ARM Assembly Language Tools V18.1.0.LTS User's Guide (Rev. U) Compiler Manual
User Manual:
Open the PDF directly: View PDF ![]() .
.
Page Count: 356 [warning: Documents this large are best viewed by clicking the View PDF Link!]
- Table of Contents
- Preface
- 1 Introduction to the Software Development Tools
- 2 Introduction to Object Modules
- 3 Program Loading and Running
- 4 Assembler Description
- 4.1 Assembler Overview
- 4.2 The Assembler's Role in the Software Development Flow
- 4.3 Invoking the Assembler
- 4.4 Controlling Application Binary Interface
- 4.5 Naming Alternate Directories for Assembler Input
- 4.6 Source Statement Format
- 4.7 Literal Constants
- 4.8 Assembler Symbols
- 4.9 Expressions
- 4.10 Built-in Functions and Operators
- 4.11 Unified Assembly Language Syntax Support
- 4.12 Source Listings
- 4.13 Debugging Assembly Source
- 4.14 Cross-Reference Listings
- 5 Assembler Directives
- 5.1 Directives Summary
- 5.2 Directives that Define Sections
- 5.3 Directives that Change the Instruction Type
- 5.4 Directives that Initialize Values
- 5.5 Directives that Perform Alignment and Reserve Space
- 5.6 Directives that Format the Output Listings
- 5.7 Directives that Reference Other Files
- 5.8 Directives that Enable Conditional Assembly
- 5.9 Directives that Define Union or Structure Types
- 5.10 Directives that Define Enumerated Types
- 5.11 Directives that Define Symbols at Assembly Time
- 5.12 Miscellaneous Directives
- 5.13 Directives Reference
- 6 Macro Language Description
- 6.1 Using Macros
- 6.2 Defining Macros
- 6.3 Macro Parameters/Substitution Symbols
- 6.4 Macro Libraries
- 6.5 Using Conditional Assembly in Macros
- 6.6 Using Labels in Macros
- 6.7 Producing Messages in Macros
- 6.8 Using Directives to Format the Output Listing
- 6.9 Using Recursive and Nested Macros
- 6.10 Macro Directives Summary
- 7 Archiver Description
- 8 Linker Description
- 8.1 Linker Overview
- 8.2 The Linker's Role in the Software Development Flow
- 8.3 Invoking the Linker
- 8.4 Linker Options
- 8.4.1 Wildcards in File, Section, and Symbol Patterns
- 8.4.2 Specifying C/C++ Symbols with Linker Options
- 8.4.3 Relocation Capabilities (--absolute_exe and --relocatable Options)
- 8.4.4 Allocate Memory for Use by the Loader to Pass Arguments (--arg_size Option)
- 8.4.5 Changing Encoding of Big-Endian Instructions
- 8.4.6 Compression (--cinit_compression and --copy_compression Option)
- 8.4.7 Compress DWARF Information (--compress_dwarf Option)
- 8.4.8 Control Linker Diagnostics
- 8.4.9 Automatic Library Selection (--disable_auto_rts Option)
- 8.4.10 Do Not Remove Unused Sections (--unused_section_elimination Option)
- 8.4.11 Linker Command File Preprocessing (--disable_pp, --define and --undefine Options)
- 8.4.12 Error Correcting Code Testing (--ecc Options)
- 8.4.13 Define an Entry Point (--entry_point Option)
- 8.4.14 Set Default Fill Value (--fill_value Option)
- 8.4.15 Generate List of Dead Functions (--generate_dead_funcs_list Option)
- 8.4.16 Define Heap Size (--heap_size Option)
- 8.4.17 Hiding Symbols
- 8.4.18 Alter the Library Search Algorithm (--library Option, --search_path Option, and TI_ARM_C_DIR Environment Variable)
- 8.4.19 Change Symbol Localization
- 8.4.20 Create a Map File (--map_file Option)
- 8.4.21 Managing Map File Contents (--mapfile_contents Option)
- 8.4.22 Disable Name Demangling (--no_demangle)
- 8.4.23 Disable Merging of Symbolic Debugging Information (--no_sym_merge Option)
- 8.4.24 Strip Symbolic Information (--no_symtable Option)
- 8.4.25 Name an Output Module (--output_file Option)
- 8.4.26 Prioritizing Function Placement (--preferred_order Option)
- 8.4.27 C Language Options (--ram_model and --rom_model Options)
- 8.4.28 Retain Discarded Sections (--retain Option)
- 8.4.29 Create an Absolute Listing File (--run_abs Option)
- 8.4.30 Scan All Libraries for Duplicate Symbol Definitions (--scan_libraries)
- 8.4.31 Define Stack Size (--stack_size Option)
- 8.4.32 Enforce Strict Compatibility (--strict_compatibility Option)
- 8.4.33 Mapping of Symbols (--symbol_map Option)
- 8.4.34 Generate Far Call Trampolines (--trampolines Option)
- 8.4.35 Introduce an Unresolved Symbol (--undef_sym Option)
- 8.4.36 Display a Message When an Undefined Output Section Is Created (--warn_sections)
- 8.4.37 Generate XML Link Information File (--xml_link_info Option)
- 8.4.38 Zero Initialization (--zero_init Option)
- 8.5 Linker Command Files
- 8.5.1 Reserved Names in Linker Command Files
- 8.5.2 Constants in Linker Command Files
- 8.5.3 Accessing Files and Libraries from a Linker Command File
- 8.5.4 The MEMORY Directive
- 8.5.5 The SECTIONS Directive
- 8.5.5.1 SECTIONS Directive Syntax
- 8.5.5.2 Section Allocation and Placement
- 8.5.5.3 Specifying Input Sections
- 8.5.5.4 Using Multi-Level Subsections
- 8.5.5.5 Specifying Library or Archive Members as Input to Output Sections
- 8.5.5.6 Allocation Using Multiple Memory Ranges
- 8.5.5.7 Automatic Splitting of Output Sections Among Non-Contiguous Memory Ranges
- 8.5.6 Placing a Section at Different Load and Run Addresses
- 8.5.7 Using GROUP and UNION Statements
- 8.5.8 Special Section Types (DSECT, COPY, NOLOAD, and NOINIT)
- 8.5.9 Configuring Error Correcting Code (ECC) with the Linker
- 8.5.10 Assigning Symbols at Link Time
- 8.5.10.1 Syntax of Assignment Statements
- 8.5.10.2 Assigning the SPC to a Symbol
- 8.5.10.3 Assignment Expressions
- 8.5.10.4 Symbols Defined by the Linker
- 8.5.10.5 Assigning Exact Start, End, and Size Values of a Section to a Symbol
- 8.5.10.6 Why the Dot Operator Does Not Always Work
- 8.5.10.7 Address and Dimension Operators
- 8.5.11 Creating and Filling Holes
- 8.6 Linker Symbols
- 8.7 Default Placement Algorithm
- 8.8 Linker-Generated Copy Tables
- 8.9 Linker-Generated CRC Tables
- 8.10 Partial (Incremental) Linking
- 8.11 Linking C/C++ Code
- 8.12 Linker Example
- 9 Absolute Lister Description
- 10 Cross-Reference Lister Description
- 11 Object File Utilities
- 12 Hex Conversion Utility Description
- 12.1 The Hex Conversion Utility's Role in the Software Development Flow
- 12.2 Invoking the Hex Conversion Utility
- 12.3 Understanding Memory Widths
- 12.4 The ROMS Directive
- 12.5 The SECTIONS Directive
- 12.6 The Load Image Format (--load_image Option)
- 12.7 Excluding a Specified Section
- 12.8 Assigning Output Filenames
- 12.9 Image Mode and the --fill Option
- 12.10 Array Output Format
- 12.11 Building a Table for an On-Chip Boot Loader
- 12.12 Controlling the ROM Device Address
- 12.13 Control Hex Conversion Utility Diagnostics
- 12.14 Description of the Object Formats
- 12.14.1 ASCII-Hex Object Format (--ascii Option)
- 12.14.2 Intel MCS-86 Object Format (--intel Option)
- 12.14.3 Motorola Exorciser Object Format (--motorola Option)
- 12.14.4 Extended Tektronix Object Format (--tektronix Option)
- 12.14.5 Texas Instruments SDSMAC (TI-Tagged) Object Format (--ti_tagged Option)
- 12.14.6 TI-TXT Hex Format (--ti_txt Option)
- 13 Sharing C/C++ Header Files With Assembly Source
- 13.1 Overview of the .cdecls Directive
- 13.2 Notes on C/C++ Conversions
- 13.2.1 Comments
- 13.2.2 Conditional Compilation (#if/#else/#ifdef/etc.)
- 13.2.3 Pragmas
- 13.2.4 The #error and #warning Directives
- 13.2.5 Predefined symbol _ _ASM_HEADER_ _
- 13.2.6 Usage Within C/C++ asm( ) Statements
- 13.2.7 The #include Directive
- 13.2.8 Conversion of #define Macros
- 13.2.9 The #undef Directive
- 13.2.10 Enumerations
- 13.2.11 C Strings
- 13.2.12 C/C++ Built-In Functions
- 13.2.13 Structures and Unions
- 13.2.14 Function/Variable Prototypes
- 13.2.15 C Constant Suffixes
- 13.2.16 Basic C/C++ Types
- 13.3 Notes on C++ Specific Conversions
- 13.4 Special Assembler Support
- A Symbolic Debugging Directives
- B XML Link Information File Description
- C Hex Conversion Utility Examples
- D Glossary
- E Revision History
- Important Notice

ARM Assembly Language Tools
v18.1.0.LTS
User's Guide
Literature Number: SPNU118U
January 2018

2SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Contents
Contents
Preface....................................................................................................................................... 12
1 Introduction to the Software Development Tools.................................................................... 15
1.1 Software Development Tools Overview ................................................................................. 16
1.2 Tools Descriptions.......................................................................................................... 17
2 Introduction to Object Modules............................................................................................ 18
2.1 Object File Format Specifications ........................................................................................ 19
2.2 Executable Object Files ................................................................................................... 19
2.3 Introduction to Sections ................................................................................................... 19
2.3.1 Special Section Names........................................................................................... 20
2.4 How the Assembler Handles Sections .................................................................................. 20
2.4.1 Uninitialized Sections ............................................................................................. 21
2.4.2 Initialized Sections ................................................................................................ 22
2.4.3 User-Named Sections ............................................................................................ 22
2.4.4 Current Section .................................................................................................... 22
2.4.5 Section Program Counters....................................................................................... 23
2.4.6 Subsections ........................................................................................................ 23
2.4.7 Using Sections Directives ........................................................................................ 24
2.5 How the Linker Handles Sections........................................................................................ 26
2.5.1 Combining Input Sections........................................................................................ 27
2.5.2 Placing Sections................................................................................................... 28
2.6 Symbols ..................................................................................................................... 28
2.6.1 External Symbols.................................................................................................. 28
2.6.2 Weak Symbols..................................................................................................... 29
2.6.3 The Symbol Table................................................................................................. 30
2.7 Symbolic Relocations ...................................................................................................... 30
2.8 Loading a Program......................................................................................................... 31
3 Program Loading and Running ............................................................................................ 32
3.1 Loading ...................................................................................................................... 33
3.1.1 Load and Run Addresses ........................................................................................ 33
3.1.2 Bootstrap Loading................................................................................................. 34
3.2 Entry Point................................................................................................................... 38
3.3 Run-Time Initialization ..................................................................................................... 38
3.3.1 _c_int00............................................................................................................. 38
3.3.2 RAM Model vs. ROM Model ..................................................................................... 39
3.3.3 Copy Tables........................................................................................................ 40
3.4 Arguments to main ......................................................................................................... 41
3.5 Run-Time Relocation ...................................................................................................... 41
3.6 Additional Information...................................................................................................... 41
4 Assembler Description........................................................................................................ 42
4.1 Assembler Overview ....................................................................................................... 43
4.2 The Assembler's Role in the Software Development Flow ........................................................... 44
4.3 Invoking the Assembler.................................................................................................... 45
4.4 Controlling Application Binary Interface ................................................................................. 46
4.5 Naming Alternate Directories for Assembler Input..................................................................... 46

www.ti.com
3
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Contents
4.5.1 Using the --include_path Assembler Option ................................................................... 46
4.5.2 Using the TI_ARM_A_DIR Environment Variable............................................................. 47
4.6 Source Statement Format................................................................................................. 49
4.6.1 Label Field.......................................................................................................... 49
4.6.2 Mnemonic Field.................................................................................................... 50
4.6.3 Operand Field ..................................................................................................... 50
4.6.4 Comment Field .................................................................................................... 52
4.7 Literal Constants ........................................................................................................... 53
4.7.1 Integer Literals..................................................................................................... 53
4.7.2 Character String Literals.......................................................................................... 54
4.7.3 Floating-Point Literals............................................................................................. 55
4.8 Assembler Symbols........................................................................................................ 55
4.8.1 Identifiers ........................................................................................................... 55
4.8.2 Labels............................................................................................................... 56
4.8.3 Local Labels........................................................................................................ 56
4.8.4 Symbolic Constants............................................................................................... 58
4.8.5 Defining Symbolic Constants (--asm_define Option) ......................................................... 58
4.8.6 Predefined Symbolic Constants ................................................................................. 60
4.8.7 Registers ........................................................................................................... 61
4.8.8 Substitution Symbols.............................................................................................. 62
4.9 Expressions ................................................................................................................. 63
4.9.1 Mathematical and Logical Operators ........................................................................... 64
4.9.2 Relational Operators and Conditional Expressions........................................................... 65
4.9.3 Well-Defined Expressions........................................................................................ 65
4.9.4 Relocatable Symbols and Legal Expressions ................................................................. 65
4.9.5 Expression Examples............................................................................................. 66
4.10 Built-in Functions and Operators......................................................................................... 67
4.10.1 Built-In Math and Trigonometric Functions ................................................................... 67
4.11 Unified Assembly Language Syntax Support........................................................................... 68
4.12 Source Listings ............................................................................................................. 69
4.13 Debugging Assembly Source............................................................................................. 72
4.14 Cross-Reference Listings ................................................................................................. 73
5 Assembler Directives.......................................................................................................... 74
5.1 Directives Summary........................................................................................................ 75
5.2 Directives that Define Sections........................................................................................... 80
5.3 Directives that Change the Instruction Type............................................................................ 82
5.4 Directives that Initialize Values ........................................................................................... 82
5.5 Directives that Perform Alignment and Reserve Space............................................................... 85
5.6 Directives that Format the Output Listings.............................................................................. 86
5.7 Directives that Reference Other Files ................................................................................... 87
5.8 Directives that Enable Conditional Assembly........................................................................... 88
5.9 Directives that Define Union or Structure Types ....................................................................... 88
5.10 Directives that Define Enumerated Types .............................................................................. 89
5.11 Directives that Define Symbols at Assembly Time .................................................................... 89
5.12 Miscellaneous Directives .................................................................................................. 90
5.13 Directives Reference....................................................................................................... 91
6 Macro Language Description ............................................................................................. 152
6.1 Using Macros.............................................................................................................. 153
6.2 Defining Macros........................................................................................................... 153
6.3 Macro Parameters/Substitution Symbols .............................................................................. 155
6.3.1 Directives That Define Substitution Symbols................................................................. 156
6.3.2 Built-In Substitution Symbol Functions........................................................................ 157
6.3.3 Recursive Substitution Symbols ............................................................................... 158

www.ti.com
4SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Contents
6.3.4 Forced Substitution .............................................................................................. 158
6.3.5 Accessing Individual Characters of Subscripted Substitution Symbols................................... 159
6.3.6 Substitution Symbols as Local Variables in Macros ........................................................ 160
6.4 Macro Libraries............................................................................................................ 161
6.5 Using Conditional Assembly in Macros ................................................................................ 162
6.6 Using Labels in Macros .................................................................................................. 164
6.7 Producing Messages in Macros ........................................................................................ 165
6.8 Using Directives to Format the Output Listing ........................................................................ 166
6.9 Using Recursive and Nested Macros .................................................................................. 167
6.10 Macro Directives Summary.............................................................................................. 168
7 Archiver Description ......................................................................................................... 169
7.1 Archiver Overview ........................................................................................................ 170
7.2 The Archiver's Role in the Software Development Flow............................................................. 171
7.3 Invoking the Archiver ..................................................................................................... 172
7.4 Archiver Examples........................................................................................................ 173
7.5 Library Information Archiver Description............................................................................... 174
7.5.1 Invoking the Library Information Archiver..................................................................... 174
7.5.2 Library Information Archiver Example......................................................................... 175
7.5.3 Listing the Contents of an Index Library ...................................................................... 175
7.5.4 Requirements .................................................................................................... 176
8 Linker Description ............................................................................................................ 177
8.1 Linker Overview........................................................................................................... 178
8.2 The Linker's Role in the Software Development Flow ............................................................... 179
8.3 Invoking the Linker........................................................................................................ 180
8.4 Linker Options............................................................................................................. 181
8.4.1 Wildcards in File, Section, and Symbol Patterns ............................................................ 183
8.4.2 Specifying C/C++ Symbols with Linker Options ............................................................. 183
8.4.3 Relocation Capabilities (--absolute_exe and --relocatable Options) ...................................... 183
8.4.4 Allocate Memory for Use by the Loader to Pass Arguments (--arg_size Option) ....................... 184
8.4.5 Changing Encoding of Big-Endian Instructions .............................................................. 185
8.4.6 Compression (--cinit_compression and --copy_compression Option) .................................... 185
8.4.7 Compress DWARF Information (--compress_dwarf Option) ............................................... 185
8.4.8 Control Linker Diagnostics...................................................................................... 185
8.4.9 Automatic Library Selection (--disable_auto_rts Option) ................................................... 186
8.4.10 Do Not Remove Unused Sections (--unused_section_elimination Option) ............................. 186
8.4.11 Linker Command File Preprocessing (--disable_pp, --define and --undefine Options)................ 187
8.4.12 Error Correcting Code Testing (--ecc Options) ............................................................. 189
8.4.13 Define an Entry Point (--entry_point Option) ................................................................ 190
8.4.14 Set Default Fill Value (--fill_value Option) ................................................................... 190
8.4.15 Generate List of Dead Functions (--generate_dead_funcs_list Option) ................................. 190
8.4.16 Define Heap Size (--heap_size Option)...................................................................... 190
8.4.17 Hiding Symbols ................................................................................................. 191
8.4.18 Alter the Library Search Algorithm (--library Option, --search_path Option, and TI_ARM_C_DIR
Environment Variable)........................................................................................... 191
8.4.19 Change Symbol Localization.................................................................................. 194
8.4.20 Create a Map File (--map_file Option) ....................................................................... 195
8.4.21 Managing Map File Contents (--mapfile_contents Option) ................................................ 196
8.4.22 Disable Name Demangling (--no_demangle) ............................................................... 197
8.4.23 Disable Merging of Symbolic Debugging Information (--no_sym_merge Option) ...................... 197
8.4.24 Strip Symbolic Information (--no_symtable Option) ........................................................ 197
8.4.25 Name an Output Module (--output_file Option) ............................................................. 198
8.4.26 Prioritizing Function Placement (--preferred_order Option) ............................................... 198
8.4.27 C Language Options (--ram_model and --rom_model Options) .......................................... 198

www.ti.com
5
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Contents
8.4.28 Retain Discarded Sections (--retain Option) ................................................................ 198
8.4.29 Create an Absolute Listing File (--run_abs Option) ........................................................ 199
8.4.30 Scan All Libraries for Duplicate Symbol Definitions (--scan_libraries)................................... 199
8.4.31 Define Stack Size (--stack_size Option) ..................................................................... 199
8.4.32 Enforce Strict Compatibility (--strict_compatibility Option) ................................................ 199
8.4.33 Mapping of Symbols (--symbol_map Option) ............................................................... 199
8.4.34 Generate Far Call Trampolines (--trampolines Option).................................................... 200
8.4.35 Introduce an Unresolved Symbol (--undef_sym Option)................................................... 202
8.4.36 Display a Message When an Undefined Output Section Is Created (--warn_sections)............... 203
8.4.37 Generate XML Link Information File (--xml_link_info Option)............................................. 203
8.4.38 Zero Initialization (--zero_init Option) ........................................................................ 203
8.5 Linker Command Files ................................................................................................... 204
8.5.1 Reserved Names in Linker Command Files.................................................................. 205
8.5.2 Constants in Linker Command Files .......................................................................... 205
8.5.3 Accessing Files and Libraries from a Linker Command File ............................................... 206
8.5.4 The MEMORY Directive ........................................................................................ 207
8.5.5 The SECTIONS Directive....................................................................................... 210
8.5.6 Placing a Section at Different Load and Run Addresses................................................... 222
8.5.7 Using GROUP and UNION Statements ...................................................................... 224
8.5.8 Special Section Types (DSECT, COPY, NOLOAD, and NOINIT)......................................... 229
8.5.9 Configuring Error Correcting Code (ECC) with the Linker.................................................. 230
8.5.10 Assigning Symbols at Link Time.............................................................................. 232
8.5.11 Creating and Filling Holes ..................................................................................... 237
8.6 Linker Symbols............................................................................................................ 240
8.6.1 Using Linker Symbols in C/C++ Applications ................................................................ 240
8.6.2 Declaring Weak Symbols ....................................................................................... 241
8.6.3 Resolving Symbols with Object Libraries..................................................................... 241
8.7 Default Placement Algorithm ............................................................................................ 242
8.7.1 How the Allocation Algorithm Creates Output Sections .................................................... 243
8.7.2 Reducing Memory Fragmentation ............................................................................. 243
8.8 Linker-Generated Copy Tables ......................................................................................... 243
8.8.1 Using Copy Tables for Boot Loading.......................................................................... 243
8.8.2 Using Built-in Link Operators in Copy Tables................................................................ 244
8.8.3 Overlay Management Example ................................................................................ 245
8.8.4 Generating Copy Tables With the table() Operator ......................................................... 245
8.8.5 Compression ..................................................................................................... 251
8.8.6 Copy Table Contents............................................................................................ 254
8.8.7 General Purpose Copy Routine................................................................................ 255
8.9 Linker-Generated CRC Tables.......................................................................................... 256
8.9.1 The crc_table() Operator........................................................................................ 256
8.9.2 Restrictions ....................................................................................................... 256
8.9.3 Examples ......................................................................................................... 257
8.9.4 Interface........................................................................................................... 259
8.9.5 A Note on the TMS570_CRC64_ISO Algorithm............................................................. 261
8.10 Partial (Incremental) Linking............................................................................................. 262
8.11 Linking C/C++ Code...................................................................................................... 263
8.11.1 Run-Time Initialization ......................................................................................... 263
8.11.2 Object Libraries and Run-Time Support ..................................................................... 264
8.11.3 Setting the Size of the Stack and Heap Sections .......................................................... 264
8.11.4 Initializing and AutoInitialzing Variables at Run Time...................................................... 264
8.11.5 Initialization of Cinit and Watchdog Timer Hold............................................................. 264
8.12 Linker Example............................................................................................................ 265
9 Absolute Lister Description ............................................................................................... 268
www.ti.com
6SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Contents
9.1 Producing an Absolute Listing .......................................................................................... 269
9.2 Invoking the Absolute Lister ............................................................................................. 270
9.3 Absolute Lister Example ................................................................................................. 271
10 Cross-Reference Lister Description .................................................................................... 274
10.1 Producing a Cross-Reference Listing .................................................................................. 275
10.2 Invoking the Cross-Reference Lister ................................................................................... 276
10.3 Cross-Reference Listing Example ...................................................................................... 277
11 Object File Utilities............................................................................................................ 279
11.1 Invoking the Object File Display Utility................................................................................. 280
11.2 Invoking the Disassembler............................................................................................... 281
11.3 Invoking the Name Utility ................................................................................................ 283
11.4 Invoking the Strip Utility.................................................................................................. 284
12 Hex Conversion Utility Description ..................................................................................... 285
12.1 The Hex Conversion Utility's Role in the Software Development Flow............................................ 286
12.2 Invoking the Hex Conversion Utility .................................................................................... 287
12.2.1 Invoking the Hex Conversion Utility From the Command Line ........................................... 287
12.2.2 Invoking the Hex Conversion Utility With a Command File ............................................... 289
12.3 Understanding Memory Widths ......................................................................................... 290
12.3.1 Target Width..................................................................................................... 290
12.3.2 Specifying the Memory Width ................................................................................. 291
12.3.3 Partitioning Data Into Output Files ........................................................................... 292
12.4 The ROMS Directive ..................................................................................................... 295
12.4.1 When to Use the ROMS Directive............................................................................ 296
12.4.2 An Example of the ROMS Directive.......................................................................... 296
12.5 The SECTIONS Directive................................................................................................ 298
12.6 The Load Image Format (--load_image Option) ...................................................................... 299
12.6.1 Load Image Section Formation ............................................................................... 299
12.6.2 Load Image Characteristics ................................................................................... 300
12.7 Excluding a Specified Section........................................................................................... 300
12.8 Assigning Output Filenames ............................................................................................ 301
12.9 Image Mode and the --fill Option ....................................................................................... 302
12.9.1 Generating a Memory Image.................................................................................. 302
12.9.2 Specifying a Fill Value ......................................................................................... 302
12.9.3 Steps to Follow in Using Image Mode ....................................................................... 302
12.10 Array Output Format ..................................................................................................... 303
12.11 Building a Table for an On-Chip Boot Loader ........................................................................ 304
12.11.1 Description of the Boot Table................................................................................ 304
12.11.2 The Boot Table Format....................................................................................... 304
12.11.3 How to Build the Boot Table ................................................................................. 304
12.11.4 Booting From a Device Peripheral .......................................................................... 305
12.11.5 Setting the Entry Point for the Boot Table ................................................................. 305
12.11.6 Using the ARM Boot Loader................................................................................. 306
12.12 Controlling the ROM Device Address.................................................................................. 310
12.13 Control Hex Conversion Utility Diagnostics ........................................................................... 311
12.14 Description of the Object Formats...................................................................................... 312
12.14.1 ASCII-Hex Object Format (--ascii Option) ................................................................. 312
12.14.2 Intel MCS-86 Object Format (--intel Option)............................................................... 313
12.14.3 Motorola Exorciser Object Format (--motorola Option)................................................... 314
12.14.4 Extended Tektronix Object Format (--tektronix Option) .................................................. 315
12.14.5 Texas Instruments SDSMAC (TI-Tagged) Object Format (--ti_tagged Option)....................... 316
12.14.6 TI-TXT Hex Format (--ti_txt Option) ........................................................................ 317
13 Sharing C/C++ Header Files With Assembly Source.............................................................. 318

www.ti.com
7
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Contents
13.1 Overview of the .cdecls Directive....................................................................................... 319
13.2 Notes on C/C++ Conversions ........................................................................................... 319
13.2.1 Comments ....................................................................................................... 319
13.2.2 Conditional Compilation (#if/#else/#ifdef/etc.)............................................................... 320
13.2.3 Pragmas ......................................................................................................... 320
13.2.4 The #error and #warning Directives.......................................................................... 320
13.2.5 Predefined symbol _ _ASM_HEADER_ _................................................................... 320
13.2.6 Usage Within C/C++ asm( ) Statements..................................................................... 320
13.2.7 The #include Directive ......................................................................................... 320
13.2.8 Conversion of #define Macros ................................................................................ 320
13.2.9 The #undef Directive ........................................................................................... 321
13.2.10 Enumerations ................................................................................................. 321
13.2.11 C Strings........................................................................................................ 321
13.2.12 C/C++ Built-In Functions ..................................................................................... 322
13.2.13 Structures and Unions........................................................................................ 322
13.2.14 Function/Variable Prototypes ................................................................................ 322
13.2.15 C Constant Suffixes .......................................................................................... 323
13.2.16 Basic C/C++ Types ........................................................................................... 323
13.3 Notes on C++ Specific Conversions ................................................................................... 323
13.3.1 Name Mangling ................................................................................................. 323
13.3.2 Derived Classes ................................................................................................ 323
13.3.3 Templates........................................................................................................ 324
13.3.4 Virtual Functions ............................................................................................... 324
13.4 Special Assembler Support.............................................................................................. 324
13.4.1 Enumerations (.enum/.emember/.endenum)................................................................ 324
13.4.2 The .define Directive ........................................................................................... 324
13.4.3 The .undefine/.unasg Directives .............................................................................. 324
13.4.4 The $$defined( ) Built-In Function ............................................................................ 325
13.4.5 The $$sizeof Built-In Function ................................................................................ 325
13.4.6 Structure/Union Alignment and $$alignof( ) ................................................................. 325
13.4.7 The .cstring Directive........................................................................................... 325
A Symbolic Debugging Directives.......................................................................................... 326
A.1 DWARF Debugging Format ............................................................................................. 327
A.2 Debug Directive Syntax .................................................................................................. 327
B XML Link Information File Description................................................................................. 328
B.1 XML Information File Element Types .................................................................................. 329
B.2 Document Elements...................................................................................................... 329
B.2.1 Header Elements ................................................................................................ 329
B.2.2 Input File List ..................................................................................................... 330
B.2.3 Object Component List.......................................................................................... 331
B.2.4 Logical Group List ............................................................................................... 332
B.2.5 Placement Map .................................................................................................. 334
B.2.6 Far Call Trampoline List ........................................................................................ 335
B.2.7 Symbol Table..................................................................................................... 336
C Hex Conversion Utility Examples........................................................................................ 337
C.1 Scenario 1 -- Building a Hex Conversion Command File for a Single 8-Bit EPROM............................ 338
C.2 Scenario 2 -- Building a Hex Conversion Command File for 16-BIS Code ....................................... 342
C.3 Scenario 3 -- Building a Hex Conversion Command File for Two 8-Bit EPROMs ............................... 345
D Glossary.......................................................................................................................... 349
D.1 Terminology ............................................................................................................... 349
E Revision History ............................................................................................................... 354
E.1 Recent Revisions ......................................................................................................... 354

www.ti.com
8SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
List of Figures
List of Figures
1-1. ARM Device Software Development Flow ............................................................................. 16
2-1. Partitioning Memory Into Logical Blocks ................................................................................ 20
2-2. Using Sections Directives Example...................................................................................... 25
2-3. Object Code Generated by the File in .................................................................................. 26
2-4. Combining Input Sections to Form an Executable Object Module................................................... 27
3-1. Bootloading Sequence (Simplified) ...................................................................................... 34
3-2. Bootloading Sequence with Secondary Bootloader ................................................................... 35
3-3. Autoinitialization at Run Time............................................................................................. 39
3-4. Initialization at Load Time ................................................................................................. 40
4-1. The Assembler in the ARM Software Development Flow............................................................. 44
4-2. Example Assembler Listing ............................................................................................... 70
5-1. The .field Directive ......................................................................................................... 83
5-2. Initialization Directives ..................................................................................................... 84
5-3. The .align Directive......................................................................................................... 85
5-4. The .space and .bes Directives .......................................................................................... 86
5-5. Double-Precision Floating-Point Format ............................................................................... 107
5-6. The .field Directive........................................................................................................ 114
5-7. Single-Precision Floating-Point Format ................................................................................ 115
5-8. The .usect Directive ..................................................................................................... 150
7-1. The Archiver in the ARM Software Development Flow .............................................................. 171
8-1. The Linker in the ARM Software Development Flow................................................................. 179
8-2. Section Placement Defined by ......................................................................................... 212
8-3. Run-Time Execution of .................................................................................................. 224
8-4. Memory Allocation Shown in and ...................................................................................... 226
8-5. Compressed Copy Table ................................................................................................ 251
8-6. Handler Table ............................................................................................................. 252
8-7. CRC_TABLE Conceptual Model........................................................................................ 259
9-1. Absolute Lister Development Flow ..................................................................................... 269
10-1. The Cross-Reference Lister Development Flow...................................................................... 275
12-1. The Hex Conversion Utility in the ARM Software Development Flow ............................................. 286
12-2. Hex Conversion Utility Process Flow................................................................................... 290
12-3. Object File Data and Memory Widths.................................................................................. 292
12-4. Data, Memory, and ROM Widths ....................................................................................... 294
12-5. The infile.out File Partitioned Into Four Output Files................................................................. 297
12-6. Sample Hex Converter Out File for Booting From 8-Bit SPI Boot.................................................. 308
12-7. Sample Hex Converter Out File for ARM 16-Bit Parallel Boot GP I/O............................................. 309
12-8. ASCII-Hex Object Format................................................................................................ 312
12-9. Intel Hexadecimal Object Format....................................................................................... 313
12-10. Motorola-S Format........................................................................................................ 314
12-11. Extended Tektronix Object Format ..................................................................................... 315
12-12. TI-Tagged Object Format................................................................................................ 316
12-13. TI-TXT Object Format.................................................................................................... 317
C-1. EPROM Memory System for Scenario 1 .............................................................................. 338
C-2. Contents of Hex Output File example1.hex ........................................................................... 341
C-3. EPROM Memory System for Scenario 2 .............................................................................. 342
C-4. Contents of Hex Output File example2.hex ........................................................................... 345
C-5. EPROM Memory System for Scenario 3 .............................................................................. 345

www.ti.com
9
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
List of Figures
C-6. Contents of Hex Output File lower16.bit............................................................................... 348
C-7. Contents of Hex Output File upper16.bit .............................................................................. 348

www.ti.com
10 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
List of Tables
List of Tables
4-1. ARM Assembler Options .................................................................................................. 45
4-2. ARM Processor Symbolic Constants .................................................................................... 60
4-3. ARM Register Symbols with Aliases..................................................................................... 61
4-4. ARM Status Registers and Aliases ...................................................................................... 61
4-5. Operators Used in Expressions (Precedence) ........................................................................ 64
4-6. Expressions With Absolute and Relocatable Symbols ................................................................ 65
4-7. Built-In Mathematical Functions .......................................................................................... 67
4-8. Symbol Attributes........................................................................................................... 73
5-1. Directives that Control Section Use...................................................................................... 75
5-2. Directives that Gather Sections into Common Groups................................................................ 75
5-3. Directives that Affect Unused Section Elimination ..................................................................... 75
5-4. Directives that Initialize Values (Data and Memory)................................................................... 75
5-5. Directives that Perform Alignment and Reserve Space............................................................... 76
5-6. Directives that Change the Instruction Type............................................................................ 76
5-7. Directives that Format the Output Listing ............................................................................... 76
5-8. Directives that Reference Other Files ................................................................................... 77
5-9. Directives that Affect Symbol Linkage and Visibility ................................................................... 77
5-10. Directives that Enable Conditional Assembly........................................................................... 77
5-11. Directives that Define Union or Structure Types ....................................................................... 77
5-12. Directives that Define Symbols........................................................................................... 78
5-13. Directives that Create or Affect Macros ................................................................................. 78
5-14. Directives that Control Diagnostics ...................................................................................... 78
5-15. Directives that Perform Assembly Source Debug...................................................................... 79
5-16. Directives that Are Used by the Absolute Lister........................................................................ 79
5-17. Directives that Perform Miscellaneous Functions...................................................................... 79
6-1. Substitution Symbol Functions and Return Values................................................................... 157
6-2. Creating Macros .......................................................................................................... 168
6-3. Manipulating Substitution Symbols..................................................................................... 168
6-4. Conditional Assembly .................................................................................................... 168
6-5. Producing Assembly-Time Messages.................................................................................. 168
6-6. Formatting the Listing .................................................................................................... 168
8-1. Basic Options Summary ................................................................................................. 181
8-2. File Search Path Options Summary.................................................................................... 181
8-3. Command File Preprocessing Options Summary .................................................................... 181
8-4. Diagnostic Options Summary ........................................................................................... 181
8-5. Linker Output Options Summary........................................................................................ 182
8-6. Symbol Management Options Summary .............................................................................. 182
8-7. Run-Time Environment Options Summary ............................................................................ 182
8-8. Link-Time Optimization Options Summary ............................................................................ 183
8-9. Miscellaneous Options Summary....................................................................................... 183
8-10. Predefined ARM Macro Names......................................................................................... 188
8-11. Groups of Operators Used in Expressions (Precedence) ........................................................... 233
10-1. Symbol Attributes in Cross-Reference Listing ........................................................................ 277
12-1. Basic Hex Conversion Utility Options .................................................................................. 287
12-2. Boot-Loader Options ..................................................................................................... 304
12-3. Boot Table Source Formats ............................................................................................. 306
12-4. Boot Table Format........................................................................................................ 306

www.ti.com
11
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
List of Tables
12-5. Options for Specifying Hex Conversion Formats ..................................................................... 312
A-1. Symbolic Debugging Directives......................................................................................... 327

12 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Read This First
Preface
SPNU118U–January 2018
Read This First
About This Manual
The ARM Assembly Language Tools User's Guide explains how to use the following Texas Instruments
Code Generation object file tools:
• Assembler
• Archiver
• Linker
• Library information archiver
• Absolute lister
• Cross-reference lister
• Disassembler
• Object file display utility
• Name utility
• Strip utility
• Hex conversion utility
How to Use This Manual
This book helps you learn how to use the Texas Instruments object file and assembly language tools
designed specifically for the ARM®32-bit devices. This book consists of four parts:
•Introductory information, consisting of Chapter 1 through Chapter 3, gives you an overview of the
object file and assembly language development tools. Chapter 2, in particular, explains object modules
and how they can be managed to help your ARM application load and run. It is highly recommended
that developers become familiar with what object modules are and how they are used before using the
assembler and linker.
•Assembler description, consisting of Chapter 4 through Chapter 6, contains detailed information
about using the assembler. Chapter 4 and Chapter 5 explain how to invoke the assembler and discuss
source statement format, valid constants and expressions, assembler output, and assembler directives.
Chapter 6 focuses on the macro language.
•Linker and other object file tools description, consisting of Chapter 7 through Chapter 12,
describes in detail each of the tools provided with the assembler to help you create executable object
files. Chapter 7 provides details about using the archiver to create object libraries. Chapter 8 explains
how to invoke the linker, how the linker operates, and how to use linker directives. Chapter 11 provides
a brief overview of some of the object file utilities that can be useful in examining the content of object
files as well as removing symbol and debug information to reduce the size of a given object file.
Chapter 12 explains how to use the hex conversion utility.
•Additional Reference material, consisting of Appendix A through Appendix D, provides
supplementary information including symbolic debugging directives used by the ARM C/C++ compiler.
It also provides hex utility examples. A description of the XML link information file and a glossary are
also provided.
www.ti.com
Notational Conventions
13
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Read This First
Notational Conventions
This document uses the following conventions:
• Program listings, program examples, and interactive displays are shown in a special typeface.
Interactive displays use a bold version of the special typeface to distinguish commands that you enter
from items that the system displays (such as prompts, command output, error messages, etc.).
Here is a sample of C code:
#include <stdio.h>
main()
{ printf("hello world\n");
}
• In syntax descriptions, the instruction, command, or directive is in a bold typeface and parameters are
in an italic typeface. Portions of a syntax that are in bold should be entered as shown; portions of a
syntax that are in italics describe the type of information that should be entered.
• Square brackets ( [ and ] ) identify an optional parameter. If you use an optional parameter, you specify
the information within the brackets. Unless the square brackets are in the bold typeface, do not enter
the brackets themselves. The following is an example of a command that has an optional parameter:
armcl [options] [filenames] [--run_linker [link_options] [object files]]
• Braces ( { and } ) indicate that you must choose one of the parameters within the braces; you do not
enter the braces themselves. This is an example of a command with braces that are not included in the
actual syntax but indicate that you must specify either the --rom_model or --ram_model option:
armcl --run_linker {--rom_model | --ram_model}filenames [--output_file= name.out]
--library= libraryname
• In assembler syntax statements, The leftmost character position, column 1, is reserved for the first
character of a label or symbol. If the label or symbol is optional, it is usually not shown. If it is a
required parameter, it is shown starting against the left margin of the box, as in the example below. No
instruction, command, directive, or parameter, other than a symbol or label, can begin in column 1.
symbol .usect "section name", size in bytes[, alignment]
• Some directives can have a varying number of parameters. For example, the .byte directive can have
multiple parameters. This syntax is shown as [, ..., parameter].
.byte parameter1[, ... , parametern]
• The TMS470 and TMS570 devices are collectively referred to as ARM.
• The ARM 16-bit instruction set is referred to as 16-BIS.
• The ARM 32-bit instruction set is referred to as 32-BIS.
• Other symbols and abbreviations used throughout this document include the following:
Symbol Definition
B,b Suffix — binary integer
H, h Suffix — hexadecimal integer
LSB Least significant bit
MSB Most significant bit
0x Prefix — hexadecimal integer
Q, q Suffix — octal integer

Related Documentation From Texas Instruments
www.ti.com
14 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Read This First
Related Documentation From Texas Instruments
See the following resources for further information about the TI Code Generation Tools:
• Texas Instruments Wiki: Compiler topics
• Texas Instruments E2E Community: Compiler forum
You can use the following books to supplement this user's guide:
SPNU151 —ARM Optimizing C/C++ Compiler User's Guide. Describes the ARM C/C++ compiler. This
C/C++ compiler accepts ANSI standard C/C++ source code and produces assembly language
source code for the ARM platform of devices.
SPNU134 —TMS470R1x User's Guide. Describes the TMS470R1x RISC microcontroller, its architecture
(including registers), ICEBreaker module, interfaces (memory, coprocessor, and debugger), 16-bit
and 32-bit instruction sets, and electrical specifications.
Trademarks
ARM is a registered trademark of ARM Limited.
All other trademarks are the property of their respective owners.
15
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Introduction to the Software Development Tools
Chapter 1
SPNU118U–January 2018
Introduction to the Software Development Tools
The ARM®is supported by a set of software development tools, which includes an optimizing C/C++
compiler, an assembler, a linker, and assorted utilities. This chapter provides an overview of these tools.
The ARM device is supported by the following assembly language development tools:
• Assembler
• Archiver
• Linker
• Library information archiver
• Absolute lister
• Cross-reference lister
• Object file display utility
• Disassembler
• Name utility
• Strip utility
• Hex conversion utility
This chapter shows how these tools fit into the general software tools development flow and gives a brief
description of each tool. For convenience, it also summarizes the C/C++ compiler and debugging tools.
For detailed information on the compiler and debugger, and for complete descriptions of the ARM device,
refer to the books listed in Related Documentation From Texas Instruments.
Topic ........................................................................................................................... Page
1.1 Software Development Tools Overview................................................................. 16
1.2 Tools Descriptions ............................................................................................. 17
C/C++
source
files
C/C++
compiler
Assembler
source
Assembler
Executable
object file
Debugging
tools
Library-build
utility
Run-time-
support
library
Archiver
Archiver
Macro
library
Absolute lister
Hex-conversion
utility
Cross-reference
lister
Object file
utilities
ARM
Linker
Macro
source
files
Object
files
EPROM
programmer
Library of
object
files
C/C++ name
demangling
utility
Software Development Tools Overview
www.ti.com
16 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Introduction to the Software Development Tools
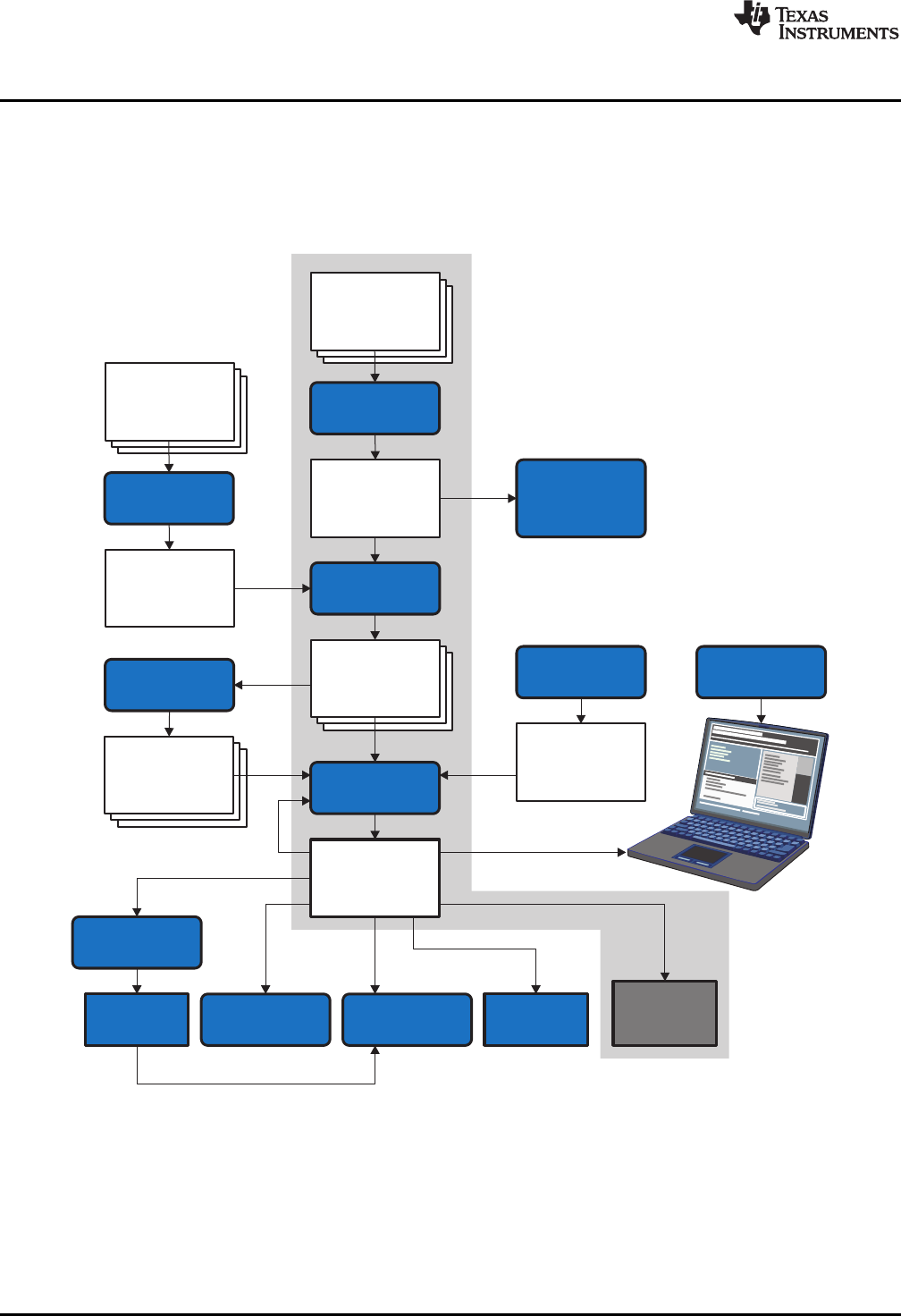
1.1 Software Development Tools Overview
Figure 1-1 shows the ARM device software development flow. The shaded portion highlights the most
common development path; the other portions are optional. The other portions are peripheral functions
that enhance the development process.
Figure 1-1. ARM Device Software Development Flow

www.ti.com
Tools Descriptions
17
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Introduction to the Software Development Tools
1.2 Tools Descriptions
The following list describes the tools that are shown in Figure 1-1:
• The C/C++ compiler accepts C/C++ source code and produces ARM machine code object modules.
See the ARM Optimizing C/C++ Compiler User's Guide for more information. A shell program, an
optimizer, and an interlist utility are included in the installation:
– The shell program enables you to compile, assemble, and link source modules in one step.
– The optimizer modifies code to improve the efficiency of C/C++ programs.
– The interlist utility interlists C/C++ source statements with assembly language output to correlate
code produced by the compiler with your source code.
• The assembler translates assembly language source files into machine language object modules.
Source files can contain instructions, assembler directives, and macro directives. You can use
assembler directives to control the assembly process, including the source listing format, data
alignment, and section content. See Chapter 4 through Chapter 6. See the TMS470R1x User's Guide
for detailed information on the assembly language instruction set.
• The linker combines object files into a single executable object module. It performs symbolic relocation
and resolves external references. The linker accepts relocatable object modules (created by the
assembler) as input. It also accepts archiver library members and output modules created by a
previous linker run. Link directives allow you to combine object file sections, bind sections or symbols
to addresses or within memory ranges, and define global symbols. See Chapter 8.
• The archiver allows you to collect a group of files into a single archive file, called a library. The most
common use of the archiver is to collect a group of object files into an object library. The linker extracts
object library members to resolve external references during the link. You can also use the archiver to
collect several macros into a macro library. The assembler searches the library and uses the members
that are called as macros by the source file. The archiver allows you to modify a library by deleting,
replacing, extracting, or adding members. See Section 7.1.
• The library information archiver allows you to create an index library of several object file library
variants, which is useful when several variants of a library with different options are available. Rather
than refer to a specific library, you can link against the index library, and the linker will choose the best
match from the indexed libraries. See Section 7.5 for more information about using the archiver to
manage the content of a library.
• You can use the library-build utility to build your own customized run-time-support library. See the
ARM Optimizing C/C++ Compiler User's Guide for more information.
• The hex conversion utility converts object files to TI-Tagged, ASCII-Hex, Intel, Motorola-S, or
Tektronix object format. Converted files can be downloaded to an EPROM programmer. See
Chapter 12.
• The absolute lister uses linked object files to create .abs files. These files can be assembled to
produce a listing of the absolute addresses of object code. See Chapter 9.
• The cross-reference lister uses object files to produce a cross-reference listing showing symbols,
their definition, and their references in the linked source files. See Chapter 10.
• The main product of this development process is a executable object file that can be executed on a
ARM device. You can use one of several debugging tools to refine and correct your code. Available
products include:
– An instruction-accurate and clock-accurate software simulator
– An XDS emulator
In addition, the following utilities are provided to help examine or manage the content of a given object file:
• The object file display utility prints the contents of object files and object libraries in either human
readable or XML formats. See Section 11.1.
• The disassembler decodes the machine code from object modules to show the assembly instructions
that it represents. See Section 11.2.
• The name utility prints a list of symbol names for objects and functions defined or referenced in an
object file or object archive. See Section 11.3.
• The strip utility removes symbol table and debugging information from object files and object libraries.
See Section 11.4.
18 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Introduction to Object Modules
Chapter 2
SPNU118U–January 2018
Introduction to Object Modules
The assembler creates object modules from assembly code, and the linker creates executable object files
from object modules. These executable object files can be executed by an ARM device.
Object modules make modular programming easier because they encourage you to think in terms of
blocks of code and data when you write an assembly language program. These blocks are known as
sections. Both the assembler and the linker provide directives that allow you to create and manipulate
sections.
This chapter focuses on the concept and use of sections in assembly language programs.
Topic ........................................................................................................................... Page
2.1 Object File Format Specifications......................................................................... 19
2.2 Executable Object Files ...................................................................................... 19
2.3 Introduction to Sections...................................................................................... 19
2.4 How the Assembler Handles Sections .................................................................. 20
2.5 How the Linker Handles Sections......................................................................... 26
2.6 Symbols............................................................................................................ 28
2.7 Symbolic Relocations ......................................................................................... 30
2.8 Loading a Program............................................................................................. 31

www.ti.com
Object File Format Specifications
19
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Introduction to Object Modules
2.1 Object File Format Specifications
The object files created by the assembler and linker conform to the ELF (Executable and Linking Format)
binary format, which is used by the Embedded Application Binary Interface (EABI). See the ARM
Optimizing C/C++ Compiler User's Guide (SPNU151) for information on the EABI ABI. The complete ARM
ABI specifications can be found in the ARM Information Center.
COFF object files and the legacy TIABI and TI ARM9 ABI modes are not supported in v15.6.0.STS and
later versions of the TI Code Generation Tools. If you would like to produce COFF output files, please use
v5.2 of the ARM Code Generation Tools and refer to SPNU151J for documentation.
The ELF object files generated by the assembler and linker conform to the December 17, 2003 snapshot
of the System V generic ABI (or gABI). This specification is currently maintained by SCO.
2.2 Executable Object Files
The linker produces executable object modules. An executable object module has the same format as
object files that are used as linker input. The sections in an executable object module, however, have
been combined and placed in target memory, and the relocations are all resolved.
To run a program, the data in the executable object module must be transferred, or loaded, into target
system memory. See Chapter 3 for details about loading and running programs.
2.3 Introduction to Sections
The smallest unit of an object file is a section. A section is a block of code or data that occupies
contiguous space in the memory map. Each section of an object file is separate and distinct.
ELF format executable object files contain segments. An ELF segment is a meta-section. It represents a
contiguous region of target memory. It is a collection of sections that have the same property, such as
writeable or readable. An ELF loader needs the segment information, but does not need the section
information. The ELF standard allows the linker to omit ELF section information entirely from the
executable object file.
Object files usually contain three default sections:
(1) Some targets allow content other than text, such as constants, in .text sections.
.text section contains executable code (1)
.data section usually contains initialized data
.bss section usually reserves space for uninitialized variables
The assembler and linker allow you to create, name, and link other kinds of sections. The .text, .data, and
.bss sections are archetypes for how sections are handled.
There are two basic types of sections:
Initialized sections contain data or code. The .text and .data sections are initialized; user-
named sections created with the .sect assembler directive are also
initialized.
Uninitialized sections reserve space in the memory map for uninitialized data. The .bss section is
uninitialized; user-named sections created with the .usect assembler
directive are also uninitialized.
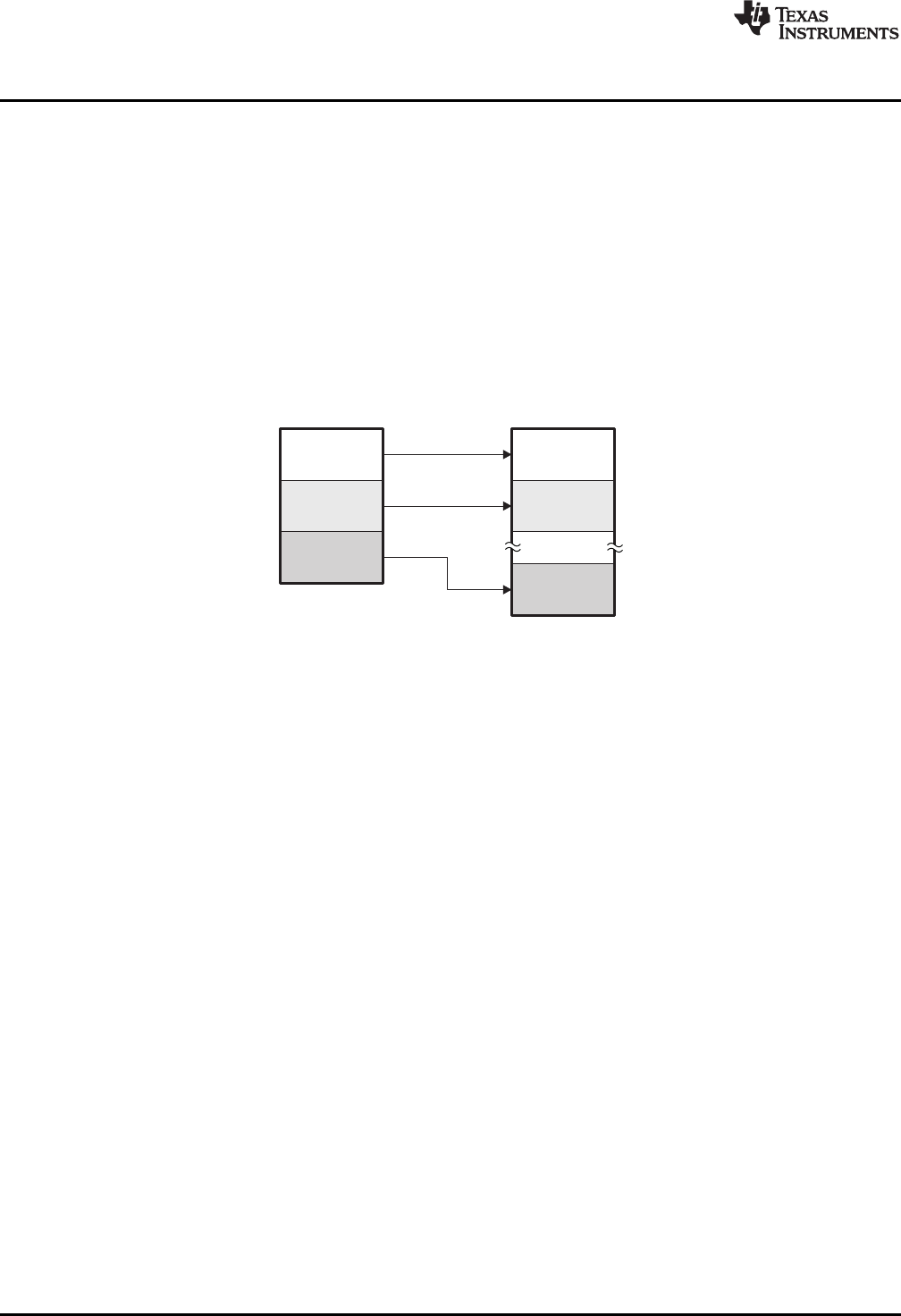
Objectfile
.bss
.data
.text
RAM
EEPROM
ROM
Targetmemory
Introduction to Sections
www.ti.com
20 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Introduction to Object Modules
Several assembler directives allow you to associate various portions of code and data with the appropriate
sections. The assembler builds these sections during the assembly process, creating an object file
organized as shown in Figure 2-1.
One of the linker's functions is to relocate sections into the target system's memory map; this function is
called placement. Because most systems contain several types of memory, using sections can help you
use target memory more efficiently. All sections are independently relocatable; you can place any section
into any allocated block of target memory. For example, you can define a section that contains an
initialization routine and then allocate the routine in a portion of the memory map that contains ROM. For
information on section placement, see the "Specifying Where to Allocate Sections in Memory" section of
the ARM Optimizing C/C++ Compiler User's Guide.
Figure 2-1 shows the relationship between sections in an object file and a hypothetical target memory.
Figure 2-1. Partitioning Memory Into Logical Blocks
2.3.1 Special Section Names
You can use the .sect and .usect directives to create any section name you like, but certain sections are
treated in a special manner by the linker and the compiler's run-time support library. If you create a section
with the same name as a special section, you should take care to follow the rules for that special section.
A few common special sections are:
• .text -- Used for program code.
• .bss -- Used for uninitialized objects (global variables).
• .data -- Used for initialized non-const objects (global variables).
• .const -- Used for initialized const objects (string constants, variables declared const).
• .cinit -- Used to initialize C global variables at startup.
• .stack -- Used for the function call stack.
• .sysmem - Used for the dynamic memory allocation pool.
For more information on sections, see the "Specifying Where to Allocate Sections in Memory" section of
the ARM Optimizing C/C++ Compiler User's Guide.
2.4 How the Assembler Handles Sections
The assembler identifies the portions of an assembly language program that belong in a given section.
The assembler has the following directives that support this function:
• .bss
• .data
• .sect
• .text
• .usect
The .bss and .usect directives create uninitialized sections; the .text, .data, and .sect directives create
initialized sections.
www.ti.com
How the Assembler Handles Sections
21
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Introduction to Object Modules
You can create subsections of any section to give you tighter control of the memory map. Subsections are
created using the .sect and .usect directives. Subsections are identified with the base section name and a
subsection name separated by a colon; see Section 2.4.6.
Default Sections Directive
NOTE: If you do not use any of the sections directives, the assembler assembles everything into the
.text section.
2.4.1 Uninitialized Sections
Uninitialized sections reserve space in ARM memory; they are usually placed in RAM. These sections
have no actual contents in the object file; they simply reserve memory. A program can use this space at
run time for creating and storing variables.
Uninitialized data areas are built by using the following assembler directives.
• The .bss directive reserves space in the .bss section.
• The .usect directive reserves space in a specific uninitialized user-named section.
Each time you invoke the .bss or .usect directive, the assembler reserves additional space in the .bss or
the user-named section. The syntax is:
.bss symbol,size in bytes[,alignment [,bank offset] ]
symbol .usect "section name", size in bytes[,alignment[,bank offset] ]
symbol points to the first byte reserved by this invocation of the .bss or .usect directive. The
symbol corresponds to the name of the variable that you are reserving space for. It can
be referenced by any other section and can also be declared as a global symbol (with
the .global directive).
size in bytes is an absolute expression (see Section 4.9). The .bss directive reserves size in bytes
bytes in the .bss section. The .usect directive reserves size in bytes bytes in section
name. For both directives, you must specify a size; there is no default value.
alignment is an optional parameter. It specifies the minimum alignment in bytes required by the
space allocated. The default value is byte aligned; this option is represented by the
value 1. The value must be a power of 2.
bank offset is an optional parameter. It ensures that the space allocated to the symbol occurs on a
specific memory bank boundary. The bank offset measures the number of bytes to
offset from the alignment specified before assigning the symbol to that location.
section name specifies the user-named section in which to reserve space. See Section 2.4.3.
Initialized section directives (.text, .data, and .sect) change which section is considered the current section
(see Section 2.4.2). However, the .bss and .usect directives do not change the current section; they simply
escape from the current section temporarily. Immediately after a .bss or .usect directive, the assembler
resumes assembling into whatever the current section was before the directive. The .bss and .usect
directives can appear anywhere in an initialized section without affecting its contents. For an example, see
Section 2.4.7.
The .usect directive can also be used to create uninitialized subsections. See Section 2.4.6 for more
information on creating subsections.
The .common directive is similar to directives that create uninitialized data sections, except that common
symbols are created, instead.
How the Assembler Handles Sections
www.ti.com
22 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Introduction to Object Modules
2.4.2 Initialized Sections
Initialized sections contain executable code or initialized data. The contents of these sections are stored in
the object file and placed in ARM memory when the program is loaded. Each initialized section is
independently relocatable and may reference symbols that are defined in other sections. The linker
automatically resolves these references. The following directives tell the assembler to place code or data
into a section. The syntaxes for these directives are:
.text
.data
.sect "section name"
The .sect directive can also be used to create initialized subsections. See Section 2.4.6, for more
information on creating subsections.
2.4.3 User-Named Sections
User-named sections are sections that you create. You can use them like the default .text, .data, and .bss
sections, but each section with a distinct name is kept distinct during assembly.
For example, repeated use of the .text directive builds up a single .text section in the object file. This .text
section is allocated in memory as a single unit. Suppose there is a portion of executable code (perhaps an
initialization routine) that you want the linker to place in a different location than the rest of .text. If you
assemble this segment of code into a user-named section, it is assembled separately from .text, and you
can use the linker to allocate it into memory separately. You can also assemble initialized data that is
separate from the .data section, and you can reserve space for uninitialized variables that is separate from
the .bss section.
These directives let you create user-named sections:
• The .usect directive creates uninitialized sections that are used like the .bss section. These sections
reserve space in RAM for variables.
• The .sect directive creates initialized sections, like the default .text and .data sections, that can contain
code or data. The .sect directive creates user-named sections with relocatable addresses.
The syntaxes for these directives are:
symbol .usect "section name", size in bytes[,alignment[,bank offset]]
.sect "section name"
The maximum number of sections is 232-1 (4294967295).
The section name parameter is the name of the section. For the .usect and .sect directives, a section
name can refer to a subsection; see Section 2.4.6 for details.
Each time you invoke one of these directives with a new name, you create a new user-named section.
Each time you invoke one of these directives with a name that was already used, the assembler resumes
assembling code or data (or reserves space) into the section with that name. You cannot use the same
names with different directives. That is, you cannot create a section with the .usect directive and then try
to use the same section with .sect.
2.4.4 Current Section
The assembler adds code or data to one section at a time. The section the assembler is currently filling is
the current section. The .text, .data, and .sect directives change which section is considered the current
section. When the assembler encounters one of these directives, it stops assembling into the current
section (acting as an implied end of current section command). The assembler sets the designated
section as the current section and assembles subsequent code into the designated section until it
encounters another .text, .data, or .sect directive.
www.ti.com
How the Assembler Handles Sections
23
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Introduction to Object Modules
If one of these directives sets the current section to a section that already has code or data in it from
earlier in the file, the assembler resumes adding to the end of that section. The assembler generates only
one contiguous section for each given section name. This section is formed by concatenating all of the
code or data which was placed in that section.
2.4.5 Section Program Counters
The assembler maintains a separate program counter for each section. These program counters are
known as section program counters, or SPCs.
An SPC represents the current address within a section of code or data. Initially, the assembler sets each
SPC to 0. As the assembler fills a section with code or data, it increments the appropriate SPC. If you
resume assembling into a section, the assembler remembers the appropriate SPC's previous value and
continues incrementing the SPC from that value.
The assembler treats each section as if it began at address 0; the linker relocates the symbols in each
section according to the final address of the section in which that symbol is defined. See Section 2.7 for
information on relocation.
2.4.6 Subsections
A subsection is created by creating a section with a colon in its name. Subsections are logical subdivisions
of larger sections. Subsections are themselves sections and can be manipulated by the assembler and
linker.
The assembler has no concept of subsections; to the assembler, the colon in the name is not special. The
subsection .text:rts would be considered completely unrelated to its parent section .text, and the
assembler will not combine subsections with their parent sections.
Subsections are used to keep parts of a section as distinct sections so that they can be separately
manipulated. For instance, by placing each function and object in a uniquely-named subsection, the linker
gets a finer-grained view of the section for memory placement and unused-function elimination.
By default, when the linker sees a SECTION directive in the linker command file like ".text", it will gather
.text and all subsections of .text into one large output section named ".text". You can instead use the
SECTION directive to control the subsection independently. See Section 8.5.5.1 for an example.
You can create subsections in the same way you create other user-named sections: by using the .sect or
.usect directive.
The syntaxes for a subsection name are:
symbol .usect "section_name:subsection_name",size in bytes[,alignment[,bank offset] ]
.sect "section_name:subsection_name"
A subsection is identified by the base section name followed by a colon and the name of the subsection.
The subsection name may not contain any spaces.
A subsection can be allocated separately or grouped with other sections using the same base name. For
example, you create a subsection called _func within the .text section:
.sect ".text:_func"
Using the linker's SECTIONS directive, you can allocate .text:_func separately, or with all the .text
sections.
You can create two types of subsections:
• Initialized subsections are created using the .sect directive. See Section 2.4.2.
• Uninitialized subsections are created using the .usect directive. See Section 2.4.1.
Subsections are placed in the same manner as sections. See Section 8.5.5 for information on the
SECTIONS directive.

How the Assembler Handles Sections
www.ti.com
24 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Introduction to Object Modules
2.4.7 Using Sections Directives
Figure 2-2 shows how you can build sections incrementally, using the sections directives to swap back
and forth between the different sections. You can use sections directives to begin assembling into a
section for the first time, or to continue assembling into a section that already contains code. In the latter
case, the assembler simply appends the new code to the code that is already in the section.
The format in Figure 2-2 is a listing file. Figure 2-2 shows how the SPCs are modified during assembly. A
line in a listing file has four fields:
Field 1 contains the source code line counter.
Field 2 contains the section program counter.
Field 3 contains the object code.
Field 4 contains the original source statement.
See Section 4.12 for more information on interpreting the fields in a source listing.
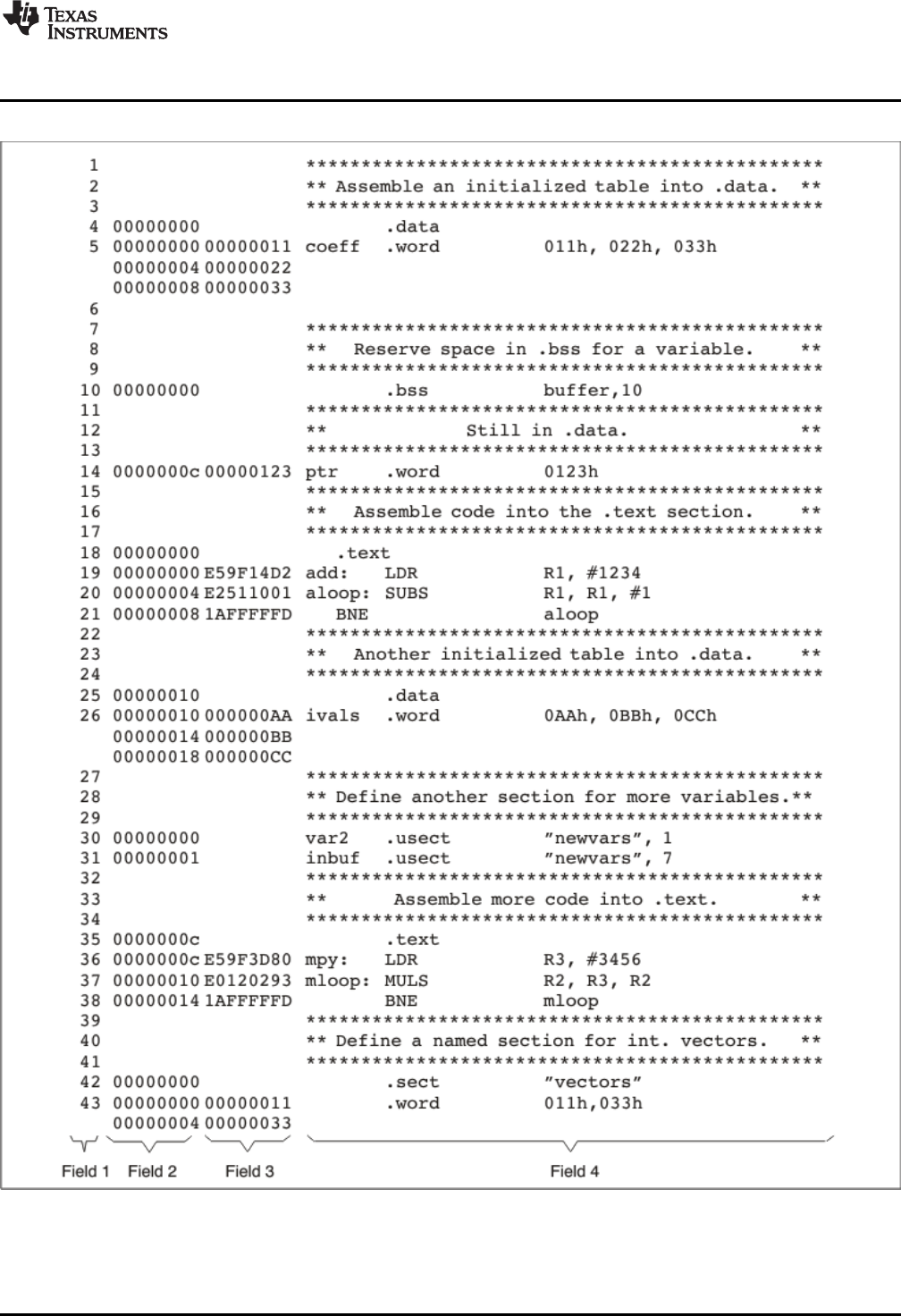
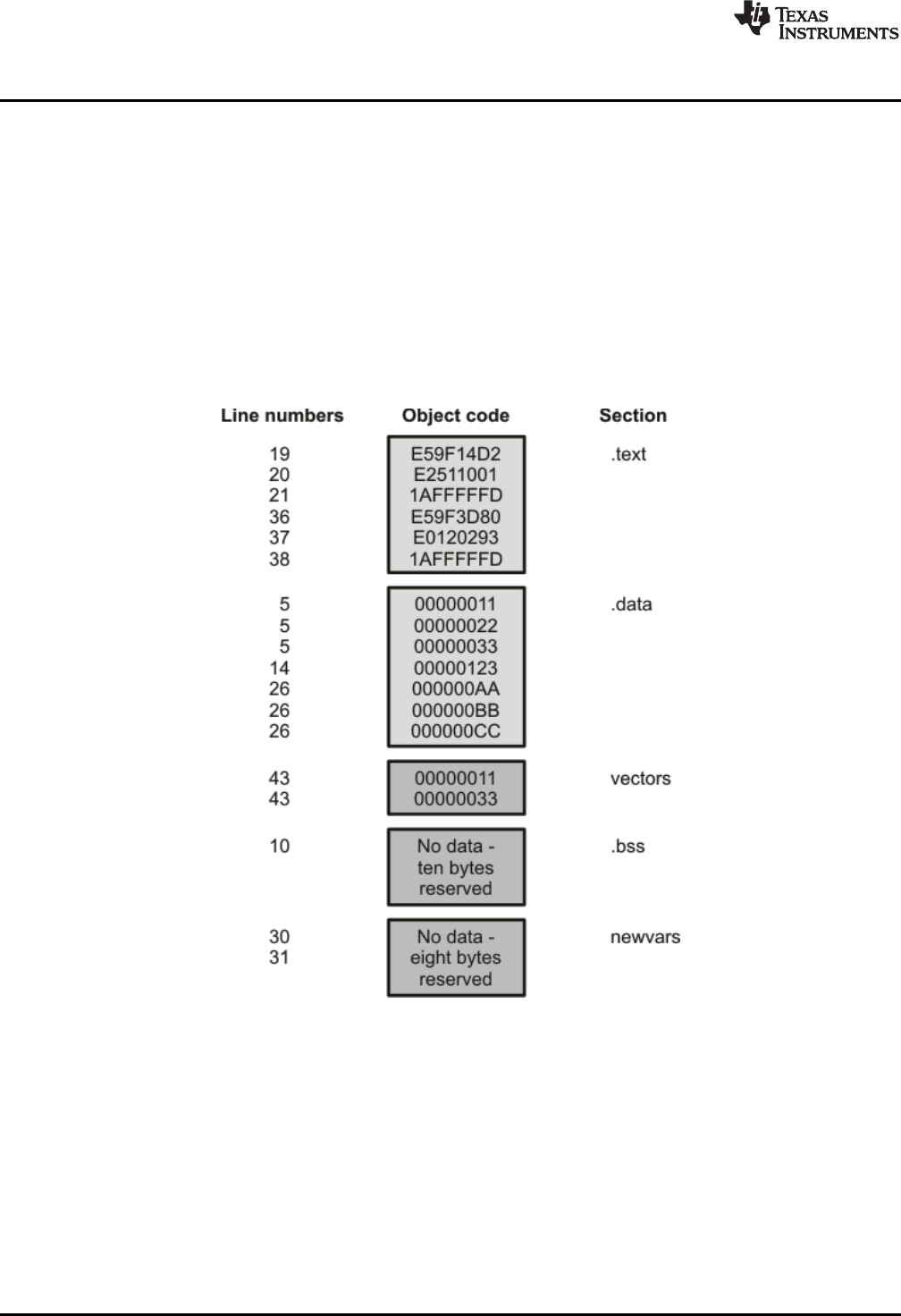
How the Linker Handles Sections
www.ti.com
26 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Introduction to Object Modules
.text contains six 32-bit words of object code.
.data contains seven words of initialized data.
vectors is a user-named section created with the .sect directive; it contains two words of initialized
data.
.bss reserves ten bytes in memory.
newvars is a user-named section created with the .usect directive; it reserves eight bytes in
memory.
The second column shows the object code that is assembled into these sections; the first column shows
the source statements that generated the object code.
Figure 2-3. Object Code Generated by the File in Figure 2-2
2.5 How the Linker Handles Sections
The linker has two main functions related to sections. First, the linker uses the sections in object files as
building blocks; it combines input sections to create output sections in an executable output module.
Second, the linker chooses memory addresses for the output sections; this is called placement. Two linker
directives support these functions:
• The MEMORY directive allows you to define the memory map of a target system. You can name
portions of memory and specify their starting addresses and their lengths.
• The SECTIONS directive tells the linker how to combine input sections into output sections and where
to place these output sections in memory.
Subsections let you manipulate the placement of sections with greater precision. You can specify the
location of each subsection with the linker's SECTIONS directive. If you do not specify a subsection, the
subsection is combined with the other sections with the same base section name. See Section 8.5.5.1.
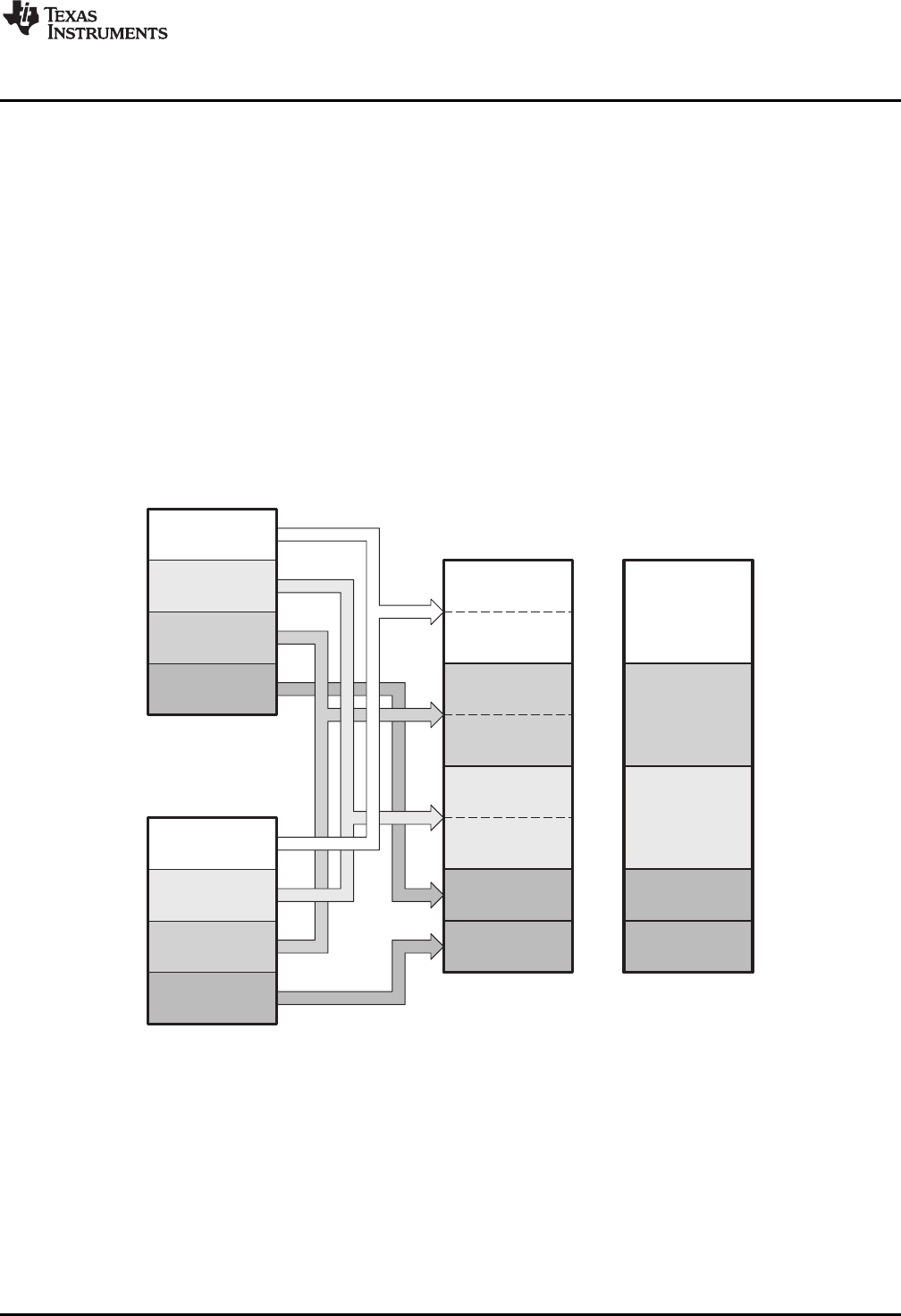
file1
(.bss)
file2
(.bss)
file1
(.data)
file2
(.data)
file1
(.text)
file2
(.text)
Init
Executable
objectmodule
Init
(namedsection)
.data
file1.obj
.text
.bss
Tables
(namedsection)
.data
file2.obj
.text
.bss
Memorymap
Tables
Init
Tables
Spacefor
variables
(.bss)
Initialized
data
(.data)
Executable
code
(.text)
www.ti.com
How the Linker Handles Sections
27
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Introduction to Object Modules
It is not always necessary to use linker directives. If you do not use them, the linker uses the target
processor's default placement algorithm described in Section 8.7. When you do use linker directives, you
must specify them in a linker command file.
Refer to the following sections for more information about linker command files and linker directives:
•Section 8.5,Linker Command Files
•Section 8.5.4,The MEMORY Directive
•Section 8.5.5,The SECTIONS Directive
•Section 8.7,Default Placement Algorithm
2.5.1 Combining Input Sections
Figure 2-4 provides a simplified example of the process of linking two files together.
Note that this is a simplified example, so it does not show all the sections that will be created or the actual
sequence of the sections. See Section 8.7 for the actual default memory placement map for ARM.
Figure 2-4. Combining Input Sections to Form an Executable Object Module
In Figure 2-4, file1.obj and file2.obj have been assembled to be used as linker input. Each contains the
.text, .data, and .bss default sections; in addition, each contains a user-named section. The executable
object module shows the combined sections. The linker combines the .text section from file1.obj and the
.text section from file2.obj to form one .text section, then combines the two .data sections and the two .bss
sections, and finally places the user-named sections at the end. The memory map shows the combined
sections to be placed into memory.

How the Linker Handles Sections
www.ti.com
28 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Introduction to Object Modules
2.5.2 Placing Sections
Figure 2-4 illustrates the linker's default method for combining sections. Sometimes you may not want to
use the default setup. For example, you may not want all of the .text sections to be combined into a single
.text section. Or you may want a user-named section placed where the .data section would normally be
allocated. Most memory maps contain various types of memory (RAM, ROM, EPROM, FLASH, etc.) in
varying amounts; you may want to place a section in a specific type of memory.
For further explanation of section placement within the memory map, see the discussions in Section 8.5.4
and Section 8.5.5. See Section 8.7 for the actual default memory allocation map for ARM.
2.6 Symbols
An object file contains a symbol table that stores information about external symbols in the object file. The
linker uses this table when it performs relocation. See Section 2.7.
An object file symbol is a named 32-bit integer value, usually representing an address. A symbol can
represent such things as the starting address of a function, variable, or section.
An object file symbol can also represent an absolute integer, such as the size of the stack. To the linker,
this integer is an unsigned value, but the integer may be treated as signed or unsigned depending on how
it is used. The range of legal values for an absolute integer is 0 to 2^32-1 for unsigned treatment and
-2^31 to 2^31-1 for signed treatment.
Symbols can be bound as global symbols,local symbols, or weak symbols. The linker handles symbols
differently based on their binding. For example, the linker does not allow multiple global definitions of a
symbol, but local symbols can be defined in multiple object files (but only once per object file). The linker
does not resolve references to local symbols in different object files, but it does resolve references to
global symbols in any other object file.
Aglobal symbol is defined in the same manner as any other symbol; that is, it appears as a label or is
defined by a directive, such as .set, .equ, .bss, or .usect. If a global symbol is defined more than once, the
linker issues a multiple-definition error. (The assembler can provide a similar multiple-definition error for
local symbols.)
Aweak symbol is a symbol that is used in the current module but is defined in another module. The linker
resolves this symbol's definition at link time. Weak symbols are similar to global symbols, except that if
one object file contains a weak symbol, and another object file contains a global symbol with the same
name, the global symbol is used to resolve references. A weak reference may be unresolved at link time,
in which case the address is treated as 0. Therefore, for weak references, application code must test to
make sure &var is not zero before attempting to read the contents. See Section 2.6.2 for more about weak
symbols.
In general, common symbols (see .common directive) are preferred over weak symbols.
See Section 4.8 for information about assembler symbols.
2.6.1 External Symbols
External symbols are symbols that are visible to other object modules. Because they are visible across
object modules, they may be defined in one file and referenced in another file. You can use the .def, .ref,
or .global directive to identify a symbol as external:
.def The symbol is defined in the current file and may be used in another file.
.ref The symbol is referenced in the current file, but defined in another file.
.global The symbol can be either of the above. The assembler chooses either .def or .ref as
appropriate for each symbol.

www.ti.com
Symbols
29
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Introduction to Object Modules
The following code fragments illustrate the use of the .global directive.
x: ADD R0, #56h ; Define x
.global x ; acts as .def x
Because x is defined in this module, the assembler treats ".global x" as ".def x". Now other modules can
refer to x.
B y ; Reference y
.global y ; .ref of y
Because y is not defined in this module, the assembler treats ".global y" as ".ref y". The symbol y must be
defined in another module.
Both the symbols x and y are external symbols and are placed in the object file's symbol table; x as a
defined symbol, and y as an undefined symbol. When the object file is linked with other object files, the
entry for x will be used to resolve references to x in other files. The entry for y causes the linker to look
through the symbol tables of other files for y’s definition.
The linker attempts to match all references with corresponding definitions. If the linker cannot find a
symbol's definition, it prints an error message about the unresolved reference. This type of error prevents
the linker from creating an executable object module.
An error also occurs if the same symbol is defined more than once.
2.6.2 Weak Symbols
The linker processes absolute symbols that are defined with "weak" binding differently from absolute
symbols that are defined with global binding (the default). Instead of including a weak absolute symbol in
the output file's symbol table by default (as it would for a global absolute symbol), the linker only includes
a weak absolute symbol in the output of a "final" link if the symbol is required to resolve an otherwise
unresolved reference.
This weak symbol handling allows you to associate addresses with symbols known to have been pre-
loaded (such as function addresses in system memory) and then link the current application against a pre-
loaded memory image. If such symbols are defined as weak absolute symbols, the linker can minimize the
number of symbols it includes in the output file's symbol table by omitting those that are not needed to
resolve references. Reducing the size of the output file's symbol table reduces the time required to link,
especially if there are a large number of pre-loaded symbols to link against. This feature is particularly
helpful for OpenCL applications.
You can define a weak absolute symbol using either assembly or the linker command file.
Using Assembly: To define a weak absolute symbol in an input object file, the source file can be written
in assembly. Use the .weak and .set directives in combination as shown in the following example, which
defines a weak absolute symbol "ext_addr_sym":
.weak ext_addr_sym
ext_addr_sym .set 0x12345678
Assemble the source file that defines weak symbols, and include the resulting object file in the link. The
"ext_addr_sym" in this example is available as a weak absolute symbol in a final link. It is a candidate for
removal if the symbol is not referenced elsewhere in the application. See .weak directive.
Using the Linker Command File: To define a weak symbol in a linker command file, use the "weak"
operator in an assignment expression to designate that the symbol as eligible for removal from the output
file's symbol table if it is not referenced. In a linker command file, an assignment expression outside a
MEMORY or SECTIONS directive can be used to define a weak linker-defined absolute symbol. For
example, you can define "ext_addr_sym" as follows:
weak(ext_addr_sym) = 0x12345678;
If the linker command file is used to perform the final link, then "ext_addr_sym" is presented to the linker
as a weak absolute symbol; it will not be included in the resulting output file if the symbol is not
referenced. See Section 8.6.2.

Symbols
www.ti.com
30 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Introduction to Object Modules
If there are multiple definitions of the same absolute symbol, the linker uses certain rules to determine
which definition takes precedence. Some definitions may have weak binding and others may have strong
binding. "Strong" in this context means that the symbol has not been given a weak binding by either of the
two methods described above. Some definitions may come from an input object file (that is, using
assembly directives) and others may come from an assignment statement in a linker command file. The
linker uses the following guidelines to determine which definition is used when resolving references to a
symbol:
• A strongly bound symbol always takes precedence over a weakly bound symbol.
• If two symbols are both strongly bound or both weakly bound, a symbol defined in a linker command
file takes precedence over a symbol defined in an input object file.
• If two symbols are both strongly bound and both are defined in an input object file, the linker provides a
symbol redefinition error and halts the link process.
2.6.3 The Symbol Table
The assembler generates an entry in the symbol table for each .ref, .def, or .global directive in
Section 2.6.1). These are external symbols, which are visible to other object modules.
The assembler also creates special symbols that point to the beginning of each section.
The assembler does not usually create symbol table entries for any symbols other than those described
above, because the linker does not use them. For example, labels (Section 4.8.2) are not included in the
symbol table unless they are declared with the .global directive. For informational purposes, there are
entries in the symbol table for each symbol in a program.
2.7 Symbolic Relocations
The assembler treats each section as if it began at address 0. Of course, all sections cannot actually
begin at address 0 in memory, so the linker must relocate sections. Relocations are symbol-relative rather
than section-relative.
The linker can relocate sections by:
• Allocating them into the memory map so that they begin at the appropriate address as defined with the
linker's MEMORY directive
• Adjusting symbol values to correspond to the new section addresses
• Adjusting references to relocated symbols to reflect the adjusted symbol values
www.ti.com
Symbolic Relocations
31
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Introduction to Object Modules
The linker uses relocation entries to adjust references to symbol values. The assembler creates a
relocation entry each time a relocatable symbol is referenced. The linker then uses these entries to patch
the references after the symbols are relocated. Example 2-1 contains a code fragment for a ARM device
for which the assembler generates relocation entries.
Example 2
‑‑
1. Code That Generates Relocation Entries
1 *********************************************
2 ** Generating Relocation Entries **
3 *********************************************
4 .ref X
5 .def Y
6 00000000 .text
7 00000000 E0921003 ADDS R1, R2, R3
8 00000004 0A000001 BEQ Y
9 00000008 E1C410BE STRH R1, [R4, #14]
10 0000000c EAFFFFFB! B X ; generates a relocation entry
11 00000010 E0821003 Y: ADD R1, R2, R3
In Example 2-1, both symbols X and Y are relocatable. Y is defined in the .text section of this module; X is
defined in another module. When the code is assembled, X has a value of 0 (the assembler assumes all
undefined external symbols have values of 0), and Y has a value of 16 (relative to address 0 in the .text
section). The assembler generates two relocation entries: one for X and one for Y. The reference to X is
an external reference (indicated by the !character in the listing). The reference to Y is to an internally
defined relocatable symbol (indicated by the 'character in the listing).
After the code is linked, suppose that X is relocated to address 0x10014. Suppose also that the .text
section is relocated to begin at address 0x10000; Y now has a relocated value of 0x10010. The linker
uses the relocation entry for the reference to X to patch the branch instruction in the object code:
EAFFFFFB! B X becomes EA000000
2.8 Loading a Program
The linker creates an executable object file which can be loaded in several ways, depending on your
execution environment. These methods include using Code Composer Studio or the hex conversion utility.
For details, see Section 3.1.
32 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Program Loading and Running
Chapter 3
SPNU118U–January 2018
Program Loading and Running
Even after a program is written, compiled, and linked into an executable object file, there are still many
tasks that need to be performed before the program does its job. The program must be loaded onto the
target, memory and registers must be initialized, and the program must be set to running.
Some of these tasks need to be built into the program itself. Bootstrapping is the process of a program
performing some of its own initialization. Many of the necessary tasks are handled for you by the compiler
and linker, but if you need more control over these tasks, it helps to understand how the pieces are
expected to fit together.
This chapter will introduce you to the concepts involved in program loading, initialization, and startup.
This chapter does not cover dynamic loading.
This chapter currently provides examples for the C6000 device family. Refer to your device documentation
for various device-specific aspects of bootstrapping.
Topic ........................................................................................................................... Page
3.1 Loading............................................................................................................. 33
3.2 Entry Point ........................................................................................................ 38
3.3 Run-Time Initialization ........................................................................................ 38
3.4 Arguments to main............................................................................................. 41
3.5 Run-Time Relocation .......................................................................................... 41
3.6 Additional Information ........................................................................................ 41

www.ti.com
Loading
33
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Program Loading and Running
3.1 Loading
A program needs to be placed into the target device's memory before it may be executed. Loading is the
process of preparing a program for execution by initializing device memory with the program's code and
data. A loader might be another program on the device, an external agent (for example, a debugger), or
the device might initialize itself after power-on, which is known as bootstrap loading, or bootloading.
The loader is responsible for constructing the load image in memory before the program starts. The load
image is the program's code and data in memory before execution. What exactly constitutes loading
depends on the environment, such as whether an operating system is present. This section describes
several loading schemes for bare-metal devices. This section is not exhaustive.
A program may be loaded in the following ways:
•A debugger running on a connected host workstation. In a typical embedded development setup,
the device is subordinate to a host running a debugger such as Code Composer Studio (CCS). The
device is connected with a communication channel such as a JTAG interface. CCS reads the program
and writes the load image directly to target memory through the communications interface.
•Another program running on the device. The running program can create the load image and
transfer control to the loaded program. If an operating system is present, it may have the ability to load
and run programs.
•"Burning" the load image onto an EPROM module. The hex converter (armhex) can assist with this
by converting the executable object file into a format suitable for input to an EPROM programmer. The
EPROM is placed onto the device itself and becomes a part of the device's memory. See Chapter 12
for details.
•Bootstrap loading from a dedicated peripheral, such as an I2C peripheral. The device may require
a small program called a bootloader to perform the loading from the peripheral. The hex converter can
assist in creating a bootloader.
3.1.1 Load and Run Addresses
Consider an embedded device for which the program's load image is burned onto EPROM/ROM. Variable
data in the program must be writable, and so must be located in writable memory, typically RAM.
However, RAM is volatile, meaning it will lose its contents when the power goes out. If this data must have
an initial value, that initial value must be stored somewhere else in the load image, or it would be lost
when power is cycled. The initial value must be copied from the non-volatile ROM to its run-time location
in RAM before it is used. See Section 8.8 for ways this is done.
The load address is the location of an object in the load image.
The run address is the location of the object as it exists during program execution.
An object is a chunk of memory. It represents a section, segment, function, or data.
The load and run addresses for an object may be the same. This is commonly the case for program code
and read-only data, such as the .const section. In this case, the program can read the data directly from
the load address. Sections that have no initial value, such as the .bss section, do not have load data and
are considered to have load and run addresses that are the same. If you specify different load and run
addresses for an uninitialized section, the linker provides a warning and ignores the load address.
The load and run addresses for an object may be different. This is commonly the case for writable data,
such as the .data section. The .data section's starting contents are placed in ROM and copied to RAM.
This often occurs during program startup, but depending on the needs of the object, it may be deferred to
sometime later in the program as described in Section 3.5.
Symbols in assembly code and object files almost always refer to the run address. When you look at an
address in the program, you are almost always looking at the run address. The load address is rarely
used for anything but initialization.
The load and run addresses for a section are controlled by the linker command file and are recorded in
the object file metadata.
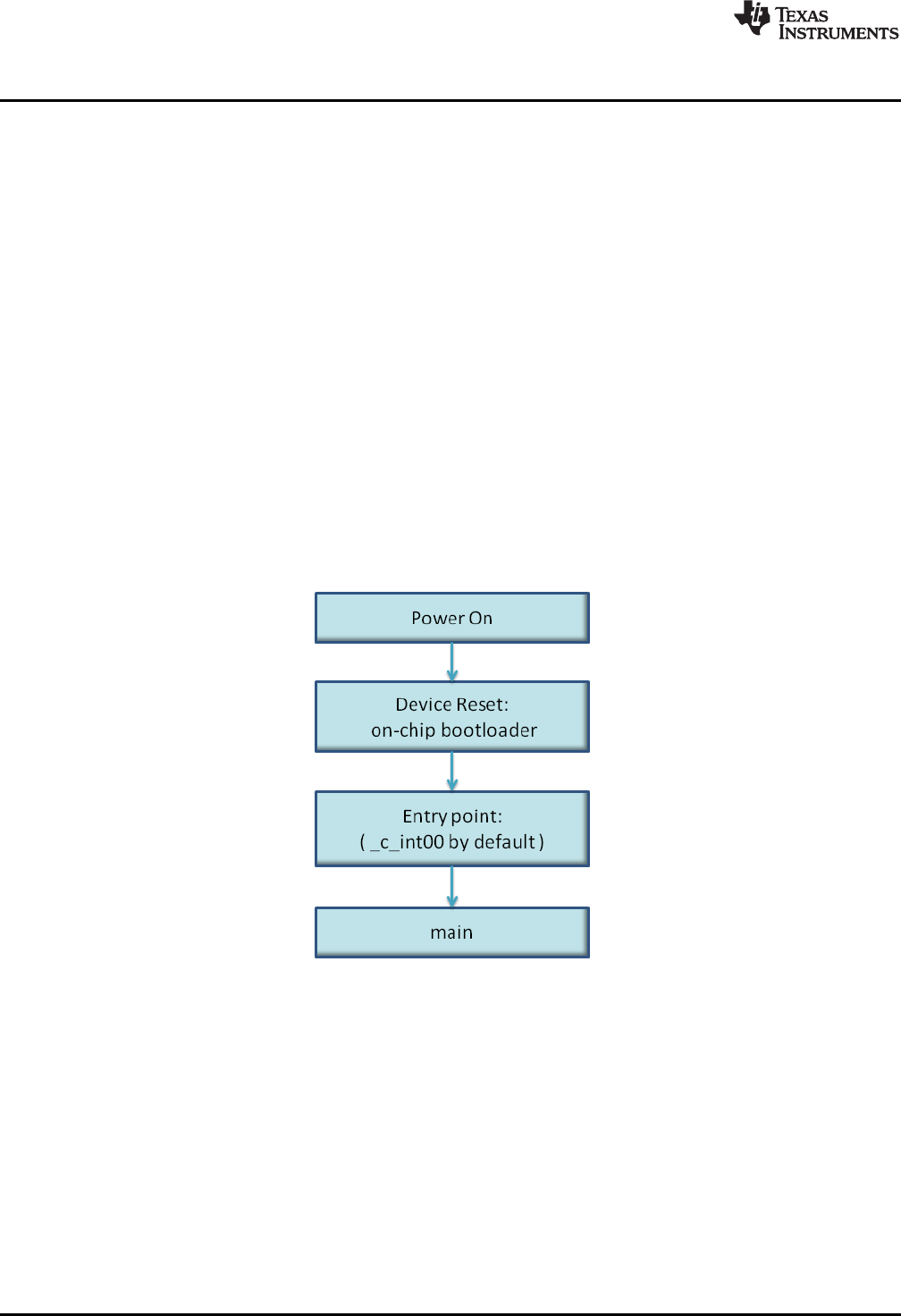
Loading
www.ti.com
34 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Program Loading and Running
The load address determines where a loader places the raw data for the section. Any references to the
section (such as references to labels in it) refer to its run address. The application must copy the section
from its load address to its run address before the first reference of the symbol is encountered at run time;
this does not happen automatically simply because you specify a separate run address. For examples that
specify load and run addresses, see Section 8.5.6.1.
For an example that illustrates how to move a block of code at run time, see Example 8-10. To create a
symbol that lets you refer to the load-time address, rather than the run-time address, see the .label
directive. To use copy tables to copy objects from load-space to run-space at boot time, see Section 8.8.
ELF format executable object files contain segments. See Section 2.3 for information about sections and
segments.
3.1.2 Bootstrap Loading
The details of bootstrap loading (bootloading) vary a great deal between devices. Not every device
supports every bootloading mode, and using the bootloader is optional. This section discusses various
bootloading schemes to help you understand how they work. Refer to your device's data sheet to see
which bootloading schemes are available and how to use them.
A typical embedded system uses bootloading to initialize the device. The program code and data may be
stored in ROM or FLASH memory. At power-on, an on-chip bootloader (the primary bootloader) built into
the device hardware starts automatically.
Figure 3-1. Bootloading Sequence (Simplified)
The primary bootloader is typically very small and copies a limited amount of memory from a dedicated
location in ROM to a dedicated location in RAM. (Some bootloaders support copying the program from an
I/O peripheral.) After the copy is completed, it transfers control to the program.
For many programs, the primary bootloader is not capable of loading the entire program, so these
programs supply a more capable secondary bootloader. The primary bootloader loads the secondary
bootloader and transfers control to it. Then, the secondary bootloader loads the rest of the program and
transfers control to it. There can be any number of layers of bootloaders, each loading a more capable
bootloader to which it transfers control.
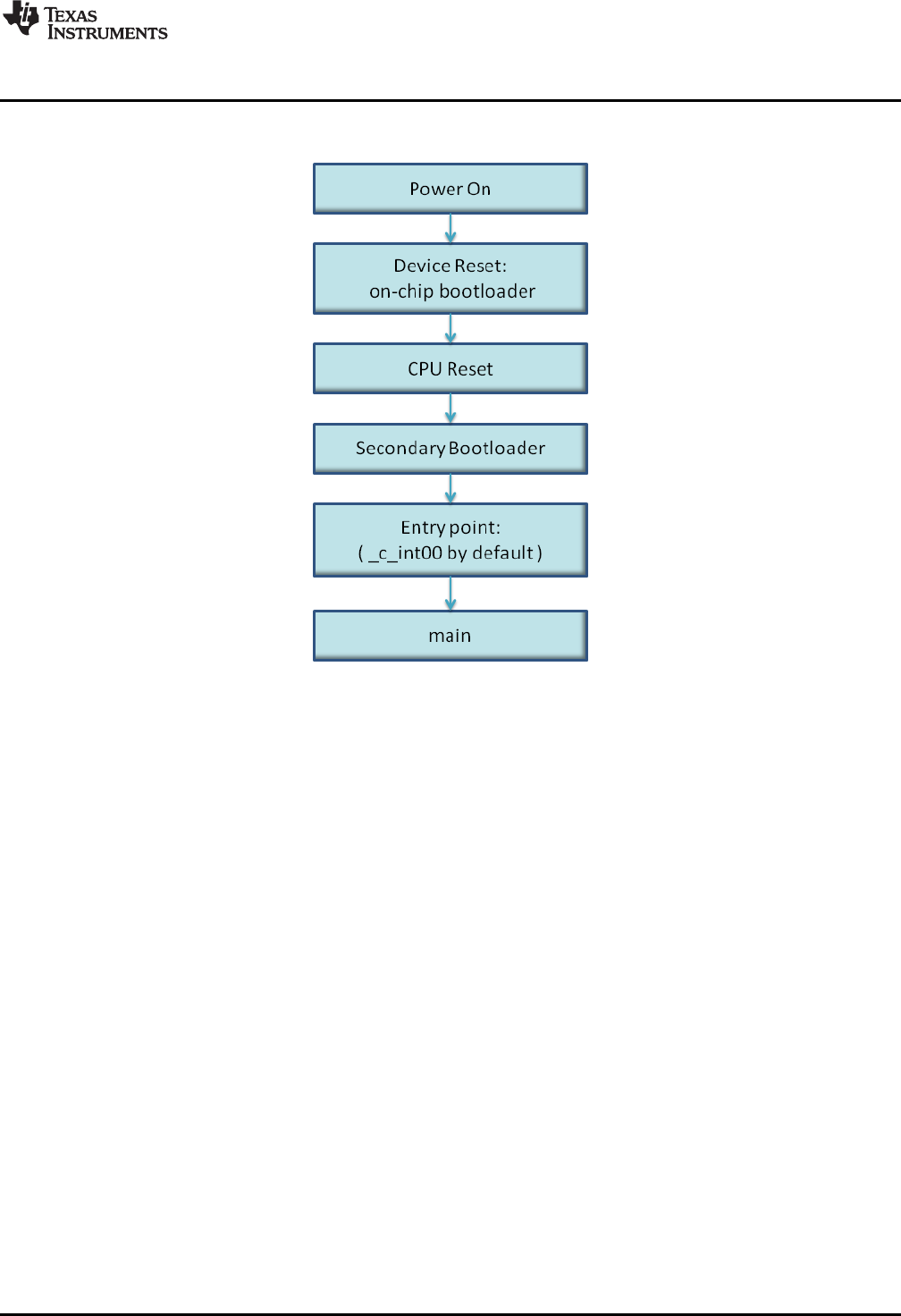
www.ti.com
Loading
35
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Program Loading and Running
Figure 3-2. Bootloading Sequence with Secondary Bootloader
3.1.2.1 Boot, Load, and Run Addresses
The boot address of a bootloaded object is where its raw data exists in ROM before power-on.
The boot, load, and run addresses for an object may all be the same; this is commonly the case for .const
data. If they are different, the object's contents must be copied to the correct location before the object
may be used.
The boot address may be different than the load address. The bootloader is responsible for copying the
raw data to the load address.
The boot address is not controlled by the linker command file or recorded in the object file; it is strictly a
convention shared by the bootloader and the program.
3.1.2.2 Primary Bootloader
The detailed operation of the primary bootloader is device-specific. Some devices have complex
capabilities such as booting from an I/O peripheral or configuring memory controller parameters.
3.1.2.3 Secondary Bootloader
The hex converter assumes the secondary bootloader is of a particular format. The hex converter's model
bootloader uses a boot table. You can use whatever format you want, but if you follow this model, the hex
converter can create the boot table automatically.

