AES 122 Farina Advancements In Impulse Response Measurements By Sine Sweeps 226 AES122
User Manual: Advancements in impulse response measurements by sine sweeps Angelo Farina's Publications
Open the PDF directly: View PDF ![]() .
.
Page Count: 21
Audio Engineering Society
Convention Paper
Presented at the 122nd Convention
2007 May 5–8 Vienna, Austria
The papers at this Convention have been selected on the basis of a submitted abstract and extended precis that have been peer
reviewed by at least two qualified anonymous reviewers. This convention paper has been reproduced from the author's advance
manuscript, without editing, corrections, or consideration by the Review Board. The AES takes no responsibility for the contents.
Additional papers may be obtained by sending request and remittance to Audio Engineering Society, 60 East 42nd Street, New
York, New York 10165-2520, USA; also see www.aes.org. All rights reserved. Reproduction of this paper, or any portion thereof,
is not permitted without direct permission from the Journal of the Audio Engineering Society.
Advancements in impulse response
measurements by sine sweeps
Angelo Farina1
1 University of Parma, Ind. Eng. Dept., Parco Area delle Scienze 181/A, 43100 PARMA, ITALY
farina@unipr.it
ABSTRACT
Sine sweeps are employed since long time for audio and acoustics measurements, but in recent years (2000 and
later) their usage became much larger, thanks to the computational capabilities of modern computers. Recent
research results allow now for a further step in sine sweep measurements, particularly when dealing with the
problem of measuring impulse responses, distortion and when working with systems which are neither time
invariant, nor linear.
The paper presents some of these advancements, and provide experimental results aimed to quantify the
improvement in signal-to-noise ratio, the suppression of pre-ringing, and the techniques employable for performing
these measurements cheaply employing a standard PC and a good-quality sound interface, and currently available
loudspeakers and microphones.
1. INTRODUCTION
At AES-Paris in 2000 a paper of the author [1] did
disclose some "new" possibilities related to sine sweep
measurements, triggering a wave of enthusiasm about
this method. The usage of exponential sine sweep,
compared with previously-employed linear sine sweeps,
provided several advantages in term of signal-to-noise
ratio and management of not-linear systems.
Furthermore, the deconvolution technique based on
convolution in time domain with the time-reversal-
mirror of the test signal allowed for clean separation of
the harmonic distortion products. And the release of the
Aurora software package [2] made it possible to
perform these measurements easily and cheaply for
everyone.
In reality, nothing was really new, as other authors
(Gerzon [3], Griesinger [4]) did already discover these
possibilities. The fact that this approach was not
successfully employed before is mainly due to the lack
of computers with enough computational power and of
easily-usable software tools.
In the following 6 years, many research groups and
professional consultants started using sine sweeps, and a

Farina
Impulse Response measurements
AES 122nd Convention, Vienna, Austria, 2007 May 5–8
Page 2 of 21
lot of papers were published (particularly remarkable
were the JAES papers of Muller/Massarani [5] and of
Embrechts et al. [6]). The tradeoffs of this technique
were understood much better, and it was recognized the
need of further perfecting the measurement technique
for dealing with some problems.
- pre-ringing at low frequency before the arrival of the
direct sound pulse
- sensitivity to abrupt pulsive noises during the
measurement
- skewing of the measured impulse response when the
playback and recording digital clocks were mismatched
- cancellation of the high frequencies in the late part of
the tail when performing synchronous averaging
- time-smearing of the impulse response when
amplitude-based pre-equalization of the test signal was
employed
All of the problems pointed out here have been
investigated, and several solutions have been proposed.
This paper presents these "refinements" to the original
exponential sine sweep technique, and divulgates the
results of some experiments performed for assessing the
effectiveness of these techniques.
The methods analyzed include:
- post-filtering of the time-reversal-mirror inverse filter
for avoiding pre-ringing
- "exact" deconvolution by division in frequency
domain with regularization
- development of equalizing filters to be convolved with
the test signal for pre or post equalization.
- counter-skewing of the measured impulse response
when the playback and recording digital clocks are
mismatched
- employing running-time cross-correlation for
performing proper synchronous averaging without
cancellation effects
The experiments for assessing the behavior of these
"enhanced" measurement techniques were performed
employing a state-of-the-art hardware system, including
a multichannel sound interface, a powerful PC, and
modified versions of the Aurora plugins [2]. Three
rooms were chosen for the test: a small listening room
equipped with a professional surround-sound
monitoring system, a concert hall employing a wide-
band, two-way dodechaedron loudspeaker, and the
passenger's compartment of a car.
Various kinds of microphones were employed too, with
the goal of assessing if the measurement of certain
acoustical quantities, such as the "spatial parameters"
described in ISO 3382, and namely LF, LFC and IACC,
can be reliably measured with currently available top-
brand microphones.
The results show that, whilst some of the proposed
methods really improve substantially the sine sweep
measurement method, solving the problems shown
above, on the other hand the weak part of the
measurement chain is still about transducers, and
namely loudspeakers and microphones, which do not act
always along our expectations, and which can cause
severe artifacts in the measured quantities.
It is therefore concluded that any impulse response
measurement chain can be used with confidence only
after a set of careful preliminary tests and alignments.
Without this, the results are prone to be at least
suspicious, and significant errors have been found in the
experimental tests. Of consequence, it appears necessary
to further improve the current measurements standards,
and mainly ISO 3382, for ensuring reliable and
reproducible measurements employing this (and other)
methods of measuring impulse responses.
2. QUICK REVIEW OF THE EXPONENTIAL
SINE SWEEP (ESS) METHOD
This chapter is recalling the theory already presented in
[1], so the reader has a consequential presentation of the
“basic” method, before discussing problems and
possible enhancements. The reader already knowing this
method can skip directly to chapter 3.
When spatial information is neglected (i.e., both source
and receivers are point and omnidirectional), the whole
information about the room’s transfer function is
contained in its impulse response, under the common
hypothesis that the acoustics of a room is a linear, time-
invariant system.
Farina
Impulse Response measurements
AES 122nd Convention, Vienna, Austria, 2007 May 5–8
Page 3 of 21
This includes both time-domain effects (echoes, discrete
reflections, statistical reverberant tail) and frequency-
domain effects (frequency response, frequency-
dependent reverberation).
The following figure shows how a room can be seen,
under these hypotheses, as a single-input, single-output
“black box”.
“Black Box”
F[x(t)]
Noise n(t)
input x(t) + output y(t)
Fig. 1 – A basic input/output system
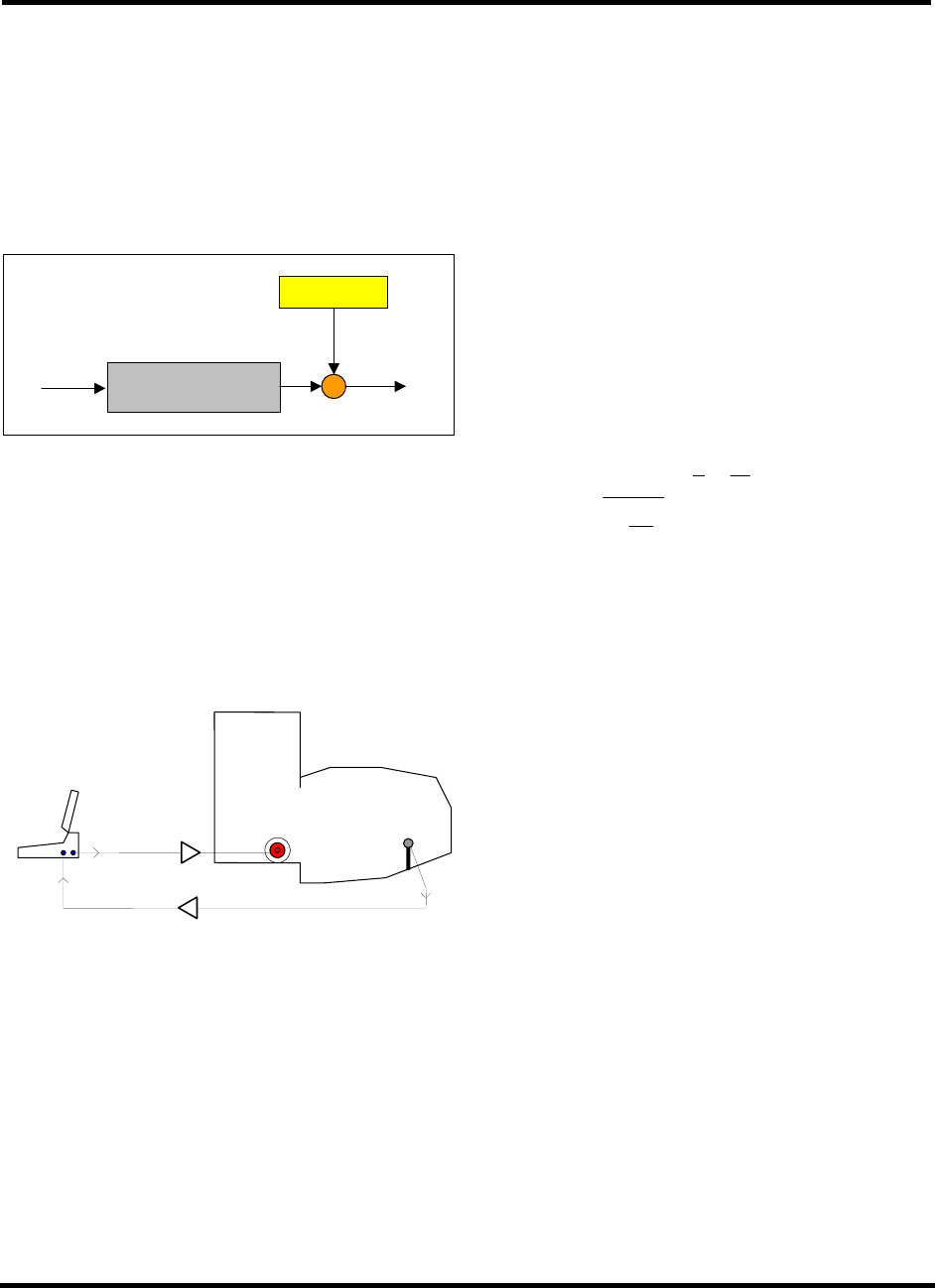
The system employed for making impulse response
measurements is conceptually described in fig. 2. A
computer generates a special test signal, which passes
through an audio power amplifier and is emitted through
a loudspeaker placed inside the theatre. The signal
reverberates inside the room, and is captured by a
microphone. After proper preamplification, this
microphonic signal is digitalized by the same computer
which was generating the test signal.
test signal output
Loudspeaker
Microphone Input
Reverberant Acoustic Space
microphone
Portable PC with
full-duplex sound card
Fig. 2 – schematic diagram of the measurement system
A first approximation to the above system is a “black
box”, conceptually described as a Linear, Time
Invariant System, with added some noise to the output,
as shown in fig. 1.
In reality, the loudspeaker is often subjected to not-
linear phenomena, and the subsequent propagation
inside the theatre is not perfectly time-invariant.
The quantity which we are initially interested to
measure is the impulse response of the linear system
h(t), removing the artifacts caused by noise, not-linear
behavior of the loudspeaker and time-variance.
The method chosen, based on an exponential sweep test
signal with aperiodic deconvolution, provides a good
answer to three above problems: the noise rejection is
better than with an MLS signal of the same length, not-
linear effects are perfectly separated from the linear
response, and the usage of a single, long sweep (with no
synchronous averaging) avoids any trouble in case the
system has some time variance.
The mathematical definition of the test signal is as
follows:
⎥
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎢
⎣
⎡
⎟
⎟
⎟
⎟
⎠
⎞
⎜
⎜
⎜
⎜
⎝
⎛
−⋅
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
ω
ω
⋅ω
=⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
ω
ω
⋅
1e
ln
T
sin)t(x 1
2
ln
T
t
1
2
1 (1)
This is a sweep which starts at angular frequency ω1,
ends at angular frequency ω2, taking T seconds.
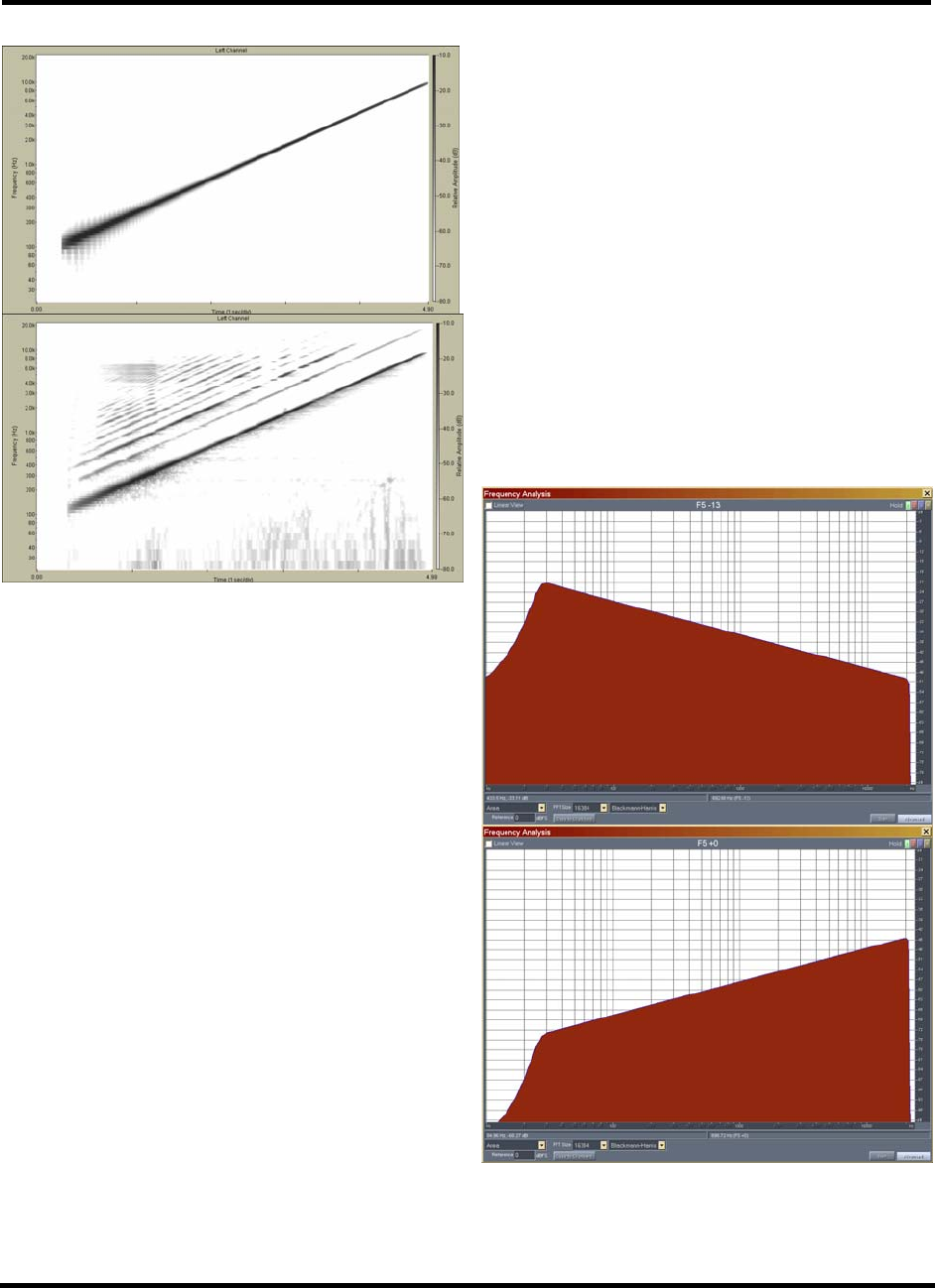
When this signal, which has constant amplitude and is
followed by some seconds of silence, is played through
the loudspeaker, and the room response is recorded
through the microphone, the resulting signal exhibit the
effects of the reverberation of the room (which
“spreads” horizontally the sweep signal), of the noise
(appearing mainly at low frequencies) and of the not-
linear distortion.
