python (Allen Downey), 17
Threads in Motion software, 106
TID (total ionizing dose), 176
Time dilation, 60
Time keeping project, 187–198
NTP, 193–197
RTC, 187–193
Time library, 29
Time-lapse photography, 55
TimeLapse.py, 55
time.sleep (.5), 29
Total ionizing dose (TID), 176
Townsend, Kevin, 117
TPV (target, position, and velocity), 70
Trimble, 158
U
UART (see Universal Asynchronous Receiver/Transmitter)
Ultimate GPS receiver:
for GPS project, 61–66
for robotic car project, 173
Ultrasonic sensor (for robotic car), 173
Uncompressed audio files, 34, 35
Universal Asynchronous Receiver/Transmitter (UART), 9
in GPS receiver, 61–64
in NFC/RFID reader project, 117, 121
serial protocol, 12, 13
in time keeping project, 195
Universal Powerline Bus (UPB) technology, 89
Universal Serial Bus (USB) connector, 7, 8
University of Cambridge Computer Laboratory, 1
UPB (Universal Powerline Bus) technology, 89
Updating software, 26
Upton, Eben, 1
Uranium ore, 175, 176
U.S. Department of Defense (DoD), 57
USB connector, 7, 8
USB hub, 8
User name, for initial startup, 14
V
V (voltage), 5
Variable resistor, 76
Vassallo, Conrad, 97, 99
Vdd (positive power-supply voltage), 10
Veho 360
speaker, 31, 32
Velleman, 175
VGA (Video Graphic array), 6
Video:
HDMI for, 5–6
for robotic car, 173
Video connector, 6–7
Video Graphic array (VGA), 6
Video monitor, choices for, 6
VideoCore IV GPU (Broadcom), 3
Viewing:
video from home security webcam, 109–111
weather station project data, 134–135
Virtual comm port, 63
Volt-ohm meter (VOM), 51
Voltage (V), 5
Voltage levels:
digital signal, 10
for electronic flash, 47
GPIO, 10
for optoisolator, 48
Voltage output meter (VOM), 80
W
Wall wart power supply, 126
Waveform Audio File Format (WAV) files:
MP3 files vs., 34–35
playing, 35
Weather station project (see 1-Wire weather station project)
Web server, testing with browser, 150–153
Webcam (home security controller):
with Motion, 106
selection of, 103–104
viewing video from, 109–111
WebIOPi, 147–149, 151
Wheezy, 95, 96, 117, 155, 161, 187, 190
while True, 29
White noise, 33, 34
Wi-Fi adapter (for robotic car), 173
Wiimote, 155, 156, 166, 169–173
Wiimote_Test.py, 170–171
win32diskimager.exe, 15
WWVB, 194, 197
X
X-10 technology, 89, 92
Z
Zensys, 92
ZigBee technology, 89
ZOC, 62, 64
Z-Stick, 94–95
ZW0301 microcontroller chip, 92, 93
ZW3102N module, 92–93
Z-Wave technology:
“basic” server, 99–101
basics of operation, 88–91
defined, 89
device attributes, 98
Home ID in, 91
lightscontrol app, 97–99
mesh network, 87–94