Loading
www.ti.com
36 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Program Loading and Running
3.1.2.4 Boot Table
The input for the model secondary bootloader is the boot table. The boot table contains records that
instruct the secondary bootloader to copy blocks of data contained in the table to specified destination
addresses. The hex conversion utility automatically builds the boot table for the secondary bootloader.
Using the utility, you specify the sections you want to initialize, the boot table location, and the name of the
section containing the secondary bootloader routine and where it should be located. The hex conversion
utility builds a complete image of the table and adds it to the program.
The boot table is target-specific. For C6000, the format of the boot table is simple. A header record
contains a 4-byte field that indicates where the boot loader should branch after it has completed copying
data. After the header, each section that is to be included in the boot table has the following contents:
• 4-byte field containing the size of the section
• 4-byte field containing the destination address for the copy
• the raw data
• 0 to 3 bytes of trailing padding to make the next field aligned to 4 bytes
More than one section can be entered; a termination block containing an all-zero 4-byte field follows the
last section.
See Section 12.11.2 for details about the boot table format.
3.1.2.5 Bootloader Routine
The bootloader routine is a normal function, except that it executes before the C environment is set up.
For this reason, it can't use the C stack, and it can't call any functions that have yet to be loaded!
The following sample code is for C6000 and is from Creating a Second-Level Bootloader for FLASH
Bootloading on TMS320C6000 Platform With Code Composer Studio (SPRA999).
Example 3-1. Sample Secondary Bootloader Routine
; ======== boot_c671x.s62 ========
; global EMIF symbols defined for the c671x family
.include boot_c671x.h62
.sect ".boot_load"
.global _boot
_boot:
;************************************************************************
;* DEBUG LOOP −COMMENT OUT B FOR NORMAL OPERATION
;************************************************************************
zero B1
_myloop: ; [!B1] B _myloop
nop 5
_myloopend: nop
;************************************************************************
;* CONFIGURE EMIF
;************************************************************************
;****************************************************************
; *EMIF_GCTL = EMIF_GCTL_V;
;****************************************************************
mvkl EMIF_GCTL,A4
|| mvkl EMIF_GCTL_V,B4
mvkh EMIF_GCTL,A4
|| mvkh EMIF_GCTL_V,B4
stw B4,*A4
;****************************************************************
; *EMIF_CE0 = EMIF_CE0_V
;****************************************************************
mvkl EMIF_CE0,A4
|| mvkl EMIF_CE0_V,B4
mvkh EMIF_CE0,A4
|| mvkh EMIF_CE0_V,B4

www.ti.com
Loading
37
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Program Loading and Running
Example 3-1. Sample Secondary Bootloader Routine (continued)
stw B4,*A4
;****************************************************************
; *EMIF_CE1 = EMIF_CE1_V (setup for 8−bit async)
;****************************************************************
mvkl EMIF_CE1,A4
|| mvkl EMIF_CE1_V,B4
mvkh EMIF_CE1,A4
|| mvkh EMIF_CE1_V,B4
stw B4,*A4
;****************************************************************
; *EMIF_CE2 = EMIF_CE2_V (setup for 32−bit async)
;****************************************************************
mvkl EMIF_CE2,A4
|| mvkl EMIF_CE2_V,B4
mvkh EMIF_CE2,A4
|| mvkh EMIF_CE2_V,B4
stw B4,*A4
;****************************************************************
; *EMIF_CE3 = EMIF_CE3_V (setup for 32−bit async)
;****************************************************************
|| mvkl EMIF_CE3,A4
|| mvkl EMIF_CE3_V,B4 ;
mvkh EMIF_CE3,A4
|| mvkh EMIF_CE3_V,B4
stw B4,*A4
;****************************************************************
; *EMIF_SDRAMCTL = EMIF_SDRAMCTL_V
;****************************************************************
|| mvkl EMIF_SDRAMCTL,A4
|| mvkl EMIF_SDRAMCTL_V,B4 ;
mvkh EMIF_SDRAMCTL,A4
|| mvkh EMIF_SDRAMCTL_V,B4
stw B4,*A4
;****************************************************************
; *EMIF_SDRAMTIM = EMIF_SDRAMTIM_V
;****************************************************************
|| mvkl EMIF_SDRAMTIM,A4
|| mvkl EMIF_SDRAMTIM_V,B4 ;
mvkh EMIF_SDRAMTIM,A4
|| mvkh EMIF_SDRAMTIM_V,B4
stw B4,*A4
;****************************************************************
; *EMIF_SDRAMEXT = EMIF_SDRAMEXT_V
;****************************************************************
|| mvkl EMIF_SDRAMEXT,A4
|| mvkl EMIF_SDRAMEXT_V,B4 ;
mvkh EMIF_SDRAMEXT,A4
|| mvkh EMIF_SDRAMEXT_V,B4
stw B4,*A4
;****************************************************************************
; copy sections
;****************************************************************************
mvkl COPY_TABLE, a3 ; load table pointer
mvkh COPY_TABLE, a3
ldw *a3++, b1 ; Load entry point
copy_section_top:
ldw *a3++, b0 ; byte count
ldw *a3++, a4 ; ram start address
nop 3
[!b0] b copy_done ; have we copied all sections?
nop 5
copy_loop:
ldb *a3++,b5
sub b0,1,b0 ; decrement counter

Entry Point
www.ti.com
38 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Program Loading and Running
Example 3-1. Sample Secondary Bootloader Routine (continued)
[ b0] b copy_loop ; setup branch if not done
[!b0] b copy_section_top
zero a1
[!b0] and 3,a3,a1
stb b5,*a4++
[!b0] and −4,a3,a5 ; round address up to next multiple of 4
[ a1] add 4,a5,a3 ; round address up to next multiple of 4
;****************************************************************************
; jump to entry point
;****************************************************************************
copy_done:
b .S2 b1
nop 5
3.2 Entry Point
The entry point is the address at which the execution of the program begins. This is the address of the
startup routine. The startup routine is responsible for initializing and calling the rest of the program. For a
C/C++ program, the startup routine is usually named _c_int00 (see Section 3.3.1). After the program is
loaded, the value of the entry point is placed in the PC register and the CPU is allowed to run.
The object file has an entry point field. For a C/C++ program, the linker will fill in _c_int00 by default. You
can select a custom entry point; see Section 8.4.13. The device itself cannot read the entry point field from
the object file, so it has to be encoded in the program somewhere.
• If you are using a bootloader, the boot table includes an entry point field. When it finishes running, the
bootloader branches to the entry point.
• If you are using an interrupt vector, the entry point is installed as the RESET interrupt handler. When
RESET is applied, the startup routine will be invoked.
• If you are using a hosted debugger, such as CCS, the debugger may explicitly set the program counter
(PC) to the value of the entry point.
3.3 Run-Time Initialization
After the load image is in place, the program can run. The subsections that follow describe bootstrap
initialization of a C/C++ program. An assembly-only program may not need to perform all of these steps.
3.3.1 _c_int00
The function _c_int00 is the startup routine (also called the boot routine) for C/C++ programs. It performs
all the steps necessary for a C/C++ program to initialize itself.
The name _c_int00 means that it is the interrupt handler for interrupt number 0, RESET, and that it sets
up the C environment. Its name need not be exactly _c_int00, but the linker sets _c_int00 as the entry
point for C programs by default. The compiler's run-time-support library provides a default implementation
of _c_int00.
The startup routine is responsible for performing the following actions:
1. Switch to user mode and sets up the user mode stack
2. Set up status and configuration registers
3. Set up the stack and secondary system stack
4. Process special binit copy table, if present.
5. Process the run-time initialization table to autoinitialize global variables (when using the --rom_model
option)
6. Call all global constructors
7. Call the function main
8. Call exit when main returns
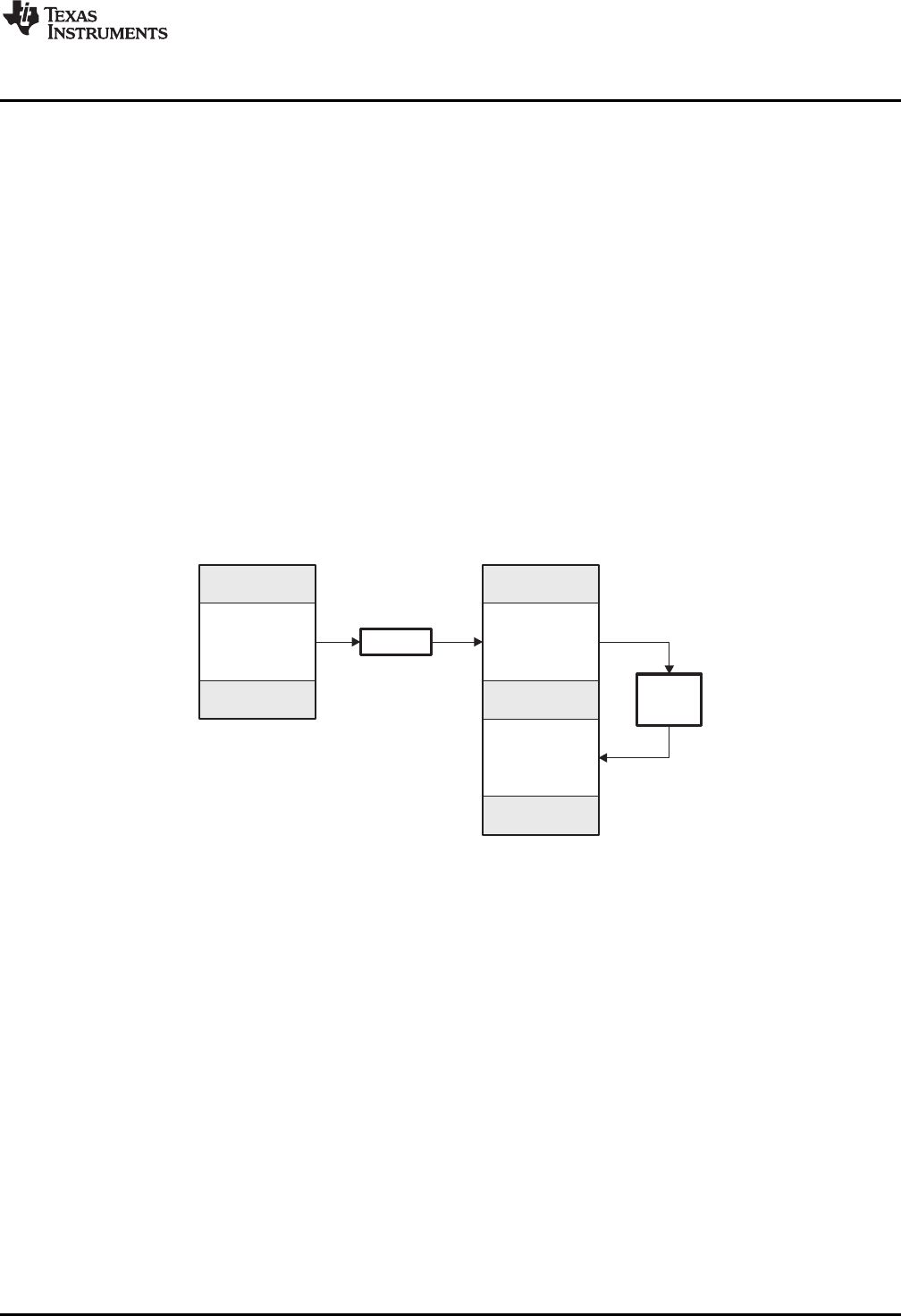
Cautoinit
tableanddata
(ROM)
.data
uninitialized
(RAM)
Boot
routine
.cinit
section Loader
Objectfile Memory
www.ti.com
Run-Time Initialization
39
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Program Loading and Running
3.3.2 RAM Model vs. ROM Model
In the EABI ROM model, the .cinit section is loaded into memory along with other initialized sections. The
linker defines a "cinit" symbol that points to the beginning of the initialization tables in memory. When the
program begins running, the C boot routine copies data from these tables into the .bss section.
In the EABI RAM model, no .cinit records are generated at startup.
3.3.2.1 Autoinitializing Variables at Run Time (--rom_model)
Autoinitializing variables at run time is the default method of autoinitialization. To use this method, invoke
the linker with the --rom_model option.
Using this method, the .cinit section is loaded into memory along with all the other initialized sections. The
linker defines a special symbol called cinit that points to the beginning of the initialization tables in
memory. When the program begins running, the C boot routine copies data from the tables (pointed to by
.cinit) into the specified variables in the .bss section. This allows initialization data to be stored in slow
non-volatile memory and copied to fast memory each time the program is reset.
Figure 3-3 illustrates autoinitialization at run time. Use this method in any system where your application
runs from code burned into slow memory or needs to survive a reset.
Figure 3-3. Autoinitialization at Run Time
3.3.2.2 Initializing Variables at Load Time (--ram_model)
Initialization of variables at load time enhances performance by reducing boot time and by saving the
memory used by the initialization tables. To use this method, invoke the linker with the --ram_model
option.
When you use the --ram_model linker option, the linker sets the STYP_COPY bit in the .cinit section's
header. This tells the loader not to load the .cinit section into memory. (The .cinit section occupies no
space in the memory map.) The linker also sets the cinit symbol to -1 (normally, cinit points to the
beginning of the initialization tables). This indicates to the boot routine that the initialization tables are not
present in memory; accordingly, no run-time initialization is performed at boot time.
A loader must be able to perform the following tasks to use initialization at load time:
• Detect the presence of the .cinit section in the object file.
• Determine that STYP_COPY is set in the .cinit section header, so that it knows not to copy the .cinit
section into memory.
• Understand the format of the initialization tables.
Figure 3-4 illustrates the initialization of variables at load time.
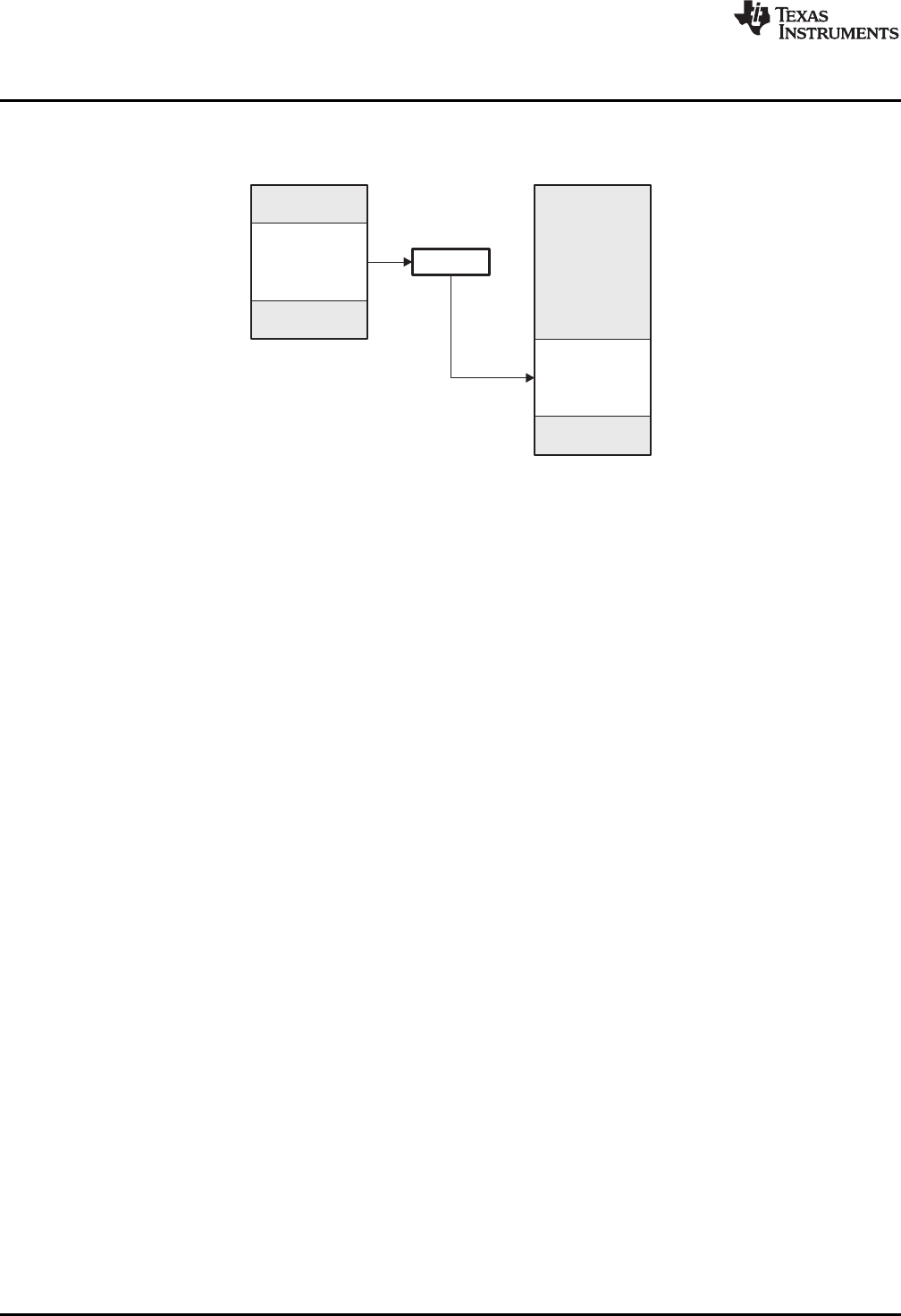
.datasection
(initialized)
(RAM)
.data
section Loader
Objectfile Memory
Run-Time Initialization
www.ti.com
40 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Program Loading and Running
Figure 3-4. Initialization at Load Time
3.3.2.3 The --rom_model and --ram_model Linker Options
The following list outlines what happens when you invoke the linker with the --ram_model or --rom_model
option.
• The symbol _c_int00 is defined as the program entry point. The _c_int00 symbol is the start of the C
boot routine in boot.obj; referencing _c_int00 ensures that boot.obj is automatically linked in from the
appropriate run-time-support library.
• The .cinit output section is padded with a termination record to tell the boot routine (autoinitialize at run
time) or the loader (initialize at load time) when to stop reading initialization tables.
• When you initialize at load time (--ram_model option):
– The linker sets cinit to -1. This indicates that the initialization tables are not in memory, so no
initialization is performed at run time.
– The STYP_COPY flag (0010h) is set in the .cinit section header. STYP_COPY is the special
attribute that tells the loader to perform initialization directly and not to load the .cinit section into
memory. The linker does not allocate space in memory for the .cinit section.
• When you autoinitialize at run time (--rom_model option), the linker defines cinit as the starting address
of the .cinit section. The C boot routine uses this symbol as the starting point for autoinitialization.
3.3.3 Copy Tables
The RTS function copy_in can be used at run-time to move code and data around, usually from its load
address to its run address. This function reads size and location information from copy tables. The linker
automatically generates several kinds of copy tables. Refer to Section 8.8.
You can create and control code overlays with copy tables. See Section 8.8.4 for details and examples.
Using copy tables is similar to performing run-time relocations as described in Section 3.5, however copy
tables require a specific table format.
3.3.3.1 BINIT
The BINIT (boot-time initialization) copy table is special in that the target will automatically perform the
copying at auto-initialization time. Refer to Section 8.8.4.2 for more about the BINIT copy table name. The
BINIT copy table is copied before .cinit processing.
3.3.3.2 CINIT
EABI .cinit tables are special kinds of copy tables. Refer to Section 3.3.2.1 for more about using the .cinit
section with the ROM model and Section 3.3.2.2 for more using it with the RAM model.

www.ti.com
Arguments to main
41
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Program Loading and Running
3.4 Arguments to main
Some programs expect arguments to main (argc, argv) to be valid. Normally this isn't possible for an
embedded program, but the TI runtime does provide a way to do it. The user must allocate an .args
section of an appropriate size using the --args linker option. It is the responsibility of the loader to populate
the .args section. It is not specified how the loader determines which arguments to pass to the target. The
format of the arguments is the same as an array of pointers to char on the target.
See Section 8.4.4 for information about allocating memory for argument passing.
3.5 Run-Time Relocation
At times you may want to load code into one area of memory and move it to another area before running
it. For example, you may have performance-critical code in an external-memory-based system. The code
must be loaded into external memory, but it would run faster in internal memory. Because internal memory
is limited, you might swap in different speed-critical functions at different times.
The linker provides a way to handle this. Using the SECTIONS directive, you can optionally direct the
linker to allocate a section twice: first to set its load address and again to set its run address. Use the load
keyword for the load address and the run keyword for the run address. See Section 3.1.1 for more about
load and run addresses. If a section is assigned two addresses at link time, all labels defined in the
section are relocated to refer to the run-time address so that references to the section (such as branches)
are correct when the code runs.
If you provide only one allocation (either load or run) for a section, the section is allocated only once and
loads and runs at the same address. If you provide both allocations, the section is actually allocated as if it
were two separate sections of the same size.
Uninitialized sections (such as .bss) are not loaded, so the only significant address is the run address. The
linker allocates uninitialized sections only once; if you specify both run and load addresses, the linker
warns you and ignores the load address.
For a complete description of run-time relocation, see Section 8.5.6.
3.6 Additional Information
See the following sections and documents for additional information:
Section 8.4.4, "Allocate Memory for Use by the Loader to Pass Arguments (--arg_size Option)"
Section 8.4.13, "Define an Entry Point (--entry_point Option)"
Section 8.5.6.1 ,"Specifying Load and Run Addresses"
Section 8.8, "Linker-Generated Copy Tables"
Section 8.11.1, "Run-Time Initialization"
.label directive
Chapter 12, "Hex Conversion Utility Description"
"Run-Time Initialization," "Initialization by the Interrupt Vector," and "System Initialization" sections in the
ARM Optimizing C/C++ Compiler User's Guide
Creating a Second-Level Bootloader for FLASH Bootloading on TMS320C6000 Platform With Code
Composer Studio (SPRA999).
42 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Assembler Description
Chapter 4
SPNU118U–January 2018
Assembler Description
The ARM assembler translates assembly language source files into machine language object files. These
files are object modules, which are discussed in Chapter 2. Source files can contain the following
assembly language elements:
Assembler directives described in Chapter 5
Macro directives described in Chapter 6
Assembly language instructions described in the TMS470R1x User's Guide.
Topic ........................................................................................................................... Page
4.1 Assembler Overview........................................................................................... 43
4.2 The Assembler's Role in the Software Development Flow....................................... 44
4.3 Invoking the Assembler ...................................................................................... 45
4.4 Controlling Application Binary Interface ............................................................... 46
4.5 Naming Alternate Directories for Assembler Input ................................................. 46
4.6 Source Statement Format.................................................................................... 49
4.7 Literal Constants................................................................................................ 53
4.8 Assembler Symbols............................................................................................ 55
4.9 Expressions ...................................................................................................... 63
4.10 Built-in Functions and Operators ......................................................................... 67
4.11 Unified Assembly Language Syntax Support......................................................... 68
4.12 Source Listings.................................................................................................. 69
4.13 Debugging Assembly Source .............................................................................. 72
4.14 Cross-Reference Listings.................................................................................... 73

www.ti.com
Assembler Overview
43
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Assembler Description
4.1 Assembler Overview
The 2-pass assembler does the following:
• Processes the source statements in a text file to produce a relocatable object file
• Produces a source listing (if requested) and provides you with control over this listing
• Allows you to divide your code into sections and maintain a section program counter (SPC) for each
section of object code
• Defines and references global symbols and appends a cross-reference listing to the source listing (if
requested)
• Allows conditional assembly
• Supports macros, allowing you to define macros inline or in a library
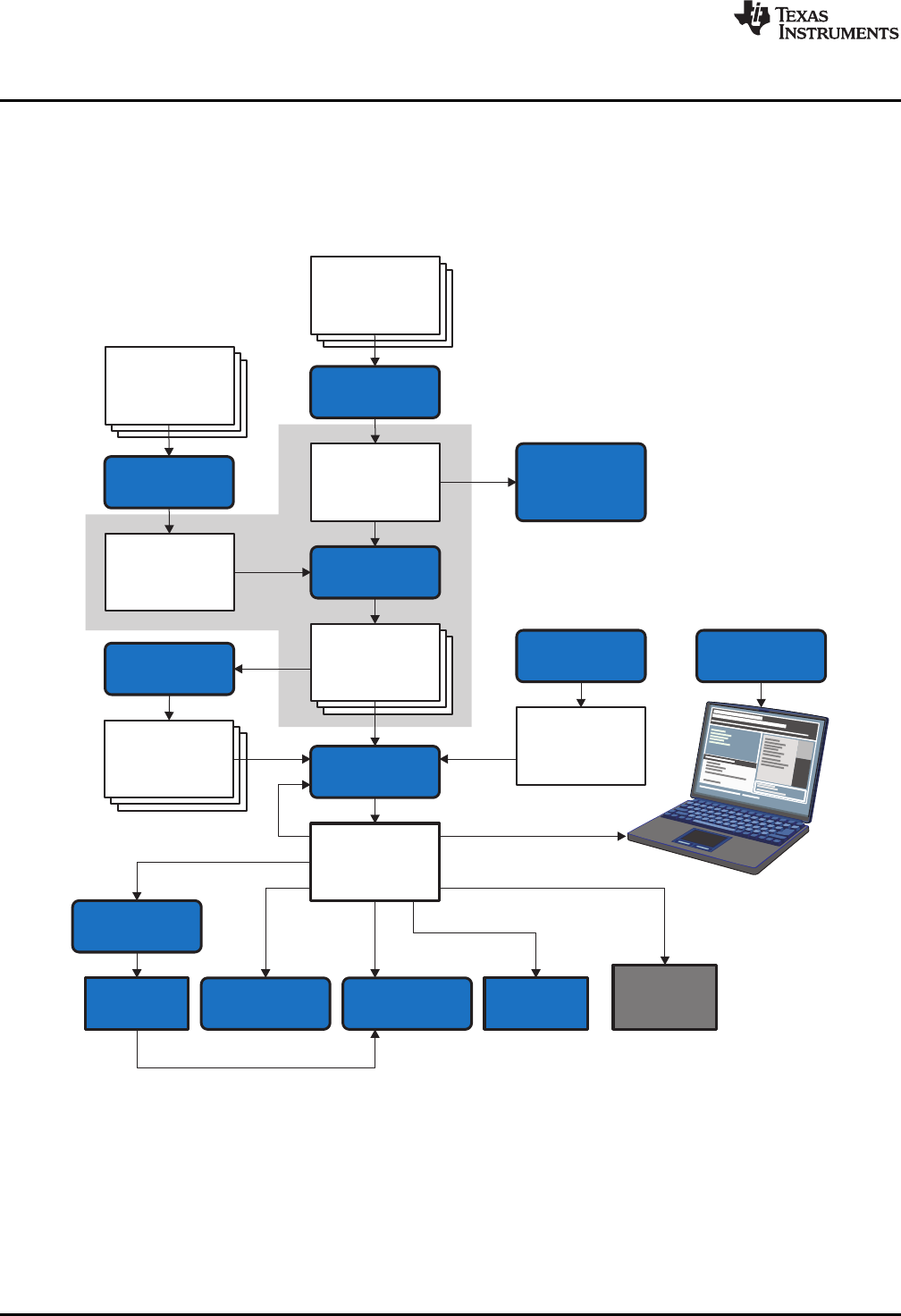
C/C++
source
files
C/C++
compiler
Assembler
source
Assembler
Executable
object file
Debugging
tools
Library-build
utility
Run-time-
support
library
Archiver
Archiver
Macro
library
Absolute lister
Hex-conversion
utility
Cross-reference
lister
Object file
utilities
ARM
Linker
Macro
source
files
Object
files
EPROM
programmer
Library of
object
files
C/C++ name
demangling
utility
The Assembler's Role in the Software Development Flow
www.ti.com
44 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Assembler Description
4.2 The Assembler's Role in the Software Development Flow
Figure 4-1 illustrates the assembler's role in the software development flow. The shaded portion highlights
the most common assembler development path. The assembler accepts assembly language source files
as input, both those you create and those created by the ARM C/C++ compiler.
Figure 4-1. The Assembler in the ARM Software Development Flow
www.ti.com
Invoking the Assembler
45
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Assembler Description
4.3 Invoking the Assembler
To invoke the assembler, enter the following:
armcl input file [options]
armcl is the command that invokes the assembler through the compiler. The compiler considers
any file with an .asm extension to be an assembly file and invokes the assembler.
input file names the assembly language source file.
options identify the assembler options that you want to use. Options are case sensitive and can
appear anywhere on the command line following the command. Precede each option with
one or two hyphens as shown.
The valid assembler options are listed in Table 4-1.
Table 4-1. ARM Assembler Options
Option Alias Description
--absolute_listing -aa Creates an absolute listing. When you use --absolute_listing, the assembler does not produce
an object file. The --absolute_listing option is used in conjunction with the absolute lister.
--asm_define=name[=def]-ad Sets the name symbol. This is equivalent to defining name with a .set directive in the case of a
numeric value or with an .asg directive otherwise. If value is omitted, the symbol is set to 1.
See Section 4.8.5.
--asm_dependency -apd Performs preprocessing for assembly files, but instead of writing preprocessed output, writes a
list of dependency lines suitable for input to a standard make utility. The list is written to a file
with the same name as the source file but with a .ppa extension.
--asm_includes -api Performs preprocessing for assembly files, but instead of writing preprocessed output, writes a
list of files included with the .include directive. The list is written to a file with the same name
as the source file but with a .ppa extension.
--asm_listing -al Produces a listing file with the same name as the input file with a .lst extension.
--asm_listing_cross_reference -ax Produces a cross-reference table and appends it to the end of the listing file; it also adds
cross-reference information to the object file for use by the cross-reference utility. If you do not
request a listing file but use the --asm_listing_cross_reference option, the assembler creates a
listing file automatically, naming it with the same name as the input file with a .lst extension.
--asm_undefine=name -au Undefines the predefined constant name, which overrides any --asm_define options for the
specified constant.
--cmd_file=filename -@ Appends the contents of a file to the command line. You can use this option to avoid limitations
on command line length imposed by the host operating system. Use an asterisk or a
semicolon (* or ;) at the beginning of a line in the command file to include comments.
Comments that begin in any other column must begin with a semicolon. Within the command
file, filenames or option parameters containing embedded spaces or hyphens must be
surrounded with quotation marks. For example: "this-file.asm"
--code_state={16|32} -mt --code_state=16 (or -mt) instructs the assembler to begin assembling instructions as 16-bit
instructions; UAL syntax (.thumb) for ARMv7 and non-UAL syntax (.state16) otherwise. By
default, the assembler begins assembling 32-bit instructions. You can reset the default
behavior by specifying --code_state=32. For information on indirect calls in 16-bit versus 32-bit
code, see the ARM Optimizing C/C++ Compiler User's Guide.
--endian -me Produces object code in little-endian format. For more information, see the ARM Optimizing
C/C++ Compiler User's Guide.
--include_file=filename -ahi Includes the specified file for the assembly module. The file is included before source file
statements. The included file does not appear in the assembly listing files.
--include_path=pathname -I Specifies a directory where the assembler can find files named by the .copy, .include, or .mlib
directives. There is no limit to the number of directories you can specify in this manner; each
pathname must be preceded by the --include_path option. See Section 4.5.1.
--quiet -q Suppresses the banner and progress information (assembler runs in quiet mode).
--symdebug:dwarf or
--symdebug:none -g (DWARF is on by default) Enables assembler source debugging in the C source debugger.
Line information is output to the object module for every line of source in the assembly
language source file. You cannot use this option on assembly code that contains .line
directives. See Section 4.13.
Controlling Application Binary Interface
www.ti.com
46 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Assembler Description
4.4 Controlling Application Binary Interface
An Application Binary Interface (ABI) defines the low level interface between object files, and between an
executable and its execution environment. The ABI exists to allow ABI-compliant object code to link
together, regardless of its source, and allows the resulting executable to run on any system that supports
that ABI. See the ARM Optimizing C/C++ Compiler User's Guide (SPNU151) for information on the EABI
ABI. The complete ARM ABI specifications can be found in the ARM Information Center.
COFF object files and the legacy TIABI and TI ARM9 ABI modes are not supported in v15.6.0.STS and
later versions of the TI Code Generation Tools. If you would like to produce COFF output files, please use
v5.2 of the ARM Code Generation Tools and refer to SPNU151J for documentation.
All object files in an EABI application must be built for EABI. The linker detects situations where object
modules conform to different ABIs and generates an error.
Note that converting an assembly file from the COFF API to EABI requires some changes to the assembly
code.
4.5 Naming Alternate Directories for Assembler Input
The .copy, .include, and .mlib directives tell the assembler to use code from external files. The .copy and
.include directives tell the assembler to read source statements from another file, and the .mlib directive
names a library that contains macro functions. Chapter 5 contains examples of the .copy, .include, and
.mlib directives. The syntax for these directives is:
.copy ["]filename["]
.include ["]filename["]
.mlib ["]filename["]
The filename names a copy/include file that the assembler reads statements from or a macro library that
contains macro definitions. If filename begins with a number the double quotes are required. Quotes are
recommended so that there is no issue in dealing with path information that is included in the filename
specification or path names that include white space. The filename may be a complete pathname, a partial
pathname, or a filename with no path information.
The assembler searches for the file in the following locations in the order given:
1. The directory that contains the current source file. The current source file is the file being assembled
when the .copy, .include, or .mlib directive is encountered.
2. Any directories named with the --include_path option
3. Any directories named with the TI_ARM_C_DIR environment variable
4. Any directories named with the TI_ARM_C_DIRenvironment variable
Because of this search hierarchy, you can augment the assembler's directory search algorithm by using
the --include_path option (described in Section 4.5.1) or the TI_ARM_A_DIR environment variable
(described in Section 4.5.2). The TI_ARM_C_DIR environment variable is discussed in the ARM
Optimizing C/C++ Compiler User's Guide.
NOTE: The TI_ARM_C_DIR environment variable takes precedence over the older TMS470_C_DIR
environment variable if both are defined. If only TMS470_C_DIR is set, it will continue to be
used. Likewise, the TI_ARM_A_DIR environment variable takes precedence over the older
TMS470_A_DIR environment variable if both are defined. If only TMS470_A_DIR is set, it
will continue to be used.
4.5.1 Using the --include_path Assembler Option
The --include_path assembler option names an alternate directory that contains copy/include files or
macro libraries. The format of the --include_path option is as follows:
armcl --include_path= pathname source filename [other options]
www.ti.com
Naming Alternate Directories for Assembler Input
47
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Assembler Description
There is no limit to the number of --include_path options per invocation; each --include_path option names
one pathname. In assembly source, you can use the .copy, .include, or .mlib directive without specifying
path information. If the assembler does not find the file in the directory that contains the current source
file, it searches the paths designated by the --include_path options.
For example, assume that a file called source.asm is in the current directory; source.asm contains the
following directive statement:
.copy "copy.asm"
Assume the following paths for the copy.asm file:
UNIX: /tools/files/copy.asm
Windows: c:\tools\files\copy.asm
You could set up the search path with the commands shown below:
Operating System Enter
UNIX (Bourne shell) armcl --include_path=/tools/files source.asm
Windows armcl --include_path=c:\tools\files source.asm
The assembler first searches for copy.asm in the current directory because source.asm is in the current
directory. Then the assembler searches in the directory named with the --include_path option.
4.5.2 Using the TI_ARM_A_DIR Environment Variable
An environment variable is a system symbol that you define and assign a string to. The assembler uses
the TI_ARM_C_DIR environment variable to name alternate directories that contain copy/include files or
macro libraries.
The assembler looks for the TI_ARM_A_DIR environment variable and then reads and processes it. If the
assembler does not find the TI_ARM_A_DIR variable, it then searches for TI_ARM_C_DIR. The
processor-specific variables are useful when you are using Texas Instruments tools for different
processors at the same time.
See the ARM Optimizing C/C++ Compiler User's Guide for details on TI_ARM_C_DIR.
NOTE: The TI_ARM_C_DIR environment variable takes precedence over the older TMS470_C_DIR
environment variable if both are defined. If only TMS470_C_DIR is set, it will continue to be
used. Likewise, the TI_ARM_A_DIR environment variable takes precedence over the older
TMS470_A_DIR environment variable if both are defined. If only TMS470_A_DIR is set, it
will continue to be used.
The command syntax for assigning the environment variable is as follows:
Operating System Enter
UNIX (Bourne Shell) TI_ARM_A_DIR=" pathname1;pathname2;..."; export TI_ARM_A_DIR
Windows set TI_ARM_A_DIR= pathname1;pathname2;...
The pathnames are directories that contain copy/include files or macro libraries. The pathnames must
follow these constraints:
• Pathnames must be separated with a semicolon.
• Spaces or tabs at the beginning or end of a path are ignored. For example the space before and after
the semicolon in the following is ignored:
set TI_ARM_A_DIR= c:\path\one\to\tools ; c:\path\two\to\tools
• Spaces and tabs are allowed within paths to accommodate Windows directories that contain spaces.
For example, the pathnames in the following are valid:
Naming Alternate Directories for Assembler Input
www.ti.com
48 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Assembler Description
In assembly source, you can use the .copy, .include, or .mlib directive without specifying path information.
If the assembler does not find the file in the directory that contains the current source file or in directories
named by the --include_path option, it searches the paths named by the environment variable.
For example, assume that a file called source.asm contains these statements:
.copy "copy1.asm"
.copy "copy2.asm"
Assume the following paths for the files:
UNIX: /tools/files/copy1.asm and /dsys/copy2.asm
Windows: c:\tools\files\copy1.asm and c:\dsys\copy2.asm
You could set up the search path with the commands shown below:
Operating System Enter
UNIX (Bourne shell) TI_ARM_A_DIR="/dsys"; export TI_ARM_A_DIR
armcl --include_path=/tools/files source.asm
Windows TI_ARM_A_DIR=c:\dsys
armcl --include_path=c:\tools\files source.asm
The assembler first searches for copy1.asm and copy2.asm in the current directory because source.asm
is in the current directory. Then the assembler searches in the directory named with the --include_path
option and finds copy1.asm. Finally, the assembler searches the directory named with TI_ARM_A_DIR
and finds copy2.asm.
The environment variable remains set until you reboot the system or reset the variable by entering one of
these commands:
Operating System Enter
UNIX (Bourne shell) unset TI_ARM_A_DIR
Windows set TI_ARM_A_DIR=
www.ti.com
Source Statement Format
49
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Assembler Description
4.6 Source Statement Format
Each line in a ARM assembly input file can be empty, a comment, an assembler directive, a macro
invocation, or an assembly instruction.
Assembly language source statements can contain four ordered fields (label, mnemonic, operand list, and
comment). The general syntax for source statements is as follows:
[label[:]]mnemonic [operand list][;comment]
Following are examples of source statements:
SYM1 .set 2 ; Symbol SYM1 = 2
Begin: MOV R0, #SYM1 ; Load R0 with 2
.word 016h ; Initialize word (016h)
The ARM assembler reads an unlimited number of characters per line. Source statements that extend
beyond 400 characters in length (including comments) are truncated in the listing file.
Follow these guidelines:
• All statements must begin with a label, a blank, an asterisk, or a semicolon.
• Labels are optional for most statements; if used, they must begin in column 1.
• One or more space or tab characters must separate each field.
• Comments are optional. Comments that begin in column 1 can begin with an asterisk or a semicolon (*
or ;), but comments that begin in any other column must begin with a semicolon.
NOTE: A mnemonic cannot begin in column 1 or it will be interpreted as a label. Mnemonic opcodes
and assembler directive names without the . prefix are valid label names. Remember to
always use whitespace before the mnemonic, or the assembler will think the identifier is a
new label definition.
The following sections describe each of the fields.
4.6.1 Label Field
A label must be a legal identifier (see Section 4.8.1) placed in column 1. Every instruction may optionally
have a label. Many directives allow a label, and some require a label.
A label can be followed by a colon (:). The colon is not treated as part of the label name. If you do not use
a label, the first character position must contain a blank, a semicolon, or an asterisk.
When you use a label on an assembly instruction or data directive, an assembler symbol (Section 4.8)
with the same name is created. Its value is the current value of the section program counter (SPC, see
Section 2.4.5). This symbol represents the address of that instruction. In the following example, the .word
directive is used to create an array of 3 words. Because a label was used, the assembly symbol Start
refers to the first word, and the symbol will have the value 40h.
....
9 * Assume some code was assembled
10 00000040 0000000A Start: .word 0Ah,3,7
00000044 00000003
00000048 00000007
A label on a line by itself is a valid statement. When a label appears on a line by itself, it points to the
instruction on the next line (the SPC is not incremented):
1 00000000 Here:
2 00000000 00000003 .word 3
A label on a line by itself is equivalent to writing:
Here: .equ $ ; $ provides the current value of the SPC
If you do not use a label, the character in column 1 must be a blank, an asterisk, or a semicolon.

Source Statement Format
www.ti.com
50 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Assembler Description
4.6.2 Mnemonic Field
The mnemonic field follows the label field. The mnemonic field cannot start in column 1; if it does, it is
interpreted as a label. There is one exception: the parallel bars (||) of the mnemonic field can start in
column 1. The mnemonic field contains one of the following items:
• Machine-instruction mnemonic (such as ADD, MUL, STR)
• Assembler directive (such as .data, .list, .equ)
• Macro directive (such as .macro, .var, .mexit)
• Macro invocation
4.6.3 Operand Field
The operand field follows the mnemonic field and contains zero or more comma-separated operands. An
operand can be one of the following:
• an immediate operand (usually a constant or symbol) (see Section 4.7 and Section 4.8)
• a register operand
• a memory reference operand
• an expression that evaluates to one of the above (see Section 4.9)
An immediate operand is encoded directly in the instruction. The value of an immediate operand must be
aconstant expression. Most instructions with an immediate operand require an absolute constant
expression, such as 1234. Some instructions (such as a call instruction) allow a relocatable constant
expression, such as a symbol defined in another file. (See Section 4.9 for details about types of
expressions.)
Aregister operand is a special pre-defined symbol that represents a CPU register.
Amemory reference operand uses one of several memory addressing modes to refer to a location in
memory. Memory reference operands use a special target-specific syntax defined in the appropriate CPU
and Instruction Set Reference Guide.
You must separate operands with commas. Not all operand types are supported for all operands. See the
description of the specific instruction in the CPU and Instruction Set Reference Guide for your device
family.
4.6.3.1 Operand Syntaxes for Instructions
The assembler allows you to specify that an operand should be used as an address, an immediate value,
an indirect address, a register, a shifted register, or a register list. The following rules apply to the
operands of instructions.
•# prefix — the operand is an immediate value. Using the # sign as a prefix causes the assembler to
treat the operand as an immediate value. This is true even if the operand is a register; the assembler
treats the register as a value instead of using the contents of the register. For example:
Label: ADD R1, R1, #123
; Add 123 (decimal) to the value of R1 and place the result in R1.
•Square brackets — the operand is an indirect address. If the operand is enclosed in square
brackets, the assembler treats the operand as an indirect address; that is, it uses the contents of the
operand as an address. Indirect addresses consist of a base and an offset. The base is specified by a
register and is formed by taking the value in the register. The offset can be specified by a register, an
immediate value, or a shifted register. Furthermore, the offset can be designated as one of the
following:
– Pre-index, where the base and offset are combined to form the address. To designate a pre-index
offset, include the offset within the enclosing right bracket.
– Postindex, where the address is formed from the base, and then the base and offset are combined.
To designate a postindex offset, include the offset outside of the right bracket.

www.ti.com
Source Statement Format
51
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Assembler Description
The offset can be added to or subtracted from the base. The following are examples of instructions that
use indirect addresses as operands:
A: LDR R1, [R1]
; Load from address in R1 into R1.
LDR R7, [R1, #5]
; Form address by adding the value in R1 to 5. Load from address into R7.
STR R3, [R1, -R2]
; Form address by subtracting the value in R2 from the value in R1. Store from R3
; to memory at address.
STR R14, [R1, +R3, LSL #2]
; Form address by adding the value in R3 shifted left by 2 to the value in R1.
; Store from R14 to memory at address.
LDR R1, [R1], #5
; Load from address in R1 into R1, then add 5 to the address.
STR R2, [R1], R5
; Store value in R2 in the address in R1, then add the value in R5 to the address.
•! suffix — write-back to register. If you use the ! sign as a suffix, the assembler writes the computed
address back to the base register. Write-back to register is used only with the indirect addressing
mode syntax.
This is an example of an instruction using the write back to register suffix:
LDR R1, [R4, #4]!
; Form address by adding the value in R4 to 4. Load from this address into R1,
; then replace the value in R4 with the address.
•^ suffix — set S bit. If you use the ^ sign as a suffix, the assembler sets the S bit. The resulting action
depends on the type of instruction being executed and whether R15 is in the transfer list. For more
information, see the LDM and STM instructions in the TMS470R1x User's Guide.
LDMIA SP, {R4-R11, R15}^
; Load registers R4 through R11 and R15 from memory at SP. Load CPSR with SPSR.
•Shifted registers. If a register symbol is followed by a shift type, the computed value is the value in
the register shifted according to the type as defined below:
LSL
LSR
ASL
ASR
ROR
RRX
Logical shift left
Logical shift right
Arithmetic shift left
Arithmetic shift right
Rotate right
Rotate right extended
The shift type can be followed by a register or an immediate whose value defines the shift amount. The
following are examples of instructions that use shifted registers as operands:
B: ADD R1, R4, R5, LSR R2
; Logical shift right the value in R5 by the value in R2. Add the value in R5 to R4.
; Place result in R1.
LDR R1, [R5, R4, LSL #4]
; Form address by adding the value in R4 shifted left by 4 to the value in R5.
; Load from address into R1.
CMP R3, R4, RRX
; Compare the value in R3 with the value in R4 rotate right extend.
•Curly braces - the operand is a register list. If you surround registers with curly braces, the
assembler treats the operand as a list of registers. You can separate registers with commas or indicate
a range of registers with a dash. The following are examples of instructions that use register lists:
LDMEA R2, {R1, R3, R6}
; Pre-decrement stack load. Load registers R1, R3 and R6 from memory at the address in R2.
STMFD R12, {R1, R3-R5}
; Pre-increment stack store. Store from registers R1 and R3 through R5 to memory at the
; address in R12.

Source Statement Format
www.ti.com
52 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Assembler Description
4.6.3.2 Immediate Values as Operands for Directives
You use immediate values as operands primarily with instructions. In some cases, you can use immediate
values with the operands of directives. For instance, you can use immediate values with the .byte directive
to load values into the current section.
It is not usually necessary to use the # prefix for directives. Compare the following statements:
ADD R1, #10
.byte 10
In the first statement, the # prefix is necessary to tell the assembler to add the value 10 to R1. In the
second statement, however, the # prefix is not used; the assembler expects the operand to be a value and
initializes a byte with the value 10.
See Chapter 5 for more information on the syntax and usage of directives.
4.6.4 Comment Field
A comment can begin in any column and extends to the end of the source line. A comment can contain
any ASCII character, including blanks. Comments are printed in the assembly source listing, but they do
not affect the assembly.
A source statement that contains only a comment is valid. If it begins in column 1, it can start with a
semicolon ( ;) or an asterisk ( *). Comments that begin anywhere else on the line must begin with a
semicolon. The asterisk identifies a comment only if it appears in column 1.

www.ti.com
Literal Constants
53
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Assembler Description
4.7 Literal Constants
Aliteral constant (also known as a literal or in some other documents as an immediate value) is a value
that represents itself, such as 12, 3.14, or "hello".
The assembler supports several types of literals:
• Binary integer literals
• Octal integer literals
• Decimal integer literals
• Hexadecimal integer literals
• Character literals
• Character string literals
• Floating-point literals
Error checking for invalid or incomplete literals is performed.
4.7.1 Integer Literals
The assembler maintains each integer literal internally as a 32-bit signless quantity. Literals are
considered unsigned values, and are not sign extended. For example, the literal 00FFh is equal to 00FF
(base 16) or 255 (base 10); it does not equal -1. which is 0FFFFFFFFh (base 16). Note that if you store
0FFh in a .byte location, the bits will be exactly the same as if you had stored -1. It is up to the reader of
that location to interpret the signedness of the bits.
4.7.1.1 Binary Integer Literals
A binary integer literal is a string of up to 32 binary digits (0s and 1s) followed by the suffix B (or b). Binary
literals of the form "0[bB][10]+" are also supported. If fewer than 32 digits are specified, the assembler
right justifies the value and fills the unspecified bits with zeros. These are examples of valid binary literals:
00000000B Literal equal to 010 or 016
0100000b Literal equal to 3210 or 2016
01b Literal equal to 110 or 116
11111000B Literal equal to 24810 or 0F816
0b00101010 Literal equal to 4210 or 2A16
0B101010 Literal equal to 4210 or 2A16
4.7.1.2 Octal Integer Literals
An octal integer literal is a string of up to 11 octal digits (0 through 7) followed by the suffix Q (or q). Octal
literals may also begin with a 0, contain no 8 or 9 digits, and end with no suffix. These are examples of
valid octal literals:
10Q Literal equal to 810 or 816
054321 Literal equal to 2273710 or 58D116
100000Q Literal equal to 3276810 or 800016
226q Literal equal to 15010 or 9616
4.7.1.3 Decimal Integer Literals
A decimal integer literal is a string of decimal digits ranging from -2147 483 648 to 4 294 967 295. These
are examples of valid decimal integer literals:

Literal Constants
www.ti.com
54 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Assembler Description
1000 Literal equal to 100010 or 3E816
-32768 Literal equal to -32 76810 or -800016
25 Literal equal to 2510 or 1916
4815162342 Literal equal to 481516234210 or 11F018BE616
4.7.1.4 Hexadecimal Integer Literals
A hexadecimal integer literal is a string of up to eight hexadecimal digits followed by the suffix H (or h) or
preceded by 0x. A hexadecimal literal must begin with a decimal value (0-9) if it is indicated by the H or h
suffix.
Hexadecimal digits include the decimal values 0-9 and the letters A-F or a-f. If fewer than eight
hexadecimal digits are specified, the assembler right-justifies the bits.
These are examples of valid hexadecimal literals:
78h Literal equal to 12010 or 007816
0x78 Literal equal to 12010 or 007816
0Fh Literal equal to 1510 or 000F16
37ACh Literal equal to 1425210 or 37AC16
4.7.1.5 Character Literals
A character literal is a single character enclosed in single quotes. The characters are represented
internally as 8-bit ASCII characters. Two consecutive single quotes are required to represent each single
quote that is part of a character literal. A character literal consisting only of two single quotes is valid and
is assigned the value 0. These are examples of valid character literals:
'a' Defines the character literal aand is represented internally as 6116
'C' Defines the character literal Cand is represented internally as 4316
'''' Defines the character literal 'and is represented internally as 2716
'' Defines a null character and is represented internally as 0016
Notice the difference between character literals and character string literals (Section 4.7.2 discusses
character strings). A character literal represents a single integer value; a string is a sequence of
characters.
4.7.2 Character String Literals
A character string is a sequence of characters enclosed in double quotes. Double quotes that are part of
character strings are represented by two consecutive double quotes. The maximum length of a string
varies and is defined for each directive that requires a character string. Characters are represented
internally as 8-bit ASCII characters.
These are examples of valid character strings:
"sample program" defines the 14-character string sample program.
"PLAN ""C""" defines the 8-character string PLAN "C".
Character strings are used for the following:
• Filenames, as in .copy "filename"
• Section names, as in .sect "section name"
• Data initialization directives, as in .byte "charstring"
• Operands of .string directives
www.ti.com
Literal Constants
55
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Assembler Description
4.7.3 Floating-Point Literals
A floating-point literal is a string of decimal digits followed by a required decimal point, an optional
fractional portion, and an optional exponent portion. The syntax for a floating-point number is:
[ +|- ] nnn . [ nnn] [ E|e[ +|- ] nnn ]
Replace nnn with a string of decimal digits. You can precede nnn with a + or a -. You must specify a
decimal point. For example, 3.e5 is valid, but 3e5 is not valid. The exponent indicates a power of 10.
These are examples of valid floating-point literals:
3.0
3.14
3.
-0.314e13
+314.59e-2
The assembler syntax does not support all C89-style float literals nor C99-style hexadecimal constants,
but the $$strtod built-in mathematical function supports both. If you want to specify a floating-point literal
using one of those formats, use $$strtod. For example:
$$strtod(".3")
$$strtod("0x1.234p-5")
You cannot directly use NaN, Inf, or -Inf as floating-point literals. Instead, use $$strtod to express these
values. The "NaN" and "Inf" strings are handled case-insensitively. See Section 4.10.1 for built-in
functions.
$$strtod("NaN")
$$strtod("Inf")
4.8 Assembler Symbols
An assembler symbol is a named 32-bit signless integer value, usually representing an address or
absolute integer. A symbol can represent such things as the starting address of a function, variable, or
section. The name of a symbol must be a legal identifier. The identifier becomes a symbolic
representation of the symbol's value, and may be used in subsequent instructions to refer to the symbol's
location or value.
Some assembler symbols become external symbols, and are placed in the object file's symbol table. A
symbol is valid only within the module in which it is defined, unless you use the .global directive or the .def
directive to declare it as an external symbol (see .global directive).
See Section 2.6 for more about symbols and the symbol tables in object files.
4.8.1 Identifiers
Identifiers are names used as labels, registers, symbols, and substitution symbols. An identifier is a string
of alphanumeric characters, the dollar sign, and underscores (A-Z, a-z, 0-9, $, and _). The first character
in an identifier cannot be a number, and identifiers cannot contain embedded blanks. The identifiers you
define are case sensitive; for example, the assembler recognizes ABC, Abc, and abc as three distinct
identifiers.

Assembler Symbols
www.ti.com
56 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Assembler Description
4.8.2 Labels
An identifier used as a label becomes an assembler symbol, which represent an address in the program.
Labels within a file must be unique.
NOTE: A mnemonic cannot begin in column 1 or it will be interpreted as a label. Mnemonic opcodes
and assembler directive names without the . prefix are valid label names. Remember to
always use whitespace before the mnemonic, or the assembler will think the identifier is a
new label definition.
Symbols derived from labels can also be used as the operands of .bss, .global, .ref, or .def directives.
.global _f
LDR A1, CON1
STR A1, [sp, #0]
BL _f
CON1: .field -269488145,32
4.8.3 Local Labels
Local labels are special labels whose scope and effect are temporary. A local label can be defined in two
ways:
• $n, where n is a decimal digit in the range 0-9. For example, $4 and $1 are valid local labels. See
Example 4-1.
•name?, where name is any legal identifier as described above. The assembler replaces the question
mark with a period followed by a unique number. When the source code is expanded, you will not see
the unique number in the listing file. Your label appears with the question mark as it did in the source
definition.
You cannot declare these types of labels as global.
Normal labels must be unique (they can be declared only once), and they can be used as constants in the
operand field. Local labels, however, can be undefined and defined again. Local labels cannot be defined
by directives.
A local label can be undefined or reset in one of these ways:
• By using the .newblock directive
• By changing sections (using a .sect, .text, or .data directive)
• By changing the state of generated code (using the .state16 or .state32 directives)
• By entering an include file (specified by the .include or .copy directive)
• By leaving an include file (specified by the .include or .copy directive)
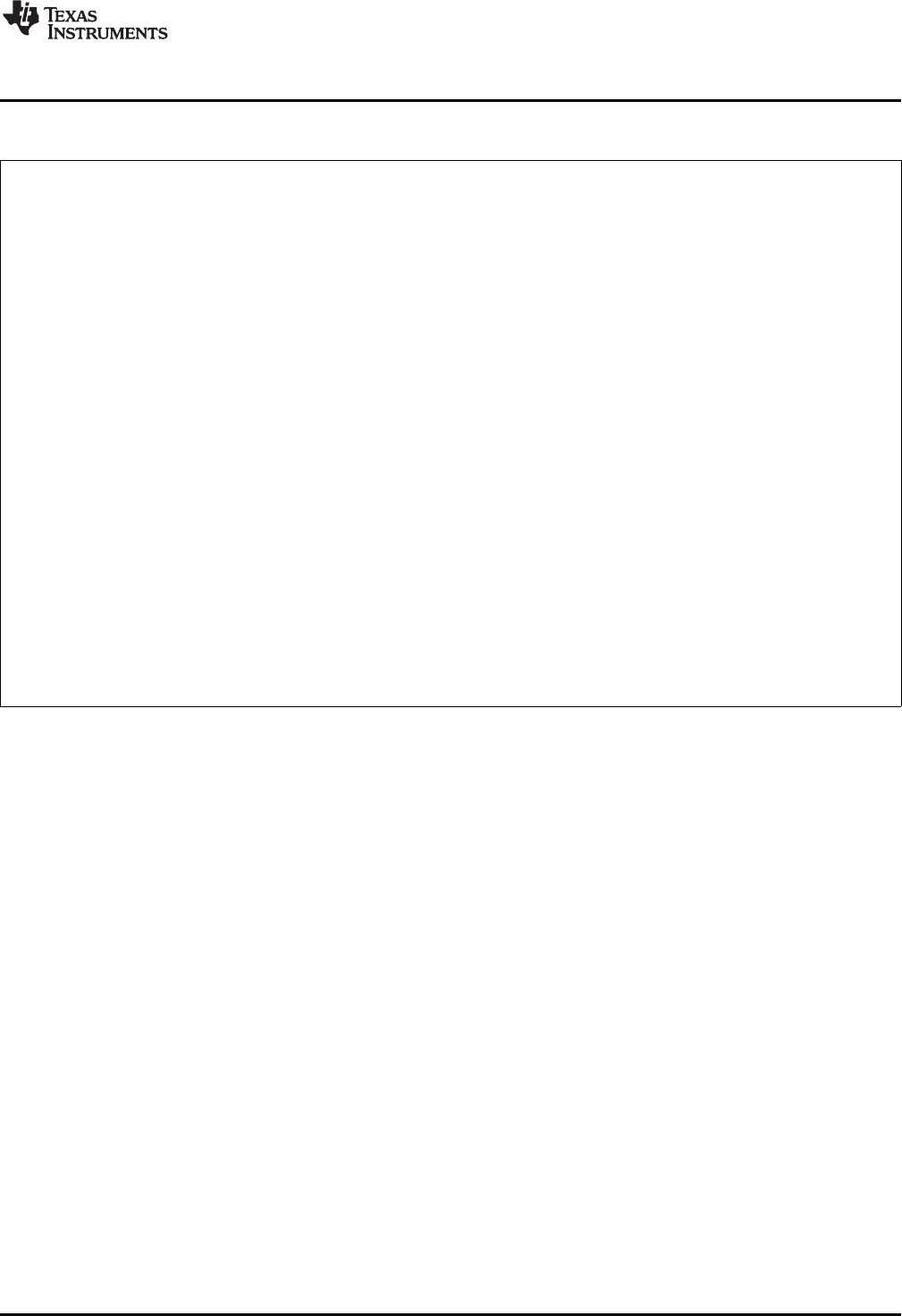
www.ti.com
Assembler Symbols
57
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Assembler Description
Example 4-1. Local Labels of the Form $n
This is an example of code that declares and uses a local label legally:
Label1: CMP r1, #0 ; Compare r1 to zero.
BCS $1 ; If carry is set, branch to $1;
ADDS r0, r0, #1 ; else increment to r0
MOVCS pc, lr ; and return.
$1: LDR r2, [r5], #4 ; Load indirect of r5 into r2
; with write back.
.newblock ; Undefine $1 so it can be used
; again.
ADDS r1, r1, r2 ; Add r2 to r1.
BPL $1 ; If the negative bit isn't set,
; branch to $1;
MVNS r1, r1 ; else negate r1.
$1: MOV pc, lr ; Return.
The following code uses a local label illegally:
BCS $1 ; If carry is set, branch to $1;
ADDS r0, r0, #1 ; else increment to r0
MOVCS pc, lr ; and return.
$1: LDR r2, [r5], #4 ; Load indirect of r5 into r2
; with write-back.
ADDS r1, r1, r2 ; Add r2 to r1.
BPL $1 ; If the negative bit isn't set,
; branch to $1;
MVNS r1, r1 ; else negate r1.
$1: MOV pc, lr ; Return.
The $1 label is not undefined before being reused by the second branch instruction. Therefore, $1 is
redefined, which is illegal.
Local labels are especially useful in macros. If a macro contains a normal label and is called more than
once, the assembler issues a multiple-definition error. If you use a local label and .newblock within a
macro, however, the local label is used and reset each time the macro is expanded.
Up to ten local labels of the $n form can be in effect at one time. Local labels of the form name? are not
limited. After you undefine a local label, you can define it and use it again. Local labels do not appear in
the object code symbol table.
For more information about using labels in macros see Section 6.6.
Assembler Symbols
www.ti.com
58 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Assembler Description
4.8.4 Symbolic Constants
A symbolic constant is a symbol with a value that is an absolute constant expression (see Section 4.9). By
using symbolic constants, you can assign meaningful names to constant expressions. The .set and
.struct/.tag/.endstruct directives enable you to set symbolic constants (see Define Assembly-Time
Constant). Once defined, symbolic constants cannot be redefined.
If you use the .set directive to assign a value to a symbol , the symbol becomes a symbolic constant and
may be used where a constant expression is expected. For example:
shift3 .set 3
MOV R0, #shift3
You can also use the .set directive to assign symbolic constants for other symbols, such as register
names. In this case, the symbolic constant becomes a synonym for the register:
AuxR1 .set R1
LDR AuxR1, [SP]
The following example shows how the .set directive can be used with the .struct, .tag. and .endstruct
directives. It creates the symbolic constants K, maxbuf, item, value, delta, and i_len.
K .set 1024 ;constant definitions
maxbuf .set 2*K
item .struct ;item structure definition
.int value ;constant offsets value = 0
.int delta ;constant offsets delta = 1
i_len .endstruct
array .tag item ;array declaration
.bss array, i_len*K
The assembler also has many predefined symbolic constants; these are discussed in Section 4.8.6.
4.8.5 Defining Symbolic Constants (--asm_define Option)
The --asm_define option equates a constant value or a string with a symbol. The symbol can then be used
in place of a value in assembly source. The format of the --asm_define option is as follows:
armcl --asm_define=name[=value]
The name is the name of the symbol you want to define. The value is the constant or string value you
want to assign to the symbol. If the value is omitted, the symbol is set to 1. If you want to define a quoted
string and keep the quotation marks, do one of the following:
• For Windows, use --asm_define= name ="\" value \"". For example, --asm_define=car="\"sedan\""
• For UNIX, use --asm_define= name ='" value "'. For example, --asm_define=car='"sedan"'
• For Code Composer, enter the definition in a file and include that file with the --cmd_file (or -@) option.
Once you have defined the name with the --asm_define option, the symbol can be used with assembly
directives and instructions as if it had been defined with the .set directive. For example, on the command
line you enter:
armcl --asm_define=SYM1=1 --asm_define=SYM2=2 --asm_define=SYM3=3 --asm_define=SYM4=4 value.asm
Since you have assigned values to SYM1, SYM2, SYM3, and SYM4, you can use them in source code.
Example 4-2 shows how the value.asm file uses these symbols without defining them explicitly.
www.ti.com
Assembler Symbols
59
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Assembler Description
Within assembler source, you can test the symbol defined with the --asm_define option with these
directives:
Type of Test Directive Usage
Existence .if $$isdefed(" name ")
Nonexistence .if $$isdefed(" name ") = 0
Equal to value .if name =value
Not equal to value .if name != value
The argument to the $$isdefed built-in function must be enclosed in quotes. The quotes cause the
argument to be interpreted literally rather than as a substitution symbol.
Example 4
‑‑
2. Using Symbolic Constants Defined on Command Line
IF_4: .if SYM4 = SYM2 * SYM2
.byte SYM4 ; Equal values
.else
.byte SYM2 * SYM2 ; Unequal values
.endif
IF_5: .if SYM1 <= 10
.byte 10 ; Less than / equal
.else
.byte SYM1 ; Greater than
.endif
IF_6: .if SYM3 * SYM2 != SYM4 + SYM2
.byte SYM3 * SYM2 ; Unequal value
.else
.byte SYM4 + SYM4 ; Equal values
.endif
IF_7: .if SYM1 = SYM2
.byte SYM1
.elseif SYM2 + SYM3 = 5
.byte SYM2 + SYM3
.endif
Assembler Symbols
www.ti.com
60 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Assembler Description
4.8.6 Predefined Symbolic Constants
The assembler has several types of predefined symbols.
$, the dollar-sign character, represents the current value of the section program counter (SPC).
In addition, the following predefined processor symbolic constants are available:
Table 4-2. ARM Processor Symbolic Constants
Macro Name Description
.TI_ARM Always set to 1
.TI_ARM_16BIS Set to 1 if the default state is 16 bit Thumb mode (the --code_state=16 option is used for an ARMv6 or
prior architecture); otherwise, set to 0.
.TI_ARM_32BIS Set to 1 if the default state is 32 bit (the --code_state=16 option is not used or the --code_state=32
option is used); otherwise, set to 0.
.TI_ARM_T2IS Set to 1 if the default state is Thumb-2 mode (the --code_state=16 option is used for an ARMv7 or
higher architecture); otherwise set to 0.
.TI_ARM_LITTLE Set to 1 if little-endian mode is selected (the --endian assembler option is used); otherwise, set to 0.
.TI_ARM_BIG Set to 1 if big-endian mode is selected (the --endian assembler option is not used); otherwise, set to 0.
_ _TI_ARM7ABI_ASSEMBLER Set to 1 if the TI ARM7 ABI is enabled (the --abi=tiabi option is used); otherwise, it is set to 0. (This
option is deprecated.)
_ _TI_ARM9ABI_ASSEMBLER Set to 1 if the TI ARM9 ABI is enabled (the --abi=ti_arm9_abi option is used); otherwise, it is set to 0.
(This option is deprecated.)
_ _TI_EABI_ASSEMBLER Set to 1 if the EABI ABI is enabled. EABI is now the only supported ABI; see Section 4.4.
_ _TI_NEON_SUPPORT_ _ Set to 1 if NEON SIMD extension is targeted (the --neon option is used); otherwise, it is set to 0.
_ _TI_ARM_V4_ _ Set to 1 if the v4 architecture (ARM7) is targeted (the -mv4 option is used); otherwise, it is set to 0.
_ _TI_ARM_V5E_ _ Set to 1 if the v5E architecture (ARM9E) is targeted (the -mv5e option is used); otherwise, it is set to 0.
_ _TI_ARM_V6_ _ Set to 1 if the v6 architecture (ARM11) is targeted (the -mv6 option is used); otherwise, it is set to 0.
_ _TI_ARM_V6M0_ _ Set to 1 if the v6M0 architecture (Cortex-M0) is targeted (the -mv6M0 option is used); otherwise, it is
set to 0.
_ _TI_ARM_V7_ _ Set to 1 if any v7 architecture (Cortex) is targeted; otherwise, it is set to 0.
_ _TI_ARM_V7A8_ _ Set to 1 if the v7A8 architecture (Cortex-A8) is targeted (the -mv7A8 option is used); otherwise, it is set
to 0.
_ _TI_ARM_V7M3_ _ Set to 1 if the v7M3 architecture (Cortex-M3) is targeted (the -mv7M3 option is used); otherwise, it is
set to 0.
_ _TI_ARM_V7M4_ _ Set to 1 if the v7M4 architecture (Cortex-M4) is targeted (the -mv7M4 option is used); otherwise, it is
set to 0.
_ _TI_ARM_V7R4_ _ Set to 1 if the v7R4 architecture (Cortex-R4) is targeted (the -mv7R4 option is used); otherwise, it is
set to 0.
_ _TI_VFP_SUPPORT_ _ Set to 1 if the VFP coprocessor is enabled (any --float_support option is used); otherwise, it is set to 0.
_ _TI_VFPV3_SUPPORT_ _ Set to 1 if the VFP coprocessor is enabled (the --float_support=vfpv3 option is used); otherwise, it is
set to 0.
_ _TI_VFPV3D16_SUPPORT_ _ Set to 1 if the VFP coprocessor is enabled (the --float_support=vfpv3d16 option is used); otherwise, it
is set to 0.
_ _TI_FPV4SPD16_SUPPORT_ _ Set to 1 if the FP coprocessor is enabled (the --float_support=fpv4spd16 option is used); otherwise, it
is set to 0.
www.ti.com
Assembler Symbols
61
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Assembler Description
4.8.7 Registers
In addition, control register names are predefined symbols.
The names of ARM registers and their aliases are register symbols, including:
• Coprocessor registers, including C0-C15.
• Coprocessor IDs, including P0-P15.
• VFP registers, including D0-D31, S0-S31.
• NEON registers, including D0-D31, Q0-Q15.
Table 4-3. ARM Register Symbols with Aliases
Register Name Alias Register Name Alias
R0 A1 R8 V5
R1 A2 R9 V6
R2 A3 R10 V7
R3 A4 R11 V8
R4 V1 R12 V9, IP
R5 V2 R13 SP
R6 V3 R14 LR
R7 V4, AP R15 PC
Register symbols and aliases can be entered as all uppercase or all lowercase characters. For example,
R13 could also be entered as r13, SP, or sp.
Control register symbols can be entered in all upper-case or all lower-case characters.
See the "Register Conventions" section of the ARM Optimizing C/C++ Compiler User's Guide for details
about the registers and their uses.
Status registers can be entered as all uppercase or all lowercase characters; that is, CPSR could also be
entered as cpsr, CPSR_ALL, or cpsr_all.
Table 4-4. ARM Status Registers and Aliases
Register Alias Description
CPSR CPSR_ALL Current processor status register
CPSR_FLG Current processor status register flag bits only
SPSR SPSR_ALL Saved processor status register
SPSR_FLG Saved processor status register flag bits only

Assembler Symbols
www.ti.com
62 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Assembler Description
4.8.8 Substitution Symbols
Symbols can be assigned a string value. This enables you to create aliases for character strings by
equating them to symbolic names. Symbols that represent character strings are called substitution
symbols. When the assembler encounters a substitution symbol, its string value is substituted for the
symbol name. Unlike symbolic constants, substitution symbols can be redefined.
A string can be assigned to a substitution symbol anywhere within a program; for example:
.asg "SP", stack-pointer
; Assigns the string SP to the substitution symbol stack-pointer.
.asg "#0x20", block2
; Assigns the string #0x20 to the substitution symbol block2.
ADD stack-pointer, stack-pointer, block2
; Adds the value in SP to #0x20 and stores the result in SP.
When you are using macros, substitution symbols are important because macro parameters are actually
substitution symbols that are assigned a macro argument. The following code shows how substitution
symbols are used in macros:
addl .macro dest, src
; addl macro definition
ADDS dest, dest, src
; Add the value in register dest to the value in register src,
; and store the result in src.
BLCS reset_ctr
; Handle overflow.
.endm
*addl invocation
addl R4, R5
; Calls the macro addl and substitutes R4 for dest and R5 for src.
; The macro adds the value of R4 and the value of R5, stores the
; result in R4, and handles overflow.
See Chapter 6 for more information about macros.

www.ti.com
Expressions
63
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Assembler Description
4.9 Expressions
Nearly all values and operands in assembly language are expressions, which may be any of the following:
• a literal constant
• a register
• a register pair
• a memory reference
• a symbol
• a built-in function invocation
• a mathematical or logical operation on one or more expressions
This section defines several types of expressions that are referred to throughout this document. Some
instruction operands accept limited types of expressions. For example, the .if directive requires its operand
be an absolute constant expression with an integer value. Absolute in the context of assembly code
means that the value of the expression must be known at assembly time.
Aconstant expression is any expression that does not in any way refer to a register or memory reference.
An immediate operand will usually not accept a register or memory reference. It must be given a constant
expression. Constant expressions may be any of the following:
• a literal constant
• an address constant expression
• a symbol whose value is a constant expression
• a built-in function invocation on a constant expression
• a mathematical or logical operation on one or more constant expressions
An address constant expression is a special case of a constant expression. Some immediate operands
that require an address value can accept a symbol plus an addend; for example, some branch
instructions. The symbol must have a value that is an address, and it may be an external symbol. The
addend must be an absolute constant expression with an integer value. For example, a valid address
constant expression is "array+4".
A constant expression may be absolute or relocatable. Absolute means known at assembly time.
Relocatable means constant, but not known until link time. External symbols are relocatable, even if they
refer to a symbol defined in the same module.
An absolute constant expression may not refer to any external symbols anywhere in the expression. In
other words, an absolute constant expression may be any of the following:
• a literal constant
• an absolute address constant expression
• a symbol whose value is an absolute constant expression
• a built-in function invocation whose arguments are all absolute constant expressions
• a mathematical or logical operation on one or more absolute constant expressions
Arelocatable constant expression refers to at least one external symbol. For ELF, such expressions may
contain at most one external symbol. A relocatable constant expression may be any of the following:
• an external symbol
• a relocatable address constant expression
• a symbol whose value is a relocatable constant expression
• a built-in function invocation with any arguments that are relocatable constant expressions
• a mathematical or logical operation on one or more expressions, at least one of which is a relocatable
constant expression
In some cases, the value of a relocatable address expression may be known at assembly time. For
example, a relative displacement branch may branch to a label defined in the same section.

Expressions
www.ti.com
64 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Assembler Description
4.9.1 Mathematical and Logical Operators
The operands of a mathematical or logical operator must be well-defined expressions. That is, you must
use the correct number of operands and the operation must make sense. For example, you cannot take
the XOR of a floating-point value. In addition, well-defined expressions contain only symbols or assembly-
time constants that have been defined before they occur in the directive's expression.
Three main factors influence the order of expression evaluation:
Parentheses Expressions enclosed in parentheses are always evaluated first.
8/(4/2)=4,but8/4/2=1
You cannot substitute braces ( { } ) or brackets ( [ ] ) for parentheses.
Precedence groups Operators, listed in Table 4-5, are divided into nine precedence groups.
When parentheses do not determine the order of expression evaluation,
the highest precedence operation is evaluated first.
8 + 4 / 2 = 10 (4 / 2 is evaluated first)
Left-to-right evaluation When parentheses and precedence groups do not determine the order of
expression evaluation, the expressions are evaluated from left to right,
except for Group 1, which is evaluated from right to left.
8 / 4*2 = 4, but 8 / (4*2) = 1
Table 4-5 lists the operators that can be used in expressions, according to precedence group.
(1) Group 1 operators are evaluated right to left. All other operators are evaluated left to right.
(2) Unary + and - have higher precedence than the binary forms.
Table 4-5. Operators Used in Expressions (Precedence)
Group(1) Operator Description(2)
1 +
-
~
!
Unary plus
Unary minus
1s complement
Logical NOT
2 *
/
%
Multiplication
Division
Modulo
3 +
-Addition
Subtraction
4 <<
>> Shift left
Shift right
5 <
<=
>
>=
Less than
Less than or equal to
Greater than
Greater than or equal to
6 =[=]
!= Equal to
Not equal to
7 & Bitwise AND
8 ^^ Bitwise exclusive OR (XOR)
9 | Bitwise OR
The assembler checks for overflow and underflow conditions when arithmetic operations are performed
during assembly. It issues a warning (the "value truncated" message) whenever an overflow or underflow
occurs. The assembler does not check for overflow or underflow in multiplication.
www.ti.com
Expressions
65
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Assembler Description
4.9.2 Relational Operators and Conditional Expressions
The assembler supports relational operators that can be used in any expression; they are especially
useful for conditional assembly. Relational operators include the following:
=Equal to ! = Not equal to
<Less than <= Less than or equal to
>Greater than > = Greater than or equal to
Conditional expressions evaluate to 1 if true and 0 if false and can be used only on operands of equivalent
types; for example, absolute value compared to absolute value, but not absolute value compared to
relocatable value.
4.9.3 Well-Defined Expressions
Some assembler directives, such as .if, require well-defined absolute constant expressions as operands.
Well-defined expressions contain only symbols or assembly-time constants that have been defined before
they occur in the directive's expression. In addition, they must use the correct number of operands and the
operation must make sense. The evaluation of a well-defined expression must be unambiguous.
This is an example of a well-defined expression:
1000h+X
where X was previously defined as an absolute symbol.
4.9.4 Relocatable Symbols and Legal Expressions
All legal expressions can be reduced to one of two forms:
relocatable symbol ±absolute symbol
or
absolute value
Unary operators can be applied only to absolute values; they cannot be applied to relocatable symbols.
Expressions that cannot be reduced to contain only one relocatable symbol are illegal.
Table 4-6 summarizes valid operations on absolute, relocatable, and external symbols. An expression
cannot contain multiplication or division by a relocatable or external symbol. An expression cannot contain
unresolved symbols that are relocatable to other sections.
Symbols that have been defined as global with the .global directive can also be used in expressions; in
Table 4-6, these symbols are referred to as external.
(1) A and B must be in the same section; otherwise, adding relocatable symbols to relocatable symbols is illegal.
Table 4-6. Expressions With Absolute and Relocatable Symbols
If A is... and If B is... , then A + B is... and A - B is...
absolute absolute absolute absolute
absolute relocatable relocatable illegal
absolute external external illegal
relocatable absolute relocatable relocatable
relocatable relocatable illegal absolute(1)
relocatable external illegal illegal
external absolute external external
external relocatable illegal illegal
external external illegal illegal

Expressions
www.ti.com
66 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Assembler Description
4.9.5 Expression Examples
Following are examples of expressions that use relocatable and absolute symbols. These examples use
four symbols that are defined in the same section:
.global extern_1 ; Defined in an external module
intern_1: .word '"D' ; Relocatable, defined in current
; module
LAB1: .set 2 ; LAB1 = 2
intern_2 ; Relocatable, defined in current
; module
intern_3 ; Relocatable, defined in current
; module
•Example 1
The statements in this example use an absolute symbol, LAB1, which is defined to have a value of 2.
The first statement loads the value 51 into R0. The second statement loads the value 27 into R0.
MOV R0, #LAB1 + ((4+3) * 7) ; R0 = 51
; 2 + ((7) * 7)
; 2 + (49) = 51
MOV R0, #LAB1 + 4 + (3*7) ; R0 = 27
;2+4+(21)=27
•Example 2
The first statement in the following example is valid; the statements that follow it are invalid.
LDR R1, intern_1 - 10 ; Legal
LDR R1, 10-intern_1 ; Can't negate reloc. symbol
LDR R1, -(intern_1) ; Can't negate reloc. symbol
LDR R1, intern_1/10 ; / isn't additive operator
LDR R1, intern_1 + intern_2 ; Multiple relocatables
•Example 3
The first statement below is legal; although intern_1 and intern_2 are relocatable, their difference is
absolute because they are in the same section. Subtracting one relocatable symbol from another
reduces the expression to relocatable symbol + absolute value. The second statement is illegal
because the sum of two relocatable symbols is not an absolute value.
LDR R1, intern_1 - intern_2 + intern_3 ; Legal
LDR R1, intern_1 + intern_2 + intern_3 ; Illegal
•Example 4
A relocatable symbol's placement in the expression is important to expression evaluation. Although the
statement below is similar to the first statement in the previous example, it is illegal because of left-to-
right operator precedence; the assembler attempts to add intern_1 to extern_3.
LDR R1, intern_1 + intern_3 - intern_2 ; Illegal
www.ti.com
Built-in Functions and Operators
67
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Assembler Description
4.10 Built-in Functions and Operators
The assembler supports built-in mathematical functions and built-in addressing operators.
The built-in substitution symbol functions are discussed in Section 6.3.2.
4.10.1 Built-In Math and Trigonometric Functions
The assembler supports built-in functions for conversions and various math computations. Table 4-7
describes the built-in functions. The expr must be a constant value.
Table 4-7. Built-In Mathematical Functions
Function Description
$$acos(expr) Returns the arccosine of expr as a floating-point value
$$asin(expr) Returns the arcsine of expr as a floating-point value
$$atan(expr) Returns the arctangent of expr as a floating-point value
$$atan2(expr,y) Returns the arctangent of expr as a floating-point value in range [-π,π]
$$ceil(expr) Returns the smallest integer not less than expr
$$cos(expr) Returns the cosine of expr as a floating-point value
$$cosh(expr) Returns the hyperbolic cosine of expr as a floating-point value
$$cvf(expr) Converts expr to a floating-point value
$$cvi(expr) converts expr to integer value
$$exp(expr) Returns the exponential function e expr
$$fabs(expr) Returns the absolute value of expr as a floating-point value
$$floor(expr) Returns the largest integer not greater than expr
$$fmod(expr,y) Returns the remainder of expr1 ÷expr2
$$int(expr) Returns 1 if expr has an integer value; else returns 0. Returns an integer.
$$ldexp(expr,expr2) Multiplies expr by an integer power of 2. That is, expr1 × 2 expr2
$$log(expr) Returns the natural logarithm of expr, where expr>0
$$log10(expr) Returns the base 10 logarithm of expr, where expr>0
$$max(expr1,expr2) Returns the maximum of two values
$$min(expr1,expr2) Returns the minimum of two values
$$pow(expr1,expr2) Returns expr1raised to the power of expr2
$$round(expr) Returns expr rounded to the nearest integer
$$sgn(expr) Returns the sign of expr.
$$sin(expr) Returns the sine of expr
$$sinh(expr) Returns the hyperbolic sine of expr as a floating-point value
$$sqrt(expr) Returns the square root of expr, expr≥0, as a floating-point value
$$strtod(str) Converts a character string to a double precision floating-point value. The string contains a properly-
formatted C99-style floating-point literal.
$$tan(expr) Returns the tangent of expr as a floating-point value
$$tanh(expr) Returns the hyperbolic tangent of expr as a floating-point value
$$trunc(expr) Returns expr rounded toward 0

Unified Assembly Language Syntax Support
www.ti.com
68 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Assembler Description
4.11 Unified Assembly Language Syntax Support
Unified assembly language (UAL) is the new assembly syntax introduced by ARM Ltd. to handle the
ambiguities introduced by the original Thumb-2 assembly syntax and provide similar syntax for ARM,
Thumb and Thumb-2. UAL is backwards compatible with old ARM assembly, but incompatible with the
previous Thumb assembly syntax.
UAL syntax is the default assembly syntax beginning with ARMv7 architectures. When writing assembly
code, the .arm and .thumb directives are used to specify ARM and Thumb UAL syntax, respectively. The
.state32 and .state16 directives remain to specify non-UAL ARM and Thumb syntax. The .arm and
.state32 directives are equivalent since UAL syntax is backwards compatible in ARM mode. Since non-
UAL syntax is not supported for Thumb-2 instructions, Thumb-2 instructions cannot be used inside of a
.state16 section. However, assembly code with .state16 sections that contain only non-UAL Thumb code
can be assembled for ARMv7 architectures to allow easy porting of older code.
See Section 5.3 for more information about the .state16, .state32, .arm, and .thumb directives.
A full description of the UAL syntax can be found in the ARM Ltd. documentation, but there are a few key
differences related to Thumb-2 syntax:
• The .W extension is used to indicate that an instruction should be encoded in a 32-bit form. A .N
extension is used to indicate that an instruction should be encoded in a 16-bit form; the assembler
reports an error if this is not possible. If no extension is used then the assembler uses a 16-bit
encoding whenever possible.
• 16-bit Thumb ALU instructions that set status indicate this with a syntax that has a 'S' modifier. This is
the same as how ARM ALU instructions that set status have always been handled.

www.ti.com
Source Listings
69
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Assembler Description
4.12 Source Listings
A source listing shows source statements and the object code they produce. To obtain a listing file, invoke
the assembler with the --asm_listing option (see Section 4.3).
Two banner lines, a blank line, and a title line are at the top of each source listing page. Any title supplied
by the .title directive is printed on the title line. A page number is printed to the right of the title. If you do
not use the .title directive, the name of the source file is printed. The assembler inserts a blank line below
the title line.
Each line in the source file produces at least one line in the listing file. This line shows a source statement
number, an SPC value, the object code assembled, and the source statement. Figure 4-2 shows these in
an actual listing file.
Field 1: Source Statement Number
Line number
The source statement number is a decimal number. The assembler numbers source lines as it
encounters them in the source file; some statements increment the line counter but are not listed. (For
example, .title statements and statements following a .nolist are not listed.) The difference between two
consecutive source line numbers indicates the number of intervening statements in the source file that
are not listed.
Include file letter
A letter preceding the line number indicates the line is assembled from the include file designated by
the letter.
Nesting level number
A number preceding the line number indicates the nesting level of macro expansions or loop blocks.
Field 2: Section Program Counter
This field contains the SPC value, which is hexadecimal. All sections (.text, .data, .bss, and named
sections) maintain separate SPCs. Some directives do not affect the SPC and leave this field blank.
Field 3: Object Code
This field contains the hexadecimal representation of the object code. All machine instructions and
directives use this field to list object code. This field also indicates the relocation type associated with
an operand for this line of source code. If more than one operand is relocatable, this column indicates
the relocation type for the first operand. The characters that can appear in this column and their
associated relocation types are listed below:
! undefined external reference
'.text relocatable
+ .sect relocatable
" .data relocatable
- .bss, .usect relocatable
% relocation expression
1 00000000 .state32
2 .copy ”mac1.inc”
A 1 to16 .macro
A 2 ADD r0,pc,#1
A 3 BX r0
A 4 .state16
A 5
A 6 .endm
3
4 .global __stack
5 ;***********************************************
6 ;*DEFINETHEUSERMODESTACK **
7 ;***********************************************
8 00000200 STACKSIZE .set 512
9 00000000 __stack: .usect ”.stack”, STACKSIZE, 4
10 ;***********************************************
11 ;*INTERRUPTVECTORS **
12 ;***********************************************
13 .global reset
14 00000000 .sect ”.intvecs”
15
16 00000000 EAFFFFFE’ B reset
17 00000004 00000000 .word 0
18 00000008 00000000 .word 0
19 0000000c 00000000 .word 0
20 00000010 00000000 .word 0
21 00000014 00000000 .word 0
22 00000018 00000000 .word 0
23 0000001c 00000000 .word 0
24
25 00000000 .text
26 .global dispatch
27 .global reset
28 ;***********************************************
29 ;*RESETROUTINE **
30 ;***********************************************
31 00000000 reset:
32 ;*−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−
33 ;*SETTOUSERMODE
34 ;*−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−
35 00000000 E10F0000 MRS r0, cpsr
36 00000004 E3C0001F BIC r0, r0, #0x1F ; Clear modes
37 00000008 E3800010 ORR r0, r0, #0x10 ; Set user mode
38 0000000c E129F000 MSR cpsr, r0
39
Field 1 Field2 Field3 Field4
Includefile
letter
Linenumber
Source Listings
www.ti.com
70 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Assembler Description
Field 4: Source Statement Field
This field contains the characters of the source statement as they were scanned by the assembler. The
assembler accepts a maximum line length of 200 characters. Spacing in this field is determined by the
spacing in the source statement.
Figure 4-2 shows an assembler listing with each of the four fields identified.
Figure 4-2. Example Assembler Listing
40 ;*−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−
41 ;*CHANGETO16BITSTATE
42 ;*−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−
43 00000010 to16
1 00000010 E28F0001 ADD r0,pc,#1
1 00000014 E12FFF10 BX r0
1 00000018 .state16
1
44
45 ;*−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−
46 ;*INITIALIZETHEUSERMODESTACK
47 ;*−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−
48 00000018 4802 LDR r0,stack
49 0000001a 4685 MOV sp,r0
50 0000001c 4802 LDR r0,stacksz
51 0000001e 4485 ADD sp,r0
52
53 ;*−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−
54 ;*DISPATCHTASKS
55 ;*−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−
56 00000020 F7FF! BL dispatch
00000022 FFEE
57 00000024 00000000−stack .long __stack
58 00000028 00000200 stacksz .long STACKSIZE
59
60
61
Nesting level
number
Field1 Field2 Field3 Field4
www.ti.com
Source Listings
71
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Assembler Description
Figure 4-2. Example Assembler Listing (Continued)
Debugging Assembly Source
www.ti.com
72 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Assembler Description
4.13 Debugging Assembly Source
By default, when you compile an assembly file, the assembler provides symbolic debugging information
that allows you to step through your assembly code in a debugger rather than using the Disassembly
window in Code Composer Studio. This enables you to view source comments and other source-code
annotations while debugging. The default has the same behavior as using the --symdebug:dwarf option.
You can disable the generation of debugging information by using the --symdebug:none option.
The .asmfunc and .endasmfunc (see .asmfunc directive) directives enable you to use C characteristics in
assembly code that makes the process of debugging an assembly file more closely resemble debugging a
C/C++ source file.
The .asmfunc and .endasmfunc directives allow you to name certain areas of your code, and make these
areas appear in the debugger as C functions. Contiguous sections of assembly code that are not enclosed
by the .asmfunc and .endasmfunc directives are automatically placed in assembler-defined functions
named with this syntax:
$filename :starting source line :ending source line $
If you want to view your variables as a user-defined type in C code, the types must be declared and the
variables must be defined in a C file. This C file can then be referenced in assembly code using the .ref
directive (see .ref directive). Example 4-3 shows the cvar.c C program that defines a variable, svar, as the
structure type X. The svar variable is then referenced in the addfive.asm assembly program in Example 4-
4and 5 is added to svar's second data member.
Compile both source files with the --symdebug:dwarf option (-g) and link them as follows:
armcl --symdebug:dwarf cvars.c addfive.asm --run_linker --library=lnk.cmd
--library=rtsv4_A_be_eabi.lib --output_file=addfive.out
When you load this program into a symbolic debugger, addfive appears as a C function. You can monitor
the values in svar while stepping through main just as you would any regular C variable.
Example 4
‑‑
3. Viewing Assembly Variables as C Types C Program
typedef struct
{
int m1;
int m2;
} X;
X svar = { 1, 2 };
Example 4
‑‑
4. Assembly Program for Example 4-3
;------------------------------------------------------------------------------
; Tell the assembler we're referencing variable "_svar", which is defined in
; another file (cvars.c).
;------------------------------------------------------------------------------
.ref _svar
;------------------------------------------------------------------------------
; addfive() - Add five to the second data member of _svar
;------------------------------------------------------------------------------
.text
.global addfive
addfive: .asmfunc
LDW .D2T2 *+B14(_svar+4),B4 ; load svar.m2 into B4
RET .S2 B3 ; return from function
NOP 3 ; delay slots 1-3
ADD .D2 5,B4,B4 ; add 5 to B4 (delay slot 4)
STW .D2T2 B4,*+B14(_svar+4) ; store B4 back into svar.m2
; (delay slot 5)
.endasmfunc
www.ti.com
Cross-Reference Listings
73
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Assembler Description
4.14 Cross-Reference Listings
A cross-reference listing shows symbols and their definitions. To obtain a cross-reference listing, invoke
the assembler with the --asm_listing_cross_reference option (see Section 4.3) or use the .option directive
with the X operand (see Select Listing Options). The assembler appends the cross-reference to the end of
the source listing. Example 4-5 shows the four fields contained in the cross-reference listing.
Example 4
‑‑
5. An Assembler Cross-Reference Listing
LABEL VALUE -DEFN REF
.TI_ARM 00000001 0
.TI_ARM_16BIS 00000000 0
.TI_ARM_32BIS 00000001 0
.TI_ARM_BIG 00000001 0
.TI_ARM_LITTLE 00000000 0
.ti_arm 00000001 0
.ti_arm_16bis 00000000 0
.ti_arm_32bis 00000001 0
.ti_arm_big 00000001 0
.ti_arm_little 00000000 0
STACKSIZE 00000200 9 10 63
__stack 00000000- 10 5 62
dispatch REF 29 60
reset 00000000' 34 16 19 30
stack 00000024' 62 52
stacksz 00000028' 63 54
Label column contains each symbol that was defined or referenced during the assembly.
Value column contains an 8-digit hexadecimal number (which is the value assigned to the
symbol) or a name that describes the symbol's attributes. A value may also be
preceded by a character that describes the symbol's attributes. Table 4-8 lists these
characters and names.
Definition (DEFN) column contains the statement number that defines the symbol. This
column is blank for undefined symbols.
Reference (REF) column lists the line numbers of statements that reference the symbol. A
blank in this column indicates that the symbol was never used.
Table 4-8. Symbol Attributes
Character or Name Meaning
REF External reference (global symbol)
UNDF Undefined
' Symbol defined in a .text section
" Symbol defined in a .data section
+ Symbol defined in a .sect section
- Symbol defined in a .bss or .usect section
74 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Assembler Directives
Chapter 5
SPNU118U–January 2018
Assembler Directives
Assembler directives supply data to the program and control the assembly process. Assembler directives
enable you to do the following:
• Assemble code and data into specified sections
• Reserve space in memory for uninitialized variables
• Control the appearance of listings
• Initialize memory
• Assemble conditional blocks
• Define global variables
• Specify libraries from which the assembler can obtain macros
• Examine symbolic debugging information
This chapter is divided into two parts: the first part (Section 5.1 through Section 5.12) describes the
directives according to function, and the second part (Section 5.13) is an alphabetical reference.
Topic ........................................................................................................................... Page
5.1 Directives Summary ........................................................................................... 75
5.2 Directives that Define Sections ............................................................................ 80
5.3 Directives that Change the Instruction Type.......................................................... 82
5.4 Directives that Initialize Values ............................................................................ 82
5.5 Directives that Perform Alignment and Reserve Space ........................................... 85
5.6 Directives that Format the Output Listings............................................................ 86
5.7 Directives that Reference Other Files ................................................................... 87
5.8 Directives that Enable Conditional Assembly ........................................................ 88
5.9 Directives that Define Union or Structure Types .................................................... 88
5.10 Directives that Define Enumerated Types.............................................................. 89
5.11 Directives that Define Symbols at Assembly Time.................................................. 89
5.12 Miscellaneous Directives..................................................................................... 90
5.13 Directives Reference........................................................................................... 91
www.ti.com
Directives Summary
75
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Assembler Directives
5.1 Directives Summary
Table 5-1 through Table 5-17 summarize the assembler directives.
Besides the assembler directives documented here, the ARM device software tools support the following
directives:
• Macro directives are discussed in Chapter 6; they are not discussed in this chapter.
• The C compiler uses directives for symbolic debugging. Unlike other directives, symbolic debugging
directives are not used in most assembly language programs. Appendix A discusses these directives;
they are not discussed in this chapter.
Labels and Comments Are Not Shown in Syntaxes
NOTE: Most source statements that contain a directive can also contain a label and a comment.
Labels begin in the first column (only labels and comments can appear in the first column),
and comments must be preceded by a semicolon, or an asterisk if the comment is the only
element in the line. To improve readability, labels and comments are not shown as part of
the directive syntax here. See the detailed description of each directive for using labels with
directives.
Table 5-1. Directives that Control Section Use
Mnemonic and Syntax Description See
.bss symbol, size in bytes[,alignment
[,bank offset]] Reserves size bytes in the .bss (uninitialized data) section .bss topic
.data Assembles into the .data (initialized data) section .data topic
.sect "section name"Assembles into a named (initialized) section .sect topic
.text Assembles into the .text (executable code) section .text topic
symbol .usect "section name", size in bytes
[,alignment[,bank offset]] Reserves size bytes in a named (uninitialized) section .usect topic
Table 5-2. Directives that Gather Sections into Common Groups
Mnemonic and Syntax Description See
.endgroup Ends the group declaration .endgroup topic
.gmember section name Designates section name as a member of the group .gmember topic
.group group section name group type :Begins a group declaration .group topic
Table 5-3. Directives that Affect Unused Section Elimination
Mnemonic and Syntax Description See
.retain "section name"Instructs the linker to include the current or specified section in the
linked output file, regardless of whether the section is referenced or
not
.retain topic
.retainrefs "section name"Instructs the linker to include any data object that references the
current or specified section. .retain topic
Table 5-4. Directives that Initialize Values (Data and Memory)
Mnemonic and Syntax Description See
.bits value1[,... ,valuen] Initializes one or more successive bits in the current section .bits topic
.byte value1[,... ,valuen] Initializes one or more successive bytes in the current section .byte topic
.char value1[,... ,valuen] Initializes one or more successive bytes in the current section .char topic
.cstring {expr1|"string1"}[,... ,{exprn|"stringn"}] Initializes one or more text strings .string topic
Directives Summary
www.ti.com
76 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Assembler Directives
Table 5-4. Directives that Initialize Values (Data and Memory) (continued)
Mnemonic and Syntax Description See
.double value1[,... ,valuen] Initializes one or more 64-bit, IEEE double-precision, floating-point
constants .double topic
.field value[,size] Initializes a field of size bits (1-32) with value .field topic
.float value1[,... ,valuen] Initializes one or more 32-bit, IEEE single-precision, floating-point
constants .float topic
.half value1[,... ,valuen] Initializes one or more 16-bit integers (halfword) .half topic
.int value1[,... ,valuen] Initializes one or more 32-bit integers .int topic
.long value1[,... ,valuen] Initializes one or more 32-bit integers .long topic
.short value1[,... ,valuen] Initializes one or more 16-bit integers (halfword) .short topic
.string {expr1|"string1"}[,... ,{exprn|"stringn"}] Initializes one or more text strings .string topic
.ubyte value1[,... ,valuen] Initializes one or more successive unsigned bytes in the current
section .ubyte topic
.uchar value1[,... ,valuen] Initializes one or more successive unsigned bytes in the current
section .uchar topic
.uhalf value1[,... ,valuen] Initializes one or more unsigned 16-bit integers (halfword) .uhalf topic
.uint value1[,... ,valuen] Initializes one or more unsigned 32-bit integers .uint topic
.ulong value1[,... ,valuen] Initializes one or more unsigned 32-bit integers .long topic
.ushort value1[,... ,valuen] Initializes one or more unsigned 16-bit integers (halfword) .short topic
.uword value1[,... ,valuen] Initializes one or more unsigned 32-bit integers .uword topic
.word value1[,... ,valuen] Initializes one or more 32-bit integers .word topic
Table 5-5. Directives that Perform Alignment and Reserve Space
Mnemonic and Syntax Description See
.align [size in bytes] Aligns the SPC on a boundary specified by size inbytes, which
must be a power of 2; defaults to byte boundary .align topic
.bes size Reserves size bytes in the current section; a label points to the end
of the reserved space .bes topic
.space size Reserves size bytes in the current section; a label points to the
beginning of the reserved space .space topic
Table 5-6. Directives that Change the Instruction Type
Mnemonic and Syntax Description See
.arm Begins assembling ARM UAL instructions. Equivalent to .state32. .arm topic
.state16 Begins assembling non-UAL 16-bit instructions .state16 topic
.state32 Begins assembling 32-bit instructions (default) .state32 topic
.thumb Begins assembling Thumb or Thumb-2 UAL instructions .thumb topic
Table 5-7. Directives that Format the Output Listing
Mnemonic and Syntax Description See
.drlist Enables listing of all directive lines (default) .drlist topic
.drnolist Suppresses listing of certain directive lines .drnolist topic
.fclist Allows false conditional code block listing (default) .fclist topic
.fcnolist Suppresses false conditional code block listing .fcnolist topic
.length [page length] Sets the page length of the source listing .length topic
.list Restarts the source listing .list topic
.mlist Allows macro listings and loop blocks (default) .mlist topic
.mnolist Suppresses macro listings and loop blocks .mnolist topic
www.ti.com
Directives Summary
77
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Assembler Directives
Table 5-7. Directives that Format the Output Listing (continued)
Mnemonic and Syntax Description See
.nolist Stops the source listing .nolist topic
.option option1[,option2,...] Selects output listing options; available options are A, B, H, M, N,
O, R, T, W, and X .option topic
.page Ejects a page in the source listing .page topic
.sslist Allows expanded substitution symbol listing .sslist topic
.ssnolist Suppresses expanded substitution symbol listing (default) .ssnolist topic
.tab size Sets tab to size characters .tab topic
.title "string"Prints a title in the listing page heading .title topic
.width [page width] Sets the page width of the source listing .width topic
Table 5-8. Directives that Reference Other Files
Mnemonic and Syntax Description See
.copy ["]filename["] Includes source statements from another file .copy topic
.include ["]filename["] Includes source statements from another file .include topic
.mlib ["]filename["] Specifies a macro library from which to retrieve macro definitions .mlib topic
Table 5-9. Directives that Affect Symbol Linkage and Visibility
Mnemonic and Syntax Description See
.common symbol, size in bytes [, alignment]r
.common symbol, structure tag [, alignment]Defines a common symbol for a variable. .common topic
.def symbol1[,... ,symboln] Identifies one or more symbols that are defined in the current
module and that can be used in other modules .def topic
.global symbol1[,... ,symboln] Identifies one or more global (external) symbols .global topic
.ref symbol1[,... ,symboln] Identifies one or more symbols used in the current module that are
defined in another module .ref topic
.symdepend dst symbol name[,src symbol name] Creates an artificial reference from a section to a symbol .symdepend topic
.weak symbol name Identifies a symbol used in the current module that is defined in
another module .weak topic
Table 5-10. Directives that Enable Conditional Assembly
Mnemonic and Syntax Description See
.if condition Assembles code block if the condition is true .if topic
.else Assembles code block if the .if condition is false. When using the .if
construct, the .else construct is optional. .else topic
.elseif condition Assembles code block if the .if condition is false and the .elseif
condition is true. When using the .if construct, the .elseif construct
is optional.
.elseif topic
.endif Ends .if code block .endif topic
.loop [count] Begins repeatable assembly of a code block; the loop count is
determined by the count..loop topic
.break [end condition] Ends .loop assembly if end condition is true. When using the .loop
construct, the .break construct is optional. .break topic
.endloop Ends .loop code block .endloop topic
Table 5-11. Directives that Define Union or Structure Types
Mnemonic and Syntax Description See
.cstruct Acts like .struct, but adds padding and alignment like that which is
done to C structures .cstruct topic
Directives Summary
www.ti.com
78 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Assembler Directives
Table 5-11. Directives that Define Union or Structure Types (continued)
Mnemonic and Syntax Description See
.cunion Acts like .union, but adds padding and alignment like that which is
done to C unions .cunion topic
.emember Sets up C-like enumerated types in assembly code Section 5.10
.endenum Sets up C-like enumerated types in assembly code Section 5.10
.endstruct Ends a structure definition .cstruct topic,
.struct topic
.endunion Ends a union definition .cunion topic,
.union topic
.enum Sets up C-like enumerated types in assembly code Section 5.10
.union Begins a union definition .union topic
.struct Begins structure definition .struct topic
.tag Assigns structure attributes to a label .cstruct topic,
.struct topic.union
topic
Table 5-12. Directives that Define Symbols
Mnemonic and Syntax Description See
.asg ["]character string["],substitution symbol Assigns a character string to substitution symbol. Substitution
symbols created with .asg can be redefined. .asg topic
.define ["]character string["],substitution symbol Assigns a character string to substitution symbol. Substitution
symbols created with .define cannot be redefined. .asg topic
symbol .equ value Equates value with symbol .equ topic
.elfsym name, SYM_SIZE(size Provides ELF symbol information .elfsym topic
.eval expression ,
substitution symbol Performs arithmetic on a numeric substitution symbol .eval topic
.label symbol Defines a load-time relocatable label in a section .label topic
.newblock Undefines local labels .newblock topic
symbol .set value Equates value with symbol .set topic
.unasg symbol Turns off assignment of symbol as a substitution symbol .unasg topic
.undefine symbol Turns off assignment of symbol as a substitution symbol .unasg topic
Table 5-13. Directives that Create or Affect Macros
Mnemonic and Syntax Description See
macname .macro [parameter1][,... ,parametern] Begin definition of macro named macname .macro topic
.endm End macro definition .endm topic
.mexit Go to .endm Section 6.2
.mlib filename Identify library containing macro definitions .mlib topic
.var Adds a local substitution symbol to a macro's parameter list .var topic
Table 5-14. Directives that Control Diagnostics
Mnemonic and Syntax Description See
.emsg string Sends user-defined error messages to the output device;
produces no .obj file .emsg topic
.mmsg string Sends user-defined messages to the output device .mmsg topic
.wmsg string Sends user-defined warning messages to the output device .wmsg topic
www.ti.com
Directives Summary
79
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Assembler Directives
Table 5-15. Directives that Perform Assembly Source Debug
Mnemonic and Syntax Description See
.asmfunc Identifies the beginning of a block of code that contains a function .asmfunc topic
.endasmfunc Identifies the end of a block of code that contains a function .endasmfunc
topic
Table 5-16. Directives that Are Used by the Absolute Lister
Mnemonic and Syntax Description See
.setsect Produced by absolute lister; sets a section Chapter 9
.setsym Produced by the absolute lister; sets a symbol Chapter 9
Table 5-17. Directives that Perform Miscellaneous Functions
Mnemonic and Syntax Description See
.cdecls [options ,]"filename"[, "filename2"[,...] Share C headers between C and assembly code .cdecls topic
.end Ends program .end topic
In addition to the assembly directives that you can use in your code, the C/C++ compiler produces several
directives when it creates assembly code. These directives are to be used only by the compiler; do not
attempt to use these directives.
• DWARF directives listed in Section A.1
• The .battr directive is used to encode build attributes for the object file.
• The .bound directive is used internally.
• The .comdat directive is used internally.
• The .compiler_opts directive indicates that the assembly code was produced by the compiler, and
which build model options were used for this file.

