Guide To BSW Distribution AUTOSAR EXP BSWDistribution
AUTOSAR_EXP_BSWDistributionGuide
AUTOSAR_EXP_BSWDistributionGuide
AUTOSAR_EXP_BSWDistributionGuide
User Manual:
Open the PDF directly: View PDF ![]() .
.
Page Count: 46
- 1 Introduction
- 2 BSW Distribution in Multi-Core Systems
- 3 BSW Distribution in Safety Systems
- 3.1 General overview on safety
- 3.2 Safety solutions in AUTOSAR
- 3.2.1 Some modules are always ASIL
- 3.2.2 Overall configuration
- 3.2.3 Crossing partition boundaries
- 3.2.4 Access to peripherals / hardware
- 3.2.5 Startup, Shutdown and Sleep/Wakeup
- 3.2.6 Error handling
- 3.2.7 Timing protection
- 3.2.8 Combining Safety and Multi-Core
- 3.2.9 Performance Considerations
- 3.2.10 Constraints
- 4 Outlook on Upcoming AUTOSAR Versions
- 5 Glossary
- 6 References
Guide to BSW Distribution
AUTOSAR Release 4.2.1
1 of 46 Document ID 631: AUTOSAR_EXP_BSWDistributionGuide.doc
- AUTOSAR Confidential -
Document Title
Guide to BSW Distribution
Document Owner
AUTOSAR
Document Responsibility
AUTOSAR
Document Identification No
631
Document Classification
Auxiliary
Document Status
Final
Part of AUTOSAR Release
4.2.1
Document Change History
Release
Changed by
Change Description
4.2.1
AUTOSAR Release
Management
Incorporation of concept “Mechanisms and
constraints to protect ASIL BSW against QM
BSW”
Minor clarifications
4.1.3
AUTOSAR Release
Management
Clarified terms
4.1.1
AUTOSAR
Administration
Initial release

Guide to BSW Distribution
AUTOSAR Release 4.2.1
2 of 46 Document ID 631: AUTOSAR_EXP_BSWDistributionGuide.doc
- AUTOSAR Confidential -
Disclaimer
This specification and the material contained in it, as released by AUTOSAR, is for
the purpose of information only. AUTOSAR and the companies that have contributed
to it shall not be liable for any use of the specification.
The material contained in this specification is protected by copyright and other types
of Intellectual Property Rights. The commercial exploitation of the material contained
in this specification requires a license to such Intellectual Property Rights.
This specification may be utilized or reproduced without any modification, in any form
or by any means, for informational purposes only.
For any other purpose, no part of the specification may be utilized or reproduced, in
any form or by any means, without permission in writing from the publisher.
The AUTOSAR specifications have been developed for automotive applications only.
They have neither been developed, nor tested for non-automotive applications.
The word AUTOSAR and the AUTOSAR logo are registered trademarks.
Advice for users
AUTOSAR specifications may contain exemplary items (exemplary reference
models, "use cases", and/or references to exemplary technical solutions, devices,
processes or software).
Any such exemplary items are contained in the specifications for illustration purposes
only, and they themselves are not part of the AUTOSAR Standard. Neither their
presence in such specifications, nor any later documentation of AUTOSAR
conformance of products actually implementing such exemplary items, imply that
intellectual property rights covering such exemplary items are licensed under the
same rules as applicable to the AUTOSAR Standard.

Guide to BSW Distribution
AUTOSAR Release 4.2.1
3 of 46 Document ID 631: AUTOSAR_EXP_BSWDistributionGuide.doc
- AUTOSAR Confidential -
Table of Contents
1 Introduction .......................................................................................................... 5
2 BSW Distribution in Multi-Core Systems ............................................................. 6
2.1 Overview ...................................................................................................... 6
2.1.1 Supported Scenarios ............................................................................. 6
2.1.2 Performance Use Cases and Hardware Assigned to Different Cores ... 6
2.1.3 Technical Overview ............................................................................... 7
2.1.3.1 BSW Functional Clusters ................................................................... 7
2.1.3.2 Inter-BSW-partition communication ................................................... 9
2.1.3.3 Determining the Partition for Service Execution ................................ 9
2.1.3.4 BSW partitions ................................................................................. 10
2.2 Parallel Execution of BSW modules ........................................................... 10
2.2.1 Core-Dependent Branching................................................................. 10
2.2.2 Master/Satellite-approach ................................................................... 10
2.2.3 Using the BSW Scheduler for Inter-Partition-Communication ............. 11
2.2.4 Using Shared Buffers (in systems without memory protection) ........... 12
2.2.5 Accessing Hardware/Drivers ............................................................... 14
2.2.6 Concurrency safe implementation of modules .................................... 15
2.3 SchM Interfaces for Parallel BSW execution .............................................. 15
2.4 Configuration of Basic Software in Partitioned Systems ............................. 16
2.4.1 Task Mapping ...................................................................................... 16
2.4.2 General Configuration of Master and Satellites ................................... 21
2.4.3 Configuring the BswM (per Partition) .................................................. 21
2.4.4 Configuring the EcuM (per Core) ........................................................ 22
3 BSW Distribution in Safety Systems .................................................................. 23
3.1 General overview on safety ........................................................................ 23
3.2 Safety solutions in AUTOSAR .................................................................... 23
3.2.1 Some modules are always ASIL ......................................................... 25
3.2.2 Overall configuration ........................................................................... 26
3.2.3 Crossing partition boundaries.............................................................. 27
3.2.3.1 QM modules calls ASIL ................................................................... 28
3.2.3.2 ASIL calls QM partition .................................................................... 31
3.2.3.3 ASIL calls ASIL ................................................................................ 34
3.2.3.4 QM calls QM .................................................................................... 34
3.2.3.5 Parameter passing .......................................................................... 34
3.2.4 Access to peripherals / hardware ........................................................ 36
3.2.5 Startup, Shutdown and Sleep/Wakeup ............................................... 37
3.2.5.1 Startup ............................................................................................. 37
3.2.5.2 Shutdown......................................................................................... 38
3.2.5.3 Sleep / Wakeup ............................................................................... 38
3.2.6 Error handling ...................................................................................... 38
3.2.7 Timing protection ................................................................................. 39
3.2.8 Combining Safety and Multi-Core ....................................................... 40
3.2.9 Performance Considerations ............................................................... 40
3.2.10 Constraints .......................................................................................... 40
4 Outlook on Upcoming AUTOSAR Versions ....................................................... 42
4.1 Known limitations ....................................................................................... 42
4.2 Inter BSW module calls in distributed BSW ................................................ 42
4.3 Standardized BSW functional clusters ....................................................... 42

Guide to BSW Distribution
AUTOSAR Release 4.2.1
4 of 46 Document ID 631: AUTOSAR_EXP_BSWDistributionGuide.doc
- AUTOSAR Confidential -
5 Glossary ............................................................................................................ 44
5.1 Acronyms and abbreviations ...................................................................... 44
5.2 Technical Terms ......................................................................................... 44
6 References ........................................................................................................ 46

Guide to BSW Distribution
AUTOSAR Release 4.2.1
5 of 46 Document ID 631: AUTOSAR_EXP_BSWDistributionGuide.doc
- AUTOSAR Confidential -
1 Introduction
This document is a general introduction to the distribution of BSW in AUTOSAR
systems. It consists of two parts, one focusing on the distribution of BSW in case of
multi-core and the other focusing on distribution in case of safety.
Chapter 2 guides to the development and configuration of AUTOSAR-compliant
software for multi-core systems. As of release 4.1, it addresses the allocation of
AUTOSAR BSW modules [1] to partitions on multi-core systems and their interaction
only. The allocation of BSW modules to different BSW partitions allows for both
enhanced functional safety and increased performance.
In chapter 3 the BSW distribution in safety cases is described. As of release 4.2
AUTOSAR allows to map BSW modules into different partitions and to protect those
partitions against each other.
Chapter 4 gives an outlook of possible future extensions in the area of BSW
distribution.
A glossary of technical terms and a list of references to external information are
provided in chapters 5 and 6.

Guide to BSW Distribution
AUTOSAR Release 4.2.1
6 of 46 Document ID 631: AUTOSAR_EXP_BSWDistributionGuide.doc
- AUTOSAR Confidential -
2 BSW Distribution in Multi-Core Systems
2.1 Overview
This chapter contains a description of the supported scenarios for distributed
execution of BSW modules on several partitions and cores and a number of use
cases in which a distribution of the BSW can enhance performance. It also
introduces basic synchronization concepts applicable to distributed BSW execution,
and an introduction to inter-partition communication.
2.1.1 Supported Scenarios
It is possible to assign functional clusters of BSW modules (“"BSW Functional
cluster"), which are used by applications to access buses, non-volatile memory, I/O
channels, and watchdogs, to different BSW partitions for safety or performance
reasons. The clustering of BSW modules is currently not standardized. Parallel
usage of the same type of functional clusters in different partitions ("duplication") is
not generally supported, but it is possible by using a master satellite approach.
Functional clusters to partitions may be assigned such that
a BSW functional cluster is only available in one partition
a BSW functional cluster is available on all partitions with all interfaces
a BSW functional cluster is distributed over multiple partitions, possibly with
partition specific subsets of functionality, to allow a high grade of concurrency.
In either of these scenarios, the following restrictions apply:
There is currently at most one QM BSW partition per core.
With the aforementioned restrictions, AUTOSAR supports the scenarios listed above.
In doing so, it addresses the following essential features:
All code for communication between BSW partitions can be generated for
automatic adaptation to different system configurations. The cross partition
communication mechanism can be generated with focus on efficiency, or, in
future releases to help to provide freedom of interference.
If access to system services (which are not part of a BSW functional cluster) is
required, efficient access from each BSW partition that needs the system
service is supported.
Efficient access to HW abstraction and drivers is supported in each BSW
partition, if required.
In all scenarios, the communication between different module entities remains
unchanged (in comparison to BSW running in a single partition).
2.1.2 Performance Use Cases and Hardware Assigned to Different Cores
The following use cases are examples for how system performance can be improved
by allocation of the BSW to multiple partitions and cores, and how systems where the
access to the peripheral hardware is assigned to multiple cores benefit from the
allocation of the BSW to multiple partitions and cores.
To increase system performance and to reduce resource consumption in
systems that are distributed over several cores, it may be necessary to
allocate functional clusters of BSW modules to different cores, e.g.

Guide to BSW Distribution
AUTOSAR Release 4.2.1
7 of 46 Document ID 631: AUTOSAR_EXP_BSWDistributionGuide.doc
- AUTOSAR Confidential -
communication modules on BSW partition "A" and I/O modules on BSW
partition "B", depending on hardware architecture, load balancing and on
distribution of SW-Cs. In particular, if HW resources are accessed exclusively
by one core in a Multi-Core system, the performance is increased by locating
the corresponding BSW users, services and drivers on that core.
Signal gateway functionality is implemented by allocating a FlexRay cluster on
one core and a CAN cluster on a different core. The two COM modules need
to be synchronized in this case, and there must be some direct cross core
communication between the two COM instances. One of the COM modules
might be the master COM that coordinates the satellite COM on the other
core.
Two communication clusters are located on different cores, one accessing a
CAN bus and the other one controlling a FlexRay bus. In case the application
SW located above one of the communication clusters on the same core needs
to send on both buses, the core local COM modules can directly communicate
with their counterparts on the other core, to efficiently send the signal over
either CAN or FlexRay. For received messages, COM has no information
about receivers above the RTE. Therefore, COM has to forward the signals on
the receiving side to the RTE, and the RTE is responsible for communication.
2.1.3 Technical Overview
Below is a short summary of the technical solution as described in the following
sections:
Define clusters of BSW modules that contain preferably all three layers of a
stack, or, if needed, a subset of modules of a stack (e.g. communication,
memory, I/O stack).
Module entities can be split into a master and satellites, which are assigned to
different BSW partitions. Masters and satellites can use non-standardized
AUTOSAR interfaces, for internal cross partition communication. The
master/satellite approach is mainly used by distributed system service
modules and for communication between BSW clusters of the same type.
The proposed solution meets the demands on performance and safety while
minimizing the impact on already standardized BSW module interfaces
(RS_BRF_00206, RS_BRF_01160). Most changes are hidden within modules (e.g.
by providing master/satellite implementations) without affecting other modules.
Interfaces between different modules do not change.
2.1.3.1 BSW Functional Clusters
BSW functional clusters are groups of functionally coherent BSW modules. Each
functional cluster includes a set of BSW modules. It is possible to have several BSW
functional clusters of the same type (e.g. several I/O clusters in different BSW
partitions), each using a different set of modules (e.g. IOHWA + ADC in one partition
and IOHWA + ADC + DIO in the second partition).
The following types of clusters might be standardized in a later release:
Communication cluster
Memory cluster
I/O cluster

Guide to BSW Distribution
AUTOSAR Release 4.2.1
8 of 46 Document ID 631: AUTOSAR_EXP_BSWDistributionGuide.doc
- AUTOSAR Confidential -
Watchdog cluster
The allocation of BSW functional clusters to BSW partitions is determined by the
usage of BSW modules by the application software. Functional clusters can be
allocated to different BSW partitions, and functional clusters of the same type can be
available in several BSW partitions. Different functional clusters can be allocated to
the same or to different BSW partitions.
The same functional cluster can only exist at most once per BSW partition.
BSW functional clusters are used by applications or other BSW modules to access
buses, memory, I/O channels and watchdogs, and they are usually required in one or
few BSW partitions only.
The introduction of BSW functional clusters does not change the existing AUTOSAR
R4.0 interfaces between the BSW and the RTE, which are mainly used to implement
AUTOSAR services, i.e. to communicate with the application layer. It may however
change the availability of standardized AUTOSAR interfaces on different partitions.
The internal structure of a BSW functional cluster, including its internal
communication between BSW modules, and the communication with system services
that the BSW functional cluster uses is not necessarily affected by the parallelization
of the BSW, and it does not need to change. It may however be adapted, for example
in order to fulfill special demands on concurrency like the support of different entities
of the same module running in different partitions.
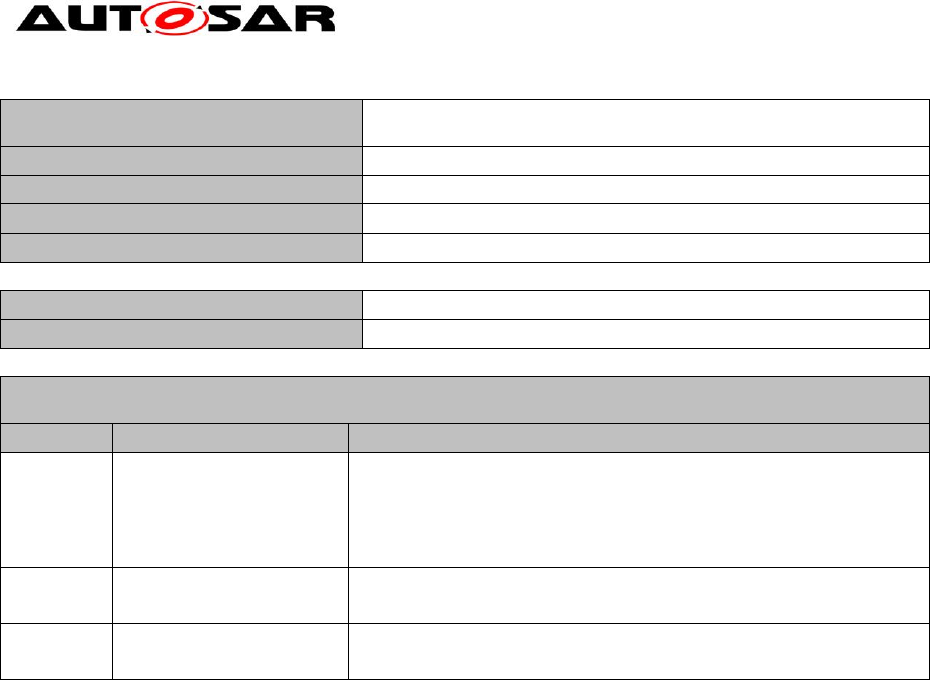
The communication and synchronization between modules in BSW functional
clusters of the same type (e.g. in two communication clusters to support a gateway
functionality) is not standardized. It will be implemented by communication between
entities (e.g. by a master and satellites) of specific modules, which can use non-
standardized interfaces for communication across BSW partition boundaries, see
Figure 1.
Guide to BSW Distribution
AUTOSAR Release 4.2.1
9 of 46 Document ID 631: AUTOSAR_EXP_BSWDistributionGuide.doc
- AUTOSAR Confidential -
Figure 1: Functional clusters of the same type
Modules that do not belong to BSW functional clusters (some MCAL modules,
system services) will always be accessed within the same BSW partition where the
BSW functional cluster is located. As the interfaces do not change, these modules
must be locally available in each BSW partition, if needed.
2.1.3.2 Inter-BSW-partition communication
Function calls to tasks that are supposed to be executed in a different BSW
partition/on a different core cannot be implemented as simple C calls to this function,
because these calls would be handled on the local BSW partition.
The BSW Scheduler (SchM) therefore provides functions to invoke masters or
satellites of the same module on different BSW partitions using either client-server or
sender-receiver communication. Details on this API of the SchM are explained in
Section 2.2.3.
2.1.3.3 Determining the Partition for Service Execution
The actual BSW partition for the handling of an RTE event is determined by its task
mapping. Basically, if an event is mapped to a task, it is executed within the partition
assigned to this task. If an event is not mapped to a task, it is executed within the
same partition as the task that caused the event. Details on the task mapping are
described in Section 2.4.1 of this document.
Calls from BSW entities to other BSW entities are not mapped to a partition. They are
executed wherever they are called. Therefore, several calls to a BSW function may
be processed in parallel on different partitions and cores. Consequently such
functions must be designed and implemented carefully w.r.t. parallel execution in
different partitions; if necessary, they shall be reentrant or concurrency safe.

