Arm Cortex M0 And M0+ System Design Kit Example Guide M0+System DUI0559D R1p1 00rel0
User Manual:
Open the PDF directly: View PDF ![]() .
.
Page Count: 100
- Arm Cortex-M0 and Cortex-M0+ System Design Kit Example System Guide
- Contents
- Preface
- 1: Introduction
- 2: Functional description
- 2.1 System-level design and design hierarchy
- 2.2 Design files
- 2.3 Processor file locations
- 2.4 Configuration options
- 2.5 Memory map
- 2.6 System controller
- 2.7 I/O pins
- 2.8 Interrupts and event functions
- 2.9 AHB system ROM table
- 2.10 Clock and reset
- 2.11 SysTick support
- 2.12 Handling the Engineering Change Order (ECO) Revision Number in ID registers
- 3: Example system testbench
- 4: Using the simulation environment
- 5: Software examples
- 6: Synthesis
- A: Debug tester
- B: Revisions
Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved.
ARM DUI 0559D (ID110117)
Arm® Cortex®-M0 and Cortex-M0+
System Design Kit
Revision: r1p1
Example System Guide
Confidential
ARM DUI 0559D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. ii
ID110117 Confidential
Arm Cortex-M0 and Cortex-M0+ System Design Kit
Example System Guide
Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved.
Release Information
The following changes have been made to this book.
Proprietary Notice
This document is CONFIDENTIAL and any use by you is subject to the terms of the agreement between you and Arm
or the terms of the agreement between you and the party authorised by Arm to disclose this document to you.
This document is protected by copyright and other related rights and the practice or implementation of the information
contained in this document may be protected by one or more patents or pending patent applications. No part of this
document may be reproduced in any form by any means without the express prior written permission of Arm. No
license, express or implied, by estoppel or otherwise to any intellectual property rights is granted by this
document unless specifically stated.
Your access to the information in this document is conditional upon your acceptance that you will not use or permit
others to use the information: (i) for the purposes of determining whether implementations infringe any third party
patents; (ii) for developing technology or products which avoid any of Arm’s intellectual property; or (iii) as a reference
for modifying existing patents or patent applications or creating any continuation, continuation in part, or extension of
existing patents or patent applications; or (iv) for generating data for publication or disclosure to third parties, which
compares the performance or functionality of the Arm technology described in this document with any other products
created by you or a third party, without obtaining Arm’s prior written consent.
THIS DOCUMENT IS PROVIDED “AS IS”. ARM PROVIDES NO REPRESENTATIONS AND NO
WARRANTIES, EXPRESS, IMPLIED OR STATUTORY, INCLUDING, WITHOUT LIMITATION, THE IMPLIED
WARRANTIES OF MERCHANTABILITY, SATISFACTORY QUALITY, NON-INFRINGEMENT OR FITNESS
FOR A PARTICULAR PURPOSE WITH RESPECT TO THE DOCUMENT. For the avoidance of doubt, Arm makes
no representation with respect to, and has undertaken no analysis to identify or understand the scope and content of,
third party patents, copyrights, trade secrets, or other rights.
This document may include technical inaccuracies or typographical errors.
TO THE EXTENT NOT PROHIBITED BY LAW, IN NO EVENT WILL ARM BE LIABLE FOR ANY DAMAGES,
INCLUDING WITHOUT LIMITATION ANY DIRECT, INDIRECT, SPECIAL, INCIDENTAL, PUNITIVE, OR
CONSEQUENTIAL DAMAGES, HOWEVER CAUSED AND REGARDLESS OF THE THEORY OF LIABILITY,
ARISING OUT OF ANY USE OF THIS DOCUMENT, EVEN IF ARM HAS BEEN ADVISED OF THE
POSSIBILITY OF SUCH DAMAGES.
If any of the provisions contained in these terms conflict with any of the provisions of any click through or signed written
agreement covering this document with Arm, then the click through or signed written agreement prevails over and
supersedes the conflicting provisions of these terms. This document may be translated into other languages for
convenience, and you agree that if there is any conflict between the English version of this document and any
translation, the terms of the English version of the Agreement shall prevail.
The Arm corporate logo and words marked with ® or ™ are registered trademarks or trademarks of Arm Limited (or
its subsidiaries) in the US and/or elsewhere. All rights reserved. Other brands and names mentioned in this document
may be the trademarks of their respective owners. Please follow Arm's trademark usage guidelines at
http://www.arm.com/company/policies/trademarks.
Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved.
Arm Limited. Company 02557590 registered in England.
Change history
Date Issue Confidentiality Change
17 March 2011 A Non-Confidential First release for r0p0
15 June 2011 B Confidential Second release for r0p0
19 April 2013 C Confidential First release for r1p0
31 October 2017 D Confidential First release for r1p1

ARM DUI 0559D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. iii
ID110117 Confidential
110 Fulbourn Road, Cambridge, England CB1 9NJ.
LES-PRE-20348
Confidentiality Status
This document is Confidential. This document may only be used and distributed in accordance with the terms of the
agreement entered into by Arm and the party that Arm delivered this document to.
Product Status
The information in this document is final, that is for a developed product.
Web Address
http://www.arm.com

ARM DUI 0559D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. iv
ID110117 Confidential
Contents
Arm Cortex-M0 and Cortex-M0+ System Design Kit
Example System Guide
Preface
About this book .......................................................................................................... vii
Feedback .................................................................................................................... xi
Chapter 1 Introduction
1.1 About the Cortex-M0 and Cortex-M0+ System Design Kit ...................................... 1-2
1.2 Cortex-M0 and Cortex-M0+ System Design Kit directory structure ......................... 1-3
1.3 Limitations of the design kit ..................................................................................... 1-5
Chapter 2 Functional description
2.1 System-level design and design hierarchy .............................................................. 2-2
2.2 Design files .............................................................................................................. 2-8
2.3 Processor file locations .......................................................................................... 2-10
2.4 Configuration options ............................................................................................. 2-11
2.5 Memory map .......................................................................................................... 2-16
2.6 System controller ................................................................................................... 2-19
2.7 I/O pins .................................................................................................................. 2-22
2.8 Interrupts and event functions ............................................................................... 2-24
2.9 AHB system ROM table ......................................................................................... 2-26
2.10 Clock and reset ...................................................................................................... 2-27
2.11 SysTick support ..................................................................................................... 2-28
2.12 Handling the Engineering Change Order (ECO) Revision Number in ID registers 2-29
Chapter 3 Example system testbench
3.1 About the testbench design ..................................................................................... 3-2
3.2 UART text output capturing and escape code ......................................................... 3-3

Contents
ARM DUI 0559D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. v
ID110117 Confidential
3.3 Debug tester ............................................................................................................ 3-4
Chapter 4 Using the simulation environment
4.1 About the simulation environment ........................................................................... 4-2
4.2 Files and directory structure .................................................................................... 4-3
4.3 Setting up the simulation environment ..................................................................... 4-5
4.4 Running a simulation in the simulation environment ............................................... 4-8
Chapter 5 Software examples
5.1 Available simulation tests ........................................................................................ 5-2
5.2 Creating a new test .................................................................................................. 5-5
5.3 Example header files and device driver files ........................................................... 5-6
5.4 Retargeting .............................................................................................................. 5-8
5.5 Example device driver software ............................................................................... 5-9
Chapter 6 Synthesis
6.1 Implementation overview ......................................................................................... 6-2
6.2 Directory structure and files ..................................................................................... 6-3
6.3 Implementation flow ................................................................................................. 6-4
6.4 Timing constraints .................................................................................................... 6-5
Appendix A Debug tester
A.1 About the debug tester ............................................................................................ A-2
A.2 Memory map ............................................................................................................ A-3
A.3 Debug tester software .............................................................................................. A-4
Appendix B Revisions

ARM DUI 0559D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. vi
ID110117 Confidential
Preface
This preface introduces the Cortex-M0 and Cortex-M0+ System Design Kit Example System
Guide. It contains the following sections:
•About this book on page vii.
•Feedback on page xi.

Preface
ARM DUI 0559D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. vii
ID110117 Confidential
About this book
This book is for the Cortex-M0 and Cortex-M0+ System Design Kit.
Implementation obligations
This book is designed to help you implement an Arm product. The extent to which the
deliverables can be modified or disclosed is governed by the contract between Arm and the
Licensee. There might be validation requirements which, if applicable, are detailed in the
contract between Arm and the Licensee and which, if present, must be complied with prior to
the distribution of any devices incorporating the technology described in this document.
Reproduction of this document is only permitted in accordance with the licenses granted to the
Licensee.
Arm assumes no liability for your overall system design and performance. Verification
procedures defined by Arm are only intended to verify the correct implementation of the
technology licensed by Arm, and are not intended to test the functionality or performance of the
overall system. You or the Licensee are responsible for performing system level tests.
You are responsible for applications that are used in conjunction with the Arm technology
described in this document, and to minimize risks, adequate design and operating safeguards
must be provided for by you. Publishing information by Arm in this book of information
regarding third party products or services is not an express or implied approval or endorsement
of the use thereof.
Product revision status
The rnpn identifier indicates the revision status of the product described in this book, where:
rn Identifies the major revision of the product.
pn Identifies the minor revision or modification status of the product.
Intended audience
This book is written for hardware engineers, software engineers, system integrators, and system
designers, who might not have previous experience of Arm products, but want to run a complete
example of a working system.
Using this book
This book is organized into the following chapters:
Chapter 1 Introduction
Read this for an introduction to the Cortex-M0 and Cortex-M0+ System Design
Kit and its features.
Chapter 2 Functional description
Read this for a description of the design and layout of the design kit.
Chapter 3 Example system testbench
Read this for a description of the testbench components.
Chapter 4 Using the simulation environment
Read this for a description of how to set up and run simulation tests.
Chapter 5 Software examples
Read this for a description of the example software tests and the device drivers.
Preface
ARM DUI 0559D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. viii
ID110117 Confidential
Chapter 6 Synthesis
Read this for a description of how to run synthesis for the example system.
Appendix A Debug tester
Read this for a description of the debug components in the design kit.
Appendix B Revisions
Read this for a description of the technical changes between released issues of this
book.
Glossary
The Arm® Glossary is a list of terms used in Arm documentation, together with definitions for
those terms. The Arm® Glossary does not contain terms that are industry standard unless the
Arm meaning differs from the generally accepted meaning.
See Arm® Glossary
http://infocenter.arm.com/help/topic/com.arm.doc.aeg0014-/index.html
.
Conventions
This book uses the conventions that are described in:
•Typographical conventions.
•Timing diagrams.
•Signals on page ix.
Typographical conventions
The following table describes the typographical conventions:
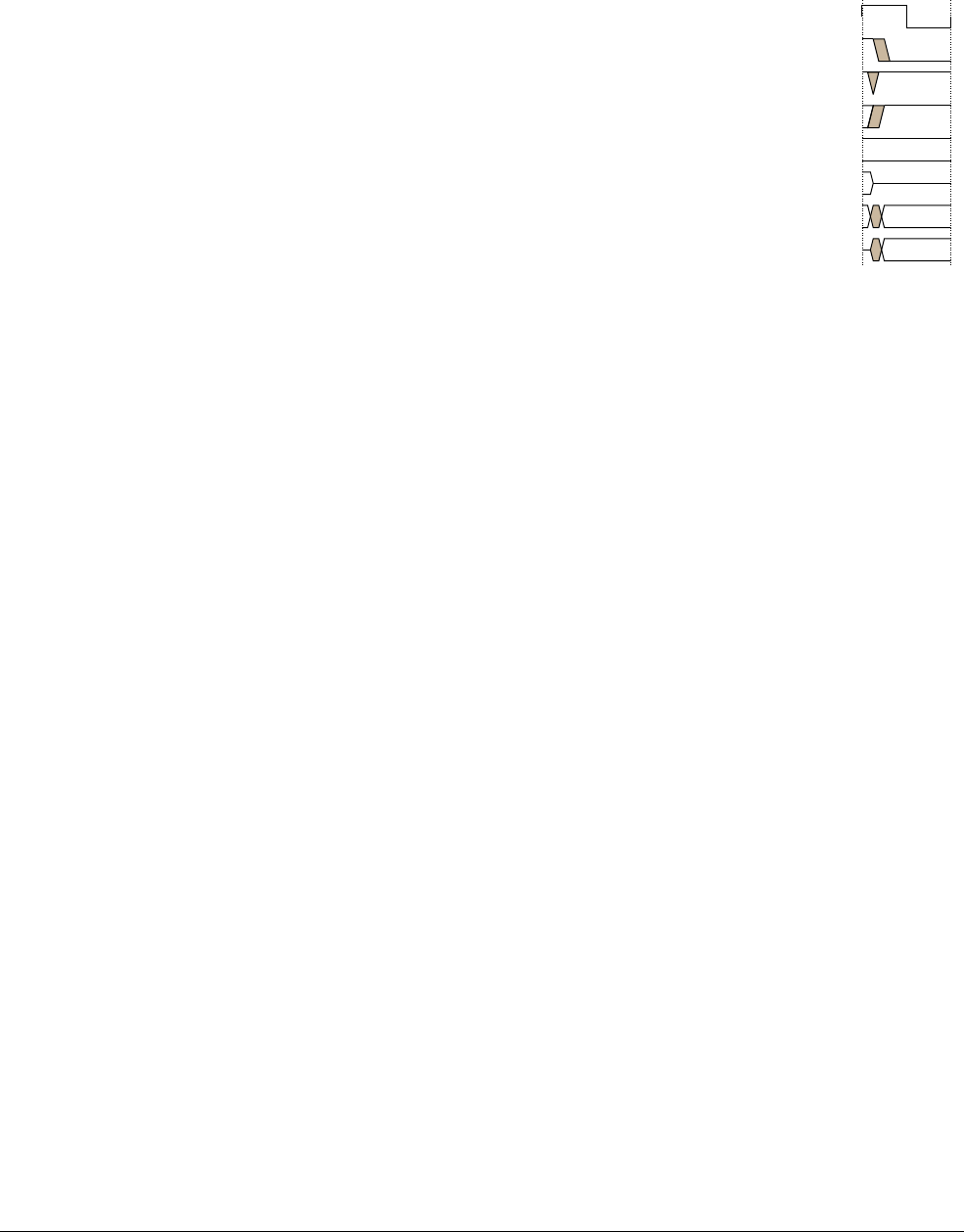
Timing diagrams
The figure named Key to timing diagram conventions on page ix explains the components used
in timing diagrams. Variations, when they occur, have clear labels. You must not assume any
timing information that is not explicit in the diagrams.
Style Purpose
italic Introduces special terminology, denotes cross-references, and citations.
bold Highlights interface elements, such as menu names. Denotes signal names. Also used for terms in descriptive
lists, where appropriate.
monospace
Denotes text that you can enter at the keyboard, such as commands, file and program names, and source code.
monospace
Denotes a permitted abbreviation for a command or option. You can enter the underlined text instead of the full
command or option name.
monospace italic
Denotes arguments to monospace text where the argument is to be replaced by a specific value.
monospace bold
Denotes language keywords when used outside example code.
<and> Encloses replaceable terms for assembler syntax where they appear in code or code fragments. For example:
MRC p15, 0 <Rd>, <CRn>, <CRm>, <Opcode_2>
SMALL CAPITALS Used in body text for a few terms that have specific technical meanings, that are defined in the Arm glossary.
For example, IMPLEMENTATION DEFINED, IMPLEMENTATION SPECIFIC, UNKNOWN, and UNPREDICTABLE.
Preface
ARM DUI 0559D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. ix
ID110117 Confidential
Shaded bus and signal areas are undefined, so the bus or signal can assume any value within the
shaded area at that time. The actual level is unimportant and does not affect normal operation.
Key to timing diagram conventions
Timing diagrams sometimes show single-bit signals as HIGH and LOW at the same time and
they look similar to the bus change shown in Key to timing diagram conventions. If a timing
diagram shows a single-bit signal in this way then its value does not affect the accompanying
description.
Signals
The signal conventions are:
Signal level The level of an asserted signal depends on whether the signal is
active-HIGH or active-LOW. Asserted means:
• HIGH for active-HIGH signals.
• LOW for active-LOW signals.
Lowercase n At the start or end of a signal name denotes an active-LOW signal.
Additional reading
This section lists publications by Arm and by third parties.
See Infocenter
http://infocenter.arm.com
, for access to Arm documentation.
See Arm CMSIS-Core
http://www.arm.com/cmsis
, for embedded software development
resources including the Cortex Microcontroller Software Interface Standard (CMSIS).
Arm publications
This book contains information that is specific to this product. See the following documents for
other relevant information:
•Arm® Cortex®-M System Design Kit Technical Reference Manual (ARM DDI 0479).
•Arm® Cortex®-M0 Devices Generic User Guide (ARM DUI 0497).
•Arm® Cortex®-M0 Integration and Implementation Manual (ARM DII 0238).
•Arm® Cortex®-M0 User Guide Reference Material (ARM DUI 0467).
•Arm® Cortex®-M0 Technical Reference Manual (ARM DDI 0432).
•Arm® Cortex®-M0+ Devices Generic User Guide (ARM DUI 0662).
•Arm® Cortex®-M0+ Integration and Implementation Manual (ARM DIT 0032).
Clock
HIGH to LOW
Transient
HIGH/LOW to HIGH
Bus stable
Bus to high impedance
Bus change
High impedance to stable bus

Preface
ARM DUI 0559D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. x
ID110117 Confidential
•Arm® Cortex®-M0+ User Guide Reference Material (ARM DUI 0605).
•Arm® Cortex®-M0+ Technical Reference Manual (ARM DDI 0484).

Preface
ARM DUI 0559D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. xi
ID110117 Confidential
Feedback
Arm welcomes feedback on this product and its documentation.
Feedback on this product
If you have any comments or suggestions about this product, contact your supplier and give:
• The product name.
• The product revision or version.
• An explanation with as much information as you can provide. Include symptoms and
diagnostic procedures if appropriate.
Feedback on content
If you have comments on content then send an e-mail to
errata@arm.com
. Give:
• The title.
• The number, ARM DUI 0559D.
• The page numbers to which your comments apply.
• A concise explanation of your comments.
Arm also welcomes general suggestions for additions and improvements.
Note
Arm tests the PDF only in Adobe Acrobat and Acrobat Reader, and cannot guarantee the quality
of the represented document when used with any other PDF reader.

ARM DUI 0559D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 1-1
ID110117 Confidential
Chapter 1
Introduction
This chapter introduces the Cortex-M0 and Cortex-M0+ System Design Kit. It contains the
following sections:
•About the Cortex-M0 and Cortex-M0+ System Design Kit on page 1-2.
•Cortex-M0 and Cortex-M0+ System Design Kit directory structure on page 1-3.
•Limitations of the design kit on page 1-5.

Introduction
ARM DUI 0559D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 1-2
ID110117 Confidential
1.1 About the Cortex-M0 and Cortex-M0+ System Design Kit
The Cortex-M0 and Cortex-M0+ System Design Kit provides:
• An example system-level design for the Arm Cortex-M0 and Cortex-M0+ processors.
• Reusable AMBA components for system-level development.
For information on the AMBA components that the design kit uses, see the Arm® Cortex®-M
System Design Kit Technical Reference Manual.
This document describes an example system for the Cortex-M0 and Cortex-M0+ processors.
The example system is a simple microcontroller design.
Introduction
ARM DUI 0559D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 1-3
ID110117 Confidential
1.2 Cortex-M0 and Cortex-M0+ System Design Kit directory structure
Table 1-1 describes the main directories of the design kit.
Figure 1-1 on page 1-4 shows the location of the file directories in the design kit.
Table 1-1 Main directory descriptions
Directory name Directory contents
logical
Verilog components including AHB-Lite and APB infrastructure components, peripherals, the APB subsystem,
and the AHB-Lite and APB protocol checkers.
systems
Design files, testbench files, and simulation setup files for the example system.
implementation
Synthesis setup files for the example system. The files support the Synopsys Design Compiler.
software
Software files. These include:
• CMSIS compatible C header files.
• Example program files for the example systems.
• An example device driver.
• The debug tester software for all the processors.
document
Documentation files.
cores
This is the default location for processor core RTL files. You can change this location by modifying the simulation
and synthesis setup. The design kit does not include the processor RTL files.
Introduction
ARM DUI 0559D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 1-4
ID110117 Confidential
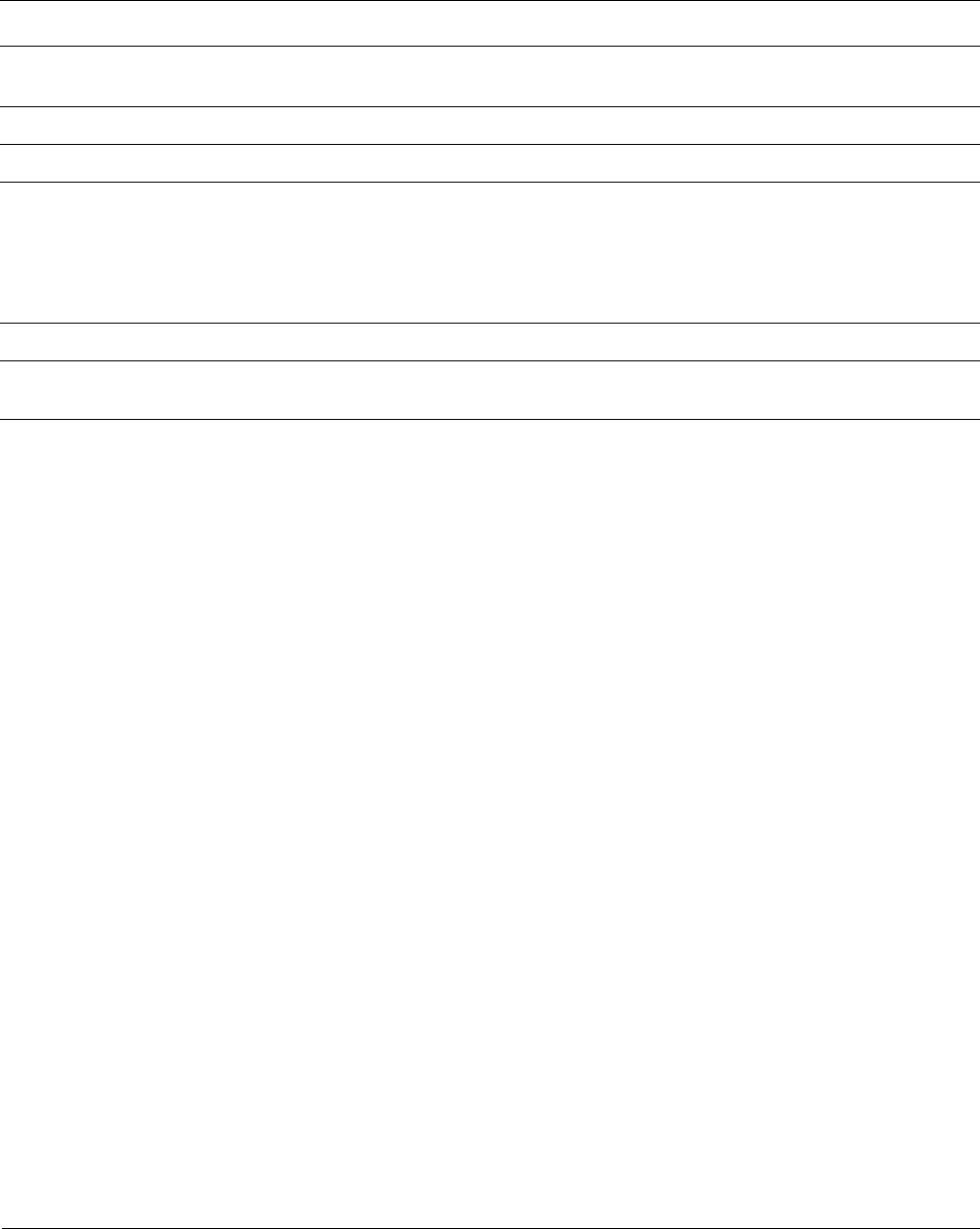
Figure 1-1 Directory structure
installation directory/
logical/
cmsdk_ahb_slave_mux/
verilog/
cmsdk_ahb_slave_mux.v
cmsdk_ahb_default_slave/
verilog/
cmsdk_ahb_default_slave.v
Directories that contain
other components
systems/
cortex_m0_mcu/
verilog/ Verilog and Verilog command files
rtl_sim/
simulation directory/
testcodes/
<testname>
cmsdk_debug_tester/ Testbench component to
test the debug interface
Other systems, when available
implementation_tsmc_ce018fg/
cortex_m0_mcu_system_synopsys/ Synthesis scripts for
synthesizable parts of the
example system
software/
cmsis/
CMSIS/
common/
demos/
dhry/
retarget/
bootloader/
scripts/
Common software files
Linker scripts and other utility scripts
documentation/ Documentation for the product
cores/ Default location for the processor RTL files
validation/
Other systems, when available
Device/
ARM/
CMSDK_CM0/
CMSDK_CM0plus/
CMSIS files, and header file for the
example system and the example
device driver code
hello/ Software compilation setup files
debug_tester/ Debug tester software
romtable_tests/
debug_tests/

Introduction
ARM DUI 0559D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 1-5
ID110117 Confidential
1.3 Limitations of the design kit
This section describes the limitations of the design kit.
1.3.1 Deliverables
The design kit does not include:
• Cortex-M0 processor RTL code.
• Cortex-M0+ processor RTL code.
•Direct Memory Access (DMA) Controller code.
• Software compilation tools.
You must license these products separately.
1.3.2 Processor support
The design kit supports the Cortex-M0 and Cortex-M0+ processors.
1.3.3 Endian support
The example system and its peripherals in the design kit are little-endian. The example system
also supports limited big-endian (BE)-8 byte-invariant mode for the following components:
AHB infrastructure components except the AHB bit band wrapper
These components are endian-independent.
AHB bit band wrapper
This component contains a Verilog parameter to enable you to operate in a
big-endian environment.
GPIO The AHB and I/O port GPIO support little-endian operation. They have a Verilog
parameter that you can configure to enable you to use them and their existing
device driver software in a big-endian environment. However, this increases the
gate count of the design because it introduces additional logic to control the byte
lane swapping.
Memory components
The behavioral models of the design kit components are designed to be
little-endian. However, they can also work in a big-endian system if the system
accesses each memory location with consistent transfer sizes.
APB peripherals
The APB peripherals are designed to be little-endian. The APB subsystem
provides a Verilog parameter that introduces additional endian conversion logic
to enable you to use these components and their device driver software in a
big-endian environment. Arm recommends that you do not use this parameter
because it adds extra hardware. To accomplish big-endian product design, Arm
recommends that you modify the peripherals and device drivers to use a
big-endian programmers model.
If you require a big-endian system design, Arm recommends that you redesign the peripherals
and memory blocks to achieve the lowest hardware overhead.

Introduction
ARM DUI 0559D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 1-6
ID110117 Confidential
1.3.4 Big-endian support with Arm GCC
By default, the GNU Tools for Arm embedded processors only support little-endian
configurations. If you use the Arm GCC in a big-endian system, you must rebuild the runtime
libraries. For information on rebuilding the toolchain, see Launchpad
https://launchpad.net/gcc-arm-embedded. You can also contact Arm for additional help.
1.3.5 Platform
This release of the Cortex-M0 and Cortex-M0+ System Design Kit supports Linux and Unix for
the simulation process and the synthesis process. If you use Keil® MDK-ARM for software
development, you can install the design kit in a location that is accessible from Linux, Unix, and
Windows. Do this using one of the following procedures:
• Install the design kit on a network drive that:
— A Linux or Unix terminal can access.
— Is mapped to a network drive on a Windows machine.
• Use a personal computer to do the following:
— Install virtualization software and install a guest Operating System (OS).
— Set up a shared folder to access the design kit through the host OS.
— Install the design kit in the shared folder.
Then compile the software with Keil MDK-ARM in the Windows environment, and run the
simulations in the Linux or Unix environment.
To run the design kit on other operating systems, modify the
makefiles
to meet your specific
requirements.

