Arm Cortex M System Design Kit Technical Reference Manual MSystem DDI0479D R1p1 00rel0
User Manual:
Open the PDF directly: View PDF ![]() .
.
Page Count: 177 [warning: Documents this large are best viewed by clicking the View PDF Link!]
- Arm Cortex-M System Design Kit Technical Reference Manual
- Contents
- Preface
- 1: Introduction
- 2: Functional description
- 3: Basic AHB-Lite components
- 4: APB components
- 5: Advanced AHB-Lite components
- 6: Behavioral memory models
- 7: Verification components
- A: IP-XACT descriptions
- B: Modification rights for supplied components
- C: Revisions

Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved.
ARM DDI 0479D (ID110117)
Arm® Cortex®-M System Design Kit
Revision: r1p1
Technical Reference Manual

ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. ii
ID110117 Non-Confidential
Arm Cortex-M System Design Kit
Technical Reference Manual
Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved.
Release Information
The following changes have been made to this document:
Proprietary Notice
This document is protected by copyright and other related rights and the practice or implementation of the information
contained in this document may be protected by one or more patents or pending patent applications. No part of this
document may be reproduced in any form by any means without the express prior written permission of Arm. No
license, express or implied, by estoppel or otherwise to any intellectual property rights is granted by this
document unless specifically stated.
Your access to the information in this document is conditional upon your acceptance that you will not use or permit
others to use the information for the purposes of determining whether implementations infringe any third party patents.
THIS DOCUMENT IS PROVIDED “AS IS”. ARM PROVIDES NO REPRESENTATIONS AND NO
WARRANTIES, EXPRESS, IMPLIED OR STATUTORY, INCLUDING, WITHOUT LIMITATION, THE IMPLIED
WARRANTIES OF MERCHANTABILITY, SATISFACTORY QUALITY, NON-INFRINGEMENT OR FITNESS
FOR A PARTICULAR PURPOSE WITH RESPECT TO THE DOCUMENT. For the avoidance of doubt, Arm makes
no representation with respect to, and has undertaken no analysis to identify or understand the scope and content of,
third party patents, copyrights, trade secrets, or other rights.
This document may include technical inaccuracies or typographical errors.
TO THE EXTENT NOT PROHIBITED BY LAW, IN NO EVENT WILL ARM BE LIABLE FOR ANY DAMAGES,
INCLUDING WITHOUT LIMITATION ANY DIRECT, INDIRECT, SPECIAL, INCIDENTAL, PUNITIVE, OR
CONSEQUENTIAL DAMAGES, HOWEVER CAUSED AND REGARDLESS OF THE THEORY OF LIABILITY,
ARISING OUT OF ANY USE OF THIS DOCUMENT, EVEN IF ARM HAS BEEN ADVISED OF THE
POSSIBILITY OF SUCH DAMAGES.
This document consists solely of commercial items. You shall be responsible for ensuring that any use, duplication or
disclosure of this document complies fully with any relevant export laws and regulations to assure that this document
or any portion thereof is not exported, directly or indirectly, in violation of such export laws. Use of the word “partner”
in reference to Arm’s customers is not intended to create or refer to any partnership relationship with any other company.
Arm may make changes to this document at any time and without notice.
If any of the provisions contained in these terms conflict with any of the provisions of any click through or signed written
agreement covering this document with Arm, then the click through or signed written agreement prevails over and
supersedes the conflicting provisions of these terms. This document may be translated into other languages for
convenience, and you agree that if there is any conflict between the English version of this document and any
translation, the terms of the English version of the Agreement shall prevail.
The Arm corporate logo and words marked with ® or ™ are registered trademarks or trademarks of Arm Limited (or
its subsidiaries) in the US and/or elsewhere. All rights reserved. Other brands and names mentioned in this document
may be the trademarks of their respective owners. Please follow Arm’s trademark usage guidelines at
http://www.arm.com/company/policies/trademarks.
Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved.
Arm Limited. Company 02557590 registered in England.
110 Fulbourn Road, Cambridge, England CB1 9NJ.
Change history
Date Issue Confidentiality Change
14 March 2011 A Non-Confidential First release for r0p0
16 June 2011 B Non-Confidential Second release for r0p0
19 April 2013 C Non-Confidential First release for r1p0
31 October 2017 D Non-Confidential First release for r1p1

ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. iii
ID110117 Non-Confidential
LES-PRE-20349
Confidentiality Status
This document is Non-Confidential. The right to use, copy and disclose this document may be subject to license
restrictions in accordance with the terms of the agreement entered into by Arm and the party that Arm delivered this
document to.
Product Status
The information in this document is final, that is for a developed product.
Web Address
http://www.arm.com

ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. iv
ID110117 Non-Confidential
Contents
Arm Cortex-M System Design Kit Technical
Reference Manual
Preface
About this book .......................................................................................................... vii
Feedback .................................................................................................................... xi
Chapter 1 Introduction
1.1 About the Cortex-M System Design Kit ................................................................... 1-2
1.2 Product revisions ..................................................................................................... 1-4
Chapter 2 Functional description
2.1 About the Cortex-M System Design Kit components ............................................... 2-2
2.2 Design components ................................................................................................. 2-3
2.3 ID registers in programmable components .............................................................. 2-5
2.4 Use of OVL .............................................................................................................. 2-6
Chapter 3 Basic AHB-Lite components
3.1 AHB default slave .................................................................................................... 3-2
3.2 AHB example slave ................................................................................................. 3-3
3.3 AHB slave multiplexer .............................................................................................. 3-6
3.4 AHB master multiplexer ........................................................................................... 3-9
3.5 AHB GPIO ............................................................................................................. 3-11
3.6 AHB to APB sync-down bridge .............................................................................. 3-17
3.7 AHB to SRAM interface module ............................................................................ 3-19
3.8 AHB to flash interface modules ............................................................................. 3-21

Contents
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. v
ID110117 Non-Confidential
3.9 AHB timeout monitor .............................................................................................. 3-24
3.10 AHB to external SRAM interface ........................................................................... 3-26
3.11 AHB bit-band wrapper ........................................................................................... 3-30
Chapter 4 APB components
4.1 APB example slaves ................................................................................................ 4-2
4.2 APB timer ................................................................................................................. 4-5
4.3 APB UART ............................................................................................................... 4-8
4.4 APB dual-input timers ............................................................................................ 4-11
4.5 APB watchdog ....................................................................................................... 4-20
4.6 APB slave multiplexer ............................................................................................ 4-26
4.7 APB subsystem ..................................................................................................... 4-27
4.8 APB timeout monitor .............................................................................................. 4-33
Chapter 5 Advanced AHB-Lite components
5.1 AHB bus matrix ........................................................................................................ 5-2
5.2 AHB upsizer ........................................................................................................... 5-14
5.3 AHB downsizer ...................................................................................................... 5-17
5.4 AHB to APB asynchronous bridge ......................................................................... 5-25
5.5 AHB to AHB and APB asynchronous bridge ......................................................... 5-27
5.6 AHB to AHB synchronous bridge ........................................................................... 5-30
5.7 AHB to AHB sync-down bridge .............................................................................. 5-32
5.8 AHB to AHB sync-up bridge .................................................................................. 5-37
Chapter 6 Behavioral memory models
6.1 ROM model wrapper ................................................................................................ 6-2
6.2 RAM model wrapper ................................................................................................ 6-6
6.3 Behavioral SRAM model with AHB interface ......................................................... 6-10
6.4 32-bit flash ROM behavioral model ....................................................................... 6-11
6.5 16-bit flash ROM behavioral model ....................................................................... 6-12
6.6 FPGA SRAM synthesizable model ........................................................................ 6-13
6.7 FPGA ROM ............................................................................................................ 6-14
6.8 External asynchronous 8-bit SRAM ....................................................................... 6-15
6.9 External asynchronous 16-bit SRAM ..................................................................... 6-16
Chapter 7 Verification components
7.1 AHB-Lite protocol checker ....................................................................................... 7-2
7.2 APB protocol checker .............................................................................................. 7-5
7.3 AHB FRBM .............................................................................................................. 7-7
Appendix A IP-XACT descriptions
A.1 About IP-XACT for the Cortex-M System Design Kit components .......................... A-2
A.2 Location of the IP-XACT description files ................................................................ A-3
A.3 Generating the IP-XACT description ....................................................................... A-5
A.4 Using the IP-XACT description ................................................................................ A-6
Appendix B Modification rights for supplied components
Appendix C Revisions


Preface
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. vii
ID110117 Non-Confidential
About this book
This is the Technical Reference Manual (TRM) for the Cortex-M System Design Kit.
Product revision status
The rnpn identifier indicates the revision status of the product described in this book, where:
rn Identifies the major revision of the product.
pn Identifies the minor revision or modification status of the product.
Intended audience
This book is written for system designers to design products with the Arm Cortex-M processors.
Using this book
This book is organized into the following chapters:
Chapter 1 Introduction
Read this for an introduction to the Cortex-M System Design Kit.
Chapter 2 Functional description
Read this for an overview of the major functional blocks and the operation of the
Cortex-M System Design Kit.
Chapter 3 Basic AHB-Lite components
Read this for a description of the AHB-Lite components that the Cortex-M System
Design Kit uses.
Chapter 4 APB components
Read this for a description of the APB components that the Cortex-M System
Design Kit uses.
Chapter 5 Advanced AHB-Lite components
Read this for a description of the advanced AHB-Lite components that the
Cortex-M System Design Kit uses.
Chapter 6 Behavioral memory models
Read this for a description of the behavioral memory models that the Cortex-M
System Design Kit uses.
Chapter 7 Verification components
Read this for a description of the verification components in the Cortex-M System
Design Kit.
Appendix A IP-XACT descriptions
Read this for a description of the location and configuration of the IP-XACT files.
Appendix B Modification rights for supplied components
Read this for a description of your rights to modify the function of certain
components beyond the normal configuration options.
Appendix C Revisions
Read this for a description of the technical changes between released issues of this
book.

Preface
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. viii
ID110117 Non-Confidential
Glossary
The Arm® Glossary is a list of terms used in Arm documentation, together with definitions for
those terms. The Arm® Glossary does not contain terms that are industry standard unless the
Arm meaning differs from the generally accepted meaning.
See the Arm® Glossary
http://infocenter.arm.com/help/topic/com.arm.doc.aeg0014-/index.html.
Typographical Conventions
This book uses the conventions that are described in:
•Typographical conventions.
•Timing diagrams.
•Signals on page ix.
Typographical conventions
The following table describes the typographical conventions:
Timing diagrams
The figure named Key to timing diagram conventions on page ix explains the components used
in timing diagrams. Variations, when they occur, have clear labels. You must not assume any
timing information that is not explicit in the diagrams.
Shaded bus and signal areas are undefined, so the bus or signal can assume any value within the
shaded area at that time. The actual level is unimportant and does not affect normal operation.
Style Purpose
italic Introduces special terminology, denotes cross-references, and citations.
bold Highlights interface elements, such as menu names. Denotes signal names. Also used for terms in descriptive
lists, where appropriate.
monospace
Denotes text that you can enter at the keyboard, such as commands, file and program names, and source code.
monospace
Denotes a permitted abbreviation for a command or option. You can enter the underlined text instead of the full
command or option name.
monospace italic
Denotes arguments to monospace text where the argument is to be replaced by a specific value.
monospace bold
Denotes language keywords when used outside example code.
<and> Encloses replaceable terms for assembler syntax where they appear in code or code fragments. For example:
MRC p15, 0 <Rd>, <CRn>, <CRm>, <Opcode_2>
SMALL CAPITALS Used in body text for a few terms that have specific technical meanings, that are defined in the Arm glossary.
For example, IMPLEMENTATION DEFINED, IMPLEMENTATION SPECIFIC, UNKNOWN, and UNPREDICTABLE.

Preface
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. ix
ID110117 Non-Confidential
Key to timing diagram conventions
Signals
The signal conventions are:
Signal-level The level of an asserted signal depends on whether the signal is
active-HIGH or active-LOW. Asserted means:
• HIGH for active-HIGH signals.
• LOW for active-LOW signals.
Lowercase n At the start or end of a signal name denotes an active-LOW signal.
Clock
HIGH to LOW
Transient
HIGH/LOW to HIGH
Bus stable
Bus to high impedance
Bus change
High impedance to stable bus

Preface
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. x
ID110117 Non-Confidential
Additional reading
This section lists publications by Arm and by third parties.
See Infocenter
http://infocenter.arm.com
, for access to Arm documentation.
Arm publications
This book contains information that is specific to this product. See the following documents for
other relevant information:
•Arm® Cortex®-M0 Technical Reference Manual (ARM DDI 0432).
•Arm® Cortex®-M0+ Technical Reference Manual (ARM DDI 0484).
•Arm® Cortex®-M3 Technical Reference Manual (ARM DDI 0337).
•Arm® Cortex®-M4 Technical Reference Manual (ARM DDI 0439).
•Arm® CoreSight™ Architecture Specification (ARM IHI 0029).
•Arm® CoreLink™ Network Interconnect NIC-301 Technical Reference Manual
(ARM DDI 0397).
The following confidential books are only available to licensees:
•Arm® Cortex®-M0 and Cortex-M0+ System Design Kit Example System Guide
(ARM DUI 0559).
•Arm® Cortex®-M System Design Kit Example System Guide (ARM DUI 0594).
Other publications
This section lists relevant documents published by third parties:
• JEDEC website
www.jedec.org
.
• Accellera website
www.accellera.org
.

Preface
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. xi
ID110117 Non-Confidential
Feedback
Arm welcomes feedback on this product and its documentation.
Feedback on this product
If you have any comments or suggestions about this product, contact your supplier and give:
• The product name.
• The product revision or version.
• An explanation with as much information as you can provide. Include symptoms and
diagnostic procedures if appropriate.
Feedback on content
If you have comments on content then send an e-mail to
errata@arm.com
. Give:
• The title.
• The number, ARM DDI 0479D.
• The page numbers to which your comments apply.
• A concise explanation of your comments.
Arm also welcomes general suggestions for additions and improvements.
Note
Arm tests the PDF only in Adobe Acrobat and Acrobat Reader, and cannot guarantee the quality
of the represented document when used with any other PDF reader.

ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 1-1
ID110117 Non-Confidential
Chapter 1
Introduction
This chapter describes the Cortex-M System Design Kit. It contains the following sections:
•About the Cortex-M System Design Kit on page 1-2
•Product revisions on page 1-4.

Introduction
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 1-2
ID110117 Non-Confidential
1.1 About the Cortex-M System Design Kit
The Cortex-M System Design Kit helps you design products using Arm Cortex-M processors.
The design kit contains the following:
• A selection of AHB-Lite and APB components, including several peripherals such as
GPIO, timers, watchdog, and UART.
• An example system for supported processor products.
• Example synthesis scripts for the example system.
• Example compilation and simulation scripts for the Verilog environment that supports
ModelSim, VCS, and NC Verilog.
• Example code for software drivers.
• Example test code to demonstrate various operations of the systems.
• Example compilation scripts and example software project files that support:
—Arm Development Studio 5 (DS-5).
— Arm RealView Development Suite.
—Keil
® Microcontroller Development Kit (MDK).
— GNU Tools for Arm Embedded Processors (ARM GCC).
• Documentation including:
—Arm® Cortex®-M System Design Kit Technical Reference Manual.
—Arm® Cortex®-M0 and Cortex-M0+ System Design Kit Example System Guide.
—Arm® Cortex®-M System Design Kit Example System Guide.
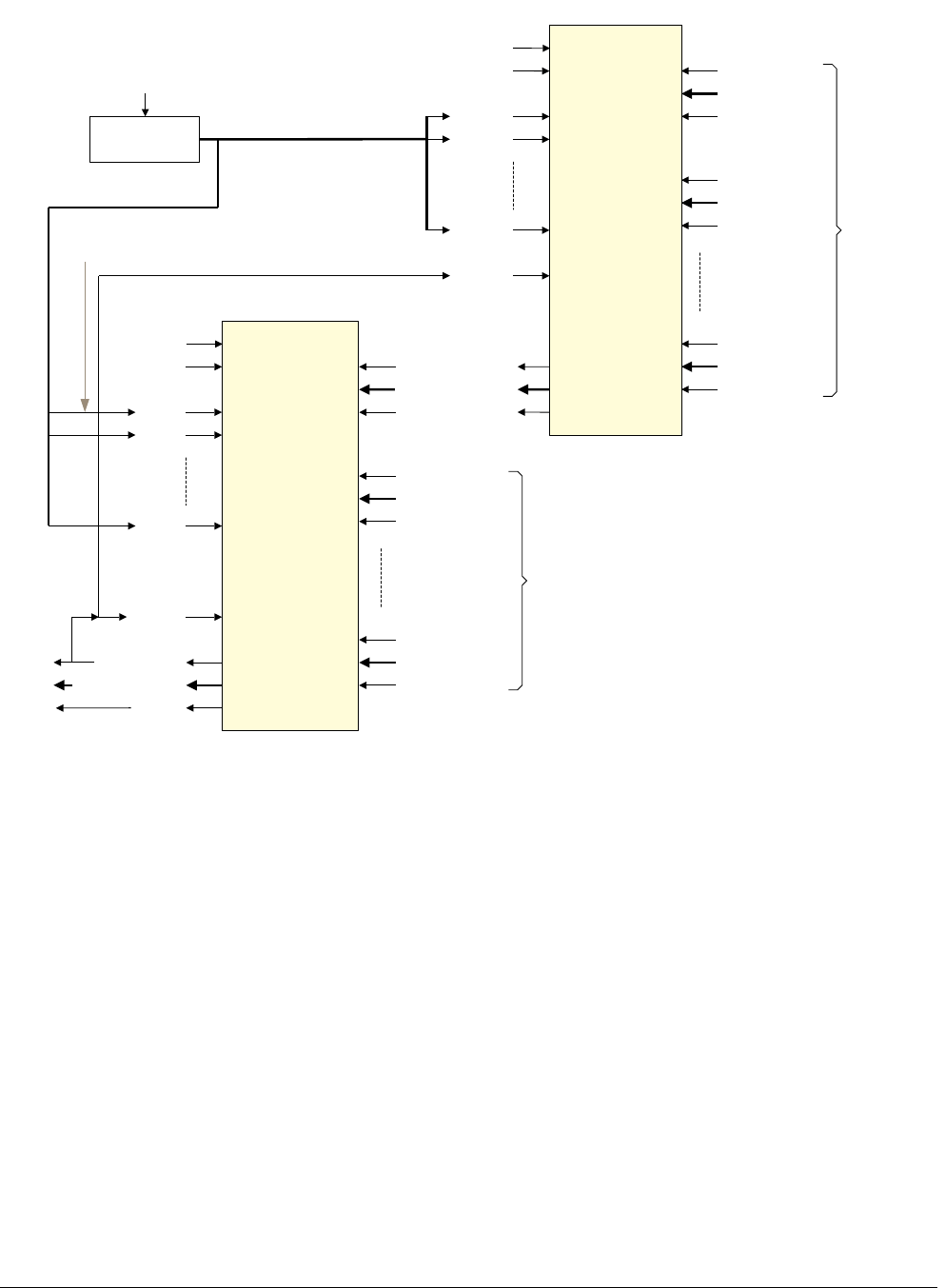
Figure 1-1 shows the use of the design kit in various stages of a design process.
Figure 1-1 Cortex-M System Design Kit usage in various stages of a design process
Licensed ARM
Cortex-M
processor
Learning to use
ARM Cortex-M
processor
Cortex-M System
Design Kit
Reusable IP
Out of box
testing
Using Cortex-M
System Design Kit
as starting point
for design
Enhancements Microcontroller
Device driver
library
Enhancement
Example driver software
Simulation setup
and software flow
System-level verification
Peripherals
verification
Simulation
environment
Peripherals
design

Introduction
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 1-3
ID110117 Non-Confidential
Table 1-1 shows the Cortex-M System Design Kit usage in various stages of a design process.
The Cortex-M System Design Kit is available as:
• Cortex-M0 and Cortex-M0+ System Design Kit. This supports Cortex-M0 and
Cortex-M0+.
• Cortex-M System Design Kit, full version. This supports Cortex-M0, Cortex-M0+,
Cortex-M3, and Cortex-M4.
The other differences between the Cortex-M0 and Cortex-M0+ version, and the Cortex-M
version of the design kit are the example systems, and the components provided. See Figure 1-2.
Figure 1-2 Difference between the two versions of the design kit
The design supports the following bus protocols:
• AHB-Lite or AMBA 3 AHB-Lite Protocol v1.0. In this document, AHB signifies
AHB-Lite.
• APB2 or AMBA 2 APB Protocol.
• APB3 or AMBA 3 APB Protocol v1.0.
• APB4 or AMBA APB Protocol v2.0.
Table 1-1 Cortex-M System Design Kit usage in various stages of a design process
Area Description
Out of Box (OoB) testing When you license the Cortex-M System Design Kit and a Cortex-M processor, you can use it for
OoB testing and benchmarking.
Learning Using the example systems, you can learn how to integrate the Cortex-M processor, and carry out
various operations.
Starting point of design You can use the Cortex-M System Design Kit as a starting point to design your microcontroller or
System on Chip (SoC) products.
Verification You can use the example system in the Cortex-M System Design Kit as a verification environment
to carry out system-level verification.
Starting point of software driver You can use the example software code in the Cortex-M System Design Kit as a starting point for
software driver development.
Reusable IP You can reuse the various components of the Cortex-M System Design Kit in microcontroller or
SoC design projects.
Cortex-M System Design Kit
AHB components APB components
Cortex-M0 and
Cortex-M0+
example system
Advanced AHB
components
AHB Bus Matrix
Behavioral
memory models
Cortex-M3 and M4
example system
Cortex-M0 and Cortex-M0+ System Design Kit
I/O port GPIO*
* For use with the Cortex-M0+ directly, or as a subcomponent within
AHB GPIO module.

Introduction
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 1-4
ID110117 Non-Confidential
1.2 Product revisions
This section describes the differences in functionality between product revisions of the
Cortex-M System Design Kit:
r0p0 First release.
r0p0-r1p0 Functional changes are:
• Support for Cortex-M0+ processor.
• Added
cmsdk_
prefix to module names.
• CMSIS updated to version 3.2.
• Changed HRESP width in some components.
• AHB slave multiplexer changed from eight ports to ten ports. See AHB
slave multiplexer on page 3-6.
• Addition of I/O port GPIO for Cortex-M0+. See AHB GPIO on page 3-11.
• Additional parameter in AHB to APB synchronous bridge. See AHB to
APB sync-down bridge on page 3-17.
• Addition of AHB to AHB and APB asynchronous bridge. See AHB to AHB
and APB asynchronous bridge on page 5-27.
• Addition of 16-bit flash ROM behavioral model. See 16-bit flash ROM
behavioral model on page 6-12.
r1p0-r1p1 Functional changes are:
• AHB Busmatrix: Muxing of signals improved to remove Xs after reset
before the first received transaction.
• AHB Busmatrix: Improved routing of HRDATA/HWDATA to reduce
power consumption because of toggling.
• AHB Busmatrix: Updated generator script to make it compatible with
newer versions of Perl and to correctly handle configurations that were
previously not working.
• AHB Busmatrix: Disabled the output of debug messages by default.
• AHB Busmatrix: Improved address decoder performance.
• AHB File Read Masters: Updated the execution testbench to the r1p0
component names.
• AHB File Read Masters: Removed unneeded timescale directives.
• AHB to APB sync-down bridge: Improved performance in case of
back-to-back transfers.
• APB Dualtimers: Removed unneeded timescale directives.
• APB Watchdog: Improved RTL to enable automatic clock gating of read
data register.
• IP-XACT: Added IP-XACT description for all components. See
Appendix A IP-XACT descriptions.
• Errata fixes to the r1p0 release.

ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 2-1
ID110117 Non-Confidential
Chapter 2
Functional description
This chapter describes the major functional blocks of the Cortex-M System Design Kit. It
contains the following sections:
•About the Cortex-M System Design Kit components on page 2-2.
•Design components on page 2-3.
•ID registers in programmable components on page 2-5.
•Use of OVL on page 2-6.

Functional description
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 2-2
ID110117 Non-Confidential
2.1 About the Cortex-M System Design Kit components
The Cortex-M System Design Kit provides example systems with AHB and APB components
designed for low-power and low-latency designs.
The preconfigured and validated examples enable you to develop devices in very short design
cycles. In addition, you can reuse the components in future designs.

Functional description
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 2-3
ID110117 Non-Confidential
2.2 Design components
The example systems consist of the following components and models:
•Basic AHB-Lite components.
•APB components.
•Advanced AHB-Lite components.
•Behavioral memory models on page 2-4.
•Verification components on page 2-4.
2.2.1 Basic AHB-Lite components
The basic AHB-Lite components are:
• AHB default slave.
• AHB example slave.
• AHB slave multiplexer.
• AHB master multiplexer.
• AHB General Purpose Input/Output (GPIO), including I/O port GPIO.
• AHB to APB sync-down bridge.
• AHB to SRAM interface module.
• AHB to flash interface modules.
• AHB timeout monitor.
• AHB to external SRAM interface.
• AHB bit-band wrapper for Cortex-M0 and Cortex-M0+.
See Chapter 3 Basic AHB-Lite components for more information.
2.2.2 APB components
The APB components are:
• APB example slave.
• APB timer.
•APB UART.
• APB dual timer.
• APB watchdog.
• APB slave multiplexer.
• APB subsystem.
• APB timeout monitor.
See Chapter 4 APB components for more information.
2.2.3 Advanced AHB-Lite components
The advanced AHB-Lite components are:
• AHB bus matrix.
• AHB upsizer.
• AHB downsizer.
• AHB to APB asynchronous bridge.
• AHB to AHB and APB asynchronous bridge.
• AHB to AHB synchronous bridge.
• AHB to AHB sync-down bridge.
• AHB to AHB sync-up bridge.

Functional description
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 2-4
ID110117 Non-Confidential
Note
The advanced AHB-Lite components are available only with the full version of the Cortex-M
System Design Kit. They are not included in the Cortex-M0 and Cortex-M0+ System Design
Kit.
See Chapter 5 Advanced AHB-Lite components for more information.
2.2.4 Behavioral memory models
The memory models are:
• ROM model wrapper.
• RAM model wrapper.
• Behavioral SRAM model with AHB interface.
• 32-bit flash ROM behavioral model.
• 16-bit flash ROM behavioral model.
• SRAM synthesizable (for FPGA) model.
• FPGA ROM.
• External asynchronous 8-bit SRAM.
• External asynchronous 16-bit SRAM.
See Chapter 6 Behavioral memory models for more information.
2.2.5 Verification components
The verification components are:
• AHB-Lite protocol checker.
• APB protocol checker.
• AHB File Reader Bus Master (FRBM).
See Chapter 7 Verification components for more information.

Functional description
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 2-5
ID110117 Non-Confidential
2.3 ID registers in programmable components
In the Cortex-M System Design Kit, some of the peripherals contain a number of read-only
Identification (ID) registers. These ID registers enable software to extract the component type
and revision information. In some cases, these registers are required to enable device driver
software to work with different versions of the same peripherals.
One of the ID registers, PID3, contains an Engineering Change Order (ECO) bit field generated
from the ECOREVNUM[3:0] input signal. The ECO operation enables you to carry out minor
design changes in the late stage of a chip design process, for example, at silicon mask level.
Connect ECOREVNUM[3:0] to tie-off cells to support ECO revision maintenance.
The ID registers are not strictly required for peripheral operation. In ultra low-power designs,
you can remove these ID registers to reduce gate count and power consumption.
When you modify a peripheral from the Cortex-M System Design Kit, modify the JEDEC ID
value and the part number in the ID registers to indicate that the peripheral is no longer identical
to the original version from Arm. Alternatively, you can remove these ID registers.
The JEDEC standard describes the JEDEC ID value allocation.
2.3.1 Modification of components
In some applications, it is necessary to modify the design of some components. If this is
required, Arm recommends that you do the following:
• Change the component name and filename to avoid confusion, especially if you are
running multiple projects using Cortex-M System Design Kit components.
• Update the ID register values. See ID registers in programmable components.
• Perform your own verification and testing.

Functional description
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 2-6
ID110117 Non-Confidential
2.4 Use of OVL
The components in the Cortex-M System Design Kit contain instantiations of Open Verification
Library (OVL) assertion components. The OVL assertions enable errors to be detected during
Verilog simulation.
The instantiation of OVL assertions is conditional:
AHB components This is controlled by the
ARM_AHB_ASSERT_ON
macro.
APB components This is controlled by the
ARM_APB_ASSERT_ON
macro.
If you use the OVL assertion feature then you can download the OVL source code from
Accellera
www.accellera.org
.

ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 3-1
ID110117 Non-Confidential
Chapter 3
Basic AHB-Lite components
This chapter describes the basic AHB-Lite components that are provided in the Cortex-M
System Design Kit. It contains the following sections:
•AHB default slave on page 3-2.
•AHB example slave on page 3-3.
•AHB slave multiplexer on page 3-6.
•AHB master multiplexer on page 3-9.
•AHB GPIO on page 3-11.
•AHB to APB sync-down bridge on page 3-17.
•AHB to SRAM interface module on page 3-19.
•AHB to flash interface modules on page 3-21.
•AHB timeout monitor on page 3-24.
•AHB to external SRAM interface on page 3-26.
•AHB bit-band wrapper on page 3-30.

Basic AHB-Lite components
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 3-2
ID110117 Non-Confidential
3.1 AHB default slave
The AHB default slave,
cmsdk_ahb_default_slave.v
, responds to transfers when the bus master
accesses an undefined address. A zero wait state OKAY response is generated for IDLE or
BUSY transfers, and an ERROR response is generated for NONSEQUENTIAL or
SEQUENTIAL transfers. Figure 3-1 shows the AHB default slave module.
Figure 3-1 AHB default slave component
Table 3-1 shows the characteristics of the AHB default slave module.
cmsdk_ahb_default_slave.v
HCLK
HRESETn
HSEL
HTRANS[1:0]
HREADY
HREADYOUT
HRESP
Table 3-1 AHB default slave characteristics
Element name Description
Filename
cmsdk_ahb_default_slave.v
Parameters None
Clock domain HCLK

Basic AHB-Lite components
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 3-3
ID110117 Non-Confidential
3.2 AHB example slave
The AHB example slave,
cmsdk_ahb_eg_slave.v
, demonstrates the implementation of a simple
AHB slave, and consists of
cmsdk_ahb_eg_slave_interface.v
and
cmsdk_ahb_eg_slave_reg.v
.
Figure 3-2 shows the AHB example slave module.
Figure 3-2 AHB example slave
The AHB example slave has the following features:
• 16 bytes of hardware RW registers organized as 4 words.
• Register accesses in byte, halfword, and word transfers.
• Optional read-only Component ID and Peripheral ID registers. You must modify the
following in these registers:
— Part number, 12 bits.
— JEDEC ID value, 7 bits.
•The ECOREVNUM input signal is connected to the ECO revision number in Peripheral
ID Register 3.
• The interface block converts the AHB protocol to a simple non-pipelined bus protocol.
You can reuse it for porting simple peripherals from 8-bit or 16-bit products to an
Arm-based system.
You can use the AHB example slave as a starting point for creating your own AHB peripherals,
as follows:
1. Copy the AHB example slave to a new directory, and rename the files to names of your
choice.
2. Remove the register block inside the AHB example slave, and replace with your own
peripheral register set.
3. Add the additional peripheral functionality and I/O pins to the design.
4. Instantiate the peripheral design in the system, and develop verification tests.
cmsdk_ahb_eg_slave.v
HCLK
HRESETn
HSELS
HADDRS[ADDRWIDTH-1:0]
HTRANSS[1:0]
HSIZES[2:0]
HWRITES
HREADYOUTS
HRDATAS[31:0]
HRESPS
HREADYS
HWDATAS[31:0]
cmsdk_ahb_eg_slave_interface.v cmsdk_ahb_eg_slave_reg.v
AHB
Simple register interface
addr
read_en
write_en
byte_strobe
wdata
rdata
ECOREVNUM[3:0]

Basic AHB-Lite components
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 3-4
ID110117 Non-Confidential
Table 3-2 shows the characteristics of the AHB example slave module.
3.2.1 Programmers model
Table 3-3 shows the AHB example slave memory map.
Table 3-2 AHB example slave characteristics
Element name Description
Filename
cmsdk_ahb_eg_slave.v
Parameters
ADDRWIDTH
Width of the AHB address bus. The default is 12.
Clock domain HCLK
Table 3-3 AHB example slave memory map
Name Base offset Type Width Reset value Description
DATA0
0x0000
RW 32
0x00000000
Simple Data Register.
DATA1
0x0004
RW 32
0x00000000
Simple Data Register.
DATA2
0x0008
RW 32
0x00000000
Simple Data Register.
DATA3
0x000C
RW 32
0x00000000
Simple Data Register.
PID4
0xFD0
RO 8
0x04
Peripheral ID Register 4:
[7:4] 4KB block count.
[3:0] jep106_c_code.
PID5a
0xFD4
RO 8
0x00
Peripheral ID Register 5.
PID6a
0xFD8
RO 8
0x00
Peripheral ID Register 6.
PID7a
0xFDC
RO 8
0x00
Peripheral ID Register 7.
PID0
0xFE0
RO 8
0x17
Peripheral ID Register 0:
[7:0] Part number[7:0].
PID1
0xFE4
RO 8
0xB8
Peripheral ID Register 1:
[7:4] jep106_id_3_0.
[3:0] Part number[11:8].
PID2
0xFE8
RO 8
0x1B
Peripheral ID Register 2:
[7:4] Revision.
[3] jedec_used.
[2:0] jep106_id_6_4.
PID3
0xFEC
RO 8
0x00
Peripheral ID Register 3:
[7:4] ECO revision number.
[3:0] Customer modification number.
CID0
0xFF0
RO 8
0x0D
Component ID Register 0.
CID1
0xFF4
RO 8
0xF0
Component ID Register 1.
CID2
0xFF8
RO 8
0x05
Component ID Register 2.
CID3
0xFFC
RO 8
0xB1
Component ID Register 3.

Basic AHB-Lite components
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 3-5
ID110117 Non-Confidential
Note
Signals such as HPROT[3:0], HMASTLOCK, and HBURST[2:0] are not used in the design,
so they do not appear in the AHB interface component.
a. The PID5, PID6, and PID7 registers are not used.

Basic AHB-Lite components
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 3-6
ID110117 Non-Confidential
3.3 AHB slave multiplexer
The AHB slave multiplexer,
cmsdk_ahb_slave_mux.v
, supports up to ten AHB slaves. It uses
parameters to define the slave port usage so that the synthesis process does not generate
unnecessary additional logic. Figure 3-3 shows the AHB slave multiplexer.
Figure 3-3 AHB slave multiplexer
The slave to master multiplexer controls the routing of read data and response signals from the
system bus slaves to the bus masters. An address decoder determines the slave that is currently
selected, and generates the HSEL signals to the AHB slave multiplexer and the AHB slaves.
The multiplexer uses a registered version of the slave select signals, because the read data and
response signals are valid during the data phase of a transfer, to connect the outputs of the
selected slave to the inputs of the bus masters.
When slaves are added to, or removed from, the system, you must modify the input connections
and update the corresponding Verilog parameters to this module to adapt for the changes.
cmsdk_ahb_slave_mux.v
HCLK
HRESETn
HSEL0
HREADYOUT0
HRDATA0[DW-1:0]
HREADYOUT
HRESP0
HSEL1
HREADYOUT1
HRDATA1[DW-1:0]
HRESP1
HSEL9
HREADYOUT9
HRDATA9[DW-1:0]
HRESP9
HRDATA[DW-1:0]
HRESP
HREADY
from AHB slaves
from address decoder

Basic AHB-Lite components
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 3-7
ID110117 Non-Confidential
Table 3-4 shows the characteristics of the AHB slave multiplexer module.
If you require more AHB slave ports, you can either cascade two AHB slave multiplexers, or
expand the design.
Figure 3-4 on page 3-8 shows the cascade connection of two AHB slave multiplexers in which
the HSEL signals for slaves 10-18 are connected to HSEL1 to HSEL9 of the AHB slave
multiplexer 2. The HSEL0 of the AHB slave multiplexer 2 is an OR function of the HSEL
signal for the AHB slaves 0-9.
Table 3-4 AHB slave multiplexer characteristics
Element name Description
Filename
cmsdk_ahb_slave_mux.v
Parameters
PORT0_ENABLE
The supported parameter values are:
0 Disable port 0.
1 Enable port 0.
PORT1_ENABLE
The supported parameter values are:
0 Disable port 1.
1 Enable port 1.
PORT2_ENABLE
The supported parameter values are:
0 Disable port 2.
1 Enable port 2.
PORT3_ENABLE
The supported parameter values are:
0 Disable port 3.
1 Enable port 3.
PORT4_ENABLE
The supported parameter values are:
0 Disable port 4.
1 Enable port 4.
PORT5_ENABLE
The supported parameter values are:
0 Disable port 5.
1 Enable port 5.
PORT6_ENABLE
The supported parameter values are:
0 Disable port 6.
1 Enable port 6.
PORT7_ENABLE
The supported parameter values are:
0 Disable port 7.
1 Enable port 7.
PORT8_ENABLE
The supported parameter values are:
0 Disable port 8.
1 Enable port 8.
PORT9_ENABLE
The supported parameter values are:
0 Disable port 9.
1 Enable port 9.
Note
All
PORT
n
_ENABLE
are set to 1 by default.
DW
Data width. You can configure the width to either
64 bits or 32 bits. This is set to 32 by default.
Clock domain HCLK
Basic AHB-Lite components
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 3-8
ID110117 Non-Confidential
Figure 3-4 Cascade connection
Instead of using multiple slave multiplexers, you can modify the design as follows:
• Copy and rename the module.
• Add ports for AHB slave connections.
• Add Verilog parameters, such as
PORT
n
_ENABLE
if required.
• Add the data phase select register, reg_hsel, and its next state logic.
• Add ports to the slave signal multiplexing logic.
• Adjust the optional OVL assertion code.
cmsdk_ahb_slave
_mux.v
HCLK
HRESETn
HSEL0
HREADYOUT0
HRDATA0[DW-1:0]
HREADYOUT
HRESP0
HSEL1
HREADYOUT1
HRDATA1[DW-1:0]
HRESP1
HSEL9
HREADYOUT9
HRDATA9[DW-1:0]
HRESP9HRDATA[DW-1:0]
HRESP
HREADY
cmsdk_ahb_slave
_mux.v
HCLK
HRESETn
HSEL0
HREADYOUT0
HRDATA0[DW-1:0]
HRESP0
HSEL1
HREADYOUT1
HRDATA1[DW-1:0]
HRESP1
HSEL9
HREADYOUT9
HRDATA9[DW-1:0]
HRESP9
HREADY
AHB decoder
HADDR
to AHB
master
Set to 1 if any of AHB
slave #0 to #9 is
selected
from AHB slaves
#0 to #9
from AHB slaves #10 to #18
AHB slave multiplexer 2
AHB slave multiplexer 1

Basic AHB-Lite components
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 3-9
ID110117 Non-Confidential
3.4 AHB master multiplexer
The AHB master multiplexer,
cmsdk_ahb_master_mux.v
, permits up to three AHB masters to
share an AHB connection. It uses parameters to define the master port usage. Therefore, the
synthesis process does not generate unnecessary additional logic. Figure 3-5 shows the AHB
master multiplexer.
Figure 3-5 AHB master multiplexer
cmsdk_ahb_master_mux.v
HCLK
HRESETn
HSELS0
HADDRS0[31:0]
HTRANSS0[1:0]
HSIZES0[2:0]
HWRITES0
HREADYOUTS0
HRDATAS0[DW-1:0]
HRESPS0
HREADYS0
HPROTS0[3:0]
HBURSTS0[2:0]
HMASTLOCKS0
HWDATAS0[DW-1:0]
HSELS1
HADDRS1[31:0]
HTRANSS1[1:0]
HSIZES1[2:0]
HWRITES1
HREADYOUTS1
HRDATAS1[DW-1:0]
HRESPS1
HREADYS1
HPROTS1[3:0]
HBURSTS1[2:0]
HMASTLOCKS1
HWDATAS1[DW-1:0]
HSELS2
HADDRS2[31:0]
HTRANSS2[1:0]
HSIZES2[2:0]
HWRITES2
HREADYOUTS2
HRDATAS2[DW-1:0]
HRESPS2
HREADYS2
HPROTS2[3:0]
HBURSTS2[2:0]
HMASTLOCKS2
HWDATAS2[DW-1:0]
HSELM
HADDRM[31:0]
HTRANSM[1:0]
HSIZEM[2:0]
HWRITEM
HREADYOUTM
HRDATAM[DW-1:0]
HRESPM
HREADYM
HPROTM[3:0]
HBURSTM[2:0]
HMASTLOCKM
HWDATAM[DW-1:0]
HMASTERM[1:0]

Basic AHB-Lite components
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 3-10
ID110117 Non-Confidential
Table 3-5 shows the characteristics of the AHB master multiplexer.
3.4.1 Arbitration scheme
The AHB master multiplexer uses a fixed arbitration scheme as follows:
Port 0 Same priority as port 1, round-robin scheme.
Port 1 Same priority as port 0, round-robin scheme.
Port 2 Higher priority master.
Switch-over between different masters is disabled during a fixed-length burst, locked transfers,
or if a transfer is indicated to the AHB slaves at the same time as a wait state occurs on the bus.
You can break an incrementing burst with an unspecified length into multiple parts as a result
of arbitration. The master multiplexer forces HTRANS to NONSEQUENTIAL for the first
transfer after switching to ensure that the AHB protocol operates correctly.
3.4.2 Limitations
The AHB master multiplexer has the following limitations:
• The downstream slave must respond with HREADYOUTM HIGH and HRESPM
OKAY when it is not selected.
3.4.3 HMASTERM output
The AHB master multiplexer provides an HMASTERM[1:0] output signal that indicates which
port a transfer originated from:
2’b00
Port 0.
2’b01
Port 1.
2’b10
Port 2.
2’b11
None.
Table 3-5 AHB master multiplexer characteristics
Element name Description
Filename
cmsdk_ahb_master_mux.v
Parameters
PORT0_ENABLE
The supported parameter values are:
0 Disable port 0.
1 Enable port 0.
PORT1_ENABLE
The supported parameter values are:
0 Disable port 1.
1 Enable port 1.
PORT2_ENABLE
The supported parameter values are:
0 Disable port 2.
1 Enable port 2.
Note
All
PORT
n
_ENABLE
are set to 1 by default.
DW
Data width. You can configure the width to either
64 bits or 32 bits. This is set to 32 by default.
Clock domain HCLK

Basic AHB-Lite components
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 3-11
ID110117 Non-Confidential
3.5 AHB GPIO
The AHB GPIO,
cmsdk_ahb_gpio.v
, is a general-purpose I/O interface unit.
The AHB GPIO provides a 16-bit I/O interface with the following properties:
• Programmable interrupt generation capability.
• Bit masking support using address values.
• Registers for alternate function switching with pin multiplexing support.
• Thread safe operation by providing separate set and clear addresses for control registers.
• Inputs are sampled using a double flip-flop to avoid metastability issues.
Figure 3-6 shows the control circuit and external interface of the AHB GPIO.
Figure 3-6 AHB GPIO control circuit and external interface
Table 3-6 shows the characteristics of the AHB GPIO.
cmsdk_ahb_gpio.v
HCLK
HRESETn
HSEL
HADDR[11:0]
HTRANS[1:0]
HSIZE[2:0]
HWRITE
HREADYOUT
HRDATA[31:0]
HRESP
HREADY
HWDATA[31:0]
GPIOINT[15:0]
COMBINT
PORTIN[15:0]
PORTOUT[15:0]
PORTEN[15:0]
PORTFUNC[15:0]
0
1
0
1
Pin Mux
I/O pad
Alternate
function signals
FCLK
ECOREVNUM[3:0]
cmsdk_ahb_
io_bridge.v cmsdk_io_gpio.v*
* If using the I/O GPIO for the Cortex-M0+ processor
Table 3-6 AHB GPIO characteristics
Element name Description
Filename
cmsdk_ahb_gpio.v
Parameters
ALTERNATE_FUNC_MASK
Indicates the pin that can have an alternate function. This parameter is set to
16’hFFFF
by default.
This means that all 16 pins can have alternate functions.
ALTERNATE_FUNC_DEFAULT
Default value for alternate function setting. This parameter is set to
16’h0000
by default. This
means that all pins are used for the GPIO function after reset.
BE
Big-endian. The default value is 0 for little-endian. Set the value to 1 for big-endian configuration.
Clock domains The clock domains are as follows:
HCLK AHB-Lite system clock. Can be gated off during sleep mode.
FCLK Free running clock, in same phase as HCLK. Must be running to generate edge trigger interrupt.

