Continental Radar PLC Manual Vers. 4.01en
User Manual:
Open the PDF directly: View PDF ![]() .
.
Page Count: 64
Continental Engineering Services GmbH
Radar PLC
Manual
Version 4.01 en
Author:
H.C Enders
Thomas Kruppi
Graf-Vollrath Weg 6
60489 Frankfurt
Germany
Version : 4.00 en
Page 2 of 64
CHANGE HISTORY
Version
Date
Change Description
Author
0.01
05.02.15
Initial Version
H.C. Enders
0.02
26.02.15
Update Filter
Thomas Kruppi
1.00
23.03.15
Release for fist system delivery
H.C. Enders
1.01
29.05.15
Some small updates
H.C. Enders
2.00
24.07.15
Update to SW Version 2.0
H.C. Enders
2.01
03.08.15
Updates after internal Review
H.C. Enders
3.00
03.12.15
Update Collision Detection
H.C. Enders
3.01
08.03.16
Update Collision Detection
Thomas Kruppi
3.02
09.03.16
Reference correction
Thomas Kruppi
4.00
25.10.16
Support of ARS 408
H.C. Enders
4.01
25.01.17
Marker Configuration Menu
H.C. Enders
Table 1: Change History
Please read this manual carefully before installing the system and carry out the installation
procedures correctly.
This manual provides guidelines for installation, but it does not guarantee the quality of the
installation work. Please complete all work in a responsible and professional manner.
Electrical work should be performed by a qualified electrician.
Page 3 of 64
Continental Engineering Services GmbH
Inhalt
1 Introduction .............................................................................................................. 5
1.1 Scope of this documentation ................................................................................... 5
1.2 Liability Conditions .................................................................................................. 5
1.3 Operating Personnel ............................................................................................... 5
1.4 Technical data ......................................................................................................... 6
1.5 Product identification ............................................................................................... 7
2 Electrical Connection ............................................................................................... 8
2.1 Connection to Power ............................................................................................... 8
2.2 Connection to CAN.................................................................................................. 8
2.3 Connection to relative Speed and yaw rate signal ................................................... 8
2.4 Connection to Output Relays ..................................................................................10
3 Software .................................................................................................................. 12
3.1 Overview ................................................................................................................13
3.1.1 Real-time I/O software .....................................................................................13
3.1.2 Visualization Software .....................................................................................13
4 Graphical User Interface ........................................................................................ 14
4.1 The Coordinate System ..........................................................................................14
4.2 Markers ..................................................................................................................17
4.3 Short Range Radar (SRR 208) Sensor ...................................................................20
4.3.1 Cluster.............................................................................................................20
4.3.2 Tracks .............................................................................................................21
4.3.3 Sensor Configuration Window .........................................................................22
4.3.4 Filter application relevant Cluster or Tracks .....................................................23
4.3.5 Collision Detection on sensor ..........................................................................26
4.4 ARS 308 Sensor (Long Range) ..............................................................................30
4.4.1 Targets ............................................................................................................31
4.4.2 Objects ............................................................................................................31
4.4.3 Sensor Configuration Window .........................................................................33
4.4.4 Filter application relevant Targets or Objects...................................................34
4.4.5 Collision Detection ..........................................................................................37
4.5 Software Collision Detection on PLC ......................................................................41
4.5.1 Definition of Regions .......................................................................................42
Version : 4.00 en
Page 4 of 64
4.5.2 Region States..................................................................................................43
4.5.3 Region specific Filter .......................................................................................44
4.5.4 Region trigger Behavior ...................................................................................46
4.5.5 Region Manager ..............................................................................................47
4.6 ARS 408 Sensor (Long Range) ..............................................................................50
4.6.1 Sensor Configuration .......................................................................................50
4.6.2 Filter Configuration ..........................................................................................54
5 Support of a second Radar Sensor ....................................................................... 57
6 Tools ....................................................................................................................... 59
6.1 Remote Desktop ....................................................................................................59
7 Appendix ................................................................................................................. 60
7.1 Power Supply AC/DC .............................................................................................60
7.2 Power Supply DC/DC .............................................................................................61
Page 5 of 64
Continental Engineering Services GmbH
1 Introduction
1.1 Scope of this documentation
This documentation is written for trained electricians. Knowledge of national standards is
required. The following document should be read before installing and operating the Radar
PLC. If the following issues are disregarded, the equipment may get damaged and the safe
function is not ensured.
©This documentation is copyrighted by Continental Engineering Services GmbH (CES). Any
reproduction, even parts, is only allowed with the permission of CES.
1.2 Liability Conditions
The responsible staff must ensure that all laws, standards, regulations and guidelines are
fulfilled. All information is given in good faith; it does not represent a guarantee with respect
to characteristics and does not exempt the user from testing the suitability of products and
from ascertaining that the industrial property rights of third parties are not violated.
No liability whatsoever will be accepted for damage – regardless of its nature and its legal
basis – arising from advice given in this publication. This does not apply in the event that we
or our legal representatives or management are found guilty of having acted with intent or
gross negligence.
No liability is borne for damage due to ordinary negligence. This exclusion of liability applies
also to the personal liability of our legal representatives and employees and other persons
employed in performing our obligations. All components are shipped in a condition to be able
to fulfill the requirements in operation according to their scope.
The Radar PLC must not be used in order to reduce safety systems, especially personal
safety. The System should only be operated by personnel who are familiar with all states that
can occur! Software knowledge is mandatory. The products are improved continuously. This
may lead to differences in the description.
We reserve the right to make technical modifications or to amend the delivery specifications.
Please contact your supplier if it should become necessary to check the technical functions
or to repair the device.
1.3 Operating Personnel
Every user of the CONTINENTAL® Radar PLC has to read this handbook and must be
acquainted with all the functions of the system.
Also every user has to read the documentation of the used continental Radar sensor.
Version : 4.00 en
Page 6 of 64
1.4 Technical data
Parameter
Value
Processor
Intel® Atom™ E3845, 1.91 GHz, 4 cores (TC3: 50)
Flash memory
8 GB CFast card
Internal main memory
4 GB DDR3 RAM
Persistent memory
integrated 1-second UPS (1 MB on Compact Flash card)
Interfaces
2 x RJ45, 10/100/1000 Mbit/s, DVI-I, 4 x USB 2.0, 1 x
CANopen,2x4..20mA Analoge,8x Relay
Diagnostics LED
1 x power, 1 x TC status, 1 x flash access, 2 x bus status
Clock
internal battery-backed clock for time and date (battery
exchangeable)
Operating system
Microsoft Windows Embedded Standard 7 P
Control software
Continental Radar PLC Software
Power supply
24 V DC (-15 %/+20 %)
Dielectric strength
500 V (supply/internal electronics)
Max. power
24 W
USP
Integrated 1s UPS (Up to 20s power with standard configuration)
Dimensions (W x H x
D)
185 mm x 100 mm x 92 mm
Weight
approx. 1,5 Kg
Operating/storage
temperature
-25…+60 °C/-40…+85 °C
Relative humidity
95 %, no condensation
Vibration/shock
resistance
conforms to EN 60068-2-6/EN 60068-2-27
EMC
immunity/emission
conforms to EN 61000-6-2/EN 61000-6-4
Protection class
IP 20
Approvals
CE
Mount
Cap rail
Table 2: Technical data Continental Radar PLC
Page 7 of 64
Continental Engineering Services GmbH
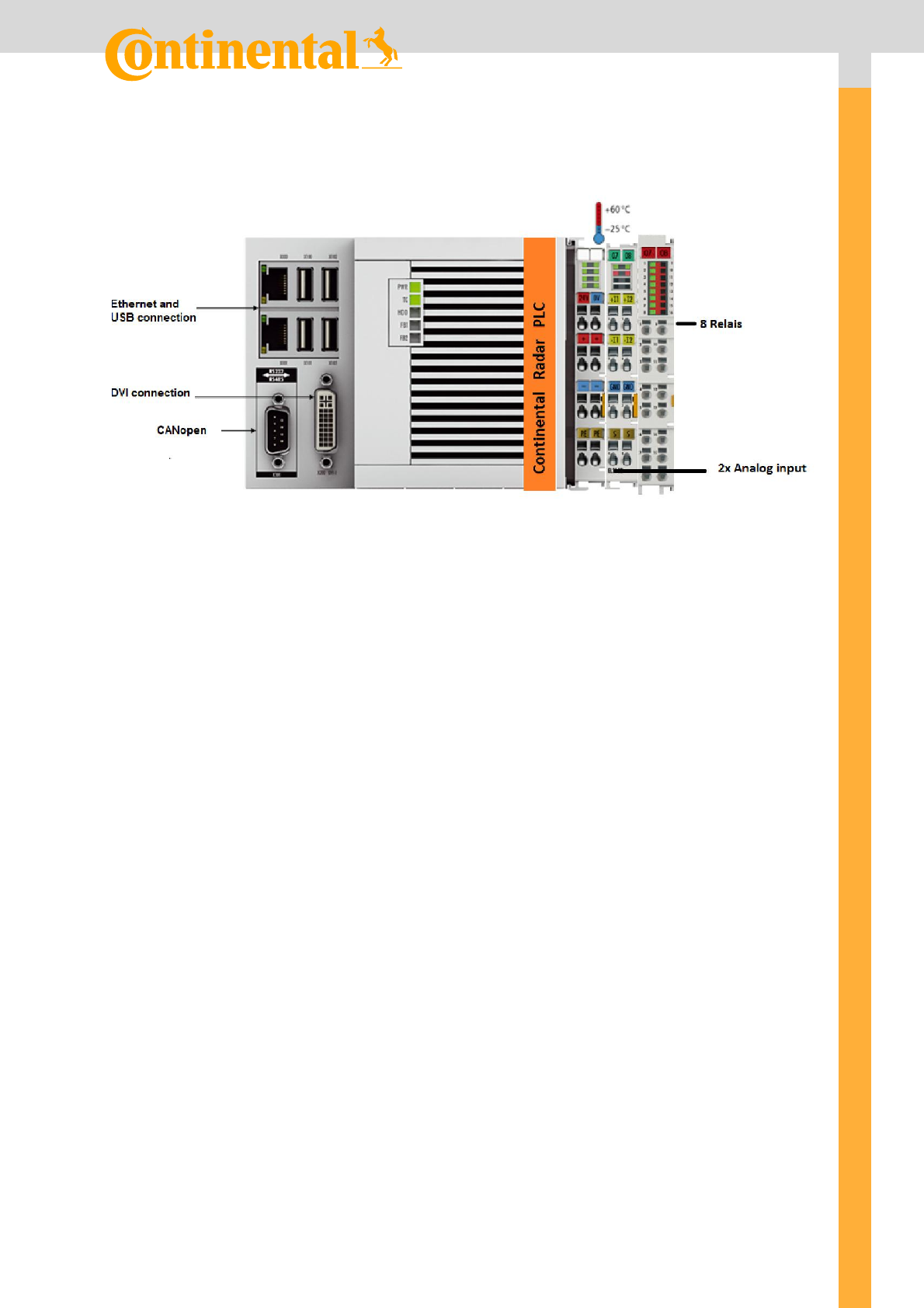
1.5 Product identification
Figure 1: Radar PLC Hardware
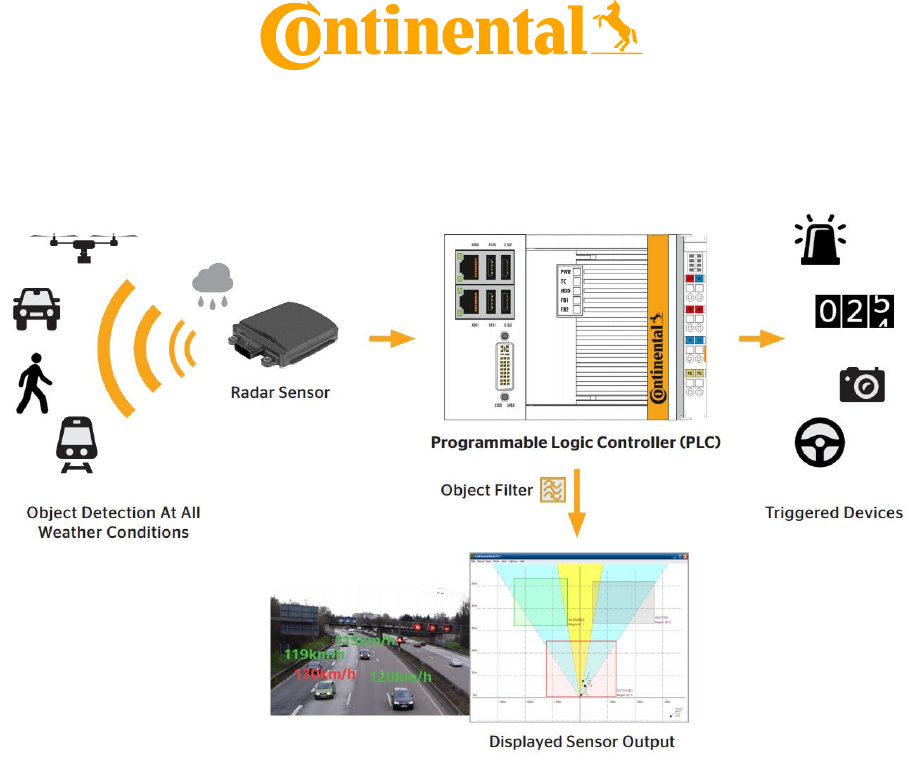
The Radar PLC is designed to display the output of either one Continental SRR208 or
ARS308 Radar Sensor on a monitor. If collision detection is supported by the sensor, it is
possible to use this device to trigger up to 8 different Solid state relays.
The Radar PLC can be mounted on a cub rail.

Version : 4.00 en
Page 8 of 64
2 Electrical Connection
2.1 Connection to Power
To bring the system into operation 24V DC has to be connected to the power input terminals.
Figure 2: Power input terminals
2.2 Connection to CAN
The CAN interface allows the communication between a Notebook or PC and the device via
a separate converter CAN to USB. The CAN bus must have a terminal resistance of
respectively 120 Ω between CAN H and CAN L at the first and last subscriber to avoid
reflections. The standard cable harness from Continental includes this resistor.
The CAN BUS of the Radar Sensor has to be connected to the CANopen connector plug.
Figure 3: CANopen connector plug
2.3 Connection to relative Speed and yaw rate signal
When the radar is integrated in a vehicle, the radar sensor needs the vehicle speed. This can
be done by an input current (4...20mA) from outside.
Page 9 of 64
Continental Engineering Services GmbH
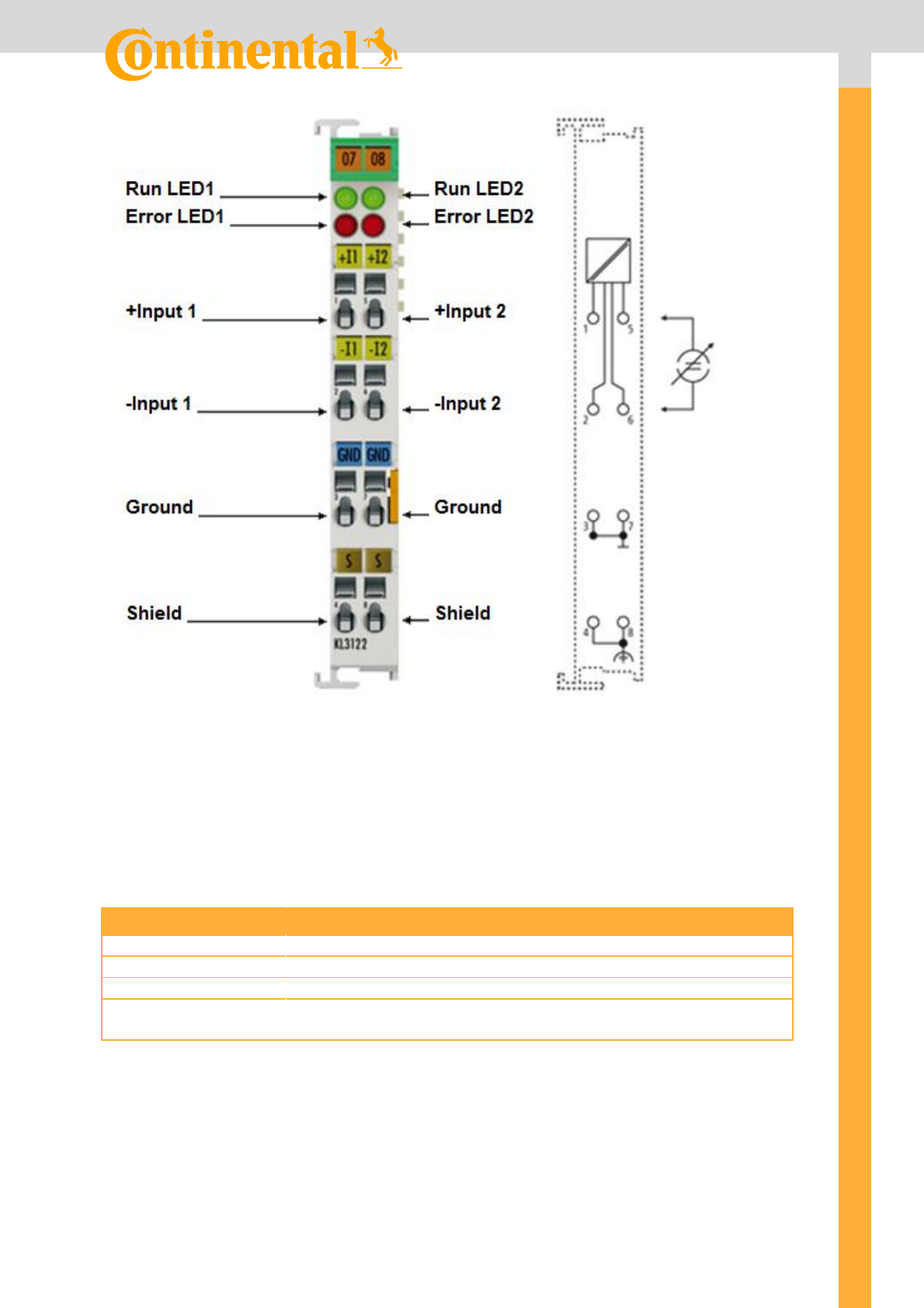
Figure 4: Analog input terminal
The speed signal has to be connected to terminal 1 and 2.
The run LEDs give an indication of the data exchange with the Bus Coupler. The error LEDs
indicate an overload condition, also it shows a cable break (0mA).
Also it is possible to connect a yaw-rate to terminal 5 and 6.
Parameter
Value
Technology
differential input
Signal current
4…20 mA
Internal resistance
50 Ω typ. shunt, load: 60 Ω + diode voltage
Common-mode
voltage UCM
35 V max.
Table 3: Technical data analog input terminal
Version : 4.00 en
Page 10 of 64
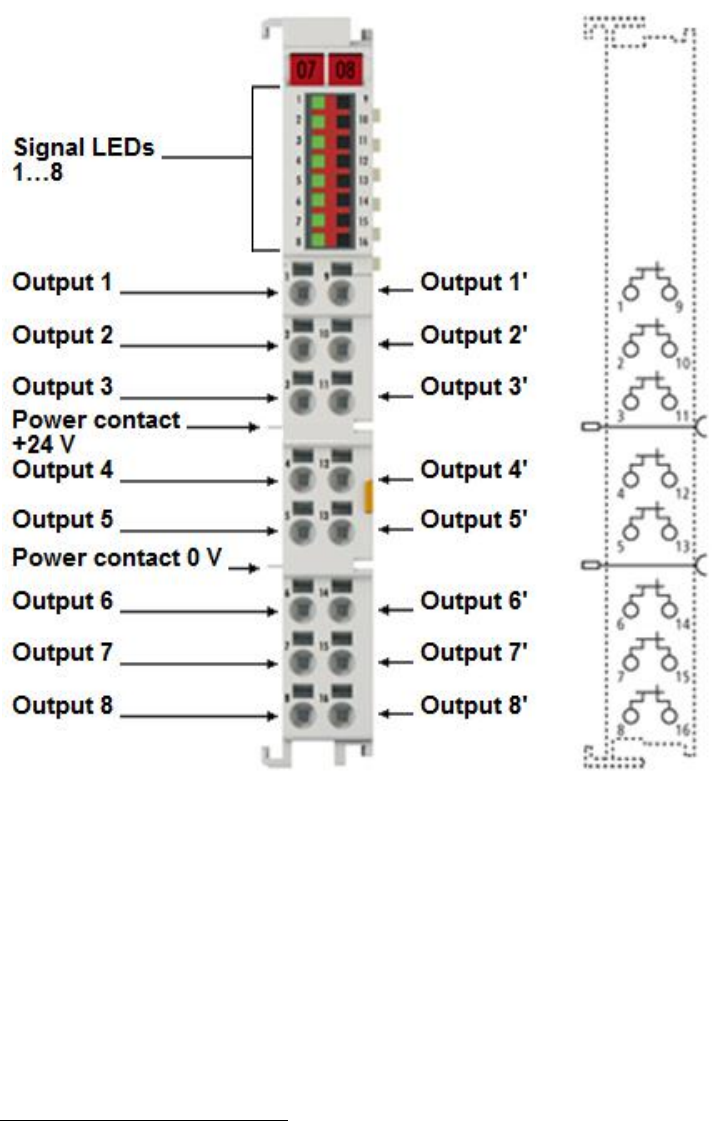
2.4 Connection to Output Relays
The Radar PLCs is able to support up to 8 solid state relays, when a collision is detected1.
With these Relays costumer specific functions can be triggered.
Figure 5: Relays output terminal
The digital Terminal provides eight switches that can be used like a relay contact for AC/DC
voltages. The electronic switch is realized through high-performance MOSFET transistors
with a low switch-on resistance. The switch itself is not short-circuit-proofed, but due to its
high pulse current capability it can cope with currents until an external fuse triggers a switch-
off. Wear resistance increases the availability of the application. Resistive and light inductive
loads can be switched up to a rated voltage of 30 V AC/DC, completely resistive loads also
up to a rated voltage of 48 V DC. High peak voltages and electromagnetic interference
pulses are prevented.