ARM DUI 0559D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 2-1
ID110117 Confidential
Chapter 2
Functional description
This chapter describes the design and layout of the design kit. It contains the following sections:
•System-level design and design hierarchy on page 2-2.
•Design files on page 2-8.
•Processor file locations on page 2-10.
•Configuration options on page 2-11.
•Memory map on page 2-16.
•System controller on page 2-19.
•I/O pins on page 2-22.
•Interrupts and event functions on page 2-24.
•AHB system ROM table on page 2-26.
•Clock and reset on page 2-27.
•SysTick support on page 2-28.
•Handling the Engineering Change Order (ECO) Revision Number in ID registers on
page 2-29.
Functional description
ARM DUI 0559D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 2-2
ID110117 Confidential
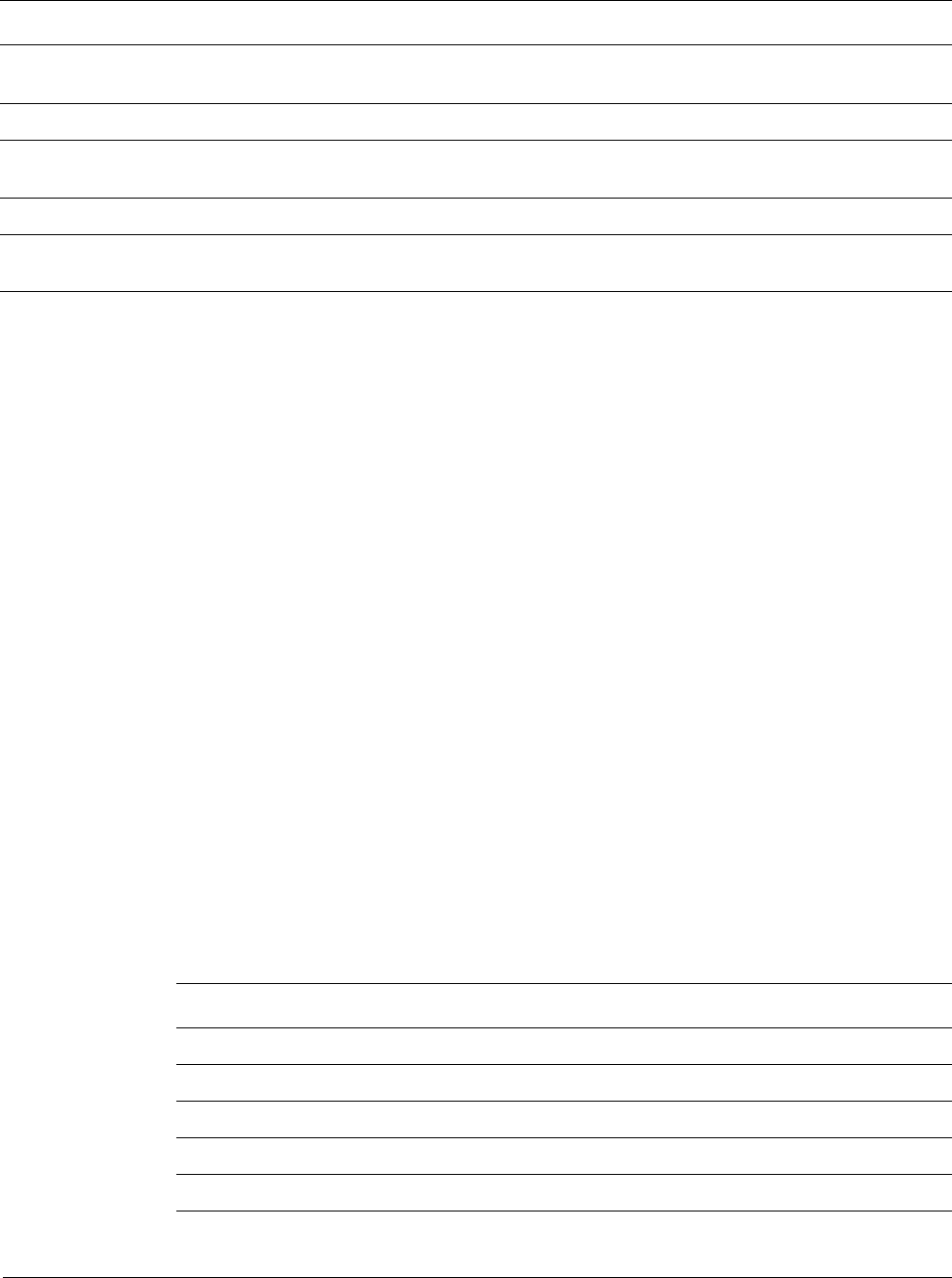
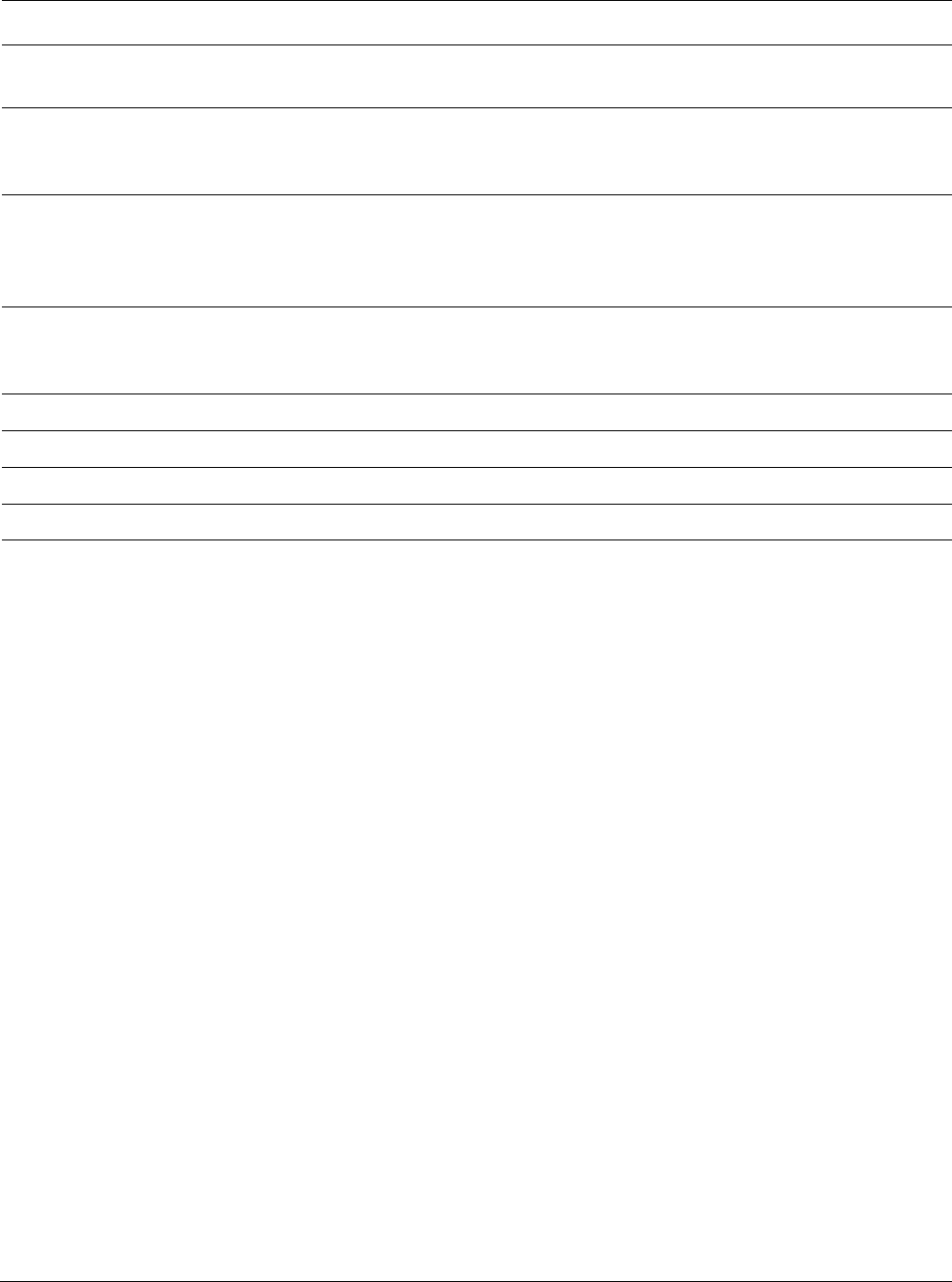
2.1 System-level design and design hierarchy
The example system is a simple microcontroller design. It contains the following:
• A single Cortex-M0 or Cortex-M0+ processor.
• Internal program memory.
• SRAM data memory.
• Boot loader.
• The following peripherals:
— Several timers.
—General Purpose Input Output (GPIO).
—Universal Asynchronous Receiver Transmitter (UART).
— Watchdog timer.
• Debug connection.
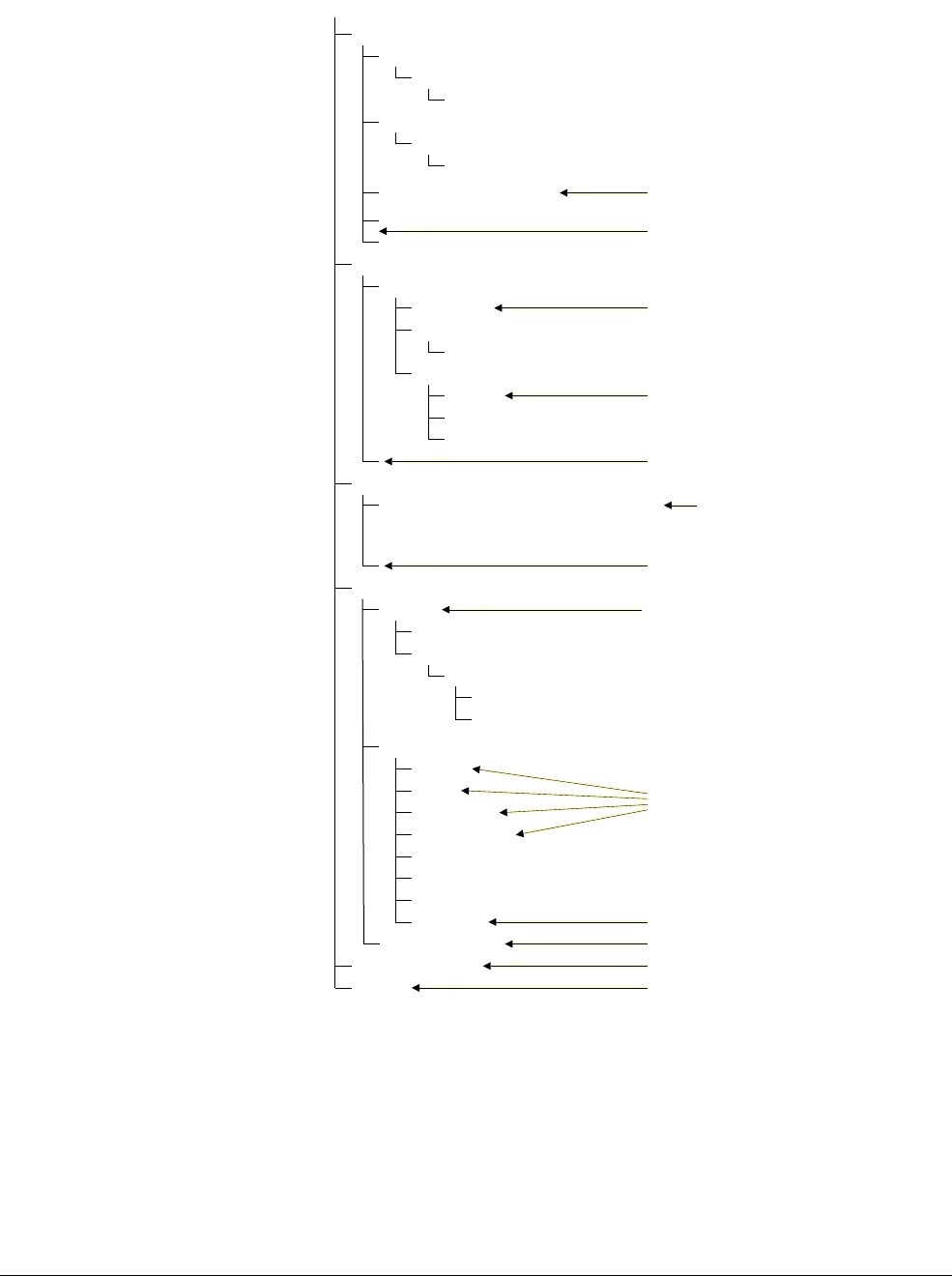
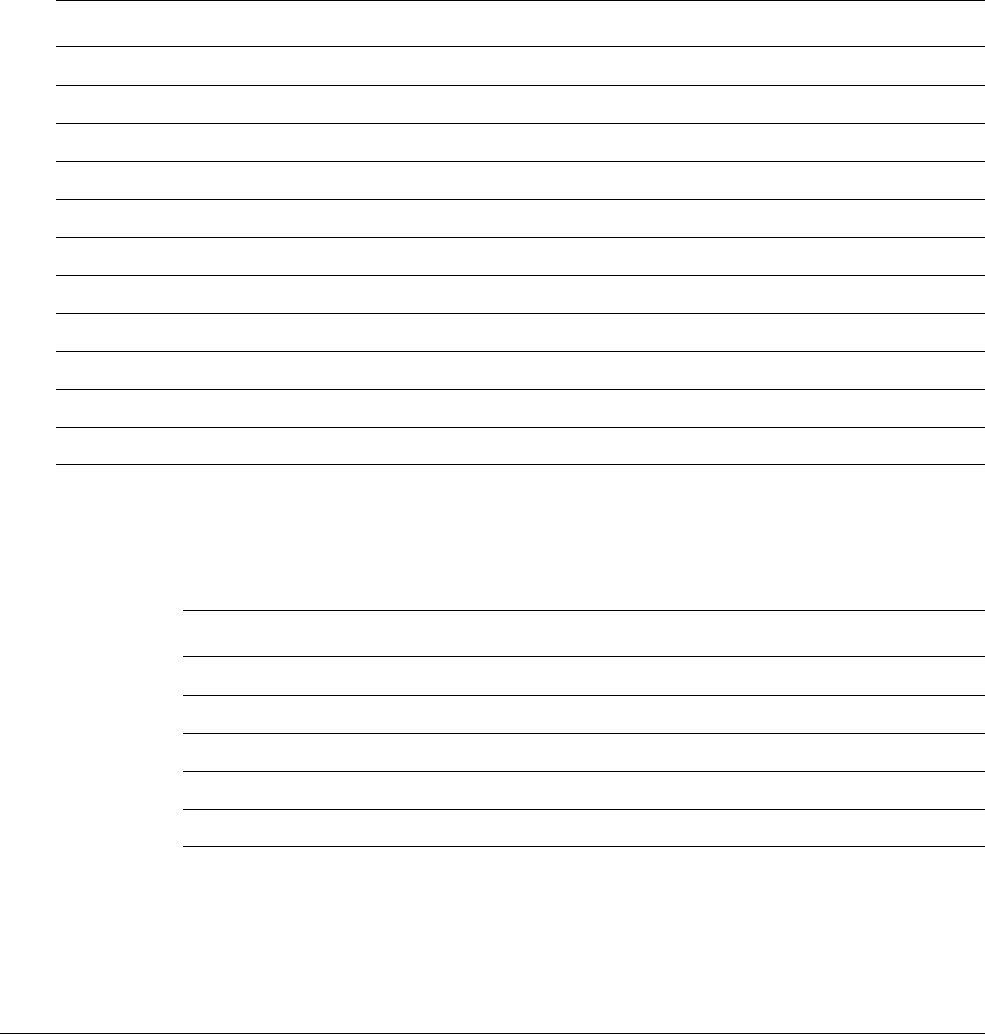
Figure 2-1 shows the top-level view of the example system.
Figure 2-1 Example microcontroller system top-level view
For the Cortex-M0+ system, the following components from the Cortex-M0+ integration kit are
reused:
•
cm0p_ik_rst_ctl
.
•
cm0p_ik_sram
.
CORTEXM0INTEGRATION or
CM0PMTBINTEGRATION
Processor and debug
interface
AHB Infrastructure including
several AHB components
Optional
PL230_udma
Micro DMA
controller
System
controller
SysTick
reference
clock
cmsdk_apb_
subsystem
cmsdk_ahb_ram
data memory
cmsdk_ahb_rom
program memory
cmsdk_ahb_rom
optional boot
loader
cmsdk_
clkreset
Crystal
oscillator
cmsdk_mcu_system
cmsdk_mcu_pin_mux
I/O pin multiplexor and tristate buffers
cmsdk_mcu_clkctrl
cortex_m0_pmu or
cm0p_ik_pmu
XTAL2
XTAL1
NRST
cmsdk_ahb_
gpio
Port 1
UART 2
TXD
Port 0
Debug
commands
and status
cmsdk_iop_
gpio*
*For use with Cortex-M0+ only
cmsdk_mcu microcontroller
System ROM
table
cmsdk_debug_tester Tristate buffers cmsdk_uart_capture
cms0p_ik_sram
Functional description
ARM DUI 0559D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 2-3
ID110117 Confidential
•
cm0p_ik_pmu
.
Table 2-1 describes the items that the microcontroller contains.
Table 2-1 Microcontroller items
Item Description
cmsdk_mcu
The example microcontroller design. This level contains the behavioral memories and clock generation
components.
cmsdk_mcu_system
The synthesizable level of the microcontroller design. This instantiates the Cortex-M0 or the Cortex-M0+
processor.
CORTEXM0INTEGRATION
The Cortex-M0 Integration Layer. This is part of the Cortex-M0 deliverable. It integrates the Cortex-M0
processor and the debug interface module.
CM0PMTBINTEGRATION
The Cortex-M0+ Integration Layer. This is part of the Cortex-M0+ deliverable. It integrates the
Cortex-M0+ processor, CoreSight™ MTB-M0+ micro trace buffer, and the debug interface module. The
CoreSight -MTB-M0+ is licensed separately from the Cortex-M0+ processor. It is not included in this
deliverable.
cmsdk_apb_subsystem
A subsystem of APB peripherals and APB infrastructure.
System controller Contains programmable registers for system control, for example memory remap and power management
enable.
SysTick reference clock SysTick reference clock generation logic.
cmsdk_ahb_gpio
A low-latency GPIO with an AHB interface. Each GPIO module provides 16 I/O pins.
cmsdk_iop_gpio
A low-latency GPIO. Each GPIO module provides 16 I/O pins. Only used in Cortex-M0+.
PL230 DMA Controller An optional instantiation of the Arm CoreLink DMA-230 Micro DMA Controller. The DMA-230 is not
included in this deliverable, and you must license it separately.
cortex_m0_pmu
An optional Cortex-M0 Power Management Unit (PMU). This is included in the Cortex-M0 deliverable. It
is not included in this deliverable.
cm0p_ik_pmu
An optional Cortex-M0+ PMU. This is included in the Cortex-M0+ deliverable. It is not included in this
deliverable.
cmsdk_mcu_clkctrl
The clock and reset generation logic behavioral model.
cmsdk_mcu_pin_mux
The pin multiplexor and tristate buffers for the I/O ports.
cmsdk_ahb_rom
A memory wrapper for the ROM to test the behavior of different implementations of memory. You can
modify the Verilog parameters to change the implementation.
cmsdk_ahb_ram
A memory wrapper for the RAM to test the behavior of different implementations of memory. You can
modify the Verilog parameters to change the implementation.
cmsdk_ahb_cs_rom_table
An example system level CoreSight ROM table that enables a debugger to identify the system as a
Cortex-M0 or Cortex-M0+ based system.
cmsdk_mtb_sync.v
Includes the synchronizers for the CoreSight M0+ MTB signals, that is, TSTART and TSTOP.
cmsdk_mcu_addr_decode
Generates the HSELS for each memory mapped component based on the CMSDK address map.
cm0p_ik_sram
A synchronous SRAM model for the CoreSight MTB-M0+. Only used in Cortex-M0+.
Functional description
ARM DUI 0559D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 2-4
ID110117 Confidential
Table 2-2 describes the items that are in the testbench but outside the microcontroller.
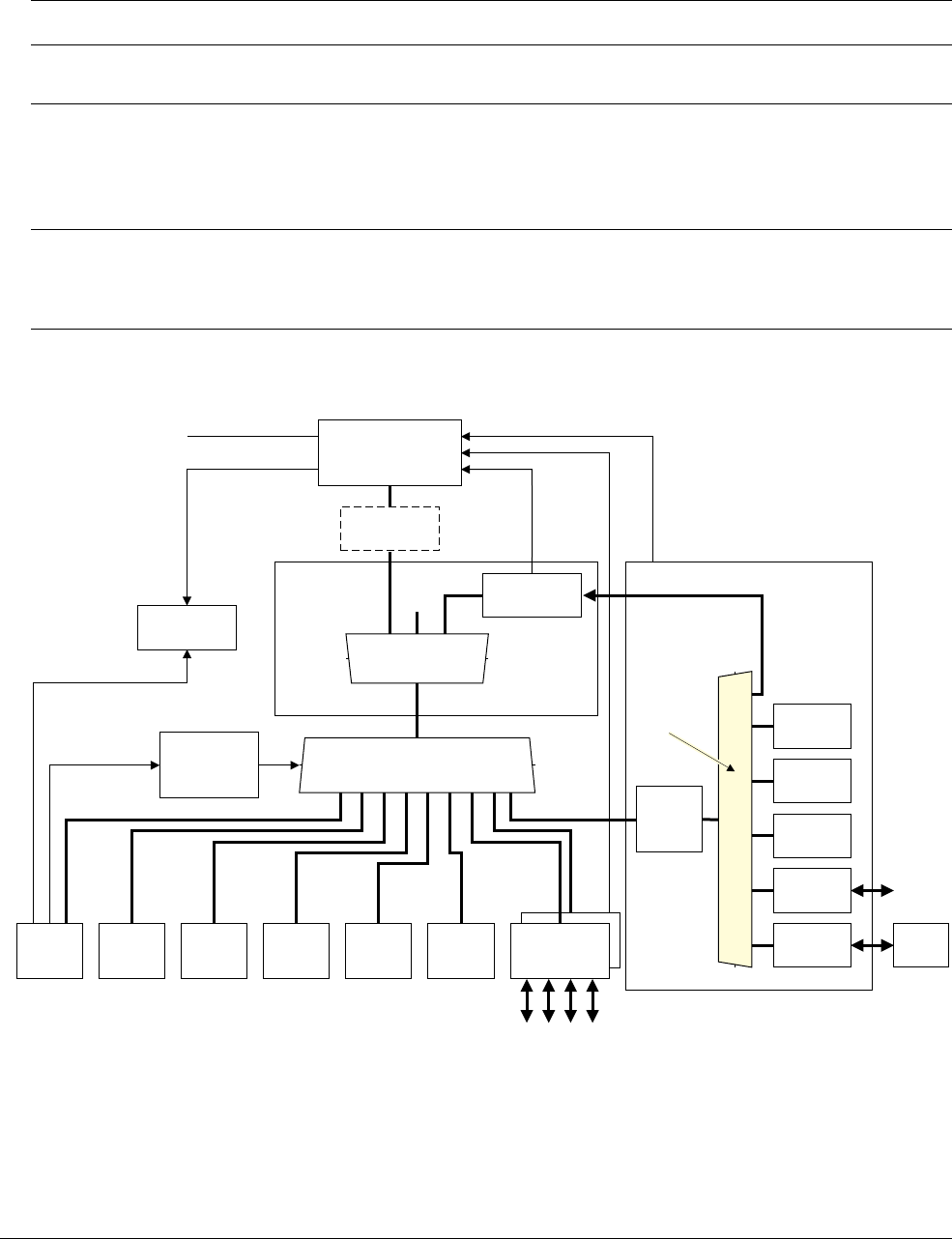
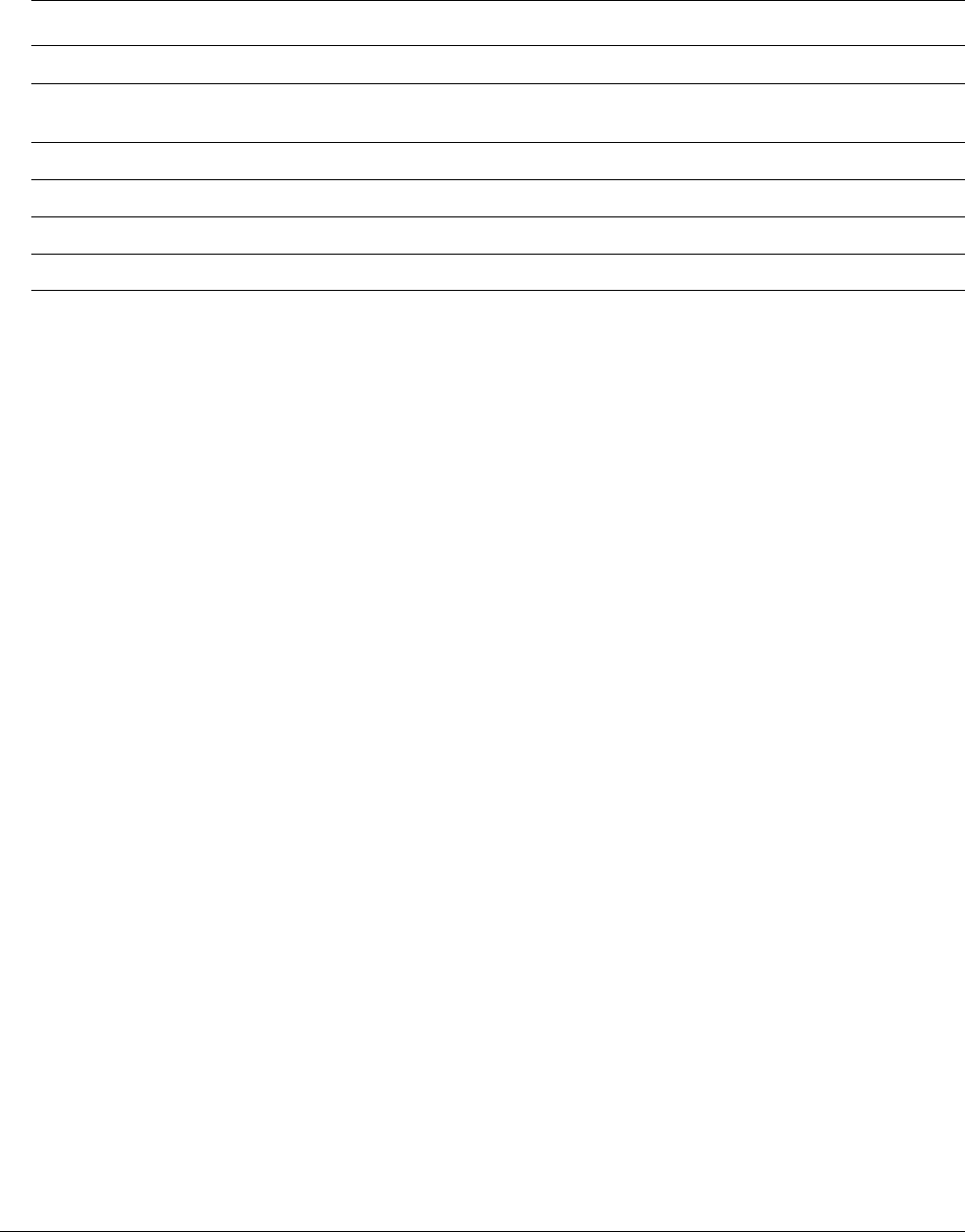
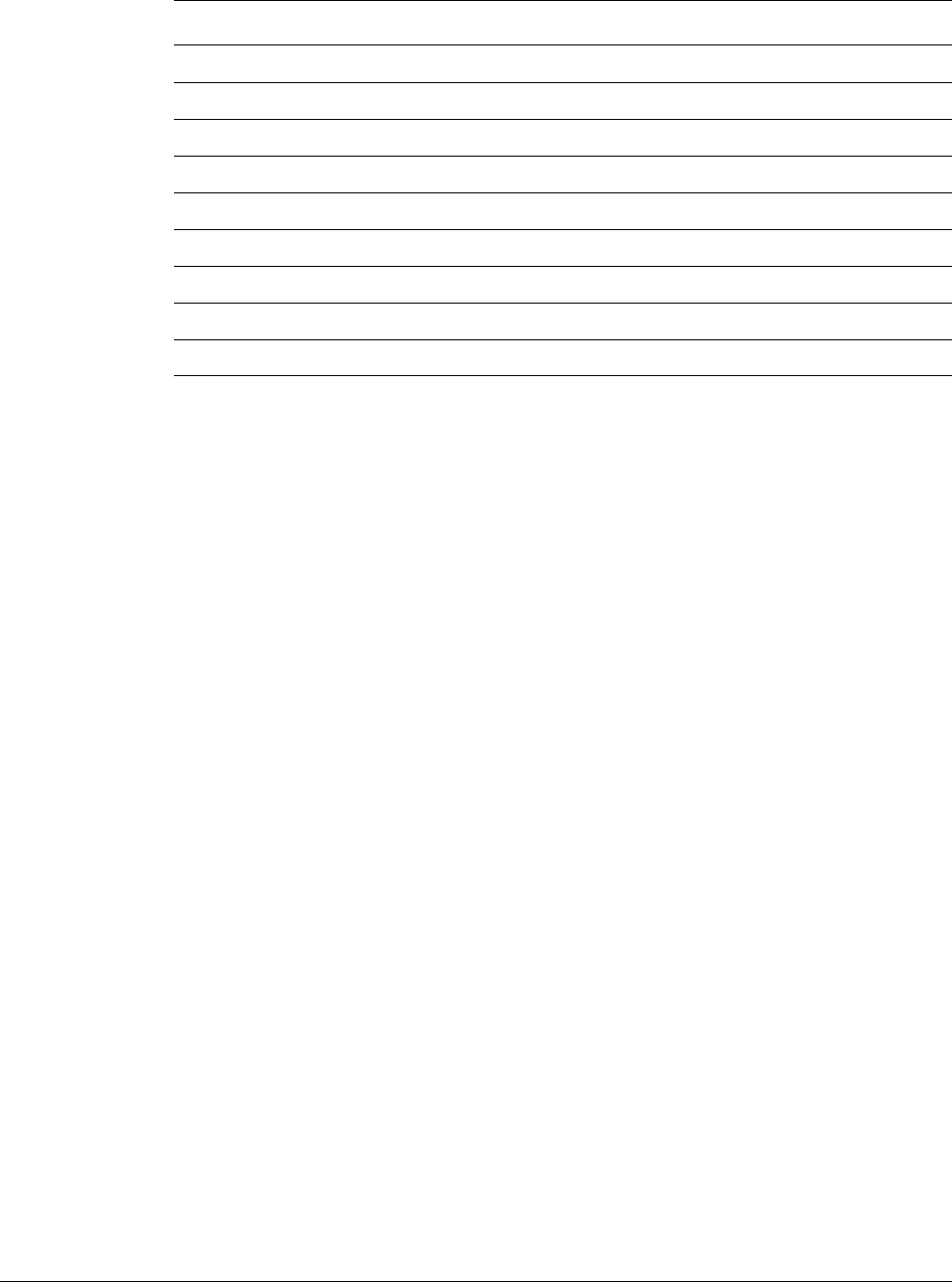
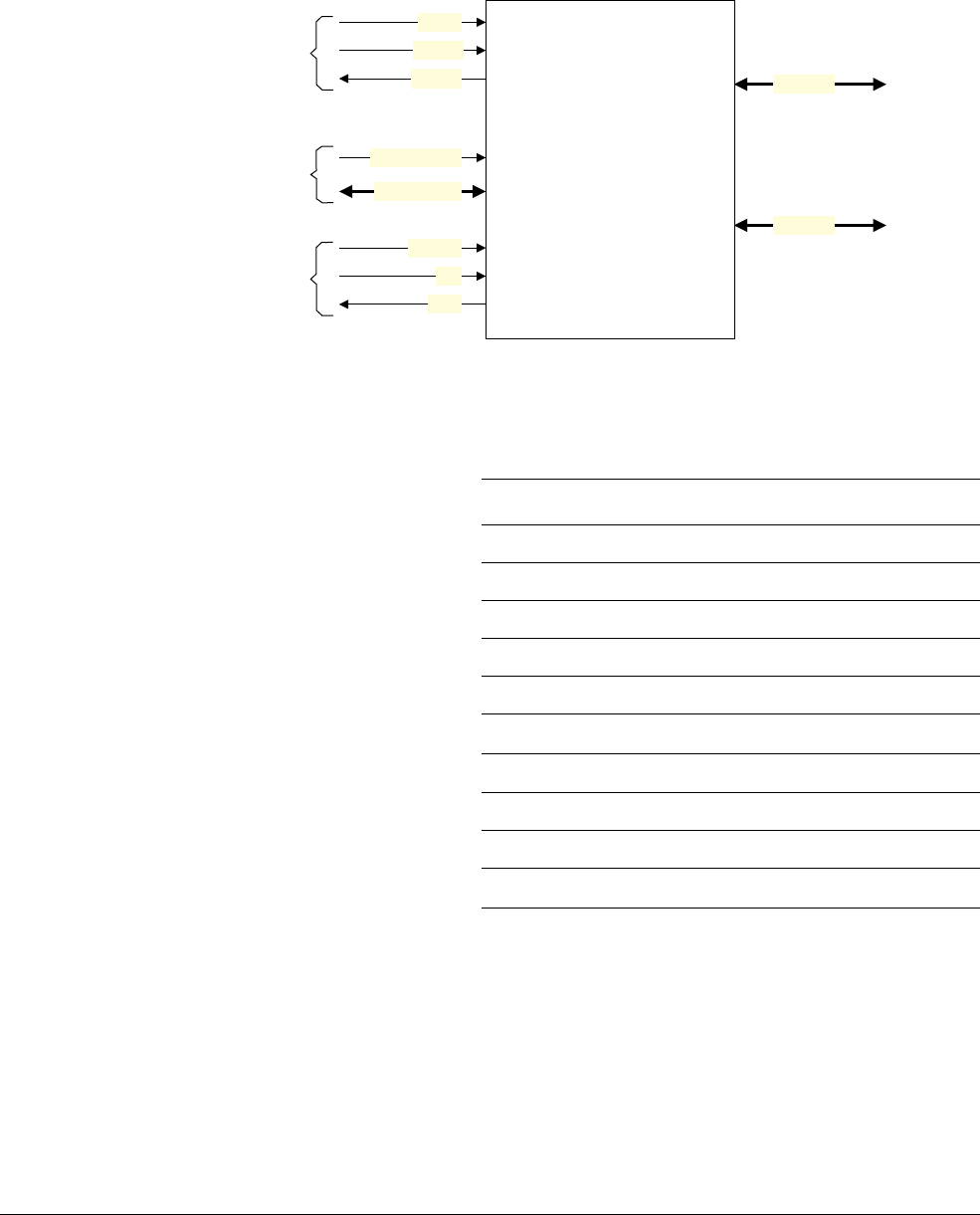
You can configure the system in a number of different ways. Figure 2-2 shows the interfaces of
the Cortex-M0 example system that includes a DMA controller.
Figure 2-2 Cortex-M0 example system with DMA controller
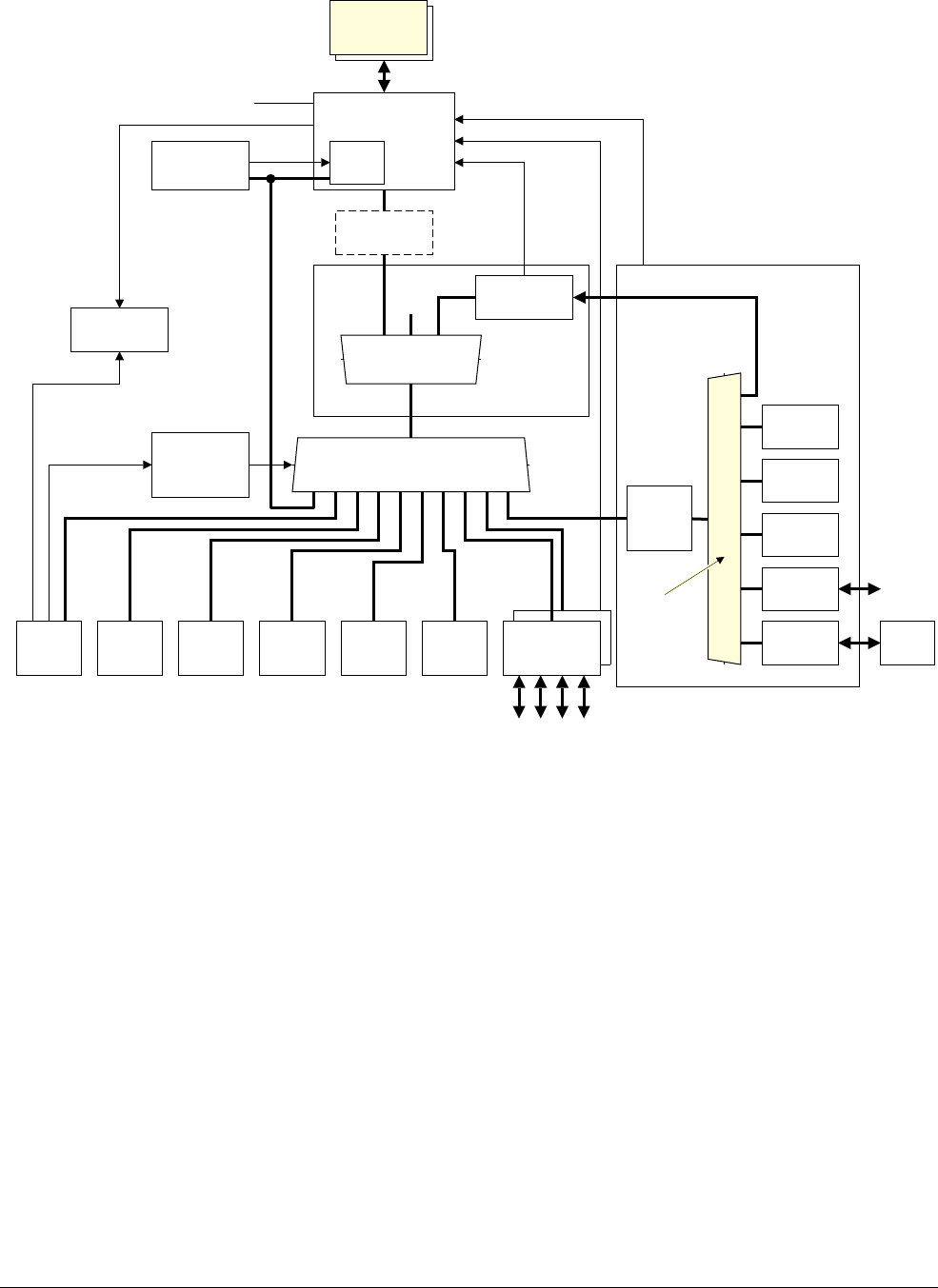
Figure 2-3 on page 2-5 shows the interfaces of the Cortex-M0+ example system that includes a
DMA controller.
Table 2-2 Testbench items
Item Descriptions
cmsdk_clkreset
Generates clock and reset signals. XTAL1 runs at 50MHz. It asserts NRST LOW for 5ns at the start of the
simulation.
cmsdk_uart_capture
Captures the text message from UART2 and displays the message during simulation. It displays each line
of the message after it receives a carriage return character. To reduce the simulation time, set the baud rate
to be same as the clock frequency. You must set the UART in the design kit to
high speed test mode
.
This unit also controls the tristate buffers that pass debug commands and status information between the
microcontroller and the debug tester. It does this by sending escape codes to the capture module.
cmsdk_debug_tester
The debug tester is a separate processor-based system that generates debug activities to test the debug
connection. To run these tests, the microcontroller communicates with the debug tester through GPIO 0 and
the I/O of port 0. By default, the testbench disables this communication with tristate buffers, so the
microcontroller can test the I/O port functionalities without starting a debug test.
Cortex-M0
Integration
DMA option
Low latency
GPIO
DMA-230
Clock
generator
AHB
address
decoder
Parameterizable 10 to 1
AHB slave multiplexor
External
3 to 1 Bus Master
multiplexor
Interrupts
Sleep
JTAG or Serial wire
Remap
Clock control
NC
System
control ROM Boot
ROM RAM Default
slave
ROM
table
Watch
dog
Simple
Timer x 2
Dual
Timer
Simple
UART
AHB to
APB
bridge
Text
output
Simple
UART x 2
16 to 1
multiplexor
Common APB sub-system
Bitband
wrapper Optional
Functional description
ARM DUI 0559D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 2-5
ID110117 Confidential
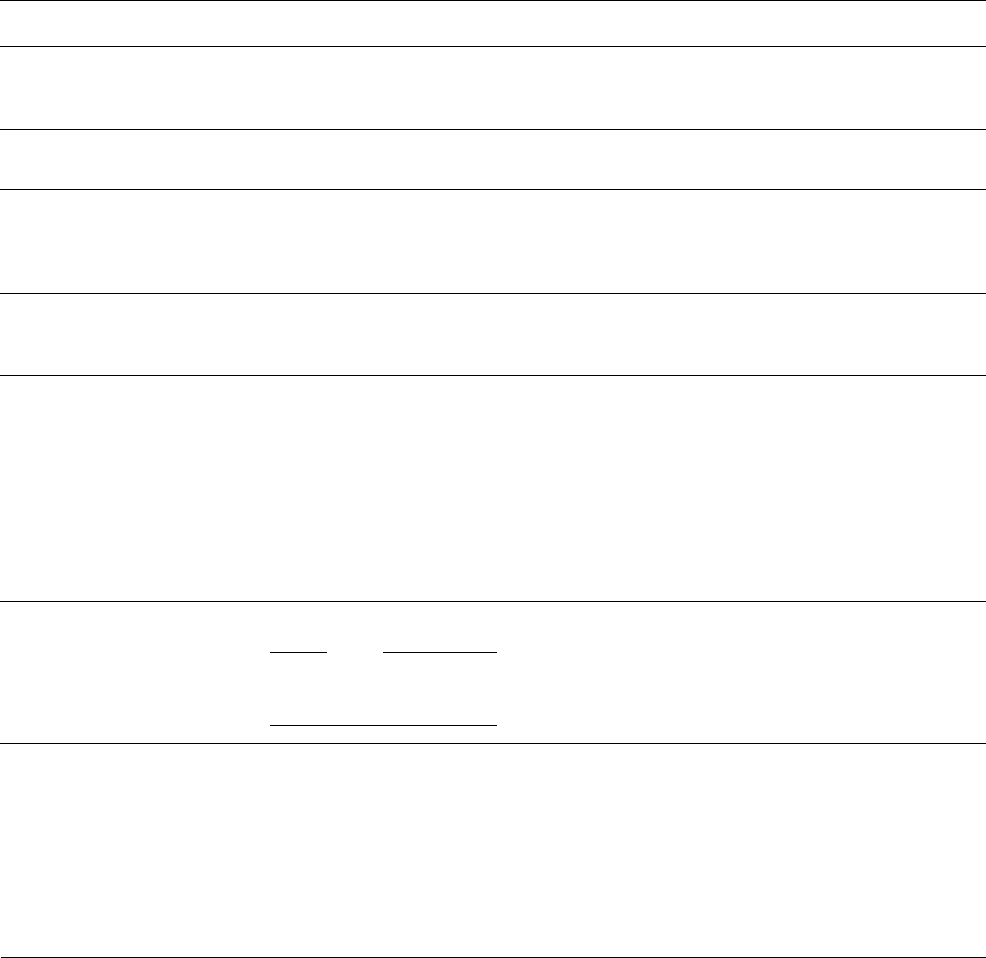
Figure 2-3 Cortex-M0+ example system with DMA controller
The processor connects to the rest of the system through an AHB Lite interface.
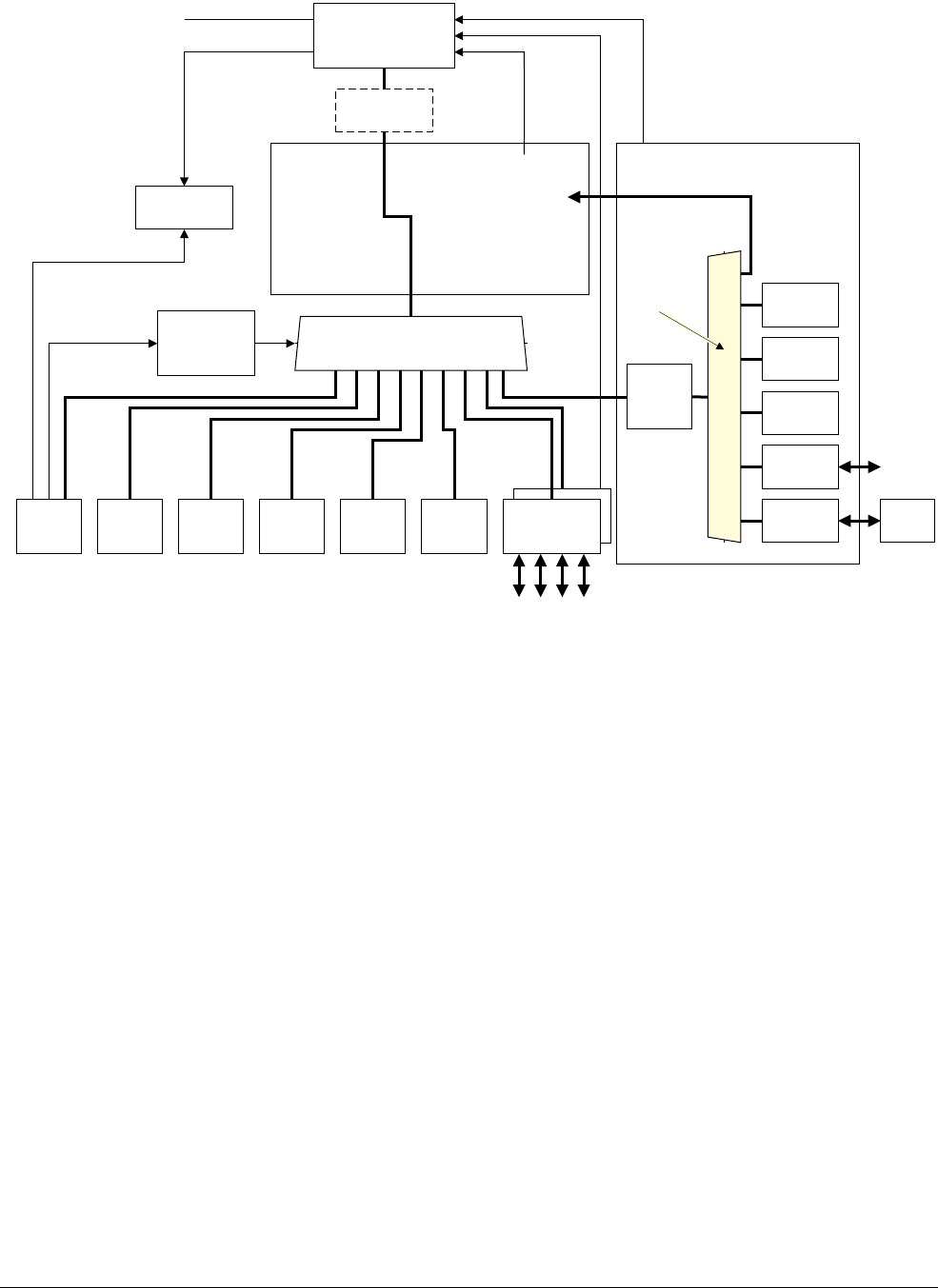
Figure 2-4 on page 2-6 shows the interfaces of the Cortex-M0 example system without a DMA
controller.
Cortex-M0+
Integration
DMA option
Low latency
GPIO
DMA-230
Clock
generator
AHB
address
decoder
Parameterizable 10 to 1
AHB slave multiplexor
System
control ROM Boot
ROM RAM Default
slave
External
3 to 1 Bus Master
multiplexor
Watch
dog
Simple
Timer x 2
Dual
Timer
Simple
UART
AHB to
APB
bridge
Text
output
Simple
UART x 2
16 to 1
multiplexor
Interrupts
Sleep
JTAG or Serial wire
Remap
Clock control
NC
ROM
table
I/O port
GPIO
MTB
Common APB sub-system
MTB RAM
Bitband
wrapper Optional
Functional description
ARM DUI 0559D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 2-6
ID110117 Confidential
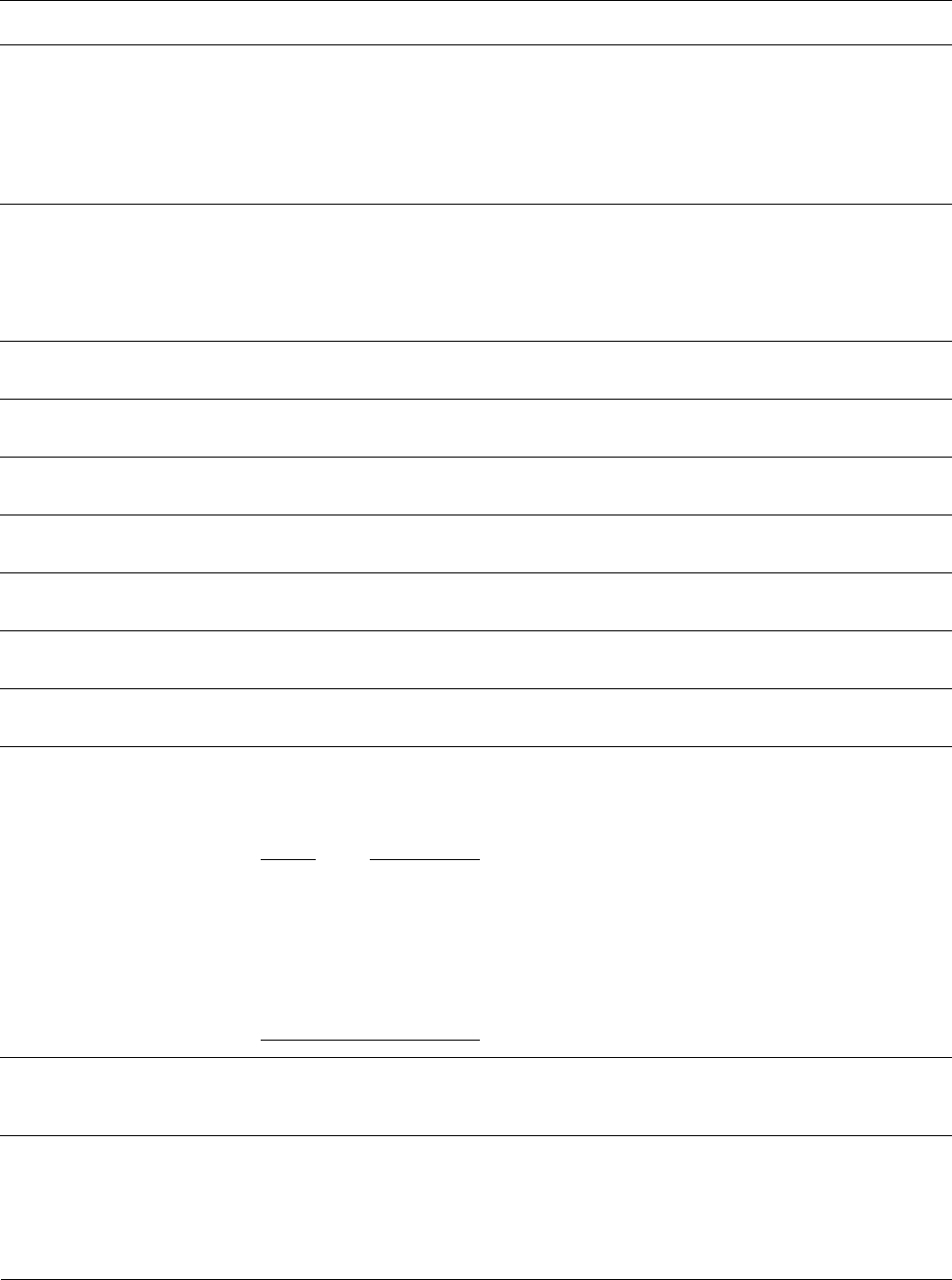
Figure 2-4 Cortex-M0 example system without DMA controller
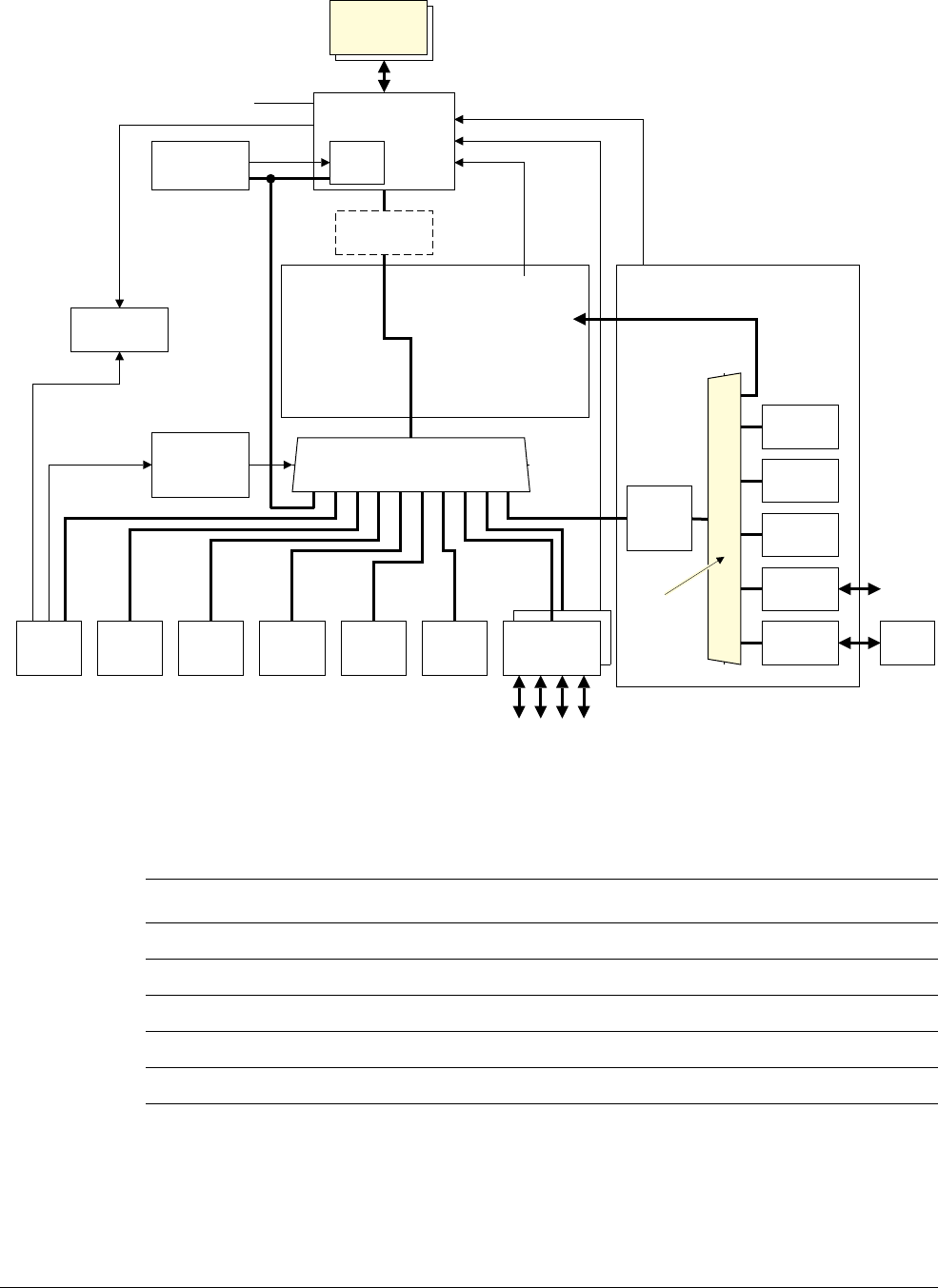
Figure 2-5 on page 2-7 shows the interfaces of the Cortex-M0+ example system without a DMA
controller.
Cortex-M0
Integration
Without DMA
Low latency
GPIO
Clock
generator
AHB
address
decoder
Parameterizable 10 to 1
AHB slave multiplexor
External
Interrupts
Sleep
JTAG or Serial wire
Remap
Clock control
System
control ROM Boot
ROM RAM Default
slave
ROM
table
Watch
dog
Simple
Timer x 2
Dual
Timer
Simple
UART
AHB to
APB
bridge
Text
output
Simple
UART x 2
16 to 1
multiplexor
Common APB sub-system
Tied LOW
Not used
Bitband
wrapper Optional
Functional description
ARM DUI 0559D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 2-7
ID110117 Confidential
Figure 2-5 Cortex-M0+ example system without DMA controller
Table 2-3 describes the design kit peripheral components that the system design includes.
The APB peripherals are instantiated in the APB subsystem block.
Cortex-M0+
Integration
Low latency
GPIO
Clock
generator
AHB
address
decoder
Parameterizable 10 to 1
AHB slave multiplexor
System
control ROM Boot
ROM RAM Default
slave
External
Watch
dog
Simple
Timer x 2
Dual
Timer
Simple
UART
AHB to
APB
bridge
Text
output
Simple
UART x 2
16 to 1
multiplexor
Interrupts
Sleep
JTAG or Serial wire
Remap
Clock control
ROM
table
I/O port
GPIO
MTB
Common APB sub-system
MTB RAM
Bitband
wrapper Optional
Without DMA
Tied LOW
Not used
Table 2-3 Design kit peripheral components
Item Descriptions
cmsdk_ahb_gpio
Two low latency GPIO with AHB interfaces. Each GPIO module provides 16 I/O pins.
cmsdk_apb_timer
A 32-bit timer.
cmsdk_apb_uart
A UART.
cmsdk_apb_watchdog
A watchdog component that is compatible with the watchdog in the AMBA design kit.
cmsdk_apb_dualtimers
A dual timer module that is compatible with the dual timer in the AMBA design kit.
Functional description
ARM DUI 0559D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 2-8
ID110117 Confidential
2.2 Design files
This section describes the following design files that are included in the design kit:
•Verilog files for the cmsdk_mcu example system.
•Verilog files for the cortex_m0_mcu testbench.
•Other files on page 2-9.
2.2.1 Verilog files for the cmsdk_mcu example system
Table 2-4 describes the Verilog files that are included in the Cortex-M0 and Cortex-M0+
microcontroller.
2.2.2 Verilog files for the cortex_m0_mcu testbench
Table 2-5 describes the Verilog files that are included in the testbench.
Table 2-4 Verilog files for the Cortex-M0 and Cortex-M0+ microcontroller
File name Description
cmsdk_mcu.v
Top level of the microcontroller
cmsdk_mcu_defs.v
Constant definitions and configuration definitions for the example microcontroller
cmsdk_mcu_system.v
Microcontroller system-level design
cmsdk_mcu_sysctrl.v
Programmable register block for system-level control
cmsdk_mcu_stclkctrl.v
SysTick reference clock generation logic
cmsdk_mcu_clkctrl.v
Clock and reset control
cmsdk_mcu_pin_mux.v
Pin multiplexer and tristate buffers for the I/O port
cmsdk_mcu_addr_decode.v
Generates the HSELS for each memory mapped component based on the CMSDK address map
cmsdk_mtb_sync.v
Synchronizer for Cortex-M0+ MTB trace start/stop control signals
cmsdk_iop_interconnect.v
Address decode and interconnection for Cortex-M0+ single cycle I/O port
cmsdk_ahb_cs_rom_table.v
CoreSight system level ROM table for CMSDK
Table 2-5 Verilog files for the Cortex-M0 and Cortex-M0+ microcontroller testbench
File name Description
tb_cmsdk_mcu.v
Testbench of the example microcontroller
cmsdk_clkreset.v
Clock and reset generator
cmsdk_uart_capture.v
UART capture for text message display and control of debug tester communication
tbench_M0.vc
Verilog command file for Cortex-M0
tbench_M0P.vc
Verilog command file for Cortex-M0+
Functional description
ARM DUI 0559D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 2-9
ID110117 Confidential
The testbench also contains a debug tester that tests the debug connectivity. Table 2-6 describes
the Verilog files of the debug tester.
The debug tester Verilog files are located in the
logical/cmsdk_debug_tester/verilog/
directory.
The debug tester has its own program image. It is stored in
debug_tester_cm0.hex
for the
Cortex-M0 processor or
debug_tester_cm0plus.hex
for the Cortex-M0+ processor. The file is
located in the
software/debug_tester
directory. This directory also contains the source code for
the debug tester program, and the compilation makefile of the program for the Arm
Development Studio (DS-5) and Arm GCC, and the compile project setup for the Keil®
Microcontroller Development Kit (MDK).
2.2.3 Other files
See Chapter 4 Using the simulation environment for information on the simulation setup and the
test codes to run simulations.
Table 2-6 Verilog files of the debug tester
File Description
cmsdk_debug_tester.v
Top level of the debug tester.
cmsdk_debug_tester_ahb_interconnect.v
AHB interconnection inside the debug tester. The debug tester is a Cortex-M0 or
Cortex-M0+ based system that requires its own AHB infrastructure.
cmsdk_ahb_default_slave.v
CMSDK AHB default slave that is used by the debug tester.
cmsdk_ahb_rom.v
Program memory for the debug tester.
cmsdk_ahb_ram.v
CMSDK AHB SRAM used by the debug tester.
cmsdk_ahb_gpio.v
CMSDK AHB GPIO