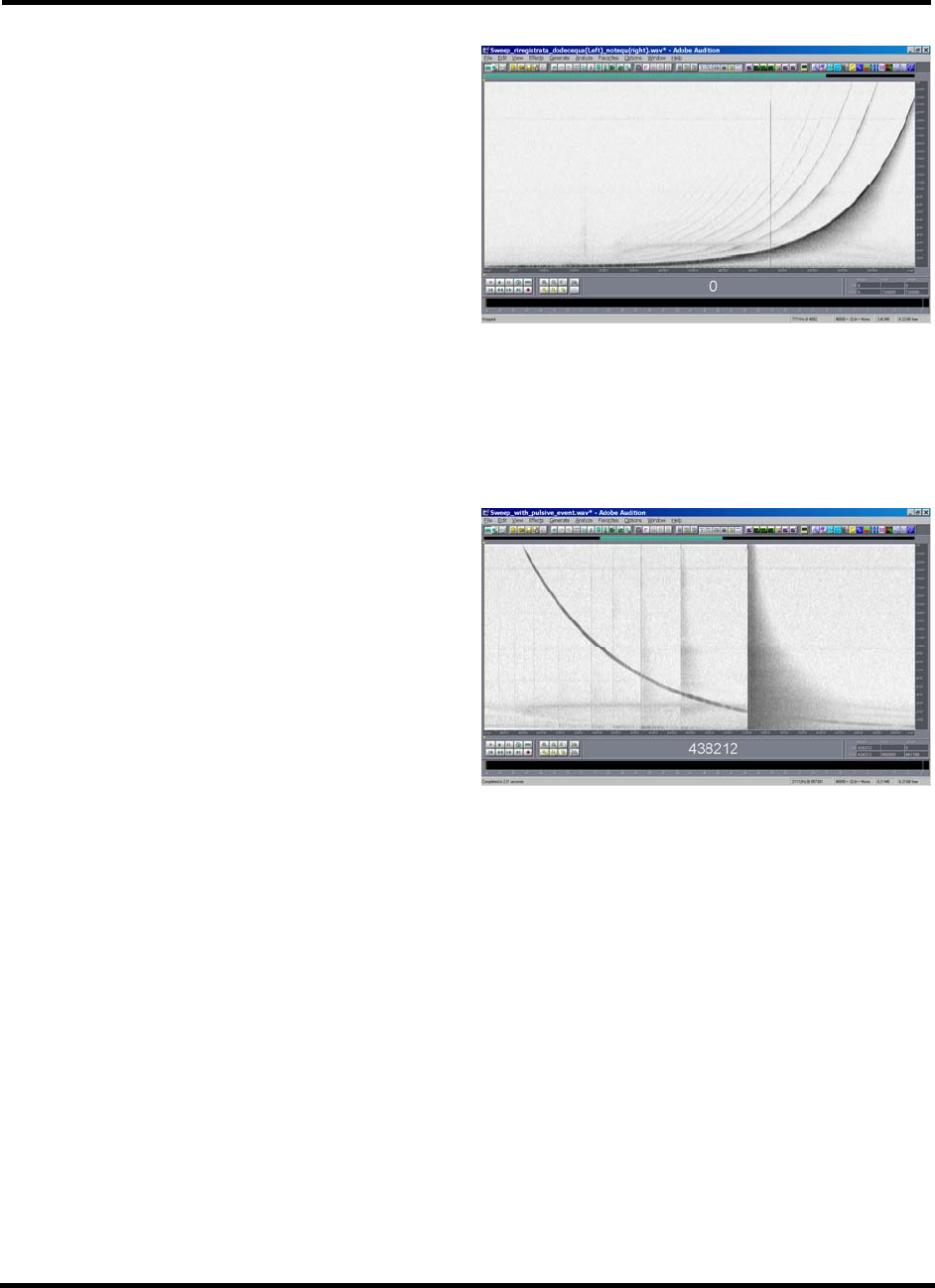
These “distorted” harmonic components appear as
straight lines, above the “main line” which corresponds
with the linear response of the system. Fig. 3 shows
both the signal emitted and the signal re-recorded
through the microphone.
Farina
Impulse Response measurements
AES 122nd Convention, Vienna, Austria, 2007 May 5–8
Page 4 of 21
Fig. 4 – sonograph of the test signal x(t) and of the
response signal y(t)
Now the output signal y(t) has been recorded, and it is
time to post-process it, for extracting the linear system’s
impulse response h(t).
What is done, is to convolve the output signal with a
proper filtering impulse response f(t), defined
mathematically in such a way that:
)t(f)t(y)t(h ⊗= (2)
The tricks here are two:
• to implement the convolution aperiodically, for
avoiding that the resulting impulse response folds
back from the end to the beginning of the time frame
(which would cause the harmonic distortion products
to contaminate the linear response)
• to employ the Time Reversal Mirror approach for
creating the inverse filter f(t)
In practice, f(t) is simply the time-reversal of the test
signal x(t). This makes the inverse filter very long, and
consequently the above convolution operation is very
“heavy” in terms of number of computations and
memory accesses required (on modern processors,
memory accesses are the slower operation, up to 100
times slower than multiplications).
However, the author developed a fast and efficient
convolution technique, which allows for computing the
above convolution in a time which is significantly
shorter than the length of the signal. [7]
It must also be taken into account the fact that the test
signal has not a white (flat) spectrum: due to the fact
that the instantaneous frequency sweeps slowly at low
frequencies, and much faster at high frequencies, the
resulting spectrum is pink (falling down by -3 dB/octave
in a Fourier spectrum). Of course, the inverse filter must
compensate for this: a proper amplitude modulation is
consequently applied to the reversed sweep signal, so
that its amplitude is now increasing by +3 dB/octave, as
shown in fig. 5.
Fig. 5 – Fourier spectrum of the test signal (above)
and of the inverse filter (below)
Farina
Impulse Response measurements
AES 122nd Convention, Vienna, Austria, 2007 May 5–8
Page 5 of 21
When the output signal y(t) is convolved with the
inverse filter f(t), the linear response packs up to an
almost perfect impulse response, with a delay equal to
the length of the test signal. But also the harmonic
distortion responses do pack at precise time delay,
occurring earlier than the linear response. The aperiodic
deconvolution technique avoids that these anticipatory
response folds back inside the time window,
contaminating the late part of the impulse response.
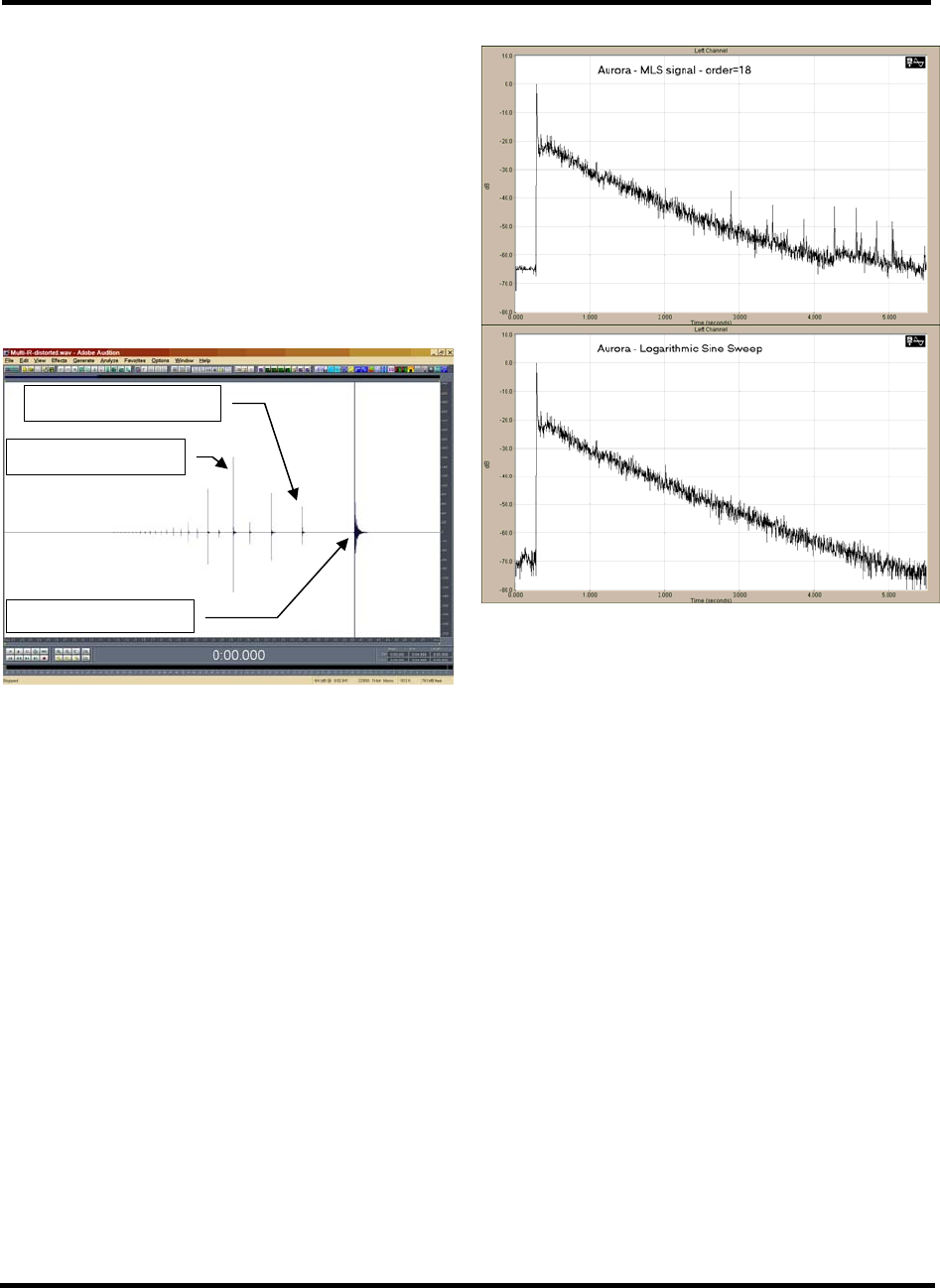
Fig. 6 shows a typical result after the convolution with
the inverse filter has been applied.
Fig. 6 – output signal y(t) convolved
with the inverse filter f(t)
At this point, applying a suitable time window it is
possible to extract just the portion required, containing
only the linear response and discarding the distortion
products.
The advantage of the new technique above the
traditional MLS method can be shown easily, repeating
the measurement in the same conditions and with the
very same equipment. Fig. 7 shows this comparison in
the case of a measurement made in a highly reverberant
space (a church).
It is easy to see how the exponential sine sweep method
produces better S/N ratio, and the disappearance of
those nasty peaks which contaminate the late part of the
MLS responses, actually caused by the slew rate
limitation of the power amplifier and loudspeaker
employed for the measurements, which produce severe
harmonic distortion.
Fig. 7 – comparison between MLS
and sine sweep measurements
This method has nowadays wide usage, and is often
employed for measuring high-quality impulse responses
which are later employed as numerical filters for
applying realistic reverberation and spaciousness during
the production of recorded music [8].
3. PROBLEMS WITH THE ESS METHOD
Despite the significant advantages shown by the ESS
method in comparison with all the other previously-
employed methods, some problems can still be found, as
already pointed out in chapter 1.
In the following subchapters, each of these problems is
analyzed, and proper workarounds are presented.
3.1. Pre-ringing
The measured impulse response often shows some
significant pre-ringing before the arrival of the direct
sound.
Linear im
p
ulse res
p
onse
2nd harmonic response
5th harmonic response
Farina
Impulse Response measurements
AES 122nd Convention, Vienna, Austria, 2007 May 5–8
Page 6 of 21
This is easily shown performing directly the
deconvolution of the IR from the original test signal,
without having it passing through the system-under-test.
This way, one should get a theoretically-perfect Dirac’s
delta function. The old MLS method is perfect in this
case, providing exactly a theoretical pulse. The
following figure shows instead what happens with the
standard ESS method.
