BSP_Design_Strategy BSP Design Strategy
BSP_Design_Strategy BSP_Design_Strategy
User Manual: BSP_Design_Strategy
Open the PDF directly: View PDF ![]() .
.
Page Count: 37
Burroughs
BURROUGHS SCIENTIFIC PROCESSOR
PARALLELISM
-THE DESIGN STRATEGY FOR THE BSP
SSP
-~------------------
BURROUGHS
SCI
ENTI F
IC
PROCESSOR
AN
OVERVIEW
BSP
Objective
BSP
System
BSP
Key
Features
BSP
Organization
BSP
Characteristics
CONTENTS
Parallel
Processor
Conflict-free
Memory
Access
Vector
Performance
Performance
Optimization
File
Memory
Vectorizing
FORTRAN
Compiler
BSP
Design
BSP
Superiority
IN
PERSPECTIVE
The
BSP
-
ANew
Approach
Linear
Vectors
A
Different
Kind
of
Supercomputer
System
Manager
Overlapped
Instruction
Mode
Linear
Vector
Approach
to
Parallelism
Scalar
Operations
BSP
Approach
to
Scalars
The
BSP
Design
110
Subsystem
Computational
Envelope
File
Memory
Summary
PARALLEL
ARCHITECTURE
Parallelism
Templates
Arithmetic
Elements
Conflict-free
Memory
Access
Parallel
Processor
Control
Unit
Scalar
Processing
Unit
BSP
Software
Page
A-l
A-l
A-2
A-3
A-3
A-4
A-4
A-4
A-5
A-5
A-6
A-6
A-7
A-7
A-9
A-9
A-l0
A-ll
A-ll
A-ll
A-12
A-13
A-14
A-15
A-15
A-16
A-16
A-17
A-19
A-19
A-~H
A-22
A-25
A-27
A-29
A-30
A-iii
~~~
~~~~~~~~~~~~~~~~~~~~~BURROUGHSSCIENTIFIC
PROCESSOR
SSP
H U R H () U ( 1 H
.(~
;-;
C
lEN
T
IF!
C
PH
() CESS 0 R
BURROUGHS
SCIENTIFIC
PROCESSOR
PARALLEL
ARCHITECTURE
PARALLELISM
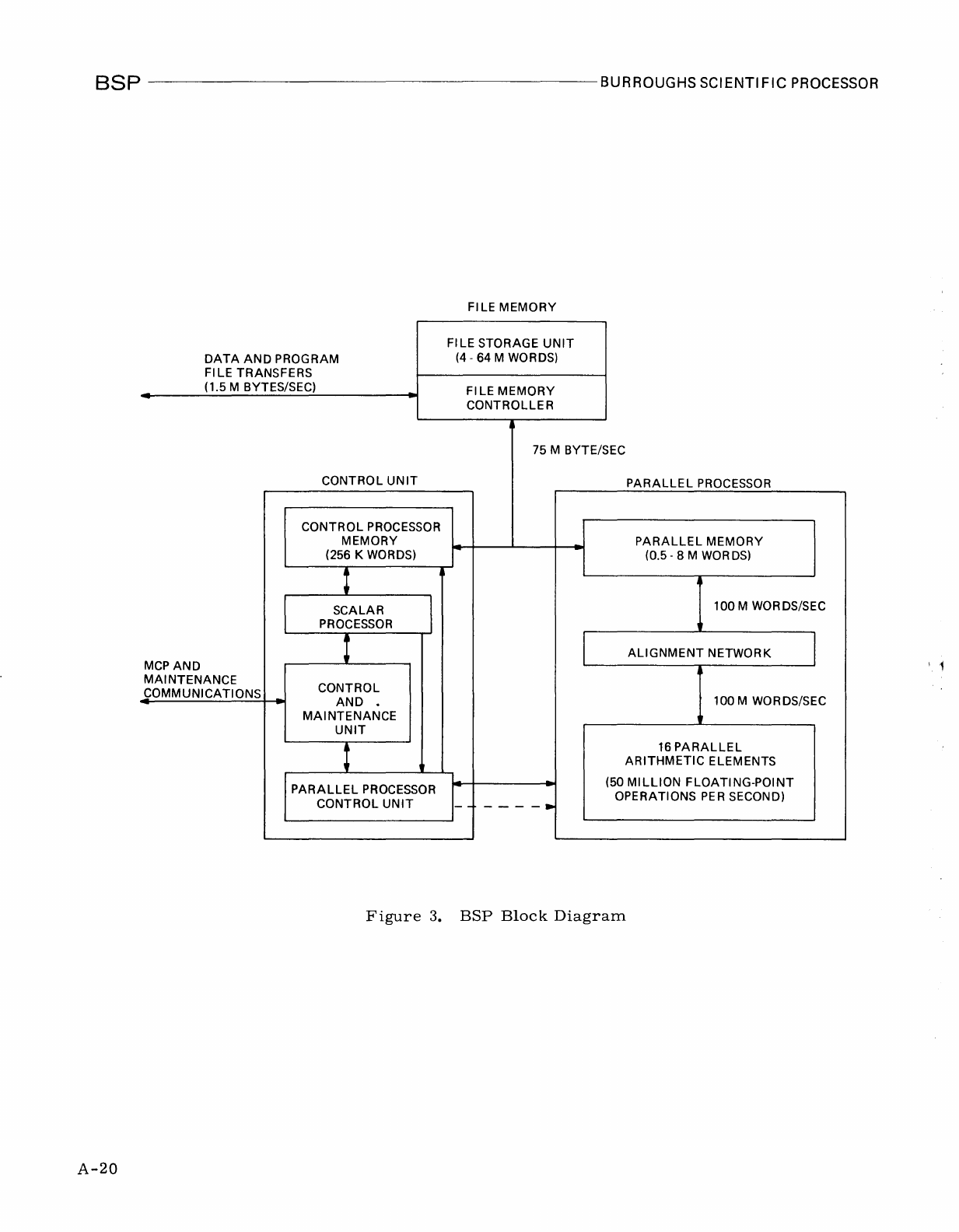
The
capability
of
the
Burroughs
Scientific
Processor
(BSP)
to
sustain
high
processing
rates
is
achieved
via
unique
parallel
designs.
The
BSP
comprises
multiple
processors
arranged
to
operate
in
parallel.
The
combined
potential
of
multiple
processors
is
brought
to
bear
on
large
computational
applications.
Figure
3
illustrates
the
overall
architecture
of
the
Burroughs
Scientific
Processor
(BSP).
Four
types
of
parallelism
are
featured
within
this
architecture;
that
is,
four
different
classes
of
computation
occur
simultaneously.
They
are:
1.
The
arithmetic
performed
by
the
16
arithmetic
elements
(AE's),
2.
Memory
fetches
and
stores,
and
the
transmission
of
data
between
memory
and
the
AE'
s,
3.
Indexing,
vector
length,
and
loop
control
computations
in
the
parallel
processor
control
unit,
4.
The
generation
of
linear
vector
operation
descriptions,
which
takes
place
in
the
scalar
processor
unit
(SPU).
The
BSP
is
analogous
to
an
efficiently
operated
business.
The
SPU
and
its
control
memory
are
the
executive
suite.
The
executive's
instructions
are
passed
to
the
administrative
clerks
in
the
parallel
processor
control
unit.
This
unit
then
does
the
bookkeeping
and
keeps
all
the
major
components
of
the
business
as
busy
and
as
efficient
as
possible.
A-19
~~p
~~~~~~~~~~~~~~~~~~~~-BURROUGHSSC'ENT'F'CPROCESSOR
A-20
DATA
AND
PROGRAM
FI
LE TRANSFERS
(1.5 M BYTES/SEC)
MCPAND
MAINTENANCE
COMMUNICATIONS
CONTROL
UNIT
CONTROL
PROCESSOR
MEMORY
(256 K WORDS)
SCALAR
PROCESSOR
CONTROL
AND
•
MAl
NTENANCE
UNIT
I
PARALLEL
PROCESSOR
CONTROL
UNIT
FILE
MEMORY
FI
LE STORAGE
UNIT
(4 -64 M WORDS)
FILE
MEMORY
CONTROLLER
75 M BYTE/SEC
--
-"
----ao
PARALLEL
PROCESSOR
PARALLEL
MEMORY
(0.5 - 8 M
WOR
OS)
100
M WORDS/SEC
ALIGNMENT
NETWORK
100 M WORDS/SEC
16
PARALLEL
ARITHMETIC
ELEMENTS
(50
MILLION
FLOATING-POINT
OPERATIONS
PER
SECOND)
Figure
3.
BSP
Block
Diagram
11
BSP
BlJRROU(;HS
SCIENTI
Fie
PROCESSOR
A
fallout
from
the
use
of
CCD'
s
is
excellent
reliability.
While
disc
errors
are
likely
to
be
multiple-bit
errors
l
CCD
errors
l
with
proper
partitioning
l
are
typically
single
bits
l
and
l
therefore
l
easily
corrected
and
bypassed
using
Hamming
codes.
The
BSP
file
memory
features
single-error
correctionl
double-error
de-
tection
(SEC
I
DED)
with
all
storage
and
data
paths.
The
maximum
size
file
memory
available
on
the
BSP
is
671
108
1
864
words
(nominally
64
million
words
l
where
a
"million"
is
220).
The
smallest
file
memory
size
is
4
million
words.
In
certain
circumstances
l
some
files
may
overflow
file
memory.
For
this
reason
l
an
additional
file
attribute
is
provided
l
allowing
the
user
to
specify
that
a
file
is
to
be
"chaptered"l
with
only
one
chapter
available
on
file
memory
at
any
given
time.
The
operating
system
automatically
transfers
chapters
between
the
file
memory
and
the
discs
on
the
system
manager
when
the
user
"releases"
a
given
chapter.
The
operating
system
assumes
that
such
files
are
sequential
and
it
double-buffers
the
chapters
l
unless
the
user
asks
for
a
chapter
out
of
sequence.