Functional description
ARM DUI 0559D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 2-10
ID110117 Confidential
2.3 Processor file locations
The default location of the Verilog RTL files for the processors is a subdirectory called
cores
.
For example:
• Cortex-M0 default RTL path is
cores/at510_cortexm0_r0p0_03rel2/logical/
• Cortex-M0+ default RTL path is
cores/at590_cortexm0p_r0p1/logical/
2.3.1 Modifying the location of the processor files for simulation
To modify the location of the Cortex-M0 default files for simulation, edit the Verilog command
file
tbench_M0.vc
.
To modify the location of the Cortex-M0+ default files for simulation, edit the Verilog command
file
tbench_M0P.vc
.
2.3.2 Modifying the location of the processor files for synthesis
Modify the synthesis script file
cmsdk_mcu_system_verilog.tcl
to match the location of the
source files.
2.3.3 Tarmac
The logging of instructions is provided in the Cortex-M0 and Cortex-M0+ using a simulation
model called Tarmac. This is enabled by default. You can disable it by editing the appropriate
vc
file and commenting out the
USE_TARMAC
define.
Functional description
ARM DUI 0559D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 2-11
ID110117 Confidential
2.4 Configuration options
The example microcontroller system contains several configurable options. You can define
these options in the following ways:
•Preprocessing definitions.
•Verilog parameters for Cortex-M0 on page 2-13.
•Verilog parameters for Cortex-M0+ on page 2-14.
•Changing the processor type on page 2-15.
2.4.1 Preprocessing definitions
The file
cortex_m0_mcu/verilog/cmsdk_mcu_defs.v
contains a number of Verilog preprocessing
definitions. To remove a definition, comment-out the line of Verilog code that describes the
preprocessing definitions. Table 2-7 describes the Verilog preprocessing definitions.
Table 2-7 Verilog preprocessing definitions
Preprocessing macro Descriptions
ARM_CMSDK_INCLUDE_BITBAND
Include this macro to add a bitband wrapper module to the example Cortex-M0 or Cortex-M0+
system. It enables these processors to have the same bitband capability as the Cortex-M3 and
Cortex-M4 processors. Comment this out to remove the bitband wrapper and reduce the gate count.
ARM_CMSDK_INCLUDE_DEBUG_TESTER
This macro includes the debug tester component that is in the simulation testbench. Remove this
macro option if you use a processor that does not have a debug feature.
ARM_CMSDK_INCLUDE_JTAG
If the debug feature is available, the debug interface can either use the JTAG protocol or the Serial
Wire protocol. Include this macro to specify the JTAG debugger protocol. Remove this macro to
specify the Serial Wire debug protocol. If you select the Serial Wire option, the example system
removes the redundant JTAG pins from the example microcontroller design.
ARM_CMSDK_INCLUDE_DMA
If you include this macro, the example system includes the instantiation of a DMA-230 Micro
DMA Controller and an AHB master multiplexer. The DMA-230 is not included in this deliverable,
and you must license it separately.
ARM_CMSDK_INCLUDE_CLKGATE
If you include this macro, the system:
•Sets the
CLKGATE_PRESENT
Verilog parameter of the Cortex-M0 or Cortex-M0+ instantiation
HIGH to enable the architectural clock gating feature.
• Includes clock gating cells in the clock controller file
cortex_m0_mcu_clkctrl.v
for gated
clock generation.
• Uses the gated clock, that the example Power Management Unit (PMU) generates, for the
connection of HCLK, DCLK, and SCLK of the Cortex-M0 or Cortex-M0+. When you
select this option and enable the Cortex-M0 or Cortex-M0+ PMU, the SysTick stops during
deep sleep mode because the PMU stops SCLK during deep sleep mode.
ARM_CMSDK_SLOWSPEED_PCLK
If you include this macro, the APB peripheral bus runs at half the speed of the AHB bus.
Note
This option is ignored when the clock gating option,
ARM_CMSDK_INCLUDE_CLKGATE
, or the
CLKGATE_PRESENT
parameter, is not set.
ARM_CMSDK_BOOT_MEM_TYPE
Defines the boot loader memory type. The options are:
•
AHB_ROM_NONE
for memory not present. This disables the bootloader feature.
•
AHB_ROM_BEH_MODEL
for behavioral ROM memory.
•
AHB_ROM_FPGA_SRAM_MODEL
for a behavioral FPGA SRAM model with an SRAM wrapper.
•
AHB_ROM_FLASH32_MODEL
for behavioral 32-bit flash memory.
•
AHB_ROM_FLASH16_MODEL
for behavioral 16-bit flash memory, for use with the Cortex-M0+
processor.
Functional description
ARM DUI 0559D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 2-12
ID110117 Confidential
ARM_CMSDK_ROM_MEM_TYPE
Defines the program memory type. The options are:
•
AHB_ROM_BEH_MODEL
for behavioral ROM memory.
•
AHB_ROM_FPGA_SRAM_MODEL
for a behavioral FPGA SRAM model with an SRAM wrapper.
•
AHB_ROM_FLASH32_MODEL
for behavioral 32-bit flash memory.
•
AHB_ROM_FLASH16_MODEL
for behavioral 16-bit flash memory, for use with the Cortex-M0+
processor.
ARM_CMSDK_RAM_MEM_TYPE
Defines the RAM memory type. The options are:
•
AHB_RAM_BEH_MODEL
for behavioral RAM memory.
•
AHB_RAM_FPGA_SRAM_MODEL
for behavioral SRAM model with SRAM wrapper.
•
AHB_RAM_EXT_SRAM16_MODEL
for benchmarking using 16-bit external asynchronous SRAM.
•
AHB_RAM_EXT_SRAM8_MODEL
for benchmarking using 8-bit external asynchronous SRAM.
ARM_CMSDK_BOOT_MEM_WS_N
Defines the number of wait states for boot loader ROM non-sequential accesses. See the Cortex-M
System Design Kit Technical Reference Manual.
ARM_CMSDK_BOOT_MEM_WS_S
Defines the number of wait states for boot loader ROM sequential accesses. See the Cortex-M
System Design Kit Technical Reference Manual.
ARM_CMSDK_ROM_MEM_WS_N
Defines the number of wait states for program ROM non-sequential accesses. See the Cortex-M
System Design Kit Technical Reference Manual.
ARM_CMSDK_ROM_MEM_WS_S
Defines the number of wait states for program ROM sequential accesses. See the Cortex-M System
Design Kit Technical Reference Manual.
ARM_CMSDK_RAM_MEM_WS_N
Defines the number of wait states for RAM non-sequential accesses. See the Cortex-M System
Design Kit Technical Reference Manual.
ARM_CMSDK_RAM_MEM_WS_S
Defines the number of wait states for RAM sequential accesses. See the Cortex-M System Design
Kit Technical Reference Manual.
ARM_CMSDK_INCLUDE_IOP
Defines the inclusion of the I/O Port GPIO in place of the AHB GPIO because they are mutually
exclusive. Only used in Cortex-M0+.
ARM_CMSDK_INCLUDE_MTB
Include this macro to instantiate the MTB and its associated RAM for trace storage. In this
configuration, the AHB RAM is removed from the system and the MTB provides the access for
data accesses. This enables the design to be kept small because only a single RAM is used for trace
and data. Only used in Cortex-M0+.
Note
When the MTB is included, the RAM that is used for the data accesses is shared with the MTB. If
you set the address width to be smaller than the default, that is,
AWIDTH = 16
, the addresses that some
tests use to write data to will alias to lower addresses, therefore some tests will not work with the
smaller memory.
It is also possible that, with a smaller address space, test data accesses and MTB accesses overwrite
each other within the shared memory space, so take care to limit each of these accesses to certain
ranges of addresses.
ARM_CMSDK_INCLUDE_F16
Configures a Cortex-M0+ based system to use 16-bit Flash. In this configuration, a 32-bit to 16-bit
converter,
cm0p_32to16_dnsize
, is used. This converter is supplied with the Cortex-M0+ integration
kit, and does not include burst support.
Table 2-7 Verilog preprocessing definitions (continued)
Preprocessing macro Descriptions
Functional description
ARM DUI 0559D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 2-13
ID110117 Confidential
2.4.2 Verilog parameters for Cortex-M0
If you are using the full version of the Cortex-M0 processor, its Verilog parameters are
propagated from the testbench. You can edit file
cortex_m0_mcu/verilog/tb_cmsdk_mcu.v
to
modify these Verilog parameters. Table 2-8 describes the parameters.
Table 2-8 Verilog parameters for Cortex-M0
Verilog parameters Descriptions
NUMIRQ
Number of Interrupt ReQuest (IRQ) signals. The range is 1-32.
SMUL
Small multiplier. This can be one of the following values:
0 Single cycle multiplier.
1 Small multiplier with multicycle operation.
SYST
SysTick Timer, it can be one of the following values:
0 No timer.
1 Include the SysTick timer.
WIC
Wake-up Interrupt Controller (WIC) support. This can be one of the following values:
0 Remove WIC.
1 Enable WIC.
WICLINES
Number of interrupt lines that the WIC supports.
DBG
Debug configuration. This can be one of the following values:
0 Remove debug feature.
1 Include debug feature.
BKPT
Number of breakpoint comparators.
WPT
Number of watchpoint comparators.
BE
Big-endian. This can be one of the following values:
0 Little-endian.
1 Big-endian.
RESET_ALL_REGS
Specifies whether all synchronous states or only the architecturally required state is
reset.
0 Only resets the architecturally required state.
1 Resets all synchronous states.
Note
Setting this parameter increases the size of the registers that are not reset by default, and
therefore also increases the overall area of the implementation.
When some of the registers in the register bank are not reset, Xs might be seen on
WDATA and RDATA during simulation. This is normal behavior.
Functional description
ARM DUI 0559D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 2-14
ID110117 Confidential
2.4.3 Verilog parameters for Cortex-M0+
If you are using the full version of the Cortex-M0+ processor, its Verilog parameters are
propagated from the testbench. You can edit file
cortex_m0_mcu/verilog/tb_cmsdk_mcu.v
to
modify these Verilog parameters. Table 2-9 describes the parameters.
Table 2-9 Verilog parameters for Cortex-M0+
Verilog parameters Descriptions
NUMIRQ
Number of Interrupt ReQuest (IRQ) signals. The range is 0-32.
SMUL
Small multiplier. This can be one of the following values:
0 Single cycle multiplier.
1 Small multiplier with multicycle operation.
SYST
SysTick Timer. This can be one of the following values:
0 No timer.
1 Include the SysTick timer.
WIC
Wake-up Interrupt Controller (WIC) support. This can be one of the following values:
0 Remove WIC.
1 Enable WIC feature.
WICLINES
Number of interrupt lines that the WIC supports.
DBG
Debug configuration. This can be one of the following values:
0 Remove debug feature.
1 Include debug feature.
BKPT
Number of breakpoint comparators.
WPT
Number of watchpoint comparators.
BE
Big-endian. This can be one of the following values:
0 Little-endian.
1 Big-endian.
IOP
Single-cycle I/O port. This can be one of the following values:
0 Exclude single-cycle I/O port.
1 Include single-cycle I/O port.
MPU
Memory Protection Unit (MPU). This can be one of the following values:
0 No MPU.
8 8-region MPU.
VTOR
Vector Table Offset Register (VTOR). This can be one of the following values:
0 Exclude VTOR.
1 Include VTOR.
IRQDIS
IRQ Disable (IRQDIS). IRQDIS[i] disables IRQ[i], for example:
32'h00000000
No IRQ disabled.
32'h0000FFFF
IRQ[15:0] disabled.
MTB
Micro Trace Buffer (MTB). This can be one of the following values:
0 Exclude MTB.
1 Include MTB.
AWIDTH
Specifies the MTB SRAM address width.
Functional description
ARM DUI 0559D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 2-15
ID110117 Confidential
2.4.4 Changing the processor type
The Cortex-M0 and Cortex-M0+ example system supports the Cortex-M0 processor and the
Cortex-M0+ processor. To support all designs, the simulation setup provides the following
Verilog command files:
tbench_M0.vc
For the full version of the Cortex-M0 processor, with the processor RTL
path pointing to the default location of
cores/at510_cortexm0_r0p0_03rel2/logical/.
tbench_M0P.vc
For the full version of the Cortex-M0+ processor, with the processor RTL
path pointing to the default location of
cores/at590_cortexm0p_r0p1/logical/.
For simulation, the makefile
cortex_m0_mcu/rtl_sim/makefile
selects the correct Verilog
command file. This makefile also enables you to select your required processor by setting the
parameter
CPU_PRODUCT
to
CORTEX_M0
, or
CORTEX_M0PLUS
.
USER
User/Privilege support. This can be one of the following values:
0 Exclude User/Privilege support.
1 Include User/Privilege support.
RAR
Specifies whether all synchronous states or only the architecturally required state is reset.
0 Only resets the architecturally required state.
1 Resets all synchronous states.
Note
Setting this parameter increases the size of the registers that are not reset by default, and
therefore also increases the overall area of the implementation.
When some of the registers in the register bank are not reset, Xs might be seen on
WDATA and RDATA during simulation. This is normal behavior.
HWF
Halfword fetching. This can be one of the following values:
0 Fetch instructions using 32-bit AHB-Lite accesses whenever possible.
1 Fetch instructions using only 16-bit AHB-Lite accesses.
Table 2-9 Verilog parameters for Cortex-M0+ (continued)
Verilog parameters Descriptions
Functional description
ARM DUI 0559D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 2-16
ID110117 Confidential
2.5 Memory map
This section describes the system memory maps. It contains the following sections:
•AHB memory map.
•APB subsystem memory map on page 2-17.
2.5.1 AHB memory map
The AHB memory map has a 4GB linear address range, but the system only uses part of the
memory space. If a bus master accesses an invalid memory location with a valid transfer, the
default slave replies with an error response to the bus master.
The file
cmsdk_mcu_system.v
contains the address decoding logic. If you modify the memory
map, you must also modify the address decoding logic in this file.
If you require the example system program to execute from boot loader memory after powerup,
set the boot loader option. This enables the system remap feature. After the boot loader starts,
the program can switch off the remap feature to enable your program to execute from the start
of the memory.
Table 2-10 describes the AHB memory map with and without the remap function.
Table 2-10 AHB memory map
Address Without remap With remap
0xF0220000
-
0xFFFFFFFF
Unused, except for the private peripheral bus
addresses in the Cortex-M0 and Cortex-M0+. Unused, except for the private peripheral bus addresses
in the Cortex-M0 and Cortex-M0+.
0xF0210000
-
0xF021FFFF
(64KB) MTB RAMa.MTB RAM
a.
0xF0201000
-
0xF021FFFF
Unused. Unused.
0xF0200000
-
0xF0200FFF
(4KB) MTB SFRa.MTB SFR
a.
0xF0000401
-
0xF01FFFFF
Unused. Unused.
0xF0000000
-
0xF0000400
(4KB) System ROM table. System ROM table.
0x40020000
-
0xEFFFFFFF
Unused, except for the private peripheral bus
addresses in the Cortex-M0 and Cortex-M0+. Unused, except for the private peripheral bus addresses
in the Cortex-M0 and Cortex-M0+.
0x4001F000
-
0x4001FFFF
(4KB) System controller registers. System controller registers.
0x40012000
-
0x4001EFFF
Unused. Unused.
0x40011000
-
0x40011FFF
(4KB) AHB GPIO 1
I/O port GPIOa.
AHB GPIO 1
I/O port GPIOa.
0x40010000
-
0x40010FFF
(4KB) AHB GPIO 0
I/O port GPIOa.
AHB GPIO 0
I/O port GPIOa
0x40000000
-
0x4000FFFF
(64KB) APB subsystem peripherals. APB subsystem peripherals.
0x20010000
-
0x3FFFFFFF
Unused. Unused.
Functional description
ARM DUI 0559D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 2-17
ID110117 Confidential
If you enable the boot loader, the system executes the following sequence after reset:
1. The processor exits from reset with the remap feature on by default. The processor fetches
the initial Program Counter and stack pointer from boot loader memory. The reset vector
points to the reset handler at the boot loader address
0x0100XXXX
.
2. The processor executes the boot loader from boot loader address
0x0100XXXX
. The remap
feature is still on so the boot loader memory is also visible from the boot loader alias
address. This is necessary if the processor is required to handle interrupts, because the
vector table is at the start of the address space.
3. When the boot loader is ready to switch to program memory, it turns off the remap feature
by writing to a register in the System Controller. See System controller on page 2-19. The
program memory is then visible at the start of the program memory. After the boot loader
switches the memory map, the processor must execute the DSB instruction and then the
ISB instruction to ensure it uses the new memory map.
4. The boot loader loads the initial stack pointer value from the program memory, and
branches to the reset handler that the reset vector specifies in the program memory.
When the linking stage creates the boot loader image, it must specify the memory location of
the boot loader actual address, not the alias. The example software includes an example boot
loader in the
software/common/bootloader/bootloader.c
file.
2.5.2 APB subsystem memory map
Table 2-11 describes the peripherals in the APB subsystem.
0x20000000
-
0x2000FFFF
(64KB) RAM. RAM.
0x01010000
-
0x1FFFFFFF
Unused. Unused.
0x01000000
-
0x0100FFFF
(64KB) Optional boot loader memory. Actual size 4KB,
access above 4KB wraps round. Optional boot loader memory. Actual size 4KB, access
above 4KB wraps round.
0x00010000
-
0x00FFFFFF
Unused. Unused.
0x00000000
-
0x0000FFFF
(64KB) Program memory. Alias of optional boot loader memory. Actual size 4KB,
access above 4KB wraps round.
a. For use with the Cortex-M0+ only.
Table 2-10 AHB memory map (continued)
Address Without remap With remap
Table 2-11 APB subsystem peripherals
Address Item Notes
0x4000F000
-
0x4000FFFF
APB expansion port 15 Connected to micro DMA controller configuration port
0x4000E000
-
0x4000EFFF
APB expansion port 14 Not used
0x4000D000
-
0x4000DFFF
APB expansion port 13 Not used
0x4000C000
-
0x4000CFFF
APB expansion port 12 Not used
0x4000B000
-
0x4000BFFF
APB test slave For validation of AHB to APB bridge
0x40009000
-
0x4000AFFF
Not used Ports on APB slave multiplexer disabled
Functional description
ARM DUI 0559D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 2-18
ID110117 Confidential
For more information on the APB subsystem, see the Arm® Cortex®-M System Design Kit
Technical Reference Manual.
0x40008000
-
0x40008FFF
Watchdog -
0x40007000
-
0x40007FFF
Not used Port on APB slave multiplexer disabled
0x40006000
-
0x40006FFF
UART2
Stdout
text message for simulations
0x40005000
-
0x40005FFF
UART1 -
0x40004000
-
0x40004FFF
UART0 -
0x40003000
-
0x40003FFF
Not used Port on APB slave multiplexer disabled
0x40002000
-
0x40002FFF
Dual timer -
0x40001000
-
0x40001FFF
Timer1 -
0x40000000
-
0x40000FFF
Timer0 -
Table 2-11 APB subsystem peripherals (continued)
Address Item Notes
Functional description
ARM DUI 0559D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 2-19
ID110117 Confidential
2.6 System controller
This section describes the system controller. It contains the following sections:
•About the system controller.
•System controller block diagram.
•Programmers model on page 2-20.
2.6.1 About the system controller
The example system contains a simple system controller that provides:
• Control of the memory remap feature.
• The ability to enable or disable the operation of the Power Management Unit (PMU), if
available.
• The ability to enable an automatic reset if the system locks up.
• Information about the cause of the last reset.
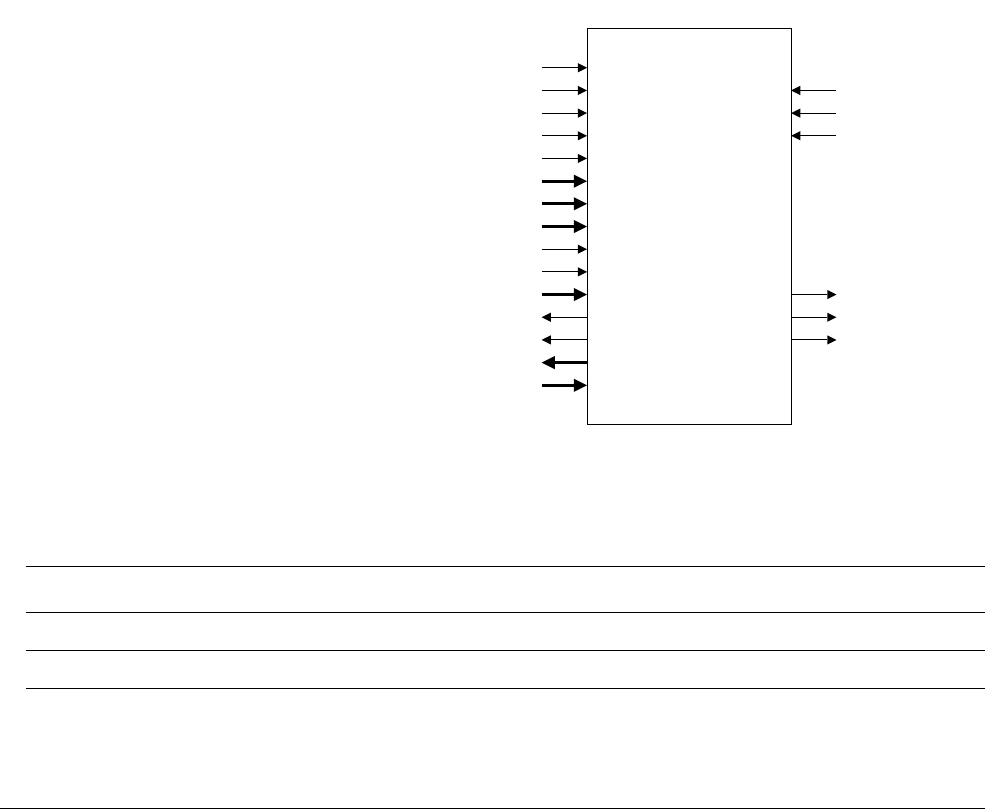
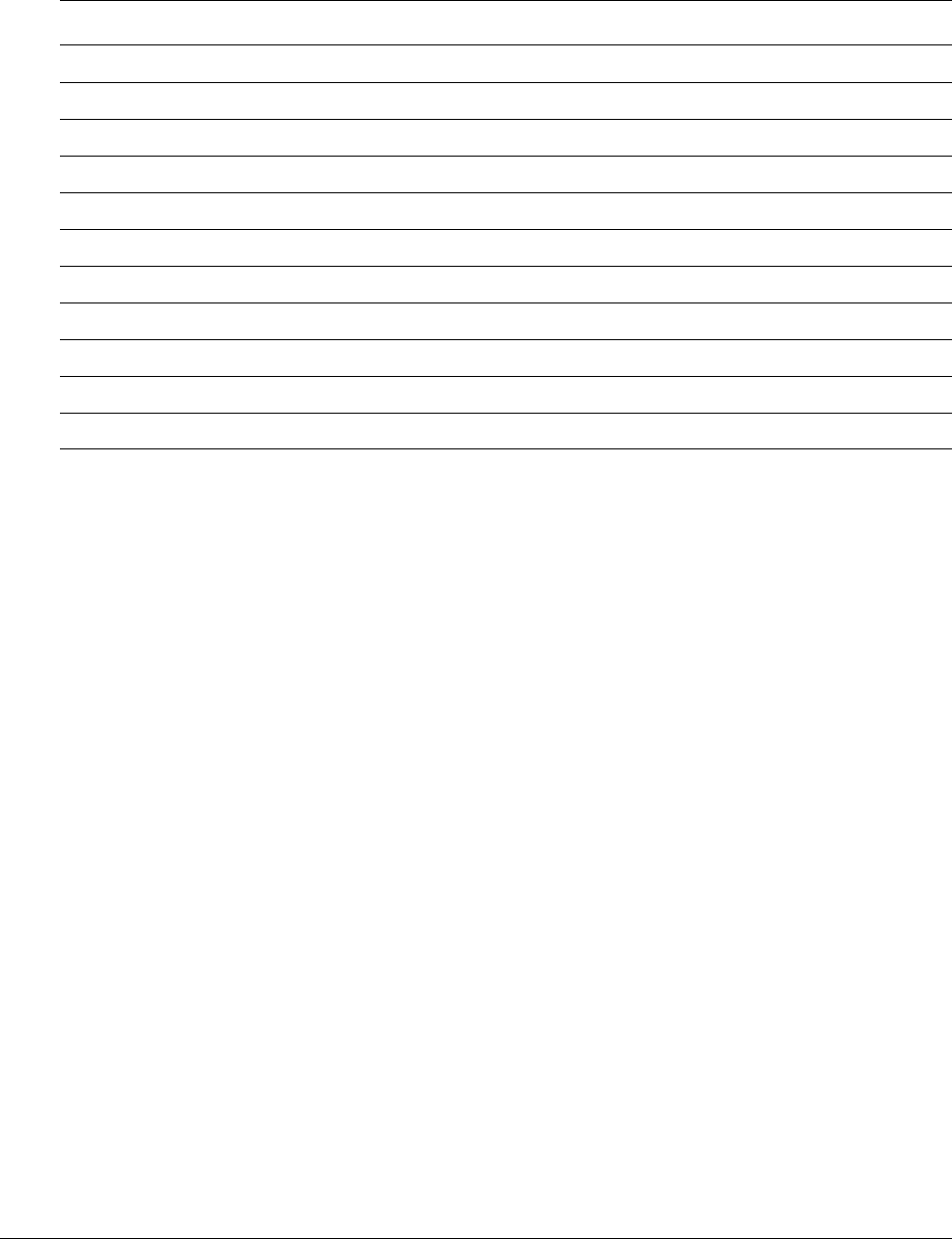
2.6.2 System controller block diagram
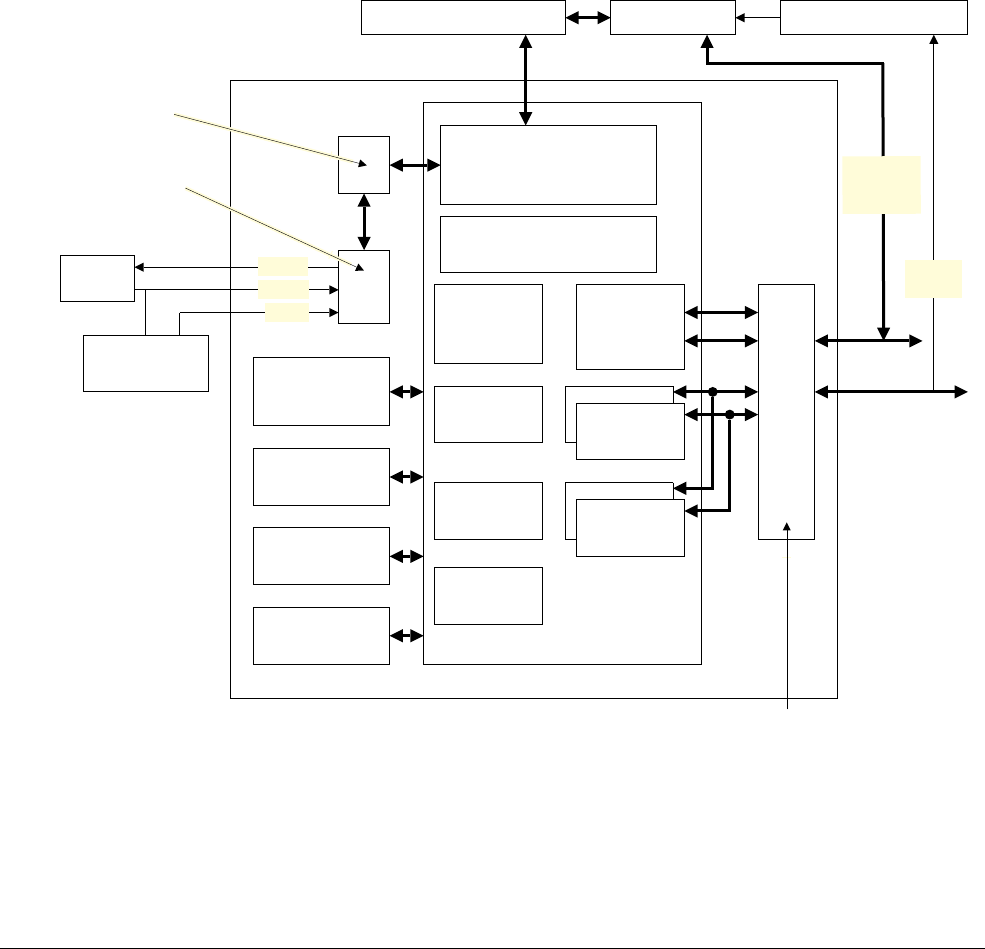
Figure 2-6 shows the example system controller.
Figure 2-6 Example system controller
Table 2-12 shows the non-AHB signals of the system controller.
FCLK
HCLK
HRESETn
PORESETn
HSEL
HADDR[11:0]
HTRANS[1:0]
HSIZE[2:0]
HWRITE
HREADY
HWDATA[31:0]
HREADYOUT
HRESP
HRDATA[31:0]
ECOREVNUM[3:0]
SYSRESETREQ
WDOGRESETREQ
REMAP
PMUENABLE
LOCKUPRESET
LOCKUP
cmsdk_mcu_sysctrl.v
Table 2-12 Example system controller non-AHB signals
Signals Descriptions
LOCKUP Tells the RSTINFO register that the cause of a system reset is because the processor enters the lockup state
SYSRESETREQ Enables a status register to capture the System Reset Request event
WDOGRESETREQ Enables a status register to capture the Watchdog Reset Request event
Functional description
ARM DUI 0559D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 2-20
ID110117 Confidential
The design provides a 4-bit ECOREVNUM input that is connected to peripheral ID register 3.
It indicates the revision changes during an Engineering Change Order (ECO) of the chip design
process. You can tie this signal LOW, or connect it to special tie-off cells so that you can change
the ECO revision number in a silicon netlist, or at a lower level, for example the silicon mask.
2.6.3 Programmers model
Table 2-13 describes the system controller programmers model.
REMAP Enables the memory remap feature
PMUENABLE Enables the PMU for the WakeUp Interrupt Controller (WIC) mode deep sleep operation
LOCKUPRESET Enable the clock and reset controller to generate a system reset automatically if the system locks up
Table 2-12 Example system controller non-AHB signals (continued)
Signals Descriptions
Table 2-13 System controller programmers model
Address Name Type Reset Descriptions
0x4001F000
REMAP RW 1 Bit 0:
1 Enable remap feature.
0 Disable remap feature.
Software symbol: CMSDK_SYSCON->REMAP
0x4001F004
PMUCTRL RW 0 Bit 0:
1 Enable PMU. If not present, the value of this bit is ignored.
0 Disable PMU.
Software symbol CMSDK_SYSCON->PMUCTRL
0x4001F008
RESETOP RW 0 Bit 0:
1 Automatically generates system reset if the processor is in the
LOCKUP state.
0 Does not automatically generate reset when the processor is in the
LOCKUP state.
Software symbol CMSDK_SYSCON->RESETOP
0x4001F00C
- - - Reserved
0x4001F010
RSTINFO RW 0 Bit 2 - If 1, processor LOCKUP caused the reset.
Bit 1 - If 1, Watchdog caused the reset.
Bit 0 - If 1, SYSRESETREQ caused the reset.
Write 1 to each bit to clear.
Software symbol CMSDK_SYSCON-> RSTINFO
0x4001FFD0
PID4 RO
0x04
Peripheral ID 4.
[7:4] Block count.
[3:0] jep106_c_code.
0x4001FFD4
PID5 RO
0x00
Peripheral ID 5, not used.
0x4001FFD8
PID6 RO
0x00
Peripheral ID 6, not used.
0x4001FFDC
PID7 RO
0x00
Peripheral ID 7, not used.
Functional description
ARM DUI 0559D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 2-21
ID110117 Confidential
The PORESETn signal resets the RSTINFO register. The HRESETn signal resets all the other
resettable registers.
0x4001FFE0
PID0 RO
0x26
Peripheral ID 0.
[7:0] Part number.
0x4001FFE4
PID1 RO
0xB8
Peripheral ID 1.
[7:4] jep106_id_3_0.
[3:0] Part number[11:8].
0x4001FFE8
PID2 RO
0x1B
Peripheral ID 2.
[7:4] revision .
[3] jedec_used.
[2:0] jep106_id_6_4.
0x4001FFEC
PID3 RO
0x-0
Peripheral ID 3.
[7:4] ECO revision number.
[3:0] Customer modification number.
0x4001FFF0
CID0 RO
0x0D
Component ID 0.
0x4001FFF4
CID1 RO
0xF0
Component ID 1 (PrimeCell class).
0x4001FFF8
CID2 RO
0x05
Component ID 2.
0x4001FFFC
CID3 RO
0xB1
Component ID 3.
Table 2-13 System controller programmers model (continued)
Address Name Type Reset Descriptions
Functional description
ARM DUI 0559D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 2-22
ID110117 Confidential
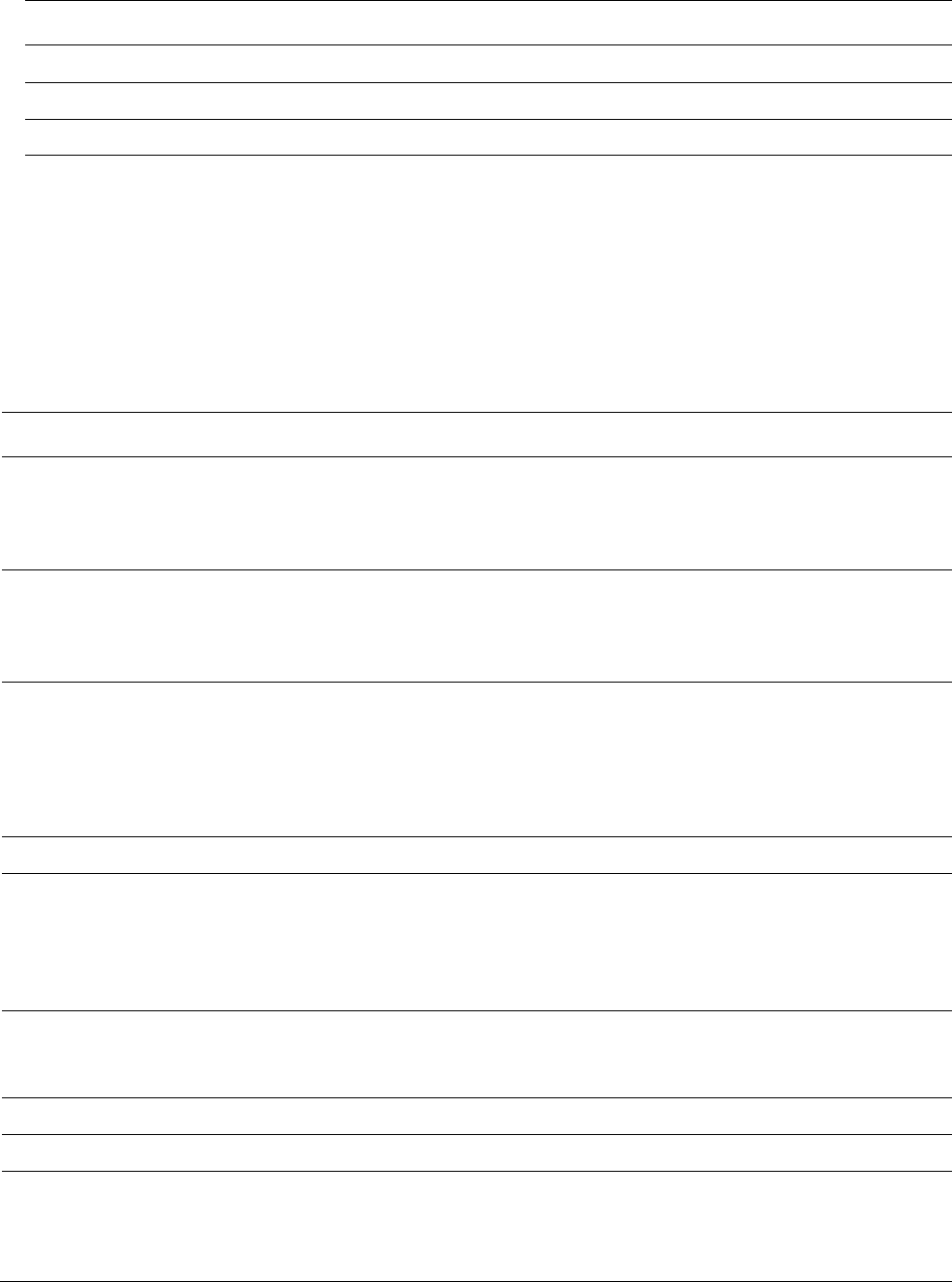
2.7 I/O pins
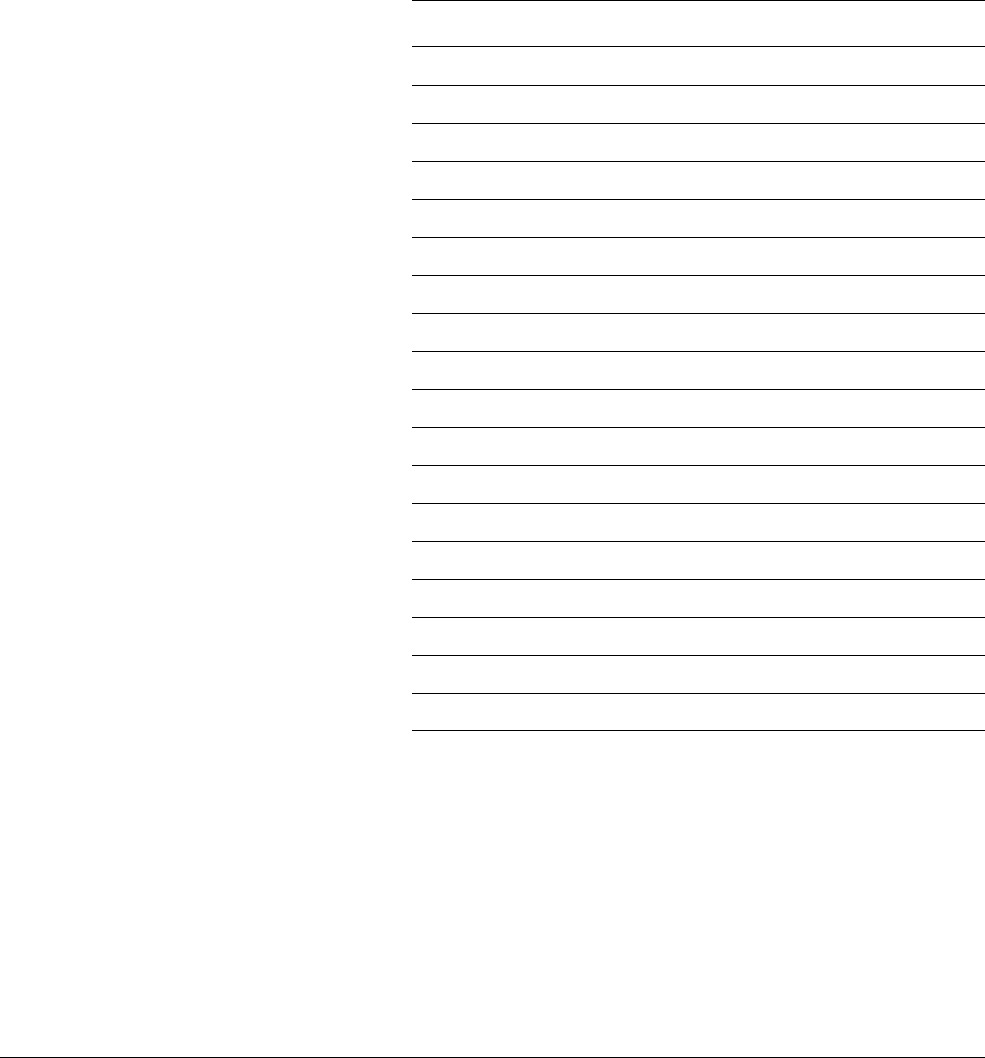
The example microcontroller has two 16-bit I/O ports and several debug signal connections.
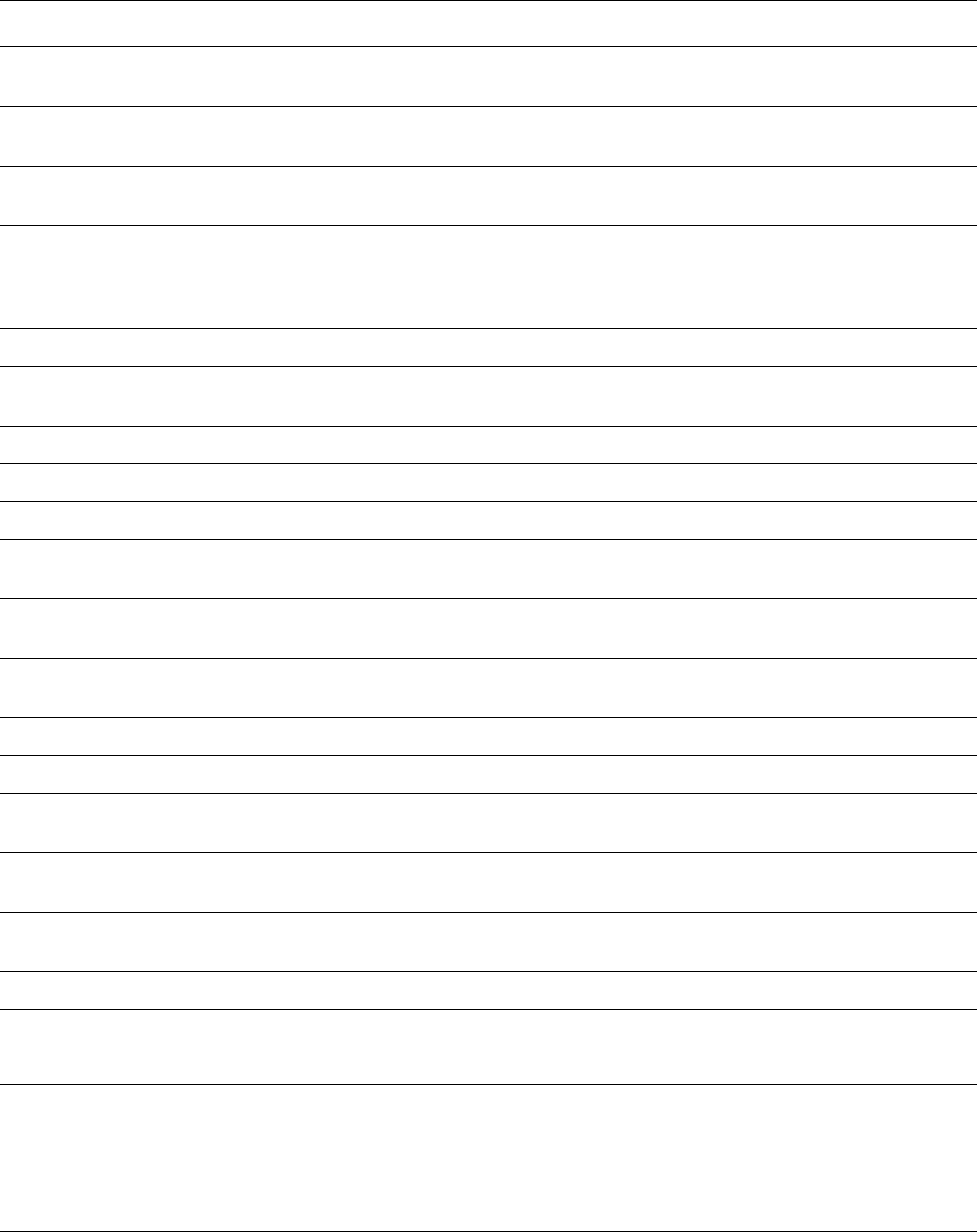
You can switch several I/O port pins to an alternate function. Figure 2-7 shows the interface of
the example microcontroller.
Figure 2-7 Example microcontroller interface
Table 2-14 describes the I/O of the example MicroController Unit (MCU).
cmsdk_mcu
Clock and
reset
signals
Optional debug
signal (only if
JTAG is included)
Debug
signals
I/O port 0
I/O port 1
NRST
XTAL1
XTAL2
SWCLKTCK
SWDIOTMS
nNRST
TDI
TDO
P0[15:0]
P1[15:0]
Table 2-14 Example MCU I/O
Signal Direction Description
XTAL1 Input Crystal oscillator
XTAL2 Output Crystal oscillator feedback
NRST Input Reset, active LOW
P0[15:0] Input GPIO
P1[15:0] Input GPIO
nTRST Input JTAG reset, active LOWa
a. This signal is only present when you select the JTAG option.
TDI Input JTAG data ina
SWDIOTMS Input Serial Wire Data or JTAG TMS
SWCLKTCK Input Serial Wire clock or JTAG clock
TDO Output JTAG data outa
Functional description
ARM DUI 0559D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 2-23
ID110117 Confidential
Table 2-15 shows the alternate functions of the GPIO 1 ports that support pin multiplexing.
Before you use the I/O pins for alternate functions, you might want to program the
corresponding GPIO alternate function registers. This step might not be necessary when you use
the alternate function as an input.
Table 2-15 GPIO alternate functions
Pin Alternate function
GPIO 1 [15:10] No alternate function.
GPIO 1 [9] Timer 1 EXTIN. Always use as timer 1 external input. The GPIO 1 alternate function setting has no effect.
GPIO 1 [8] Timer 0 EXTIN. Always use as timer 0 external input. The GPIO 1 alternate function setting has no effect.
GPIO 1 [7] TSTART to MTB.
GPIO 1 [6] TSTOP to MTB.
GPIO 1 [5] UART2 TXD.
GPIO 1 [4] UART2 RXD. Always use as UART input. The GPIO 1 alternate function setting has no effect.
GPIO 1 [3] UART1 TXD.
GPIO 1 [2] UART1 RXD. Always use as UART input. The GPIO 1 alternate function setting has no effect.
GPIO 1 [1] UART0 TXD.
GPIO 1 [0] UART0 RXD. Always use as UART input. The GPIO 1 alternate function setting has no effect.
Functional description
ARM DUI 0559D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 2-24
ID110117 Confidential
2.8 Interrupts and event functions
The example system contains:
• 32 Interrupt Request (IRQ) lines.
• One NonMaskable Interrupt (NMI).
• One event signal.
2.8.1 Interrupt assignments
Table 2-16 describes the interrupt assignments.
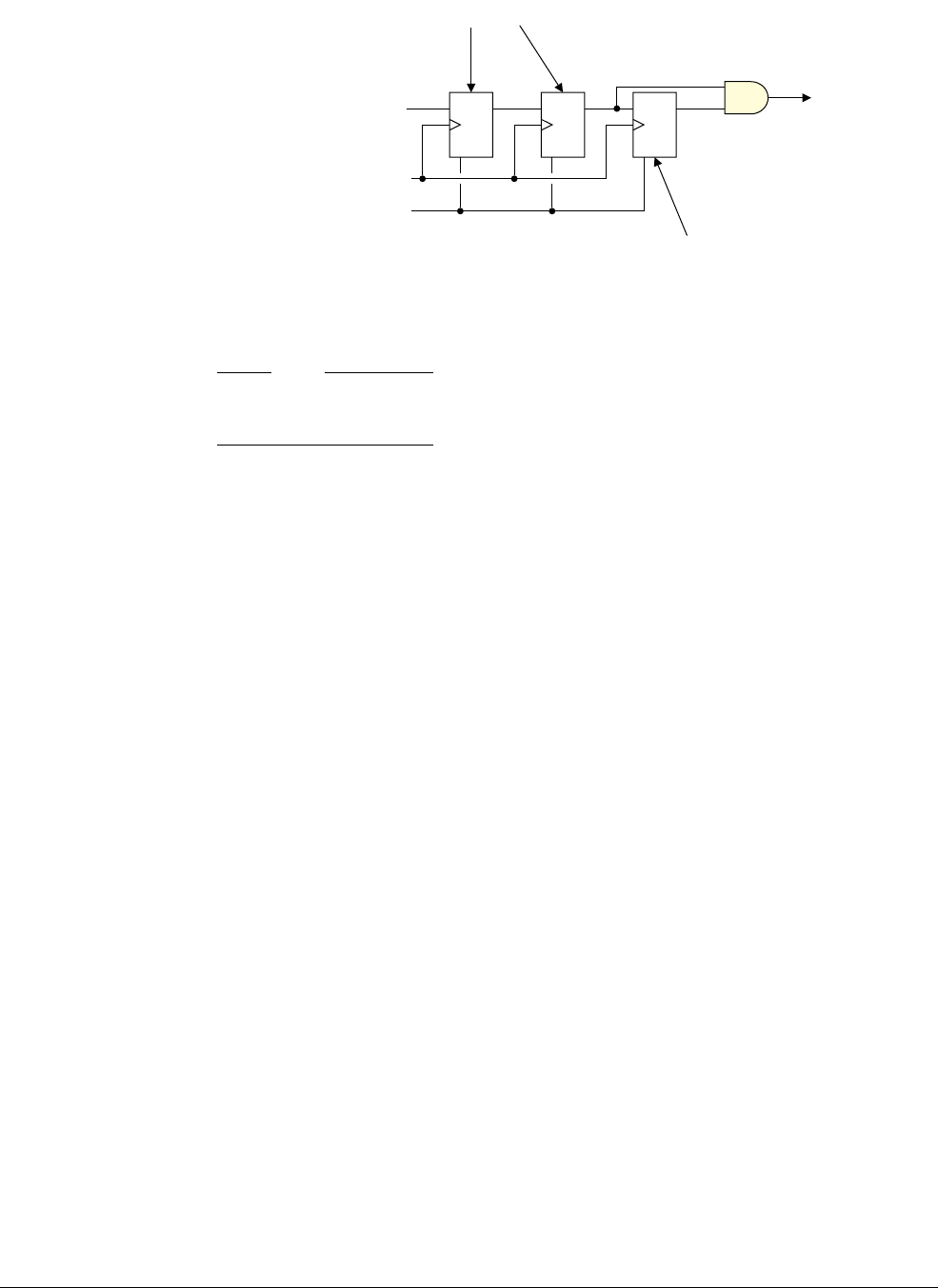
2.8.2 Interrupt synchronization
If a peripheral generates an interrupt signal in a clock domain that is asynchronous to the
processor clock, you must synchronize the interrupt signal to the processor clock domain before
you connect it to the NVIC of the processor. Figure 2-8 on page 2-25 shows an example circuit
that performs this synchronization.
Table 2-16 Interrupt assignments
IRQ/NMI Device
NMI Watchdog
0 UART 0 receive interrupt
1 UART 0 transmit interrupt
2 UART 1 receive interrupt
3 UART 1 transmit interrupt
4 UART 2 receive interrupt
5 UART 2 transmit interrupt
6 GPIO 0 combined interrupt for AHB GPIO and I/O port GPIO
7 GPIO 1 combined interrupt for AHB GPIO and I/O port GPIO
8Timer 0
9Timer 1
10 Dual timer
11 Not used
12 UART 0 overflow interrupt
13 UART 1 overflow interrupt
14 UART 2 overflow interrupt
15 DMA done and DMA error
16-31 GPIO 0 individual interrupts
Functional description
ARM DUI 0559D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 2-25
ID110117 Confidential
Figure 2-8 IRQ synchronizer
Note
The IRQ synchronizer only works with a level-triggered interrupt source, so the peripheral must
hold the interrupt signal HIGH until the processor clears the ISR interrupt signal.
The APB subsystem contains several example IRQ synchronizers to demonstrate their use. The
synchronizers are optional. They are only enabled if you set the Verilog parameter
INCLUDE_IRQ_SYNCHRONIZER
to a nonzero value. This Verilog parameter is defined in the
apb_subsystem.v
file. It is not overridden in the
cmsdk_mcu_system.v
file.
The example system design uses the same clock source for the processor clock HCLK and the
peripheral clocks PCLK and PCLKG. Therefore there is no asynchronous clock domain
boundary, so this parameter is set LOW.
2.8.3 Event
The Cortex-M0 and Cortex-M0+ have an RXEV input signal. If software uses the
WFE
instruction to put the processor to sleep, an event received at RXEV wakes up the processor. In
the example system, RVEX is connected to dma_done of the DMA-230 Micro DMA
controller. This enables the processor to wake up from WFE sleep when the DMA process
finishes.
DQDQDQ
Synchronized
Interrupt signal
to the processor
Interrupt
source
Processor
clock
Reset
Extra D-type flip-flop to prevent
glitches generating an unwanted pulse
Prevents metastability

