Altirra Hardware Reference Manual
User Manual:
Open the PDF directly: View PDF ![]() .
.
Page Count: 325 [warning: Documents this large are best viewed by clicking the View PDF Link!]
- 1.1 Introduction
- 1.2 What's new in this edition
- 1.3 Conventions in this manual
- 1.4 Basic characteristics
- Chapter 2 CPU
- Chapter 3 System control
- Chapter 4 ANTIC
- 4.1 Basic operation
- 4.2 Display timing
- 4.3 Playfield
- 4.4 Character modes
- 4.5 Mapped (bitmap) modes
- 4.6 Display list
- 4.7 Scrolling
- 4.8 Non-maskable interrupts
- 4.9 WSYNC
- 4.10 VCOUNT
- 4.11 Playfield DMA
- 4.12 Abnormal playfield DMA
- 4.13 Player/missile DMA
- 4.14 Scan line timing
- 4.15 Cycle counting example
- 4.16 Examples
- 4.17 Further reading
- Chapter 5 POKEY
- Chapter 6 CTIA/GTIA
- Chapter 7 Accessories
- Chapter 8 Cartridges
- Chapter 9 Serial I/O (SIO) Bus
- Chapter 10 Disk drives
- 10.1 Introduction
- 10.2 Basic protocol
- 10.3 Extended protocols
- 10.4 Commands
- 10.5 Timing
- 10.6 Anomalies
- 10.7 810 disk drive
- 10.8 810 hardware
- 10.9 Happy 810
- 10.10 1050 disk drive
- 10.11 1050 hardware
- 10.12 US Doubler
- 10.13 Happy 1050
- 10.14 I.S. Plate
- 10.15 XF551 disk drive
- 10.16 XF551 hardware
- 10.17 Indus GT disk drive
- 10.18 Indus GT hardware
- 10.19 ATR8000 hardware
- 10.20 Percom RFD-40S1
- Chapter 11 Parallel Bus Interface
- Chapter 12 Internal devices
- Chapter 13 5200 SuperSystem
- Chapter 14 Reference
- 14.1 Memory map
- 14.2 Register list
- 14.3 GTIA registers
- HPOSP0-3 [D000-D003, W]
- M0PF-M3PF [D000-D003, R]
- HPOSM0-3 [D004-D007, W]
- P0PF-P3PF [D004-D007, R]
- SIZEP0-SIZEP3 [D008-D00B, W]
- M0PL-M3PL [D008-D00B, R]
- SIZEM [D00C, W]
- P0PL-P3PL [D00C-D00F, R]
- GRAFP0-3 [D00D-D010, W]
- TRIG0-3 [D010-D013, R]
- GRAFM [D011, W]
- COLPM0-3 [D012-D015, W]
- PAL [D014, R]
- COLPF0-3 [D016-D019, W]
- COLBK [D01A, W]
- PRIOR [D01B, W]
- VDELAY [D01C, W]
- GRACTL [D01D, W]
- HITCLR [D01E, W]
- CONSOL [D01F, R/W]
- 14.4 POKEY registers
- 14.5 PIA registers
- 14.6 ANTIC registers
- 14.7 Register listing
- Chapter 15 Bibliography
- Appendix A Polynomial Counters
- Appendix B Physical Disk Format
- Appendix C Quick Reference

Altirra Hardware
Reference Manual
2018-08-12 Edition
Avery Lee

Altirra Hardware Reference Manual Created by Avery Lee
Table of Contents
1.1. Introduction ............................................................................................................................................... 8
1.2. What's new in this edition ......................................................................................................................... 9
1.3. Conventions in this manual ..................................................................................................................... 12
1.4. Basic characteristics ............................................................................................................................... 13
2. CPU ............................................................................................................................................................... 16
2.1. Registers ................................................................................................................................................. 17
2.2. Decimal mode ......................................................................................................................................... 17
2.3. Cycle timing ............................................................................................................................................ 18
2.4. Interrupts ................................................................................................................................................. 19
2.5. Undocumented instructions .................................................................................................................... 23
2.6. 65C02 compatibility ................................................................................................................................ 26
2.7. 65C816 compatibility .............................................................................................................................. 28
2.8. 65C816 native mode ............................................................................................................................... 29
2.9. Examples ................................................................................................................................................ 31
2.10. Further reading ..................................................................................................................................... 31
3. System control ............................................................................................................................................... 32
3.1. System Reset button .............................................................................................................................. 33
3.2. Peripheral Interface Adapter (PIA) .......................................................................................................... 33
3.3. Memory system ...................................................................................................................................... 35
3.4. Bank switching ........................................................................................................................................ 36
3.5. Extended memory ................................................................................................................................... 37
3.6. Miscellaneous connections ..................................................................................................................... 38
3.7. Examples ................................................................................................................................................ 38
3.8. Further reading ....................................................................................................................................... 39
4. ANTIC ............................................................................................................................................................ 40
4.1. Basic operation ....................................................................................................................................... 41
4.2. Display timing ......................................................................................................................................... 42
4.3. Playfield .................................................................................................................................................. 43
4.4. Character modes .................................................................................................................................... 44
4.5. Mapped (bitmap) modes ......................................................................................................................... 46
4.6. Display list ............................................................................................................................................... 47
4.7. Scrolling .................................................................................................................................................. 50
4.8. Non-maskable interrupts ......................................................................................................................... 54
4.9. WSYNC .................................................................................................................................................. 56
4.10. VCOUNT ............................................................................................................................................... 58
4.11. Playfield DMA ........................................................................................................................................ 58
4.12. Abnormal playfield DMA ........................................................................................................................ 60
4.13. Player/missile DMA ............................................................................................................................... 64
4.14. Scan line timing .................................................................................................................................... 65
4.15. Cycle counting example ........................................................................................................................ 75
4.16. Examples .............................................................................................................................................. 77
4.17. Further reading ..................................................................................................................................... 78
5. POKEY .......................................................................................................................................................... 79
5.1. Addressing .............................................................................................................................................. 80
5.2. Initialization ............................................................................................................................................. 80
5.3. Sound generation ................................................................................................................................... 80
5.4. Serial port ............................................................................................................................................... 82
5.5. Clock generation ..................................................................................................................................... 89
5.6. Noise generators .................................................................................................................................... 89
5.7. Interrupts ................................................................................................................................................. 90
- 2

Altirra Hardware Reference Manual Created by Avery Lee
5.8. Keyboard scan ........................................................................................................................................ 91
5.9. Paddle scan ............................................................................................................................................ 95
5.10. Examples .............................................................................................................................................. 97
5.11. Further reading ..................................................................................................................................... 97
6. CTIA/GTIA ..................................................................................................................................................... 98
6.1. Color encoding ........................................................................................................................................ 99
6.2. Player/missile graphics ......................................................................................................................... 101
6.3. Collision detection ................................................................................................................................. 105
6.4. Priority control ....................................................................................................................................... 106
6.5. High resolution mode (ANTIC modes 2, 3, and F) ................................................................................ 108
6.6. GTIA special modes .............................................................................................................................. 109
6.7. Cycle timing ........................................................................................................................................... 111
6.8. General purpose I/O .............................................................................................................................. 113
6.9. Further reading ...................................................................................................................................... 113
7. Accessories .................................................................................................................................................. 114
7.1. Joystick ................................................................................................................................................. 115
7.2. Paddle ................................................................................................................................................... 115
7.3. Mouse ................................................................................................................................................... 116
7.4. Light Pen/Gun ....................................................................................................................................... 117
7.5. CX-85 Numerical Keypad ...................................................................................................................... 117
7.6. CX-20 Driving Controller ....................................................................................................................... 118
7.7. CX-21/23/50 Keyboard Controller ......................................................................................................... 118
7.8. XEP80 Interface Module ....................................................................................................................... 119
7.9. Corvus Disk System ............................................................................................................................. 132
8. Cartridges .................................................................................................................................................... 134
8.1. Cartridge port ........................................................................................................................................ 135
8.2. Atarimax flash cartridges ....................................................................................................................... 136
8.3. Atarimax MyIDE-II ................................................................................................................................. 136
8.4. SIC! ....................................................................................................................................................... 139
8.5. SIDE 1 / SIDE 2 .................................................................................................................................... 140
8.6. Corina ................................................................................................................................................... 143
8.7. R-Time 8 ............................................................................................................................................... 143
8.8. Veronica ................................................................................................................................................ 144
9. Serial I/O (SIO) Bus ..................................................................................................................................... 148
9.1. Basic SIO protocol ................................................................................................................................ 149
9.2. Polling ................................................................................................................................................... 153
9.3. 850 Interface Module ............................................................................................................................ 156
9.4. 1030 Modem ......................................................................................................................................... 159
9.5. SX212 Modem ...................................................................................................................................... 160
9.6. R-Verter ................................................................................................................................................ 162
9.7. 410/1010 Program Recorder ................................................................................................................ 162
9.8. MidiMate ............................................................................................................................................... 163
9.9. Pocket Modem ...................................................................................................................................... 163
10. Disk drives ................................................................................................................................................. 165
10.1. Introduction ......................................................................................................................................... 166
10.2. Basic protocol ..................................................................................................................................... 172
10.3. Extended protocols ............................................................................................................................. 173
10.4. Commands ......................................................................................................................................... 176
10.5. Timing ................................................................................................................................................. 178
10.6. Anomalies ........................................................................................................................................... 182
10.7. 810 disk drive ...................................................................................................................................... 184
10.8. 810 hardware ...................................................................................................................................... 186
10.9. Happy 810 .......................................................................................................................................... 189
10.10. 1050 disk drive .................................................................................................................................. 191
- 3

Altirra Hardware Reference Manual Created by Avery Lee
10.11. 1050 hardware .................................................................................................................................. 192
10.12. Happy 1050 ...................................................................................................................................... 194
10.13. XF551 disk drive ............................................................................................................................... 197
10.14. XF551 hardware ............................................................................................................................... 200
10.15. Indus GT disk drive ........................................................................................................................... 201
10.16. Indus GT hardware ........................................................................................................................... 203
10.17. ATR8000 hardware ........................................................................................................................... 205
10.18. Percom RFD-40S1 ............................................................................................................................ 208
11. Parallel Bus Interface ................................................................................................................................. 210
11.1. Introduction .......................................................................................................................................... 211
11.2. Common memory map ........................................................................................................................ 211
11.3. ICD Multi I/O (MIO) ............................................................................................................................. 212
11.4. CSS Black Box .................................................................................................................................... 214
12. Internal devices .......................................................................................................................................... 219
12.1. Introduction ......................................................................................................................................... 220
12.2. Covox .................................................................................................................................................. 220
12.3. Ultimate1MB ....................................................................................................................................... 220
12.4. VideoBoard XE ................................................................................................................................... 228
13. 5200 SuperSystem .................................................................................................................................... 244
13.1. Introduction ......................................................................................................................................... 245
13.2. Differences from the 8-bit computer line ............................................................................................. 245
13.3. Controller ............................................................................................................................................ 245
13.4. 5200 Memory map .............................................................................................................................. 248
14. Reference .................................................................................................................................................. 249
14.1. Memory map ....................................................................................................................................... 250
14.2. Register list ......................................................................................................................................... 251
14.3. GTIA registers ..................................................................................................................................... 253
14.4. POKEY registers ................................................................................................................................. 273
14.5. PIA registers ....................................................................................................................................... 289
14.6. ANTIC registers .................................................................................................................................. 292
14.7. Register listing .................................................................................................................................... 304
15. Bibliography ............................................................................................................................................... 307
A. Polynomial Counters ................................................................................................................................... 309
B. Physical Disk Format ................................................................................................................................... 314
B.1. Raw geometry ...................................................................................................................................... 315
B.2. Bit encoding .......................................................................................................................................... 315
B.3. Address field ......................................................................................................................................... 316
B.4. Data field .............................................................................................................................................. 316
B.5. CRC algorithm ...................................................................................................................................... 317
C. Quick Reference ......................................................................................................................................... 318
C.1. CPU opcode table ................................................................................................................................ 319
- 4

Altirra Hardware Reference Manual Created by Avery Lee
Index of Tables
Table 1: NMOS 6502 opcode table.......................................................................................................................23
Table 2: 65C02 opcode table................................................................................................................................ 27
Table 3: 65C816 opcode table.............................................................................................................................. 28
Table 4: Typical power-up values for ANTIC registers...........................................................................................42
Table 5: ANTIC display timing............................................................................................................................... 42
Table 6: DMA and shift clock rates by mode......................................................................................................... 61
Table 7: Serial port timing modes.......................................................................................................................... 85
Table 8: Key codes (scan matrix layout)............................................................................................................... 92
Table 9: Key codes (130XE keyboard layout).......................................................................................................92
Table 10: PAL GTIA color encodings................................................................................................................... 100
Table 11: Results of various size changes in the middle of a player image.........................................................104
Table 12: Priority logic outputs for unusual priority modes..................................................................................107
Table 13: ANx bus encodings.............................................................................................................................. 111
Table 14: Timing for mid-screen writes to GTIA registers....................................................................................112
Table 15: CX-85 keypad to PORTA bit pattern mapping.....................................................................................118
Table 16: Keyboard Controller key matrix...........................................................................................................118
Table 17: Character bit to block graphics mapping.............................................................................................123
Table 18: XEP80 Timing Register Values............................................................................................................ 131
Table 19: Corvus Interface modes...................................................................................................................... 132
Table 20: SIDE 1/2 register map......................................................................................................................... 141
Table 21: SIO device IDs.................................................................................................................................... 150
Table 22: Peripheral Handler Relocation Record Types......................................................................................155
Table 23: 1030 Modem hardware commands.....................................................................................................160
Table 24: SX212 supported commands..............................................................................................................161
Table 25: Disk drive status frame........................................................................................................................ 172
Table 26: Disk drive transfer rates...................................................................................................................... 174
Table 27: PERCOM Block Contents...................................................................................................................175
Table 28: Detected Percom blocks for various disk drives and formats..............................................................176
Table 29: Disk drive transmit timings by firmware............................................................................................... 178
Table 30: Disk drive step rate timings................................................................................................................. 179
Table 31: Disk format strategies by drive type.................................................................................................... 179
Table 32: Track sector layouts by drive type and format.....................................................................................181
Table 33: FDC status codes for various read sector conditions..........................................................................182
Table 34: Ideal 810 sector read timing................................................................................................................184
Table 35: 810 memory map................................................................................................................................ 187
Table 36: 810 RIOT I/O port assignments...........................................................................................................188
Table 37: Happy 810 rev.7 drive mode bits.........................................................................................................190
Table 38: 1050 memory map.............................................................................................................................. 193
Table 39: 1050 RIOT I/O port assignments.........................................................................................................194
Table 40: Happy 1050 drive mode bits................................................................................................................197
Table 41: XF551 drive status flags...................................................................................................................... 198
Table 42: XF551 PERCOM configuration block values.......................................................................................199
Table 43: XF551 8040 I/O port connections........................................................................................................201
Table 44: Commonly used Indus GT uploadable code fragments.......................................................................202
Table 45: Indus GT memory map........................................................................................................................ 203
Table 46: Indus GT status 1 port signals.............................................................................................................204
Table 47: Indus GT status 2 port signals.............................................................................................................204
Table 48: ATR8000 input port assignments......................................................................................................... 206
Table 49: ATR8000 drive control port layout (OUT 30-3FH)................................................................................207
Table 50: ATR8000 SIO status port layout (IN 70-7FH)......................................................................................207
Table 51: ATR8000 printer status port layout (IN 20-2FH)..................................................................................208
- 5

Altirra Hardware Reference Manual Created by Avery Lee
Table 52: Percom RFD-40S1 memory map........................................................................................................ 208
Table 53: MIO memory map................................................................................................................................ 212
Table 54: Black Box memory map...................................................................................................................... 215
Table 55: VBXE extended display list (XDL) entry format...................................................................................230
Table 56: VBXE attribute map block layout......................................................................................................... 233
Table 57: VBXE blitter setup block...................................................................................................................... 234
Table 58: VBXE blit modes.................................................................................................................................235
Table 59: VBXE blitter speeds............................................................................................................................ 236
Table 60: VBXE registers.................................................................................................................................... 238
Table 61: CPU opcode table............................................................................................................................... 320
Index of Figures
Figure 1: Effects of overlapping IRQ/NMI timing...................................................................................................22
Figure 2: Effect of vertical scrolling on mode lines................................................................................................52
Figure 3: Abusing vertical scrolling in the “GTIA 9++” mode.................................................................................53
Figure 4: ANTIC event timing................................................................................................................................ 74
Figure 5: DMA and CPU timing for DLI handler.................................................................................................... 76
Figure 6: POKEY asynchronous serial receive timing...........................................................................................87
Figure 7: POKEY synchronous serial receive/transmit timing...............................................................................88
Figure 8: Veronica memory layout......................................................................................................................145
Figure 9: SIO command timing........................................................................................................................... 152
Figure 10: Ultimate1MB flash memory map........................................................................................................222
- 6

Altirra Hardware Reference Manual Created by Avery Lee
Copyright © 2009-2018 Avery Lee, All Rights Reserved.
Permission is granted to redistribute this document in verbatim form as long as it is done free of charge and for
non-commercial purposes.
All trademarks are the property of their respective owners.
While the information in this document is presumed correct, no guarantee is provided as to its accuracy or
fitness for a particular use.
- 7

Altirra Hardware Reference Manual Created by Avery Lee
1.1 Introduction
This document describes the hardware programming model used by Altirra, an emulator for the Atari 8-bit series
of home computers, including the 400, 800, 600XL, 800XL, 1200XL, 130XE, and XEGS models. Although the
emulator provides a virtual programming environment, it is intended to mimic the actual hardware. This
document attempts to describe the hardware in detail as the target to which the emulator aspires to imitate.
Some of this information has been collected from both official and unofficial sources, and some of it has been
determined by hand through testing on a real, still functioning Atari 800XL.
While I've spent a lot of time tracking down details myself, I have to acknowledge the substantial amount of
literature already available which provided background for this document. First and foremost, I'm indebted to the
technical staff behind the Atari Home Computer System Hardware Manual, which did a very good job of
describing the behavior and programming specifications for the official functionality in the Atari hardware, and
which should be considered required reading prior to this document. Similar shout-outs go to the authors of
Atari's OS Manual, which similarly documents the software side, and to Ian Chadwick and his Mapping the Atari,
Revised Edition, which contains the most detailed and complete memory map of the Atari I know of.
If you have the time and inclination, please check out my Altirra emulator, available at the following web address:
http://www.virtualdub.org/altirra.html
-- Avery Lee
1.1 - Introduction 8

Altirra Hardware Reference Manual Created by Avery Lee
1.2 What's new in this edition
This release
•CPU: Clarified exact rules for when a branch crosses a page.
•CPU: Fixed some erroneous illegal instructions in the 6502 opcode chart.
•ANTIC: Fixed wrong modes being listed for 512 byte / 1K character set size.
•POKEY: Additional information about high-pass filter timing.
•GTIA: New section on NTSC and PAL artifacting.
•Disk: Added information about task sequencing in disk drive controllers, I.S. Plate, sector interleaving
order used by disk drive firmware, XF551 FDC error codes, long sector behavior, 810 revision B
firmware, US Doubler hardware and commands, fixed incorrect sector ranges for XF551 back side
encoding.
05/17/2017 release
•Additional light pen information.
•Rewritten and expanded section on POKEY’s serial port hardware, including precise timing diagrams.
•MyIDE-II CompactFlash reset behavior.
•SX212 power-on behavior.
•New chapter on disk drives, including information on the Happy 810, Happy 1050, ATR8000, Percom
RFD-40S1, and the hardware for the 810, 1050, XF551, and Indus GT.
03/25/2016 release
•65C816 opcode table.
•800 floating I/O data bus.
•POKEY: Additional details on serial port behavior and keyboard and paddle scans.
•Additional XEP-80 details.
•Controllers: CX-20 Driving Controller, CX-21/23/50 Keyboard Controller.
•New device info: Indus GT disk drive, Corvus Disk Interface, Pocket Modem.
•810 and 1050 updates: long sector behavior, FDC status.
•SIDE 2 corrections.
•Physical disk format: sector length behavior.
07/05/2015 release
•System: Added information about floating PIA port B bits.
•CPU: Added new sections on new 65C816 functionality, undocumented 6502 opcodes, and opcode
tables.
•ANTIC: New sections on display timing, effects of extending the height of mode lines.
1.1 - Introduction 9

Altirra Hardware Reference Manual Created by Avery Lee
•POKEY: Added info about keyboard conflicts.
•GTIA: Added info about color generation.
•New chapter on cartridges: AtariMax, SIC!, SIDE, Corina, R-Time 8, Veronica.
•New chapter on Parallel Bus Interface devices: Black Box, Multi I/O.
•Additional device information: R-Verter, MidiMate, Ultimate1MB, VideoBoard XE.
•Additional XEP-80 commands.
•New appendices on polynomial counters and physical floppy disk formats.
04/27/2014 release
•CPU: Added section on 65C02 and 65C816 compatibility issues.
•System Control: Added information on Parallel Bus Interface IRQs.
•POKEY: Added keyboard scan code table.
•GTIA: Updated with new table of player/missile/playfield priority conflicts and information about priority
conflicts in GTIA modes.
•Serial I/O: Now has its own chapter, including information about type 0-4 polling and device-provided
relocatable loaders.
•850: Corrected errors in the description of the Write command, expanded description of the Stream
command, and added sections on the 850 bootstrap process.
•Disk: Added more details on 810 FDC controller status and command error conditions, and a new
section about disk anomalies used by protection mechanisms.
•New section on XEP80 device.
•Reference: Updated to note guarantees on PAL register bits, and fixed errors in PACTL listing and
register quick reference.
05/14/2013 release
•ANTIC updates:
◦Bus activity during WSYNC.
◦Abnormal playfield DMA.
•GTIA updates:
◦Border behavior in mode 10.
◦Player/missile shift details and lockup state.
•POKEY updates:
◦Polynomial counter patterns and timing behaviors.
09/15/2012 release
•Cycle numbers have been readjusted back so that cycle 0 is once again the missile DMA fetch.
•PIA corrections and interrupt behavior.
1.1 - Introduction 10

Altirra Hardware Reference Manual Created by Avery Lee
•CPU interrupt acknowledge timing.
•Parallel Bus Interface (PBI) information.
•XEGS game ROM selection and keyboard sense.
•ANTIC updates:
◦Virtual playfield DMA
◦Vertically scrolled jump instructions
◦VSCROL vs. DLI timing
•POKEY updates:
◦Additional serial port initializing and timing information
•GTIA updates:
◦Lo-res mode 10 anomaly
•Additional peripheral documentation:
◦CX-85 numerical keypad
◦850 Interface Module
◦1030 Modem
◦810, 1050, and XF551 Disk Drives
◦Generic SIO protocol
•Fixed backwards serial port and keyboard overrun bits in SKCTL reference.
•Fixed swapped Control and Shift bits in KBCODE reference.
•Removed incorrect location of international character set from memory map; this is an OS convention
anyway, not inherent in hardware.
11/23/2010 release
•5200 SuperSystem documentation.
•BRK anomalies, decimal mode, and I flag timing.
•ANTIC horizontal scrolling bug.
•NMIST timing.
•Temperature sensitive POKEY and GTIA behaviors.
•Keyboard scan behavior.
•All scan line cycle numbers have been corrected to match the horizontal position counter (one less than
previous).
1.1 - Introduction 11

Altirra Hardware Reference Manual Created by Avery Lee
1.3 Conventions in this manual
Number format
Unless specified, numbers without a prefix are given in base 10 (decimal). Numbers prefixed by $ are given in
base 16 (hexadecimal). In sections that describe Z80-based devices, Intel-style hex conventions are used
instead with hex numbers ending in H, i.e. 50H.
Scan line timing
A significant number of hardware events with interesting timing occur relative to a particular offset within the
timing of a scan line, which is one horizontal sweep of the display CRT beam. Many activities within the
hardware occur at specific positions within a scan line and it is frequently useful to synchronize the CPU to scan
line timing. There are 114 machine cycles for each scan line.
There is no program visible horizontal position counter in the Atari hardware. To make it easier to refer to specific
offsets within a scan line, the cycles within a scan line are numbered from 0-113 in this manual, where cycle 0
corresponds to the missile DMA at the beginning of a scan line. This is also approximately the beginning of
horizontal sync in the output video signal. Altirra also uses this convention in its debugger.
Deadlines
Sometimes it is necessary for the CPU to write to a hardware register before or after a particular deadline to
produce a desired behavior. For purposes here, A CPU write to a register on cycle N satisfies a requirement to
write by cycle N, before cycle N+1, and after cycle N-1. The cycle number is always in terms of the actual write
cycle from the CPU and not the write instruction. For instance, an INC NMIRES instruction that begins execution
on cycle 90 writes to NMIRES at cycles 95 and cycle 96, assuming no DMA contention.
Event timing
An event observable by a register is said to occur on a particular cycle when that is the first cycle in which a read
of that register reflects the event. For instance, if an interrupt bit activates in IRQST on cycle 95 of a scan line, it
means that reading the register on or prior to cycle 94 will not show the interrupt and reading it on or after cycle
95 will.
In most cases, event timing is described in this manual in terms of when it becomes visible to program
execution. For instance, interrupts are described according to when the 6502 can either sense a change in
interrupt status or begins executing an interrupt routine, and not when the IRQ signal on 6502 is asserted. An
exception is externally visible outputs, such as video, audio, and I/O.
Active low and active high signals
In hardware designs, the signals may be designated as either active low or active high depending on the
interpretation of the circuit design. The IRQ line on the CPU, for instance, is an active low signal and is activated
by pulling the signal line to the low state. On the other hand, the RD5 signal from the cartridge that maps $A000-
BFFF is active high, and is pulled up to +5V to signal that cartridge ROM is present.
To avoid confusion, this manual uses the terms asserted and negated to indicate the state of a signal line. An
active low signal is asserted in the low state, and negated in the high state; an active high signal is asserted in
the high state and negated in the low state.
1.1 - Introduction 12

Altirra Hardware Reference Manual Created by Avery Lee
1.4 Basic characteristics
Program visible behavior
A behavior or effect in the hardware which can be detected by a running program is program visible. Most of the
hardware behavior described in this manual is program visible. For instance, the serialization behavior of the
player/missile registers in GTIA is program visible because it can be detected through the collision registers. Any
program-visible behavior is detectable by program code and can therefore be checked to detect incomplete
emulation or broken hardware.
In contrast, a non program visible behavior cannot be detected by a running program: there is no way for an Atari
program to detect the colors produced by the GTIA priority logic unless external hardware provides a loopback
path.
Byte order (endian)
The 6502 is a little endian processor and therefore writes words with the lower order byte at the lower address of
the byte pair. The hardware follows the same convention: in the few cases where word registers exist or words
are fetched, the byte with the lower address is the lower order byte.
Bit order
Within a byte, bit 7 is the most significant bit (MSB), and bit 0 is the least significant bit (LSB). A left shift moves
bits toward the MSB from the LSB, and is equivalent to multiplying by a power of two.
Whenever data in a byte represents graphics patterns, the left-most (MSB) pixel is displayed on the left side on
screen. Wider two-bit and four-bit pixels are stored with the same bit ordering within a pixel, allowing arithmetic
operations to function on those pixels.
Address alignment
The timing of certain CPU operations and the behavior of DMA by ANTIC can depend on the addresses of bytes
within a block of memory. The start of a block of memory is said to be aligned to a particular boundary if it is a
multiple of that value. For instance, the address $0800 is aligned to a 1K boundary because $0800 is divisible by
a 1K block size ($0400 bytes). The address $0A00, however, is not.
A memory block crosses an alignment boundary if the addresses of the first and last bytes result in different
values when divided by the alignment block size. A 40 byte block at $090A-0931 is contained within a 1K
boundary, whereas $07FF-0826 crosses the 1K boundary at $0800. There are two specific behaviors associated
with crossing such a boundary. One is that the 6502 sometimes requires an extra cycle when boundary is
crossed; another is that the 6502 or ANTIC may fail to cross an alignment boundary and wrap addresses within
the alignment block instead.
A page is a 256 byte block of memory aligned on a 256 byte boundary. Many operations in the 6502 require
accesses to specific pages or require extra cycles when indexing causes address arithmetic to produce a final
address in a different page. Two 16-bit addresses have the same page if their first two hex digits are the same,
i.e. $A900 and $A947.
Read-only and write-only registers
Most registers in the hardware are either read-only or write-only: you cannot read a write-only register or write to
a read-only register. The address locations are also often shared between different read-only and write-only
registers, meaning that an attempt to use an unsupported memory operation will actually access the wrong
register. The OS maintains a number of shadow registers in the kernel database in order to support reading of
write only registers, with the caveat being that the shadow must be manually updated along with the hardware
1.1 - Introduction 13

Altirra Hardware Reference Manual Created by Avery Lee
register.
There are a few notable exceptions where registers are read/write, such as CONSOL in the GTIA and the
direction register in the PIA.
Strobe registers
Some hardware registers, such as POTGO and WSYNC, are strobe registers. These registers trigger an action
in the hardware when written by the CPU. The value written to the register is irrelevant and ignored, and the
strobe is activated even if the same value is written multiple times.
There are also registers that will trigger changes on a read cycle. The PIA data registers are examples, as
reading them clears pending interrupts. Similarly, some cartridge banking hardware only decodes addresses
without checking the read/write line and thus respond to a read by switching cartridge banks.
Latched (sticky) bits
Latched bits are activated when an event occurs and stay in that state until reset. Most of the interrupt status bits
in IRQST work that way, asserting IRQ on the CPU until the interrupt is acknowledged.
Incomplete address decoding (aliasing)
Address decoding is the hardware process of determining if a memory address corresponds to a particular
device. A device with full address decoding responds only to the specific addresses it is designed. For efficiency
reasons, many hardware devices on the Atari only partially decode addresses by checking a subset of address
bits. An example is the PIA, which only contains four addressable locations but is assigned a 256 byte region at
$D300-D3FF. Because bits 2-7 of the address are ignored, the PIA is mirrored 64 times within this address
space. This is also called aliasing, because two or more addresses serve as aliases for the same memory
location.
Although all of the mirror addresses of a hardware register are equivalent, there is typically still a canonical
address associated with that register, the address intended to be used. Using the canonical address of a register
is less likely to run into problems in expanded configurations. For instance, while $D3C0 is a valid address to
access the PORTA register on stock hardware, it may be overlaid and repurposed by expansion hardware.
Machine cycles (clocks)
Although most of the system actually runs at a faster rate, the smallest atomic unit of time for CPU execution is a
single cycle at approximately 1.8MHz. All CPU instructions must begin and end on a cycle boundary; all reads
and writes to registers must take place on a particular cycle. Unless otherwise specified, all cycles in this
document refer to machine cycles.
Color clock
Much of the graphics system in the Atari runs at the speed of the color clock, which for NTSC machines runs at
the color subcarrier (3.579545MHz). A color cycle is completed every time the color clock advances. The highest
resolution possible for most graphics is determined by this clock, which produces 160 low resolution pixels
across at standard playfield width. High resolution displays run at twice this frequency, for a dot clock of 7MHz,
but only luminance effects are possible at this rate. Playfield and sprite positioning also occur at color clock rate.
There are two color cycles for every machine cycle. On PAL machines, where the color subcarrier is at a much
higher frequency, most of the faster processes within GTIA still occur at twice the machine cycle rate.
Machine-specific behavior
There are unfortunately a few cases in which marginal timing causes systems to differ in behavior. Examples are
1.1 - Introduction 14

Altirra Hardware Reference Manual Created by Avery Lee
the interrupt delay between POKEY and the 6502 and the behavior of the GTIA fifth player bit. In some cases
this can even manifest as temperature sensitivity, where a system will change behavior once a certain involved
chip has warmed up and display erratic behavior during the transition. It is best that code be written to avoid
dependency on such cases and to tolerate variance between systems.
1.1 - Introduction 15
Chapter 2
CPU
The 6502 chip is the CPU of the Atari. Used in many computers of the time and still in use as
a microcontroller in enhanced forms, both the official and unofficial behaviors of the 6502 are
well known. While the 6502 was later superseded by chips such as the 65C02 and the
65C816, the Atari 8-bit line continued using the original 6502 until the very end.
Note that there is some confusion as to the precise chip used in the Atari 8-bit series. The
original 400/800 use the NMOS 6502, along with a handful of extra circuitry to provide the
ability to halt the CPU for ANTIC DMA; this was later replaced with the 6502C, a custom
version that contains the HALT logic built-in. This should not be confused with the CMOS
65C02, which is an enhanced 6502 with additional instructions and which was never used in
the Atari 8-bit line.
The 6502 contains many nuances and unusual undocumented behaviors which are crucial to
understand when programming to the metal on the Atari 8-bit series. For the sake of brevity,
the basic architecture of the 6502 will be omitted here to allow more space for documenting
these corner cases.

Altirra Hardware Reference Manual Created by Avery Lee
2.1 Registers
Unused flag
The 6502 does not use bit 5 of the P register. It can't be cleared and always reads as a 1 when pushed to the
stack with the PHP instruction or by interrupt entry.
On the 65C816, bit 5 is reused as the (M)ode bit in native mode.
Break (B) flag
Bit 4 of the processor status register is the (B)reak bit and is used to indicate whether an IRQ or a BRK
instruction caused the IRQ routine to be run. It is set if the trigger was an BRK and cleared if it was a IRQ.
Contrary to both official and unofficial documentation, the B bit does not actually exist in the P register.
Attempting to clear bit 4 of P and reading the result back always gives a 1 bit. The only time the B flag is visible
is when the 6502 pushes the P register on the stack as part of interrupt handling. In that case, the P value
pushed onto the stack will have bit 4 cleared for a BRK.
Decimal (D) flag
The D bit (bit 3) in the processor status register activates decimal mode in the 6502. When set to 1, the ADC and
SBC instructions perform BCD correction. CMP, CPX, CPY, INC, DEC, and indexed addressing are not affected.
NMOS 6502s do not clear the D flag automatically, so it must be cleared on reset. It should also be cleared in an
interrupt handler if the interrupt code uses ADC or SBC and mainline code may use decimal mode.
2.2 Decimal mode
Decimal correction
Decimal arithmetic in the 6502 works by correcting each nibble after addition or subtraction. For addition, 6 is
added if the nibble result exceeds 10; for subtraction, 6 is subtracted if the result is negative. The carry between
the low and high nibbles is computed before this correction, so the correction can never cause a double carry.
For instance, for $0F + $0F, an intermediate result of $1E is computed, and the correction then produces $14.
Flags computation
All flags are computed after carries are propagated between nibbles but before decimal correction occurs.1
For addition, the C flag is set whenever there is a carry out from the high nibble, allowing for extended precision
decimal arithmetic. For instance, $99 + $01 = $00 with carry set. For subtraction, it is cleared for a borrow.
The Z flag is set when the intermediate result is $00, before decimal correction. Example: $FF + $01 = $66, with
Z set.
The N flag is also set according to the intermediate result, to match bit 7. Example: $99 + $01 = $00, with N set.
The V flag is set when the carry between bit 6 and bit 7 is different than the result carry, or alternatively, when
there is a signed overflow in binary arithmetic.
65C02 behavior
ADC and SBC take an additional cycle in decimal mode on the 65C02.
[1] [IJO10]
Chapter 2 - CPU 17

Altirra Hardware Reference Manual Created by Avery Lee
The 65C02 computes the N, V, and Z flags differently in decimal mode. All three are computed the same way as
if the same result were achieved in binary mode. That is, N is set if bit 7 of the result is set; Z is set if the result is
$00; V is set if the carry from bit 6 to bit 7 is different than the carry flag.
ADC produces the same results for invalid BCD encodings on the 65C02 as it does on the 6502, but SBC can
produce different results.2
65C816 behavior
The 65C816 computes decimal flags and results the same way as the 65C02, regardless of the state of the E
flag. This means that the flags can be tested to distinguish a 6502 from a 65C816 in the same way. No extra
cycle is taken as with the 65C02.
Unlike the 65C02, the 65C816 produces the same accumulator results as the 6502 for an SBC instruction with
invalid opcodes.
2.3 Cycle timing
Clock speed
On an NTSC machine, the 6502 runs at exactly half the speed of the color clock, or 1.789773MHz. There are
exactly 114 cycles per scan line and 29,868 cycles per frame. On a PAL machine, the 6502 runs at 2/5ths the
color subcarrier frequency, or 1.773447MHz; there are still 114 cycles per scan line, but 35,568 cycles per frame.
DMA contention
On occasion the Atari's custom chips must fetch data from memory. This is known as Direct Memory Access
(DMA), and when it occurs, the 6502 is blocked from the memory bus while ANTIC does a read cycle. This
phenomenon slows down execution of code on the CPU and is known as DMA contention. All DMA in the Atari is
related to the display and therefore the graphics setup determines the reduction in CPU performance. For NTSC,
the highest rate at which the CPU can run is 92% (1.65Mcycles/sec); the standard Graphics 0 display reduces
this to 64% (1.14Mcycles/sec). PAL runs noticeably faster since all display related DMA runs only 5/6ths as
often.
Dead memory cycles
The 6502 uses the memory bus on every cycle without exception. Most of the time this is for useful work and
therefore leads to very efficient bus utilization. There are cases, however, when these memory cycles are wasted
cycles, such as:
•The second cycle of an implied mode instruction. (TXA)
•The ALU cycle of a read-modify-write instruction. (INC abs)
•The second-to-last cycle of a zero page indexed read or write. (LDA zp,X)
•The second-to-last cycle of an absolute or indirect indexed write. (STA abs, X)
•The second-to-last cycle of an absolute or indirect indexed read that crosses a page boundary (AND
abs, Y).
•Conditional branches that cross a page boundary (BNE).
A memory transaction is issued during these dummy cycles and therefore these dead cycles cannot be
overlapped by DMA – the CPU must still be halted. For the most part these cycles are harmless, as the Atari is a
[2] [6502Dec]
Chapter 2 - CPU 18

Altirra Hardware Reference Manual Created by Avery Lee
fairly safe platform where reads to hardware registers seldom have side effects. There are a few cases in which
this does matter and indexing should be used with care:
•Accessing the PIA ($D300-D3FF), because reads from the data registers will clear pending interrupts.
•Accessing the cartridge control region ($D500-D5FF). Some cartridges use this region to switch banks
and will respond to both reads and writes.
•Accessing PBI devices ($D100-D1FE and $D600-D7FF), which may also have read-sensitive regions.
•Any access with a read-modify-write instruction, since the extra cycle is a write cycle (except on the
65C02 or 65C816 in native mode).
Crossing page boundaries
The 6502 attempts to optimize indexed reads by issuing a speculative read before it has adjusted for a possible
carry in the high byte. If no carry is required, a cycle is saved. Otherwise, if a carry is required, it will retry the
read with the correct address. For example, given the following sequence:
LDX #$80
LDA $20F0,X
...the 6502 will read $2070 first, and then retry with the correct address $2170. The only modes that have this
behavior are: abs,X, abs,Y, and (zp),Y. The zp,X, zp,Y, and (zp,X) modes do not need to index outside of zero
page and wrap from $00FF to $0000 without an extra cycle; (zp),Y does not incur an extra cycle for using $FF as
the zero-page address. The (abs) mode, unique to JMP, also lacks the extra clock due to the well-known bug on
the NMOS 6502 of accessing $xxFF and $xx00.
Writes, on the other hand, cannot be done speculatively as a wrong guess would trash an unrelated memory
location. Therefore, stores using the abs,X, abs,Y, and (zp),Y modes always take the extra clock cycle. The first
clock cycle is a speculative read and the second clock cycle is a write with the correct address. Read-modify-
write instructions also always take an extra clock cycle, indexed or not, except that the dummy cycle is a write
cycle.
Branches that cross a page boundary also have this behavior, doing a read with an incorrect address high byte
first, and taking four clock cycles instead of three. No additional cycle is taken to cross a page boundary for a
non-taken branch, a JMP, JSR, RTI, or RTS instruction, or any other non-branch execution.
Note
A branch crosses a page boundary when the addition of the signed branch offset changes the high byte of
the PC. This means that a page crossing occurs if the target is on a different page from the address of the
next instruction, not from the address of the branch instruction. For instance, a BCC $80C0 instruction at
$80FE crosses a page because it is branching from $8100 to $80C0, even though the branch instruction
itself is entirely within the same page as its target. Similarly, a BEQ $8110 instruction at $80FE does not
cross a page. This happens because the branch offset is added after the PC has already been incremented
for both bytes of the branch instruction.
2.4 Interrupts
Level-based vs. edge-based interrupts
IRQs on the 6502 are level triggered interrupts, which means that the interrupt request is a continuing condition
that is active as long as the IRQ line is asserted. This facilitates delayed response to the IRQ as the 6502 will
eventually respond to the IRQ as long as the device continues to assert the IRQ line. It also allows for
multiplexing as multiple devices can assert IRQ and the 6502 will execute the IRQ handler repeatedly until all
interrupts are handled. However, this also means that the interrupt condition must be cleared on the device or
Chapter 2 - CPU 19

Altirra Hardware Reference Manual Created by Avery Lee
else the IRQ handler will continue to execute. It also means there is no memory of an interrupt event – if an
interrupt request occurs while IRQs are masked in the 6502 and is revoked before they are unmasked, the IRQ
handler will not execute.
NMIs, on the other hand, are edge triggered and are one-time event rather than a condition. Once the NMI signal
is asserted, the 6502 will execute the NMI handler at the next opportunity. If a second NMI is requested before
the first one is acknowledged, the NMI handler will only run once and the other NMI is lost.
Interrupt timing
The 6502 does not abort or resume instructions and can only respond to an interrupt on instruction boundaries.
This means that longer instructions can increase interrupt response delay. The longest standard instruction
possible on the 6502 is seven clocks, which can be due to a (zp),Y access crossing a page boundary, a read-
modify-write instruction using abs,X mode, or a BRK/interrupt. A delay of 8 cycles is possible with undocumented
read-modify-write instructions that use indirect indexed or indexed indirect mode, such as opcode $13. However,
much longer delays can occur if a store to WSYNC [D40A] is performed, which can lengthen an instruction by as
much as a hundred clock cycles. Use of WSYNC should be avoided if display list interrupts or other time-critical
interrupts are active.
Clearing I with an interrupt pending
If an interrupt is already pending but is blocked by the I flag, clearing the I flag with a CLI or PLP instruction will
result in the interrupt occurring at the end of the next instruction, and not immediately after the clearing
instruction. For instance, given the following code:
CLI
NOP
The pending interrupt will not be serviced until the end of the NOP instruction. This does not happen with the RTI
instruction; an IRQ can be serviced immediately after an RTI that clears the I flag.
Setting the I flag with an interrupt pending
Because of pipelining within the 6502, it is possible for the last cycle of a SEI or PLP instruction to execute
immediately after the 6502 begins to acknowledge an IRQ. When this happens, the IRQ routine begins
executing before the next instruction, and the curious result is that an IRQ executes with the pushed flags on the
stack having the I bit set. The most common way to hit this behavior is using the following sequence to dispatch
pending IRQs at a well-defined time:
CLI
SEI
This does not happen with the RTI instruction, which changes the flags earlier in the instruction. This effect
occurs with CLI+SEI and CLI+PLP pairs; it does not occur with CLI+RTI, PLP+[SEI/RTI/PLP], or RTI+
[SEI/RTI/PLP], for which no IRQ is dispatched even if one is pending.
Taken branch delay
A taken relative branch delays interrupt acknowledgment by one cycle: a case in which the earliest opportunity to
respond to an interrupt is immediately after the branch instead is delayed to the next instruction. This occurs for
any Bcc instruction which does not cross a page boundary. The effect does not occur if the branch instruction
crosses a page (4 cycles), or for any other control flow instruction such as JMP, JSR, RTS, or RTI.
Overlapping interrupts
It is possible for the 6502 to first begin executing the seven-cycle interrupt sequence for an IRQ and then jump to
the NMI vector instead if an NMI occurs quickly enough.
Chapter 2 - CPU 20

Altirra Hardware Reference Manual Created by Avery Lee
For IRQ+NMI conflicts, this behavior simply leads to faster acknowledgment of the NMI. However, it also has
unfortunate consequences for the BRK ($00) instruction. The BRK instruction is essentially the same as an IRQ
except that the flags byte pushed on the stack has the B flag set. Because of this, it is possible for an NMI to
hijack the BRK sequence in the same way. When this occurs, the NMI vector is invoked with the B flag set on the
flags byte on the stack. Thus, robust handling of BRK instructions requires it to be checked for in both the IRQ
and NMI handlers.3
There are no issues with an overlapping IRQ and BRK instruction. However, when multiplexing the IRQ vector
for both IRQ and BRK, the BRK instruction must be serviced before the handler exits. For multiplexed IRQs, the
handler can service one IRQ at a time, relying on the hardware to keep IRQ asserted as causing the handler to
re-execute until all IRQs are serviced. This is not true for BRK, which will be lost if not serviced.
On the Atari, this effect occurs if a BRK instruction begins execution at between cycles 4-8 of a scan line where
either the DLI or VBI is activated.
[3] This effect is covered in detail in [VIC09], under 6510 Instruction Timing. The effect of an IRQ on a BRK is arguably not
a bug, as I can find no program-visible effects: the BRK executes as expected, and the IRQ is then acknowledged
afterward assuming that the IRQ line is still asserted. This does require that the IRQ handler check BRK first, though,
which usually doesn't happen.
Chapter 2 - CPU 21

Altirra Hardware Reference Manual Created by Avery Lee
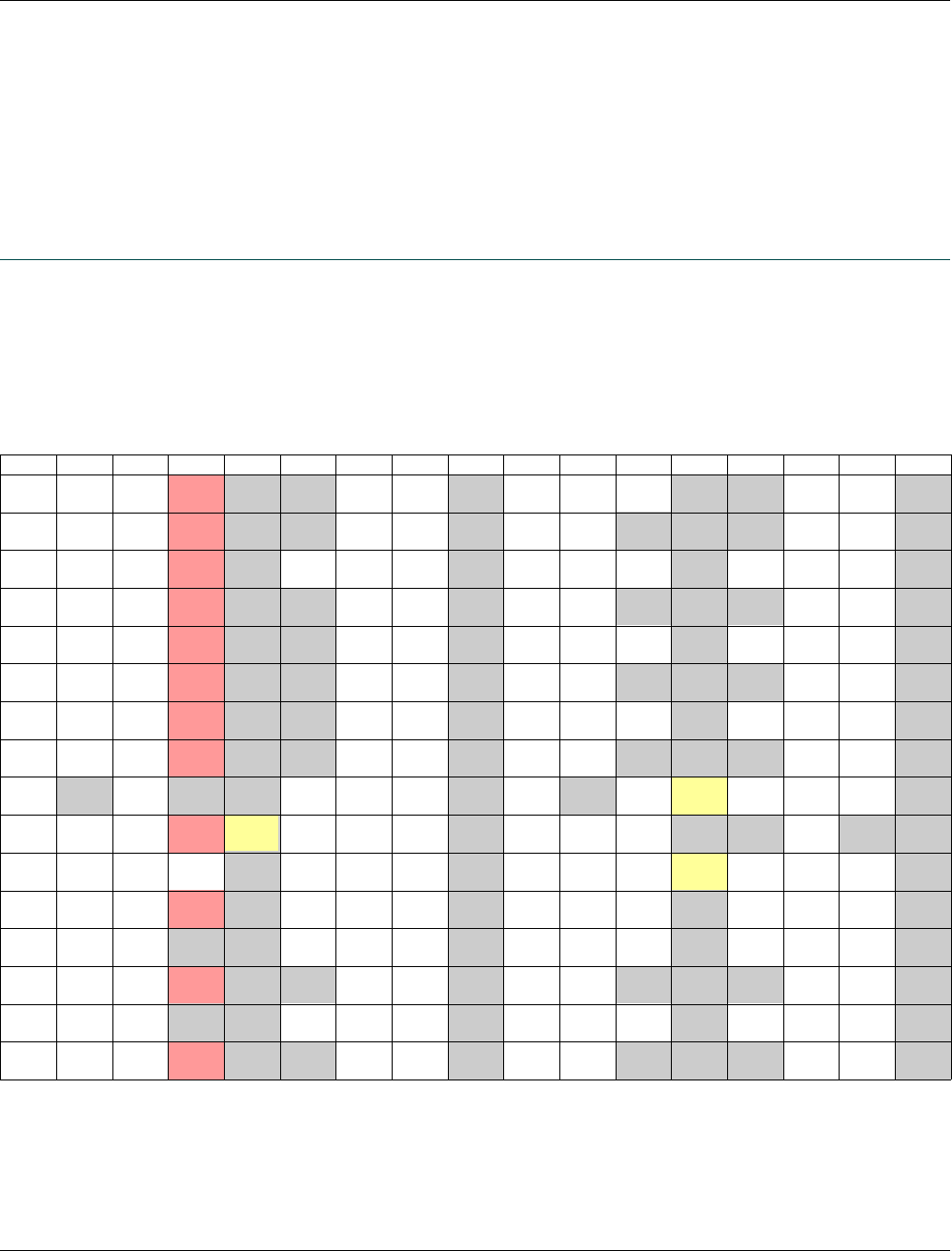
105 106 107 108 109 110 111 112 113 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23
IRQ LSR abs PHA LDA #im STA abs NMI PHA
IRQ LSR abs PHA LDA #im NMI PHA LDA #im
IRQ LSR abs PHA LDA #im NMI PHA LDA #im
IRQ LSR abs PHA NMI PHA LDA #im
IRQ LSR abs PHA NMI PHA LDA #im
IRQ LSR abs PHA NMI PHA LDA #im
IRQ LSR abs NMI PHA LDA #im
IRQ LSR abs NMI PHA LDA #im
IRQ LSR abs NMI PHA LDA #im
IRQ LSR abs NMI PHA
IRQ LSR abs NMI PHA
IRQ LSR abs NMI
IRQ LSR abs NMI
IRQ LSR abs PHA LDA #im
NMI PHA LDA #im STA LDA #im
NMI PHA LDA #im STA LDA #im
Figure 1: Effects of overlapping IRQ/NMI timing
The table above shows how the 6502 responds to IRQ and NMI being asserted at varying offsets from each other. When the IRQ occurs sufficiently before the NMI, the
6502 completes the pending interrupt sequence or current instruction before beginning the interrupt sequence for the NMI. This always entails a minimum of at least 7
cycles for the interrupt sequence and 6 cycles for the first instruction of the IRQ handler (LSR abs, 6 cycles). Unusual behavior starts when the IRQ sequence begins on
cycle 4, which causes the NMI to be lost entirely. Afterward, the IRQ sequence that would begin at cycle 5 or later is taken over by the NMI, resulting in the NMI handler
executing earlier than usual. The exact same timing occurs with BRK instead of IRQ.
Chapter 2 - CPU 22
Altirra Hardware Reference Manual Created by Avery Lee
Consecutive interrupts
The 6502 cannot acknowledge an interrupt immediately after executing an interrupt sequence. This includes
BRK, IRQ, and NMI. The first instruction of the IRQ or NMI handler is always executed, regardless of any
pending interrupt. The one case where interrupt sequences will execute back-to-back is if the first instruction of
the interrupt handler is a BRK instruction. Because the BRK instruction is piggybacked on top of the interrupt
logic, a pending interrupt can hijack the BRK instruction to run the interrupt handler instead.
2.5 Undocumented instructions
Out of the 256 possible 8-bit opcode encodings, 151 correspond to defined instructions. Due the way that the
6502 decodes instructions, some of the other 101 opcodes activate strange internal behaviors instead of being
ignored or raising an interrupt.
Table 1 shows the complete opcode table for the 6502. Opcodes in gray are undocumented instructions that
appear to have stable behavior; opcodes in yellow are undocumented instructions that appear to be unstable.
Opcodes in red lock up the 6502 until reset.
x0 x1 x2 x3 x4 x5 x6 x7 x8 x9 xA xB xC xD xE xF
0x BRK ORA
(zp,X)
KIL SLO
(zp,X)
NOP
zp
ORA
zp
ASL
zp
SLO
zp
PHP ORA
#imm
ASL ANC
#imm
NOP
abs
ORA
abs
ASL
abs
SLO
abs
1x BPL
rel
ORA
(zp),Y
KIL SLO
(zp),Y
NOP
zp,X
ORA
zp,X
ASL
zp,X
SLO
zp,X
CLC ORA
abs,Y
NOP SLO
abs,Y
NOP
abs,X
ORA
abs,X
ASL
abs,X
SLO
abs,X
2x JSR
abs
AND
(zp,X)
KIL RLA
(zp,X)
BIT
zp
AND
zp
ROL
zp
RLA
zp
PLP AND
#imm
ROL ANC
#imm
BIT
abs
AND
abs
ROL
abs
RLA
abs
3x BMI
rel
AND
(zp),Y
KIL RLA
(zp),Y
NOP
zp,X
AND
zp,X
ROL
zp,X
RLA
zp,X
SEC AND
abs,Y
NOP RLA
abs,Y
NOP
abs,X
AND
abs,X
ROL
abs,X
RLA
abs,X
4x RTI EOR
(zp,X)
KIL SRE
(zp,X)
NOP
zp
EOR
zp
LSR
zp
SRE
zp
PHA EOR
#imm
LSR ASR
#imm
JMP
abs
EOR
abs
LSR
abs
SRE
abs
5x BVC
rel
EOR
(zp),Y
KIL SRE
(zp),Y
NOP
zp,X
EOR
zp,X
LSR
zp,X
SRE
zp,X
CLI EOR
abs,Y
NOP SRE
abs,Y
NOP
abs,X
EOR
abs,X
LSR
abs,X
SRE
abs,X
6x RTS ADC
(zp,X)
KIL RRA
(zp,X)
NOP
zp
ADC
zp
ROR
zp
RRA
zp
PLA ADC
#imm
ROR ARR
#imm
JMP
(abs)
ADC
abs
ROR
abs
RRA
abs
7x BVS
rel
ADC
(zp,Y)
KIL RRA
(zp),Y
NOP
zp,X
ADC
zp,X
ROR
zp,X
RRA
zp,X
SEI ADC
abs,Y
NOP RRA
abs,Y
NOP
abs,X
ADC
abs,X
ROR
abs,X
RRA
abs,X
8x NOP
#imm
STA
(zp,X)
NOP
#imm
SAX
(zp,X)
STY
zp
STA
zp
STX
zp
SAX
zp
DEY NOP
#imm
TXA ANE
#imm
STY
abs
STA
abs
STX
abs
SAX
abs
9x BCC
rel
STA
(zp),Y
KIL SHA
(zp),Y
STY
zp,X
STA
zp,X
STX
zp,Y
SAX
zp,X
TYA STA
abs,Y
TXS SHS
abs,Y
SHY
abs,X
STA
abs,X
SHX
abs,Y
SHA
abs,Y
Ax LDY
#imm
LDA
(zp,X)
LDX
#imm
LAX
(zp,X)
LDY
zp
LDA
zp
LDX
zp
LAX
zp
TAY LDA
#imm
TAX LXA
#imm
LDY
abs
LDA
abs
LDX
abs
LAX
abs
Bx BCS
rel
LDA
(zp),Y
KIL LAX
(zp),Y
LDY
zp,X
LDA
zp,X
LDX
zp,Y
LAX
zp,Y
CLV LDA
abs,Y
TSX LAS
abs,Y
LDY
abs,X
LDA
abs,X
LDX
abs,Y
LAX
abs,X
Cx CPY
#imm
CMP
(zp,X)
NOP
#imm
DCP
(zp,X)
CPY
zp
CMP
zp
DEC
zp
DCP
zp
INY CMP
#imm
DEX SBX
#imm
CPY
abs
CMP
abs
DEC
abs
DCP
abs
Dx BNE
rel
CMP
(zp),Y
KIL DCP
(zp),Y
NOP
zp,X
CMP
zp,X
DEC
zp,X
DCP
zp,X
CLD CMP
abs,Y
NOP DCP
abs,Y
NOP
abs,X
CMP
abs,X
DEC
abs,X
DCP
abs,X
Ex CPX
#imm
SBC
(zp,X)
NOP
#imm
ISB
(zp,X)
CPX
zp
SBC
zp
INC
zp
ISB
zp
INX SBC
#imm
NOP SBC
#imm
CPX
abs
SBC
abs
INC
abs
ISB
abs
Fx BEQ
rel
SBC
(zp),Y
KIL ISB
(zp),Y
NOP
zp,X
SBC
zp,X
INC
zp,X
ISB
zp,Y
SED SBC
abs,Y
NOP ISB
abs,Y
NOP
abs,X
SBC
abs,X
INC
abs,X
ISB
abs,X
Table 1: NMOS 6502 opcode table
Note on opcode names
Because the additional instructions were neither supported nor documented, there are no official names for the
instructions. As such, emulators, assemblers, and disassemblers vary widely in the names used. The names
Chapter 2 - CPU 23

Altirra Hardware Reference Manual Created by Avery Lee
used here match a popularly used assembler, but they are by no means definitive.4
KIL
Opcodes: $02, 12, 22, 32, 42, 52, 62, 72, 92, B2, D2, F2.
The KIL opcodes permanently lock up the 6502 such that it stops executing instructions and no longer responds
to interrupts. Only a reset will restart execution.
NOP
Opcodes: $04, 0C, 14, 1A, 1C, 34, 3C, 44, 54, 5A, 4C, 64, 74, 7A, 7C, 80, 82, 89, D4, DA, DC, F4, FA, FC.
NOP opcodes may execute addressing modes but do not change registers, flags, or control flow. Opcode $EA is
the only official NOP instruction.
Note that these opcodes proceed similarly to ALU operations, so they will read operands similarly as to an LDA
instruction. This includes executing an additional cycle when indexing across a page boundary.
Merged read-modify-write and read-modify instructions
Many of the illegal instructions are a result of combining read-modify-write instructions such as INC/DEC with
ALU instructions like ADC and SBC. The combinations are:
•DCP = DEC + CMP
•ISB = INC + SBC
•SLO = ASL + ORA
•RLA = ROL + AND
•SRE = LSR + EOR
•RRA = ROR + ADC
The read-modify-write portion proceeds in the same manner, but the result of the RMW instruction is then used
as the argument of the ALU instruction, changing the flags and potentially A. Cycle count is the same as the
RMW instruction.
The ISB and RRA instructions are sensitive to the decimal mode flag due to incoporation of the SBC and ADC
functions.
LAX (LDA + LDX)
Opcodes: $A3, A7, AF, B3, B7, BF
LAX instructions load the same value into both A and X, setting the N and Z flags.
SAX (STA + STX)
Opcodes: $87, 8F, 97, 9F
Stores the bitwise AND of A and X to memory. No flags are changed.
SHA
Opcodes: $93
[4] For more information on undocumented opcodes and alternative mnemonics: [VIC09] [IllOpc]
Chapter 2 - CPU 24

Altirra Hardware Reference Manual Created by Avery Lee
Stores the bitwise AND of A, X, and the high byte read from the base address. Note that this is the high byte of
the base address as read from page zero, not the high byte after Y has been added.
In addition, if a page crossing occurs during indexing with Y, the result of the bitwise AND also replaces the high
address byte.
Warning
The $93 opcode has been reported to be unstable – the interaction between the high byte and bitwise AND
operation does not reliably occur on all CPUs.
SHX
Opcodes: $9E
Stores the bitwise AND of X and the high byte + 1 of the base address. If a page crossing occurs during indexing
with Y, the bitwise AND result also replaces the high address byte.
ANC
Opcodes: $0B
Same as AND, except with the result bit 7 also being copied into the carry flag.
ASR (AND + LSR)
Opcodes: $4B
Same as an AND instruction followed by and LSR A instruction.
ARR (ADC + AND + ROR)
Opcodes: $6B
Performs a complex operation involving a rotate right and possible decimal correction, changing the A register
and the N, V, Z, and C flags.
ANE
Opcodes: $8B
Bitwise AND with accumulator, X, and immediate data, written back to accumulator.
Warning
The $8B opcode is not stable and may produce varying results where not all bits in the above formula
participate in the bitwise AND instruction.5
SHS (TXS + STA abs,Y)
Opcodes: $9B
The stack pointer (S) is set to the bitwise AND of X and A, and the data written to abs,Y is this result bitwise
ANDed with the high byte + 1.
[5] See http://visual6502.org/wiki/index.php?title=6502_Opcode_8B_%28XAA,_ANE%29 for an extended discussion of this
opcode.
Chapter 2 - CPU 25

Altirra Hardware Reference Manual Created by Avery Lee
LXA (LDA + TAX)
Stores the bitwise AND of A and the argument to both A and X, setting the N and Z flags.
Warning
The $AB opcode is not stable. It has been reported to load the immediate argument to A and X without the
bitwise AND on an Atari 800.
LAS (LDA + TSX)
A, X, and S are set to the bitwise AND of the read data and S, with the N and Z flags set as usual.
SBX
AND A into the X register, then CMP with data.
2.6 65C02 compatibility
The 65C02 is an enhanced version of the 6502 implemented in CMOS and with additional instructions added.
While it is mostly compatible with the 6502, there are a few differences in both documented and undocumented
behavior.
Note that the 65C02 is not the same as a 6502C. Some Atari computers had a custom CPU called the 6502C
(Sally) that had integrated HALT logic. This chip uses the same NMOS 6502 core and lacks the additional
instructions or behavior of the newer 65C02.
Opcode table
None of the undocumented instructions of the 6502 work on the 65C02. All previously unassigned opcodes are
reassigned to new opcodes or defined as NOPs with specific behavior. Table 2 shows the new opcodes in green
and the defined NOPs in gray. Bit change/branch opcodes in purple are only supported by some 65C02 variants;
other 65C02 makes and the 65C816 do not support bit opcodes.
Chapter 2 - CPU 26

Altirra Hardware Reference Manual Created by Avery Lee
x0 x1 x2 x3 x4 x5 x6 x7 x8 x9 xA xB xC xD xE xF
0x BRK ORA
(zp,X)
NOP NOP TSB
zp
ORA
zp
ASL
zp
RMB0
zp
PHP ORA
#imm
ASL NOP TSB
abs
ORA
abs
ASL
abs
BBR0
zp,rel
1x BPL
rel
ORA
(zp),Y
ORA
(zp)
NOP TRB
zp
ORA
zp,X
ASL
zp,X
RMB1
zp
CLC ORA
abs,Y
INC NOP TRB
abs
ORA
abs,X
ASL
abs,X
BBR1
zp,rel
2x JSR
abs
AND
(zp,X)
NOP NOP BIT
zp
AND
zp
ROL
zp
RMB2
zp
PLP AND
#imm
ROL NOP BIT
abs
AND
abs
ROL
abs
BBR2
zp,rel
3x BMI
rel
AND
(zp),Y
AND
(zp)
NOP BIT
zp,X
AND
zp,X
ROL
zp,X
RMB3
zp
SEC AND
abs,Y
DEC NOP BIT
abs,X
AND
abs,X
ROL
abs,X
BBR3
zp,rel
4x RTI EOR
(zp,X)
NOP NOP NOP EOR
zp
LSR
zp
RMB4
zp
PHA EOR
#imm
LSR NOP JMP
abs
EOR
abs
LSR
abs
BBR4
zp,rel
5x BVC
rel
EOR
(zp),Y
EOR
(zp)
NOP NOP EOR
zp,X
LSR
zp,X
RMB5
zp
CLI EOR
abs,Y
PHY NOP NOP EOR
abs,X
LSR
abs,X
BBR5
zp,rel
6x RTS ADC
(zp,X)
NOP NOP STZ
zp
ADC
zp
ROR
zp
RMB6
zp
PLA ADC
#imm
ROR NOP JMP
(abs)
ADC
abs
ROR
abs
BBR6
zp,rel
7x BVS
rel
ADC
(zp,Y)
ADC
(zp)
NOP STZ
zp,X
ADC
zp,X
ROR
zp,X
RMB7
zp
SEI ADC
abs,Y
PLY NOP JMP
(abs,X)
ADC
abs,X
ROR
abs,X
BBR7
zp,rel
8x BRA
rel
STA
(zp,X)
NOP NOP STY
zp
STA
zp
STX
zp
SMB0
zp
DEY BIT
#imm
TXA NOP STY
abs
STA
abs
STX
abs
BBS0
zp,rel
9x BCC
rel
STA
(zp),Y
STA
(zp)
NOP STY
zp,X
STA
zp,X
STX
zp,Y
SMB1
zp
TYA STA
abs,Y
TXS NOP STZ
abs
STA
abs,X
STZ
abs,X
BBS1
zp,rel
Ax LDY
#imm
LDA
(zp,X)
LDX
#imm
NOP LDY
zp
LDA
zp
LDX
zp
SMB2
zp
TAY LDA
#imm
TAX NOP LDY
abs
LDA
abs
LDX
abs
BBS2
zp,rel
Bx BCS
rel
LDA
(zp),Y
LDA
(zp)
NOP LDY
zp,X
LDA
zp,X
LDX
zp,Y
SMB3
zp
CLV LDA
abs,Y
TSX NOP LDY
abs,X
LDA
abs,X
LDX
abs,Y
BBS3
zp,rel
Cx CPY
#imm
CMP
(zp,X)
NOP NOP CPY
zp
CMP
zp
DEC
zp
SMB4
zp
INY CMP
#imm
DEX WAI CPY
abs
CMP
abs
DEC
abs
BBS4
zp,rel
Dx BNE
rel
CMP
(zp),Y
CMP
(zp)
NOP NOP CMP
zp,X
DEC
zp,X
SMB5
zp
CLD CMP
abs,Y
PHX STP NOP CMP
abs,X
DEC
abs,X
BBS5
zp,rel
Ex CPX
#imm
SBC
(zp,X)
NOP NOP CPX
zp
SBC
zp
INC
zp
SMB6
zp
INX SBC
#imm
NOP NOP CPX
abs
SBC
abs
INC
abs
BBS6
zp,rel
Fx BEQ
rel
SBC
(zp),Y
SBC
(zp)
NOP NOP SBC
zp,X
INC
zp,X
SMB7
zp
SED SBC
abs,Y
PLX NOP NOP SBC
abs,X
INC
abs,X
BBS7
zp,rel
Table 2: 65C02 opcode table
Absolute indirect addressing bug
The JMP (abs) instruction ($6C) no longer wraps within a page on the 65C02: a JMP ($02FF) instruction will
access $2FF and $300 instead of $2FF and $200, and take an additional cycle when doing so.
Decimal mode
ADC and SBC instructions take one additional cycle in decimal mode on the 65C02. This is to compute proper
flag results.
The 65C02 automatically clears the decimal flag on reset or on entry to an interrupt. On the 6502, it was
undefined on power-up and left at the previous state on interrupt.
Read-modify-write instructions
Instructions that do read-modify-write cycles – INC, DEC, ASL, LSR, ROL, and ROR – behave differently during
the modify cycle. On the original 6502, the sequence is read-write-write, where the second cycle is a write cycle
that just rewrites the data that was just read. On the 65C02, the second cycle is a read cycle to that address.
This alters the timing of RMW instructions to WSYNC and breaks fast IRQ acknowledgment hacks involving
RMW cycles on IRQEN/IRQST.
Read-modify-write with absolute indexing
The abs,X mode versions of read-modify-write instructions only take 6 cycles on the 65C02 when indexing within
Chapter 2 - CPU 27

Altirra Hardware Reference Manual Created by Avery Lee
a page, instead of 7 as on the 6502.
2.7 65C816 compatibility
The 65C816 is a further enhanced version of the 65C02 with even more instructions and addressing modes as
well as new native execution mode. It is actually slightly more compatible with the original 6502 than the 65C02
due to some corrections in emulation mode. Because of its greatly increased power, the 65C816 is more
common of an addition to Atari computers than the 65C02.
Opcode table
The 65C816 doesn't support any of the 6502's undocumented instructions either, but it has even more of the
previously unused opcodes filled with valid instructions, including ones that were NOPs on the 65C02. There are
no unassigned opcodes on the 65C816. New opcodes are shown in blue in Table 3.
x0 x1 x2 x3 x4 x5 x6 x7 x8 x9 xA xB xC xD xE xF
0x BRK ORA
(dp,X)
COP
imm
ORA
d,S
TSB
dp
ORA
dp
ASL
dp
ORA
[dp]
PHP ORA
#imm
ASL PHD TSB
abs
ORA
abs
ASL
abs
ORA
al
1x BPL
rel
ORA
(dp),Y
ORA
(dp)
ORA
(d,S),Y
TRB
dp
ORA
dp,X
ASL
dp,X
ORA
[dp],Y
CLC ORA
abs,Y
INC TCS TRB
abs
ORA
abs,X
ASL
abs,X
ORA
al,X
2x JSR
abs
AND
(dp,X)
JSR
al
AND
d,S
BIT
dp
AND
dp
ROL
dp
AND
[dp]
PLP AND
#imm
ROL PLD BIT
abs
AND
abs
ROL
abs
AND
al
3x BMI
rel
AND
(dp),Y
AND
(dp)
AND
(d,S),Y
BIT
dp,X
AND
dp,X
ROL
dp,X
AND
[dp],Y
SEC AND
abs,Y
DEC TSC BIT
abs,X
AND
abs,X
ROL
abs,X
AND
al,X
4x RTI EOR
(dp,X)
WDM EOR
d,S
MVP
b,b
EOR
dp
LSR
dp
EOR
[dp]
PHA EOR
#imm
LSR PHK JMP
abs
EOR
abs
LSR
abs
EOR
al
5x BVC
rel
EOR
(dp),Y
EOR
(dp)
EOR
(d,S),Y
MVN
b,b
EOR
dp,X
LSR
dp,X
EOR
[dp],Y
CLI EOR
abs,Y
PHY TCD JMP
al
EOR
abs,X
LSR
abs,X
EOR
al,X
6x RTS ADC
(dp,X)
PER
rel16
ADC
d,S
STZ
dp
ADC
dp
ROR
dp
ADC
[dp]
PLA ADC
#imm
ROR RTL JMP
(abs)
ADC
abs
ROR
abs
ADC
al
7x BVS
rel
ADC
(dp,Y)
ADC
(dp)
ADC
(d,S),Y
STZ
dp,X
ADC
dp,X
ROR
dp,X
ADC
[dp],Y
SEI ADC
abs,Y
PLY TDC JMP
(abs,X)
ADC
abs,X
ROR
abs,X
ADC
al,X
8x BRA
rel
STA
(dp,X)
BRL
rel16
STA
d,S
STY
dp
STA
dp
STX
dp
STA
[dp]
DEY BIT
#imm
TXA PHB STY
abs
STA
abs
STX
abs
STA
al
9x BCC
rel
STA
(dp),Y
STA
(dp)
STA
(d,S),Y
STY
dp,X
STA
dp,X
STX
dp,Y
STA
[dp],Y
TYA STA
abs,Y
TXS TXY STZ
abs
STA
abs,X
STZ
abs,X
STA
al,X
Ax LDY
#imm
LDA
(dp,X)
LDX
#imm
LDA
d,S
LDY
dp
LDA
dp
LDX
dp
LDA
[dp]
TAY LDA
#imm
TAX PLB LDY
abs
LDA
abs
LDX
abs
LDA
al
Bx BCS
rel
LDA
(dp),Y
LDA
(dp)
LDA
(d,S),Y
LDY
dp,X
LDA
dp,X
LDX
dp,Y
LDA
[dp],Y
CLV LDA
abs,Y
TSX TYX LDY
abs,X
LDA
abs,X
LDX
abs,Y
LDA
al,X
Cx CPY
#imm
CMP
(dp,X)
REP
#imm
CMP
d,S
CPY
dp
CMP
dp
DEC
dp
CMP
[dp]
INY CMP
#imm
DEX WAI CPY
abs
CMP
abs
DEC
abs
CMP
al
Dx BNE
rel
CMP
(dp),Y
CMP
(dp)
CMP
(d,S),Y
PEI
(dp)
CMP
dp,X
DEC
dp,X
CMP
[dp],Y
CLD CMP
abs,Y
PHX STP JMP
[abs]
CMP
abs,X
DEC
abs,X
CMP
al,X
Ex CPX
#imm
SBC
(dp,X)
SEP
#imm
SBC
d,S
CPX
dp
SBC
dp
INC
dp
SBC
[dp]
INX SBC
#imm
NOP XBA CPX
abs
SBC
abs
INC
abs
SBC
al
Fx BEQ
rel
SBC
(dp),Y
SBC
(dp)
SBC
(d,S),Y
PEA
abs
SBC
dp,X
INC
dp,X
SBC
[dp],Y
SED SBC
abs,Y
PLX XCE JSR
(abs,X)
SBC
abs,X
INC
abs,X
SBC
al,X
Table 3: 65C816 opcode table
Decimal mode
The 65C816 computes “correct” flags for ADC and SBC in decimal mode like the 65C02, but doesn't take an
additional cycle to do so, fixing the timing incompatibility.
The decimal flag is cleared on entry to the reset or interrupt handlers in the same way.
Chapter 2 - CPU 28

Altirra Hardware Reference Manual Created by Avery Lee
Absolute indirect addressing bug
Like the 65C02, the 65C816 indexes correctly across pages when reading the address for a JMP (abs)
instruction. However, it does so without an additional cycle.
Read-modify-write instructions
Unlike the 65C02, the 65C816 preserves the 6502's read/write/write cycle pattern for RMW instructions in
emulation mode. In native mode, the sequence is read/read/write as for the 65C02. The 65C816 also executes
the abs,X versions in 7 cycles like the 6502.
Cross-bank indexing
Absolute indexed and indirect indexed address modes can cross banks on the 65C816 on an attempt to wrap
around from $FFFF to $0000, even in emulation mode. This is a rare case where the 65C816 is less compatible
in emulation mode than the 65C02 and affects the abs,X, abs,Y, and (zp),Y addressing modes. The access
instead crosses over into bank $01.
The most common way to accidentally trigger this is by attempting to index using the Y register and a negative
offset on a page zero symbol, i.e. LDA ICHIDZ-$F0,Y. The zp,Y addressing mode is only available on the STX
and LDX instructions, so assemblers will commonly promote this to the abs,Y addressing mode. The resulting
code then wraps around the 64K address space and fails on a 65C816 with 24-bit addressing.
Depending on the address wrapping pattern, affected code may still work if there is RAM in bank $01 and the
data stored there is only accessed by wrapping around the 64K address space. The affected code will access
bank $01 instead of bank $00 as originally intended, but still work, The code will also work if the 65C816 is only
connected to a 16-bit address bus, in which case banks $00 and $01 are equivalent anyway.
Program-bank and hardwired bank 0 reads never cross bank boundaries and wrap within the same bank, in
either emulation or native mode. This includes instruction fetches, relative branches, absolute indirect and
absolute indexed indirect addressing modes, stack operations, and direct page addressing mode reads.
2.8 65C816 native mode
New to the 65C816 is the ability to switch into native mode, which unlocks the full power of the 65C816 including
16-bit memory access, arithmetic, and indexing, extended addressing, and extended interrupt handling.
M and X flags
The formerly unused bits 5 and 4 of the P register are re-purposed in native mode as the M and X flags,
respectively. The M flag selects the width of memory and accumulator operations, whereas the X flag selects the
width of operations involving the X and Y index registers. Indexed addressing and memory accesses from X/Y
based instructions like PHX and CPY use the X flag. In both cases, a flag value of 1 selects 8-bit width, and 0
selects 16-bit width. Both M and X flags are forced to 1 upon entering emulation mode and cannot be changed
until native mode is re-entered.
Whenever the X flag is set to 1 for any reason, the high bytes of the X and Y registers are cleared to $00 and
their previous contents are lost. This happens both with an explicit change to the X flag and implicitly when
switching to emulation mode. Changing the X flag back to 0 does not restore the previous contents of the high
bytes, which will remain $00. However, setting the M flag to 1 does not clear the high byte of the accumulator
register, which can still be accessed by the XBA, TCS, TSC, TCD, TDC, TAX, and TAY instructions.
Some memory access and accumulator-based operations are always 16-bit regardless of state of the M flag,
because they involve registers or values that are inherently 16-bit wide. These include accesses to the D register
(PHD, PLD, TCD, and TDC), accesses to the S register (TCS, TSC, TXS, TSX), push effective address
instructions (PEA, PEI, PER), and indirect addressing modes ((dp), (dp,X), (dp),Y, etc).
Chapter 2 - CPU 29

Altirra Hardware Reference Manual Created by Avery Lee
Extended direct page addressing
In emulation mode, the dp,X and dp,Y addressing modes wrap within a page by default to emulate the behavior
of the 6502's zp,X and zp,Y addressing modes. This occurs whenever the low byte of the D register is $00,
which is the default as D is set to $0000 on reset. If the D register is modified to a value where the low byte is not
$00, then direct page indexing will cross pages, but at the cost of one additional cycle per direct page indexed
instruction. This extra cycle occurs regardless of whether a page crossing occurs.
An exception to the above is that new instructions introduced with the 65C816 that read words from the direct
page will cross pages even if the low byte of D is 0. This includes PEI (dp) and all instructions that use the [dp]
and [dp],Y addressing modes, which will cross over from $00FF to $0100 and $0101 with D=0. This differs from
instructions using ($FF), ($FF,X) and ($FF),Y, which would read the base address argument from $FF and $00
instead. 65C02-inherited instructions wrap within the direct page the same way as 6502-inherited instructions.
In native mode, all direct page accesses cross page boundaries with any instruction regardless of the value of D.
Indexing will cross pages freely, and 16-bit accesses starting at $xxFF will continue to $yy00 on the next page.
No additional clock cycles are taken when doing so. However, direct page accesses always wrap within bank 0,
and if the low byte of D is not $00, all direct page indexed addressing will take an additional cycle regardless of
whether a page crossing occurs.
Extended stack addressing in native mode
The stack pointer is 16 bits wide in native mode and thus the stack can be of any length and start at any
address. Like direct page accesses, stack-relative accesses are always constrained to be within bank 0, even
when wrapping from $FFFF to $0000.
Warning
In emulation mode, the high byte of the stack pointer is constrained to $01, so setting the stack pointer via
TXS places the stack in the $01xx page as it does on the 6502. However, in native mode, executing TXS
with 8-bit indexing (X flag set) sets the stack pointer to $00xx, which is typically undesirable. This means
that setting the stack in native mode usually requires either 16-bit indexing mode or using TCS instead.
Similarly to when the X flag is set, whenever emulation mode is entered, the high byte of S is reset to $01 and
the previous contents are lost.
Extended stack addressing in emulation mode
During emulation mode, stack operations performed by all 6502 and 65C02 instructions are constrained to page
one. However, almost all new instructions introduced on the 65C816 that access the stack will temporarily index
and write outside of page 1 into page zero when pushing or read from page two when popping.6
Instructions that have this behavior: PHD, PLD, PLB, PEA, PEI, PER, JSL, JSR (a,X), RTL, LDA d,S, STA d,S,
LDA (d,S),Y.
Instructions that don't have this behavior: PLX, COP, PHB, PHK. The latter two instructions, although new to the
65C816, can't differ in behavior because they only push a single byte, which is always within page one
regardless.
The stack pointer is readjusted to be within page 1 again after the instruction executes. For instance, executing
PHD twice with S=0 will write to $0100 and $00FF, then $01FE and $01FD. Similarly, RTL with S=$FF will read
from $0200-0202 and then finish with S=$02.
Interrupt vectors
In native mode, a different set of interrupt vectors is used: ($FFEE) for IRQ, ($FFEA) for NMI, ($FFE6) for BRK,
[6] See also [ObWrap].
Chapter 2 - CPU 30

Altirra Hardware Reference Manual Created by Avery Lee
($FFE4) for COP, and ($FFE8) for ABORT. The dedicated BRK vector means that it is no longer necessary to
check for it in IRQ and NMI handlers.
There is no native RESET vector because the 65C816 always switches to emulation mode on reset. Thus,
($FFFC) is always used.
2.9 Examples
Pole Position
The decrementing counters seen at the end of a race rely on the undocumented behavior of the N flag in
decimal mode. If the N flag is not emulated correctly, the counters may underflow and count indefinitely.
2.10 Further reading
For a witty introduction to 6502 assembly language programming, read [LAN84].
Everyone knows about the official 6502 instruction set and about the JMP indirect bug, but sources giving exact
corner-case behavior in other areas are scarcer. For cycle-level operation of the 6502, [MOS76] and [MOS76a]
give details that can be difficult to find elsewhere, such as precise timing for acknowledging non-maskable
interrupts. The datasheet in [EYE86] gives similar information for the 65C816 and has valuable information about
differences between the NMOS 6502, 65C02, and 65C816.
For undocumented instruction details, consult [VIC09] for a thorough overview and for functionality and timing
details. Note, however, that there are some errors in compared to the actual 6502 and the VICE emulator in the
BCD correction algorithm.
Chapter 2 - CPU 31
Chapter 3
System control

Altirra Hardware Reference Manual Created by Avery Lee
3.1 System Reset button
On the original 400/800, the [SYSTEM RESET] key is connected to the RNMI line on ANTIC, which then causes
an NMI to be issued to the 6502. The system NMI routine detects this condition via bit 5 of NMIST and invokes
warm start behavior.
Starting with the 1200XL, this behavior was changed to use real reset logic instead. On the XL/XE models,
pressing the Reset button causes the reset lines to be pulled on the 6502, ANTIC, FREDDIE, and PIA. This
causes NMIs to be masked, memory banking to be reset to default, and the 6502 to restart execution at the reset
vector. The RNMI line is permanently wired with a pullup to +5V and thus ANTIC will never signal a system reset
NMI on these models.
3.2 Peripheral Interface Adapter (PIA)
The 6520 PIA chip controls several miscellaneous functions within the Atari.
Addressing
The PIA occupies the $D3xx block of address space and exposes four register locations from $D300-D303. Only
the low two address bits are decoded, so each register is repeated 64 times.
Caution
Ultimate1MB overlays the $D380-D3FF half of the PIA region with its own registers.
I/O ports
The PIA contains two 8-bit data ports, port A and port B. Each contains eight bits which are individually
switchable between input mode or output mode by a data direction register. Port A is controlled by control
register PACTL [$D302] and data register PORTA [$D300]; port B uses control register PBCTL [$D303] and data
register PORTB [$D301].
The data direction registers DDRA/DDRB and input/output registers ORA/ORB share addresses. In order to read
or write the data direction register, bit 2 of the port's control register must be set to 0, and to read or write the I/O
register, bit 2 must be set to 1.
Port A is connected to the direction lines of joystick ports 1 and 2. Port B is connected to ports 3 and 4 on the
400/800. The XL/XE models do not have these joystick ports, so port B is used for memory banking and LED
control instead.
I/O direction
Each bit in the data direction register controls whether a bit is in input or output mode. A zero bit sets the bit to
input mode, while a one bit enables output for that bit. A bit in the output register is ignored when that bit is set to
input, but all bits in the input register are valid even for output bits. This behavior differs between port A and port
B. For port A, a bit set to output will read back as the logical AND of the output and external state. This is
sometimes used to mask off incoming bits; a bit will read as zero if either the PIA or an external device is pulling
the line low. For port B, any bit set to output always reads back the output state regardless of external influence.
Control lines
The interrupt and proceed lines of the SIO bus are connected to control lines CB1 and CA1 of the PIA,
respectively. These are generally unused and disabled by setting bits 0 and 1 of PACTL and PBCTL to zero.
They are used by a few devices, though, most notably the 1030 Direct Connect Modem.
Chapter 3 - System control 33