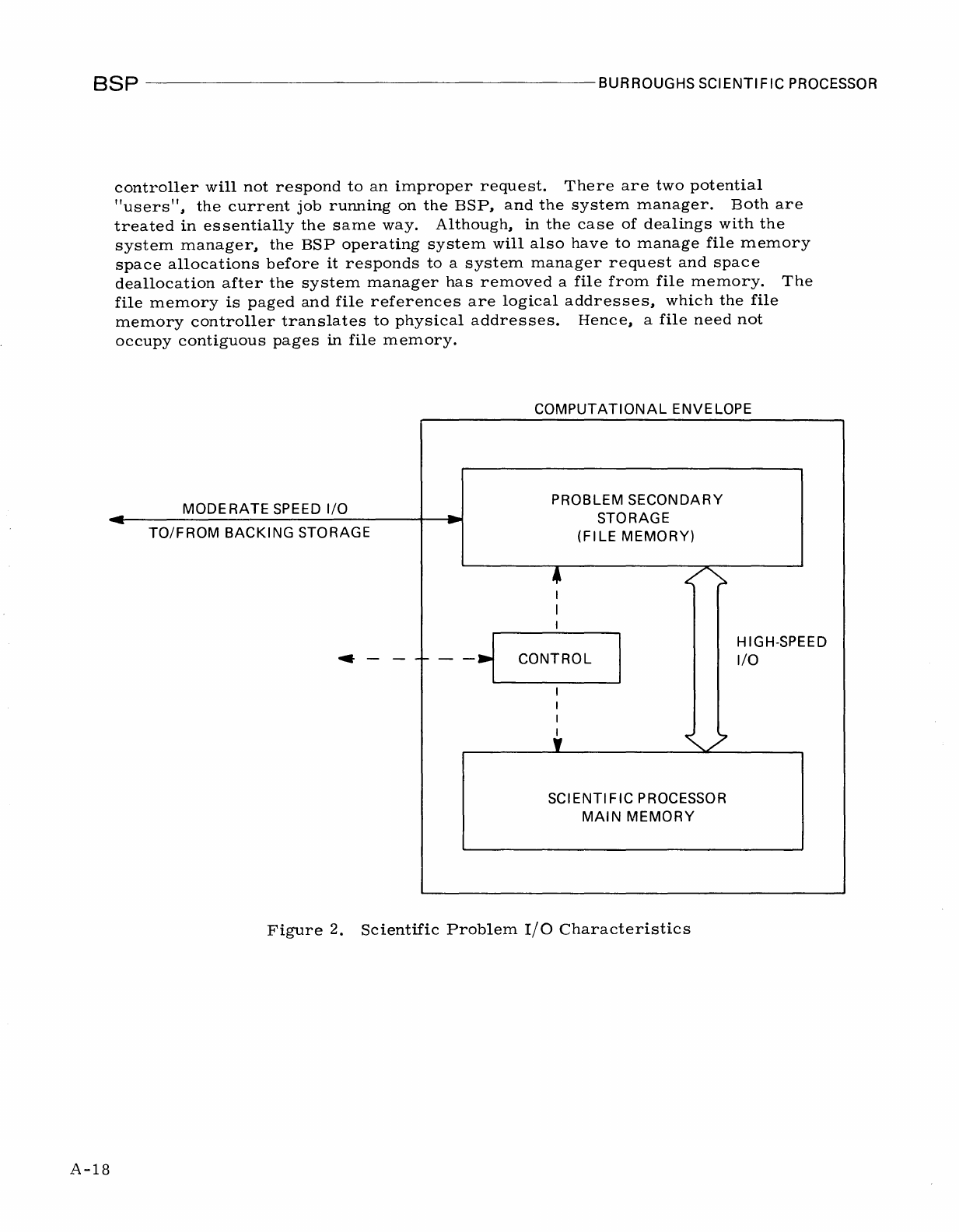
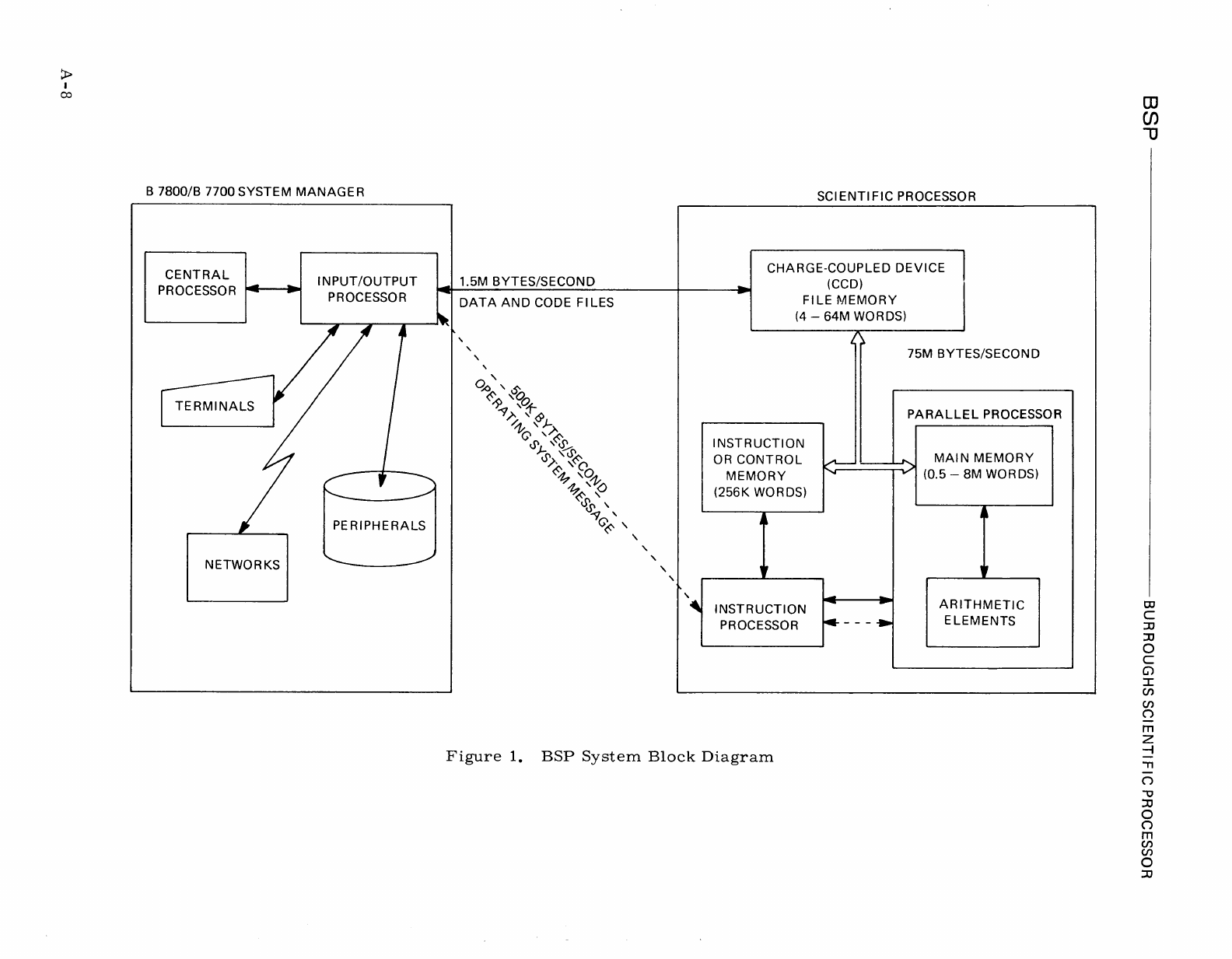
SUMMARY
Figure
1
shows
the
BSP
connected
to
a B
7800
or
a B
7700
system
manager
and
illustrates
that
the
BSP
is
the
realization
of
the
computational
envelope
(Figure
2).
The
high-speed
110
transfers
occur
inside
the
BSP
between
main
memory
and
file
memory.
New
jobs
are
staged
to
the
file
memorYI
and
output
from
finished
jobs
is
staged
to
the
system
manager
from
the
file
memory.
Figure
1
also
shows
some
specialized
communication
paths
between
the
BSP
and
the
system
manager.
These
are
used
for
operating
system
communications
l
for
performance
logging
l
for
hardware
error
loggingl
and
for
maintenance
and
diagnos-
tic
purposes.
The
connection
to
the
B
7700
or
B
7800
is
through
a
standard
110
port.
Hence
l
if
a B
7700
owner
wished
to
attach
a
BSP
I
he
would
install
the
BSP
I
connect
the
cables
to
a B
7700
110
processor
l
recompile
the
operating
system
with
the
BSP
option
set
l
and
go.
It
is
evident
from
the
way
in
which
the
ESP
is
connected
to
the
system
manager
l
and
the
arguments
upon
which
the
computational
envelope
approach
is
based
l
that
normal
job
flow
through
the
ESP
is
first-in/first-out.
However
l
priority
overrides
are
provided.
These
are
primarily
for
job
debug
purposes
l
because
the
system
manager
will
be
providing
the
text
editing
l
compiling
l
file
management
l
etc.
I
that
constitute
the
usual
time-sharing
load
on
a
scientific
processing
system.
The
file
memory
controller
is
the
key
to
fast
file
memory
response
l
user
controll
low
operating
system
overhead
l
and
file
security.
On
a
file-open
command
by
a
user
l
the
operating
system
in
the
BSP
is
invoked.
This
system
determines
the
user's
access
rights
to
the
file
and
then
sets
status
bits
in
the
file
memory
con-
troller
to
correspond
with
these
access
rights.
Subsequent
references
to
the
file
by
the
user
are
done
with
in-line
code
in
user
model
since
the
file
memory
A-17
~~p
~~~~~~~~~~~~~~~~~~~~~BURROUGHSSCIENTIFICPROCESSOR
A-IS
controller
will
not
respond
to
an
improper
request.
There
are
two
potential
"users"J
the
current
job
running
on
the
BSP
J
and
the
system
manager.
Both
are
treated
in
essentially
the
sarne
way.
AlthoughJ
in
the
case
of
dealings
with
the
system
manager
J
the
BSP
operating
system
will
also
have
to
manage
file
memory
space
allocations
before
it
responds
to
a
system
manager
request
and
space
deallocation
after
the
system
manager
has
removed
a
file
from
file
memory.
The
file
memory
is
paged
and
file
references
are
logical
addresses
J
which
the
file
memory
controller
translates
to
physical
addresses.
Hence
J a
file
need
not
occupy
contiguous
pages
in
file
memory.
-
-MODE RATE SPEED I/O -
-
TO/FROM BACKING STORAGE
. -
--
f-
-
--1
COMPUTATIONAL ENVELOPE
PROBLEM SECONDARY
STORAGE
(FI
LE
MEMORY)
.-
I
I
I
CONTROL
I
I
I
I
,
SCIENTIFIC PROCESSOR
MAIN
MEMORY
HIGH-SPEED
I/O
Figure
2.
Scientific
Problem
I/O
Characteristics
BSP
-
-----------------~--------
--------------------------
BUR R 0 U G
HS
SC
I E
NT
I
Fie
P R OC E
SSO
R
processed
with
reasonable
efficiency.
The
idea
is
that
a
conversion
may
be
done
in
manageable
stages"
with
useful
effect
for
one's
efforts
at
each
stage.
In
summary"
the
BSP
approach
was
to
design
a
more
general
vector
processor"
and
to
forego
the
very
fast
scalar
hardware.
Is
the
science
of
parallelism
too
young
for
such
a
design?
No
one
can
say
for
sure.
But
the
next
few
years
should
be
revealing.
THE
BSP
DESIGN
The
major
BSP
design
elements
include
the
system
manager"
110
subsystem"
parallel
main
memory"
arithmetic
elements"
and
scalar
processor"
parallel
processor
control"
and
the
control
and
maintenance
processor.
Also
included
are
BSP
software"
job
flow"
and
the
various
user
interfaces.
I/O
Subsystem
In
scientific
computations"
the
dominant
I/O
patterns
differ
radically
from
those
in
the
business
data
processing
arena.
With
business
data
processing"
small
numbers
of
operations
are
performed
on
a
very
large
data
base.
Also"
the
amount
of
main
memory
required
to
efficiently
process
a
business
data
job
is
relatively
small.
Hence"
in
business
data
processing"
I/O
becomes
a
bottleneck"
because
of
the
limited
number
of
operations
performed
on
data
while
it
resides
in
main
memory.
But"
short
of
placing
the
entire
database
in
Inain
rneTIlory" a
given
job
does
not
demand
too
much
memory
to
execute
with
adequate
efficiency.
This
is
an
ideal
environment
for
fostering
multiprogramming.
Many
problems
may
reside
in
main
memory
at
once.
A
few
will
be
in
an
active
state;
the
rest
will
be
waiting
in
I/O.
The
situation
is
quite
different
in
the
case
of
scientific
computations.
A
given
job
usually
requires
a
large
amount
of
memory
before
it
can
execute
efficiently.
With
present
processor
speeds
and
memory
sizes"
the
larger
bread-and-butter
jobs
execute
best
if
each
one
has
main
memory
to
itself.
In
the
case
of
many
scientific
jobs"
some
of
the
data
on
secondary
storage
is
best
regarded
as
an
overflow
of
main
memory
-
this
data
is
what
would
not
fit
in
main
memory"
but
the
programmer
really
wishes
it
were
there.
Hence"
this
overflow
data
is
quite
tightly
coupled
to
the
processing
of
data
in
TIlain
nlenlory"
and
the
programmer
may
want
to
exercise
a
great
degree
of
control
over
the
I/O
process.
Compare
such
a
situation
with
business
data
processing.
In
business
data
process-
ing"
the
programmer
is
delighted
to
have
sophisticated
operating
systems
doLYlg
his
I/O
for
him.
And
he
is
not
concerned
if
the
operating
system
is
trying
to
optimize
110
for
all
the
jobs
in
the
mix.
The
scientific
programmer
resents
such
a
situation.
He
wants
as
much
memory
as
he
can
get"
and
then
he
wants
direct
control
over
I/O
whenever
feasible.
For
this
reason"
and
due
to
details
of
particular
hardware
sys-
tems"
many
scientific
programmers
have
reported
spending
the
bulk
of
their
pro-
gramming
effort
trying
to
optimize
1/
O.
A-15
~~p
~~~~~~~~~~~~~~~~~~~~BURROUGHSSCIENTIFICPROCESSOR
A-16
Such
a
state
of
affairs
is
unfortunate~
because
the
overall
flow
of
the
high-speed
I/O
in
most
scientific
problems
is
very
simple.
If
the
scientific
programmer
were
not
simultaneously
battling
an
operating
system~
as
well
as
often
inadequate
I/O
devices~
he
could
describe
his
I/O
needs
with
a
few
simple
statements.
In
contrast
with
these
difficulties~
the
scientific
programmer
has
certain
advantages
which
are
irrelevant
to
the
commercial
programmer.
For
example"
his
file
sizes
are
relatively
small.
Of
course~
immense
file
sizes
may
be
a
consideration
in
both
cases
for
large
problems.
In
general~
however~
scientific
problems
require
much
smaller
files.
Also~
the
scientific
problem
performs
more
operations
on
each
data
word
it
retrieves
from
secondary
storage.
Further~
the
scientific
problem
programmer
can
typically
state
the
flow
of
1/
O.
That
is~
the
high-speed
I/O
flow
is
not
usually
data-dependent.
In
other
words~
efficient
double-buffering
I/O
schemes
are
normally
applicable.
computational
Envelope
How
did
all
this
affect
BSP
I/O
design?
The
BSP
design
is
based
on
the
premise
that
the
high
-speed
I/O
and
storage
requirements
be
specified
in
what
is
called
the
computational
envelope.
The
performance
of
the
secondary
I/O
subsystem
is
de-
signed
to
be
sufficient
to
support
the
processor
and
main
memory.
This
performance
is
completely
under
user
control.
Finally~
for
simplicity~
a
single
1/
0
device~
rather
than
a
hierarchy~
is
used
for
this
secondary
storage
system.
(See
Figure
2.
)
Although
the
scientific
problem
program
makes
more
extensive
use
of
I/O
data
than
does
the
business
data
program~
the
speed
of
present
supercomputers
is
so
great
that
no
conventional
I/O
device
can
support
them.
Also~
the
access
times
associated
with
conventional
devices
are
much
too
long.
Because
access
time
is
a
discontinuity
that
must
be
smoothed
in
I/O
opera
tions~
slow
access
times
imply
large
I/O
buffers.
If~
at
the
same
time~
the
transfer
rate
must
be
increased~
then
the
buffers
must
be
still
larger.
For
many
problems
simulated
in
designing
the
BSP~
cache
buffer
sizes
would
have
approached
half
a
million
words~
if
disc
technology
were
used
for
the
secondary
storage.