Functional description
ARM DUI 0559D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 2-26
ID110117 Confidential
2.9 AHB system ROM table
This module,
cmsdk_ahb_cs_rom_table
, is an example system level CoreSight ROM table. This
enables a debugger to uniquely identify the Cortex-M0 or Cortex-M0+ based system, and
enables debug components, such as the optional CoreSight MTB-M0+, to be discovered
automatically.
The system ROM table is a 4K component, and is located at address
0xF0000000
in the memory
map. This module includes parameters that you must modify with your own JEP106
manufacturer ID value and a part number that identifies your system. See the Arm® CoreSight®
Architecture Specification for information about how to configure your ROM tables to ensure
that they are correctly referenced.
The example system ROM table for the Cortex-M0 system has a single entry:
• A pointer to the Cortex-M0 ROM table.
The example system ROM table for the Cortex-M0+ system has two entries:
• A pointer to the Cortex-M0+ ROM table.
• A pointer to the optional CoreSight MTB-M0+.
The system ROM table is included in the Cortex-M0 and Cortex-M0+ systems. However by
default it is not the first ROM table in Cortex-M0 based systems because the Cortex-M0 DAP
points to the processor ROM table. You can modify the value of baseaddr in the Cortex-M0
integration level to make the Cortex-M0 DAP point to the system ROM table instead.
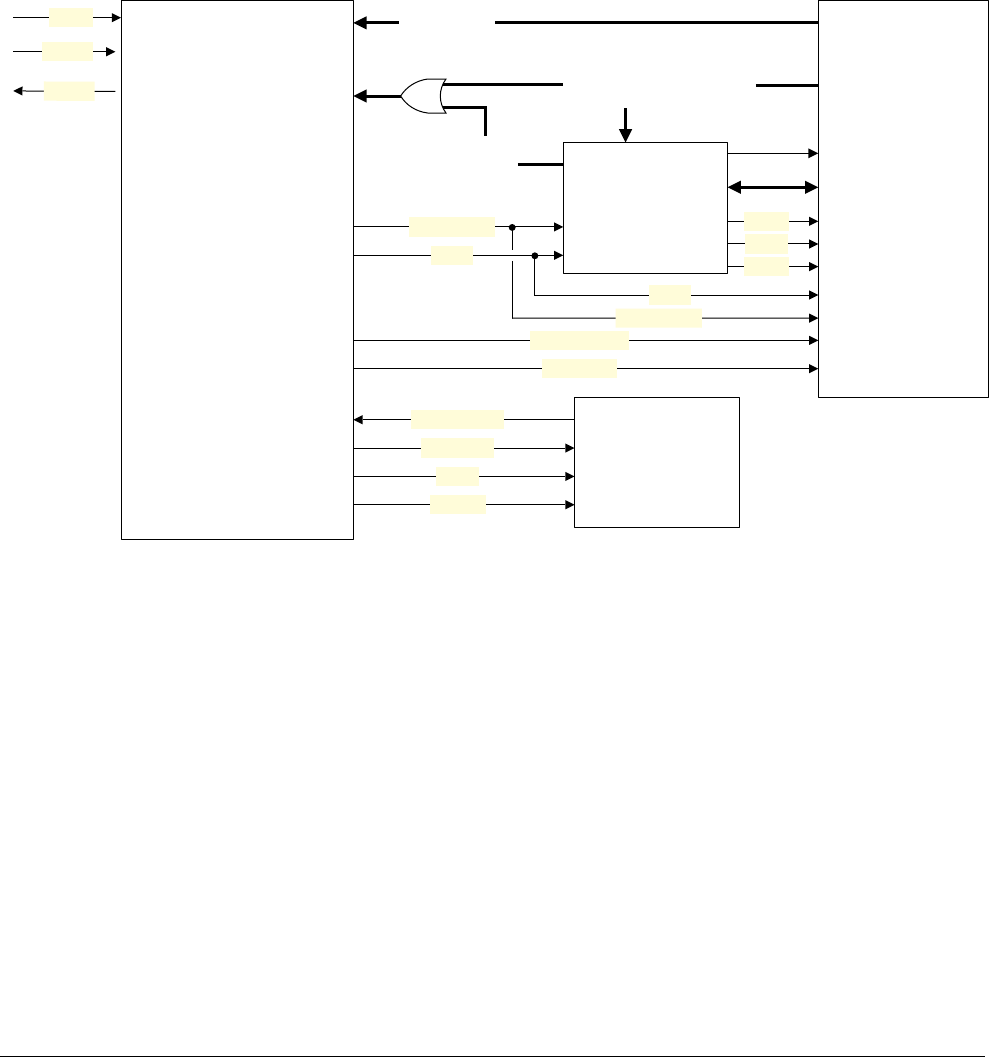
Functional description
ARM DUI 0559D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 2-27
ID110117 Confidential
2.10 Clock and reset
The example microcontroller uses a single reset and a single clock source. The clock and reset
controller performs:
• The reset synchronization of the reset input.
• The generation of the reset outputs.
• The clock generation for the peripheral subsystem.
The PMU is inside the microcontroller. It performs the clock gating and the wake-up of the
system from deep-sleep.
Figure 2-9 shows the clock and reset operation of the example microcontroller.
Figure 2-9 Example microcontroller clock and reset operation
The example only demonstrates a simple application scenario. Arm recommends that, for actual
silicon projects, you modify the design of the PMU and clock controller for device-specific
testability and clocking requirements.
The AHB to APB bridge in the APB subsystem permits the APB peripheral bus to run at a clock
rate that is derived from the AHB clock by PCLKEN. By default the example system ties HIGH
PCLKEN that connects to the AHB to APB bridge. Therefore PCLK is the same as HCLK. If
you require a slower APB clock, you must:
• Modify the Verilog file
cmsdk_mcu_clkctrl.v
to generate PCLKEN at a reduced rate.
•Use PCLKEN and clock gating logic to generate PCLK.
The Verilog file
cmsdk_mcu_clkctrl.v
is the clock and reset controller, and provides an example
of how to create a lower PCLK frequency. The
ARM_CMSDK_SLOWSPEED_PCLK
preprocessing
directive enables this feature. The Verilog file also provides a PCLKG clock signal used by the
APB interface logic in the peripherals. If there is no APB transfer activity, you can turn off the
PCLKG signal to reduce power. The AHB to APB bridge generates the APBACTIVE signal
that controls the generation of PCLKG.
Clock and reset
controller
cmsdk_mcu_clkctrl
Processor
status
Peripheral
subsystem
Power management
unit
cortexm0_pmu or
cm0p_ik_pmu
System reset request,
Watchdog reset request
HCLK
SCLK
DCLK
PORESETn
PORESETn
FCLK
DBGRESETn
HRESETn
FCLK
NRST
XTAL1
XTAL2
APBACTIVE
PRESETn
PCLK
PCLKG
CORTEXM0
INTEGRATION or
CM0PMTB
INTEGRATION
HRESETn
WIC interface
PMU
Reset
requests
Functional description
ARM DUI 0559D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 2-28
ID110117 Confidential
2.11 SysTick support
The example system includes a simple divider to provide a reference clock for the SysTick
timer. The divider has a divide ratio of 1000. The system runs at 50MHz in simulation, so the
SysTick reference clock runs at 50KHz.
Table 2-17 describes the bit field values of the STCALIB register.
Note
See the SysTick Calibration Value Register, SYST_CALIB in the ARMv6-M Architecture
Reference Manual for more information.
Table 2-17 STCALIB register bit field values
Signal SysTick->CALIB register field Value
STCALIB[25] NOREF (bit 31) 0 Reference clock is available
STCALIB[24] SKEW (bit 30) 1 Calibration value is not accurate
STCALIB[23:0] TENMS (bit 23 to 0) 0 Calibration value is not available
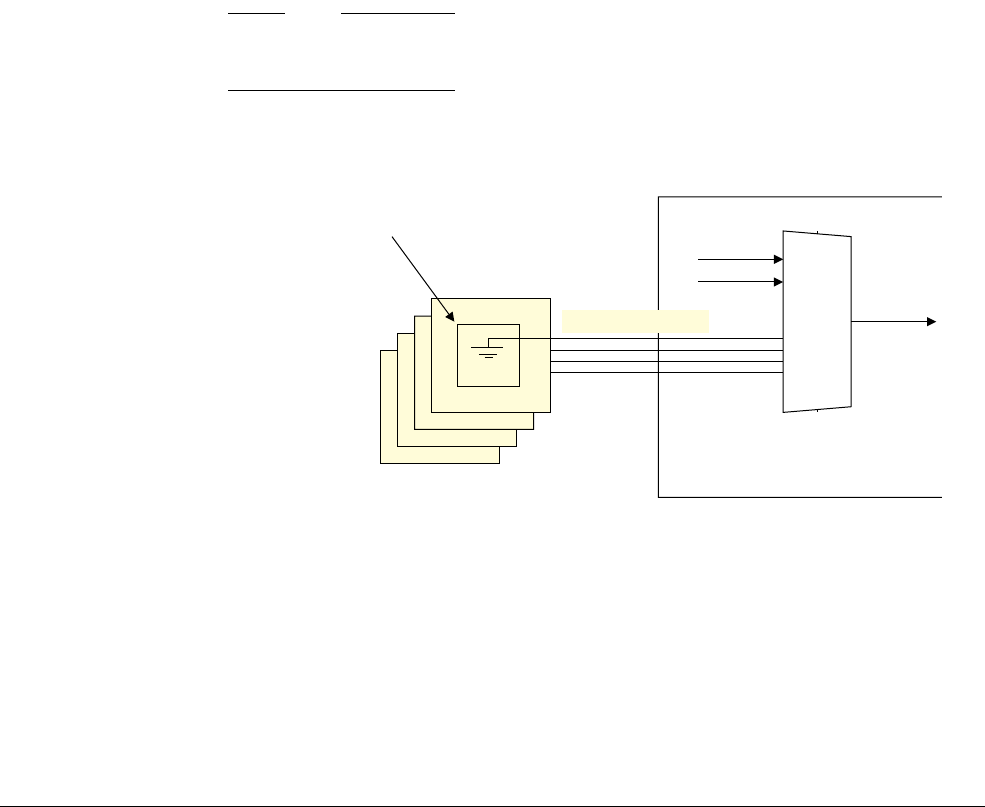
Functional description
ARM DUI 0559D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 2-29
ID110117 Confidential
2.12 Handling the Engineering Change Order (ECO) Revision Number in ID registers
The peripheral blocks in the Cortex-M0 and Cortex-M0+ System Design Kit provide a set of
peripheral ID registers. These registers enable software to determine the identity of the
peripheral and the revision of the design, so that you can perform software-based workaround
solutions if a defect is detected in a peripheral.
One of the bit fields in the ID registers is connected to a 4-bit input called ECOREVNUM. This
is the ECO Revision Number, and enables the revision information to be modified using metal
fixes or ECO. To enable these modifications, you must do the following:
1. In the instantiation of the peripheral blocks in the example system Verilog files, you must
connect each bit of the ECOREVNUM input to individual tie-off cells. This includes
cortex_m_mcu_system.v
as shown in Table 2-4 on page 2-8, and
apb_subsystem.v
which is
described in the Cortex-M System Design Kit Technical Reference Manual.
Arm recommends that the tie-off cells are instantiated with a separated level of hierarchy
so that they can be located easily, and to enable the process of switching the design to a
different technology to be made easier by just changing the tie-off cell files.
2. Ensure that the tie-off cells are not optimized away in each stage of the synthesis and
layout. This is commonly achieved by setting the signal as
dont_touch
. If any stage of the
implementation flow does not retain the
dont_touch
attribute, the revision value in the ID
register might not be modifiable with metal fixes or ECO changes.
Note
Ensure that the synthesis tool does not merge multiple bits of the tie-off cells, or share the tie-off
cell connection with other functional logic.
Figure 2-10 shows the recommended method of using separate hierarchy for tie-off cells.
Figure 2-10 Separate hierarchy for tie-off cells
The example synthesis scripts contain the
dont_touch
attribute for the ECOREVNUM input for
the Cortex-M0 or Cortex-M0+ processor, but not the peripheral blocks. If required, see the
processor example using ECOREVNUM to implement the same arrangement for the
peripheral blocks.
The behavior of the synthesis tool might change between different compile options and tool
versions. This can have an impact to the resulting connection for ECOREVNUM. Arm
recommends that you manually check the correct implementation of ECOREVNUM each time
after synthesis or layout implementation is carried out.
Read data
Read data
multiplexer
ECOREVNUM[3:0]
Technology
dependent tie-off cell
tie0 x 4
Peripheral
Other read
data values

ARM DUI 0559D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 3-1
ID110117 Confidential
Chapter 3
Example system testbench
This chapter describes the testbench components. It contains the following sections:
•About the testbench design on page 3-2.
•UART text output capturing and escape code on page 3-3.
•Debug tester on page 3-4.
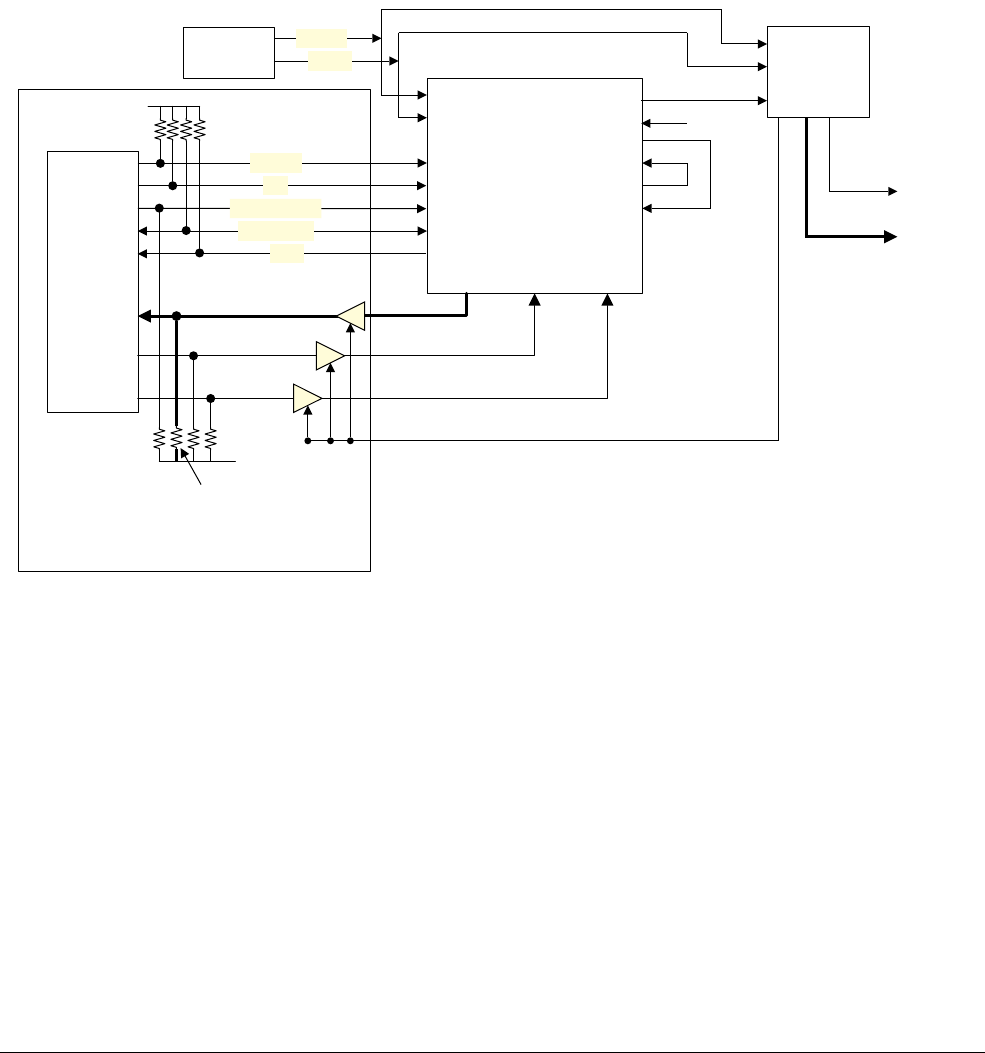
Example system testbench
ARM DUI 0559D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 3-2
ID110117 Confidential
3.1 About the testbench design
The example system includes a testbench to enable you to simulate the example microcontroller
with a supported Verilog simulator.
The testbench includes:
• A loop back connection for UART testing.
• A debug tester to test for debug connectivity.
• A clock and reset generator.
• Text message capture by the UART.
Figure 3-1 shows a block diagram of the testbench.
Figure 3-1 Testbench block diagram
For simulation, XTAL1 runs at 50MHz. NRST is asserted LOW for 5ns at the beginning of the
simulation.
UART0 connects to UART1 in a crossover arrangement so you can test the serial
communication. The serial output of UART2 is connected to a UART capture module that can
generate text messages during simulation. See the
cmsdk_uart_capture.v
file.
cmsdk_mcu
cmsdk_clkreset
XTAL1
NRST
cmsdk_uart_capture
RXD
CLK
RESETn
P1[4]
P1[5]
P1[2]
P1[3]
P1[0]
P1[1]
UART2
UART0
UART1
NC
Debug
tester
Pull up
debug_command[5:0]
P0[13:8]
Pull down
debug_running
P0[15] P0[14]
debug_test_en
(Debug Test Enable)
debug_err
Present only when debug feature is included
SIMULATIONEND
AUXCTRL[7:0]
XTAL1
NRST
nTRST
TDI
SWCLKTCK
SWDITMS
TDO
times six resistors for the bus