Directives that Define Sections
www.ti.com
80 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Assembler Directives
5.2 Directives that Define Sections
These directives associate portions of an assembly language program with the appropriate sections:
• The .bss directive reserves space in the .bss section for uninitialized variables.
• The .data directive identifies portions of code in the .data section. The .data section usually contains
initialized data.
• The .retain directive can be used to indicate that the current or specified section must be included in
the linked output. Thus even if no other sections included in the link reference the current or specified
section, it is still included in the link.
• The .retainrefs directive can be used to force sections that refer to the specified section. This is useful
in the case of interrupt vectors.
• The .sect directive defines an initialized named section and associates subsequent code or data with
that section. A section defined with .sect can contain code or data.
• The .text directive identifies portions of code in the .text section. The .text section usually contains
executable code.
• The .usect directive reserves space in an uninitialized named section. The .usect directive is similar to
the .bss directive, but it allows you to reserve space separately from the .bss section.
Chapter 2 discusses these sections in detail.
Example 5-1 shows how you can use sections directives to associate code and data with the proper
sections. This is an output listing; column 1 shows line numbers, and column 2 shows the SPC values.
(Each section has its own program counter, or SPC.) When code is first placed in a section, its SPC
equals 0. When you resume assembling into a section after other code is assembled, the section's SPC
resumes counting as if there had been no intervening code.
The directives in Example 5-1 perform the following tasks:
.text initializes words with the values 1, 2, 3, 4, 5, 6, 7, and 8.
.data initializes words with the values 9, 10, 11, 12, 13, 14, 15, and 16.
var_defs initializes words with the values 17 and 18.
.bss reserves 19 bytes.
xy reserves 20 bytes.
The .bss and .usect directives do not end the current section or begin new sections; they reserve the
specified amount of space, and then the assembler resumes assembling code or data into the current
section.
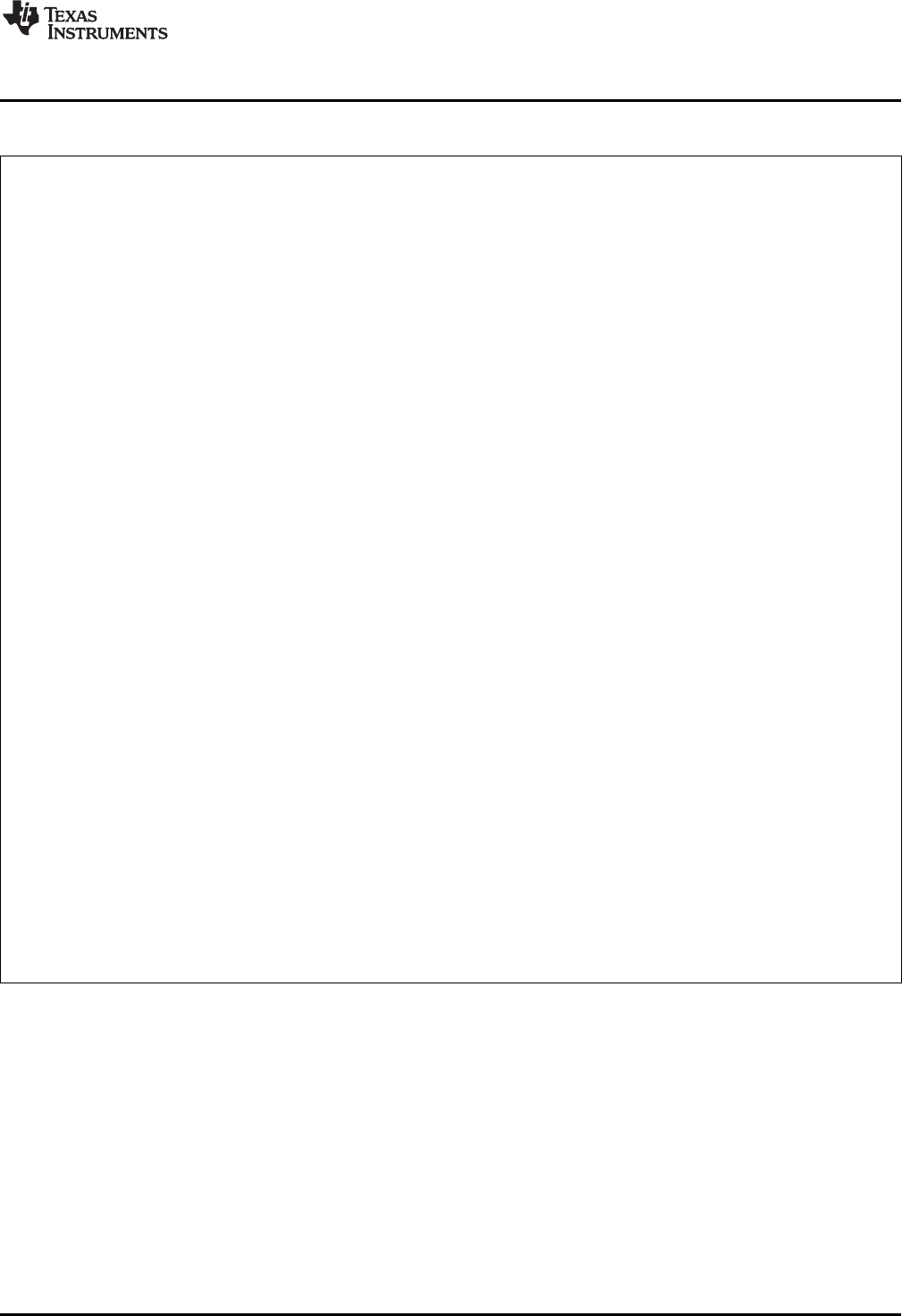
www.ti.com
Directives that Define Sections
81
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Assembler Directives
Example 5
‑‑
1. Sections Directives
1 ***************************************************
2 * Start assembling into the .text section *
3 ***************************************************
4 00000000 .text
5 00000000 00000001 .word 1,2
00000004 00000002
6 00000008 00000003 .word 3,4
0000000c 00000004
7
8 ***************************************************
9 * Start assembling into the .data section *
10 ***************************************************
11 00000000 .data
12 00000000 00000009 .word 9, 10
00000004 0000000A
13 00000008 0000000B .word 11, 12
0000000c 0000000C
14
15 **************************************************
16 * Start assembling into a named, *
17 * initialized section, var_defs *
18 **************************************************
19 00000000 .sect "var_defs"
20 00000000 00000011 .word 17, 18
00000004 00000012
21
22 **************************************************
23 * Resume assembling into the .data section *
24 **************************************************
25 00000010 .data
26 00000010 0000000D .word 13, 14
00000014 0000000E
27 00000000 .bss sym, 19 ; Reserve space in .bss
28 00000018 0000000F .word 15, 16 ; Still in .data
0000001c 00000010
29
30 **************************************************
31 * Resume assembling into the .text section *
32 **************************************************
33 00000010 .text
34 00000010 00000005 .word 5, 6
00000014 00000006
35 00000000 usym .usect "xy", 20 ; Reserve space in xy
36 00000018 00000007 .word 7, 8 ; Still in .text
0000001c 00000008

Directives that Change the Instruction Type
www.ti.com
82 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Assembler Directives
5.3 Directives that Change the Instruction Type
By default, the assembler begins assembling all instructions in a file as 32-bit instructions. You can
change the default action by using the --code_state=16 assembler (see Section 4.3) option, which causes
the assembler to begin assembling all instructions in a file as 16-bit instructions. You can also use four
directives that change how the assembler assembles instructions starting at the point where the directives
occur:
• The .arm directive tells the assembler to begin assembling ARM UAL syntax 32-bit instructions starting
at the location of the directive. The .arm directive performs an implicit word alignment before any
instructions are written to the section to ensure that all 32-bit instructions are word aligned. The .arm
directive also resets any local labels defined. The .arm directive is equivalent to the .state32 directive.
• The .state16 directive causes the assembler to begin assembling non-UAL 16-bit instructions starting
at the location of the directive. The .state16 directive performs an implicit halfword alignment before
any instructions are written to the section to ensure that all 16-bit instructions are halfword aligned. The
.state16 directive also resets any local labels defined.
• The .state32 directive tells the assembler to begin assembling 32-bit instructions starting at the
location of the directive. The .state32 directive performs an implicit word alignment before any
instructions are written to the section to ensure that all 32-bit instructions are word aligned. The
.state32 directive also resets any local labels defined.
• The .thumb directive tells the assembler to begin assembling Thumb or Thumb-2 UAL syntax
instructions starting at the location of the directive. The .thumb directive performs an implicit word
alignment before any instructions are written to the section to ensure that all instructions are word
aligned. The .thumb directive also resets any local labels defined.
5.4 Directives that Initialize Values
Several directives assemble values for the current section. For example:
• The .byte and .char directives place one or more 8-bit values into consecutive bytes of the current
section. These directives are similar to .word, .int, and .long, except that the width of each value is
restricted to 8 bits.
• The .double directive calculates the double-precision (64-bit) IEEE floating-point representation of one
or more floating-point values and stores them in two consecutive words in the current section. The
.double directive automatically aligns to the double-word boundary.
31
0 0 0
0
0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 0 0 1 0 0 0 1 1 0 1 0 0
31 30 29
0 0 0
28 27 26 25 24 23 22 21 20 19 18 17 16 15 14 13 12 0
0 0 0 0 1 0 0 1 0 0 0 1 1 0 1 0 0
31
0 1 1
22 21 20 19 18 0
0 0 1 0 0 0 1 0 0 0 0
31
0 1 1
28 27 26 25 24 23 0
0 0 1 0 0 0
31 30 29
0 1 1
.field3,3
.field8,6
.field16,5
.field01234h,20
.field01234h,32
3bits
6bits
5bits
20bits
www.ti.com
Directives that Initialize Values
83
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Assembler Directives
• The .field directive places a single value into a specified number of bits in the current word. With .field,
you can pack multiple fields into a single word; the assembler does not increment the SPC until a word
is filled. If a field will not fit in the space remaining in the current word, .field will insert zeros to fill the
current word and then place the field in the next word. See the .field topic.
Figure 5-1 shows how fields are packed into a word. Using the following assembled code, notice that
the SPC does not change for the first three fields (the fields are packed into the same word):
1 00000000 60000000 .field 3, 3
2 00000000 64000000 .field 8, 6
3 00000000 64400000 .field 16, 5
4 00000004 01234000 .field 01234h, 20
5 00000008 00001234 .field 01234h, 32
Figure 5-1. The .field Directive
• The .float directive calculates the single-precision (32-bit) IEEE floating-point representation of a single
floating-point value and stores it in a word in the current section that is aligned to a word boundary.
• The .half and .short directives place one or more 16-bit values into consecutive 16-bit fields
(halfwords) in the current section. The .half and .short directives automatically align to a short (2-byte)
boundary.
• The .int,.long, and .word directives place one or more 32-bit values into consecutive 32-bit fields
(words) in the current section. The .int, .long, and .word directives automatically align to a word
boundary.
• The .string and .cstring directives place 8-bit characters from one or more character strings into the
current section. The .string and .cstring directives are similar to .byte, placing an 8-bit character in each
consecutive byte of the current section. The .cstring directive adds a NUL character needed by C; the
.string directive does not add a NUL character.
• The .ubyte,.uchar,.uhalf,.uint,.ulong,.ushort, and .uword directives are provided as unsigned
versions of their respective signed directives. These directives are used primarily by the C/C++
compiler to support unsigned types in C/C++.
Directives that Initialize Constants When Used in a .struct/.endstruct Sequence
NOTE: The .bits, .byte, .char, .int, .long, .word, .double, .half, .short, .ubyte, .uchar, .uhalf, .uint,
.ulong, .ushort, .uword, .string, .float, and .field directives do not initialize memory when they
are part of a .struct/ .endstruct sequence; rather, they define a member’s size. For more
information, see the .struct/.endstruct directives.
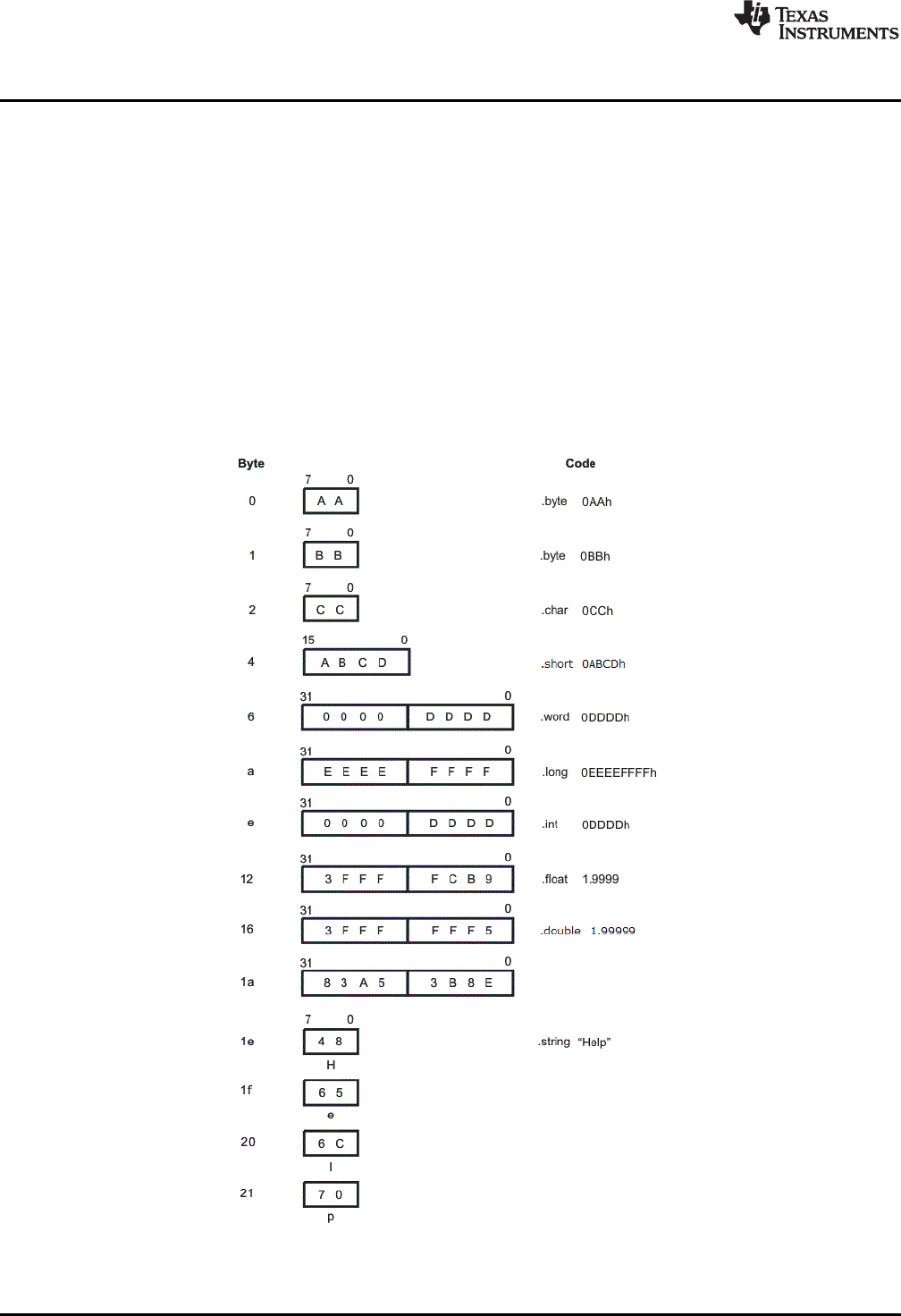
Directives that Initialize Values
www.ti.com
84 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Assembler Directives
Figure 5-2 compares the .byte, .char, .short, .int, .long, .float, .double, .word, and .string directives using
the following assembled code:
1 00000000 AA .byte 0AAh, 0BBh
00000001 BB
2 00000002 CC .char 0CCh
3 00000004 ABCD .short 0ABCDh
4 00000006 0000DDDD .word 0DDDDh
5 0000000a EEEEFFFF .long 0EEEEFFFFh
6 0000000e 0000DDDD .int 0DDDDh
7 00000012 3FFFFCB9 .float 1.9999
8 00000016 3FFFFFF5 .double 1.99999
0000001a 83A53B8E
9 0000001e 48 .string "Help"
0000001f 65
00000020 6C
00000021 70
Figure 5-2. Initialization Directives
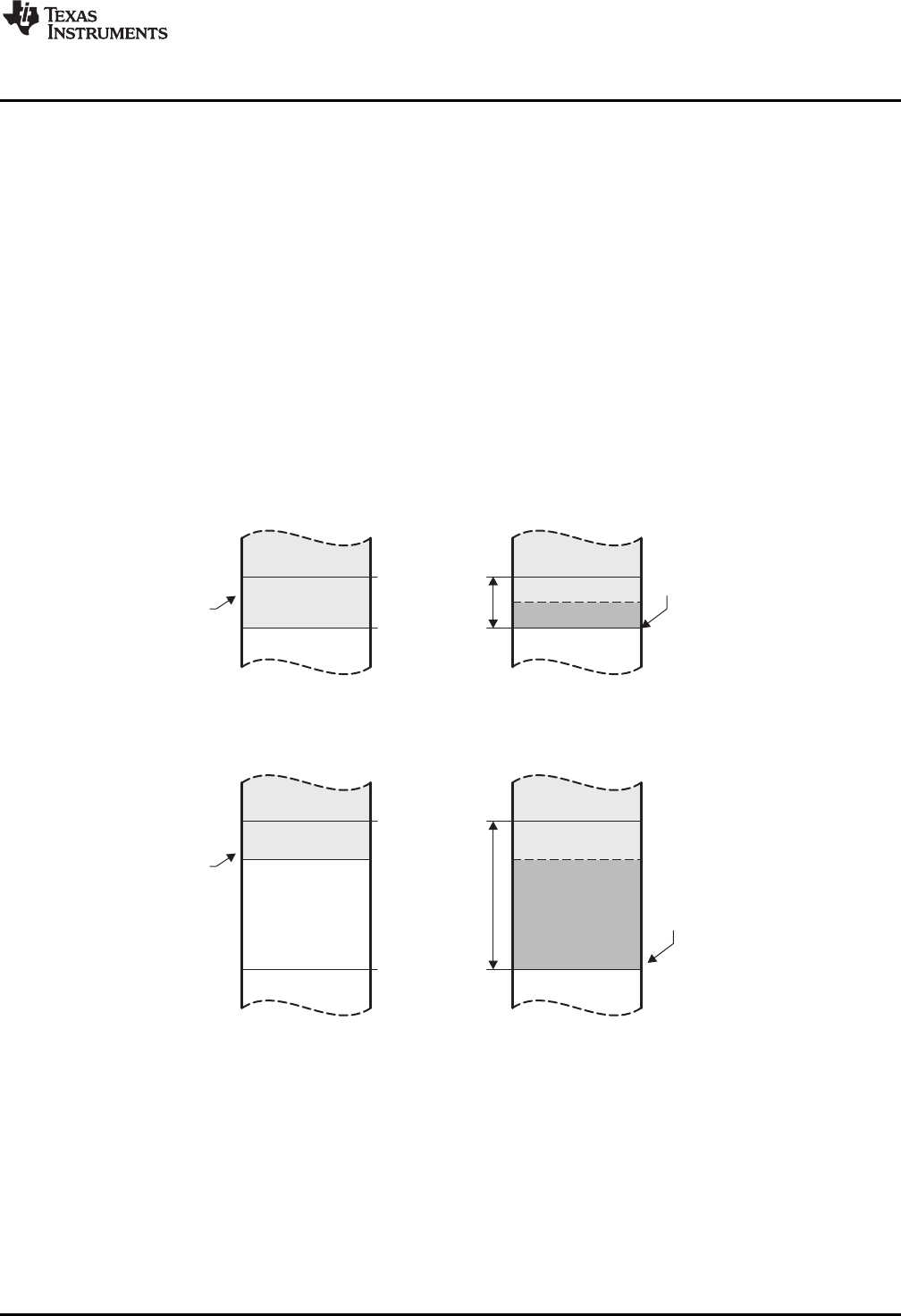
02h
04h
Current
SPC=03h
NewSPC=04h
afterassembling
.align2directive
2
bytes
(a)Resultof.align2
08h
0Ch
Current
SPC=0Ah NewSPC=0Ch
afterassembling
.aligndirective
1word
(b)Resultof.alignwithoutanargument
www.ti.com
Directives that Perform Alignment and Reserve Space
85
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Assembler Directives
5.5 Directives that Perform Alignment and Reserve Space
These directives align the section program counter (SPC) or reserve space in a section:
• The .align directive aligns the SPC at a 1-byte to 32K-byte boundary. This ensures that the code
following the directive begins on the byte value that you specify. If the SPC is already aligned at the
selected boundary, it is not incremented. Operands for the .align directive must equal a power of 2
between 20and 215, inclusive.
Figure 5-3 demonstrates the .align directive. Using the following assembled code:
1 00000000 40000000 .field 2,3
2 00000000 4000000B .field 11, 21
3 .align 2
4 00000004 45 .string "Errcnt"
00000005 72
00000006 72
00000007 63
00000008 6E
00000009 74
5 .align
6 0000000c 04 .byte 4
Figure 5-3. The .align Directive
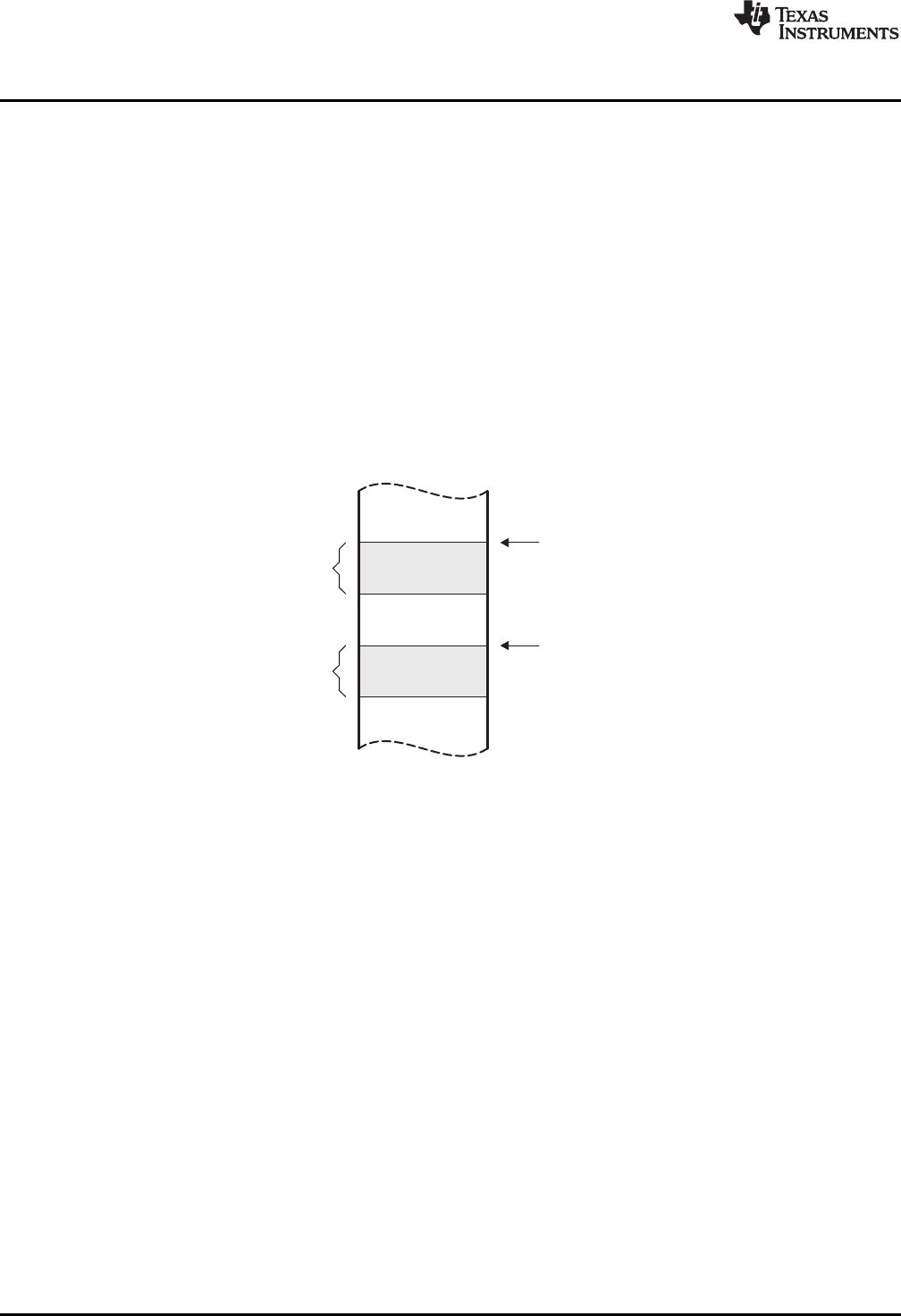
17bytes
reserved
20bytes
reserved
Res_1=08h
Res_2=33h
Directives that Format the Output Listings
www.ti.com
86 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Assembler Directives
• The .bes and .space directives reserve a specified number of bytes in the current section. The
assembler fills these reserved byres with 0s. You can reserve a specified number of words by
multiplying the number of bytes by 4.
– When you use a label with .space, it points to the first byte that contains reserved bits.
– When you use a label with .bes, it points to the last byte that contains reserved bits.
Figure 5-4 shows how the .space and .bes directives work for the following assembled code:
1
2 00000000 00000100 .word 100h, 200h
00000004 00000200
3 00000008 Res_1: .space 17
4 0000001c 0000000F .word 15
5 00000033 Res_2: .bes 20
6 00000034 BA .byte 0BAh
Res_1 points to the first byte in the space reserved by .space. Res_2 points to the last byte in the
space reserved by .bes.
Figure 5-4. The .space and .bes Directives
5.6 Directives that Format the Output Listings
These directives format the listing file:
• The .drlist directive causes printing of the directive lines to the listing; the .drnolist directive turns it off
for certain directives. You can use the .drnolist directive to suppress the printing of the following
directives. You can use the .drlist directive to turn the listing on again.
.asg
.break
.emsg
.eval
.fclist
.fcnolist
.length
.mlist
.mmsg
.mnolist
.sslist
.ssnolist
.var
.width
.wmsg
• The source code listing includes false conditional blocks that do not generate code. The .fclist and
.fcnolist directives turn this listing on and off. You can use the .fclist directive to list false conditional
blocks exactly as they appear in the source code. You can use the .fcnolist directive to list only the
conditional blocks that are actually assembled.
• The .length directive controls the page length of the listing file. You can use this directive to adjust
listings for various output devices.
• The .list and .nolist directives turn the output listing on and off. You can use the .nolist directive to
prevent the assembler from printing selected source statements in the listing file. Use the .list directive
to turn the listing on again.
• The source code listing includes macro expansions and loop blocks. The .mlist and .mnolist directives
turn this listing on and off. You can use the .mlist directive to print all macro expansions and loop
blocks to the listing, and the .mnolist directive to suppress this listing.

www.ti.com
Directives that Reference Other Files
87
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Assembler Directives
• The .option directive controls certain features in the listing file. This directive has the following
operands:
Aturns on listing of all directives and data, and subsequent expansions, macros, and blocks.
Blimits the listing of .byte and .char directives to one line.
Hlimits the listing of .half and .short directives to one line.
Mturns off macro expansions in the listing.
Nturns off listing (performs .nolist).
Oturns on listing (performs .list).
Rresets the B, H, M, T, and W directives (turns off the limits of B, H, M, T, and W).
Tlimits the listing of .string directives to one line.
Wlimits the listing of .word and .int directives to one line.
Xproduces a cross-reference listing of symbols. You can also obtain a cross-reference listing
by invoking the assembler with the --asm_listing_cross_reference option (see Section 4.3).
• The .page directive causes a page eject in the output listing.
• The source code listing includes substitution symbol expansions. The .sslist and .ssnolist directives
turn this listing on and off. You can use the .sslist directive to print all substitution symbol expansions
to the listing, and the .ssnolist directive to suppress this listing. These directives are useful for
debugging the expansion of substitution symbols.
• The .tab directive defines tab size.
• The .title directive supplies a title that the assembler prints at the top of each page.
• The .width directive controls the page width of the listing file. You can use this directive to adjust
listings for various output devices.
5.7 Directives that Reference Other Files
These directives supply information for or about other files that can be used in the assembly of the current
file:
• The .copy and .include directives tell the assembler to begin reading source statements from another
file. When the assembler finishes reading the source statements in the copy/include file, it resumes
reading source statements from the current file. The statements read from a copied file are printed in
the listing file; the statements read from an included file are not printed in the listing file.
• The .def directive identifies a symbol that is defined in the current module and that can be used in
another module. The assembler includes the symbol in the symbol table.
• The .global directive declares a symbol external so that it is available to other modules at link time.
(For more information about global symbols, see Section 2.6.1). The .global directive does double duty,
acting as a .def for defined symbols and as a .ref for undefined symbols. The linker resolves an
undefined global symbol reference only if the symbol is used in the program. The .global directive
declares a 16-bit symbol.
• The .mlib directive supplies the assembler with the name of an archive library that contains macro
definitions. When the assembler encounters a macro that is not defined in the current module, it
searches for it in the macro library specified with .mlib.
• The .ref directive identifies a symbol that is used in the current module but is defined in another
module. The assembler marks the symbol as an undefined external symbol and enters it in the object
symbol table so the linker can resolve its definition. The .ref directive forces the linker to resolve a
symbol reference.
• The .symdepend directive creates an artificial reference from the section defining the source symbol
name to the destination symbol. The .symdepend directive prevents the linker from removing the
section containing the destination symbol if the source symbol section is included in the output module.
• The .weak directive identifies a symbol that is used in the current module but is defined in another
module. It is equivalent to the .ref directive, except that the reference has weak linkage.

Directives that Enable Conditional Assembly
www.ti.com
88 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Assembler Directives
5.8 Directives that Enable Conditional Assembly
Conditional assembly directives enable you to instruct the assembler to assemble certain sections of code
according to a true or false evaluation of an expression. Two sets of directives allow you to assemble
conditional blocks of code:
• The .if/.elseif/.else/.endif directives tell the assembler to conditionally assemble a block of code
according to the evaluation of an expression.
.if condition marks the beginning of a conditional block and assembles code
if the .if condition is true.
[.elseif condition] marks a block of code to be assembled if the .if condition is
false and the .elseif condition is true.
.else marks a block of code to be assembled if the .if condition is
false and any .elseif conditions are false.
.endif marks the end of a conditional block and terminates the block.
• The .loop/.break/.endloop directives tell the assembler to repeatedly assemble a block of code
according to the evaluation of an expression.
.loop [count] marks the beginning of a repeatable block of code. The optional
expression evaluates to the loop count.
.break [end condition] tells the assembler to assemble repeatedly when the .break end
condition is false and to go to the code immediately after
.endloop when the expression is true or omitted.
.endloop marks the end of a repeatable block.
The assembler supports several relational operators that are useful for conditional expressions. For more
information about relational operators, see Section 4.9.2.
5.9 Directives that Define Union or Structure Types
These directives set up specialized types for later use with the .tag directive, allowing you to use symbolic
names to refer to portions of a complex object. The types created are analogous to the struct and union
types of the C language.
The .struct, .union, .cstruct, and .cunion directives group related data into an aggregate structure which is
more easily accessed. These directives do not allocate space for any object. Objects must be separately
allocated, and the .tag directive must be used to assign the type to the object.
type .struct ; structure tag definition
X .int
Y .int
T_LEN .endstruct
COORD .tag type ; declare COORD (coordinate)
COORD .space T_LEN ; actual memory allocation
LDR R0, COORD.Y ; load member Y of structure
; COORD into register R0.
The .cstruct and .cunion directives guarantee that the data structure will have the same alignment and
padding as if the structure were defined in analogous C code. This allows structures to be shared between
C and assembly code. See Chapter 13. For .struct and .union, element offset calculation is left up to the
assembler, so the layout may be different than .cstruct and .cunion.

www.ti.com
Directives that Define Enumerated Types
89
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Assembler Directives
5.10 Directives that Define Enumerated Types
These directives set up specialized types for later use in expressions allowing you to use symbolic names
to refer to compile-time constants. The types created are analogous to the enum type of the C language.
This allows enumerated types to be shared between C and assembly code. See Chapter 13.
See Section 13.2.10 for an example of using .enum.
5.11 Directives that Define Symbols at Assembly Time
Assembly-time symbol directives equate meaningful symbol names to constant values or strings.
• The .asg directive assigns a character string to a substitution symbol. The value is stored in the
substitution symbol table. When the assembler encounters a substitution symbol, it replaces the
symbol with its character string value. Substitution symbols created with .asg can be redefined.
.asg "10, 20, 30, 40", coefficients
; Assign string to substitution symbol.
.byte coefficients
; Place the symbol values 10, 20, 30, and 40
; into consecutive bytes in current section.
• The .define directive assigns a character string to a substitution symbol. The value is stored in the
substitution symbol table. When the assembler encounters a substitution symbol, it replaces the
symbol with its character string value. Substitution symbols created with .define cannot be redefined.
• The .eval directive evaluates a well-defined expression, translates the results into a character string,
and assigns the character string to a substitution symbol. This directive is most useful for manipulating
counters:
.asg 1 , x ; x = 1
.loop ; Begin conditional loop.
.byte x*10h ; Store value into current section.
.break x = 4 ; Break loop if x = 4.
.eval x+1, x ; Increment x by 1.
.endloop ; End conditional loop.
• The .label directive defines a special symbol that refers to the load-time address within the current
section. This is useful when a section loads at one address but runs at a different address. For
example, you may want to load a block of performance-critical code into slower off-chip memory to
save space and move the code to high-speed on-chip memory to run. See the .label topic for an
example using a load-time address label.
• The .set and .equ directives set a constant value to a symbol. The symbol is stored in the symbol table
and cannot be redefined; for example:
bval .set 0100h ; Set bval = 0100h
.long bval, bval*2, bval+12
; Store the values 0100h, 0200h, and 010Ch
; into consecutive words in current section.
The .set and .equ directives produce no object code. The two directives are identical and can be used
interchangeably.
• The .unasg directive turns off substitution symbol assignment made with .asg.
• The .undefine directive turns off substitution symbol assignment made with .define.
• The .var directive allows you to use substitution symbols as local variables within a macro.

Miscellaneous Directives
www.ti.com
90 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Assembler Directives
5.12 Miscellaneous Directives
These directives enable miscellaneous functions or features:
• The .asmfunc and .endasmfunc directives mark function boundaries. These directives are used with
the compiler --symdebug:dwarf (-g) option to generate debug information for assembly functions.
• The .cdecls directive enables programmers in mixed assembly and C/C++ environments to share C
headers containing declarations and prototypes between C and assembly code.
• The .end directive terminates assembly. If you use the .end directive, it should be the last source
statement of a program. This directive has the same effect as an end-of-file character.
• The .group,.gmember, and .endgroup directives define an ELF group section to be shared by
several sections.
• The .newblock directive resets local labels. Local labels are symbols of the form $n, where n is a
decimal digit. They are defined when they appear in the label field. Local labels are temporary labels
that can be used as operands for jump instructions. The .newblock directive limits the scope of local
labels by resetting them after they are used. See Section 4.8.3 for information on local labels.
These three directives enable you to define your own error and warning messages:
• The .emsg directive sends error messages to the standard output device. The .emsg directive
generates errors in the same manner as the assembler, incrementing the error count and preventing
the assembler from producing an object file.
• The .mmsg directive sends assembly-time messages to the standard output device. The .mmsg
directive functions in the same manner as the .emsg and .wmsg directives but does not set the error
count or the warning count. It does not affect the creation of the object file.
• The .wmsg directive sends warning messages to the standard output device. The .wmsg directive
functions in the same manner as the .emsg directive but increments the warning count rather than the
error count. It does not affect the creation of the object file.
For more information about using the error and warning directives in macros, see Section 6.7.
www.ti.com
Directives Reference
91
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Assembler Directives
5.13 Directives Reference
The remainder of this chapter is a reference. Generally, the directives are organized alphabetically, one
directive per topic. Related directives (such as .if/.else/.endif), however, are presented together in one
topic.
.align Align SPC on the Next Boundary
Syntax .align [size in bytes]
Description The .align directive aligns the section program counter (SPC) on the next boundary,
depending on the size in bytes parameter. The size can be any power of 2, although
only certain values are useful for alignment. An operand of 1 aligns the SPC on the next
byte boundary, and this is the default if no size in bytes is given. The size in bytes must
equal a power of 2; the value must be between 1 and 32,768, inclusive. The assembler
assembles words containing null values (0) up to the next size in bytes boundary:
1 aligns SPC to byte boundary
2 aligns SPC to halfword boundary
4 aligns SPC to word boundary
8 aligns SPC to doubleword boundary
128 aligns SPC to page boundary
Using the .align directive has two effects:
• The assembler aligns the SPC on an x-byte boundary within the current section.
• The assembler sets a flag that forces the linker to align the section so that individual
alignments remain intact when a section is loaded into memory.
Example This example shows several types of alignment, including .align 2, .align 8, and a default
.align.
1 00000000 04 .byte 4
2 .align 2
3 00000002 45 .string "Errorcnt"
00000003 72
00000004 72
00000005 6F
00000006 72
00000007 63
00000008 6E
00000009 74
4 .align
5 0000000c 60000000 .field 3,3
6 0000000c 6A000000 .field 5,4
7 .align 2
8 0000000c 6A006000 .field 3,3
9 .align 8
10 00000010 50000000 .field 5,4
11 .align
12 00000014 04 .byte 4

Directives Reference
www.ti.com
92 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Assembler Directives
.asg/.define/.eval Assign a Substitution Symbol
Syntax .asg "character string",substitution symbol
.define "character string",substitution symbol
.eval expression,substitution symbol
Description The .asg and .define directives assign character strings to substitution symbols.
Substitution symbols are stored in the substitution symbol table. The .asg directive can
be used in many of the same ways as the .set directive, but while .set assigns a
constant value (which cannot be redefined) to a symbol, .asg assigns a character string
(which can be redefined) to a substitution symbol.
• The assembler assigns the character string to the substitution symbol.
• The substitution symbol must be a valid symbol name. The substitution symbol is up
to 128 characters long and must begin with a letter. Remaining characters of the
symbol can be a combination of alphanumeric characters, the underscore (_), and
the dollar sign ($).
The .define directive functions in the same manner as the .asg directive, except that
.define disallows creation of a substitution symbol that has the same name as a register
symbol or mnemonic. It does not create a new symbol name space in the assembler,
rather it uses the existing substitution symbol name space. The .define directive is used
to prevent corruption of the assembly environment when converting C/C++ headers. See
Chapter 13 for more information about using C/C++ headers in assembly source.
The .eval directive performs arithmetic on substitution symbols, which are stored in the
substitution symbol table. This directive evaluates the expression and assigns the string
value of the result to the substitution symbol. The .eval directive is especially useful as a
counter in .loop/.endloop blocks.
• The expression is a well-defined alphanumeric expression in which all symbols have
been previously defined in the current source module, so that the result is an
absolute expression.
• The substitution symbol must be a valid symbol name. The substitution symbol is up
to 128 characters long and must begin with a letter. Remaining characters of the
symbol can be a combination of alphanumeric characters, the underscore (_), and
the dollar sign ($).
See the .unasg/.undefine topic for information on turning off a substitution symbol.

www.ti.com
Directives Reference
93
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Assembler Directives
Example This example shows how .asg and .eval can be used.
1 .sslist ; show expanded sub. symbols
2 ; using .asg and .eval
3
4 .asg R13, STACKPTR
5 .asg &, AND
6
7 00000000 E28DD018 ADD STACKPTR, STACKPTR, #280 AND 255
# ADD R13, R13, #280 & 255
8 00000004 E28DD018 ADD STACKPTR, STACKPTR, #280 & 255
# ADD R13, R13, #280 & 255
9
10 .asg 0, x
11 .loop 5
12 .eval x+1, x
13 .word x
14 .endloop
1 .eval x+1, x
# .eval 0+1, x
1 00000008 00000001 .word x
# .word 1
1 .eval x+1, x
# .eval 1+1, x
1 0000000c 00000002 .word x
# .word 2
1 .eval x+1, x
# .eval 2+1, x
1 00000010 00000003 .word x
# .word 3
1 .eval x+1, x
# .eval 3+1, x
1 00000014 00000004 .word x
# .word 4
1 .eval x+1, x
# .eval 4+1, x
1 00000018 00000005 .word x
# .word 5

Directives Reference
www.ti.com
94 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Assembler Directives
.asmfunc/.endasmfunc Mark Function Boundaries
Syntax symbol .asmfunc [stack_usage(num)]
.endasmfunc
Description The .asmfunc and .endasmfunc directives mark function boundaries. These directives
are used with the compiler -g option (--symdebug:dwarf) to allow assembly code
sections to be debugged in the same manner as C/C++ functions.
You should not use the same directives generated by the compiler (see Appendix A) to
accomplish assembly debugging; those directives should be used only by the compiler to
generate symbolic debugging information for C/C++ source files.
The symbol is a label that must appear in the label field.
The .asmfunc directive has an optional parameter, stack_usage, which indicates that the
function may use up to num bytes.
Consecutive ranges of assembly code that are not enclosed within a pair of .asmfunc
and .endasmfunc directives are given a default name in the following format:
$filename :beginning source line :ending source line $
Example In this example the assembly source generates debug information for the user_func
section.
1 00000000 .sect ".text"
2 .global user_func
3 .global printf
4
5 .align 4
6 .armfunc user_func
7 00000000 .state32
8
9 userfunc: .asmfunc
10 00000000 E92D4008 STMFD SP!, {A4, LR}
11 00000004 E28F000C ADR A1, SL1
12 00000008 EBFFFFFC! BL printf
13 0000000c E3A00000 MOV A1, #0
14 00000010 E8BD4008 LDMFD SP!, {A4, LR}
15 00000014 E12FFF1E BX LR
16 .endasmfunc
17
18 .align 4
19 00000018 48 SL1: .string "Hello World!",10,0
00000019 65
0000001a 6C
0000001b 6C
0000001c 6F
0000001d 20
0000001e 57
0000001f 6F
00000020 72
00000021 6C
00000022 64
00000023 21
00000024 0A
00000025 00
www.ti.com
Directives Reference
95
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Assembler Directives
.bits Initialize Bits
Syntax .bits value1[, ... , valuen]
Description The .bits directive places one or more values into consecutive bits of the current section.
The .bits directive is similar to the .field directive (see .field topic ). However, the .bits
directive does not allow you to specify the number of bits to fill or increment the SPC.

Directives Reference
www.ti.com
96 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Assembler Directives
.bss Reserve Space in the .bss Section
Syntax .bss symbol,size in bytes[,alignment]
Description The .bss directive reserves space for variables in the .bss section. This directive is
usually used to allocate space in RAM.
• The symbol is a required parameter. It defines a symbol that points to the first
location reserved by the directive. The symbol name must correspond to the variable
that you are reserving space for.
• The size in bytes is a required parameter; it must be an absolute constant
expression. The assembler allocates size bytes in the .bss section. There is no
default size.
• The alignment is an optional parameter that ensures that the space allocated to the
symbol occurs on the specified boundary. The boundary indicates must be set to a
power of 2 between 20and 215, inclusive. If the SPC is already aligned at the
specified boundary, it is not incremented.
For more information about sections, see Chapter 2.
Example In this example, the .bss directive allocates space for two variables, TEMP and ARRAY.
The symbol TEMP points to four bytes of uninitialized space (at .bss SPC = 0). The
symbol ARRAY points to 100 bytes of uninitialized space (at .bss SPC = 04h). Symbols
declared with the .bss directive can be referenced in the same manner as other symbols
and can also be declared external.
1 ***********************************************
2 ** Start assembling into the .text section. **
3 ***********************************************
4 00000000 .text
5 00000000 E3A00000 MOV R0, #0
6
7 ***********************************************
8 ** Allocate 4 bytes in .bss for TEMP. **
9 ***********************************************
10 00000000 Var_1: .bss TEMP, 4
11
12 ***********************************************
13 ** Still in .text. **
14 ***********************************************
15 00000004 E2801056 ADD R1, R0, #56h
16 00000008 E0020091 MUL R2, R1, R0
17
18 ***********************************************
19 ** Allocate 100 bytes in .bss for the symbol **
20 ** named ARRAY. **
21 ***********************************************
22 00000004 .bss ARRAY, 100, 4
23
24 ***********************************************
25 ** Assemble more code into .text. **
26 ***********************************************
27 0000000c E1A0F00E MOV PC, LR
28
29 ***********************************************
30 ** Declare external .bss symbols. **
31 ***********************************************
32 .global ARRAY, TEMP
33 .end

www.ti.com
Directives Reference
97
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Assembler Directives
.byte/.ubyte/.char/.uchar Initialize Byte
Syntax .byte value1[, ... , valuen]
.ubyte value1[, ... , valuen]
.char value1[, ... , valuen]
.uchar value1[, ... , valuen]
Description The .byte,.ubyte,.char, and .uchar directives place one or more values into
consecutive bytes of the current section. A value can be one of the following:
• An expression that the assembler evaluates and treats as an 8-bit signed number
• A character string enclosed in double quotes. Each character in a string represents a
separate value, and values are stored in consecutive bytes. The entire string must be
enclosed in quotes.
The first byte occupies the eight least significant bits of a full 32-bit word. The second
byte occupies bits eight through 15 while the third byte occupies bits 16 through 23. The
assembler truncates values greater than eight bits.
If you use a label, it points to the location of the first byte that is initialized.
When you use these directives in a .struct/.endstruct sequence, they define a member's
size; they do not initialize memory. For more information, see the .struct/.endstruct/.tag
topic.
Example In this example, 8-bit values (10, -1, abc, and a) are placed into consecutive bytes in
memory with .byte. Also, 8-bit values (8, -3, def, and b) are placed into consecutive
bytes in memory with .char. The label STRX has the value 0h, which is the location of
the first initialized byte. The label STRY has the value 6h, which is the first byte
initialized by the .char directive.
1 00000000 .space 100h
2 00000100 0A STRX .byte 10, -1, "abc", 'a'
00000101 FF
00000102 61
00000103 62
00000104 63
00000105 61
3 00000106 08 STRY .char 8, -3, "def", 'b'
00000107 FD
00000108 64
00000109 65
0000010a 66
0000010b 62

Directives Reference
www.ti.com
98 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Assembler Directives
.cdecls Share C Headers Between C and Assembly Code
Syntax Single Line:
.cdecls [options ,]"filename "[, " filename2 "[,...]]
Syntax Multiple Lines:
.cdecls [options]
%{
/*---------------------------------------------------------------------------------*/
/* C/C++ code - Typically a list of #includes and a few defines */
/*---------------------------------------------------------------------------------*/
%}
Description The .cdecls directive allows programmers in mixed assembly and C/C++ environments
to share C headers containing declarations and prototypes between the C and assembly
code. Any legal C/C++ can be used in a .cdecls block and the C/C++ declarations cause
suitable assembly to be generated automatically, allowing you to reference the C/C++
constructs in assembly code; such as calling functions, allocating space, and accessing
structure members; using the equivalent assembly mechanisms. While function and
variable definitions are ignored, most common C/C++ elements are converted to
assembly, for instance: enumerations, (non-function-like) macros, function and variable
prototypes, structures, and unions.
The .cdecls options control whether the code is treated as C or C++ code; and how the
.cdecls block and converted code are presented. Options must be separated by
commas; they can appear in any order:
CTreat the code in the .cdecls block as C source code (default).
CPP Treat the code in the .cdecls block as C++ source code. This is the
opposite of the C option.
NOLIST Do not include the converted assembly code in any listing file generated
for the containing assembly file (default).
LIST Include the converted assembly code in any listing file generated for the
containing assembly file. This is the opposite of the NOLIST option.
NOWARN Do not emit warnings on STDERR about C/C++ constructs that cannot
be converted while parsing the .cdecls source block (default).
WARN Generate warnings on STDERR about C/C++ constructs that cannot be
converted while parsing the .cdecls source block. This is the opposite of
the NOWARN option.
In the single-line format, the options are followed by one or more filenames to include.
The filenames and options are separated by commas. Each file listed acts as if #include
"filename" was specified in the multiple-line format.
In the multiple-line format, the line following .cdecls must contain the opening .cdecls
block indicator %{. Everything after the %{, up to the closing block indicator %}, is
treated as C/C++ source and processed. Ordinary assembler processing then resumes
on the line following the closing %}.
The text within %{ and %} is passed to the C/C++ compiler to be converted into
assembly language. Much of C language syntax, including function and variable
definitions as well as function-like macros, is not supported and is ignored during the
conversion. However, all of what traditionally appears in C header files is supported,
including function and variable prototypes; structure and union declarations; non-
function-like macros; enumerations; and #defines.

www.ti.com
Directives Reference
99
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Assembler Directives
The resulting assembly language is included in the assembly file at the point of the
.cdecls directive. If the LIST option is used, the converted assembly statements are
printed in the listing file.
The assembly resulting from the .cdecls directive is treated similarly to a .include file.
Therefore the .cdecls directive can be nested within a file being copied or included. The
assembler limits nesting to ten levels; the host operating system may set additional
restrictions. The assembler precedes the line numbers of copied files with a letter code
to identify the level of copying. An A indicates the first copied file, B indicates a second
copied file, etc.
The .cdecls directive can appear anywhere in an assembly source file, and can occur
multiple times within a file. However, the C/C++ environment created by one .cdecls is
not inherited by a later .cdecls; the C/C++ environment starts new for each .cdecls.
See Chapter 13 for more information on setting up and using the .cdecls directive with C
header files.
Example In this example, the .cdecls directive is used call the C header.h file.
C header file:
#define WANT_ID 10
#define NAME "John\n"
extern int a_variable;
extern float cvt_integer(int src);
struct myCstruct { int member_a; float member_b; };
enum status_enum { OK = 1, FAILED = 256, RUNNING = 0 };
Source file:
.cdecls C,LIST,"myheader.h"
size: .int $$sizeof(myCstruct)
aoffset: .int myCstruct.member_a
boffset: .int myCstruct.member_b
okvalue: .int status_enum.OK
failval: .int status_enum.FAILED
.if $$defined(WANT_ID)
id .cstring NAME
.endif
Listing File:
1 .cdecls C,LIST,"myheader.h"
A 1 ; ------------------------------------------
A 2 ; Assembly Generated from C/C++ Source Code
A 3 ; ------------------------------------------
A 4
A 5 ; =========== MACRO DEFINITIONS ===========
A 6 .define "10",WANT_ID
A 7 .define """John\n""",NAME
A 8
A 9 ; =========== TYPE DEFINITIONS ===========
A 10 status_enum .enum
A 11 00000001 OK .emember 1
A 12 00000100 FAILED .emember 256
A 13 00000000 RUNNING .emember 0
A 14 .endenum
A 15
A 16 myCstruct .struct 0,4
17 ; struct size=(8 bytes|64 bits), alignment=4
A 18 00000000 member_a .field 32
19 ; int member_a - offset 0 bytes, size (4 bytes|32 bits)
A 20 00000004 member_b .field 32
21 ; float member_b - offset 4 bytes, size (4 bytes|32 bits)

Directives Reference
www.ti.com
100 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Assembler Directives
A 22 00000008 .endstruct
23 ; final size=(8 bytes|64 bits)
A 24
A 25 ; =========== EXTERNAL FUNCTIONS ===========
A 26 .global _cvt_integer
A 27
A 28 ; =========== EXTERNAL VARIABLES ===========
A 29 .global _a_variable
2 00000000 00000008 size: .int $$sizeof(myCstruct)
3 00000004 00000000 aoffset: .int myCstruct.member_a
4 00000008 00000004 boffset: .int myCstruct.member_b
5 0000000c 00000001 okvalue: .int status_enum.OK
6 00000010 00000100 failval: .int status_enum.FAILED
7 .if $$defined(WANT_ID)
8 00000014 0000004A id .cstring NAME
00000015 0000006F
00000016 00000068
00000017 0000006E
00000018 0000000A
00000019 00000000
9 .endif

www.ti.com
Directives Reference
101
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Assembler Directives
.common Create a Common Symbol
Syntax .common symbol,size in bytes[,alignment]
.common symbol,structure tag[,alignment]
Description The .common directive creates a common symbol in a common block, rather than
placing the variable in a memory section.
This directive is used by the compiler when the --common option is enabled (the default),
which causes uninitialized file scope variables to be emitted as common symbols. The
benefit of common symbols is that generated code can remove unused variables that
would otherwise increase the size of the .bss section. (Uninitialized variables of a size
larger than 32 bytes are separately optimized through placement in separate subsections
that can be omitted from a link.) This optimization happens for C/C++ code by default
unless you use the --common=off compiler option.
• The symbol is a required parameter. It defines a name for the symbol created by this
directive. The symbol name must correspond to the variable that you are reserving
space for.
• The size in bytes is a required parameter; it must be an absolute expression. The
assembler allocates size bytes in the section used for common symbols. There is no
default size.
• A structure tag can be used in place of a size to specify a structure created with the
.struct directive. Either a size or a structure tag is required for this argument.
• The alignment is an optional parameter that ensures that the space allocated to the
symbol occurs on the specified boundary. The boundary must be set to a power of 2
between 20and 215, inclusive. If the SPC is already aligned at the specified boundary,
it is not incremented.
Common symbols are symbols that are placed in the symbol table of an ELF object file.
They represent an uninitialized variable. Common symbols do not reference a section.
(In contrast, initialized variables need to reference a section that contains the initialized
data.) The value of a common symbol is its required alignment; it has no address and
stores no address. While symbols for an uninitialized common block can appear in
executable object files, common symbols may only appear in relocatable object files.
Common symbols are preferred over weak symbols. See the section on the "Symbol
Table" in the System V ABI specification for more about common symbols.
When object files containing common symbols are linked, space is reserved in an
uninitialized section for each common symbol. A symbol is created in place of the
common symbol to refer to its reserved location.
Directives Reference
www.ti.com
102 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Assembler Directives
.copy/.include Copy Source File
Syntax .copy "filename"
.include "filename"
Description The .copy and .include directives tell the assembler to read source statements from a
different file. The statements that are assembled from a copy file are printed in the
assembly listing. The statements that are assembled from an included file are not printed
in the assembly listing, regardless of the number of .list/.nolist directives assembled.
When a .copy or .include directive is assembled, the assembler:
1. Stops assembling statements in the current source file
2. Assembles the statements in the copied/included file
3. Resumes assembling statements in the main source file, starting with the statement
that follows the .copy or .include directive
The filename is a required parameter that names a source file. It is enclosed in double
quotes and must follow operating system conventions.
You can specify a full pathname (for example, /320tools/file1.asm). If you do not specify
a full pathname, the assembler searches for the file in:
1. The directory that contains the current source file
2. Any directories named with the --include_path assembler option
3. Any directories specified by the TI_ARM_A_DIR environment variable
4. Any directories specified by the TI_ARM_C_DIR environment variable
For more information about the --include_path option and TI_ARM_A_DIR, see
Section 4.5. For more information about TI_ARM_C_DIR, see the ARM Optimizing
C/C++ Compiler User's Guide.
The .copy and .include directives can be nested within a file being copied or included.
The assembler limits nesting to 32 levels; the host operating system may set additional
restrictions. The assembler precedes the line numbers of copied files with a letter code
to identify the level of copying. A indicates the first copied file, B indicates a second
copied file, etc.
Example 1 In this example, the .copy directive is used to read and assemble source statements
from other files; then, the assembler resumes assembling into the current file.
The original file, copy.asm, contains a .copy statement copying the file byte.asm. When
copy.asm assembles, the assembler copies byte.asm into its place in the listing (note
listing below). The copy file byte.asm contains a .copy statement for a second file,
word.asm.
When it encounters the .copy statement for word.asm, the assembler switches to
word.asm to continue copying and assembling. Then the assembler returns to its place
in byte.asm to continue copying and assembling. After completing assembly of byte.asm,
the assembler returns to copy.asm to assemble its remaining statement.
copy.asm
(source file) byte.asm
(first copy file) word.asm
(second copy file)
.space 29
.copy "byte.asm"
** Back in original file
.string "done"
** In byte.asm
.byte 32,1+ 'A'
.copy "word.asm"
** Back in byte.asm
.byte 67h + 3q
** In word.asm
.word 0ABCDh, 56q

www.ti.com
Directives Reference
103
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Assembler Directives
Listing file:
1 00000000 .space 29
2 .copy "byte.asm"
A 1 ** In byte.asm
A 2 0000001d 20 .byte 32,1+ 'A'
0000001e 42
A 3 .copy "word.asm"
B 1 ** In word.asm
B 2 00000020 0000ABCD .word 0ABCDh, 56q
00000024 0000002E
A 4 ** Back in byte.asm
A 5 00000028 6A .byte 67h + 3q
3
4 ** Back in original file
5 00000029 64 .string "done"
0000002a 6F
0000002b 6E
0000002c 65
Example 2 In this example, the .include directive is used to read and assemble source statements
from other files; then, the assembler resumes assembling into the current file. The
mechanism is similar to the .copy directive, except that statements are not printed in the
listing file. include.asm
(source file) byte2.asm
(first copy file) word2.asm
(second copy file)
.space 29
.include "byte2.asm"
** Back in original file
.string "done"
** In byte2.asm
.byte 32,1+ 'A'
.include
"word2.asm"
** Back in byte2.asm
.byte 67h + 3q
** In word2.asm
.word 0ABCDh, 56q
Listing file:
1 00000000 .space 29
2 .include "byte2.asm"
3
4 ** Back in original file
5 00000029 64 .string "done"
0000002a 6F
0000002b 6E
0000002c 65

Directives Reference
www.ti.com
104 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Assembler Directives
.cstruct/.cunion/.endstruct/.endunion/.tag Declare C Structure Type
Syntax [stag].cstruct|.cunion [expr]
[mem0]element [expr0]
[mem1]element [expr1]
...
...
[memn].tag stag [exprn]
[memN]element [exprN]
[size].endstruct|.endunion
label .tag stag
Description The .cstruct and .cunion directives have been added to support ease of sharing of
common data structures between assembly and C code. The .cstruct and .cunion
directives can be used exactly like the existing .struct and .union directives except that
they are guaranteed to perform data layout matching the layout used by the C compiler
for C struct and union data types.
In particular, the .cstruct and .cunion directives force the same alignment and padding as
used by the C compiler when such types are nested within compound data structures.
The .endstruct directive terminates the structure definition. The .endunion directive
terminates the union definition.
The .tag directive gives structure characteristics to a label, simplifying the symbolic
representation and providing the ability to define structures that contain other structures.
The .tag directive does not allocate memory. The structure tag (stag) of a .tag directive
must have been previously defined.
Following are descriptions of the parameters used with the .struct, .endstruct, and .tag
directives:
• The stag is the structure's tag. Its value is associated with the beginning of the
structure. If no stag is present, the assembler puts the structure members in the
global symbol table with the value of their absolute offset from the top of the
structure. The stag is optional for .struct, but is required for .tag.
• The element is one of the following descriptors: .byte, .char, .int, .long, .word,
.double, .half, .short, .string, .float, and .field. All of these except .tag are typical
directives that initialize memory. Following a .struct directive, these directives
describe the structure element's size. They do not allocate memory. A .tag directive
is a special case because stag must be used (as in the definition of stag).
• The expr is an optional expression indicating the beginning offset of the structure.
The default starting point for a structure is 0.
• The exprn/N is an optional expression for the number of elements described. This
value defaults to 1. A .string element is considered to be one byte in size, and a .field
element is one bit.
• The memn/N is an optional label for a member of the structure. This label is absolute
and equates to the present offset from the beginning of the structure. A label for a
structure member cannot be declared global.
• The size is an optional label for the total size of the structure.
Example This example illustrates a structure in C that will be accessed in assembly code.

www.ti.com
Directives Reference
105
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Assembler Directives
typedef struct STRUCT1
; { int i0; /* offset 0 */
; short s0; /* offset 4 */
; } struct1; /* size 8, alignment 4 */
;
; typedef struct STRUCT2
; { struct1 st1; /* offset 0 */
; short s1; /* offset 8 */
; } struct2; /* size 12, alignment 4 */
;
; The structure will get the following offsets once the C compiler lays out the structure
; elements according to the C standard rules:
;
; offsetof(struct1, i0) = 0
; offsetof(struct1, s0) = 4
; sizeof(struct1) = 8
; offsetof(struct2, s1) = 0
; offsetof(struct2, i1) = 8
; sizeof(struct2) = 12
;
; Attempts to replicate this structure in assembly using the .struct/.union directives will not
; create the correct offsets because the assembler tries to use the most compact arrangement:
struct1 .struct
i0 .int ; bytes 0-3
s0 .short ; bytes 4-5
struct1len .endstruct ; size 6, alignment 4
struct2 .struct
st1 .tag struct1 ; bytes 0-5
s1 .short ; bytes 6-7
endstruct2 .endstruct ; size 8, alignment 4
.sect "data1"
.word struct1.i0 ; 0
.word struct1.s0 ; 4
.word struct1len ; 6
.sect "data2"
.word struct2.st1 ; 0
.word struct2.s1 ; 6
.word endstruct2 ; 8
;
; The .cstruct/.cunion directives calculate offsets in the same manner as the C compiler. The resulting
; assembly structure can be used to access the elements of the C structure. Compare the difference
; in the offsets of those structures defined via .struct above and the offsets for the C code.
cstruct1 .cstruct
i0 .int ; bytes 0-3
s0 .short ; bytes 4-5
cstruct1len .endstruct ; size 8, alignment 4
cstruct2 .cstruct
st1 .tag cstruct1 ; bytes 0-7
s1 .short ; bytes 8-9
cendstruct2 .endstruct ; size 12, alignment 4
.sect "data3"
.word cstruct1.i0, struct1.i0 ; 0
.word cstruct1.s0, struct1.s0 ; 4
.word cstruct1len, struct1len ; 8
.sect "data4"
.word cstruct2.st1, struct2.st1 ; 0
.word cstruct2.s1, struct2.s1 ; 8
.word cendstruct2, endstruct2 ; 12
Directives Reference
www.ti.com
106 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Assembler Directives
.data Assemble Into the .data Section
Syntax .data
Description The .data directive sets .data as the current section; the lines that follow will be
assembled into the .data section. The .data section is normally used to contain tables of
data or preinitialized variables.
For more information about sections, see Chapter 2.
Example In this example, code is assembled into the .data and .text sections.
1 ***********************************************
2 ** Reserve space in .data. **
3 ***********************************************
4 00000000 .data
5 00000000 .space 0CCh
6
7 ***********************************************
8 ** Assemble into .text. **
9 ***********************************************
10 00000000 .text ; Constant into .data
11 00000000 INDEX .set 0
12 00000000 E3A00000 MOV R0, #INDEX
13
14 ***********************************************
15 ** Assemble into .data. **
16 ***********************************************
17 000000cc Table: .data
18 000000cc FFFFFFFF .word -1 ; Assemble 32-bit
19 ; constant into .data.
20
21 000000d0 FF .byte 0FFh ; Assemble 8-bit
22 ; constant into .data.
23
24 ***********************************************
25 ** Assemble into .text. **
26 ***********************************************
27 00000004 .text
28 00000004 000000CC" con: .field Table, 32
29 00000008 E51F100C LDR R1, con
30 0000000c E5912000 LDR R2, [R1]
31 00000010 E0802002 ADD R2, R0, R2
32 ***********************************************
33 ** Resume assembling into the .data section **
34 ** at address 0Fh. **
35 ***********************************************
36 000000d1 .data
S E E E E E E E E E E EMMMMMMMMMMMMMMMMMMMM
31 20 0
MMMMMMMMMMMMMMMMMMMMMMMMMMMMMMMM
0
31
Legend: S=sign
E=exponent(11-bitbiased)
M=mantissa(52-bitfraction)
www.ti.com
Directives Reference
107
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Assembler Directives
.double Initialize Double-Precision Floating-Point Value
Syntax .double value1[, ... , valuen]
Description The .double directive places the IEEE double-precision floating-point representation of
one or more floating-point values into the current section. Each value must be an
absolute constant expression with an arithmetic type or a symbol equated to an absolute
constant expression with an arithmetic type. Each constant is converted to a floating-
point value in IEEE double-precision 64-bit format. Double-precision floating point
constants are aligned to a double word boundary.
The 64-bit value is stored in the format shown in Figure 5-5.
Figure 5-5. Double-Precision Floating-Point Format
When you use .double in a .struct/.endstruct sequence, .double defines a member's size;
it does not initialize memory. For more information, see the .struct/.endstruct/.tag topic.
Example This example shows the .double directive.
1 00000000 C5308B2A .double -2.0e25
00000004 2C280291
2 00000008 40180000 .double 6
0000000c 00000000
3 00000010 407C8000 .double 456
00000014 00000000

Directives Reference
www.ti.com
108 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Assembler Directives
.drlist/.drnolist Control Listing of Directives
Syntax .drlist
.drnolist
Description Two directives enable you to control the printing of assembler directives to the listing file:
The .drlist directive enables the printing of all directives to the listing file.
The .drnolist directive suppresses the printing of the following directives to the listing
file. The .drnolist directive has no affect within macros.
• .asg
• .break
• .emsg
• .eval
• .fclist
• .fcnolist
• .mlist
• .mmsg
• .mnolist
• .sslist
• .ssnolist
• .var
• .wmsg
By default, the assembler acts as if the .drlist directive had been specified.
Example This example shows how .drnolist inhibits the listing of the specified directives.
Source file:
.asg 0, x
.loop 2
.eval x+1, x
.endloop
.drnolist
.asg 1, x
.loop 3
.eval x+1, x
.endloop
Listing file:
3 .asg 0, x
4 .loop 2
5 .eval x+1, x
6 .endloop
1 .eval 0+1, x
1 .eval 1+1, x
7
8 .drnolist
12 .loop 3
13 .eval x+1, x
14 .endloop

www.ti.com
Directives Reference
109
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Assembler Directives
.elfsym ELF Symbol Information
Syntax .elfsym name, SYM_SIZE(size)
Description The .elfsym directive provides additional information for symbols in the ELF format. This
directive is designed to convey different types of information, so the type,data pair is
used to represent each type. Currently, this directive only supports the SYM_SIZE type.
SYM_SIZE indicates the allocation size (in bytes) of the symbol indicated by name.
Example This example shows the use of the ELF symbol information directive.
.sect ".examp"
.alignment 4
.elfsym ex_sym, SYM_SIZE(4)
ex_sym:
.word 0

Directives Reference
www.ti.com
110 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Assembler Directives
.emsg/.mmsg/.wmsg Define Messages
Syntax .emsg string
.mmsg string
.wmsg string
Description These directives allow you to define your own error and warning messages. When you
use these directives, the assembler tracks the number of errors and warnings it
encounters and prints these numbers on the last line of the listing file.
The .emsg directive sends an error message to the standard output device in the same
manner as the assembler. It increments the error count and prevents the assembler from
producing an object file.
The .mmsg directive sends an assembly-time message to the standard output device in
the same manner as the .emsg and .wmsg directives. It does not, however, set the error
or warning counts, and it does not prevent the assembler from producing an object file.
The .wmsg directive sends a warning message to the standard output device in the
same manner as the .emsg directive. It increments the warning count rather than the
error count, however. It does not prevent the assembler from producing an object file.
Example This example sends the message ERROR -- MISSING PARAMETER to the standard
output device.
Source file:
MSG_EX .macro parm1
.if $$symlen(parm1) = 0
.emsg "ERROR -- MISSING PARAMETER"
.else
ADD parm1, r7, r8
.endif
.endm
MSG_EX R0
MSG_EX
Listing file:
1 MSG_EX .macro parm1
2 .if $$symlen(parm1) = 0
3 .emsg "ERROR -- MISSING PARAMETER"
4 .else
5 ADD parm1, r7, r8
6 .endif
7 .endm
8
9 00000000 MSG_EX R0
1 .if $$symlen(parm1) = 0
1 .emsg "ERROR -- MISSING PARAMETER"
1 .else
1 00000000 E0870008 ADD R0, r7, r8
1 .endif
10
11 00000004 MSG_EX
1 .if $$symlen(parm1) = 0
1 .emsg "ERROR -- MISSING PARAMETER"
***** USER ERROR ***** - : ERROR -- MISSING PARAMETER
1 .else
1 ADD parm1, r7, r8
1 .endif
1 Error, No Warnings

www.ti.com
Directives Reference
111
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Assembler Directives
In addition, the following messages are sent to standard output by the assembler:
*** ERROR! line 11: ***** USER ERROR ***** - : ERROR -- MISSING PARAMETER
.emsg "ERROR -- MISSING PARAMETER" ]]
1 Error, No Warnings
Errors in source - Assembler Aborted
.end End Assembly
Syntax .end
Description The .end directive is optional and terminates assembly. The assembler ignores any
source statements that follow a .end directive. If you use the .end directive, it must be
the last source statement of a program.
This directive has the same effect as an end-of-file character. You can use .end when
you are debugging and you want to stop assembling at a specific point in your code.
Ending a Macro
NOTE: Do not use the .end directive to terminate a macro; use the .endm macro
directive instead.
Example This example shows how the .end directive terminates assembly. Any source statements
that follow the .end directive are ignored by the assembler.
Source file:
START: .space 300
TEMP .set 15
.bss LOC1, 48h
LOCL_n .word LOC1
MVN R0, R0
ADD R0, R0, #TEMP
LDR R4, LOCL_n
STR R0, [R4]
.end
.byte 4
.word CCCh
Listing file:
1 00000000 START: .space 300
2 0000000F TEMP .set 15
3 00000000 .bss LOC1, 48h
4 0000012c 00000000- LOCL_n .word LOC1
5 00000130 E1E00000 MVN R0, R0
6 00000134 E280000F ADD R0, R0, #TEMP
7 00000138 E51F4014 LDR R4, LOCL_n
8 0000013c E5840000 STR R0, [R4]
9 .end

Directives Reference
www.ti.com
112 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Assembler Directives
.fclist/.fcnolist Control Listing of False Conditional Blocks
Syntax .fclist
.fcnolist
Description Two directives enable you to control the listing of false conditional blocks:
The .fclist directive allows the listing of false conditional blocks (conditional blocks that
do not produce code).
The .fcnolist directive suppresses the listing of false conditional blocks until a .fclist
directive is encountered. With .fcnolist, only code in conditional blocks that are actually
assembled appears in the listing. The .if, .elseif, .else, and .endif directives do not
appear.
By default, all conditional blocks are listed; the assembler acts as if the .fclist directive
had been used.
Example This example shows the assembly language and listing files for code with and without
the conditional blocks listed.
Source file:
AAA .set 1
BBB .set 0
.fclist
.if AAA
ADD R0, R0, #1024
.else
ADD R0, R0, #1024*10
.endif
.fcnolist
.if AAA
ADD R0, R0, #1024
.else
ADD R0, R0, #1024*10
.endif
Listing file:
***ARM***
1 00000001 AAA .set 1
2 00000000 BBB .set 0
3 .fclist
4
5 .if AAA
6 00000000 E2800B01 ADD R0, R0, #1024
7 .else
8 ADD R0, R0, #1024*10
9 .endif
10
11 .fcnolist
12
14 00000004 E2800B01 ADD R0, R0, #1024

www.ti.com
Directives Reference
113
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Assembler Directives
.field Initialize Field
Syntax .field value[,size in bits]
Description The .field directive initializes a multiple-bit field within a single word (32 bits) of memory.
This directive has two operands:
• The value is a required parameter; it is an expression that is evaluated and placed in
the field. The value must be absolute.
• The size in bits is an optional parameter; it specifies a number from 1 to 32, which is
the number of bits in the field. The default size is 32 bits. If you specify a value that
cannot fit in size in bits, the assembler truncates the value and issues a warning
message. For example, .field 3,1 causes the assembler to truncate the value 3 to 1;
the assembler also prints the message:
*** WARNING! line 21: W0001: Field value truncated to 1
.field 3, 1
Successive .field directives pack values into the specified number of bits starting at the
current word. Fields are packed starting at the most significant part of the word, moving
toward the least significant part as more fields are added. If the assembler encounters a
field size that does not fit into the current word, it writes out the word, and begins
packing fields into the next word.
The .field directive is similar to the .bits directive (see the .bits topic). However, the .bits
directive does not allow you to specify the number of bits in the field and does not
automatically increment the SPC when a word boundary is reached.
Use the .align directive to force the next .field directive to begin packing a new word.
If you use a label, it points to the byte that contains the specified field.
When you use .field in a .struct/.endstruct sequence, .field defines a member's size; it
does not initialize memory. For more information, see the .struct/.endstruct/.tag topic.
Example This example shows how fields are packed into a word. The SPC does not change until
a word is filled and the next word is begun.
1 ************************************
2 ** Initialize a 14-bit field. **
3 ************************************
4 00000000 2AF00000 .field 0ABCh, 14
5
6 ************************************
7 ** Initialize a 5-bit field **
8 ** in the same word. **
9 ************************************
10 00000000 2AF14000 L_F: .field 0Ah, 5
11
12 ************************************
13 ** Write out the word. **
14 ************************************
15 .align 4
16
17 ************************************
18 ** Initialize a 4-bit field. **
19 ** This fields starts a new word. **
20 ************************************
21 00000004 C0000000 x: .field 0Ch, 4
22
23 ************************************
24 ** 32-bit relocatable field **
25 ** in the next word. **
26 ************************************
27 00000008 00000004' .field x
28
31
0 0 0
0
0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 0 0 0 0 1 1 0 0 0 0 1
31
1 1 0
0
0
31 0
31 30 29
0 0 1
14-bitfield
5-bitfield
4-bitfield
28 27 26 25 24 23 22 21 20 19 18
0101011110 0
0
0
.field0ABCh,14
0
Word Code
18 17 16 15 14 13
0 0 10101011110001010
.field00Ah,5
1
30 29 28
.align4
.field00Ch,5
31
0 0 0
0
0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 0
.fieldx
2
3 .field04321,32
Directives Reference
www.ti.com
114 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Assembler Directives
29 ************************************
30 ** Initialize a 32-bit field. **
31 ************************************
32 0000000c 00004321 .field 04321h, 32
Figure 5-6 shows how the directives in this example affect memory.
Figure 5-6. The .field Directive
S E E E E E E E EMMMMMMMMMMMMMMMMMMMMMMM
31 23 0
Legend: S=sign(1bit)
E=exponent(8-bitbiased)
M=mantissa(23-bitfraction)
value=(-1)Sx(1.0+mantissa)x(2)exponent-127
www.ti.com
Directives Reference
115
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Assembler Directives
.float Initialize Single-Precision Floating-Point Value
Syntax .float value[, ... , valuen]
Description The .float directive places the IEEE single-precision floating-point representation of a
single floating-point constant into a word in the current section. The value must be an
absolute constant expression with an arithmetic type or a symbol equated to an absolute
constant expression with an arithmetic type. Each constant is converted to a floating-
point value in IEEE single-precision 32-bit format.
The 32-bit value is stored exponent byte first, most significant byte of fraction second,
and least significant byte of fraction third, in the format shown in Figure 5-7.
Figure 5-7. Single-Precision Floating-Point Format
When you use .float in a .struct/.endstruct sequence, .float defines a member's size; it
does not initialize memory. For more information, see the .struct/.endstruct/.tag topic.
Example Following are examples of the .float directive:
1 00000000 E9045951 .float -1.0e25
2 00000004 40400000 .float 3
3 00000008 42F60000 .float 123

Directives Reference
www.ti.com
116 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Assembler Directives
.global/.def/.ref Identify Global Symbols
Syntax .global symbol1[, ... , symboln]
.def symbol1[, ... , symboln]
.ref symbol1[, ... , symboln]
Description Three directives identify global symbols that are defined externally or can be referenced
externally:
The .def directive identifies a symbol that is defined in the current module and can be
accessed by other files. The assembler places this symbol in the symbol table.
The .ref directive identifies a symbol that is used in the current module but is defined in
another module. The linker resolves this symbol's definition at link time.
The .global directive acts as a .ref or a .def, as needed.
Aglobal symbol is defined in the same manner as any other symbol; that is, it appears
as a label or is defined by the .set, .equ, .bss, or .usect directive. If a global symbol is
defined more than once, the linker issues a multiple-definition error. (The assembler can
provide a similar multiple-definition error for local symbols.) The .ref directive always
creates a symbol table entry for a symbol, whether the module uses the symbol or not;
.global, however, creates an entry only if the module actually uses the symbol.
A symbol can be declared global for either of two reasons:
• If the symbol is not defined in the current module (which includes macro, copy, and
include files), the .global or .ref directive tells the assembler that the symbol is
defined in an external module. This prevents the assembler from issuing an
unresolved reference error. At link time, the linker looks for the symbol's definition in
other modules.
• If the symbol is defined in the current module, the .global or .def directive declares
that the symbol and its definition can be used externally by other modules. These
types of references are resolved at link time.
Example This example shows four files. The file1.lst and file2.lst refer to each other for all symbols
used; file3.lst and file4.lst are similarly related.
The file1.lst and file3.lst files are equivalent. Both files define the symbol INIT and
make it available to other modules; both files use the external symbols X, Y, and Z. Also,
file1.lst uses the .global directive to identify these global symbols; file3.lst uses .ref and
.def to identify the symbols.
The file2.lst and file4.lst files are equivalent. Both files define the symbols X, Y, and Z
and make them available to other modules; both files use the external symbol INIT. Also,
file2.lst uses the .global directive to identify these global symbols; file4.lst uses .ref and
.def to identify the symbols.
file1.lst
1 ; Global symbol defined in this file
2 .global INIT
3 ; Global symbols defined in file2.lst
4 .global X, Y, Z
5 00000000 INIT:
6 00000000 E2800056 ADD R0, R0, #56h
7 00000004 00000000! .word X
8 ; .
9 ; .
10 ; .
11 .end

www.ti.com
Directives Reference
117
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Assembler Directives
file2.lst
1 ; Global symbols defined in this file
2 .global X, Y, Z
3 ; Global symbol defined in file1.lst
4 .global INIT
5 00000001 X: .set 1
6 00000002 Y: .set 2
7 00000003 Z: .set 3
8 00000000 00000000! .word INIT
9 ; .
10 ; .
11 ; .
12 .end
file3.lst
1 ; Global symbols defined in this file
2 .def INIT
3 ; Global symbol defined in file4.lst
4 .ref X, Y, Z
5 00000000 INIT:
6 00000000 E2800056 ADD R0, R0, #56
7 00000004 00000000! .word X
8 ; .
9 ; .
10 ; .
11 .end
file4.lst
1 ; Global symbols defined in this file
2 .def X, Y, Z
3 ; Global symbol defined in file3.lst
4 .ref INIT
5 00000001 X: .set 1
6 00000002 Y: .set 2
7 00000003 Z: .set 3
8 00000000 00000000! .word INIT
9 ; .
10 ; .
11 ; .
12 .end

Directives Reference
www.ti.com
118 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Assembler Directives
.group/.gmember/.endgroup Define Common Data Section
Syntax .group group section name group type
.gmember section name
.endgroup
Description Three directives instruct the assembler to make certain sections members of an ELF
group section (see the ELF specification for more information on group sections).
The .group directive begins the group declaration. The group section name designates
the name of the group section. The group type designates the type of the group. The
following types are supported:
0x0 Regular ELF group
0x1 COMDAT ELF group
Duplicate COMDAT (common data) groups are allowed in multiple modules; the linker
keeps only one. Creating such duplicate groups is useful for late instantiation of C++
templates and for providing debugging information.
The .gmember directive designates section name as a member of the group.
The .endgroup directive ends the group declaration.

www.ti.com
Directives Reference
119
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Assembler Directives
.half/.short/.uhalf/.ushort Initialize 16-Bit Integers
Syntax .half value1[, ... , valuen]
.short value1[, ... , valuen]
.uhalf value1[, ... , valuen]
.ushort value1[, ... , valuen]
Description The .half and .short directives place one or more values into consecutive halfwords in
the current section. A value can be either:
• An expression that the assembler evaluates and treats as a 16-bit signed or unsigned
number
• A character string enclosed in double quotes. Each character in a string represents a
separate value and is stored alone in the least significant eight bits of a 16-bit field,
which is padded with 0s.
The assembler truncates values greater than 16 bits.
If you use a label with .half or .short, it points to the location where the assembler places
the first byte.
These directives perform a halfword (16-bit) alignment before data is written to the
section. This guarantees that data resides on a 16-bit boundary.
When you use .half or .short in a .struct/.endstruct sequence, they define a member's
size; they do not initialize memory. For more information, see the .struct/.endstruct/.tag
topic.
Example In this example, .half is used to place 16-bit values (10, -1, abc, and a) into consecutive
halfwords in memory; .short is used to place 16-bit values (8, -3, def, and b) into
consecutive halfwords in memory. The label STRN has the value 100ch, which is the
location of the first initialized halfword for .short.
1 00000000 .space 100h * 16
2 00001000 000A .half 10, -1, "abc", 'a'
00001002 FFFF
00001004 0061
00001006 0062
00001008 0063
0000100a 0061
3 0000100c 0008 STRN .short 8, -3, "def", 'b'
0000100e FFFD
00001010 0064
00001012 0065
00001014 0066
00001016 0062
Directives Reference
www.ti.com
120 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Assembler Directives
.if/.elseif/.else/.endif Assemble Conditional Blocks
Syntax .if condition
[.elseif condition]
[.else]
.endif
Description These directives provide conditional assembly:
The .if directive marks the beginning of a conditional block. The condition is a required
parameter.
• If the expression evaluates to true (nonzero), the assembler assembles the code that
follows the expression (up to a .elseif, .else, or .endif).
• If the expression evaluates to false (0), the assembler assembles code that follows a
.elseif (if present), .else (if present), or .endif (if no .elseif or .else is present).
The .elseif directive identifies a block of code to be assembled when the .if expression is
false (0) and the .elseif expression is true (nonzero). When the .elseif expression is
false, the assembler continues to the next .elseif (if present), .else (if present), or .endif
(if no .elseif or .else is present). The .elseif is optional in a conditional block, and more
than one .elseif can be used. If an expression is false and there is no .elseif, the
assembler continues with the code that follows a .else (if present) or a .endif.
The .else directive identifies a block of code that the assembler assembles when the .if
expression and all .elseif expressions are false (0). The .else directive is optional in the
conditional block; if an expression is false and there is no .else statement, the assembler
continues with the code that follows the .endif. The .elseif and .else directives can be
used in the same conditional assembly block.
The .endif directive terminates a conditional block.
See Section 4.9.2 for information about relational operators.
Example This example shows conditional assembly:
1 00000001 SYM1 .set 1
2 00000002 SYM2 .set 2
3 00000003 SYM3 .set 3
4 00000004 SYM4 .set 4
5
6 If_4: .if SYM4 = SYM2 * SYM2
7 00000000 04 .byte SYM4 ; Equal values
8 .else
9 .byte SYM2 * SYM2 ; Unequal values
10 .endif
11
12 If_5: .if SYM1 <= 10
13 00000001 0A .byte 10 ; Less than / equal
14 .else
15 .byte SYM1 ; Greater than
16 .endif
17
18 If_6: .if SYM3 * SYM2 != SYM4 + SYM2
19 .byte SYM3 * SYM2 ; Unequal value
20 .else
21 00000002 08 .byte SYM4 + SYM4 ; Equal values
22 .endif
23
24 If_7: .if SYM1 = SYM2
25 .byte SYM1
26 .elseif SYM2 + SYM3 = 5
27 00000003 05 .byte SYM2 + SYM3
28 .endif

www.ti.com
Directives Reference
121
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Assembler Directives
.int/.unint/.long/.ulong/.word/.uword Initialize 32-Bit Integers
Syntax .int value1[, ... , valuen]
.uint value1[, ... , valuen]
.long value1[, ... , valuen]
.ulong value1[, ... , valuen]
.word value1[, ... , valuen]
.uword value1[, ... , valuen]
Description The .int,.unint,.long, .ulong,.word, and .uword directives place one or more values
into consecutive words in the current section. Each value is placed in a 32-bit word by
itself and is aligned on a word boundary. A value can be either:
• An expression that the assembler evaluates and treats as a 32-bit signed or unsigned
number
• A character string enclosed in double quotes. Each character in a string represents a
separate value and is stored alone in the least significant eight bits of a 32-bit field,
which is padded with 0s.
A value can be either an absolute or a relocatable expression. If an expression is
relocatable, the assembler generates a relocation entry that refers to the appropriate
symbol; the linker can then correctly patch (relocate) the reference. This allows you to
initialize memory with pointers to variables or labels.
If you use a label with these directives, it points to the first word that is initialized.
When you use these directives in a .struct/.endstruct sequence, they define a member's
size; they do not initialize memory. See the .struct/.endstruct/.tag topic.
Example 1 This example uses the .int directive to initialize words.
1 00000000 .space 73h
2 00000000 .bss PAGE, 128
3 00000080 .bss SYMPTR, 4
4 00000074 E3A00056 INST: MOV R0, #056h
5 00000078 0000000A .int 10, SYMPTR, -1, 35 + 'a', INST, "abc"
0000007c 00000080-
00000080 FFFFFFFF
00000084 00000084
00000088 00000074'
0000008c 00000061
00000090 00000062
00000094 00000063
Example 2 This example shows how the .long directive initializes words. The symbol DAT1 points to
the first word that is reserved.
1 00000000 0000ABCD DAT1: .long 0ABCDh, 'A' + 100h, 'g', 'o'
00000004 00000141
00000008 00000067
0000000c 0000006F
2 00000010 00000000' .long DAT1, 0AABBCCDDh
00000014 AABBCCDD
3 00000018 DAT2:
Example 3 In this example, the .word directive is used to initialize words. The symbol WORDX
points to the first word that is reserved.
1 00000000 00000C80 WORDX: .word 3200, 1 + 'AB', -0AFh, 'X'
00000004 00004242
00000008 FFFFFF51
0000000c 00000058

Directives Reference
www.ti.com
122 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Assembler Directives
.label Create a Load-Time Address Label
Syntax .label symbol
Description The .label directive defines a special symbol that refers to the load-time address rather
than the run-time address within the current section. Most sections created by the
assembler have relocatable addresses. The assembler assembles each section as if it
started at 0, and the linker relocates it to the address at which it loads and runs.
For some applications, it is desirable to have a section load at one address and run at a
different address. For example, you may want to load a block of performance-critical
code into slower memory to save space and then move the code to high-speed memory
to run it. Such a section is assigned two addresses at link time: a load address and a run
address. All labels defined in the section are relocated to refer to the run-time address
so that references to the section (such as branches) are correct when the code runs.
See Section 3.5 for more information about run-time relocation.
The .label directive creates a special label that refers to the load-time address. This
function is useful primarily to designate where the section was loaded for purposes of
the code that relocates the section.
Example This example shows the use of a load-time address label.
sect ".examp"
.label examp_load ; load address of section
start: ; run address of section
<code>
finish: ; run address of section end
.label examp_end ; load address of section end
See Section 8.5.6 for more information about assigning run-time and load-time
addresses in the linker.

www.ti.com
Directives Reference
123
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Assembler Directives
.length/.width Set Listing Page Size
Syntax .length [page length]
.width [page width]
Description Two directives allow you to control the size of the output listing file.
The .length directive sets the page length of the output listing file. It affects the current
and following pages. You can reset the page length with another .length directive.
• Default length: 60 lines. If you do not use the .length directive or if you use the
.length directive without specifying the page length, the output listing length defaults
to 60 lines.
• Minimum length: 1 line
• Maximum length: 32 767 lines
The .width directive sets the page width of the output listing file. It affects the next line
assembled and the lines following. You can reset the page width with another .width
directive.
• Default width: 132 characters. If you do not use the .width directive or if you use the
.width directive without specifying a page width, the output listing width defaults to
132 characters.
• Minimum width: 80 characters
• Maximum width: 200 characters
The width refers to a full line in a listing file; the line counter value, SPC value, and
object code are counted as part of the width of a line. Comments and other portions of a
source statement that extend beyond the page width are truncated in the listing.
The assembler does not list the .width and .length directives.
Example The following example shows how to change the page length and width.
********************************************
** Page length = 65 lines **
** Page width = 85 characters **
********************************************
.length 65
.width 85
********************************************
** Page length = 55 lines **
** Page width = 100 characters **
********************************************
.length 55
.width 100

Directives Reference
www.ti.com
124 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Assembler Directives
.list/.nolist Start/Stop Source Listing
Syntax .list
.nolist
Description Two directives enable you to control the printing of the source listing:
The .list directive allows the printing of the source listing.
The .nolist directive suppresses the source listing output until a .list directive is
encountered. The .nolist directive can be used to reduce assembly time and the source
listing size. It can be used in macro definitions to suppress the listing of the macro
expansion.
The assembler does not print the .list or .nolist directives or the source statements that
appear after a .nolist directive. However, it continues to increment the line counter. You
can nest the .list/.nolist directives; each .nolist needs a matching .list to restore the
listing.
By default, the source listing is printed to the listing file; the assembler acts as if the .list
directive had been used. However, if you do not request a listing file when you invoke
the assembler by including the --asm_listing option on the command line (see
Section 4.3), the assembler ignores the .list directive.
Example This example shows how the .copy directive inserts source statements from another file.
The first time this directive is encountered, the assembler lists the copied source lines in
the listing file. The second time this directive is encountered, the assembler does not list
the copied source lines, because a .nolist directive was assembled. The .nolist, the
second .copy, and the .list directives do not appear in the listing file. Also, the line
counter is incremented, even when source statements are not listed.
Source file:
.copy "copy2.asm"
* Back in original file
NOP
.nolist
.copy "copy2.asm"
.list
* Back in original file
.string "Done"
Listing file:
1 .copy "copy2.asm"
A 1 * In copy2.asm (copy file)
A 2 00000000 00000020 .word 32, 1 + 'A'
00000004 00000042
2 * Back in original file
3 00000008 E1A00000 NOP
7 * Back in original file
8 00000014 44 .string "Done"
00000015 6F
00000016 6E
00000017 65

www.ti.com
Directives Reference
125
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Assembler Directives
.loop/.endloop/.break Assemble Code Block Repeatedly
Syntax .loop [count]
.break [end-condition]
.endloop
Description Three directives allow you to repeatedly assemble a block of code:
The .loop directive begins a repeatable block of code. The optional count operand, if
used, must be a well-defined integer expression. The count indicates the number of
loops to be performed (the loop count). If count is omitted, it defaults to 1024. The loop
will be repeated count number of times, unless terminated early by a .break directive.
The optional .break directive terminates a .loop early. You may use .loop without using
.break. The .break directive terminates a .loop only if the end-condition expression is true
(evaluates to nonzero). If the optional end-condition operand is omitted, it defaults to
true. If end-condition is true, the assembler stops repeating the .loop body immediately;
any remaining statements after .break and before .endloop are not assembled. The
assembler resumes assembling with the statement after the .endloop directive. If end-
condition is false (evaluates to 0), the loop continues.
The .endloop directive marks the end of a repeatable block of code. When the loop
terminates, whether by a .break directive with a true end-condition or by performing the
loop count number of iterations, the assembler stops repeating the loop body and
resumes assembling with the statement after the .endloop directive.
Example This example illustrates how these directives can be used with the .eval directive. The
code in the first six lines expands to the code immediately following those six lines.
1 .eval 0,x
2 COEF .loop
3 .word x*100
4 .eval x+1, x
5 .break x = 6
6 .endloop
1 00000000 00000000 .word 0*100
1 .eval 0+1, x
1 .break 1 = 6
1 00000004 00000064 .word 1*100
1 .eval 1+1, x
1 .break 2 = 6
1 00000008 000000C8 .word 2*100
1 .eval 2+1, x
1 .break 3 = 6
1 0000000c 0000012C .word 3*100
1 .eval 3+1, x
1 .break 4 = 6
1 00000010 00000190 .word 4*100
1 .eval 4+1, x
1 .break 5 = 6
1 00000014 000001F4 .word 5*100
1 .eval 5+1, x
1 .break 6 = 6

Directives Reference
www.ti.com
126 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Assembler Directives
.macro/.endm Define Macro
Syntax macname .macro [parameter1[, ... , parametern]]
model statements or macro directives
.endm
Description The .macro and .endm directives are used to define macros.
You can define a macro anywhere in your program, but you must define the macro
before you can use it. Macros can be defined at the beginning of a source file, in an
.include/.copy file, or in a macro library.
macname names the macro. You must place the name in the source
statement's label field.
.macro identifies the source statement as the first line of a macro
definition. You must place .macro in the opcode field.
[parameters] are optional substitution symbols that appear as operands for the
.macro directive.
model statements are instructions or assembler directives that are executed each
time the macro is called.
macro directives are used to control macro expansion.
.endm marks the end of the macro definition.
Macros are explained in further detail in Chapter 6.

www.ti.com
Directives Reference
127
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Assembler Directives
.mlib Define Macro Library
Syntax .mlib "filename"
Description The .mlib directive provides the assembler with the filename of a macro library. A macro
library is a collection of files that contain macro definitions. The macro definition files are
bound into a single file (called a library or archive) by the archiver.
Each file in a macro library contains one macro definition that corresponds to the name
of the file. The filename of a macro library member must be the same as the macro
name, and its extension must be .asm. The filename must follow host operating system
conventions; it can be enclosed in double quotes. You can specify a full pathname (for
example, c:\320tools\macs.lib). If you do not specify a full pathname, the assembler
searches for the file in the following locations in the order given:
1. The directory that contains the current source file
2. Any directories named with the --include_path assembler option
3. Any directories specified by the TI_ARM_A_DIR environment variable
4. Any directories specified by the TI_ARM_C_DIR environment variable
See Section 4.5 for more information about the --include_path option.
A .mlib directive causes the assembler to open the library specified by filename and
create a table of the library's contents. The assembler stores names of individual library
members in the opcode table as library entries. This redefines any existing opcodes or
macros with the same name. If one of these macros is called, the assembler extracts the
library entry and loads it into the macro table. The assembler expands the library entry
as it does other macros, but it does not place the source code in the listing. Only macros
called from the library are extracted, and they are extracted only once.
See Chapter 6 for more information on macros and macro libraries.
Example The code creates a macro library that defines two macros, inc4.asm and dec4.asm. The
file inc4.asm contains the definition of inc4 and dec4.asm contains the definition of dec4.
inc4.asm dec4.asm
* Macro for incrementing
inc4 .macro reg1, reg2, reg3, reg4
Add reg1, reg1, #1
ADD reg2, reg2, #1
ADD reg3, reg3, #1
ADD reg4, reg4, #1
.endm
* Macro for decrementing
dec4 .macro reg1, reg2, reg3, reg4
SUB reg1, reg1, #1
SUB reg2, reg2, #1
SUB reg3, reg3, #1
SUB reg4, reg4, #1
.endm
Use the archiver to create a macro library:
armar -a mac inc4.asm dec4.asm
ar32 -a mac inc4.asm dec4.asm
Now you can use the .mlib directive to reference the macro library and define the
inc4.asm and dec4.asm macros:
1 .mlib "mac.lib"
2 ; Macro call
3 00000000 inc4 R7, R6, R5, R4
1 00000000 E2877001 ADD R7, R7, #1
1 00000004 E2866001 ADD R6, R6, #1
1 00000008 E2855001 ADD R5, R5, #1
1 0000000c E2844001 ADD R4, R4, #1
4
5 ; Macro call
6 00000010 dec4 R0, R1, R2, R3
1 00000010 E2400001 SUB R0, R0, #1
1 00000014 E2411001 SUB R1, R1, #1
1 00000018 E2422001 SUB R2, R2, #1
1 0000001c E2433001 SUB R3, R3, #1

Directives Reference
www.ti.com
128 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Assembler Directives
.mlist/.mnolist Start/Stop Macro Expansion Listing
Syntax .mlist
.mnolist
Description Two directives enable you to control the listing of macro and repeatable block
expansions in the listing file:
The .mlist directive allows macro and .loop/.endloop block expansions in the listing file.
The .mnolist directive suppresses macro and .loop/.endloop block expansions in the
listing file.
By default, the assembler behaves as if the .mlist directive had been specified.
See Chapter 6 for more information on macros and macro libraries. See the
.loop/.break/.endloop topic for information on conditional blocks.
Example This example defines a macro named STR_3. The first time the macro is called, the
macro expansion is listed (by default). The second time the macro is called, the macro
expansion is not listed, because a .mnolist directive was assembled. The third time the
macro is called, the macro expansion is again listed because a .mlist directive was
assembled.
1 STR_3 .macro P1, P2, P3
2 .string ":p1:", ":p2:", ":p3:"
3 .endm
4
5 00000000 STR_3 "as", "I", "am" ; Invoke STR_3 macro.
1 00000000 3A .string ":p1:", ":p2:", ":p3:"
00000001 70
00000002 31
00000003 3A
00000004 3A
00000005 70
00000006 32
00000007 3A
00000008 3A
00000009 70
0000000a 33
0000000b 3A
6 .mnolist ; Suppress expansion.
7 0000000c STR_3 "as", "I", "am" ; Invoke STR_3 macro.
8 .mlist ; Show macro expansion.
9 00000018 STR_3 "as", "I", "am" ; Invoke STR_3 macro.
1 00000018 3A .string ":p1:", ":p2:", ":p3:"
00000019 70
0000001a 31
0000001b 3A
0000001c 3A
0000001d 70
0000001e 32
0000001f 3A
00000020 3A
00000021 70
00000022 33
00000023 3A

www.ti.com
Directives Reference
129
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Assembler Directives
.newblock Terminate Local Symbol Block
Syntax .newblock
Description The .newblock directive undefines any local labels currently defined. Local labels, by
nature, are temporary; the .newblock directive resets them and terminates their scope.
A local label is a label in the form $n, where nis a single decimal digit, or name?, where
name is a legal symbol name. Unlike other labels, local labels are intended to be used
locally, and cannot be used in expressions. They can be used only as operands in 8-bit
jump instructions. Local labels are not included in the symbol table.
After a local label has been defined and (perhaps) used, you should use the .newblock
directive to reset it. The .text, .data, and .sect directives also reset local labels. Local
labels that are defined within an include file are not valid outside of the include file.
See Section 4.8.3 for more information on the use of local labels.
Example This example shows how the local label $1 is declared, reset, and then declared again.
1 00000000 E3510000 LABEL1: CMP r1, #0
2 00000004 2A000001 BCS $1
3 00000008 E2900001 ADDS r0, r0, #1
4 0000000c 21A0F00E MOVCS pc, lr
5 00000010 E4952004 $1: LDR r2, [r5], #4
6 .newblock ; Undefine $1 to use again.
7 00000014 E0911002 ADDS r1, r1, r2
8 00000018 5A000000 BPL $1
9 0000001c E1F01001 MVNS r1, r1
10 00000020 E1A0F00E $1: MOV pc, lr

Directives Reference
www.ti.com
130 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Assembler Directives
.option Select Listing Options
Syntax .option option1[,option2,. . .]
Description The .option directive selects options for the assembler output listing. The options must
be separated by commas; each option selects a listing feature. These are valid options:
Aturns on listing of all directives and data, and subsequent expansions, macros,
and blocks.
Blimits the listing of .byte and .char directives to one line.
Hlimits the listing of .half and .short directives to one line.
Llimits the listing of .long directives to one line.
Mturns off macro expansions in the listing.
Nturns off listing (performs .nolist).
Oturns on listing (performs .list).
Rresets any B, H, M, T, and W (turns off the limits of B, H, M, T, and W).
Tlimits the listing of .string directives to one line.
Wlimits the listing of .word and .int directives to one line.
Xproduces a cross-reference listing of symbols. You can also obtain a cross-
reference listing by invoking the assembler with the --
asm_listing_cross_reference option (see Section 4.3).
Options are not case sensitive.
Example This example shows how to limit the listings of the .byte, .char, .int, long, .word, and
.string directives to one line each.
1 *****************************************************
2 ** Limit the listing of .byte, .char, .int, .long, **
3 ** .word, and .string directives to 1 line each. **
4 *****************************************************
5 .option B, W, T
6 00000000 BD .byte -'C', 0B0h, 5
7 00000003 BC .char -'D', 0C0h, 6
8 00000008 0000000A .int 10, 35 + 'a', "abc"
9 0000001c AABBCCDD .long 0AABBCCDDh, 536 + 'A'
10 00000024 000015AA .word 5546, 78h
11 0000002c 45 .string "Extended Registers"
12
13 ****************************************************
14 ** Reset the listing options. **
15 ****************************************************
16 .option R
17 0000003e BD .byte -'C', 0B0h, 5
0000003f B0
00000040 05
18 00000041 BC .char -'D', 0C0h, 6
00000042 C0
00000043 06
19 00000044 0000000A .int 10, 35 + 'a', "abc"
00000048 00000084
0000004c 00000061
00000050 00000062
00000054 00000063
20 00000058 AABBCCDD .long 0AABBCCDDh, 536 + 'A'
0000005c 00000259
21 00000060 000015AA .word 5546, 78h
00000064 00000078
22 00000068 45 .string "Extended Registers"
00000069 78

www.ti.com
Directives Reference
131
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Assembler Directives
0000006a 74
0000006b 65
0000006c 6E
0000006d 64
0000006e 65
0000006f 64
00000070 20
00000071 52
00000072 65
00000073 67
00000074 69
00000075 73
00000076 74
00000077 65
00000078 72
00000079 73
.page Eject Page in Listing
Syntax .page
Description The .page directive produces a page eject in the listing file. The .page directive is not
printed in the source listing, but the assembler increments the line counter when it
encounters the .page directive. Using the .page directive to divide the source listing into
logical divisions improves program readability.
Example This example shows how the .page directive causes the assembler to begin a new page
of the source listing.
Source file:
Source file (generic)
.title "**** Page Directive Example ****"
; .
; .
; .
.page
Listing file:
TMS470R1x Assembler Version x.xx Day Time Year
Copyright (c) 1996-2011 Texas Instruments Incorporated
**** Page Directive Example **** PAGE 1
2 ; .
3 ; .
4 ; .
TMS470R1x Assembler Version x.xx Day Time Year
Copyright (c) 1996-2011 Texas Instruments Incorporated
**** Page Directive Example **** PAGE 2
No Errors, No Warnings