File
Memory
Hence~
the
BSP
secondary
storage~
called
file
memory~
is
based
on
semiconductor
technology
-
64-bit
charge-coupled
device
(CCD)
technology~
to
be
specific.
The
results
are
average
latencies
well
under
one
millisecond
and
sustainable
transfer
rates
over
60
megabytes
per
second.
Buffer
sizes
are
reasonable
and
optimum
performance
is
attained
with
simple
standard
FORTRAN
statements.
In
other
words~
straightforward
programming
gets
all
the
performance
there
is
to
get~
and
this
performance
is
adequate
to
the
task.
I
.~
I
SSP
BURROUGHS
SCIENTIFIC
PROCESSOR
The
BSP's
memory
system
handles
problem
2.
The
solution
to
problem
3
may
be
inferred
from
the
reference
already
made
to
the
very
high
level
instruction
set
in
the
BSP.
This
same
instruction
set
is
part
of
the
solution
to
problem
4.
The
needed
high
system
utilization
rate
implied
by
problem
1
is
gained
in
part
by
the
parallel
processor
control
unit,
which
is
described
later.
And
the
BSP
does
take
advantage
of
the
emerging
science
of
parallelism
to
help
it
gain
an
unusual
speed
on
linear
recurrences.
Due
to
what
has
become
known
as
the
"scalar
problem",
there
is
a
substantial
difficulty
implicit
in
the
simultaneous
solution
to
problems
1,
4,
and
6.
The
problem
is
easily
described,
but
difficult
to
resolve.
For
example,
imagine
a
linear
vector
processor
that
could
process
vectors
at
infinite
speed,
but
could
process
scalars
no
faster
than
one
operation
every
microsecond.
Then,
if
the
total
problem
comprised
90%
vector
and
100/0
scalar
processing,
the
vectors
would
be
done
in
no
time
at
all,
but
the
scalars
would
be
done
one
operation
per
micro-
second.
Because
only
10%
of
the
problem
would
be
scalars"
one
operation
per
microsecond
would
be
divided
by
O.
1
to
obtain
an
overall
speed
of
10
operations
per
microsecond
on
the
example
problem.
This
is
not
especially
fast
because
users
now
want
at
least
20
floating-point
opera-
tions
per
microsecond.
Yet
the
example
is
not
unreasonable,
because
many
vector
machines"
with
maximum
speeds
over
50
floating-point
operations
per
microsecond,
have
a
difficult
time
sustaining
10
floating-point
operations
per
microsecond.
Scalar
Operations
Before
discussing
potential
solutions
to
the
problem
of
how
to
do
scalars
fast"
it
is
beneficial
to
first
explain
what
a
scalar
operation
entails.
This,
however,
is
no
simple
task.
First
of
all,
some
apparent
scalars
are
not
evident.
For
example,
the
memory
indexing
hardware
on
most
vector
computers
fetches
the
entire
linear
vector,
based
only
on
some
simple
information
such
as
start
of
vector,
address
difference
between
vector
elements,
and
length
of
vector.
Similarly,
the
execution
of
the
vector
operation
is
the
same
as
executing
an
inner
loop
of
a
program.
This
means
that
many
indexing
operations,
and
much
of
the
loop
overhead
present
in
an
ordinary
scalar
machine,
are
eliminated
as
a
result
of
the
basic
idea
of
the
linear
vector
processor.
But
certainly,
some
work
rernains,
for
exarnple,
generation
of
the
simple
vector
descriptors
referred
to
previously.
Is
this
a
sequence
of
scalar
operations?
Per-
haps
it
is.
On
some
vector
machines,
nothing
else
can
happen
while
a
vector
is
processed.
The
instruction
processor
can
be
busy
retrieving
a
description
of
the
neAi:
vector
operation.,
vT/hile
the
present
vector
operation
is
executing.
On
the
BSP,
the
SPU
can
describe
and
queue
a
sequence
of
vector
operations,
while
a
given
vector
operation
executes.
Vector
setup
operations
are
countable
scalars
on
some
machines,
while
on
other
machines,
setups
are
counted
only
if
they
can
not
be
over-
lapped
with
a
vector
operation
already
executing.
A-13
~~p
~~~~~~~~~~~~~~~~~~~~~BURROUGHSSCIENTIFICPROCESSOR
A-14
There
are
other
situations
in
which
machines
are
difficult
to
compare
directly.
For
example
l
on
the
BSP
the
DO
loop:
DO
I =
21
N
A(I)
=
C(I)
~:~
A(I-l)
+ B
(I)
END
DO
is
executed
in
parallel
l
with
a
maximum
speed
well
over
10
operations
per
micro-
second.
On
other
vector
machines
l
this
common
construct
must
be
executed
as
a
scalar
sequence.
And
l
if
it
is
to
execute
rapidlYI
the
vector
machine
must
also
contain
a
very
fast
scalar
processor.
BSP
Approach
to
Scalars
This
is
where
the
BSP
parts
company
with
the
other
recent
vector
machines.
To
solve
this
recurrence
l
and
some
other
problems
J
conventional
wisdom
J
at
presentJ
says
a
fast
scalar
processor
must
be
included
in
the
design.
But
there
are
three
major
problems
with
this
viewpoint.
The
first
is
that
the
fast
scalar
processor
may
be
a
high
cost
item.
The
second
problem
is
more
insidious
J
but
probably
more
severe.
To
the
extent
that
the
compiler
must
choose
between
the
use
of
the
scalar
hardware
and
vector
hardware
J
the
compiler
has
the
job
of
compiling
to
two
machines.
This
is
probably
sufficiently
difficult
that
the
compiler
will
be
unable
to
generate
object
code
for
all
the
parallelism
it
has
found.
For
example
l
if
the
scalar
code
is
intimately
dependent
on
the
vector
code
J
or
vice
versa
J
either
the
hardware
must
have
extremely
clever
synchronizing
mechanisms
to
tie
the
processors
together
J
or
the
compiler
must
decide
that
some
mixed
code
will
arbitrarily
be
categoriz
ed
as
all
being
of
one
type.
The
third
problem
is
also
insidious
J
and
possiblYJ
the
most
costly.
This
problem
is
that
the
arbitrary
inclusion
of
a
fast
scalar
processor
J
to
solve
a
problem
in
an
ad
hoc
waYJ
almost
guarantees
that
a
successor
machine
from
the
same
manu-
facturer
will
require
a
substantial
reconversion
effort.
The
successor
machine
is
not
likely
to
retain
the
structure
of
its
predecessor.
For
these
reasons
l
although
the
BSP
FORTRAN
compiler
will
use
the
SPU
for
selected
scalar
operations
J
the
ESP
compiler
is
likely
to
treat
a
tloating-point
scalar
as
a
vector
of
length
one
-
or
to
treat
a
sequence
of
floating-point
scalars
as
a
non-
linear
vector
operation
sequence.
This
enables
the
ESP
to
forego
the
mixed
blessing
of
the
ultra-fast
scalar
unit.
It
allows
the
compiler
to
concentrate
on
capitalizing
on
detected
parallelism.
And
it
guarantees
upward
compatibility
with
a
successor
machine
l
recompilation
being
the
maximum
conversion
penalty.
This
approach
also
permits
a
smooth
initial
conversion
to
the
ESP.
In
the
beginningJ
a
conversion
may
leave
an
undesirable
amount
of
scalars.
Eut
l
with
uniform
treat-
ment
of
operands
J a
scalar
does
not
have
to
be
made
part
of
a
vector
of
length
100
to
be
processed
efficiently.
If
it
becomes
part
of
a
vector
of
length
3J
then
it
is
processed
three
times
as
fast
as
before.
Vectors
of
length
on
the
order
of
10
are
(",:,
!
BSP
BURROUGHS
SCIENTIFIC
PROCESSOR
A
DIFFERENT
KIND
OF
SUPERCOMPUTER
So
far,
this
section
has
attempted
to
explain
the
basic
rationale
behind
the
current
crop
of
supercomputers,
namely,
the
linear
vector.
And,
further,
because
of
this
basic
rationale,
the
use
of
parallel
arithmetic
elements
in
the
BSP
and
in
the
ILLIAC
IV
does
not
cause
them
to
be
fundamentally
very
different
from
the
pipeline-
based
supercomputers.
However,
one
important
difference
has
been
identified,
that
is,
from
the
beginning,
the
BSP
was
intended
to
be
paired
with
another
processor,
namely,
the
Burroughs
B
7700/B
7800.
System
Manager
In
this
respect,
the
BSP
is
somewhat
akin
to
the
IBM
3838
signal
data
processor.
The
IBM
3838,
however,
only
executes
functions
or
subroutines
passed
to
it
by
its
manager,
whereas
the
BSP
executes
either entire
programs
or
substantial
portions
of
programs.
Thus,
the
prime
motivation
for
attaching
an
IBM
3838
to
its
manager
is
to
enhance
the
power
of
the
manager
by
off-loading.
The
basic
motivation
for
attaching
the
BSP
to
a
system
manager,
on
the
other
hand,
is
to
free
the
BSP
for
concentrating
on
processing
large
computational
problems.
A
second
motivation
is
to
create
a
total
system
that
features
application
and
throughput
capabilities
not
economically
feasible
with
a
single
specialized
processor.
Overlapped
Instruction
Mode
The
BSP
differs
from
its
supercomputer
alternatives
in
another
important
respect.
Its
instruction
processor
is
loosely
coupled
to
the
parallel
arithmetic
elements.
The
approach
is
a
generalizetion
of
the
overlapped
instruction
execution
mode
in
ILLIAC
IV.
ILLIAC
IV
runs
more
than
twice
as
fast
in
the
overlapped
mode
than
in
a
nonoverlapped
mode.
In
order
to
achieve
this
overlap,
the
BSP
has
a
queue
between
the
instruction
processor
and
the
unit
that
drives
the
arithmetic
elements.
The
queue
is
comparable
to
the
ILLIAC
IV
implementation.
In
contrast,
however,
it
contains
hardware
fea-
tures
that
check
for
out-of-bound
array
references
and
optimize
the
choice
between
inner
and
outer
FORTRAN
DO
loops.
The
latter
feature
facilitates
such
functions
as
the
Fast
Fourier
Transform
(FFT),
which
has
an
inner
loop
whose
length
is
de-
creasing,
while
the
next
outer
loop's
length
is
increasing.
In
the
ESP,
this
loop
length
optimization
maintains
a
256-point
(or
larger)
FFT
running
at
over
75%
of
maximum
machine
speed.
This
is
because
all
vectors
will
be
of
length
16
or
more
(and
hence
efficient
on
16
AE's),
even
though
the
programmer
wrote
a
structure
that
implied
vector
lengths
of
8,
4,
2,
and
1
in
the
final
FFT
stages.
The
BSP's
ability
to
run
fully
overlapped
surpasses
the
ILLIAC
IV's
ability
to
run
fully
overlapped.
Whereas
the
ILLIAC
IV's
instruction
processor
must
call
on
the
parallel
section
for
instruction
storage
and
for
some
arithmetic
operations,
the
BSP's
instruction
processor,
called
the
scalar
processing
unit
(SPU),
has
full
arithmetic
capability.
The
SPU
is
also
equipped
with
local
memory
called
control
A-I1
~~p
~~~~~~~~~~~~~~~~~~~~~BURROUGHSSCIENTIFICPROCESSOR
A-12
memory
(CM),
which
is
used
for
storage
of
indexing
parameters,
and
vector
descriptors.
In
total,
these
features
further
the
overlap
implementation
between
vector
instruction
processing
and
vector
instruction
execution
introduced
with
the
ILLIAC
IV.
Linear
Vector
Approach
to
Parallelism
The
last
basic
difference
between
the
ESP
and
supercomputer
alternatives
is
perhaps
the
most
controversial.
It
stems
from
the
ESP's
timing
in
the
evolution
of
linear
vector-based
supercomputers.
In
designing
the
ESP,
some
experience
had
been
accumulated
relative
to
the
ways
in
which
the
linear
vector
approach
to
parallelism
could
be
applied
to
real
world
problems.
In
this
respect,
it
is
not
unreasonable
to
assert
that
the
ESP
is
the
forerunner
of
a
second
generation
of
supercomputers.
What
substantiation
is
there
for
this
rather
strong
assertion?
The
following
is
a
list
of
some
ideas
or
problems
that
were
understood
when
the
ESP
design
started:
1.
Maximum
speed
is
not
nearly
as
important
as
sustainable
speed.
2.
A
one-dimensional
memory
-
one
that
is
efficient
only
for
linear
vectors
whose
elements
are
packed
adjacent
to
one
another
-
is
not
sufficiently
general.
3.
Assembly
language
level
programming
is
almost
incompatible
with
linear
vector
programming.
Even
the
set
of
FORTRAN
primitives
cannot
directly
express
many
simple
linear
vector
constructs.
If
the
programmer
is
to
think
effectively
about
his
problem
at
the
linear
vector
level,
he
must
be
insulated
from
concern
with
machine
details.
4.
It
is
possible
to
construct
FORTRAN
program
analyzers
which
find
a
large
percentage
of
the
intrinsic
parallelism
in
programs.
How-
ever,
if
the
target
machine
structure
is
not
simple
and
general
at
a
high
level,
an
analyzer
cannot
create
useful
object
code
from
the
parallelism
it
has
found.
5.
Although
the
use
of
parallelism
still
has
many
vestiges
of
black
art
practice,
a
science
is
beginning
to
emerge.