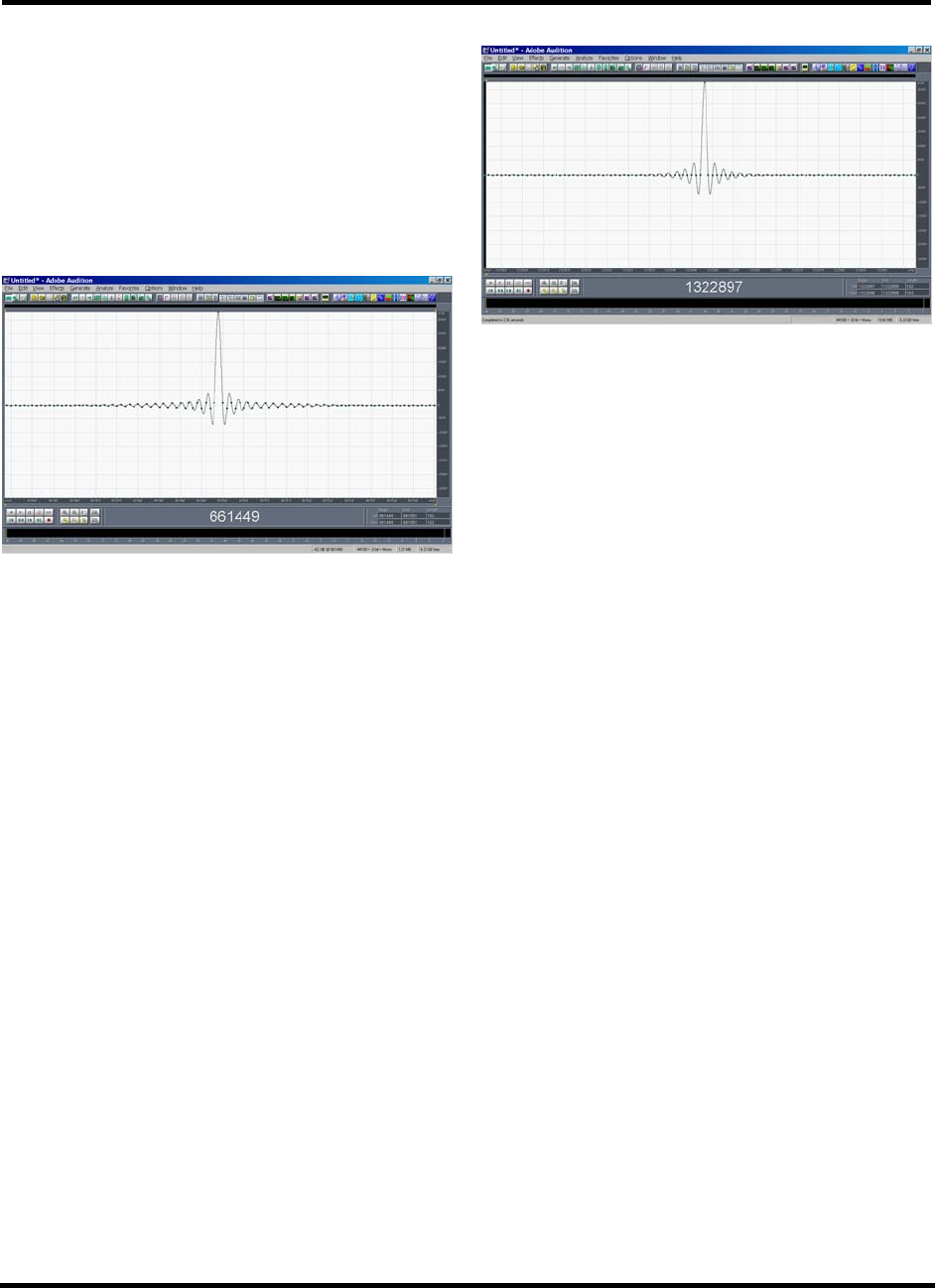
Fig. 8 – pre-ringing artifact with fade-out
As shown in fig. 8, the peak is in reality some sort of
Sync function, and it shows a number of damped
oscillations both before and after the main peak. This is
due to the limited bandwidth of the signal (22 Hz to 22
kHz, in this case) and to the presence of some fade-in
and fade-out on the envelope of the test signal (0.1s in
this example, employing a 15s-long ESS). These two
factors define substantially a trapezoidal window in the
frequency-domain, which becomes the Sync-like
function in time domain.
However, the situation ameliorates significantly if we
remove the fade-out. The following figure show the
results obtained with exactly the same settings as in the
previous case, but with a length of the fade-in set to 0.0s
(fade-in is still 0.1s).
Albeit the appearance of the waveform looks the same
(due to the “analogue waveform” display of Adobe
Audition), looking carefully at the digital values (the
small squares along the waveform) one now sees that
the results are very close to a theoretical Dirac’s Delta
function, and that no pre-ringing or post-ringing are
anymore significantly present.
Fig. 9 – reduced pre-ringing artifact without fade-out
However, it is not a good idea to remove completely the
fade-out: at the end of the sweep, the final value
computed could be not-zero, and consequently the
sound system will be excited with a step function, which
spreads a lot of energy all along the spectrum.
A solution alternative to removing the fade-out is to
continue the sweep up to the Nyquist frequency (22050
Hz, in our example, as the sampling rate was 44.1 kHz),
and cutting it manually at the latest zero-crossing before
its abrupt termination. This way, no pulsive sound is
generated at the end, and the full-bandwidth of the
sweep removes almost completely the high-frequency
pre-ringing.
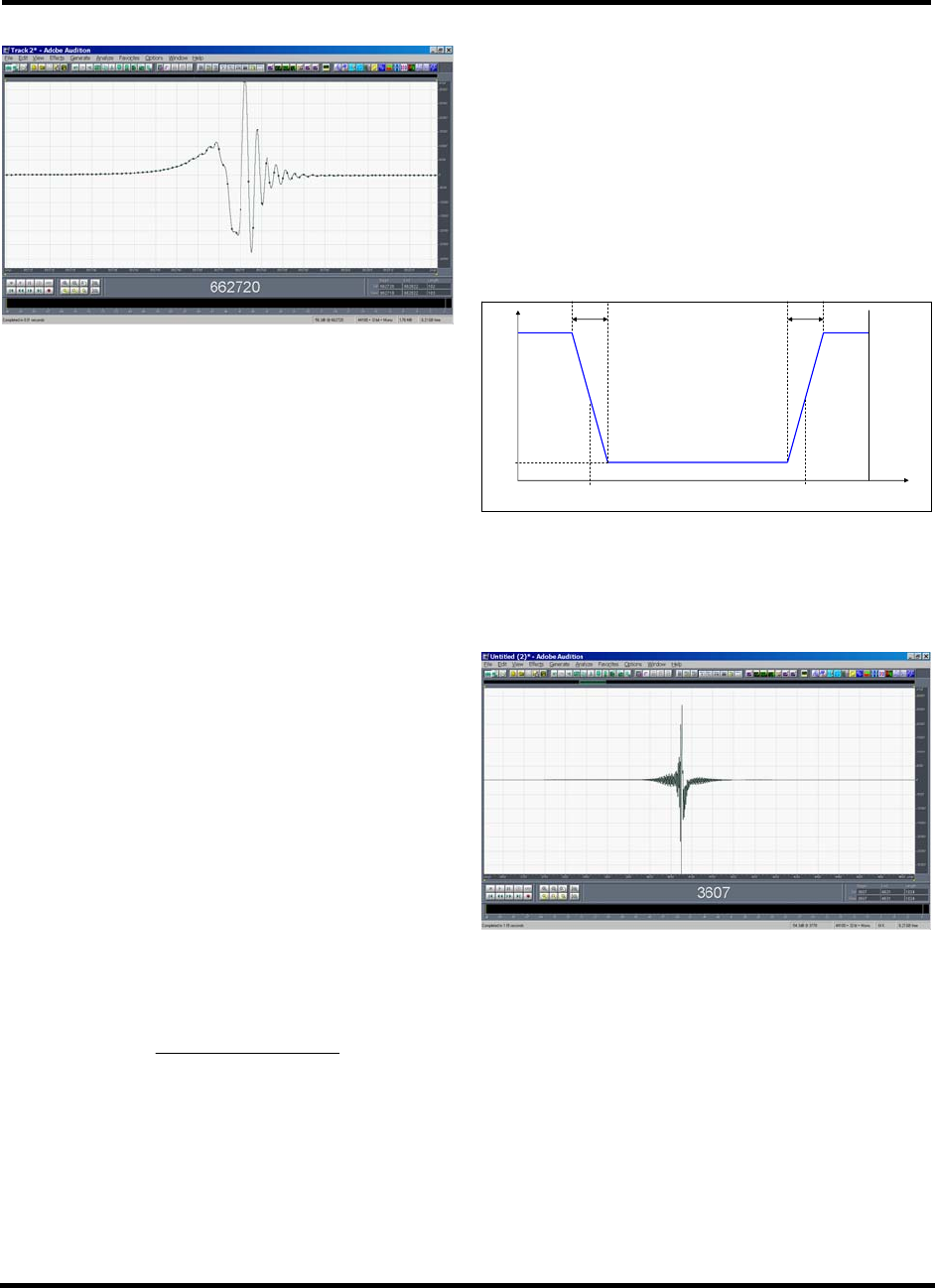
However, in some cases, also low frequencies can cause
a significant pre-ringing. This is shown easily
employing a “loopback” connection, that is, connecting
a wire directly from the output to the input of the sound
card.
The following figure shows the result of a “loopback”
measurement, employing the same parameters as for the
previous example (fs=44100 Hz, sweep from 22 Hz to
22050 Hz, 15s long, 0.1s fade-in, no fade-out).
Farina
Impulse Response measurements
AES 122nd Convention, Vienna, Austria, 2007 May 5–8
Page 7 of 21
Fig. 10 – low-frequency pre-ringing artifact
Removing the fade-in does not provide any benefit, in
this case. So, the way of controlling this type of pre-
ringing (due to the analog equipment) is to create a
proper time-packing filter, and to apply it to the
measured IR.
A packing filter is a filter capable of compacting the
time-signature of the impulse response. Various
methods for creating a numerical approximation to an
ideal packing filter have been proposed in the past. The
method employed here is the one developed by Ole
Kirkeby, when working at the ISVR with prof. Nelson
[9]. Although Kirkeby did propose this method for
multichannel inversion (cross-talk cancellation), it can
be successfully employed also just for the purpose of
packing in time the transfer function of a single-input,
single-output system.
The Kirkeby algorithm is as follows:
1) The IR to be inverted is FFT transformed to
frequency domain:
H(f) = FFT [h(f)] (3)
2) The computation of the inverse filter is done in
frequency domain:
() ()
[]
()
[]
() ()
ffHfHConj
fHConj
fC ε+⋅
= (4)
Where ε(f) is a small regularization parameter,
which can be frequency-dependent, so that the
inversion does not operates outside the
frequency range covered by the sine sweep
3) Finally, an IFFT brings back the inverse filter
to time domain:
c(t) = IFFT [C(f)] (5)
Usually the regularization parameter ε(f) is choosen
with a very small value inside the frequency range
covered by the sine sweep, and a much larger value
outside that frequency range, as shown in the following
figure:
εest
εint
flow fhigh
ΔfΔf
Fig. 11 – frequency-dependent regularization parameter
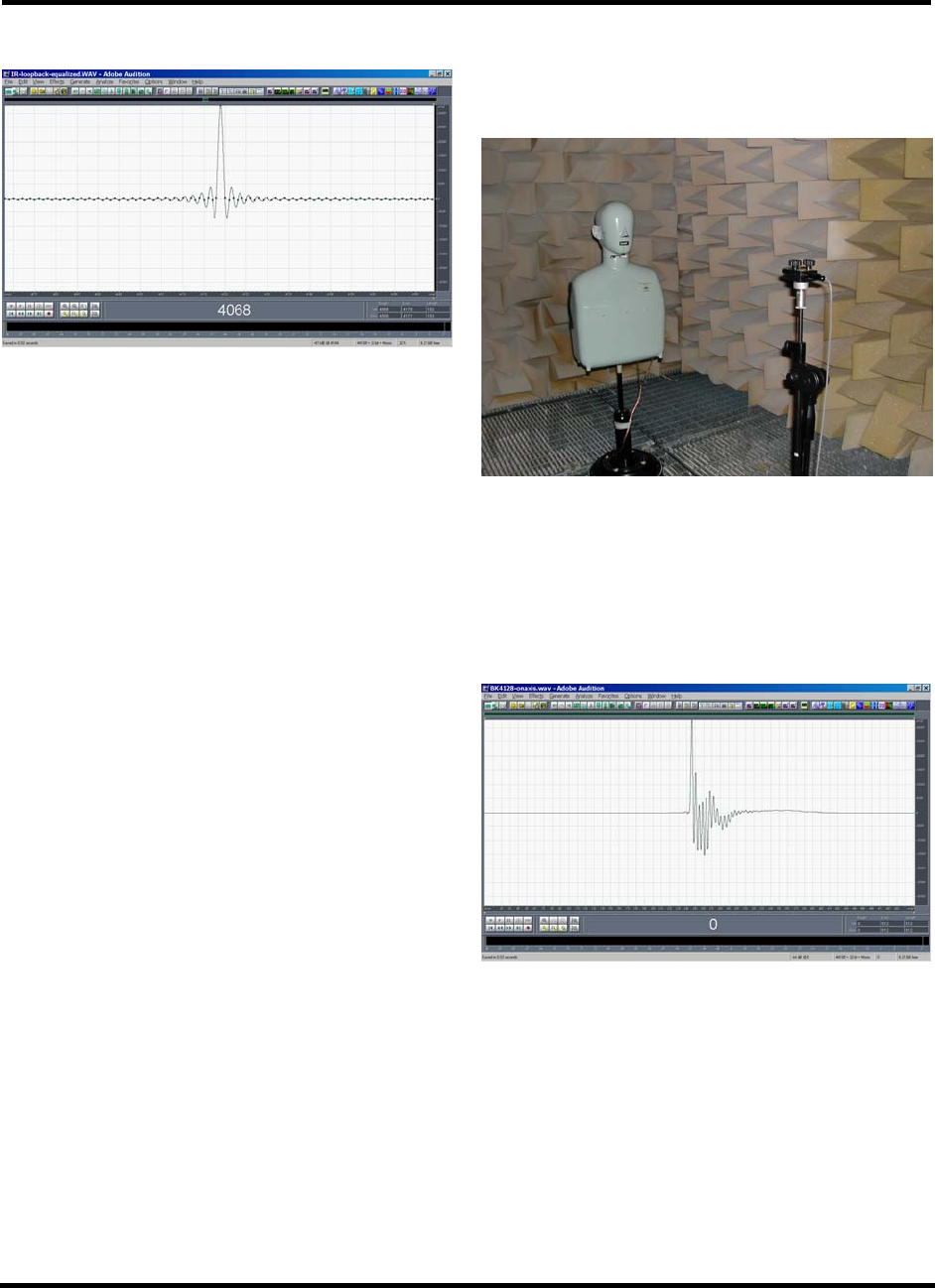
The following figure shows the inverse filter computed
for compacting the “loopback” IR shown in fig. 10:
Fig. 12 – “compacting” inverse Kirkeby filter
When this filter is convolved with the measured
“loopback” IR shown in fig. 10, the result is the one
shown in the next figure:
Farina
Impulse Response measurements
AES 122nd Convention, Vienna, Austria, 2007 May 5–8
Page 8 of 21
Fig. 13 – “loopback” IR convolved with the
“compacting” inverse Kirkeby filter
It can be seen that the usage of the inverse filter
managed to re-pack the measured IR back to an almost
perfect Dirac’s Delta function.
In conclusion, pre-ringing artifacts can be substantially
avoided by combining the usage of a wide-band sweep
running up to the Nyquist frequency, without any fade-
out, and the usage of a suitable “compacting” inverse
filter, computed with the Kirkeby method from a
“reference” impulse response.
In the example shown here, the “reference”
measurement for computing the inverse filter has been
performed electrically, so it does not contain the effect
of power amplifier, loudspeaker and microphones. This
makes sense if the goal of the measurement is to get
information about the behaviour of these
electroacoustics components (in most cases, for
measuring the performances of the loudspeaker).