Directives Reference
www.ti.com
132 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Assembler Directives
.retain / .retainrefs Conditionally Retain Sections In Object Module Output
Syntax .retain["section name"]
.retainrefs["section name"]
Description The .retain directive indicates that the current or specified section is not eligible for
removal via conditional linking. You can also override conditional linking for a given
section with the --retain linker option. You can disable conditional linking entirely with the
--unused_section_elimination=off linker option.
The .retainrefs directive indicates that any sections that refer to the current or specified
section are not eligible for removal via conditional linking. For example, applications may
use an .intvecs section to set up interrupt vectors. The .intvecs section is eligible for
removal during conditional linking by default. You can force the .intvecs section and any
sections that reference it to be retained by applying the .retain and .retainrefs directives
to the .intvecs section.
The section name identifies the section. If the directive is used without a section name, it
applies to the current initialized section. If the directive is applied to an uninitialized
section, the section name is required. The section name must be enclosed in double
quotes. A section name can contain a subsection name in the form section
name:subsection name.
The linker assumes that all sections by default are eligible for removal via conditional
linking. (However, the linker does automatically retain the .reset section.) The .retain
directive is useful for overriding this default conditional linking behavior for sections that
you want to keep included in the link, even if the section is not referenced by any other
section in the link. For example, you could apply a .retain directive to an interrupt
function that you have written in assembly language, but which is not referenced from
any normal entry point in the application.

www.ti.com
Directives Reference
133
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Assembler Directives
.sect Assemble Into Named Section
Syntax .sect " section name "
.sect " section name "[,{RO|RW}] [,{ALLOC|NOALLOC}]
Description The .sect directive defines a named section that can be used like the default .text and
.data sections. The .sect directive sets section name to be the current section; the lines
that follow are assembled into the section name section.
The section name identifies the section. The section name must be enclosed in double
quotes. A section name can contain a subsection name in the form section name :
subsection name. See Chapter 2 for more information about sections.
The sections can be marked read-only (RO) or read-write (RW). Also, the sections can
be marked for allocation (ALLOC) or no allocation (NOALLOC). These attributes can be
specified in any order, but only one attribute from each set can be selected. RO conflicts
with RW, and ALLOC conflicts with NOALLOC. If conflicting attributes are specified the
assembler generates an error, for example:
"t.asm", ERROR! at line 1:[E0000] Attribute RO cannot be combined with attr RW
.sect "illegal_sect",RO,RW
Example This example defines two special-purpose sections, Sym_Defs and Vars, and assembles
code into them.
1 ******************************************************
2 ** Begin assembling into .text section. **
3 ******************************************************
4 00000000 .text
5 00000000 E3A00078 MOV R0, #78h
6 00000004 E2801078 ADD R1, R0, #78h
7 ******************************************************
8 ** Begin assembling into Sym_Defs section. **
9 ******************************************************
10 00000000 .sect "Sym_Defs"
11 00000000 3D4CCCCD .float 0.05 ; Assembled into Sym_Defs
12 00000004 000000AA X: .word 0AAh ; Assembled into Sym_Defs
13 00000008 E2833028 ADD R3, R3, #28h ; Assembled into Sym_Defs
14 ******************************************************
15 ** Begin assembling into Vars section. **
16 ******************************************************
17 00000000 .sect "Vars"
18 00000010 WORD_LEN .set 16
19 00000020 DWORD_LEN .set WORD_LEN * 2
20 00000008 BYTE_LEN .set WORD_LEN / 2
21 ******************************************************
22 ** Resume assembling into .text section. **
23 ******************************************************
24 00000008 .text
25 00000008 E2802042 ADD R2, R0, #42h ; Assembled into .text
26 0000000c 03 .byte 3, 4 ; Assembled into .text
0000000d 04
27 ******************************************************
28 ** Resume assembling into Vars section. **
29 ******************************************************
30 00000000 .sect "Vars"
31 00000000 000D0000 .field 13, WORD_LEN
32 00000000 000D0A00 .field 0Ah, BYTE_LEN
33 00000004 00000008 .field 10q, DWORD_LEN
Directives Reference
www.ti.com
134 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Assembler Directives
.set/.equ Define Assembly-Time Constant
Syntax symbol .set value
symbol .equ value
Description The .set and .equ directives equate a constant value to a .set/.equ symbol. The symbol
can then be used in place of a value in assembly source. This allows you to equate
meaningful names with constants and other values. The .set and .equ directives are
identical and can be used interchangeably.
• The symbol is a label that must appear in the label field.
• The value must be a well-defined expression, that is, all symbols in the expression
must be previously defined in the current source module.
Undefined external symbols and symbols that are defined later in the module cannot be
used in the expression. If the expression is relocatable, the symbol to which it is
assigned is also relocatable.
The value of the expression appears in the object field of the listing. This value is not
part of the actual object code and is not written to the output file.
Symbols defined with .set or .equ can be made externally visible with the .def or .global
directive (see the .global/.def/.ref topic). In this way, you can define global absolute
constants.
Example This example shows how symbols can be assigned with .set and .equ.
1 *****************************************************
2 ** Equate symbol AUX_R1 to register AR1 and use **
3 ** it instead of the register. **
4 **********************************************
5 00000001 AUX_R1 .set R1
6 00000000 E3A01056 MOV AUX_R1, #56h
7
8 *****************************************************
9 ** Set symbol index to an integer expression. **
10 ** and use it as an immediate operand. **
11 *****************************************************
12 00000035 INDEX .equ 100/2 +3
13 00000004 E2810035 ADD R0, AUX_R1, #INDEX
14
15 *****************************************************
16 ** Set symbol SYMTAB to a relocatable expression. **
17 ** and use it as a relocatable operand. **
18 *****************************************************
19 00000008 0000000A LABEL .word 10
20 00000009' SYMTAB .set LABEL + 1
21
22 *****************************************************
23 ** Set symbol NSYMS equal to the symbol INDEX **
24 ** INDEX and use it as you would INDEX. **
25 *****************************************************
26 00000035 NSYMS .set INDEX
27 0000000c 00000035 .word NSYMS

www.ti.com
Directives Reference
135
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Assembler Directives
.space/.bes Reserve Space
Syntax [label].space size in bytes
[label].bes size in bytes
Description The .space and .bes directives reserve the number of bytes given by size in bytes in the
current section and fill them with 0s. The section program counter is incremented to
point to the word following the reserved space.
When you use a label with the .space directive, it points to the first byte reserved. When
you use a label with the .bes directive, it points to the last byte reserved.
Example This example shows how memory is reserved with the .space and .bes directives.
1 **************************************************
2 ** Begin assembling into the .text section. **
3 **************************************************
4 00000000 .text
5
6 **************************************************
7 ** Reserve 0F0 bytes in the .text section. **
8 **************************************************
9 00000000 .space 0F0h
10 000000f0 00000100 .word 100h, 200h
000000f4 00000200
11 **************************************************
12 ** Begin assembling into the .data section. **
13 **************************************************
14 00000000 .data
15 00000000 49 .string "In .data"
00000001 6E
00000002 20
00000003 2E
00000004 64
00000005 61
00000006 74
00000007 61
16 ***************************************************
17 ** Reserve 100 bytes in the .data section; RES_1 **
18 ** points to the first byte that contains **
19 ** reserved bytes. **
20 ***************************************************
21 00000008 RES_1: .space 100
22 0000006c 0000000F .word 15
23 00000070 00000008" .word RES_1
24
25 ***************************************************
26 ** Reserve 20 bits in the .data section; RES_2 **
27 ** points to the last byte that contains **
28 ** reserved bytes. **
29 **************************************************
30 00000087 RES_2: .bes 20
31 00000088 00000036 .word 36h
32 0000008c 00000087" .word RES_2

Directives Reference
www.ti.com
136 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Assembler Directives
.sslist/.ssnolist Control Listing of Substitution Symbols
Syntax .sslist
.ssnolist
Description Two directives allow you to control substitution symbol expansion in the listing file:
The .sslist directive allows substitution symbol expansion in the listing file. The
expanded line appears below the actual source line.
The .ssnolist directive suppresses substitution symbol expansion in the listing file.
By default, all substitution symbol expansion in the listing file is suppressed; the
assembler acts as if the .ssnolist directive had been used.
Lines with the pound (#) character denote expanded substitution symbols.
Example This example shows code that, by default, suppresses the listing of substitution symbol
expansion, and it shows the .sslist directive assembled, instructing the assembler to list
substitution symbol code expansion.
1 ADDL .macro dest, src
2 .global reset_ctr
3 ADDS dest, dest, src
4 BLCS reset_ctr
5 .endm
6
7 00000000 ADDL R4, R5
1 .global reset_ctr
1 00000000 E0944005 ADDS R4, R4, R5
1 00000004 2BFFFFFD! BLCS reset_ctr
8 00000008 E5954000 LDR R4, [R5]
9 0000000c ADDL R0, R4
1 .global reset_ctr
1 0000000c E0900004 ADDS R0, R0, R4
1 00000010 2BFFFFFA! BLCS reset_ctr
10
11 .sslist
12
13 00000014 E5B53004 LDR R3, [R5, #4]!
14 00000018 E5954000 LDR R4, [R5]
15 0000001c ADDL R4, R3
1 .global reset_ctr
1 0000001c E0944003 ADDS dest, dest, src
# ADDS R4, R4, R3
1 00000020 2BFFFFF6! BLCS reset_ctr

www.ti.com
Directives Reference
137
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Assembler Directives
.state16 Assemble 16-Bit Instructions (Non-UAL Syntax)
Syntax .state16
Description By default, the assembler begins assembling all instructions in a file as 32-bit
instructions. Use the .state16 directive to direct the assembler to begin assembling all
instructions at that point as 16-bit instructions. This directive and the .state32 directive
allow you to switch between the two assembly modes for non-UAL syntax. If you want to
assemble an entire file as 16-bit instructions for V6 and earlier architectures, use the −mt
assembler option, which instructs the assembler to begin the assembly process,
assembling all instructions as 16-bit instructions.
The .state16 directive performs an implicit halfword alignment before any instructions are
written to the section to ensure that all 16-bit instructions are halfword-aligned. The
.state16 directive also resets any local labels defined.
Example In this example, the assembler assembles 16-bit instructions, begins assembling 32-bit
instructions, and returns to assembling 16-bit instructions.
1 .global glob1, glob2
2 ****************************************************
3 ** Begin assembling 16-bit instructions. **
4 ****************************************************
5 00000000 .state16
6
7 00000000 4808 LDR r0, glob1_a
8 00000002 4909 LDR r1, glob2_a
9 00000004 6800 LDR r0, [r0]
10 00000006 6809 LDR r1, [r1]
11 00000008 0080 LSL r0, r0, #2
12 0000000a 3156 ADD r1, #56h
13 0000000c 4778 BX pc
14 0000000e 46C0 NOP
15 ****************************************************
16 ** Switch to 32-bit instructions to use the **
17 ** 32-bit state long multiply instruction. **
18 ****************************************************
19 00000010 .state32
20
21 00000010 E0845190 UMULL r5, r4, r0, r1
22 00000014 E28FE001 ADD lr, pc, #1
23 00000018 E12FFF1E BX lr
24 ****************************************************
25 ** Continue assembling 16-bit instructions. **
26 ****************************************************
27 0000001c .state16
28
29 0000001c 1A2D SUB r5, r5, r0
30 0000001e D200 BCS $1
31 00000020 3C01 SUB r4, #1
32 00000022 $1
33 00000024 00000000! glob1_a .word glob1
34 00000028 00000000! glob2_a .word glob2

Directives Reference
www.ti.com
138 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Assembler Directives
.state32/.arm Assemble 32-Bit Instructions
Syntax .state32
.arm
Description By default, the assembler begins assembling all instructions in a file as 32-bit
instructions. When you use the -mt assembler option or the .state16 directive to
assemble 16-bit instructions, you can use the .state32 or .arm directive to tell the
assembler to begin assembling all instructions after the .state32/.arm directive as 32-bit
instructions.
When you are writing assembly code, the .arg directive is used to specify ARM UAL
syntax. The .state32 and .arm directives are equivalent since UAL syntax is backward
compatible.
These directives perform an implicit word alignment before any instructions are written to
the section to ensure that all 32-bit instructions are word-aligned. These directives also
reset any local labels defined.
Example In this example, the assembler assembles 32-bit instructions, begins assembling 16-bit
instructions, and returns to assembling 32-bit instructions.
1 .global globs, filter
2 ****************************************************
3 ** Begin assembling 32-bit instructions. **
4 ****************************************************
5 00000000 .state32
6 00000000 E28F4001 ADD r4, pc, #1
7 00000004 E12FFF14 BX r4
8 ****************************************************
9 ** Switch to 16-bit instructions to use **
10 ** less code space. **
11 ****************************************************
12 00000008 .state16
13 00000008 2200 MOV r2, #0
14 0000000a 2300 MOV r3, #0
15 0000000c 4C0B LDR r4, globs_a
16 0000000e 2500 MOV r5, #0
17 00000010 2600 MOV r6, #0
18 00000012 2700 MOV r7, #0
19 00000014 4690 MOV r8, r2
20 00000016 4691 MOV r9, r2
21 00000018 4692 MOV r10, r2
22 0000001a 4693 MOV r11, r2
23 0000001c 4694 MOV r12, r2
24 0000001e 4695 MOV r13, r2
25 00000020 4778 BX pc
26 00000022 46C0 NOP
27 ****************************************************
28 ** Continue assembling 32-bit instructions. **
29 ****************************************************
30 00000024 .state32
31 00000024 E4940004 LDR r0, [r4], #4
32 00000028 E5941000 LDR r1, [r4]
33 0000002c EBFFFFF3! BL filter
34 00000030 E1500001 CMP r0, r1
35 00000034 30804005 ADDCC r4, r0, r5
36 00000038 20464001 SUBCS r4, r6, r1
37 0000003c 00000000! globs_a .word globs

www.ti.com
Directives Reference
139
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Assembler Directives
.string/.cstring Initialize Text
Syntax .string {expr1| "string1"} [, ... , {exprn| "stringn"} ]
.cstring {expr1| "string1"} [, ... , {exprn| "stringn"} ]
Description The .string and .cstring directives place 8-bit characters from a character string into the
current section. The expr or string can be one of the following:
• An expression that the assembler evaluates and treats as an 8-bit signed number.
• A character string enclosed in double quotes. Each character in a string represents a
separate value, and values are stored in consecutive bytes. The entire string must be
enclosed in quotes.
The .cstring directive adds a NUL character needed by C; the .string directive does not
add a NUL character. In addition, .cstring interprets C escapes (\\ \a \b \f \n \r \t \v
\<octal>).
The assembler truncates any values that are greater than eight bits. Operands must fit
on a single source statement line.
If you use a label, it points to the location of the first byte that is initialized.
When you use .string and .cstring in a .struct/.endstruct sequence, the directive only
defines a member's size; it does not initialize memory. For more information, see the
.struct/.endstruct/.tag topic.
Example In this example, 8-bit values are placed into consecutive bytes in the current section.
1 00000000 41 Str_Ptr: .string "ABCD"
00000001 42
00000002 43
00000003 44
2 00000004 41 .string 41h, 42h, 43h, 44h
00000005 42
00000006 43
00000007 44
3 00000008 41 .string "Austin", "Houston", "Dallas"
00000009 75
0000000a 73
0000000b 74
0000000c 69
0000000d 6E
0000000e 48
0000000f 6F
00000010 75
00000011 73
00000012 74
00000013 6F
00000014 6E
00000015 44
00000016 61
00000017 6C
00000018 6C
00000019 61
0000001a 73
4 0000001b 30 .string 36 + 12

Directives Reference
www.ti.com
140 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Assembler Directives
.struct/.endstruct/.tag Declare Structure Type
Syntax [stag].struct [expr]
[mem0]element [expr0]
[mem1]element [expr1]
...
...
...
[memn].tag stag [exprn]
...
...
...
[memN]element [exprN]
[size].endstruct
label .tag stag
Description The .struct directive assigns symbolic offsets to the elements of a data structure
definition. This allows you to group similar data elements together and let the assembler
calculate the element offset. This is similar to a C structure or a Pascal record. The
.struct directive does not allocate memory; it merely creates a symbolic template that can
be used repeatedly.
The .endstruct directive terminates the structure definition.
The .tag directive gives structure characteristics to a label, simplifying the symbolic
representation and providing the ability to define structures that contain other structures.
The .tag directive does not allocate memory. The structure tag (stag) of a .tag directive
must have been previously defined.
Following are descriptions of the parameters used with the .struct, .endstruct, and .tag
directives:
• The stag is the structure's tag. Its value is associated with the beginning of the
structure. If no stag is present, the assembler puts the structure members in the
global symbol table with the value of their absolute offset from the top of the
structure. The stag is optional for .struct, but is required for .tag.
• The expr is an optional expression indicating the beginning offset of the structure.
The default starting point for a structure is 0.
• The memn/N is an optional label for a member of the structure. This label is absolute
and equates to the present offset from the beginning of the structure. A label for a
structure member cannot be declared global.
• The element is one of the following descriptors: .byte, .char, .int, .long, .word,
.double, .half, .short, .string, .float, .field, and .tag. All of these except .tag are typical
directives that initialize memory. Following a .struct directive, these directives
describe the structure element's size. They do not allocate memory. The .tag
directive is a special case because stag must be used (as in the definition of stag).
• The exprn/N is an optional expression for the number of elements described. This
value defaults to 1. A .string element is considered to be one byte in size, and a .field
element is one bit.
• The size is an optional label for the total size of the structure.
Directives that Can Appear in a .struct/.endstruct Sequence
NOTE: The only directives that can appear in a .struct/.endstruct sequence are
element descriptors, conditional assembly directives, and the .align
directive, which aligns the member offsets on word boundaries. Empty
structures are illegal.

www.ti.com
Directives Reference
141
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Assembler Directives
The following examples show various uses of the .struct, .tag, and .endstruct directives.
Example 1 1 REAL_REC .struct ; stag
2 00000000 NOM .int ; member1 = 0
3 00000004 DEN .int ; member2 = 1
4 00000008 REAL_LEN .endstruct ; real_len = 4
5
6 00000000 E59F0004 LDR R0, REAL_A
7 00000004 E5904004 LDR R4, [R0, #REAL_REC.DEN]
8 00000008 E0811004 ADD R1, R1, R4
9 00000000 .bss REAL, REAL_LEN ; allocate mem rec
10 0000000c 00000000- REAL_A .word REAL
11
Example 2 12 CPLX_REC .struct
13 00000000 REALI .tag REAL_REC ; stag
14 00000008 IMAGI .tag REAL_REC ; member1 = 0
15 00000010 CPLX_LEN .endstruct ; cplx_len = 8
16
17 COMPLEX .tag CPLX_REC ; assign structure
18 ; attribute
19 00000010 COMPLEX .space CPLX_LEN ; allocate space
20 00000020 E51F4018 LDR R4, COMPLEX.REALI ; access structure
21 00000024 E0811004 ADD R1, R1, R4
Example 3 1 .struct ; no stag puts mems into
2 ; global symbol table
3 00000000 X .int ; create 3 dim templates
4 00000004 Y .int
5 00000008 Z .int
6 0000000C .endstruct
Example 4 1 BIT_REC .struct ; stag
2 00000000 STREAM .string 64
3 00000040 BIT7 .field 7 ; bit7 = 64
4 00000040 BIT8 .field 9 ; bit9 = 64
5 00000042 BIT10 .field 10 ; bit10 = 64
6 00000044 X_INT .int ; x_int = 68
7 00000048 BIT_LEN .endstruct ; length = 72

Directives Reference
www.ti.com
142 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Assembler Directives
.symdepend/.weak Affect Symbol Linkage and Visibility
Syntax .symdepend dst symbol name[,src symbol name]
.weak symbol name
Description These directives are used to affect symbol linkage and visibility.
The .symdepend directive creates an artificial reference from the section defining src
symbol name to the symbol dst symbol name. This prevents the linker from removing the
section containing dst symbol name if the section defining src symbol name is included
in the output module. If src symbol name is not specified, a reference from the current
section is created.
The .weak directive identifies a symbol that is used in the current module but is defined
in another module. The linker resolves this symbol's definition at link time. Instead of
including a weak symbol in the output file's symbol table by default (as it would for a
global symbol), the linker only includes a weak symbol in the output of a "final" link if the
symbol is required to resolve an otherwise unresolved reference. See Section 2.6.2 for
details about how weak symbols are handled by the linker.
The .weak directive is equivalent to the .ref directive, except that the reference has weak
linkage.
A global symbol is defined in the same manner as any other symbol; that is, it appears
as a label or is defined by the .set, .equ, .bss, or .usect directive. If a global symbol is
defined more than once, the linker issues a multiple-definition error. (The assembler can
provide a similar multiple-definition error for local symbols.) The .weak directive always
creates a symbol table entry for a symbol, whether the module uses the symbol or not;
.symdepend, however, creates an entry only if the module actually uses the symbol.
A symbol can be declared global in either of the following ways:
• If the symbol is not defined in the current module (which includes macro, copy, and
include files), use the .weak directive to tell the assembler that the symbol is defined
in an external module. This prevents the assembler from issuing an unresolved
reference error. At link time, the linker looks for the symbol's definition in other
modules.
• If the symbol is defined in the current module, use the .symdepend directive to
declare that the symbol and its definition can be used externally by other modules.
These types of references are resolved at link time.
For example, use the .weak and .set directives in combination as shown in the following
example, which defines a weak absolute symbol "ext_addr_sym":
.weak ext_addr_sym
ext_addr_sym .set 0x12345678
If you assemble such assembly source and include the resulting object file in the link, the
"ext_addr_sym" in this example is available as a weak absolute symbol in a final link. It
is a candidate for removal if the symbol is not referenced elsewhere in the application.

www.ti.com
Directives Reference
143
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Assembler Directives
.tab Define Tab Size
Syntax .tab size
Description The .tab directive defines the tab size. Tabs encountered in the source input are
translated to size character spaces in the listing. The default tab size is eight spaces.
Example In this example, each of the lines of code following a .tab statement consists of a single
tab character followed by an NOP instruction.
Source file:
; default tab size
NOP
NOP
NOP
.tab 4
NOP
NOP
NOP
.tab 16
NOP
NOP
NOP
Listing file:
1 ; default tab size
2 00000000 E1A00000 NOP
3 00000004 E1A00000 NOP
4 00000008 E1A00000 NOP
5
7 0000000c E1A00000 NOP
8 00000010 E1A00000 NOP
9 00000014 E1A00000 NOP
10
12 00000018 E1A00000 NOP
13 0000001c E1A00000 NOP
14 00000020 E1A00000 NOP

Directives Reference
www.ti.com
144 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Assembler Directives
.text Assemble Into the .text Section
Syntax .text
Description The .text sets .text as the current section. Lines that follow this directive will be
assembled into the .text section, which usually contains executable code. The section
program counter is set to 0 if nothing has yet been assembled into the .text section. If
code has already been assembled into the .text section, the section program counter is
restored to its previous value in the section.
The .text section is the default section. Therefore, at the beginning of an assembly, the
assembler assembles code into the .text section unless you use a .data or .sect directive
to specify a different section.
For more information about sections, see Chapter 2.
Example This example assembles code into the .text and .data sections.
1 ******************************************
2 ** Begin assembling into .data section. **
3 ******************************************
4 00000000 .data
5 00000000 0A .byte 0Ah, 0Bh
00000001 0B
6 ******************************************
7 ** Begin assembling into .text section. **
8 ******************************************
9 00000000 .text
10 00000000 41 START: .string "A","B","C"
00000001 42
00000002 43
11 00000003 58 END: .string "X","Y","Z"
00000004 59
00000005 5A
12 00000008 E3A01003 MOV R1, #END-START
13 0000000c E1A01181 MOV R1, R1, LSL #3
14
15 ******************************************
16 ** Resume assembling into .data section.**
17 ******************************************
18 00000002 .data
19 00000002 0C .byte 0Ch, 0Dh
00000003 0D
20 ******************************************
21 ** Resume assembling into .text section.**
22 ******************************************
23 00000010 .text
24 00000010 51 .string "QUIT"
00000011 55
00000012 49
00000013 54

www.ti.com
Directives Reference
145
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Assembler Directives
.thumb Assemble Thumb or Thumb-2 Instructions (UAL Syntax)
Syntax .thumb
Description You can use the .thumb directive to tell the assembler to begin assembling all
instructions after the .thumb directive using Thumb (32-bit) or Thumb-2 (16-bit or 32-bit)
UAL syntax. The assembler determines whether instructions are 16- or 32-bit
instructions based on the syntax structure of the code.
The .thumb directive performs an implicit halfword alignment before any instructions are
written to the section to ensure that all Thumb/Thumb-2 instructions are halfword
aligned. These directives also reset any local labels defined.
Example In this example, the assembler assembles 16-bit instructions, begins assembling 32-bit
instructions, and returns to assembling 16-bit instructions.
1 .global glob1, glob2
2 ****************************************************
3 ** Begin assembling Thumb instructions. **
4 ****************************************************
5 00000000 .thumb
6
7 00000000 4808 LDR r0, glob1_a
8 00000002 4909 LDR r1, glob2_a
9 00000004 6800 LDR r0, [r0]
10 00000006 6809 LDR r1, [r1]
11 00000008 0080 LSLS r0, r0, #2
12 0000000a 3156 ADDS r1, #56h
13 0000000c 4778 BX pc
14 0000000e 46C0 NOP
15 ****************************************************
16 ** Switch to ARM mode to use the long **
17 ** multiply instruction. **
18 ****************************************************
19 00000010 .arm
20
21 00000010 E0845190 UMULL r5, r4, r0, r1
22 00000014 E28FE001 ADD lr, pc, #1
23 00000018 E12FFF1E BX lr
24 ****************************************************
25 ** Continue assembling Thumb instructions. **
26 ****************************************************
27 0000001c .thumb
28
29 0000001c 1A2D SUBS r5, r5, r0
30 0000001e D201 BCS $1
31 00000020 3C01 SUBS r4, #1
32 00000024 $1
33 00000024 00000000! glob1_a .word glob1
34 00000028 00000000! glob2_a .word glob2

Directives Reference
www.ti.com
146 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Assembler Directives
.title Define Page Title
Syntax .title "string"
Description The .title directive supplies a title that is printed in the heading on each listing page. The
source statement itself is not printed, but the line counter is incremented.
The string is a quote-enclosed title of up to 64 characters. If you supply more than 64
characters, the assembler truncates the string and issues a warning:
*** WARNING! line x: W0001: String is too long - will be truncated
The assembler prints the title on the page that follows the directive and on subsequent
pages until another .title directive is processed. If you want a title on the first page, the
first source statement must contain a .title directive.
Example In this example, one title is printed on the first page and a different title is printed on
succeeding pages.
Source file:
.title "**** Fast Fourier Transforms ****"
; .
; .
; .
.title "**** Floating-Point Routines ****"
.page
Listing file:
TMS470R1x Assembler Version x.xx Day Time Year
Copyright (c) 1996-2011 Texas Instruments Incorporated
**** Fast Fourier Transforms **** PAGE 1
2 ; .
3 ; .
4 ; .
TMS470R1x Assembler Version x.xx Day Time Year
Copyright (c) 1996-2011 Texas Instruments Incorporated
**** Floating-Point Routines **** PAGE 2
No Errors, No Warnings
www.ti.com
Directives Reference
147
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Assembler Directives
.union/.endunion/.tag Declare Union Type
Syntax [stag].union [expr]
[mem0]element [expr0]
[mem1]element [expr1]
...
...
...
[memn].tag stag [exprn]
...
...
...
[memN]element [exprN]
[size].endunion
label .tag stag
Description The .union directive assigns symbolic offsets to the elements of alternate data structure
definitions to be allocated in the same memory space. This enables you to define
several alternate structures and then let the assembler calculate the element offset. This
is similar to a C union. The .union directive does not allocate any memory; it merely
creates a symbolic template that can be used repeatedly.
A .struct definition can contain a .union definition, and .structs and .unions can be
nested.
The .endunion directive terminates the union definition.
The .tag directive gives structure or union characteristics to a label, simplifying the
symbolic representation and providing the ability to define structures or unions that
contain other structures or unions. The .tag directive does not allocate memory. The
structure or union tag of a .tag directive must have been previously defined.
Following are descriptions of the parameters used with the .struct, .endstruct, and .tag
directives:
• The utag is the union's tag. is the union's tag. Its value is associated with the
beginning of the union. If no utag is present, the assembler puts the union members
in the global symbol table with the value of their absolute offset from the top of the
union. In this case, each member must have a unique name.
• The expr is an optional expression indicating the beginning offset of the union.
Unions default to start at 0. This parameter can only be used with a top-level union. It
cannot be used when defining a nested union.
• The memn/N is an optional label for a member of the union. This label is absolute and
equates to the present offset from the beginning of the union. A label for a union
member cannot be declared global.
• The element is one of the following descriptors: .byte, .char, .int, .long, .word,
.double, .half, .short, .string, .float, and .field. An element can also be a complete
declaration of a nested structure or union, or a structure or union declared by its tag.
Following a .union directive, these directives describe the element's size. They do not
allocate memory.
• The exprn/N is an optional expression for the number of elements described. This
value defaults to 1. A .string element is considered to be one byte in size, and a .field
element is one bit.
• The size is an optional label for the total size of the union.

Directives Reference
www.ti.com
148 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Assembler Directives
Directives that Can Appear in a .union/.endunion Sequence
NOTE: The only directives that can appear in a .union/.endunion sequence are
element descriptors, structure and union tags, and conditional assembly
directives. Empty structures are illegal.
These examples show unions with and without tags.
Example 1 1 .global employid
2 xample .union ; utag
3 0000 ival .word ; member1 = int
4 0000 fval .float ; member2 = float
5 0000 sval .string ; member3 = string
6 0002 real_len .endunion ; real_len = 2
7
8 000000 .bss employid, real_len ;allocate memory
9
10 employid .tag xample ; name an instance
11 000000 0000- ADD employid.fval, A ; access union element
Example 2 1
2 ; utag
3 0000 x .long ; member1 = long
4 0000 y .float ; member2 = float
5 0000 z .word ; member3 = word
6 0002 size_u .endunion ; real_len = 2
7

www.ti.com
Directives Reference
149
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Assembler Directives
.usect Reserve Uninitialized Space
Syntax symbol .usect "section name", size in bytes[,alignment[,bank offset] ]
Description The .usect directive reserves space for variables in an uninitialized, named section. This
directive is similar to the .bss directive; both simply reserve space for data and that
space has no contents. However, .usect defines additional sections that can be placed
anywhere in memory, independently of the .bss section.
• The symbol points to the first location reserved by this invocation of the .usect
directive. The symbol corresponds to the name of the variable for which you are
reserving space.
• The section name must be enclosed in double quotes. This parameter names the
uninitialized section. A section name can contain a subsection name in the form
section name :subsection name.
• The size in bytes is an expression that defines the number of bytes that are reserved
in section name.
• The alignment is an optional parameter that ensures that the space allocated to the
symbol occurs on the specified boundary. The boundary can be set to any power of
2.
• The bank offset is an optional parameter that ensures that the space allocated to the
symbol occurs on a specific memory bank boundary. The bank offset value measures
the number of bytes to offset from the alignment specified before assigning the
symbol to that location.
Initialized sections directives (.text, .data, and .sect) tell the assembler to pause
assembling into the current section and begin assembling into another section. A .usect
or .bss directive encountered in the current section is simply assembled, and assembly
continues in the current section.
Variables that can be located contiguously in memory can be defined in the same
specified section; to do so, repeat the .usect directive with the same section name and
the subsequent symbol (variable name).
For more information about sections, see Chapter 2.
Example This example uses the .usect directive to define two uninitialized, named sections, var1
and var2. The symbol ptr points to the first byte reserved in the var1 section. The symbol
array points to the first byte in a block of 100 bytes reserved in var1, and dflag points to
the first byte in a block of 50 bytes in var1. The symbol vec points to the first byte
reserved in the var2 section.
2bytes
100bytes
50bytes
array
ptr
dflag
Sectionvar1
152bytesreserved
invar1
100bytes
ptr
Sectionvar2
100bytesreserved
invar2
Directives Reference
www.ti.com
150 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Assembler Directives
Figure 5-8 shows how this example reserves space in two uninitialized sections, var1
and var2.
1 ******************************************************
2 ** Assemble into the .text section. **
3 ******************************************************
4 00000000 .text
5 00000000 E3A01003 MOV R1, #03h
6
7 ******************************************************
8 ** Reserve 1 byte in the var1 section. **
9 ******************************************************
10 00000000 ptr .usect "var1", 1
11
12 ******************************************************
13 ** Reserve 100 bytes in the var1 section. **
14 ******************************************************
15 00000001 array .usect "var1", 100
16
17 00000004 E281001F ADD R0, R1, #037 ; Still in .text
18
19 ******************************************************
20 ** Reserve 50 bytes in the var1 section. **
21 ******************************************************
22 00000065 dflag .usect "var1", 50
23
24 00000008 E2812064 ADD R2, R1, #dflag - array ; Still in .text
25
26 ******************************************************
27 ** Reserve 100 bytes in the var2 section. **
28 ******************************************************
29 00000000 vec .usect "var2", 100
30
31 0000000c E0824000 ADD R4, R2, R0 ; Still in .text
32 ******************************************************
33 ** Declare a .usect symbol to be external. **
34 ******************************************************
35 .global array
Figure 5-8. The .usect Directive

www.ti.com
Directives Reference
151
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Assembler Directives
.unasg/.undefine Turn Off Substitution Symbol
Syntax .unasg symbol
.undefine symbol
Description The .unasg and .undefine directives remove the definition of a substitution symbol
created using .asg or .define. The named symbol will removed from the substitution
symbol table from the point of the .undefine or .unasg to the end of the assembly file.
See Section 4.8.8 for more information on substitution symbols.
These directives can be used to remove from the assembly environment any C/C++
macros that may cause a problem. See Chapter 13 for more information about using
C/C++ headers in assembly source.
.var Use Substitution Symbols as Local Variables
Syntax .var sym1[,sym2,... ,symn]
Description The .var directive allows you to use substitution symbols as local variables within a
macro. With this directive, you can define up to 32 local macro substitution symbols
(including parameters) per macro.
The .var directive creates temporary substitution symbols with the initial value of the null
string. These symbols are not passed in as parameters, and they are lost after
expansion.
See Section 4.8.8 for more information on substitution symbols .See Chapter 6 for
information on macros.
152 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Macro Language Description
Chapter 6
SPNU118U–January 2018
Macro Language Description
The ARM device assembler supports a macro language that enables you to create your own instructions.
This is especially useful when a program executes a particular task several times. The macro language
lets you:
• Define your own macros and redefine existing macros
• Simplify long or complicated assembly code
• Access macro libraries created with the archiver
• Define conditional and repeatable blocks within a macro
• Manipulate strings within a macro
• Control expansion listing
Topic ........................................................................................................................... Page
6.1 Using Macros................................................................................................... 153
6.2 Defining Macros ............................................................................................... 153
6.3 Macro Parameters/Substitution Symbols............................................................. 155
6.4 Macro Libraries ................................................................................................ 161
6.5 Using Conditional Assembly in Macros............................................................... 162
6.6 Using Labels in Macros..................................................................................... 164
6.7 Producing Messages in Macros.......................................................................... 165
6.8 Using Directives to Format the Output Listing ..................................................... 166
6.9 Using Recursive and Nested Macros .................................................................. 167
6.10 Macro Directives Summary................................................................................ 168
www.ti.com
Using Macros
153
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Macro Language Description
6.1 Using Macros
Programs often contain routines that are executed several times. Instead of repeating the source
statements for a routine, you can define the routine as a macro, then call the macro in the places where
you would normally repeat the routine. This simplifies and shortens your source program.
If you want to call a macro several times but with different data each time, you can assign parameters
within a macro. This enables you to pass different information to the macro each time you call it. The
macro language supports a special symbol called a substitution symbol, which is used for macro
parameters. See Section 6.3 for more information.
Using a macro is a 3-step process.
Step 1. Define the macro. You must define macros before you can use them in your program. There
are two methods for defining macros:
a. Macros can be defined at the beginning of a source file or in a copy/include file. See
Section 6.2,Defining Macros, for more information.
b. Macros can also be defined in a macro library. A macro library is a collection of files in
archive format created by the archiver. Each member of the archive file (macro library)
may contain one macro definition corresponding to the member name. You can access a
macro library by using the .mlib directive. For more information, see Section 6.4.
Step 2. Call the macro. After you have defined a macro, call it by using the macro name as a
mnemonic in the source program. This is referred to as a macro call.
Step 3. Expand the macro. The assembler expands your macros when the source program calls
them. During expansion, the assembler passes arguments by variable to the macro
parameters, replaces the macro call statement with the macro definition, then assembles the
source code. By default, the macro expansions are printed in the listing file. You can turn off
expansion listing by using the .mnolist directive. For more information, see Section 6.8.
When the assembler encounters a macro definition, it places the macro name in the opcode table. This
redefines any previously defined macro, library entry, directive, or instruction mnemonic that has the same
name as the macro. This allows you to expand the functions of directives and instructions, as well as to
add new instructions.
6.2 Defining Macros
You can define a macro anywhere in your program, but you must define the macro before you can use it.
Macros can be defined at the beginning of a source file or in a .copy/.include file (see Copy Source File);
they can also be defined in a macro library. For more information about macro libraries, see Section 6.4.
Macro definitions can be nested, and they can call other macros, but all elements of the macro must be
defined in the same file. Nested macros are discussed in Section 6.9.
A macro definition is a series of source statements in the following format:
macname .macro [parameter1] [,... ,parametern]
model statements or macro directives
[.mexit]
.endm
macname names the macro. You must place the name in the source statement's label field.
Only the first 128 characters of a macro name are significant. The assembler
places the macro name in the internal opcode table, replacing any instruction or
previous macro definition with the same name.
.macro is the directive that identifies the source statement as the first line of a macro
definition. You must place .macro in the opcode field.
parameter 1,
parameter n
are optional substitution symbols that appear as operands for the .macro directive.
Parameters are discussed in Section 6.3.
Defining Macros
www.ti.com
154 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Macro Language Description
model statements are instructions or assembler directives that are executed each time the macro is
called.
macro directives are used to control macro expansion.
.mexit is a directive that functions as a goto .endm. The .mexit directive is useful when
error testing confirms that macro expansion fails and completing the rest of the
macro is unnecessary.
.endm is the directive that terminates the macro definition.
If you want to include comments with your macro definition but do not want those comments to appear in
the macro expansion, use an exclamation point to precede your comments. If you do want your comments
to appear in the macro expansion, use an asterisk or semicolon. See Section 6.7 for more information
about macro comments.
Example 6-1 shows the definition, call, and expansion of a macro.
Example 6
‑‑
1. Macro Definition, Call, and Expansion
Macro definition: The following code defines a macro, add3, with four parameters:
1 *
2
3 * add3
4 *
5 * ADDRP = P1 + P2 + P3
6
7 add3 .macro P1, P2, P3, ADDRP
8
9 ADD ADDRP, P1, P2
10 ADD ADDRP, ADDRP, P3
11 .endm
Macro call: The following code calls the add3 macro with four arguments:
12
13 00000000 add3 R1, R2, R3, R0
Macro expansion: The following code shows the substitution of the macro definition for the macro call. The
assembler substitutes R1, R2, R3, and R0 for the P1, P2, P3, and ADDRP parameters of add3.
1
1 00000000 E0810002 ADD R0, R1, R2
1 00000004 E0800003 ADD R0, R0, R3
www.ti.com
Macro Parameters/Substitution Symbols
155
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Macro Language Description
6.3 Macro Parameters/Substitution Symbols
If you want to call a macro several times with different data each time, you can assign parameters within
the macro. The macro language supports a special symbol, called a substitution symbol, which is used for
macro parameters.
Macro parameters are substitution symbols that represent a character string. These symbols can also be
used outside of macros to equate a character string to a symbol name (see Section 4.8.8).
Valid substitution symbols can be up to 128 characters long and must begin with a letter. The remainder
of the symbol can be a combination of alphanumeric characters, underscores, and dollar signs.
Substitution symbols used as macro parameters are local to the macro they are defined in. You can define
up to 32 local substitution symbols (including substitution symbols defined with the .var directive) per
macro. For more information about the .var directive, see Section 6.3.6.
During macro expansion, the assembler passes arguments by variable to the macro parameters. The
character-string equivalent of each argument is assigned to the corresponding parameter. Parameters
without corresponding arguments are set to the null string. If the number of arguments exceeds the
number of parameters, the last parameter is assigned the character-string equivalent of all remaining
arguments.
If you pass a list of arguments to one parameter or if you pass a comma or semicolon to a parameter, you
must surround these terms with quotation marks.
At assembly time, the assembler replaces the macro parameter/substitution symbol with its corresponding
character string, then translates the source code into object code.
Example 6-2 shows the expansion of a macro with varying numbers of arguments.
Example 6
‑‑
2. Calling a Macro With Varying Numbers of Arguments
Macro definition:
Parms .macro a,b,c
; a = :a:
; b = :b:
; c = :c:
.endm
Calling the macro:
Parms 100,label Parms 100,label,x,y
; a = 100 ; a = 100
; b = label ; b = label
; c = "" ; c = x,y
Parms 100, , x Parms "100,200,300",x,y
; a = 100 ; a = 100,200,300
; b = "" ; b = x
; c = x ; c = y
Parms """string""",x,y
; a = "string"
; b = x
; c = y
Macro Parameters/Substitution Symbols
www.ti.com
156 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Macro Language Description
6.3.1 Directives That Define Substitution Symbols
You can manipulate substitution symbols with the .asg and .eval directives.
• The .asg directive assigns a character string to a substitution symbol.
For the .asg directive, the quotation marks are optional. If there are no quotation marks, the assembler
reads characters up to the first comma and removes leading and trailing blanks. In either case, a
character string is read and assigned to the substitution symbol. The syntax of the .asg directive is:
.asg["]character string["], substitution symbol
Example 6-3 shows character strings being assigned to substitution symbols.
Example 6-3. The .asg Directive
.asg R13, stack_ptr ; stack pointer
• The .eval directive performs arithmetic on numeric substitution symbols.
The .eval directive evaluates the expression and assigns the string value of the result to the
substitution symbol. If the expression is not well defined, the assembler generates an error and
assigns the null string to the symbol. The syntax of the .eval directive is:
.eval well-defined expression ,substitution symbol
Example 6-4 shows arithmetic being performed on substitution symbols.
Example 6-4. The .eval Directive
.asg 1,counter
.loop 100
.word counter
.eval counter + 1,counter
.endloop
In Example 6-4, the .asg directive could be replaced with the .eval directive (.eval 1, counter) without
changing the output. In simple cases like this, you can use .eval and .asg interchangeably. However, you
must use .eval if you want to calculate a value from an expression. While .asg only assigns a character
string to a substitution symbol, .eval evaluates an expression and then assigns the character string
equivalent to a substitution symbol.
See Assign a Substitution Symbol for more information about the .asg and .eval assembler directives.
www.ti.com
Macro Parameters/Substitution Symbols
157
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Macro Language Description
6.3.2 Built-In Substitution Symbol Functions
The following built-in substitution symbol functions enable you to make decisions on the basis of the string
value of substitution symbols. These functions always return a value, and they can be used in
expressions. Built-in substitution symbol functions are especially useful in conditional assembly
expressions. Parameters of these functions are substitution symbols or character-string constants.
In the function definitions shown in Table 6-1,aand bare parameters that represent substitution symbols
or character-string constants. The term string refers to the string value of the parameter. The symbol ch
represents a character constant.
(1) For more information about predefined register names, see Section 4.8.6.
Table 6-1. Substitution Symbol Functions and Return Values
Function Return Value
$$symlen (a) Length of string a
$$symcmp (a,b) < 0 if a<b; 0 if a=b; > 0 if a>b
$$firstch (a,ch) Index of the first occurrence of character constant ch in string a
$$lastch (a,ch) Index of the last occurrence of character constant ch in string a
$$isdefed (a) 1 if string ais defined in the symbol table
0 if string ais not defined in the symbol table
$$ismember (a,b) Top member of list bis assigned to string a
0 if bis a null string
$$iscons (a) 1 if string ais a binary constant
2 if string ais an octal constant
3 if string ais a hexadecimal constant
4 if string ais a character constant
5 if string ais a decimal constant
$$isname (a) 1 if string ais a valid symbol name
0 if string ais not a valid symbol name
$$isreg (a) (1) 1 if string ais a valid predefined register name
0 if string ais not a valid predefined register name
Example 6-5 shows built-in substitution symbol functions.
Example 6
‑‑
5. Using Built-In Substitution Symbol Functions
.asg label, ADDR ; ADDR = label
.if ($$symcmp(ADDR, "label") = 0) ; evaluates to true
LDR R4, ADDR
.endif
.asg "x,y,z" , list ; list = x,y,z
.if ($$ismember(ADDR,list)) ; ADDR = x, list = y,z
SUB R4, R4, #4 ; sub x
.endif
Macro Parameters/Substitution Symbols
www.ti.com
158 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Macro Language Description
6.3.3 Recursive Substitution Symbols
When the assembler encounters a substitution symbol, it attempts to substitute the corresponding
character string. If that string is also a substitution symbol, the assembler performs substitution again. The
assembler continues doing this until it encounters a token that is not a substitution symbol or until it
encounters a substitution symbol that it has already encountered during this evaluation.
In Example 6-6, the x is substituted for z; z is substituted for y; and y is substituted for x. The assembler
recognizes this as infinite recursion and ceases substitution.
Example 6
‑‑
6. Recursive Substitution
.asg "x",z ; declare z and assign z = "x"
.asg "z",y ; declare y and assign y = "z"
.asg "y",x ; declare x and assign x = "y"
LDR R0, x
* LDR R0, x ; recursive expansion
6.3.4 Forced Substitution
In some cases, substitution symbols are not recognizable to the assembler. The forced substitution
operator, which is a set of colons surrounding the symbol, enables you to force the substitution of a
symbol's character string. Simply enclose a symbol with colons to force the substitution. Do not include
any spaces between the colons and the symbol. The syntax for the forced substitution operator is:
:symbol:
The assembler expands substitution symbols surrounded by colons before expanding other substitution
symbols.
You can use the forced substitution operator only inside macros, and you cannot nest a forced substitution
operator within another forced substitution operator.
Example 6-7 shows how the forced substitution operator is used.

www.ti.com
Macro Parameters/Substitution Symbols
159
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Macro Language Description
Example 6-7. Using the Forced Substitution Operator
1 force .macro
2 .asg 0,x
3 .loop 8
4 AUX:x: .set x
5 .eval x+1,x
6 .endloop
7 .endm
8
9 00000000 force
1 .asg 0,x
1 .loop 8
1 AUX:x: .set x
1 .eval x+1,x
1 .endloop
2 00000000 AUX0 .set 0
2 .eval 0+1,x
2 00000001 AUX1 .set 1
2 .eval 1+1,x
2 00000002 AUX2 .set 2
2 .eval 2+1,x
2 00000003 AUX3 .set 3
2 .eval 3+1,x
2 00000004 AUX4 .set 4
2 .eval 4+1,x
2 00000005 AUX5 .set 5
2 .eval 5+1,x
2 00000006 AUX6 .set 6
2 .eval 6+1,x
2 00000007 AUX7 .set 7
2 .eval 7+1,x
6.3.5 Accessing Individual Characters of Subscripted Substitution Symbols
In a macro, you can access the individual characters (substrings) of a substitution symbol with subscripted
substitution symbols. You must use the forced substitution operator for clarity.
You can access substrings in two ways:
• :symbol (well-defined expression):
This method of subscripting evaluates to a character string with one character.
• :symbol (well-defined expression 1,well-defined expression 2):
In this method, expression1represents the substring's starting position, and expression2represents the
substring's length. You can specify exactly where to begin subscripting and the exact length of the
resulting character string. The index of substring characters begins with 1, not 0.
Example 6-8 and Example 6-9 show built-in substitution symbol functions used with subscripted
substitution symbols. In Example 6-8, subscripted substitution symbols redefine the ADD instruction so
that it handles short immediate values. In Example 6-9, the subscripted substitution symbol is used to find
a substring strg1 beginning at position start in the string strg2. The position of the substring strg1 is
assigned to the substitution symbol pos.
Macro Parameters/Substitution Symbols
www.ti.com
160 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Macro Language Description
Example 6
‑‑
8. Using Subscripted Substitution Symbols to Redefine an Instruction
ADDX .macro dst, imm
.var TMP
.asg :imm(1):, TMP
.if $$symcmp(TMP,"#") = 0
ADD dst, dst, imm
.else
.emsg "Bad Macro Parameter"
.endif
.endm
ADDX R9, #100 ; macro call
ADDX R9, R8 ; macro call
Example 6
‑‑
9. Using Subscripted Substitution Symbols to Find Substrings
substr .macro start,strg1,strg2,pos
.var LEN1,LEN2,I,TMP
.if $$symlen(start) = 0
.eval 1,start
.endif
.eval 0,pos
.eval 1,i
.eval $$symlen(strg1),LEN1
.eval $$symlen(strg2),LEN2
.loop
.break I = (LEN2 - LEN1 + 1)
.asg ":strg2(I,LEN1):",TMP
.eval i,pos
.break
.else
.eval I + 1,i
.endif
.endloop
.endm
.asg 0,pos
.asg "ar1 ar2 ar3 ar4",regs
substr 1,"ar2",regs,pos
.word pos
6.3.6 Substitution Symbols as Local Variables in Macros
If you want to use substitution symbols as local variables within a macro, you can use the .var directive to
define up to 32 local macro substitution symbols (including parameters) per macro. The .var directive
creates temporary substitution symbols with the initial value of the null string. These symbols are not
passed in as parameters, and they are lost after expansion.
.var sym1[,sym2,... ,symn]
The .var directive is used in Example 6-8 and Example 6-9.
www.ti.com
Macro Libraries
161
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Macro Language Description
6.4 Macro Libraries
One way to define macros is by creating a macro library. A macro library is a collection of files that contain
macro definitions. You must use the archiver to collect these files, or members, into a single file (called an
archive). Each member of a macro library contains one macro definition. The files in a macro library must
be unassembled source files. The macro name and the member name must be the same, and the macro
filename's extension must be .asm. For example:
Macro Name Filename in Macro Library
simple simple.asm
add3 add3.asm
You can access the macro library by using the .mlib assembler directive (described in Define Macro
Library). The syntax is:
.mlib filename
When the assembler encounters the .mlib directive, it opens the library named by filename and creates a
table of the library's contents. The assembler enters the names of the individual members within the library
into the opcode tables as library entries; this redefines any existing opcodes or macros that have the same
name. If one of these macros is called, the assembler extracts the entry from the library and loads it into
the macro table.
The assembler expands the library entry the same way it expands other macros. See Section 6.1 for how
the assembler expands macros. You can control the listing of library entry expansions with the .mlist
directive. For information about the .mlist directive, see Section 6.8 and Start/Stop Macro Expansion
Listing. Only macros that are actually called from the library are extracted, and they are extracted only
once.
You can use the archiver to create a macro library by including the desired files in an archive. A macro
library is no different from any other archive, except that the assembler expects the macro library to
contain macro definitions. The assembler expects only macro definitions in a macro library; putting object
code or miscellaneous source files into the library may produce undesirable results. For information about
creating a macro library archive, see Section 7.1.
Using Conditional Assembly in Macros
www.ti.com
162 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Macro Language Description
6.5 Using Conditional Assembly in Macros
The conditional assembly directives are .if/.elseif/.else/.endif and .loop/ .break/.endloop. They can be
nested within each other up to 32 levels deep. The format of a conditional block is:
.if well-defined expression
[.elseif well-defined expression]
[.else]
.endif
The .elseif and .else directives are optional in conditional assembly. The .elseif directive can be used
more than once within a conditional assembly code block. When .elseif and .else are omitted and when
the .if expression is false (0), the assembler continues to the code following the .endif directive. See
Assemble Conditional Blocks for more information on the .if/ .elseif/.else/.endif directives.
The .loop/.break/.endloop directives enable you to assemble a code block repeatedly. The format of a
repeatable block is:
.loop [well-defined expression]
[.break [well-defined expression]]
.endloop
The .loop directive's optional well-defined expression evaluates to the loop count (the number of loops to
be performed). If the expression is omitted, the loop count defaults to 1024 unless the assembler
encounters a .break directive with an expression that is true (nonzero). See Assemble Conditional Blocks
Repeatedly for more information on the .loop/.break/.endloop directives.
The .break directive and its expression are optional in repetitive assembly. If the expression evaluates to
false, the loop continues. The assembler breaks the loop when the .break expression evaluates to true or
when the .break expression is omitted. When the loop is broken, the assembler continues with the code
after the .endloop directive. For more information, see Section 5.8.
Example 6-10,Example 6-11, and Example 6-12 show the .loop/.break/ .endloop directives, properly
nested conditional assembly directives, and built-in substitution symbol functions used in a conditional
assembly code block.
Example 6
‑‑
10. The .loop/.break/.endloop Directives
.asg 1,x
.loop
.break (x == 10) ; if x == 10, quit loop/break with expression
.eval x+1,x
.endloop
www.ti.com
Using Conditional Assembly in Macros
163
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Macro Language Description
Example 6
‑‑
11. Nested Conditional Assembly Directives
.asg 1,x
.loop
.if (x == 10) ; if x == 10, quit loop
.break (x == 10) ; force break
.endif
.eval x+1,x
.endloop
Example 6
‑‑
12. Built-In Substitution Symbol Functions in a Conditional Assembly Code Block
.fcnolist
*
*Double Add or Subtract
*
DBL .macro ABC, dsth, dstl, srch, srcl ; add or subtract double
.if $$symcmp(ABC,"+")
ADDS dstl, dstl, srcl ; add double
ADC dsth, dsth, srch
.elseif $$symcmp(ABC,"-")
SUBS dstl, dstl, srcl ; subtract double
SUBS dsth, dsth, srch
.else
.emsg "Incorrect Operator Parameter"
.endif
.endm
*Macro Call
DBL -, R4, R5, R6, R7
Using Labels in Macros
www.ti.com
164 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Macro Language Description
6.6 Using Labels in Macros
All labels in an assembly language program must be unique. This includes labels in macros. If a macro is
expanded more than once, its labels are defined more than once. Defining a label more than once is
illegal. The macro language provides a method of defining labels in macros so that the labels are unique.
Simply follow each label with a question mark, and the assembler replaces the question mark with a
period followed by a unique number. When the macro is expanded, you do not see the unique number in
the listing file. Your label appears with the question mark as it did in the macro definition. You cannot
declare this label as global. See Section 4.8.3 for more about labels.
The syntax for a unique label is:
label ?
Example 6-13 shows unique label generation in a macro. The maximum label length is shortened to allow
for the unique suffix. For example, if the macro is expanded fewer than 10 times, the maximum label
length is 126 characters. If the macro is expanded from 10 to 99 times, the maximum label length is 125.
The label with its unique suffix is shown in the cross-listing file. To obtain a cross-listing file, invoke the
assembler with the --cross_reference option (see Section 4.3).
Example 6
‑‑
13. Unique Labels in a Macro
1 ; define macro to find minimum
2 MIN .macro dst, src1, src2
3 CMP src1, src2
4 BCC m1?
5 MOV dst, src1
6 B m2?
7
8 m1? MOV dst, src2
9 m2?
10 .endm
11
12 ; call macro
13 00000000 .state16
14 00000000 MIN r4, r1, r2
1 00000000 4291 CMP r1, r2
1 00000002 D301 BCC m1?
1 00000004 1C0C MOV r4, r1
1 00000006 E000 B m2?
1
1 00000008 1C14 m1? MOV r4, r2
1 0000000a m2?

www.ti.com
Producing Messages in Macros
165
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Macro Language Description
6.7 Producing Messages in Macros
The macro language supports three directives that enable you to define your own assembly-time error and
warning messages. These directives are especially useful when you want to create messages specific to
your needs. The last line of the listing file shows the error and warning counts. These counts alert you to
problems in your code and are especially useful during debugging.
.emsg sends error messages to the listing file. The .emsg directive generates errors in the same
manner as the assembler, incrementing the error count and preventing the assembler from
producing an object file.
.mmsg sends assembly-time messages to the listing file. The .mmsg directive functions in the same
manner as the .emsg directive but does not set the error count or prevent the creation of an
object file.
.wmsg sends warning messages to the listing file. The .wmsg directive functions in the same
manner as the .emsg directive, but it increments the warning count and does not prevent the
generation of an object file.
Macro comments are comments that appear in the definition of the macro but do not show up in the
expansion of the macro. An exclamation point in column 1 identifies a macro comment. If you want your
comments to appear in the macro expansion, precede your comment with an asterisk or semicolon.
Example 6-14 shows user messages in macros and macro comments that do not appear in the macro
expansion.
For more information about the .emsg, .mmsg, and .wmsg assembler directives, see Define Messages.
Example 6
‑‑
14. Producing Messages in a Macro
1 MUL_I .macro x,y
2 .if ($$symlen(x) ==0)
3 .emsg "ERROR -- Missing Parameter"
4 .mexit
5 .elseif ($$symlen(y) == 0)
6 .emsg "ERROR -- Missing Parameter"
7 .mexit
8 .else
9 MOV R1, x
10 MOV R2, y
11 MUL R0, R1, R2
12 .endif
13 .endm
14
15 00000000 MUL_I #50, #51
1 .if ($$symlen(x) ==0)
1 .emsg "ERROR -- Missing Parameter"
1 .mexit
1 .elseif ($$symlen(y) == 0)
1 .emsg "ERROR -- Missing Parameter"
1 .mexit
1 .else
1 00000000 E3A01032 MOV R1, #50
1 00000004 E3A02033 MOV R2, #51
1 00000008 E0000291 MUL R0, R1, R2
1 .endif
16
17 0000000c MUL_I
1 .if ($$symlen(x) ==0)
1 .emsg "ERROR -- Missing Parameter"
***** USER ERROR ***** - : ERROR -- Missing Parameter
1 .mexit
1 Error, No Warnings

Using Directives to Format the Output Listing
www.ti.com
166 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Macro Language Description
6.8 Using Directives to Format the Output Listing
Macros, substitution symbols, and conditional assembly directives may hide information. You may need to
see this hidden information, so the macro language supports an expanded listing capability.
By default, the assembler shows macro expansions and false conditional blocks in the list output file. You
may want to turn this listing off or on within your listing file. Four sets of directives enable you to control
the listing of this information:
•Macro and loop expansion listing
.mlist expands macros and .loop/.endloop blocks. The .mlist directive prints all code
encountered in those blocks.
.mnolist suppresses the listing of macro expansions and .loop/ .endloop blocks.
For macro and loop expansion listing, .mlist is the default.
•False conditional block listing
.fclist causes the assembler to include in the listing file all conditional blocks that do not
generate code (false conditional blocks). Conditional blocks appear in the listing
exactly as they appear in the source code.
.fcnolist suppresses the listing of false conditional blocks. Only the code in conditional blocks
that actually assemble appears in the listing. The .if, .elseif, .else, and .endif directives
do not appear in the listing.
For false conditional block listing, .fclist is the default.
•Substitution symbol expansion listing
.sslist expands substitution symbols in the listing. This is useful for debugging the expansion
of substitution symbols. The expanded line appears below the actual source line.
.ssnolist turns off substitution symbol expansion in the listing.
For substitution symbol expansion listing, .ssnolist is the default.
•Directive listing
.drlist causes the assembler to print to the listing file all directive lines.
.drnolist suppresses the printing of certain directives in the listing file. These directives are
.asg, .eval, .var, .sslist, .mlist, .fclist, .ssnolist, .mnolist, .fcnolist, .emsg, .wmsg,
.mmsg, .length, .width, and .break.
For directive listing, .drlist is the default.
www.ti.com
Using Recursive and Nested Macros
167
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Macro Language Description
6.9 Using Recursive and Nested Macros
The macro language supports recursive and nested macro calls. This means that you can call other
macros in a macro definition. You can nest macros up to 32 levels deep. When you use recursive macros,
you call a macro from its own definition (the macro calls itself).
When you create recursive or nested macros, you should pay close attention to the arguments that you
pass to macro parameters because the assembler uses dynamic scoping for parameters. This means that
the called macro uses the environment of the macro from which it was called.
Example 6-15 shows nested macros. The y in the in_block macro hides the y in the out_block macro. The
x and z from the out_block macro, however, are accessible to the in_block macro.
Example 6
‑‑
15. Using Nested Macros
in_block .macro y,a
. ; visible parameters are y,a and x,z from the calling macro
.endm
out_block .macro x,y,z
. ; visible parameters are x,y,z
.
in_block x,y ; macro call with x and y as arguments
.
.
.endm
out_block ; macro call
Example 6-16 shows recursive and fact macros. The fact macro produces assembly code necessary to
calculate the factorial of n, where n is an immediate value. The result is placed in data memory address
loc. The fact macro accomplishes this by calling fact1, which calls itself recursively.
Example 6
‑‑
16. Using Recursive Macros
fact .macro N, loc ; N is an integer constant. Register loc address = N!
.if N < 2 ; 0! = 1! = 1
MOV loc, #1
.else
MOV loc, #N ; N >= 2 so, store N in loc.
.eval -1, N ; Decrement N, and do the factorial of N - 1.
fact1 ; Call fact with current environment.
.endm
fact1 .macro
.if N > 1
MOV R0, #N ; N > 1 so, store N in R0.
MUL loc, R0, loc ; Multiply present factorial by present position.
.eval N - 1, N ; Decrement position.
fact1 ; Recursive call.
.endif
.endm
Macro Directives Summary
www.ti.com
168 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Macro Language Description
6.10 Macro Directives Summary
The directives listed in Table 6-2 through Table 6-6 can be used with macros. The .macro, .mexit, .endm
and .var directives are valid only with macros; the remaining directives are general assembly language
directives.
Table 6-2. Creating Macros
See
Mnemonic and Syntax Description Macro Use Directive
.endm End macro definition Section 6.2 .endm
macname .macro [parameter1][,... ,parametern] Define macro by macname Section 6.2 .macro
.mexit Go to .endm Section 6.2 Section 6.2
.mlib filename Identify library containing macro definitions Section 6.4 .mlib
Table 6-3. Manipulating Substitution Symbols
See
Mnemonic and Syntax Description Macro Use Directive
.asg ["]character string["], substitution symbol Assign character string to substitution symbol Section 6.3.1 .asg
.eval well-defined expression, substitution symbol Perform arithmetic on numeric substitution symbols Section 6.3.1 .eval
.var sym1[,sym2,...,symn] Define local macro symbols Section 6.3.6 .var
Table 6-4. Conditional Assembly
See
Mnemonic and Syntax Description Macro Use Directive
.break [well-defined expression] Optional repeatable block assembly Section 6.5 .break
.endif End conditional assembly Section 6.5 .endif
.endloop End repeatable block assembly Section 6.5 .endloop
.else Optional conditional assembly block Section 6.5 .else
.elseif well-defined expression Optional conditional assembly block Section 6.5 .elseif
.if well-defined expression Begin conditional assembly Section 6.5 .if
.loop [well-defined expression] Begin repeatable block assembly Section 6.5 .loop
Table 6-5. Producing Assembly-Time Messages
See
Mnemonic and Syntax Description Macro Use Directive
.emsg Send error message to standard output Section 6.7 .emsg
.mmsg Send assembly-time message to standard output Section 6.7 .mmsg
.wmsg Send warning message to standard output Section 6.7 .wmsg
Table 6-6. Formatting the Listing
See
Mnemonic and Syntax Description Macro Use Directive
.fclist Allow false conditional code block listing (default) Section 6.8 .fclist
.fcnolist Suppress false conditional code block listing Section 6.8 .fcnolist
.mlist Allow macro listings (default) Section 6.8 .mlist
.mnolist Suppress macro listings Section 6.8 .mnolist
.sslist Allow expanded substitution symbol listing Section 6.8 .sslist
.ssnolist Suppress expanded substitution symbol listing (default) Section 6.8 .ssnolist
169
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Archiver Description
Chapter 7
SPNU118U–January 2018
Archiver Description
The ARM archiver lets you combine several individual files into a single archive file. For example, you can
collect several macros into a macro library. The assembler searches the library and uses the members
that are called as macros by the source file. You can also use the archiver to collect a group of object files
into an object library. The linker includes in the library the members that resolve external references during
the link. The archiver allows you to modify a library by deleting, replacing, extracting, or adding members.
On architectures like ARM, it is often desirable to have multiple versions of the same object file libraries,
each built with different sets of build options. When several versions of a single library are available, the
library information archiver can be used to create an index library of all the object file library versions. This
index library is the used in the link step in place of a particular version of your object file library.
Topic ........................................................................................................................... Page
7.1 Archiver Overview ............................................................................................ 170
7.2 The Archiver's Role in the Software Development Flow ........................................ 171
7.3 Invoking the Archiver........................................................................................ 172
7.4 Archiver Examples............................................................................................ 173
7.5 Library Information Archiver Description............................................................. 174

Archiver Overview
www.ti.com
170 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Archiver Description
7.1 Archiver Overview
You can build libraries from any type of files. Both the assembler and the linker accept archive libraries as
input; the assembler can use libraries that contain individual source files, and the linker can use libraries
that contain individual object files.
One of the most useful applications of the archiver is building libraries of object modules. For example,
you can write several arithmetic routines, assemble them, and use the archiver to collect the object files
into a single, logical group. You can then specify the object library as linker input. The linker searches the
library and includes members that resolve external references.
You can also use the archiver to build macro libraries. You can create several source files, each of which
contains a single macro, and use the archiver to collect these macros into a single, functional group. You
can use the .mlib directive during assembly to specify that macro library to be searched for the macros
that you call. Chapter 6 discusses macros and macro libraries in detail, while this chapter explains how to
use the archiver to build libraries.
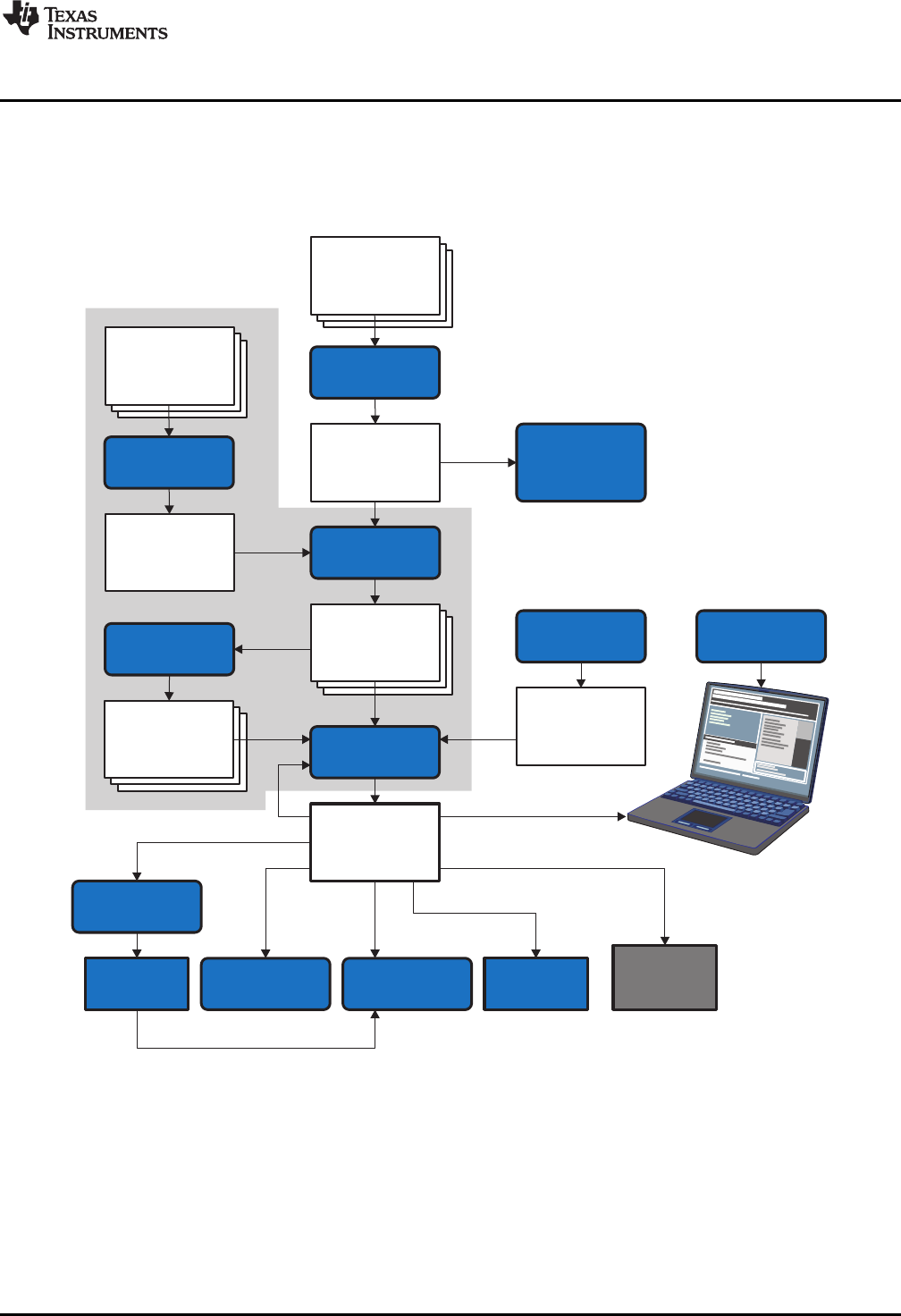
C/C++
source
files
C/C++
compiler
Assembler
source
Assembler
Executable
object file
Debugging
tools
Library-build
utility
Run-time-
support
library
Archiver
Archiver
Macro
library
Absolute lister
Hex-conversion
utility
Cross-reference
lister
Object file
utilities
ARM
Linker
Macro
source
files
Object
files
EPROM
programmer
Library of
object
files
C/C++ name
demangling
utility
www.ti.com
The Archiver's Role in the Software Development Flow
171
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Archiver Description
7.2 The Archiver's Role in the Software Development Flow
Figure 7-1 shows the archiver's role in the software development process. The shaded portion highlights
the most common archiver development path. Both the assembler and the linker accept libraries as input.
Figure 7-1. The Archiver in the ARM Software Development Flow

Invoking the Archiver
www.ti.com
172 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Archiver Description
7.3 Invoking the Archiver
To invoke the archiver, enter:
armar[-]command [options]libname [filename1... filenamen]
armar is the command that invokes the archiver.
[-]command tells the archiver how to manipulate the existing library members and any specified. A
command can be preceded by an optional hyphen. You must use one of the following
commands when you invoke the archiver, but you can use only one command per
invocation. The archiver commands are as follows:
@uses the contents of the specified file instead of command line entries. You can
use this command to avoid limitations on command line length imposed by the
host operating system. Use a ; at the beginning of a line in the command file to
include comments. (See Example 7-1 for an example using an archiver command
file.)
aadds the specified files to the library. This command does not replace an existing
member that has the same name as an added file; it simply appends new
members to the end of the archive.
ddeletes the specified members from the library.
rreplaces the specified members in the library. If you do not specify filenames, the
archiver replaces the library members with files of the same name in the current
directory. If the specified file is not found in the library, the archiver adds it instead
of replacing it.
tprints a table of contents of the library. If you specify filenames, only those files
are listed. If you do not specify any filenames, the archiver lists all the members in
the specified library.
xextracts the specified files. If you do not specify member names, the archiver
extracts all library members. When the archiver extracts a member, it simply
copies the member into the current directory; it does not remove it from the library.
options In addition to one of the commands, you can specify options. To use options, combine
them with a command; for example, to use the a command and the s option, enter -as
or as. The hyphen is optional for archiver options only. These are the archiver options:
-q (quiet) suppresses the banner and status messages.
-s prints a list of the global symbols that are defined in the library. (This option is
valid only with the a, r, and d commands.)
-u replaces library members only if the replacement has a more recent modification
date. You must use the r command with the -u option to specify which members to
replace.
-v (verbose) provides a file-by-file description of the creation of a new library from an
old library and its members.
libname names the archive library to be built or modified. If you do not specify an extension for
libname, the archiver uses the default extension .lib.
filenames names individual files to be manipulated. These files can be existing library members or
new files to be added to the library. When you enter a filename, you must enter a
complete filename including extension, if applicable.
Naming Library Members
NOTE: It is possible (but not desirable) for a library to contain several members with the same
name. If you attempt to delete, replace, or extract a member whose name is the same as
another library member, the archiver deletes, replaces, or extracts the first library member
with that name.

www.ti.com
Archiver Examples
173
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Archiver Description
7.4 Archiver Examples
The following are examples of typical archiver operations:
• If you want to create a library called function.lib that contains the files sine.obj, cos.obj, and flt.obj,
enter:
armar -a function sine.obj cos.obj flt.obj
The archiver responds as follows:
==> new archive 'function.lib' ==> building new archive 'function.lib'
• You can print a table of contents of function.lib with the -t command, enter:
armar -t function
The archiver responds as follows:
FILE NAME SIZE DATE
---------------- ----- ------------------------
sine.obj 300 Wed Jun 15 10:00:24 2011
cos.obj 300 Wed Jun 15 10:00:30 2011
flt.obj 300 Wed Jun 15 09:59:56 2011
• If you want to add new members to the library, enter:
armar -as function atan.obj
The archiver responds as follows:
==> symbol defined: '_sin'
==> symbol defined: '$sin'
==> symbol defined: '_cos'
==> symbol defined: '$cos'
==> symbol defined: '_tan'
==> symbol defined: '$tan'
==> symbol defined: '_atan
==> symbol defined: '$atan'
==> building archive 'function.lib'
Because this example does not specify an extension for the libname, the archiver adds the files to the
library called function.lib. If function.lib does not exist, the archiver creates it. (The -s option tells the
archiver to list the global symbols that are defined in the library.)
• If you want to modify a library member, you can extract it, edit it, and replace it. In this example,
assume there is a library named macros.lib that contains the members push.asm, pop.asm, and
swap.asm.
armar -x macros push.asm
The archiver makes a copy of push.asm and places it in the current directory; it does not remove
push.asm from the library. Now you can edit the extracted file. To replace the copy of push.asm in the
library with the edited copy, enter:
armar -r macros push.asm
• If you want to use a command file, specify the command filename after the -@ command. For
example:
armar -@modules.cmd
The archiver responds as follows:
==> building archive 'modules.lib'

Archiver Examples
www.ti.com
174 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Archiver Description
Example 7-1 is the modules.cmd command file. The r command specifies that the filenames given in
the command file replace files of the same name in the modules.lib library. The -u option specifies that
these files are replaced only when the current file has a more recent revision date than the file that is
in the library.
Example 7
‑‑
1. Archiver Command File
; Command file to replace members of the
; modules library with updated files
; Use r command and u option:
ru
; Specify library name:
modules.lib
; List filenames to be replaced if updated:
align.asm
bss.asm
data.asm
text.asm
sect.asm
clink.asm
copy.asm
double.asm
drnolist.asm
emsg.asm
end.asm
7.5 Library Information Archiver Description
Section 7.1 explains how to use the archiver to create libraries of object files for use in the linker of one or
more applications. You can have multiple versions of the same object file libraries, each built with different
sets of build options. For example, you might have different versions of your object file library for big and
little endian, for different architecture revisions, or for different ABIs depending on the typical build
environments of client applications. However, if you have several versions of a library, it can be
cumbersome to keep track of which version of the library needs to be linked in for a particular application.
When several versions of a single library are available, the library information archiver can be used to
create an index library of all of the object file library versions. This index library is used in the linker in
place of a particular version of your object file library. The linker looks at the build options of the
application being linked, and uses the specified index library to determine which version of your object file
library to include in the linker. If one or more compatible libraries were found in the index library, the most
suitable compatible library is linked in for your application.
7.5.1 Invoking the Library Information Archiver
To invoke the library information archiver, enter:
armlibinfo [options]-o=libname libname1[libname2... libnamen]
armlibinfo is the command that invokes the library information archiver.
options changes the default behavior of the library information archiver. These options are:
-o libname specifies the name of the index library to create or update. This option is
required.
-u updates any existing information in the index library specified with the -o
option instead of creating a new index.
libnames names individual object file libraries to be manipulated. When you enter a libname, you
must enter a complete filename including extension, if applicable.
www.ti.com
Library Information Archiver Description
175
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Archiver Description
7.5.2 Library Information Archiver Example
Consider these object file libraries that all have the same members, but are built with different build
options:
Object File Library Name Build Options
mylib_ARMv4_be.lib --code_state=32 --silicon_version=4 --endian=big
mylib_ARMv4_le.lib --code_state=32 --silicon_version=4 --endian=little
mylib_THUMBv4_be.lib --code_state=16 --silicon_version=4 --endian=big
mylib_THUMBv4_le.lib --code_state=16 --silicon_version=4 --endian=little
mylib_THUMBv7A8_le.lib --code_state=16 --silicon_version=7A8 --endian=little
Using the library information archiver, you can create an index library called mylib.lib from the above
libraries:
armlibinfo -o mylib.lib mylib_ARMv4_be.lib mylib_THUMBv4_be.lib
mylib_THUMBv7A8_le.lib mylib_ARMv4_le.lib mylib_THUMBv4_le.lib
You can now specify mylib.lib as a library for the linker of an application. The linker uses the index library
to choose the appropriate version of the library to use. If the --issue_remarks option is specified before the
--run_linker option, the linker reports which library was chosen.
•Example 1 (ISA v7A8, little endian):
armcl-mv7A8 -me --mylib_pruv3_be main.c -z -l lnk.cmd ./mylib.lib
<Linking>
remark: linking in "mylib_THUMBv7A8_le.lib" in place of "mylib.lib"
•Example 2 (ISAv5, big endian):
armcl -mv5e --issue_remarks main.c -z -l lnk.cmd ./mylib.lib
<Linking>
remark: linking in "mylib_ARMv4_be.lib" in place of "mylib.lib"
In Example 2, there was no version of the library for ISAv5, but an ISAv4 library was available and is
compatible, so it was used.
7.5.3 Listing the Contents of an Index Library
The archiver’s -t option can be used on an index library to list the archives indexed by an index library:
armar t mylib.lib
SIZE DATE FILE NAME
-------- ------------------------ -----------------
119 Mon Apr 23 12:45:22 2007 mylib_ARMv4_be.lib.libinfo
119 Mon Apr 23 12:45:22 2007 mylib_ARMv4_le.lib.libinfo
119 Mon Apr 23 12:45:22 2007 mylib_THUMBv4_be.lib.libinfo
119 Mon Apr 23 12:45:22 2007 mylib_THUMBv4_le.lib.libinfo
119 Mon Apr 23 12:45:22 2007 mylib_THUMBv7A8_le.lib.libinfo
0 Mon Apr 23 12:45:22 2007 __TI_$$LIBINFO
The indexed object file libraries have an additional .libinfo extension in the archiver listing. The
__TI_$$LIBINFO member is a special member that designates mylib.lib as an index library, rather than a
regular library.
If the archiver’s -d command is used on an index library to delete a .libinfo member, the linker will no
longer choose the corresponding library when the index library is specified.
Using any other archiver option with an index library, or using -d to remove the __TI_$$LIBINFO member,
results in undefined behavior, and is not supported.

Library Information Archiver Description
www.ti.com
176 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Archiver Description
7.5.4 Requirements
You must follow these requirements to use library index files:
• At least one application object file must appear on the linker command line before the index library.
• Each object file library specified as input to the library information archiver must only contain object file
members that are built with the same build options.
• The linker expects the index library and all of the libraries it indexes to be in a single directory.
177
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Linker Description
Chapter 8
SPNU118U–January 2018
Linker Description
The ARM linker creates executable modules by combining object modules. This chapter describes the
linker options, directives, and statements used to create executable modules. Object libraries, command
files, and other key concepts are discussed as well.
The concept of sections is basic to linker operation; Chapter 2 includes a detailed discussion of sections.
Topic ........................................................................................................................... Page
8.1 Linker Overview ............................................................................................... 178
8.2 The Linker's Role in the Software Development Flow............................................ 179
8.3 Invoking the Linker ........................................................................................... 180
8.4 Linker Options ................................................................................................. 181
8.5 Linker Command Files ...................................................................................... 204
8.6 Linker Symbols ................................................................................................ 240
8.7 Default Placement Algorithm ............................................................................. 242
8.8 Linker-Generated Copy Tables ........................................................................... 243
8.9 Linker-Generated CRC Tables ............................................................................ 256
8.10 Partial (Incremental) Linking .............................................................................. 262
8.11 Linking C/C++ Code.......................................................................................... 263
8.12 Linker Example ................................................................................................ 265

Linker Overview
www.ti.com
178 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Linker Description
8.1 Linker Overview
The ARM linker allows you to allocate output sections efficiently in the memory map. As the linker
combines object files, it performs the following tasks:
• Allocates sections into the target system's configured memory
• Relocates symbols and sections to assign them to final addresses
• Resolves undefined external references between input files
The linker command language controls memory configuration, output section definition, and address
binding. The language supports expression assignment and evaluation. You configure system memory by
defining and creating a memory model that you design. Two powerful directives, MEMORY and
SECTIONS, allow you to:
• Allocate sections into specific areas of memory
• Combine object file sections
• Define or redefine global symbols at link time
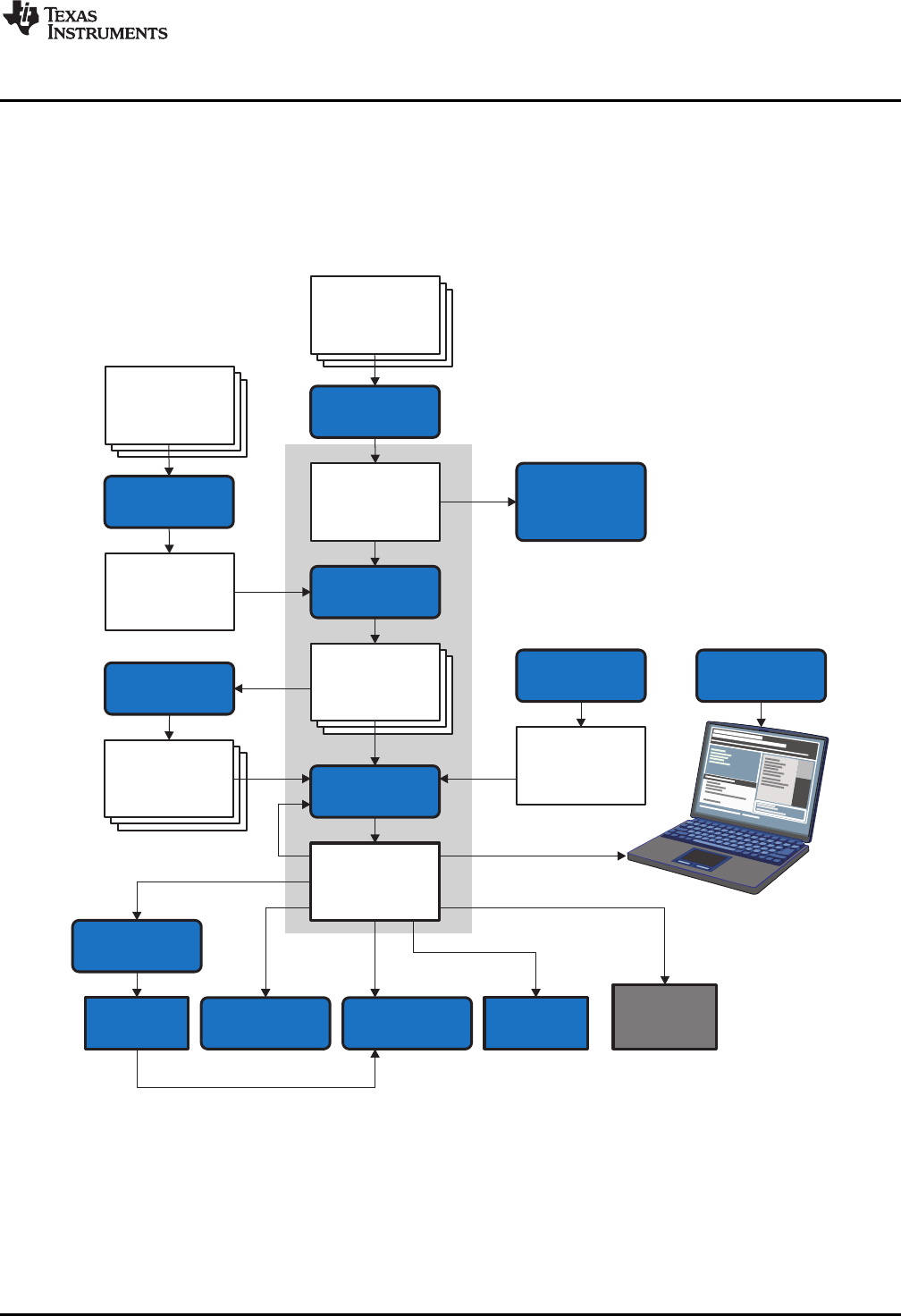
C/C++
source
files
C/C++
compiler
Assembler
source
Assembler
Executable
object file
Debugging
tools
Library-build
utility
Run-time-
support
library
Archiver
Archiver
Macro
library
Absolute lister
Hex-conversion
utility
Cross-reference
lister
Object file
utilities
ARM
Linker
Macro
source
files
Object
files
EPROM
programmer
Library of
object
files
C/C++ name
demangling
utility
www.ti.com
The Linker's Role in the Software Development Flow
179
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Linker Description
8.2 The Linker's Role in the Software Development Flow
Figure 8-1 illustrates the linker's role in the software development process. The linker accepts several
types of files as input, including object files, command files, libraries, and partially linked files. The linker
creates an executable object module that can be downloaded to one of several development tools or
executed by a ARM device.
Figure 8-1. The Linker in the ARM Software Development Flow
Invoking the Linker
www.ti.com
180 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Linker Description
8.3 Invoking the Linker
The general syntax for invoking the linker is:
armcl --run_linker [options]filename1.... filenamen
armcl --run_linker is the command that invokes the linker. The --run_linker option's short form is
-z.
options can appear anywhere on the command line or in a linker command file.
(Options are discussed in Section 8.4.)
filename 1,filename ncan be object files, linker command files, or archive libraries. The default
extension for all input files is .obj; any other extension must be explicitly
specified. The linker can determine whether the input file is an object or ASCII
file that contains linker commands. The default output filename is a.out, unless
you use the --output_file option to name the output file.
There are two methods for invoking the linker:
• Specify options and filenames on the command line. This example links two files, file1.obj and file2.obj,
and creates an output module named link.out.
armcl --run_linker file1.obj file2.obj --output_file=link.out
• Put filenames and options in a linker command file. Filenames that are specified inside a linker
command file must begin with a letter. For example, assume the file linker.cmd contains the following
lines:
--output_file=link.out file1.obj file2.obj
Now you can invoke the linker from the command line; specify the command filename as an input file:
armcl --run_linker linker.cmd
When you use a command file, you can also specify other options and files on the command line. For
example, you could enter:
armcl --run_linker --map_file=link.map linker.cmd file3.obj
The linker reads and processes a command file as soon as it encounters the filename on the
command line, so it links the files in this order: file1.obj, file2.obj, and file3.obj. This example creates an
output file called link.out and a map file called link.map.
For information on invoking the linker for C/C++ files, see Section 8.11.
www.ti.com
Linker Options
181
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Linker Description
8.4 Linker Options
Linker options control linking operations. They can be placed on the command line or in a command file.
Linker options must be preceded by a hyphen (-). Options can be separated from arguments (if they have
them) by an optional space.
Table 8-1. Basic Options Summary
Option Alias Description Section
--run_linker -z Enables linking Section 8.3
--output_file -o Names the executable output module. The default filename is a.out. Section 8.4.25
--map_file -m Produces a map or listing of the input and output sections, including holes, and
places the listing in filename Section 8.4.20
--stack_size -stack Sets C system stack size to size bytes and defines a global symbol that
specifies the stack size. Default = 2K bytes Section 8.4.31
--heap_size -heap Sets heap size (for the dynamic memory allocation in C) to size bytes and
defines a global symbol that specifies the heap size. Default = 2K bytes Section 8.4.16
Table 8-2. File Search Path Options Summary
Option Alias Description Section
--library -l Names an archive library or link command filename as linker input Section 8.4.18
--search_path -i Alters library-search algorithms to look in a directory named with pathname
before looking in the default location. This option must appear before the --
library option.
Section 8.4.18.1
--priority -priority Satisfies unresolved references by the first library that contains a definition for
that symbol Section 8.4.18.3
--reread_libs -x Forces rereading of libraries, which resolves back references Section 8.4.18.3
--disable_auto_rts Disables the automatic selection of a run-time-support library Section 8.4.9
Table 8-3. Command File Preprocessing Options Summary
Option Alias Description Section
--define Predefines name as a preprocessor macro. Section 8.4.11
--undefine Removes the preprocessor macro name.Section 8.4.11
--disable_pp Disables preprocessing for command files Section 8.4.11
Table 8-4. Diagnostic Options Summary
Option Alias Description Section
--diag_error Categorizes the diagnostic identified by num as an error Section 8.4.8
--diag_remark Categorizes the diagnostic identified by num as a remark Section 8.4.8
--diag_suppress Suppresses the diagnostic identified by num Section 8.4.8
--diag_warning Categorizes the diagnostic identified by num as a warning Section 8.4.8
--display_error_number Displays a diagnostic's identifiers along with its text Section 8.4.8
--emit_warnings_as_errors -pdew Treats warnings as errors Section 8.4.8
--issue_remarks Issues remarks (nonserious warnings) Section 8.4.8
--no_demangle Disables demangling of symbol names in diagnostics Section 8.4.22
--no_warnings Suppresses warning diagnostics (errors are still issued) Section 8.4.8
--set_error_limit Sets the error limit to num. The linker abandons linking after this number of
errors. (The default is 100.) Section 8.4.8
--verbose_diagnostics Provides verbose diagnostics that display the original source with line-wrap Section 8.4.8
--warn_sections -w Displays a message when an undefined output section is created Section 8.4.36
Linker Options
www.ti.com
182 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Linker Description
Table 8-5. Linker Output Options Summary
Option Alias Description Section
--absolute_exe -a Produces an absolute, executable module. This is the default; if neither --
absolute_exe nor --relocatable is specified, the linker acts as if --absolute_exe
were specified.
Section 8.4.3.1
--ecc:data_error Inject the specified errors into the output file for testing Section 8.4.12
Section 8.5.9
--ecc:ecc_error Inject the specified errors into the Error Correcting Code (ECC) for testing Section 8.4.12
Section 8.5.9
--mapfile_contents Controls the information that appears in the map file. Section 8.4.21
--relocatable -r Produces a nonexecutable, relocatable output module Section 8.4.3.2
--generate_dead_funcs_list Writes a list of the dead functions that were removed by the linker to file
fname. Section 8.4.15
--rom -r Create a ROM object
--run_abs -abs Produces an absolute listing file Section 8.4.29
--xml_link_info Generates a well-formed XML file containing detailed information about the
result of a link Section 8.4.37
Table 8-6. Symbol Management Options Summary
Option Alias Description Section
--entry_point -e Defines a global symbol that specifies the primary entry point for the output
module Section 8.4.13
--globalize Changes the symbol linkage to global for symbols that match pattern Section 8.4.19
--hide Hides global symbols that match pattern Section 8.4.17
--localize Changes the symbol linkage to local for symbols that match pattern Section 8.4.19
--make_global -g Makes symbol global (overrides -h) Section 8.4.19.1
--make_static -h Makes all global symbols static Section 8.4.19.1
--no_symtable -s Strips symbol table information and line number entries from the output
module Section 8.4.24
--retain Retains a list of sections that otherwise would be discarded Section 8.4.28
--scan_libraries -scanlibs Scans all libraries for duplicate symbol definitions Section 8.4.30
--symbol_map Maps symbol references to a symbol definition of a different name Section 8.4.33
--undef_sym -u Places an unresolved external symbol into the output module's symbol table Section 8.4.35
--unhide Reveals (un-hides) global symbols that match pattern Section 8.4.17
Table 8-7. Run-Time Environment Options Summary
Option Alias Description Section
--arg_size --args Allocates memory to be used by the loader to pass arguments Section 8.4.4
-be32 Forces the linker to generate BE-32 object code. Section 8.4.5
-be8 Forces the linker to generate BE-8 object code. Section 8.4.5
--cinit_hold_wdt={on|off} Hold (on) or do not hold (off) watchdog timer during cinit auto-initialization. Section 8.11.5
--fill_value -f Sets default fill values for holes within output sections; fill_value is a 32-bit
constant Section 8.4.14
--ram_model -cr Initializes variables at load time Section 8.4.27
--rom_model -c Autoinitializes variables at run time Section 8.4.27
--trampolines Generates far call trampolines; on by default Section 8.4.34
www.ti.com
Linker Options
183
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Linker Description
Table 8-8. Link-Time Optimization Options Summary
Option Alias Description Section
--cinit_compression
[=compression_kind] Specifies the type of compression to apply to the C auto initialization data. The
default if this option is used with no kind specified is lzss for Lempel-Ziv-
Storer-Szymanski compression. Alternately, specify --cinit_compression=rle to
use Run Length Encoded compression, which generally provides less efficient
compression.
Section 8.4.6
--compress_dwarf Aggressively reduces the size of DWARF information from input object files Section 8.4.7
--copy_compression
[=compression_kind] Compresses data copied by linker copy tables Section 8.4.6
--unused_section_elimination Eliminates sections that are not needed in the executable module; on by
default Section 8.4.10
Table 8-9. Miscellaneous Options Summary
Option Alias Description Section
--linker_help -help Displays information about syntax and available options –
--minimize_trampolines Places sections to minimize number of far trampolines required Section 8.4.34.2
--preferred_order Prioritizes placement of functions Section 8.4.26
--strict_compatibility Performs more conservative and rigorous compatibility checking of input object
files Section 8.4.32
--trampoline_min_spacing When trampoline reservations are spaced more closely than the specified limit,
tries to make them adjacent Section 8.4.34.3
--zero_init Controls preinitialization of uninitialized variables. Default is on. Section 8.4.38
8.4.1 Wildcards in File, Section, and Symbol Patterns
The linker allows file, section, and symbol names to be specified using the asterisk (*) and question mark
(?) wildcards. Using * matches any number of characters and using ? matches a single character. Using
wildcards can make it easier to handle related objects, provided they follow a suitable naming convention.
For example:
mp3*.obj /* matches anything .obj that begins with mp3 */
task?.o* /* matches task1.obj, task2.obj, taskX.o55, etc. */
SECTIONS
{
.fast_code: { *.obj(*fast*) } > FAST_MEM
.vectors : { vectors.obj(.vector:part1:*) > 0xFFFFFF00
.str_code : { rts*.lib<str*.obj>(.text) } > S1ROM
}
8.4.2 Specifying C/C++ Symbols with Linker Options
The link-time symbol is the same as the high-level language name.
See Section 8.6.1 for information about referring to linker symbols in C/C++ code.
8.4.3 Relocation Capabilities (--absolute_exe and --relocatable Options)
The linker performs relocation, which is the process of adjusting all references to a symbol when the
symbol's address changes (Section 2.7).
The linker supports two options (--absolute_exe and --relocatable) that allow you to produce an absolute
or a relocatable output module. The linker also supports a third option (-ar) that allows you to produce an
executable, relocatable output module.

Linker Options
www.ti.com
184 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Linker Description
When the linker encounters a file that contains no relocation or symbol table information, it issues a
warning message (but continues executing). Relinking an absolute file can be successful only if each input
file contains no information that needs to be relocated (that is, each file has no unresolved references and
is bound to the same virtual address that it was bound to when the linker created it).
8.4.3.1 Producing an Absolute Output Module (--absolute_exe option)
When you use the --absolute_exe option without the --relocatable option, the linker produces an absolute,
executable output module. Absolute files contain no relocation information. Executable files contain the
following:
• Special symbols defined by the linker (see Section 8.5.10.4)
• An header that describes information such as the program entry point
•No unresolved references
The following example links file1.obj and file2.obj and creates an absolute output module called a.out:
armcl --run_linker --absolute_exe file1.obj file2.obj
The --absolute_exe and --relocatable Options
NOTE: If you do not use the --absolute_exe or the --relocatable option, the linker acts as if you
specified --absolute_exe.
8.4.3.2 Producing a Relocatable Output Module (--relocatable option)
When you use the --relocatable option, the linker retains relocation entries in the output module. If the
output module is relocated (at load time) or relinked (by another linker execution), use --relocatable to
retain the relocation entries.
The linker produces a file that is not executable when you use the --relocatable option without the --
absolute_exe option. A file that is not executable does not contain special linker symbols or an optional
header. The file can contain unresolved references, but these references do not prevent creation of an
output module.
This example links file1.obj and file2.obj and creates a relocatable output module called a.out:
armcl --run_linker --relocatable file1.obj file2.obj
The output file a.out can be relinked with other object files or relocated at load time. (Linking a file that will
be relinked with other files is called partial linking. For more information, see Section 8.10.)
8.4.3.3 Producing an Executable, Relocatable Output Module (-ar Option)
If you invoke the linker with both the --absolute_exe and --relocatable options, the linker produces an
executable, relocatable object module. The output file contains the special linker symbols, an optional
header, and all resolved symbol references; however, the relocation information is retained.
This example links file1.obj and file2.obj to create an executable, relocatable output module called xr.out:
armcl --run_linker -ar file1.obj file2.obj --output_file=xr.out
8.4.4 Allocate Memory for Use by the Loader to Pass Arguments (--arg_size Option)
The --arg_size option instructs the linker to allocate memory to be used by the loader to pass arguments
from the command line of the loader to the program. The syntax of the --arg_size option is:
--arg_size= size
The size is the number of bytes to be allocated in target memory for command-line arguments.
By default, the linker creates the __c_args__ symbol and sets it to -1. When you specify --arg_size=size,
the following occur:
• The linker creates an uninitialized section named .args of size bytes.
• The __c_args__ symbol contains the address of the .args section.

www.ti.com
Linker Options
185
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Linker Description
The loader and the target boot code use the .args section and the __c_args__ symbol to determine
whether and how to pass arguments from the host to the target program. See the ARM Optimizing C/C++
Compiler User's Guide for information about the loader.
8.4.5 Changing Encoding of Big-Endian Instructions
When you are creating big-endian executable files, you can determine whether instruction encoding is in
little or big endian. The -be8 option produces big-endian executable modules with little-endian encoded
instructions. This is the default behavior for architecture version 6 and higher.
The -be32 option produces big-endian executable modules with big-endian encoded instructions. This is
the default behavior for architecture version 5 and lower.
8.4.6 Compression (--cinit_compression and --copy_compression Option)
By default, the linker does not compress data. These two options specify compression through the linker.
The --cinit_compression option specifies the compression type the linker applies to the C autoinitialization
data. The default is lzss.
Overlays can be managed by using linker-generated copy tables. To save ROM space the linker can
compress the data copied by the copy tables. The compressed data is decompressed during copy. The --
copy_compression option controls the compression of the copy data tables.
The syntax for the options are:
--cinit_compression[=compression_kind]
--copy_compression[=compression_kind]
The compression_kind can be one of the following types:
•off. Don't compress the data.
•rle. Compress data using Run Length Encoding.
•lzss. Compress data using Lempel-Ziv Storer and Symanski compression (the default if
nocompression_kind is specified).
Compressed sections within initialization tables are byte aligned in order to reduce the occurrence of holes
in the .cinit table.
See Section 8.8.5 for more information about compression.
8.4.7 Compress DWARF Information (--compress_dwarf Option)
The --compress_dwarf option aggressively reduces the size of DWARF information by eliminating
duplicate information from input object files. The --compress_dwarf option eliminates duplicate information
that could not be removed through the use of ELF COMDAT groups. (See the ELF specification for
information on COMDAT groups.)
8.4.8 Control Linker Diagnostics
The linker uses certain C/C++ compiler options to control linker-generated diagnostics. The diagnostic
options must be specified before the --run_linker option.
--diag_error=num Categorize the diagnostic identified by num as an error. To find the numeric
identifier of a diagnostic message, use the --display_error_number option first
in a separate link. Then use --diag_error=num to recategorize the diagnostic
as an error. You can only alter the severity of discretionary diagnostics.
--diag_remark=num Categorize the diagnostic identified by num as a remark. To find the numeric
identifier of a diagnostic message, use the --display_error_number option first
in a separate link. Then use --diag_remark=num to recategorize the
diagnostic as a remark. You can only alter the severity of discretionary
diagnostics.