Altirra Hardware Reference Manual Created by Avery Lee
Control lines CB2 and CA2, however, are connected to the SIO command and motor control lines, respectively.
Bits 3-5 of PACTL/PBCTL are used to control the line state and should be set to 110 for a low state or 111 for a
high state.7 The command line is pulled low by the Atari while a command is being sent to an SIO device; the
motor line is pulled low when a cassette tape deck should begin recording or playback.
The control lines can be used to issue an IRQ to the CPU, but this is seldom useful unless an external SIO
device is specially made to take advantage of this ability.
Typically the values $34 and $3C are written to PACTL/PBCTL; this disables interrupts, raises or lowers the
CA2/CB2 line, and keeps the PORTA/PORTB register in data mode so the OS VBI routine can read the joystick
ports.
Interrupt status/enable bits
Bits 7 and 6 of PACTL and PBCTL indicate interrupt status of CA1/CB1 and CA2/CB2, respectively. They are
read-only and their values are ignored on write. A set bit indicates a pending interrupt, and if the interrupt is
enabled, an IRQ is also issued to the CPU.
Reading the input register for a port resets both interrupt bits for that port. This must be the input register;
reading the data direction register has no effect on interrupt status. This has implications for PIA interrupt
handlers, which must either require that ORA/ORB be active when PIA IRQs are active and unmasked or
temporarily switch from DDRA/DDRB to ORA/ORB to acknowledge the interrupt.
Unlike with POKEY, disabling interrupts does not clear the pending interrupt bit, and interrupts can be flagged by
edge detection even if interrupts are disabled. However, switching CA2/CB2 to output mode (1xx) does clear the
corresponding interrupt status (bit 6).
Reset behavior
The PIA is reset only on power on on the 800; it is also reset by the Reset button on XL/XE models. When the
PIA is reset, all registers are cleared to $00. This disables all interrupts, switches PORTA/PORTB to the data
direction register, and sets all peripheral port bits to input mode.
Floating inputs
On the XL/XE series, unused signal lines on PIA port B are not tied to ground or +5V and are therefore left
floating. This creates a condition where the value read on those bits via the PORTB register can drift over time.
Specifically, if unused port B bits are switched from outputting a 1 to input mode, they will read as 1 for a while
before eventually stabilizing at 0. If the last output value was a 0, the read bit in input mode will immediately be a
0 with no delay.
While this can cause port B to return random data, it is not usually a problem in practice because only unused
port B bits are affected and it only occurs for bits in input mode. On XL/XE systems, PIA port B is usually set to
output mode on all bits early in initialization and kept that way during normal operation.
The unused, floating port B bits for unmodified hardware are as follows:
•1200XL: bits 1-6
•600XL, 800XL, 65XE: bits 2-6
•130XE: bit 6
•XEGS: bits 2-5
[7] [ATA82] III.20 indicates that bits 4-5 should be set to 1. While this is the most useful setting, bits 3-5 can also be set to
other values to access six more control modes for the CA2 line. For instance, a value of 000 will reconfigure the pin for
input, resulting in it being passively pulled up to the true state.
Chapter 3 - System control 34

Altirra Hardware Reference Manual Created by Avery Lee
The approximate time delay for the 1-to-0 transition, based on measurements on real hardware, is in the range
of 100-500 ms. Delays vary between individual bits, between systems and can even vary widely on the same
system. For instance, one system may show fairly consistent 160-190ms delays among its bits, whereas another
may show 300-500ms. In any case, it is slow enough that it can even be detected from BASIC.
The 400/800 has pull-ups on all port B lines and leaves none floating. Port A is not susceptible to this issue either
as it has internal pull-ups within the PIA.
For systems that have add-on extended memory, the additional bits used by the memory expansion are
expected to be connected to additional hardware such that they would always be pulled up, preventing those bits
from floating. This is notably not true for Ultimate1MB, though, since it implements extended memory by
shadowing writes to the PIA instead of physically connecting to the PIA's port B. Therefore, on a U1MB system, it
is possible to have bits that both float in input mode and control extended memory.
Spurious interrupts
Switching from output to input mode on the CA2/CB2 control lines can cause spurious interrupts to be flagged in
the control register. For CA2, this happens when positive edge detection is enabled (PACTL[3:5] = 010 or 011)
after the output has been pulled low recently (110). For CB2, an output low-to-high transition must be followed by
any input mode (PBCTL[3:5] = 110 to 111, then 0xx). When the input mode is selected, bit 6 will become set and
an IRQ will be requested from the CPU if the PIA interrupt is enabled (PACTL/PBCTL[3] = 1).
The CB2 case is particularly nasty as it corresponds to the SIO command line and the required transition is part
of the normal SIO protocol. Merely writing $08 into PBCTL can cause an infinite series of interrupts if an
appropriate IRQ routine is not registered to clear the unexpected PIA interrupt.
3.3 Memory system
Initial memory contents
The contents of memory upon power-up are undefined and should be treated as such. However, in some
circumstances they are deterministic or almost deterministic.
The first case is when the computer is powered up after being turned off for a long time. In this case, the RAM
will contain block patterns related to the internal organization of the DRAM memory chips. One possible pattern
is alternating $00 and $FF bytes.
The second case is if the computer is only turned off for a short period of time before being turned back on.
When the power is turned off, the DRAM contents will begin to degrade as the lack of regular refresh causes the
memory cells to lose state. This can take anywhere from seconds to minutes, and if power is restored in
between, the result will be a random mix of data from the last powered state and bits that have decayed to the
base state.
Floating data bus
Some addresses are not decoded and responded to by any hardware device, leaving the data bus in an
undriven state. These include $D100-D1FF and $D600-D7FF with no PBI devices installed and $D500-D5FF
with no cartridge.
Depending on the model, this may either result in a pulled up or floating bus. On an XL and some XE machines,
there are pull-up resistors on the data bus which will force the bus to $FF for an unhandled read. On the 400/800
and other XE machines, these pull-ups are missing and the result is a floating data bus. The floating data bus
will tend to return the byte that was on the data bus from the previous cycle.
RAM does not drive the data bus during a refresh cycle, so the value on the floating data bus is not changed.
However, the floating data bus will reflect the value read by ANTIC if the last cycle was a DMA cycle from a
Chapter 3 - System control 35

Altirra Hardware Reference Manual Created by Avery Lee
driven location.
When the CPU is suspended by a write to WSYNC, it repeats its current read cycle until the WSYNC condition is
cleared by ANTIC. During this time, the bus will repeatedly reflect the data at the location the CPU is trying to
read. This can be in turn picked up by ANTIC if one of its DMA channels is reading from an undriven location.
Floating I/O data bus
On the 800, the system ROMs, PIA, POKEY, and cartridges are connected to a secondary I/O data bus that is
split by a pair of data bus transceivers from the main data bus that the CPU, ANTIC, and CTIA/GTIA are
connected to. The data buses are connected for some addresses that are not handled by any device, which
means that floating data can be read from the I/O data bus separately from the main bus. This is only true on the
800; the 400, XL, XE, and XEGS have all devices on a single data bus.
The following address ranges are decoded for the secondary data bus: $C000-CFFF, $D100-D3FF, $D500-
FFFF. The address ranges for CTIA/GTIA ($D000-D0FF) and ANTIC ($D400-D4FF) are excluded and occur over
the main data bus only.
Reading an unhandled address on the I/O data bus reads the floating bus data on that bus, which is only
affected by accesses to that bus. In particular, this means that reads and writes to main memory are not
reflected. Writes to any address on the I/O bus will float data on that bus even if no device responds to the write,
and this value can persist until the next read on the I/O bus even if other accesses occur to the main bus in
between.
As an example, if PEEK(49152) is executed from Atari BASIC running on a cartridge, the value read will most
often be 212 ($D4). This is because BASIC reads the supplied address with an LDA ($D4),Y instruction. The first
two cycles of this instruction read the instruction bytes $B1 and $D4 from the I/O bus, the next two cycles read
the address 49152 ($C000) from RAM at $D4 and $D5 on the main bus, and the last cycle reads the $D4 value
from the floating data from the I/O bus at address $C000. (The value will vary in practice because ANTIC may
halt the CPU temporarily and read character data from ROM at $E000-E3FF during the instruction.) On the other
hand, if BASIC is loaded into RAM, the value will tend to reflect character data because the instruction fetches
will no longer occur on the I/O bus.
3.4 Bank switching
Bank switching allows the CPU to access more memory than would ordinarily be reachable via the 64K address
space dictated by its 16 address lines by multiplexing address regions based on bank switching registers. On the
XL series, this allows ROM to be selectively disabled, permitting access to 62K of memory.
ROM control
While the 400/800 use PIA port B to interface with joystick ports 3 and 4, the XL/XE computers only have two
joystick ports. The otherwise unused port B is instead used to enable and disable the system ROMs.
Bit 0 controls the OS ROM at $C000-CFFF and $D800-FFFF. A '1' bit enables the OS ROM.
Bit 1 controls the BASIC ROM at $A000-BFFF (except on the 1200XL, which has no built-in BASIC). A '0' bit
enables the BASIC ROM. Note that this is inverted from the OS ROM bit (bit 0).
Bit 7 controls the self-test ROM at $5000-57FF. A '0' bit enables the self-test ROM, if the OS ROM is also
enabled. If the OS ROM is disabled, the self-test ROM is also disabled regardless of the state of bit 7.
Pull-ups ensure that port B bits 0 and 7, and also bit 1 on non-1200XL machines, are held high if those bits are
switched to input mode on the PIA. Since the PIA switches all port bits to inputs on reset, this guarantees that
the OS ROM is enabled and the BASIC and self-test ROMs are disabled on system reset.
Clearing bit 0 and setting bits 1 and 7 disables all system ROMs, enabling access to 62K of RAM. The 2K block
Chapter 3 - System control 36

Altirra Hardware Reference Manual Created by Avery Lee
of hardware registers at $D000-D7FF cannot be disabled.
Writes to ROM
The MMU logic maps addresses to circuitry solely based on address. This means that any writes to addresses
that are currently assigned to kernel ROM, BASIC ROM, or cartridge ROM are ignored and do not affect the
underlying RAM. It is not possible to “write through” the ROM as on some other platforms.
BASIC ROM overlap (XL/XE only)
The priority in the $A000-BFFF address range is cartridge ROM, then BASIC ROM, and then RAM. If both the
cartridge and BASIC ROM are enabled in that area, the cartridge is visible.
Game ROM (XEGS only)
On the XEGS, setting bit 6 of PIA port B to 0 enables the Missile Command game ROM at $A000-BFFF. This
has lower priority than the BASIC ROM and will therefore be overridden by BASIC if port B bit 1 is also set to 0.
3.5 Extended memory
130XE banking
The 130XE additionally uses bits 2-5 to control access to an additional 64K of memory through a window at
4000-7FFF. Bits 4 and 5 enable CPU and ANTIC access to extra memory when cleared. Bits 2 and 3 control the
memory bank, selecting one of four extra 16K banks. The CPU and ANTIC must access the same bank of
memory if both are using extended memory. There is no way to redirect the 4000-7FFF window to any memory
in the primary 64K.
The self-test ROM has priority over the extended memory window if both are enabled.
320K modification (RAMBO)
Bits 4-7 of PORTB are used to access 16 extended banks of 16K at 4000-7FFF. This results in 64K + 256K =
320K of memory. Because bit 5 is used, ANTIC external memory access is not available if this mod is used on
130XE hardware. Instead, both CPU and ANTIC are switched at the same time.
576K modification
Reusing the BASIC bit (bit 1) raises the number of selectable banks to 32, for a total of 64K + 512K = 576K. Bits
0, 4, and 7 still control the kernel ROM, CPU access, and the self-test ROM on XL/XE hardware.
1088K modification
Overloading the self-test bit (bit 7) gives six bits for bank selection, bits 1-3 and 5-7. 64 banks of 16K plus the
main 64K bank gives 64K + 1024K = 1088K. Note that the self-test ROM is still accessible if the extended RAM
access bit (bit 4) is disabled.
Main memory aliasing
Some extended memory expansions may alias 64K of extended memory against main memory due to reusing
the same memory addressing. The result is that four of the extended memory banks address main memory such
that reading or writing the two address windows are equivalent. This is documented behavior for the ICD
RAMBO XL product, which aliases banks 0-3 of its 256K extended memory space against main memory.8
[8] [RamboXL] p. 14
Chapter 3 - System control 37

Altirra Hardware Reference Manual Created by Avery Lee
3.6 Miscellaneous connections
Cartridge sense (XL/XE only)
On the XL/XE series, the RD5 cartridge line is connected to the trigger 3 input (T3) of GTIA. The RD5 line
signals when the cartridge is supplying data in the $A000-BFFF range and therefore built-in memory should be
suppressed. Because RD5 is active high, the TRIG3 register in GTIA reads as a 1 (button not pressed) when
cartridge ROM is present and 0 (button pressed) when it is absent. This is used as a cartridge sense mechanism
by the XL/XE OS.
When a cartridge is disabled via bank switching and no longer presenting anything at $A000-BFFF, TRIG3 reads
as a 0.
The internal BASIC ROM does not affect TRIG3.
On a SECAM system with an FGTIA, the triggers are gated and only updated once each horizontal blank. This
causes delays in TRIG3 updating to match cartridge state changes and is a source of cartridge compatibility
problems. The TRIG3 cartridge sense can also be affected by the GTIA trigger latch function.
Keyboard sense (XEGS only)
On the XEGS, the trigger 2 input (T2) of GTIA is used to sense whether a keyboard is connected. If a keyboard
is connected, TRIG2 reads $01 (trigger not pressed), while it reads $00 otherwise. This is consistent with the
XL/XE series which has T2 disconnected and also reads $01.
1200XL option jumpers
The 1200XL has four option jumpers which are connected to unused pot lines. Option jumper J1 is connected to
POT4 and causes a self-test on startup if installed.9
3.7 Examples
Caverns of Mars
This game configures the upper four bits of port A as output in order to force them to zero, and fails to read the
joystick if this is not reflected in the values read.
MidiTrack III
Monitors the CA1 (SIO proceed) input of the PIA for synchronization pulses without having IRQA1 enabled.
R-Verter handler software
Monitors CA1 (SIO proceed) and CB1 (SIO interrupt) inputs to the PIA without either IRQA1 or IRQB1 enabled.
WarGames
This game has a unique check to verify that $C000-CFFF is not populated with either RAM or ROM on an 800
system. If the routines in this region do not match the checksum for the 1200XL or XL/XE ver. 2 OS, the game
writes a byte to a single location in this range and then reads a series of addresses, checking whether the data
read from any of those addresses changes. Since the check routine is running from RAM, this relies on the write
being floated on the I/O data bus without being disturbed by the instruction fetches. The check will pass if
$C000-CFFF either contains RAM or returns floating I/O bus data, but will fail if it is ROM or main floating bus
[9] [ATAXL] p.15
Chapter 3 - System control 38

Altirra Hardware Reference Manual Created by Avery Lee
data.
Atari Operating System Rev. A/B
The RAM sizing test for OS-A/B tests for RAM by twice complementing the byte at the beginning of each 4K of
memory starting at $1000 and checking that the value read back matches each time. This test normally stops at
$C000 due to the floating I/O bus, relying on the instruction fetches from ROM to immediately overwrite the
written value on the I/O data bus. This test will also stop at $C000-CFFF if the range returns a constant value
due to either ROM or a pulled-up data bus. If the system is reconfigured so that the memory sizing code runs
from the main data bus or that $C000-CFFF returns floating data from a different bus, the sizing code can
incorrectly determine that range to be RAM.
3.8 Further reading
The definitive resource for anything involving the Atari memory map is [CHA85]. Appendix 16 provides
information on the new PORTB assignments for the 130XE.
[ATAXL] describes numerous modifications to the hardware and kernel in the 1200XL, such as the option
jumpers.
[ATA82] contains both functional and detailed schematics of the Atari 400/800 and is useful in tracing signal flow
between the custom chips.
For detailed programming information for the 6520 PIA chip, particularly modes not covered by the Hardware
Manual, consult [MOS76].
Chapter 3 - System control 39

Altirra Hardware Reference Manual Created by Avery Lee
Chapter 4
ANTIC
ANTIC is the master chip of the Atari 8-bit chipset, controlling frame timing and doing all direct memory
access (DMA).
Chapter 4 - ANTIC 40

Altirra Hardware Reference Manual Created by Avery Lee
4.1 Basic operation
Addressing
ANTIC occupies the $D4xx block of address space. Only the low four bits are decoded, so any address of the
form $D4XY will address mirror X of register Y. The canonical registers are at $D400-D40F.
Unassigned addresses within the ANTIC address range read as $FF. This is true even on hardware models that
have a floating data bus for unassigned addresses, as ANTIC actually drives $FF onto the bus for addresses in
its range that don't have registers assigned.
Reset behavior
On power-on or reset, ANTIC automatically clears the following items:
•Horizontal and vertical counters
•Refresh row address counter
•NMIEN
•DMACTL
•Playfield DMA clock
The following items are not reset:
•WSYNC
•HSCROL/VSCROL
•PMBASE
•CHBASE
•PENH/PENV
•CHACTL
•DLISTL/H
•NMIST
•Memory scan counter
Typically a warm reset routine will clear all registers in order to reset ANTIC to a known state.
Note that on 400/800 hardware, ANTIC is only reset on power-on. On XL/XE hardware, the Reset button also
resets ANTIC.
Typical power-up values
Any registers that are not internally cleared by ANTIC on reset have undefined contents on power-up. However,
the internal architecture biases some registers toward specific values:
Chapter 4 - ANTIC 41

Altirra Hardware Reference Manual Created by Avery Lee
Register Typical power-up value
PENH $00
PENV $FF
Table 4: Typical power-up values for ANTIC registers
These values are most likely to appear when the system is powered up cold. If it has been powered down
recently – within a few seconds – these registers may instead show some partial bits from when the system was
last turned off.
4.2 Display timing
As the main display processor in the system, ANTIC is responsible for overall display timing. The ideal display
timings produced by ANTIC are as follows (ignoring component variation):
Parameter NTSC PAL
Master clock 14.31818MHz 14.18757MHz
Machine clock 1.790772MHz
(14.31818MHz ÷ 8)
1.773447MHz
(14.18757MHz ÷ 8)
Horizontal scan rate (scan line rate) 15.69975KHz
(1.789772MHz ÷ 114)
15.55655KHz
(1.773447MHz ÷ 114)
Vertical scan rate (frame rate) 59.92271Hz
(15.69975KHz ÷ 262)
49.86074Hz
(15.55655KHz ÷ 312)
Table 5: ANTIC display timing
Importantly, the horizontal and vertical scan rates deviate from ideal NTSC and PAL broadcast timing. For NTSC,
the machine clock runs at exactly half the color subcarrier rate (3.58MHz), but the scan line is 114 machine
cycles instead of 113.75 cycles and the frame has 262 scan lines instead of 262.5. This prevents the color
subcarrier from inverting phase on each scan line and produces a non-interlaced display with 15.700KHz /
59.92Hz timing instead of an interlaced one with 15.735KHz / 59.94Hz timing. Similarly, the PAL ANTIC
produces 312 scan lines instead of 312.5 and also produces a non-interlaced display.
Mixed PAL/NTSC systems
While standard systems have matched ANTIC and GTIA chips, it is possible to combine an NTSC ANTIC with a
PAL GTIA or vice versa. This results in either a 50Hz NTSC display or a 60Hz PAL display. The NTSC-50 case is
the more interesting of the two as the 50Hz frame rate avoids many compatibility issues with software written for
PAL. In such a mixed system, the ANTIC type determines the frame timing and the GTIA type determines the
value read from the PAL register.
Although ANTIC does not directly indicate its type via a readable register like GTIA does, an NTSC ANTIC can
readily be distinguished from a PAL ANTIC by polling the VCOUNT register.
Pixel aspect ratios
The display timings used by ANTIC also determine the aspect ratio of pixels on screen. These pixels are not
square, and furthermore, differ between NTSC and PAL.
For NTSC, a dot clock of 12.2727Hz corresponds to square pixels.10 However, this is for interlaced video (~480
visible scan lines), so the equivalent rate for non-interlaced video is half the rate, 6.1364MHz. The dot clock
produced by NTSC ANTIC+GTIA at hires mode is faster at 7.159MHz, giving a noticeably narrow pixel at
[10] [TIVideoDec] p.2-7.
Chapter 4 - ANTIC 42

Altirra Hardware Reference Manual Created by Avery Lee
0.857:1. Player/missile graphics and higher-resolution but non-hires playfields typically use 160 clock resolution,
however, so their pixels will be doubly wide at 1.714:1.
For PAL, a dot clock of 14.75MHz is used for square pixels in interlaced video, giving 7.375MHz for non-
interlaced video. The PAL ANTIC+GTIA in hires mode outputs pixels at 7.094MHz, giving a slightly wide hires
pixel at 1.04:1. Although not square, this is close enough for many purposes.
Many other computers of the era used a similar technique of generating pixels with a dot clock derived from the
color subcarrier frequency and have comparable pixel aspect ratios, particularly the Apple II and the Amiga.
4.3 Playfield
The main display produced by ANTIC is known as the playfield.
Playfield width
Three playfield widths are supported: narrow, normal, and wide. The normal playfield width is 160 color clocks
wide (320 hires pixels), and is used by all OS graphics modes. Narrow playfields are 128 color clocks wide;
these are useful when the extra width is not needed, as narrow playfields have less data to set and also allow
the CPU to run slightly faster. Wide playfields are 192 color clocks wide and even cover the overscan regions on
the sides.
All three playfield widths share the same center, so a normal playfield adds 16 color clocks on each side of the
narrow playfield, and a wide playfield adds another 16 color clocks on each side. However, the wide playfield is
so wide that it is truncated: 12 color clocks are hidden on the left side and two are cut off by horizontal blank on
the right. As a result, only 178 color clocks out of 192 are visible.11
DMACTL bits 0-1 control the width of the playfield, and can also disable the playfield entirely, causing the
background color to be displayed.
Playfield colors
The playfield is composed of up to four colors, PF0-PF3, overlaid on top of the background (BAK). ANTIC tells
the GTIA when each playfield color is used, and five independent color registers in GTIA are used to produce the
final playfield. Depending on the display mode, there are four different color configurations:
•Two colors. These bitmap modes display either BAK or PF0.
•Four colors. These bitmap modes display BAK or PF0-PF2.
•Five colors. These character modes display BAK or PF0-PF3.
•One color in two luminances. These are special high-resolution modes where pixels are so narrow
that they are only a half color clock wide. In these modes, the entire playfield is a single hue as specified
by PF2, but the graphics data is used to conditionally substitute in the luminance from PF1.
The fourth playfield color, PF3, is seldom used by the playfield. Therefore, the GTIA contains a bit to reuse this
color as a fifth color for player/missile graphics instead.
Playfield modes
ANTIC supports fourteen playfield display modes, selected by the display list. Each playfield covers the entire
width of the screen for some vertical distance, controlled by the display list; it is possible to vertically stack
different playfield modes on the same screen. Six of the display modes are character modes, while the other
[11] The displayable width for a wide playfield is given as 176 color clocks in some references. The discrepancy is because
in a wide unscrolled IR mode 2-5/D-F playfield, the last two color clocks are garbage due to suppressed DMA cycles.
They are part of the playfield, however, as they can cause player-playfield collisions.
Chapter 4 - ANTIC 43

Altirra Hardware Reference Manual Created by Avery Lee
eight are mapped (bitmap) modes.
Playfield data ordering
All playfield data, including bitmap data and character font data, is stored such that bit 7 represents the left-mode
pixel on screen and bit 0 is the right-most pixel. In multicolor modes where a pair or group of four bits is used to
represent a pixel, the bits are ordered as for CPU integers. For instance, the color PF1 in the second pixel of a
four-color bitmap or character map mode would be represented by the pattern xx10xxxx.
4.4 Character modes
The playfield can be configured to display text through character modes, which use a layer of indirection to
produce output. In these modes, two separate memory regions are used:
•Character names. These are fetched first, and indicate which characters to display within the mode line.
•Character set data. The character names are then used to index into the current row of the character
set to fetch the actual data to display.
Character modes allow text displays to be produced with minimal data manipulation, since the CPU need only
modify one byte per character rather than copy the data for each character.
Some character modes display characters as monochrome, whereas others display characters as multicolor.
The multicolor modes are often used to quickly display graphical tiles rather than text.
Mode list
These are the character modes supported by ANTIC:
Mode Scan lines Colors Bytes (normal width) Resolution Color mode Pixel size
2 8 1.5 40 40 Hi-res 8x8
3 10 1.5 40 40 Hi-res 8x8
4 8 5 40 40 Lo-res 8x8
5 16 5 40 40 Lo-res 8x16
6 8 5 20 20 Lo-res 16x8
7 16 5 20 20 Lo-res 16x16
Modes 2 and 3: High-resolution monochrome text
Mode 2 is the standard 40-column screen seen on startup. Each playfield byte selects an 8x8 character from an
array of 128 pointed to by CHBASE; bit 7 controls inversion or blinking, based on modes in CHACTL.
The character set requires 1K of memory and must be aligned to a 1K boundary. Each of the 128 characters is
described by 8 contiguous bytes, where the first byte corresponds to the data for the first scan line. With each
byte, each bit corresponds to a pixel on screen, where bit 7 is the left-most pixel. Because mode 2 is a hi-res
mode, the entire playfield uses the PF2 color, and each bit indicates whether luminance comes from PF2 (0 bit),
or PF1 (1 bit).
Although it is not exposed as a standard OS mode, it is possible to enable the GTIA modes with a mode 2 or 3
playfield, thus giving a 9 or 16 color tiled playfield.
Mode 3 is similar to mode 2, except that each mode line is 10 scan lines tall instead of 8. The extra two scan
lines reuse the same data from the first two, but only one of the pairs displays valid data. Characters 00-5F
display data for scan lines 0-7 and display $00 data for rows 8-9, while characters 60-7F display on rows 2-9
Chapter 4 - ANTIC 44

Altirra Hardware Reference Manual Created by Avery Lee
instead and display $00 data for scan lines 0-1. This permits one-quarter of the character set to have
descenders. For descenders to display properly, the character data must be stored out of order since rows 2-7
are displayed above rows 0-1.
Modes 4 and 5: Multicolor text
Mode 4 is another character mode that produces 40 characters across in normal width, but unlike modes 2 and
3, mode 4 is a lo-res mode that produces up to five colors. Instead of each character producing monochrome
characters in an 8x8 block, each character is instead 4x8 with pixels twice as wide. Normally each pair of bits
produces either the background color (00) or PF0-PF2 (01-11). If bit 7 is set, however, the 11 pair produces PF3
instead of PF2.
Mode 5 is the same as mode 4, except that scan lines are repeated once and each character is 16 scan lines tall
instead of 8.
Modes 6 and 7: Single color text in five colors
Mode 6 is the familiar single-color, double-wide signature character mode of the Atari. At normal width, it
produces 20 8x8 characters per row, where each pixel is one color clock wide. The character set is half the size
in mode 6, requiring only 512 bytes and 512 byte alignment. Only 64 characters are available in the mode
because the upper two bits are used to select the foreground color used by 1 bits, with 00-11 producing PF0-
PF3. 0 bits in the character data always produce the background color.
Mode 7 is the same as mode 6, except that scan lines are doubled and each character is 16 scan lines tall.
Character set storage
All character modes require image data for each character. For modes 2-5, the character set is stored as 128
characters within a 1K block, aligned to a 1K boundary; for modes 6 and 7, it contains 64 characters within a 512
byte block, aligned on a 512 byte boundary. The low three bits of the address specify the row so that each
contiguous block of 8 bytes represents a character.
The top 6 or 7 bits of the CHBASE register specify the base address of the character set. It can be dynamically
changed on the fly, but the change will not take effect until two cycles past when the register is changed. While
bit 1 is not used in modes that use 1K of character data, it is still stored on write and that latent bit will become
active should a 0.5K character data mode activate.
Blinking and inversion
In the high-resolution modes (modes 2 and 3), bit 7 of the character name is used as an extra attribute bit to
indicate reverse video or blinking. For this to happen, bits 0 and 1 of CHACTL must be used. When bit 1 is set,
character cells with name bit 7 set are displayed inverted. When bit 0 is set, those cells are blanked as if the
character font data were all zero bits. This means that in order for text to blink, software must periodically toggle
the state of bit 0. Setting both bits 0 and 1 results in inverted space characters.
If display DMA is temporarily disabled when character name fetch would occur, ANTIC reuses the character
names stored in the line buffer, but the invert/blink state that normally comes from bit 7 is reused from the last
character rather than the bit 7 value from the line buffer.
Bits 0 and 1 of CHACTL have no effect in modes 4-7.
Vertical reflection
Setting bit 2 of CHACTL flips all characters upside-down, displaying row 7 of the character set first. Unlike the
blink and inversion features, this affects all character modes.
Vertical reflection works exactly as if the row bytes in the character set were reversed in order. This means that it
Chapter 4 - ANTIC 45

Altirra Hardware Reference Manual Created by Avery Lee
produces nonsensical results for characters with descenders in mode 3 (60-7F), as the reflection causes rows 6-
7 to appear in the descender area.
4.5 Mapped (bitmap) modes
The playfield can also display data from memory directly in bitmap modes, which simply map single bits or pairs
of bits to color. This allows every pixel to be completely independent at the cost of often requiring much more
memory, as much as 8K per frame buffer. ANTIC always displays bitmap data with the first byte of each row and
the most significant bit of each byte corresponding to the leftmost pixel.
The supported modes are as follows:
Mode Scan lines Colors Bytes (normal width) Resolution Color mode Pixel size
8 8 4 10 40 Lo-res 8x8
9 4 2 10 80 Lo-res 4x4
A 4 4 20 80 Lo-res 4x4
B 2 2 20 160 Lo-res 2x2
C 1 2 20 160 Lo-res 2x1
D 2 4 40 160 Lo-res 2x2
E 1 4 40 160 Lo-res 2x1
F 1 1.5 40 320 Hi-res 1x1
Mode 8: Four color bitmap at lowest resolution (4x8 pixels)
Mode 8 is the lowest resolution graphics mode, producing 40 pixels across with one of four colors. Bits 7 and 6
of a byte correspond to the left-most pixel; 00 selects the background color while 01-11 produces PF0-PF2. Each
pixel is 4 color clocks wide and 8 scan lines tall.
Modes 9 and A: Bitmap modes with 2x4 pixels
Mode 9 is double the horizontal and vertical resolution of mode 8, with each pixel being 2 color clocks wide and
4 scan lines tall. However, it is only a two-color mode, with each bit selecting the background (0) or PF0 (1). Bit 7
is the left-most pixel in each byte.
Mode A is the four-color version of mode 9. Each pixel selects the background (00) or PF0-PF2 (01-11).
Modes B and D: Bitmap modes with 1x2 pixels
Mode B increases resolution further to 1 color clock and 2 scan lines per pixel, with two colors per pixel
(background and PF0).
Mode D is the same as mode B, except that each pixel is two bits and selects from one of four colors.
Modes C and E: Bitmap modes with 1x1 pixels
Mode C is the same as mode B, except that mode lines are only one scan line high. It is the highest resolution
two color bitmap mode available.
Mode E is the same as mode C, except that each pixel is two bits and selects from one of four colors. It is the
highest resolution four color bitmap mode available.
Chapter 4 - ANTIC 46

Altirra Hardware Reference Manual Created by Avery Lee
Mode F: High resolution bitmap mode
Mode F produces 320 pixels across at normal width, with each bit corresponding to a pixel one-half color clock
wide and one scan line tall. It is a high-resolution mode, meaning that the whole playfield uses the PF2 color and
the luminance from either PF2 (0) or PF1 (1).
This mode is also the mode that serves as the basis for the three new modes added with the GTIA; the only
difference in setup is that bits 6 and 7 of PRIOR on the GTIA are set to a value other than 00.
4.6 Display list
The display list determines how and when ANTIC fetches playfield data for display through GTIA. It is composed
of a series of one-byte or three-byte instructions, each of which controls the display of at least one scan line on
screen, and is normally repeated for every frame.
Instruction pointer
The DLISTL and DLISTH registers contain the instruction pointer used to fetch the display list. At the end of each
mode line, ANTIC fetches a new instruction at the location pointed to by DLISTL/DLISTH into the instruction
register (IR), and then increments the pointer. This continues until a jump instruction is reached, which then
loads a new address into DLISTL/DLISTH. ANTIC does not store the start of the display list and has no registers
to do so; the display list must either loop or be restarted by the CPU.
The display list can reside anywhere in the 64K address space, but it cannot cross a 1K boundary. This is
because the DLISTL/DLISTH register is actually split into 6 bit and 10 bit portions, where the lower 10 bits
increment and the upper 6 bits do not.12 As a result, during normal execution the display list will wrap from the
top of a 1K block to the bottom during fetching, e.g. $07FF to $0400. This will happen even in the middle of a
three-byte LMS or jump instruction. Jump instructions are not limited and can cross 1K boundaries to any
address.
DLISTL/DLISTH are live during display list execution and any write to either will immediately change the address
used for the next display list fetch. Because of the possibility of display list interrupts, it is dangerous to do this in
the middle of a display list, as changing only one of the address bytes may cause ANTIC to execute random
memory as a display list and therefore issue spurious DLIs. A $C1 instruction is particularly dangerous as it will
cause a DLI to activate every scan line until vertical blank and can easily cause a crash. Therefore, the display
list pointer should normally only be updated when either display list DMA is disabled or during vertical blank.
Instruction format
A display list instruction is described in a single byte as follows:
DLI LMS VS HS Mode
D7 Display list interrupt
0 No interrupt
1 Interrupt CPU at beginning of last scan line
D6 Load memory scan counter (LMS operation)
0 Normal
1 Load memory scan counter with new 16-bit address
D5 Vertical scroll
0 Disable vertical scrolling
1 Enable vertical scrolling
[12] Hardware II.10
Chapter 4 - ANTIC 47

Altirra Hardware Reference Manual Created by Avery Lee
D4 Horizontal scroll
0 Disable horizontal scrolling
1 Enable horizontal scrolling
D0:D3 Mode
0000 Blank
0001 Jump
other Non-blank mode line
Instruction bytes are read into the Instruction Register (IR) within ANTIC.
Playfield mode lines
Modes 2-F select a playfield mode line for display.
Load Memory Scan (LMS) commands
Setting bit 6 on a non-blank mode line causes the playfield memory scan pointer to be reloaded with a new
address from the two following bytes, LSB first. This can be done on any such mode line and as frequently or
infrequently as required; no blank line is incurred and the display appears uninterrupted. Normally one LMS is
required at the beginning of the display list to reset the playfield address to the beginning of the screen memory.
Screen modes that require more than 4K of memory require at least one other LMS command in the middle of
the screen to hop the 4K boundary. LMS commands may also be used in order to store rows of the display in
discontiguous memory or with address spacing other than the default for the current playfield width, which is
useful for large scrolling playfields.
Warning
An LMS alone is not enough to correctly display a playfield that requires more than 4K of data. If a scan line
crosses a 4K boundary, it will wrap around to the beginning of the 4K block in the middle of the scan line.
This cannot be fixed with LMS as that can only affect the beginning of the scan line. The OS avoids this
problem while still maintaining contiguous addressing by adjusting the offset of the playfield buffer so that
the 4K boundary occurs exactly between scan lines.
Blank mode lines (IR mode 0)
A blank mode line is specified by an instruction byte whose lowest four bits are 0000. In this case, bits 4-6
specify a scan line count instead, where 000-111 specify 1-8 scan lines. As a result, a blank mode line is always
considered to have the horizontal/vertical scroll and LMS bits cleared. However, it can trigger a DLI, and is also
subject to height modification if at the end of a vertical scrolling region.
Jump command (IR mode 1)
Instruction bytes with a mode of 0001 are jump commands and are always followed by two bytes indicating the
new instruction pointer for the display list. This produces a three-byte instruction similar to a 6502 JMP
instruction, where the new 16-bit address is specified as low-byte first. Because the jump instruction occupies a
display list slot, a blank line is displayed during its execution.
Like blank line instructions, jump instructions are never interpreted as having scrolling enabled, regardless of the
values of bits 4 and 5, which are ignored for jump instructions. However, if the jump instruction follows a
vertically scrolled mode line, it can be extended due to ending a vertical scrolling region the same way that blank
lines can. When this occurs, ANTIC repeatedly fetches a new display list address at the beginning of each
subsequent scan line. This has the effect of following a chain of indirect 16-bit addresses and is typically
undesirable.
DLIs can be triggered on jump commands.
Chapter 4 - ANTIC 48

Altirra Hardware Reference Manual Created by Avery Lee
Jump and wait for Vertical Blank (IR mode 1 + bit 6)
A jump instruction with bit 6 set ($41) also suspends the display list until vertical blank. This is usually used to
terminate the display list and restart it for the next frame. When using a display list that loops using such an
instruction, it is not necessary to write DLISTL/DLISTH per frame as ANTIC will autonomously repeat the display
list every frame.
The internal execution of a JVB instruction is the same as if display DMA were disabled immediately after a jump
instruction. No instruction or address bytes are fetched again, and the jump instruction is replayed over and over.
If the previous instruction had vertical scrolling enabled, then the JVB instruction will initially have its height
modified appropriately, and then replay subsequently with one scan line high as usual. Similarly, if the DLI bit is
set on the JVB instruction ($C1), ANTIC will fire a DLI each and every time it is replayed, up to once per scan
line.
Like any other instruction, JVB requires a scan line to execute. This means that attempting to create a display list
with 240 visible scan lines and ending with a JVB will fail, since the JVB makes the display list 241 scan lines
tall. Unless DLISTL/DLISTH is rewritten in the VBI to manually restart the display list each frame, this will result
in a flickering display where even frames display the intended 240 line display and odd frames are blank frames
consisting solely of the JVB instruction.
The display list pointer is reset when the address bytes are fetched on the first scan line of the JVB instruction.
Writes to DLISTL/DLISTH afterward will replace the address that was loaded with JVB, even if they occur before
vertical blank.
Once display list DMA has been suspended with a JVB instruction, there is no way to restart it other than to wait
for vertical blank.
Valid display list range
The display list starts at scan line 8 and ends no later than scan line 248. The maximum height of a display list is
thus always 240 scan lines. This is true even in PAL, which has 50 more scan lines than NTSC.
If a display list is too long, ANTIC automatically suspends the display list at the beginning of vertical blank at
scan line 248 and resumes it at the end of vertical blank on scan line 8 of the next frame. This means that if a
display list were exactly 480 scan lines tall and looped with a jump ($01) instruction, it would alternate perfectly
between two images. Typically this doesn't happen, though, because the vertical blank routine reloads
DLISTL/DLISTH. Otherwise, however, ANTIC will happily keep fetching instructions, wrapping around within 1K
of memory over and over.
The vertical scroll bit (bit 5) is still tracked across vertical blank. This means that if the vertical scroll bit is always
on for all displayed mode lines, no vertical scrolling actually occurs, because none of the mode lines is either the
start or end of a vertical scrolling region.
Any mode line which extends partially over the vertical blank is truncated. If this occurs when a DLI is enabled on
that mode line, the DLI is skipped since the last scan line never occurs.
Suspended display list DMA
DMACTL bit 5 controls display list DMA, but the display list itself is actually always enabled. When DMA is
enabled, the display list instead repeats its previous instruction byte. Any Jump or Load Memory Scan (LMS)
commands are disabled as the address fetch is also skipped, and the display list pointer does not increment. If
the display list was stopped after a JVB instruction ($41), this produces blank lines and the display list is
effectively stopped. However, any other instruction byte activates a mode line as usual, including multi-row blank
lines, character and bitmap mode lines, and even activating DLIs as usual.
Turning off display list DMA has no effect after a jump and wait for vertical blank ($41) instruction executes, as
no fetches occur anyway once JVB completes.
Chapter 4 - ANTIC 49

Altirra Hardware Reference Manual Created by Avery Lee
While bits 0-5 and bit 7 of the instruction register are preserved across vertical blank, bit 6 of the IR is cleared
across vertical blank. This makes no difference except in the extremely rare case where display list DMA is
enabled on cycles 0 or 1, late enough for the instruction byte fetch to be suppressed but early enough for the
address fetches to occur.
Display list DMA enable/disable timing
Display list instructions are fetched on cycle 1 of a scan line, between missiles and players. However, display list
DMA must be enabled by cycle 113 of the previous line in order for it to take effect at the beginning of the next
line. If DMA is enabled on cycle 0, it still doesn't occur on the immediately following cycle.
Hi-res last scan line bug
Under normal circumstances, a display list should not be constructed such that scan line 247 is a hi-res scan
line. This is not ordinarily possible with a normal display list, only with one that is too long or by repeating mode
lines by disabling display list DMA. If scan line 247 is a hi-res line, then ANTIC will fail to properly activate vertical
blank or vertical sync in the active playfield display region whenever bits 0-1 of DMACTL[3:2] are other than 00.
This can result in severe display distortion if vertical sync on scan lines 251-253 (NTSC) or 275-278 (PAL) is
disturbed. Another side effect is that GTIA will continue to process player/missile graphics and P/M collisions in
the non-blanked regions.
4.7 Scrolling
Normally, a playfield can only be scrolled by changing the memory scan pointer used to begin fetching data. This
restricts scrolling to byte granularity, which is fairly large on-screen for most display modes. ANTIC has support
for both fine horizontal and vertical scrolling, which allows playfields to be scrolled more finely than by LMS
instructions.
Enabling horizontal scrolling
Bit 4 of a display list instruction enables horizontal scrolling for that mode line. This enables the fetch of extra
playfield data and then shifts the playfield by the value specified in the HSCROL register, specified as the
number of color clocks to shift the playfield right from 0-15. For a scroll value of 0, the visible playfield image is
aligned as if the wider playfield were simply windowed to the requested width.
The same number of color clocks is displayed as without scrolling, so there are no visible scroll artifacts on the
sides with horizontally scrolled narrow or normal width playfields. A wide playfield will shift in background color
on the left with increasing scroll values, and also show a few color clocks of garbage on the rightmost border.
Effects on playfield DMA
Enabling horizontal scrolling increases the fetch width by one level, so a narrow playfield fetches the same data
as a normal playfield, and a normal playfield fetches a wide playfield's worth of data. This increases the number
of bytes per scan line accordingly, which must be taken into account when laying out playfield data. It also
results in more playfield DMA cycles, impacting CPU speed and DLI timing. There is no change in fetch width for
wide playfields.
Playfield DMA is delayed by one cycle for each increase by two in the HSCROL value. Even and odd scroll
values have the same DMA timing and are differentiated by an optional single color cycle delay within ANTIC.
With normal or wide playfields, the shift in DMA timing results in some DMA cycles being dropped near the end
of the scan line. While ANTIC doesn't halt the CPU during these cycles, it does still fetch data from the bus into
internal memory and increment the memory scan counter.
Chapter 4 - ANTIC 50

Altirra Hardware Reference Manual Created by Avery Lee
Scrolling high-resolution modes
High resolution modes cannot be scrolled with single pixel accuracy. It is only possible to scroll by pairs of pixels
at a time because HSCROL only has color clock precision.
Scrolling GTIA modes
In GTIA modes, data from adjacent color clocks are paired together by GTIA to form 4-bit pixels. The pairing is
determined relative to horizontal blank and is not affected by horizontal scrolling. This means that for proper
scrolling of these modes HSCROL should be set to even values only. If odd values are used, ANTIC will delay
the playfield data by a color clock unbeknownst to GTIA, resulting in the wrong pairs of bits being merged
together into pixels.
Changes to HSCROL between rows of a mode line
For mode lines that are more than one scan line tall, it is possible to change HSCROL between scan lines within
that mode line. This makes it possible to shear the mode line. The internally buffered data is replayed relative to
the start of each scan line, so it moves as expected.
Changes to HSCROL in the middle of a scan line
The horizontal scroll value can also be changed in the middle of a scan line, but the effects are less intuitive. The
LSB of HSCROL which controls the internal color clock delay can be changed at any time for immediate effect,
shifting following displayed data by a color clock. Changes to bits 1-3, however, will not result in a visible change
at the point of change since they change the starting and stopping cycles for playfield DMA. For instance,
changing HSCROL from 0 to 4 would have no visible effect, but changing it from 0 to 5 would.
There are two artifacts that can occur at the end of the scan line, however, when changing bits 1-3. The first is
the change in the playfield DMA end position can change the number of bytes that the memory scan counter is
advanced, resulting in playfield data for the next scan line being displaced. For instance, changing HSCROL
from 0 to 8 in the middle of a horizontally scrolled, narrow width mode 7 line will result in the memory scan
counter being advanced by 21 bytes instead of 20. A more serious artifact occurs if the playfield DMA pattern for
the new scroll value no longer aligns with the pattern that was established when DMA started; this happens if bit
1 is changed in modes 2-5/D-F, bits 1-2 in modes 6-7/A-C, or bits 1-3 in modes 8-9. Doing so changes the cycle
at which ANTIC attempts to stop playfield DMA, and if it fails, playfield DMA continues through horizontal blank
and into the next scan line.
Chapter 4 - ANTIC 51

Altirra Hardware Reference Manual Created by Avery Lee
Artifacts with wide playfields
With some combinations of IR mode and horizontal scroll values, it is possible for garbage to appear on the right
side of a wide playfield. This garbage appears very far right and off the visible areas of most televisions,
although some can display it. The garbage data is not random: it corresponds to activity on the data bus during
playfield fetches blocked due to occurring too late in the scan line (see DMA timing charts). This is usually limited
to 1-2 color clocks and is more likely to happen in character modes due to character data being fetched one
cycle later relative to display than bitmap data. The effect can extend farther left if HSCROL is changed in the
middle of a mode line to shift display of data in ANTIC's internal buffer.
Most of the time, the garbage is simply an unwanted artifact. However, because this data is sent to GTIA, it can
be detected by player/missile collisions against the playfield and can be a source of unwanted collisions.
Vertical scrolling
Vertical scrolling in ANTIC is controlled by bit 5 of a display list instruction. When bit 5 is set, the VSCROL [D405]
register modifies the height of selected mode lines in the display list to allow portions of the display to be scrolled
on a scan line basis. When the vertical scrolling bit changes from a 0 to a 1 on adjacent mode lines, the first line
for which it is set is shortened by starting it at the scan line specified by VSCROL. Similarly, when it changes
from a 1 to a 0, the first line for which that bit is reset is also shortened by ending it at that scan line. This means
that a vertically scrolled region consisting of three mode 2 lines will have bit 5 set on the first two lines and
occupy (8-VSCROL) + 8 + (VSCROL+1) = 17 scan lines instead of the usual 24.
VSCROL and the row counter are both 4-bit counters regardless of mode, and odd effects can be created by
Chapter 4 - ANTIC 52
3
4
5
6
7
0
1
2
3
4
5
6
7
0
1
2
3
Figure 2: Effect of vertical scrolling on mode lines
The first mode line with bit 5
set starts the vertically
scrolled region and is
shortened from the top.
Subsequent mode lines with bit
5 set are unchanged and
always display their normal
number of scan lines.
The first mode line with bit 5
cleared ends the vertically
scrolled region and is shortened
at the bottom.
VSCROL sets the starting
scan line for the first mode
line.
VSCROL sets the ending
scan line for the last mode
line.

Altirra Hardware Reference Manual Created by Avery Lee
setting them to out of range values. For instance, a mode F scan line is only one scan line high and ordinarily
vertical scrolling doesn't make sense. However, if VSCROL is set to 13 upon entering such a scan line, the row
counter will count from 13 to 0, creating a mode F region where each pixel is four scan lines tall, but the DMA
overhead is still only for one scan line. This is similarly possible when exiting the vertically scrolled region by
setting VSCROL to 3 so that the row counter runs from 0 to 3. This creates the so-called “GTIA 9++” mode
where GTIA modes can be run with lower vertical resolution with much lower DMA overhead than if LMS lines
were used to produce the same effect.
There are different deadlines for VSCROL changes depending on what specifically is affected. For determining
the initial row counter when entering a vertical scrolling region, VSCROL must be written by cycle 0, and for
determining the final row for the end of a scrolled region, it must be written by cycle 108. The six clock window
between these deadlines can be abused in order to halve the number of DLIs required to implement a turbo
mode. This is done by writing VSCROL twice in quick succession, with the first value terminating the current
mode line and the second value setting the height of the next. Finally, VSCROL must be written by cycle 5 to
affect DLIs.
Vertical scrolling regions do not have to exclusively use the same mode, as the vertical scrolling functionality
only affects the starting and ending mode lines via row count.
Blank mode lines ($x0) are always considered to have the vertical scroll bit cleared since the scroll bits are used
for a blank line count instead. The blank line is still subject to height changes if it ends a vertically scrolled
region, however. Jump instructions ($x1) can also have their height modified in the same way.
Mode lines with unusual height
All mode lines can be extended beyond their normal height up to 16 scan lines through vertical scrolling.
Chapter 4 - ANTIC 53
13
14
15
0
0
1
2
3
13
14
15
0
0
1
2
3
Figure 3: Abusing vertical scrolling in the “GTIA 9++” mode
Even mode lines begin a
vertically scrolled region and
start from scan line 13,
wrapping around to 0.
The boundary between
vertically scrolled regions is
critical. Here VSCROL must
be set to 3 and then 13 in
quick succession.
Odd mode lines end a vertically
scrolled region and stop on
scan line 3.

Altirra Hardware Reference Manual Created by Avery Lee
IR mode 0 lines are always blank, no matter how high.
IR mode 1 lines are always blank, but when extended beyond one scan line, re-fetch DLISTL and DLISTH on
each scan line.
For IR mode 2, rows 8-9 are blanked for characters $00-5F and $80-BF the same way that they are for IR mode
3. Rows 10-15 are the same as rows 2-7.
For IR mode 3, rows 10-15 are the same as rows 2-7.
For IR modes 4 and 6, rows 8-15 are the same as 0-7.
For all bitmap modes (IR modes 8-15), all rows are the same. Regardless of how high the bitmap mode line is or
the starting row, the data fetch still always only occurs on the first scan line.
It is possible to extend mode lines beyond even 16 scan lines by changing VSCROL in the middle of the mode
line. Since the delta counter (row counter) is only 4 bits wide, rows 0-15 are repeated until the mode line ends.
Mode 8/9 horizontal scrolling bug
IR 8 and 9 mode lines can be corrupted if they follow a horizontally scrolled mode line at normal or wide width.
This occurs when the prior line uses IR modes 2-5 or D-F with HSCROL >= 10, or modes 6-7 or A-C with
HSCROL >= 14. When this happens, the memory scan counter is incorrect unless reset with an LMS instruction,
pixels are shifted out at incorrect rates, and scan lines within the mode 8-9 line are not aligned properly. This bug
can occur regardless of whether the mode 8/9 line is horizontally scrolled, although the artifacts are different.
The effects can also carry over into subsequent mode 8/9 lines:
•Non-scrolled IR mode 8/9 line:
◦Following mode 2-5/D-F, HSCROL=A-B or E-F: Corruption carries over to subsequent scan lines.
◦Following mode 2-5/D-F, HSCROL=C-D: Resolves itself within two scan lines.
◦Following mode 6-7/A-C, HSCROL=E-F: Corruption carries over to subsequent scan lines.
•Scrolled mode 8/9 line:
◦Following mode 2-5/D-F: Resolves itself within three scan lines.
◦Following mode 6-7/A-C: Resolves itself within two scan lines.
The effect does not occur with narrow playfield width. The cause of this bug is the playfield DMA clock failing to
stop properly; see Abnormal playfield DMA for details.
4.8 Non-maskable interrupts
ANTIC can assert two types of non-maskable interrupts to synchronize the CPU to the display. Vertical blank
interrupts (VBIs) occur at the end of the displayable region and are used to synchronize to frames. Display list
interrupts (DLIs) occur in the middle of the displayable region and are used to effect mid-screen changes that are
not possible through the display list alone.
Enabling interrupts
Setting bits 6 and 7 of NMIEN enable DLIs and VBIs, respectively. Once an interrupt is enabled, ANTIC will then
assert an NMI on the CPU at the beginning of scan line 248 for VBIs, or the last scan line of a DLI-enabled mode
line. The NMI handler will then begin execution on the next instruction boundary at cycle 10 or later.
NMIEN must be written by cycle 7 to enable an interrupt and by cycle 8 in order to disable it.
Chapter 4 - ANTIC 54

Altirra Hardware Reference Manual Created by Avery Lee
Triggering a DLI
To trigger a DLI, bit 7 should be set on a display list instruction. This causes ANTIC to fire an NMI at the start of
the last scan line for that mode line. Typically the DLI interrupt handler will then issue an STA WSYNC in order to
synchronize to the end of the scan line, enabling it to write to hardware registers just prior to the next mode line
at a time where the user will not see artifacts from the changes.
You can set the DLI bit on any mode line, including a blank mode line. The strangest use is when the DLI bit is
set on a wait for vertical blank instruction ($C1); this causes a DLI to be issued on every scan line until vertical
blank begins at scan line 248. Obviously, the DLI must be very short to run reliably in this situation, but it is
possible.
If vertical scrolling causes a mode line with a DLI to be shortened, the DLI will still fire at the end of the shortened
mode line, and just prior to the next mode line. This can cause surprises if a DLI is attempted at the start or end
of a vertically scrolled region, because this can cause the DLI to occur on the more strongly contended first scan
line.
Reading interrupt status
Since all NMIs from ANTIC route through a single vector on the CPU, the NMIST register is used to determine
the interrupt source. Bit 7 indicates a DLI, bit 6 indicates a VBI, and bit 5 indicates that the system reset button
was pressed (400/800 only). The status bits in NMIST are independent of the enable bits in NMIEN: interrupt
status is reported even for disable interrupts.
The reset (RNMI) bit stays latched until cleared by NMIRES, but the VBI and DLI bits are mutually exclusive: the
DLI bit is cleared at scan line 248, and the VBI bit is cleared whenever a DLI occurs. This means that it is
generally unnecessary to test the VBI bit or write to NMIRES past boot – the NMI routine can test bit 7 for a DLI,
bit 5 for reset, and then assume a VBI otherwise.
NMIST bits 6 and 7 are set starting on cycle 7 of a scan line where a VBI or DLI is active. Clearing those bits by
writing NMIRES does not prevent the interrupt from firing, but can confuse an NMI dispatch routine.
Interrupt dispatch timing
The earliest that the CPU can normally begin execution of the seven-cycle sequence to enter the NMI handler is
cycle 10, with additional delays as needed to finish the current instruction. However, if an IRQ triggers starting at
cycles 5-9, its interrupt sequence can be co-opted by the NMI, allowing the NMI to execute correspondingly
earlier.
If an interrupt is enabled on exactly cycle 7 of a scan line, NMI timing is delayed by one cycle to cycle 11.
DLI timing
Display list interrupts have extremely critical timing for two reasons: they have to change hardware registers
within a very narrow window of time (usually horizontal blank), and they need to execute quickly to avoid
conflicting with each other or stealing too much CPU from mainline and IRQ routines. As such, it is very useful to
count exact cycles for DLI execution.
DLI execution proceeds as follows13:
·ANTIC pulls NMI at cycle 8 at the beginning of a scan line, right after display list and P/M DMA.
·The 6502 requires two cycles to acknowledge the NMI14.
[13] De Re Atari also has a good description of DLI timing and explains how to break a DLI routine into phases by timing
requirements.
[14] [MOS76] 38
Chapter 4 - ANTIC 55

Altirra Hardware Reference Manual Created by Avery Lee
·0-6 cycles pass as the 6502 finishes the currently executing instruction.
·Interrupt entry takes 7 cycles.
Thus, if you are writing a custom NMI handler, the earliest that the handler will run is cycle 17. Note that DMA
contention will slow down this sequence, and it's virtually guaranteed that at least refresh DMA will interfere
starting with cycle 25.
If the OS handler is used, then the OS will execute a BIT NMIST / BPL not taken / JMP (VDSLST) sequence
before executing your handler, resulting in an additional 11 cycles of delay. Including refresh DMA, your handler
will execute starting on cycle 28-36.
At this point, the normal procedure is to save registers as needed, load up registers with needed values, STA
WSYNC, and then write values to hardware registers as quickly as possible during horizontal blank. Afterward,
the exit path will frequently spill into the middle of the next scan line, but that is not nearly as critical.
Note that these timings assume that the DLI is occurring on a blank mode line. Any non-blank line will require
playfield DMA cycles that will significantly delay interrupt routine execution: a normal-width mode 0 line will shift
the entry window for the OS case to cycles 36-44, and horizontal scrolling or wide playfields makes this worse.
Extra care is required when using DLIs around vertical scrolling, because it can shorten a mode line to only the
first scan line, causing a DLI to fire on a scan line where the active region is blocked by solid playfield DMA. The
extreme case occurs if the next mode line is also a character mode line, which can result in so much DMA
contention that two entire scan lines pass before the 6502 can even enter the DLI handler.
Missed NMIs
If the 6502 responds to an IRQ starting at exactly cycle 4, any NMI that ANTIC would have triggered on cycle 8
will be lost.15 This happens whenever the IRQ acknowledgment sequence occurs over cycles 4-10 and includes
DLIs, VBIs, and on the 400/800, the SYSTEM RESET interrupt. NMIST is still updated as usual, however. The
most visible artifact caused by this problem is glitching on screen if you attempt to use DLIs while an SIO
transfer is in progress. However, it can happen with any IRQ source, including POKEY timers and the keyboard.
It can also occur with an exactly timed BRK instruction. It cannot, however, occur with a regular instruction, not
even one that takes seven cycles (INC abs,X).
DLIs and writes to VSCROL
A vertically scrolled region ends when the row counter matches the value in VSCROL. Normally, this happens
shortly before the display list fetch at the end of the scan line. However, when a DLI is requested on the ending
mode line, ANTIC must determine the end of the mode line much earlier in a scan line. Specifically, this happens
shortly before the DLI would occur. A write to VSCROL that affects whether a DLI occurs on a scan line must
occur by cycle 5. Writes after that point will be too late to block or trigger the DLI, but will still affect the height of
the mode line.
4.9 WSYNC
A write to WSYNC [D40A] halts CPU execution until the end of a scan line, allowing the CPU to synchronize to
the display. One more cycle elapses before the CPU is halted until cycle 105, when execution resumes around
the start of horizontal blank. Because the CPU usually gets to execute the first cycle of the next instruction, this
appears as if the instruction started on cycle 104. There are, however, three circumstances that can change this
behavior:
·If the cycle immediately after writing WSYNC is blocked.
In this case, the CPU doesn't get to execute the first cycle of the next instruction, and that instruction
[15] Speculation on the AtariAge forums is that this is caused by a bug in ANTIC, which does not assert the NMI line long
enough for the CPU to reliably acknowledge the interrupt.
Chapter 4 - ANTIC 56

Altirra Hardware Reference Manual Created by Avery Lee
starts from the beginning as usual on cycle 105.
·If playfield DMA extends to cycle 105.
Wide playfields, normal playfields with horizontal scrolling, and narrow playfields with high horizontal
scroll values can encroach on cycle 105. This causes a one-cycle delay in the CPU restart.
·If refresh DMA extends to cycle 105 or 106.
The first scan line of a character mode line can incur solid playfield DMA during the active region such
that refresh DMA is pushed all the way to the end of the scan line. This can cause refresh DMA to
occupy cycle 105, resulting in a one-cycle delay for the CPU. If playfield DMA is already occupying cycle
105, however, then it will push refresh DMA to cycle 106, resulting in a two-cycle delay.
These factors mean that there can be up to a three cycle variance in when an instruction following a write to
WSYNC finishes execution, not counting interrupts. Therefore, if you are attempting to use a write to WSYNC to
establish an event at an exact time on a scan line, your best bet is to write to WSYNC twice during vertical blank
or during blank mode lines, ensuring that no DMA interference occurs. You should also ensure that a DLI or VBI
does not take place on the scan line as otherwise the interrupt is guaranteed to fire immediately after the
instruction that writes to WSYNC.
Because the 6502 can only respond to interrupts at the end of an instruction, a write to WSYNC can cause long
delays in interrupt response time. This is particularly problematic for DLIs, which can be pushed down by an
entire scan line. Therefore, STA WSYNC should be avoided in main code when time-critical DLIs are in use. A
loop on VCOUNT is a popular alternative:
LDA VCOUNT
LOOP CMP VCOUNT
BEQ LOOP
Execution resumes anywhere between cycles 0-6 of the next scan line.
Deadline for writes to WSYNC
Writes to WSYNC up to cycle 103 wait until the start of horizontal blank on the current scan line. A write to cycle
104 or later is too late and causes a wait until the start of horizontal blank on the next scan line.
Read-modify-write instructions
Using a read-modify-write instruction such as INC or DEC to write to WSYNC causes special behavior because
this is the only case where the cycle immediately following the write to WSYNC is another write cycle.16 The
6502 does not respond to RDY during a write cycle and therefore always performs this write on the next
available cycle regardless. As a result, an INC WSYNC instruction has the useful behavior of ignoring whether
the next cycle is occupied by DMA, with the next instruction starting on cycle 105.
The deadline for the last cycle of a RMW instruction to write to WSYNC is still cycle 103. If the instruction
executes one cycle later such that two write cycles occur on cycle 103 and 104, the behavior is slightly different:
the next instruction will still start on cycle 105, but the second cycle of that instruction will be delayed until cycle
105 on the next scan line.
The 65C02 and 65C816 have different behavior when RDY is asserted during writes, so it is best to avoid relying
on this behavior if compatibility with CPU accelerators is desired.
[16] The 6502 can actually run up to three write cycles back to back if you include the interrupt acknowledgment sequence,
where PCH/PCL/P are pushed onto the stack. However, since this is always to stack locations in page 1, WSYNC
cannot be involved.
Chapter 4 - ANTIC 57

Altirra Hardware Reference Manual Created by Avery Lee
Bus activity during WSYNC
Because WSYNC works by asserting the RDY signal to the CPU, it effectively causes the CPU to retry its current
read cycle repeatedly until RDY is negated. This will ordinarily be either the first or the second instruction byte of
the next instruction after the write to WSYNC. Ordinarily this is of no consequence unless the address
corresponds to a read-sensitive hardware device or the WSYNC wait occurs during a period when phantom
DMA is occurring (see Scan line timing and Player/missile graphics).
4.10 VCOUNT
The VCOUNT [D40B] register reflects bits 1-8 of the vertical scan counter. Bit 0 is not connected, so this only
permits two-line resolution. VCOUNT maintains its value up through cycle 109 and increments on cycle 110 of a
scan line. For an NTSC machine, VCOUNT counts from $00 to $82; for PAL, it counts to $9B.
If you are using VCOUNT to check for a scan line near the top of the screen, consider using a greater-equal
check rather than an equality check, as otherwise the test can lock up if the VBI handler takes too long to
execute. This is a common cause of lockup when programs meant for PAL are run under NTSC, where there is
much less vertical blank time.
End-of-frame anomaly
ANTIC requires one additional cycle to detect that the vertical counter has hit the end of frame value and to reset
it to $00. This means that reading VCOUNT on exactly cycle 110 of the very last scan line will give $83 (NTSC)
or $9C (PAL), which correspond to scan lines 262 and 312, respectively; starting with cycle 111, it reads $00.
This is the only cycle in the frame where this highest value can be seen and is thus extremely rare, but it could
be a surprise to a DLI handler using VCOUNT to index tables.
4.11 Playfield DMA
Fetch rates
ANTIC supports three different fetch rates for playfield DMA. The slowest rate is one fetch per eight cycles and is
used for modes 8 and 9. The medium rate of one fetch per four cycles is used for modes 6-7 and A-C. The
fastest rate of one fetch per two cycles is used for modes 2-5 and D-F.
During the first scan line of a character mode, ANTIC fetches both character names and character data. The
data fetch occurs three cycles after the corresponding name fetch. For modes 2-5, this causes ANTIC to occupy
the bus with playfield DMA continuously with name and data fetches for a large portion of the scan line.
Line buffering
A 48 byte buffer within ANTIC is used to store graphic data for a single scan line. Its purpose is to buffer data for
use on repeated scan lines, reducing DMA overhead. For bitmap modes, it allows ANTIC to only read graphics
data for a mode line once, during the first scan line. For character modes, it holds the character name data which
is then repeatedly used to fetch each scan line of character data from the character set.
Because only character names are buffered in character modes and not character data, the two text modes that
have double-height characters – modes 5 and 7 – must still fetch character data on every scan line even though
half of the fetches are redundant.
Loading the line buffer
The line buffer is loaded during playfield DMA on the first scan line of a mode line during character name or
bitmap graphics fetches. Character data fetches are not loaded into the line buffer. During normal operation, this
loads 8, 16, or 32 bytes for a narrow playfield, 10, 20, or 40 bytes for a normal-width playfield, or 12, 24, or 48
Chapter 4 - ANTIC 58

Altirra Hardware Reference Manual Created by Avery Lee
bytes for a wide playfield.
If playfield DMA is disabled during portions of the first scan line, the DMA cycles are disabled but the loads still
occur at the standard times, loading the current values of the bus as bitmap or character data. The internal
address counter also continues to advance as usual, so if playfield DMA is re-enabled later in the scan line loads
into the buffer will resume with the correct internal address for each horizontal location. However, if playfield
DMA is disabled early enough so that the playfield never starts on the first scan line, no loads will occur and the
line buffer will not be modified at all.
The line buffer is never cleared. Narrow or normal width playfield loads preserve the unused contents at the end
of the line buffer. It is not changed by a blank mode line or a jump and the contents also persist across vertical
blank. By carefully toggling playfield DMA and stretching mode lines through abuse of vertical scrolling, it is
possible to fill the screen with playfield with reduced or even total absence of playfield DMA cycles.
Line buffer addressing
The line buffer is addressed such that the first location is always accessed at the playfield start position. This
means that if the same data is replayed with different start positions – either through varying HSCROL with
horizontal scrolling or by varying playfield fetch in DMACTL – the displayed graphics will shift to follow the
change in the left playfield border.
If the mode line is changed, causing a change in interpretation or in data rate, the buffered data is replayed just
as if it were fetched from memory. For instance, if the line buffer is loaded with a normal mode E line and then
replayed in mode 8, the first 10 bytes of the mode E line will be reinterpreted as mode 8 data.
Dynamic changes to playfield width
The playfield width bits in DMACTL[1:0], and the horizontal scroll position bits in HSCROL[3:1], determine the
start and stop positions of the playfield on each scan line. Normally, ANTIC starts the playfield at the start
position and stops the playfield at the stop position. Moving the timing of the start and stop positions dynamically
can cause unusual playfield widths.
For the playfield start position, the deadlines for setting the playfield start position are cycles 24, 16, and 8 for
narrow, normal, and wide fetch widths. Bits 1 and 0 of DMACTL must be set to the desired value by these cycle
numbers to take effect. When horizontal scrolling is active, the deadline is delayed by one additional cycle for
every increase by two in the HSCROL value. Various writes then have the following effects:
·Moving the start later (narrower fetch width or greater scroll value) takes effect as expected if done by
the deadline, and is ignored for the current scan line if done too late.
·Moving the start earlier will still take effect if written by the deadline for the new width (earlier deadline). If
the start is moved earlier by the deadline of the old position and after the deadline of the new position,
the playfield will not start at all since the start has been moved back behind the current position.
The playfield stop position acts similarly, with corresponding deadlines of cycles 88, 96, and 104. Moving the
stop later by the earlier deadline extends the playfield to the farther stop position. Moving the stop earlier behind
the current position extends the playfield to the wide stop position, which is always active.
By changing the width and horizontal scroll values on the fly, it is possible to start and stop the playfield at
mismatched positions. For instance, changing the playfield width from narrow to normal in the middle of the scan
line with mode E will extend the playfield on the right side and cause additional bytes to be fetched. The resulting
playfield is 144 color clocks wide and advances the memory scan counter by 36 bytes.
Chapter 4 - ANTIC 59

Altirra Hardware Reference Manual Created by Avery Lee
Warning
It is easy to accidentally hit one of these corner cases when changing DMACTL from a DLI handler, since
the window for cleanly changing the playfield width is very narrow. If you are using WSYNC to synchronize,
you only have a few instructions afterward to write DMACTL before you are in the danger zone. Timing for
changing DMA parameters is much tighter than those for display parameters, so change DMACTL before
modifying color registers. Symptoms that you are hitting DMACTL too late include losing a line when trying
to enable DMA, gaining an extra line when trying to disable it, or having subsequent playfield addressing
screwed up unless LMS instructions are added to the display list.
Disabling playfield DMA
Setting DMACTL bits 1-0 to %00 disables the playfield, shutting off both DMA cycles and the display. The
playfield is always absent (background color) whenever playfield DMA is disabled. If it is disabled in the middle of
an active playfield, it vanishes until re-enabled. This is true even in high-resolution modes: background is
displayed, not PF2.
If playfield DMA is disabled before the playfield starts, the memory scan counter and line buffer are not updated.
However, if disabled after playfield DMA starts, the memory scan counter continues to count and the line buffer is
still loaded according to the current DMA pattern.
Mid scan line changes to playfield DMA
Changing the playfield DMA mode via the low two bits of DMACTL in the middle of a scan line has a number of
interesting effects. Much of this is related to the scan line buffer within ANTIC, which buffers some but not all of
the data between scan lines. Specific cases:
·In IR modes 2 and 3, the invert state is also not updated while DMA is disabled, resulting in the blanked
scan line from the previous case displaying either PF2 or PF2L1 depending on the last seen invert state.
This only occurs on the affected scan line; subsequent scan lines will once again show the correct invert
state according to the buffered character names in the line buffer as long as DMA is re-enabled.
·For mode lines that span multiple scan lines, suspending playfield DMA for a portion of the first scan line
results in portions of the line buffer not being updated. Previously written data in those portions are
reused in display for subsequent scan lines. In character mode, this results in old character names being
used.
4.12 Abnormal playfield DMA
Under certain circumstances, ANTIC can lose track of playfield DMA such that it begins fetching playfield data
with an abnormal pattern, producing a garbled playfield. This can also scramble the display list, which can in turn
crash the CPU by issuing bogus DLIs. As these effects are very difficult to control, typically this condition is
simply an unwanted artifact to avoid.
DMA clock
There are two clocks within ANTIC that control playfield display, the DMA clock and the shift clock. Both are
constructed as shift rings with taps to read cycling bits and extra gates to inject or clear bits in the cycling
pattern. The first of these, the DMA clock, controls the timing of DMA cycles and the incrementing of the memory
scan counter. It runs at machine cycle rate and is either two, four, or eight cycles long depending on the fetch
rate required for the current playfield mode. Three taps off this clock produce the requests for character name,
bitmap data, and character data at 0, +2, and +3 cycle offsets, respectively.
A single bit is injected into the DMA clock at playfield start, and that single bit position is cleared at playfield stop.
The DMA clock is also unconditionally cleared whenever the current IR mode corresponds to a blank line or
jump, or during vertical blank.
Chapter 4 - ANTIC 60

Altirra Hardware Reference Manual Created by Avery Lee
Shift clock
The shift clock, on the other hand, controls the shifting of graphics data out of the graphic shift register. It is a
four-bit ring and runs at color clock rate, twice as fast as the DMA clock. There are taps at all four bits and either
one, two, or all four of them are enabled depending on the required shift rate for the graphic shift register, which
shifts either one or two bits per interval.
ANTIC clears both the shift clock and the shift register during special DMA time (cycles 0-7). The shift clock
starts running when bits are injected into it from the DMA clock by means of the bitmap or character data fetch,
synchronizing it to the arrival of the first graphics byte from either the bus or line buffer RAM. It is not stopped at
playfield stop, simply continuing to run to clear out the shift register.
Table 6 gives the rates for both clocks for each mode.
IR Mode DMA rate Shift rate Shift
mode
2, 3, 4, 5 Fast (every two cycles) Fast (1/cc) 2-bit
6, 7 Medium (every four cycles) Fast (1/cc) 1-bit
8 Slow (every eight cycles) Slow (1/4cc) 2-bit
9 Slow (every eight cycles) Medium (1/2cc) 1-bit
A Medium (every four cycles) Medium (1/2cc) 2-bit
B, C Medium (every four cycles) Fast (1/cc) 1-bit
D, E, F Fast (every two cycles) Fast (1/cc) 2-bit
Table 6: DMA and shift clock rates by mode
Disrupting the DMA and shift clocks
As noted earlier, ANTIC stops the DMA clock by resetting a single bit in it at playfield stop time. Changing
registers mid-scanline in a way that shifts the playfield stop position can cause ANTIC to clear the wrong bit and
prevent it from stopping the DMA clock properly. When this happens, the DMA clock continues to run through
horizontal blank and into the next scan line. This causes several undesirable results:
•Playfield DMA continues across horizontal blank and into the next scan line. This also advances the
memory scan counter by additional steps, resulting in skipped playfield bytes. Note that playfield DMA
cycles are still suppressed during cycles 105-111 and 0, so any extra cycles during that window are still
virtual DMA cycles.
•DMA fetches can overlap. This can occur between playfield DMA itself – character name and character
data fetch – or with special DMA such as display list and player graphics fetches. When this happens,
the address used is the bitwise AND of all fetch addresses involved and the fetched data is used for all
of the DMA requests. A refresh DMA cycle cannot overlap, however, as it is only triggered by the
absence of other DMA requests.
•The clocks can run at faster than normal rate or with erratic timing. ANTIC can fetch continuously at one
fetch/cycle even in graphics modes if the DMA clock is disrupted. When the shift clock is disrupted
separately, pixels are shifted out to GTIA faster than normal for the mode line and 00 pixels are shifted
out whenever the 8-bit shift register runs out of data bits.
Disrupting the DMA clock with HSCROL
Once the DMA clock is running, ANTIC attempts to reset a single bit in the DMA clock at exactly two points: the
Chapter 4 - ANTIC 61

Altirra Hardware Reference Manual Created by Avery Lee
playfield stop position for the current width setting, and the playfield stop position for a wide playfield. The stop
positions for all playfield widths are multiples of eight cycles apart and thus the wide playfield stop aligns with the
DMA pattern started at any playfield width. Therefore, it is not possible to disrupt the DMA clock with width
changes alone as ANTIC will always be able to stop the clock on its second attempt and the playfield will only be
extended to the wide playfield stop position.
Horizontal scrolling is another story, as for every two color clocks in horizontal scroll the playfield start and stop
positions are shifted by one cycle. The cycle pattern for the ending HSCROL value must match the cycle pattern
of the starting HSCROL pattern for the DMA clock to stop properly. For instance, in mode 2 the DMA clock runs
at a rate of one fetch per two cycles, so the HSCROL bit 1 must match up for the start and stop patterns to line
up with even or odd cycle timing. Similarly, in mode 8, the clock is running at a rate of one fetch per eight cycles,
so HSCROL bits 1-3 must match exactly. When this occurs, playfield DMA will stop cleanly, although the scan
line may be an unusual number of pixels long.
When the start and stop patterns do not line up, the DMA clock will continue running. ANTIC will continue to set
and unset bits in the DMA clock on subsequent mode lines. Therefore, it is possible to build up or drop additional
fetch cycles, leading to progressively more or less screwy DMA patterns.
What makes this bug especially problematic is that the DMA clock runs rather late into horizontal blank when
horizontally scrolling at wide fetch width. This means that it is easy to accidentally trigger it by changing
HSCROL on the fly in a DLI handler right after writing to WSYNC. The deadlines for affecting this behavior with
HSCROL are the same as for moving the playfield stop with DMACTL: the write must occur three cycles before
where the next character name fetch would occur in the pattern, or in a bitmap mode, five cycles prior to the next
graphics fetch. For a normal character mode playfield, this is on or before cycle 95 + HSCROL/2. ANTIC always
tries again at the equivalent wide stop, for which the write must happen on or before cycle 103 + HSCROL/2.
This means that in order for a horizontally scrolled normal or wide width line to display correctly, HSCROL should
not be rewritten before cycle 111, three cycles before missile DMA fetch.
Disrupting the DMA clock with mode switching
Abnormal DMA patterns can also occur simply with specific orders of mode lines where the DMA clock slows
down between the two mode lines. This happens because the DMA clock is always eight bits long even though
the ring part is restricted to four or two bits for medium and fast shift rates, and thus it takes four or six clocks for
any bits left in the clock to completely shift out. The DMA clock runs so late into horizontal blank when horizontal
scrolling is active at normal or wide playfield width that these latent bits can be recaptured when the ring part of
the clock is suddenly extended at the switch to the slowest speed. These extra bits then cause an abnormal
DMA condition.
For this problem to occur, a playfield character name fetch must have been scheduled within cycles 109-111 for
a character mode, or a graphics fetch within cycles 111-113 for a bitmap mode. The only conditions that can
cause this are:
·Horizontally scrolled normal or wide width mode line at fast DMA fetch rate (modes 2-5 or D-F), with
HSCROL >= 10.
·Horizontally scrolled normal or wide width mode line at medium DMA fetch rate (modes 6-7 or A-C), with
HSCROL >= 14.
·Existing abnormal DMA condition including those fetch cycles.
These fetches do not have to be actual DMA cycles as the DMA clock still runs during subsequent mode lines to
fetch from the internal line buffer. The bits captured during these 1-3 cycles then become extraneous fetches in
the 4-bit or 8-bit playfield DMA pattern for the next scan line.
Abnormal DMA patterns across scan lines
An abnormal DMA condition will persist across multiple scan lines as long as errant bits continue to cycle around
Chapter 4 - ANTIC 62

Altirra Hardware Reference Manual Created by Avery Lee
the DMA clock and it is not stopped by a blank line or other clearing condition. However, because the scan line is
114 cycles long and not evenly divisible by the length of the DMA clock, the abnormal DMA pattern will change
on each scan line when the DMA clock is operating in slow or medium speed modes where it is eight or four
cycles long. This can result in the abnormal pattern resolving itself after a few scan lines as ANTIC “sweeps”
over the abnormal pattern at different offsets, removing one or more errant bits each time.
As an example, changing HSCROL from $00 to $04 in the middle of a horizontally scrolled mode 8 line will shift
the offset of playfield DMA cycles from %10000000 to %00100000 after the start bit has been injected into the
clock, preventing the stop from occurring and causing the former pattern to stay in the DMA clock. However,
because 114 mod 8 = 2, the errant pattern will have shifted by two clocks on the next scan line, resulting in
subsequent extra DMA patterns of %00000010, %00001000, and %00100000. The last pattern lines up with the
normal pattern of HSCROL=$04, so the errant bit will be cleared by the playfield stop, ending the abnormal
DMA.
Similarly, if HSCROL is instead changed from $00 to $02, a four-line cycle of patterns %01000010, %01001000,
%01100000, and %11000000 will result.
Abnormal shift patterns
The shift clock is reset at the beginning of each scan line and initialized based on the pattern of DMA cycles
produced by the DMA clock, which means that the shift clock can only run abnormally if the DMA clock is
abnormal. However, the shift clock runs double speed at color clock rate and is only four bits long, which means
only two bits can be affected by the even and odd fetches from the DMA clock. Furthermore, mode 8 is the only
mode in which the shift clock can be disrupted because every other mode already requires the playfield shift
register to shift at least once per machine cycle anyway.
In mode 8, the shift pattern is abnormal if the DMA pattern includes both even and odd cycles. When this
happens, the shift clock then runs at double normal speed, producing pixels at two color clock resolution (80
across) instead of four color clock (40 across) resolution. If this causes the shift register to empty before it is
reloaded again, the background is produced (pixel code %00).17
In all modes, the additional DMA cycles will also result in extra loads into the shift register. The extra data is
ORed into the contents of the shift register. In character modes, this happens prior to the effects triggered by
character name bits 6 and 7, such as inversion/blinking in IR modes 2 and 3 and the color changes in IR modes
4-7. This means that the next time a character name is read, the new values of bits 6 or 7 will immediately take
effect, even for bits that have yet to shift out of the playfield shift register.
Abnormal line buffer addressing
Ordinarily, ANTIC never advances beyond the 48th location in the line buffer. An abnormal DMA clock, however,
can advance the line buffer address faster at up to double normal speed, causing the line buffer address to
exceed that limit or even wrap. The internal address counter is a 6-bit maximal length polynomial counter and
has a sequence of 63 addresses. The first 48 addresses correspond the internal RAM and there is no response
to the last 15 addresses. This means that when the line buffer is loaded, the entire 48 byte RAM is loaded before
15 fetches are discarded, and then the RAM is reloaded again. Similarly, during display, the 48 byte buffer is
displayed and then the last 15 locations result in $FF data.
The second anomaly that can occur is that ANTIC can skip addresses in the line buffer when reading from it on
back-to-back cycles in a bitmap mode. Specifically, whenever there are back-to-back cycles, all but the last fetch
of the sequence will use the data from one later position. As a result, the value that should have been fetched
first will be dropped and the last value will be used twice. This happens even on the first line where DMA fetches
occur, because the data is first written to and then read from the line buffer. Only the reads from the line buffer
are affected; the writes occur to the expected addresses and the buffered data will be normal if replayed on a
subsequent mode line with a normal DMA clock.
[17] The reason this can happen, despite the DMA clock also running at double rate, is that the extra bits in the DMA clock
may not be evenly spaced. A second fetch can partially overlap the first in the shift register, leaving a gap.
Chapter 4 - ANTIC 63

Altirra Hardware Reference Manual Created by Avery Lee
Overlapping DMA
Abnormal DMA patterns can cause DMA cycles to overlap. In a character mode, character name and data
fetches can occur at the same time when the DMA clock causes both even and odd fetches. When this occurs,
the bitwise AND of the two addresses is used as the fetch address and the returned data is used for both
fetches.
A DMA conflict can also occur between special DMA at cycles 0-7 and playfield DMA. As with playfield-playfield
DMA conflicts, the bitwise AND of all addresses is used and the fetched data goes to all requests. However, this
can occur even if playfield DMA is disabled in DMACTL. Display list DMA, missile DMA, and player DMA can be
affected by this conflict.
Warning
The potential for overlap with display list DMA is what makes the abnormal playfield DMA bug a serious
one. If it just affected the playfield, then the only problem would be visual glitching. When abnormal playfield
DMA overlaps display list DMA, however, it can send the display list execution off into the weeds. This can
then cause wild display list interrupts to fire and the program to crash.
Resetting the playfield clocks
Whenever an appropriate playfield stop position is reached, ANTIC clears bits from the DMA clock. If there are
no other bits left flying around in the clock, the abnormal condition is ended. Entering vertical blank or executing
blank mode display list instructions ($x0 or $x1) will also unconditionally clear the DMA clock and end any
abnormal DMA pattern.
Switching to a mode line with a faster shift rate will shorten the recirculating portion of the DMA clock. Once this
happens, any extraneous bits in the non-circulating portion will shift out and no longer contribute to abnormal
DMA.
Since the shift clock is reset by ANTIC at the beginning of each scan line, clearing an abnormal condition in the
DMA clock will automatically fix the shift clock.
4.13 Player/missile DMA
ANTIC can fetch graphics data for players and missiles on behalf of GTIA. Bit 3 of DMACTL enables player
DMA, and bit 2 of DMACTL enables missile DMA. Missile DMA is forced on if player DMA is enabled in order to
preserve proper timing against GTIA.
Vertical resolution
Bit 4 of DMACTL switches between two-line and one-line resolution. This simply changes the addressing that
ANTIC uses to fetch player data. If one-line resolution is selected (bit 4 = 1), each player/missile occupies 256
bytes of memory and unique data is fetched per scan line. If two-line resolution is selected, each player/missile
occupies 128 bytes of memory and each byte is fetched twice on adjacent scan lines.
P/M graphics memory layout
The address of player/missile data is specified by PMBASE [$D407]. In two-line resolution mode, player/missile
data must be aligned on a 1K boundary and the upper six bits of the address are specified by bits 2-7 of
PMBASE. In one-line resolution mode, P/M data must be aligned on a 2K boundary and the upper five bits of the
address are specified by bits 3-7 of PMBASE, with bit 2 being ignored. However, bit 2 of PMBASE is still stored
and becomes active if resolution is switched back to two-line without writing to PMBASE again.
The P/M graphics memory is in turn split into 8 sections of 128 or 256 bytes each. The first three sections are
unused. The fourth section, starting at offset $0180 or $0300 from PMBASE, contains the four missiles; bits 7-6
correspond to missile 3 and bits 0-1 correspond to missile 0. The last four sections starting at $0200 or $0400
Chapter 4 - ANTIC 64