Basic AHB-Lite components
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 3-12
ID110117 Non-Confidential
3.5.1 Features of the GPIO
The following sections describe the features of the GPIO:
•Interrupt generation
•Masked access.
Interrupt generation
The AHB GPIO provides programmable interrupt generation features. Three registers control
this, and each register has separate set and clear addresses. You can configure each bit of the I/O
pins to generate interrupts based on these three registers. See Table 3-7.
After an interrupt is triggered, the corresponding bit in the INTSTATUS register is set. This also
causes the corresponding bit of the GPIOINT[15:0] signal to be asserted. As a result, the
combined interrupt signal, COMBINT, is also asserted. You can clear the interrupt status using
an interrupt handler that writes 1 to the corresponding bit of the INTCLEAR register, the same
address as the INTSTATUS register.
Note
The free running clock signal, FCLK, must be active during interrupt detection, because of the
double flip-flop synchronization logic. There is also a 3-cycle latency for the interrupt
generation that consists of two cycles for input signal synchronization, and one cycle for
registering of the interrupt status.
Masked access
The masked access feature permits individual bits or multiple bits to be read from or written to
in a single transfer. This avoids software-based read-modify-write operations that are not thread
safe. With the masked access operations, the 16-bit I/O is divided into two halves, lower byte
and upper byte. The bit mask address spaces are defined as two arrays, each containing 256
words.
For example, to set bits[1:0] to 1 and clear bits[7:6] in a single operation, you can carry out the
write to the lower byte mask access address space. The required bit mask is
0xC3
, and you can
write the operation as
MASKLOWBYTE[0xC3] = 0x03
as Figure 3-7 on page 3-13 shows.
Table 3-7 Interrupt generation
Interrupt enable[n] Interrupt polarity[n] Interrupt type[n] Interrupt feature
0 - - Disabled
10 0Low-level
1 0 1 Falling edge
1 1 0 High-level
1 1 1 Rising edge

Basic AHB-Lite components
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 3-13
ID110117 Non-Confidential
Figure 3-7 Masked access 1
Similarly, to update some of the bits in the upper 8 bits of the GPIO port, you can use the
MASKHIGHBYTE array as Figure 3-8 shows.
Figure 3-8 Masked access 2
0x0400
0x0800
0x0000
0x0FC0
Address
offset
Address offset =
0x0400 + 0xC3*4 = 0x70C
Operation: MASKLOWBYTE[0xC3] = 0x03
MASKLOWBYTE is a data
array of 32-bit x 256
GPIOOUT[15:0] becomes 0x322B
GPIOOUT[15:0] was 0x32E8
Set bits [1:0] to 1
Clear bits [7:6] to 0
Bit mask = ‘b11000011 (0xC3)
Data and Control
registers
Lower byte masked
access
Upper byte masked
access
ID registers
Data and Control
registers
Address
offset
0x0400
0x0800
Lower byte masked
access
Upper byte masked
access
0x0000
0x0FC0
ID registers
Address offset =
0x0800 + 0x98*4 = 0xA60
Operation: MASKHIGHBYTE[0x98] = 0x8000
MASKHIGHBYTE is a data array
of 32-bit x 256
GPIOOUT[15:0] becomes 0xA22B
Clear bits [12:11] to 0
Set bits [15] to 1
Bit mask = b10011000 (0x98)
GPIOOUT[15:0] was 0x322B

Basic AHB-Lite components
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 3-14
ID110117 Non-Confidential
3.5.2 Programmers model
Table 3-8 shows the software programmable registers in the example AHB GPIO.
Table 3-8 GPIO memory map
Name Base offset Type Width Reset value Description
DATA
0x0000
RW 16
0x----
Data value [15:0]:
Read Sampled at pin.
Write To data output register.
Read back value goes through double flip-flop
synchronization logic with a delay of two cycles.
DATAOUT
0x0004
RW 16
0x0000
Data output Register value [15:0]:
Read Current value of data output register.
Write To data output register.
Reserved
0x0008
-
0x000C
- - - Reserved.
OUTENSET
0x0010
RW 16
0x0000
Output enable set [15:0]:
Write 1 Set the output enable bit.
0 No effect.
Read back 0 Indicates the signal
direction as input.
1 Indicates the signal
direction as output.
OUTENCLR
0x0014
RW 16
0x0000
Output enable clear [15:0]:
Write 1 Clears the output enable bit.
0 No effect.
Read back 0 Indicates the signal
direction as input.
1 Indicates the signal
direction as output.
ALTFUNCSET
0x0018
RW 16
0x0000
Alternative function set [15:0]:
Write 1 Sets the ALTFUNC bit.
0 No effect.
Read back 0 For I/O.
1 For an alternate function.
ALTFUNCCLR
0x001C
RW 16
0x0000
Alternative function clear [15:0]:
Write 1 Clears the ALTFUNC bit.
0 No effect.
Read back 0 For I/O.
1 For an alternate function.
INTENSET
0x0020
RW 16
0x0000
Interrupt enable set [15:0]:
Write 1 Sets the enable bit.
0 No effect.
Read back 0 Interrupt disabled.
1 Interrupt enabled.

Basic AHB-Lite components
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 3-15
ID110117 Non-Confidential
INTENCLR
0x0024
RW 16
0x0000
Interrupt enable clear [15:0]:
Write 1 Clear the enable bit.
0 No effect.
Read back 0 Interrupt disabled.
1 Interrupt enabled.
INTTYPESET
0x0028
RW 16
0x0000
Interrupt type set [15:0]:
Write 1 Sets the interrupt type bit.
0 No effect.
Read back 0 For LOW or HIGH level.
1 For falling edge or rising
edge.
INTTYPECLR
0x002C
RW 16
0x0000
Interrupt type clear [15:0]:
Write 1 Clears the interrupt type bit.
0 No effect.
Read back 0 For LOW or HIGH level.
1 For falling edge or rising
edge.
INTPOLSET
0x0030
RW 16
0x0000
Polarity-level, edge IRQ configuration [15:0]:
Write 1 Sets the interrupt polarity
bit.
0 No effect.
Read back 0 For LOW level or falling
edge.
1 For HIGH level or rising
edge.
INTPOLCLR
0x0034
RW 16
0x0000
Polarity-level, edge IRQ configuration [15:0]:
Write 1 Clears the interrupt polarity
bit.
0 No effect.
Read back 0 For LOW level or falling
edge.
1 For HIGH level or rising
edge.
INTSTATUS,
INTCLEAR
0x0038
RW 16
0x0000
Write one to clear interrupt request:
Write [15:0] IRQ status clear Register. Write:
1 To clear the interrupt
request.
0 No effect.
Read back [15:0] IRQ status Register.
MASKLOWBYTE
0x0400
-
0x07FC
RW 16
0x----
Lower 8 bits masked access. Bits[9:2] of the address
value are used as enable bit mask for the access:
[15:8] Not used. RAZ/WI.
[7:0] Data for lower byte access, with
bits[9:2] of address value that is used as
enable mask for each bit.
Table 3-8 GPIO memory map (continued)
Name Base offset Type Width Reset value Description

Basic AHB-Lite components
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 3-16
ID110117 Non-Confidential
3.5.3 Component dependency
For use with the Cortex-M0+ processor, the AHB GPIO contains an AHB to single-cycle I/O
interface adapter, and a GPIO module with a single-cycle I/O interface. To use this module in
your design, add
cmsdk_ahb_gpio/verilog
and
cmsdk_iop_gpio/verilog
in the search path, or
explicitly include the Verilog RTL files in these two directories in your project.
MASKHIGHBYTE
0x0800
-
0x0BFC
RW 16
0x----
Higher 8 bits masked access. Bits[9:2] of the address
value are used as enable bit mask for the access:
[15:8] Data for higher byte access, with
bits[9:2] of address value that is used as
enable mask for each bit.
[7:0] Not used. RAZ/WI.
Reserved
0x0C00
-
0x0FCF
- - - Reserved.
PID4
0x0FD0
RO 8
0x04
Peripheral ID Register 4:
[7:4] Block count.
[3:0] jep106_c_code.
PID5a
0x0FD4
RO -
0x00
Peripheral ID Register 5.
PID6a
0x0FD8
RO -
0x00
Peripheral ID Register 6.
PID7a
0x0FDC
RO -
0x00
Peripheral ID Register 7.
PID0
0x0FE0
RO 8
0x20
Peripheral ID Register 0:
[7:0] Part number[7:0].
PID1
0x0FE4
RO 8
0xB8
Peripheral ID Register 1:
[7:4] jep106_id_3_0.
[3:0] Part number[11:8].
PID2
0x0FE8
RO 8
0x1B
Peripheral ID Register 2:
[7:4] Revision.
[3] jedec_used.
[2:0] jep106_id_6_4.
PID3
0x0FEC
RO 8
0x00
Peripheral ID Register 3:
[7:4] ECO revision number.
[3:0] Customer modification number.
CID0
0x0FF0
RO 8
0x0D
Component ID Register 0.
CID1
0x0FF4
RO 8
0xF0
Component ID Register 1.
CID2
0x0FF8
RO 8
0x05
Component ID Register 2.
CID3
0x0FFC
RO 8
0xB1
Component ID Register 3.
a. The PID5, PID6, and PID7 registers are not used.
Table 3-8 GPIO memory map (continued)
Name Base offset Type Width Reset value Description

Basic AHB-Lite components
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 3-17
ID110117 Non-Confidential
3.6 AHB to APB sync-down bridge
The AHB to APB sync-down bridge,
cmsdk_ahb_to_apb.v
, has the following features:
• Supports APB2, APB3, and APB4.
• Runs the APB interface semi-synchronously slower than the AHB interface.
Figure 3-9 shows the AHB to APB sync-down bridge.
Figure 3-9 AHB to APB sync-down bridge
Table 3-9 shows the characteristics of the AHB to APB sync-down bridge module.
The AHB to APB bridge has an output that is called APBACTIVE that controls the clock gating
cell for generation of a gated PCLK. The gated PCLK is called PCLKG in the example system.
When there is no APB transfer, this signal is LOW and stops PCLKG. Peripherals that are
designed with separate clock pins for bus logic and peripheral operation can use the gated
PCLK to reduce power consumption.
This block requires an APB clock that is synchronized to HCLK. PCLK can be divided or the
same as HCLK by using PCLKEN.
When developing a system for AMBA 2.0, you can tie PSLVERR LOW, and PREADY HIGH.
cmsdk_ahb_to_apb.v
HCLK
HRESETn
HSEL
HADDR[ADDRWIDTH-1:0]
HTRANS[1:0]
HWRITE
HREADYOUT
HRDATA[31:0]
HRESP
HREADY
HWDATA[31:0]
PRDATA[31:0]
PADDR[ADDRWIDTH-1:0]
PENABLE
PSEL
PWRITE
PWDATA[31:0]
APBACTIVE
PSLVERR
PREADY
HSIZE[2:0] PSTRB[3:0]
HPROT[3:0] PPROT[2:0]
PCLKEN
Table 3-9 AHB to APB sync-down bridge characteristics
Element name Description
Filename
cmsdk_ahb_to_apb.v
Parameters
ADDRWIDTH
APB address width. The default value is 16, that is, 64K byte APB address space.
REGISTER_RDATA
1 Registered read data path.
0 Combinational read data path.
The default value is 1.
REGISTER_WDATA
1 Registered write data path.
0 Combinational write data path.
Registering write data can help reduce timing issues caused by large fanouts. The
default value is 0.
Clock domain HCLK

Basic AHB-Lite components
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 3-18
ID110117 Non-Confidential
When using APB2 and APB3 peripheral systems, you can ignore the PPROT[2:0] and
PSTRB[3:0] signals.
For systems that do not require a high operating frequency, you can override the
REGISTER_RDATA
Verilog parameter to 0 to reduce the latency of APB accesses. This results in the read data from
the APB slaves, PRDATA, being directly output to the AHB read data output, HRDATA, and
reduces the wait states in addition to the gate counts. By default, the
REGISTER_RDATA
parameter
is set to 1 to include a registering stage.
For a system with HCLK equal to PCLK, and if there is no error response from APB slaves,
the minimum number of cycles for each RW is as follows:
• Three HCLK cycles when
REGISTER_RDATA
is 1.
•Two HCLK cycles when
REGISTER_RDATA
is 0.
For systems that require a high operating frequency, set the
REGISTER_WDATA
Verilog parameter
to 1 to register the AHB master write data. This breaks the path between HWDATA and
PWDATA but increases the latency of write transfers by one cycle.

Basic AHB-Lite components
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 3-19
ID110117 Non-Confidential
3.7 AHB to SRAM interface module
The AHB to SRAM interface module,
cmsdk_ahb_to_sram.v
, enables on-chip synchronous
SRAM blocks to attach to an AHB interface. It performs read and write operations with zero
wait states. The design supports 32-bit SRAM only. The SRAM must support byte writes. You
can also use this module in FPGA development for connecting FPGA block RAM to the AHB.
Figure 3-10 shows the AHB to SRAM interface module.
Figure 3-10 AHB to SRAM interface module
Table 3-10 shows the characteristics of the AHB to SRAM interface module.
The design always responds with OKAY and zero wait states.
The AHB to SRAM interface module assumes the SRAM read and write access timings that
Figure 3-11 on page 3-20 shows.
cmsdk_ahb_to_sram.v
HCLK
HRESETn
HSEL
HTRANS[1:0]
HWRITE
HREADYOUT
HRDATA[31:0]
HRESP
HREADY
HWDATA[31:0]
SRAMRDATA[31:0]
SRAMADDR[AW-3:0]
SRAMWEN[3:0]
SRAMWDATA[31:0]
HSIZE[2:0]
SRAMCS
HADDR[AW-1:0]
Table 3-10 AHB to SRAM interface module characteristics
Element name Description
Filename
cmsdk_ahb_to_sram.v
Parameters
AW
Address width. The default value is 16, that is, 64KB.
For example, if the SRAM is 8KB, set
AW
to 13.
Clock domain HCLK

Basic AHB-Lite components
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 3-20
ID110117 Non-Confidential
Figure 3-11 SRAM interface timing
If a read operation follows immediately after a write operation, the write address and write data
are stored in an internal buffer, and the SRAM carries out the read operation first. The stalled
write transfer is carried out when the AHB interface is idle, or when there is a write transfer.
A merging of read data between the internal buffers and the read data from SRAM is carried out
automatically by the interface module, when:
• A read operation follows immediately after a write operation to the same address.
• A sequence of read operations follows immediately after a write operation with any of the
read transfers using the same address.
The merging processing uses internal buffer byte valid status and ensures the read data that
returns to the bus master is up-to-date. This process occurs transparently and does not result in
any wait states.
HCLK
SRAMADDR
SRAMCS
SRAMWEN
SRAMWDATA
SRAMRDATA
Read address and read control
signals apply Fetch read data
HADDR
HTRANS
NSEQ/SEQ
HWRITE
HREADY
HRDATA
HSEL
HWDATA
Write address, data and write control
signals apply
data
addr
NSEQ/SEQ
addr
data
addr
data
addr
data

Basic AHB-Lite components
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 3-21
ID110117 Non-Confidential
3.8 AHB to flash interface modules
The AHB to flash interface modules,
cmsdk_ahb_to_flash32.v and cmsdk_ahb_to_flash16.v
,
enable you to connect a simple 32-bit or 16-bit read-only flash memory model to an AHB
system. They include parameterized wait state generation.
Figure 3-12 shows the AHB to flash interface module for 32-bit flash ROM.
Figure 3-12 AHB to flash interface module for 32-bit flash ROM
Table 3-11 shows the characteristics of the AHB to flash interface module for 32-bit flash ROM.
Figure 3-13 on page 3-22 shows the AHB to flash interface module for 16-bit flash ROM. This
module is design to work with 16-bit AHB. A 32-bit AHB to 16-bit AHB downsizer is available
in the Cortex-M0+ deliverable. Inside the integration kit, the filename is
cm0p_32to16_dnsize.v
.
cmsdk_ahb_to_flash32.v
HCLK
HRESETn
HSEL
HTRANS[1:0]
HWRITE
HREADYOUT
HRDATA[31:0]
HRESP
HREADY
HWDATA[31:0]
HSIZE[2:0]
HADDR[AW-1:0] FLASHADDR[AW-3:0]
FLASHRDATA[31:0]
HPROT[3:0]
Table 3-11 AHB to flash interface module for 32-bit flash ROM characteristics
Element name Description
Filename
cmsdk_ahb_to_flash32.v
Parameters
AW
Address width. The default value is 16.
WS
Wait state. The default value is 1. The valid range of wait state is 0-3.
Clock domain HCLK

Basic AHB-Lite components
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 3-22
ID110117 Non-Confidential
Figure 3-13 AHB to flash interface module for 16-bit flash ROM
Table 3-12 shows the characteristics of the AHB to flash interface module for 16-bit flash ROM.
This interface module only supports read operations.
Figure 3-14 on page 3-23 shows the flash memory read access timings with different wait states.
cmsdk_ahb_to_flash16.v
HCLK
HRESETn
HSEL
HTRANS[1:0]
HWRITE
HREADYOUT
HRDATA[15:0]
HRESP
HREADY
HWDATA[15:0]
HSIZE[2:0]
HADDR[AW-1:0] FLASHADDR[AW-2:0]
FLASHRDATA[15:0]
HPROT[3:0]
Table 3-12 AHB to flash interface module for 16-bit ROM characteristics
Element name Description
Filename
cmsdk_ahb_to_flash16.v
Parameters
AW
Address width. The default value is 16.
WS
Wait state. The default value is 1. The valid range of wait state is 0-3.
Clock domain HCLK

Basic AHB-Lite components
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 3-23
ID110117 Non-Confidential
Figure 3-14 AHB to flash read access timing
HCLK
HADDR N
HTRANS NONSEQ
HWRITE
HREADY
HREADYOUT
HRDATA
HSEL
FLASHADDR N
FLASHRDATA
Flash memory read with WS = 0
HCLK
HADDR N
HTRANS NONSEQ
HWRITE
HREADY
HREADYOUT
HRDATA
HSEL
FLASHADDR N
FLASHRDATA
Flash memory read with WS = 1

Basic AHB-Lite components
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 3-24
ID110117 Non-Confidential
3.9 AHB timeout monitor
The AHB timeout monitor,
cmsdk_ahb_timeout_mon.v
, prevents an AHB slave from locking up a
system. It is placed between the AHB master and slave, and is connected directly to the AHB
slave. If there is an active transfer to the slave, and the slave holds HREADY LOW for more
than a certain number of clock cycles, the monitor generates an error response to the bus master.
Figure 3-15 shows the AHB timeout monitor module.
If the bus master generates any subsequent access to this slave, the monitor returns an error
response, and blocks access to the slave. The timeout monitor stops generating error responses
and masking access to the slave when the slave has completed the transfer that timed out by
asserting HREADYOUT HIGH. If a burst is in progress, the timeout monitor masks the
remaining beats in the burst before becoming transparent again.
Figure 3-15 AHB timeout monitor
Figure 3-16 shows the typical usage of the AHB timeout monitor.
Figure 3-16 Use of AHB timeout monitor
If the monitor is directly coupled to the processor, or connected to an AHB path that is used for
exception handler code access, the processor cannot execute the bus fault exception handler.
If multiple bus slaves require monitoring, Arm recommends that you use multiple monitors
instead of putting one monitor at the AHB slave multiplexer connection, to prevent the monitor
from blocking access to the program ROM or SRAM.
The
TIME_OUT_VALUE
Verilog parameter determines the number of wait state cycles that trigger
the timeout.
You can use the TIMEOUT output signal to export timeout events to external logic. During
timeout, the TIMEOUT signal is asserted continuously until the AHB slave asserts the
HREADYOUT signal.
Table 3-13 on page 3-25 shows the characteristics of the AHB timeout monitor.
cmsdk_ahb_timeout_mon.v
HCLK
HRESETn
HSELS
HTRANSS[1:0]
HREADYOUTS
HRESPS
HREADYS
HREADYOUTM
HRESPM
HSELM
HTRANSM[1:0]
HREADYM
TIMEOUT
AHB master AHB interconnect AHB slaveAHB timeout monitor

Basic AHB-Lite components
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 3-25
ID110117 Non-Confidential
Table 3-13 AHB timeout monitor characteristics
Element name Description
Filename
cmsdk_ahb_timeout_mon.v
Parameters
TIME_OUT_VALUE
Number of wait cycles that trigger timeout. Permitted values for this
parameter are 2-1024 inclusive. The default value is 16.
Clock domain HCLK

Basic AHB-Lite components
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 3-26
ID110117 Non-Confidential
3.10 AHB to external SRAM interface
The AHB to external SRAM interface module,
cmsdk_ahb_to_extmem16.v
, enables external
SRAM, static memory devices, or external peripherals, to connect to the Cortex-M processor
design. The module supports only 16-bit and 8-bit external interfaces. Figure 3-17 shows the
AHB to external SRAM interface module.
Figure 3-17 AHB to external SRAM interface
The interface module,
cmsdk_ahb_to_extmem16.v
, is designed to support an external bidirectional
data bus. The DATAOEn signal controls the tristate buffer for data output. You must add your
own tristate buffers in your system implementation. The design enables turnaround cycles to be
inserted between reads and writes to prevent current spikes that could occur for a very short time
when the processor system and the external device both drive the data bus. The following
signals control wait states for reads, wait states for writes, and the number of turnaround cycles
respectively:
•CFGREADCYCLE.
•CFGWRITECYCLE.
•CFGTURNAROUNDCYCLE.
You can operate the interface module in 8-bit mode, with CFGSIZE LOW, or 16-bit mode, with
CFGSIZE HIGH. All the configuration control signals must remain stable during operation.
The design generates an OKAY response.
Table 3-14 shows the characteristics of the AHB to external SRAM interface.
cmsdk_ahb_to_extmem16.v
HCLK
HRESETn
HSEL
HADDR[AW-1:0]
HTRANS[1:0]
HWRITE
HREADYOUT
HRDATA[31:0]
HRESP
HREADY
HWDATA[31:0]
HSIZE[2:0]
ADDR[AW-1:0]
DATAOUT[15:0]
CFGREADCYCLE[2:0]
CFGWRITECYCLE[2:0]
CFGTURNAROUNDCYCLE[2:0]
CFGSIZE
DATAOEn
DATAIN[15:0]
WEn
OEn
CEn
LBn
UBn
Table 3-14 AHB to external SRAM interface characteristics
Element name Description
Filename
cmsdk_ahb_to_extmem16.v
Parameters
AW
Address width. The default value is 16.
Clock domain HCLK

Basic AHB-Lite components
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 3-27
ID110117 Non-Confidential
3.10.1 Signal descriptions
Table 3-15 shows the non-AMBA signals that the AHB to external SRAM interface uses.
Figure 3-18 on page 3-28 shows the external SRAM interface timing for the following signals.
These are the control wait states for reads, wait states for writes, and the number of turnaround
cycles respectively:
•CFGREADCYCLE=0.
•CFGWRITECYCLE=0.
•CFGTURNAROUNDCYCLE=0.
Table 3-15 AHB to external SRAM interface signals
Signal Description
CFGREADCYCLE[2:0] Number of clock cycles for a read operation. A value of 0 indicates one read cycle.
CFGWRITECYCLE[2:0] Number of clock cycles for a write operation. A value of 0 indicates one write cycle. The
interface module automatically inserts one additional setup cycle before the write and one
hold cycle after the write.
CFGTURNAROUNDCYCLE[2:0] Number of clock cycles that are required to switch between a read and a write operation on
the tristate bus. A value of 0 indicates one turnaround cycle.
CFGSIZE Set:
LOW For 8-bit memory.
HIGH For 16-bit memory.
DATAOEn Tristate buffer output enable for DATAOUT. Active LOW.
WEn Write strobe for external memory device. Active LOW.
OEn Read access output enable for external memory device. Active LOW.
CEn Chip enable. Active LOW.
LBn Lower byte enable. Active LOW.
UBn Upper byte enable. Active LOW.