3.2. Equalization of the equipment
In other cases, in which the goal of the measurement is
just to analyze the acoustical transfer function between
an “ideal” sound source and an “ideal” receiver, also the
effect of the electroacoustical devices should be
removed. In this case, the “reference” measurement is a
complete anechoic measurement including power
amplifier, loudspeaker and microphone, and the Kirkeby
inverse filter will remove any time-domain and
frequency-domain artifact caused by the whole
measurement system.
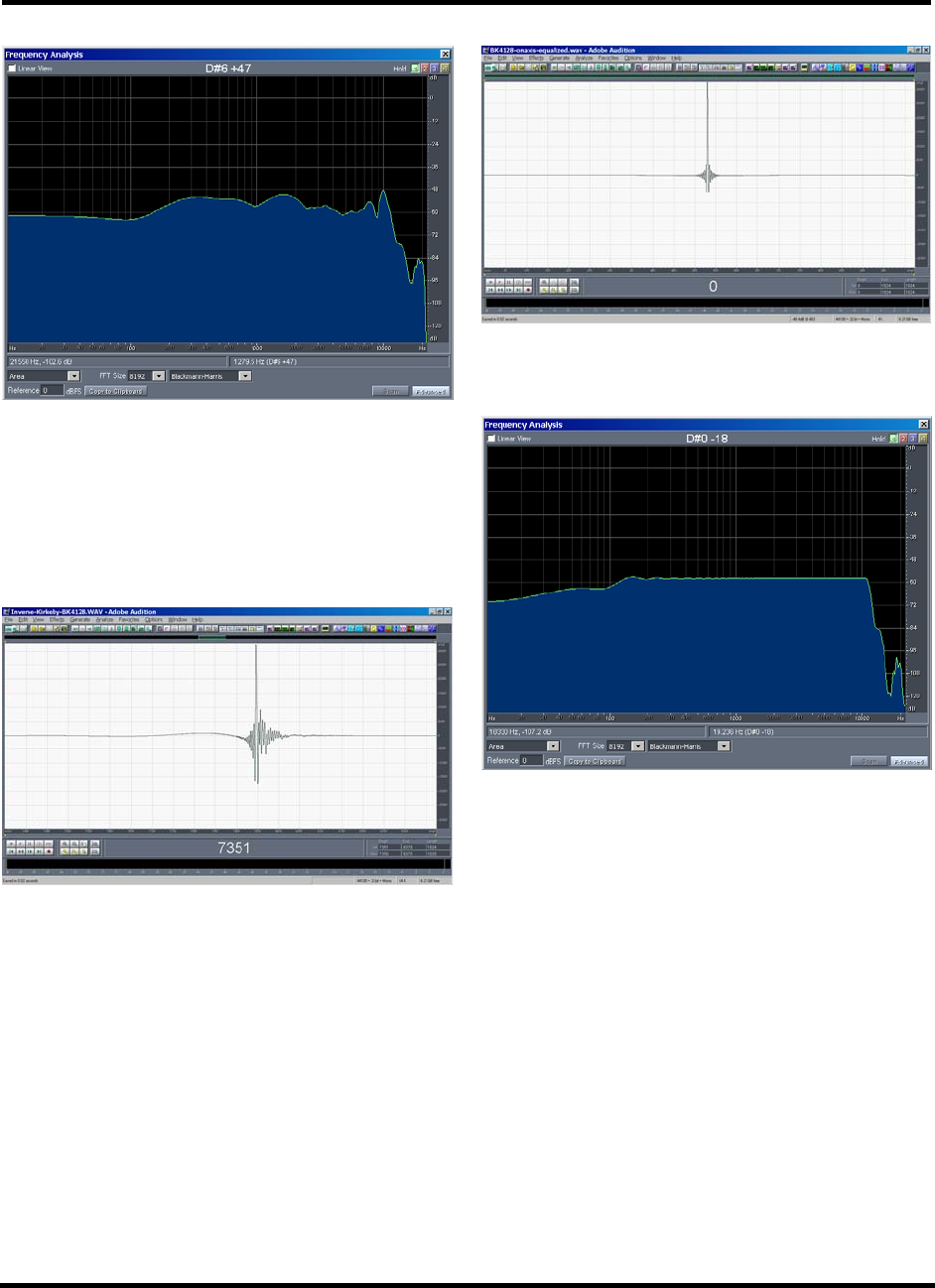
For example, the following figure shows the anechoic
measurement of the transfer function of a
loudspeaker+microphone setup:
Fig. 14 – measurement of the “reference” IR of an
artificial mouth and an omnidirectional microphone
This example refers to a small, limited-range
loudspeaker, employed in a head-and-torso simulator.
The measured IR and its frequency response are shown
in the following pictures:
Fig. 15 – measured IR of the artificial mouth system
Farina
Impulse Response measurements
AES 122nd Convention, Vienna, Austria, 2007 May 5–8
Page 9 of 21
Fig. 16 – measured frequency response of the artificial
mouth system
Again, a Kirkeby inverse filter is computed, for
correcting the transfer function of the whole
measurement system (this time the usable frequency
range has been narrowed to 10-11000 Hz):
Fig. 17 – “equalizing” inverse Kirkeby filter
When this inverse filter is applied (by convolution) to
the measured IR of this artificial mouth system, we get
an IR and a frequency response as shown here below:
Fig. 18 – measured IR of the artificial mouth system
after equalization with the inverse filter
Fig. 19 – measured frequency response of the artificial
mouth system after equalization
Although in this case the inverse filter did not manage
to provide a “perfect” result, it still caused the transfer
function of the system to closely approach the “ideal”
one. This way, the electroacoustical sound system can
be employed for measurements without any significant
biasing effect.
The latter point to be discussed is if it is better to apply
this equalizing filter to the test signal before playing it
through the system, or to the recorded signal
(indifferently before or after the deconvolution).
Both approaches have some advantages and
disadvantages. Applying the equalizing filter to the test
signal usually results in a weaker test signals being
radiated by the loudspeaker, and in clipping at extreme
Farina
Impulse Response measurements
AES 122nd Convention, Vienna, Austria, 2007 May 5–8
Page 10 of 21
frequencies (where the boost provided by the equalizing
filter is greater).
On the other hand, the usage of the filter after the
measurement is done results in “colouring” the
spectrum of the background noise, which can, in some
case, become audible and disturbing.
In practice, has it often happens, the better strategy
revealed to be hybrid: the test signal is first roughly
equalized, employing one of the standard tools provided
by Adobe Audition (for example Graphic Equalizer).
This allows to limit the boost at extreme frequencies
and the gain loss at medium frequencies, but however
the radiates sound becomes already almost flat.
Then, as usual, a reference anechoic measurement is
performed (employing the pre-equalized test signal); a
Kirkeby inverse filter is thereafter computed, with the
goal of removing the residual colouring of the
measurement system. This inverse filter is applied as a
post-filter, to the measured data, ensuring that the total
transfer function of the measurement system is made
perfectly flat. This is the approach successfully
employed in the Waves project, as described in more
detail in [8].
3.3. Pulsive noises during the measurement
When long sweeps are employed for improving the
signal-to-noise ratio, the risk that some pulsive noise
occurs during the measurement increases, as it is
difficult to keep people perfectly still for more than a
few seconds. Typical sources of pulsive noise are
objects falling on the floor, seats being moved, or
“cracks” caused by steps over wooden floors.
The following sonogram shows a recorded sweep
contaminated by an evident spurious pulsive event (the
vertical line), caused by an object falling on the floor.
Fig. 20 – pulsive event contaminating an ESS
measurement
After convolution with the inverse filter, this pulsive
event causes a quite evident artifact on the deconvolved
IR, as shown here:
Fig. 21 – Artifact caused by a pulsive event
In practice, the artifact is a sort of frequency-decreasing
sweep, starting well before the beginning of the linear
impulse response, and continuing after it. The first part
is practically irrelevant on the linear IR, as it will be cut
away together with the harmonic distortion responses.
However, the part of this spurious sweep occurring in
the late part of the measurement can cause severe
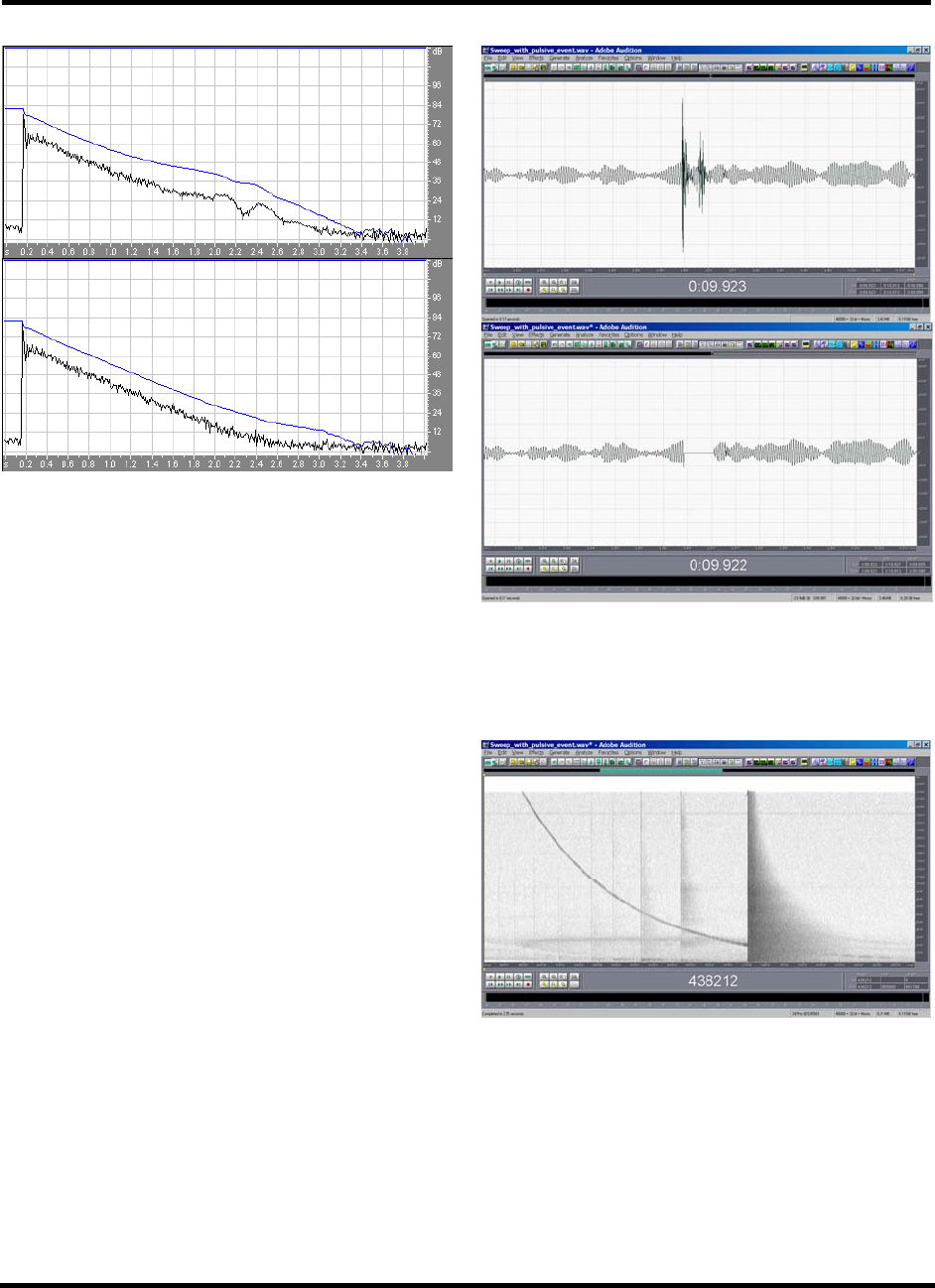
problems. In particular, when analyzing the reverberant
tail, this artifact is causing large errors on the estimate
of the reverberation time and of the other acoustical
parameters computed according to ISO 3382. The
following figure shows a comparison between the
octave-band-filtered IR with and without contamination
by the spurious pulsive noise.
Farina
Impulse Response measurements
AES 122nd Convention, Vienna, Austria, 2007 May 5–8
Page 11 of 21
Fig. 22 – octave-band filtered IR (at 1 kHz)
contaminated from pulsive noise (above)
and without contamination (below)
The presence of the spurious effect generated by the
pulsive noise is causing an overestimate of T30 (2.48 s
instead of 2.13 s). Also Clarity C80 and Center Time are
affected, but more lightly.
One way of removing this artifact consists in silencing
the recording signal in correspondence of the pulsive
event, as shown in the following figure:
Fig. 23 – silencing the spurious event
After deconvolving the edited signal, the following IR is
obtained:
Fig. 24 – effect of the silenced pulsive event
on the deconvolved IR
Despite silencing the event, the artifact is still there,
albeit with reduced amplitude. The analysis of the
reverberant tail still shows some effect of the pulsive
artifact, as shown here:
Farina
Impulse Response measurements
AES 122nd Convention, Vienna, Austria, 2007 May 5–8
Page 12 of 21
Fig. 25 – octave-band filtered IR
with silenced pulsive event
A much better removal of the pulsive event is obtained
by employing the Click/Pop Eliminator provided by
Adobe Audition. The following picture shows how it
works:
Fig. 26 – effect of the Auto Click/Pop Eliminator
In this case, the result of the deconvolution is the
following:
Fig. 27 – effect of the pulsive event
on the deconvolved IR after click/pop Eliminator
The artifact has been further reduced, but it is still there.