In
particular,
linear
recurrence
relations
are
now
known
to
be
susceptible
to
parallelism.
6.
Conversion
to
a
linear
vector
machine
should
be
accomplished
once.
Any
new
design
should
consider
the
future,
so
the
user
will
not
confront
difficulties
converting
to
a
successor
machine.
\ I
BSP
--~--------------~--------
BU
R ROUG
HS
SCI
ENTI F I CPR OCESSO R
BURROUGHS
SCIENTIFIC
PROCESSOR
IN
PERSPECTIVE
THE
BSP
- A
NEW
APPROACH
Early
in
1973,
Burroughs
assembled
a
select
team
to
design
a
commercial
super-
computer.
In
1977,
the
team's
efforts
resulted
in
the
Burroughs
Scientific
Processor
(BSP)
- a
product
that
presents
a
new
approach
to
large-scale
computational
proc-
essing.
This
section
places
the
ESP
in
perspective,
discusses
its
more
interesting
features,
and
describes
various
design
trade-offs.
The
BSP
uses
a
large-scale
Burroughs
B
7700/B
7800
general-purpose
computer
as
a
system
manager.
As
a
result,
the
global
structure
of
the
BSP
itself
is
simple.
It
consists
of
an
instruction
processor,
a
set
of
parallel
arithmetic
elements,
a
main
memory,
an
instruction
or
control
memory,
and
a
single
1/0
device
(Figure
1).
This
110
device
is
called
file
memory.
It
is
controlled
by
the
BSP's
instruction
processor.
It
functions
as
a
high-speed
110
device
for
programs
running
on
the
BSP
and
as
a
staging
point
for
lower-speed
110
going
to
or
coming
from
the
system
manager.
The
BSP
parallel
processor
has
16
parallel
arithmetic
elements
(AE's)
driven
in
lock-step
by
a
single
instruction
stream.
Hence,
the
BSP
is
a
single-instruction,
multiple-data
stream
(SIMD)
architecture.
In
this
respect,
it
is
comparable
with
other
large
pipeline
or
parallel
scientific
processors.
A-9
~~p
~~~~~~~~~~~~~~~~~~~~BURROUGHSSCIENTIFICPROCESSOR
A-10
LINEAR
VECTORS
Single-instruction~
multiple-data
stream
(SIMD)
machines
were
designed
to
process
"linear
vectors".
A
vector
is
an
operand
consisting
of
a
series
of
numbers
or
values.
A
linear
vector
is
a
vector
that
is
mapped
into
storage
in
a
linear
fashion;
the
ad-
dresses
of
the
constituents
differ
by
a
constant.
Such
vectors
are
the
most
elemen-
tary
vectors
that
can
be
formed
by
looping
structures
in
programming
languages
(00
loops~
etc.).
Linear
vectors
are
naturally
generated
when
programming
language
array
element
index
expressions
are
linear
functions
of
loop
parameters.
It
is
this
latter
fact
that
has
caused
the
SIMD
architecture
to
emerge
as
the
front-
runner
in
attempts
to
gain
increased
scientific
processing
speed
through
parallelism.
That
is~
once
parallelism
is
selected~
it
must
be
noted
that
the
bulk
of
scientific
processing
involves
processing
contained
within
looping
structures.
The
simplest
array
element
describable
in
looping
structures
is
a
single
quantity~
a
scalar.
However~
parallelism
requires
operations
on
more
than
one
object
at
once.
This
being
so"
the
simplest
data
type
susceptible
to
parallelism
is
the
linear
vector.
The
linear
vector
has
two
significant
advantages
relative
to
other
parallel
operands.
First"
it
is
straightforward
to
design
hardware
that
will
efficiently
fetch
linear
vectors
from
memory"
under
the
control
of
a
simple
vector
descriptor.
The
second
advantage
is
that"
inside
a
loop
structure"
the
same
operation
is
specified
between
all
the
consecutive
element
pairs
of
a
pair
of
vector
operands.
Together"
these
two
advantages
imply
that"
while
operations
between
linear
vectors
can
be
done
using
parallel
hardware"
the
control
of
such
operations
can
be
from
a
single
in-
struction
using
a
simple
data
descriptor.
Consequently"
the
relatively
simple
SIMD
architecture
provides
sufficient
control
capability
to
exploit
this
particular
kind
of
parallelism.
The
SIMD
architecture
has
previously
appeared
in
several
forms:
64
processing
elements"
with
their
private
memories"
driven
by
a
single
instruction
processor
in
the
ILLIAC
IV;
sets
of
pipelines"
each
performing
a
part
of
an
arithmetic
opera-
tion"
as
in
the
CDC
STAR"
TI
ASC"
and
CRA
Y
-1.
Regardless
of
the
nature
and
method
of
implementation"
however"
all
of
these
machines"
including
the
BSP"
have
been
designed
to
function
optimally
with
linear
vectors
as
operands.
Hence"
it
is
reasonable
to
categorize
all
of
them
as
linear
vector
machines"
or"
more
commonly"
vector
machines.
Because
the
linear
vector
is
the
basic
programming
entity"
the
BSP's
instruction
set
is
designed
around
the
concept
of
linear
vectors
of
arbitrary
length.
The
granularity
in
vector
operations"
caused
by
the
fact
that
16
arithmetic
elements
do
16
identical
things
at
once"
as
well
as
the
need
to
properly
manipulate
vectors
whose
lengths
are
not
integer
multiples
of
16"
is
handled
automatically
by
the
control
hardware.
The
BSP
FORTRAN
compiler
is
unaware
that
there
are
16
AE's.
The
compiler
simply
deals
with
vectors
and
issues
vector
instructions.
1"'1
B S
p------------------~-------------.-~.-------------------------
--
SUR
ROUGHS
SCI EN T I
Fie
PROCESSOR
SSP
DESIGN
. . . meets the specific requirements
of
large-scale scientific processing
What
are
these
requirements?
First,
the
performance
level
of
supercomputers
requires
some
type
of
concurrent
computational
capability.
Second,
the
bulk
of
operations
characterizing
scientific
computation
are
floating-point
numerical
operations,
indexing
and
branching.
Third,
many
large
codes
have
execution
times
best
measured
in
terms
of
hours;
some
require
days.
Fourth,
a
key
characteristic
of
scientific
programs
(and
one
that
distinguishes
them
from
commercial
business
codes)
is
that
they
generate
and
regenerate
their
own
data
bases,
often
in
a
very
regular
way.
This
feature
confines
high-speed
110
to
an
envelope
containing
the
floating-point
processor
and
a
fast
secondary
store.
Fifth,
the
scientific
marketplace
is
FORTRAN
-dominated
with
codes
involving
man-years
of
preparation
and
tens
of
thousands
of
source
statements.
The
BSP
has
been
designed
to
meet
all
these
requirements.
SSP
SUPERIORITY
is
based
on several significant advantages over
other
systems
in
the
supercomputer
class
Clearly,
the
BSP
is
a
superior
performer.
It
is
competitively
priced.
The
machine
derives
its
performance
capabilities
from
a
number
of
considerations.
The
BSP
is
a
total
system,
combining
a
most
advanced
general-purpose
processor
with
a
floating-point
system
of
exceptional
speed.
Its
design
philosophy
is
such
that
extensibility
is
an
integral
part
of
it.
Another
significant
feature
of
the
BSP
is
its
reliability.
The
system
has
been
constructed
from
standard
BCML
circuits
and
packages.
All
paths
to
and
from
memory
are
equipped
with
error-correcting
capability
(SECDED).
In
addition,
there
is
residue
checking
on
all
arithmetic
operation,
instruction
retry,
and
an
extensive
set
of
on-line
system
device
diagnostics.
Because
of
these
features
offered
by
the
BSP,
Burroughs
can
expand
its
market
potential
and
extend
its
competitive
range.
A-7
B
7800/B
7700
SYSTEM
MANAGER
CENTRAL
P R
OC
ESSO
R
...
--=-
__
--I-=~
INPUT/OUTPUT
PROCESSOR
_ 1.5M
BYTES/SECOND
DATA
AND
CODE
FILES
~""'----'''''----'r-----'~
~7;
,
-....,
r'--
___
-~
PE
RIPHERALS
NETWORKS
, ,
,
,
, ,
,
'"
SCI
ENTI
FIC PROCESSOR
-
CHARGE-COUPLED
DEVICE
(CCD)
FILE
MEMORY
(4 -
64M
WORDS)
l\
INSTRUCTION
OR
CONTROL
t"""--
...
75M
BYTES/SECOND
PARALLEL
PROCESSOR
MAIN
MEMORY
MEMORY
......,-
y (0.5 -8M WORDS)
(256K
WORDS)
~
.~
~
n,
-
--
ARITHMETIC
INSTRUCTION
--
PROCESSOR
14---·
ELEMENTS
Figure
1.
BSP
System
Block
Diagram
ro
CJ)
1)
OJ
C
:D
:D
o
C
G)
I
en
en
(")
m
Z
-I
"TI
(")
-0
:D
o
(")
m
en
en
o
:D
BSP
BURROUGHS SCIENTIFIC PROCESSOR
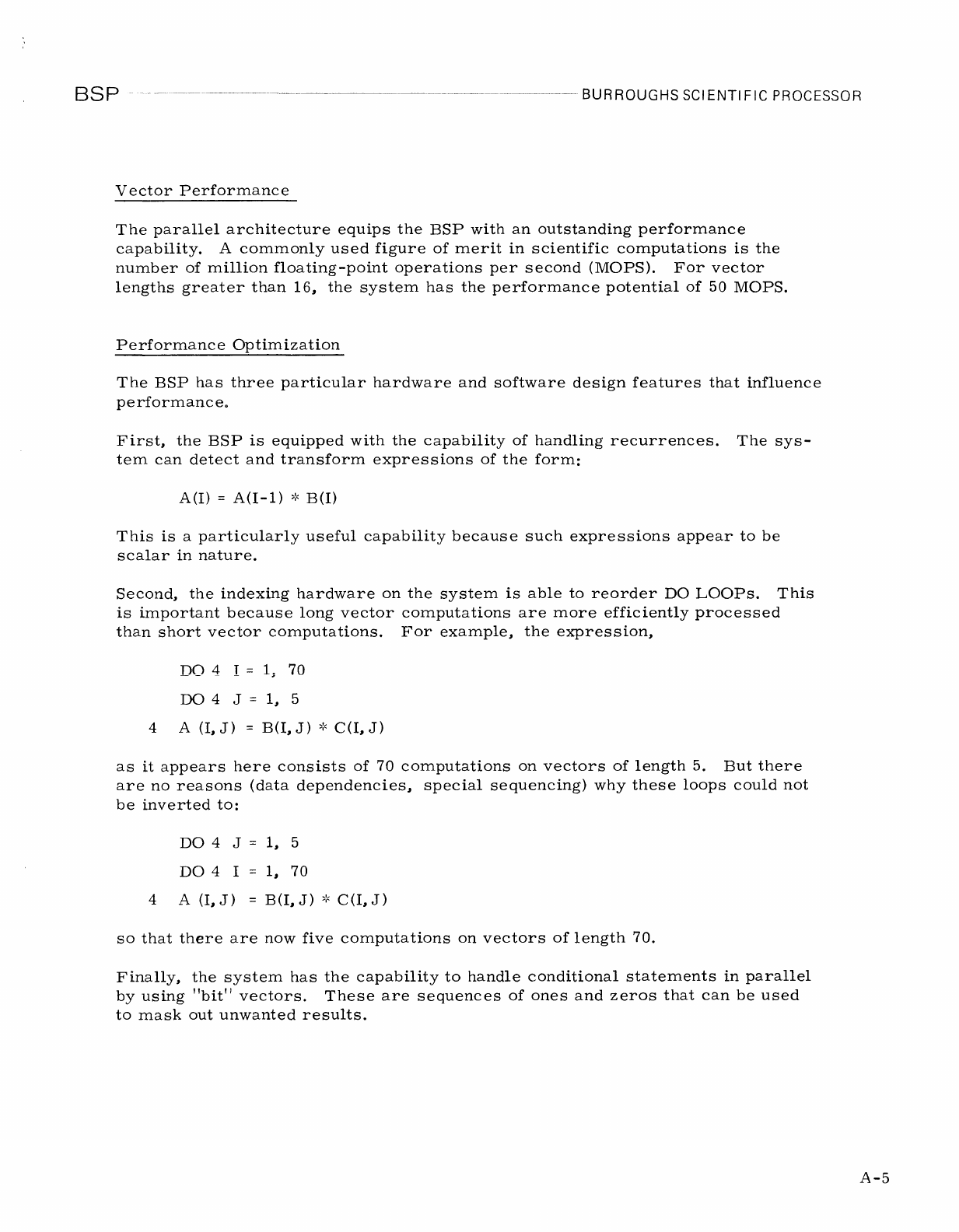
Vector
Performance
The
parallel
architecture
equips
the
BSP
with
an
outstanding
performance
capability.
A
commonly
used
figure
of
merit
in
scientific
computations
is
the
number
of
million
floating-point
operations
per
second
(MOPS).
For
vector
lengths
greater
than
16
1
the
system
has
the
performance
potential
of
50
MOPS.
Performance
Optimization
The
BSP
has
three
particular
hardware
and
software
design
features
that
influence
performance.
First,
the
BSP
is
equipped
with
the
capability
of
handling
recurrences.