1 Only possible, if the radar sensor supports collision detection. (SRR 208-2C or ARS308C)
Page 11 of 64
Continental Engineering Services GmbH
Parameter
Value
Rated load voltage
0…30 V AC/DC (only ohmic load: 0…48 V DC)
Short circuit current
not short-circuit-proof, see peak current
Output current
2 A (∑ 10 A @ 55° C)
Breakdown voltage
80 V
Peak current
5 A (100 ms), < 50 A (10 ms)
Conductor connection
solid wire conductors: direct plug-in technique; stranded wire
conductors and ferrules: spring actuation by screwdriver
Rated cross-section
solid wire: 0.08…1.5 mm²; stranded wire: 0.25…1.5 mm²;
ferrule: 0.14…0.75 mm²
Table 4: Technical data output relays
Version : 4.00 en
Page 12 of 64
3 Software
The Radar PLC software starts automatically when powering up the embedded PC. It takes
about 2 minutes.
Figure 6: Radar PLC Software
Page 13 of 64
Continental Engineering Services GmbH
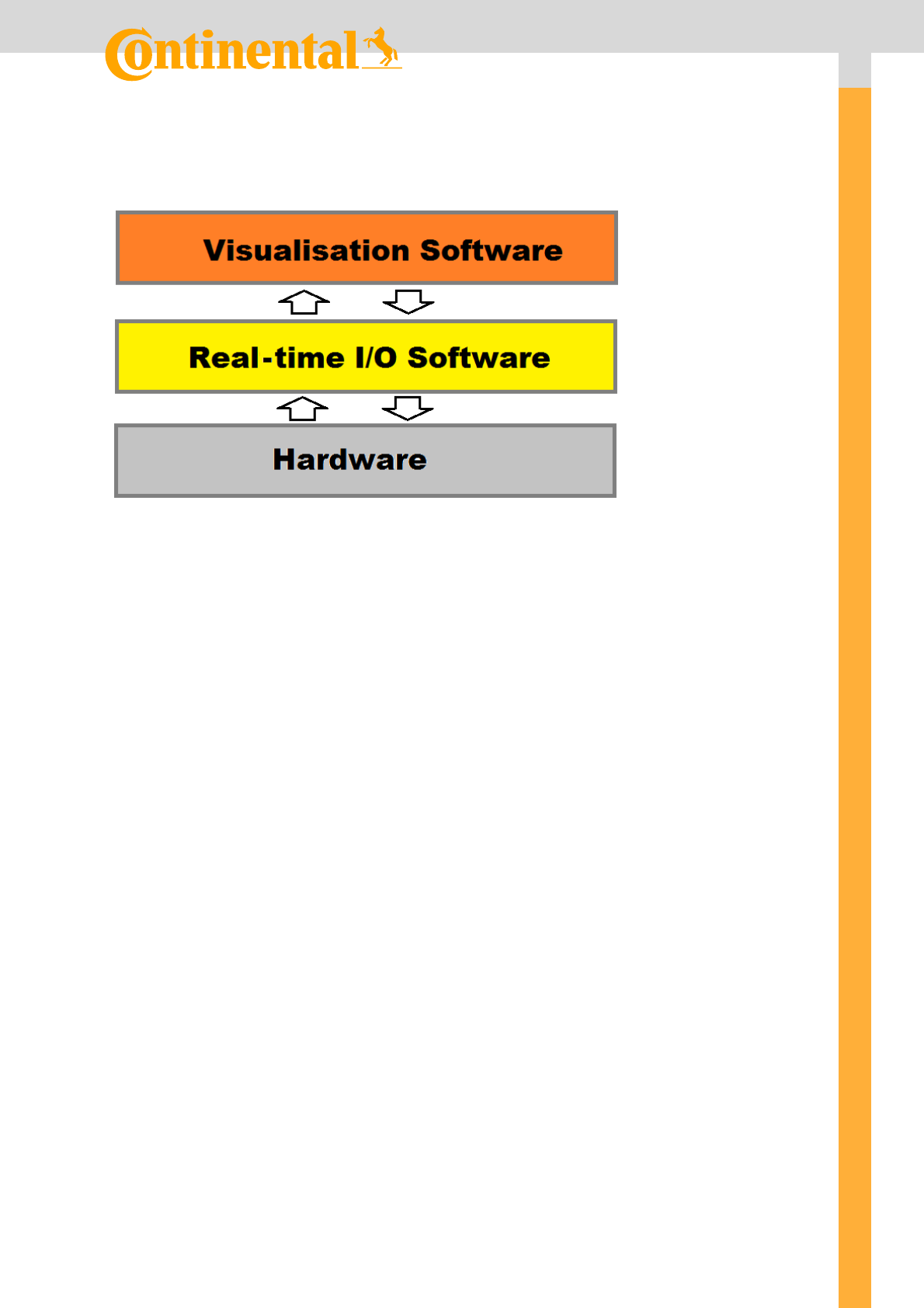
3.1 Overview
The software consists of two parts:
Figure 7: Two parts of the Radar PLC Software
3.1.1 Real-time I/O software
This software part is responsible for the communication between the In- and Output-channels
and the Visualization software. It is operating between the hardware and the Windows
operating system. This allows the software to work around the Windows system instantly
providing exceedingly fast access times for hardware communication.
3.1.2 Visualization Software
This software represents the Graphical User Interface (GUI) for the Radar Sensor signals.
The GUI operates on the Windows System and communicates with the real-time I/O
software. It displays objects the Radar detected and allows the user to configure the Radar
Sensor.
Version : 4.00 en
Page 14 of 64
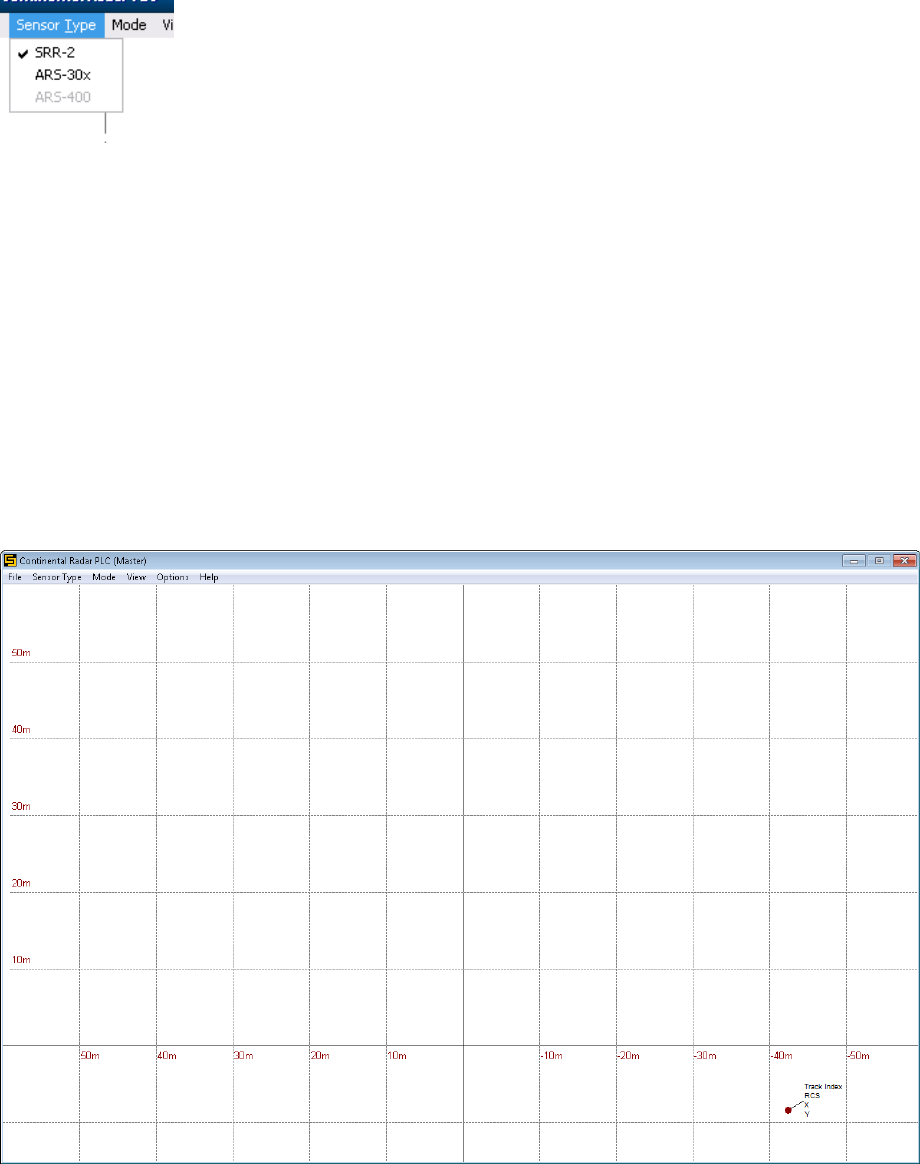
4 Graphical User Interface
The handling of the SRR- and ARS-Sensor is different. So the user has to configure the
software according to the connected sensor.
Figure 8: Configuration of Sensor type
The Continental Radar PLC menus and appearance is adjusted on startup according to the
Sensor (SRR20X, ARS30X) referenced in the “program.ini” file in the Continental Radar PLC
folder. By editing the “program.ini” the default startup sensor can be configured. To do so,
edit the “defaultSensor” parameter in “C:\Continental Radar-PLC\program.ini”. Valid values
for that parameter are “ARS30x” and “SRR20X”.
4.1 The Coordinate System
The entities detected by the radar sensor are displayed in a Cartesian coordinate system
assuming the radar sensor is positioned in the origin. By default the axis maxima are limited
by 60m in longitudinal direction and +/-60m in lateral direction (for the SRR 20X sensor).
Negative longitudinal values are not possible.
Figure 9: Cartesian Coordinate System used to display detected entities
Page 15 of 64
Continental Engineering Services GmbH
The reference lines of the coordinate system grid have a fixed distance of 10m making it
very easy to read and classify detected entities.
A legend of currently displayed information is visible in the lower right corner of the
coordinate system. This is the currently displayed set of information shown next to each
detected entity (See chapter 4.3(SRR20X) and 4.4(ARS30X) for sensor specific information).
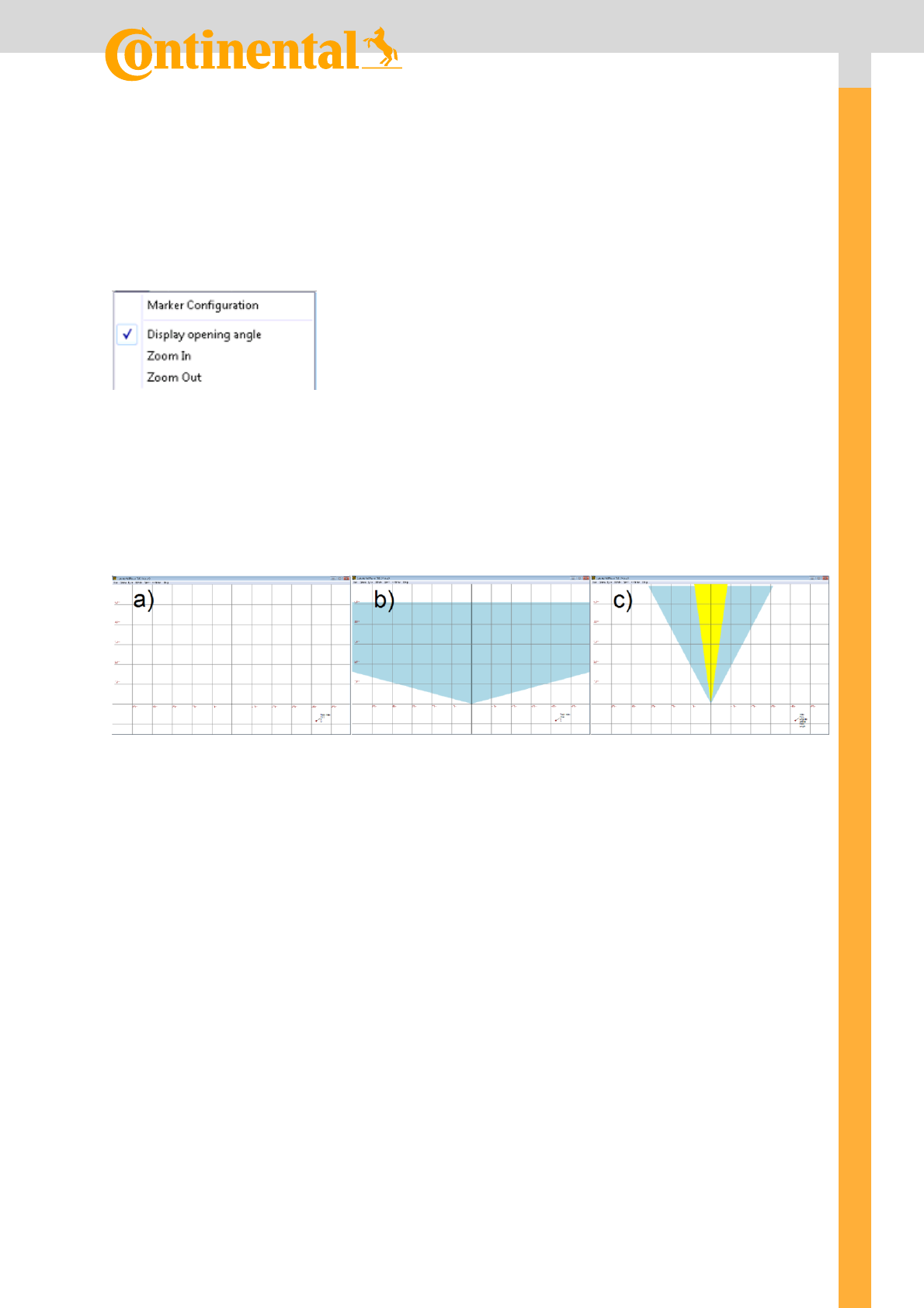
The current display and the coordinate system can be configured via the View Menu (Figure
10).
Figure 10: View Settings for display and coordinate system configuration
In the View Menu it is possible to switch the currently displayed set of entity information
between Positioning and Velocity information. Furthermore it is possible to display the
Opening Angle (Field of view) of the currently used radar sensor. This option is activated by
default. Figure 11 shows the plain coordinate system (a), the opening angle for the SRR20X
(b), and the opening angle for the ARS30X sensor (c).
Figure 11: Different appearances of the coordinate system
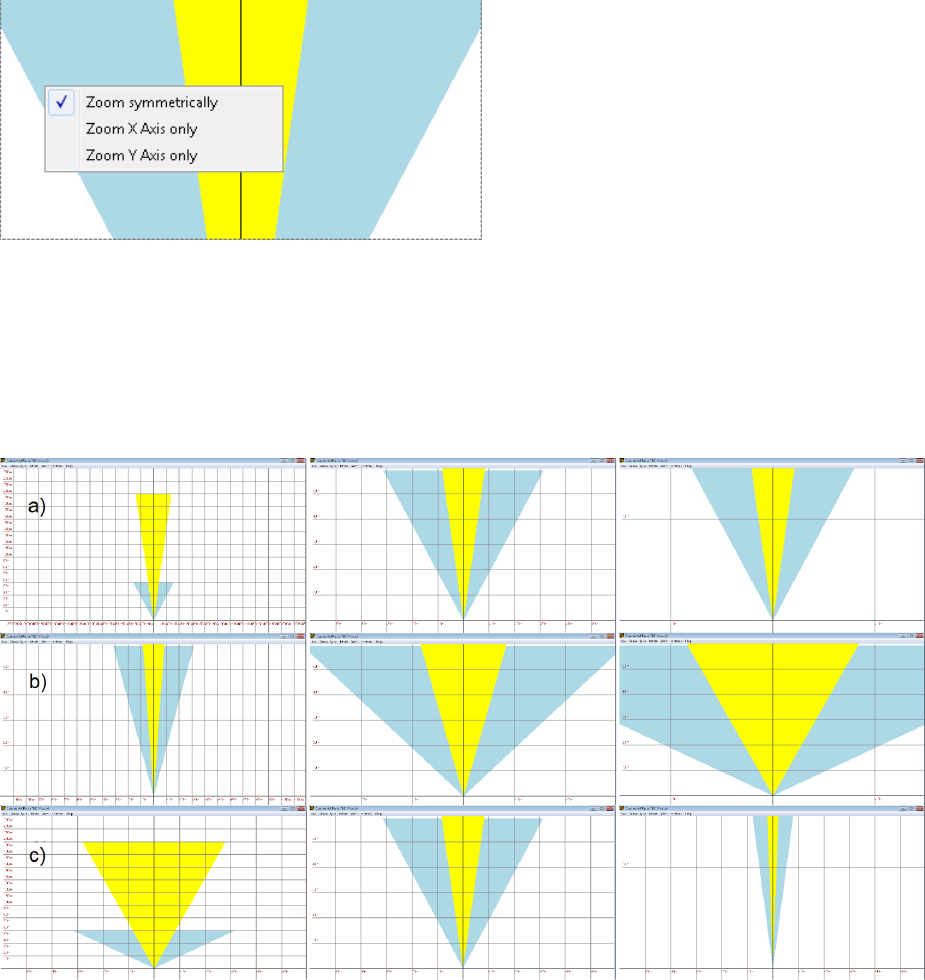
It is also possible to scale the coordinate system. To do so either simply scroll the mouse
wheel up to zoom-in and down to zoom-out or select the Zoom In/Zoom Out option from the
View Menu (Figure 10). By default the zoom is performed symmetrically meaning the
longitudinal and lateral axis are zoomed by the same factor (Figure 13-a). This can be
adjusted by right-clicking into the Main Screen and opening the Zoom-Options.
Version : 4.00 en
Page 16 of 64
Figure 12: Zoom Options for symmetrical, longitudinal only or lateral only zoom.
When selecting the “X Axis only” option only the lateral axis is scaled upon zooming. The
longitudinal axis stays at its current value (Figure 13-b). Respectively when selecting the “Y
Axis only” option from the zoom menu, only the longitudinal axis is scaled and the lateral
axis remains at its current value (Figure 13-c).
Figure 13: Exemplary zoom modes and stages
Page 17 of 64
Continental Engineering Services GmbH
4.2 Markers
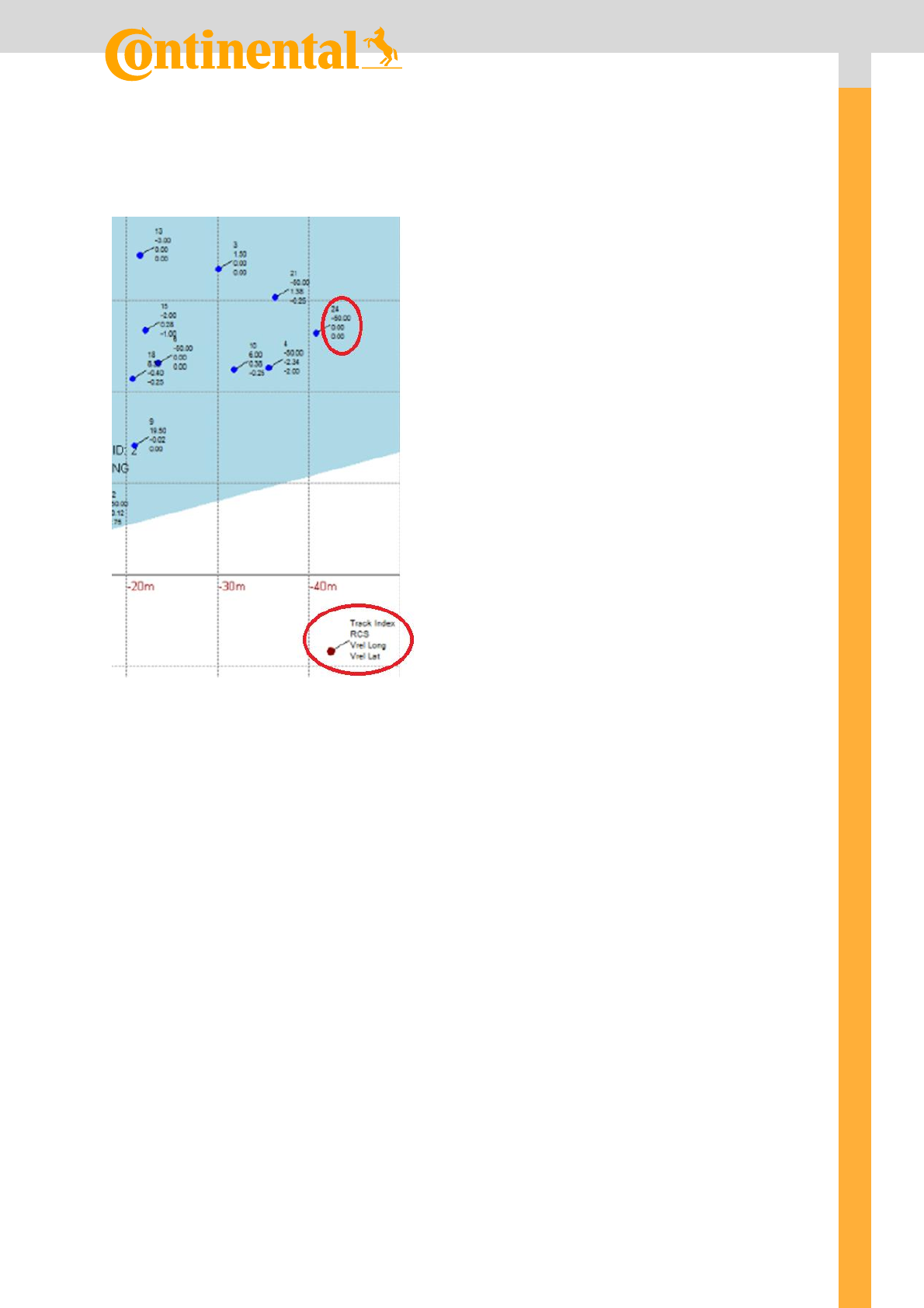
Each entities detected by the radar can carry additional information.