Guide to BSW Distribution
AUTOSAR Release 4.2.1
10 of 46 Document ID 631: AUTOSAR_EXP_BSWDistributionGuide.doc
- AUTOSAR Confidential -
2.1.3.4 BSW partitions
Only partitions that have the configuration parameter
EcucPartitionBswModuleExecution set to true can execute BSW modules. Such
partitions are called BSW partitions. BSW partitions may additionally contain
application software components above the RTE.
2.2 Parallel Execution of BSW modules
This is the chapter for developers of BSW modules.
2.2.1 Core-Dependent Branching
Because entities of the same module share the same implementation, even if they
are running on different cores, different behavior cannot be realized by different code.
Instead, the specific behavior shall be determined by runtime information. It is
possible for example to use the core id for this, i.e. branch the control flow depending
on the return value of the OS APIs GetCoreID(), or also GetApplicationID().
2.2.2 Master/Satellite-approach
Modules that need to be accessed in different BSW partitions can be implemented
using the master/satellite pattern.
The distribution of work between master and satellite is implementation specific. One
extreme is that the satellite only provides the interfaces to the other modules in the
same BSW partition, and that it routes all requests to the master and answers back
to the other modules. At the other extreme, the satellite can provide the full
functionality locally (e.g. local mode management for a complete application which
runs in the same BSW partition) and only synchronizes its internal states with the
master, if necessary. There might even be several masters for different functionality,
e.g. two PduR masters for a distributed PduR gateway.
The master coordinates requests from the satellites and can filter or monitor
incoming satellite requests. The master and one or several satellites are treated like
being one module entity in some respect:
Master and satellites are always vendor specific solutions, coming from the same
vendor.
The interfaces of master and satellite to other module entities in general are the
same as specified in AUTOSAR R4.0 for traditional modules. Master and satellite
should provide the same APIs. This means that when migrating to partitioned
systems, existing module entities can be replaced by a master and one or several
satellites, in most cases without changing other modules. Exceptions might be
module internal adaptations to additional delays which are caused by inter-
partition communication.
Master and satellites have the same entry points in each BSW partition (i.e. they
start executing the same functions from shared memory) and internally branch
(e.g. by using the "GetApplicationID ()" API) to master or satellite specific code
according to the OS-Application (partition) they run in. Depending on the build
strategy, other implementations might be possible in multi-Core systems if each
core can execute its own code. Also, satellites might share the same code without
further branching.

Guide to BSW Distribution
AUTOSAR Release 4.2.1
11 of 46 Document ID 631: AUTOSAR_EXP_BSWDistributionGuide.doc
- AUTOSAR Confidential -
The communication between master and satellites is not standardized. It is
considered to be module-internal and is not visible to other modules.
The communication between master and satellite can be initiated in either
direction (i.e. by both the master and the satellites), as well as from one satellite
to another one.
All interfaces between masters and satellites are only allowed to be connected
within the same distributed module.
The communication between master and satellites can be implemented within
one BswModuleEntity, or between different BswModuleEntities that belong to the
same BSW module.
Depending on the application, usage of master/satellite may be appropriate or
not. For example, it may be more efficient to use separate, partition specific
watchdog clusters, which work independently from each other, rather than using
the Watchdog Manager in a master/satellite approach.
The master is the part of a distributed BSW module that coordinates requests by
satellites and can filter or monitor incoming satellite requests. This may result in
additional fault detection or fault mitigation mechanisms. Generally, all errors
caused by distributed execution of a module should be handled module internally.
The master/satellite implementation is the standard solution for system services in
partitioned systems.
Specific drivers also might have to provide local satellites, if the hardware can only
be accessed from a different core. The standard solution, if possible, is to execute
the same multi-core reentrant function in each partition and to separate the data to
work on into disjoint sets, one for each partition. For example, the COM module may
work on all IPDUs assigned to the bus that the BSW functional cluster of this module
belongs to. Concurrent access to the same hardware or shared data needs to be
protected, e.g. by ExclusiveAreas in this case.
In specific cases, modules within BSW functional clusters also need to be
implemented as master/satellite, if the BSW functional clusters are duplicated and
the entities in different BSW partitions need to be synchronized or need to exchange
data. This might apply to the Watchdog Manager, the NVRAM manager, and to
network and state managers in duplicated communication clusters. COM modules
also might need to have a master and a satellite to implement cross partition gateway
functionality.
2.2.3 Using the BSW Scheduler for Inter-Partition-Communication
The BSW Scheduler (SchM) provides a number of functions to support
communication between BSW module entities that are executed in parallel. More
precisely, it provides the following methods to handle synchronous and
asynchronous calls (including callbacks) as well as sender-receiver communication.
The functionality is generally similar to that of function calls between SWCs and the
BSW. However, because the RTE may not be available at certain points of time
(especially during startup of an ECU), this functionality must be available within the
BSW itself.

Guide to BSW Distribution
AUTOSAR Release 4.2.1
12 of 46 Document ID 631: AUTOSAR_EXP_BSWDistributionGuide.doc
- AUTOSAR Confidential -
Std_ReturnType SchM_Call_<bsnp>[_<vi>_<ai>]_<name>(
[OUT <typeOfReturnValue> returnValue]
[IN|IN/OUT\|OUT]<data_1> ... [IN|IN/OUT|OUT] <data_n>)
or
Std_ReturnType SchM_Call_<bsnp>[_<vi>_<ai>]_<name>(
[IN|IN/OUT\|OUT]<data_1> ... [IN|IN/OUT|OUT] <data_n>)
Invoke a client-server-operation, possibly crossing partition boundaries. The
actual parameters data_1 ... data_n are information that is passed [IN]
and/or re-passed [IN/OUT | OUT] to/from the called service.
The presence of the parameter returnValue and its type
<typeOfReturnValue> depend on the called service. For synchronous
calls, the parameter is present and <typeOfReturnValue> is the type
returned by the called service. For asynchronous client-server-operations and
operations with return type void, the parameter is omitted.
Std_ReturnType SchM_Result_<bsnp>[_<vi>_<ai>]_<name>(
[IN|IN/OUT|OUT]<data_1> ... [IN|IN/OUT|OUT] <data_n>)
Callback from an asynchronous client-server-operation, possibly crossing
partition boundaries.
The receiver of a callback is determined by the
AsynchronousServerCallResultPoint of this callback. The
AsynchronousServerCallResultPoint refers to the originating
AsynchronousServerCallPoint, which in turn “knows” the calling module entity.
Std_ReturnType SchM_Send_<bsnp>[_<vi>_<ai>]_<name>(IN
<data>)
Write data to a sender-receiver link between BSW modules, possibly crossing
partition boundaries.
Std_ReturnType SchM_Receive_<bsnp>[_<vi>_<ai>]_<name>(OUT
<data>)
Read data from a sender-receiver link between BSW modules, possibly
crossing partition boundaries.
2.2.4 Using Shared Buffers (in systems without memory protection)
In systems without memory protection between the BSW partitions, system services
and all BswCalledEntities can be called directly in every partition, including the
complete call tree. This requires a reentrant, concurrency safe implementation.
The services and other called entities might work on module internal data, which is
shared between different entities of the same module. All access to such data must
be protected by ExclusiveAreas. Appropriateness of concrete protection mechanisms
depends on the possible kinds of access. For example, concurrent writing generally
Guide to BSW Distribution
AUTOSAR Release 4.2.1
13 of 46 Document ID 631: AUTOSAR_EXP_BSWDistributionGuide.doc
- AUTOSAR Confidential -
needs to be prohibited, whereas concurrent reading may be acceptable, as long as
only one partition writes at the same time.
BswSchedulableEntities are located on one core only and process the data
periodically or event driven.
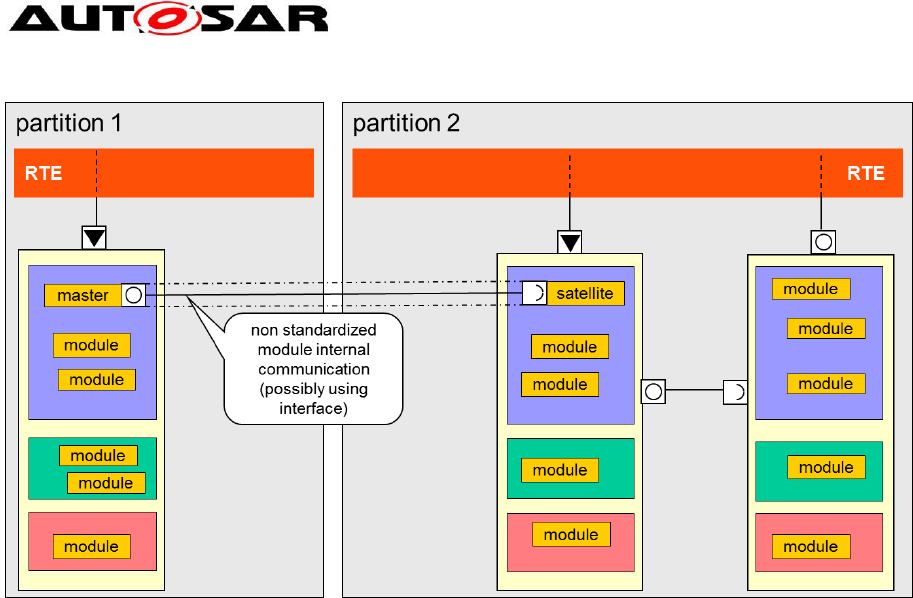
Figure 2: Invocation of same service on different cores
Figure 2 shows the example of a service "X", where the same API and the same
code is called directly by the RTE on different cores. This is the default, if the
services (respectively the OperationInvokedEvents) are not mapped to a task.
The code must be reentrant and concurrency safe, which means that all access to
data must be protected against concurrent access by the same or by a different entity
of the same module.
In this example, the same service "X" (BswCalledEntity) writes into a module internal
data buffer accessible from core 0 and from core 1. A "main function"
(BswSchedulableEntity), which is mapped to a task, reads the data from the buffer
for further processing. In order to prevent read/write-conflicts, this “main function”
must be protected from reading the buffer while it is written.
This can be considered a special case of the generic master/satellite approach for
systems without memory protection between the BSW partitions.
The advantage of this approach is that the original, unchanged modules can be used,
as long as they are implemented concurrency safe, which is usually the case for
single core already, if different entities of the same module work on the same data,
as shown in the example for core 0. Compared to the AUTOSAR R4.0 solution,
where all service calls have to be routed to the master core, the performance can be
improved considerably without much effort (assuming there is no need to do cross-
core communication later).
The following must be considered for a concurrency safe, reentrant implementation:
Access to all shared resources, e.g. buffers, is protected by ExclusiveAreas.
Guide to BSW Distribution
AUTOSAR Release 4.2.1
14 of 46 Document ID 631: AUTOSAR_EXP_BSWDistributionGuide.doc
- AUTOSAR Confidential -
Call trees can be made multi-core safe, if either called entities are safe, or calls
are protected by ExclusiveAreas (if lock times stay within a specified limit).
BswCalledEntities that are available to CDDs can also be called directly by the CDD.
The same rules apply as in R4.0.
The SchM must support cross core ExclusiveAreas, implemented by protected
Spinlocks. A protected spinlock is an exclusive area that has "OS_SPINLOCK" as its
value of "RteExclusiveAreaImplMechanism". This kind of exclusive areas is available
for controlled access by BSW modules only. Protected spinlocks are handled by the
Basic Software Scheduler.
2.2.5 Accessing Hardware/Drivers
BswModuleEntities of the MCAL (drivers) are accessed within the BSW partition
where the caller is located.
If the same driver is required in different BSW partitions, different types of
implementations are possible:
The same reentrant code can be executed in each BSW partition. The driver can
be accessed with the same API in each BSW partition. The code does not need to
be partition-aware. This is the default solution, which is safe as long as the
hardware objects are exclusively assigned to a single partition.
The driver is of master/satellite type with internal branching, depending on the
BSW partition it is running in. The masters may call other entities in the same
BSW partition and access the hardware. The satellites may forward the request to
the master in a different BSW partition without accessing any hardware directly.
partition 2partition 1
RTE
module
module
module
module
module
module
module
RTE
module
module
module A
CDD
shared hardware
protection module A
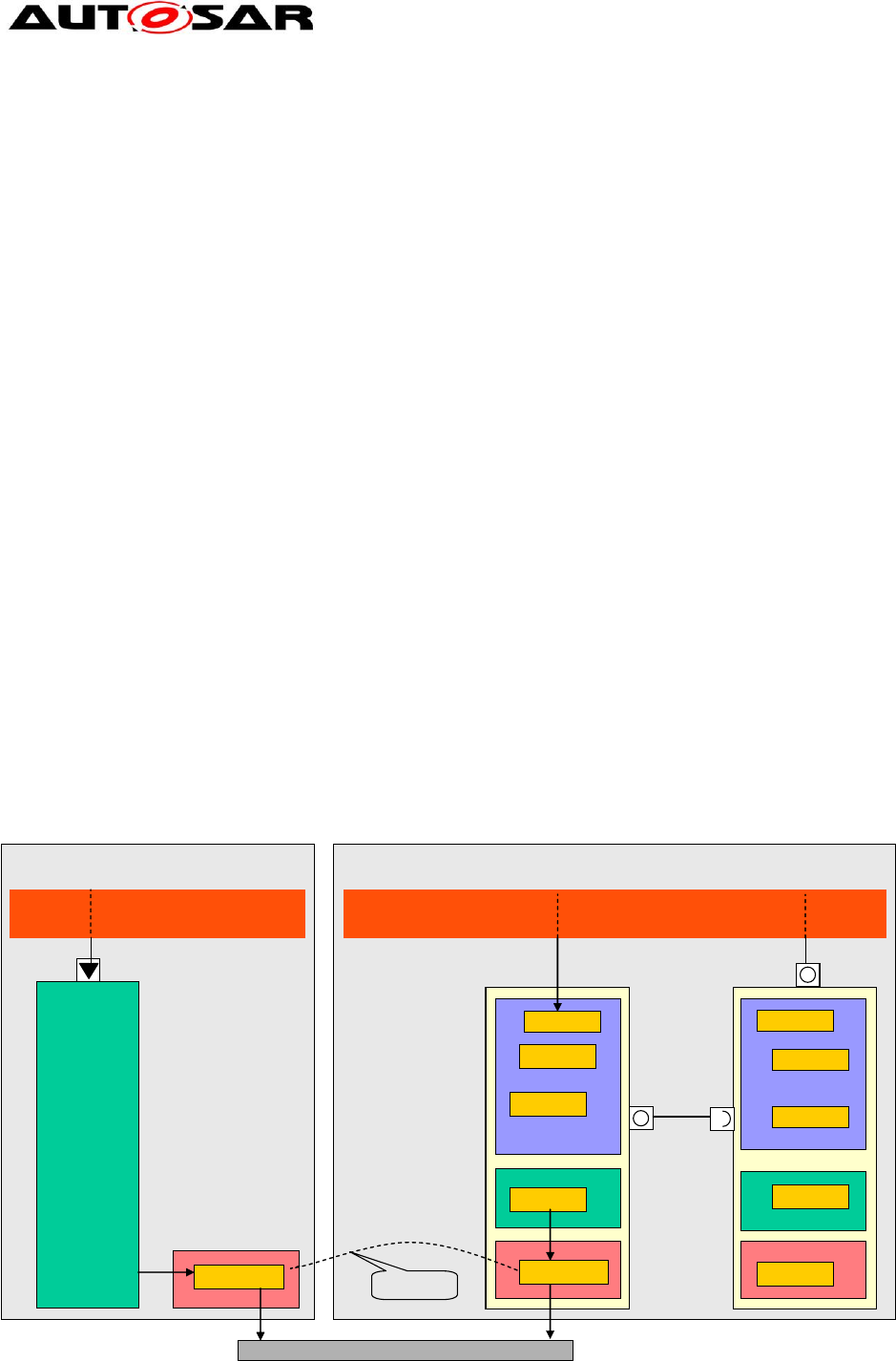
Figure 3: Protected Access to Shared Hardware