Basic AHB-Lite components
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 3-28
ID110117 Non-Confidential
Figure 3-18 External SRAM interface timing 1
Figure 3-19 on page 3-29 shows the external SRAM interface timing for the following signals.
These are the control wait states for reads, wait states for writes, and the number of turnaround
cycles respectively:
•CFGREADCYCLE=1, that is, two cycles.
•CFGWRITECYCLE=1, that is, two cycles.
•CFGTURNAROUNDCYCLE=1, that is, two cycles.
HCLK
HADDR A1
HTRANS NONSEQ
HWRITE
HREADY
HREADYOUT
HRDATA
HSEL
ADDR A1
DATAIN
A2
NONSEQ
DATAOEn
A2
DATAOUT (valid)
HWDATA (valid)
CEn
OEn
UBn, LBn
WEn
D1
D1
D2
D2
Read
operation
Bus turnaround
cycle
Write
operation

Basic AHB-Lite components
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 3-29
ID110117 Non-Confidential
Figure 3-19 External SRAM interface timing 2
HCLK
HADDR A1
HTRANS NONSEQ
HWRITE
HREADY
HREADYOUT
HRDATA
HSEL
ADDR
DATAIN
NONSEQ
DATAOEn
A2
DATAOUT (valid)
HWDATA (valid)
CEn
OEn
UBn, LBn
WEn
D1
D1
D2
D2
A2
A1
Read operation Bus turnaround cycles Write operation

Basic AHB-Lite components
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 3-30
ID110117 Non-Confidential
3.11 AHB bit-band wrapper
The AHB bit-band wrapper,
cmsdk_ahb_bitband.v
, provides the bit-band functionality for the
Cortex-M0 and Cortex-M0+ processor.
Note
The bit-band wrapper is provided as a workaround for designers who are migrating silicon
designs from a Cortex-M3 or Cortex-M4 processor to a Cortex-M0 or Cortex-M0+ processor,
and require software compatibility with the Cortex-M3 and Cortex-M4 bit-band feature. Using
the bit-band wrapper can result in the following:
• Longer timing paths on AHB interconnect and therefore a reduction in the maximum
clock frequency.
• Higher power consumption.
• Larger design size.
Arm recommends that bit level access functionality is designed into any peripherals that can
benefit from fast bit set and clear operations rather than using the bit-band wrapper.
Figure 3-20 shows the AHB bit-band wrapper module for the Cortex-M0 and Cortex-M0+
processor.
Figure 3-20 AHB bit-band wrapper for Cortex-M0 and Cortex-M0+ processor
cmsdk_ahb_bitband.v
HCLK
HRESETn
HSELS
HADDRS[31:0]
HTRANSS[1:0]
HWRITES
HREADYOUTS
HRDATAS[31:0]
HRESPS
HREADYS
HWDATAS[31:0]
HSIZES[2:0]
HMASTLOCKS
HPROTS[3:0]
HBURSTS[2:0]
HSELM
HADDRM[31:0]
HTRANSM[1:0]
HSIZEM[2:0]
HWRITEM
HREADYOUTM
HRDATAM[31:0]
HRESPM
HREADYM
HPROTM[3:0]
HBURSTM[2:0]
HMASTLOCKM
HWDATAM[31:0]
HMASTERS[MW-1:0] HMASTERM[MW-1:0]

Basic AHB-Lite components
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 3-31
ID110117 Non-Confidential
Table 3-16 shows the characteristics of the AHB bit-band wrapper for the Cortex-M0 and
Cortex-M0+ processor.
When an AHB data transfer goes to bit-band alias regions
0x22000000
to
0x23FFFFFFC
or
0x42000000
to
0x43FFFFFFC
, the transfer is remapped to bit-band regions
0x20000000
to
0x200FFFFF
or
0x40000000
to
0x400FFFFF
.
If the transfer is a read operation, a single remapped read transfer is produced, and the Least
Significant Bit (LSB) of the read data indicates the bit value read. If the transfer is a write
operation, the transfer is converted into a locked read-modify-write sequence.
The written bit is replaced by the LSB of the write data from the bus master, for example, the
Cortex-M0 or Cortex-M0+ processor. During the read-modify sequence, HMASTLOCK is
asserted to ensure that the operation is atomic.
The value of HADDR must be word-aligned when accessing a bit-band alias. The transfer size
is either in word, halfword, or byte. The size of the transfer to the AHB slaves matches the
transfer size that the bus master uses.
For instruction transfers, indicated by 0 in HPROT[0] or transfers to other memory locations,
the transfers are not altered.
3.11.1 Bit-banding
Bit-banding maps a complete word of memory onto a single bit in the bit-band region. For
example, writing to one of the alias words sets or clears the corresponding bit in the bit-band
region. This enables every individual bit in the bit-banding region to be directly accessible from
a word-aligned address using a single LDR instruction. It also enables individual bits to be
toggled without performing a read-modify-write sequence of instructions.
The bit-band wrapper supports two bit-band regions. These occupy the lowest 1MB of the
SRAM,
0x20000000
, and peripheral memory,
0x40000000
, regions respectively. These bit-band
regions map each word in an alias region of memory to a bit in a bit-band region of memory.
The bit-band wrapper contains logic that controls bit-band accesses as follows:
• It remaps bit-band alias addresses to the bit-band region.
• For reads, it extracts the requested bit from the read byte, and returns this in the LSB of
the read data returned to the core.
• For writes, it converts the write to an atomic read-modify-write operation.
The memory map has two 32MB alias regions that map to two 1MB bit-band regions:
• Accesses to the 32MB SRAM alias region map to the 1MB SRAM bit-band region.
• Accesses to the 32MB peripheral alias region map to the 1MB peripheral bit-band region.
Table 3-16 AHB bit-band wrapper for Cortex-M0 processor characteristics
Element name Description
Filename
cmsdk_ahb_bitband.v
Parameters
MW
Width of HMASTER signals. The default value is 1 because HMASTER in the Cortex-M0 and
Cortex-M0+ processor is a one-bit signal.
BE
Big-endian. The default value is 0 for little-endian. Set the value to 1 for big-endian configuration.
Clock domain HCLK

Basic AHB-Lite components
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 3-32
ID110117 Non-Confidential
The following mapping formula shows how to reference each word in the alias region to a
corresponding bit, or target bit, in the bit-band region:
bit_word_offset = (byte_offset x 32) + (bit_number × 4)
bit_word_addr = bit_band_base + bit_word_offset
where:
bit_word_offset
The position of the target bit in the bit-band memory region.
bit_word_addr
The address of the word in the alias memory region that maps to the
targeted bit.
bit_band_base
The starting address of the alias region.
byte_offset
The number of the byte in the bit-band region that contains the targeted bit.
bit_number
The bit position, 0-7, of the targeted bit.
Figure 3-21 shows examples of bit-band mapping between the SRAM bit-band alias region and
the SRAM bit-band region:
• The alias word at
0x23FFFFE0
maps to bit[0] of the bit-band byte at
0x200FFFFF
:
0x23FFFFE0
=
0x22000000 + (0xFFFFF×32) + 0×4
.
• The alias word at
0x23FFFFFC
maps to bit[7] of the bit-band byte at
0x200FFFFF
:
0x23FFFFFC
=
0x22000000 + (0xFFFFF×32) + 7×4
.
• The alias word at
0x22000000
maps to bit[0] of the bit-band byte at
0x20000000
:
0x22000000
= 0x22000000 + (0×32) + 0×4
.
• The alias word at
0x2200001C
maps to bit[7] of the bit-band byte at
0x20000000
:
0x2200001C
= 0x22000000 + (0×32) + 7×4
.
Figure 3-21 Bit-band mapping
0x23FFFFE4
0x22000004
0x23FFFFE00x23FFFFE80x23FFFFEC0x23FFFFF00x23FFFFF40x23FFFFF80x23FFFFFC
0x220000000x220000140x220000180x2200001C 0x220000080x22000010 0x2200000C
32MB alias region
0
7 0
07
0x200000000x200000010x200000020x20000003
6 5 4 3 2 1 07 6 5 4 3 2 1 7 6 5 4 3 2 1 07 6 5 4 3 2 1
07 6 5 4 3 2 1 6 5 4 3 2 107 6 5 4 3 2 1 07 6 5 4 3 2 1
0x200FFFFC0x200FFFFD0x200FFFFE0x200FFFFF
1MB SRAM bit-band region

Basic AHB-Lite components
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 3-33
ID110117 Non-Confidential
Accessing an alias region directly
Writing to a word in the alias region has the same effect as a read-modify-write operation on the
targeted bit in the bit-band region.
Bit[0] of the value written to a word in the alias region determines the value written to the
targeted bit in the bit-band region:
• Writing a value with bit[0] set writes a 1 to the bit-band bit.
• Writing a value with bit[0] cleared writes a 0 to the bit-band bit.
Bits[31:1] of the alias word have no effect on the bit-band bit:
• Writing
0x01
has the same effect as writing
0xFF
.
• Writing
0x00
has the same effect as writing
0x0E
.
Reading a word in the alias region returns either
0x01
or
0x00
:
• A value of
0x01
indicates that the targeted bit in the bit-band region is set.
• A value of
0x00
indicates that the targeted bit is clear.
Bits[31:1] are 0.
Directly accessing a bit-band region
You can directly access the bit-band region with normal reads and writes to that region.
3.11.2 Limitations
The AHB bit-band has the following limitations:
• The downstream slave must respond with HREADYOUTM HIGH and HRESPM
OKAY when it is not selected.

ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 4-1
ID110117 Non-Confidential
Chapter 4
APB components
This chapter describes the APB components that the Cortex-M System Design Kit uses. It
contains the following sections:
•APB example slaves on page 4-2.
•APB timer on page 4-5.
•APB UART on page 4-8.
•APB dual-input timers on page 4-11.
•APB watchdog on page 4-20.
•APB slave multiplexer on page 4-26.
•APB subsystem on page 4-27.
•APB timeout monitor on page 4-33.
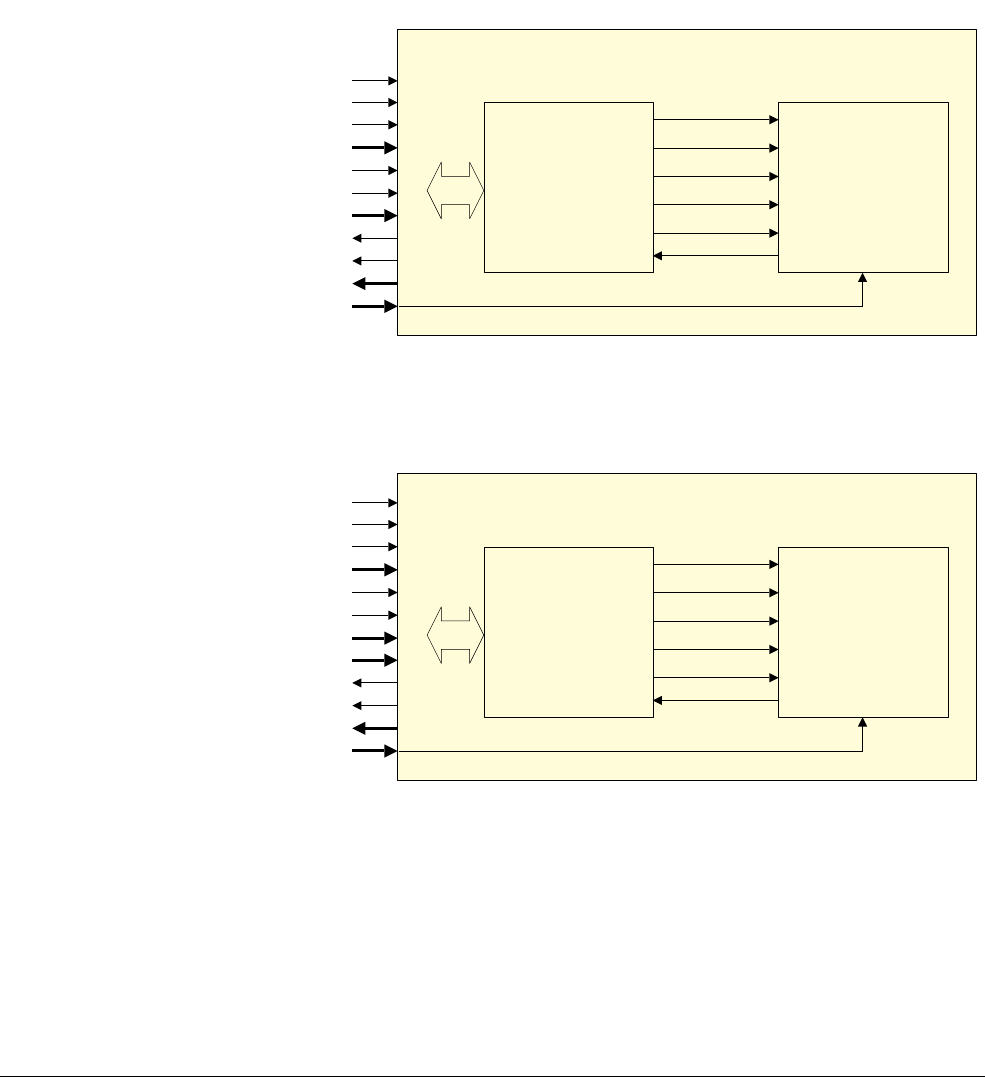
APB components
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 4-2
ID110117 Non-Confidential
4.1 APB example slaves
The APB example slaves,
cmsdk_apb3_eg_slave.v
and
cmsdk_apb4_eg_slave.v,
demonstrate how
to implement basic APB slaves. Each provides four words of hardware RW registers and
additional read-only ID registers. Each APB transfer to these example slaves takes two cycles,
and no additional wait states are inserted. The following example slaves are included for the
Cortex-M System Design Kit:
•APB3.
•APB4.
Figure 4-1 shows an APB3 example slave module.
Figure 4-1 APB3 example slave
Figure 4-2 shows an APB4 example slave module.
Figure 4-2 APB4 example slave
The APB example slaves include the following features:
• A simple APB slave interface.
• 32-bit data bus, endian-independent. For the APB3 example slave, the data handling is 32
bits only. For the APB4 example slave, use the PSTRB signal to perform the write
operations on individual bytes.
• Data transfers require two clock cycles.
cmsdk_apb3_eg_slave.v
cmsdk_apb3_eg_slave_interface.v cmsdk_apb3_eg_slave_reg.v
APB
Simple register interface
addr
read_en
write_en
byte_strobe
wdata
rdata
PCLK
PRESETn
PSEL
PADDR[ADDRWIDTH-1:0]
PENABLE
PWRITE
PREADY
PRDATA[31:0]
PSLVERR
PWDATA[31:0]
ECOREVNUM[3:0]
cmsdk_apb4_eg_slave.v
cmsdk_apb4_eg_slave_interface.v cmsdk_apb4_eg_slave_reg.v
APB
Simple register interface
addr
read_en
write_en
byte_strobe
wdata
rdata
PCLK
PRESETn
PSEL
PADDR[ADDRWIDTH-1:0]
PENABLE
PWRITE
PREADY
PRDATA[31:0]
PSLVERR
PWDATA[31:0]
ECOREVNUM[3:0]
PSTRB[3:0]

APB components
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 4-3
ID110117 Non-Confidential
• Four 32-bit RW registers.
Table 4-1 shows the characteristics of the APB example slave.
In the same way as the AHB example slave, the design of the APB example slaves are
partitioned into an interface module and a register module. You can use the interface module to
connect most peripheral blocks that are designed for traditional 8-bit or 16-bit microcontrollers
to simplify migration to Arm-based systems.
4.1.1 Programmers model
Table 4-2 shows the APB example slave memory map.
Table 4-1 APB example slave characteristics
Element name Description
Filename
cmsdk_apb3_eg_slave.v
, for example APB3 slave.
cmsdk_apb4_eg_slave.v
, for example APB4 slave.
Parameters
ADDRWIDTH
Width of the APB address bus. The default is 12.
Clock domain PCLK
Table 4-2 APB example slave memory map
Name Base offset Type Width Reset value Description
DATA0
0x0000
RW 32
0x00000000
-
DATA1
0x0004
RW 32
0x00000000
-
DATA2
0x0008
RW 32
0x00000000
-
DATA3
0x000C
RW 32
0x00000000
-
Unused
0x0010
-
0x0FCF
- - - Read as 0 and write ignored.
PID4
0xFD0
RO 8
0x04
Peripheral ID Register 4:
[7:4] Block count.
[3:0] jep106_c_code.
PID5
0xFD4
RO 8
0x00
Peripheral ID Register 5.
PID6
0xFD8
RO 8
0x00
Peripheral ID Register 6.
PID7
0xFDC
RO 8
0x00
Peripheral ID Register 7.
PID0
0xFE0
RO 8
0x18
APB3 example slave. Peripheral ID Register 0:
[7:0] Part number[7:0].
0x19
APB4 example slave. Peripheral ID Register 0:
[7:0] Part number[7:0].
PID1
0xFE4
RO 8
0xB8
Peripheral ID Register 1:
[7:4] jep106_id_3_0.
[3:0] Part number[11:8].

APB components
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 4-4
ID110117 Non-Confidential
Note
The APB signal PPROT[2:0] is not required for the operation of the APB example slaves.
Therefore, these signals are not included in the design, and are not shown in Figure 4-1 on
page 4-2 and Figure 4-2 on page 4-2.
PID2
0xFE8
RO 8
0x1B
Peripheral ID Register 2:
[7:4] Revision.
[3] jedec_used.
[2:0] jep106_id_6_4.
PID3
0xFEC
RO 8
0x00
Peripheral ID Register 3:
[7:4] ECO revision number.
[3:0] Customer modification number.
CID0
0xFF0
RO 8
0x0D
Component ID Register 0.
CID1
0xFF4
RO 8
0xF0
Component ID Register 1.
CID2
0xFF8
RO 8
0x05
Component ID Register 2.
CID3
0xFFC
RO 8
0xB1
Component ID Register 3.
Table 4-2 APB example slave memory map (continued)
Name Base offset Type Width Reset value Description

APB components
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 4-5
ID110117 Non-Confidential
4.2 APB timer
The APB timer,
cmsdk_apb_timer.v
, is a 32-bit down-counter with the following features:
• You can generate an interrupt request signal, TIMERINT, when the counter reaches 0.
The interrupt request is held until it is cleared by writing to the INTCLEAR register.
• You can use the zero to one transition of the external input signal, EXTIN, as a timer
enable.
• If the APB timer count reaches 0 and, at the same time, the software clears a previous
interrupt status, the interrupt status is set to 1.
• The external clock, EXTIN, must be slower than half of the peripheral clock because it is
sampled by a double flip-flop and then goes through edge-detection logic when the
external inputs act as a clock. See Programmers model on page 4-6.
• A separate clock pin, PCLKG, for the APB register read or write logic that permits the
clock to peripheral register logic to stop when there is no APB activity.
• Component ID and Peripheral ID Registers. These read-only ID registers are optional.
You must modify the following in these registers:
— Part number, 12 bits.
— JEDEC ID value, 7 bits.
•The ECOREVNUM input signal is connected to the ECO revision number in Peripheral
ID Register 3.
Figure 4-3 shows the APB timer module.
Figure 4-3 APB timer
cmsdk_apb_timer.v
PCLKG
PRESETn
PSEL
PADDR[11:2]
PENABLE
PWRITE
PREADY
PRDATA[31:0]
PSLVERR
PWDATA[31:0]
EXTIN
TIMERINT
PCLK
ECOREVNUM[3:0]
32-bit down
counter
Synchronizer
Edge
detection
1
CTRL[2]
0
1
CTRL[1]
0
1
1
CTRL[0]
Decrement
val==1
CTRL[3]
Reload value
SET
CLR

APB components
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 4-6
ID110117 Non-Confidential
Table 4-3 shows the characteristics of the APB timer.
4.2.1 Programmers model
Table 4-4 shows the APB timer memory map.
Table 4-3 APB timer characteristics
Element name Description
Filename
cmsdk_apb_timer.v
.
Parameters None.
Clock domain You can turn off the gated peripheral bus clock for register access, PCLKG, when there is no APB access.
The free running clock, PCLK, is used for timer operation. This must be the same frequency as, and synchronous
to, the PCLKG signal.
Table 4-4 APB timer memory map
Name Base offset Type Width Reset value Description
CTRL
0x000
RW 4
0x0
[3] Timer interrupt enable.
[2] Select external input as clock.
[1] Select external input as enable.
[0] Enable.
VALUE
0x004
RW 32
0x00000000
[31:0] Current value.
RELOAD
0x008
RW 32
0x00000000
[31:0] Reload value. A write to this register sets the
current value after it reaches 0.
INTSTATUS
INTCLEAR
0x00C
RW 1
0x0
[0] Timer interrupt. Write one to clear.
PID4
0xFD0
RO 8
0x04
Peripheral ID Register 4:
[7:4] Block count.
[3:0] jep106_c_code.
PID5
0xFD4
RO 8
0x00
Peripheral ID Register 5
PID6
0xFD8
RO 8
0x00
Peripheral ID Register 6
PID7
0xFDC
RO 8
0x00
Peripheral ID Register 7
PID0
0xFE0
RO 8
0x22
Peripheral ID Register 0:
[7:0] Part number[7:0].
PID1
0xFE4
RO 8
0xB8
Peripheral ID Register 1:
[7:4] jep106_id_3_0.
[3:0] Part number[11:8].
PID2
0xFE8
RO 8
0x1B
Peripheral ID Register 2:
[7:4] Revision.
[3] jedec_used.
[2:0] jep106_id_6_4.
PID3
0xFEC
RO 8
0x00
Peripheral ID Register 3:
[7:4] ECO revision number.
[3:0] Customer modification number.

APB components
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 4-7
ID110117 Non-Confidential
Note
The APB interface always responds with an OKAY, with no wait states, and is two cycles per
transfer, so you can ignore the PSLVERR and PREADY outputs for APB2 applications.
4.2.2 Signal descriptions
Table 4-5 shows the APB timer signals.
CID0
0xFF0
RO 8
0x0D
Component ID Register 0.
CID1
0xFF4
RO 8
0xF0
Component ID Register 1.
CID2
0xFF8
RO 8
0x05
Component ID Register 2.
CID3
0xFFC
RO 8
0xB1
Component ID Register 3.
Table 4-4 APB timer memory map (continued)
Name Base offset Type Width Reset value Description
Table 4-5 APB timer signals
Signal Direction Description
EXTIN Input External input. This signal is synchronized by double flip-flops before the time logic uses it.
TIMERINT Output Timer interrupt output.