Altirra Hardware Reference Manual Created by Avery Lee
contain the graphics for players 0-3. Within each section, bits 0-7 or bits 1-7 of the vertical scan counter are used
as the offset for fetching graphics data.
P/M DMA timing
When enabled in DMACTL, player and missile data is fetched on each scan line within the visible region (8-247).
This means that in one-line resolution mode, the first and last 8 bytes of each section are always unused. Missile
data is fetched during cycle 0 while player data is fetched during cycles 2-5.
In two-line resolution mode, bit 0 of the vertical resolution counter is ignored and each byte is fetched twice and
sent to GTIA on consecutive scan lines. This means that the P/M graphics can still change on each scan line if
the data is modified in between. The only difference between one-line and two-line resolution is in addressing.18
P/M DMA enable timing
Player/missile DMA must be enabled or disabled in DMACTL at least two cycles in advance to take effect. In
particular, disabling missile DMA only one cycle earlier at cycle 113 will not prevent missile DMA from
immediately occurring on the following cycle 0.
4.14 Scan line timing
Memory refresh DMA
Nine cycles of refresh DMA occur on every scan line in order to refresh DRAM, starting at cycle 25 and occurring
every four cycles after that. These refresh cycles occur even in vertical blank. Refresh DMA can be blocked by
playfield DMA, in which case the refresh cycle occurs on the next free cycle. Only one such cycle can be
deferred at a time and any additional blocked refresh cycles in a row are simply dropped. This only occurs in the
first scan line of modes 2-5, where memory is so contended that only 1-2 refreshes can fit.
In wide character modes, the final refresh cycle can be pushed all the way to the end of playfield DMA at cycle
105 or 106, resulting in an additional cycle of delay for a WSYNC on that scan line.
Data output from the RAMs is not enabled during refresh cycles and the data bus is undriven during refresh
cycles. This leads to either a pulled up or floating data bus condition, depending on the memory configuration.
Display list DMA
The display list requires one DMA cycle for each instruction byte, which occurs at cycle 1, between players and
missiles. Mode lines that perform an LMS or a jump also fetch an additional address word at cycles 6 and 7. This
fetch occurs at the beginning of the scan line where the mode line takes effect visually.
For modes that span multiple scan lines, the display list fetch only occurs on the first scan line. The jump and
wait for vertical blank (JVB) instruction is also only fetched once regardless of the number of scan lines until
vertical blank.
Playfield DMA
Three playfield widths are available: narrow, normal, and wide. Normal playfields are 80 cycles wide, while
narrow playfields are 64 cycles and wide playfields are 96 cycles long. All fetch windows have the same center,
with each wider setting adding 8 clocks on each side. There is a hardware stop that prevents playfield DMA from
going beyond cycle 105. Any fetch cycles that would occur on cycle 106 or later are suppressed, although the
playfield memory address is still incremented.
Enabling horizontal scrolling automatically causes narrow playfields to use the normal fetch window and normal
[18] [AHS00] p.45 contains a couple of errors. Each fetched missile or player consumes 240 bytes per frame, not 226, and
two-line resolution mode takes the same number of cycles as one-line mode, not half.
Chapter 4 - ANTIC 65

Altirra Hardware Reference Manual Created by Avery Lee
width playfields to use the wide fetch window. No additional data is fetched for wide scrolled playfields.
Horizontal scrolling causes the playfield fetch window to be delayed by one cycle for every two color clocks of
scroll. The additional color clock delay required by odd scroll values is given by internal buffering.
Mapped mode playfield DMA
The mapped graphics modes have three horizontal densities, resulting in fetches every eight clock cycles
(modes 8-9), four cycles (modes A-C), or two cycles (D-F). These occur on the first scan line of the mode. ANTIC
internally buffers the data so that modes that span more than one scan line do not need to fetch any data on
subsequent scan lines. This is used to powerful effect in the so called “GTIA 9++” modes, where mode F lines
are extended to four scan lines by vertical scroll trickery, resulting in one-fourth vertical resolution with one-fourth
the bandwidth requirements.
Mapped playfield DMA begins at clock 26, 18, or 10 depending on width.
Character mode playfield DMA
Character modes have two horizontal densities, resulting in name fetches every two clock cycles (modes 2-5) or
every four clocks (modes 6-7). The character names are fetched with the same timing as for mapped mode data,
at clocks 28, 20, and 12 for the various widths.
Additionally, in these modes the character data itself must be fetched. The data fetch occurs three clocks later
than the name fetch. Although the names are buffered internally by ANTIC, the character data isn't, and is
always fetched for each scan line regardless of whether double-height modes are used (modes 5 and 7).
Virtual DMA cycles
Playfield DMA cycles that would occur on cycle 106 or later are blocked by the hardware and do not occupy the
bus or stop the 6502. However, ANTIC still reads the data bus and stores or interprets the data on those cycles.
This usually results in 6502 bus activity being loaded as playfield data. In rare cases, it is possible for a refresh
cycle to overlap with a virtual DMA cycle, resulting in floating bus data being used.
DMA timing charts
The following charts show the timing of per scan line DMA, based on various modes and settings. IR mode,
playfield width, P/M graphics, LMS instructions, and horizontal scrolling all affect DMA timing. Note that the
charts are arranged by fetch width, so a narrow playfield with horizontal scrolling is actually described by the
normal playfield chart. There are no charts for subsequent scan lines for mapped modes, as no playfield DMA
occurs in that case. HSCR refers to the HSCROL value, if horizontal scrolling is enabled; odd values have the
same DMA pattern as the next lower even value.
Chapter 4 - ANTIC 66

Altirra Hardware Reference Manual Created by Avery Lee
ANTIC modes 2-5, mode line, wide playfield
HSCR 0 8 16 24 32 40 48 56 64 72 80 88 96 104 112
0
2
4
6
8
10
12
14
ANTIC modes 2-5, mode line, normal playfield
HSCR 0 8 16 24 32 40 48 56 64 72 80 88 96 104 112
0
2
4
6
8
10
12
14
Player/missile graphics Memory refresh Playfield DMA Character map DMA Display list DMA Virtual DMA
ANTIC mode 2-5, mode line, narrow playfield
HSCR 0 8 16 24 32 40 48 56 64 72 80 88 96 104 112
off
Player/missile graphics Memory refresh Playfield DMA Character map DMA Display list DMA Virtual DMA
Chapter 4 - ANTIC 67
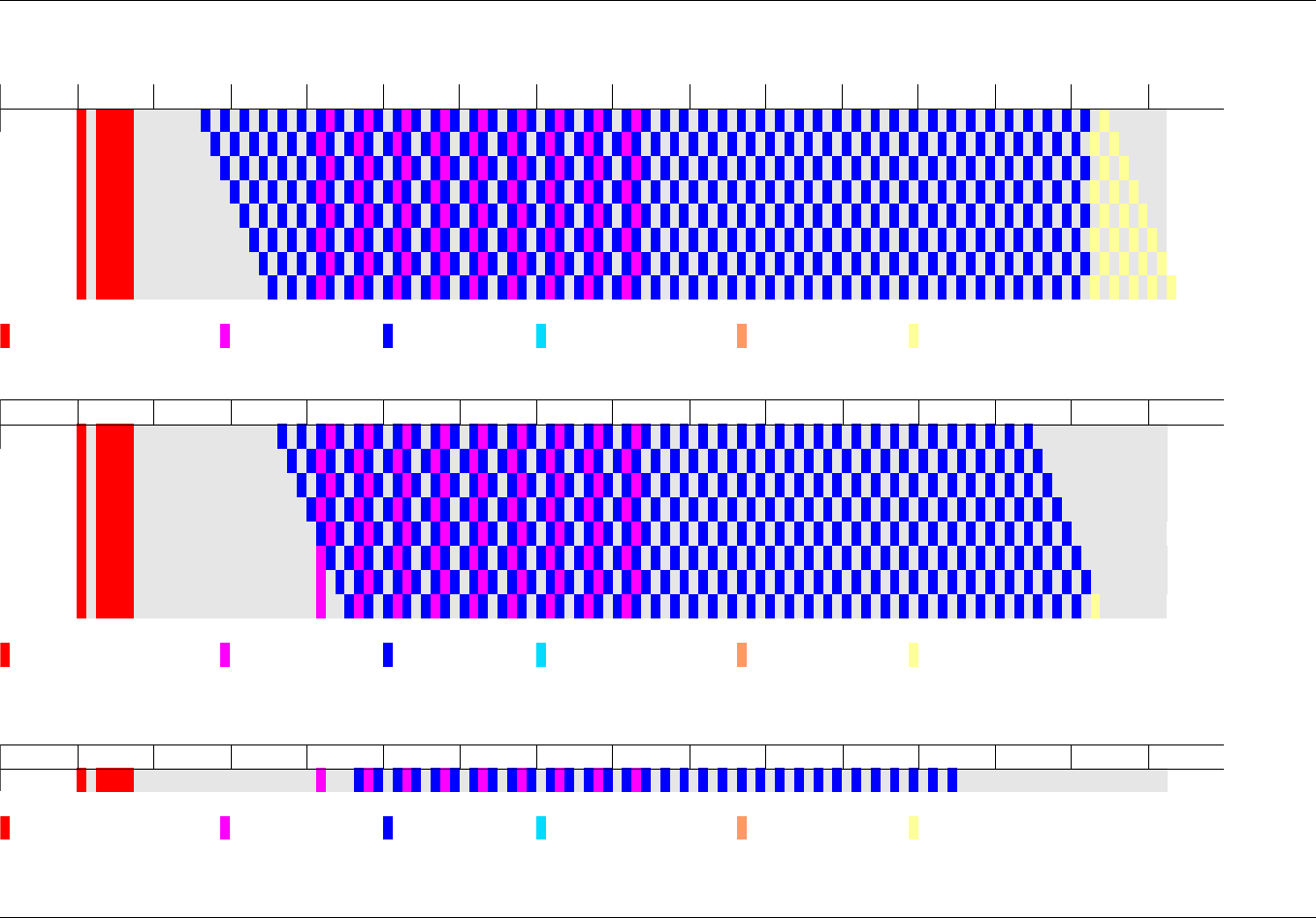
Altirra Hardware Reference Manual Created by Avery Lee
ANTIC modes 2-5, subsequent lines, wide playfield
HSCR 0 8 16 24 32 40 48 56 64 72 80 88 96 104 112
0
2
4
6
8
10
12
14
Player/missile graphics Memory refresh Playfield DMA Character map DMA Display list DMA Virtual DMA
ANTIC modes 2-5, subsequent lines, normal playfield
HSCR 0 8 16 24 32 40 48 56 64 72 80 88 96 104 112
0
2
4
6
8
10
12
14
Player/missile graphics Memory refresh Playfield DMA Character map DMA Display list DMA Virtual DMA
ANTIC modes 2-5, subsequent lines, narrow playfield
HSCR 0 8 16 24 32 40 48 56 64 72 80 88 96 104 112
off
Player/missile graphics Memory refresh Playfield DMA Character map DMA Display list DMA Virtual DMA
Chapter 4 - ANTIC 68

Altirra Hardware Reference Manual Created by Avery Lee
ANTIC modes 6 and 7, mode line, wide playfield
HSCR 0 8 16 24 32 40 48 56 64 72 80 88 96 104 112
0
2
4
6
8
10
12
14
Player/missile graphics Memory refresh Playfield DMA Character map DMA Display list DMA Virtual DMA
ANTIC modes 6 and 7, mode line, normal playfield
HSCR 0 8 16 24 32 40 48 56 64 72 80 88 96 104 112
0
2
4
6
8
10
12
14
Player/missile graphics Memory refresh Playfield DMA Character map DMA Display list DMA Virtual DMA
ANTIC modes 6 and 7, mode line, narrow playfield
HSCR 0 8 16 24 32 40 48 56 64 72 80 88 96 104 112
off
Player/missile graphics Memory refresh Playfield DMA Character map DMA Display list DMA Virtual DMA
Chapter 4 - ANTIC 69

Altirra Hardware Reference Manual Created by Avery Lee
ANTIC modes 6 and 7, subsequent lines, wide playfield
HSCR 0 8 16 24 32 40 48 56 64 72 80 88 96 104 112
0
2
4
6
8
10
12
14
Player/missile graphics Memory refresh Playfield DMA Character map DMA Display list DMA Virtual DMA
ANTIC modes 6 and 7, subsequent lines, normal playfield
HSCR 0 8 16 24 32 40 48 56 64 72 80 88 96 104 112
0
2
4
6
8
10
12
14
Player/missile graphics Memory refresh Playfield DMA Character map DMA Display list DMA Virtual DMA
ANTIC modes 6 and 7, subsequent lines, narrow playfield
HSCR 0 8 16 24 32 40 48 56 64 72 80 88 96 104 112
off
Player/missile graphics Memory refresh Playfield DMA Character map DMA Display list DMA Virtual DMA
Chapter 4 - ANTIC 70

Altirra Hardware Reference Manual Created by Avery Lee
ANTIC modes 8 and 9, mode line, wide playfield
HSCR 0 8 16 24 32 40 48 56 64 72 80 88 96 104 112
0
2
4
6
8
10
12
14
Player/missile graphics Memory refresh Playfield DMA Character map DMA Display list DMA Virtual DMA
ANTIC modes 8 and 9, mode line, normal playfield
HSCR 0 8 16 24 32 40 48 56 64 72 80 88 96 104 112
0
2
4
6
8
10
12
14
Player/missile graphics Memory refresh Playfield DMA Character map DMA Display list DMA Virtual DMA
ANTIC modes 8 and 9, mode line, narrow playfield
HSCR 0 8 16 24 32 40 48 56 64 72 80 88 96 104 112
off
Player/missile graphics Memory refresh Playfield DMA Character map DMA Display list DMA Virtual DMA
Chapter 4 - ANTIC 71

Altirra Hardware Reference Manual Created by Avery Lee
ANTIC modes A-C, mode line, wide playfield
HSCR 0 8 16 24 32 40 48 56 64 72 80 88 96 104 112
0
2
4
6
8
10
12
14
Player/missile graphics Memory refresh Playfield DMA Character map DMA Display list DMA Virtual DMA
ANTIC modes A-C, mode line, normal playfield
HSCR 0 8 16 24 32 40 48 56 64 72 80 88 96 104 112
0
2
4
6
8
10
12
14
Player/missile graphics Memory refresh Playfield DMA Character map DMA Display list DMA Virtual DMA
ANTIC modes A-C, mode line, narrow playfield
HSCR 0 8 16 24 32 40 48 56 64 72 80 88 96 104 112
off
Player/missile graphics Memory refresh Playfield DMA Character map DMA Display list DMA Virtual DMA
Chapter 4 - ANTIC 72

Altirra Hardware Reference Manual Created by Avery Lee
ANTIC modes D-F, mode line, wide playfield
HSCR 0 8 16 24 32 40 48 56 64 72 80 88 96 104 112
0
2
4
6
8
10
12
14
Player/missile graphics Memory refresh Playfield DMA Character map DMA Display list DMA Virtual DMA
ANTIC modes D-F, mode line, normal playfield
HSCR 0 8 16 24 32 40 48 56 64 72 80 88 96 104 112
0
2
4
6
8
10
12
14
Player/missile graphics Memory refresh Playfield DMA Character map DMA Display list DMA Virtual DMA
ANTIC modes D-F, mode line, narrow playfield
HSCR 0 8 16 24 32 40 48 56 64 72 80 88 96 104 112
off
Player/missile graphics Memory refresh Playfield DMA Character map DMA Display list DMA Virtual DMA
Chapter 4 - ANTIC 73

Altirra Hardware Reference Manual Created by Avery Lee
Event timing chart
Figure 4: ANTIC event timing
The above figure shows the timing of various events within ANTIC and the available cycle times at which the CPU can read or write values in response.
These are marked on machine cycle boundaries, so only writes before the boundary will affect the event and only reads after the boundary will reflect it.
For instance, the narrow width playfield start boundary is between cycles 24 and 25, so a write to DMACTL to turn on the narrow playfield must occur on
cycle 24 or earlier. Similarly, the VCOUNT increment on a scan line will only be reflected in reads on cycle 100 or later.
(1) PF start/stop events are delayed by one cycle for every two increase in HSCROL when horizontal scrolling.
(2) 7-cycle NMI sequence normally starts at first instruction boundary on cycle 10 or later, unless overlapping an earlier IRQ.
(3) If read/modify/write instruction on 6502 or 65C816 (emulation mode), both write cycles must occur before this deadline.
Chapter 4 - ANTIC 74
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113
VSCROL set start Normal PF start (1) Normal PF stop (1) VSCROL end check
DL DMA enable VBI/DLI triggered (2) Narrow PF start (1) Narrow PF stop (1)
VCOUNT increments
VSCROL/DLI check Wide PF start (1)
DLI/VBI bit set in NMIST WSYNC end VCOUNT rollover
Wide PF stop (1)
WSYNC deadline (3)

Altirra Hardware Reference Manual Created by Avery Lee
4.15 Cycle counting example
Let's assume that we want to schedule a series of palette color changes between lines of 40-column text (ANTIC
mode 2). To do this, we use the following DLI routine:
PHA
TXA
PHA
LDX NEWCL1
LDA NEWCL2
STA WSYNC
STX COLPF1
STA COLPF2
PLA
TAX
PLA
RTI
Chapter 4 - ANTIC 75
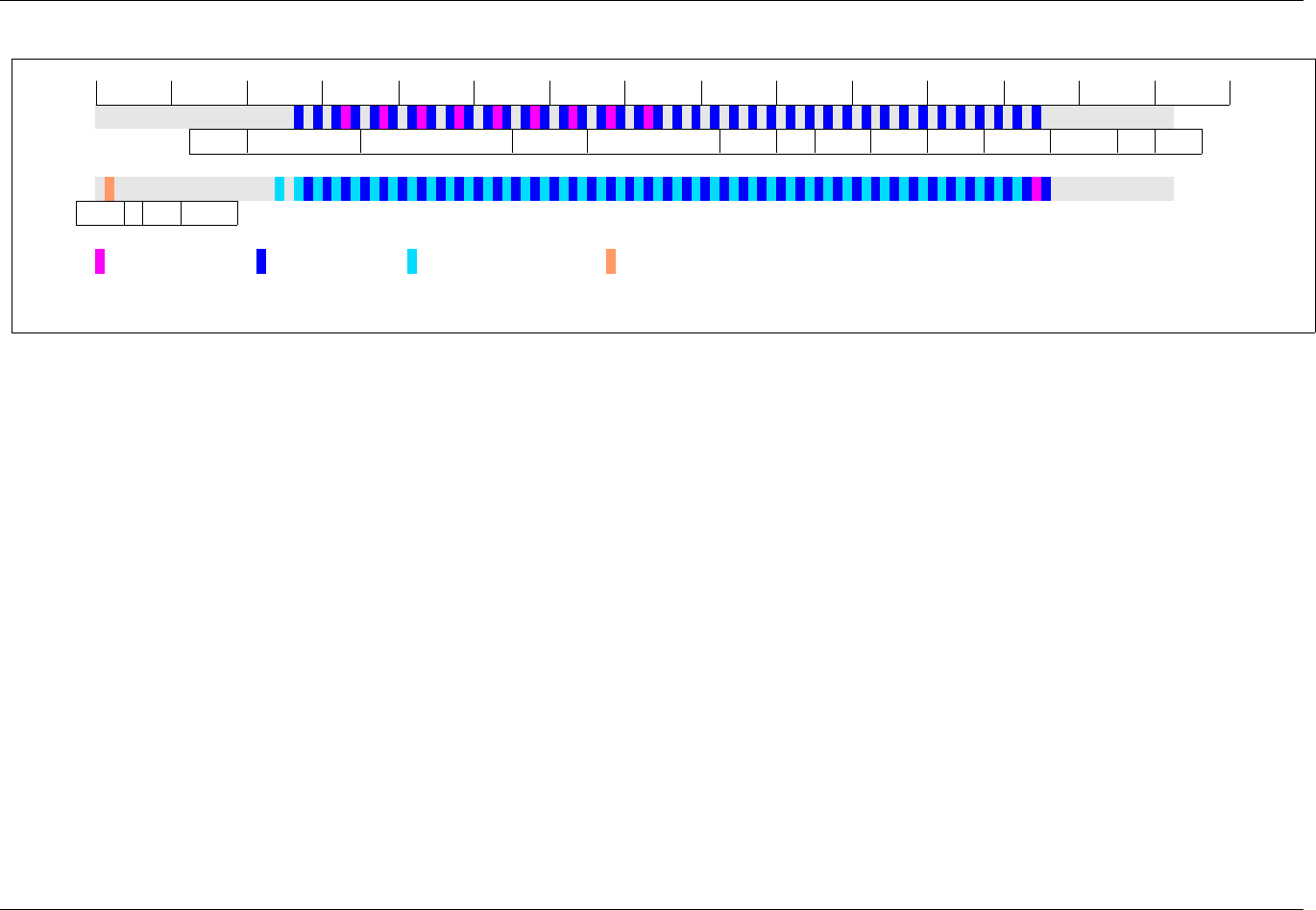
Altirra Hardware Reference Manual Created by Avery Lee
0 8 16 24 32 40 48 56 64 72 80 88 96 104 112
PREV NMI BIT BPL JMP PHA TXA PHA LDX LDA STA STX
STA
PLA
PLA
TAX
PLA RTI
Memory refresh Playfield DMA Character map DMA Display list DMA
Figure 5: DMA and CPU timing for DLI handler.
Cycle counting breakdown
Figure 5 shows the DMA and instruction timing for the DLI handler. First,
after receiving the NMI request at cycle 8 and acknowledging it at cycle 10,
the 6502 has to finish the previous instruction. The worst case of six clocks
is shown here. Afterward, it takes seven clocks for the 6502 to push PC and
P onto the stack and to fetch the NMI vector. At this point playfield DMA
starts, which slows down the CPU; the first instruction doesn't execute until
cycle 28. From there, it takes 11 CPU cycles to execute the OS NMI handler,
which actually takes 36 machine cycles with DMA contention, meaning that
the user DLI handler isn't entered until cycle 66.
Once in the DLI handler, it takes 8 CPU cycles (16 machine cycles) to save
X and A and 6 CPU cycles (12 machine cycles) to preload two colors. That's
as much that can be done while still in the visible region, so on cycle 94, an
STA WSYNC is executed. The first cycle of the next instruction is executed
before the CPU is halted until cycle 105, after which X and A are pushed into
the PF0 and PF1 color registers at cycles 107 and 111, respectively. Finally,
the epilogue begins at cycle 112, where it takes 10 CPU cycles (11 machine
cycles) to restore A and X and another six cycles to exit the DLI handler.
There are a few aspects to note about this DLI handler. First, it doesn't write
NMIRES; that is generally unnecessary for DLIs. Second, the horizontal
blank region before the line to be modified is critical timing-wise. In this case
there would have been enough CPU time to STA WSYNC first and then both
load and store the color values in HBLANK, but that's not always the case,
especially with P/M DMA enabled or when the background color is involved.
Second, the DLI handler consumes an entire scan line worth of CPU time
despite only changing two registers and not setting up a subsequent DLI
handler. In practice, this means that any large region that requires many per-
scan-line register changes is better done with a kernel started by one DLI
rather than with multiple smaller DLIs.
Chapter 4 - ANTIC 76

Altirra Hardware Reference Manual Created by Avery Lee
4.16 Examples
Zaxxon II
This game uses a display list interrupt (DLI) on a scan line that is highly contended, with a scrolled normal width
playfield and P/M graphics active. As a result, the 6502 is unable to read NMIST until past the standard interrupt
cycle on the next scan line, and the DLI bit must remain active for more than a full scan line for Zaxxon to work
correctly.
Race in Space
Unusually, the interrupt flag is set on the wait for VBL instruction at the end of the display list for the title screen.
The game relies on the high number of interrupts that this generates; failing to generate an interrupt per scan
line results in the title screen scrolling very slowly or never completing.
Race in Space also uses player collisions against a hi-res (mode F) playfield.
Numen
A lot of tricks are used in this demo, but it almost immediately goes into the “GTIA 9++” mode where VSCROL is
alternated to generate mode F with four scan lines per row and one-quarter the DMA overhead.
Bounty Bob Strikes Back!
This game loops on an alias of the VCOUNT register, $D47B, and jams on startup if address mirroring is not
supported.
Chicken
The display list for Chicken contains a vertical scrolling region that ends on a blank mode line. The vertical scroll
interaction causes this mode line to be variably extended beyond its usual one-scan-line height.
Tarzan of the Apes
The mid-screen DLI routine for the title screen of this game expects VCOUNT to roll over prior to P/M DMA at
the start of the next scan line.
Atomix Plus!
There is a buggy loop in this game for copying memory below the kernel ROM ($D800-FFFF) that enables
ANTIC interrupts before re-enabling the kernel ROM. It relies on a DLI or VBI never interrupting the following
sequence:
LDA #$40
STA NMIEN
LDA #$01
STA PORTB
Pacem in Terris
One of the DLI handlers for the title screen attempts to change playfield width from narrow to normal by writing to
DMACTL, but misses the deadline doing so. The result is that the scan line is blank and the “Quasimodo” bitmap
is shifted one scan line lower than the display list would indicate.
Chapter 4 - ANTIC 77

Altirra Hardware Reference Manual Created by Avery Lee
Atari OS C: handler
The cassette (C:) handler in the Atari OS has a bug where it can rarely compute bogus baud rates due to
improper reading of VCOUNT. The OS tries to read both VCOUNT and a frame counter maintained by the VBI
and assumes that scan line 248 or higher (VCOUNT ≥ 124) always occurs after the VBI, but this is not the case.
ANTIC triggers the VBI about a dozen cycles after VCOUNT increments to 124, so it is possible for
VCOUNT=124 to occur both before and after the VBI. The former causes an erroneous baud rate to be
computed by the OS.
4.17 Further reading
Consult [ATA82] for a overviews and register descriptions for ANTIC. Surprisingly, there is little, if any, additional
information in the formerly confidential chip document [AHS99]. A bit more information can be found in [AHS00],
but the accuracy of the additional information appears questionable.
[CRA82] notes a number of nuances about programming ANTIC, most notably the tricky timing in display list
interrupts. Note that there appear to be some slight timing discrepancies compared to the real Atari.
Chapter 4 - ANTIC 78
Chapter 5
POKEY

Altirra Hardware Reference Manual Created by Avery Lee
5.1 Addressing
POKEY occupies the $D2xx block of memory. Only the lowest four bits are significant, so any access of the form
$D2xy accesses mirror x of register y. The canonical registers are at $D200-D20F.
Unassigned addresses
Reading locations assigned to POKEY but that don't correspond to a readable internal register return $FF, even
on machines with a floating data bus.
Stereo modification
A popular unofficial modification involves piggybacking a second POKEY onto the system and using address line
A4 to select between them. In that case, the even mirrors select the main POKEY, and the odd mirrors select the
secondary one. The secondary POKEY has less functionality available due to missing interrupt and I/O
connections.
5.2 Initialization
POKEY does not have a RESET line and therefore powers up in indeterminate state. IRQEN must be reset prior
to clearing the I bit on the CPU to avoid stray IRQs.
Bits 0 and 1 of SKCTL normally control the keyboard scan and debounce features. However, clearing both of
those bits also activates another initialization function, which causes the 15KHz clock, 64KHz clock, serial port
hardware, and polynomial noise generators to be reset.
Setting the serial clock selection bits SKCTL (bits 3-5) to 0 resets the serial port circuitry. Therefore, SKCTL
should be set to $00 to initialize all POKEY functions.
Clock reset timing
The initialization function can be used to reset the 15KHz and 64KHz clocks to known offsets in the scan line. As
long as init mode has been enabled long enough for both clocks to reset fully, the clock offsets will be
determined by when init mode is exited. However, the design of the clocks causes the clocks to be reset to
partway through their cycles instead of the beginning.
Both clocks are polynomial counters with truncated cycles. The 15KHz clock is a 7-bit XNOR counter with a
polynomial of x7+x6+1. On a pattern of %1001001 (shifting left), a '1' bit is forced and a pulse emitted. This
occurs 78 cycles after the reset state of %0000000. The 64KHz clock is a 5-bit XOR counter with polynomial
x5+x3+1 and a forced '1' bit on %00010, occurring 19 cycles after the reset state of %11111. If IRQs are enabled
for unlinked timers using these clocks with period 0, the IRQ is asserted in IRQST 83 and 24 cycles after the
write to SKCTL that clears init mode.
5.3 Sound generation
POKEY has four audio channels with individual timers and audio output circuitry. Each channel has an
associated frequency register (AUDF1-4) and control register (AUDC1-4). In addition, there is a shared control
register (AUDCTL) for common functions.
Chapter 5 - POKEY 80

Altirra Hardware Reference Manual Created by Avery Lee
Countdown timers
Each channel has an 8-bit countdown timer associated with it to produce clocking pulses. The period for each
timer is set by the AUDFx register, specifying a divisor from 1 ($00) to 256 ($FF). The countdown timer produces
a pulse each time it underflows and resets, which can then be used to drive an interrupt, the serial port, or sound
generation.
By default, timers use the default audio clock, which is selected by AUDCTL bit 0. Setting this bit to 0 selects the
64KHz clock, while setting it to 1 selects the 15KHz clock. It is not possible to use both the 15KHz and 64KHz
clocks at the same time. In addition, timers 1 and 3 can be switched to the fast 1.79MHz clock through AUDCTL
bits 6 and 5.
When a timer underflows, it takes three cycles to reload. This means that for a timer running at 1.79MHz, the
actual period for a AUDF1/3 value of N is N+4 cycles. For timers using the 15KHz or 64KHz clock, the period is
N+1 ticks, where each tick is 114 cycles with the 15KHz clock and 28 cycles with the 64KHz clock. Because the
audio clock runs independently of the timers, the three cycle reload delay is absorbed in this case and does not
affect the timer period.
Linked timers
Setting bit 4 of AUDCTL links timers 1 and 2 so that timer 2 is clocked using the output of timer 1, and similarly,
bit 3 links timers 3 and 4 together. This merges the pair of counters into a 16-bit counter. This is typically used
with the 1.79MHz clock on the low timer in order to achieve higher precision, but linked timers can also be used
with the 15KHz and 64KHz clocks. The high timer – timer 2 or 4 – is the one that has the desired period and is
the one that should be enabled for audio, IRQs, or serial port clocking. Linking occurs prior to the audio circuitry
and thus the waveform settings for the low channel have no effect on the clocking of the high channel.
When timers are linked, the delay for reloading the timer pair is increased because the low timer must underflow
first before the high timer can underflow. This increases the reload delay to 6 cycles and therefore the period for
a 1.79MHz paired counter is N+7 cycles instead of N+4 cycles. Since linking is the only way that the 1.79MHz
clock can be used with the serial port, this effectively limits the serial port to a bit rate of 128 kilobaud and a byte
rate of 12.8 kilobytes per second.
While linked timers are intended to be used as a single high-precision timer, both channels are still active.
Normally, timers 1 or 3 should be muted in a linked scenario, but it is possible to use them and exploit the
irregular timing of the low channel. For instance, when the 16-bit period is $0140, the low timer will underflow
after 65 ticks first and then run a full 256 ticks before the counter pair resets. One use for this is as a one-shot
timer for creating variable delays within a 256 tick period or less.
Waveform selection
Bits 5-7 of AUDCx control the waveform used by the audio circuitry for a channel. This allows each channel to
produce a flat level (no output), a square wave, or a more complex wave driven by the polynomial noise
generators.
Bit 5 selects either noise (0) or a square wave (1). When the square wave is enabled, each time the timer
expires and the output circuitry is clocked, the output toggles, resulting in a square wave with a frequency half
that of the timer. When noise is enabled, bit 6 selects either the 9/17-bit generator (0) or the 4-bit generator (1).
Bit 7 controls the sampling mode. If it is set, the timer output directly clocks the output waveform. If it is cleared,
however, the 5-bit generator masks out some of the clock pulses, omitting pulses that would cause the output to
toggle or sample the 4/9/17-bit noise generators. This gives a rougher sound.
Due to the short periods of most of the pseudorandom noise generators, it is possible to have undesirable
interactions between the period of the countdown timer and the period of the noise generator. For instance, a
channel using the 64KHz clock and an AUDFx value of $CC has a period of 5740 clocks. When used with the 4-
bit noise generator, five different sounds can result because the 4-bit generator has a period of 15 and the timer
Chapter 5 - POKEY 81

Altirra Hardware Reference Manual Created by Avery Lee
period is divisible by 5, meaning that only three bits of the pattern are used. Exactly which three are used
depends on when the sound is started. In a more extreme case, $D1 would produce no noise at all, because the
period is 5880 clocks, which is divisible by 15 – meaning that it will always sample the same bit from the noise
pattern.
Volume control
Bits 0-3 of AUDCx control the volume level for a channel, from 0 (silent) to 15 (maximum volume). The volume
level only matters if the channel output is currently a 1; if it is a 0, then there will be no output from the channel
regardless of the volume level.
Volume output from POKEY is non-linear in that adding two channels of equal volume doesn't produce output
with twice the amplitude, but somewhat less. Instead, two channels at volume 15 will only be about 50% louder
as each one individually. This has the effect of compressing the output, amplifying quieter sounds and
attenuating louder ones. POKEY's output is not balanced, so having more channels with an output of 1 and a
higher volume produces more distortion.
Volume-only mode
Bit 4 of AUDC1-4 activates volume-only mode for a channel. This causes the channel output to be forced to a 1,
ignoring the output of the timer, noise generators, and high-pass logic, and only producing sound based on the
volume set by bits 0-3 of AUDCx. This is often used for playback of digital sound effects at 4-bit/sample
precision.
Note that because the volume-only mode is enforced after the high-pass logic, the normal inversion of channels
1 and 2 relative to 3 and 4 doesn't apply to this mode; volume-only channels will add in any combination.
High-pass filter
Channels 1 and 2 have a high-pass filter which is enabled by bits 2 and 1 of AUDCTL, respectively. This uses
channel 3 or 4 to clock a high-pass flip-flop that captures the output of the lower channel and XORs against it,
canceling the output back to a 0 whenever the higher channel ticks. This zeroes part of the lower channel's
output, acting as a crude high-pass filter.
The high-pass XOR is after almost all of the lower channel's audio logic except for the volume-only override, but
uses only the high channel's timer ticks. Any noise settings from the low channel affect the high-pass result and
using volume-only mode on the low channel will override it completely, but none of the distortion or volume
settings for the high channel affect the high-pass operation.
When the high-pass filter is disabled, the high-pass flip-flop is forced to a 1, but the XOR still takes place. This
causes the signal from channels 1 and 2 to be inverted. Normally this isn't noticeable, but it can show up when
two channels play synchronized sound. If channels 1 and 2 are set to the same frequency and to pure tone
mode, they will add, but if the same is done with channels 1 and 3, they will cancel. This doesn't happen in
volume-only mode, however, as the gates that force volume-only mode are after the high-pass circuitry and
therefore volume-only channels always add in any combination.
The high-pass update path has about 1.5 cycles of delay. If channels 1 and 3 have their timers synchronized to a
period of P cycles and channel 3 is running two cycles ahead of channel 1, a half cycle pulse will be produced
per period. The half-cycle offset makes it impossible for the high-pass filter to completely cancel the lower
channel's output.
Resetting the timers
Writing to the STIMER register causes all of the timers to reload and sets the output flip-flops to 1. When high-
pass filters are disabled, this turns off the output of channels 1 and 2 and turns on the output of channels 3 and
4. This is useful to synchronize the sound channels.
Chapter 5 - POKEY 82

Altirra Hardware Reference Manual Created by Avery Lee
There is a four cycle delay from the time that STIMER is strobed to when the timers are reset. With timer 1 set to
1.79MHz, 8-bit mode and with an AUDF1 value of N, IRQST bit 1 is set N+8 cycles after STIMER is written. This
holds even if timers 1+2 are linked, although the bit for timer 2 (bit 1) is set three cycles later.
For timers have have IRQs enabled, the resetting of the timers does not assert an IRQ. A full period must pass
before IRQs are fired.
STIMER has no effect on the phase offset of the 15KHz and 64KHz clocks. Regardless of when it is strobed, any
timers that are using those clocks will still only decrement and underflow according to the timing of those clocks,
and if such a timer hasn't decremented since the last time it was reset, there will be no effect on that timer. This
can be exploited by using STIMER to reset 1.79MHz clocked timers without affecting the slowly clocked ones.
5.4 Serial port
The serial port is used to transfer data to and from the SIO bus. This allows for communication with disk drives,
printers, cassette tape recorders, and other SIO-supporting peripherals.
Input shift register
Serial reception involves a 10-bit shift register and an 8-bit SERIN data register. When the serial input line is
pulled low for the start bit, the input shift register begins shifting until it has received a total of ten bits: the start
bit, eight data bits in order from LSB to MSB, and the stop bit. The eight data bits are copied into the SERIN
register and the serial input ready IRQ (IRQEN/IRQST bit 5) is asserted if enabled to indicate that a byte is
available. The shift register can then begin immediately receiving a new byte while the CPU reads the last byte
from SERIN.
The SERIN register always contains the last input byte received, whether or not it had errors. Reading the
SERIN register has no side effects; it does not acknowledge reception of a byte and it can be read multiple times
before the next byte arrives. Only one byte can be queued in SERIN, as the next byte will be copied into it as
soon as it completes even if no further bytes arrive and the shift register goes idle.
SKSTAT bit 1 indicates when the serial input shift register is active. It switches to 0 when the start bit is sampled
and back to 1 when the stop bit is sampled. This means that when receiving back-to-back bytes, this bit is low
90% of the time (9 bit cells out of 10); it does not stay low continuously.
Output shift register
Serial transmission involves another 10-bit shift register and 8-bit SEROUT data register. These are independent
from the input shift register and both can act independently for full-duplex mode. Writing to the SEROUT register
sets a bit indicating that a byte has been queued, after which it is copied into the shift register for serial
transmission. After that happens, SEROUT can be loaded again with another byte. This allows one byte to
queued so that bytes can be sent back-to-back even if small delays occur in loading SEROUT.
Only one byte can be loaded into SEROUT at a time. If a second byte is written before the first can be loaded
into the shift register, the second byte replaces the first and only one byte is sent.
The serial output ready IRQ (IRQEN/ST bit 4) is asserted whenever SEROUT has been loaded into the output
shift register and is ready for another byte. Continuous transmission is assured as long as SEROUT is reloaded
before the previous byte finishes shifting out. The serial output ready IRQ is not asserted when shifting
completes if no new byte is ready to load.
The serial output complete IRQ (IRQEN/ST bit 3) is asserted whenever the output shift register is idle. Unlike
other POKEY IRQs, it is not latched – it will stay asserted even if it is disabled in IRQEN and will automatically
deassert when shifting begins. This IRQ will stay inactive continuously while sending back-to-back bytes. One
use for the output complete IRQ is to determine when shifting has completed so the serial hardware can be
reconfigured. Another is to send with two stop bits instead of one stop bit, by using the output complete IRQ in
place of the output ready IRQ.
Chapter 5 - POKEY 83

Altirra Hardware Reference Manual Created by Avery Lee
Warning
The output shift register only attempts to loads once every bit cell time on the rising edge of the serial clock
and thus there is a delay from the first write to SEROUT until the serial output ready/complete IRQs update
and SEROUT is ready for a second byte. Attempting to write SEROUT twice without a wait for serial output
ready in between can fail when the second byte replaces the first before it can be loaded into the shift
register. This also means that it is necessary to wait for serial output ready before checking serial output
complete to end a transmission in case excessive delays have caused the shift register to temporarily idle
for a fraction of a bit between bytes even if SEROUT has already been reloaded.
Framing errors
SKSTAT bit 7 reports if a framing error occurs on the serial input port. A framing error occurs when shifting is
started by detection of a 0 start bit, but the tenth bit that should be the stop bit is not a 1, indicating that the byte
was not received correctly.
Framing errors do not affect the shift/load processes. The errant byte is still loaded into SERIN and a receive
IRQ is still asserted, despite the error.
Overrun errors
SKSTAT bit 5 indicates whether an overrun has occurred.19 An overrun occurs when a serial byte is not read
before the next byte is received; when this occurs, the new byte replaces the previous byte in SERIN and the
previous byte is lost.
The overrun bit is set specifically when a new byte is received and the serial port logic attempts to assert the
serial input interrupt when it is already active (IRQST bit 5 set to 0). This means that in order to acknowledge
receipt of a byte from SERIN, the serial input interrupt (IRQST bit 5) must be reset. The interrupt should also be
cleared before the start of a receive operation to clear any previously received stray data. Overruns are not
detected if this interrupt is disabled.
Reading a data byte from SERIN by itself has no bearing on whether an overrun is detected, only the interrupt
status.
Warning
The design of the serial port makes it impossible to completely reliably detect overrun errors since the serial
input ready IRQ must be temporarily disabled to acknowledge it, during which time an overrun can be
missed, and because there is necessarily a delay between the IRQ being acknowledged and the byte being
read from SERIN.
There is no overrun detection for output. Writing SEROUT again when a byte is already pending simply replaces
the previously queued byte with the new byte. Only one byte can be queued behind the one that is actively being
shifted out.
Polled operation
It is possible to drive the serial port in polled mode by enabling serial interrupts on POKEY, disabling interrupts
on the CPU, and then polling IRQST. This can be useful if the data rate is too high to use interrupts. The interrupt
must both be enabled and masked since the interrupt status bit is required to detect the reception of a new data
byte.
Direct input
Bit 4 of SKSTAT directly reads the raw state of the serial input line. This bypasses all of the shifting and clocking
logic and ignores all serial input settings, working even if all clocks are stopped. This is used by the kernel to
[19] Credit to HiassofT for noting that the SKSTAT reference on [ATA82] III.18 has D5 and D6 swapped.
Chapter 5 - POKEY 84

Altirra Hardware Reference Manual Created by Avery Lee
measure baud rate prior to reading a block from cassette tape, since the serial input shift register cannot be used
until the baud rate has been set.
Clock selection
Bits 4-6 of SKCTL control the clocks used during serial port operation. These three bits affect a number of
switches and gates and interact in complex manners. For instance, bit 4 generally enables asynchronous receive
using timer 4, but it also sometimes changes the output clock as well. Each setting specifies a different
combination of signals to use for both the input and output clocks, as well as whether to configure the
bidirectional clock line as an input or an output. Here are all of the modes:20
Setting Input clock Output clock External clock
000 External clock External clock Input
001 Channel 3+4 (async) External clock Input
010 Channel 4 Channel 4 Output channel 4
011 Channel 3+4 (async) Channel 4 (async) Input
100 External clock Channel 4 Input
101 Channel 3+4 (async) Channel 4 (async) Input
110 Channel 421 Channel 2 Output channel 4
111 Channel 3+4 (async) Channel 2 Input
Table 7: Serial port timing modes
The modes for standard half-duplex SIO operation are 001 for reception and 010 for transmission. The external
clock output is not normally used; for instance, the 810 disk drive ignores the clock lines and uses timing loops
for both transmission and reception.
Serial port clocks are produced by divide-by-two flip flops driven off of the counter outputs. They are not affected
by any of the audio control bits in the AUDC1-4 registers. However, the clock select and linking bits in AUDCTL –
bit 0 and bits 3-6 – do affect serial port operation since they affect the countdown timers themselves.
When using timer channels to clock the serial port, the timer frequency should be set to twice the baud rate.22
Channels 3+4 should also be linked together and driven by the 1.79MHz clock for highest precision. For cassette
operation at 600 baud, the divisor setting is $05CC; for disk operation at 19200 baud, it is $0028. Remember
that there is a six cycle delay in reloading a 16-bit, 1.79MHz timer. Due to imprecision in the timer divisor at high
frequencies, the actual transmission rate for the SIO bus is 19040 baud.
Serial clock reset
Setting bits 4-6 of SKCTL to 000, thus selecting an external clock for both input and output, also resets the serial
input and output clock flip-flops to a known state. The serial output updates on the next output clock cycle,
whereas the serial input updates after the next two input clock cycles.
[20] [ATA82] II.27 has the official mode chart; see also unnumbered page with serial/audio diagram for exact switch and gate
layout.
[21] [ATA82] II.27 and [AHS03] p.21 appear to have the same error of showing channel 2 as the input clock for the 110
setting. This is not possible, as only channel 4 or the bidirectional clock line can be routed to the serial input shift
register. The description text correctly indicates channel 4.
[22] [ATA82] II.25. The output clock toggles level each time the timer expires, so the frequency of the clock is half the
frequency of the timer.
Chapter 5 - POKEY 85

Altirra Hardware Reference Manual Created by Avery Lee
Timer usage during serial port operation
The serial port and audio circuitry both share the countdown timers and thus timers used for controlling the serial
port are not available for audio generation. Usually channels 3 and 4 are used for clock generation; when using
two-tone mode for recording to cassette, channels 1 and 2 are also occupied for FSK output.
Note that while the serial port uses the output of the counters, the audio circuitry is still active. This means that
the occupied channels should normally be silenced by setting their volume to zero and the corresponding
interrupt enables in IRQEN should also be disabled. However, the audio channels can be enabled for effect. The
SIO library in the kernel ROM normally enables audio from channel 4 during transfers, producing the
characteristic beep-beep-beep of Atari disk loads.
Asynchronous receive mode
Setting bit 4 of SKCTL [$D20F] enables asynchronous receive mode. In this mode, timers 3 and 4 are held in
reset state while POKEY is waiting for a start bit, allowing the timers to run only once a start bit is detected. This
aligns timers 3+4 to the leading edge of the byte that the serial port input logic samples roughly in the center of
each bit. Without this, the serial port input is not synchronized with the device on the other end and can sample
between bits, producing errors. In most cases, and particularly with disk drives, serial input is not reliable without
asynchronous mode.
Asynchronous receive mode also has the side effect of producing a characteristic audio tone when the sound
output is enabled on timers 3 or 4. This occurs because the audio circuit receives an odd number of pulses for
each byte (19), which in pure tone mode causes the audio channel to toggle once per byte. At 19200 baud, this
produces approximately a 960Hz tone during the read of each disk sector. The exact pitch produced varies
depending on the delay introduced by the device between bytes. This tone does not occur during transmission to
the device as that is done in synchronous mode, where the timer(s) used for the output clock run continuously.
Since asynchronous mode holds timers 3 and 4 in reset while waiting for a start bit, those timers are stopped
entirely when no data is being received. This means that leaving async mode enabled effectively disables
channels 3+4 for all audio except volume-only mode. Therefore, bit 4 of SKCTL should be cleared before
attempting to use those channels for audio.23
Shift timing
As stated earlier, the serial port logic shifts bits in or out at half the rate of the controlling timer, with the input and
output shift registers use alternating phases of the clock if they share the same timer. When asynchronous
receive mode is enabled, it presets the clock at the beginning of the start bit so that the input shift register shifts
in the start bit one period (half bit) later, sampling the middle of the start bit. Setting SKCTL bits 4-6 to %000
resets the clocks to the opposite phase.
The serial port shift registers are also only loaded or unloaded on this clock, which means that the interrupt bit
latches are only activated on clock edges. This leads to unintuitive behavior when SEROUT is loaded for the first
byte of an output stream, as the serial output shift register is only loaded at the next clock edge.
First, SEROUT cannot be written twice back-to-back at the start because of the delay. It is necessary to wait for
the serial output ready IRQ (bit 4), which indicates when the contents of SEROUT have been moved to the
output shift register. This can take up to an entire bit cell time. If SEROUT is written again before this happens,
the second byte overwrites the first and only that byte is transmitted instead.
Second, if the output shift register is initially idle, the serial output complete IRQ (bit 3) will not deassert until the
load occurs, as it only does so after the shift register loads from SEROUT and begins shifting. This means that
the complete IRQ should not be enabled or polled until the output register is known to be shifting, or else a
[23] [ATA82] II.26 states a slightly different rule, that the start bit resets channels 3+4. This must be interpreted as waiting
for the start bit and not the actual reception of the start bit in order to explain why those channels become silent when
asynchronous mode is enabled even when no serial data is being received.
Chapter 5 - POKEY 86

Altirra Hardware Reference Manual Created by Avery Lee
transmit routine may fail to wait for the last byte to complete and truncate the transmission.
Chapter 5 - POKEY 87

Altirra Hardware Reference Manual Created by Avery Lee
Figure 6 shows the timing relationships for asynchronous receive timing. Timers 3+4 are held frozen until
POKEY detects the leading edge of the start bit, upon which the timers are started. Every timer 4 period is a half-
bit, so sampling begins one period later and every two periods after that. 19 timer periods or 9½ bits later, the
stop bit is sampled, SERIN is updated with the new data byte, the serial input ready IRQ is asserted, the overrun
and framing error bits in SKSTAT are updated, and timers 3+4 are stopped. SKSTAT bit 1, which indicates
whether the serial input shifter is busy, asserts halfway into the start bit and deasserts halfway into the stop bit.
Chapter 5 - POKEY 88
Figure 6: POKEY asynchronous serial receive timing
D0 D1 D2 D3 D4 D5 D6Start StopD7
previous byte new byte
Serial input
SERIN
Serial input
ready IRQ
Timer 4 IRQ
and audio tick
Timers 3+4
running
SKSTAT bit 1

Altirra Hardware Reference Manual Created by Avery Lee
Figure 7 shows the timing for synchronous receive and transmission. Reception is the same as for asynchronous mode, except that the shift timing is
determined by falling edges of the clock alone without the clock being restarted by the leading edge of the start bit. For transmission, each write to
SEROUT immediately loads the SEROUT register, but the shift register is only loaded on the next rising edge of the clock. Once this happens, the serial
complete IRQ is deasserted and the serial output ready IRQ is asserted, if enabled. SEROUT can then be reloaded with the next byte at any time before
the first byte finishes sending. The serial output register is automatically reloaded with the second byte from SEROUT, and after it completes and no more
bytes are queued, the serial output complete IRQ is reasserted. The serial output ready IRQ is not asserted a third time.
Chapter 5 - POKEY 89
Figure 7: POKEY synchronous serial receive/transmit timing
D0 D1 D2 D3 D4 D5 D6Start StopD7
byte 1 byte 2
Serial input
SERIN
Serial input
ready IRQ
Serial clock
D0 D1 D2 D3 D4 D5 D6Start StopD7
byte 1 byte 2SEROUT
byte 1 byte 2Output shifter
D0 D1 D2 D3 D4 D5 D6Start StopD7
Serial output D0 D1 D2 D3 D4 D5 D6Start StopD7
Serial output
ready IRQ
Serial output
complete IRQ assertedasserted

Altirra Hardware Reference Manual Created by Avery Lee
Two-tone mode
Two-tone mode is enabled by setting bit 3 of SKCTL and replaces the normal 1 and 0 bits output to the SIO bus
with tones clocked by timers 1 and 2, respectively. This is used when writing data to tape, where the timers are
programmed in 64KHz mode with divisors $05 (5327Hz) and $07 (3995Hz) to do FSK encoding. The timer
output is tapped prior to the output circuitry and so the serial output is unaffected by either AUDC1 or AUDC2;
the serial port has its own divide-by-two circuit, independent of the audio dividers.
The switching between timer 1 and 2 based on serial data is done only in the serial logic and is therefore
inaudible; both audio channels will play during transmission if their control registers are set appropriately. There
is still an audible effect from two-tone mode, however, due to resynchronization between the timers: whenever a
timer pulse toggles the serial output, both timers are reset. The purpose of this is to align the timer phases to
avoid runt pulses in the output. This does not send a pulse to the audio logic, so the channel whose timer did not
underflow can either be silenced or lowered in pitch.
In order for two-tone mode to function as intended, timer 2 must have a lower frequency (longer period) than
timer 1.24 The reason is that while timer 1 pulses only toggle the serial output when the serial bit is a 1, timer 2
pulses always toggle the output regardless.25 When timer 2 has a longer period, this works because on a 1 bit
the pulses from timer 1 will always preempt timer 2 before it can underflow and fire. If timer 2 has a shorter
period, however, it will affect timer 1 regardless of the bit being output. With the standard 5327Hz/3995Hz tones,
this means that a 1 bit results in timer 1 playing 5327Hz and a 0 bit results in timers 1 and 2 playing both tones.
The force break bit (SKCTL bit 7) can be used to enforce a known 0 output so that timer 2 is always used to
reset timer 1.
5.5 Clock generation
There are three clocks that can be used to drive the counters:
●Channels 1 and 3 can use 1.78979MHz (NTSC) if bits 6 and 5 of AUDCTL ($D208) are set, respectively.
●Otherwise, channels use a 63.9210KHz clock by default. This is exactly 1/28th of the main clock.
●If bit 0 of AUDCTL ($D208) is set, then channels use a 15.7KHz clock instead. This is exactly 1/114th of
the main clock.
Both the 64KHz and 15KHz clocks are generated by polynomial counters internal to POKEY, driven off the main
clock, and have no guaranteed phase relation to other clocks in the system. In particular, the 15.7KHz clock
signal is labeled as HSYNC in the schematic, presumably because it counts at the same rate as ANTIC's scan
lines, but there is no connection to synchronize the two. The phase relationship between the 15.7KHz clock and
horizontal scan timing is determined by when initialization mode is ended.
5.6 Noise generators
POKEY contains three noise generators, all composed of maximal-length linear feedback shift registers (LFSRs,
or polynomial counters) that run at 1.79MHz. These are used both for generating audio noise as well as random
numbers for the CPU.
4-bit and 5-bit noise generators
The 4- and 5-bit generators within POKEY are linear feedback shift registers with the polynomials 1+x3+x4 and
1+x3+x5, respectively. They are only used for noise output and are not accessible to the CPU.
[24] [ATA82] II.26
[25] This means that the audio and serial port block diagram in [ATA82] is incorrect; it should show ((chan 1 AND serial) OR
chan2) instead of a switch between chan 1 and chan 2 leading into the div-by-2 block in the two tones path.
Chapter 5 - POKEY 90

Altirra Hardware Reference Manual Created by Avery Lee
The 4-bit generator has the pattern: 000111011001010.
The 5-bit generator has the pattern: 1000001110010001010111101101001.
9/17-bit noise generator
POKEY also has a third shift register which is either 9 or 17 bits long, depending on bit 7 of AUDCTL. When in 9-
bit (short) mode, the polynomial is 1+x4+x9; when in 17-bit (long) mode, an additional eight bits are added to the
shift register and the polynomial is 1+x12+x17. Eight bits of the shift register are visible to the CPU via RANDOM
[D20A]; this is most commonly used for random numbers, but it can also be used to test cycle counting
hypotheses. RANDOM shifts right at the rate of one bit per machine cycle.
If the main LFSR is in 9-bit mode and samples are taken from RANDOM ($D20A) every scan line by STA
WSYNC + LDA RANDOM, part of the sequence is as follows: 00 DF EE 16 B9.
Audio channel noise delays
The outputs of the noise generators are delayed to each audio channel by one clock apart to prevent the
channels from receiving the exact same noise. A given pattern bit arrives at channels 1, 2, 3, and then 4, in that
order.
For the 9/17-bit generator, the audio channels receive noise from the right end of RANDOM. This means that all
noise bits are visible to the CPU before they reach the audio circuitry.
Linked channels sample the noise generators from whichever channels are generating audio. Normally only the
higher channel has nonzero volume, so its timing determines the noise produced. If the lower channel is enabled
to produce sound, its noise output will be determined by that channel's timing, one cycle away from the higher
channel.
Initialization behavior
The polynomial counters must be reset on startup in case they power up in a lock-up state, of which there is
always exactly one state: either all 1s or 0s, depending on the implementation of the counter. Initialization mode
forces bits into the register until it is reset to the opposite of the lock-up state so that it is guaranteed to count
normally when the initialization state ends. Initialization mode need not be asserted for a long period of time for
the polynomial counters to work, as a single bit of the right polarity is enough to prevent lock-up.
When exiting initialization mode, the polynomial counters begin counting immediately. For instance, if 9-bit mode
is selected, executing STA SKCTL + LDA RANDOM back-to-back will give A=$1F, which is four bits after the all
ones state.
When initialization mode is re-entered, 1s are shifted into RANDOM from the left side. Beginning with nine cycles
after SKCTL is written to first enter init mode, RANDOM will always read $FF. Another nine cycles are needed for
the rest of the shift register to clear; it will work fine if restarted earlier, but not all of the bits will have been reset.
5.7 Interrupts
POKEY can issue interrupts to notify the CPU of events such as timer expiration and changes in serial port state.
All interrupts from POKEY are IRQs.
Chapter 5 - POKEY 91

Altirra Hardware Reference Manual Created by Avery Lee
Interrupt enable/status
The IRQEN register selectively enables or disables interrupts; a 1 bit enables an interrupt. When an interrupt is
enabled and becomes active, the corresponding bit in IRQST is set to a 1 and the IRQ line to the 6502 CPU is
asserted. POKEY will keep the IRQ line asserted until all pending interrupts are cleared by resetting the
corresponding IRQEN bit; this ensures that the CPU will continue to execute its IRQ routine until all interrupts
are serviced, even if an NMI intervenes temporarily.
Note that the serial transmission complete interrupt (bit 3) is special – it is not latched, so it is simply active
whenever the serial output shift register is idle and automatically deasserts when a new byte begins to shift out.
The interrupt status bit and corresponding interrupt will be set in that case even if bit 3 of IRQEN is cleared. This
can be useful to assert an IRQ on the CPU on demand.
Disabling all interrupt sources in IRQEN does not block all IRQs; POKEY shares the IRQ control line with the PIA
and the Parallel Bus Interface, which can also trigger IRQs on the CPU.
Interrupt timing
There is a minimum 2-3 unhalted cycle delay from the time that an interrupt is signaled in the IRQST register to
the first time that the 6502 will begin the seven cycle interrupt acknowledge sequence. This delay is extended if
the 6502 is in the middle of executing an instruction when the three cycles have elapsed or if ANTIC halts the
CPU for DMA.
Machine-specific Behavior Warning
The IRQ delay can vary between systems or based on temperature. A 3 cycle delay appears to be more
common, but some systems can consistently show 2 cycles.26
Enable/disable timing
A write to IRQEN that enables an interrupt must occur at least four cycles before the interrupt source activates,
or else the interrupt will not be latched in IRQST and an IRQ will not occur. For instance, if a timer is configured
such that the IRQ handler would trigger on cycle 16 of a scan line, the latest that the write to IRQEN can occur is
cycle 12.
For disabling an interrupt, the write to IRQEN must occur at least two cycles in advance. In other words, for an
IRQ on cycle 16, the write must occur on cycle 14 or earlier to block the interrupt in time. This means that there
is a one-cycle window where an IRQ can still occur after its source has been shut off via IRQEN.
Warning
The fact that a previously signaled IRQ can happen immediately after a write to IRQEN means that caution
must be taken when attempting to shut off POKEY interrupts. Simply attempting to write $00 to IRQEN can
fail if an IRQ occurs afterward and re-enables interrupts, leading to a rare crash. To be safe, mask interrupts
with an SEI instruction before clearing IRQEN; this ensures that the 6502 cannot service the interrupt
before noticing that the IRQ line has been negated.
It is also possible for the IRQ handler to be entered without an interrupt being signaled in IRQST by means of the
serial output complete IRQ. This can happen because the serial output complete IRQ deasserts automatically
once a new byte is loaded into the output shift register and there is a delay from when SEROUT is written to
when this occurs.
Initial interrupt state
Because POKEY has no reset pin, IRQEN state is indeterminate on start-up. IRQEN should be cleared before
the 6502 I flag is cleared.
[26] Credit goes to HiassofT for discovering this innovative method of measuring temperature with an Atari computer.
Chapter 5 - POKEY 92

Altirra Hardware Reference Manual Created by Avery Lee
5.8 Keyboard scan
The keyboard is automatically scanned by POKEY, which detects any pressed keys and notifies the CPU of new
key presses.
Key press detection
When a key is pressed, the key code is placed into bits 0-5 of the KBCODE [D209] register. The keyboard
interrupt (IRQST/EN bit 6) is also activated if it is enabled. At the same time, SKSTAT bit 2 is set to indicate that
a key is depressed and stays asserted as long as the key is held down, allowing software to implement key
repetition.
Whenever a key code is latched into KBCODE, bits 6 and 7 are also set to indicate the state of the Shift and
Control keys, respectively. These bits are updated at the same time as bit 0-5 and do not change if Shift or
Control changes state without another key press. However, SKSTAT bit 3 is updated whenever a change in the
Shift key is detected even if no other key is pressed.
If the same key is pressed multiple times in a row, KBCODE does not change. Therefore, the only way to detect
manually repeated key presses is through the keyboard IRQ or by polling SKSTAT. Key releases never change
KBCODE or interrupt status and can only be detected by polling.
Key codes
The key codes that appear in KBCODE are scan codes, which are different than ATASCII or INTERNAL codes
for characters. Tables 8 and 9 lists the base key codes returned for each key, before the Shift and Ctrl bits are
set.
+0/8 +1/9 +2/A +3/B +4/C +5/D +6/E +7/F
$00 L J ; : F1 F2 K + \ * ^
$08 O P U Ret I - _ = |
$10 V Help C F3 F4 B X Z
$18 4 $ 3 # 6 & Esc 5 % 2 " 1 !
$20 , [ Space . ] N M / ? Invert
$28 R E Y Tab T W Q
$30 9 ( 0 ) 7 ' Bksp 8 @ < >
$38 F H D Caps G S A
Table 8: Key codes (scan matrix layout)
Chapter 5 - POKEY 93

Altirra Hardware Reference Manual Created by Avery Lee
Help
[11]
Start Select Option Reset
Esc
[1C]
!
1 [1F]
"
2 [1E]
#
3 [1A]
$
4 [18]
%
5 [1D]
&
6 [1B]
'
7 [33]
@
8 [35]
(
9 [30]
)
0 [32]
Clr
< [36]
Ins
> [37]
Bksp
[34]
Break
Tab
[2C]
Q
[2F]
W
[2E]
E
[2A]
R
[28]
T
[2D]
Y
[2B]
U
[0B]
I
[0D]
O
[08]
P
[0A]
_
- [0E]
|
= [0F]
Return
[08]
Control A
[3F]
S
[3E]
D
[3A]
F
[38]
G
[3D]
H
[39]
J
[01]
K
[05]
L
[00]
:
; [02]
\
+ [06]
^
* [07]
Caps
[3C]
Shift Z
[17]
X
[16]
C
[12]
V
[10]
B
[15]
N
[23]
M
[25]
[
, [20]
]
. [22]
?
/ [26]
Shift Inv
[27]
Space
[21]
Table 9: Key codes (130XE keyboard layout)
The Start, Select, Option, and Reset keys do not have key codes associated with them as they are detected
differently; Shift and Control keys function as modifier keys.
Six key codes are not mapped to keys in the keyboard matrix and cannot be triggered in normal operation. The
function keys F1-F4 are also absent on all models except the 1200XL. However, the absent key codes can be
triggered on a stock keyboard if the keyboard debounce is disabled (SKCTL=$02). For instance, pressing
O+V+Help quickly with debounce disabled can latch $09 into KBCODE. This is also theoretically possible with
debounce enabled, but improbable due to the very tight timing requirements.
Keyboard overruns
If a new key is pressed and detected while the keyboard IRQ is still active (IRQST bit 6), a keyboard overrun is
signaled by clearing SKSTAT bit 6, and the new key code replaces the old one in KBCODE. Reading KBCODE
has no effect on the IRQ or overrun state.
A keyboard overrun condition is cleared by writing to SKRES.
Scan timing
The keyboard scan is triggered by the 15KHz clock. This means that keyboard IRQs occur relative to when the
15KHz clock is initialized. This typically means that the keyboard IRQ never hits the magic cycle on a scan line
that can block NMIs, but just about every key can hit that cycle if POKEY is initialized at just the wrong offset.
This happens if initialization mode is cleared at around cycle 32 on a scan line. The timing will vary somewhat
due to variance in when the 6502 is able to acknowledge the interrupt.
Scan algorithm
The keyboard scanning hardware consists of a 6-bit counter, a 6-bit latched compare register, and a state
machine with four states. One key out of 64 total is checked per cycle at 15KHz, so a full scan takes 4ms. The
state hardware functions as follows27:
·State 0 (key up):
·If a key is down, latch the counter in the compare register and go to state 1.
·State 1 (debounce key down):
[27] Flowchart versions of the keyboard state machine can also be found in [AHS03] and [AHS03a]. They do not, however,
indicate the connection to SKSTAT.
Chapter 5 - POKEY 94

Altirra Hardware Reference Manual Created by Avery Lee
·If the counter matches the compare register, and the current key is not down, go to state 0.
·If the counter matches the compare register, and the current key is down, assert the keyboard IRQ,
clear bit 2 of SKSTAT, copy the counter value into KBCODE, and go to state 3.
·If the counter does not match the compare register, and the current key is down, go to state 0.
·State 3 (confirmed key down):
·If the counter matches the compare register, and the current key is not down, go to state 2.
·State 2 (debounce key up):
·If the counter matches the compare register, and the current key is not down, set bit 2 of SKSTAT
and go to state 0.
This flow assumes that keyboard debounce (SKCTL bit 0) is enabled. If debounce is disabled, then comparisons
against the compare register always pass.
SKSTAT bit 2, which indicates whether a key is held down, is updated based on the current state of the keyboard
state machine. It is only updated after a key up or down has been debounced, and asserts at the same time that
KBCODE is updated and the IRQ is triggered.
The design of the keyboard state machine limits the maximum normal (debounced) typing rate to approximately
60 characters per second, since key presses can only be registered once every four full keyboard scans (256
horizontal blanks).
Control/Shift/Break scan
The Control, Shift, and Break keys are detected in parallel with other keys during the scan. Control and Shift are
detected concurrently with scan codes $00 and $10, while Break is detected with $30. Control and Shift states
are captured into internal latches that are later fed into SKSTAT bit 3 and KBCODE bits 6 and 7; Break is used to
trigger the Break key IRQ. These keys are not affected by debounce, are not reflected in SKSTAT bit 2, and do
not trigger keyboard overruns.
Both Shift keys are wired identically and cannot be distinguished in software.
The Break key is monitored only for key down transitions. When a Break key press is detected, the Break key
IRQ (bit 7) is asserted if enabled. The IRQ will not retrigger while the key is held down and the key press is lost if
the IRQ is disabled when the key down occurs. There is no direct way to determine if it is still depressed or when
it is released.28
Keyboard scan enable
Bit 1 of SKCTL enables keyboard scanning. If it is disabled, the state machine is forced to state 0 and the
counter is held in reset state. This causes SKSTAT bit 2 to reset to 1. However, KBCODE and any previously
signaled keyboard IRQs are unaffected, and SKSTAT bit 3 retains its current state regardless of subsequent
movements of the Shift key.
The Break key cannot be detected while the keyboard scan is disabled.
Keyboard debounce
Bit 0 of SKCTL controls the debounce function. When enabled, a key must be detected as pressed in two
consecutive scan cycles before a key press is registered, and the key must be released for two consecutive scan
cycles before the key is considered released. This is intended to filter out noise from mechanical switches, which
[28] This is not entirely true as it is possible to detect the Break state indirectly by phantom keys if specific other keys are
depressed at the same time and debounce is disabled, but this is a corner case useless in practice.
Chapter 5 - POKEY 95

Altirra Hardware Reference Manual Created by Avery Lee
produce noise output when pressed or released. Unfortunately, this function is poorly named and has several
side effects besides debouncing.
When enabled, the keyboard will never register a key press when two or more keys are pressed simultaneously.
This is because the keyboard scan logic does a second pass over the keyboard to verify a key press and rejects
it if another key is depressed at the same time. However, once a key press has been registered, any other keys
are ignored and the key will continue to be reported as depressed until it is released.
When disabled, the keyboard is basically non-functional, as the keyboard state machine checks consecutive
keys rather than the same key in consecutive cycles. In this mode, a key press will only register if two
consecutive keys are held down, and afterward will register it for only two additional scan lines before reporting a
release, even if the key is still held down. This pattern will also repeat every time the keyboard is scanned, so
holding down a pair of adjacent keys will cause the second key to be reported once every 64 scan lines (~240
times a second). These effects are typically undesirable and so debounce normally must be enabled for normal
keyboard operation.
Note that the 5200 keyboard is the opposite: it requires debounce to be disabled to function. See chapter 13 for
details.
Shift and Break key detection are not affected by the debounce function – they are reported via SKSTAT bit 3
and IRQST bit 7 in the same manner regardless.
Key conflicts
While the POKEY hardware views the keyboard as a linear set of 64 keys, it is actually physically arranged as a
2D matrix where the high three bits of the key scan code control the output lines and low three bits control the
input lines, and a key is detected when it connects an output line to an input line. Because there are no diodes
on the keys, pressing three or more keys on a rectangle in the matrix can result in an additional phantom key
appearing at the missing fourth corner of the rectangle. For instance, pressing L, J, and V will also result in the
Help key being detected.
Ordinarily this isn't a problem, because the debounce logic prevents any keys from being registered when more
than one key is down. If debounce is disabled, however, the phantom keys can be detected when new pairs of
keys with adjacent scan codes are activated. With L+J+V, for example, the L+J pair will result in KBCODE=$01,
followed by V + phantom Help setting KBCODE=$11.
Where this particularly causes a problem is when two or more of the Control, Shift, or Break keys are pressed in
conjunction with another key. The Control key shares a control line with keys that have a $00-07 base scan
code, Shift with $10-17, and Break with $30-37. Usually, pressing one of these keys at the same time as a
regular key is OK because they have a dedicated input line. Pressing two of them, however, will cause phantom
keys to appear on the regular key matrix. The most noticeable impact of this is that none of the
Control+Shift+key combinations for scan codes $C0-C7 or $D0-D7 can be detected. Also, Control+V+L will
simulate Shift, and Control+L+9 will simulate Break.
Note that this problem is caused by the keyboard matrix hooked up to POKEY. On the 5200, the upper trigger is
fully independent from the keypad and causes no such conflicts.
Auto-repeat
There is no auto-repeat hardware in POKEY. Keyboard auto-repeat must be implemented in software.
5.9 Paddle scan
POKEY has inputs for eight potentiometer (“pot”) inputs, typically used to read paddles. Pulse timing is
automatically handled in hardware, relieving the CPU of the need to poll the inputs and simply requiring values to
be read after the polling has completed.
Chapter 5 - POKEY 96

Altirra Hardware Reference Manual Created by Avery Lee
Polling mechanism
The pot inputs are designed to be connected to a capacitor charged up by a variable voltage, where the voltage
is determined by a pot-based divider in the paddle controller. The voltage from the controller determines the rate
at which the capacitor charges up, which in turn changes the time taken for the capacitor to charge up to
threshold voltage. POKEY measures how long this takes and reports this as the controller position. Afterward,
dumping transistors drain the capacitors and reset them for the next read.
The polling process is started by a write to the POTGO register. This resets the main counter, which begins
counting up from 0 once per scan line. The value of this counter is continuously latched into the each pot
position register (POT0-7) until the corresponding input reaches threshold. The counter stops at 228, which is
latched into the registers for any pot inputs that have not yet reached threshold.
Normally, the polling counter is driven by the same clock that is used by the keyboard scan. Therefore, paddle
scanning is inoperative when initialization mode is active and the keyboard clock is frozen. The except is when
fast pot scan mode is enabled, which selects the machine clock instead of the 15KHz clock.
Polling status
The ALLPOT register can be used to check the state of each input. Each bit in ALLPOT corresponds to one of
the inputs and reads 1 while the input is being polled, then 0 when polling is complete. Therefore, the amount of
time that each bit is 0 is proportional to the count eventually read. ALLPOT is forced to $00 once the scan has
finished, regardless of the state of the inputs.
ALLPOT also indicates which POTn registers are being updated continuously from the master counter. If an
input somehow dips back below input threshold during the scan, the corresponding bit in ALLPOT will revert to 1
and the POTn register will resume updating from the main counter.
The POT counters can be read while the scan is occurring. The main counter is continuously copied into the
POT0-7 registers until each input reaches threshold, so all counters will count up in sync until then.
Fast pot scan mode
Setting bit 2 of SKCTL enables fast pot scan mode, which switches the counter from the 15.7KHz keyboard clock
to the 1.79MHz machine clock. The scan time is shortened to two scan lines, and the values latched into the
POT0-7 counters are proportional to clock cycles instead of scan lines. When used with regular paddles, this
produces counts that are about 114 times higher, giving 0-229 at the extreme low end of the normal pot value
range. The counter stops one value higher in this mode than in normal scan mode (229 vs. 228).
A side effect of enabling fast pot scan mode is that it also disables the capacitor dump transistors. This means
that, by default, simply enabling fast pot scan mode will not work because the capacitors will never be drained
below threshold voltage after they have changed up, no matter how many times POTGO is strobed. Inputs that
have already reached input threshold at the start of the scan will not have their position registers updated at all.
The dump transistors are disabled as soon as fast pot scan mode is enabled, so attempting to enable fast pot
scan mode and then write POTGO can fail when the capacitors charge up past the threshold in between the two
writes. The dump transistors are on whenever slow pot scan mode is enabled and a scan is not occurring.
Reading live counters
Attempting to read the POT0-7 registers during the active pot scan can produce non-monotonic results if those
registers are still being updated. Specifically, the bits 0-4 of the count may be blended between cycles such that
LSBs reset to 0 before the carry has propagated through to upper bits. The effect is that instead of counting $00-
$10, the low bits count in the following sequence: $00, $10, $10, $12, $10, $14, $14, $16, $10, $18, $18, $1A,
$18, $1C, $1C, $1E, $10. As a result, fast pot scan mode cannot be used to reliably count cycles.
Note that while the live values during the scan are always even, odd values can be recorded as the final value
when the counters stop updating.
Chapter 5 - POKEY 97

Altirra Hardware Reference Manual Created by Avery Lee
Truncated scans
A full paddle scan takes 228 scan lines or cycles, depending on the mode. The entire time is required regardless
of when the individual pot scan counters latch. If POTGO is retriggered before the previous scan finishes, the
dump transistors will not have had a chance to drain the capacitors before the next scan starts, resulting in
truncated counts. For instance, restarting the scan after 64 scan lines will result in counts 64 lower for any inputs
reaching threshold after the restart. Continuously restarting the scan can prevent the pot counters from updating
at all, because the dump transistors will never get a chance to activate. It takes about 20-40 cycles before the
capacitors are sufficiently drained to produce normal values.
Reset
Other than the stopping of the slow pot scan clock, the pot scan logic is not affected by initialization mode. The
scan counter may need to count for up to a full 256 counts (not 228) to fully reset the pot scan logic.
Unconnected inputs
On the XL/XE computers and the XEGS, which only have two joystick ports, pot inputs 4-7 are hardwired to
ground and will always read 228 (normal scan mode) or 229 (fast scan mode).
5.10 Examples
Atari OS, up through XL/XE OS ver. 2
Most versions of the Atari OS have a race condition in the SIO first byte transmit routine where a byte is written
to SEROUT before the CHKSUM variable is initialized, while IRQs are unmasked. The serial input ready IRQ,
which fires one serial tick layer, can strike in between the writes to SEROUT and CHKSUM, updating CHKSUM
with the second byte before it is initialized. The chances of this are greatly raised by the VBI being enabled,
which can also strike in between and then extend the window for the IRQ to ~130 cycles.
The result of this race is a blown checksum calculation. A disk drive will send back a NAK in response, but due to
another bug in SIO, the result is a long timeout delay before the command is retried. It was fixed in later versions
by swapping the order so that CHKSUM is written first.
Ray of Hope, Numen
Both of these demos use channels 3+4 in 16-bit mode at 1.79MHz with the 4-bit polynomial noise generator
selected. The channels are set to a high frequency and the demos rely on the pattern of the noise generator to
alias the frequency down to a lower range. The cycle period is therefore critical for the high notes to sound
correctly instead of squeaking.
SpartaDOS X
SDX uses its own SIO routines for disk access that use polling rather than interrupts, by disabling interrupts on
the CPU and waiting for bits in IRQST to change state.
5.11 Further reading
Read the Hardware Manual [ATA82] or the POKEY datasheet [AHS03] for theory and register-level
specifications for POKEY. The Hardware Manual is especially useful here as it has detailed descriptions of the
serial port and audio paths that are undocumented elsewhere.
Chapter 5 - POKEY 98
Chapter 6
CTIA/GTIA

Altirra Hardware Reference Manual Created by Avery Lee
6.1 Color encoding
Color registers
For the most part, colors are encoded in GTIA through a palette of color registers, where displayed data refers to
a color register and that register provides the actual color used. Changing the color register changes the color of
all objects using that color register.
There are nine write-only color registers on the GTIA. COLBK is the background/border color register, COLPF0-
3 are the playfield color registers, and COLPM0-3 are the player/missile color registers.
Color encoding
The high four bits of each color register encodes the hue, with 0 being a special value indicating no color
(grayscale). Bits 1-3 encode the luminance (brightness) of the color, with 000 being the darkest and 111 being
the brightest. Note that the luminance does not affect the saturation of the color, so a luminance of 0 does not
mean black if hue is non-zero. The two fields together allow for 128 distinct colors.
Bit 0 of any data written to a color register is ignored. Although the GTIA can display 256 colors, this is only
possible through the special 16 luminance mode and not through the color registers. The lowest luminance bit is
always 0 for any output from a color register.
A word on colors
The actual colors produced by GTIA differ for each computer, depending on the setting of a tuning pot inside the
computer and also the display monitor hooked up to it. This has led to a lot of disagreement about what colors
result from each hue value. Even official Atari documentation differs. For instance, the Atari BASIC Reference
Manual and the Hardware Manual specify that hues 1 and 15 should have different colors, whereas the 400/800
Service Manual advises adjusting the SALT color bar test pattern so that they have the same color. As such,
there is no single authoritative, official answer on what colors each hue value should provide. This must
be kept in mind when choosing color values.
Another important issue is that the versions of the GTIA produced for the three main TV encoding standards –
NTSC, PAL, and SECAM – all differ in the way they encode color.
NTSC color encoding
An NTSC GTIA produces color by phase shifting a square wave at the same frequency as the NTSC color
subcarrier. This generates different, evenly-spaced hues. Because the strength of the color signal is independent
of the brightness, colors with low brightness are much more saturated than ones with higher brightness. Hue
value 0 does not produce any color signal and therefore produces pure grays.
The TV's color circuitry is synchronized to GTIA's color output by means of a color burst emitted during
horizontal blank. The phase of this signal corresponds to a light yellow-orange color, sometimes called “gold.”
GTIA then produces colors by emitting a color subcarrier with various phase shifts from the color burst, with all of
the phase shifts evenly spaced. Hue 1 has one unit of phase delay, and each successive hue has additional
multiples of delay added. The delay is nominally around 24°. Ascending hues, and therefore increasing delays,
produce colors of orange, red, purple, blue, cyan, green, lime, and finally light yellow-orange again.
The delay between the hue phases is adjustable by a trimpot on the motherboard. This affects each delay stage
and therefore has greater effect on higher hue numbers. The last hue, hue 15, varies the most as it is at the end
of all delay stages and therefore has the most sensitivity to the color adjustment. Depending on the adjustment,
its output can range from green, to yellow, to even orange if it wraps around past hue 1. In contrast, hue 1 varies
very little except due to display differences, and low-numbered hues have less variation between systems.
Chapter 6 - CTIA/GTIA 100

Altirra Hardware Reference Manual Created by Avery Lee
NTSC brightness encoding
The four-bit brightness value specified in color registers or produced by blending is converted to a brightness
(luminance) signal with roughly equal steps, with 0 = black and 15 = white. There are two quirks in this
conversion in hardware to be aware of, however.
The first quirk is that brightness levels 7 and 8 can be spaced closer together than the rest of the steps, almost
identical.
The second quirk is that brightness level 0 is “blacker than black.” This is because of a difference between
blanking level and black level in most NTSC varieties (except for NTSC-J), where blanking is at 0 IRE, black is at
7.5 IRE, and white is at 100 IRE. The Atari encodes brightness level 0 at blanking level, putting it at about -8%
on a scale of black to white.
PAL color encoding
PAL encodes color differently than NTSC, and thus the PAL GTIA uses a different strategy to generate colors.
The main issue is that one of the color subcarrier axes reverses phases on every scan line, so different phases
are required to produce the same color. Like the NTSC GTIA, the PAL GTIA uses a delay line to produce
different phases, but different phases are used for even and odd scan lines, and the spacing between the hues
is also not even.
The phases used by the PAL GTIA for the various colors are as follows, in terms of delays (angles are ideal
given a 22.5° delay):
Hue Even lines Odd lines Ideal UV angle
1 1 5 135.0°
2 0 6 112.5°
3 7 (inverted) 7 90.0°
4 6 (inverted) 0 (inverted) 67.5°
5 5 (inverted) 1 (inverted) 45.0°
6 4 (inverted) 2 (inverted) 22.5°
7 2 (inverted) 4 (inverted) 337.5°
8 1 (inverted) 5 (inverted) 315.0°
9 0 (inverted) 6 (inverted) 292.5°
10 7 7 (inverted) 270.0°
11 5 1 225.0°
12 4 2 202.5°
13 3 3 180.0°
14 2 4 157.5°
15 1 5 135.0°
Table 10: PAL GTIA color encodings
Hue 1 is used for the color burst, which uses an angle of 135° and 225° on alternating lines, the latter of which is
converted back to 135° in UV space by the alternating line inversion. The reversal of the color subcarrier
direction between scan lines means that colors can display different hues between even and off scan lines
depending on the color adjustment.
Chapter 6 - CTIA/GTIA 101