Guide to BSW Distribution
AUTOSAR Release 4.2.1
15 of 46 Document ID 631: AUTOSAR_EXP_BSWDistributionGuide.doc
- AUTOSAR Confidential -
In general, the same hardware should only be accessed from one BSW partition.
However, if concurrent access to the same hardware from different partitions is
unavoidable, this needs to be protected within the MCAL module as shown in Figure
3, e.g. by using ExclusiveAreas. This is particularly important if drivers on different
cores access the same hardware.
2.2.6 Concurrency safe implementation of modules
Concurrency safety of BSW modules respectively the functions implemented by
these modules may be achieved by different mechanisms.
Generally, the following levels of reentrancy can be distinguished according to
(TPS_BSWMDT_04103). The concrete level of a BswModuleEntity is defined in the
optional attribute “reentrancyLevel”.
Multi-core reentrant: Unlimited concurrent execution of an interface is
possible, including preemption and parallel execution on multi-core systems.
This level can be either achieved by mutual exclusion when entering critical
regions, or by the absence of such regions, for example if there are no shared
resources (including hardware and memory).
Single-core reentrant: Pseudo-concurrent execution (i.e. preemption) of an
interface is possible on single core systems. This is the highest level of
reentrancy defined by AUTOSAR 4.0.3. Because it does not explicitly cover
multi-core systems, “concurrency safe” has been introduced additionally. This
level can generally be ensured by the same mechanisms as “concurrency
safe”, but they must be ensured to work across core boundaries.
Non-reentrant: Concurrent execution of this interface is not possible.
If a module that is not concurrency safe is invoked in different partitions, there is no
warranty that the module will uphold its desired behavior. In this case, correct
behavior shall be ensured by the usage of the module, for example if the caller(s)
prevent parallel execution by using exclusive areas.
2.3 SchM Interfaces for Parallel BSW execution
This chapter describes the extensions to the SchM required by the concept
“Enhanced BSW allocation”.
The Basic Software Scheduler (SchM) is responsible for handling the inter-partition
communication between BSW modules. This is conceptually similar to the handling
of inter-partition communication between SW-Cs by the RTE. Because the BSW
modules are arranged below the RTE in the AUTOSAR architecture however, the
communication must be available before the RTE is available. Therefore and for
reasons of performance, BSW modules use the SchM for communication.
For the distribution of BSW modules across several partitions, the SchM shall
implement the methods SchM_Call, SchM_Result, SchM_Send and
SchM_Receive, which are used to handle service calls and callbacks as well as
writing data to and reading data from a sender-receiver connection. For details on the
signatures of these functions, please refer to Section 2.2.3, which describes the
SchM extensions from a BSW developer's point of view.
Guide to BSW Distribution
AUTOSAR Release 4.2.1
16 of 46 Document ID 631: AUTOSAR_EXP_BSWDistributionGuide.doc
- AUTOSAR Confidential -
The SchM can use IocSend (a direct call to the OS) to send data in inter-partition
communication. Other RTE internal mechanism might not be available during startup.
The Inter-OS-Application Communicator (IOC) shall be configured to provide
IocSend_<Id> functions with a uniquely determined <Id> for all client-server and
sender-receiver connections that cross partition boundaries.
Analogously, the SchM shall use IocReceive to receive data from inter-partition
communication, and the IOC shall provide the corresponding IocReceive_<Id>
functions.
The following frame contains some pseudo code snippets that show how to use the
IOC for inter-partition communication.
2.4 Configuration of Basic Software in Partitioned Systems
This is the chapter for integrators.
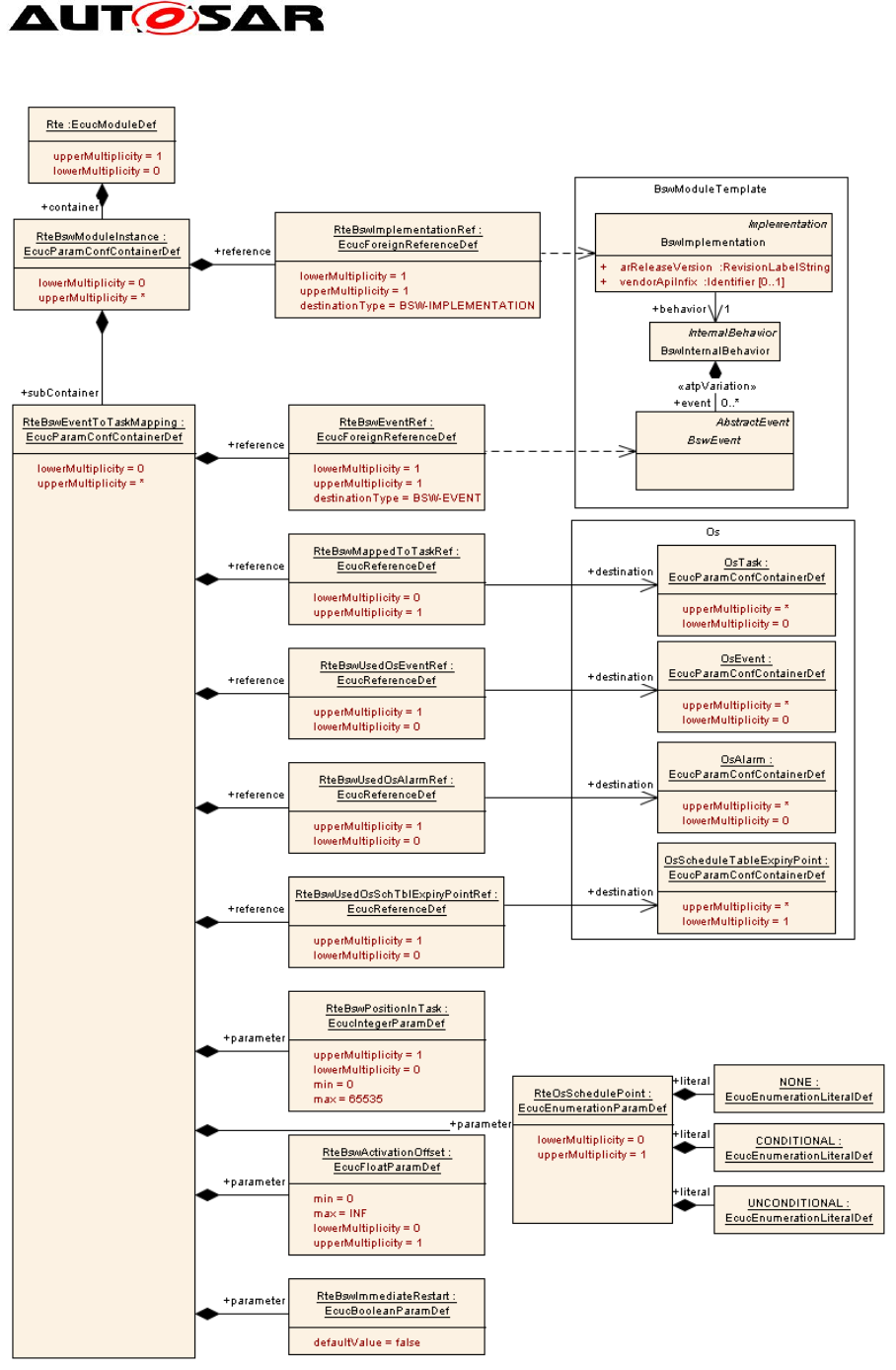
2.4.1 Task Mapping
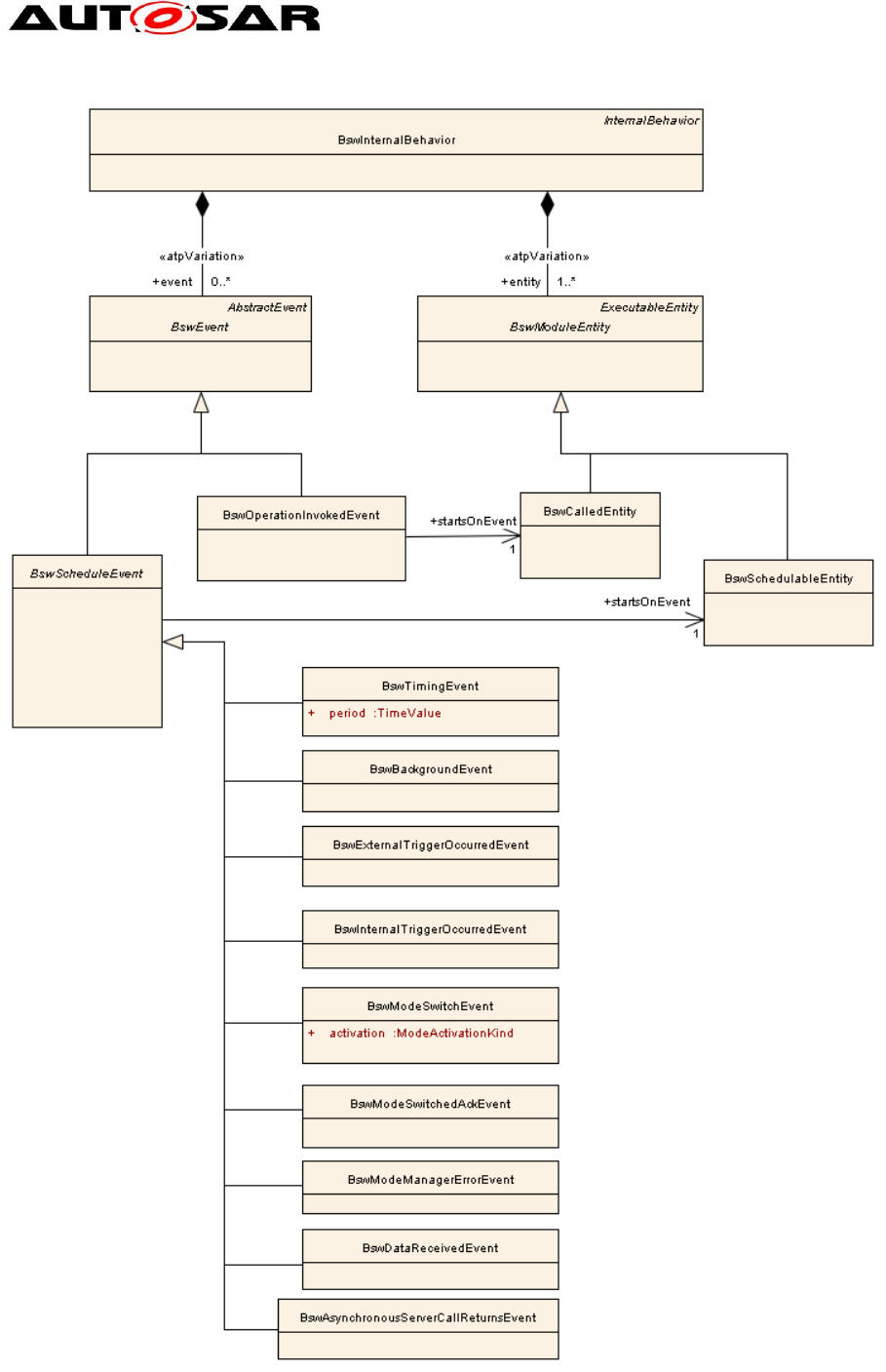
The parallelization of BSW modules introduces several new subclasses of BswEvent
to the AUTOSAR metamodel. These classes are shown in Figure 4. Each BswEvent
(including instances of subclasses of BswEvent) is assigned to a
BswSchedulableEntity, which is started upon occurrence of the event.
void some_BSW_function(){
char *str = "some text";
SchM_Send_Data_Src_DstN(str);
}
Std_ReturnType SchM_Send_Data_Src_DstN(char *str){
IocSend_1(str, 5);
ActivateTask(TASK1);
}
Std_ReturnType SchM_Receive_Data_Src_DstN(char *str){
IocReceive_1(str);
}
TASK(TASK1){
char data[20];
SchM_Receive_Data_Master_Sat1(data);
/* do something with data */
}
Guide to BSW Distribution
AUTOSAR Release 4.2.1
17 of 46 Document ID 631: AUTOSAR_EXP_BSWDistributionGuide.doc
- AUTOSAR Confidential -
Figure 4: Events triggered by the invocation of BSW functions
Guide to BSW Distribution
AUTOSAR Release 4.2.1
18 of 46 Document ID 631: AUTOSAR_EXP_BSWDistributionGuide.doc
- AUTOSAR Confidential -
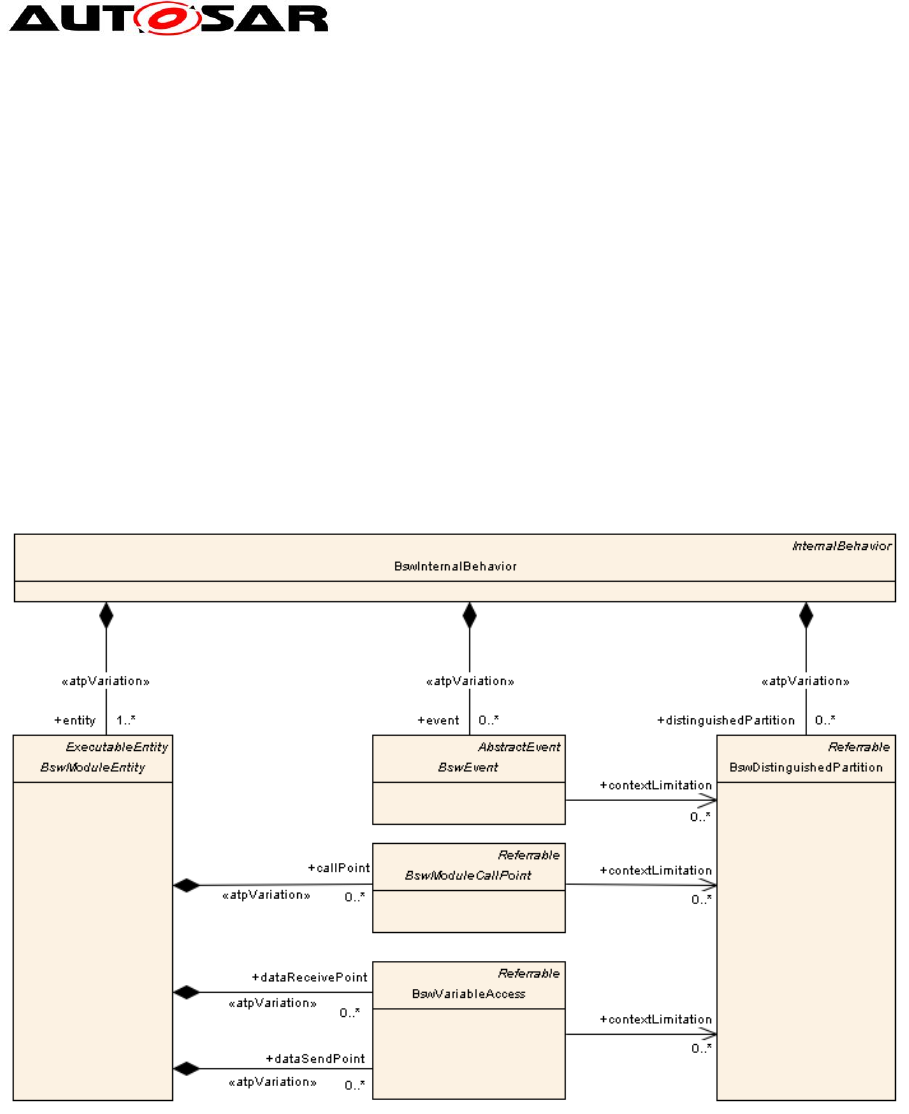
A more fine grained description of the partition specific behavior of an entity can be
described by the use of BswDistinguishedPartitions, as shown in Figure 5. A
BswDistinguishedPartition is the abstract representation of a partition, which allows
to the mapping of a specific BswEvent, BswModuleCallPoint or BswVariableAccess
to a set of abstract partitions. The representation of a partition at this point is an
abstract one in the sense that it is part of the BSW module description (according to
the module description template), whereas a concrete partition is determined at ECU
configuration time.
For example, if a module entity running in partition 1 provides data via a
VariableDataPrototype to the same entity running in partitions 2 and 3, the
BswModuleEntity aggregates a dataSendPoint with a contextLimitiation to partition 1
and a dataSendPoint with a contextLimitation to partitions 2 and 3.
Figure 5: Modeling partition specific properties of entities using BswDistinguishedPartitions
Guide to BSW Distribution
AUTOSAR Release 4.2.1
20 of 46 Document ID 631: AUTOSAR_EXP_BSWDistributionGuide.doc
- AUTOSAR Confidential -
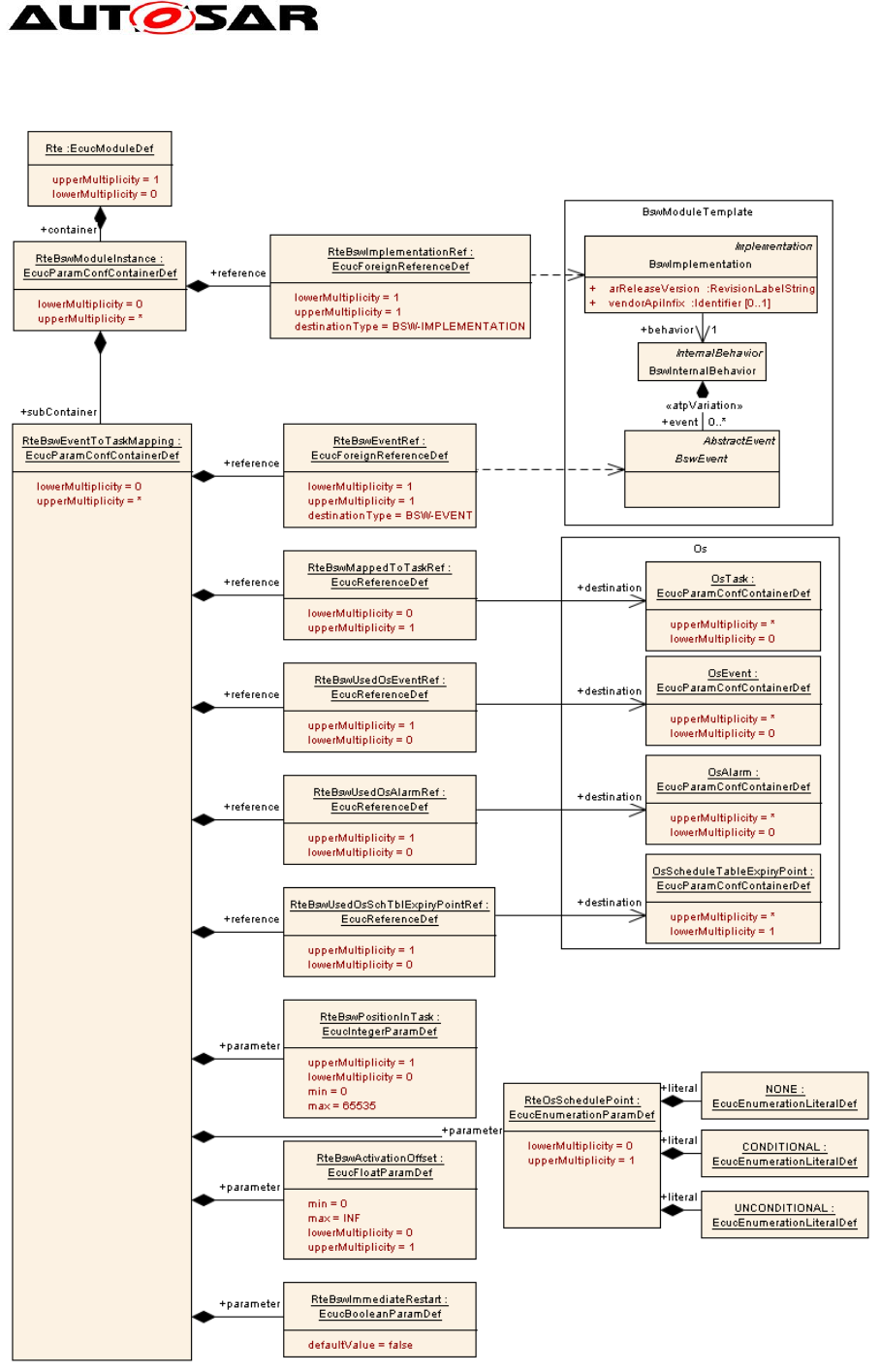
Figure 6: Mapping OperationInvokedEvents to tasks