APB components
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 4-8
ID110117 Non-Confidential
4.3 APB UART
The APB UART,
cmsdk_apb_uart.v
, is a simple design that supports 8-bit communication
without parity, and is fixed at one stop bit per configuration. Figure 4-4 shows the APB UART
module.
Figure 4-4 APB UART
The APB UART contains buffering. See Figure 4-5.
Figure 4-5 APB UART buffering
This buffer arrangement is sufficient for most simple embedded applications. For example, a
processor running at 30MHz with a baud rate of 115200 means a character transfer every
30 × 106× (1 + 8 + 1) / 115200 = 2604 cycles. For duplex communication, the processor might
receive an interrupt every 1300 clock cycles. Because the interrupt response time and the
handler execution time are usually quite short, this leaves sufficient processing time for the
thread.
The design includes a double flip-flop synchronization logic for the receive data input.
cmsdk_apb_uart.v
PCLKG
PRESETn
PSEL
PADDR[11:2]
PENABLE
PWRITE
PREADY
PRDATA[31:0]
PSLVERR
PWDATA[31:0]
RXD
UARTINT
PCLK
TXD
TXEN
BAUDTICK
TXINT
RXINT
TXOVRINT
RXOVRINT
ECOREVNUM[3:0]
Write buffer
Read buffer
Shift register
Shift register
You can write a new character to the write buffer
while the shift register is sending out a character.
The shift register can receive the next
character while the data in the receive
buffer is waiting for the processor to read it.
Baud rate
generator
TX FSM
RX FSM
APB
interface
TXD
RXD

APB components
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 4-9
ID110117 Non-Confidential
Table 4-6 shows the characteristics of the APB UART.
4.3.1 Programmers model
Table 4-7 shows the APB UART memory map.
Table 4-6 APB UART characteristics
Element name Description
Filename
cmsdk_apb_uart.v
Parameters None
Clock domain PCLK for timer operation. This clock is always running.
PCLKG for register access. This clock can be gated when the APB interface is idle. When PCLKG is running,
it is the same as PCLK.
Table 4-7 APB UART memory map
Name Base offset Type Width Reset value Description
DATA
0x000
RW 8
0x--
[7:0] Data value.
Read Received data.
Write Transmit data.
STATE
0x004
RW 4
0x0
[3] RX buffer overrun, write 1 to clear.
[2] TX buffer overrun, write 1 to clear.
[1] RX buffer full, read-only.
[0] TX buffer full, read-only.
CTRL
0x008
RW 7
0x00
[6] High-speed test mode for TX only.
[5] RX overrun interrupt enable.
[4] TX overrun interrupt enable.
[3] RX interrupt enable.
[2] TX interrupt enable.
[1] RX enable.
[0] TX enable.
INTSTATUS
INTCLEAR
0x00C
RW 4
0x0
[3] RX overrun interrupt. Write 1 to clear.
[2] TX overrun interrupt. Write 1 to clear.
[1] RX interrupt. Write 1 to clear.
[0] TX interrupt. Write 1 to clear.
BAUDDIV
0x010
RW 20
0x00000
[19:0] Baud rate divider. The minimum number is 16.
PID4
0xFD0
RO 8
0x04
Peripheral ID Register 4:
[7:4] Block count.
[3:0] jep106_c_code.
PID5a
0xFD4
RO 8
0x00
Peripheral ID Register 5.
PID6a
0xFD8
RO 8
0x00
Peripheral ID Register 6.
PID7a
0xFDC
RO 8
0x00
Peripheral ID Register 7.
PID0
0xFE0
RO 8
0x21
Peripheral ID Register 0:
[7:0] Part number[7:0].

APB components
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 4-10
ID110117 Non-Confidential
The APB UART supports a high-speed test mode, useful for simulation during SoC or ASIC
development. When CTRL[6] is set to 1, the serial data is transmitted at one bit per clock cycle.
This enables you to send text messages in a much shorter simulation time. If required, you can
remove this feature for silicon products to reduce the gate count. You can do this by removing
bit[6] of the reg_ctrl signal in the Verilog code. The APB interface always sends an OKAY
response with no wait state and is two cycles per transfer.
You must program the baud rate divider register before enabling the UART. For example, if the
PCLK is running at 12MHz, and the required baud rate is 9600, program the baud rate divider
register as 12 × 106/ 9600 = 1250.
The BAUDTICK output pulses at a frequency of 16 times that of the programmed baud rate.
You can use this signal for capturing UART data in a simulation environment.
The TXEN output signal indicates the status of CTRL[0]. You can use this signal to switch a
bidirectional I/O pin in a silicon device to UART data output mode automatically when the
UART transmission feature is enabled.
The buffer overrun status in the STATE field is used to drive the overrun interrupt signals.
Therefore, clearing the buffer overrun status deasserts the overrun interrupt, and clearing the
overrun interrupt bit also clears the buffer overrun status bit in the STATE field.
PID1
0xFE4
RO 8
0xB8
Peripheral ID Register 1:
[7:4] jep106_id_3_0.
[3:0] Part number[11:8].
PID2
0xFE8
RO 8
0x1B
Peripheral ID Register 2:
[7:4] Revision.
[3] jedec_used.
[2:0] jep106_id_6_4.
PID3
0xFEC
RO 8
0x00
Peripheral ID Register 3:
[7:4] ECO revision number.
[3:0] customer modification number.
CID0
0xFF0
RO 8
0x0D
Component ID Register 0.
CID1
0xFF4
RO 8
0xF0
Component ID Register 1.
CID2
0xFF8
RO 8
0x05
Component ID Register 2.
CID3
0xFFC
RO 8
0xB1
Component ID Register 3.
a. The PID5, PID6, and PID7 registers are not used.
Table 4-7 APB UART memory map (continued)
Name Base offset Type Width Reset value Description

APB components
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 4-11
ID110117 Non-Confidential
4.4 APB dual-input timers
The APB dual-input timer module,
cmsdk_apb_dualtimers.v
, is an APB slave module consisting
of two programmable 32-bit or 16-bit down-counters that can generate interrupts when they
reach 0. You can program a timer to implement:
• A 32-bit or a 16-bit counter.
• One of the following timer modes:
— Free-running.
— Periodic.
—One-shot.
The operation of each timer module is identical. See Functional description on page 4-12 for a
description of each of the timer modes.
The dual-input timer module provides access to two interrupt-generating, programmable 32-bit
Free-Running Counters (FRCs). The FRCs operate from a common timer clock, TIMCLK, and
each FRC has its own clock enable input, TIMCLKEN1 and TIMCLKEN2. Each FRC also
has a prescaler that can divide down the enabled TIMCLK rate by 1, 16, or 256. This enables
the count rate for each FRC to be controlled independently using their individual clock enables
and prescalers.
The system clock, PCLK, controls the programmable registers, and the timer clock, TIMCLK,
drives the counter, enabling the counters to run from a much slower clock than the system clock.
Figure 4-6 shows the dual-input timer module.
Figure 4-6 APB dual-input timers
Table 4-8 shows the characteristics of the APB dual-input timer.
cmsdk_apb_dualtimers.v
TIMCLK
PRESETn
PSEL
PADDR[11:2]
PENABLE
PWRITE
PRDATA[31:0]
PWDATA[31:0]
TIMCLKEN1
TIMINT1
PCLK
ECOREVNUM[3:0]
TIMCLKEN2
TIMINT2
TIMINTC
Table 4-8 APB dual-input timer characteristics
Element name Description
Filename
cmsdk_apb_dualtimers.v
Parameters None
Clock domain PCLK

APB components
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 4-12
ID110117 Non-Confidential
4.4.1 Functional description
Two timers are defined by default, although you can easily expand this using extra instantiations
of the FRC block. The same principle of simple expansion is used for the register configuration,
to enable you to use more complex counters. For each timer, the following modes of operation
are available:
Free-running mode
The counter wraps after reaching its zero value, and continues to count down from
the maximum value. This is the default mode.
Periodic timer mode
The counter generates an interrupt at a constant interval, reloading the original
value after wrapping past zero.
One-shot timer mode
The counter generates an interrupt once. When the counter reaches 0, it halts until
you reprogram it. You can do this using one of the following:
• Clearing the one-shot count bit in the control register, in which case the
count proceeds according to the selection of Free-running or Periodic
mode.
• Writing a new value to the Load Value register.
4.4.2 Operation
Each timer has an identical set of registers as Table 4-9 on page 4-14 shows. The operation of
each timer is identical. The timer is loaded by writing to the LOAD register and, if enabled,
counts down to 0. When a counter is already running, writing to the LOAD register causes the
counter to immediately restart at the new value. Writing to the background load value has no
effect on the current count. The counter continues to decrement to 0, and then restarts from the
new load value, if in periodic mode, and one-shot mode is not selected.
When 0 is reached, an interrupt is generated. You can clear the interrupt by writing to the
INTCLR register. If you selected one-shot mode, the counter halts when it reaches 0 until you
deselect one-shot mode, or write a new load value.
Otherwise, after reaching a zero count, if the timer is operating in free-running mode, it
continues to decrement from its maximum value. If you selected periodic timer mode, the timer
reloads the count value from the LOAD register and continues to decrement. In this mode, the
counter effectively generates a periodic interrupt.
You select the mode using a bit in the Timer Control register. See Table 4-10 on page 4-16. At
any point, you can read the current counter value from the Current Value register. You can
enable the counter using a bit in the Control register.
At reset, the counter is disabled, the interrupt is cleared, and the LOAD register is set to 0. The
mode and prescale values are set to free-running, and clock divide of one respectively.
Figure 4-7 on page 4-13 shows a block diagram of the free-running timer module.

APB components
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 4-13
ID110117 Non-Confidential
Figure 4-7 Free-running timer block
The timer clock enable is generated by a prescale unit. The counter then uses the enable to create
a clock with one of the following timings:
• The system clock.
• The system clock divided by 16, generated by 4 bits of prescale.
• The system clock divided by 256, generated by 8 bits of prescale.
Figure 4-8 shows how the timer clock frequency is selected in the prescale unit. This enables
you to clock the timer at different frequencies.
Figure 4-8 Prescale clock enable generation
Note
This selection is in addition to any similar facility already provided as part of any clock
generation logic external to the timers.
Interrupt generation
An interrupt is generated when the full 32-bit counter reaches 0, and is only cleared when the
TimerXClear location is written to. A register holds the value until the interrupt is cleared. The
most significant carry bit of the counter detects the counter reaching 0.
You can mask interrupts by writing 0 to the Interrupt Enable bit in the Control register. You can
read the following from status registers:
• Raw interrupt status, before masking.
• Final interrupt status, after masking.
The interrupts from the individual counters, after masking, are logically ORed into a combined
interrupt, TIMINTC. This provides an additional output from the timer peripheral.
4.4.3 Clocking
The timers contain the PCLK and TIMCLK clock inputs. PCLK is the main APB system
clock, and is used by the register interface. TIMCLK is the input to the prescale units and the
decrementing counters. You must qualify a pulse on TIMCLK by the appropriate
TIMCLKENx signal being HIGH.
Control
Timer
clock enable Load
32-bit down counter
Value Interrupt
generation
Timer
clock
enable
Divide
by 16
Divide
by 16
Control Prescale select
Timer clock
enable after
prescaling

APB components
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 4-14
ID110117 Non-Confidential
The design of the timers assumes that PCLK and TIMCLK are synchronous. To enable the
counter to operate from a lower effective frequency than that at which PCLK is running, you
can:
• Connect both PCLK and TIMCLK inputs to the APB PCLK signal, and pulse
TIMCLKENx HIGH at the required frequency, synchronized to PCLK.
•Tie TIMCLKENx HIGH and feed an enabled version of PCLK into the TIMCLK input.
This provides sparse clock pulses synchronous to PCLK.
This provision of two clock inputs enables the counters to continue to run while the APB system
is in a sleep state when PCLK is disabled. External system control logic must handle the
changeover periods when PCLK is disabled and enabled to ensure that the PCLK and
TIMCLK inputs are fed with synchronous signals when any register access is to occur.
4.4.4 Programmers model
Table 4-9 shows the timer registers.
Table 4-9 Timer memory map
Name Base offset Type Width Reset value Description
TIMER1LOAD
0x00
RW 32
0x00000000
See LOAD register on page 4-15.
TIMER1VALUE
0x04
RO 32
0xFFFFFFFF
See Current Value register on page 4-15.
TIMER1CONTROL
0x08
RW 8
0x20
See Timer Control register on page 4-16.
TIMER1INTCLR
0x0C
WO - - See Interrupt Clear register on page 4-16.
TIMER1RIS
0x10
RO 1
0x0
See Raw Interrupt Status register on page 4-17.
TIMER1MIS
0x14
RO 1
0x0
See Interrupt Status register on page 4-17.
TIMER1BGLOAD
0x18
RW 32
0x00000000
See Background Load register on page 4-17.
TIMER2LOAD
0x20
RW 32
0x00000000
See LOAD register on page 4-15.
TIMER2VALUE
0x24
RO 32
0xFFFFFFFF
See Current Value register on page 4-15.
TIMER2CONTROL
0x28
RW 8
0x20
See Timer Control register on page 4-16.
TIMER2INTCLR
0x2C
WO - - See Interrupt Clear register on page 4-16.
TIMER2RIS
0x30
RO 1
0x0
See Raw Interrupt Status register on page 4-17.
TIMER2MIS
0x34
RO 1
0x0
See Interrupt Status register on page 4-17.
TIMER2BGLOAD
0x38
RW 32
0x00000000
See Background Load register on page 4-17.
TIMERITCR
0xF00
RW 1
0x0
See Integration Test Control register on page 4-18.
TIMERITOP
0xF04
WO 2
0x0
See Integration Test Output Set register on page 4-18.
TIMERPERIPHID4
0xFD0
RO 8
0x04
Peripheral ID Register 4:
[7:4] Block count.
[3:0] jep106_c_code.
TIMERPERIPHID5a
0xFD4
RO 8
0x00
Peripheral ID Register 5.
TIMERPERIPHID6a
0xFD8
RO 8
0x00
Peripheral ID Register 6.
TIMERPERIPHID7a
0xFDC
RO 8
0x00
Peripheral ID Register 7.
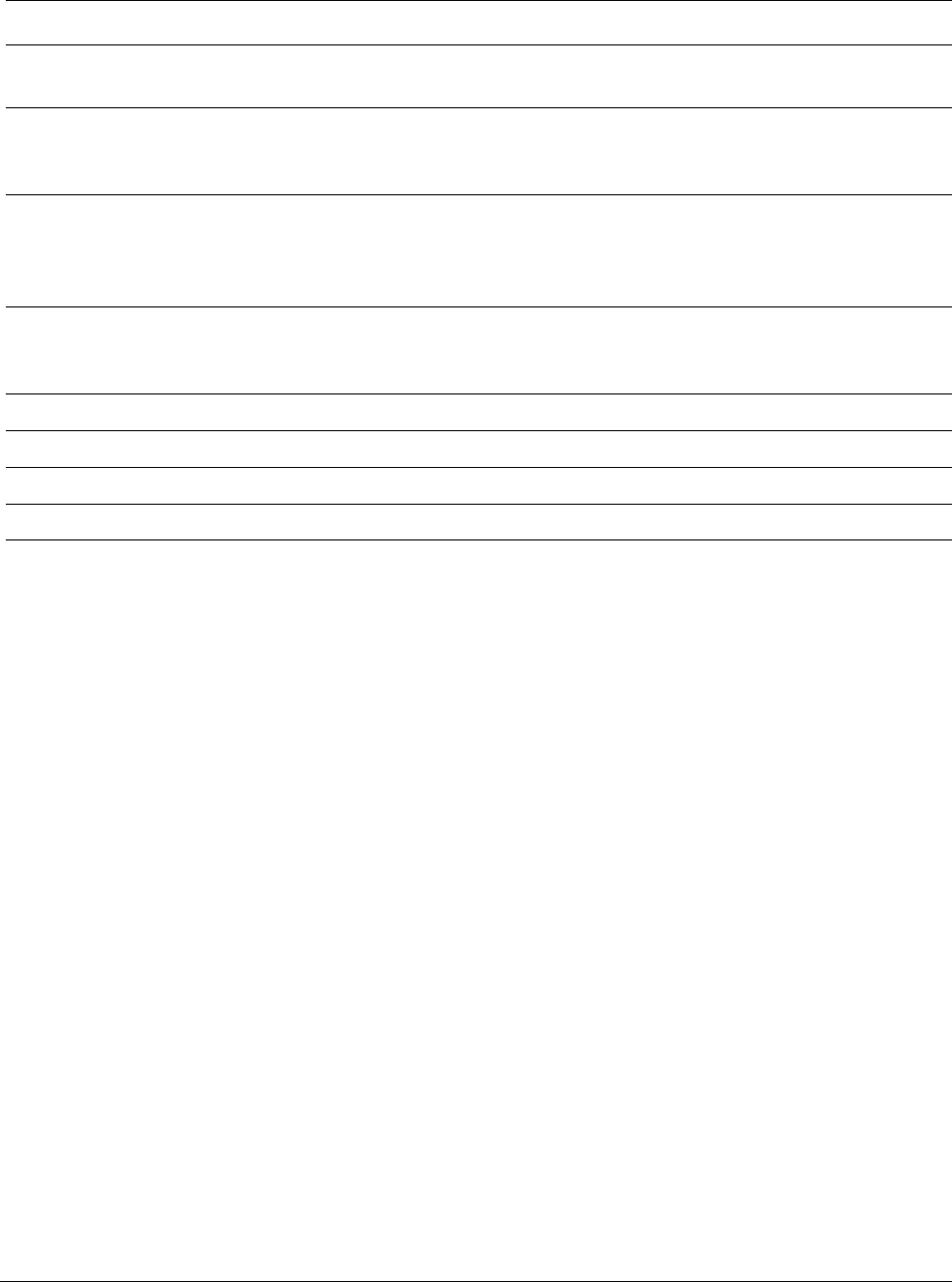
APB components
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 4-15
ID110117 Non-Confidential
LOAD register
The TIMERXLOAD register contains the value from which the counter is to decrement. This is
the value that is used to reload the counter when Periodic mode is enabled, and the current count
reaches 0.
When this register is written to directly, the current count is immediately reset to the new value
at the next rising edge of TIMCLK that TIMCLKEN enables.
The value in this register is also overwritten if the TIMERXBGLOAD register is written to, but
the current count is not immediately affected.
If values are written to both the TIMERXLOAD and TIMERXBGLOAD registers before an
enabled rising edge on TIMCLK, the following occurs:
1. On the next enabled TIMCLK edge, the value that is written to the TIMERXLOAD value
replaces the current count value.
2. Every time the counter reaches 0, the current count value is reset to the value written to
TIMERXBGLOAD.
Reading from the TIMERXLOAD register at any time after the two writes have occurred
retrieves the value that is written to TIMERXBGLOAD. That is, the value that is read from
TIMERXLOAD is always the value that takes effect for Periodic mode after the next time the
counter reaches 0.
Current Value register
The TIMERXVALUE register provides the current value of the decrementing counter.
TIMERPERIPHID0
0xFE0
RO 8
0x23
Peripheral ID Register 0:
[7:0] Part number[7:0].
TIMERPERIPHID1
0xFE4
RO 8
0xB8
Peripheral ID Register 1:
[7:4] jep106_id_3_0.
[3:0] Part number[11:8].
TIMERPERIPHID2
0xFE8
RO 8
0x1B
Peripheral ID Register 2:
[7:4] Revision.
[3] jedec_used.
[2:0] jep106_id_6_4.
TIMERPERIPHID3
0xFEC
RO 8
0x00
Peripheral ID Register 3:
[7:4] ECO revision number.
[3:0] customer modification number.
TIMERPCELLID0
0xFF0
RO 8
0x0D
Component ID Register 0.
TIMERPCELLID1
0xFF4
RO 8
0xF0
Component ID Register 1.
TIMERPCELLID2
0xFF8
RO 8
0x05
Component ID Register 2.
TIMERPCELLID3
0xFFC
RO 8
0xB1
Component ID Register 3.
a. The TIMERPERIPHID5, TIMERPERIPHID6, and TIMERPERIPHID7 registers are not used.
Table 4-9 Timer memory map (continued)
Name Base offset Type Width Reset value Description

APB components
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 4-16
ID110117 Non-Confidential
Timer Control register
The TIMERXCONTROL register is a read or write register. Figure 4-9 shows the register bit
assignments.
Figure 4-9 TIMERXCONTROL register bit assignments
Table 4-10 shows the register bit assignments.
Interrupt Clear register
Any write to the TIMERXINTCLR register clears the interrupt output from the counter.
Timer Enable
31 0
Timer Mode
12345678
Interrupt Enable
Reserved
TimerPre
Timer Size
One-shot Count
Undefined
Table 4-10 TIMERXCONTROL register bit assignments
Bits Name Function
[31:8] - Reserved, read UNDEFINED, must read as 0s.
[7] Timer Enable Enable bit:
0 Timer disabled, default.
1 Timer enabled.
[6] Timer Mode Mode bit:
0 Timer is in free-running mode, default.
1 Timer is in periodic mode.
[5] Interrupt Enable Interrupt Enable bit:
0 Timer Interrupt disabled.
1 Timer Interrupt enabled, default.
[4] Reserved Reserved bit, do not modify, and ignore on read
[3:2] TimerPre Prescale bits:
00 0 stages of prescale, clock is divided by 1, default.
01 4 stages of prescale, clock is divided by 16.
10 8 stages of prescale, clock is divided by 256.
11 UNDEFINED, do not use.
[1] Timer Size Selects 16-bit or 32-bit counter operation:
0 16-bit counter, default.
1 32-bit counter.
[0] One-shot Count Selects one-shot or wrapping counter mode:
0 Wrapping mode, default.
1 One-shot mode.