Linker Options
www.ti.com
186 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Linker Description
--diag_suppress=num Suppress the diagnostic identified by num. To find the numeric identifier of a
diagnostic message, use the --display_error_number option first in a
separate link. Then use --diag_suppress=num to suppress the diagnostic.
You can only suppress discretionary diagnostics.
--diag_warning=num Categorize the diagnostic identified by num as a warning. To find the numeric
identifier of a diagnostic message, use the --display_error_number option first
in a separate link. Then use --diag_warning=num to recategorize the
diagnostic as a warning. You can only alter the severity of discretionary
diagnostics.
--display_error_number Display a diagnostic's numeric identifier along with its text. Use this option in
determining which arguments you need to supply to the diagnostic
suppression options (--diag_suppress, --diag_error, --diag_remark, and --
diag_warning). This option also indicates whether a diagnostic is
discretionary. A discretionary diagnostic is one whose severity can be
overridden. A discretionary diagnostic includes the suffix -D; otherwise, no
suffix is present. See the ARM Optimizing C/C++ Compiler User's Guide for
more information on understanding diagnostic messages.
--emit_warnings_as_
errors Treat all warnings as errors. This option cannot be used with the --
no_warnings option. The --diag_remark option takes precedence over this
option. This option takes precedence over the --diag_warning option.
--issue_remarks Issue remarks (nonserious warnings), which are suppressed by default.
--no_warnings Suppress warning diagnostics (errors are still issued).
--set_error_limit=num Set the error limit to num, which can be any decimal value. The linker
abandons linking after this number of errors. (The default is 100.)
--verbose_diagnostics Provide verbose diagnostics that display the original source with line-wrap
and indicate the position of the error in the source line
8.4.9 Automatic Library Selection (--disable_auto_rts Option)
The --disable_auto_rts option disables the automatic selection of a run-time-support (RTS) library. See the
ARM Optimizing C/C++ Compiler User's Guide for details on the automatic selection process.
8.4.10 Do Not Remove Unused Sections (--unused_section_elimination Option)
In order to minimize the foot print, the ELF linker does not include a section that is not needed to resolve
any references in the final executable. Use --unused_section_elimination=off to disable this optimization.
The syntax for the option is:
--unused_section_elimination[=on|off]
The linker default behavior is equivalent to --unused_section_elimination=on.

www.ti.com
Linker Options
187
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Linker Description
8.4.11 Linker Command File Preprocessing (--disable_pp, --define and --undefine Options)
The linker preprocesses linker command files using a standard C preprocessor. Therefore, the command
files can contain well-known preprocessing directives such as #define, #include, and #if / #endif.
Three linker options control the preprocessor:
--disable_pp Disables preprocessing for command files
--define=name[=val] Predefines name as a preprocessor macro
--undefine=name Removes the macro name
The compiler has --define and --undefine options with the same meanings. However, the linker options are
distinct; only --define and --undefine options specified after --run_linker are passed to the linker. For
example:
armcl --define=FOO=1 main.c --run_linker --define=BAR=2 lnk.cmd
The linker sees only the --define for BAR; the compiler only sees the --define for FOO.
When one command file #includes another, preprocessing context is carried from parent to child in the
usual way (that is, macros defined in the parent are visible in the child). However, when a command file is
invoked other than through #include, either on the command line or by the typical way of being named in
another command file, preprocessing context is not carried into the nested file. The exception to this is --
define and --undefine options, which apply globally from the point they are encountered. For example:
--define GLOBAL
#define LOCAL
#include "incfile.cmd" /* sees GLOBAL and LOCAL */
nestfile.cmd /* only sees GLOBAL */
Two cautions apply to the use of --define and --undefine in command files. First, they have global effect as
mentioned above. Second, since they are not actually preprocessing directives themselves, they are
subject to macro substitution, probably with unintended consequences. This effect can be defeated by
quoting the symbol name. For example:
--define MYSYM=123
--undefine MYSYM /* expands to --undefine 123 (!) */
--undefine "MYSYM" /* ahh, that's better */
The linker uses the same search paths to find #include files as it does to find libraries. That is, #include
files are searched in the following places:
1. If the #include file name is in quotes (rather than <brackets>), in the directory of the current file
2. In the list of directories specified with --Iibrary options or environment variables (see Section 8.4.18)
There are two exceptions: relative pathnames (such as "../name") always search the current directory; and
absolute pathnames (such as "/usr/tools/name") bypass search paths entirely.

Linker Options
www.ti.com
188 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Linker Description
The linker provides the built-in macro definitions listed in Table 8-10. The availability of these macros
within the linker is determined by the command-line options used, not the build attributes of the files being
linked. If these macros are not set as expected, confirm that your project's command line uses the correct
compiler option settings.
Table 8-10. Predefined ARM Macro Names
Macro Name Description
_ _DATE_ _ Expands to the compilation date in the form mmm dd yyyy
_ _FILE_ _ Expands to the current source filename
_ _TI_COMPILER_VERSION_ _ Defined to a 7-9 digit integer, depending on if X has 1, 2, or 3 digits. The number does
not contain a decimal. For example, version 3.2.1 is represented as 3002001. The
leading zeros are dropped to prevent the number being interpreted as an octal.
_ _TI_EABI_ _ Defined to 1 if EABI is enabled; otherwise, it is undefined.
_ _TI_ ARM_ _ Always defined
_ _TI_ ARM_V4_ _ Defined to 1 if the v4 architecture (ARM7) is targeted (the -mv4 option is used);
otherwise, it is undefined.
_ _TI_ ARM_V5_ _ Defined to 1 if the v5E architecture (ARM9E) is targeted (the -mv5e option is used);
otherwise, it is undefined.
_ _TI_ ARM_V6_ _ Defined to 1 if the v6 architecture (ARM11) is targeted (the -mv6 option is used);
otherwise, it is undefined.
_ _TI_ ARM_V6M0_ _ Defined to 1 if the v6M0 architecture (Cortex-M0) is targeted (the -mv6M0 option is
used); otherwise, it is undefined.
_ _TI_ ARM_V7_ _ Defined to 1 if any v7 architecture (Cortex) is targeted; otherwise, it is undefined.
_ _TI_ ARM_V7A8_ _ Defined to 1 if the v7A8 architecture (Cortex-A8) is targeted (the -mv7A8 option is used);
otherwise, it is undefined.
_ _TI_ ARM_V7M_ _ Defined to 1 if any Cortex-M architecture is targeted; otherwise, it is undefined.
_ _TI_ ARM_V7M3_ _ Defined to 1 if the v7M3 architecture (Cortex-M3) is targeted (the -mv7M3 option is
used); otherwise, it is undefined.
_ _TI_ ARM_V7M4_ _ Defined to 1 if the v7M4 architecture (Cortex-M4) is targeted (the -mv7M4 option is
used); otherwise, it is undefined.
_ _TI_ ARM_V7R4_ _ Defined to 1 if the v7R4 architecture (Cortex-R4) is targeted (the -mv7R4 option is
used); otherwise, it is undefined.
_ _TIME_ _ Expands to the compilation time in the form "hh:mm:ss"

www.ti.com
Linker Options
189
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Linker Description
8.4.12 Error Correcting Code Testing (--ecc Options)
Error Correcting Codes (ECC) can be generated and placed in separate sections through the linker
command file. ECC uses extra bits to allow errors to be detected and/or corrected by a device. The ECC
support provided by the linker is compatible with the ECC support in TI Flash memory on various TI
devices. TI Flash memory uses a modified Hamming(72,64) code, which uses 8 parity bits for every 64
bits. Check the documentation for your Flash memory to see if ECC is supported. (ECC for read-write
memory is handled completely in hardware at run time.)
See Section 8.5.9 for details on linker command file syntax for ECC support.
To test ECC error detection and handling, you can use two command-line options that inject bit errors into
the linked executable. These options let you specify an address where an error should appear and a
bitmask of bits in the code/data at that address to flip. You can specify the address of the error absolutely
or as an offset from a symbol.
When a data error is injected, the ECC parity bits for the data are calculated as if the error were not
present. This simulates bit errors that might actually occur and test ECC's ability to correct different levels
of errors.
The --ecc:data_error option injects errors into the load image at the specified location. The syntax is:
--ecc:data_error=(symbol+offset|address)[,page],bitmask
The address is the location of the minimum addressable unit where the error is to be injected. A
symbol+offset can be used to specify the location of the error to be injected with a signed offset from that
symbol. The page number is needed to make the location non-ambiguous if the address occurs on
multiple memory pages. The bitmask is a mask of the bits to flip; its width should be the width of an
addressable unit.
For example, the following command line flips the least-significant bit in the byte at the address 0x100,
making it inconsistent with the ECC parity bits for that byte:
armcl test.c --ecc:data_error=0x100,0x01 -z -o test.out
The following command flips two bits in the third byte of the code for main():
armcl test.c --ecc:data_error=main+2,0x42 -z -o test.out
The --ecc:ecc_error option injects errors into the ECC parity bits that correspond to the specified
location. Note that the ecc_error option can therefore only specify locations inside ECC input ranges,
whereas the data_error option can also specify errors in the ECC output memory ranges. The syntax is:
--ecc:ecc_error=(symbol+offset|address)[,page],bitmask
The parameters for this option are the same as for --ecc:data_error, except that the bitmask must be
exactly 8 bits. Mirrored copies of the affected ECC byte will also contain the same injected error.
An error injected into an ECC byte with --ecc:ecc_error may cause errors to be detected at run time in any
of the 8 data bytes covered by that ECC byte.
For example, the following command flips every bit in the ECC byte that contains the parity information for
the byte at 0x200:
armcl test.c --ecc:ecc_error=0x200,0xff -z -o test.out
The linker disallows injecting errors into memory ranges that are neither an ECC range nor the input range
for an ECC range. The compiler can only inject errors into initialized sections.

Linker Options
www.ti.com
190 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Linker Description
8.4.13 Define an Entry Point (--entry_point Option)
The memory address at which a program begins executing is called the entry point. When a loader loads
a program into target memory, the program counter (PC) must be initialized to the entry point; the PC then
points to the beginning of the program.
The linker can assign one of four values to the entry point. These values are listed below in the order in
which the linker tries to use them. If you use one of the first three values, it must be an external symbol in
the symbol table.
• The value specified by the --entry_point option. The syntax is:
--entry_point= global_symbol
where global_symbol defines the entry point and must be defined as an external symbol of the input
files. The external symbol name of C or C++ objects may be different than the name as declared in the
source language; refer to the ARM Optimizing C/C++ Compiler User's Guide.
• The value of symbol _c_int00 (if present). The _c_int00 symbol must be the entry point if you are
linking code produced by the C compiler.
• The value of symbol _main (if present)
• 0 (default value)
This example links file1.obj and file2.obj. The symbol begin is the entry point; begin must be defined as
external in file1 or file2.
armcl --run_linker --entry_point=begin file1.obj file2.obj
See Section 8.6.1 for information about referring to linker symbols in C/C++ code.
8.4.14 Set Default Fill Value (--fill_value Option)
The --fill_value option fills the holes formed within output sections. The syntax for the option is:
--fill_value= value
The argument value is a 32-bit constant (up to eight hexadecimal digits). If you do not use --fill_value, the
linker uses 0 as the default fill value.
This example fills holes with the hexadecimal value ABCDABCD:
armcl --run_linker --fill_value=0xABCDABCD file1.obj file2.obj
8.4.15 Generate List of Dead Functions (--generate_dead_funcs_list Option)
The --generate_dead_funcs_list option creates a list of functions that are never referenced (dead) and
writes the list to the specified file. If no filename is specified, the default filename dead_funcs.xml is used.
The syntax for the option is:
--generate_dead_funcs_list=filename
Refer to the ARM Optimizing C/C++ Compiler User's Guide for details on the --generate_dead_funcs_list
option and the corresponding --use_dead_funcs_list option.
8.4.16 Define Heap Size (--heap_size Option)
The C/C++ compiler uses an uninitialized section called .sysmem for the C run-time memory pool used by
malloc(). You can set the size of this memory pool at link time by using the --heap_size option. The syntax
for the --heap_size option is:
--heap_size= size
The size must be a constant. This example defines a 4K byte heap:
armcl --run_linker --heap_size=0x1000 /* defines a 4k heap (.sysmem section)*/
The linker creates the .sysmem section only if there is a .sysmem section in an input file.
The linker also creates a global symbol __TI_SYSMEM_SIZE and assigns it a value equal to the size of
the heap. The default size is 2K bytes. See Section 8.6.1 for information about referring to linker symbols
in C/C++ code.

www.ti.com
Linker Options
191
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Linker Description
8.4.17 Hiding Symbols
Symbol hiding prevents the symbol from being listed in the output file's symbol table. While localization is
used to prevent name space clashes in a link unit, symbol hiding is used to obscure symbols which should
not be visible outside a link unit. Such symbol’s names appear only as empty strings or “no name” in
object file readers. The linker supports symbol hiding through the --hide and --unhide options.
The syntax for these options are:
--hide=' pattern '
--unhide=' pattern '
The pattern is a string with optional wildcards ? or *. Use ? to match a single character and use * to match
zero or more characters.
The --hide option hides global symbols with a linkname matching the pattern. It hides symbols matching
the pattern by changing the name to an empty string. A global symbol that is hidden is also localized.
The --unhide option reveals (un-hides) global symbols that match the pattern that are hidden by the --hide
option. The --unhide option excludes symbols that match pattern from symbol hiding provided the pattern
defined by --unhide is more restrictive than the pattern defined by --hide.
These options have the following properties:
• The --hide and --unhide options can be specified more than once on the command line.
• The order of --hide and --unhide has no significance.
• A symbol is matched by only one pattern defined by either --hide or --unhide.
• A symbol is matched by the most restrictive pattern. Pattern A is considered more restrictive than
Pattern B, if Pattern A matches a narrower set than Pattern B.
• It is an error if a symbol matches patterns from --hide and --unhide and one does not supersede the
other. Pattern A supersedes pattern B if A can match everything B can and more. If Pattern A
supersedes Pattern B, then Pattern B is said to more restrictive than Pattern A.
• These options affect final and partial linking.
In map files these symbols are listed under the Hidden Symbols heading.
8.4.18 Alter the Library Search Algorithm (--library Option, --search_path Option, and
TI_ARM_C_DIR Environment Variable)
Usually, when you want to specify a file as linker input, you simply enter the filename; the linker looks for
the file in the current directory. For example, suppose the current directory contains the library object.lib. If
this library defines symbols that are referenced in the file file1.obj, this is how you link the files:
armcl --run_linker file1.obj object.lib
If you want to use a file that is not in the current directory, use the --library linker option. The --library
option's short form is -l. The syntax for this option is:
--library=[pathname]filename
The filename is the name of an archive, an object file, or linker command file. You can specify up to 128
search paths.
The --library option is not required when one or more members of an object library are specified for input
to an output section. For more information about allocating archive members, see Section 8.5.5.5.
You can augment the linker's directory search algorithm by using the --search_path linker option or the
TI_ARM_C_DIR environment variable. The linker searches for object libraries and command files in the
following order:
1. It searches directories named with the --search_path linker option. The --search_path option must
appear before the --Iibrary option on the command line or in a command file.
2. It searches directories named with TI_ARM_C_DIR.
3. If TI_ARM_C_DIR is not set, it searches directories named with the assembler's TI_ARM_A_DIR
environment variable.
Linker Options
www.ti.com
192 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Linker Description
4. It searches the current directory.
NOTE: The TI_ARM_C_DIR environment variable takes precedence over the older TMS470_C_DIR
environment variable if both are defined. If only TMS470_C_DIR is set, it will continue to be
used. Likewise, the TI_ARM_A_DIR environment variable takes precedence over the older
TMS470_A_DIR environment variable if both are defined. If only TMS470_A_DIR is set, it
will continue to be used.
8.4.18.1 Name an Alternate Library Directory (--search_path Option)
The --search_path option names an alternate directory that contains input files. The --search_path option's
short form is -I. The syntax for this option is:
--search_path= pathname
The pathname names a directory that contains input files.
When the linker is searching for input files named with the --library option, it searches through directories
named with --search_path first. Each --search_path option specifies only one directory, but you can have
several --search_path options per invocation. When you use the --search_path option to name an
alternate directory, it must precede any --library option used on the command line or in a command file.
For example, assume that there are two archive libraries called r.lib and lib2.lib that reside in ld and ld2
directories. The table below shows the directories that r.lib and lib2.lib reside in, how to set environment
variable, and how to use both libraries during a link. Select the row for your operating system:
Operating System Enter
UNIX (Bourne shell)
armcl --run_linker f1.obj f2.obj --search_path=/ld --search_path=/ld2
--library=r.lib --library=lib2.lib
Windows
armcl --run_linker f1.obj f2.obj --search_path=\ld --search_path=\ld2
--library=r.lib --library=lib2.lib
8.4.18.2 Name an Alternate Library Directory (TI_ARM_C_DIR Environment Variable)
An environment variable is a system symbol that you define and assign a string to. The linker uses an
environment variable named TI_ARM_C_DIR to name alternate directories that contain object libraries.
The command syntaxes for assigning the environment variable are:
Operating System Enter
UNIX (Bourne shell) TI_ARM_C_DIR=" pathname1;pathname2;..."; export TI_ARM_C_DIR
Windows set TI_ARM_C_DIR= pathname1;pathname2;...
The pathnames are directories that contain input files. Use the --library linker option on the command line
or in a command file to tell the linker which library or linker command file to search for. The pathnames
must follow these constraints:
• Pathnames must be separated with a semicolon.
• Spaces or tabs at the beginning or end of a path are ignored. For example the space before and after
the semicolon in the following is ignored:
set TI_ARM_C_DIR= c:\path\one\to\tools ; c:\path\two\to\tools
• Spaces and tabs are allowed within paths to accommodate Windows directories that contain spaces.
For example, the pathnames in the following are valid:
set TI_ARM_C_DIR=c:\first path\to\tools;d:\second path\to\tools
In the example below, assume that two archive libraries called r.lib and lib2.lib reside in ld and ld2
directories. The table below shows how to set the environment variable, and how to use both libraries
during a link. Select the row for your operating system:

www.ti.com
Linker Options
193
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Linker Description
Operating System Invocation Command
UNIX (Bourne shell)
TI_ARM_C_DIR="/ld ;/ld2"; export TI_ARM_C_DIR;
armcl --run_linker f1.obj f2.obj --library=r.lib --library=lib2.lib
Windows
TI_ARM_C_DIR=\ld;\ld2
armcl --run linker f1.obj f2.obj --library=r.lib --library=lib2.lib
The environment variable remains set until you reboot the system or reset the variable by entering:
Operating System Enter
UNIX (Bourne shell) unset TI_ARM_C_DIR
Windows set TI_ARM_C_DIR=
The assembler uses an environment variable named TI_ARM_A_DIR to name alternate directories that
contain copy/include files or macro libraries. If TI_ARM_C_DIR is not set, the linker searches for object
libraries in the directories named with TI_ARM_A_DIR. For information about TI_ARM_A_DIR, see
Section 4.5.2. For more information about object libraries, see Section 8.6.3.
8.4.18.3 Exhaustively Read and Search Libraries (--reread_libs and --priority Options)
There are two ways to exhaustively search for unresolved symbols:
• Reread libraries if you cannot resolve a symbol reference (--reread_libs).
• Search libraries in the order that they are specified (--priority).
The linker normally reads input files, including archive libraries, only once when they are encountered on
the command line or in the command file. When an archive is read, any members that resolve references
to undefined symbols are included in the link. If an input file later references a symbol defined in a
previously read archive library, the reference is not resolved.
With the --reread_libs option, you can force the linker to reread all libraries. The linker rereads libraries
until no more references can be resolved. Linking using --reread_libs may be slower, so you should use it
only as needed. For example, if a.lib contains a reference to a symbol defined in b.lib, and b.lib contains a
reference to a symbol defined in a.lib, you can resolve the mutual dependencies by listing one of the
libraries twice, as in:
armcl --run_linker --library=a.lib --library=b.lib --library=a.lib
or you can force the linker to do it for you:
The --priority option provides an alternate search mechanism for libraries. Using --priority causes each
unresolved reference to be satisfied by the first library that contains a definition for that symbol. For
example:
objfile references A
lib1 defines B
lib2 defines A, B; obj defining A references B
% armcl --run_linker objfile lib1 lib2
Under the existing model, objfile resolves its reference to A in lib2, pulling in a reference to B, which
resolves to the B in lib2.
Under --priority, objfile resolves its reference to A in lib2, pulling in a reference to B, but now B is resolved
by searching the libraries in order and resolves B to the first definition it finds, namely the one in lib1.
The --priority option is useful for libraries that provide overriding definitions for related sets of functions in
other libraries without having to provide a complete version of the whole library.
For example, suppose you want to override versions of malloc and free defined in the rtsv4_A_be_eabi.lib
without providing a full replacement for rtsv4_A_be_eabi.lib. Using --priority and linking your new library
before rtsv4_A_be_eabi.lib guarantees that all references to malloc and free resolve to the new library.
The --priority option is intended to support linking programs with SYS/BIOS where situations like the one
illustrated above occur.

Linker Options
www.ti.com
194 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Linker Description
8.4.19 Change Symbol Localization
Symbol localization changes symbol linkage from global to local (static). This is used to obscure global
symbols in a library which should not be visible outside the library, but must be global because they are
accessed by several modules in the library. The linker supports symbol localization through the --localize
and --globalize linker options.
The syntax for these options are:
--localize=' pattern '
--globalize=' pattern '
The pattern is a string with optional wildcards ? or *. Use ? to match a single character and use * to match
zero or more characters.
The --localize option changes the symbol linkage to local for symbols matching the pattern.
The --globalize option changes the symbol linkage to global for symbols matching the pattern. The --
globalize option only affects symbols that are localized by the --localize option. The --globalize option
excludes symbols that match the pattern from symbol localization, provided the pattern defined by --
globalize is more restrictive than the pattern defined by --localize.
See Section 8.4.2 for information about using C/C++ identifiers in linker options such as --localize and --
globalize.
These options have the following properties:
• The --localize and --globalize options can be specified more than once on the command line.
• The order of --localize and --globalize options has no significance.
• A symbol is matched by only one pattern defined by either --localize or --globalize.
• A symbol is matched by the most restrictive pattern. Pattern A is considered more restrictive than
Pattern B, if Pattern A matches a narrower set than Pattern B.
• It is an error if a symbol matches patterns from --localize and --globalize and if one does not supersede
other. Pattern A supersedes pattern B if A can match everything B can, and some more. If Pattern A
supersedes Pattern B, then Pattern B is said to more restrictive than Pattern A.
• These options affect final and partial linking.
In map files these symbols are listed under the Localized Symbols heading.
8.4.19.1 Make All Global Symbols Static (--make_static Option)
The --make_static option makes all global symbols static. Static symbols are not visible to externally linked
modules. By making global symbols static, global symbols are essentially hidden. This allows external
symbols with the same name (in different files) to be treated as unique.
The --make_static option effectively nullifies all .global assembler directives. All symbols become local to
the module in which they are defined, so no external references are possible. For example, assume
file1.obj and file2.obj both define global symbols called EXT. By using the --make_static option, you can
link these files without conflict. The symbol EXT defined in file1.obj is treated separately from the symbol
EXT defined in file2.obj.
armcl --run_linker --make_static file1.obj file2.obj
The --make_static option makes all global symbols static. If you have a symbol that you want to remain
global and you use the --make_static option, you can use the --make_global option to declare that symbol
to be global. The --make_global option overrides the effect of the --make_static option for the symbol that
you specify. The syntax for the --make_global option is:
--make_global= global_symbol

www.ti.com
Linker Options
195
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Linker Description
8.4.20 Create a Map File (--map_file Option)
The syntax for the --map_file option is:
--map_file= filename
The linker map describes:
• Memory configuration
• Input and output section allocation
• Linker-generated copy tables
• Trampolines
• The addresses of external symbols after they have been relocated
• Hidden and localized symbols
The map file contains the name of the output module and the entry point; it can also contain up to three
tables:
• A table showing the new memory configuration if any nondefault memory is specified (memory
configuration). The table has the following columns; this information is generated on the basis of the
information in the MEMORY directive in the linker command file:
–Name. This is the name of the memory range specified with the MEMORY directive.
–Origin. This specifies the starting address of a memory range.
–Length. This specifies the length of a memory range.
–Unused. This specifies the total amount of unused (available) memory in that memory area.
–Attributes. This specifies one to four attributes associated with the named range:
R specifies that the memory can be read.
W specifies that the memory can be written to.
X specifies that the memory can contain executable code.
I specifies that the memory can be initialized.
For more information about the MEMORY directive, see Section 8.5.4.
• A table showing the linked addresses of each output section and the input sections that make up the
output sections (section placement map). This table has the following columns; this information is
generated on the basis of the information in the SECTIONS directive in the linker command file:
–Output section. This is the name of the output section specified with the SECTIONS directive.
–Origin. The first origin listed for each output section is the starting address of that output section.
The indented origin value is the starting address of that portion of the output section.
–Length. The first length listed for each output section is the length of that output section. The
indented length value is the length of that portion of the output section.
–Attributes/input sections. This lists the input file or value associated with an output section. If the
input section could not be allocated, the map file will indicate this with "FAILED TO ALLOCATE".
For more information about the SECTIONS directive, see Section 8.5.5.
• A table showing each external symbol and its address sorted by symbol name.
• A table showing each external symbol and its address sorted by symbol address.
The following example links file1.obj and file2.obj and creates a map file called map.out:
armcl --run_linker file1.obj file2.obj --map_file=map.out
Example 8-32 shows an example of a map file.
Linker Options
www.ti.com
196 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Linker Description
8.4.21 Managing Map File Contents (--mapfile_contents Option)
The --mapfile_contents option assists with managing the content of linker-generated map files. The syntax
for the --mapfile_contents option is:
--mapfile_contents= filter[, filter]
When the --map_file option is specified, the linker produces a map file containing information about
memory usage, placement information about sections that were created during a link, details about linker-
generated copy tables, and symbol values.
The --mapfile_contents option provides a mechanism for you to control what information is included in or
excluded from a map file. When you specify --mapfile_contents=help from the command line, a help
screen listing available filter options is displayed. The following filter options are available:
Attribute Description Default State
crctables CRC tables On
copytables Copy tables On
entry Entry point On
load_addr Display load addresses Off
memory Memory ranges On
modules Module view On
sections Sections On
sym_defs Defined symbols per file Off
sym_dp Symbols sorted by data page On
sym_name Symbols sorted by name On
sym_runaddr Symbols sorted by run address On
all Enables all attributes
none Disables all attributes
The --mapfile_contents option controls display filter settings by specifying a comma-delimited list of display
attributes. When prefixed with the word no, an attribute is disabled instead of enabled. For example:
--mapfile_contents=copytables,noentry
--mapfile_contents=all,nocopytables
--mapfile_contents=none,entry
By default, those sections that are currently included in the map file when the --map_file option is specified
are included. The filters specified in the --mapfile_contents options are processed in the order that they
appear in the command line. In the third example above, the first filter, none, clears all map file content.
The second filter, entry, then enables information about entry points to be included in the generated map
file. That is, when --mapfile_contents=none,entry is specified, the map file contains only information about
entry points.
The load_addr and sym_defs attributes are both disabled by default.
If you turn on the load_addr filter, the map file includes the load address of symbols that are included in
the symbol list in addition to the run address (if the load address is different from the run address).
You can use the sym_defs filter to include information sorted on a file by file basis. You may find it useful
to replace the sym_name, sym_dp, and sym_runaddr sections of the map file with the sym_defs section
by specifying the following --mapfile_contents option:
--mapfile_contents=nosym_name,nosym_dp,nosym_runaddr,sym_defs
By default, information about global symbols defined in an application are included in tables sorted by
name, data page, and run address. If you use the --mapfile_contents=sym_defs option, static variables
are also listed.

www.ti.com
Linker Options
197
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Linker Description
8.4.22 Disable Name Demangling (--no_demangle)
By default, the linker uses demangled symbol names in diagnostics. For example:
undefined symbol first referenced in file
ANewClass::getValue() test.obj
The --no_demangle option disables the demangling of symbol names in diagnostics. For example:
undefined symbol first referenced in file
_ZN9ANewClass8getValueEv test.obj
8.4.23 Disable Merging of Symbolic Debugging Information (--no_sym_merge Option)
By default, the linker eliminates duplicate entries of symbolic debugging information. Such duplicate
information is commonly generated when a C program is compiled for debugging. For example:
-[ header.h ]-
typedef struct
{
<define some structure members>
} XYZ;
-[ f1.c ]-
#include "header.h"
...
-[ f2.c ]-
#include "header.h"
...
When these files are compiled for debugging, both f1.obj and f2.obj have symbolic debugging entries to
describe type XYZ. For the final output file, only one set of these entries is necessary. The linker
eliminates the duplicate entries automatically.
8.4.24 Strip Symbolic Information (--no_symtable Option)
The --no_symtable option creates a smaller output module by omitting symbol table information and line
number entries. The --no_sym_table option is useful for production applications when you do not want to
disclose symbolic information to the consumer.
This example links file1.obj and file2.obj and creates an output module, stripped of line numbers and
symbol table information, named nosym.out:
armcl --run_linker --output_file=nosym.out --no_symtable file1.obj file2.obj
Using the --no_symtable option limits later use of a symbolic debugger.
Stripping Symbolic Information
NOTE: The --no_symtable option is deprecated. To remove symbol table information, use the
armstrip utility as described in Section 11.4.
Linker Options
www.ti.com
198 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Linker Description
8.4.25 Name an Output Module (--output_file Option)
The linker creates an output module when no errors are encountered. If you do not specify a filename for
the output module, the linker gives it the default name a.out. If you want to write the output module to a
different file, use the --output_file option. The syntax for the --output_file option is:
--output_file= filename
The filename is the new output module name.
This example links file1.obj and file2.obj and creates an output module named run.out:
armcl --run_linker --output_file=run.out file1.obj file2.obj
8.4.26 Prioritizing Function Placement (--preferred_order Option)
The compiler prioritizes the placement of a function relative to others based on the order in which --
preferred_order options are encountered during the linker invocation. The syntax is:
--preferred_order=function specification
Refer to the ARM Optimizing C/C++ Compiler User's Guide for details on the program cache layout tool,
which is impacted by --preferred_option.
8.4.27 C Language Options (--ram_model and --rom_model Options)
The --ram_model and --rom_model options cause the linker to use linking conventions that are required by
the C compiler.
• The --ram_model option tells the linker to initialize variables at load time.
• The --rom_model option tells the linker to autoinitialize variables at run time.
For more information, see Section 8.11,Section 3.3.2.1, and Section 3.3.2.2.
8.4.28 Retain Discarded Sections (--retain Option)
When --unused_section_elimination is on, the ELF linker does not include a section in the final link if it is
not needed in the executable to resolve references. The --retain option tells the linker to retain a list of
sections that would otherwise not be retained. This option accepts the wildcards '*' and '?'. When
wildcards are used, the argument should be in quotes. The syntax for this option is:
--retain=sym_or_scn_spec
The --retain option take one of the following forms:
•--retain= symbol_spec
Specifying the symbol format retains sections that define symbol_spec. For example, this code retains
sections that define symbols that start with init:
--retain='init*'
You cannot specify --retain='*'.
•--retain= file_spec(scn_spec[, scn_spec, ...]
Specifying the file format retains sections that match one or more scn_spec from files matching the
file_spec. For example, this code retains .intvec sections from all input files:
--retain='*(.int*)'
You can specify --retain='*(*)' to retain all sections from all input files. However, this does not prevent
sections from library members from being optimized out.
•--retain= ar_spec<mem_spec, [mem_spec, ...>(scn_spec[, scn_spec, ...]
Specifying the archive format retains sections matching one or more scn_spec from members
matching one or more mem_spec from archive files matching ar_spec. For example, this code retains
the .text sections from printf.obj in the rts32eabi.lib library:
--retain=rts32eabi.lib<printf.obj>(.text)

www.ti.com
Linker Options
199
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Linker Description
If the library is specified with the --library option (--library=rts32eabi.lib) the library search path is used
to search for the library. You cannot specify '*<*>(*)'.
8.4.29 Create an Absolute Listing File (--run_abs Option)
The --run_abs option produces an output file for each file linked. These files are named with the input
filenames and an extension of .abs. Header files, however, do not generate a corresponding .abs file.
8.4.30 Scan All Libraries for Duplicate Symbol Definitions (--scan_libraries)
The --scan_libraries option scans all libraries during a link looking for duplicate symbol definitions to those
symbols that are actually included in the link. The scan does not consider absolute symbols or symbols
defined in COMDAT sections. The --scan_libraries option helps determine those symbols that were
actually chosen by the linker over other existing definitions of the same symbol in a library.
The library scanning feature can be used to check against unintended resolution of a symbol reference to
a definition when multiple definitions are available in the libraries.
8.4.31 Define Stack Size (--stack_size Option)
The ARM C/C++ compiler uses an uninitialized section, .stack, to allocate space for the run-time stack.
You can set the size of this section in bytes at link time with the --stack_size option. The syntax for the --
stack_size option is:
--stack_size= size
The size must be a constant and is in bytes. This example defines a 4K byte stack:
armcl --run_linker --stack_size=0x1000 /* defines a 4K heap (.stack section)*/
If you specified a different stack size in an input section, the input section stack size is ignored. Any
symbols defined in the input section remain valid; only the stack size is different.
When the linker defines the .stack section, it also defines a global symbol, __TI_STACK_SIZE, and
assigns it a value equal to the size of the section. The default software stack size is 2K bytes. See
Section 8.6.1 for information about referring to linker symbols in C/C++ code.
8.4.32 Enforce Strict Compatibility (--strict_compatibility Option)
The linker performs more conservative and rigorous compatibility checking of input object files when you
specify the --strict_compatibility option. Using this option guards against additional potential compatibility
issues, but may signal false compatibility errors when linking in object files built with an older toolset, or
with object files built with another compiler vendor's toolset. To avoid issues with legacy libraries, the --
strict_compatibility option is turned off by default.
8.4.33 Mapping of Symbols (--symbol_map Option)
Symbol mapping allows a symbol reference to be resolved by a symbol with a different name. Symbol
mapping allows functions to be overridden with alternate definitions. This feature can be used to patch in
alternate implementations, which provide patches (bug fixes) or alternate functionality. The syntax for the -
-symbol_map option is:
--symbol_map= refname=defname
For example, the following code makes the linker resolve any references to foo by the definition
foo_patch:
--symbol_map='foo=foo_patch'
The --symbol_map option is now supported even if --opt_level=4 was used when compiling.

Linker Options
www.ti.com
200 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Linker Description
8.4.34 Generate Far Call Trampolines (--trampolines Option)
The ARM device has PC-relative call and PC-relative branch instructions whose range is smaller than the
entire address space. When these instructions are used, the destination address must be near enough to
the instruction that the difference between the call and the destination fits in the available encoding bits. If
the called function is too far away from the calling function, the linker generates an error.
The alternative to a PC-relative call is an absolute call, which is often implemented as an indirect call: load
the called address into a register, and call that register. This is often undesirable because it takes more
instructions (speed- and size-wise) and requires an extra register to contain the address.
By default, the compiler generates near calls. The --trampolines option causes the linker to generate a
trampoline code section for each call that is linked out-of-range of its called destination. The trampoline
code section contains a sequence of instructions that performs a transparent long branch to the original
called address. Each calling instruction that is out-of-range from the called function is redirected to the
trampoline.
For example, in a section of C code the bar function calls the foo function. The compiler generates this
code for the function:
bar:
...
call foo ; call the function "foo"
...
If the foo function is placed out-of-range from the call to foo that is inside of bar, then with --trampolines
the linker changes the original call to foo into a call to foo_trampoline as shown:
bar:
...
call foo_trampoline ; call a trampoline for foo
...
The above code generates a trampoline code section called foo_trampoline, which contains code that
executes a long branch to the original called function, foo. For example:
foo_trampoline:
branch_long foo
Trampolines can be shared among calls to the same called function. The only requirement is that all calls
to the called function be linked near the called function's trampoline.
The syntax for this option is:
--trampolines[=on|off]
The default setting is on. For ARM, trampolines are turned on by default.
When the linker produces a map file (the --map_file option) and it has produced one or more trampolines,
then the map file will contain statistics about what trampolines were generated to reach which functions. A
list of calls for each trampoline is also provided in the map file.
The Linker Assumes R13 Contains the Stack Pointer
NOTE: Assembly language programmers must be aware that the linker assumes R13 contains the
stack pointer. The linker must save and restore values on the stack in trampoline code that it
generates. If you do not use R13 as the stack pointer, you should use the linker option that
disables trampolines, --trampolines=off. Otherwise, trampolines could corrupt memory and
overwrite register values.

www.ti.com
Linker Options
201
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Linker Description
8.4.34.1 Advantages and Disadvantages of Using Trampolines
The advantage of using trampolines is that you can treat all calls as near calls, which are faster and more
efficient. You will only need to modify those calls that don't reach. In addition, there is little need to
consider the relative placement of functions that call each other. Cases where calls must go through a
trampoline are less common than near calls.
While generating far call trampolines provides a more straightforward solution, trampolines have the
disadvantage that they are somewhat slower than directly calling a function. They require both a call and a
branch. Additionally, while inline code could be tailored to the environment of the call, trampolines are
generated in a more general manner, and may be slightly less efficient than inline code.
An alternative method to creating a trampoline code section for a call that cannot reach its called function
is to actually modify the source code for the call. In some cases this can be done without affecting the size
of the code. However, in general, this approach is extremely difficult, especially when the size of the code
is affected by the transformation.
8.4.34.2 Minimizing the Number of Trampolines Required (--minimize_trampolines Option)
The --minimize_trampolines option attempts to place sections so as to minimize the number of far call
trampolines required, possibly at the expense of optimal memory packing. The syntax is:
--minimize_trampolines=postorder
The argument selects a heuristic to use. The postorder heuristic attempts to place functions before their
callers, so that the PC-relative offset to the callee is known when the caller is placed. By placing the callee
first, its address is known when the caller is placed so the linker can definitively know if a trampoline is
required.
8.4.34.3 Making Trampoline Reservations Adjacent (--trampoline_min_spacing Option)
When a call is placed and the callee's address is unknown, the linker must provisionally reserve space for
a far call trampoline in case the callee turns out to be too far away. Even if the callee ends up being close
enough, the trampoline reservation can interfere with optimal placement for very large code sections.
When trampoline reservations are spaced more closely than the specified limit, use the --
trampoline_min_spacing option to try to make them adjacent. The syntax is:
--trampoline_min_spacing=size
A higher value minimizes fragmentation, but may result in more trampolines. A lower value may reduce
trampolines, at the expense of fragmentation and linker running time. Specifying 0 for this option disables
coalescing. The default is 16K.
Linker Options
www.ti.com
202 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Linker Description
8.4.34.4 Carrying Trampolines From Load Space to Run Space
It is sometimes useful to load code in one location in memory and run it in another. The linker provides the
capability to specify separate load and run allocations for a section. The burden of actually copying the
code from the load space to the run space is left to you.
A copy function must be executed before the real function can be executed in its run space. To facilitate
this copy function, the assembler provides the .label directive, which allows you to define a load-time
address. These load-time addresses can then be used to determine the start address and size of the code
to be copied. However, this mechanism will not work if the code contains a call that requires a trampoline
to reach its called function. This is because the trampoline code is generated at link time, after the load-
time addresses associated with the .label directive have been defined. If the linker detects the definition of
a .label symbol in an input section that contains a trampoline call, then a warning is generated.
To solve this problem, you can use the START(), END(), and SIZE() operators (see Section 8.5.10.7).
These operators allow you to define symbols to represent the load-time start address and size inside the
linker command file. These symbols can be referenced by the copy code, and their values are not
resolved until link time, after the trampoline sections have been allocated.
Here is an example of how you could use the START() and SIZE() operators in association with an output
section to copy the trampoline code section along with the code containing the calls that need trampolines:
SECTIONS
{ .foo : load = ROM, run = RAM, start(foo_start), size(foo_size)
{ x.obj(.text) }
.text: {} > ROM
.far : { --library=rts.lib(.text) } > FAR_MEM
}
A function in x.obj contains an run-time-support call. The run-time-support library is placed in far memory
and so the call is out-of-range. A trampoline section will be added to the .foo output section by the linker.
The copy code can refer to the symbols foo_start and foo_size as parameters for the load start address
and size of the entire .foo output section. This allows the copy code to copy the trampoline section along
with the original x.obj code in .text from its load space to its run space.
See Section 8.6.1 for information about referring to linker symbols in C/C++ code.
8.4.35 Introduce an Unresolved Symbol (--undef_sym Option)
The --undef_sym option introduces the linkname for an unresolved symbol into the linker's symbol table.
This forces the linker to search a library and include the member that defines the symbol. The linker must
encounter the --undef_sym option before it links in the member that defines the symbol. The syntax for the
--undef_sym option is:
--undef_sym= symbol
For example, suppose a library named rtsv4_A_be_eabi.lib contains a member that defines the symbol
symtab; none of the object files being linked reference symtab. However, suppose you plan to relink the
output module and you want to include the library member that defines symtab in this link. Using the --
undef_sym option as shown below forces the linker to search rtsv4_A_be_eabi.lib for the member that
defines symtab and to link in the member.
armcl --run_linker --undef_sym=symtab file1.obj file2.obj rtsv4_A_be_eabi.lib
If you do not use --undef_sym, this member is not included, because there is no explicit reference to it in
file1.obj or file2.obj.

www.ti.com
Linker Options
203
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Linker Description
8.4.36 Display a Message When an Undefined Output Section Is Created (--warn_sections)
In a linker command file, you can set up a SECTIONS directive that describes how input sections are
combined into output sections. However, if the linker encounters one or more input sections that do not
have a corresponding output section defined in the SECTIONS directive, the linker combines the input
sections that have the same name into an output section with that name. By default, the linker does not
display a message to tell you that this occurred.
You can use the --warn_sections option to cause the linker to display a message when it creates a new
output section.
For more information about the SECTIONS directive, see Section 8.5.5. For more information about the
default actions of the linker, see Section 8.7.
8.4.37 Generate XML Link Information File (--xml_link_info Option)
The linker supports the generation of an XML link information file through the --xml_link_info=file option.
This option causes the linker to generate a well-formed XML file containing detailed information about the
result of a link. The information included in this file includes all of the information that is currently produced
in a linker generated map file. See Appendix B for specifics on the contents of the generated XML file.
8.4.38 Zero Initialization (--zero_init Option)
The C and C++ standards require that global and static variables that are not explicitly initialized must be
set to 0 before program execution. The C/C++ compiler supports preinitialization of uninitialized variables
by default. To turn this off, specify the linker option --zero_init=off.
The syntax for the --zero_init option is:
--zero_init[={on|off}]
Disabling Zero Initialization Not Recommended
NOTE: In general, this option it is not recommended. If you turn off zero initialization, automatic
initialization of uninitialized global and static objects to zero will not occur. You are then
expected to initialize these variables to zero in some other manner.

Linker Command Files
www.ti.com
204 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Linker Description
8.5 Linker Command Files
Linker command files allow you to put linker options and directives in a file; this is useful when you invoke
the linker often with the same options and directives. Linker command files are also useful because they
allow you to use the MEMORY and SECTIONS directives to customize your application. You must use
these directives in a command file; you cannot use them on the command line.
Linker command files are ASCII files that contain one or more of the following:
• Input filenames, which specify object files, archive libraries, or other command files. (If a command file
calls another command file as input, this statement must be the last statement in the calling command
file. The linker does not return from called command files.)
• Linker options, which can be used in the command file in the same manner that they are used on the
command line
• The MEMORY and SECTIONS linker directives. The MEMORY directive defines the target memory
configuration (see Section 8.5.4). The SECTIONS directive controls how sections are built and
allocated (see Section 8.5.5.)
• Assignment statements, which define and assign values to global symbols
To invoke the linker with a command file, enter the armcl --run_linker command and follow it with the
name of the command file:
armcl --run_linker command_filename
The linker processes input files in the order that it encounters them. If the linker recognizes a file as an
object file, it links the file. Otherwise, it assumes that a file is a command file and begins reading and
processing commands from it. Command filenames are case sensitive, regardless of the system used.
Example 8-1 shows a sample linker command file called link.cmd.
Example 8
‑‑
1. Linker Command File
a.obj /* First input filename */
b.obj /* Second input filename */
--output_file=prog.out /* Option to specify output file */
--map_file=prog.map /* Option to specify map file */
The sample file in Example 8-1 contains only filenames and options. (You can place comments in a
command file by delimiting them with /* and */.) To invoke the linker with this command file, enter:
armcl --run_linker link.cmd
You can place other parameters on the command line when you use a command file:
armcl --run_linker --relocatable link.cmd c.obj d.obj
The linker processes the command file as soon as it encounters the filename, so a.obj and b.obj are
linked into the output module before c.obj and d.obj.
You can specify multiple command files. If, for example, you have a file called names.lst that contains
filenames and another file called dir.cmd that contains linker directives, you could enter:
armcl --run_linker names.lst dir.cmd
One command file can call another command file; this type of nesting is limited to 16 levels. If a command
file calls another command file as input, this statement must be the last statement in the calling command
file.
www.ti.com
Linker Command Files
205
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Linker Description
Blanks and blank lines are insignificant in a command file except as delimiters. This also applies to the
format of linker directives in a command file. Example 8-2 shows a sample command file that contains
linker directives.
Example 8
‑‑
2. Command File With Linker Directives
a.obj b.obj c.obj /* Input filenames */
--output_file=prog.out /* Options */
--map_file=prog.map
MEMORY /* MEMORY directive */
{
FAST_MEM: origin = 0x0100 length = 0x0100
SLOW_MEM: origin = 0x7000 length = 0x1000
}
SECTIONS /* SECTIONS directive */
{
.text: > SLOW_MEM
.data: > SLOW_MEM
.bss: > FAST_MEM
}
For more information, see Section 8.5.4 for the MEMORY directive, and Section 8.5.5 for the SECTIONS
directive.
8.5.1 Reserved Names in Linker Command Files
The following names (in both uppercase and lowercase) are reserved as keywords for linker directives. Do
not use them as symbol or section names in a command file.
ADDRESS_MASK ECC LEN o SECTIONS
ALGORITHM END LENGTH ORG SIZE
ALIAS f LOAD ORIGIN START
ALIGN FILL LOAD_END PAGE TABLE
ATTR GROUP LOAD_SIZE PALIGN TYPE
BLOCK HAMMING_MASK LOAD_START PARITY_MASK UNION
COMPRESSION HIGH MEMORY RUN UNORDERED
COPY INPUT_PAGE MIRRORING RUN_END VFILL
CRC_TABLE INPUT_RANGE NOINIT RUN_SIZE
DSECT l (lowercase L) NOLOAD RUN_START
In addition, any section names used by the TI tools are reserved from being used as the prefix for other
names, unless the section will be a subsection of the section name used by the TI tools. For example,
section names may not begin with .debug.
8.5.2 Constants in Linker Command Files
You can specify constants with either of two syntax schemes: the scheme used for specifying decimal,
octal, or hexadecimal constants (but not binary constants) used in the assembler (see Section 4.7) or the
scheme used for integer constants in C syntax.
Examples:
Format Decimal Octal Hexadecimal
Assembler format 32 40q 020h
C format 32 040 0x20

Linker Command Files
www.ti.com
206 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Linker Description
8.5.3 Accessing Files and Libraries from a Linker Command File
Many applications use custom linker command files (or LCFs) to control the placement of code and data in
target memory. For example, you may want to place a specific data object from a specific file into a
specific location in target memory. This is simple to do using the available LCF syntax to reference the
desired object file or library. However, a problem that many developers run into when they try to do this is
a linker generated "file not found" error when accessing an object file or library from inside the LCF that
has been specified earlier in the command-line invocation of the linker. Most often, this error occurs
because the syntax used to access the file on the linker command-line does not match the syntax that is
used to access the same file in the LCF.
Consider a simple example. Imagine that you have an application that requires a table of constants called
"app_coeffs" to be defined in a memory area called "DDR". Assume also that the "app_coeffs" data object
is defined in a .data section that resides in an object file, app_coeffs.obj. app_coeffs.obj is then included in
the object file library app_data.lib. In your LCF, you can control the placement of the "app_coeffs" data
object as follows:
SECTIONS
{
...
.coeffs: { app_data.lib<app_coeffs.obj>(.data) } > DDR
...
}
Now assume that the app_data.lib object library resides in a sub-directory called "lib" relative to where you
are building the application. In order to gain access to app_data.lib from the build command-line, you can
use a combination of the –i and –l options to set up a directory search path which the linker can use to
find the app_data.lib library:
%> armcl <compile options/files> -z -i ./lib -l app_data.lib mylnk.cmd <link options/files>
The –i option adds the lib sub-directory to the directory search path and the –l option instructs the linker to
look through the directories in the directory search path to find the app_data.lib library. However, if you do
not update the reference to app_data.lib in mylnk.cmd, the linker will fail to find the app_data.lib library and
generate a "file not found" error. The reason is that when the linker encounters the reference to
app_data.lib inside the SECTIONS directive, there is no –l option preceding the reference. Therefore, the
linker tries to open app_data.lib in the current working directory.
In essence, the linker has a few different ways of opening files:
• If there is a path specified, the linker will look for the file in the specified location. For an absolute path,
the linker will try to open the file in the specified directory. For a relative path, the linker will follow the
specified path starting from the current working directory and try to open the file at that location.
• If there is no path specified, the linker will try to open the file in the current working directory.
• If a –l option precedes the file reference, then the linker will try to find and open the referenced file in
one of the directories in the directory search path. The directory search path is set up via –i options
and environment variables (like C_DIR and C6X_C_DIR).
As long as a file is referenced in a consistent manner on the command line and throughout any applicable
LCFs, the linker will be able to find and open your object files and libraries.
Returning to the earlier example, you can insert a –l option in front of the reference to app_data.lib in
mylnk.cmd to ensure that the linker will find and open the app_data.lib library when the application is built:
SECTIONS
{
...
.coeffs: { -l app_data.lib<app_coeffs.obj>(.data) } > DDR
...
}
Another benefit to using the –l option when referencing a file from within an LCF is that if the location of
the referenced file changes, you can modify the directory search path to incorporate the new location of
the file (using –i option on the command line, for example) without having to modify the LCF.

www.ti.com
Linker Command Files
207
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Linker Description
8.5.4 The MEMORY Directive
The linker determines where output sections are allocated into memory; it must have a model of target
memory to accomplish this. The MEMORY directive allows you to specify a model of target memory so
that you can define the types of memory your system contains and the address ranges they occupy. The
linker maintains the model as it allocates output sections and uses it to determine which memory locations
can be used for object code.
The memory configurations of ARM systems differ from application to application. The MEMORY directive
allows you to specify a variety of configurations. After you use MEMORY to define a memory model, you
can use the SECTIONS directive to allocate output sections into defined memory.
For more information, see Section 2.5.
8.5.4.1 Default Memory Model
If you do not use the MEMORY directive, the linker uses a default memory model that is based on the
ARM architecture. This model assumes that the full 32-bit address space (232 locations) is present in the
system and available for use. For more information about the default memory model, see Section 8.7.
8.5.4.2 MEMORY Directive Syntax
The MEMORY directive identifies ranges of memory that are physically present in the target system and
can be used by a program. Each range has several characteristics:
• Name
• Starting address
• Length
• Optional set of attributes
• Optional fill specification
When you use the MEMORY directive, be sure to identify all memory ranges that are available for the
program to access at run time. Memory defined by the MEMORY directive is configured; any memory that
you do not explicitly account for with MEMORY is unconfigured. The linker does not place any part of a
program into unconfigured memory. You can represent nonexistent memory spaces by simply not
including an address range in a MEMORY directive statement.
The MEMORY directive is specified in a command file by the word MEMORY (uppercase), followed by a
list of memory range specifications enclosed in braces. The MEMORY directive in Example 8-3 defines a
system that has 4K bytes of fast external memory at address 0x0000 0000, 2K bytes of slow external
memory at address 0x0000 1000 and 4K bytes of slow external memory at address 0x1000 0000. It also
demonstrates the use of memory range expressions as well as start/end/size address operators (see
Example 8-4).
Example 8-3. The MEMORY Directive
/********************************************************/
/* Sample command file with MEMORY directive */
/********************************************************/
file1.obj file2.obj /* Input files */
--output_file=prog.out /* Options */
MEMORY
{
FAST_MEM (RX): origin = 0x00000000 length = 0x00001000
SLOW_MEM (RW): origin = 0x00001000 length = 0x00000800
EXT_MEM (RX): origin = 0x10000000 length = 0x00001000

Linker Command Files
www.ti.com
208 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Linker Description
The general syntax for the MEMORY directive is:
MEMORY
{
name 1 [(attr )]: origin = expression , length = expression [, fill = constant]
.
.
name n [(attr )]: origin = expression , length = expression [, fill = constant]
}
name names a memory range. A memory name can be one to 64 characters; valid characters
include A-Z, a-z, $, ., and _. The names have no special significance to the linker; they
simply identify memory ranges. Memory range names are internal to the linker and are not
retained in the output file or in the symbol table. All memory ranges must have unique
names and must not overlap.
attr specifies one to four attributes associated with the named range. Attributes are optional;
when used, they must be enclosed in parentheses. Attributes restrict the allocation of
output sections into certain memory ranges. If you do not use any attributes, you can
allocate any output section into any range with no restrictions. Any memory for which no
attributes are specified (including all memory in the default model) has all four attributes.
Valid attributes are:
Rspecifies that the memory can be read.
Wspecifies that the memory can be written to.
Xspecifies that the memory can contain executable code.
Ispecifies that the memory can be initialized.
origin specifies the starting address of a memory range; enter as origin,org, or o. The value,
specified in bytes, is a 32-bit integer constant expression, which can be decimal, octal, or
hexadecimal.
length specifies the length of a memory range; enter as length,len, or l. The value, specified in
bytes, is a 32-bit integer constant expression, which can be decimal, octal, or hexadecimal.
fill specifies a fill character for the memory range; enter as fill or f. Fills are optional. The value
is an integer constant and can be decimal, octal, or hexadecimal. The fill value is used to
fill areas of the memory range that are not allocated to a section. (See Section 8.5.9.3 for
virtual filling of memory ranges when using Error Correcting Code (ECC).)
Filling Memory Ranges
NOTE: If you specify fill values for large memory ranges, your output file will be very large because
filling a memory range (even with 0s) causes raw data to be generated for all unallocated
blocks of memory in the range.
The following example specifies a memory range with the R and W attributes and a fill constant of
0FFFFFFFFh:
MEMORY
{
RFILE (RW) : o = 0x0020, l = 0x1000, f = 0xFFFF
}
You normally use the MEMORY directive in conjunction with the SECTIONS directive to control placement
of output sections. For more information about the SECTIONS directive, see Section 8.5.5.

www.ti.com
Linker Command Files
209
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Linker Description
8.5.4.3 Expressions and Address Operators
Memory range origin and length can use expressions of integer constants with the following operators:
Binary operators: * / % + - << >> == =
< <= > >= & | && ||
Unary operators: - ~ !
Expressions are evaluated using standard C operator precedence rules.
No checking is done for overflow or underflow, however, expressions are evaluated using a larger integer
type.
Preprocess directive #define constants can be used in place of integer constants. Global symbols cannot
be used in Memory Directive expressions.
Three address operators reference memory range properties from prior memory range entries:
START(MR) Returns start address for previously defined memory range MR.
SIZE(MR) Returns size of previously defined memory range MR.
END(MR) Returns end address for previously defined memory range MR.
Example 8-4. Origin and Length as Expressions
/********************************************************/
/* Sample command file with MEMORY directive */
/********************************************************/
file1.obj file2.obj /* Input files */
--output_file=prog.out /* Options */
#define ORIGIN 0x00000000
#define BUFFER 0x00000200
#define CACHE 0x0001000
MEMORY
{
FAST_MEM (RX): origin = ORIGIN + CACHE length = 0x00001000 + BUFFER
SLOW_MEM (RW): origin = end(FAST_MEM) length = 0x00001800 - size(FAST_MEM)
EXT_MEM (RX): origin = 0x10000000 length = size(FAST_MEM) - CACHE
8.5.4.4 The ALIAS Statement
Certain devices, such as the MSP432 Cortex M4, have a region of RAM that can be addressed by two
different memory buses--a system bus and an instruction bus. This RAM region, which is located in the
DATA region of the memory map (usually at 0x20000000), is internally aliased to the CODE region
(usually at 0x01000000). This aliasing takes advantage of the instruction bus to fetch code from RAM
while freeing the other system buses. On such devices, your linker command file should use the ALIAS
statement so that placements to CODE and DATA are made with no collisions.
In order to use the above capability, the linker must be aware of the two addresses that point to the same
memory. Use the following syntax within a MEMORY directive to create an ALIAS for a memory range.
ALIAS regions must have the same length.
MEMORY
{
...
ALIAS
{
SRAM_CODE (RWX) : origin = 0x01000000
SRAM_DATA (RW) : origin = 0x20000000
} length = 0x0001000
...
}

Linker Command Files
www.ti.com
210 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Linker Description
8.5.5 The SECTIONS Directive
After you use MEMORY to specify the target system's memory model, you can use SECTIONS to allocate
output sections into specific named memory ranges or into memory that has specific attributes. For
example, you could allocate the .text and .data sections into the area named FAST_MEM and allocate the
.bss section into the area named SLOW_MEM.
The SECTIONS directive controls your sections in the following ways:
• Describes how input sections are combined into output sections
• Defines output sections in the executable program
• Allows you to control where output sections are placed in memory in relation to each other and to the
entire memory space (Note that the memory placement order is not simply the sequence in which
sections occur in the SECTIONS directive.)
• Permits renaming of output sections
For more information, see Section 2.5,Section 2.7, and Section 2.4.6. Subsections allow you to
manipulate sections with greater precision.
If you do not specify a SECTIONS directive, the linker uses a default algorithm for combining and
allocating the sections. Section 8.7 describes this algorithm in detail.
8.5.5.1 SECTIONS Directive Syntax
The SECTIONS directive is specified in a command file by the word SECTIONS (uppercase), followed by
a list of output section specifications enclosed in braces.
The general syntax for the SECTIONS directive is:
SECTIONS
{
name : [property [, property] [, property]...]
name : [property [, property] [, property]...]
name : [property [, property] [, property]...]
}
Each section specification, beginning with name, defines an output section. (An output section is a section
in the output file.) Section names can refer to sections, subsections, or archive library members. (See
Section 8.5.5.4 for information on multi-level subsections.) After the section name is a list of properties
that define the section's contents and how the section is allocated. The properties can be separated by
optional commas. Possible properties for a section are as follows:
•Load allocation defines where in memory the section is to be loaded. See Section 3.5,
Section 3.1.1, and Section 8.5.6.
Syntax: load = allocation or
>allocation
•Run allocation defines where in memory the section is to be run.
Syntax: run = allocation or
run > allocation
•Input sections defines the input sections (object files) that constitute the output section. See
Section 8.5.5.3.
Syntax: {input_sections }
www.ti.com
Linker Command Files
211
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Linker Description
•Section type defines flags for special section types. See Section 8.5.8.
Syntax: type = COPY or
type = DSECT or
type = NOLOAD
•Fill value defines the value used to fill uninitialized holes. See Section 8.5.11.
Syntax: fill = value
Example 8-5 shows a SECTIONS directive in a sample linker command file.
Example 8-5. The SECTIONS Directive
/**************************************************/
/* Sample command file with SECTIONS directive */
/**************************************************/
file1.obj file2.obj /* Input files */
--output_file=prog.out /* Options */
SECTIONS
{
.text: load = EXT_MEM, run = 0x00000800
.const: load = FAST_MEM
.bss: load = SLOW_MEM
.vectors: load = 0x00000000
{
t1.obj(.intvec1)
t2.obj(.intvec2)
endvec = .;
}
.data:alpha: align = 16
.data:beta: align = 16
}
Figure 8-2 shows the output sections defined by the SECTIONS directive in Example 8-5 (.vectors, .text,
.const, .bss, .data:alpha, and .data:beta) and shows how these sections are allocated in memory using the
MEMORY directive given in Example 8-3.
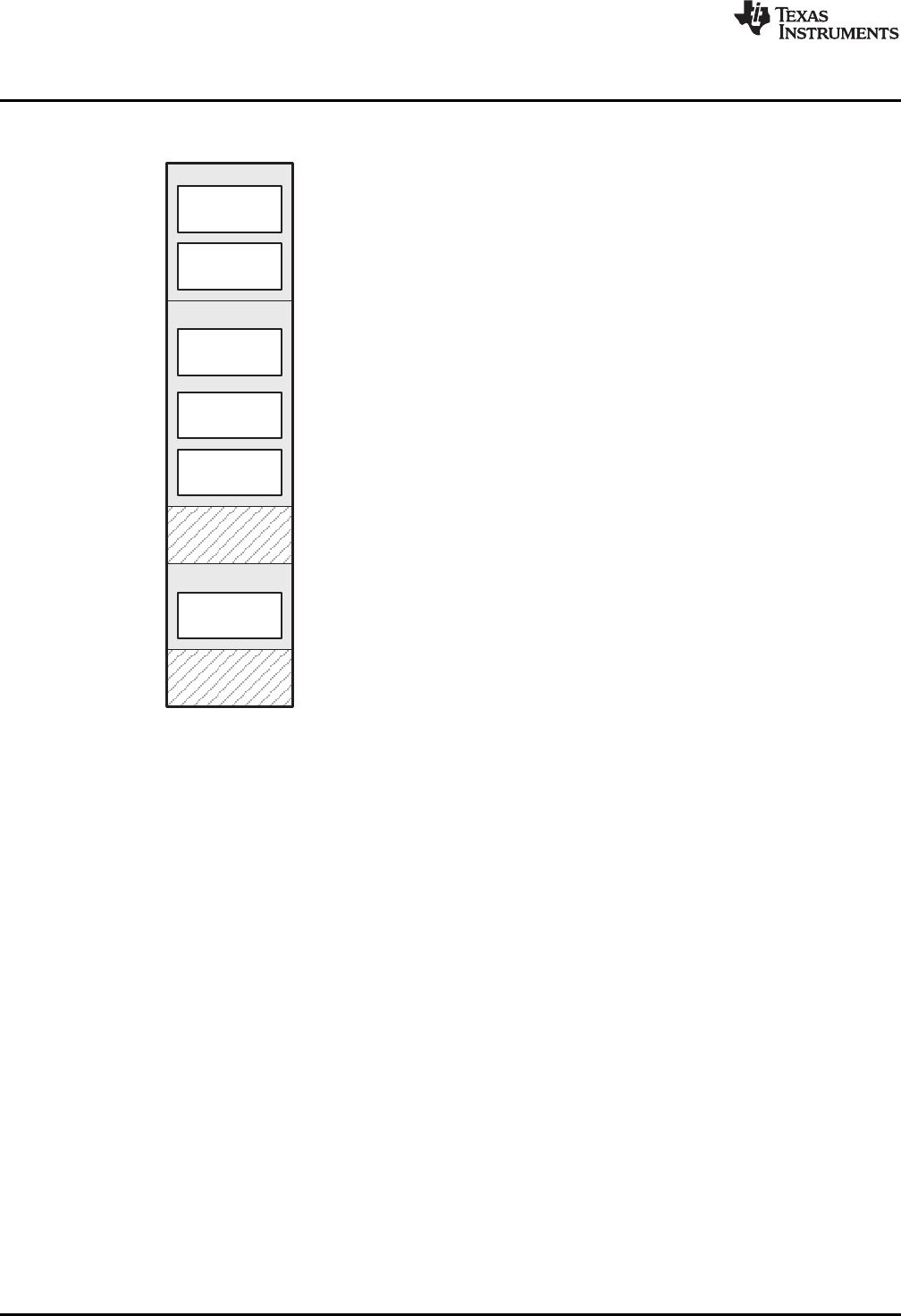
.const
.data:alpha
.vectors
FAST_MEM
.bss
SLOW_MEM
.data:beta
.text
EXT_MEM
0x00000000
0x00001000
0x00001800
0x10000000
0x10001000
0xFFFFFFFF
-Boundat0x00000000
- AllocatedinFAST_MEM
- AllocatedinSLOW_MEM
- Alignedon16-byte
boundary
- Alignedon16-byte
boundary
-Emptyrangeofmemory
asdefinedinabove
- AllocatedinEXT_MEM
-Emptyrangeofmemory
asdefinedinabove
The sectioniscomposedofthe.intvec1
sectionfromt1.objandthe.intvec2sectionfrom
t2.obj.
.vectors
The sectioncombinesthe.constsections
fromfile1.objandfile2.obj.
.const
The sectioncombinesthe.bsssectionsfrom
file1.objandfile2.obj.
.bss
The subsectioncombinesthe.data:al-
phasubsectionsfromfile1.objandfile2.obj. The
subsectioncombinesthe.data:beta
subsectionsfromfile1.objandfile2.obj. Thelinker
placesthesubsectionsanywherethereisspacefor
them(inSLOW_MEMinthisillustration)andaligns
eachona16-byteboundary.
.data:alpha
.data:beta
The sectioncombinesthe.textsectionsfrom
file1.objandfile2.obj. Thelinkercombinesallsec-
tionsnamed.textintothissection. Theapplication
mustrelocatethesectiontorunat0x00000800.
.text
Linker Command Files
www.ti.com
212 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Linker Description
Figure 8-2. Section Placement Defined by Example 8-5
8.5.5.2 Section Allocation and Placement
The linker assigns each output section two locations in target memory: the location where the section will
be loaded and the location where it will be run. Usually, these are the same, and you can think of each
section as having only a single address. The process of locating the output section in the target's memory
and assigning its address(es) is called placement. For more information about using separate load and
run placement, see Section 8.5.6.
If you do not tell the linker how a section is to be allocated, it uses a default algorithm to place the section.
Generally, the linker puts sections wherever they fit into configured memory. You can override this default
placement for a section by defining it within a SECTIONS directive and providing instructions on how to
allocate it.
You control placement by specifying one or more allocation parameters. Each parameter consists of a
keyword, an optional equal sign or greater-than sign, and a value optionally enclosed in parentheses. If
load and run placement are separate, all parameters following the keyword LOAD apply to load
placement, and those following the keyword RUN apply to run placement. The allocation parameters are:
Binding allocates a section at a specific address.
.text: load = 0x1000
Named
memory allocates the section into a range defined in the MEMORY directive with the specified
name (like SLOW_MEM) or attributes.
.text: load > SLOW_MEM
Alignment uses the align or palign keyword to specify the section must start on an address boundary.
.text: align = 0x100
Blocking uses the block keyword to specify the section must fit between two address aligned to the
blocking factor. If a section is too large, it starts on an address boundary.
.text: block(0x100)

www.ti.com
Linker Command Files
213
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Linker Description
For the load (usually the only) allocation, use a greater-than sign and omit the load keyword:
.text: > SLOW_MEM
.text: {...} > SLOW_MEM
.text: > 0x4000
If more than one parameter is used, you can string them together as follows:
.text: > SLOW_MEM align 16
Or if you prefer, use parentheses for readability:
.text: load = (SLOW_MEM align(16))
You can also use an input section specification to identify the sections from input files that are combined
to form an output section. See Section 8.5.5.3.
Additional information about controlling the order in which code and data are placed in memory is provided
in the FAQ topic on section placement.
8.5.5.2.1 Example: Placing Functions in RAM
The --ramfunc compiler option and ramfunc function attribute allow the compiler to specify that a function
is to be placed in and executed from RAM. Most newer TI linker command files support the ramfunc
option and function attribute by placing such functions in the .TI.ramfunc section. If you see a linker error
related to this section, you should add the .TI.ramfunc section to your SECTIONS directive as follows. In
these examples, RAM and FLASH are names of MEMORY regions for RAM and Flash memory; the
names may be different in your linker command file.
For RAM-based devices:
.TI.ramfunc : {} > RAM
For Flash-based devices:
.TI.ramfunc : {} load=FLASH, run=RAM, table(BINIT)
See the Placing functions in RAM wiki page for details.
8.5.5.2.2 Binding
You can set the starting address for an output section by following the section name with an address:
.text: 0x00001000
This example specifies that the .text section must begin at location 0x1000. The binding address must be
a 32-bit constant.
Output sections can be bound anywhere in configured memory (assuming there is enough space), but
they cannot overlap. If there is not enough space to bind a section to a specified address, the linker issues
an error message.
Binding is Incompatible With Alignment and Named Memory
NOTE: You cannot bind a section to an address if you use alignment or named memory. If you try to
do this, the linker issues an error message.
8.5.5.2.3 Named Memory
You can allocate a section into a memory range that is defined by the MEMORY directive (see
Section 8.5.4). This example names ranges and links sections into them:
MEMORY
{
SLOW_MEM (RIX) : origin = 0x00000000, length = 0x00001000
FAST_MEM (RWIX) : origin = 0x03000000, length = 0x00000300
}
SECTIONS
{

Linker Command Files
www.ti.com
214 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Linker Description
.text : > SLOW_MEM
.data : > FAST_MEM ALIGN(128)
.bss : > FAST_MEM
}
In this example, the linker places .text into the area called SLOW_MEM. The .data and .bss output
sections are allocated into FAST_MEM. You can align a section within a named memory range; the .data
section is aligned on a 128-byte boundary within the FAST_MEM range.
Similarly, you can link a section into an area of memory that has particular attributes. To do this, specify a
set of attributes (enclosed in parentheses) instead of a memory name. Using the same MEMORY directive
declaration, you can specify:
SECTIONS
{
.text: > (X) /* .text --> executable memory */
.data: > (RI) /* .data --> read or init memory */
.bss : > (RW) /* .bss --> read or write memory */
}
In this example, the .text output section can be linked into either the SLOW_MEM or FAST_MEM area
because both areas have the X attribute. The .data section can also go into either SLOW_MEM or
FAST_MEM because both areas have the R and I attributes. The .bss output section, however, must go
into the FAST_MEM area because only FAST_MEM is declared with the W attribute.
You cannot control where in a named memory range a section is allocated, although the linker uses lower
memory addresses first and avoids fragmentation when possible. In the preceding examples, assuming no
conflicting assignments exist, the .text section starts at address 0. If a section must start on a specific
address, use binding instead of named memory.
8.5.5.2.4 Controlling Placement Using The HIGH Location Specifier
The linker allocates output sections from low to high addresses within a designated memory range by
default. Alternatively, you can cause the linker to allocate a section from high to low addresses within a
memory range by using the HIGH location specifier in the SECTION directive declaration. You might use
the HIGH location specifier in order to keep RTS code separate from application code, so that small
changes in the application do not cause large changes to the memory map.
For example, given this MEMORY directive:
MEMORY
{
RAM : origin = 0x0200, length = 0x0800
FLASH : origin = 0x1100, length = 0xEEE0
VECTORS : origin = 0xFFE0, length = 0x001E
RESET : origin = 0xFFFE, length = 0x0002
}
and an accompanying SECTIONS directive:
SECTIONS
{
.bss : {} > RAM
.sysmem : {} > RAM
.stack : {} > RAM (HIGH)
}
The HIGH specifier used on the .stack section placement causes the linker to attempt to allocate .stack
into the higher addresses within the RAM memory range. The .bss and .sysmem sections are allocated
into the lower addresses within RAM. Example 8-6 illustrates a portion of a map file that shows where the
given sections are allocated within RAM for a typical program.

www.ti.com
Linker Command Files
215
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Linker Description
Example 8-6. Linker Placement With the HIGH Specifier
.bss 0 00000200 00000270 UNINITIALIZED
00000200 0000011a rtsxxx.lib : defs.obj (.bss)
0000031a 00000088 : trgdrv.obj (.bss)
000003a2 00000078 : lowlev.obj (.bss)
0000041a 00000046 : exit.obj (.bss)
00000460 00000008 : memory.obj (.bss)
00000468 00000004 : _lock.obj (.bss)
0000046c 00000002 : fopen.obj (.bss)
0000046e 00000002 hello.obj (.bss)
.sysmem 0 00000470 00000120 UNINITIALIZED
00000470 00000004 rtsxxx .lib : memory.obj (.sysmem)
.stack 0 000008c0 00000140 UNINITIALIZED
000008c0 00000002 rtsxxx .lib : boot.obj (.stack)
As shown in Example 8-6 , the .bss and .sysmem sections are allocated at the lower addresses of RAM
(0x0200 - 0x0590) and the .stack section is allocated at address 0x08c0, even though lower addresses
are available.
Without using the HIGH specifier, the linker allocation would result in the code shown in Example 8-7
The HIGH specifier is ignored if it is used with specific address binding or automatic section splitting (>>
operator).
Example 8-7. Linker Placement Without HIGH Specifier
.bss 0 00000200 00000270 UNINITIALIZED
00000200 0000011a rtsxxx.lib : defs.obj (.bss)
0000031a 00000088 : trgdrv.obj (.bss)
000003a2 00000078 : lowlev.obj (.bss)
0000041a 00000046 : exit.obj (.bss)
00000460 00000008 : memory.obj (.bss)
00000468 00000004 : _lock.obj (.bss)
0000046c 00000002 : fopen.obj (.bss)
0000046e 00000002 hello.obj (.bss)
.stack 0 00000470 00000140 UNINITIALIZED
00000470 00000002 rtsxxx.lib : boot.obj (.stack)
.sysmem 0 000005b0 00000120 UNINITIALIZED
000005b0 00000004 rtsxxx.lib : memory.obj (.sysmem)
8.5.5.2.5 Alignment and Blocking
You can tell the linker to place an output section at an address that falls on an n-byte boundary, where n
is a power of 2, by using the align keyword. For example, the following code allocates .text so that it falls
on a 32-byte boundary:
.text: load = align(32)
Blocking is a weaker form of alignment that allocates a section anywhere within a block of size n. The
specified block size must be a power of 2. For example, the following code allocates .bss so that the entire
section is contained in a single 128-byte block or begins on that boundary:
bss: load = block(0x0080)
You can use alignment or blocking alone or in conjunction with a memory area, but alignment and
blocking cannot be used together.

Linker Command Files
www.ti.com
216 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Linker Description
8.5.5.2.6 Alignment With Padding
As with align, you can tell the linker to place an output section at an address that falls on an n-byte
boundary, where n is a power of 2, by using the palign keyword. In addition, palign ensures that the size
of the section is a multiple of its placement alignment restrictions, padding the section size up to such a
boundary, as needed.
For example, the following code lines allocate .text on a 2-byte boundary within the PMEM area. The .text
section size is guaranteed to be a multiple of 2 bytes. Both statements are equivalent:
.text: palign(2) {} > PMEM
.text: palign = 2 {} > PMEM
If the linker adds padding to an initialized output section then the padding space is also initialized. By
default, padding space is filled with a value of 0 (zero). However, if a fill value is specified for the output
section then any padding for the section is also filled with that fill value. For example, consider the
following section specification:
.mytext: palign(8), fill = 0xffffffff {} > PMEM
In this example, the length of the .mytext section is 6 bytes before the palign operator is applied. The
contents of .mytext are as follows:
addr content
---- -------
0000 0x1234
0002 0x1234
0004 0x1234
After the palign operator is applied, the length of .mytext is 8 bytes, and its contents are as follows:
addr content
---- -------
0000 0x1234
0002 0x1234
0004 0x1234
0006 0xffff
The size of .mytext has been bumped to a multiple of 8 bytes and the padding created by the linker has
been filled with 0xff.
The fill value specified in the linker command file is interpreted as a 16-bit constant. If you specify this
code:
.mytext: palign(8), fill = 0xff {} > PMEM
The fill value assumed by the linker is 0x00ff, and .mytext will then have the following contents:
addr content
---- -------
0000 0x1234
0002 0x1234
0004 0x1234
0006 0x00ff
If the palign operator is applied to an uninitialized section, then the size of the section is bumped to the
appropriate boundary, as needed, but any padding created is not initialized.
The palign operator can also take a parameter of power2. This parameter tells the linker to add padding to
increase the section's size to the next power of two boundary. In addition, the section is aligned on that
power of 2 as well. For example, consider the following section specification:
.mytext: palign(power2) {} > PMEM
Assume that the size of the .mytext section is 120 bytes and PMEM starts at address 0x10020. After
applying the palign(power2) operator, the .mytext output section will have the following properties:
name addr size align
------- ---------- ----- -----
.mytext 0x00010080 0x80 128

www.ti.com
Linker Command Files
217
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Linker Description
8.5.5.3 Specifying Input Sections
An input section specification identifies the sections from input files that are combined to form an output
section. In general, the linker combines input sections by concatenating them in the order in which they
are specified. However, if alignment or blocking is specified for an input section, all of the input sections
within the output section are ordered as follows:
• All aligned sections, from largest to smallest
• All blocked sections, from largest to smallest
• All other sections, from largest to smallest
The size of an output section is the sum of the sizes of the input sections that it comprises.
Example 8-8 shows the most common type of section specification; note that no input sections are listed.
Example 8-8. The Most Common Method of Specifying Section Contents
SECTIONS
{
.text:
.data:
.bss:
}
In Example 8-8, the linker takes all the .text sections from the input files and combines them into the .text
output section. The linker concatenates the .text input sections in the order that it encounters them in the
input files. The linker performs similar operations with the .data and .bss sections. You can use this type of
specification for any output section.
You can explicitly specify the input sections that form an output section. Each input section is identified by
its filename and section name. If the filename is hyphenated (or contains special characters), enclose it
within quotes:
SECTIONS
{
.text : /* Build .text output section */
{
f1.obj(.text) /* Link .text section from f1.obj */
f2.obj(sec1) /* Link sec1 section from f2.obj */
"f3-new.obj" /* Link ALL sections from f3-new.obj */
f4.obj(.text,sec2) /* Link .text and sec2 from f4.obj */
f5.obj(.task??) /* Link .task00, .task01, .taskXX, etc. from f5.obj */
f6.obj(*_ctable) /* Link sections ending in "_ctable" from f6.obj */
X*.obj(.text) /* Link .text section for all files starting with */
/* "X" and ending in ".obj" */
}
}
It is not necessary for input sections to have the same name as each other or as the output section they
become part of. If a file is listed with no sections,all of its sections are included in the output section. If any
additional input sections have the same name as an output section but are not explicitly specified by the
SECTIONS directive, they are automatically linked in at the end of the output section. For example, if the
linker found more .text sections in the preceding example and these .text sections were not specified
anywhere in the SECTIONS directive, the linker would concatenate these extra sections after f4.obj(sec2).
The specifications in Example 8-8 are actually a shorthand method for the following:
SECTIONS
{
.text: { *(.text) }
.data: { *(.data) }
.bss: { *(.bss) }
}
Linker Command Files
www.ti.com
218 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Linker Description
The specification *(.text) means the unallocated .text sections from all input files. This format is useful if:
• You want the output section to contain all input sections that have a specified name, but the output
section name is different from the input sections' name.
• You want the linker to allocate the input sections before it processes additional input sections or
commands within the braces.
The following example illustrates the two purposes above:
SECTIONS
{
.text : {
abc.obj(xqt)
*(.text)
}
.data : {
*(.data)
fil.obj(table)
}
}
In this example, the .text output section contains a named section xqt from file abc.obj, which is followed
by all the .text input sections. The .data section contains all the .data input sections, followed by a named
section table from the file fil.obj. This method includes all the unallocated sections. For example, if one of
the .text input sections was already included in another output section when the linker encountered
*(.text), the linker could not include that first .text input section in the second output section.
Each input section acts as a prefix and gathers longer-named sections. For example, the pattern *(.data)
matches .dataspecial. This mechanism enables the use of subsections, which are described in the
following section.
8.5.5.4 Using Multi-Level Subsections
Subsections can be identified with the base section name and one or more subsection names separated
by colons. For example, A:B and A:B:C name subsections of the base section A. In certain places in a
linker command file specifying a base name, such as A, selects the section A as well as any subsections
of A, such as A:B or A:C:D.
A name such as A:B can specify a (sub)section of that name as well as any (multi-level) subsections
beginning with that name, such as A:B:C, A:B:OTHER, etc. All subsections of A:B are also subsections of
A. A and A:B are supersections of A:B:C. Among a group of supersections of a subsection, the nearest
supersection is the supersection with the longest name. Thus, among {A, A:B} the nearest supersection of
A:B:C:D is A:B. With multiple levels of subsections, the constraints are the following:
1. When specifying input sections within a file (or library unit) the section name selects an input section
of the same name and any subsections of that name.
2. Input sections that are not explicitly allocated are allocated in an existing output section of the same
name or in the nearest existing supersection of such an output section. An exception to this rule is that
during a partial link (specified by the --relocatable linker option) a subsection is allocated only to an
existing output section of the same name.
3. If no such output section described in 2) is defined, the input section is put in a newly created output
section with the same name as the base name of the input section
Consider linking input sections with the following names:
europe:north:norway europe:central:france europe:south:spain
europe:north:sweden europe:central:germany europe:south:italy
europe:north:finland europe:central:denmark europe:south:malta
europe:north:iceland
www.ti.com
Linker Command Files
219
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Linker Description
This SECTIONS specification allocates the input sections as indicated in the comments:
SECTIONS {
nordic: {*(europe:north)
*(europe:central:denmark)} /* the nordic countries */
central: {*(europe:central)} /* france, germany */
therest: {*(europe)} /* spain, italy, malta */
}
This SECTIONS specification allocates the input sections as indicated in the comments:
SECTIONS {
islands: {*(europe:south:malta)
*(europe:north:iceland)} /* malta, iceland */
europe:north:finland : {} /* finland */
europe:north : {} /* norway, sweden */
europe:central : {} /* germany, denmark */
europe:central:france: {} /* france */
/* (italy, spain) go into a linker-generated output section "europe" */
}
Upward Compatibility of Multi-Level Subsections
NOTE: Existing linker commands that use the existing single-level subsection features and which do
not contain section names containing multiple colon characters continue to behave as
before. However, if section names in a linker command file or in the input sections supplied
to the linker contain multiple colon characters, some change in behavior could be possible.
You should carefully consider the impact of the rules for multiple levels to see if it affects a
particular system link.
8.5.5.5 Specifying Library or Archive Members as Input to Output Sections
You can specify one or more members of an object library or archive for input to an output section.
Consider this SECTIONS directive:
Example 8-9. Archive Members to Output Sections
SECTIONS
{
boot > BOOT1
{
--library=rtsXX.lib<boot.obj> (.text)
--library=rtsXX.lib<exit.obj strcpy.obj> (.text)
}
.rts > BOOT2
{
--library=rtsXX.lib (.text)
}
.text > RAM
{
* (.text)
}
}
In Example 8-9, the .text sections of boot.obj, exit.obj, and strcpy.obj are extracted from the run-time-
support library and placed in the .boot output section. The remainder of the run-time-support library object
that is referenced is allocated to the .rts output section. Finally, the remainder of all other .text sections are
to be placed in section .text.

Linker Command Files
www.ti.com
220 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Linker Description
An archive member or a list of members is specified by surrounding the member name(s) with angle
brackets < and > after the library name. Any object files separated by commas or spaces from the
specified archive file are legal within the angle brackets.
The --library option (which normally implies a library path search be made for the named file following the
option) listed before each library in Example 8-9 is optional when listing specific archive members inside <
>. Using < > implies that you are referring to a library.
To collect a set of the input sections from a library in one place, use the --library option within the
SECTIONS directive. For example, the following collects all the .text sections from rtsv4_A_be_eabi.lib
into the .rtstest section:
SECTIONS
{
.rtstest { --library=rtsv4_A_be_eabi.lib(.text) } > RAM
}
SECTIONS Directive Effect on --priority
NOTE: Specifying a library in a SECTIONS directive causes that library to be entered in the list of
libraries that the linker searches to resolve references. If you use the --priority option, the first
library specified in the command file will be searched first.
8.5.5.6 Allocation Using Multiple Memory Ranges
The linker allows you to specify an explicit list of memory ranges into which an output section can be
allocated. Consider the following example:
MEMORY
{
P_MEM1 : origin = 0x02000, length = 0x01000
P_MEM2 : origin = 0x04000, length = 0x01000
P_MEM3 : origin = 0x06000, length = 0x01000
P_MEM4 : origin = 0x08000, length = 0x01000
}
SECTIONS
{
.text : { } > P_MEM1 |P_MEM2 |P_MEM4
}
The | operator is used to specify the multiple memory ranges. The .text output section is allocated as a
whole into the first memory range in which it fits. The memory ranges are accessed in the order specified.
In this example, the linker first tries to allocate the section in P_MEM1. If that attempt fails, the linker tries
to place the section into P_MEM2, and so on. If the output section is not successfully allocated in any of
the named memory ranges, the linker issues an error message.
With this type of SECTIONS directive specification, the linker can seamlessly handle an output section
that grows beyond the available space of the memory range in which it is originally allocated. Instead of
modifying the linker command file, you can let the linker move the section into one of the other areas.
8.5.5.7 Automatic Splitting of Output Sections Among Non-Contiguous Memory Ranges
The linker can split output sections among multiple memory ranges for efficient allocation. Use the >>
operator to indicate that an output section can be split, if necessary, into the specified memory ranges:
MEMORY
{
P_MEM1 : origin = 0x2000, length = 0x1000
P_MEM2 : origin = 0x4000, length = 0x1000
P_MEM3 : origin = 0x6000, length = 0x1000
P_MEM4 : origin = 0x8000, length = 0x1000
}
SECTIONS
{
.text: { *(.text) } >> P_MEM1 |P_MEM2 |P_MEM3 |P_MEM4
}

www.ti.com
Linker Command Files
221
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Linker Description
In this example, the >> operator indicates that the .text output section can be split among any of the listed
memory areas. If the .text section grows beyond the available memory in P_MEM1, it is split on an input
section boundary, and the remainder of the output section is allocated to P_MEM2 | P_MEM3 | P_MEM4.
The | operator is used to specify the list of multiple memory ranges.
You can also use the >> operator to indicate that an output section can be split within a single memory
range. This functionality is useful when several output sections must be allocated into the same memory
range, but the restrictions of one output section cause the memory range to be partitioned. Consider the
following example:
MEMORY
{
RAM : origin = 0x1000, length = 0x8000
}
SECTIONS
{
.special: { f1.obj(.text) } load = 0x4000
.text: { *(.text) } >> RAM
}
The .special output section is allocated near the middle of the RAM memory range. This leaves two
unused areas in RAM: from 0x1000 to 0x4000, and from the end of f1.obj(.text) to 0x8000. The
specification for the .text section allows the linker to split the .text section around the .special section and
use the available space in RAM on either side of .special.
The >> operator can also be used to split an output section among all memory ranges that match a
specified attribute combination. For example:
MEMORY
{
P_MEM1 (RWX) : origin = 0x1000, length = 0x2000
P_MEM2 (RWI) : origin = 0x4000, length = 0x1000
}
SECTIONS
{
.text: { *(.text) } >> (RW)
}
The linker attempts to allocate all or part of the output section into any memory range whose attributes
match the attributes specified in the SECTIONS directive.
This SECTIONS directive has the same effect as:
SECTIONS
{
.text: { *(.text) } >> P_MEM1 | P_MEM2}
}
Certain sections should not be split:
• Certain sections created by the compiler, including
– The .cinit section, which contains the autoinitialization table for C/C++ programs
– The .pinit section, which contains the list of global constructors for C++ programs
• An output section with an input section specification that includes an expression to be evaluated. The
expression may define a symbol that is used in the program to manage the output section at run time.
• An output section that has a START(), END(), OR SIZE() operator applied to it. These operators
provide information about a section's load or run address, and size. Splitting the section may
compromise the integrity of the operation.
• The run allocation of a UNION. (Splitting the load allocation of a UNION is allowed.)
If you use the >> operator on any of these sections, the linker issues a warning and ignores the operator.

Linker Command Files
www.ti.com
222 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Linker Description
8.5.6 Placing a Section at Different Load and Run Addresses
At times, you may want to load code into one area of memory and run it in another. For example, you may
have performance-critical code in slow external memory. The code must be loaded into slow external
memory, but it would run faster in fast external memory.
The linker provides a simple way to accomplish this. You can use the SECTIONS directive to direct the
linker to allocate a section twice: once to set its load address and again to set its run address. For
example:
.fir: load = SLOW_MEM, run = FAST_MEM
Use the load keyword for the load address and the run keyword for the run address.
See Section 3.5 for an overview on run-time relocation.
The application must copy the section from its load address to its run address; this does not happen
automatically when you specify a separate run address. (The TABLE operator instructs the linker to
produce a copy table; see Section 8.8.4.1.)
8.5.6.1 Specifying Load and Run Addresses
The load address determines where a loader places the raw data for the section. Any references to the
section (such as labels in it) refer to its run address. See Section 3.1.1 for an overview of load and run
addresses.
If you provide only one allocation (either load or run) for a section, the section is allocated only once and
loads and runs at the same address. If you provide both allocations, the section is allocated as if it were
two sections of the same size. This means that both allocations occupy space in the memory map and
cannot overlay each other or other sections. (The UNION directive provides a way to overlay sections; see
Section 8.5.7.2.)
If either the load or run address has additional parameters, such as alignment or blocking, list them after
the appropriate keyword. Everything related to allocation after the keyword load affects the load address
until the keyword run is seen, after which, everything affects the run address. The load and run allocations
are completely independent, so any qualification of one (such as alignment) has no effect on the other.
You can also specify run first, then load. Use parentheses to improve readability.
The examples that follow specify load and run addresses.
In this example, align applies only to load:
.data: load = SLOW_MEM, align = 32, run = FAST_MEM
The following example uses parentheses, but has effects that are identical to the previous example:
.data: load = (SLOW_MEM align 32), run = FAST_MEM
The following example aligns FAST_MEM to 32 bits for run allocations and aligns all load allocations to 16
bits:
.data: run = FAST_MEM, align 32, load = align 16
For more information on run-time relocation see Section 3.5.
Uninitialized sections (such as .bss) are not loaded, so their only significant address is the run address.
The linker allocates uninitialized sections only once: if you specify both run and load addresses, the linker
warns you and ignores the load address. Otherwise, if you specify only one address, the linker treats it as
a run address, regardless of whether you call it load or run.
This example specifies load and run addresses for an uninitialized section:
.bss: load = 0x1000, run = FAST_MEM
A warning is issued, load is ignored, and space is allocated in FAST_MEM. All of the following examples
have the same effect. The .bss section is allocated in FAST_MEM.
.dbss: load = FAST_MEM
.bss: run = FAST_MEM
.bss: > FAST_MEM

www.ti.com
Linker Command Files
223
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Linker Description
8.5.6.2 Referring to the Load Address by Using the .label Directive
Normally, any reference to a symbol refers to its run-time address. However, it may be necessary at run
time to refer to a load-time address. Specifically, the code that copies a section from its load address to its
run address must have access to the load address. The .label directive defines a special symbol that
refers to the section's load address. Thus, whereas normal symbols are relocated with respect to the run
address, .label symbols are relocated with respect to the load address. See Create a Load-Time Address
Label for more information on the .label directive.
Example 8-10 and Example 8-11 show the use of the .label directive to copy a section from its load
address in SLOW_MEM to its run address in FAST_MEM. Figure 8-3 illustrates the run-time execution of
Example 8-10.
If you use the table operator, the .label directive is not needed. See Section 8.8.4.1.
Example 8-10. Moving a Function from Slow to Fast Memory at Run Time
;-----------------------------------------------------------
; define a section to be copied from SLOW_MEM to FAST_MEM
;-----------------------------------------------------------
.sect ".fir"
.label fir_src ; load address of section
fir: ; run address of section
<code here> ; code for section
.label fir_end ; load address of section end
;-----------------------------------------------------------
; copy .fir section from SLOW_MEM to FAST_MEM
;-----------------------------------------------------------
.text
LDR r4, fir_s ; get fir load address start
LDR r5, fir_e ; get fir load address stop
LDR r3, fir_a ; get fir run address
$1: CMP r4, r5
LDRCC r0, [r4], #4 ; copy fir routine to its
; run address
STRCC r0, [r3], #4
BCC $1
;-----------------------------------------------------------
; jump to fir routine, now in FAST_MEM
;-----------------------------------------------------------
B fir
fir_a .word fir
fir_s .word fir_start
fir_e .word fir_end
Example 8-11. Linker Command File for Example 8-10
/******************************************************/
/* PARTIAL LINKER COMMAND FILE FOR FIR EXAMPLE */
/******************************************************/
MEMORY
{
FAST_MEM : origin = 0x00001000, length = 0x00001000
SLOW_MEM : origin = 0x10000000, length = 0x00001000
}
SECTIONS
{
.text: load = FAST_MEM
.fir: load = SLOW_MEM, run FAST_MEM
}
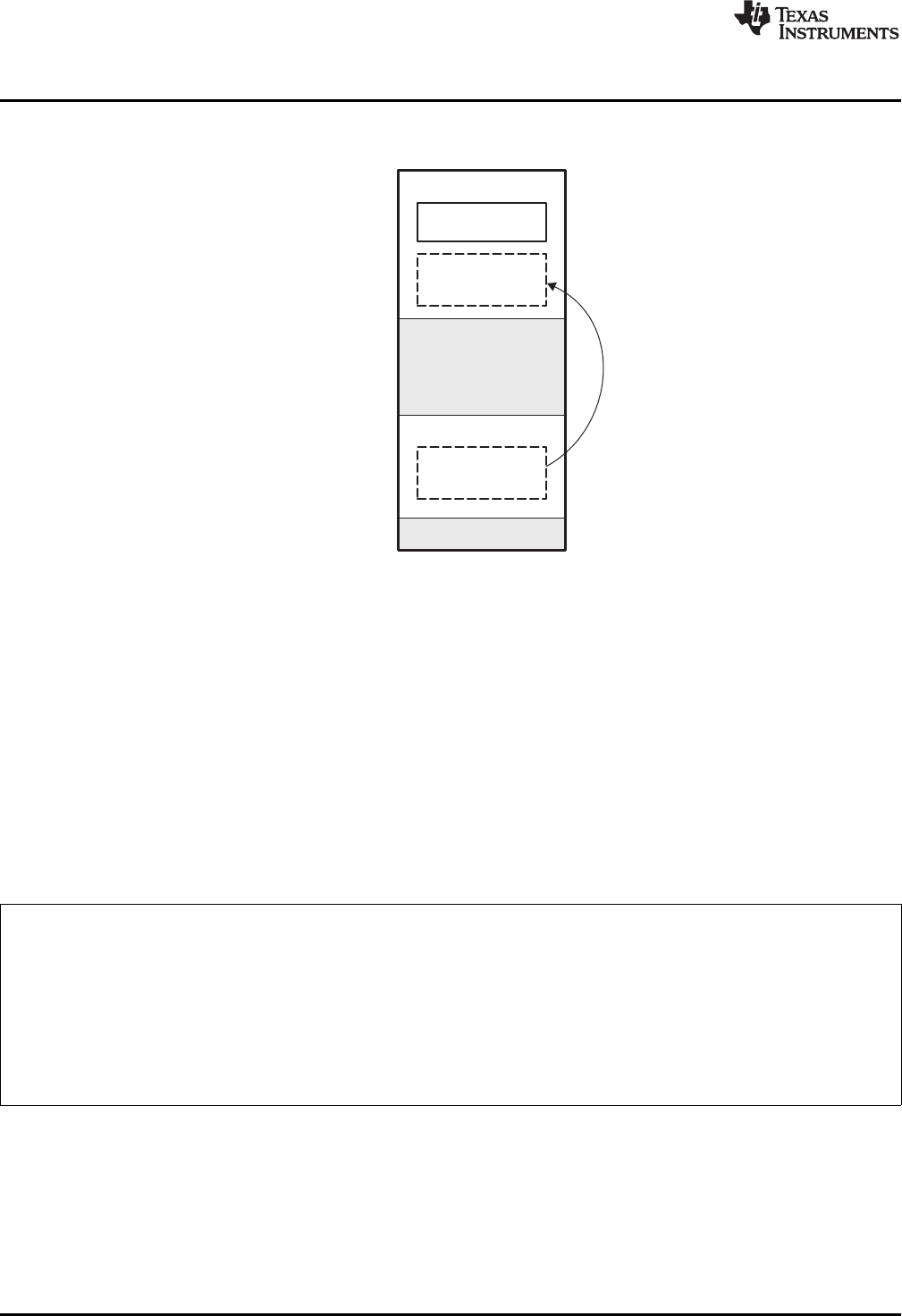
fir(relocated
torunhere)
.text
FAST_MEM
SLOW_MEM
fir(loadshere)
0x00000000
0x00001000
0x10000000
0x10001000
0xFFFFFFFF
Linker Command Files
www.ti.com
224 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Linker Description
Figure 8-3. Run-Time Execution of Example 8-10
See Section 8.6.1 for information about referring to linker symbols in C/C++ code.
8.5.7 Using GROUP and UNION Statements
Two SECTIONS statements allow you to organize or conserve memory: GROUP and UNION. Grouping
sections causes the linker to allocate them contiguously in memory. Unioning sections causes the linker to
allocate them to the same run address.
8.5.7.1 Grouping Output Sections Together
The SECTIONS directive's GROUP option forces several output sections to be allocated contiguously and
in the order listed, unless the UNORDERED operator is used. For example, assume that a section named
term_rec contains a termination record for a table in the .data section. You can force the linker to allocate
.data and term_rec together:
Example 8-12. Allocate Sections Together
SECTIONS
{
.text /* Normal output section */
.bss /* Normal output section */
GROUP 0x00001000 : /* Specify a group of sections */
{
.data /* First section in the group */
term_rec /* Allocated immediately after .data */
}
}
You can use binding, alignment, or named memory to allocate a GROUP in the same manner as a single
output section. In the preceding example, the GROUP is bound to address 0x1000. This means that .data
is allocated at 0x1000, and term_rec follows it in memory.
www.ti.com
Linker Command Files
225
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Linker Description
You Cannot Specify Addresses for Sections Within a GROUP
NOTE: When you use the GROUP option, binding, alignment, or allocation into named memory can
be specified for the group only. You cannot use binding, named memory, or alignment for
sections within a group.
8.5.7.2 Overlaying Sections With the UNION Statement
For some applications, you may want to allocate more than one section that occupies the same address
during run time. For example, you may have several routines you want in fast external memory at different
stages of execution. Or you may want several data objects that are not active at the same time to share a
block of memory. The UNION statement within the SECTIONS directive provides a way to allocate several
sections at the same run-time address.
In Example 8-13, the .bss sections from file1.obj and file2.obj are allocated at the same address in
FAST_MEM. In the memory map, the union occupies as much space as its largest component. The
components of a union remain independent sections; they are simply allocated together as a unit.
Example 8-13. The UNION Statement
SECTIONS
{
.text: load = SLOW_MEM
UNION: run = FAST_MEM
{
.bss:part1: { file1.obj(.bss) }
.bss:part2: { file2.obj(.bss) }
}
.bss:part3: run = FAST_MEM { globals.obj(.bss) }
}
Allocation of a section as part of a union affects only its run address. Under no circumstances can
sections be overlaid for loading. If an initialized section is a union member (an initialized section, such as
.text, has raw data), its load allocation must be separately specified. See Example 8-14.
Example 8-14. Separate Load Addresses for UNION Sections
UNION run = FAST_MEM
{
.text:part1: load = SLOW_MEM, { file1.obj(.text) }
.text:part2: load = SLOW_MEM, { file2.obj(.text) }
}
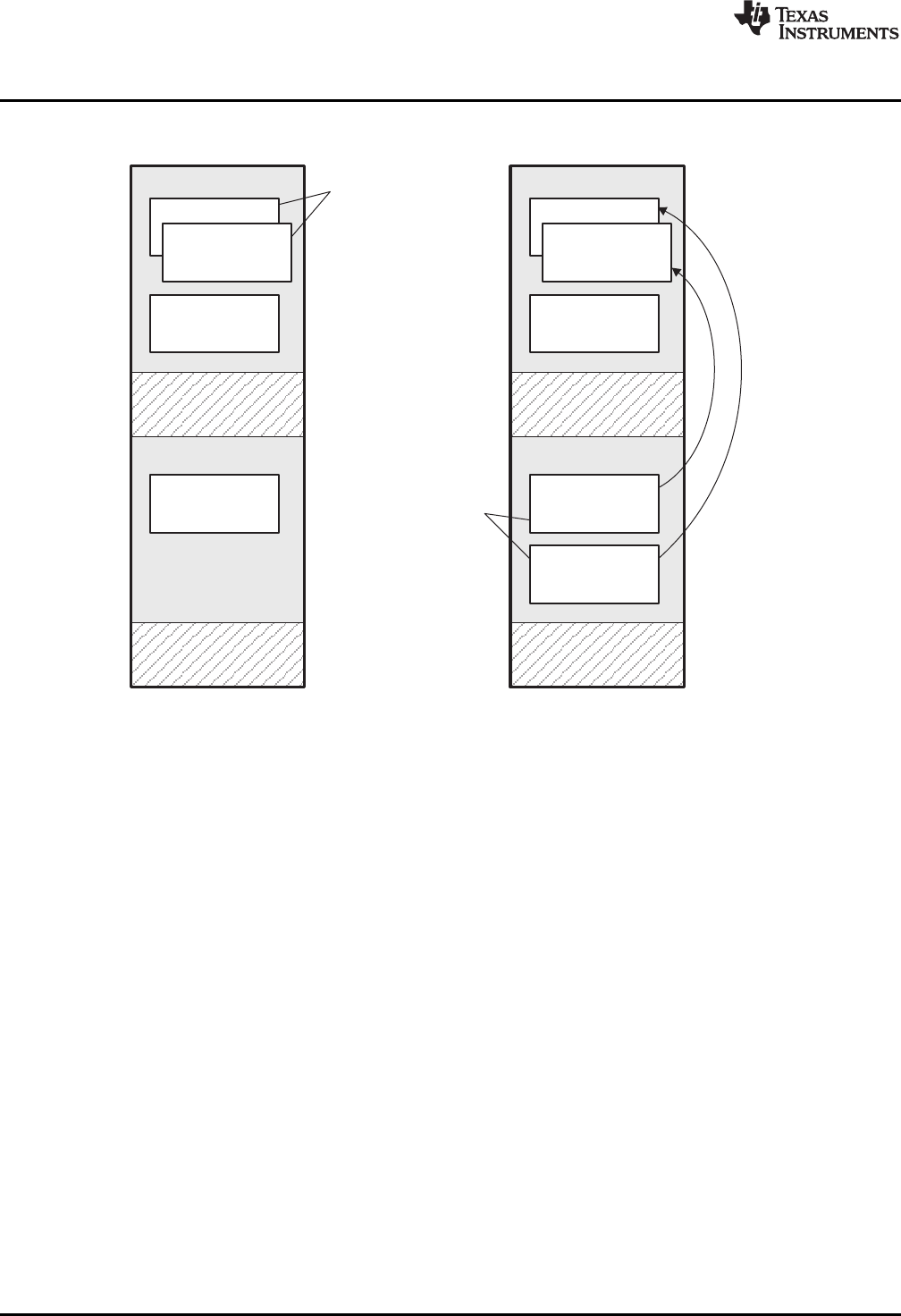
.bss:part2
.bss:part1
.bss:part3
FAST_MEM
.text
SLOW_MEM
Sectionscanrun
asaunion. This
isrun-timealloca-
tiononly.
.text2(run)
.text1(run)
.bss:part3
FAST_MEM
.text1(load)
SLOW_MEM
.text2(load)
Sectionscannot
loadasaunion
Copiesat
runtime
Linker Command Files
www.ti.com
226 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Linker Description
Figure 8-4. Memory Allocation Shown in Example 8-13 and Example 8-14
Since the .text sections contain raw data, they cannot load as a union, although they can be run as a
union. Therefore, each requires its own load address. If you fail to provide a load allocation for an
initialized section within a UNION, the linker issues a warning and allocates load space anywhere it can in
configured memory.
Uninitialized sections are not loaded and do not require load addresses.
The UNION statement applies only to allocation of run addresses, so it is meaningless to specify a load
address for the union itself. For purposes of allocation, the union is treated as an uninitialized section: any
one allocation specified is considered a run address, and if both run and load addresses are specified, the
linker issues a warning and ignores the load address.

www.ti.com
Linker Command Files
227
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Linker Description
8.5.7.3 Nesting UNIONs and GROUPs
The linker allows arbitrary nesting of GROUP and UNION statements with the SECTIONS directive. By
nesting GROUP and UNION statements, you can express hierarchical overlays and groupings of sections.
Example 8-15 shows how two overlays can be grouped together.
Example 8-15. Nesting GROUP and UNION Statements
SECTIONS
{
GROUP 0x1000 : run = FAST_MEM
{
UNION:
{
mysect1: load = SLOW_MEM
mysect2: load = SLOW_MEM
}
UNION:
{
mysect3: load = SLOW_MEM
mysect4: load = SLOW_MEM
}
}
}
For this example, the linker performs the following allocations:
• The four sections (mysect1, mysect2, mysect3, mysect4) are assigned unique, non-overlapping load
addresses. The name you defined with the .label directive is used in the SLOW_MEM memory region.
This assignment is determined by the particular load allocations given for each section.
• Sections mysect1 and mysect2 are assigned the same run address in FAST_MEM.
• Sections mysect3 and mysect4 are assigned the same run address in FAST_MEM.
• The run addresses of mysect1/mysect2 and mysect3/mysect4 are allocated contiguously, as directed
by the GROUP statement (subject to alignment and blocking restrictions).
To refer to groups and unions, linker diagnostic messages use the notation:
GROUP_nUNION_n
where nis a sequential number (beginning at 1) that represents the lexical ordering of the group or union
in the linker control file without regard to nesting. Groups and unions each have their own counter.
8.5.7.4 Checking the Consistency of Allocators
The linker checks the consistency of load and run allocations specified for unions, groups, and sections.
The following rules are used:
• Run allocations are only allowed for top-level sections, groups, or unions (sections, groups, or unions
that are not nested under any other groups or unions). The linker uses the run address of the top-level
structure to compute the run addresses of the components within groups and unions.
• The linker does not accept a load allocation for UNIONs.
• The linker does not accept a load allocation for uninitialized sections.
• In most cases, you must provide a load allocation for an initialized section. However, the linker does
not accept a load allocation for an initialized section that is located within a group that already defines
a load allocator.