Guide to BSW Distribution
AUTOSAR Release 4.2.1
21 of 46 Document ID 631: AUTOSAR_EXP_BSWDistributionGuide.doc
- AUTOSAR Confidential -
An RteBswEventToTaskMapping refers to a BswEvent (indirectly via its
RteBswEventRef) and to an OsTask (also indirectly via its
RteBswMappedToTaskRef). The task is in turn mapped to a partition, and the
partition is mapped to a µC core, which is the core responsible for the processing of
the event. Mapping an event to a task is optional; if an event is not mapped to a task,
it is handled in its originating partition. If no special mechanisms apply that prevent
concurrent execution, a prerequisite for a non-mandatory mapping of an event to a
task is:
if the BSW entity is shared between multiple BSW partitions the entity needs
to be concurrency safe
in case it is exclusively available only on one BSW partition it needs to be at
least reentrant.
Please note that it is currently not allowed to map RunnableEntities of a SW
component to multiple partitions [SWS_Rte_07347]. For BSW it is possible to map
the same module entities to different tasks and partitions by using different
BSWEvents referring to the same entity
2.4.2 General Configuration of Master and Satellites
Modules that shall be available in multiple partitions can be implemented as masters
and satellites. In this case, the master and all satellites of the same module share the
same code (which may implement core-dependent behavior however) and the same
configuration. Hence, a master and its satellites are treated as one module entity
w.r.t. their configuration.
The communication between master and satellites is not to be standardized. It is
considered to be module-internal and it is not visible to other modules. However,
since it is recommended to use SchM mechanisms for internal communication, the
non-standardized client-server entries and data accesses in the BSWMD to connect
master and satellite need to be configured.
2.4.3 Configuring the BswM (per Partition)
On systems with distributed BSW there is one BSW Mode Manager (BswM) per
partition (but one OS and EcuM per core, which is the same as long as we have one
BSW partition per core). Each of these BswMs can be configured independently. A
BswM mainly interacts with the state managers (ECU state manager and bus state
managers, for instance) on the same partition.
The BswM is also responsible for the initialization and shutdown of BSW modules
running in the same partition. Therefore, its configuration depends on the mapping of
BSW modules to partitions.
The configuration of the BswMs is split across the container BswMGeneral, which
contains shared configuration parameters of all BswM entities and BswMConfig
containers, where one BswMConfig is defined for each BswM entity. Consequenty,
the mapping of a BswM to its partition is defined in the corresponding BswMConfig
container, which has a BswMPartitionRef pointing to the respective partition. This
mapping of BswM configurations to partitions ensures that for every partition the
correct configuration of the BswM can be determined.
Additional extensions to the BswM configurations for the allocation of BSW modules
to multiple partitions are

Guide to BSW Distribution
AUTOSAR Release 4.2.1
22 of 46 Document ID 631: AUTOSAR_EXP_BSWDistributionGuide.doc
- AUTOSAR Confidential -
A reference BswMRequestRemoteMode in the container
BswMAvailableActions. This action indicates a call to a BswM in a different
partition, which is used to propagate mode requests.
References BswMBswMModeRequest and
BswMBswMModeSwitchNotification in the container
BswMModeRequestSource. The BswMBswMModeRequest indicates that the
source of a mode request is a BswM running in a different partition
(ECUC_BswM_00980, cf. [5]). BswMBswMModeSwitchNotification indicates
that another BswM has switched a mode.
All functions listed in an action list that is processed by a BswM entity must be
available in the partition this BswM is running in.
2.4.4 Configuring the EcuM (per Core)
On systems with distributed BSW there is one EcuM per core (even if there are
multiple BSW partitions on that core). In other words, on every core there shall be
one and only one partition that runs the EcuM. The partition running the EcuM is
determined by the EcuMFlexEcucPartitionRef, which is specified in the container
EcuMFlexUserConfig of the EcuM configuration.
Distributing the BSW is only possible when using the EcuM Flex; the EcuM Fixed
does not support this.
On architectures with a sequential start of cores, there is one designated master core
in which the boot loader starts the master EcuM via EcuM_init. The EcuM in the
master core starts some drivers, determines the Post Build configuration and starts
all remaining cores with all their satellite EcuMs.
On architectures where all cores are started at the same time, core dependent
branching within the EcuM_init function can be used to achieve core-specific
behavior. This can in turn be used to identify the EcuM master (running on the
master core), which is responsible for the EcuM initialization on the slaves.