The
sys-
tem
can
detect
and
transform
expressions
of
the
form:
A(I)
=
A(I
-1)
>:'
B(I)
This
is
a
particularly
useful
capability
because
such
expressions
appear
to
be
scalar
in
nature.
Second,
the
indexing
hardware
on
the
system
is
able
to
reorder
DO
LOOPs.
This
is
important
because
long
vector
computations
are
more
efficiently
processed
than
short
vector
computations.
For
example,
the
expression,
DO
4 I =
I,
70
00
4 J =
1,
5
4 A
(I,
J)
= B
(II
J)
>:'
C
(II
J)
as
it
appears
here
consists
of
70
computations
on
vectors
of
length
5.
But
there
are
no
reasons
(data
dependencies
l
special
sequencing)
why
these
loops
could
not
be
inverted
to:
DO
4 J =
11
5
DO
4 I
4 A
(II
J)
11
70
B
(II
J)
>:'
C
(II
J )
so
that
there
are
now
five
computations
on
vectors
of
length
70.
Finally,
the
system
has
the
capability
to
handle
conditional
statements
in
parallel
by
using
"bit"
vectors.
These
are
sequences
of
ones
and
zeros
that
can
be
used
to
mask
out
unwanted
results.
A-5
~~p
~~~~~~~~~~~~~~~~~~~~~BURROUGHSSCIENTIFICPROCESSOR
A-6
FILE
MEMORY
One
of
the
truly
significant
innovations
in
the
BSP
is
the
file
memory.
It
serves
as
the
secondary
storage
system
for
the
parallel
processor
memory,
and
is
important
because
of
the
greatly
enhanced
performance
capability
it
gives
the
BSP.
On
most
systems
(even
supercomputers),
secondary
storage
is
provided
by
discs.
In
supercomputers
this
can
be
a
problem
because
the
rate
at
which
information
can
be
transferred
from
secondary
storage
to
main
memory
is
simply
not
matched
to
the
tremendous
processing
capability
of
the
CPU.
In
fact,
for
several
classes
of
problems
where
the
program
and
data
spill
out
of
main
memory
onto
discs,
overall
system
performance
can
be
very
seriously
degraded.
The
most
important
feature
about
the
file
memory
for
BSP
performance
is
that
it
sustains
a
transfer
rate
to
parallel
memory
of
10
M
words/
second,
complement-
ing
the
processing
capability
of
the
AE'
s
well
and
providing
system
balance.
VECTORIZING
FORTRAN
COMPILER
One
of
the
very
strongest
assets
of
the
BSP
is
its
software.
The
BSP
is
the
first
supercomputer
developed
as
a
total
system,
and
that
concept
extends
to
BSP
software.
The
BSP
is
provided
with
a
mature
operating
system
(the
MCP)
and
a
vectorizing
FORTRAN
compiler.
What
does
vectorizing
mean?
It
is
merely
the
recognition
of
computational
sequences
that
can
be
done
simultaneously.
On
a
serial
or
scalar
processor,
the
sequence
of
computations
DO
10 I = 1,
100
10
A(I)
=
B(I)
+
C(I)
,:~
D(I)
would
be
done
one
at
a
time.
In
examining
a
code,
the
vectorizing
compiler
recognizes
that
such
sequences
can
be
done
simultaneously.
It
is,
therefore,
a
means
of
converting
scalar
or
sequential
programs
into
parallel
programs.
Users
will
also
be
able
to
program
in
FORTRAN
exclusively.
No
assembly
language
programming
will
be
necessary
to
achieve
the
performance
of
the
BSP.
For
new
program
development,
the
language
will
also
be
equipped
with
vector
extensions
that
will
allow
for
the
introduction
of
parallel
computing
concepts
from
the
beginning.
, \
I
~
I \
I '
BSP
~
...
--~-----~-------
BURROUGHS
SCI
ENTI
Fie
P.ROCESSOR
BSP
KEY
FEATURES
include a system manager,
the
SSP
elements, and a vectorizing FO
RTRAN
compiler
The
system
manager
is
responsible
for
overall
ESP
job
scheduling
and
control.
Through
it,
program
preparation
and
data
input
and
output
are
accomplished.
It
serves
as
the
device
for
interactive
program
preparation
and
debugging
and
pro-
vides
archival
storage.
The
control
processor
portion
of
the
BSP
is
a
high-speed,
asynchronous
unit
that
controls
the
parallel
processor
and
performs
scheduling,
file
allocation,
and
1/0
management.
It
is
characterized
by
an
80-nanosecond
cycle
time
(12.
5-megaHertz
clock)
and
is
equipped
with
262K
words
of
4K
MOS
memory
with
an
access
time
of
145
nanoseconds.
The
control
processor
also
serves
to
interface
the
BSP
with
maintenance
and
diagnostic
devices.
Programs
to
be
run
on
the
BSP
are
compiled
on
the
system
manager
using
a
vectorizing
FORTRAN
compiler,
which
is
a
significant
part
of
the
system
software.
It
is
used
to
maximize
the
efficiency
of
the
BSP
across
a
wide
spectrum
of
scientific
applic
at
ions.
SSP
ORGANIZATION
...
consists
of
three basic
units:
control
unit,
parallel processor,
file
memory
The
control
vnit
is
made
up
of
a
"scalar"
processor
unit
that
handles
setup
of
vector
operations
for
the
parallel
processor,
262
K
words
of
memory
in
which
the
program
to
be
executed
is
stored,
a
parallel
processor
control
unit
that
sets
up
vector
calculations"
and
a
control
and
maintenance
unit
that
is
used
to
inter-
face
the
maintenance
features
of
the
system
manager
to
the
BSP.
The
parallel
processor
is
made
up
to
16
arithmetic
elements
(AEs)
connected
to
a
parallel
processor
memory
by
means
of
alignment
network.
The
network
is
a
cross-bar
switch
that
connects
the
parallel
memory
banks
to
the
AEs
and
is
used
to
guarantee
conflict-free
memory
access.
The
BSP
is
completed
by
the
file
memory
that
consists
of
charge-coupled
device
(CCD)
storage
media
and
a
file
memory
control
unit.
A-3
~~p
~~~~~~~~~~~~~~~~~~~~~SURROUGHSSCIENTIFICPROCESSOR
A-4
SSP
CHARACTERISTICS . . . include the parallel processor, file memory,
and
vectorizing
"FORTRAN
compiler"
PARALLEL
PROCESSOR
The
parallel
processor
portion
of
the
BSP
is
designed
to
perform
"vector"
oriented
computations
at
a
very
high
rate.
The
BSP
itself
is
a
single
instruction
stream/
multiple
data
stream
computing
device.
The
high
execution
rate
is
achieved
by
partitioning
computations
onto
the
16
arithmetic
elements
of
the
parallel
processor.
Consider
the
following
FORTRAN
statement:
DO
10
I =
1"
1000
A(I)
=
B(I)
+
C(I)
':<
D(I).
The
sequence
of
computations
performed
is:
A(l)
A(2)
A(N)
B(l)
+
C(l)
':<
D(l)
B(2)
+
C(2)
':<
D(2)
B(N)
+
C(N)
':<
D(N).
Quite
obviously"
there
is
no
dependence
in
these
expressions
of
A(N)
on
(N-1).
That
is"
the
computations
are
independent
of
one
another.
There
is"
therefore"
no
reason
not
to
perform
these
computations
simultaneously.
That
is"
if
there
were
an
ensemble
of
arithmetic
elements
(AE1"
AE
2"
AE
"
etc.)
then
at
the
same
time
that
A(l)
was
being
computed
in
AE1"
A(2)
courd
be
computed
in
AE2"
A(N)
in
AEn"
and
so
forth.
This
is
the
basic
idea
behind
the
computational
philosophy
of
the
BSP.
What
makes
the
philosophy
truly
usable
is
that
large
classes
of
scientific
problems
exhibit
this
type
of
computational
concurrency.
Conflict-free
Memory
Access
One
of
the
key
reasons
the
BSP
is
able
to
sustain
such
tremendous
computation
rates
is
the
conflict-free
memory
access.
The
system
is
designed
so
that
the
number
of
memory
banks
is
relatively
prime
to
the
number
of
processing
ele-
ments.
With
this
design
decision"
it
is
possible
to
map
data
into
the
parallel
memory
so
that
rows"
columns"
diagonals
(in
fact"
any
sequence
of
elements
in
a
two-dimensional
array
that
are
regularly
spaced)
can
be
accessed
at
full
memory
bandwidth.
This
situation
contrasts
with
other
supercomputers
in
which
only
rows
or
columns
or
diagonals
can
be
accessed
at
the
full
rate.
SSP
SSP
OBJECTIVE
·~~SURROUGHS
SCIENTIFIC
PROCESSOR
BURROUGHS
SCIENTIFIC
PROCESSOR
AN
OVERVIEW
to
extend Burroughs
product
excellence
into
the domain
of
very high-speed
scientific computing
Traditionally"
Burroughs
has
been
very
strong
in
covering
the
entire
spectrum
of
general-purpose
data
processing,
from
the
B
80
to
the
B
7800.
With
the
BSP"
Burroughs
is
complementing
these
general-purpose
capabilities
with
a
most
in-
novative
and
powerful
scientific
system.
The
demands
of
large-scale
scientific
processing
impose
vigorous
requirements
on
the
machine
that
supports
it.
The
BSP
has
been
designed
to
meet
and
surpass
these
requirements.
In
particular"
the
BSP
is
a
very
high-performance
system.
It
is
in
the
"supercomputer"
class
of
machines
and
will
deliver
floating-point
re-
sults
up
to
50 X
10
6
operations
per
second.
In
contrast
with
other
currently
avail-
able
supercomputers"
the
BSP
is
a
total
system.
It
combines
the
general-purpose
processing
capability
of
a
Burroughs
large-scale
or
very
large-scale
system
with
exceptional
floating-point
capability.
Burroughs
has
chosen
to
build
the
scientific
processor
from
a
new
circuit
family,
BCML
(Burroughs
Current
Mode
Logic).
As
a
result"
the
BSP
enjoys
high
reli-
ability"
availability
and
maintainability
and
is
exceptionally
cost-effective.
Finally"
there
is
a
large
degree
of
extensibility
inherent
in
the
BSP
design.
The
system
has
an
impressive
potential
for
modular
growth.
A-l
~~p
~~~~~~~~~~~~~~~~~~~~~SURROUGHSSCIENTIFICPROCESSOR
A-2
SSP
SYSTEM . . . consists
of
the system manager
and
the scientific processor
The
system
manager
(typicallYJ
a E
7800)
schedules
and
allocates
tasks
to
the
scientific
processor.
It
supports
networking
and
data
communications
and
has
a
complete
set
of
peripherals
(printers
J
disks
J
tapes)
that
can
be
extended
to
in-
clude
archival
storage.
The
scientific
processor
consists
of
the
control
processor
J
the
parallel
pro-
cessor
J
and
the
file
memory.
There
are
three
basic
models
of
the
ESP.
For
the
user
who
already
has
a E
7700
or
E
7800
J
there
is
the
basic
ESP.
For
other
users
J
the
basic
configurations
are
the
ESP/7811
and
ESP/7821.
•
Easic
ESP
-
16
arithmetic
elements
J
524K
words
of
parallel
processor
memorYJ
a
control
processor
with
262K
words
of
memorYJ
and
4 M
words
of
file
memory.
•
ESP
/7811
- a
ESP
with
a E
7811
system
manager.
The
E
7800
•
has
one
central
processor
J
one
I/O
processor
J
one
maintenance
processor
J
and
an
operator
display
console
with
dual
displays.
ESP
/7821
- a
ESP
with
a E
7821
system
manager.
The
E
7821
has
two
central
processors
l
two
I/O
processors
J
one
maintenance
processor
l
and
an
operator
display
con-
sole
with
dual
displays.
Dual
ESP
interface
adapters
provide
a
connection
between
the
ESP
and
both
E
7800
I/O
processors.
However
l
only
one
interface
adapter
is
active
at
anyone
time;
the
other
is
used
for
backup
or
system
reconfigura
tion.
SSP
BURROUC;HS
SCIENTI
Fie
PROCESSOR
TEMPLATES
The
problem
of
keeping
the
AE'
s~
the
alignment
network~
and
the
memory
simul-
taneously
busy
is
interesting.
Collectively,
these
global
elements
form
a
pipeline.
That
is~
data
is
first
fetched
from
memory,
transmitted
to
the
AE'
s
over
the
alignment
network,
processed
by
the
AE'
s~
transmitted
back
to
memory,
and
stored.
In
total,
this
is
a
five-step
process~
executed
with
four
major
elements
(memory,
input
alignment
network,
AE's
and
output
alignment
network).
The
parallel
processor
control
unit
keeps
these
system
elements
as
busy
as
possible
relying
on
precoded
microinstructions
called
"templates".
A
template
is
a
description
of
an
entire
sequence
of
operations
that
a
group
of
associated
sets
of
16
numbers
follows.
For
example~
such
a
group
of
sets
of
numbers
could
be
the
addition
of
16
elements
of
"A"
to
16
elements
of
"E"
to
form
16
elements
of
"e".
In
other
words,
one
template
can
be
used
to
control
16
arith-
metic
operations
which
can
be
done
simultaneously
by
the
16
AE'
s~
plus
all
the
associated
memory
and
data
transmission
operations.
The
problem
that
the
parallel
processor
control
unit
must
solve
is
the
interleaving
of
one
such
set
of
operations,
or
template,
with
the
next
set.