Linker Command Files
www.ti.com
228 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Linker Description
• As a shortcut, you can specify a load allocation for an entire group, to determine the load allocations
for every initialized section or subgroup nested within the group. However, a load allocation is
accepted for an entire group only if all of the following conditions are true:
– The group is initialized (that is, it has at least one initialized member).
– The group is not nested inside another group that has a load allocator.
– The group does not contain a union containing initialized sections.
• If the group contains a union with initialized sections, it is necessary to specify the load allocation for
each initialized section nested within the group. Consider the following example:
SECTIONS
{
GROUP: load = SLOW_MEM, run = SLOW_MEM
{
.text1:
UNION:
{
.text2:
.text3:
}
}
}
The load allocator given for the group does not uniquely specify the load allocation for the elements
within the union: .text2 and .text3. In this case, the linker issues a diagnostic message to request that
these load allocations be specified explicitly.
8.5.7.5 Naming UNIONs and GROUPs
You can give a name to a UNION or GROUP by entering the name in parentheses after the declaration.
For example:
GROUP(BSS_SYSMEM_STACK_GROUP)
{
.bss :{}
.sysmem :{}
.stack :{}
} load=D_MEM, run=D_MEM
The name you defined is used in diagnostics for easy identification of the problem LCF area. For example:
warning: LOAD placement ignored for "BSS_SYSMEM_STACK_GROUP": object is uninitialized
UNION(TEXT_CINIT_UNION)
{
.const :{}load=D_MEM, table(table1)
.pinit :{}load=D_MEM, table(table1)
}run=P_MEM
warning:table(table1) operator ignored: table(table1) has already been applied to a section
in the "UNION(TEXT_CINIT_UNION)" in which ".pinit" is a descendant

www.ti.com
Linker Command Files
229
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Linker Description
8.5.8 Special Section Types (DSECT, COPY, NOLOAD, and NOINIT)
You can assign the following special types to output sections: DSECT, COPY, NOLOAD, and NOINIT.
These types affect the way that the program is treated when it is linked and loaded. You can assign a type
to a section by placing the type after the section definition. For example:
SECTIONS
{
sec1: load = 0x00002000, type = DSECT {f1.obj}
sec2: load = 0x00004000, type = COPY {f2.obj}
sec3: load = 0x00006000, type = NOLOAD {f3.obj}
sec4: load = 0x00008000, type = NOINIT {f4.obj}
}
• The DSECT type creates a dummy section with the following characteristics:
– It is not included in the output section memory allocation. It takes up no memory and is not included
in the memory map listing.
– It can overlay other output sections, other DSECTs, and unconfigured memory.
– Global symbols defined in a dummy section are relocated normally. They appear in the output
module's symbol table with the same value they would have if the DSECT had actually been
loaded. These symbols can be referenced by other input sections.
– Undefined external symbols found in a DSECT cause specified archive libraries to be searched.
– The section's contents, relocation information, and line number information are not placed in the
output module.
In the preceding example, none of the sections from f1.obj are allocated, but all the symbols are
relocated as though the sections were linked at address 0x2000. The other sections can refer to any of
the global symbols in sec1.
• A COPY section is similar to a DSECT section, except that its contents and associated information are
written to the output module. The .cinit section that contains initialization tables for the ARM C/C++
compiler has this attribute under the run-time initialization model.
• A NOLOAD section differs from a normal output section in one respect: the section's contents,
relocation information, and line number information are not placed in the output module. The linker
allocates space for the section, and it appears in the memory map listing.
• A NOINIT section is not C auto-initialized by the linker. It is your responsibility to initialize this section
as needed.

Linker Command Files
www.ti.com
230 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Linker Description
8.5.9 Configuring Error Correcting Code (ECC) with the Linker
Error Correcting Codes (ECC) can be generated and placed in separate sections through the linker
command file. ECC uses extra bits to allow errors to be detected and/or corrected by a device. The ECC
support provided by the linker is compatible with the ECC support in TI Flash memory on various TI
devices. TI Flash memory uses a modified Hamming(72,64) code, which uses 8 parity bits for every 64
bits. Check the documentation for your Flash memory to see if ECC is supported. (ECC for read-write
memory is handled completely in hardware at run time.)
See Section 8.4.12 for command-line options that introduce bit errors into code that has a corresponding
ECC section or into the ECC parity bits themselves. You can use these options to test your ECC error
handling code.
ECC can be generated during linking. The ECC data is included in the resulting object file, alongside code
and data, as a data section located at the appropriate address. No extra ECC generation step is required
after compilation, and the ECC can be uploaded to the device along with everything else.
You can control the generation of ECC data using the ECC specifier in the memory map (Section 8.5.9.1)
and the ECC directive (Section 8.5.9.2).
8.5.9.1 Using the ECC Specifier in the Memory Map
To generate ECC, add a separate memory range to your memory map to hold ECC data and to indicate
which memory range contains the Flash data that corresponds to this ECC data. If you have multiple
memory ranges for Flash data, you should add a separate ECC memory range for each Flash data range.
The definition of an ECC memory range can also provide parameters for how to generate the ECC data.
The memory map for a device supporting Flash ECC may look something like this:
MEMORY {
VECTORS : origin=0x00000000 length=0x000020
FLASH0 : origin=0x00000020 length=0x17FFE0
FLASH1 : origin=0x00180000 length=0x180000
STACKS : origin=0x08000000 length=0x000500
RAM : origin=0x08000500 length=0x03FB00
ECC_VEC : origin=0xf0400000 length=0x000004 ECC={ input_range=VECTORS }
ECC_FLA0 : origin=0xf0400004 length=0x02FFFC ECC={ input_range=FLASH0 }
ECC_FLA1 : origin=0xf0430000 length=0x030000 ECC={ input_range=FLASH1 }
}
The specification syntax for ECC memory ranges is as follows:
MEMORY {
<memory specifier1> : <memory attributes> [ vfill=<fill value> ]
<memory specifier2> : <memory attributes> ECC = {
input_range = <memory specifier1>
[ algorithm = <algorithm name> ]
[ fill = [ true, false ] ]
}
}
The "ECC" specifier attached to the ECC memory ranges indicates the data memory range that the ECC
range covers. The ECC specifier supports the following parameters:
input_range = <memory
range>The data memory range covered by this ECC data range. Required.
algorithm = <ECC algorithm
name>The name of an ECC algorithm defined later in the command file using
the ECC directive. Optional if only one algorithm is defined. (See
Section 8.5.9.2.)
fill = true | false Whether to generate ECC data for holes in the initialized data of the input
range. The default is "true". Using fill=false produces behavior similar to
the nowECC tool. The input range can be filled normally or using a virtual
fill (see Section 8.5.9.3).

www.ti.com
Linker Command Files
231
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Linker Description
8.5.9.2 Using the ECC Directive
In addition to specifying ECC memory ranges in the memory map, the linker command file must specify
parameters for the algorithm that generates ECC data. You might need multiple ECC algorithm
specifications if you have multiple Flash devices.
Each TI device supporting Flash ECC has exactly one set of valid values for these parameters. The linker
command files provided with Code Composer Studio include the ECC parameters necessary for ECC
support on the Flash memory accessible by the device. Documentation is provided here for completeness.
You specify algorithm parameters with the top-level ECC directive in the linker command file. The
specification syntax is as follows:
ECC {
<algorithm name> : parity_mask = <8-bit integer>
mirroring = [ F021, F035 ]
address_mask = <32-bit mask>
}
For example:
MEMORY {
FLASH0 : origin=0x00000020 length=0x17FFE0
ECC_FLA0 : origin=0xf0400004 length=0x02FFFC ECC={ input_range=FLASH0
algorithm=F021 }
}
ECC { F021 : parity_mask = 0xfc
mirroring = F021 }
This ECC directive accepts the following attributes:
algorithm_name Specify the name you would like to use for referencing the algorithm.
address_mask = <32-bit
mask>This mask determines which bits of the address of each 64-bit piece of
memory are used in the calculation of the ECC byte for that memory.
Default is 0xffffffff, so that all bits of the address are used. (Note that the
ECC algorithm itself ignores the lowest bits, which are always zero for a
correctly-aligned input block.)
parity_mask = <8-bit mask> This mask determines which ECC bits encode even parity and which bits
encode odd parity. Default is 0, meaning that all bits encode even parity.
mirroring = F021 | F035 This setting determines the order of the ECC bytes and their duplication
pattern for redundancy. Default is F021.
8.5.9.3 Using the VFILL Specifier in the Memory Map
Normally, specifying a fill value for a MEMORY range creates initialized data sections to cover any
previously uninitialized areas of memory. To generate ECC data for an entire memory range, the linker
either needs to have initialized data in the entire range, or needs to know what value uninitialized memory
areas will have at run time.
In cases where you want to generate ECC for an entire memory range, but do not want to initialize the
entire range by specifying a fill value, you can use the "vfill" specifier instead of a "fill" specifier to virtually
fill the range:
MEMORY {
FLASH : origin=0x0000 length=0x4000 vfill=0xffffffff
}
The vfill specifier is functionally equivalent to omitting a fill specifier, except that it allows ECC data to be
generated for areas of the input memory range that remain uninitialized. This has the benefit of reducing
the size of the resulting object file.
The vfill specifier has no effect other than in ECC data generation. It cannot be specified along with a fill
specifier, since that would introduce ambiguity.
If fill is specified in the ECC specifier, but vfill is not specified, vfill defaults to 0xff.

Linker Command Files
www.ti.com
232 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Linker Description
8.5.10 Assigning Symbols at Link Time
Linker assignment statements allow you to define external (global) symbols and assign values to them at
link time. You can use this feature to initialize a variable or pointer to an allocation-dependent value. See
Section 8.6.1 for information about referring to linker symbols in C/C++ code.
8.5.10.1 Syntax of Assignment Statements
The syntax of assignment statements in the linker is similar to that of assignment statements in the C
language:
symbol =expression; assigns the value of expression to symbol
symbol + = expression; adds the value of expression to symbol
symbol - =expression; subtracts the value of expression from symbol
symbol * = expression; multiplies symbol by expression
symbol / = expression; divides symbol by expression
The symbol should be defined externally. If it is not, the linker defines a new symbol and enters it into the
symbol table. The expression must follow the rules defined in Section 8.5.10.3. Assignment statements
must terminate with a semicolon.
The linker processes assignment statements after it allocates all the output sections. Therefore, if an
expression contains a symbol, the address used for that symbol reflects the symbol's address in the
executable output file.
For example, suppose a program reads data from one of two tables identified by two external symbols,
Table1 and Table2. The program uses the symbol cur_tab as the address of the current table. The
cur_tab symbol must point to either Table1 or Table2. You could accomplish this in the assembly code,
but you would need to reassemble the program to change tables. Instead, you can use a linker
assignment statement to assign cur_tab at link time:
prog.obj /* Input file */
cur_tab = Table1; /* Assign cur_tab to one of the tables */
8.5.10.2 Assigning the SPC to a Symbol
A special symbol, denoted by a dot (.), represents the current value of the section program counter (SPC)
during allocation. The SPC keeps track of the current location within a section. The linker's . symbol is
analogous to the assembler's $ symbol. The . symbol can be used only in assignment statements within a
SECTIONS directive because . is meaningful only during allocation and SECTIONS controls the allocation
process. (See Section 8.5.5.)
The . symbol refers to the current run address, not the current load address, of the section.
For example, suppose a program needs to know the address of the beginning of the .data section. By
using the .global directive (see Identify Global Symbols), you can create an external undefined variable
called Dstart in the program. Then, assign the value of . to Dstart:
SECTIONS
{
.text: {}
.data: {Dstart = .;}
.bss : {}
}
This defines Dstart to be the first linked address of the .data section. (Dstart is assigned before .data is
allocated.) The linker relocates all references to Dstart.
A special type of assignment assigns a value to the . symbol. This adjusts the SPC within an output
section and creates a hole between two input sections. Any value assigned to . to create a hole is relative
to the beginning of the section, not to the address actually represented by the . symbol. Holes and
assignments to . are described in Section 8.5.11.
www.ti.com
Linker Command Files
233
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Linker Description
8.5.10.3 Assignment Expressions
These rules apply to linker expressions:
• Expressions can contain global symbols, constants, and the C language operators listed in Table 8-11.
• All numbers are treated as long (32-bit) integers.
• Constants are identified by the linker in the same way as by the assembler. That is, numbers are
recognized as decimal unless they have a suffix (H or h for hexadecimal and Q or q for octal). C
language prefixes are also recognized (0 for octal and 0x for hex). Hexadecimal constants must begin
with a digit. No binary constants are allowed.
• Symbols within an expression have only the value of the symbol's address. No type-checking is
performed.
• Linker expressions can be absolute or relocatable. If an expression contains any relocatable symbols
(and 0 or more constants or absolute symbols), it is relocatable. Otherwise, the expression is absolute.
If a symbol is assigned the value of a relocatable expression, it is relocatable; if it is assigned the value
of an absolute expression, it is absolute.
The linker supports the C language operators listed in Table 8-11 in order of precedence. Operators in the
same group have the same precedence. Besides the operators listed in Table 8-11, the linker also has an
align operator that allows a symbol to be aligned on an n-byte boundary within an output section (n is a
power of 2). For example, the following expression aligns the SPC within the current section on the next
16-byte boundary. Because the align operator is a function of the current SPC, it can be used only in the
same context as . —that is, within a SECTIONS directive.
. = align(16);
Table 8-11. Groups of Operators Used in Expressions (Precedence)
Group 1 (Highest Precedence) Group 6
!
~
-
Logical NOT
Bitwise NOT
Negation & Bitwise AND
Group 2 Group 7
*
/
%
Multiplication
Division
Modulus | Bitwise OR
Group 3 Group 8
+
-Addition
Subtraction && Logical AND
Group 4 Group 9
>>
<< Arithmetic right shift
Arithmetic left shift || Logical OR
Group 5 Group 10 (Lowest Precedence)
==
! =
>
<
< =
> =
Equal to
Not equal to
Greater than
Less than
Less than or equal to
Greater than or equal to
=
+ =
- =
* =
/ =
Assignment
A + = B
A - = B
A * = B
A / = B
is equivalent to
is equivalent to
is equivalent to
is equivalent to
A = A + B
A = A - B
A = A * B
A = A / B

Linker Command Files
www.ti.com
234 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Linker Description
8.5.10.4 Symbols Defined by the Linker
The linker automatically defines several symbols based on which sections are used in your assembly
source. A program can use these symbols at run time to determine where a section is linked. Since these
symbols are external, they appear in the linker map. Each symbol can be accessed in any assembly
language module if it is declared with a .global directive (see Identify Global Symbols). You must have
used the corresponding section in a source module for the symbol to be created. Values are assigned to
these symbols as follows:
.text is assigned the first address of the .text output section.
(It marks the beginning of executable code.)
etext is assigned the first address following the .text output section.
(It marks the end of executable code.)
.data is assigned the first address of the .data output section.
(It marks the beginning of initialized data tables.)
edata is assigned the first address following the .data output section.
(It marks the end of initialized data tables.)
.bss is assigned the first address of the .bss output section.
(It marks the beginning of uninitialized data.)
end is assigned the first address following the .bss output section.
(It marks the end of uninitialized data.)
The following symbols are defined only for C/C++ support when the --ram_model or --rom_model option is
used.
__TI_STACK_END is assigned the end of the .stack size.
__TI_STACK_SIZE is assigned the size of the .stack section for.
__TI_SYSMEM_SIZE is assigned the size of the .sysmem section.
See Section 8.6.1 for information about referring to linker symbols in C/C++ code.
8.5.10.5 Assigning Exact Start, End, and Size Values of a Section to a Symbol
The code generation tools currently support the ability to load program code in one area of (slow) memory
and run it in another (faster) area. This is done by specifying separate load and run addresses for an
output section or group in the linker command file. Then execute a sequence of instructions (the copying
code in Example 8-10) that moves the program code from its load area to its run area before it is needed.
There are several responsibilities that a programmer must take on when setting up a system with this
feature. One of these responsibilities is to determine the size and run-time address of the program code to
be moved. The current mechanisms to do this involve use of the .label directives in the copying code. A
simple example is illustrated in Example 8-10.
This method of specifying the size and load address of the program code has limitations. While it works
fine for an individual input section that is contained entirely within one source file, this method becomes
more complicated if the program code is spread over several source files or if the programmer wants to
copy an entire output section from load space to run space.
Another problem with this method is that it does not account for the possibility that the section being
moved may have an associated far call trampoline section that needs to be moved with it.

www.ti.com
Linker Command Files
235
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Linker Description
8.5.10.6 Why the Dot Operator Does Not Always Work
The dot operator (.) is used to define symbols at link-time with a particular address inside of an output
section. It is interpreted like a PC. Whatever the current offset within the current section is, that is the
value associated with the dot. Consider an output section specification within a SECTIONS directive:
outsect:
{
s1.obj(.text)
end_of_s1 = .;
start_of_s2 = .;
s2.obj(.text)
end_of_s2 = .;
}
This statement creates three symbols:
• end_of_s1—the end address of .text in s1.obj
• start_of_s2—the start address of .text in s2.obj
• end_of_s2—the end address of .text in s2.obj
Suppose there is padding between s1.obj and s2.obj created as a result of alignment. Then start_of_s2 is
not really the start address of the .text section in s2.obj, but it is the address before the padding needed to
align the .text section in s2.obj. This is due to the linker's interpretation of the dot operator as the current
PC. It is also true because the dot operator is evaluated independently of the input sections around it.
Another potential problem in the above example is that end_of_s2 may not account for any padding that
was required at the end of the output section. You cannot reliably use end_of_s2 as the end address of
the output section. One way to get around this problem is to create a dummy section immediately after the
output section in question. For example:
GROUP
{
outsect:
{
start_of_outsect = .;
...
}
dummy: { size_of_outsect = . - start_of_outsect; }
}
8.5.10.7 Address and Dimension Operators
Six operators allow you to define symbols for load-time and run-time addresses and sizes:
LOAD_START( sym )
START( sym )Defines sym with the load-time start address of related allocation unit
LOAD_END( sym )
END( sym )Defines sym with the load-time end address of related allocation unit
LOAD_SIZE( sym )
SIZE( sym )Defines sym with the load-time size of related allocation unit
RUN_START( sym )Defines sym with the run-time start address of related allocation unit
RUN_END( sym )Defines sym with the run-time end address of related allocation unit
RUN_SIZE(sym )Defines sym with the run-time size of related allocation unit
Linker Command File Operator Equivalencies --
NOTE: LOAD_START() and START() are equivalent, as are LOAD_END()/END() and
LOAD_SIZE()/SIZE(). The LOAD names are recommended for clarity.
These address and dimension operators can be associated with several different kinds of allocation units,
including input items, output sections, GROUPs, and UNIONs. The following sections provide some
examples of how the operators can be used in each case.

Linker Command Files
www.ti.com
236 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Linker Description
These symbols defined by the linker can be accessed at runtime using the _symval operator, which is
essentially a cast operation. For example, suppose your linker command file contains the following:
.text: RUN_START(text_run_start), RUN_SIZE(text_run_size) { *(.text) }
Your C program can access these symbols as follows:
extern char text_run_start, text_run_size;
printf(".text load start is %lx\n", _symval(&text_run_start));
printf(".text load size is %lx\n", _symval(&text_run_size));
See Section 8.6.1 for more information about referring to linker symbols in C/C++ code.
8.5.10.7.1 Input Items
Consider an output section specification within a SECTIONS directive:
outsect:
{
s1.obj(.text)
end_of_s1 = .;
start_of_s2 = .;
s2.obj(.text)
end_of_s2 = .;
}
This can be rewritten using the START and END operators as follows:
outsect:
{
s1.obj(.text) { END(end_of_s1) }
s2.obj(.text) { START(start_of_s2), END(end_of_s2) }
}
The values of end_of_s1 and end_of_s2 will be the same as if you had used the dot operator in the
original example, but start_of_s2 would be defined after any necessary padding that needs to be added
between the two .text sections. Remember that the dot operator would cause start_of_s2 to be defined
before any necessary padding is inserted between the two input sections.
The syntax for using these operators in association with input sections calls for braces { } to enclose the
operator list. The operators in the list are applied to the input item that occurs immediately before the list.
8.5.10.7.2 Output Section
The START, END, and SIZE operators can also be associated with an output section. Here is an example:
outsect: START(start_of_outsect), SIZE(size_of_outsect)
{
<list of input items>
}
In this case, the SIZE operator defines size_of_outsect to incorporate any padding that is required in the
output section to conform to any alignment requirements that are imposed.
The syntax for specifying the operators with an output section does not require braces to enclose the
operator list. The operator list is simply included as part of the allocation specification for an output
section.

www.ti.com
Linker Command Files
237
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Linker Description
8.5.10.7.3 GROUPs
Here is another use of the START and SIZE operators in the context of a GROUP specification:
GROUP
{
outsect1: { ... }
outsect2: { ... }
} load = ROM, run = RAM, START(group_start), SIZE(group_size);
This can be useful if the whole GROUP is to be loaded in one location and run in another. The copying
code can use group_start and group_size as parameters for where to copy from and how much is to be
copied. This makes the use of .label in the source code unnecessary.
8.5.10.7.4 UNIONs
The RUN_SIZE and LOAD_SIZE operators provide a mechanism to distinguish between the size of a
UNION's load space and the size of the space where its constituents are going to be copied before they
are run. Here is an example:
UNION: run = RAM, LOAD_START(union_load_addr),
LOAD_SIZE(union_ld_sz), RUN_SIZE(union_run_sz)
{
.text1: load = ROM, SIZE(text1_size) { f1.obj(.text) }
.text2: load = ROM, SIZE(text2_size) { f2.obj(.text) }
}
Here union_ld_sz is going to be equal to the sum of the sizes of all output sections placed in the union.
The union_run_sz value is equivalent to the largest output section in the union. Both of these symbols
incorporate any padding due to blocking or alignment requirements.
8.5.11 Creating and Filling Holes
The linker provides you with the ability to create areas within output sections that have nothing linked into
them. These areas are called holes. In special cases, uninitialized sections can also be treated as holes.
This section describes how the linker handles holes and how you can fill holes (and uninitialized sections)
with values.
8.5.11.1 Initialized and Uninitialized Sections
There are two rules to remember about the contents of output sections. An output section contains either:
• Raw data for the entire section
•No raw data
A section that has raw data is referred to as initialized. This means that the object file contains the actual
memory image contents of the section. When the section is loaded, this image is loaded into memory at
the section's specified starting address. The .text and .data sections always have raw data if anything was
assembled into them. Named sections defined with the .sect assembler directive also have raw data.
By default, the .bss section (see Reserve Space in the .bss Section) and sections defined with the .usect
directive (see Reserve Uninitialized Space) have no raw data (they are uninitialized). They occupy space
in the memory map but have no actual contents. Uninitialized sections typically reserve space in fast
external memory for variables. In the object file, an uninitialized section has a normal section header and
can have symbols defined in it; no memory image, however, is stored in the section.
8.5.11.2 Creating Holes
You can create a hole in an initialized output section. A hole is created when you force the linker to leave
extra space between input sections within an output section. When such a hole is created, the linker must
supply raw data for the hole.
Holes can be created only within output sections. Space can exist between output sections, but such
space is not a hole. To fill the space between output sections, see Section 8.5.4.2.

Linker Command Files
www.ti.com
238 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Linker Description
To create a hole in an output section, you must use a special type of linker assignment statement within
an output section definition. The assignment statement modifies the SPC (denoted by .) by adding to it,
assigning a greater value to it, or aligning it on an address boundary. The operators, expressions, and
syntaxes of assignment statements are described in Section 8.5.10.
The following example uses assignment statements to create holes in output sections:
SECTIONS
{
outsect:
{
file1.obj(.text)
. += 0x0100 /* Create a hole with size 0x0100 */
file2.obj(.text)
. = align(16); /* Create a hole to align the SPC */
file3.obj(.text)
}
}
The output section outsect is built as follows:
1. The .text section from file1.obj is linked in.
2. The linker creates a 256-byte hole.
3. The .text section from file2.obj is linked in after the hole.
4. The linker creates another hole by aligning the SPC on a 16-byte boundary.
5. Finally, the .text section from file3.obj is linked in.
All values assigned to the . symbol within a section refer to the relative address within the section. The
linker handles assignments to the . symbol as if the section started at address 0 (even if you have
specified a binding address). Consider the statement . = align(16) in the example. This statement
effectively aligns the file3.obj .text section to start on a 16-byte boundary within outsect. If outsect is
ultimately allocated to start on an address that is not aligned, the file3.obj .text section will not be aligned
either.
The . symbol refers to the current run address, not the current load address, of the section.
Expressions that decrement the . symbol are illegal. For example, it is invalid to use the -= operator in an
assignment to the . symbol. The most common operators used in assignments to the . symbol are += and
align.
If an output section contains all input sections of a certain type (such as .text), you can use the following
statements to create a hole at the beginning or end of the output section.
.text: { .+= 0x0100; } /* Hole at the beginning */
.data: { *(.data)
. += 0x0100; } /* Hole at the end */
Another way to create a hole in an output section is to combine an uninitialized section with an initialized
section to form a single output section. In this case, the linker treats the uninitialized section as a hole and
supplies data for it. The following example illustrates this method:
SECTIONS
{
outsect:
{
file1.obj(.text)
file1.obj(.bss) /* This becomes a hole */
}
}
Because the .text section has raw data, all of outsect must also contain raw data. Therefore, the
uninitialized .bss section becomes a hole.
Uninitialized sections become holes only when they are combined with initialized sections. If several
uninitialized sections are linked together, the resulting output section is also uninitialized.

www.ti.com
Linker Command Files
239
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Linker Description
8.5.11.3 Filling Holes
When a hole exists in an initialized output section, the linker must supply raw data to fill it. The linker fills
holes with a 32-bit fill value that is replicated through memory until it fills the hole. The linker determines
the fill value as follows:
1. If the hole is formed by combining an uninitialized section with an initialized section, you can specify a
fill value for the uninitialized section. Follow the section name with an = sign and a 32-bit constant. For
example:
SECTIONS
{ outsect:
{
file1.obj(.text)
file2.obj(.bss)= 0xFF00FF00 /* Fill this hole with 0xFF00FF00 */
}
}
2. You can also specify a fill value for all the holes in an output section by supplying the fill value after the
section definition:
SECTIONS
{ outsect:fill = 0xFF00FF00 /* Fills holes with 0xFF00FF00 */
{
. += 0x0010; /* This creates a hole */
file1.obj(.text)
file1.obj(.bss) /* This creates another hole */
}
}
3. If you do not specify an initialization value for a hole, the linker fills the hole with the value specified
with the --fill_value option (see Section 8.4.14). For example, suppose the command file link.cmd
contains the following SECTIONS directive:
SECTIONS { .text: { .= 0x0100; } /* Create a 100 word hole */ }
Now invoke the linker with the --fill_value option:
armcl --run_linker --fill_value=0xFFFFFFFF link.cmd
This fills the hole with 0xFFFFFFFF.
4. If you do not invoke the linker with the --fill_value option or otherwise specify a fill value, the linker fills
holes with 0s.
Whenever a hole is created and filled in an initialized output section, the hole is identified in the link map
along with the value the linker uses to fill it.
8.5.11.4 Explicit Initialization of Uninitialized Sections
You can force the linker to initialize an uninitialized section by specifying an explicit fill value for it in the
SECTIONS directive. This causes the entire section to have raw data (the fill value). For example:
SECTIONS
{
.bss: fill = 0x12341234 /* Fills .bss with 0x12341234 */
}
Filling Sections
NOTE: Because filling a section (even with 0s) causes raw data to be generated for the entire
section in the output file, your output file will be very large if you specify fill values for large
sections or holes.

Linker Symbols
www.ti.com
240 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Linker Description
8.6 Linker Symbols
This section provides information about using and resolving linker symbols.
8.6.1 Using Linker Symbols in C/C++ Applications
Linker symbols have a name and a value. The value is a 32-bit unsigned integer, even if it represents a
pointer value on a target that has pointers smaller than 32 bits.
The most common kind of symbol is generated by the compiler for each function and variable. The value
represents the target address where that function or variable is located. When you refer to the symbol by
name in the linker command file or in an assembly file, you get that 32-bit integer value.
However, in C and C++ names mean something different. If you have a variable named x that contains
the value Y, and you use the name "x" in your C program, you are actually referring to the contents of
variable x. If "x" is used on the right-hand side of an expression, the compiler fetches the value Y. To
realize this variable, the compiler generates a linker symbol named x with the value &x. Even though the
C/C++ variable and the linker symbol have the same name, they don't represent the same thing. In C, x is
a variable name with the address &x and content Y. For linker symbols, x is an address, and that address
contains the value Y.
Because of this difference, there are some tricks to referring to linker symbols in C code. The basic
technique is to cause the compiler to creating a "fake" C variable or function and take its address. The
details differ depending on the type of linker symbol.
Linker symbols that represent a function address: In C code, declare the function as an extern
function. Then, refer to the value of the linker symbol using the same name. This works because function
pointers "decay" to their address value when used without adornment. For example:
extern void _c_int00(void);
printf("_c_int00 %lx\n", (unsigned long)&_c_int00);
Suppose your linker command file defines the following linker symbol:
func_sym=printf+100;
Your C application can refer to this symbol as follows:
extern void func_sym(void);
printf("func_sym %lx\n", _symval(&func_sym)); /* these two are equivalent */
printf("func_sym %lx\n", (unsigned long)&func_sym);
Linker symbols that represent a data address: In C code, declare the variable as an extern variable.
Then, refer to the value of the linker symbol using the & operator. Because the variable is at a valid data
address, we know that a data pointer can represent the value.
Suppose your linker command file defines the following linker symbols:
data_sym=.data+100;
xyz=12345
Your C application can refer to these symbols as follows:
extern char data_sym;
extern int xyz;
printf("data_sym %lx\n", _symval(&data_sym)); /* these two are equivalent */
printf("data_sym %p\n", &data_sym);
myvar = &xyz;

www.ti.com
Linker Symbols
241
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Linker Description
Linker symbols for an arbitrary address: In C code, declare this as an extern symbol. The type does
not matter. If you are using GCC extensions, declare it as "extern void". If you are not using GCC
extensions, declare it as "extern char". Then, refer to the value of the linker symbol mySymbol as
_symval(&mySymbol). You must use the _symval operator, which is equivalent to a cast, because the 32-
bit value of the linker symbol could be wider than a data pointer. The compiler treats _symval(&mySymbol)
in a special way that can represent all 32 bits, even when pointers are 16 bits. Targets that have 32-bit
pointers can usually use &mySymbol instead of the _symval operator. However, the portable way to
access such linker symbols across TI targets is to use _symval(&mySymbol).
Suppose your linker command file defines the following linker symbol:
abs_sym=0x12345678;
Your C application can refer to this symbol as follows:
extern char abs_sym;
printf("abs_sym %lx\n", _symval(&abs_sym));
8.6.2 Declaring Weak Symbols
In a linker command file, an assignment expression outside a MEMORY or SECTIONS directive can be
used to define a linker-defined symbol. To define a weak symbol in a linker command file, use the "weak"
operator in an assignment expression to designate that the symbol as eligible for removal from the output
file's symbol table if it is not referenced. For example, you can define "ext_addr_sym" as follows:
weak(ext_addr_sym) = 0x12345678;
When the linker command file is used to perform the final link, then "ext_addr_sym" is presented to the
linker as a weak absolute symbol; it will not be included in the resulting output file if the symbol is not
referenced.
See Section 2.6.2 for details about how weak symbols are handled by the linker.
8.6.3 Resolving Symbols with Object Libraries
An object library is a partitioned archive file that contains object files as members. Usually, a group of
related modules are grouped together into a library. When you specify an object library as linker input, the
linker includes any members of the library that define existing unresolved symbol references. You can use
the archiver to build and maintain libraries. Section 7.1 contains more information about the archiver.
Using object libraries can reduce link time and the size of the executable module. Normally, if an object
file that contains a function is specified at link time, the file is linked whether the function is used or not;
however, if that same function is placed in an archive library, the file is included only if the function is
referenced.
The order in which libraries are specified is important, because the linker includes only those members
that resolve symbols that are undefined at the time the library is searched. The same library can be
specified as often as necessary; it is searched each time it is included. Alternatively, you can use the --
reread_libs option to reread libraries until no more references can be resolved (see Section 8.4.18.3). A
library has a table that lists all external symbols defined in the library; the linker searches through the table
until it determines that it cannot use the library to resolve any more references.
The following examples link several files and libraries, using these assumptions:
• Input files f1.obj and f2.obj both reference an external function named clrscr.
• Input file f1.obj references the symbol origin.
• Input file f2.obj references the symbol fillclr.
• Member 0 of library libc.lib contains a definition of origin.
• Member 3 of library liba.lib contains a definition of fillclr.
• Member 1 of both libraries defines clrscr.

Default Placement Algorithm
www.ti.com
242 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Linker Description
If you enter:
armcl --run_linker f1.obj f2.obj liba.lib libc.lib
then:
• Member 1 of liba.lib satisfies the f1.obj and f2.obj references to clrscr because the library is searched
and the definition of clrscr is found.
• Member 0 of libc.lib satisfies the reference to origin.
• Member 3 of liba.lib satisfies the reference to fillclr.
If, however, you enter:
armcl --run_linker f1.obj f2.obj libc.lib liba.lib
then the references to clrscr are satisfied by member 1 of libc.lib.
If none of the linked files reference symbols defined in a library, you can use the --undef_sym option to
force the linker to include a library member. (See Section 8.4.35.) The next example creates an undefined
symbol rout1 in the linker's global symbol table:
armcl --run_linker --undef_sym=rout1 libc.lib
If any member of libc.lib defines rout1, the linker includes that member.
Library members are allocated according to the SECTIONS directive default allocation algorithm; see
Section 8.5.5.
Section 8.4.18 describes methods for specifying directories that contain object libraries.
8.7 Default Placement Algorithm
The MEMORY and SECTIONS directives provide flexible methods for building, combining, and allocating
sections. However, any memory locations or sections you choose not to specify must still be handled by
the linker. The linker uses algorithms to build and allocate sections in coordination with any specifications
you do supply.
If you do not use the MEMORY and SECTIONS directives, the linker allocates output sections as though
the memory map and section definitions were as shown in Example 8-16 were specified.
Example 8
‑‑
16. Default Allocation for ARM Devices
{
RAM : origin = 0x00000000, length = 0xFFFFFFFF
}
SECTIONS
{
.text : ALIGN(4) {} > RAM
.const: ALIGN(4) {} > RAM
.data : ALIGN(4) {} > RAM
.bss : ALIGN(4) {} > RAM
.cinit: ALIGN(4) {} > RAM /* -c option only */
.pinit: ALIGN(4) {} > RAM /* -c option only */
}
Also see Section 2.5.1 for information about default memory allocation.
All .text input sections are concatenated to form a .text output section in the executable output file, and all
.data input sections are combined to form a .data output section.
If you use a SECTIONS directive, the linker performs no part of this default allocation. Instead, allocation
is performed according to the rules specified by the SECTIONS directive and the general algorithm
described next in Section 8.7.1.
www.ti.com
Default Placement Algorithm
243
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Linker Description
8.7.1 How the Allocation Algorithm Creates Output Sections
An output section can be formed in one of two ways:
Method 1 As the result of a SECTIONS directive definition
Method 2 By combining input sections with the same name into an output section that is not defined in
a SECTIONS directive
If an output section is formed as a result of a SECTIONS directive, this definition completely determines
the section's contents. (See Section 8.5.5 for examples of how to define an output section's content.)
If an output section is formed by combining input sections not specified by a SECTIONS directive, the
linker combines all such input sections that have the same name into an output section with that name.
For example, suppose the files f1.obj and f2.obj both contain named sections called Vectors and that the
SECTIONS directive does not define an output section for them. The linker combines the two Vectors
sections from the input files into a single output section named Vectors, allocates it into memory, and
includes it in the output file.
By default, the linker does not display a message when it creates an output section that is not defined in
the SECTIONS directive. You can use the --warn_sections linker option (see Section 8.4.36) to cause the
linker to display a message when it creates a new output section.
After the linker determines the composition of all output sections, it must allocate them into configured
memory. The MEMORY directive specifies which portions of memory are configured. If there is no
MEMORY directive, the linker uses the default configuration as shown in Example 8-16. (See
Section 8.5.4 for more information on configuring memory.)
8.7.2 Reducing Memory Fragmentation
The linker's allocation algorithm attempts to minimize memory fragmentation. This allows memory to be
used more efficiently and increases the probability that your program will fit into memory. The algorithm
comprises these steps:
1. Each output section for which you supply a specific binding address is placed in memory at that
address.
2. Each output section that is included in a specific, named memory range or that has memory attribute
restrictions is allocated. Each output section is placed into the first available space within the named
area, considering alignment where necessary.
3. Any remaining sections are allocated in the order in which they are defined. Sections not defined in a
SECTIONS directive are allocated in the order in which they are encountered. Each output section is
placed into the first available memory space, considering alignment where necessary.
If you want to control the order in which code and data are placed in memory, see the FAQ topic on
section placement.
8.8 Linker-Generated Copy Tables
The linker supports extensions to the linker command file syntax that enable the following:
• Make it easier for you to copy objects from load-space to run-space at boot time
• Make it easier for you to manage memory overlays at run time
• Allow you to split GROUPs and output sections that have separate load and run addresses
8.8.1 Using Copy Tables for Boot Loading
In some embedded applications, there is a need to copy or download code and/or data from one location
to another at boot time before the application actually begins its main execution thread. For example, an
application may have its code and/or data in FLASH memory and need to copy it into on-chip memory
before the application begins execution.
Linker-Generated Copy Tables
www.ti.com
244 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Linker Description
One way to develop such an application is to create a copy table in assembly code that contains three
elements for each block of code or data that needs to be moved from FLASH to on-chip memory at boot
time:
• The load address
• The run address
• The size
The process you follow to develop such an application might look like this:
1. Build the application to produce a .map file that contains the load and run addresses of each section
that has a separate load and run placement.
2. Edit the copy table (used by the boot loader) to correct the load and run addresses as well as the size
of each block of code or data that needs to be moved at boot time.
3. Build the application again, incorporating the updated copy table.
4. Run the application.
This process puts a heavy burden on you to maintain the copy table (by hand, no less). Each time a piece
of code or data is added or removed from the application, you must repeat the process in order to keep
the contents of the copy table up to date.
8.8.2 Using Built-in Link Operators in Copy Tables
You can avoid some of this maintenance burden by using the LOAD_START(), RUN_START(), and
SIZE() operators that are already part of the linker command file syntax . For example, instead of building
the application to generate a .map file, the linker command file can be annotated:
SECTIONS
{
.flashcode: { app_tasks.obj(.text) }
load = FLASH, run = PMEM,
LOAD_START(_flash_code_ld_start),
RUN_START(_flash_code_rn_start),
SIZE(_flash_code_size)
...
}
In this example, the LOAD_START(), RUN_START(), and SIZE() operators instruct the linker to create
three symbols:
Symbol Description
_flash_code_ld_start Load address of .flashcode section
_flash_code_rn_start Run address of .flashcode section
_flash_code_size Size of .flashcode section
These symbols can then be referenced from the copy table. The actual data in the copy table will be
updated automatically each time the application is linked. This approach removes step 1 of the process
described in Section 8.8.1.
While maintenance of the copy table is reduced markedly, you must still carry the burden of keeping the
copy table contents in sync with the symbols that are defined in the linker command file. Ideally, the linker
would generate the boot copy table automatically. This would avoid having to build the application twice
and free you from having to explicitly manage the contents of the boot copy table.
For more information on the LOAD_START(), RUN_START(), and SIZE() operators, see Section 8.5.10.7.
www.ti.com
Linker-Generated Copy Tables
245
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Linker Description
8.8.3 Overlay Management Example
Consider an application that contains a memory overlay that must be managed at run time. The memory
overlay is defined using a UNION in the linker command file as illustrated in Example 8-17:
Example 8-17. Using a UNION for Memory Overlay
SECTIONS
{
...
UNION
{
GROUP
{
.task1: { task1.obj(.text) }
.task2: { task2.obj(.text) }
} load = ROM, LOAD_START(_task12_load_start), SIZE(_task12_size)
GROUP
{
.task3: { task3.obj(.text) }
.task4: { task4.obj(.text) }
} load = ROM, LOAD_START(_task34_load_start), SIZE(_task_34_size)
} run = RAM, RUN_START(_task_run_start)
...
}
The application must manage the contents of the memory overlay at run time. That is, whenever any
services from .task1 or .task2 are needed, the application must first ensure that .task1 and .task2 are
resident in the memory overlay. Similarly for .task3 and .task4.
To affect a copy of .task1 and .task2 from ROM to RAM at run time, the application must first gain access
to the load address of the tasks (_task12_load_start), the run address (_task_run_start), and the size
(_task12_size). Then this information is used to perform the actual code copy.
8.8.4 Generating Copy Tables With the table() Operator
The linker supports extensions to the linker command file syntax that enable you to do the following:
• Identify any object components that may need to be copied from load space to run space at some
point during the run of an application
• Instruct the linker to automatically generate a copy table that contains (at least) the load address, run
address, and size of the component that needs to be copied
• Instruct the linker to generate a symbol specified by you that provides the address of a linker-
generated copy table. For instance, Example 8-17 can be written as shown in Example 8-18:

Linker-Generated Copy Tables
www.ti.com
246 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Linker Description
Example 8-18. Produce Address for Linker Generated Copy Table
SECTIONS
{
...
UNION
{
GROUP
{
.task1: { task1.obj(.text) }
.task2: { task2.obj(.text) }
} load = ROM, table(_task12_copy_table)
GROUP
{
.task3: { task3.obj(.text) }
.task4: { task4.obj(.text) }
} load = ROM, table(_task34_copy_table)
} run = RAM
...
}
Using the SECTIONS directive from Example 8-18 in the linker command file, the linker generates two
copy tables named: _task12_copy_table and _task34_copy_table. Each copy table provides the load
address, run address, and size of the GROUP that is associated with the copy table. This information is
accessible from application source code using the linker-generated symbols, _task12_copy_table and
_task34_copy_table, which provide the addresses of the two copy tables, respectively.
Using this method, you need not worry about the creation or maintenance of a copy table. You can
reference the address of any copy table generated by the linker in C/C++ or assembly source code,
passing that value to a general purpose copy routine, which will process the copy table and affect the
actual copy.
8.8.4.1 The table() Operator
You can use the table() operator to instruct the linker to produce a copy table. A table() operator can be
applied to an output section, a GROUP, or a UNION member. The copy table generated for a particular
table() specification can be accessed through a symbol specified by you that is provided as an argument
to the table() operator. The linker creates a symbol with this name and assigns it the address of the copy
table as the value of the symbol. The copy table can then be accessed from the application using the
linker-generated symbol.
Each table() specification you apply to members of a given UNION must contain a unique name. If a
table() operator is applied to a GROUP, then none of that GROUP's members may be marked with a
table() specification. The linker detects violations of these rules and reports them as warnings, ignoring
each offending use of the table() specification. The linker does not generate a copy table for erroneous
table() operator specifications.
Copy tables can be generated automatically; see Section 8.8.4. The table operator can be used with
compression; see Section 8.8.5.
www.ti.com
Linker-Generated Copy Tables
247
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Linker Description
8.8.4.2 Boot-Time Copy Tables
The linker supports a special copy table name, BINIT (or binit), that you can use to create a boot-time
copy table. This table is handled before the .cinit section is used to initialize variables at startup. For
example, the linker command file for the boot-loaded application described in Section 8.8.2 can be
rewritten as follows:
SECTIONS
{
.flashcode: { app_tasks.obj(.text) }
load = FLASH, run = PMEM,
table(BINIT)
...
}
For this example, the linker creates a copy table that can be accessed through a special linker-generated
symbol, __binit__, which contains the list of all object components that need to be copied from their load
location to their run location at boot-time. If a linker command file does not contain any uses of
table(BINIT), then the __binit__ symbol is given a value of -1 to indicate that a boot-time copy table does
not exist for a particular application.
You can apply the table(BINIT) specification to an output section, GROUP, or UNION member. If used in
the context of a UNION, only one member of the UNION can be designated with table(BINIT). If applied to
a GROUP, then none of that GROUP's members may be marked with table(BINIT).The linker detects
violations of these rules and reports them as warnings, ignoring each offending use of the table(BINIT)
specification.
8.8.4.3 Using the table() Operator to Manage Object Components
If you have several pieces of code that need to be managed together, then you can apply the same table()
operator to several different object components. In addition, if you want to manage a particular object
component in multiple ways, you can apply more than one table() operator to it. Consider the linker
command file excerpt in Example 8-19:
Example 8-19. Linker Command File to Manage Object Components
SECTIONS
{
UNION
{
.first: { a1.obj(.text), b1.obj(.text), c1.obj(.text) }
load = EMEM, run = PMEM, table(BINIT), table(_first_ctbl)
.second: { a2.obj(.text), b2.obj(.text) }
load = EMEM, run = PMEM, table(_second_ctbl)
}
.extra: load = EMEM, run = PMEM, table(BINIT)
...
}
In this example, the output sections .first and .extra are copied from external memory (EMEM) into
program memory (PMEM) at boot time while processing the BINIT copy table. After the application has
started executing its main thread, it can then manage the contents of the overlay using the two overlay
copy tables named: _first_ctbl and _second_ctbl.
Linker-Generated Copy Tables
www.ti.com
248 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Linker Description
8.8.4.4 Linker-Generated Copy Table Sections and Symbols
The linker creates and allocates a separate input section for each copy table that it generates. Each copy
table symbol is defined with the address value of the input section that contains the corresponding copy
table.
The linker generates a unique name for each overlay copy table input section. For example,
table(_first_ctbl) would place the copy table for the .first section into an input section called
.ovly:_first_ctbl. The linker creates a single input section, .binit, to contain the entire boot-time copy table.
Example 8-20 illustrates how you can control the placement of the linker-generated copy table sections
using the input section names in the linker command file.
Example 8-20. Controlling the Placement of the Linker-Generated Copy Table Sections
SECTIONS
{
UNION
{
.first: { a1.obj(.text), b1.obj(.text), c1.obj(.text) }
load = EMEM, run = PMEM, table(BINIT), table(_first_ctbl)
.second: { a2.obj(.text), b2.obj(.text) }
load = EMEM, run = PMEM, table(_second_ctbl)
}
.extra: load = EMEM, run = PMEM, table(BINIT)
...
.ovly: { } > BMEM
.binit: { } > BMEM
}
For the linker command file in Example 8-20, the boot-time copy table is generated into a .binit input
section, which is collected into the .binit output section, which is mapped to an address in the BMEM
memory area. The _first_ctbl is generated into the .ovly:_first_ctbl input section and the _second_ctbl is
generated into the .ovly:_second_ctbl input section. Since the base names of these input sections match
the name of the .ovly output section, the input sections are collected into the .ovly output section, which is
then mapped to an address in the BMEM memory area.
If you do not provide explicit placement instructions for the linker-generated copy table sections, they are
allocated according to the linker's default placement algorithm.
The linker does not allow other types of input sections to be combined with a copy table input section in
the same output section. The linker does not allow a copy table section that was created from a partial link
session to be used as input to a succeeding link session.

www.ti.com
Linker-Generated Copy Tables
249
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Linker Description
8.8.4.5 Splitting Object Components and Overlay Management
It is possible to split sections that have separate load and run placement instructions. The linker can
access both the load address and run address of every piece of a split object component. Using the
table() operator, you can tell the linker to generate this information into a copy table. The linker gives each
piece of the split object component a COPY_RECORD entry in the copy table object.
For example, consider an application which has seven tasks. Tasks 1 through 3 are overlaid with tasks 4
through 7 (using a UNION directive). The load placement of all of the tasks is split among four different
memory areas (LMEM1, LMEM2, LMEM3, and LMEM4). The overlay is defined as part of memory area
PMEM. You must move each set of tasks into the overlay at run time before any services from the set are
used.
You can use table() operators in combination with splitting operators, >>, to create copy tables that have
all the information needed to move either group of tasks into the memory overlay as shown in Example 8-
21.
Example 8-21. Creating a Copy Table to Access a Split Object Component
SECTIONS
{
UNION
{
.task1to3: { *(.task1), *(.task2), *(.task3) }
load >> LMEM1 | LMEM2 | LMEM4, table(_task13_ctbl)
GROUP
{
.task4: { *(.task4) }
.task5: { *(.task5) }
.task6: { *(.task6) }
.task7: { *(.task7) }
} load >> LMEM1 | LMEM3 | LMEM4, table(_task47_ctbl)
} run = PMEM
...
.ovly: > LMEM4
}

Linker-Generated Copy Tables
www.ti.com
250 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Linker Description
Example 8-22 illustrates a possible driver for such an application.
Example 8-22. Split Object Component Driver
#include <cpy_tbl.h>
extern far COPY_TABLE task13_ctbl;
extern far COPY_TABLE task47_ctbl;
extern void task1(void);
...
extern void task7(void);
main()
{
...
copy_in(&task13_ctbl);
task1();
task2();
task3();
...
copy_in(&task47_ctbl);
task4();
task5();
task6();
task7();
...
}
You must declare a COPY_TABLE object as far to allow the overlay copy table section placement to be
independent from the other sections containing data objects (such as .bss).
The contents of the .task1to3 section are split in the section's load space and contiguous in its run space.
The linker-generated copy table, _task13_ctbl, contains a separate COPY_RECORD for each piece of the
split section .task1to3. When the address of _task13_ctbl is passed to copy_in(), each piece of .task1to3
is copied from its load location into the run location.
The contents of the GROUP containing tasks 4 through 7 are also split in load space. The linker performs
the GROUP split by applying the split operator to each member of the GROUP in order. The copy table for
the GROUP then contains a COPY_RECORD entry for every piece of every member of the GROUP.
These pieces are copied into the memory overlay when the _task47_ctbl is processed by copy_in().
The split operator can be applied to an output section, GROUP, or the load placement of a UNION or
UNION member. The linker does not permit a split operator to be applied to the run placement of either a
UNION or of a UNION member. The linker detects such violations, emits a warning, and ignores the
offending split operator usage.
Loadaddress Runaddress Size(0ifloaddataiscompressed)
Recsize Reccnt
www.ti.com
Linker-Generated Copy Tables
251
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Linker Description
8.8.5 Compression
When automatically generating copy tables, the linker provides a way to compress the load-space data.
This can reduce the read-only memory foot print. This compressed data can be decompressed while
copying the data from load space to run space.
You can specify compression in two ways:
• The linker command line option --copy_compression=compression_kind can be used to apply the
specified compression to any output section that has a table() operator applied to it.
• The table() operator accepts an optional compression parameter. The syntax is: .
table( name , compression= compression_kind )
The compression_kind can be one of the following types:
–off. Don't compress the data.
–rle. Compress data using Run Length Encoding.
–lzss. Compress data using Lempel-Ziv-Storer-Szymanski compression.
A table() operator without the compression keyword uses the compression kind specified using the
command line option --copy_compression.
When you choose compression, it is not guaranteed that the linker will compress the load data. The linker
compresses load data only when such compression reduces the overall size of the load space. In some
cases even if the compression results in smaller load section size the linker does not compress the data if
the decompression routine offsets for the savings.
For example, assume RLE compression reduces the size of section1 by 30 bytes. Also assume the RLE
decompression routine takes up 40 bytes in load space. By choosing to compress section1 the load space
is increased by 10 bytes. Therefore, the linker will not compress section1. On the other hand, if there is
another section (say section2) that can benefit by more than 10 bytes from applying the same
compression then both sections can be compressed and the overall load space is reduced. In such cases
the linker compresses both the sections.
You cannot force the linker to compress the data when doing so does not result in savings.
You cannot compress the decompression routines or any member of a GROUP containing .cinit.
8.8.5.1 Compressed Copy Table Format
The copy table format is the same irrespective of the compression_kind. The size field of the copy record
is overloaded to support compression. Figure 8-5 illustrates the compressed copy table layout.
Figure 8-5. Compressed Copy Table
In Figure 8-5, if the size in the copy record is non-zero it represents the size of the data to be copied, and
also means that the size of the load data is the same as the run data. When the size is 0, it means that
the load data is compressed.
8.8.5.2 Compressed Section Representation in the Object File
The linker creates a separate input section to hold the compressed data. Consider the following table()
operation in the linker command file.
SECTIONS
{
.task1: load = ROM, run = RAM, table(_task1_table)
}
The output object file has one output section named .task1 which has different load and run addresses.
This is possible because the load space and run space have identical data when the section is not
compressed.
32-bithandleraddress1
32-bithandleraddressN
_TI_Handler_Table_Base:
_TI_Handler_Table_Limit:
Linker-Generated Copy Tables
www.ti.com
252 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Linker Description
Alternatively, consider the following:
SECTIONS
{
.task1: load = ROM, run = RAM, table(_task1_table, compression=rle)
}
If the linker compresses the .task1 section then the load space data and the run space data are different.
The linker creates the following two sections:
•.task1 : This section is uninitialized. This output section represents the run space image of section
task1.
•.task1.load : This section is initialized. This output section represents the load space image of the
section task1. This section usually is considerably smaller in size than .task1 output section.
The linker allocates load space for the .task1.load input section in the memory area that was specified for
load placement for the .task1 section. There is only a single load section to represent the load placement
of .task1 - .task1.load. If the .task1 data had not been compressed, there would be two allocations for the
.task1 input section: one for its load placement and another for its run placement.
8.8.5.3 Compressed Data Layout
The compressed load data has the following layout:
8-bit index Compressed data
The first 8 bits of the load data are the handler index. This handler index is used to index into a handler
table to get the address of a handler function that knows how to decode the data that follows. The handler
table is a list of 32-bit function pointers as shown in Figure 8-6.
Figure 8-6. Handler Table
The linker creates a separate output section for the load and run space. For example, if .task1.load is
compressed using RLE, the handler index points to an entry in the handler table that has the address of
the run-time-support routine __TI_decompress_rle().
8.8.5.4 Run-Time Decompression
During run time you call the run-time-support routine copy_in() to copy the data from load space to run
space. The address of the copy table is passed to this routine. First the routine reads the record count.
Then it repeats the following steps for each record:
1. Read load address, run address and size from record.
2. If size is zero go to step 5.
3. Call memcpy passing the run address, load address and size.
4. Go to step 1 if there are more records to read.
5. Read the first byte from the load address. Call this index.
6. Read the handler address from (&__TI_Handler_Base)[index].
7. Call the handler and pass load address + 1 and run address.
8. Go to step 1 if there are more records to read.
The routines to handle the decompression of load data are provided in the run-time-support library.
www.ti.com
Linker-Generated Copy Tables
253
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Linker Description
8.8.5.5 Compression Algorithms
The following subsections provide information about decompression algorithms for the RLE and LZSS
formats. To see example decompression algorithms, refer to the following functions in the Run-Time
Support library:
•RLE: The __TI_decompress_rle() function in the copy_decompress_rle.c file.
•LZSS: The __TI_decompress_lzss() function in the copy_decompress_lzss.c file.
Run Length Encoding (RLE):
8-bit index Initialization data compressed using run length encoding
The data following the 8-bit index is compressed using run length encoded (RLE) format. ARM uses a
simple run length encoding that can be decompressed using the following algorithm:
1. Read the first byte, Delimiter (D).
2. Read the next byte (B).
3. If B != D, copy B to the output buffer and go to step 2.
4. Read the next byte (L).
a. If L == 0, then length is either a 16-bit or 24-bit value, or we’ve reached the end of the data, read
next byte (L).
1. If L == 0, length is a 24-bit value or the end of the data is reached, read next byte (L).
a. If L == 0, the end of the data is reached, go to step 7.
b. Else L <<= 16, read next two bytes into lower 16 bits of L to complete 24-bit value for L.
2. Else L <<= 8, read next byte into lower 8 bits of L to complete 16-bit value for L.
b. Else if L > 0 and L < 4, copy D to the output buffer L times. Go to step 2.
c. Else, length is 8-bit value (L).
5. Read the next byte (C); C is the repeat character.
6. Write C to the output buffer L times; go to step 2.
7. End of processing.
The ARM run-time support library has a routine __TI_decompress_rle24() to decompress data
compressed using RLE. The first argument to this function is the address pointing to the byte after the 8-
bit index. The second argument is the run address from the C auto initialization record.
RLE Decompression Routine
NOTE: The previous decompression routine, __TI_decompress_rle(), is included in the run-time-
support library for decompressing RLE encodings that are generated by older versions of the
linker.
Lempel-Ziv-Storer-Szymanski Compression (LZSS):
8-bit index Data compressed using LZSS
The data following the 8-bit index is compressed using LZSS compression. The ARM run-time-support
library has the routine __TI_decompress_lzss() to decompress the data compressed using LZSS. The first
argument to this function is the address pointing to the byte after the 8-bit Index, and the second argument
is the run address from the C auto initialization record.

Linker-Generated Copy Tables
www.ti.com
254 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Linker Description
8.8.6 Copy Table Contents
To use a copy table generated by the linker, you must know the contents of the copy table. This
information is included in a run-time-support library header file, cpy_tbl.h, which contains a C source
representation of the copy table data structure that is generated by the linker. Example 8-23 shows the
copy table header file.
Example 8-23. ARM cpy_tbl.h File
/*****************************************************************************/
/* cpy_tbl.h v##### */
/* Copyright (c) 2003 Texas Instruments Incorporated */
/* */
/* Specification of copy table data structures which can be automatically */
/* generated by the linker (using the table() operator in the LCF). */
/*****************************************************************************/
#ifndef _CPY_TBL
#define _CPY_TBL
#ifdef __cplusplus
extern "C" namespace std {
#endif /* __cplusplus */
/*****************************************************************************/
/* Copy Record Data Structure */
/*****************************************************************************/
typedef struct copy_record
{
unsigned int load_addr;
unsigned int run_addr;
unsigned int size;
} COPY_RECORD;
/*****************************************************************************/
/* Copy Table Data Structure */
/*****************************************************************************/
typedef struct copy_table
{
unsigned short rec_size;
unsigned short num_recs;
COPY_RECORD recs[1];
} COPY_TABLE;
/*****************************************************************************/
/* Prototype for general purpose copy routine. */
/*****************************************************************************/
extern void copy_in(COPY_TABLE *tp);
#ifdef __cplusplus
} /* extern "C" namespace std */
#ifndef _CPP_STYLE_HEADER
using std::COPY_RECORD;
using std::COPY_TABLE;
using std::copy_in;
#endif /* _CPP_STYLE_HEADER */
#endif /* __cplusplus */
#endif /* !_CPY_TBL */
For each object component that is marked for a copy, the linker creates a COPY_RECORD object for it.
Each COPY_RECORD contains at least the following information for the object component:
• The load address
• The run address
• The size

www.ti.com
Linker-Generated Copy Tables
255
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Linker Description
The linker collects all COPY_RECORDs that are associated with the same copy table into a
COPY_TABLE object. The COPY_TABLE object contains the size of a given COPY_RECORD, the
number of COPY_RECORDs in the table, and the array of COPY_RECORDs in the table. For instance, in
the BINIT example in Section 8.8.4.2, the .first and .extra output sections will each have their own
COPY_RECORD entries in the BINIT copy table. The BINIT copy table will then look like this:
COPY_TABLE __binit__ = { 12, 2,
{ <load address of .first>,
<run address of .first>,
<size of .first> },
{ <load address of .extra>,
<run address of .extra>,
<size of .extra> } };
8.8.7 General Purpose Copy Routine
The cpy_tbl.h file in Example 8-23 also contains a prototype for a general-purpose copy routine, copy_in(),
which is provided as part of the run-time-support library. The copy_in() routine takes a single argument:
the address of a linker-generated copy table. The routine then processes the copy table data object and
performs the copy of each object component specified in the copy table.
The copy_in() function definition is provided in the cpy_tbl.c run-time-support source file shown in
Example 8-24.
Example 8-24. Run-Time-Support cpy_tbl.c File
/*****************************************************************************/
/* cpy_tbl.c v##### */
/* */
/* General purpose copy routine. Given the address of a linker-generated */
/* COPY_TABLE data structure, effect the copy of all object components */
/* that are designated for copy via the corresponding LCF table() operator. */
/*****************************************************************************/
#include <cpy_tbl.h>
#include <string.h>
typedef void (*handler_fptr)(const unsigned char *in, unsigned char *out)
/*****************************************************************************/
/* COPY_IN() */
/*****************************************************************************/
void copy_in(COPY_TABLE *tp)
{
unsigned short I;
for (I = 0; I < tp->num_recs; I++)
{
COPY_RECORD crp = tp->recs[i];
unsigned char *ld_addr = (unsigned char *)crp.load_addr;
unsigned char *rn_addr = (unsigned char *)crp.run_addr;
if (crp.size)
{
/*------------------------------------------------------------------*/
/* Copy record has a non-zero size so the data is not compressed. */
/* Just copy the data. */
/*------------------------------------------------------------------*/
memcpy(rn_addr, ld_addr, crp.size);
}
}
}

Linker-Generated CRC Tables
www.ti.com
256 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Linker Description
8.9 Linker-Generated CRC Tables
The linker supports an extension to the linker command file syntax that enables the verification of code or
data by means of Cyclic Redundancy Code (CRC). The linker computes a CRC value for the specified
region at link time, and stores that value in target memory such that it is accessible at boot or run time.
The application code can then compute the CRC for that region and ensure that the value matches the
linker-computed value.
The run-time-support library does not supply a routine to calculate CRC values at boot or run time.
Examples that perform cyclic redundancy checking using linker-generated CRC tables are provided in the
Tools Insider blog in TI's E2E community.
8.9.1 The crc_table() Operator
For any section that should be verified with a CRC, the linker command file must be modified to include
the crc_table() operator. The specification of a CRC algorithm is optional. The syntax is:
crc_table(user_specified_table_name[, algorithm=xxx])
The linker uses the CRC algorithm from any specification given in a crc_table() operator. If that
specification is omitted, the TMS570_CRC64_ISO algorithm is used. The linker includes CRC table
information in the map file. This includes the CRC value as well as the algorithm used for the calculation.
The CRC table generated for a particular crc_table() instance can be accessed through the table name
provided as an argument to the crc_table() operator. The linker creates a symbol with this name and
assigns the address of the CRC table as the value of the symbol. The CRC table can then be accessed
from the application using the linker-generated symbol.
The crc_table() operator can be applied to an output section, a GROUP, a GROUP member, a UNION, or
a UNION member. If applied to a GROUP or UNION, the operator is applied to each member of the
GROUP or UNION.
You can include calls in your application to a routine that will verify CRC values for relevant sections. You
must provide this routine. See below for more details on the data structures and suggested interface.
8.9.2 Restrictions
It is important to note that the CRC generator used by the linker is parameterized as described in the
crc_tbl.h header file (see Example 8-29). Any CRC calculation routine employed outside of the linker must
function in the same way to ensure matching CRC values. The linker cannot detect a mismatch in the
parameters. To understand these parameters, see A Painless Guide to CRC Error Detection Algorithms
by Ross Williams, which is likely located at http://www.ross.net/crc/download/crc_v3.txt.
Only the CRC algorithm names and identifiers specified in crc_tbl.h are supported. All other names and ID
values are reserved for future use. Your system may not include built-in hardware that computes all these
CRC algorithms. Consult the documentation for your hardware for more detail. The following CRC
algorithms are supported:
• CRC8_PRIME
• CRC16_ALT
• CRC16_802_15_4
• CRC_CCITT
• CRC24_FLEXRAY
• CRC32_PRIME
• CRC32_C
• CRC64_ISO
The TMS570_CRC64_ISO algorithm has an initial value of 0. The details of the algorithm are available in
the MCRC documentation.
There are also restrictions which will be enforced by the linker:
• CRC can only be requested at final link time.
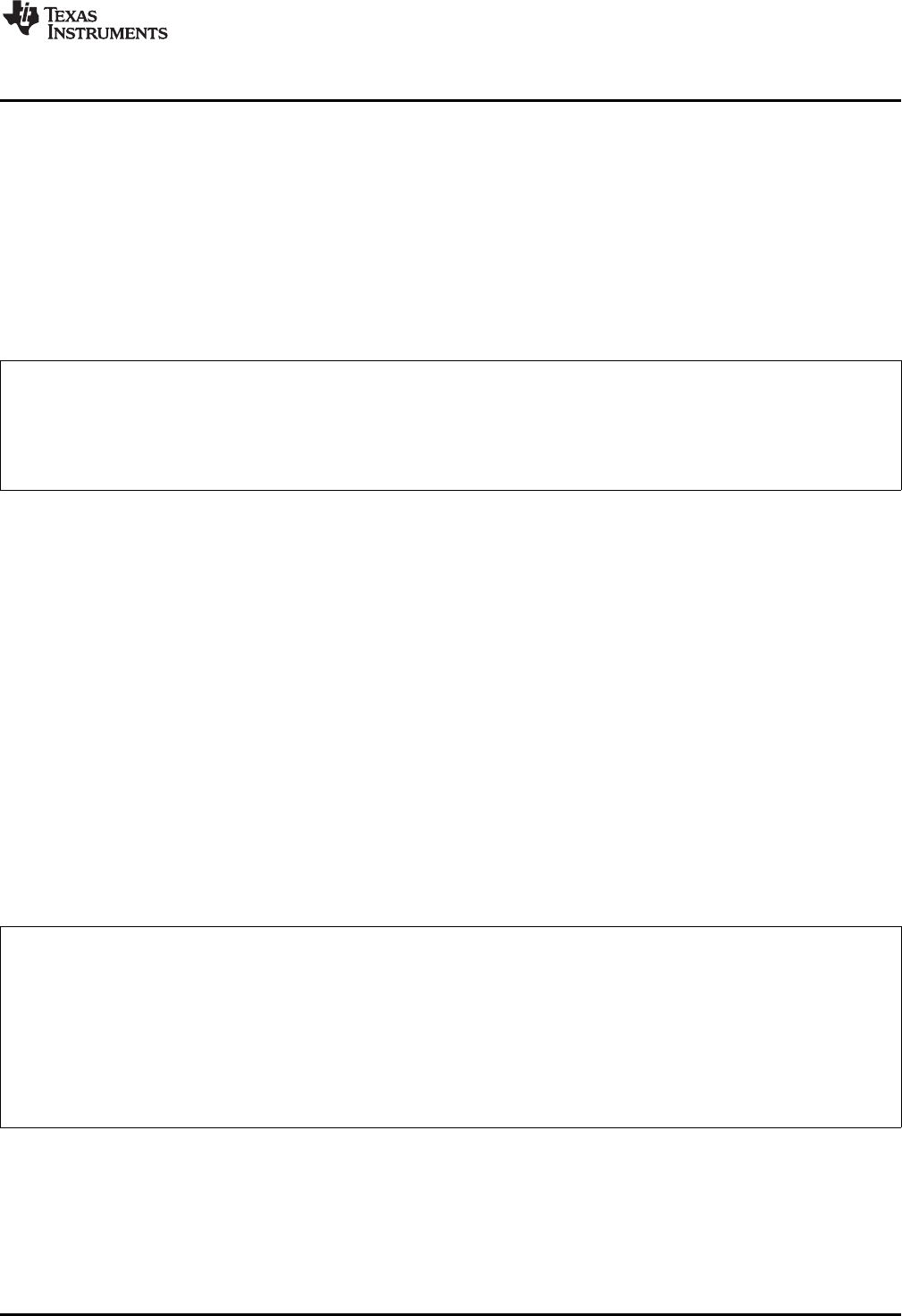
www.ti.com
Linker-Generated CRC Tables
257
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Linker Description
• CRC can only be applied to initialized sections.
• CRC can be requested for load addresses only.
• Certain restrictions also apply to CRC table names. For example, BINIT may not be used as a CRC
table name.
8.9.3 Examples
The crc_table() operator is similar in syntax to the table() operator used for copy tables. A few simple
examples of linker command files follow.
Example 8-25. Using crc_table() Operator to Compute the CRC Value for .text Data
...
SECTIONS
{
...
.section_to_be_verified: {a1.obj(.text)} crc_table(_my_crc_table_for_a1)
}
Example 8-25 defines a section named “.section_to_be_verified”, which contains the .text data from the
a1.obj file. The crc_table() operator requests that the linker compute the CRC value for the .text data and
store that value in a table named “my_crc_table_for_a1”. This table will contain all the information needed
to invoke a user-supplied CRC calculation routine, and verify that the CRC calculated at run time matches
the linker-generated CRC. The table can be accessed from application code using the symbol
my_crc_table_for_a1, which should be declared of type “extern CRC_TABLE”. This symbol will be defined
by the linker. The application code might resemble the following.
#include "crc_tbl.h"
extern CRC_TABLE my_crc_table_for_a1;
verify_a1_text_contents()
{
...
/* Verify CRC value for .text sections of a1.obj. */
if (my_check_CRC(&my_crc_table_for_a1)) puts("OK");
}
The my_check_CRC() routine is discussed in detail in Section 8.9.4,Example 8-30.
Example 8-26. Specifying an Algorithm in the crc_table() Operator
...
SECTIONS
{
...
.section_to_be_verified_2: {b1.obj(.text)} load=SLOW_MEM, run=FAST_MEM,
crc_table(_my_crc_table_for_b1, algorithm=TMS570_CRC64_ISO)
.TI.crctab: > CRCMEM
}
...
In Example 8-26, the CRC algorithm is specified in the crc_table() operator. The specified algorithm is
used to compute the CRC of the text data from b1.obj. The CRC tables generated by the linker are
created in the special section .TI.crctab, which can be placed in the same manner as other sections. In
this case, the CRC table _my_crc_table_for_b1 is created in section .TI.crctab:_my_crc_table_for_b1, and
that section is placed in the CRCMEM memory region.
Linker-Generated CRC Tables
www.ti.com
258 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Linker Description
Example 8-27. Using a Single Table for Multiple Sections
...
SECTIONS
{
.section_to_be_verified_1: {a1.obj(.text)}
crc_table(_my_crc_table_for_a1_and_c1)
.section_to_be_verified_3: {c1.obj(.text)}
crc_table(_my_crc_table_for_a1_and_c1, algorithm=TMS570_CRC64_ISO)
}
...
In Example 8-27 the same identifier, _my_crc_table_for_a1_and_c1, is specified for both a1.obj and
c1.obj. The linker creates a single table that contains entries for both text sections.
Example 8-28. Applying the crc_table() Operator to a GROUP or UNION
...
SECTIONS
{
UNION
{
section1: {} crc_table(table1)
section2:
} crc_table(table2)
}
When the crc_table() operator is applied to a GROUP or a UNION, the linker applies the table
specification to the members of the GROUP or UNION.
In Example 8-28 the linker creates two CRC tables, table1 and table2. table1 contains one entry for
section1. Because both sections are members of the UNION, table2 contains entries for section1 and
section2. The order of the entries in table2 is unspecified.
table_name
(such as linker−generated symbol
my_crc_table_for_a1)
rec_size=8
num_recs=2
recs
alg ID
alg ID
address
address
data size
data size
CRC value
CRC value
www.ti.com
Linker-Generated CRC Tables
259
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Linker Description
8.9.4 Interface
The CRC generation function uses a mechanism similar to the copy table functionality. Using the syntax
shown above in the linker command file allows specification of code/data sections that have CRC values
computed and stored in the run time image. This section describes the table data structures created by
the linker, and how to access this information from application code.
The CRC tables contain entries as detailed in the run-time-support header file crc_tbl.h, as illustrated in
Figure 8-7.
Figure 8-7. CRC_TABLE Conceptual Model
The crc_tbl.h header file is included in Example 8-29. This file specifies the C structures created by the
linker to manage CRC information. It also includes the specifications of the supported CRC algorithms. A
full discussion of CRC algorithms is beyond the scope of this document, and the interested reader should
consult the referenced document for a description of the fields shown in the table. The following fields are
relevant to this document.
• Name – text identifier of the algorithm, used by the programmer in the linker command file.
• ID – the numeric identifier of the algorithm, stored by the linker in the crc_alg_ID member of each table
entry.
• Order – the number of bits used by the CRC calculation.
• Polynomial – used by the CRC computation engine.
• Initial Value – the initial value given to the CRC computation engine.
Linker-Generated CRC Tables
www.ti.com
260 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Linker Description
Example 8-29. The CRC Table Header, crc_tbl.h
/*****************************************************************************/
/* crc_tbl.h */
/* */
/* Specification of CRC table data structures which can be automatically */
/* generated by the linker (using the crc_table() operator in the linker */
/* command file). */
/*****************************************************************************/
/* */
/* The CRC generator used by the linker is based on concepts from the */
/* document: */
/* "A Painless Guide to CRC Error Detection Algorithms" */
/* */
/* Author : Ross Williams (ross@guest.adelaide.edu.au.). */
/* Date : 3 June 1993. */
/* Status : Public domain (C code). */
/* */
/* Description : For more information on the Rocksoft^tm Model CRC */
/* Algorithm, see the document titled "A Painless Guide to CRC Error */
/* Detection Algorithms" by Ross Williams (ross@guest.adelaide.edu.au.). */
/* This document is likely to be in "ftp.adelaide.edu.au/pub/rocksoft" or */
/* at http:www.ross.net/crc/download/crc_v3.txt. */
/* */
/* Note: Rocksoft is a trademark of Rocksoft Pty Ltd, Adelaide, Australia. */
/*****************************************************************************/
#include <stdint.h> /* For uintXX_t */
/*****************************************************************************/
/* CRC Algorithm Specifiers */
/* */
/* The following specifications, based on the above cited document, are used */
/* by the linker to generate CRC values. */
/*
ID Name Order Polynomial Initial Ref Ref CRC XOR Zero
Value In Out Value Pad
--------------------------------------------------------------------------------
10 "TMS570_CRC64_ISO", 64, 0x0000001b, 0x00000000, 0, 0, 0x00000000, 1
*/
/* Users should specify the name, such as TMS570_CRC64_ISO, in the linker */
/* command file. The resulting CRC_RECORD structure will contain the */
/* corresponding ID value in the crc_alg_ID field. */
/*****************************************************************************/
#define TMS570_CRC64_ISO 10
/*********************************************************/
/* CRC Record Data Structure */
/* NOTE: The list of fields and the size of each field */
/* varies by target and memory model. */
/*********************************************************/
typedef struct crc_record
{
uint64_t crc_value;
uint32_t crc_alg_ID; /* CRC algorithm ID */
uint32_t addr; /* Starting address */
uint32_t size; /* size of data in bytes */
uint32_t padding; /* explicit padding so layout is the same */
/* for ELF */
} CRC_RECORD;
www.ti.com
Linker-Generated CRC Tables
261
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Linker Description
In the CRC_TABLE struct, the array recs[1] is dynamically sized by the linker to accommodate the number
of records contained in the table (num_recs). A user-supplied routine to verify CRC values should take a
table name and check the CRC values for all entries in the table. An outline of such a routine is shown in
Example 8-30.
Example 8-30. General Purpose CRC Check Routine
/**************************************************************/
/* General purpose CRC check routine. Given the address of a */
/* linker-generated CRC_TABLE data structure, verify the CRC */
/* of all object components that are designated with the */
/* corresponding LCF crc_table() operator. */
/**************************************************************/
#include <crc_tbl.h>
/*********************************************************/
/* MY_CHECK_CRC() - returns 1 if CRCs match, 0 otherwise */
/*********************************************************/
unsigned int my_check_CRC(CRC_TABLE *tp)
{
int i;
for (i = 0; i < tp-> num_recs; i++)
{
CRC_RECORD crc_rec = tp->recs[i];
/**************************************************/
/* COMPUTE CRC OF DATA STARTING AT crc_rec.addr */
/* FOR crc_rec.size UNITS. USE */
/* crc_rec.crc_alg_ID to select algorithm. */
/* COMPARE COMPUTED VALUE TO crc_rec.crc_value. */
/**************************************************/
}
if all CRCs match, return 1;
else return 0;
}
8.9.5 A Note on the TMS570_CRC64_ISO Algorithm
The MCRC module calculates CRCs on 64-bit chunks of data. This is accomplished by writing a long long
value to two memory mapped registers. In C this looks like a normal write of a long long to memory. The
code generated to read/write a long long to memory is something like the following, where R2 contains the
most significant word and R3 contains the least significant word. So the most significant word is written to
the low address and the least significant word is written to the high address:
LDM R0, {R2, R3}
STM R1, {R2, R3}
The CRC memory mapped registers are in the reverse order from how the compiler performs the store.
The least significant word is mapped to the low address and the most significant word is mapped to the
high address.
This means that the words are actually swapped before performing the CRC calculation. It also means
that the calculated CRC value has the words swapped. The TMS570_CRC64_ISO algorithm takes these
issues into consideration and performs the swap when calculating the CRC value. The computed CRC
value stored in the table has the words swapped so the value is the same as it is in memory.
For the end user, these details should be transparent. If the run-time CRC routine is written in C, the long
long loads and stores will be generated correctly. The DMA mode of the MCRC module will also work
correctly.

Partial (Incremental) Linking
www.ti.com
262 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Linker Description
Another issue with the algorithm is that it requires the run-time CRC calculation to be done with 64-bit
chunks. The MCRC module allows smaller chunks of data, but the values are padded to 64-bits. The
TMS570_CRC64_ISO algorithm does not perform any padding, so all CRC computations must be done
with 64-bit values. The algorithm will automatically pad the end of the data with zeros if it does not end on
a 64-bit boundary.
8.10 Partial (Incremental) Linking
An output file that has been linked can be linked again with additional modules. This is known as partial
linking or incremental linking. Partial linking allows you to partition large applications, link each part
separately, and then link all the parts together to create the final executable program.
Follow these guidelines for producing a file that you will relink:
• The intermediate files produced by the linker must have relocation information. Use the --relocatable
option when you link the file the first time. (See Section 8.4.3.2.)
• Intermediate files must have symbolic information. By default, the linker retains symbolic information in
its output. Do not use the --no_sym_table option if you plan to relink a file, because --no_sym_table
strips symbolic information from the output module. (See Section 8.4.24.)
• Intermediate link operations should be concerned only with the formation of output sections and not
with allocation. All allocation, binding, and MEMORY directives should be performed in the final link.
Since the ELF object file format is used, input sections are not combined into output sections during a
partial link unless a matching SECTIONS directive is specified in the link step command file.
• If the intermediate files have global symbols that have the same name as global symbols in other files
and you want them to be treated as static (visible only within the intermediate file), you must link the
files with the --make_static option (see Section 8.4.19.1).
• If you are linking C code, do not use --ram_model or --rom_model until the final linker. Every time you
invoke the linker with the --ram_model or --rom_model option, the linker attempts to create an entry
point. (See Section 8.4.27,Section 3.3.2.1, and Section 3.3.2.2.)
The following example shows how you can use partial linking:
Step 1: Link the file file1.com; use the --relocatable option to retain relocation information in the
output file tempout1.out.
armcl --run_linker --relocatable --output_file=tempout1 file1.com
file1.com contains:
SECTIONS
{
ss1: {
f1.obj
f2.obj
.
.
.
fn.obj
}
}

www.ti.com
Linking C/C++ Code
263
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Linker Description
Step 2: Link the file file2.com; use the --relocatable option to retain relocation information in the
output file tempout2.out.
armcl --run_linker --relocatable --output_file=tempout2 file2.com
file2.com contains:
SECTIONS
{
ss2: {
g1.obj
g2.obj
.
.
.
gn.obj
}
}
Step 3: Link tempout1.out and tempout2.out.
armcl --run_linker --map_file=final.map --
output_file=final.out tempout1.out tempout2.out
8.11 Linking C/C++ Code
The C/C++ compiler produces assembly language source code that can be assembled and linked. For
example, a C program consisting of modules prog1, prog2, etc., can be assembled and then linked to
produce an executable file called prog.out:
armcl --run_linker --rom_model --
output_file prog.out prog1.obj prog2.obj ... rtsv4_A_be_eabi.lib
The --rom_model option tells the linker to use special conventions that are defined by the C/C++
environment.
The archive libraries shipped by TI contain C/C++ run-time-support functions.
C, C++, and mixed C and C++ programs can use the same run-time-support library. Run-time-support
functions and variables that can be called and referenced from both C and C++ will have the same
linkage.
For more information about the ARM C/C++ language, including the run-time environment and run-time-
support functions, see the ARM Optimizing C/C++ Compiler User's Guide.
8.11.1 Run-Time Initialization
All C/C++ programs must be linked with code to initialize and execute the program, called a bootstrap
routine, also known as the boot.obj object module. The symbol _c_int00 is defined as the program entry
point and is the start of the C boot routine in boot.obj; referencing _c_int00 ensures that boot.obj is
automatically linked in from the run-time-support library. When a program begins running, it executes
boot.obj first. The boot.obj symbol contains code and data for initializing the run-time environment and
performs the following tasks:
• Changes from system mode to user mode
• Sets up the user mode stack
• Processes the run-time .cinit initialization table and autoinitializes global variables (when the linker is
invoked with the --rom_model option)
• Calls main
The run-time-support object libraries contain boot.obj. You can:
• Use the archiver to extract boot.obj from the library and then link the module in directly.
• Include the appropriate run-time-support library as an input file (the linker automatically extracts
boot.obj when you use the --ram_model or --rom_model option).

Linking C/C++ Code
www.ti.com
264 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Linker Description
8.11.2 Object Libraries and Run-Time Support
The ARM Optimizing C/C++ Compiler User's Guide describes additional run-time-support functions that
are included in rts.src. If your program uses any of these functions, you must link the appropriate run-time-
support library with your object files.
You can also create your own object libraries and link them. The linker includes and links only those
library members that resolve undefined references.
If you want to link object files created with the TI CodeGen tools with object files generated by other
compiler tool chains, the ARM standard specifies that you should define the
_AEABI_PORTABILITY_LEVEL preprocessor symbol as follows before #including any standard header
files, such as <stdlib.h>.
#define _AEABI_PORTABILITY_LEVEL 1
This definition enables full portability. Defining the symbol to 0 specifies that the "C standard" portability
level should be used.
8.11.3 Setting the Size of the Stack and Heap Sections
The C/C++ language uses two uninitialized sections called .sysmem and .stack for the memory pool used
by the malloc( ) functions and the run-time stacks, respectively. You can set the size of these by using the
--heap_size or --stack_size option and specifying the size of the section as a 4-byte constant immediately
after the option. If the options are not used, the default size of the heap is 2K bytes and the default size of
the stack is 2K bytes.
See Section 8.4.16 for setting heap sizes and Section 8.4.31 for setting stack sizes.
8.11.4 Initializing and AutoInitialzing Variables at Run Time
Autoinitializing variables at run time is the default method of autoinitialization. To use this method, invoke
the linker with the --rom_model option. See Section 3.3.2.1 for details.
Initialization of variables at load time enhances performance by reducing boot time and by saving the
memory used by the initialization tables. To use this method, invoke the linker with the --ram_model
option. See Section 3.3.2.2 for details.
See Section 3.3.2.3 for information about the steps that are performed when you invoke the linker with the
--ram_model or --rom_model option.
8.11.5 Initialization of Cinit and Watchdog Timer Hold
You can use the --cinit_hold_wdt option on some devices to specify whether the watchdog timer should be
held (on) or not held (off) during cinit auto-initialization. Setting this option causes an RTS auto-
initialization routine to be linked in with the program to handle the desired watchdog timer behavior.

www.ti.com
Linker Example
265
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Linker Description
8.12 Linker Example
This example links three object files named demo.obj, ctrl.obj, and tables.obj and creates a program called
demo.out.
Assume that target memory has the following program memory configuration:
Address Range Contents
0x00000000 to 0x00001000 SLOW_MEM
0x00001000 to 0x00002000 FAST_MEM
0x08000000 to 0x08000400 EEPROM
The output sections are constructed in the following manner:
• Executable code, contained in the .text sections of demo.obj, fft.obj, and tables.obj, is linked into
program memory ROM.
• Variables, contained in the var_defs section of demo.obj, are linked into data memory in block
FAST_MEM_2.
• Tables of coefficients in the .data sections of demo.obj, tables.obj, and fft.obj are linked into
FAST_MEM_1. A hole is created with a length of 100 and a fill value of 0x07A1C.
• The xy section form demo.obj, which contains buffers and variables, is linked by default into page 1 of
the block STACK, since it is not explicitly linked.
• Executable code, contained in the .text sections of demo.obj, ctrl.obj, and tables.obj, must be linked
into FAST_MEM.
• A set of interrupt vectors, contained in the .intvecs section of tables.obj, must be linked at address
FAST_MEM.
• A table of coefficients, contained in the .data section of tables.obj, must be linked into EEPROM. The
remainder of block FLASH must be initialized to the value 0xFF00FF00.
• A set of variables, contained in the .bss section of ctrl.obj, must be linked into SLOW_MEM and
preinitialized to 0x00000100.
• The .bss sections of demo.obj and tables.obj must be linked into SLOW_MEM.

Linker Example
www.ti.com
266 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Linker Description
Example 8-31 shows the linker command file for this example. Example 8-32 shows the map file.
Example 8
‑‑
31. Linker Command File, demo.cmd
/*****************************************************************************/
/*** Specify Link Options ***/
/*****************************************************************************/
--entry_point SETUP /* Define the program entry point */
--output_file=demo.out /* Name the output file */
--map_file=demo.map /* Create an output map file */
/*****************************************************************************/
/*** Specify the Input Files ***/
/*****************************************************************************/
demo.obj
ctrl.obj
tables.obj
/*****************************************************************************/
/*** Specify the Memory Configurations ***/
/*****************************************************************************/
MEMORY
{
FAST_MEM : org = 0x00000000 len = 0x00001000 /* PROGRAM MEMORY (ROM) */
SLOW_MEM : org = 0x00001000 len = 0x00001000 /* DATA MEMORY (RAM) */
EEPROM : org = 0x08000000 len = 0x00000400 /* COEFFICIENTS (EEPROM) */
}
/*****************************************************************************/
/* Specify the Output Sections */
/*****************************************************************************/
SECTIONS
{
.text : {} > FAST_MEM /* Link all .text sections into ROM */
.intvecs : {} > 0x0 /* Link interrupt vectors at 0x0 */
.data : /* Link .data sections */
{
tables.obj(.data)
. = 0x400; /* Create hole at end of block */
} > EEPROM, fill = 0xFF00FF00 /* Fill and link into EEPROM */
ctrl_vars: /* Create new sections for ctrl variables */
{
ctrl.obj(.bss)
} > SLOW_MEM, fill = 0x00000100 /* Fill with 0x100 and link into RAM */
.bss : {} > SLOW_MEM /* Link remaining .bss sections into RAM */
}
/*****************************************************************************/
/*** End of Command File ***/
/*****************************************************************************/
Invoke the linker by entering the following command:
armcl --run_linker demo.cmd
This creates the map file shown in Example 8-32 and an output file called demo.out that can be run on an
ARM device.
www.ti.com
Linker Example
267
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Linker Description
Example 8
‑‑
32. Output Map File, demo.map
OUTPUT FILE NAME: <demo.out>
ENTRY POINT SYMBOL: "SETUP" address: 000000d4
MEMORY CONFIGURATION
name origin length attributes fill
-------- -------- --------- ---------- --------
FAST_MEM 00000000 000001000 RWIX
SLOW_MEM 00001000 000001000 RWIX
EEPROM 08000000 000000400 RWIX
SECTION ALLOCATION MAP
output attributes/
section page origin length input sections
-------- ---- ---------- ---------- ----------------
.text 0 00000020 00000138
00000020 000000a0 ctrl.obj (.text)
000000c0 00000000 tables.obj (.text)
000000c0 00000098 demo.obj (.text)
.intvecs 0 00000000 00000020
00000000 00000020 tables.obj (.intvecs)
.data 0 08000000 00000400
08000000 00000168 tables.obj (.data)
08000168 00000298 --HOLE-- [fill = ff00ff00]
08000400 00000000 ctrl.obj (.data)
08000400 00000000 demo.obj (.data)
ctrl_var 0 00001000 00000500
00001000 00000500 ctrl.obj (.bss) [fill = 00000100]
.bss 0 00001500 00000100 UNINITIALIZED
00001500 00000100 demo.obj (.bss)
00001600 00000000 tables.obj (.bss)
GLOBAL SYMBOLS
address name address name
-------- ---- -------- ----
00001500 .bss 00000020 clear
08000000 .data 00000020 .text
00000020 .text 000000b8 set
000000d4 SETUP 000000c0 x42
00000020 clear 000000d4 SETUP
08000400 edata 00000158 etext
00001600 end 00001500 .bss
00000158 etext 00001600 end
000000b8 set 08000000 .data
000000c0 x42 08000400 edata
[10 symbols]
268 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Absolute Lister Description
Chapter 9
SPNU118U–January 2018
Absolute Lister Description
The ARM absolute lister is a debugging tool that accepts linked object files as input and creates .abs files
as output. These .abs files can be assembled to produce a listing that shows the absolute addresses of
object code. Manually, this could be a tedious process requiring many operations; however, the absolute
lister utility performs these operations automatically.
Topic ........................................................................................................................... Page
9.1 Producing an Absolute Listing........................................................................... 269
9.2 Invoking the Absolute Lister .............................................................................. 270
9.3 Absolute Lister Example ................................................................................... 271
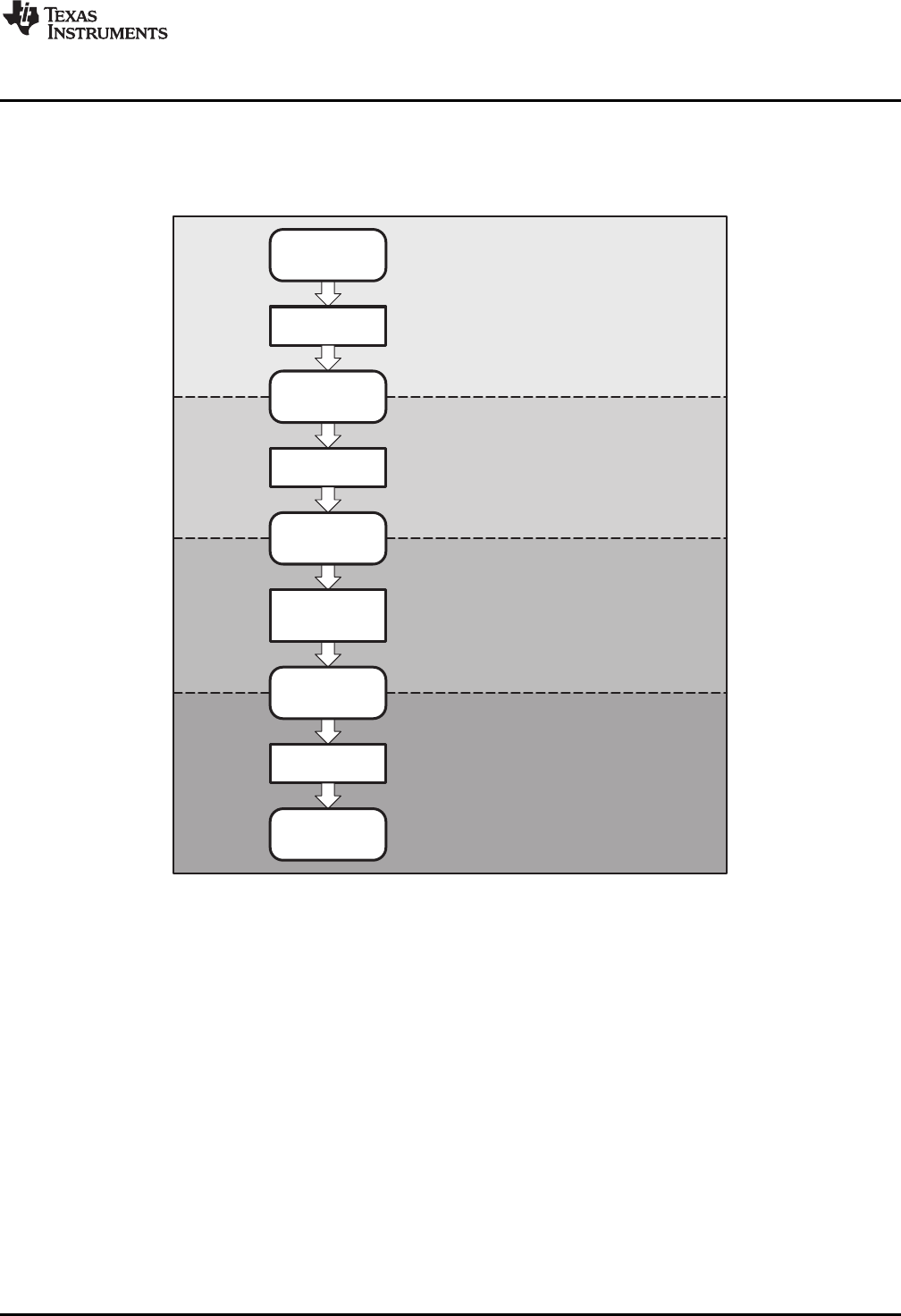
First, assemble a source file.
Link the resulting object file.
Invoke the absolute lister; use the linked
object file as input. This creates a file with
an .abs extension.
Finally, assemble the .abs file; you must
invoke the assembler with the compiler
--absolute_listing option.
This produces a listing file that contains
absolute addresses.
Step 1:
Step 2:
Step 3:
Step 4:
Assembler
source file
Assembler
Object
file
Linker
Linked object
file
Absolute
lister
.abs
file
Assembler
Absolute
listing
www.ti.com
Producing an Absolute Listing
269
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Absolute Lister Description
9.1 Producing an Absolute Listing
Figure 9-1 illustrates the steps required to produce an absolute listing.
Figure 9-1. Absolute Lister Development Flow

Invoking the Absolute Lister
www.ti.com
270 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Absolute Lister Description
9.2 Invoking the Absolute Lister
The syntax for invoking the absolute lister is:
armabs [-options]input file
armabs is the command that invokes the absolute lister.
options identifies the absolute lister options that you want to use. Options are not case sensitive
and can appear anywhere on the command line following the command. Precede each
option with a hyphen (-). The absolute lister options are as follows:
-e enables you to change the default naming conventions for filename extensions on
assembly files, C source files, and C header files. The valid options are:
• ea [.]asmext for assembly files (default is .asm)
• ec [.]cext for C source files (default is .c)
• eh [.]hext for C header files (default is .h)
• ep [.]pext for CPP source files (default is cpp)
The . in the extensions and the space between the option and the extension are
optional.
-q (quiet) suppresses the banner and all progress information.
input file names the linked object file. If you do not supply an extension, the absolute lister
assumes that the input file has the default extension .out. If you do not supply an input
filename when you invoke the absolute lister, the absolute lister prompts you for one.
The absolute lister produces an output file for each file that was linked. These files are named with the
input filenames and an extension of .abs. Header files, however, do not generate a corresponding .abs
file.
Assemble these files with the --absolute_listing assembler option as follows to create the absolute listing:
armcl --absolute_listing filename .abs
The -e options affect both the interpretation of filenames on the command line and the names of the
output files. They should always precede any filename on the command line.
The -e options are useful when the linked object file was created from C files compiled with the debugging
option (--symdebug:dwarf compiler option). When the debugging option is set, the resulting linked object
file contains the name of the source files used to build it. In this case, the absolute lister does not generate
a corresponding .abs file for the C header files. Also, the .abs file corresponding to a C source file uses
the assembly file generated from the C source file rather than the C source file itself.
For example, suppose the C source file hello.csr is compiled with the debugging option set; the debugging
option generates the assembly file hello.s. The hello.csr file includes hello.hsr. Assuming the executable
file created is called hello.out, the following command generates the proper .abs file:
armabs -ea s -ec csr -eh hsr hello.out
An .abs file is not created for hello.hsr (the header file), and hello.abs includes the assembly file hello.s,
not the C source file hello.csr.

www.ti.com
Absolute Lister Example
271
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Absolute Lister Description
9.3 Absolute Lister Example
This example uses three source files. The files module1.asm and module2.asm both include the file
globals.def.
module1.asm
.text
.bss dflag, 1
.bss array, 100
dflag_a .word dflag
array_a .word array
offst_a .word offst
.copy globals.def
LDR r4, array_a
LDR r5, offst_a
LDR r3, dflag_a
LDR r0, [r4, r5]
STR r0, [r3]
module2.asm
.text
.bss offst, 1
offst_a .word offst
.copy globals.def
LDR r4, offst_a
STR r0, [r4]
globals.def
.global array
.global offst
.global dflag
The following steps create absolute listings for the files module1.asm and module2.asm:
Step 1: First, assemble module1.asm and module2.asm:
armcl module1
armcl module2
This creates two object files called module1.obj and module2.obj.
Step 2: Next, link module1.obj and module2.obj using the following linker command file, called
bttest.cmd:
--output_file=bttest.out
--map_file=bttest.map
module1.obj
module2.obj
MEMORY
{
P_MEM : org = 0x00000000 len = 0x00001000
D_MEM : org = 0x00001000 len = 0x00001000
}
SECTIONS
{
.data: >D_MEM
.text: >P_MEM
.bss: >D_MEM
}
Invoke the linker:
armcl --run_linker bttest.cmd
This command creates an executable object file called bttest.out; use this file as input for the
absolute lister.