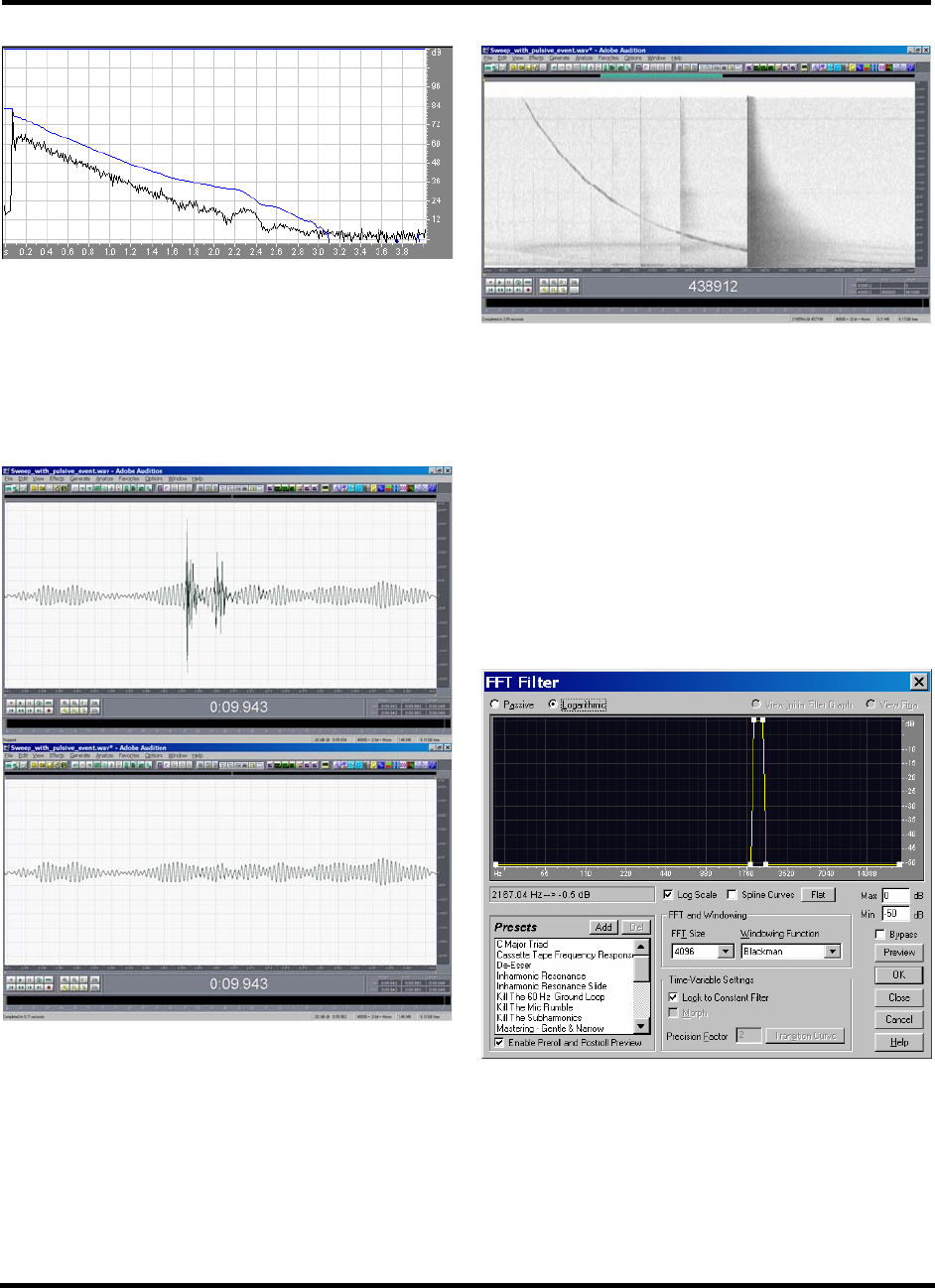
Finally, an even better way of removing the artifact is
based on the knowledge of the frequency of the sine
sweep at the moment in which the pulsive event did
happen. In the case presented here, the instantaneous
frequency was 2159 Hz. So, applying a narrow-
passband filter at this exact frequency, all the wide-band
noise is removed, and a “clean” sinusoidal waveform is
restored, as shown in the following figures:
Fig. 28 – usage of FFT Filter for removing the pulsive
artifact
Farina
Impulse Response measurements
AES 122nd Convention, Vienna, Austria, 2007 May 5–8
Page 13 of 21
Fig. 29 – effect of FFT filter for removing
the pulsive artifact
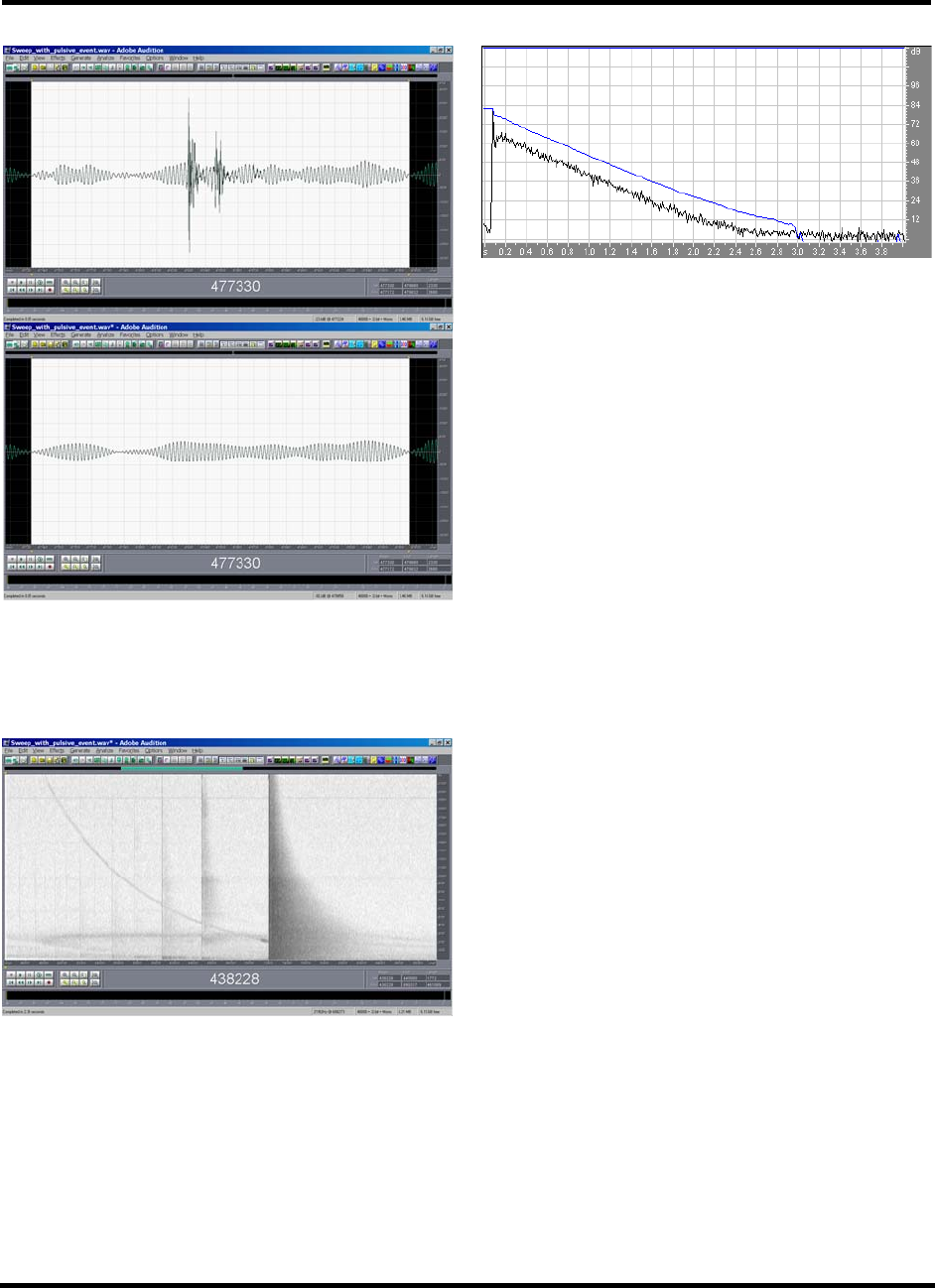
After deconvolution, the measured impulse response is
as follows:
Fig. 30 – result of the FFT filter
Now the artifact amplitude has been reduced so much
that there is no more distortion of the reverberant tail, as
shown here:
Fig. 31 – octave-band filtered IR
with pulsive event removed with FFT filter
So it can be concluded that the best way of removing a
pulsive artifact from a sweep measurement is to apply a
narrow-band filter just around the instantaneous
frequency at which the event occurred.
3.4. Clock mismatch
One of the great advantages of the ESS method over
other methods for measuring the impulse response is
that a tight synchronization between the playback clock
and the recording clock is not required.
In fact, even if two completely independent hardware
devices are employed, and no clock synchronization is
employed, usually the impulse response obtained is
perfectly clean and without observable artifacts.
However, when the mismatch between the two clocks
becomes significant, the deconvolved impulse response
starts to be “skewed” in the frequency-time plane.
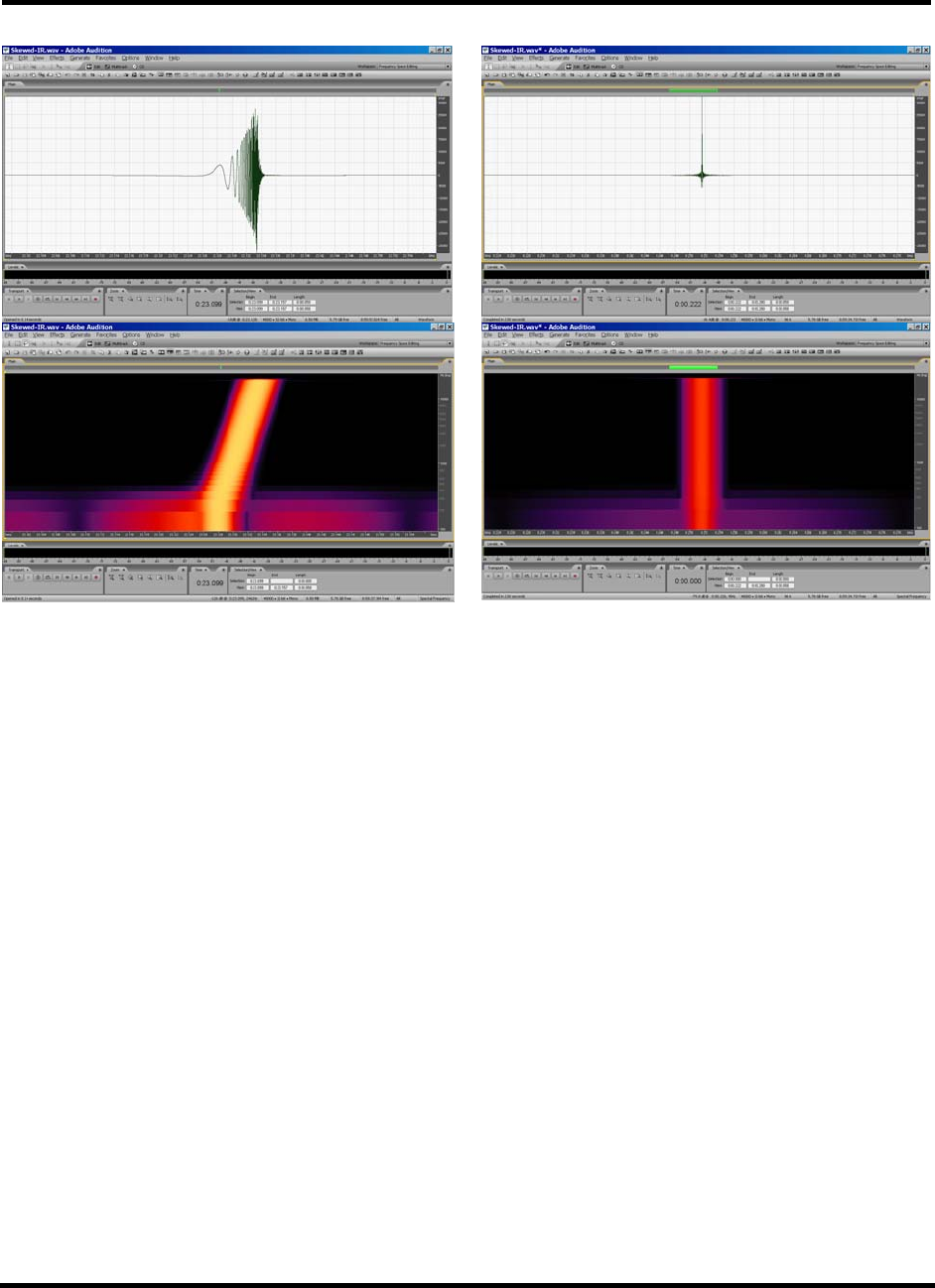
For example, the following figure shows the result of a
purely-electrical measurement, obtained playing the test
signal with a portable CD player, directly wired to a
computer sound card, employed for recording.
Farina
Impulse Response measurements
AES 122nd Convention, Vienna, Austria, 2007 May 5–8
Page 14 of 21
Fig. 32 – a skewed IR
The waveform clearly shows that low frequencies are
starting earlier than high frequencies, and the sonograph
demonstrates that, with a logarithmic frequency scale,
the IR does not have a vertical (synchronous)
appearance, but a sloped (skewed) appearance.
Various methods can be applied for re-aligning the
clocks. For example, if a “reference” measurement can
be performed, we could try to use a Kirkeby inverse
filter for fixing the mismatch, as already shown in
chapters 3.1 and 3.2.
The following figure show the result of such an inverse
filter applied to the electrical measurement performed.
Fig. 33 – correction of a skewed IR employing a
Kirkeby inverse filter
The result obtained employing the inverse filter is quite
good; and it is also correcting for the magnitude of the
frequency response of the system, not only for the
frequency-dependent delay.
Nevertheless, this approach requires the availability of a
clean reference measurement, performed either
electrically (as in this example) or under anechoic
conditions.
Whenever a reference measurement is not available, the
inverse filter approach cannot be employed. Another
possible solution is the usage of a pre-strecthed inverse
filter for performing the IR deconvolution.