In
general,
one
template
will
not
be
identical
to
the
one
that
follows
it.
For
example,
a
succeeding
template
may
be
generating
the
first
16
elements
of
Z = Q
':(
R +
P,
while
the
forerunner
template
is
doing
the
last
16
(or
less)
elements
of
e = A +
E.
The
reason
for
wanting
to
interleave
dissimilar
types
of
templates
is
that,
if
it
is
not
done~
then
the
pipeline
formed
by
memory~
the
alignInent
networks~
and
the
AE's
must
be
emptied
between
the
completion
of
one
vector
operation
and
the
start
of
the
next.
If
this
were
to
happen~
then
the
ESP
would
suffer
from
the
same
vector
startup
problem
that
has
plagued
other
pipeline
machines.
The
manifesta-
tion
of
this
problem
to
the
user
is
that
the
machine
is
inefficient
for
operation
on
short
vectors
because
of
the
startup
idle
time.
Given
that
a
template
is
a
microsequence
specified
at
system
design
time~
the
job
of
the
parallel
processor
control
unit
is
substantially
simplified.
Instead
of
having
to
efficiently
interleave
the
control
of
several
dissimilar
units,
the
parallel
processor
control
unit
simply
has
to
select
the
next
stored
sequence.
ESP
templates
can
be
characterized
satisfactorily
by
two
numbers.
One
number
specifies
the
clock
count
between
a
template's
last
fetch
from
memory
and
its
last
store
into
memory.
In
other
words~
the
ternplate
leaves
this
many
memory
clocks
available
for
the
next
template.
The
other
number
is
the
number
of
memory
clocks
the
template
needs
at
its
beginning.
This
number
must
be
less
than
or
equal
to
the
number
of
clocks
left
by
the
preceding
template.
For
example~
let
a
template
be
T1
(2,
3).
This
means
the
template
needs
two
contiguous
memory
clocks
to
start
up,
and
it
leaves
three
contiguous
memory
clocks
between
its
last
fetch
from
memory
and
its
last
store
into
memory.
If
another
template
is
T2
(3,
5),
then
the
sequence
Tl
(2,
3)
followed
by
T2
(3~
5)
would
have
complete
overlap
between
T 1
and
T2~
with
no
wasted
cycles.
If
one
used
the
sequence
Tl
(2~
3)
followed
by
another
T1
(2~
3)~
there
would
be
one
A-21
~~p
~~~~~~~~~~~~~~~~~~~~~BURROUGHSSCIENTIFICPROCESSOR
A-22
clock
lost
in
the
interface
between
the
two
templates.
And"
of
course"
if
a T 1
(2" 3)
is
followed
by
a
T3
(4"
2)
there
are
four
wasted
clocks"
because
4
is
not
less
than
or
equal
to
3.
In
the
ESP"
an
adequate
number
of
template
choices
exists
so
that
the
average
time
lost
between
two
dissimilar
templates
is
small.
Template
control
entails
the
selection
between
templates
already
in
control
storage.
The
criterion
of
the
selection
is
optimized
efficiency
of
the
system.
Clearly"
the
power
of
the
processor
required
to
make
this
selection
is
miniscule
compared
with
the
power
required
to
attempt
dynamically
to
optimize
system
utilization.
There
is
an
extra
bonus
attributable
to
using
templates
in
the
parallel
processor
control.
This
is
the
ability
to
implement
retry
on
vector
operations.
Upon
detec-
tion
of
a
noncorrectable
error"
the
control
lets
the
last
successful
template
finish"
resets
any
partially
started
templates
back
to
the
start
point"
and
retries
the
tem-
plate
which
failed.
The
ESP
is
the
only
supercomputer
that
features
vector
operation
retry.
A
problem
can
occur
in
a
system
that
has
this
much
overlap.
The
problem
is
called
a
vector
"hazard".
For
example"
if
A = E + C
is
followed
by
Q = A
~:(
R"
then
the
elements
of
A
must
be
stored
by
the
first
statement
before
they
are
used
in
the
second.
If
the
vector
operations
are
long"
no
problem
exists.
If
they
are
short"
it
may
be
necessary
to
hold
up
the
second
operation
until
the
first
has
finished"
even
though
this
costs
some
lost
cycles.
The
parallel
processor
control
unit
in
the
ESP
automatically
detects
and
solves
this
problem
situation.
The
tem-
plate
control
processor
adopts
a
different
strategy
in
this
case.
Instead
of
maxi-
mizing
overlap"
it
selects
templates
which
minimize
time
lost
between
operations.
ARITHMETIC
ELEMENTS
All
16
arithmetic
elements
(AE'
s)
in
the
parallel
processor
are
identical.
The
set
of
16
is
driven
from
a
single
microsequence"
in
keeping
with
the
SIMD
nature
of
the
machine.
Each
arithmetic
element
is
quite
soft"
in
the
sense
that
only
the
most
primitive
operators
are
hardwired.
The
control
word
is
over
100
bits
wide.
In
part"
this
large
control
word
width
is
due
to
direct
access
to
primitive
functions;
it
is
large
because
the
arithmetic
element
has
an
unusual
range
of
processing
capability.
That
is"
besides
being
a
floating
point
machine"
the
AE
has
substantial
nonnumeric
capability.
A
comprehensive
set
of
field
manipulation
and
editing
operators
is
available.
Additionally,
a
spec
ial
set
of
operators
is
available
specifically
for
FORTRAN
format
conversion.
While
the
ESP
is
marked
as
a
floating-point
number
processor"
in
actuality"
with
its
charge-coupled
device
(CCD)
file
memory"
exceptionally
large
main
memory"
and
versatile
AE'
s"
it
may
well
represent
the
largest
available
nonnumeric
processor.
BSP
BURROUGHS
SCIENTIFIC
PROCESSOR
Floatirlg
point
add,
subtract,
and
multiply
each
take
two
memory
clocks
in
an
AE.
The
use
of
two
clocks
enables
memory
bandwidth
to
be
balanced
exactly
with
AE
bandwidth
for
triadic
operations.
A
triadic
operation
is
defined
as
having
three
operands
and
one
result.
Evidently,
this
does
result
in
balance,
because
the
four
memory
clocks
required
to
handle
the
operands
and
result
are
balanced
by
the
four
clocks
required
by
the
two
arithmetic
operations,
which
convert
three
operands
into
one
result.
The
ESP
memory
system
cycle
time
is
160
nanoseconds.
The
AE
cycle
time
is
the
same.
In
this
day
of
cycle
times
much
shorter
than
160
nanoseconds,
it
is
reasonable
to
wonder
at
such
a
long
cycle
time.
A
shorter
AE
clock
would
have
allowed
more
effective
utilization
of
AE
parts
be-
cause
they
would
have
been
used
more
often
per
operation.
However,
offsetting
factors
were
the
high
level
of
integration
in
the
ECL
circuits,
and
the
desire
for
ease
of
manufacturing
and
straightforward
maintenance
through
absence
of
need
to
fine
tune
the
clock
signal.
To
some
extent,
accumulated
gate
delays
at
the
level
of
integration
required
a
long
clock
(although
certainly
not
as
long
as
160
nano-
seconds),
but
primarily
the
level
of
integration
made
the
long
clock
affordable.
The
extra
ICs
did
not
substantially
impact
total
system
size.
Floating-point
divide
is
implemented
by
generating
the
reciprocal
in
a
Newton-
Raphson
iteration.
The
square
root
is
performed
in
the
hardware
as
well.
It
is
also
implemented
via
the
Newton-Raphson
algorithm.
ROMs
exist
in
each
AE
to
give
the
first
approximations
for
the
divide
and
square
root
iterations.
One
ad-
vantage
of
using
parallel
AE
1
s,
instead
of
pipeline
ilTlplenlentation,
is
the
relative
ease
with
which
a
full-length
divide
and
square
root
can
be
generated.
The
single-precision,
floating-point
format
is
48
bits
long.
It
has
36
bits
of
significant
exponent
and
10
bits
of
binary
exponent.
This
gives
a
range
of
10
±
307
and
about
11
decimal
digits
of
precision.
The
floating
point
arithmetic
is
done
using
guard
bits
and
effi-cient
rounding
algorithms.
Even
for
large
problems,
it
is
rare
for
more
precision
to
be
needed.
Double
precision
is
available,
however,
should
added
precision
be
required.
The
AE
has
double-length
accumulators
and
double
length-registers
in
key
places.
This
permits
direct
implementation
of
double-precision
operators
in
the
hardware.
The
AE
also
permits
software
implementations
of
triple-precision,
etc.
Note
that
with
16
AE's,
each
generating
an
add,
subtract,
or
multiply
in
320
nano-
seconds,
and
with
parallel-processor
control
fully
overlapped,
the
maximum
speed
of
the
ESP
is
50
million
floating-point
operations
per
second.
While
sustained
operation
at
this
111axinlunl
speed
will
be
infrequent,
it
should
be
evident
tha
t
over-
all
design
philosophy
has
been
to
produce
a
machine
which
can
sustain
a
reasonable
fraction
of
its
maximum
operation
rate.
A-23
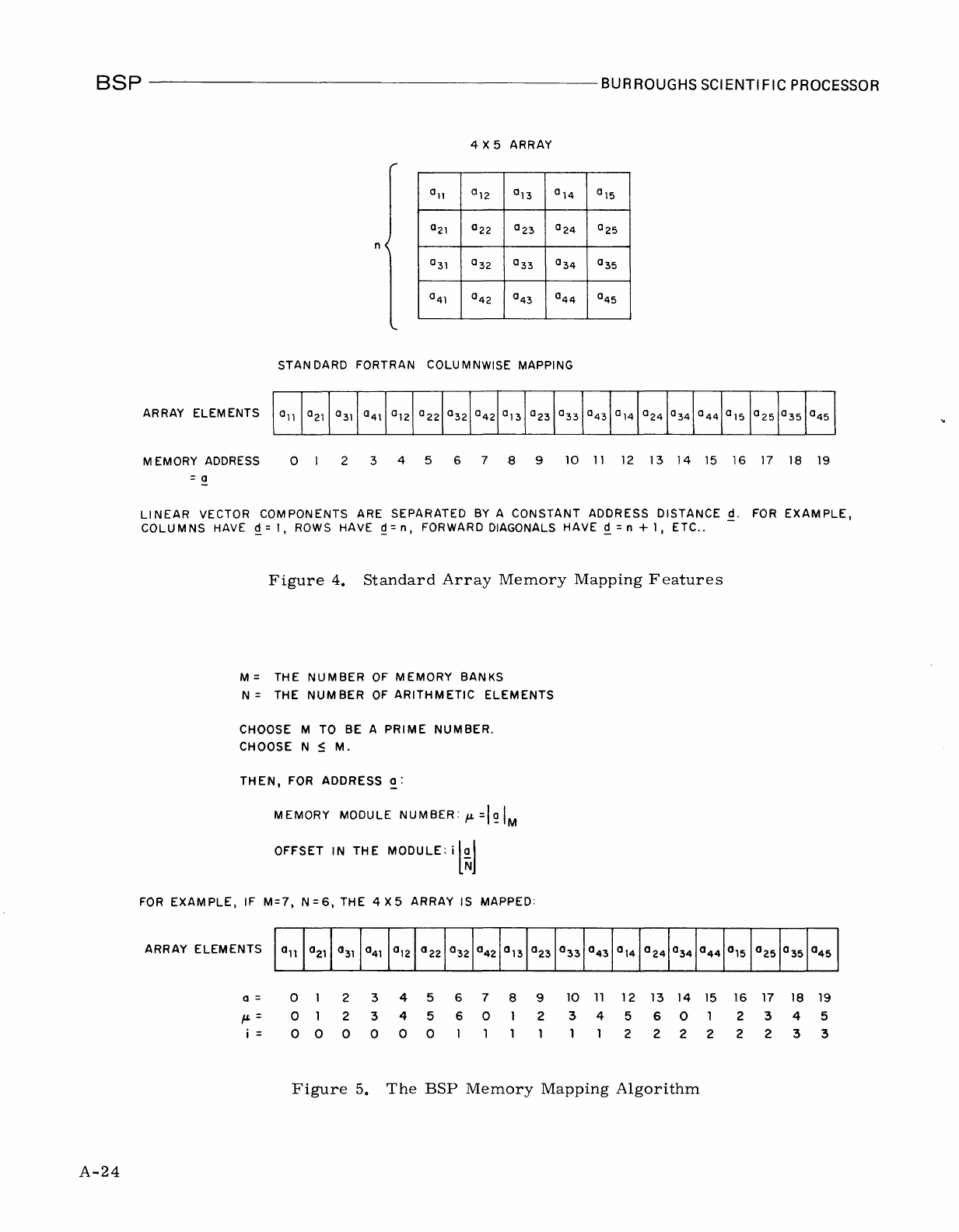
~~p
~~~~~~~~~~~~~~~~~~~~~BURROUGHSSCIENTIFICPROCESSOR
A-24
4 X 5
ARRAY
°11
°12
°13
°14
°15
°21
°22
°23
°24
°25
n
°31
°32
°33
°34
°35
°41
°42
°43
°44
°45
STAN
DARD
FORTRAN
COLU MNWISE MAPPING
ARRAY ELEM ENTS
M EMORY ADDRESS o 2 3 4 5 6 7 8 9
10
11
12
13
14
15
16
17 18 19
= °
LINEAR
VECTOR
COMPONENTS
ARE
SEPARATED
BY
A
CONSTANT
ADDRESS
DISTANCE
d.