APB components
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 4-17
ID110117 Non-Confidential
Raw Interrupt Status register
The TIMERXRIS register indicates the raw interrupt status from the counter. This value is
ANDed with the timer interrupt enable bit from the Timer Control register to create the masked
interrupt, that is passed to the interrupt output pin. Figure 4-10 shows the register bit
assignments.
Figure 4-10 TIMERXRIS register bit assignments
Table 4-11 shows the register bit assignments.
Interrupt Status register
The TIMERXMIS register indicates the masked interrupt status from the counter. This value is
the logical AND of the raw interrupt status with the timer interrupt enable bit from the Timer
Control register, and is the same value that is passed to the interrupt output pin. Figure 4-11
shows the register bit assignments.
Figure 4-11 TIMERXMIS register bit assignments
Table 4-12 shows the register bit assignments.
Background Load register
The TIMERXBGLOAD register contains the value from which the counter is to decrement.
This is the value that is used to reload the counter when Periodic mode is enabled, and the
current count reaches 0.
Raw Timer Interrupt
Undefined
31 0
1
Table 4-11 TIMERXRIS register bit assignments
Bits Name Function
[31:1] - Reserved, read UNDEFINED, must read
as 0s.
[0] Raw Timer Interrupt Raw interrupt status from the counter
Timer Interrupt
Undefined
31 0
1
Table 4-12 TIMERXMIS register bit assignments
Bits Name Function
[31:1] - Reserved, read as 0
[0] Timer Interrupt Enabled interrupt status from the counter

APB components
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 4-18
ID110117 Non-Confidential
This register provides an alternative method of accessing the TIMERXLOAD register. The
difference is that writes to TIMERXBGLOAD do not cause the counter to immediately restart
from the new value.
Reading from this register returns the same value that is returned from TIMERXLOAD. See
LOAD register on page 4-15.
Integration Test Control register
The TIMERITCR register enables integration test mode. When in this mode, the Integration
Test Output Set register directly controls the masked interrupt outputs. The combined interrupt
output, TIMINTC, then becomes the logical OR of the bits set in the Integration Test Output
Set register. Figure 4-12 shows the register bit assignments.
Figure 4-12 TIMERITCR register bit assignments
Table 4-13 shows the register bit assignments.
Integration Test Output Set register
When in integration test mode, the values in this write-only register, TIMERITOP, directly drive
the enabled interrupt outputs. Figure 4-13 shows the register bit assignments.
Figure 4-13 TIMERITOP register bit assignments
Table 4-14 shows the register bit assignments.
Integration Test Mode Enable
Undefined
31 0
1
Table 4-13 TIMERITCR register bit assignments
Bits Name Function
[31:1] - Reserved, read as 0
[0] Integration Test Mode Enable When set HIGH, places the timers into integration test mode
Integration Test TIMINT2 value
31 0
Integration Test TIMINT1 value
12
Undefined
Table 4-14 TIMERITOP register bit assignments
Bits Name Function
[31:2] - Reserved, read UNDEFINED, must read as 0s
[1] Integration Test TIMINT2 value Value output on TIMINT2 when in integration test mode
[0] Integration Test TIMINT1 value Value output on TIMINT1 when in integration test mode

APB components
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 4-19
ID110117 Non-Confidential
4.4.5 Signal descriptions
Table 4-15 shows the non-AMBA signals that the timer uses.
Table 4-15 Timer signals
Signal Type Direction Description
TIMCLK Timer clock Input Timer clock input. This must be synchronous to PCLK for normal
operation.
TIMCLKEN1 Timer 1 clock enable Input Enable for timer 1 clock input. The counter only decrements on a
rising edge of TIMCLK when TIMCLKEN1 is HIGH.
TIMCLKEN2 Timer 2 clock enable Input Enable for timer 2 clock input. The counter only decrements on a
rising edge of TIMCLK when TIMCLKEN2 is HIGH.
TIMINT1 Counter 1 interrupt Output Active HIGH interrupt signal to the interrupt controller module.
Indicates that counter 1 generated an interrupt after being
decremented to 0.
TIMINT2 Counter 2 interrupt Output Active HIGH interrupt signal to the interrupt controller module.
Indicates that counter 2 generated an interrupt after being
decremented to 0.
TIMINTC Combined counter interrupt Output Active HIGH interrupt signal to the interrupt controller module. This
signal indicates that one of the counters generated an interrupt having
been decremented to 0, and is the logical OR of TIMINT1 and
TIMINT2.
ECOREVNUM ECO revision information Input This input is connected to the ECO revision number in the Peripheral
ID Register 3 to show revision changes during ECO of the chip
design process. You can tie this signal LOW, or connect it to special
tie-off cells so that you can change the ECO revision number at
silicon netlists, or at a lower-level such as silicon mask.

APB components
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 4-20
ID110117 Non-Confidential
4.5 APB watchdog
The APB watchdog module,
cmsdk_apb_watchdog.v
, is based on a 32-bit down-counter that is
initialized from the Reload register, WDOGLOAD. The watchdog module generates a regular
interrupt, WDOGINT, depending on a programmed value. The counter decrements by one on
each positive clock edge of WDOGCLK when the clock enable, WDOGCLKEN, is HIGH.
The watchdog monitors the interrupt and asserts a reset request WDOGRES signal when the
counter reaches 0, and the counter is stopped. On the next enabled WDOGCLK clock edge, the
counter is reloaded from the WDOGLOAD register and the countdown sequence continues. If
the interrupt is not cleared by the time the counter next reaches 0, the watchdog module reasserts
the reset signal.
The watchdog module applies a reset to a system in the event of a software failure, providing a
way to recover from software crashes. You can enable or disable the watchdog unit as required.
Figure 4-14 shows the APB watchdog module.
Figure 4-14 APB watchdog
Table 4-16 shows the characteristics of the APB watchdog.
Figure 4-15 shows the flow diagram for the watchdog operation.
Figure 4-15 Watchdog operation flow diagram
cmsdk_apb_watchdog.v
WDOGCLK
PRESETn
PSEL
PADDR[11:2]
PENABLE
PWRITE
PRDATA[31:0]
PWDATA[31:0]
WDOGCLKEN
WDOGINT
PCLK
ECOREVNUM[3:0] WDOGRES
Table 4-16 APB watchdog characteristics
Element name Description
Filename
cmsdk_apb_watchdog.v
Parameters None
Clock domain PCLK
Watchdog is
programmed Counter reaches zero
Count down
without
reprogram
If the INTEN bit in the WDOGCONTROL
register is set to 1, WDOGINT is asserted
Counter reaches zero
Counter reloaded
and count down
without reprogram
If the RESEN bit in the WDOGCONTROL
register is set to 1, WDOGRES is asserted
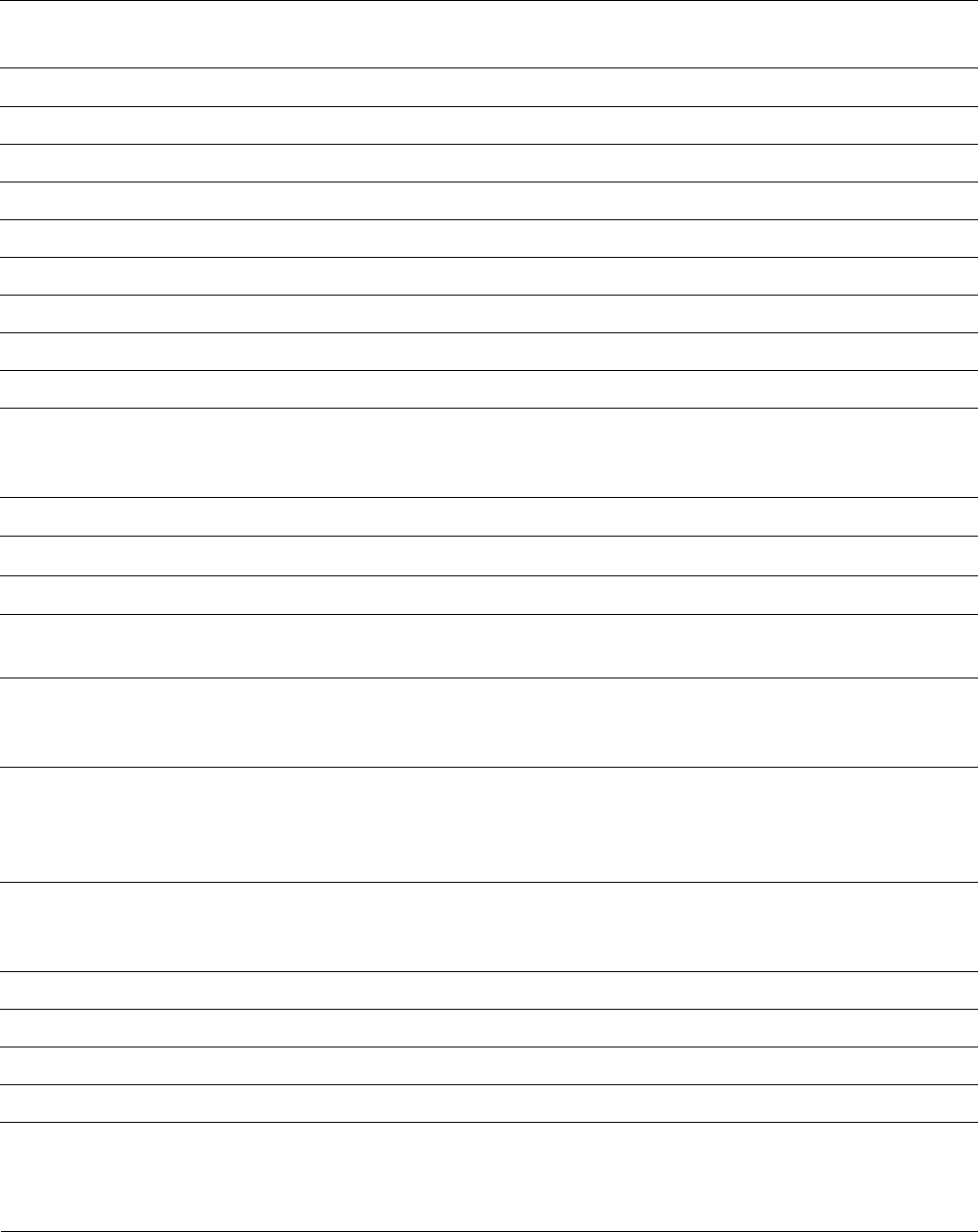
APB components
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 4-21
ID110117 Non-Confidential
4.5.1 Programmers model
Table 4-17 shows the watchdog registers.
Table 4-17 Watchdog memory map
Name Base
offset Type Width Reset
value Description
WDOGLOAD
0x00
RW 32
0xFFFFFFFF
See Watchdog Load register on page 4-22.
WDOGVALUE
0x04
RO 32
0xFFFFFFFF
See Watchdog Value register on page 4-22.
WDOGCONTROL
0x08
RW 2
0x0
See Watchdog Control register on page 4-22.
WDOGINTCLR
0x0C
WO - - See Watchdog Clear Interrupt register on page 4-22.
WDOGRIS
0x10
RO 1
0x0
See Watchdog Raw Interrupt Status register on page 4-22.
WDOGMIS
0x14
RO 1
0x0
See Watchdog Interrupt Status register on page 4-23.
WDOGLOCK
0xC00
RW 32
0x0
See Watchdog Lock register on page 4-23.
WDOGITCR
0xF00
RW 1
0x0
See Watchdog Integration Test Control Register on page 4-24.
WDOGITOP
0xF04
WO 2
0x0
See Watchdog Integration Test Output Set register on page 4-24.
WDOGPERIPHID4
0xFD0
RO 8
0x04
Peripheral ID Register 4:
[7:4] Block count.
[3:0] jep106_c_code.
WDOGPERIPHID5a
0xFD4
RO 8
0x00
Peripheral ID Register 5.
WDOGPERIPHID6a
0xFD8
RO 8
0x00
Peripheral ID Register 6.
WDOGPERIPHID7a
0xFDC
RO 8
0x00
Peripheral ID Register 7.
WDOGPERIPHID0
0xFE0
RO 8
0x24
Peripheral ID Register 0:
[7:0] Part number[7:0].
WDOGPERIPHID1
0xFE4
RO 8
0xB8
Peripheral ID Register 1:
[7:4] jep106_id_3_0.
[3:0] Part number[11:8].
WDOGPERIPHID2
0xFE8
RO 8
0x1B
Peripheral ID Register 2:
[7:4] Revision.
[3] jedec_used.
[2:0] jep106_id_6_4.
WDOGPERIPHID3
0xFEC
RO 8
0x00
Peripheral ID Register 3:
[7:4] ECO revision number.
[3:0] Customer modification number.
WDOGPCELLID0
0xFF0
RO 8
0x0D
Component ID Register 0.
WDOGPCELLID1
0xFF4
RO 8
0xF0
Component ID Register 1.
WDOGPCELLID2
0xFF8
RO 8
0x05
Component ID Register 2.
WDOGPCELLID3
0xFFC
RO 8
0xB1
Component ID Register 3.
a. The WDOGPERIPHID5, WDOGPERIPHID6, and WDOGPERIPHID7 registers are not used.

APB components
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 4-22
ID110117 Non-Confidential
Watchdog Load register
The WDOGLOAD register contains the value from which the counter is to decrement. When
this register is written to, the count is immediately restarted from the new value. The minimum
valid value for WDOGLOAD is 1.
Watchdog Value register
The WDOGVALUE register gives the current value of the decrementing counter.
Watchdog Control register
The WDOGCONTROL register enables the software to control the watchdog unit. Figure 4-16
shows the register bit assignments.
Figure 4-16 WDOGCONTROL register bit assignments
Table 4-18 shows the register bit assignments.
Watchdog Clear Interrupt register
A write of any value to the WDOGINTCLR register clears the watchdog interrupt, and reloads
the counter from the value in WDOGLOAD.
Watchdog Raw Interrupt Status register
The WDOGRIS register indicates the raw interrupt status from the counter. This value is
ANDed with the interrupt enable bit from the control register to create the masked interrupt, that
is passed to the interrupt output pin. Figure 4-17 shows the register bit assignments.
Figure 4-17 WDOGRIS register bit assignments
RESEN
31 0
INTEN
12
Undefined
Table 4-18 WDOGCONTROL register bit assignments
Bits Name Function
[31:2] - Reserved, read UNDEFINED, must read as 0s.
[1] RESEN Enable watchdog reset output, WDOGRES. Acts as a mask for the reset output. Set to 1 to enable the reset, or to
0 to disable the reset.
[0] INTEN Enable the interrupt event, WDOGINT. Set to 1 to enable the counter and the interrupt, or to 0 to disable the
counter and interrupt. Reloads the counter from the value in WDOGLOAD when the interrupt is enabled, after
previously being disabled.
Raw Watchdog Interrupt
Undefined
31 0
1

APB components
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 4-23
ID110117 Non-Confidential
Table 4-19 shows the register bit assignments.
Watchdog Interrupt Status register
The WDOGMIS register indicates the masked interrupt status from the counter. This value is
the logical AND of the raw interrupt status with the INTEN bit from the control register, and is
the same value that is passed to the interrupt output pin. Figure 4-18 shows the register bit
assignments.
Figure 4-18 WDOGMIS register bit assignments
Table 4-20 shows the register bit assignments.
Watchdog Lock register
The WDOGLOCK register disables write accesses to all other registers. This is to prevent rogue
software from disabling the watchdog functionality. Writing a value of
0x1ACCE551
enables write
access to all other registers. Writing any other value disables write accesses. A read from this
register returns only the bottom bit:
0 Indicates that write access is enabled, not locked.
1 Indicates that write access is disabled, locked.
Figure 4-19 shows the register bit assignments.
Figure 4-19 WDOGLOCK register bit assignments
Table 4-19 WDOGRIS register bit assignments
Bits Name Function
[31:1] - Reserved, read UNDEFINED, must read
as 0s.
[0] Raw Watchdog Interrupt Raw interrupt status from the counter.
Watchdog Interrupt
31 0
1
Undefined
Table 4-20 WDOGMIS register bit assignments
Bits Name Function
[31:1] - Reserved, read UNDEFINED, must read
as 0s.
[0] Watchdog Interrupt Enabled interrupt status from the counter.
Register write enable status
Enable register writes
31 0
1

APB components
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 4-24
ID110117 Non-Confidential
Table 4-21 shows the register bit assignments.
Watchdog Integration Test Control Register
The WDOGITCR Register enables integration test mode. When in this mode, the test output
register directly controls the masked interrupt output, WDOGINT, and reset output,
WDOGRES. Figure 4-20 shows the register bit assignments.
Figure 4-20 WDOGITCR Register bit assignments
Table 4-22 shows the register bit assignments.
Watchdog Integration Test Output Set register
When the WDOGITOP register is in integration test mode, the values in this register directly
drive the enabled interrupt output and reset output. Figure 4-21 shows the register bit
assignments.
Figure 4-21 WDOGITOP register bit assignments
Table 4-21 WDOGLOCK register bit assignments
Bits Name Function
[31:1] Enable register writes Enable write access to all other registers by writing
0x1ACCE551
. Disable write access by
writing any other value.
[0] Register write enable status 0 Write access to all other registers is enabled. This is the default.
1 Write access to all other registers is disabled.
Integration Test Mode Enable
Undefined
31 0
1
Table 4-22 WDOGITCR Register bit assignments
Bits Name Function
[31:1] - Reserved, read UNDEFINED, must read as 0s.
[0] Integration Test Mode Enable When set to 1, places the watchdog into integration test mode.
Integration Test WDOGINT value
31 0
Integration Test WDOGRES value
12
Undefined

APB components
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 4-25
ID110117 Non-Confidential
Table 4-23 shows the register bit assignments.
4.5.2 Signal descriptions
Table 4-24 shows the non-AMBA signals that the watchdog unit uses.
Table 4-23 WDOGITOP register bit assignments
Bits Name Function
[31:2] - Reserved, read UNDEFINED, must read as 0s.
[1] Integration Test WDOGINT value Value output on WDOGINT when in integration test mode.
[0] Integration Test WDOGRES value Value output on WDOGRES when in integration test mode.
Table 4-24 Watchdog unit signals
Signal Type Direction Description
WDOGCLK Watchdog clock Input The watchdog clock must be synchronous to the APB clock PCLK.
WDOGCLKEN Watchdog clock
enable Input The enable for the watchdog clock input. The counters only decrement on a
rising edge of WDOGCLK when WDOGCLKEN is HIGH.
WDOGRESn Watchdog reset Input The watchdog clock domain reset input.
WDOGINT Watchdog
interrupt Output The watchdog interrupt.
WDOGRES Watchdog reset Output The watchdog timeout reset.
ECOREVNUM ECO revision
information Input This input is connected to the ECO revision number in the Peripheral ID
Register 3 to show revision changes during ECO of the chip design process. You
can tie this signal LOW, or connect it to special tie-off cells so that you can
change the ECO revision number at silicon netlists, or a lower-level such as the
silicon mask.

APB components
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 4-26
ID110117 Non-Confidential
4.6 APB slave multiplexer
The APB slave multiplexer,
cmsdk_apb_slave_mux.v
, supports up to 16 APB slaves. It uses four
bits of PADDR to generate the PSEL and handle the data and response multiplexing. You can
configure the four bits of PADDR that perform decoding, and drive them into
DECODE4BIT[3:0]. The APB slave multiplexer supports various APB device footprints.
Figure 4-22 shows the APB slave multiplexer module.
Figure 4-22 APB slave multiplexer
Table 4-25 shows the characteristics of the APB slave multiplexer.
cmsdk_apb_slave_mux.v
DECODE4BIT[3:0]
PSEL
PREADY0
PRDATA[31:0]
PSLVERR
PRDATA0[31:0]
PSLVERR0
PSEL0
PREADY1
PRDATA1[31:0]
PSLVERR1
PSEL1
PREADY15
PRDATA15[31:0]
PSLVERR15
PSEL15
PREADY
Table 4-25 APB slave multiplexer characteristics
Element name Description
Filename
cmsdk_apb_slave_mux.v
Parameters
PORT0_ENABLE
The supported parameter values are:
0 Disable port 0.
1 Enable port 0.
PORT1_ENABLE
The supported parameter values are:
0 Disable port 1.
1 Enable port 1.
PORT2_ENABLE
The supported parameter values are:
0 Disable port 2.
1 Enable port 2.
.
.
.
PORT15_ENABLE
The supported parameter values are:
0 Disable port 15.
1 Enable port 15.
By default, all port enable parameters are set to 1, that is, enabled.
Clock domain No clock input. Combinational logic only. Runs in the PCLK domain.
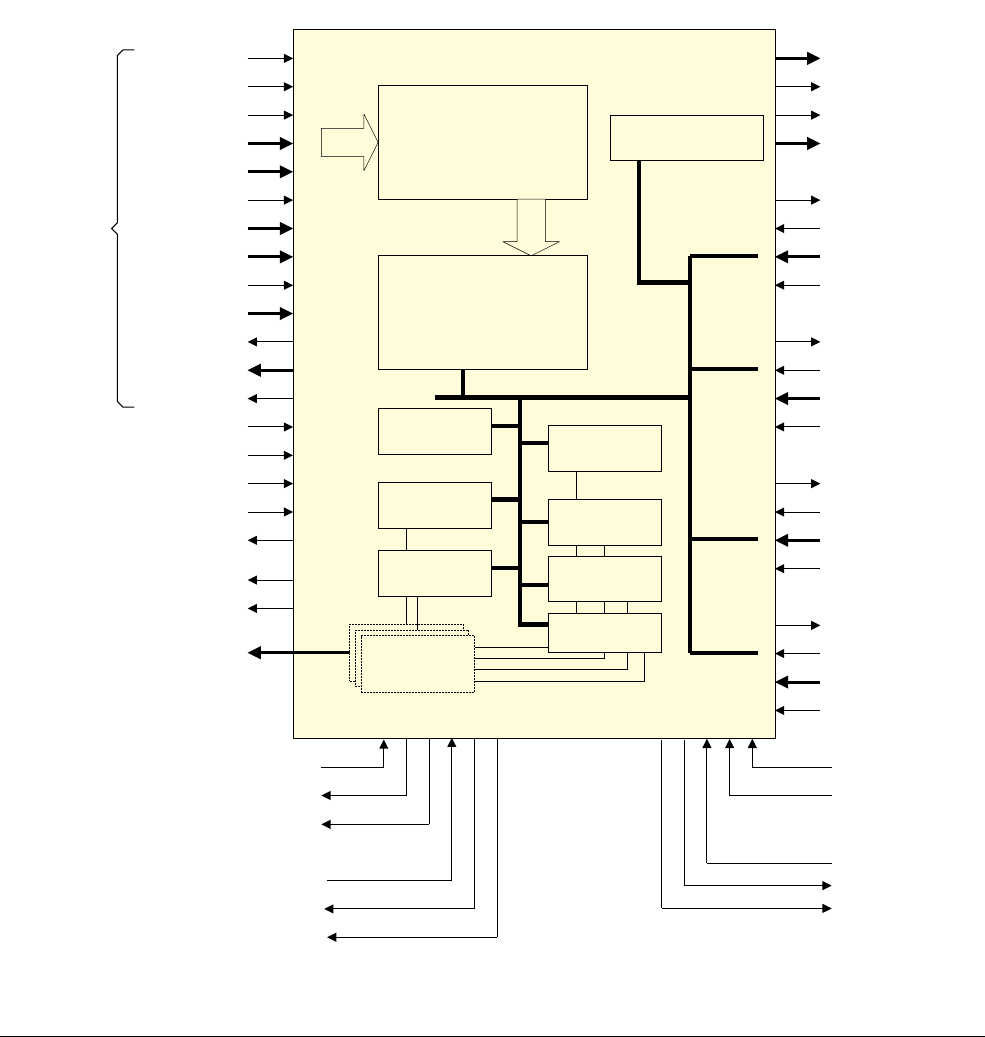
APB components
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 4-27
ID110117 Non-Confidential
4.7 APB subsystem
The APB subsystem,
cmsdk_apb_subsystem.v
, is a common platform for all example systems in
the Cortex-M System Design Kit. It contains the following:
• APB timers.
•APB UART.
• Dual-input timer, watchdog.
• AHB to APB bridge.
• Test slave.
• IRQ synchronizers.
Figure 4-23 shows the APB subsystem module.
Figure 4-23 APB subsystem
cmsdk_apb_subsystem.v
HCLK
HRESETn
HADDR[15:0]
HSEL
HRDATA[31:0]
HRESP
HREADYOUT
HTRANS[1:0]
HWRITE
HSIZE[2:0]
HREADY
HWDATA[31:0]
PCLK
PCLKEN
PCLKG
PADDR[11:2]
PWDATA[31:0]
PWRITE
PENABLE
ext12_psel
ext12_pslverr
ext12_pready
ext12_prdata[31:0]
APBACTIVE
ext13_psel
ext13_pslverr
ext13_pready
ext13_prdata[31:0]
ext14_psel
ext14_pslverr
ext14_pready
ext14_prdata[31:0]
ext15_psel
ext15_pslverr
ext15_pready
ext15_prdata[31:0]
APB expansion ports
cmsdk_ahb_to_apb.v
cmsdk_apb_slave_mux.v
cmsdk_apb_
timer.v
APB
expansion
ports
apbsubsys_interrupt[31:0]
irq_sync.v
irq_sync.v
irq_sync.v
cmsdk_apb_
timer.v
timer0_extin
timer1_extin
uart2_rxd
uart2_txd
uart2_txen
uart1_rxd
uart1_txd
uart1_txen
uart0_rxd
uart0_txd
uart0_txen
HPROT[3:0]
cmsdk_apb_
dualtimer.v
cmsdk_apb_
uart.v
cmsdk_apb_
uart.v
cmsdk_apb_
uart.v
cmsdk_apb_
watchdog.v
watchdog_interrupt
watchdog_reset
IRQ synchronizers
cmsdk_apb_
test_slave.v
AHB interface
PRESETn