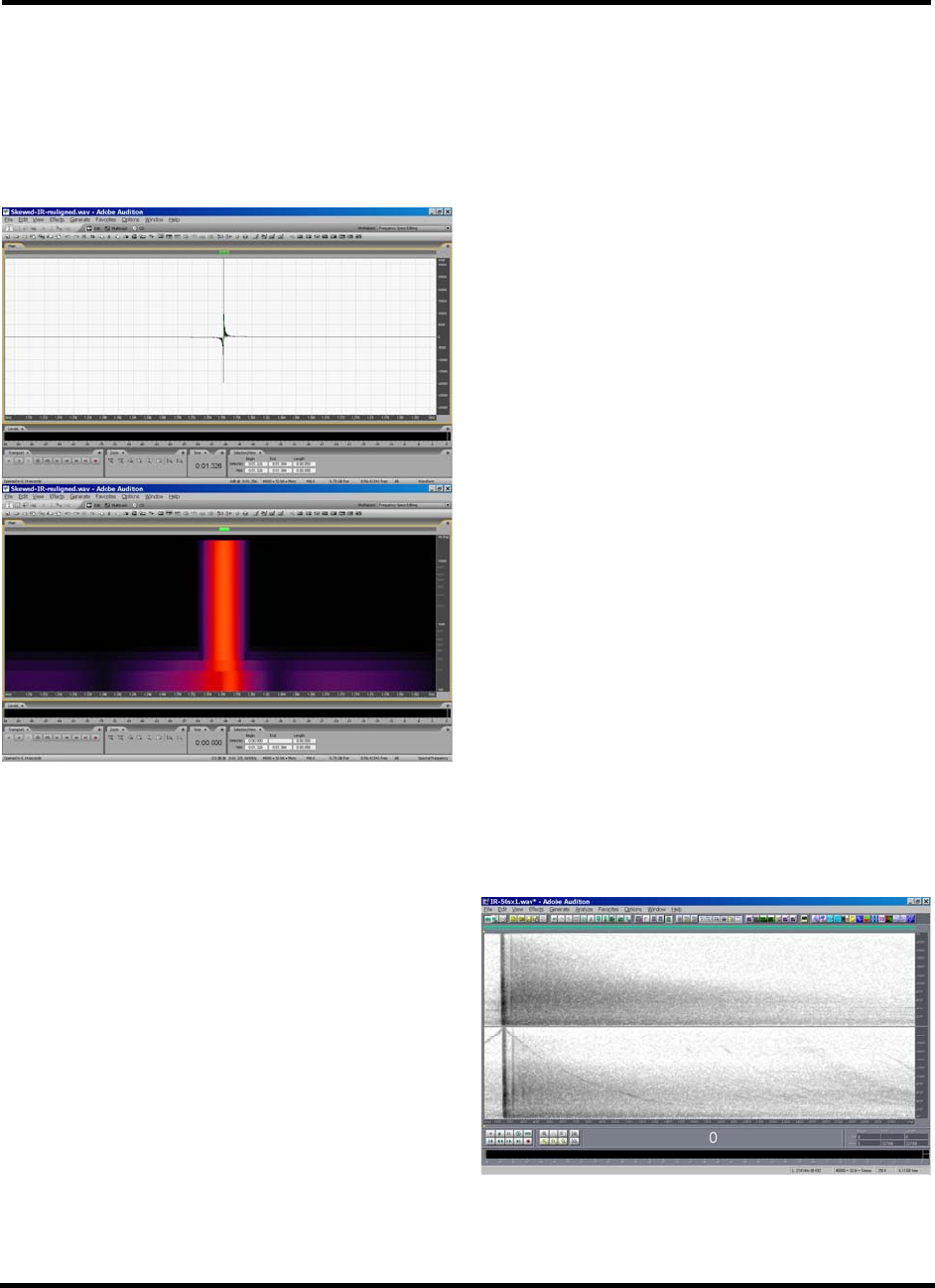
For example, in this example it can be seen how the
original inverse filter is too short. If we now create an
inverse filter slightly longer than the original one, we
can correct for the skewness of the sonograph.
Looking again at fig. 32, we see that the skewness is
approximately 8.5 ms long. So we generate a new sine
Farina
Impulse Response measurements
AES 122nd Convention, Vienna, Austria, 2007 May 5–8
Page 15 of 21
sweep, and its inverse sweep, 8.5 ms longer than the
original one.
When we convolve this longer inverse sweep with the
recorded signal, the deconvolution produces the
following result:
Fig. 34 – correction of a skewed measurement
employing deconvolution with a longer inverse sweep
This result is not so clean as the one obtained with the
Kirkeby inversion, but now we have got a quite good
clock realignment without the need of a reference
measurement.
It must be said, however, that a skewed impulse
response, although bad to see and to listen, is still quite
usable for computing acoustical parameters. It is
nevertheless always useful to correct for the clock
mismatch, as this significantly improves the peak-to-
noise ratio. For example, with the data presented here,
the usage of the longer inverse sweep for the
deconvolution provides an amelioration of the peak-to-
noise ratio by 12.45 dB, which is quite significant.
3.5. Time averaging
The usage of averaging several impulse responses for
improving the signal-to-noise ratio is a deprecated
technology when working with the ESS method.
Synchronous time averaging works only if the whole
system is perfectly time-invariant. This is never the case
when the system involves propagation of the sound in
air, due to air movement and change of the air
temperature. So, the preferred way for improving the
signal to noise ratio is not to average a number of
distinct measurements, but instead to perform a single,
very long sweep measurement, as clearly recommended
in the ISO 18233/2006 standard.
However, in some cases the usage of long sweeps is not
allowed (for example, when the method is implemented
on small, portable devices equipped with little memory),
and so time-synchronous averaging is the only way for
getting results in a noisy environment.
Unfortunately, even a very slight time-variance of the
system produces substantial artifacts in the late part of
the reverberant tail, and at higher frequencies.
This happens because the sound arriving after a longer
path is more subject to the variability of the time-of
flight due to unstable atmospheric conditions.
Furthermore, a given differential time delay translates in
a phase error which increases with frequency.
The following picture compares the sonographs of two
IRS, the first comes from a single, long sweep of 50s,
the second from the average of a series of 50 short
sweeps of 1s each.
Fig. 35 – single sweep of 50s (above)
versus 50 sweeps of 1s (below)
Farina
Impulse Response measurements
AES 122nd Convention, Vienna, Austria, 2007 May 5–8
Page 16 of 21
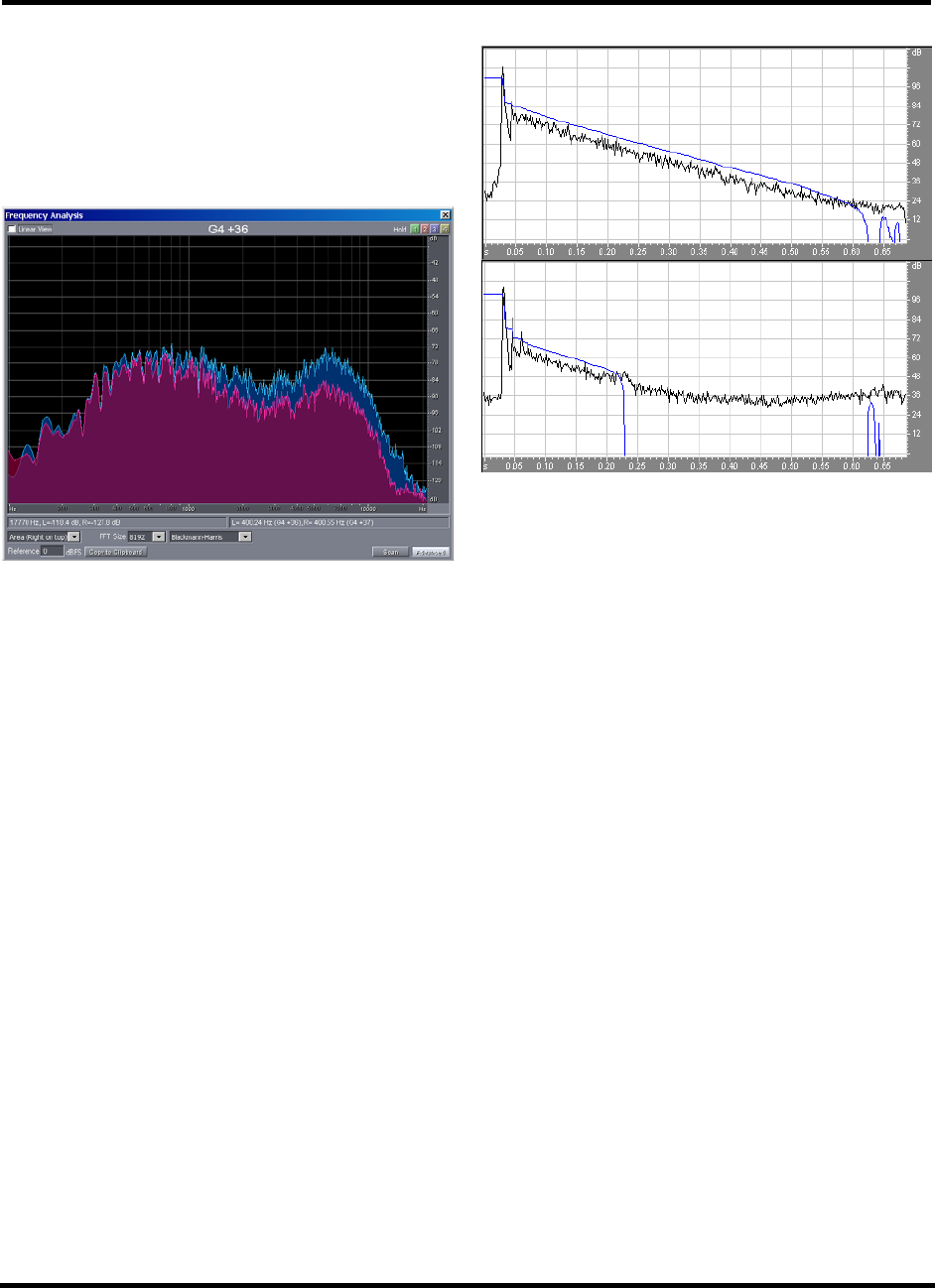
Although from the above picture it is not very easy to
see the difference, it can be noted that the energy of the
reverberant tail is significantly underestimated, at high
frequency, in the second measurement. This can be seen
easily displaying the spectrum of the signal in the range
100 ms to 300 ms after the direct sound, as shown here:
Fig. 36 – spectrum of single sweep of 50s (above)
versus 50 sweeps of 1s (below)
It can be seen how, above 350 Hz, the synchronously-
averaged IR is systematically underestimated. Around
5-6 kHz the underestimation is more than 10 dB.
This of course affects also the slope of the decay curve,
and the estimate of reverberation times. The following
figure shows the comparison between the octave-band
filtered impulse response and decay curves at 4 kHz:
Fig. 37 – octave-band-filtered impulse response
of a single sweep of 50s (above)
versus 50 sweeps of 1s (below)
It can be seen how the single-sweep measurement is
providing a perfectly linear decay with quite good
dynamic range (63 dB), whilst the synchronously-
averaged IR exhibit strong underestimate of the energy
of the reverberant tail, and simultaneously a much worst
signal-to-noise ratio (43 dB).
It can be concluded that synchronously-averaging a
number of subsequent IRs obtained with the ESS
method is causing unacceptable artifacts.
However, an alternative technique can be used, in these
cases, for processing the data.
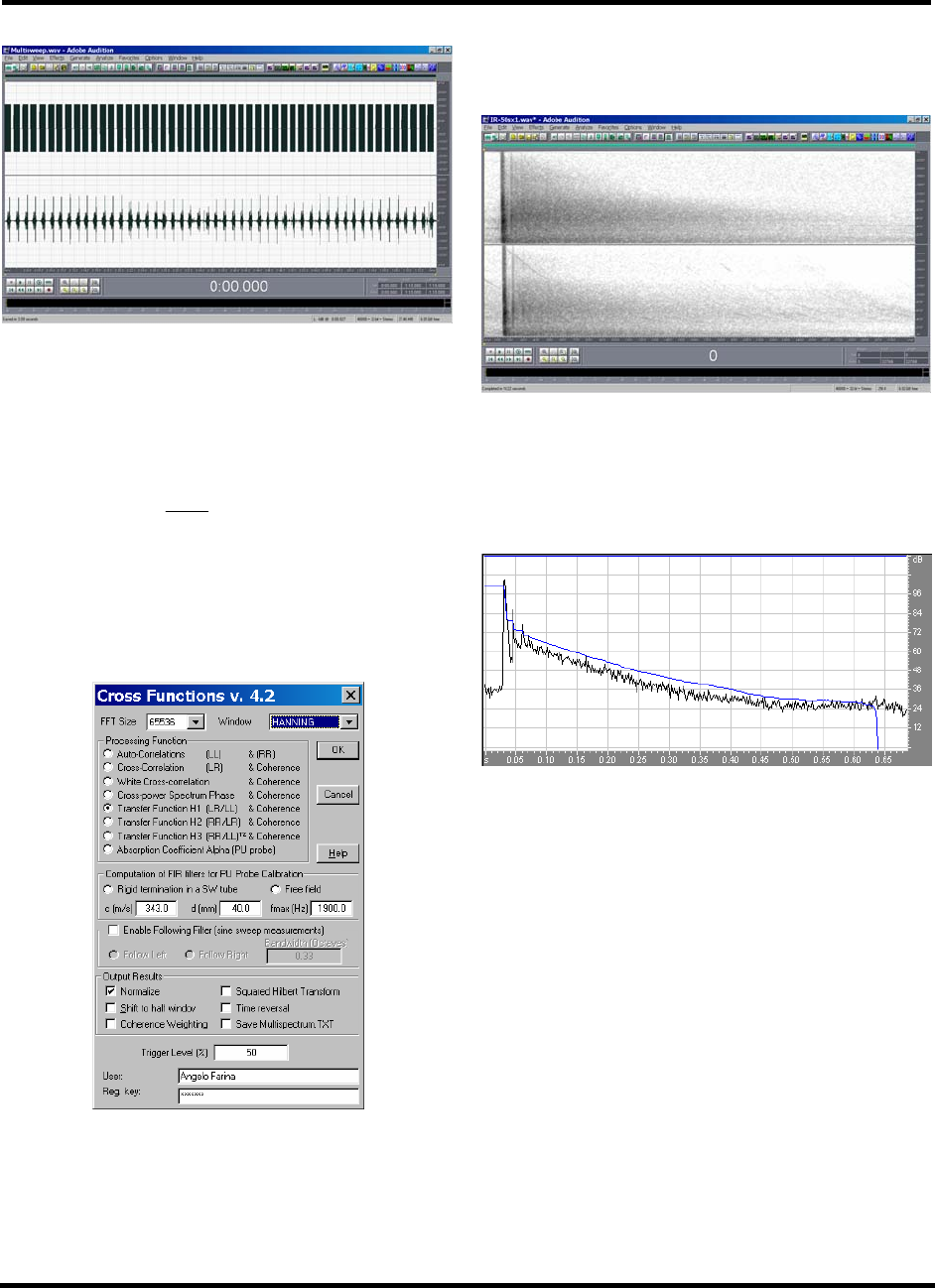
It is necessary to create a stereo file, containing the test
signal in the left channel, and the recorded signal in the
right channel, as shown here:
Farina
Impulse Response measurements
AES 122nd Convention, Vienna, Austria, 2007 May 5–8
Page 17 of 21
Fig. 38 – multisweep signal (test and response)
Now this stereo waveform is processed with the new
Aurora plugin named Cross Functions, which is
employed for computing the transfer function H1, by
performing complex averaging in spectral domain:
()
LL
LR
1G
G
fH = (5)
Where GLR and GLL are the averaged cross-spectrum
and autospectrum, respectively
This is the user’s interface of this plugin:
Fig. 39 – Computation of H1
Only the first half of the resulting transfer function is
kept, for removing most of the effects of the Hanning
window. The following figure shows the recovered
impulse response, compared with the single-sweep one:
Fig. 40 – single sweep of 50s (above)
versus 50 sweeps of 1s (below)
processed with the Cross Functions module
Analyzing the octave-band-filtered impulse response (at
4 kHz), the following is obtained:
Fig. 41 – octave-band-filtered impulse response
of a 50 sweeps of 1s (Cross Functions)
It can be seen that the situation is now significantly
better than with “standard” time-synchronous
averaging: the frequency-domain processing provided
an impulse response with better signal-to-noise ratio and
with a reverberant tail only slightly underestimated. The
single sweep method is still better, but now the
difference is not so large, and the measurement result is
still usable.