FOR
EXAMPLE,
COLU
M NS HAVE
Q.
= 1, ROWS
HAVE
~
=
n,
FORWARD DIAGONALS
HAVE
Q.
= n +
1,
ETC..
-
Figure
4.
Standard
Array
Memory
Mapping
Features
M =
THE
NUMBER
OF
MEMORY
BANKS
N =
THE
NUM
BER
OF
ARITHMETIC
ELEMENTS
CHOOSE M
TO
BE
A
PRIME
NUMBER.
CHOOSE
N
~
M.
TH
EN,
FOR
ADDRESS
a:
MEMORY
MODULE
NUMBER:
p.
=I~
1M
OFFSET
IN
THE
MODULE:
i
l~l
FOR
EXAMPLE.
IF
M=7,
N=6,
THE
4X5
ARRAY
IS
MAPPED:
ARRAY
ELEMENTS
° =
p.=
i =
o 1
o 1
o 0
2
2
o
3
3
o
4
4
o
5
5
o
6
6
7
o 8 9
2
10
11
3 4
1
12
13 14
15
5 6 0 1
2 2 2 2
Figure
5.
The
BSP
Memory
Mapping
Algorithm
16
17
2 3
2 2
18 19
4 5
3 3
BSP
8URFiOUC,HS
SCif:::i\nIFIC PROCESSOR
CONFLICT-FREE
MEMORY
ACCESS
A
unique
feature
of
the
BSP
is
its
memory
system
which
delivers
a
useful
operand
to
each
AE,
per
each
memory
cycle.
That
is,
the
distance
in
memory
between
elements
of
a
vector
need
not
be
unity.
Therefore,
DO
loops
may
con-
tain
nonunity
increments,
or
the
program
may
access
rows,
columns,
or
diagonals
of
matrices
without
penalty.
This
kind
of
memory
capability
has
not
been
available
before
with
memory
parts
of
modest
speed.
Supercomputer
designers
have
elected
either
to
use
memories
with
severe
access
restrictions,
or
have
used
expensive
fast
memory
parts
to
attain
a
degree
of
conflict-free
access
through
bandwidth
overkill.
The
hardware
techniques
used
to
ensure
conflict-free
access
are
a
prime
number
of
memory
ports"
full
crossbar
switches
between
the
memory
ports
and
the
AE's,
and
special
memory
index
generation
along
with
crossbar
switch
tag
generation.
The
index
and
tag
generators
compute
the
proper
addresses
for
a
particular
address
pattern.
This
address
pattern
is
the
one
used
by
orthodox
serial
computers.
That
is,
each
higher
memory
address
refers
to
the
"next"
word
in
memory.
With
this
pattern,
the
parallel
memory
is
completely
compatible
with
all
the
constructs
of
present
programming
languages.
In
particular,
FORTRAN
EQUIVALENCE,
COMMON,
and
array
parameter
passing
can
be
implemented
in
the
same
way
as
on
a
conventional
computer.
As
an
example,
consider
Figure
4.
This
shows
a 4
by
5
matrix
mapped
column-
wise
into
the
memory
of
a
serial
machine.
For
purposes
of
illustration,
assume
a 6
AE,
7
memory
bank
parallel
machine.
(The
BSP
has
1 7
memory
banks.)
The
index
and
tag
equations
are
shown
in
Figure
5.
The
index
is
the
floor
of
the
integer
quotient
of
the
address
~
divided
by
the
number
of
AE'
s.
Thus,
the
index
will
re-
main
constant
for
a
cycle
equal
to
the
number
of
AE'
s;
then
it
will
jump
by
one
value.
On
the
other
hand,
the tag
(or
memory
bank
number
in
which
the
value
associated
with
address
~
is
stored)
will
be
~
modulo
the
number
of
memory
banks.
Hence
the
tags
will
be
repeated
cycles
of
the
same
values,
with
no
value
repeating
in
one
cycle,
and
the
length
of
the
cycle
equal
to
the
number
of
memory
banks.
As
long
as
the
number
of
AE'
s
is
less
than
or
equal
to
the
number
of
memory
banks"
the
sequence
of
tag
values
will
cause
a
different
memory
bank
to
be
connected
to
each
AE.
Thus,
each
AE
may
receive
or
send
a
unique
value.
The
particular
storage
pattern
produced
in
this
6
AE,
7
memory
bank
system
for
the
4
by
5
example
array
is
shown
in
Figure
6.
Figure
7
shows
index
and
tag
calculations
for
the
second
row
of
the
array.
Note
that
the
equations
yield
an
AE
centrist
vantage
point.
That
is,
the
first
logical
element
of
the
vector
goes
to
the
first
AE,
etc.
There
is
nothing
special
about
this
approach
beyond
a
certain
confort
in
thinking.
The
important
point
is
the
following:
As
long
as
the
same
set
of
equations
is
always
applied
to
the
data,
from
the
first
time
it
comes
in
as
I/O
onward"
then
the
storage
pattern
is
com-
pletely
invisible
to
the
user.
This
applies
to
program
dumps,
etc.,
as
well
be-
cause
the
hardware
always
obeys
the
same
rules.
A-25
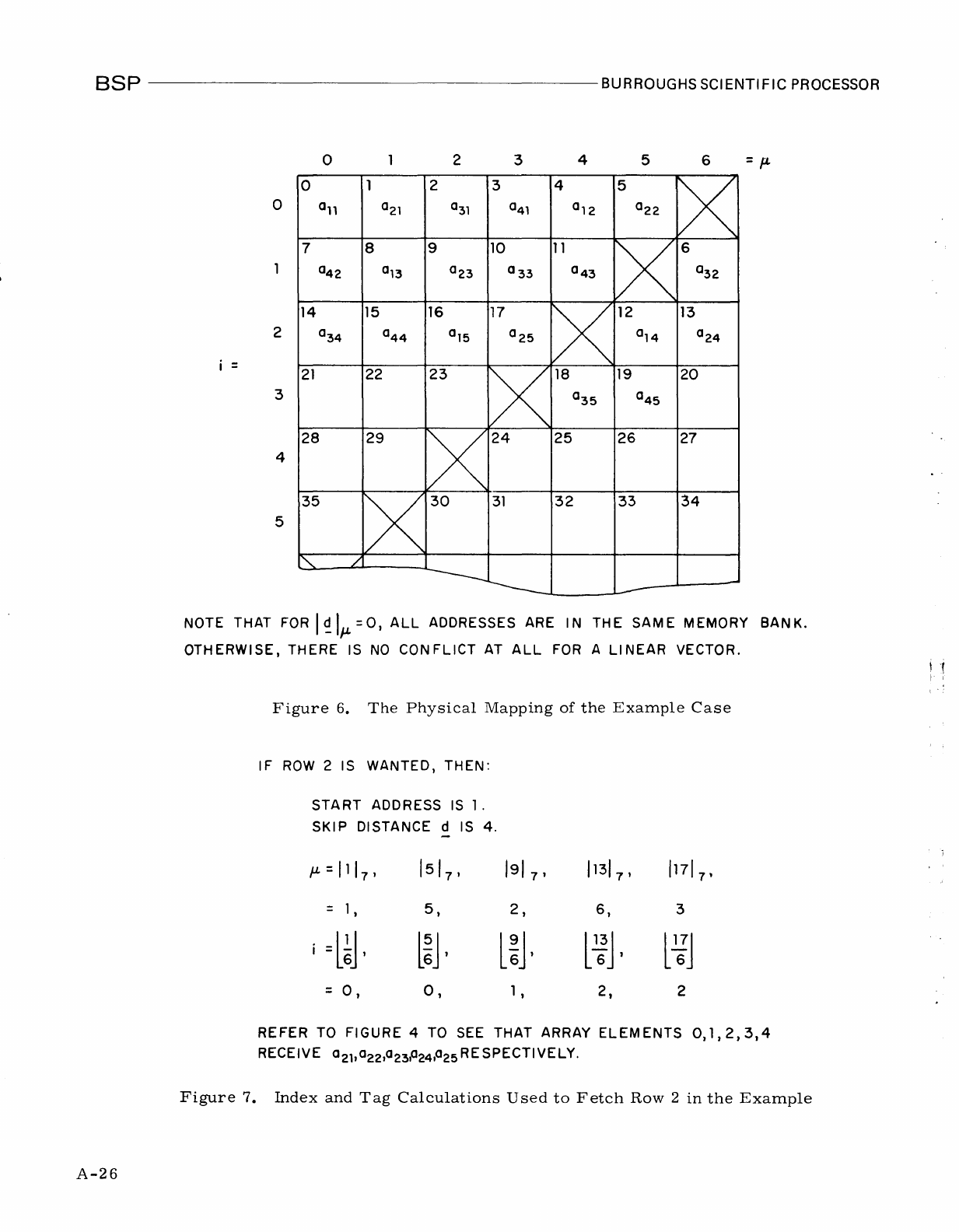
~~p
~~~~~~~~~~~~~~~~~~~~~BURROUGHSSCIENTIFICPROCESSOR
A-26
o 2 3 4 5 6
=p.
o 0 1 2 3 4 5
[><
°11
°21
°31
°41
°'2
°22
7 8 9
10
11
[X
6
°42
°13
°23
°33
°43
Q
32
i =
14
15
16
17 [X
12 13
°34
°44
°15
°25
°14
°24
21
22
23
[X
18 19
20
°35
°45
2
3
28
29
[X
24
25 26
27
4
35
[X
30
31
32
33
34
5
:"-.
./
-----
-
NOTE
THAT
FOR I q
IfL
=
0,
ALL
ADDRESSES ARE
IN
TH E
SAM
E M EMORY
BAN
K.
OTHERWISE,
THERE
IS
NO
CONFLICT
AT
ALL
FOR A
LINEAR
VECTOR.
Figure
6.
The
Physical
Mapping
of
the
Example
Case
IF
ROW 2 IS
WANTED,
THEN:
START
ADDRESS
IS 1 .
SKIP
DISTANCE
d IS
4.
fL=11I
7, 151 7,
1917
'
1131
7 ' 11717 '
=
1,
5,
2,
6,
3
=l~J
'
l~J
'
lU
l~J
'
ll;J
=
0,
0,
1 ,
2,
2
REFER
TO
FIGURE
4 TO SEE
THAT
ARRAY
ELEMENTS
0,1,2,3,4
RECEIVE
02"022,023,024,025
RE
SPECTIVELY.
Figure
7.
Index
and
Tag
Calculations
Used
to
Fetch
Row
2
in
the
Example
BSP
The
unused
memory
cells
are
the
result
of
having
one
less
AE
than
there
are
memory
banks.
For
the
example
case,
this
is
not
a
useful
occurrence.
For
the
real
BSP,
with
16
AE'
sand
1 7
memory
banks,
divis
ion
by
16
is
much
simpler
and
faster
than
division
by
1 7.
However,
one
then
pays
the
penalty
of
supplying
some
extra
memory
to
reach
a
given
usable
size.
Note
that
conflict
does
occur
if
the
addresses
are
separated
by
an
integer
multiple
of
the
number
of
memory
banks.
In
this
case,
all
the
values
one
wants
are
in
the
same
memory
bank.
For
the
BSP,
this
means
that
skip
distances
of
1 7,
34,
51,
etc.,
should
be
avoided.
In
practice,
51
is
a
likely
problem
skip.
This
is
be-
cause
it
is
the
skip
of
a
forward
diagonal
of
a
matrix
with
column
length
50.
If
conflict
occurs
in
the
BSP,
the
arithmetic
is
performed
correctly,
but
at
1/16
the
normal
speed.
The
system
logs
the
occurrence
of
conflicts
and
their
impact
on
the
total
running
time.
This
information
is
given
to
the
programmer
for
corrective
action,
if
the
impact
was
significant.
BSP
memory
reliability
has
been
mentioned.
Diagnosibility
is
also
an
important
feature.
Instead
of
placing
the
Hamming
code
generators,
detectors,
and
correctors
on
the
memories,
as
is
usual,
they
are
placed
at
the
AE'
s.
This
way
the
entire
loop,
from
the
AE's
to
the
memory
and
back
again,
is
Hamming
code
corrected.
A
side
benefit
of
the
conflict-free
access
hardware
is
that
control
information
can
be
buried
in
the
Hamming
code
in
such
a
way
that
failing
control
elements
can
easily
be
detected
and
identified.
Hence,
not
only
are
memory
elements
and
data
paths
checked
in
the
BSP
design,
but
control
logic
is
checked
as
well.
PARALLEL
PROCESSOR
CONTROL
UNIT
Many
of
the
functions
of
the
parallel
processor
control
unit
have
been
mentioned.
The
unit
is
essentially
a
pipe,
with
each
stage
concerned
with
translating
or
check-
ing
input
instructions
into
accurate
control
signals
for
the
parallel
processor.
The
first
stage
in
this
pipeline
is
called
the
vector
input
and
validation
unit
(VIVU).
The
vector
and
array
instructions,
assembled
by
the
SPU,
are
inserted
at
this
point.
The
VIVU
assembles
a
sequence
of
such
instructions
into
a
single
global
description
of
an
operation
defined
over
a
set
of
program
arrays.
It
also
esta-
blishes
the
relationship
between
this
operation
and
the
one
before,
to
guard
against
vector
hazards.
The
form
of
instruction
inserted
by
the
SPU
into
the
VIVU
is
interesting.