Absolute Lister Example
www.ti.com
272 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Absolute Lister Description
Step 3: Now, invoke the absolute lister:
armabs bttest.out
This command creates two files called module1.abs and module2.abs:
module1.abs:
.nolist
array .setsym 000001001h
dflag .setsym 000001000h
offst .setsym 000001068h
.data .setsym 000001000h
edata .setsym 000001000h
.text .setsym 000000000h
etext .setsym 00000002ch
.bss .setsym 000001000h
end .setsym 00000106ch
.setsect ".text",000000000h
.setsect ".data",000001000h
.setsect ".bss",000001000h
.list
.text
.copy "module1.asm"
module2.abs:
.nolist
array .setsym 000001001h
dflag .setsym 000001000h
offst .setsym 000001068h
.data .setsym 000001000h
edata .setsym 000001000h
.text .setsym 000000000h
etext .setsym 00000002ch
.bss .setsym 000001000h
end .setsym 00000106ch
.setsect ".text",000000020h
.setsect ".data",000001000h
.setsect ".bss",000001068h
.list
.text
.copy "module2.asm"
These files contain the following information that the assembler needs for Step 4:
• They contain .setsym directives, which equate values to global symbols. Both files contain
global equates for the symbol dflag. The symbol dflag was defined in the file globals.def,
which was included in module1.asm and module2.asm.
• They contain .setsect directives, which define the absolute addresses for sections.
• They contain .copy directives, which defines the assembly language source file to include.
The .setsym and .setsect directives are useful only for creating absolute listings, not normal
assembly.
Step 4: Finally, assemble the .abs files created by the absolute lister (remember that you must use
the --absolute_listing option when you invoke the assembler):
armcl --absolute_listing module1.abs
armcl --absolute_listing module2.abs
This command sequence creates two listing files called module1.lst and module2.lst; no
object code is produced. These listing files are similar to normal listing files; however, the
addresses shown are absolute addresses.
The absolute listing files created are module1.lst (see Example 9-1 ) and module2.lst (see
Example 9-2).

www.ti.com
Absolute Lister Example
273
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Absolute Lister Description
Example 9
‑‑
1. module1.lst
module1.abs PAGE 1
15 00000000 .text
16 .copy "module1.asm"
A 1 00000000 .text
A 2 00001000 .bss dflag, 1
A 3 00001001 .bss array, 100
A 4 00000000 00001000- dflag_a .word dflag
A 5 00000004 00001001- array_a .word array
A 6 00000008 00001068! offst_a .word offst
A 7 .copy globals.def
B 1 .global array
B 2 .global offst
B 3 .global dflag
A 8
A 9 0000000c E51F4010 LDR r4, array_a
A 10 00000010 E51F5010 LDR r5, offst_a
A 11 00000014 E51F301C LDR r3, dflag_a
A 12 00000018 E7940005 LDR r0, [r4, r5]
A 13 0000001c E5830000 STR r0, [r3]
No Errors, No Warnings
Example 9
‑‑
2. module2.lst
module2.abs PAGE 1
15 00000020 .text
16 .copy "module2.asm"
A 1 00000020 .text
A 2 00001068 .bss offst, 1
A 3 00000020 00001068- offst_a .word offst
A 4 .copy globals.def
B 1 .global array
B 2 .global offst
B 3 .global dflag
A 5
A 6 00000024 E51F400C LDR r4, offst_a
A 7 00000028 E5840000 STR r0, [r4]
No Errors, No Warnings
274 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Cross-Reference Lister Description
Chapter 10
SPNU118U–January 2018
Cross-Reference Lister Description
The ARM cross-reference lister is a debugging tool. This utility accepts linked object files as input and
produces a cross-reference listing as output. This listing shows symbols, their definitions, and their
references in the linked source files.
Topic ........................................................................................................................... Page
10.1 Producing a Cross-Reference Listing.................................................................. 275
10.2 Invoking the Cross-Reference Lister................................................................... 276
10.3 Cross-Reference Listing Example....................................................................... 277
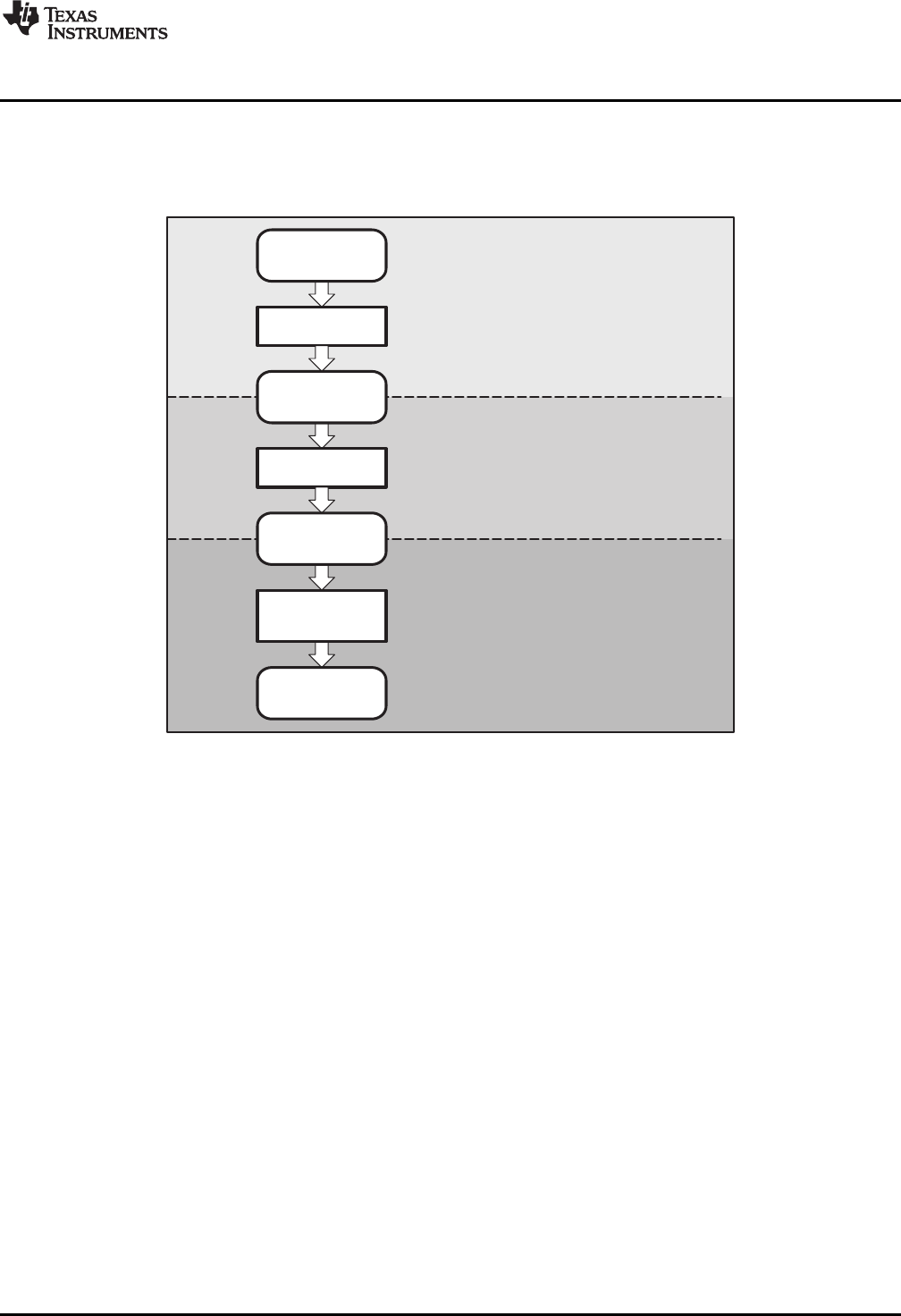
First, invoke the assembler with the compiler
--cross_reference option. This produces
a cross-reference table in the listing file and
adds to the object file cross-reference infor-
mation. By default, only global symbols are
cross-referenced. If you use the compiler
--output_all_syms option, local symbols are
cross-referenced as well.
Link the object file (.obj) to obtain an
executable object file (.out).
Invoke the cross-reference lister. The
following section provides the command
syntax for invoking the cross-reference lister
utility.
Step 1:
Step 2:
Step 3:
Assembler
source file
Assembler
Object
file
Linker
Linked object
file
Cross-reference
lister
Cross-reference
listing
www.ti.com
Producing a Cross-Reference Listing
275
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Cross-Reference Lister Description
10.1 Producing a Cross-Reference Listing
Figure 10-1 illustrates the steps required to produce a cross-reference listing.
Figure 10-1. The Cross-Reference Lister Development Flow
Invoking the Cross-Reference Lister
www.ti.com
276 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Cross-Reference Lister Description
10.2 Invoking the Cross-Reference Lister
To use the cross-reference utility, the file must be assembled with the correct options and then linked into
an executable file. Assemble the assembly language files with the --cross_reference option. This option
creates a cross-reference listing and adds cross-reference information to the object file. By default, the
assembler cross-references only global symbols, but if the assembler is invoked with the --
output_all_syms option, local symbols are also added. Link the object files to obtain an executable file.
To invoke the cross-reference lister, enter the following:
armxref [options] [input filename [output filename]]
armxref is the command that invokes the cross-reference utility.
options identifies the cross-reference lister options you want to use. Options are not case
sensitive and can appear anywhere on the command line following the command.
-l (lowercase L) specifies the number of lines per page for the output file. The format
of the -l option is -lnum, where num is a decimal constant. For example, -l30 sets
the number of lines per page in the output file to 30. The space between the
option and the decimal constant is optional. The default is 60 lines per page.
-q suppresses the banner and all progress information (run quiet).
input filename is a linked object file. If you omit the input filename, the utility prompts for a filename.
output filename is the name of the cross-reference listing file. If you omit the output filename, the default
filename is the input filename with an .xrf extension.
www.ti.com
Cross-Reference Listing Example
277
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Cross-Reference Lister Description
10.3 Cross-Reference Listing Example
These terms defined appear in the cross-reference listing in Example 10-1:
Symbol Name of the symbol listed
Filename Name of the file where the symbol appears
RTYP The symbol's reference type in this file. The possible reference types are:
STAT The symbol is defined in this file and is not declared as global.
EDEF The symbol is defined in this file and is declared as global.
EREF The symbol is not defined in this file but is referenced as global.
UNDF The symbol is not defined in this file and is not declared as global.
AsmVal This hexadecimal number is the value assigned to the symbol at assembly time. A
value may also be preceded by a character that describes the symbol's attributes.
Table 10-1 lists these characters and names.
LnkVal This hexadecimal number is the value assigned to the symbol after linking.
DefLn The statement number where the symbol is defined.
RefLn The line number where the symbol is referenced. If the line number is followed by an
asterisk (*), then that reference can modify the contents of the object. A blank in this
column indicates that the symbol was never used.
Table 10-1. Symbol Attributes in Cross-Reference Listing
Character Meaning
' Symbol defined in a .text section
" Symbol defined in a .data section
+ Symbol defined in a .sect section
- Symbol defined in a .bss or .usect section
Example 10-1 is an example of cross-reference listing.
Example 10
‑‑
1. Cross-Reference Listing
File: bttest.out Wed Nov 13 17:07:42 xxxx Page: 1
=============================================================================
Symbol: array
Filename RTYP AsmVal LnkVal DefLn RefLn RefLn RefLn
________ ____ ________ ________ ______ _______ _______ _______
module1.asm EDEF -00000001 00001001 3 1A 5
=============================================================================
Symbol: array_a
Filename RTYP AsmVal LnkVal DefLn RefLn RefLn RefLn
________ ____ ________ ________ ______ _______ _______ _______
module1.asm STAT '00000004 00000004 5 9
=============================================================================
Symbol: dflag
Filename RTYP AsmVal LnkVal DefLn RefLn RefLn RefLn
________ ____ ________ ________ ______ _______ _______ _______
module1.asm EDEF -00000000 00001000 2 3A 4
=============================================================================
Symbol: dflag_a
Filename RTYP AsmVal LnkVal DefLn RefLn RefLn RefLn
________ ____ ________ ________ ______ _______ _______ _______
module1.asm STAT '00000000 00000000 4 11
=============================================================================
Symbol: offst
Filename RTYP AsmVal LnkVal DefLn RefLn RefLn RefLn
________ ____ ________ ________ ______ _______ _______ _______
module1.asm EREF 00000000 00001068 2A 6
Cross-Reference Listing Example
www.ti.com
278 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Cross-Reference Lister Description
Example 10
‑‑
1. Cross-Reference Listing (continued)
module2.asm EDEF -00000000 00001068 2 2A 3
=============================================================================
Symbol: offst_a
Filename RTYP AsmVal LnkVal DefLn RefLn RefLn RefLn
________ ____ ________ ________ ______ _______ _______ _______
module1.asm STAT '00000008 00000008 6 10
module2.asm STAT '00000000 00000020 3 6
=============================================================================
279
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Object File Utilities
Chapter 11
SPNU118U–January 2018
Object File Utilities
This chapter describes how to invoke the following utilities:
• The object file display utility prints the contents of object files, executable files, and/or archive
libraries in both text and XML formats.
• The disassembler accepts object files and executable files as input and produces an assembly listing
as output. This listing shows assembly instructions, their opcodes, and the section program counter
values.
• The name utility prints a list of names defined and referenced in an object file, executable files, and/or
archive libraries.
• The strip utility removes symbol table and debugging information from object and executable files.
Topic ........................................................................................................................... Page
11.1 Invoking the Object File Display Utility................................................................ 280
11.2 Invoking the Disassembler ................................................................................ 281
11.3 Invoking the Name Utility................................................................................... 283
11.4 Invoking the Strip Utility.................................................................................... 284
Invoking the Object File Display Utility
www.ti.com
280 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Object File Utilities
11.1 Invoking the Object File Display Utility
The object file display utility, armofd, prints the contents of object files (.obj), executable files (.out), and/or
archive libraries (.lib) in both text and XML formats. Hidden symbols are listed as no name, while localized
symbols are listed like any other local symbol.
To invoke the object file display utility, enter the following:
armofd [options]input filename [input filename]
armofd is the command that invokes the object file display utility.
input filename names the object file (.obj), executable file (.out), or archive library (.lib) source file.
The filename must contain an extension.
options identify the object file display utility options that you want to use. Options are not case
sensitive and can appear anywhere on the command line following the command.
Precede each option with a hyphen.
-cg Prints function stack usage and callee information in XML
format. While the XML output may be accessed by a
developer, this option was primarily designed to be used
by tools such as Code Composer Studio to display an
application’s worst case stack usage.
--dwarf_display=attributes Controls the DWARF display filter settings by specifying a
comma-delimited list of attributes. When prefixed with no,
an attribute is disabled instead of enabled.
Examples: --dwarf_display=nodabbrev,nodline
--dwarf_display=all,nodabbrev
--dwarf_display=none,dinfo,types
The ordering of attributes is important (see --obj_display).
The list of available display attributes can be obtained by
invoking armofd --dwarf_display=help.
--dynamic_info Outputs dynamic linking information.
-g Appends DWARF debug information to program output.
-h Displays help
-o=filename Sends program output to filename rather than to the
screen.
--obj_display attributes Controls the object file display filter settings by specifying
a comma-delimited list of attributes. When prefixed with
no, an attribute is disabled instead of enabled.
Examples: --obj_display=rawdata,nostrings
--obj_display=all,norawdata
--obj_display=none,header
The ordering of attributes is important. For instance, in "--
obj_display=none,header", armofd disables all output,
then re-enables file header information. If the attributes
are specified in the reverse order, (header,none), the file
header is enabled, the all output is disabled, including the
file header. Thus, nothing is printed to the screen for the
given files. The list of available display attributes can be
obtained by invoking armofd --obj_display=help.
-v Prints verbose text output.
-x Displays output in XML format.
--xml_indent=num Sets the number of spaces to indent nested XML tags.
www.ti.com
Invoking the Disassembler
281
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Object File Utilities
If an archive file is given as input to the object file display utility, each object file member of the archive is
processed as if it was passed on the command line. The object file members are processed in the order in
which they appear in the archive file.
If the object file display utility is invoked without any options, it displays information about the contents of
the input files on the console screen.
Object File Display Format
NOTE: The object file display utility produces data in a text format by default. This data is not
intended to be used as input to programs for further processing of the information. XML
format should be used for mechanical processing.
11.2 Invoking the Disassembler
The disassembler, armdis, examines the output of the assembler or linker. This utility accepts an object
file or executable file as input and writes the disassembled object code to standard output or a specified
file.
To invoke the disassembler, enter the following:
armdis [options]input filename[.] [output filename]
armdis is the command that invokes the disassembler.
options identifies the name utility options you want to use. Options are not case sensitive and
can appear anywhere on the command line following the invocation. Precede each
option with a hyphen (-). The name utility options are as follows:
-a disables printing of address along with label names within
instructions.
-b displays data as bytes instead of words.
-be8 disassembles in BE-8 mode.
-c dumps the object file information.
--copy_tables (aliased as -y, or -Y) displays copy tables and the sections copied.
The table information is dumped first, then each record followed by
its load and run data. See Example 11-3.
-d disables display of data sections.
-e displays integer values in hexadecimal.
-h shows the current help screen.
-i disassembles data sections as text.
-I disassembles text as data.
-n dumps the symbol table.
-q (quiet mode) suppresses the banner and all progress information.
-qq (super quiet mode) suppresses all headers.
-r uses raw register IDs (R0, R1, etc.).
-R shows run-time address if different from load-time address.
-s suppresses printing of address and data words.
input
filename[.ext]is the name of the input file. If the optional extension is not specified, the file is
searched for in this order:
1. infile
2. infile.out, an executable file
3. infile.obj, an object file
output filename is the name of the optional output file to which the disassembly will be written. If an
output filename is not specified, the disassembly is written to standard output.
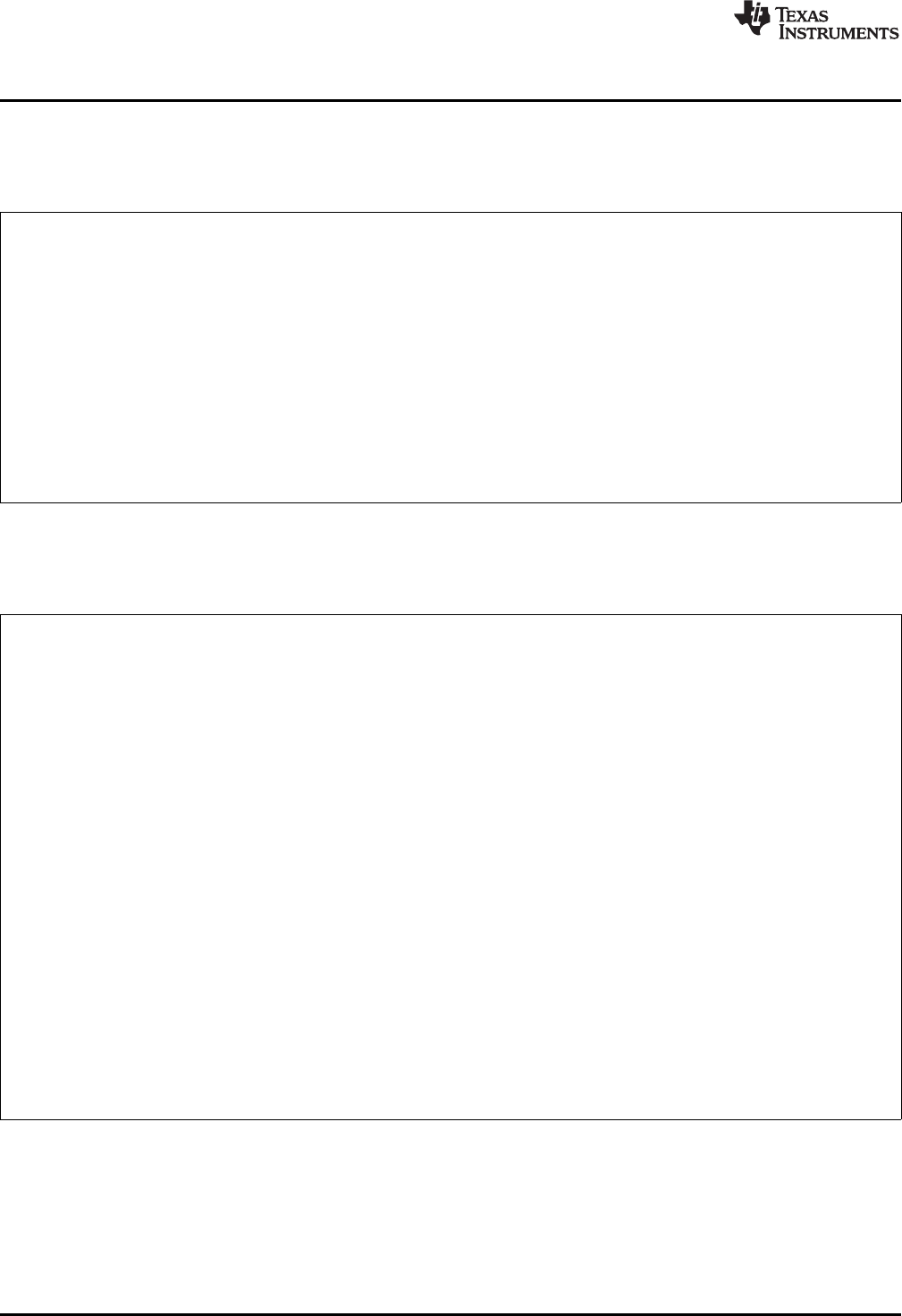
Invoking the Disassembler
www.ti.com
282 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Object File Utilities
When the example file in Example 11-1 is compiled, the assembler produces an object file,
memcpy32.obj.
Example 11
‑‑
1. Object File memcpy32.asm
.global C_MEMCPY
C_MEMCPY: .asmfunc stack_usage(12)
CMP r2, #0 ; CHECK FOR n == 0
BXEQ lr ;
STMFD sp!, {r0, lr} ; SAVE RETURN VALUE AND ADDRESS
TST r1, #0x3 ; CHECK ADDRESS ALIGNMENT
BNE _unaln ; IF NOT WORD ALIGNED, HANDLE SPECIALLY
TST r0, #0x3 ;
BNE _saln ;
_aln: CMP r2, #16 ; CHECK FOR n >= 16
BCC _l16 ;
STMFD sp!, {r4} ;
SUB r2, r2, #16 ;
As shown in Example 11-2, the disassembler can produce disassembly from the object file,
memcpy32.obj. The first two lines are entered on the command line.
Example 11
‑‑
2. Disassembly From memcpy32.asm
TEXT Section .text, 0x180 bytes at 0x0
000000: C_MEMCPY:
000000: .state32
000000: E3520000 CMP R2, #0
000004: 012FFF1E BXEQ R14
000008: E92D4001 STMFD R13!, {R0, R14}
00000c: E3110003 TST R1, #3
000010: 1A00002B BNE 0x000000C4
000014: E3100003 TST R0, #3
000018: 1A00002F BNE 0x000000DC
00001c: E3520010 CMP R2, #16
000020: 3A000008 BCC 0x00000048
000024: E92D0010 STMFD R13!, {R4}
000028: E2422010 SUB R2, R2, #16
Example 11-3 provides an example of how the output would appear if a copy record refers to different
load and run sections and the --copy_table option is used.
www.ti.com
Invoking the Disassembler
283
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Object File Utilities
Example 11
‑‑
3. Partial Copy Record Output With Different Load and Run Address
COPY TABLE: _data2_ctbl, 0x30 at 0x5E10, 1 record(s)
_data2_ctbl[0]: load addr=0x200158, size=0x12B, encoding=lzss
DATA Section .data2_scn.load, 0x12B bytes at 0x200158
200158: $d:
200158: 020f0000 .word 0x020f0000
20015c: beef0003 .word 0xbeef0003
.
.
_data2_ctbl[0]: run addr=0x52A0, size=0x960
DATA Section .data1_scn, 0x960 bytes at 0x52A0
0052a0: data1:
0052a0: $d:
0052a0: .data1_scn:
0052a0: 0000beef .word 0x0000beef
0052a4: 0000beef .word 0x0000beef
.
.
11.3 Invoking the Name Utility
The name utility, armnm, prints the list of names defined and referenced in an object file, executable file,
or archive library. It also prints the symbol value and an indication of the kind of symbol. Hidden symbols
are listed as "".
To invoke the name utility, enter the following:
armnm [-options] [input filenames]
armnm is the command that invokes the name utility.
input filename is an object file (.obj), executable file (.out), or archive library (.lib).
options identifies the name utility options you want to use. Options are not case sensitive and
can appear anywhere on the command line following the invocation. Precede each
option with a hyphen (-). The name utility options are as follows:
-a prints all symbols.
-f prepends file name to each symbol.
-g prints only global symbols.
-h shows the current help screen.
-l produces a detailed listing of the symbol information.
-n sorts symbols numerically rather than alphabetically.
-o file outputs to the given file.
-p causes the name utility to not sort any symbols.
-q (quiet mode) suppresses the banner and all progress information.
-r sorts symbols in reverse order.
-s lists symbols in the dynamic symbol table for an ELF object module.
-u only prints undefined symbols.
Invoking the Strip Utility
www.ti.com
284 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Object File Utilities
11.4 Invoking the Strip Utility
The strip utility, armstrip, removes symbol table and debugging information from object and executable
files.
To invoke the strip utility, enter the following:
armstrip [-p]input filename [input filename]
armstrip is the command that invokes the strip utility.
input filename is an object file (.obj) or an executable file (.out).
options identifies the strip utility options you want to use. Options are not case sensitive and can
appear anywhere on the command line following the invocation. Precede each option
with a hyphen (-). The strip utility option is as follows:
-o filename writes the stripped output to filename.
-p removes all information not required for execution. This option causes more
information to be removed than the default behavior, but the object file is
left in a state that cannot be linked. This option should be used only with
executable (.out) files.
When the strip utility is invoked without the -o option, the input object files are replaced with the stripped
version.
285
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Hex Conversion Utility Description
Chapter 12
SPNU118U–January 2018
Hex Conversion Utility Description
The ARM assembler and linker create object files which are in binary formats that encourage modular
programming and provide powerful and flexible methods for managing code segments and target system
memory.
Most EPROM programmers do not accept object files as input. The hex conversion utility converts an
object file into one of several standard ASCII hexadecimal formats, suitable for loading into an EPROM
programmer. The utility is also useful in other applications requiring hexadecimal conversion of an object
file (for example, when using debuggers and loaders).
The hex conversion utility can produce these output file formats:
• ASCII-Hex, supporting 16-bit addresses
• Extended Tektronix (Tektronix)
• Intel MCS-86 (Intel)
• Motorola Exorciser (Motorola-S), supporting 16-bit addresses
• Texas Instruments SDSMAC (TI-Tagged), supporting 16-bit addresses
• Texas Instruments TI-TXT format, supporting 16-bit addresses
• C arrays
Topic ........................................................................................................................... Page
12.1 The Hex Conversion Utility's Role in the Software Development Flow .................... 286
12.2 Invoking the Hex Conversion Utility.................................................................... 287
12.3 Understanding Memory Widths .......................................................................... 290
12.4 The ROMS Directive.......................................................................................... 295
12.5 The SECTIONS Directive ................................................................................... 298
12.6 The Load Image Format (--load_image Option)..................................................... 299
12.7 Excluding a Specified Section............................................................................ 300
12.8 Assigning Output Filenames.............................................................................. 301
12.9 Image Mode and the --fill Option......................................................................... 302
12.10 Array Output Format........................................................................................ 303
12.11 Building a Table for an On-Chip Boot Loader ..................................................... 304
12.12 Controlling the ROM Device Address................................................................. 310
12.13 Control Hex Conversion Utility Diagnostics........................................................ 311
12.14 Description of the Object Formats..................................................................... 312
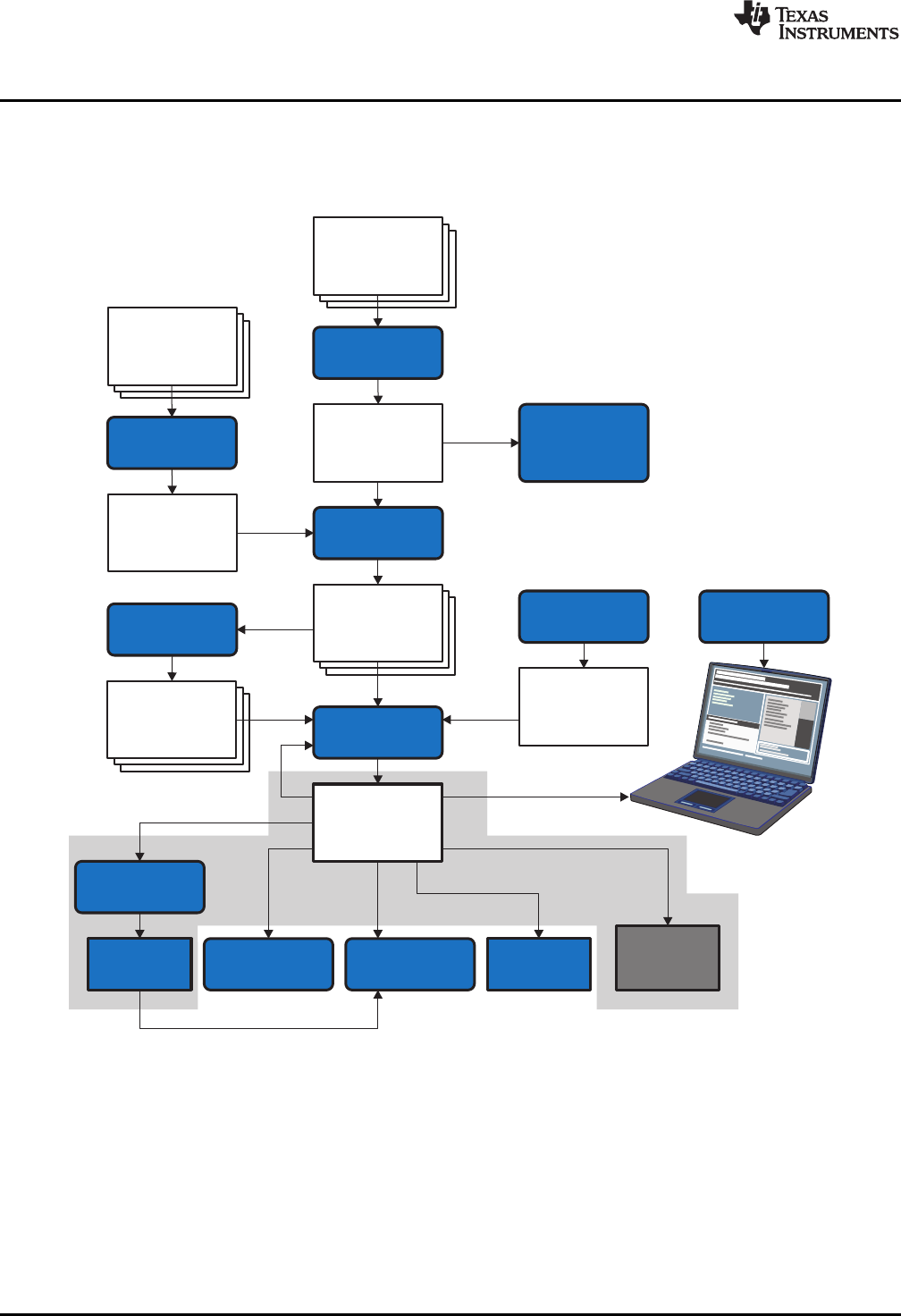
C/C++
source
files
C/C++
compiler
Assembler
source
Assembler
Executable
object file
Debugging
tools
Library-build
utility
Run-time-
support
library
Archiver
Archiver
Macro
library
Absolute lister
Hex-conversion
utility
Cross-reference
lister
Object file
utilities
ARM
Linker
Macro
source
files
Object
files
EPROM
programmer
Library of
object
files
C/C++ name
demangling
utility
The Hex Conversion Utility's Role in the Software Development Flow
www.ti.com
286 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Hex Conversion Utility Description
12.1 The Hex Conversion Utility's Role in the Software Development Flow
Figure 12-1 highlights the role of the hex conversion utility in the software development process.
Figure 12-1. The Hex Conversion Utility in the ARM Software Development Flow
www.ti.com
Invoking the Hex Conversion Utility
287
SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Hex Conversion Utility Description
12.2 Invoking the Hex Conversion Utility
There are two basic methods for invoking the hex conversion utility:
•Specify the options and filenames on the command line. The following example converts the file
firmware.out into TI-Tagged format, producing two output files, firm.lsb and firm.msb.
armhex -t firmware -o firm.lsb -o firm.msb
•Specify the options and filenames in a command file. You can create a file that stores command
line options and filenames for invoking the hex conversion utility. The following example invokes the
utility using a command file called hexutil.cmd:
armhex hexutil.cmd
In addition to regular command line information, you can use the hex conversion utility ROMS and
SECTIONS directives in a command file.
12.2.1 Invoking the Hex Conversion Utility From the Command Line
To invoke the hex conversion utility, enter:
armhex [options]filename
armhex is the command that invokes the hex conversion utility.
options supplies additional information that controls the hex conversion process. You can use
options on the command line or in a command file. Table 12-1 lists the basic options.
• All options are preceded by a hyphen and are not case sensitive.
• Several options have an additional parameter that must be separated from the option
by at least one space.
• Options with multi-character names must be spelled exactly as shown in this
document; no abbreviations are allowed.
• Options are not affected by the order in which they are used. The exception to this rule
is the --quiet option, which must be used before any other options.
filename names an object file or a command file (for more information, see Section 12.2.2).
Table 12-1. Basic Hex Conversion Utility Options
Option Alias Description See
General Options
--byte -byte Number output locations by bytes rather than by target
addressing --
--entrypoint=addr -e Specify the entry point at which to begin execution after boot
loading Table 12-2
--exclude={fname(sname) |
sname}-exclude If the filename (fname) is omitted, all sections matching
sname will be excluded. Section 12.7
--fill=value -fill Fill holes with value Section 12.9.2
--help -options, -h Display the syntax for invoking the utility and list available
options. If the option is followed by another option or phrase,
detailed information about that option or phrase is displayed. Section 12.2.2
--image -image Select image mode Section 12.9.1
--linkerfill -linkerfill Include linker fill sections in images --
--map=filename -map Generate a map file Section 12.4.2
--memwidth=value -memwidth Define the system memory word width (default 16 bits) Section 12.3.2
--outfile=filename -o Specify an output filename Section 12.8
--quiet -q Run quietly (when used, it must appear before other options) Section 12.2.2
--romwidth=value -romwidth Specify the ROM device width (default depends on format
used). This option is ignored for the TI-TXT and TI-Tagged
formats. Section 12.3.3
Invoking the Hex Conversion Utility
www.ti.com
288 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Hex Conversion Utility Description
Table 12-1. Basic Hex Conversion Utility Options (continued)
Option Alias Description See
--zero -zero, -z Reset the address origin to 0 in image mode Section 12.9.3
Diagnostic Options
--diag_error=id Categorizes the diagnostic identified by id as an error Section 12.13
--diag_remark=id Categorizes the diagnostic identified by id as a remark Section 12.13
--diag_suppress=id Suppresses the diagnostic identified by id Section 12.13
--diag_warning=id Categorizes the diagnostic identified by id as a warning Section 12.13
--display_error_number Displays a diagnostic's identifiers along with its text Section 12.13
--issue_remarks Issues remarks (nonserious warnings) Section 12.13
--no_warnings Suppresses warning diagnostics (errors are still issued) Section 12.13
--set_error_limit=count Sets the error limit to count. The linker abandons linking after
this number of errors. (The default is 100.) Section 12.13
Output Options
--array Select array output format Section 12.10
--ascii -a Select ASCII-Hex Section 12.14.1
--intel -i Select Intel Section 12.14.2
--motorola=1 -m1 Select Motorola-S1 Section 12.14.3
--motorola=2 -m2 Select Motorola-S2 Section 12.14.3
--motorola=3 -m3 Select Motorola-S3 (default -m option) Section 12.14.3
--tektronix -x Select Tektronix (default format when no output option is
specified) Section 12.14.4
--ti_tagged -t Select TI-Tagged Section 12.14.5
--ti_txt Select TI-Txt Section 12.14.6
Load Image Options
--load_image Select load image Section 12.6
--section_name_prefix=string Specify the section name prefix for load image object files Section 12.6

www.ti.com
Invoking the Hex Conversion Utility
289
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Hex Conversion Utility Description
12.2.2 Invoking the Hex Conversion Utility With a Command File
A command file is useful if you plan to invoke the utility more than once with the same input files and
options. It is also useful if you want to use the ROMS and SECTIONS hex conversion utility directives to
customize the conversion process.
Command files are ASCII files that contain one or more of the following:
•Options and filenames. These are specified in a command file in exactly the same manner as on the
command line.
•ROMS directive. The ROMS directive defines the physical memory configuration of your system as a
list of address-range parameters. (See Section 12.4.)
•SECTIONS directive. The hex conversion utility SECTIONS directive specifies which sections from the
object file are selected. (See Section 12.5.)
•Comments. You can add comments to your command file by using the /* and */ delimiters. For
example:
/* This is a comment. */
To invoke the utility and use the options you defined in a command file, enter:
armhex command_filename
You can also specify other options and files on the command line. For example, you could invoke the
utility by using both a command file and command line options:
armhex firmware.cmd --map=firmware.mxp
The order in which these options and filenames appear is not important. The utility reads all input from the
command line and all information from the command file before starting the conversion process. However,
if you are using the -q option, it must appear as the first option on the command line or in a command file.
The --help option displays the syntax for invoking the compiler and lists available options. If the --help
option is followed by another option or phrase, detailed information about the option or phrase is
displayed. For example, to see information about options associated with generating a boot table use --
help boot.
The --quiet option suppresses the hex conversion utility's normal banner and progress information.
• Assume that a command file named firmware.cmd contains these lines:
firmware.out /* input file */
--ti-tagged /* TI-Tagged */
--outfile=firm.lsb /* output file */
--outfile=firm.msb /* output file */
You can invoke the hex conversion utility by entering:
armhex firmware.cmd
• This example shows how to convert a file called appl.out into eight hex files in Intel format. Each output
file is one byte wide and 4K bytes long.
appl.out /* input file */
--intel /* Intel format */
--map=appl.mxp /* map file */
ROMS
{
ROW1: origin=0x00000000 len=0x4000 romwidth=8
files={ appl.u0 appl.u1 app1.u2 appl.u3 }
ROW2: origin=0x00004000 len=0x4000 romwidth=8
files={ app1.u4 appl.u5 appl.u6 appl.u7 }
}
SECTIONS
{ .text, .data, .cinit, .sect1, .vectors, .const:
}
The raw data in the object file
is grouped into words according
to the size specified by the
--memwidth option.
The memwidth-sized words are
broken up according to the size
specified by the --romwidth option
and are written to a file(s)
according to the specified format
(i.e., Intel, Tektronix, etc.).
Phase I
Phase II
Input file
Output file(s)
Raw data in object files is
represented in the target’s
addressable units. For the
ARM device, this is 32 bits.
Understanding Memory Widths
www.ti.com
290 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Hex Conversion Utility Description
12.3 Understanding Memory Widths
The hex conversion utility makes your memory architecture more flexible by allowing you to specify
memory and ROM widths. To use the hex conversion utility, you must understand how the utility treats
word widths. Three widths are important in the conversion process:
• Target width
• Memory width
• ROM width
The terms target word, memory word, and ROM word refer to a word of such a width.
Figure 12-2 illustrates the separate and distinct phases of the hex conversion utility's process flow.
Figure 12-2. Hex Conversion Utility Process Flow
12.3.1 Target Width
Target width is the unit size (in bits) of the target processor's word. The width is fixed for each target and
cannot be changed. The ARM targets have a width of 32 bits.
www.ti.com
Understanding Memory Widths
291
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Hex Conversion Utility Description
12.3.2 Specifying the Memory Width
Memory width is the physical width (in bits) of the memory system. Usually, the memory system is
physically the same width as the target processor width: a 16-bit processor has a 32-bit memory
architecture. However, some applications require target words to be broken into multiple, consecutive, and
narrower memory words.
By default, the hex conversion utility sets memory width to the target width (in this case, 32 bits).
You can change the memory width (except for TI-TXT format) by:
• Using the --memwidth option. This changes the memory width value for the entire file.
• Setting the memwidth parameter of the ROMS directive. This changes the memory width value for the
address range specified in the ROMS directive and overrides the --memwidth option for that range.
See Section 12.4.
For both methods, use a value that is a power of 2 greater than or equal to 8.
You should change the memory width default value of 16 only when you need to break single target words
into consecutive, narrower memory words.
TI-TXT Format is 8 Bits Wide
NOTE: You cannot change the memory width of the TI-TXT format. The TI-TXT hex format supports
an 8-bit memory width only.
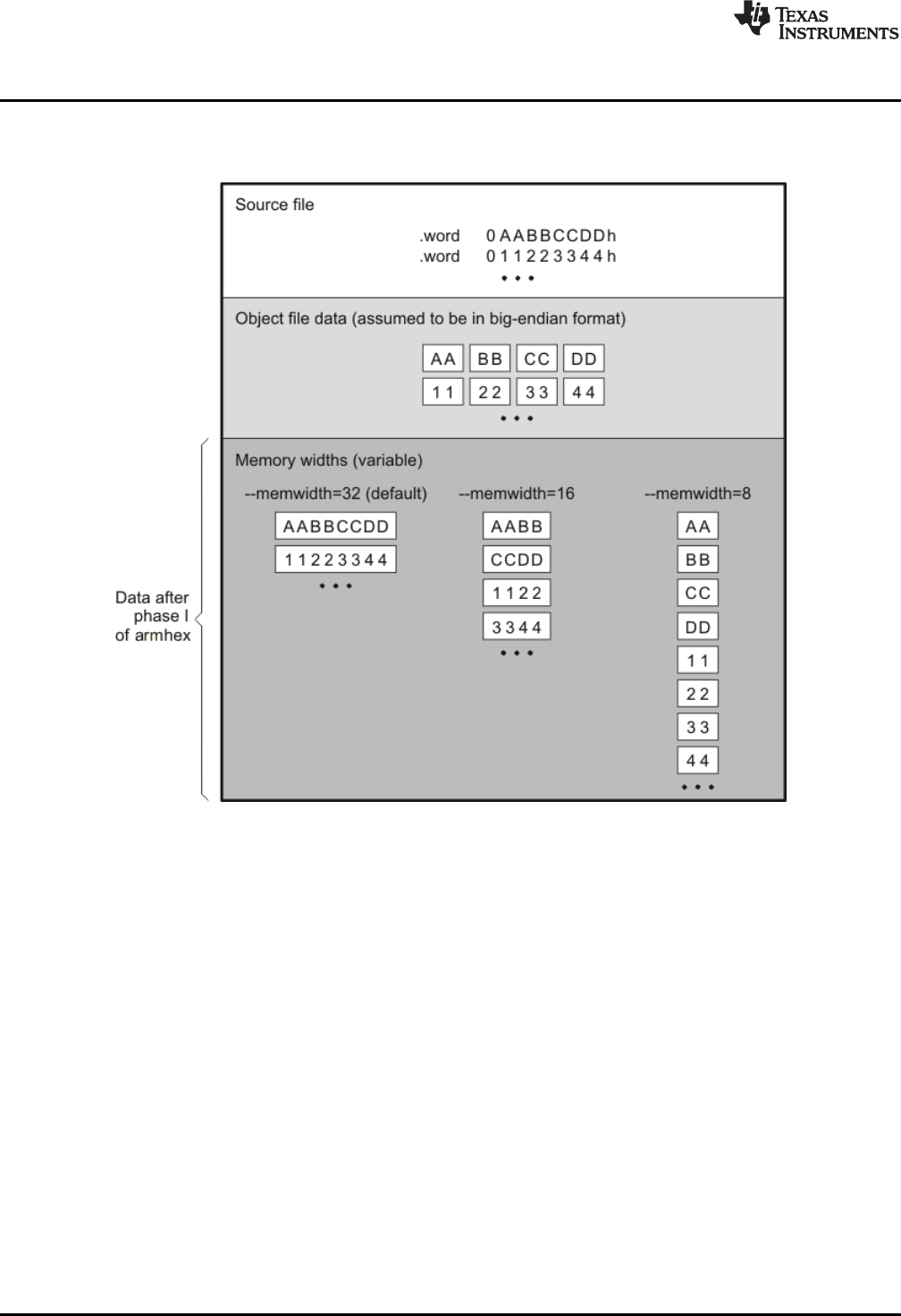
Understanding Memory Widths
www.ti.com
292 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Hex Conversion Utility Description
Figure 12-3 demonstrates how the memory width is related to object file data.
Figure 12-3. Object File Data and Memory Widths
12.3.3 Partitioning Data Into Output Files
ROM width determines how the hex conversion utility partitions the data into output files. ROM width
specifies the physical width (in bits) of each ROM device and corresponding output file (usually one byte
or eight bits). After the object file data is mapped to the memory words, the memory words are broken into
one or more output files. The number of output files is determined by the following formulas:
• If memory width ≥ROM width:
number of files = memory width ÷ ROM width
• If memory width < ROM width:
number of files = 1
A A B B C C D D 1 1 2 2 3 3 4 4
--memwidth=32
31 0
www.ti.com
Understanding Memory Widths
293
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Hex Conversion Utility Description
For example, for a memory width of 32, you could specify a ROM width value of 32 and get a single
output file containing 32-bit words. Or you can use a ROM width value of 16 to get two files, each
containing 16 bits of each word.
The default ROM width that the hex conversion utility uses depends on the output format:
• All hex formats except TI-Tagged are configured as lists of 8-bit bytes; the default ROM width for these
formats is 8 bits.
• TI-Tagged is a 16-bit format; the default ROM width for TI-Tagged is 16 bits.
The TI-Tagged Format is 16 Bits Wide
NOTE: You cannot change the ROM width of the TI-Tagged format. The TI-Tagged format supports
a 16-bit ROM width only.
TI-TXT Format is 8 Bits Wide
NOTE: You cannot change the ROM width of the TI-TXT format. The TI-TXT hex format supports
only an 8-bit ROM width.
You can change ROM width (except for TI-Tagged and TI-TXT formats) by:
• Using the --romwidth option. This option changes the ROM width value for the entire object file.
• Setting the romwidth parameter of the ROMS directive. This parameter changes the ROM width value
for a specific ROM address range and overrides the --romwidth option for that range. See
Section 12.4.
For both methods, use a value that is a power of 2 greater than or equal to 8.
If you select a ROM width that is wider than the natural size of the output format, the utility simply writes
multibyte fields into the file. The --romwidth option is ignored for the TI-TXT and TI-Tagged formats.
Figure 12-4 illustrates how the object file data, memory, and ROM widths are related to one another.
Memory width and ROM width are used only for grouping the object file data; they do not represent
values. Thus, the byte ordering of the object file data is maintained throughout the conversion process. To
refer to the partitions within a memory word, the bits of the memory word are always numbered from right
to left as follows:
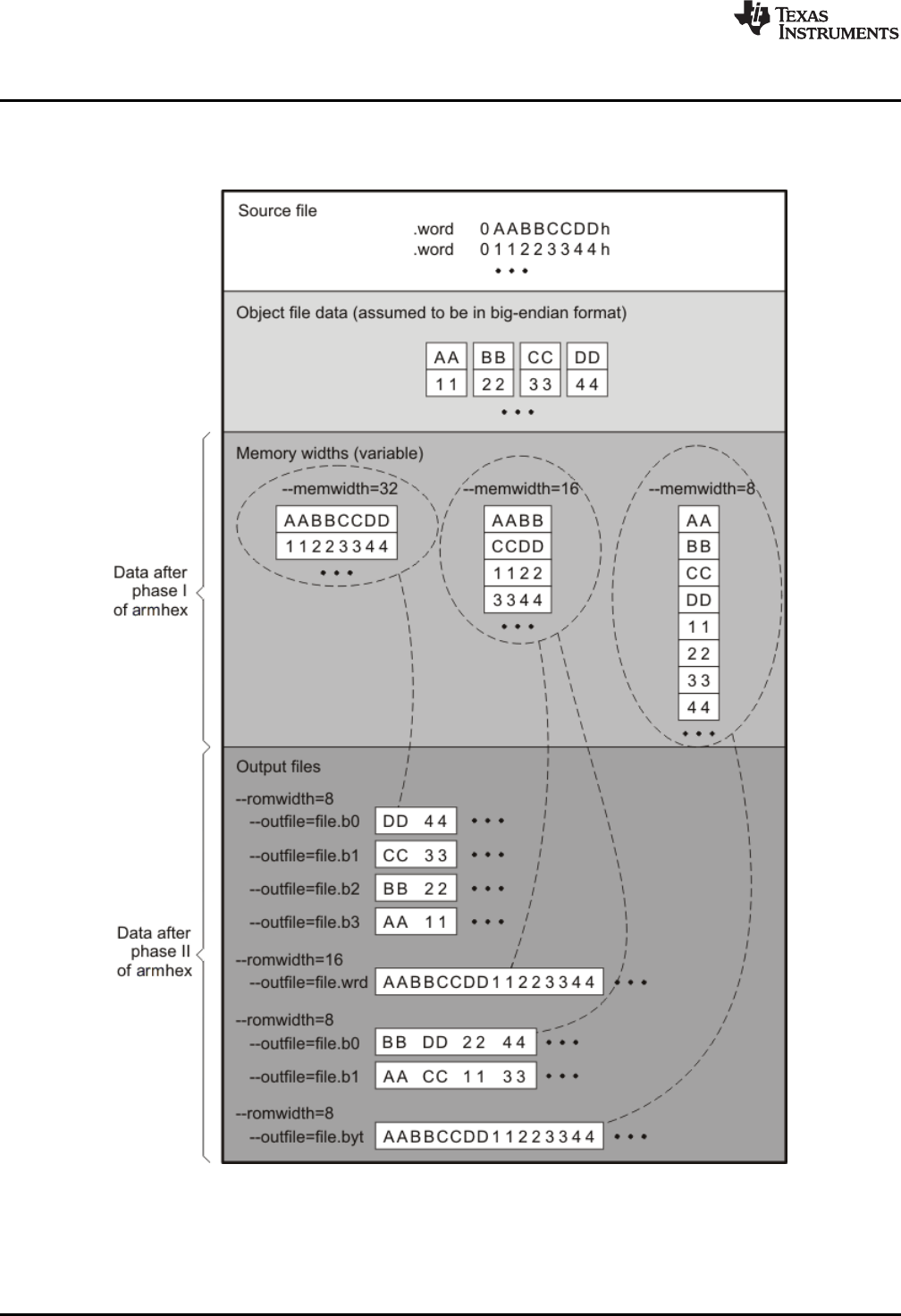
www.ti.com
The ROMS Directive
295
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Hex Conversion Utility Description
12.4 The ROMS Directive
The ROMS directive specifies the physical memory configuration of your system as a list of address-range
parameters.
Each address range produces one set of files containing the hex conversion utility output data that
corresponds to that address range. Each file can be used to program one single ROM device.
The ROMS directive is similar to the MEMORY directive of the ARM linker: both define the memory map
of the target address space. Each line entry in the ROMS directive defines a specific address range. The
general syntax is:
ROMS
{
romname :[origin=value,] [length=value,] [romwidth=value,]
[memwidth=value,] [fill=value]
[files={filename 1,filename 2, ...}]
romname :[origin=value,] [length=value,] [romwidth=value,]
[memwidth=value,] [fill=value]
[files={filename 1,filename 2, ...}]
...
}
ROMS begins the directive definition.
romname identifies a memory range. The name of the memory range can be one to eight
characters in length. The name has no significance to the program; it simply identifies
the range, except when the output is for a load image in which case it denotes the
section name. (Duplicate memory range names are allowed.)
origin specifies the starting address of a memory range. It can be entered as origin, org, or o.
The associated value must be a decimal, octal, or hexadecimal constant. If you omit
the origin value, the origin defaults to 0. The following table summarizes the notation
you can use to specify a decimal, octal, or hexadecimal constant:
Constant Notation Example
Hexadecimal 0x prefix or h suffix 0x77 or 077h
Octal 0 prefix 077
Decimal No prefix or suffix 77
length specifies the length of a memory range as the physical length of the ROM device. It
can be entered as length, len, or l. The value must be a decimal, octal, or hexadecimal
constant. If you omit the length, it defaults to the length of the entire address space.
romwidth specifies the physical ROM width of the range in bits (see Section 12.3.3). Any value
you specify here overrides the --romwidth option. The value must be a decimal, octal,
or hexadecimal constant that is a power of 2 greater than or equal to 8.
memwidth specifies the memory width of the range in bits (see Section 12.3.2). Any value you
specify here overrides the --memwidth option. The value must be a decimal, octal, or
hexadecimal constant that is a power of 2 greater than or equal to 8. When using the
memwidth parameter, you must also specify the paddr parameter for each section in
the SECTIONS directive. (See Section 12.5.)
fill specifies a fill value to use for the range. In image mode, the hex conversion utility
uses this value to fill any holes between sections in a range. A hole is an area between
the input sections that comprises an output section that contains no actual code or
data. The fill value must be a decimal, octal, or hexadecimal constant with a width
equal to the target width. Any value you specify here overrides the --fill option. When
using fill, you must also use the --image command line option. (See Section 12.9.2.)
The ROMS Directive
www.ti.com
296 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Hex Conversion Utility Description
files identifies the names of the output files that correspond to this range. Enclose the list of
names in curly braces and order them from least significant to most significant output
file, where the bits of the memory word are numbered from right to left. The number of
file names must equal the number of output files that the range generates. To calculate
the number of output files, see Section 12.3.3. The utility warns you if you list too many
or too few filenames.
Unless you are using the --image option, all of the parameters that define a range are optional; the
commas and equal signs are also optional. A range with no origin or length defines the entire address
space. In image mode, an origin and length are required for all ranges.
Ranges must not overlap and must be listed in order of ascending address.
12.4.1 When to Use the ROMS Directive
If you do not use a ROMS directive, the utility defines a single default range that includes the entire
address space. This is equivalent to a ROMS directive with a single range without origin or length.
Use the ROMS directive when you want to:
•Program large amounts of data into fixed-size ROMs. When you specify memory ranges
corresponding to the length of your ROMs, the utility automatically breaks the output into blocks that fit
into the ROMs.
•Restrict output to certain segments. You can also use the ROMS directive to restrict the conversion
to a certain segment or segments of the target address space. The utility does not convert the data
that falls outside of the ranges defined by the ROMS directive. Sections can span range boundaries;
the utility splits them at the boundary into multiple ranges. If a section falls completely outside any of
the ranges you define, the utility does not convert that section and issues no messages or warnings.
Thus, you can exclude sections without listing them by name with the SECTIONS directive. However, if
a section falls partially in a range and partially in unconfigured memory, the utility issues a warning and
converts only the part within the range.
•Use image mode. When you use the --image option, you must use a ROMS directive. Each range is
filled completely so that each output file in a range contains data for the whole range. Holes before,
between, or after sections are filled with the fill value from the ROMS directive, with the value specified
with the --fill option, or with the default value of 0.
12.4.2 An Example of the ROMS Directive
The ROMS directive in Example 12-1 shows how 16K bytes of 16-bit memory could be partitioned for two
8K-byte 8-bit EPROMs. Figure 12-5 illustrates the input and output files.
Example 12-1. A ROMS Directive Example
infile.out
--image
--memwidth 16
ROMS
{
EPROM1: org = 0x00004000, len = 0x2000, romwidth = 8
files = { rom4000.b0, rom4000.b1}
EPROM2: org = 0x00006000, len = 0x2000, romwidth = 8,
fill = 0xFF00FF00,
files = { rom6000.b0, rom6000.b1}
}
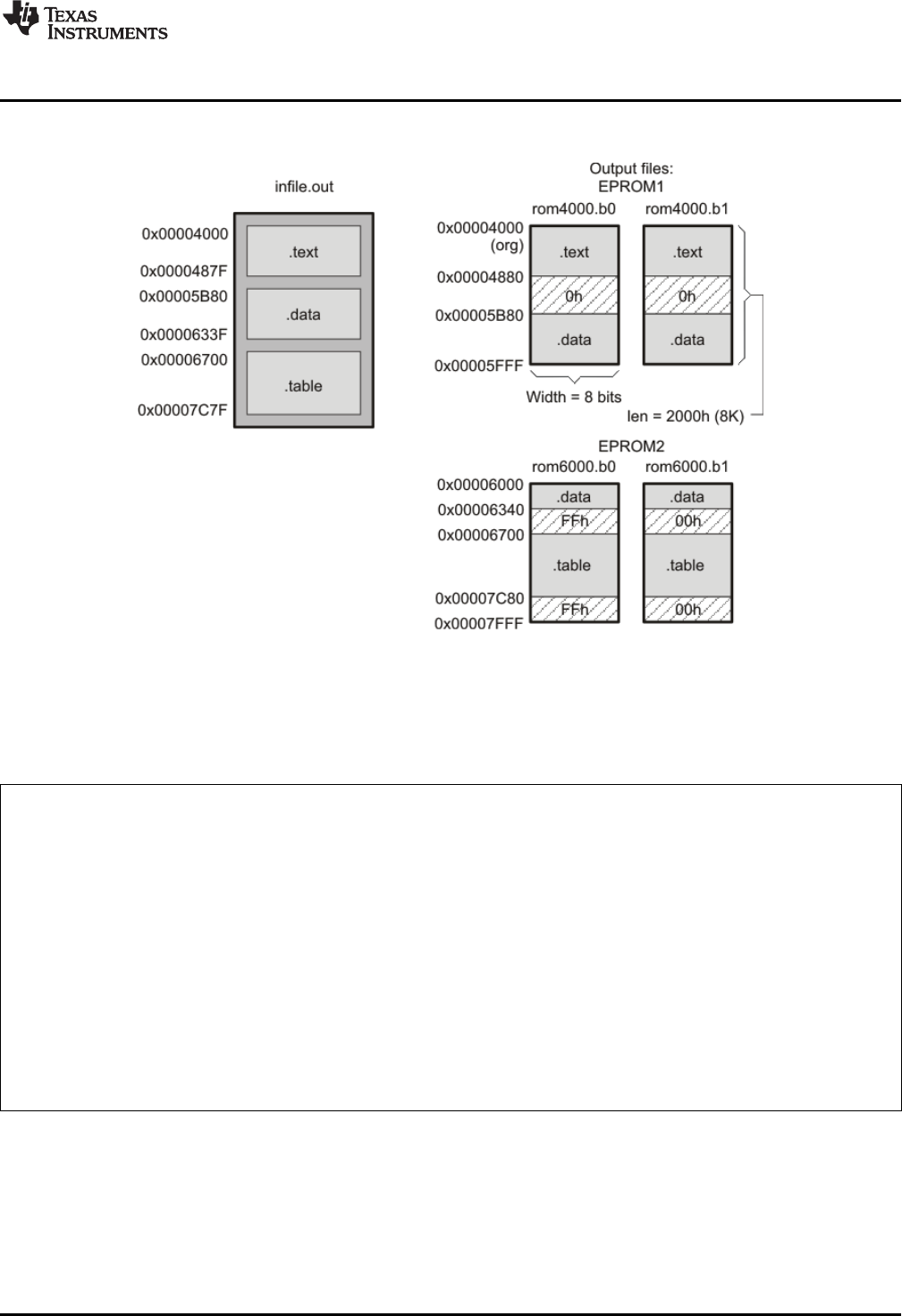
www.ti.com
The ROMS Directive
297
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Hex Conversion Utility Description
Figure 12-5. The infile.out File Partitioned Into Four Output Files
The map file (specified with the --map option) is advantageous when you use the ROMS directive with
multiple ranges. The map file shows each range, its parameters, names of associated output files, and a
list of contents (section names and fill values) broken down by address. Example 12-2 is a segment of the
map file resulting from the example in Example 12-1.
Example 12-2. Map File Output From Example 12-1 Showing Memory Ranges
-----------------------------------------------------
00004000..00005fff Page=0 Width=8 "EPROM1"
-----------------------------------------------------
OUTPUT FILES: rom4000.b0 [b0..b7]
rom4000.b1 [b8..b15]
CONTENTS: 00004000..0000487f .text
00004880..00005b7f FILL = 00000000
00005b80..00005fff .data
-----------------------------------------------------
00006000..00007fff Page=0 Width=8 "EPROM2"
-----------------------------------------------------
OUTPUT FILES: rom6000.b0 [b0..b7]
rom6000.b1 [b8..b15]
CONTENTS: 00006000..0000633f .data
00006340..000066ff FILL = ff00ff00
00006700..00007c7f .table
00007c80..00007fff FILL = ff00ff00
The SECTIONS Directive
www.ti.com
298 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Hex Conversion Utility Description
EPROM1 defines the address range from 0x00004000 through 0x00005FFF with the following sections:
This section ... Has this range ...
.text 0x00004000 through 0x0000487F
.data 0x00005B80 through 0x00005FFF
The rest of the range is filled with 0h (the default fill value), converted into two output files:
• rom4000.b0 contains bits 0 through 7
• rom4000.b1 contains bits 8 through 15
EPROM2 defines the address range from 0x00006000 through 0x00007FFF with the following sections:
This section ... Has this range ...
.data 0x00006000 through 0x0000633F
.table 0x00006700 through 0x00007C7F
The rest of the range is filled with 0xFF00FF00 (from the specified fill value). The data from this range is
converted into two output files:
• rom6000.b0 contains bits 0 through 7
• rom6000.b1 contains bits 8 through 15
12.5 The SECTIONS Directive
You can convert specific sections of the object file by name with the hex conversion utility SECTIONS
directive. You can also specify those sections that you want to locate in ROM at a different address than
the load address specified in the linker command file. If you:
• Use a SECTIONS directive, the utility converts only the sections that you list in the directive and
ignores all other sections in the object file.
• Do not use a SECTIONS directive, the utility converts all initialized sections that fall within the
configured memory.
Uninitialized sections are never converted, whether or not you specify them in a SECTIONS directive.
Sections Generated by the C/C++ Compiler
NOTE: The ARM C/C++ compiler automatically generates these sections:
•Initialized sections: .text, .const, .cinit, and .switch
•Uninitialized sections: .bss, .stack, and .sysmem
Use the SECTIONS directive in a command file. (See Section 12.2.2.) The general syntax is:
SECTIONS
{
oname(sname)[:] [paddr=value]
oname(sname)[:] [paddr=boot]
oname(sname)[:] [boot]
...
}
SECTIONS begins the directive definition.
oname identifies the object filename the section is located within. The filename is optional
when only a single input file is given, but required otherwise.
sname identifies a section in the input file. If you specify a section that does not exist, the
utility issues a warning and ignores the name.

www.ti.com
The Load Image Format (--load_image Option)
299
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Hex Conversion Utility Description
paddr=value specifies the physical ROM address at which this section should be located. This value
overrides the section load address given by the linker. This value must be a decimal,
octal, or hexadecimal constant. It can also be the word boot (to indicate a boot table
section for use with a boot loader). If your file contains multiple sections, and if one
section uses a paddr parameter, then all sections must use a paddr parameter.
boot configures a section for loading by a boot loader. This is equivalent to using
paddr=boot. Boot sections have a physical address determined by the location of the
boot table. The origin of the boot table is specified with the --bootorg option.
For more similarity with the linker's SECTIONS directive, you can use colons after the section names (in
place of the equal sign on the boot keyboard). For example, the following statements are equivalent:
SECTIONS { .text: .data: boot }
SECTIONS { .text: .data = boot }
In the example below, the object file contains six initialized sections: .text, .data, .const, .vectors, .coeff,
and .tables. Suppose you want only .text and .data to be converted. Use a SECTIONS directive to specify
this:
SECTIONS { .text: .data: }
To configure both of these sections for boot loading, add the boot keyword:
SECTIONS { .text = boot .data = boot }
12.6 The Load Image Format (--load_image Option)
A load image is an object file which contains the load addresses and initialized sections of one or more
executable files. The load image object file can be used for ROM masking or can be relinked in a
subsequent link step.
12.6.1 Load Image Section Formation
The load image sections are formed by collecting the initialized sections from the input executables. There
are two ways the load image sections are formed:
•Using the ROMS Directive. Each memory range that is given in the ROMS directive denotes a load
image section. The romname is the section name. The origin and length parameters are required. The
memwidth, romwidth, and files parameters are invalid and are ignored.
When using the ROMS directive and the load_image option, the --image option is required.
•Default Load Image Section Formation. If no ROMS directive is given, the load image sections are
formed by combining contiguous initialized sections in the input executables. Sections with gaps
smaller than the target word size are considered contiguous.
The default section names are image_1, image_2, ... If another prefix is desired, the --
section_name_prefix=prefix option can be used.

The Load Image Format (--load_image Option)
www.ti.com
300 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Hex Conversion Utility Description
12.6.2 Load Image Characteristics
All load image sections are initialized data sections. In the absence of a ROMS directive, the load/run
address of the load image section is the load address of the first input section in the load image section. If
the SECTIONS directive was used and a different load address was given using the paddr parameter, this
address will be used.
The load image format always creates a single load image object file. The format of the load image object
file is determined based on the input files. The file is not marked executable and does not contain an entry
point. The default load image object file name is ti_load_image.obj. This can be changed using the --
outfile option. Only one --outfile option is valid when creating a load image, all other occurrences are
ignored.
Concerning Load Image Format
NOTE: These options are invalid when creating a load image:
• --memwidth
• --romwidth
• --zero
• --byte
If a boot table is being created, either using the SECTIONS directive or the --boot option, the
ROMS directive must be used.
12.7 Excluding a Specified Section
The --exclude section_name option can be used to inform the hex utility to ignore the specified section. If
a SECTIONS directive is used, it overrides the --exclude option.
For example, if a SECTIONS directive containing the section name mysect is used and an --exclude
mysect is specified, the SECTIONS directive takes precedence and mysect is not excluded.
The --exclude option has a limited wildcard capability. The * character can be placed at the beginning or
end of the name specifier to indicate a suffix or prefix, respectively. For example, --exclude sect*
disqualifies all sections that begin with the characters sect.
If you specify the --exclude option on the command line with the * wildcard, use quotes around the section
name and wildcard. For example, --exclude"sect*". Using quotes prevents the * from being interpreted by
the hex conversion utility. If --exclude is in a command file, do not use quotes.
If multiple object files are given, the object file in which the section to be excluded can be given in the form
oname(sname). If the object filename is not provided, all sections matching the section name are
excluded. Wildcards cannot be used for the filename, but can appear within the parentheses.

www.ti.com
Assigning Output Filenames
301
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Hex Conversion Utility Description
12.8 Assigning Output Filenames
When the hex conversion utility translates your object file into a data format, it partitions the data into one
or more output files. When multiple files are formed by splitting memory words into ROM words, filenames
are always assigned in order from least to most significant, where bits in the memory words are numbered
from right to left. This is true, regardless of target or endian ordering.
The hex conversion utility follows this sequence when assigning output filenames:
1. It looks for the ROMS directive. If a file is associated with a range in the ROMS directive and you
have included a list of files (files = {. . .}) on that range, the utility takes the filename from the list.
For example, assume that the target data is 32-bit words being converted to four files, each eight bits
wide. To name the output files using the ROMS directive, you could specify:
ROMS
{
RANGE1: romwidth=8, files={ xyz.b0 xyz.b1 xyz.b2 xyz.b3 }
}
The utility creates the output files by writing the least significant bits to xyz.b0 and the most significant
bits to xyz.b3.
2. It looks for the --outfile options. You can specify names for the output files by using the --outfile
option. If no filenames are listed in the ROMS directive and you use --outfile options, the utility takes
the filename from the list of --outfile options. The following line has the same effect as the example
above using the ROMS directive:
--outfile=xyz.b0 --outfile=xyz.b1 --outfile=xyz.b2 --outfile=xyz.b3
If both the ROMS directive and --outfile options are used together, the ROMS directive overrides the --
outfile options.
3. It assigns a default filename. If you specify no filenames or fewer names than output files, the utility
assigns a default filename. A default filename consists of the base name from the input file plus a 2- to
3-character extension. The extension has three parts:
a. A format character, based on the output format (see Section 12.14):
afor ASCII-Hex
ifor Intel
mfor Motorola-S
tfor TI-Tagged
xfor Tektronix
b. The range number in the ROMS directive. Ranges are numbered starting with 0. If there is no
ROMS directive, or only one range, the utility omits this character.
c. The file number in the set of files for the range, starting with 0 for the least significant file.
For example, assume a.out is for a 32-bit target processor and you are creating Intel format output.
With no output filenames specified, the utility produces four output files named a.i0, a.i1, a.i2, a.i3.
If you include the following ROMS directive when you invoke the hex conversion utility, you would have
eight output files:
ROMS
{
range1: o = 0x00001000 l = 0x1000
range2: o = 0x00002000 l = 0x1000
}
These output files ... Contain data in these locations ...
a.i00, a.i01, a.i02, a.i03 0x00001000 through 0x00001FFF
a.i10, a.i11, a.i12, a.i13 0x00002000 through 0x00002FFF

Image Mode and the --fill Option
www.ti.com
302 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Hex Conversion Utility Description
12.9 Image Mode and the --fill Option
This section points out the advantages of operating in image mode and describes how to produce output
files with a precise, continuous image of a target memory range.
12.9.1 Generating a Memory Image
With the --image option, the utility generates a memory image by completely filling all of the mapped
ranges specified in the ROMS directive.
An object file consists of blocks of memory (sections) with assigned memory locations. Typically, all
sections are not adjacent: there are holes between sections in the address space for which there is no
data. When such a file is converted without the use of image mode, the hex conversion utility bridges
these holes by using the address records in the output file to skip ahead to the start of the next section. In
other words, there may be discontinuities in the output file addresses. Some EPROM programmers do not
support address discontinuities.
In image mode, there are no discontinuities.Each output file contains a continuous stream of data that
corresponds exactly to an address range in target memory. Any holes before, between, or after sections
are filled with a fill value that you supply.
An output file converted by using image mode still has address records, because many of the
hexadecimal formats require an address on each line. However, in image mode, these addresses are
always contiguous.
Defining the Ranges of Target Memory
NOTE: If you use image mode, you must also use a ROMS directive. In image mode, each output
file corresponds directly to a range of target memory. You must define the ranges. If you do
not supply the ranges of target memory, the utility tries to build a memory image of the entire
target processor address space. This is potentially a huge amount of output data. To prevent
this situation, the utility requires you to explicitly restrict the address space with the ROMS
directive.
12.9.2 Specifying a Fill Value
The --fill option specifies a value for filling the holes between sections. The fill value must be specified as
an integer constant following the --fill option. The width of the constant is assumed to be that of a word on
the target processor. For example, specifying --fill=0xFFFF results in a fill pattern of 0x0000FFFF. The
constant value is not sign extended.
The hex conversion utility uses a default fill value of 0 if you do not specify a value with the fill option. The
--fill option is valid only when you use --image; otherwise, it is ignored.
12.9.3 Steps to Follow in Using Image Mode
Step 1: Define the ranges of target memory with a ROMS directive. See Section 12.4.
Step 2: Invoke the hex conversion utility with the --image option. You can optionally use the --zero
option to reset the address origin to 0 for each output file. If you do not specify a fill value
with the ROMS directive and you want a value other than the default of 0, use the --fill option.

www.ti.com
Array Output Format
303
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Hex Conversion Utility Description
12.10 Array Output Format
The --array option causes the output to be generated in C array format. In this format, data contained in
initialized sections of an executable file are defined as C arrays. Output arrays may be compiled along
with a host program and used to initialize the target at runtime.
Arrays are formed by collecting the initialized sections from the input executable. There are two ways
arrays are formed:
•With the ROMS directive. Each memory range that is given in the ROMS directive denotes an array.
The romname is used as the array name. The origin and length parameters of the ROM directive are
required. The memwidth,romwidth, and files parameters are invalid and are ignored.
•No ROMS directive (default). If no ROMS directive is given, arrays are formed by combining
initialized sections within each page, beginning with the first initialized section. Arrays will reflect any
gaps that exist between sections.
The default The --array:name_prefix option can be used to override the default prefix for array names.
For example, use --array:name_prefix=myarray to cause the
The data type for array elements is uint8_t..
Building a Table for an On-Chip Boot Loader
www.ti.com
304 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Hex Conversion Utility Description
12.11 Building a Table for an On-Chip Boot Loader
The ARM hex utility provides the ability to create a boot table for use with an on-chip boot loader. The
supported boot formats are intended for use on C28x devices with ARM cores. The boot table is stored in
memory or loaded from a device peripheral to initialize code or data.
See Section 3.1.2 for a general discussion of bootstrap loading.
12.11.1 Description of the Boot Table
The input for a boot loader is the boot table. The boot table contains records that instruct the on-chip
loader to copy blocks of data contained in the table to specified destination addresses. The table can be
stored in memory (such as EPROM) or read in through a device peripheral (such as a serial or
communications port).
The hex conversion utility automatically builds the boot table for the boot loader. Using the utility, you
specify the sections you want the boot loader to initialize and the table location. The hex conversion utility
builds a complete image of the table according to the format specified and converts it into hexadecimal in
the output files. Then, you can burn the table into ROM or load it by other means.
12.11.2 The Boot Table Format
The boot table format is simple. Typically, there is a header record containing a key value that indicates
memory width, entry point, and values for control registers. Each subsequent block has a header
containing the size and destination address of the block followed by data for the block. Multiple blocks can
be entered. The table ends with a header containing size zero.
12.11.3 How to Build the Boot Table
Table 12-2 summarizes the hex conversion utility options available for the boot loader.
Table 12-2. Boot-Loader Options
Option Description
--boot Convert all sections into bootable form (use instead of a SECTIONS directive).
--bootorg=value Specify the source address of the boot-loader table.
--entrypoint=value Specify the entry point at which to begin execution after boot loading. The value can be an
address or a global symbol.
--gpio8 Specify the source of the boot-loader table as the GP I/O port, 8-bit mode
--gpio16 Specify the source of the boot-loader table as the GP I/O port, 16-bit mode
--lospcp=value Specify the initial value for the LOSPCP register. The value is used only for the spi8 boot table
format and is ignored for all other formats. A value greater than 0x7F is truncated to 0x7F.
--spi8 Specify the source of the boot-loader table as the SPI-A port, 8-bit mode
--spibrr=value Specify the initial value for the SPIBRR register. The value is used only for the spi8 boot table
format and is ignored for all other formats. A value greater than 0x7F is truncated to 0x7F.
12.11.3.1 Building the Boot Table
To build the boot table, follow these steps:
Step 1: Link the file. Each block of the boot table data corresponds to an initialized section in the
object file. Uninitialized sections are not converted by the hex conversion utility (see
Section 12.5).
When you select a section for placement in a boot-loader table, the hex conversion utility
places the section's load address in the destination address field for the block in the boot
table. The section content is then treated as raw data for that block. The hex conversion
utility does not use the section run address. When linking, you need not worry about the
ROM address or the construction of the boot table; the hex conversion utility handles this.

www.ti.com
Building a Table for an On-Chip Boot Loader
305
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Hex Conversion Utility Description
Step 2: Identify the bootable sections. You can use the --boot option to tell the hex conversion
utility to configure all sections for boot loading. Or, you can use a SECTIONS directive to
select specific sections to be configured (see Section 12.5). If you use a SECTIONS
directive, the --boot option is ignored.
Step 3: Set the boot table format. Specify the --gpio8, --gpio16, or --spi8 options to set the source
format of the boot table. You do not need to specify the memwidth and romwidth as the utility
will set these formats automatically. If --memwidth and --romwidth are used after a format
option, they override the default for the format.
Step 4: Set the ROM address of the boot table. Use the --bootorg option to set the source address
of the complete table.
Step 5: Set boot-loader-specific options. Set entry point and control register values as needed.
Step 6: Describe your system memory configuration. See Section 12.3 and Section 12.4.
12.11.3.2 Leaving Room for the Boot Table
The complete boot table is similar to a single section containing all of the header records and data for the
boot loader. The address of this section is the boot table origin. As part of the normal conversion process,
the hex conversion utility converts the boot table to hexadecimal format and maps it into the output files
like any other section.
Be sure to leave room in your system memory for the boot table, especially when you are using the
ROMS directive. The boot table cannot overlap other nonboot sections or unconfigured memory. Usually,
this is not a problem; typically, a portion of memory in your system is reserved for the boot table. Simply
configure this memory as one or more ranges in the ROMS directive, and use the --bootorg option to
specify the starting address.
12.11.4 Booting From a Device Peripheral
You can choose the port to boot from by using the --gpio8, --gpio16, or --spi8 boot table format option.
The initial value for the LOSPCP register can be specified with the --lospcp option. The initial value for the
SPIBRR register can be specified with the --spibrr option. Only the --spi8 format uses these control
register values in the boot table.
If the register values are not specified for the --spi8 format, the hex conversion utility uses the default
values 0x02 for LOSPCP and 0x7F for SPIBRR. When the boot table format options are specified and the
ROMS directive is not specified, the ASCII format hex utility output does not produce the address record.
12.11.5 Setting the Entry Point for the Boot Table
After completing the boot load process, execution starts at the default entry point specified by the linker
and contained in the object file. By using the --entrypoint option with the hex conversion utility, you can set
the entry point to a different address.
For example, if you want your program to start running at address 0x0123 after loading, specify --
entrypoint=0x0123 on the command line or in a command file. You can determine the --entrypoint address
by looking at the map file that the linker generates.
Valid Entry Points
NOTE: The value can be a constant, or it can be a symbol that is externally defined (for example,
with a .global) in the assembly source.
Building a Table for an On-Chip Boot Loader
www.ti.com
306 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Hex Conversion Utility Description
12.11.6 Using the ARM Boot Loader
This subsection explains how to use the hex conversion utility with the boot loader for C28x devices with
ARM cores. The boot loader accepts the formats listed in Table 12-3.
Table 12-3. Boot Table Source Formats
Format Option
Parallel boot GP I/O 8 bit --gpio8
Parallel boot GP I/O 16 bit --gpio16
8-bit SPI boot --spi8
The ARM on C28x devices with ARM cores can boot through the SPI-A 8-bit, GP I/O 8-bit, or GP I/I 16-bit
interface. The format of the boot table is shown in Table 12-4.
Table 12-4. Boot Table Format
Description Bytes Content
Boot table header 1-2 Key value (0x10AA or 0x08AA)
3-18 Register initialization value or reserved for future use
19-22 Entry point
Block header 23-24 Block size in number of bytes (nl)
25-28 Destination address of the block
Block data 29-30 Raw data for the block (nl bytes)
Block header 31 + nl Block size in number of bytes
. Destination address of the block
Block data . Raw data for the block
Additional block headers and data,
as required ... Content as appropriate
Block header with size 0 0x0000; indicates the end of the boot table.
The ARM on C28x devices with ARM cores can boot through either the serial 8-bit or parallel interface
with either 8- or 16-bit data. The format is the same for any combination: the boot table consists of a field
containing the destination address, a field containing the length, and a block containing the data. You can
boot only one section. If you are booting from an 8-bit channel, 8-bit bytes are stored in the table with
MSBs first; the hex conversion utility automatically builds the table in the correct format. Use the following
options to specify the boot table source:
• To boot from a SPI-A port, specify --spi8 when invoking the utility. Do not specify --memwidth or --
romwidth. Use --lospcp to set the initial value for the LOSPCP register and --spibrr to set the initial
value for the SPIBRR register. If the register values are not specified for the --spi8 format, the hex
conversion utility uses the default value 0x02 for LOSPCP and 0x7F for SPIBRR.
• To load from a general-purpose parallel I/O port, invoke the utility with --gpio8 or --gpio16. Do not
specify --memwidth or --romwidth.
www.ti.com
Building a Table for an On-Chip Boot Loader
307
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Hex Conversion Utility Description
The command file in Example 12-3 allows you to boot the .text and .cinit sections of test.out from a 16-bit-
wide EPROM at location 0x3FFC00. The map file test.map is also generated.
Example 12-3. Sample Command File for Booting From 8-Bit SPI Boot
/*---------------------------------------------------------------------------*/
/* Hex converter command file. */
/*---------------------------------------------------------------------------*/
test.out /* Input file */
--ascii /* Select ASCII format */
--map=test.map /* Specify the map file */
--outfile=test_spi8.hex /* Hex utility out file */
--boot /* Consider all the input sections as boot sections */
--spi8 /* Specify the SPI 8-bit boot format */
--lospcp=0x3F /* Set the initial value for the LOSPCP as 0x3F */
/* The -spibrr option is not specified to show that */
/* the hex utility uses the default value (0x7F) */
--entrypoint=0x3F0000 /* Set the entry point */
The command file in Example 12-3 generates the out file in Figure 12-6. The control register values are
coded in the boot table header and that header has the address that is specified with the --entrypoint
option.
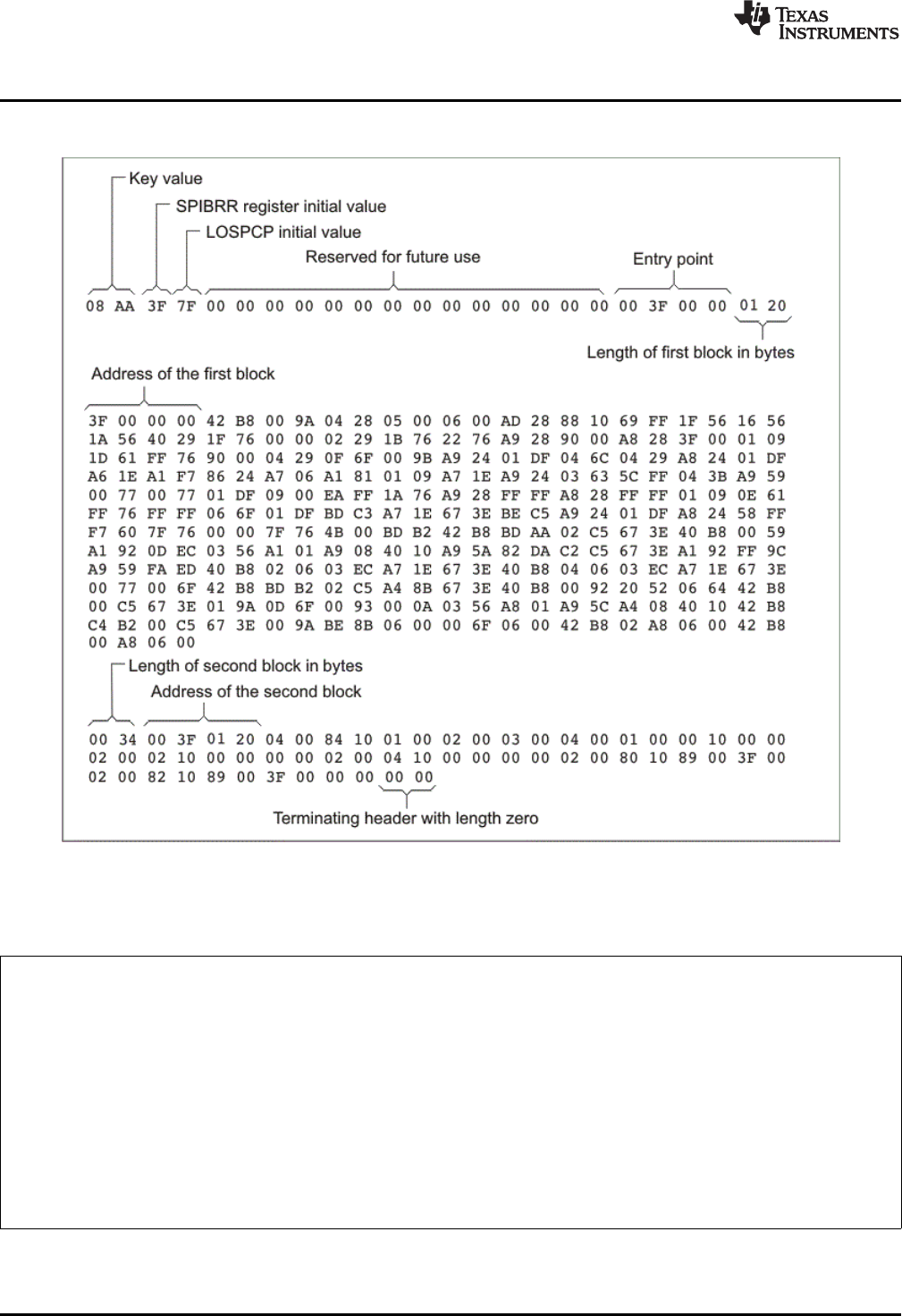
Building a Table for an On-Chip Boot Loader
www.ti.com
308 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Hex Conversion Utility Description
Figure 12-6. Sample Hex Converter Out File for Booting From 8-Bit SPI Boot
The command file in Example 12-4 allows you to boot the .text and .cinit sections of test.out from the 16-
bit parallel GP I/O port. The map file test.map is also generated.
Example 12-4. Sample Command File for ARM 16-Bit Parallel Boot GP I/O
/*---------------------------------------------------------------------*/
/* Hex converter command file. */
/*---------------------------------------------------------------------*/
test.out /* Input file */
--ascii /* Select ASCII format */
--map=test.map /* Specify the map file */
--outfile=test_gpio16.hex /* Hex utility out file */
--gpio16 /* Specify the 16-bit GP I/O boot format */
SECTIONS
{
.text: paddr=BOOT
.cinit: paddr=BOOT
}
The command file in Example 12-4 generates the out file in Figure 12-7.
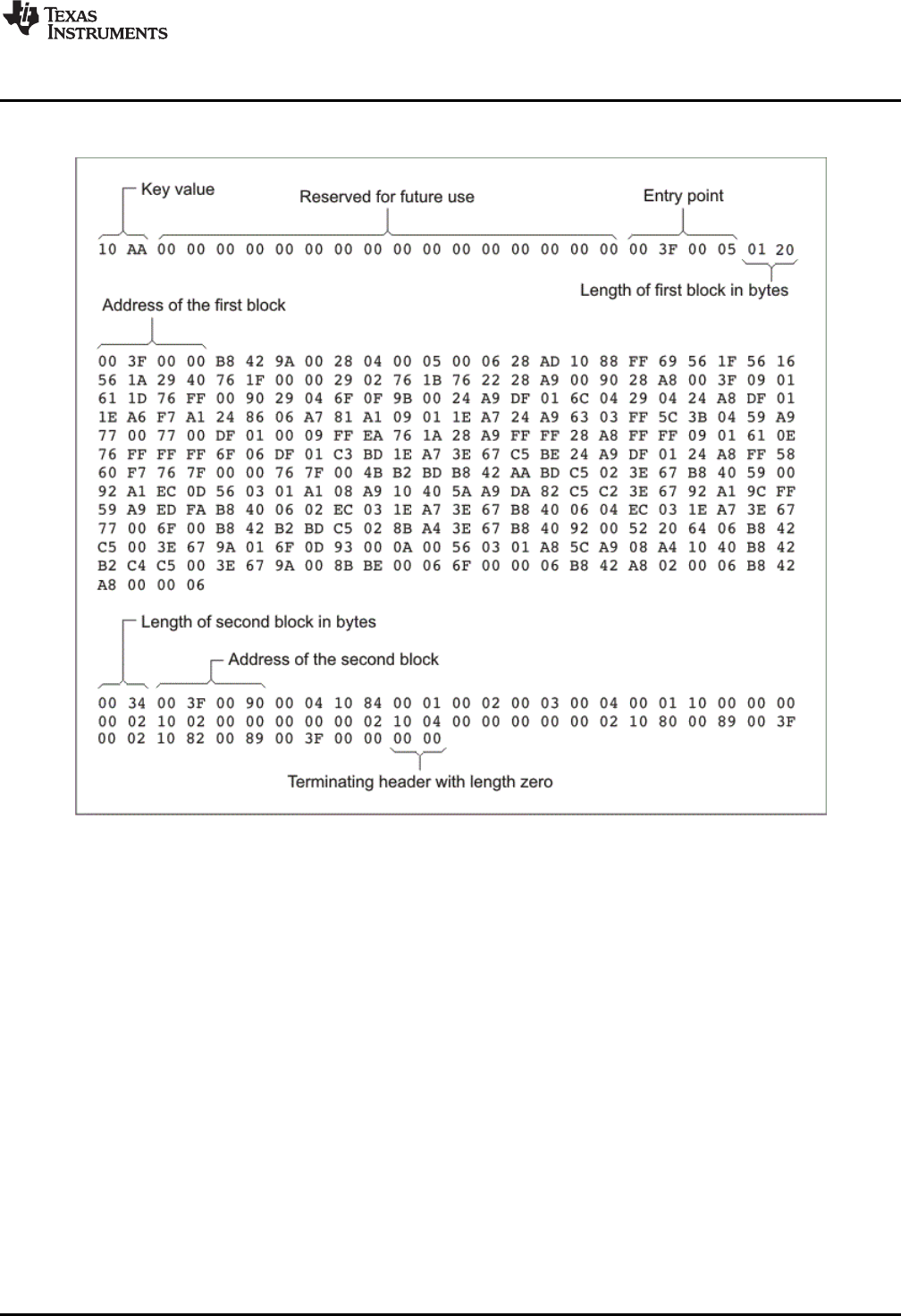

Controlling the ROM Device Address
www.ti.com
310 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Hex Conversion Utility Description
12.12 Controlling the ROM Device Address
The hex conversion utility output address field corresponds to the ROM device address. The EPROM
programmer burns the data into the location specified by the hex conversion utility output file address field.
The hex conversion utility offers some mechanisms to control the starting address in ROM of each
section. However, many EPROM programmers offer direct control of the location in ROM in which the
data is burned.
The address field of the hex-conversion utility output file is controlled by the following items, which are
listed from low to high priority:
1. The linker command file. By default, the address field of the hex conversion utility output file is the
load address (as given in the linker command file).
2. The paddr parameter of the SECTIONS directive. When the paddr parameter is specified for a
section, the hex conversion utility bypasses the section load address and places the section in the
address specified by paddr.
3. The --zero option. When you use the --zero option, the utility resets the address origin to 0 for each
output file. Since each file starts at 0 and counts upward, any address records represent offsets from
the beginning of the file (the address within the ROM) rather than actual target addresses of the data.
You must use the --zero option in conjunction with the --image option to force the starting address in
each output file to be zero. If you specify the --zero option without the --image option, the utility issues
a warning and ignores the --zero option.
4. The --byte option. Some EPROM programmers may require the output file address field to contain a
byte count rather than a word count. If you use the −byte option, the output file address increments
once for each byte. For example, if the starting address is 0h, the first line contains eight words, and
you use no −byte option, the second line would start at address 8 (8h). If the starting address is 0h, the
first line contains eight words, and you use the −byte option, the second line would start at address 16
(010h). The data in both examples are the same; −byte affects only the calculation of the output file
address field, not the actual target processor address of the converted data.
The --byte option causes the address records in an output file to refer to byte locations within the file,
whether the target processor is byte-addressable or not.

www.ti.com
Control Hex Conversion Utility Diagnostics
311
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Hex Conversion Utility Description
12.13 Control Hex Conversion Utility Diagnostics
The hex conversion utility uses certain C/C++ compiler options to control hex-converter-generated
diagnostics.
--diag_error=id Categorizes the diagnostic identified by id as an error. To determine the
numeric identifier of a diagnostic message, use the --display_error_number
option first in a separate link. Then use --diag_error=id to recategorize the
diagnostic as an error. You can only alter the severity of discretionary
diagnostics.
--diag_remark=id Categorizes the diagnostic identified by id as a remark. To determine the
numeric identifier of a diagnostic message, use the --display_error_number
option first in a separate link. Then use --diag_remark=id to recategorize the
diagnostic as a remark. You can only alter the severity of discretionary
diagnostics.
--diag_suppress=id Suppresses the diagnostic identified by id. To determine the numeric
identifier of a diagnostic message, use the --display_error_number option first
in a separate link. Then use --diag_suppress=id to suppress the diagnostic.
You can only suppress discretionary diagnostics.
--diag_warning=id Categorizes the diagnostic identified by id as a warning. To determine the
numeric identifier of a diagnostic message, use the --display_error_number
option first in a separate link. Then use --diag_warning=id to recategorize the
diagnostic as a warning. You can only alter the severity of discretionary
diagnostics.
--display_error_number Displays a diagnostic's numeric identifier along with its text. Use this option in
determining which arguments you need to supply to the diagnostic
suppression options (--diag_suppress, --diag_error, --diag_remark, and --
diag_warning). This option also indicates whether a diagnostic is
discretionary. A discretionary diagnostic is one whose severity can be
overridden. A discretionary diagnostic includes the suffix -D; otherwise, no
suffix is present. See the ARM Optimizing C/C++ Compiler User's Guide for
more information on understanding diagnostic messages.
--issue_remarks Issues remarks (nonserious warnings), which are suppressed by default.
--no_warnings Suppresses warning diagnostics (errors are still issued).
--set_error_limit=count Sets the error limit to count, which can be any decimal value. The linker
abandons linking after this number of errors. (The default is 100.)
--verbose_diagnostics Provides verbose diagnostics that display the original source with line-wrap
and indicate the position of the error in the source line
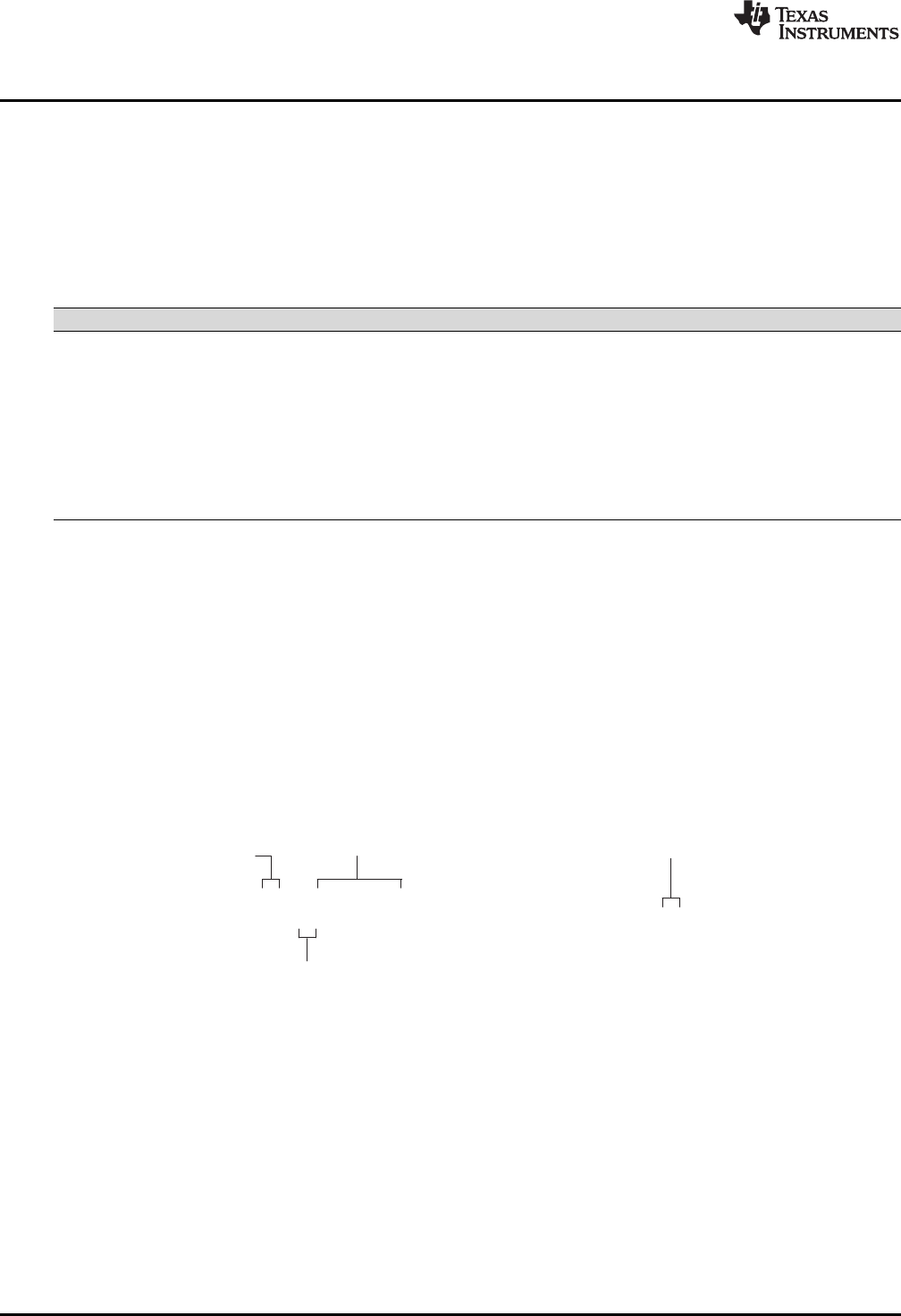
^B$AXXXXXXXX,
XXXXXXXXXXXXXXXXXXXX...^C
Nonprintable
start code
Nonprintable
endcode
Address
Databyte
Description of the Object Formats
www.ti.com
312 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Hex Conversion Utility Description
12.14 Description of the Object Formats
The hex conversion utility has options that identify each format. Table 12-5 specifies the format options.
They are described in the following sections.
• You should use only one of these options on the command line. If you use more than one option, the
last one you list overrides the others.
• The default format is Tektronix (--tektronix option).
Table 12-5. Options for Specifying Hex Conversion Formats
Option Alias Format Address Bits Default Width
--ascii -a ASCII-Hex 16 8
--intel -i Intel 32 8
--motorola=1 -m1 Motorola-S1 16 8
--motorola=2 -m2 Motorola-S2 24 8
--motorola=3 -m3 Motorola-S3 32 8
--ti-tagged -t TI-Tagged 16 16
--ti_txt TI_TXT 8 8
--tektronix -x Tektronix 32 8
Address bits determine how many bits of the address information the format supports. Formats with 16-
bit addresses support addresses up to 64K only. The utility truncates target addresses to fit in the number
of available bits.
The default width determines the default output width of the format. You can change the default width by
using the --romwidth option or by using the romwidth parameter in the ROMS directive. You cannot
change the default width of the TI-Tagged format, which supports a 16-bit width only.
12.14.1 ASCII-Hex Object Format (--ascii Option)
The ASCII-Hex object format supports 16-bit addresses. The format consists of a byte stream with bytes
separated by spaces. Figure 12-8 illustrates the ASCII-Hex format.
Figure 12-8. ASCII-Hex Object Format
The file begins with an ASCII STX character (ctrl-B, 02h) and ends with an ASCII ETX character (ctrl-C,
03h). Address records are indicated with $AXXXXXXX, in which XXXXXXXX is a 8-digit (16-bit)
hexadecimal address. The address records are present only in the following situations:
• When discontinuities occur
• When the byte stream does not begin at address 0
You can avoid all discontinuities and any address records by using the --image and --zero options. This
creates output that is simply a list of byte values.
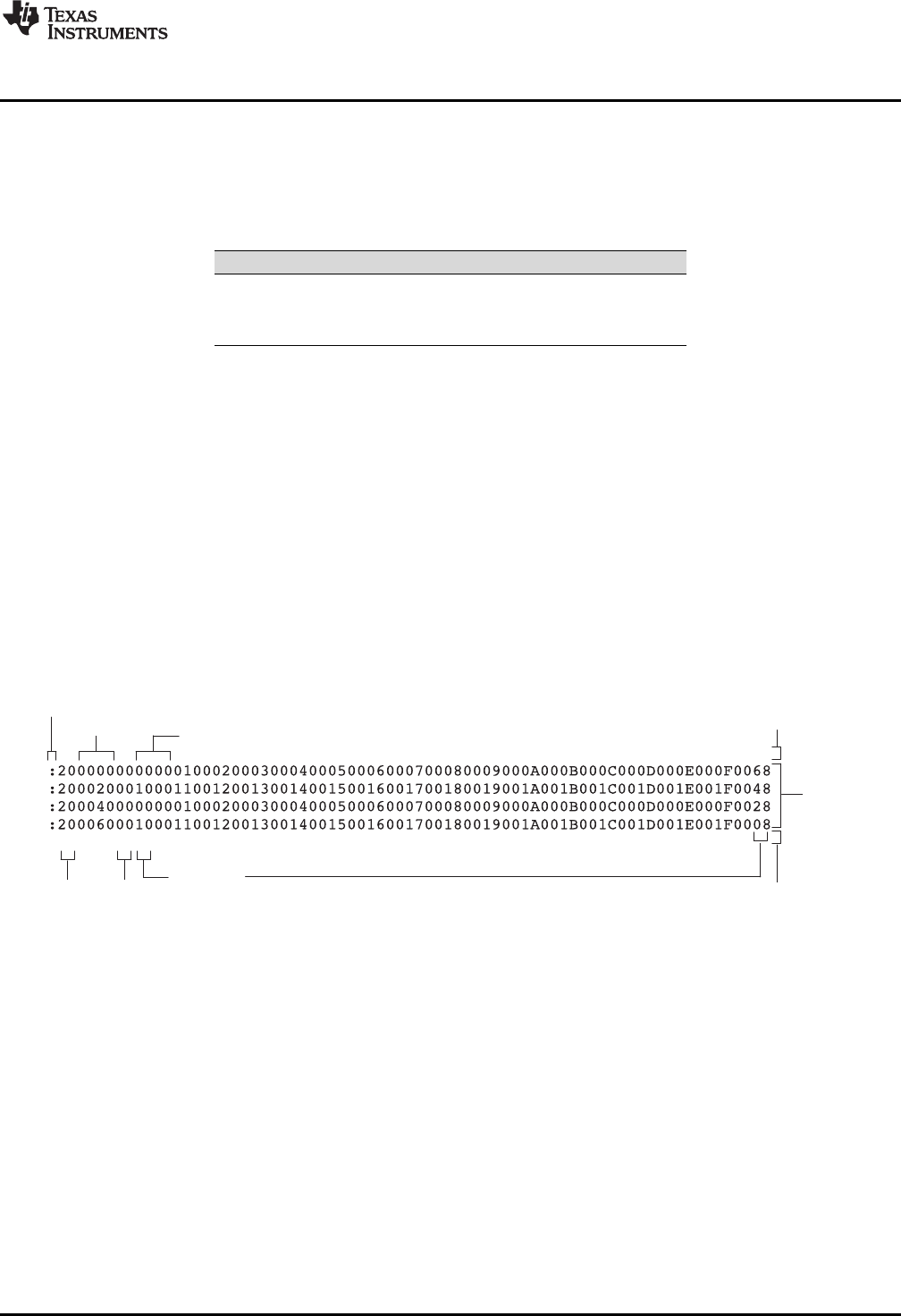
:00000001FF
Start
character
Byte
count
Checksum
Data
records
Record
type
Address Mostsignificant16bits
Extendedlinear
addressrecord
End-of-file
record
www.ti.com
Description of the Object Formats
313
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Hex Conversion Utility Description
12.14.2 Intel MCS-86 Object Format (--intel Option)
The Intel object format supports 16-bit addresses and 32-bit extended addresses. Intel format consists of
a 9-character (4-field) prefix (which defines the start of record, byte count, load address, and record type),
the data, and a 2-character checksum suffix.
The 9-character prefix represents three record types:
Record Type Description
00 Data record
01 End-of-file record
04 Extended linear address record
Record type00, the data record, begins with a colon ( : ) and is followed by the byte count, the address of
the first data byte, the record type (00), and the checksum. The address is the least significant 16 bits of a
32-bit address; this value is concatenated with the value from the most recent 04 (extended linear
address) record to create a full 32-bit address. The checksum is the 2s complement (in binary form) of the
preceding bytes in the record, including byte count, address, and data bytes.
Record type 01, the end-of-file record, also begins with a colon ( : ), followed by the byte count, the
address, the record type (01), and the checksum.
Record type 04, the extended linear address record, specifies the upper 16 address bits. It begins with a
colon ( : ), followed by the byte count, a dummy address of 0h, the record type (04), the most significant
16 bits of the address, and the checksum. The subsequent address fields in the data records contain the
least significant bytes of the address.
Figure 12-9 illustrates the Intel hexadecimal object format.
Figure 12-9. Intel Hexadecimal Object Format
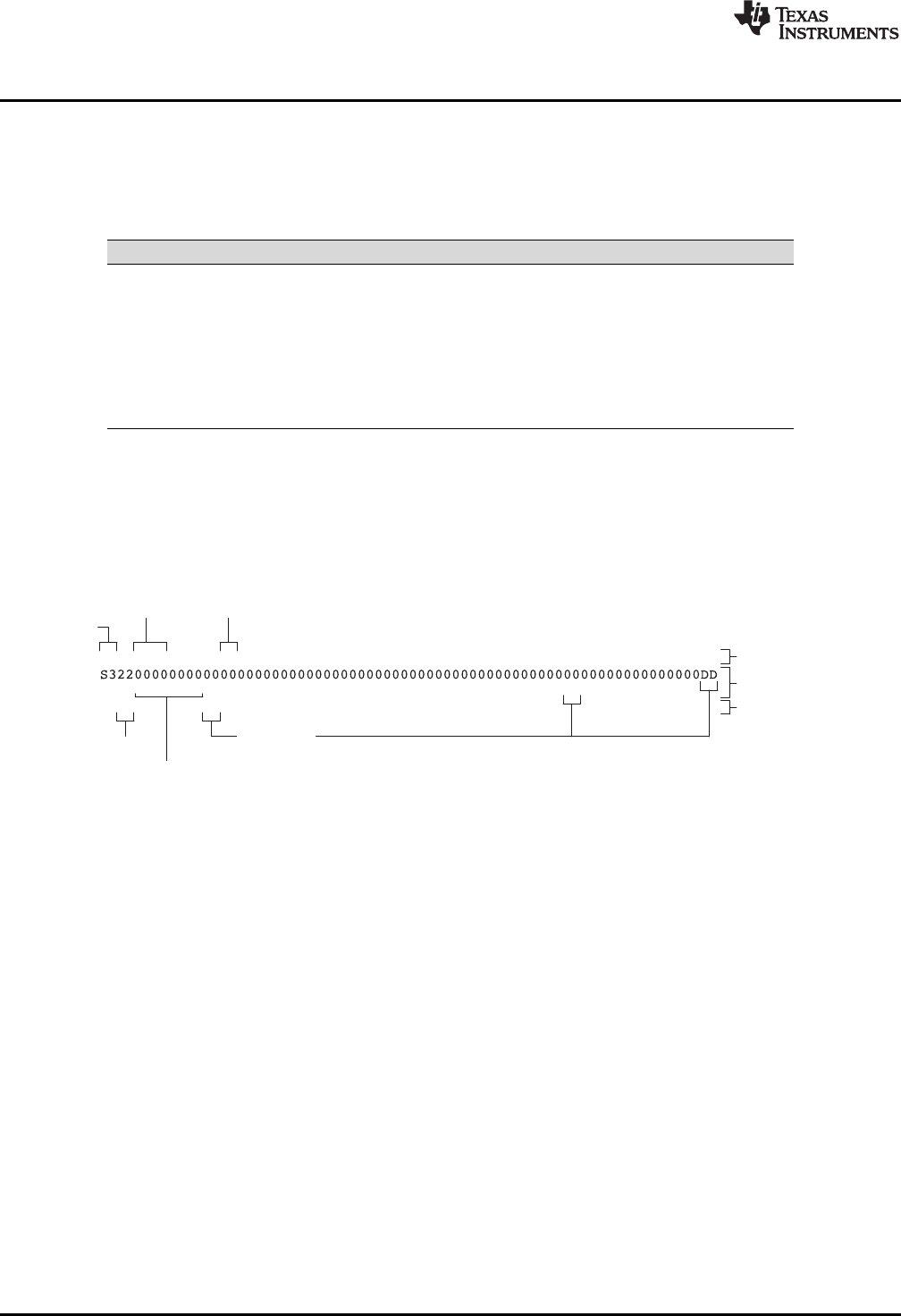
S00600004844521B
S31A0001FFEB000000000000000000000000000000000000000000FA
S70500000000FA
Record
type
Bytecount Checksum
Datarecords
Address
Headerrecord
Termination
record
Checksum
AddressforS3records
Description of the Object Formats
www.ti.com
314 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Hex Conversion Utility Description
12.14.3 Motorola Exorciser Object Format (--motorola Option)
The Motorola S1, S2, and S3 formats support 16-bit, 24-bit, and 32-bit addresses, respectively. The
formats consist of a start-of-file (header) record, data records, and an end-of-file (termination) record.
Each record consists of five fields: record type, byte count, address, data, and checksum. The three
record types are:
Record Type Description
S0 Header record
S1 Code/data record for 16-bit addresses (S1 format)
S2 Code/data record for 24-bit addresses (S2 format)
S3 Code/data record for 32-bit addresses (S3 format)
S7 Termination record for 32-bit addresses (S3 format)
S8 Termination record for 24-bit addresses (S2 format)
S9 Termination record for 16-bit addresses (S1 format)
The byte count is the character pair count in the record, excluding the type and byte count itself.
The checksum is the least significant byte of the 1s complement of the sum of the values represented by
the pairs of characters making up the byte count, address, and the code/data fields.
Figure 12-10 illustrates the Motorola-S object format.
Figure 12-10. Motorola-S Format
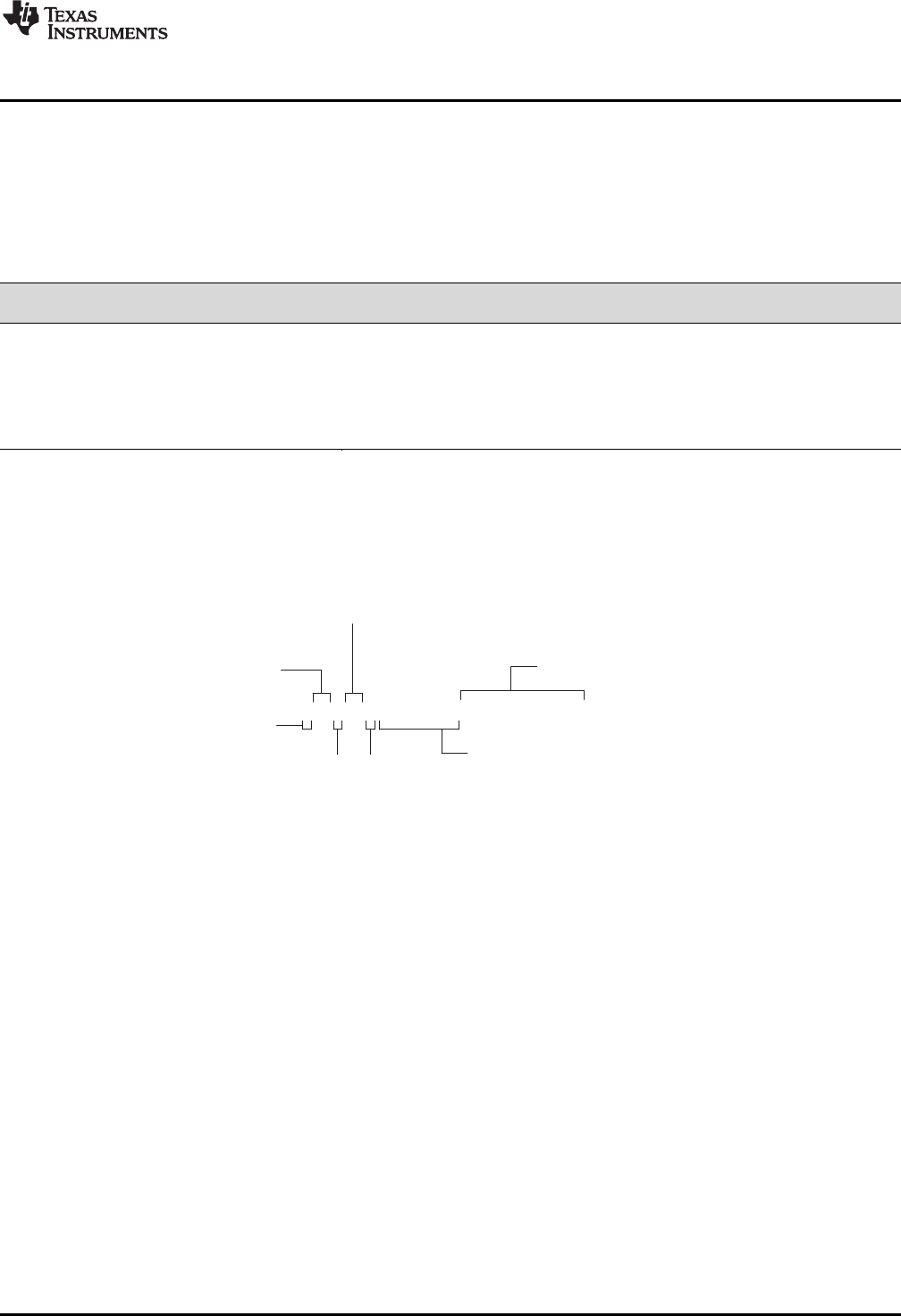
%15621810000000202020202020
Blocklength
1ah=26
Checksum: 21h = 1+5+6+8+1+0+0+0+0+0+0+
0+
2+0+2+0+2+0+2+0+2+0+2+
0
Loadaddress:10000000h
Header
character
Blocktype:6
(data)
Objectcode:6bytes
Lengthof
loadaddress
www.ti.com
Description of the Object Formats
315
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Hex Conversion Utility Description
12.14.4 Extended Tektronix Object Format (--tektronix Option)
The Tektronix object format supports 32-bit addresses and has two types of records:
Data records contains the header field, the load address, and the object code.
Termination records signifies the end of a module.
The header field in the data record contains the following information:
Item Number of ASCII
Characters Description
% 1 Data type is Tektronix format
Block length 2 Number of characters in the record, minus the %
Block type 1 6 = data record
8 = termination record
Checksum 2 A 2-digit hex sum modulo 256 of all values in the record except the % and the
checksum itself.
The load address in the data record specifies where the object code will be located. The first digit
specifies the address length; this is always 8. The remaining characters of the data record contain the
object code, two characters per byte.
Figure 12-11 illustrates the Tektronix object format.
Figure 12-11. Extended Tektronix Object Format
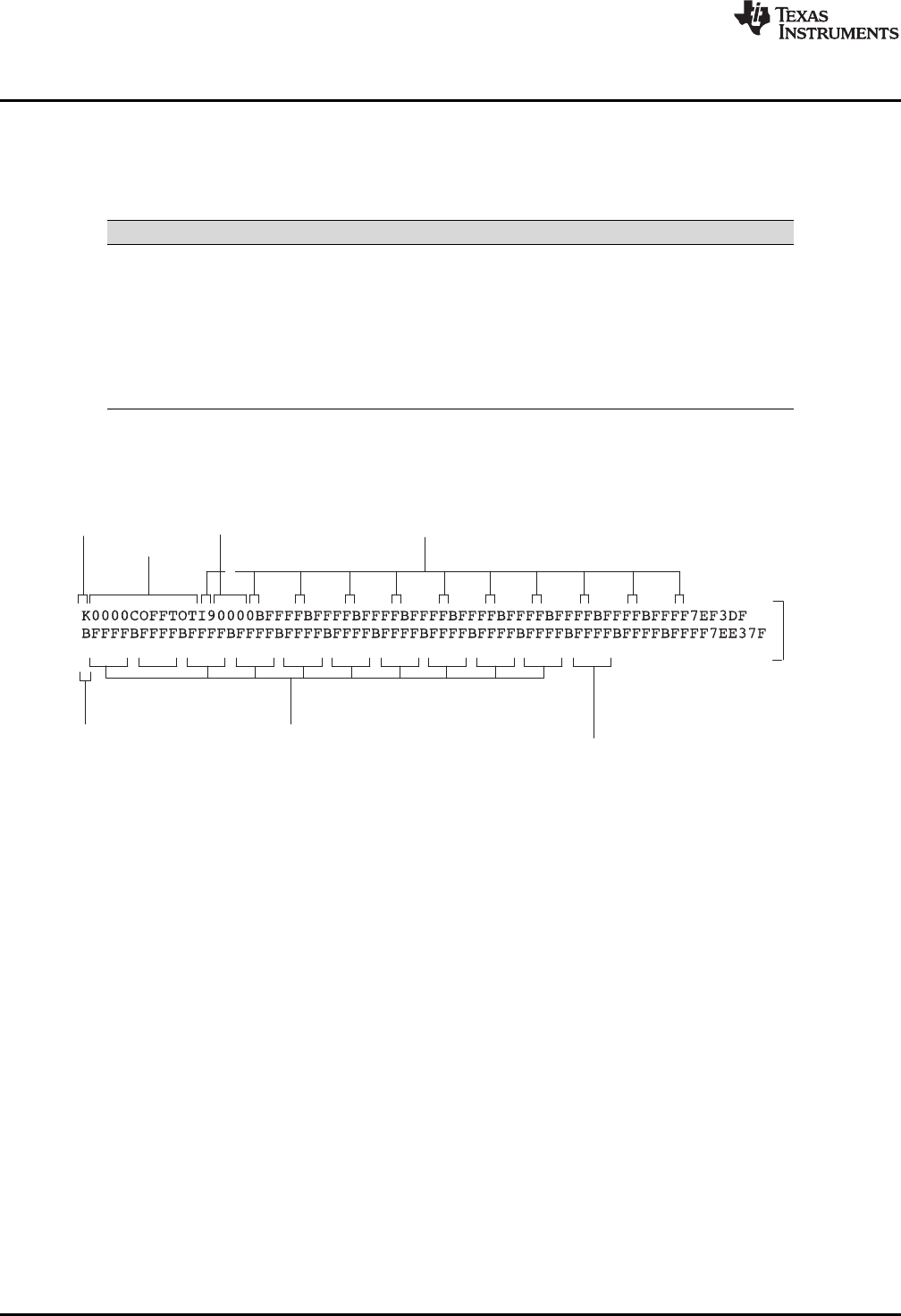
BFFFFBFFFFBFFFFBFFFFBFFFFBFFFFBFFFFBFFFFBFFFFBFFFF7F245F
:
Tagcharacters
Program
identifier
Load
address
Data
words Checksum
Data
records
End-of-file
record
Start-of-file
record
Description of the Object Formats
www.ti.com
316 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Hex Conversion Utility Description
12.14.5 Texas Instruments SDSMAC (TI-Tagged) Object Format (--ti_tagged Option)
The Texas Instruments SDSMAC (TI-Tagged) object format supports 16-bit addresses, including start-of-
file record, data records, and end-of-file record. Each data records consists of a series of small fields and
is signified by a tag character:
Tag Character Description
K Followed by the program identifier
7 Followed by a checksum
8 Followed by a dummy checksum (ignored)
9 Followed by a 16-bit load address
B Followed by a data word (four characters)
F Identifies the end of a data record
* Followed by a data byte (two characters)
Figure 12-12 illustrates the tag characters and fields in TI-Tagged object format.
Figure 12-12. TI-Tagged Object Format
If any data fields appear before the first address, the first field is assigned address 0000h. Address fields
may be expressed but not required for any data byte. The checksum field, preceded by the tag character
7, is the 2s complement of the sum of the 8-bit ASCII values of characters, beginning with the first tag
character and ending with the checksum tag character (7 or 8). The end-of-file record is a colon ( : ).
@ADDR1
DATA01DATA02........DATA16
DATA17DATA32........DATA32
DATAm........DATAn
@ADDR2
DATA01....................DATAn
q
Section
start
End-of-line
character
Data
bytes
Data
bytes
Section
start
www.ti.com
Description of the Object Formats
317
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Hex Conversion Utility Description
12.14.6 TI-TXT Hex Format (--ti_txt Option)
The TI-TXT hex format supports 16-bit hexadecimal data. It consists of section start addresses, data byte,
and an end-of-file character. These restrictions apply:
• The number of sections is unlimited.
• Each hexadecimal start address must be even.
• Each line must have 16 data bytes, except the last line of a section.
• Data bytes are separated by a single space.
• The end-of-file termination tag q is mandatory.
The data record contains the following information:
Item Description
@ADDR Hexadecimal start address of a section
DATAn Hexadecimal data byte
q End-of-file termination character
Figure 12-13. TI-TXT Object Format
Example 12-5. TI-TXT Object Format
@F000
31 40 00 03 B2 40 80 5A 20 01 D2 D3 22 00 D2 E3
21 00 3F 40 E8 FD 1F 83 FE 23 F9 3F
@FFFE
00 F0
Q
318 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Sharing C/C++ Header Files With Assembly Source
Chapter 13
SPNU118U–January 2018
Sharing C/C++ Header Files With Assembly Source
You can use the .cdecls assembler directive to share C headers containing declarations and prototypes
between C and assembly code. Any legal C/C++ can be used in a .cdecls block and the C/C++
declarations will cause suitable assembly to be generated automatically, allowing you to reference the
C/C++ constructs in assembly code.
Topic ........................................................................................................................... Page
13.1 Overview of the .cdecls Directive ....................................................................... 319
13.2 Notes on C/C++ Conversions ............................................................................. 319
13.3 Notes on C++ Specific Conversions.................................................................... 323
13.4 Special Assembler Support ............................................................................... 324