Example system testbench
ARM DUI 0559D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 3-3
ID110117 Confidential
3.2 UART text output capturing and escape code
When a program wants to display a message in the simulation environment, it can execute the
printf
or
puts
functions. It can also directly call the UART routines to output the message to
UART2. When it executes the
printf
or
puts
functions, the UART output routine executes
through retargeting code and outputs the characters to the serial output of UART2. The UART
capture module captures the input data and outputs the received characters when it receives the
Carriage Return (CR) character.
To reduce simulation time, the high-speed test mode of the example system UART outputs each
bit in one clock cycle. Therefore, the UART capture module captures the input data at one bit
per cycle. If the UART outputs serial data at a different speed, you must change the clock that
connects to the UART capture module.
You can also use the UART capture module to terminate a simulation. When it receives a
character value of
0x4
, unless it receives this character immediately following the ESC (
0x1B
)
character, it stops the simulation using the
$stop
Verilog system task. Before the end of the
simulation, the UART capture module outputs a pulse on the SIMULATIONEND output to
enable you to use this signal to trigger other tasks or hardware logic before the end of a
simulation.
The UART capture module also supports the following features when you use the escape code:
• Control of the debug test enable signal debug_test_en.
• Provides an 8-bit auxiliary output AUXCTRL.
It implements the following escape codes:
ESC, 0x10, N Capture value of N to AUXCTRL[7:0].
ESC, 0x11 Set debug_test_en HIGH.
ESC, 0x12 Set debug_test_en LOW.
The system uses the debug_test_en signal to control tristate buffers that enable or disable
information passing between the example microcontroller and the debug tester.
Example system testbench
ARM DUI 0559D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 3-4
ID110117 Confidential
3.3 Debug tester
The debug tester is a testbench component that tests debug and trace connectivity. Other tests
do not require the debug tester. This section describes the following:
•About the debug tester.
•Operation.
•Information passing on page 3-6.
•Debug tester program on page 3-7.
•Debug tester test function information on page 3-8.
3.3.1 About the debug tester
The debug tester is a separate processor system that uses a Cortex-M0 or Cortex-M0+ processor.
It is included only when you define the debug option
ARM_CMSDK_INCLUDE_DEBUG_TESTER
in the
Verilog file
cmsdk_mcu_defs.v
. By default, the system disables the debug tester by setting the
debug command input LOW at the start of the simulation. When the example microcontroller is
required to carry out a debug test, it sends the escape code
ESC-0x11
to UART2 to enable the
communication between the example microcontroller and the debug tester.
3.3.2 Operation
Table 3-1 describes the set of signals that the debug tester uses to communicate with the
example microcontroller:
Figure 3-2 on page 3-5 shows the handshaking sequence of the communication between the
debug tester and the microcontroller.
Table 3-1 Debug tester interface signals
Signal Direction Description
DBGCMD Input from microcontroller Debug command, 6-bit signal to indicate what task to perform
DBGRUNNING Output to microcontroller Debug tester acknowledges the debug command, or debug tester is running a debug
task
DBGERROR Output to microcontroller Debug tester has encountered an error during the debug operation
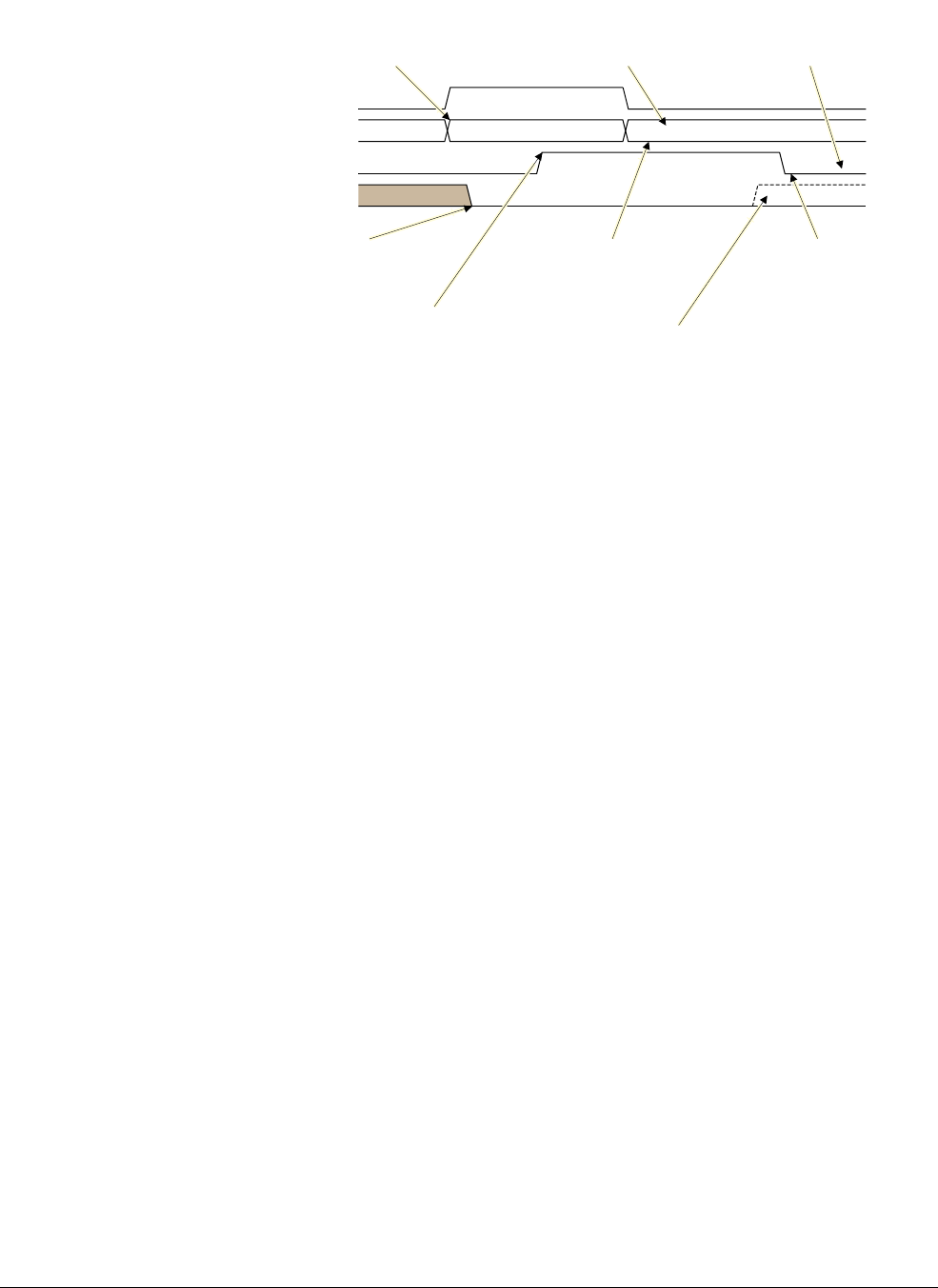
Example system testbench
ARM DUI 0559D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 3-5
ID110117 Confidential
Figure 3-2 Debug command handshake sequence
Figure 3-3 on page 3-6 shows the program flow chart of the debug tester.
0 A
0
DBGCMD[4:0]
DBGRUNNING
DBGERROR
Microcontroller
asserts debug
command
Microcontroller detects
DBGRUNNING and
deasserts the debug
command
Microcontroller detects the
deassertion of DBGRUNNING
and continues
Debug tester deasserts
DBGRUNNING to indicate
it has finished its debug
operation
Debug tester detects the
deassertion of DBGCMD[5]
and starts the debug task
Debug tester completes its
debug task and updates
DBGERROR
Debug tester asserts
DBGRUNNING to
acknowledge the debug
command DBGCMD and waits
for the microcontroller to
deassert DBGCMD[5]
Debug tester detects the
debug command and
clears the error status
DBGCMD[5]
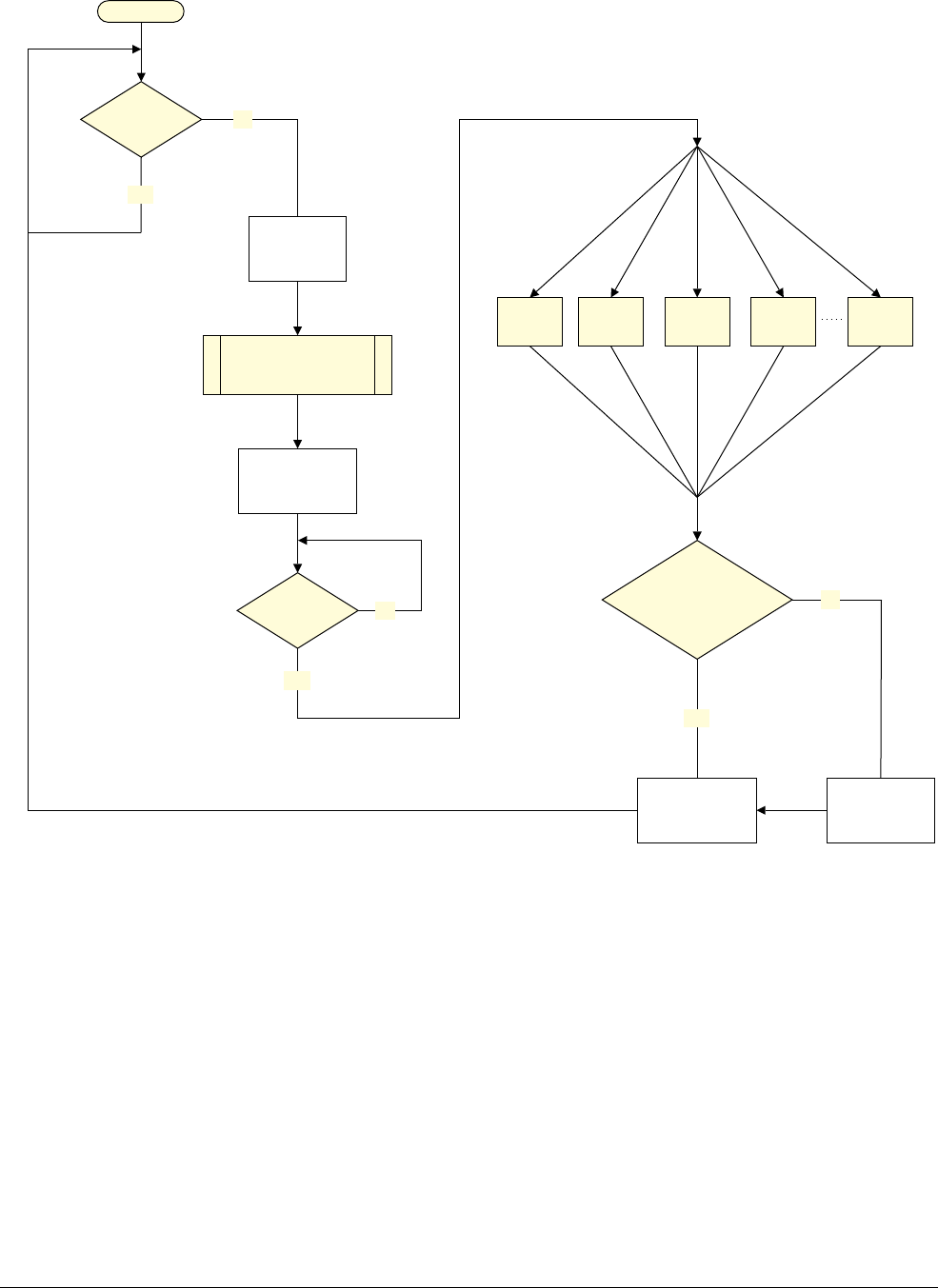
Example system testbench
ARM DUI 0559D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 3-6
ID110117 Confidential
Figure 3-3 Program flow chart of debug tester
The debug tester also has its own test functions. See Debug tester test function information on
page 3-8.
3.3.3 Information passing
The handshaking mechanism between the debug tester and the microcontroller can only pass
information about the test start and test result. To enable the debug tester to transfer more
information, it uses four words of SRAM at a memory address above the stack memory.
By allocating four words of RAM space above the top of stack memory, the debug tester locates
the data variables by accessing the Main Stack Pointer (MSP) initial value, that is always at
address
0x0
. The debug tester then executes the data transfer. Figure 3-4 on page 3-7 shows the
memory space that the debug tester uses for its communication.
Start
DBGCMD[5]
is 0?
Yes
No
Clear
DBGERROR
Detect what task is
required
Assert
DBGRUNNING
No
Yes
Task A Task B Task C Task D Task N
Task completed
successfully?
Yes
Deassert
DBGRUNNING
No
Assert
DBGERROR
DBGCMD[5]
is 0?
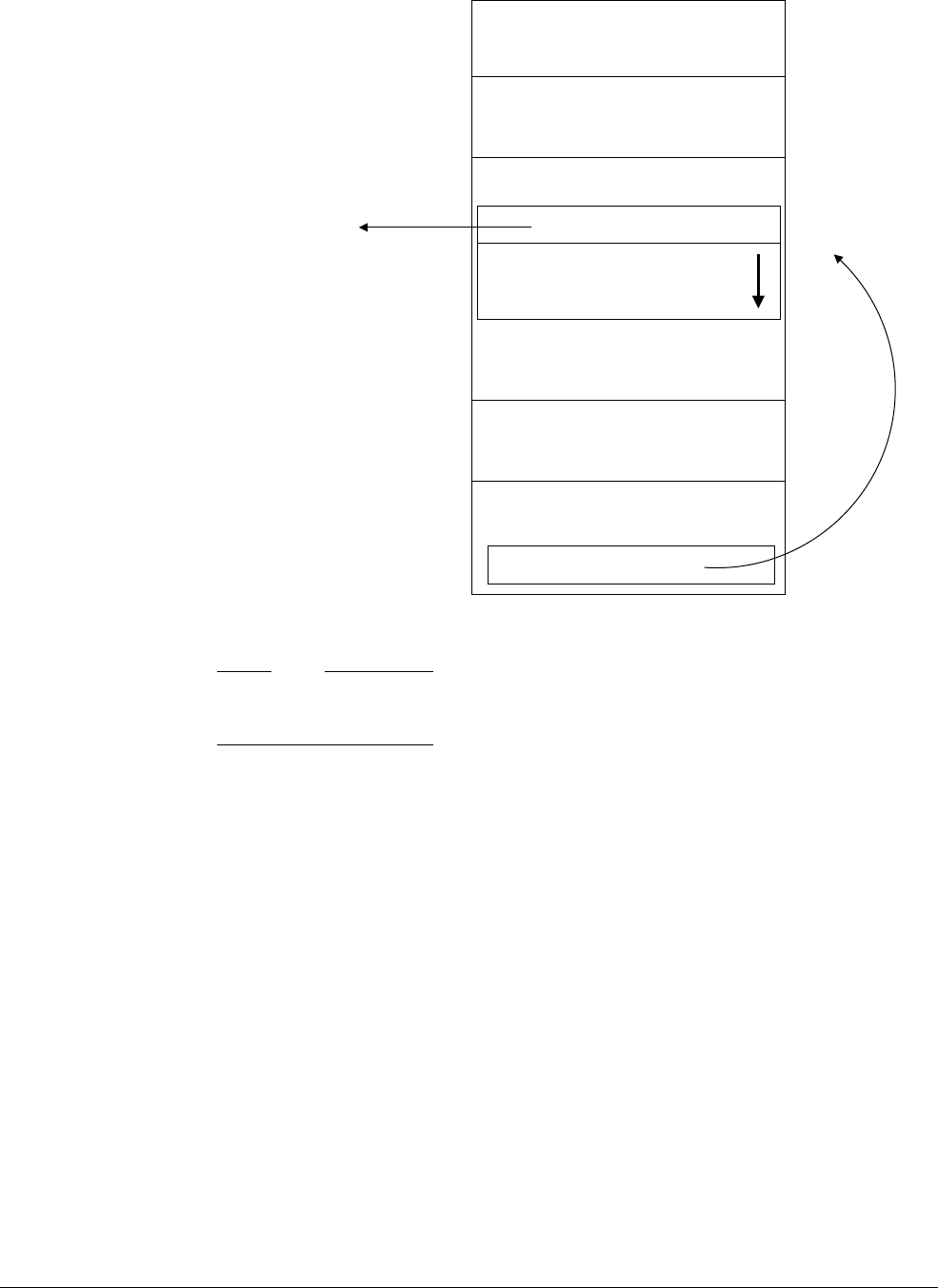
Example system testbench
ARM DUI 0559D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 3-7
ID110117 Confidential
Figure 3-4 Memory space for debug tester communication
Note
If a simulation test uses the debug tester, the top of the stack memory must be at least four words
lower than the ending address of the valid SRAM memory range.
3.3.4 Debug tester program
The debug tester is a processor system that has its own program code. The design kit includes a
precompiled version of the debug tester program in the
software/debug_tester/
directory, either
debugtester_le.hex
for little endian and
debugtester_be.hex
for big endian. You can change the
configuration of the processor, for example, because one of the following has changed:
• Expected value of an ID register.
• Expected number of comparators in breakpoint or watchpoint units.
•Endianness.
If you change the configuration of the processor, you might have to update the debug tester
program. You can locate the source code of the debug tester program in the
software/debug_tester/
directory. This directory includes the files
debugtester.h
and debug
cmsdk_debugtester.h
, which contain generic values and peripheral definitions common across
all Cortex-M series processors.
Additional header files can be found the
systems/cortex_m0_mcu/testcodes/generic
directory.
This directory includes the file
config_id.h
, which stores most of the expected values.
The design kit includes the compile setup for Arm DS-5, GCC, and Keil MDK-ARM so you can
regenerate the test program with your new configuration.
Stack Top address 0x00000000
ROM
RAM
Initial value of MSP
Stack space
0x20000000
Stack Top
4 words of RAM
space for data
transfer
Example system testbench
ARM DUI 0559D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 3-8
ID110117 Confidential
3.3.5 Debug tester test function information
Table 3-2 describes the test functions that the debug tester provides.
Table 3-2 Debug tester test functions
Function name Input data Return data Return status Description
FnSetInterfaceJTAG
(DBGCMD [4:0] = 0)
None. None. FAIL if DAP was already
on.
PASS otherwise.
Set debug tester to use
JTAG protocol.
FnSetInterfaceSW
(DBGCMD [4:0] = 1)
None. None. FAIL if DAP was already
on or DAP reported errors.
PASS if DPIDR was
successfully read from the
DP.
Set debug tester to use
Serial Wire protocol and
read DPIDR from DAP.
FnDAPPowerUp
(DBGCMD [4:0] = 2)
None. None. FAIL if DAP was already
on or DAP reported errors.
PASS when system and
debug power domain
power-up-requests have
been acknowledged.
Power up the system and
debug power domains.
FnDAPPowerDown
(DBGCMD [4:0] = 3)
None. None. FAIL if DAP was already
off or DAP reported errors.
PASS when system and
debug power domain
power-down-requests have
been acknowledged.
Power down the system
and debug power
domains.
FnGetTAPID
(DBGCMD [4:0] = 4)
None.
Memory[StackTop]
=
JTAG TAPID FAIL if DAP was already
on or DAP reported errors.
PASS when TAPID has
been written to the MCU
memory.
Read the DAP JTAG
TAP ID and return using
the reserved SRAM
space above the stack.
FnGetDPReg
(DBGCMD [4:0] = 5)
Memory[StackTop]
=
DP Register address.
Memory[StackTop]
=
DP Register value. FAIL if DAP was already
on or DAP reported errors.
PASS when DP register
value has been written to
the MCU memory.
Read the value of a DP
register.
FnGetAPReg
(DBGCMD [4:0] = 6)
Memory[StackTop]
=
AP Register address.
Memory[StackTop]
=
AP Register value. FAIL if DAP was already
on or DAP reported errors.
PASS when AP register
value has been written to
the MCU memory.
Read the value of an AP
register.
FnGetAPMem
(DBGCMD [4:0] = 7)
Memory[StackTop]
=
AP Memory address.
Memory[StackTop]
=
AP Memory value. FAIL if DAP was already
on or DAP reported errors.
PASS when word-aligned
AP Memory value has been
written to the MCU
memory.
Read a word of memory.
Example system testbench
ARM DUI 0559D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 3-9
ID110117 Confidential
FnSetAPMem
(DBGCMD [4:0] = 8)
Memory[StackTop]
=
AP Memory address.
Memory[StackTop + 4]
= Data value.
None FAIL if DAP was already
on or DAP reported errors.
PASS when data value has
been written to the
word-aligned location in
the MCU memory.
Write a word of
memory.
FnGetAemCSIDs
(DBGCMD [4:0] = 9)
Memory[StackTop]
=
CoreSight
Component Base
Address.
Memory[StackTop]
=
Merged ID value
({CID3, CID2, CID1,
CID0}).
Memory[StackTop+4]
=
Merged ID value
({PID3, PID2, PID1,
PID0}).
Memory[StackTop+8]
=
Merged ID value
({PID7, PID6, PID5,
PID4}).
FAIL if DAP was already
on or DAP reported errors.
PASS when CoreSight
Component and Peripheral
ID values have been written
to the MCU memory.
Read the CoreSight
Component ID0 to ID3
(address offset
0xFF0
to
0xFFC
) and Peripheral
ID0 to ID7 of a
peripheral (address
offset
0xFD0
to
0xFEC
).
FnConnectWakeUnhalt
(DBGCMD [4:0] = 10)
None.
Memory[StackTop]
= 1. FAIL if DAP was already
on or DAP reported errors.
PASS if MCU was seen
sleeping and was
successfully halted, the
software flag written and
core un-halted.
If the processor is
sleeping, halt the
processor and write to a
memory location that
contains a software flag
variable, and then unhalt
the processor.
FnConnectCheckUnlockup
(DBGCMD [4:0] = 11)
Memory[StackTop + 8]
= Non Faulting
HardFault Handler
(NOP, BX LR).
Memory[StackTop +
0xC]
= Fault
generating HardFault
Handler (
0xf123
, BX
LR).
None. FAIL if DAP was already
on or DAP reported errors.
PASS if MCU was seen in
Lockup State and was
successfully put back into
normal running state.
If the processor is
locked up, halt the
processor, modify
HardFault handler in
SRAM, change Program
Counter and then permit
the processor to resume
its operation.
FnEnableHaltingDebug
(DBGCMD [4:0] = 12)
None. None. FAIL if DAP was already
on or DAP reported errors.
PASS if write to
DHCSR.C_DEBUGEN
was successful.
Enable debugging by
setting the
C_DEBUGEN bit in the
DHCSR.
FnDAPAccess
(DBGCMD [4:0] = 13)
None
Memory[StackTop]
= 7:
Bit 0 = word RW
success.
Bit 1 = halfword RW
success.
Bit 2 = byte RW
success).
FAIL if DAP was already
on or DAP reported errors.
PASS if test was successful.
Perform simple read and
write operations into the
MCU memory at word,
halfword, and byte sizes.
Table 3-2 Debug tester test functions (continued)
Function name Input data Return data Return status Description

ARM DUI 0559D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 4-1
ID110117 Confidential
Chapter 4
Using the simulation environment
This chapter describes how to set up and run simulation tests. It contains the following sections:
•About the simulation environment on page 4-2.
•Files and directory structure on page 4-3.
•Setting up the simulation environment on page 4-5.
•Running a simulation in the simulation environment on page 4-8.

Using the simulation environment
ARM DUI 0559D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 4-2
ID110117 Confidential
4.1 About the simulation environment
The simulation environment in this example system enables you to start a system-level
simulation very quickly. The simulation environment includes software files and simulation
setup makefiles.
The simulation environment supports the following Verilog simulators:
• Mentor ModelSim (6.0 or above).
• Cadence NC Verilog.
• Synopsys VCS.
The makefile for setting up the simulation is created for the Linux platform.
You can compile the example software using any of the following:
•Arm Development Studio 5 (DS-5).
• Arm RealView Development Suite.
•Keil
® Microcontroller Development Kit (MDK).
• GNU Tools for Arm Embedded Processors (Arm GCC).
The Keil MDK is available only for the Windows platform. Therefore, to use Keil MDK you
must carry out the software compilation and the simulation in two separate stages.
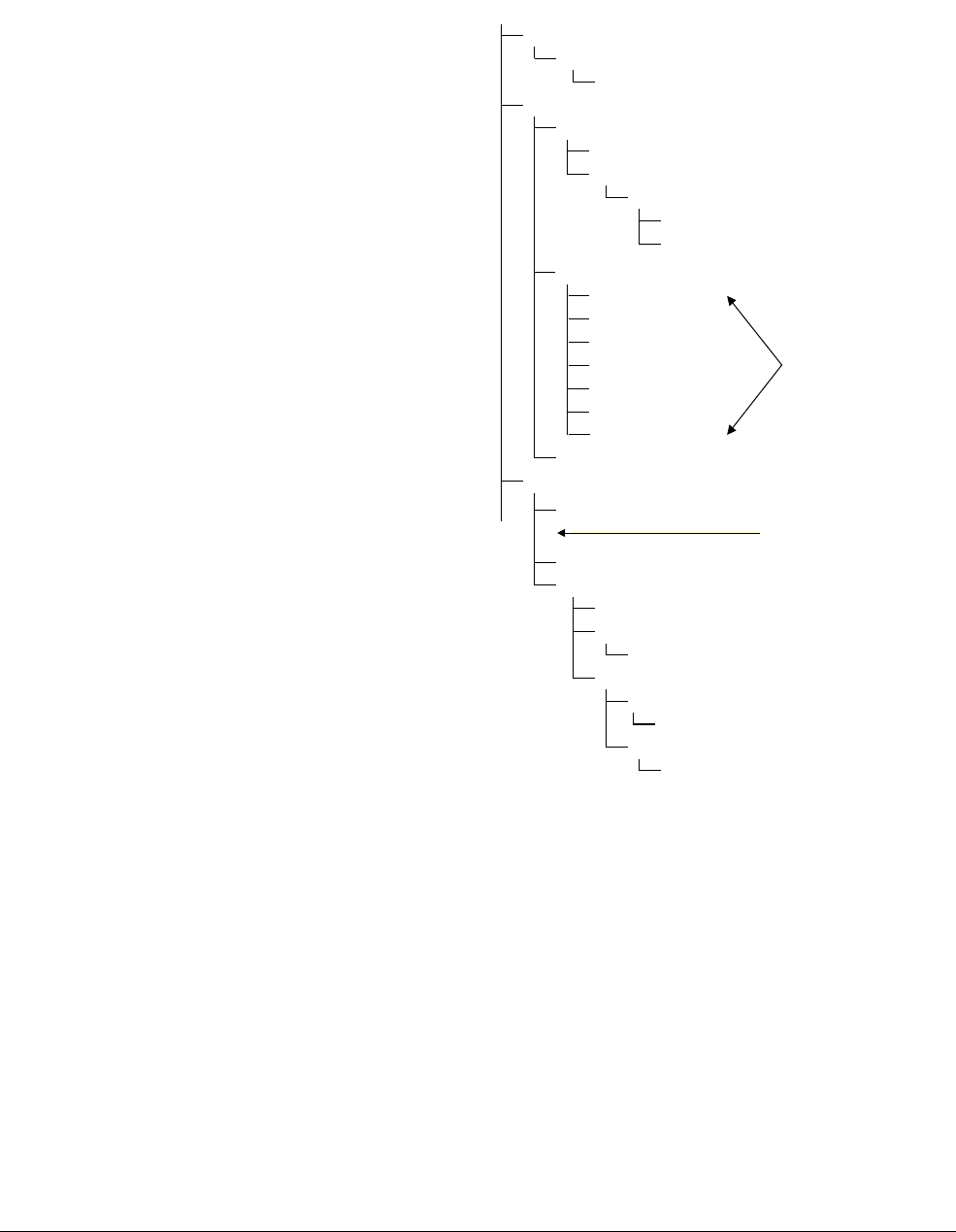
Using the simulation environment
ARM DUI 0559D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 4-3
ID110117 Confidential
4.2 Files and directory structure
Figure 4-1 shows the layout of the directories in the example system.
Figure 4-1 Directories for simulation
The Cortex-M0 and Cortex-M0+ System Design Kit contains example systems for the Arm
Cortex-M0 and Cortex-M0+ processors. The Cortex-M System Design Kit contains more
example systems. The files for the additional systems are located in sub-directories below the
systems
directory.
Table 4-1 on page 4-4 describes the contents of several of the directories in Figure 4-1.
<Installation directory/>
software/
common/
demos/
retarget/
bootloader/
Common software files
scripts/
systems/
Other example systems
cortex_m0_mcu/
verilog/
rtl_sim/
makefile
testcodes/
hello/
makefile
[other test]/
makefile
validation/
cmsis/
CMSIS/
Device/
ARM/
CMSDK_CM0/
CMSDK_CM0plus/
debug_tester/
logical/
cmsdk_debug_tester/
verilog/
romtable_tests/
debug_tests/
Using the simulation environment
ARM DUI 0559D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 4-4
ID110117 Confidential
Table 4-1 Installation directory information
Directory name Directory contents
software/cmsis/CMSIS
Example processor support files.
software/cmsis/Device/ARM/
Example device specific processor support files and example system header
files, for example,
CMSDK_CM0
for Cortex-M0 and
CMSDK_CM0plus
for
Cortex-M0+.
systems/cortex_m0_mcu/verilog
Verilog and Verilog command files.
systems/cortex_m0_mcu/rtl_sim/
Files for simulation that includes a
makefile
to compile the Verilog and run
the simulation. It also invokes a
makefile
in the
testcodes
directory to
compile the software.
systems/cortex_m0_mcu/testcodes/
Testcodes for software testing .
systems/cortex_m0_mcu/testcodes/<testname>/makefile
Makefile for example testcodes, for DS-5 and Arm GCC.
logical/cmsdk_debug_tester/verilog/
Design of the debug tester.
software/common/demos
C program codes for demonstration.
software/common/validation
C program codes for functional tests.
software/common/bootloader
Example boot loader.
software/common/dhry
Dhrystone demonstation.
software/common/retarget
Support files to handle printing.
software/common/debug_tests
Debug test.
software/common/romtable_tests
Reads the system ROM table to determine what the system contains.
software/common/scripts
Linker scripts.
software/debug_tester
Design of the debug tester for the Cortex-M Series processor supported.
This contains all necessary files to generate the
.hex
file software that the
debug tester runs. This directory also includes a precompiled image, source
code, and a makefile for the Arm DS-5 and Arm GCC.
Using the simulation environment
ARM DUI 0559D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 4-5
ID110117 Confidential
4.3 Setting up the simulation environment
This section describes how to set up the simulation environment. It contains the following:
•Installing the processor core.
•Modifying the rtl_sim/makefile.
•Modifying configuration files on page 4-6.
•Enabling assertions checking on page 4-6.
•Setting up tools on page 4-7.
4.3.1 Installing the processor core
This design kit does not include the processor RTL. After you unpack the design kit
deliverables, you must also unpack and install the processor RTL. The Verilog command files
that are located in directory
systems/cortex_m0_mcu/verilog/
assume that the processor RTL
files are stored in the
cores
directory. See Figure 1-1 on page 1-4. The directories are as follows:
•
cores/at510_cortexm0_r0p0_03rel2/logical/
for Cortex-M0. The path is specified in file
tbench_M0.vc
.
•
cores/at590_cortexm0p_r0p1/logical/
for Cortex-M0+. The path is specified in file
tbench_M0P.vc
. In addition, a number of components from the Cortex-M0+ integration kit
are also required. The integration kit is expected to be located in
cores/at590_cortexm0p_r0p1/integration_kit
.
If you store the processor RTL in another location you must also update the corresponding
Verilog command file.
You have the option to include the DMA-230 Micro DMA Controller in your simulation
environment. The DMA-230 is not included in the design kit, and you must license it separately.
The default location for the DMA-230 is in directory
logical/pl230_udma/logical/
. The Verilog
command files specify the location.
4.3.2 Modifying the rtl_sim/makefile
The makefile in the
rtl_sim
directory controls the following simulation operations:
• Compiling the RTL.
• Running the simulation in batch mode.
• Running the simulation in interactive mode.
You must specify several variables inside this makefile. Table 4-2 describes the variables.
Table 4-2 Makefile variables
Variable Descriptions
TESTNAME
Name of software test to be executed, for example,
hello
or
dhry
. This name must match the software directory
name inside the
systems/cortex_m0_mcu/testcodes/
directory.
TEST_LIST
List of tests available.
CPU_PRODUCT
The type of CPU core product. This can be
CORTEX_M0
or
CORTEX_M0PLUS
.
SIMULATOR
The Verilog simulator product. This can be one of the following:
mti Mentor Graphics Questasim.
vcs Synopsys VCS.
nc Cadence IUS/Incisive.
MTI_OPTIONS
Simulator tool specific command line options for Mentor Graphics Questasim.
Using the simulation environment
ARM DUI 0559D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 4-6
ID110117 Confidential
Note
• You do not have to edit all of these variables every time you run a different test. You can
override the makefile variables with command line options. For example, you can keep
the
TESTNAME
variable unchanged, and override it only when you run a simulation.
• See Run the simulation on page 4-10 for example test programs.
4.3.3 Modifying configuration files
The
systems/cortex_m0_mcu/verilog/cmsdk_mcu_defs.v
file specifies most of the configurations
of the example system.
For more information see Preprocessing definitions on page 2-11. If you do not have a DMA
Controller installed, you must comment out the line
`include ARM_CMSDK_INCLUDE_DMA
.
If you want to change the configuration of the processors, for example the number of IRQ lines,
you can edit the Verilog parameters in the
systems/cortex_m0_mcu/verilog/tb_cmsdk_mcu.v
file.
This propagates the settings to the processor instantiation. See Verilog parameters for
Cortex-M0 on page 2-13 and Verilog parameters for Cortex-M0+ on page 2-14.
Note
Ensure that the relevant
CMSIS
header file for your chosen processor agrees with the
configuration performed for the presence or not of the MPU and VTOR, as applicable. See
systems/cortex_m0_mcu/rtl_sim/makefile
for more information.
4.3.4 Enabling assertions checking
To enable assertions checking you must download the OVL Verilog library from Accellera, and
add the OVL library path in the include and search paths of your simulator setup using the
Verilog command file,
tbench_M0.vc
, or
tbench_M0P.vc
.
The Verilog command file also contains preprocessing definitions that control the inclusion of
OVL assertions in the example system. Define:
•
ARM_AHB_ASSERT_ON
to include AHB-Lite protocol checkers and OVL assertions in
AHB-Lite components.
•
ARM_APB_ASSERT_ON
to include APB protocol checkers and OVL assertions in APB
components.
•
ARM_IOP_ASSERT_ON
to include Cortex-M0+ I/O Port protocol checkers.
VCS_OPTIONS
Simulator tool specific command line options for Synopsys VCS.
NC_OPTIONS
Simulator tool specific command line options for Cadence IUS/Incisive.
BOOTLOADER
Name of boot loader software directory. This name must match the software directory name inside
systems/cortex_m0_mcu/testcodes/
directory.
SW_MAKE_OPTIONS
Options that pass to the software makefile.
Table 4-2 Makefile variables (continued)
Variable Descriptions

Using the simulation environment
ARM DUI 0559D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 4-7
ID110117 Confidential
4.3.5 Setting up tools
The simulation requires one of the supported Verilog simulators and tools, for compiling and
assembling the software code.

Using the simulation environment
ARM DUI 0559D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 4-8
ID110117 Confidential
4.4 Running a simulation in the simulation environment
This section describes how to run a simulation in the design toolkit. It contains the following
sections:
•Compile the RTL.
•Compile the test code.
•Run the simulation on page 4-10.
4.4.1 Compile the RTL
After you have configured the environment, you must compile the Verilog RTL in the
rtl_sim
directory. To do this, use the following command:
<installation directory>/systems/cortex_m0_mcu/rtl_sim> make compile
This starts the compilation process. The process uses a Verilog command file that the value of
parameter
CPU_PRODUCT
determines. The compile stage ignores the
TESTNAME
setting.
If an error occurs at this time, it might be caused by an incorrect RTL path setting. Check the
RTL path settings in the Verilog command file
tbench_M0.vc
or
tbench_M0P.vc
and the
CPU_PRODUCT
variable in the makefile located in the
rtl_sim
directory.
You can use the command line to override variables in the makefile. For example, the following
command line specifies that Modelsim is used for compilation:
<installation directory>/systems/cortex_m0_mcu/rtl_sim> make compile SIMULATOR=mti
4.4.2 Compile the test code
Before you compile the software code, you might want to change some of the settings for the
software compilation. Each software test has a corresponding subdirectory in the
systems/cortex_m0_mcu/testcodes
directory. Inside each of these directories is a makefile for
software compilation. The makefiles support Arm DS-5 and Arm GCC. Table 4-3 lists the
settings contained in the makefiles.
Table 4-3 Makefile settings
Variable Descriptions
TOOL_CHAIN
This can be set to one of the following:
ds5
Arm Development Suite.
gcc
Arm GCC.
keil
Keil Microcontroller Development Suite.
If you select
keil
, the make process pauses so you can manually continue the compilation from Keil MDK in the
Windows environment.
TESTNAME
Name of the software test. This must match the directory name.
CPU_TYPE
CPU type. The default setting is one of the following:
--cpu Cortex-M0
If the
TOOL_CHAIN
is
ds5
.
-mcpu=cortex-m0
If the
TOOL_CHAIN
is
gcc
.
COMPILE_BIGEND
Endianness. This can be set to one of the following:
0 Little-endian. This is the default value.
1 Big-endian.
Using the simulation environment
ARM DUI 0559D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 4-9
ID110117 Confidential
Note
A Keil-specific project file specifies the options for Keil MDK.
Use makefiles to compile your software. You can use one of the following makefiles:
•The makefile in testcodes/<testname>.
•The makefile in rtl_sim, software compilation only on page 4-10.
The makefile in testcodes/<testname>
Execute the following:
make all
This starts the software compilation process for DS-5 or Arm GCC.
You can override the variable in the makefile, for example, by executing the following:
make all TOOL_CHAIN=ds5 COMPILE_MICROLIB=1
This causes the program to compile using DS-5 with the MicroLIB option
enabled.
make clean
This cleans all intermediate files created during the compilation process invoked
by
make all
. If changes are made in code other than the testcode itself, for
example, in the CMSIS header files, running
make clean
ensures that these
changes are detected by a subsequent
make all
.
COMPILE_MICROLIB
Use only for the DS-5 option.
0 Normal C runtime library. This is the default value.
1 MicroLIB, a C runtime library optimized for microcontroller applications.
COMPILE_SMALLMUL
Use only for the DS-5 option.
0 Use single cycle multiplier. This is the default value.
1 Use the small multiplier that has a multiple clock cycle operation.
USER_DEFINE
A user defined C preprocessing macros. Set to
-DCORTEX_M0
or
-DCORTEX_M0P
for most test codes. This enables a
piece of test code to include the correct header for the processor when multiplex example systems share the test
code. You can add additional preprocessing macros for your applications.
SOFTWARE_DIR
Shared software directory
CMSIS_DIR
Base location of all CMSIS source code.
DEVICE_DIR
Device specific support files, for example, header files, and device driver files.
STARTUP_DIR
Startup code location.
ARM_CC_OPTIONS
Arm C Compiler options. Use only for the DS-5 option.
ARM_ASM_OPTIONS
Arm Assembler options. Use only for the DS-5 option.
ARM_LINK_OPTIONS
Arm Linker options. Use only for the DS-5 option.
GNU_CC_FLAGS
GCC compile option. Use only for the Arm GCC option.
LINKER_SCRIPT
Linker script location. Use only for the Arm GCC option.
Table 4-3 Makefile settings (continued)
Variable Descriptions
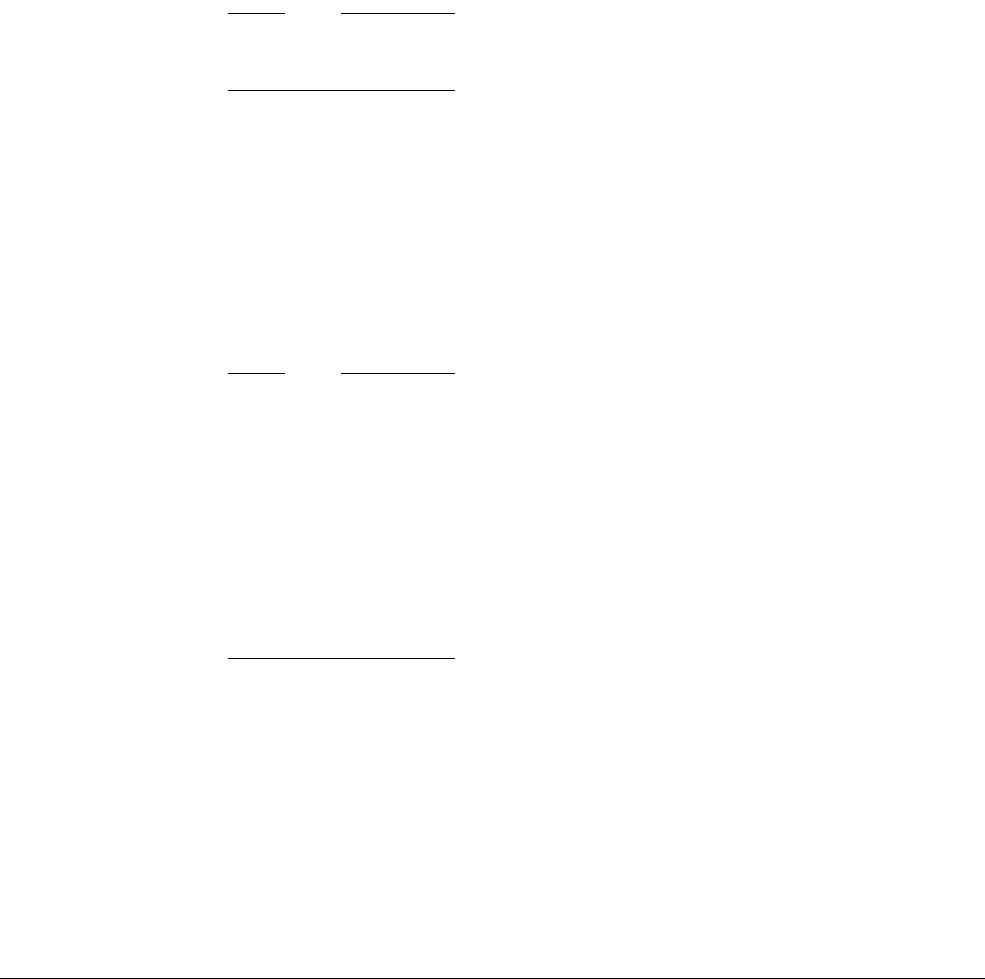
Using the simulation environment
ARM DUI 0559D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 4-10
ID110117 Confidential
The makefile in rtl_sim, software compilation only
For example, in
systems/cortex_m0_mcu/rtl_sim/
, you can execute:
make code
The makefile in the
rtl_sim
directory changes the current directory to the one
specified by the
TESTNAME
variable. By default there is no
TESTNAME
specified in the
makefile. If
make code
is executed without specifying a
TESTNAME
on the make
command line or by editing the makefile, a message is printed requesting a
TESTNAME
to be specified.
You can use the command line to specify the software test that you want to run by executing the
following:
make code TESTNAME=hello
This causes the
hello
test and the bootloader code to compile. The process then
copies the compiled code images to the
rtl_sim
directory.
Note
Use the
make code
option to debug compilation errors because this option does not invoke
simulation.
4.4.3 Run the simulation
After the RTL compilation, you can start the simulation in the
systems/cortex_m0_mcu/rtl_sim/
directory using one of the following commands:
make sim
For interactive simulation.
make run
For batch mode simulation.
The makefile in the
rtl_sim
directory automatically invokes the makefiles in the testcodes
directories. Figure 4-2 on page 4-11 shows the interaction of the makefiles.
Note
The
make run
and the
make sim
step automatically runs the
make code
operation. Therefore, if you
have previously compiled a test using
make code
with specific options, you must repeat the same
options when you invoke
make run
or
make sim
.
For example:
•
make code TESTNAME=sleep_demo TOOL_CHAIN=ds5 COMPILE_MICROLIB=1
•
make sim TESTNAME=sleep_demo TOOL_CHAIN=ds5 COMPILE_MICROLIB=1 SIMULATOR=vcs
If you do not do this, the software test might be recompiled without the previous configuration
settings. The command
make code
enables you to test that a program file compiles correctly. It
does not start the simulation.
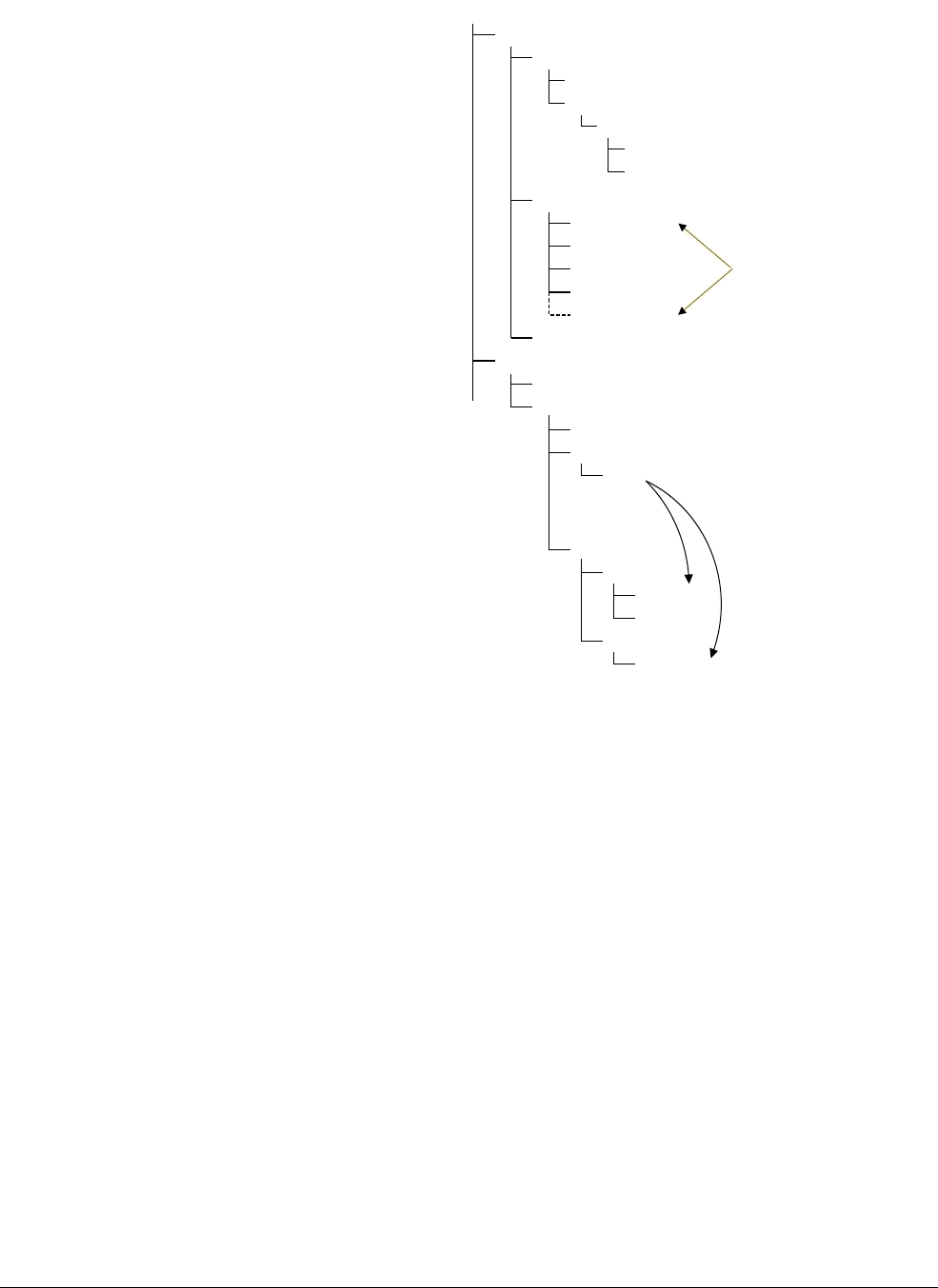
Using the simulation environment
ARM DUI 0559D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 4-11
ID110117 Confidential
Figure 4-2 Interaction of makefiles
The Debug tester software is precompiled. You have to only compile this software if you change
the processor configuration.
The software directory contains shared header files and shared test programs.
To compile the software and run a simulation, execute
make run TESTNAME=hello
in the
rtl_sim
directory:
• The makefile in the
rtl_sim
directory uses the makefile in the
bootloader
directory to
compile the boot loader code and copy the resulting image back to the
rtl_sim
directory.
• The makefile in the
rtl_sim
directory uses the makefile in the
hello
directory to compile
the hello world code and copy the resulting image back to the
rtl_sim
directory.
• The makefile in the
rtl_sim
directory starts the simulator.
If you set the software toolchain in the makefile to
keil
, this causes the make process to pause
and prompt you to compile your project in Keil MDK. You can resume the process by pressing
any key.
You can use command line options to override the makefile variables. For example:
•
make sim TESTNAME=sleep_demo SIMULATOR=vcs TOOL_CHAIN=ds5
The last action of the simulation writes the value
0x4
to UART2. When the
cmsdk_uart_capture
device captures this value, it triggers the simulation to stop.
<Installation directory/>
software/
common/
demos/
retarget/
bootloader/ Common software files
scripts/
systems/
other example systems/
cortex_m0_mcu/
verilog/
rtl_sim/
makefile
testcodes/
hello/
makefile
bootloader/
makefile
hello.c
validation/
cmsis/
CMSIS/
Device/
ARM/
CMSDK_CM0/
CMSDK_CM0plus/
debug_tester/

Using the simulation environment
ARM DUI 0559D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 4-12
ID110117 Confidential
For example, the
hello
test results in the following output for the Cortex-M0 processor:
# Time: 0 ps Iteration: 1 Instance: /tb_cmsdk_mcu/u_cmsdk_debug_tester/u_ram#
30160 ns UART: Hello world# 31580 ns UART: Test Ended# Break in NamedBeginStat
p_sim_end at ../verilog/cmsdk_uart_capture.v line 219# Stopped at
../verilog/cmsdk_uart_capture.v line 219# quit -f
The Verilog file
cmsdk_uart_capture.v
contains the text
Test Ended
that it displays before the
simulation stops.
To compile the testbench and run all the tests that the
TEST_LIST
variable specifies, execute the
following on the command line:
make all
You can use the command line to override several test parameters. For example, to specify the
VCS simulator execute the following:
make all SIMULATOR=vcs
Note
A warning appears when using Questasim with a Cortex-M0 based system because of the
following modules being referenced but uncompiled:
•
cm0p_32to16_dnsize
.
•
cmsdk_ahb_to_flash16
.
You can ignore this warning.