Figure 14 Additional Information
Depending on the Sensor and the operation mode different additional information is
available. Up to 6 configurable different values can be displayed at once. The menu can be
found under View / Marker Configuration.
Version : 4.00 en
Page 18 of 64
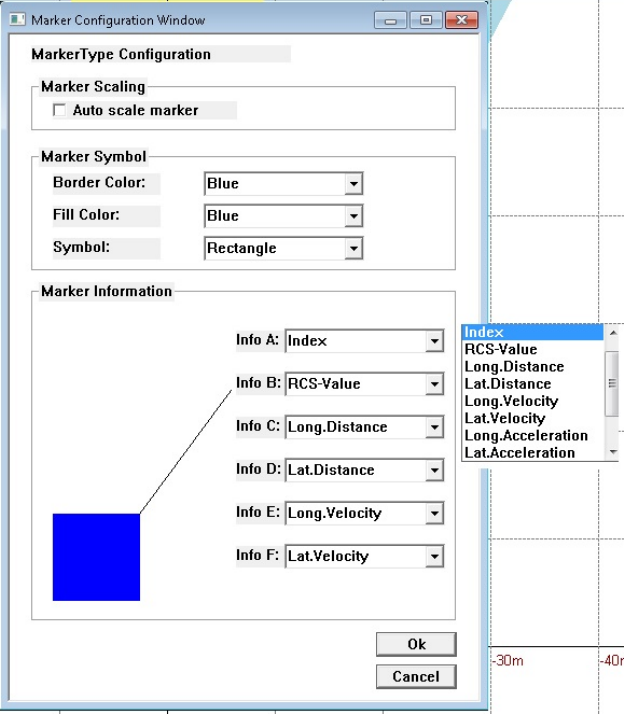
Figure 15 Marker Configuration
On the ARS408 in object mode the following values are selectable:
-Index
-RCS Value
-Longitional Distance
-Lateral Distance
-Longitional Velocity
-Lateral Velocity
-Longitional Acceleration
-Lateral Acceleration
-Object class
Page 19 of 64
Continental Engineering Services GmbH
For the markers of all Sensor types and operation modes color and Symbol can be changed.
Also on the ARS408 a auto scale of the marker size is available. The scaling is done by the
detected object width and length for rectangle and by RCS by Circle.
Version : 4.00 en
Page 20 of 64
4.3 Short Range Radar (SRR 208) Sensor
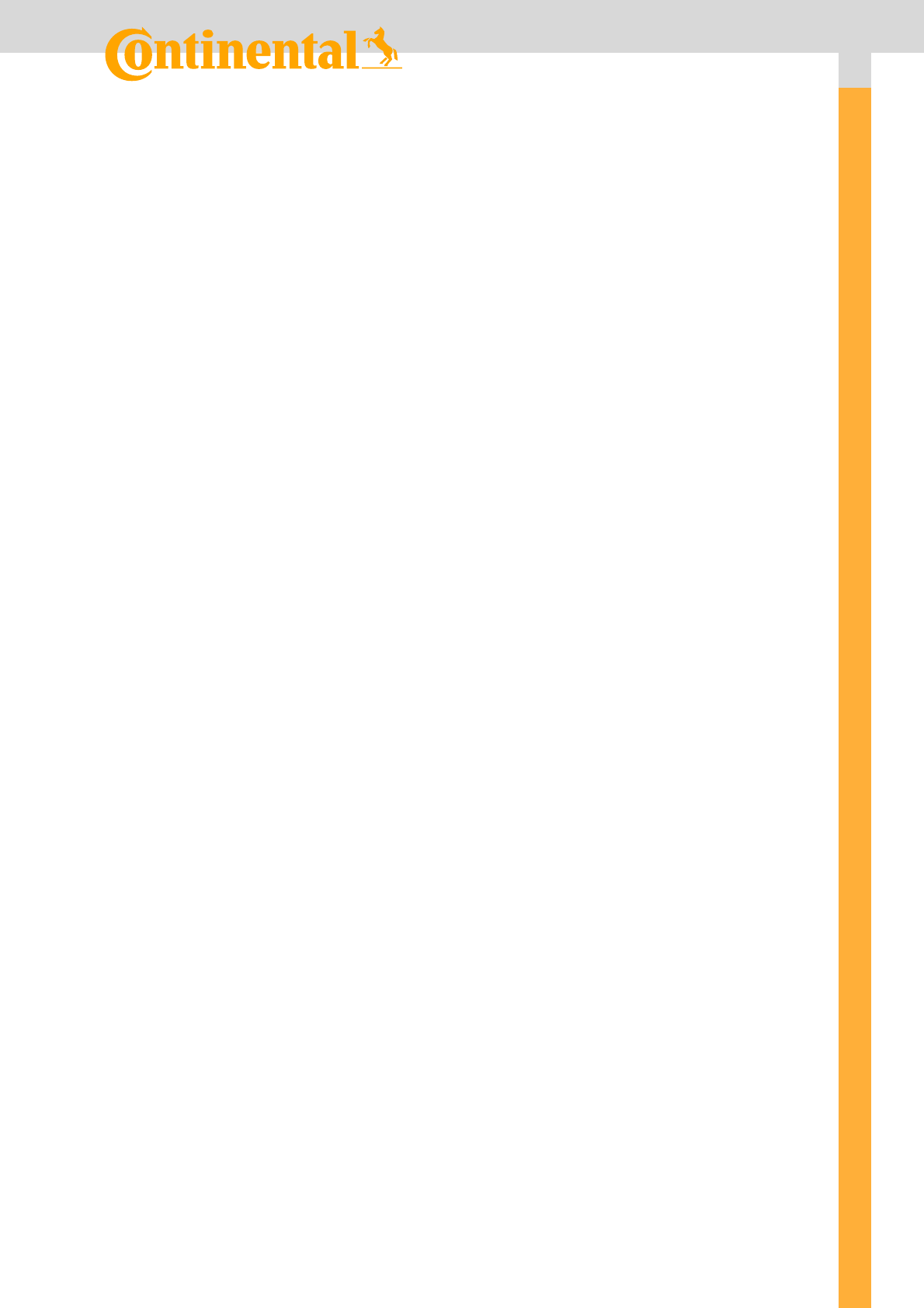
Figure 16: SRR Main Screen
The main screen shows the SRRs field of view, marked by the light blue area. The white
regions mark everything outside the sensors field of view. By the sensor detected entities are
displayed within the field of view of the sensor. Markers also provide additional measurement
data about detected entities (Radar Cross Section (RCS), speed..) A legend is shown in the
lower right corner of the Main Screen.
The sensor supports two operation modes. It can deliver Tracks or Cluster2 data.
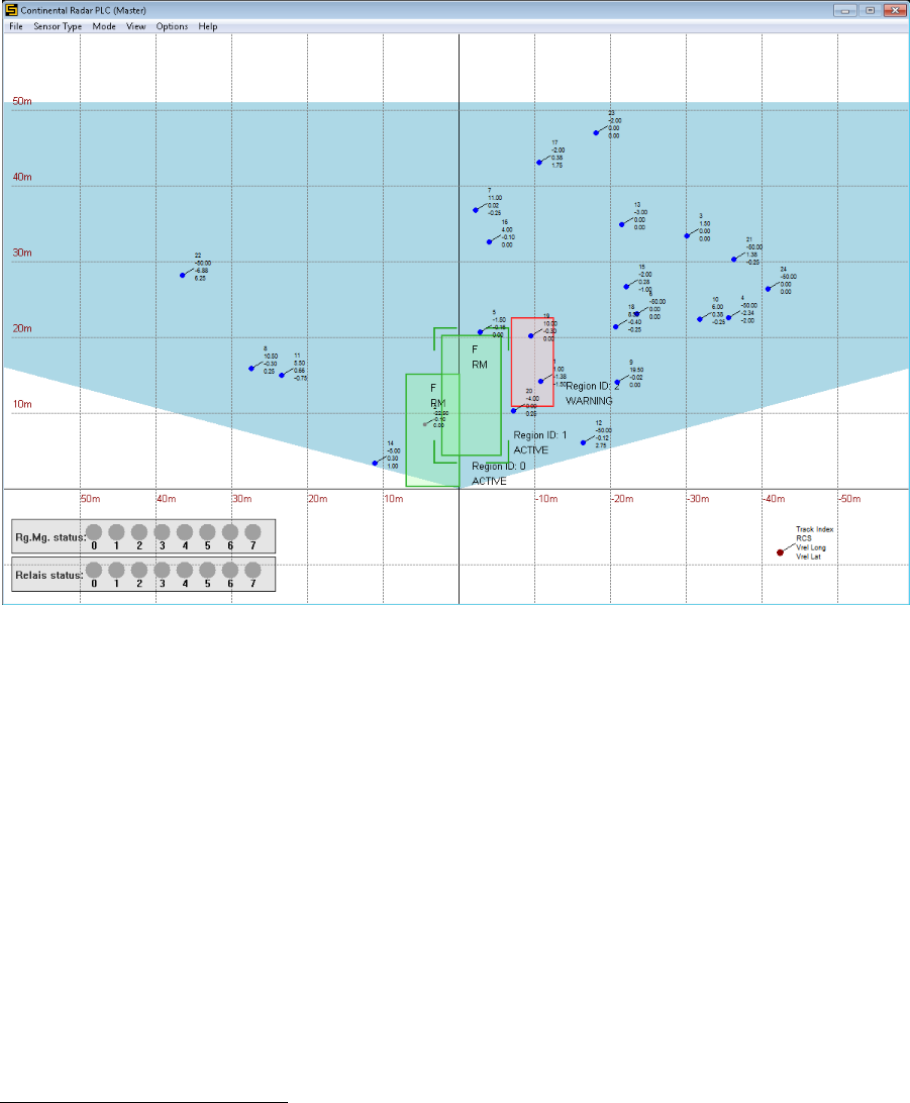
4.3.1 Cluster
The Cluster mode can be activated by selecting Cluster from the Mode Menu.
2 See the SRR208 manual for description
Page 21 of 64
Continental Engineering Services GmbH
Figure 17: Mode selection for Cluster
Clusters represent reflected signals with similar position and movement. The software is able
to display up to 128 Cluster at once. Each Cluster provides a set of information.
Figure 18: SRR Cluster Markings
Parameter
Description
Index
Current index of the cluster in the cluster list
RCS
Radar Cross Section[dB*m^2]
Range
Radial distance of the cluster[m]
Azimuth
Cluster angle[°]
Vrel
Relative velocity of the cluster[m/s]
Table 5: Cluster parameter overview
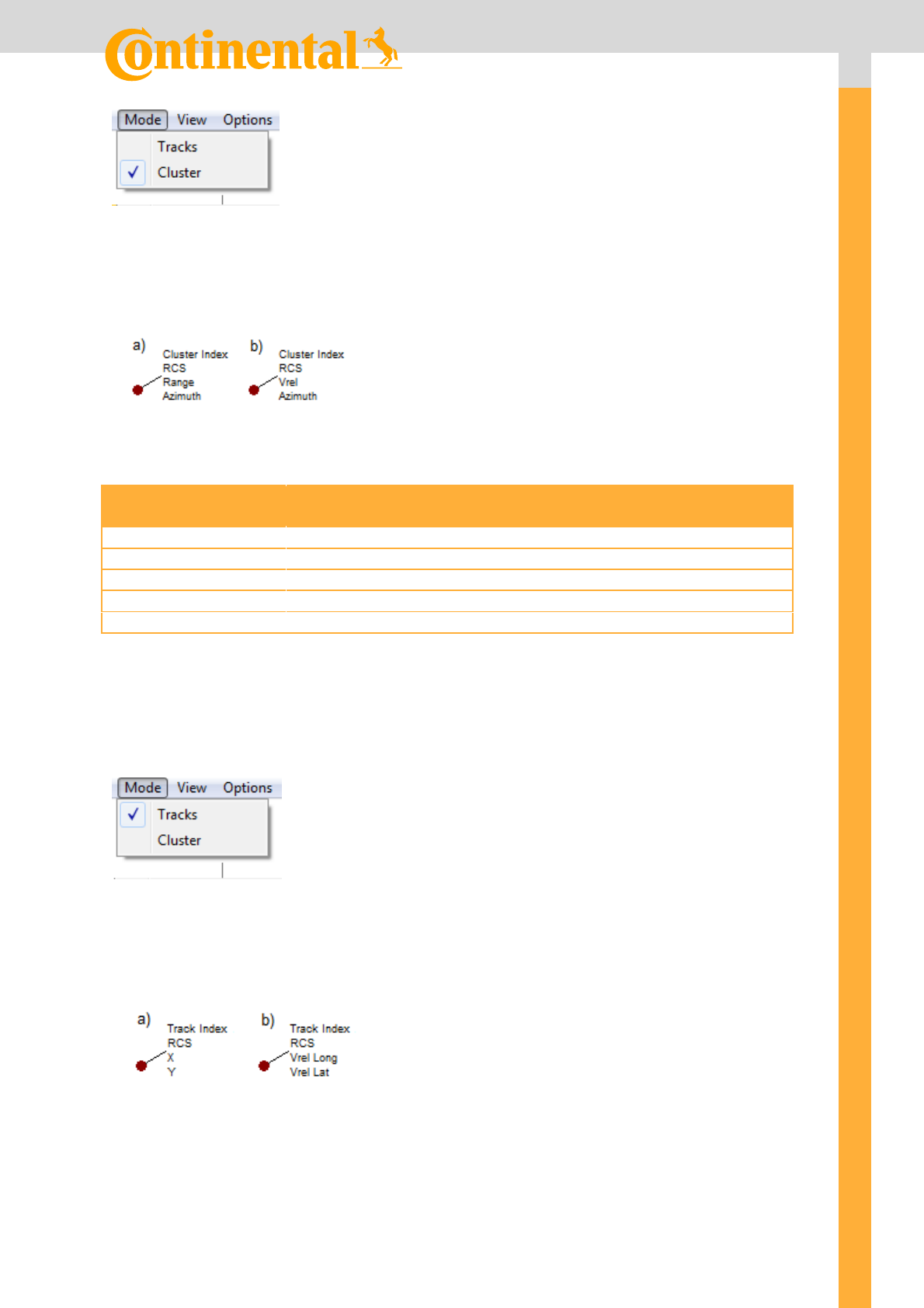
4.3.2 Tracks
The Track mode can be activated by selecting Tracks from the Mode Menu.
Figure 19: Mode selection for Tracks
Tracks in contrast to Cluster have a history. They represent Cluster tracked over time. The
software is able to display up to 25 Tracks at once. Each Track provides a set of information.
Figure 20: SRR Track Markings
Version : 4.00 en
Page 22 of 64
Parameter
Description
Index
Current index of the track in the track list
RCS
Radar Cross Section[dB*m^2]
X
Longitudinal position of the track[m]
Y
Lateral position of the track[m]
Vrel Long
Relative longitudinal velocity[m/s]
Vrel Lat
Relative lateral velocity[m/s]
Table 6: Track parameter overview
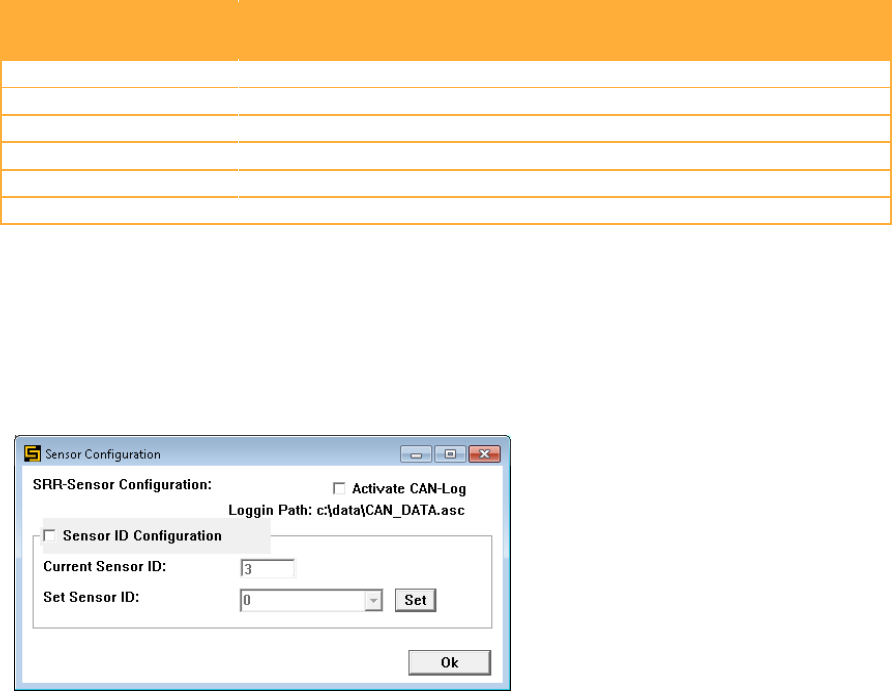
4.3.3 Sensor Configuration Window
Basic Sensor properties can be adjusted in the “Sensor Configuration” window. To open it,
select Options/ Sensor Configuration.
Figure 21: The Sensor Configuration Window
4.3.3.1 CAN-Bus Log
In the “Sensor Configuration” window you can activate a CAN-Log which will record every
CAN-Message sent by the sensor.
The logging file “CAN_DATA.asc” is stored at the location shown at “Logging Path”. This is
the default Logfile location. If you want to adjust the Logging Path, you can do so by
changing the “logPath” parameter in the “program.ini” file in the program folder
“C:\Continental Radar-PLC\program.ini”.
Note: When changing the default Logfile location, it is mandatory to enter a valid path-
string e.g. c:\data\CAN_DATA.asc without any apostrophes or quotation marks. In general it
might be helpful to create backup copies of all *.ini files before changing parameter values.
4.3.3.2 Sensor ID Configuration
The Sensor ID Configuration allows selecting a sensor ID for the connected sensor. The
Sensor ID also determines the address space of CAN communication messages according
to (base message ID | (0x10 * sensor ID)).
The Current Sensor ID option shows the currently used Sensor ID. The Set Sensor ID
option allows changing the Sensor ID. Therefore a value between 0 and 7 can be selected
from the drop-down menu. Confirming the new value by pressing the Set-Button will write
the new configuration to the Radar-Sensor.
Page 23 of 64
Continental Engineering Services GmbH
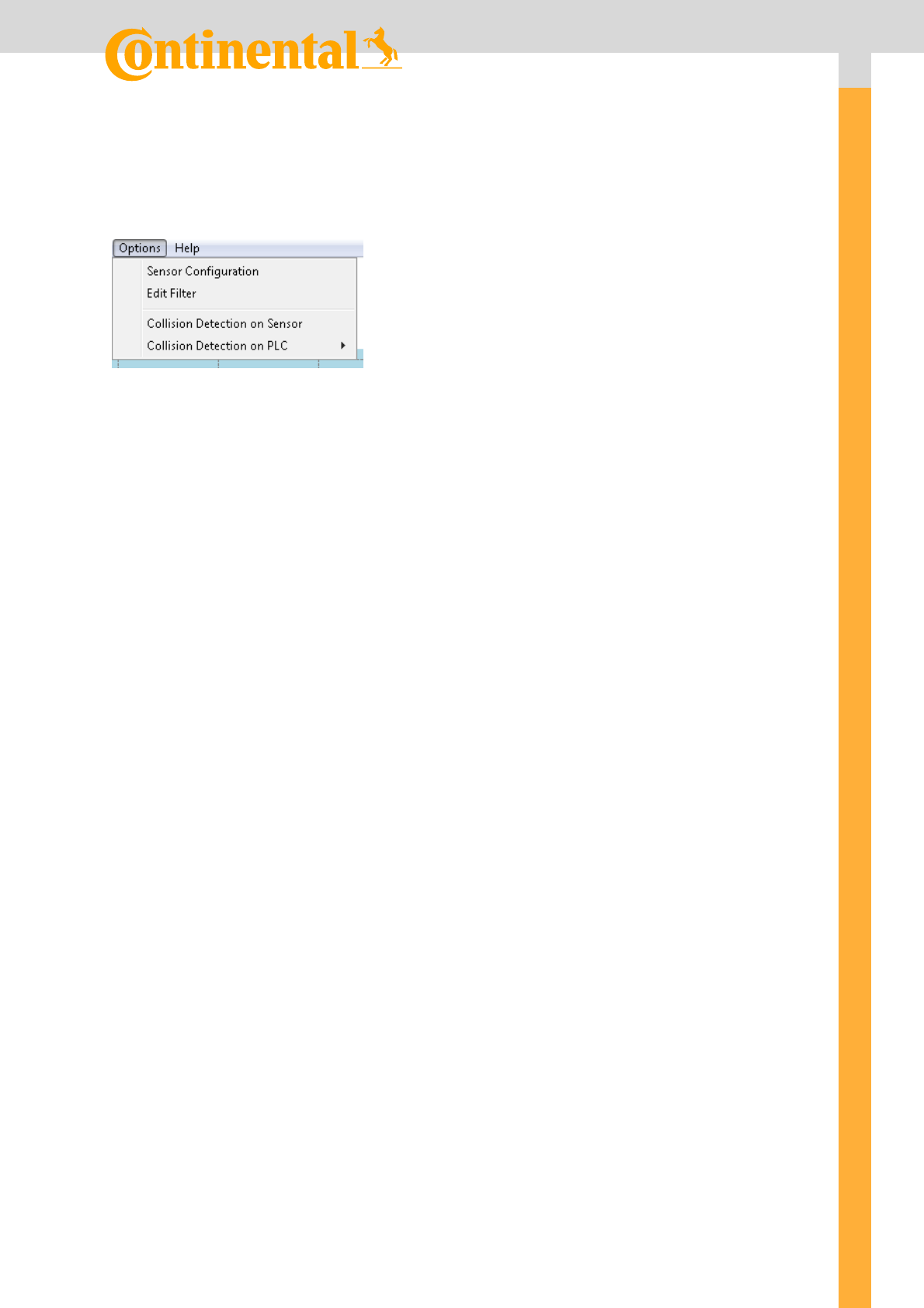
4.3.4 Filter application relevant Cluster or Tracks
To see only application relevant Cluster or Tracks it is possible to set filter values. This
allows the software to reject entities that violate the set of rules established by the filter
values thus displaying only relevant Cluster or Tracks.