Altirra Hardware Reference Manual Created by Avery Lee
The greater complexity of the encoding scheme means that encoded colors from a PAL system have less
variance than an NTSC system, and the “correct” color adjustment for PAL is more apparent. Hues 1 and 15 are
always the same, for instance, because they are hardcoded to the same delays. The offset due to inversion on
hues 3-10 is always 180° regardless of the adjustment. Finally, while the stable reference color on NTSC is hue
1, on PAL it is hue 13.
Regarding the actual colors produced, the U-V color encoding space used by PAL is related to the I-Q color
encoding space used by NTSC by a flip and a 33° rotation. The color burst emitted by NTSC systems lies at
180° in the U-V coordinate space. While NTSC systems nominally have their colors spaced by 23-26°, in the
PAL encoding they are spaced by uneven multiples of 22.5°, leading to wider gaps between hues 6 and 7 and
hues 10 and 11.
PAL color blending
To combat hue shifting problems that occur with NTSC, PAL reverses the phase direction of the color subcarrier
on alternating scanlines. This has the effect of reversing the direction of phase errors as well. For instance, if a
signal transmission issue caused color signal phase to advance on each scan line between the encoder and the
decoder, this would result in alternating increasing and decreasing angles in U-V space. Decoders can take
advantage of this by combining color from adjacent scan lines, canceling the phase error at the cost of
decreased saturation. A common way is to average in the color from the previous scan line via a delay line.
This effect can be used to blend colors between scan lines. Alternating mode 9 and 11 lines, for instance, will
mix the gray level from the mode 9 lines with the color from the mode 11 lines, producing a more pseudo-256
color mode. Note that the blending effect only pertains to chroma and not luma.
6.2 Artifacting
Composite video encodes both brightness (luma) and color (chroma) together into the same signal. The decoder
separates these imperfectly, which leads to the ability for the luma signal to produce colors when specific
patterns are used. This is known as artifacting and can be used to deliberately encode colors without using the
color hardware in the computer, particularly in hires modes that do not have the ability to directly produce colors
from the playfield. The resulting colors depend strongly on the specific model of computer hardware.
Artifacting only occurs with a composite video or RF connection. With separate Y/C (S-Video) outputs, the luma
and chroma signals are never combined and there is no artifacting.
NTSC composite signal encoding
The chroma signal for NTSC is encoded using quadrature amplitude modulation (QAM) at the color subcarrier
frequency, 3.579545MHz. This results in a sine wave where the phase of the sine wave determines the hue and
the amplitude determines the saturation. Lack of this signal therefore produces no color. In order to decode this
signal, the receiver must have a phase reference, which is provided by a color burst of defined phase and color
in horizontal blank.
Besides hue/saturation, there is another interpretation of the color signal, which the sum of two separate I and Q
signals. I is the in-phase signal, while Q is the quadrature signal. Both are encoded as sine and cosine waves 90
degrees apart in phase, and the sum of the two is the color signal. The two representations are equivalent; I-Q is
the Cartesian (X-Y) representation, while hue/saturation is the polar (phase/magnitude) representation.
Luma/chroma crosstalk
In order to recover the luma and chroma from the composite signal, the decoder must separate the two signals.
This is done imperfectly and the result is crosstalk between the two signals. When part of the original luma signal
is decoded as chroma, artifacted color results.
Some of this results from imperfect separation circuitry in the decoder, but there are situations where it is
Chapter 6 - CTIA/GTIA 102

Altirra Hardware Reference Manual Created by Avery Lee
theoretically impossible to separate the two. The primary issue is if the luma signal has a component at the color
subcarrier frequency, since signal theory says that such a signal can be decomposed into the sum of a sine
wave at that frequency and higher frequency harmonics. This makes it impossible to distinguish the fundamental
sine wave in the luma signal from the chroma subcarrier. Avoiding this conflict requires the encoder to exclude
chroma-like signals from the luma signal before mixing the two. The computer does not do this, which allows for
false colors.
The literature for standard NTSC has references to this effect being avoided due to the luma and chroma
sequences interleaving in frequency space as offset combs. This is due to the line and fields rates being an odd
number of color cycles, which causes the color subcarrier to invert phase on adjacent lines and fields. In old TVs
where the color subcarrier is visible, this shows as a fine checkerboard slowly moving up. A comb filter can then
take advantage of this by combining adjacent lines or fields to cancel the color subcarrier. Unfortunately, the
computer’s output deviates from this and generates a signal that is a whole number of color cycles per line and
frame. The effect is that the color subcarrier doesn’t invert phase between adjacent lines or frames, and the
frequency combs of the luma and chroma signals overlap instead of interleaving.
Artifacted color hues
In order to produce stable artifacted colors, the phase relationship between luma and chroma must be known.
The NTSC GTIA produces pixels using a pixel clock (dot clock) that is a multiple of the chroma subcarrier, thus
producing stable hues. The highest resolution lores modes use a pixel clock at the chroma subcarrier frequency
fsc = 3.58MHz, too low to produce artifacted colors. The hires modes, however, use 2 x fsc = 7.16MHz, which
means that alternating pixel patterns produce a signal at the chroma subcarrier rate. Two hues are thus available
for even and odd patterns.
The colors produced by the even and odd pattern vary, however. The colors produced by the two patterns will
always have the same saturation and opposite hues, by virtue of being signal inverses of each other, and the
average of the signal means that the brightness will be halfway (approx. luma 7). The hues, however, depend on
the relative phase offset between the luma signal and the color burst produced by GTIA in horizontal blank. This
varies for different computer models due to differences in the video output circuitry resulting in different delays
between luma and chroma. The most common combinations produced are blue/green on 800s, purple/green on
XLs, and red/blue on XEs. The GTIA color adjustment does not affect artifacted hues, however, since it doesn’t
affect color 1, which doubles as the color burst.
Note that while the hues for even and odd patterns are opposite in the signal, they are not necessarily exactly
opposite when displayed. A major reason for this is that artifacted colors are often so highly saturated that they
fall outside of the displayable color range (gamut) of the display, causing the hues to shift when the color values
are clamped to range. For instance, it is impossible for a display to produce negative color. This can particularly
lead to noticeable differences in the displayed artifacted color between a computer monitor and a TV. The
brighter display of the TV can provide more headroom in RGB space than the monitor for the same signal,
causing the monitor to clamp more than the TV. The result is the TV showing blue/green artifacting, while the
monitor clamps those colors to purple/green.
Brightness and saturation of artifacted colors
How saturated artifacted colors depends on the relative strength of the 3.58MHz waveform in the luma signal
relative to the color burst. For the luma signal, this depends on the difference in brightness between the even
and odd pixels. For instance, alternating luma 0 and 4 gives about the same saturation as 10 and 14.29
The other factor is the strength of the color burst, which varies between computer models. A strong color burst
gives weaker artifacting, while a weak color burst gives stronger artifacting. Out of three sampled NTSC
computers, an 800 had the weakest color signal with color burst peak-to-peak of about 4 luma units, an 800XL
about 8, and a 130XE about 14. Correspondingly, the 800 showed the most saturated artifacting colors.
[29] The difference in signal strength between 0/4 and 10/14 isn’t exactly the same in practice, since the luma steps are
slightly uneven.
Chapter 6 - CTIA/GTIA 103

Altirra Hardware Reference Manual Created by Avery Lee
The brightness of artifacted colors is more straightforward, as it is simply the average of the luma pixels – the
result after the fsc component has been separated out.
Mixing artifacted and non-artifacted colors
When conventionally generated colors are mixed with artifacted colors, the result is the additive blend of the two,
since the luma and chroma signals are added together, causing their color signal components to also add. This
addition occurs in the I-Q space that the chroma is encoded in. Since YIQ is related to YUV and RGB by linear
transforms, this is also equivalently an addition in those color spaces.
PAL artifacting
It is also possible to produce artifacted colors in the PAL system, though the technique and interpretation is more
complex. One of the main differences is the color subcarrier is at a higher frequency, 4.43MHz instead of
3.58MHz. This is a factor of 5/4 faster than the NTSC subcarrier and results in the subcarrier no longer matching
the dot clock. Instead, 5 color cycles align with 4 lores pixels, giving a larger repeating pattern than the simple
even/odd patterns with NTSC.
PAL alternation
The phase reversal of PAL on alternating scanlines also affects the colors produced through artifacting, since it
also requires the pattern to be reversed on successive scanlines to produce a consistent hue. This produces a
herringbone or interrupted checkerboard pattern. This pattern can be placed at four different offsets for four
different hues.
Two additional hues are possible by deliberately not reversing the phase direction of the pattern and instead
using vertical stripes as with NTSC. This causes the pattern to have opposite V axis values on adjacent
scanlines, which are then cancelled by the receiver. The result is blue and yellow, the two colors on the U axis.
6.3 Player/missile graphics
GTIA supports display of eight sprites on top of the playfield. These sprites can have distinct colors and can be
moved horizontally much more quickly than the playfield for fast action. Four of the sprites are 8-bit wide players
and four are two-bit wide missiles. All sprites are the height of the screen and can be as tall as desired. It is also
possible to reposition sprites horizontally in the middle of the screen in order to increase the number of visible
objects on screen.
Player/missile colors
Four color registers are reserved for player/missile graphics, COLPM0-3. Each player shares its color with the
missile of the same number.
Player/missile graphics DMA
The default method for GTIA to receive player/missile graphics data is for ANTIC DMA to read it on a scan line
basis, thus relieving the CPU of the burden of spoon-feeding graphics data. In order for this to happen, either
bits 2 or 3 of DMACTL in ANTIC must be set to enable DMA, and the corresponding bits 0 and 1 of GRACTL
must be set in GTIA to receive data. The graphics data registers GRAFP0-P3 and GRAFM are then accordingly
loaded automatically at the beginning of each scan line.
If player or missile DMA is only set in GRACTL and not in DMACTL, then two odd effects can occur. First, if only
missile DMA is enabled on ANTIC, but player DMA is enabled in GTIA, then the players will be loaded with
whatever bytes are active on the bus while the CPU is executing during cycles 2-5 of the scan line. Second, if
P/M DMA is entirely disabled on ANTIC, it is possible for GTIA to mistake a display list fetch for the missile fetch,
because the first halted cycle within horizontal blank is considered to be the missile fetch. This causes GTIA to
Chapter 6 - CTIA/GTIA 104

Altirra Hardware Reference Manual Created by Avery Lee
read the display list instruction as missile data and to load players at cycles 3-7 instead of 2-5.
When P/M graphics DMA is stopped on the GTIA side, the graphics data registers retain the last value loaded
into them. This results in full-height stripes on screen unless the objects are subsequently repositioned or have
their data registers cleared.
Graphic data registers
The CPU can also load directly into the graphics data registers for players and missiles by writing to GRAFP0-3
and GRAFM directly. This allows the CPU to directly control P/M graphics data when ANTIC DMA is
inconvenient. It also allows vertical bar patterns to be displayed without requiring data in memory, since the
graphics latches can be loaded once and GTIA will reuse the same pattern for each scan line.
Vertical delay
Vertical delay is used to move a two-line resolution sprite with scan line resolution. Unlike the Atari 2600's TIA,
the GTIA does not have a true vertical delay function with a delayed graphics latch. Instead, the “vertical delay”
function works by masking DMA fetches. Setting the bit for a sprite in the VDELAY register causes GTIA to load
DMA data for that sprite only on odd scan lines. In two-line resolution mode, when ANTIC repeats the same data
on pairs of scan lines, this effectively moves the sprite image down by one scan line. In one-line resolution
mode, this effectively reduces the sprite to two-line resolution.
VDELAY has no effect on writes from the CPU to GRAFP0-3 or GRAFM.
Player/missile positioning
The eight P/M objects are positioned along their left side via registers HPOSP0-HPOSP3 [D400-D403] and
HPOSM0-HPOSM3 [D404-D407]. Position registers have color clock resolution. A player or missile begins
shifting its output to the video display when the horizontal position counter matches the position register; this
happens even if the object is positioned in the horizontal blank region (pos < $22), as long as part of it is in the
visible region.
The center of the playfield is at the pixel boundary between $7F and $80. This means that the narrow playfield
spans $40-$BF, the normal playfield $30-$CF, and the wide playfield $2C-$DD (visible portion of $20-$DF).
Size control
Each of the players and missiles can be set to one of three widths, with each bit displaying as one color clock
(single width), two color clocks (double width), or four color clocks (quadruple width). Player widths are set by
SIZEP0-SIZEP3; missile widths are set by SIZEM. Objects are always positioned from their left edge, so
increasing a object's width causes it to expand to the right.
Shift triggering and timing
An object's image is produced by a shift register that gradually shifts out bits to the left. The timing of this shifter
is controlled by a horizontal position comparator and a state machine controlled by the size setting.
A player or missile's shift register is loaded and begins shifting when the horizontal position of the object
matches the horizontal position counter. This is checked every color cycle, so changing the position in the middle
of the scan line can result in missing or duplicated object images. Moving it to the left of the current position
prevents the object from triggering, and moving it to the right sets it up to trigger at the new position. Repeatedly
moving the object to the right will cause it to appear multiple times. Because only the trigger point at the left side
of the object matters, changing the position in the middle of the object's image has no effect and the object will
continue to shift out at the same position.
The player/missile shift registers are constantly running, even across horizontal and vertical blank. This means
Chapter 6 - CTIA/GTIA 105

Altirra Hardware Reference Manual Created by Avery Lee
that unlike with the 2600's TIA, positioning a player partially off-screen horizontally will show a partial object
within the display region and not wrap the image within it. It is possible, however, for overlap and lockup effects
to be carried over from vertical blank into the display of the next frame.
Overlapping object images
When the horizontal comparator matches, the shift register is reloaded with the contents of the graphics data
register. This is done by ORing the latch data into the shift register. Ordinarily the shift register will have long
emptied and therefore the shift register contents afterward will be that of the data register. However, if the image
has not yet completed shifted out, some of the old bits from the previous image will still be in the register and
combined with the new image.
Shift state machine
The timing of the shift register is controlled by a two-bit state machine whose operation is directed by the object's
size setting. This state machine effectively counts off the color clocks for each bit in the sprite image, starting at
%00 and going up to %11 for a quadruple width register. A shift register occurs each time the state machine
transitions to the %00 state, which is forced whenever the shift register is reloaded. The operation of this state
machine can be expressed simply:
state' = (state + 1) AND size
Thus, for normal width (%00) the shifter stays in %00 state and shifts out at a rate of one color clock per bit,
whereas with quadruple width (%11) the shifter counts from %00 to %11 and shifts at out four color clocks per
bit.
Chapter 6 - CTIA/GTIA 106

Altirra Hardware Reference Manual Created by Avery Lee
Mid-image size changes
Changing the size of an object causes its shift register to immediately begin shifting with the new width, but using
the existing shift state. For the most part, this causes the shift register to finish shifting out its current pixel at the
new width, but this leads to some strange patterns when switching to and from double width. Table 11 shows the
effects of various size changes.
Shift register lockup anomaly
The size code %10 produces a normal width sprite similarly to the %00 code. However, the state machine acts
slightly differently than the %10 mode in that it has a lockup state not present with %00. Specifically, switching an
object to the %10 mode when it is in double or quadruple width and in the %01 or %10 state results in the shift
register getting stuck in the %10 state and continuously outputting the same bit. These cases are shown in red in
Table 11. This condition persists as long as the size is not changed again and object is not retriggered, even
across horizontal and vertical blank into the next frame. Typically this does not cause problems unless the size is
changed in the middle of an image, as otherwise the shift register will have emptied out anyway.
Chapter 6 - CTIA/GTIA 107
Original
size
New size Pixels before size change Pixels after size change
1x 2x 00 00 00 00 01 00 01 00
1x 4x 00 00 00 00 01 10 11 00
2x 1x 01 00 01 00 00 00 00 00
00 01 00 01 00 00 00 00
2x 4x 01 00 01 00 01 10 11 00
00 01 00 01 10 11 00 01
4x 1x 01 10 11 00 00 00 00 00
10 11 00 01 00 00 00 00
11 00 01 10 00 00 00 00
00 01 10 11 00 00 00 00
4x 2x 01 10 11 00 01 00 01 00
10 11 00 01 00 01 00 01
11 00 01 10 01 00 01 00
00 01 10 11 00 01 00 01
2x 1x* 01 00 01 10 10 10 10 10
00 01 00 00 00 00 00 00
4x 1x* 01 10 11 00 00 00 00 00
10 11 00 01 10 10 10 10
11 00 01 10 10 10 10 10
00 01 10 11 00 00 00 00
Table 11: Results of various size changes in the middle of a player image

Altirra Hardware Reference Manual Created by Avery Lee
6.4 Collision detection
GTIA has 60 collision bits to indicate when players, missiles, and the playfield collide. This permits fast collision
detection at pixel-exact level without the need for the CPU to do expensive bounding box or image comparison
checks.
Collision detection mechanism
A collision is flagged between two objects when both objects are active at the same time during display. This
means that a collision is not detected until the display logic actually processes the collision location on-screen,
and the CPU must wait until the end of a frame or at least past the point of object display in order for collisions to
be reliably detected.
Color registers do not play a part in collision detection – the collision logic can distinguish between two objects of
the same color. This is sometimes used to establish hidden collision objects for gameplay purposes, such as an
invisible wall or a trigger. The collision logic can also see collisions between two objects even if a third object is
displayed on top. Collisions are reported for all pairs of colliding objects, so if three players overlap, six collisions
are reported: P0P1, P0P2, P1P0, P1P2, P2P0, P2P1.
Playfield collisions
For collision detection purposes, the non-background playfield colors are each separate entities that can register
collisions with players and missiles. 32 collision bits in eight registers, P0PF-P3PF and M0PF-M3PF, are devoted
to registering P/M collisions against PF0-PF3. No collisions are detected against the background.
In high resolution mode (ANTIC modes 2, 3, and F), the areas corresponding to a 1 bit in the graphics data are
considered to be PF2 for collision purposes. Each pair of high-resolution pixels is combined and a collision is
detected if either pixel is set where a sprite is present. No collisions are registered against areas with a 0 bit
even though those are displayed as non-background color.
No playfield collisions are detected in GTIA modes 9 and 11. In GTIA mode 10, a playfield collision will register
whenever pixels using PF0-PF3 codes are present. No P/M collisions are reported for playfield pixels that use
P/M color codes in a GTIA mode 10 screen.
Player/missile collisions
Twelve collision bits report collisions between players. A collision between player X and player Y sets two bits,
one for player X in the PyPL register and another for player Y in the PxPL register. A player never registers a
collision with itself and the self-collision bit for a player is always 0.
Sixteen collision bits in registers M0PL-M3PL report collisions between players and missiles. Each register
indicates collisions between all four players against each missile.
There is no support for collision detection between missiles.
Horizontal and vertical blank
P/M collisions are only registered during the visible portions of the screen refresh and are ignored during
horizontal and vertical blank. This means that only the portions of objects at horizontal positions 34-221 ($22-
$DD) and in scan lines 8-247 ($08-$F7) can trigger collisions.
An object that is so far left or right that it is in partially in horizontal blank can still register collisions in the part
that is in the visible region.
Note that if ANTIC fails to activate vertical blank due to having hi-res active on scan line 247, GTIA will process
P/M graphics and can report collisions in scan lines in the 248-7 range when the playfield is enabled.
Chapter 6 - CTIA/GTIA 108

Altirra Hardware Reference Manual Created by Avery Lee
Resetting collision latches
The collision detection bits are latches and will stay set once a collision has been detected. Writing to HITCLR
resets all collision latches to zero.
6.5 Priority control
Playfield/object priority
The GTIA uses a priority scheme to determine which objects to display when multiple objects overlap. Bits 0-3 of
PRIOR control the relative priority between player/missiles and the playfields. The four official modes are as
follows30:
PRIOR[3:0] 1000 0100 0010 0001
Top PF0 PF0 P0 P0
PF1 PF1 P1 P1
P0 PF2 PF0 P2
P1 PF3 PF1 P3
P2 P0 PF2 PF0
P3 P1 PF3 PF1
PF2 P2 P2 PF2
PF3 P3 P3 PF3
Bottom BAK BAK BAK BAK
Note that the official hardware manual lists the fifth player (P5) as having the same priority as PF3. This is only
partially true, as P5 actually assumes the priority of the highest priority playfield; more on this later.
The exact logic used by GTIA for resolving playfield and player/missile priorities is as follows:
PRI01 = PRI0 + PRI1
PRI12 = PRI1 + PRI2
PRI23 = PRI2 + PRI3
PRI03 = PRI0 + PRI3
SP0 = P0 * /(PF01*PRI23) * /(PRI2*PF23)
SP1 = P1 * /(PF01*PRI23) * /(PRI2*PF23) * (/P0 + MULTI)
SP2 = P2 * /P01 * /(PF23*PRI12) * /(PF01*/PRI0)
SP3 = P3 * /P01 * /(PF23*PRI12) * /(PF01*/PRI0) * (/P2 + MULTI)
SF0 = PF0 * /(P23*PRI0) * /(P01*PRI01) * /SF3
SF1 = PF1 * /(P23*PRI0) * /(P01*PRI01) * /SF3
SF2 = PF2 * /(P23*PRI03) * /(P01*/PRI2) * /SF3
SF3 = PF3 * /(P23*PRI03) * /(P01*/PRI2)
SB = /P01 * /P23 * /PF01 * /PF23
In this form, the priority bits enable specific signals that cause elements to suppress lower priority elements.
Priority mode 0
Clearing all four priority bits PRIOR[3:0] causes the all of the cross-disable signals in the priority logic to turn off,
enabling some combinations to mix. The reduced logic for this mode is as follows:
SP0 = P0
SP1 = P1 * (/P0 + MULTI)
[30] Hardware III.8
Chapter 6 - CTIA/GTIA 109

Altirra Hardware Reference Manual Created by Avery Lee
SP2 = P2 * /P01 * /PF01
SP3 = P3 * /P01 * /PF01 * (/P2 + MULTI)
SF0 = PF0 * /SF3
SF1 = PF1 * /SF3
SF2 = PF2 * /P01
SF3 = PF3 * /P01
The effect is to allow playfields 0 and 1 to mix with players 0 and 1, and playfields 2 and 3 to mix with players 2
and 3. The result of two colors mixing is the bitwise OR of their color register contents. PF0/PF1/P0/P1 still have
priority over PF2/PF3/P2/P3.
Conflicting priority bits
If more than one priority bit is set, then the more of the cross-disable signals are activated than usual, and the
result is that the priority logic turns off outputs more often. This leads to cases where no signals are output,
including the background, and the output is black (color $00).
Active layers PRIOR[3:0] bits
0011 0101 0110 0111 1001 1010 1011 1100 1101 1110 1111
PF01+P01 P01 black black black black black black PF01 black black black
PF01+P23 P23 P23 PF01 P23 P23 PF01 P23 PF01 P23 PF01 P23
PF01+P01+P23 P01 black black black black black black PF01 black black black
PF23+P01 P01 PF23 PF23 PF23 P01 P01 P01 PF23 PF23 PF23 PF23
PF23+P23 black black PF23 black P23 black black black black black black
PF23+P01+P23 P01 black PF23 black P01 P01 P01 black black black black
P5+P01 P01 P5 P5 P5 P01 P01 P01 P5 P5 P5 P5
P5+P23 black P23 P5 black P23 black black P23 black black black
P5+P01+P23 P01 black P5 black P01 P01 P01 P01 black black black
P5+PF01+P01 P01 P5 P5 P5 black black black P5 P5 P5 P5
P5+PF01+P23 black black P5 black P23 black black black black black black
P5+PF01+P01+P23 P01 black P5 black black black black black black black black
P5+PF23+P01 P01 P5 P5 P5 P01 P01 P01 P5 P5 P5 P5
P5+PF23+P23 black black P5 black P23 black black black black black black
P5+PF23+P01+P23 P01 black P5 black P01 P01 P01 black black black black
Table 12: Priority logic outputs for unusual priority modes
In the above table, P01 is player 0 or 1, P23 is player 2 or 3, PF01 is playfield 0 or 1, PF23 is playfield 2 or 3,
and P5 is the fifth player (missiles). If fifth player mode is disabled, P01 and P23 also include the missiles.
All conflicts that produce black are the result of combinations involving players and playfield, where the fifth
player counts as PF3. Combinations between players alone or playfields and the fifth player are always resolved
and never produce black.
Fifth player enable
PRIOR bit 4 changes the layer of all four missiles to that of playfield 3 (PF3), thus allowing them to be used as a
fifth player. No other change to the missiles occurs – the missiles retain independent positions and sizes, and in
Chapter 6 - CTIA/GTIA 110

Altirra Hardware Reference Manual Created by Avery Lee
order to be used as a “fifth player” they must be moved together manually. This means, however, that it is
possible to take advantage of just the color change and still position the missiles in different places on screen.
Enabling fifth player mode also switches the priority of the missiles to that of playfield 3, except that it always
wins against all other playfields. This leads to a contradiction in the priority mode set by PRIOR[3:0] = %1000,
where the playfields are split by players in priority order. In this configuration, PF0-PF1 should cover P0-P3,
which should in turn cover PF2-PF3. However, because PF3 actually overrides PF0-PF2 in order to
accommodate the fifth player, this leads to the odd result that when all of the following are active:
·Either PF0 or PF1
·At least one of P0-P3
·The fifth player
...PF3 actually shows up from the fifth player in this case, because PF0/PF1 overrides the players, and then PF3
overrides PF0/PF1. However, if PF0/PF1 is taken away, then P0-P3 show up instead.
Enabling the fifth player does not affect collisions in any way. Even though it changes all missiles to use the PF3
color, each individual missile still registers collisions against playfields and players as usual, and no extra PF3
collisions result.
The fifth player has odd interactions with the 16 luma and 16 color modes. The logic that prevents the playfield
values from being impressed onto the players only checks the inputs that contribute to player colors. The fifth
player bypasses this such that when it is active in these modes, the result is the PF3 color impressed with the
luminance or color specified by the playfield.
Multiple color player enable
By setting PRIOR bit 5, it is possible to blend players together in order to produce additional colors. The pairs
that blend are P0+P1, P2+P3, M0+M1, and M2+M3. This works simply by disabling the priority logic between
these pairs, thus allowing both colors to contribute to the output. The resultant color is the bitwise OR of the color
registers involved.
Multiple color mode has no effect on collision detection.
6.6 High resolution mode (ANTIC modes 2, 3, and F)
At the beginning of horizontal blank, ANTIC signals to the GTIA whether high resolution mode is enabled. This
mode is enabled for ANTIC modes 2, 3 and F and specifies whether the low two bits of playfield data for each
color clock is to be interpreted as individual bits for high resolution mode. This produces pixels at each half color
clock, or 320 pixels across for normal playfield width. However, as much of the logic in GTIA operates at color
clock rate, this necessitates some logic bypassing and thus some unusual behavior.
When high resolution mode is active, the priority logic always sees PF2, and that is the color that is used unless
that playfield is overlapped by players. The high resolution data bypasses the priority logic and conditionally
impresses only the luminance from PF1 onto the output. This takes place regardless of whatever color register is
used, so the change in luminance occurs on top of anything, including players, missiles, and the fifth player. The
collision logic, however, sees a modified PF2C output that is the OR of the two pixels in each color clock, thus
registering collisions against PF2 as expected.
Pseudo ANTIC mode E
High resolution mode is forced off whenever any of the GTIA special modes are active, thus preventing the PF1
luminance substitution or PF2C collision from interfering. This leads to a quirk of the GTIA whenever PRIOR[7:6]
are set in the middle of a scan line. The high resolution flip-flop can only be set at horizontal blank, but it resets
any time PRIOR[7:6] is activated and stays off for the rest of the scan line even if those bits are reset to 00.
Chapter 6 - CTIA/GTIA 111

Altirra Hardware Reference Manual Created by Avery Lee
When this happens, ANTIC continues to encode data in high resolution mode while GTIA starts interpreting it as
low-resolution data. Due to the differences in ANx bus encoding, this causes ANTIC mode F to revert to a
pseudo mode E, where the bit pairs 00-11 encode PF0-PF3 instead of BAK + PF0-PF2.
6.7 GTIA special modes
Setting the top two bits of PRIOR to something other than 00 enables one of the three special GTIA modes.
These three modes have several features in common:
•Each pixel is elongated to occupy two color clocks, giving a resolution across of 80 pixels at normal
playfield width.
•The GTIA modes only work properly with the hi-res ANTIC modes 2, 3, and F.
•They allow access to more simultaneous colors per scan line than any other documented modes.
These modes only work with a GTIA chip. On rare older devices with a CTIA, the top two bits of PRIOR are
ignored.
Mode 9 (16 luminances in one color) (PRIOR[7:6] = 01)
Setting PRIOR[7:6] = 01 produces a playfield with a single color, but using sixteen luminance values. As this
occurs by bypassing the color registers, this is the only mode in which the lowest luminance bit can be set and
therefore 256 distinct color values produced instead of the usual 128. The color of the playfield comes from the
background color register.
For priority purposes, the mode 9 playfield is essentially background. No playfield collisions register, and P/M
graphics always have priority over the playfield. The playfield drops out in the presence of any player, even for
priority conflicts that produce black.
Missiles also have priority over the playfield like players, unless fifth player mode is enabled. When the fifth
player is enabled, however, it will mix with the playfield. The result is the color of PF3 combined with the
luminance of the playfield.
Mode 11 (16 colors in one luminance) (PRIOR[7:6] = 11)
With PRIOR[7:6] = 11, the playfield is instead a single luminance, but with any of all 16 colors specified by the
playfield data. The luminance comes from the background color register, with the exception of pixel value
%0000, which is always forced to black.
Mode 11 playfields interact with P/M graphics similarly as with mode 9. When the fifth player overlaps the
playfield, the result is as if the background color is replaced with PF3: PF3's luminance with the playfield's color,
except if the playfield is %0000 in which case the result is black.
Mode 10 (9 color mode) (PRIOR[7:6] = 10)
The nine color mode, activated by PRIOR[7:6] = 10, is more unusual than the other two special modes. All of the
colors come from the color registers, giving more color flexibility, and causing more interaction with the priority
and collision logic.
The four bit pixel values activate color registers as follows:
·0000-0011: P0-P3
·x100-x111: PF0-PF3
·10xx: Background
For priority purposes, the pixel values which correspond to player colors act as though that player/missile were
Chapter 6 - CTIA/GTIA 112

Altirra Hardware Reference Manual Created by Avery Lee
active and are thus modified by the priority settings in PRIOR[0:3]. They do not, however, activate player
collisions. The nine color mode, however, is able to activate playfield collisions via the PF0-PF3 codes.
The nine color mode is delayed by one color clock (one half pixel) and thus appears shifted slightly right relative
to all other modes.
Border regions are rendered with a code of 0000 or player 0. This means that players and missiles 1-3 will
generally be hidden in borders except for when multicolor P/M or fifth player mode allows them to overcome
player in priority.
This mode has a quirk when driven with a low-resolution ANTIC display mode that does not occur with the 16
color/luminance modes. Ordinarily, the BAK and PF0 signals from ANTIC produce the same result as they both
send 00 over the AN0 and AN1 lines. However, in the 9 color mode, the BAK signal mutes the playfield signals
for the entire two color clock pixel when sent as the second half. This leads the a 9 color mode anomaly where
the four bit combination 1000 in ANTIC mode E results in the background color rather than the PF0 color that the
resultant 0100 pixel would normally indicate.
Horizontally scrolling GTIA modes
GTIA modes can be horizontally scrolled like any other mode, with the extra provision that only even values of
HSCROL will work properly. This is because GTIA is unaware of ANTIC's horizontal scroll offset when it groups
bit pairs to form 4-bit pixels. Odd values of HSCROL will produce a valid display but mix the low two bits of one
pixel with the high two of bits of the next pixel to form new pixels instead of shifting the pixels, the same as if the
bitmap data were shifted by two bits. The fat pixels in GTIA modes cannot be horizontally shifted by finer than
two color clock precision by normal means.31
Mixing GTIA modes with low resolution modes
As previously noted, the GTIA modes only work properly with the high resolution modes 2, 3, and F. The reason
for this has to do with the encoding of the data on the AN0-2 bus between ANTIC and GTIA. While the highest
bandwidth modes have a raw data rate of two bits per color clock, the ANx bus actually has a bandwidth of three
bits per color clock, with ANTIC doing additional encoding of the data based on the display mode. The difference
in encoding between low-resolution and high-resolution modes prevents the GTIA modes from fully working
when ANTIC is set to a low-resolution mode.
The AN0-2 bus encodings are given in Table 13.32
Encoding Lores Hires
000 Background
001 Vertical sync
010 Horizontal blank and switch to lores
011 Horizontal blank and switch to hires
100 PF0 %00 pixel pair
101 PF1 %01 pixel pair
110 PF2 %10 pixel pair
111 PF3 %11 pixel pair
Table 13: ANx bus encodings
[31] It has been reported that certain GTIA chips can shift mode 10 by a color clock when running warm, but this is neither
reliable nor program controllable.
[32] [AHS99a] p. 7
Chapter 6 - CTIA/GTIA 113

Altirra Hardware Reference Manual Created by Avery Lee
In low resolution modes, one pixel is sent per color clock, and in high resolution modes, two pixels are sent per
color clock. ANTIC signals the lores/hires state of the next scan line during horizontal blank and this then
determines GTIA's interpretation of the %100-%111 codes.
Normally, the GTIA modes are used with ANTIC high resolution modes, in which the raw bitmap data is sent on
AN0-1 two bits at a time. GTIA groups two pairs of bits at a time to form 4-bit pixels, which are then interpreted
according to the GTIA mode. The high order bit AN2 is ignored, so the background encoding is not distinguished
from a PF0 or %00 bit pair encoding and the border works differently in GTIA modes.
In low resolution modes, the mapping from pixels to ANx encodings is not straightforward and causes problems
with GTIA modes. In particular, most four-color modes map BAK and PF0-PF2 instead of PF0-PF3. This makes
the available AN0-1 encodings %00, %00, %01, and %10, with %11 not represented. The result is that
attempting to use mode E, for instance, results in only 9 of the 16 pixel values being available with %11xx and
%xx11 patterns being unattainable. ANTIC modes 4-7 can send the PF3 encoding, but are relatively inflexible in
doing so.
6.8 Cycle timing
The following sections all assume that a write has taken place on cycle 65 of a scan line. In a normal width mode
E line, this would be immediately before ANTIC reads data for positions $8C-$8F.
Color register changes
A write to a color register takes place one color clock later, so a write to COLPM0 at cycle 65 shows up on
screen at $81.
P/M priority changes
A write to PRIOR bits 0-3 or 5 takes place two color clocks later, so a write at cycle 65 shows up on screen at
$82.
The fifth player bit (PRIOR bit 4) normally also takes place two color clocks later at $82. However, on some
systems this circuit is temperature sensitive and shows a one-cycle artifact until $83 when the system has
warmed up.
P/M graphics changes
A write to a player/missile graphics register only takes effect when the sprite retriggers and its shift register is
reloaded. The delay for this is three color clocks. A write to GRAFP0 at cycle 65 would only take effect for player
0 at $83 or later.
P/M position/size changes
A write to a player/missile position or size register must take place five color clocks in advance to take effect.
This means that a write on cycle 65 can prevent display of a player at or right of $85, and reposition it to $85 or
farther. Effectively, both the old and the new player image are clipped on the left side of $85.
Changes to the size register will take effect immediately, with the remaining bits in the shift register shifting out at
the new width. However, due to the design of the stretching circuitry, switching between double and quadruple
width is slightly erratic, with the double-to-quadruple change showing a slightly uneven relation and the
quadruple-to-double change being slightly non-monotonic. Changes to and from normal width are always well
behaved.
Chapter 6 - CTIA/GTIA 114

Altirra Hardware Reference Manual Created by Avery Lee
GTIA mode changes
A change to bits 6-7 of PRIOR takes place between 3-5 color clocks after the write, primarily after 4 color clocks
with a possible cycle of artifact on each side. For a write on cycle 65, the change takes place at positions $83-
$85. The nature of the artifact on-screen depends on the exact transition:
·Mode 8 to mode 9/11: Clean transition after 4 color clocks.
·Mode 8 to mode 10: Clean transition after 3 color clocks.
·Mode 9/11 to mode 8: 1-2 color clock transition after 3 color clocks. At $83, the mode 9/11 pixel is cut in
half and the playfield is absent, showing background color if there are no players or missiles. Pseudo
mode E display begins at $84, but the data from $83 is displayed instead. (Presumably this is an artifact
of timing sensitivity in disabling the mode 10 delay line.)
·Mode 10 to mode 8: One color clock transition after 4 color clocks.
Machine-specific Behavior Warning
On some systems, the artifact at $84 does not occur when switching from mode 9/11 to mode 8.
6.9 General purpose I/O
Console switches
The CONSOL register controls and senses the state of four uncommitted I/O lines, each of which can be used in
either read or write mode. Setting bits 0-3 to 1 causes the corresponding line to be pulled down and to read as a
0; clearing a bit allows the line to be read normally. On the Atari, bit 3 is connected to the console speaker and
bits 0-2 are connected to the Start, Select, and Option bits, respectively.
Trigger inputs
TRIG0-3 report the state of the trigger input lines. Bit 1-7 are always 0, while bit 0 reads 1 for an inactive trigger
and 0 for an active trigger. These are normally connected to joystick triggers. On the XL/XE, TRIG2 is hardwired
inactive while TRIG3 indicates cartridge mapping state, bit 0 = 1 for cartridge ROM present. The XEGS also
maps TRIG2 to a keyboard presence line, bit 0 = 1 for keyboard present.
Trigger latching can be enabled by setting bit 2 of GRACTL. This causes the trigger registers to latch so that they
continue to register activation even after a trigger is released, allowing trigger activation to be detected at any
time regardless of how often the TRIG0-3 registers are polled. Latching can only be enabled for all triggers at the
same time, however, so enabling it on an XL/XE machine will also affect cartridge map sensing.
The SECAM version of the GTIA, the FGTIA, has an additional quirk in that trigger inputs are only sensed at the
beginning of horizontal blank.
Chapter 6 - CTIA/GTIA 115
Changed Timing
Color register $81 (1 cclk)
PRIOR bits 0-3, 5 $82 (2 cclks)
PRIOR bit 4 $82-83 (2-3 cclks)
PRIOR bits 6-7 $83-85 (3-5 cclks)
Player/missile image $83 (3 cclks)
Player/missile position $85 (5 cclks)
Table 14: Timing for mid-screen writes to GTIA registers

Altirra Hardware Reference Manual Created by Avery Lee
6.10 Further reading
The main source for functionality and register level descriptions for the GTIA is the Hardware Manual [ATA82] as
usual, but it only covers CTIA level of functionality. Read the GTIA datasheet [AHS99a] for additional details on
the GTIA modes and on communication between ANTIC and GTIA.
Chapter 6 - CTIA/GTIA 116
Chapter 7
Accessories

Altirra Hardware Reference Manual Created by Avery Lee
7.1 Joystick
The Atari 8-bit computer series uses the same digital joystick used by the 2600 VCS. The direction sensors are
connected to four contiguous bits on the PIA. Ports 1 and 2 use port A, whereas ports 3 and 4 on the 600/800
use port B:
7 0
Port 2/4 Port 1/3
right left down up right left down up
All direction bits are inverted, so these ports register $FF either when no joysticks are attached or all connected
joysticks are centered.
There are generally no circuits to prevent both the left and right or up and down signals from being activated at
the same time. Although it normally does not occur due to the design of the joystick, both opposing signals can
be active at the same time either due to noise or simply due to another type of controller being plugged into the
joystick port.
The joystick button is attached to one of GTIA's TRIGx inputs. The trigger bit is also inverted, reading $00 when
the button is depressed and $01 when released.
7.2 Paddle
Paddle controllers consist of a single rotation knob and a trigger button. Two paddle controllers connect to a
single game controller port, so up to four paddles can be attached to an XL/XE and eight paddles to a 400/800.
Paddle knob
The rotating knob on each paddle sends a signal to the computer that allows it to read the angular position of the
knob with fine accuracy. On a standard CX30 paddle, the angular range of each paddle is about 330º. The
position of the knob is read through the POT0-POT7 registers in POKEY, which have a range of 1-228 ($01-
$E4), where 1 is fully counterclockwise (left) and 228 is fully clockwise (right).
In order to read the paddles, the POTGO register must be written. This resets all counters and begins charging a
capacitor for each paddle through the potentiometer attached to the knob, where the position of the knob
controls the charge rate. Once a capacitor reaches the threshold, the corresponding bit in ALLPOT is set and a
scan line count is latched into the corresponding POTn register. As these counts are latched from a counter
running at scan line rate (15.7KHz), the count isn't actually latched until that number of scan lines has actually
passed. Typically the POTn values are read and then POTGO strobed from the vertical blank interrrupt.
The exact timing and values produced by this process depend on a couple of variables, specifically the voltage
threshold used by POKEY, the resistance range of the potentiometers in the paddles, and the value of the
charging capacitor. The ideal formula relating a paddle position as a fraction of the rotational range and the
voltage threshold is as follows:
scanlines=ln
(
Vcc
Vcc−Vthreshold
)
×( 1−fraction) ×RC×15700
Vcc is 5V, Vthreshold is 1.9-2.6V33, R is 1MΩ for CX30 paddles34, C is 0.047µF, fraction is 0 for full left and 1 for
full right. Values will vary, particularly due to the wide range in threshold voltage, but for a threshold mid-value of
2.25V, this gives a scan line range of 1-441. Since the scan line counter only counts up to 228, this means that
[33] [AHS03] p. 22 (VT+ positive-going threshold voltage)
[34] There is a 1.8KΩ resistor in the computer in series with the potentiometer, but it is small enough in comparison that it
can be ignored.
Chapter 7 - Accessories 118

Altirra Hardware Reference Manual Created by Avery Lee
only about half of the paddle range is used (mid way to full clockwise), the left side returning full 228. The above
formula is linear in fraction and the potentiometer in the CX30 is also linear, so the relationship between angular
position and the POTn values is also linear.
Paddle trigger
Each paddle also has a trigger button associated with it. The paddle trigger is connected to the PIA ports, as with
the joystick direction inputs. The lower of the paddle pairs – corresponding to POT0/2/4/6 – activates the left
direction (bits 2/6) and the higher of the paddle pairs activates the right direction (bits 3/7). As usual, the bits are
inverted and read as 0 when the button is activated.
Fast pot scan mode
POKEY can be configured to read the paddle inputs in two scan lines instead of 228 scan lines by means of
SKCTL bit 2, but this does not work with paddles for a couple of reasons. First, the paddles charge too slowly for
fast pot scan mode. The capacitance, charge rate, and threshold are still the same, so the POTn registers are
simply loaded with a value 114 times as large and the 0-229 value range covers only a tiny rotational range on
the right end.
The second issue is that the POTn registers will not consistently load. Normally, dumping transistors are turned
on momentarily when POTGO is strobed to empty the capacitors so they begin charging up voltage from empty.
These are disabled in fast pot scan mode, and thus the scan can start with capacitors already partially or fully
charged. If the capacitor is partially charged, it will reach threshold sooner and the recorded count will be lower
than expected. If the capacitor is already charged above threshold, the POTn register will not be updated at all.
7.3 Mouse
A computer mouse consists of up to three buttons and a pair of motion detectors. There are two types of mice
that can easily be connected to an 8-bit Atari, Atari ST and Amiga. The two types are similar, with minor
differences in the motion encoding.
The horizontal and vertical axes are encoded using quadrature encoding on pairs of control lines, producing
different cyclical patterns based on the direction of movement, either 00-01-11-10-00 or 00-10-11-01-00. The
pattern repeats indefinitely as long as the mouse is moving and there is no limit to how far the mouse can move.
The quadrature signals are connected to the joystick direction bits and are reflected in the PIA port, although the
wiring differs between the mouse types:
Bit 3/7 Bit 2/6 Bit 1/5 Bit 0/4
Joystick Right Left Down Up
ST mouse YB YA XA XB
Amiga mouse XB YB XA YA
The pattern 0/0, 1/0, 1/1, 0/1 signifies rightward motion for the XA/XB signals and downward motion for the
YA/YB signals.
The quadrature inputs must be sampled at a high rate in order for the mouse to work, as each change must be
detected for motion to be measured properly. For instance, if two changes were to occur between
measurements, i.e. 00 to 11, it would be impossible to determine the direction of motion. For a 100 cpi (counts
per inch) mouse, this requires a minimum sampling rate of 300Hz to support motion up to 3 inches/second, with
higher rates needed for faster motion or higher resolution mice. Checking the mouse from a VBI handler is
therefore unlikely to produce satisfactory results.
There are up to three buttons on a mouse. The left mouse button is connected to the joystick trigger input and
Chapter 7 - Accessories 119

Altirra Hardware Reference Manual Created by Avery Lee
can be read the same way; the right and middle mouse buttons, if present, are connected to the paddle A and B
inputs. Unfortunately, the mouse connects these lines to ground instead of +5V as the paddle does, so the Atari
hardware cannot read them – there is no circuitry hooked up in this configuration to charge the pot capacitors.
7.4 Light Pen/Gun
Light pen and light gun devices sense the electron beam of a cathode ray tube (CRT) monitor to report the
screen position of the device to the computer. They only work with CRTs that do single scan – they do not work
with CRTs that scan at 100/120Hz or with LCDs.
Sensing signal connection
As the light pen or gun senses the passing of the electron beam, it sends a pulse to the computer on the joystick
trigger input on its connected joystick port. On the 400, the device must be connected to port 4, but it may be
connected to any of the available ports on the 800/XL/XE models. Any trigger on any of the wired ports will
register a pen position, including a non-light-sensing device such as a joystick.
Position reporting mechanism
The appropriate trigger lines are connected to the light pen (LP) input on ANTIC, which latches the current
horizontal and vertical position counters into the PENH and PENV registers. This latching only occurs on the
edge when the line is asserted; if the trigger line is held down, such as from a joystick, the latched position will
reflect the time of depression.
The PENH register reports the horizontal position with color clock resolution, from 0-227, while PENV reports
the vertical position with two-line resolution, from 0-130 or 0-155, similar to VCOUNT. Latching is not limited to
the visible area of the screen; ANTIC will record a location in the border or even in the blanking intervals if a
pulse arrives during that time.
PENH and PENV will continue to reflect the last known position if no further trigger pulses arrive. They are not
cleared by vertical blank.
Note that it is possible for the PENH and PENV registers to have any value in 0-255, even those corresponding
to invalid beam positions. In particular, PENV may have the value $FF. This occurs because the pen position
registers are not cleared on a reset and therefore may have arbitrary contents on power-up.
On-screen detection
There is no direct way to sense if a light-sensing device is aimed at the screen. However, since the timing signal
is connected to the trigger inputs, it is possible to read the TRIG0-3 registers on GTIA to determine this, since an
off-screen device will not send pulses. Typically bit 2 of GRACTL is set to enable latching on the trigger inputs,
making it easier to detect the quick pulse from a VBI routine.
7.5 CX-85 Numerical Keypad
The Atari CX-85 Numerical Keypad is a 17 key pad that attaches via the joystick port. It sends six signals
through the joystick direction, trigger, and paddle B lines. The corresponding four bits in PORTA are set for each
key as follows:
Chapter 7 - Accessories 120

Altirra Hardware Reference Manual Created by Avery Lee
ESCAPE
1100
7
0101
8
0110
9
0111
-
1111
NO
0100
4
0001
5
0010
6
0011
+/ENTER
1110
DELETE
0000
1
1001
2
1010
3
1011
YES
1000
0
1100
.
1101
Table 15: CX-85 keypad to PORTA bit pattern mapping
The paddle B input (POT1/3/5/7) is used to distinguish the ESCAPE key from the 0 key, which both share the
1100 encoding. When ESCAPE is pressed, the paddle line is negated and the POTx register reads 228; for any
other key it is asserted and POTx reads 1.
The trigger is asserted (0) as long as any key is pressed; when this happens, the joystick direction bits in PORTA
and the pot line indicate the key that was pressed. The PORTA and POTx values will persist after the key is
released, or even if other keys are pressed while the first key is held down. If the first key is then released, the
keypad may begin reporting one of the other keys that are still pressed, although this is not always the case.
7.6 CX-20 Driving Controller
The CX-20 Driving Controller is similar to a paddle controller except there is only one connected per port, the
rotary knob can be rotated indefinitely in either direction, and the resolution is much lower.
The trigger of the driving controller is connected the same way as a joystick trigger and is reflected in TRIG0-3.
Rotations are transmitted over the up/down joystick lines as a two-bit Gray code which changes once for every
sixteenth of a rotation and cycles every quarter rotation. For a left rotation, the bits 1/0 or 5/4 in PORTA/PORTB
step 00-01-11-10-00, and for a right rotation, they step 00-10-11-01-00. This is similar to the X axis of an ST
mouse, but at a much lower rate.
7.7 CX-21/23/50 Keyboard Controller
The CX-21, CX-23, and CX-50 keyboard controllers have different physical shapes but the same key layout and
signal interface. They connect a four row, three column keypad to a joystick port using a combination of the
joystick and paddle lines.
Signals
The four rows of the keyboard matrix are connected to the joystick lines and the three columns are connected to
the paddle and trigger lines:
123Up
456Down
789Left
* 0 # Right
Paddle B Paddle A Trigger
Table 16: Keyboard Controller key matrix
To read the matrix, the four joystick direction signals are configured as outputs and brought low one at a time.
The two paddle inputs and trigger are then read to sense the columns. The trigger input will be sensed as a 1 if
Chapter 7 - Accessories 121

Altirra Hardware Reference Manual Created by Avery Lee
its column is inactive and 0 if it is active; paddle inputs will tend to read ~1-2 for inactive and ~228 for active.
Fast pot scan mode
Unlike paddles, which only pull up the paddle lines, the keyboard controller also grounds them. This means that
fast pot scan mode can be directly used with the Keyboard Controller without having to discharge the capacitors
with slow scan. After enabling fast scan, the paddle inputs can be read directly by strobing POTGO and then
reading ALLPOT within 228 cycles. This permits reading the Keyboard Controller much faster than once every 3-
4 frames.
The POT0-7 registers are still not valid in this configuration by default since they do not update if the capacitors
are already above charging threshold when the scan starts. They will read $E5 if a column is activated, but may
retain their previous value otherwise. This limitation can be avoided by strobing POTGO in slow scan and then
dynamically switching to fast scan, but this is inferior to using ALLPOT.
Multiple key presses
As is usually the case for a keyboard matrix without diodes, pressing multiple keys on a Keyboard Controller can
cause phantom keys to appear in the matrix. Two keys can always be resolved independently without phantoms;
three or more will cause phantoms if they occupy a shared row and column. For instance, pressing 1, 2, and 4 is
indistinguishable from also having 5 pressed.
Pressing multiple keys also has the effect of reducing the paddle position values reported by POKEY in the
POT0-7 registers for non-activated keys. The effect is hardly noticeable in normal pot scan mode where the
counts drop from 2-3 to 1-2, but is more noticeable in fast pot mode where readings can decline from around
$B0 to as low as $60. This occurs because depressed keys on inactive rows supply additional current from high
row lines to the paddle inputs on active rows through the column lines. This will occur independently for each
column unless the columns are connected by two keys depressed on both paddle columns of the same row.
7.8 XEP80 Interface Module
The XEP80 Interface Module is a device that plugs into joystick port 1 or 2 and provides a separate 80-column,
monochrome text display. It also has limited graphics capability.
Communication protocol
Data is transferred to and from the XEP80 via a serial protocol at a baud rate of 15.625KHz. This is designed to
be close to the horizontal scan rate of 15.7KHz on the host computer. Communication from the host to the
XEP80 is by means of the joystick up line (bit 0 or 4 of PORTA/B) and communication from the XEP80 to the
host is via the joystick down line (bit 1 or 5 of PORTA/B).
The data format is one start bit, followed by nine data bits starting with the LSB, and ending with one stop bit.
Bytes sent with bit 8=0 are characters to print, while bytes sent with bit 8=1 are commands.
When sending data back to the host, the XEP80 actually uses two stop bits, giving the host one bit cell of time
between the bytes.
Cursor updates
Whenever a character is read or written, the XEP80 sends back update bytes to tell the computer that the
operation has completed and the new location of the cursor. All cursor update bytes have bit 8 set. The cursor
update consists of one to three bytes of the following types:
·$100-150: New horizontal position, with no following vertical position byte.
·$180-1D0: New horizontal position, to be followed by a new vertical position byte.
Chapter 7 - Accessories 122

Altirra Hardware Reference Manual Created by Avery Lee
·$1E0-1FF: New vertical position.
The horizontal position update only indicates positions 0-80, with 80 being returned for any positions to the right
of that. A horizontal position query command must be issued to retrieve the true horizontal position beyond
column 80.
If the cursor doesn't change, such as if an escape sequence is started ($1B), a dummy horizontal update is sent.
Burst mode
The XEP80 can be placed into a burst mode where cursor updates are suppressed for faster text output.
Instead, the XEP80 simply pulls its output low while it is busy and raises it when it is done. This avoids the delay
of waiting for the cursor update bytes, at the cost of the computer needing to manually query the cursor position
when needed.
There is a short delay between when the XEP80 receives a character and when it can assert the busy output. As
a result, the host must wait 90µs before checking busy state.35 This is about 160 machine cycles.
Burst mode is automatically activated in pixel graphics or printer mode.
Left and right margins
During put or get character operations, the cursor is constrained to be within the left and right margins,
inclusively. Whenever the cursor advances beyond the right margin, it is moved to the left margin on the next
line. By default, the left and right margins are set to columns 0 and 79.
Note that while the cursor is restricted to within the margins, vertical scroll operations always move entire rows
including text outside of the margins. Line clear operations, on the other hand, clear 80 columns starting at the
scroll position.
Logical lines
The first 24 lines of the screen are organized as a series of logical lines, where each logical line contains one or
more contiguous physical lines. Physical lines are grouped into a logical line when characters are printed past
the right margin at the end of a logical line.
There are two differences between the logical line handling in the XL/XE OS's screen editor and the XEP80.
First, the OS screen editor allows logical lines to contain a maximum of three physical lines (120 characters),
while there is no limit in the XEP80 and the entire screen can be one big logical line. Second, instead of using an
external bitfield to track logical line boundaries, the XEP80 tracks logical line groupings by means of EOLs in the
frame buffer. The end of a logical line is marked by an EOL at the right margin column.
End of line anomaly
Because of the use of EOLs in the frame buffer to track logical lines, the XEP80 can track spaces at the end of a
logical line, unlike the standard E: driver. Compounding this issue is that the standard XEP80 E: handler will
return these spaces and the XEP80 firmware will replace EOLs with spaces when moving the cursor for the
move right ($1F), backspace ($7A), and tab ($7F) special characters. This can result in unwanted effects like
splicing a large number of spaces at the end of a DATA statement in a BASIC program. EOLs cannot be
reinserted into a logical line, so this can only be fixed by deleting spaces and shortening the line.
Status row
The 25th row (row 24) is special as it is the status row, for which much functionality is disabled. When the cursor
is in the status row, only the escape and clear special characters are processed and all other characters are
[35] [ATA87] p.11
Chapter 7 - Accessories 123

Altirra Hardware Reference Manual Created by Avery Lee
printed. Advancing past the right margin wraps back to the left margin within the status row.36
Video timing
The XEP80 is notorious for extreme amounts of overscan in text mode that can make the outer portions of the
display invisible to the user. The primary reason for this is the use of a 10 row character cell with 25 character
rows, giving 250 active display scan lines out of 262 total in a non-interlaced NTSC display. This exceeds the
243 scan lines per field normally used for a fully overscanned display and far exceeds the approximately 192
scan line region typically considered title-safe, making the top and bottom rows of the screen hard to see on
regularly adjusted displays. The situation is not much better in PAL, where the character cell height is increased
to 12 rows, giving 300 active scan lines.
Another issue with the XEP80's video output is that it is significantly out of spec. The horizontal scan rate is
16.3KHz in 60Hz text mode and 16.1KHz in 60Hz graphics mode. The number of scan lines is also off, with the
XEP80 producing 272 scan lines in 60Hz text, 269 scan lines in 60Hz graphics, 327 scan lines in 50Hz text, 323
scan lines in 50Hz graphics. The vertical scan rate is generally much better, but the poor horizontal scan rate
and incorrect scan line count prevent some modern TVs from locking onto the XEP80's display and will show a
vertically rolling picture. It is possible to reprogram the XEP80 for closer 60Hz timings at least by use of
undocumented commands (50Hz timings are more awkward given the NS405's limitations).
Video memory layout
8KB of video memory is present in the XEP80 for text, graphics, and auxiliary data. In text mode, this is
organized as 25 rows of 256 bytes each for easy addressing, from $0000-19FF. This allows for horizontally
scrolling the 80x25 display window over a 256x25 virtual text screen. While each row is contiguous, the XEP80
will display them out of order as scrolling is performed by swapping display row pointers rather than moving data
in memory.
In addition to the text display, video memory is also used for tracking tab stops and queued print data. Memory at
$1A00-1AFF contains flags for tab stops at each column, and $1B00-1FFF is used for the print buffer.
Internal memory layout
64 bytes of internal memory are also contained within the NS405 processor and contain working registers, the
stack, and variables. These bytes are normally managed for internal use by the XEP80, but may be written using
command $E5.
Of the internal memory locations, the most interesting are addresses $20-38, which contain the high byte of the
starting address for each display row. Bits 0-4 are used for memory addressing, while bit 5 selects one of the two
ATASCII character sets in the external character ROM and bit 6 bypasses the external character ROM entirely
for pixel graphics or the internal character set. The row pointers are only reinitialized by power-on or a master
reset ($C2) command; afterward they are swapped around as needed during scroll and insert/delete operations.
Character display attributes
Two attribute latch registers determine the display characteristics of characters on screen. Attribute latch 0 is
used when character data bit 7 = 0 while attribute latch 1 is used when character data bit 7 = 1. This mostly
corresponds to characters $00-7F and $80-FF, except when the ATASCII character sets are enabled in which
case $9B (EOL) also uses attribute latch 0.37 Normally both attribute latches are set to $FF, which disables all
[36] [ATA87] p.5 has a warning about a lockup if the cursor is moved to the status row while BASIC is at its READY prompt.
This is an issue with the handler software – it tries to read characters until it finds an EOL, and due to the special
behavior in the status row, it can end up looping infinitely.
[37] This bizarre EOL anomaly is due to the way external character sets are implemented in the NS405: attribute latch
selection is based on bit 7 of the data coming into the NS405, and when the ATASCII character sets are enabled this
actually comes from bit 7 of the character data and not the character name. The external character ROM is set up to
emit bit 7 = 0 for $00-7F and $9B and bit 7 = 1 for $80-9A and $9C-FF. When the external character ROM is bypassed,
Chapter 7 - Accessories 124

Altirra Hardware Reference Manual Created by Avery Lee
special attributes.
The attribute registers can be set by means of commands $F4 and $F5, which each set one of the attribute
latches to the value of the last character written. All bits in the attribute byte have inverted behavior such that
they must be set to 0 to enable the feature:
·Bit 0 (Reverse video): Inverts the entire character cell.
·Bit 1 (Half intensity): This bit sets characters to half-intensity. This feature is not hooked up in the
XEP80, so it does nothing.
·Bit 2 (Blink): Causes the character to blink on and off by alternately blanking character data. This
happens at half the cursor blink rate, normally toggling every 32 frames. If reverse video is also enabled
on this character and the reverse video blink field option is set in the VCR (bit 0), the entire character cell
is inverted instead.
·Bit 3 (Double height): Stretches a character vertically to double its normal height. When active, the
blanking function is disabled and bit 6 is repurposed as the character half bit, where 0 selects the lower
half and 1 selects the upper half. Double height mode is only functional with the internal character set or
block graphics and does not work with the ATASCII character sets.
·Bit 4 (Double width): Stretches a character horizontally to double its normal width, covering both the
current and next character cells. The next character and its attribute are ignored.
·Bit 5 (Underline): ORs an underline into the character graphic.
·Bit 6 (Blank): Blanks out all character data.
·Bit 7 (Block graphics): Replaces the character from the character set with block graphics instead,
based on bits 0-6 of the character. This mode only works with the internal graphics set; it produces
garbage with the ATASCII character sets due to the character graphic data being converted to block
graphics instead of the original character.
The order of operations for attributes is block graphics, double width + height, blank + blink, underline, reverse
video blink field, reverse video, and then finally global reverse video.
Character sets
Three character sets are available with the XEP80, two of which correspond to the standard ATASCII and
international ATASCII character sets, while the third is an internal character set within the NS405. The ATASCII
and international ATASCII character sets can be mixed on a line-by-line basis, although this is not normally
exposed and only available by writing directly to internal memory to toggle bit 5 of character row address bytes.
The two ATASCII character sets are both 256 characters in size, with the $80-FF characters being inverted
versions of $00-7F. Thus, $80-FF produce inverted character graphics even though the attribute latches are not
set for reverse video. The exception is the inverted escape or EOL character $9B, which is blanked in both
character sets to keep the EOLs in the framebuffer from showing up.
The internal character set contains only 128 characters and so does not show inverse video unless the attribute
latches are changed. Because it does not contain the hacked-in blank for the EOL character, enabling the
internal character set causes blank areas of the display to show ä instead.
Block graphics
Clearing bit 7 of one of the attribute latches causes the corresponding half of the character set to display block
graphics. This divides the character cell into a 3x3 grid with bits 0-6 of the character set lighting the sub-blocks.
Since there are 9 sub-blocks and only 7 bits, bits 0 and 5 control two sub-blocks each:
the NS405 sees the actual character names and so the split between the latches is the more normal $00-7F / $80-FF.
Chapter 7 - Accessories 125

Altirra Hardware Reference Manual Created by Avery Lee
0 1 0
2 3 4
5 6 5
Table 17: Character bit to block graphics mapping
Block graphics normally only work properly with the internal character set. The reason is that it requires the
NS405 to directly see the original character bytes, and when the ATASCII character sets are enabled those bytes
are translated through the character ROM. The result is that each row of ATASCII character graphics data is
interpreted as block graphics per the layout above, resulting in garbled block graphics. Enabling the internal
character set disables the external character ROM and allows block graphics to work correctly. It can also be
made to work with the ATASCII character sets by writing into internal memory to set bit 6 on character row
address bytes to bypass the external character ROM for those rows.
Pixel graphics
Command $99 switches the XEP80 from text mode to pixel graphics. In pixel graphics mode, all 8K of on-board
memory is dedicated to a 320x200 monochrome display, similar to GRAPHICS 8. The pixel aspect ratio,
however, is much narrower than a GR.8 display, as the pixels are output with a dot clock of 12MHz instead of
7.14MHz. This produces a narrower than square display on NTSC.
In graphics mode, the firmware writes normal bytes received directly to the cursor location, ignoring all normal
special character processing logic. The cursor address is automatically incremented, but not wrapped within the
display, so it cycles through all VRAM including non-displayed memory. Since the NS405 displays bits LSB-first
instead of MSB-first as ANTIC does, the XEP80 firmware reverses the order of bits when writing bytes into
display memory in graphics mode.
Internally, the graphics display is stored in on-board memory as contiguous rows at $0000-1F3F. However, the
external character set ROMs must be bypassed, so the NS405 is set to address $4000-5F3F. If the display
pointers are modified to within $0000-3FFF or $8000-BFFF, the display data will be translated through one of the
ATASCII character generators, using a row height of 10 scan lines. However, due to the bit reversal done during
writes, this requires sending the XEP80 bit reversed ATASCII so that the firmware un-reverses it to the correct
values on write. Also, for some reason, the row counter is incremented after the fifth byte in each scan line
instead of at the end.
The standard cursor positioning commands can be used in graphics mode, but since the text row pointers are
not reinitialized by the command to enter graphics mode, vertical positioning is indeterminate unless a master
reset is issued first. The standard cursor commands also only allow positioning up to $18FF. An alternative is the
undocumented $E2 command, but that requires writing two bytes to the cursor address. One workaround is to
modify BEGD/ENDD/HOME to warp the display around the status row location at $1800-18FF and then use the
$98 command to move the cursor to the status row before issuing commands that require the last character or
extra byte values.
Pixel graphics mode oddities
The cursor is still active in pixel graphics mode, although it is only a single scan line tall. Cursor blinking is
disabled when pixel graphics mode is entered, but the cursor on/off state is preserved. There is a bug in the
XEP80 that corrupts the display if the Cursor On or Cursor On, Blinking commands are issued in pixel graphics
mode, due to resetting VCR back to text mode values.
The attribute latches are still also valid in pixel graphics. Bit 7 of display memory, or bit 0 in data written from the
computer, selects the attribute latch (1 = latch B). There is no $9B anomaly. Reverse video, blink, double width,
underline, and blank attributes are active, while half intensity, double height, and graphics attributes are
Chapter 7 - Accessories 126

Altirra Hardware Reference Manual Created by Avery Lee
ignored.38 The Set Graphics command ($99) does not reset the attribute latches, so they must be manually reset
back to $FF for proper pixel graphics display if they have been previously modified, unless attribute activation is
actually desired.
Hardware scrolling
In text mode, the LSB of the address for each display row other than the status row is specified by command
$DC. This scrolls the display horizontally without requiring copying of display data, and is thus fast and non-
destructive. Similarly, the firmware uses the NS405's table lookup mode to quickly scroll vertically, since it allows
doing so by swapping row address pointers.
Pixel graphics mode supports both horizontal and vertical scrolling, although doing so requires several
undocumented firmware commands. The BEGD and ENDD registers can be modified to specify a wrapping
region, and the HOME register to set a starting address within that region. This allows horizontal scrolling on a
byte basis and vertical scrolling on a scan line basis. Although the XEP80 only has 8K of display memory, the
address registers on the NS405 are full 16 bit; the display pointer will wrap around the 8K memory and cross the
boundaries for the different external character set generator modes specified by A13 and A14.
Unlike text mode, where the status row is a single row, in pixel graphics mode the status row is extended to a
non-scrollable region of arbitrary row height. Timing chain register 8 specifies the row on which this region
begins, with a starting address specified by SROW, after which rows are displayed sequentially.
Warning
There appears to be a bug in the NS405 with the non-scrollable region such that the display address is
reset to SROW at the end of each scan line in the row specified by TC[8] instead of only at the end of the
last scan line. The result is that with a character height of 10 scan lines, scan lines 1-9 of that row are
repeated versions of the beginning scan line of the non-scrollable region pointed to by SROW.
Initial state
The power-on or post-reset state of the XEP80 is as follows:
·60Hz text mode
·Attribute latches set to $FF
·List mode disabled, escape not active
·Left margin at 0, right margin at 79
·RAM cleared to EOL ($9B)
·Tabs set every 8 characters starting at the 8th column (column 7), and also at column 2
Special characters
Move up ($1C)
Moves the cursor up one physical line, wrapping from row 0 to row 23.
Move down ($1D)
Moves the cursor down one physical line, wrapping from row 23 to row 0.
[38] The NS405 manual says that attribute-based reverse video is disabled in pixel graphics mode, but this appears to be
untrue for the XEP80's pixel graphics configuration – resetting bit 0 of either attribute latch will invert bytes mapped to
that latch, same as in text mode.
Chapter 7 - Accessories 127

Altirra Hardware Reference Manual Created by Avery Lee
Move left ($1E)
Moves the cursor left, wrapping from the left margin to the right margin within the same physical line.
Move right ($1F)
Moves the cursor right, wrapping from the right margin to the left margin within the same physical line. An EOL is
replaced with a space if it is the character under the cursor prior to moving right.
Backspace ($7A)
Moves left one character within the current logical line and replaces the character at the new position with a
space. If the cursor is at the left margin, it will move to the right margin on the previous line if that is part of the
same logical line (no EOL at right margin); otherwise, the backspace operation is ignored.
Tab ($7F)
Advances the cursor right one character until the next tab stop is reached, replacing EOLs with spaces in
positions that it leaves. This will splice logical lines together without inserting physical lines if the end of a logical
line is breached.
Clear tab ($9E) / Set tab ($9F)
Sets or clears the current horizontal position as a tab position. Neither the framebuffer nor the cursor position are
modified.
Command set
Set Horizontal Cursor Position ($00-4F)
Moves the cursor to the specified horizontal position.
Set Horizontal Cursor Position High Nibble ($50-5F)
Modifies the high four bits of the horizontal cursor position to $0x-Fx. The lower four bits are not modified.
Set Left Margin ($60-6F)
Sets the left margin to positions 0-15.
Set Left Margin High Nibble ($70-7F)
Sets the high bits of the left margin position to $0x-Fx. The lower four bits are not modified.
Set Vertical Cursor Position ($80-97)
Moves the cursor to the specified vertical position.
Set Cursor to Status Row ($98)
Moves the cursor to row 24, the status row.
Set Graphics to 60Hz ($99)
Reinitializes the XEP80 in 320x200 pixel graphics mode at 60Hz refresh rate. The cursor is reset to the top-left
byte in the display, cursor blinking is turned off, character blink mode is set to foreground only, and the display
polarity is set to white-on-black.
Chapter 7 - Accessories 128

Altirra Hardware Reference Manual Created by Avery Lee
This command sets HOME=$4000, BEGD=$4000, ENDD=$FFFF, and CURS=$4000.
Modify Graphics to 50Hz ($9A)
Changes video timing parameters to display pixel graphics at 50Hz refresh. This only works properly if the
XEP80 is already in graphics mode.
Set Right Margin ($A0-AF)
Sets the right margin to positions 64-79 ($40-4F).
Set Right Margin High Nibble ($B0-BF)
Sets the upper four bits of the right margin position to $0x-Fx. The lower four bits are not modified.
Read Char and Advance ($C0)
Reads and returns the character under the current cursor position and then advances to the next position. This
will return EOLs without translating them to spaces. The cursor wraps within the margins and either stays in the
status row or advances to the next row if not in the status row. If the cursor goes beyond row 23, the screen will
scroll.
A cursor update follows the read byte.
Read Horizontal Position ($C1)
Returns the horizontal cursor position. Unlike the cursor update data, this returns the unmodified horizontal
position over the full $00-FF range and is useful when the cursor update indicates $50+.
Master Reset ($C2)
Reinitializes the XEP80, resetting everything that the power-on path does except for UART parameters. This
includes the system and video control registers, the entire timing chain, and all state, as well as filling RAM with
EOLs.
An $01 byte is returned on completion.
Get Printer Port Status ($C3)
Returns $00 if the printer is busy and $01 if it is online and ready.
Fill Memory With Previous Character ($C4)
The entire 8K of memory is filled with the last character written. This is intended to be used with pixel graphics
mode since the byte is written in reversed bit order and the entire 8K is overwritten, including memory that would
be used by the tab array and print buffer in text mode.
An $01 byte is returned on completion.
Fill Memory With Space ($C5)
Fills all 8K of memory with spaces ($20). An $01 byte is returned on completion.
Fill Memory With EOL ($C6)
Fills all 8K of memory with EOLs ($9B). An $01 byte is returned on completion.
Chapter 7 - Accessories 129

Altirra Hardware Reference Manual Created by Avery Lee
Read Character Without Advancing ($C7) (undocumented)
Returns the character at the current cursor position. No EOL translation occurs, the cursor is not moved, and no
cursor update is sent.
Read Timer Counter Register ($CB) (undocumented)
Reads and returns the value of the 8048 T register. This register is set to $00 for text mode and $03 for graphics
mode.
Clear List Flag ($D0)
Turns off list mode, enabling normal escape processing.
Set List Flag ($D1)
Turns on list mode, which causes all characters except for EOL ($9B) to be escaped and printed. This is the
XEP80's equivalent to the E: handler's DSPFLG.
The list flag is ignored in pixel graphics mode.
Set Normal Transmit Mode ($D2)
Disables burst mode so that each character is followed up by a cursor update of one or more bytes. This also
exits printer mode.
Set Burst Transmit Mode ($D3)
Turns on burst mode. In burst mode, the XEP80 lowers its transmit line while busy and raises it when ready. No
cursor update is sent. This also exits printer mode.
Set ATASCII Character Set ($D4)
Changes the text display to use the standard ATASCII character set, including all text currently on screen. This is
the same as the standard OS character set at $E000-E3FF except that $9B displays as blank.
Set International Character Set ($D5)
Changes the text display to use the international ATASCII character set, including all text currently on screen.
This is the same as the alternate OS character set at $CC00-CFFF except that $9B displays as blank.
Set Internal Character Set ($D6)
Changes the text display to use the internal character set inside the NS-405.
Modify Text Display to 50Hz ($D7)
Changes the text display to to 50Hz and taller characters for a PAL display.
Cursor Off ($D8)
Hides the cursor.
Cursor On ($D9)
Shows the cursor and sets it to solid mode.
Chapter 7 - Accessories 130

Altirra Hardware Reference Manual Created by Avery Lee
Warning
The Cursor On ($D9) and Cursor On, Blinking ($DA) commands use a shadow of the Video Control
Register (VCR) that is not updated by the command to switch to pixel graphics. As a result, using either
command will switch the NS405 out of pixel graphics mode back to text mode, corrupting the display. This
can be fixed by rewriting the correct value into the VCR or turning the cursor on/off prior to enabling pixel
graphics.
Cursor On, Blinking ($DA)
Shows the cursor and sets it to blink mode. The cursor blinks on and off with a period of 16 frames per state.
Move to Logical Start ($DB)
Moves the cursor vertically to the start of a logical line. A logical line is defined as a set of contiguous physical
lines where all but the last physical line have a non-EOL character at the right margin.
Note that the horizontal position of the cursor is not changed by this command.
Set Scroll Window ($DC)
Horizontally scrolls the text window so that cursor is at the left-most column on screen.
This command has no effect in pixel graphics mode.
Set Printer Output ($DD)
Redirects character output to the printer. This automatically turns on burst transmit mode.
Set White on Black ($DE)
Turns off reverse video mode.
Set Black on White ($DF)
Turns on reverse video mode.
Set Extra Byte ($E1, $E4, $E6, $EE, $F0, $F2, $F9) (undocumented)
Copies the value of the last character to the extra byte. The extra byte is used for debugging commands that
require two bytes of input. This should be followed up immediately with another command to use the extra byte,
as it can be overwritten by many commands as well as some text movement operations (insert/delete).
Set Cursor Address ($E2) (undocumented)
Modifies the NS405 CURS register, which contains the cursor address, to have the high byte from the extra byte
and the low byte from the extra byte. This moves the cursor on screen and also sets the next address used by
cursor-driven operations.
Write Internal Memory ($E5) (undocumented)
Writes an internal memory location using the address specified by the extra byte and the value of the last
character.
Set Display Home Address ($E7) (undocumented)
Sets the value of the NS405 HOME register. This register determines the starting address of the graphics screen
at the top-left corner of the display. It is normally set to $4000 by the firmware.
Chapter 7 - Accessories 131

Altirra Hardware Reference Manual Created by Avery Lee
In text mode, this register is regularly overwritten by interrupt at the end of each row, and so this command has
no lasting effect.
Write Video Control Register ($ED) (undocumented)
Writes the value of the last character into the video control register (VCR) of the NS405.
D7:D6 Display mode
0X Text, internal character set
10 Text, external character set
11 Pixel graphics
D5 Display enable
0 Disable display
1 Enable display
D4 Internal/external attribute mode
0 Internal attribute latches (XEP80 operating mode)
1 External attribute memory (not supported by XEP80)
D3 Reverse video
0 Reverse video display for entire screen (note that this stacks with reverse video on each character)
1 Normal display
D2 Cursor reverse video
0 Cursor inverts character cell
1 Cursor overwrites character cell
D1 Cursor blink
0 Cursor is solid
1 Cursor blinks
D0 Reverse video blink field/character
0 Character data blinks when reverse video is enabled in attributes (blink between inverted char and filled cell)
1 Whole character cell blinks when reverse video is enabled in attribute (alternately invert/don't invert character cell)
Set Begin Display Address ($EF) (undocumented)
Sets the NS405 BEGD register, which determines the beginning address of the scrollable region in graphics
mode. The display wraps back to this address after reaching the value of ENDD.
The BEGD register is not active in text mode, during which the firmware uses table lookup mode.
Set End Display Address ($F1) (undocumented)
Sets the NS405 ENDD register, which determines the ending address of the scrollable region in graphics mode.
When ENDD is reached, the display wraps to the address specified in BEGD. Note that ENDD must be one past
the last byte in the ending scan line before the wrap.
The display address must exactly match ENDD at the end of a scan line to wrap back to BEGD. It is possible to
wrap around from ENDD to BEGD in the middle of a row, but not in the middle of a scan line. If the display
address advances past ENDD during a scan line, the display will fail to wrap and continue displaying rows
sequentially past ENDD.
The ENDD register is not active in text mode, during which the firmware uses table lookup mode.
Chapter 7 - Accessories 132

Altirra Hardware Reference Manual Created by Avery Lee
Set Status Row Address ($F3) (undocumented)
Sets the NS405 SROW register, which determines the starting address of the status row. This is normally set to
$1800, $3800, or $5800 by the firmware depending on the current character set. The vertical location of the
status row is determined by timing chain register 8.
In text mode, the status row's address is determined by SROW instead of HOME, and therefore that single row
is not affected by horizontal scrolling. In graphics mode, the status row defines the start of a non-scrollable
vertical area that begins at the address specified by SROW and extends to the bottom of the display.
Set Attribute Latch 0/1 ($F4 / $F5)
Sets the one of the two attribute latches used to format text characters on screen. Attribute latch 0 is used for
character data with bit 7=0 while attribute latch 1 is used for character data with bit 7=1. Both attribute latches
are set to $FF by default. The attribute latch is set to the value of the last character.
Note that while the attribute latches are still active with pixel graphics, they are not reset by the command to set
pixel graphics mode.
While the $F4/F5 commands are not listed in the XEP80.DOC file included on the XEP80 handler disk, they are
officially documented in the ATRIBUTE.BAS demo program.
Set Timing Control Pointer ($F6) (undocumented)
Sets the Timing Control Pointer (TCP) register from the value of the last character. This register sets the index of
the next register to modify in the NS405 timing control chain. Only bits 0-3 are valid.
Set Timing Control Register ($F7) (undocumented)
Sets the register in the timing chain pointed to by the TCP to the value of the last character. Afterward, the TCP
is advanced to the next register. Table 18 gives the values applied to the timing chain by the firmware for various
modes.
Chapter 7 - Accessories 133

Altirra Hardware Reference Manual Created by Avery Lee
Register 60Hz
Text
50Hz
Text
60Hz
Gfx
50Hz
Gfx
0 Horizontal total 68 5C
1 Horizontal display length 4F 27
2 Horizontal sync start 52 3B
3 Horizontal sync end 5F 46
4 Char height + extra scans 91 B2 98 BA
5 Vertical total 1A 19
6 Vertical display height 18 13 10
7 Vertical sync 02 79
8 Status row 17
9 Blink rate + duty cycle F4
10 Block graphics horiz. 30
11 Block graphics vert. 36
12 Underline 89
13 Cursor 0F
Table 18: XEP80 Timing Register Values
Set Vertical Interrupt Register ($F8) (undocumented)
Sets the NS405 VINT register to the value of the last character. The VINT register controls the NS405 equivalent
of ANTIC's DLI, such that an interrupt is fired at the end of the specified row. The XEP80 initializes VINT to the
second to last row in the main region (22) and uses the vertical interrupt to reset the current row counter to the
last row (23).
Set Baud Rate ($FA) (undocumented)
Sets the NS405 PSR (prescaler) register to the value of the last character and the BAUD register to the value of
the extra byte. Bits 4-7 of the PSR select the prescaling factor in half-factor increments from 3.5 to 11. Bits 0-2 of
the PSR supply bits 8-10 of the divisor, while the BAUD register supplies bits 0-7. The resultant baud rate is as
follows:
baud=750,000
(
3.5+0.5×PSR[7 :4 ]
)
×(PSR[2 :0]:BAUD+1)
The defaults are PSR=$90 and BAUD=$05. This sets the prescaler to ÷8 and the divisor to ÷6, for a final baud
rate of 750,000 ÷ 48 = 15,625 baud.
Set UART Control Register ($FB) (undocumented)
Sets the NS405 UCR register to the value of the last character. The UCR is constantly rewritten by the serial I/O
routines in the XEP80 firmware, so this command is ineffective.
Set UART Multiplex Register ($FC) (undocumented)
Sets the NS405 UMX register to the value of the last character. This register allows either the transmit or receive
rate to be divided down from the other, giving asymmetric baud rates. Exactly one bit from bits 0-5 is set to select
Chapter 7 - Accessories 134

Altirra Hardware Reference Manual Created by Avery Lee
a divisor from ÷1 to ÷32, respectively. Bit 7 then selects the divided down rate for transmit (0) or receive (1).
On init, UMX is set to $01 to use the same baud rate for transmit and receive operations.
Set UART Transmit Register ($FD) (undocumented)
Sets the NS405 XMTR register to the value of the last character, retransmitting that character back to the
computer.
Strobe Printer ($FF) (undocumented)
Sends the printer a strobe indicating a new byte is available, without actually setting a new byte.
7.9 Corvus Disk System
The Corvus Disk System, made by Corvus Systems, was a multi-platform system for adding external hard disk
storage to a computer. For the Atari 8-bit computers, the Corvus was connected to the computer through an
Interface box that connected to joystick ports 3 and 4 on the 400/800.
Joystick port usage
The standard Corvus Interface is a bidirectional, byte-wide parallel port with additional control signals. Since
combining two joystick ports only gives 8 bidirectional data lines total via the joystick direction lines connected to
the PIA, the Interface provides a nibble-wide data interface to the computer and adapts it to the byte-wise
interface of the Corvus.
Joystick port 3 (PORTB bits 0-3) is used as the bidirectional half-duplex data path, while joystick port 4 (PORTB
bits 4-7) is configured as output-only for control signals. The control signals are used to drive the Interface as
follows:
PORTB bits 4-6 Command
000 Write lower nibble
001 Write upper nibble and send byte to drive
010 Receive byte from drive and read lower nibble
011 Read upper nibble
100 Read interface status
Table 19: Corvus Interface modes
Bit 7 is used as a strobe, with commands taking effect on the falling edge of bit 7.
Reading interface status
Issuing the %100 command causes the Interface to place bus status onto the nibble bus, reflected as bits 0-1 of
PORTB. Bit 0 indicates ready status, where 0 indicates that the device is busy and 1 indicates that it is ready to
transfer data. Bit 1 indicates the direction of the bus for the current pending transfer, where 0 means computer-
to-host and 1 means host-to-computer.
Command set
All communication with the disk system is initiated by the computer via commands. All commands follow the
same form, with a command packet being sent from the computer, followed by a status code and return data
from the device. The disk is exposed to the computer as a linear array of 512 byte blocks, which can be read or
Chapter 7 - Accessories 135

Altirra Hardware Reference Manual Created by Avery Lee
written as 128, 256, 512, or 1024 byte sectors via multiple types of read/write sector commands.
Details of the protocol and command set are too large to include here. Fortunately, Corvus Systems published
complete documentation for both in Corvus Mass Storage Systems General Technical Information [CorvusGTI].
Chapter 7 - Accessories 136

Altirra Hardware Reference Manual Created by Avery Lee
Chapter 8
Cartridges
Chapter 8 - Cartridges 137

Altirra Hardware Reference Manual Created by Avery Lee
8.1 Cartridge port
Address regions
Cartridges are accessed through three memory address windows:
·Left cartridge: $A000-BFFF
·Right cartridge: $8000-9FFF
·Cartridge control (CCTL): $D500-D5FF
The left cartridge slot is common to all hardware models and can map to any of the three regions. The right
cartridge slot is only present on the 800 and can only map to the right cartridge and cartridge control regions. All
three regions can be read/write, if the cartridge supports it.
These hardware regions are decoded by the computer itself and are the only ones accessible to the cartridge
port; the cartridge cannot map to any other memory regions. It does have access to the read/write line, though,
and can handle writes as well as reads.
Warning
The main computer hardware typically is tolerant of false reads as there are only two hardware registers
that have side effects on reads, PORTA and PORTB on the PIA. Cartridges, on the other hand, often have
banking registers in the $D500-D5FF cartridge control region that can trigger a bank switch on a read. This
includes false reads from indexed addressing modes and DMA.
Care should therefore be used when accessing registers in the CCTL or PBI ranges using abs,X, abs,Y,
(zp,X), and (zp),Y addressing modes. For instance, using LDA $D5FF,X with X=$08 to access a PBI
register at $D607 can trip a cartridge bank switch due to a false read from $D507.
Similarly, display lists should be managed properly to avoid accidentally having ANTIC DMA from the
cartridge bank registers. Overwriting an active display list with $D5 bytes, for instance, can cause playfield
DMA to read from $D5D5 and crash the program by switching cartridge banks.
Power-on and reset behavior
Cartridges may or may not have a known state on a cold start, depending on whether they have circuitry to
ensure a reset on power-up. Those that don't and have hardware registers essentially power up in indeterminate
state and must be programmed accordingly. For instance, a banked cartridge without reset circuitry can power-
up in any bank, so all banks must contain startup code to jump to the proper startup bank.
The cartridge port does not have the computer reset signal exposed, and so cartridges are not normally able to
detect a warm reset by the System Reset button. Therefore, even cartridges that have power-up reset circuitry
may not be able to reset themselves on a warm reset or a software cold reset and still need startup code in all
banks. It is theoretically possible to do this based on detecting when header addresses are read from the
cartridge, but doing so is not common. More typically, a hardware button is included to allow the user to manually
reset the cartridge.
Late hardware reset
Some cartridges can also experience hardware delays in power-on reset. When these delays are long enough,
they can cause the cartridge to change behavior after the 6502 has already begun executing the OS cold start
initialization code. One symptom that this can cause is a cartridge that fails to reliably run a software image
configured a diagnostic cartridge to the OS, which is checked very early in OS boot, but works when there is
enough delay between power-on and the cartridge boot attempt. This can include configuring the cartridge
Chapter 8 - Cartridges 138

