AE GPS Manual D1
User Manual:
Open the PDF directly: View PDF ![]() .
.
Page Count: 2
GPS [GYSFDMAXB] GPS 3
C-MOS (3.3V)
) S * ) )
A*2 GUI
[Mini GPS] NM A
S : GYSFDMAXB ( )
GPS : MT3339 (MediaTek)
A )
: 66 ( ) ( )
: GPS( ( )
( )
( )
V
(GYSFDMAXB 3.3V )
( )
(3.3V)
T ( )
S (3.3V) (
S-9
D )
( )
: ( )
太陽誘電製・小型高感度 GPS モジュール [GYSFDMAXB] 使用
GPS 受信機キット
(* : ( [3D-Fix] *2)
受信感度 :-164dBm( トラッキング ), 電源 : DC5V/40mA
シリアル通信 : 9600bps, 1PPS 出力 , QZSS( みちびき )3機受信対応
D
C 2
F
3V
VDD3V3_BACKUP
TX
D
VDD3V3
PPS
SBD2
GYSFDMAXB
TxD
D
OUT I
X P332P -G
+ V
XxD
2
D
V
#
#
F
F
#2
2
U
U2
U3
( )
U2 U2
U2 U2
U2
U2
C
C3
F
C2
C
3.3V V
2 PPS ( )
PPS : S) A( )
3.3V
#
# 6
#3
#
#6
C
SBD3
FF
( : )
U GYSFDMAXB GPS ( )
U2 x inver er
U3 P332 -G 3.3 DO
SBD SB SBD3 S ( )
OS A PPS
2 PPS
G V ( )
F
C*3
( )
(*3)
)
A(GUI CUI )
S ( ( DOP )
( ( )
( ( )
(GUI CUI )
T(GUI CUI )
C [ ]
#
T
O
:
#3
株式会社 秋月電子通商 2018_03_30 Rev1.04
設定用 GUI ソフトウェアと詳細な資料は、弊社 Web サイト http://akizukidenshi.com/catalog/g/gK-09991/ にございます。
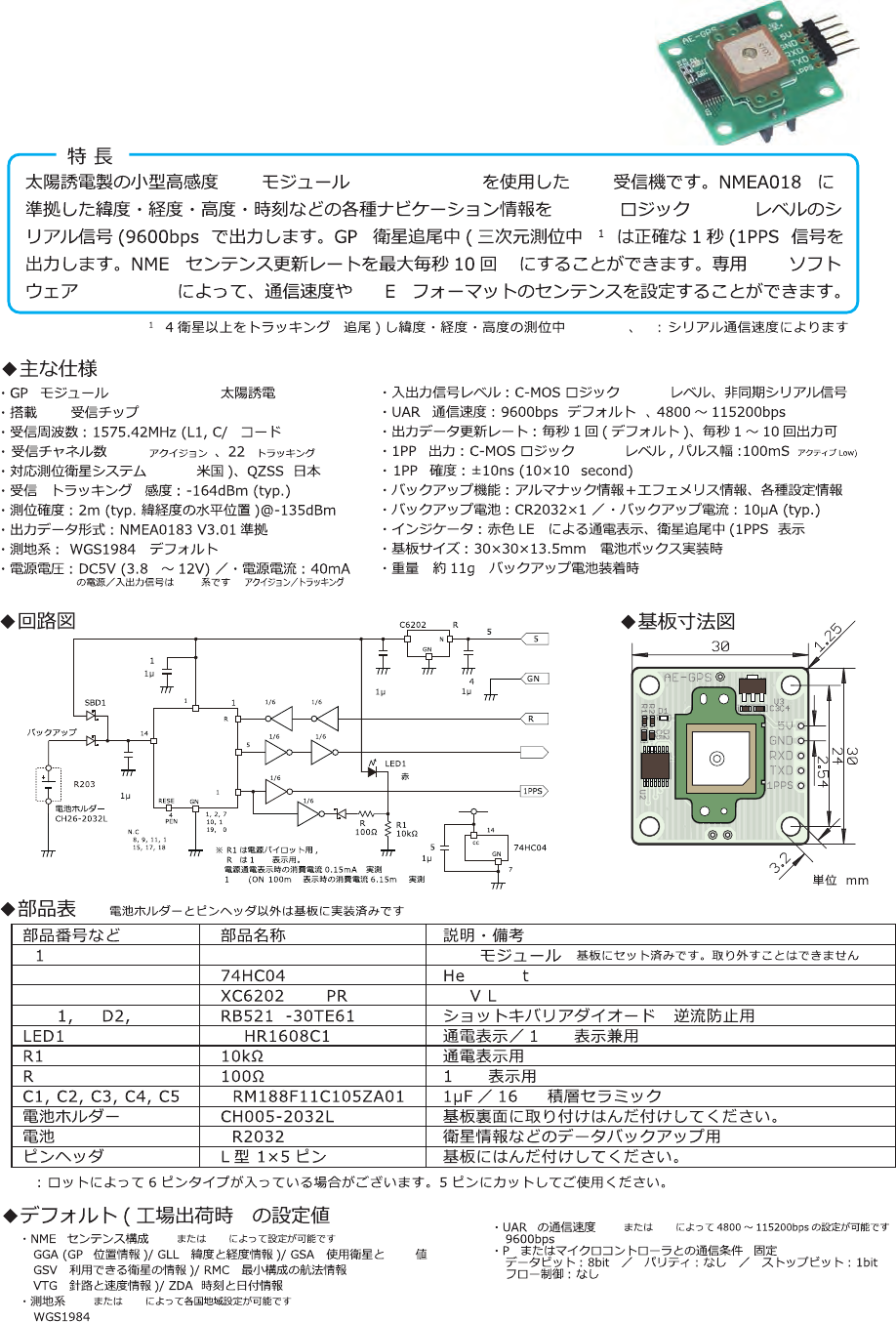
5V 電源入力端子(3.8V~12V)
信号/電源GND端子
データ入力端子(3.3V系、非同期シリアル)
データ出力端子(3.3V系、非同期シリアル )
1PPS出力端子(3.3V系、アクティブLow)
◆基板表面 (端子と機能名 )◆基板裏面 (電池ホルダー取り付け面 )