ARM DUI 0559D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 5-1
ID110117 Confidential
Chapter 5
Software examples
This chapter describes the example software tests and the device drivers. It contains the
following sections:
•Available simulation tests on page 5-2.
•Creating a new test on page 5-5.
•Example header files and device driver files on page 5-6.
•Retargeting on page 5-8.
•Example device driver software on page 5-9.
Software examples
ARM DUI 0559D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 5-2
ID110117 Confidential
5.1 Available simulation tests
Table 5-1 shows the example software tests that this design kit contains.
Table 5-1 Example software test list
TESTNAME Descriptions
hello
Simple test to display the
Hello world
message. It uses the retargeting action that redirects printf
to the UART output.
interrupt_demo
Demonstration of interrupt features.
sleep_demo
Demonstration of sleep features.
dhry
Simple Dhrystone test.
self_reset_demo
Demonstration of the self reset feature that uses the signal SYSRESETREQ.
dualtimer_demo
Demonstration of the APB Dual Timer.
watchdog_demo
Demonstration of the APB Watchdog.
rtx_demo
Demonstration of the Keil RTX OS.
gpio_tests
Tests the low latency AHB GPIO. Supports I/O GPIO.
timer_tests
Tests the simple APB timer.
uart_tests
Tests the simple APB UART.
default_slaves_tests
Tests the default slave activation. It accesses invalid memory locations.
bitband_tests
Tests the bitband wrapper.
debug_tests
aDebug connectivity test. You can only use this test with the full version of the Cortex-M0 or
Cortex-M0+, and if you configure the system to include the debug features.
dma_tests
Tests the DMA-230 connections. For more information, see
config_id.h
in the
generic
directory.
gpio_driver_tests
Simple test for the GPIO device driver functions.
timer_driver_tests
Simple test for the simple timer device driver functions.
uart_driver_tests
Simple test for the UART device driver functions.
apb_mux_tests
Simple test for the APB slave multiplexer.
memory_tests
Simple test for the system memory map.
romtable_tests
bChecks that it is possible for a debugger to autodetect the Cortex-M0 or Cortex-M0+ processor.
vtor_tests
cSimple test for the Vector Table Offset Register (VTOR).
mpu_tests
cSets up a number of MPU regions and demonstrates the generation of faults from the MPU.
user_tests
cSimple test for user and privilege modes in the Cortex-M0+ processor.
mtb_tests
cSimple test for the Micro Trace Buffer (MTB).
a. These tests use a
confg_id.h
file in the
cortex_m0_mcu/testcodes/generic
directory to configure the tests to run with the same
setup as the processor.
b. This test prints a failure message by default on the Cortex-M0+ processor because the first ROM table is the system ROM table,
which contains zero values by default. You must change the values in the system ROM table. See AHB system ROM table on
page 2-26. This test passes on Cortex-M0 because the first ROM table the test finds is the processor ROM table.
c. Only applicable in Cortex-M0+. This test is skipped in Cortex-M0.
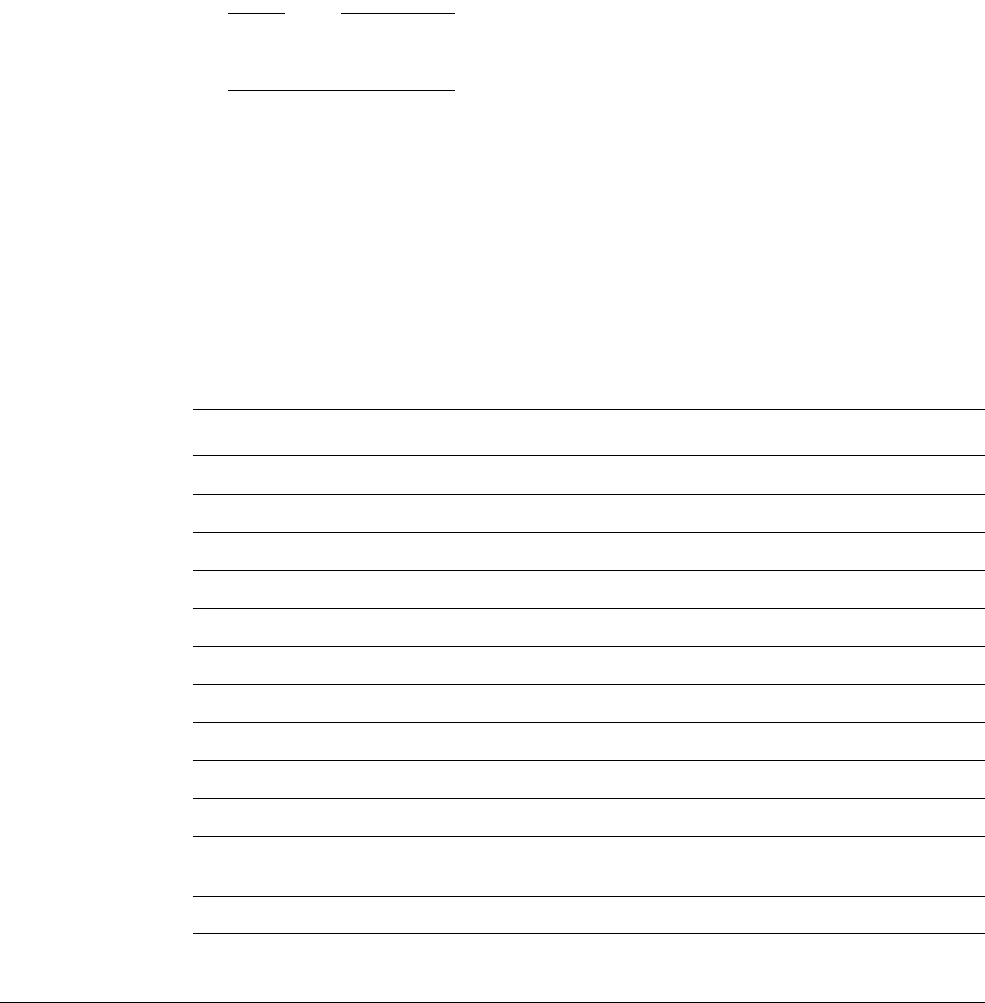
Software examples
ARM DUI 0559D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 5-3
ID110117 Confidential
debug_tests
is the only test that uses the debug tester.
Many of these tests are shared with multiple example systems that are only available in the full
version of the design kit. Therefore, the source code for these tests is located in the
software/common/
directory, see Files and directory structure on page 4-3. This directory also
contains shared header files and example device driver files. See Example header files and
device driver files on page 5-6.
Some of the tests are timing dependent and are written for a system with zero wait states. The
test might fail if you change the wait states of the system.
The RTX OS is a feature in the Keil MDK-ARM. The example software package includes a
precompiled hex file of the RTX demonstration test, therefore you can simulate this test without
a Keil MDK-ARM setup. For this test, the example software package includes the project files
that you can modify and recompile if you require.
Note
The precompiled RTX OS image is built for a little-endian system, and therefore does not work
if you choose a big-endian configuration.
The
config_id.h
header file in the
testcodes/generic
directory contains the defines for each of
the available functions in the Cortex-M0 or Cortex-M0+ processor. You must update this file to
reflect the configuration of the system so that the tests pass correctly. For example, if the MPU
is enabled in the Cortex-M0+ processor, set
EXPECTED_MPU
to
8
.
5.1.1 Generic header file for tests
In the same way that you can use the parameters in the RTL to configure the hardware, there is
a header file for the tests,
testcodes/generic/config_id.h
, which includes defines that must
match the hardware so the tests run correctly. Table 5-2 shows the defines.
Table 5-2 Defines for tests
Define Description
EXPECTED_BE
Set to 1 for big endian and 0 for little endian.
EXPECTED_BKPT
Shows the number of breakpoints, 0,2, or 4.
EXPECTED_DBG
Set to 1 when the debug is enabled.
EXPECTED_NUMIRQ
Provides the number of interrupts, up to 32.
EXPECTED_SMUL
Set to 1 when the small multiplier is selected, otherwise the fast multiplier is present.
EXPECTED_SYST
Set to 1 when the SysTick extension is selected.
EXPECTED_WPT
Provides the number of watchpoints, 0, 1, or 2.
EXPECTED_JTAGnSW
Set 1 for JTAG and 0 for Serial Wire.
EXPECTED_IOP
Set to 1 when the I/O Port interface is present. Only applicable for Cortex-M0+.
EXPECTED_MPU
Set to the number of MPU regions, that is, 0 or 8. Only applicable for Cortex-M0+.
EXPECTED_USER
Set to 1 when user and privilege mode is available, otherwise only privilege mode is
present. Only applicable for Cortex-M0+.
EXPECTED_VTOR
Set 1 when there is VTOR in the system. Only applicable for Cortex-M0+.
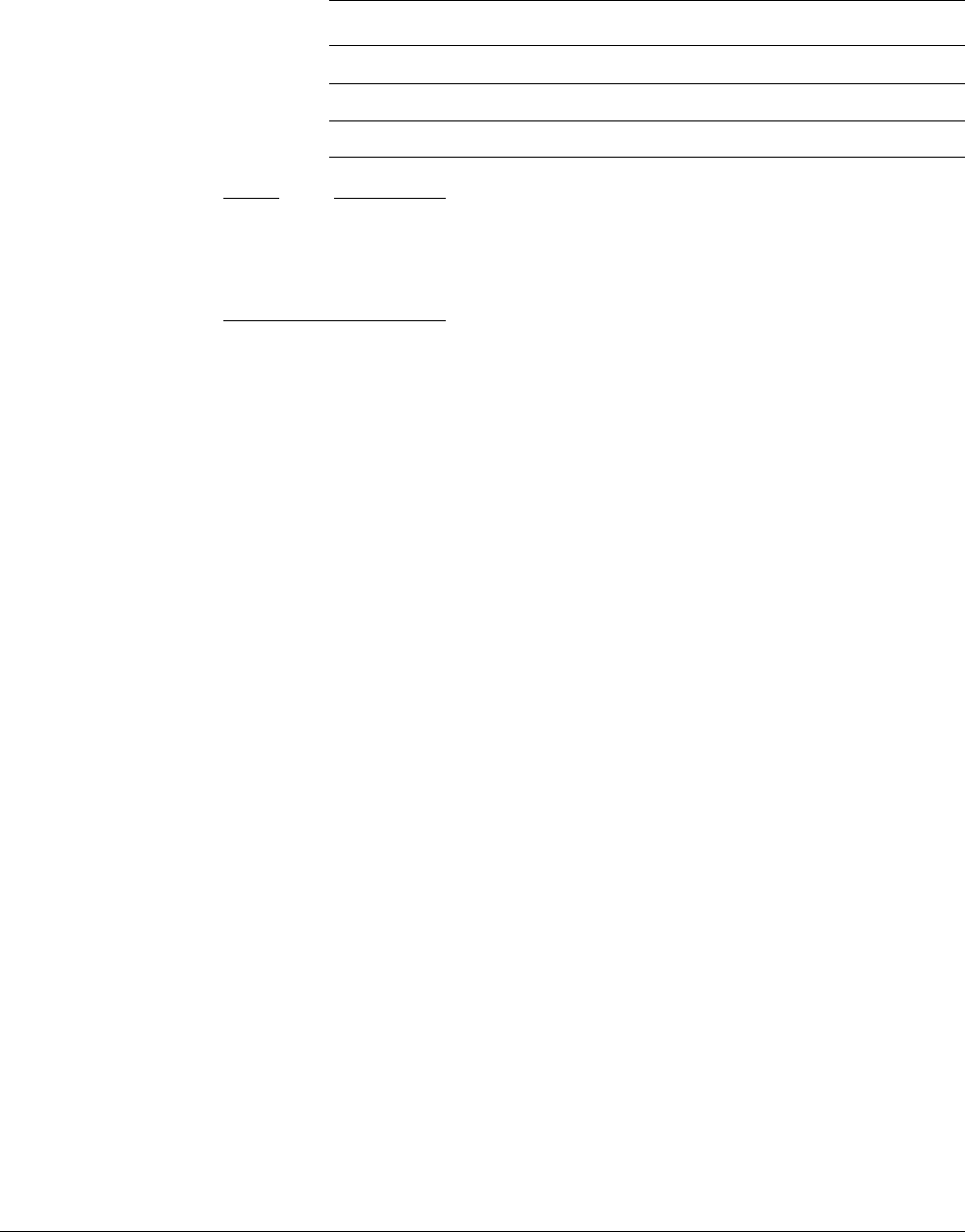
Software examples
ARM DUI 0559D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 5-4
ID110117 Confidential
For the Cortex-M0+, you can select the MTB to perform instruction trace. Table 5-3 shows the
defines.
Note
When the MTB is included, that is,
EXPECTED_MTB = 1
, the RAM that is used for the data accesses
is shared with the MTB. If you set the address width to be smaller than the default, that is,
EXPECTED_MTB_AWIDTH = 16
, the addresses that some tests use to write data to will alias to lower
addresses, therefore some tests do not work with the smaller memory.
Table 5-3 Defines for MTB tests
Define Description
EXPECTED_MTB
Expected CoreSight MTB-M0+ configuration, 0-1
EXPECTED_MTB_BASEADDR
Expected CoreSight MTB-M0+ BASEADDR,
0
-
0xFFFFFFFF
EXPECTED_MTB_AWIDTH
Expected CoreSight MTB-M0+ address width, 5-32