APB components
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 4-28
ID110117 Non-Confidential
Table 4-26 shows the characteristics of the APB subsystem.
The example APB subsystem is designed primarily for little-endian configuration. The
peripherals are designed with the little-endian programmers model. The big-endian parameter
is provided to enable Arm to perform system-level tests to verify the bus component behavior
in the big-endian configuration, and to enable system designers to evaluate the processor in the
Table 4-26 APB subsystem characteristics
Element name Description
Filename
cmsdk_apb_subsystem.v
Parameter
APB_EXT_PORT12_ENABLE
Enable APB expansion port 12.
APB_EXT_PORT13_ENABLE
Enable APB expansion port 13.
APB_EXT_PORT14_ENABLE
Enable APB expansion port 14.
APB_EXT_PORT15_ENABLE
Enable APB expansion port 15.
Note
• Ports 12-15 are to connect APB3 slaves.
• Ports 0-11 are peripherals inside the APB subsystem.
INCLUDE_IRQ_SYNCHRONIZER
Set to 1 to include the IRQ synchronizer. Set to 0 to connect IRQ signals directly to the NVIC of
the processor. The default value is 0.
INCLUDE_APB_TEST_SLAVE
Set to 1 to include
apb_test_slave
. Set to 0 to remove. The default value is 1.
INCLUDE_APB_TIMER0
Set to 1 to include timer #0. Set to 0 to remove. The default value is 1.
INCLUDE_APB_TIMER1
Set to 1 to include timer #1. Set to 0 to remove. The default value is 1.
INCLUDE_APB_DUALTIMER0
Set to 1 to include dual timer. Set to 0 to remove. The default value is 1.
INCLUDE_APB_UART0
Set to 1 to include uart #0. Set to 0 to remove. The default value is 1.
INCLUDE_APB_UART1
Set to 1 to include uart #1. Set to 0 to remove. The default value is 1.
INCLUDE_APB_UART2
Set to 1 to include uart #2. Set to 0 to remove. The default value is 1.
INCLUDE_APB_WATCHDOG
Set to 1 to include watchdog. Set to 0 to remove. The default value is 1.
BE
Big-endian. The default value is 0, little-endian. Set the value to 1 for big-endian configuration.
Note
By default, all port enable parameters are set to 0.
Clock domain HCLK For the AHB to APB bridge.
PCLK For peripheral operation.
PCLKG Gated PCLK for APB bus interface logic. It must be the same frequency and same phase as
PCLK. Tie LOW, when there are no APB activities. The APBACTIVE output signal controls the
gating.

APB components
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 4-29
ID110117 Non-Confidential
big-endian configuration. Use of the big-endian parameter is not recommended for product
development, because it adds extra hardware. Ideally, you must modify the peripherals for the
big-endian systems to use the big-endian programmers model.
4.7.1 Programmers model
Table 4-27 shows the APB subsystem memory map.
Table 4-28 shows the APB subsystem IRQ assignments.
Table 4-27 APB subsystem memory map
Offset value Device
0x0000
Timer 0
0x1000
Timer 1
0x2000
Dual Timer
0x3000
Not useda
a. The corresponding port of the APB slave
multiplexer is disabled by a Verilog parameter.
0x4000
UART 0
0x5000
UART 1
0x6000
UART 2
0x7000
Not useda
0x8000
Watchdog
0x9000
-
0xA000
Not useda
0xB000
APB test slave for validation purpose
0xC000
APB expansion port 12
0xD000
APB expansion port 13
0xE000
APB expansion port 14
0xF000
APB expansion port 15
Table 4-28 APB subsystem IRQ assignments
IRQ Device
0 UART 0 receive interrupt
1 UART 0 transmit interrupt
2 UART 1 receive interrupt
3 UART 1 transmit interrupt
4 UART 2 receive interrupt
5 UART 2 transmit interrupt
6, 7 Not used in the APB subsystema

APB components
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 4-30
ID110117 Non-Confidential
4.7.2 Signal descriptions
The APB subsystem contains the following non-AMBA signals in its interface:
•Clock and reset signals.
•UART signals on page 4-31.
•Timer signals on page 4-31.
•Watchdog signals on page 4-31.
•Interrupt signals on page 4-31.
•APB expansion port signals on page 4-32.
Clock and reset signals
Table 4-29 shows the APB subsystem clock and reset signals.
8Timer 0
9Timer 1
10 Dual-input timer
11 Not used
12 UART 0 overflow interrupt
13 UART 1 overflow interrupt
14 UART 2 overflow interrupt
15 Not used in APB subsystemb
16-31 Not used in APB subsystema
a. Reserved for GPIO in AHB.
b. Reserved for DMA.
Table 4-28 APB subsystem IRQ assignments (continued)
IRQ Device
Table 4-29 APB subsystem clock and reset signals
Signal Description
PCLKEN Clock enable for APB interface.
The AHB to APB bridge uses this signal to enable you to run the APB operation at a lower speed than the AHB. The
APB peripherals in the example system use the divided clock, PCLK and PCLKG, and therefore these peripherals
ignore this signal.
PCLK must be the gated version of HCLK using PCLKEN. PCLKG might be a gated version of PCLK, for
example, using APBACTIVE.
APBACTIVE The AHB to APB bridge generates this signal. It enables you to handle clock gating for the gated APB bus clock,
PCLKG, in the example system.
When there is no APB transfer, you can stop the gated APB bus clock to reduce power.
HRESETn Clock reset for AHB side.
PRESETn Clock reset for APB side.

APB components
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 4-31
ID110117 Non-Confidential
UART signals
The subsystem includes UART 0, UART 1, and UART 2. These signals are connected to a pin
multiplexer of the example system to interface with external I/O. Table 4-30 shows the APB
subsystem UART signals.
Timer signals
The timer signals are connected to a multiplexer pin of the example system to interface with
external I/O. Table 4-31 shows the APB subsystem timer signals.
Watchdog signals
In the example system, the watchdog interrupt is connected to the Non-Maskable Interrupt
(NMI) signal of the processor, and the watchdog reset signal is connected to the reset generator
of the system. Table 4-32 shows the APB subsystem watchdog signals.
Interrupt signals
In the example system design, this signal is merged with the other interrupt signals, and
connected to the Nested Vectored Interrupt Controller (NVIC) of the Cortex-M processor.
Table 4-33 shows the APB subsystem interrupt signal
Table 4-30 APB subsystem UART signals
Signal Description
uartn_rxd Receive data
uartn_txd Transmit data
uartn_txen Transmit enable
Table 4-31 APB subsystem timer signals
Signal Description
timer0_extin Timer 0 external input
timer1_extin Timer 1 external input
Table 4-32 APB subsystem watchdog signals
Signal Description
watchdog_interrupt Watchdog interrupt
watchdog_reset Watchdog reset
Table 4-33 APB subsystem interrupt signal
Signal Description
apbsubsys_interrupt APB subsystem interrupt

APB components
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 4-32
ID110117 Non-Confidential
APB expansion port signals
APB expansion ports 12-15 enable you to connect additional APB slaves, if required. If you do
not use these ports, you can disable them using a Verilog parameter to avoid unused logic.
Table 4-34 shows the APB expansion port signals.
4.7.3 APB test slave
A simple APB test slave is included for verification purposes. Arm uses the test slave to verify
the handling of wait states and error responses in the AHB to APB bridge. The APB test slave
contains a software-programmable register that supports word, halfword, and byte size accesses.
Programmers model
Table 4-35 shows the APB test slave memory map.
Note
The AHB interface on the APB subsystem can generate non-word sized writes which is not
supported by the current APB peripherals in the Cortex-M System Design Kit. The current APB
peripherals do not support non-word sized writes because PSTRB is not present. Therefore,
restrict all write accesses to be word sized writes.
Table 4-34 APB subsystem APB expansion port signals
Signal Description
extn_psel APB expansion port n, select
extn_pready APB expansion port n, ready
extn_prdata[31:0] APB expansion port n, read data
extn_pslverr APB expansion port n, slave error
Table 4-35 APB test slave memory map
Base offset Type Reset value Description
0x000
RW
0x00000000
Data register, 32-bit. Zero wait state, two PCLK cycles per access.
0x004
RW
0x00000000
Alias of Data register, with one wait state.
0x008
RW
0x00000000
Alias of Data register, with two wait states.
0x00C
RW
0x00000000
Alias of Data register, with three wait states.
0x010-0x0EF
RW - Reserved. RAZ/WI.
0xF0
RW
0x00000000
Alias of Data register, with zero wait states and error responses.
0xF4
RW
0x00000000
Alias of Data register, with one wait state and error response.
0xF8
RW
0x00000000
Alias of Data register, with two wait states and error responses.
0xFC
RW
0x00000000
Alias of Data register, with three wait states and error responses.
0x100-0xFFF
RW - Reserved. RAZ/WI.

APB components
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 4-33
ID110117 Non-Confidential
4.8 APB timeout monitor
The APB timeout monitor,
cmsdk_apb_timeout_mon.v
, prevents an APB slave from locking up a
system. It is placed between an APB master and an APB slave, and is connected directly to the
APB slave. If there is an active transfer to the slave, and the slave holds the PREADY signal
LOW for more than a certain number of clock cycles, the monitor generates an error response
to the bus master.
If the bus master generates any subsequent access to this slave, the monitor returns an error
response and blocks the access to the slave until the slave has asserted its PREADY HIGH.
Figure 4-24 shows the APB timeout monitor module.
Figure 4-24 APB timeout monitor
If multiple APB slaves require monitoring, each of them might require its own APB timeout
monitor, unless the bus fault handler does not require access to the blocked APB bus segment
and therefore can work during a blocking state. See Figure 4-25.
Figure 4-25 Use of APB timeout monitor
Table 4-36 shows the characteristics of the APB timeout monitor.
cmsdk_apb_timeout_mon.v
PCLK
PRESETn
PSELS
PENABLES
PREADYS
PSLVERRS
PADDRS[ADDRWIDTH-1:0]
PREADYM
PSLVERRM
PSELM
PENABLEM
PADDRM[ADDRWIDTH-1:0]
TIMEOUT
PPROTS[2:0]
PWRITES
PWDATAS[31:0]
PSTRBS[3:0]
PPROTM[2:0]
PWRITEM
PWDATAM[31:0]
PSTRBM[3:0]
AHB to APB bridge APB slave mux APB slaveAPB timeout monitor
Table 4-36 APB timeout monitor characteristics
Element name Description
Filename
cmsdk_apb_timeout_mon.v
Parameter
ADDRWIDTH
Width of APB address bus. The default value is 12.
TIME_OUT_VALUE
Number of wait state cycles that trigger timeout. The value can vary from 3-1023, and the
default value is 16.
Clock domain PCLK for APB operation.

ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 5-1
ID110117 Non-Confidential
Chapter 5
Advanced AHB-Lite components
This chapter describes the advanced AHB-Lite components that the Cortex-M System Design
Kit uses. It contains the following sections:
•AHB bus matrix on page 5-2.
•AHB upsizer on page 5-14.
•AHB downsizer on page 5-17.
•AHB to APB asynchronous bridge on page 5-25.
•AHB to AHB and APB asynchronous bridge on page 5-27.
•AHB to AHB synchronous bridge on page 5-30.
•AHB to AHB sync-down bridge on page 5-32.
•AHB to AHB sync-up bridge on page 5-37.
Note
The advanced AHB-Lite components are available only with the Cortex-M System Design Kit,
full version. They are not included in the Cortex-M0 and Cortex-M0+ System Design Kit.

Advanced AHB-Lite components
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 5-2
ID110117 Non-Confidential
5.1 AHB bus matrix
In the Cortex-M System Design Kit, the bus matrix component provides a low-latency solution.
The following subsections describe the bus matrix configurable features and operation:
•Key features.
•Bus matrix configurability on page 5-3.
•Bus matrix module on page 5-3.
•Operation on page 5-5.
•Programmers model on page 5-5.
•Block functionality on page 5-6.
•Arbitration and locked transfers on page 5-7.
•Address map on page 5-8.
•Signal descriptions on page 5-11.
5.1.1 Key features
The bus matrix has the following key features:
• Supports the AMBA 3 AHB-Lite protocol.
• Number of slave ports, from 1-16.
• Number of master ports, from 1-16.
• Routing data width, either 32 bits or 64 bits.
• Routing address width, from 32-64 bits.
• Arbiter type, that can be round-robin, fixed, or burst.
• Default slave included with each slave port.
• Optional xUSER signals, from 0-32 bits, with zero meaning excluded.
• Sparse connectivity:
— The sparse connectivity feature removes any unnecessary connections, and reduces
area and multiplexer delays.
— Separate instances of the output stage and output arbiter are generated for each
master port.
— For input-output stages with only one sparse connection, the choice of arbiter is
overridden with single arbiter and output stage modules. These single modules also
permit 1 × n interconnects.
• Design entry by command line where the address map is calculated, excluding REMAP
support.
• Design entry by XML configuration file that enables you to specify an address map,
including REMAP support.
• User-specified module names or automatically derived top-level name.
• User-specified source and target directories.
• Optional
`timescale
Verilog directives.

Advanced AHB-Lite components
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 5-3
ID110117 Non-Confidential
5.1.2 Bus matrix configurability
The bus matrix is a configurable component that enables you to connect multiple AHB masters
to multiple AHB slaves.
The bus matrix RTL is generated automatically using the
BuildBusMatrix.pl
script. The script
takes different configuration parameters, for example, the number of masters, number of slaves,
and data-width, and generates the corresponding Verilog RTL.
Alternatively, you can create an XML file to describe the bus matrix design, and pass it on to
the
BuildBusMatrix.pl
script to create the bus matrix.
Note
You must execute the
BuildBusMatrix.pl
script from the
logical/cmsdk_ahb_busmatrix
directory.
To get help, enter:
bin/BuildBusMatrix.pl -help
5.1.3 Bus matrix module
The bus matrix module,
cmsdk_ahb_busmatrix_<num_slaves>x<num_masters>_lite.v
, enables
multiple AHB masters from different AHB buses to be connected to multiple AHB slaves on
multiple AHB slave buses. It enables parallel access to a number of shared AHB slaves from a
number of different AHB masters. The bus matrix determines the master that gains access to
each slave, and routes the control signals and data signals between them. This block is required
in multi-layer AHB systems.
Figure 5-1 on page 5-4 shows the bus matrix module.

Advanced AHB-Lite components
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 5-4
ID110117 Non-Confidential
Figure 5-1 Bus matrix module components
Figure 5-1 shows a bus matrix module component block diagram for (m+1) input ports, (n+1)
output ports, 64-bit routing data width, 32-bit routing address width, and 32-bit USER signal
widths.
The bus matrix signal names have the following suffixes for port and pin naming:
• Signals on the AHB slave interface from AHB masters have the suffix S.
• Signals on the AHB master interface to AHB slaves have the suffix M.
The bus matrix connects to the masters and slaves using this naming scheme, with an additional
integer to identify the correct master and slave. For example, connect HWDATAS0[63:0] to the
64-bit AHB Master 0 write data port, and HWDATAM0[63:0] to the AHB Slave 0 write data
port.
AHB BusMatrix
HCLK
To AHB
slaves
AHB
slave
interface 0
AHB
master
interface 0
HRESPS0
HBURSTS0[2:0]
HTRANSS0[1:0]
HPROTS0[3:0]
HSIZES0[2:0]
HWRITES0
HADDRS0[31:0]
HMASTLOCKS0
HRESETn
HWDATAS0[63:0]
HREADYS0
HREADYOUTS0
HRDATAS0[63:0]
HSELS0
To AHB
masters
To AHB
slaves
AHB
slave
interface m
AHB master
interface n
To AHB
masters
REMAP[3:0]
HMASTERS0[3:0]
HRESPM0
HBURSTM0[2:0]
HTRANSM0[1:0]
HPROTM0[3:0]
HSIZEM0[2:0]
HWRITEM0
HADDRM0[31:0]
HMASTLOCKM0
HWDATAM0[63:0]
HREADYMUXM0
HREADYOUTM0
HRDATAM0[63:0]
HSELM0
HMASTERM0[3:0]
HRESPSm
HBURSTSm[2:0]
HTRANSSm[1:0]
HPROTSm[3:0]
HSIZESm[2:0]
HWRITESm
HADDRSm[31:0]
HMASTLOCKSm
HWDATASm[63:0]
HREADYSm
HREADYOUTSm
HRDATASm[63:0]
HSELSm
HMASTERSm[3:0]
HRESPMn
HBURSTMn[2:0]
HTRANSMn[1:0]
HPROTMn[3:0]
HSIZEMn[2:0]
HWRITEMn
HADDRMn[31:0]
HMASTLOCKMn
HWDATAMn[63:0]
HREADYMUXMn
HREADYOUTMn
HRDATAMn[63:0]
HSELMn
HMASTERMn[3:0]
HAUSERSm[31:0]
HWUSERSm[31:0]
HRUSERSm[31:0]
Optional 32-bit
USER signals
HAUSERMm[31:0]
HWUSERMm[31:0]
HRUSERMm[31:0]
Optional
32-bit USER
signals
HAUSERS0[31:0]
HWUSERS0[31:0]
HRUSERS0[31:0]
Optional 32-bit
USER signals
HAUSERM0[31:0]
HWUSERM0[31:0]
HRUSERM0[31:0]
Optional
32-bit USER
signals

Advanced AHB-Lite components
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 5-5
ID110117 Non-Confidential
5.1.4 Operation
The following sections describe the operation of the bus matrix:
•Integrating the bus matrix.
•Locked sequences.
Integrating the bus matrix
When integrating the bus matrix component:
• The input ports, with signal suffix S, are AHB slave ports, and you must connect them
accordingly.
• The output ports, with signal suffix M, are AHB slave gasket ports. That is, they attach
directly to an AHB slave port, that they mirror. The AHB slave gasket port is not treated
in the same way as a full AHB master port.
• If you want to use the output from a bus matrix as a bus master on an additional AHB
layer, and if you require a high operational frequency, Arm recommends that you use a
component such as an AHB bridge, for example, an AHB to AHB synchronous bridge or
the
Ahb2AhbPass
component in the Arm AMBA Design Kit (ADK).
Note
When connecting to an output port on the bus matrix, you must connect the HSEL pin to the
attached slave even if there is only one slave present. If you do not do this, the slave might see
spurious transfers.
Locked sequences
The bus matrix is only designed to support locked sequences that target a single output port.
Because of this, you do not require a snooping bus across all input ports. This provides
arbitration for locked transfers on all layers simultaneously.
5.1.5 Programmers model
The design of the bus matrix consists of an input stage, a decode stage, and an output stage that
Block functionality on page 5-6 describes. Figure 5-2 on page 5-6 shows a bus matrix design
with:
• Four slave ports, for connection to bus masters.
• Three master ports, for connection to slaves.

Advanced AHB-Lite components
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 5-6
ID110117 Non-Confidential
Figure 5-2 Example bus matrix design configuration
5.1.6 Block functionality
The following sections describe the functionality of the bus matrix module:
•Input stage.
•Decode stage.
•Output stage on page 5-7.
Input stage
The input stage provides the following functions:
• It registers and holds an incoming transfer if the receiving slave is not able to accept the
transfer immediately.
• If the bus matrix switches between input ports while in the middle of an undefined length
burst, the input stage modifies the HTRANS and HBURST signals for the interrupted
input port, so that when it is reinstated, the remaining transfers in the burst meet the AHB
specification.
Decode stage
The decode stage generates the select signal for individual slaves. It also handles the
multiplexing of response signals and read data. During the address phase of a transfer, the
decoder asserts the slave-select signal for the appropriate output stage corresponding to the
address of the transfer. In addition, the decoder routes an active signal from the output stage
DQ
Input stage Decoder
DQ
Input stage Decoder
DQ
Input stage Decoder
DQ
Input stage Decoder
Output stage
Output stage
Output stage

Advanced AHB-Lite components
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 5-7
ID110117 Non-Confidential
back to the input stage. This signal indicates to the input that its address is currently being driven
onto the chosen slave. During the data phase of a transfer, the decoder routes the response
signals and read data back to the input port.
Each slave port, connected to an AHB master, is associated with a separate decoder. This
enables the AHB masters to have independent address maps, that is, a shared slave is not
required to appear in the same address location for all masters. This is useful for multiprocessor
systems.
Any gaps in the memory map are redirected to a default slave that returns an OKAY or ERROR
response, depending on the type of access. An instance of a default slave is associated with each
decoder.
The decoder stage also supports the system address Remap function. A 4-bit REMAP control
signal connects to the decoder. You can use remapping to change the address of physical
memory or a device after the application has started executing. This is typically done to permit
RAM to replace ROM when the initialization has been completed.
In multi-layer AHB systems that have local slaves on some of the AHB layers, the address
decoding is performed in two stages. The first address decoder selects between local slaves and
the shared slaves available through the AHB bus matrix module. To support this, the decode
stage in the bus matrix includes an HSEL input that indicates whether the address from an input
port is destined for a shared slave.
Output stage
The output stage has the following functions:
• Selects the address and control signals from the input stages.
• Selects the corresponding write data from the input stage.
• Determines when to switch between input ports in the input stage.
The output stage only selects an input source when that input has a transfer in the holding
register.
The output stage generates an active signal for each input port when the address from that input
port is being driven onto the slave. This signal enables the input stage to determine when to hold
up transfers from other masters because the slave is not currently available.
When a sequence of transfers to a shared slave has finished, and there are no more transfers to
the slave required by any of the input ports, the output stage switches the address and control
signals to an idle state.
5.1.7 Arbitration and locked transfers
This section describes:
•Arbitration.
•Locked transfers on page 5-8.
Arbitration
The arbitration in the bus matrix module determines the input port that has access to the shared
slave, and each shared slave has its own arbitration. Different arbitration schemes provide
different system characteristics in terms of access latency and overall system performance.