電池ホルダー[プラス(ピン2本)]
電池ホルダー[マイナス]
バックアップ電池 (CR2032) によって衛星情報( アルマナックおよびエフェ
メリス )、各種設定情報、RTC 情報をバックアップすることができます。
これらの情報は、GPS 受信機のスタートアップ時に利用されます。
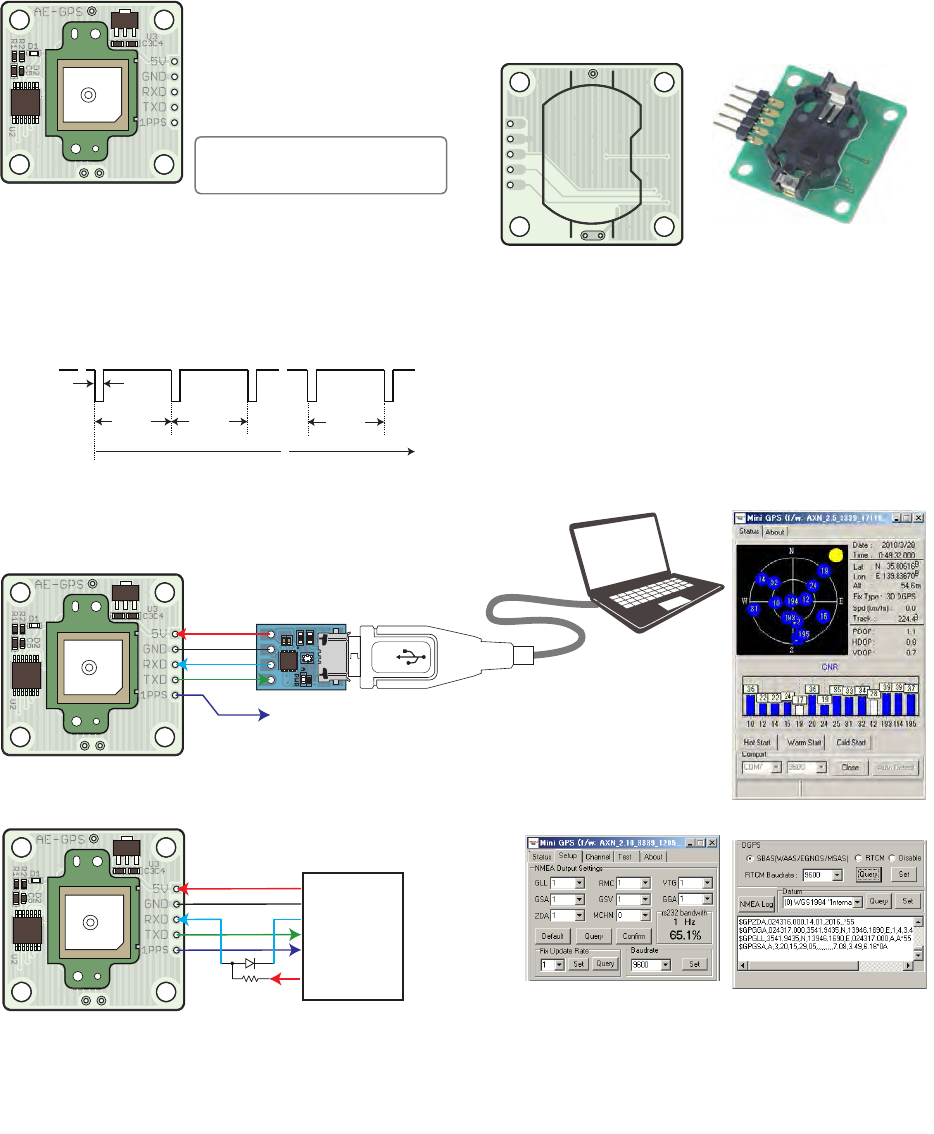
◆外部機器との接続方法 (PCとUSB 接続する場合 )
◆外部機器との接続方法 (マイコンと接続する場合 )
・LEDの光り方
D1(赤色 LED)は、5V( 主電源)が給電されると薄くパイロット点灯
します。GPS 衛星追尾中(三次元測位中)は、これに加えて1秒毎に
明るく点滅(フラッシュ)します。フラッシュ時間は0.1秒です。
・1PPS (1 pulse-per-second)出力
3D-Fix すると正確な1000ms (1 秒)間隔で、100ms(0.1秒)のパルス
が出力されます。
3D-Fix 継続中は、正確な1PPS信号が出力され続けます。
注:GPS モジュール(GYSFDMAXB) を基板から取り外すことはできません。
誘電体アンテナ表面には、受信周波数トリミング跡があります。
入出力端子は、付属の5ピン L型ピンヘッ
ダを取り付けるか、電子ワイヤー (AWG#24
程度 )で配線します。
Arduino-UNO 等の 5V系MCU
(システム内部の 3.3V 電源を利用 )
Da: 1N4148など
Ra: 10kΩ
5V
GND
TX(D0)
RX(D1)
入力 *4
3.3V
(Dn または An)
Da
Ra
~
~
~
~
① ② ③
100ms
~
~
3D-Fix
1000ms 1000ms
1000ms
L (0V)
H (3.3V)
B
5V
GND
RXD TX
TXD RX
1PPS 出力 *4
*4: 1PPS信号を使用しない場合には配線は不要です。
プラス側
マイナス側
USB
端子
パーソナル
コンピュータ
・バックアップ電池を使用しない場合
主電源の通電が常時確保されバックアップの必要がない場合には、電池ホル
ダーを取り付けないことができます。全体の高さが8mm (端子配線部を除く)
の低背となります。ただし電源断(停電 )の場合には、衛星情報、各種設定が
消失しデフォルト状態に戻ります。この場合には、工場出荷時の完全コールド
スタートとなります。
・バックアップ電池の交換サイクル
バックアップ電池は数か月ごとに電池電圧を測定するか、定期交換をお勧めし
ます。
電池電圧が2.4V以下になった場合に交換してください。電池電圧を測定でき