Figure 22: Enable Filter
The filter can be adjusted and activated in the Filter Settings, available through the
Options/Edit Filter Menu. Since Tracks and Cluster data come with different sets of
parameters the Filter Menu automatically adjusts to the respective display mode. Figure 23
and Figure 24 display the Filter Settings for Cluster and Tracks.
Customized filter values can be written to an Ini-File for later use by pressing the “Save to
Ini” Button. Depending on whether Cluster or Tracks are selected, the filter values will be
written to the “C:\Continental Radar-PLC\SRR20X.ini” File at the Key “filter_tracks” for Track-
Mode or “filter_cluster” when the display mode is set to Cluster. Formerly saved customized
filter values can be loaded from the Ini by pressing the “Load from Ini” Button.
Version : 4.00 en
Page 24 of 64
Important:
The filtering is only active, when “Activate Filter” is selected and Apply is pressed
The Ini-Filter values will be loaded automatically after program startup and when
switching the Sensor-Type or Send Mode. This includes the filter activation.
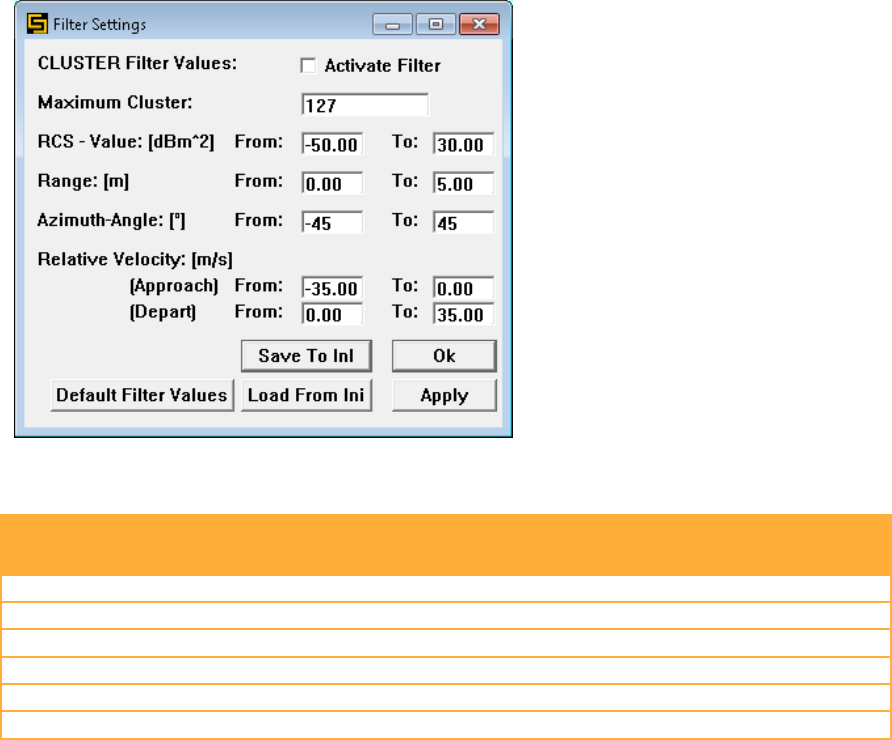
Figure 23: Cluster Filter Settings
Parameter
Description
Activate Filter
Flag the filter to be activated on confirmation
Maximum Cluster Index
Maximum Cluster Index to be displayed
RCS-Value
Radar Cross Section range to be displayed
Range
Distance range in which Cluster should be displayed
Azimuth-Angle
Angle range in which Cluster should be displayed
Relative Velocity
Relative Velocity range for Cluster that should be displayed
Table 7: Cluster Filter value description
Page 25 of 64
Continental Engineering Services GmbH
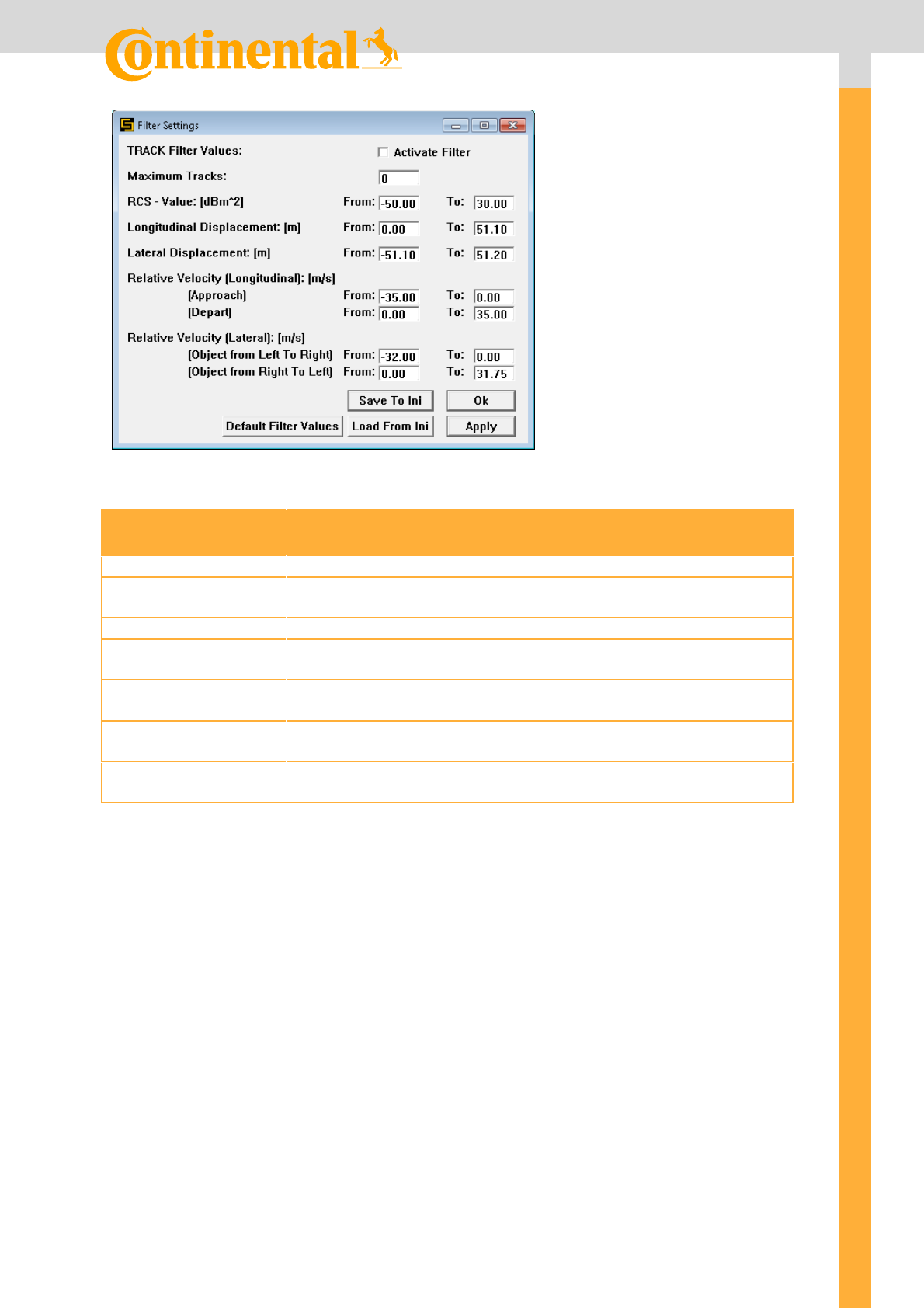
Figure 24: Track Filter Settings
Parameter
Description
Activate Filter
Flag the filter to be activated on confirmation
Maximum Track
Index
Maximum Track Index to be displayed
RCS-Value
Radar Cross Section range to be displayed
Longitudinal
Displacement
Displacement range in longitudinal direction in which Tracks
should be displayed
Lateral Displacement
Displacement range in lateral direction in which Tracks should
be displayed
Relative Velocity
(Longitudinal)
Relative velocity range in longitudinal direction for Tracks that
should be displayed
Relative Velocity
(Lateral)
Relative velocity range in lateral direction for Tracks that should
be displayed
Table 8: Track Filter value description
Version : 4.00 en
Page 26 of 64
4.3.5 Collision Detection on sensor
Collision Detections is only supported with a SRR 208 with sensor internal collision detection
software (optional).
The Collision Detection recognition is done directly on the sensor itself and the visualization
software only reflects the current collision states monitored by the Radar. So the filter
function is not supported. At present the Collision Detection for the sensor versions
mentioned above is only available for Tracks. See Software Collision Detection on PLC for
collision detection with filter ability for Tracks and Cluster (Chapter 4.5).
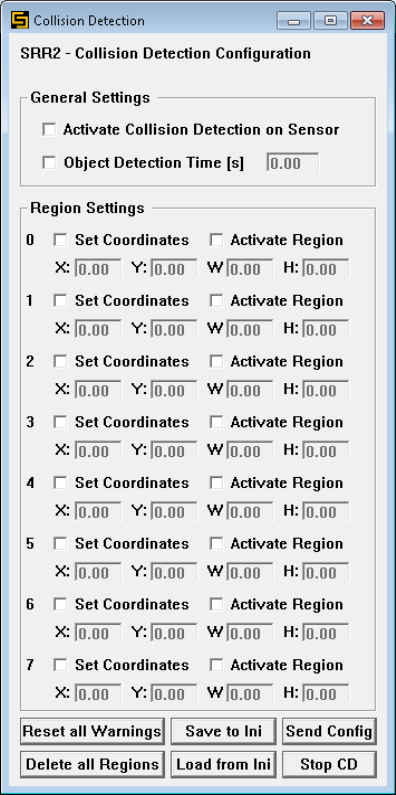
The collision detection Configuration is accessible through the Options/Collision Detection
Menu.
Figure 25: SRR Collision Detection Configuration
Page 27 of 64
Continental Engineering Services GmbH
Parameter
Description
General Settings
Activate Collision Detection
Region independent. De-/activate collision detection
function
Set Object Detection Time
Minimum time an objects needs to be detected before
warning is triggered
Region Settings
0…7
Number of the region
Set Coordinates
Activates selected region for drawing
Activate Region
Activates selected region for collision detection
X
X value of the upper left corner of the warning region
Y
Y value of the upper left corner of the warning region
W
Width of the warning region
H
Height of the warning region
Table 9: SRR Collision Detection Settings
In Collision Detection Mode the user is able to define and activate up to 8 Warning Regions
for which he will receive collision detection information.
The Collision Detection Configuration is separated into General Settings which affect the
Collision Detection function as a whole and Region dependent settings which only affect the
selected Warning Region. To bring the Collision Detection to work the user first needs to
activate the Collision Detection Functionality on the sensor. Furthermore at least one
Warning Region needs to be defined and activated. Only then the Sensor will monitor the
defined region for collision detection violations.
Version : 4.00 en
Page 28 of 64
Figure 26: SRR defining warn regions
To define a Warning Region, the Set Coordinates Flag of the respective region needs to be
set. This activates the selected region for drawing. By left-clicking into the Main Screen and
dragging the mouse a rectangular, Warn Region can be created. While moving the mouse
the regions X, Y, W and H Parameters in the Collision Configuration Window will be updated.
When selecting a Region for drawing, some crossed out areas can be seen. Those limit the
Sensors detection scope and make sure only valid regions are defined. When trying to set
invalid values to warning regions by starting or ending outside the detection scope the region
will automatically use the maximum valid value for the respective invalid coordinate (
Version : 4.00 en
Page 30 of 64
The Regions current color also reflects the regions current state (grey = inactive, green =
activated, red = warning).
A defined Region-Setup can be stored by pressing the “Save to Ini” Button. Hereby all
region coordinates and their active state as well as the general Collision Detection settings
are written to the “C:\Continental Radar-PLC\SRR20X.ini” at the key “coll_det_regions”.
Respectively a saved Region-Setup can be loaded by pressing the “Load from Ini” Button.
By selecting the “Reset all Warnings” Button, all active Warning Regions on the Sensor will
be reset to the “No Warning State” (green) until another violation of the region is detected.
This can be immediately if no restrictions are set or after the Minimal Detection Time if it is
selected and written to the sensor.The “Delete all Regions” Button deletes all Regions that
are currently observed by the Radar Sensor. No Collision Detection Warnings will be sent
after this, unless a new region is created.
By selecting the “Stop C(ollision)D(etection)” Button the Collision Detection Functionality will
be shut down. No more Collision Detection Warning Messages are sent until the
Functionality gets reinitialized.
In Collision Detection Mode the Radar Sensor is unable to send regular Track Signals
displayed in None Collision Detection Mode, however creating a warning region that covers
the whole valid Main Screen will allow the sensor to detect all Tracks within his detection
scope. But note that the displayed tracks are Warning Tracks, meaning Tracks that triggered
a Collision Detection Warning, thus the region activation is mandatory.
4.4 ARS 308 Sensor (Long Range)
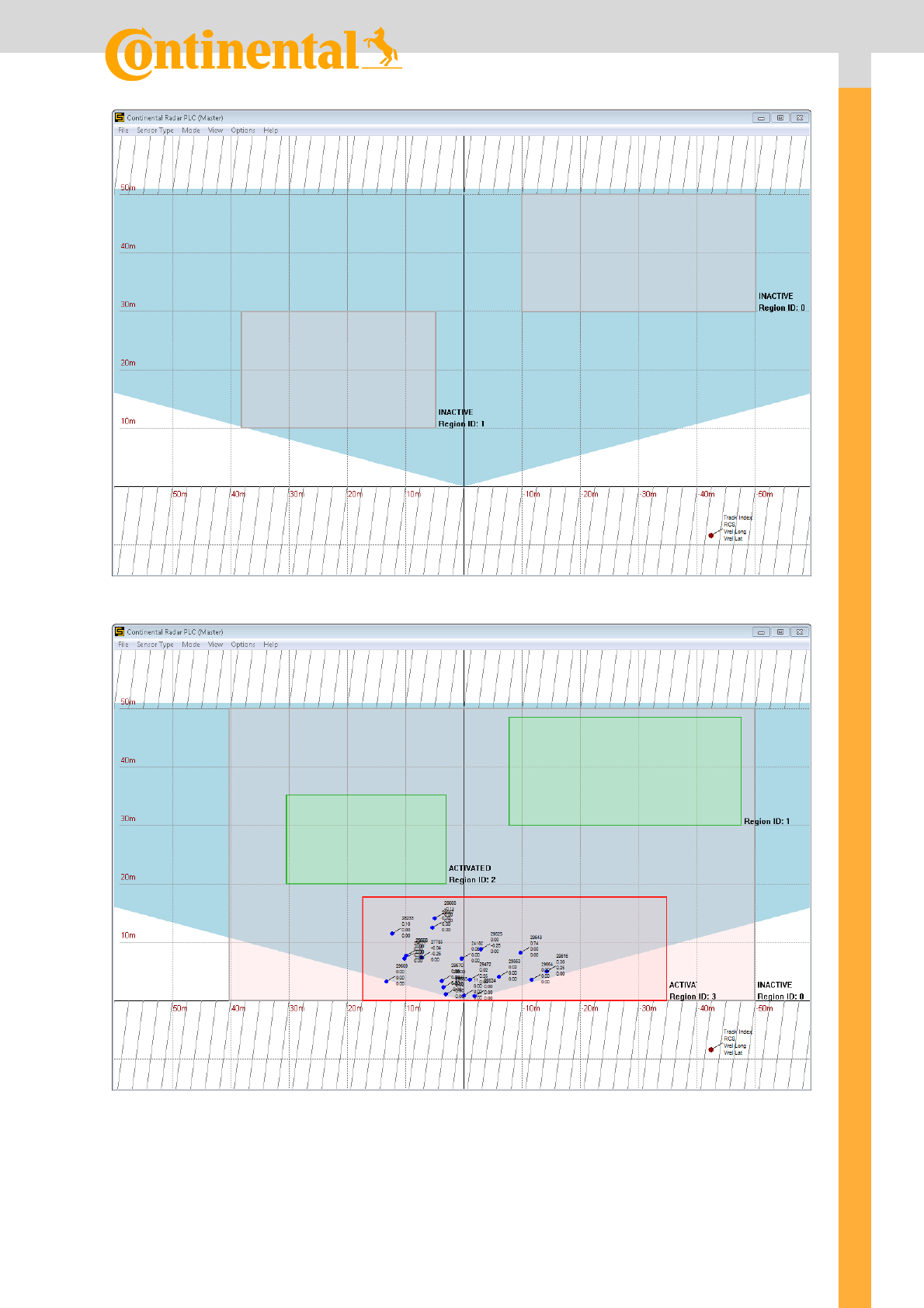
Figure 28: ARS308 Main Screen in Near-View
Page 31 of 64
Continental Engineering Services GmbH
The Main Screen shows the ARS308s field of view. The Yellow and light blue areas indicate
the sensors Near- and Long-Range detection areas. The white regions are outside the
sensors detection scope. By the sensor detected entities are displayed within the field of
view of the sensor. The markers also provide additional information about detected entities.
Besides the entities location further information about its speed, dimensions, Radar Cross
Section (RCS)… are displayed. A legend is shown as information in the lower right corner of
the Main Screen. The sensor supports two modes. It can display the measured data either as
Objects or Targets3.
4.4.1 Targets
The Targets display can be activated by selecting Targets from the Mode Menu.
Figure 29: Mode Selection for Targets
Targets represent reflected signals with similar position and movement. The software is able
to display up to 96 Targets at once. Each Target provides a set of configurable information.
Parameter
Description
NoOfTarget
Target number in the Target List
RCS
Radar Cross Section[dB*m^2]
Range
Target Range
Angle
Target Angle[°]
Vrel
Target relative velocity[m/s]
4.4.2 Objects
The Objects display can be activated by selecting Objects from the Mode Menu.
Figure 30: Configuration - Targets / Objects
Objects in contrast to Targets have a history. They represent Targets tracked over time. The
software is able to display up to 40 Objects at once. Each Object provides a set of measured
data.
3 See the ARS308 manual for description
Version : 4.00 en
Page 32 of 64
Parameter
Description
ObjectID
Unique Object ID
Length
Object Length[m]
Width
Object width[m]
RCS
Radar Cross Section[dB*m^2]
VrelLong
Relative longitudinal speed[m/s]
Vlat
Object lateral velocity[m/s]
Table 10: Object parameter overview
Page 33 of 64
Continental Engineering Services GmbH
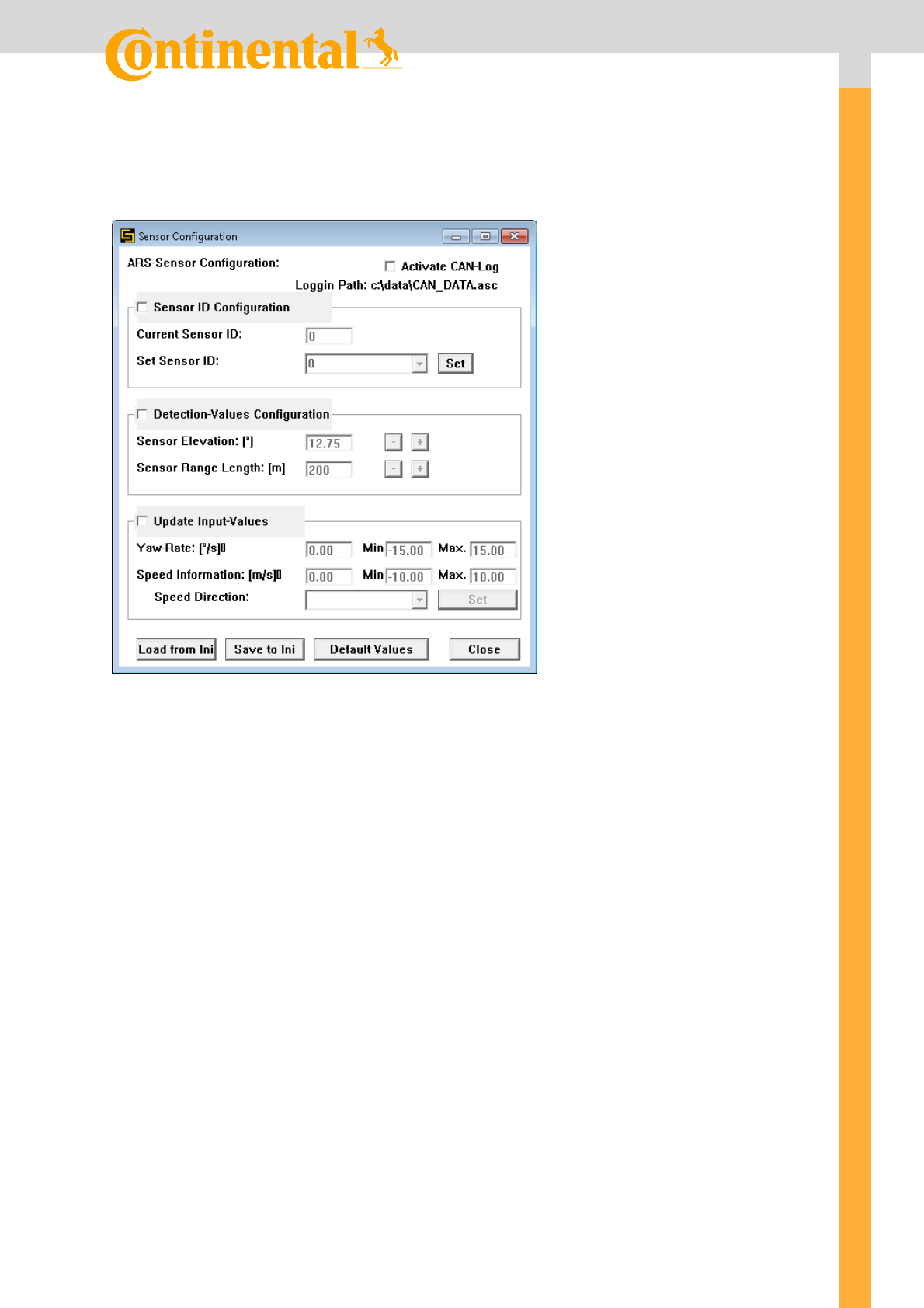
4.4.3 Sensor Configuration Window
Basic Sensor properties can be adjusted in the “Sensor Configuration” Window. To open it,
select Options/ Sensor Configuration.
