ASC500 Manual V3 2 1
User Manual:
Open the PDF directly: View PDF ![]() .
.
Page Count: 128 [warning: Documents this large are best viewed by clicking the View PDF Link!]
Version:
3.2.1
Modified:
November 12
Products:
ASC500
User Manual
ASC500
SPM Controller & Software v2.5.3
attocube systems AG, Königinstrasse 11a (Rgb), D - 80539 München Germany
Phone: +49 89-2877 80915 Fax: +49 89-2877 80919
E-Mail: info@attocube.com www.attocube.com
For technical queries, contact:
support@attocube.com
attocube systems office Munich:
Phone +49 89 2877 80915
Fax +49 89 2877 80919

Page 2

Page 3
© 2001-2012 attocube systems AG. Product and company names listed are trademarks or trade names of their
respective companies. Any rights not expressly granted herein are reserved. ATTENTION: Specifications and technical
data are subject to change without notice.
Table of Contents
Table of Contents ................................................................... 3
I. Introduction ................................................................ 5
I.1. System Overview ........................................................... 5
I.2. Safety Information ........................................................ 5
I.2.a. Warnings ................................................................... 6
I.3. Declarations of Conformity .............................................. 8
I.4. Waste Electrical and Electronic Equipment (WEEE) Directive ... 9
II. Hardware Description ................................................... 10
II.1. Mechanical Installation ................................................. 10
II.2. Electrical Installation ................................................... 11
II.2.a. Connecting to the Voltage Supply ................................. 11
II.2.b. Fuses ...................................................................... 11
II.3. Front and Rear Panel Connections .................................... 12
II.3.a. Front Panel ASC500 v1 ............................................... 12
II.3.b. Rear Panel ASC500 v1 ................................................. 12
II.3.c. Cable description ASC500 v1 ........................................ 13
II.3.d. Front Panel ASC500 v2 ............................................... 14
II.3.e. Back Panel ASC500 v2 ................................................ 15
II.4. The iBox..................................................................... 16
III. Description of the Controller .......................................... 18
III.1. Key Features and Benefits .............................................. 18
III.2. Hardware Specifications ................................................ 18
III.3. General Functionality .................................................... 19
III.4. Hardware Requirements and Operating Systems ................. 20
III.5. Hardware Driver Installation .......................................... 20
III.5.a. Windows XP ............................................................. 21
III.5.b. Windows Vista / Windows 7 (32/64 bit) .......................... 22
IV. Data handling ............................................................. 25
IV.1. Quick guide for data saving ............................................ 25
IV.1.a. The DCC ................................................................... 25
IV.1.b. The Snapshot Preset Configuration ............................... 28
IV.2. Data handling details .................................................... 29
IV.2.a. Signals, data channels and data groups ......................... 29
IV.2.b. Internal Signal Flow................................................... 29
IV.2.c. Data processing chain ................................................ 30
IV.2.d. Sample time and Average ............................................ 31
IV.2.e. Data Channel Configuration (DCC) in detail ..................... 32
IV.2.f. DCC usage................................................................ 33
IV.2.g. Saving the data ........................................................ 34
IV.2.h. Parameter File .......................................................... 38
IV.2.i. Snapshot Presets ...................................................... 38
V. Operating the Controller: General Usage and Overview ......... 41
V.1. Software Installation and Getting Started.......................... 41
V.2. Description of Main Daisy Program ................................... 42
V.2.a. The main toolbar ....................................................... 42
V.2.b. The menu bar ........................................................... 44
V.2.c. Loading a profile ....................................................... 49
V.3. Profile configuration .................................................... 50

Page 4
V.3.a. User-configurable GUI appearance ................................ 51
V.3.b. Aliases menu ............................................................ 51
V.3.c. New signal and parameter names in v2.5 ........................ 54
V.4. General Usage and Description of Common GUI Controls ....... 55
V.4.a. Text Edit Boxes ......................................................... 55
V.4.b. Context Menu ........................................................... 56
V.4.c. Frame View context menu ............................................ 58
V.4.d. Display wizard .......................................................... 58
VI. Description of the AFM Profile ......................................... 62
VI.1. The Output section ....................................................... 62
VI.2. The Scanner Control ..................................................... 64
VI.2.a. Closed Loop Scanning ................................................ 67
VI.2.b. Lithography ............................................................. 72
VI.3. The Z Control feedback loop............................................ 76
VI.3.a. Slope Compensation .................................................. 77
VI.3.b. Setpoint Modulation .................................................. 80
VI.3.c. Z control P and I units ................................................ 81
VI.4. The Scan Data Displays .................................................. 81
VI.4.a. Frame View .............................................................. 81
VI.4.b. SCAN Line View Tab .................................................... 82
VI.4.c. Example for Shifting, Moving and Zooming the Scan Area .. 84
VI.5. The main functions tab section ....................................... 87
VI.5.a. Phase Locked Loop (PLL tab) ....................................... 87
VI.5.b. Lever excitation tab ................................................... 95
VI.5.c. The low frequency Lock-In tab (LF LockIn) ...................... 96
VI.5.d. Coarse Tab ............................................................... 96
VI.5.e. Pathmode Tab ........................................................ 100
VI.5.f. External Handshake ................................................. 101
VI.5.g. Dual Pass Mode ....................................................... 103
VI.5.h. Q Control ............................................................... 105
VI.5.i. Crosslink ............................................................... 109
VI.5.j. DAC Outputs ........................................................... 112
VI.5.k. Scan; Manual Positioning .......................................... 112
VI.6. 1-dimensional data displays ......................................... 112
VI.6.a. Spectroscopy Tab(s) ................................................ 112
VI.6.b. Resonance View ...................................................... 114
VI.6.c. Line View............................................................... 115
VI.6.d. Frequency Analysis View ........................................... 116
VI.7. Closed Loop Step Scanning .......................................... 118
VI.7.a. Concept ................................................................ 118
VI.7.b. Connection ............................................................ 120
VI.7.c. Operation .............................................................. 121
VII. Firmware Upgrade ...................................................... 125
VIII. Preventive Maintenance .............................................. 126
VIII.1. Safety Testing ........................................................... 126
VIII.2. Fuses ...................................................................... 126
VIII.3. Cleaning .................................................................. 126
Page 5
© 2001-2012 attocube systems AG. Product and company names listed are trademarks or trade names of their
respective companies. Any rights not expressly granted herein are reserved. ATTENTION: Specifications and technical
data are subject to change without notice.
I. Introduction
I.1. System Overview
The SPM Scan Controller ASC500 is a complete scan control unit providing
the suitable signals for the use with the attoCFM Confocal Microscope, the
attoAFM Atomic Force Microscope, the attoSNOM Near-Field Optical
Microscope, the attoSTM Scanning Tunneling Microscope as well as any
other homebuilt or commercial scanning probe microscope.
The modular and flexible digital SPM controller ASC500 combines state of
the art hardware with innovative software concepts to offer an unmatched
variety of controlling many different scanning probe microscopy
applications to the customer. All desirable functions and high-end
specifications for controlling the experiment of your choice are available.
The flexible, FPGA-based architecture allows the implementation of your
particular requirements to the system.
In combination with the manual input box ASC500-iBox enabling fast and
controlled adjustment of the major parameters manually in addition to
using the software, this control unit is unique in the field of scanning
probe microscopy.
I.2. Safety Information
For the continuing safety of the operators of this equipment, and the
protection of the equipment itself, the operator should take note of the
Warnings, Cautions, and Notes throughout this handbook and, where
visible, on the product itself.
The following safety symbols may be used on the equipment:
Warning, risk of danger. Refer to the handbook for details on this hazard.
Warning, risk of electric shock. High voltages present.
Warning, laser radiation. Do not stare into beam. Class 1M Laser product.
Page 6
Functional (EMC) earth/ground terminal.
The following safety symbols may be used throughout the handbook:
Warning. An instruction which draws attention to the risk of injury or
death.
Caution. An instruction which draws attention to the risks of damage to
the product, process or surroundings.
Note. Clarification of an instruction or additional information.
I.2.a. Warnings
The unit must be connected only to an earthed fused supply of 110 to 230 V.
The equipment, as described herein, is designed for use by personnel
properly trained in the use and handling of mains powered electrical
equipment. Only personnel trained in the servicing and maintenance of
this equipment should remove its covers or attempt any repairs or
adjustments. If malfunction is suspected, immediately return the part to
attocube systems for repair or replacement. There are no user-serviceable
parts inside the electronics. Modified or opened electronics cannot be
covered by the attocube warranty anymore. Take special care if connecting
products from other manufacturers. Follow the General Accident
Prevention Rules.
If this equipment is used in a manner not specified by the manufacturer,
the protection provided by the equipment may be impaired. Do not operate
the instrument outside its rated supply voltages or environmental range.
In particular, excessive moisture may impair safety.
Page 7
© 2001-2012 attocube systems AG. Product and company names listed are trademarks or trade names of their
respective companies. Any rights not expressly granted herein are reserved. ATTENTION: Specifications and technical
data are subject to change without notice.
Never connect any cabling to the electronics when contacts are
exposed! Never connect any cabling to the electronics when the
electronics is not in GND mode! Avoid short-cuts. Be careful not to cause
a short-cut between the contacts in the BNC or any other connectors.
For laboratory use only. This unit is intended for operation from a normal,
single phase supply, in the temperature range 5° to 40°C, 20% to 80% RH.
Page 8
I.3. Declarations of Conformity
For Customers in Europe
This equipment has been tested and found to comply with the EC Directives
amended by 93/68/EEC.
Compliance was demonstrated by conformance to the following
specifications which have been listed in the Official Journal of the
European Communities:
Safety EN61010: 2001
EMC EN61326: 1997
Page 9
© 2001-2012 attocube systems AG. Product and company names listed are trademarks or trade names of their
respective companies. Any rights not expressly granted herein are reserved. ATTENTION: Specifications and technical
data are subject to change without notice.
I.4. Waste Electrical and Electronic Equipment (WEEE) Directive
DE16963721
Compliance
As required by the Waste Electrical and Electronic Equipment (WEEE)
Directive of the European Community and the corresponding national laws,
attocube systems offers all end users in the EC the possibility to return
"end of life" units without incurring disposal charges.
This offer is valid for attocube systems electrical and electronic equipment:
sold after August 13th 2005,
marked correspondingly with the crossed out "wheelie bin" logo
(see logo to the left),
sold to a company or institute within the EC,
currently owned by a company or institute within the EC,
still complete, not disassembled, and not contaminated.
As the WEEE directive applies to self contained operational electrical and
electronic products, this "end of life" take back service does not refer to
other attocube products, such as
pure OEM products, that means assemblies to be built into a unit
by the user (e. g. OEM electronic drivers),
components,
mechanics and optics,
left over parts of units disassembled by the user (PCB's, housings
etc.).
If you wish to return an attocube unit for waste recovery, please contact
attocube systems or your nearest dealer for further information.
Waste treatment on your own responsibility
If you do not return an "end of life" unit to attocube systems, you must
hand it to a company specialized in waste recovery. Do not dispose of the
unit in a litter bin or at a public waste disposal site.
Ecological background
It is well known that WEEE pollutes the environment by releasing toxic
products during decomposition. The aim of the European RoHS directive is
to reduce the content of toxic substances in electronic products in the
future.
The intent of the WEEE directive is to enforce the recycling of WEEE. A
controlled recycling of end of live products will thereby avoid negative
impacts on the environment.
Page 10
II. Hardware Description
II.1. Mechanical Installation
Siting
Unpack all the components and retain all packing material and shipping
container for your future shipping needs. When placing the controller, do
not obstruct the ventilation slots in any way. Make also sure that the
controller is not paced close to any liquids or moisture.
Carefully unpack and visually inspect the controller and stages for any
damage. Place all components on a flat and clean surface.
Caution. When siting the unit, it should be positioned so as not to impede
the operation of the rear panel power supply plug and switch. Ensure that
proper airflow is maintained to the unit. Do not obscure the ventilation
holes
Warning. Operation outside the following environmental limits may
adversely affect operator safety:
Indoor use only
Maximum altitude 2000 m
Temperature range 5°C to 40°C
Maximum humidity less than 80% RH (non-condensing) at 31°C
To ensure reliable operation the unit should not be exposed to corrosive
agents or excessive moisture, heat or dust. If the unit has been stored at a
low temperature or in an environment of high humidity, it must be allowed
to reach ambient conditions before being powered up.
Note. In applications requiring the highest level of accuracy and
repeatability, it is recommended that the controller unit is powered up
approximately 30 minutes before use, in order to allow the internal
temperature to stabilize.
Caution. Do not connect cabling longer than 3m. Longer cabling may
increase the sensitivity of the device to external influences.
Page 11
© 2001-2012 attocube systems AG. Product and company names listed are trademarks or trade names of their
respective companies. Any rights not expressly granted herein are reserved. ATTENTION: Specifications and technical
data are subject to change without notice.
II.2. Electrical Installation
II.2.a. Connecting to the Voltage Supply
Warnings. The unit must be connected only to an earthed fused supply of
110 to 230V.
Use only power supply cables supplied by attocube systems, other cables
may not be rated to the same current. The unit is shipped with appropriate
power cables for use in the UK, Europe, and the USA. When shipped to
other territories the appropriate power plug must be fitted by the user.
II.2.b. Fuses
Two T 4 A/250 V fuses are located on the back panel for the mains voltage.
Note. When replacing fuses:
Switch off the power and disconnect the power cord before removing the
fuse cover.
Always replace broken fuses with a fuse of the same rating and type.
Page 12
II.3. Front and Rear Panel Connections
II.3.a. Front Panel ASC500 v1
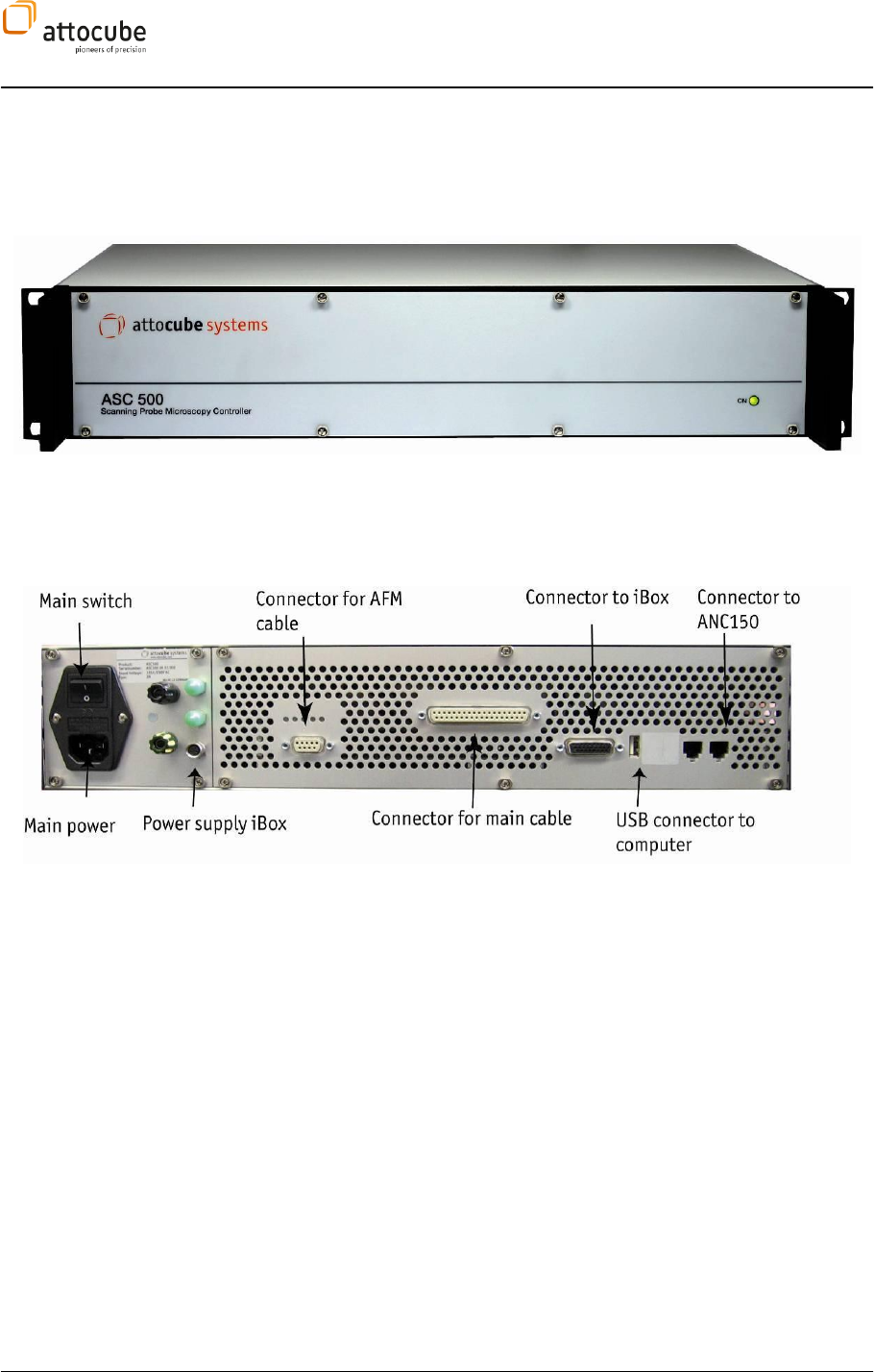
Figure 1:
Front panel of the ASC500.
-LED
indicating the power status of the unit. If the unit is on, the LED is lit.
II.3.b. Rear Panel ASC500 v1
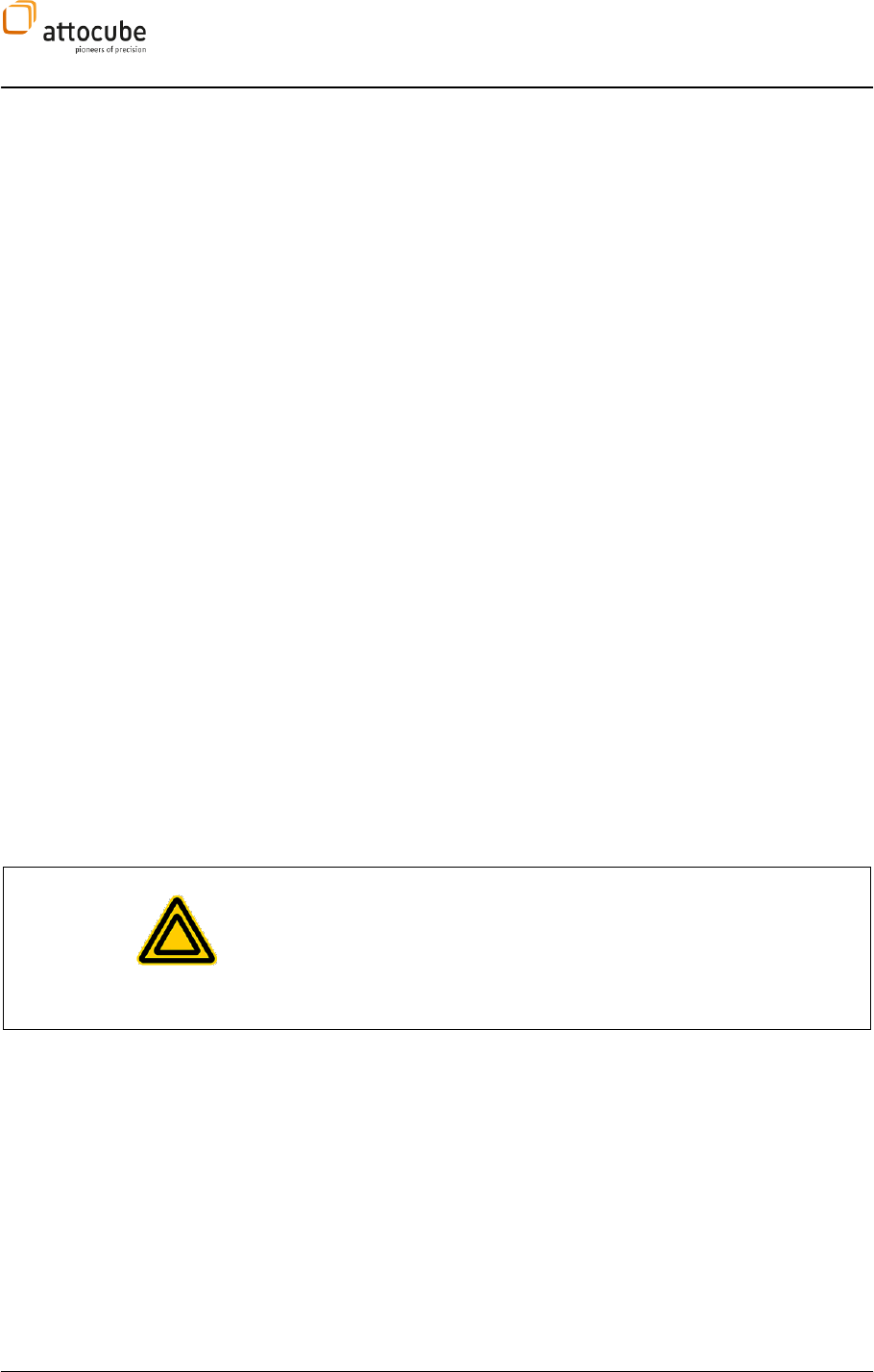
Figure 2:
Back panel of the ASC500 scan controller.
On the back panel, there are:
- the main power switch,
- the fuse holder (see fuse description above),
- the main power supply connector,
(110/220 V, 50 60 Hz, max. 20 VA),
- an earth terminal for additional connection of the unit to earth,
- the functional ground for connecting a setup to the electronics
ground,
- 3 power connectors for supplying additional hardware (e.g. iBox)
- the AFM connector (high speed input and output),
- the main SPM outputs,
- the connector for the iBox,
- the USB connector for connection to a PC,
- the serial connector to connect to the ANC150.
Page 13
© 2001-2012 attocube systems AG. Product and company names listed are trademarks or trade names of their
respective companies. Any rights not expressly granted herein are reserved. ATTENTION: Specifications and technical
data are subject to change without notice.
II.3.c. Cable description ASC500 v1
Power supply:
Use the power cable to connect the ASC500 to the 100, 115 or 220 V jack.
USB cable from computer to ASC500:
Use the USB connector to connect to your computer.
ASC500-iBox:
Connect the cable attached to the ASC500-iBox to the respective connector
of the ASC500 and the round pin connector for the power supply.
Main cable - Signal In- and Outputs:
Use the main cable and connect it to the respective connector. The BNC
connectors are connected to the setup as follows:
ADC 1: sensor signal
ADC 2: optional input
ADC 3: optional input
DAC 1: optional output
DAC 2: optional output
x-Out: connects to the voltage amplifier for x-axis (e.g. ANC200)
y-Out: connects to the voltage amplifier for y-axis (e.g. ANC200)
z-Out: connects to the voltage amplifier for z-axis (e.g. ANC200)
AFM cable – High Speed Signal In- and Output:
Use the AFM cable and connect it to the respective connector. The BNC
connectors are connected to the AFM setup as follows:
Fosc: high frequency sensor signal (e.g. AFM tapping mode) as
feedback input
Fexc: high frequency excitation signal
Warning. Do not, under any circumstances attempt to connect the digital
I/O to any external equipment that is not galvanically isolated from the
mains or is connected to a voltage higher than the limits specified. In
addition to the damage that may occur to the controller there is a risk of
serious injury and fire hazard.
Page 14
II.3.d. Front Panel ASC500 v2
Since end of 2008, a new hardware version of the ASC500 controller is
available. Although the basic hardware concept was kept similar, there are
many improvements implemented in the new version. This allows for even
more powerful applications in the future. The differences between the two
versions will be documented in the respective sections of this manual.
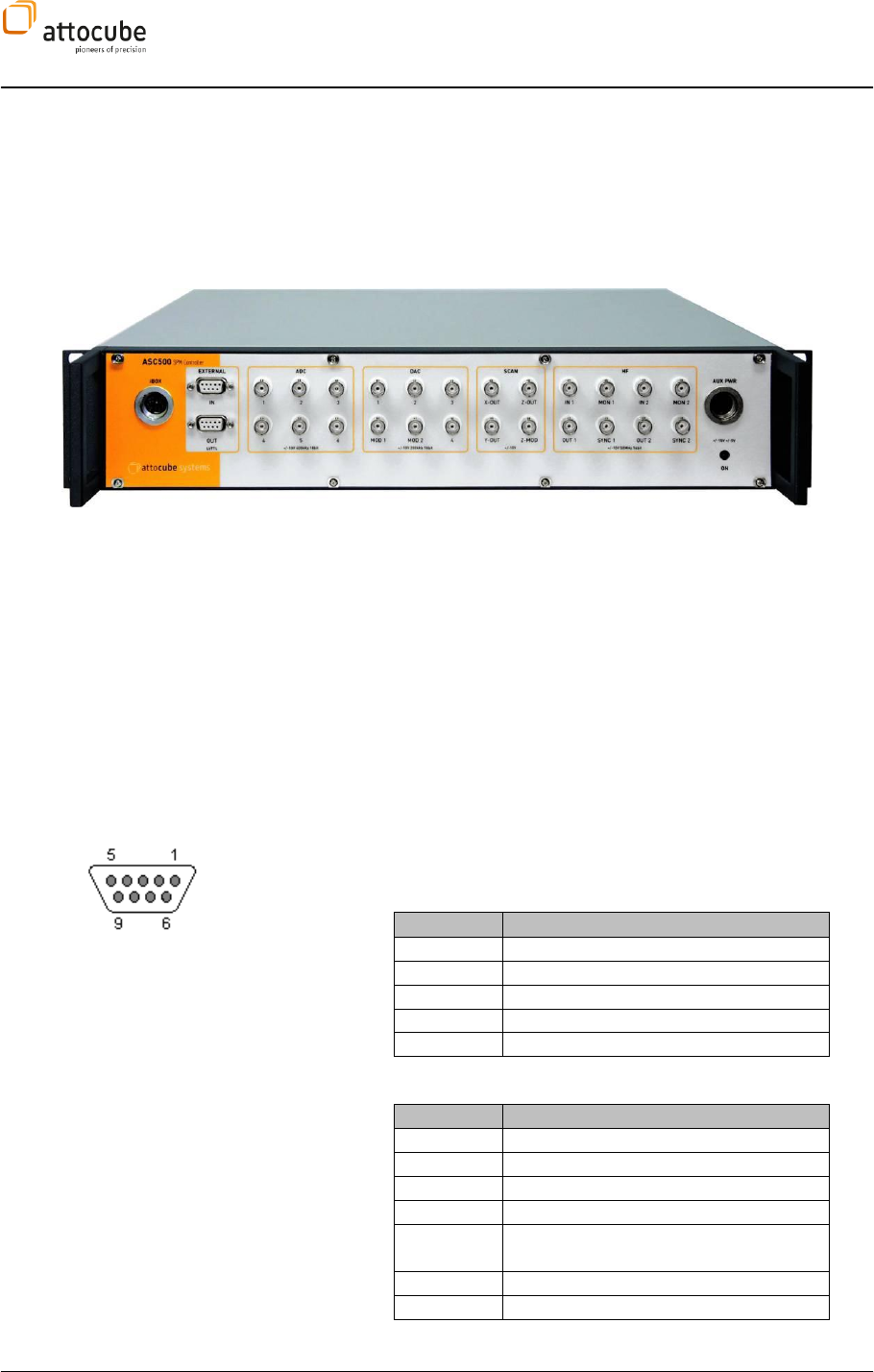
Figure 3:
Front panel of the ASC500 v2. The break-out cable of v1 was replaced by easily accessible BNC connectors
at the front panel. Please note that both input and output ranges and sampling rate of all converters are indicated
directly below the connector plugs.
With the new hardware versions, most connections to and from the
controller are available on the front panel. Different sections in the front
panel combine the plugs for certain functionalities like inputs, outputs,
trigger ports, etc. The different sections are (from left to right):
iBox connection: The iBox connector is to be pushed into this socket.
External: There are two 8 bit LVTTL (low voltage TTL, 3.3 V)
connectors, one for input and one for output triggering. Connectors are 9-
pin D-sub (Pin 9 is GND).
Figure 4
On the left, the pin numbering for the sub-D connector of the External lines
is shown. The upper input
inputs:
Input pin
Usage
1
Counter input
2
Reserved
3
External Handshake SYNC
4-8
Reserved
9
GND
The output ows:
Output pin
Usage
1
Pixelclock output
2
Lineclock output
3
Frameclock output
4
External Handshake SYNC OUT
5
Shutter (used by lithography, see
section VI.2.b)
6-8
Reserved
9
GND

Page 15
© 2001-2012 attocube systems AG. Product and company names listed are trademarks or trade names of their
respective companies. Any rights not expressly granted herein are reserved. ATTENTION: Specifications and technical
data are subject to change without notice.
ADC section: There are six ADC inputs available, labeled 1 through 6,
with 18 bit 400 kS/s each.
DAC section: There are four DAC outputs available (+/-10 V, 16 bit,
200 kS/s). Two additional modulation ports, labeled MOD1 and MOD2 can
be used to add any analog voltage to the outputs of DAC1 and DAC2,
respectively.
SCAN section: The SCAN section provides the outputs of the scan
engine Xout, Yout and Zout. In addition, there is a modulation input for
the Zout that gives you the possibility to externally modulate the voltage
output to the z scanner.
HF section: This section provides the high frequency inputs and
outputs (50 MS/s) of the controller. There are two independent groups of
in- and outputs. Each group features 16 bit, 50 MS/s ADCs and DACs, as
well as SYNC out (same output frequency than OUT with +/- 5V amplitude)
and MON out (pre-amplified IN signal).
AUX power: This connector provides stable +/- 15 V and +/- 5 V for
external devices. Maximum current is 200 mA at 5 V and 100 mA at 15 V.
The connector is a 5pin Binder series 440.
II.3.e. Back Panel ASC500 v2
The back panel of the ASC500 generation v2, features two new possibilities
to connect the controller to other devices. There is a digital serial interface
(called NSL A and NSL B) and a LAN connector.
Figure 5:
Back panel of the ASC500 v2. Please note the new digital interface (NSL) and the LAN connection.
The connectors will be described in more detail from left to right:
Power connection: Connection to mains. The ASC500 features auto
range for 110 - 115 V and 230 V, 50..60 Hz.
Ground: 4 mm plug for connecting to earth and housing
GND.
Voltage indicators: Shows correct availability of internal DC
voltages.
NSL A/B: Digital serial interface to connect to attocube
ANC350 Step/Scan-Controller. 9 pin D-sub connector.
USB: USB 2.0 interface to connect to the PC.

Page 16
Serial: Serial interface to connect to attocube ANC150
/ANC300 Step-Controller. RJ45 connector.
LAN: LAN 100 Mbit connection to the PC.
II.4. The iBox
Using the ASC500-iBox, the main scan- and feedback parameters can be
accessed manually. This enables e.g. precise and fast control of the
feedback loop and the scanning process itself.
Figure 6:
The ASC500-iBox (bottom) for manual control of all important scan and feedback parameter.
Page 17
© 2001-2012 attocube systems AG. Product and company names listed are trademarks or trade names of their
respective companies. Any rights not expressly granted herein are reserved. ATTENTION: Specifications and technical
data are subject to change without notice.
On the lower right, there is the main Lock/Unlock switch. This is a security
feature against unwanted changes. If the iBox is locked, no values can be
changed; only different values for control purposes can be displayed. If the
iBox is unlocked, all parameters can be changed again.
There are six displays at the top. Each display can show one of the values of
the knobs underneath, as well as one additional value which can be
selected by the button underneath. Which value it actually displays can be
seen by the yellow LED to the left of each row. If one of the knobs is
pressed or turned, the display directly switches to show this value.
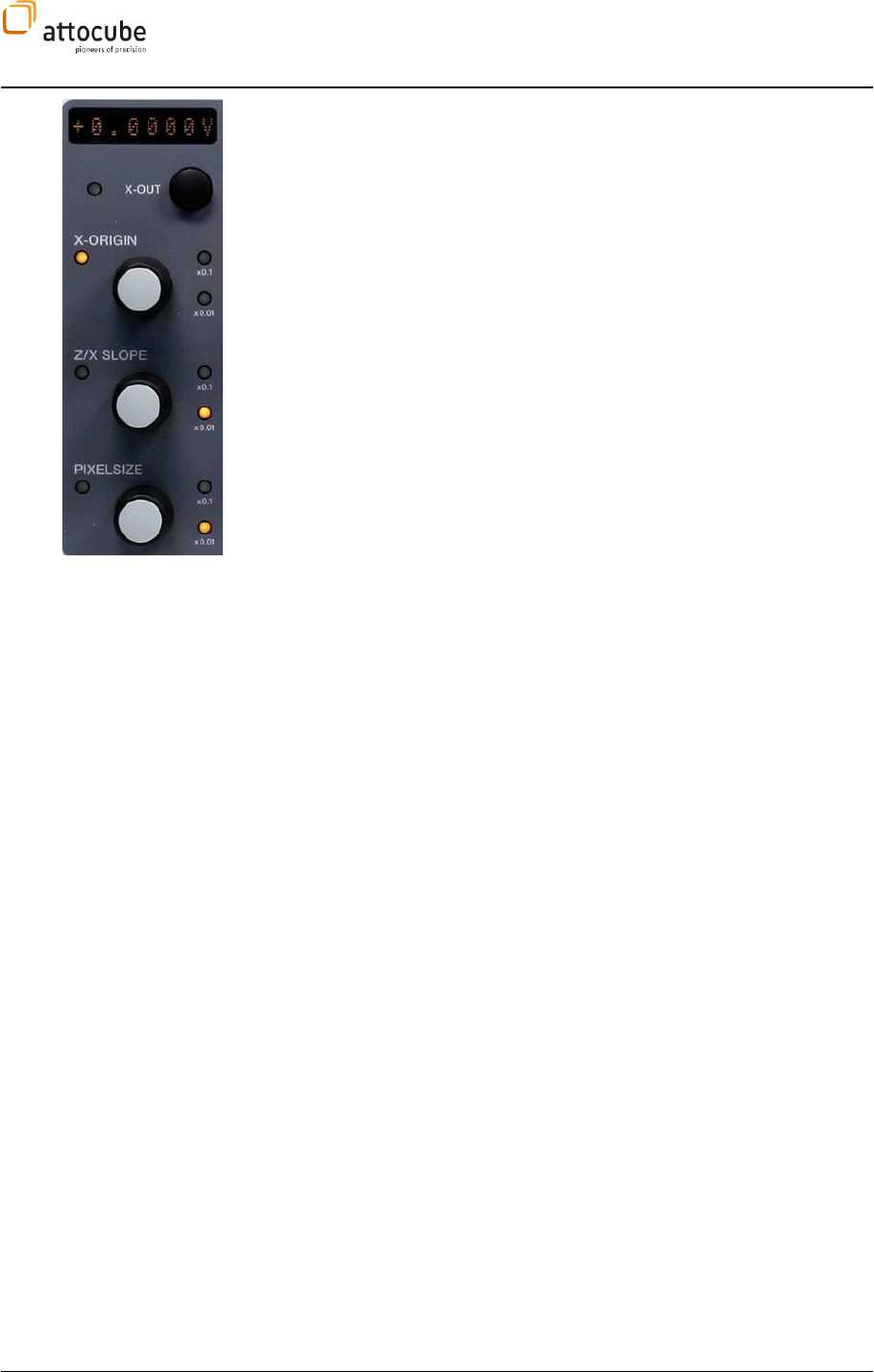
In the example to the left, the display can show the x-output value (when
pressing on the black knob), or can show one of the three other values: X-
Origin, Z/X Slope or Pixelsize (for a description of these functions, please
refer to the respective sections).
By pushing the respective button, the sensitivity of the dial can be toggled
through three different nuances. The respective amplification is indicated
by the LEDs to the right of the knob. The amplification is either 1x (no LED
is lit), or 0.1x or 0.01x, if the respective LEDs are on.
Using the toggle switch in the bottom center of the iBox, the scan can be
started, paused, and stopped. Pushing the switch up once will start a scan,
whereas pushing it down will pause the scan. Pushing it down two times
will stop the scan.
The feedback loop control which can be found directly above can be
controlled in the same way (on, pause, retract).
With the emergency stop button right to the scan control, the scan and the
feedback loop can be switched off immediately.
The two knobs (AUX A and AUX B) on the right can be associated to
different parameters. This can be done via the Preferences tab (see section
I.1.a).

Page 18
III. Description of the Controller
III.1. Key Features and Benefits
AFM/SNOM Control
18 bit 400 kS/s ADC input-channel for AFM contact mode signal
digital measurement of frequency and phase for AFM non-contact
mode with feedback
DDS for oscillation excitation / frequency range 1 kHz to 2 MHz
14 bit 40 MS/s ADC input-channel for measurement of the
amplitude dampening (new v2 version: 16 bit 50 MS/s)
Digital PI feedback loop for z controller
CFM Control
18 bit 400 kS/s ADC input-channel for CFM signal
photodiode amplifier with fiber-optical input
STM Control
18 bit 400 kS/s ADC input-channel for measurement of tunneling
current
16 bit 200 kS/s DAC output-channel for gap voltage
Modulation input for gap voltage
Digital PI feedback loop for z controller
Scan Generation
2D xy-scan generator with 4 MHz pixel frequency,
16 bit resolution in full range mode (16 bit offset + 16 bit scan),
up to 26 bit resolution in small range mode,
hardware rotation and hardware zoom,
hardware crosstalk compensation,
hardware slope compensation
slewrate controlled movement,
direct vectorized positioning
Other
counter input: i.e. 24 bit 10 MHz min. pulse width 50 ns
online data processing: digital filter, low-pass, averaging, offset
correction, calibration, FFT, ...
several spectroscopy modes: dI/dV, dI/dZ, df/dZ, dφ/dZ
III.2. Hardware Specifications
Inputs (ADC1-6)
Voltage range: +/- 10 V
Max. allowed voltage: +/- 15 V
Converter resolution: 18 bit
Voltage resolution: 76 µV
Update rate: 400 kHz
Input resistance: 10 kOhm
INL +/- 2.5 LSB
DNL + 1.75/-1 LSB
Offsets: +/- 60 mV
Outputs (X-, Y-, Z-Out)
The scan outputs generate the scan voltage with 16 bit resolution. If the
Active Scan Area is smaller than the total scan range, the 16 bit output
pattern is automatically attenuated to match the Active Scan Area. By

Page 19
© 2001-2012 attocube systems AG. Product and company names listed are trademarks or trade names of their
respective companies. Any rights not expressly granted herein are reserved. ATTENTION: Specifications and technical
data are subject to change without notice.
doing so, the full 16 bit resolution is available for any given scan range,
leading to an extremely high scan resolution in small range mode. The Z-
Out output to the z scanner features an 18 bit resolution with possible
14 bit attenuation. The scan outputs are designed in a way that you will
never reach the digital bit resolution limit!
Voltage range: +/- 10 V (uni- or bipolar)
Max. output current: +/- 20 mA
Converter resolution: 16 bit (18 bit for Z-Out)
Programmable attenuation: 14 bit
Programmable offset: +/- 10 V
Offset resolution: 16 bit
Max. resolution in small range mode: 16 bit over 1.2 mV
Update rate: 4 MHz
Outputs (DAC1-4)
Voltage range: +/- 10 V
Max. output current: +/- 20 mA
Converter resolution: 16 bit
Voltage resolution: 305 µV
Update rate: 200 kHz
INL: +/- 1 LSB
DNL: +/- 1 LSB
External
External 1: 8 LVTTL inputs (Pin 1-8)
External 2: 8 LVTTL outputs (Pin 1-8)
GND Pin: Pin 9
Pulse Level: 3.3 V
III.3. General Functionality
Scanning probe microscopy works by scanning a probe across a sample and
thereby recording certain physical variables. The ASC500 controller and
software controls the scan position and movement, acquires
simultaneously several signals during the scan and saves the acquired
images. Furthermore it offers the option of feedback for AFM
measurements in feedback mode.
In order to perform the scanning, the software calculates voltage ramps
depending on the scan amplitude, the scan speed and the number of pixels
of the image. The voltage ramps will be amplified by any o
voltage amplifiers (ANC200, ANC250, ANC300, and ANC350) and sent to
the piezos in X, Y and Z directions. A line by line scan is achieved.
In case of scanning in feedback mode, the feedback loop will keep the
sensor value as close as possible to the value called set level.
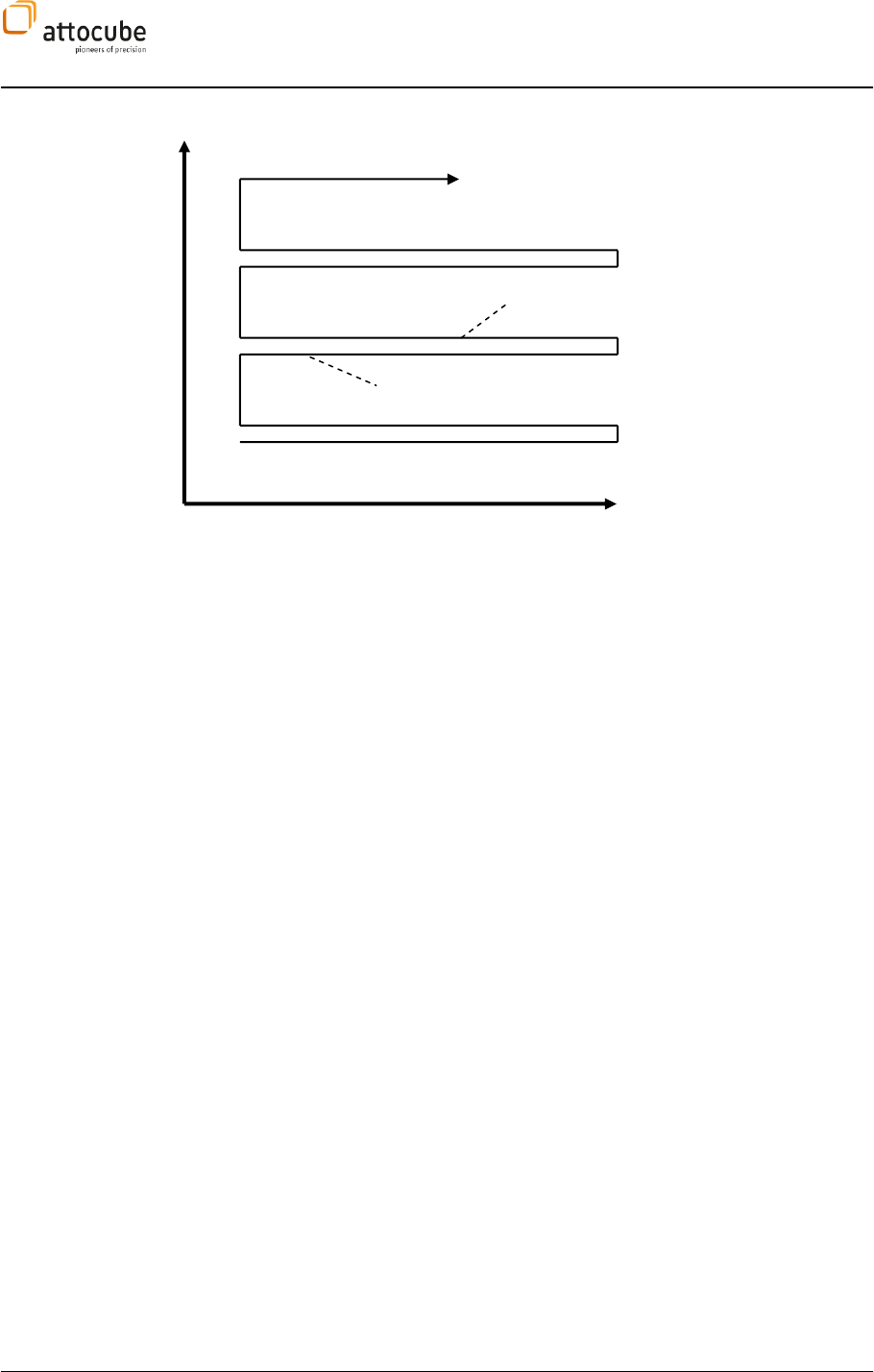
During the displacement in X direction, called the fast axis, the Y-position
remains constant. The x direction will be scanned in both forward and
backward directions, leading to two images: the forward and backward
image. All signals are acquired during both forward and backward motion.
Page 20
Figure 7
: Movement of the sample during the scan.
III.4. Hardware Requirements and Operating Systems
The recommended system has a 2 GHz processor, 1 GB RAM, 20 GB hard
windows environment and to ensure proper functionality of the program
for high speed acquisition. The hard disk space is necessary to store a
large amount of images. The current version of the software is available
for Windows® XP the appropriate drivers for the software are delivered
with the system.
III.5. Hardware Driver Installation
The controller is connected to the computer via USB. Software and drivers
are either installed on the computer delivered with the system or included
on a CD. In the latter case, please copy the software (folder
ASC500drivers (folder
onto your computer.
When the ASC500 is connected to the computer and switched on for the
first time, the computer should recognize the new hardware. Please follow
the steps below to install the driver.
Forward
Backward
Line 1
Line 2
Line 3
Y (slow axis)
X (fast axis)
Page 21
© 2001-2012 attocube systems AG. Product and company names listed are trademarks or trade names of their
respective companies. Any rights not expressly granted herein are reserved. ATTENTION: Specifications and technical
data are subject to change without notice.
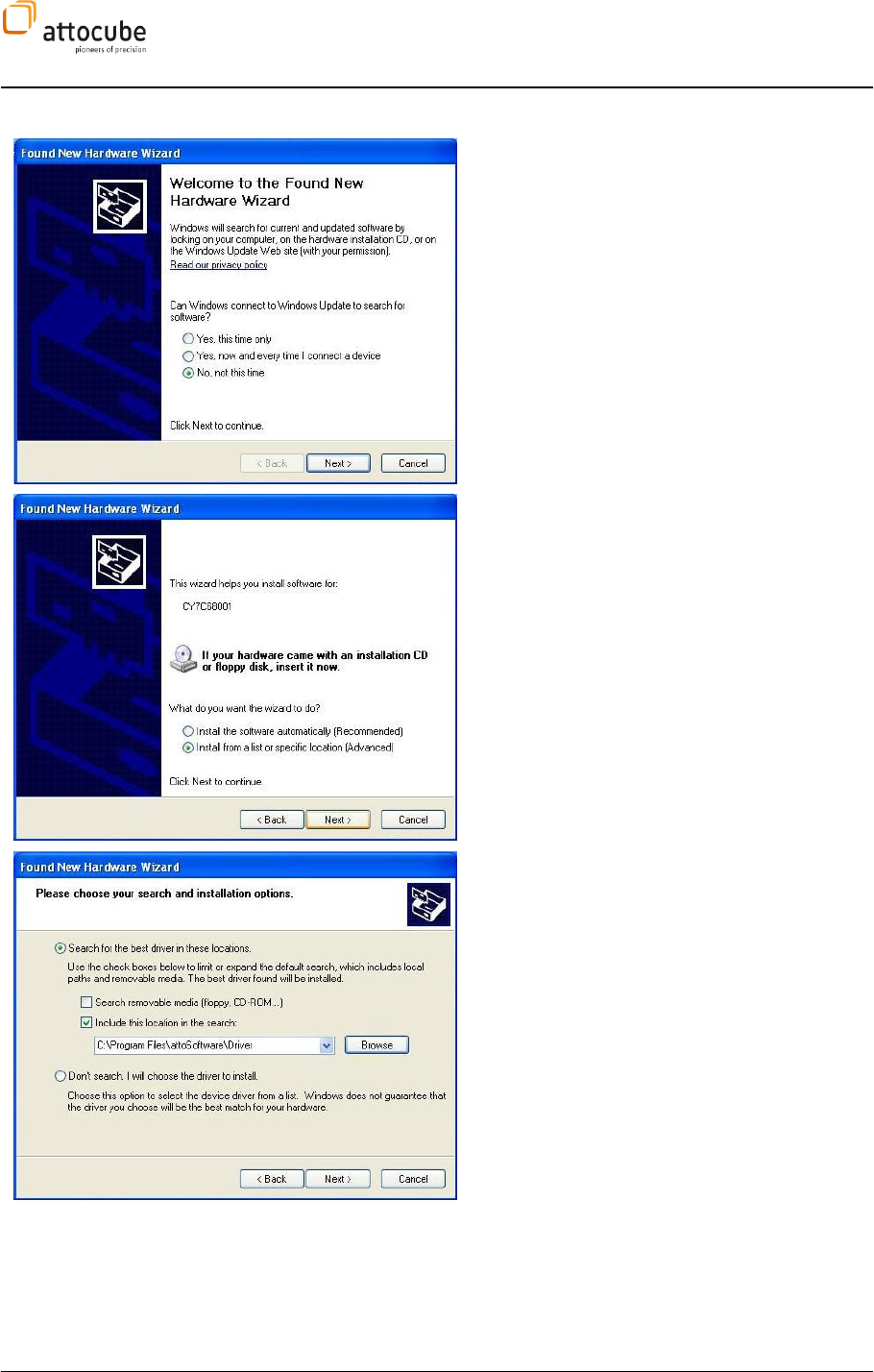
III.5.a. Windows XP
On first connection and if the driver is not
installed, a window as shown will pop up. Do not
search for the drivers automatically, but choose:
Next, you can choose between an automatic
installation of the software on an installation from
a specific location.
In this window, search for the driver at a defined
location.
following window.
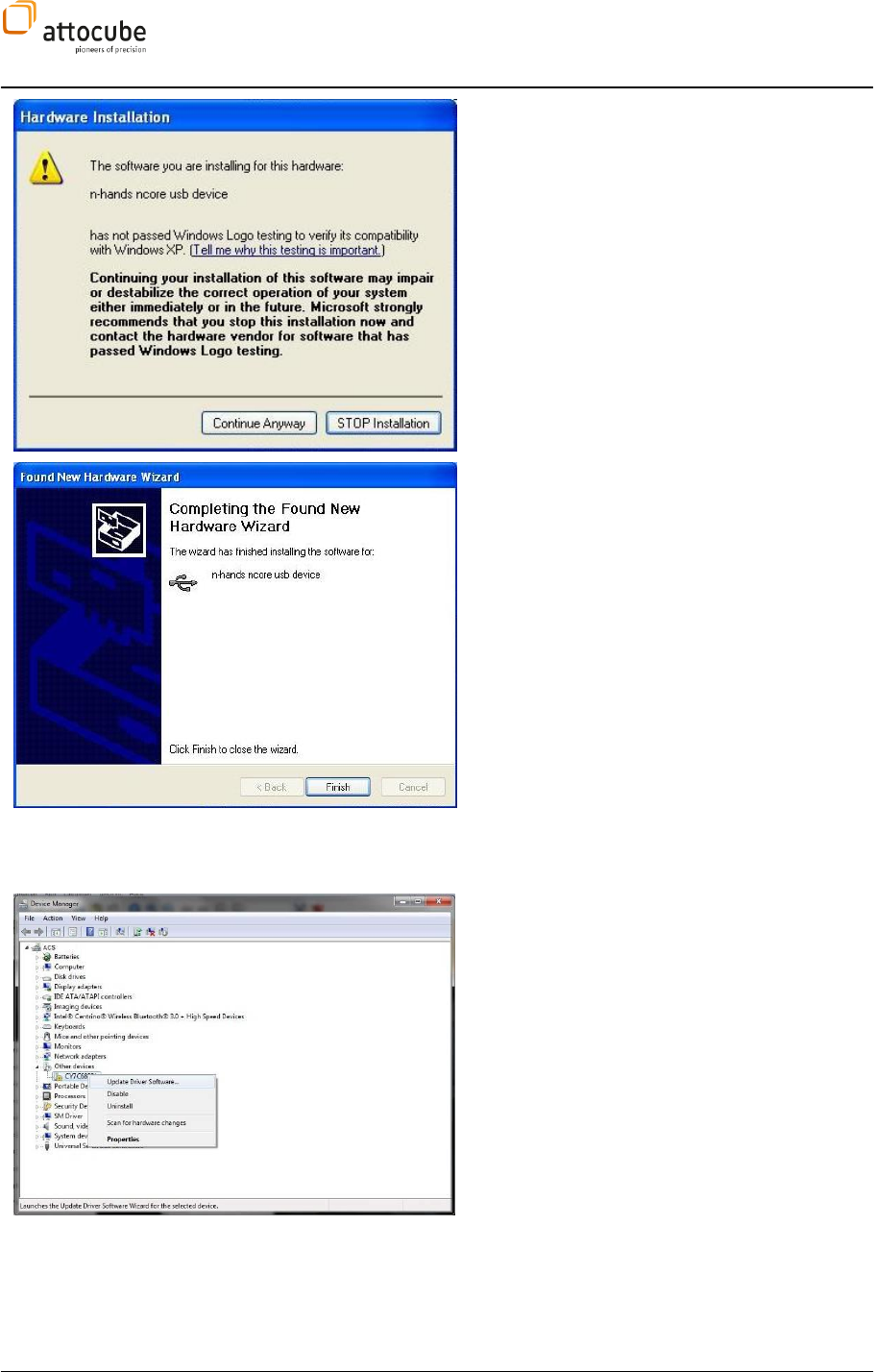
Page 22
In case a window as shown on the left appears,
indicating that the driver has not passed the
proceed with the installation.
Finish the installation.
III.5.b. Windows Vista / Windows 7 (32/64 bit)
Go to Control Panel -> Device Manager, and search
for the new device. Right click to select Update
Driver Software.
Page 23
© 2001-2012 attocube systems AG. Product and company names listed are trademarks or trade names of their
respective companies. Any rights not expressly granted herein are reserved. ATTENTION: Specifications and technical
data are subject to change without notice.
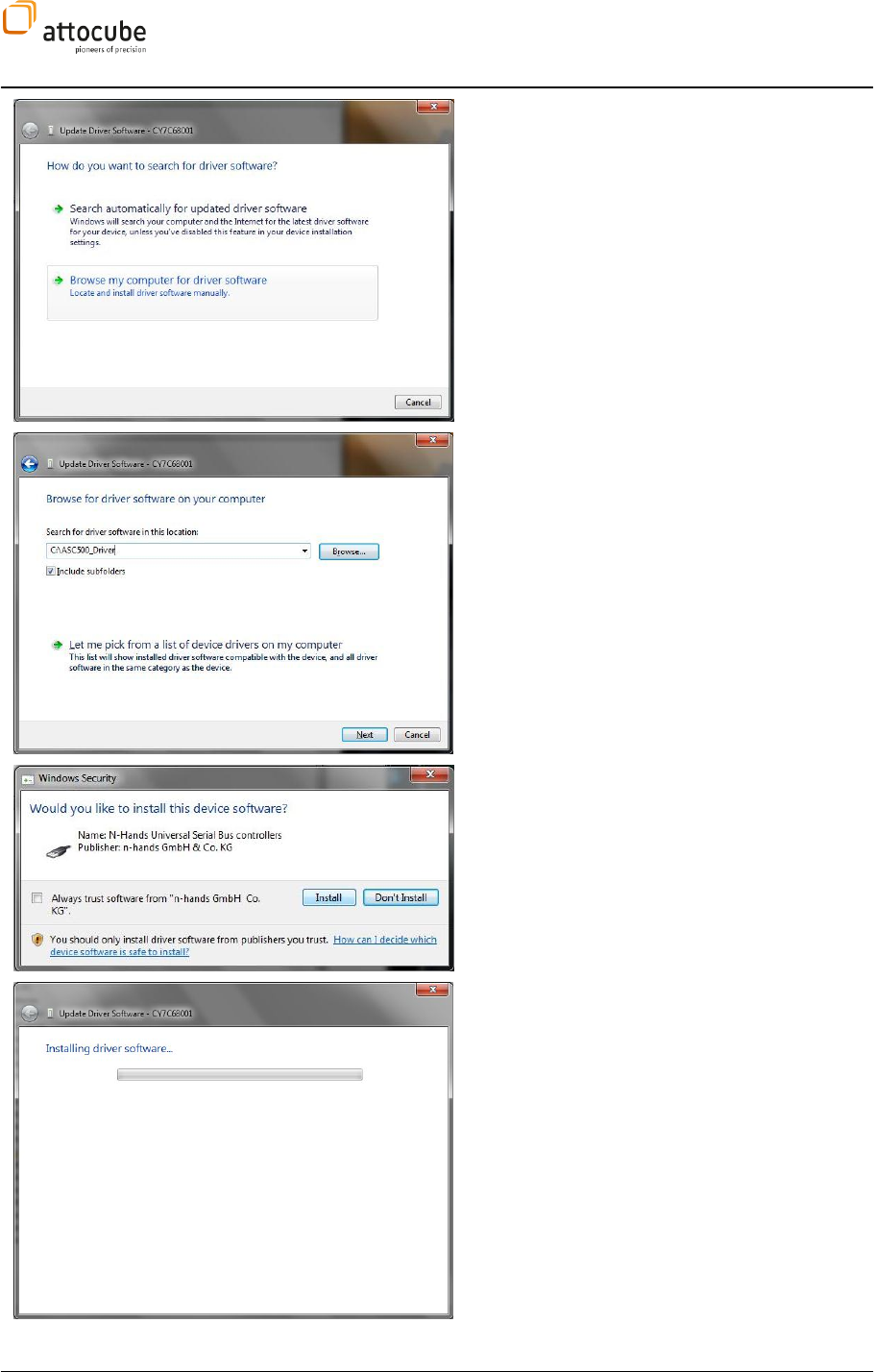
Select Browse my computer for driver software.
Browse to select the directory where you have
stored the ASC500 driver(s) and click Next.
(Note that there are separate driver files for
Windows Vista / Windows 7 32 bit and 64 bit
versions.)
Click on Install
Page 24
Click Close to finish the installation procedure.
Page 25
© 2001-2012 attocube systems AG. Product and company names listed are trademarks or trade names of their
respective companies. Any rights not expressly granted herein are reserved. ATTENTION: Specifications and technical
data are subject to change without notice.
IV. Data handling
Any successful experiment relies on a safe and reliable storage of its
outcome. Moreover, the quality of a measurement may not be immediately
apparent so the data has to be analyzed in a second step. The format of the
stored data has to be compatible to all tools the user might want to employ.
In this sense, the act of saving the experimental outcome is a task of major
importance in the course of the experiment. In the design of the ASC500
and its software, this importance was especially emphasized.
The software allows for fast and flexible procedures of data storage:
data can be saved on a time basis from microseconds to hours
data can be saved in a multiple of 1D, 2D and 3D file formats
user defined data groups can be saved by one single mouse click
automatic snapshots and text files containing parameters are
generated
all file formats are compatible to all major analyzing software
(SPIP, MountainsMap, Gwyddion, Wsxm, ...) or can be directly
viewed in the Windows Explorer
In the following chapter, the data storage capabilities of the ASC500
controller as described in detail.
IV.1. Quick guide for data saving
This chapter will give a short overview to provide a quick entry on how to use
ctions will give all
necessary details for getting the maximum flexibility and time
effectiveness out of the product.
IV.1.a. The DCC
The central point for all data related processes in the ASC500 is the Data
Channel Configuration dialogue (DCC). It is used to define what signals are
accessible in the various modules of the controller and how these signals
are saved. The DCC is accessible from various points of the graphical user
interface (GUI) via the icon that is shown to the left.
Page 26
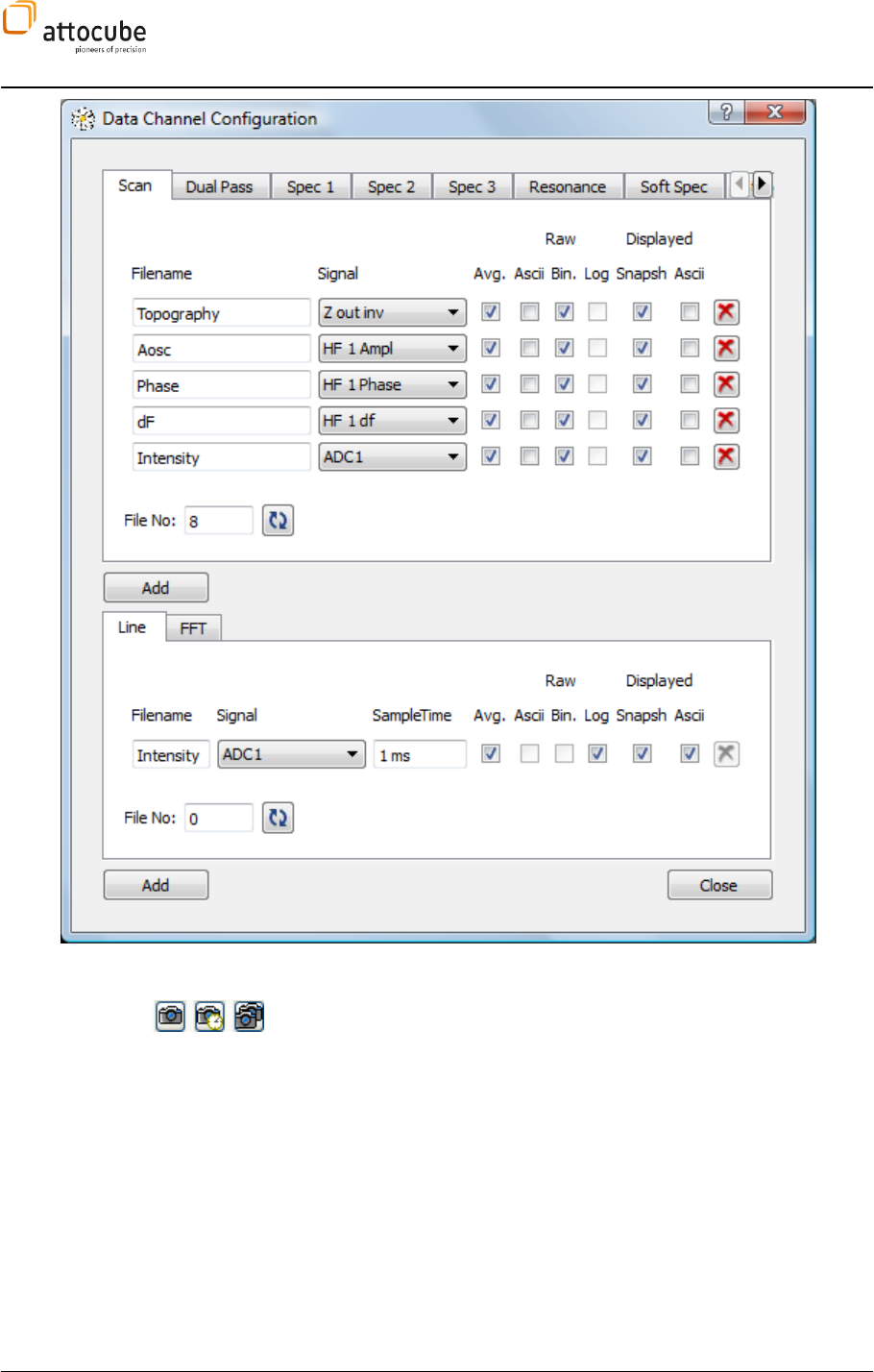
Figure 8:
The Data Channel Configuration dialogue.
Figure 8 shows the DCC in one example configuration. There will always be
one channel predefined in the LINE and FFT group. Only a filename has to be
defined. The AVG checkboxes should be turned ON and both SNAPSH and
ASCII should be checked under DISPLAYED. This means that clicking one of
the SNAPSHOT icons (as shown to the left) in either line view or FFT display
will save the corresponding data in both a data type format and as a
screenshot for better orientation. The signal that is to be shown in the
display can either be chosen in the DCC or directly in the line of FFT display.
The SCAN data group on the top of the DCC is responsible for all data
collected during an xy raster scan and is thus of major importance.
Normally, at least two channels will be defined here:
One will be the topography signal, defined as the output of the z
controller. The corresponding signal is called Z out inv as shown in
Page 27
© 2001-2012 attocube systems AG. Product and company names listed are trademarks or trade names of their
respective companies. Any rights not expressly granted herein are reserved. ATTENTION: Specifications and technical
data are subject to change without notice.
the example above.
The other could be the error signal of the z controller. For contact
mode AFM, this would be the deflection signal usually connected to
ADC1. For non-contact AFM, it would be the output of the lockin
called HF 1 Ampl. For STM, it would be the tunneling current, again
usually connected to ADC1.
The AVG, RAW BIN, RAW ASCII and DISPLAYED SNAPSH checkboxes should all
be checked to save the SCAN data in a binary and text type data format as
well as as a snapshot. Any number of additional data channels can be added
by clicking the ADD button.
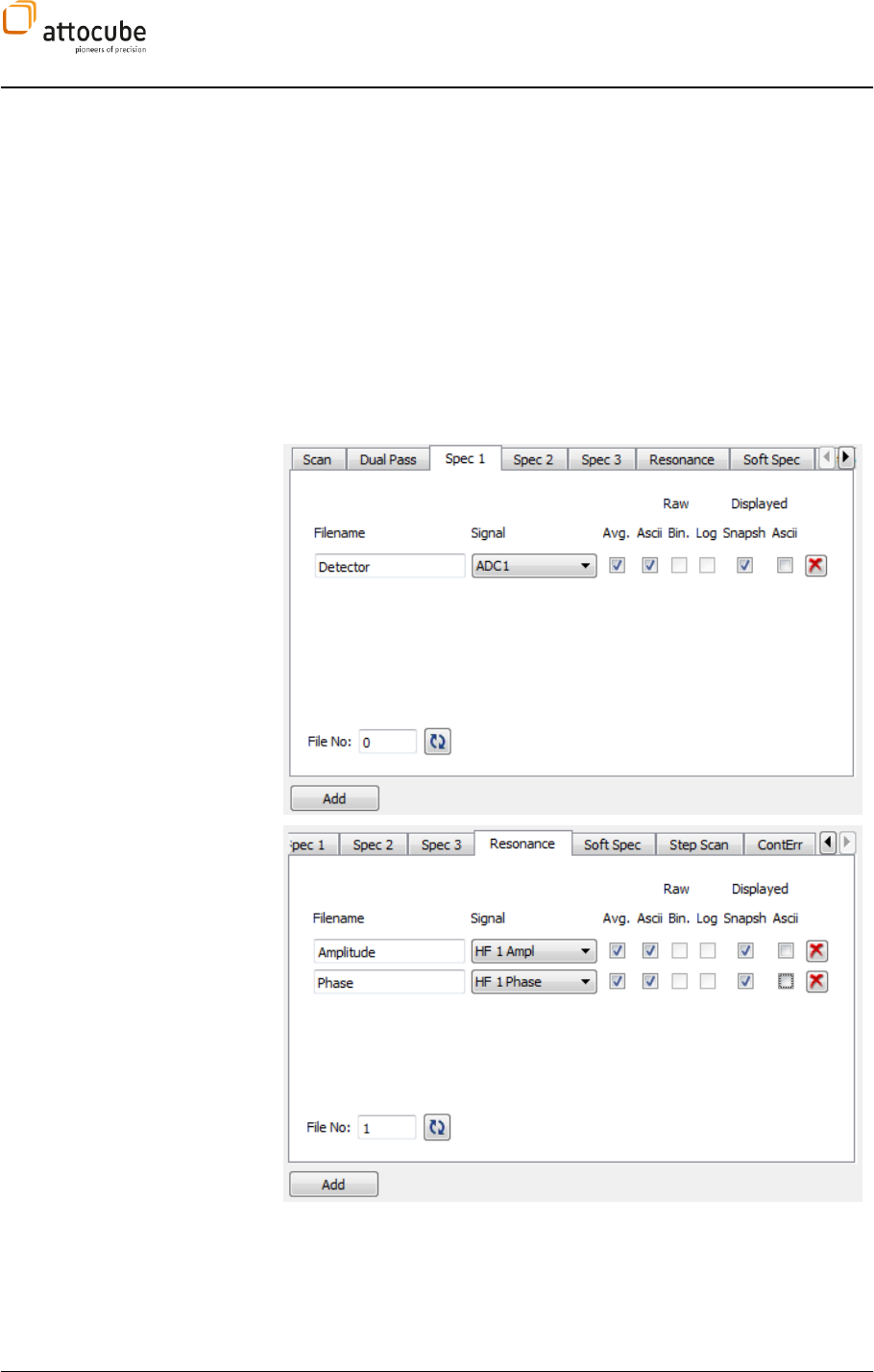
For most experiments, one or more spectroscopy and/or Resonance features
will be necessary. The data channels needed for these operations can be
created in one of the SPEC tabs and the Resonance tab.
DCC Spectroscopy Tab
DCC Resonance Tab
With the settings shown above, all of the basic experiments in scanning
probe microscopy can be done. Scan data will be recorded on two channels
simultaneously, spectroscopy and Resonance experiments can be done and
any given signal can be examined in a line and FFT display. The recorded
data can be stored to hard disk by clicking on one of the snapshot icons in a
Page 28
display. A snapshot trigger in a SCAN display will save the data of all SCAN
data channels simultaneously. The data will be stored in a multitude of
formats: for example the SCAN data of Figure 8 will be saved in ASCII and
binary type format and in addition as a PNG picture file. There will be extra
files for both forward and backward scan direction. There will also be a
snapshot of the SCAN line view and an extra text file with the most
important scan parameters. All of this will be saved by a single mouse click
and all files will automatically be numbered and grouped.
The point in time of the data saving will depend on the type of snapshot icon
that is used for triggering the data storage.
The Snapshot Immediate will save all data in its current state: It may be a
half-filled SCAN image or any arbitrary fraction of a LINE display.
Snapshot Delayed will save the data at the next completion of the
underlying operation. A SCAN will be saved when the scan area has been
completed, a spectroscopy will be saved once the sweep range has been
Snapshot Repeat will turn the Snapshot Delayed function in an endless
cycle. The cycle can be stopped upon the following click on the Snapshot
Repeat button.
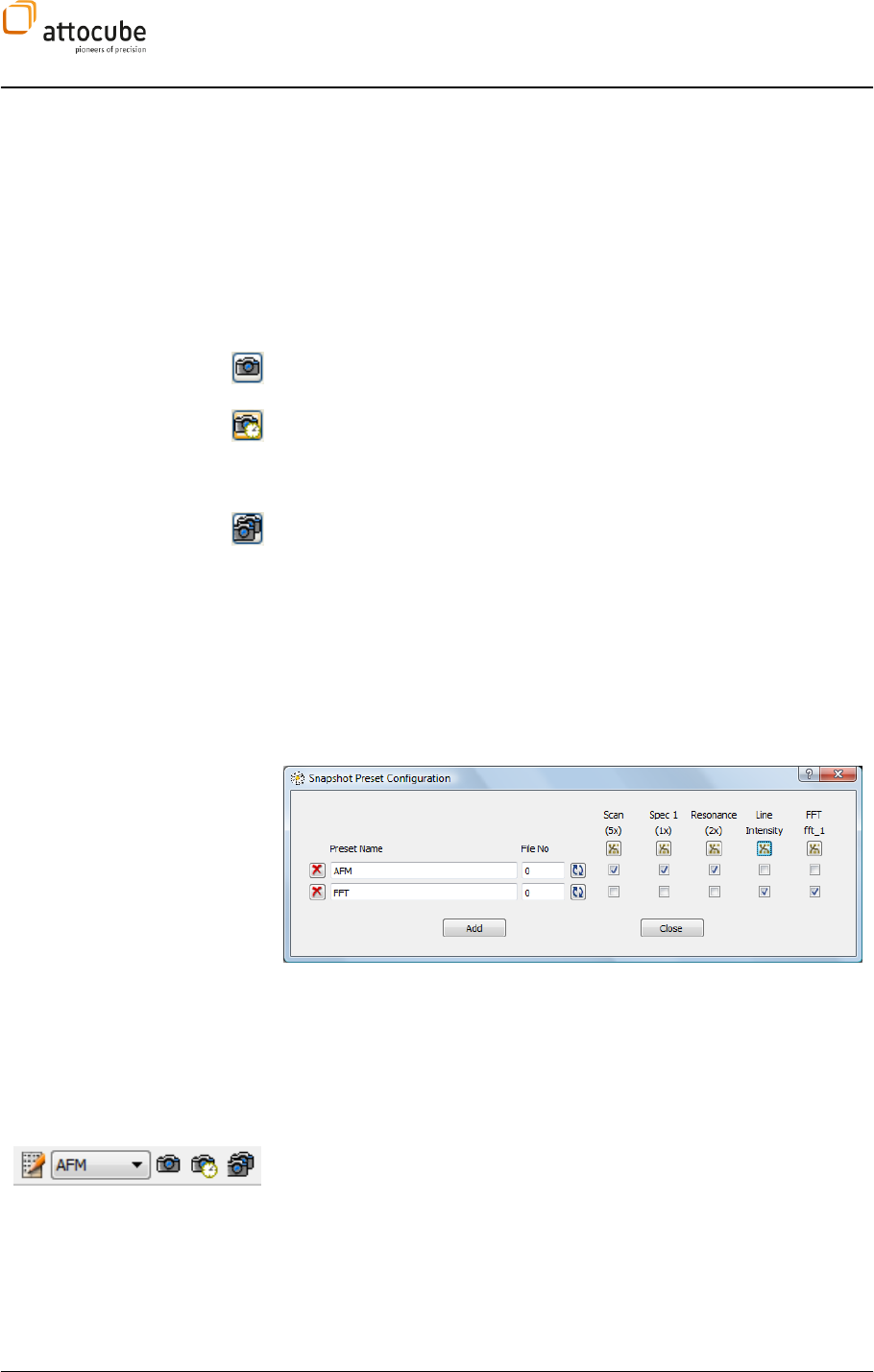
IV.1.b. The Snapshot Preset Configuration
A click on the snapshot icons within a display will trigger the data storage of
the complete data group that corresponds to the display. I.e. a snapshot
trigger in a SCAN display will save all data channels belonging to SCAN. To
save a multiple of data groups simultaneously, the SNAPSHOT PRESET
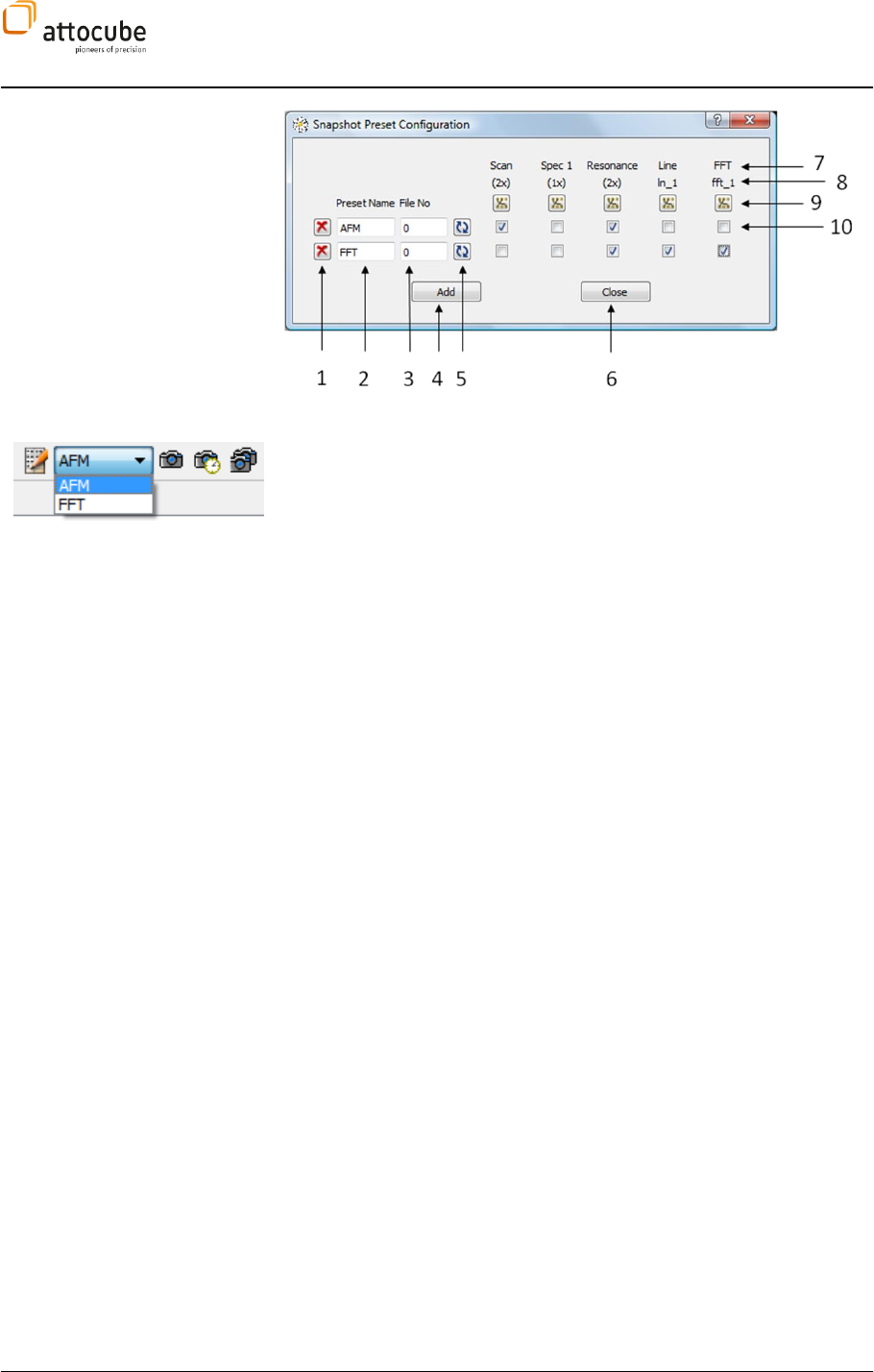
functionality can be used. An example is shown in Figure 9.
Figure 9:
The Snapshot Preset Configuration
For each preset, any combination of data groups can be chosen that will be
saved simultaneously. Only data groups with at least one data channel are
allowed in the preset configuration dialogue. Any number of presets can be
added with the Add button.
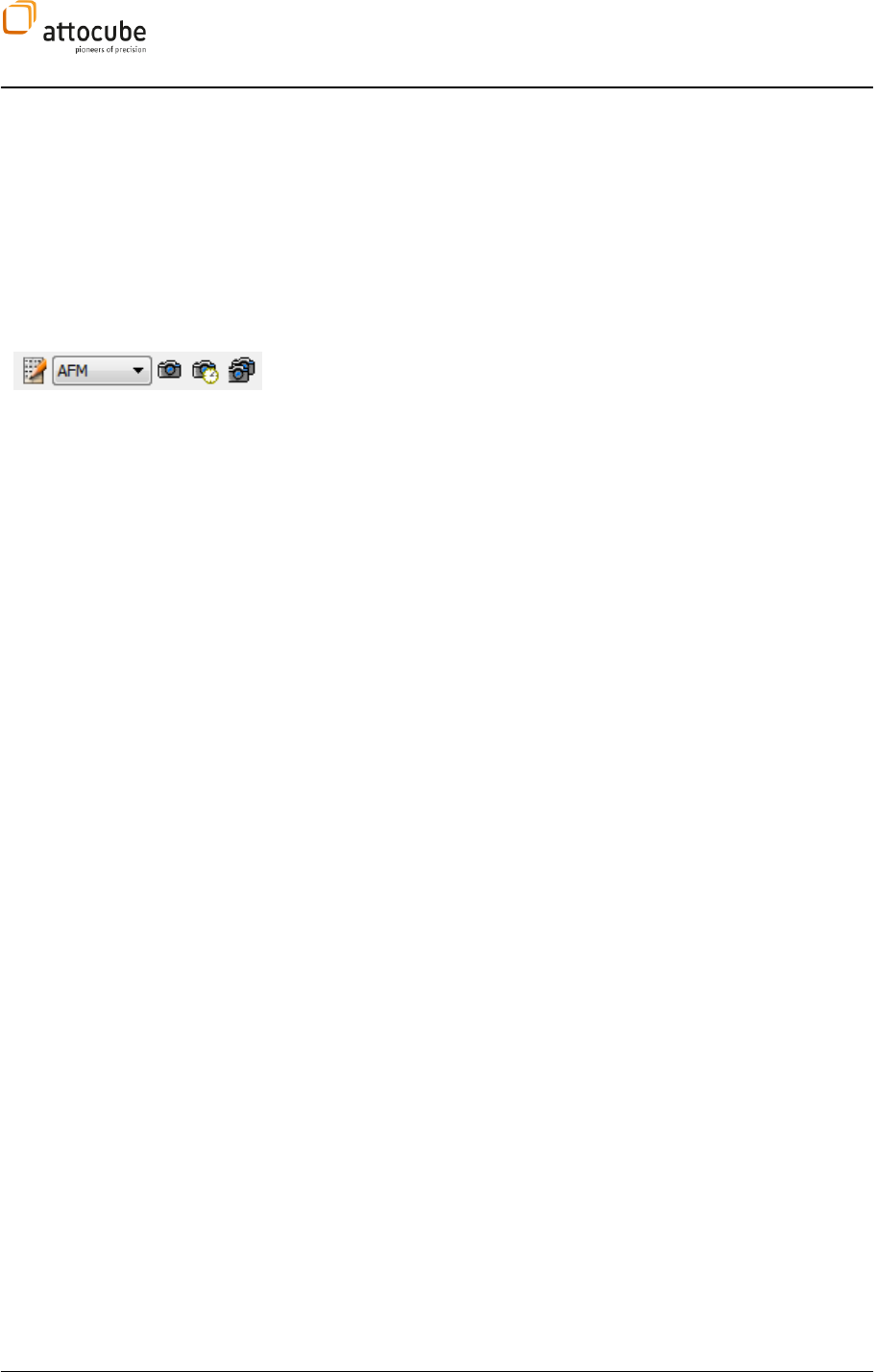
To trigger the data storage of a preset, the preset icons shown to the left
can be used. The icons can be found in the main status line of the Daisy
program. To reach the Snapshot Preset Configuration dialogue, the leftmost
icon has to be clicked. The drop-down list is used to choose the preset for
the next saving process. The preset snapshot icons to the right work similar
to their local display counterparts described in the section above.