Altirra Hardware Reference Manual Created by Avery Lee
software as a non-diagnostic cartridge to the OS, on a software cold reset.
Warning
An Ultimate1MB-equipped system can fail to exhibit this issue due to the additional delays caused by the
Ultimate1MB's BIOS code, which executes before the regular OS. This additional delay then gives the
cartridge hardware enough time to fully reset, hiding the issue.
8.2 Atarimax flash cartridges
MaxFlash 1Mbit cartridge
The MaxFlash 1Mbit cartridge maps one megabit (128KB) of flash memory, 8KB at a time, through $A000-BFFF.
Bank switching is performed by either read or write accesses to $D500-D51F, where address bits 0-3 control the
bank and bit 4 disables the cartridge when set. Written data is ignored.
The flash ROM can be programmed in-place from the computer through standard flash ROM unlock and
programming sequences.
Flash types seen in the wild:
•AMD Am29F010 ($01/$20)
•Micron M29F010B ($20/$20)
MaxFlash 8Mbit cartridge
The MaxFlash 8Mbit cartridge maps eight megabits (1MB) of flash memory, 8KB at a time, through $A000-BFFF.
Bank switching is performed by either read or write accesses to $D500-D5FF, where address bits 0-7 control the
bank and bit 7 disables the cartridge when set. Written data is ignored.
Two 4Mbit flash chips are present in this cartridge. Like the 1Mbit cartridge, the 8Mbit cartridge can also be
programmed in-place.
Flash types seen in the wild:
•AMD Am29F040B ($01/$A4)
•Bright BM29F040 ($AD/$40)
MaxFlash 1Mbit + MyIDE cartridge
The MaxFlash 1Mbit + MyIDE cartridge is similar to the 1Mbit cartridge, except with the banking address range
moved and a MyIDE interface added. Banking is controlled by a read or write access to $D520-D53F instead of
$D500-D51F.
The MyIDE interface maps the CompactFlash ATA registers at $D500-D507. Only the lower 8 bits of the data bus
are exposed, so the CF device must be driven in 8-bit transfer mode.
8.3 Atarimax MyIDE-II
The Atarimax MyIDE-II cartridge is an advanced cartridge that contains 512KB of flash ROM, 512KB of RAM,
and a CompactFlash interface.
For official programming information, consult the MyIDE-II Programming Information document on the Atarimax
website: [MyIDE-II]
Chapter 8 - Cartridges 139

Altirra Hardware Reference Manual Created by Avery Lee
CompactFlash interface
The ATA-compatible registers of the CompactFlash interface are exposed by the MyIDE-II at $D500-D507. Only
an 8-bit interface is provided. However, the alternate register set is also exposed, allowing access to the
software reset facility of the CF device.
It is also possible to control power to the CF device, as well as sense when the CF device is changed. A green
LED lights up whenever the CF device is powered.
Banking mechanism
Two independently controllable access windows are provided at $8000-9FFF and $A000-BFFF. The $A000-
BFFF left cartridge bank is controlled by $D508 and the $8000-9FFF right-cartridge window by $D50A. Both
registers are write-only. Bits 0-5 of the value written select an 8K bank, with bits 6-7 being ignored.
Unusually, the MyIDE-II also provides a third “keyhole” window at $D580-D5FF. It is mapped in 128 byte banks,
selected by a pair of banking registers at $D50C (low byte) and $D50D (high byte).
An additional write-only control register at $D50F controls the mode for each of the banking windows.
Valid address ranges
The CF/IDE address range at $D500-D507 is only driven on read if the CompactFlash device is powered and
active. If it is unpowered or held in reset state, this range will be undriven.
$D508-D50F return status information in bits 5-7, but bits 0-4 are undriven.
$D510-D57F is undriven.
$D580-D5FF is undriven if the keyhole window is disabled.
Registers
$D500-D507 CompactFlash control register window (read/write)
Exposes the main ATA control register set, or if bit 0 of $D50E is cleared, the alternate control register set.
$D508-D50F CompactFlash device status (read only)
CFP CFR CFP Undriven
D7 CompactFlash device present sense
0 Not present
1 Present
D6 CompactFlash reset state
0 /RESET asserted
1 /RESET negated
D5 CompactFlash power state
0 Unpowered
1 Powered
Indicates whether a CompactFlash device is present and whether it is powered or in reset state. This reflects the
physical state of the device interface, not bits 0 and 1 of $D50E. When no CF card is present, the interface is
automatically powered down and bits 5-7 read 0.
The canonical address for this register is $D50E.
Chapter 8 - Cartridges 140

Altirra Hardware Reference Manual Created by Avery Lee
Note that bits 0-4 of the data bus are not driven when reading this address.
$D508 Left cartridge window banking register (write only)
Ignored Bank
D5:D0 Left cartridge bank
Selects an 8K region for the left cartridge window out of 512K, from the memory type selected for the left
cartridge window.
$D50A Right cartridge window banking register (write only)
Ignored Bank
D5:D0 Right cartridge bank
Selects an 8K region for the right cartridge window out of 512K, from the memory type selected for the right
cartridge window.
$D50C Keyhole window low banking register (write only)
Keyhole bank, bits 7-0
Controls bits 7-0 of the keyhole window bank, in 128 byte half-pages.
$D50D Keyhole window high banking register (write only)
Ignored Keyhole bank, bits 11-8
Controls bits 11-8 of the keyhole window bank, in 128 byte half-pages.
$D50E CompactFlash control register (write only)
Ignored CFP CFA
D1 CompactFlash power control
0 Disable power and assert /RESET
1 Enable power
D0 CompactFlash reset control / alternate register select
0 Select alternate register set
1 Select main register set and deassert /RESET
Controls power to the CF device and which ATA/CF register set is active. Bits 0 and 1 also control the /RESET
line to the CF device; it is automatically asserted when the device is powered on and deasserted when
selecting the main register set.
A rising edge on bit 1 is required to power up the device. This is significant if bit 1 is set when a CF card is
removed and then reinserted. If bit 1 is already set when this happens, writing $02 again will neither power on
the device nor light up the green power LED; it is necessary to clear and then set bit 1 again.
Similarly, a rising edge on bit 0 is necessary to bring the device out of reset once it has been powered, and if
bit 0 is already set it must be reset first. The CF device cannot be both powered on and brought out of reset in
the same write. This means that the normal sequence to initialize the device is $00 > $02 > $03. An attempt to
Chapter 8 - Cartridges 141

Altirra Hardware Reference Manual Created by Avery Lee
write $00 and then $03 will result in the device being powered on but still held in reset state, and further writes
of $03 will have no effect since a rising edge on bit 0 is required, i.e. $00 > $03 > $02 > $03 would be needed.
Once the device has been powered up and brought out of reset, toggling bit 0 switches between the main and
alternate register sets. Bit 1 must be kept high to keep the device powered.
Power and reset states cannot be modified when no CompactFlash card is present, and the CF interface is
always reported as powered down and in reset state in this case. However, bits 0 and 1 can still be written and
their state is still tracked, which is why it is necessary to write $00 before attempting to power up the CF
device.
$D50F Memory window control register (write only)
Left CTL Right CTL Ignored Keyhole
D7:D6 Left cartridge window mode
D5:D4 Right cartridge window mode
00 Flash ROM
01 RAM, read/write
10 RAM, read-only
11 Disabled
D1:D0 Keyhole window mode
00 RAM, read/write
01 RAM, read-only
10 Flash ROM
11 Disabled
Note that the selection modes are encoded differently for the keyhole window than for the cartridge windows.
$D580-D5FF Keyhole window (read/write)
Accesses a 128-byte window of flash or on-board memory. If the keyhole window is disabled, reads from this
region are not handled by the cartridge and return undriven bus data.
8.4 SIC!
The SIC!, or Super Inexpensive Cartridge!, is a flash ROM based cartridge which holds 128KB, 256KB, or
512KB.
Banking mechanism
The flash ROM is exposed via both the $8000-9FFF and $A000-BFFF windows, which are independently toggle-
able but banked together. Banks are 16K with the $8000-9FFF window mapping the lower 8K of the bank.
The banking register is exposed at $D500-D51F, with the following contents:
•Bits 0-4: Selects 16K bank.
•Bit 5 = 1: Enables $8000-9FFF window.
•Bit 6 = 0: Enables $A000-BFFF window.
•Bit 7 = 1: Enables flash writes.
On power-up, the bank register is reset to $00.
Chapter 8 - Cartridges 142

Altirra Hardware Reference Manual Created by Avery Lee
Enable/disable switch
The enable/disable switch forces off the $A000-BFFF window when set to the disable side.
Flash types
•Winbond 29C020
8.5 SIDE 1 / SIDE 2
SIDE 1 is a cartridge with 512KB of flash memory and a CompactFlash interface. SIDE 2 revises the design with
additional support for reading back banking register values, sensing CF removal, and signaling via an LED. The
two versions are similar but not completely compatible.
Flash ROM
The flash ROM on the SIDE is used to emulate a pair of stacked cartridges, a pass-through SpartaDOS X (SDX)
cartridge with a second (“top”) cartridge inserted above it. Both are independently bank switched through
separate banking registers.
A physical switch on the cartridge enables or disables the SDX half, regardless of the SDX banking state.
The 4Mbit flash on the SIDE can be programmed in-place on the computer using standard flash ROM unlock
and programming sequences.
CompactFlash interface
SIDE also includes a CompactFlash interface. The eight main parallel ATA compatible registers are exposed, as
well as the CF reset signal.
Only the lower 8 bits of the CF data bus are exposed, so the CF device must be driven in 8-bit transfer mode.
Real-time clock
The RTC chip in the SIDE is a Maxim DS1305, which combines a real-time clock with battery backup and a 96
byte NVRAM. The DS1305 is accessed over an SPI bus through several control bits.
Register map
SIDE occupies a sparse set of addresses in the $D5E0-D5FF range. Table 20 shows the register layout. Grayed
out entries indicate locations not handled by SIDE and ignored for reads or writes.
Chapter 8 - Cartridges 143

Altirra Hardware Reference Manual Created by Avery Lee
Address
SIDE 1 SIDE 2
Read Write Read Write
D5E0 SDX bank
D5E1 SDX bank
D5E2 SPI sense SPI control SPI sense SPI control
D5E4 Cart bank Cart bank
D5F0 CF registers CF registers
D5F7
D5F8
CF reset
Signature CF reset
D5F9 Chg. sense Chg. reset
D5FB
D5FC Signature Signature
D5FF
Table 20: SIDE 1/2 register map
SIDE 1 Registers
$D5E0 SDX banking register (SIDE 1 only, write only)
Controls banking for the SDX half of the cartridge.
Bits 0-5 select an 8K bank, while bit 7 disables the SDX half if set.
Bit 6 controls the top half of the cartridge, which is enabled if it is 0 and disabled if it is 1.
This register is set to $00 on power-up, enabling the SDX half and enabling the top cartridge. Pressing the menu
button also does this.
$D5E2 SPI bus sense (read only)
Bit 3 reflects the state of the SPI bus input line from the RTC chip. Currently bits 0-2 and 4-7 are reserved, but
are currently driven as 0 by the SIDE hardware and thus the register always reads as $00 or $08.
$D5E2 SPI bus control (write only)
Controls the three outgoing lines on the SPI bus to the RTC chip.
Bit 0 controls the chip enable and must be set to enable communication with the RTC chip.
Bit 1 controls the SPI clock.
Bit 2 controls the SPI outgoing data line.
$D5E4 Cartridge banking register (write only)
Controls banking for the top cartridge half.
Chapter 8 - Cartridges 144

Altirra Hardware Reference Manual Created by Avery Lee
Bits 0-5 select an 8K bank. The interpretation of bit 5 is inverted from the SDX half, so the halves of the flash
ROM are flipped between the top half and the SDX half.
Bit 7 disables the top half if set. If cleared, the top half cartridge is enabled only if the pass through from the SDX
half is also enabled via bit 6 of the SDX banking register.
This register is reset to $00 on startup, enabling the top half cartridge at bank 32.
$D5F0-D5F7 CompactFlash hardware registers (read/write)
Parallel ATA register set, as exposed by the CompactFlash device.
$D5F8-D5FB CompactFlash reset register (write only)
Bit 0 controls the reset signal to the CompactFlash device, where 0 resets the CF card, and 1 enables normal
operation.
$D5FC-D5FF Signature bytes
These four locations hold the string “SIDE” ($53 49 44 45) if the SDX half is enabled by hardware switch and “
IDE” ($20 49 44 45) if it is not.
SIDE 2 Register Differences
$D5E1 SDX banking register (SIDE 2 only, read only)
This is the same as the SDX banking register in SIDE 1, except moved from $D5E0 to $D5E1 and made
readable.
$D5E4 Top cartridge banking register (SIDE 2 only, read/write)
This register is read/write in SIDE 2, versus read-only in SIDE 1.
Also new to SIDE 2 is bit 6, which enables 16K banking if set. In that case, the top cartridge is mapped to $8000-
BFFF in 16K banks instead of $A000-BFFF in 8K banks. Bit 0 of the bank number is ignored in 16K mode,
although it is still stored and readable. Also, bit 7 only controls $A000-BFFF, and it is possible for that window to
be disabled while $8000-9FFF is still enabled through bit 6.
$D5F8 SIDE version detect (SIDE 2 only, read only)
Reads $32 to indicate a SIDE 2.
Warning
SIDE 1 does not respond to $D5F8 and reading that address will return bus data on systems with a floating
data bus. This value can come from data read by ANTIC DMA, and therefore can read as $32 on a SIDE 1.
This means that simply reading $D5F8 and comparing it to $32 can falsely detect a SIDE 1 as SIDE 2.
One way to avoid this is ensuring that the floating bus data is a value other than $32. This can be done by
preventing a DMA cycle prior to the read, thus making it likely that the last instruction byte will be returned
instead ($D5), a value sufficiently different from $32. This can be ensured by reading in horizontal blank
with interrupts or DMA off.
$D5F8 CompactFlash reset register (SIDE 2 only, write only)
Controls /RESET on CompactFlash card via bit 0, same as $D5F8 on SIDE 1. The difference is that SIDE 2 only
responds to $D5F8 for this and not $D5F8-D5FB as on SIDE 1.
Chapter 8 - Cartridges 145

Altirra Hardware Reference Manual Created by Avery Lee
$D5F9 CompactFlash change status (SIDE 2 only, read only)
Bit 0 reads 0 when no change has been detected, and 1 when the CompactFlash card has been removed since
the last time the change latch was reset. This latch stays set to 1, even after another CF card is inserted, until
reset by a write to $D5F9.
$D5F9 CompactFlash change control/strobe (SIDE 2 only, write only)
Resets the CF change latch when written, if a CF card is inserted. If no CF card is inserted, the CF change latch
cannot be reset.
Bit 1 controls the status LED, which is normally turned on when bit 1 is cleared and turned off when it is set. The
LED state is then inverted when the CF device is removed and the latch is set. The LED state is therefore
determined by the XOR of the status LED bit and the change state.
8.6 Corina
Corina is a hybrid cartridge with two configurations, 1MB of flash ROM or 512KB of flash ROM + 512KB of RAM.
In addition, there is an EEPROM for persistent storage of small data.
Memory layout
Corina uses a 16K banking window at $8000-BFFF controlled by a single banking register at $D500. The
banking register is write-only and values written into it are composed as follows:
7 0
DIS Mode Bank
D7 Enable/disable
0 $8000-BFFF window enabled
1 $8000-BFFF window disabled
D6:D5 Mapping mode
00 ROM banks 0-31
01 ROM banks 32-63 or RAM
10 EEPROM
11 Reserved
D4:D0 16K bank select (RAM/ROM only)
EEPROM
The EEPROM module provides 8KB of non-volatile storage, accessible when bits 5-6 of the banking register are
set to %10. The NVRAM is directly writable; there is no special protocol necessary to access or unlock the
EEPROM.
8.7 R-Time 8
The R-Time 8 is cartridge that adds a real-time clock to the computer. It has no firmware on-board and writes a
software driver to be loaded externally. The real-time clock is provided by an M3002-16PI chip.
Register mapping
The R-Time 8 has 16 internal 8-bit locations mapped to a single read/write port, located at $D5B8-D5BF. The
read/write port is only 4 bits wide, bits 0-3. Accesses are carried out by patterns of accesses:
•Check status: Read from initial state.
Chapter 8 - Cartridges 146

Altirra Hardware Reference Manual Created by Avery Lee
•Read memory: Write address, read high nibble data, read low nibble data.
•Write memory: Write address, write high nibble data, write low nibble data.
When the current step in the sequence is unknown, the M3002 can be reset to initial state by issuing two dummy
reads.
Warning
The R-Time 8 only drives the lower four bits of the data bus. This means that depending on the computer,
the upper four bits will either be 1111 or data from the floating data bus. All reads from the R-Time 8 should
be masked to ignore the upper four bits.
Internal memory
The internal memory locations of the RTC chip are documented in the M3002 datasheet, but the important ones
are as follows:
Location Contents
$0 Seconds (0-59)
$1 Minutes (0-59)
$2 Hours (0-23)
$3 Day (0-31)
$4 Month (1-12)
$5 Year (0-99)
$6 Weekday (1-7)
$7 Week number (1-53)
All of these locations are read/write and stored as binary coded decimal (BCD).
8.8 Veronica
The Veronica cartridge adds a 65C816 coprocessor with 128K of RAM to the computer.39
Programming model
The 65C816 CPU runs in a dedicated memory address space, communicating with the 6502 solely by a
semaphore bit and a 16K shared memory window. The 65C816 uses only 16-bit addressing with the bank
address ignored, so it effectively runs as a 65C802; clock speed is 14MHz, 8x that of the main computer. The
6502 can reset the 65C816 at any time, but there is no support for interrupts.
Because of this design, the 65C816 cannot run programs directly on the computer; it is dependent upon the
6502 for bootstrap and for communication with main memory and hardware, including all of the custom chips
(ANTIC, GTIA, PIA, and POKEY). However, there is no DMA contention either, so the 65C816 always runs at full
speed.
There is no persistent storage on Veronica, and the cartridge powers up with both memory windows disabled.
Therefore, bootstrap must occur from an external source, like disk.
[39] The author would like to thank the Veronica team for permission and assistance in publishing technical information
about the Veronica cartridge.
Chapter 8 - Cartridges 147

Altirra Hardware Reference Manual Created by Avery Lee
Memory layout
64K of the memory is reserved exclusively for the 65816, of which nearly all is mapped directly, except for 16
inaccessible bytes shadowed by the hardware registers at $0200-020F in the 65C816's address space. The
remaining 64K of memory is shared between the 65C816 and 6502 for communications purposes. It is split into
two banks of 32K, of which the 65C816 sees one and the 6502 sees the other, and which can be swapped
between them. In addition, each 32K bank is split into 16K halves, where both the 6502 and 65C816 can
independently choose whether to access the bottom or top half.
On the 65C816 side, the 16K shared memory window can be placed at either $4000-7FFF or $C000-FFFF. The
window is always enabled at one of the two possible locations. The location of the window and which 16K half of
the 32K bank is selected are controlled by the hardware register at $0200-020F.
The 6502 can similarly map a 16K half of its 32K bank to the cartridge windows at $8000-9FFF and $A000-
BFFF. One 16K half is selected at a time and each window is mapped to a fixed 8K section of it, but the two 8K
windows can be independently enabled or disabled. Bank, half, and window selection are controlled by a
hardware register at $D5C0.
A significant aspect of this design is that the 65C816 and 6502 never see the same memory at the same time.
Both can access all of the memory, but each 32K bank is always exclusively accessed by one side and the two
halves can only be swapped. Furthermore, while 16K halves can be independently chosen on each side, the
32K bank swap can only be triggered by the 6502.
Semaphore signaling
In addition to the shared memory windows, Veronica also contains a single shared semaphore bit between the
two CPUs, exposed as the high bit (bit 7) of the respective hardware control registers. A change to the
semaphore bit on one side is immediately reflected on the other side.
Chapter 8 - Cartridges 148
Figure 8: Veronica memory layout
16K
$C000-FFFF
window
$4000-7FFF
window
$A000-BFFF window
$8000-9FFF window
65C816
address space
6502 address
space
16K
16K
16K
bank
swap

Altirra Hardware Reference Manual Created by Avery Lee
Warning
The multiprocessor environment created by Veronica poses some unique challenges for synchronization
and requires special care when writing communications code between the CPUs. In particular, read-modify-
write instructions like INC/DEC that would ordinarily be safe with interrupts on the 6502 are not safe when
communicating between the 6502 and the 65816, because one CPU can swap memory banks or read the
semaphore in the middle of an instruction being executed by the other. The 6502 does not support atomic
memory primitives at all and the 65C816 on Veronica is not hooked up for doing so, so communications
protocols must be written with this in mind.
Hardware registers
$0200-020F Veronica control register (65C816 side; read/write)
7 0
SEM WIN HLF Reserved
D7 Shared semaphore
0 (default)
D6 Window address
0 $C000-FFFF (default)
1 $4000-7FFF
D5 Bank half select
0 Use 16K half A of 32K bank
1 Use 16K half B of 32K bank (default)
D0-D4 Reserved (reads as 1)
The 65C816 controls its portion of the Veronica hardware by a single register, mirrored at $0200-020F. This
register exposes the shared semaphore bit as well as banking window selection and bank half selection. Its
value is reset to $3F on power-up or soft reset.
$D5C0 Host control register (6502 side; read/write)
7 0
SEM WNA WN8 BNK SWP RES
D7 Shared semaphore
1 (default)
D6 Reserved (reads as 1)
D5 $A000-BFFF window enable
0 Disable $A000-BFFF window (default)
1 Enable $A000-BFFF window
D4 $8000-9FFF window enable
0 Disable $8000-9FFF window (default)
1 Enable $8000-9FFF window
D3 Bank half select
0 Use 16K half A of 32K bank
1 Use 16K half B of 32K bank (default)
D2 Reserved (reads as 1)
Chapter 8 - Cartridges 149

Altirra Hardware Reference Manual Created by Avery Lee
D1 Bank swapping
0 6502 uses bank A, 65816 uses bank B (default)
1 6502 uses bank B, 65816 uses bank A
D0 Soft reset
0 Disable 65816 – hold in reset state (default)
1 Enable 65816
On the host side, Veronica is controlled via this single register at $D5C0. Three of the bits affect the 65C816 – bit
0 (reset), bit 1 (swap banks), and bit 7 (semaphore); the remainder control memory mapping on the 6502 side. At
power-up this register is set to $CC.
By default, Veronica powers up with the 65C816 held in reset. This also resets the memory configuration on the
65C816 side so that the memory window is at $C000-FFFF and viewing the upper 16K half of the memory bank.
The 6502 must upload bootstrap code into its window $A000-BFFF and then swap memory banks before or
while turning off soft reset, so that the 65C816 can begin executing the bootstrap code at $E000-FFFF in its
memory space through the reset vector at ($FFFC).
Caution
The semaphore bit is inverted between the 6502 and the 65816. A 0 on the 6502 side is reflected as a 1 on
the 65816 side, and vice versa.
Hardware versions
There are two versions of the Veronica hardware. Version 1 use a three RAM chip design, where one chip
supplies the main 64K of memory while the other two chips have the 32K swappable bank memory, and runs the
65C816 asynchronously to the main computer clock. Version 2 uses a single multiplexed 128K RAM and runs
the 65C816 synchronously at 8x the main clock.
Both versions of the hardware have the same hardware registers and programming model. However, there is
one significant difference. The V1 hardware swaps window banks without synchronization with the 65C816 side,
meaning that a memory access to the banking window in progress during the swap can be corrupted. This
means that reliable operation on V1 hardware requires excluding the 65C816 from the banking window
whenever the 6502 swaps banks. V2 hardware does not have this limitation since it runs the 65C816 and swaps
banks synchronously.
Chapter 8 - Cartridges 150
Chapter 9
Serial I/O (SIO) Bus
The serial I/O (SIO) bus is the main data bus for peripherals and supports cassette tape decks,
disk drives, printers, communication devices.

Altirra Hardware Reference Manual Created by Avery Lee
9.1 Basic SIO protocol
Data bus connection
Two data lines are used on the SIO bus, one for data sent from the computer (DATA OUT) and another for data
received by the computer (DATA IN). The two are independent and can both can be used simultaneously for full
duplex operation, even with different baud rates for the two directions. Multiple devices can listen simultaneously,
but only one can send at any one time.
Each device on the SIO bus is configured as either a host or peripheral. The computer is wired as a host and
sends on DATA OUT while receiving on DATA IN; peripherals are reversed and receive on DATA OUT while
sending on DATA IN. As a result, peripherals cannot normally talk to other peripherals. One consequence of this
is that popular SIO2PC devices, which are used to emulate a disk drive with a PC, cannot be used to control
other disk drives because the SIO2PC is wired as a peripheral and a reverse-wired 10502PC device is required
instead. A few devices are wired to operate in both modes, including auto-switching SIO2PC/10502PC adapters
and the Indus GT disk drive.
On the computer, the serial data input and output lines are connected to the serial port lines on POKEY, and
therefore all data transfers require manipulating POKEY's serial port. This also results in a standard data format
of one start bit, eight data bits from LSB to MSB, and one stop bit with no parity. The normal communication rate
is 19,200 baud, although this varies for device-specific commands.
SIO control lines
The CB2 control line on the PIA is connected to the command line on the SIO bus and is used to tell peripherals
that a command frame is being sent. It is active low, so it is normally high and then dropped low during the
command frame. The high-to-low transition tells the device that a command frame is starting; the low-to-high
transition signals to the device that the computer is ready to receive the response.
The CA2 control line connects to the motor control line on the SIO bus to activate a cassette tape recorder. It is
also active low and enables the cassette motor when lowered.
SIO interrupt lines
Two control lines on the SIO bus are rarely used but allow peripherals to interrupt the main computer CPU. The
Proceed line is connected to the PIA's CA1 input, whereas the Interrupt line is connected to the CB1 input.
Enabling these interrupts in the PIA control registers will cause the IRQ handler to be invoked on demand. The
1030 Direct Connect Modem is a peripheral that uses this functionality.
Command Frame
Because multiple devices can be connected to the SIO bus, a standard command sequence is necessary to
address a specific device. This is done by lowering the command line and sending a five byte frame at 19200
baud. The five bytes are:
·Device ID
·Command
·Auxiliary byte 1
·Auxiliary byte 2
·Checksum
The device ID indicates the device being addressed. Table 21 lists some device IDs used.
Chapter 9 - Serial I/O (SIO) Bus 152

Altirra Hardware Reference Manual Created by Avery Lee
$31-3F Disk drive (D:)
$40-43 820 printer (P:)
$45 Atari Peripheral Emulator (APE)
$46 AspeQt
$4F Type 3/4 poll
$50-53 850 serial device (R:)
$5F Cassette tape (C:) (virtual OS device)
$6F DOS2DOS (PCLink)
Table 21: SIO device IDs
Device $5F is special as it is a virtual device used by the OS to represent the cassette device, intercepted by the
SIO routines and routed to special cassette code. DDEVIC=$5F is what is intercepted, not the final SIO bus
device ID of $5F. The actual ID $5F is therefore unused, but unavailable for use by a physical device.
The command byte indicates the command being issued, with command codes specific to each device. The
auxiliary bytes provide command parameters.
At the end of the frame is the checksum, which is a simple 8-bit carry wrap-around checksum. It can be
computed by initially clearing the 6502 carry bit and then adding each data byte in sequence with ADC, followed
by folding the carry bit back in with ADC #0. The command frame is valid if the carry wrap-around checksum of
the four command bytes is equal to the checksum byte.40
Not all devices use command frames. Cassette tape recorders are dumb devices and only use the motor control
line, not interpreting any commands on the bus; the 1030 modem uses simple command bytes at 300 baud.
Note
Although most OSes have no limitation on device ID range, the 65C816 XL OS is unable to access device
IDs with the MSB set ($80-FF).
Command Protocol
In addition to interpreting command frames, a standard intelligent SIO device also follows a specific protocol for
command execution. All command and data transfers are normally at 19200 baud with no parity. This proceeds
as follows41:
1. Command frame
·The host lowers the command line to indicate the start of a command.
·A delay of 750µs-1600µs is introduced for the peripheral to notice the command line state.
·The five-byte command frame is sent.
·Another delay of 650µs-950µs is introduced for the peripheral to finish receiving the command.
(Note that the minimum bound on this is violated by the OS; peripherals should assume no minimum
delay.)
·The command line is raised.
·The peripheral checks the command frame, and ignores it if the command is intended for another
[40] This is also known as a one's complement sum and there are interesting properties that can be used to accelerate its
computation, such as associativity. See [RFC1071] for an extended discussion of optimization opportunities.
[41] See [ATAXL] section 9 for the official SIO protocol description.
Chapter 9 - Serial I/O (SIO) Bus 153

Altirra Hardware Reference Manual Created by Avery Lee
peripheral or if a framing or checksum error has occurred.
2. Command acknowledgment
·The peripheral initially checks the command code and command parameters for validity. This may
take up to 16ms.
·If the command is valid, it quickly sends back a $41 ('A') byte to acknowledge a valid command. If it
is invalid, a $4E ('N') or NAK byte is sent back.
3. Data frame from computer
·If the command requires a data frame to be sent from the computer, it is now sent at this time at
19200 baud between 10-18ms after the ACK byte is received from the device. The length is
command dependent. A carry wrap-around checksum byte is included at the end.
·The peripheral has 850µs-16ms to process and validate the data frame.
·If the data frame is received correctly, a $41 ('A') or ACK byte is sent by the peripheral. Otherwise, a
$4E ('N') or NAK byte is sent and the command is aborted. No complete/error byte is sent if a NAK is
sent.
4. Command execution
·The peripheral now executes the command. The amount of time taken varies and can be significant,
anywhere from milliseconds for a status command to several hundred milliseconds for a read sector
command and over a minute for formatting a disk.
5. Command result
·A delay of at least 250µs is required after the ACK byte before indicating the command result. Note
that this delay is dead time, i.e. from the end of the ACK byte to the beginning of the result byte.
·If the command completed successfully, a $43 ('C') or Complete byte is sent by the peripheral.
Otherwise, a $45 ('E') or Error byte is sent.
6. Data frame from peripheral
·For commands that send data back to the computer, the peripheral now sends a data frame. A carry
wrap-around checksum is sent at the end. Note that for commands that return data, this frame is
sent even if an error status ($45) was returned.
7. End of command
·The command is now completed and another command may be issued on the bus.
Chapter 9 - Serial I/O (SIO) Bus 154

Parameter Source of delay Timing
Assert command line to start of command frame Host 750µs-1.6ms
Command frame (5 bytes) Host Varies (~2.6ms)
End of command frame to deassert command line Host 650µs-950µs
Deassert command line to start of ACK/NAK Peripheral 0-16ms
ACK/NAK byte Peripheral Varies (~520µs)
End of ACK/NAK to start of write data Host 10-18ms
Write data Host Varies (~68ms for 128b sector)
End of write data to start of ACK Peripheral 850µs-16ms
ACK byte Peripheral Varies (~520µs)
Execute operation Peripheral 250µs to device timeout
Complete/Error byte Peripheral Varies (~520µs)
End of C/E byte to read data Peripheral Not specified; may be zero.
Read data Host Varies (~68ms for 128b sector)
Figure 9: SIO command timing
command
A
N
data
C/E
A A C/E
A C/E data
0-16ms
10-18ms 850µs-16ms
250µs+
250µs+
Command
line
Failed command
Simple command
Read command
Write command
command
command
command
750µs-1.6ms 650µs-950µs

Altirra Hardware Reference Manual Created by Avery Lee
Warning
There is no specified delay between the Complete/Error byte and the beginning of the data frame during a
read operation and several disk drives will send the data frame back-to-back with the C/E byte. The receive
routine needs to keep the serial port hardware active in receive mode across these two sections of the
protocol because the first data byte will likely start shifting in even before the CPU is able to read and
acknowledge the C/E byte.
Interrupting commands
In general, the SIO bus does not support interrupting a command in progress. Once a device has recognized a
valid command frame and begun acting upon it, it will likely ignore further commands on the bus until the
operation has completed, as most devices do not have the ability to interrupt the controller when a command
starts (the Indus GT being an exception). Other devices may still respond to further commands addressed to
them, however; this can lead to a situation where two devices try to send data to the computer to the same time,
producing garbled data.
9.2 Polling
The host computer can poll the SIO bus to automatically discover and download handlers from each device. This
is done by sending polling commands out onto the bus and checking if any devices respond.
Type 0 Poll
A Type 0 Poll is essentially a disk boot – a request for sector 1 on D1:, which is then interpreted as a disk boot
sector and results in consecutive sectors being read from disk. A peripheral can emulate a “disk” drive in order to
satisfy a Type 0 Poll.42 A peripheral can delay responding to a sector read until a number of consecutive get
status requests have been received in order to ensure that any real disk drive at the D1: address has a chance
to respond first.
The 850 Interface Module responds to Type 0 Polls.
Type 1 Poll
Command $3F (?) is used to perform a Type 1 Poll.43 AUX1 and AUX2 are not used, and the command returns
12 bytes if successful. These 12 bytes are the device control block (DCB) to be used with the OS SIO to read in
the bootstrap loader starting at $0500, which is then invoked by a JSR to $0506.44 This is similar enough to a
disk boot that the same image can be used for both. The 850 Interface Module responds to this type of poll.
DOS 2.0S's default AUTORUN.SYS responds to a Type 1 Poll, but it has a quirk that requires the device
bootstrap to follow a few rules:
·Only one device's handler can load, as only one successful poll is handled.
·As noted, the entry point to the bootstrap routine must be at $0506.
·The bootstrap routine must hook (DOSINI) such that the next call to it does not chain through to DOS.
Another shortcoming of a Type 1 Poll is that a device will only respond affirmatively to it once, and then never
again until it is power-cycled.
[42] [AHS05] p.8
[43] [AHS05] p.10
[44] The $0506 start address is, in fact, hardcoded by DOS 2.0's AUTORUN.SYS.
Chapter 9 - Serial I/O (SIO) Bus 156

Altirra Hardware Reference Manual Created by Avery Lee
Type 2 Poll
Command $3F is also used for Type 2 Polls.45 However, no other information is available about them.
Type 3 Poll
Type 3 Polls are documented in the XL Addendum and use both address $4F and command $40 (@) together.46
Unlike a Type 1 Poll, Type 3 Polls allow the host to restart the process and re-poll peripherals without requiring
them to be power-cycled, and also stream the handler in a standardized relocatable form instead of needing the
peripheral to handle relocation itself. The host is required to use address $4F and command $40, but devices
are allowed to only check for the command. This means that command $40 is globally reserved across all device
IDs.47
The Poll Reset command resets all peripherals and restarts the polling process. It is issued with AUX1 and AUX2
set to $4F. No peripherals are supposed to actually reply to a Poll Reset – it is simply sent blind.
AUX1/AUX2=$00 is the main poll command. Every peripheral that responds to a Type 3 Poll responds to a
unique retry of this command, i.e. one device may respond to the initial command, while another device might
only respond to the 4th. This requires that each device count off the number of consecutive times this command
has been received. There are 26 slots available since that is the number of attempts from the OS.
On a successful poll, the device returns a four byte payload with the following data: handler size (low byte),
handler size (high byte), device ID, and version ID. The device ID can then be used to address the device
directly to load the handler. The handler size must be even.48 Afterward, the device remembers the successful
poll so that it doesn't respond to it again until a poll reset is issued.
A Null Poll is issued by setting AUX1/AUX2=$4E. This effectively serves as a no-op command that does nothing
but restart a polling sequence, resetting the retry counters for each device.
The XL/XE OS issues a Type 3 Poll after boot and before run.
Type 4 Poll
A Type 4 Poll is similar to a Type 3 Poll except that it is triggered by a request for a specific device.49 The
address and command are the same – $4F/$40 – but AUX1 contains the device name and unit number together
in ATASCII. For instance, a request for H: or H1: would have $48/$01 in the AUX bytes.
The XL/XE OS issues a Type 4 Poll on an attempt to access a nonexistent CIO device.
Type 3/4 Handler Loading
When a device has been successfully found via a Type 3 or Type 4 Poll, the handler is then loaded from the
device directly using the download command $26, using the device ID from the poll. AUX1 is set to a block
number, starting at zero and counting up as many blocks as necessary according to the handler size. On
success, a 128 byte payload is returned. Invalid block numbers can result in either a NAK or lack of response.50
Type 3/4 Handler Format
The blocks of handler data returned by the download command, when reassembled, form a stream of data to
load and relocate a 6502 machine program. This module consists of two main relocatable sections, a zero-page
section and a non-zero-page section, as well as optional non-relocatable sections at absolute addresses. The
[45] [AHS05] p.10
[46] [ATAXL] p.22
[47] [AHS05] p.9
[48] [AHS05] p.10
[49] [ATAXL] p.23
[50] [AHS05] p.11
Chapter 9 - Serial I/O (SIO) Bus 157

Altirra Hardware Reference Manual Created by Avery Lee
program is assembled from records in the stream, with each record defined by a leading type byte. All records
except for the end record are followed by a length byte, which includes everything except the type and length
bytes.
Text records (record types $00, $01, and $0A)
A text record delivers up to 255 bytes of a section. $00 is for the non-zero page section, $01 is for the zero-page
section, and $0A is for a non-relocatable section. The payload consists of a 16-bit offset from the beginning of
the section, followed by the section data.
Relocation records (record types $02-09)
Relocation records are used to adjust references within sections to point to the final location of those or other
sections. The references in the section data initially contain the offset from the beginning of the target section;
the address of the target section is added to produce the final referenced address.
There are eight types of reference:
Token Referencing section type Target section type Reference type
$02 Non zero page Non zero page Low byte of word address
$03 Zero page
$04 Non zero page Zero page Byte address
$05 Zero page
$06 Non zero page Non zero page Word address
$07 Zero page
$08 Non zero page High byte of word address
$09 Zero page
Table 22: Peripheral Handler Relocation Record Types
The locations of the references to be relocated are specified in the payload as byte offsets from the beginning of
the last text record. This means that relocation records need to be interleaved with text records and that word
addresses should not be split across text record boundaries.
Record types $08 and $09 are special as they adjust references consisting of only the high byte of the target
address. This is an unusual relocation type and allows handlers to be relocated anywhere in memory, not just to
page boundaries. For these types, the offset data consists of pairs of bytes instead of single bytes, where the
first byte of each pair is the offset and the second byte is the low byte of the reference offset. The low byte in the
relocation data is combined with the high byte in the text record to form the reference offset, which is then added
to the section address to produce the target address. The high byte of this target address is then written back to
the section.
End record (record type $0B)
The last record in the handler is type $0B, which signifies the end of the relocation stream. Unlike the other
record types, no length byte is included. Instead, the $0B token is followed by three bytes:
·Self-start byte: $00 for no self start, $01 to automatically invoke an absolute address, and $02 to invoke
a relocated address within the non-zero-page section.
·16-bit start relative or absolute start address.
Chapter 9 - Serial I/O (SIO) Bus 158

Altirra Hardware Reference Manual Created by Avery Lee
9.3 850 Interface Module
SIO addressing
The RS232 ports are addressed using the SIO addresses $50-53.
Status command
The status command ($53 = 'S') returns error and control state information from the 850 controller; AUX1 and
AUX2 are ignored. Two bytes are returned, the first of which contains error state and the second of which
contains control line state:
First status byte:
7 0
FRA OPT RDY SER CMD
D7 Framing error detected
D3 Invalid option
D2 Not ready (monitored control line inactive)
D1 Bad SIO data frame
D0 Invalid command
0 No error detected
1 Error detected
Second status byte:
7 0
DSR CTS CRX 0 RCV
D7:D6 DSR state
D5:D4 CTS state
D3:D2 CRX state
00 Always low since last check
01 Currently low, but was high at some point since last check
10 Currently high, but was low at some point since last check
11 Always high since last check
D0 RCV state
0 Space
1 Mark
Write command
The write command ($57 = 'W') is used to send data to the 850 controller for transmission. The AUX1 byte of the
command frame specifies the number of bytes in the data payload from 0 to 64 bytes, while AUX2 is ignored. If
AUX1 is zero, the data payload portion of the SIO sequence is skipped.
Regardless of the value in AUX1, the data frame is always padded to 64 bytes.
The 850 controller does not issue a (C)omplete response until the entire block has been sent.
Control command
The control command ($41 = 'A') corresponds to the R: handler's XIO 34 and is used to modify the outgoing
control lines.
Chapter 9 - Serial I/O (SIO) Bus 159

Altirra Hardware Reference Manual Created by Avery Lee
AUX1:
7 0
DTRc DTR RTSc RTS XMTc XMT
D7 Enable DTR (Data Terminal Ready) change
D5 Enable RTS (Request To Send) change
D1 Enable XMT (Transmit) change
0 No change
1 Change state
D6 New DTR state (if D7 set)
D4 New RTS state (if D5 set)
D0 New XMT state (if D1 set)
0 Negate / space
1 Assert / mark
Stream command
Sending the command $58 ('X') switches the 850 controller into streaming mode, which corresponds to
concurrent mode on the R: handler. AUX1 specifies the I/O direction, while AUX2 is ignored:
AUX1:
7 0
R W
D1 Read enable
0 Read from 850 direction disabled
1 Read from 850 direction enabled
D0 Write enable
0 Write to 850 direction disabled
1 Write to 850 direction enabled
If the current word size for the channel is anything other than 8-bit, the I/O direction must be input only and the
baud rate must be 300 baud or less, or the command will fail.
The returned data payload for the stream command consists of nine bytes to be written to $D200-D208 (AUDF1-
AUDCTL) to configure POKEY for the correct baud rate during the transfer. Afterward, the controller starts
operating in streaming mode.
Streaming mode causes the controller to reflect between the Atari SIO bus and the serial port. During streaming,
no commands can be sent to the controller, and in particular, it is not possible to read the control line status. The
controller exits streaming mode the next time that the command line is asserted.
Configure command
The configure command ($42 = 'B') corresponds to the R: handler's XIO 36. It sets the baud rate, word size, stop
bits, and control signal monitoring.
AUX1:
7 0
2SB Word size Baud rate
Chapter 9 - Serial I/O (SIO) Bus 160

Altirra Hardware Reference Manual Created by Avery Lee
D7 Stop bits
0 1 stop bit
1 2 stop bits
D4:D5 Word size
00 5 bits
01 6 bits
10 7 bits
11 8 bits
D0:D3 Baud rate
0000 300 baud
0001 45.5 baud
0010 50 baud
0011 56.875 baud
0100 75 baud
0101 110 baud
0110 134.5 baud
0111 150 baud
1000 300 baud
1001 600 baud
1010 1200 baud
1011 1800 baud
1100 2400 baud
1101 4800 baud
1110 9600 baud
1111 19200 baud
AUX2:
7 0
DSR CTS CRX
D2 Watch DSR (Data Set Ready) line
D1 Watch CTS (Clear To Send) line
D0 Watch CRX (Carrier Ready) line
0 Ignore control line
1 Block attempts to write block or start streaming when control line is negated
Type 1/2 Poll command
Command $3F polls the SIO bus for devices with automatically loadable handlers. The 850 responds to this
command in one of two ways. For the standard poll with AUX1=$00, it responds once to the very last (26th)
attempt. It always responds to AUX1=$01. The result of the command is a 12-byte DCB to use with the SIOV
vector to retrieve the booter/relocator, which is then invoked at $0506.51 This program then loads, relocates, and
initializes the handler at MEMLO, after which MEMLO is raised to above the handler.
Booter/relocator download command
Command $21 (!) loads the booter/relocator from the device; AUX1/2 are ignored. The booter/relocator is
returned in a single block, so the size must be known beforehand. This command is usually not issued directly,
but according to the DCB returned by the poll command. One ROM version returns 342 ($0156) bytes from this
command, meaning that $0500-0655 must be available to bootstrap the 850.
Handler download command
Command $26 (&) is used to load the peripheral handler from the device; AUX1/2 are ignored. Unlike the similar
command used by Type 3/4 Polls, the 850 does not return the handler in blocks. Instead, it is returned as a
[51] As noted earlier, DOS II's AUTORUN.SYS hardcodes $0506 as the start address, so this can be relied upon.
Chapter 9 - Serial I/O (SIO) Bus 161

Altirra Hardware Reference Manual Created by Avery Lee
single large block. This means that the handler size must be known beforehand. This command is usually not
issued directly, but automatically by the booter/relocator. One ROM version returns 1496 ($0592) bytes from this
command.
9.4 1030 Modem
The 1030 modem is an SIO bus peripheral that allows phone line based communications at 300 baud with Bell
103 modem compatible modulation. 52
Data protocol
When a connection is active, the computer and the 1030 modem exchange data directly on the bus at 300 baud,
without using command or data frames. This means that the SIO bus is exclusively dedicated to the modem
during an online connection unless suspended using the $5A (“Z”) command.
Interrupts
The 1030 modem is one of the rare devices that uses the SIO proceed and interrupt control lines. The proceed
line is used to signal completion of a command, while the interrupt line indicates the carrier detect state. Both are
intended to drive the PIA interrupt facility in order to assert IRQs on the 6502.
Command protocol
Unlike other SIO peripherals, the 1030 uses a non-standard protocol for communication commands on the SIO
bus. All commands are sent as single characters at 300 baud with the command line asserted. Presumably, any
other peripherals on the bus would ignore such commands as they would encounter framing errors attempting to
interpret the sent data at 19200 baud.
[52] The author would like to acknowledge the help of mr-atari and AtariGeezer in recording and analysis of the 1030
hardware, particularly the bootstrap process.
Chapter 9 - Serial I/O (SIO) Bus 162

Altirra Hardware Reference Manual Created by Avery Lee
Code Command Description
$48 ('H”) Send break signal
$49 (“I”) Set originate mode Switches to the originating modem set band (1270Hz/1070Hz).
$4A (“J”) Set answer mode Switches to the answering modem set band (2225Hz/2025Hz).
$4B (“K”) Begin pulse dial Take phone off hook and prepare to pulse dial. Bytes received in
the range of $01-$0A are interpreted as the number of times to
pulse the phone line.
$4C (“L”) Pick up phone (off hook)
$4D (“M”) Hang up phone (on hook)
$4F (“O”) Begin tone dial Take phone off hook and connect POKEY audio to phone line.
$50 (“P”) Start 30 second timeout Wait up to 30 seconds for carrier.
$51 (“Q”) Reset modem
$57 (“W”) Set analog loopback test Turns on analog echo so that transmitted data is received.
$58 (“X”) Clear analog loopback test Turns off analog echo.
$59 (“Y”) Resume modem Stops transmission of received data across SIO bus.
$5A (“Z”) Suspend modem Resumes transmission of received data across SIO bus.
Table 23: 1030 Modem hardware commands
Tone dialing
There is no direct support on the 1030 modem itself for tone dialing. Instead, DTMF tones are generated using
POKEY on the main computer and the audio output is then conducted onto the phone line.
Bootstrap support
The 1030 supports both disk emulation for a full bootstrap and a separate command for handler download only.
Disk emulation is done similarly to the 850, where the 1030 will emulate get status and read sector commands
for D1: after a number of unanswered command retries. The 1030 responds with an 810-like status response of
$00 00 E0 00 and a single boot sector. The code within this boot sector then does two things: it bails out silently
(C=0) if a T: device is already present, and then it loads the ModemLink software from the modem. ModemLink is
downloaded to $0C00-33FF using SIO address $58, command $3B.
The T: handler embedded within the on-board ModemLink software can also be downloaded by itself using
address $58, command $3C, AUX $00/$00, and a receive length of $B30. This retrieves a handler to be placed
at $1D00-282F, with its initialization routine at $1D0C.
9.5 SX212 Modem
The SX212 modem is a Hayes-compatible 1200 baud modem with both SIO and RS-232 connections. Like the
XM301 and unlike the 1030, it has no on-board software and a T: handler or communications program must be
loaded externally.
Command set
The SX212's command interface is handled by a Sierra Semiconductor SC11008 Stand-Alone Modem Interface
Controller. The following commands are supported:
Chapter 9 - Serial I/O (SIO) Bus 163

Altirra Hardware Reference Manual Created by Avery Lee
A/ Repeat last command
ATA Answer (go off hook)
ATB Set Bell modulation mode*
ATC Set transmit carrier
ATD Dial
ATE Set echo
ATF Set full duplex
ATH Set on/off hook
ATI Information
ATL Speaker loudness*
ATM Speaker mode
ATO Originate (go off hook)
ATP Set pulse dial mode
ATQ Set quiet mode
ATR Set reverse mode
ATS Set or query register
ATT Set touch dialing
ATV Set verbose reporting
ATX Set connect/busy/dialtone reporting
ATY Set long space disconnect enable*
ATZ Reset modem
Table 24: SX212 supported commands
Commands marked with an asterisk (*) are ones that are documented in the SC11008 datasheet and supported
by the SX212, but not documented in the Atari SX212 Modem Owner's Manual.
Escape guard
Like truly Hayes-compatible modems, the SX212 requires appropriate guard time before and after the +++
escape sequence to recognize it as such. This is set in register S12 in 1/50th second units and defaults to one
second. Attempting to use the time-independent escape sequence (TIES) used by some modems without
appropriate delays does not work.53
Version information
The ATI0 and ATI1 commands emit decimal numbers for the product code and firmware checksum of the
modem, respectively. On at least one modem, these values are 134 and 103.
SIO motor control line
Since the standard SIO command frame protocol is not used by the SX212, the motor control line is used
[53] Not only does Atari's manual not document this either, the Atari SX212 modem handler tries to emit +++AT as part of its
initialization sequence without delays, even though the hardware is configured by default to require guard times.
Chapter 9 - Serial I/O (SIO) Bus 164

Altirra Hardware Reference Manual Created by Avery Lee
instead to indicate when communication with the modem is desired. Data is only received by and sent from the
SX212 when the motor control line is asserted low.
Conflicts on the motor control line are avoided because the SX212, like the 410 and 1010 Program Recorders,
only have one SIO connector and are designed to only be used at the end of the SIO chain.
SIO proceed/interrupt lines
The SX212 indicates the carrier detect and high speed states to the computer through the SIO proceed and
interrupt signals, respectively. These match the indicator lights such that the proceed line is low whenever CD is
on and the interrupt line is low when HS is on. Changes in these signals are then exposed to software via
connections to the CA1 and CB1 inputs on the PIA.
Because the PIA only allows edge detection on the CA1/CB1 inputs, an initialization sequence is necessary for
the handler software to ascertain the current state of the SIO proceed and interrupt lines before it can begin
tracking changes in the CD/HS states.
Speed auto-switching
Commands can be sent to the modem at either 300 or 1200 baud. When the character is received in command
mode, the modem will automatically switch to the correct speed. This flips both the state of the high speed (HS)
indicator and the SIO interrupt line. The character that triggers this switch is still recognized and processed
correctly.
The SX212 powers up in high-speed mode.
9.6 R-Verter
The R-Verter is a small adapter cable that connects an RS-232 serial device to the SIO bus.
Motor control line
The standard SIO protocol is not used by the R-Verter; the motor control line is used instead to enable
communications. When the motor control line is asserted (motor on), full-duplex transmit/receive and DTR
sensing are enabled; when it is negated, the R-Verter disconnects from the bus.
Communication parameters
The R-Verter does not have a UART or UART-like controller and simply adapts the SIO bus to an RS-232
connector. This means that serial framing and timing are determined by POKEY, while parity and stop bit settings
are driven by software.
Carrier Detect and Data Set Ready sensing
The Carrier Detect (CD) and Data Set Ready (DSR) pins of the RS-232 connector are hooked up to the Proceed
and Interrupt lines on the SIO bus, respectively, with inversion. This means that an active CD/DSR line pulls
CA1/CB1 low.
9.7 410/1010 Program Recorder
The 410 and 1010 Program Recorders are cassette tape recorders with a connection to the SIO bus.
Motor control
The SIO motor control line enables the 410/1010 recorder motor under computer control, allowing the tape to be
stopped on demand. The Play or Record button must also be depressed on the 410 for the motor to activate.
Chapter 9 - Serial I/O (SIO) Bus 165

Altirra Hardware Reference Manual Created by Avery Lee
The motor control line also serves as the voltage source for the audio track, cutting out the audio when the motor
is deactivated. A side effect of this is that rapid toggling of the motor control line will be reflected as audio on the
computer when the 410/1010 is connected.
Data decoding and encoding
During playback, the data track is processed by two bandpass filters centered at ~4kHz and ~5KHz. The
amplitudes of the two filters are compared and the result is sent across the SIO bus, with the 4KHz filter
producing a 0 and the 5KHz filter producing a 1. This decodes the frequency shift keying (FSK) encoding used to
record data onto the tape.
When recording, the SIO bus data is recorded directly onto the tape. This is normally done with two-tone mode
with timers 1 and 2 clocked with the 64KHz clock with divisors of 6 and 8 (AUDF1=5 and AUDF2=7), giving
5327Hz and 3995Hz as the two tones.
Turbo modifications
A popular modification to Atari cassette tape recorders involves adding a turbo mode that bypasses the FSK
bandpass filters. This allows for higher data rates to be recorded onto the tape, at the cost of additional
complexity to manually modulate the signal. This is often activated by lowering the command line.
9.8 MidiMate
The MidiMate provides MIDI capability over the SIO bus.
MIDI communications
MIDI messages are sent at 31250 baud, which is not a rate that POKEY can hit normally with sufficient accuracy.
Therefore, the MidiMate provides an external clock for POKEY to use, by dividing down a 4MHz crystal by 128.
This is then selected by software using the external input/output clocking modes in the SKCTL register. Software
is responsible for following the MIDI protocol for sent messages.
Sync input
An external source can be connected to the MidiMate for timing synchronization purposes. This is connected to
the SIO bus interrupt line, which in turn connects to the CB1 input on the PIA.
Enable/disable
The SIO motor control line is used to enable the MidiMate. When asserted, the external serial clock and sync
input are enabled; otherwise, they are disconnected from the SIO bus.
9.9 Pocket Modem
The Pocket Modem, by BOT Engineering, is a small SIO-based, 300 baud modem.
Data transfers
POKEY's standard serial port functionality is used for full-duplex communication with the modem. There is no
setting for baud rate on the modem itself; the baud rate is determined solely by the rate at which POKEY sends
and receives data. Supported baud rates are 110, 210, 300, and 500 baud.
Command protocol
The Pocket Modem does not use the standard SIO command protocol. Instead, it uses a custom command
Chapter 9 - Serial I/O (SIO) Bus 166

Altirra Hardware Reference Manual Created by Avery Lee
protocol based on both the command and motor control lines. The command line serves as the data line and the
motor line serves as a clock.
Each command provides the setting for four mode bits on the device. The bits, in shifting order are:
•Bit 0: Enables data communication. When this is set, the modem transfers data between the SIO bus
and the phone line.
•Bit 1: Off-hook state. Takes the phone off-hook (1) to answer or dial, or places it on-hook (0) to hang up.
•Bit 2: Sets the carrier frequencies to originate (0) or answer (1).
•Bit 3: Enables dialing if set to 1.
The command line is set to low for a 0 or high for a 1, and is shifted into the device on the falling edge (asserting
edge) of the motor control line. There does not appear to be a direct indicator of when the last bit is shifted. The
shift rate is very slow, about one bit every six video frames in the standard driver.
Commonly used modes include %0000 to hang up, %0011 for communication when originating a call, %0111 for
comm when answering a call, %0010 or %0110 when temporarily suspending a call for disk access, and %1010
when dialing.
Pulse dialing
Tone dialing is not supported by the Pocket Modem, but it does support pulse dialing. Pulse dialing is enabled by
switching to mode %1010, which takes the phone off hook and enables dialing mode. In dialing mode, the
command line is used to control the on-hook state, such that asserting command (low) takes the phone off-hook,
and negating command (high) places it back on-hook. Pulse dialing is then performed by pulsing the on-hook
state with timing under software control.
Carrier detect
The SIO proceed line is used to communicate carrier detect state to the computer. It is asserted (low) when a
remote carrier is absent and negated (high) when a carrier is present.
Ring detect
Auto-answer is also supported by means of a ring detection signal on the SIO interrupt line. The Pocket Modem
sends pulses on the interrupt line whenever ringing is detected. It cannot answer the phone automatically, but
software can count the ring pulses and switch the Pocket Modem to on-hook answer mode once enough pulses
have arrived.
Chapter 9 - Serial I/O (SIO) Bus 167
Chapter 10
Disk drives

Altirra Hardware Reference Manual Created by Avery Lee
10.1 Introduction
All floppy disk drives used with the 8-bit computer are built on top of the common 90K disk format and disk drive
protocol established by the first disk drive, the 810 disk drive. The physical disk format is that used by the
common Western Digital floppy drive controller (FDC) chips of the era and the disk protocol is a simple, high-
level block protocol, leading to a high level of baseline compatibility between disk drives of differing internal
architectures.
Geometry abstraction
All of the standard disk drive commands work in terms of logical sector numbering instead of physical
track/sector numbers. For instance, a 90K single density disk is addressed as a linear array of sectors in the
range 1-720. This frees the computer from having to take physical disk geometry into account. A hard disk or
simulated disk may have very different physical storage, but as long as it exposes 720 sectors of 128 bytes each
in the disk interface, it can substitute for a regular single density disk.
That having been said, the disk interface does not fully abstract away the geometry because it does not have a
standard command to return the capacity of the disk in sectors or the size of each sector. This missing facility
was later provided by the Percom block commands supported by many enhanced drives.
By convention, logical sector 0 is not used, although drives differ in whether they return an error for such a
request. Since logical sector numbers are 16-bit unsigned values, the maximum disk size accessible through
standard commands is 65535 sectors.
Disk formats
The most common Atari disk format is the original 90K single density format, composed of 720 sectors of 128
bytes each, arranged in 40 tracks of 18 sectors each on a 5.25” floppy disk. This is the only format supported by
the 810 disk drive and the one used for most software distribution.
The 1050 drive added support for MFM encoding instead of FM, which allowed the capacity on each track to be
increased from 18 sectors per track to 26 sectors per track, or 1040 sectors. This was called enhanced or
medium density and increased storage per disk from 90K to 130K.
Some enhanced drives supported a double density format, encoding 18 sectors per track of 256 bytes each for
180K total. Beyond that, double-sided and 80 track encodings doubled or quadrupled the disk size further.
It is also possible for devices to support arbitrary disk sizes, such as 16384 sectors of 128 bytes each. When
using such a disk geometry not related to a physical disk format, the Percom block will often indicate only a
single track.
Boot sectors
To the boot loader used by the operating system, the boot sectors are a contiguous set of logical sectors starting
at sector 1, where a header in sector 1 indicates the total number of boot sectors. The first stage of the boot
loader can be anywhere from 1-255 sectors long. Standard disk operating systems typically use 1-3 sectors for
their stage 1 loader, which can then scatter load the rest of DOS from the remainder of the disk.
Double density formats with 256 bytes per sector add an additional restriction to the boot loader, however. By
convention, the first three sectors of a double-density disk are only 128 bytes long since the OS boot loader can
only load sectors of that size. The stage 1 loader must therefore fit within 384 bytes and contain code to change
the sector size for the remainder of the load. Although the physical sectors on disk are 256 bytes long, the drive
firmware only allows 128 bytes to be read or written from these sectors with the standard read/write commands.
Chapter 10 - Disk drives 169

Altirra Hardware Reference Manual Created by Avery Lee
Reporting errors
Atari-compatible disk drives can report errors in one of two main ways. The first is to reply to the command with
a NAK, and the second is to report an Error status instead of Complete. A NAK can only be returned within the
very short command timeout of 1-2 frames and usually results from an invalid command, while an Error occurs
later and generally results from a problem with accessing the disk. In either case, the Status ($53) command
returns more detailed information about the error.
A third failure case that can occur is a checksum error when data is transferred from the computer to the drive.
Command frames with bad checksums are always ignored without an error being returned, as they are either
bogus or were intended for another device. Drives are inconsistent in how they handle data frames with bad
checksums; some will NAK the data frame, while others will simply abort the command silently and rely on the
computer timing out.
In the case of an actual error when reading or writing from the disk, drives will usually attempt to retry the
operation internally at least once before returning an error to the computer. If the retry is successful, the only
indication to the computer is a longer delay for the result. Depending on the specific error involved, the drive
firmware may opt to seek the head away and back to the target track again if it suspects a head positioning
problem. This is called a recalibrate or restore when the head is stepped all the way to track 0 and back,
because it ensures that both the head position and the firmware’s tracking of it are consistent.
High-speed transfers
Standard disk drive commands always transfer data at 19,200 baud in both directions. Some enhanced drives,
such as the XF551 and the US Doubler, support high speed transfers at 38,400 baud or higher speeds. About
60-70Kbaud is the highest speed that can reasonably be supported with the display enabled; beyond that it is
difficult for the 6502 to keep up without dropping a byte due to display DMA and the vertical blank interrupt
stealing cycles.
There are multiple methods of initiating a high-speed transfer, depending on the specific protocol. XF551-style
protocols send the command at 19200 baud and switch to a higher speed for the data frame depending on bit 7
of the command. US Doubler type drives detect a command frame being sent at high speed and use that as the
signal to run the entire protocol at that rate. Other drives may use high bits of the sector number or custom
command IDs to signal. The US Doubler protocol is the most standardized as it allows the computer to query the
drive for its high-speed transfer rate, permitting support of a variety of speeds with a single code path.
Unfortunately, there is no direct and easy way to determine which high speed protocols that a disk drive
supports.
High-speed disk transfer rates are sometimes referred to by “POKEY divisor,” which is the combined value
written to POKEY's AUDF3 and AUDF4 registers to set the transfer rate. The US Doubler uses POKEY divisor
10, for instance, which gives a communications rate of 52,600 baud. The fastest rate possible with stock
hardware is POKEY divisor 0, which gives a speed of 127 Kbaud. Note that the baud rate refers to the speed at
which bits are sent; the delay between bytes can vary even at the same baud rate, and that does also affect the
overall transfer rate.
NTSC/PAL incompatibilities
It is possible for compatibility issues to arise between a drive and NTSC/PAL computers due to the 1% difference
in clock rate. This occurs when the transfer rate is marginal for either the computer or the drive for one of the
types and the clock rate differences pushes the other type over the edge.
One example is the XF551, whose high-speed mode was incompatible with PAL computers with early firmware
versions due to using too fast of a receive clock, just within 5% tolerance for the transmit rate of NTSC
computers but over for PAL. Another is the Speedy 1050, whose high-speed receive loop on the drive is slightly
too slow to keep up with the byte transfer rate of an NTSC computer.
Chapter 10 - Disk drives 170

Altirra Hardware Reference Manual Created by Avery Lee
Rotational latency
The timing of a read or write sector operation is determined not only by the time to transfer the sector, but also
when the sector becomes available. When the floppy drive is active, the disk media is spinning at a constant
speed of 288 or 300 RPM and the drive must wait until the desired sector arrives under the head before the
sector can be read or written, causing additional delay for the operation. The maximum delay is determined by
the rotational period of the disk, which at 288 RPM is 208ms.
Since the disk is constantly spinning when the drive is active, any delay for any reason results in a change in
rotational position. This includes processing on the computer, receiving the command from the computer, and
transferring sector data to/from the computer. One consequence of this is that these operations are hidden from
a timing standpoint if the drive already has to wait for the sector to arrive. This is why high speed operation by
itself is ineffective, because the 33ms that is saved with the higher transfer rate just results in 33ms more wait
time for the next sector to arrive under the head.
On the other hand, if other operations take too long and the sector has already passed, the drive must wait for
the media to spin around until the sector passes by again. This is known as “blowing a rev” and results in a
major drop in read/write speed.
Interleaving
The single-density disk format places 18 sectors at a bit less than 20° apart on the track. However, a standard
read or write sector command takes about 91ms end-to-end, or 156° at 288 RPM. This means that simply
placing the sectors in order would perform poorly, because every time the drive attempted to read the next sector
the drive head would be about 136° past it, requiring the disk to spin around more than another half revolution
again. This would limit the transfer rate to less than one sector per full revolution of the disk.
A solution to this problem is interleaving, placing the sectors in a different order so each sector is as close as
possible to where the drive would be ready to access it. Single density disks normally use a 9:1 interleave, which
means that sequential logical sectors are placed nine physical sectors apart. This results in an ordering of 1, 10,
2, 11, 3, 12, … on the disk and doubles the transfer rate from one to two sectors per revolution. Enhanced
density disks use a 13:1 interleave with 26 sectors per track, which also arranges about two sectors per
revolution. Double density disks, on the other hand, require a longer delay due to having twice as long of a
sector to transfer and use 15:1, putting each next sector almost all the way around the disk.54
Because the optimal interleave is dependent upon all delays including time to transfer the sector across the SIO
bus, high-speed operation allows use of and often requires tighter interleave factors. XF551 high-speed mode,
for instance, cuts 120° off the end-to-end sector time, allowing use of a 9:1 interleave instead of 15:1. However,
this is only good at high speed and reads slowly when normal speed transfers are used.
The interleave pattern of a track is determined when the track is formatted and the sector address fields are
written. After that, sector write operations reuse the existing address field and only rewrite the data field of each
sector, preserving the existing sector order.
Track buffering
A more general way to solve the sector timing problem is track buffering. Instead of the reading each sector
when requested and depending on sectors being interleaved optimally, the drive instead reads all sectors into a
track buffer in memory first and transfers from the track buffer to the computer. This greatly reduces delays
because the drive can read all sectors on the track in physical order instead of logical order, requiring only one
revolution to do so, and then send buffered sectors to the computer without rotational delays. Track buffering can
cut the time to read a full track by about 25% at normal speed, from 10 revolutions to 7½. Furthermore, the
[54] The “about” part comes from the sectors not actually being all spaced nine apart: 9 is divisible into 18, so while sectors
1 and 2 are nine apart, sector 3 is 10 slots away from 2. This is why some poorly interleaved disks or slow loaders
produce an alternating slow/fast beep pattern – the drive misses sectors on the short gaps but has enough time on the
long ones.
Chapter 10 - Disk drives 171

Altirra Hardware Reference Manual Created by Avery Lee
buffering eliminates the need to format the disk with an optimal interleave pattern, allowing even faster reads
with high speed transfers even with a standard interleave.
There are a few downsides to track buffering. First, it requires a significant amount of additional memory. Base
810 and 1050 drives only have 256 bytes of RAM, but it takes a minimum of 2.25K to buffer a single density
track. Second, some protected disks will not boot with track buffering because of the altered read timing. Third,
track buffering can slow down random access because it requires two revolutions to read any sectors on a track
even if only one sector is needed.
Drives vary in whether they buffer writes; some only buffer reads, while others have write buffering as an option.
The floppy drive controllers generally do not allow for reading all sectors on a track in a single revolution.
Instead, one pass is required to read the sector order using Read Address commands to prepare for a second
pass with Read Sector commands. To avoid this penalty on every read, buffering drives typically read the sector
order once on track 0 and reuse it for other tracks, assuming that the sector order is the same on each track. A
single Read Address command then suffices to find the next sector to arrive under the head before reading all
sectors on the track. This reduces the latency for reloading the track buffer to about N + 1.5 sectors for N
sectors/track.
Disk change detection
To safely buffer tracks, the firmware must be able to tell when the disk has changed and therefore buffered data
is invalid. On 1050-based drives, this is commonly done by monitoring the Not Ready status from the FDC. This
is tied to the drive lever and allows the firmware to sense when the drive mechanism is opened and re-closed.
810-based drives can’t do this and instead look for a change in the write protect sensor, which will temporarily be
obscured while the disk is being inserted or removed and then revealed when there is no disk in the drive.
While effective, neither of these approaches is foolproof. The write protect sector approach is defeated if the
sensor is kept covered during the change, such as by a piece of paper used to “write protect” disks without
actually covering the write protect tabs. Both approaches also require the drive to actively monitor the change
status, which can only be done during idle periods. This means that a disk change can be missed if done during
a disk operation.
Motor control and idle timeout
It is undesirable for the disk drive to constantly operate with the disk spinning since doing so puts additional wear
on both the disk and the drive and consumes power. For these reasons, disk drives turn on the spindle and head
stepping motors only when needed. The next operation requiring physical disk access has additional delay while
waiting for the spindle motor to spin back up to speed and for the stepper motor to stabilize, usually around 50-
200ms.
Once the drive has gone idle for a predetermined amount of time, the drive firmware turns the motors back off.
The idle timeout varies between drives but is typically about 2-3 seconds. Some drives also seek the head to a
specific track when idling. A significant side effect of a drive idling is that the next access takes longer due to the
need for the drive to spin back up and reposition the head.
Seeking
Although a disk has 40 or 80 tracks, the drive mechanism only has one head per side that can read one track at
a time. The head must move between the different tracks as needed, a process known as seeking. This
introduces additional delays into disk access when accessing sectors on different tracks, dependent on how
many tracks the head has to move across.
The head is stepped between tracks by a stepper motor, a type of motor that moves in discrete steps. It is
controlled by turning on and off different coils in the motor, called phases. Most stepper motors on Atari-
compatible disk drives have four phases (810 and 1050), although three is also possible. For some stepper
Chapter 10 - Disk drives 172

Altirra Hardware Reference Manual Created by Avery Lee
motors, one phase is turned on at a time in sequence to step the head (1, 2, 3, 4, 1...), and for others two
adjacent phases have to be turned on at a time (1+2, 2+3, 3+4, 4+1, 1+2, …). The spindle motor must be active
when the head is stepped.
80 track drives always step one phase per track, but some 40 track drives differ; some step by full tracks per
phase (810) and others by a half track per phase (1050). For the latter, two steps are necessary to move a full
track. Furthermore, because the head positioning may differ slightly for a half-step inward vs. outward, the
firmware typically does two additional half-steps inward and outward when seeking inward to ensure consistent
positioning regardless of direction.
Track 0 and recalibration
The stepper motor phases allow the motor to be relatively stepped between tracks, but provide no indication or
control over absolute position. Therefore, the firmware has to first determining the position of the head before it
can correctly seek. Stepping the head outward until it is known to be on track 0 establishes a known baseline
from where the firmware can track the head's absolute position as it is stepped inward and outward. This is
known as a recalibrate or restore operation.
One way to recalibrate the drive is to simply step it outward by enough steps to ensure that the head has
stepped all the way to track 0, no matter where it may have been. This typically requires several more steps than
the usual range of the head, such as 45 steps for a 40-track mechanism. Once the head reaches track 0, a stop
prevents the head from moving any further, and so it will bang against the stop as it steps between track 0 and 1.
On the 810, this produces the characteristic stuttery step sound when the drive is accessed with no disk. The
stepper motor has a defined phase offset for track 0 that the recalibrate operation will always stop on, such as
phase 1 or 4.
Some drive mechanisms have a track 0 sensor to detect when the head is positioned on track 0, avoiding the
need to bang the head against the stop and minimizing recalibration time. A quirk of track 0 sensors is that they
can also activate for an adjacent track or half-track; track 0 is reached when the sensor activates and the head is
on the correct phase for track 0.
Besides startup, recalibration is also necessary when the firmware detects that the head may not be positioned
over the correct track, such as when a sector is not found or sector address fields with the wrong track ID are
found. When this occurs, the firmware recalibrates the head and re-seeks back to try to correct the head
position. This produces the characteristic grr-grr sound when an error occurs.
Task sequencing
For all contemporary physical disk drive types, the drive is a small computer in its own right with a standard CPU
acting as its controller. The performance constraints on this controller CPU are typically strict enough that the
drive firmware can only do one thing at a time, whether it be transferring data on the SIO bus, operating the
floppy drive controller (FDC), or seeking the disk drive head.
The most direct consequence of this is the disk drive not being able to respond to changes in the hardware that it
is not interacting with. For instance, during an actual sector read or write operation with the FDC, the controller is
under very tight timing constraints, typically needing to transfer each byte within 32 cycles while also monitoring
a watchdog timer. This leaves no CPU time for monitoring the SIO bus, which means that any attempts by the
host computer to issue another command to the drive are ignored. Similarly, a track buffering drive will not notice
a disk being changed while receiving or sending a data frame to the host computer since it is too busy managing
the serial transfer to poll the ready or write protect state to detect the disk change.
Some disk drives do have some situational awareness during active command processing by means of
interrupts. The Indus GT, for instance, can interrupt its Z80 processor when the SIO command line is asserted
for the start of a new command. This gives it some ability to stop an active command in order to process a new
incoming command, instead of always ignoring overlapping commands.
Chapter 10 - Disk drives 173

Altirra Hardware Reference Manual Created by Avery Lee
Drive characteristics
Base drive Drive type Controller ROM RAM Formats RPM High speed Code upload Track buffering
Atari 810
Atari 810 (rev. B, C) 0.5MHz 6507 2K 256 bytes SD
288
- - -
Atari 810 (rev. E) 0.5MHz 6507 2K 256 bytes SD - Yes -
Happy 810 (pre-rev.7) 0.5MHz 6507 3K 3.25K SD - Yes Read only
Happy 810 (rev. 7) 0.5MHz 6507 6K 3.25K SD 38K Yes Read/write
Archiver / The Chip 0.5MHz 6507 4K 256 bytes SD - Yes -
Atari 1050
Atari 1050 1MHz 6507 4K 256 bytes SD, ED
288
- - -
Happy 1050 1MHz 6502 8K 6.25K SD, ED, DD 38K / 52K Yes Read/write
Super Archiver 1MHz 6507 4K 2.25K SD, ED, DD - Yes -
Speedy 1050 1MHz 65C02 8K 8.25K SD, ED, DD 55K Yes Read/write
US Doubler 1MHz 6502 4K 384 bytes SD, ED, DD 52K - -
1050 Duplicator 1MHz 6502 4K 8.25K SD, ED, DD 52K Yes Read only
1050 Turbo 1MHz 6507 8K 256 bytes SD, ED, DD 71K - -
TOMS 1050 1MHz 6502 8K 8.25K SD, ED, DD Yes -
Tygrys 1050 1MHz 6507 4K 2.25K SD, ED, DD 38K / 55K Yes -
I.S. Plate 1MHz 6502 8K 16.25K SD, ED, DD 52K Yes Read/write
Atari XF551 8.3MHz 8040 4K 256 bytes SD, ED, DD, DSDD 300 38K - -
Indus GT 4MHz Z80 4K 2-64K SD, ED, DD 288 38K / 68K Yes Read/write
ATR8000 4MHz Z80 4K 16-64K SD, DD, DSDD+ 300, 360 - - -
Percom RFD-40S1 1MHz 6809 2K 2K SD, DD, DSDD+ 300 - - -
Chapter 10 - Disk drives 174

Altirra Hardware Reference Manual Created by Avery Lee
10.2 Basic protocol
All disk drives support a common set of commands, the commands supported by the original 810 disk drive.
These commands can be used to access any disk of up to 65,535 sectors of 128 bytes each, for a maximum of
8MB.
Common command conventions
All disk commands are sent to the drive using a standard SIO command frame at 19,200 baud, and follow the
usual conventions for ACK/NAK/Complete/Error.
Error conditions that can be detected from the command itself, like an attempt to read a sector with an invalid
sector number, cause the command frame to be NAKed. On the other hand, error conditions only determined
after an access to the disk are instead returned as an Error response, after the command frame is ACKed and
possibly a data frame sent from the computer.
Drives differ on treatment of data frames that are received with invalid checksums. Some drives NAK the data
frame, while others simply abort the command without sending a response.
The operation timeout for disk drive commands is typically $0F, or about 15 seconds. Most operations complete
much more quickly, but this time accommodates the drive spinning up, seeking to the desired track, possibly
performing multiple retries to read or write the sector, and then returning the result. The exception is the format
command, which requires a much longer timeout specified in the Status command.
Status ($53)
The status ('S' = $53) command is used to query the status of the disk drive. AUX1 and AUX2 in the command
frame are ignored. In response, the drive sends back a four byte status block.
Byte Description
+0 Drive status
•D4 = 1: Motor running
•D3 = 1: Failed due to write protected disk
•D2 = 1: Unsuccessful PUT operation
•D1 = 1: Last data frame received unsuccessfully
•D0 = 1: Last command frame received unsuccessfully
+1 Inverted floppy drive controller (FDC) status
•Bit 7 = 0: Drive not ready
•Bit 6 = 0: Write protect error
•Bit 5 = 0: Deleted sector
•Bit 4 = 0: Record not found (missing sector)
•Bit 3 = 0: CRC error
•Bit 2 = 0: Lost data
•Bit 1 = 0: Data request pending
•Bit 0 = 0: Busy
+2 Format timeout, in units of 64 vblanks
•$E0 (224) = 4 minutes (NTSC) or 4.8 minutes (PAL)
•$FE (254) = 4.5 minutes (NTSC) or 5.4 minutes (PAL)
+3 Unused (usually $00)
Table 25: Disk drive status frame
Chapter 10 - Disk drives 175

Altirra Hardware Reference Manual Created by Avery Lee
Read ($52)
The read ('R' = $52) command reads a sector from the disk. The AUX1 and AUX2 bytes of the command frame
hold the LSB and MSB, respectively, of the sector to read. On completion, the drive returns the sector data, with
the size determined by the format of the disk and whether the requested sector is a boot sector. This occurs
even in the event of a read error.
On most drives, an attempt to read a sector with an invalid sector number – outside of 1-720 for a single density
disk – will result in the command being immediately NAKed. There are drives that will accept sector 0, however,
and the read sector command is also sometimes overloaded for memory access.
Put ($50)
The put ('P' = $50) command writes a sector to the disk, without verification. The AUX1 and AUX2 bytes of the
command frame hold the LSB and MSB, respectively, of the sector to read, and sector data is sent by the
computer following acknowledgment of the command frame. The size of the sector data depends on the format
of the disk and whether the requested sector is a boot sector.
On most drives, an attempt to write a sector with an invalid sector number – outside of 1-720 for a single density
disk – will result in the command being immediately NAKed. There are drives that will accept sector 0, however,
and the put sector command is also sometimes overloaded for memory access.
Write ($57)
The write command ('W' = $57) command is the same as the put command, except that it also re-reads the
sector afterward to verify a successful write.
On most drives, an attempt to write a sector with an invalid sector number – outside of 1-720 for a single density
disk – will result in the command being immediately NAKed. There are drives that will accept sector 0, however,
and the write sector command is also sometimes overloaded for memory access.
Format ($21)
The format command ('!' = $21) command formats a disk, writing 40 tracks and then verifying all sectors. All
sectors are fill with the data byte $00. On completion, the drive returns a sector-sized buffer containing a list of
16-bit bad sector numbers, terminated by $FFFF.
Because the format command takes much longer than other disk commands, it also requires a longer timeout.
The status command returns the timeout required for a format operation, in multiples of 64 frames.
10.3 Extended protocols
Many disk drives also support common extended protocols that allows flexible access to higher-capacity disk
formats and high-speed operation.
Double density
Drives supporting true double density operation – 256 bytes per sector – also extend the read/write/put sector
commands to use that size frame when accessing double density disks. Accesses to boot sectors (sectors 1-3)
are an exception as they still use 128 byte data frames. The format command is also extended to return a 256
byte buffer when formatting a double-density disk.
High speed operation
The Get High Speed Index ($3F) command is used to query the high-speed index for a drive that follows the US
Doubler protocol for high-speed operation. It is a read command that returns a data frame with a single byte, the
Chapter 10 - Disk drives 176

Altirra Hardware Reference Manual Created by Avery Lee
POKEY divisor to use when communicating with the drive at high speed. This value is written into AUDF3, with
AUDF4 set to $00, to set the speed of serial transmission. A divisor of $28 is standard (18866-19040 baud),
while high-speed divisors will usually be $0A or less (52640 baud or faster). Modern disk drive emulators can go
all the way to POKEY divisor 0, for the fastest self-clocked rate of 127840 baud, although this requires a special
ultra high speed SIO routine to transfer successfully on the computer side.
When a drive supports the US Doubler protocol, it accepts command frames at both normal 19200 baud and
also the faster rate. The speed at which the command frame is sent determines the speed for the entire
command, including ACK/NAK, complete/error, and data frames in both directions. No change to the command
byte is necessary, nor are any high-speed flags used in the AUX bytes.
Command retry logic is essential when using the US Doubler protocol because many drives supporting it can
only receive at one speed at a time and handle both speeds by toggling back and forth between them. This
means that it is highly likely that the first command frame sent will be dropped. The TOMS Turbo drive is unusual
in using the SIO clock lines to receive command frames at varying rates without alternating receive rates and
relying on the computer to retry.
Not all disk drives use this method of high-speed communication. The Happy 810/1050, XF551, and Indus GT
use differing methods that have no generic way of querying the drive, different high-speed command IDs, and
use a low-speed command frame with a high-speed data frame. The 1050 Turbo uses bit 7 of AUX2 to enable
high-speed data frame operation. Table 26 lists some known transfer rates used by disk drives.
Type POKEY divisor
Baud rate (ideal)
NTSC SECAM PAL
Standard (19200 baud) 40 19040 18952 18866
XF551
Indus GT Synchromesh
Happy 1050 (built-in)
SIO2PC (38400 baud)
16 38908 38728 38553
US Doubler
Tygrys 1050 10 52640 52397 52160
Speedy 1050 9 55930 55671 55420
SIO2PC (57600 baud) 8 59659 59383 59114
Indus GT SuperSynchromesh
1050 Turbo 6 68837 68519 68209
SIO2PC (115200 baud) 1 111860 111343 110840
Fastest possible (internal clock) 0 127840 127250 126674
Table 26: Disk drive transfer rates
Note that these transfer rates determine the timing of bits, not bytes; the byte transfer rate can be lower due to
additional delays between bytes. Also, the rates given are ideal transfer rates when the computer is sending to
the drive. When the drive is transmitting to the computer, it controls the transfer rate, and the actual ideal rate
may vary from the above as long as it is within POKEY’s tolerances for receive rate. The transmitter and receiver
must agree in rate within 5% to avoid skewing by more than a half bit by the time each byte ends.
Percom block standard
High-capacity disk formats are almost universally managed by means of the Percom block standard, established
by Percom Data Corporation with their line of disk drives. The current disk format setting on the drives is
described in a 12 byte block called the Percom block, with a pair of query and set commands called Read
Percom Block ($4E) and Write Percom Block ($4F).
Chapter 10 - Disk drives 177