Figure 31: ARS 308 Sensor Configuration Window
4.4.3.1 CAN-Bus Log
In the “Sensor Configuration” window you can activate a CAN-Log which will record every
CAN-Message sent by the sensor.
The logging file “CAN_DATA.asc” is stored at the location shown at “Logging Path”. This is
the default Logfile location. If you want to adjust the Logging Path, you can do so by
changing the “logPath” parameter in the “program.ini” file in the program folder
“C:\Continental Radar-PLC\program.ini”.
Note: When changing the default Logfile location, it is mandatory to enter a valid path-
string e.g. c:\data\CAN_DATA.asc without any apostrophes or quotation marks. In general it
might be helpful to create backup copies of all *.ini files before changing parameter values.
4.4.3.2 Sensor ID Configuration
The Sensor ID Configuration allows changing the ID between 0 and 7 for the connected
sensor. The Sensor ID also determines the address space of CAN communication messages
according to (base message ID | (0x10 * sensor ID)).
The Current Sensor ID option shows the currently used Sensor ID. The Set Sensor ID
option allows changing the Sensor ID. Therefore a value between 0 and 7 can be selected
Version : 4.00 en
Page 34 of 64
from the drop-down menu. Confirming the new value by pressing the Set-Button will write
the new configuration to the Radar-Sensor.
4.4.3.3 Detection Value Configuration
The Detection Value Configuration allows adjusting the Radar sensors detection scope by
changing the plate elevation and the Range Length. By adjusting the sensor’s plate, the
elevation angle of the radar beam is altered between 0° (inclined towards the sky) and 32°
(inclined towards the ground). By setting the range length parameter, the maximum distance
at which objects will be detected can be adjusted between 50m and 200m. By adjusting both
parameters the radar sensor can be calibrated to receive optimal reflections from an area of
interest. With a shorter range, the measurement accuracy of the measured distances is
getting better.
4.4.3.4 Update Input Values
These values are used, when the sensor is mounted on vehicle. It helps to separate moving
objects from the environment.
By selecting Update Input Values the currently vehicle speed and yaw rate are displayed
and continuously updated. Those signals are calculated from the externally set input current
(4…20mA) on the EL3122 module (2.3, p.8).The default minimum and maximum values for
speed and yaw rate are set to the sensors limits. Both values can be adjusted by entering
new values in the “Min.” and “Max.” fields and activated by pressing the Set Button.
It is also possible to save Detection Value Configuration and the set minimum and
maximum values of the Input Values Configuration to the “ARS30x.ini” file. Respectively
a saved Detection Value Configuration and Input Value Configuration can be loaded by
pressing the “Load from Ini” Button.
The “Default Values” Button resets the Set Sensor ID within the Sensor ID Configuration
the whole Detection Values Configuration and the minimum and maximum values for
speed and yaw rate within the Input Values Configuration to their individual default value
given by the radar sensor.
4.4.4 Filter application relevant Targets or Objects
To display only application relevant Targets or Objects it is possible to set filter values.
Figure 32: Enable Filter
The filter can be adjusted and activated in the Filter Settings, available through the
Options/Edit Filter Menu. Since Objects and Targets data come with different sets of
parameters the Filter Menu automatically adjusts to the respective display mode. Figure 33
and Figure 34 display the Filter Settings for Objects and Targets.
Page 35 of 64
Continental Engineering Services GmbH
Customized filter values can be written to an Ini-File for later use by pressing the “Save to
Ini” Button. Depending on whether Objects or Targets are selected, the filter values will be
written to the “C:\Continental Radar-PLC\ARS30x.ini” File at the Key “filter_objects” for
Object-Mode or “filter_Targets” when the display mode is set to Targets. Formerly saved
customized filter values can be loaded from the Ini by pressing the “Load from Ini” Button.
Important:
The filtering is only active, when “Activate Filter” is selected and Apply is pressed
The Ini-Filter values will be loaded automatically after program startup and when
switching the Sensor-Type or Send Mode. This includes the filter activation.
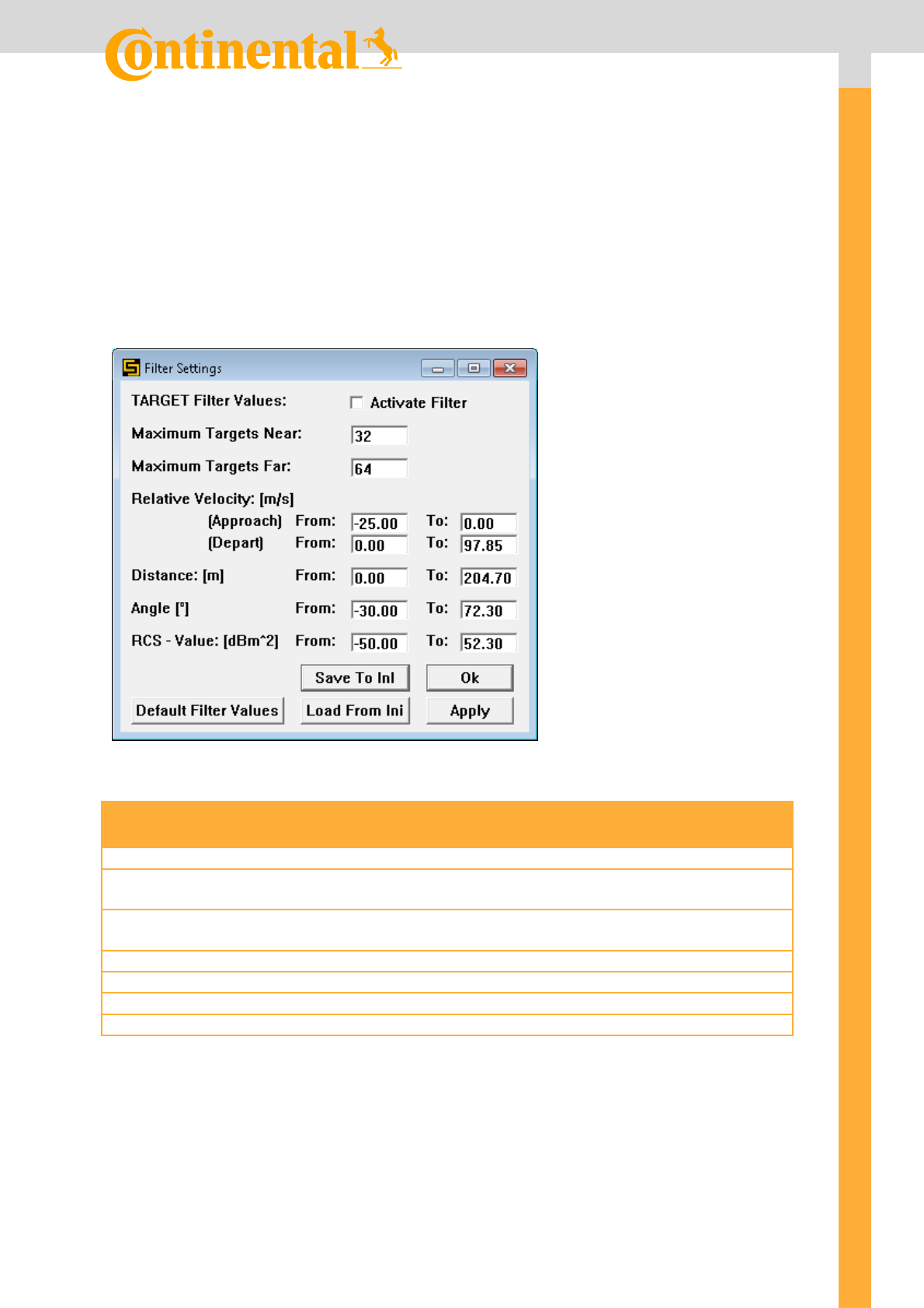
Figure 33: Target Filter Settings
Parameter
Description
Activate Filter
Flag the filter to be activated on confirmation
Maximum Target Index
Near
Maximum Index of Targets in Near distance to be displayed
Maximum Target Index
Far
Maximum Index of Targets in Far distance to be displayed
Relative Velocity
Relative velocity range for Targets that should be displayed
Distance
Distance range in which Targets should be displayed
Angle
Angle range in which Cluster should be displayed
RCS-Value
Radar Cross Section range to be displayed
Table 11: Target Filter value description
Version : 4.00 en
Page 36 of 64
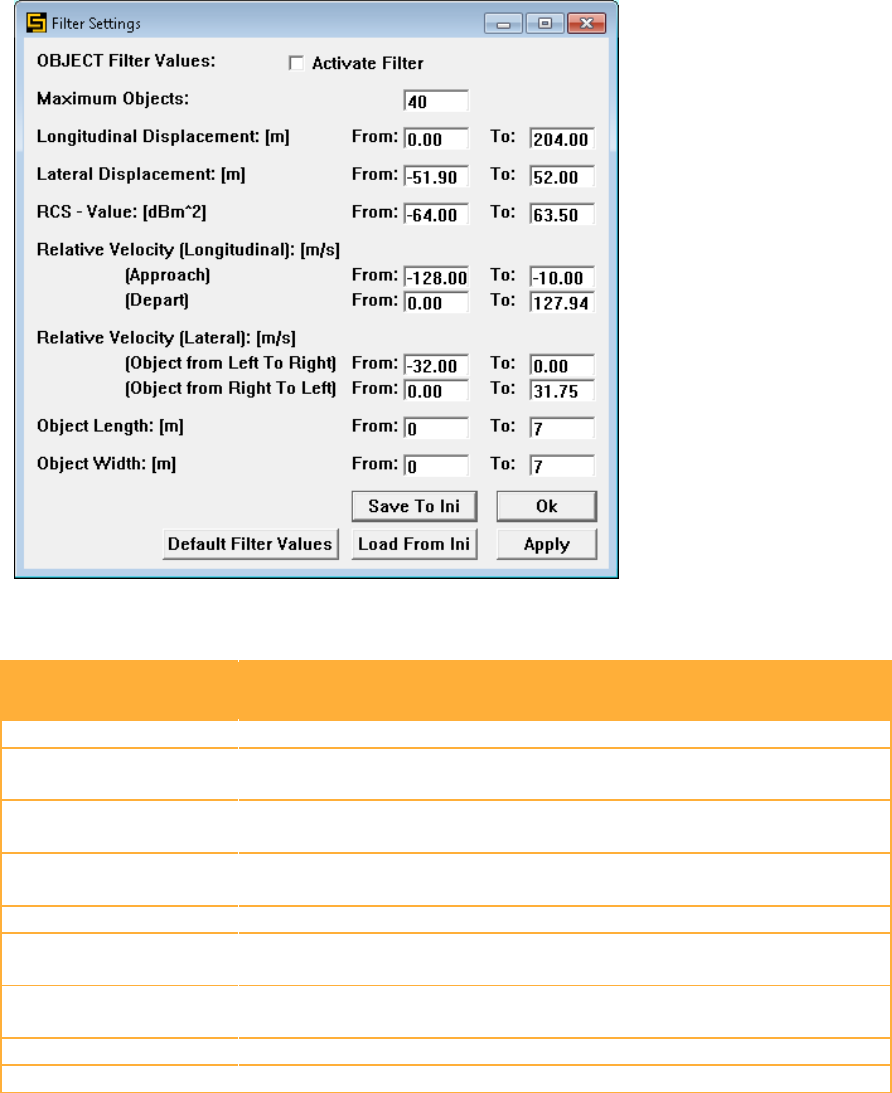
Figure 34: Object Filter Settings
Parameter
Description
Activate Filter
Flag the filter to be activated on confirmation
Maximum Object
Index
Maximum Object Index to be displayed
Longitudinal
Displacement
Displacement range in longitudinal direction in which Objects
should be displayed
Lateral Displacement
Displacement range in lateral direction in which Objects should
be displayed
RCS-Value
Radar Cross Section range to be displayed
Relative Velocity
(Longitudinal)
Relative velocity range in longitudinal direction for Objects that
should be displayed
Relative Velocity
(Lateral)
Relative velocity range in lateral direction for Objects that should
be displayed
Object Length
Length range for Objects that should be displayed
Object Width
Width range for Objects that should be displayed
Table 12: Object Filter Value description
In the Filter Settings the signals can be filtered by all relevant information. Only
Targets/Objects within the activated filter range will be displayed on screen. For the filter to
take effect it needs to be activated and applied. Upon start and when no customized filter
values have been saved to the Ini file, the filter value range for each parameter reflects the
sensors default value range. Edited filter values can easily be restored to the original sensor
Page 37 of 64
Continental Engineering Services GmbH
default value range by resetting the filter values. Edited filter values can easily be restored to
the original sensor default value range by pressing the “Default Filter Values” Button.
4.4.5 Collision Detection
If the ARS308 Radar Sensor supports internal collision detection, this function can be
activated. This is done directly by the sensor itself and the visualization software only reflects
the current collision states monitored by the Radar Sensor. So the filter function is not
supported. Collision Detection is only available for Objects.
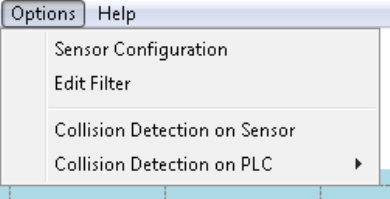
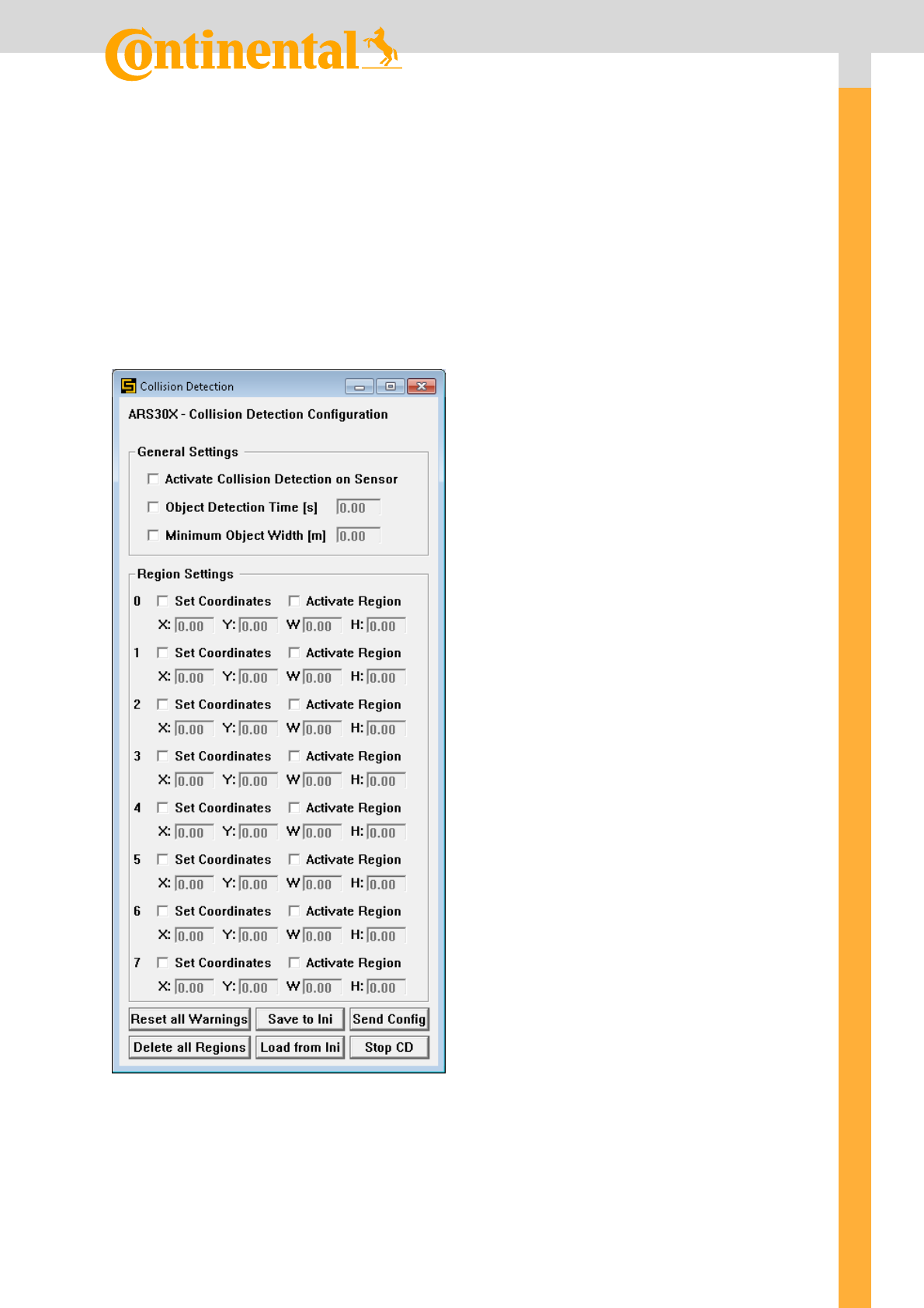
The collision detection Configuration is accessible through the Options/Collision Detection on
Sensor Menu.
Figure 35: ARS308 Collision Detection Configuration
Version : 4.00 en
Page 38 of 64
Parameter
Description
General Settings
Activate Collision Detection
Region independent. De-/activate collision detection
function
Set Object Detection Time
Minimum time an objects needs to be detected before
warning is triggered
Minimum Object Width
Minimum Width an object needs to have in order to
trigger a warning.
Region Settings
0…7
Number of the region
Set Coordinates
Activates selected region for drawing
Activate Region
Activates selected region for collision detection
X
X value of the upper left corner of the warning region
Y
Y value of the upper left corner of the warning region
W
Width of the warning region
H
Height of the warning region
Table 13 ARS Collision Detection Settings
In Collision Detection mode the user is able to define and activate up to 8 warning regions for
which he will receive collision detection information. Each warning region is connected to an
output relay (See 2.4)
The Collision Detection Configuration is separated into General Settings which affect the
Collision Detection function as a whole and Region dependent settings which only affect the
selected Warning region. For starting the Collision Detection, the user first needs to activate
the Collision Detection Functionality on the sensor. Furthermore at least one Warning Region
needs to be defined and activated. Only then the Sensor will monitor the defined region for
collision detection violations.
Page 39 of 64
Continental Engineering Services GmbH
Figure 36: ARS 308 defining warn regions
To define a Warning Region the Set Coordinates Flag of the respective region needs to be
set. This activates the selected region for drawing. By left-clicking into the Main Screen and
dragging the mouse a rectangular Warn Region can be created. While moving the mouse the
regions X, Y, W and H Parameters in the Collision Configuration Window will be updated.
When selecting a Region for drawing, a crossed out area can be seen. It limits the Sensors
detection scope and makes sure only valid regions are defined. When trying to set invalid
values to warning regions by starting or ending outside the detection scope the region will
automatically use the maximum valid value for the respective invalid coordinate (Figure 36).
Version : 4.00 en
Page 40 of 64
Figure 37: ARS-Collision Detection Mode
To activate the region the Activate Region flag needs to be set. The “Send Config” Button
will write the General Settings and the Region Settings of the currently selected Region to
the Radar Sensor.
The Regions current color also reflects the regions current state (grey = inactive, green =
activated, red = warning).
A defined Region-Setup can be stored by pressing the “Save to Ini” Button. Hereby all
region coordinates and their active state as well as the general collision settings are written
to the “C:\Continental Radar-PLC\ARS30x.ini” at the key “coll_det_regions”. Respectively a
saved Region-Setup can be loaded by pressing the “Load from Ini” Button.
By pressing the “Reset all Warnings” Button, all active warning regions on the Sensor will
be reset to the “No Warning State” (green).
The “Delete all Regions” Button deletes all Regions that are currently observed by the
Radar Sensor. No Collision Detection Warnings will be sent after this.
By selecting the Stop C(ollision) D(etection) Button the Collision Detection Functionality is
shut down. No more Collision Detection Warning Messages are sent until the
Functionality gets reinitialized.
In Collision Detection Mode the Radar Sensor is unable to send the regular Object Signals
displayed in None Collision Detection Mode, however creating a Warning Region that covers
the whole Main Screen will allow the sensor to detect all Objects within his detection scope.
But note that the displayed Objects are Warning Objects, meaning Objects that triggered a
Collision Detection Warning, thus the region activation is mandatory.
Page 41 of 64
Continental Engineering Services GmbH
4.5 Software Collision Detection on PLC
The Collision Detection on PLC functionality is performed on the Radar PLC and is
independent from the Radar Sensors Collision Detection. It works for all Sensor Models
(SRR208, ARS308) as well as all output configurations (SRR208: Tracks, Cluster; ARS308:
Objects, Targets).
Note: It is not possible to activate Collision Detection on Sensor and on PLC at the same
time!
The Collision Detection on PLC offers a bandwidth of features and options that are not
supplied by the Collision Detection on Sensor, thus granting a great level of flexibility for
various custom applications. The Collision Detection on PLC is accessible through the
Options/Collision Detection on PLC Menu.