Guide to BSW Distribution
AUTOSAR Release 4.2.1
23 of 46 Document ID 631: AUTOSAR_EXP_BSWDistributionGuide.doc
- AUTOSAR Confidential -
3 BSW Distribution in Safety Systems
3.1 General overview on safety
In today’s cars several ECUs may control safety relevant actuators depending on the
functionality of the vehicle. Examples are electronic steering lock systems, adaptive
cruise control systems or braking systems. If such a system shows a misbehavior a
dangerous situation can occur where the driver is no longer able to drive the car in a
save manner. To avoid such failures the specific ECUs must be developed in a way
that the system can detect and react in a controlled way to such faults. The ISO
26262 is the norm which describes how the development of such ECUs shall be
performed to realize a save system. This norm defines four “Automotive Integrity
Safety Levels” (ASIL) which classify the risk of the system. Based on the risks
specific (safety) requirements of the system are derived. These requirements may be
related to hardware (e.g. support for multiple channels to allow detection of hardware
problems) or software (e.g. control flow checking) or both. In AUTOSAR we focus on
software, so the hardware part will no longer be considered here. Be aware that an
ASIL is always defined for a system, which means hard- and software, and with
respect to software application software and basic software.
3.2 Safety solutions in AUTOSAR
AUTOSAR up to R4.1 supports safety systems by offering different base
mechanisms which are typically required in such ECUs. The following list contains
the main safety mechanisms:
- Partitioning of SWCs to support the isolation in space. This means that it is
possible to separate SWCs of different ASIL from each other and to make sure
that the SWCs are not able to write to other SWCs data. The realization requires
hardware support (a memory protection or memory management unit) and is
realized in the Os module and used by the Rte.
- Timing and control flow supervision to monitor executing entities and to detect
faults caused by blocking or wrong execution. In AUTOSAR the Os and the
WdgM take care of this issue.
- A safe communication via end-to-end protection is possible between ECUs (and
even inside an ECU). This guarantees e.g. that the data which is send is not
modified between the sender and the receiver(s). The responsible module is the
E2Elibrary.
Some other modules support additional mechanisms which are also useful in safety
systems (e.g. CoreTest or RamTest).
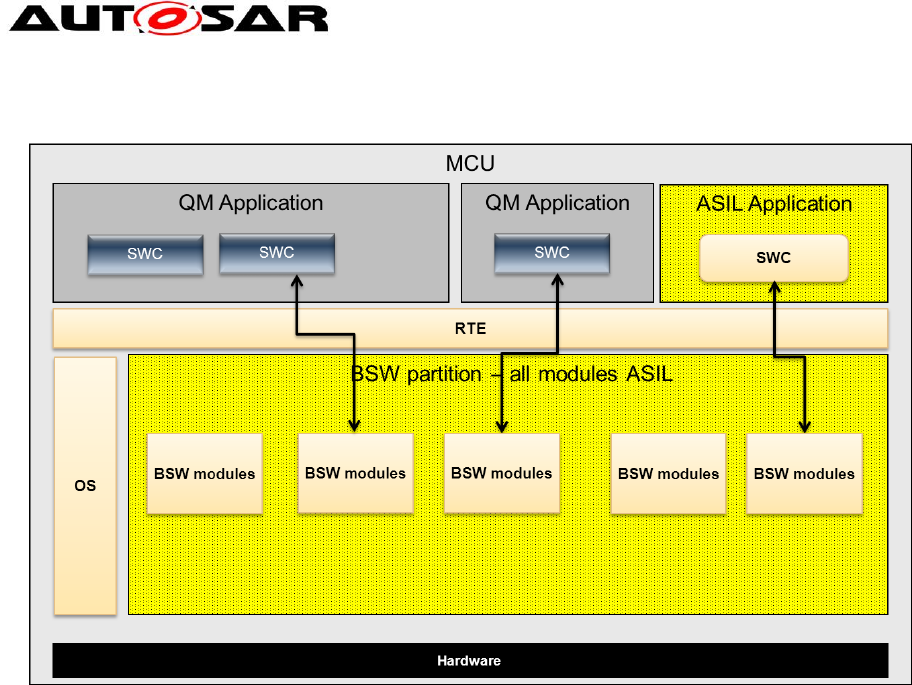
The following picture shows how an AUTOSAR R4.1 can be used to support an ASIL
ECU.
Guide to BSW Distribution
AUTOSAR Release 4.2.1
24 of 46 Document ID 631: AUTOSAR_EXP_BSWDistributionGuide.doc
- AUTOSAR Confidential -
Figure 7: All BSW developed according ASIL
The approach works but has one big disadvantage: all BSW modules must be
developed according the highest ASIL of the system. This causes a lot of additional
work even if only some of the BSW modules are really required for a specific safety
requirement.
Starting with R4.2 AUTOSAR offers an additional way how a safe system can be
developed without the requirement to implement the whole BSW with the according
ASIL. The key aspects of the new approach are:
- The BSW modules are not all mapped to one partition, but can be placed in
separate partitions depending on the ASIL need. This means that a system can
have one QM partition and a partition for each ASIL level (or even more ASIL
partitions)
- The impact of the approach to single BSW modules is minimal. This means the
scope of the modules is the same on ASIL and QM. There is no change of
interfaces between modules.
- Only the modules which provide the safety relevant features (e.g. the memory
protection offered by the Os) need to be developed according to the system’s
ASIL. Sometimes it is even possible to limit the required ASIL functionality to a
subset of a BSW module.
The ASIL modules inside the ASIL partition(s) need to be specifically developed.
They not only need to meet the requirements of the ASIL level, but they also need to
detect if they are called from inside the partition or outside the partition.
Guide to BSW Distribution
AUTOSAR Release 4.2.1
25 of 46 Document ID 631: AUTOSAR_EXP_BSWDistributionGuide.doc
- AUTOSAR Confidential -
With this approach it is possible:
- To reuse existing BSW modules which were developed on QM level (no ASIL)
without module modification.
The proposed approach has to be assessed case by case in order to estimate the
applicability of this approach for the particular safety case and the benefits of
combining QM/ASIL modules compared to a pure ASIL approach.
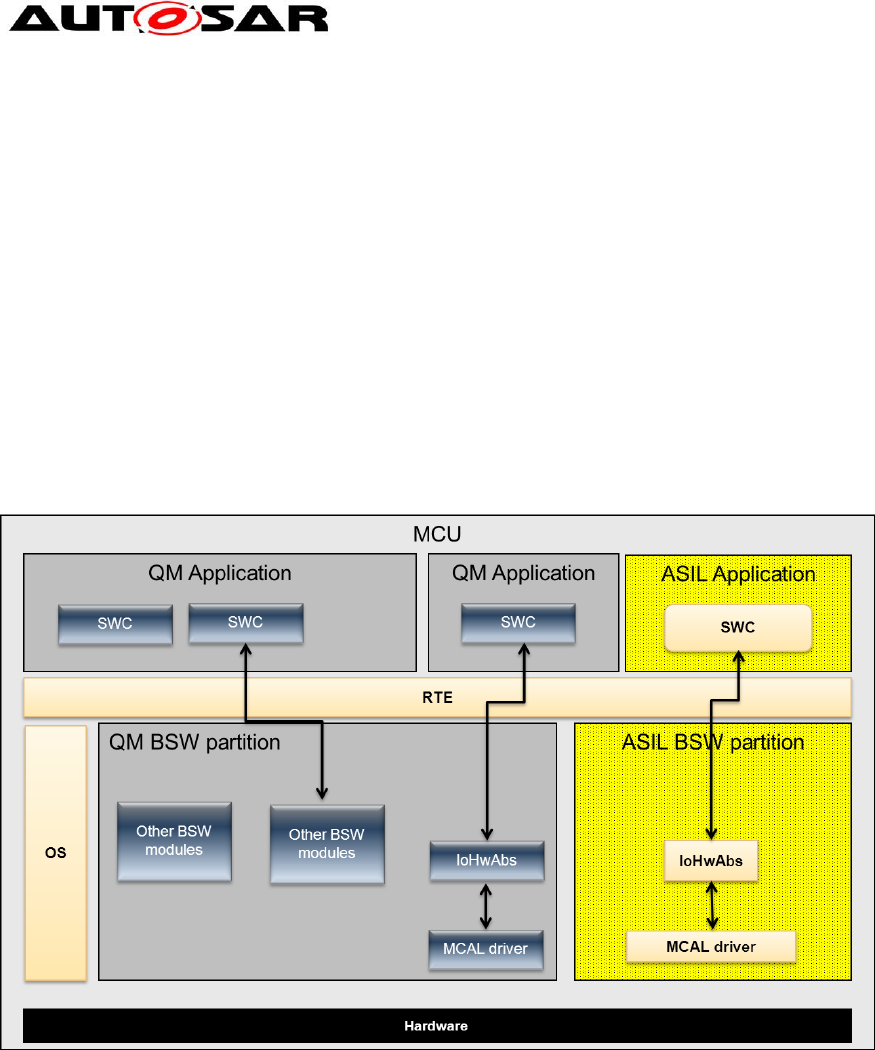
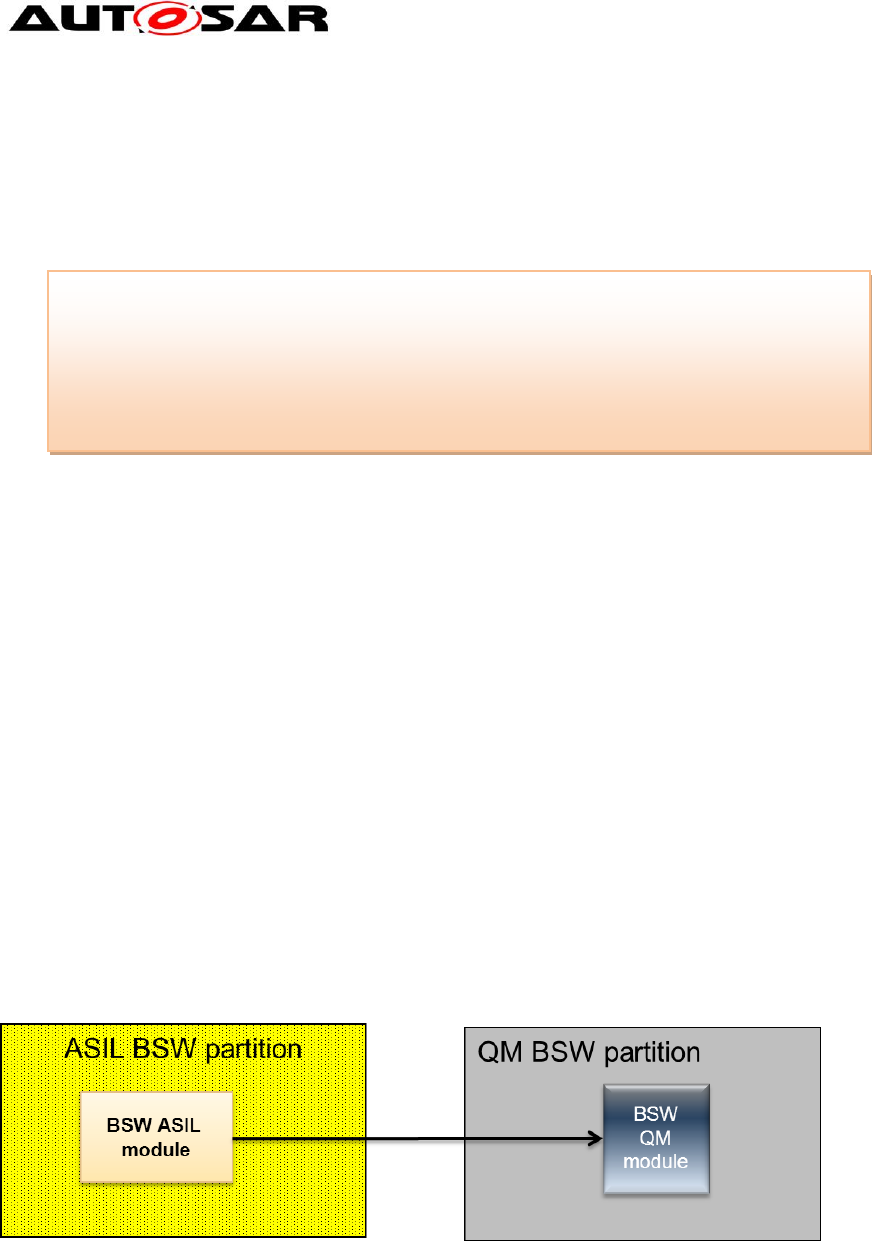
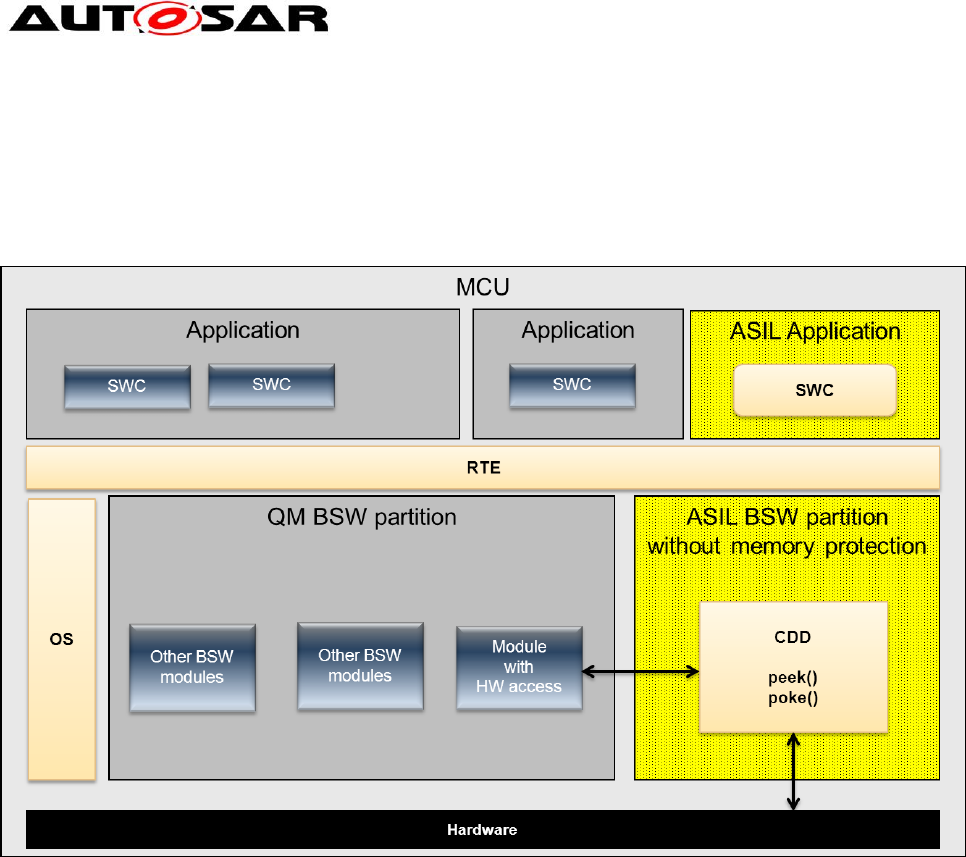
BSW modules can be placed in different partitions. AUTOSAR supports one QM
partition and several ASIL partitions. The following figure shows an example
mapping. Here the ASIL SWC has save access to some hardware via an own
partition in the BSW which contains an IoHwAbs and the needed drivers below.
Figure 8: BSW modules mapped in different partitions
It is strongly recommended that QM BSW partitions run in user mode if possible in
case we have BSW ASIL partitions in the system to avoid changes to hardware
registers (e.g. MPU settings). If this is not possible (e.g. hardware supports
supervisor mode only) you need additional means to assure freedom from
interference.
3.2.1 Some modules are always ASIL
Since the protection mechanism is provided by some specific BSW modules (e.g. the
Operating System) these modules have to be developed according to the highest
ASIL in the system. If they are not developed at this level it cannot be assured that
they are able to fulfill their supervision task. The decision which modules have to be
Guide to BSW Distribution
AUTOSAR Release 4.2.1
26 of 46 Document ID 631: AUTOSAR_EXP_BSWDistributionGuide.doc
- AUTOSAR Confidential -
developed to ASIL is always project specific and is determined from the safety
requirements of the system.
3.2.2 Overall configuration
The separation of BSW modules in different BSW partitions for safety needs to be
configured in the ECU configuration. The mapping is done in the EcuC and Os
configurations.
For each such BSW partition an OsApplication is required. The following settings
apply to the Os configuration of each BSW OsApplication:
Name
Value for BSW
partitions
OsTrusted
TRUE
OsTrustedApplicationWithProtection
TRUE or FALSE
OsTrustedApplicationDelayTimingViolationCall
TRUE
Other attributes of the OsApplication can be filled as needed. Note that hook
functions of BSW partitions have no meaning in AUTOSAR and shall be avoided.
Additionally note that the OSApplication TRUSTED attribute (OsTrusted) of the OS-
Application is not related to ASIL/non-ASIL.
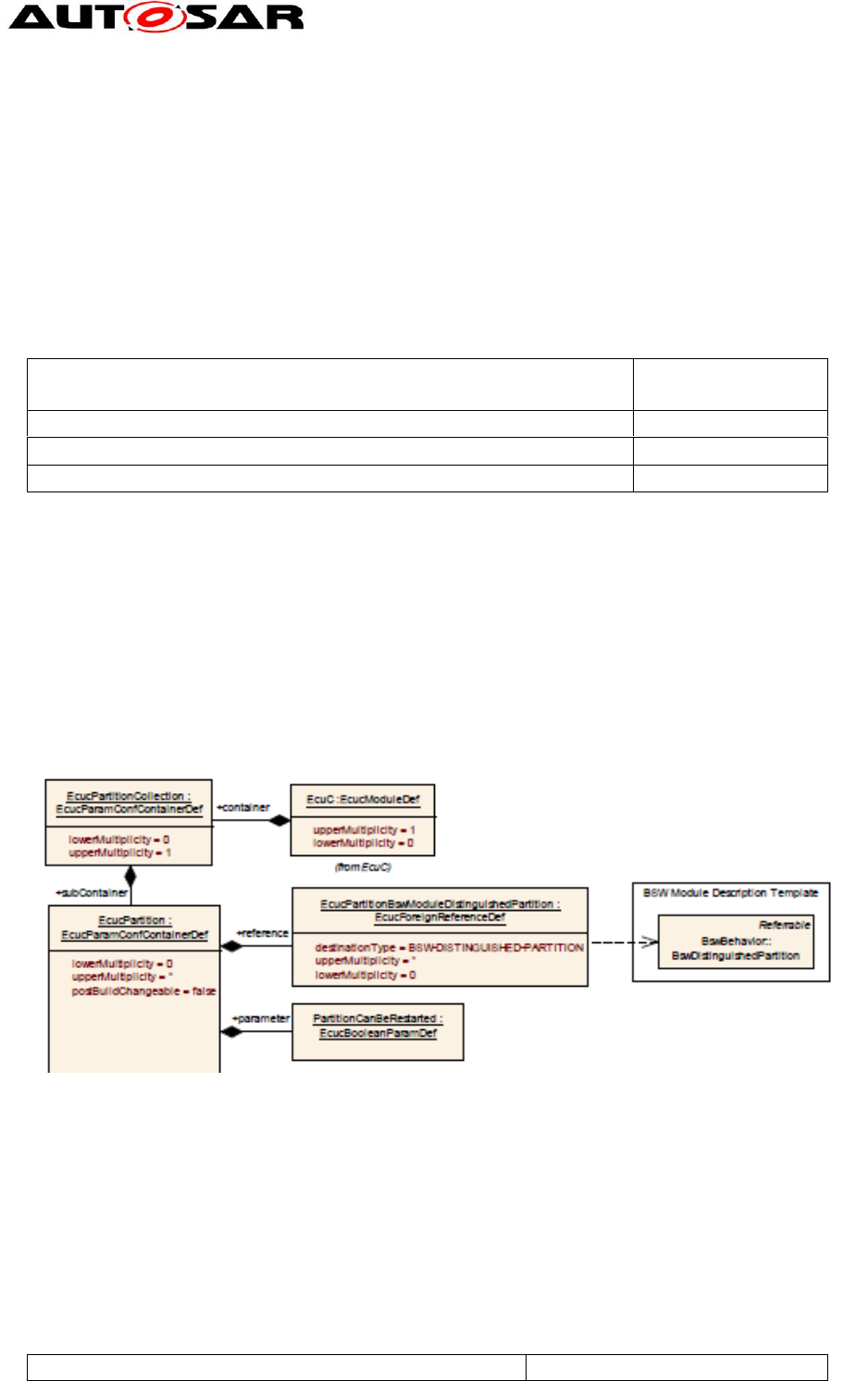
Afterwards the BSW modules, which are used, have to be configured and mapped to
the different partitions. The mapping is done in EcuC:
Figure 9: EcuC configuration – mapping of BSW to partitions
The EcucPartitionCollection (multiplicity 0..1) contains all partitions of the
system. For each of them a sub container EcucPartition (0..*) exists which
contains references (EcucPartitionBswModuleDistinguishedPartition
(0..*)) to the BSW modules (via BSWDT) which are placed into this partition.
The following settings apply to the EcucPartition configuration of each BSW
partition:
Name
Value for BSW partitions
Guide to BSW Distribution
AUTOSAR Release 4.2.1
27 of 46 Document ID 631: AUTOSAR_EXP_BSWDistributionGuide.doc
- AUTOSAR Confidential -
EcucPartitionBswQmModuleExecution
TRUE for QM modules
FALSE for ASIL modules
PartitionCanBeRestarted
FALSE
EcucPartitionBswModuleExecution
TRUE
OsAppEcucPartitionRef
Link to the OsApplication of
this partition
At the end we have one QM partition and one (or more) ASIL partitions configured
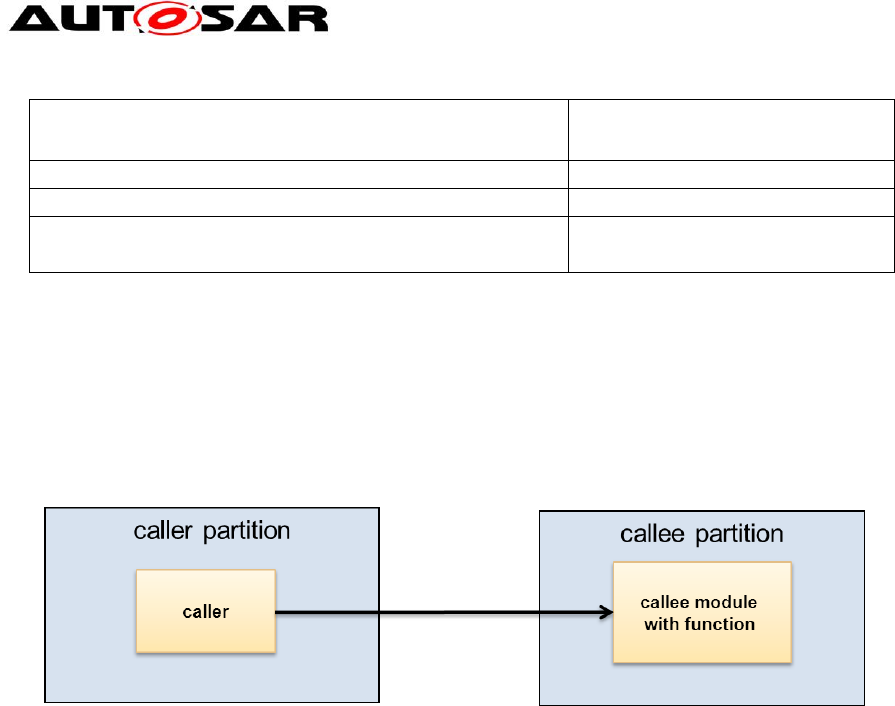
3.2.3 Crossing partition boundaries
When BSW modules are placed into different partitions, the crossing of boundaries is
the biggest issue which needs to be solved. The following figure shows the scenario
in a quite general view:
Figure 10: Cross partition call
This is due to the fact that the called service assumes that it has full access to
module local data, which is not true if the call is performed from another partition
because the memory protection settings are still those of the caller. In general there
are 3 possibilities how the problem can be solved:
1. Instead of a direct call the caller can do an ActivateTask() to a Task from
the callee partition. In this case the activated Task will perform the real call
to the function. Instead of the ActivateTask() a SetEvent() can be used as
an alternative. Note that both mechanisms work in an asynchronous way
which means that the original caller may need to wait or have to poll for the
result
2. The caller can use CallTrustedFunction() to enter the callee partition, or the
callee after being called use CallTrustedFunction() to hand over to its
partition. After entering the function can be called directly.
CallTrustedFuntion() makes sure that the caller gets the appropriate rights
to make the call, e.g. changing the memory protection to the setting of the
called function.
3. The call of the function may be directly possible if the called function does
not write to own data or calls other functions which write to such data. E.g.
if the function just reads out a value and return it. Basically, such a function
behaves like a library.
Guide to BSW Distribution
AUTOSAR Release 4.2.1
28 of 46 Document ID 631: AUTOSAR_EXP_BSWDistributionGuide.doc
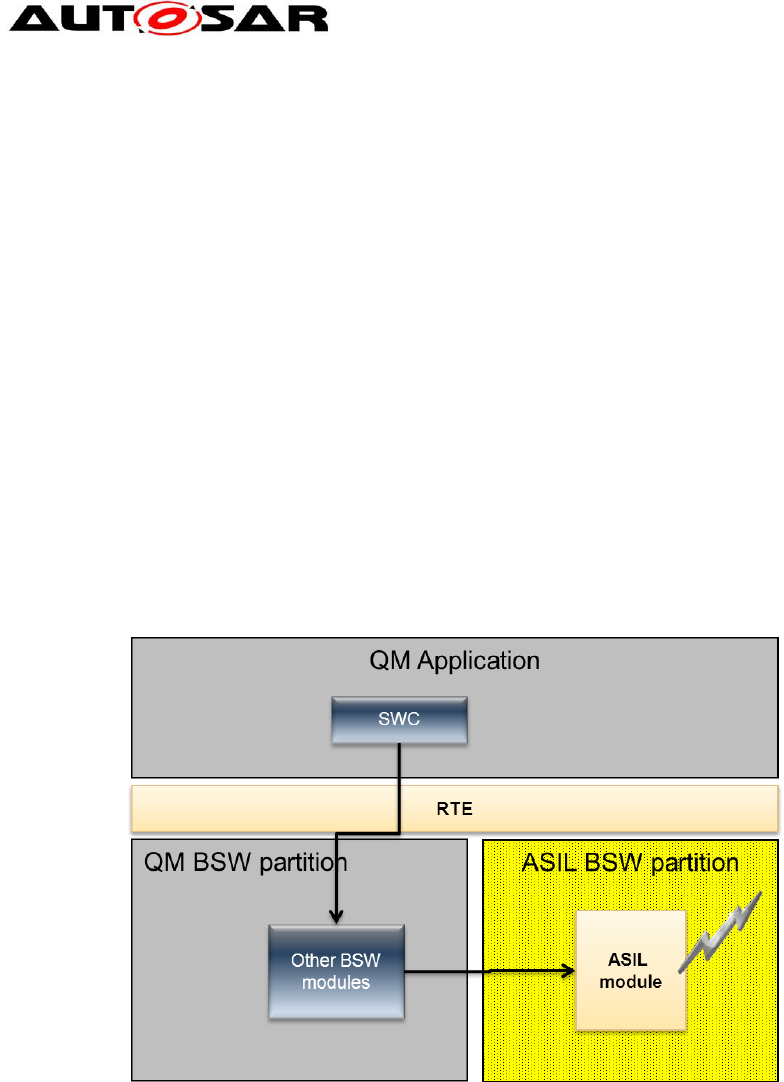
- AUTOSAR Confidential -
Dependent on the mapping of the BSW modules to different partitions the right option
has to be chosen. For all function calls between BSW modules located in different
partitions which are synchronous, we will focus on the calling possibilities (2) and (3).
Because as already stated QM modules are not changed, we have to encapsulate
calls which are made from QM partitions to ASIL and vice versa. The ASIL module is
always responsible to handle the boundary crossing since the QM module is not
touched and does not know this border. This means that if the ASIL module is the
caller, the boundary handling needs to take place on the caller side, and if the ASIL
module is the callee, the boundary handling needs to take place on the callees side
The following descriptions focus on ASIL and QM BSW modules. Besides BSW
modules also CDD might be included in the system. For CDDs the same rules and
restrictions apply (if not otherwise explicitly stated)
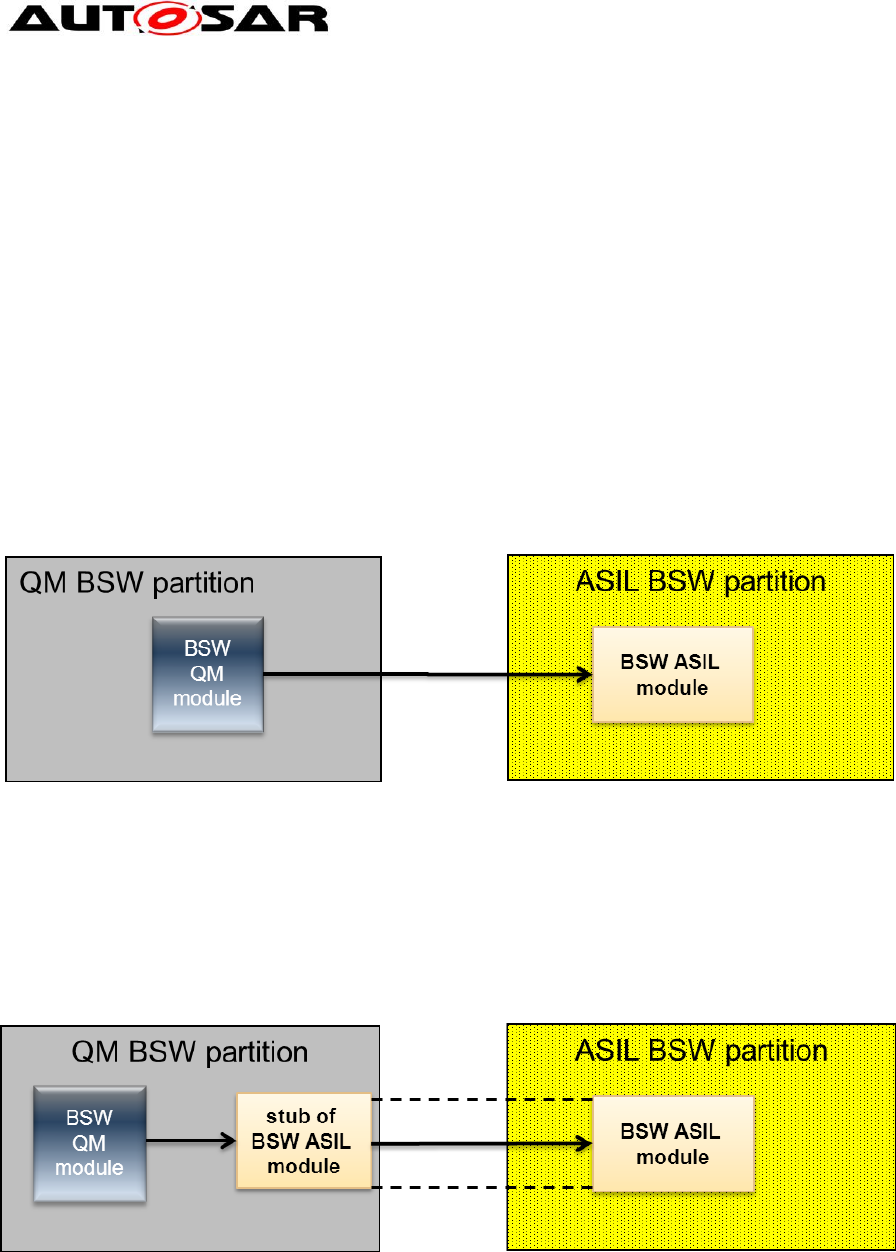
3.2.3.1 QM modules calls ASIL
Figure 11: QM calls ASIL
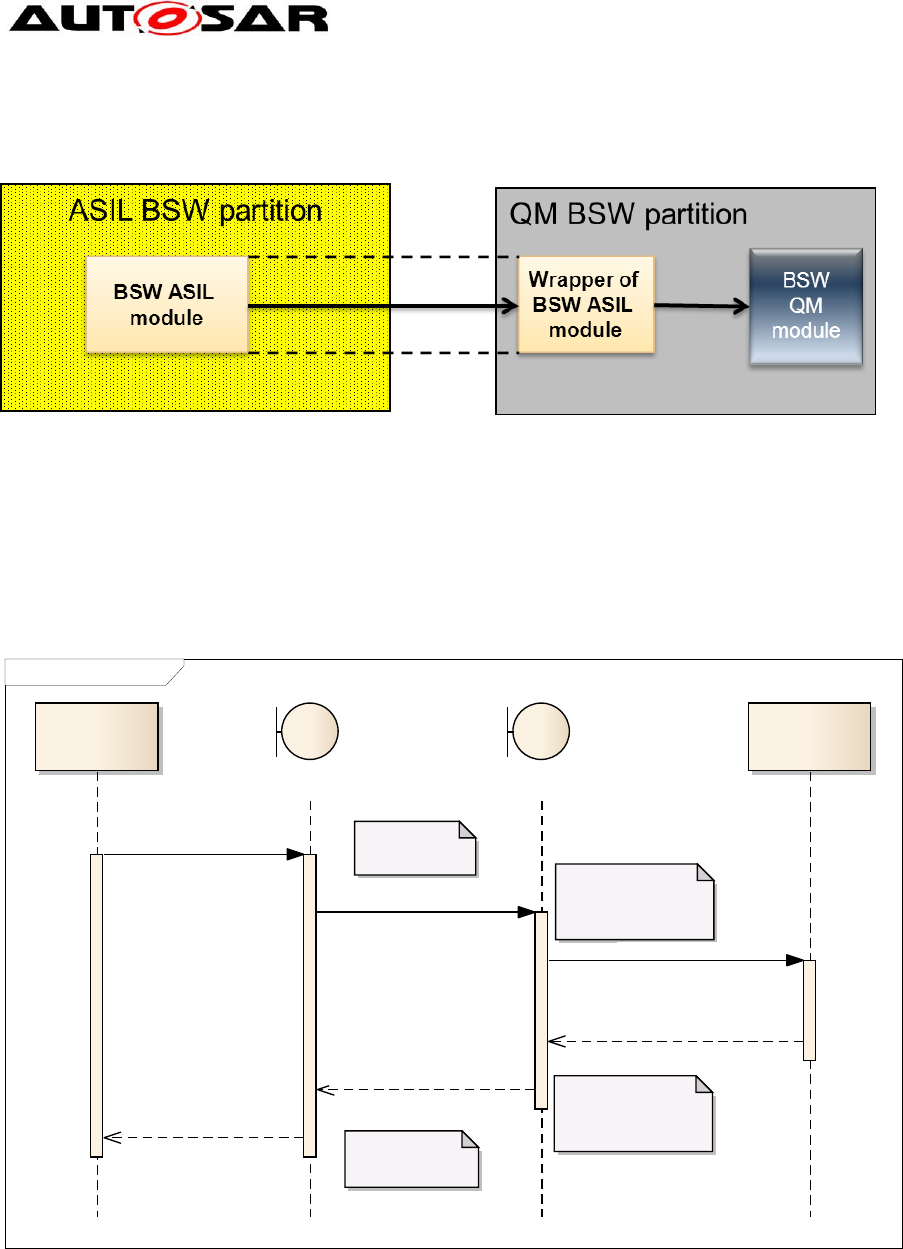
As already stated the QM module which performs the call is unchanged. Even more:
The QM not even knows that the called function (module) belongs to a different
partition. This means we have to encapsulate the called function into a stub which
performs the boundary crossing.
Figure 12: Details of QM calls ASIL
This stub function can be static or generated and belongs to the called module. It can
be seen as a new function entry of the called function of the ASIL module. The
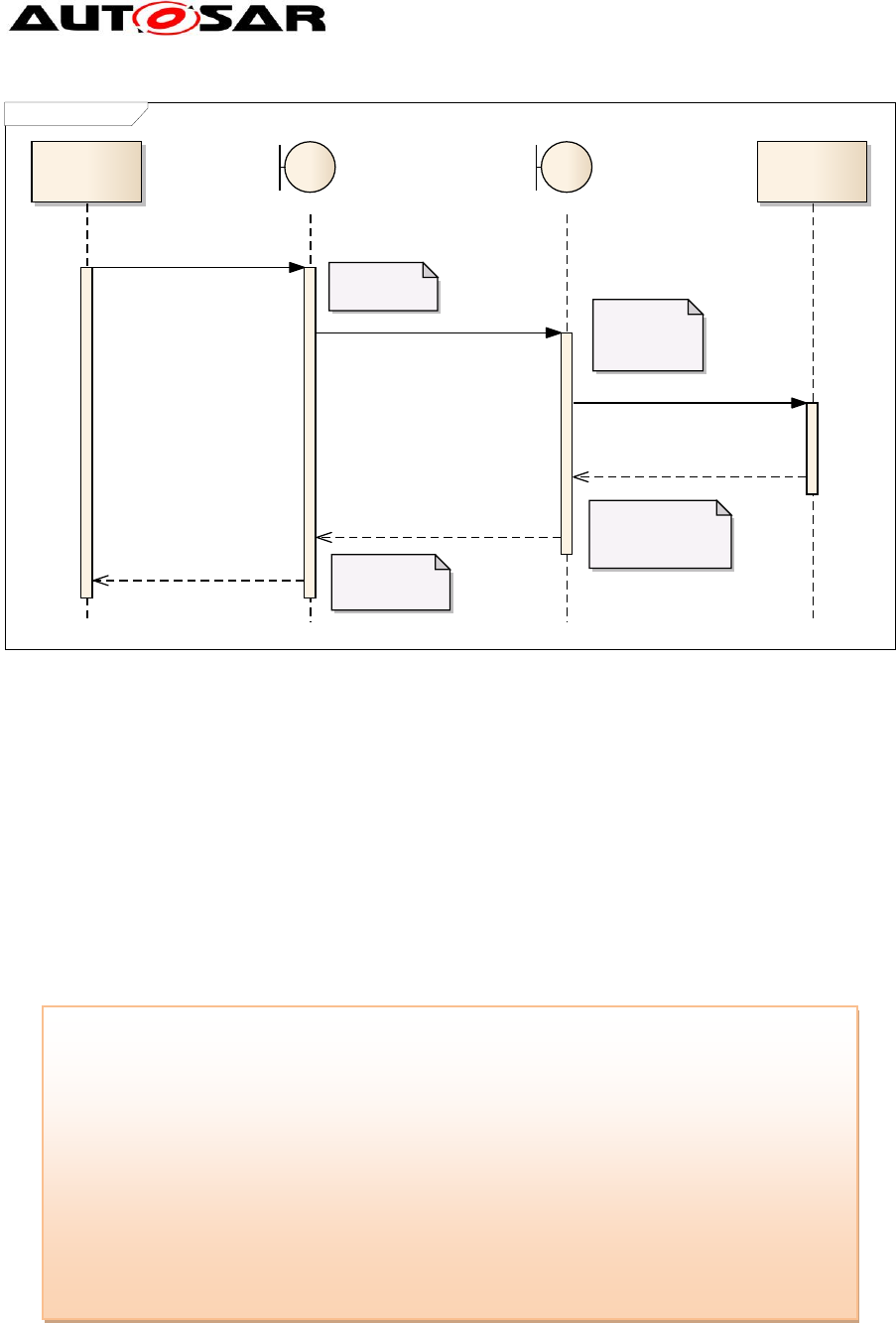
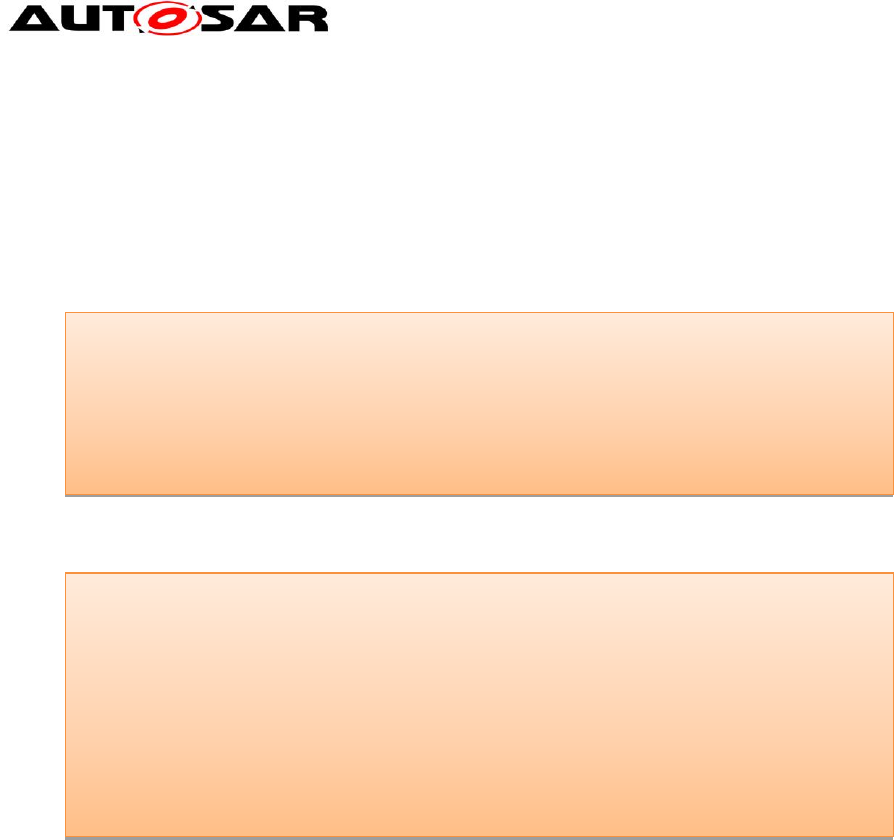
following message sequence chart shows the calling sequence. As you can see the
stub itself also has two parts, one on the caller side and one on the callee partition.
Guide to BSW Distribution
AUTOSAR Release 4.2.1
29 of 46 Document ID 631: AUTOSAR_EXP_BSWDistributionGuide.doc
- AUTOSAR Confidential -
sd Stub call to ASIL
QM module
Stub (caller side) Stub (callee side)
ASIL module
Unpack results
Pack arguments
unpack
arguments and
prepare call
pack results and INOUT
/ OUT parameter
module function()
CallTrustedFunction()
call real function()
return from call()
return to caller partition()
return module function()
Figure 13: Call sequence when a stub is used
The stub itself can be static (hand written) or generated based on the available
configuration information. The next two sub chapters are detailing the different
approaches.
3.2.3.1.1 Static stub
A static stub has to cover all situations. In our case the important issue is to find the
caller partition in order to make type of call. The next code fragment shows an
example of a static stub:
Note that you have to init your own module application Id (or use directly the
generated application name)
3.2.3.1.2 Generated stub
StdReturnType module_function()
{
runId = GetCurrentApplicationId();
if (runId == module_applicationId)
{ /* direct call possible */
return Modulemodule_function_real()
} else {
CallTrustedFunction(MODULE_REALFUNCTION_ID,NULL)
…
}
}
Guide to BSW Distribution
AUTOSAR Release 4.2.1
30 of 46 Document ID 631: AUTOSAR_EXP_BSWDistributionGuide.doc
- AUTOSAR Confidential -
If an optimized version of the stub shall be generated the generator needs all
information (e.g. who calls the function) in order to create the best code. If
information is missing or incomplete the generated code might either not be able to
generate the code at all or the code may fail during runtime.
AUTOSAR has an abstraction for calls between different partitions. This method is
used in multicore systems to allow modules a communication between different
partitions on different cores.
The mechanism used by the generated code is offered by the SchM: SchM_Call().
The SchM_Call() will then be mapped within the SchM to one of the methods listed in
3.2.2.
For finding the best method for crossing the boundary the central question is:
Who will call the function (and use the stub)?
This information must be provided by the user via the SchM configuration. The
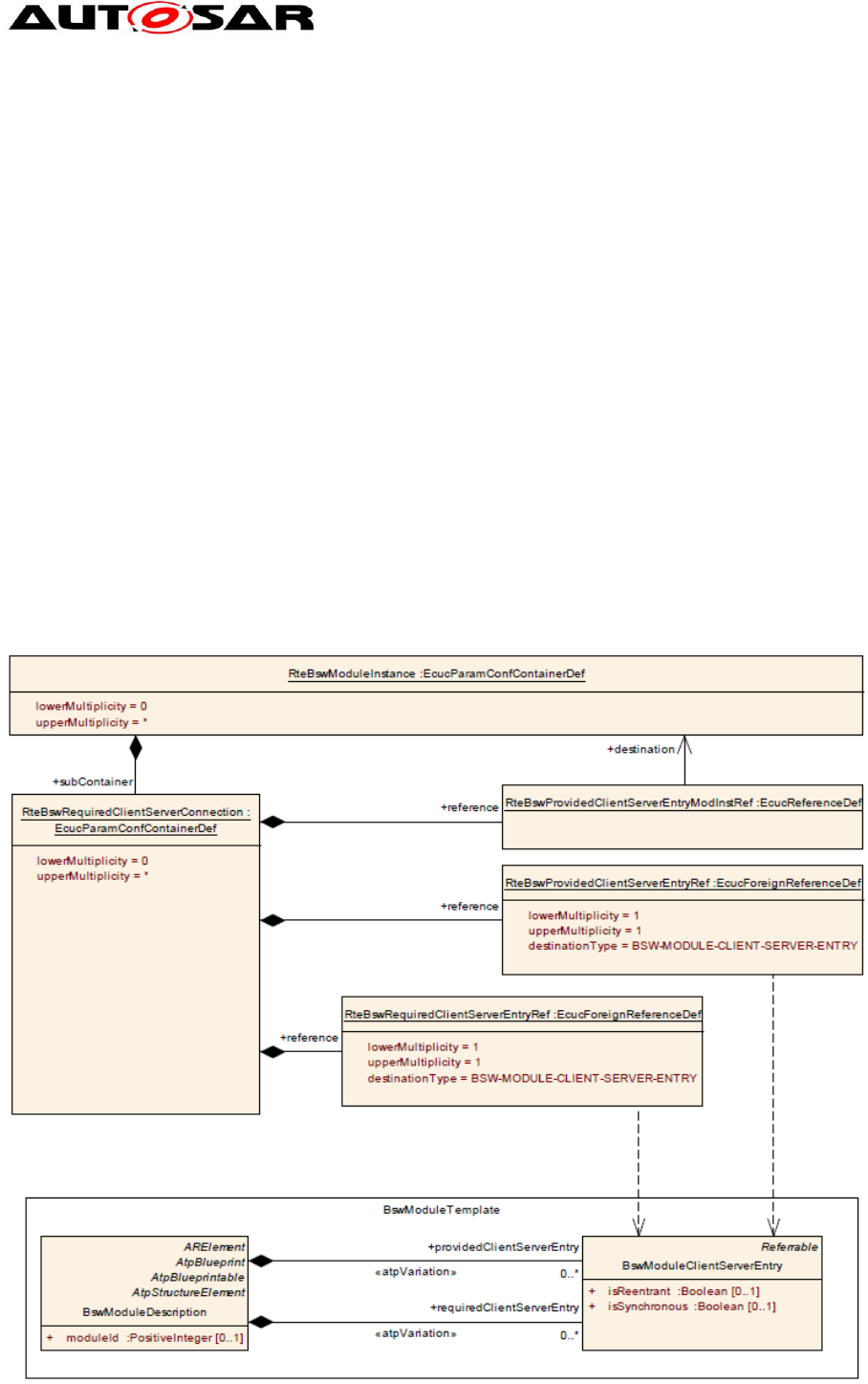
configuration consists of caller, callee and references to their modules (and also
implicit to the partitions). The following diagram from the RTE shows the
configuration of SchM_Call():
Figure 14: Configuration of SchM_Call()
Guide to BSW Distribution
AUTOSAR Release 4.2.1
31 of 46 Document ID 631: AUTOSAR_EXP_BSWDistributionGuide.doc
- AUTOSAR Confidential -
Based on this information and the information where a BSW module is placed, the
SchM can generate optimized version of the SchM_Call().
E.g. if there is only one stub user and this user is placed in the same partition as the
called BSW module a direct call is possible. Example of a stub using SchM_Call():
The approach to generate a stub has some limits which need to be considered during
system development:
Calls from integrator code: A configuration via SchM_Call() is not possible for
integrator code since this code does not belong to any BSW module and does not
have any configuration (EcuConfiguration) and module (BSWDT) information
which could be used. In such cases a hand written static stub has to be used.
A SchM_Call() configures exactly one caller-callee relationship. If a function is
called by different callers, the generated part of the stub cannot distinguish which
SchM_Call() is required for which caller. In such cases a static stub is required.
Note: If also the QM caller would use a SchM_Call() instead of the real function name
the stub could be avoided completely. But this would contradict the target to reuse
existing QM code unmodified.
For parameter handling see 3.2.3.5.
3.2.3.2 ASIL calls QM partition
Figure 15: ASIL calls QM
This chapter covers now the direction of an ASIL caller and a QM callee. Here the
ASIL module already knows that a boundary crossing is required. (Otherwise the
called QM function would be an ASIL function). Since the QM function shall not
detect any difference when called from an ASIL function or from a QM function in the
same partition, it must be called as would the call be locally performed.
Std_ReturnType module_function()
{
Std_ReturnType r;
(void) SchM_Call_target_module_function(&r);
Return r;
}
Guide to BSW Distribution
AUTOSAR Release 4.2.1
32 of 46 Document ID 631: AUTOSAR_EXP_BSWDistributionGuide.doc
- AUTOSAR Confidential -
As a consequence of this we need again a code fragment which performs the real
call. This code fragment in this case is named wrapper.
Figure 16: Wrapper for ASIL calls to QM
This wrapper function can be statically or dynamically generated and belongs to the
caller module but is partly executed in the partition of the callee. The following
message sequence chart shows the calling sequence, when CallTrustedFunctio() is
used:
sd Wrapper Call to QM
ASIL module
QM module
Wrapper (caller
side) Wrapper (callee
side)
Pack arguments
Unpack results
Unpack arguments and
prepare call
Pack results and INOUT
and OUT parameters
module function()
CallTrustedFunction()
Call real function()
return from call()
return of CallTrustedFunction()
return from wrapper()
Figure 17: Call sequence when a wrapper is used
We can again differentiate in a static wrapper and wrappers which are generated out
of the configuration.
Note that independent of the technical solution it needs to be checked whether such
calls are allowed within the project specific safety goals.
Guide to BSW Distribution
AUTOSAR Release 4.2.1
33 of 46 Document ID 631: AUTOSAR_EXP_BSWDistributionGuide.doc
- AUTOSAR Confidential -
3.2.3.2.1 Static wrapper
The following code fragment shows a possible wrapper in case only one “user” calls
the function (in other cases the buffer handling needs to be extended).
In the example the CallTrustedFunction() mechanism is used:
This is the second part of the wrapper which is located in the callee partition:
3.2.3.2.2 Generated wrapper
If the wrapper shall be generated the generator needs specific information in order to
create the best code. If information is missing or incomplete the generated wrapper
code might fail.
Like the stub handling In 3.2.3.1 we can use the SchM_Call() service to hide the
partition transitioning. In contrast to the stubs we need not to focus on possible users
of the wrapper – the users are just the ASIL module functions – but on the called
function. This means we have to find out the callees partition in order to make the
right call. Since we only support one QM partition, we can just look this up
(parameter EcucPartitionBswQmModuleExecution ist TRUE) and know where
the call must be performed.
There is also one limitation of this approach:
Calls to integrator code: A configuration via SchM_Call() is not possible since the
integrator code does not belong to any BSW module and does not have any
configuration (EcuConfiguration) and module (BSWDT) information which could
be used. In such cases a separate static wrapper has to be used to encapsulate
calls from integrator code and the integrator code need small changes, e.g.
changing the name of the called function to avoid name clashes.
uint8 wrapper_function()
{
/* … */
CallTrustedFunction(MODULE_REALFUNCTION_ID,NULL)
return function_return_value;
}
uint8 function_return_value;
void TRUSTED_call_function (TrustedFunctionIndexType a,
parameter_struct *local_struct)
{
function_return_value = function();
return;
}