www.ti.com
Overview of the .cdecls Directive
319
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Sharing C/C++ Header Files With Assembly Source
13.1 Overview of the .cdecls Directive
The .cdecls directive allows programmers in mixed assembly and C/C++ environments to share C headers
containing declarations and prototypes between the C and assembly code. Any legal C/C++ can be used
in a .cdecls block and the C/C++ declarations will cause suitable assembly to be generated automatically.
This allows the programmer to reference the C/C++ constructs in assembly code — calling functions,
allocating space, and accessing structure members — using the equivalent assembly mechanisms. While
function and variable definitions are ignored, most common C/C++ elements are converted to assembly:
enumerations, (non function-like) macros, function and variable prototypes, structures, and unions.
See the .cdecls directive description for details on the syntax of the .cdecls assembler directive.
The .cdecls directive can appear anywhere in an assembly source file, and can occur multiple times within
a file. However, the C/C++ environment created by one .cdecls is not inherited by a later .cdecls; the
C/C++ environment starts over for each .cdecls instance.
For example, the following code causes the warning to be issued:
.cdecls C,NOLIST
%{
#define ASMTEST 1
%}
.cdecls C,NOLIST
%{
#ifndef ASMTEST
#warn "ASMTEST not defined!" /* will be issued */
#endif
%}
Therefore, a typical use of the .cdecls block is expected to be a single usage near the beginning of the
assembly source file, in which all necessary C/C++ header files are included.
Use the compiler --include_path=path options to specify additional include file paths needed for the header
files used in assembly, as you would when compiling C files.
Any C/C++ errors or warnings generated by the code of the .cdecls are emitted as they normally would for
the C/C++ source code. C/C++ errors cause the directive to fail, and any resulting converted assembly is
not included.
C/C++ constructs that cannot be converted, such as function-like macros or variable definitions, cause a
comment to be output to the converted assembly file. For example:
; ASM HEADER WARNING - variable definition 'ABCD' ignored
The prefix ASM HEADER WARNING appears at the beginning of each message. To see the warnings,
either the WARN parameter needs to be specified so the messages are displayed on STDERR, or else
the LIST parameter needs to be specified so the warnings appear in the listing file, if any.
Finally, note that the converted assembly code does not appear in the same order as the original C/C++
source code and C/C++ constructs may be simplified to a normalized form during the conversion process,
but this should not affect their final usage.
13.2 Notes on C/C++ Conversions
The following sections describe C and C++ conversion elements that you need to be aware of when
sharing header files with assembly source.
13.2.1 Comments
Comments are consumed entirely at the C level, and do not appear in the resulting converted assembly
file.

Notes on C/C++ Conversions
www.ti.com
320 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Sharing C/C++ Header Files With Assembly Source
13.2.2 Conditional Compilation (#if/#else/#ifdef/etc.)
Conditional compilation is handled entirely at the C level during the conversion step. Define any necessary
macros either on the command line (using the compiler --define=name=value option) or within a .cdecls
block using #define. The #if, #ifdef, etc. C/C++ directives are not converted to assembly .if, .else, .elseif,
and .endif directives.
13.2.3 Pragmas
Pragmas found in the C/C++ source code cause a warning to be generated as they are not converted.
They have no other effect on the resulting assembly file. See the .cdecls topic for the WARN and
NOWARN parameter discussion for where these warnings are created.
13.2.4 The #error and #warning Directives
These preprocessor directives are handled completely by the compiler during the parsing step of
conversion. If one of these directives is encountered, the appropriate error or warning message is emitted.
These directives are not converted to .emsg or .wmsg in the assembly output.
13.2.5 Predefined symbol _ _ASM_HEADER_ _
The C/C++ macro _ _ASM_HEADER_ _ is defined in the compiler while processing code within .cdecls.
This allows you to make changes in your code, such as not compiling definitions, during the .cdecls
processing.
Be Careful With the _ _ASM_HEADER_ _ Macro
NOTE: You must be very careful not to use this macro to introduce any changes in the code that
could result in inconsistencies between the code processed while compiling the C/C++
source and while converting to assembly.
13.2.6 Usage Within C/C++ asm( ) Statements
The .cdecls directive is not allowed within C/C++ asm( ) statements and will cause an error to be
generated.
13.2.7 The #include Directive
The C/C++ #include preprocessor directive is handled transparently by the compiler during the conversion
step. Such #includes can be nested as deeply as desired as in C/C++ source. The assembly directives
.include and .copy are not used or needed within a .cdecls. Use the command line --include_path option to
specify additional paths to be searched for included files, as you would for C compilation.
13.2.8 Conversion of #define Macros
Only object-like macros are converted to assembly. Function-like macros have no assembly
representation and so cannot be converted. Pre-defined and built-in C/C++ macros are not converted to
assembly (i.e., __FILE__, __TIME__, __TI_COMPILER_VERSION__, etc.). For example, this code is
converted to assembly because it is an object-like macro:
#define NAME Charley
This code is not converted to assembly because it is a function-like macro:
#define MAX(x,y) (x>y ? x : y)
Some macros, while they are converted, have no functional use in the containing assembly file. For
example, the following results in the assembly substitution symbol FOREVER being set to the value
while(1), although this has no useful use in assembly because while(1) is not legal assembly code.
#define FOREVER while(1)

www.ti.com
Notes on C/C++ Conversions
321
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Sharing C/C++ Header Files With Assembly Source
Macro values are not interpreted as they are converted. For example, the following results in the
assembler substitution symbol OFFSET being set to the literal string value 5+12 and not the value 17.
This happens because the semantics of the C/C++ language require that macros are evaluated in context
and not when they are parsed.
#define OFFSET 5+12
Because macros in C/C++ are evaluated in their usage context, C/C++ printf escape sequences such as
\n are not converted to a single character in the converted assembly macro. See Section 13.2.11 for
suggestions on how to use C/C++ macro strings.
Macros are converted using the .define directive (see Section 13.4.2), which functions similarly to the .asg
assembler directive. The exception is that .define disallows redefinitions of register symbols and
mnemonics to prevent the conversion from corrupting the basic assembly environment. To remove a
macro from the assembly scope, .undef can be used following the .cdecls that defines it (see
Section 13.4.3).
The macro functionality of # (stringize operator) is only useful within functional macros. Since functional
macros are not supported by this process, # is not supported either. The concatenation operator ## is only
useful in a functional context, but can be used degenerately to concatenate two strings and so it is
supported in that context.
13.2.9 The #undef Directive
Symbols undefined using the #undef directive before the end of the .cdecls are not converted to assembly.
13.2.10 Enumerations
Enumeration members are converted to .enum elements in assembly. For example:
enum state { ACTIVE=0x10, SLEEPING=0x01, INTERRUPT=0x100, POWEROFF, LAST};
is converted to the following assembly code:
state .enum
ACTIVE .emember 16
SLEEPING .emember 1
NTERRUPT .emember 256
POWEROFF .emember 257
LAST .emember 258
.endenum
The members are used via the pseudo-scoping created by the .enum directive.
The usage is similar to that for accessing structure members, enum_name.member.
This pseudo-scoping is used to prevent enumeration member names from corrupting other symbols within
the assembly environment.
13.2.11 C Strings
Because C string escapes such as \n and \t are not converted to hex characters 0x0A and 0x09 until their
use in a string constant in a C/C++ program, C macros whose values are strings cannot be represented
as expected in assembly substitution symbols. For example:
#define MSG "\tHI\n"
becomes, in assembly:
.define """\tHI\n""",MSG ; 6 quoted characters! not 5!
When used in a C string context, you expect this statement to be converted to 5 characters (tab, H, I,
newline, NULL), but the .string assembler directive does not know how to perform the C escape
conversions.
You can use the .cstring directive to cause the escape sequences and NULL termination to be properly
handled as they would in C/C++. Using the above symbol MSG with a .cstring directive results in 5
characters of memory being allocated, the same characters as would result if used in a C/C++ strong
context. (See Section 13.4.7 for the .cstring directive syntax.)

Notes on C/C++ Conversions
www.ti.com
322 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Sharing C/C++ Header Files With Assembly Source
13.2.12 C/C++ Built-In Functions
The C/C++ built-in functions, such as sizeof( ), are not translated to their assembly counterparts, if any, if
they are used in macros. Also, their C expression values are not inserted into the resulting assembly
macro because macros are evaluated in context and there is no active context when converting the
macros to assembly.
Suitable functions such as $$sizeof( ) are available in assembly expressions. However, as the basic types
such as int/char/float have no type representation in assembly, there is no way to ask for $$sizeof(int), for
example, in assembly.
13.2.13 Structures and Unions
C/C++ structures and unions are converted to assembly .struct and .union elements. Padding and ending
alignments are added as necessary to make the resulting assembly structure have the same size and
member offsets as the C/C++ source. The primary purpose is to allow access to members of C/C++
structures, as well as to facilitate debugging of the assembly code. For nested structures, the assembly
.tag feature is used to refer to other structures/unions.
The alignment is also passed from the C/C++ source so that the assembly symbol is marked with the
same alignment as the C/C++ symbol. (See Section 13.2.3 for information about pragmas, which may
attempt to modify structures.) Because the alignment of structures is stored in the assembly symbol, built-
in assembly functions like $$sizeof( ) and $$alignof( ) can be used on the resulting structure name symbol.
When using unnamed structures (or unions) in typedefs, such as:
typedef struct { int a_member; } mystrname;
This is really a shorthand way of writing:
struct temporary_name { int a_member; };
typedef temporary_name mystrname;
The conversion processes the above statements in the same manner: generating a temporary name for
the structure and then using .define to output a typedef from the temporary name to the user name. You
should use your mystrname in assembly the same as you would in C/C++, but do not be confused by the
assembly structure definition in the list, which contains the temporary name. You can avoid the temporary
name by specifying a name for the structure, as in:
typedef struct a_st_name { ... } mystrname;
If a shorthand method is used in C to declare a variable with a particular structure, for example:
extern struct a_name { int a_member; } a_variable;
Then after the structure is converted to assembly, a .tag directive is generated to declare the structure of
the external variable, such as:
_a_variable .tag a_st_name
This allows you to refer to _a_variable.a_member in your assembly code.
13.2.14 Function/Variable Prototypes
Non-static function and variable prototypes (not definitions) will result in a .global directive being generated
for each symbol found.
See Section 13.3.1 for C++ name mangling issues.
Function and variable definitions will result in a warning message being generated (see the
WARN/NOWARN parameter discussion for where these warnings are created) for each, and they will not
be represented in the converted assembly.
The assembly symbol representing the variable declarations will not contain type information about those
symbols. Only a .global will be issued for them. Therefore, it is your responsibility to ensure the symbol is
used appropriately.
See Section 13.2.13 for information on variables names which are of a structure/union type.

www.ti.com
Notes on C/C++ Conversions
323
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Sharing C/C++ Header Files With Assembly Source
13.2.15 C Constant Suffixes
The C constant suffixes u, l, and f are passed to the assembly unchanged. The assembler will ignore
these suffixes if used in assembly expressions.
13.2.16 Basic C/C++ Types
Only complex types (structures and unions) in the C/C++ source code are converted to assembly. Basic
types such as int, char, or float are not converted or represented in assembly beyond any existing .int,
.char, .float, etc. directives that previously existed in assembly.
Typedefs of basic types are therefore also not represented in the converted assembly.
13.3 Notes on C++ Specific Conversions
The following sections describe C++ specific conversion elements that you need to be aware of when
sharing header files with assembly source.
13.3.1 Name Mangling
Symbol names may be mangled in C++ source files. When mangling occurs, the converted assembly will
use the mangled names to avoid symbol name clashes. You can use the demangler (armdem) to
demangle names and identify the correct symbols to use in assembly.
To defeat name mangling in C++ for symbols where polymorphism (calling a function of the same name
with different kinds of arguments) is not required, use the following syntax:
extern "C" void somefunc(int arg);
The above format is the short method for declaring a single function. To use this method for multiple
functions, you can also use the following syntax:
extern "C"
{
void somefunc(int arg);
int anotherfunc(int arg);
...
}
13.3.2 Derived Classes
Derived classes are only partially supported when converting to assembly because of issues related to
C++ scoping which does not exist in assembly. The greatest difference is that base class members do not
automatically become full (top-level) members of the derived class. For example:
----------------------------------------------------------
class base
{
public:
int b1;
};
class derived : public base
{
public:
int d1;
}
In C++ code, the class derived would contain both integers b1 and d1. In the converted assembly
structure "derived", the members of the base class must be accessed using the name of the base class,
such as derived.__b_base.b1 rather than the expected derived.b1.
A non-virtual, non-empty base class will have __b_ prepended to its name within the derived class to
signify it is a base class name. That is why the example above is derived.__b_base.b1 and not simply
derived.base.b1.
Notes on C++ Specific Conversions
www.ti.com
324 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Sharing C/C++ Header Files With Assembly Source
13.3.3 Templates
No support exists for templates.
13.3.4 Virtual Functions
No support exists for virtual functions, as they have no assembly representation.
13.4 Special Assembler Support
13.4.1 Enumerations (.enum/.emember/.endenum)
The following directives support a pseudo-scoping for enumerations:
ENUM_NAME .enum
MEMBER1 .emember [value]
MEMBER2 .emember [value]
...
.endenum
The .enum directive begins the enumeration definition and .endenum terminates it.
The enumeration name (ENUM_NAME) cannot be used to allocate space; its size is reported as zero.
The format to use the value of a member is ENUM_NAME.MEMBER, similar to a structure member
usage.
The .emember directive optionally accepts the value to set the member to, just as in C/C++. If not
specified, the member takes a value one more than the previous member. As in C/C++, member names
cannot be duplicated, although values can be. Unless specified with .emember, the first enumeration
member will be given the value 0 (zero), as in C/C++.
The .endenum directive cannot be used with a label, as structure .endstruct directives can, because the
.endenum directive has no value like the .endstruct does (containing the size of the structure).
Conditional compilation directives (.if/.else/.elseif/.endif) are the only other non-enumeration code allowed
within the .enum/.endenum sequence.
13.4.2 The .define Directive
The .define directive functions in the same manner as the .asg directive, except that .define disallows
creation of a substitution symbol that has the same name as a register symbol or mnemonic. It does not
create a new symbol name space in the assembler, rather it uses the existing substitution symbol name
space. The syntax for the directive is:
.define substitution string ,substitution symbol name
The .define directive is used to prevent corruption of the assembly environment when converting C/C++
headers.
13.4.3 The .undefine/.unasg Directives
The .undef directive is used to remove the definition of a substitution symbol created using .define or .asg.
This directive will remove the named symbol from the substitution symbol table from the point of the .undef
to the end of the assembly file. The syntax for these directives is:
.undefine substitution symbol name
.unasg substitution symbol name
This can be used to remove from the assembly environment any C/C++ macros that may cause a
problem.
Also see Section 13.4.2, which covers the .define directive.

www.ti.com
Special Assembler Support
325
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Sharing C/C++ Header Files With Assembly Source
13.4.4 The $$defined( ) Built-In Function
The $$defined directive returns true/1 or false/0 depending on whether the name exists in the current
substitution symbol table or the standard symbol table. In essence $$defined returns TRUE if the
assembler has any user symbol in scope by that name. This differs from $$isdefed in that $$isdefed only
tests for NON-substitution symbols. The syntax is:
$$defined( substitution symbol name )
A statement such as ".if $$defined(macroname)" is then similar to the C code "#ifdef macroname".
See Section 13.4.2 and Section 13.4.3 for the use of .define and .undef in assembly.
13.4.5 The $$sizeof Built-In Function
The assembly built-in function $$sizeof( ) can be used to query the size of a structure in assembly. It is an
alias for the already existing $$structsz( ). The syntax is:
$$sizeof( structure name )
The $$sizeof function can then be used similarly to the C built-in function sizeof( ).
The assembler's $$sizeof( ) built-in function cannot be used to ask for the size of basic C/C++ types, such
as $$sizeof(int), because those basic type names are not represented in assembly. Only complex types
are converted from C/C++ to assembly.
Also see Section 13.2.12, which notes that this conversion does not happen automatically if the C/C++
sizeof( ) built-in function is used within a macro.
13.4.6 Structure/Union Alignment and $$alignof( )
The assembly .struct and .union directives take an optional second argument which can be used to
specify a minimum alignment to be applied to the symbol name. This is used by the conversion process to
pass the specific alignment from C/C++ to assembly.
The assembly built-in function $$alignof( ) can be used to report the alignment of these structures. This
can be used even on assembly structures, and the function will return the minimum alignment calculated
by the assembler.
13.4.7 The .cstring Directive
You can use the .cstring directive to cause the escape sequences and NULL termination to be properly
handled as they would in C/C++.
.cstring "String with C escapes.\nWill be NULL terminated.\012"
See Section 13.2.11 for more information on the .cstring directive.
326 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Symbolic Debugging Directives
Appendix A
SPNU118U–January 2018
Symbolic Debugging Directives
The assembler supports several directives that the ARM C/C++ compiler uses for symbolic debugging.
These directives are not meant for use by assembly-language programmers. They require arguments that
can be difficult to calculate manually, and their usage must conform to a predetermined agreement
between the compiler, the assembler, and the debugger. This appendix documents these directives for
informational purposes only.
Topic ........................................................................................................................... Page
A.1 DWARF Debugging Format................................................................................ 327
A.2 Debug Directive Syntax..................................................................................... 327

www.ti.com
DWARF Debugging Format
327
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Symbolic Debugging Directives
A.1 DWARF Debugging Format
A subset of the DWARF symbolic debugging directives are always listed in the assembly language file that
the compiler creates for program analysis purposes. To list the complete set used for full symbolic debug,
invoke the compiler with the --symdebug:dwarf option, as shown below:
armcl --symdebug:dwarf --keep_asm input_file
The --keep_asm option instructs the compiler to retain the generated assembly file.
To disable the generation of all symbolic debug directives, invoke the compiler with the -symdebug:none
option:
armcl --symdebug:none --keep_asm input_file
The DWARF debugging format consists of the following directives:
• The .dwtag and .dwendtag directives define a Debug Information Entry (DIE) in the .debug_info
section.
• The .dwattr directive adds an attribute to an existing DIE.
• The .dwpsn directive identifies the source position of a C/C++ statement.
• The .dwcie and .dwendentry directives define a Common Information Entry (CIE) in the .debug_frame
section.
• The .dwfde and .dwendentry directives define a Frame Description Entry (FDE) in the .debug_frame
section.
• The .dwcfi directive defines a call frame instruction for a CIE or FDE.
A.2 Debug Directive Syntax
Table A-1 is an alphabetical listing of the symbolic debugging directives. For information on the C/C++
compiler, refer to the ARM Optimizing C/C++ Compiler User's Guide.
Table A-1. Symbolic Debugging Directives
Label Directive Arguments
.block [beginning line number]
.dwattr DIE label ,DIE attribute name (DIE attribute value )[, DIE attribute name (attribute value )[,...]
.dwcfi call frame instruction opcode[,operand[,operand]]
CIE label .dwcie version ,return address register
.dwendentry
.dwendtag
.dwfde CIE label
.dwpsn " filename ", line number ,column number
DIE label .dwtag DIE tag name ,DIE attribute name (DIE attribute value )[, DIE attribute name (attribute value )
[,...]
.endblock [ending line number]
.endfunc [ending line number[,register mask[,frame size]]]
.eos
.etag name[,size]
.file " filename "
.func [beginning line number]
.line line number[,address]
.member name ,value[,type ,storage class ,size ,tag ,dims]
.stag name[,size]
.sym name ,value[,type ,storage class ,size ,tag ,dims]
.utag name[,size]
328 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
XML Link Information File Description
Appendix B
SPNU118U–January 2018
XML Link Information File Description
The ARM linker supports the generation of an XML link information file via the --xml_link_info file option.
This option causes the linker to generate a well-formed XML file containing detailed information about the
result of a link. The information included in this file includes all of the information that is currently produced
in a linker-generated map file.
As the linker evolves, the XML link information file may be extended to include additional information that
could be useful for static analysis of linker results.
This appendix enumerates all of the elements that are generated by the linker into the XML link
information file.
Topic ........................................................................................................................... Page
B.1 XML Information File Element Types................................................................... 329
B.2 Document Elements.......................................................................................... 329

www.ti.com
XML Information File Element Types
329
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
XML Link Information File Description
B.1 XML Information File Element Types
These element types will be generated by the linker:
•Container elements represent an object that contains other elements that describe the object.
Container elements have an id attribute that makes them accessible from other elements.
•String elements contain a string representation of their value.
•Constant elements contain a 32-bit unsigned long representation of their value (with a 0x prefix).
•Reference elements are empty elements that contain an idref attribute that specifies a link to another
container element.
In Section B.2, the element type is specified for each element in parentheses following the element
description. For instance, the <link_time> element lists the time of the link execution (string).
B.2 Document Elements
The root element, or the document element, is <link_info>. All other elements contained in the XML link
information file are children of the <link_info> element. The following sections describe the elements that
an XML information file can contain.
B.2.1 Header Elements
The first elements in the XML link information file provide general information about the linker and the link
session:
• The <banner> element lists the name of the executable and the version information (string).
• The <copyright> element lists the TI copyright information (string).
• The <link_time> is a timestamp representation of the link time (unsigned 32-bit int).
• The <output_file> element lists the name of the linked output file generated (string).
• The <entry_point> element specifies the program entry point, as determined by the linker (container)
with two entries:
– The <name> is the entry point symbol name, if any (string).
– The <address> is the entry point address (constant).
Example B-1. Header Element for the hi.out Output File
<banner>TMS320Cxx Linker Version x.xx (Jan 6 2008)</banner>
<copyright>Copyright (c) 1996-2008 Texas Instruments Incorporated</copyright>
<link_time>0x43dfd8a4</link_time>
<output_file>hi.out</output_file>
<entry_point>
<name>_c_int00</name>
<address>0xaf80</address>
</entry_point>

Document Elements
www.ti.com
330 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
XML Link Information File Description
B.2.2 Input File List
The next section of the XML link information file is the input file list, which is delimited with a
<input_file_list> container element. The <input_file_list> can contain any number of <input_file>
elements.
Each <input_file> instance specifies the input file involved in the link. Each <input_file> has an id attribute
that can be referenced by other elements, such as an <object_component>. An <input_file> is a container
element enclosing the following elements:
• The <path> element names a directory path, if applicable (string).
• The <kind> element specifies a file type, either archive or object (string).
• The <file> element specifies an archive name or filename (string).
• The <name> element specifies an object file name, or archive member name (string).
Example B-2. Input File List for the hi.out Output File
<input_file_list>
<input_file id="fl-1">
<kind>object</kind>
<file>hi.obj</file>
<name>hi.obj</name>
</input_file>
<input_file id="fl-2">
<path>/tools/lib/</path>
<kind>archive</kind>
<file>rtsxxx.lib</file>
<name>boot.obj</name>
</input_file>
<input_file id="fl-3">
<path>/tools/lib/</path>
<kind>archive</kind>
<file>rtsxxx.lib</file>
<name>exit.obj</name>
</input_file>
<input_file id="fl-4">
<path>/tools/lib/</path>
<kind>archive</kind>
<file>rtsxxx.lib</file>
<name>printf.obj</name>
</input_file>
...
</input_file_list>
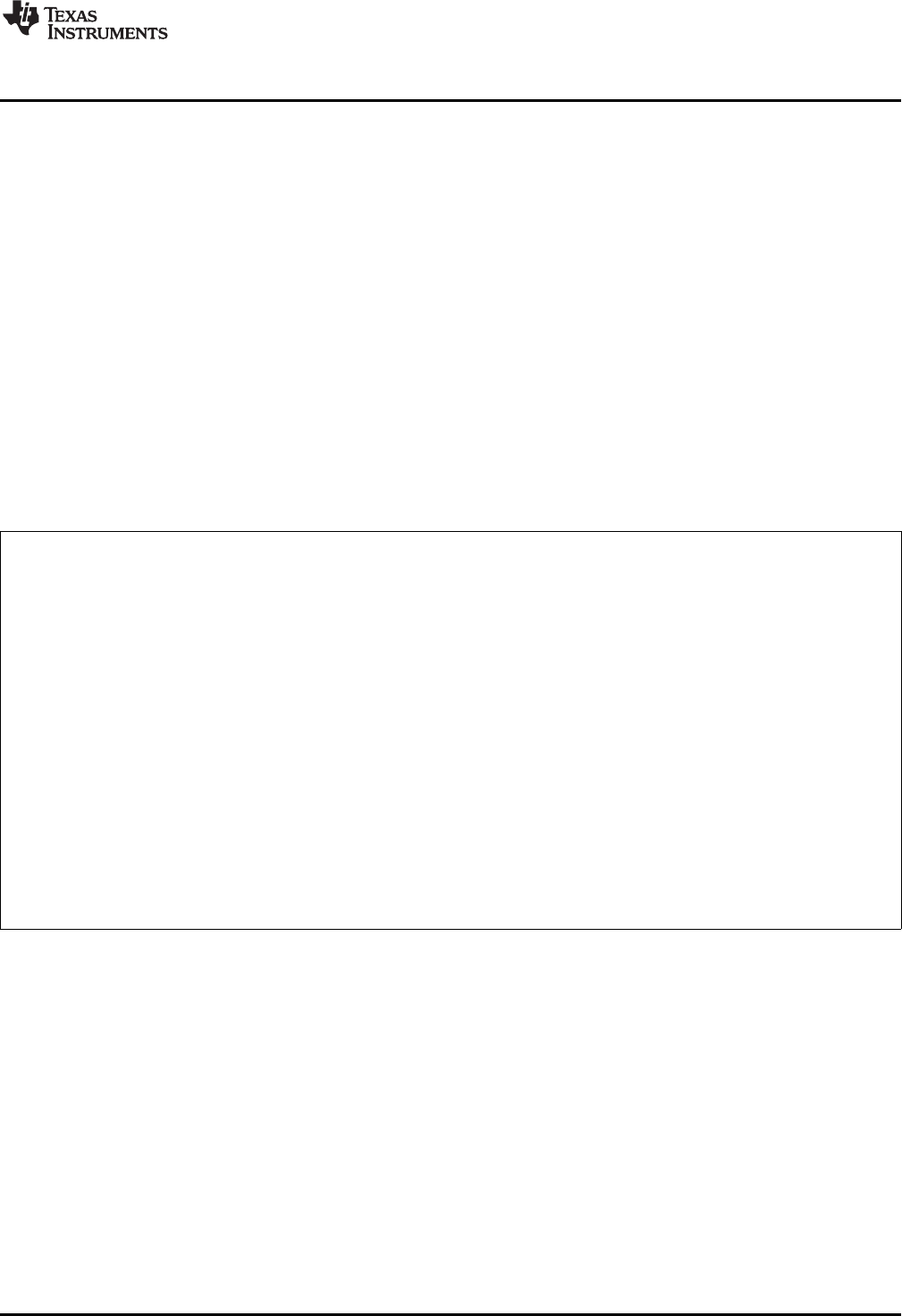
www.ti.com
Document Elements
331
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
XML Link Information File Description
B.2.3 Object Component List
The next section of the XML link information file contains a specification of all of the object components
that are involved in the link. An example of an object component is an input section. In general, an object
component is the smallest piece of object that can be manipulated by the linker.
The <object_component_list> is a container element enclosing any number of <object_component>
elements.
Each <object_component> specifies a single object component. Each <object_component> has an id
attribute so that it can be referenced directly from other elements, such as a <logical_group>. An
<object_component> is a container element enclosing the following elements:
• The <name> element names the object component (string).
• The <load_address> element specifies the load-time address of the object component (constant).
• The <run_address> element specifies the run-time address of the object component (constant).
• The <size> element specifies the size of the object component (constant).
• The <input_file_ref> element specifies the source file where the object component originated
(reference).
Example B-3. Object Component List for the fl-4 Input File
<object_component id="oc-20">
<name>.text</name>
<load_address>0xac00</load_address>
<run_address>0xac00</run_address>
<size>0xc0</size>
<input_file_ref idref="fl-4"/>
</object_component>
<object_component id="oc-21">
<name>.data</name>
<load_address>0x80000000</load_address>
<run_address>0x80000000</run_address>
<size>0x0</size>
<input_file_ref idref="fl-4"/>
</object_component>
<object_component id="oc-22">
<name>.bss</name>
<load_address>0x80000000</load_address>
<run_address>0x80000000</run_address>
<size>0x0</size>
<input_file_ref idref="fl-4"/>
</object_component>

Document Elements
www.ti.com
332 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
XML Link Information File Description
B.2.4 Logical Group List
The <logical_group_list> section of the XML link information file is similar to the output section listing in a
linker-generated map file. However, the XML link information file contains a specification of GROUP and
UNION output sections, which are not represented in a map file. There are three kinds of list items that
can occur in a <logical_group_list>:
• The <logical_group> is the specification of a section or GROUP that contains a list of object
components or logical group members. Each <logical_group> element is given an id so that it may be
referenced from other elements. Each <logical_group> is a container element enclosing the following
elements:
– The <name> element names the logical group (string).
– The <load_address> element specifies the load-time address of the logical group (constant).
– The <run_address> element specifies the run-time address of the logical group (constant).
– The <size> element specifies the size of the logical group (constant).
– The <contents> element lists elements contained in this logical group (container). These elements
refer to each of the member objects contained in this logical group:
• The <object_component_ref> is an object component that is contained in this logical group
(reference).
• The <logical_group_ref> is a logical group that is contained in this logical group (reference).
• The <overlay> is a special kind of logical group that represents a UNION, or a set of objects that
share the same memory space (container). Each <overlay> element is given an id so that it may be
referenced from other elements (like from an <allocated_space> element in the placement map). Each
<overlay> contains the following elements:
– The <name> element names the overlay (string).
– The <run_address> element specifies the run-time address of overlay (constant).
– The <size> element specifies the size of logical group (constant).
– The <contents> container element lists elements contained in this overlay. These elements refer to
each of the member objects contained in this logical group:
• The <object_component_ref> is an object component that is contained in this logical group
(reference).
• The <logical_group_ref> is a logical group that is contained in this logical group (reference).
• The <split_section> is another special kind of logical group that represents a collection of logical
groups that is split among multiple memory areas. Each <split_section> element is given an id so that
it may be referenced from other elements. The id consists of the following elements.
– The <name> element names the split section (string).
– The <contents> container element lists elements contained in this split section. The
<logical_group_ref> elements refer to each of the member objects contained in this split section,
and each element referenced is a logical group that is contained in this split section (reference).

www.ti.com
Document Elements
333
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
XML Link Information File Description
Example B-4. Logical Group List for the fl-4 Input File
<logical_group_list>
...
<logical_group id="lg-7">
<name>.text</name>
<load_address>0x20</load_address>
<run_address>0x20</run_address>
<size>0xb240</size>
<contents>
<object_component_ref idref="oc-34"/>
<object_component_ref idref="oc-108"/>
<object_component_ref idref="oc-e2"/>
...
</contents>
</logical_group>
...
<overlay id="lg-b">
<name>UNION_1</name>
<run_address>0xb600</run_address>
<size>0xc0</size>
<contents>
<object_component_ref idref="oc-45"/>
<logical_group_ref idref="lg-8"/>
</contents>
</overlay>
...
<split_section id="lg-12">
<name>.task_scn</name>
<size>0x120</size>
<contents>
<logical_group_ref idref="lg-10"/>
<logical_group_ref idref="lg-11"/>
</contents>
...
</logical_group_list>

Document Elements
www.ti.com
334 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
XML Link Information File Description
B.2.5 Placement Map
The <placement_map> element describes the memory placement details of all named memory areas in
the application, including unused spaces between logical groups that have been placed in a particular
memory area.
The <memory_area> is a description of the placement details within a named memory area (container).
The description consists of these items:
• The <name> names the memory area (string).
• The <page_id> gives the id of the memory page in which this memory area is defined (constant).
• The <origin> specifies the beginning address of the memory area (constant).
• The <length> specifies the length of the memory area (constant).
• The <used_space> specifies the amount of allocated space in this area (constant).
• The <unused_space> specifies the amount of available space in this area (constant).
• The <attributes> lists the RWXI attributes that are associated with this area, if any (string).
• The <fill_value> specifies the fill value that is to be placed in unused space, if the fill directive is
specified with the memory area (constant).
• The <usage_details> lists details of each allocated or available fragment in this memory area. If the
fragment is allocated to a logical group, then a <logical_group_ref> element is provided to facilitate
access to the details of that logical group. All fragment specifications include <start_address> and
<size> elements.
– The <allocated_space> element provides details of an allocated fragment within this memory area
(container):
• The <start_address> specifies the address of the fragment (constant).
• The <size> specifies the size of the fragment (constant).
• The <logical_group_ref> provides a reference to the logical group that is allocated to this
fragment (reference).
– The <available_space element provides details of an available fragment within this memory area
(container):
• The <start_address> specifies the address of the fragment (constant).
• The <size> specifies the size of the fragment (constant).
Example B-5. Placement Map for the fl-4 Input File
<placement_map>
<memory_area>
<name>PMEM</name>
<page_id>0x0</page_id>
<origin>0x20</origin>
<length>0x100000</length>
<used_space>0xb240</used_space>
<unused_space>0xf4dc0</unused_space>
<attributes>RWXI</attributes>
<usage_details>
<allocated_space>
<start_address>0x20</start_address>
<size>0xb240</size>
<logical_group_ref idref="lg-7"/>
</allocated_space>
<available_space>
<start_address>0xb260</start_address>
<size>0xf4dc0</size>
</available_space>
</usage_details>
</memory_area>
...
</placement_map>

www.ti.com
Document Elements
335
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
XML Link Information File Description
B.2.6 Far Call Trampoline List
The <far_call_trampoline_list> is a list of <far_call_trampoline> elements. The linker supports the
generation of far call trampolines to help a call site reach a destination that is out of range. A far call
trampoline function is guaranteed to reach the called function (callee) as it may utilize an indirect call to
the called function.
The <far_call_trampoline_list> enumerates all of the far call trampolines that are generated by the linker
for a particular link. The <far_call_trampoline_list> can contain any number of <far_call_trampoline>
elements. Each <far_call_trampoline> is a container enclosing the following elements:
• The <callee_name> element names the destination function (string).
• The <callee_address> is the address of the called function (constant).
• The <trampoline_object_component_ref> is a reference to an object component that contains the
definition of the trampoline function (reference).
• The <trampoline_address> is the address of the trampoline function (constant).
• The <caller_list> enumerates all call sites that utilize this trampoline to reach the called function
(container).
• The <trampoline_call_site> provides the details of a trampoline call site (container) and consists of
these items:
– The <caller_address> specifies the call site address (constant).
– The <caller_object_component_ref> is the object component where the call site resides
(reference).
Example B-6. Fall Call Trampoline List for the fl-4 Input File
<far_call_trampoline_list>
...
<far_call_trampoline>
<callee_name>_foo</callee_name>
<callee_address>0x08000030</callee_address>
<trampoline_object_component_ref idref="oc-123"/>
<trampoline_address>0x2020</trampoline_address>
<caller_list>
<call_site>
<caller_address>0x1800</caller_address>
<caller_object_component_ref idref="oc-23"/>
</call_site>
<call_site>
<caller_address>0x1810</caller_address>
<caller_object_component_ref idref="oc-23"/>
</call_site>
</caller_list>
</far_call_trampoline>
...
</far_call_trampoline_list>

Document Elements
www.ti.com
336 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
XML Link Information File Description
B.2.7 Symbol Table
The <symbol_table> contains a list of all of the global symbols that are included in the link. The list
provides information about a symbol's name and value. In the future, the symbol_table list may provide
type information, the object component in which the symbol is defined, storage class, etc.
The <symbol> is a container element that specifies the name and value of a symbol with these elements:
• The <name> element specifies the symbol name (string).
• The <value> element specifies the symbol value (constant).
Example B-7. Symbol Table for the fl-4 Input File
<symbol_table>
<symbol>
<name>_c_int00</name>
<value>0xaf80</value>
</symbol>
<symbol>
<name>_main</name>
<value>0xb1e0</value>
</symbol>
<symbol>
<name>_printf</name>
<value>0xac00</value>
</symbol>
...
</symbol_table>
337
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Hex Conversion Utility Examples
Appendix C
SPNU118U–January 2018
Hex Conversion Utility Examples
The flexible hex conversion utility offers many options and capabilities. Once you understand the proper
ways to configure your EPROM system and the requirements of the EPROM programmer, you will find
that converting a file for a specific application is easy.
The three scenarios in this appendix show how to develop a hex conversion command file for avoiding
holes, using 16-BIS (16-bit instruction set) code, and using multiple-EPROM systems. The scenarios use
this assembly code:
**************************************************
* Assemble two words into section "secA" *
**************************************************
.sect "secA"
.word 012345678h
.word 0abcd1234h
**************************************************
* Assemble two words into section "secB" *
**************************************************
.sect "secB"
.word 087654321h
.word 04321dcbah
Before you use this appendix, read Chapter 12 to understand how to use the hex conversion utility.
Topic ........................................................................................................................... Page
C.1 Scenario 1 -- Building a Hex Conversion Command File for a Single 8-Bit EPROM... 338
C.2 Scenario 2 -- Building a Hex Conversion Command File for 16-BIS Code ................ 342
C.3 Scenario 3 -- Building a Hex Conversion Command File for Two 8-Bit EPROMs....... 345
ROM width: 8 bits
ROM0
128K 8
Width: 32 bits
ARM CPU
EPROM system memory width: 8 bits
Scenario 1 -- Building a Hex Conversion Command File for a Single 8-Bit EPROM
www.ti.com
338 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Hex Conversion Utility Examples
C.1 Scenario 1 -- Building a Hex Conversion Command File for a Single 8-Bit EPROM
Scenario 1 shows how to build the hex conversion command file for converting an object file for the
memory system shown in Figure C-1. In this system, there is one external 128K × 8-bit EPROM
interfacing with a TMS470 target processor.
Figure C-1. EPROM Memory System for Scenario 1
A object file consists of blocks of memory (sections) with assigned memory locations. Typically, all
sections are not adjacent: there are holes between sections in the address space for which there is no
data. Scenario 1 shows how you can use the hex conversion utility’s image mode to fill any holes before,
between, or after sections with a fill value.
For this scenario, the application code resides in the program memory (ROM) on the TMS470 CPU, but
the data tables used by this code reside in an off-chip EPROM.
The circuitry of the target board handles the access to the data; the native TMS470 address of 0x1000
accesses location 0x0 on the EPROM.
To satisfy the address requirements for the code, this scenario requires a linker command file that
allocates sections and memory as follows:
• The program/application code (represented in this scenario by the secA section shown in Example C-
1) must be linked so that its address space resides in the program memory (ROM) on the TMS470
CPU.
• To satisfy the condition that the data be loaded on the EPROM at address 0x0 but be referenced by
the application code at address 0x1000, secB (the section that contains the data for this application)
must be assigned a linker load address of 0x1000 so that all references to data in this section will be
resolved with respect to the TMS470 CPU address. In the hex conversion utility command file, the
paddr option must be used to burn the section of data at EPROM address 0x0. This value overrides
the section load address given by the linker.
Example C-1 shows the linker command file that resolves the addresses needed in the stated
specifications.

www.ti.com
Scenario 1 -- Building a Hex Conversion Command File for a Single 8-Bit EPROM
339
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Hex Conversion Utility Examples
Example C
‑‑
1. Linker Command File and Link Map for Scenario 1
/****************************************************************************/
/* Scenario 1 Link Command */
/* */
/* Usage: armlnk <obj files...> -o <out file> -m <map file> lnk32.cmd */
/* armcl <src files...> -z -o <out file> -m <map file> lnk32.cmd */
/* */
/* Description: This file is a sample command file that can be used */
/* for linking programs built with the TMS470 C */
/* compiler. Use it as a guideline; you may want to change */
/* the allocation scheme according to the size of your */
/* program and the memory layout of your target system. */
/* */
/* Notes: (1) You must specify the directory in which rts32.lib is */
/* located. Either add a "-i<directory>" line to this */
/* file, or use the system environment variable C_DIR to */
/* specify a search path for libraries. */
/* */
/* (2) If the runtime-support library you are using is not */
/* named rts32.lib, be sure to use the correct name here. */
/****************************************************************************/
-m example1.map
/* SPECIFY THE SYSTEM MEMORY MAP */
MEMORY
{
I_MEM : org = 0x00000000 len = 0x00000020 /* INTERRUPTS */
D_MEM : org = 0x00000020 len = 0x00010000 /* DATA MEMORY (RAM) */
P_MEM : org = 0x00010020 len = 0x00100000 /* PROGRAM MEMORY (ROM) */
}
/* SPECIFY THE SECTIONS ALLOCATION INTO MEMORY */
SECTIONS
{
secA: load = P_MEM
secB: load = 0x1000
}
You must create a hex conversion command file to generate a hex output with the correct addresses and
format for the EPROM programmer.
In the memory system outlined in Figure C-1, only the application data is stored on the EPROM; the data
resides in secB of the object file created by the linker. By default, the hex conversion utility converts all
initialized sections that appear in the object file. To prevent the conversion of the application code in secA,
a SECTIONS directive must be defined in the hex conversion command file to list explicitly the section(s)
to be converted. In this case, secB must be listed explicitly as the section to be converted.
The EPROM programmer in this scenario has the following system requirements:
• The EPROM programmer loads only a complete ROM image. A complete ROM image is one in which
there is a contiguous address space (there are no holes in the addresses in the converted file), and
each address in the range contains a known value. Creating a complete ROM image requires the use
of the −image option and the ROMS directive.
– Using the −image option causes the hex conversion utility to create an output file that has
contiguous addresses over the specified memory range and forces the utility to fill address spaces
that are not previously filled by raw data from sections defined in the input object file. By default,
the value used to fill the unused portions of the memory range is 0.
– Because the -image option operates over a known range of memory addresses, a ROMS directive
is needed to specify the origin and length of the memory for the EPROM.
• To burn the section of data at EPROM address 0x0, the paddr option must be used. This value
overrides the section load address given by the linker.
• In this scenario, the EPROM is 128K × 8 bits. Therefore, the memory addresses for the EPROM must
range from 0x0 to 0x20000.

Scenario 1 -- Building a Hex Conversion Command File for a Single 8-Bit EPROM
www.ti.com
340 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Hex Conversion Utility Examples
• Because the EPROM memory width is eight bits, the memwidth value must be set to 8.
• Because the physical width of the ROM device is eight bits, the romwidth value must be set to 8.
• Intel format must be used.
Since memwidth and romwidth have the same value, only one output file is generated (the number of
output files is determined by the ratio of memwidth to romwidth). The output file is named with the -o
option.
The hex conversion command file for Scenario 1 is shown in Example C-2. This command file uses the
following options to select the requirements of the system:
Option Description
-i Create Intel format
-image Generate a memory image
-map example1.mxp Generate example1.mxp as the map file of the conversion
-o example1.hex Name example1.hex as the output file
-memwidth 8 Set EPROM system memory width to 8
-romwidth 8 Set physical ROM width to 8
Example C
‑‑
2. Hex Conversion Command File for Scenario 1
/* Hex Conversion Command file for Scenario 1 */
a.out /* linked object file, input */
-I /* Intel format */
-image
-map example1.mxp /* Generate a map of the conversion */
-o example1.hex /* Resulting hex output file */
-memwidth 8 /* EPROM memory system width */
-romwidth 8 /* Physical width of ROM */
ROMS
{
EPROM: origin = 0x0, length = 0x20000
}
SECTIONS
{
secB: paddr = 0x0 /* Select only section, secB, for conversion */
}
Example C-3 shows the contents of the resulting map file (example1.mxp). Figure C-2 shows the contents
of the resulting hex output file (example1.hex). The hex conversion utility places the data tables, secB, at
address 0 and then fills the remainder of the address space with the default fill value of 0. For more
information about the Intel MCS-86 object format, see Figure 12-9.
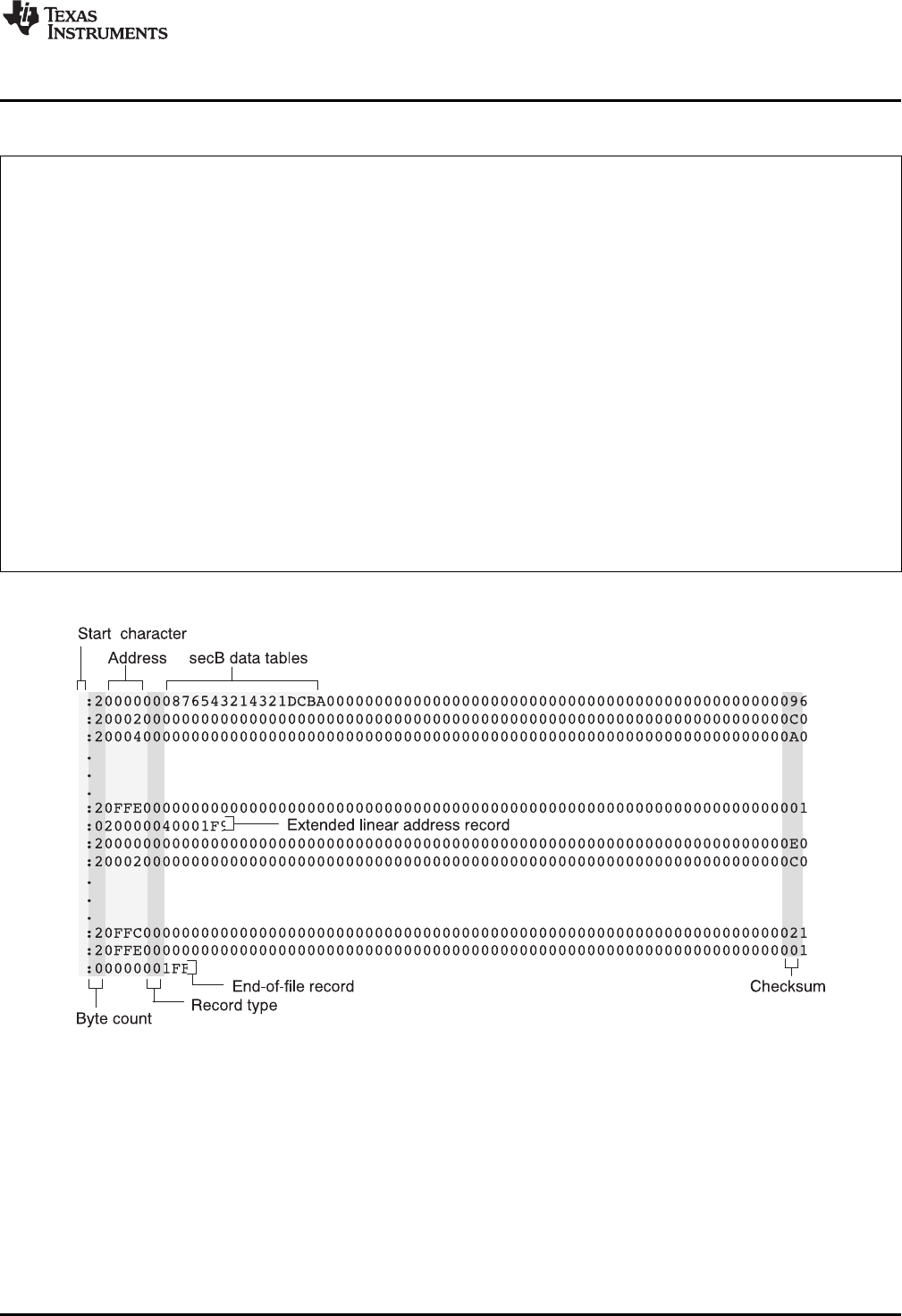
www.ti.com
Scenario 1 -- Building a Hex Conversion Command File for a Single 8-Bit EPROM
341
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Hex Conversion Utility Examples
Example C
‑‑
3. Contents of Hex Map File example1.mxp
**********************************************************
TMS470 Hex Converter Version x.xx
**********************************************************
Mon Sep 18 15:57:00 1995
INPUT FILE NAME: <a.out>
OUTPUT FORMAT: Intel
PHYSICAL MEMORY PARAMETERS
Default data width: 8
Default memory width: 8
Default output width: 8
OUTPUT TRANSLATION MAP
---------------------------------------------------------
00000000..0001ffff Page=0 ROM Width=8 Memory Width=8 "EPROM"
---------------------------------------------------------
OUTPUT FILES: example1.hex [b0..b7]
CONTENTS: 00000000..00000007 Data Width=1 secB
00000007..0001ffff FILL = 00000000
Figure C-2. Contents of Hex Output File example1.hex
ROM width: 16 bits
ROM0
128K 16
Width: 32 bits
ARM CPU
EPROM system memory width: 16 bits
Scenario 2 -- Building a Hex Conversion Command File for 16-BIS Code
www.ti.com
342 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Hex Conversion Utility Examples
C.2 Scenario 2 -- Building a Hex Conversion Command File for 16-BIS Code
Scenario 2 shows how to build the hex conversion command file to generate the correct converted file for
the application code and data that will reside on a single 16-bit EPROM. The EPROM memory system for
this scenario is shown in Figure C-3. For this scenario, the TMS470 CPU operates with the T control bit
set, so the processor executes instructions in 16-BIS mode.
Figure C-3. EPROM Memory System for Scenario 2
For this scenario, the application code and data reside on the EPROM: the lower 64K words of EPROM
memory are dedicated to application code space and the upper 64K words are dedicated to the data
tables. The application code is loaded starting at address 0x0 on the EPROM but maps to the TMS470
CPU at address 0x3000. The data tables are loaded starting at address 0x1000 on the EPROM and map
to the TMS470 CPU address 0x20.
www.ti.com
Scenario 2 -- Building a Hex Conversion Command File for 16-BIS Code
343
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Hex Conversion Utility Examples
Example C-4 shows the linker command file that resolves the addresses needed for the load on EPROM
and the TMS470 CPU access.
Example C
‑‑
4. Linker Command File for Scenario 2
/****************************************************************************/
/* Scenario 2 Link Command */
/* */
/* Usage: armlnk <obj files...> -o <out file> -m <map file> lnk16.cmd */
/* armcl <src files...> -z -o <out file> -m <map file> lnk16.cmd */
/* */
/* Description: This file is a sample command file that can be used */
/* for linking programs built with the TMS470 C */
/* compiler. Use it as a guideline; you may want to change */
/* the allocation scheme according to the size of your */
/* program and the memory layout of your target system. */
/* */
/* Notes: (1) You must specify the directory in which rts16.lib is */
/* located. Either add a "-i<directory>" line to this */
/* file, or use the system environment variable C_DIR to */
/* specify a search path for libraries. */
/* */
/* (2) If the runtime-support library you are using is not */
/* named rts16.lib, be sure to use the correct name here. */
/****************************************************************************/
-m example2.map
/* SPECIFY THE SYSTEM MEMORY MAP */
MEMORY
{
I_MEM : org = 0x00000000 len = 0x00000020 /* INTERRUPTS */
D_MEM : org = 0x00000020 len = 0x00010000 /* DATA MEMORY (RAM) */
P_MEM : org = 0x00010020 len = 0x00100000 /* PROGRAM MEMORY (ROM) */
}
/* SPECIFY THE SECTIONS ALLOCATION INTO MEMORY */
SECTIONS
{
secA: load = 0x3000
secB: load = 0x20
}
You must create a hex conversion command file to generate a hex output with the correct addresses and
format for the EPROM programmer. The EPROM programmer in this scenario has the following system
requirements:
• Because the EPROM memory width is 16 bits, the memwidth value must be set to 16.
• Because the physical width of the ROM device is 16 bits, the romwidth value must be set to 16.
• Intel format must be used.
The EPROM programmer does not require a ROM image, so the addresses in the input hex output file do
not need to be contiguous.
Because memwidth and romwidth have the same value, only one output file is generated (the number of
output files is determined by the ratio of memwidth to romwidth). The output file is named with the -o
option.
A ROMS directive is used in this scenario since the paddr option is used to relocate both secA and secB.
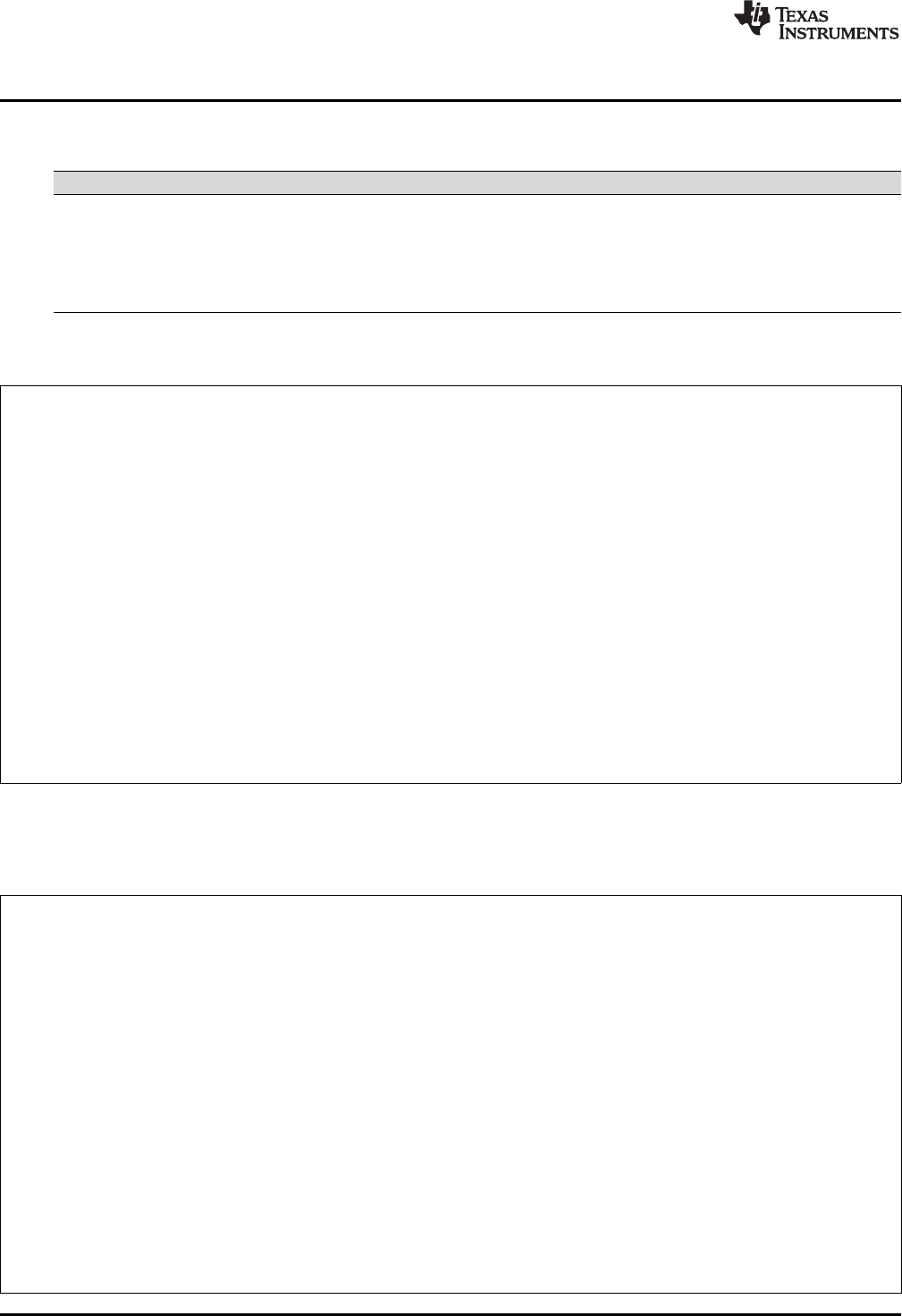
Scenario 2 -- Building a Hex Conversion Command File for 16-BIS Code
www.ti.com
344 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Hex Conversion Utility Examples
The hex conversion command file for Scenario 2 is shown in Example C-5. This command file uses the
following options to select the requirements of the system:
Option Description
-i Create Intel format
-map example2.mxp Generate example2.mxp as the map file of the conversion
-o example2.hex Name example2.hex as the output file
-memwidth 8 Set EPROM system memory width to 8
-romwidth 8 Set physical ROM width to 8
Example C
‑‑
5. Hex Conversion Command File for Scenario 2
/* Hex Conversion Command file for Scenario 2 */
a.out /* linked object file, input */
-I /* Intel format */
/* The following two options are optional */
-map example2.mxp /* Generate a map of the conversion */
-o example2.hex /* Resulting Hex Output file */
/* Specify EPROM system Memory Width and Physical ROM width */
-memwidth 16 /* EPROM memory system width */
-romwidth 16 /* Physical width of ROM */
ROMS
{
EPROM: origin = 0x0, length = 0x20000
}
SECTIONS
{
secA: paddr = 0x0
secB: paddr = 0x1000
}
Example C-6 shows the contents of the resulting map file (example2.mxp). Figure C-4 shows the contents
of the resulting hex output file (example2.hex).
Example C
‑‑
6. Contents of Hex Map File example2.mxp
*********************************************************
TMS470 Hex Converter Version x.xx
**********************************************************
Mon Sep 18 19:34:47 1995
INPUT FILE NAME: <a.out>
OUTPUT FORMAT: Intel
PHYSICAL MEMORY PARAMETERS
Default data width: 8
Default memory width: 16
Default output width: 16
OUTPUT TRANSLATION MAP
---------------------------------------------------------
00000000..0001ffff Page=0 ROM Width=16 Memory Width=16 "EPROM"
---------------------------------------------------------
OUTPUT FILES: example2.hex [b0..b15]
CONTENTS: 00000000..00000003 Data Width=1 secA
00001000..00001003 Data Width=1 secB
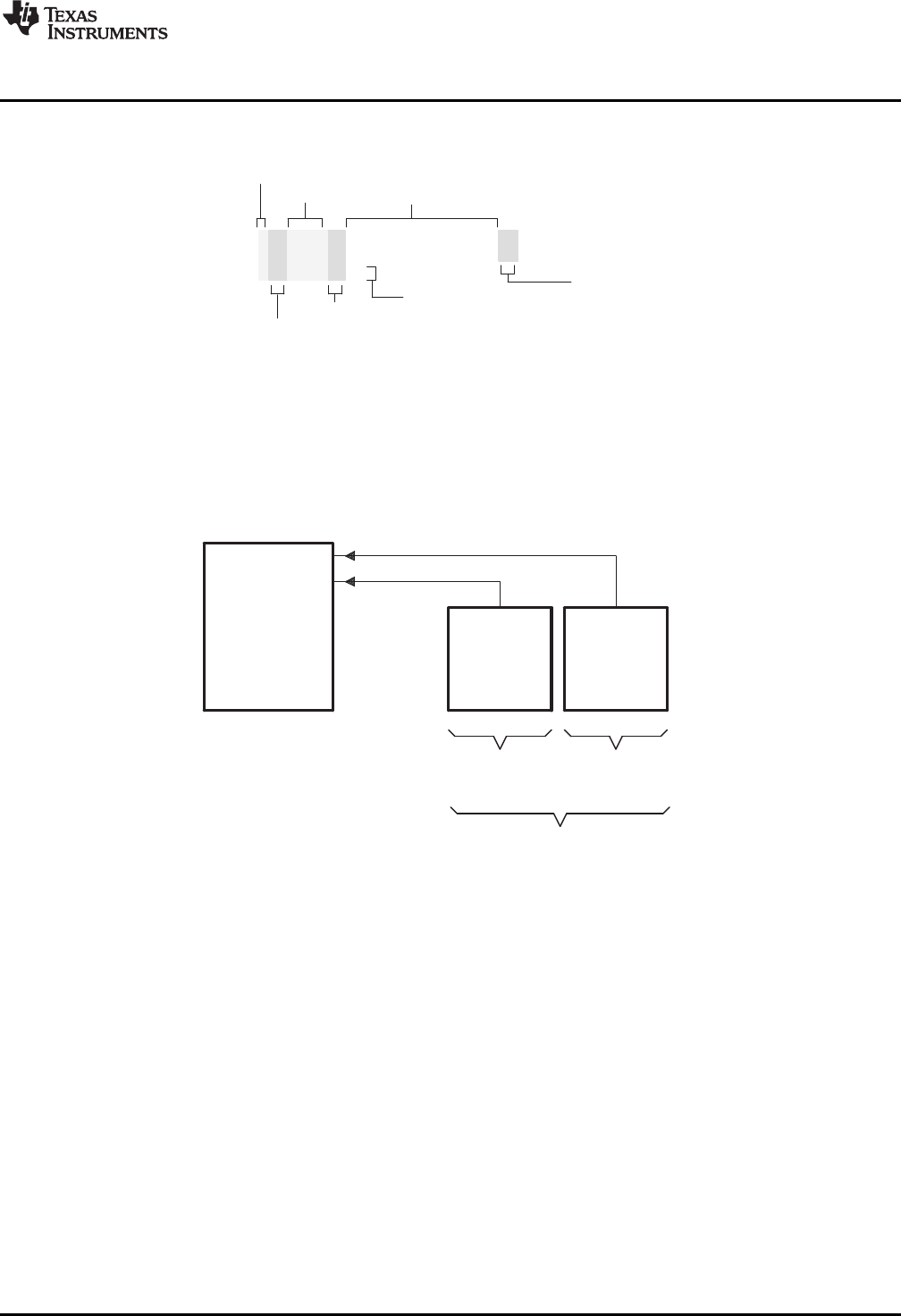
Lower 16 bits
Upper 16 bits
EPROM system memory width: 32 bits
ROM width:
16 bits
ROM width:
16 bits
ROM1
64K 16
ROM0
64K 16
Width: 32 bits
ARM CPU
Startcharacter
Address Data
Bytecount
Recordtype
Checksum
End-of-filerecord
:0800000012345678ABCD123426
:08100000876543214321DCBA9E
:00000001FF
www.ti.com
Scenario 3 -- Building a Hex Conversion Command File for Two 8-Bit EPROMs
345
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Hex Conversion Utility Examples
Figure C-4. Contents of Hex Output File example2.hex
C.3 Scenario 3 -- Building a Hex Conversion Command File for Two 8-Bit EPROMs
Scenario 3 shows how to build the hex conversion command file for converting a object file for the
memory system shown in Figure C-5. In this system, there are two external 64K × 16-bit EPROMs
interfacing with the TMS470 target processor. The application code and data will be burned on the
EPROM starting at address 0x20. The application code will be burned first, followed by the data tables.
Figure C-5. EPROM Memory System for Scenario 3
In this scenario, the EPROM load address for the application code and for the data also corresponds to
the TMS470 CPU address that accesses the code and data. Therefore, only a load address needs to be
specified.

Scenario 3 -- Building a Hex Conversion Command File for Two 8-Bit EPROMs
www.ti.com
346 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Hex Conversion Utility Examples
Example C-7 shows the linker command file for this scenario.
Example C
‑‑
7. Linker Command File for Scenario 3
/****************************************************************************/
/* Scenario 3 Link Command */
/* */
/* Usage: armlnk <obj files...> -o <out file> -m <map file> lnk32.cmd */
/* armcl <src files...> -z -o <out file> -m <map file> lnk32.cmd */
/* */
/* Description: This file is a sample command file that can be used */
/* for linking programs built with the TMS470 C */
/* compiler. Use it as a guideline; you may want to change */
/* the allocation scheme according to the size of your */
/* program and the memory layout of your target system. */
/* */
/* Notes: (1) You must specify the directory in which rts32.lib is */
/* located. Either add a "-i<directory>" line to this */
/* file, or use the system environment variable C_DIR to */
/* specify a search path for libraries. */
/* */
/* (2) If the runtime-support library you are using is not */
/* named rts32.lib, be sure to use the correct name here. */
/****************************************************************************/
-m example3.map
/* SPECIFY THE SYSTEM MEMORY MAP */
MEMORY
{
I_MEM : org = 0x00000000 len = 0x00000020 /* INTERRUPTS */
D_MEM : org = 0x00000020 len = 0x00010000 /* DATA MEMORY (RAM) */
P_MEM : org = 0x00010020 len = 0x00100000 /* PROGRAM MEMORY (ROM) */
}
/* SPECIFY THE SECTIONS ALLOCATION INTO MEMORY */
SECTIONS
{
secA: load = 0x20
secB: load = D_MEM
}
You must create a hex conversion command file to generate a hex output with the correct addresses and
format for the EPROM programmer.
The EPROM programmer in this scenario has the following system requirements:
• In the memory system outlined in Figure C-5, the EPROM system memory width is 32 bits because
each of the physical ROMs provides 16 bits of a 32-bit word. Because the EPROM system memory
width is 32 bits, the memwidth value must be set to 32.
• Because the width of each of the physical ROMs is 16 bits, the romwidth value must be set to 16.
• Intel format must be used.
With a memwidth of 32 and a romwidth of 16, two output files are generated by the hex conversion utility
(the number of files is determined by the ratio of memwidth to romwidth). In previous scenarios, the output
filename was specified with the -o option. Another way to specify the output filename is to use the files
keyword within a ROMS directive. When you use -o or the files keyword, the first output filename always
contains the low-order bytes of the word.

www.ti.com
Scenario 3 -- Building a Hex Conversion Command File for Two 8-Bit EPROMs
347
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Hex Conversion Utility Examples
The hex conversion command file for Scenario 3 is shown in Example C-8. This command file uses the
following options to select the requirements of the system:
Option Description
-i Create Intel format
-map example3.mxp Generate example3.mxp as the map file of the conversion
-memwidth 32 Set EPROM system memory width to 32
-romwidth 16 Set physical ROM width to 16
The files keyword is used within the ROMS directive to specify the output filenames.
Example C
‑‑
8. Hex Conversion Command File for Scenario 3
/* Hex Conversion Command file for Scenario 3 */
a.out /* linked object file, input */
-I /* Intel format */
/* Optional Commands */
-map example3.mxp /* Generate a map of the conversion */
/* Specify EPROM system memory width and physical ROM width */
-memwidth 32 /* EPROM memory system width */
-romwidth 16 /* Physical width of ROM */
ROMS
{
EPROM: org = 0x0, length = 0x20000
files={ lower16.bit, upper16.bit }
}
Example C-9 shows the contents of the resulting map file (example3.mxp).
Example C
‑‑
9. Contents of Hex Map File example3.mxp
**********************************************************
TMS470 Hex Converter Version x.xx
**********************************************************
Tue Sep 19 07:41:28 1995
INPUT FILE NAME: <a.out>
OUTPUT FORMAT: Intel
PHYSICAL MEMORY PARAMETERS
Default data width: 8
Default memory width: 32
Default output width: 16
OUTPUT TRANSLATION MAP
---------------------------------------------------------
00000000..0001ffff Page=0 ROM Width=16 Memory Width=32 "EPROM"
---------------------------------------------------------
OUTPUT FILES: lower16.bit [b0..b15]
upper16.bit [b16..b31]
CONTENTS: 00000020..00000021 Data Width=1 secA
00000028..00000029 Data Width=1 secB
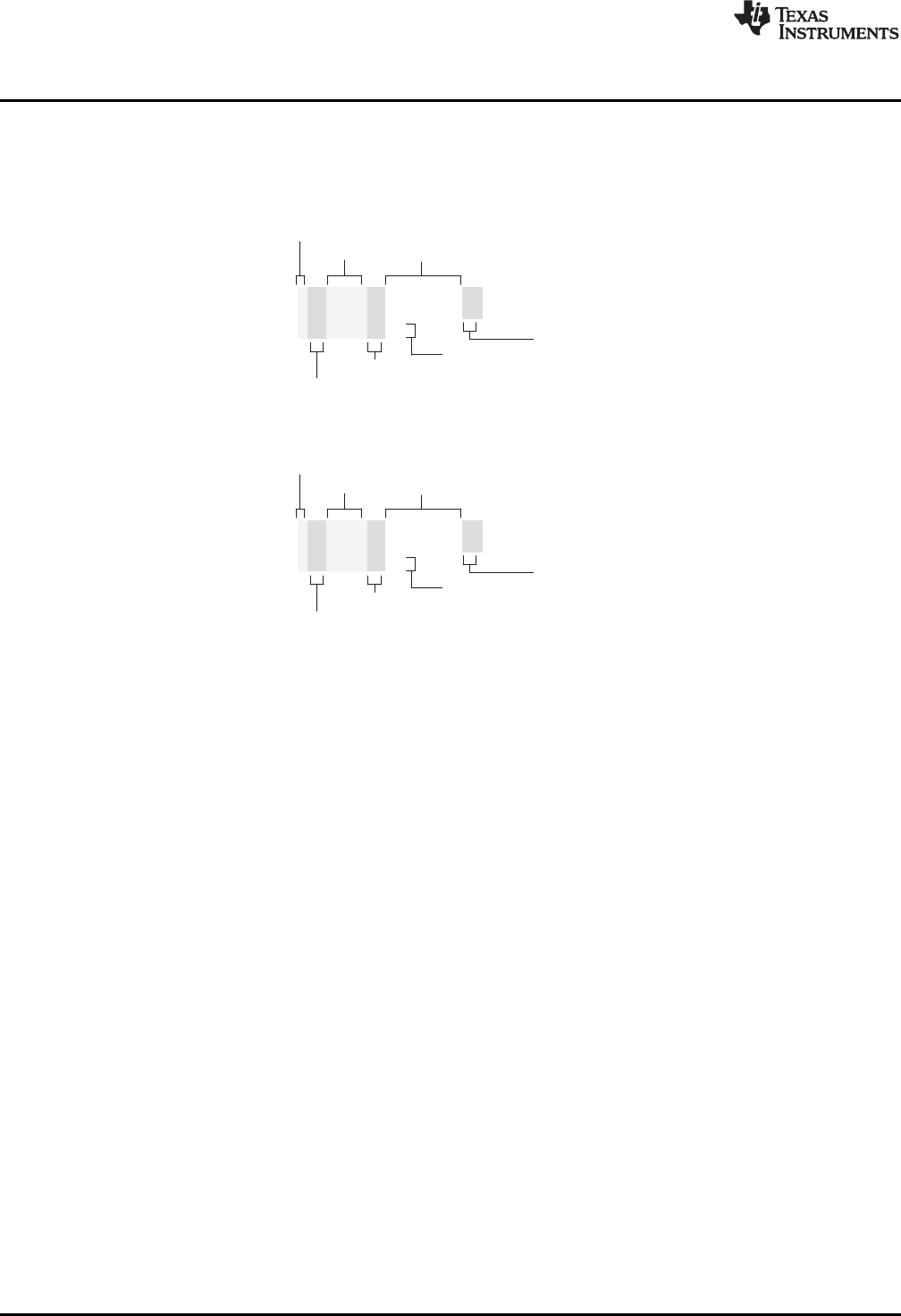
Startcharacter
Address Data
Bytecount
Recordtype
Checksum
End-of-filerecord
:040020001234ABCD1E
:040028008765432184
:00000001FF
Startcharacter
Address Data
Bytecount
Recordtype
Checksum
End-of-filerecord
:0400200056781234C8
:040028004321DCBADA
:00000001FF
Scenario 3 -- Building a Hex Conversion Command File for Two 8-Bit EPROMs
www.ti.com
348 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Hex Conversion Utility Examples
The contents of the output files lower16.bit and upper16.bit are shown in Figure C-6 and Figure C-7,
respectively. The low-order 16 bits of the 32-bit output word are stored in the lower16.bit file, while the
upper 16 bits are stored in the upper16.bit file.
Figure C-6. Contents of Hex Output File lower16.bit
Figure C-7. Contents of Hex Output File upper16.bit

349
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Glossary
Appendix D
SPNU118U–January 2018
Glossary
D.1 Terminology
ABI — Application binary interface.
absolute address — An address that is permanently assigned to a ARM memory location.
absolute constant expression — An expression that does not refer to any external symbols or any
registers or memory reference. The value of the expression must be knowable at assembly time.
absolute lister — A debugging tool that allows you to create assembler listings that contain absolute
addresses.
address constant expression — A symbol with a value that is an address plus an addend that is an
absolute constant expression with an integer value.
alignment — A process in which the linker places an output section at an address that falls on an n-byte
boundary, where nis a power of 2. You can specify alignment with the SECTIONS linker directive.
allocation — A process in which the linker calculates the final memory addresses of output sections.
ANSI — American National Standards Institute; an organization that establishes standards voluntarily
followed by industries.
archive library — A collection of individual files grouped into a single file by the archiver.
archiver — A software program that collects several individual files into a single file called an archive
library. With the archiver, you can add, delete, extract, or replace members of the archive library.
ASCII — American Standard Code for Information Interchange; a standard computer code for
representing and exchanging alphanumeric information.
assembler — A software program that creates a machine-language program from a source file that
contains assembly language instructions, directives, and macro definitions. The assembler
substitutes absolute operation codes for symbolic operation codes and absolute or relocatable
addresses for symbolic addresses.
assembly-time constant — A symbol that is assigned a constant value with the .set directive.
big endian — An addressing protocol in which bytes are numbered from left to right within a word. More
significant bytes in a word have lower numbered addresses. Endian ordering is hardware-specific
and is determined at reset. See also little endian
binding — A process in which you specify a distinct address for an output section or a symbol.
BIS — Bit instruction set.
block — A set of statements that are grouped together within braces and treated as an entity.
.bss section — One of the default object file sections. You use the assembler .bss directive to reserve a
specified amount of space in the memory map that you can use later for storing data. The .bss
section is uninitialized.
byte — Per ANSI/ISO C, the smallest addressable unit that can hold a character.

Terminology
www.ti.com
350 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Glossary
C/C++ compiler — A software program that translates C source statements into assembly language
source statements.
command file — A file that contains options, filenames, directives, or commands for the linker or hex
conversion utility.
comment — A source statement (or portion of a source statement) that documents or improves
readability of a source file. Comments are not compiled, assembled, or linked; they have no effect
on the object file.
compiler program — A utility that lets you compile, assemble, and optionally link in one step. The
compiler runs one or more source modules through the compiler (including the parser, optimizer,
and code generator), the assembler, and the linker.
conditional processing — A method of processing one block of source code or an alternate block of
source code, according to the evaluation of a specified expression.
configured memory — Memory that the linker has specified for allocation.
constant — A type whose value cannot change.
constant expression — An expression that does not in any way refer to a register or memory reference.
cross-reference lister — A utility that produces an output file that lists the symbols that were defined,
what file they were defined in, what reference type they are, what line they were defined on, which
lines referenced them, and their assembler and linker final values. The cross-reference lister uses
linked object files as input.
cross-reference listing — An output file created by the assembler that lists the symbols that were
defined, what line they were defined on, which lines referenced them, and their final values.
.data section — One of the default object file sections. The .data section is an initialized section that
contains initialized data. You can use the .data directive to assemble code into the .data section.
directives — Special-purpose commands that control the actions and functions of a software tool (as
opposed to assembly language instructions, which control the actions of a device).
DWARF — A standardized debugging data format that was originally designed along with ELF, although it
is independent of the object file format.
EABI — An embedded application binary interface (ABI) that provides standards for file formats, data
types, and more.
ELF — Executable and linking format; a system of object files configured according to the System V
Application Binary Interface specification.
emulator — A hardware development system that duplicates the ARM operation.
entry point — A point in target memory where execution starts.
environment variable — A system symbol that you define and assign to a string. Environmental
variables are often included in Windows batch files or UNIX shell scripts such as .cshrc or .profile.
epilog — The portion of code in a function that restores the stack and returns.
executable module — A linked object file that can be executed in a target system.
expression — A constant, a symbol, or a series of constants and symbols separated by arithmetic
operators.
external symbol — A symbol that is used in the current program module but defined or declared in a
different program module.
field — For the ARM, a software-configurable data type whose length can be programmed to be any
value in the range of 1-32 bits.

www.ti.com
Terminology
351
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Glossary
global symbol — A symbol that is either defined in the current module and accessed in another, or
accessed in the current module but defined in another.
GROUP — An option of the SECTIONS directive that forces specified output sections to be allocated
contiguously (as a group).
hex conversion utility — A utility that converts object files into one of several standard ASCII
hexadecimal formats, suitable for loading into an EPROM programmer.
high-level language debugging — The ability of a compiler to retain symbolic and high-level language
information (such as type and function definitions) so that a debugging tool can use this
information.
hole — An area between the input sections that compose an output section that contains no code.
identifier— Names used as labels, registers, and symbols.
immediate operand — An operand whose value must be a constant expression.
incremental linking — Linking files in several passes. Incremental linking is useful for large applications,
because you can partition the application, link the parts separately, and then link all of the parts
together.
initialization at load time — An autoinitialization method used by the linker when linking C/C++ code.
The linker uses this method when you invoke it with the --ram_model link option. This method
initializes variables at load time instead of run time.
initialized section — A section from an object file that will be linked into an executable module.
input section — A section from an object file that will be linked into an executable module.
ISO — International Organization for Standardization; a worldwide federation of national standards
bodies, which establishes international standards voluntarily followed by industries.
label — A symbol that begins in column 1 of an assembler source statement and corresponds to the
address of that statement. A label is the only assembler statement that can begin in column 1.
linker — A software program that combines object files to form an object module that can be allocated
into system memory and executed by the device.
listing file — An output file, created by the assembler, that lists source statements, their line numbers,
and their effects on the section program counter (SPC).
literal constant — A value that represents itself. It may also be called a literal or an immediate value.
little endian — An addressing protocol in which bytes are numbered from right to left within a word. More
significant bytes in a word have higher numbered addresses. Endian ordering is hardware-specific
and is determined at reset. See also big endian
loader — A device that places an executable module into system memory.
macro — A user-defined routine that can be used as an instruction.
macro call — The process of invoking a macro.
macro definition — A block of source statements that define the name and the code that make up a
macro.
macro expansion — The process of inserting source statements into your code in place of a macro call.
macro library — An archive library composed of macros. Each file in the library must contain one macro;
its name must be the same as the macro name it defines, and it must have an extension of .asm.
map file — An output file, created by the linker, that shows the memory configuration, section
composition, section allocation, symbol definitions and the addresses at which the symbols were
defined for your program.

Terminology
www.ti.com
352 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Glossary
member — The elements or variables of a structure, union, archive, or enumeration.
memory map — A map of target system memory space that is partitioned into functional blocks.
memory reference operand — An operand that refers to a location in memory using a target-specific
syntax.
mnemonic — An instruction name that the assembler translates into machine code.
model statement — Instructions or assembler directives in a macro definition that are assembled each
time a macro is invoked.
named section — An initialized section that is defined with a .sect directive.
object file — An assembled or linked file that contains machine-language object code.
object library — An archive library made up of individual object files.
object module — A linked, executable object file that can be downloaded and executed on a target
system.
operand — An argument of an assembly language instruction, assembler directive, or macro directive
that supplies information to the operation performed by the instruction or directive.
optimizer — A software tool that improves the execution speed and reduces the size of C programs.
options — Command-line parameters that allow you to request additional or specific functions when you
invoke a software tool.
output module — A linked, executable object file that is downloaded and executed on a target system.
output section — A final, allocated section in a linked, executable module.
partial linking — Linking files in several passes. Incremental linking is useful for large applications
because you can partition the application, link the parts separately, and then link all of the parts
together.
quiet run — An option that suppresses the normal banner and the progress information.
raw data — Executable code or initialized data in an output section.
register operand — A special pre-defined symbol that represents a CPU register.
relocatable constant expression— An expression that refers to at least one external symbol, register, or
memory location. The value of the expression is not known until link time.
relocation — A process in which the linker adjusts all the references to a symbol when the symbol's
address changes.
ROM width — The width (in bits) of each output file, or, more specifically, the width of a single data value
in the hex conversion utility file. The ROM width determines how the utility partitions the data into
output files. After the target words are mapped to memory words, the memory words are broken
into one or more output files. The number of output files is determined by the ROM width.
run address — The address where a section runs.
run-time-support library — A library file, rts.src, that contains the source for the run time-support
functions.
section — A relocatable block of code or data that ultimately will be contiguous with other sections in the
memory map.
section program counter (SPC) — An element that keeps track of the current location within a section;
each section has its own SPC.
sign extend — A process that fills the unused MSBs of a value with the value's sign bit.
www.ti.com
Terminology
353
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Glossary
simulator — A software development system that simulates ARM operation.
source file — A file that contains C/C++ code or assembly language code that is compiled or assembled
to form an object file.
static variable — A variable whose scope is confined to a function or a program. The values of static
variables are not discarded when the function or program is exited; their previous value is resumed
when the function or program is reentered.
storage class — An entry in the symbol table that indicates how to access a symbol.
string table — A table that stores symbol names that are longer than eight characters (symbol names of
eight characters or longer cannot be stored in the symbol table; instead they are stored in the string
table). The name portion of the symbol's entry points to the location of the string in the string table.
structure — A collection of one or more variables grouped together under a single name.
subsection — A relocatable block of code or data that ultimately will occupy continuous space in the
memory map. Subsections are smaller sections within larger sections. Subsections give you tighter
control of the memory map.
symbol — A name that represents an address or a value.
symbolic constant — A symbol with a value that is an absolute constant expression.
symbolic debugging — The ability of a software tool to retain symbolic information that can be used by a
debugging tool such as an emulator or simulator.
tag — An optional type name that can be assigned to a structure, union, or enumeration.
target memory — Physical memory in a system into which executable object code is loaded.
.text section — One of the default object file sections. The .text section is initialized and contains
executable code. You can use the .text directive to assemble code into the .text section.
unconfigured memory — Memory that is not defined as part of the memory map and cannot be loaded
with code or data.
uninitialized section — A object file section that reserves space in the memory map but that has no
actual contents. These sections are built with the .bss and .usect directives.
UNION — An option of the SECTIONS directive that causes the linker to allocate the same address to
multiple sections.
union — A variable that can hold objects of different types and sizes.
unsigned value — A value that is treated as a nonnegative number, regardless of its actual sign.
variable — A symbol representing a quantity that can assume any of a set of values.
veneer — A sequence of instructions that serves as an alternate entry point into a routine if a state
change is required.
well-defined expression — A term or group of terms that contains only symbols or assembly-time
constants that have been defined before they appear in the expression.
word — A 32-bit addressable location in target memory
354 SPNU118U–January 2018
Submit Documentation Feedback
Copyright © 2018, Texas Instruments Incorporated
Revision History
Appendix E
SPNU118U–January 2018
Revision History
E.1 Recent Revisions
This table lists significant changes made to this document. The left column identifies the first version of
this document in which a particular change appeared.
Version
Added Chapter Location Additions / Modifications / Deletions
SPNU118U Hex
Conversion
Utility
Section 12.2.1 and
Section 12.10 Added the --array option, which causes the array output format to be
generated.
Previous Revisions:
SPNU118R Linker
Description Section 8.9 Provided a link to an E2E blog post that provides examples that perform cyclic
redundancy checking using linker-generated CRC tables.
SPNU118R Linker
Description Section 8.11.2 _AEABI_PORTABILITY_LEVEL can be defined to enable full object file
portability when headers files are included.
SPNU118Q Linker
Description Section 8.5.9 Documented revised behavior of ECC directives.
SPNU118P Linker
Description Section 8.4
Several linker options have been deprecated, removed, or renamed. The linker
continues to accept some of the deprecated options, but they are not
recommended for use. See the Compiler Option Cleanup wiki page for a list of
deprecated and removed options, options that have been removed from CCS,
and options that have been renamed.
SPNU118P Linker
Description Section 8.4.6 The default for --cinit_compression and --copy_compression has been changed
from RLE to LZSS.
SPNU118O Linker
Description Section 8.5.3 Information about accessing files and libraries from a linker command file has
been added.
SPNU118O Linker
Description Section 8.9.2 The list of available CRC algorithms has been expanded.
SPNU118O Object File
Utilities Section 11.1 A –cg option has been added to the Object File Display utility to display
function stack usage and callee information in XML format.
SPNU118N Object
Modules Section 2.1
The COFF object file format is no longer supported. The ARM Code
Generation Tools now support only the Embedded Application Binary Interface
(EABI) ABI, which works only with object files that use the ELF object file
format and the DWARF debug format. Sections of this document that referred
to the COFF format have been removed or simplified. If you would like to
produce COFF output files, please use v5.2 of the ARM Code Generation
Tools and refer to SPNU118M for documentation.
The .clink directive and the --no_sym_merge linker option have been
deprecated.
SPNU118N
Object
Modules,
Directives,
and Linker
Section 2.6.2,
.weak topic, and
Section 8.6.2
Weak symbols can be declared using assembly or the linker command file. The
linker removes weak symbols from the output file if the symbol is not required
to resolve any references.
SPNU118N Linker Section 8.5.4.4 Added the ALIAS statement.
SPNU118N Linker Section 8.4.21 Added modules as a filter for the --mapfile_contents linker command line
option.
SPNU118N Linker Section 8.5.5.2.1 Added an example for placing functions in RAM.
SPNU118M Object
Modules Section 2.4.4 Added information about the current section and how directives interact with it.
SPNU118M Object
Modules Section 2.6 and
Section 2.6.3 Added information about various types of symbols and about symbol tables.
www.ti.com
Recent Revisions
355
SPNU118U–January 2018
Submit Documentation Feedback Copyright © 2018, Texas Instruments Incorporated
Revision History
Version
Added Chapter Location Additions / Modifications / Deletions
SPNU118M Assembler
Description Section 4.8.6 Added __TI_ ARM_V7M4__ predefined macro name for Cortex-M4.
SPNU118M Assembler
Description Section 4.10.1 Built-in functions use a prefix of $$.
SPNU118M Linker Section 8.4.2,
Section 8.5.10.7,
and Section 8.6.1 Added information about referencing linker symbols.
SPNU118M Linker Section 8.4.11 Added a list of the linker's predefined macros.
SPNU118M Linker Section 8.5.5.1 Removed invalid syntax for load and fill properties.
SPNU118M Linker Section 8.11.5 Added the --cinit_hold_wdt linker option.

IMPORTANT NOTICE FOR TI DESIGN INFORMATION AND RESOURCES
Texas Instruments Incorporated (‘TI”) technical, application or other design advice, services or information, including, but not limited to,
reference designs and materials relating to evaluation modules, (collectively, “TI Resources”) are intended to assist designers who are
developing applications that incorporate TI products; by downloading, accessing or using any particular TI Resource in any way, you
(individually or, if you are acting on behalf of a company, your company) agree to use it solely for this purpose and subject to the terms of
this Notice.
TI’s provision of TI Resources does not expand or otherwise alter TI’s applicable published warranties or warranty disclaimers for TI
products, and no additional obligations or liabilities arise from TI providing such TI Resources. TI reserves the right to make corrections,
enhancements, improvements and other changes to its TI Resources.
You understand and agree that you remain responsible for using your independent analysis, evaluation and judgment in designing your
applications and that you have full and exclusive responsibility to assure the safety of your applications and compliance of your applications
(and of all TI products used in or for your applications) with all applicable regulations, laws and other applicable requirements. You
represent that, with respect to your applications, you have all the necessary expertise to create and implement safeguards that (1)
anticipate dangerous consequences of failures, (2) monitor failures and their consequences, and (3) lessen the likelihood of failures that
might cause harm and take appropriate actions. You agree that prior to using or distributing any applications that include TI products, you
will thoroughly test such applications and the functionality of such TI products as used in such applications. TI has not conducted any
testing other than that specifically described in the published documentation for a particular TI Resource.
You are authorized to use, copy and modify any individual TI Resource only in connection with the development of applications that include
the TI product(s) identified in such TI Resource. NO OTHER LICENSE, EXPRESS OR IMPLIED, BY ESTOPPEL OR OTHERWISE TO
ANY OTHER TI INTELLECTUAL PROPERTY RIGHT, AND NO LICENSE TO ANY TECHNOLOGY OR INTELLECTUAL PROPERTY
RIGHT OF TI OR ANY THIRD PARTY IS GRANTED HEREIN, including but not limited to any patent right, copyright, mask work right, or
other intellectual property right relating to any combination, machine, or process in which TI products or services are used. Information
regarding or referencing third-party products or services does not constitute a license to use such products or services, or a warranty or
endorsement thereof. Use of TI Resources may require a license from a third party under the patents or other intellectual property of the
third party, or a license from TI under the patents or other intellectual property of TI.
TI RESOURCES ARE PROVIDED “AS IS” AND WITH ALL FAULTS. TI DISCLAIMS ALL OTHER WARRANTIES OR
REPRESENTATIONS, EXPRESS OR IMPLIED, REGARDING TI RESOURCES OR USE THEREOF, INCLUDING BUT NOT LIMITED TO
ACCURACY OR COMPLETENESS, TITLE, ANY EPIDEMIC FAILURE WARRANTY AND ANY IMPLIED WARRANTIES OF
MERCHANTABILITY, FITNESS FOR A PARTICULAR PURPOSE, AND NON-INFRINGEMENT OF ANY THIRD PARTY INTELLECTUAL
PROPERTY RIGHTS.
TI SHALL NOT BE LIABLE FOR AND SHALL NOT DEFEND OR INDEMNIFY YOU AGAINST ANY CLAIM, INCLUDING BUT NOT
LIMITED TO ANY INFRINGEMENT CLAIM THAT RELATES TO OR IS BASED ON ANY COMBINATION OF PRODUCTS EVEN IF
DESCRIBED IN TI RESOURCES OR OTHERWISE. IN NO EVENT SHALL TI BE LIABLE FOR ANY ACTUAL, DIRECT, SPECIAL,
COLLATERAL, INDIRECT, PUNITIVE, INCIDENTAL, CONSEQUENTIAL OR EXEMPLARY DAMAGES IN CONNECTION WITH OR
ARISING OUT OF TI RESOURCES OR USE THEREOF, AND REGARDLESS OF WHETHER TI HAS BEEN ADVISED OF THE
POSSIBILITY OF SUCH DAMAGES.
You agree to fully indemnify TI and its representatives against any damages, costs, losses, and/or liabilities arising out of your non-
compliance with the terms and provisions of this Notice.
This Notice applies to TI Resources. Additional terms apply to the use and purchase of certain types of materials, TI products and services.
These include; without limitation, TI’s standard terms for semiconductor products http://www.ti.com/sc/docs/stdterms.htm), evaluation
modules, and samples (http://www.ti.com/sc/docs/sampterms.htm).
Mailing Address: Texas Instruments, Post Office Box 655303, Dallas, Texas 75265
Copyright © 2018, Texas Instruments Incorporated