Figure 38: The Collision Detection on Sensor Window
Version : 4.00 en
Page 42 of 64
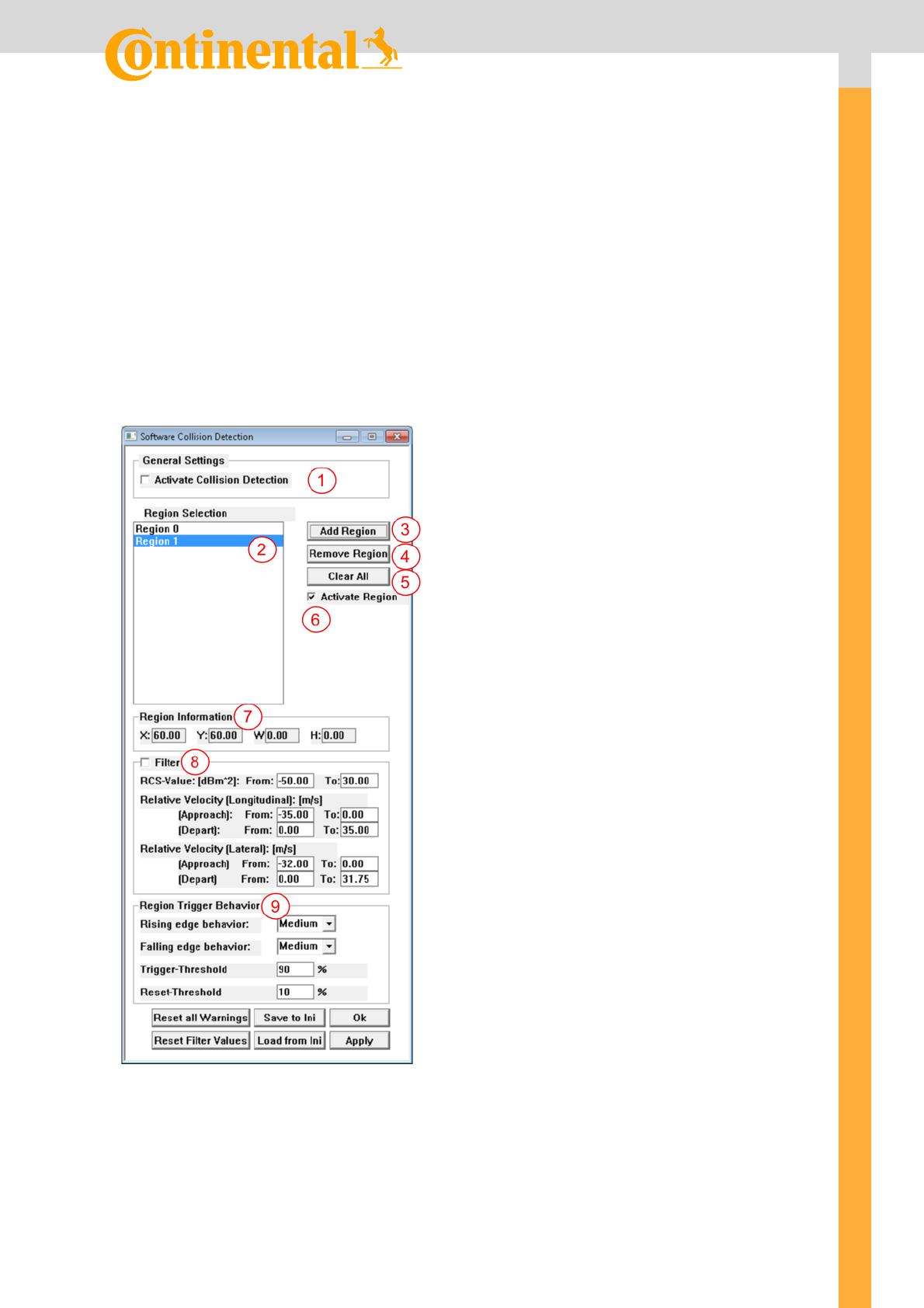
In Collision Detection on PLC Mode the user is able to define and activate up to 24 Warning
Regions, each of which will deliver collision detection information.
The feature itself can be activated by selecting the Activate Collision Detection Option
(Figure 38-1). By default the feature is deactivated.
In order to perform Collision Detection at least one Region needs to be created, defined and
activated. Only then the defined region will be monitored for collision detection violations.
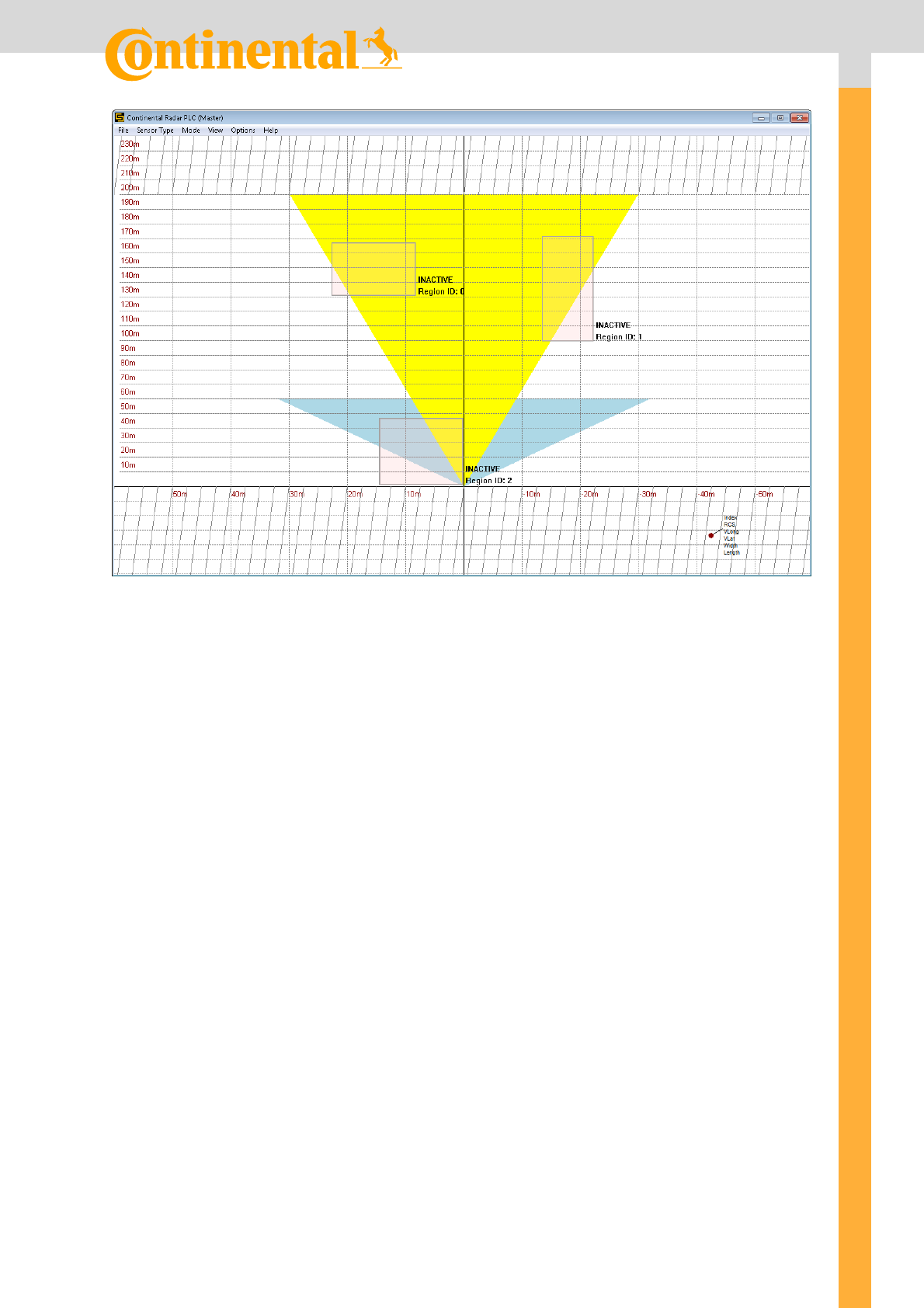
4.5.1 Definition of Regions
To create a new region, press the “Add Region” Button (Figure 38-3). A new region will be
added to the Region Selection at the next available index (0…23). To define the region,
select it from the Region Selection and left-click into the Main Screen while dragging the
mouse to define the regions X, Y, W and H parameters (Figure 38-7).
Regions can either be selected by directly left-clicking on the region itself, or by selecting the
region from the Region Selection. Both ways the region will be surrounded with a selection
frame. To adjust a regions position left-click the region while dragging the mouse. Note that
changes made to a regions properties, e.g. Filter Values or Trigger Behavior need to be
applied to take effect. Unapplied changes will be lost upon selecting a different region.
To delete a region, select the region and either press the “Remove Region” Button (Figure
38-4) or hit the “delete” Key on the keyboard.
In order to remove all regions press the “Clear All” Button (Figure 38-5).
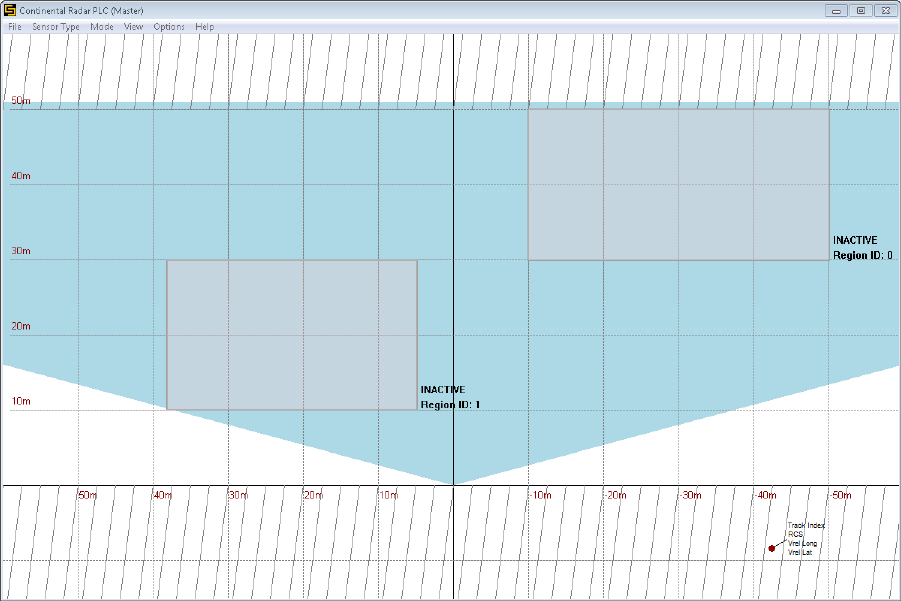
Figure 39: SRR Collision Detection on PLC defining warn regions
Page 43 of 64
Continental Engineering Services GmbH
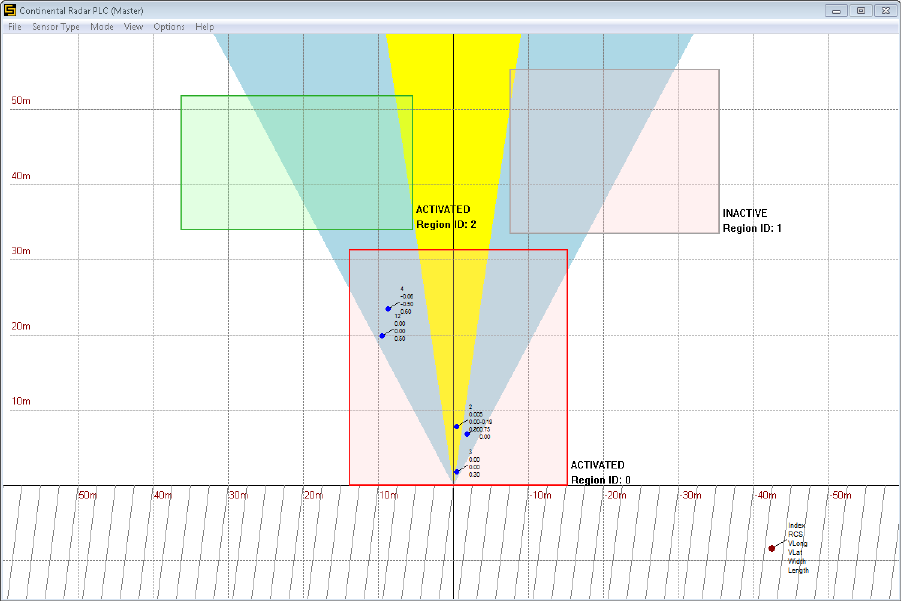
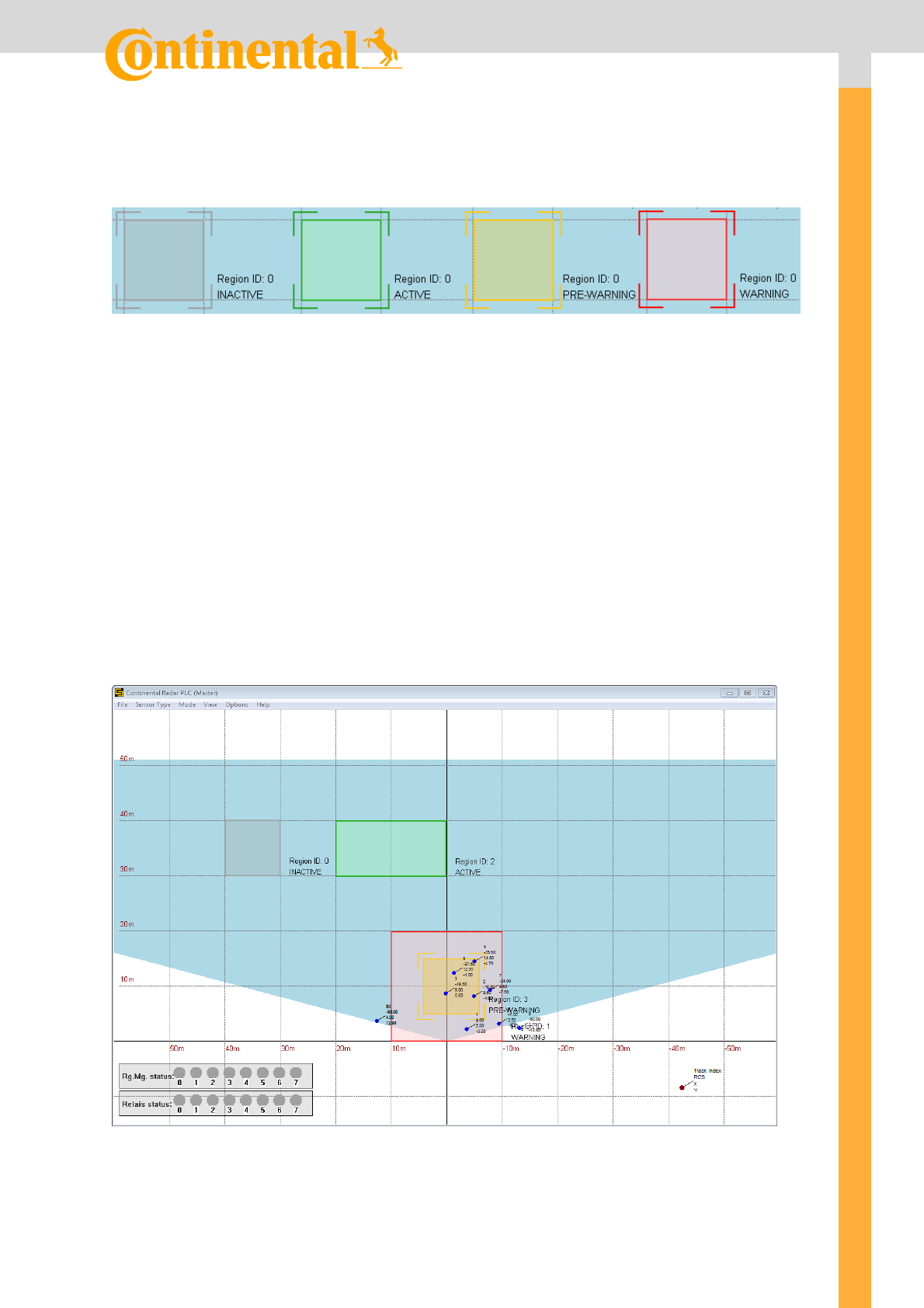
4.5.2 Region States
Depending on whether a collision warning is currently detected or not, warning regions
feature different states represented by their color.
Figure 40: A regions different states
A deactivated region has the state inactive and will appear gray. It is visually displayed in
the Main Screen but it is excluded from the collision detection function, hence it cannot raise
a collision warning even though entities might be displayed in the area.
An active region is displayed green and will perform collision detection for all entities. It is
able to raise a collision detection warning upon entity detection.
In order to prevent the regions state to rapidly flicker between warning and no warning in
case a detected entity appears and disappears periodically the pre-warning state was
implemented. It serves as a noise filter to validate a detected entity and ensure its being
relevant rather than just background noise. This trigger-filter is performed by a moving
average calculation and explained in section 4.5.4. A region in pre-warning state appears in
a bright orange. If an entity or several entities are detected past the pre-warning state, a
collision detection warning is being raised and the region changes to the warning state. This
state stays active as long as entities are detected within the region. When no more entities
are detected, the region will reset and its state changes back to active.
Figure 41: Different warning states during a collision detection measurement.
Version : 4.00 en
Page 44 of 64
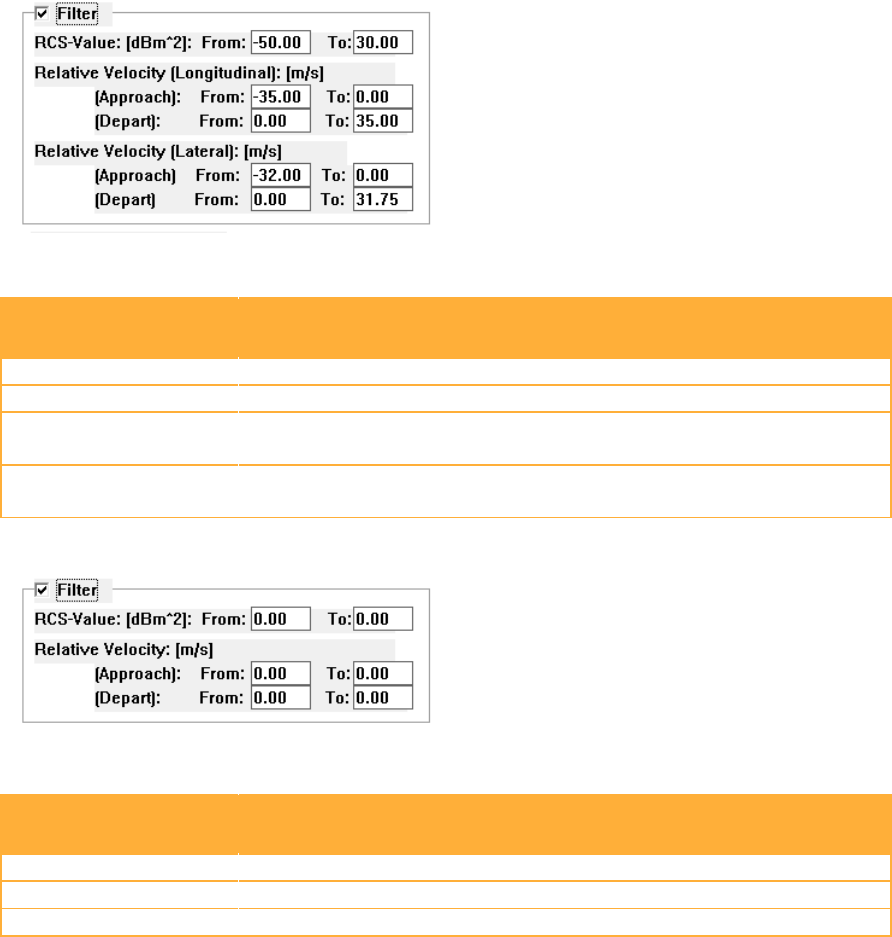
4.5.3 Region specific Filter
Just as the global filters (4.3.4) that operate on raw Track or Cluster data, each region offers
a set of filters to refine the view on detected entities. This allows for regions to neglect certain
Tracks or Cluster outside the scope of the application leaving only pre-selected entities to
trigger warning messages.
The Filter can be activated by checking the “Filter” option (Figure 38-8) in the Collision
Detection on PLC Window. A region with an activated filter is indicated by an “F” character in
the upper right corner (Figure 44). Since Tracks and Cluster data come with different sets of
parameters, the Filter Menu automatically adjusts to the respective display mode. Figure 42
and Figure 43 display the Filter Settings for Tracks and Cluster.
Figure 42: Region Filter for Tracks
Parameter
Description
Filter
Flag to activate or deactivate the region filter
RCS-Value
Radar Cross Section range to be displayed
Relative Velocity
(Longitudinal)
Relative velocity range in longitudinal direction for Tracks to be
displayed
Relative Velocity
(Lateral)
Relative velocity range in lateral direction for Tracks to displayed
Table 14: Region Filter value description for Tracks
Figure 43: Region Filter for Cluster
Parameter
Description
Filter
Flag to activate or deactivate the region filter
RCS-Value
Radar Cross Section range to be displayed
Relative Velocity
Relative Velocity range for Cluster to be displayed
Table 15: Region Filter value description for Cluster
Page 45 of 64
Continental Engineering Services GmbH
The default filter value range for each parameter reflects the sensors default value range.
Edited filter values can easily be restored to the original sensor default value range by
pressing the “Default Filter Values” Button.