So, in practice, the employment of a number of
independent sweeps can provide almost acceptable
results, provided that the deconvolution and averaging
of the impulse response are performed in reversed order
(first averaging, then deconvolution), and in the
frequency domain.
Farina
Impulse Response measurements
AES 122nd Convention, Vienna, Austria, 2007 May 5–8
Page 18 of 21
4. PERFORMANCE OF ELECTROACOUSTIC
TRANSDUCERS
For room acoustics measurements, it is common to
employ:
• An omnidirectional loudspeaker (dodecahedron)
• An Omni + Figure of Eight microphone
• A binaural microphone (dummy head)
In the previous chapter it has been already discussed
how to measure the impulse response and frequency
response of a measurement chain containing also
loudspeakers and microphones, and how to reasonably
equalize it. However, the problem still arises of the
spatial properties (directivity) of these transducers.
It will be shown here that the measured directivities of
loudspeakers and microphones differ significantly from
the nominal ones, causing errors which are orders of
magnitude greater than those described in the previous
chapter.
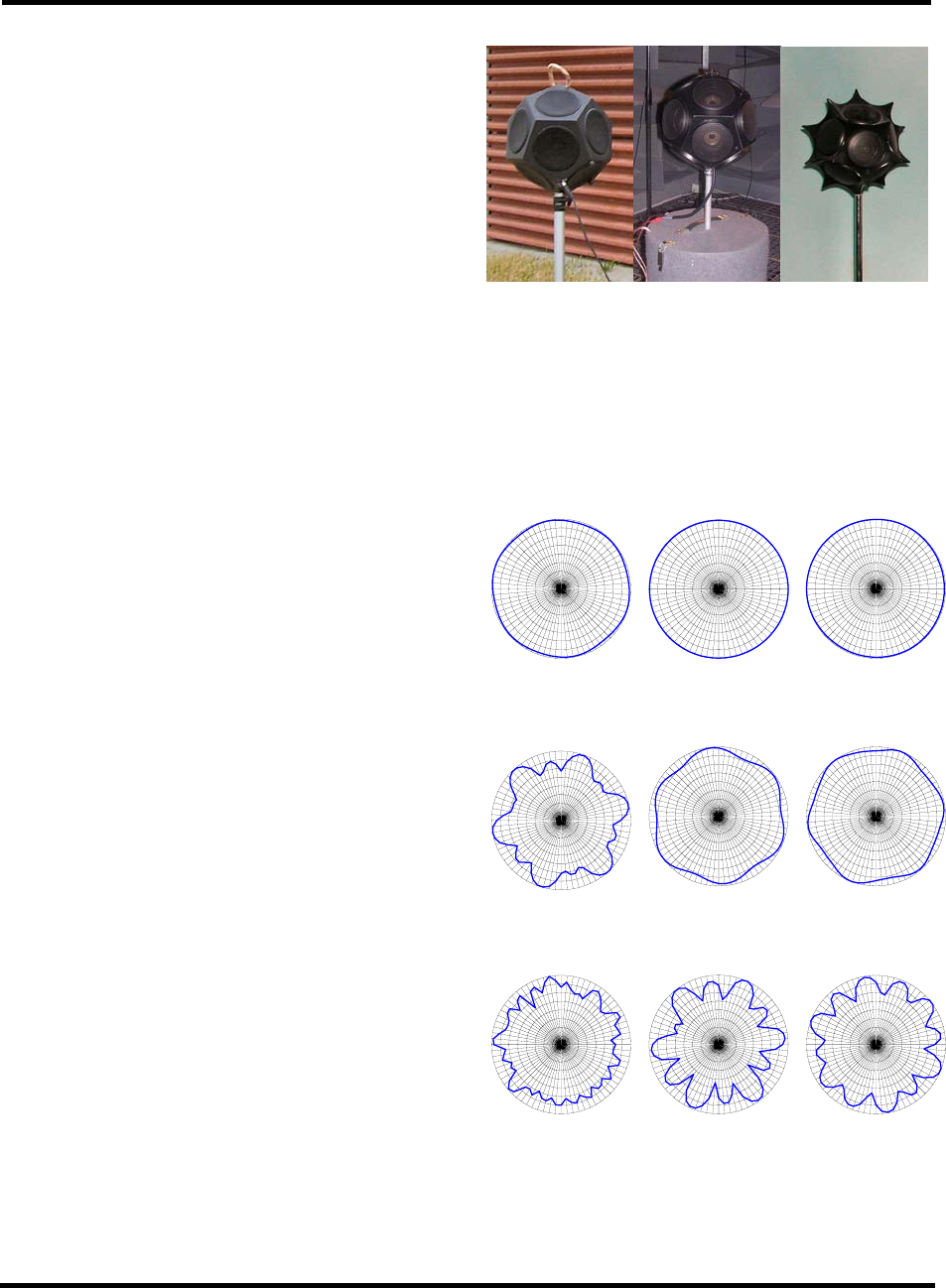
4.1. Dodechaedron loudspeakers
These loudspeakers are usually employing single-way,
wide-band transducers, and require heavy equalization
fro providing flat sound power response. However, the
equalization cannot correct the polar patterns of these
loudspeakers, which deviate significantly from
omnidirectional starting at frequencies above 1 kHz.
Here we present the results of polar patterns measured
in anechoic conditions for three dodechaedrons. The
first one is a standard-size (40cm diameter) employing
for building acoustics measurements (LookLine D-300);
the second one is a smaller version (25 cm diameter)
specifically developed for measurement of impulse
responses in theaters and concert halls (Look Line D-
100). Finally, the third one employs waveguides for
reconstructing a more uniform spherical wavefront
(Omnisonics 1000).
The following figure shows the three dodechaedrons
analyzed:
Fig. 42 – 3 dodechaedron loudspeakers
The above loudspeakers have been measured inside an
anechoic chamber over a turntable, so the horizontal
polar patterns have been obtained, in octave-bands.
The following three figures compare these polar
patterns at 1000, 2000 and 4000 Hz.
Horizontal Polar Plot - LookLine D300 - 1000 Hz
-40
-35
-30
-25
-20
-15
-10
-5
0
0510 15 20 25 3035404550
55
60
65
70
75
80
85
90
95
100
105
110
115
120
125
130
135
140
145
150
155
160
165
170
175
180
185
190
195
200
205
210
215
220
225
230
235
240
245
250
255
260
265
270
275
280
285
290
295
300
305
310
315
320
325
330
335
340
345
350
355
Horizontal Polar Plot - LookLine D200 - 1000 Hz
-40
-35
-30
-25
-20
-15
-10
-5
0
05
10 15 20 25 3035404550
55
60
65
70
75
80
85
90
95
100
105
110
115
120
125
130
135
140
145
150
155
160
165
170
175
180
185
190
195
200
205
210
215
220
225
230
235
240
245
250
255
260
265
270
275
280
285
290
295
300
305
310
315
320
325
330
335
340
345
350
355
Horizontal Polar Plot - Omnisonic - 1000 Hz
-40
-35
-30
-25
-20
-15
-10
-5
0
0510 15 20 25 3035404550
55
60
65
70
75
80
85
90
95
100
105
110
115
120
125
130
135
140
145
150
155
160
165
170
175
180
185
190
195
200
205
210
215
220
225
230
235
240
245
250
255
260
265
270
275
280
285
290
295
300
305
310
315
320
325
330
335
340
345
350
355
Fig. 43 – directivity patterns at 1 kHz
Horizontal Polar Plot - LookLine D300 - 2000 Hz
-40
-35
-30
-25
-20
-15
-10
-5
0
0510 15 20 25 3035404550
55
60
65
70
75
80
85
90
95
100
105
110
115
120
125
130
135
140
145
150
155
160
165
170
175185
190
195
200
205
210
215
220
225
230
235
240
245
250
255
260
265
270
275
280
285
290
295
300
305
310
315
320
325
330
335
340
345
350
355
Horizontal Polar Plot - LookLine D200 - 2000 Hz
-40
-35
-30
-25
-20
-15
-10
-5
0
05
10 15 20 25 3035404550
55
60
65
70
75
80
85
90
95
100
105
110
115
120
125
130
135
140
145
150
155
160
165
170
175
180
185
190
195
200
205
210
215
220
225
230
235
240
245
250
255
260
265
270
275
280
285
290
295
300
305
310
315
320
325
330
335
340
345
350
355
Horizontal Polar Plot - Omnisonic - 2000 Hz
-40
-35
-30
-25
-20
-15
-10
-5
0
0510 15 20 25 3035404550
55
60
65
70
75
80
85
90
95
100
105
110
115
120
125
130
135
140
145
150
155
160
165
170
175
180
185
190
195
200
205
210
215
220
225
230
235
240
245
250
255
260
265
270
275
280
285
290
295
300
305
310
315
320
325
330
335
340
345
350
355
Fig. 44 – directivity patterns at 2 kHz
Horizontal Polar Plot - LookLine D300 - 4000 Hz
-40
-35
-30
-25
-20
-15
-10
-5
0
0510 15 20 25 3035404550
55
60
65
70
75
80
85
90
95
100
105
110
115
120
125
130
135
140
145
150
155
160
165
170
175
180
185
190
195
200
205
210
215
220
225
230
235
240
245
250
255
260
265
270
275
280
285
290
295
300
305
310
315
320
325
330
335
340
345
350
355
Horizontal Polar Plot - LookLine D200 - 4000 Hz
-40
-35
-30
-25
-20
-15
-10
-5
0 05 10 15 20 25 3035404550
55
60
65
70
75
80
85
90
95
100
105
110
115
120
125
130
135
140
145
150
155
160
165
170
175
180
185
190
195
200
205
210
215
220
225
230
235
240
245
250
255
260
265
270
275
280
285
290
295
300
305
310
315
320
325
330
335
340
345
350
355
Horizontal Polar Plot - Omnisonic - 4000 Hz
-40
-35
-30
-25
-20
-15
-10
-5
0
0510 15 20 25 3035404550
55
60
65
70
75
80
85
90
95
100
105
110
115
120
125
130
135
140
145
150
155
160
165
170
175
180
185
190
195
200
205
210
215
220
225
230
235
240
245
250
255
260
265
270
275
280
285
290
295
300
305
310
315
320
325
330
335
340
345
350
355
Fig. 45 – directivity patterns at 4 kHz
It can be seen how all three these dodecaedrons exhibit
quite irregular polar patterns at medium-high frequency.
Farina
Impulse Response measurements
AES 122nd Convention, Vienna, Austria, 2007 May 5–8
Page 19 of 21
4.2. Omni + Figure of 8 mics
Although the usage of small-size measurement
microphones does not pose any significant problem (as
a B&K ½” capsule is almost perfectly omnidirectional
and with flat frequency response up to 20 kHz), when
spatial parameters such as LE, LF or LFC need to be
measured it is necessary to employ a variable-
directivity-pattern mike, providing both omnidirectional
and figure-of-8 patterns.
For this purpose, it is common to employ not-
measurement-grade probes, often manufactured by top-
quality makers such as Neumann or Schoeps. However,
the values of spatial parameters measured with different
microphonic probes are often quite unreproducible.