Guide to BSW Distribution
AUTOSAR Release 4.2.1
34 of 46 Document ID 631: AUTOSAR_EXP_BSWDistributionGuide.doc
- AUTOSAR Confidential -
For parameter handling see 3.2.3.5.
3.2.3.3 ASIL calls ASIL
The case of an ASIL to ASIL call can be seen as a combination of 3.2.3.2 and
3.2.3.1. Also here a generic glue code might be needed if the modules are not placed
in the same ASIL partition. In this case either the caller or the callee have to provide
this glue code. In an ASIL system the glue code is normally provided by those
modules which have the higher ASIL. The glue code can be created statically or can
be generated.
For the generation of the glue code the following limitations exist:
Calls to integrator code: A configuration via SchM_Call() is not possible since the
integrator code does not belong to any BSW module and does not have any
configuration (EcuConfiguration) and module (BSWDT) information which could
be used. In such cases
o Either a static glue code has to be used to encapsulate calls from/to
integrator code and the integrator code might need small changes, e.g.
changing the name of the called function to avoid name clashes.
o or offer vendor specific configuration parameter which holds per callout a
reference to the OsApplication where the integration code is placed.
If we know only the address of the callee (this can happen if the interface is
generic and function pointers are used for the call, e.g. in the PDU Router) we
need a dedicated vendor specific configuration parameter for the ASIL module
which provides the information in which partition the callee is located.
3.2.3.4 QM calls QM
This caller-callee combination is not supported by AUTOSAR. Reason is that this is
not possible without changing an existing QM module. Therefore, only one BSW QM
partition is supported. Hence all these calls are partition local.
3.2.3.5 Parameter passing
In the previous sections we showed how a call to a function in another partition can
be made. Besides the real call mechanism there is another important topic and this is
the passing of parameters to the callee and passing results back to the caller. The
question behind this is: How does the callee access these parameters and how can
results be propagated back to the caller.
AUTOSAR differentiates between IN, OUT and INOUT parameters which are
passed. IN parameters are not critical, because they are normally passed by value
and even for cases where a by reference passing is done the callee is not allowed to
write to them. This means that they do not pass any information back to the caller.
OUT and INOUT parameters are used to return results from the callee back to the
caller. The question now is: how can these values passed back to the caller if callee
and caller are not in the same partition.
In general the following methods are possible:

Guide to BSW Distribution
AUTOSAR Release 4.2.1
35 of 46 Document ID 631: AUTOSAR_EXP_BSWDistributionGuide.doc
- AUTOSAR Confidential -
1. If caller and callee are in different partitions the callee works on a copy (for
INOUT data) or empty space (OUT data) and when returning back to the caller
the values are copied back. For the inter partition communication of data
AUTOSAR offers the IOC mechanism of the Os. However, often usage of IOC
can be avoided by copying such that only read access is needed.
2. A hardware specific solution: In such cases a copy / extra buffer is avoided by
using dedicated hardware features of the used microcontroller which guarantee
freedom of interference. E.g. If the hardware allows for private shared memory
areas between caller and callee.
In the following we will show how (1) works. Option (2) depends on the used
hardware and is not standardized in AUTOSAR. The following code fragment shows
an example how the parameter passing works (case: ASIL calls QM)
/* caller side code */
Std_ReturnType _Dem_GetOperationCycleState(
uint8 id,
Dem_OperationCycleStateType* state)
{
….
/* setup params struct with arguments */
ret = CallTrustedFunction(GETCYCLESTATE,¶ms)
if (ret == E_OK)
{
IocReceive_RETURNVALUEGETCYCLESTATE(&ret);
IocReceive_VALUEGETCYCLESTATE(state);
}
return ret;
}
Guide to BSW Distribution
AUTOSAR Release 4.2.1
36 of 46 Document ID 631: AUTOSAR_EXP_BSWDistributionGuide.doc
- AUTOSAR Confidential -
Note that the above example is quite typical for AUTOSAR inter-partition calls. It
assumes that the lifetime of the buffer is equal to the duration of the called function. If
this is different, e.g. one function which just provides a buffer and another function at
a later time indicate that the buffer is now ready (example: NvM read mechanism) an
adoption is needed.
3.2.4 Access to peripherals / hardware
In AUTOSAR the access to peripherals or hardware is limited to BSW modules.
Typically only some of them require a real access, e.g.:
- The Os switches between different contexts and need to read/write the
context registers. Also interrupt locking requires normally access to
hardware registers or execution of privileged instructions.
- During startup the Mcu driver needs to enable the microcontroller clocks
and may perform further initialization of registers
- IO drivers need to access their part of the hardware.
- …
If parts of the BSW are now running in a partition where the memory protection is
enabled the full access to hardware is normally no longer possible. In such cases a
hardware access can be realized by:
1. “CDD approach”: Create a piece of code which access the required hardware
and map this code to a trusted OsAppication with memory protection disabled.
This allows the code to have full access. From within your BSW module all
hardware access must then call this small piece of code. In this case this code
has full access to hardware.
2. “Hardware approach”: If possible map the hardware registers into the address
space of the partition which requires the access. This normally opens the
access to these registers for the BSW modules which are located in the
partition. The availability of this method depends strongly on the used
microcontroller and the capabilities of the memory protection unit.
/* callee side code */
void TRUSTED_GETCYCLESTATE(TrustedFunctionIndexType a,
parameter_struct *local_struct)
{
Std_ReturnType localreturn;
uint 8 localid;
Dem_OperationCycleStateType localstate
/* setup parameters from local_struct */
…
localreturn = Dem_GetOperationCycleState(localid,
&localstate);
IocSend_RETURNVALUEGETCYCLESTATE(localreturn);
IocSend_VALUEGETCYCLESTATE(localstate);
return;
}
local_struct.return_value = function();
return;
}
Guide to BSW Distribution
AUTOSAR Release 4.2.1
37 of 46 Document ID 631: AUTOSAR_EXP_BSWDistributionGuide.doc
- AUTOSAR Confidential -
Example for the “CDD approach”: A CDD offers methods to read (peek) and write
(poke) hardware registers. Note that in such cases it should be mentioned that
additionally an access management is necessary (“Who is allowed to call these
functions?”) because otherwise you could not guarantee freedom from interference.
The CDD is mapped to an partition with full memory access.
Figure 18: CDD approach
Note that some modules typically have implicit access, because their code is
executed before the memory protection scheme is started in the Os. Details can be
found in the next chapter.
3.2.5 Startup, Shutdown and Sleep/Wakeup
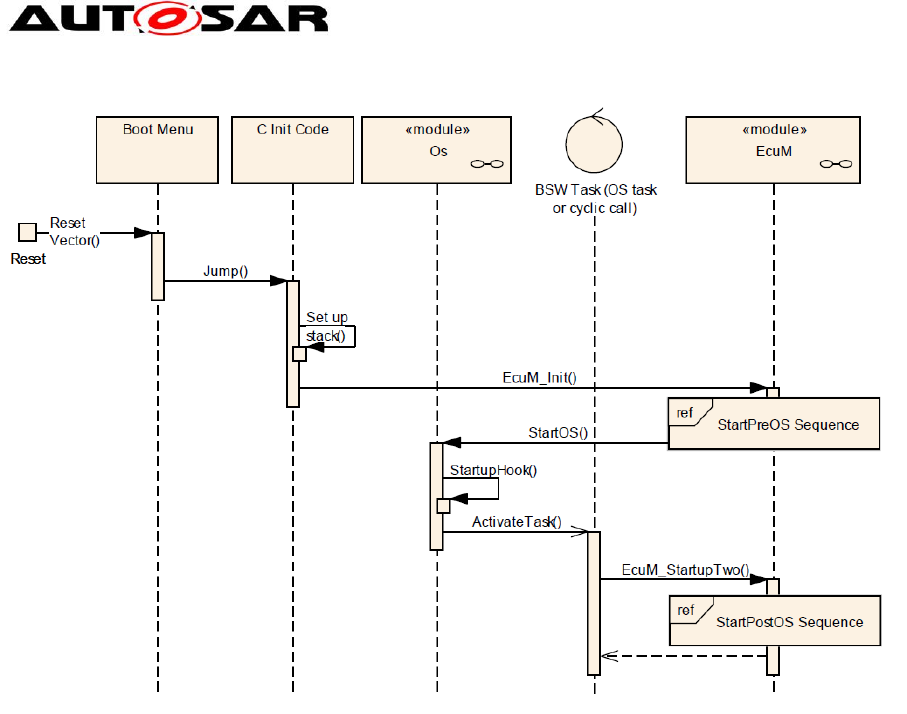
3.2.5.1 Startup
In AUTOSAR the startup is handled by the EcuM module. It takes care about the
right order during system start. In an ASIL system the user has to take care that
during startup no relevant data is overwritten or the issue is at least detected. Such
faults can happen because the memory protection is not yet running because the Os
is not yet started. The following figure from the EcuM shows the default sequence
during startup.
Guide to BSW Distribution
AUTOSAR Release 4.2.1
38 of 46 Document ID 631: AUTOSAR_EXP_BSWDistributionGuide.doc
- AUTOSAR Confidential -
Figure 19: Startup of ECU
As a general hint it is always good to minimize the amount of code which is executed
before the Os starts. Depending on the ASIL it might be required to develop all code
of the startup as ASIL or to find other ways to make sure that nothing bad happened
during startup e.g. by checking relevant data at a later point in time.
3.2.5.2 Shutdown
For the shutdown we have to distinguish different scenarios. From AUTOSAR
perspective the EcuM also handles the shutdown. Compared with the startup we
have a situation where the memory protection is enabled also during shutdown.
3.2.5.3 Sleep / Wakeup
In AUTOSAR EcuM takes also care for the sleep / wakeup handling. If a system has
specific safety requirements in this area, also the EcuM shall take care. E.g. check if
users are allowed to trigger a sleep / do a wakeup validation.
3.2.6 Error handling
When BSW modules are mapped to different partitions they do not change the
overall AUTOSAR error handling. E.g. calls to Dem or Det still take place and –
depending on the mapping – may cross partition boundaries.
Nevertheless the use of more than one partition with BSW modules introduces some
new fault scenarios:
- A BSW function located in a trusted memory protected partition may cause a
memory violation.
- A BSW function may be executed with timing protection and may run out of time,
causing a timing violation.
Guide to BSW Distribution
AUTOSAR Release 4.2.1
39 of 46 Document ID 631: AUTOSAR_EXP_BSWDistributionGuide.doc
- AUTOSAR Confidential -
- A BSW function may try to access some hardware registers where it has no
access to.
- …
In AUTOSAR systems without BSW distribution these issues are normally not
detected because the timing protection is not used for BSW tasks. This may cause
problems during normal program execution probably or at a later point in time.
In a partitioned system where the protection is enabled also for BSW modules the
problems are detected and reported via the OsProtectionHook. Although it is possible
to restart a single OsApplication, restarting of single BSW partitions is not possible,
since the BSW as whole has too many dependencies between the modules. This
means that also for partitioned systems a protection fault is fatal and will cause a
restart of the system. The advantage is that the fault can be detected much earlier
and the restart can be made in a more controlled manner.
3.2.7 Timing protection
From the errors mentioned in 3.2.6 the timing faults are a special case since they
may happen at any time. E.g. consider the following example:
Figure 20: Timing fault
Here a runnable of a SWC calls an AUTOSAR service and continues execution in the
QM BSW partition. From here a call to an ASIL module located in a different partition
is performed. Then – right within the ASIL module – the timing violation takes place.
The ASIL module has no chance to detect the problem and the system will shutdown.
To avoid such scenarios, trusted OsApplications have the ability to delay timing
violation up to the point when the causing task (or ISR) leaves the partition. If both
BSW partitions have the flag enabled the timing violation is reported at the point
where the call from the SWC to the BSW module returns. Then it causes a violation
and may end with a restart of the QM Application partition. The advantage here is
that the BSW does not report the issue and there is no need for a shutdown.