Page 29
© 2001-2012 attocube systems AG. Product and company names listed are trademarks or trade names of their
respective companies. Any rights not expressly granted herein are reserved. ATTENTION: Specifications and technical
data are subject to change without notice.
After this short overview, the next section will give details and background
on the data handling and saving capabilities of the ASC500 SPM controller.
IV.2. Data handling details
IV.2.a. Signals, data channels and data groups
A signal is a stream of data that can have two origins:
1. The signal is directly sampled through one of the input connectors.
This would be called an external signal. There are 8 external signals
that are named after its input connector (ADC1, ..., HF1 IN, ...,
Counter)
2. The signal is generated within the ASC500 (internal signal).
Internal signals could be the output of a PI controller (Z_out) or a
lock-in (HF 1 Ampl, HF 1 Phase).
Signals are routed in data channels. A data channel combines the
measurement data with some secondary data that carries additional
information like the position of a data point within an image or a time
stamp. Data channels are thus divided into different groups depending on
the context of the data. One signal is often used in different data channels
at the same time. For example the deflection read-out of an AFM (connected
to the ADC1 input) could be used for recording the topography and feeding
the FFT module at the same time. The ADC1 signal would then be used in two
data channels, one belonging to the data group SCAN and one belonging to
the data group FFT. Up to 14 data channels can be used at the same time.
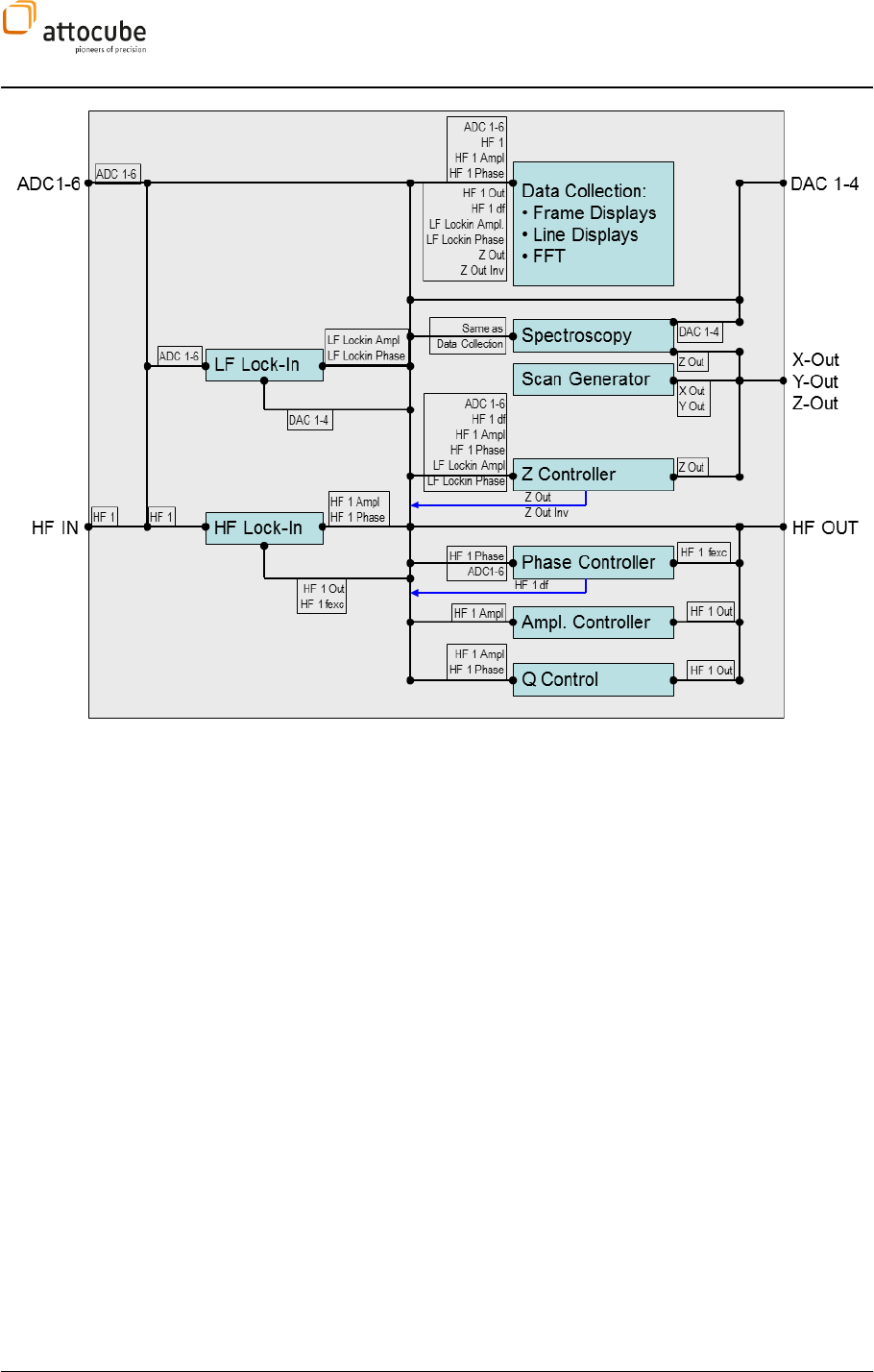
IV.2.b. Internal Signal Flow
The ASC500 SPM controller features a very flexible architecture. There are
many different ways to route the signals between the internal controller
modules to gain a maximum of functionality. Figure 10 gives an overview
on the internal signal flow. The most important controller functions are
illustrated by boxes. Each controller function is connected to other
functions via data lines. Data lines attached to the left of a controller
module show all possible input signals for the respective controller
function. Data lines starting from the right side or from the bottom of a
controller module show the possible output signal generated or altered by
the module.
For example in a standard non-contact mode AFM measurement, the lever
signal would be attached to the HF IN connector on the front panel. The
signal that is carrying the lever information is HF 1 which is automatically
routed into the high frequency HF Lock-In. The lock-in demodulates the HF
1 and generates the HF 1 Ampl signal which can then be used both as an
input value for the Z Controller and also to feed a two-dimensional display
during the scan in the Data Collection module.
Page 30
Figure 10
: Internal Signal Flow Diagram. This diagram gives an overview on the relation between input and
output connectors, the names of the signals and the most important controller functions. Data flow direction is
from left to right (otherwise indicated). Each controller function is depicted by a box, all possible input signal are
shown on the input side of the box, the output signal are shown to the right of the box.
The controller modules shown in Figure 10 are explained in more detail in
section Operating the Controller of this manual.
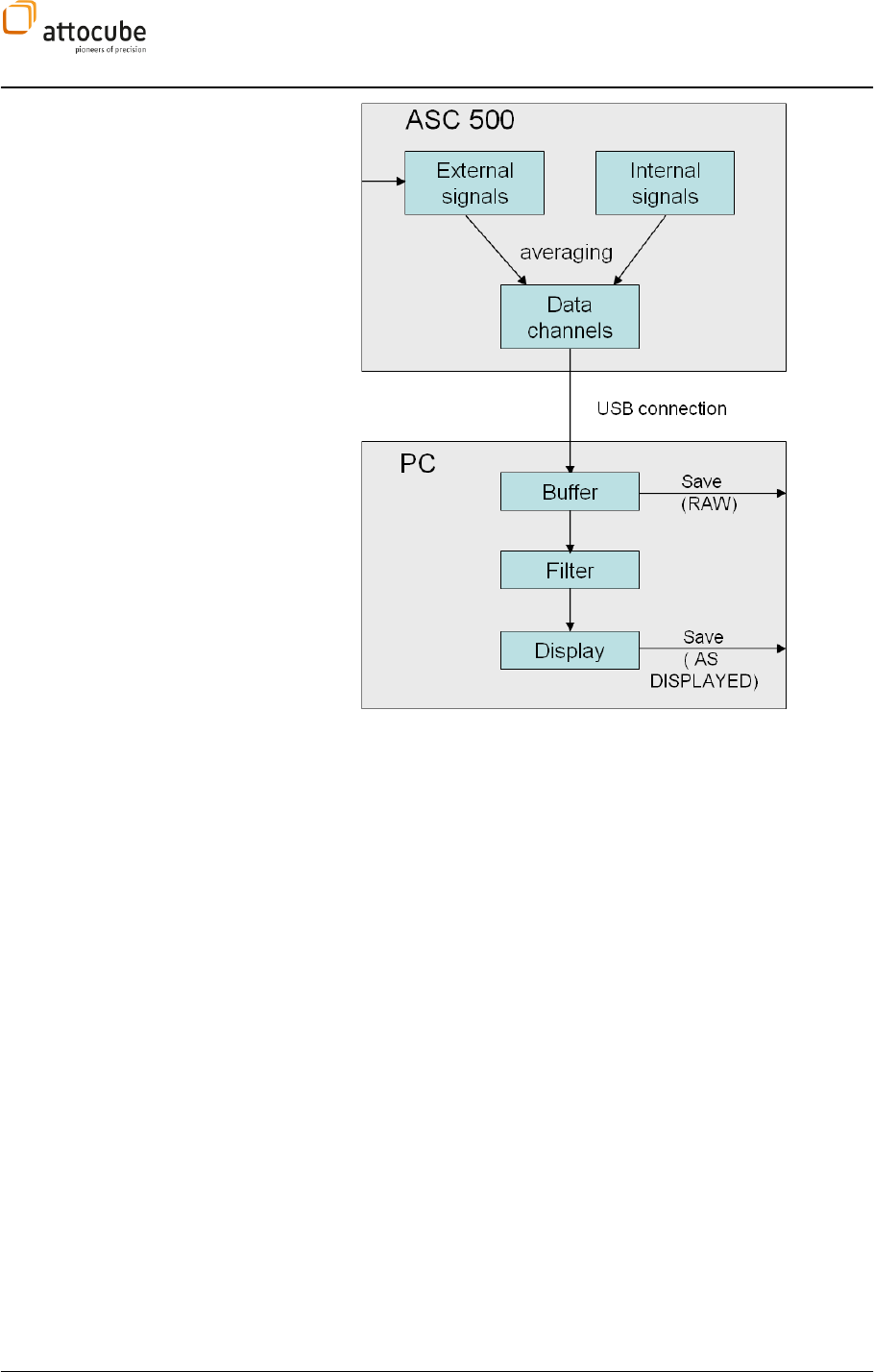
IV.2.c. Data processing chain
The diagram of the data processing chain is shown in Figure 11. All signals
are either recorded or generated within the physical unit of the ASC500
controller.
(defined in the DCC, see IV.2.e). After transmission to the PC via USB, the
data is stored in a buffer. The content of the buffers can be saved directly to
hard disk, choosing from various types of file formats. In addition, it can be
routed to a display (optionally via one or more filtering stages). The content
of the display can then again be saved either in a Windows picture format
(for fast overview via Windows explorer) or in a data format that now
includes the filter stages (pre-processed or as-displayed data).
Page 31
© 2001-2012 attocube systems AG. Product and company names listed are trademarks or trade names of their
respective companies. Any rights not expressly granted herein are reserved. ATTENTION: Specifications and technical
data are subject to change without notice.
Figure 11:
The data flow chain of the ASC500
IV.2.d. Sample time and Average
All internal and external signals use an internal general time base of 2.5 µs.
This time corresponds to the 400 kHz sampling frequency of the general ADC
inputs. In some cases, data is needed only in a slower repetition rate. In the
Daisy GUI the repetition time for signals is called Sample Time. If the Sample
Time is set to a value larger than the time base of 2.5 µs, data has to be
reduced. The user can choose from two options how the data reduction is
done:
1. Averaging ON: all values recorded within a Sample Time are averaged.
2. Averaging OFF: the first value of the Sample Time sets the signal value and
during the rest of the sample time, all other incoming data is ignored.
The data reduction is done in the ASC500 controller in order to reduce the
traffic on the USB connection between ASC500 and PC as much as possible.
The Sample Time of all channels within one data group will be equal.
However, there are two exceptions: the LINE and FFT groups leave it to the
user to define a separate sample time for each channel. For all groups, the
Sample Time is defined in the respective parts of the GUI corresponding to
the data group. For example, the Sample Time for the SCAN group is set via
choosing the scan speed. Still, the Average option is to be defined in the
DCC. It is set to Average ON for all channels per default.

Page 32
IV.2.e. Data Channel Configuration (DCC) in detail
A central point for the configuration of the data processing chain is the Data
Channel Configuration dialogue (DCC). It can be accessed from various
points in the graphical user interface by clicking on the DCC button shown to
the left. In the DCC, data channels are created and signals are assigned to
the data channels.
In the DCC, also the behaviour of the data channels at the time of data
storage is defined. Hereby it is important to distinguish between the
definition of possible file formats and other storage options and the actual
process of the data storage. The possibilities are to be defined within the
DCC; the trigger for the saving process will be done in the respective data
displays, using one of the snapshot icons.
The data channels are sorted in the following groups:
SCAN data associated with the scan motion. Each data point is
referenced within a 2-dimensional frame and has been
recorded in either forward or backward direction. Data from
the SCAN group can be represented in either a two
dimensional display (called a frame view) or as a one
dimensional display showing single or multiple lines of the
scan.
2nd PASS data associated with the Dual Pass Mode (see VI.5.g on page
103). If the dual pass mode is set to ON, the data group 2nd
PASS represents the data of each second line. Since the origin
of the data is very similar to the data of the SCAN group, it can
be viewed with the same display types.
SPEC1, SPEC2, SPEC3
data associated with the Spectroscopy feature. It will be
displayed in a 1D type display.
RESONANCE data associated with the Resonance feature. Representation:
two 1D type displays, usually showing the amplitude and
phase of a lever against frequency.
SOFT SPEC data associated with the Soft Spectroscopy feature.
Representation: 1D display
STEP SCAN data associated with the Step Scan feature. Representation:
2D frame, 1D line
Page 33
© 2001-2012 attocube systems AG. Product and company names listed are trademarks or trade names of their
respective companies. Any rights not expressly granted herein are reserved. ATTENTION: Specifications and technical
data are subject to change without notice.
The above image shows the lower part of the DCC with both LINE and FFT
data groups.
LINE no data association. Any signal can be shown against time.
Representation: 1D line, multiple 1D line
FFT no data association. Any signal can be shown in frequency
space: Representation: 1D line
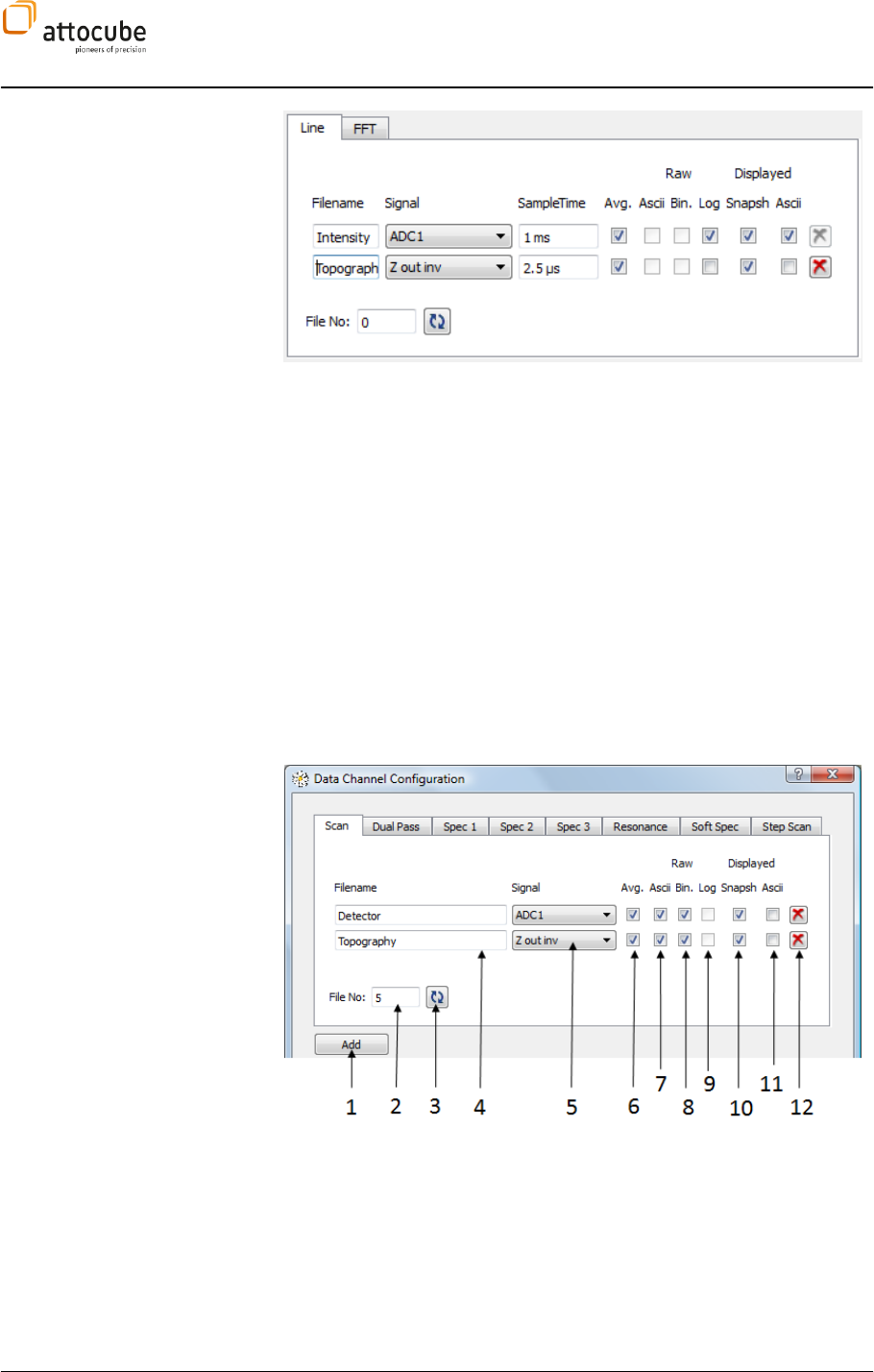
IV.2.f. DCC usage
Before the experiment is started, the data channel configuration has to be
defined in the DCC. After the definition, the data channel configuration can
be saved by saving the GUI profile under File – Save Profile or Save As. The
different sections of the DCC are described in more detail below.
1 Using the Add button, a new data channel can be created in the current
data group. Up to 14 data channels can be used at the same time. Please
note that it is not possible to add data channels during operation. For
Examples, DATA group channels can only be added when the scanner is not
running.
2 The current filename index number is shown here. It will be
automatically increased with each saving process. This number cannot be