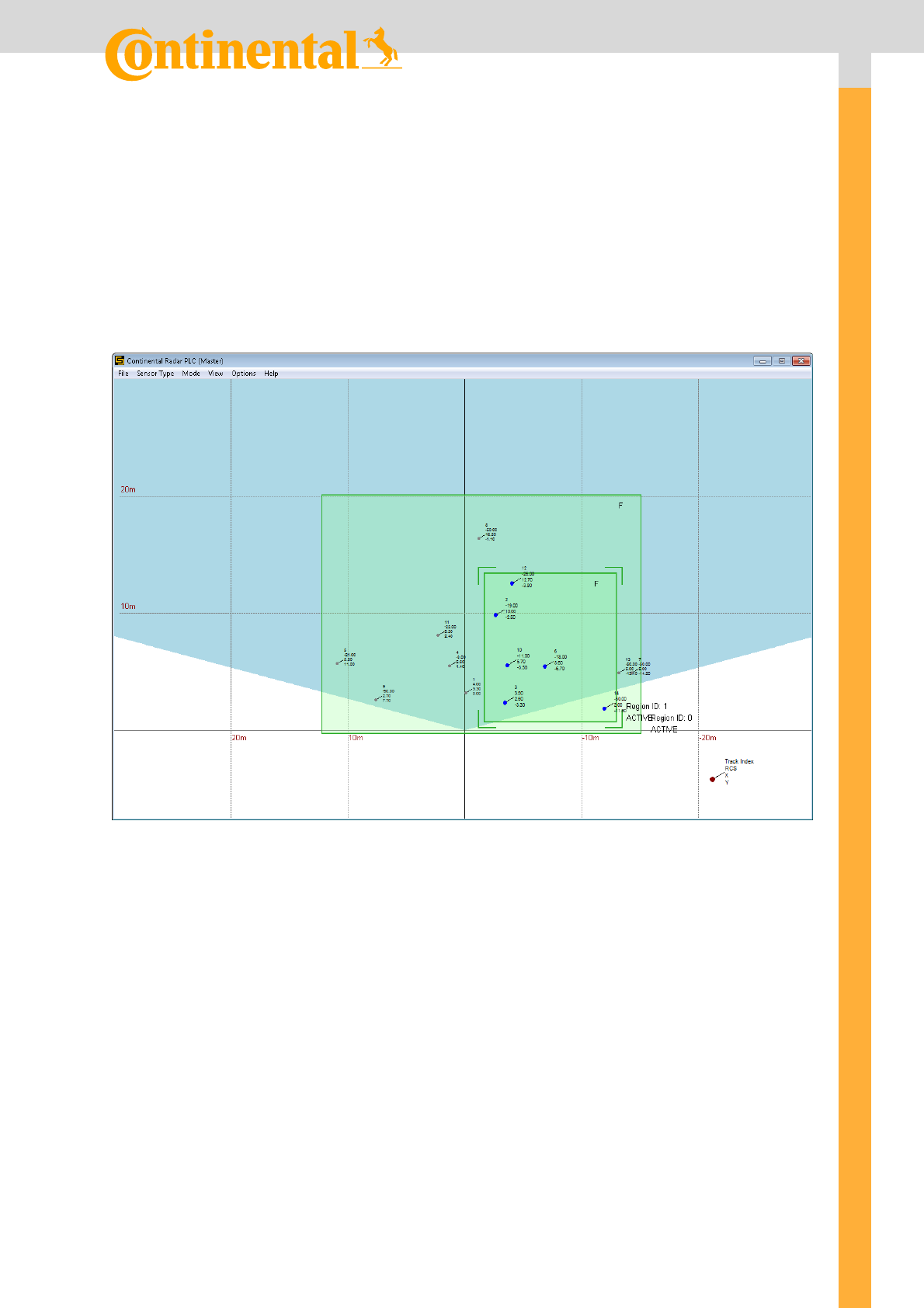
A region’s set of filter values is reduced compared to the global filter since a regions position,
width and height replace filter such as longitudinal or lateral displacement. The filter settings
allow filtering all relevant information and only Cluster or Tracks within the range will pass. In
contrast to the global filter, the region specific filter won’t remove filtered entities from the
entity list but exclude them from the Collision Detection function. Excluded – or filtered –
entities appear as small gray rectangles (Figure 44).
Figure 44: Active region filtering
Version : 4.00 en
Page 46 of 64
4.5.4 Region trigger Behavior
Depending on environmental surroundings the radar sensor detects a lot of background
noise due to multiple reflections on obstacles and surfaces. These reflections are usually not
permanent and lead to flickering Tracks or Cluster that are visible only for a very short period
of time before disappearing. With the pre-warning state between the active- and warning-
state we introduced an intermediate state that serves as noise filter to prevent exactly those
occasionally occurring entities to cause collision detection violations and thus constantly
setting/resetting possibly connected relays. The noise filter is a moving average based on the
entity detection within a region every radar processing cycle.
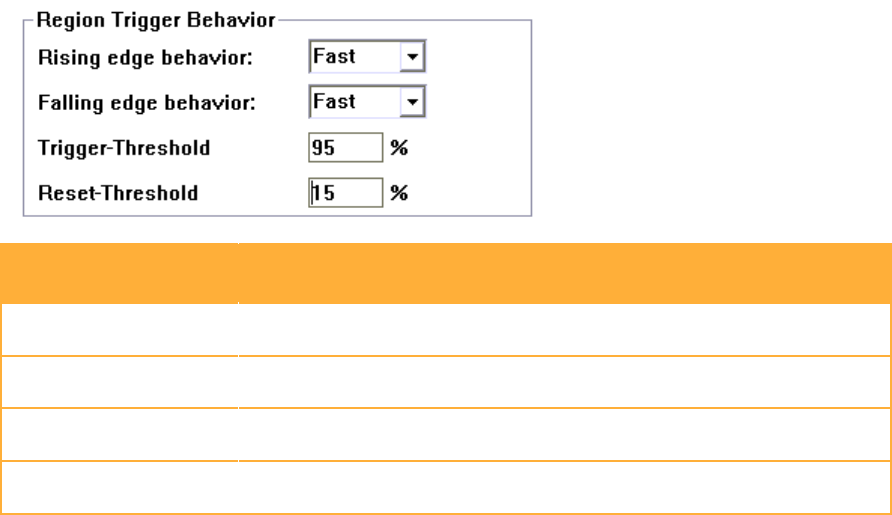
The region trigger behavior (Figure 38-9) determines the way a region changes from the pre-
warning to the warning state granting the possibility to adjust the noise filters parameters.
These parameters affect the rising- and falling-edge of the moving average which are the
steepness of the curve and the trigger-thresholds. With the thresholds shall define a
hysteresis.
Parameter
Description
Rising edge behavior
Steepness of the rising edge of the moving average curve (Fast,
Medium,Slow)
Falling edge behavior
Steepness of the falling edge of the moving average curve (Fast,
Medium,Slow)
Trigger-threshold
Trigger level in [%] at which the region will change from pre-
warning to warning – Use this value for finetuning
Reset-threshold
Reset level in [%] at which the region will reset from warning to
active – Use this value for finetuning
Table 16: Region trigger behavior configuration parameters
Page 47 of 64
Continental Engineering Services GmbH
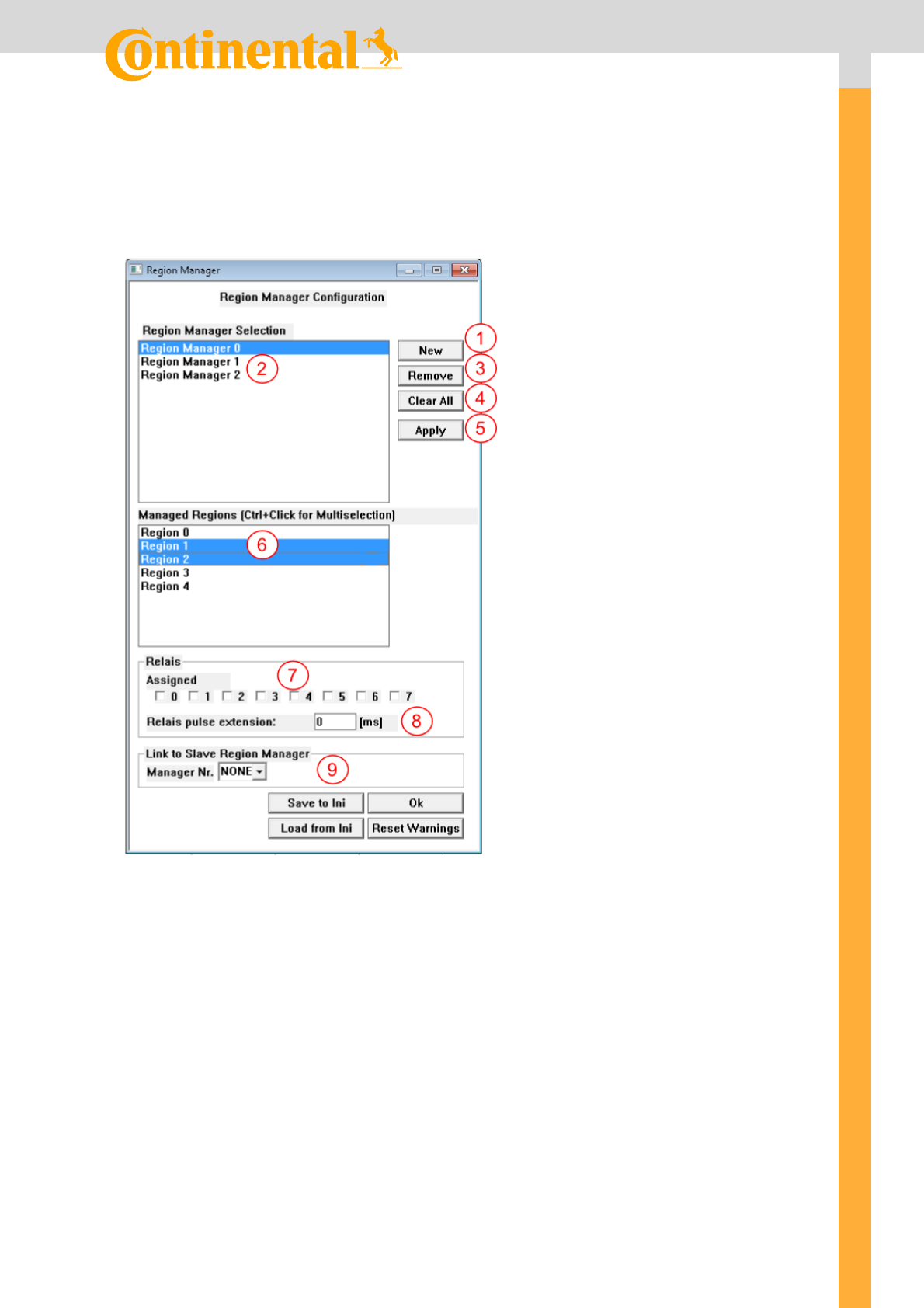
4.5.5 Region Manager
The Region Manager is used to manage warning regions created for the Collision Detection
on PLC and can be found in the Options\Region Manager Menu.
Figure 45: The Region Manager Window
With a Region Manager it is possible to link different Warning Regions together, directly
connecting them with the internal warning state of the Region Manager itself. The Region
Manager will trigger as soon as a Warning is raised by any one of its managed regions and
will hold its warning state until none of his managed regions raises warnings anymore, hence
linking them together. This way it is possible to observe irregular shaped areas or only
several single spots for Collision Detection violations.
Furthermore it is possible to assign up to 8 Solid State output Relays to the Region Manager
that are set by the Manager once one of the monitored regions triggers a warning.
The Relays can be used to switch electronic devices (Warning lamps, signal horns…)
Version : 4.00 en
Page 48 of 64
4.5.5.1 Creating a Region Manager
To create a new Region Manager, press the “New” Button (Figure 45-1). A new Region
Manager will be added to the Region Manager Selection (Figure 45-2) at the next available
index (0…8). Note that changes made to Region Manager Properties e.g. Managed Regions,
Link to Slave Region Manager or Relays need to be applied to take effect (Figure 45-5).
Unapplied changes will be lost upon selecting a different Region Manager. To delete a
Region Manager, select the Manager from the Region Manager Selection and press the
“Remove” Button (Figure 45-3).
In order to remove all Region Manager, press the “Clear All” Button (Figure 45-4).
4.5.5.2 Assigning Regions
It is possible to assign up to 24 regions to a Region Manager. After creating a new Region
Manager the available regions will be displayed in the Managed Regions Section of the
Region Manager Window (Figure 45-6). Regions created after opening the Region Manager
Window require reopening the window in order to update the Managed Region List.
Figure 46: Assigning regions to a Region Manager
To assign a region, select the Region Manager from the Region Manager Selection and left-
click on the Region you want to assign. For multi selection press the Ctrl-Key and left-click on
the regions you want to assign. All regions assigned to any Region Manager are indicated an
“RM” String in the upper right corner (Figure 46).
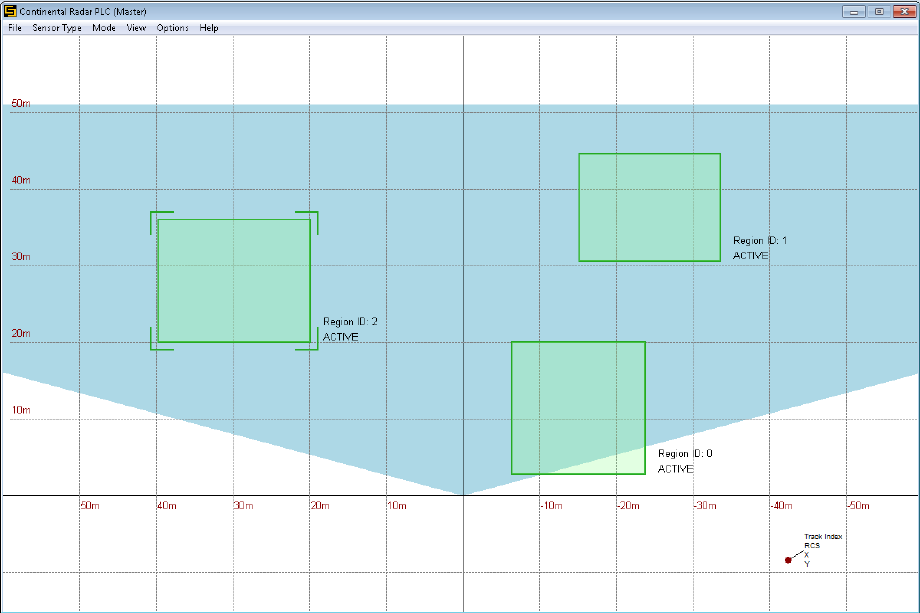
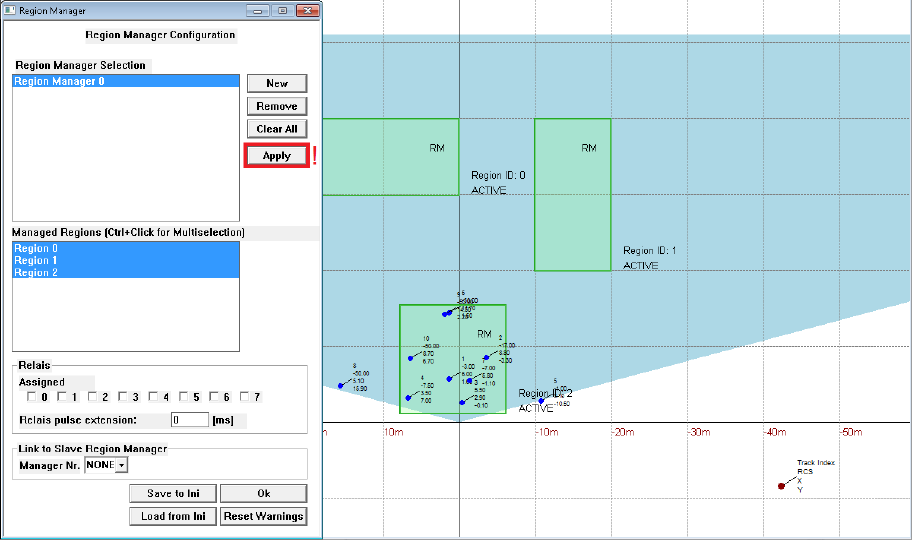
4.5.5.3 Region Manager Status and Relays assignment
It is possible to assign up to 8 Solid State Relays to a Region Manager, that is triggered if
any one of the Managers regions raises a collision detection warning (red). To assign one or
more Relays to a Region Manager simply select the checkbox of the respective Relay in the
Region Manager Window (Figure 45-7). With activated Collision Detection Function the
Page 49 of 64
Continental Engineering Services GmbH
current state of the Region Manager and Relays is displayed in the lower left Corner of the
Main Screen (Figure 47).
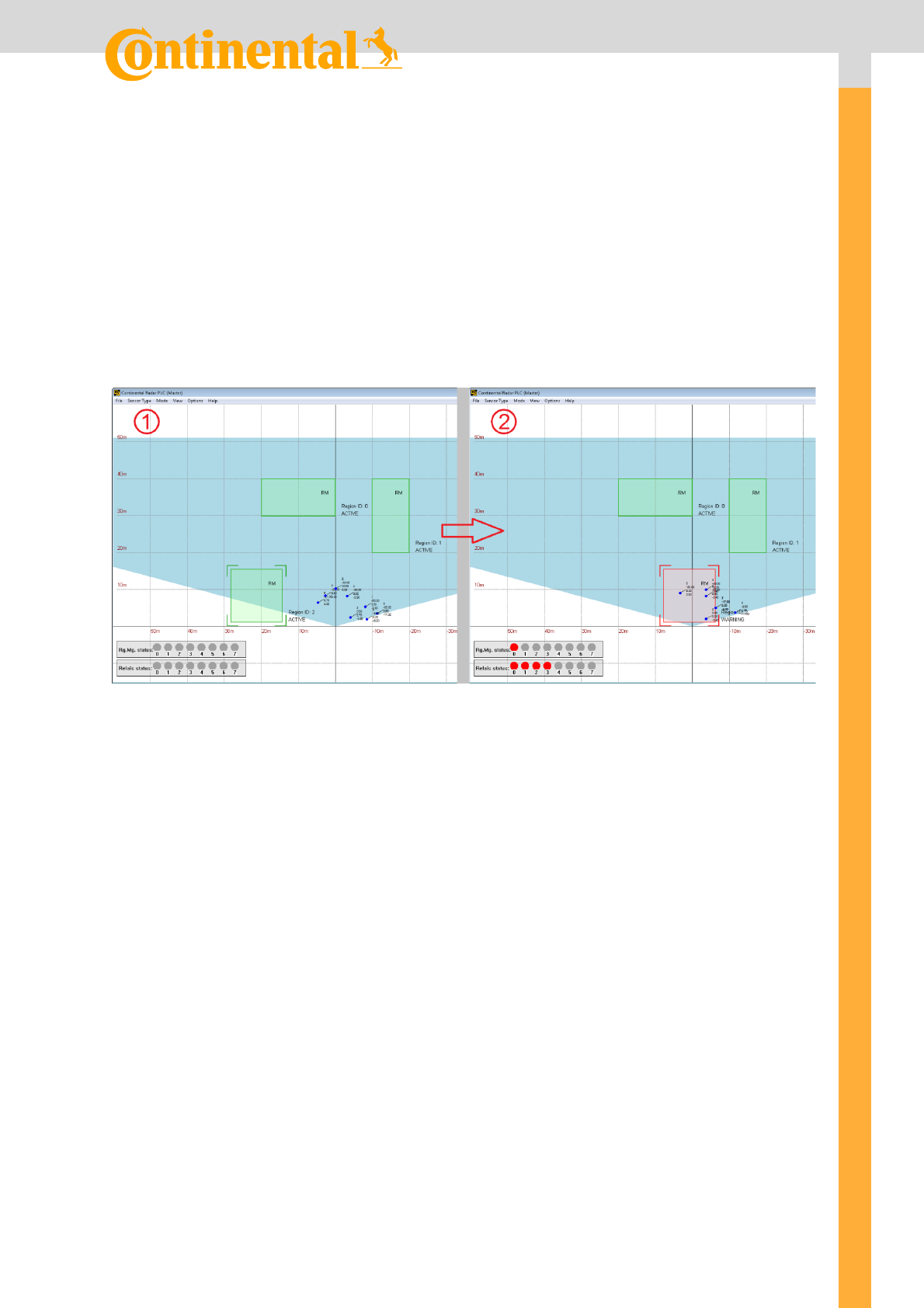
Example:
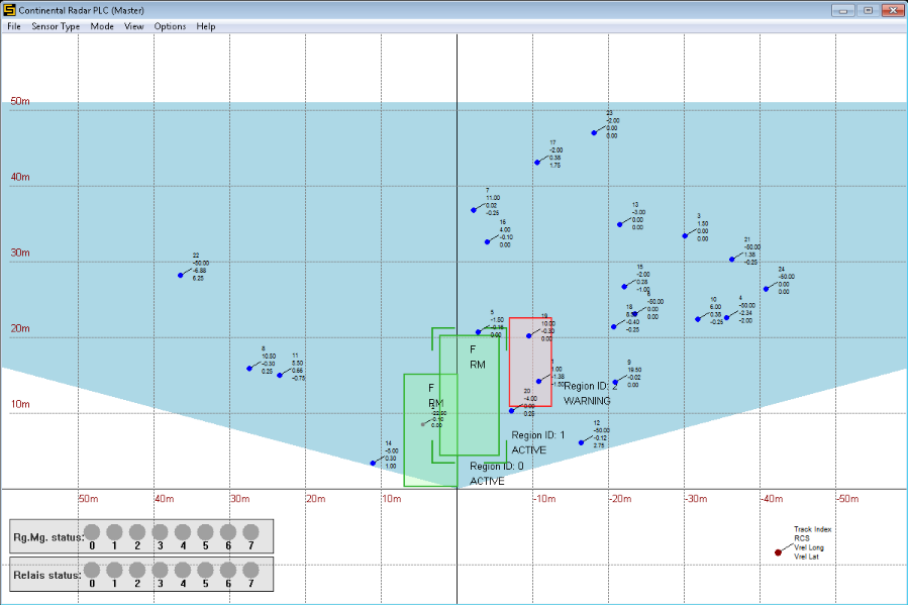
In this example we create a Region Manager and assign 3 Regions to be managed.
Furthermore we assign the Relays 0…3 to be triggered by the Manager upon entity
detection. In Figure 47-1 you can see that neither the Region Manager nor the assigned
relays are triggered as long as no Warning Messages are sent by any one of the managed
regions. As soon as one of the managed regions raises a warning message, the Region
Manager switches its state and triggers the assigned relays. This state will be active as long
as a warning is active in any one of the assigned regions.
Figure 47: Interaction of Regions, Region Manager and Relays.
When no warnings are detected anymore the region will reset to the active state but the
Region Manager and the assigned relays will stay triggered until the Relay Pulse Extension
is expired. The Pulse Extension prolongs the reset and is adjustable by entering a time
period in milliseconds [ms] (Figure 45-8).
Version : 4.00 en
Page 50 of 64
4.6 ARS 408 Sensor (Long Range)
The ARS 408 Sensor is the successor of the ARS308 Sensor. This sensor is from the
communication and features equal to the ARS 308. This chapter describes the additional
features and differences of the ARS 408 Sensor in the PLC software.