Altirra Hardware Reference Manual Created by Avery Lee
Offset Contents
+0 Number of tracks (typically 40 or 80)
+1 Step rate
+2-3 Sectors per track (typically 18 or 26; MSB first)
+4 Number of sides, minus 1 (0 or 1)
+5 Density (0 = FM, 4 = MFM)
+6-7 Sector size in bytes (MSB first)
+8 Drive present (0 = absent, nonzero = present)
+9-11 Unused
Table 27: PERCOM Block Contents
Note that all two-byte quantities in the Percom block are stored as big-endian (MSB first), because it was
introduced on a 6809-based drive. This is opposite from the little-endian convention used by the 6502.
The Percom block is used both to query the format detected for a disk and to set the format to use when
formatting a new disk. There is typically only one setting on the drive and setting it differently from the currently
mounted disk can render the disk unreadable by the drive. The drive may also overwrite the setting if the disk is
changed, a read/write operation is triggered that causes the drive to auto-detect the format on the current disk,
or the user selects a density via external controls on the drive.
Drive firmware varies widely in handling of the Percom block. The step rate setting is frequently ignored and
firmware usually only validates and stores just enough information for the formats supported by the drives. The
XF551, for instance, barely checks enough information to be able to distinguish the four formats that it supports,
and on a read request re-formats the Percom block based on that information. Other drives may use more of the
block – particularly the original Percom drives – and so it is a good idea to read the Percom block from the drive
and modify it rather than simply writing a new block to the drive. This also means that re-reading the block after a
modification attempt is necessary to verify that the changes have actually been accepted by the drive. Drives do
not necessarily NAK an attempt to write an unsupported configuration block.
For formatting, the current Percom block setting is used for the next format command, usually $21 (format), $66
(format skewed), or $A1 (format with high-speed skew).
Drives may or may not update the Percom block state when detecting the density of a new disk. The US
Doubler, Super Archiver, and Indus GT drives in particular do not. Table 28 lists the various status byte 0 and
Percom block values detected by various drives.
Chapter 10 - Disk drives 178

Altirra Hardware Reference Manual Created by Avery Lee
Format Drive Status Tracks Step Sectors Sides-1 Density Sector size Present Reserved
SD 1050 Duplicator 00 28 00 0012 00 00 0080 40 000000
Happy 1050 00 FF 000000
Speedy 1050 01 FF 000000
TOMS 1050 00 28 000000
1050 Turbo 00 01 000000
Tygrys 1050 00 FF 000000
XF551 00 01 410000
ATR8000 00 40 000000
Percom RFD-40S1 01 FF Random
ED 1050 Duplicator 80 28 00 001A 00 04 0080 40 000000
Happy 1050 00 FF 000000
Speedy 1050 01 FF 000000
TOMS 1050 00 28 000000
1050 Turbo 00 01 000000
Tygrys 1050 00 FF 000000
XF551 00 01 410000
DD 1050 Duplicator 20 28 00 0012 00 04 0100 40 000000
Happy 1050 20 00 00 FF 000000
Speedy 1050 20 01 00 FF 000000
TOMS 1050 20 00 00 28 000000
1050 Turbo 20 00 00 01 000000
Tygrys 1050 20 00 00 FF 000000
XF551 6055 00 01 01 410000
ATR8000 20 00 00 40 000000
Percom RFD-40S1 20 01 00 FF Random
Table 28: Detected Percom blocks for various disk drives and formats
Medium / enhanced density is a special case as it may not be accessible via the write Percom block command,
particularly with the 1050 drive that does not support the Percom block. Instead, the enhanced density format
must be detected via bit 7 of the drive status byte from the status ($53) command, and selected by formatting
with the format medium command ($22).
10.4 Commands
Value Command Drive support
$20 Execute code 810 rev. E
$21 Format All drives
$22 Format medium 1050 and all other ED-capable drives
$23 Speed diagnostic 1050, Happy 1050 rev. 1, Tygrys 1050
$24 Diagnostic 1050, Happy 1050 rev. 1, Tygrys 1050
$24 TOMS 1050
[55] The XF551 is unable to detect whether a double density disk is double sided or not, so it simply assumes double sided.
Chapter 10 - Disk drives 179

Altirra Hardware Reference Manual Created by Avery Lee
Value Command Drive support
$36 Clear sector broadcast flags Happy 810 rev. 7
$37 Verify sector broadcast Happy 810 rev. 7
$38 Broadcast sectors Happy 810 rev. 7
$3F Get high speed index Most high-speed capable drives
$42 Archiver
$43 Check sectors Archiver
$44 Archiver
$46 Format track Archiver
$47 Scan track Archiver
$48 Happy command Happy 810 rev. 7, Happy 1050, Tygrys 1050
$4C Load sector list Archiver
$4D Execute code Archiver
$4E Read Percom block Most double density capable drives
$4E Set idle timeout / idle drive Archiver
$4F Write Percom block Most double density capable drives
$4F Open Archiver Archiver
$4F Write sector with verify (alias) 810 rev. B, C
$50 Put sector (write without verify) All drives
$51 Quiet (turn off motor) Happy 810 rev. 7, Happy 1050, Tygrys 1050
$52 Read sector All drives
$53 Status All drives
$54 Transfer memory 810 rev. E
$54 Read trace buffer Archiver
$55 TOMS 1050
$56 TOMS 1050
$57 Write sector with verify All drives
$58 Execute code Indus GT
$5A Zero sector / trace buffer Archiver
$66 Format skewed US Doubler, Tygrys 1050
$70 Put sector (high speed) Happy 810 rev. 7, Happy 1050, Tygrys 1050
$72 Read sector (high speed) Happy 810 rev. 7, Happy 1050, Tygrys 1050
$77 Write sector with verify (high speed) Happy 810 rev. 7, Happy 1050, Tygrys 1050
$A1 Format with high-speed skew Indus GT, XF551 (slightly different protocols)
$A2 Format medium with high-speed skew Indus GT, XF551
$A3 Format boot tracks with high-speed skew Indus GT
$CE Read Percom block (high speed) XF551, Indus GT
$CF Write Percom block (high speed) XF551, Indus GT
$D0 Put sector (high speed) XF551, Indus GT
$D2 Read sector (high speed) XF551, Indus GT
$D3 Get status (high speed) XF551, Indus GT
$D7 Write sector (high speed) XF551, Indus GT
Chapter 10 - Disk drives 180

Altirra Hardware Reference Manual Created by Avery Lee
10.5 Timing
Transmit rates
While transmit rates on the computer side are set by POKEY divisor, transmit rates on the drive side are
determined by timing loops in the firmware. There is significant variance in the rates that are used. Table 29
gives both bit and byte timings for many drive types and transfer modes.
Type / mode Method
Bits Bytes
Cycles Bits/sec Cycles Bytes/sec
Atari 810 rev. B, C, E Bit-bang 26 cycles @ 0.5MHz 19230.8 265 cycles @ 0.5MHz 1886.8
Happy 810 Bit-bang 26 cycles @ 0.5MHz 19230.8 265 cycles @ 0.5MHz 1886.8
Happy 810 high speed Bit-bang 13 cycles @ 0.5MHz 38461.5 151 cycles @ 0.5MHz 3311.3
Atari 1050 Bit-bang 51 cycles @ 1MHz 19607.8 549 cycles @ 1MHz 1821.5
1050 Duplicator Bit-bang 51 cycles @ 1MHz 19607.8 573 cycles @ 1MHz 1745.2
1050 Duplicator high speed Bit-bang 19 cycles @ 1MHz 52631.6 249 cycles @ 1MHz 4016.1
1050 Turbo Bit-bang 52 cycles @ 1MHz 19230.8 520 cycles @ 1MHz 1923.1
1050 Turbo high speed Bit-bang 14 cycles @ 1MHz 71428.6 151 cycles @ 1MHz 6622.5
Happy 1050 Bit-bang 51 cycles @ 1MHz 19607.8 524 cycles @ 1MHz 1908.4
Happy 1050 high speed Bit-bang 26 cycles @ 1MHz 38461.5 315 cycles @ 1MHz 3174.6
Happy 1050 USD emulation Bit-bang 19 cycles @ 1MHz 52631.6 220 cycles @ 1MHz 4545.5
US Doubler Bit-bang 53 cycles @ 1MHz 18867.9 534 cycles @ 1MHz 1872.7
US Doubler high speed Bit-bang 19 cycles @ 1MHz 52631.6 220 cycles @ 1MHz 4545.5
Speedy 1050 Bit-bang 52 cycles @ 1MHz 19230.8 525 cycles @ 1MHz 1904.8
Speedy 1050 high speed Bit-bang 18 cycles @ 1MHz 55555.5 214 cycles @ 1MHz 4672.9
Tygrys 105056 Bit-bang 51 cycles @ 1MHz 19607.8 521 cycles @ 1MHz
523 cycles @ 1MHz
1919.4
1912.0
Tygrys 1050 high speed 1 Bit-bang 26 cycles @ 1MHz 38461.5 296 cycles @ 1MHz 3378.4
Tygrys 1050 high speed 2 Bit-bang 19 cycles @ 1MHz 52631.6 219 cycles @ 1MHz
221 cycles @ 1MHz
4566.2
4524.9
I.S. Plate Bit-bang 53 cycles @ 1MHz 18867.9 532 cycles @ 1MHz 1879.7
I.S. Plate high speed Bit-bang 19 cycles @ 1MHz 52631.6 221 cycles @ 1MHz 4524.9
Atari XF551 Bit-bang 29 cycles @ 0.55MHz 19157.1 290 cycles @ 0.55MHz 1915.7
Atari XF551 high speed Bit-bang 14 cycles @ 0.55MHz 39682.5 140 cycles @ 0.55MHz 3968.3
Indus GT Bit-bang 209 T-states @ 4MHz 19138.7 2237 T-states @ 4MHz 1788.1
Indus GT Synchromesh Bit-bang 104 T-states @ 4MHz 38461.5 1163 T-states @ 4MHz 3439.4
Indus GT SuperSynchromesh Bit-bang 58 T-states @ 4MHz 68695.5 598 T-states @ 4MHz 6689.0
ATR8000 v3.02 Bit-bang 208 cycles @ 4MHz 19230.8 2080 cycles @ 4MHz 1923.1
Percom RFD-40S1 UART 208 cycles @ 4MHz 19230.8 2080 cycles @ 4MHz 1923.1
Table 29: Disk drive transmit timings by firmware
[56] The Tygrys 1050 firmware indexes across pages when sending from internal non-sector buffers. This causes bytes sent
from the Status and Read Percom Block commands to take two additional cycles.
Chapter 10 - Disk drives 181

Altirra Hardware Reference Manual Created by Avery Lee
Most drives use the bit-bang method of SIO communication, where the controller – typically a 6507 – manually
times and reads or writes one bit at a time. This places very tight timing constraints on the firmware, but allows
high-speed operation to be added by a firmware change. The Percom drive is unusual in using a UART chip to
handle serial conversion.
While a transferred byte consists of 10 bits – a start bit, eight data bits, and a stop bit – the byte rate is not
always one tenth the bit rate. It can be slower if the firmware takes additional time between bytes. This doesn’t
affect the reliability of the transfer, because the receiver synchronizes to the start bit.
It does affect the transfer rate and thus the fundamental tone produced by the computer when receiving data
from the drive, though, since the tone is at half the frequency that bytes are received. For the 810, the main
receive tone is 943.4Hz, and for the 1050, it is a noticeably lower 910.8Hz.
Step timings
The step timing determines the time taken for the stepper motor to move the head by one step between tracks.
Some drives step by full tracks, where one step switches to a new data track, and other drives step by half-
tracks, requiring at least two steps for every seek.
Type Approximate Timing
Atari 810 (rev. B/C/E) ~2640 cycles @ 0.5MHz (5.3ms) per full track
Atari 1050 ~10200 cycles @ 1MHz (10.2ms) per half track
Indus GT ~39650 T-states @ 4MHz (9.9ms) per full track
Table 30: Disk drive step rate timings
Additionally, at the end of each seek a head settling time is required to allow the head position to stabilize. This
time is the same regardless of the distance seeked.
Format timing
Disk drives vary in their strategy for formatting a disk. The majority of Atari-compatible disk drives use a two-pass
strategy where they first format all 40 tracks of a disk from track 0 inward and then verify each track in reverse
outward. Some drives vary from this behavior and reverse the direction of the verify or both passes, and some
do both formatting and verification together on each track. Table 31 lists the strategy for each drive.
Chapter 10 - Disk drives 182

Altirra Hardware Reference Manual Created by Avery Lee
Base
drive
Drive type Method Behavior
Atari 810 Atari 810 rev. B/C/E Overlap Format in, verify out
Happy 810 Format in, verify out
810 Archiver Format+verify in
Atari 1050 Atari 1050 rev. L Overlap Format in, verify out
Happy 1050 Format in, verify out
Super Archiver Format+verify in
Speedy 1050 Format+verify out
US Doubler Format in, verify out
1050 Duplicator Format in, verify out
1050 Turbo Format+verify in
TOMS 1050 Format+verify in
Tygrys 1050 Format in, verify out
Atari XF551 Index Format in, verify in
Indus GT 1.2 Overlap Format in, verify in
ATR-8000 v3.20 Index Format+verify in
Percom RFD-40S1 Overlap Format in, verify out
Table 31: Disk format strategies by drive type
The majority of drives ignore or cannot sense the index pulse of the drive mechanism and simply format each
track starting at the current position. This must be done without a reference for the beginning or end of a track,
so the firmware simply writes an overly long track with extra padding at the beginning to ensure that the entire
track is formatted, some of which will be overwritten by the end of the track. Using this method also means that
each track starts at a different rotational position. Drives that do use the index sensor format index-to-index
instead, producing no track skew. However, this tends to take longer since the drive must wait a full revolution to
begin formatting the next track.
Track layout
There is also a lot of variation in the layout of a formatted track between drives. All Atari-compatible disk drives
use floppy drive controllers that are descendants of the Western Digital FD1771, which imposes some
requirements on the layout of the track. However, the firmware is able to vary the content and length of some of
the gaps between fields as well as the order of the sectors. A major purpose of the gaps between sectors and at
the end of the track is to accommodate variations in drive speed during formatting and when sectors are
rewritten. The gap at the end of the track is also longer than the gap between sectors, causing slightly uneven
delays between sectors; the tighter the sectors are packed together and the longer the gap at the end of the
track, the more sector-to-sector time varies and the more critical of a deadline software has to meet to read
sectors at top speed, but also the more tolerant the layout is of a fast drive.
Sectors are also written out of order on the track with an interleave pattern to allow extra time between
successive logical sectors, since the drive firmware and computer can’t process each sector quickly enough in
physical order. With the SIO disk drive protocol, the time to transfer the sector between the disk drive and the
computer over the SIO bus dominates and thus the same interleave factors tend to be used for each format.
However, the larger gap at the end of the track means that there are more subtleties to a sector interleave
pattern than just an N:1 ordering. This is most apparent in the variations in the interleave used for single density
formats, in which some drives manage to drop nearly a full revolution off the track read time with less than a 2%
reduction in the minimum delay between sequential sectors.
Table 32 gives the sector layout and ideal timings for each drive type and format. All sector timings are for
2µs/4µs bit cells at 288 RPM.
Chapter 10 - Disk drives 183

Altirra Hardware Reference Manual Created by Avery Lee
Format Drive type Sector spacing Min Delay Max Delay Interleave Sector order Revs to Read
SD Atari 810 rev. B 11.072 ms 144.0 ms 153.0 ms 13:1 18,7,14,3,10,17,6,13,2,9,16,5,12,1,8,15,4,11 12.4
Atari 810 rev. C 11.072 ms 99.6 ms 119.8 ms 9:1 18,1,3,5,7,9,11,13,15,17,2,4,6,8,10,12,14,16 9.0
Atari 810 rev. E 11.008 ms 99.1 ms 120.3 ms
Speedy 1050 11.520 ms 103.7 ms 116.2 ms 9:1 1,3,5,7,9,11,13,15,17,2,4,6,8,10,12,14,16,18 9.0
Happy 1050 11.200 ms 100.8 ms 118.7 ms
Atari XF551 11.072 ms 99.6 ms 119.8 ms
Indus GT 1.2 11.072 ms 99.6 ms 119.8 ms
Atari 1050 rev. L 11.072 ms 99.6 ms 119.8 ms
ATR-8000 v3.20 10.880 ms 87.0 ms 110.4 ms 9:1 18,16,14,12,10,8,6,4,2,17,15,13,11,9,7,5,3,1 8.2
Tygrys 1050 11.136 ms 97.0 ms 100.2 ms 9:1 17,15,13,11,9,7,5,3,1,18,16,14,12,10,8,6,4,2 8.1
Happy 810 11.072 ms 97.7 ms 99.6 ms
810 Archiver 11.072 ms 97.7 ms 99.6 ms
1050 Duplicator 11.072 ms 97.7 ms 99.6 ms
Percom RFD-40S1 10.944 ms 98.5 ms 98.9 ms
Super Archiver 10.880 ms 97.9 ms 99.5 ms
1050 Turbo 10.880 ms 97.9 ms 99.5 ms
TOMS 1050 10.880 ms 97.9 ms 99.5 ms
US Doubler 10.816 ms 97.3 ms 100.1 ms
SD H/S Indus GT 1.2 (Sync 1.21) 11.072 ms 64.4 ms 66.4 ms 6:1 16,13,10,7,4,1,17,14,11,8,5,2,18,15,12,9,6,3 5.4
Indus GT 1.2 (INDUS.SYS) 11.072 ms 53.3 ms 55.3 ms 5:1 4,8,12,16,1,5,9,13,17,2,6,10,14,18,3,7,11,15 4.5
Indus GT 1.2 (SupSync 1.30) 11.072 ms 42.3 ms 44.3 ms 4:1 5,10,15,1,6,11,16,2,7,12,17,3,8,13,18,4,9,14 3.6
ED Atari 1050 rev. L 7.680 ms 99.8 ms 116.2 ms 13:1 1,3,5,7,9,11,13,15,17,19,21,23,25,
2,4,6,8,10,12,14,16,18,20,22,24,26
13.0
Happy 1050 7.680 ms 99.8 ms 116.2 ms
Super Archiver 7.680 ms 99.8 ms 116.2 ms
Speedy 1050 7.424 ms 96.5 ms 119.2 ms
US Doubler 7.648 ms 99.4 ms 116.6 ms
Atari XF551 6.848 ms 89.0 ms 126.2 ms
Indus GT 1.2 6.848 ms 89.0 ms 126.2 ms
1050 Duplicator 6.592 ms 85.7 ms 129.2 ms
TOMS 1050 7.680 ms 92.2 ms 100.8 ms 12:1 9,18,7,16,25,5,14,23,3,12,21,1,10,
19,8,17,26,6,15,24,4,13,22,2,11,20
11.2
Tygrys 1050 7.680 ms 92.2 ms 100.8 ms
1050 Turbo 7.648 ms 91.8 ms 101.3 ms
DD Super Archiver 10.848 ms 197.5 ms 197.5 ms 17:1 18,17,16,15,14,13,12,11,10,9,8,7,6,5,4,3,2,1 16.2
US Doubler 10.816 ms 197.5 ms 197.5 ms
Speedy 1050 11.520 ms 173.8 ms 184.3 ms 15:1 6,12,18,5,11,17,4,10,16,3,9,15,2,8,14,1,7,13 14.3
Happy 1050 10.976 ms 175.4 ms 175.6 ms
Atari XF551 10.944 ms 164.2 ms 186.4 ms 15:1 1,7,13,6,12,18,5,11,17,4,10,16,3,9,15,2,8,14 14.3
Percom RFD-40S1 10.880 ms 163.2 ms 186.6 ms
ATR-8000 v3.20 10.688 ms 160.3 ms 187.0 ms
Tygrys 1050 10.976 ms 164.4 ms 164.6 ms 14:1 14,9,4,18,13,8,3,17,12,7,2,16,11,6,1,15,10,5 13.5
1050 Turbo 10.880 ms 163.2 ms 164.8 ms
TOMS 1050 10.880 ms 163.2 ms 164.8 ms
Indus GT 1.2 10.944 ms 98.5 ms 120.8 ms 9:1 1,3,5,7,9,11,13,15,17,2,4,6,8,10,12,14,16,18 9.0
DD H/S Atari XF551 10.944 ms 98.5 ms 120.8 ms 9:1 1,3,5,7,9,11,13,15,17,2,4,6,8,10,12,14,16,18 9.0
Indus GT 1.2 (Sync 1.21) 10.944 ms 109.4 ms 109.8 ms 9:1 2,4,6,8,10,12,14,16,18,1,3,5,7,9,11,13,15,17 9.0
Indus GT 1.2 (INDUS.SYS) 10.944 ms 76.6 ms 87.9 ms 7:1 1,14,9,4,17,12,7,2,15,10,5,18,13,8,3,16,11,6 6.6
Indus GT 1.2 (SupSync 1.30) 10.944 ms 65.6 ms 66.0 ms 6:1 16,13,10,7,4,1,17,14,11,8,5,2,18,15,12,9,6,3 5.4
Table 32: Track sector layouts by drive type and format
Chapter 10 - Disk drives 184

Altirra Hardware Reference Manual Created by Avery Lee
10.6 Anomalies
Abnormal sectors on the disk will trigger unusual behavior from the 810 disk drive. These can result from a
corrupted disk, or they can be intentional in order to make a disk harder to copy. Copy protection mechanisms
depend on the 810 and its floppy drive controller (FDC) responding to abnormal sectors in specific ways.
Note that because of the inverted FDC data bus on the 810, all FDC status bits are inverted when returned to the
computer in a Status command. This means that a ‘0’ bit indicates an error state, not a ‘1’ bit. Table 33 gives
values of status byte 1 for various conditions encountered during a sector read command.
Condition Status
(810)
Status
(1050)
Status
(XF551)
Normal operation $FF $FF
Write protected $BF $BF
Record not found $EF $FF
Data CRC error or weak sector $F7 $F7
Address CRC error $E7 $FF
Deleted sector $9F $DF $DF
Deleted sector with CRC error $97 $D7 $D7
Long sector $FC / $FE $F9 $F9
Long sector with CRC error $FC / $FE $F1 $F1
Deleted long sector $9C / $9E $D9 $D9
Deleted long sector with CRC error $9C / $9E $D1 $D1
Table 33: FDC status codes for various read sector conditions
In general, the FDC does not retry operations on an error, the one exception being that it will make multiple
passes on a track to try to find a valid sector address field. Once it has found a valid address field, it makes only
one attempt to read or write the sector. Any retries, and re-steps or recalibrations of the head position, are done
by the firmware. Generally only the error from the last attempt is returned.
Record not found (missing sector)
If a sector cannot be found on a track, the FDC will make a couple more attempts to find it before giving up and
returning Error. A sector's worth of data is still returned. FDC status bit 4 is cleared to indicate a Record Not
Found (RNF) error.
The effort made to find the missing sector varies. The FDC is specified to wait up to five rotations, but many
drives use a fake index pulse driven by a timer (RIOT) rather than the actual index pulse on the disk.
The XF551 is unusual in not reporting an FDC error for a missing sector. The read operation recalibrates and
fails with an error, but the FDC error field in the status packet is $FF instead of $EF.
No disk in drive
A more general issue than a missing sector is a missing disk. The 810 lacks the ability to detect a missing disk or
open drive door and will simply attempt requested disk operations. This typically results in the drive in the same
behavior as for a missing sector, including bumping the head against the track 0 stop each time, and takes a
couple of seconds for the operation to fail.
1050 derived drives are different in that the drive latch does have a hardware sensor and it is tied to the Not
Ready input on the FDC. This allows the firmware to detect when the drive door is open and immediately return
Chapter 10 - Disk drives 185

Altirra Hardware Reference Manual Created by Avery Lee
an error to the computer, without even spinning up or seeking the drive mechanism. Errors in this case are
returned almost immediately for each command.
Data CRC error
The data field of each sector is protected by a Cyclic Redundancy Check (CRC), which is a 16-bit code that is
computed from the data and is written along with it. On read, the CRC is recomputed and verified against the
written version to check if the data was read successfully. A mismatch indicates data corruption.
When a CRC error occurs, the 810 returns Error status instead of Complete status, but still returns the sector
data. Bit 3 is also cleared in FDC status to indicate CRC Error.
Data CRC errors only occur for reads since for writes the CRC is generated and written instead of being read
and checked. The CRC Error bit can still be asserted on an address CRC error, however.
Address CRC error
The address field of each sector is also protected by a CRC. If the FDC is attempting to find a sector and the
only address fields it can find with that sector number all have CRC errors, both the CRC and Record Not Found
(RNF) status bits will be set (bits 4 and 5). If duplicate sectors are present and one of the sectors has a valid
address field, however, that sector will be used and the CRC Error bit will not be set.
The XF551 does not report either an RNF or CRC error for this condition. The read operation fails, but the FDC
error reported is $FF.
Deleted/user sector
Each sector includes a data address mark byte that indicates the start of the sector data. The DAM is normally a
modified $FB byte with some clock pulses missing, but the FDC also supports a modified $F8 byte to indicate a
“deleted” record, as well as $F9 and $FA for user type records. While the FDC considers this normal and reads
the sector successfully, the firmware considers it an error and will retry the read. Upon failing out, it will send
back the sector's data with an Error status.
FDC models, and therefore drives, differ in the status raised for a deleted or user type sector. 810 drives use a
1771 controller, which returns the two record type bits in bits 5 and 6. A deleted sector will therefore return FDC
status to the computer with bits 5 and 6 cleared. 1050 drives, however, use a 279X controller that only returns
the LSB of the record type in bit 5, with bit 6 set for read operations. This means that an 810 will return $9F for a
deleted sector while a 1050 will return $DF. It also means that the two user data types appear the same as
normal and deleted data marks and are indistinguishable to either the computer or the drive firmware.
Deleted/user sector errors can only occur during reads. For writes, the FDC will write a normal Data Address
Mark (DAM) without regard for the existing one, if there even is one.
Long sector
The FDC used by the 810 supports 256, 512, and 1024 byte sectors as well as the 128 byte sector that the 810
uses, and more importantly, the sector size is recorded in the address field. This provides an opportunity for the
FDC and firmware to disagree on sector size.
Normally, the 810 firmware stops when the FDC asserts an interrupt, but due to a quirk in the firmware, it will
also stop after reading 129 bytes and then immediately read the FDC status. Since the FDC is still reading the
sector, the busy bit (bit 0) is guaranteed to be asserted, and the DRQ bit (bit 1) may also be asserted if another
byte has been decoded in time. The lost data bit (bit 2) won't be asserted, though, because not enough time will
have passed to lose a byte, and the CRC error bit (bit 3) won't be asserted because the FDC will have cleared it
at the start of the command and not verified the CRC yet. Therefore, the FDC status will read either $FE or $FC.
As usual, the first 128 bytes of the sector are returned along with the Error status.
Chapter 10 - Disk drives 186

Altirra Hardware Reference Manual Created by Avery Lee
The 1050 firmware differs here in that it waits for the FDC to complete its operation before reading status, while
still not reading the pending data. This means that the Lost Data bit will be asserted, BUSY negated, and CRC
Error state updated.
Not all drives report long sectors as errors. The firmware for some drives reads all bytes in the physical sector
instead of using the logical sector size, meaning that they will read long sectors successfully without error. The
Indus GT and Percom RFD-40S1 are two drives that do this.
Weak sector
Weakly recorded or unrecorded data regions will appear as noise to the FDC. This results in random sector data,
which virtually guarantees a CRC error. As with other error types, the read data will be returned even with the
CRC error, allowing the weak sector to be detected.
Phantom (duplicated) sectors
Multiple sectors within the same track can have duplicate sector IDs, in which case any of them may be found by
the FDC. Since the FDC will return the first instance of the sector it finds, the phantom sector found depends on
when the read command is issued and how long it takes for the firmware to issue the corresponding FDC
command. Note that the firmware will attempt to retry up to two times on an error, which may mean that the first
phantom sector found is not the one that is returned if the sectors also have errors.
The delays in processing the command and reading a physical sector affect the rotational timing, which in turn
determines the phantom sector that is read. Ideal timings for an 810 drive running revision C firmware at
500KHz, with a drive mechanism running exactly at 288 RPM, no seeks required, and motor already on are
given in Table 34.
Event Time Rotation
Send command at 19200 baud 2.63 ms 4.54°
Deassert command line ? ?
Command line deasserted to ACK byte sent 0.59 ms 1.02°
ACK byte sent to FDC command issued 3.22 ms 5.56°
Rotational delay 0-208.3 ms 0-360°
Read physical sector 9.66 ms 16.69°
Compute checksum and return sector data 74.06 ms 127.98°
Table 34: Ideal 810 sector read timing
Not counting additional delays for host-side processing, it takes a minimum of 90.16 ms (155.8°) to read a
sector. For this reason, sectors need to be placed at nearly opposite sides of a track for the 810 to read them
back-to-back.
10.7 810 disk drive
The 810 disk drive adapts a 5.25” floppy disk drive to the Atari SIO interface. Disks are formatted as single-
sided, single-density with 18 128-byte sectors on 40 tracks, for a total of 720 sectors and 90K of storage. The
disk geometry is abstracted from the computer so that the disk appears as a linear store of sectors numbered
from 1-720 with simple read/write commands. Motor control and seeking are handled automatically by the drive.
Commands
Commands are sent to the 810 using a standard SIO frame at 19200 baud, and follow usual conventions for
ACK/NAK/Complete/Error.
Chapter 10 - Disk drives 187

Altirra Hardware Reference Manual Created by Avery Lee
Attempts to issue unknown commands or commands with bad arguments – a sector number of 0 or above 720 –
results in a NAK being sent for the original command. A valid command that fails because of a disk I/O error
returns an ACK for the original command followed by an ERROR code for the command result, and then a data
frame if one is expected for the command.
Status ($53)
The status ('S' = $53) command is used to query the status of the 810 disk drive. The AUX1 and AUX2 bytes of
the command frame are ignored. In response, the drive sends back a four byte status block:
·Drive status
·Bit 4 = 1: Motor running
·Bit 3 = 1: Failed due to write protected disk
·Bit 2 = 1: Unsuccessful PUT operation
·Floppy drive controller status (inverted from FDC)
·Bit 6 = 0: Write protect error
·Bit 5 = 0: Deleted sector (sector marked as deleted in sector header)
·Bit 4 = 0: Record not found (missing sector)
·Bit 3 = 0: CRC error
·Bit 2 = 0: Lost data
·Bit 1 = 0: Data pending
·Bit 0 = 0: Busy
·Default timeout ($E0 = 224 vertical blanks)
·Unused ($00)
Read ($52)
The read ('R' = $52) command reads a 128 byte sector from the disk. The AUX1 and AUX2 bytes of the
command frame hold the LSB and MSB, respectively, of the sector to read. On completion, the drive returns 128
bytes of sector data. This occurs even in the event of a read error.
If the sector number in AUX1/2 is 0 or greater than 720, the command is immediately NAKed.
Put ($50)
The put ('P' = $50) command writes a 128 byte sector to the disk, without verification. The AUX1 and AUX2 bytes
of the command frame hold the LSB and MSB, respectively, of the sector to read, and 128 bytes of sector data
are sent by the computer following acknowledgment of the command frame.
If the sector number in AUX1/2 is 0 or greater than 720, the command is immediately NAKed.
Write ($57)
The write command ('W' = $57) command is the same as the put command, except that it also re-reads the
sector afterward to verify a successful write.
If the sector number in AUX1/2 is 0 or greater than 720, the command is immediately NAKed.
Due to a bug in the firmware, the 810 accepts $4F as an alias for $57.
Chapter 10 - Disk drives 188

Altirra Hardware Reference Manual Created by Avery Lee
Format ($21)
The format command ('!' = $21) command formats a disk, writing 40 tracks and then verifying all sectors. All
sectors are fill with the data byte $00. On completion, the drive returns a 128 byte buffer containing a list of 16-bit
bad sector numbers, terminated by $FFFF.
Track layout and timing
The disk rotates in an 810 drive at a rate of 288 revolutions per minute (RPM) or 4.8 revolutions per second.
Each track is split into 18 sectors, so each sector arrives under the head at a rate of at least 86 sectors/second.
The sectors are not necessarily distributed evenly, so they will tend to arrive a bit faster than that.
The floppy disk controller (FDC) in the 810 is clocked at 1MHz. Internally, this clock is divided by four to produce
a 250KHz bit clock, which is then divided by two again for separate clock and data bits to produce a data rate of
125Kbits/second or 26,042 bits per track. For each sector, there are 128 data bytes, 28 bytes of header and
CRC overhead, and then a 10 byte gap between each sector. This nominally places sectors 1328 bits (10.6 ms)
apart. A 12 byte track header and an additional 256 pad bytes fill out the track.
Because of significant transfer delays, the 810 formats tracks with non-sequential sectors to reduce rotational
latencies. This includes the time to read the sector from the disk, and more significantly, the time to transfer the
sector to the computer at 19,200 baud. This takes 95ms, during which 9 sectors will pass under the disk head. If
the sectors were written out in order, the next sector would already have been passed, requiring another disk
rotation for the sector to arrive again. This is known as “blowing a rev” and reduces the disk read rate to less
than one sector per revolution. Instead, the 810 formats tracks with all odd sectors first and then all even sectors
so that the next sector soon arrives under the head when the computer is issuing back-to-back read or write
sector requests. The result is that two sectors can be read in a bit more than one revolution instead of just one,
for an effective read rate within a track of about 1,170 bytes/sec or 11,700 baud.
Reading or writing sectors on another track also incurs seek delays. The 810 seeks at a rate of 5.3 ms/track,
followed by an additional 10ms of head settling time at the end of the seek.
Firmware revisions
There are three known revisions of the 810 firmware, revisions B, C, and E. The most common version is
revision C. All firmware ROMs are 2K in size.
Revision CRC32
Revision B 19227D33
Revision C 0896F03D
Revision E AAD220F4
Table 35: 810 drive firmware revisions
Revision B
Revision B is a rarer, earlier version of the 810 firmware, differing from revision C only in the sector order used
when formatting a disk. Revision B used a slower sector order with a minimum spacing of 13 sectors, whereas C
reduces this to the typical 9 sector distance.
Revision E changes
The revision E ROM adds a few new commands to the 810 over rev. C, specifically ones that allow execution of
custom code on the drive.
Chapter 10 - Disk drives 189

Altirra Hardware Reference Manual Created by Avery Lee
$20 (execute code)
Command $20 takes a 128 byte data frame sent from the computer and executes it on the 810 at address $80.
The firmware sends the command and data frame ACKs before calling the custom routine, and expects that
routine to return with RTS. Afterward, the firmware sends the Complete signal back to the computer.
$80-FF and $180-1CF are available for use by the custom routine, the former for temporary storage during the
routine's execution, and the latter for permanent storage (not used by the firmware at all).
$4F
The bug in revision C that allowed $4F as an alias for $57 (write sector) has been fixed; rev. E rejects $4F with a
NAK.
$54 (transfer memory)
Reads 128 bytes of memory starting at the address specified by AUX1 and AUX2, where AUX1 is the LSB of the
address, and sends that buffer back to the computer.
$FE and $FF are trashed by this command and cannot be read back.
10.8 810 hardware
While a standard 810 does not allow custom code execution, ones with revision E or other modified firmware do,
and in those cases it becomes necessary to know how to access the 810 hardware.
CPU
The 810 uses a 6507 CPU running at 0.5MHz (500KHz). The 6507 only has 13 address bits and can only
access 8K of memory; this is the same memory model as a 6502 with A13-A15 ignored and thus all memory
ranges are mirrored eight times in the 64K address space. The 6507's memory map is as follows:
Address range Mapping
$0800-0FFF ROM (2K)
$0700-07FF RIOT registers (mirror)
$0680-06FF 6810 memory (mirror)
$0600-067F 1771 FDC (mirror)
$0500-05FF RIOT memory (mirror)
$0480-04FF 6810 memory (mirror)
$0400-047F 1771 FDC (mirror)
$0380-03FF RIOT registers
$0300-037F RIOT registers (mirror)
$0280-02FF 6810 memory (mirror)
$0200-027F 1771 FDC (mirror)
$0180-01FF RIOT memory
$0100-017F RIOT memory (mirror)
$0080-00FF 6810 memory
$0000-007F 1771 FDC
Table 36: 810 memory map
A12 is not used for any decoding, and thus in a stock 810 all address ranges are mirrored 16 times at every 4K.
There is no DMA or memory refresh in the 810, so all memory cycles are available for the CPU and the 6507
runs at a constant speed.
The 6507 also has no interrupts, either IRQ or NMI. This means that the NMI vector is used and the IRQ vector
Chapter 10 - Disk drives 190

Altirra Hardware Reference Manual Created by Avery Lee
is only used for BRK instructions, which can be executed without fear of interference with interrupts.
1771 Floppy Drive Controller
The floppy drive controller used in the 810 is a Western Digital FD1771 or equivalent, which only handles single
density. For speed it is mapped in the lower half of page zero, with the canonical range being $00-03. The 1771
is run at 1MHz timings and is missing several of the usual connections to the drive hardware.
First, none of the head stepping and loading signals are hooked up. The stepper motor phases are controlled
through RIOT instead of the FDC, the head is always loaded, and there is no track 0 sensor. The seek
commands on the FDC are not used for seeking the head and the FDC is simply told which track it should use
for comparisons against the track field in sector address fields.
Second, no index pulse sensor is hooked up either. Instead, the index pulse input to the FDC is driven by the
IRQ signal from the RIOT, traditionally asserted via the RIOT's timer. This places write track and sector search
timeouts under control of the firmware and allows the 810 to read and write sectors across the index position.
The 810 in fact has no way of even determining the position of the index on the disk.
An additional quirk is that the 1771 FDC has an inverted data bus. This requires all register read and writes to
the FDC to be inverted by the CPU, and is also responsible for the standard of inverted data on Atari floppy
disks.
6810 RAM
The 6810 provides 128 bytes of memory at $80-FF, used mainly by the 6507 as the transfer buffer for FDC
reads/writes and data frame transmission with the computer. This memory is also mirrored at $180-1FF so that
its upper portion can hold the stack.
ROM
2K of ROM provides the firmware for the drive. Its canonical address range is $0800-0FFF, although $F800-
FFFF is also required in order for interrupt vectors to be read.
6532 RAM I/O Timer (RIOT)
The RIOT chip provides a majority of the support functions in the 810, providing memory for the stack and
working variables, timing facilities, and control of all the miscellaneous signals. The canonical ranges are $0180-
01FF for the memory and $0380-039F for the control registers.
The timer facility is mainly used to drive the index pulse facility on the FDC, but does not need to match the
actual rotational timing of a floppy disk and is typically not set to do so; instead, it is used to force the FDC to
time out if a sector is not found on a track or the FDC would otherwise continue indefinitely with a command.
This can also be done with the PA7 edge detection feature since both are connected to a common IRQ output,
but this usage is less common (some versions of the Happy diagnostic do so).
The 810 firmware relies on an undocumented quirk of the RIOT timer in that once the initial delay has expired
and the timer switches to 1T timing, it will continuously underflow and reassert the timer IRQ every 256 cycles.
This is used by the firmware to force a series of quick “index pulses” after a multi-rotational delay of about half a
second has expired, quickly making the FDC think that five revolutions have passed. For this to work, the
firmware needs to repeatedly read the timer in order to deassert the timer IRQ after each revolution.
The RIOT's I/O ports are connected to a wide variety of signals:
Chapter 10 - Disk drives 191

Altirra Hardware Reference Manual Created by Avery Lee
Port Signal Direction Usage Polarity
Port A PA7 Input FDC DRQ 1 = DRQ asserted
PA6 Input FDC INTRQ 1 = INTRQ asserted
PA5 Input Jumper
PA4 Input Write protect sector 1 = write protected
PA3 Output ROM bank switch (Archiver only)
PA2 Input Drive code A sense57 1 = D1/D2, 0 = D3/D4
PA1 Output Spindle motor control 1 = enabled
PA0 Input Drive code B sense 1 = D1/D4, 0 = D2/D3
Port B PB7 Output SIO data input (device to computer)58 non-inverted
PB6 Input SIO ready 1 = ready
PB5 Output Stepper phase 1 1 = activated
PB4 Output Stepper phase 2 1 = activated
PB3 Output Stepper phase 3 1 = activated
PB2 Output Stepper phase 4 1 = activated
PB1 Input SIO command 1 = asserted
PB0 Input SIO data output (computer to device) inverted
Table 37: 810 RIOT I/O port assignments
Track stepping
As previously noted, the 810 does not use the FDC to step the head between tracks, and instead drives the
stepper phases using PB2-PB5 on the RIOT. One reason for this is that the 810's drive mechanism uses a 4-
phase stepper motor instead of 3 phases as expected by the FDC. Two adjacent phases are activated at the
same time whenever the head is being stepped or held in position during a read or write operation; all phases
are turned off when the drive goes idle. A shift of one phase in the stepper motor steps the head by one track.
Because no track 0 sensor is hooked up, the 810 cannot determine when the head is over track 0 and instead
simply steps the head outward a bit more than 40 tracks to recalibrate. This causes the head to bump against
the track 0 stop slightly. Phases 1 and 4 are active when the head is at track 0, i.e. %1001 for PB2-PB5;
stepping inward to higher numbered tracks requires turning on successive phases in a pattern of %0011 for track
1, %0110 for track 2, etc.
10.9 Happy 810
The Happy 810 is an 810 disk drive modified with a larger, custom firmware ROM and an additional 3K of RAM.
Custom code can be uploaded to the drive, allowing new functions to be added to the firmware.
Memory map
The Happy 810 maps 3K of RAM at $0800-13FF and 3K of ROM to $1400-1FFF. The firmware is stored in a 4K
ROM, but 1K of it is inaccessible to the drive and can only be read in an external ROM reader. The top 2K of the
firmware at $1800-1FFF is a modified version of the 810 rev. C firmware, relocated from $0800-0FFF and
patched. Many routines, such as the transfer routines, are in analogous positions.
In the revision 7 version of the firmware, the firmware was extended to 6K by bank switching. Banks are selected
by reading or writing $1FF8 and $1FF9. The revision 7 firmware adds write buffering and a number of Happy
[57] Note that the drive codes are encoded using a Gray code, not binary.
[58] The SIO data lines are named from the computer side, so the SIO data input line is an output for the 810.
Chapter 10 - Disk drives 192

Altirra Hardware Reference Manual Created by Avery Lee
1050 compatible commands to the drive.
Memory read/write commands
No new commands are added in the Happy 810. The only added functionality are memory read and write sub-
commands, which can then be used to patch into the command handler.
To access RAM, a sector read or write command is issued with a “sector” in the range of $0800-1380. 128 bytes
of RAM at that address are then read or written to the drive according to the standard command protocol. An
attempt to read or write any other address fails with a command NAK. For writes, command $57 must be used,
not command $50.
Track buffering
The Happy 810 buffers tracks by default when reading sectors.
Command handler patch
It is possible to upload a patch at $0800 to inject custom commands into the command handler. This is
composed of three sections:
•$0800-0808: Custom command signature. These bytes must be exactly: $26 11 34 14 15 57 37 85 86.
They have no meaning other than as a signature.
•$0809-0820: Dispatch addresses for commands $50-57, as a table of words.
•$0821+: Memory available for custom command implementation.
Because the drive does not preinitialize these tables, successfully uploading a custom command table to the
drive typically requires knowledge of addresses within the firmware. A relocated and slightly patched version of
the standard 810 rev. C firmware resides at $1800-1FFF in the bank visible at command dispatch. All standard
command entry points, as well as utility functions for sending and receiving data, are in the same locations with a
$1000 offset.
Fast/slow switch (rev. 7 only)
The rev. 7 firmware supports a fast/slow switch by means of bits 3 and 5 on port A of the RIOT.59 If PA3 and PA5
are connected together, allowing PA3 to drive PA5, then the firmware interprets this as a signal to disable track
buffering and run in slow mode.
High speed commands (rev. 7 only)
The built-in firmware supports high-speed versions of the read, write, and put sector commands as $72, $77,
and $70, respectively. The command frame and command ACK/NAK are sent at low speed, while the
completion/error and data frame are sent at 38,400 baud ($10 divisor).
Quiet command (rev. 7 only)
Command $51 (‘Q’) turns off the drive motors immediately. AUX1/2 are ignored.
Happy command (rev. 7 only)
Command $48 (‘H’) is a command with multiple functions, multiplexed by AUX1.
[59] The 810 mod is documented in [Happy] p. 31.
Chapter 10 - Disk drives 193

Altirra Hardware Reference Manual Created by Avery Lee
Set idle timeout (AUX1=$01)
Sub-command $01 sets the inactivity timeout for the drive. AUX2 sets the timeout in units of about 50ms.
Set alternate device ID (AUX1=$02)
Sub-command $02 changes the alternate device ID for the drive. Bits 0-6 of AUX2 set the alternate device ID,
while bit 7 determines whether the drive only responds to the alternate ID. For instance, for a drive normally
configured for D1: by hardware switches, $34 would map it to both D1: and D4:, and $B4 would map the drive to
D4: only. In the latter case, the drive would no longer respond to D1:.
The change to the device ID does not take place immediately, but is instead queued for the next disk change.
Reinitialize drive (AUX1=$03)
Sub-command $03 reinitializes the drive by performing a software reset. The Complete byte is actually sent
before the reset instead of after, as the drive forgets all state when the reset occurs; this means that the drive will
be uncommunicative for a short time afterward.
Configure drive (AUX1=$04-FF)
Sub-commands $04-FF reconfigure the Happy-specific functionality of the drive. The bits in AUX1 determine the
mode bits to change, while the bits in AUX2 are the new states for those mode bits. Table 38 lists the functions of
the individual mode bits.
Bit Function (if set)
Bit 6 ($40) Disable track read/write buffering
Bit 5 ($20) Disable track write buffering
Bit 2 ($04) Enables alternate device ID
Table 38: Happy 810 rev.7 drive mode bits
Thus, AUX1=$58, AUX2=$40 would disable track buffering and restore normal write protect sensing.
Changes to all but the track buffering modes – bit 2 – take effect immediately. Track buffering and write buffering
can be disabled immediately, but read buffering can only be enabled if it has already been initialized, and write
buffering cannot be enabled immediately; otherwise, these changes take effect on the next disk change.
Unlike the Happy 1050, the Happy 810 does not have the ability to go into “unhappy mode” by command.
Instead, the Happy Warp menu uploads custom dispatch code to the drive to disable extended commands.
Multi-drive broadcast ($36-38) (rev. 7 only)
Commands $36-38 are used to broadcast data from the computer to multiple Happy 810 drives simultaneously.
The 3K of Happy RAM is divided into 24 sectors of 128 bytes each, which are also tracked by 24 byte flags. The
commands allow the computer to send the same sector data to all drives in one transmission, verify that the
drives received the data, and then trigger all drives to write the data to disk. The firmware only provides the
broadcast commands; custom code must be uploaded to the drive to actually use the data. All commands use
high speed for the data frame and result portions of the protocol (38400 baud).
Command $38 is used to broadcast to multiple drives that are set to use the same alternate device ID. It is
unique in not sending any response back from the drive, avoiding conflicts between the multiple drives receiving
the same command. The command receives a 128 byte data frame, which is uploaded to drive RAM at the
address specified in AUX1/2, within $0800-13FF. The corresponding flag is also set to indicate that the sector
was received successfully.
Commands $36 and $37 are used to verify reception. $36 clears all sector flags and then returns Complete; $38
Chapter 10 - Disk drives 194

Altirra Hardware Reference Manual Created by Avery Lee
reads back the sector flags as a 24-byte frame. Each byte is $FF for a successfully received sector, or $00 if the
sector was not received or had a checksum error.
10.10 1050 disk drive
The 1050 disk drive is a double-density drive capable of storing 130K on a diskette instead of the 90K of the 810.
This is done by using double-density MFM encoding, allowing 26 128-byte sectors to be stored per track instead
of 18, for a total of 1040 sectors. The stock 1050 does not support true double density with 256 byte MFM
sectors.
Disk sense
Unlike the 810, the 1050 is able to sense when a disk is inserted since the drive latch is connected to the floppy
drive controller's ready input. FDC status bit 7 reflects this status, and the firmware also uses this to determine
when a disk change has occurred. When a disk is inserted and the latch is closed, the drive seeks to track 1 and
issues the READ ADDRESS command to detect whether the disk is using FM (single density) or MFM (double
density) encoding. When no disk is inserted, the drive returns errors on read/write commands without even trying
to turn on the motor.
Status command
The status command in the 1050 returns one additional bit of information: drive status bit 7 indicates the disk
encoding. If bit 7 is cleared, the disk is formatted as single density (18 sectors per track), whereas if it is set, the
disk is formatted as enhanced density (26 sectors per track).
The write protect bits (bit 4 of drive status and bit 6 of FDC status) are updated every time the status command
is issued, even if no disk drive mechanism activity occurs. Even if the latch is open and the drive motor is off, the
status command will still reflect the change in the write protect sense as disks are inserted and removed.
When no disk is inserted, bit 7 of the FDC status byte will be cleared to indicate a not ready condition.
Format Medium Density command
The format medium density ($22 = '”') command formats a disk using double-density encoding instead of single
density. It otherwise operates similarly to the original $21 format command.
Transmission timing
Like the 810, the 1050 also uses its CPU to bit-bang data across the serial port, but it has a faster 1MHz
processor. The transmit routine takes 51 cycles per bit and 549 cycles per byte, producing a transmit rate of
19608 baud, a read sector tone of 911Hz, and a read rate of 1822 bytes/second. This results in the computer
producing noticeably lower tones when reading from a 1050 versus an 810.
Seek timing
The 1050 steps by half tracks a time since it uses an 80 track mechanism. The step rate is 10ms, giving 20ms
per track, followed by a 20ms head settling delay.
Seek anomaly
A strange behavior of the 1050 is that it has slightly longer seek times when seeking forward to higher-numbered
tracks than when seeking backward. When seeking forward, the 1050 does an additional half-track step forward,
followed by a half-track step backward. This ensures that the 1050 always finishes a seek with a backward step,
for better consistency in head positioning.
Chapter 10 - Disk drives 195

Altirra Hardware Reference Manual Created by Avery Lee
Formatted track layout
Medium density disks are formatted by 1050 with a 13:1 interleave, separating even and odd sectors within each
track. There is about a two sector skew between tracks such that track 2, sector 1 has approximately the same
angular position as track 1, sector 5.
Long sector handling
Unlike the 810, which reads FDC status immediately after transferring 128 data bytes from the FDC during read
sector commands, the 1050 always waits for the command to complete before reading drive status. This leads to
different FDC status values when reading long sectors of 256 bytes or more. In particular, the DRQ and lost data
bits will be asserted due to the additional data being ignored by the firmware, the BUSY flag will be negated, and
the CRC error bit will accurately reflect where the CRC was correct on the entire sector, regardless of the data
bytes that were dropped. This generally produces FDC status values of either $F9 for sectors with correct CRCs
and $F1 for sectors with bad CRCs.
10.11 1050 hardware
Like the 810, the 1050 also has no command to upload code to the drive. However, a large number of
enhancements were made for the 1050 which do, and writing custom code for the drive requires knowing how to
interface with the hardware.
Controller
The controller in the 1050 is a 6507 running at 1MHz. Its memory map is as follows (along with canonical
ranges):
Address range Mapping
$F000-FFFF ROM (4K)
$0C00-0FFF 279X FDC (mirror)
$0B80-0BFF RIOT registers (mirror)
$0B00-0B7F Not mapped
$0A80-0AFF RIOT registers (mirror)
$0A00-0A7F Not mapped
$0980-09FF RIOT RAM (mirror)
$0900-097F 6810 RAM (mirror)
$0880-08FF RIOT RAM (mirror)
$0800-087F 6810 RAM (mirror)
$0400-07FF 279X FDC
$0380-03FF RIOT registers (mirror)
$0300-037F Not mapped
$0280-02FF RIOT registers
$0200-027F Not mapped
$0180-01FF RIOT RAM
$0100-017F 6810 RAM (mirror)
$0080-00FF RIOT RAM (mirror)
$0000-007F 6810 RAM
Table 39: 1050 memory map
Due to the 6507’s limited address bus, all memory mappings are repeated every 8K in the address space. The
set of memory mapped devices is similar to the 810, with the notable exception that the FDC is no longer
mapped in page zero; instead, a single full page of RAM is mirrored to both page zero and the stack page.
Chapter 10 - Disk drives 196

Altirra Hardware Reference Manual Created by Avery Lee
FDC
A WD2793/2797 acts as the floppy drive controller for the drive. It differs mainly from the FD1771 used in the
810 by supporting MFM encoding. Like the 810, the FDC's head stepping facilities are not used and the index
pulse is supplied from the RIOT timer instead of the drive. However, notable differences are that the drive latch is
connected to the ready input on the FDC, so both the FDC and the firmware can detect when the drive door is
open, and a track 0 sensor is also hooked up.
RIOT
Port Signal Direction Usage Polarity
Port A PA7 Input FDC DRQ 1 = DRQ asserted
PA6 Input60 RIOT IRQ / index pulse sense
PA5 Output FDC density control 1 = FM, 0 = MFM
PA4 Output FDC write precompensation enable
PA3 Output Spindle motor control 0 = enabled
PA2 Output ROM bank switch (Super Archiver only)
PA1 Input Drive code A sense61 1 = D1/D2, 0 = D3/D4
PA0 Input Drive code B sense 1 = D1/D4, 0 = D2/D3
Port B PB7 Output SIO data input (device to computer)62 non-inverted
PB6 Input SIO data output (computer to device) inverted
PB5 Output Stepper phase 1 0 = activated
PB4 Output Stepper phase 2 0 = activated
PB3 Output Stepper phase 3 0 = activated
PB2 Output Stepper phase 4 0 = activated
PB1 Input SIO ready 0 = ready
PB0 Input SIO command 1 = asserted
Table 40: 1050 RIOT I/O port assignments
Track stepping
The read/write head in the 1050 is stepped between tracks by port B bits 2-5 like in the 810, but with some
important differences. The outputs are pulled low instead of high to activate phases, only one phase is active at a
time instead of two, and each change in phase steps by a half-track instead of a full track. In terms of values
written to port B, a right shift steps inward to higher number tracks, and a left shift steps outward to lower
numbered tracks.
Track 0 sensor
Oddly, the track 0 sensor is hooked up inverted so that the FDC senses a track 0 condition when the head is not
on track 0 and vice versa. This is no issue for the FDC since its seek facilities are not used, but it does mean that
the firmware has to interpret the Track 00 bit in FDC status oppositely from its intended interpretation.
[60] Normally input, but some Happy 1050 software drives PA6 in output mode to directly inject index pulses.
[61] As with the 810, the 1050 encodes the drive ID in Gray code instead of binary.
[62] Note that the SIO data lines are named from the computer side, so the SIO data input line is an output for the 810.
Chapter 10 - Disk drives 197

Altirra Hardware Reference Manual Created by Avery Lee
10.12 US Doubler
The US Doubler is a hardware modification to the 1050 drive that adds high-speed and double density support. It
consists of a replacement 4K firmware and an additional 128 bytes of memory.
Hardware changes
The only hardware change made by the US Doubler is to add another 128 bytes of memory next to the RIOT
registers, canonically addressed at $0200-027F and mirrored at $0300-037F. This increases the total memory to
384 bytes and allows use of 256 byte sectors without convoluted programming tricks.
High-speed operation
Communication with the US Doubler can be run at high-speed to greatly decrease loading times. The first step is
to query the drive’s high-speed index with command $3F, which returns a single-byte data frame with the POKEY
divisor, which is always $0A for the US Doubler. Sending a command at this high speed then causes the drive to
use this speed for all communications for that command.
The firmware is only capable of receiving commands at one speed at a time, so it handles speed switching by
toggling high-speed for the command frame receive whenever a command frame receive error occurs. This
means that the drive ignores the first command sent after a speed switch and relies on the computer to retry the
command without a response.
Since the US Doubler lacks a track buffer, effective high-speed operation depends on the disk being formatted
with a suitable high-speed skew. Using high-speed communication with a disk formatted with standard sector
order doesn’t give an improvement. Similarly, using standard speed with a high-speed skew formatted disk gives
bad read performance.
Format skewed command ($66)
By default, the US Doubler uses a standard speed skew for the $21 and $22 format commands. For high-speed
operation, it is necessary to format disks with a high-speed sector skew instead. This is done with command
$66. This command is a write command that takes a 128 byte data frame containing the PERCOM block
parameters in the first 12 bytes, followed by the sector list. The sector list contains 1-based sector numbers.
The format skewed command is flexible with its support of PERCOM block parameters. In particular, custom
track and sector per track counts are supported, allowing partial disk formatting and missing/duplicated sectors.
Write PERCOM block command ($4E)
PERCOM blocks set using command $4E are partially parsed by the US Doubler. Bytes 0 (track count), 3
(sectors per track), 5 (density), and 7 (bytes per sector low) are used; all other bytes are ignored.
10.13 Happy 1050
The Happy 1050 adds a 6502 CPU, 6K of RAM, and an additional 4K of ROM to the 1050. Additional features
include track buffering, custom code upload, and high-speed operation. It is, however, not compatible with the
Happy 810; the two use different command sets and require different code uploads.
Memory map
The Happy 1050 replaces the 6507 with a 6502, expanding the address space from 8K to 64K. This is used to
map 6K of RAM at $8000-97FF and a 4K ROM window at $F000-FFFF. The ROM is bank-switched, exposing
8K of ROM as two 4K banks switched by an access to $FFF8 or $FFF9.
Chapter 10 - Disk drives 198

Altirra Hardware Reference Manual Created by Avery Lee
Memory read/write commands
As with the Happy 810, the read and write sector commands have been extended to allow memory access. A
sector address with bit 15 set reads or writes to that address on the drive. Unlike the Happy 810, both put/write
commands work and the start address can be anywhere in $8000-FFFF, not just in RAM. Also, the transfer size
depends on the current density setting, so 256 bytes are transferred if the current drive setting is double density.
High speed commands
The built-in firmware supports high-speed versions of the read, write, and put sector commands as $72, $77,
and $70, respectively. The command frame and command ACK/NAK are sent at low speed, while the
completion/error and data frame are sent at 38,400 baud ($10 divisor).
Revision 2 firmware is also capable of using US Doubler compatible high speed protocols. Like the US Doubler,
it uses a POKEY divisor of $0A. Unlike other drives using this protocol, support for this is not enabled until the
Get High Speed Index ($3F) command is received, upon which the firmware enables the USD-compatible high
speed code.
Track read buffering
By default, the Happy 1050 has track read buffering enabled to speed up read operations. Instead of reading
each sector as requested by the computer, the drive reads all sectors on a track in the order stored on disk, and
then uses the buffer to satisfy read sector commands without issuing commands to the floppy disk controller.
This greatly reduces rotational delays and speeds up sequential reads on a single density disk by about 25%. It
is even possible for the drive to idle the disk mechanism and stop the motors while still responding to read sector
commands, as long as the requested sectors are all in the buffer.
Whenever a sector is requested on a track not in the buffer, the firmware seeks to and reads the new track. It
first issues a Read Address command to read the sector ID of the next sector on the disk, and then begins
reading sectors into the buffer after that. Buffering a track thus takes slightly more than a revolution.
In order to do this, the firmware needs to know the sector order beforehand, which it does so by scanning and
recording the sector order from track 0 via Read Address commands when a new disk is inserted, which is then
used for all tracks. The firmware detects a disk change by polling for changes in the state of the Not Ready
status bit on the FDC, which is connected to the 1050’s drive lever. It can only do so when the drive is idle,
however, so it is possible for a disk change to be missed if the change occurs very quickly while a command is
being processed.
Track read buffering is automatically disabled if the Controller is present and the Fast/Slow switch is set to Slow.
It can be re-enabled on the fly by changing the switch back to Fast, upon which the firmware will re-scan the
sector order and resume buffered reads.
Sector 1 buffering
When track buffering is enabled, the firmware also maintains a special side cache for track 0, sector 1,
independently of the normal track buffering cache. This allows the drive to service requests for sector 1 without
invalidating the track buffer and re-reading all of track 0. In particular, this speeds up accesses by SpartaDOS,
which frequently re-reads sector 1 to check if the disk volume has been changed.
Track write buffering
The Happy 1050 has the ability to buffer writes as well as reads. Up to an entire track can be buffered, which is
then written out in a single rotation to disk after enough time has passed or the buffer needs to be reused for
another track. Both write and put commands are cached by the write buffer.
The write buffer is also automatically flushed on any recognized command that is not a read, write, or put sector
Chapter 10 - Disk drives 199

Altirra Hardware Reference Manual Created by Avery Lee
command or the Happy command ($48). All modified sectors in the write buffer and written back to the disk
before the command is executed.
When writing modified sectors back to disk, the drive first does a Read Address command to determine the
current position of the head in sector order, and then begins writing modified sectors starting with the next sector.
As long as the disk has a consistent sector order between all tracks, this allows the drive to write all sectors in a
single revolution regardless of sector interleave. A verify pass is always done afterward by re-reading the
sectors, regardless of whether the sectors were written with a write or put sector command. Only sectors that
were written are re-read.
In single density with 6K of RAM, the Happy 1050 is capable of buffering different two tracks for read and write,
and can alternate between reading from one and writing to another without having to flush in between. It cannot
buffer two read or two write tracks, though.
1050 diagnostic commands (rev. 1 only)
Revision 1 firmware supports the $23 and $24 1050 diagnostic commands. These commands were removed
and will return a NAK on rev. 2 firmware.
Quiet command
Command $51 (‘Q’) turns off the drive motors immediately. AUX1/2 are ignored. As with other non-sector
commands, the Quiet command flushes buffered write data back to the disk before turning off the motors.
Happy command
Command $48 (‘H’) is a command with multiple functions, multiplexed by AUX1.
All sub-commands flush track buffers before performing their function.
Warning
Command $48 flushes the write buffer without writing modified sectors back to disk, so any modified
sectors still left in the track write buffer are lost! This can be avoided by flushing the write buffer with a
status command ($53) first.
Set idle timeout (AUX1=$01)
Sub-command $01 sets the inactivity timeout for the drive. AUX2 sets the timeout in units of about 50ms.
Set alternate device ID (AUX1=$02)
Sub-command $02 changes the alternate device ID for the drive. Bits 0-6 of AUX2 set the alternate device ID,
while bit 7 determines whether the drive only responds to the alternate ID. For instance, for a drive normally
configured for D1: by hardware switches, $34 would map it to both D1: and D4:, and $B4 would map the drive to
D4: only. In the latter case, the drive would no longer respond to D1:.
The change to the device ID does not take place immediately, but is instead queued for the next disk change.
Reinitialize drive (AUX1=$03)
Sub-command $03 reinitializes the drive by performing a software reset. The Complete byte is actually sent
before the reset instead of after, as the drive forgets all state when the reset occurs; this means that the drive will
be uncommunicative for a short time afterward.
Configure drive (AUX1=$04-FF)
Sub-commands $04-FF reconfigure the Happy-specific functionality of the drive. The bits in AUX1 determine the
Chapter 10 - Disk drives 200

Altirra Hardware Reference Manual Created by Avery Lee
mode bits to change, while the bits in AUX2 are the new states for those mode bits. Table 41 lists the functions of
the individual mode bits.
Bit Function (if set)
Bit 7 ($80) Unhappy mode (disable all extended functions)
Bit 6 ($40) Disable track read/write buffering
Bit 5 ($20) Disable track write buffering
Bit 4 ($10) Force write protected
Bit 3 ($08) Force write enabled
Bit 2 ($04) Enables alternate device ID
Table 41: Happy 1050 drive mode bits
Thus, AUX1=$80, AUX2=$80 would set Unhappy Mode, while AUX1=$58, AUX2=$40 would disable track
buffering and restore normal write protect sensing.
If mode bits 3 and 4 are set at the same time, the write protect state is sensed normally, the same as if both
functions were disabled.
Changes to all but the track buffering modes – bits 2-4 and 7 – take effect immediately. Track buffering and write
buffering can be disabled immediately, but read buffering can only be enabled if it has already been initialized,
and write buffering cannot be enabled immediately; otherwise, these changes take effect on the next disk
change.
Fast/slow switch
Two hardware switches are added to drives that have the Controller Option. The fast/slow switch is used to
toggle the track buffering feature of the drive, which speeds up disk access but is incompatible with some disks.
When this switch is set to the Slow setting, accesses to $9800-9FFF or $B800-BFFF toggle a flip-flop that is
connected to the Set Overflow line on the controller 6502. This means that every other access sets the V flag on
the CPU. If the switch is set to Fast or the Controller is not present, these accesses are ignored. There is no
preset state for this flip-flop and thus the firmware must always issue at least two accesses.
Write protect switch
The second switch on the Controller is a three-way switch to control the write protect setting on the disk. The
three settings are Normal, Protect, and Write.
In the Normal setting, the write protect sensor of the drive mechanism is modified by an inversion flip-flop before
being passed to the FDC. An access to $4000-7FFF toggles the flip-flop, switching between inverting and not
inverting the state of the sensor. An access to the fast/slow switch ranges ($9800-9FFF and $B800-BFFF) clears
this flip-flop, restoring normal non-inverted sensing. There is no way to directly set the flip-flop, but the firmware
can achieve any required configuration by a combination of clear/toggle accesses and checking the FDC’s write
protect state.
In the Protect and Write settings, the Write Protect state seen by the FDC is overridden to either always on or off,
regardless of the disk and flip-flop state. The firmware can still clear or toggle the flip-flop, but cannot affect the
WP signal. It is therefore not possible for the firmware to write to the disk when the switch is set to Protect.
10.14 I.S. Plate
The I.S. Plate – also referred to in the official documentation as the I.S 1050 Plate Enhancement, Innovated
Software’s Plate, ISP Plate, ISP PLATE, and 1050 ISP – is a single-board modification to 1050 drives to add
revised firmware and additional RAM. It replaces the 6507 CPU with a 6502, the 4K firmware with 8K firmware,
Chapter 10 - Disk drives 201

Altirra Hardware Reference Manual Created by Avery Lee
and adds 16K of static RAM.
Memory map
A12 in the 6507’s 13-bit address space is replaced by the 6502’s A15, which causes $0000-7FFF to reflect
$0000-0FFF in the original memory map eight times, containing all of the hardware and excluding the firmware
ROM. The new 8K of firmware ROM is at $E000-FFFF, though only 4K at $F000-FFFF is used. The 16K of RAM
is split into two 8K halves, one at $8000-9FFF and the other at $C000-DFFF.
High-speed operation
US-Doubler style high speed operation is invoked by sending command frames at 52Kbaud (divisor $0A).
10.15 XF551 disk drive
The XF551 disk drive adds true support for double-density disks, with 720 sectors of 256 bytes each. It also
spins the disk at 300 RPM instead of 288 RPM, resulting in slightly lower rotational latencies.
High speed transfers
The high bit of a command byte can be set to request high speed transfers. When this is set, the initial ACK or
NAK byte is sent at 19,200 baud, and then the transmission rate between the computer and the XF551 for the
remainder of the command is raised to 38,400 baud. This includes any following ACK, Complete, Error,
checksum, and data frame bytes in either direction, but it does not include the command frame itself which must
always be sent at standard speed. Any command may be executed in high speed except for disk format
commands.
Status command
The status command ($53) returns additional status on the XF551. The first byte indicates the following:
Bit Description
Bit 7 0 = single or double density
1 = enhanced density
Bit 6 1 = double sided
Bit 5 0 = single or enhanced density
1 = double density
Bit 4 Always 0
Bit 3 1 = last put operation failed due to write protect
Bit 2 1 = last put operation failed
Bit 1 1 = receive error on last data frame
Bit 0 1 = receive error on last command frame
Table 42: XF551 drive status flags
The XF551 does not indicate motor status via bit 4.
The timeout field in the returned status is set to $FE on the XF551 instead of $E0.
Format With High-Speed Skew command
Issuing the format command with the high bit set ($A1) instructs the XF551 to do a format using a sector skew
Chapter 10 - Disk drives 202

Altirra Hardware Reference Manual Created by Avery Lee
better suited to high-speed transfer rates, using a 9:1 interleave instead of a 15:1 interleave. Because of the
reuse of bit 7, this is not a high-speed command and the data frame is sent at low speed. The high-speed skew
only pertains to double density formats and does not affect single density or enhanced density formatting.
Read PERCOM Block command
Command $4E ('N') reads a PERCOM configuration block from the drive. This corresponds to either the last
detected format or the last format selected by the Write PERCOM Block command, whichever is more recent.
The XF551 always returns one of the following four configurations as an 12 byte payload:
Format
Data Index SD ED SSDD DSDD
Track count 0 40
Step rate 1 $00 (6 ms/half track)
Sectors per track 2-3 18 26 18 18
Sides minus one 4 0 0 0 1
Recording method 5 $00 (FM) $04 (MFM) $04 (MFM) $04 (MFM)
Bytes per sector 6-7 128 128 256 256
Drive status 8 $01 (online)
Reserved byte 9 $41
Reserved bytes 10-11 $00
Table 43: XF551 PERCOM configuration block values
Note that all 16-bit quantities in the PERCOM block are stored in big-endian order with the high byte first,
backwards from traditional 6502 convention.
Write PERCOM Block command
The PERCOM block can also be modified using command $4F ('O'), which receives the PERCOM block as a 12
byte payload. This is used to set the desired format for a subsequent format command. The XF551 does not
validate or interpret the entire PERCOM block, however, and does the bare minimum of checks needed to
distinguish its supported formats:
·If the sectors per track count is 26, extended density is selected.
·If the bytes per sector count is less than 256, single density is selected.
·If the sides minus one value is zero, single sided double density is selected.
·Otherwise, double sided double density is selected.
Track count, step rate, recording method, and drive status are always ignored.
Transmission timing
The XF551's 8040 CPU runs at 8.333MHz, giving a machine cycle rate of 555KHz. The transmission loop runs
at a rate of 29 cycles per bit (19157 baud) and 290 cycles per byte (1915.7 bytes/second). In high-speed mode,
this is accelerated to 14 cycles/bit (39683 baud) and 140 cycles/byte (3968.3 bytes/second).
Command line timing
Most disk drives are lenient with or even ignore timing for releasing /COMMAND after the command frame is
Chapter 10 - Disk drives 203

Altirra Hardware Reference Manual Created by Avery Lee
sent. The XF551 is unusually strict in this regard and will reject any command frame for which /COMMAND is not
still asserted at the end of the command frame. Therefore, it is essential to wait for the last byte to finish
transmitting completely before deasserting /COMMAND.
Density switching problem
Unfortunately, the XF551 firmware has problems with reliably detecting double density disks and can sometimes
fail to read such disks after a disk change. The firmware will automatically switch from FM to MFM, but defaults
to enhanced (medium) density first, and relies on a long sector error to indicate when it should switch to double
density. If the logical sector number of the next request maps in enhanced density to a physical sector with
number greater than 18, the FDC will not be able to find a sector to read and the firmware is unable to trigger a
density change on the resulting Record Not Found error.
Compounding this problem is an additional quirk in the firmware, which is that boot sectors 1-3 are exempted
from the long sector check. This prevents the XF551 from switching densities properly when a double density
MyDOS disk is used with SpartaDOS X, since SDX first reads sector 1 to detect the filesystem type and check
for a volume change before reading the directory at sector 361; sector 1 causes a change only to ED and then
attempting to read 361 causes a RNF on track 13, sector 23. Some XF551-oriented DOSes deliberately issue a
dummy read to sector 4 to force a density change to double density.
10.16 XF551 hardware
Drive mechanism
The XF551's drive mechanism is a double-sided, 40 track drive spinning at 300 RPM.
Controller
The XF551's controller is an 8040 running at 8.33MHz. The system clock speed is slightly higher to compensate
for the 300 RPM rotational speed; the controller and FDC are clocked faster by the same amount that the drive
spins faster, by 4.2%. This ensures that the FDC reads and writes at the same density on disk that other drives
do at 288 RPM.
Although an 8.33MHz master clock is faster than most drives, the 8040 internally runs 15 clock cycles per
machine cycle, so the CPU core runs machine cycles at a much lower 0.55MHz speed. The 8040 still maintains
reasonable throughput at this rate because its instructions only take 1-2 machine cycles.
The only RAM in the system is 256 bytes of internal RAM within the 8040; 4K of firmware ROM is addressed
externally. There is no memory map for the XF551 because the only peripheral connected to the data bus is the
FDC and the address put on the bus is ignored, with register selection done through port 2.
The two I/O ports on the 8040 serve similar purposes to the RIOT I/O ports on the 810 and 1050.
Chapter 10 - Disk drives 204

Altirra Hardware Reference Manual Created by Avery Lee
Port Signal Direction Usage Polarity
Port 1 P1.7 Output SIO data input (device to computer) inverted
P1.6 Output Floppy drive side select 0 = bottom, 1 = top
P1.5 Output FDC data bus read/write control 1 = read, 0 = write
P1.4 Output FDC reset 0 = asserted (reset)
P1.3 Output FDC density control 1 = FM, 0 = MFM
P1.2 Input FDC INTRQ 1 = asserted
P1.1 Output FDC address bit 1 non-inverted
P1.0 Output FDC address bit 0 non-inverted
Port 2 P2.7 Input Drive select 1 = D3: or D4:
P2.6 Input Drive select 1 = D2: or D4:
P2.5 - Not connected
P2.4 - Not connected
P2.3 - Not connected
P2.2 - Not connected
P2.1 - Not connected
P2.0 - Not connected
Table 44: XF551 8040 I/O port connections
The large number of non-connected lines on port 2 is not an accident or underutilization of the hardware. The
output latches for those bits are instead used by the firmware as internal storage. This is required to support
double-density operation with only 256 bytes of RAM; the entire RAM is used as the transfer buffer, requiring all
other state to be stuffed into unconventional locations such as port 2, the timer (T) register, and even the stack
pointer.
Two additional input pins on the 8048, T0 and T1, are connected to the SIO DATA OUT and FDC DRQ signals,
respectively. T0 receives the inverted data sent from the computer; T1 is raised high when the FDC requires data
transfer.
FDC
The floppy drive controller chip in the XF551 is a WD1770/1772. Unlike earlier Atari drives, the XF551 connects
the 1770/1772 even more conventionally, with spindle motor, head stepping phases and the index sensor
hooked up as well as ready and track 0 control lines. Thus, seeking in the XF551 is done by regular FDC seek
commands rather than manually rotating control lines with the CPU, and motor idle is also under FDC control.
The difference between the 1770 and 1772 is the step rate used for seeking. The 1770 results in a seek rate of
28.9ms/track, whereas the 1772 gives 5.8ms/track. The seek times are slightly faster than standard due to the
FDC being clocked at 8.3MHz instead of 8MHz.
10.17 Indus GT disk drive
The Indus GT disk drive from Indus Systems, Inc. provides up to 180K of single-sided, double-density disk
storage over an extended version of the SIO disk protocol. It contains a Z80A running at 4MHz with 2K of RAM.
Command set
Nine commands are supported by the built-in firmware: read sector ($52), status ($53), write sector ($57), put
sector ($50), read PERCOM block ($4E), write PERCOM block ($4F), format ($21), format enhanced ($22), and
execute ($58). This can be extended through uploaded code.
Chapter 10 - Disk drives 205

Altirra Hardware Reference Manual Created by Avery Lee
Execute command ($58)
The Indus GT specific 'X' ($58) command allows arbitrary code to be uploaded and executed on the drive. This is
useful both for diagnostic purposes and to extend the functionality of the drive. In particular, allows the
Syncromesh and SuperSynchromesh extensions to add (working) high speed operation.
Bit 0 of the AUX2 byte determines whether to upload code (1) or execute it (0). When uploading code, AUX1
specifies the length of code to be transferred in bytes. The code is located in the drive's memory at 7F00h and is
invoked with AUX2 bit 0 = 0. The code can perform arbitrary transfers in response to being invoked, including
both receiving data (write) and sending data (read).
Commonly uploaded code sequences
While arbitrary code can be executed on the Indus GT, there are a few standard code sequences used by
software that interfaces with the Indus. Table 45 gives lengths, SIO checksums, and descriptions of the
commonly uploaded code sequences.
Length (checksum) Description
$19 ($52) Checks firmware version on drive. Returns a two-byte payload containing the major and minor version in BCD, i.e.
$01 20 for 1.20.
$8A ($EB) Synchromesh loader from Indus GTSYNC.COM utility.
$67 ($49)
$100 ($22)
$100 ($A0)
$100 ($CF)
Synchromesh firmware (SV1.20) from Indus GTSYNC.COM utility.
$E5 ($45) SuperSynchromesh loader from Indus GTSYNC.COM utility.
$69 ($DA)
$100 ($BA)
$100 ($62)
$100 ($F5)
SuperSynchromesh firmware (SV1.30) from Indus GTSYNC.COM utility.
$F5 ($A4)
$100 ($EE)
$100 ($96)
RamCharger firmware from Indus GTSYNC.COM utility.
$E5 ($F0) SuperSynchromesh loader from SpartaDOS X INDUS.SYS.
$69 ($6E)
$100 ($BA)
$100 ($62)
$100 ($F5)
SuperSynchromesh firmware (SV1.30 patched) from SpartaDOS X INDUS.SYS.
Table 45: Commonly used Indus GT uploadable code fragments.
The loaders are invoked repeatedly using the execute mode of the $58 command, supplying blocks of code each
time. The short block is given first, but the blocks are arranged in ascending address order. No length is
specified in AUX1 for each block and the loader and uploader must be matched. At the end of a firmware upload,
an additional execute call is made with no length to finalize the upload.
High-speed operation
Synchromesh is the name of the Indus GT's high speed operation at 38,400 baud. It is very similar to but not
exactly the same as the XF551's high speed operation. Bit 7 is set on a command to indicate that the data phase
should be performed at high speed. As with the XF551, the command frame itself and the command ACK occur
at low speed (19,200 baud), but the data frame ACK/Complete/Error bytes, data payload, and checksum are
transferred at high speed.
The original version of Synchromesh on the drive uses the clock in/out signals from the computer to control send
Chapter 10 - Disk drives 206

Altirra Hardware Reference Manual Created by Avery Lee
and receive timing on the drive. For these reasons, receive operations must always synchronous mode instead
of asynchronous mode with the original version of Synchromesh. This doesn't apply to standard speed
communication as the firmware synchronizes to the leading edge of the start bit in that case. The updated
version of Synchromesh uploaded to the drive by GTSYNC.COM also uses conventional timing methods for
high-speed operation and thus requires the usual asynchronous receive mode on POKEY.
SuperSynchromesh increases the transfer speed to 69,000 baud, equivalent to POKEY's divisor 6.
High-speed format commands
The stock firmware on the drive supports high-speed versions of the format commands, but they simply transfer
the final sector list in high-speed – no change is made to the sector skew. All disks are formatted with even and
odd sectors partitioned, giving a 9:1 interleave in SD/DD and 13:1 for ED.
The uploaded versions of Synchromesh revise the $A1 command to use more appropriate interleaves for high-
speed operation. Synchromesh uses 6:1 interleave for SD and 9:1 for DD, while SuperSynchromesh uses 5:1 for
SD and 7:1 for DD.
Also added with the firmware update is $A3, which reformats only the boot tracks of a disk with standard, non-
high-speed appropriate interleaves. The first three tracks are formatted on SD, while the first two tracks are
formatted on DD. There is no corresponding low-speed $23 command.
$A2 is not supported by the updated firmware, and neither the $A1 nor the $A3 commands can format ED disks.
Caution
The Indus GT and XF551 are incompatible with respect to the $A1 and $A2 format commands. The $A1
format command sends a low-speed data frame on the XF551, while on the Indus GT it sends a high-speed
data frame. The $A2 command has the same behavior on the stock firmware and is not supported at all by
the uploaded Synchromesh or SuperSynchromesh firmware.
10.18 Indus GT hardware
Controller
The Indus GT is controlled by a Z80 microprocessor running at 4MHz, with the following memory map:
Address range Mapping
$8000-FFFF Upper 32K of RAMCharger RAM (if present)
$7800-7FFF RAM (2K)
$7000-77FF RAM (2K) (mirror)
$6000-6FFF 1770/2797 FDC
$4000-5FFF LED/misc control
$3000-3FFF Step control (write only)
$2000-2FFF Status 2 (read only)
$1000-1FFF Status 1 (read only)
$0000-0FFF ROM (4K)
Table 46: Indus GT memory map
The lower 32K of address space can also be replaced with the lower 32K of RAMCharger memory.
Chapter 10 - Disk drives 207

Altirra Hardware Reference Manual Created by Avery Lee
Status 1 port
Bit Description
Bit 7 1 = Write protect sensor latch (stays set when write protect is sensed)
Bit 6 1: Error button is depressed
Bit 5 1: Drive type button is depressed
Bit 4 1: Track button is depressed
Bit 3 1: Not connected (always 1)
Bit 2 0: S1-3 is closed (up) – selects double density as default
Bit 1 0: S1-2 is closed (up) – assigns D3: or D4: to drive63
Bit 0 0: S1-1 is closed (up) – assigns D2: or D4: to drive
Table 47: Indus GT status 1 port signals
In addition, accessing the status 1 port with an even address clears bits 4-7 of the status port. Typically, the
firmware accesses an even address first and then re-reads an odd address to query the port.
Status 2 port
Bit Description
Bit 7 1 = FDC INTRQ asserted
Bit 6 1 = FDC DRQ asserted
Bit 5 0 = SIO COMMAND line asserted
Bit 4 1 = SIO READY line asserted
Bit 3 SIO DATA IN (non-inverted)
Bit 2 SIO DATA OUT (non-inverted)
Bit 1 SIO CLOCK IN (non-inverted)
Bit 0 SIO CLOCK OUT (non-inverted)
Table 48: Indus GT status 2 port signals
Step control port
Writing to 3000-3FFFH controls the stepper motor. Bits 0-3 control the four phases, where a 1 bit activates a
phase and only one phase is active at a time. Phases are activated in ascending order (0-1-2-3) for stepping
inward to higher numbered tracks and descending order (3-2-1-0) for stepping outward to lower numbered
tracks.
LED/misc control ports
Bits 0-6 of $4xxx and $5xxx control the LED readout display, composed of two 7-segment digits. $4000-4FFF
controls the ones (right) digit, while $5000-5FFF controls the tens (left) digit. There is no decimal point. Bits 0-6
are hooked up to segments A-G, which are, in order: top, top right, bottom right, bottom, bottom left, top left, and
center. The bits are active low so that a 0 bit lights up a segment.
Bit 7 controls miscellaneous signals on both ports. Writing D7=0 to $4000-4FFF enables the busy light; writing
D7=1 to $5000-5FFF enables write precompensation.
Since both ports are write-only, the LEDs must be rewritten to toggle the busy light or write precomp and vice
versa.
[63] Unlike the 810 and 1050, the Indus GT uses plain binary for drive ID.
Chapter 10 - Disk drives 208