Page 34
edited.
3 Reset the File No to 0.
4 Filename used for storing the data of the data channel.
5 The Signal that will be routed into the data channel.
6 Average button. The signal will be averaged over its sample time. See
IV.2.d for more details.
7, 8, 9, 10, 11 Here, the file and data format for the disk storage of the
data can be defined. There are in general five possible formats. Not every
data group has all five formats available. A more detailed description of the
formats is given in section IV.2.g. In the DCC, only the formats are defined.
To actually trigger the storage process, the snapshot icons in the data
displays have to be used.
12 the Remove button will remove the corresponding data channel from
the data group. Please note that the first data channel of both LINE and FFT
data group cannot be removed.
IV.2.g. Saving the data
Available options
There are several options for the storage of each data channel. In general,
the data can be saved either RAW or as DISPLAYED (see Figure 11 for clarity).
RAW means that the data is taken from the buffer, i.e. before any filtering.
For example, SCAN data will be saved without the underground filter if the
RAW option is chosen. The DISPLAYED option will save the data as it is shown
in the corresponding display, i.e. after the filter stages. NOTE: The
DISPLAYED option of any data channel will NOT be saved, if the data channel
is not connected (i.e. shown) in a DAISY display.
RAW ASCII: The data of the channel will be saved in an ASCII type format.
The data will be stored as recorded. For SCAN and similar data groups, there
will be one file for forward and one for the backward direction. This format is
available for SCAN, 2nd PASS, SPEC1-3, CALIB, SOFT SPEC and STEP SCAN data
groups.
RAW BIN: The data of the channel will be saved in a binary format. The data
will be stored as recorded. For SCAN and similar data, there will be one file
for forward and one for backward direction. This format is available for
SCAN, 2nd PASS and STEP SCAN data groups.
LOG: The LOG option is only accessible for LINE data. This option will write
the data to a file as a stream of points, one point with each Sample Time. The
resulting file will be of ASCII (text) type. Please note that LOG files can get
very large, so it is advisable to use the log function only with large Sample
Times. The logging is started and stopped by using the Snapshot Repeat
button in the respective LINE display.
DISPLAYED SNAPSHOT: If checked, the data will be saved as a screen
snapshot of the current display. It will be saved in a PNG file format by
default, but the format can be changed using the Settings – Preferences – File
Output – Snapshot Format. This feature is especially useful to provide an
Page 35
© 2001-2012 attocube systems AG. Product and company names listed are trademarks or trade names of their
respective companies. Any rights not expressly granted herein are reserved. ATTENTION: Specifications and technical
data are subject to change without notice.
overview on the stored data on the harddisk using only the Windows
Explorer. NOTE: As with all DISPLAYED save options, data will only be saved
if the channel is dargestellt in a DAISY display. For SCAN channels, both
forward and backward scan snapshots will be saved, even if only one
direction is shown on the screen.
DISPLAYED ASCII: The content of the display that shows the data channel
will be stored in a text type format. In contrast to the RAW ASCII option, the
file will contain all data changes resulting from the filters the data might
have passed. Again, the data will only be saved if the data is shown in a
display at the time of the saving trigger.
Triggering data storage
Each display in the Daisy GUI contains three buttons for issuing a saving
trigger (shown to the left). These buttons will be used to trigger the process
of data storage
The Save Immediate button will save the data in its current state, i.e. a scan
frame that is half filled or a fraction of a LINE VIEW line.
The Save Delayed button will store the data when the corresponding data
unit will be completed for the next time. This means that a scan will be saved
once the frame is finished and a spectroscopy will be saved as soon as it is
completed. A save icon will appear in the corresponding display to note that
a data storage process is PENDING??.
A third option will be the SAVE REPEAT button. With this button pressed, the
data will be repeatedly saved in a manner that is equal to the SAVE
COMPLETE option. For example a scan will be repeatedly saved every time
the complete scan area has been imaged. The procedure can be stopped by a
second click on the SAVE REPEAT button. For LINE data, the SAVE REPEAT
button can have two meanings: 1. If the LOG option in the DCC is chosen,
the data will be saved as a continuous data stream in one file, one data
point for each sample time. 2. If the LOG option in the DCC is not chosen,
the SAVE REPEAT for LINE data will work similar to all other data groups:
data will be saved at the moment the display is full.
Triggering a data storage process will always save all channels of a data
group. For example, each click on a SAVE button in a frame display will write
all data belonging to the SCAN data group to the hard disk. This will be both
the 2D image, but also the 1D data of the corresponding scan line view
(meaning the line view that shows the scan data line per line). There are,
however, two exceptions for this rule: The LINE and FFT data group behave
differently: here a SAVE trigger will only store the data channel shown in the
display where the SAVE is triggered. If there are several displays with LINE
information and all of them need to be stored to hard disk, the user needs to
click on all corresponding SAVE buttons. Another possibility is to use the
Snapshot Preset option of the DAISY GUI to combine any combination of data
channels to be saved on one mouse click (see next section IV.2.i). The
reason for the different behaviour of LINE and FFT data compared to all
other data groups is that the time scales of various LINE or FFT displays may
be very different. One LINE view could show a signal on a microsecond time
scale, while another LINE display could very slowly log data from for
ng
process allows for a separate data storage for either long term or short term
Page 36
data. The differences between LINE/FFT compared to other data groups is
also highlighted in the splitting of the DCC, where LINE and FFT are shown in
an extra lower part of the DCC window.
Filename Convention
The filename will be composed from several parts. First, there will be a prefix
referencing the data group and an index number. The index number will be
automatically increased after each saving cycle. The next part of the
filename will be the data channel name as entered by the user in the DCC.
This is followed by an extension providing some closer description of the
It could also be the name of the display in case the data is saved AS
DISPLAYED. Finally, the Windows filename extension sets the file format
filenames will all start with the same prefix, so it will be immediately clear
that they are all based on the same data.
Please note that the name of any display can be changed via its context
menu.
Here are several examples:
SC002-Topography-bwd.asc
This filename is composed as follows:
SC SCAN data group
002 index
TOPOGRAPHY name taken from DCC
BWD backward scan
.ASC 2D ASCII type format
S1002-Tunnel Current-Spectroscopy 1.png
S1 data group SPEC1
002 index number
TUNNEL CURRENT Name from DCC
SPECTROSCOPY 1 Name of the display that was the origin of the
snapshot. The existence of the display name within the filename is a sign
that the data was saved as DISPLAYED.
.PNG picture file format
If a filename is already used in the target directory, DAISY will automatically
to guarantee a
successful storage of the data.
Target directory
All files will be stored in the same directory. This directory can be changed
at any time under Settings – Preferences – File Output - Target Directory.
Page 37
© 2001-2012 attocube systems AG. Product and company names listed are trademarks or trade names of their
respective companies. Any rights not expressly granted herein are reserved. ATTENTION: Specifications and technical
data are subject to change without notice.
File formats
All data saved by Daisy will contain a file header that is readable with any
standard text editor. A typical file header looks as follows:
# Daisy line view snapshot
# 2011-02-01T07:26:35
# display: FFT Display
# x-pixels: 813
# x-unit: Hz
# y-unit: V
X ; Y
Obviously, an FFT display was saved with a content of 813 pairs of voltage
versus Hz data points. After the header, the file contains the measurement
data in either ASCII or binary format (depending on the file format type). In
case of an ASCII file format, the data is written in a form similar to the last
line of the header: two columns separated by a semicolon.
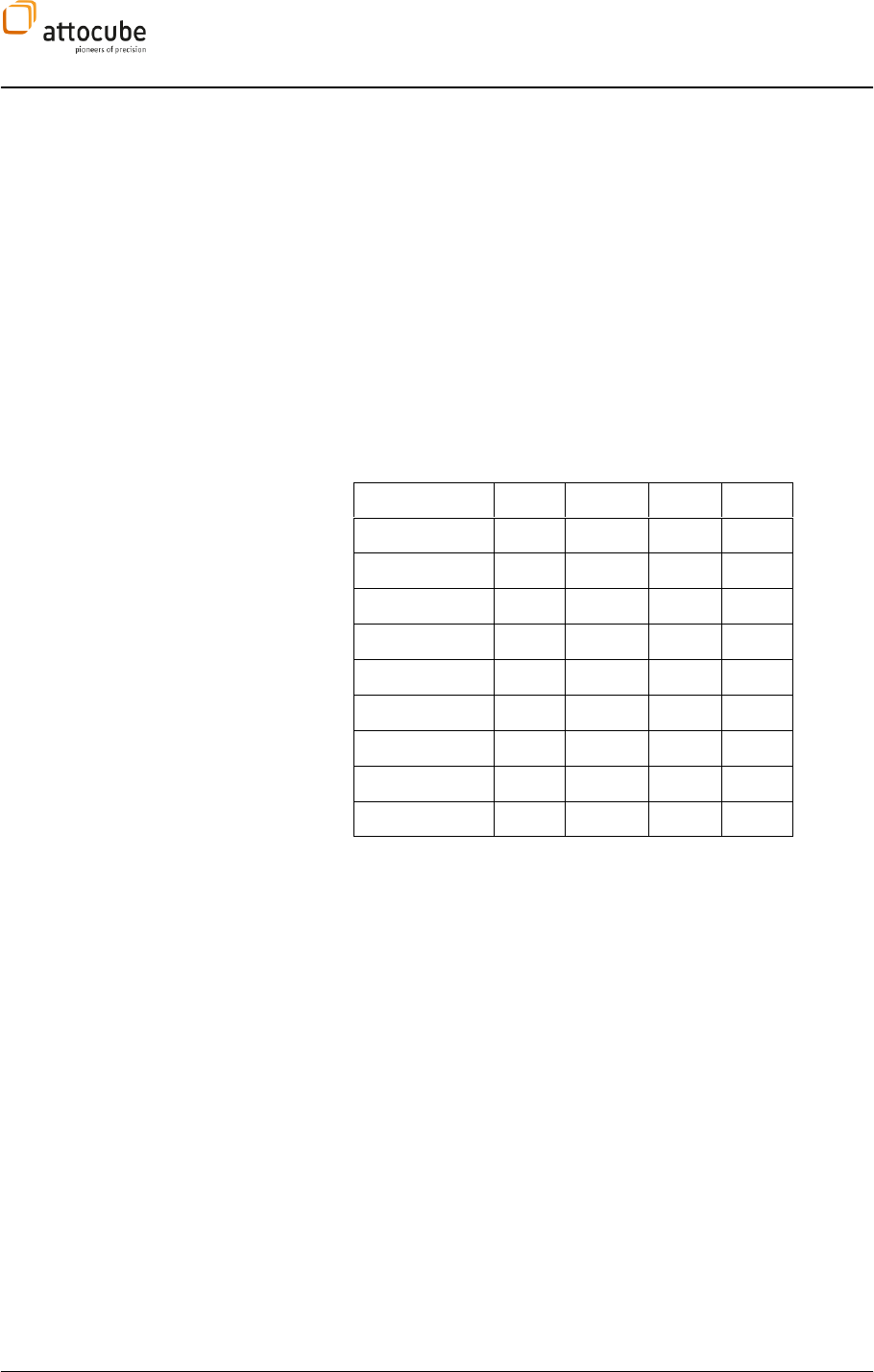
The following table provides an overview on the available file format types:
ASC
BCRF
PNG
CSV
SCAN
+
+
+
-
SCAN LINE
-
-
+
+
2ND PASS
+
+
+
-
SPEC 1-3
-
-
+
+
CALIB
-
-
+
+
SOFT SPEC
-
-
+
+
STEP SCAN
+
+
+
-
LINE
-
-
+
+
FFT
-
-
+
+
Note: SCAN LINE data is not a separate data group but belongs to the SCAN
data group and is saved by the same trigger. SCAN LINE data is only
available AS DISPLAYED and will thus be saved automatically if one of the
DISPLAYED checkboxes in the SCAN section of the DCC is marked.
ASC Format
The ASC format is used for 2D data (SCAN, 2nd PASS, STEP SCAN). The data
will be written to a file as ASCII text. The resulting files can be opened in a
text editor or any standard image analysing software. Due to the nature of
text files, the file size will be 2-5 times larger than its binary counterpart
BCRF. There are two slightly different versions of the ASC file format:
The data points are separated by a line feed.
Data within one scan line a separated by a TAB and the end of a
scan line is marked by a line feed (line oriented).
To choose between these two options, a checkbox under Settings –
Preferences – File Output – ASC Format can be used.
BCRF Format
The BCRF is the binary counterpart of the ASC format and can be used for the
same data (2D data). After the ASCII header, the data points are saved in a
binary format which leads to a file size reduction of up to 5.
Page 38
PNG Format
This format is a picture type format for screen snapshots. It is available for
all data and display types. The content of the display is saved to hard disk as
it is shown on the screen. For SCAN and similar data, there will be always the
forward and backward scan direction saved to a separate file (even if only
one direction is shown in the display). Data post processing is not possible
with this format. Still, saving screenshots provides an easy overview over
collected data. The format can be switched to JPEG, BMP and others under
Settings – Preferences – Snapshot Format.
CSV Format
The CSV format is an ASCII/text type file format for 1D data (LINE, SPEC1-3,
FFT). CSV (comma separated values) can be imported to every program that
is capable of analysing data sorted in columns and rows (Excel, Origin,
Sigmaplot, SciLab,...)
IV.2.h. Parameter File
For each data storage cycle an additional text file can be created that is
called the Parameter File. The Parameter File will contain the most important
parameters that were set in the Daisy GUI at the time of the saving process.
The filename is parameter.txt with a prefix equal to the prefixes of the
corresponding data files. The file is readable with any text editor. The user
can add any arbitrary text to the Parameter File via Displays – Snashot
Comments. The creation of Parameter File can be omitted under Settings –
Preferences – File Output – Parameter file.
IV.2.i. Snapshot Presets
Often during an experiment, several data groups need to be saved at the
same time. For example, FFT and LINE data are a common couple because
they represent complementary information on the same physical origin.
Also, SCAN and LINE data might be interesting to save together, if for
example the LINE data represents an additional parameter of the
measurement. The DAISY GUI is equipped with functionality to combine
several data groups in presets and save all data with one mouse click.
Moreover, different presets can be defined and activated via a simple drop
down list. A very flexible and powerful tool for data saving is thus at hand
for the user.
To enter the Snapshot Presets Configuration dialogue, the user has to click
on the button shown to the left in the status line of the DAISY. In the
following menu, the data groups can be assigned to certain presets. Each
preset will be represented by one line in the dialogue.
Page 39
© 2001-2012 attocube systems AG. Product and company names listed are trademarks or trade names of their
respective companies. Any rights not expressly granted herein are reserved. ATTENTION: Specifications and technical
data are subject to change without notice.
1 The Remove button is used to remove one preset from the list.
2 Name of the preset. This is used to identify the preset in the trigger
dropdown list (shown to the left).
3 Index number of next data filename.
4 Reset index number to zero.
5 The Add button is used to add another preset to the list. There is no limit
to the number of presets.
6 The Close button will accept all changes and closes the dialogue.
7 Data Groups: all data groups with active data channels are shown. For
LINE and FFT data, each channel will be shown separately because these
channels could potentially be stored separately. For all other data groups,
all data channels of the group will always be stored combined.
8 This line shows either the number of active data channels in the group or
the name of the data channels for LINE or FFT group.
9 DCC shortcut. To change the data channel configuration, a click on this
icon leads to the DCC.
10 These checkboxes are used to add the corresponding data group to the
preset.
Snapshot Preset Filename
Convention
The filenames created by the snapshot presets are composed similarly to the
filenames from data group storage. The difference is the prefix numbers. All
the files corresponding to their common trigger.
1) Prefix: P0 .. Pn + 3-digit number. P0 corresponds to the first
preset, P1 to the second and so on.
2) Data channel name
3) Na source
4) for SCAN data: denotation of scan directions; fwd or bwd
5) filename extension
Example:
P0001-ln_1-Line View.csv
Page 40
This filename is composed as follows:
P0 Preset 0 was used to create the file
001 index number
ln_1 data channel name taken from the DCC
Line View Name of the display (marks that data was saved AS
DISPLAYED)
.csv
How to trigger a snapshot
preset
The data storage of a Snapshot Preset is done via one of the three snapshot
buttons shown to the left. These buttons can be found in the main status
line of the Daisy program. The usage of these buttons is very similar to the
snapshot icons from the data group storage (see page 35)
Page 41
© 2001-2012 attocube systems AG. Product and company names listed are trademarks or trade names of their
respective companies. Any rights not expressly granted herein are reserved. ATTENTION: Specifications and technical
data are subject to change without notice.
V. Operating the Controller: General Usage and Overview
This chapter gives a general overview on the Daisy software and its
functionalities.
V.1. Software Installation and Getting Started
Copy the folder on the CD \Software\ASC500 Software and all its contents to
a new folder c:\Programs\attoSoftware\ASC500. You are not required to
execute any installation program. It is possible to generate a shortcut on
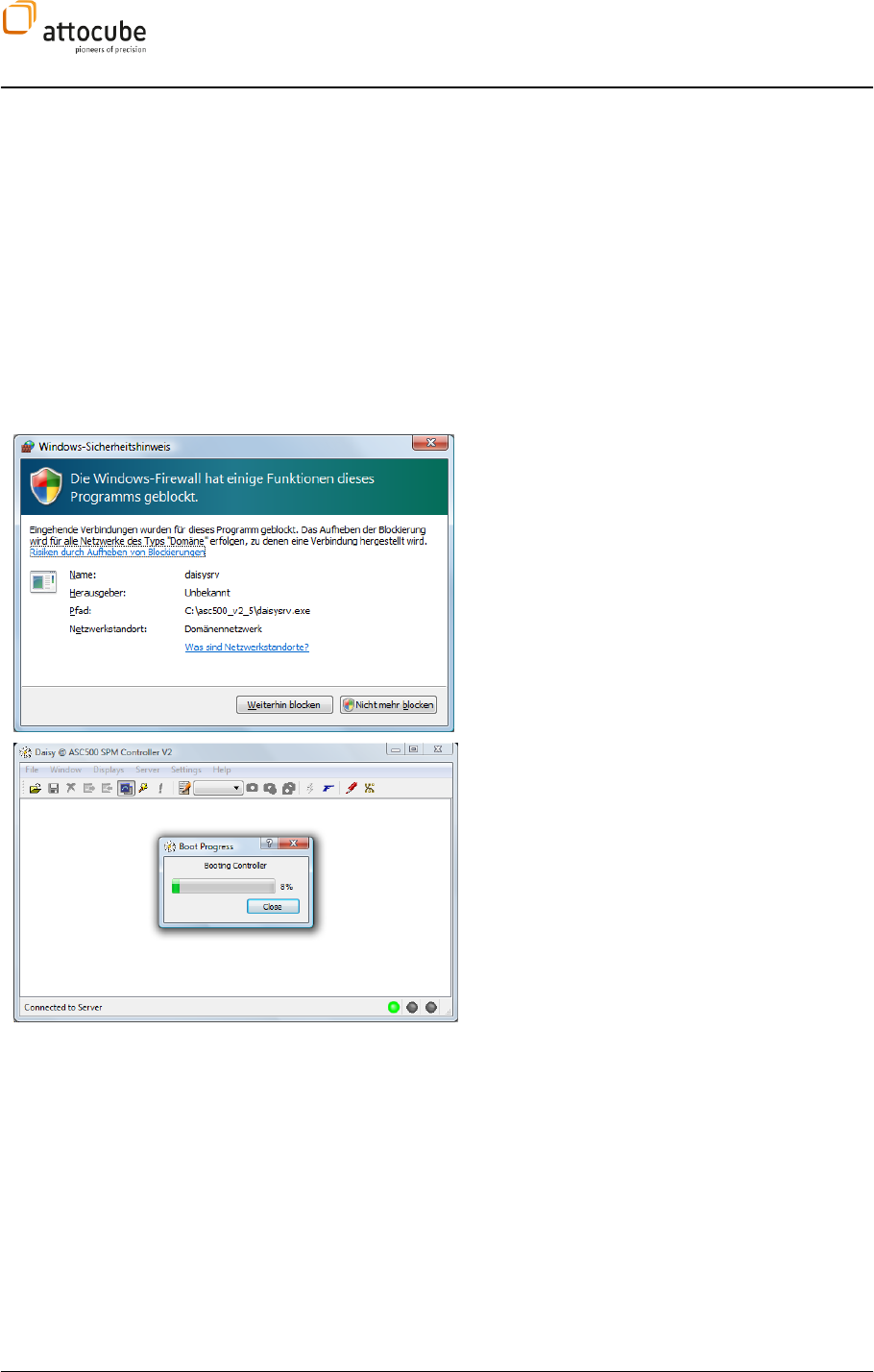
Switch on the controller.
f your firewall is
activated, the following error message appears.
Now, the ASC500 hardware is automatically booted
and the window as shown to the left appears.
Remark: by booting the hardware, all FPGA and DSP
code is transferred from the computer to the
controller, thus defining its functionality. Please
note that upgrading to a new software version only
requires starting the new version of the Daisy
program. All changes will be automatically
programmed into the hardware. Furthermore, the
software will distinguish automatically between v1
and v2 hardware version of the ASC500 and load
corresponding files.
Page 42
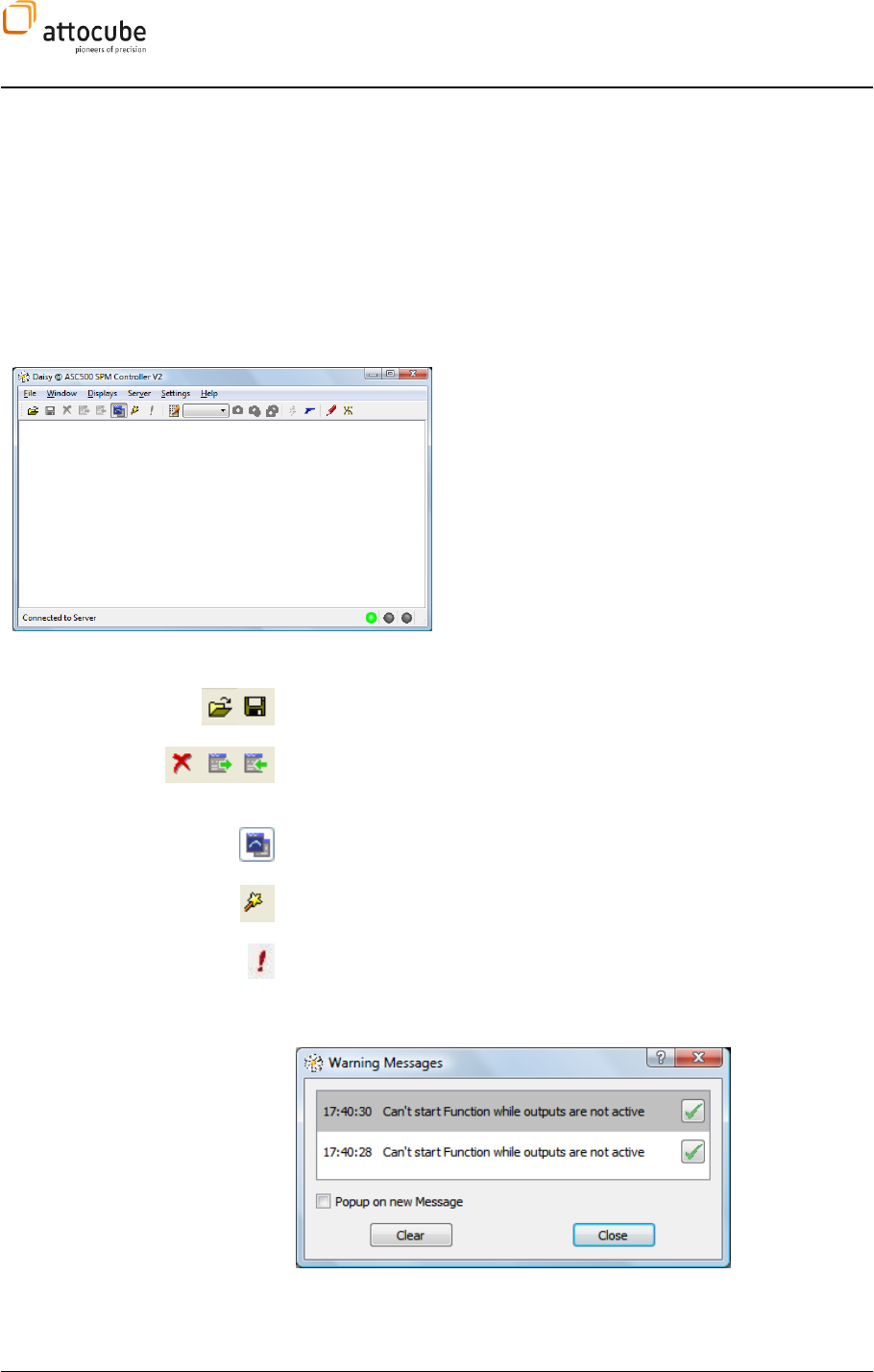
V.2. Description of Main Daisy Program
After booting, the main server program is running (see image below). It
enables the connection to the hardware and handles data inputs and
outputs. Also, it can reboot the controller and send new boot code. Yet, for
controlling parameters and outputs of the ASC500, a profile has to be loaded
that defines the graphical user interface (GUI). A profile (*.ngp) consists of
saved settings and a panel (*.ngc). Hence, user settings can be saved with
the profile.
On the lower right there are three status LEDs (from
left to right):
- the server is connected to the hardware (green
LED),
- the server is receiving data (green),
- an overload error occurred (red).
V.2.a. The main toolbar
Load/ Save Profile. Profiles and panels can also be loaded and saved with
the File menu.
Close/ Detach/ Collect Panel. If you have loaded one or several panels, it
is possible to detach them from the server application or re-collect them
also by using the Window menu.
Always on top. If this button is checked, Daisy windows will always stay on
top of other windows running on the computer.
Display wizard. You can open additional data windows using the display
wizard. Please see section V.4.d on page 58 for further information.
Warning messages. Press this button to show the warning messages
window., which can also be configured to pop up on every new message.
You can either clear the whole list, or check single messages to delete
them.
Page 43
© 2001-2012 attocube systems AG. Product and company names listed are trademarks or trade names of their
respective companies. Any rights not expressly granted herein are reserved. ATTENTION: Specifications and technical
data are subject to change without notice.
Snapshot Presets: Data of different context can be saved within one
mouse click. The Snapshot Preset icons shown to the left are used for this
functionality. Further details on data handling and saving are given in
section IV.
Start/ Shutdown Server. The server application on the PC as well as the
hardware can be booted or shut down using the Server menu. The boot
messages from the server program can also be opened here. In case of
problems, the Server Output can help to trace a problem.
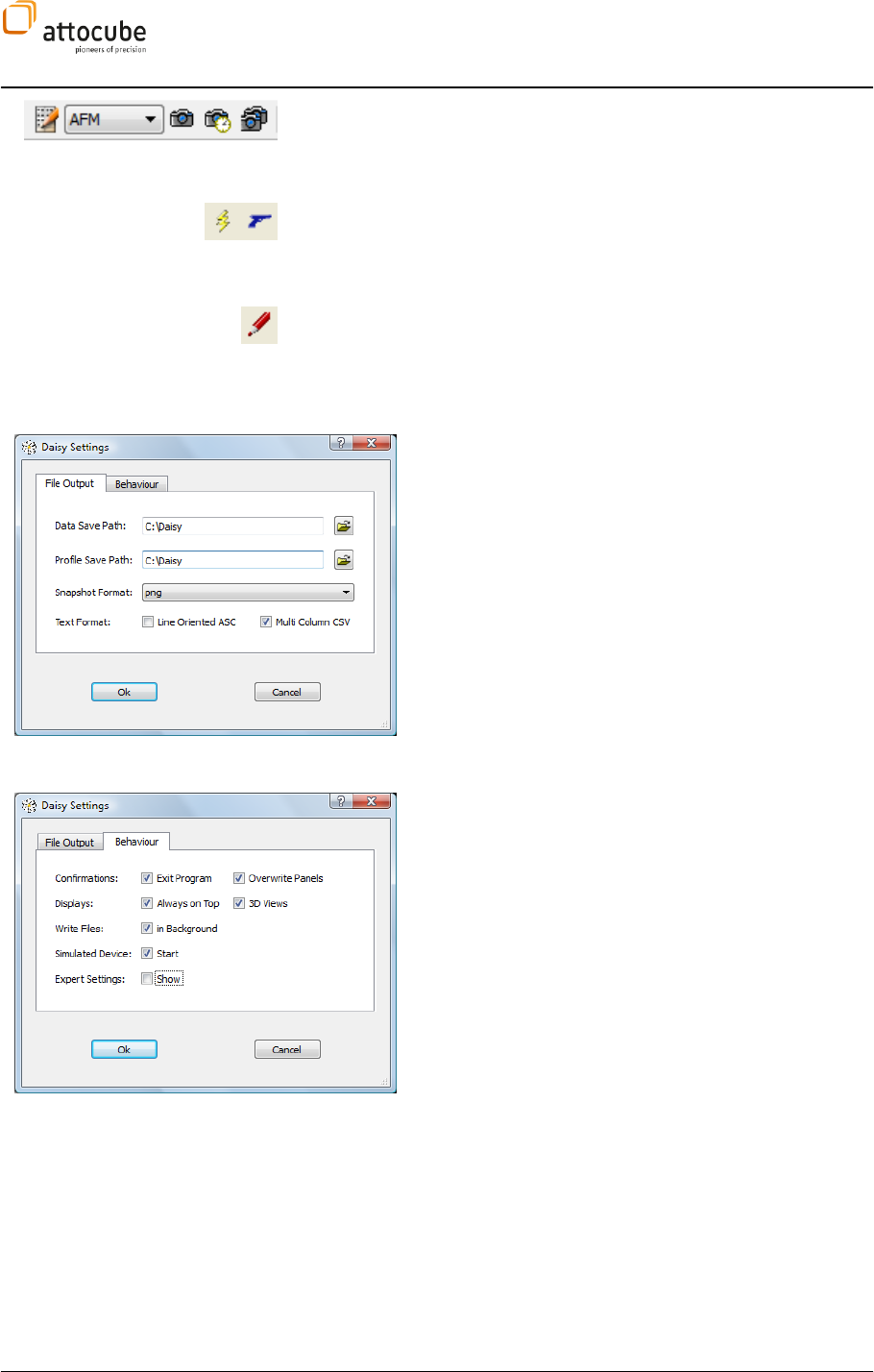
Daisy settings. Open the preferences dialog to change certain global
settings. It is recommended not to change these settings unless needed.
The File Output tab features the following settings:
Data Save Path: Set the target directory in which all data
/ snapshots will be saved by selecting a path with the
Open icon to the right.
Profile Save Path: Set the target directory in which the
profiles will be saved.
Snapshot Format: You can choose between bmp, png,
ppm, xbm & xpm file formats for the snapshots.
Text Format: For 2D data, choose between Line Oriented
ASC and one data point per line.
For multiple curves, use multiple colums in .csv files or
alternatively, write multiple curves one after another.
The Behavior tab features the following settings:
Confirmations: Check the corresponding boxes if you
want to be notified before exiting the program, and before
overwriting panels respectively.
Displays: Check the corresponding boxes to activate
Always on Top for the displays, and for enabling 3
dimensional data displays (available upon right-clicking
in a frame view). Since this functionality is not supported
by all PC hardware configuration, the 3D views option is
set to OFF by default.
Write Files: Check this box to enable writing files in the
background.
Simulated Device: Check this box to start the Daisy in
siumulation mode (without actually connecting to the
ASC500 hardware).
Export settings: Check this box to show the Expert
Settings.
Page 44
V.2.b. The menu bar
In addition to the standard menu entries as already described above, there are the following options available in
the main menu bar:
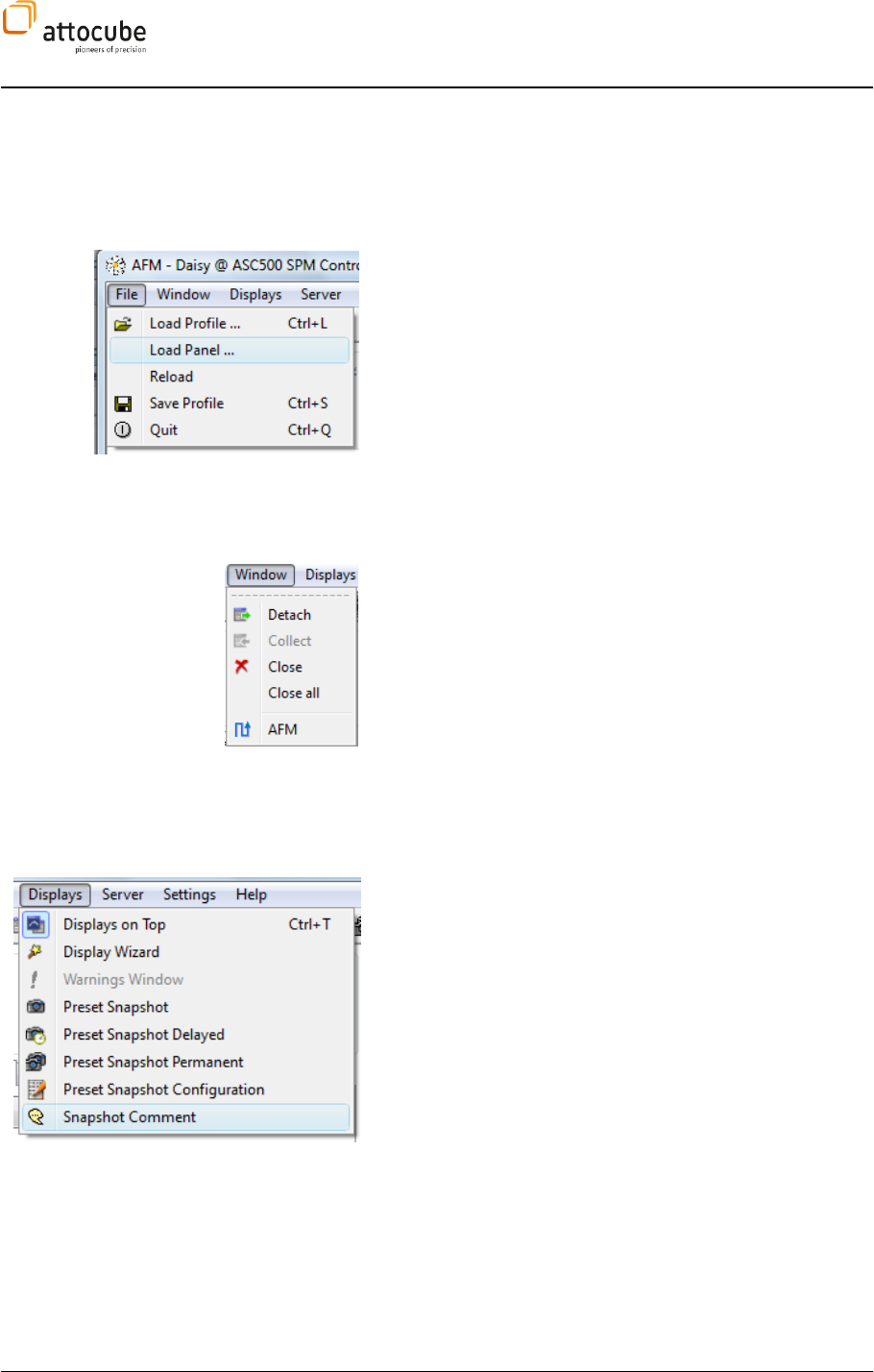
The File menu contains the following entries:
Load Profile: Click here to load a profile (.ngp).
Load Panel: In addition to profiles (.ngp), there is also a number
of preconfigured panels (.ngc) available.
Reload: Use this option to reload the current profile. This option
is helpful if e.g. settings have been changed which will only come
into effect after reloading the profile (such as changing Aliases,
see section V.3.b).
Save Profile: Use this option to save you profile.
Quit: Exit the program.
The Window menu contains the following entries:
Detach: Use this option to detach the current display from the
main Daisy window. This option is particularly useful when using
more than one screen or very large screens.
Collect: Use this option to re-attach detached displays to the
main GUI window.
Close: Use this option to close the current display.
Close all: Use this option to close all displays at once.
The last entry consists of all currently active / open displays; use
this to switch between the different windows.
The Displays menu contains the following entries:
Snapshot Comment: Here you can enter comments which will be
saved in the parameter file.
Page 45
© 2001-2012 attocube systems AG. Product and company names listed are trademarks or trade names of their
respective companies. Any rights not expressly granted herein are reserved. ATTENTION: Specifications and technical
data are subject to change without notice.
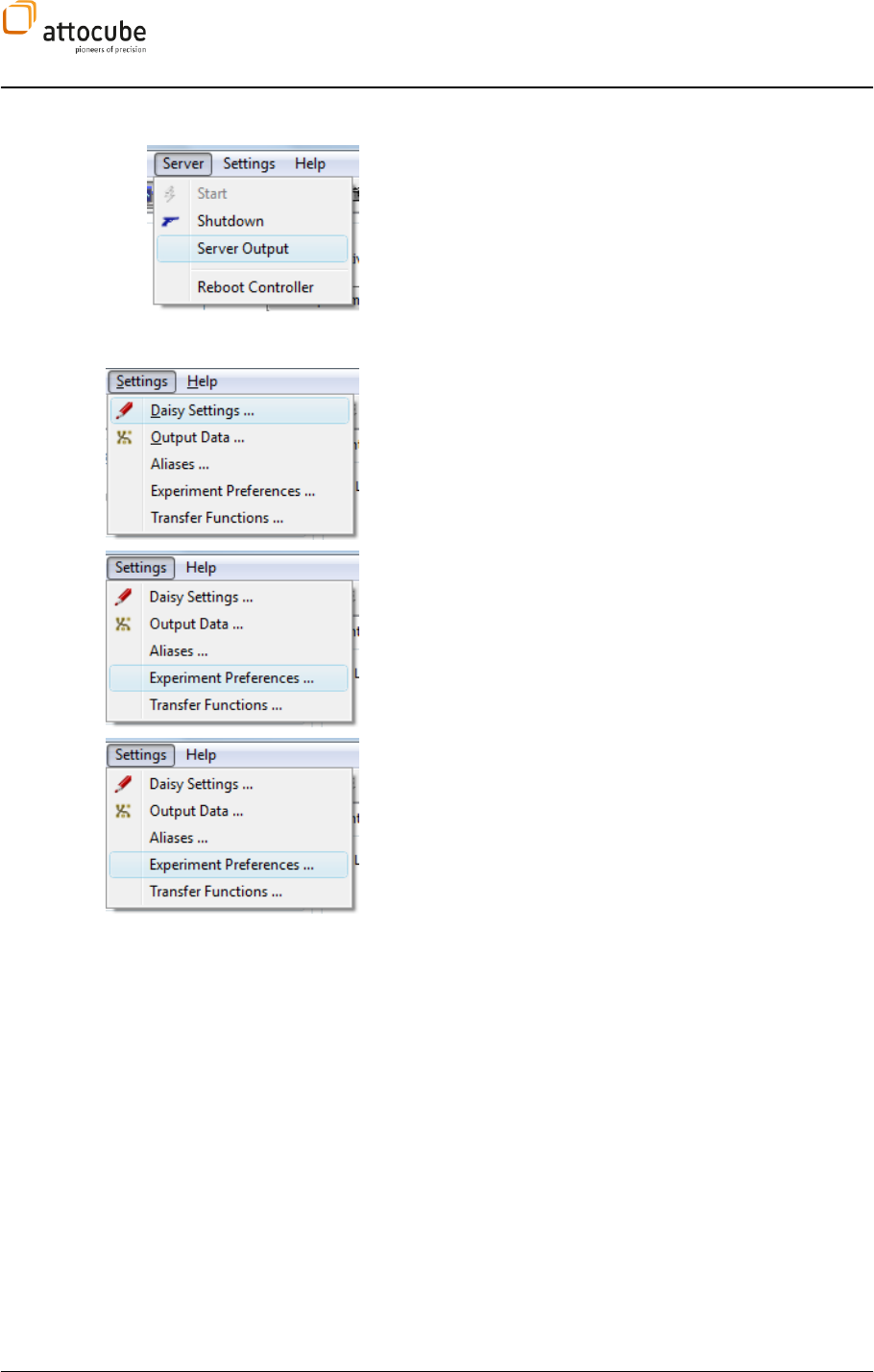
The Server menu contains the following entries:
Start & Shutdown: See the corresponding button descriptions
above (section V.2.a)
Server Output: This opens a window which lists the
communication between the Daisy server and the hardware.
Reboot Controller: Use this option to reboot the controller.
The Settings menu contains the following entries:
Daisy Settings: See the corresponding button description above
(section V.2.a).
Output Data: This opens the DCC window, see description in
section IV.1.a.
Experiment Preferences: This opens a window with several tabs
for certain settings associated with program behaviors during
experiments (in contrast to the Daisy Settings menu), which are
described below:
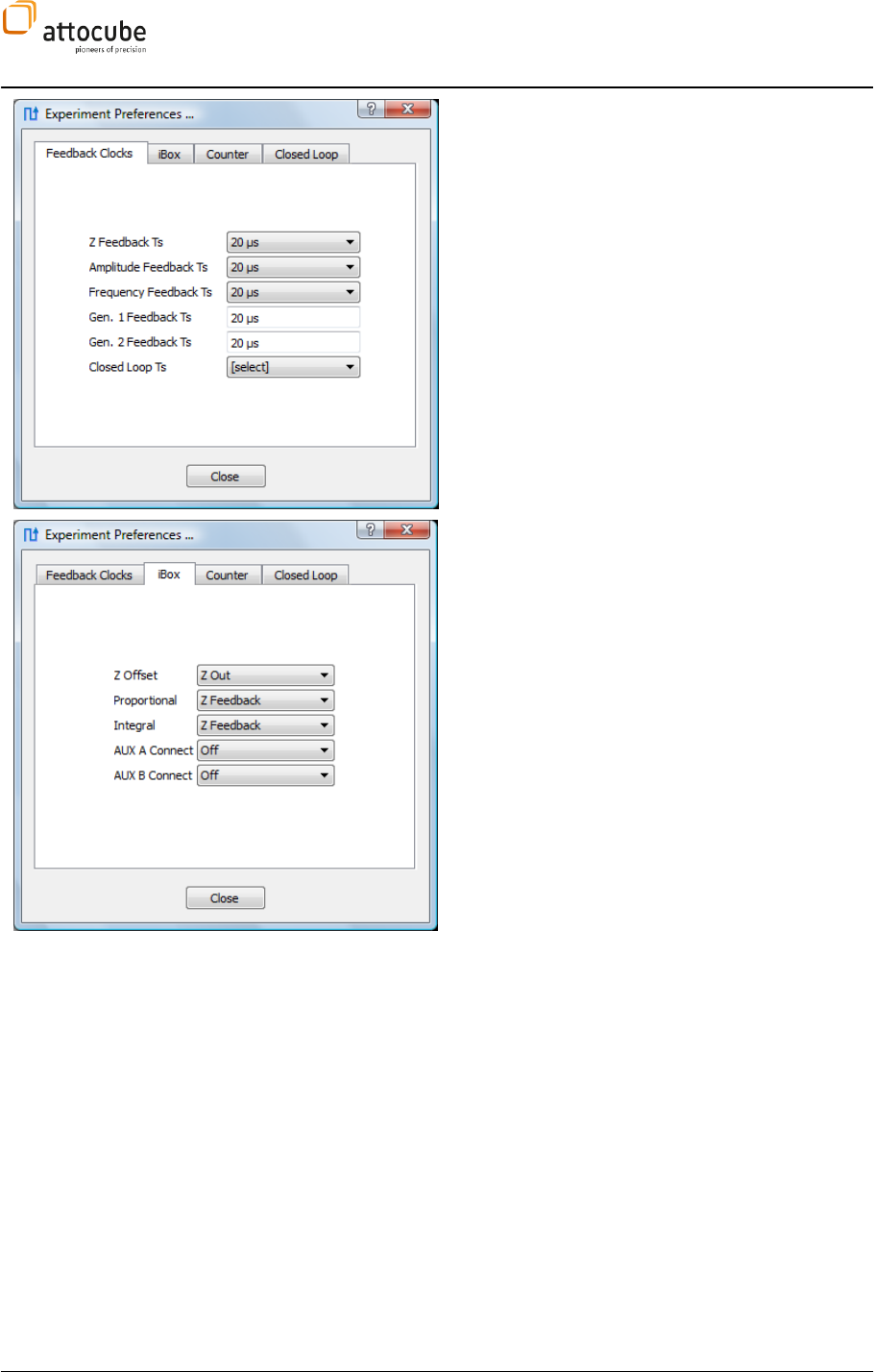
Page 46
In this tab, you can change the different Feedback
Clocks.
In this tab, you can change the assignments for some
iBox knobs to certain signals:
Z Offset: Choose between Z Out and Z Offset.
Proportional & Integral: Choose between Z Feedback,
Amplitude Feedback and Frequency Feedback.
AUX A & B Connect: On the iBox (see section II.4),
there are two auxiliary knobs that can be freely
assigned to one of a number of different parameters
using these settings.
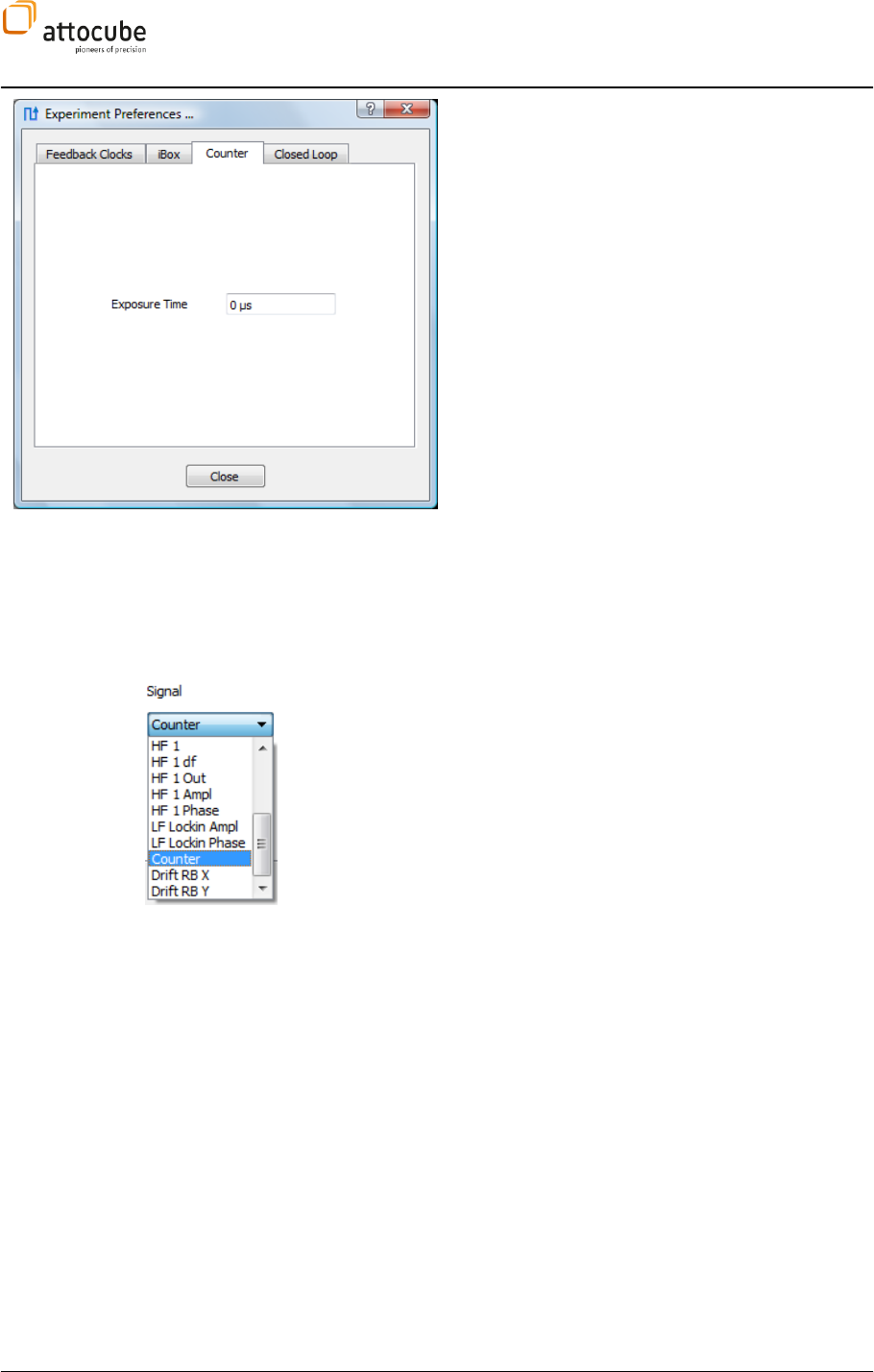
Page 47
© 2001-2012 attocube systems AG. Product and company names listed are trademarks or trade names of their
respective companies. Any rights not expressly granted herein are reserved. ATTENTION: Specifications and technical
data are subject to change without notice.
The ASC500 has a dedicated input port for low-voltage
TTL pulses. Within the software, a counting procedure
keeps track on the number of received TTL pulses. It
can be used to display the number of counts in any line
or frame view. To use the counter, please connect the
source of the pulses to pin 1 of the External 1
connector (see Figure 3 on page 14).
Please note that the ASC500 accepts only low-voltage TTL pulses, i.e. pulses
with an amplitude of 3.3 V. The maximum repetition rate is 20 MHz.
To activate the Counter in the software, go to Preferences tab and enter an
Exposure Time for the counter. The exposure time is the time interval in
which the incoming pulses are accumulated. The exposure time can range
between 2.5 µs and 163 ms in 2.5 µs steps.
The counter signal can be chosen in all line and frame displays. If the
sample time of the display is larger than the exposure time, a number of
exposures can be averaged. In case the exposure time is larger than the
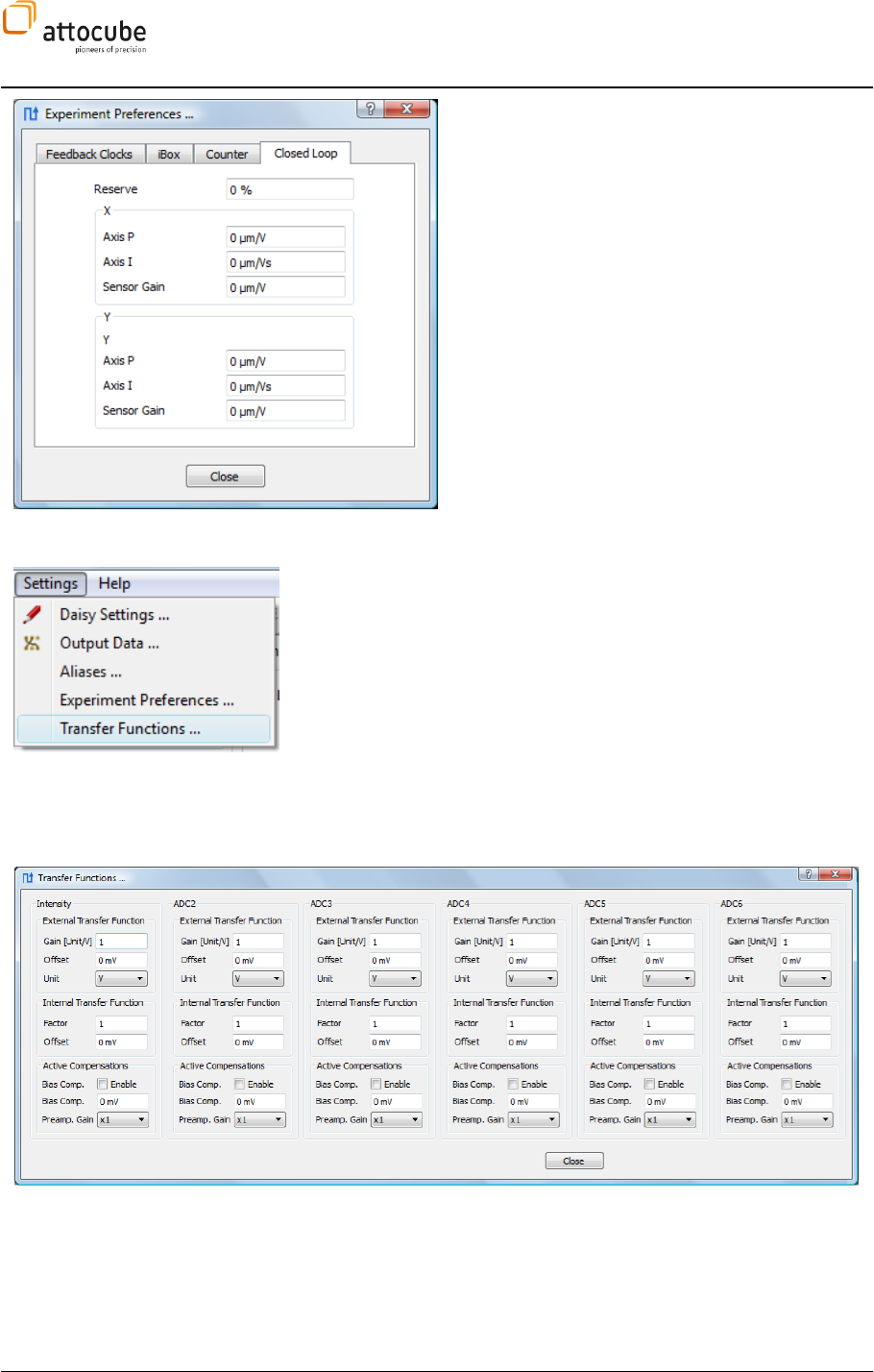
Page 48
For a description of this tab, please see section VI.2.a
on page 67.
Transfer Functions
The Transfer Functions offer the following functionalities:
1. Conversion of the voltage values read by ADC inputs towards physical
meaningful units. For example, if a photo-detector is used to collect your
data, Daisy can display all data in Watts. Use External Transfer Function for
the conversion.
2. Calibration of the ADC inputs. ADC voltage inputs usually show small
voltage offsets in the milli-Volt range. You can compensate for this offset
with the Internal Transfer Function.
3. Setting of a working point and an additional preamp gain. If you have e.g.
a small signal on a constant DC voltage, you can compensate for this DC part
and increase the gain for this channel.
External Transfer Function
Gain: Enter the conversion factor in Unit/V. For example, if a photo-
detector with an amplification of 5e6 V/W is used (corresponding to
0.2 µW/V), you can enter either Gain = 0.2 and Unit = uW or Gain = 200 and
Unit = nW. Please note that Daisy automatically displays the appropriate unit
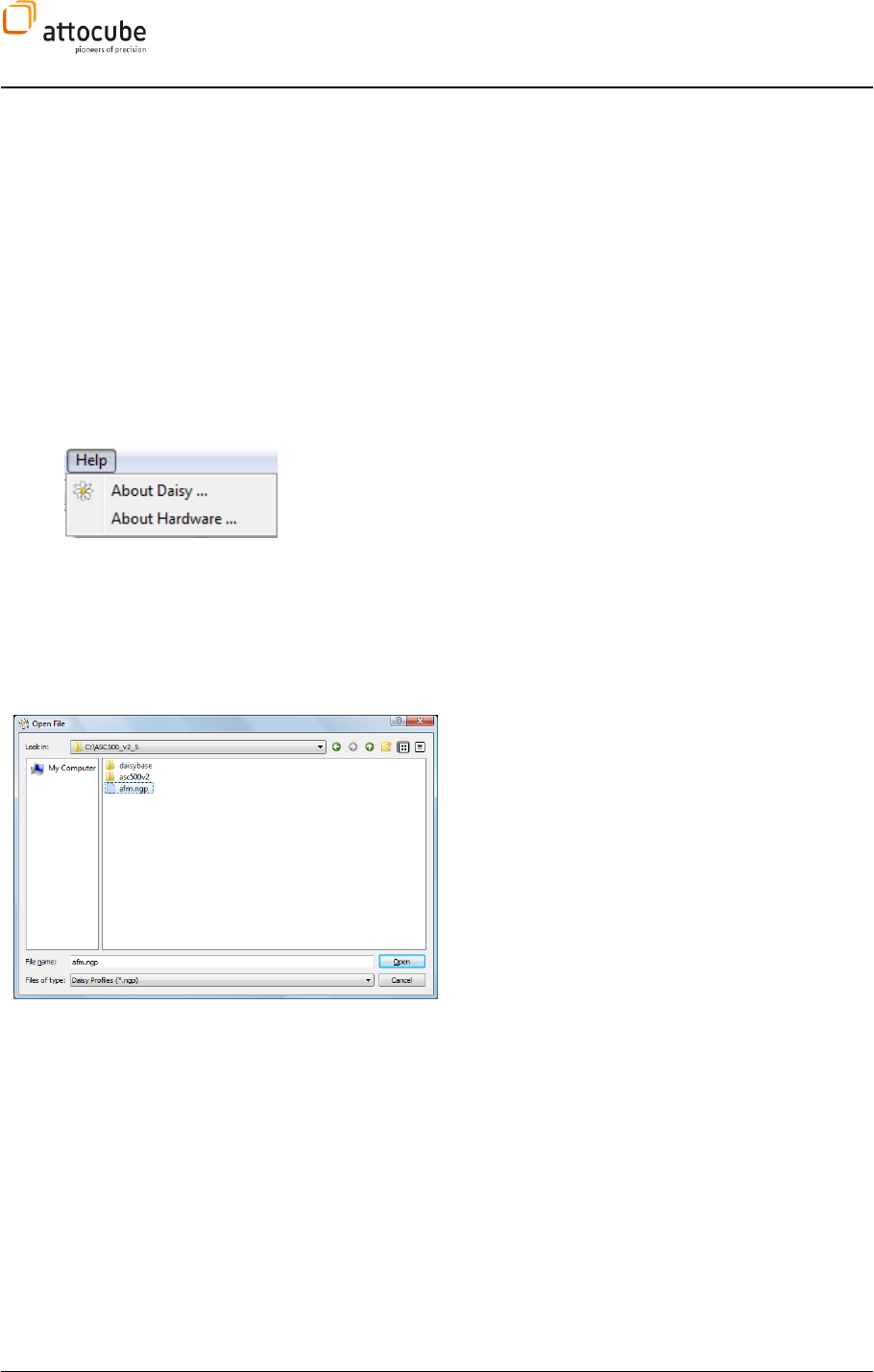
Page 49
© 2001-2012 attocube systems AG. Product and company names listed are trademarks or trade names of their
respective companies. Any rights not expressly granted herein are reserved. ATTENTION: Specifications and technical
data are subject to change without notice.
prefix (nano- or micro-Watt) independent of the Unit setting.
Offset: Lets you specify an offset value added to the signal.
Internal Transfer Fuctions
Factor: Use this factor to correct for a ADC gain different to 1. Please note
that the actual signal will be divided by this factor.
Offset: Offset value to be added on the respective ADC.
Active Compensations
Bias Comp. Enable: Enable the active bias compensation.
Bias Comp.: Enter the DC offset on the input signal, that is to
be subtracted.
The Help menu contains the following entries:
About Daisy: Here you can find information about the Daisy software
version as well as licensing issues.
About Hardware: Here you can find information about your current ASC500
hardware.
V.2.c. Loading a profile
In order to perform a Scanning Probe Microscopy (SPM) measurement, a
profile needs to loaded, which defines the graphical user interface (GUI):
Open a
force microscopy.
After opening the GUI, the main panel appears (see
below). In the main panel, all functions of the AFM can
be controlled.
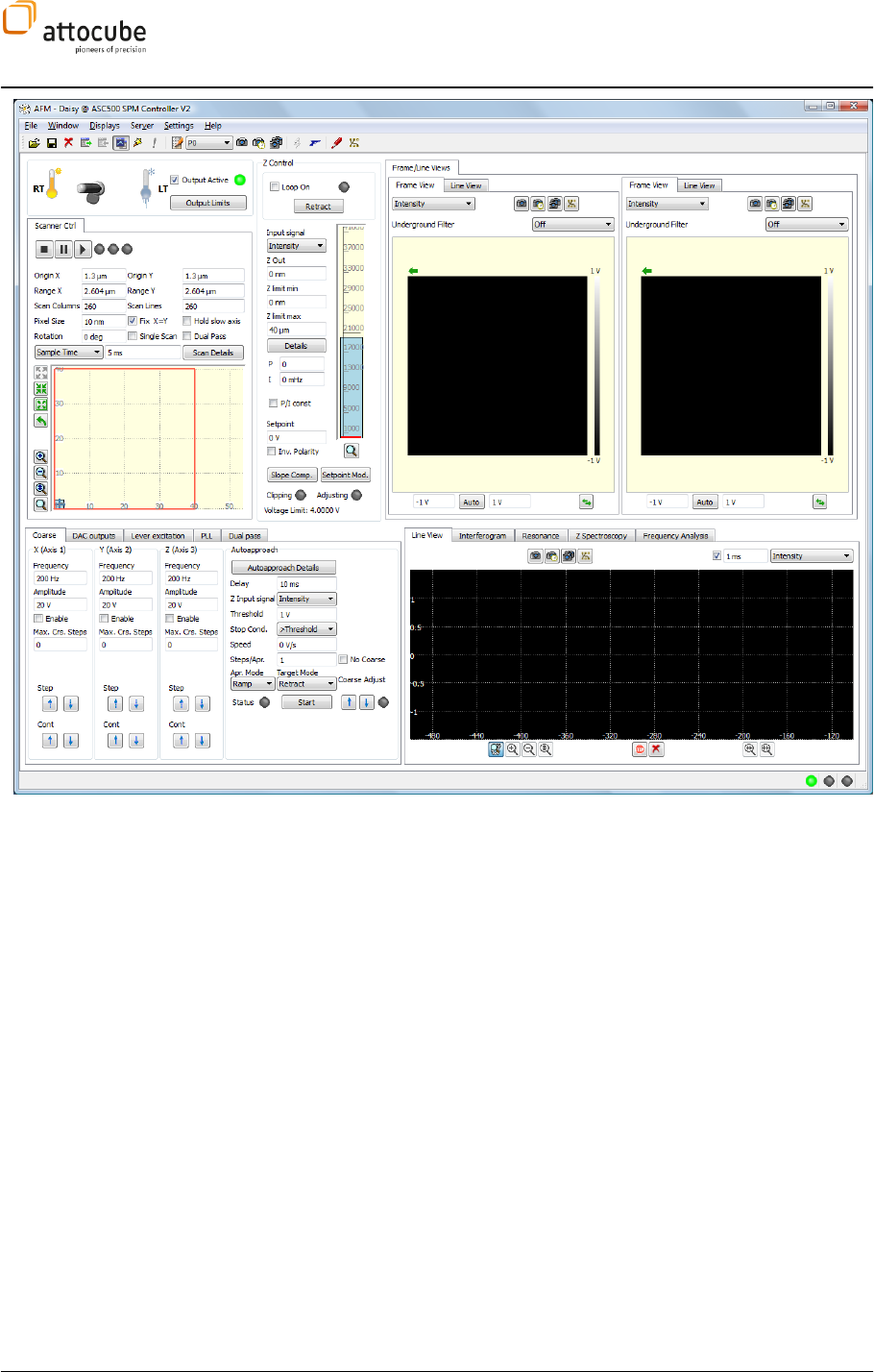
Page 50
The GUI is organized in 6 main sections: in the upper half of the screen, the
Output Limits, Scan Control, Z Control and the Scan Data Displays are located,
whereas the lower half contains tab section on the left for the main parameter
functions and a right tab section for the spectroscopies, a frequency analysis
and the time-based line view.
Special GUIs are available for all attocube systems microscopes. These have
been developed to adapt for the use of the specific instrument. In the CFM GUI
for example, there are less controls and parameters to facilitate the usage
with the confocal microscope. With the STM-GUI, the look-and-feel is slightly
different to enable the use of the software in this context. Both CFM and STM
GUI are subsets of the AFM GUI. Hence, the focus of this manual is the AFM
GUI.
V.3. Profile configuration
While preconfigured profiles (.ngp) are available for the most common
scanning probe methods, the new Daisy release v2.5 allows the user to
customize certain parts of the GUI, as will be described in the following
section. Besides, parameters (like output limits, scan ranges, slew rates
etc.) are also stored in the profile, such that every user of the instrument
can create his/her own presets.
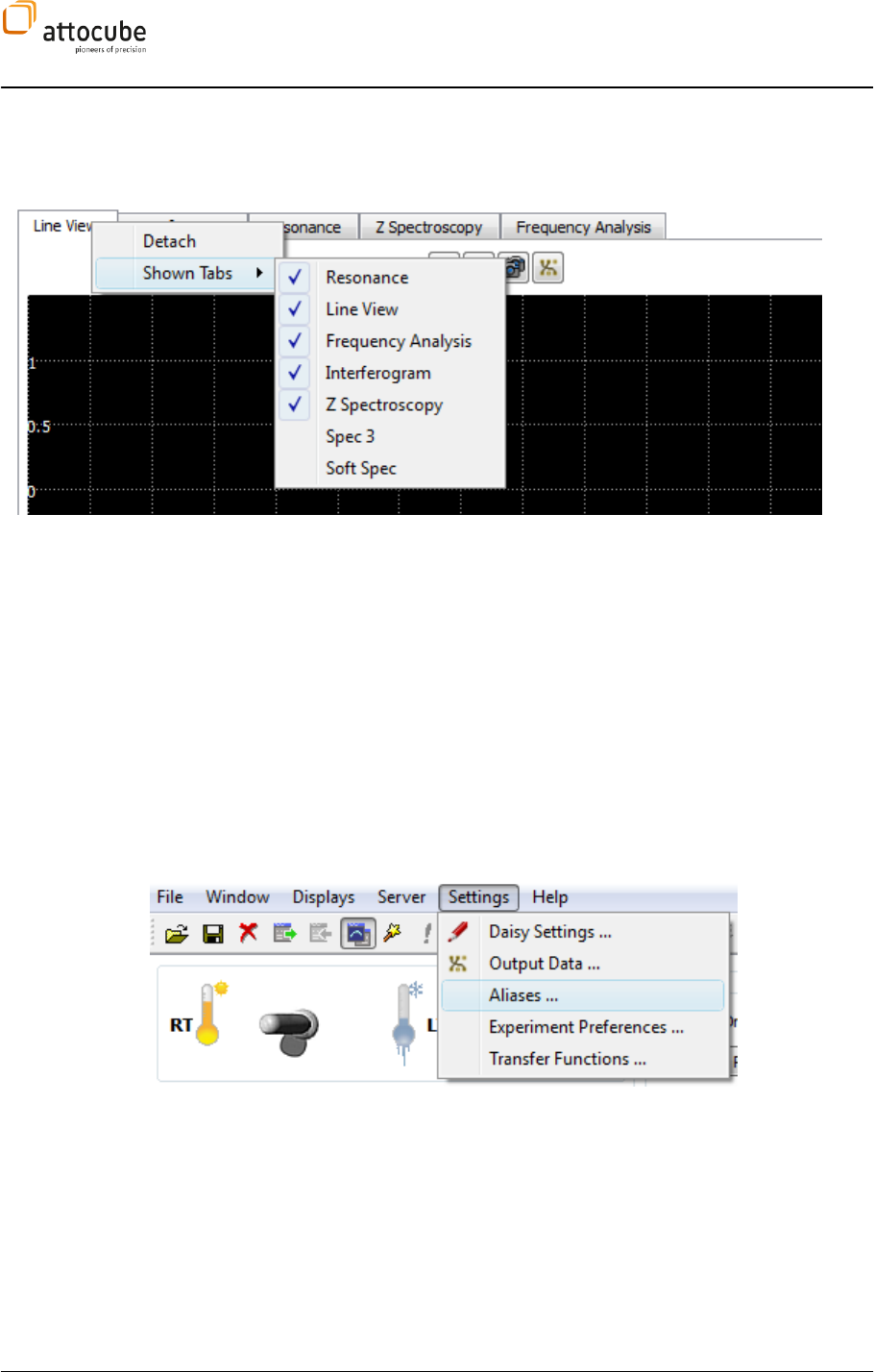
Page 51
© 2001-2012 attocube systems AG. Product and company names listed are trademarks or trade names of their
respective companies. Any rights not expressly granted herein are reserved. ATTENTION: Specifications and technical
data are subject to change without notice.
V.3.a. User-configurable GUI appearance
By right-clicking on any of the tabs in the main GUI, the user can decide
whether to show, hide or detach it:
The order of the tabs can also be changed by dragging and dropping any of
the tabs to a new position within the tab bar.
The configuration of each tab section can be stored by creating a customized
profile.
V.3.b. Aliases menu
Since both the ASC500 hardware as well as the Daisy software serve the
purpose of a very generic, multipurpose and powerful SPM controller, many
of the signals, parameters and tab names within the software have also been
kept as generic as possible. However, many users are likely to stick to one or
two certain specific SPM methods as well as sets of parameters for their
experiments. Consequently, the user has been given the possibility to
rename most of the generic resources in the Aliases menu in order to
increase the user-friendliness:
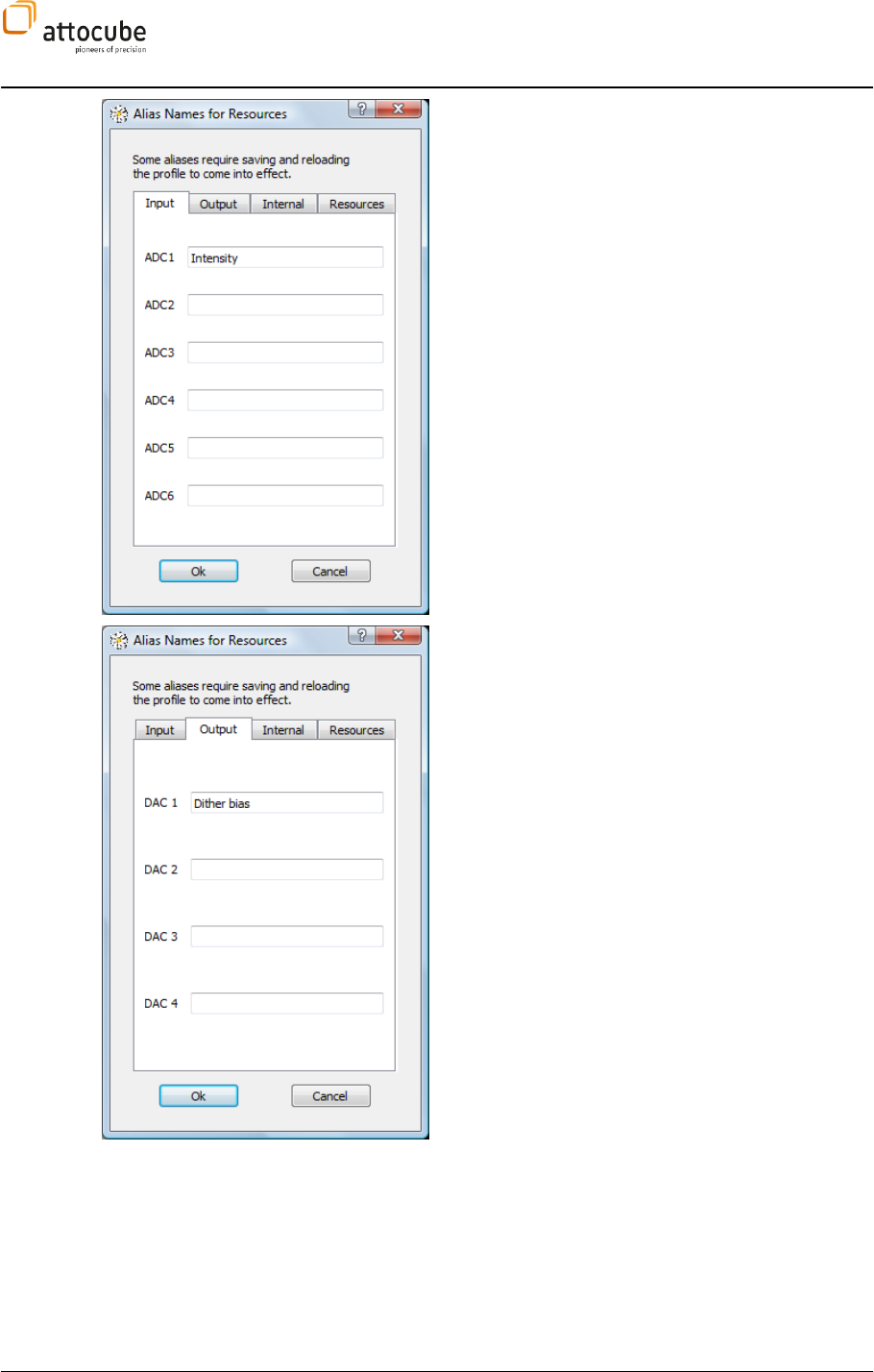
Page 52
Simply type in new Aliases for any of the shown Input
signal names and click OK.
Simply type in new Aliases for any of the shown Output
signal names and click OK.
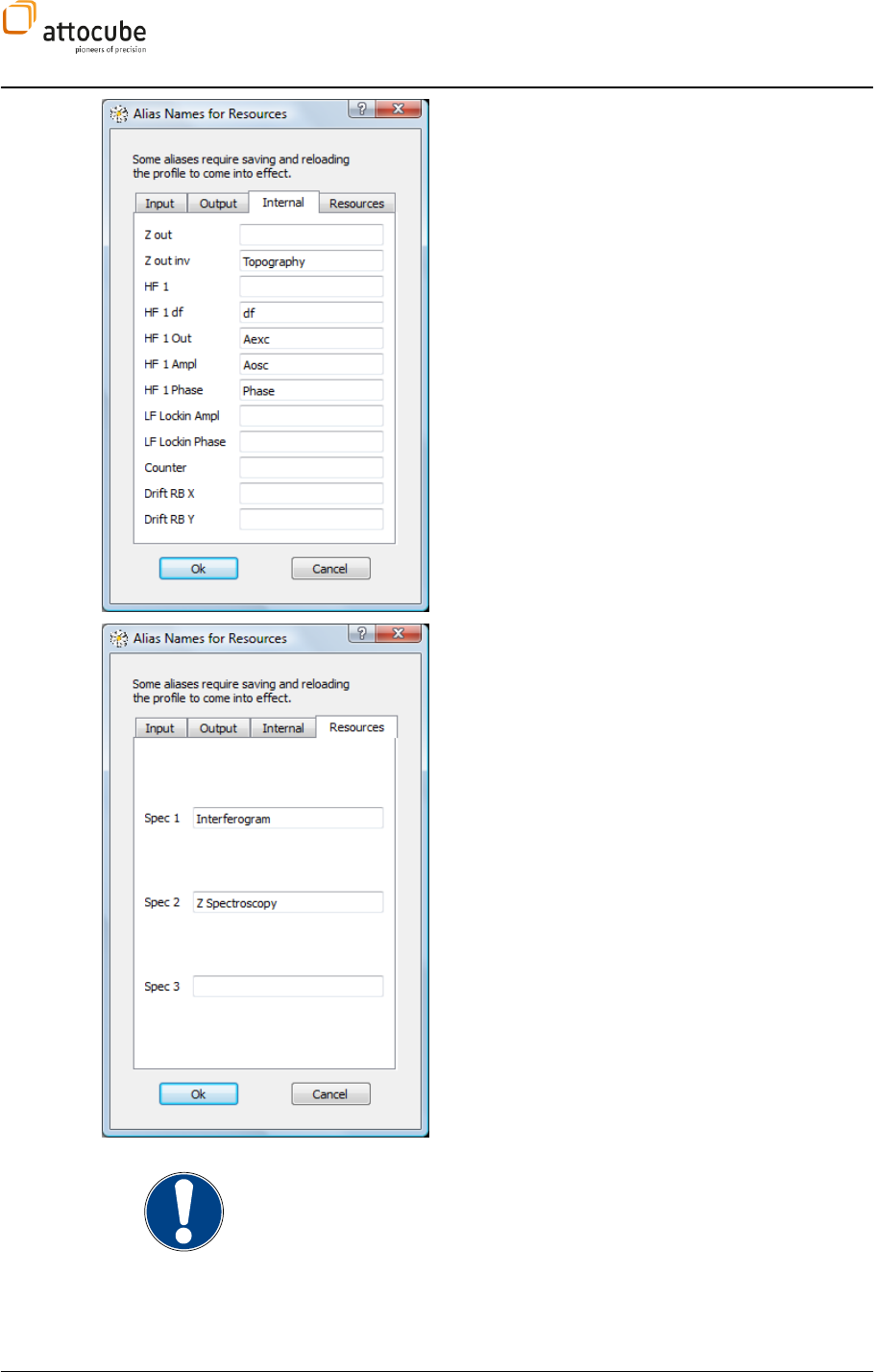
Page 53
© 2001-2012 attocube systems AG. Product and company names listed are trademarks or trade names of their
respective companies. Any rights not expressly granted herein are reserved. ATTENTION: Specifications and technical
data are subject to change without notice.
Simply type in new Aliases for any of the shown Internal
signal names and click OK.
Simply type in new Aliases for any of the shown
Resources and click OK.
Note: The new Aliases for the resources will not come into effect until the
current profile is saved and reloaded.
Page 54
V.3.c. New signal and parameter names in v2.5
Starting from v2.5, several signals, parameters and tabs in the GUI have been renamed compared to previous
versions of the Daisy software (or have been equipped with the opportunity of aliases). The following table lists
the changes in order to help existing users with an updated Daisy software to get an overview of the mapping
between old and new names:
Signals
Previous name
New name in v2.5
SPM Z out
Z out
SPM Z out inv
Z out inv
AFM signal
HF 1
AFM df
HF 1 df
AFM Aexc
HF 1 OUT
AFM Aosc
HF 1 Ampl
AFM Phase
HF 1 Phase
LockIn Ampl
LF Lockin Ampl
LockIn Phase
LF Lockin Phase
Tabs
Previous name
New name in v2.5
Calibration
Resonance
LockIn
2 separate tabs:
- LF LockIn
- Lever excitation (=HF 1)
2nd Pass
Dual Pass
Pref
tab removed!
see:
- Output Limits (section VI.1),
- Experiment settings (section V.2.b), and
- Transfer Functions (section V.2.b)
Transfer
moved to Settings menu → Transfer
functions (section V.2.b):
all 6 transfer functions are now combined
Page 55
© 2001-2012 attocube systems AG. Product and company names listed are trademarks or trade names of their
respective companies. Any rights not expressly granted herein are reserved. ATTENTION: Specifications and technical
data are subject to change without notice.
V.4. General Usage and Description of Common GUI Controls
V.4.a. Text Edit Boxes
Most parameters of the experiment are controlled by entering numbers into
text edit boxes. The Daisy software provides a simple and intuitive way of
entering numbers.
Most numbers are accompanied by a physical unit. When entering or
changing a number, the units do not have to be entered. Just type the
number and press return; Daisy will automatically add the appropriate unit.
the prefix:
1. Enter a value greater than 1000 or less than 1. If you enter for
Daisy will change to microns
2.
r pico-
for nano---
If you do not enter a prefix, Daisy will keep the last prefix. The only time
lease note that in this case it is usually sufficient
Using the mouse wheel
The mouse wheel can be used to conveniently edit the value of any text edit
box throughout the Daisy program. If the cursor is positioned on a text field,
decreased by turning the mouse wheel downward.
The sensitivity of the mouse wheel increment can be set for each text edit
box separately by using the Step Width
It can be chosen between relative (default) or absolute steps. Even without
using the context menu, the sensitivity of the mouse wheel can be increased
by pressing the SHIFT and/or STRG key during turning of the mouse wheel.
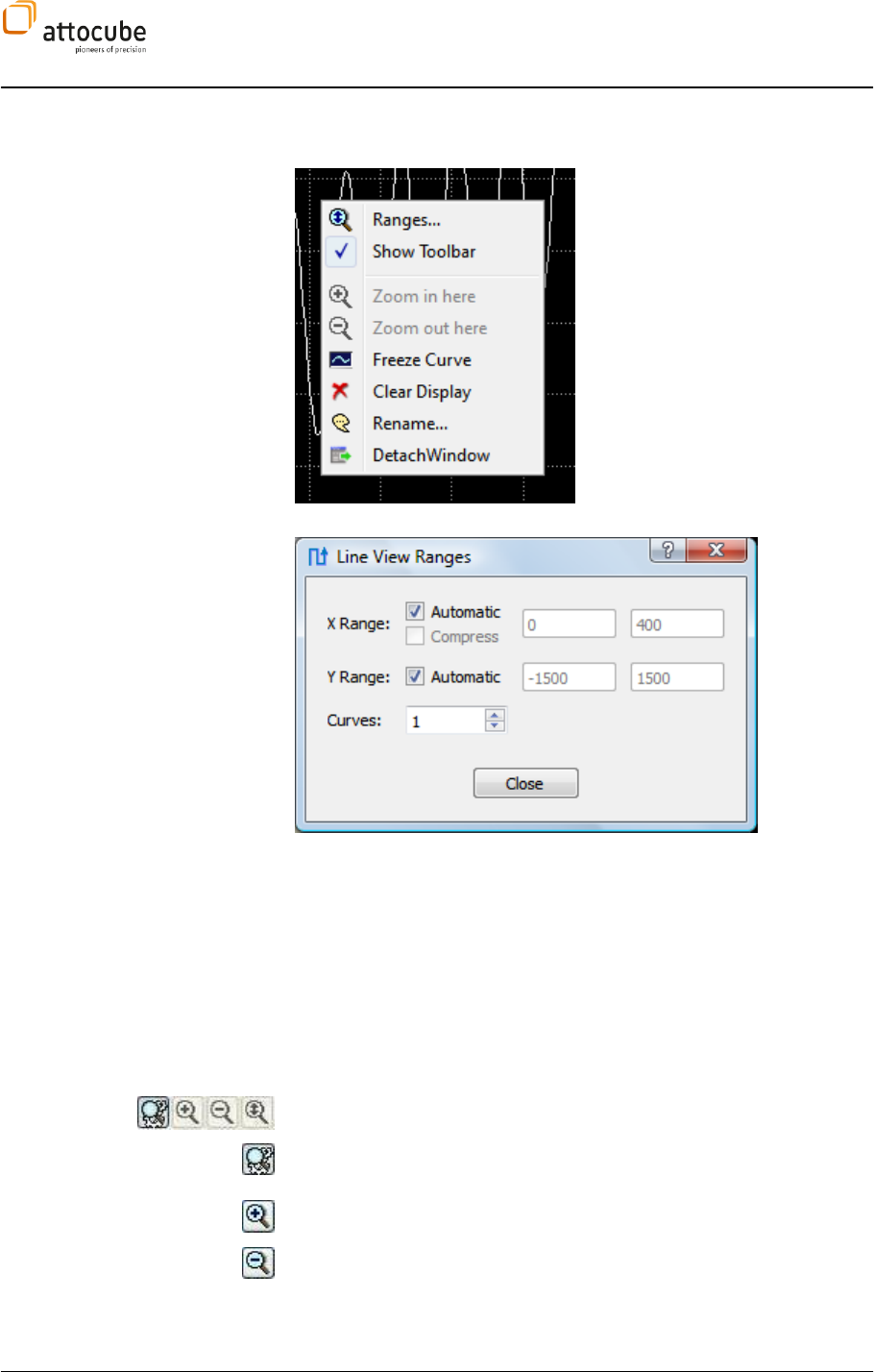
Page 56
V.4.b. Context Menu
By right-clicking on any graph window, one can open the corresponding
context menu. The functions that are available to the graphs are the same
throughout the program. The context menu looks as follows:
Ranges
The X Range and Y Range of the graph can be explicitly set. Deactivate the
check-boxes to enter the range values manually. Please note that it is not
recommended to use the manual X Range functionality. In the FFT graph,
please use the Fmin/Fmax parameters instead.
The Curves value allows for displaying several adjacent traces within the
same graph. The traces will be displayed in different colors for clarity.
Click on Close to close the window.
Show Toolbar
If the Show Toolbar button is activated, several toolbar icons will be shown
below the graph:
The four icons to the left comprise the Zoom Tools.
If this icon is enabled, auto-range mode is switched on. The Zoom Tools to
the right are not activated.
Zoom in.
Zoom out.
Page 57
© 2001-2012 attocube systems AG. Product and company names listed are trademarks or trade names of their
respective companies. Any rights not expressly granted herein are reserved. ATTENTION: Specifications and technical
data are subject to change without notice.
Zoom to maximum range.
These buttons represent the Frame Tools. When active, certain operations to
modify the data range can be performed. See for example the description of
the Frame Tools in the Data Display section VI.4.
Clear the display. The current data will be deleted and the graph will start
over. Useful if you have chosen a slow display.
Stop the display from being updated. The graph will stay until cleared or
Stop is pressed again.
Freeze Curve
This function freezes the currently displayed curve. It can be used as a
reference to compare to. The frozen curve can be erased using the Clear
Display function.
Clear Display
Use this option to clear the current display.
Rename
Here you can rename the snapshot data of the current display.
Detach Window
Use this function to detach the graph from the Daisy window into an
independent window. You can then resize this window and move it wherever
it suits you best. This is especially useful when you use a system with two
monitors. This function can also be accessed by double-clicking on the
graph.
You can reattach the window either by using the context menu of the new
stand-alone graph (Attach window) or by right clicking on the empty space
in the Daisy window and selecting Attach Window.
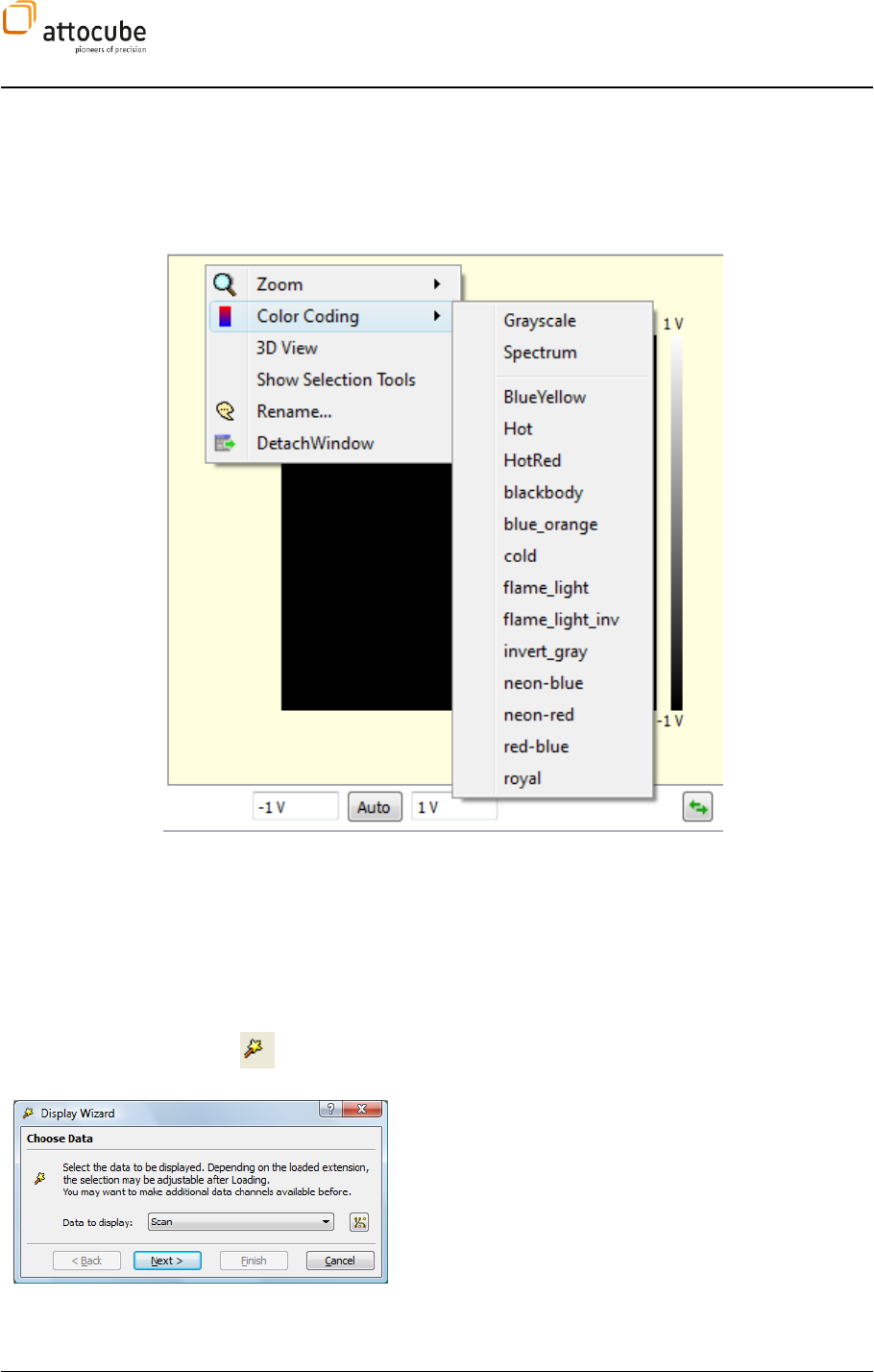
Page 58
V.4.c.
Frame View
context menu
The Frame view context menu offers mainly the same options as described
above, but in addition, one can also activate a 3 dimensional data view (3D
view), and/or change the Color Coding. One can choose the colors which
provide best contrast for the data. There is also the possibility to add more
color scales. Just copy a color scale in the *.lut format into the program
folder. It will automatically be added to the menu.
V.4.d. Display wizard
The Display Wizard is a powerful tool to personalize the GUI and to open
access to more data windows. It is possible to create line and frame views
(and combinations thereof) and to apply filters to them. The data in these
windows can be integrated into the automatic global snapshot routine,
giving you the possibility to save all interesting data with one mouse click.
This is especially useful for e.g. the Lift Mode, where one requires an
additional data display for the second pass data.
One can open a new display as described below:
First, click on the Display Wizard button.
The first wizard window appears, where you can define
additional data channels for the new display that you are
about to create, and use the pull-
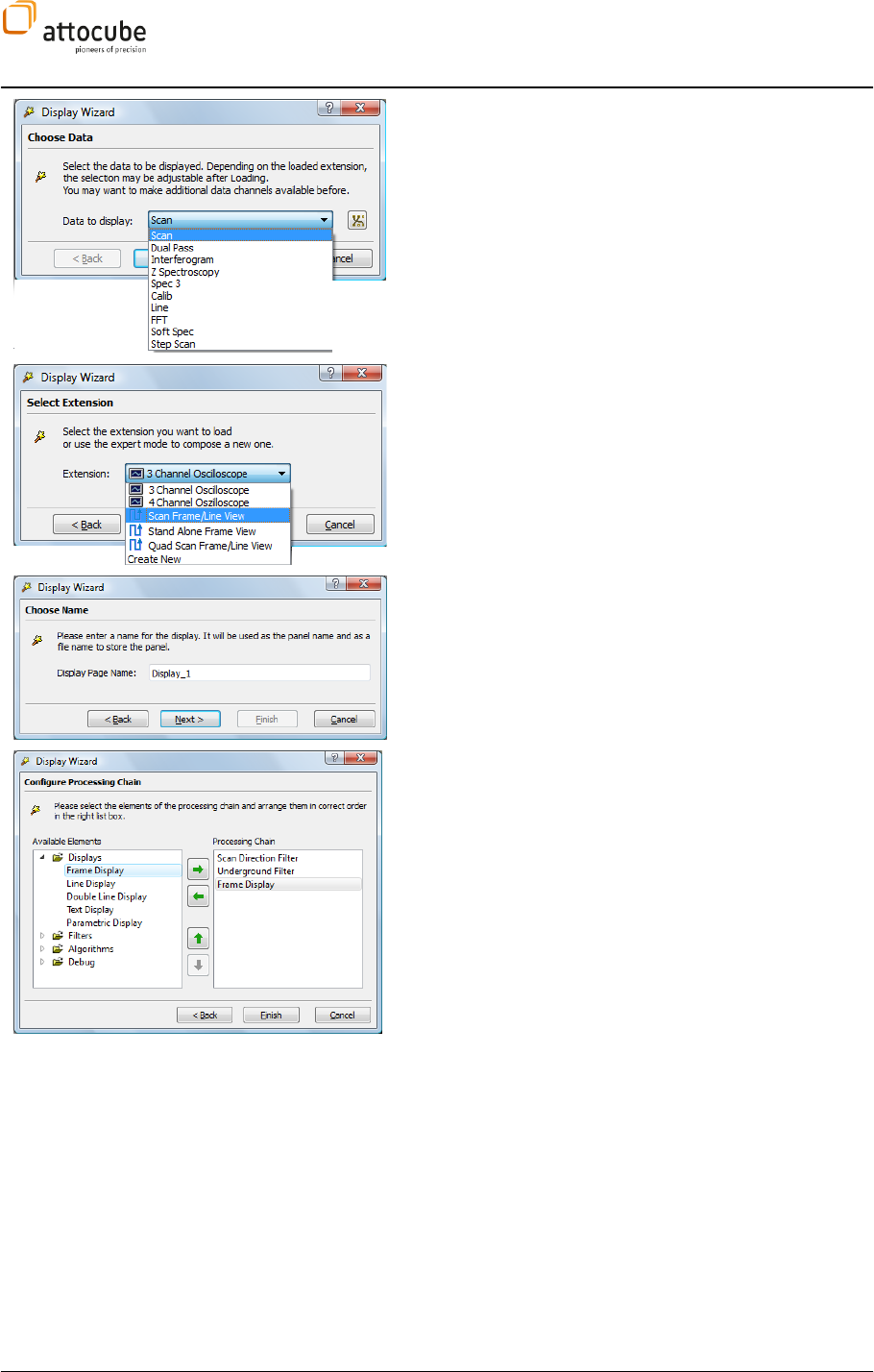
Page 59
© 2001-2012 attocube systems AG. Product and company names listed are trademarks or trade names of their
respective companies. Any rights not expressly granted herein are reserved. ATTENTION: Specifications and technical
data are subject to change without notice.
left). After choosing the most appropriate one, click Next.
For most of the data categories, there are preconfigured
Extensions available, but you can also select Create New to
manually choose the details of your new display.
If you select one of the preconfigured Extensions, simply click
Finish to start using the new display.
In case you choose a data display that either lacks a
preconfiguration, or that you would like to manually set up,
you are first asked to assign a name to the new display. Click
Next.
Now, configure the processing chain. Select the actions and
elements you want to use for the new display. In this example,
a frame display together with a scan direction filter and an
underground filter is selected. Highlight the elements on the
list to the left, then press the right arrow button to add the
element to the processing chain. The processing chain will be
executed from top to bottom at runtime, so it is important to
place the filter before the display. To do this, highlight the
filters in the processing chain list and then press the up arrow
button. Press Finish.
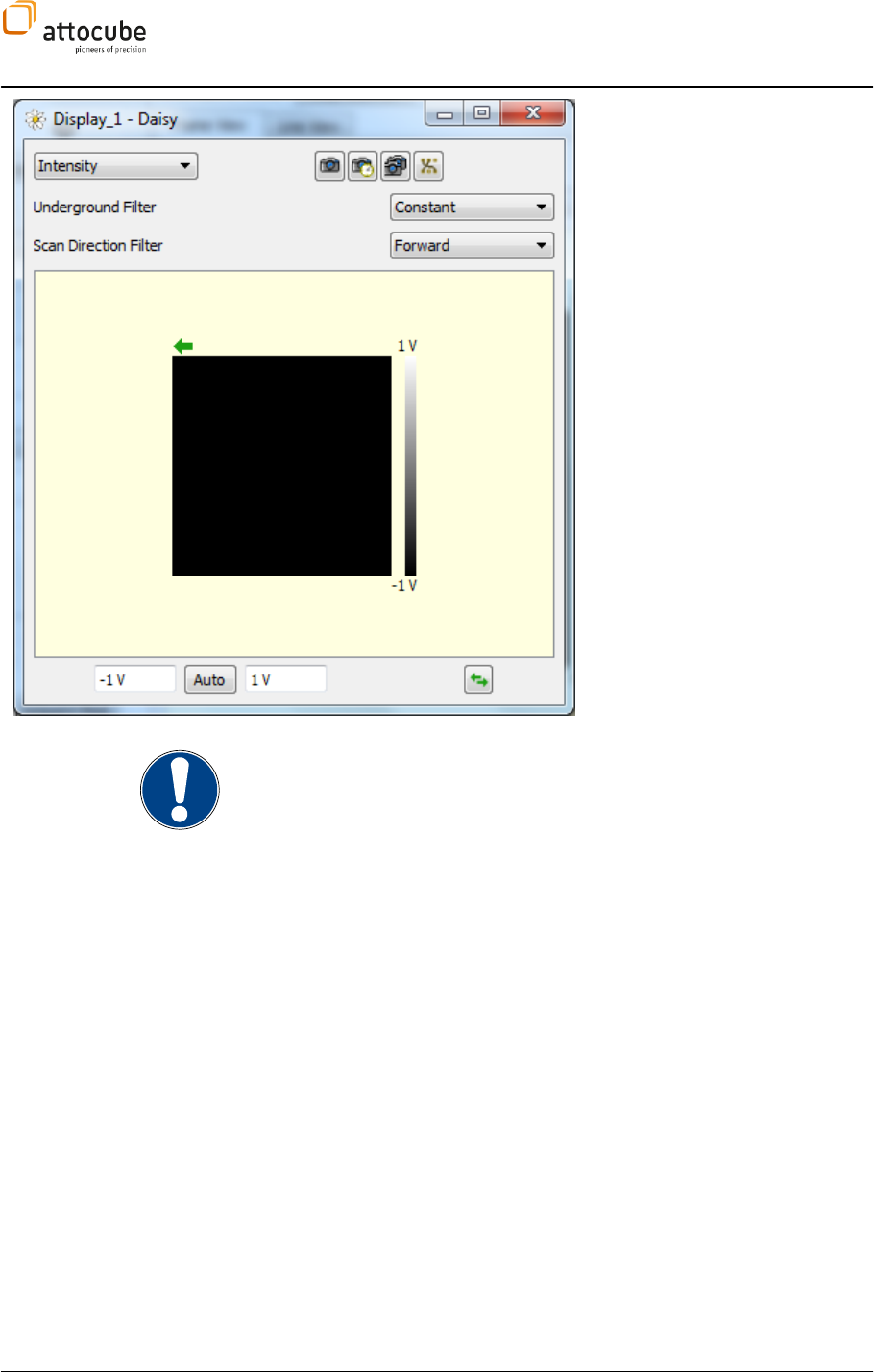
Page 60
The new window will appear. Detach
it from the Daisy window, or keep it
as another tab within your main
window. The signal can be chosen via
the drop down list in the upper left of
the window. Set the Scan Direction
Filter according to your needs
(forward or backward; Off means
forward and backward and will result
in backward). Now the new display is
configured for the measurement.
Note: Not every combination of Trigger, Filter and type of view will result in a
reasonable display. For example, an underground filter is only valuable in a
SCAN type context.
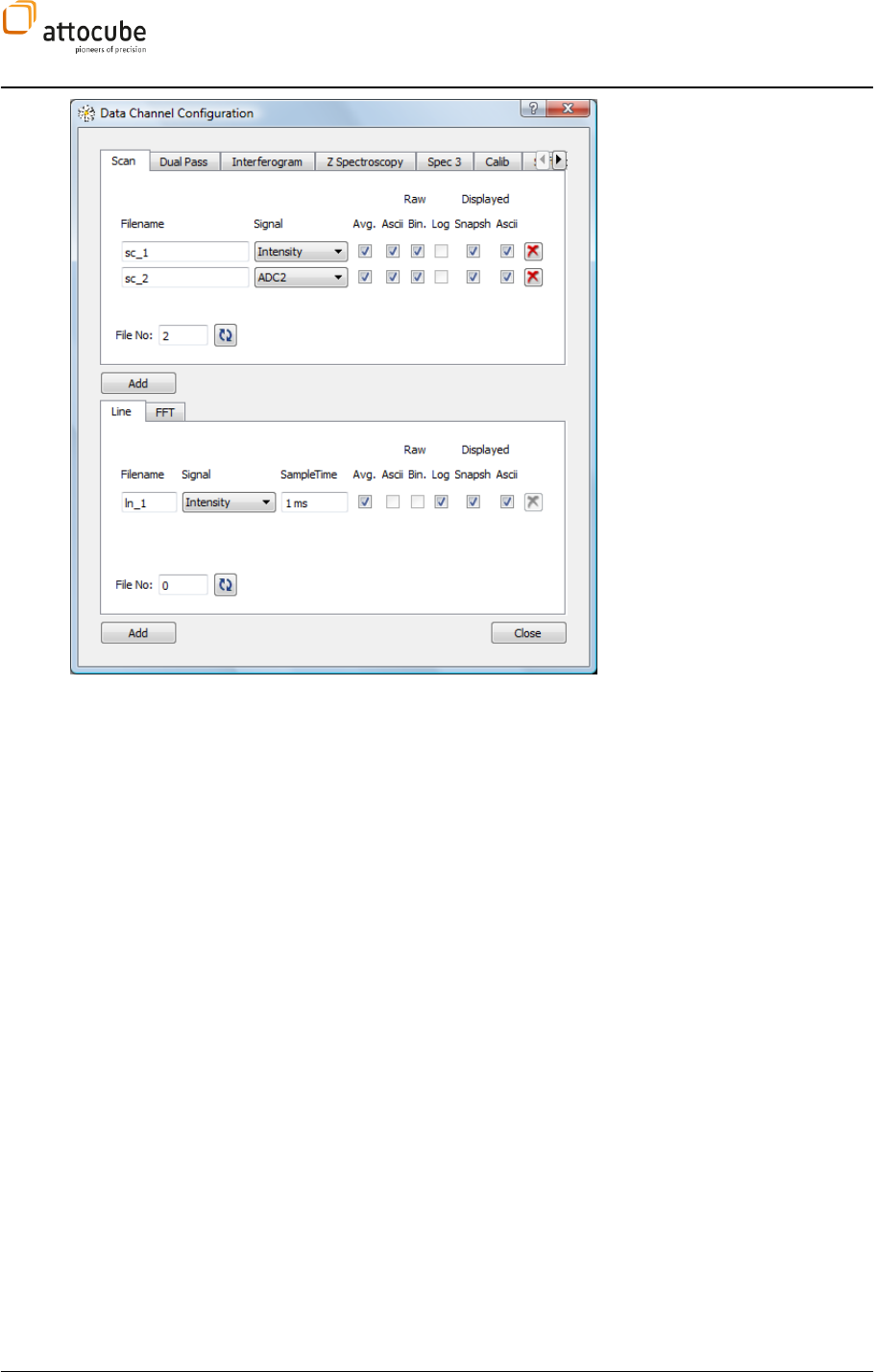
Page 61
© 2001-2012 attocube systems AG. Product and company names listed are trademarks or trade names of their
respective companies. Any rights not expressly granted herein are reserved. ATTENTION: Specifications and technical
data are subject to change without notice.
If you have not done so already,
please check that your desired
signal(s) are available as data
channels in the DCC (see section
IV.1 for details.)
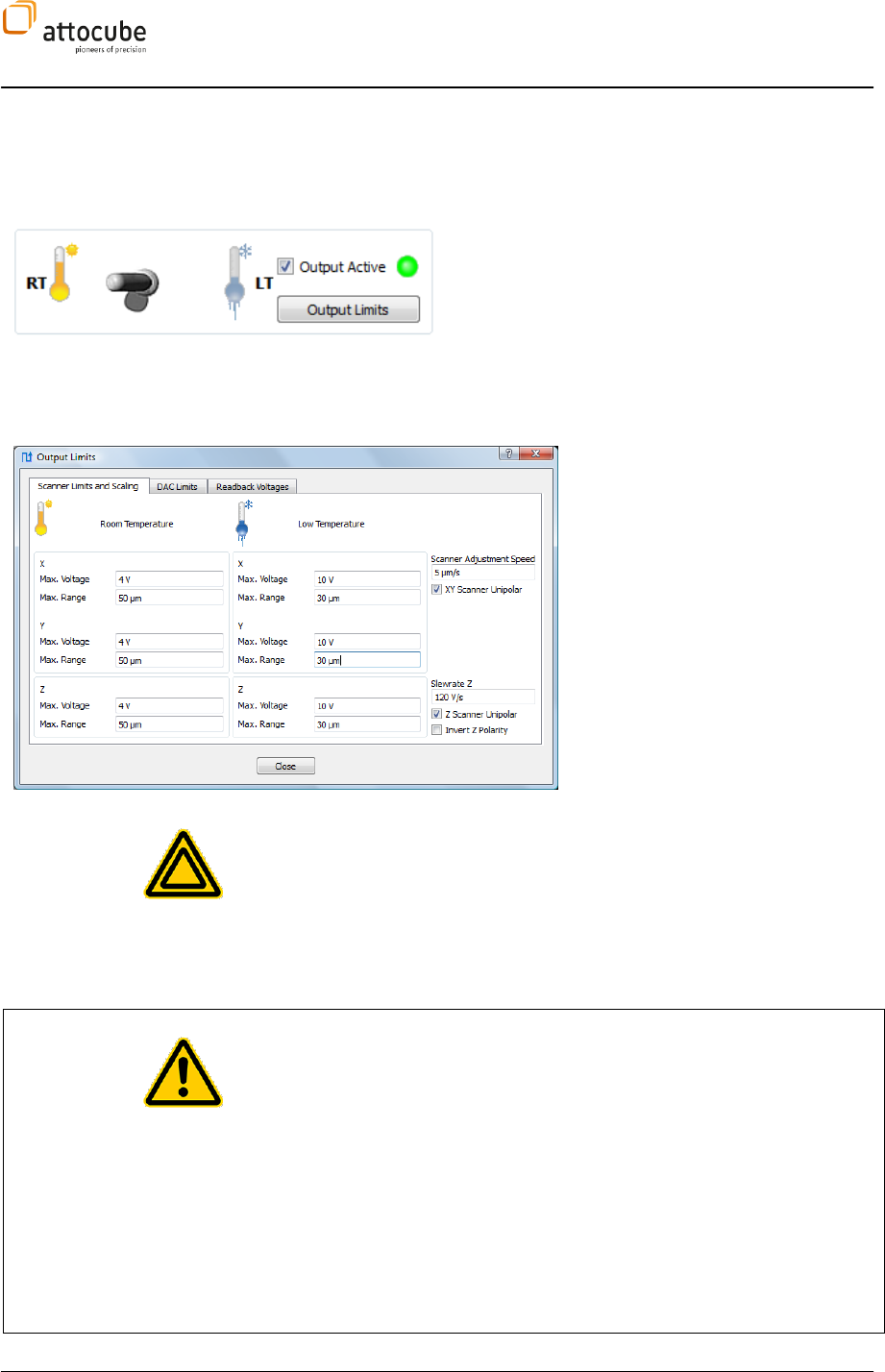
Page 62
VI. Description of the AFM Profile
VI.1. The Output section
The upper left corner of the GUI hosts the control
section for the activation of all controller outputs as
well as the settings for their corresponding limits.
The central switch to the left can be used to
conveniently alternate between room temperature (RT)
and low temperature (LT) settings.
The actual limiting values for each case can be defined
upon clicking on the Output Limits button.
The first tab contains the Scanner limits
and scaling details for RT and LT
respectively, as well as a switch to
toggle between uni- and bipolar
settings for all scanner outputs: using
the latter will also switch between
max. voltage ranges of either 0..max
(unipolar) or –max..+max (bipolar).
Furthermore, the presets for Scanner
Adjustment Speed (which controls the
rate at which the tip position is moved
upon changing the position of the scan
field), the slew rate of the Z output and
its polarity can be adjusted.
Important Note: Choose all of these settings very carefully, since wrong
voltage ranges (also wrong polarity settings) may damage the piezos of
your scanners!
Typical values are stored in the respective profiles provided by attocube
and/or can be found in the respective manual of your attocube microscope.
Caution. The output limit is the voltage supplied by the ASC500 controller.
This voltage is then typically fed into a voltage amplifier (e.g. the ANC300)
which amplifies this voltage by some factor before it is applied to the
piezos.
amplifiers are:
ANC250 factor 20
ANC300 factor 15
ANC350 factor 14
ALWAYS TAKE INTO ACCOUNT THE AMPLIFICATION FACTOR PROVIDED BY YOUR
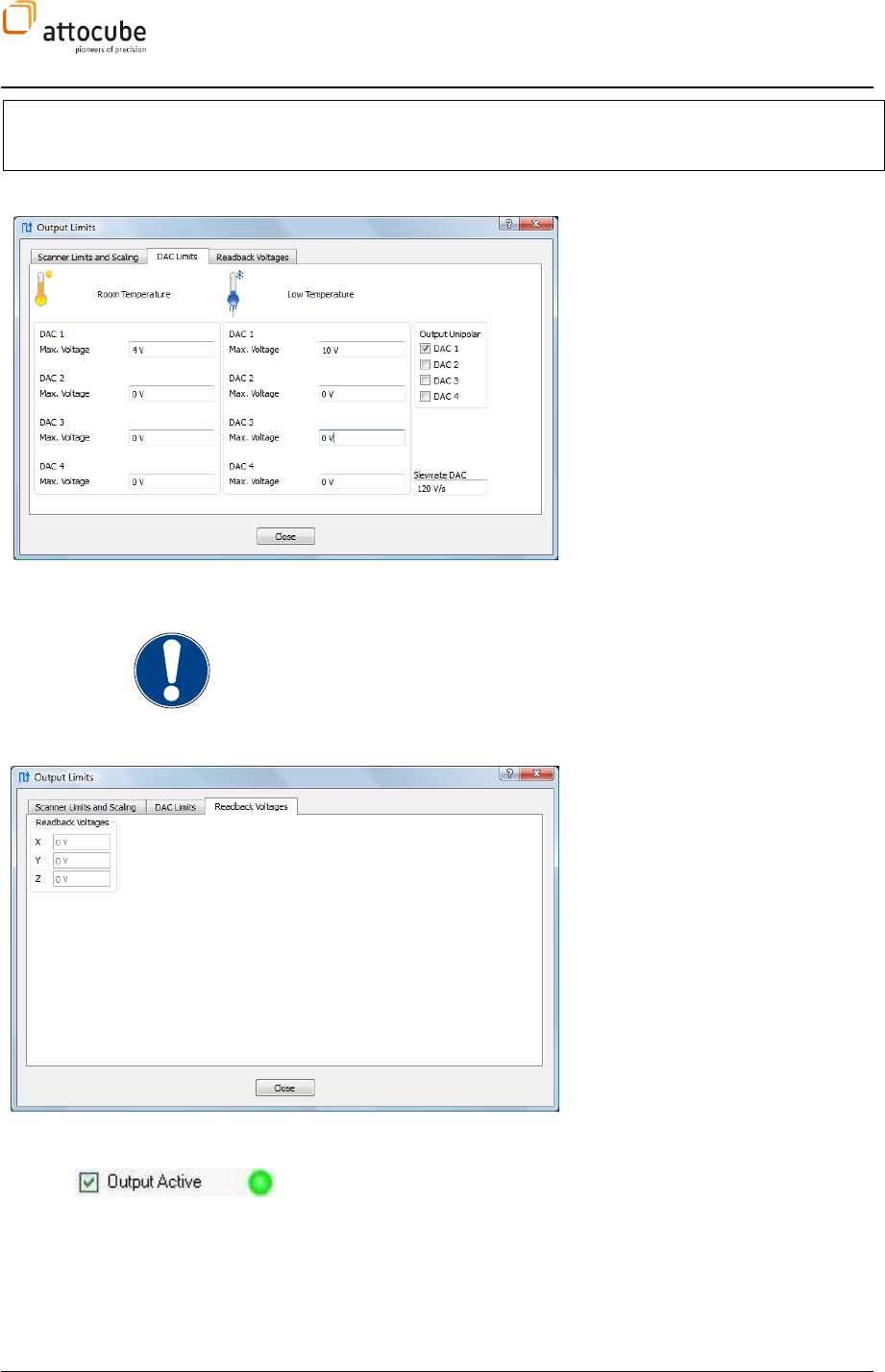
Page 63
© 2001-2012 attocube systems AG. Product and company names listed are trademarks or trade names of their
respective companies. Any rights not expressly granted herein are reserved. ATTENTION: Specifications and technical
data are subject to change without notice.
VOLTAGE AMPLIFIER IN ORDER NOT TO EXCEED THE MAXIMUM ALLOWED
VOLTAGE.
The second tab contains the min. and
max. voltages for all DAC outputs at RT
and LT respectively. Besides, the slew
rate can be adjusted.
As an additional safety feature, the
user needs to allow bipolar outputs
for each DAC separately by checking
the corresponding box.
(Please note that when using aliases as
described in section V.3.b, they will be
used everywhere in the Daisy instead
of the original parameter names as
shown here in case of DAC1, which has
been renamed to Dither bias.)
Note:
Please be aware that also wrong DAC limits may damage your hardware,
such as in case of the cantilever based AFM/MFM the dither piezo, which is
usually connected to DAC1!
The third tab contains displays for the
actual voltages of x, y and z (read back
from the controller).
Output Active: With the Output Active button all electrical outputs of the
ASC500 controller can be enabled or deactivated. If disabled, all electrical
outputs are set to zero. The switching procedure may take some seconds.
The LED to the right of Output Active indicates whether the outputs are
active (green) or not (red).
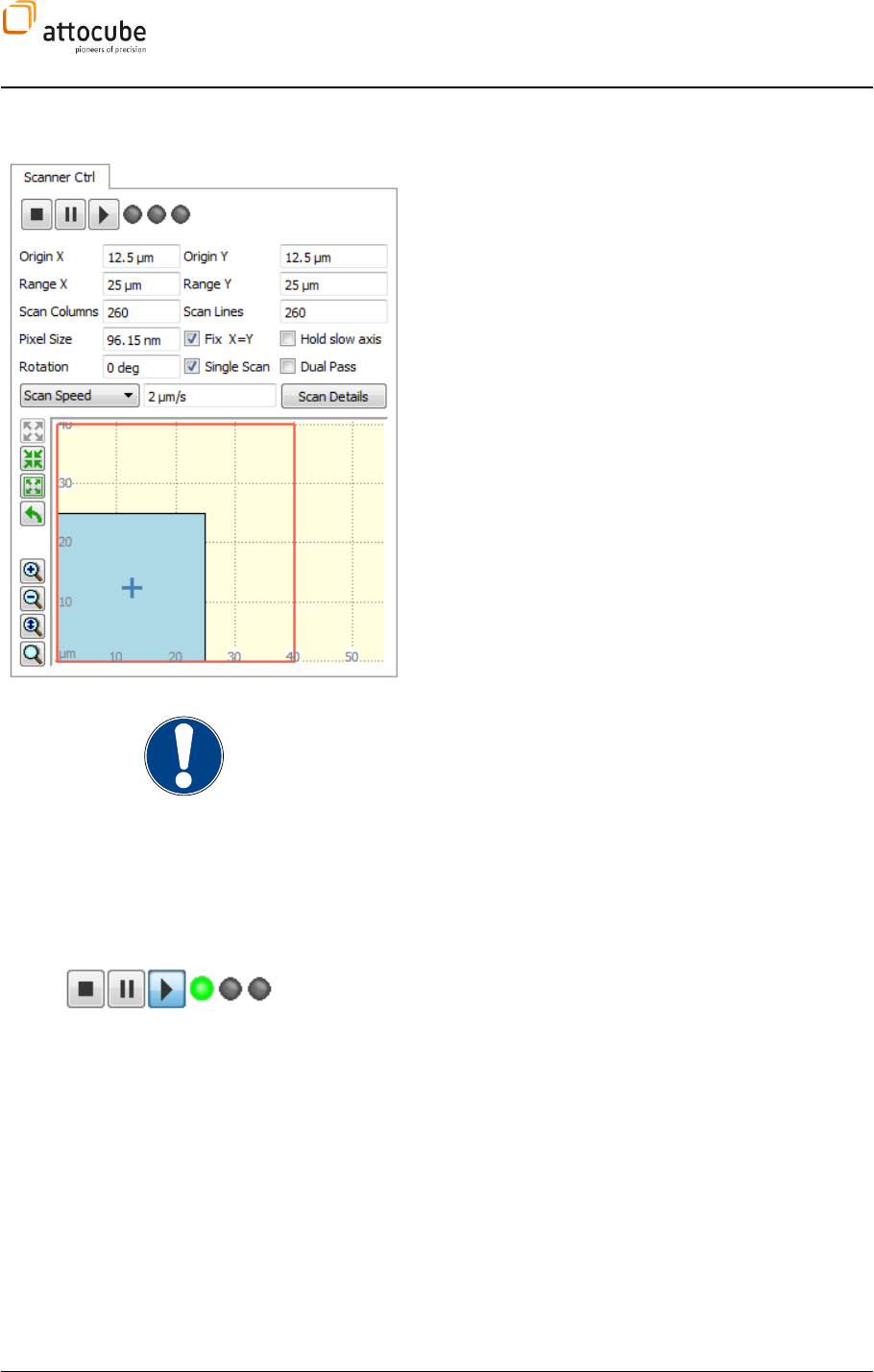
Page 64
VI.2. The Scanner Control
The scanner widget is the control center of the scan
generation. All important scan parameters, such as the
number of Scan Lines and Scan Columns, Pixel Size, and
Sample Time can be entered here. Furthermore, an offset
for the scan area can be set (Origin X and Origin Y).
The scan area can also be rotated by entering the desired
Rotation angle. Please note that a rotation can only be
performed if the space for this transaction is available, i.e.
the origin of x and y has to be moved (when using a
unipolar piezo scanner).
Note: Rotation is done by hardware mixing of the x- and y-channels. This
has the great advantage of a smooth and step-free rotation as compared to
digital rotation.
Due to this analog mixing procedure, there is a small error to the angle. A
slight angle error of about +/-150mdeg may be visible in certain check
measurements.
Start/Stop, Scan Status
LEDs
These buttons are the main scanner control. The following knobs and LEDs
are available:
Stop Scanner: The left icon is used to stop the scanner. The scanner is
moved to the lower left corner of the active scan area.
Pause Scanner: The middle icon is used to pause the scanning movement.
The scanner will stop at the current scan position and will restart from here
after the next click of the Start Scan button.
Start Scanner: The right icon is used to start the scanning process. A red
dot will mark the current position of the scanner in the Active Scan Area. If
the Single Scan button is active, the scanner will be stopped and
repositioned to the origin after one complete scan. If Single Scan is not
active, the scanner will run until you press either Stop or Pause Scan.
Scan Status LEDs: The left LED (green) is lit when the scanner is running
and image data is collected.
Scanner Moving LED: The middle LED (red) is lit when the scanner is