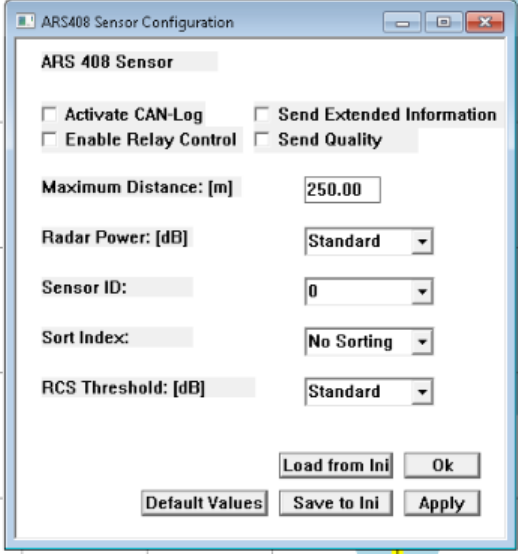
4.6.1 Sensor Configuration
Basic Sensor properties can be adjusted in the “Sensor Configuration” Window. To open it,
select Options/ Sensor Configuration.
4.6.1.1 CAN-Bus Log
In the “Sensor Configuration” window you can activate a CAN-Log which will record every
CAN-Message sent by the sensor.
The logging file “CAN_DATA.asc” is stored at the location shown at “Logging Path”. This is
the default Logfile location. If you want to adjust the Logging Path, you can do so by
changing the “logPath” parameter in the “program.ini” file in the program folder
“C:\Continental Radar-PLC\program.ini”.
Note: When changing the default Logfile location, it is mandatory to enter a valid path-
string e.g. c:\data\CAN_DATA.asc without any apostrophes or quotation marks. In general it
might be helpful to create backup copies of all *.ini files before changing parameter values.

Page 51 of 64
Continental Engineering Services GmbH
4.6.1.2 Send Extended Information
This Entry can activate “Extended Object Data”(See ARS 408 manual), which is transmitted
from the ARS 408 on the CAN Bus. It delivers the Length and Width of the detected objects.
Users that are interested in theses parameters should activate this function.
4.6.1.3 Enable Relay Control
The ARS 408 internal Collision detection supports one Wilke CAN Modul box with 4
Channels. If this option is activated, the first 4 collision detection Regions are triggering the
Relais 1-4 on the Wilke Modul. If the ARS 408 internal Collision detection and the Wilke CAN
outputs are activated, an autonomous Collision Detection without Radar PLC can be done.
The Module has to be terminated on the CAN BUS on both Ends with a 120 Ohm resistor.
Figure 48 CAN-Bus I/O Module: 4 digital Outputs (Article Code DV-CANFRAS4-01)
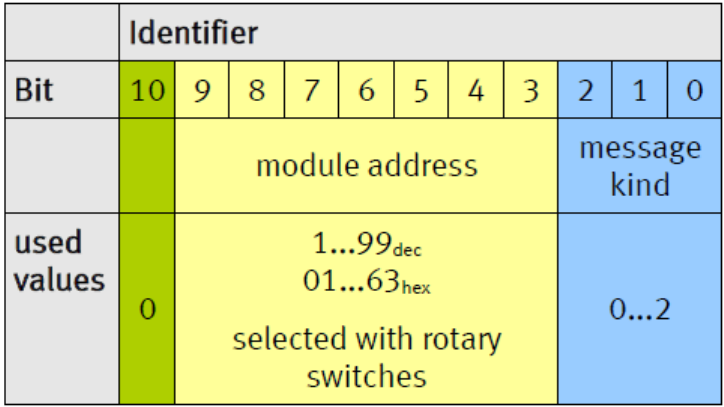
To use this module it has to be configured to 500kBit/s. The module address has to be
configured to 0x8 (Upper switch:0, bottom switch:1).
{kind=link}
Version : 4.00 en
Page 52 of 64
Figure 49 Wilke CAN Module configuration
4.6.1.4 Send Quality
If this feature is activated, quality information shall be sent for Clusters or Objects (See ARS
408 Documentation).These information and only be found in the ARS 408 CAN Bus
messages. They are not displayed by the Radar PLC
4.6.1.5 Maximum Distance
Configuaration of the Maximum distance of far scan (near scan maximum distance is set
proportionally). The parameter can be set from 196m to 260m (See ARS 408
Documentation).
4.6.1.6 Radar Power
Radar output power. This menu allows to change the Radar Output Power(See ARS 408
Documentation).
4.6.1.7 Sensor ID Configuration
The Sensor ID Configuration allows changing the ID between 0 and 7 for the connected
sensor. The Sensor ID also determines the address space of CAN communication messages
according to (base message ID | (0x10 * sensor ID)).
The Current Sensor ID option shows the currently used Sensor ID. The Set Sensor ID
option allows changing the Sensor ID. Therefore a value between 0 and 7 can be selected
Page 53 of 64
Continental Engineering Services GmbH
from the drop-down menu. Confirming the new value by pressing the Set-Button will write
the new configuration to the Radar-Sensor.
4.6.1.8 Sort Index
Allows do define the sorting order of the Object. If range is selected, the sensor delivers the
nearest objects first. If RCS is selected, the sensor sends out the object with the strongest
Radar echo at first.
4.6.1.9 RCS Threshold
This Entry activates the sensors high sensitive mode. It can help to detect small objects.
Version : 4.00 en
Page 54 of 64
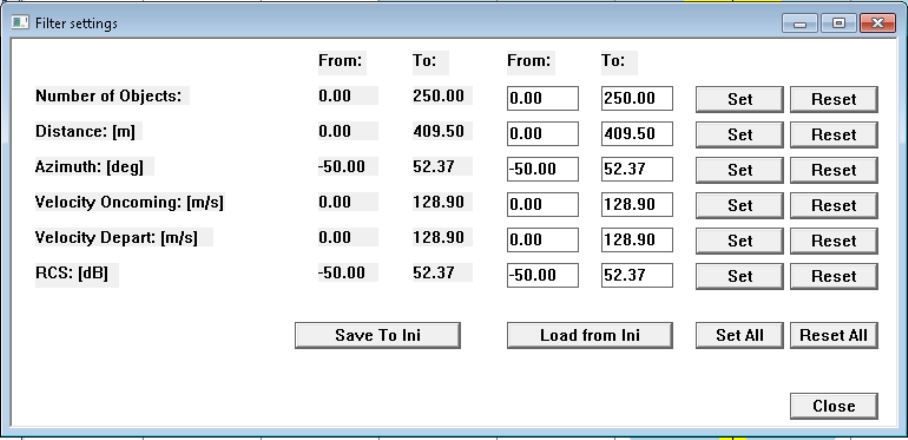
4.6.2 Filter Configuration
The ARS 408 Sensor is able to filter out application relevant Objects/Clusters. The relevant
Objects can be used together with the sensor internal collision detection.
4.6.2.1 Object filter
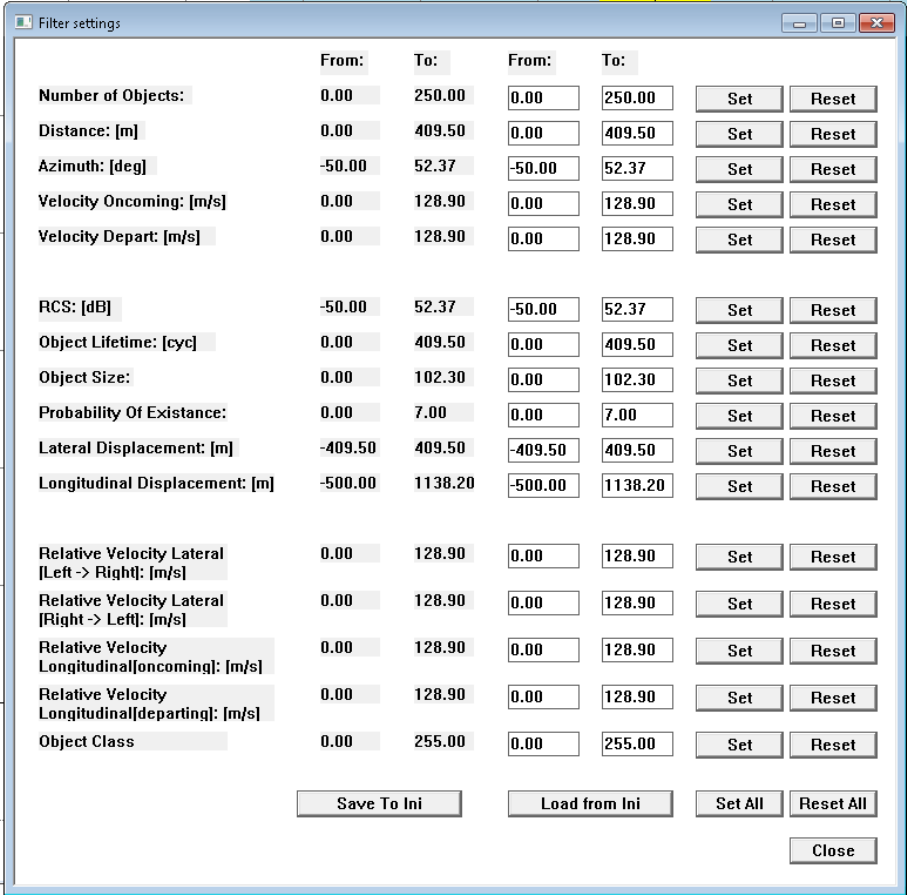
Figure 50 Object filter configuration
The following option can be used to filter out application relevant clusters. A combination of
several of these filters can be activated also.
Page 55 of 64
Continental Engineering Services GmbH
4.6.2.1.1 Number of Objects
This filter can be used that the sensor only delivers a defined maximum amount of Objects.
For example:
When the Maximum Value is set to 2 and the sensors sorting order is configured to distance
the nearest 2 Objects are filtered out.
4.6.2.1.2 Distance
An Object detection operation range can be defined.
4.6.2.1.1 Azimuth
A view range between to angles can be defined
4.6.2.1.2 Radial Velocity
With this filter, objects within a speed range can be filtered out
For example:
If only moving objects should be filtered out, the following configuration will do the job:
Velocity Oncoming: 0.3m/s to 128.9m/s
Velocity Departing: 0.3m/s to 128.9m/s
4.6.2.1.3 RCS
With this filter is possible to see only strong Object or from Objects with weak radar refection.
4.6.2.1.4 Object Lifetime
When an Object is captured by the sensor internal tacking, the Lifetime is measured. With
this filter it is possible separate new (or sporadic) from solid Objects.
4.6.2.1.5 Object Size
Filter for the object size in m^2
4.6.2.1.6 Probability of Existence
This sensor internal tracking algorithm is capable of estimating the probabilities of Object
existence while tracking them. This estimation is given in a range from 0 to 7, where 7 hast
the highest probability of existence
4.6.2.1.1 Lateral/Longitudinal displacement
This filters can be set, when a certain supervision area shall be defined.
4.6.2.1.1 Relative Velocity
With this filter, objects within a speed range in for different directions can be filtered out
Version : 4.00 en
Page 56 of 64
4.6.2.2 Cluster Filter
4.6.2.2.1 Number of Cluster
This filter can be used that the sensor only delivers a defined maximum amount of Clusters
4.6.2.2.2 Radial Distance
A Target detection operation range can be defined.
4.6.2.2.3 Azimuth
A view range between to angles can be defined
4.6.2.2.4 Radial Velocity
With this filter, objects within a speed range can be filtered out
For example:
If only moving objects should be filtered out, the following configuration will do the job:
Velocity Oncoming: 0.3m/s to 128.9m/s
Velocity Departing: 0.3m/s to 128.9m/s
4.6.2.2.5 RCS
With this filter is possible to see only strong Object or from Objects with weak radar refection.
Page 57 of 64
Continental Engineering Services GmbH
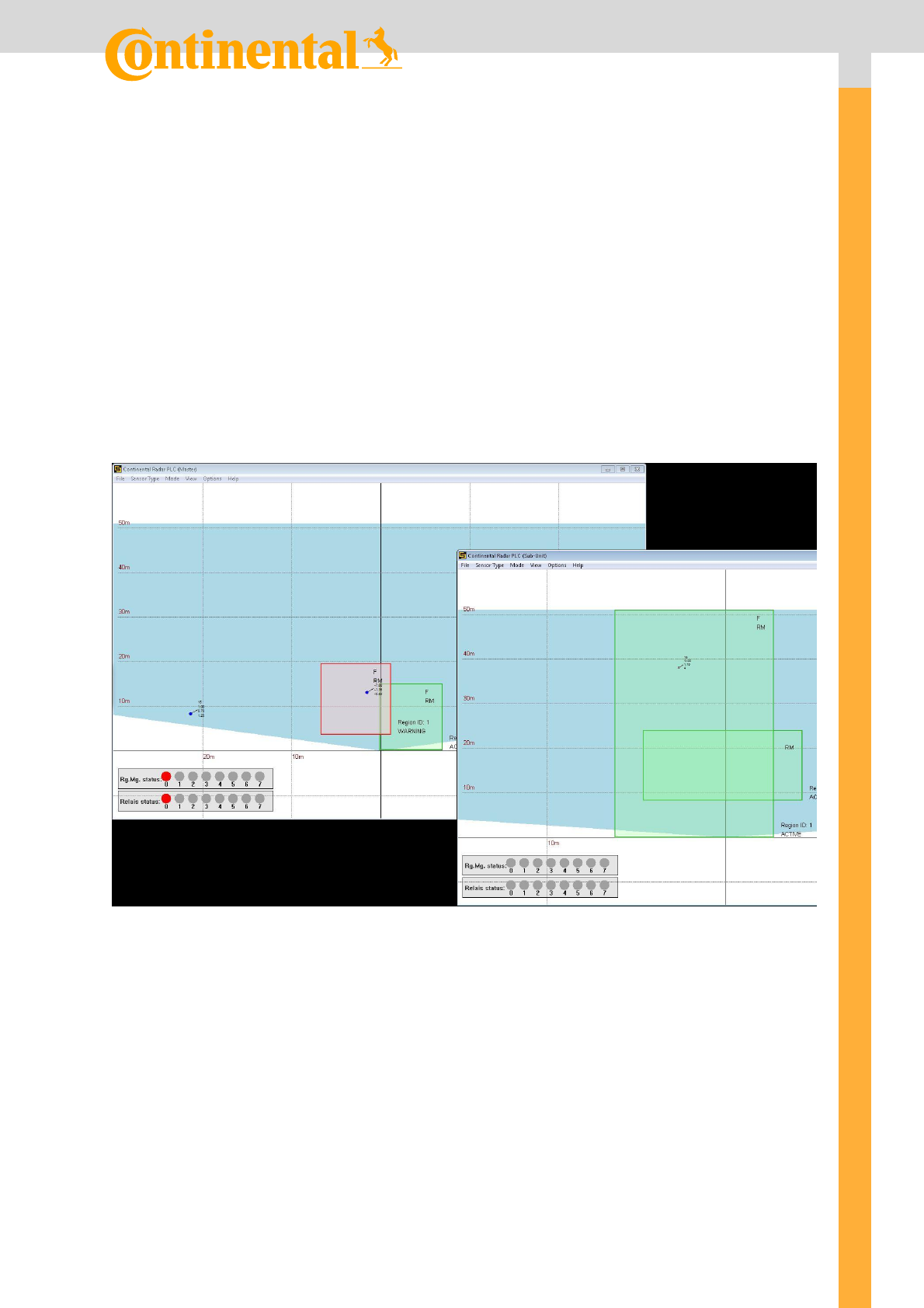
5 Support of a second Radar Sensor
It is possible to connect a second Radar Sensor to the PLC. That allows to compare different
radar sensors for one application or expands the
The second sensor has to be connected to the right hand side CAN interface on the Radar
PLC. That has to be done before booting up the radar PLC. Two sensors can work together
in collision detection. In this scenario the Continental Radar PLC software runs in two
instances, one in MASTER and one in SUB-UNIT configuration.
Figure 51: Exemplary setup of a master-sub-unit system. Each Radar-PLC visualization covers one of the
connected sensors.
By using the “Link to Sub-Unit Region Manager” Option in the Region Manager Window it is
possible to create a logical AND connection between a Sub-Unit and Master-Unit Region
Manager. This adds the Sub-Unit Region Manager state as a condition to the Master-Units
Region Manager trigger behavior. Only when the Sub-Units Region Manager signals a
Warning, the Master Region Manager is able to trigger the connected relays.

Version : 4.00 en
Page 58 of 64
Figure 52 Add sub-unit manager to master region manager
.
Page 59 of 64
Continental Engineering Services GmbH
6 Tools
6.1 Remote Desktop
When the Radar PLC is connected over an Ethernet cable to another computer it is possible
to access the Radar PLC over Remote Desktop. The Remote Desktop connection needs the
Ethernet Port, which is configured with a fix IP Address – X001.
IP – Address:
169.254.167.240
Password:
Arcus

Version : 4.00 en
Page 60 of 64
7 Appendix
7.1 Power Supply AC/DC
For the Power supply with 100-240 VC AC it is possible to use the PULS ML 30.106 power
supply. It delivers 24V DC for the Radar PLC and 12V or 24V for the Radar Sensor. For
further information about the Sensor voltage and power consumption please see the
respective sensor data sheet.
Figure 53: PULS ML 30.106 power supply

Page 61 of 64
Continental Engineering Services GmbH
7.2 Power Supply DC/DC
RS 50W Single Output 12V DC/DC voltage converter – Output 24V DC
Figure 54: 12/24V DC/DC voltage converter
Version : 4.00 en
Page 62 of 64
List of Figures
Figure 1: Radar PLC Hardware ............................................................................................. 7
Figure 2: Power input terminals ............................................................................................. 8
Figure 3: CANopen connector plug........................................................................................ 8
Figure 4: Analog input terminal .............................................................................................. 9
Figure 5: Relays output terminal ...........................................................................................10
Figure 6: Radar PLC Software ..............................................................................................12
Figure 7: Two parts of the Radar PLC Software ...................................................................13
Figure 8: Configuration of Sensor type .................................................................................14
Figure 9: Cartesian Coordinate System used to display detected entities .............................14
Figure 10: View Settings for display and coordinate system configuration ............................15
Figure 11: Different appearances of the coordinate system ..................................................15
Figure 12: Zoom Options for symmetrical, longitudinal only or lateral only zoom. .................16
Figure 13: Exemplary zoom modes and stages ....................................................................16
Figure 14 Additional Information ...........................................................................................17
Figure 15 Marker Configuration ............................................................................................18
Figure 16: SRR Main Screen ................................................................................................20
Figure 17: Mode selection for Cluster ...................................................................................21
Figure 18: SRR Cluster Markings .........................................................................................21
Figure 20: Mode selection for Tracks ....................................................................................21
Figure 21: SRR Track Markings ...........................................................................................21
Figure 23: The Sensor Configuration Window ......................................................................22
Figure 24: Enable Filter ........................................................................................................23
Figure 25: Cluster Filter Settings ..........................................................................................24
Figure 26: Track Filter Settings .............................................................................................25
Figure 27: SRR Collision Detection Configuration ................................................................26
Figure 28: SRR defining warn regions ..................................................................................28
Figure 29: SRR Collision Detection Mode.............................................................................29
Figure 30: ARS308 Main Screen in Near-View .....................................................................30
Figure 31: Mode Selection for Targets ..................................................................................31
Figure 34: Configuration - Targets / Objects .........................................................................31
Figure 37: ARS 308 Sensor Configuration Window ..............................................................33
Figure 38: Enable Filter ........................................................................................................34
Figure 39: Target Filter Settings ...........................................................................................35
Figure 40: Object Filter Settings ...........................................................................................36
Page 63 of 64
Continental Engineering Services GmbH
Figure 41: ARS308 Collision Detection Configuration ...........................................................37
Figure 42: ARS 308 defining warn regions ...........................................................................39
Figure 43: ARS-Collision Detection Mode.............................................................................40
Figure 44: The Collision Detection on Sensor Window .........................................................41
Figure 45: SRR Collision Detection on PLC defining warn regions .......................................42
Figure 46: A regions different states .....................................................................................43
Figure 47: Different warning states during a collision detection measurement. .....................43
Figure 48: Region Filter for Tracks .......................................................................................44
Figure 49: Region Filter for Cluster .......................................................................................44
Figure 50: Active region filtering ...........................................................................................45
Figure 51: The Region Manager Window .............................................................................47
Figure 52: Assigning regions to a Region Manager ..............................................................48
Figure 53: Interaction of Regions, Region Manager and Relays. ..........................................49
Figure 54 CAN-Bus I/O Module: 4 digital Outputs (Article Code DV-CANFRAS4-01) ...........51
Figure 55 Wilke CAN Module configuration ..........................................................................52
Figure 56 Object filter configuration ......................................................................................54
Figure 57: Exemplary setup of a master-sub-unit system. Each Radar-PLC visualization
covers one of the connected sensors. ..................................................................................57
Figure 58 Add sub-unit manager to master region manager .................................................58
Figure 59: PULS ML 30.106 power supply ...........................................................................60
Figure 60: 12/24V DC/DC voltage converter .........................................................................61
Version : 4.00 en
Page 64 of 64
List of Tables
Table 1: Change History ........................................................................................................ 2
Table 2: Technical data Continental Radar PLC .................................................................... 6
Table 3: Technical data analog input terminal ....................................................................... 9
Table 4: Technical data output relays ...................................................................................11
Table 5: Cluster parameter overview ....................................................................................21
Table 6: Track parameter overview ......................................................................................22
Table 7: Cluster Filter value description ................................................................................24
Table 8: Track Filter value description ..................................................................................25
Table 9: SRR Collision Detection Settings ............................................................................27
Table 11: Object parameter overview ...................................................................................32
Table 12: Target Filter value description ...............................................................................35
Table 13: Object Filter Value description ..............................................................................36
Table 14 ARS Collision Detection Settings ...........................................................................38
Table 15: Region Filter value description for Tracks .............................................................44
Table 16: Region Filter value description for Cluster ............................................................44
Table 17: Region trigger behavior configuration parameters ................................................46