Altirra Hardware Reference Manual Created by Avery Lee
I/O ports
A number of signals are also tied to I/O ports in the range 00-0FH. Either an input or output operation will work
as only the address matters:
•00/01H: SIO AUDIO IN control
•02/03H: Enable/disable drive index pulse (02H enables, 03H disables).
•04/05H: SIO DATA IN / transmit to computer (04H transmits a 1).
•06/07H: SIO DATA OUT / transmit as computer (06H transmits a 1).
•08/09H: Set FDC density (08H = MFM, 09H = FM).
•0A/0BH: Motor control (0AH = on).
•0C/0DH: Direct index pulse control (0CH asserts).
•0E/0FH: RAMCharger lower bank enable (0FH enables).
SIO connections
The Indus GT is unusual in being wired such that it can both transmit and receive on both the SIO DATA IN and
SIO DATA OUT lines, allowing it to act as a host as well as a peripheral. It can also send pulse waves on SIO
AUDIO IN and read both the SIO CLOCK IN and SIO CLOCK OUT lines, also uncommon connections.
However, it cannot drive the SIO clock lines, nor can it drive or sense the proceed, interrupt, or motor control
lines.
RAM Charger
The optional RAM Charger adds 64K of RAM to the Indus GT, allowing it to buffer tracks and to run CP/M. The
upper 32K of RAM is always mapped at $8000-FFFF, while the lower 32K of RAM can be bank-switched in by
accessing ports 0EH and 0FH, where 0FH enables the RAM and 0EH disables it.
TOMS Turbo Drive
The TOMS Turbo Drive is a clone of the Indus GT that is compatible hardware-wise, but uses different firmware.
10.19 ATR8000 hardware
The ATR8000 connects up to four standard disk drive mechanisms, an RS-232 serial port, and a parallel printer
port to the computer.
Controller
A Z80 microprocessor running at 4MHz controls the drive. The memory map is simple: either 16K of RAM with
$C000-FFFF as the canonical range, or 64K of RAM. The drive’s firmware is contained on either a 2K or 4K
ROM that is mirrored throughout the lower 32K of address space and can be switched off for access to the RAM.
Writes to RAM are always enabled and so writing through the ROM is possible.
I/O ports are used to communicate with the peripherals, which include the floppy disk controller (FDC), a Z8430
Counter/Timer Circuit (CTC) chip, and discrete control hardware.
Chapter 10 - Disk drives 209

Altirra Hardware Reference Manual Created by Avery Lee
Ports Description
00-1FH Not connected
20-2FH Printer status
30-3FH Not connected
40-4FH Floppy drive controller
50-5FH RS-232 status
60-6FH Not connected
70-7FH SIO status
80-BFH Counter/Timer Circuit
C0-FFH Not connected
Table 49: ATR8000 input port assignments
Ports Description
00-1FH Not connected
20-2FH Printer data latch
30-3FH Drive control
40-4FH Floppy drive controller
50-5FH Miscellaneous control (bit 0 only)
•50/58H: SIO DATA IN
•51/59H: RS-232 transmit data
•52/5AH: ROM enable (0 = enabled)
•53/5BH: Printer strobe (1 = asserted)
•54/5CH: Index control flip/flop clear (0 = asserted)
•55/5DH: RS-232 DTR/RTS
•56/5EH: Index control flip/flop preset (0 = asserted)
•57/5FH: CTC trigger 0 select (0 = SIO DATA OUT, 1 = SIO COMMAND)
60-7FH Not connected
80-BFH Counter/Timer Circuit
C0-FFH Not connected
Floppy drives
Up to four 5.25” or 8” disk drives can be connected to the ATR8000. The firmware detects which types are
connected by checking the rate of index pulses from each drive, checking for 300 RPM for a 5.25” mechanism or
360 RPM for 8”. Only one drive can be selected at a time.
The hardware has the ability to turn off the index sensor, allowing the FDC to read and write sectors across the
index. This is done by controlling an index pulse enable flip/flop via a pair of ports; writing a 0 to bit 0 of 54/5CH
asserts the clear line to disable the index pulse, and writing a 0 to bit 0 of 56/5EH asserts the preset line to
enable the index pulse, with only one of these normally asserted at a time. However, it cannot manually inject
index pulses under CPU control as most other 810-compatible drives can.
Floppy drive controller (FDC)
The FDC in the ATR8000 is a FD1797, which supports double density and side selection but not motor control.
The motor is still controlled by the FDC, but using the head load output. Head stepping is controlled by the FDC.
Due to support for 8” disk drives, the ATR8000 has the ability to clock the FDC higher than typical at double
speed, permitting 2µs/cell FM and 1µs/cell MFM.
The DRQ and INTRQ lines from the FDC are wired up unusually to the Z80: they assert an NMI, but only when
Chapter 10 - Disk drives 210

Altirra Hardware Reference Manual Created by Avery Lee
the Z80 is executing a HALT instruction. This allows the NMI to be used in a controlled manner. The two different
interrupt sources can only be distinguished by means of the FDC status register.
Counter/Timer Circuit (CTC)
A Z8430 CTC chip provides both timer and signal triggering services. Of the four channels, channel 0 can be
used to monitor either incoming SIO data or command state, while channel 2 can sense incoming data on the
serial port. Channel 3 is chained to channel 2’s output in the ATR8000 so that both of them can be linked
together for a extended range watchdog timer.
Any of the four channels can issue an interrupt to the Z80 on counter or timer expiration. The interrupt is
delivered in vectored mode (IM 2), allowing the firmware to use distinct routines for each channel without
needing to manually dispatch.
Drive control
Output to ports 30-3FH controls various drive and floppy controller signals.
Bit Description
Bit 7 Density select (1 = FM, 0 = MFM)
Bit 6 Clock select (0 = 1µs/2µs, 1 = 2µs/4µs)
Bit 5 Side select
Bit 4 FDC reset
Bit 3 Drive select 4 (1 = selected)
Bit 2 Drive select 3 (1 = selected)
Bit 1 Drive select 2 (1 = selected)
Bit 0 Drive select 1 (1 = selected)
Table 50: ATR8000 drive control port layout (OUT 30-3FH)
Bits 0-3 are used to select drives, with a one bit selecting a drive and all zero bits deselecting all drives. It is
possible to select more than one drive at a time, and in fact the firmware does this at startup to seek all four
drives to track 0 at the same time.
Bit 6 selects the data rate for the floppy drive controller. A 1 bit selects a 4µs bit cell for FM or 2µs for MFM for
5.25” drives; a 0 bit doubles the data rate to 2µs FM or 1µs MFM for 8” drives.
Bit 7 selects FM for single density (1) or MFM for double density (0).
SIO bus connection
Input operations from ports 70-7FH read inputs from the SIO bus, as shown in Table 51. Output operations to
port 50/58H bit 0 send data on the SIO DATA IN line with normal polarity. There is no hardware support for
driving PROCEED/INTERRUPT or the clock lines.
Bit Description
Bit 7 SIO DATA OUT (normal polarity)
Bit 3 SIO READY (1 = computer powered)
Bit 1 SIO COMMAND (0 = asserted)
Table 51: ATR8000 SIO status port layout (IN 70-7FH)
Chapter 10 - Disk drives 211

Altirra Hardware Reference Manual Created by Avery Lee
Parallel printer port
Output operations to ports 20-2FH write to the parallel printer port data latch. This data is then sent to the printer
on the next data strobe, which is accomplished by raising and then lowering bit 0 on port 53H/5BH. Ports 20-2FH
can also be read to query printer status, particularly the BUSY line. Table 52 gives the layout of this port.
Bit Description
Bit 7 BUSY (1 = printer busy)
Bit 6 ERROR
Bit 5 /BUSY
Bit 4 /ACK
Table 52: ATR8000 printer status port layout (IN 20-2FH)
RS-232 serial port
The ATR8000 also supports an RS-232 compatible serial port, with support for control lines. However, it has no
UART to drive it and no connection to the CTC, so all serial port I/O is bit-banged by the Z80. Output to port
51/59H bit 0 controls the transmit line, while input from port 50-5FH bit 7 senses the receive line. Both bit use
normal data polarity, i.e. 0 and 1 bits give 0/1 data, start bits are 0, and stop bits are 1.
Output to port 55H/5DH bit 0 controls the DTR or RTS line, depending on jumper configuration. Input from ports
50-5FH read control lines; bit 2 senses Ring Indicator (RI), while bit 1 can sense pin 11, DCD, DSR, or CTS
lines. Signal selection is controlled by jumpers.
10.20 Percom RFD-40S1
Controller
The Percom’s controller is a 6809 running at 1MHz.
Address range Mapping
$F800-FFFF ROM (2K)
$F000-F7FF ROM (2K) (mirror)
$DC00-DFFF Static RAM (1K)
$D030-D033 6850 ACIA
$D018-D01B FDC control (write only)
$D014-D017 Switch sense and drive control
$D010-D013 FDC
Table 53: Percom RFD-40S1 memory map
Interrupts
The fast IRQ (FIRQ) input of the 6809 is connected to the data request (DRQ) line of the floppy drive controller.
For fast response time, the firmware does not actually use interrupts for data transfers; instead, it issues the
SYNC instruction to block execution until DRQ is asserted.
The non-maskable interrupt (NMI) input on the 6809 is driven by a combination of the FDC’s interrupt signal and
a one-shot timer. The NMI signal is asserted at all times except when the timer is running and the FDC is not
requesting an interrupt. Since the NMI is edge-activated, this effectively triggers an NMI whenever either the
FDC finishes a command or the timer expires, whichever is first. The timer is activated by writing a 1 to bit 0 of
$D018-D01B and has a period of at least a few hundred milliseconds, sufficient to cover a few rotations of the
disk; it can be prematurely ended by clearing bit 0.
Chapter 10 - Disk drives 212

Altirra Hardware Reference Manual Created by Avery Lee
ACIA
Communication over the serial I/O bus is handled by a 6850 ACIA. The transmit and receive clocks are
hardwired to 19200 baud (4MHz ÷ 13 as the 16x clock, to be exact), so the RFD-40S1 is one of the few drives
that cannot do high-speed operation even with modified firmware.
Switch sense
Addresses $D014-D017 read the state of the configuration switches and jumpers. Bits 0-3 read the switches on
the back, while bit 4 reads an internal jumper. Bits 0-1 select the starting drive number, from D1: to D4: in binary
code; bit 4, if set, shifts to the D5-D8: range.
Bit 7 reads the inverted index pulse (/IP) signal from the currently selected drive.
Drive control
$D014-D017 controls miscellaneous drive functions. Bit 3, if set, enables drive select and turns on the motor for
the selected drive; the drive is selected by bits 1-2. Bit 0 controls side (head) selection.
FDC control
$D018-D01B controls the floppy drive controller. Bit 2 selects single density (0) or double density (1). Bit 3 gates
the index pulse from the drive, disabling it if set.
Bit 0 controls the command timeout circuitry. When enabled, any write to the FDC resets the command timer,
which will assert the NMI signal to the 6809 after the timer expires. The NMI signal will also be asserted if the
FDC itself requests an interrupt. Resetting bit 0 disables the timer, causing it to hold NMI in the asserted state.
This design means that NMI is asserted constantly when idle, but this does not cause a problem as the NMI
signal is edge triggered and only causes an interrupt when it transitions to an active state. This also prevents the
FDC from triggering a second interrupt shortly after the timer expires.
Chapter 10 - Disk drives 213
Chapter 11
Parallel Bus Interface

Altirra Hardware Reference Manual Created by Avery Lee
11.1 Introduction
The parallel bus interface (PBI) was added with the XL series of computers for greater expansion capabilities.
Unlike the cartridge port, the PBI allows for wider address ranges and use of interrupts.
The XE series has a similar but different expansion port called the enhanced cartridge interface (ECI), which
combines with the cartridge port to provide PBI-like capabilities. The capabilities of the ECI are similar enough to
PBI that adapters can be used to make the same hardware work on both.
11.2 Common memory map
Address regions
The address pages $D1xx, D5xx, and D6xx are reserved for the currently active PBI device. In addition, $D1FF
is used as a shared control location.These ranges are unused by the main computer, so when not driven by the
PBI device, reads return undriven bus data.
The math pack region at $D800-DFFF is also used as a PBI firmware window.
Device select register
PDVS [$D1FF] is the hardware select register for PBI devices. Each bit corresponds to an individual device,
where setting a single bit to 1 selects that device and writing $00 deselects all devices. Only one bit should be
set at a time. The response to selection is device dependent but typically involves overlaying the math pack at
$D800-DFFF with device-specific firmware ROM.
The presence of the selection register at $D1FF is by convention, encouraged by the support in the XL/XE OS; it
is not directly implemented or decoded by the computer and must be implemented in the PBI device. This means
that devices can vary in its implementation. The Black Box, for instance, only partially decodes its address and
overloads it with other device-specific control bits.
Device IRQ status register
PDVI [$D1FF] is also the address of the shared IRQ status register. A '1' bit in this register indicates that a device
is requesting an interrupt. Only the bits corresponding to present devices are pertinent and other bits may have
undefined values.
The procedure for acknowledging a PBI device IRQ is device specific and must be done by the device firmware.
Like PDVS, devices connected to the PBI bus are not obligated to implement PDVI according to the PBI
standard.
PBI address region
The address range $D600-D7FF is reserved for PBI device addressing and can be used for RAM, ROM, or I/O
of an actively selected PBI device.
PBI memory map overlays
The MMU allows the PBI device to overlay RAM, but not any I/O, or cartridge address space. ROM also cannot
be overlaid, except for the math pack region at $D800-DFFF which can be swapped out for PBI device ROM
through a Math Pack Disable (MPD) signal.
Chapter 11 - Parallel Bus Interface 215

Altirra Hardware Reference Manual Created by Avery Lee
11.3 ICD Multi I/O (MIO)
The Multi I/O (MIO) device from ICD, Inc. adds SCSI, parallel printing, and RS-232 port capability through the
PBI.
Register map
The MIO occupies the $D100-D1FF and $D600-D6FF regions of PBI address space:
Read Write
D6FF MIO RAM
D600
D1FF Status 2 Control 2
D1FE Status 1 Control 1
D1FD SCSI/printer data latch
D1FC Reset SCSI bus strobe RAM bank A8-A15
D1FB Mirrors of $D1FC-D1FF
D1E0
D1DF 6551 ACIA
D1C0
D11F Unused
D100
Table 54: MIO memory map
$D1FC Reset SCSI bus (read-only strobe)
Reading from this register asserts the reset line on the SCSI bus. The value read is undefined.
$D1FC RAM bank A8-A15 (write-only)
Controls the eight of the bank address bits for the MIO memory window at $D600-D6FF. The banking value
cannot be read back.
$D1FD SCSI/printer data latch (read/write)
Reads or writes data on the SCSI bus. The data is inverted for SCSI and non-inverted for the parallel printer. Bus
driver direction is controlled by the SCSI I/O line state.
Accesses to this register also cause the MIO hardware to automatically acknowledge the byte on the SCSI bus,
if handshaking is in effect (+REQ > +ACK).
$D1FE Status register #1 (read-only)
REQ PBS BSY I/O MSG C/D
D7 SCSI REQ state
0 Data transfer requested
Chapter 11 - Parallel Bus Interface 216

Altirra Hardware Reference Manual Created by Avery Lee
D6 Printer BUSY state
0 Printer not busy
1 Printer busy
D5 SCSI BSY state
0 $D600-D6FF RAM window disabled
1 $D600-D6FF RAM window enabled
D2 SCSI I/O state
0 Input (transfer from target to initiator/host)
1 Output (transfer from initiator/host to target)
D1 SCSI MSG state
0 Message is being transmitted
D0 SCSI C/D state
0 Asserted: command, status, or message being transferred
1 Negated: data being transferred
Reading this register also clears the SCSI reset state, if it was triggered by a read from $D1FC.
$D1FE Control register #1 (write-only)
PIQ PST RAM SEL RAM bank A16-A19
D7 Printer BUSY IRQ enable
0 IRQ disabled
1 IRQ enabled
D6 Printer STROBE
0 Asserted: New data valid
1 Negated: End of strobe
D5 RAM enable
0 $D600-D6FF RAM window disabled
1 $D600-D6FF RAM window enabled
D4 SCSI MSG signal
0 Asserted
1 Negated
D0:D3 RAM bank A16-A19
$D1FF Status register #2 / PBI interrupt status (read-only)
IRQ ACI DSR CTS DCD
D4 IRQ status
0 ACIA or printer IRQ pending
D3 Printer interrupt status
0 Printer IRQ pending
D2 RS232 Data Set Ready (DSR) state
1 DSR asserted
D1 RS232 Clear To Send (CTS) state
0 Negated: Device requesting hold-off
1 Asserted: Device allowing data
Chapter 11 - Parallel Bus Interface 217

Altirra Hardware Reference Manual Created by Avery Lee
D0 RS232 Data Carrier Detect
0 Negated: No modem carrier detected
1 Asserted: Modem carrier detected
Bits 3 and 4 reflect the status of the printer and PBI IRQ lines, respectively. These are not latches, and disabling
the respective IRQs will cause these bits to change to 1 immediately.
$D1FF Control register #2 / PBI select (write-only)
ROM bank
D5:D2 ROM bank select
0000 No bank selected (disable ROM)
0001 Select bank 0 (canonical)
0010 Select bank 1 (canonical)
0011 Select bank 0
0100 Select bank 2 (canonical)
0101 Select bank 0
0110 Select bank 0
0111 Select bank 0
1000 Select bank 3 (canonical)
1001 Select bank 0
1010 Select bank 1
1011 Select bank 0
1100 Select bank 2
1101 Select bank 0
1110 Select bank 0
1111 Select bank 0
This register controls the selected ROM bank as well as whether the I/O light is active – it is lit up whenever any
ROM bank is selected. Only one bit is supposed to be set at a time, selecting one of four 2K banks for a total of
8K of firmware ROM.
SCSI data handshaking
SCSI requires handshaking through a pair of REQ/ACK lines to transfer data bytes over the bus. The target first
asserts REQ to begin a transfer, the initator (host) asserts ACK in turn to indicate that it has read or written a
byte, the target negates REQ to acknowledge the ACK, and the initator negates ACK to complete the transfer.
This allows data transfers to be throttled appropriately to accommodate delays on either end.
Because this handshaking protocol is expensive to implement in software, the MIO does this automatically in
hardware. A read or write to the data latch [$D1C1] automatically asserts ACK if REQ is asserted, and the
hardware automatically deasserts ACK whenever REQ is deasserted.
Printer busy IRQ
The MIO also has support for interrupt-driven printer spooling. Bit 7 of $D1FE enables an IRQ whenever the
printer is not busy and can accept another byte. Like the serial output complete IRQ in POKEY, this IRQ is not
latched. If the printer reasserts BUSY due to receiving another byte while this IRQ is enabled, the IRQ will
deassert by itself.
11.4 CSS Black Box
The Black Box by Computer Software Services (CSS) is a device that provides SCSI, parallel printer, RS-232
port, and screenshot functionality over the PBI bus.
Chapter 11 - Parallel Bus Interface 218

Altirra Hardware Reference Manual Created by Avery Lee
Register map
The Black Box occupies the $D100-D1FF and $D600-D6FF regions of PBI address space:
D6FF Black Box RAM
D600
D1FF Status register (read only)
Control register (write only)
D1C0
D1BF 6521 PIA
D180
D17F 6522 VIA
D150
D13F 6551 ACIA
D120
D11F Unused
D100
Table 55: Black Box memory map
The control register is designed to be compatible with the OS definition of the PBI select register:
DCD CTS DSR MSG ROM bank
D7 RS232 data carrier detect (DCD) signal
0 Negated
1 Asserted
D6 RS232 clear to send (CTS) signal
0 Negated
1 Asserted
D5 RS232 data set ready (DSR) signal
0 Negated
1 Asserted
D4 SCSI MSG signal
0 Asserted
1 Negated
D0:D3 ROM bank
0000 None selected
other ROM selected
Similarly, the status register is compatible with the OS definition of the PBI interrupt status register:
Not used MNU SS VIA ACIA
D3 Menu button
0 Button depressed
1 Button released
Chapter 11 - Parallel Bus Interface 219

Altirra Hardware Reference Manual Created by Avery Lee
D2 Screenshot button
0 Button depressed
1 Button released
D1 VIA interrupt status
0 No interrupt pending
1 VIA interrupt pending
D0 ACIA interrupt status
0 No interrupt pending
1 ACIA interrupt pending
6522 VIA connections
VIA port A is connected to both the SCSI and printer buses. Although the SCSI bus has inverted data compared
to the standard 6502 bus, an inverting bus transceiver is used so that the stored data is non-inverted. This
means that the printer output is inverted instead, however.
VIA port B is used for several miscellaneous signals:
·D0=0 (input/output): SCSI Input/Output signal asserted. This also controls the direction of the
printer/SCSI data bus driver, where 1=output.
·D1=0 (input/output): SCSI Command/Data signal asserted
·D2=0 (output): SCSI SEL signal asserted
·D3=0 (output): SCSI RESET signal asserted
·D4=1 (input): Printer busy
·D5=0 (input): Printer fault (overridable by DIP switch #1)
·D6=0 (input/output): SCSI BUSY signal asserted
·D7=0 (input/output): SCSI REQ signal asserted
The VIA's CA1 and CA2 signals are used for handshaking on the SCSI bus, with REQ on CA1 and ACK on CA2.
VIA CB1 is used as a switch indicator and is pulled low when either the menu or screen dump buttons are
depressed. It is normally configured to generate an IRQ on a negative transition.
VIA CB2 is used to drive the printer strobe line and is driven low at least 0.5µs to indicate that a new valid byte is
on the printer bus.
6521 PIA connections
Port A is used in output mode to select the RAM bank that appears at $D600-D6FF. Bits 0-6 are used, for a total
of 32K RAM addressable.
Port B bits 0 and 1 are used to read the graphics/text and hard drive write protect switches. Both are pulled down
to 0 (grounded) when activated.
Port B bits 2-7 are connected to DIP switches #2-7, where a switch that is ON pulls the corresponding port line
down to a 0. DIP switch #8 is unused. For 32K firmware, port B bit 2 is re-purposed as a high bank select bit and
DIP switch #2 must be turned off for normal operation.
CA2 is connected to RS-232 RTS (Request To Send), while CB2 is connected to DTR (Data Terminal Ready).
CA1 and CB1 are not connected.
Chapter 11 - Parallel Bus Interface 220

Altirra Hardware Reference Manual Created by Avery Lee
Caution
The Black Box has its PIA wired differently than the base computer. The main PIA in the computer has the
address lines swapped, whereas the Black Box wires it conventionally. This means that the order of the four
registers is port A, control A, port B, and control B on the Black Box instead of port A, port B, control A,
control B.
Firmware ROM
The original version of the Black Box has 16K of ROM mapped in 2K banks at $D800-DFFF. Banks 1, 2, 4, and 8
correspond to PBI devices seen as the OS, and therefore must contain valid entry points. In addition, banks 1
and 2 service the ACIA and VIA interrupts, respectively. Bank 0 disables the ROM.
The I/O light on the Black Box is also tied to the bank select and will light up whenever the ROM is active.
On units with 32K of ROM, there are an additional 7 banks of ROM selectable via PIA port B bit 2. Bank 8 is not
accessible.
RAM
Base versions of the Black Box also have 8K of scratch RAM mapped in 256 byte banks through $D600-D6FF.
PIA port A bits 0-5 is used to select the bank. With 32K RAM, bits 0-7 are used. Finally, 64K RAM adds PIA port
B bit 1 as an 8th RAM bank select bit.
SCSI hard disk interface
The Black Box exposes its interface to SCSI hard disks through its 6522 VIA and status registers. The pertinent
connections are as follows:
•VIA port A connects to the SCSI data bus. The hardware handles inversion of data written to or read
from this bus, so the 6502 sees non-inverted data.
•VIA port B bits 0, 1, 6 and 7 are used in both input and output mode for I/O, C/D, BUSY and REQ. All are
active low. Port B bit 0 (I/O) also controls the direction of the data bus transceiver, where 1 = output.
•VIA port B bits 2 and 3 are used in output mode to drive SEL and RESET.
•VIA control signals CA1 and CA2 are used for SCSI handshaking signals REQ and ACK.
All handshaking and control signals are connected to the VIA as active low. The 6502 largely has to drive the
entire SCSI protocol in software, with the notable exception of the REQ and ACK signals. Those are connected
to allow the VIA to be configured in hardware handshaking mode, automatically driving one of the signals
whenever the 6502 reads data from or writes data to port A.
Caution
The Black Box's data latch is inverted from the MIO's. The MIO has SCSI data inverted and printer data
non-inverted, whereas the Black Box has SCSI data non-inverted and printer data inverted.
Printer interface
The parallel printer port interface is driven entirely through the VIA:
·VIA port A is used to send inverted printer data.
·VIA port B bit 0 is pulled high in order to switch the SCSI/printer bus transceiver to output mode.
·VIA port B bit 4 is used in input mode to sense the printer BUSY line (1 = busy).
·VIA port B bit 5 is used in input mode to sense a printer fault (0 = fault). DIP switch #1 overrides this
signal to 1 (no fault) if set. This is done directly in hardware; the switch cannot be read directly.
Chapter 11 - Parallel Bus Interface 221

Altirra Hardware Reference Manual Created by Avery Lee
·VIA CB2 is connected to STROBE and is momentarily driven low to indicate to the printer that a new
data byte is available.
Serial (RS-232) interface
Serial communication primarily uses the 6551 ACIA. It is connected with a 1.8432MHz crystal for standard baud
rate generation, which means that the ÷16 external clock mode is inoperative. The ACIA can generate IRQs and
status register bit 0 is set when this occurs.
None of the control lines are hooked up to the ACIA, so hardware handshaking is not possible. Instead, the DSR,
CTS, and DTD are read through status port bits 5-7, and RTS and DTR are driven through PIA CA2 and CB2. All
are active high.
Chapter 11 - Parallel Bus Interface 222
Chapter 12
Internal devices

Altirra Hardware Reference Manual Created by Avery Lee
12.1 Introduction
Internal devices are ones that are installed inside of the computer instead of connecting via the peripheral ports.
With direct access to the address/data buses as well as other internal signals, they can add functionality in ways
not possible through even PBI/ECI.
In this chapter, discussion will be limited to add-ons that are not simply internal versions of devices, with the
same behavior as the external version, i.e. internal SDX.
12.2 Covox
A “Covox” interface is a very simple way to get higher quality digital sound output than is possible through
POKEY. It consists solely of a latch to capture data off of the data bus and an digital-analog converter (DAC) to
convert it to an audio waveform.
Note that Covox interfaces are not standardized, so individual interfaces may differ slightly in implementation.
Programming interface
The Covox interface is typically assigned an address range such as $D600-D6FF, $D700-D7FF, or $D280-D2FF.
Writes to any address in the range change the signal level, which is specified as an unsigned 8-bit sound
sample. Reads are not handled, which means that it is not normally possible to detect a Covox interface.
The audio sampling rate is determined by the timing of writes from the CPU, which must write to the interface at
regular intervals. The sample changes immediately upon a write, so writes that change the sample value must
be spaced to reduce jitter.
Multi-channel output
A Covox interface can be extended to stereo or 4-channel output by including two or four latch+DAC pairs. The
A0 or A1-A0 address lines are then used to select the channel. For the four channel case, the channel order is
arranged to match the Amiga, so that channels 0+3 route to the left channel and 1+2 route to the right.64
12.3 Ultimate1MB
Ultimate1MB, or U1MB for short, is a multifunction device installed internally to the computer that provides a
number of expansion functions, some of which are not possible externally:65
•Up to 1MB of extended memory
•Selectable OS, BASIC, and game ROM images
•Computer-flashable firmware
•SpartaDOS X cartridge emulation
•Soft-enable and address decoding for other expansion peripherals
•Parallel Bus Interface device emulation
These features are primarily achieved by taking over the sockets used for the MMU and OS ROM.
For official programming information: [U1MB].
[64] It is also valid to route the other way, with 0+3 to right and 1+2 to left. Apparently, Commodore couldn't get this
consistently right in either the Amiga hardware manual or case markings.
[65] The author would like to thank Candle for providing Ultimate1MB technical information and hardware for testing.
Chapter 12 - Internal devices 224

Altirra Hardware Reference Manual Created by Avery Lee
CPLD revisions
There are two versions of the Complex Programmable Logic Device (CPLD) that drives the U1MB. Revision 1
contains the bulk of the functionality, but revision 2 adds support for Parallel Bus Interface (PBI) device
emulation. The revision 1 CPLD is flash upgradable and can be updated to revision 2, although this cannot be
done from the computer and requires an external CPLD programmer.
Flash ROM
Much of the U1MB's functionality is a 4MBit (512K) flash device, which substitutes for all ROM in the system. It is
directly mappable in 8K banks through the 8K read/write cartridge window and indirectly mappable as read-only
through the BASIC, OS, and PBI address ranges.
Five memory ranges within the flash ROM have designated functions in the hardware. These include the
bootstrap ROM at $50000-53FFF, the OS ROM banks at $70000-7FFFF, the BASIC ROM banks at $60000-
67FFF, the game ROM banks at $68000-6FFFF, and the PBI ROM banks at $58000-5FFFF. The remainder of
the flash ROM has designated areas for mapping through the cartridge window, but these usages are not
required by the hardware design.
The flash ROM is programmable in-place from the computer side as long as flash writing is enabled via bit 7 of
UAUX [$D381]. When this is enabled, all memory windows that have flash ROM exposed also handle flash
writes. This means, for instance, that it is possible to enter autoselect mode through writes to the OS ROM at
$F555 and $FAAA. There is no reset facility for the flash ROM, so if the computer is reset while the flash ROM is
in a programming or query state, the computer will fail to run the BIOS and a power cycle is required to recover.
When the flash ROM is write protected via bit 7 of UAUX [$D381], all writes to the flash ROM are blocked. This
not only prevents inadvertent erasure or programming of the flash ROM, but also prevents entry into command
or autoselect mode.
U1MB has shipped with multiple types of flash ROM which vary in significant ways. Early versions shipped with
an Amic A29040 ($37/$86), whereas some newer models shipped with different devices such as an
SST39SF040 ($BF/$B7). This distinction is important due to the variation in sector size (64K vs. 4K) and in
sector programming sequences.
Chapter 12 - Internal devices 225

Altirra Hardware Reference Manual Created by Avery Lee
Warning
Because there is only one flash ROM chip in Ultimate1MB, all flash ROM based mappings visible to the
6502 will change when the flash ROM mode is changed. This includes the OS ROM, BASIC ROM, game
ROM, self-test ROM, and internal cartridge ROM. Therefore, entering autoselect mode through writes to the
cartridge window will cause the OS ROM image to vanish, as $C000-CFFF and $D800-FFFF will return
manufacturer and device code data instead of flash array data.
BIOS ROM
On power-up, the BIOS ROM at $50000-53FFF in the flash ROM is mapped as the computer's bootstrap OS
ROM. This is laid out in standard XL/XE OS ROM order, so $50000-50FFF is mapped to low OS ROM at $C000-
CFFF, $51800-53FFF is mapped to high OS ROM at $D800-DFFF, and $51000-517FF supplies the self-test
ROM at $5000-57FF when enabled. The BIOS ROM handles U1MB initialization and configuration before
handing off control to one of the four OS ROM slots at $70000-7FFFF in flash. The BIOS ROM is re-enabled and
regains control on a reset.
Normally, the XL/XE OS has to detect whether a reset sequence corresponds to a cold reset or a warm reset by
the presence of signature bytes in RAM. The BIOS need not do this as the U1MB provides a hardware register
bit to indicate a cold boot. Bit 7 of COLDF [$D383] is set on power-up and can be cleared under software control
to indicate a warm reset the next time the reset vector is invoked.
OS, BASIC, and Game ROM
The flash ROM also contains four image slots each for the 16K OS and 8K BASIC ROMs present in a stock
Chapter 12 - Internal devices 226
$7FFFF
OS ROM images (64K)
$70000
Game ROM images (32K)
$68000
BASIC ROM images (32K)
$60000
PBI ROM images (32K)
$58000
$54000 Unused (16K)
$50000 BIOS (16K)
Unused (320K)
$00000
Figure 10: Ultimate1MB flash memory map

Altirra Hardware Reference Manual Created by Avery Lee
XL/XE, as well as the 8K game ROM additionally present in an XEGS. One of the four images can be
independently selected of each type by the BIOS.
The game ROM is enabled by PORTB bit 6. It is only enabled if the U1MB is configured in XEGS mode by
hardware jumper.
Cartridge control
U1MB provides sufficient cartridge emulation facilities to run a version of SpartaDOS X (SDX). The flash ROM
can be enabled in the left cartridge window at $A000-BFFF in 64 banks of 8K each, controlled by $D5E0.
Although the lower half of flash ROM is assigned to cartridge emulation, this window actually allows all 512K of
the flash ROM to be mapped and doubles as the window for updating flash ROM.
The upper two bits of the SDX control register allow toggling of both the internal and external cartridges: either
can be enabled or both can be disabled. However, only the $8000-9FFF and $A000-BFFF windows of the
external cartridge can be controlled; the cartridge control (CCTL) region at $D500-D5FF is always enabled.
TRIG3 sensing is emulated so that it is asserted when either the internal or external cartridges are mapping
$A000-BFFF.
Note that when enabled, the banking register overlaps with the CCTL region. The U1MB does not exclude this
address from CCTL, meaning that a write to $D5E0 is handled both by U1MB and the external cartridge. A
consequence of this is that U1MB's internal cartridge pass-through is incompatible with SIDE 1 as a write to this
address will change the SIDE 1 bank even if the external cartridge is disabled. There is no issue if the internal
cartridge is disabled by the BIOS, in which case U1MB's $D5E0 register is hidden.
External device control
Several bits in UAUX [$D381] are devoted to controlling external devices. Bits 0-3 control external signals and
otherwise have no meaning to U1MB itself, although they are conventionally labeled for COVOX and stereo
POKEY enable signals.
Bits 4-5 control VideoBoard XE addressing, allowing selection between $D640, $D740, or disabling VBXE
entirely. U1MB will automatically decode the $D6xx or $D7xx pages for VBXE if enabled, and in addition,
automatically disable VBXE when those ranges are needed for I/O RAM. These bits have no effect if the VBXE
enable signal is not hooked up to anything.
Bit 6 controls SoundBoard decoding. Unlike the other bits, it has an effect even if no SoundBoard is present: it
prevents POKEY from being accessed at $D210-D2FF.
Bit 7 enables or disables writes to the flash ROM.
Parallel Bus Interface device emulation (revision 2 CPLD only)
U1MB also allows for PBI device emulation through up to 8K of banked PBI ROM and an additional 0.8K of I/O
RAM. The emulated PBI device can be configured to use bit 0, 2, 4, or 6 of the device select register at $D1FF;
when selected, PBI ROM is enabled at $D800-DFFF as a math pack overlay. This overlays either RAM or OS
ROM. Four banks of 2K are exposed from $59800, $5B800, $5D800, and $5F800 in the flash ROM, selectable
through a bank switch register at $D1BF.
When PBI ROM is enabled, 895 bytes of I/O RAM are also exposed: 191 bytes at $D100-D1BE, 192 bytes at
$D500-D5BF, and 512 bytes at $D600-D7FF. These bytes are from dedicated memory not otherwise accessible
due to being shadowed by the I/O address region. When I/O RAM is active, these address ranges are blocked
by the U1MB MMU so that they do not activate external cartridge control (CCTL) or VBXE accesses.
PBI device emulation is only available on U1MB devices with updated CPLD firmware; the original run lacks it.
Chapter 12 - Internal devices 227

Altirra Hardware Reference Manual Created by Avery Lee
Warning
The A29040 flash chip used in some devices has a 64K sector size, which means that it is not possible to
reflash the PBI ROM without erasing the BIOS ROM at the same time. This is risky as a corrupted BIOS will
brick the computer, since the computer cannot boot without the BIOS ROM. Furthermore, if the PBI ROM is
enabled, the OS will attempt to call into it on any SIO operation. Flashing software that updates either the
BIOS or PBI ROMs must be written with this in mind.
PBI button function (revision 2 CPLD only)
Although not required, the PBI device emulation functionality is intended to be used with the CompactFlash
interface of a SIDE 2 cartridge. An additional “PBI button” feature can be enabled in U1MB to take advantage of
the reset button of the SIDE 2, allowing it to be used as an input to drive PBI-based disk emulation.
When the PBI button function is enabled, the left cartridge window ($A000-BFFF) of the external cartridge is
suppressed, but can still be sensed via bit 6 of [$D384]. To detect a press of the reset button, the PBI firmware
disables the SIDE 2 $A000-BFFF banking window; a press of the reset button causes the cartridge to reset to
bank 0 with the window enabled, which can then be sensed via $D384. While the button can be sensed
regardless, the PBI button function prevents $A000-BFFF from suddenly being overlaid by the external cartridge.
The PBI button function must be disabled for external cartridges to work normally.
Real-time clock
A Maxim DS1305 real-time clock chip on the U1MB provides a clock and 96 bytes of non-volatile user storage.
Both are battery backed up and thus persist across power cycles. The RTC is connected via Serial Peripheral
Interface (SPI) bus and communication occurs serially through three bits in RTCIN/RTCOUT [$D3E2]. Since it is
hooked up in 4-wire configuration, the clock may be driven with either polarity per the DS1305 specs.
The DS1305 has timing specs that are difficult but not impossible to violate using the stock 6502. One way to do
so is to attempt to change CE (chip enable) or SDO (serial data out) in the same write as a change to SCLK
(serial clock). This can violate the setup/hold timing requirements for the DS1305. The timing constraints on CE
(chip enable) can also be exceeded by back-to-back stores. A 65C816 accelerator running in fast RAM can do
so much more easily and more care is required when driving the DS1305 from an accelerator.
Config lock
When the BIOS is invoked on power-up or reset, the U1MB is initially in unlocked mode. This enables I/O RAM
at $D100-D1BE, $D500-D5BF, and $D600-D7FF and the configuration registers. BASIC and GAME ROM are
disabled and inaccessible. If enabled, these regions map to the same region as the internal cartridge window.
Once the BIOS is finished configuring the system, the configuration is locked by setting bit 7 of UCTL [$D380].
This swaps out the BIOS, enables the selected OS/GAME/BASIC ROMs and disables the configuration
registers. Since the BIOS ROM image is swapped out in this process, a jump into RAM is usually necessary to
trigger the config lock and then invoke the RESET vector on the OS ROM.
Config lock cannot be turned off in software once enabled and can only be reverted by a reset.
Memory mapping
The U1MB contains 1MB of extended memory, which can be enabled through UCTL[1:0]. This memory is only
used for PORTB extended memory. Normal memory, and the I/O memoy enabled in PBI and config lock modes,
still comes from the memory on the motherboard.
Non-canonical PIA access incompatibility
Normally, the entire address range $D300-D3FF is mapped to the Peripheral Interface Adapter (PIA). However,
Chapter 12 - Internal devices 228

Altirra Hardware Reference Manual Created by Avery Lee
in an U1MB system, $D380-D3FF is reserved for U1MB registers, and the PIA responds only to $D300-D37F.
This is true at all times, regardless of configuration or config lock state. Memory locations that do not correspond
to a readable U1MB register return undriven bus data.
Extended memory banking anomaly
Most memory expansions leverage the unused bits in PIA port B to select the extended memory bank. In the
576K and 1088K modes, this leads to a conflict with bits 1, 6, and 7, which control BASIC, XEGS Game, and
self-test ROMs, respectively. Some memory expansions simply take over some of these bits, disabling the self-
test ROM and/or requiring an external switch for BASIC.
Because U1MB shadows the PIA rather than using the output of PIA port B, it has unusual behavior here: in
576K and 1088K modes, it modifies BASIC / Game / self-test enables based on changes to bits 1, 6, and 7 only
for writes that have the CPU window disabled (bit 4 = 1). This has three odd consequences: it means that
PORTB writes are now sequence dependent as there are 11 bits of state being driven by 8 bits of written data,
these ROMs can be enabled while the expanded memory window is active, and in 576K mode, these ROMs can
be toggled while changing banking bits with only the ANTIC window enabled.
Cartridge sense anomaly
In XL/XE hardware, TRIG3 senses the state of the left cartridge window ($A000-BFFF) to provide a cartridge
detection mechanism. This is emulated by U1MB so that when the internal cartridge is enabled, TRIG3 is active
as expected. However, this is done by intercepting reads from TRIG3 in a way that is not sensitive to the trigger
latching feature enabled by bit 2 of GRACTL. This means that if either the internal or external cartridge is
unmapped from $A000-BFFF while trigger latching is enabled on a U1MB equipped system, TRIG3 will not stay
1 as ordinarily expected.
Registers
$D1BF UPBIBANK – PBI ROM bank select (write only; PBI ROM active only)
Ignored BANK
D1:D0 PBI ROM bank
00 $59800-59FFF
01 $5B800-5BFFF
10 $5D800-5DFFF
11 $5F800-5FFFF
Controls the ROM bank mapped at $D800-DFFF when PBI emulation is active. This register is invisible and the
bank is reset to 0 whenever the PBI device is deselected.
$D380 UCTL – Main configuration (write only; config unlocked only)
LCK IOR Ign. SDX OS MEM
D7 Config lock
0 No change
1 Lock config
D6 I/O RAM enable
0 I/O RAM disabled
1 I/O RAM enabled
D4 SpartaDOS X (SDX) module enable
0 SDX module enabled
Chapter 12 - Internal devices 229

Altirra Hardware Reference Manual Created by Avery Lee
1 SDX module disabled
D3:D2 OS ROM select
00 $70000-73FFF
01 $74000-77FFF
10 $78000-7BFFF
11 $7C000-7FFFF
D1:D0 Memory configuration
00 64K – no extended RAM
01 320K Rambo – PORTB bits 2, 3, 5, and 6 control bank; bit 4 controls CPU+ANTIC access
10 576K Compy – PORTB bits 1, 2, 3, 6, and 7; bit 4 controls CPU access, bit 5 controls ANTIC access
11 1088K – PORTB bits 1, 2, 3, 5, 6, and 7; bit 4 controls CPU+ANTIC access
$D381 UAUX – Auxiliary configuration (write only; config unlocked only)
WE SB VBXE S1 S0 M1 M0
D7 Flash write enable
0 Flash writes enabled
1 Flash writes disabled
D6 SoundBoard enable
0 $D210-D2FF assigned to SoundBoard
1 $D210-D2FF assigned to POKEY
D5:D4 VideoBoard XE (VBXE) address
00 $D640
01 $D740
1x Disabled
D3:D0 S1/S0/M1/M0 signal outputs
Controls flash and external device decoding. If flash writes are enabled, all memory windows that are mapped to
the flash ROM accept writes; otherwise, writes to flash are blocked.
$D382 UPBI/UCAR – PBI/cartridge configuration (write only; config unlocked only)
GAME BASIC BTN PBI PBI_ID
D7:D6 Game ROM select
00 $68000-69FFF
01 $6A000-6BFFF
10 $6C000-6DFFF
11 $6E000-6FFFF
D5:D4 BASIC ROM select
00 $60000-61FFF
01 $62000-63FFF
10 $64000-65FFF
11 $66000-67FFF
D3 PBI button enable
0 PBI button disabled
1 PBI button enabled
D2 PBI emulation enable
0 PBI emulation disabled
1 PBI emulation enabled
D1:D0 PBI device ID select (PBI emulation enabled only)
Chapter 12 - Internal devices 230

Altirra Hardware Reference Manual Created by Avery Lee
00 PBI device ID 0 ($01)
01 PBI device ID 2 ($04)
10 PBI device ID 4 ($10)
11 PBI device ID 6 ($40)
$D383 COLDF – Cold reset flag (read/write; read-only once config locked)
CLD 0
D7 Cold reset flag
0 Last reset was warm reset
1 Last reset was cold reset
The cold reset flag is automatically set to 1 by the hardware on power-up, and can be set or cleared under
software control. This is used to reliably distinguish between cold and warm resets, as its state persists across a
warm reset. Once config lock is established, this register becomes read-only until the next reset.
$D384 PBI button status (read only)
BTN RD5 0
D7 PBI button status
0 PBI button feature disabled
1 PBI button feature enabled
D6 External cartridge RD5 sense
0 External cartridge $A000-BFFF unmapped
1 External cartridge $A000-BFFF mapped
The PBI button status register is used to sense whether the PBI button feature is enabled and to check whether
it has been pressed. Bit 6 indicates whether the external cartridge is attempting to map $A000-BFFF; this is used
to sense the reset button on the SIDE 2 cartridge, since that button re-enables the banking window at bank 0.
This register is always visible even if the PBI emulation and PBI button features are disabled.
$D3E2 RTCIN – Real-time clock input (read only)
0 SDI 0
D3 Serial Data In (SDI) line
Senses the Serial Data In (SDI) line used to receive data from the DS1305 real time clock.
$D3E2 RTCOUT – Real-time clock output (write only)
Ignored SDO SCL. CE
D2 Serial Data Out (SDO) signal
D1 Serial Clock (SCLK) signal
D0 DS1305 Chip Enable (CE) signal
0 DS1305 not selected
1 DS1305 selected
Used to drive the output signals on the Serial Peripheral Interface (SPI) bus to which the DS1305 RTC is
connected. The chip must be enabled through the CE bit, and then SCLK toggled to either shift data into the chip
a bit at a time through SDO or out a bit at a time through SDI.
Chapter 12 - Internal devices 231

Altirra Hardware Reference Manual Created by Avery Lee
Consult the DS1305 datasheet for required timing specifications. The general required precautions, for a
DS1305 running at 2.0-3.3V and the standard 1.79MHz machine clock:
•Avoid writing to RTCOUT with read/modify/write instructions, due to the back-to-back writes with
different values.
•Toggle SCLK no faster than every third cycle.
•Wait at least one cycle after a write to SCLK before reading SDI during reads.
•The first transition of SCLK must occur at least 7 cycles after CE is asserted.
•CE must be inactive for at least 7 cycles before being asserted again.
$D5E0 SDXCTL – SDX module control (write only; internal cartridge enabled only)
INT/EXT SDXBANK
D7:D6 Internal/external cartridge enable
0x Internal cartridge only enabled
10 External cartridge only enabled
11 Internal and external cartridge disabled
D5:D0 Internal cartridge bank
Controls both the internal cartridge, intended for SpartaDOS X (SDX), and the external cartridge. Both the
$8000-9FFF and $A000-BFFF windows of the external cartridge are controlled together. If the PBI button feature
is enabled, the $A000-BFFF window of the external cartridge is disabled even if the external cartridge is
enabled. However, the $8000-9FFF window is unaffected.
This register is forced to $80 whenever the SDX module is disabled.
Warning
Writes to SDXCTL are not excluded from the cartridge control (CCTL) region, and so any writes to $D5E0
will be handled by both U1MB and the external cartridge.
12.4 VideoBoard XE
VideoBoard XE is an internal add-on that adds enhanced display capabilities, including higher horizontal
resolution (640x), increased color depth of up 1024 colors per scan line out of a 21-bit color space, 80-column
text, a hardware blitter, and RGB video output.
In addition, its FPGA core can be upgraded in software, allowing for bug fixes and additional features in the
future. As of this writing, the current VBXE core is version 1.26.
For the official programming documentation for VBXE, see: [VBXE].
Architecture
VBXE acts parallel to the GTIA, interpreting ANTIC's output and replicating GTIA's behavior to reproduce the
standard display. In parallel, the VBXE's extended display list (XDL) is used to drive new overlay and attribute
map planes, which are combined with the ANTIC display to produce final output.
One significant point about this setup is that while VBXE shadows writes to GTIA, reads are still handled by
GTIA itself. In particular, this means that collisions act the same as they normally do based solely on the ANTIC
playfield and GTIA player/missile graphics, ignoring all of the new functionality. Display timing is also controlled
by ANTIC; VBXE does not trigger vertical blank or display list interrupts, which must still be done through
ANTIC's interrupt facilities.
Chapter 12 - Internal devices 232

Altirra Hardware Reference Manual Created by Avery Lee
Local memory
The VBXE contains 512K of high-speed local video memory, which can be used by the extended display and
blitter. The local memory subsystem runs at 14MHz, providing 8x the memory bandwidth available to ANTIC.
Data must be either created in local memory using the blitter or uploaded with the CPU before it can be used by
VBXE.
Two memory access windows are provided to access local memory, MEMAC A and MEMAC B. MEMAC A is a
flexible window that can be 4K, 8K, 16K, or 32K in size and placed anywhere in the 64K address space on 4K
boundaries. MEMAC B is a fixed 16K window at $4000-7FFF. Both windows are read/write and can be enabled
for either CPU/ANTIC access or both. MEMAC A has priority over MEMAC B if both are enabled.
Extended display list (XDL)
The extended display list (XDL) is the VBXE equivalent of the ANTIC display list. It runs in parallel to ANTIC's
display list and controls the extended display functions on the VBXE side, including the overlay and attribute
map layers.
To enable the XDL, bit 0 must be set in the VIDEO_CONTROL register. Once enabled, the XDL automatically
repeats each frame starting at the local address specified by XDL_ADR0-2. Like the ANTIC display list, the XDL
begins execution immediately after vertical blank starting at scan line 8.
Table 56 gives the layout of an XDL entry. Only two bytes are required for each entry; the remainder of the entry
is composed of optional blocks depending on enable bits in the first two bytes. Optional parameters remain in
effect until modified again.
Chapter 12 - Internal devices 233

Altirra Hardware Reference Manual Created by Avery Lee
Data
Control OvScroll OvAddress Repeat AtMapOff AtMapOn OvDisable Graphics Text
End Lores Hires OvMisc AttrLayout AttrAddr ChBase
Repeat Repeat count
Overlay
address
Overlay address, bits 7-0
Overlay address, bits 15-8
Overlay address, bits 18-16
Overlay stride, bits 7-0
Overlay stride, bits 11-8
Overlay
scroll
Horizontal scroll
Vertical scroll
Character
base
Character set base address, bits 18-11
Attribute
map
address
Attribute map address, bits 7-0
Attribute map address, bits 15-8
Attribute map address, bits 18-16
Attribute map stride, bits 7-2
Attribute map stride, bits 11-8
Attribute
map layout
Attribute map horizontal scroll
Attribute map vertical scroll
Attribute map cell width, minus one
Attribute map cell height, minus one
Overlay
misc.
Playfield palette Overlay palette Overlay width
Overlay priority
Table 56: VBXE extended display list (XDL) entry format
The first optional block is the repeat count, enabled by bit 5 of the first control byte. Unlike ANTIC, which requires
mode bytes to be repeated, VBXE allows a repeat count for mode lines to compact the XDL. The repeat byte is
the number of times to additionally repeat the mode line, so a repeat value of $FF causes 256 counts of the
mode line. For simple displays, the repeat count allows the XDL to be more compact than the equivalent ANTIC
display.
The next optional block is the overlay address, enabled by bit 6 of the first control byte. The first three bytes are
the new starting address of the overlay row, and the last two bytes are the stride from the start of one row to the
next, in bytes. This is the equivalent of the ANTIC LMS instruction, except that the stride is also controllable.
Bit 7 of the first control byte enables new horizontal and vertical scroll values, in pixels. These values only affect
text modes.
Bit 0 of the second control byte enables a new base address for the text mode font.
Bit 1 of the second control byte sets a new base address and stride for the attribute map. Note that the attribute
map stride can only be set as multiples of 4.
Bit 2 of the second control byte sets new scrolling and cell size parameters for the attribute map. Both scroll and
Chapter 12 - Internal devices 234

Altirra Hardware Reference Manual Created by Avery Lee
cell size parameters are in VBXE standard resolution pixels, minus one.
Bit 3 of the second control byte loads miscellaneous parameters: the overlay/attribute map width, overlay and
ANTIC playfield palettes, and the overlay priority bits. Overlay/attribute map width is %00 or %11 for narrow,
%01 for normal, and %10 for wide. The overlay priority byte selects which layers the overlay has priority over, in
the same format as the P0-P3 registers.
Bit 7 of the second control byte terminates the XDL when set.
XDL restart
Unlike the ANTIC DL, the XDL does not require a jump instruction at the end or the CPU to rewrite the XDL
starting address each frame. It is instead automatically restarted from the XDL_ADR0-2 address automatically at
the beginning of vertical sync. Note that this requires the XDL to be set up earlier than ANTIC, which allows the
display list to be initialized as late as the end of vertical blank or even later.
Many parameters that can optionally be set in the XDL are reset to defaults at the beginning of each frame:
•Text mode scroll offsets are set to 0.
•Overlay width is set to normal width (%01).
•Overlay priority is set to $FF (priority over all other layers).
•The attribute map is disabled, attribute map scroll offsets are reset to 0, and the attribute cell size is set
to 8x8 ($07, $07).
•Palette selections are reset to palette 0 for ANTIC's display and palette 1 for the overlay.
Notably, overlay and attribute map addressing is not automatically reset and should be initialized at the
beginning of the XDL.
Overlay
The overlay is VBXE equivalent of ANTIC's playfield, displaying either text or bitmap graphics. It is so named
because it normally displays on top of the playfield. Overlays can be displayed in the same three widths, narrow
(128 color clocks), normal (160 color clocks), and wide (184 color clocks).
The overlay mode is selected by bits 0-1 of the first XDL control byte and bits 4-5 of the second:
•Standard resolution (Text = 0, Graphics = 1, LR = 0, HR = 0): 320 pixels in normal width, same
resolution as ANTIC hires, but with one byte per pixel (256 colors).
•Low resolution (Text = 0, Graphics = 1, LR = 1, HR = 0): 160 pixels in normal width, same resolution
as ANTIC lores, but with one byte per pixel (256 colors).
•High resolution (Text = 0, Graphics = 1, LR = 0, HR = 1): 640 pixels in normal width, with one nibble
per pixel (16 colors).
•Text (Text = 1, Graphics = 0): 80-column text with attribute control bytes. Each pixel in the text font is
rendered at hires resolution (640 across in normal width).
The wide overlay differs slightly in width from an ANTIC wide playfield. A wide overlay is displayed from
horizontal positions $2C-D3, whereas an ANTIC wide playfield is displayed further right at $2C-DD.
VBXE's overlay does not require LMS instructions every mode line to accommodate non-standard strides
between scan lines. The stride is set directly in the XDL and can accommodate address offsets from 0 to 2047
bytes.
Chapter 12 - Internal devices 235

Altirra Hardware Reference Manual Created by Avery Lee
Overlay priority
The priority of the overlay versus player/missile graphics is controlled via an 8-bit overlay priority mask. Each bit
in the priority mask controls whether the overlay has priority over the corresponding GTIA layer, including
playfields, player/missile graphics, and the background. A ‘1’ bit gives the overlay priority over the GTIA layer.
Bi
t
FX1.24 FX1.26
7 PF3/P5 Background color
6 PF2 PF2/PF3/P5
5 PF1
4 PF0
3 P3
2 P2
1 P1
0 P0
Table 57: VBXE overlay priority bits
Warning
The definition of priority bits 6 and 7 is different between FX1.24 and FX1.26. Bit 7 is particularly
troublesome as VBXE software commonly turns off most or all of the ANTIC+GTIA graphics, and a priority
of $00 in that case will display the overlay normally in FX1.24 but cause it to vanish on FX1.26.
Overlay priority is determined based on the result of player/missile and playfield priority. The priority bits
corresponding to all color inputs are ORed together and the result is then used to mask the overlay. This means
that the multicolor player bit affects overlay priority – if P0 and P1 are both active, this determines whether the
priority bit for P0 alone or P0 and P1 together affect the overlay. If more than one layer is active, the overlay has
priority if the priority bit for any of the layers is set.
Normally, the overlay priority is determined by the XDL. If the attribute map is active, it overrides the XDL and
can select the priority register on a per-cell basis.
Overlay collision detection
Collisions are automatically detected between the overlay and other layers, including the playfield, player/missile
graphics, and the attribute map. Like with GTIA, these collisions are detected during scan out and are registered
for later inspection in the COLDETECT register. A write to COLCLR resets COLDETECT and prepares for
another collision scan.
A major difference between GTIA collisions and VBXE overlay collisions is that the latter are affected by priority
settings, specifically PRIOR bits 0-5. With GTIA, collisions are registered between all objects even if some are
obscured, and neither the fifth player nor multicolor enables affect collisions. On the other hand, VBXE flags
collisions based on which color registers contribute to the final output, and therefore will not flag overlay
collisions with hidden objects and is sensitive to both the P5 and multicolor player bits. For instance, if players 0-
2 and missile 3 are overlapping the overlay, VBXE will flag only P0+P1 collisions if PRIOR=$24, and only a PF3
collision if PRIOR=$14. The overlay priority settings, however, do not affect overlay collisions.
The COLMASK register selects which subset of overlay byte values can trigger a collision. In lores and standard
res modes, this allows masking each of the eight groups of 32 color values out of the total of 256 to control
collisions. In hires modes, this filtering is still by byte, so it filters based on the color of the left pixel of each pixel
pair.
Chapter 12 - Internal devices 236

Altirra Hardware Reference Manual Created by Avery Lee
Text mode
In text mode, the overlay consists of pairs of bytes, a character name byte followed by an attribute byte. The
image for each character is supplied as 8x8 bitmaps in a 2K block of local memory. This is similar to an ANTIC
mode 2 character font except that the font contains a full set of 256 characters.
The attribute byte determines the colors used for the character cell. Bits 0-6 select the foreground color, from
colors $00-7F. Bit 7 controls the background opacity. If set, the background is opaque and uses the foreground
color with bit 7 set ($80-FF); if clear, the background is either transparent or color $80 depending on the overlay
transparency mode.
Unlike ANTIC text modes, VBXE text mode lines are a single scan line tall and must be repeated 8 times to
display a full character cell row. Vertical scrolling also works differently, changing offsets within the mode lines
rather than changing mode line heights. The overlay memory pointer is advanced to the next row after whenever
the last row (row 7) is displayed.
Attribute map
The attribute map allows the display to be altered on a per-cell basis, where the size of a cell varies from 8x1 to
32x32 VBXE standard resolution pixels. Palette selection and other rendering modes can be altered for each
cell.
Each cell is controlled by a four-byte block:
Data
0 PF0 color or hires PF3 mask
1 PF1 color
2 PF2 color
3 Playfield palette Overlay palette Collision Rev OvPriority
Table 58: VBXE attribute map block layout
The first three bytes override the PF0-PF2 playfield colors used for rendering the ANTIC playfield. These colors
are subject to the xcolor setting – if extended color mode is disabled, the LSB of these color values are forced to
0, the same as for the GTIA color registers.
Control bits 0-1 override the overlay priority setting from one of the P0-P3 registers.
Control bit 2 reverses lores/hires interpretation of ANTIC data so that lores data is interpreted as hires and vice
versa. Hires data is reinterpreted in bit pairs as PF0-PF3; lores data is reinterpreted as pairs of hires pixels.
Control bit 3 enables collisions between the attribute map and the overlay. A collision is signaled whenever an
attribute map cell with this bit set overlaps non-transparent overlay pixels.
Control bits 4-5 override the palette used for the overlay.
Control bits 6-7 override the palette used for the playfield.
In ANTIC hires mode, byte 0 is repurposed as a PF3 mask instead of a PF0 override. A '1' bit replaces the PF2
background color with PF3. Bits are rendered in standard bitmap order from MSB to LSB. The resolution of the
PF3 mask is determined by the width of the attribute cell: 1 pixel/bit at width 8, 2 pixels/bit at widths 9-16, and 4
pixels/bit at widths 17-32.
The horizontal position and width of the attribute map is controlled by the same width setting as the overlay
width. This is true regardless of whether the overlay is enabled and of the width of the ANTIC playfield. Areas not
covered the attribute map are rendered as if the attribute map were disabled.
Chapter 12 - Internal devices 237

Altirra Hardware Reference Manual Created by Avery Lee
Attribute map limitations
The attribute map is buffered in on-chip memory, which allows the map to be fetched only once per cell row and
relaxes timing requirements. However, it also limits the width of the attribute map to 43 cells. This is just enough
to cover a wide width overlay with horizontal scrolling with a cell width of 8 pixels. Below 8 pixels, the attribute
map may run out of data as the hardware is constrained to stop fetching beyond 43 cells.
There is no limit on cell height; the attribute map can be used with single scan line resolution.
Blitter
The hardware blitter greatly accelerates data copying and transformation in VBXE space. It is a two-argument,
src/dst blitter that can do simple arithmetic and logical operations between arbitrary 2D memory rectangles. The
blitter can use the full 14MHz bandwidth of the VBXE local memory bus, but is limited to accessing local memory
only; data must be copied to and from local memory by the CPU for the blitter to work with non-local data. The
blitter cannot access main memory or hardware registers directly.
The blitter is driven by a blit list in local memory, which contains a linear array of 21-byte entries for each blit.
Each blit entry contains all information required to set up the blit, including source and destination addresses,
mode selectors, strides, and size information. The only CPU intervention required is to set up the beginning of
the blit list and trigger the blitter. An IRQ can optionally be triggered at the end of the blit list to notify the CPU
when all blits have completed.
Chapter 12 - Internal devices 238

Altirra Hardware Reference Manual Created by Avery Lee
Offset Data
0 Source address bits 7-0
1 Source address bits 15-8
2 Source address bits 23-16
3 Source Y step bits 7-0
4 Source Y steps 12-8 (signed)
5 Source X step bits 7-0 (signed)
6 Destination address bits 7-0
7 Destination address bits 15-8
8 Destination address bits 23-16
9 Destination Y step bits 7-0
10 Destination Y step bits 12-8 (signed)
11 Destination X step bits 7-0 (signed)
12 Source width minus 1 bits 7-0
13 SW8
14 Source height minus 1 bits 7-0
15 Source data AND mask
16 Source data XOR mask
17 Collision mask
18 Source zoom Y minus 1 Source zoom X minus 1
19 PatEnable Source pattern width minus 1
20 Next Mode
Table 59: VBXE blitter setup block
Bytes 0-11 specify the source and destination areas. The initial addresses are for the first byte to read/write, and
step values are specified for both X and Y directions. The step values are signed and may also be zero, allowing
for ascending and descending blits, strided blits, and pattern fill operations. Note that for a descending blit, the
beginning of the last row or column must be specified and not one-after as for some copy interfaces; the
supplied addresses are always the first ones used. Also, the Y step values are independent of the X step values
and the copy width, so that each starting row address is the previous starting row address plus the Y step offset.
This is often referred to as a pitch or stride value, versus a modulo value which is the distance from the end of
one row to the beginning of the next.
Bytes 12-14 specify the blit size as width and height values. This is specified as the number of bytes or rows
processed, minus 1, and allows for up to a 512x256 blit. This means that only 128K of memory can be modified
per blit, but the X and Y step values mean that the range of addresses touched can be larger.
Bytes 15 and 16 allow modification of each source byte. Each source byte is bitwise ANDed with the AND mask
and then XORed with the XOR mask. Using an AND mask of $00 allows use of constant source data without
having to fill source memory.
Byte 18 controls source zoom. Each byte can be expanded to up to an 8x8 rectangle by replication. This is done
by repeating the columns and rows in the blit with the same source byte; if zoom is set to 2x3, each source byte
Chapter 12 - Internal devices 239

Altirra Hardware Reference Manual Created by Avery Lee
is repeated twice during each row, and then each row is repeated three times. The blit size is in terms of source
area, so a 320x200 blit with 2x2 zoom reads a 320x200 source area and writes a 640x400 destination area. The
X and Y destination step offsets are applied as usual between each repetition of a source byte.
Byte 19 controls source pattern mode. If enabled, 1-128 bytes at the beginning of each source row are repeated.
This happens after zoom, so 4x zoom with a pattern length of 8 gives four copies of the first pattern byte, four
copies of the second pattern byte, etc.
Byte 20 selects the blit mode. Table 60 lists the possible modes.
Mode Operation Description
0 Copy Copy source to destination
1 Byte stencil copy Copy source to destination if non-zero
2 Binary addition Add source to destination
3 Bitwise OR Compute bitwise OR of source with destination
4 Bitwise AND Compute bitwise AND of source with destination
5 Bitwise XOR Compute bitwise XOR of source with destination
6 Nibble stencil copy Copy each nibble from source to destination if non-zero
Table 60: VBXE blit modes
Modes 1 and 6 are directly suited for blitting sprites with color 0 as a transparency value; mode 1 is for the byte
oriented modes (LR/SR) and mode 6 is for the nibble oriented hires mode (HR).
Bit 3 in byte 20 indicates whether another blit follows in the blit list. If set, the blitter will automatically read in and
perform the next blit in the blit list after the current one finishes. The blitter can therefore do a long series of
heterogeneous blit operations without CPU involvement. This can be particularly advantageous given that the
blitter's X/Y step offset capability allows the blitter to modify its own blit lists. However, a significant limitation is
that the blit list must be contiguous in memory as there is no jump facility.
Blitter collision detection
The blitter can detect collisions between source data being merged with destination data. A collision is detected
when a non-transparent source pixel is merged with a non-transparent source pixel. No collisions are detected in
mode 0; collisions are detected per byte in modes 1-5, and per-nibble in mode 6.
The collision mask field in the blit block controls which destination pixel values trigger collisions. The range of
palette indices is partitioned into 8 groups, where each bit enables collisions for a corresponding group. In
modes 1-5, bit 0 enables collisions with $01-1F, bit 1 with $20-3F, bit 2 with $40-5F, etc. In mode 6, each group is
two colors, so bit 0 enables $1, bit 1 enables $2-3, bit 2 enables $4-5, etc. A collision mask of $00 disables
collision detection.
Upon the first collision within a blit, the destination pixel causing the collision is copied into the blitter collision
code register. In mode 6, a collision in the high nibble or low nibble copies the destination pixel to the high or low
nibble of the collision code register; only one nibble will be set per blit.
Collision detection is free for most modes, with the exception of stencil copies (mode 1). In mode 1, enabling
collision detection reduces the speed of the blit because it requires a read from the destination that would
otherwise be unnecessary.
Blitter speed
The blitter's speed depends on the available memory bandwidth, the operations selected, and sometimes the
Chapter 12 - Internal devices 240

Altirra Hardware Reference Manual Created by Avery Lee
data involved. First, it uses all local memory cycles available, but at the lowest priority; any accesses to VRAM
by the display, XDL, blitter, or MEMAC windows preempt the blitter. Higher-density displays therefore result in
slower blits. Faster operations run at two cycles/byte, whereas slower ones run at three cycles/byte. Table 61
gives the speed of each blit mode.
Mode Speed
Mode 0 (fill/copy) 2 cycles/byte
Mode 1 (bytewise stencil copy) 1 cycle/byte for $00 source
2 cycles/byte for non-$00 source w/o coll. detect
3 cycles/byte for non-$00 source w/coll. detect
Mode 2 (add) 1 cycle/byte for $00 source
3 cycles/byte for non-$00 source
Mode 3 (bitwise OR) 1 cycle/byte for $00 source
3 cycles/byte for non-$00 source
Mode 4 (bitwise AND) 2 cycles/byte for $00 source
3 cycles/byte for non-$00 source
Mode 5 (bitwise XOR) 1 cycle/byte for $00 source
3 cycles/byte for non-$00 source
Mode 6 (nibblewise stencil copy) 1 cycle/byte for $00 source
3 cycles/byte for non-$00 source
Table 61: VBXE blitter speeds
The $00 optimization check occurs after constant AND/XOR factors have been applied, and pertains to inputs
into the mode operation such that either no change occurs in the destination or the existing value can be
ignored. Note that there is no optimization for AND/OR with $FF.
Additionally, the blitter can skip source fetches if the source is known to be constant. If the source AND mask is
$00, or for repetition due to X zoom, the blitter will skip source fetches after the first. For instance, a fill operation
with mode 0 can run at 1 cycle/byte instead of 2 cycles/byte. However, a Y zoom is not accelerated in this
manner and will re-read the source each time, so a 2x8 zoom blit can be done faster as a transposed 8x2 zoom
blit.
In the event that both optimizations apply – source AND and XOR masks both $00, or X zoom of a $00 value –
the blitter runs at 1 cycle/byte, re-reading the source.
For small blits, the time to read in the blit information from the blit list is also significant. Setting up each blit
requires 21 free memory cycles for each blit.
DMA pattern
VBXE local memory accesses are primarily driven off of an 8-cycle sequence associated with machine cycles.
MEMAC and overlay accesses have the highest priority; the former only occur on odd cycles and the latter on
even cycles, so they never conflict with each other. The next priority are XDL/attribute map fetches, and the
blitter has the lowest priority.
MEMAC accesses occur on cycle 1 for reads or cycle 3 for writes. Having ANTIC or the CPU accessing local
memory through a MEMAC window can therefore consume up to one-eighth of the available local memory
bandwidth. This will not affect the display, but may delay attribute map fetches or slow down the blitter.
The overlay only consumes memory cycles during the active region. Because the overlay uses only even cycles,
it never collides with MEMAC accesses, which are on odd cycles. For graphics modes, lores modes fetch on
Chapter 12 - Internal devices 241

Altirra Hardware Reference Manual Created by Avery Lee
cycles 0 and 4, while standard and hires modes fetch on 0, 2, 4, and 6. Text modes fetch character name,
character attribute, and font data on even cycles every eight cycles.
XDL updates require 22 VBXE cycles just after the end of the overlay active region, regardless of how many
bytes are actually read. MEMAC cycles preempt the XDL regardless of whether a fetch occurs, but any memory
cycles skipped by the XDL are available for the blitter.
The attribute map is read immediately after the XDL is or would be processed. 172 bytes are read from local
memory into an on-chip line buffer during horizontal blanking time, which is then used to display during active
region. This load only occurs when a new row of the attribute map is encountered, either by rolling over the row
counter, changing attribute map addressing, or restarting the attribute map. However, 172 bytes are always read
regardless of the width of the playfield or attribute cells. Only MEMAC can preempt attribute map fetches, so this
takes at most 26 machine cycles to complete.
The blitter has lowest priority and uses any spare cycles not otherwise needed by other DMA engines. Available
blitter bandwidth may range from 236-912 cycles per scan line depending on other DMA requirements. The
blitter never has idle cycles during a blit and is always reading and writing memory, so it only makes progress on
a blit when a memory cycle is available.
No stolen cycles are needed for refreshing VBXE local memory, and none of the VBXE local accesses are
slowed by ANTIC DMA cycles in main memory. ANTIC DMA only slows down VBXE operations when mapped to
local memory through a MEMAC window.
Soft reset
Any write to $D080-D0FF in GTIA address space causes the VBXE to soft reset. This is used to ensure that
VBXE resets properly on power-up. However, it can also cause compatibility problems if these addresses are
written during normal operation. Accidentally writing $D080 every frame, for instance, will cause the VBXE
display to blank out.
Register map
VBXE is controlled via a register bank of 32 bytes, normally decoded at either $D640-D65F or $D740-D75F.
Most registers are write-only, although a couple of read-only and read-write registers exist. None of the read
registers have side effects, so it is safe to use indexed loads and stores to VBXE.
Chapter 12 - Internal devices 242

Altirra Hardware Reference Manual Created by Avery Lee
Read Write
$Dx40 CORE_REVISION VIDEO_CONTROL
$Dx41 MINOR_REVISION XDL_ADR0
$Dx42 XDL_ADR1
$Dx43 XDL_ADR2
$Dx44 CSEL
$Dx45 PSEL
$Dx46 CR
$Dx47 CG
$Dx48 CB
$Dx49 COLMASK
$Dx4A COLDETECT COLCLR
$Dx4B
$Dx4C
$Dx4D
$Dx4E
$Dx4F
$Dx50 BLT_COLLISION_CODE BL_ADR0
$Dx51 BL_ADR1
$Dx52 BL_ADR2
$Dx53 BLITTER_BUSY BLITTER_START
$Dx54 IRQ_STATUS IRQ_CONTROL
$Dx55 P0
$Dx56 P1
$Dx57 P2
$Dx58 P3
$Dx59
$Dx5A
$Dx5B
$Dx5C
$Dx5D MEMAC_B_CONTROL
$Dx5E MEMAC_CONTROL MEMAC_CONTROL
$Dx5F MEMAC_BANK_SEL MEMAC_BANK_SEL
Table 62: VBXE registers
Chapter 12 - Internal devices 243

Altirra Hardware Reference Manual Created by Avery Lee
$Dx40 CORE_REVISION – VBXE major revision (read only)
Major version GTIA emulation mode
D7:D4 Major version
D3:D0 GTIA emulation mode
0 Full FX core
1 GTIA-only core
Indicates the major version of the VBXE core and whether full FX functionality is enabled or only GTIA
emulation. As of this writing, the latest FX core is version 1.26 (CORE_REVISION = $11, MINOR_REVISION =
$26).
$Dx40 VIDEO_CONTROL – Video control register (write only)
Ign. OvTrans EXT XDL
D3:D2 Overlay transparency mode
x0 Disabled
01 Transparency enabled for color 0
11 Transparency enabled for colors 0 and 15
D1 Extended color mode
0 Disabled – GTIA color registers select 128 colors and ANTIC hires mode uses one hue
1 Enabled – GTIA color registers select 256 colors and ANTIC hires mode uses two hues
D0 Extended display list (XDL) enable
0 Disabled
1 Enabled
Bit 0 enables or disables the extended display list (XDL). If disabled, the overlay and attribute maps are turned
off. It is buffered and only takes effect at the beginning of vertical sync.
Bit 1 enables extended color mode. This extends the standard GTIA color registers from 3 bits of luminance to 4,
and switches ANTIC hires mode to use the full PF1 color for the foreground instead of just the luminance. If
disabled, the LSB of all GTIA color registers are forced to 0 during color processing, although bit 0 is stored
regardless.
Bit 2 enables transparency for the overlay layer, so that color 0 is transparent with regard to collisions and P/M or
playfield layers placed behind the overlay.
Bit 3 enables color $F (hires) or $xF (lores/standard) as an additional transparency color for display and
collisions. It is used to generate colors that are visually transparent but still detected as collisions during blitter
operations.
VIDEO_CONTROL is forced to $00 on reset.
$Dx41 MINOR_REVISION – VBXE minor revision (read only)
SHA Minor high Minor low
D7 Shared memory capability
0 RAMBO 256K emulation disabled
1 RAMBO 256K emulation enabled
D6:D4 Minor version high digit
D3:D0 Minor version low digit.
Chapter 12 - Internal devices 244

Altirra Hardware Reference Manual Created by Avery Lee
Indicates whether the current VBXE core supports extended memory emulation and the minor version of the
core. $26 indicates version x.26 without RAMBO emulation.
$Dx41-Dx43 XDL_ADR0-2 – XDL start address (write only)
Sets the 19-bit starting address in local memory for the XDL, with XDL_ADR0 supplying bits 0-7. Unlike
DLISTL/DLISTH in ANTIC, this is not the actual address register, but a buffer register that is copied to the actual
register during vertical sync (not vertical blank). Any writes to these registers will not take effect until then.
$Dx44 CSEL – Color register write select (write only)
Sets the color register to modify in the currently selected write palette.
CSEL is indeterminate on power-up and not affected by reset.
$Dx45 PSEL – Palette write select (write only)
Ignored. Palette
D1:D0 Palette to modify
Sets the palette to modify with the CR/CG/CB registers.
PSEL is indeterminate on power-up and not affected by reset.
$Dx46-48 CR/CG/CB – Palette write latches (write only)
Color value Ign.
D7:D1 Red, green, or blue color value
Sets the red, green, or blue value to be written to the color register selected by CSEL/PSEL. The new color
value takes effect immediately. A write to $Dx48 (CB) also increments CSEL to the next color register.
Palette 0 is reset to GTIA colors on power-up. The palettes are not affected by reset.
$Dx49 COLMASK – Overlay collision mask (write only)
C7 C6 C5 C4 C3 C2 C1 C0
D7 Enable collisions with overlay values $E0-FF
D6 Enable collisions with overlay values $C0-DF
D5 Enable collisions with overlay values $A0-BF
D4 Enable collisions with overlay values $80-9F
D3 Enable collisions with overlay values $60-7F
D2 Enable collisions with overlay values $40-5F
D1 Enable collisions with overlay values $20-3F
D0 Enable collisions with overlay values $00-1F
Controls which overlay data bytes can trigger collisions. Each bit enables one-eighth of the possible values.
Note that the check is byte value based even in hires display mode, where each byte contains two pixels.
The value of COLMASK is indeterminate on startup.
Chapter 12 - Internal devices 245

Altirra Hardware Reference Manual Created by Avery Lee
$Dx4A COLCLR – Overlay collision clear strobe (write only)
A write to COLCLR clears the COLDETECT register.
$Dx4A COLDETECT – Overlay collision detect (read only)
ATT PF2 PF1 PF0 P3 P2 P1 P0
D7 Collision detected with attribute map
D6 Collision detected with playfield 2 or 3, or the fifth player
D5 Collision detected with playfield 1
D4 Collision detected with playfield 0
D3 Collision detected with player/missile 3
D2 Collision detected with player/missile 2
D1 Collision detected with player/missile 1
D0 Collision detected with player/missile 0
Indicates which collisions have been detected between the overlay and the player/missile, playfield, or attribute
map layers since the last time COLCLR was written.
$Dx50 BLT_COLLISION_CODE – Blitter collision code status register (read only)
Contains the destination byte that triggered the first enabled collision detected during a blit. This register is
automatically cleared to $00 at the beginning of a blit.
BLT_COLLISION_CODE has indeterminate contents on power-up or after reset.
$Dx50-Dx52 BL_ADR0-2 – Blitter blit list start address (write only)
Sets the 19-bit starting address for the blitter blit list, with BL_ADR0 supplying bits 0-7. This address is only used
when a blit is started; any writes to BL_ADR0-2 do not take effect until the blitter is restarted.
$Dx53 BLITTER_BUSY – Blitter status register (read only)
0 BSY LOD
D1 Blitter busy
0 Blitter idle or loading from blit list
1 Blitter active
D0 Blitter control block load
0 Blitter idle or active
1 Blitter loading control block
BLITTER_BUSY indicates the current blitter status. Bit 0 is set while the blitter is loading a control block, while bit
1 is set while the blitter is processing data. The two bits are never set at the same time.
$Dx54 BLITTER_START – Blitter start/stop control register (write only)
0 RUN
D0 Blitter run control
0 Stop blitter
1 Start blitter
BLITTER_START is used to start or stop the blitter. Writing bit 0 = 0 will immediately stop the blitter. Writing bit 0
= 1, however, will only start the blitter if it is not already running; if it is already running, 0 must be written to stop
Chapter 12 - Internal devices 246

Altirra Hardware Reference Manual Created by Avery Lee
it before 1 can be written to restart the blitter at a new blit list address. If the blitter is known to have finished the
last blit list, it is not necessary to write a 0 bit before writing a 1 bit to start the new blit list.
$Dx54 IRQ_STATUS – IRQ status register (read only)
0 BC
D0 Blitter complete IRQ status
0 Inactive
1 Active
IRQ_STATUS indicates whether the blitter complete IRQ is active. The IRQ_CONTROL register must be written
to clear the interrupt.
$Dx54 IRQ_CONTROL – IRQ control register (write only)
Ignored BC
D0 Blitter complete IRQ enable
0 Disabled
1 Enabled
Enables or disables the blitter complete IRQ. Any write to this register, regardless of the value written, also clears
any pending IRQ.
$Dx55-Dx58 P0-P3 – Overlay priority registers (write only)
BAK PF2 PF1 PF0 P3 P2 P1 P0
D7 Overlay has priority over background color
D6 Overlay has priority over playfield 2, 3, or the fifth player
D5 Overlay has priority over playfield 1
D4 Overlay has priority over playfield 0
D3 Overlay has priority over player/missile 3
D2 Overlay has priority over player/missile 2
D1 Overlay has priority over player/missile 1
D0 Overlay has priority over player/missile 0
0 Other layer has priority (underlay)
1 Overlay has priority
Determines which layers the overlay appears under or over, when the attribute map is active. If more than one
layer is active, the overlay has priority if any of the priority bits for those layers indicate that the overlay has
priority. The attribute map selects which priority register is in effect for a pixel; if the attribute map is disabled,
these registers are ignored and the priority value comes from the XDL.
$Dx5D MEMAC_B_CONTROL – MEMAC B window control register (write only)
ANT CPU Ign. Starting address
D7 ANTIC enable
D6 CPU enable
D4:D0 Starting address (bits 18-14)
Enables the MEMAC B window for either ANTIC access, CPU access, or both, and sets the starting address to
one of 32 16K banks in the 512K local memory space. Note that unlike the MEMAC A control registers,
Chapter 12 - Internal devices 247

Altirra Hardware Reference Manual Created by Avery Lee
MEMAC_B_CONTROL is write only.
MEMAC_B_CONTROL is set to 0 on reset.
$Dx5E MEMAC_CONTROL – MEMAC A control register (read/write)
Base CPU ANT Size
D7:D4 Window base address ($x000)
D3 CPU access enable
D2 ANTIC access enable
D1:D0 Window size
00 4K window
01 8K window
10 16K window
11 32K window
Enables or disables the MEMAC A window and sets its location in CPU/ANTIC address space. The window does
not have to be aligned to its size in CPU address space, so it is possible to have a 32K window starting at
$2000. If the window extends beyond the end of the 64K address space, it is truncated and does not wrap to the
beginning.
MEMAC_CONTROL is set to $00 on reset.
$Dx5F MEMAC_BANK_SEL – MEMAC A bank control register (read/write)
ENA Starting address
D7 Window enable
D6:D0 Starting address (bits 18-12)
Enables or disables the MEMAC A window and sets its starting address in local memory. The window is always
aligned to its size, so up to three low order bits in MEMAC_BANK_SEL may be ignored depending on the
window size. However, those bits are still stored and can become active if the window size is shrunk.
MEMAC_BANK_SEL is set to $00 on reset.
Chapter 12 - Internal devices 248
Chapter 13
5200 SuperSystem

Altirra Hardware Reference Manual Created by Avery Lee
13.1 Introduction
The 5200 SuperSystem is a console with hardware similar to the 400/800 computer line. The 5200 cannot run
software made for the 400/800 or vice versa, but they share the same CPU and many of the same custom chips,
and therefore software can be ported between the two with only minor difficulty.
13.2 Differences from the 8-bit computer line
Power control
Two cartridge lines are used as a power switching mechanism to cut power to the console whenever a cartridge
has been removed. Therefore, the console is never running without a cartridge.
Memory space
The 5200 contains 16K of random access memory from $0000-3FFF.
Cartridges have a much larger 32K address space window at $4000-BFFF. The cartridge area is dedicated and
does not overlay RAM. There is no cartridge control region.
ANTIC
ANTIC still exists at $D400-D4FF and works the same as on the XL/XE. Nothing is attached to the RNMI control
line.
GTIA
The 5200's GTIA lies at $C000-CFFF instead of $D000-D0FF. The four switch lines controlled by the CONSOL
register are used solely for output, specifically controller selection and analog stick control.
POKEY
POKEY exists at $E800-EFFF in the 5200 instead of $D2xx. The keyboard scanning logic is connected to the
controllers rather than to a dedicated keyboard. The SIO port is not used in the base system but is still exposed
via the expansion port and vectored in the OS.
Peripheral Interface Adapter
The 5200 does not have a PIA chip. Controllers are read through POKEY and GTIA instead, and there is no
memory remapping ability.
Operating system
The OS ROM is only 2K in the 5200, from $F800-FFFF. The character font is at $F800, leaving only 1K of code
space. There are no defined vectors within the OS.
The region from $F000-F7FF consists of an additional 2K of unused ROM.
13.3 Controller
The 5200 controller consists of an analog stick, a pair of top/bottom buttons, a 9-digit pad with # and * buttons,
and Start/Reset/Pause buttons. Depending on the model, either two or four controllers can be attached to the
system unit.
Chapter 13 - 5200 SuperSystem 250