Page 65
© 2001-2012 attocube systems AG. Product and company names listed are trademarks or trade names of their
respective companies. Any rights not expressly granted herein are reserved. ATTENTION: Specifications and technical
data are subject to change without notice.
moving without data collection (e.g. during the movement to the origin
after pressing the Stop Scanner button).
Adjusting LED: The right LED is lit, when the scanner is adjusted internally.
During this procedure, the scanner cannot be started.
Origin X/Origin Y [pm/nm/µm]: Offset of the center of the active scan
area.
Range X/Range Y [pm/nm/µm]: Enter your desired scan range.
Scan Lines/Scan Columns: Enter the number of pixels in x (columns) and y
(lines) direction that will be collected. The scan range will be Pixel Size
times the number of pixels in each direction. If the Fix X=Y button is active,
only square scan areas are allowed and each change in Scan Lines or Scan
Columns will immediately affect the complementary parameter.
Pixel Size [nm]: Enter the pixel size in nanometers.
Sample Time [µs]: Time for the collection of one image data point. Please
note that the Sample Time is usually much higher than the time needed to
acquire one data point (2.5 µs). If the Average button in the Data Display
window is not activated, Daisy will acquire one data point and saves it to the
image, then skips all data points for the rest of one Sample Time. If Average
is activated, then all data points within one Sample Time will be acquired
and averaged to give one image data point.
For a smooth scanning movement, the scanner is not stopped during the
Sample Time, but moves steadily to the next pixel.
Instead of the Sample Time, the user can choose to set and maintain the
following derived parameters:
Line Frequency: = Sample Time * Scan Columns *2
The factor two is given for forward and backward measurement.
Scan Speed: = Sample Time / Pixel Size
Time per Frame: = Sample Time * Scan Columns * Scan Lines * 2
Dependent on which parameter is chosen, Daisy will try to keep this
parameter constant if other parameters are changed. For example, if Time
per Frame is selected and Scan Columns and Lines are decreased (Fix x=y
enabled), the Sample Time is increased accordingly. If the Pixel Size is
increased, the Scan Speed will increase accordingly to meet the same Time
per Frame.
Rotation [deg]: Enter a value between 0 and 360 degree. The Active Scan
Area will be rotated around the Origin. Please note that a rotation can only
be performed if enough space in the total scan area is available.
Fix X=Y: Toggle between fixing the scan range to be equal in both directions
and allowing different ranges for X and Y.
Hold slow axis: Activate this option to always scan the same line.
Single Scan: Activate this option to automatically stop the scan upon
completion of the frame.
Dual Pass: Use this option for the Dual Pass mode, see also section VI.5.g.
In this mode, every line is scanned twice (fwd-bkwd, fwd-bkwd, next line).
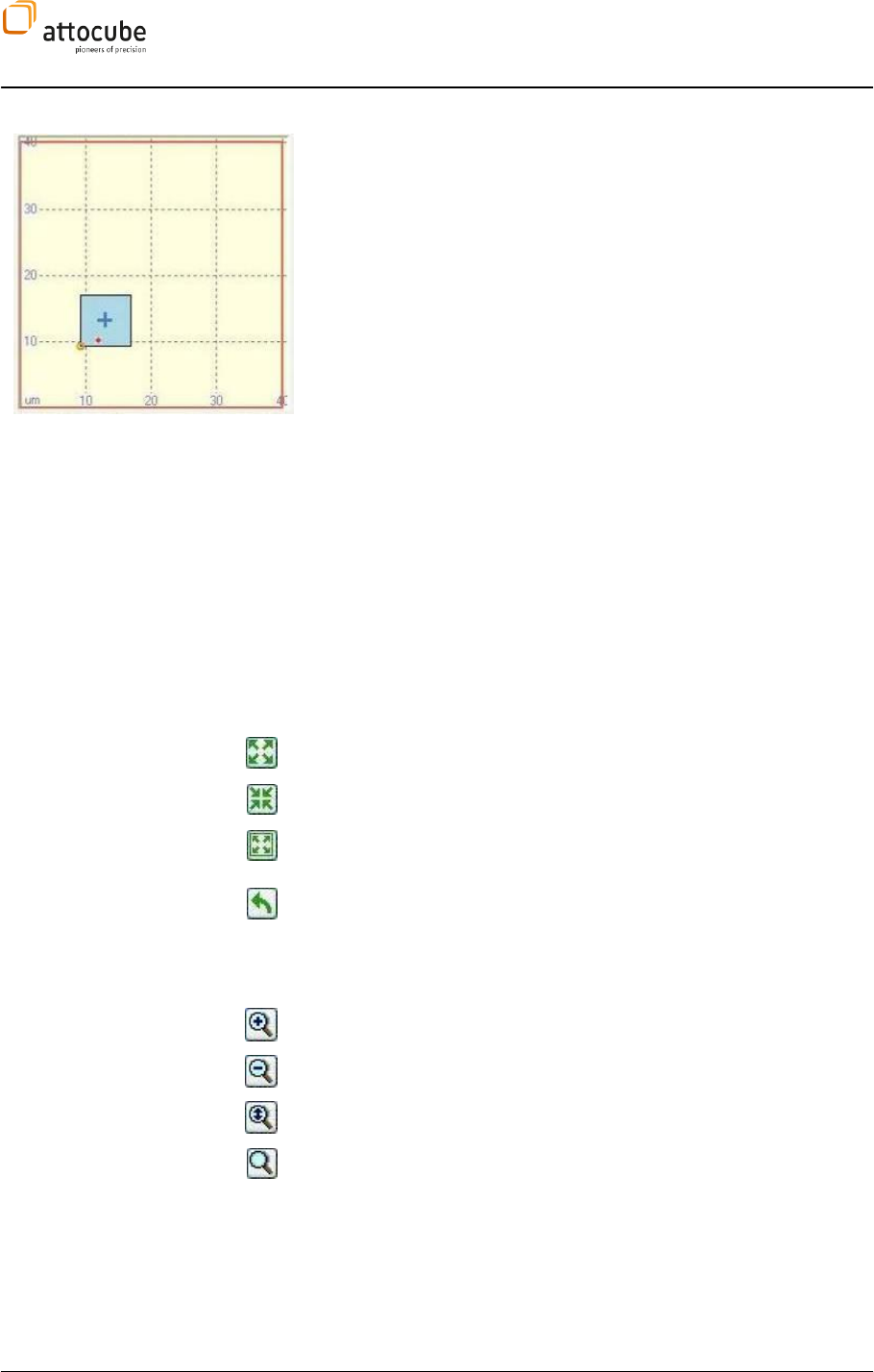
Page 66
The Scan Display
The Scan Display gives an overview over scan range and active scan area. In
its smallest magnification, the total available scan range is visible and
marked by a red rectangle. The Active Scan Area is marked by the blue
rectangle and can be arbitrarily chosen within the total scan range. During
scanning, a red dot marks the current position of the scanner (for very fast
scans, this dot is spreads out to a line). The yellow circle marks the origin of
the scan, whereas the blue cross marks the center of rotation.
To change the Active Scan Area, one can either enter the desired
parameters manually or adjust the Active Scan Area using the mouse. There
are three different possibilities to change the Active Scan Area with the
mouse:
Move: Position the mouse on the blue cross in the middle of the Active
Scan Area. The mouse pointer will change to a cross. Drag with the left
mouse button to reposition the scan area.
Resize: Position the mouse on the border of the Active Scan Area. The
mouse pointer will change to a rectangle. Drag the border with the left
mouse button until the desired size is reached. This will change the Pixel
Size, whereas the Scan Lines/Columns remain unchanged.
Rotate: Position the mouse somewhere between the border and the middle
of the Active Scan Area. The mouse pointer will change to a circle. Drag to
rotate.
Active Scan Area Size Tools
One can use the Size Tools to change the Active Scan Area.
Enlarge: Enlarges the Active Scan Area by 19%.
Shrink: Shrinks the Active Scan Area by 19%.
Maximize: Sets the Active Scan Area to fill the total available scan
range. Rotation is set to zero.
Rotate: Rotates the Active Scan Area by 90 degrees. This feature is
helpful if you want to quickly exchange the fast and slow scanning axis.
Active Scan Area Zoom
Tools
Use these icons to zoom in and out of the Scan Display. These tools do not
change the Active Scan Area.
Zoom in
Zoom out
Zoom all: Shows the total available scan area.
Zoom Adjust: Shows the Active Scan Area.
Scan Details
Click on Scan Details to display important additional scan parameters which
follow directly from the defined scan parameters.

Page 67
© 2001-2012 attocube systems AG. Product and company names listed are trademarks or trade names of their
respective companies. Any rights not expressly granted herein are reserved. ATTENTION: Specifications and technical
data are subject to change without notice.
Range X/Range Y: Size of the Active Scan Area.
Line Frequency: Line Frequency in Hertz. Please note that
Line Frequency is based on the time for forward and
backward scan of one line.
Frame Time: Time needed for the completion of one up
scan or one down scan.
Scan Speed: Speed of the scanner in micrometers per
second.
Voltage Limit: The current voltage output limit as
defined in the Preferences Tab.
VI.2.a. Closed Loop Scanning
The ASC500 supports the use of scan position sensors to provide closed
loop scanning functionality. In a closed loop scan mode, all non-
linearities of the scan motion that arise due to the non-linearities of the
But not only the scan motion will be
affected; also the point positioning within the path mode will be free of
p
range of either 1.2 mm or 5mm (depending on the model) and thus allow
for exact repositioning within the wide xy coarse range.
Principle of operation
Figure 12 shows the principle of operation of the closed loop control
functionality. The target position will be fed into a PI controller that will
adjust the scanner control voltage until the current position matches the
target position. There are two PI controller, one for each x or y scan
will determine the speed in which the scanner will follow the target
position. If the target position changes continuously as in the scan
movement, there will be fixed shift between the target and the actual
position. This shift is called contouring error. It can be diminished by
maximizing the speed of the closed loop control loop. Still, the control
speed must be slow enough to still offer a stable feedback without any
oscillations.
attocube systems closed loop sensors offer a sensor range that is much
larger than the range of motion of the scanner. The scan range will thus
always be a small part of the sensor range. If coarse positioning is used,
is possible to recalibrate the scanner coordinates by a single mouse click
to define a new position of the scan range within the sensor range.
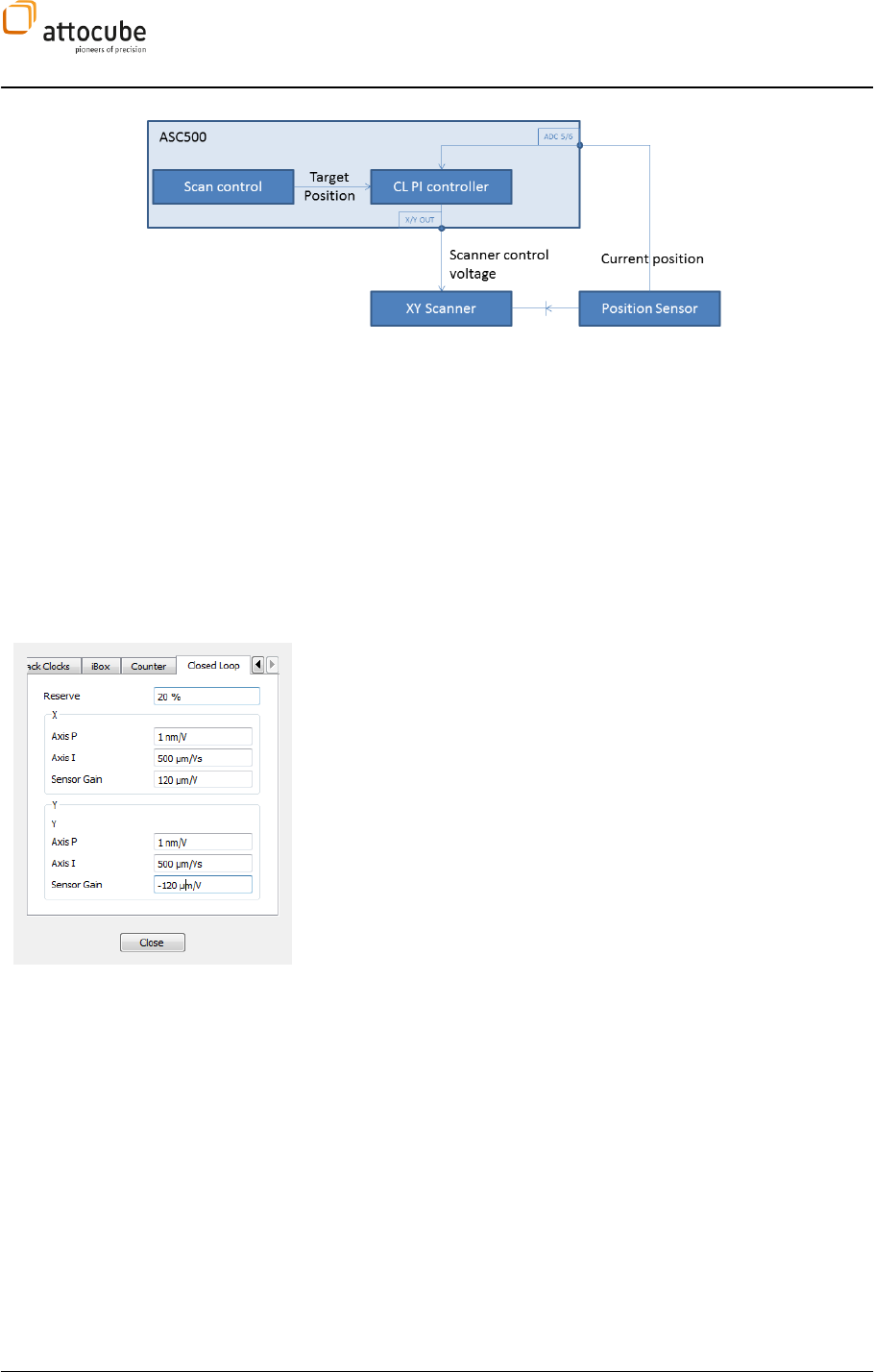
Page 68
Figure 12: Principle of operation of closed loop scanning
Preparation
The following preparation steps have to be finished before a closed loop
scan can be started. These steps are listed here for reference only,
because both software and hardware are readily configured after the
1. The sensors have to be mounted in the microscope setup and the
2. The sensor signal is an analog voltage that has to be fed into the
ADC5 input of the ASC500 for the x direction sensor and into the
ADC6 input for the y direction sensor. It is not possible to change
the input configuration to other ADC inputs.
3. The parameters of the closed loop PI controller can be set under
Settings – Experiment Preferences in the Closed Loop tab. An
example is shown to the left:
a. Reserve: Defines an extra scan range margin around the
actual scan range. This extra margin allows for
positioning the tip on the boundaries of the actual scan
range, even if the non-linearities of the scanner require
a scanner voltage that would lead to an out-of-range
tip position in open loop scan mode. In closed loop
scan mode, the actual scan range plus the reserve will
be mapped to the full 16 bit resolution of the scanner
output converters.
b. Axis P/Axis I: Defines the P and I feedback parameters
of either x or y closed loop controller. Good values to
start with are P = 1nm/V and I = 500 µm/V (I being the
much more important parameter). If feedback is too
slow, Axis I should be increased, if the feedback is
unstable, Axis I must be decreased.
c. Sensor Gain: Defines the position vs. voltage rate of the
sensor. For standard attocube sensors, this gain is
either 120 µm/V or 500 µm/V. The sign of the sensor
gain is important: a negative value will be appropriate
for a configuration where an increasing scanner voltage
leads to a decreased position value.
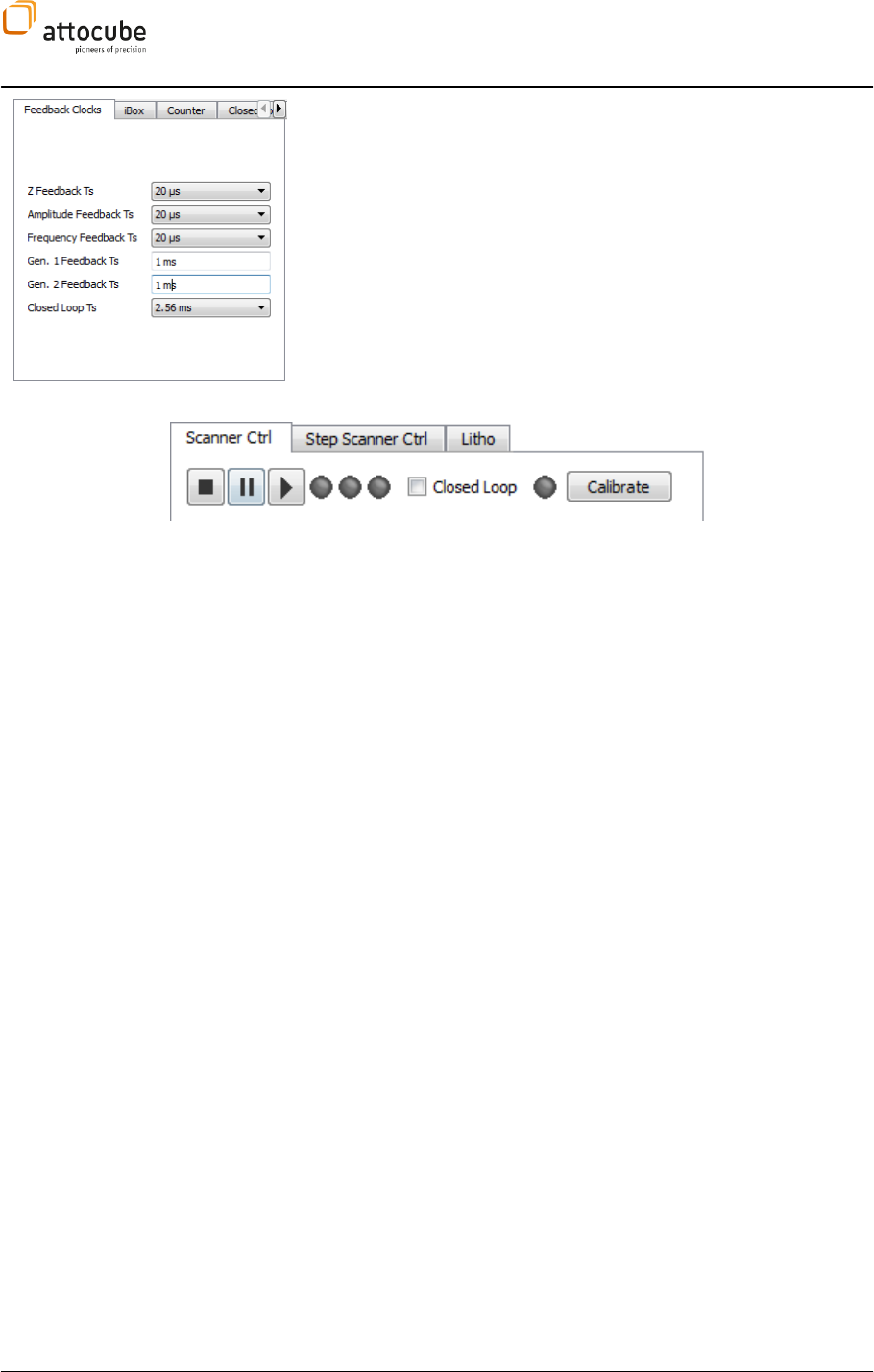
Page 69
© 2001-2012 attocube systems AG. Product and company names listed are trademarks or trade names of their
respective companies. Any rights not expressly granted herein are reserved. ATTENTION: Specifications and technical
data are subject to change without notice.
4. The clock of the closed loop feedback should be set to 2.56 ms.
This value can be checked under Settings – Experiment
Preferences in the Feedback Clocks tab. This tab is shown to the
left.
Figure 13: The closed loop control buttons on the top of the scanner widget. From middle to right: Closed loop
activation checkbox, closed loop status LED and Calibrate button.
Operation of closed loop
scanning
Once the closed loop control is started, all scanner movements will be
operated in closed loop mode. Scanning movements, point positioning in
path mode and manual tip positioning will be free of non-linearities and
creep.
Before switching to closed loop mode, it is important to calibrate the
coordinates. This is done by pressing the Calibrate button on the upper
right of the scanner widget (see Figure 13). Then the closed loop mode
can be activated by checking the Closed Loop checkbox.
There are a few situations where the start of the closed loop mode will be
prohibited:
- Scanner is moving; scan movements have to be stopped
before turning on closed loop mode
- Lithography is running
- Pathmode is running
- The Hold Slow Axis option of the scanner widget is active
- Scan field rotation is not equal to zero; due to certain
hardware constraints, rotation of the scan field is not
possible in closed loop mode.
- The scanner is currently in a state of switching from
closed loop back to open loop (the closed loop LED will
be red)
In all cases above, an error message will be generated and closed loop
mode will not be activated.
The usage of the scanner in closed loop mode is similar to the open loop
mode situation. However there is a difference in the way the red dot in the
scanner widget indicates the actual scan position. The red dot will NOT