Software examples
ARM DUI 0559D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 5-5
ID110117 Confidential
5.2 Creating a new test
You can add new tests to the
testcodes
directory. Use the hello test as a guide to the format you
can use. For example, you can use the following process to create a new test:
1. Create a new directory in the
testcodes/
directory. For example:
a.
cd <installation_directory>/systems/cortex_m0_mcu/testcodes
b.
mkdir mytest
2. Copy the files that are located in the
hello/
directory to your new test directory, and then
rename the test file. For example:
a.
cd mytest
b.
cp ../hello/* .
c.
mv hello.c mytest.c
3. Edit the makefile to rename
hello.c
to
mytest.c
4. Ensure that the output hex file has the same name as the directory name, for example
mytest.hex
. This enables the
makefile
in
rtl_sim/
directory to copy the hex file to the
rtl_sim/
directory before the simulation starts.
5. If required, you can add the name of your new test to the
TEST_LIST
variable in the
makefile
located in the
rtl_sim/
directory.
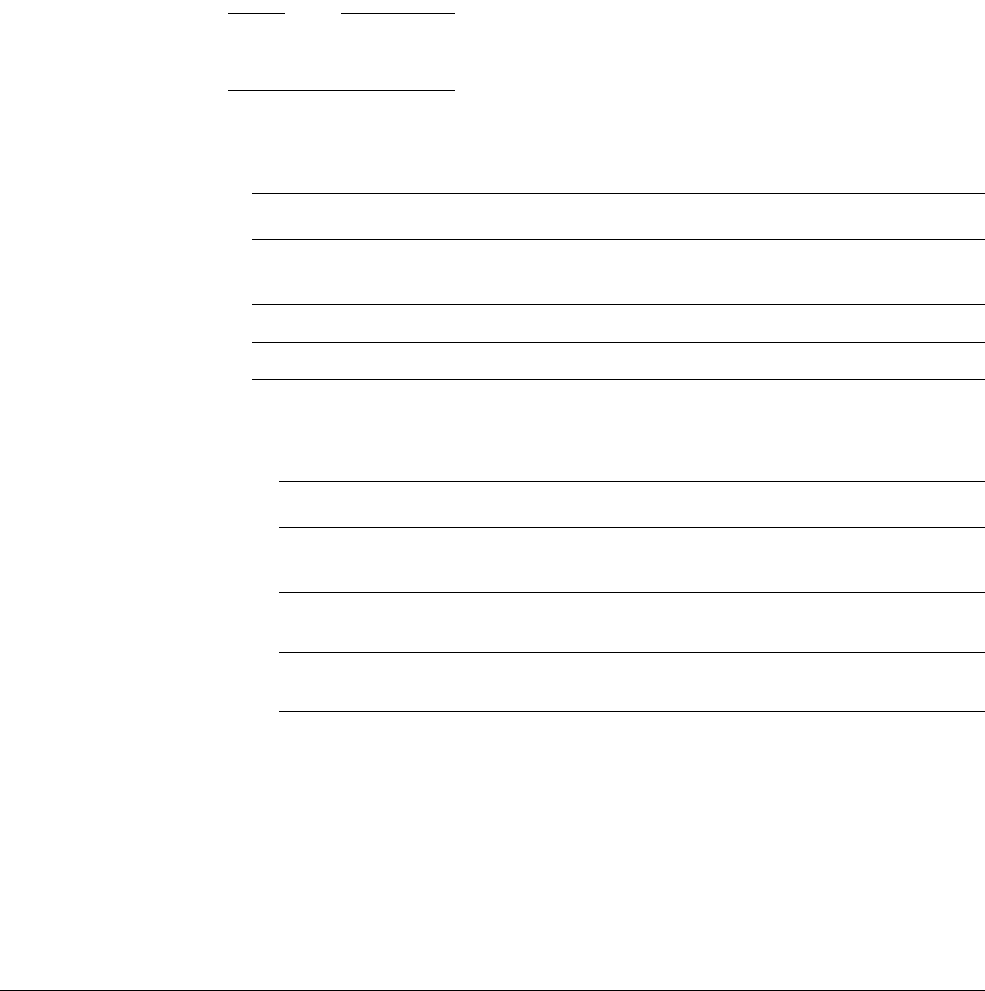
Software examples
ARM DUI 0559D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 5-6
ID110117 Confidential
5.3 Example header files and device driver files
The example software uses header files that are based on the Cortex Microcontroller Software
Interface Standard (CMSIS). The example software includes the following types of files:
• Generic Cortex-M0 and Cortex-M0+ processor header files, located in directory
software/cmsis/CMSIS/Include/
.
• Device-specific header files, located in directory
software/cmsis/Device/ARM/CMSDK_CM0/
or
software/cmsis/Device/ARM/CMSDK_CM0plus/
.
• Device-specific startup codes, located in directory
cmsis/Device/ARM/CMSDK_CM0/Source
/
or
cmsis/Device/ARM/CMSDK_CM0plus/Source/
.
• Device-specific example device drivers, located in directory
cmsis/Device/ARM/CMSDK_CM0/
or
cmsis/Device/ARM/CMSDK_CM0plus/
.
Note
You must update to the latest version of the CMSIS-Core files when preparing your own CMSIS
software packages. See Arm CMSIS-Core
http://www.arm.com/cmsis
.
Table 5-4 shows the generic Cortex-M0 and Cortex-M0+ processor support files.
Table 5-5 shows the device-specific header files.
Table 5-4 Generic Cortex-M0 and Cortex-M0+ processor support files
Filename Descriptions
core_cm0.h
core_cm0plus.h
CMSIS 3.20 compatible header file for processor peripheral registers definitions.
core_cmInstr.h
CMSIS 3.20 compatible header file for accessing special instructions.
core_cmFunc.h
CMSIS 3.20 compatible header file for accessing special registers.
Table 5-5 Device-specific header files
Filename Descriptions
CMSDK_CM0.h
CMSDK_CM0plus.h
CMSIS compatible device header file including register definitions
system_CMSDK_CM0.h
or
system_CMSDK_CM0plus.h
CMSIS compatible header file for system functions
system_CMSDK_CM0.c
or
system_CMSDK_CM0plus.c
CMSIS compatible program file for system functions
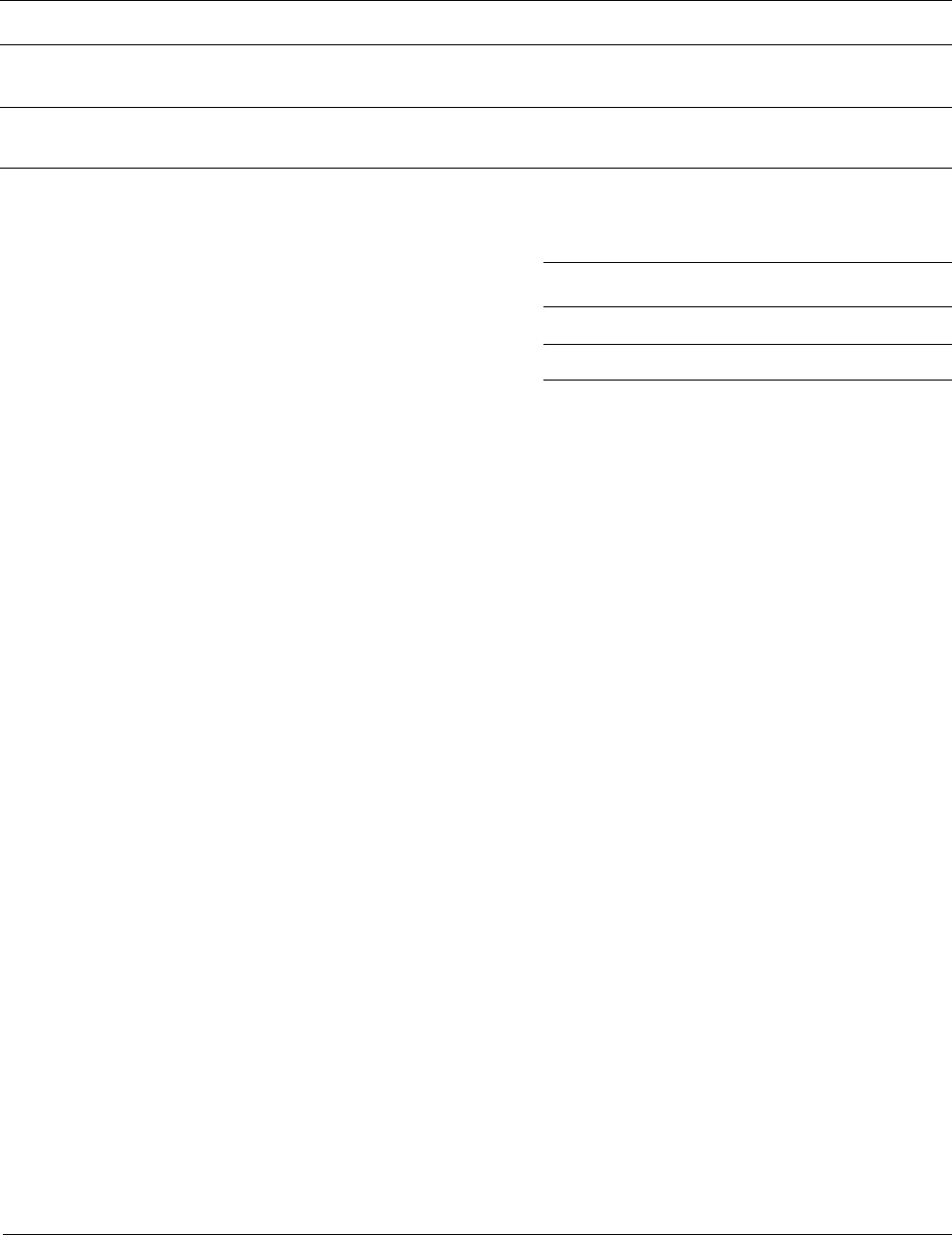
Software examples
ARM DUI 0559D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 5-7
ID110117 Confidential
Table 5-6 shows the device-specific startup codes.
Table 5-7 shows the device-specific example device drivers.
You can use the
config_id.h
file in the
testcodes/generic
directory to configure the test
switches to run differently, depending on whether USER or MPU is present.
To use these header files, you only have to include the device-specific header file
CMSDK_CM0.h
or
CMSDK_CM0plus.h
. This file imports all the required header files. Because some of the shared
program files in the
software/common
directory also support different types of processor, these
programs include the following header code:
#ifdef CORTEX_M0#include "CMSDK_CM0.h"#endif#ifdef CORTEX_M0PLUS#include
"CMSDK_CM0plus.h"#endif
The makefile in directory
systems/cortex_m0_mcu/testcodes/<testname>
contains the
USER_DEFINE
variable that defines the C preprocessing directive
CORTEX_M0
or
CORTEX_M0PLUS
. This
ensures that the simulation uses the correct version of the header file.
Table 5-6 Device-specific startup codes
Filename Descriptions
cmsis/Device/ARM/CMSDK_CM0/Source/ARM/startup_CMSDK_CM0.s
cmsis/Device/ARM/CMSDK_CM0plus/Source/ARM/startup_CMSDK_CM0plus.s
CMSIS compatible startup code for Arm DS-5 or Keil MDK
cmsis/Device/ARM/CMSDK_CM0/Source/GCC/startup_CMSDK_CM0.s
cmsis/Device/ARM/CMSDK_CM0plus/Source/GCC/startup_CMSDK_CM0plus.s
CMSIS compatible startup code for Arm GCC
Table 5-7 Device-specific example device drivers
Filename Descriptions
CMSDK_driver.h
Header file for including driver code
CMSDK_driver.c
Driver code implementation
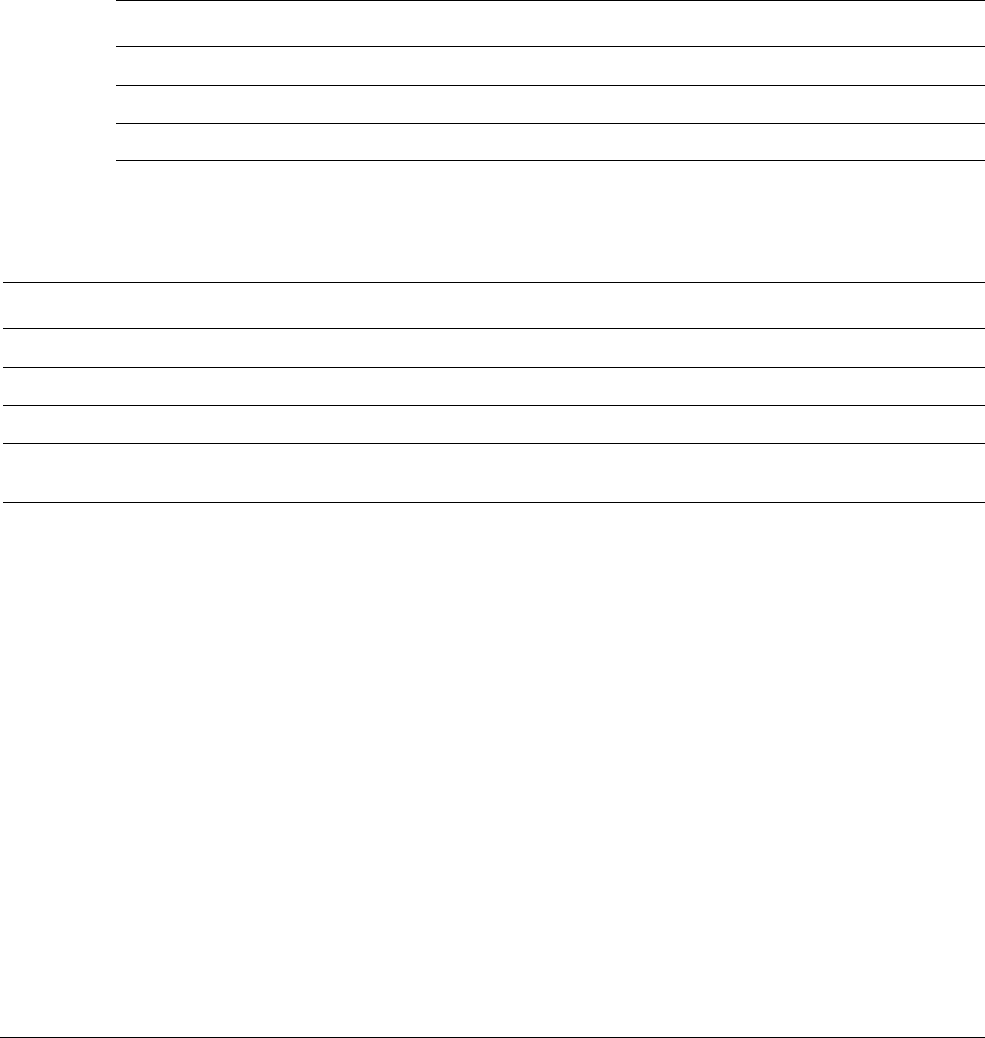
Software examples
ARM DUI 0559D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 5-8
ID110117 Confidential
5.4 Retargeting
Several test programs use the
printf
and
puts
functions to display text messages during the
simulation. The retargeting code performs this function. It redirects text output to UART2. The
tb_uart_capture
device in the testbench captures the text and outputs it to the simulation console
during the simulation.
For the Arm DS-5 and Keil MDK environments, the retarget function for text output is
fputc
.
The retarget function for Arm GCC, and most gcc-based C compilers, is the
_write_r
function.
These functions are located in file
software/common/retarget/retarget.c
.
Table 5-8 shows the files that are required for retargeting support.
The UART support files are
uart_stdout.c
and
uart_stdout.h
. Table 5-9 shows the UART
functions.
Table 5-8 Retargeting support files
Files Descriptions
software/common/retarget/retarget.c
Retargeting implementation for Arm DS-5, Keil MDK, and Arm GCC
software/common/retarget/uart_stdout.h
Header for UART functions used by
retarget.c
software/common/retarget/uart_stdout.c
Implementation of UART functions
Table 5-9 Support file functions
Function Descriptions
void UartStdOutInit(void)
Initialize UART2 and GPIO1 (for pin multiplexing) for text message output.
char UartPutc(unsigned char my_ch)
Output a single character to UART 2.
char UartGetc(void)
Read a character from UART.
char UartEndSimulation(void)
Terminate the simulation by sending value
0x4
to UART 2. When
tb_uart_capture
receives
this data, it stops the simulation.
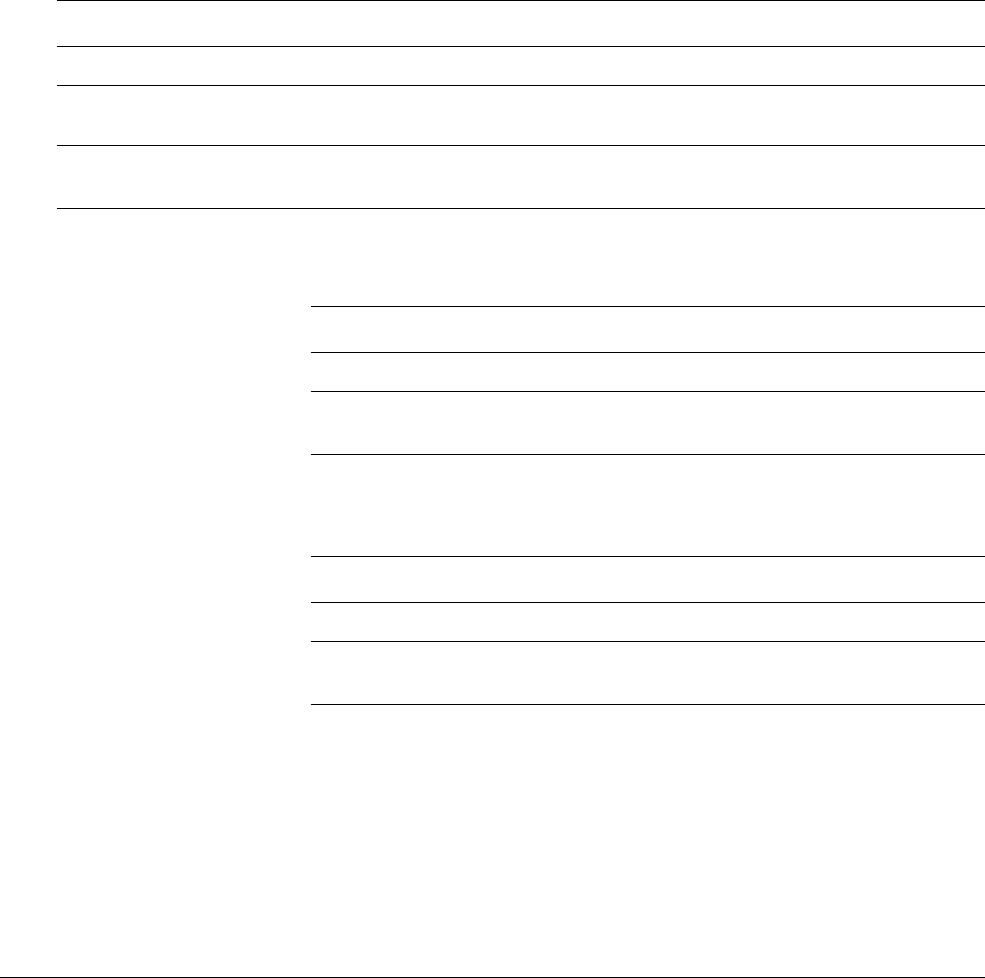
Software examples
ARM DUI 0559D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 5-9
ID110117 Confidential
5.5 Example device driver software
The design kit contains several driver functions for:
• The simple APB timer.
• The APB UART.
•The AHB GPIO.
The files
CMSDK_driver.c
and
CMSDK_driver.h
contain these functions.
5.5.1 UART driver functions
Table 5-10 to Table 5-21 on page 5-11 describe the UART driver functions.
Table 5-10 shows the initialize UART function.
Table 5-11 shows the get UART RX buffer full status function.
Table 5-12 shows the get UART TX buffer full status function.
Table 5-10 Initialize UART function
Description Initialize UART
Process Initialize UART. Detect error status and return 1 if any error is detected.
Function
uint32_t CMSDK_uart_init(CMSDK_UART_TypeDef *CMSDK_UART, uint32_t divider, uint32_t_tx_en,
uint32_t_rx_en, uint32_t tx_irq_en, uint32_t rx_irq_en, uint32_t tx_ovrirq_en, uint32_t rx_ovrirq_en,)
Return 0 Success.
1 Error flag.
Table 5-11 Get UART RX buffer full status function
Description Get UART RX buffer full status
Function
uint32_t CMSDK_uart_GetRxBufferFull(CMSDK_UART_TypeDef *CMSDK_UART)
.
Return 0 Receive buffer empty.
1 Receive buffer full.
Table 5-12 Get UART TX buffer full status function
Description Get UART TX buffer full status
Function
uint32_t CMSDK_uart_GetTxBufferFull(CMSDK_UART_TypeDef *CMSDK_UART).
Return 0 Transmit buffer empty.
1 Transmit buffer full.
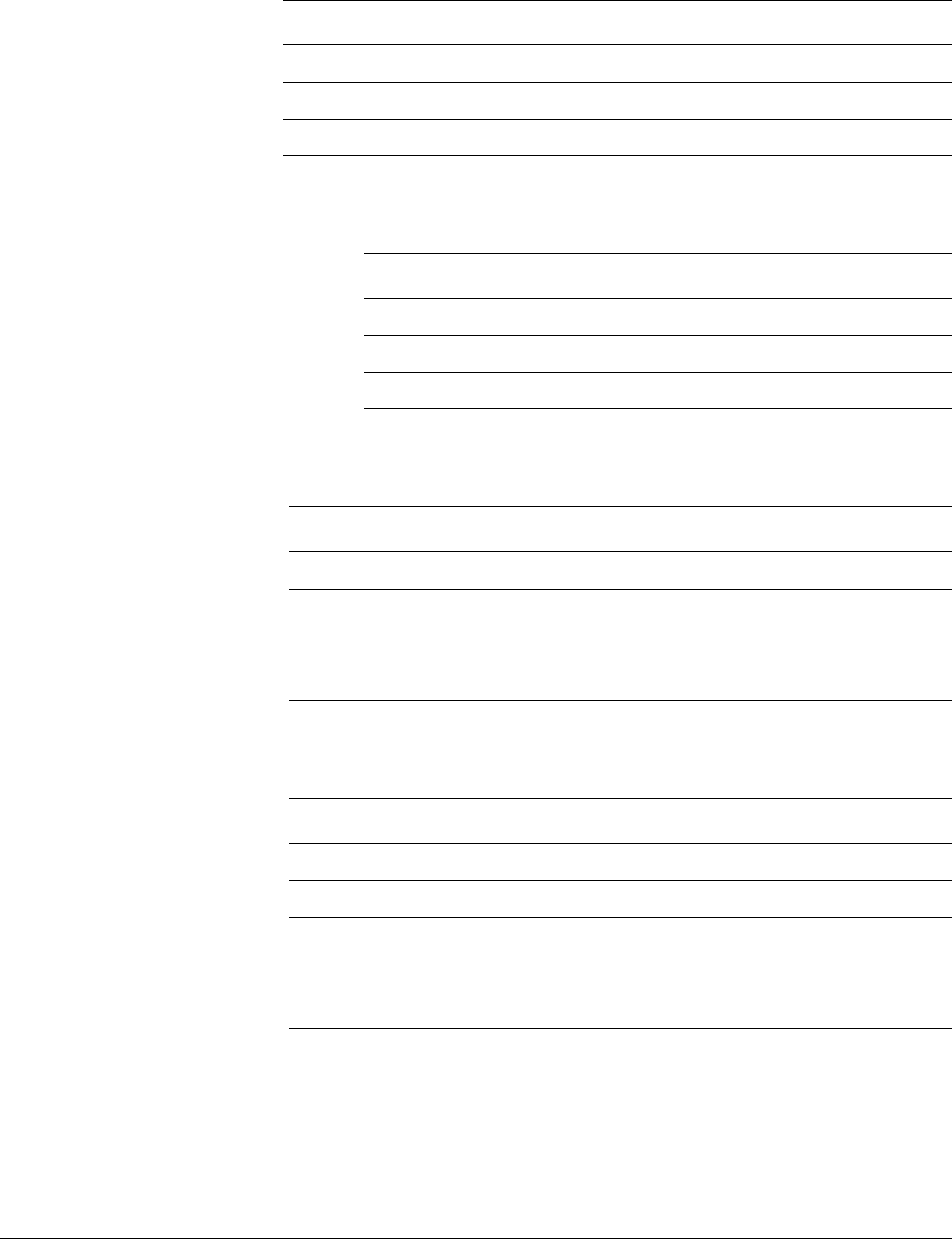
Software examples
ARM DUI 0559D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 5-10
ID110117 Confidential
Table 5-13 shows the send a character to UART TX buffer function.
Table 5-14 shows the receive a character from UART RX buffer function.
Table 5-15 shows the get UART overrun status function.
Table 5-16 shows the clear UART overrun status function.
Table 5-13 Send a character to UART TX buffer function
Description Send a character to UART TX buffer
Process If TX buffer full, wait. Send a character to TX buffer.
Function
void CMSDK_uart_SendChar(CMSDK_UART_TypeDef *CMSDK_UART, char txchar)
.
Return None.
Table 5-14 Receive a character from UART RX buffer function
Description Receive a character from UART RX buffer
Process If RX buffer empty, wait. Receive a character from RX buffer.
Function
char CMSDK_uart_ReceiveChar(CMSDK_UART_TypeDef *CMSDK_UART)
.
Return Received character.
Table 5-15 Get UART overrun status function
Description Get UART overrun status
Function
uint32_t CMSDK_uart_GetOverrunStatus(CMSDK_UART_TypeDef *CMSDK_UART)
.
Return 0 No overrun.
1 Transmit overrun.
2 Receive overrun.
3 Both transmit and receive overrun.
Table 5-16 Clear UART overrun status function
Description Clear UART overrun status
Process Clear overrun status. Read overrun status again and return new status.
Function
uint32_t CMSDK_uart_GetOverrunStatus(CMSDK_UART_TypeDef *CMSDK_UART)
.
Return 0 No overrun.
1 Transmit overrun.
2 Receive overrun.
3 Both transmit and receive overrun.
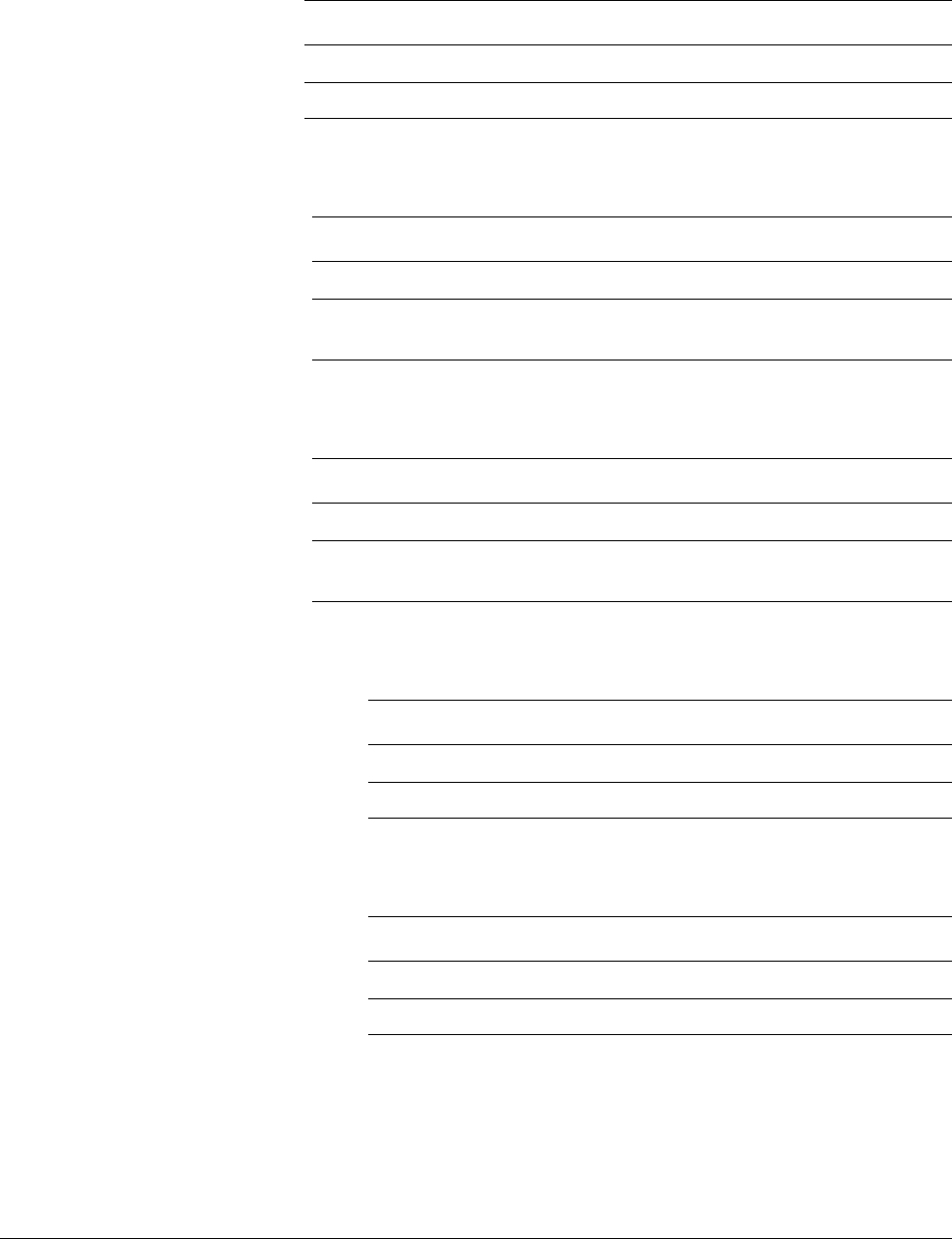
Software examples
ARM DUI 0559D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 5-11
ID110117 Confidential
Table 5-17 shows the get UART baud rate divider value function.
Table 5-18 shows the get UART transmit IRQ status function.
Table 5-19 shows the get UART receive IRQ status function.
Table 5-20 shows the UART TX interrupt clear function.
Table 5-21 shows the UART RX interrupt clear function.
5.5.2 Timer driver functions
Table 5-22 on page 5-12 to Table 5-33 on page 5-14 describe the timer driver functions.
Table 5-17 Get UART baud rate divider value function
Description Get UART baud rate divider value
Function
uint32_t CMSDK_uart_GetBaudDivider(CMSDK_UART_TypeDef *CMSDK_UART)
.
Return Baud rate divider value.
Table 5-18 Get UART transmit IRQ status function
Description Get UART transmit IRQ status
Function
uint32_t CMSDK_uart_GetTxIRQStatus(CMSDK_UART_TypeDef *CMSDK_UART)
.
Return 0 IRQ request inactive.
1 IRQ request active.
Table 5-19 Get UART receive IRQ status function
Description Get UART receive IRQ status
Function
uint32_t CMSDK_uart_GetRxIRQStatus(CMSDK_UART_TypeDef *CMSDK_UART)
.
Return 0 IRQ request inactive.
1 IRQ request active.
Table 5-20 UART TX interrupt clear function
Description UART TX interrupt clear
Function
void CMSDK_uart_ClearTxIRQ(CMSDK_UART_TypeDef *CMSDK_UART)
.
Return None.
Table 5-21 UART RX interrupt clear function
Description UART RX interrupt clear
Function
void CMSDK_uart_ClearRxIRQ(CMSDK_UART_TypeDef *CMSDK_UART)
.
Return None.
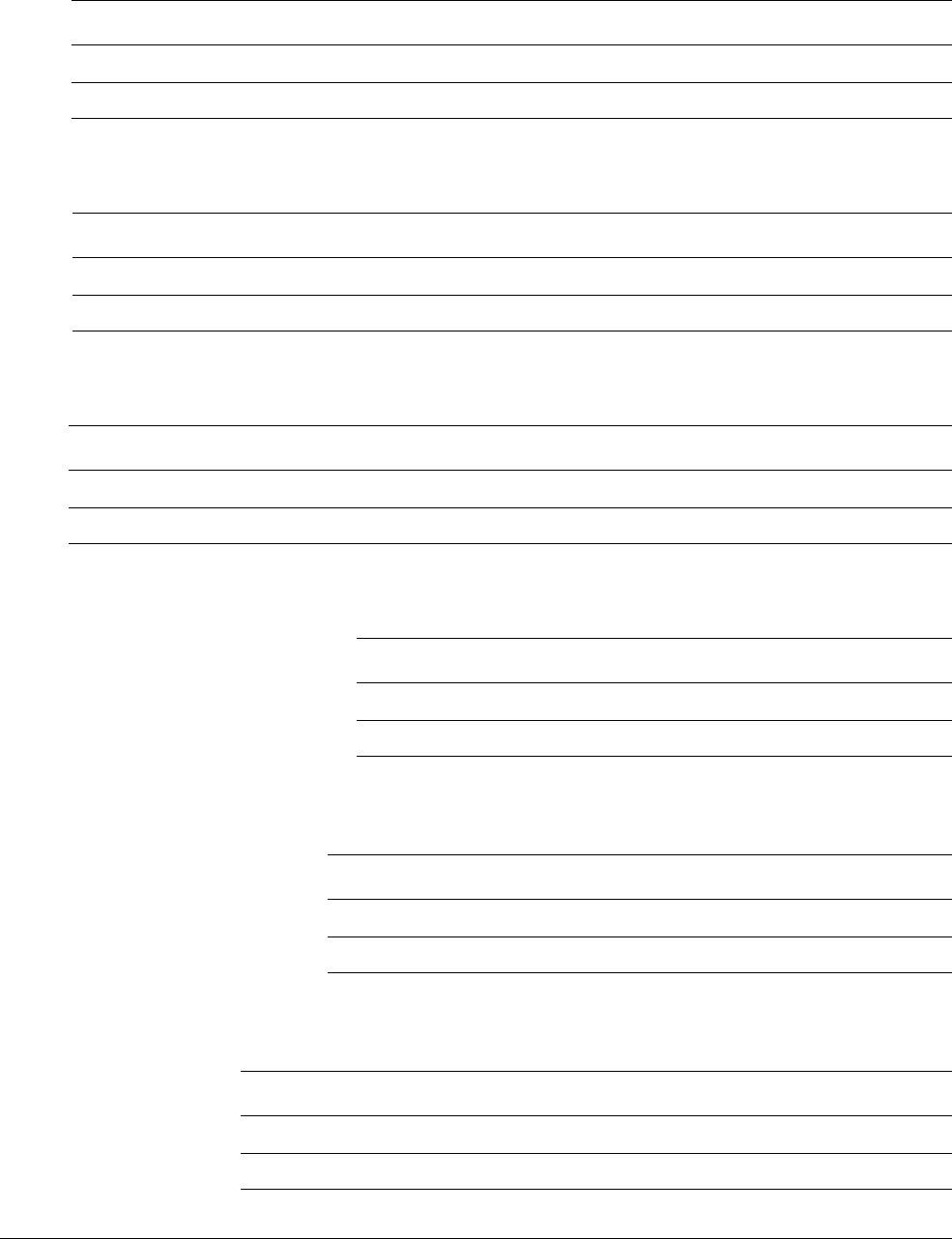
Software examples
ARM DUI 0559D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 5-12
ID110117 Confidential
Table 5-22 shows the set timer for multi-shoot mode with internal clock function.
Table 5-23 shows the set timer for multi-shoot mode with external clock function.
Table 5-24 shows the set timer for multi-shoot mode with external input as enable function.
Table 5-25 shows the timer interrupt clear function.
Table 5-26 shows the get timer reload value function.
Table 5-27 shows the timer reload value function.
Table 5-22 Set Timer for multi-shoot mode with internal clock function
Description Set Timer for multi-shoot mode with internal clock
Function
void CMSDK_timer_Init_IntClock(CMSDK_TIMER_TypeDef *CMSDK_TIMER, uint32_t reload, uint32_t irq_en)
.
Return None.
Table 5-23 Set Timer for multi-shoot mode with external clock function
Description Set Timer for multi-shoot mode with external clock
Function
void CMSDK_timer_Init_ExtClock(CMSDK_TIMER_TypeDef *CMSDK_TIMER, uint32_t reload, uint32_t irq_en
).
Return None.
Table 5-24 Set Timer for multi-shoot mode with external input as enable function
Description Set Timer for multi-shoot mode with external input as enable
Function
void CMSDK_timer_Init_ExtEnable(CMSDK_TIMER_TypeDef *CMSDK_TIMER, uint32_t reload, uint32_t irq_en)
.
Return None.
Table 5-25 Timer interrupt clear function
Description Timer interrupt clear
Function
void CMSDK_timer_ClearIRQ(CMSDK_TIMER_TypeDef *CMSDK_TIMER).
Return None.
Table 5-26 Get Timer reload value function
Description Get Timer reload value
Function
uint32_t CMSDK_timer_GetReload(CMSDK_TIMER_TypeDef *CMSDK_TIMER)
.
Return Reload register value.
Table 5-27 Set Timer reload value function
Description Set Timer reload value
Function
void CMSDK_timer_SetReload(CMSDK_TIMER_TypeDef *CMSDK_TIMER, uint_32 value)
.
Return None.
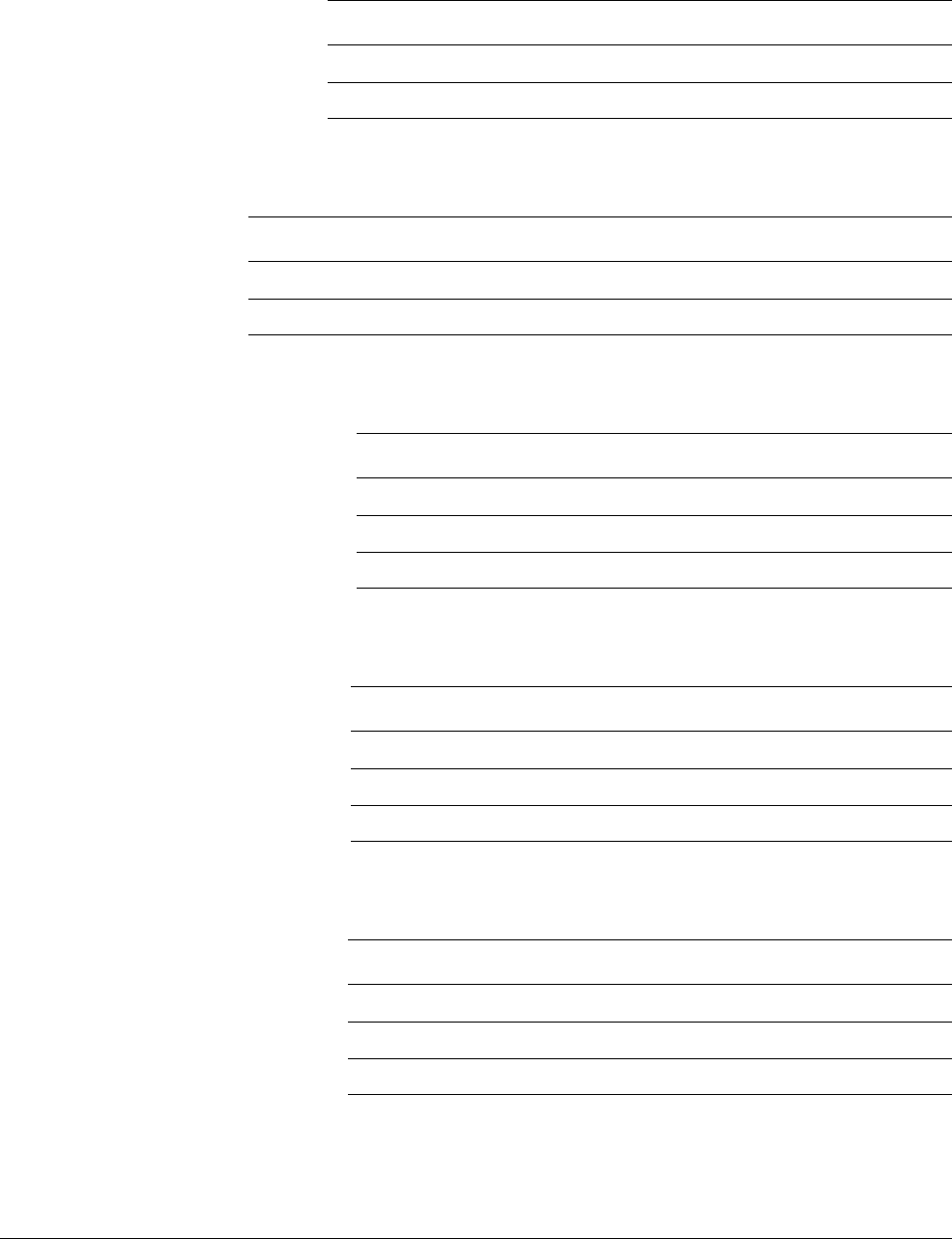
Software examples
ARM DUI 0559D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 5-13
ID110117 Confidential
Table 5-28 shows the get timer current value function.
Table 5-29 shows the set timer current value function.
Table 5-30 shows the stop timer function.
Table 5-31 shows the start timer function.
Table 5-32 shows the enable timer interrupt function.
Table 5-28 Get Timer current value function
Description Get Timer current value
Function
uint32_t CMSDK_timer_GetValue(CMSDK_TIMER_TypeDef *CMSDK_TIMER).
Return Timer current value.
Table 5-29 Set Timer current value function
Description Set Timer current value
Function
void CMSDK_timer_SetValue(CMSDK_TIMER_TypeDef *CMSDK_TIMER, uint_32 value)
.
Return None.
Table 5-30 Stop Timer function
Description Stop Timer
Process Clear timer enable bit to 0.
Function
void CMSDK_timer_StopTimer(CMSDK_TIMER_TypeDef *CMSDK_TIMER)
.
Return None.
Table 5-31 Start Timer function
Description Start Timer
Process Set timer enable bit to 1.
Function
void CMSDK_timer_StartTimer(CMSDK_TIMER_TypeDef *CMSDK_TIMER
).
Return None.
Table 5-32 Enable Timer interrupt function
Description Enable Timer interrupt
Process Clear timer IRQ enable bit to 0.
Function
void CMSDK_timer_EnableIRQ(CMSDK_TIMER_TypeDef *CMSDK_TIMER).
Return None.
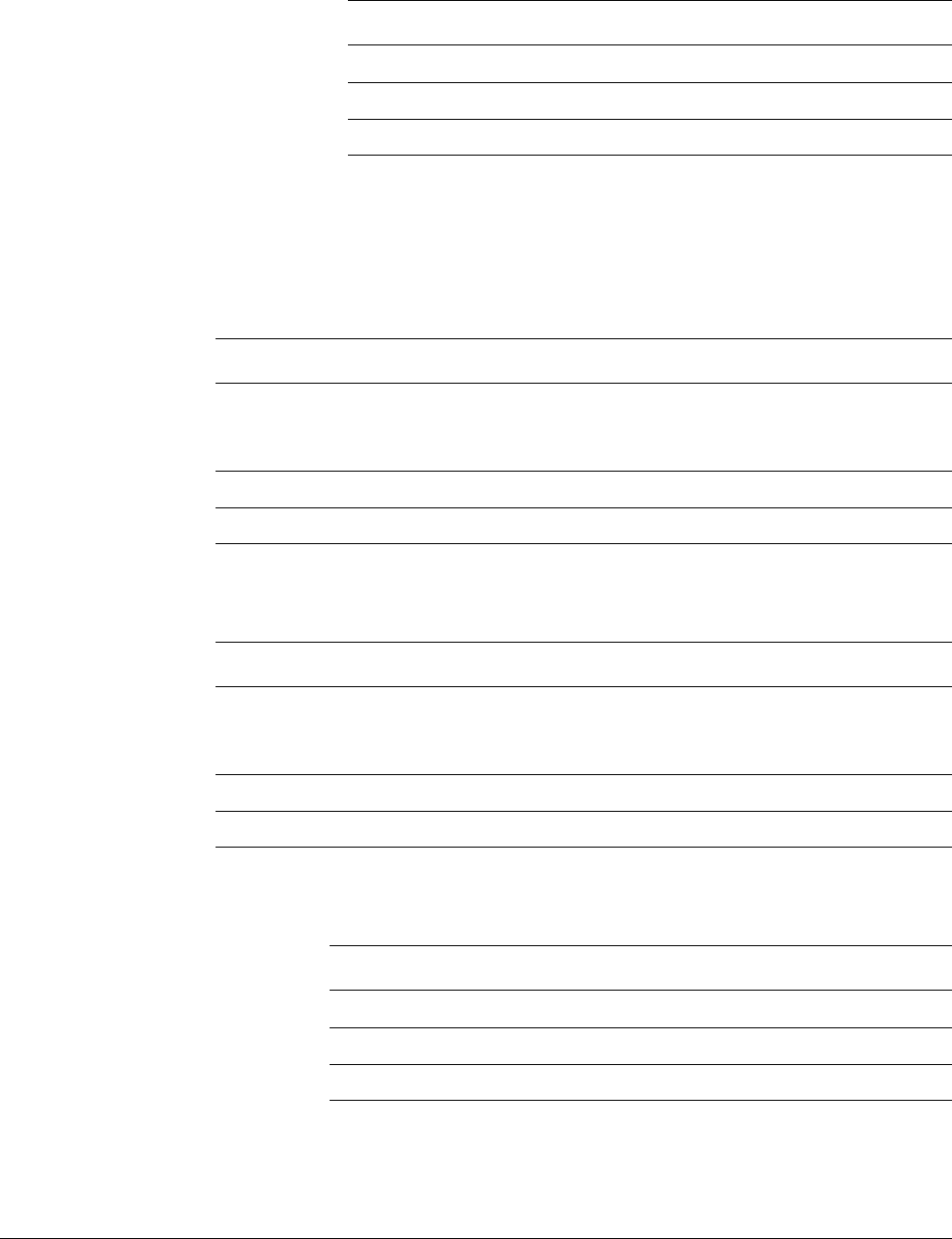
Software examples
ARM DUI 0559D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 5-14
ID110117 Confidential
Table 5-33 shows the disable timer interrupt function.
5.5.3 GPIO driver functions
Table 5-34 to Table 5-47 on page 5-18 describe the GPIO driver functions.
Table 5-34 shows the set GPIO output enable function.
Table 5-35 shows the clear GPIO output enable function.
Table 5-36 shows the get GPIO output enable function.
Table 5-33 Disable Timer interrupt function
Description Disable Timer interrupt
Process Clear timer IRQ enable bit to 0.
Function
void CMSDK_timer_DisableIRQ(CMSDK_TIMER_TypeDef *CMSDK_TIMER)
.
Return None.
Table 5-34 Set GPIO output enable function
Description Set GPIO output enable
Process Read current Output Enable setting.
Modify value (OR).
Write back Output Enable.
Function
void CMSDK_gpio_SetOutEnable(CMSDK_GPIO_TypeDef *CMSDK_GPIO, uint_32 outenable)
.
Return None.
Table 5-35 Clear GPIO output enable function
Description Clear GPIO output enable
Process Read current Output Enable setting.
Modify value (AND NOT).
Write back Output Enable.
Function
void CMSDK_gpio_ClrOutEnable(CMSDK_GPIO_TypeDef *CMSDK_GPIO, uint_32 outenable)
.
Return None.
Table 5-36 Get GPIO output enable function
Description Get GPIO output enable
Process Read current Output Enable setting.
Function
uint_32 CMSDK_gpio_GetOutEnable(CMSDK_GPIO_TypeDef *CMSDK_GPIO)
.
Return Current settings of output enable.
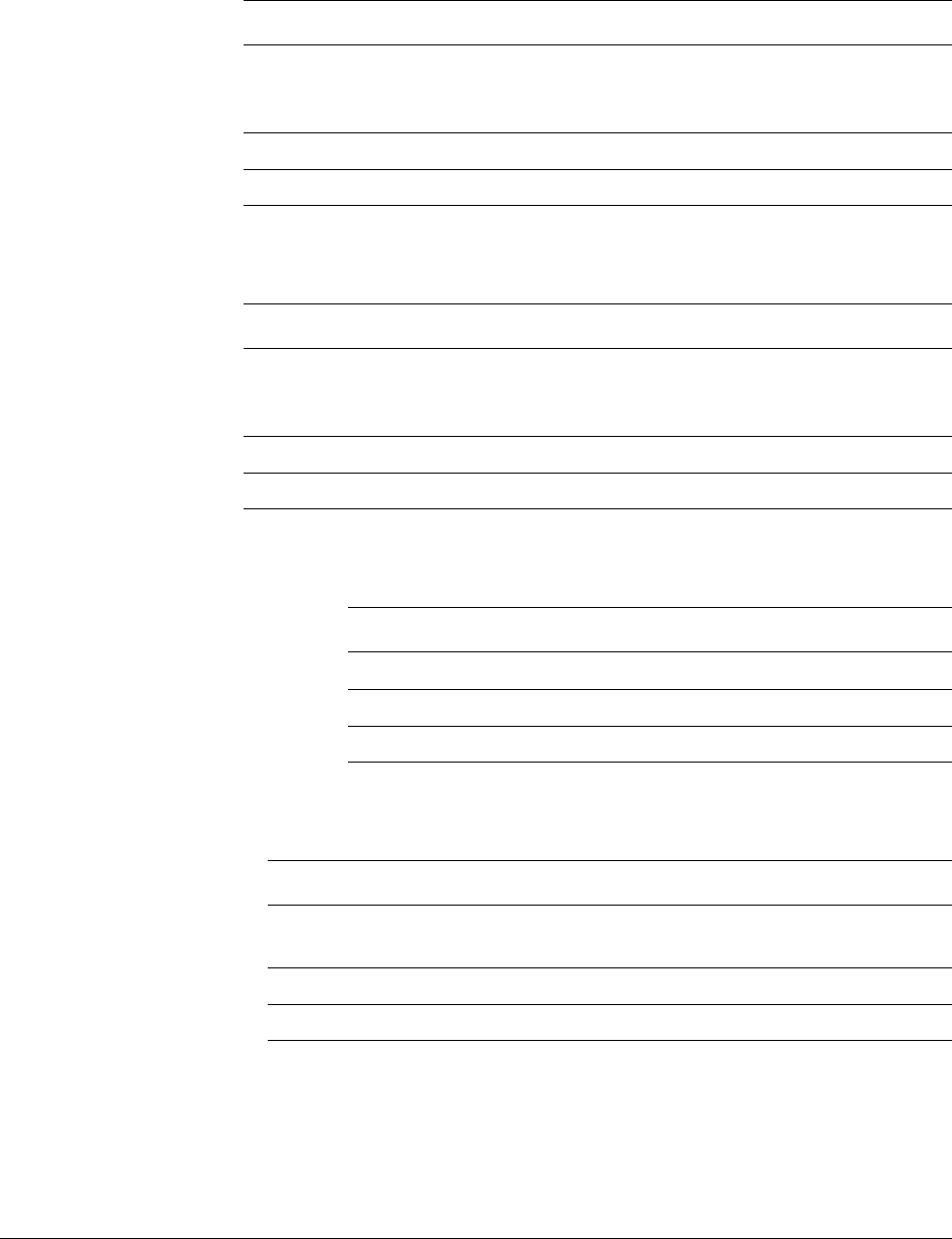
Software examples
ARM DUI 0559D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 5-15
ID110117 Confidential
Table 5-37 shows the set GPIO alternative function enable function.
Table 5-38 shows the clear GPIO alternative function enable function.
Table 5-39 shows the get GPIO alternative function setting function.
Table 5-40 shows the clear GPIO interrupt function.
Table 5-37 Set GPIO Alternate function enable function
Description Set GPIO Alternate function enable
Process Read current Alternate Function setting.
Modify value (OR).
Write back Output Enable.
Function
void CMSDK_gpio_SetAltFunc(CMSDK_GPIO_TypeDef *CMSDK_GPIO, uint_32 AltFunc)
.
Return None.
Table 5-38 Clear GPIO Alternate function enable function
Description Clear GPIO Alternate function enable
Process Read current Alternate function setting.
Modify value (AND NOT).
Write back Alternate function setting.
Function
void CMSDK_gpio_ClrAltFunc(CMSDK_GPIO_TypeDef *CMSDK_GPIO, uint_32 AltFunc)
.
Return None.
Table 5-39 Get GPIO Alternate function setting function
Description Get GPIO Alternate function setting
Process Read current Alternate function setting.
Function
uint_32 CMSDK_gpio_GetAltFunc(CMSDK_GPIO_TypeDef *CMSDK_GPIO)
.
Return Current settings of Alternate function.
Table 5-40 Clear GPIO interrupt function
Description Clear GPIO interrupt
Process Shift 1 << Num to get bit pattern.
Write to INTCLEAR.
Function
uint_32 CMSDK_gpio_IntClear(CMSDK_GPIO_TypeDef *CMSDK_GPIO, uint_32 Num)
.
Return Current settings of INTSTATUS.
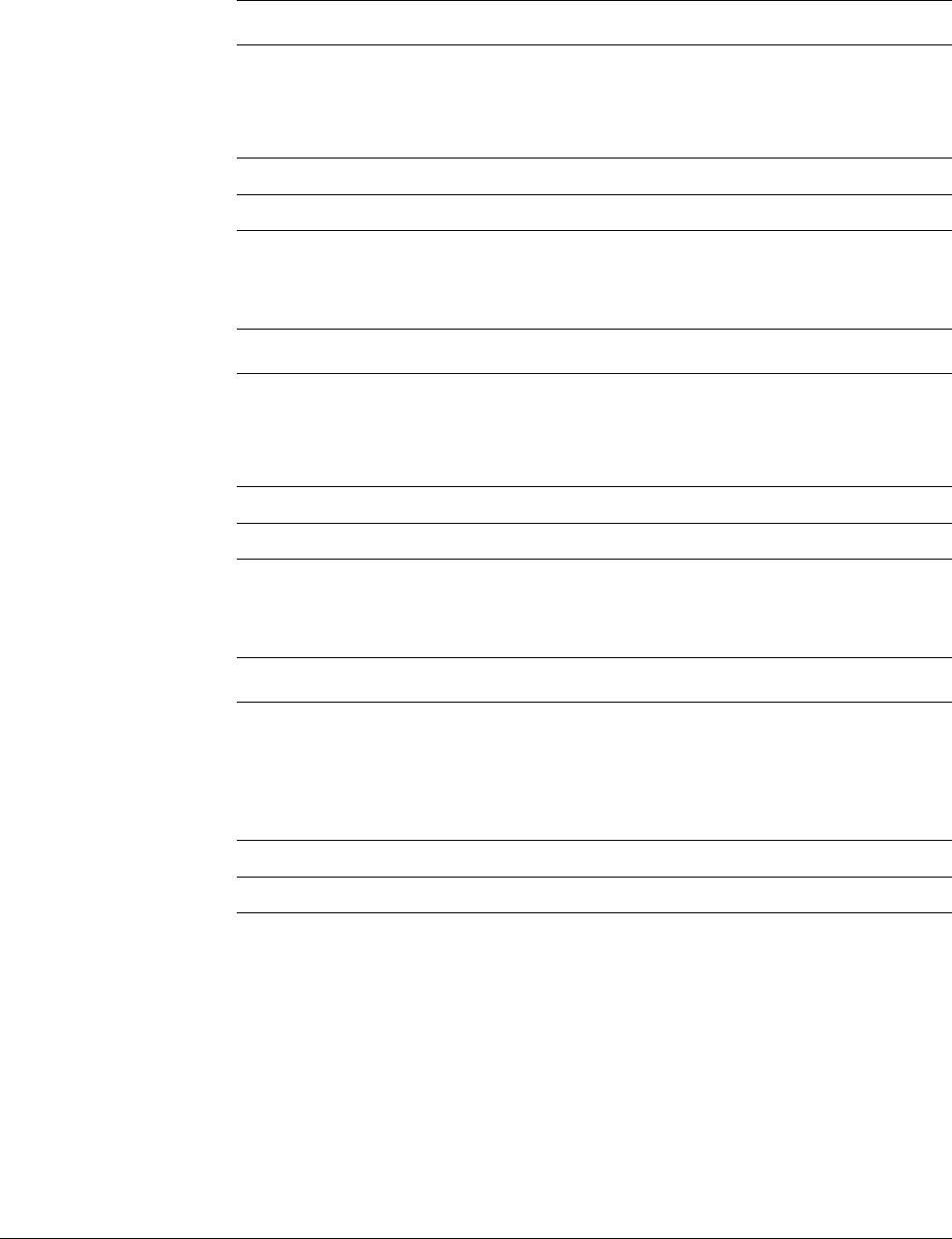
Software examples
ARM DUI 0559D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 5-16
ID110117 Confidential
Table 5-41 shows the enable GPIO interrupt function.
Table 5-42 shows the disable GPIO interrupt function.
Table 5-43 shows the set up GPIO interrupt as high-level function.
Table 5-41 Enable GPIO interrupt function
Description Enable GPIO interrupt
Process Shift 1 << Num to get bit pattern.
Read the current value of INTEN.
Modify value (OR).
Write back to INTEN.
Function
uint_32 CMSDK_gpio_SetIntEnable(CMSDK_GPIO_TypeDef *CMSDK_GPIO, uint_32 Num)
.
Return Current settings of INTEN.
Table 5-42 Disable GPIO interrupt function
Description Disable GPIO interrupt
Process Shift 1 << Num to get bit pattern.
Read the current value of INTEN.
Modify value (OR).
Write back to INTEN.
Function
uint_32 CMSDK_gpio_ClrIntEnable(CMSDK_GPIO_TypeDef *CMSDK_GPIO, uint_32 Num)
.
Return Current settings of INTEN.
Table 5-43 Set up GPIO interrupt as high-level function
Description Set up GPIO interrupt as high level
Process Shift 1 << Num to get bit pattern.
Read current value of INTTYPE, INTPOL.
Mask the bits to be changed (clear to 0).
Modify the value (OR).
Write to INTTYPE, INTPOL.
Function
void CMSDK_gpio_SetIntHighLevel(CMSDK_GPIO_TypeDef *CMSDK_GPIO, uint_32 Num)
.
Return None.

Software examples
ARM DUI 0559D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 5-17
ID110117 Confidential
Table 5-44 shows the set up GPIO interrupt as rising edge function.
Table 5-45 shows the set up GPIO interrupt as low-level function.
Table 5-46 shows the set up GPIO interrupt as falling edge function.
Table 5-44 Set up GPIO interrupt as rising edge function
Description Set up GPIO interrupt as rising edge
Process Shift 1 << Num to get bit pattern.
Read current value of INTTYPE, INTPOL.
Mask the bits to be changed (clear to 0).
Modify the value (OR).
Write to INTTYPE, INTPOL.
Function
void CMSDK_gpio_SetIntRisingEdge(CMSDK_GPIO_TypeDef *CMSDK_GPIO, uint_32 Num)
.
Return None.
Table 5-45 Set up GPIO interrupt as low-level function
Description Set up GPIO interrupt as low level
Process Shift 1 << Num to get bit pattern.
Read current value of INTTYPE, INTPOL.
Mask the bits to be changed (clear to 0).
Modify the value (OR).
Write to INTTYPE, INTPOL.
Function
void CMSDK_gpio_SetIntLowLevel(CMSDK_GPIO_TypeDef *CMSDK_GPIO, uint_32 Num)
.
Return None.
Table 5-46 Set up GPIO interrupt as falling edge function
Description Set up GPIO interrupt as falling edge
Process Shift 1 << Num to get bit pattern.
Read current value of INTTYPE, INTPOL.
Mask the bits to be changed (clear to 0).
Modify the value (OR).
Write to INTTYPE, INTPOL.
Function
void CMSDK_gpio_SetIntFallingEdge(CMSDK_GPIO_TypeDef *CMSDK_GPIO, uint_32 Num)
.
Return None.

Software examples
ARM DUI 0559D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 5-18
ID110117 Confidential
Table 5-47 shows the set up GPIO output value using the Masked access function.
5.5.4 Linker script for Arm GCC
The directory
software/common/scripts/
contains the linker script
cmsdk_cm0.ld
for Arm GCC.
It contains symbols that are specific to the Arm GCC startup code. If you use another gcc
toolchain, you must modify this linker script accordingly.
Table 5-47 Set up GPIO output value using Masked access function
Description Set up GPIO output value using Masked access
Process Write to MASKLOWBYTE[mask &
0x00FF
] = value.
Write to MASKHIGHBYTE[(mask &
0xFF00
) >> 8] = value [15:8].
Function
void CMSDK_gpio_MaskedWrite(CMSDK_GPIO_TypeDef *CMSDK_GPIO, uint_32 value, uint_32 mask)
.
Return None.

ARM DUI 0559D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 6-1
ID110117 Confidential
Chapter 6
Synthesis
This chapter describes how to run synthesis for the example system. It contains the following
sections:
•Implementation overview on page 6-2.
•Directory structure and files on page 6-3.
•Implementation flow on page 6-4.
•Timing constraints on page 6-5.
Synthesis
ARM DUI 0559D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 6-2
ID110117 Confidential
6.1 Implementation overview
The design kit includes a set of example scripts to enable synthesis of the
cmsdk_mcu_system
. The
example scripts support Synopsys Design Compiler. The scripts in the design kit provide a
simple setup to enable you to quickly obtain area and timing information from the design:
• They do not include all required steps for a complete implementation flow.
• They do not support SRPG implementation and handle the whole design as one single
power domain.
• They must not be used for design signoff.
Three main steps are provided in the scripts:
1. Synthesis, which is handled by
cmsdk_mcu_system_syn.tcl
.
2. DFT scan insertion, which is handled by
cmsdk_mcu_system_dft.tcl
.
3. Logical Equivalence Checking (LEC) of the netlist against the Verilog model, which is
handled by
cmsdk_mcu_system_fm.tcl
.
Note
This script does not handle Automatic Test Pattern Generation (ATPG).
The design kit uses the design level
cmsdk_mcu_system
because it contains all parts of the systems
except the blocks that might affect DFT, for example, reset and clock generation logic, and
memories. You must synthesize the clock and reset generation logic separately to avoid issues
with scan test control. In addition, you might want to modify the clock and reset logic, and the
PMU to your own requirements for system-level power management.
The memory blocks included in the design kit are behavioral model, and therefore not suitable
for synthesis.
Synthesis
ARM DUI 0559D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 6-3
ID110117 Confidential
6.2 Directory structure and files
Figure 6-1 shows the file directories in the synthesis environment.
Figure 6-1 Implementation directories
Table 6-1 shows the directories in the synthesis environment.
Table 6-2 shows the contents of the
scripts/
directory.
<Installation directory/>
implementation_tsmc_ce018fg/
cortex_m0_mcu_system_synopsys/
scripts/
data/
reports/
synthesis/
dft/
logs/
work/
lec/
Table 6-1 Implementation directories
Directories Descriptions
scripts/
Location of the synthesis scripts.
data/
Location of the data that is generated from the synthesis process.
reports/
Location of the report files.
logs/
Location of the synthesis log file.
work/
Location of the temporary files that are generated from the elaboration of the design. Arm recommends that you clear
the contents of this directory before you run a new synthesis.
Table 6-2 Contents of the scripts/ directory
Files Descriptions
cmsdk_mcu_system_syn.tcl
Main script for the synthesis process
cmsdk_mcu_system_dft.tcl
Main script for the DFT scan chain insertion process
cmsdk_mcu_system_tech.tcl
Setup for the cell library and technology-specific parameters
cmsdk_mcu_system_verilog.tcl
Specifies the Verilog files for synthesis, including the library-specific clock gate model
cmsdk_mcu_system_verilog-rtl.tcl
Specifies the Verilog files for LEC, including the generic RTL clock gate model
design_config.tcl
Configuration of the synthesis
cmsdk_mcu_system_clocks.tcl
Clock generation script
cmsdk_mcu_system_constraints.tcl
Constraints of the design, for example, timing
cmsdk_mcu_system_fm.tcl
Main script for Logical Equivalence Checking (LEC)
cmsdk_mcu_system_reports.tcl
Main script for the design report generation