Guide to BSW Distribution
AUTOSAR Release 4.2.1
40 of 46 Document ID 631: AUTOSAR_EXP_BSWDistributionGuide.doc
- AUTOSAR Confidential -
The feature can be enabled for each trusted OsApplication via the configuration
parameter OsTrustedApplicationDelayTimingViolationCall.
3.2.8 Combining Safety and Multi-Core
In case ASIL systems are implemented using a multi-core architecture, all
considerations made until now for both, safety and multi-core, are valid. In a multi-
core system, the BSW is assigned to core specific partitions. If safety is added, we
have core specific QM partitions (one per core) and core specific ASIL partitions. The
specific multi-core configuration parameters and the specific safety configuration
parameters are independent and need to be set according to the multi-core
respectively safety needs.
3.2.9 Performance Considerations
The main goal for BSW distribution within safety systems is the minimized effort if
only (small) parts of the system need to be developed according to ASIL. The
drawback is that the protection schema causes additional overhead. The amount of
time required for the overhead depends on the project and on the mapping of the
BSW modules and the frequency of interaction between the partitions.
The overhead will be minimized if …
… as few as possible BSW partitions are used. Adding more partitions causes in
all cases more overhead.
… mapping of BSW modules follows the “nearest” approach. This means that
modules with a high interaction should be placed in one partition. E.g. placing the
whole communication stack in on partition is much faster than splitting it up and
placing e.g. the PduR in a separate partition.
… the number of inter partition calls is minimized. The possibilities for the user
are normally limited since AUTOSAR defines the interaction between the BSW
modules. Nevertheless integrator code and CDDs can be written in such way that
the number of such inter partition calls is minimal.
… specific hardware features are supported. E.g. if there is a possibility to have
more memory regions by hardware they can be utilized to avoid copying data for
OUT or INOUT parameters. Note that it is not enough that the hardware offers
such mechanisms; the AUTOSAR vendor must also utilize it (e.g. by supporting
such features in the Os or memory mapping handling).
… avoid IOC calls. IOC will always do a copy of your data. Thus avoiding calls to
it will increase the performance. In general try to “pull” the data instead of “push”,
this means the caller shall (after return of CallTrustedFunction()) try to read the
data. The buffer shall be on the callee side if possible.
3.2.10 Constraints
The approach to separate BSW modules into different partitions works, but has
limitations depending on the available hardware:

Guide to BSW Distribution
AUTOSAR Release 4.2.1
41 of 46 Document ID 631: AUTOSAR_EXP_BSWDistributionGuide.doc
- AUTOSAR Confidential -
On some MCUs the access to registers is limited to specific processor modes.
In such cases a peek/poke approach (see 3.2.4) is usable but consumes more
time than a direct access. The amount of time spend for these functions may
be fine for startup or shutdown, but not during normal operation if performed
with high frequency.
Normally only write access is limited between (BSW) partitions. Sometimes
even a read access to peripheral registers has write effects (e.g. reading the
buffer of received characters). In such cases also the read access may be
limited.
Sometimes the hardware does not support the use of memory protection while
executing in privileged modes. In such cases it is recommended to run all
partitions in non-privileged modes to use memory protection. The amount of
code which requires privilege modes shall be minimal in such cases.
Note that for those measures typically the MCAL vendor is responsible. This may
also apply for an MCAL qualified to an ASIL if the BSW is only QM.

Guide to BSW Distribution
AUTOSAR Release 4.2.1
42 of 46 Document ID 631: AUTOSAR_EXP_BSWDistributionGuide.doc
- AUTOSAR Confidential -
4 Outlook on Upcoming AUTOSAR Versions
In this chapter, we list changes to the distribution of BSW that may occur in the next
backward incompatible release of AUTOSAR. Hence, the content of this chapter is
not applicable to AUTOSAR 4.x implementations, but is supposed to show possible
extensions and enhancements for future versions of AUTOSAR. Note that all these
topics need to be considered in parallel, because definitions of BSW functional
clusters and their standardized interfaces, which will be named "Standardized
AUTOSAR BSW Cluster Interface" then, are needed to support a safety use case.
4.1 Known limitations
The support for Basic Software Allocation in AUTOSAR is currently limited to
backward compatible changes (w.r.t. AUTOSAR 4.0.3). This currently results in the
following restrictions, which may not apply to future releases of AUTOSAR:
There is only one QM BSW partition per core.
Communication between master and satellites is not standardized.
BSW functional clusters and their AUTOSAR BSW Cluster Interface are not
standardized.
4.2 Inter BSW module calls in distributed BSW
Currently the BSW distribution has the constraint that existing QM modules shall be
reused as is. If we would weaken this we can allow a more performant
communication between modules. E.g. it could be possible to include SchM_Call()s
directly at the caller and to avoid the stubs. (Typically the caller knows the context of
the call and can prepare the best environment for the call).
Also multi-core systems would benefit if all inter BSW module calls are encapsulated
with a SchM_Call().
4.3 Standardized BSW functional clusters
BSW functional clusters are groups of functionally coherent BSW modules. Each
BSW functional cluster includes a set of BSW modules. It is possible to have several
functional clusters of the same type (e.g. several I/O clusters in different partitions),
each using a different set of modules (e.g. IOHWA + ADC in one partition and
IOHWA + ADC + DIO in the second partition). Each functional cluster has a
”AUTOSAR BSW Cluster Interface", which is used to communicate with other
functional clusters
BSW functional clusters can be allocated to different partitions, and functional
clusters of the same type can be available in several partitions. Different functional
clusters can be allocated to the same or to different partitions.
The same functional cluster can only exist at most once in each partition.
But this whole cluster allocation and the resulting real interfaces are not yet
standardized, just the technique is proposed here. Thus:
Upcoming versions of AUTOSAR may standardize one or more of the following:
Define which modules are assigned to which BSW functional cluster (=>
“Standardized BSW functional cluster”). It is very likely that modules of the
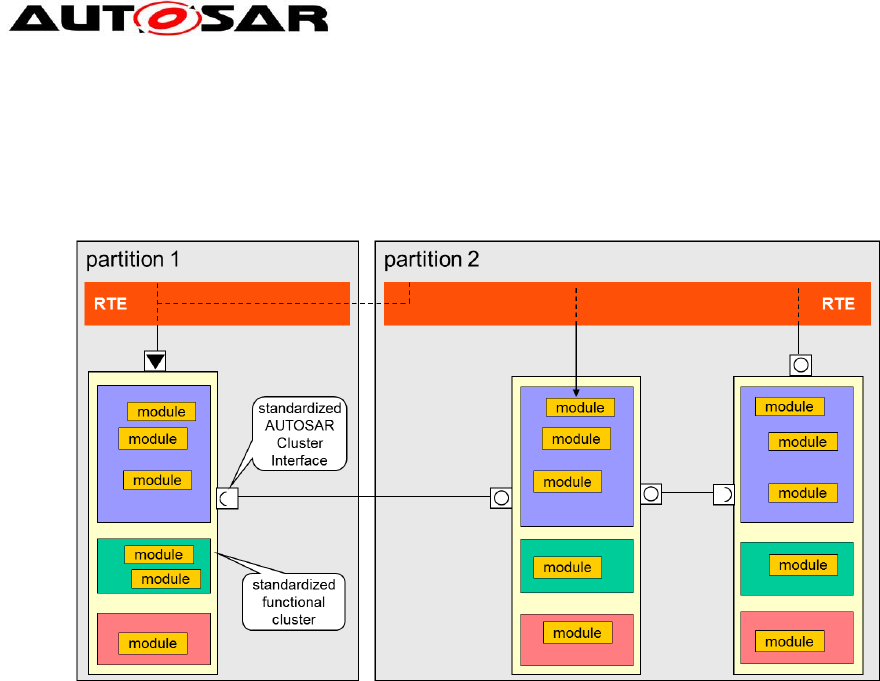
Guide to BSW Distribution
AUTOSAR Release 4.2.1
43 of 46 Document ID 631: AUTOSAR_EXP_BSWDistributionGuide.doc
- AUTOSAR Confidential -
same stack (for instance I/O services, I/O hardware abstraction and I/O
drivers) will be assigned to the same functional cluster.
Standardize communication between functional clusters of different types via
"Standardized AUTOSAR BSW cluster interfaces”, as shown in Figure 21.
Figure 21: Standardized BSW Functional Clusters
Guide to BSW Distribution
AUTOSAR Release 4.2.1
44 of 46 Document ID 631: AUTOSAR_EXP_BSWDistributionGuide.doc
- AUTOSAR Confidential -
5 Glossary
All technical terms used throughout this document - except the ones listed here - can
be found in the official AUTOSAR glossary [2] or the Software Component Template
Specification [3].
5.1 Acronyms and abbreviations
Abbreviation
Explanation
ASIL
Automotive Safety Integrity Level
QM
Quality Managed (i.e. not developed according to ASIL
requirements)
IOC
Inter OS-Application communicator, part of OS
MCU
microcontroller unit, µC
MCAL
microcontroller abstraction layer
5.2 Technical Terms
Term
Explanation
BSW
functional
cluster
A coherent group of BSW modules. The technique is proposed in
this document, but a real allocation of modules to clusters is
currently not standardized. A BSW functional cluster may be similar
to what usually is called a "stack", but it would also be possible to
combine several stacks into a cluster or to distribute a stack across
several clusters. A BSW functional cluster includes the superset of
modules, which can be part of the functional cluster, but not all
modules need to be available in a specific implementation. In case
the real allocation of BSW modules to BSW functional clusters is
standardized in future, they probably will be named “Standardized
BSW functional clusters”.
BSW functional clusters can be allocated to different partitions, and
clusters of the same type can be available in several partitions
(either on the same or on different cores). Different functional
clusters can be allocated to the same partition.
Note: Contrary to ICC2 clustering, the internal structure and the
interfaces between the modules within the functional cluster are not
affected by the BSW multi-core support in AUTOSAR 4.1.1.
AUTOSAR
BSW Cluster
Interface
Interfaces between BSW functional clusters resulting from a
vendor/project specific definition of BSW functional clusters. The
technique is proposed in this document in a vendor/project specific
way. But the allocation of modules to BSW functional clusters and
thus the resulting interfaces are not standardized yet (if possible at
all). This term may be defined in an upcoming release of AUTOSAR
as “Standardized AUTOSAR BSW Cluster Interface” after
standardization.
Contrary to the standardized AUTOSAR interfaces, AUTOSAR BSW
Cluster Interfaces shall not be connected to SW-Cs or BSW modules
on other MCUs.
Master
Part of a distributed BSW module that coordinates requests by
satellites and can filter or monitor incoming satellite requests. The
Guide to BSW Distribution
AUTOSAR Release 4.2.1
45 of 46 Document ID 631: AUTOSAR_EXP_BSWDistributionGuide.doc
- AUTOSAR Confidential -
master may work properly even if the satellites are not available. In
future versions of AUTOSAR, where case partitioning may be used
to enhance safety, it may be recommended or mandatory to locate
the master in a partition with a high trust level, e.g. in a trusted
partition.
Satellite
Part of a distributed BSW module. The distribution of work between
master and satellite is implementation specific. One possibility is that
the satellite only provides the interfaces to the other modules and
routes all requests to the master and answers back to the other
modules. In a different scenario, the satellite can provide the full
functionality locally and only synchronizes its internal states with the
master if necessary. Intermediate forms between these two
scenarios are possible, but the satellites in general cannot work
without the master.

Guide to BSW Distribution
AUTOSAR Release 4.2.1
46 of 46 Document ID 631: AUTOSAR_EXP_BSWDistributionGuide.doc
- AUTOSAR Confidential -
6 References
[1] Requirements on Basic Software Module Description Template
AUTOSAR_RS_BSWModuleDescriptionTemplate
[2] Glossary
AUTOSAR_TR_Glossary
[3] Software Component Template
AUTOSAR_TPS_SoftwareComponentTemplate
[4] Concept Enhanced BSW Allocation
AUTOSAR_CONC_EnhancedBSWAllocation
[5] Specification of Basic Software Mode Manager
AUTOSAR_SWS_BSWModeManager