Page 70
show the current scan position. Instead, it will display the current scanner
output voltage transferred back to a position. To highlight the difference,
the following example might be helpful: Consider the origin of the actual
scan range is set to (5 µm/5 µm) and the scanner calibration is 10 µm/V
with the scanner being in STOP mode. In open loop mode, the red dot
would be located on the (5 µm/5 µm) position in the scan grid and the
output voltage would be (0.5 V/0.5 V). In closed lo
non-linearities might require a voltage output of (0.45 V/0.48 V) to
stabilize the scanner on a (5 µm/5 µm) position. The red dot will now
show a scan position corresponding to a (4.5 µm/4.8 µm) position, i.e.
outside of the actual scan range (that is displayed in blue in the scanner
widget). The advantage of this illustration is that the user has an
instantaneous indication on the status of the scanner. If the scanner
output voltage hits the voltage boundaries, it will be immediately obvious
to the user. The voltage boundaries could be either the boundaries of the
total scan range or the boundaries of the actual scan range plus Reserve.
In upcoming versions of the software, the user will have the choice
between this type of illustration and an illustration where the red dot
really indicates the position of the scanner/tip.
Contouring error
Scanning in closed loop mode requires the feedback system to operate
with a constantly changing setpoint. Consequently, the setpoint will
never be reached and there will always be a lag between the target
position (the setpoint) and the actual scan position. This lag is called
contouring error. Apart from some deviations at the turning points of the
scan, the contouring error will be constant for a certain scan speed and a
parameters). It is worth noting that the real physical position of a feature
on the sample is exactly in the middle between its position in the forward
and backward trace.
Using the position pick tools of the 2D SCAN views to mark a position
within the 2D image will result in a position that is shifted by the
contouring error in the fast scan direction (there will be no contouring
error in the slow scan direction). In contrast to the scan movement, the
point positioning movement in the Path Mode will not show a contouring
error and the target position will be reached within the resolution of the
sensor. Without any compensation, a given position will be missed in fast
scan direction by the amount of the contouring error.
The ASC500 Daisy software allows for compensation of the contouring
error. It is possible to define a fixed Compensation X value that will be
automatically added to all pathmode and lithography positions. This way
the contouring error can be easily compensated if its magnitude is known.
There is also a powerful tool to detect the magnitude of the contouring
error. This is done by an evaluation of the correlation between forward
and backward scan and is described in the next section.
Contouring error
compensation
The contouring error will show up as a shift between forward and
backward trace. In Figure 14, a line trace is shown with a clear shift
between forward and backward trace. In the lower section of Figure 14,
the CL Contouring Error menu of the right tab section is shown. It is
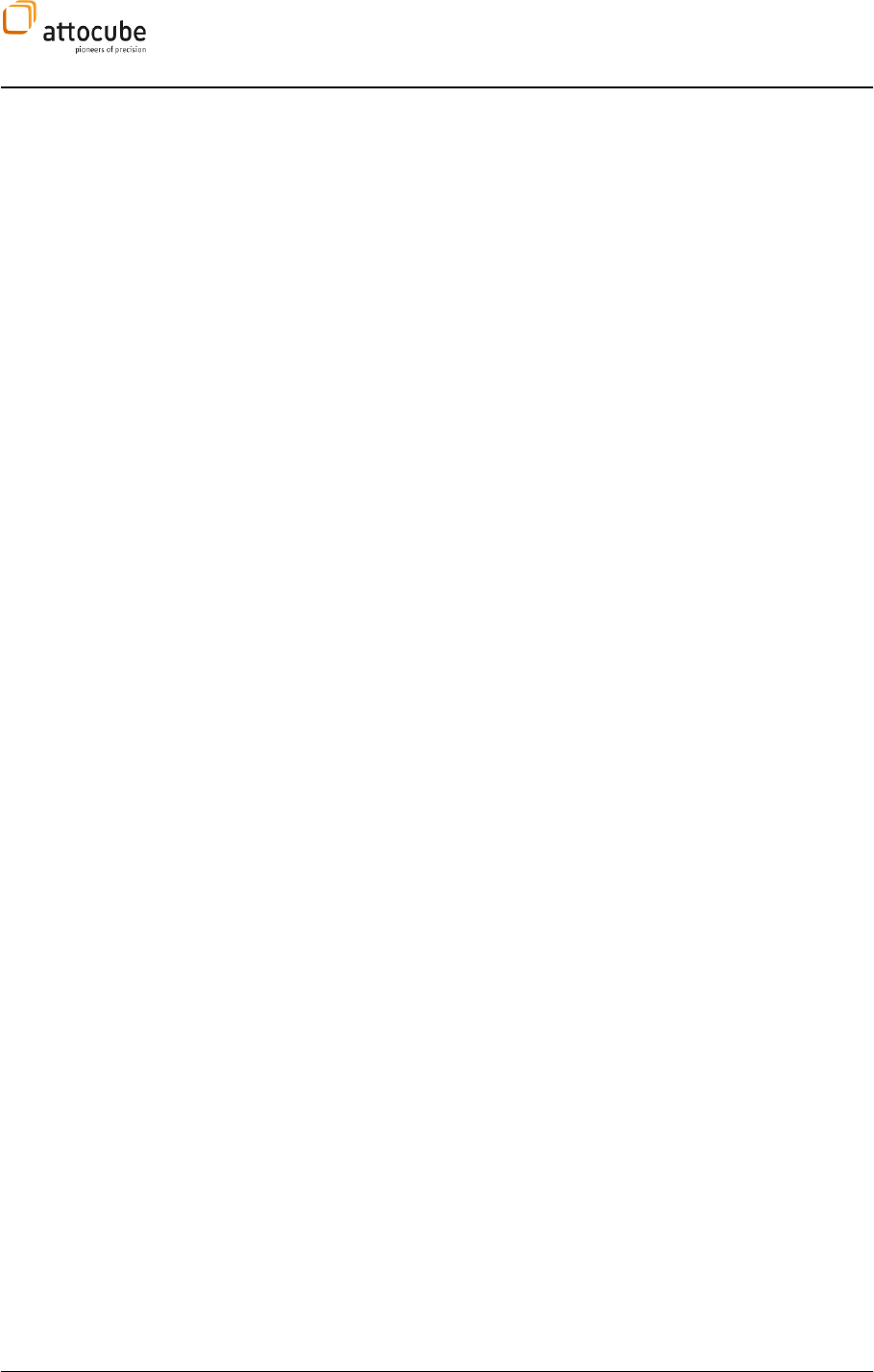
Page 71
© 2001-2012 attocube systems AG. Product and company names listed are trademarks or trade names of their
respective companies. Any rights not expressly granted herein are reserved. ATTENTION: Specifications and technical
data are subject to change without notice.
composed from different fields:
- Compensation X: defines the value of the shift that will
automatically be added to all point positions of
Pathmode and Lithography. This value can be entered
either manually or automatically by using the Confirm
button that is described below.
Note: This value can be positive or negative. An
automatically detected Compensation X value will only
lead to the correct target position if the Pathmode or
Lithography points are referenced to a FORWARD scan
direction (i.e. if the points are chosen in a SCAN display
showing the forward scan direction).
- Signal: defines the signal that is chosen for the
correlation processing. The signal can be chosen from
all signals accessible in the SCAN section.
- Correlation Filter: can be set to either On or OFF. In OFF
mode, the display below the filter will show the forward
and backward line trace of the Signal. If the filter is
activated, the display will show the correlation between
forward and backward trace for all possible shifts
between both traces. The correlation will be maximized
if the shift equals the double contouring error.
- Contouring Error: If the correlation filter is activated,
the contouring error will be calculated for each scan
line as half of the shift where the maximum in the
correlation appears. It will be displayed for each line
and cannot be changed
- Confirm: By pressing the Confirm button, the current
value of the contouring error will be transferred to the
Compensation X field. Thus, the semiautomatic
compensation of the contouring error is finished.
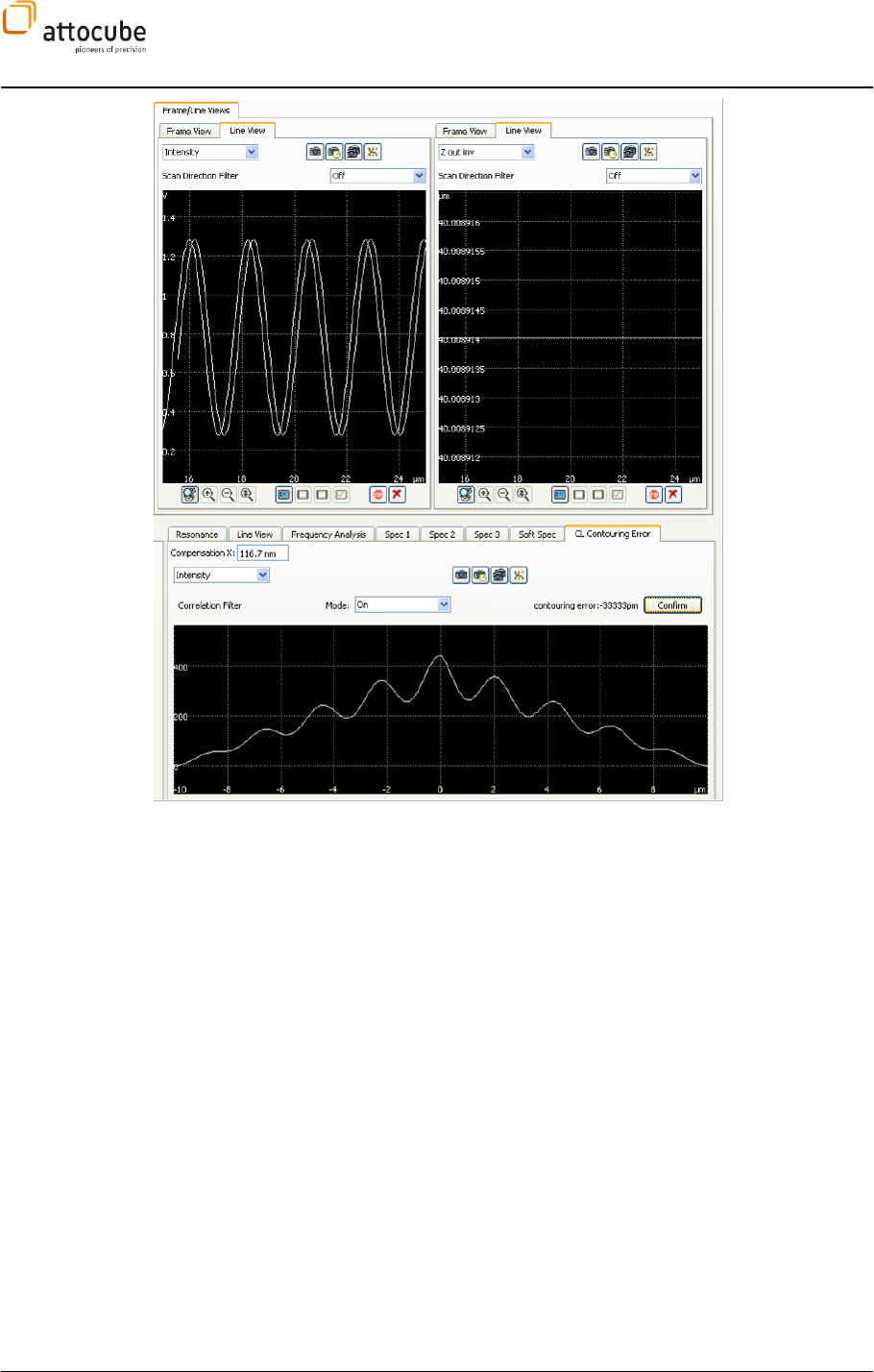
Page 72
Figure 14:
Closed Loop Contouring Error compensation using a forward-backward correlation.
VI.2.b. Lithography
The Daisy Lithography module can be used for defining geometrical
shapes that will be retraced by the sensor head. It allows the definition of
arbitrary convex polygons and single points. Moreover, a shutter can be
controlled via TTL pulses to allow for exposition of certain structures on
the sample surface.
Lithography can be operated in both closed loop and open loop mode.
Shape definition
The shape definition of the lithography pattern is done via a text file.
There are two basic shapes to define the lithography pattern: Polygons
and Points. Each of these basic shape definitions can be combined with a
command to control an optional shutter. An example for a shape file is
shown in Figure 15.
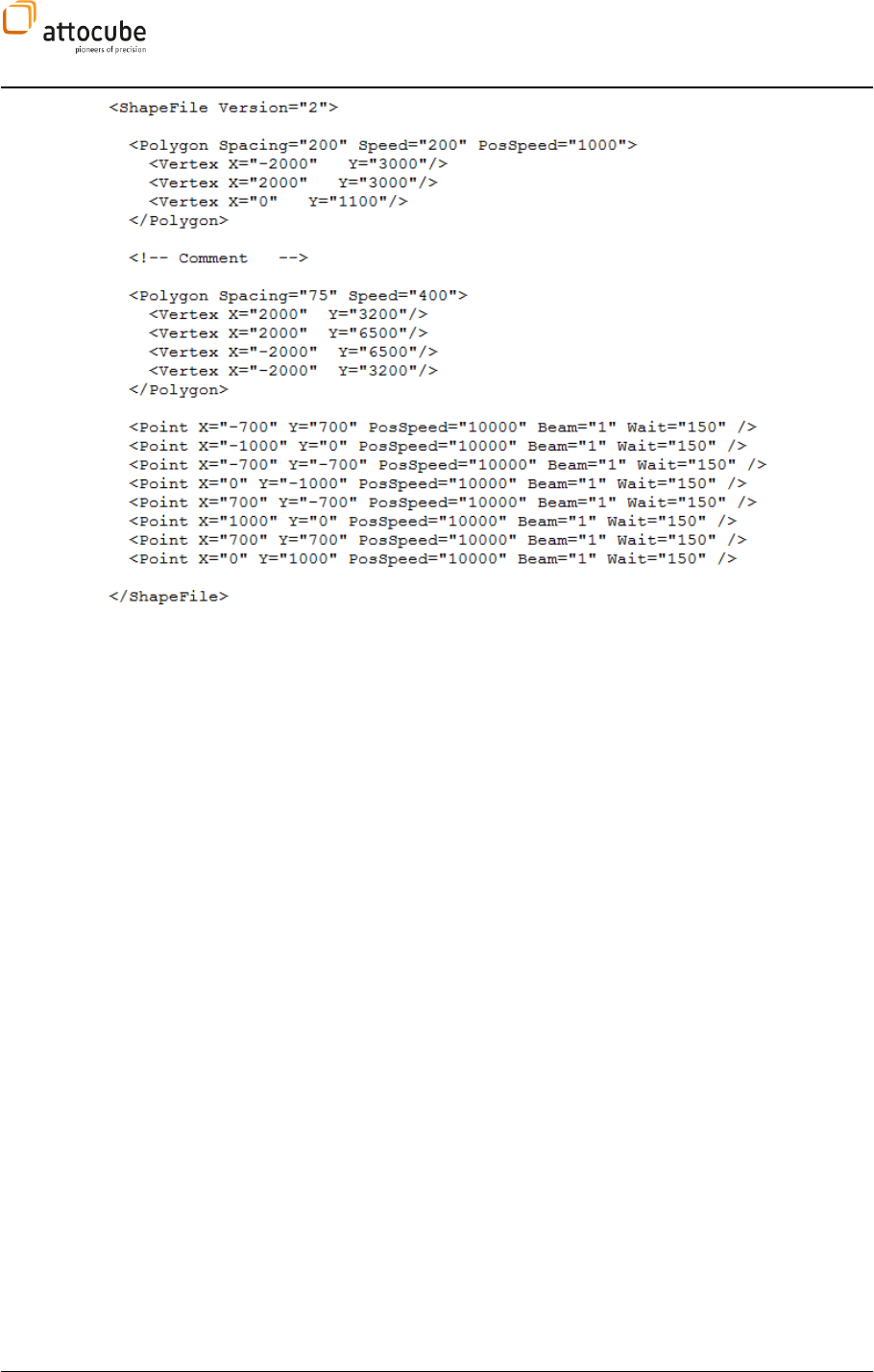
Page 73
© 2001-2012 attocube systems AG. Product and company names listed are trademarks or trade names of their
respective companies. Any rights not expressly granted herein are reserved. ATTENTION: Specifications and technical
data are subject to change without notice.
Figure 15: Example of a shape definition file.
The shape file must be an ASCII file with an nls extension. It must start
with a <ShapeFile Version”2”> command and end with a
</ShapeFile> command. In between, there can be any number of
Polygon and Point commands. Comments can be inserted enclosed in a
<!-- and --> respectively. All coordinates given in a shape definition
file are interpreted in nm and are relative to the center of the current scan
range.
The two basic definitions can be done via:
1. Polygon command:
<Polygon Attributes>
<Vertex X Y/>
<Vertex X Y/>
<Vertex X Y/>
</Polygon>
The Attributes can be:
a. Spacing : the spacing of the filling pattern in nm (default:
1). The polygon will be written by meandering lines with a
line spacing given the Spacing attribute.
b. Speed: the scan speed during the writing of the polygon in
nm/s (default: 10000)
c. PosSpeed: the scan speed during the approach of the
polygon in nm/s (default: 10000)
d. Beam: controls a shutter via a TTL output. Beam on (1)
leads to high voltage on the TTL output, Beam off (2) leads
to GND voltage on the output connector. The output
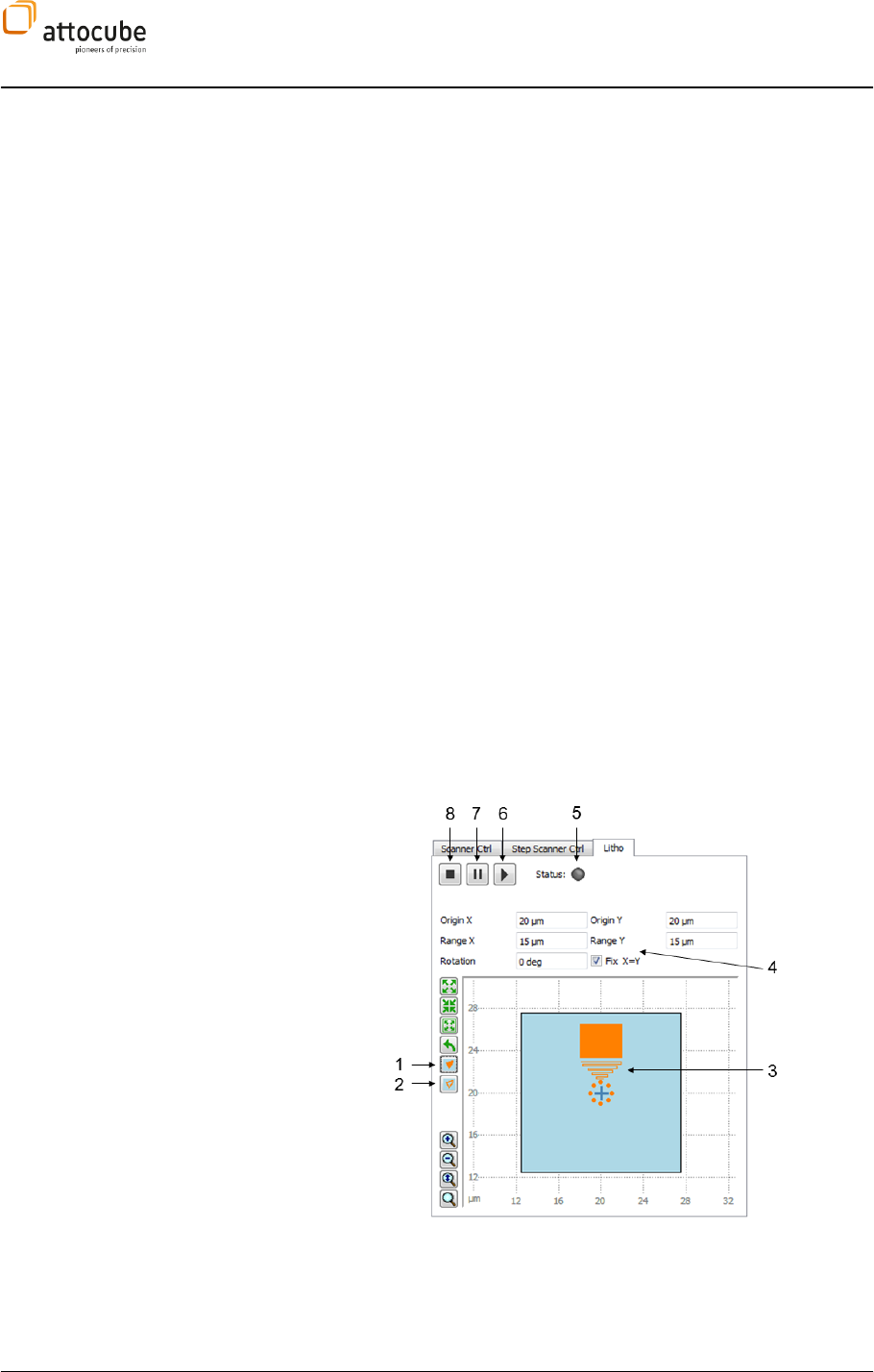
Page 74
connector for this functionality is pin number 5 of the
External OUT connector (see section II.3.d on page 14).
e. Handshake: Stop for handshake with external device
before scanning (Default: 0)
All attributes can be omitted. The default values will be used for
omitted attributes.
The polygon itself is defined via a sequence of vertices. Each vertex
has to be specified with a <Vertex/> command. It is important to
note that only convex polygon will result in a well-defined output.
2. Point command
<Point X Y/>
a. X and Y: mandatory attributes in nm.
b. PosSpeed: the scan speed during the approach of the
point in nm/s (default 10000)
c. Wait: Wait time in ms after reaching the point (default: 0)
d. Beam: Beam on (1) or off (0) during wait time (default: 1)
To check the shape, the text file can be loaded into the Daisy software
where the shape will be displayed in the Lithography section of the
scanner widget. How this is done will be explained in the next section.
Operation of lithography
The lithography control is placed in the Litho tab of the scanner widget.
The tab is shown in Figure 16. The lithography tab is similar to the scanner
control tab. Some settings can be changed in both tabs and the changes
in one tab will immediately affect the other.
Figure 16: Lithography widget with shape definition. The shape that is
shown was produced by the shape definition file of Figure 15.
Page 75
© 2001-2012 attocube systems AG. Product and company names listed are trademarks or trade names of their
respective companies. Any rights not expressly granted herein are reserved. ATTENTION: Specifications and technical
data are subject to change without notice.
1 load lithography definition file: upon a click on this button, a Windows
dialogue will appear to specify the lithography shape definition file. After
loading, the lithography shape will be shown in the display.
2 clear shape: with this button, any shape that is displayed will be
erased.
3 the loaded shape is drawn into the actual scan range. It is worth
noting that the meandering lines of the lithography are only resolved in
the lower triangle of the shape. Here, a line spacing of 200 nm was used.
The single lines of the rectangle (spaced 75 nm apart) can only be
displayed using the zoom buttons in the lower left of the panel.
4 here, the basic definition of the actual scan range can be set. Changes
will immediately affect the Scan Control Tab.
5 Status LED: green is lithography is running
6 Start button: starts the lithography
7 Pause button: pauses the lithography. During pause, the shutter will
be closed and reopen upon ending of the pause in case its status was open
before the pause.
8 Stop button: Stops the lithography. The shutter is closed and the
scanner moves to the origin
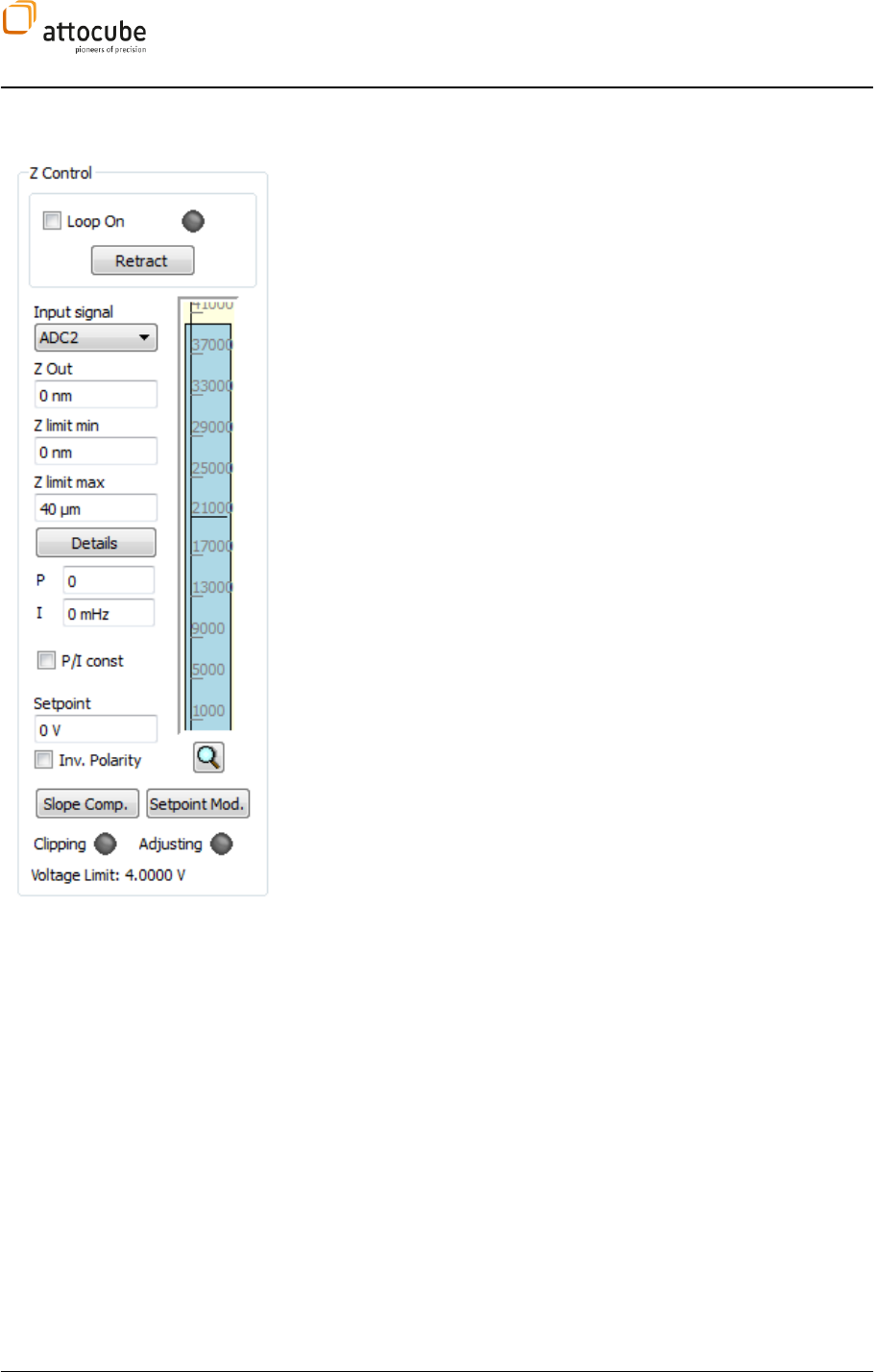
Page 76
VI.3. The Z Control feedback loop
The Z control loop controls the z-position of a sensor with respect to a
sample. There are several Input Signals to choose from, whereas the output
of the loop is strictly connected to Z OUT. The loop output is limited to a
voltage ranging from Z Offset to (Z Offset + Z Range) (see Details dialog). The
output can be additionally limited using the Z Limit min and Z limit max
settings.
The feedback loop always tries to modify z-out so that the input signal actual
value gets closer to the setpoint. Whether the loop needs to be in negative or
positive feedback, can be chosen with Inv. Polarity. The proportional gain P
is sensitive to sudden jumps in the signal, whereas the integral gain I is
sensitive to the integral of the signal.
The main loop-controls are: The Loop On checkbox, the Retract Button at the
top as well as the indicator LEDs at the bottom. The following states are
possible:
Loop on: Enable the check box to switch on the loop. The LED will
turn green.
Loop off: If the box is unchecked, the feedback loop will hold the
position of z-out and will not react on changes of the input signal.
Retract: If Retract has been pressed, the loop is switched off and
the voltage is taken down to Z Offset (i.e. the tip is retracted from the
sample).
Clipping: The Clipping LED is enabled, if the active loop reaches one
of the limits, i.e. either the lower limit Z Offset, or the upper limit
(Z Offset + Z Range).
Adjusting: This LED indicates that the red bar is not yet synchronized
with the real z-out value (due to lower update rate).
Inv. Polarity: For experiments, where the sensor signal increases with
decreasing sensor sample distance (e.g. in STM, the tip gets closer with
higher z-out voltage), leave this box unchecked. For experiments, where the
sensor signal decreases with decreasing sensor sample distance (e.g.
oscillation amplitude of a vibrating tip), do check the box.
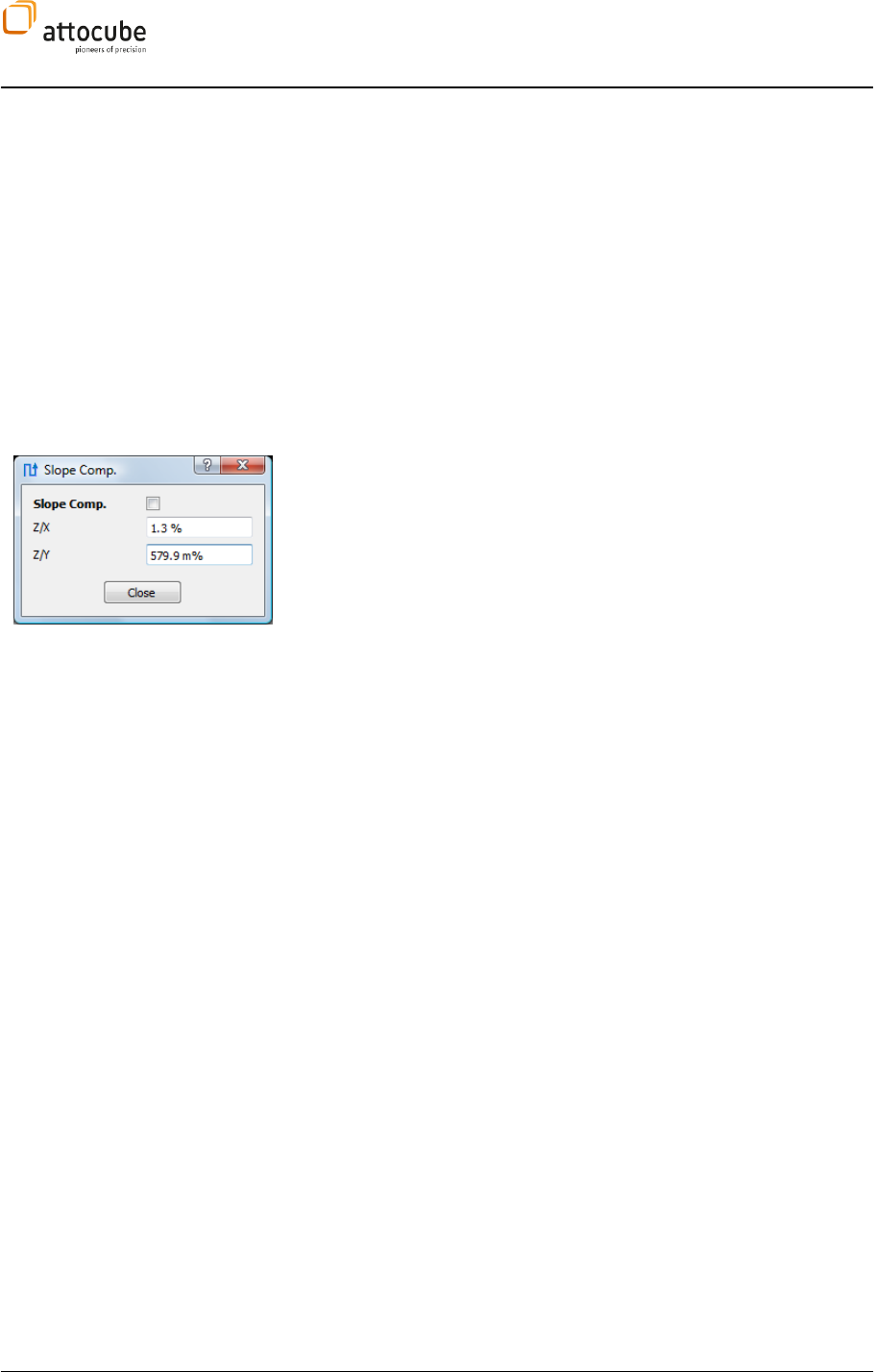
Page 77
© 2001-2012 attocube systems AG. Product and company names listed are trademarks or trade names of their
respective companies. Any rights not expressly granted herein are reserved. ATTENTION: Specifications and technical
data are subject to change without notice.
VI.3.a. Slope
Compensation
The Slope Compensation is an important feature to compensate for a tilt of
the sample with respect to the horizontal plane. Quite often in SPM
experiments, the height of the investigated feature is much smaller than its
lateral dimension so the scan range will be large in xy and small in z. In this
configuration even a small tilt of the sample does disturb the image and
masks smallest topographic variations. To compensate for these sample tilts,
the ASC500 features a powerful Slope Compensation that enables scanning of
a tilted plane without any influence on the z controller. Once the Slope
Compensation is set and activated, the sample will be scanned as if it was
lying perfectly flat
mple distance constant even without employing
a z feedback.
The Slope Compensation is activated by clicking on the Slope Comp. button in
the z controller widget. A window as shown to the left will appear. The
compensation values for both X and Y axis can be entered separately in the
Z/X and Z/Y box, respectively. The Slope Compensation can be activated and
deactivated using the Slope Comp. toggle button.
A negative slope (of the forward scan) will be compensated by a positive
value and vice versa. The values can be chosen between -20% and 20%.
To set the correct values the compensates the sample tilt, it is best to do the
following:
1. Set the scan rotation to 0 degrees.
2. Scan a line and change the Z/X factor of the Slope Compensation
until a flat line appears horizontal.
3. Set the scan rotation to 90 degrees and repeat the previous step for
the Z/Y factor.
Figure 17 shows typical line scans with and without Slope Compensation for
an AFM scan of the 25 nm high grating with a 4 µm pitch. As can be seen in
the image, the Slope Compensation acts on the total scan range of the
scanner; the two line scans displayed here would meet at an x position of 0
µm, the offset between the white and the red scan line is thus the result of
the Slope Compensation together with a scan field that does not include the x
origin position.
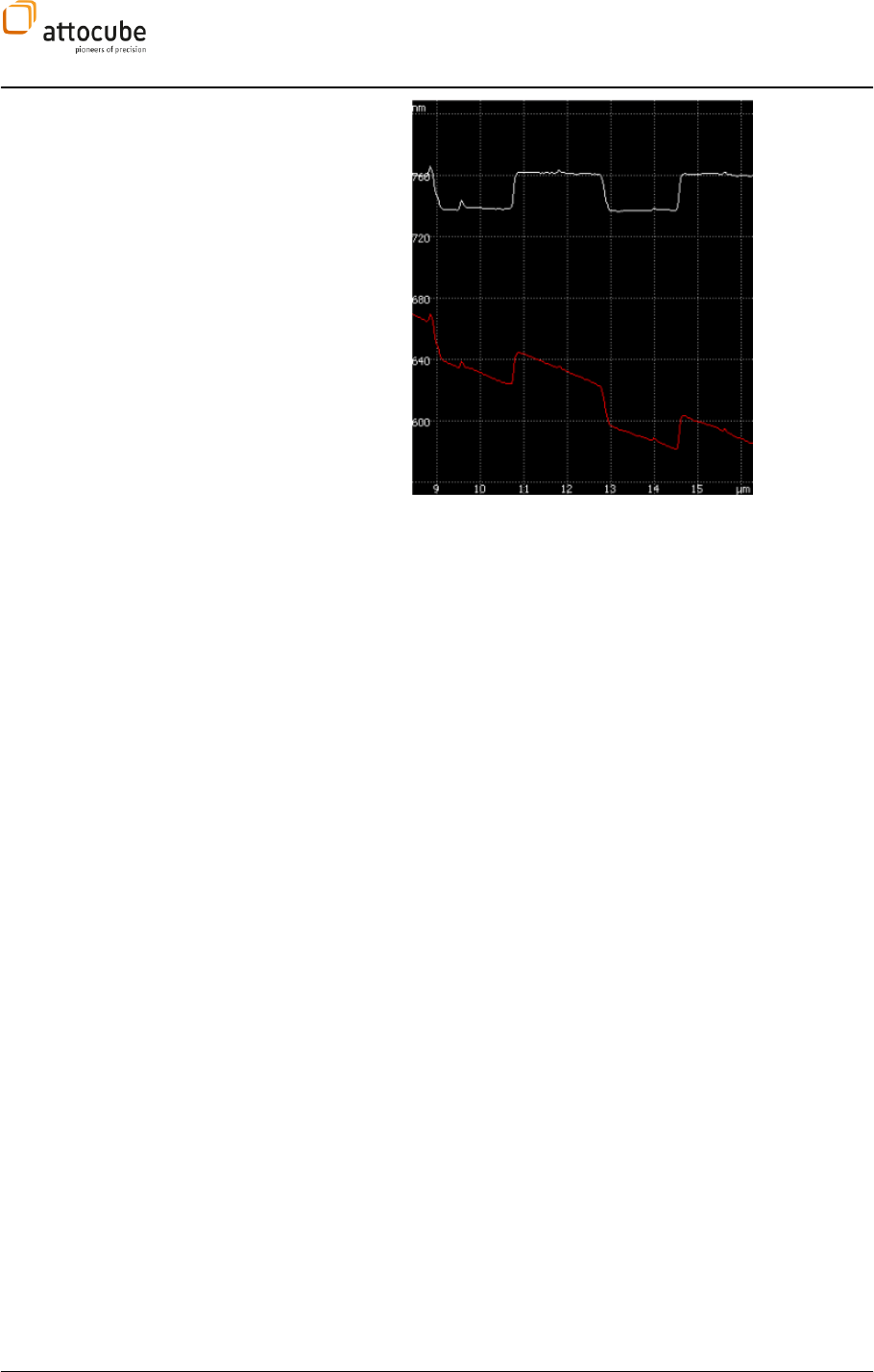
Page 78
Figure 17: A typical line scan before (red) and after (white) the sample tilt is
compensated by the Slope Compensation feature.
Slope Compensation
Details
The Slope Compensation is realized internally by an analog
adding/subtracting of some part of the X OUT and Y OUT voltages to the Z OUT
voltage. A positive Slope Compensation of 20 % for both X and Y axes will
thus lead to a large additional voltage (called Slope Compensation Voltage
SCV) in the Z OUT voltage output if the scanner moves to the upper right
corner of the total scan range. If for example the maximum allowed voltage
for all x, y and z scanner is 4 V, the SCV can vary between -1.6 V and 1.6 V
(These voltages will typically be amplified by a factor of 15 before applied to
the scanner). If the SCV would simply be added or subtracted to the Z OUT
voltage, the resulting voltage could possibly be either large enough to
damage the scanner piezo or negative enough to lead to some
depolarization of the scan piezo.
To overcome this problem, a safety margin for the Z OUT voltage is employed
in the following way: for the actual settings of Z/X and Z/Y, the maximum
positive a
of the SCV for a scanner position in the upper right corner of the total scan
range). If the Slope Compensation is activated, the Z OUT voltage range will
automatically be reduced by the exact values of the SCV. This way, the sum of
the Z OUT voltage (as set by the z controller) and the SCV will never exceed
the maximum allowed voltage and no harm will be done to the scanner.
The reduction of the z scan range is visualized in the z controller
The safety margin due to the slope compensation will be shown red in this
display. Below, there are several examples.
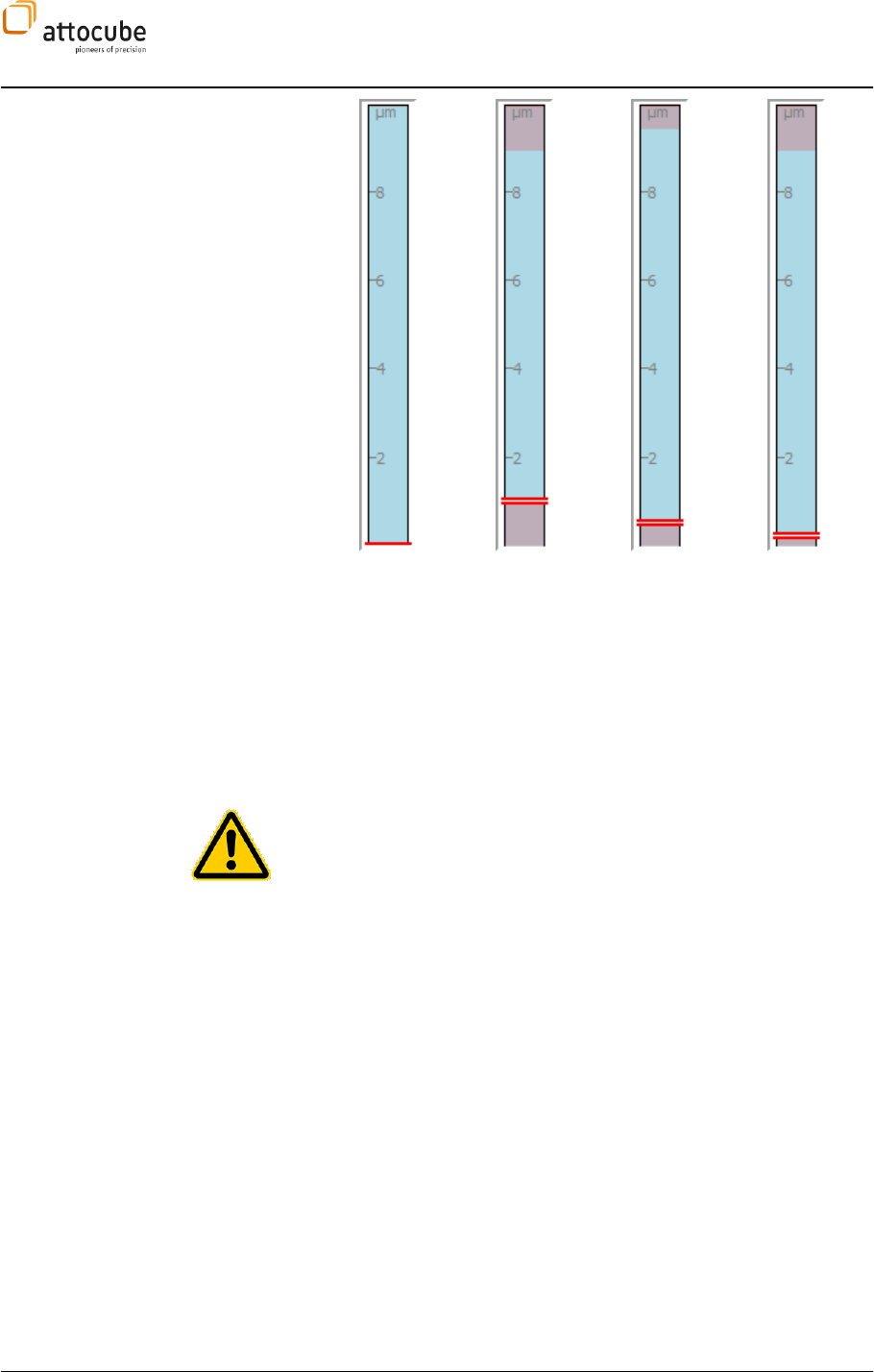
Page 79
© 2001-2012 attocube systems AG. Product and company names listed are trademarks or trade names of their
respective companies. Any rights not expressly granted herein are reserved. ATTENTION: Specifications and technical
data are subject to change without notice.
1 2 3 4
(1) The display shows a z scan range of 10 µm that is not restricted
because the Slope Compensation factors are both set to zero.
The full range of the scanner is accessible for scanning.
(2) The display shows a z scan range with a restriction due to the
Slope Compensation by Z/X = 10 % and Z/Y = - 10%. In this
case, 10 % of X OUT means 1 µm safety margin in Z OUT. The
positive factor for Z/X leads to a reduction of 1 µm at the upper
limit of the z scan range. The negative Z/Y factor of -10 % leads
to a reduction of the z scan range of 1 µm at the lower limit of
the z scan range. It is important to note that this reduction
position. At the moment the Slope Compensation is activated,
the scanner will thus move the tip closer to the sample!
However, this will not harm the tip if the Slope Compensation is
set correctly. Basically, the tip will be driven closer to the
Overload Capacity
(3) As in (2), the display again shows a z scan range with a
restriction due to the Slope Compensation by Z/X = 10 % and
Z/Y = - 10%. The fact that the restrictions are smaller is due to
another margin that has not been discussed so far. There is a
hardware parameter called Slope Compensation Overload
Capacity that will increase the accessible z scan range. This
parameter is related to the fact that piezos in general have
some tolerance in their voltage ratings. A piezo rated for 0 V
to 60 V can safely be driven by a voltage of – 3 V to 63 V. This
Overload Capacity
can be used to regain some or all of the z
Slope Compensation. In the
example shown above in (3), an Overload Capacity of 5% has
been employed to reduce the restrictions to merely 0.5 µm on
each end of the z scan range. The Overload Capacity can be set
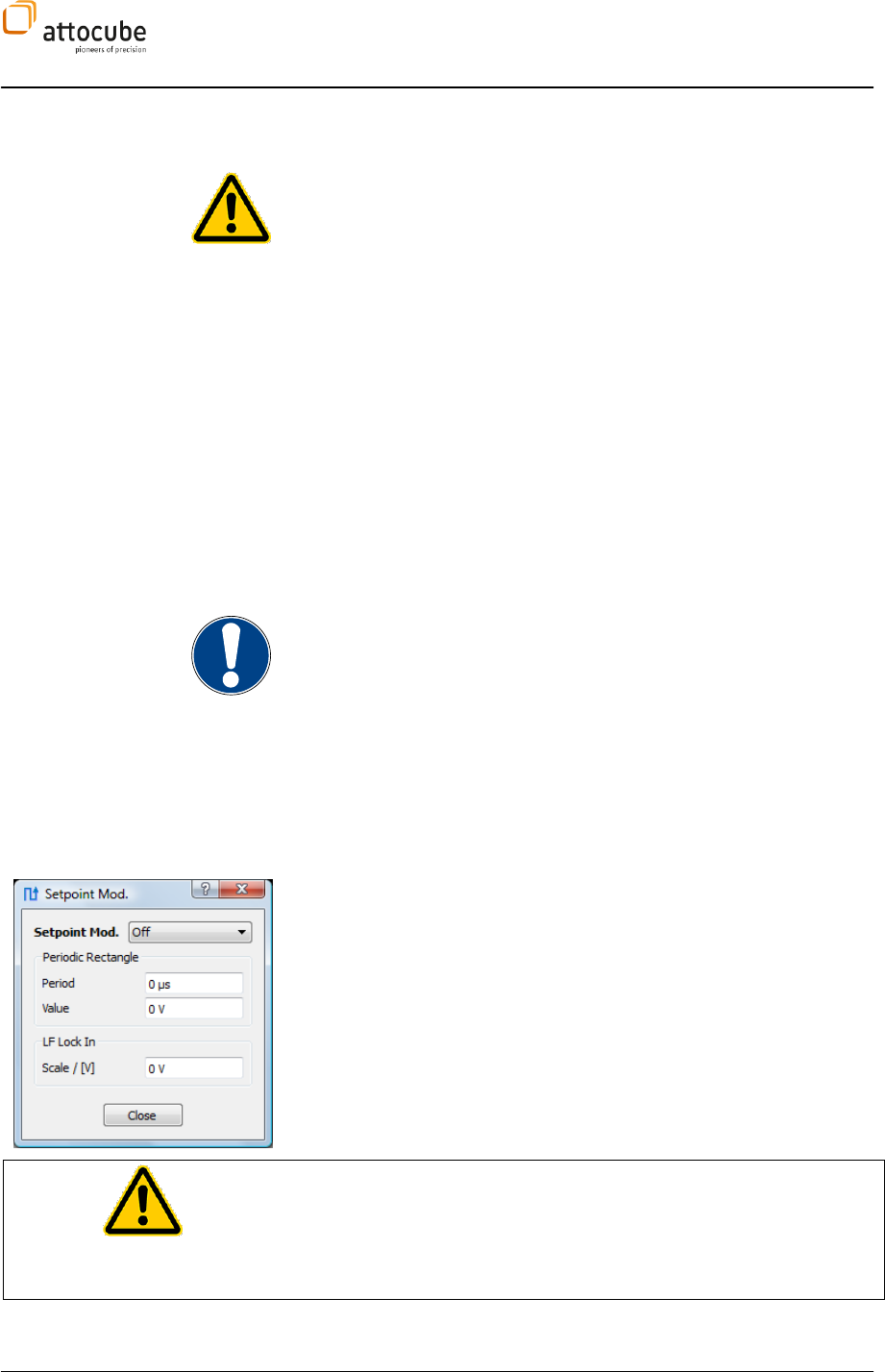
Page 80
in the Output Limits – Expert Settings – Overload Capacity
section.
It is strongly recommended not to change the
Overload
Capacity
and leave the value that is set in this field by the
manufacturer. False settings of the
Overload Capacity
may
damage the piezo and will lead to a loss of warranty.
(4) The display shows a 10 µm z scan range with the following
settings: Z/X = 15%, Z/Y = -7 %, Overload Capacity = 5 %. The
positive Slope Compensation factor of 15 % together with the
Overload Capacity leads to restriction of 1 µm at the upper limit
of the z scan range. At the lower side, the negative Slope
Compensation factor of -7% will be diminished by the 5%
Overload Capacity, leaving a restriction of 200 nm at the lower
end of the z scan range. The retract position is elevated to this
value.
Notes
a. The SCV will not be part of the internal signals Z OUT and Z OUT INV.
However, it will of course be a part of the Z OUT voltage.
b. The Slope Compensation can be set at any time during a scan. A
change in the Slope Compensation will immediately lead to a change
in the Z OUT voltage. The speed of this change is governed by the Z
Slewrate that can be set under Output Limits – Sanner Limits and
Scaling – Slewrate Z. If the Z Slewrate is faster than the speed of the
z control loop, a change in the Slope Compensation can potentially
lead to a tip degrading.
c. The limits of +/- 20% of the Slope Compensation are set by
hardware limits that where built into the ASC500. These limits were
designed on purpose to avoid an exceeding crosstalk of noise from
the X OUT and Y OUT voltage on the Z OUT voltage.
VI.3.b. Setpoint
Modulation
This feature is useful to optimize the P-I parameters with a tip in contact.
If you enable Setpoint Modulation, the setpoint of the feedback loop will be
switched with the given period between the value entered in the feedback
loop control and the value given in this dialog. Hence, this feature simulates
an ultimately sharp feature. This facilitates the tuning of the feedback loop
accordingly.
Note: Do not switch on the Setpoint Modulation before the setpoint
parameters are carefully defined. If there is e.g. still 0 V entered in the Value
field, the loop would try to reach this value, possibly crashing the tip.
Caution: The Setpoint Modulation has an immediate effect on setpoint of the
feedback loop. It is recommended to enter meaningful values before
enabling this feature. Also, sensitive tips may be damaged if the values for
the feedback loop and the two setpoints are not correctly chosen.
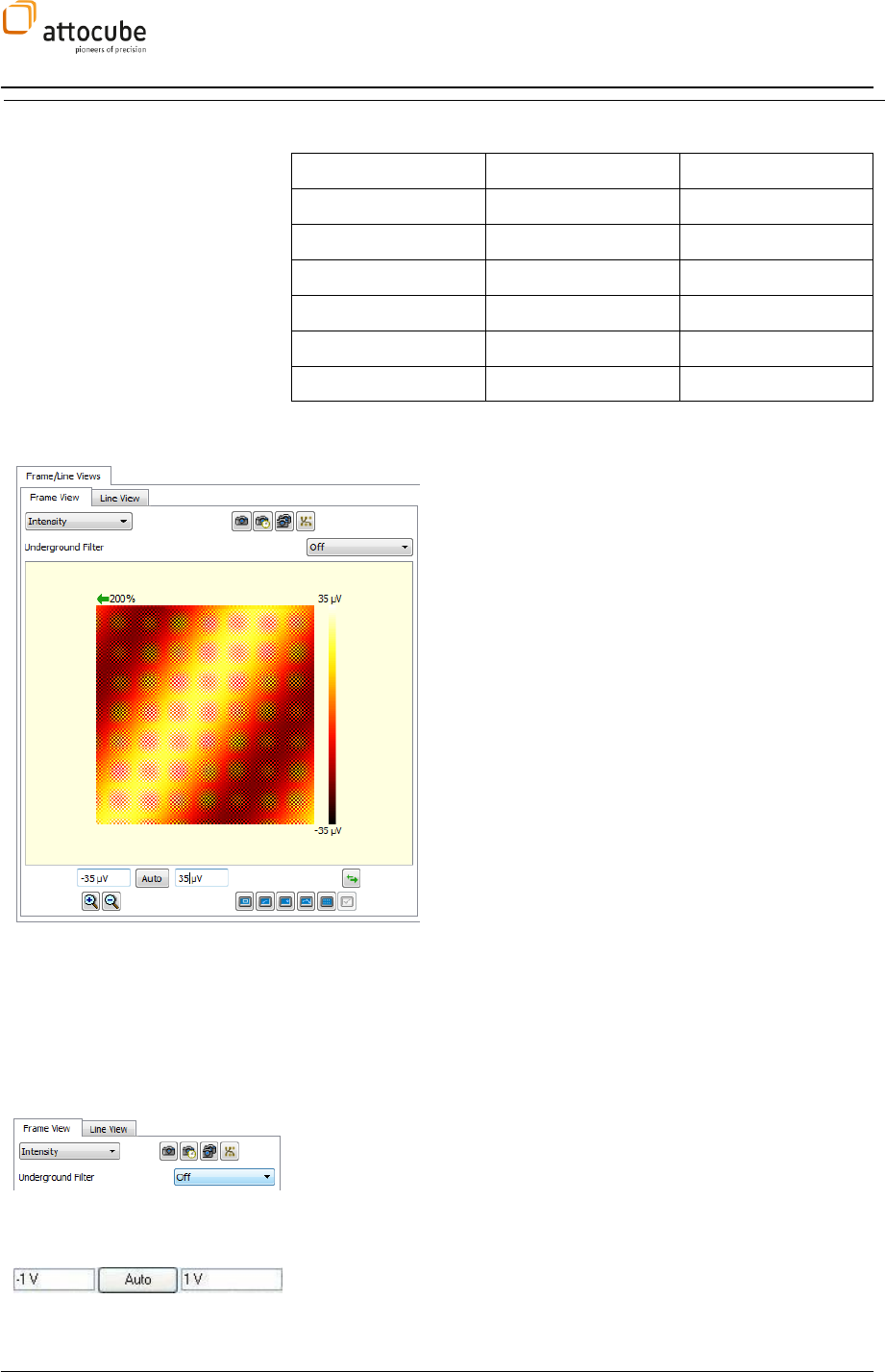
Page 81
© 2001-2012 attocube systems AG. Product and company names listed are trademarks or trade names of their
respective companies. Any rights not expressly granted herein are reserved. ATTENTION: Specifications and technical
data are subject to change without notice.
VI.3.c. Z control P and
I units
The physical unit of the P and I parameters of the feedback loop are
dependent on the input signal of the loop. The units are:
Input Signal
P unit
I unit
ADC 1..6
µm/V
µm/V/s
HF 1 df
µm/Hz
µm/Hz/s
HF 1 Ampl
µm/V
µm/V/s
HF 1 Phase
µm/deg
µm/deg/s
LF Lockin Ampl
µm/V
µm/V/s
LF Lockin Phase
µm/deg
µm/deg/s
VI.4. The Scan Data Displays
In the main screen there are two display windows (left
and right display) showing the scanning results. In these
windows, either images (Frame View) or line scans (Line
View) can be displayed online. Furthermore, data can be
saved, and the scan area can be modified.
The drop down menu at the top of the window allows for
selecting the respective signal to be displayed. By
activating the Average button all incoming data within
one sample time (as specified in the Scanner Widget) is
averaged before it is displayed on the screen. If Average
is deactivated, Daisy displays the first incoming data
point at a new scan position and then discards all further
data within this sample time.
In the Frame View the acquired data is shown in a xy-plot,
with the intensity color-coded as specified (see section
V.4.c for a description of the context menu). In Line View
the data is shown as curves.
If the cursor is paused for a second over one of the
displays a pop-up window will display the physical
coordinates of the chosen point.
Also, you can double-click on the window to detach it
from the main window at any time, allowing for any user-
defined resizing or repositioning of the window on the
screen.
VI.4.a. Frame View
The drop down menu at the top of the window allows for selecting the
respective signal to be displayed. The signals can be chosen from a list a
defined in the DCC (see IV.1.a). To the right, the snapshot icons allow for
saving of SCAN data as described in section IV.2.g. The line below shows an
underground filter: this filter can be used to subtract a function of 0th
(Constant) or 1st order (Linear) from each line to remove scan artefacts.
Graduation Tools: Below the frame display area the Graduation Tools are
shown. By pressing the Auto button, the graduation limits will be calculated
Page 82
from the currently displayed values, i.e. the currently chosen color scale will
be spread to match the data which is displayed at the moment of pressing
the button. To further enhance the contrast or highlight certain parts of the
image, one can choose the graduation limits manually by entering values to
the left (Graduation Minimum) and to the right (Graduation Maximum). It is
also very convenient to use the mouse wheel to change the graduation
settings. For this, just move the mouse pointer on the respective input field
and then use the mouse wheel to continually change the setting. Use STRG or
SHIFT key together with the mouse wheel to change the sensitivity of the
wheel (see also section V.4.a).
Scan Direction Switch: This button allows you to switch between displaying
either the Forward (data acquired in a left-to-right scan) or Backward (right-
to-left) data.
Please note that the following Selection tools are only shown when activated by right-clicking on the frame view,
see section V.4.c.
Frame Zoom Tools: The Frame Zoom Tools allow for zooming in or out. Please
note that only integer zoom factors (or 1/integer factors) are allowed to
avoid aliasing effects. If the image size in any zoom setting is larger than the
available size in the Frame View window, scroll bars appear.
Frame Tools: The Frame Tools are shown to the lower right of the Frame View.
The Frame Tools can be used to alter the current scan area. The Frame Tools
are advantageous when one wants to reposition the scan area based on
information that is currently shown in the Frame View. It is possible to (from
left to right):
- select a new rectangle for scanning,
- rotate the scan direction,
- select a new center of the scan area, or
- start the Pathmode.
The rightmost button is used to accept the selections made. Please note that
you cannot use that Frame Tools until one scan image has been taken and all
frame positions are initialized.
The second icon from the right under the left data display is used to start the
Pathmode. To select a path, first click on the button, then select points of
interest in the data display. These positions will be shown as small circles in
the display, with a line connecting the different points indicating the path.
After selecting the path, a click on the accept button will start the path
mode. Please see section VI.5.e on how to select the measurement type
performed on each point.
VI.4.b. SCAN Line View Tab
In the Line View Tab, single or multiple lines of the scan image can be displayed during scanning. The Line View is
constantly updated during scanning and shows the current values of the chosen Signal versus sample position.
Please note that a comment window appears if you stop the cursor over the line view graph, displaying the actual
position.
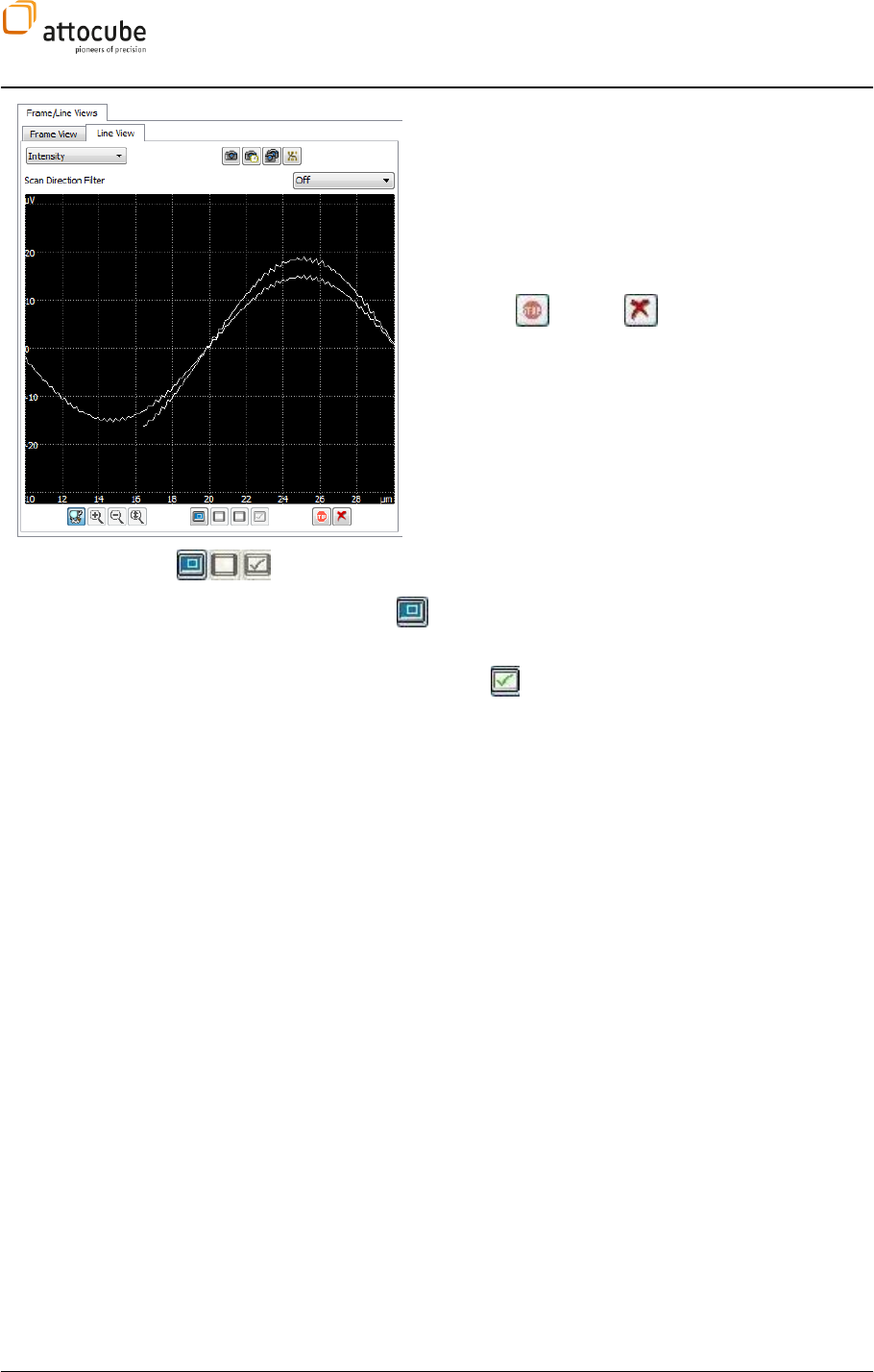
Page 83
© 2001-2012 attocube systems AG. Product and company names listed are trademarks or trade names of their
respective companies. Any rights not expressly granted herein are reserved. ATTENTION: Specifications and technical
data are subject to change without notice.
You can use the Scan Direction Filter to either display the
Forward or the Backward scan. If the Scan Direction Filter is
turned off, then both forward and backward scans will be
displayed. You can increase the number of simultaneously
displayed lines using the Curves function in the Line View
Ranges context menu. Multiple lines are displayed in
different colors for better clarity.
Use the Zoom Tools to adjust the display range. You can also
use the Stop and Clear buttons as described in the
common controls and properties section V.4.b.
Frame Tools: One can set a new scan range directly from the
Line View graph of the Display using these buttons. Choose the Select New X
Range button and then drag the two vertical lines to enclose the desired
new x-range (as shown in the graph).
Click on the Accept button and note how the active scan area changes in
the Scanner Widget. If the Fix X=Y button is activated, the y scan range will be
changed, too.
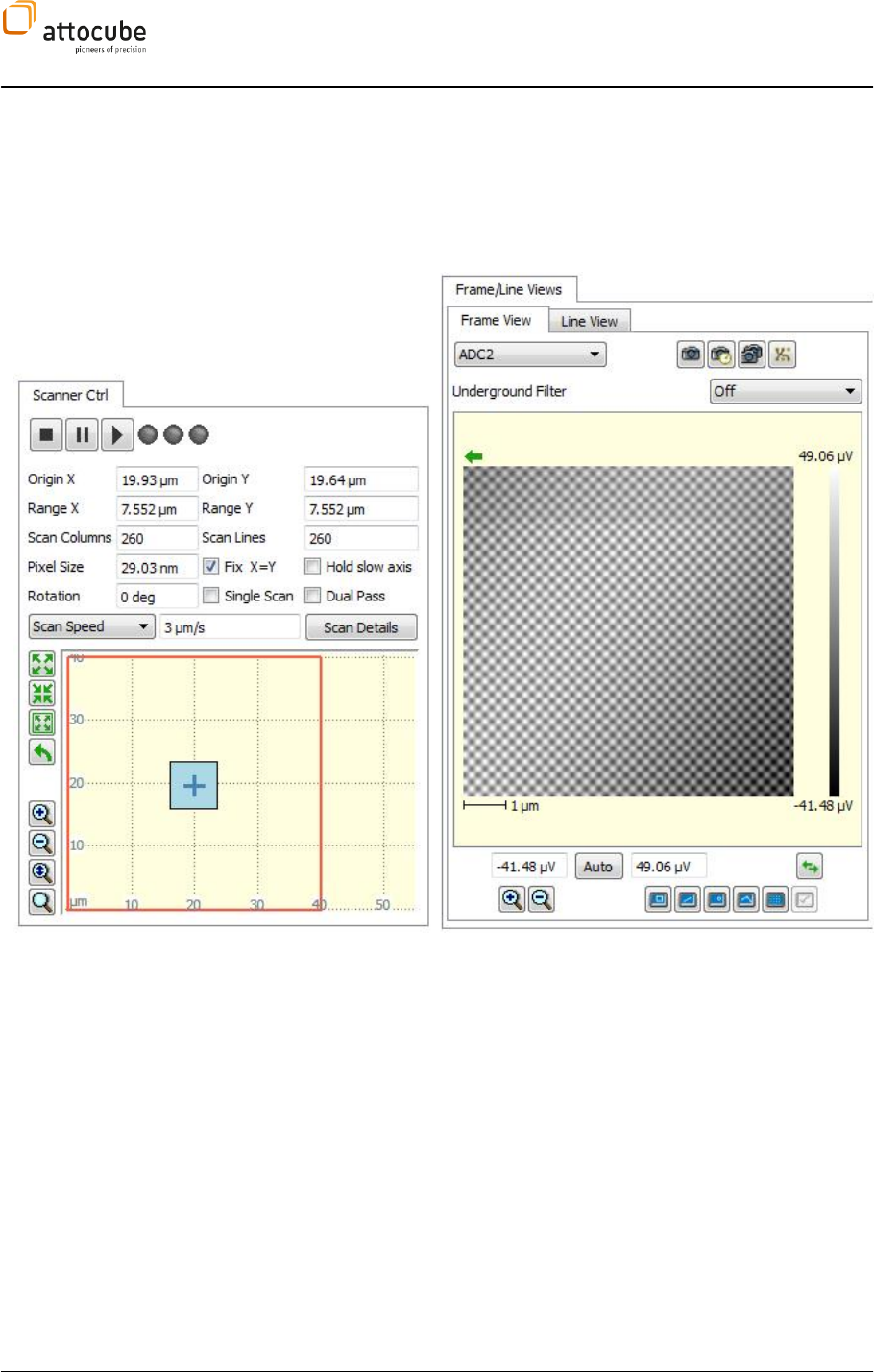
Page 84
VI.4.c. Example for Shifting, Moving and Zooming the Scan Area
As an example, an image in the simulation mode of the software was
acquired. As can be seen below, the full scan range of the xy scanner was
40 x 40 µm, and an 7.552 x 7.552 µm image (blue square) was taken
approximately in the middle of the full range. Also, the frame axes of the
image are parallel to the x- and y-direction of the scanner.
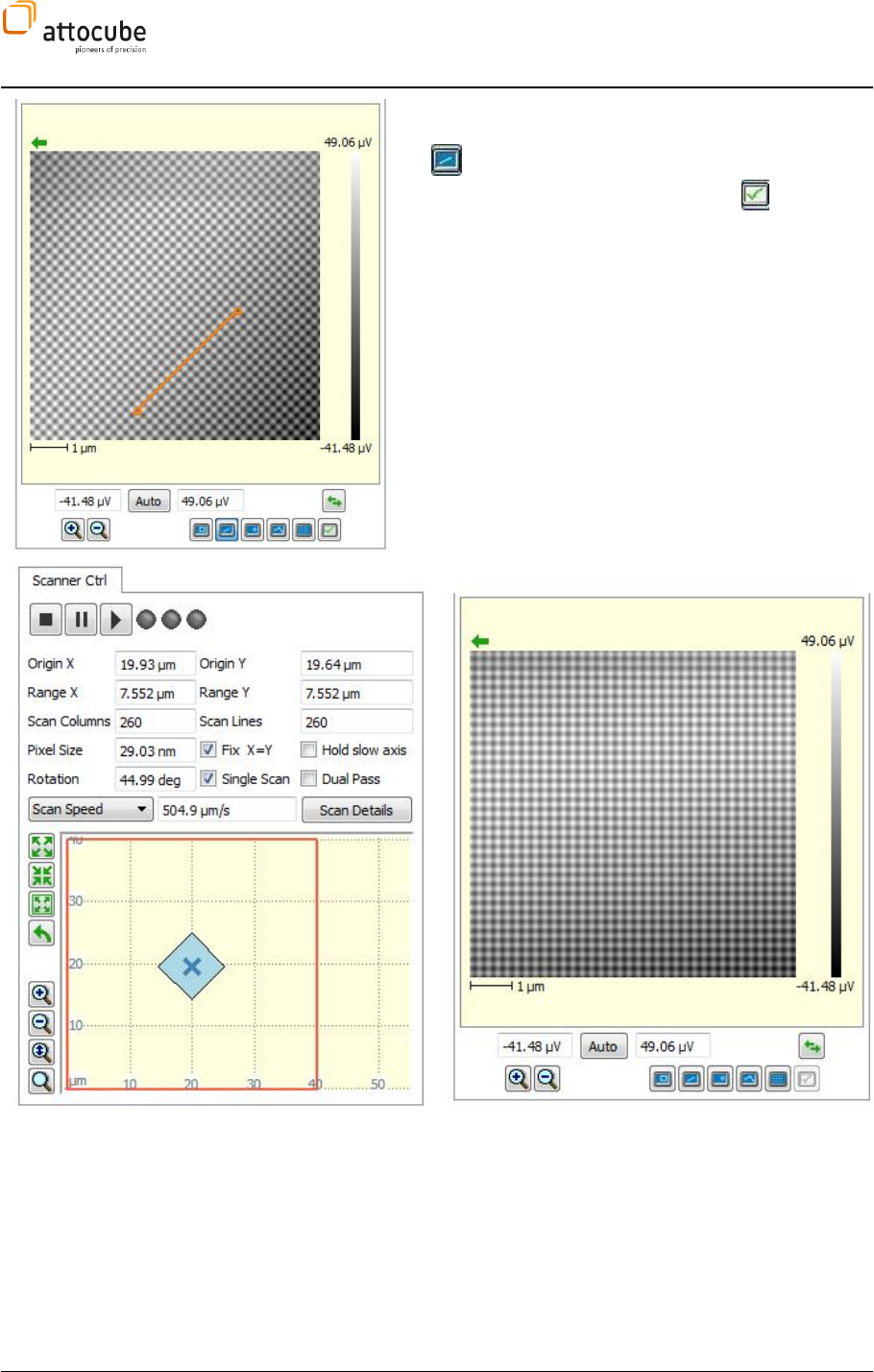
Page 85
© 2001-2012 attocube systems AG. Product and company names listed are trademarks or trade names of their
respective companies. Any rights not expressly granted herein are reserved. ATTENTION: Specifications and technical
data are subject to change without notice.
To rotate the scan direction so that the artificial dot array has
a certain orientation to the frame axes, one has to activate
the button, then draw a line in the Frame View window, as
can be seen in the picture aside. Click on the button to
accept the choice. The next scan will be carried out with the x-
axis along the line.
All parameters in the Scanner Widget are automatically
adjusted and the blue square is rotated to show the new scan
area (see below).
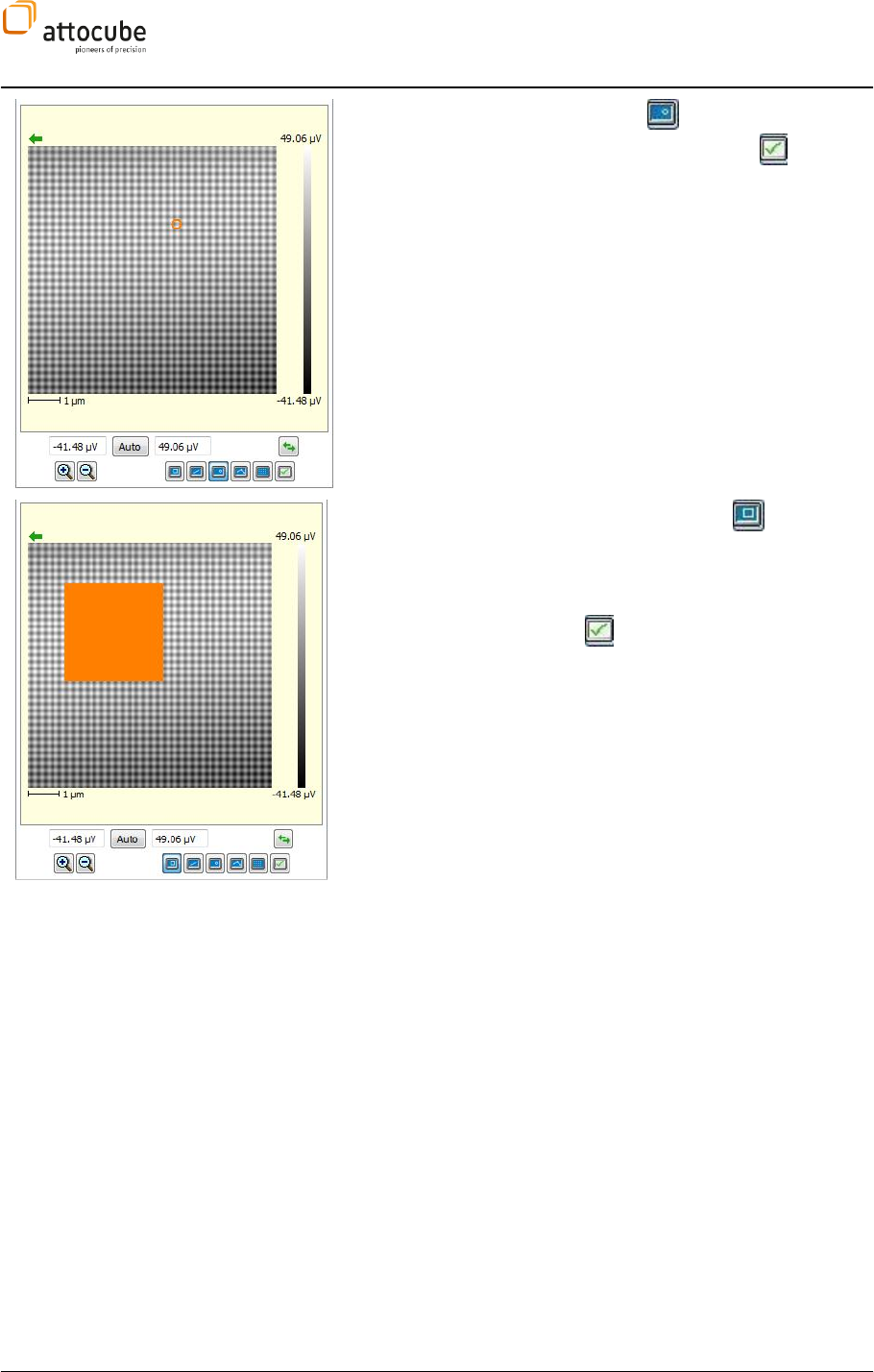
Page 86
To choose a new center of scan, use the button. Click on the new
center in the Frame View and accept the selection with .
The Scanner Widget will automagically adjust the scan area to be
centered on the new spot as close as possible within the allowed
maximum scan range of the scanner.
Finally, to zoom in on details of the image, use the button and
drag a rectangle around the area of interest. Please note that the
chosen rectangle is transformed to a square if the Fix X=Y button in
the Scanner Widget is activated.
Again, after accepting with the button, a new scan area will be
defined. The screen shot below shows the result of these actions.
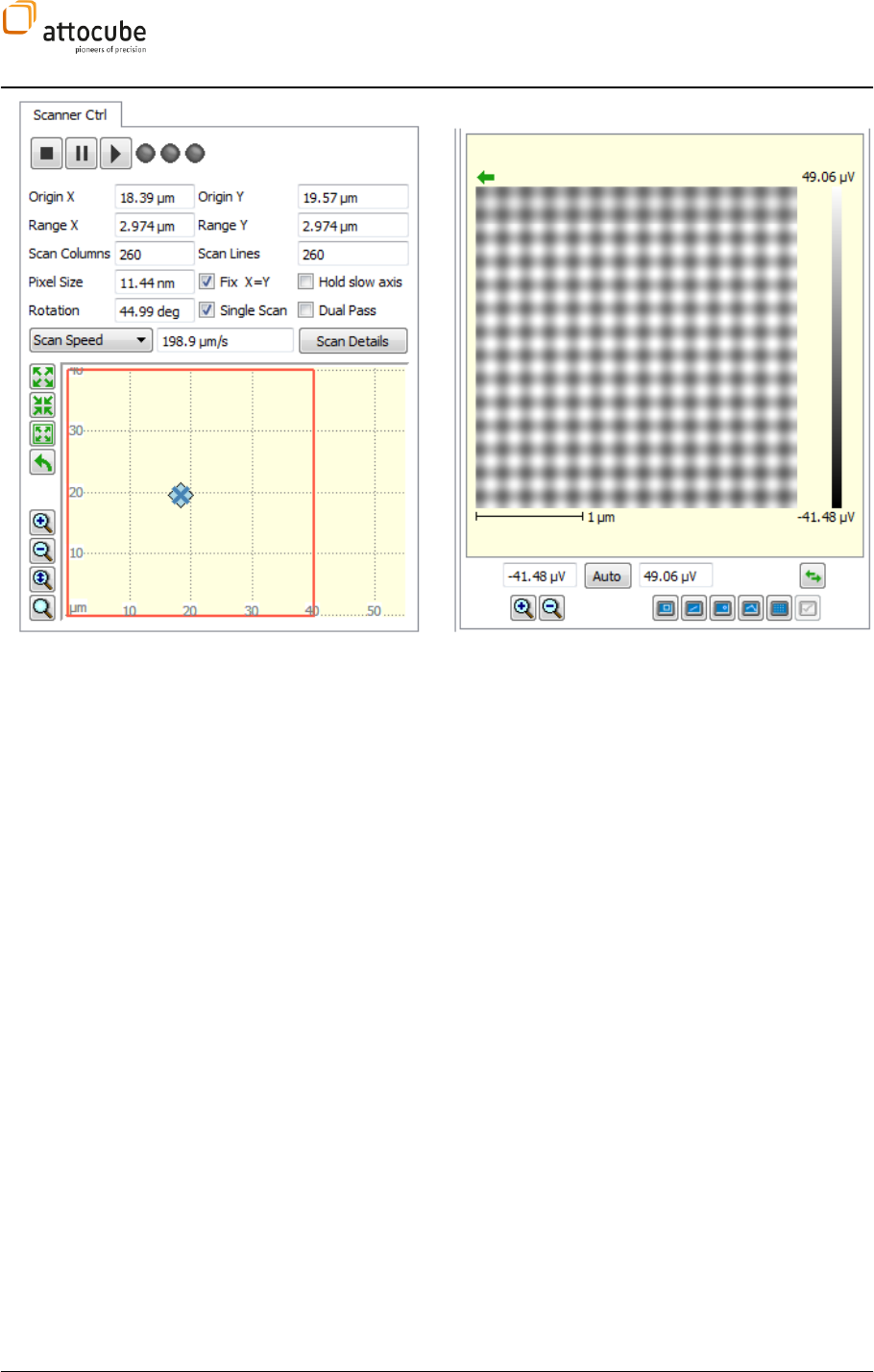
Page 87
© 2001-2012 attocube systems AG. Product and company names listed are trademarks or trade names of their
respective companies. Any rights not expressly granted herein are reserved. ATTENTION: Specifications and technical
data are subject to change without notice.
VI.5. The main functions tab section
All main functions such as the PLL, coarse motion control, pathmode, Lock-In(s) & Q control, Dual pass and DAC
outputs are located in the tab section on the lower left part of the GUI. The user can conveniently adjust the order
of the tabs as well as choose which tabs to show and which to hide as described in section V.3.a.
VI.5.a. Phase Locked Loop (PLL tab)
Introduction
A completely digital Phase Locked Loop (PLL) is integrated in the ASC500.
With the PLL, an advanced operation mode is provided to control high Q
oscillators (like tuning forks at low temperatures). The PLL mode is an
alternative to standard non-contact mode operation, where the oscillator
(tuning fork or cantilever) is driven at a fixed frequency and the change in
oscillation amplitude is used to drive the z controller and to gain
topographic information. This latter mode will be called amplitude
modulation mode in the following sections, in contrast to frequency
modulation or PLL mode.
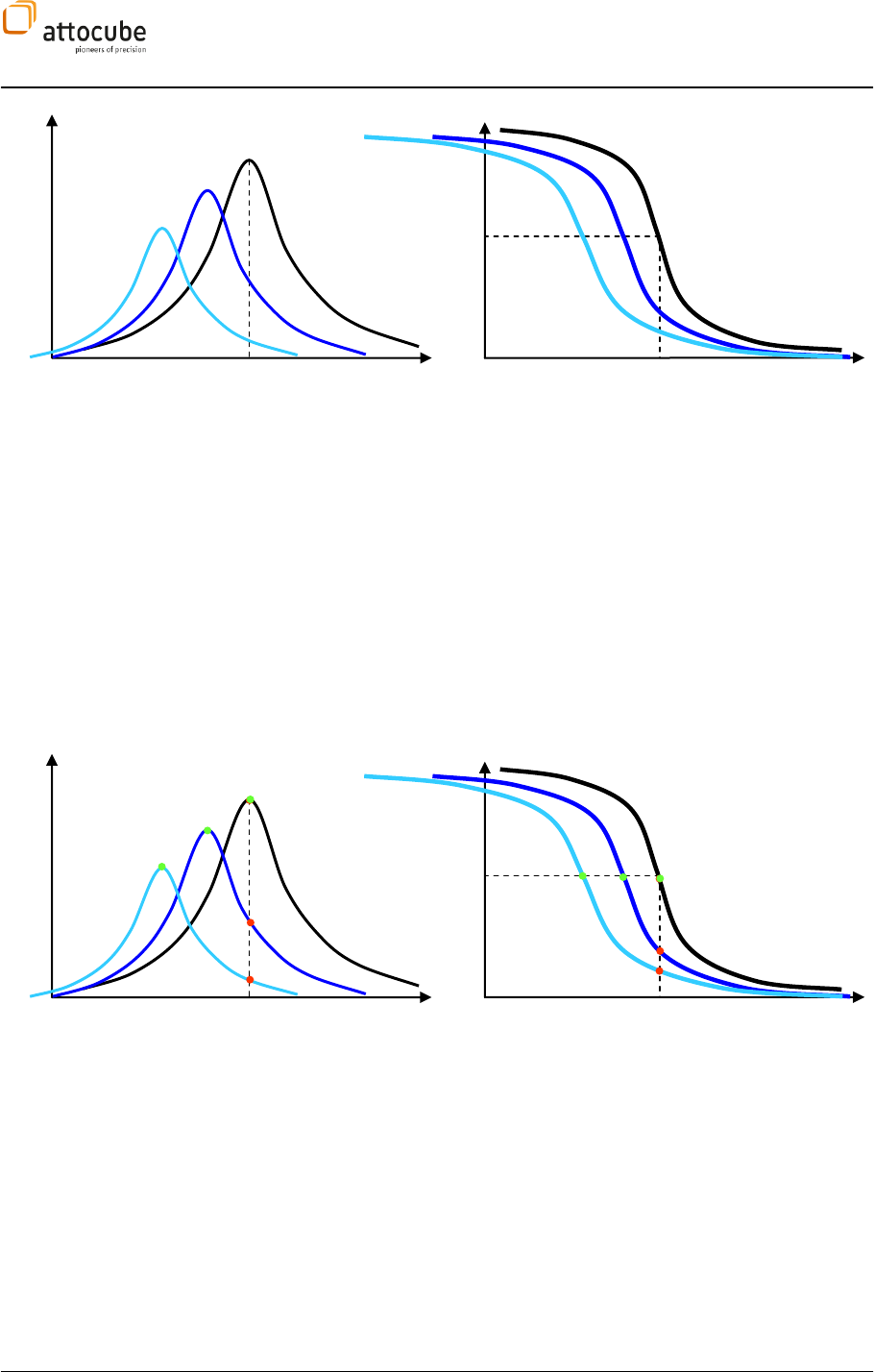
Page 88
Figure 18:
Amplitude and phase response of a driven oscillator in presence of a force gradient (black curve shows
response at no gradient, dark blue and light blue curves at increasing force gradient). f0 denotes the resonance
frequency of the oscillator without an applied force gradient. With increasing force, the amplitude maximum gets
damped and shifts to lower frequencies. The phase response is also shifted to lower frequencies and the maximum
slope of the curve is decreasing.
In a typical non-contact AFM measurement, the oscillating tip is brought
into the force field of the sample surface. Figure 19 shows the response of
the oscillation properties of the tip on the force gradient originating from
the sample. PLL and amplitude modulation mode differ in the way the
controller reacts to such changes in oscillation properties. In amplitude
modulation mode, the tip is constantly excited with the frequency f0, i.e.
the resonance frequency of the freely oscillating lever.
Figure 19:
Working points in amplitude modulation mode (red dots) and in PLL mode (green dots). The PLL mode
traces the resonance frequency of the oscillating lever.
Figure 19 demonstrates the different behavior of both modes. The
measured oscillation amplitude follows the red dots. The measurement
does not reflect the real amplitude damping due to sample forces, but
merely some amplitude drop due to the shape of the amplitude response
curve. In PLL mode, the excitation always follows the amplitude maximum
(i.e. the resonance frequency shown by the green dots), giving more
valuable physical information. The question is how it can be achieved that
the excitation always follows the resonance?
f
A
f
f
f0
f0
π/2
f
A
f
f
f0
f0
π /2
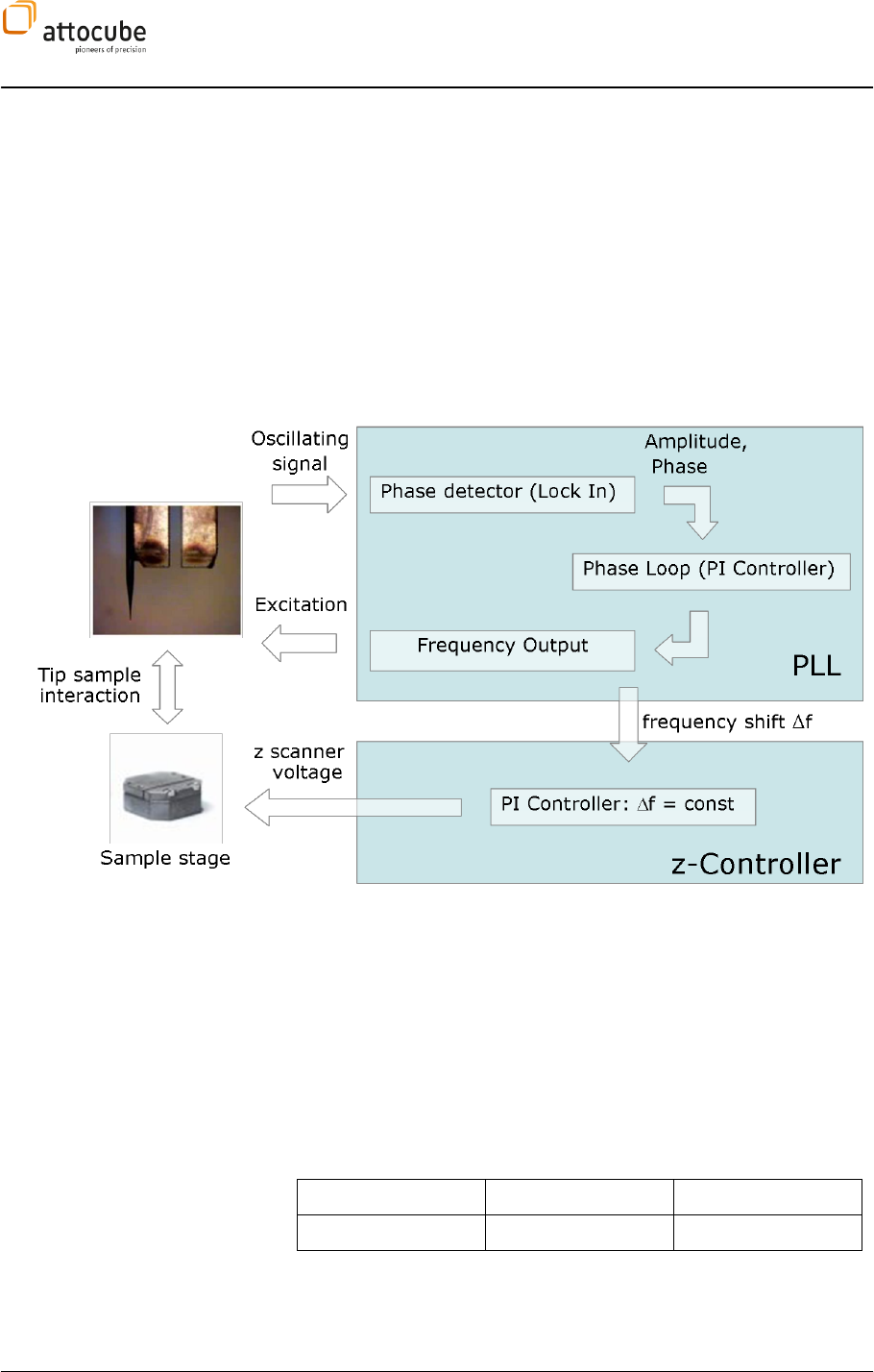
Page 89
© 2001-2012 attocube systems AG. Product and company names listed are trademarks or trade names of their
respective companies. Any rights not expressly granted herein are reserved. ATTENTION: Specifications and technical
data are subject to change without notice.
At the resonance frequency, the phase shift between input and output
signal is always /2. This fact is used in PLL mode to control the excitation
frequency. An extra proportional integral control loop is operated to keep
the excitation on resonance. The input value for this loop is the phase
between excitation and oscillation signal as it is calculated by the internal
lock-in amplifier, the output value is the excitation frequency or simpler
the shift in excitation frequency f. This control loop is called phase loop.
The frequency shift f is directly proportional to the force gradient that is
affecting the lever oscillation. Figure 20 shows a schematic of the PLL
operation mode. The output of the phase loop will be used as an imput for
the z controller, keeping the frequency shift and thus the force on the tip
constant.
Figure 20:
Schematic of the PLL operation mode.
The PLL mode is an advanced mode to operate in the sense that two PI
loops have to be operated at the same time. Potential instabilities in one
loop will directly affect the other loop. The advantages are twofold:
1. The measured signal f will give a direct measure on the force
gradient acting on the tip.
2. The PLL allows higher scan speeds for high Q levers.
PLL controller P and I units
The physical units of the P and I parameters of the feedback controllers
can be found here:
Amplitdue Control
Input signal
P unit
I unit
HF 1 Ampl
V/V
V/V/s
Frequency Control