Synthesis
ARM DUI 0559D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 6-4
ID110117 Confidential
6.3 Implementation flow
The implementation flow includes the following steps:
1. Configure the design. This includes the following:
• Edit
cmsdk_mcu_defs.v
to match your system-level configuration requirements,
including which processor to use.
• Edit
cmsdk_mcu_system.v
to define the requirements, such as MPU and number of
interrupts, using the Verilog parameter for the Cortex-M0 or Cortex-M0+
Integration level.
2. Select the appropriate library cells for clock gating and Clock-Domain Crossing (CDC)
purposes. See the Arm® Cortex®-M0 Integration and Implementation Manual and the
Arm® Cortex®-M0+ Integration and Implementation Manual for more information.
3. Customize the synthesis script for the targeted cell library.
4. Customize the synthesis script for the timing constraints and configuration.
5. Perform the synthesis.
6. Review the result.
Note
The following clock gating cells in files can only be used for behavioral simulation:
•
<your_cortex_m0_dir>/logical/models/cells/cm0_acg.v
•
<your_cortex_m0_dir>/logical/models/cells/cm0_pmu_acg.v
•
<your_cortex_m0p_dir>/logical/models/cells/cm0p_acg.v
•
<your_cortex_m0p_dir>/logical/models/cells/cm0p_pmu_acg.v
You must not use these files for synthesis, although they are used in the LEC as part of the
reference system.
For synthesis, the directory
logical/models/clkgate/
contains the corresponding demonstration
files for using the TSMC 0.18μm Ultra Low Leakage (ULL) process clock gating library cells.
You must customize the synthesis scripts before starting synthesis, as Table 6-3 shows.
Table 6-3 Synthesis script descriptions
Script name Description
cmsdk_mcu_system_tech.tcl
Update this file to match the cell library installation path in your environment. Also, update this
file if you use a different semiconductor process or use different process-related constraints.
cmsdk_mcu_system_verilog.tcl
Update this file to define the design files you want to synthesize.
cmsdk_mcu_system_constraints.tcl
Update this file if your timing requirements of the design are different from the default settings,
for example the input and output constraints.
design_config.tcl
Update this file if you change the configuration of your design.
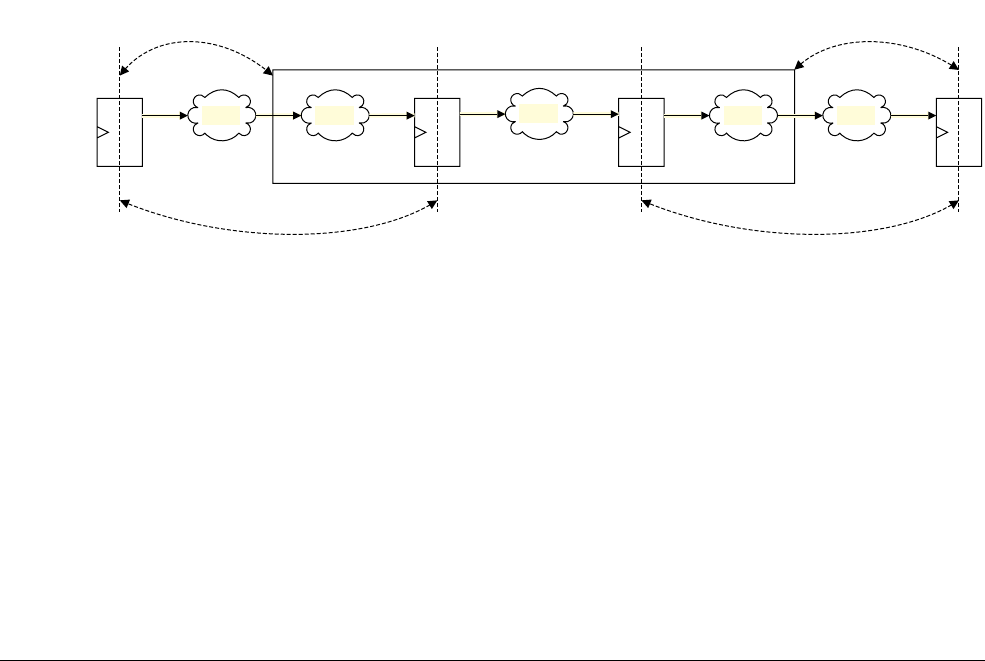
Synthesis
ARM DUI 0559D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 6-5
ID110117 Confidential
6.4 Timing constraints
This section describes the following timing issues of a design:
•Maximum frequency.
•Input and output delay
•Combinatorial paths on page 6-8.
•Running the makefile on page 6-8.
6.4.1 Maximum frequency
The default synthesis scripts target a frequency of 50MHz on a 0.18µm Ultra Low Leakage
(ULL) process. Although the Cortex-M0 and Cortex-M0+ processors are capable of running at
higher frequencies, the extra bus infrastructure results in longer timing paths. You can increase
the maximum frequency if you simplify the design configuration by doing one or more of the
following:
• Remove the DMA option.
• Remove the bitband wrapper option.
You can also increase the maximum clock frequency if you relax the timing constraints of the
memory interface.
If you have changed the design configuration, for example, by adding a DMA controller, you
might also have to modify the timing constraints to meet the timing budget.
6.4.2 Input and output delay
The input delay and output delay of the interface ports define their timing constraints. Figure 6-2
shows the input delays and output delays of the interface ports.
Figure 6-2 Input and output delays
Table 6-4 on page 6-6 and Table 6-5 on page 6-8 describe the default input and output delay
setting in the example synthesis script. The higher the percentage value, the tighter the timing
requirement.
DQ
delay delay
DQ
delay
DQ
delay
DQ
delay
Input
delay
Output
delay
Design boundary
100% of a
clock cycle
100% of a
clock cycle
Synthesis
ARM DUI 0559D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 6-6
ID110117 Confidential
Table 6-4 shows the timing constraints for the FCLK domain and HCLK domain interface
signals.
Table 6-4 Timing constraints for FCLK and HCLK
Interface Signals Type Descriptions Input
delay Output
delay
Memory AHB HADDR[31:0]
HTRANS[1:0]
HSIZE[2:0]
HWRITE
HWDATA[31:0]
HREADY
Output
Output
Output
Output
Output
Output
Address
Transfer type
Transfer size
Transfer direction
Write data
Transfer ready
50%
50%
50%
50%
60%
30%
Flash memory ROM
AHB flash_hsel
flash_hreadyout
flash_hrdata[31:0]
flash_hresp
Output
Input
Input
Input
Device select for flash/ROM
Flash/ROM ready
Flash/ROM read data
Flash/ROM response
40%
60%
60%
50%
SRAM AHB sram_hsel
sram_hreadyout
sram_hrdata[31:0]
sram_hresp
Output
Input
Input
Input
Device select for SRAM
SRAM ready
SRAM read data
SRAM response
40%
60%
60%
50%
Boot loader ROM AHB boot_hsel
boot_hreadyout
boot_hrdata[[31:0]
boot_hresp
Output
Input
Input
Input
Device select for boot ROM
Boot ROM ready
Boot ROM read data
Boot ROM response
40%
60%
60%
50%
CPU status SLEEPING
SLEEPDEEP
SYSRESETREQ
LOCKUP
Output
Output
Output
Output
Core is in sleep mode
Core is in deep sleep mode
System reset request
Core is locked up
50%
50%
50%
50%
Power management PMUENABLE
GATEHCLK
WAKEUP
APBACTIVE
WICENREQ
WICENACK
CDBGPWRUPREQ
CDBGPWRUPACK
SLEEPHOLDREQn
SLEEPHOLDACKn
Output
Output
Output
Output
Input
Output
Output
Input
Input
Output
PMU enable
Safe to gate off HCLK
WIC request for wake up
PCLKG enable/gating control
PMU request WIC feature
WIC acknowledge to PMU
Debug power up request
Debug power up acknowledge
Sleep extend request from PMU
Sleep extend acknowledge
60%
30%
60%
50%
60%
60%
40%
60%
60%
60%
Reset WDOGRESETREQ
LOCKUPRESET
HRESETn
PORESETn
DBGRESETn
PRESETn
Output
Output
Input
Input
Input
Input
Watchdog reset request
Reset system when locked up
AHB reset
Cold reset
Debug reset
APB reset
60%
60%
60%
60%
50%
50%
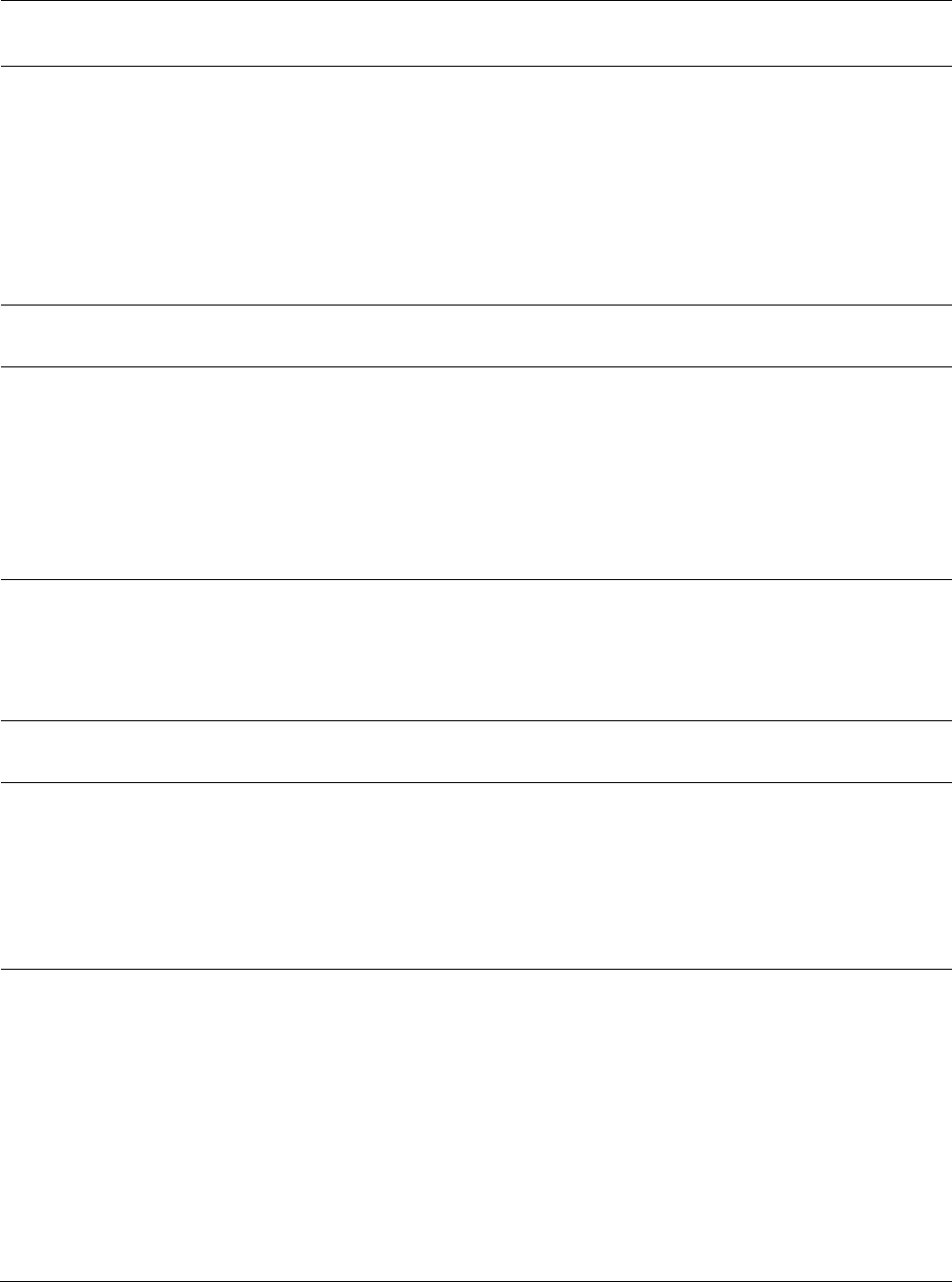
Synthesis
ARM DUI 0559D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 6-7
ID110117 Confidential
UART uart0_rxd
uart0_txd
uart0_txen
uart1_rxd
uart1_txd
uart1_txen
uart2_rxd
uart2_txd
uart2_txen
Input
Output
Output
Input
Output
Output
Input
Output
Output
UART0 receive data
UART0 transmit data
UART0 transmit enable
UART1 receive data
UART1 transmit data
UART1 transmit enable
UART2 receive data
UART2 transmit data
UART2 transmit enable
60%
60%
60%
60%
60%
60%
60%
60%
60%
Timer timer0_extin
timer1_extin
Input
Input
Timer0 external input
Timer1 external input
60%
60%
GPIO p0_in[15:0]
p0_out[15:0]
p0_outend[15:0]
p0_altfunc[15:0]
p1_in[15:0]
p1_out[15:0]
p1_outend[15:0]
p1_altfunc[15:0]
Input
Output
Output
Output
Input
Output
Output
Output
GPIO port0 input
GPIO port0 output
GPIO port0 output enable
GPIO port0 alternate function
GPIO port1 input
GPIO port1 output
GPIO port1 output enable
GPIO port1 alternate function
60%
60%
60%
60%
60%
60%
60%
60%
Misc PCLKEN Input PCLK enable the for AHB to APB
bridge, it is currently tied HIGH in the
example clock controller
60%
RSTBYPASS
DFTRSTDISABLE
Input
Input
Reset bypass input for Cortex-M0 only
Reset bypass input for Cortex-M0+ only
20%
20%
MTB RAM TSTART
TSTOP
Input
Input
External Trace Start pin
External Trace Stop pin
60%
60%
MTB SRAM SRAMBASEADDR[31:0]
RAMHCLK
RAMRD[31:0]
RAMAD[AWIDTH-3:0]
RAMWD[31:0]
RAMCS
RAMWE[3:0]
Input
Output
Input
Output
Output
Output
Output
MTB SRAM base address
MTB RAM clock, optionally gated
MTB connected RAM read-data
MTB connected RAM address
MTB connected RAM write-data
MTB connected RAM chip select
MTB RAM byte lane write enables
60%
60%
60%
60%
60%
60%
60%
Table 6-4 Timing constraints for FCLK and HCLK (continued)
Interface Signals Type Descriptions Input
delay Output
delay
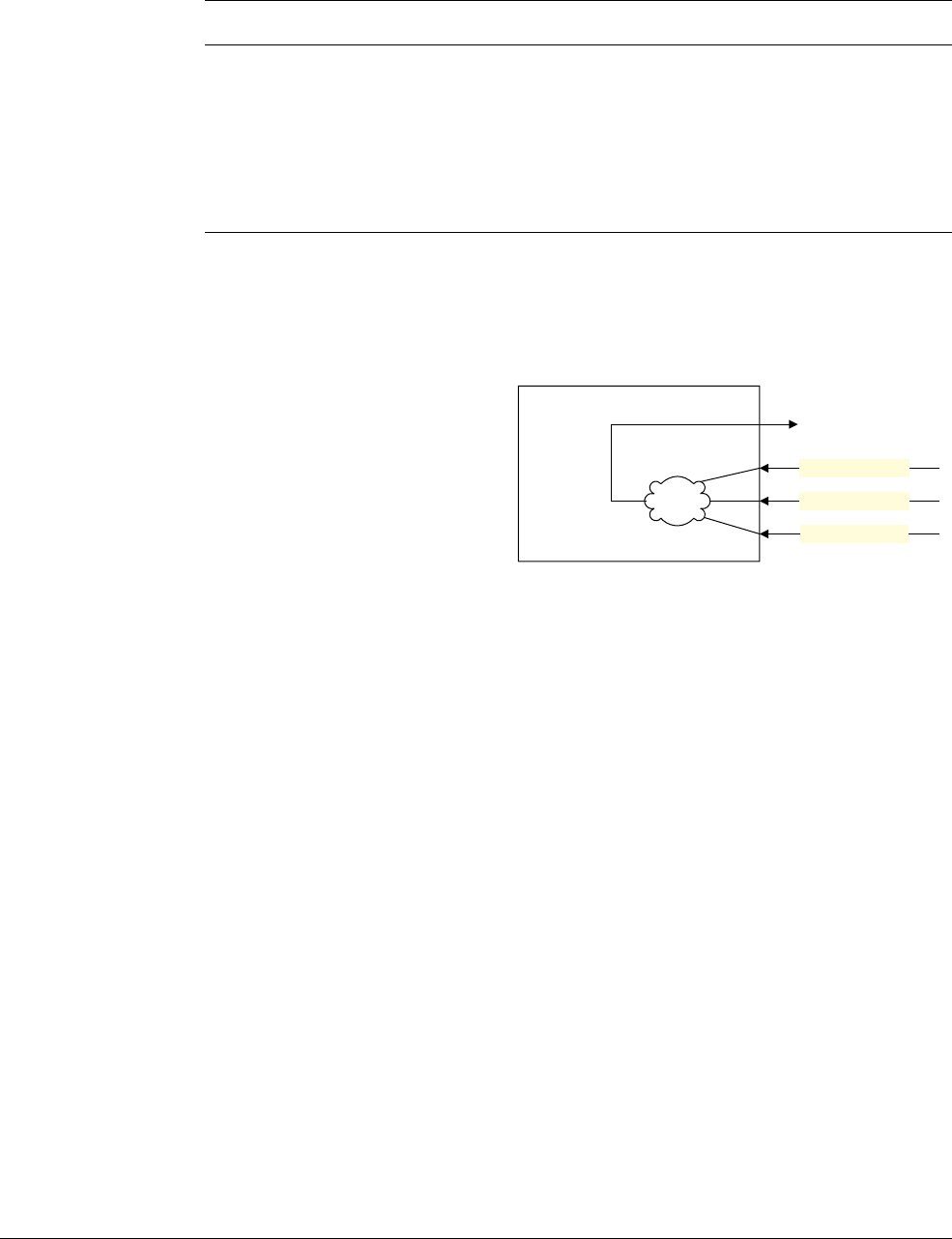
Synthesis
ARM DUI 0559D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 6-8
ID110117 Confidential
Table 6-5 shows the timing constraints for the SWCLKTCK domain interface signals.
6.4.3 Combinatorial paths
Figure 6-3 shows a combinatorial path in the design that affects the input and output constraints.
Figure 6-3 HREADY path
Because of this signal path, the example script sets the HREADY output delay value to only
30%.
6.4.4 Running the makefile
The makefile is located in
implementation_tsmc_ce018fg/cortex_m0_mcu_system_synopsys
. This
makefile performs synthesis and Design for Test (DFT), and generates a log file. Use the
makefile as follows:
make synthesis
Performs synthesis using the topological features.
make dft
Inserts DFT into the netlist after synthesis.
make lec
Performs Logical Equivalence Checking (LEC) between the Verilog RTL
and the synthesized netlist.
make lec_synthesis
Performs LEC on the synthesized netlist.
make lec_dft
Performs LEC on the DFT netlist.
make front
Performs both the synthesis and DFT steps.
make analysis
Performs both the LEC steps on the synthesized and DFT netlists.
make all
Performs all steps, that is, synthesis, DFT, LEC synthesis, and LEC DFT.
make clean
Cleans all the report directories, log files, and database information to be
removed, ready for a new run.
Table 6-5 Timing constraints for SWCLKTCK domain interface signals
Interface Signals Type Descriptions Input delay Output delay
Debug SWDITMS
TDI
SWDO
SWDOEN
nTDOEN
TDO
nTRST
Input
Input
Output
Output
Output
Output
Input
Data In (SW) / TMS (JTAG)
Test data in (JTAG)
Serial Wire Data Out (SW)
Data Output enable (SW)
Data Output Enable (JTAG)
Data Output (JTAG)
Test reset (JTAG)
60%
60%
60%
60%
60%
60%
60%
flash_readyout
sram_readyout
boot_readyout
HREADY
Design boundary

ARM DUI 0559D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. A-1
ID110117 Confidential
Appendix A
Debug tester
This appendix describes the debug components in the design kit. It contains the following
sections:
•About the debug tester on page A-2.
•Memory map on page A-3.
•Debug tester software on page A-4.
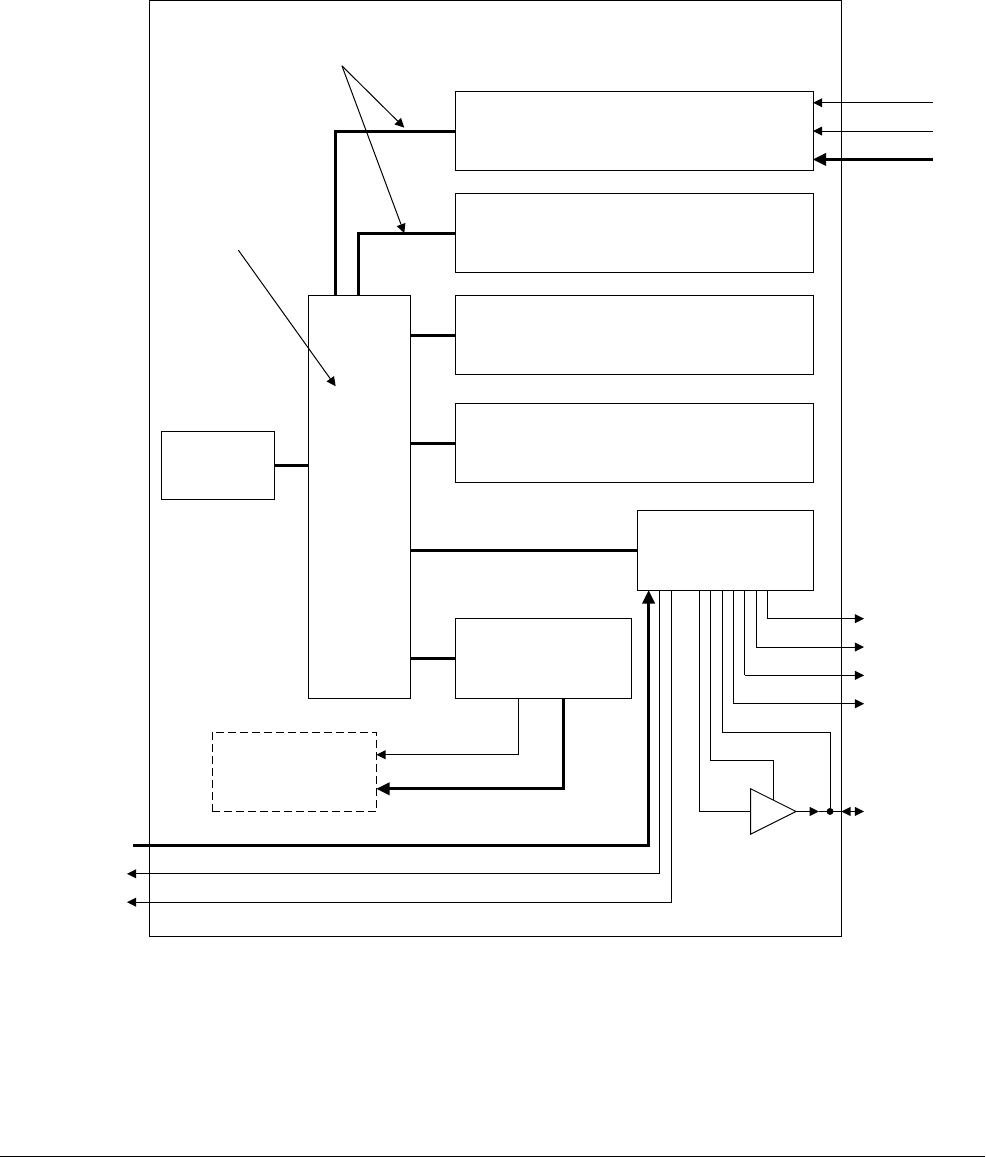
Debug tester
ARM DUI 0559D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. A-2
ID110117 Confidential
A.1 About the debug tester
The debug tester is a testbench component that tests the connectivity of the debug feature. It is
a Cortex-M0 or Cortex-M0+ based system that controls the Cortex-M0 or Cortex-M0+ DAP in
the example microcontroller system. It uses the JTAG or Serial-Wire protocol through a simple
I/O interface.
Figure A-1 shows the debug tester.
Figure A-1 Debug tester
cmsdk_ahb_default_slave
Default slave
cmsdk_ahb_rom
Program memory
cmsdk_ahb_ram
SRAM
cmsdk_ahb_gpio 0
I/O interface
GPIO0[2]
GPIO0[1]
TDI
SWCLKTCK
GPIO0[0] nTRST
GPIO0[4]
SWDIOTMS
GPIO0[6]
GPIO0[5]
Text message
display
GPIO1[7]strobe
data
GPIO0[14]
GPIO0[15]
GPIO0[13:8]
DBGCMD
DBGRUNNING
DBGERROR
GPIO1[6:0]
cmsdk_debug_tester_ahb_interconnect
AHB infrastructure
Cortex-M
integration
cmsdk_debug_tester
cmsdk_debug_tester_trace_capture
Trace capture buffer
(only present in Cortex-M3 or Cortex-M4 system)
SWV
TRACECLK
TRACEDATA[3:0]
cmsdk_ahb_gpio 1
I/O interface
GPIO0[3] TDO
Debug tester
ARM DUI 0559D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. A-3
ID110117 Confidential
A.2 Memory map
Table A-1 shows the memory map address space for the debug tester.
Table A-1 Debug tester memory map
Address Descriptions
0x00000000
to
0x0000FFFF
, size 64KB ROM
0x20000000
to
0x20003FFF
, size 16KB SRAM
0x40000000
to
0x40000FFF
, size 4KB GPIO0
0x40001000
to
0x40001FFF
, size 4KB GPIO1
Other addresses except the Cortex-M0 or Cortex-M0+ internal System Control Space Default slave
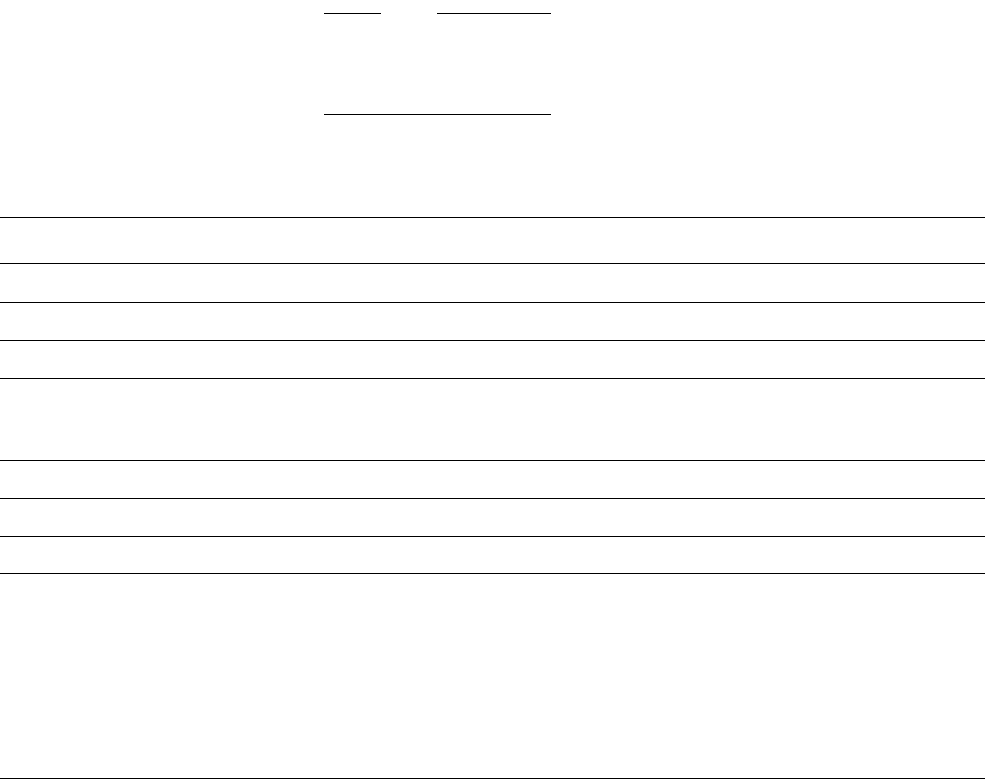
Debug tester
ARM DUI 0559D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. A-4
ID110117 Confidential
A.3 Debug tester software
The debug tester software is located in
software/debug_tester
. This directory includes
pre-compiled hex files for the debug tester processor for both little-endian and big-endian
configurations of the example microcontroller:
•
debugtester_le.hex
.
•
debugtester_be.hex
.
If you configure your example microcontroller to support big-endian, you must also ensure that
the debug tester loads the
debugtester_be.hex
image.
These precompiled images are built for the Cortex-M0 processor, and so will execute correctly
on whichever Cortex-M processor you use in the debug tester.
The design kit includes the source code of the debug tester software, a makefile configured for
Arm DS-5 and Arm GCC, and a project file for Keil MDK. Normally, you do not have to
recompile the software for the debug tester. However if you want to recompile the software
image, follow these steps:
1. Edit the makefile to modify the compile configuration if required, for example, to target
a particular Cortex-M processor, or to switch to a different toolchain.
2. Do one of the following:
• Run
make
if you are using Arm DS-5 or Arm GCC.
• Open the project file and compile the project if you are using Keil MDK-ARM.
Note
You must open the correct project file for the processor and endian configuration
chosen. For example, open
debugtester_cm0_be.uvproj
if you are using a Cortex-M0
processor configured for big-endian.
Table A-2 shows the debug tester source files.
The compilation process also requires the processor support header files to be in the directory
software/cmsis/CMSIS/Include/
.
Table A-2 Debug tester source files
File Description
cmsdk_debugtester.h
CMSIS header file which describes the debug tester.
debugtester.c
Main program of the debug tester.
debugtester.h
Main program header file. Edit this file if you need to enable message printing from the debug tester.
debugtester_functions.h
This file defines the functions that the debug tester supports. It is not used by the debug tester code
itself, but is included by tests running on the example microcontroller that use the debug tester
functions.
retarget_cmsdk_debugtester.c Printf
retargeting function. Enables C
printf()
calls to use the debug tester character output device.
system_cmsdk_debugtester.c
Empty
SystemInit()
function. Included for CMSIS compatibility.
system_cmsdk_debugtester.h
Header file for
system_cmsdk_debugtester.c
.
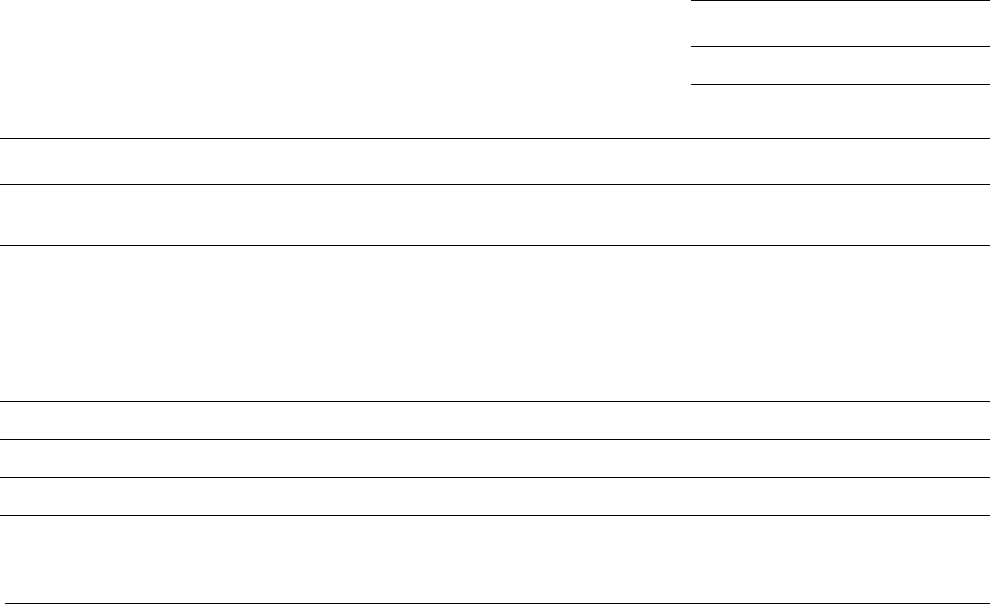
ARM DUI 0559D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. B-1
ID110117 Confidential
Appendix B
Revisions
This appendix describes the technical changes between released issues of this book.
Table B-1 Issue A
Change Location Affects
First release - -
Table B-2 Differences between Issue A and Issue B
Change Location Affects
After an engineering review, confidentiality of document changed from
Non-Confidential to Confidential Whole document All revisions
References changed from Cortex-M0 to reflect Arm® Cortex®-M System Design
Kit Technical Reference Manual
About the Cortex-M0 and
Cortex-M0+ System Design Kit
on page 1-2
Table 2-7 on page 2-11
APB subsystem memory map on
page 2-17
All revisions
Description for
cmsdk_ahb_gpio
item updated Table 2-1 on page 2-3 All revisions
Note added to Preprocessing macro
ARM_CMSDK_SLOWSPEED_PCLK
in table Table 2-7 on page 2-11 All revisions
Address
0x40020000
-
0xFFFFFFFF
Without remap wording updated Table 2-10 on page 2-16 All revisions
File location amended in last paragraph of AHB memory map section to:
software/common/bootloader/bootloader.c
AHB memory map on page 2-16 All revisions
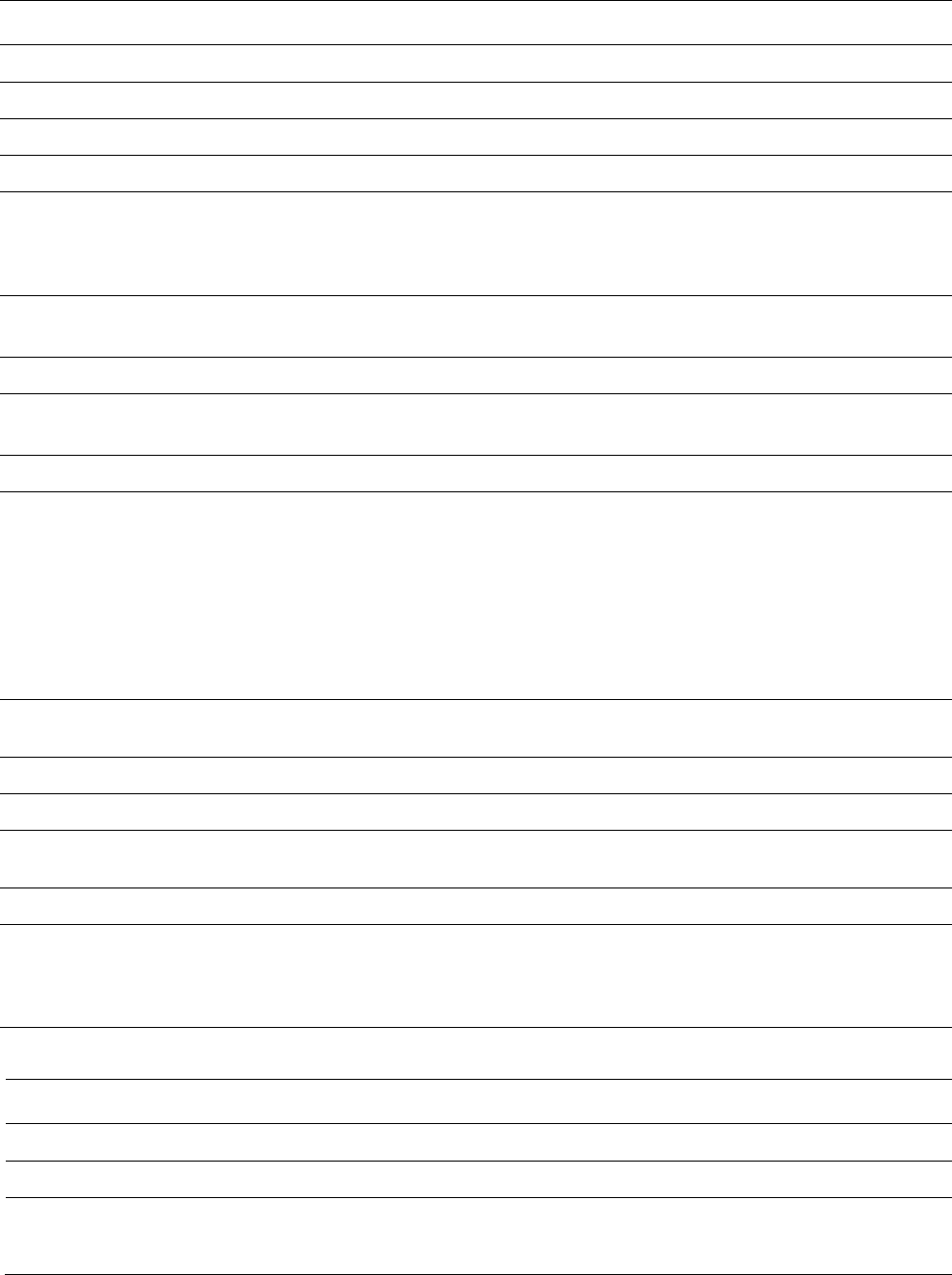
Revisions
ARM DUI 0559D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. B-2
ID110117 Confidential
Signal amended to WDOGRESETREQ in Example system controller figure Figure 2-6 on page 2-19 All revisions
Example microcontroller clock and reset operation figure updated Figure 2-9 on page 2-27 All revisions
Separate hierarchy for tie-off figure updated Figure 2-10 on page 2-29 All revisions
Testbench block diagram figure updated Figure 3-1 on page 3-2 All revisions
Paragraph updated to:
Before the simulation stops, the UART capture module outputs a pulse on the
SIMULATIONEND output to enable you to use this signal to trigger other tasks
or hardware logic before the end of a simulation.
UART text output capturing and
escape code on page 3-3 All revisions
Function description updated to:
Read the value from an address in the memory
Table 3-20 on page 3-12 All revisions
Return data updated to reflect None Table 3-22 on page 3-13 All revisions
Input data description second line updated to:
Memory[StackTop +
0xC
] = Fault generating HardFault Handler (
0xf123
,
BX LR
)
Table 3-23 on page 3-13 All revisions
Directory name amended to:
software/cmsis/CM0/
Table 4-1 on page 4-4 All revisions
Demonstration software and functional tests directories added to Installation
directory table:
•
software/common/demos
•
software/common/validation
•
software/common/bootloader
•
software/common/dhry
•
software/common/retarget
•
software/common/scripts
Table 4-1 on page 4-4 All revisions
Sections removed on makefile in
rtl_sim
, combined with simulation stage
because function no longer available Compile the test code on
page 4-8 All revisions
Additional example software test
bitband_tests
added Table 5-1 on page 5-2 All revisions
cd mytest
command added to second item in itemized list Creating a new test on page 5-5 All revisions
Note updated Implementation flow on
page 6-4 All revisions
Description for
ortex_m0_mcu_system_tech.tcl
script name updated Table 6-3 on page 6-4 All revisions
Paragraph added:
In the case where the design configuration is changed, for example, by adding a
DMA controller, you also might have to modify the timing constraints to meet the
timing budget.
Maximum frequency on
page 6-5 All revisions
Table B-3 Differences between issue B and issue C
Change Location Affects
Updated references to Cortex-M0 to include Cortex-M0+ Throughout document r1p0
All module names prefixed with
cmsdk_
Throughout document r1p0
Changed RealView Development Suite (RVDS) to Development
Suite (DS-5) and CodeSourcery g++ to Arm GCC Throughout document r1p0
Table B-2 Differences between Issue A and Issue B (continued)
Change Location Affects
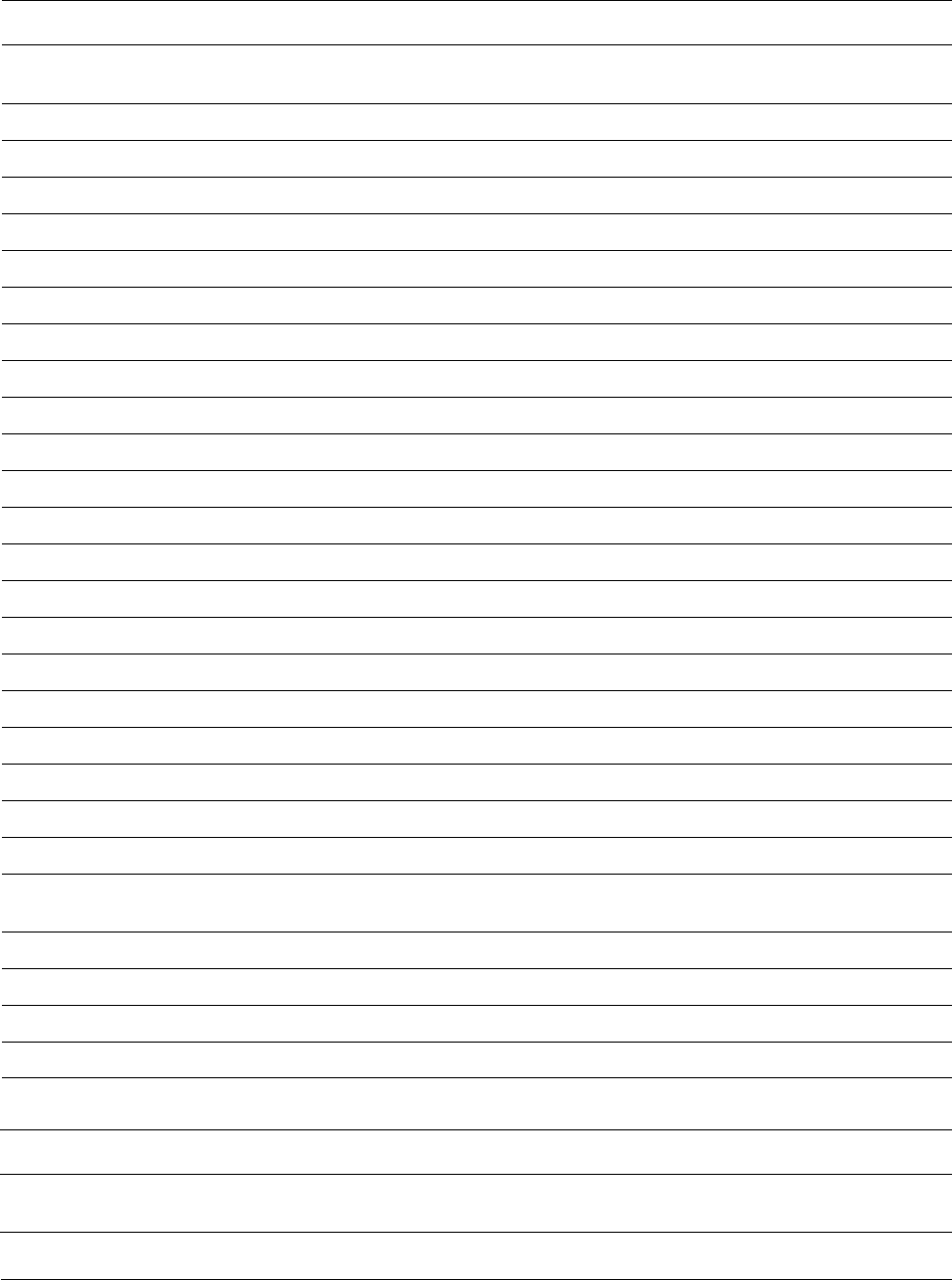
Revisions
ARM DUI 0559D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. B-3
ID110117 Confidential
Updated directory structure to show details of
software/
directory Figure 1-1 on page 1-4, Figure 4-1 on page 4-3,
Table 4-1 on page 4-4, and Figure 4-2 on page 4-11 r1p0
Added information on big-endian support with Arm GCC Big-endian support with Arm GCC on page 1-6 r1p0
Added Cortex-M0+ components Figure 2-1 on page 2-2 and Table 2-1 on page 2-3 r1p0
Updated interface diagrams for Cortex-M0 Figure 2-2 on page 2-4 and Figure 2-4 on page 2-6 r1p0
Added interface diagrams for Cortex-M0+ Figure 2-3 on page 2-5 and Figure 2-5 on page 2-7 r1p0
Updated Verilog file names, parameters, and definitions Table 2-4 on page 2-8 to Table 2-7 on page 2-11 r1p0
Added file locations for Cortex-M0+ Processor file locations on page 2-10 r1p0
Added Tarmac description Tarmac on page 2-10 r1p0
Added Verilog preprocessing definitions for Cortex-M0+ Table 2-7 on page 2-11 r1p0
Added Verilog parameters for Cortex-M0+ Verilog parameters for Cortex-M0+ on page 2-14 r1p0
Added instructions on changing CPU type to Cortex-M0+ Changing the processor type on page 2-15 r1p0
Added Cortex-M0+ components to AHB memory map Table 2-10 on page 2-16 r1p0
Added MTB functions to GPIO alternate function table Table 2-15 on page 2-23 r1p0
Updated interrupt assignments to include I/O port GPIO Table 2-16 on page 2-24 r1p0
Added AHB system ROM table AHB system ROM table on page 2-26 r1p0
Consolidated debug tester test functions into a single table Table 3-2 on page 3-8 r1p0
Updated installation directory Table 4-1 on page 4-4 r1p0
Added installation instructions for Cortex-M0+ Installing the processor core on page 4-5 r1p0
Updated makefile descriptions Compile the test code on page 4-8 r1p0
Added tests for Cortex-M0+ components Table 5-1 on page 5-2 r1p0
Added defines for tests Generic header file for tests on page 5-3 r1p0
Added MTB RAM and MTB SRAM signal timing constraints Table 6-4 on page 6-6 r1p0
Replaced running synthesis script description with new makefile
description Running the makefile on page 6-8 r1p0
Updated debug tester block diagram Figure A-1 on page A-2 r1p0
Updated debug tester memory map Debug tester memory map on page A-3 r1p0
Updated debug tester software description Debug tester software on page A-4 r1p0
Deleted GPIO peripheral description Appendix A Debug tester r1p0
Table B-4 Differences between issue C and issue D
Change Location Affects
Addresses with remap
0xF0220000
-
0xFFFFFFFF
and
0x40020000
-
0xEFFFFFFF
changed to unused. AHB memory map on page 2-16 All revisions
Table B-3 Differences between issue B and issue C (continued)
Change Location Affects