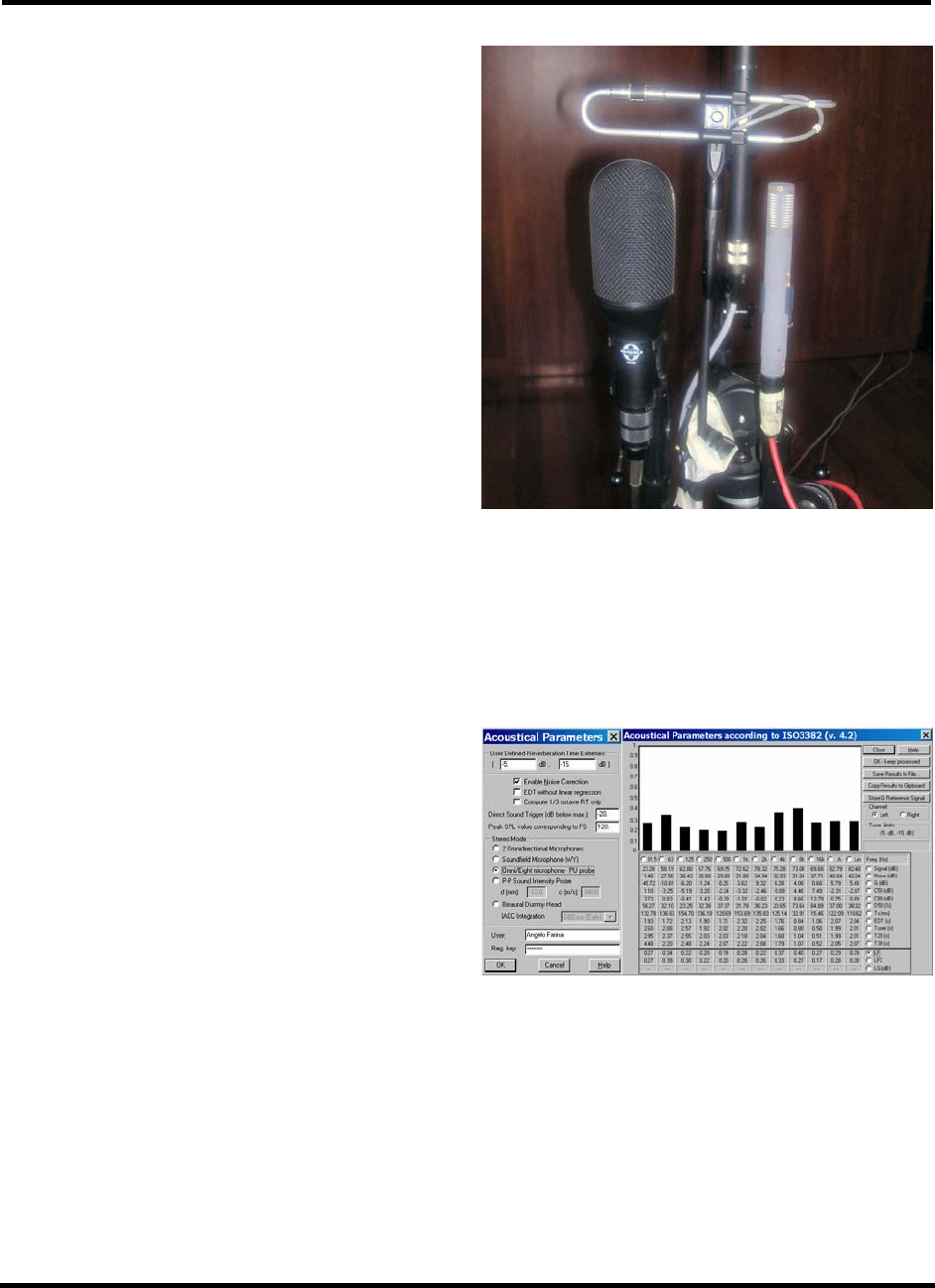
So it was decided to perform a comparative experiment
among 4 of these dual-pattern probes, including these
mikes:
• Soundfield ST-250
• Bruel & Kjaer sound instensity kit type 3595
• Schoeps CMC5
• Neumann TLM 170R
The following image shows some of the probes being
compared, during the measurements performed inside
the Auditorium of Parma:
Fig. 46 – 3 microphonic probes
A stereo impulse response has been measured with each
probe, containing the Omni response on the left channel,
and the figure-of-8 response in the right channel. Each
of these 2-channels IRs have been processed with the
Aurora plugin named Acoustical Paramaters, specifying
the type of probe being employed, as shown here:
Fig. 47 – the Acoustical Parameters plugin
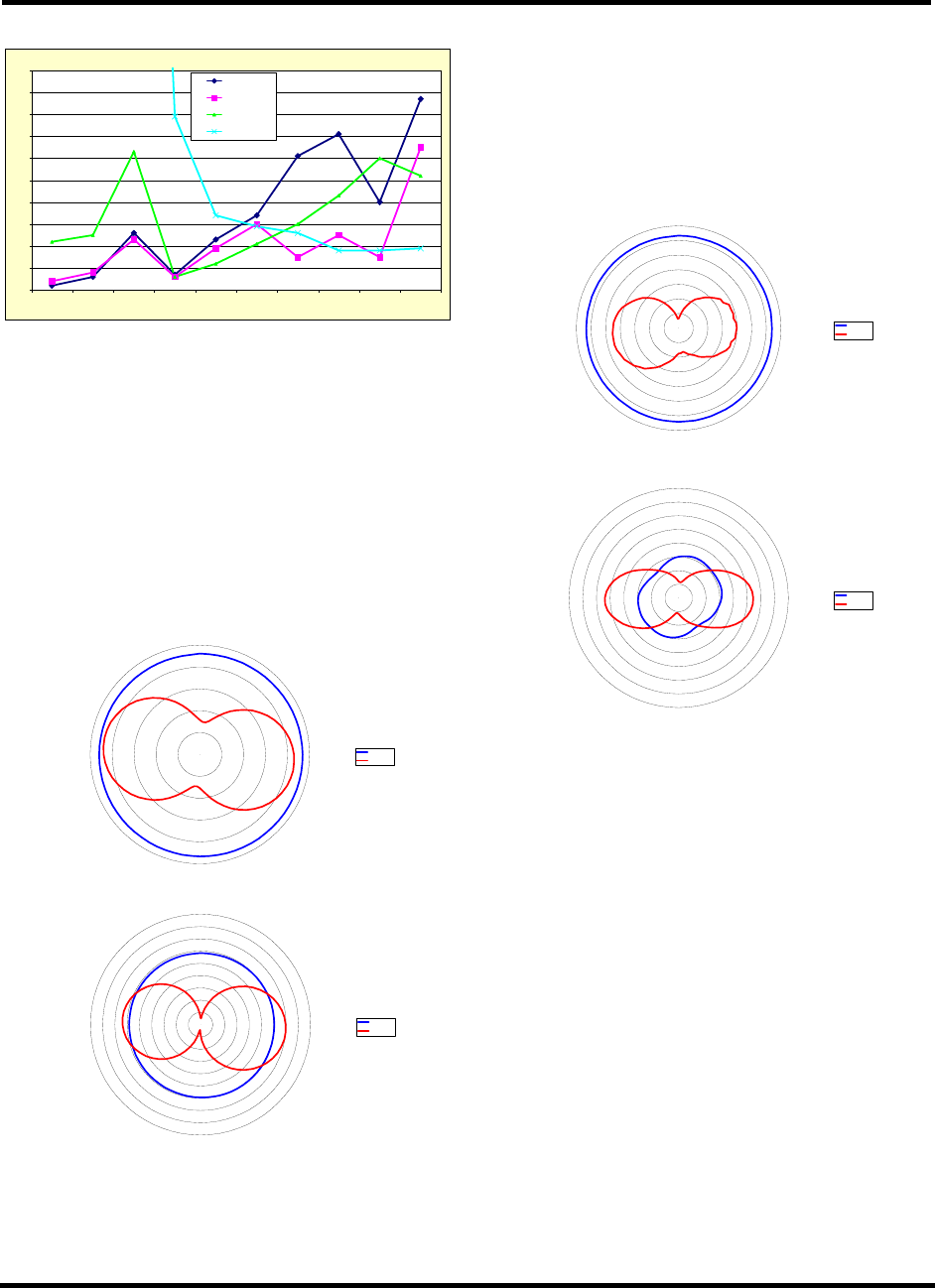
This way, the LF parameter has been measuring for all 4
probes, in octave bands, and at two distances from the
sound source (7.5m and 25m). The following figure
shows the results at 25m:
Farina
Impulse Response measurements
AES 122nd Convention, Vienna, Austria, 2007 May 5–8
Page 20 of 21
Comparison LF - measure 2 - 25m distance
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
31.5 63 125 250 500 1000 2000 4000 8000 16000
Frequency (Hz)
LF
Schoeps
Neumann
Soundfield
B&K
Fig. 48 – LF measured at 25m
It can be seen how the results are completely diverging;
it is impossible to establish what of the 4 probes was
measuring correctly, albeit the Schoeps looks more
“reasonable” than the other three.
These deviations are caused by the polar patterns of the
probes. As an example, here we report a couple of polar
patterns of the Soundfield ST-250, measured on a
turntable inside an anechoic room:
500 Hz
0
0.05
0.1
0.15
0.2
0.25
0510 15 20 25 30 35 40 45
50
55
60
65
70
75
80
85
90
95
100
105
110
115
120
125
130
135
140
145
150
155
160
165
170
175
180
185
190
195
200
205
210
215
220
225
230
235
240
245
250
255
260
265
270
275
280
285
290
295
300
305
310
315
320
325
330335340345350355
Pressure
Velocity
2000 Hz
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
0510 15 20 25 30 35 40 45
50
55
60
65
70
75
80
85
90
95
100
105
110
115
120
125
130
135
140
145
150
155
160
165
170
175
180
185
190
195
200
205
210
215
220
225
230
235
240
245
250
255
260
265
270
275
280
285
290
295
300
305
310
315
320
325
330335340345350355
Pressure
Velocity
Fig. 49 – ST-250 – polar patterns at 500 Hz and 2 kHz
It can be seen that, even at medium frequencies, the
figure-of-8 pattern is distorted, and is not properly gain-
matched with the omnidirectional one. These deviations
are even greater at very low and very high frequencies,
as shown here:
125 Hz
0
0.02
0.04
0.06
0.08
0.1
0.12
0.14
0510 15 20 25 30 35 40 45
50
55
60
65
70
75
80
85
90
95
100
105
110
115
120
125
130
135
140
145
150
155
160
165
170
175
180
185
190
195
200
205
210
215
220
225
230
235
240
245
250
255
260
265
270
275
280
285
290
295
300
305
310
315
320
325
330335340345350355
Pressure
Velocity
8000 Hz
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
0510 15 20 25 30 35 40 45
50
55
60
65
70
75
80
85
90
95
100
105
110
115
120
125
130
135
140
145
150
155
160
165
170
175
180
185
190
195
200
205
210
215
220
225
230
235
240
245
250
255
260
265
270
275
280
285
290
295
300
305
310
315
320
325
330335340345350355
Pressure
Velocity
Fig. 50 – ST-250 – polar patterns at 125 Hz and 8 kHz
It can be concluded that actually no available
microphonic system can be used for assessing reliably
the values of spatial acoustical parameters such as LE,
LF or LFC.
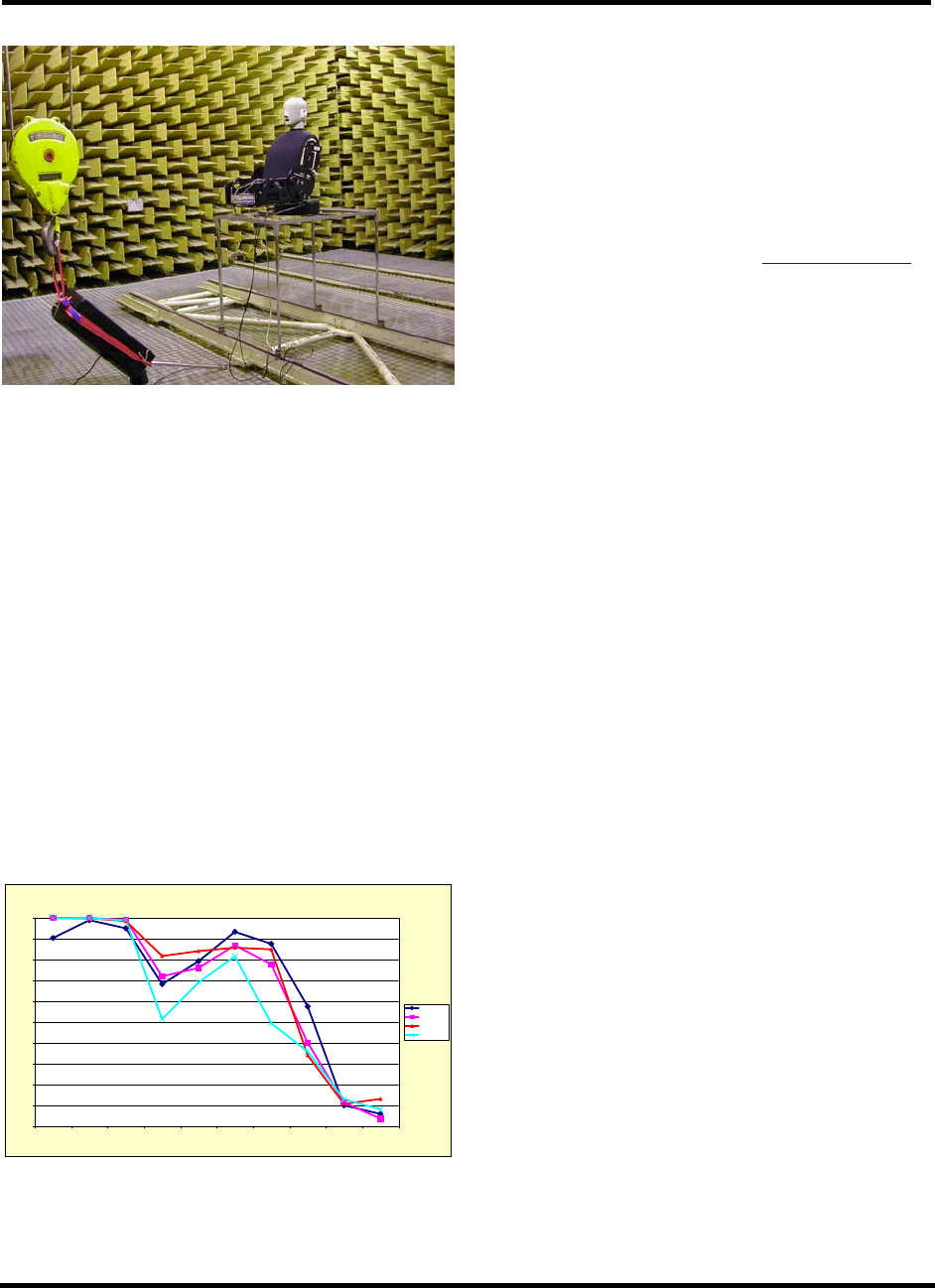
4.3. Binaural microphones
Another way of assessing the spatial properties of a
room is by means of the IACC parameter (inter aural
cross correlation), also defined in ISO-3382, and
measurable employing a binaural microphone and the
Aurora Acoustical Parameter plugin.
However, various makers of dummy heads produce
quite different microphone assemblies. For checking
comparatively their performances, a set of impulse
response measurements have been performed in a large
anechoic chamber, employing a turntable controlled by
the sound card, as shown in the following figure:
Farina
Impulse Response measurements
AES 122nd Convention, Vienna, Austria, 2007 May 5–8
Page 21 of 21
Fig. 51 – anechoic measurements on dummy heads
Also in this case 4 different binaural microphones have
been tested:
• Bruel & Kjaer type 4100
• Cortex
• Head Acoustics HMS-III
• Neumann KU-100
A synthetic diffuse sound field has been generated,
employing a number of loudspeakers surrounding the
dummy head and feeding them with uncorrelated pink
noise.
In principle, given the fact that the sound field was
exactly the same, all the dummy heads should have
given the same value of IACC. Instead, as shown in the
following figure, the results have been quite diverging:
IACCe - random incidence
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
31.5 63 125 250 500 1000 2000 4000 8000 16000
Frequency (Hz)
IACCe
B&K4100
Cortex
Head
Neumann
Fig. 52 – IACC measured with the 4 dummy heads
The deviations, however, are not so bad as those
obtained in the previous chapter for the measurement of
LF. It can be concluded that, with currently available
systems, the measurement of IACC is slightly more
reproducible than that of LF.
5. ACKNOWLEDGEMENTS
This work was supported by LAE (www.laegroup.org).
6. REFERENCES
[1] A.Farina – “Simultaneous measurement of impulse
response and distortion with a swept-sine
technique”, 110th AES Convention, February 2000.
[2] www.aurora-plugins.com
[3] P.Craven, M.Gerzon - "Practical Adaptive Room
And Loudspeaker Equaliser for Hi-Fi Use" - 92nd
AES Convention, March 1992
[4] D.Griesinger - "Beyond MLS - Occupied Hall
Measurement With FFT Techniques" - 101st AES
Convention, Nov 1996
[5] S. Müller, P. Massarani – “Transfer-Function
Measurement with Sweeps”, JAES Vol. 49,
Number 6 pp. 443 (2001).
[6] G. Stan, J.J. Embrechts, D. Archambeau –
“Comparison of Different Impulse Response
Measurement Techniques”, JAES Vol. 50, No. 4, p.
249, 2002 April.
[7] A. Torger, A. Farina – “Real-time partitioned
convolution for Ambiophonics surround sound”,
2001 IEEE Workshop on Applications of Signal
Processing to Audio and Acoustics - Mohonk
Mountain House New Paltz, New York October 21-
24, 2001.
[8] A. Farina, R. Ayalon – “Recording concert hall
acoustics for posterity” - 24th AES Conference on
Multichannel Audio, Banff, Canada, 26-28 June
2003
[9] O. Kirkeby, P. A. Nelson, H. Hamada, “The "Stereo
Dipole" - A Virtual Source Imaging System Using
Two Closely Spaced Loudspeakers” – JAES vol.
46, n. 5, 1998 May, pp. 387-395.