Page 90
Input Signal
P unit
I Unit
HF 1 Phase
kHz/deg
kHz/deg/s
ADC1 .. 6
kHz/V
kHz/V/s
Operation of the PLL
Preparations
Before employing the PLL, all relevant connections have to be made. In
particular, the signal from the oscillating lever has to be connected to the
HF IN 1 input and the dither signal has to be connected to HF OUT 1. With
these connections, the lever signal will be addressed via HF IN 1 AC within
the Daisy software, and the demodulated lock-in signal will be HF LI 1 and
HF LI 1 Phase.
While the PLL is running, a number of signals are interesting to observe:
HF LI 1 Phase: the phase between lever excitation and lever
oscillation. This is the input signal for the phase loop.
HF LI 1: the amplitude of the lever oscillation. In PLL mode this is
a measure of the oscillation damping due to sample forces.
df: the frequency shift relative to the free resonance frequency of
the lever. This is the output signal of the phase loop and at the
same time the input value of the z controller
Z out inv: this is the output value of the z controller that gives the
topographic information.
To have all relevant system parameters under control, it is convenient to
open three extra windows using the Display Wizard.
1. An extra line view with permanent trigger to show either
or HF LI 1.
2. An extra window with a Line View, an Underground Filter
and a Frame View that is triggered on scanner. This will
be used to display HF LI 1.
3. An window containing a Line View, an Underground Filter
and a Frame View that is also triggered on scanner. This
will be used to display HF LI 1 Phase.
Detach all the extra windows from the main Daisy application and
distribute them over the screen. In the main frame views, choose df for the
left and Z out inv for the right display and HF LI 1 Phase for the standard
Line View.
Find the resonance of the cantilever using the Resonance feature of the
ASC500. Choose and appropriate excitation amplitude in the Lock In tab
and set the Integration Time of the lock in to some reasonable value (500
µs .. 2 ms). After starting the Resonance, set the excitation frequency to
the match the resonance frequency and set the offset phase (under Lock
In, High Frequency, Demodulation, Phase Shift) so that the HF LI 1 Phase at
the resonance frequency is 0. The result should look similar to Figure 21.
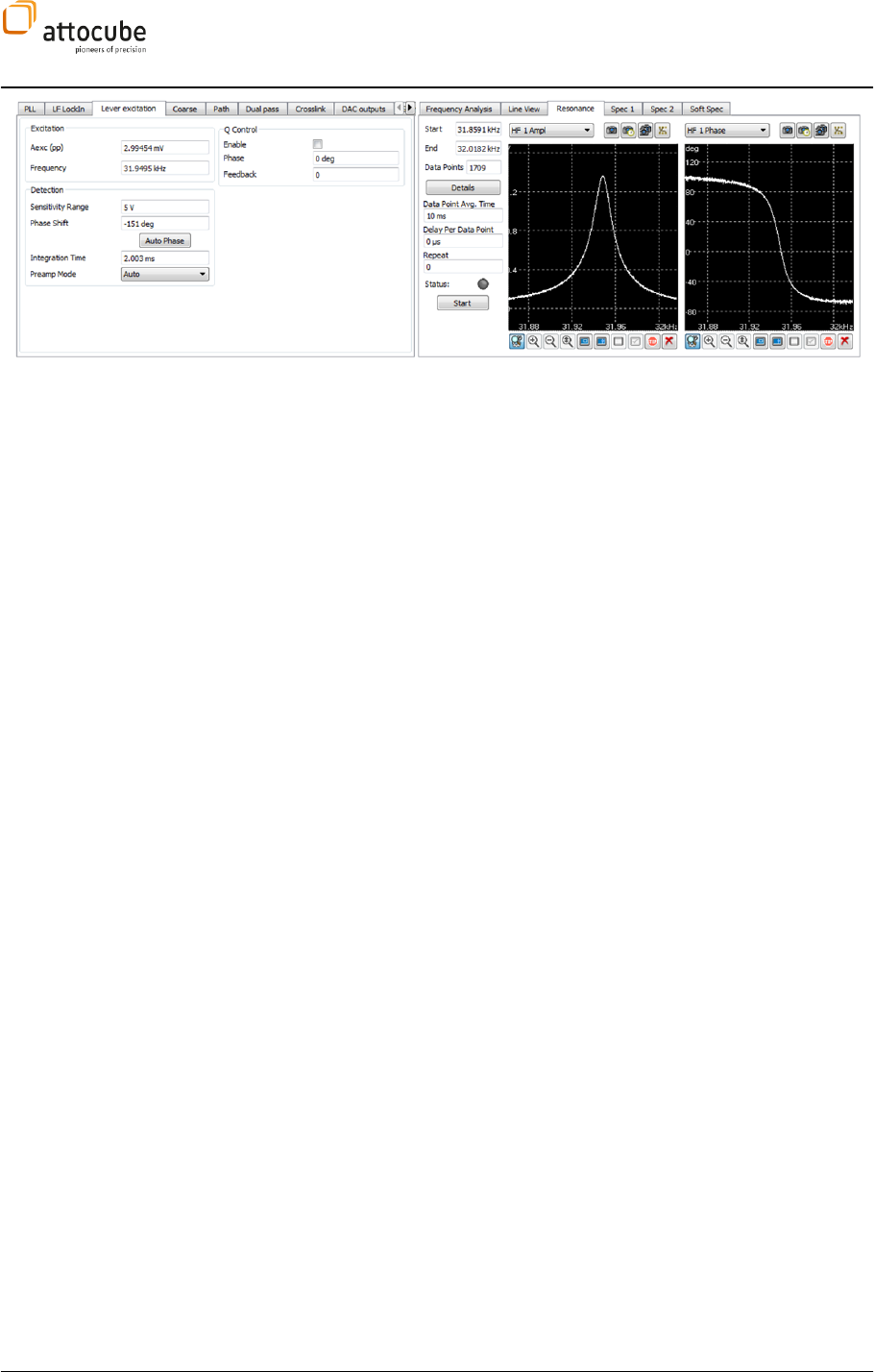
Page 91
© 2001-2012 attocube systems AG. Product and company names listed are trademarks or trade names of their
respective companies. Any rights not expressly granted herein are reserved. ATTENTION: Specifications and technical
data are subject to change without notice.
Figure 21:
Recording amplitude and phase response of the lever using the Resonance tool.
Phase Loop settings
The phase loop settings can be found in the Non-Contact Mode tab under
Frequency Control. Before you turn on the loop, the following settings have
to be made:
Limit the range of the output frequency to gain higher frequency
resolution. A range of 1 to 2 kHz around the resonance is
recommended. Insert the appropriate values to the Min and Max
fields.
Choose the proportional and integral parameters for the loop.
Start with small values (P = 10 µ and I = 1 mHz). The P/I const
button always keeps the ratio of P and I constant when one
parameter is changed.
The input signal for the phase loop can be selected in the Actual
Value list. Mostly, this will be set to HF LI 1 Phase, so that the
internal lock in is delivering the phase signal. In case an external
lock in amplifier is used for the phase detection, connect it to one
of the ADC inputs and choose the respective ADC in the Actual
Value list.
If the phase offset was correctly compensated (see Preparations),
the Setpoint value is 0 deg. Check the Inv. Polarity button if the
phase response is has a negative slope.
The phase loop can now be started by checking the Loop button. The green
LED will be turned on and the value in the df field will by constantly
updated to show the current value of the frequency shift. The Frequency
Control widget should look similar to Figure 22.
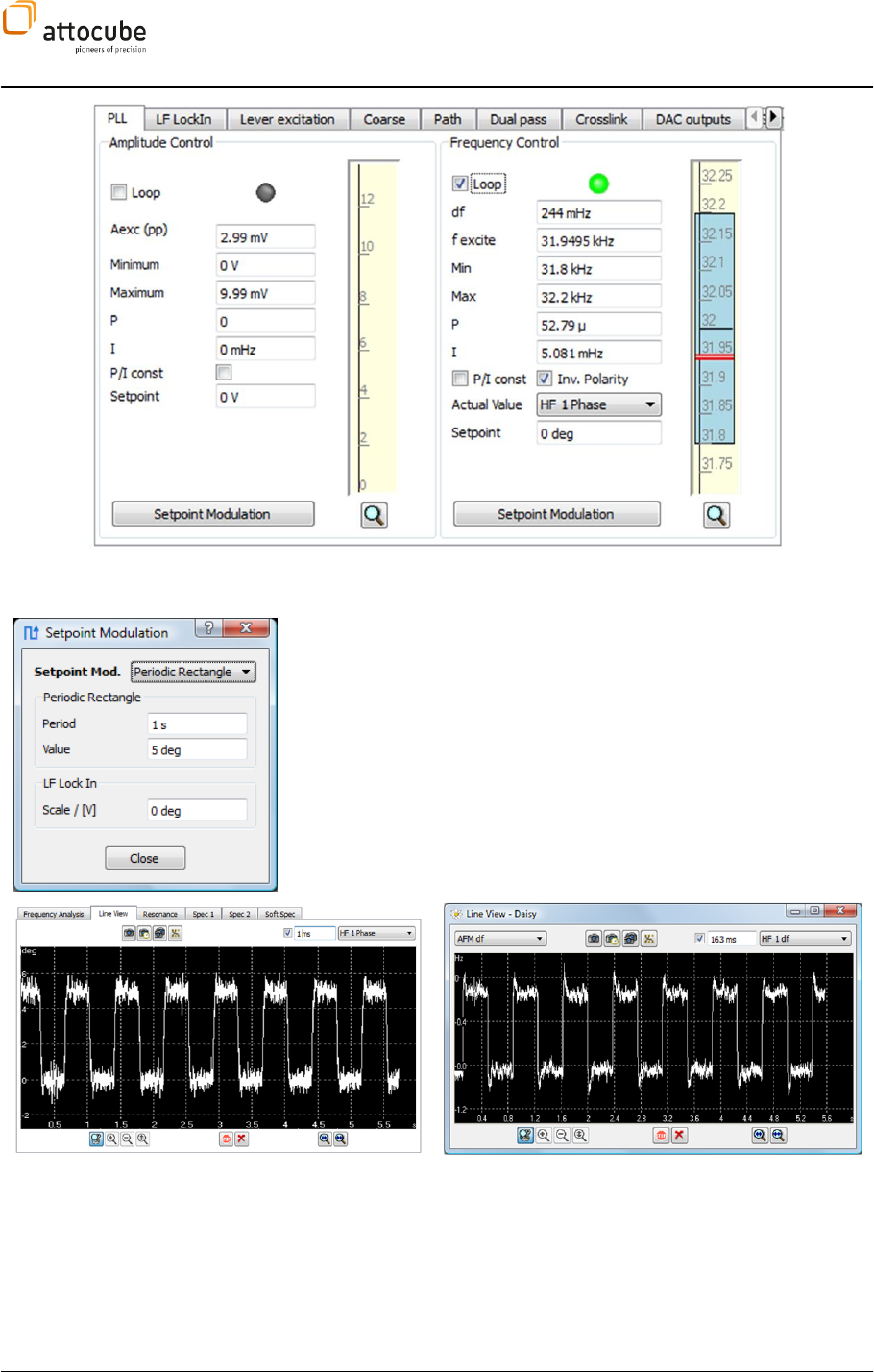
Page 92
Figure 22
: Phase loop settings.
Before the z controller is started, it is important to improve the P and I
settings of the phase loop. Open the Setpoint Modulation window and
choose HF LI 1 Phase and df to be shown in the two Line Views. The
Setpoint modulation will periodically change the phase loop setpoint
between two values, simulating the loop response to a step function input.
Choose a Period of 1 s and an alternate setpoint Value of 5 deg. Start the
setpoint modulation by checking the button. Change the phase loop P and
I parameters until the df line view shows a stable step function with only a
light overshoot as shown in Figure 23. Now that the phase loop is stable
and optimized, the setpoint modulation has to be stopped.
Figure 23:
Using the Setpoint Modulation to optimize the phase loop parameters.
Z controller settings
Now the z controller can be employed. Choose df as the Actual Value for the
z controller. The polarity of the z controller depends on the application:
for application with increasing frequency shift with increasing force on the
tip (mostly tuning forks) the z controller setpoint should be positive and
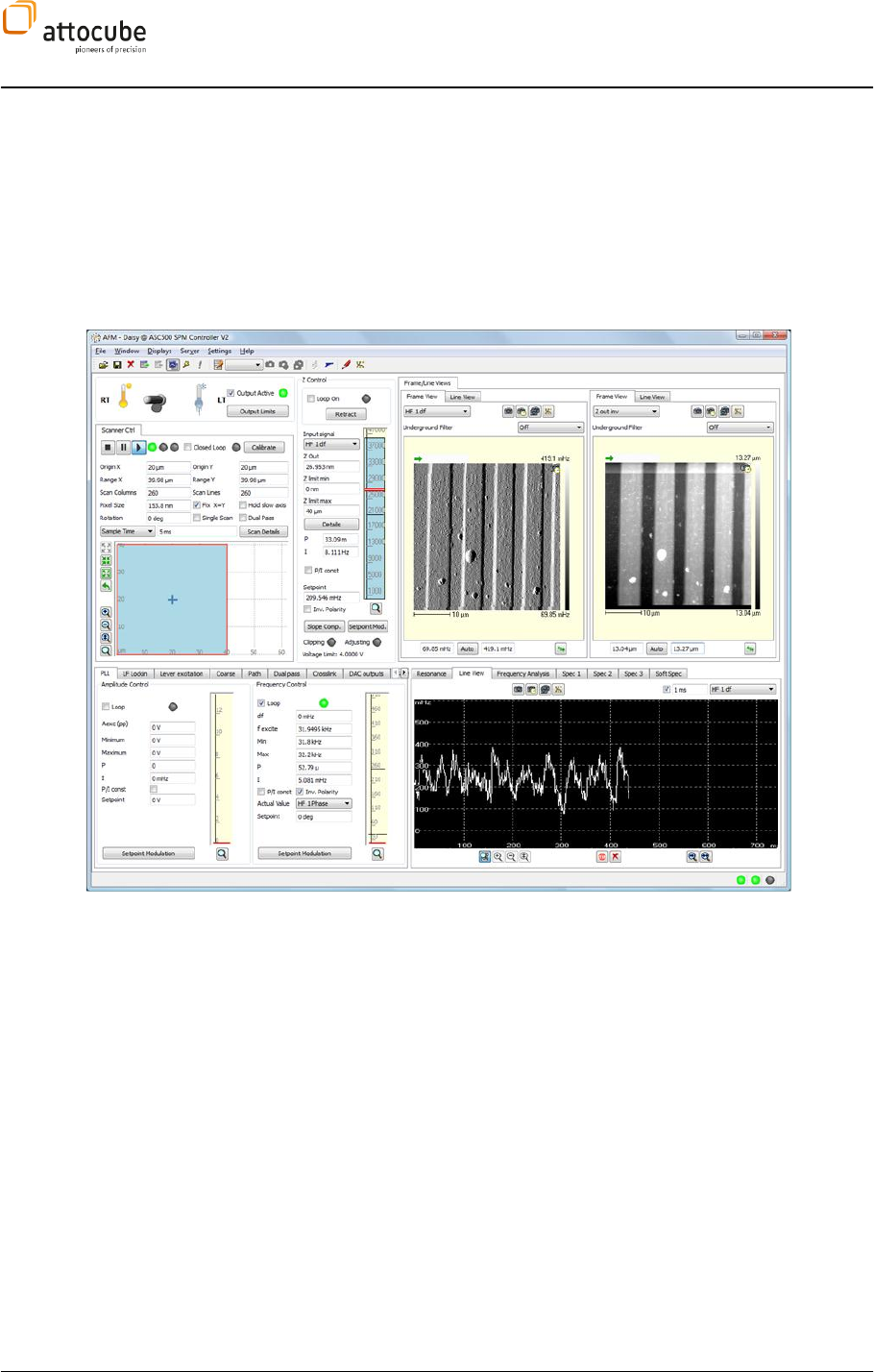
Page 93
© 2001-2012 attocube systems AG. Product and company names listed are trademarks or trade names of their
respective companies. Any rights not expressly granted herein are reserved. ATTENTION: Specifications and technical
data are subject to change without notice.
the Inv. Polarity button in the z controller should be left unchecked. If the
frequency shift decreases with increasing force on the tip, the setpoint
should be chosen negative and the Inv. Polarity has to be checked. If the
tip is within z scanner reach of the sample, turn on the z feedback using
slow P and I parameters (if the tip is further away, employ the auto
approach). Start the scan with a low scan speed ( </= 1 µm/s) and tune
reached.
Figure 24 shows a measurement in PLL mode of a Si test grating.
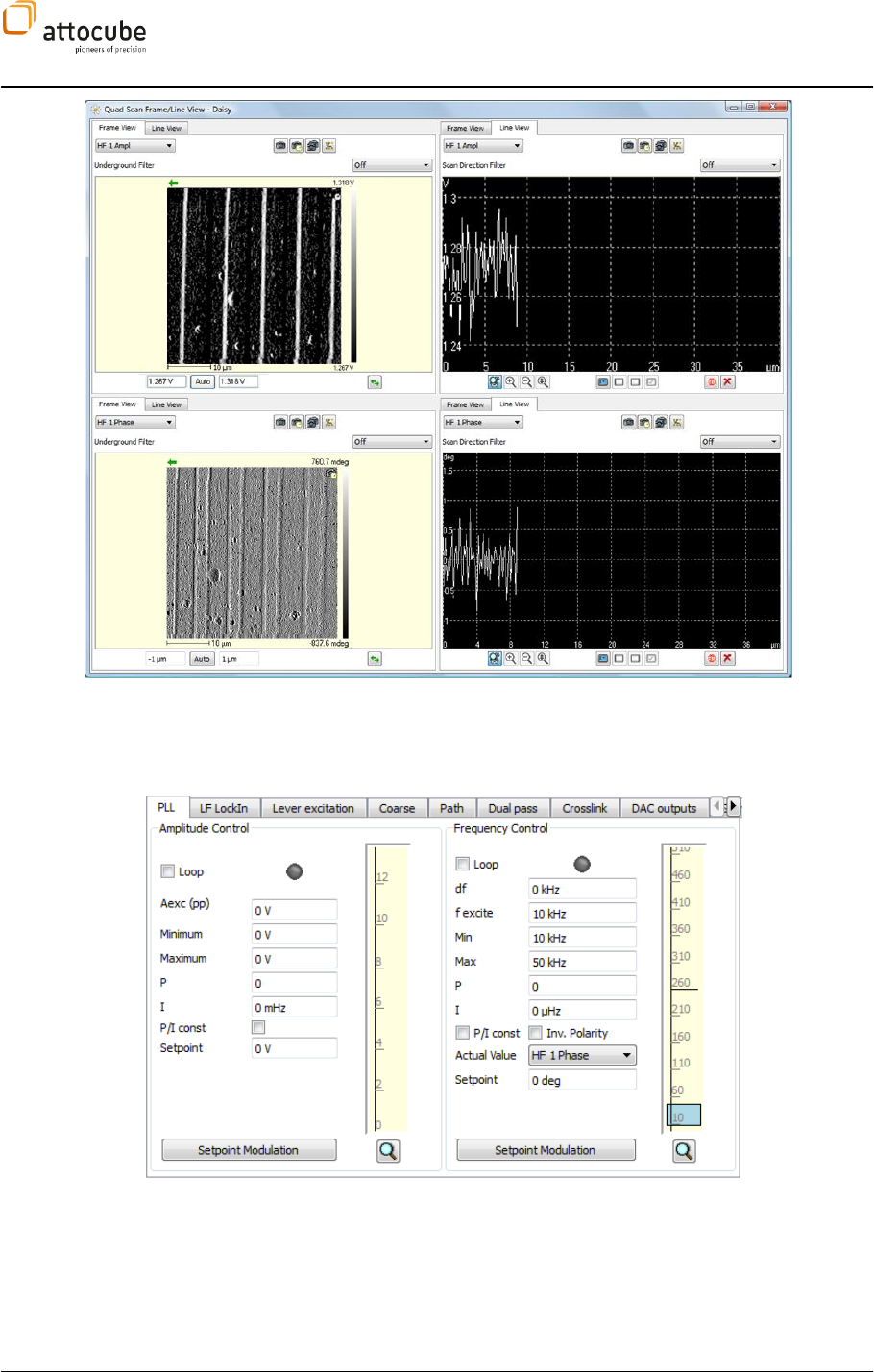
Page 94
Figure 24:
Screenshot of PLL operation.
The PLL tab
The PLL Tab contains the functionality needed to control any type of
oscillating appliance. There are two fields to enter fixed values for excitation
amplitude and frequency, as well as two loops for automated amplitude
control and frequency control.
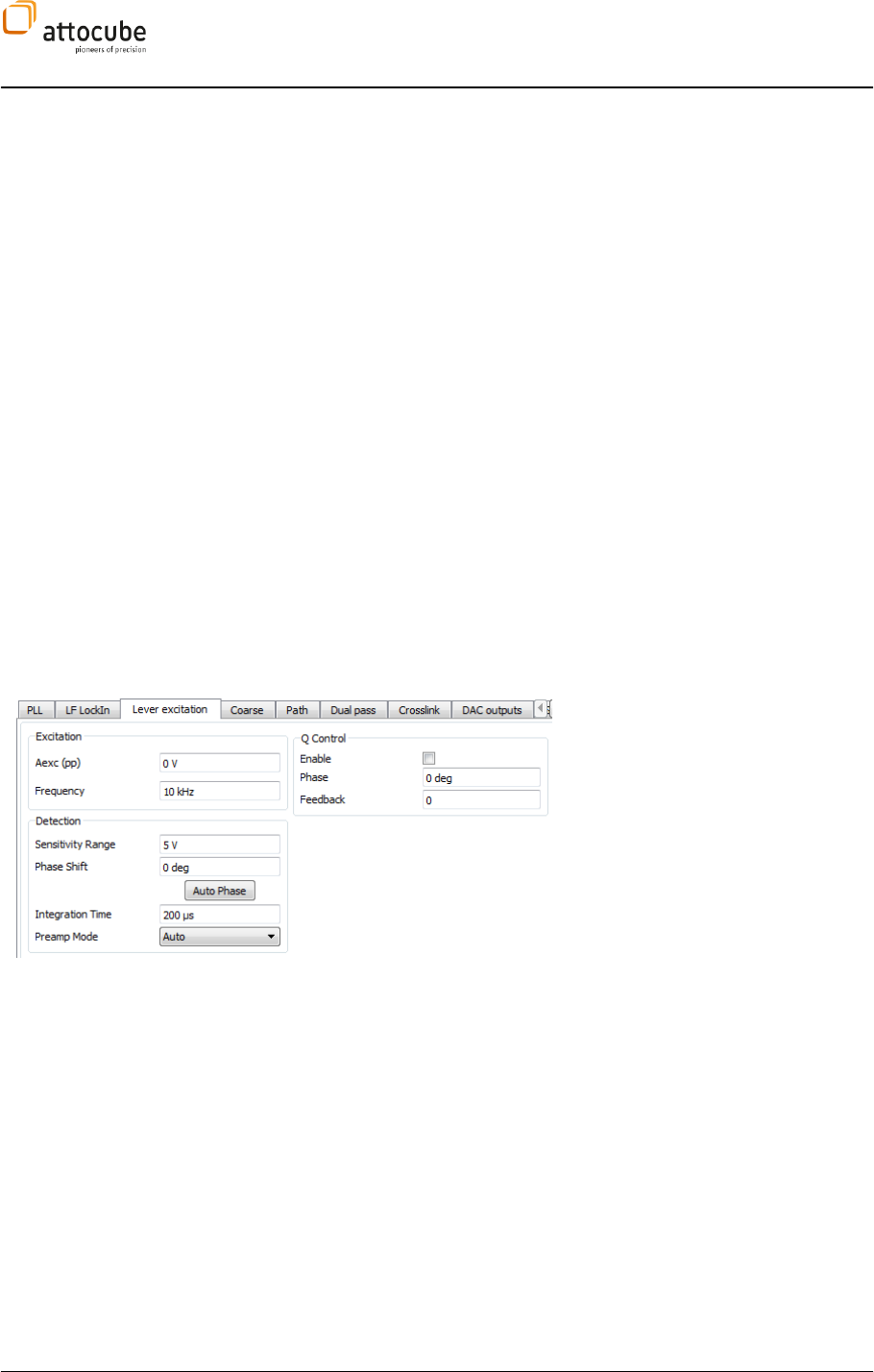
Page 95
© 2001-2012 attocube systems AG. Product and company names listed are trademarks or trade names of their
respective companies. Any rights not expressly granted herein are reserved. ATTENTION: Specifications and technical
data are subject to change without notice.
Note that the amplitude and frequency value can also be addressed in the
Lock-in Tab (see section I.1.a).
The configuration of the PLL loops is similar to the z controller (see section
VI.3). They can act in a certain range between Min and Max. P and I
parameters need to be chosen accordingly. The Inv. Polarity checkbox can
invert the logic of the loop. The green LED will indicate an active loop.
The two loops are internally bound to certain input and output signals,
which cannot be changed (see section IV.2.b).For the Amplitude loop, the
input signal is HF LI 1 and the output signal is the excitation frequency Aexc.
For the phase control loop, the input signal may be chosen via a drop-down
list: it could be either one of the ADCs or the HF LI 1 Phase signal. This leaves
the user the choice to use an external lock-in (connected to one of the ADCs)
to drive the PLL.
In both loops one can use the setpoint modulation in order to find
reasonable P and I parameters.
VI.5.b. Lever excitation tab
Some of the most common scanning probe techniques like AFM or MFM use a mechanical oscillator given by a
cantilever to detect changes in the interaction strength between the probe (e.g. AFM tip) and the sample surface.
In this AC mode, the cantilever is excited (usually) at its resonance frequency, and the resulting oscillation signal
is recorded with a Lock-In amplifier. In the ASC500, this functionality is covered by the HF section, which is
controlled via the Lever excitation tab:
The input signal for this HF Lock-In is
HF IN 1 AC, the output is both HF LI 1
and HF LI 1 Phase. Refer to section
IV.2.b for the connection schematics.
The loop is configured with the
following values:
Amplitude: Amplitude of the output reference (peak to peak).
Frequency: Frequency of the reference output.
Sensitivity Range: Sensitivity of the Lock-In. If the signal exceeds the
Sensitivity Range, overflow may occur and wrong values may be displayed.
The maximum sensitivity is 5 V. Decreasing the Sensitivity increases the lock-
in resolution.
Phase Shift: Can correct for constant phase shifts of the Signal with
respect to the reference. Note, that this governs only the output of HF LI 1
Phase. HF LI 1measures the full amplitude of the signal.
Integration Time: Integration Time of the Lock-In. With longer
integration time the loop reacts slower, yet with having less noise.
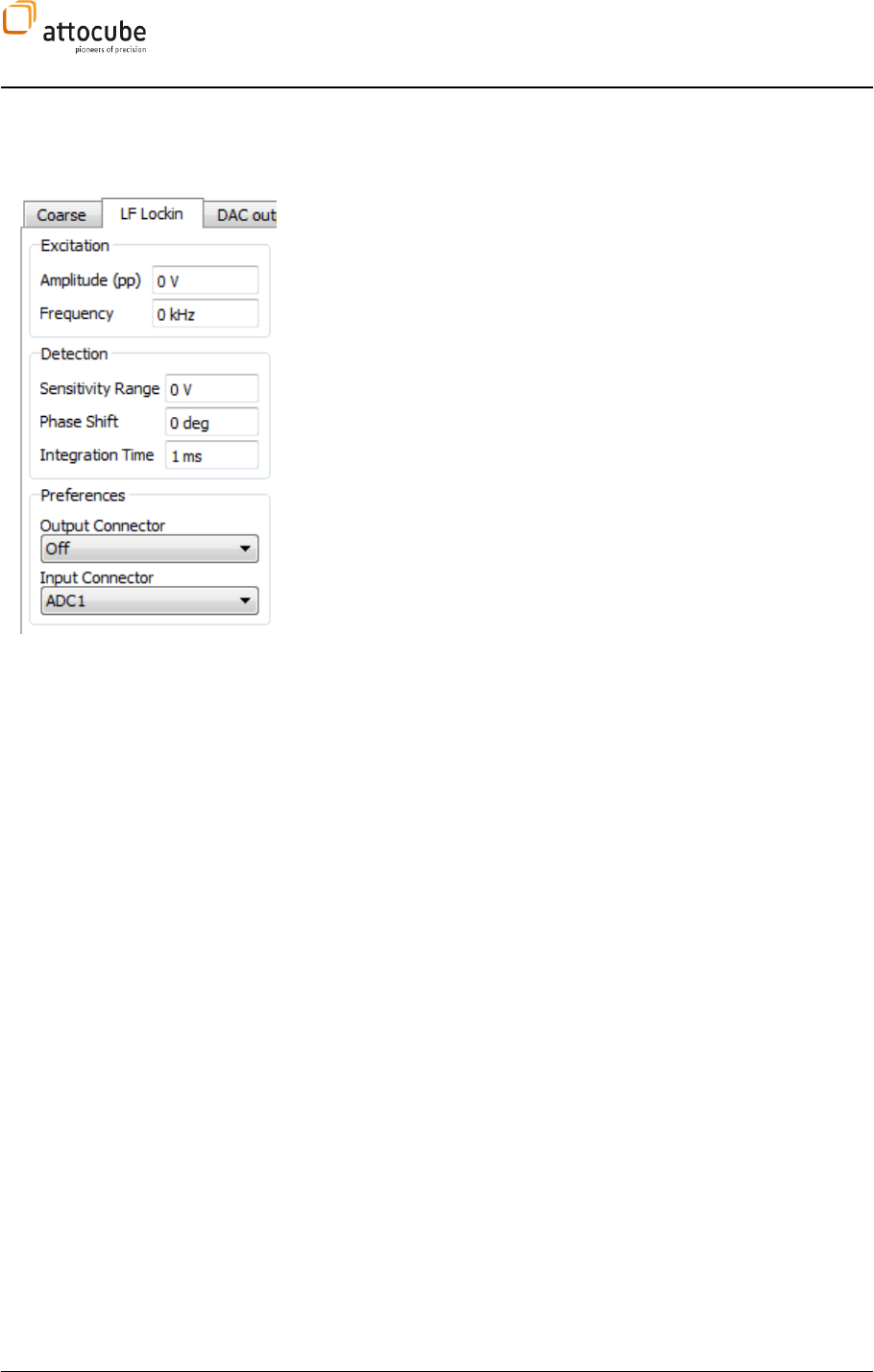
Page 96
VI.5.c. The low frequency Lock-In tab (LF LockIn)
The low frequency Lock-In produces a reference signal with a certain
Amplitude and Frequency which is passed to the respective Output
Connector. Note that the amplitude and frequency value can also be
addressed in the Non-Contact Mode Tab (see section VI.5.a).
The input signal (Input Connector) is then analyzed using the
demodulation values (Sensitivity Range, Phase Shift, and Integration Time).
The output channels of the LF Lock-In are LF LI 1 Ampl and LF LI 1 Phase.
These can be selected as source for most any display.
Other than that, the LF LockIn settings work in complete analogy to the
ones for the HF LockIn (= Lever excitation tab, see section VI.5.b).
VI.5.d. Coarse Tab
300 or
ANC350 controller, the Daisy software can be used to operate coarse
positioner movement. To use the coarse movement features, please make
sure that the ASC500 is connected to the controller using the respective
cabling (see section II.3.e).
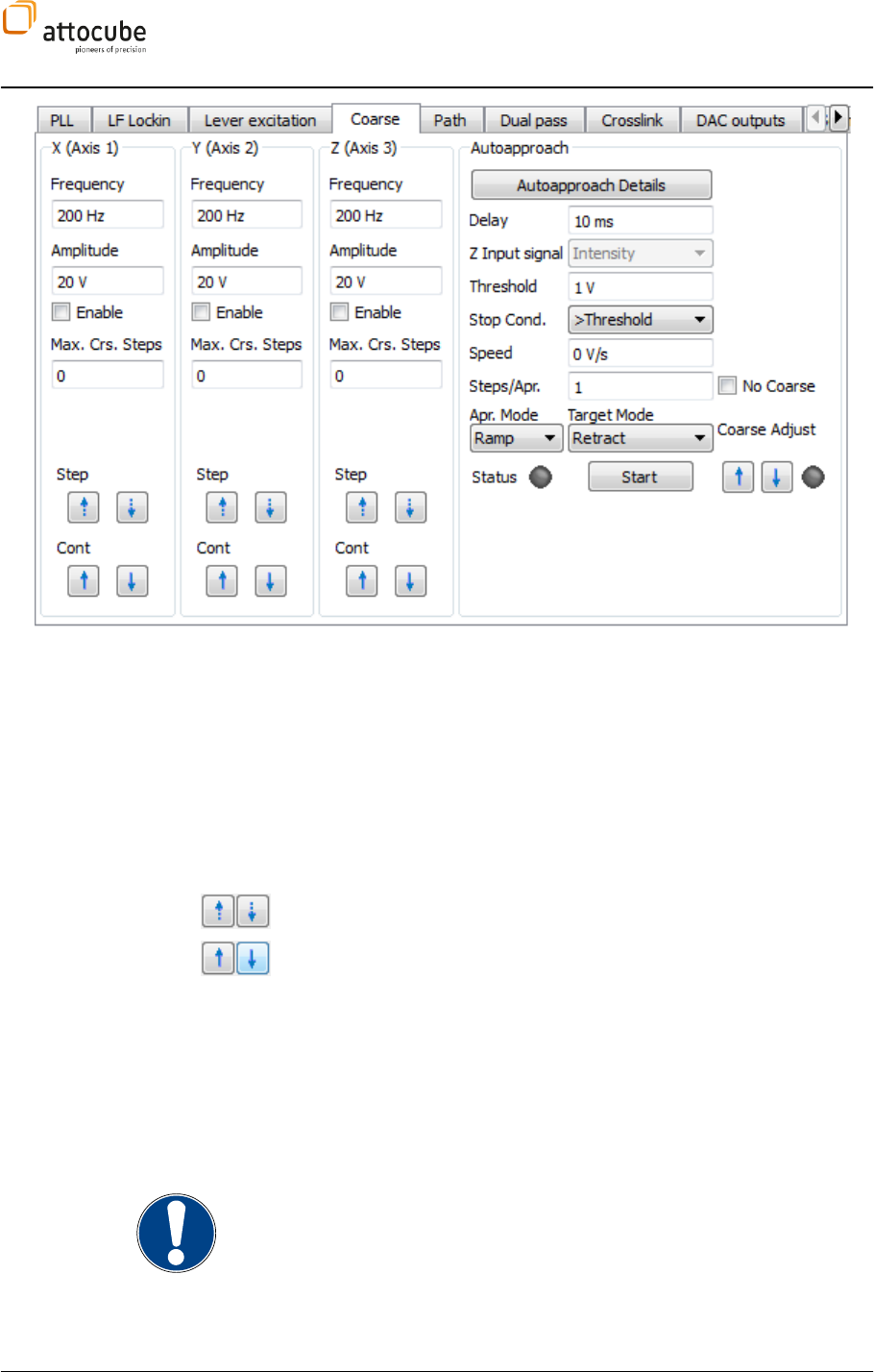
Page 97
© 2001-2012 attocube systems AG. Product and company names listed are trademarks or trade names of their
respective companies. Any rights not expressly granted herein are reserved. ATTENTION: Specifications and technical
data are subject to change without notice.
The Coarse tab is divided into four different sections. The three sections to
the left belong to x, y, and z axis. All settings related to an automatic
approach are collected in the Autoapproach section to the right.
Axis 1 .. Axis 3
Each Axis section can operate one axis of the coarse positioners. Basic
parameters of the coarse movement are set in the Frequency and Amplitude
fields. For further details on these parameters, please see the respective
manuals of coarse positioners and coarse positioning controllers. The Enable
button will enable the coarse steps using the arrow buttons in the lower part
of the axis sections (The Autoapproach will automatically enable and disable
the coarse step movement).
The Step buttons can be used for single step movement.
The Cont buttons can be used for continuous movement. The movement will
start when the mouse button is pressed and will stop when the button is
released. If the text edit field Max. Crs. Steps is set to a value > 0, the Cont.
coarse movement can be used to execute a well-defined number of coarse
steps. If, for example, the Max. Crs. Steps is set to 100 and the Cont. button is
pressed for a sufficiently long time, the movement will stop after exactly 100
steps. For safety reasons, the movement will stop sooner if the button is
released before the total of 100 steps is completed. In case the Max. Crs.
Steps is set to zero, the movement will only be stopped by the release of the
mouse button.
Note. The Frequency and Amplitude values are programmed to the coarse
controller only if the value is changed and confirmed. These edit boxes are in
no way an indicator for the values that are currently set in the coarse control
device.