ない場合には、半年から1年を目安に定期交換してください。
[COM ポート通信設定 ]
ボーレート : 9600bps
データビット : 8bit
パリティ : なし
ストップビット : 1bit
フロー制御 : なし
シリアル ⇔ USB
変換モジュール
[ M-08461 等 ] USB ケーブル
GPS GUI ツール [Mini GPS] ⇒
・Windows Vista以降に対応
・衛星ビューアと各種設定変更
用 GUI ツール(ソフトウェア )
◆初期動作テスト (完全コールドスタートからの起動 )
GPS 受信機に 5V(3.8V~12V) を給電します。パイロットランプ (LED1)が薄
く点灯します。つぎに GPS 受信機を屋外か窓際に設置します。このとき誘電体
アンテナが真上(天空)を向くようにします。40秒~十数分ほど静置して待つと、
LED1が1秒毎にフラッシュします。
この状態は三次元測位 (3D-Fix) 中を示し、4衛星以上を追尾していることを意味
しています。GPS衛星から放送されているアルマナック(軌道 )情報とエフェメ
リス(位置 )情報を完全に復調するために、3D-Fixの状態を 15 分以上維持し続
けることをお勧めします。
これらの情報は受信状況が悪化して衛星を見失ったときの再追尾時や、電源再起
動時のホットスタートやウォームスタートに利用されます(バックアップ電池有
効時 )。
3D-Fix までの時間は、受信環境と GPS 衛星の配置(動的変化 )によります。全
天が見渡せるビルの屋上などでは、最短で 40 秒程度です。
◆スタート種別による TTFF (初期位置算出時間 )
主電源をオフからオンにしたときに測位するまでにかかる時間
下記仕様の条件:全天が見渡せる受信環境 (受信信号レベル : -135dBm)
・ホットスタート : 1秒 (typ.)
有効なアルマナックとエフェメリス、時間情報を保持している状態での再起動
・ウォームスタート : 34秒 (typ.)
有効なアルマナック情報のみを保持している状態での再起動
・コールドスタート : 42秒 (typ.)
有効な情報がすべて失われている状態での再起動
・完全コールドスタート : 42秒 (typ.)
工場出荷時のデフォルト状態、バックアップ電池が消耗した状態、電池によるバックアップを
していない状態での再起動
注 : それぞれの TTFFは、受信環境によって異なります。
セットアップメニュー
NMEAセンテンス出力構成、UART 通信速度などの設定を行うことができます。
CR2032の刻印が見えるように
電池ホルダーにセットしてください。