Altirra Hardware Reference Manual Created by Avery Lee
Multiplexing
The key pad and top button of all controllers are multiplexed and bits 0-1 of CONSOL select the controller to
read. The bottom button and analog stick have dedicated inputs per controller and are not affected.
Analog stick
The analog stick is composed of a pair of potentiometers hooked up to pairs of POTx lines on POKEY. Even
POT lines correspond to horizontal sticks, with lower values indicating left direction and higher values indicating
right direction. Similarly, odd POT lines correspond to vertical, with lower to upper values meaning up to down
placement.
Famously, the 5200 controller's analog stick does not auto-center, and thus the center position must be
determined in software. Common techniques for doing this include periodically reading the joystick position
between waves or levels and taking the average of min/max measured positions as the center. A correctly
functioning controller is guaranteed to have a side-to-side range of at least 160 counts in the corresponding
POTx register.66
Bit 2 of CONSOL must be set in order for the analog joystick to read properly. Clearing it cuts power to the
potentiometers, causing the POTx registers to instead register the maximum value of 228 ($E4). This line also
doubles as the calibration control line for the trackball and as a trackball detection mechanism.67
Keypad
The keypads for all four controllers are multiplexed onto the keyboard scanning lines of POKEY. The low two bits
of CONSOL select the controller to read, with 00 selecting controller #1, 01 selecting #2, etc. From the selected
controller, the twelve buttons and the three game control buttons are mapped onto KBCODE bits 1-4 as follows:
1
1111
2
1110
3
1101
Start
1100
4
1011
5
1010
6
1001
Pause
1000
7
0111
8
0110
9
0101
Reset
0100
*
0011
0
0010
#
0001
The K0 and K5 output lines are not used, causing POKEY to detect each pressed key two times during each
keyboard scan. For instance, holding down the 0 key will cause key values $04, $05, $24 and $25 to be
detected.
The keyboard debounce feature (SKCTL bit 0) must be disabled in order to detect a key press. If it is enabled,
the keyboard logic will see the redundant keyboard mappings as multiple pressed keys and will never report a
key press in SKSTAT, KBCODE, or IRQST. Disabling debounce also prevents POKEY from properly detecting a
held key, however, and therefore in this mode each pressed key will be reported every 32 scan lines (~490Hz). If
debounce is quickly enabled within one scan line after the key is reported, however, the keyboard logic will
properly wait until the key is released before reporting any other key presses.
[66] [AHS03a] p. 25.
[67] [AHS03a] p. 21.
Chapter 13 - 5200 SuperSystem 251

Altirra Hardware Reference Manual Created by Avery Lee
Triggers
There are two trigger buttons on the 5200 controller, an upper trigger and a lower trigger. The bottom button of
each controller is wired to TRIG0-TRIG3, depending on the controller, and functions the same as a joystick
button on the 8-bit computer line. The top button is instead wired to the KR2 line of POKEY, which causes it to
register as the SHIFT, CONTROL, and BREAK keys on the scanned keyboard. This means that it will trigger a
break IRQ (IRQST bit 7) as well as show up in the top two bits of KBCODE if a key pad button is pressed.
Chapter 13 - 5200 SuperSystem 252

Altirra Hardware Reference Manual Created by Avery Lee
13.4 5200 Memory map
Chapter 13 - 5200 SuperSystem 253
16K RAM
Cartridge Area
(32K)
GTIA
ANTIC
POKEY
Kernel ROM
0000
4000
C000
D000
D400
D500
E800
F000
FFFF
Chapter 14
Reference

Altirra Hardware Reference Manual Created by Avery Lee
14.1 Memory map
Chapter 14 - Reference 255
48K RAM
OS ROM (14K)
Hardware Registers
ANTIC
PIA
POKEY
GTIA
Cartridge control
Unused
0000
C000
D000
D800
FFFF
Math pack ROM
Cartridge A
8K
Cartridge B
8K
A000
8000
16K Extended RAM
Window (XE)
4000
PBI ROM (XL/XE)
PBI Control
PBI Control
ROM Expansion
(XL/XE)
Self-Test (XL/XE)
5000
5800
D000
D100
D200
D300
D400
D500
D600
D800
14K RAM
(XL/XE)
4K RAM (XL/XE)
BASIC ROM
(XL/XE)
E000

Altirra Hardware Reference Manual Created by Avery Lee
14.2 Register list
HPOSP0-3 [D000-D003, W]
M0PF-M3PF [D000-D003, R]
HPOSM0-3 [D004-D007, W]
P0PF-P3PF [D004-D007, R]
SIZEP0-SIZEP3 [D008-D00B, W]
M0PL-M3PL [D008-D00B, R]
SIZEM [D00C, W]
P0PL-P3PL [D00C-D00F, R]
GRAFP0-3 [D00D-D010, W]
TRIG0-3 [D010-D013, R]
GRAFM [D011, W]
COLPM0-3 [D012-D015, W]
PAL [D014, R]
COLPF0-3 [D016-D019, W]
COLBK [D01A, W]
PRIOR [D01B, W]
VDELAY [D01C, W]
GRACTL [D01D, W]
HITCLR [D01E, W]
CONSOL [D01F, R/W]
AUDF1-4 [D200/2/4/6,W]
POT0-7 [D200-D207,R]
AUDC1-4 [D201/3/5/7, W]
AUDCTL [D208, W]
ALLPOT [D208, R]
STIMER [D209, W]
KBCODE [D209, R]
SKRES [D20A, W]
RANDOM [D20A, R]
POTGO [D20B, W]
SEROUT [D20D, W]
SERIN [D20D, R]
IRQEN [D20E, W]
IRQST [D20E, R]
SKCTL [D20F, W]
SKSTAT [D20F, R]
PORTB [D301, R/W]
PACTL [D302, R/W]
PBCTL [D303, R/W]
DMACTL [D400, W]
CHACTL [D401, W]
DLISTL/DLISTH [D402-3, W]
HSCROL [D404, W]
VSCROL [D405, W]
PMBASE [D407, W]
CHBASE [D409, W]
WSYNC [D40A, W]
VCOUNT [D40B, R]
NMIEN [D40E, W]
NMIST [D40F, R]
NMIRES [D40F, W]
Chapter 14 - Reference 256

Altirra Hardware Reference Manual Created by Avery Lee
Chapter 14 - Reference 257

Altirra Hardware Reference Manual Created by Avery Lee
14.3 GTIA registers
HPOSP0-3 [D000-D003, W]
Unit Address Description
GTIA HPOSP0, HPOSP1, Player 0-3 horizontal position
HPOSP2, HPOSP3
$D000-$D003 (Write Only)
Register layout
7 0
Horizontal position
Description
HPOSP0-HPOSP3 control the position of the left edge of each of the four players, in color clocks. More
precisely, they set the trigger point at which the shift register is loaded and begins shifting player graphics
data through the collision and priority logic to the video output.
A position of $80 corresponds to the center of the playfield. The narrow playfield runs from $40-$BF, the
normal playfield from $30-$CF, and the wide playfield from $22-$DD.
Chapter 14 - Reference 258

Altirra Hardware Reference Manual Created by Avery Lee
M0PF-M3PF [D000-D003, R]
Unit Address Description
GTIA M0PF, M1PF, M2PF, Missile-to-playfield collision registers
M3PF
$D000-$D003 (Read Only)
Register layout
7 0
0 0 0 0 PF3 PF2 PF1 PF0
D3:D0 Playfield 0-3 collision bits
0 No collision detected
1 Collision detected
Description
A bit is set in the M0PF, M1PF, M2PF, and M3PF registers whenever missiles 0-3 overlap a playfield in the
visible region, but bit 0 being set for a collision with playfield 0. Overlaps in the horizontal or vertical blank
region are not detected. Collisions are latched and stay flagged until HITCLR is written.
No playfield collisions are detected in GTIA modes 9 or 11. Playfield collisions are triggered normally for GTIA
mode 10.
In high-resolution modes (ANTIC modes 2, 3, and F), the monochrome playfield is considered to be PF2.
Either of the two pixels being set in the pair displayed during a color clock will signal a PF2 collision on that
clock.
Chapter 14 - Reference 259

Altirra Hardware Reference Manual Created by Avery Lee
HPOSM0-3 [D004-D007, W]
Unit Address Description
GTIA HPOSM0, HPOSM1, Missile 0-3 horizontal position
HPOSM2, HPOSM3
$D004-$D007 (Write Only)
Register layout
7 0
Horizontal position
Description
HPOSM0-HPOSM3 control the position of the left edge of each of the four missiles, in color clocks. More
precisely, they set the trigger point at which the shift register is loaded and begins shifting missile graphics
data through the collision and priority logic to the video output.
A position of $80 corresponds to the center of the playfield. The narrow playfield runs from $40-$BF, the
normal playfield from $30-$CF, and the wide playfield from $22-$DD.
Chapter 14 - Reference 260

Altirra Hardware Reference Manual Created by Avery Lee
P0PF-P3PF [D004-D007, R]
Unit Address Description
GTIA P0PF, P1PF, P2PF, Player-to-playfield collision registers
P3PF
$D004-$D007 (Read Only)
Register layout
7 0
0 0 0 0 PF3 PF2 PF1 PF0
D3:D0 Playfield 0-3 collision bits
0 No collision detected
1 Collision detected
Description
A bit is set in the P0PF, P1PF, P2PF, and P3PF registers whenever players 0-3 overlap a playfield in the
visible region, but bit 0 being set for a collision with playfield 0. Overlaps in the horizontal or vertical blank
region are not detected. Collisions are latched and stay flagged until HITCLR is written.
No playfield collisions are detected in GTIA modes 9 or 11. Playfield collisions are triggered normally for GTIA
mode 10.
In high-resolution modes (ANTIC modes 2, 3, and F), the monochrome playfield is considered to be PF2.
Either of the two pixels being set in the pair displayed during a color clock will signal a PF2 collision on that
clock.
Chapter 14 - Reference 261

Altirra Hardware Reference Manual Created by Avery Lee
SIZEP0-SIZEP3 [D008-D00B, W]
Unit Address Description
GTIA SIZEP0, SIZEP1, Player horizontal width control
SIZEP2, SIZEP3
$D008-$D00B (Write Only)
Register layout
7 0
Ignored Size
D1:D0 Player size
00 Normal width (1 color clock per bit)
01 Double width (2 color clocks per bit)
10 Normal width (1 color clock per bit)
11 Quadruple width (4 color clocks per bit)
Description
SIZEP0-SIZEP3 control the horizontal width of each player by specifying how many color clocks to display
each bit on screen. Since the horizontal position registers control the left side of each player, increasing the
width causes players to expand to the right.
A change to SIZEPx while the corresponding player is being shifted out will take place immediately.
Chapter 14 - Reference 262

Altirra Hardware Reference Manual Created by Avery Lee
M0PL-M3PL [D008-D00B, R]
Unit Address Description
GTIA M0PL, M1PL, M2PL, Missile-to-player collision registers
M3PL
$D008-$D00B (Read Only)
Register layout
7 0
0 0 0 0 P3 P2 P1 P0
D3:D0 Player 0-3 collision bits
0 No collision detected
1 Collision detected
Description
A bit is set in the M0PL, M1PL, M2PL, and M3PL registers whenever missiles 0-3 overlap a player in the
visible region, but bit 0 being set for a collision with player 0. Overlaps in the horizontal or vertical blank
region are not detected. Collisions are latched and stay flagged until HITCLR is written.
Chapter 14 - Reference 263

Altirra Hardware Reference Manual Created by Avery Lee
SIZEM [D00C, W]
Unit Address Description
GTIA SIZEM Missile horizontal width control
$D00C (Write Only)
Register layout
7 0
Size 3 Size 2 Size 1 Size 0
D7:D6 Missile 3 size
D5:D4 Missile 2 size
D3:D2 Missile 1 size
D1:D0 Missile 0 size
00 Normal width (1 color clock per bit)
01 Double width (2 color clocks per bit)
10 Normal width (1 color clock per bit)
11 Quadruple width (4 color clocks per bit)
Description
SIZEM0-SIZEM3 control the horizontal width of each missile by specifying how many color clocks to display
each bit on screen. Since the horizontal position registers control the left side of each missile, increasing the
width causes missiles to expand to the right.
A change to SIZEM while the corresponding missile is being shifted out will take place immediately.
Chapter 14 - Reference 264

Altirra Hardware Reference Manual Created by Avery Lee
P0PL-P3PL [D00C-D00F, R]
Unit Address Description
GTIA P0PL, P1PL, P2PL, Player-to-player collision registers
P3PL
$D00C-$D00F (Read Only)
Register layout
7 0
0 0 0 0 P3 P2 P1 P0
D3:D0 Player 0-3 collision bits
0 No collision detected
1 Collision detected
Description
A bit is set in the P0PL, P1PL, P2PL, and P3PL registers whenever two players overlap in the visible region,
with bit 0 being set for a collision with player 0. Overlaps in the horizontal or vertical blank region are not
detected. Collisions are latched and stay flagged until HITCLR is written.
A player never collides with itself and the corresponding collision bit is always 0.
Chapter 14 - Reference 265

Altirra Hardware Reference Manual Created by Avery Lee
GRAFP0-3 [D00D-D010, W]
Unit Address Description
GTIA GRAFP0, GRAFP1, Player graphics registers
GRAFP2, GRAFP3
$D00D-$D010 (Write Only)
Register layout
7 0
Player graphics data
Description
GRAFP0-GRAFP3 hold the graphics data that is loaded into the shift register when each player is triggered
by horizontal position. Normally player DMA is enabled on ANTIC when player graphics are used, which
causes GRAFP0-GRAFP3 to be loaded automatically at the start of each scan line. When disabled, GTIA
uses whatever data is in the internal latches. The latches can then be updated under CPU control, or simply
left alone to display the same data on every scan line.
Data is displayed MSB to LSB, with the most significant bit being displayed on the left.
Chapter 14 - Reference 266

Altirra Hardware Reference Manual Created by Avery Lee
TRIG0-3 [D010-D013, R]
Unit Address Description
GTIA TRIG0, TRIG1, TRIG2, Trigger registers
TRIG3
$D010-$D013 (Read Only)
Register layout
7 0
0 0 0 0 0 0 0 T
D0 Trigger bit (inverted)
0 Trigger active
1 Trigger not active
Description
TRIG0-3 reflect the state of the four joystick trigger inputs.
On the XL line, only two joystick ports are present and TRIG2 always reads as 1. TRIG3 is re-purposed as
the cartridge detect line, reading 1 if cartridge ROM is mapped to $A000-BFFF and 0 otherwise.
Chapter 14 - Reference 267

Altirra Hardware Reference Manual Created by Avery Lee
GRAFM [D011, W]
Unit Address Description
GTIA GRAFM Missile graphics register
$D011 (Write Only)
Register layout
7 0
Missile 3 Missile 2 Missile 1 Missile 0
Description
GRAFM holds the graphics data that is loaded into the shift register when each missile is triggered by
horizontal position. Normally missile DMA is enabled on ANTIC when missile graphics are used, which
causes GRAFM to be loaded automatically at the start of each scan line. When disabled, GTIA uses
whatever data is in the internal latch. The latch can then be updated under CPU control, or simply left alone
to display the same data on every scan line.
Data is displayed MSB to LSB, with the most significant bit being displayed on the left.
Chapter 14 - Reference 268

Altirra Hardware Reference Manual Created by Avery Lee
COLPM0-3 [D012-D015, W]
Unit Address Description
GTIA COLPM0, COLPM1, Player/missile 0-3 color register
COLPM2, COLPM3
$D012-$D015 (Write Only)
Register layout
7 0
Hue Luminance Ign.
Description
These registers control the base colors used for players 0-3.
Chapter 14 - Reference 269

Altirra Hardware Reference Manual Created by Avery Lee
PAL [D014, R]
Unit Address Description
GTIA PAL NTSC/PAL detect register
$D014 (Read Only)
Register layout
7 0
0 0 0 0 PAL
D3:D0 NTSC/PAL detect
0001 PAL
1111 NTSC
Description
The PAL register indicates whether the GTIA is either the NTSC or PAL model.
Note that while the entire value read from the PAL register appears to be stable and consistent, only bits 1-3
are guaranteed to be set to a particular value according to the original specification.68
[68] [ATA82] III.1
Chapter 14 - Reference 270

Altirra Hardware Reference Manual Created by Avery Lee
COLPF0-3 [D016-D019, W]
Unit Address Description
GTIA COLPF0, COLPF1, Playfield 0-3 color register
COLPF2, COLPF3
$D016-$D019 (Write Only)
Register layout
7 0
Hue Luminance Ign.
Description
These registers control the base colors used for playfields 0-3.
In ANTIC modes 2, 3, and F, COLPF2 controls the color of the playfield. A 1 bit in the graphics data replaces
the luminance of a pixel with that from COLPF1.
Chapter 14 - Reference 271

Altirra Hardware Reference Manual Created by Avery Lee
COLBK [D01A, W]
Unit Address Description
GTIA COLBK Background color register
$D01A (Write Only)
Register layout
7 0
Hue Luminance Ign.
Description
This register controls the color of the background, including the horizontal and vertical blank regions.
Chapter 14 - Reference 272

Altirra Hardware Reference Manual Created by Avery Lee
PRIOR [D01B, W]
Unit Address Description
GTIA PRIOR Priority control
$D01B (Write Only)
Register layout
7 0
GTIA MC P5 Priority mode
D3:D0 Playfield / P/M priority mode
1000 PF0 > PF1 > P0 > P1 > P2 > P3 > PF2 > PF3 > BAK
0100 PF0 > PF1 > PF2 > PF3 > P0 > P1 > P2 > P3 > BAK
0010 P0 > P1 > PF0 > PF1 > PF2 > PF3 > P2 > P3 > BAK
0001 P0 > P1 > P2 > P3 > PF0 > PF1 > PF2 > PF3 > BAK
D4 Fifth player enable
0 Missiles use player 0-3 colors
1 Missiles use playfield 3 color
D5 Multicolor player enable
0 Normal
1 Multicolor players enabled
D7:D6 GTIA mode enable
00 Normal
01 1 color / 16 luma mode
10 9 color mode
11 16 colors / 1 luma mode
Description
PRIOR controls a bunch of miscellaneous options, including player/missile priority relative to playfields. All of
these options have complex interactions with the rest of the video display logic. See the CTIA/GTIA chapter
for details.
Chapter 14 - Reference 273

Altirra Hardware Reference Manual Created by Avery Lee
VDELAY [D01C, W]
Unit Address Description
GTIA VDELAY Vertical delay
$D01C (Write Only)
Register layout
7 0
P3 P2 P1 P0 M3 M2 M1 M0
D7:D0 Vertical delay
0 Accept DMA data every scan line
1 Accept DMA data only on odd scan lines
Description
VDELAY is used to vertically scroll players and missiles down by one scan line in two-line resolution mode.
Contrary to its name, however, it doesn't actually delay anything. What it does is control whether GTIA loads
the graphics latches from the data during DMA time on even scan lines. When a bit is set in VDELAY, the
corresponding sprite only loads data on odd scan lines, which effectively moves the sprite down a scan line
when two-line DMA mode is enabled. In single line mode, this has the effect of halving sprite resolution.
VDELAY has no effect on direct writes to the GRAFP0-3 or GRAFM registers.
Chapter 14 - Reference 274

Altirra Hardware Reference Manual Created by Avery Lee
GRACTL [D01D, W]
Unit Address Description
GTIA GRACTL Graphics control
$D01D (Write Only)
Register layout
7 0
Ignored LT P M
D0 Missile DMA enable
0 Disabled
1 Missile DMA enabled
D1 Player DMA enable
0 Disabled
1 Player DMA enabled
D2 Trigger latch enable
0 Trigger inputs are momentary
1 Trigger inputs are latched
Description
GRACTL controls player/missile DMA on the GTIA side. DMACTL in ANTIC must be set appropriately to
enable P/M data to be fetched from memory, but GRACTL in GTIA must also be set for that data to be
accepted into the GRAFP0-GRAFP3 and GRAFM registers.
Chapter 14 - Reference 275

Altirra Hardware Reference Manual Created by Avery Lee
HITCLR [D01E, W]
Unit Address Description
GTIA HITCLR Collision control clear strobe
$D01E (Write Only)
Register layout
7 0
Ignored
Description
A write to HITCLR clears all of the collision registers.
Chapter 14 - Reference 276

Altirra Hardware Reference Manual Created by Avery Lee
CONSOL [D01F, R/W]
Unit Address Description
GTIA CONSOL Console control
$D01F (Read/Write)
Register layout
7 0
0 0 0 0 SPK OPT SEL STA
D3 Loudspeaker
0 Source
1 Sink
D2 OPTION key
0 Asserted (read) / Source (write)
1 Inactive (read) / Sink (write)
D1 SELECT key
0 Asserted (read) / Source (write)
1 Inactive (read) / Sink (write)
D0 START key
0 Asserted (read) / Source (write)
1 Inactive (read) / Sink (write)
Description
CONSOL reads and writes the state of four bidirectional switch lines connected to GTIA. On the Atari, these
are connected to the internal loudspeaker and the OPTION, SELECT, and START keys. Writing a 0 into a bit
causes the corresponding switch line to be pulled up to +5V, and writing a 1 sinks it to ground.
By default, the OS writes $08 into CONSOL during vertical blank.69 This causes the CONSOL register to read
$07 when no keys are pressed, with bits 0-2 going low when one of the console buttons is pressed. If a 1 is
written into bits 0-2, the corresponding switch is grounded and always reads as a 0.
The XL series has no internal loudspeaker and thus the speaker output is routed to the TV instead.
[69] [ATA82] III.15
Chapter 14 - Reference 277

Altirra Hardware Reference Manual Created by Avery Lee
14.4 POKEY registers
AUDF1-4 [D200/2/4/6,W]
Unit Address Description
POKEY AUDF1, AUDF2, Audio channel 0-3 frequency
AUDF3, AUDF4
$D200, $D202, $D204, (Write Only)
$D206
Register layout
7 0
Frequency
Description
AUDF1-AUDF4 control the frequency of the four audio channels.
Chapter 14 - Reference 278

Altirra Hardware Reference Manual Created by Avery Lee
POT0-7 [D200-D207,R]
Unit Address Description
POKEY POT0-POT7 Potentiometer read counter
$D200-$D207 (Read Only)
Register layout
7 0
Potentiometer read counter value
Description
POT0-POT7 indicate the value of each of the eight potentiometer read counters. When POTGO is written,
each of the counters is reset to 0 and begins counting up until either the threshold or the value 228 has been
hit. The corresponding bit in ALLPOT is then cleared to indicate that the pot counter value is valid.
Chapter 14 - Reference 279

Altirra Hardware Reference Manual Created by Avery Lee
AUDC1-4 [D201/3/5/7, W]
Unit Address Description
POKEY AUDC1, AUDC2, Audio channel 0-3 control
AUDC3, AUDC4
$D201, $D203, $D205, (Write Only)
$D207
Register layout
7 0
CLK NM NC D Volume level
D3:D0 Volume level
0000 Silent
0001 Lowest volume
1111 Highest volume
D4 Output disable
0 Normal operation
1 Volume-only mode
D5 Noise control
0 Sample noise source
1 Output pure tone (produce square wave by toggling output on clock pulse)
D6 Noise mode
0 Sample 9-bit or 17-bit polynomial generator (see AUDCTL bit 7)
1 Sample 4-bit polynomial generator
D7 Sampling clock mode
0 Mask out clock pulses using 5-bit polynomial generator
1 Use timer output directly as clock
Description
AUDC1-AUDC4 control the volume and timbre of the four audio channels.
See the Audio and Serial Port Block Diagram page of the Hardware Manual [ATA82] for a logic diagram that
shows precisely how the bits in AUDCx affect the output flow.
Chapter 14 - Reference 280

Altirra Hardware Reference Manual Created by Avery Lee
AUDCTL [D208, W]
Unit Address Description
POKEY AUDCTL Audio control
$D208 (Write Only)
Register layout
7 0
PLY CH1 CH3 L12 L34 HP1 HP3 15K
D7 Polynomial select
0 RANDOM and audio channels use 17-bit polynomial generator
1 RANDOM and audio channels use 9-bit polynomial generator
D6 Channel 1 fast clock enable
D5 Channel 3 fast clock enable
0 Clock channel with 15KHz or 64KHz clock
1 Clock channel with 1.79MHz clock
D4 Channel 1+2 link enable
D3 Channel 3+4 link enable
0 Independent 8-bit counters
1 Linked 16-bit counter (clock 2 with 1 or 4 with 3).
D2 Channel 1 high pass filter enable
D1 Channel 2 high pass filter enable
0 Normal operation
1 High pass enabled (filter channel 1/2 with channel 3/4)
D0 Clock select
0 Use 64KHz as slow audio clock
1 Use 15KHz as slow audio clock
Description
AUDCTL controls a number of miscellaneous sound parameters.
Chapter 14 - Reference 281

Altirra Hardware Reference Manual Created by Avery Lee
ALLPOT [D208, R]
Unit Address Description
POKEY ALLPOT Potentiometer read status
$D208 (Read Only)
Register layout
7 0
Potentiometer read status
D7:D0 Pot 0-7 read status
0 Potentiometer read complete
1 Potentiometer still being read
Description
ALLPOT indicates when each of the eight potentiometers have been read and the counter values are valid.
Chapter 14 - Reference 282

Altirra Hardware Reference Manual Created by Avery Lee
STIMER [D209, W]
Unit Address Description
POKEY STIMER Start timer strobe
$D209 (Write Only)
Register layout
7 0
Ignored
Description
Writing to STIMER causes all timers to restart from their set period values, sets the output flip-flops for all
channels to 0 (1 after inversion). When high-pass filters are disabled, this silences channels 1 and 2 and
enables output for channels 3 and 4.
Errata
The POKEY datasheet [AHS03] states that STIMER forces channels 1 and 2 to logic high and channels 3
and 4 to logic low; this is backwards if logic high is the state that produces sound.
Chapter 14 - Reference 283

Altirra Hardware Reference Manual Created by Avery Lee
KBCODE [D209, R]
Unit Address Description
POKEY KBCODE Keyboard code register
$D209 (Read Only)
Register layout
7 0
CRL SHF Keyboard scan code
D7 Control key state
1 Control key was down when key was pressed
0 Control key was not down when key was pressed
D6 Shift key state
1 Shift key was down when key was pressed
0 Shift key was not down when key was pressed
Description
Contains the scan code of the most recently pressed key, along with the state of the Shift and Control keys
when it was pressed. This register is only changed on a key press; it does not respond to a key release.
Chapter 14 - Reference 284

Altirra Hardware Reference Manual Created by Avery Lee
SKRES [D20A, W]
Unit Address Description
POKEY SKRES Serial/keyboard reset strobe
$D20A (Write Only)
Register layout
7 0
Ignored
Description
Writing to SKRES resets the serial port and keyboard status bits in SKSTAT (bits 5-7).
Chapter 14 - Reference 285

Altirra Hardware Reference Manual Created by Avery Lee
RANDOM [D20A, R]
Unit Address Description
POKEY RANDOM Random number generator
$D20A (Read Only)
Register layout
7 0
Random data
Description
Reads the state of the top eight bits of the 17-bit polynomial noise generator. This generator shifts right one
bit every machine cycle (1.79MHz).
If bit 7 of AUDCTL is set, the 17-bit polynomial noise generator is shortened to 9 bits. This is reflected in the
values read from RANDOM. Because the noise generator is a linear feedback shift register (LFSR) of the
XOR variety, a state of all zeroes is invalid and therefore a RANDOM value of 00 is a unique LFSR state (all
other values can be one of two states). From this state, the progression is as follows:
0: 00
1: 80
2: 40
3: 20
4: 10
5: 88
6: 44
7: 22
8: 11
9: 88
10: c4
11: 62
12: 31
13: 98
14: 4c
15: 26
16: 13
17: 89
18: c4
19: e2
20: 71
21: b8
22: 5c
23: ae
24: 57
25: ab
26: d5
27: 6a
28: b5
29: da
30: 6d
31: 36
32: 1b
33: 8d
34: c6
35: e3
36: 71
37: 38
38: 1c
39: 8e
40: 47
41: 23
42: 91
43: 48
44: a4
45: 52
46: a9
47: 54
48: 2a
49: 15
50: 8a
51: c5
52: 62
53: b1
54: d8
55: 6c
56: 36
57: 9b
58: cd
59: e6
60: f3
61: f9
62: 7c
63: 3e
64: 9f
65: cf
66: e7
67: f3
68: 79
69: 3c
70: 1e
71: 8f
72: 47
73: a3
74: d1
75: 68
76: b4
77: da
78: ed
79: 76
80: 3b
81: 9d
82: 4e
83: a7
84: 53
85: 29
86: 94
87: 4a
88: 25
89: 12
90: 09
91: 04
92: 82
93: 41
94: 20
95: 90
96: c8
97: 64
98: 32
99: 99
100: cc
101: e6
102: 73
103: b9
104: 5c
105: 2e
106: 17
107: 8b
108: c5
109: e2
110: f1
111: f8
112: 7c
113: be
114: df
115: ef
116: f7
117: 7b
118: 3d
119: 1e
120: 0f
121: 07
122: 83
123: c1
124: e0
125: f0
126: f8
127: fc
128: fe
129: ff
130: ff
131: 7f
132: 3f
133: 1f
134: 0f
135: 87
136: c3
137: e1
138: f0
139: 78
140: bc
141: de
142: ef
143: 77
144: 3b
145: 1d
146: 0e
147: 87
148: 43
149: a1
150: d0
151: 68
152: 34
153: 9a
154: cd
155: 66
156: b3
157: d9
158: 6c
159: b6
160: db
161: ed
162: f6
163: 7b
164: bd
165: 5e
166: 2f
167: 17
168: 0b
169: 85
170: c2
171: e1
172: 70
173: 38
174: 9c
175: ce
176: 67
177: 33
178: 19
179: 0c
180: 86
181: 43
182: 21
183: 90
184: 48
185: 24
186: 12
187: 89
188: 44
189: a2
190: 51
191: a8
192: d4
193: ea
194: 75
195: ba
196: 5d
197: ae
198: d7
199: eb
200: f5
201: 7a
202: 3d
203: 9e
204: 4f
205: 27
206: 93
207: 49
208: a4
209: d2
210: e9
211: 74
212: 3a
213: 9d
214: ce
215: e7
216: 73
217: 39
218: 1c
219: 0e
220: 07
221: 03
222: 81
223: c0
224: e0
225: 70
226: b8
227: dc
228: ee
229: 77
230: bb
231: 5d
232: 2e
233: 97
234: cb
235: e5
236: f2
237: 79
238: bc
239: 5e
240: af
241: 57
242: 2b
243: 95
244: 4a
245: a5
246: 52
247: 29
248: 14
249: 0a
250: 05
251: 02
252: 81
253: 40
254: a0
255: 50
256: a8
257: 54
258: aa
259: 55
260: aa
261: d5
262: ea
263: f5
264: fa
265: 7d
266: be
267: 5f
268: af
269: d7
270: 6b
271: b5
272: 5a
273: 2d
274: 16
275: 0b
276: 05
277: 82
278: c1
279: 60
280: b0
281: d8
282: ec
283: 76
284: bb
285: dd
286: 6e
287: b7
288: db
289: 6d
290: b6
291: 5b
292: ad
293: d6
294: 6b
295: 35
296: 1a
297: 0d
298: 06
299: 83
300: 41
301: a0
302: d0
303: e8
304: 74
305: ba
306: dd
307: ee
308: f7
309: fb
310: 7d
311: 3e
312: 1f
313: 8f
314: c7
315: e3
316: f1
317: 78
318: 3c
319: 9e
320: cf
321: 67
322: b3
323: 59
324: 2c
325: 96
326: cb
327: 65
328: b2
329: 59
330: ac
331: d6
332: eb
333: 75
334: 3a
335: 1d
336: 8e
337: c7
338: 63
339: b1
340: 58
341: 2c
342: 16
343: 8b
344: 45
345: a2
346: d1
347: e8
348: f4
349: fa
350: fd
351: fe
352: 7f
353: bf
354: 5f
355: 2f
356: 97
357: 4b
358: a5
359: d2
360: 69
361: 34
362: 1a
363: 8d
364: 46
365: a3
366: 51
367: 28
368: 94
369: ca
370: 65
371: 32
372: 19
373: 8c
374: c6
375: 63
376: 31
377: 18
378: 0c
379: 06
380: 03
381: 01
382: 80
383: c0
384: 60
385: 30
386: 98
387: cc
388: 66
389: 33
390: 99
391: 4c
392: a6
393: 53
394: a9
395: d4
396: 6a
397: 35
398: 9a
399: 4d
400: 26
401: 93
402: c9
403: e4
404: f2
405: f9
406: fc
407: 7e
408: bf
409: df
410: 6f
411: b7
412: 5b
413: 2d
414: 96
415: 4b
416: 25
417: 92
418: 49
419: 24
420: 92
421: c9
422: 64
423: b2
424: d9
425: ec
426: f6
427: fb
428: fd
429: 7e
430: 3f
431: 9f
432: 4f
433: a7
434: d3
435: 69
436: b4
437: 5a
438: ad
439: 56
440: 2b
441: 15
442: 0a
443: 85
444: 42
445: a1
446: 50
447: 28
448: 14
449: 8a
450: 45
451: 22
452: 91
453: c8
454: e4
455: 72
456: b9
457: dc
458: 6e
459: 37
460: 9b
461: 4d
462: a6
463: d3
464: e9
465: f4
466: 7a
467: bd
468: de
469: 6f
470: 37
471: 1b
472: 0d
473: 86
474: c3
475: 61
476: b0
477: 58
478: ac
479: 56
480: ab
481: 55
482: 2a
483: 95
484: ca
485: e5
486: 72
487: 39
488: 9c
489: 4e
490: 27
491: 13
492: 09
493: 84
494: c2
495: 61
496: 30
497: 18
498: 8c
499: 46
500: 23
501: 11
502: 08
503: 84
504: 42
505: 21
506: 10
507: 08
508: 04
509: 02
510: 01
Chapter 14 - Reference 286

Altirra Hardware Reference Manual Created by Avery Lee
POTGO [D20B, W]
Unit Address Description
POKEY POTGO Potentiometer read start strobe
$D20B (Write Only)
Register layout
7 0
Ignored
Description
Writing to POTGO dumps the potentiometer read capacitors and resets the pot counters, restarting the pot
read process. This causes all POT0-POT7 registers to reset to 0 and ALLPOT becomes $FF until each pot is
measured. In fast pot scan mode, the pots can be used as cycle timers, although the read values appear to
be slightly unreliable while counting.
Chapter 14 - Reference 287

Altirra Hardware Reference Manual Created by Avery Lee
SEROUT [D20D, W]
Unit Address Description
POKEY SEROUT Serial output register
$D20D (Write Only)
Register layout
7 0
Serial data
Description
SEROUT is written by the CPU to specify the data that should be copied to the serial output shift register and
sent out to the SIO bus.
Chapter 14 - Reference 288

Altirra Hardware Reference Manual Created by Avery Lee
SERIN [D20D, R]
Unit Address Description
POKEY SERIN Serial input register
$D20D (Read Only)
Register layout
7 0
Serial input data
Description
Reads the data that was most recently shifted into POKEY from the SIO bus and clears the internal data-
ready state. If two consecutive bytes are shifted in without SERIN being read in between, the second byte
overwrites the first. This does not set the serial input overrun bit unless the serial input IRQ is still active – the
overrun bit is based on the IRQ state and not whether SERIN is read.
Chapter 14 - Reference 289

Altirra Hardware Reference Manual Created by Avery Lee
IRQEN [D20E, W]
Unit Address Description
POKEY IRQEN IRQ enable register
$D20E (Write Only)
Register layout
7 0
BRK KBD SIN SOT STR T4 T2 T1
D7 Break key interrupt
D6 Keyboard interrupt
D5 Serial input data ready interrupt
D4 Serial output data needed ready interrupt
D3 Serial output transmission completed interrupt
D2 Timer 4 expired interrupt
D1 Timer 2 expired interrupt
D0 Timer 1 expired interrupt
0 Disabled, reset associated status bit
1 Enabled
Description
IRQEN selectively enables or disables various IRQ sources within POKEY. Disabling an IRQ source via
IRQEN also resets the associated status bit in IRQST and clears the interrupt if it is currently pending. The
exception is the transmission complete bit in IRQST (bit 3), which is not reset by writes to IRQEN. As long as
the serial output hardware is idle, setting bit 3 will immediately cause the serial output transmission interrupt
to fire.
Chapter 14 - Reference 290

Altirra Hardware Reference Manual Created by Avery Lee
IRQST [D20E, R]
Unit Address Description
POKEY IRQST IRQ status register
$D20E (Read Only)
Register layout
7 0
BRK KBD SIN SOT STR T4 T2 T1
D7 Break key interrupt
D6 Keyboard interrupt
D5 Serial input data ready interrupt
D4 Serial output data needed ready interrupt
D2 Timer 4 expired interrupt
D1 Timer 2 expired interrupt
D0 Timer 1 expired interrupt
0 Interrupt pending
1 Not active or interrupt disabled
D3 Serial output transmission completed interrupt
0 Serial transmission completed
1 Serial transmission in progress
Description
IRQST indicates when various interrupts are pending from POKEY. These interrupts remain active and trigger
at the end of the next instruction if the 6502 processor status bit I is cleared unless reset via IRQEN.
Most bits in IRQST are reset and stay low when the corresponding interrupt is cleared via IRQEN. The
exception is the serial output transmission bit (bit 3), which is not latched and always indicates the current
state.
Chapter 14 - Reference 291

Altirra Hardware Reference Manual Created by Avery Lee
SKCTL [D20F, W]
Unit Address Description
POKEY SKCTL Serial/keyboard control
$D20F (Write Only)
Register layout
7 0
FB Serial clk mode 2T FP KS KD
D7 Force break
0 Serial data is output normally
1 Serial output line is forced to 0
D6:D5 Serial clock mode
D4 Asynchronous receive mode
0 Disabled
1 Enabled – use timer 4 as input clock and reset timers 3+4 when waiting for start bit or a zero is received
D3 Two-tone mode
0 Disabled – serial data is output directly on bus
1 Enabled – audio channels 1 and 2 output on bus for a 1 and a 0, respectively
D2 Fast pot scan
0 Slow pot scan: counters increment every 114 cycles
1 Fast pot scan: counters increment every cycle
D1 Enable keyboard scan
D0 Enable keyboard debounce
0 Disabled
1 Enabled
00* Special case – initialize
Description
SKCTL controls a number of miscellaneous serial port, keyboard, and pot scan functions in POKEY. See
chapter 5.4, Serial port for more details.
Chapter 14 - Reference 292

Altirra Hardware Reference Manual Created by Avery Lee
SKSTAT [D20F, R]
Unit Address Description
POKEY SKSTAT Serial/keyboard status
$D20F (Read Only)
Register layout
7 0
SF SO KO SD SH KY SI 1
D7 Serial input frame error
0 Framing error detected in serial data
D6 Keyboard overrun error
0 Keyboard overrun detected: new key pressed while keyboard interrupt (IRQST bit 6) active
D5 Serial input overrun error
0 Serial input overrun detected: new serial input byte received while serial input interrupt (IRQST bit 5) active
D4 Serial input data line state
0 Serial input data line low
1 Serial input data line high
D3 Keyboard SHIFT key state
0 A SHIFT key is depressed
1 No SHIFT keys are depressed
D2 Key depressed state
0 A non-modifier key is currently depressed
1 No non-modifier keys are depressed
D1 Serial input shift register busy
0 Serial byte currently being received
Description
SKSTAT reports the status of several keyboard and serial port functions. It is primarily used to determine if an
error has occurred during serial reception. A write to SKRES resets the serial input frame, serial input
overrun, and keyboard overrun bits.
Chapter 14 - Reference 293

Altirra Hardware Reference Manual Created by Avery Lee
14.5 PIA registers
PORTB [D301, R/W]
Unit Address Description
PIA PORTB Port B data/direction register
$D301 (Read/Write)
Register layout
7 0
Direction bits Direction (PBCTL bit 2 = 0)
Jack 4 Jack 3 400/800 only
S Unused L2 L1 B K 1200XL only
S Unused B K 600XL/800XL
S Un. A C Bank B K 130XE only
D7:D0 Direction bits (PBCTL bit 2 = 0)
0 Input
1 Output
D0 Kernel ROM enable (XL/XE)
0 Map RAM at $D800-FFFF
1 Map Kernel ROM at $D800-FFFF
D1 BASIC ROM enable (XL/XE)
0 BASIC ROM enabled at $A000-BFFF
1 BASIC ROM disabled
D3:D2 Console LED 1 and 2 states (1200XL only)
0 LED on
1 LED off
D3:D2 Extended bank select (130XE only)
00 Map $10000-$13FFF as extended bank
01 Map $14000-$17FFF as extended bank
10 Map $18000-$1BFFF as extended bank
11 Map $1C000-$1FFFF as extended bank
D4 CPU extended memory access enable (130XE only)
D5 ANTIC extended memory access enable (130XE only)
0 Extended bank at $4000-7FFF
1 Primary bank at $4000-7FFF
D7 Self-test ROM enabled (XL/XE)
0 Map self-test ROM from $D000-$D7FF to $5000-57FF if kernel ROM is enabled
1 Disable self-test ROM
Description
PORTB originally accessed joystick ports 3 and 4 on the 800, but in later models with only two joystick ports it
was re-purposed for various other features.
Chapter 14 - Reference 294

Altirra Hardware Reference Manual Created by Avery Lee
PACTL [D302, R/W]
Unit Address Description
PIA PACTL Port A control register
$D302 (Read/Write)
Register layout
7 0
I1 I2 CA2 DIR CA1
D7 IRQA1 status (read only)
D6 IRQA2 status (read only)
0 No interrupt pending
1 Interrupt pending
D5:D3 CA2 (SIO motor line) I/O mode
000 Input: set IRQA2 on negative transition, interrupt disabled
001 Input: set IRQA2 on negative transition, interrupt enabled
010 Input: set IRQA2 on positive transition, interrupt disabled
011 Input: set IRQA2 on positive transition, interrupt enabled
100 Output: lower on PORTA read until CA1 transition
101 Output: pulse low for one cycle on PORTA read
110 Output: assert (lower) motor line
111 Output: negate (raise) motor line
D2 Data direction register enable
0 PORTA [D300] accesses data direction register
1 PORTA [D300] accesses input and output registers
D1 CA1 (SIO proceed line) edge detection mode
0 Set IRQA1 on negative transition
1 Set IRQA1 on positive transition
D0 CA1 (SIO proceed line) interrupt enable
0 IRQA1 disabled
1 IRQA1 enabled
Description
PACTL controls the operation of port A and the PORTA register on the PIA. There are many more options
supported by the PIA than documented here; consult [MOS76] for full details.
Chapter 14 - Reference 295

Altirra Hardware Reference Manual Created by Avery Lee
PBCTL [D303, R/W]
Unit Address Description
PIA PBCTL Port B control register
$D303 (Read/Write)
Register layout
7 0
I1 I2 CB2 DIR CB1
D7 IRQB1 status (read only)
D6 IRQB2 status (read only)
0 No interrupt pending
1 Interrupt pending
D5:D3 CB2 (SIO command line) I/O mode
000 Input: set IRQB2 on negative transition, interrupt disabled
001 Input: set IRQB2 on negative transition, interrupt enabled
010 Input: set IRQB2 on positive transition, interrupt disabled
011 Input: set IRQB2 on positive transition, interrupt enabled
100 Output: lower on PORTB write until CB1 transition
101 Output: pulse low for one cycle on PORTB write
110 Output: assert (lower) command line
111 Output: negate (raise) command line
D2 Data direction register enable
0 PORTB [D301] accesses data direction register
1 PORTB [D301] accesses input and output registers
D1 CA1 (SIO interrupt line) edge detection mode
0 Set IRQB1 on negative transition
1 Set IRQB1 on positive transition
D0 CA1 (SIO interrupt line) interrupt enable
0 IRQB1 disabled
1 IRQB1 enabled
Description
PBCTL controls the operation of port B and the PORTB register on the PIA. There are many more options
supported by the PIA than documented here; consult [MOS76] for full details.
Chapter 14 - Reference 296

Altirra Hardware Reference Manual Created by Avery Lee
14.6 ANTIC registers
DMACTL [D400, W]
Unit Address Description
ANTIC DMACTL DMA control
$D400 (Write Only)
Register layout
7 0
Ignored D5 D4 D3 D2 D1:D0
D1:D0 Playfield width
00 Disabled
01 Narrow playfield (128 color clocks)
10 Normal playfield (160 color clocks)
11 Wide playfield (192 color clocks)
D2 Missile DMA enable
0 Disabled (ignored if player DMA is enabled)
1 Enabled
D3 Player DMA enable
0 Disabled
1 Enabled
D4 Player/missile vertical resolution
0 Two-line resolution
1 One-line resolution
D5 Display list DMA enable
0 Disabled
1 Enabled
Description
The DMACTL register selectively enables DMA from ANTIC for various display items. For players and
missiles, DMA mode must also be enabled in GTIA for it to take effect; otherwise, ANTIC will run DMA cycles
but the object graphics will not be updated.
Missile DMA is enabled whenever player DMA is enabled, even if bit 2 is cleared. This is needed since GTIA
interprets bus data depending on the number of cycles since the first time HALT is asserted during horizontal
blank, and thus the timing of the missile DMA cycle determines which data is used for players.
Chapter 14 - Reference 297

Altirra Hardware Reference Manual Created by Avery Lee
CHACTL [D401, W]
Unit Address Description
ANTIC CHACTL Character control
$D401 (Write Only)
Register layout
7 0
Ignored D2 D1 D0
D0 Character blink enable
0 Disabled
1 Hide characters with name bit 7 set
D1 Character invert
0 Disabled
1 Invert image of characters with name bit 7 set
D2 Vertical reflect
0 Display rows 0 through 7 (normal)
1 Display rows 7 through 0 (reflected)
Description
CHACTL controls various features of 40 column text modes (ANTIC modes 2 and 3).
The blink bit does not actually cause characters to blink – it only selectively hides or shows some characters.
To actually blink text, the blink bit must be periodically toggled.
Vertical reflection is performed by inverting the bits of the row counter used to fetch character data. This
means that reflection may not work as expected for ANTIC mode 3 since the special case mapping for the
descendant rows is not affected.
Chapter 14 - Reference 298

Altirra Hardware Reference Manual Created by Avery Lee
DLISTL/DLISTH [D402-3, W]
Unit Address Description
ANTIC DLISTL/DLISTH Display list address
$D402/$D403 (Write Only)
Register layout
15 0
Display list address
Description
Set the current display list fetch address. Any writes to this register immediately redirect the display list, so it
is recommended that it only be changed during vertical blank.70
The display list hardware only has a ten-bit counter. Display lists may be located anywhere in memory, but
may not cross a 1K boundary without a jump instruction.71
[70] [ATA82] III.6
[71] [ATA82] III.5
Chapter 14 - Reference 299

Altirra Hardware Reference Manual Created by Avery Lee
Unit Address Description
ANTIC HSCROL Horizontal scroll offset
$D404 (Write Only)
Register layout
7 0
Ignored Horizontal scroll
D3:D0 Horizontal delay in color clocks
Description
This register adjusts the horizontal scroll amount for mode lines that have display list mode bit 4 set. Data
display can be delayed by up to 15 color clocks, scrolling the playfield to the right. This does not affect the
timing of the displayed window, so the left and right displayed margins for narrow and normal width playfields
are not affected.
Playfield fetch timing is delayed by one cycle for every two color clocks of scroll. Odd values have the same
fetch timing as even values, with the additional delay coming from an internal one-clock delay.
Odd delay values will give unexpected results for GTIA modes since the boundaries of the pixels are not
adjusted to match the fetch delay. This causes pairs of bits to be pulled from adjacent pixels to form the four-
bit values used for display.
Chapter 14 - Reference 300

Altirra Hardware Reference Manual Created by Avery Lee
VSCROL [D405, W]
Unit Address Description
ANTIC VSCROL Vertical scroll offset
$D405 (Write Only)
Register layout
7 0
Ignored Vertical scroll
D3:D0 Vertical delay in color clocks
Description
This register adjusts the vertical scroll amount for mode lines in a vertical scroll region. This includes any
mode line with display list instruction bit 5 set and the next mode line after that.
For the first mode line in a vertically scrolled region, the VSCROL register sets the index of the first row
displayed in the mode line. Increasing the scroll amount therefore shortens the first mode line by removing
scan lines from the top. For the last mode line in a vertically scrolled region, increasing scroll values extends
the last mode line by adding scan lines from the bottom.
It is possible to set VSCROL such that the row counter counts through values not normally valid for a mode
line. When this happens, the mode line is extended as the row counter counts up to 15 and wraps around to
0. For text modes, only the low three bits are used to fetch data and thus rows 8-15 display the same data as
rows 0-7.
VSCROL must be written by cycle 0 at the beginning of a mode line to affect the start of a scrolling region and
by cycle 109 to determine whether the next scan line is the last scan line of an scroll-ending mode line.
Errata
The hardware manual [ATA82] shows only the lowest three bits being significant for 8-line display modes, but
all four bits are significant in all display modes.
Chapter 14 - Reference 301

Altirra Hardware Reference Manual Created by Avery Lee
PMBASE [D407, W]
Unit Address Description
ANTIC PMBASE Player/missile base address
$D407 (Write Only)
Register layout
7 0
P/M base address Ignored
D7:D2 Bits 10-15 of P/M base address (two-line resolution)
D7:D3 Bits 11-15 of P/M base address (one-line resolution)
Description
PMBASE sets the base address for fetching player/missile graphics. For one-line resolution, only the top five
bits can be set, and therefore the P/M data must be aligned to a 2K boundary. For two-line resolution, the top
six bits are settable and 1K alignment is required.
Chapter 14 - Reference 302

Altirra Hardware Reference Manual Created by Avery Lee
CHBASE [D409, W]
Unit Address Description
ANTIC CHBASE Character data base address
$D409 (Write Only)
Register layout
7 0
Character data base address Ign.
D7:D1 Bits 9-15 of character data base address (ANTIC modes 2, 3, 4 and 5)
D7:D2 Bits 10-15 of character data base address (ANTIC modes 6 and 7)
Description
CHBASE sets the base address for fetching character data. Each character consists of an 8x8 block of
monochrome data and occupies eight contiguous bytes. For ANTIC modes 2-5, CHBASE points to 128
characters starting at a 1K boundary, and for ANTIC modes 6-7, 64 characters starting at a 512 byte
boundary.
Chapter 14 - Reference 303

Altirra Hardware Reference Manual Created by Avery Lee
WSYNC [D40A, W]
Unit Address Description
ANTIC WSYNC Wait for Horizontal Sync
$D40A (Write Only)
Register layout
7 0
Ignored
Description
A write to WSYNC causes the CPU to halt execution until the start of horizontal blank. One more cycle
passes before the CPU is halted until cycle 105 on the current scan line. If the next cycle is free, the CPU
executes the first cycle of the next instruction; otherwise, the next instruction starts at cycle 105. DMA
contention at cycles 105 and 106 may cause the CPU restart to be delayed until as late as cycle 107.
Because the 6502 can only service an interrupt at the end of an instruction, use of WSYNC can cause
excessively long delays in servicing interrupts. This is most serious with display list interrupts, where the
delay can cause DLIs to occur on the wrong scan line or to be missed entirely.
Chapter 14 - Reference 304

Altirra Hardware Reference Manual Created by Avery Lee
VCOUNT [D40B, R]
Unit Address Description
ANTIC VCOUNT Vertical count
$D40B (Read Only)
Register layout
7 0
Bits 1-8 of vertical position counter
Description
VCOUNT allows the vertical position counter to be read to two-line resolution. For NTSC, VCOUNT runs from
0 to 131; for PAL, it runs from 0 to 156.
The VCOUNT register increments on cycle 110 of a scan line.
Chapter 14 - Reference 305

Altirra Hardware Reference Manual Created by Avery Lee
NMIEN [D40E, W]
Unit Address Description
ANTIC NMIEN Non-maskable interrupt enable
$D40E (Write Only)
Register layout
7 0
DLI VBI Ignored
D7 Display list interrupt enable
0 Disabled
1 Enabled
D6 Vertical blank interrupt enable
0 Disabled
1 Enabled
Description
NMIEN enables and disables NMI interrupts issued by ANTIC. This is required since the 6502 itself does not
allow masking the NMI. Both interrupts are disabled automatically on system reset.72
The reset interrupt cannot be masked through NMIEN.73
[72] Hardware II.28
[73] Hardware III.1
Chapter 14 - Reference 306

Altirra Hardware Reference Manual Created by Avery Lee
NMIST [D40F, R]
Unit Address Description
ANTIC NMIST Non-maskable interrupt status
$D40F (Read Only)
Register layout
7 0
DLI VBI RES 1 1 1 1 1
D7 Display list interrupt status
0 Inactive
1 Active
D6 Vertical blank interrupt status
0 Inactive
1 Active
D5 System reset interrupt status (400/800 only)
0 Inactive
1 Active
Description
NMIST indicates which interrupt source in ANTIC triggered an NMI. The register layout is arranged so that a
single BIT instruction can be used to very quickly check the DLI and VBI sources. A write to NMIRES is then
used to clear status bits once the interrupt is serviced.
The DLI bit is automatically cleared when the VBI bit is set at scan line 248. Therefore, it is ordinarily never
necessary to strobe NMIRES for either interrupt, as testing the DLI bit is sufficient to distinguish the two.
On the XL/XE series, the system reset button is hooked up to the RESET line rather than ANTIC's RNMI line,
and thus the system reset NMI never occurs.
Chapter 14 - Reference 307

Altirra Hardware Reference Manual Created by Avery Lee
NMIRES [D40F, W]
Unit Address Description
ANTIC NMIRES Non-maskable interrupt reset
$D40F (Write Only)
Register layout
7 0
Ignored
Description
A write to NMIRES resets the interrupt status bits in the NMIST register. This is only necessary for the NMI
service routine to continue to identify the source of each interrupt – unlike for IRQs, the NMI is edge-triggered
and therefore NMIRES does not need to be written to clear the interrupt itself.
Typically, NMIRES is only written when handling the vertical blank interrupt and not display list interrupts,
because DLIs handlers are time critical. ANTIC assists this by automatically clearing the DLI bit in NMIST at
the start of scan line 248.
Chapter 14 - Reference 308

Altirra Hardware Reference Manual Created by Avery Lee
14.7 Register listing
Unit Address Name Desc Bits
GTIA D000 (R) M0PF
Missile/playfield collision
0
PF3 PF2 PF1 PF0
D001 (R) M1PF
D002 (R) M2PF
D003 (R) M3PF
D004 (R) P0PF
Player/playfield collision
D005 (R) P1PF
D006 (R) P2PF
D007 (R) P3PF
D008 (R) M0PL
Missile/player collision
P3 P2 P1 P0
D009 (R) M1PL
D00A (R) M2PL
D00B (R) M3PL
D00C (R) P0PL
Player/player collision
0
D00D (R) P1PL 0
P0D00E (R) P2PL 0 P1
D00F (R) P3PL 0 P2
D010 (R) TRIG0
Joystick triggers 0
T0
D011 (R) TRIG1 T1
D012 (R) TRIG2 T2
D013 (R) TRIG3 T3
D014 (R) PAL NTSC/PAL detect $01 for PAL, $0F for NTSC
D000 (W) HPOSP0 Player 0 position
Horizontal position in color clocks
D001 (W) HPOSP1 Player 1 position
D002 (W) HPOSP2 Player 2 position
D003 (W) HPOSP3 Player 3 position
D004 (W) HPOSM0 Missile 0 position
D005 (W) HPOSM1 Missile 1 position
D006 (W) HPOSM2 Missile 2 position
D007 (W) HPOSM3 Missile 3 position
D008 (W) SIZEP0 Player 0 size
Ignored
x0: Normal
01: Double
11: Quad
D009 (W) SIZEP1 Player 1 size
D00A (W) SIZEP2 Player 2 size
D00B (W) SIZEP3 Player 3 size
D00C (W) SIZEM Missile sizes M3 M2 M1 M0
D00D (W) GRAFP0
Player graphics latch Player graphic data
D00E (W) GRAFP1
D00F (W) GRAFP2
D010 (W) GRAFP3
D011 (W) GRAFM Missile graphics latch M3 M2 M1 M0
Chapter 14 - Reference 309

Altirra Hardware Reference Manual Created by Avery Lee
Unit Address Name Desc Bits
D012 (W) COLPM0
Player/missile colors
Hue Luminance Ign.
D013 (W) COLPM1
D014 (W) COLPM2
D015 (W) COLPM3
D016 (W) COLPF0
Playfield colors
D017 (W) COLPF1
D018 (W) COLPF2
D019 (W) COLPF3
D01A (W) COLBK Background color
D01B (W) PRIOR Priority control GTIA mode MC PL5 Priority mode
D01C (W) VDELAY Vertical delay P3 P2 P1 P0 M3 M2 M1 M0
D01D (W) GRACTL Graphics control Ignored LT P M
D01E (W) HITCLR Collision clear strobe Ignored
D01F
(R/W)
CONSOL Console switches 0 SPK OPT SEL STA
PBI D1FF (R) PDVI PBI device interrupt each 1 bit = device interrupt pending
D1FF (W) PDVS PBI device select $00 = none, single bit = select device
POKEY D200 (R) POT0
Paddle (pot) positions Paddle position (0-228)
D201 (R) POT1
D202 (R) POT2
D203 (R) POT3
D204 (R) POT4
D205 (R) POT5
D206 (R) POT6
D207 (R) POT7
D208 (R) ALLPOT Direct pot. read P7 P6 P5 P4 P3 P2 P1 P0
D209 (R) KBCODE Keyboard code CRL SHF Scan code
D200 (W) AUDF1
Audio channel frequency Period - 4 (8-bit)
Period - 7 (16-bit)
D202 (W) AUDF2
D204 (W) AUDF3
D206 (W) AUDF4
D201 (W) AUDC1
Audio channel control 5-bit 4-bit
noise Noise Vol.
only Volume
D203 (W) AUDC2
D205 (W) AUDC3
D207 (W) AUDC4
D208 (W) AUDCTL Audio control 9-bit Fast
1
Fast
31+2 3+4 Hi1 Hi2 15K
D209 (W) STIMER Start timer strobe Ignored
D20A (R) RANDOM Random number gen. Random number
D20A (W) SKRES Serial/keyboard reset Ignored
D20D (R) SERIN Serial input data Received serial data
D20D (W) SEROUT Serial output data Serial data to transmit
Chapter 14 - Reference 310

Altirra Hardware Reference Manual Created by Avery Lee
Unit Address Name Desc Bits
D20E (R)
D20E (W)
IRQST
IRQEN
IRQ status
IRQ enable Brk Key Sin Sout Scmp T#4 T#2 T#1
D20F (R) SKSTAT Serial/keyboard status Frm KOv SIOv SDir Shift KDwn SIBs 1
D20F (W) SKCTL Serial/keyboard control FBrk S.Clock Asyn 2Tn FPot KScn KDb
PIA D300
(R/W)
PORTA Port A data/direction Joystick 2 Joystick 1
D301
(R/W)
PORTB Port B data/direction STst CPU ANT ExtBank BAS OS
D302
(R/W)
PACTL Port A control IRQ1 IRQ2 CA2 (SIO motor) DDR CA1
(SIOInt)
D303
(R/W)
PBCTL Port B control IRQ1 IRQ2 CB2 (SIO cmd.) DDR CB1 (SIOPr)
ANTIC D400 (W) DMACTL DMA control Ignored DList 2Line Plyr Mssl PF Width
D401 (W) CHACTL Character control Ignored Blink Invert Refl.
D402 (W) DLISTL Display list addr low Display list address bits 7-0
D403 (W) DLISTH Display list addr high Display list address bits 15-8
D404 (W) HSCROL Horizontal scroll Ignored Horizontal scroll right
D405 (W) VSCROL Vertical scroll Ignored Vertical scroll down
D407 (W) PMBASE Player/missile base Player/missile base address bits 15-10
D409 (W) CHBASE Character set base Character set address bits 15-9 Ign.
D40A (W) WSYNC Wait for horizontal sync Ignored
D40B (R) VCOUNT Vertical count Vertical counter bits 8-1
D40E (W) NMIEN NMI enable DLI VBI Ignored
D40F (R) NMIST NMI status DLI VBI RES 1
D40F (W) NMIRES NMI reset strobe Ignored
Chapter 14 - Reference 311
Chapter 15
Bibliography

Altirra Hardware Reference Manual Created by Avery Lee
[6502Dec] Clark, Bruce, Decimal Mode, 2009. Retrieved on June 28, 2009 from
http://www.6502.org/tutorials/decimal_mode.html.
[AHS00] Atari, CGIA CO20577 (NTSC), 2000.
[AHS03] Atari, POKEY CO12294, 2003.
[AHS03a] Atari Historical Society, PAM Package, 2003. Retrieved on July 5, 2015 from
http://www.atarimuseum.com/ahs_archives/archives/archives-techdocs-5200.htm.
[AHS05] Atari, Sweet 16 OS supplement 3, .
[AHS99] Atari, ANTIC CO12296 (NTSC) Rev. D, 1999.
[AHS99a] Atari, GTIA CO14805 (NTSC), 1999.
[ATA82] Atari, Atari Home Computer System Hardware Manual, 1982.
[ATA87] Atari, Product Specification for XEP80 80 Column and Parallel Printer Board, 1987.
[ATAXL] Atari, Atari Home Computer System Operating System Manual, XL Addendum, .
[CHA85] Chadwick, Ian, Mapping the Atari, Revised Edition, 1985.
[CorvusGTI] Corvus Systems, Corvus Mass Storage Systems General Technical Information, 1984.
[CRA82] Crawford, Chris, De Re Atari, 1982.
[EYE86] Eyes, David and Lichty, Ron, Programming the 65816, 1986.
[Happy] HAPPY COMPUTERS, Inc., Happy 810 & 1050 Enhancement Warp Speed Software Rev. 7
User's Manual, 1986. Retrieved on January 30, 2017 from
http://www.atarimax.com/members/happy/users.pdf.
[IJO10] ijor, Flags on decimal mode on the NMOS 6502, 2010. Retrieved on July 5, 2015 from
http://www.atariage.com/forums/topic/163876-flags-on-decimal-mode-on-the-nmos-6502/.
[IllOpc] Offenga, Freddy, 6502 Undocumented Opcodes, 1999. Retrieved on May 5, 2015 from
http://www.ataripreservation.org/websites/freddy.offenga/illopc31.txt.
[LAN84] Lancaster, Don, Assembly Cookbook for the Apple II/IIe, 1984.
[MOS76] MOS Technology, MCS6500 Microcomputer Family Hardware Manual, 1976.
[MOS76a] MOS Technology, MCS6500 Microcomputer Family Programming Manual, 1976.
[MyIDE-II] Tucker, Steven, myide_ii_hardware_registers.txt, 2012. Retrieved on July 5, 2015 from
http://atarimax.com/flashcart/forum/viewtopic.php?f=17&t=1306.
[ObWrap] Anomie, Anomie's SNES OpenBus & Wrapping Doc, 2007. Retrieved on May 17, 2015 from
https://github.com/gilligan/snesdev/blob/master/docs/ob-wrap.txt.
[RamboXL] ICD, RAMBO XL Installation & Operations Manual, 1986. Retrieved on December 20, 2015 from
http://www.atarimania.com/documents/rambo_manual.pdf.
[RFC1071] Braden, R., Borman, D., and C. Partridge, Computing the Internet checksum, 1988. Retrieved on
July 18, 2015 from http://www.rfc-editor.org/info/rfc1071.
[TIVideoDec] Texas Instruments, TVP5020 NTSC/PAL Video Decoder Data Manual, 2000. Retrieved on July 5,
2015 from http://www.ti.com/general/docs/lit/getliterature.tsp?
baseLiteratureNumber=slas186&fileType=pdf.
[U1MB] Bartkowicz, Sebastian, Ultimate1MB Programmer's Reference, 2015. Retrieved on July 5, 2015
from http://spiflash.org/block/20.html.
[VBXE] T. Piórek, VideoBoard XE FX Core version 1.26 Programmer's Manual, 2013. Retrieved on July 5,
2015 from http://spiflash.org/block/15.html.
[VIC09] VICE team, Documentation for the NMOS 65xx/85xx Instruction Set, 2009. Retrieved on July 19,
2009 from http://vice-emu.sourceforge.net/plain/64doc.txt.
Chapter 15 - Bibliography 313
Appendix A
Polynomial Counters

Altirra Hardware Reference Manual Created by Avery Lee
POKEY's noise generators use a form of polynomial counter called a linear feedback shift register. This is a type
of pseudo-random number generator that is cheap to implement in hardware and generates a long sequence of
bits with a short shift register.
Feedback polynomials
A polynomial counter is composed of a shift register and a feedback network generating new bits to shift into that
register. The feedback network combines multiple bits at various taps on the shift register using an XOR or
XNOR function, usually two or four. This then causes the shift register to “count” through various states. The
sequence produced, however, is not in numerical order as it is for a binary counter.
The feedback network can be represented as a characteristic feedback polynomial composed of powers xi,
where each power represents a specific tap off the shift register. For instance, a polynomial for a 4-bit counter is
as follows:
x4 + x3 + 1
The “1” corresponds to the newly produced bit, whereas x3 is the third bit back and x4 is the fourth bit back. Also,
addition is modulo-2 here, or equivalent to XOR. The tap xN always exists for an N-bit counter, or else the top bit
would not contribute to sequence length. Thus, the following sequence is generated: 000100110101111.
As noted earlier, XNOR may be used instead of XOR, where XNOR is the inverted result of XOR. XNOR
produces an equivalent polynomial counter, except that the feedback and shift register states are inverted.
Lock-up state
A polynomial counter always has one state that is not generated by the counter sequence. This state is all
zeroes for an XOR-based counter and all ones for an XNOR-based counter. The feedback network produces the
same bit from this state. This called the lock-up state, because the counter will never advance from this state.
The presence of the lock-up state means that polynomial counters must have a reset mechanism to force at
least one bit of the non-lock-up polarity into the shift register. Only one bit is necessary since there is only one
lock-up state and reaching any of the other 2N-1 states is sufficient to re-enter the full cycle.
Generated sequence
Typically, the polynomial is chosen to produce a maximal-length sequence of 2N-1 bits for an N bit counter,
cycling through all possible states except one. The missing value is due to one state not being generated in the
sequence, the all zero state for XOR feedback. This means that the sequence has one fewer 0 bit than 1 bits.
The value of any N contiguous bits in the sequence is unique within the sequence.
The sequence length is of consequence when sampling the sequence as regular intervals, as POKEY does
when using the polynomial counters for noise generation. Sampling periods that have common factors with the
sequence length will reduce the effective sequence length. In particular, POKEY's 4-bit counter has a period of
15 = 5·3, and the 9-bit counter has a period 511 = 73·7.
A polynomial counter does not have to use a maximal-length sequence. Instead, it may use a polynomial which
causes the sequence to repeat with a shorter cycle using a subset of states, or additional logic to reset the
counter midway through the cycle. POKEY and GTIA contain counters with non-maximal sequence lengths of 28
and 114 from 5-bit and 7-bit counters, respectively. In this case, all of the non-lockup states that are not part of
the looping sequence will eventually lead into the loop.
Polynomial counter simulation
The polynomial for POKEY's 9-bit generator is:
x9 + x4 + 1
Appendix A - Polynomial Counters 315

Altirra Hardware Reference Manual Created by Avery Lee
It is possible to simulate the values produced by the RANDOM register, given one other pieces of information,
namely that it shifts right. Given this, the sequence can be generated by the following C code:
unsigned v = 0x80;
do {
printf("%02x\n", v & 0xff);
v = (v >> 1) + (((v << (9-1)) ^ (v << (4-1))) & 0x100);
} while(v != 0x80);
This produces the sequence in the order seen by the 6502, by XORing the bits at both taps together and shifting
it in on the left.
Alternate configuration
Running the feedback in the opposite direction, shifting bits out and XORing them in at each tap, allows for an
alternate method of simulation:
unsigned v = 1<<8;
do {
printf("%02x\n", v & 0xff);
v >>= 1;
if (v & 0x80)
v ^= (1 << (9+7)) + (1 << (4+7));
} while((v & (0x1ff << 8)) != 1);
This form is easier to simulate in software as the feedback is done via a scatter rather than gather operation.
However, while it produces the same sequence of bits, the shift register state is different, and so an extra 8 bits
of shift register are necessary to capture the same output values.
This is the same algorithm implemented in 6502 code:
lda #0
sta xrandom ;initialize random output
lda #1 ;initialize shift register bits 0-7
clc ;initialize shift register bit 8
loop:
ror ;shift
php ;save shift register bit 8
ror xrandom ;contains newly generated byte
plp ;restore shift register bit 8
bcc loop ;skip if 0 bit shifted out
eor #$08 ;xor in x^4 tap (x^9 tap done via carry)
bcs loop ;continue
Seeking to arbitrary positions
A shortcoming of the above algorithms is that they are limited to sequentially producing states. This is fine for
noise generation or building tables, but can be a hassle when random access by position is needed. Fortunately,
it is also possible to compute the shift register's state at any position in O(log2 N) time.
The alternate simulation algorithm works by storing base-2 polynomials in binary numbers, where each bit i
represents an element xi in a polynomial. That means the algorithm computes the following in base-2 polynomial
arithmetic:
xi mod (x9+x4+1)
xi,, in turn, can be represented as the product of powers of two, i.e. x0, x1, x2, x4, x8, etc. That leads to the
Appendix A - Polynomial Counters 316

Altirra Hardware Reference Manual Created by Avery Lee
following strategy:
•Precompute a table of x2^i mod M.
•Given a position P, multiply together the appropriate values of x2^i mod M for each bit i set in P to
determine the shift register state at position P.
•Run the shift register from that position to retrieve the desired output stream bits.
This is most useful with the 17-bit shift register (x17+x12+1), whose output sequence can be too impractically large
to precompute. The following C code generates the register values seen by RANDOM after exiting initialization
mode, with the 17-bit shift register enabled:
uint32_t powers[17];
uint32_t polymul(uint32_t x, uint32_t y, uint32_t base, uint32_t hibit) {
uint32_t accum = 0;
while(y) {
if (y & 1)
accum ^= x;
y >>= 1;
x <<= 1;
if (x & hibit)
x ^= base;
}
return accum;
}
uint32_t polyeval17(uint32_t idx, uint32_t initial_state) {
uint32_t x = initial_state;
for(int i=0; i<17; ++i) {
if (idx & 1)
x = polymul(x, powers[i], 0x21001, 0x20000);
idx >>= 1;
}
return x;
}
int main() {
// precompute powers of 2 mod polynomial
powers[0] = 2;
for(int i=1; i<17; ++i)
powers[i] = polymul(powers[i-1], powers[i-1], 0x21001, 0x20000);
// evaluate RANDOM at every possible position
for(int i=0; i<131071; ++i) {
uint32_t v = polyeval17((131071 - i + 4) % 131071, 0x1FFFF) << 8;
for(int j=0; j<8; ++j) {
v >>= 1;
if (v & 0x80)
Appendix A - Polynomial Counters 317

Altirra Hardware Reference Manual Created by Avery Lee
v ^= (1 << (17+7)) + (1 << (12+7));
}
printf("%02x\n", v & 0xff);
}
}
Appendix A - Polynomial Counters 318
Appendix B
Physical Disk Format

Altirra Hardware Reference Manual Created by Avery Lee
B.1 Raw geometry
Single density
A single density disk contains 40 tracks of 18 sectors with 128 bytes per sector, giving a total of 90KB of storage.
The tracks are spaced at 48 tracks per inch (tpi), so a more modern 80 track drive with 96tpi needs to double-
step to read and write a single density disk. Only the first (bottom) side is used.
Enhanced (medium) density
An enhanced or medium density disk contains 40 tracks of 26 sectors with 128 bytes per sector, giving 130KB of
storage. Track density is the same as for single density.
Double density
A double density disk contains 40 tracks of 18 sectors with 256 bytes per sector, giving 180KB of storage. Track
density is the same as for single density.
For compatibility with the OS boot routines, the first three sectors of a double-density disk – track 0, sector 1
through 3 – are exposed to the computer as 128 byte sectors. However, they are still encoded on the physical
disk as 256 byte sectors like the rest of the disk. The disk drive firmware extends the sector to 256 bytes on write
and discards the extra bytes on read. The 128 bytes used are at the beginning of the sector and the other 128
bytes are usually $00.
Track/sector number conversion
All disk formats use the same method to convert between the sector numbers used by the SIO disk protocol and
the track/sector numbers used on the physical disk: the sectors are numbered in sequential order starting at
track 0 and going up to track 39. For a single density disk, SIOsector = track*18 + sector.
For the XF551's DSDD format, SIO sectors 1-720 are on side 0 (bottom) and SIO sectors 721-1440 are on side
1 (top). The sectors are in reverse order on side 1, so SIO sectors 721, 722, 723... are on track 39 sector 18,
track 39 sector 17, track 39 sector 16, etc.
Index position
Neither the index mark in the track nor the index sensor is used. Tracks may start at any angular position on the
disk, and in particular sectors may lie across the index position. During formatting, tracks are laid out such that
there is skew between tracks and sector 1 lies at a different angular position on each track.
B.2 Bit encoding
Bit cell encoding
All data bits are encoded into a pair of bit cells before being written to disk. The first cell is the clock cell, used to
maintain synchronization of the decoder's bit cell clock, and the second cell is the data cell. A '1' bit in either cell
corresponds to a flux transition on disk, where the local magnetic field reverses, and detected on read as a
pulse; a '0' bit is the absence of flux transition and corresponding read pulse.
Bits are stored on disk in MSB-to-LSB order. No framing (start/stop) bits are used, so bit- and byte-level
synchronization is achieved through special synchronization bytes, and then maintained from then on for the
field being read. There are no requirements for bit or byte timing to be synchronized between fields.
Appendix B - Physical Disk Format 320

Altirra Hardware Reference Manual Created by Avery Lee
FM encoding (single density)
On single density disks, frequency modulation (FM) encoding is used. Each data bit is encoded as a pair of bit
cells, the first being a clock bit that is always 1, and the second being the data bit. The clock bit ensures that the
decoder sees enough clock transitions to be able to lock onto the bit cell timing used by the encoder. A bit cell is
4µs long at 288 RPM, giving approximately 52,000 bit cells per revolution, or ~3,250 raw data bytes per track.
For synchronization at the byte level, a special pattern of clock bits is used for data bytes that mark the
beginning of address and data fields. For these, some of the clock bits encoded as 0 instead of 1 (missing flux
transition), giving a pattern of $C7 instead of $FF.
Note that the decoder does not always validate the clock bits. They are checked in order to identify the special
mark bytes, but otherwise do not need to be set as long as enough 1 bits are present in both clock and data bit
cells to satisfy timing requirements. This is exploited by some copy protection schemes that omit clock bits within
the data field to encode a $C7 clock byte, allowing the data field of one sector to overlap the address field of
another to fit an otherwise impossible number of sectors on a track (36!).
MFM encoding (enhanced and double density)
The increased capacity of enhanced and double density formats is achieved with modified frequency modulation
(MFM) encoding, which reduces the density of flux transitions (1 bits) and uses tighter timing to cram in more bit
cells. Unlike FM, which always encodes a 1 bit in clock cells, MFM encodes a 0 in a clock cell if either of the two
adjacent data cells has a 1. This allows the bit cell to be halved to 2µs at 288 RPM, encoding ~104,100 bit cells
per revolution and ~6,500 raw data bytes per track.
Like FM, unusual clock bit patterns are used for synchronization, but the patterns are different. For MFM, a
sequence of three $A1 bytes is used prior to each DAM/IDAM, with a clock pattern of $0A. In some literature,
this is given as a combined shift pattern of $4489. The DAM/IDAM itself has a normal clock pattern.
B.3 Address field
The address field marks the beginning of a sector and includes the track, head, and sector numbers, as well as
the size of the sector. It is written once during formatting and then only read afterward.
For MFM, the address field starts with three synchronization bytes ($0A clock / $A1 data), followed by the IDAM
of $FE. For FM, it starts with the $FE IDAM with a $C7 clock. After that is the zero-based track number (0-39),
the zero-based head number, the one-based sector number (1-18 or 1-26), and the sector length (0=128, 1=256,
2=512, 3=1024), and finally two CRC bytes.
Only the two low bits of the sector length field are used. Bits 2-7 are ignored.
In FM, at least one $00 data byte must precede the IDAM for it to be recognized.
When searching for a sector, the FDC checks the track and sector numbers of each address field. A mismatch in
track number indicates that a seek error has occurred and causes the FDC to recalibrate and re-seek; a
mismatch in sector number causes the FDC to continue searching until it either finds the desired sector or times
out. The head number, however, is not checked by the FDC.
B.4 Data field
Following the address field is the data field for the sector, marked by a Data Address Mark (DAM). The DAM is
normally $FB, but can also be values $F8-FA to indicate a deleted or custom type sector. This is interpreted as
an error by Atari-compatible disk drives and used by some copy protection schemes since it cannot be written
through the standard disk protocol.
As with the address field, the DAM is preceded by three $A1 synchronization bytes in MFM, and preceded by
$00 and encoded with $C7 clock in FM. It is then immediately followed by the data bytes for the sector, and then
Appendix B - Physical Disk Format 321

Altirra Hardware Reference Manual Created by Avery Lee
two CRC bytes.
Data inversion
The original Atari 810 Disk Drive used a floppy drive controller that had an inverted data bus without a
compensating inversion between the FDC and the CPU. As a result, all data is written to and read from disk
inverted by this drive. This practice was maintained for compatibility reasons and continued with the MFM-
encoded enhanced- and double-density formats. However, synchronization, address, and CRC bytes are
generated by the FDC itself and therefore not inverted.
B.5 CRC algorithm
Both index marks and sector data are protected by a 16-bit CRC to reasonably detect data corruption. The CRC
has a polynomial of x16+x12+x5+1. The initial value of the CRC register is all ones ($FFFF), with the checksum
being shifted left as new bits are shifted in on the right, MSB first. The resulting CRC value is then stored or
checked against the CRC stored after the checked region, stored MSB-first.
The following C code computes the disk CRC-16:
uint16_t ComputeCRC(const uint8_t *buf, uint32_t len) {
uint16_t crc = 0xFFFF;
for(uint32_t i=0; i<len; ++i) {
uint8_t c = buf[i];
crc ^= (uint16_t)c << 8;
for(int j=0; j<8; ++j) {
uint16_t feedback = (crc & 0x8000) ? 0x1021 : 0;
crc += crc;
crc ^= feedback;
}
}
return crc;
}
FM format
For address fields in the FM format, the CRC includes the ID Address Mark (IDAM) byte of $FE, followed by the
track, head, sector, and sector size bytes, for a total of five bytes. The address CRC of the first boot sector (track
0, sector 1) is $D2C3.
For data fields in the FM format, the CRC includes the Data Address Mark (DAM) byte of $F8-FB, followed by
the 128 data bytes, for 129 bytes covered. These are the raw data bytes as seen by the FDC, so they are
inverted from the data bytes seen by the computer. The CRC for a sector of all $00s as seen by the computer
($FF on disk) is $A580.
MFM format
The basic method of CRC calculation and checking is the same as for MFM, but the bytes covered differ slightly
due to changes in synchronization. For both address and data fields, the three $A1 synchronization bytes before
the IDAM or DAM are also included in the CRC, giving a total of eight bytes checksummed for addresses and
132 for data fields. The CRCs for track 0, sector 1 containing all $00s from the computer's perspective are
$EA2D and $9A17.
Appendix B - Physical Disk Format 322
Appendix C
Quick Reference

Altirra Hardware Reference Manual Created by Avery Lee
C.1 CPU opcode table
Table 63 lists all official opcodes supported by the 6502, 65C02, and 65C816 CPUs. Opcodes highlighted in
green require a 65C02, while ones in blue require a 65C802/65C816.
The flags column shows flags affected or used by the instruction. 0/1 indicates that the flag is set or cleared; X
indicates that the flag is modified. S indicates that the flag is not modified, but the instruction changes behavior
depending on its value. For the M/X flags, this indicates a change in operand and operation size.
Name - #i dp abs long (dp) [dp] [a] (abs) rel r16 * Flags
dp ,X ,Y ,S ,X ,Y ,X ,X ,Y ,SY ,Y ,X N V M X D I Z C
ADC 69 65 75 63 6D 7D 79 6F 7F 72 61 71 73 67 77 X X S S X X
AND 29 25 35 23 2D 3D 39 2F 3F 32 21 31 33 27 37 X S X
ASL 0A 06 16 0E 1E X S X X
BCC 90 S
BCS B0 S
BEQ F0 S
BIT74 89 24 34 2C 3C X X X
BMI 30 S
BNE D0 S
BPL 10 S
BRA 80 82
BRK 00
BVC 50 S
BVS 70 S
CLC 18 0
CLD D8 0
CLI 58 0
CLV B8 0
CMP C9 C5 D5 C3 CD DD D9 CF DF D2 C1 D1 D3 C7 D7 X X S X X
COP 02
CPX E0 E4 EC X X S X X
CPY C0 C4 CC X X S X X
DEC 3A C6 D6 CE DE X S X
DEX CA X S X
DEY 88 X S X
EOR 49 45 55 43 4D 5D 59 4F 5F 52 41 51 53 47 57 X S X
INC 1A E6 F6 EE FE X S X
INX E8 X S X
INY C8 X S X
JMP 4C 5C DC 6C 7C
JSR 20 22 FC
LDA A9 A5 B5 A3 AD BD B9 AF BF B2 A1 B1 B3 A7 B7 X S X
LDX A2 A6 B6 AE BE X S X
LDY A0 A4 B4 AC BC X S X
LSR 4A 46 56 4E 5E 0 S X X
MVN 54 S
MVP 44 S
NOP EA
ORA 09 05 15 03 0D 1D 19 0F 1F 12 01 11 13 07 17 X S X
PEA F4
PEI D4
PER 62
PHA 48 S
PHB 8B
PHD 0B
PHK 4B
PHP 08
PHX DA S
PHY 5A S
[74] The BIT #imm instruction of the 65C02 differs from the other BIT opcodes: it does not set the N and V flags.
Appendix C - Quick Reference 324

Altirra Hardware Reference Manual Created by Avery Lee
Name - #i dp abs long (dp) [dp] [a] (abs) rel r16 * Flags
dp ,X ,Y ,S ,X ,Y ,X ,X ,Y ,SY ,Y ,X N V M X D I Z C
PLA 68 X S X
PLB AB
PLD 2B
PLP 28 XXXXXXXX
PLX FA X S X
PLY 7A X S X
REP C2 XXXXXXXX
ROL 2A 26 36 2E 3E X S X X
ROR 4A 46 56 4E 5E X S X X
RTI 40 XXXXXXXX
RTL 6B
RTS 60
SBC E9 E5 F5 E3 ED FD F9 EF FF F2 E1 F1 F3 E7 F7 X X S S X X
SEC 38 1
SED F8 1
SEI 78 1
SEP E2 XXXXXXXX
STA 85 95 83 8D 9D 99 8F 9F 92 81 91 93 87 97 S
STP DB
STX 86 96 8E S
STY 84 94 8C S
STZ 64 74 9C 9E S
TAX AA X S X
TAY A8 X S X
TCD 5B X X
TCS 1B
TDC 7B X X
TRB 14 1C S X
TSB 04 0C S X
TSC 3B
TSX BA S
TXA 8A X S X
TXS 9A
TYA 98 X S X
TYX BB X S X
WAI CB
WDM 42
XBA EB X X
XCE FB X X X
Table 63: CPU opcode table
Appendix C - Quick Reference 325