Page 98
Auto Approach
The Auto Approach is used to bring the tip into close proximity of the sample
surface. The procedure that is employed for this task works as follows: the z
scanner is continuously expanded while the sensor signal is being traced.
When the stop condition is met, i.e. when the tip is close to the sample, the
system will immediately finish the Auto Approach and enter the Target Mode.
The Target Mode can be defined to be either an activated z feedback loop or it
could also be a tip retract. If the stop condition is not met till the maximum
stroke of the z scanner, the z scanner will be retracted and a number of
coarse steps will be issued. After this the procedure will be restarted.
There are two different ramp modes for the Auto Approach: In the Ramp mode
the z scanner expansion is done in a constant speed. This speed must be
chosen small enough so that the tip is not damaged before the stop
condition is met. The alternative is to use the Loop mode, where the speed
setpoint parameters (the P parameter does not contribute due to the
definition of a proportional feedback gain). As in normal feedback
operation, the expansion speed will be depending on the difference between
the actual sensor signal and the setpoint. This means that the Loop mode will
react on slow changes in the sensor signal (for example due to long range
forces) with an adaption of the approach speed.
It is important to note that the parameters used to define the Auto Approach
behavior are partly set in the z controller section of the Daisy GUI (see
section VI.3). Most importantly, the sensor signal that is being traced for the
stop condition is defined through the Input Signal of the z feedback loop. In
case the Loop mode is used, of course all parameters of the z feedback loop
are taken as entered in the respective fields of the z controller.
In Loop mode, the approach can come to a halt if the sensor signal equals
the setpoint before the threshold condition is met. The system will be in a
stable condition, but the Auto Approach will still be active in the background.
If this behavior is to be avoided, the setpoint of the z controller and the
threshold value of the Auto Approach should be set to equal values.
The Auto Approach can be manually stopped either by clicking the Start
button of the Auto Approach section while the Auto Approach is running or by
clicking on the Retract button of the z controller. In the first case, the z
scanner will keep its current position; in the later case, the z scanner will be
driven to zero (i.e. maximum distance between tip and sample).
Delay: Delay after coarse stepping. As stepping may induce some
noise or ringing in the experiment. The settling time between the coarse
step and the start of the z scanner expansion can be defined here. During
this time, the sensor signal will not be traced for the threshold condition.
Z Input signal: This display shows the input signal used for the
autoapproach procedure. The Z Input signal can be changed in the Z Control
section (see section VI.3).
Threshold: Value for the stop condition.
Stop Cond.: Defines if the threshold represents a lower or upper
boundary of the sensor signal range. In STM type experiments, the Stop
Condition -contact AFM type experiments,
Page 99
© 2001-2012 attocube systems AG. Product and company names listed are trademarks or trade names of their
respective companies. Any rights not expressly granted herein are reserved. ATTENTION: Specifications and technical
data are subject to change without notice.
Speed: Approach speed for Ramp Mode.
Steps/Apr.: Defines the number of coarse steps that will be executed
after each scanner ramp. Usually, this value will be defined depending on
the stroke of the z scanner in relation to the step width of the coarse device.
For attocube microscope systems, this value will be given in the operation
manual of the microscope.
Apr. Mode: Approach mode; defines whether Loop or Ramp mode is
used. Details are given in the text above.
Target Mode: Defines the mode that is activated after the stop condition
was reached. It is possible to switch on the feedback loop (Loop On), or to
retract the tip (Retract).
Status LED: The status LED indicates whether the autoapproach is
active or not.
Start: Press Start to start the Autoapproach.
Coarse Adjust: ssue single
steps with the autoapproach coarse axis. The coarse adjust button is meant
to set the contact range of the tip within the z scanner stroke. Normally,
after finishing the autoapproach the tip is in the upper part of the z scanner
range. Using the Coarse Adjust buttons, one can move the contact point of
the tip to a more convenient position in the middle of the z scanner range
(with better scanner linearity). This is done by deactivating the feedback
loop, triggering one coarse step and then restarting the feedback. So this
functionality can be used with the feedback turned ON without any risk of
damaging the tip.
Note: if the feedback was not active upon the triggering of the Coarse Adjust,
it will not be activated after the execution of the coarse step.
No coarse: If this option is chosen, the coarse movement of the
autoapproach will be deactivated.
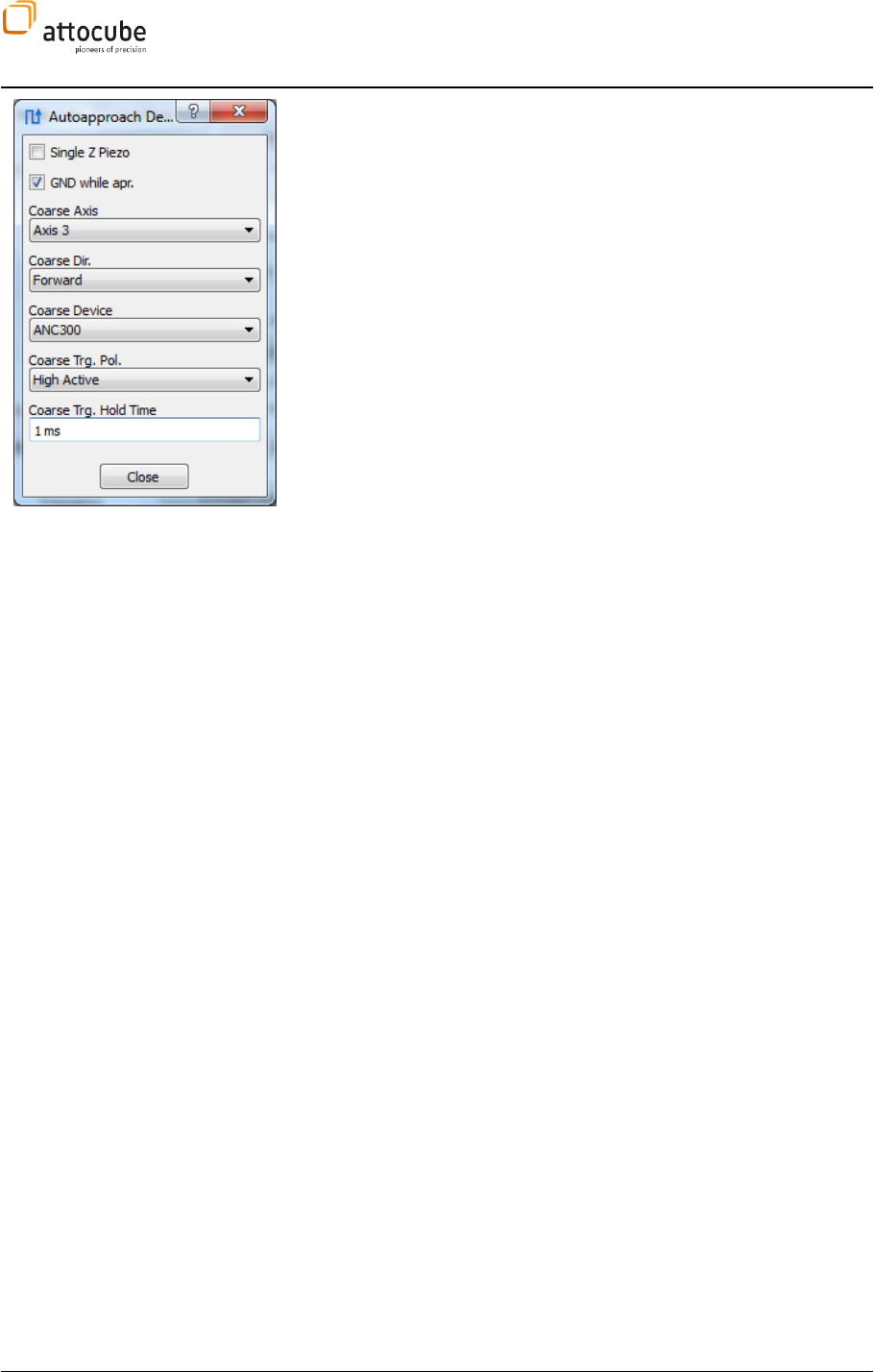
Page 100
The Autoapproach Details section includes all approach parameters that will
have to be set only once to configure a certain hardware configuration.
Single Z-Piezo: Enable, if the z positioner piezo and the z scan piezo are
the same physical device. In this case, the ANC300 will be switched to EXT
mode during the approach.
GND while apr.: When enabled, the coarse control device will be switched
to GND mode during z scanner expansion. For lowest noise, this option
should always be activated.
Coarse Axis: Defines the axis number of the z coarse positioner. The
attocube standard is to use axis no. 3 as the z-axis.
Coarse Dir.: Defines the coarse approach direction. Standard is
forward.
Coarse Device: Defines the coarse control device. The possibilities to
choose from are
1. ANC300 for operation with an attocube ANC300. The connection to
the ANC300 has to be done a serial cable.
2. TTL via DAC2: Can be used to control any coarse controller that can
be triggered by a TTL pulse (5V pulse amplitude). The connection
has to be made via the standard DAC2 output.
3. LVTTL via DAC2: Can be used to control any coarse controller that can
be triggered by a low voltage TTL pulse (2.2V pulse amplitude). The
connection has to be made via the standard DAC2 output.
4. ANC350 via NSL: For operation with an attocube ANC350. The
connection is done via a special NSL cable. For further information
on this connection, please contact attocube.
VI.5.e. Pathmode Tab
The Pathmode is used for experiments that are defined on a grid of points or
on a number of randomly selected points of the scan field. On each point, a
number of actions can be defined and grouped into action lists. Predefined
actions include any of the internal spectroscopies as well as handshake
actions (either manually or with external instruments). The flexibility and
diversity of this function makes it a very powerful tool for the
experimentalist.
The Pathmode is enabled using the Frame Tools of either frame view (see
section VI.4). To select a path, first click on the button, then select points of
interest in the data display. These positions will be shown as small circles in
the display, with a line connecting the different points indicating the path.
After selecting the path, a click on the accept button will initialize the
Pathmode. Paths and grids can be saved, edited and reloaded using the
respective items in the Path Control section of the Path tab.
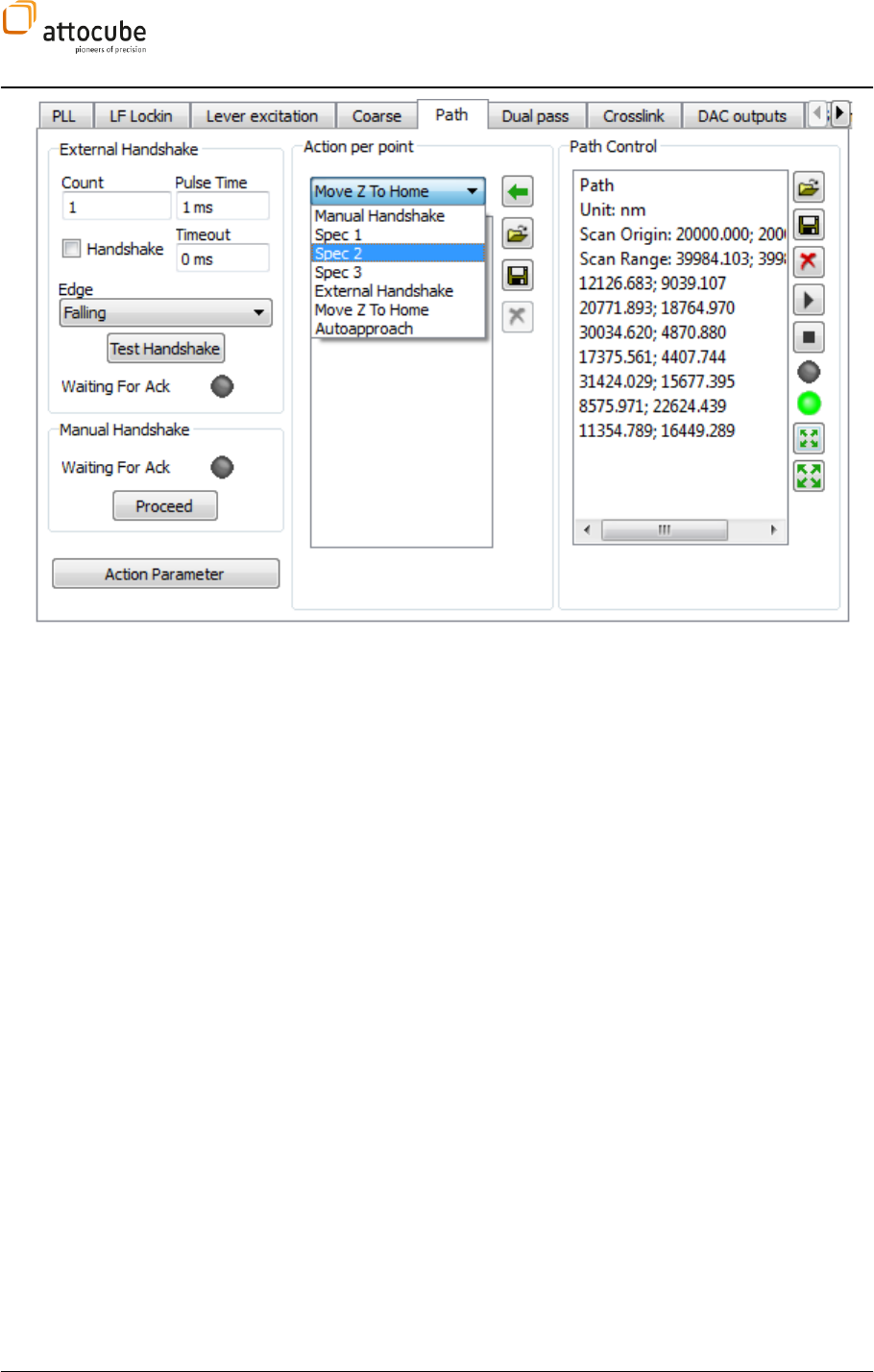
Page 101
© 2001-2012 attocube systems AG. Product and company names listed are trademarks or trade names of their
respective companies. Any rights not expressly granted herein are reserved. ATTENTION: Specifications and technical
data are subject to change without notice.
Manual Handshake: If this option is enabled, the user has to confirm
each step with the Proceed button (in the Manual Handshake section). The
scanner position on each point can be manually altered using the Manual
Positioning option described in section VI.5.k.
VI.5.f. External Handshake
The External Handshake is used to integrate external devices into the control
capabilities of the ASC500. The interaction between the ASC500 and the
external device is done by means of TTL pulses. For the definition of the SNYC
connector pins, see Figure 4 on page 12. The idea of the procedure is the
following:
1. The ASC500 drives the tip to a certain spot of interest (defined by
the path mode)
2. A SNYC OUT TTL pulse is issued once the tip has reached the target
position to trigger the external device.
3. The external device (for example a spectrometer) executes a certain
measurement task.
4. After the measurement is finished, the external device issues
another TTL pulse which is triggered by the ASC500.
5. Upon receiving a SNYC IN TTL pulse, the ASC500 drives the tip to the
next point (or repeat the measurement circle).
To use this capability, the following conditions have to be fulfilled:
a) The SYNC OUT line of the ASC500 must be connected to the external
device
b) The SYNC IN line of the ASC500 has to be connected to the external
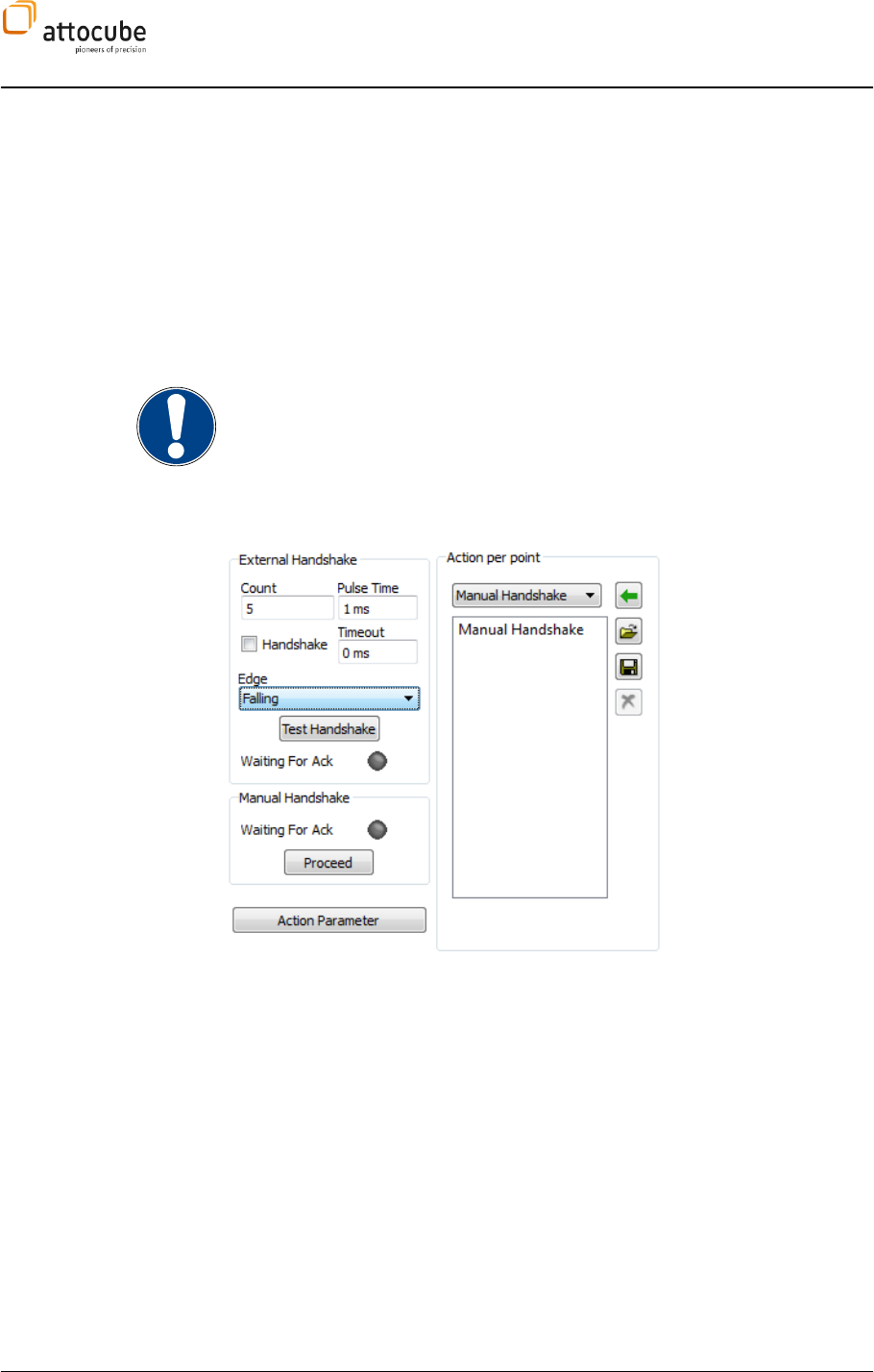
Page 102
device
c) The external device must be capable of being triggered by a TTL
pulse.
d) The external device must be capable of sending a TTL pulse after the
fulfillment of its measurement task. If this is not possible, the
ASC500 can also wait a predefined amount of time at each spot
before moving to the next spot. The waiting time at each point must
be adjusted to make sure the external device has finished its
measurement task.
NOTE on TTL pulses:
The ASC500 TTL input and output lines are using low-voltage TTL (LVTTL)
pulses, i.e. pulses with a high level of 3.3 V. However, the use of 5 V TTL
pulses (also commonly used) will not damage the input stage of the ASC500.
Also, since the threshold voltage for all TTL high levels is defined as 2.5 V,
communication with a 5 V-TTL device is guaranteed without problems.
Figure 25:
External Handshake dialog
To setup the handshake procedure with the external device, the External
Handshake section of the Path tab is used. The parameters will be explained
in the following:
Count: Number of handshake cycles to be executed per point.
Pulse Time: Defines the length of the SYNC OUT pulse.
Handshake: If activated, the controller waits for a return SYNC IN pulse
(or until timeout). If deactivated, the tip will smoothly move from point to
point sending a SYNC OUT whenever a new point is reached.
Timeout: Defines the maximum period of time the controller is
waiting for a SYNC IN pulse. After Timeout time has elapsed, the controller
will either proceed with the next SYNC OUT pulse (if Count > 1) or the tip will
move to the next point. The Timeout can be deactivated by setting it to 0. In
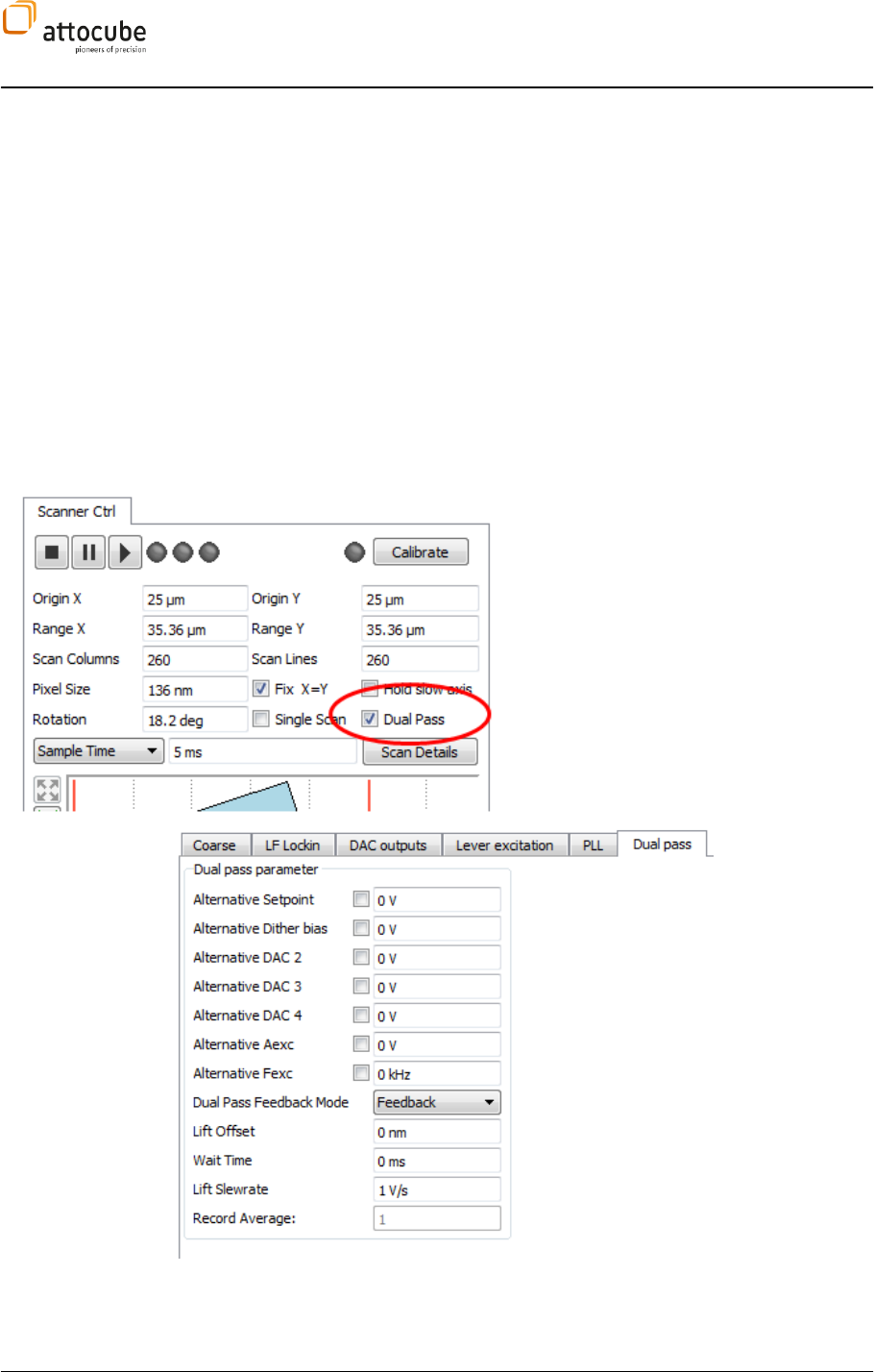
Page 103
© 2001-2012 attocube systems AG. Product and company names listed are trademarks or trade names of their
respective companies. Any rights not expressly granted herein are reserved. ATTENTION: Specifications and technical
data are subject to change without notice.
this case, the tip will not move to the next pixel until a SYNC input is sensed.
Timeout can be used to control external devices that do not have the
capability to return a SYNC IN TTL pulse.
Edge: Defines if the SYNC input TTL pulse will be triggered on
either Falling or Raising edge.
Test Handshake: Runs one cycle of the Handshake procedure. A first click on
this button will issue a SYNC OUT TTL pulse. A second click will simulate the
SNYC input pulse, i.e. the tip will move to the next point (or repeat the cycle
if Count > 1). Note that a Timeout can occur before the second click is done
in which case the second click will not end the cycle but instead start a new
cycle.
Wait for Ack: This green LED is ON as long as the controller is waiting for
a SYNC IN pulse.
VI.5.g. Dual Pass Mode
The Dual Pass Mode changes the scan
movement so that each line is scanned twice
(forward backward forward backward)
before proceeding to the next scan line.
Various parameters can be altered during the
second line pass, including a constant height
offset between the tip and the sample surface,
sometimes referred to as Lift Mode. The Dual
Pass Mode is activated within the scanner
widget; the parameters used for the second
line pass can be set in the Dual Pass Mode Tab.
Please employ the Display Wizard to open new
frame or line views to display the second pass
data.
Alternative Setpoint: Enter the z feedback setpoint that will be used for
every second line pass. Activate the alternative setpoint feature by checking
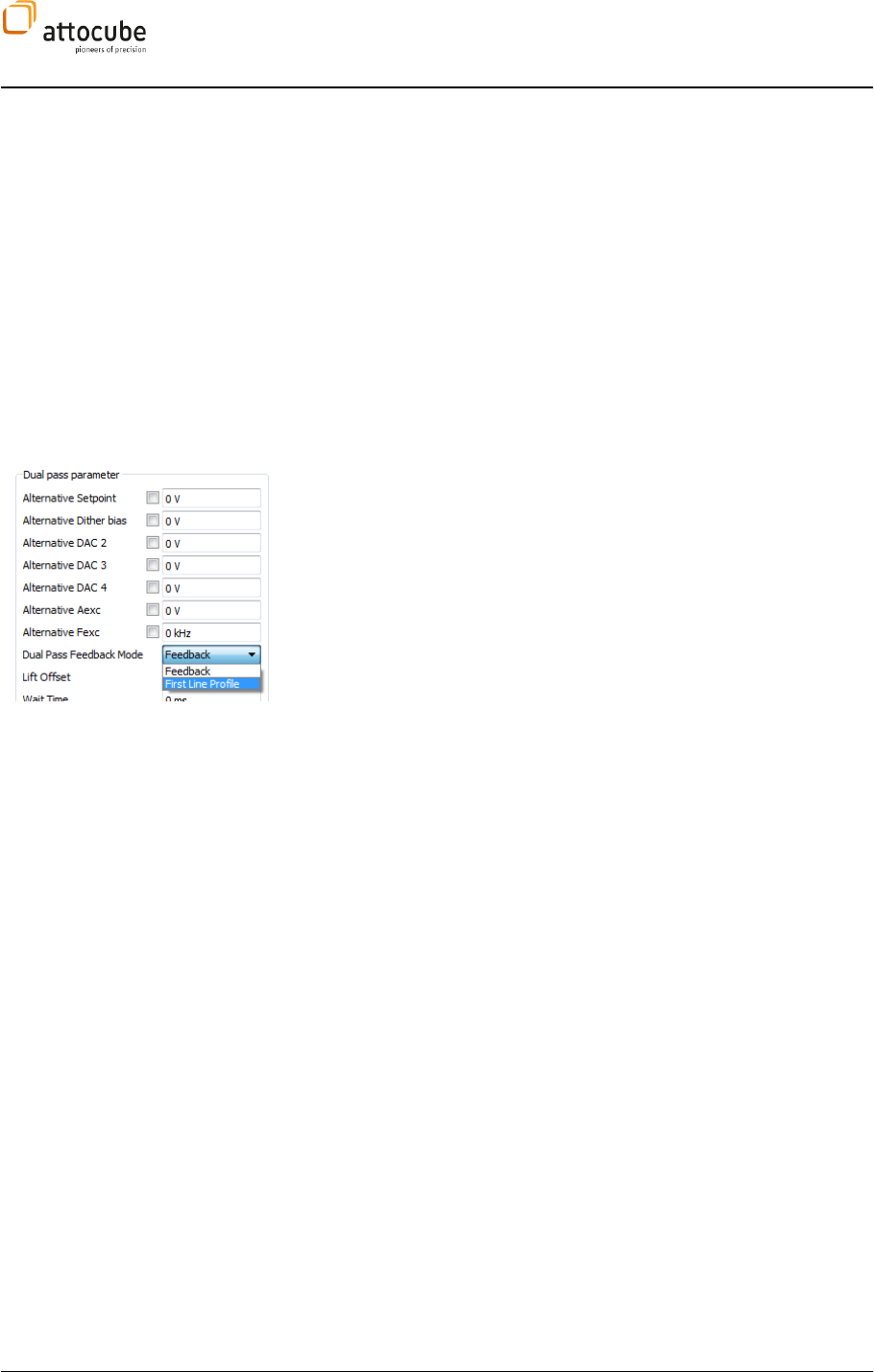
Page 104
the button left to the edit box. Please note that the alternative setpoint
feature will only work if Feedback is selected under Second Pass Feedback
Mode.
Alternative DAC1: Enter an alternative output voltage that will be
sent to the DAC1 output during the second line pass. Activate the feature by
checking the button left to the edit box. Again, this alternative output
feature will only work if Feedback is selected under Second Pass Feedback
Mode.
Dual Pass Feedback Mode: The Dual Pass Mode allows for two different
modes of operation:
1. Feedback: The z feedback will be still active during the second pass.
You can either choose a different z feedback setpoint (Alternative
Setpoint) or a different DAC1 voltage output (Alternative DAC 1 or
both) during the second line pass.
2. First Line Profile: This option records the sample topography during
the first pass. In the second pass, the feedback is turned off and the
tip is scanned along the recorded topography plus the Lift Offset.If
made correctly the the distance between tip and sample is kept
constant this way. This mode is especially useful to image long
range forces (i.e. electrostatic or magnetic) without topography
side effects.
Below is a detailed description of the behavior with the First Line
Profile Option enabled:
The topography (i.e. Z_out) information during the first line
pass (forward and backward) is recorded.
Before starting the second pass, the z feedback is stopped and
the tip is retracted to a certain height specified under Lift
Offset. The speed of this retraction movement is governed by
the Lift Slewrate. The scanner pauses for the Wait Time in order
to give the system the chance to settle.
The topography of the first line pass is repeated in the defined
offset height. At each point, the tip is at the well defined
distance over the sample surface. Data recording on each of
Scanner) is stopped. The second pass data is recorded in data
windows triggered by Second Line.
After completing the second pass (forward and backward) the z
feedback is turned on again and the scan is paused for another
Wait Time to let the system settle. The scanner is moved to the
next line and the first pass of the new line started.
Lift Offset: Specify the distance between tip and surface during the
second pass. Please note that a positive value will cause the tip to be lifted
by this height. Negative values are forbidden.
Wait Time: Defines the time the scanner is paused at the beginning
and the end of the second pass. Please note that the Lift Slewrate may
automatically be adapted to ensure that the scanner has reached the defined
lift height before the wait time has ended (before the second pass). After

Page 105
© 2001-2012 attocube systems AG. Product and company names listed are trademarks or trade names of their
respective companies. Any rights not expressly granted herein are reserved. ATTENTION: Specifications and technical
data are subject to change without notice.
finishing the second pass, the z feedback will be turned on. Please make sure
that the Wait Time is long enough to give the feedback the possibility to
reach the first pass setpoint.
Lift Slewrate: Defines the voltage rate of change that is applied to the z
scanner to reach the lift height at the beginning of the second pass.
Record Average: This number shows the number of recorded topography
points that will be averaged to give one height data point for the second
pass. This value is automatically set by the system and it is not adjustable.
Normally, it will be set to 1 and it will only be increased for lines with a very
high number of data points.
Second Pass Frame Views
To display, record, and save the data from the second pass, one employs the
Display Wizard as described in section V.4.d on page 58. Use any free data
channel to open a frame or line view with the desired filters.
VI.5.h. Q Control
Any oscillating system showing resonance behavior can be described by a Q
factor. The Q factor is a measure of the damping of the oscillating system.
In non-contact mode AFM, the Q factor is a function of the internal damping
of the lever (cantilever or tuning fork) and the lever environment (fluid,
ambient, high vacuum, and UHV). The Q factor is a very important parameter
for non-contact AFM, because it determines or constrains important
measurement parameters such as sensitivity and scan speed.
Given a certain measurement environment and a certain lever, the Q factor
can be easily measured but it cannot be altered in standard SPM
applications. The ASC500 Q Control feature enables changing the Q factor
and thus gives access to the control of important measurement parameters.
The Q control can be especially helpful in two situations:
1. Non-contact measurements in a low temperature and/or UHV
environment. Q factors in these environments can get very high (up
to 105-106), resulting in very small damping of the oscillation
amplitude and thus to very large time constants for changes in the
oscillation amplitude (order of tens of seconds). In amplitude
modulation mode, the z feedback control will work directly on this
very slowly changing oscillation signal, thus reducing the scan
speed significantly. Q reduction is a very effective way to overcome
these speed limits.
2. Measurements in a liquid environment typically show very low Q
factors (< 100). Increasing the Q factor may give reasonable
sensitivity for these measurements.
Schematics
To gain access of the control over the Q factor, a sophisticated oscillation
scheme is necessary. The excitation signal for the lever is composed in the
Signal Adder from two parts:
The first part is the fixed AC signal at the resonance frequency of the lever
coming from the Lock-In amplifier.
The second part is the signal that is deduced from the oscillation signal of
the lever: The output of the lever is demodulated by the internal Lock-In
detector to obtain its amplitude and phase (relative to the fixed excitation
signal). These signals are routed into a phase shifter and an amplitude gain
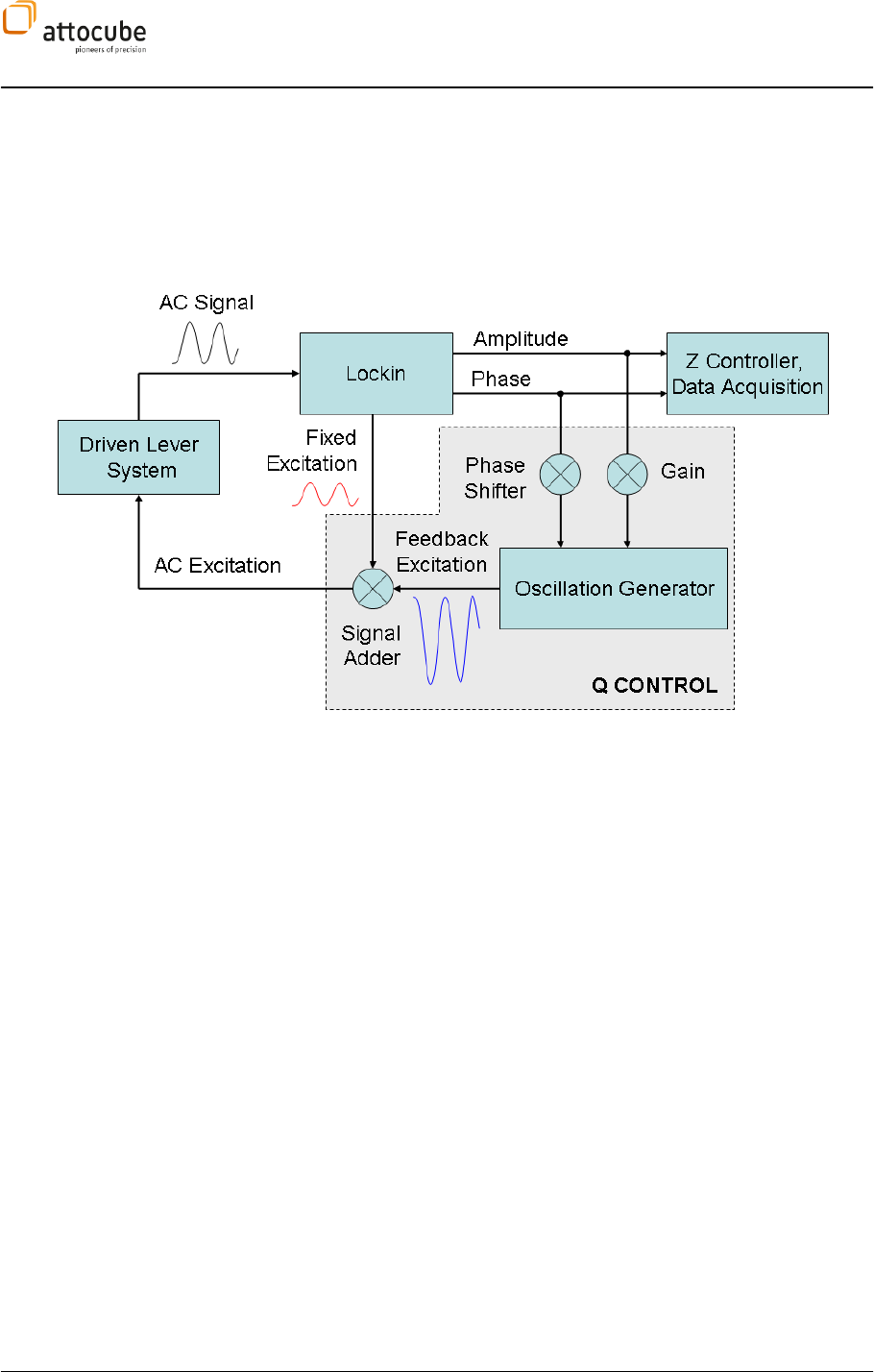
Page 106
and a new oscillating signal is synthesized in the Oscillation Generator, called
Feedback Excitation.
One can show mathematically that feedback signals with a phase shift of +/-
/2 enhance or reduce the effective damping in the system. The lever will
behave exactly as if it was built in a different way or if the environment has
changed. Below, one can see the schematics of the Q control excitation.
The Q factor can be measured with the Resonance feature (see section VI.6.b
on page 114). Find the FWHM (full width half maximum) f from the
amplitude vs. frequency plot to the left. The Q factor is then calculated using
the relationship:
Q = fres/f
The Q Control controls can be found in the Lock In tab. There are only two
parameters and one Enable button. You can set the phase shift between the
cantilever oscillation (Aosc) and the feedback excitation signal and the gain
of the feedback signal.
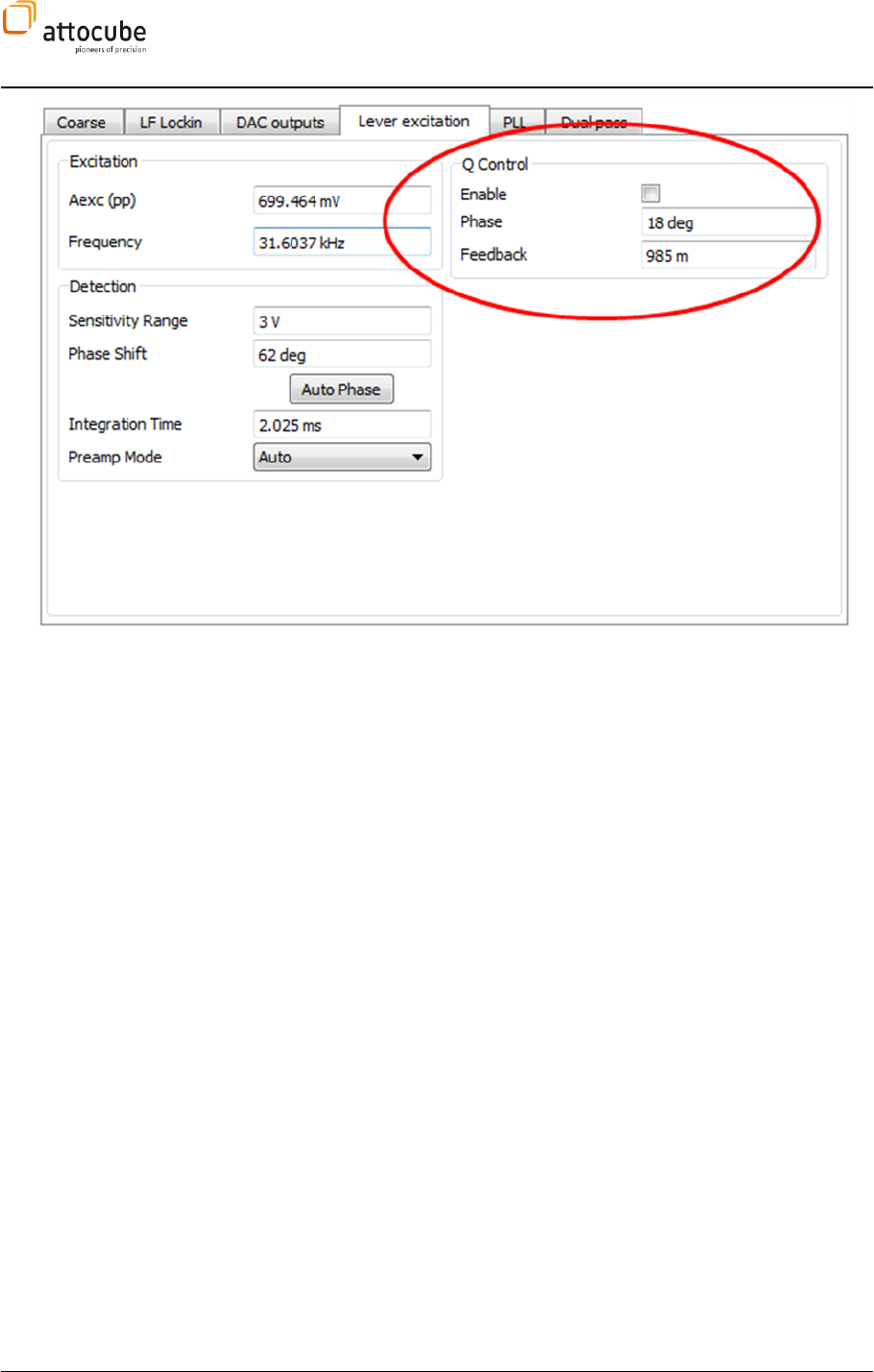
Page 107
© 2001-2012 attocube systems AG. Product and company names listed are trademarks or trade names of their
respective companies. Any rights not expressly granted herein are reserved. ATTENTION: Specifications and technical
data are subject to change without notice.
Enable: Turns the Q control on or off. Please note that turning the
Q control on or off may change the oscillation amplitude of the lever
significantly. Although this will not damage the tip, you may want to use the
excitation amplitude field (found directly to the left under High
Frequency/Modulation/Amplitude (pp)) to reduce the excitation before
checking/unchecking the Enable button.
Phase: Sets the phase shift between the lever oscillation and the
feedback excitation signal. Although in theory this should be either +90 deg
or -90 deg, there are always additional phase shifts due to electronic
components in the signal path and due to the (short but non-zero) time it
takes for the ASC500 to demodulate the signal. The best way to find the right
value is to change the Phase systematically while repeatedly doing the
Resonance (set the Curves value of both Resonance views to 10 or larger to
have several frequency sweeps displayed in one graph). For values differing
from +/- 90 deg phase, the resonance frequency is shifted in frequency. By
going stepwise through the -180 deg .. +180 deg Phase range, one should
see the maximum of the amplitude resonance curve moving around in a
circle. Note the values for minimum resonance peak if you want to reduce the
Q factor or either note the Phase value of the maximum if you want to
Feedback
value.
Feedback: This sets the gain of the feedback excitation signal. The
range of this value is 0 to 1. Please note that for values above 0.5, the
effective value of the fixed excitation is reduced to strengthen the feedback
excitation part. One can easily increase the fixed excitation if only loosing
signal amplitude and not seeing any impact on the Q control. For most
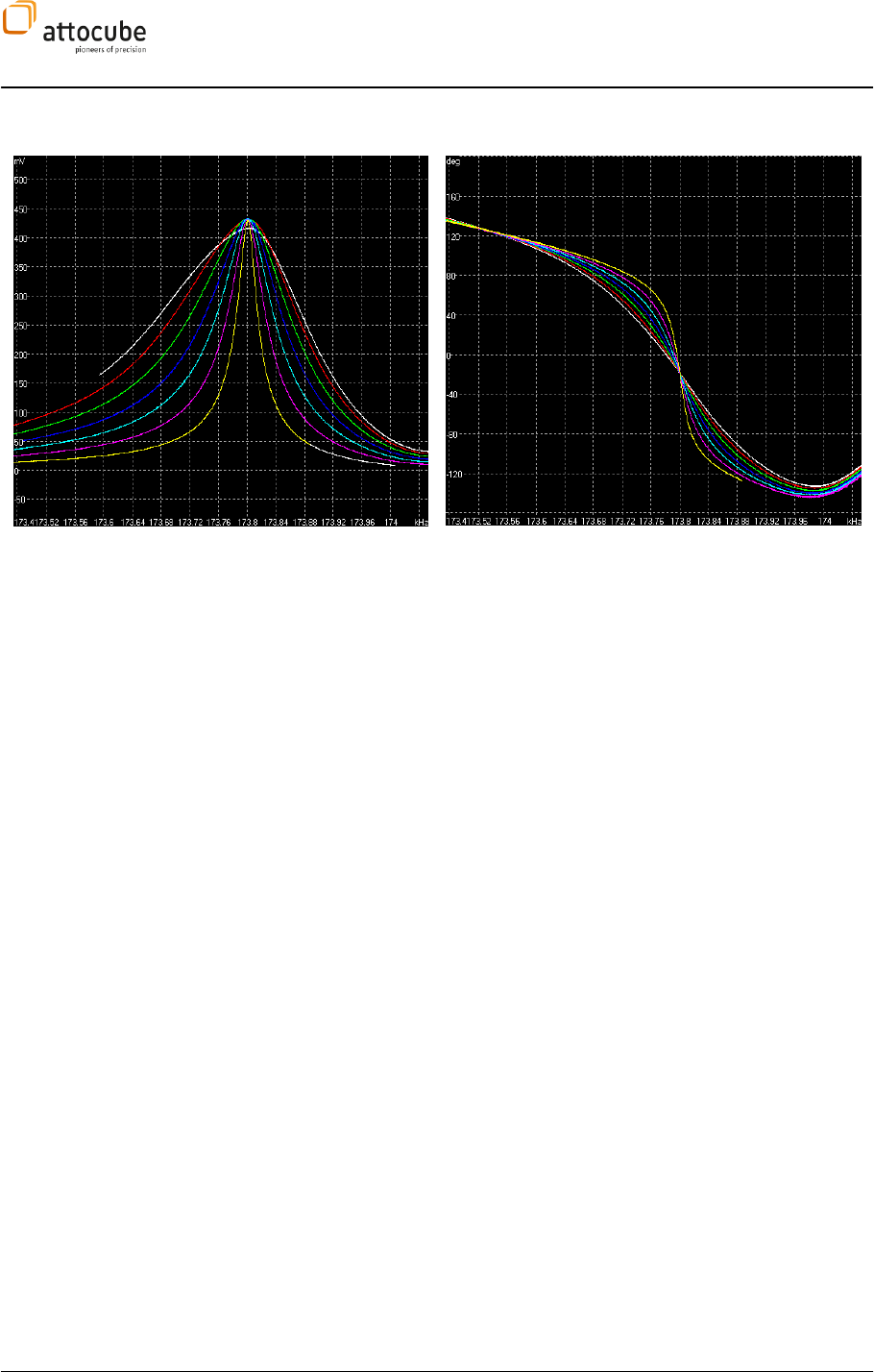
Page 108
applications, a value of larger than 0.85 will be necessary to effectively alter
the Q factor.
Example
The above examples show the Q reduction of a cantilever based AFM at 4 K.
The Q factor could be reduced by approximately one order of magnitude
(note that the original amplitude response is not shown).
Please note that due to the self-excitation nature of the Q control, the
oscillating system can show rather strange behavior far off the resonance
frequency of the lever. This does not have any consequences on the
reproducible and stable behavior of the Q control near the resonance
frequency.
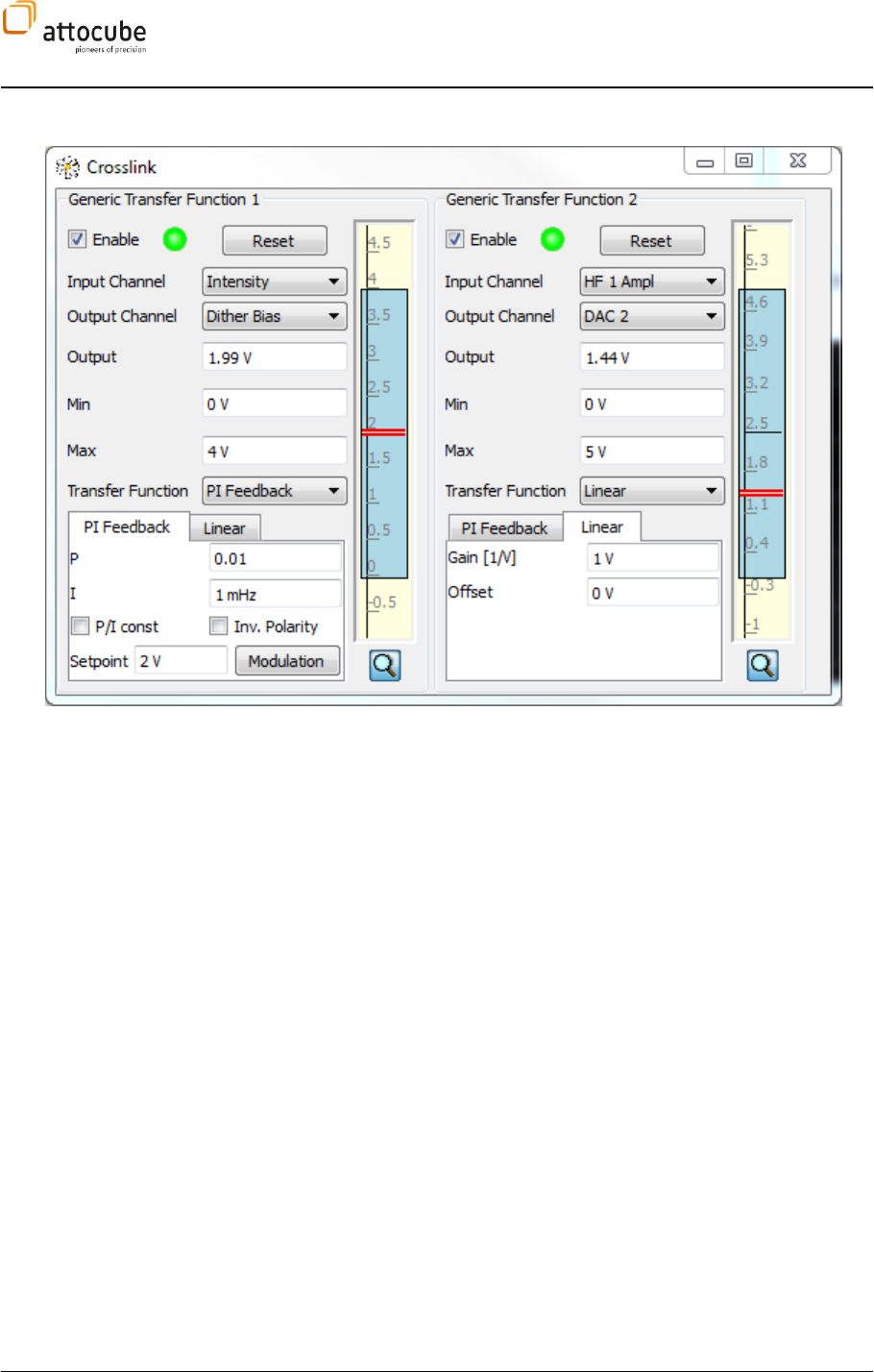
Page 109
© 2001-2012 attocube systems AG. Product and company names listed are trademarks or trade names of their
respective companies. Any rights not expressly granted herein are reserved. ATTENTION: Specifications and technical
data are subject to change without notice.
VI.5.i. Crosslink
Figure 26: The Crosslink tab. The tab is divided into two parts both of which can be either used as a PI feedback loop
or for signal routing purposes.
The Crosslink tab provides two useful functionalities: one is a generic PI
feedback loop for general purpose feedback requirements. The second is a
routing functionality of any internal or external signal to any of the standard
DAC outputs of the ASC500. This can be used for example to combine the
internal lockin amplifiers with external hardware by routing its amplitude to
the DAC outputs and using the analog voltage with external equipment. As can
be seen in Figure 26, the tab is divided into two sections: each of the sections
can be used either as a feedback loop or for signal routing purposes.
The feedback loops are implemented as generic PI controllers. Any internal or
external signal can be used as a loop input. Any of the standard DAC outputs
can be used as a loop output. The control loops feature adjustable output
ranges, adjustable polarity and Setpoint Modulation for easy P and I tuning.
The operation of these feedback loops is very similar to that of the z feedback
controller (see section VI.3 on page 76).
The functionality of the tab section can be chosen in the drop-down list under
Transfer Function. It can be chosen between PI Feedback (in the left side of
Figure 26) or Linear (right side of Figure 26).
In the next section a detailed description of the operation is given.
Enable: Turns the functionality loop on and off. Please note that the
output value will not be retracted when the loop is turned off. To retract the
output to a home position, use the Reset button.
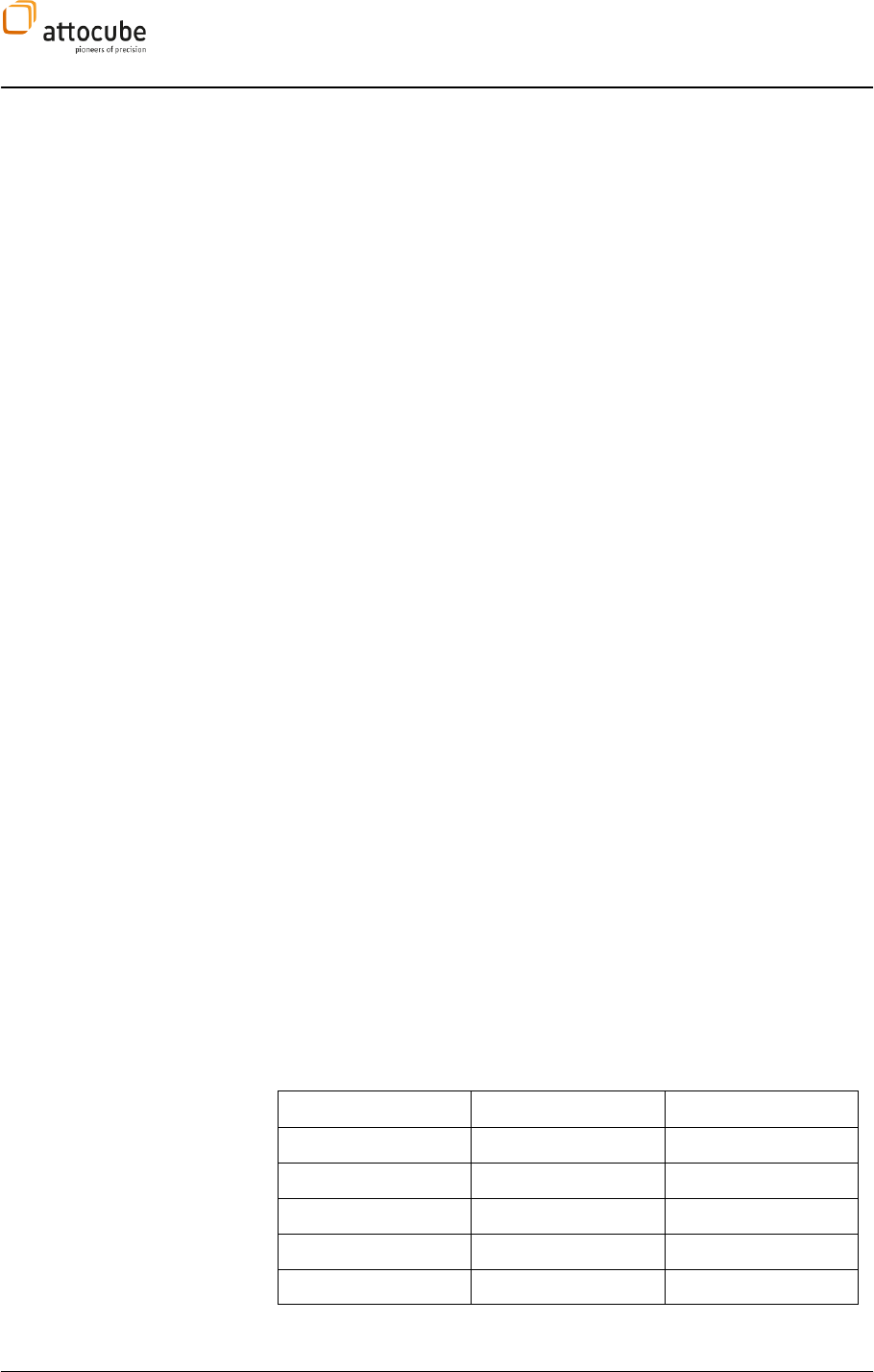
Page 110
Reset: Resets the output to a certain starting point.
Input Channel: Definition of the input signal for the control loop/signal
router.
Output Channel: Definition of the output channel. This can be any of the
standard DAC outputs.
Output: If the loop/router in enabled, this field shows the current
output value. In case the loop/router is stopped, this field can be used to
enter a certain static voltage on the Output Channel. It is worth noting that
this field overwrites its counterpart of the DAC Output tab (see section VI.5.j)
Min/Max: Defines the output voltage range.
Transfer Function: Defines the functionality of the section. It can be
chosen between PI Feedback and Linear. The parameters for either PI Feedback
or Linear functionality can be chosen in the respective sub-tabs described
below.
PI Feedback
P and I: Definition of the control parameters for the loop.
P/I const: With this button checked, a change in either P or I will also
change the respective other parameter to keep the ratio between P and I
constant.
Setpoint: Definition of the target value for the signal specified in Input
Channel.
Inverse Polarity: Definition of the polarity of the control loop. Unchecked
Inverse Polarity means that the control loop will decrease the output if the
input value is larger than the setpoint and vice versa. Check the Inverse
Polarity button to control signals with negative slopes, i.e. where the output
needs to be increased to decrease the input value.
Linear
Gain: Defines the gain between the analog voltage output and the
signal that is routed to the output.
Offset: Defines the offset of the linear transfer function between the
input channel and the output voltage.
In the display to the right of the text edit boxes, there is a display showing the
allowed output range together with the current output value.
Crosslink P and I units
The physical unit of the P and I parameters of the Crosslink feedback loops are
dependent on the input signal of the loop. The units are:
Input Signal
P unit
I unit
ADC 1..6
V/V
V/V/s
HF 1 df
V/Hz
V/Hz/s
HF 1 Ampl
V/V
V/V/s
HF 1 Phase
V/deg
V/deg/s
LF Lockin Ampl
V/V
V/V/s

Page 111
© 2001-2012 attocube systems AG. Product and company names listed are trademarks or trade names of their
respective companies. Any rights not expressly granted herein are reserved. ATTENTION: Specifications and technical
data are subject to change without notice.
LF Lockin Phase
V/deg
V/deg/s
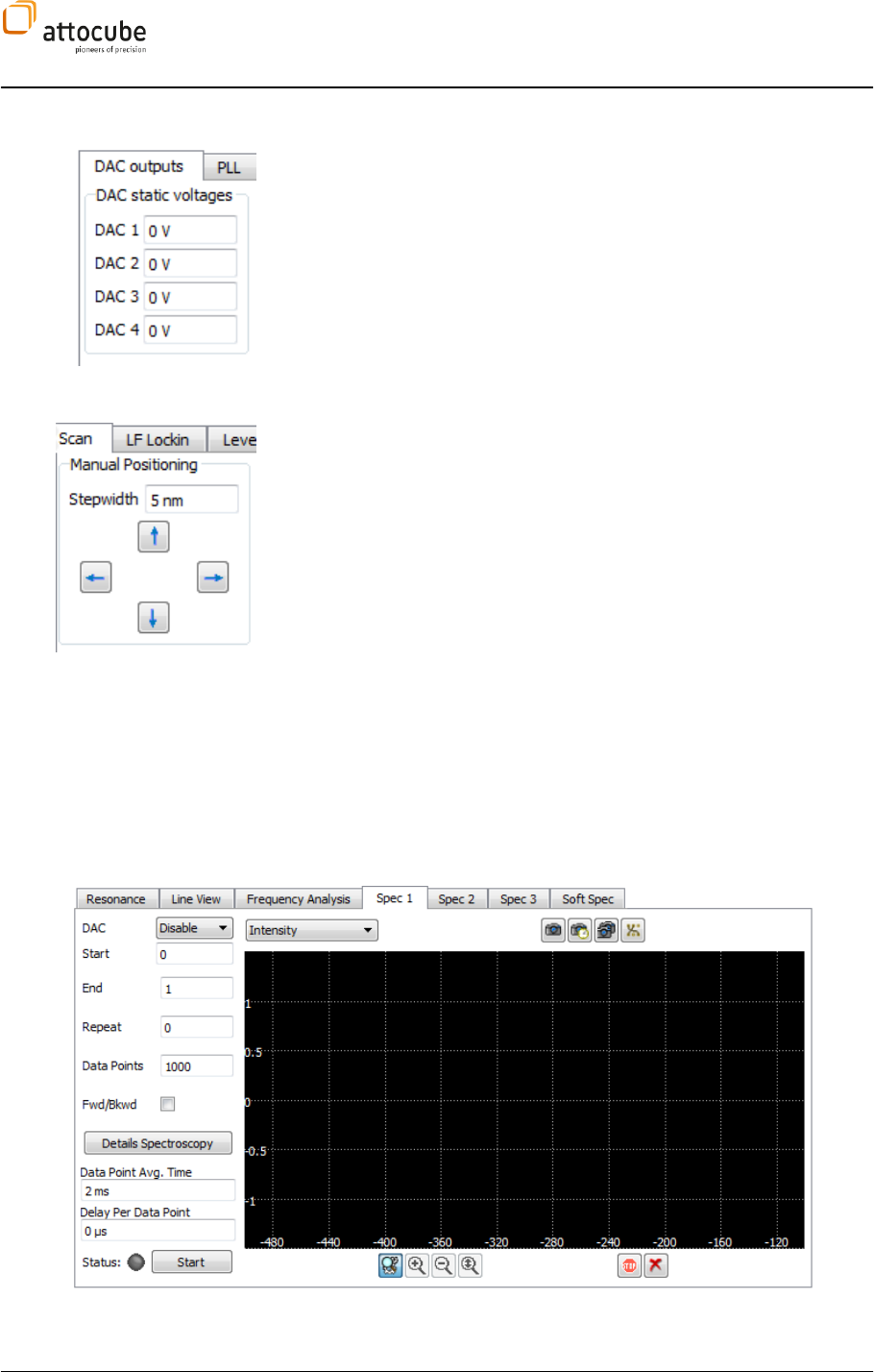
Page 112
VI.5.j. DAC Outputs
In the DAC Output section, static output voltages can be defined for all
standard DAC outputs. There is one edit box for each of the four DAC outputs,
each named with its alias as defined in the Aliases menu (see section V.3.b).
The numbers to be entered here are limited by the range that is defined in the
Output Limits menu (see section VI.1).
It is worth noting that the static voltages defined here can be overwritten by
either the output of the Crosslink section or can be modulated by the output of
the low frequency lock-in.
VI.5.k. Scan; Manual Positioning
Sometimes, it is useful to manually adjust the position of the tip. The Manual
Positioning tool in the Scan tab can be used for this task. If the scanning is not
moving (either in STOP mode or within the Pathmode tool) the scanner can be
moved in discrete steps in all lateral directions. The Stepwidth can be entered
in the respective text field and then the arrow icons can be used to step in the
respective directions.
VI.6. 1-dimensional data displays
VI.6.a. Spectroscopy Tab(s)
With the spectroscopy tabs (Spec 1-3), one or more signals can be recorded while changing certain system
photoluminescence as a function of the gate voltage.
Note that you can change the name of these three tabs in the Aliases menu, see section V.3.b for details.