In
keeping
with
Burroughs
policy
of
designing
standard
product
computers
as
language
processors,
it
was
determined
early
in
the
BSP
design
cycle
that
the
machine
would
pi~ocess
assignn1.ent
stateITlents.
ArithlTIetic
assignment
statements
are
the
basic
ingredient
to
most
numerical
processing.
The
templates
are
memory-to-memory
entities,
because
assignment
statements
are
memory-to-memory
statements.
In
the
case
of
Burroughs
stack
machines,
such
as
the
B
7800,
the
source
language
translates
almost
directly
into
object
language
with
little
need
for
run-time
process-
ing
to
aid
in
the
description
of
the
object
language.
Hence,
in
the
B
7800
this
run-
time
processing
is
automatically
invoked
in
the
hardware.
A-27
~~p
~~~~~~~~~~~~~~~~~~~~~BURROUGHSSCIENTIFICPROCESSOR
A-28
It
was
not
possible
to
take
the
same
approach
with
the
BSP.
The
most
general
BSP
parallel
processor
construct
is
a
sequence
of
vectors,
essentially
a
nested
pair
of
DO
loops.
Because
in
the
general
case,
all
of
the
parameters
used
to
describe
an
operation
could
be
run-time
variables,
so
much
language
processing
is
involved
that
it
makes
no
sense
to
try
to
do
it
in
automatic
hardware.
For
example,
parametrized
descriptors
of
operations
on
sets
of
vectors,
where
the
parameters
are
computed
at
run
time,
involve
a
great
deal
of
run-time
processing
to
convert
the
parametrized
source
language
into
object
code.
This
general
consideration
defines
the
need
for
the
SPU
as
well
as
the
point
in
the
processing
sequence
at
which
the
SPU
passes
instructions
to
the
parallel
processor
control
unit.
This
point
is
where
run-time
source
language
processing
ceases,
and
all
subsequent
vector
operation
processing
can
be
done
in
a
uniform
way.
From
a
language
point
of
view,
this
point
is
the
time
at
which
actual
para-
meters
can
be
inserted
into
a
formal
assignment
statement.
This
is,
consider
the
triadic
formal
assignment
statement
RBV
, Z = A
OP
1 B
OP
2
C,
OBV
;
where
Z,
A,
B,
and
C
are
vector
descriptors,
oPl
and
oP2
are
operators,
and
OBV
/RBV
are
the
optional
operand
and
result
bit
vector
descriptors.
The
executing
this
operation,
the
SPU
issues
the
following
sequence
to
the
parallel
processor
control
unit:
VFORM
OBV
RBV
VOPERAND
VOPERAND
VOPERAND
VRESULT
A
B
C
Z
The
information
in
the
VFORM
instruction
will
name
the
actual
operators
to
be
used,
designate
the
level
of
loop
nesting,
indicate
presence
of
bit
vectors,
etc.
The
OBV
and
RBV
descriptors
will
give
a
start
address
and
a
length.
The
starting
addresses
are
not
referenced
to
an
array,
because
bit
vectors
are
not
FORTRAN
concepts.
However,
the
vector
operand
and
result
descriptors
give
the
start
of
the
vector
relative
to
an
array
location,
the
location
of
the
array,
the
volume
of
the
array,
the
skip
distance
in
the
location
of
the
array,
the
volume
of
the
array,
the
skip
distance
in
memory
between
vector
elements,
and
the
optional
skip
dis-
tance
between
the
start
of
vectors
in
a
nested
loop
pair.
Some
consideration
should
convince
the
reader
that
this
is
the
point
where
run-time
language
process-
ing
has
ceased.
The
remaining
processing,
for
example,
array
bounds
checking,
will
be
constant
for
all
operations.
Hence,
it
is
seen
that
the
BSP
is
a
FORTRAN
language
processor.
SSP
After
the
VIVU
has
processed
the
vector
form
and
its
associated
operand
and
re-
sult
descriptors~
the
finished
package
description
is
stored
in
the
template
descriptor
mernory
(TDM).
The
TDM
functions
as
a
queue
J
thereby
permitting
many
vector
forms
to
be
present
in
it
at
once.
The
template
control
unit
(TeD)
fetches
information
from
the
TDM~
updates
it~
and
stores
the
updated
information
back
in
the
TDM.
The
function
of
the
TeU
is
to
drive
the
parallel
processor.
It
does
this
by
selecting
an
appropriate
template
and
then
using
the
address
informa-
tion
in
the
TDM
to
generate
tags
and
indices
for
the
quantities
dealt
with
by
the
template.
Because
a
template
normally
processes
sets
of
16
elements~
the
TeD
normally
updates
addresses
by
16
and
stores
the
new
addresses
back
into
the
TDM.
However~
for
a
memory
conflict
case~
or
compress/
expand/
merge
operations~
the
TeD
adds
the
correct
updating
number
to
addresses
before
restoring
them
to
the
TDM.
For
retry~
checkpointing~
and
arithmetic
fault
identification~
the
TDM
also
contains
a
copy
of
the
original
vector
form~
as
received
from
the
VIVD.
The
program-
address
counter
value
of
the
instruction
which
issued
the
vector
form
is
also
stored
in
the
TDM.
In
the
case
of
program
termination
due
to
arithmetic
faults~
the
pro-
grammer
is
given
the
index
of
the
first
operand
pair
causing
a
fault
in
a
vector
form~
the
nature
of
the
fault~
the
line
number
of
the
associated
source
statement~
and
the
calling
sequence
used
to
reach
that
statement.
If
the
TeD
is
processing
the
last
template
of
a
vector
form~
there
will
generally
not
be
sets
of
16
elements
involved.
This
is
because
the
last
template
will
require
only
enough
elements
to
process
the
vector
length
specified
by
the
program.
For
this
case
J
the
TeD
will
pad
the
partial
lengths
out
to
16
using
"nUll"
operands.
The
null
operands
are
genera
ted
by
the
input
alignment
network
aid
have
the
follow-
ing
properties
in
the
AE
IS:
operand
....
41----
"null"
(operator)
operand
operand
"'4~--
operand
(operator)
"nUll"
Also~
memory
bank
will
refuse
to
store
a
null.
Hence~
"nUll"
times
1
equals
1~
"null"
plus
I
equals
1.
And
J
of
course
J
two
nulls
produce
a
null.
SOl
a
vector
that
is
not
an
integer
multiple
of
16
is
padded
out
with
a
quantity
which
results
in
no
improper
stores
occurring.
But
the
null
is
more
than
that.
For
example~
in
a
sum
reduction~
where
numbers
are
being
transmitted
between
AE
I
s~
the
correct
sums
are
formed
because
the
nulls
do
not
intrude
into
the
result.
The
same
is
true
for
a
product
reduction
J
or
for
a
reduction
using
"maximum"
or
"minimum"
as
the
operator~
in
which
case
a
search
is
occurring.
SCALAR
PROCESSING
UNIT
The
SPU
is
a
conventional~
register-oriented
processor
in
most
respects.
It
operates
on
an
80-nanosecond
cycle.
It
has
16
48-bit~
general-purpose
registers~
a
full
complement
of
numeric
and
nonnumeric
operators
and
an
instruction
processor
which
includes
content-addressable~
memory-controlled~
in-buffer
J
looping
A-29
~~p
~~~~~~~~~~~~~~~~~~~~~BURROUGHSSCIENTIFICPROCESSOR
A-30
capability.
The
unusual
features
of
the
SPU
relate
to
subroutine
entry
and
to
in-
structions
issued
to
the
parallel
processor
control
unit.
In
addition
to
the
16
general
purpose
registers
l
there
are
16
120-bit
vector
data
buffers
(VDB's).
The
120-bit
width
is
the
maximum
width
of
any
parallel
processor
control
unit
instruction.
If
a
vector
instruction
or
descriptor
has
been
completely
assembled
at
compile
time
l
then
it
will
be
fetched
from
control
memory
into
a
VDB.
From
there
l a
single
clock
will
be
sent
into
the
VIVU
input
buffer.
If
some
run-time
vector
instruction
or
vector
descriptor
processing
is
necessarYI
then
as
many
as
four
of
the
general-purpose
registers
can
be
referenced
to
insert
fields
into
the
120-bit
wide
VIVU
input
buffer.
This
data
will
overwrite
the
associated
fields
in
the
120-bit
word
coming
from
the
VDB
set.
This
facility
permits
the
formation
of
skeletal
descriptors
at
compile
time
l
with
the
expectation
that
missing
fields
will
be
filled
in
at
run
time.
It
also
permits
a
compile-time-generated
descriptor
to
be
overwritten
at
run
time
l
which
can
be
used
to
optimize
VDB
usage
and
memory
references.
The
SPU
uses
a
push-down
stack
for
subroutine
linkage.
The
data
which
goes
on
the
stack
is
the
return
address
and
a
register
address
translation
table.
The
48-
bit
and
120-bit
registers
are
referred
to
via
an
address
translation
unit.
This
capability
assists
in
parameter
passing
and
in
the
minimization
of
register
saves
and
restores
during
subroutine
entry
and
exit.
A
second
stack
is
maintained
for
the
SPU
executive
state.
Control
memory
is
divided
into
the
executive
areal
user
read/
write
areal
and
user
read-only
area.
The
user
stack
is
at
one
end
of
the
user
read/
write
area.
BSP
SOFTWARE
Wherever
possible
l
the
BSP
takes
advantage
of
existing
B
7700/B
7800
software.
Necessary
additional
items
are
a
small
operating
system
to
run
on
the
SPU
I a
BSP
compiler
and
the
associated
linkage
editor
and
intrinsic
functions
l
and
the
diagnostic
package.
Perhaps
the
most
interesting
aspect
of
the
SPU
operating
system
is
its
facility
for
staying
out
of
the
way.
For
example
l
I/O
is
done
in
user
model
and
assuming
I/O
is
overlapped
by
computations
l
the
SPU
spends
less
than
a
microsecond
in
managing
a
transfer.
Overlay
management
and
chaptered
file
management
are
the
major
operating
system
functions
performed
for
a
running
program.
The
hardware
assists
in
overlay
management
by
allowing
presence
bits
to
be
assigned
to
each
phase
of
a
program.
Hence
l
the
operating
system
is
dropped
into
automaticallYI
if
and
only
if
the
program
attempts
to
enter
a
routine
in
a
phase
which
is
not
present.
The
FORTRAN
compiler
has
a
number
of
interesting
features.
The
most
important
is
the
vectorization
pass
over
the
program
l
which
converts
serial
FORTRAN
into
vector
constructs.
The
BSP
vectorization
pass
is
a
more
complete
parallel
analysis
\
.!
SSP
BURROUGHS
SCIENTIFIC
PROCESSOR
of
a
program
than
has
been
previously
inserted
into
product
compilers.
The
usual
approach
has
been
to
attempt
to
vectorize
only
loops
which
did
not
contain
branches
or
cyclic
dependencies.
The
BSP
vectorizer
issues
vector
instructions
even
for
branching
cases"
as
long
as
the
branch
paths
depend
on
vectors
which
are
known
at
branch
time.
The
vectorizer
also
detects
cyclic
dependencies.
If
an
analysis
of
the
dependency
shows
it
is
equivalent
to
a
linear
recurrence"
then
appropriate
vector
instructions
are
issued.
These
types
of
parallelism
are
the
most
frequent
which
can
be
detected
using
rigorously
defined
algorithms.
There
are
some
important
cases"
such
as
when
a
user
has
undertaken
to
manage
indices"
for
which
only
ad
hoc
vectoriza
tion
techniques
are
known.
These
will
be
vectorized
as
well"
but
clear-cut
statements
about
the
extent
of
vectorization
are
not
possible.
The
FORTRAN
compiler
also
contains
the
facility
to
directly
express
vector
and
array
constructs.
Assignment
statements
like
A = A +
1"
where
A
is
an
array"
are
permitted.
Index
expressions
are
permitted
on
array
identifiers.
For
example,ll
if
A
is
a
3-dimensional
array"
then
A
(10:50:2"
6"
1:10)
would
refer
to
a 21
by
10
array
which
is
a
subspace
of
A.
Clearly"
this
reference
need
only
generate
a
descriptor"
which
is
pushed
into
the
VIVU
queue.
No
actual
subset
of
A
is
generated
as
a
temporary.
An
interesting
special
feature
of
the
compiler
is
a
source
code
regenerator.
This
regenerator
creates
standard
FORTRAN
statements.
Hence"
a
programmer
can
indulge
in
the
use
of
array
extensions"
but
retain
full
compatibility
with
standard
FORrl'RAN.
Because
of
the
way
in
which
the
B
7700/B
7800
is
connected
to
the
BSP"
it
is
possible
to
use
standard
B
7700/B
7800
terminals
or
network
connections
to
run
BSP
diagnostics.
A
field
engineer
can
invoke
a
sequence
of
routines
which
will
result
in
a
printout
of
suspect
IC
locations.
He
can
quickly
replace
the
suspect
IC's
and
bring
the
BSP
back
up
again"
if
it
is
down.
This
idea
is
extended
to
the
ability
to
use
BSP
development
engineers
on-line
in
the
diagnostic
process.
Thus"
the
field
engineer
and
the
customer
have
excellent
assurance
of
prompt
system
recovery.
A
-31
~~p
~~~~~~~~~~~~~~~~~~~~~BURROUGHSSCIENTIFICPROCESSOR