Page 113
© 2001-2012 attocube systems AG. Product and company names listed are trademarks or trade names of their
respective companies. Any rights not expressly granted herein are reserved. ATTENTION: Specifications and technical
data are subject to change without notice.
There are three basic types of spectroscopies:
1. DAC Spectroscopy: Any of the four standard DAC outputs can be used
for spectroscopy purposes.
2. Z Spectroscopy: this type of spectroscopy will sweep the Z Out
voltage while recording any kind of internal or external signal.
3. Low Freq: low frequency spectroscopy changes the frequency of the
low frequency lock-in.
The type of spectroscopy is defined in the DAC drop-down list of either of the
three Spec tabs. All types of spectroscopies are operated in the same way.
these are controlled in the same way. For simplicity, we refer in the following
only to a Z-Spectroscopy.
The voltage is swept in a step-like way: the sweep range is divided into a
number of steps (Data Points). The first voltage step is generated and is kept
constant during the measurement of the response signal. Only after the
measurement of the first data point is finished, the output voltage changes
to the next point.
Start: Specify the start position within the allowed z-range .
End: Specify the end position within the allowed z-range . If End is
smaller the Start, the output will be swept backwards.
Repeat: If the measurement should be repeated automatically, increase the
Repeat value. Please note that by default, the graph will only show one
measurement trace. To display more than one trace in the spectroscopy view,
open the Ranges dialog of the Spectroscopy View (see section 0 for details).
Data Points: Specify the number of data points between Start and End.
Please note that this number is slightly altered once you start the sweep.
This is because of the quantized nature of the digital output; the minimum
step size of the 16 bit DAC output is for example 300 µV.
Fwd/Bkwd: If activated, the voltage is swept from Start to End and
then back to Start. The backward sweep is displayed in a different color.
Loop Off: Switches the feedback loop off during the measurement.
Especially with the Z-Spectroscopy, it is important to switch the loop off;
otherwise the loop override the spectroscopy. When the spectroscopy
measurement is finished, the loop is automatically switched on again.
Limiter: If Limiter is enabled, the spectroscopy will stop if the limit
criterion as given in the Details dialog is met. You can use the limiter to
protect e.g. sensitive tips during the sweep.
Data Point Avg. Time: Specify here the measurement time per pixel. All
collected data during this measurement time will be averaged.
Delay Per Data Point: Enter a delay for each point after the new value
has been set, before the data is taken.
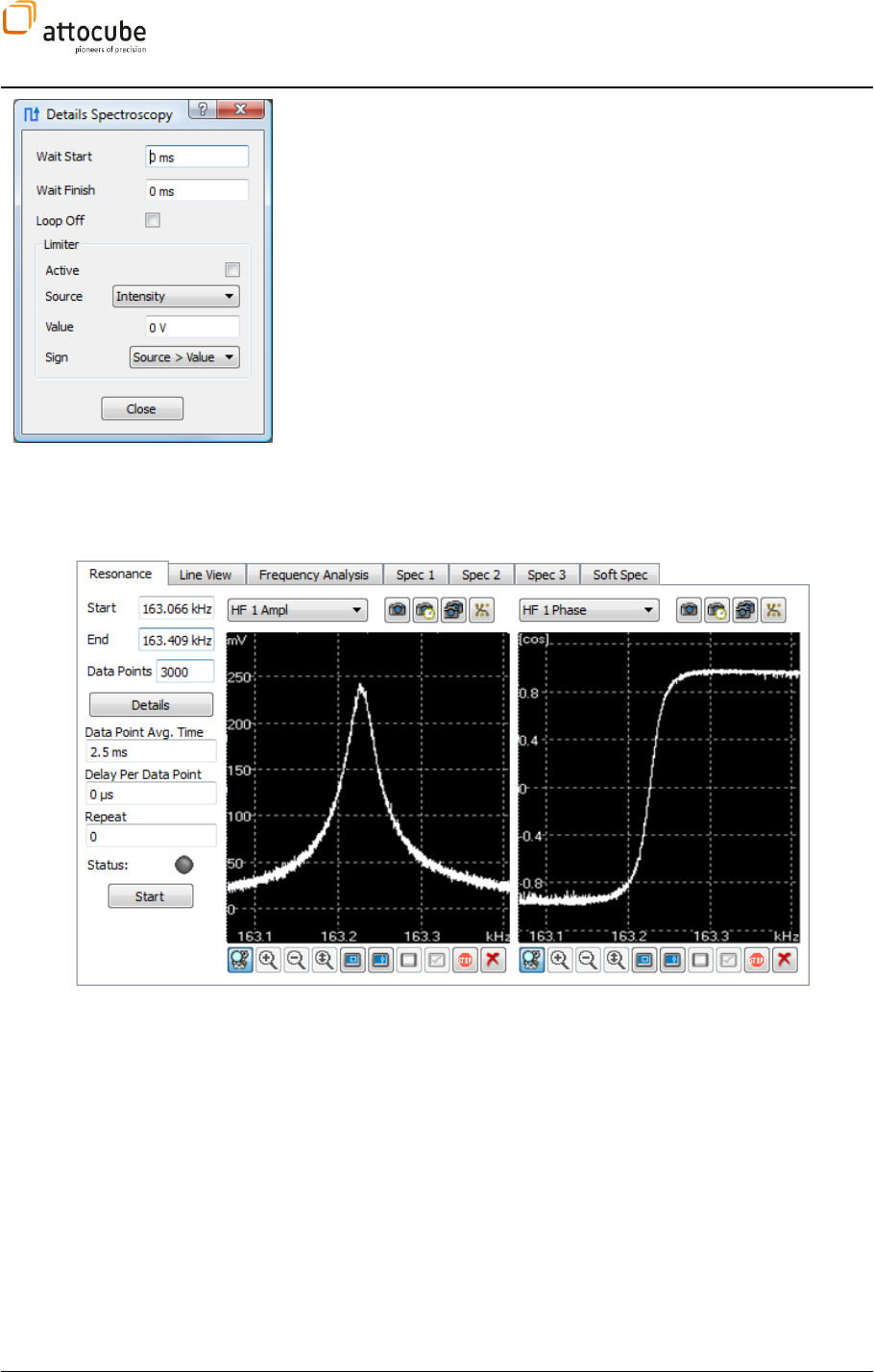
Page 114
Details Spectroscopy: Opens the Details dialog window:
Wait Start: Delay time before the spectroscopy is started.
Wait Finish: Delay time after the spectroscopy is finished.
Limiter Source: Signal to trace during the measurement.
Limiter Value: Exact value for the limit criteria.
Limiter Limit: If hit, the spectroscopy is stopped
The graph generated can be manipulated and saved using general graph
tools described in detail in section V.4.b.
VI.6.b. Resonance View
Use the Resonance View to find and characterize an oscillation with
frequency and phase response. By pressing the Start button, the given
frequency window will be scanned, while the response from the AFM Lock-in
is imaged in the amplitude (left) and in the phase window (right). See
section IV.2.bfor details on the internal signal flow. The settings for this
calibration are similar to the spectroscopy features.
Start: Enter a start frequency for the frequency sweep.
End: Enter a stop frequency for the frequency sweep.
Data Points: Enter the number of data points to be traced and displayed
in the images to the right. With fewer points the calibration run will be faster
of course.
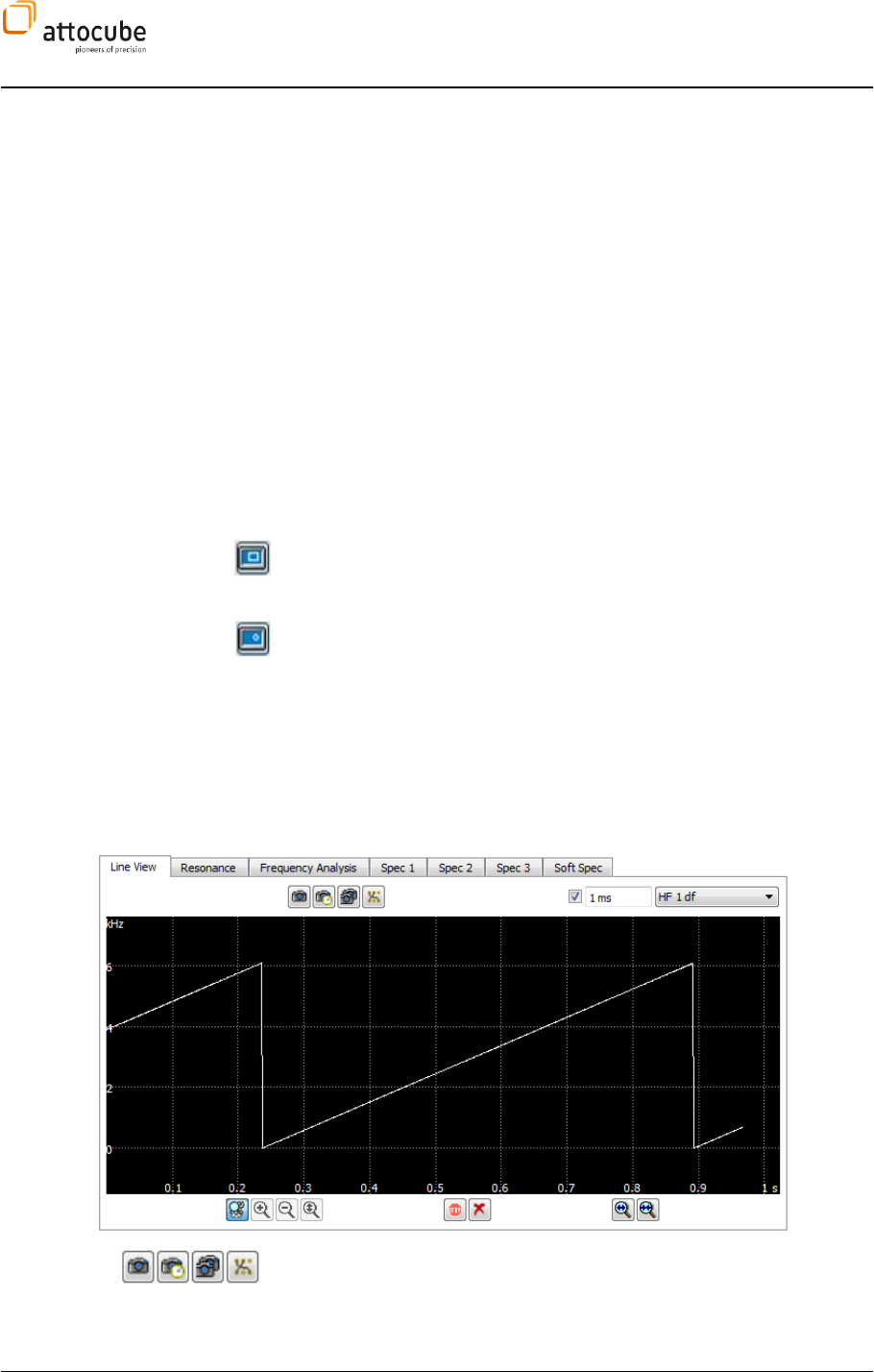
Page 115
© 2001-2012 attocube systems AG. Product and company names listed are trademarks or trade names of their
respective companies. Any rights not expressly granted herein are reserved. ATTENTION: Specifications and technical
data are subject to change without notice.
Wait Start: This is a delay time before the calibration run is started.
Wait Finish: This is a delay time after the calibration run is stopped and
the system returns to the main frequency as given in the Lock-In Tab or Non-
Contact Mode Tab.
Data Point Avg. Time: Specify here the measurement time per pixel. All
collected data during this measurement time will be averaged.
Delay Per Data Point: Enter a delay for each point after the new
frequency value has been set, before the data is taken. This is to avoid
ringing after the excitation frequency has been changed.
Repeat: If the calibration run has to be repeated several times, this
can be done by entering a respective number in this field. Please note that
zero corresponds to no repetition.
Status: Indicates whether the calibration is running.
Start: Starts the calibration run.
Select new window: Use this Frame Tool to select a new frequency window
from the amplitude or phase display. This will enter the new start and end
values in the corresponding fields.
Select frequency: If you select a point in the amplitude or phase window,
the respective value will be entered as the new frequency in the Non-Contact
Mode Tab and Lock-In Tab, respectively (see sections 0 and I.1.a).
VI.6.c. Line View
The Line View is the most elementary form of displaying data. The data is
displayed against time. Although it is a very basic tool, the line view can be
highly useful because of its simplicity and versatility. It is capable of
displaying data in the time range from milliseconds to kiloseconds.
To the left of the line view graph, the input parameters can be chosen. Below
the graph are the common tools to change the display and save the displayed
data (described in detail in chapter V.4.b).
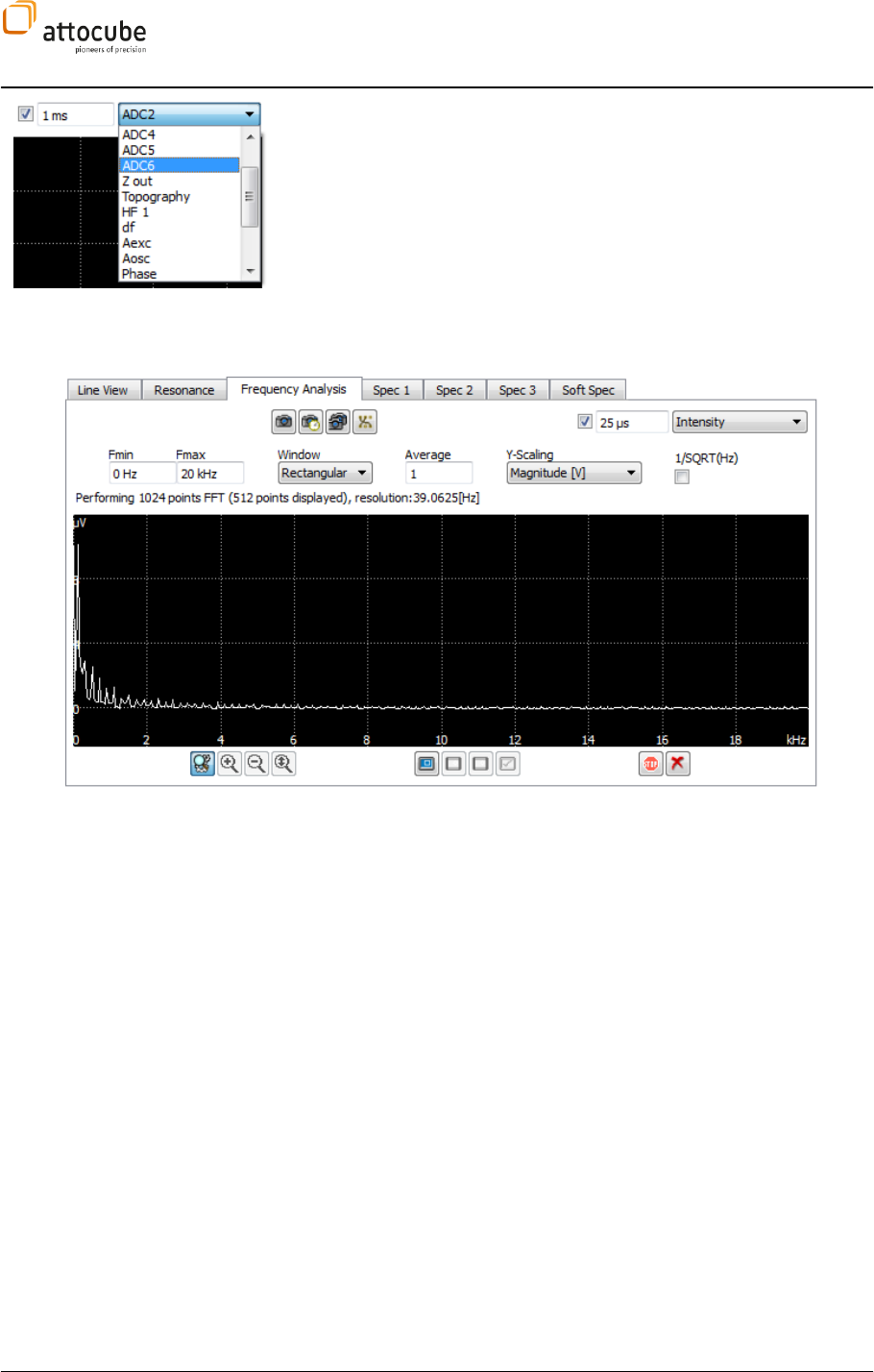
Page 116
Signal: Choose the input signal to be displayed in the line view.
Sample Time: The time which corresponds to one pixel in the line view
graph. Since the sampling speed of the ASC500 inputs is 400 kHz, the
smallest value to be entered here is 2.5 µs.
Average: With this check box you can activate data averaging. This
means that all incoming data within one Sample Time is averaged before it is
displayed in line view.
VI.6.d. Frequency Analysis View
The Frequency Analysis allows for examination of signals in a frequency
domain representation. The ASC500 offers an extremely powerful Frequency
Analysis tool to help optimizing the signal, analyzing mechanical or
electrical noise and to better understanding properties of oscillating systems
like cantilevers or tuning forks. Signals can be analyzed in a frequency range
from DC to 200 kHz, with a frequency resolution well below 1 Hz. Different
window functions can be used to reduce leakage and a number of
representations can be chosen to meet your application.
The image above shows the Frequency Analysis window. To the left of the
graph, the input Signal and the Sample Time can be chosen. Above the
graph, the FFT parameters can be set. The graph itself is displayed in a
frequency vs. amplitude style. The units are shown in the lower right and the
upper left corner of the graph. Please note that the unit of the amplitude
axis is automatically adjusted to the unit of the input signal as specified in
the Transfer Functions Panel.
Time Domain Parameters
Signal: Specification of the input signal. One can choose between
any ADC or AFM input, lock-in data, or Z-Out.
Sample Time: One can choose the sample time for the FFT input signal.
The sample time determines the maximum frequency which can be displayed
in the spectrum. Enter 2.5 µs to access the full sampling speed of the ADC
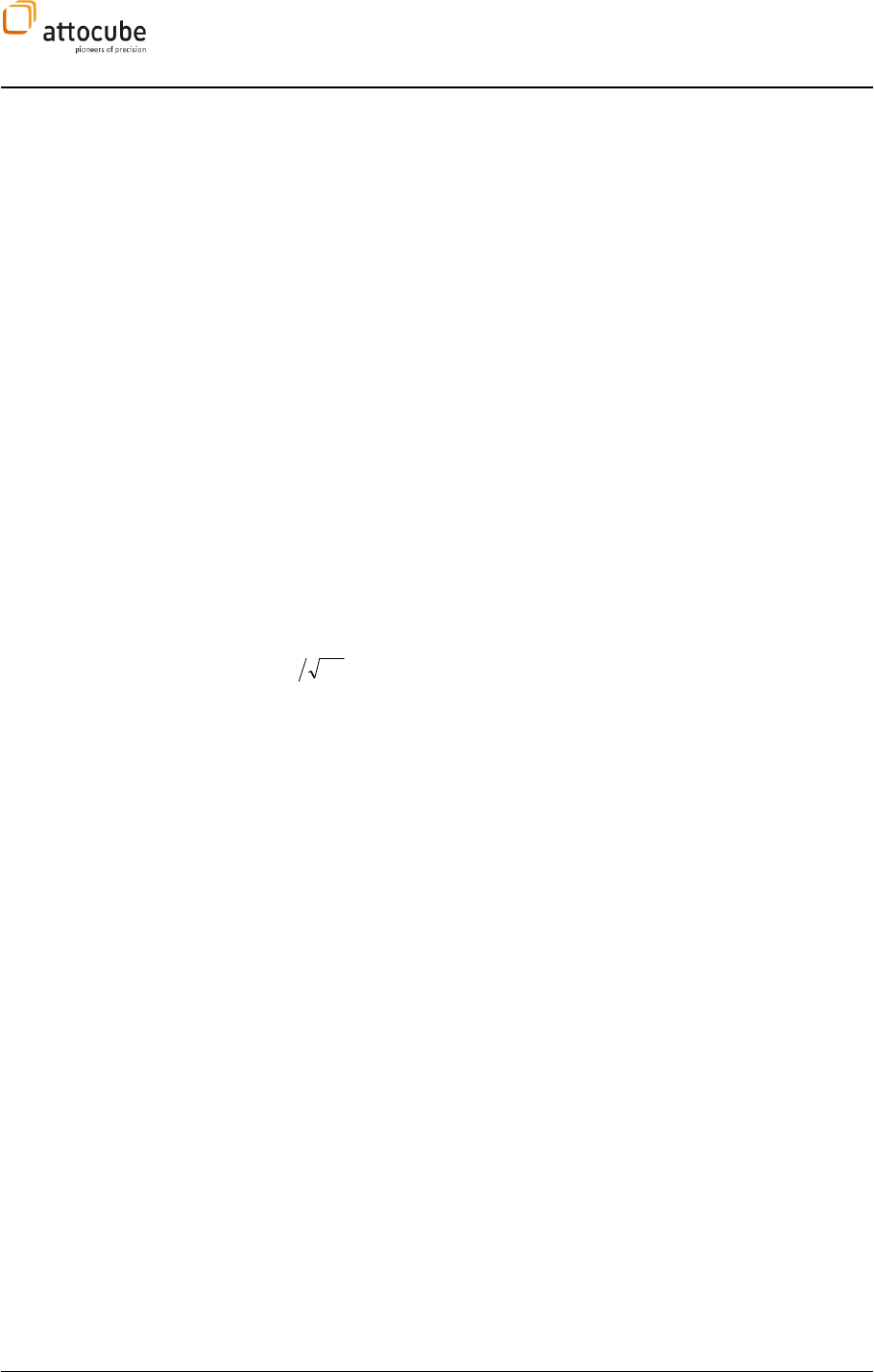
Page 117
© 2001-2012 attocube systems AG. Product and company names listed are trademarks or trade names of their
respective companies. Any rights not expressly granted herein are reserved. ATTENTION: Specifications and technical
data are subject to change without notice.
converters (400 kHz), which will allow a FFT from DC to 200 kHz. Increase the
sample time in case the full frequency range is not needed and also to gain
higher frequency resolution. Also, higher sample times reduce the CPU load.
Average: This button activates time domain averaging, i.e. all
incoming data within one Sample Time is averaged before it is processed by
the FFT. One can use this averaging to reduce aliasing artifacts in low
frequency FFT data.
FFT Parameters
Fmin/Fmax: Enter the frequency range you want to analyse here. Fmax
must be smaller or equal to 1/(2*Sample Time). The status line below the
input fields immediately shows the frequency resolution corresponding to
the chosen settings.
Window: Setting of the window function used for FFT calculation.
Choose from Rectangular, Hamming, Blackman, and Flat Top to meet your
requirements in either amplitude or frequency resolution and leakage.
Average: Allows for applying a linear averaging to the FFT data. In
contrast to the time domain averaging, FFT averaging calculates the mean
value of several FFT traces, not input values. Please note that high Average
values may lead to long update intervals of the FFT graph.
Y-Scaling: Choose between Magnitude[V], logarithmic Magnitude
[dBV], Power Density [dBm] and Power Spectrum [dBm].
1/SQRT(Hz): Use this button to display the magnitudes normalized by a
Hz1
factor.

Page 118
VI.7. Closed Loop Step Scanning
A special feature of the ASC500 is the Closed Loop Step Scanning
functionality. It uses coarse positioning stages to raster a (usually large)
sample area by stepping from point to point. Position readout of the
coarse stages is used to drive the raster motion in closed loop to provide
maximum accuracy and repeatability. The scan area is only limited by the
range of the coarse positioners (usually mm range) and acquisition speed.
This feature is especially helpful for SPM techniques where the sensor in
not in direct contact with the sample such as confocal, Hall Probe and
SQUID.
VI.7.a. Concept
The Closed Loop Step Scanning requires a set of coarse positioners with
readout functionality and a step controller that is capable of step
triggering by means of TTL pulses. Although the functionality only requires
the position encoder to provide a position-proportional voltage signal, it
will be assumed in this manual that attocubes ANPxyz series positioners
with RES encoders are used and that these positioners are controlled by an
ANC350 step controller.
A schematic of the setup is shown in Figure 29. The ASC500 connects to
the ANC350 via a multi-pin trigger line. All parameters relevant for the
stepping are set in the ANC350. The logic of the closed loop scanning is
done in the ASC500. The step scanning is a two step process:
1. The origin of the scan is approached.
2. The step scan motion and data acquisition is started.
The step scan motion is done in a line-by-line mode. The x direction is
always the fast scan axis. The positioners will move in x direction from
point to point, and data will be collected at each target point of the closed
loop grid. After the line is finished, the starting point of the next line will
be approached without any data acquisition. Unlike the normal scan, a
step scan will thus only produce forward direction data in order to increase
the acquisition bandwidth.
Algorithm
The closed loop algorithm is shown in Figure 27. Upon approaching a grid
point, the actual position is compared to the target position. Data
acquisition is started if the actual position is larger or equal than the
target position. The positioner will always move in positive direction to
avoid hysteresis errors from the position encoder. Obviously, a single step
size of the positioner must be much smaller than the spacing between to
points of a grid to reach a good positioning accuracy.
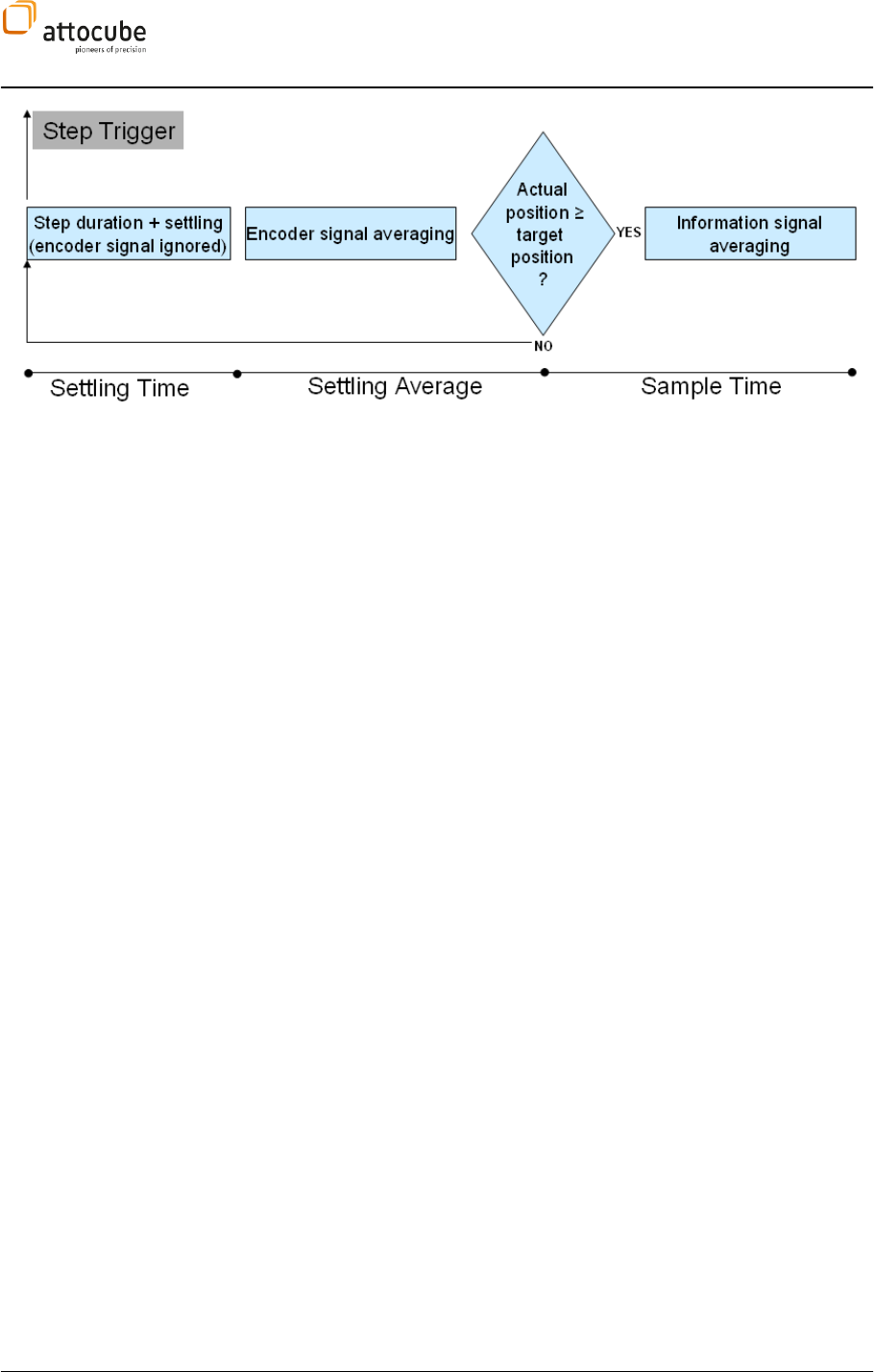
Page 119
© 2001-2012 attocube systems AG. Product and company names listed are trademarks or trade names of their
respective companies. Any rights not expressly granted herein are reserved. ATTENTION: Specifications and technical
data are subject to change without notice.
Figure 27:
The closed loop step scan algorithm.
The determination of the actual position itself is a two step process:
During the first part (called the Settling Time) the encoder signal is
ignored. This time must be chosen sufficiently large to provide enough
time for the positioner to finish the step and to stabilize on the new
position. A good value is 2/fSTEP (fSTEP being the driving frequency of the
coarse positioners). During the second part of the process, the encoder
signal is averaged to obtain a reasonably accurate position value. This
period is called the Settling Average.
Origin Approach
The approach of the scan origin uses a different algorithm to approach its
target point. The origin of the step scan will be approached in a way so
that the first point of the scan grid lies very close but to right and below
the origin position. The tolerances of the target position for the approach
can be defined in the Approach Range field of the GUI. An Origin of X with
an Appr. Range of dx will result in a target position of X-2dx with a
tolerance of +/- dx. If for example the scan origin is set to 500 µm and the
Appr. Range is set to 1 µm, the controller will drive the coarse positioner
until the actual position lies within a range of 497 µm to 499 µm. The same
procedure is repeated for the y movement.
Maximum Steps
A step scan can run over long time scales (hours or even days). If a coarse
positioner experiences problems of motion during the scan (i.e. because
of mechanical blockage) it is highly likely that the user will not be there to
immediately notice the problem and fix it. The positioner would go on
stepping on the same point until the user interferes. To avoid this
behavior, a maximum number of steps can be defined. If the next target
point cannot be reached within this maximum number of steps, the
controller will stop the positioning and go into an error mode. A warning
LED in the step scan widget will be turned ON. Figure 28 shows the
appearance of the step scan control widget after the occurrence of a Max.
Steps error. The origin of the error is immediately clear by comparing the
Avg. Steps with the Max. Steps value. After this error, the scan can be
resumed by clicking on the Start Scan button. The scan will be continued
where it has stopped. The error can also be detected by means of the
LabView remote control and action can be taken automatically.
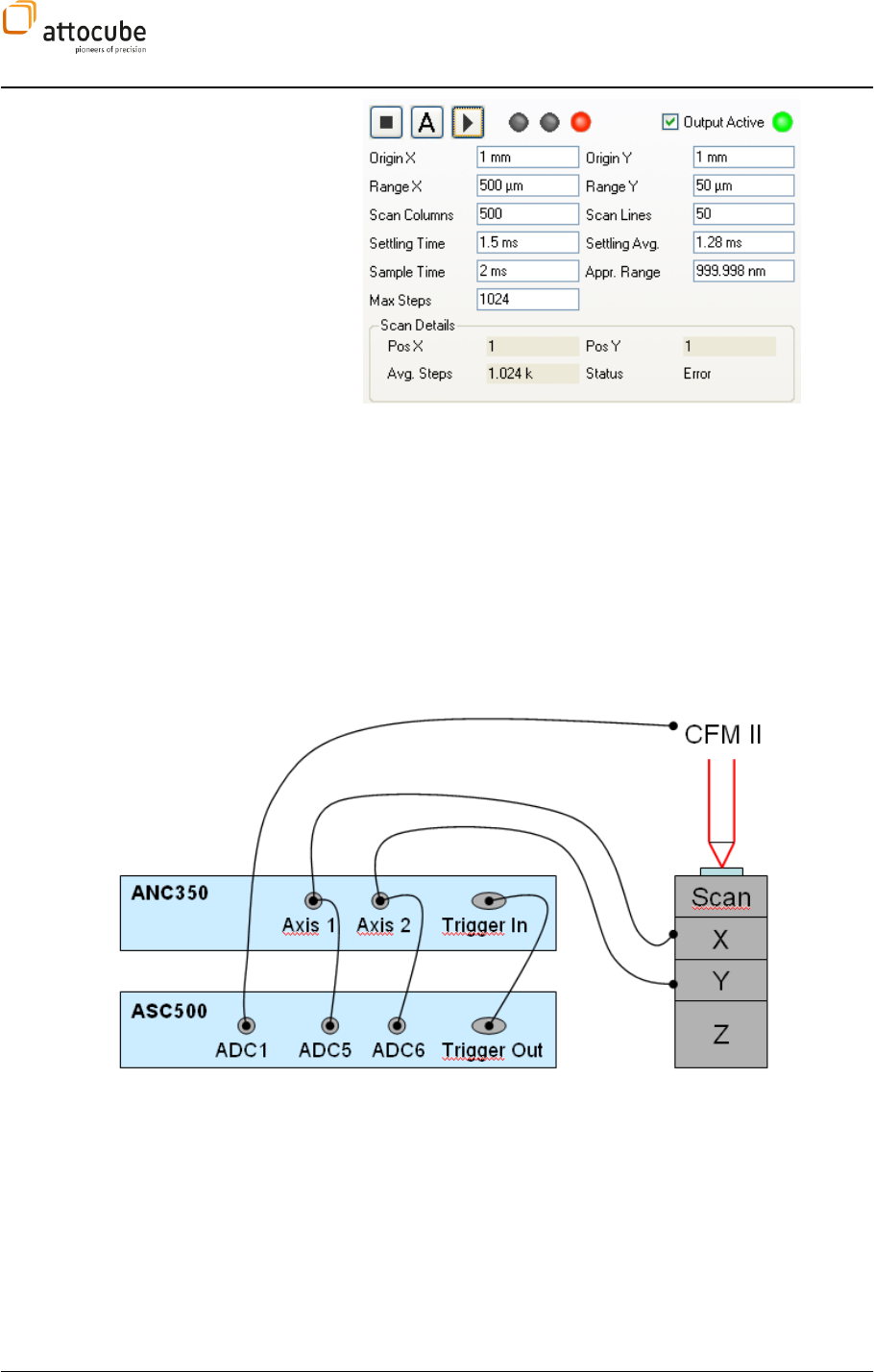
Page 120
Figure 28:
Status of step scan widget after a Maximum Steps error has
occurred.
VI.7.b. Connection
The positioners are connected to the ANC350 in a standard way. In
addition, the resistive signal is routed also to the ASC500 via customized
cables. These cables for room temperature operation are delivered with
the system. For special UHV or low temperature wiring, cables have to be
customized by the user. Details on the pin layout scheme of the wiring are
given in the ANC350 manual. The VSENS and GND pins of the positioner
cabling have to be routed through to the inputs of the ASC500.
Figure 29:
Schematics of a Closed Loop Step Scanning setup .The microscope part (attoCFM II)is only shown for
reference.
The sensor signal has to be fed into the ASC500 using fixed input
connectors:
X sensor signal ADC5
Y sensor signal ADC6
These two input connectors feature a high input resistance to eliminate
measurement errors when measuring high resistance loads.
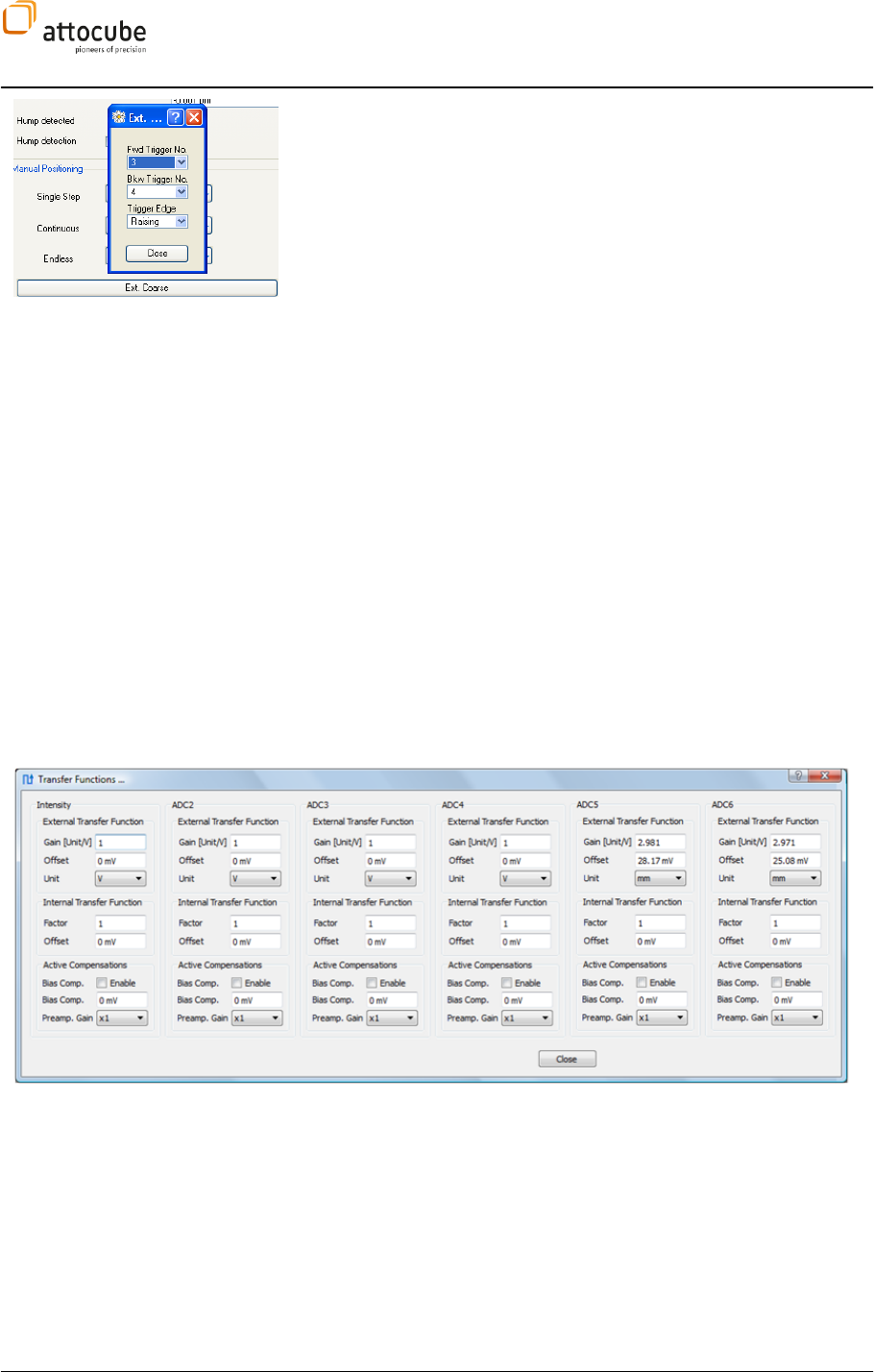
Page 121
© 2001-2012 attocube systems AG. Product and company names listed are trademarks or trade names of their
respective companies. Any rights not expressly granted herein are reserved. ATTENTION: Specifications and technical
data are subject to change without notice.
The trigger lines use a dedicated cable that is provided together with the
controller. In the ASC350 software, the trigger pins have to be set to the
following values:
Axis X (usually Axis 1):
o Forward trigger 3
o Backward trigger 4
Axis Y (usually Axis 2)
o Forward trigger 5
o Backward trigger 6
Within the ANC350 software, the trigger pin configuration can be found in
the tab of the respective axis under Ext. Coarse (see image to the left)
VI.7.c. Operation
Calibration
To translate the sensor input signal from volts to a position in mm, the
Transfer Function standard feature of the ASC500 is used (see section
V.2.b). The calibration can be done as follows:
1. Drive the positioner to 1 mm (using the ANC350), then to 3 mm
and calculate the difference in the sensor signal (in Volts). The
sensor signal can be monitored using the Line View in the ASC500
with either ADC5 or ADC6 as a signal.
2. Calculate the transfer gain in mm/V by dividing by 2 and taking
the inverse. Enter the transfer gain to the Gain edit box of the
External Transfer Function.
3. Use the mouse wheel to change the External Transfer Function
Offset until the reading in the line view (in mm) corresponds to
the reading on the ANC350 axis.
4. Repeat steps 1 to 3 for the second axis.
A typical example of the transfer values is shown in Figure 30.
Figure 30:
A typical calibration of the input connectors for resistive position sensors.
Step Scan control
The
graphical user interface. It is the second tab behind the standard scan
control. Figure 31 shows the control widget.
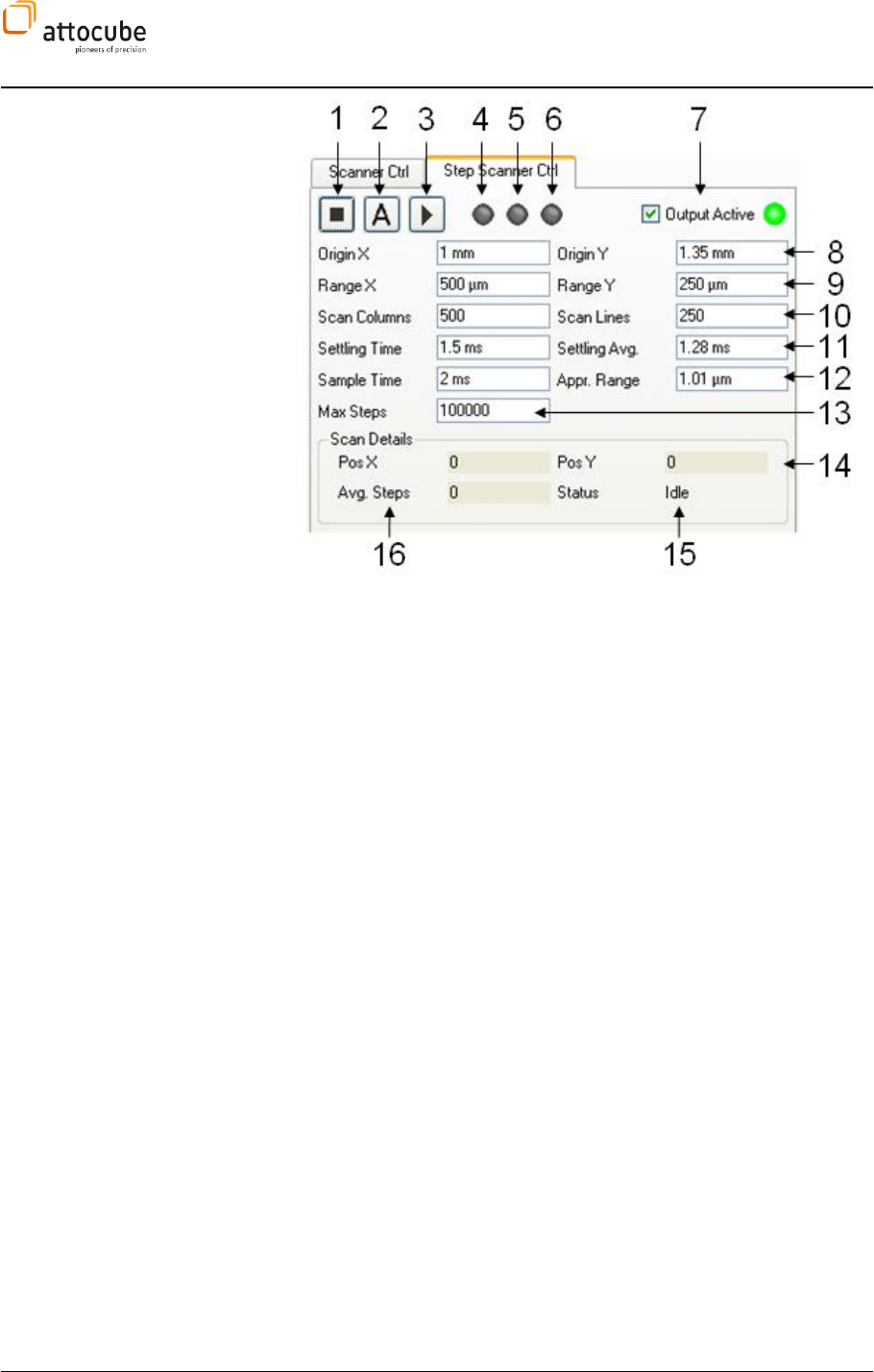
Page 122
Figure 31:
The Step Scan control widget.
1 Stop button: Stops the scan and finished data acquisition. The
positioners remain at their current position.
2 Approach button: Moves the positioners to the scan origin that is
defined in 8. The details of this movement are described on page 119.
3 Start Scan button: Starts scan and data acquisition. An approach to the
origin should have been done before starting the scan to make sure the
positioners are on the lower left of the scan field. After completion of the
scan, the positioners are driven back to the origin and the scan is stopped.
4 Scanner Running LED (green): Signals the undisturbed movement of
the step scanner.
5 Scanner Adjusting LED (green): Signals a scan movement that does not
belong to the data acquisition process.
6 Scanner Error LED (red): Signals a scan error that was caused by an
exceeding of Max Steps. If this LED is ON, the scan can be resumed by
pressing the Start Button.
7 Output Active button: Activated or deactivates all ASC500 outputs. It
can be used instead of its counterpart in the normal scan widget.
8 Origin X/Origin Y: Defines the origin (lower left) of the step scan field.
The user has to make sure that the origin lies within the movement
boundaries of the positioners.
9 Range X/Range Y: Defines the range of the step scan. The user has to
make sure that the range lies within the movement boundaries of the
positioners.
10 Scan Columns/Scan Lines: Defines the resolution of the scan and,
together with the Range, the spacing of the scan grid. The user has to
between two points. This can be reached by using a small amplitude for the
11 Settling Time: waiting period after the trigger of a coarse positioner
step. Details are shown in Figure 27.

Page 123
© 2001-2012 attocube systems AG. Product and company names listed are trademarks or trade names of their
respective companies. Any rights not expressly granted herein are reserved. ATTENTION: Specifications and technical
data are subject to change without notice.
11 Settling Average: averaging period for the encoder signal after a
coarse positioner step. Details are shown in Figure 27.
12 Sample Time: period for data acquisition. The signal will be averaged
during this period and written into the data channel after completion.
12 Approach Range: target range for the origin approach process. This is
explained in more detail on page 119.
13 Max. Steps: defines the maximum steps to be triggered between two
points of the scan grid. Details can be found on page 119. The minimum
value is 1024.
14 Actual scan position: this gives a permanent update of the actual scan
position in x and y.
15 Status: this gives a permanent update on the status of the scan in text
form.
16 Average Steps: this gives a permanent update on the number of steps
between two points of the scan grid. If this field shows 0 or 1 often, either
scan has to be increased for reasonable control accuracy.
Scan Speed
The scan speed of the step scan cannot be chosen directly, as it is a
function of various parameters. The main source of uncertainty is the
number of steps needed from one point of the scan grid to the next. If the
number of steps per unit length were known, the three parameters Settling
Time, Settling Average and Sample Time fully determine the scan speed.
With the settings shown in Figure 31 and a step excitation with an
amplitude = 20 V and a frequency = 2 kHz, a typical scan speed of 100 µm/s
can be reached at room temperature. The step size was small enough to
reach a high control accuracy with a grid point spacing of 1 µm.
Step Scan Data Display
The Step Scan data displays can be found on the upper right side of the
Daisy panel. It is shown in Figure 32. It consists of one frame view showing
the 2D data of the scan and one scan line view to the left showing the scan
line by line. The displays are very similar to the SCAN data displays with
the only difference that there is no backward scan direction (and thus also
no scan direction filter). The Display Wizard can be used to define any
number of additional displays for Step Scan data.
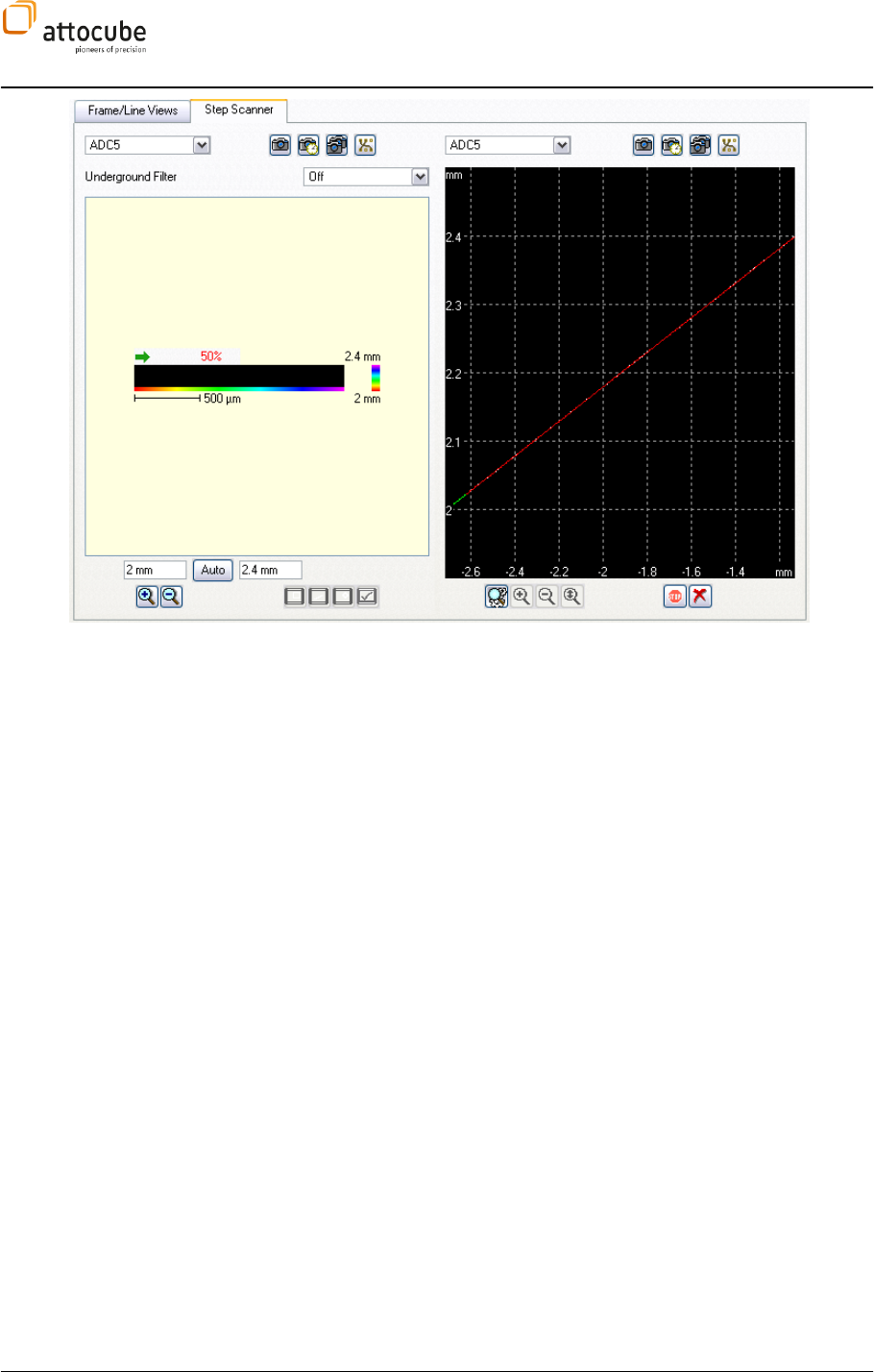
Page 124
Figure 32:
The Step Scan data display.

Page 125
© 2001-2012 attocube systems AG. Product and company names listed are trademarks or trade names of their
respective companies. Any rights not expressly granted herein are reserved. ATTENTION: Specifications and technical
data are subject to change without notice.
VII. Firmware Upgrade
ASC500. As there is no permanent firmware inside the ASC500, all one has
to do is to boot the controller with the new software. This uploads the new
hardware program into the controller.
So, all that needs to be done is to install the software as written in section
V.1.
Page 126
VIII. Preventive Maintenance
Warning. The equipment contains no user serviceable parts. There is a risk
of severe electrical shock if the equipment is operated with the covers
removed. Only personnel authorized by attocube systems and trained in
the maintenance of this equipment should remove its covers or attempt any
repairs or adjustments. Maintenance is limited to safety testing and
cleaning as described in the following sections.
VIII.1. Safety Testing
Safety testing in accordance with local regulations, should be performed on
a regular basis, (typically annually for an instrument in daily use).
Caution. The instrument contains a power supply filter. Insulation testing
of the power supply connector should be performed using a DC voltage.
VIII.2. Fuses
Two T 4 A/250 V fuses are located on the back panel.
Note. When replacing fuses:
Switch off the power and disconnect the power cord before removing the
fuse cover.
Always replace broken fuses with a fuse of the same rating and type.
VIII.3. Cleaning
Warnings:
Disconnect the power supply before cleaning the unit.
Never allow water to get inside the case.
Do not saturate the unit.
Do not use any type of abrasive pad, scouring powder, or solvent, e.g.
alcohol or benzene.
The fascia may be cleaned with a soft cloth, lightly dampened with water or
a mild detergent.

Page 127
© 2001-2012 attocube systems AG. Product and company names listed are trademarks or trade names of their
respective companies. Any rights not expressly granted herein are reserved. ATTENTION: Specifications and technical
data are subject to change without notice.
Note. Any time you call for technical support, the software version and the
serial number are essential to trouble-shoot a problem. The serial number
is shown on the backside of the ASC400. the software version can be
-

Page 128
attocube systems AG
Königinstrasse 11a (Rgb)
D-80539 München
Germany
Phone +49 89 2877 80915
Fax +49 89 2877 80919