Advanced AHB-Lite components
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 5-8
ID110117 Non-Confidential
The slave switch supports the following arbitration schemes:
Fixed arbitration
One port always has the highest priority and the order of priority for all other ports
is fixed.
You can break up burst transfers, if a higher-priority master requests the same
slave, except where the burst transfer is a locked transfer.
Fixed (burst) arbitration
This is similar to fixed arbitration but it does not break defined length burst
transfers and it is the default arbitration for the bus matrix.
Round-robin arbitration
Arbitration is performed during every active clock cycle, indicated by
HREADYM. Priority initially goes to the lowest-numbered requestor, that is,
input port 0. When multiple requests are active, priority goes to the next
lowest-numbered requestor compared to the currently active one. Fixed-length
bursts are not broken. The arbitration waits for the end of the burst before passing
control to the next requestor, if one exists. INCR bursts are treated as four-beat
bursts, to optimize memory accesses, with guard logic to ensure that a sequence
of short INCR bursts does not freeze the arbitration scheme.
Note
In the case of burst and round-robin arbitration, a master that is connected to a bus matrix slave
is able to terminate fixed-length bursts early. However, the module only allows three
consecutive early termination bursts (with the data phase) before arbitrating again, which
prevents the starvation of the masters.
Locked transfers
Using a multi-layer AHB system requires certain restrictions to be placed on the use of locked
transfers to prevent a system deadlock. A sequence of locked transfers must be performed to the
same slave in the system. Because the minimum address space that you can allocate to a single
slave is 1KB, a bus master can ensure that this restriction is met by ensuring that it does not
perform a locked sequence of transfers over a 1KB boundary. This ensures that it never crosses
an address decode boundary.
Therefore, if a bus master is to perform two locked transfer sequences to different address
regions, the bus master must not start the second locked transfer sequence until the final data
phase of the first locked transfer sequence has completed.
5.1.8 Address map
If you do not use the XML configuration method, you can use command-line parameters
instead. In this case, the address map is calculated automatically as follows:
•Figure 5-3 on page 5-9 shows the equations that enable the address map to be divided into
a number of regions depending on the number of master ports:

Advanced AHB-Lite components
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 5-9
ID110117 Non-Confidential
Figure 5-3 Region equations
• Each slave port has the same decoder instance.
• There is no REMAP support.
If you are using XML configuration method, the decode stage can have a fully-customized
address map, and each slave port can have an independent view of the address space.
Example 5-1 shows a slave port address map description.
Example 5-1 Slave port address map description
<slave_interface name="SI1">
<address_region interface="MI0" mem_lo="40000000" mem_hi="4fffffff" remapping="move"/>
<address_region interface="MI0" mem_lo="70000000" mem_hi="7fffffff" remapping="alias"/>
<address_region interface="MI1" mem_lo="80000000" mem_hi="9fffffff" remapping="none"/>
<address_region interface="MI2" mem_lo="a0000000" mem_hi="bfffffff" remapping="move"/>
<address_region interface="MI3" mem_lo="00000000" mem_hi="1fffffff" remapping="move"/>
<remap_region interface="MI0" mem_lo="00000000" mem_hi="1fffffff" bit="0"/>
<remap_region interface="MI1" mem_lo="50000000" mem_hi="5fffffff" bit="0"/>
<remap_region interface="MI2" mem_lo="60000000" mem_hi="6fffffff" bit="1"/>
<remap_region interface="MI3" mem_lo="c0000000" mem_hi="dfffffff" bit="0"/>
</slave_interface>
Address region
The address region parameters determine the routing of transactions to the master interfaces.
Each master interface can have multiple non-contiguous address regions, when multiple sets of
address region parameters are defined. However, the address regions of different master
interfaces must not overlap. The
mem_lo
parameter defines the lower bound address and the
mem_hi
parameter defines the upper bound address for the master interface.
The
remapping
configuration parameter defines the behavior of master interfaces that support
address remapping. It becomes active when the relevant REMAP signal is set. There are two
types of address remapping behavior:
• If you set the
remapping
parameter to
alias
or
none
, the remapping creates an alias of the
defined region in the new address space.
• If you set the
remapping
parameter to
move
, the address region is removed from the original
address space and the master interface appears at the location that is defined by the remap
region in the new address space.
regions = round_to_highest_2toN(total_master_ports)
region_size =
_____________
2routing_address_width
regions
region_base = region_size x master_port_instance
region_top = region_base + region_size - 1

Advanced AHB-Lite components
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 5-10
ID110117 Non-Confidential
Remap region
These regions are activated when using the remap facility, and each remap region is associated
with a bit of the REMAP signal.
When the relevant REMAP signal is set, the remap regions take higher priority than normal
address regions for the same master interface. In addition, any normal regions that have the
remapping parameter set to
move
, are removed from the address space. If more than one bit is
asserted for the same master interface, the least significant bit takes priority.
Figure 5-4 on page 5-11 shows the address map of the slave interface, which is defined in
Example 5-1 on page 5-9, at different remap states.
The address map is explained at the remap state REMAP =
0001
as follows:
• Normally, the address map, MI0, appears at two non-contiguous regions
, 0x40000000
and
0x70000000
. When you set remap bit to 0, the region at
0x40000000
is removed because the
remapping parameter is set to
move
and MI0 appears at the new remap region
0x00000000
to
0x1FFFFFFF
. The MI0 region at
0x70000000
is not removed because its remapping
parameter is declared as
alias
.
• When you set remap bit to 0, MI1 appears at the new remap region,
0x50000000
to
0x5FFFFFFF
. The region at
0x80000000
did not change because its remapping is set to
none
.
• MI2 did not change even though its remapping is declared as
move
, because it is associated
with remap bit one. Remap bit one is not set at the current remap state.
• MI3 is moved to a new base address
0xC0000000
.
Note
You can consider MI0 as ROM and MI3 as RAM. At boot time, the REMAP signal is set to
0001
and you can observe ROM at base address
0x00000000
. After booting, the REMAP signal
is set to
0000
, the RAM now appears at
0x00000000
, and the ROM is moved up in the address
space to
0x40000000
.
Figure 5-4 on page 5-11 shows the address map at different remap states.

Advanced AHB-Lite components
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 5-11
ID110117 Non-Confidential
Figure 5-4 Address map at different remap states
5.1.9 Signal descriptions
Table 5-1 shows the bus matrix signals.
0xFFFFFFFF
0x00000000
0x40000000
0x80000000
0xC0000000
0x20000000
0x50000000
0x70000000
0xA0000000
0xFFFFFFFF
0x00000000
0x40000000
0x80000000
0xC0000000
0x20000000
0x50000000
0x70000000
0xA0000000
0x60000000
0xE0000000
REMAP = 0000 REMAP = 0001
0xFFFFFFFF
0x00000000
0x40000000
0x80000000
0xC0000000
0x20000000
0x50000000
0x70000000
0xA0000000
0x60000000
0xE0000000
REMAP = 0011
MI2
MI1
MI0
MI0
MI3
MI3
MI2
MI1
MI0
MI1
MI3
MI1
MI0
MI2
MI1
MI0
MI0
Table 5-1 Bus matrix signals
Signal Direction Description
HCLK Input System bus clock. Logic is triggered on the rising edge of the clock.
HRESETn Input Activate LOW asynchronous reset.
System address control
REMAP[3:0] Input System address remap control.
Interface to masters, AHB slave
HADDRSx[N-1:0] Input N-bit address bus from AHB master. The value of N can vary from 32 to 64.
HBURSTSx[2:0] Input Burst size information.
HMASTERSx[3:0] Input Current active master.
HMASTLOCKSx Input Indicates that the transfer on the master AHB is a locked transfer.
HPROTSx[3:0] Input Protection information.
HRDATASx[63:0 or 31:0] Output Read data to bus master. You can configure the width to either 64 bits or 32 bits.

Advanced AHB-Lite components
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 5-12
ID110117 Non-Confidential
HREADYOUTSx Output HREADY signal feedback to the master bus, indicating whether the AHB bus matrix
module is ready for the next operation.
HREADYSx Input HREADY signal on the master AHB bus, indicating the start or end of a transfer.
HRESPSx Output Response from the AHB bus matrix module to the AHB master.
HSELSx Input Active HIGH select signal to indicate that a shared slave connected to the AHB bus
matrix module is selected.
HSIZESx[2:0] Input Size of the data.
HWDATASx[63:0 or 31:0] Input Write data from AHB masters. You can configure the width to be either 64 or 32 bits.
HWRITESx Input Indicates a read or write operation.
Interface to slaves (AHB master)
HADDRMx[N-1:0] Output N-bit address bus for the AHB slave. The value of N can vary from 32 to 64.
HBURSTMx[2:0] Output Burst size information.
HMASTERMx[3:0] Output Currently active master.
HMASTLOCKMx Output Indicates that the transfer on the AHB slave is a locked transfer.
HPROTMx[3:0] Output Protection information.
HRDATAMx[63:0 or 31:0] Input Data read back from AHB slaves. You can configure the width to be either 64 bits or 32
bits.
HREADYOUTMx Input HREADYOUT from the AHB slave or slave multiplexer.
HREADYMUXMx Output HREADY feedback to all slaves.
HRESPMx Input HRESP from the AHB slave or slave multiplexer.
HSELMx Output Active HIGH select signal to indicate that the slave bus is accessed. You can use this
signal to drive a single AHB slave directly, or drive a secondary AHB decoder if you
use multiple AHB slaves.
HSIZEMx[2:0] Output Size of the data.
HWDATAMx[63:0 or 31:0] Output Write data to AHB slaves. You can configure the width to be either 64 bits or 32 bits.
HWRITEMx Output Indicates a read or write operation.
USER signals
HAUSERSx Input Additional sideband bus that has the same timing as the slave interface address phase
signals.
HWUSERSx Input Additional sideband bus that has the same timing as the slave interface write data phase
signals.
HRUSERSx Output Additional sideband bus that has the same timing as the slave interface read data phase
signals.
Table 5-1 Bus matrix signals (continued)
Signal Direction Description

Advanced AHB-Lite components
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 5-13
ID110117 Non-Confidential
USER signals
The bus matrix supports USER signals on master and slave interfaces. These signals are
optional, and a value of 0 on the
user_signal_width
parameter removes them from the generated
Verilog. If the
user_signal_width
parameter or the
--userwidth
command line switch is set to a
nonzero value, that value defines the width of those USER signals. The USER signals have the
same timing as the payload signals for that channel. For example, the HAUSER signals have
the same timing as the address payload signals.
The USER signals are:
•HAUSER.
•HRUSER.
•HWUSER.
N-bit addressing
The bus matrix supports N-bit addressing, that is, you can configure the address bus to be 32-64
bits. By default, the address width is set to 32 bits, but you can change this by setting the
--addrwidth
command line switch or by changing the
routing_address_width
global parameter
in the XML file. Setting the address width affects both the address buses for the slave ports and
master ports.
Note
The presence of USER signals and the support of N-bit addressing enables the bus matrix to
fully connect to a network interconnect product such as the CoreLink network interconnect
NIC-301. The bus matrix USER signals are fully mapped to their AXI counterparts. This is
typically useful in mixed protocol designs. See the Arm® CoreLink™ Network Interconnect
NIC-301 Technical Reference Manual for more information.
HAUSERMx Output Additional sideband bus that has the same timing as the master interface address phase
signals.
HWUSERMx Output Additional sideband bus that has the same timing as the master interface write data
phase signals.
HRUSERMx Input Additional sideband bus that has the same timing as the master interface read data phase
signals.
Table 5-1 Bus matrix signals (continued)
Signal Direction Description

Advanced AHB-Lite components
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 5-14
ID110117 Non-Confidential
5.2 AHB upsizer
The following subsections describe the AHB upsizer features and its operation:
•Overview.
•Method of using AHB upsizer.
5.2.1 Overview
The AHB upsizer,
cmsdk_ahb_upsizer64.v
, enables a 32-bit AHB bus master to connect to a
64-bit AHB slave. Figure 5-5 shows the AHB upsizer module.
Figure 5-5 AHB upsizer
Table 5-2 shows the characteristics of the AHB upsizer.
The AHB upsizer handles the routing of data only and does not modify the transfer type or
response information.
5.2.2 Method of using AHB upsizer
You can connect the AHB upsizer in a number of ways with various combinations of 32-bit or
64-bit AHB Lite systems. For example, you can couple the AHB upsizer directly with a 64-bit
slave as Figure 5-6 on page 5-15 shows.
cmsdk_ahb_upsizer64.v
HCLK
HRESETn
HSELS
HADDRS[31:0]
HTRANSS[1:0]
HWRITES
HREADYOUTS
HRDATAS[31:0]
HRESPS
HREADYS
HWDATAS[31:0]
HSIZES[2:0]
HMASTLOCKS
HPROTS[3:0]
HBURSTS[2:0]
HSELM
HADDRM[31:0]
HTRANSM[1:0]
HSIZEM[2:0]
HWRITEM
HREADYOUTM
HRDATAM[63:0]
HRESPM
HREADYM
HPROTM[3:0]
HBURSTM[2:0]
HMASTLOCKM
HWDATAM[63:0]
Table 5-2 AHB upsizer characteristics
Element name Description
Filename
cmsdk_ahb_upsizer64.v
Parameters None
Clock domain HCLK

Advanced AHB-Lite components
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 5-15
ID110117 Non-Confidential
Figure 5-6 Using AHB upsizer, type one
If there is more than one 64-bit AHB slave in the AHB segment, it is possible to share an AHB
upsizer as shown in Figure 5-7 on page 5-16.
32-bit AHB Lite
master
32-bit AHB slave
64-bit AHB slave
Address
decoder
HADDR
controls
HREADYOUT
HRDATA
HRESP
HREADYOUTS
HRDATAS, 32-bit
HRESPS
HREADYOUT
HRDATA, 64-bit
HRESP
HSEL
HSELS HSELM
HREADYOUTM
HRDATAM
HRESPM
32-bit AHB
slave
multiplexer HADDRS HADDRM
HREADY
HRDATA
HRESP
HSEL
AHB upsizer
HWDATA
controlscontrols
HWDATAS HWDATAM HWDATA, 64-bit
32-bit HWDATA
controls
Note: The controls included are HTRANS, HWRITE, HSIZE, HPROT, and HBURST.

Advanced AHB-Lite components
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 5-16
ID110117 Non-Confidential
Figure 5-7 Using AHB upsizer, type two
You can use the HSEL signals generated from the 32-bit bus directly on the 64-bit AHB slaves
because the AHB upsizer does not change the behavior of the HSEL signals. This arrangement
avoids the requirement to have two AHB decoders in the system.
32-bit AHB Lite
master
32-bit AHB slave
64-bit AHB slave #1
Address
decoder
HADDR
AHB controls
HREADYOUT
HRDATA
HRESP
HREADYOUTS
HRDATAS
HRESPS
HREADYOUT
HRESP
HSEL
HSELS HSELM
HREADYOUTM
HRDATAM
HRESPM
32-bit
AHB slave
multiplexer
HADDRS HADDRM
HREADY
HRDATA
HRESP
HSEL
AHB Upsizer
64-bit AHB slave #2
HREADYOUT
HRESP
64-bit
AHB slave
multiplexer
AHB controls
Not used
AHB controls
HRDATA, 64-bit
HRDATA, 64-bit
64-bit
32-bit
HWDATA
HWDATAS HWDATAM HWDATA, 64-bit
HWDATA, 64-bit
HSEL
AHB controls
AHB controls
HSEL
HSEL
HADDR
HADDR
HREADY

Advanced AHB-Lite components
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 5-17
ID110117 Non-Confidential
5.3 AHB downsizer
The following subsections describe the AHB downsizer features and its operation:
•About the AHB downsizer.
•Programmers model on page 5-18.
•Signal descriptions on page 5-22.
•Using AHB downsizer on page 5-23.
5.3.1 About the AHB downsizer
The AHB downsizer module,
cmsdk_ahb_downsizer64.v
, enables a 64-bit AHB bus master to
connect to a 32-bit AHB slave. The downsizer module reduces the width of the data bus by half
from an AHB master to an AHB slave. You can use full-width master transfer, involving
modification of the transfer type, burst, and size, and latching half of the master read data. In
addition, you might require multiple slave writes or reads to transfer data to and from the narrow
slave.
Figure 5-8 shows the AHB downsizer module.
Figure 5-8 AHB downsizer
cmsdk_ahb_downsizer64.v
HCLK
HRESETn
HSELS
HADDRS[31:0]
HTRANSS[1:0]
HWRITES
HREADYOUTS
HRDATAS[63:0]
HRESPS
HREADYS
HWDATAS[63:0]
HSIZES[2:0]
HMASTLOCKS
HPROTS[3:0]
HBURSTS[2:0]
HSELM
HADDRM[31:0]
HTRANSM[1:0]
HSIZEM[2:0]
HWRITEM
HREADYOUTM
HRDATAM[31:0]
HRESPM
HREADYM
HPROTM[3:0]
HBURSTM[2:0]
HMASTLOCKM
HWDATAM[31:0]
HMASTERM[HMASTER_WIDTH-1:0]
HMASTERS[HMASTER_WIDTH-1:0]

Advanced AHB-Lite components
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 5-18
ID110117 Non-Confidential
Table 5-3 shows the characteristics of the AHB downsizer.
5.3.2 Limitations
The AHB downsizer has the following limitations:
• The downstream slave must respond with HREADYOUTM HIGH and HRESPM OKAY
when it is not selected.
5.3.3 Programmers model
The following sections describe the programming details for the downsizer:
•Downsizer transfers.
•Burst blocking after error on page 5-20.
•Modification of control signals on page 5-21.
Downsizer transfers
You can use the following options for downsizer transfers:
Downsizer not selected
When the HSELS signal of the downsizer module is LOW, the transfer size is
passed to the 32-bit AHB, and HSELM is driven LOW. The 32-bit slaves must
ignore the transfers by monitoring HSELM and HADDRM. HREADYS from
the 64-bit bus is output to HREADYM. All 32-bit devices connected to the 32-bit
AHB must monitor this HREADYM signal to determine the end of the current
transfer, and the start of the next transfer.
Narrow transfers, downsizer selected
If the downsizer module is selected, and the transfer is 32 bits or less, the
downsizer module passes the transfer through. All the control signals and
responses from the slave are left unmodified. In this case, the only function of the
downsizer is to route the appropriate half of the wide master write data bus to the
narrow slave data bus for write transfers.
Read transfers require even less control, and the narrow slave read data is
replicated across the wide master bus.
Table 5-3 AHB downsizer characteristics
Element name Description
Filename
cmsdk_ahb_downsizer64.v
Parameter
HMASTER_WIDTH
Width of HMASTER. This is set to 1 by default.
ERR_BURST_BLOCK_ALL
When this is set to 1, if an error response is received during a burst sequence, the remaining
transfers in the burst sequence are blocked by the AHB downsizer and do not reach the
downstream 32-bit AHB. The AHB downsizer returns an error response to each of the
remaining transfers remains in the burst sequence. This behavior applies to 64-bit, 32-bit,
16-bit, and 8-bit transfers.
When this is set to 0, the same blocking behavior applies to 64-bit burst transfers only.
Burst of other transfer sizes do not have this blocking behavior. See Burst blocking after
error on page 5-20. This is set to 1 by default.
Clock domain HCLK

Advanced AHB-Lite components
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 5-19
ID110117 Non-Confidential
Table 5-4 shows the handling of narrow transfers.
For 32, 16, and 8-bit transfers, HWDATA is selected by bit[2] of the transfer
address. If this bit is set LOW, HWDATA[31:0] is routed to the 32-bit AHB. If
this bit is set HIGH, bits[63:32] are routed.
If an ERROR response is received from the 32-bit slave, the downsizer module
automatically terminates the current transfer by passing the response to the 64-bit
bus. If the current transfer request on the 64-bit bus is a valid transfer, NONSEQ
or SEQ, it is captured by the registers in the downsizer module and is applied to
the 32-bit AHB one cycle later. The downsizer module inserts a wait state on the
64-bit bus to ensure that the next transfer is not missed.
If the transfer is a burst, and an ERROR response is received from a 32-bit slave,
the rest of the burst is blocked. You can disable the burst blocking behavior for
32, 16, and 8-bit burst transfers by setting the
ERR_BURST_BLOCK_ALL
Verilog
parameter to 0. See Burst blocking after error on page 5-20.
Wide transfers, downsizer selected
The role of the downsizer module is more complicated for 64-bit transfers. For
both read and write transfers, the wide master transfers are broken down into two
narrow slave cycles. The address to the slave is modified, to ensure that the two
slave accesses go to different address locations. Table 5-5 shows the address line
modification and data routing.
64-bit write transfers are split into two 32-bit transfers on two successive
addresses. Table 5-5 shows the generation of HADDRM[2] and the routing of
write data. Because HWDATAS is stable during the two AHB transfers on the
32-bit AHB, no register is required to hold HWDATA.
During 64-bit read accesses, the construction of a full-width word for the master
to read two slave accesses is required. The data from the first read is latched, and
the data from the second read flows straight through the block. Bits[31:0] are
Table 5-4 Narrow transfer handling
Transfer on 64-bit AHB Transfer on 32-bit AHB Address
32, 16, or 8-bit transfer 32, 16, or 8-bit transfer HADDR passes through.
If HADDR[2] = 0 then the HWDATAS[31:0] signals pass through.
Otherwise, the HWDATAS[63:32] signals pass through.
HRDATAS = HRDATAM, HRDATAM.
Table 5-5 Address line modification and data routing
Transfer on 64-bit AHB Transfer on 32-bit AHB Address
64-bit transfer Cycle 1 HADDR passes through.
HWDATAS[31:0] passes through.
HRDATAM is stored in the downsizer module.
HADDRS[2:0] must equal
000
.
Cycle 2 HADDRM[2] is set to 1.
HWDATAS[63:32] passes through.
HRDATAM passes through to HRDATAS[63:32].
Previously stored data is output to HRDATAS[31:0].

Advanced AHB-Lite components
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 5-20
ID110117 Non-Confidential
always transferred in the first cycle, and bits[63:32] are transferred in the second
cycle using the next word address. This transfer characteristic occurs
independently of target system endianness.
If an ERROR response is received from the 32-bit slave, the response is passed to
the 64-bit bus immediately. If this occurs on the first half of the 64-bit transfer,
the second half of the transfer is not carried out.
If a two-cycle response is received, the downsizer module automatically aborts
the current transfer by inserting an IDLE cycle on the 32-bit bus. If the current
transfer request on the 64-bit bus is a valid transfer, NONSEQ, the registers in the
downsizer module capture it and apply it to the 32-bit AHB one cycle later. The
downsizer module inserts a wait state on the 64-bit bus to ensure that the next
transfer is not missed.
If the transfer is a burst, and an ERROR response is received from 32-bit slave,
the rest of the burst is blocked.
Burst blocking after error
If an ERROR response is received from a 32-bit slave during a 64-bit burst, and if the 64-bit
master continues the burst, the rest of the burst is blocked. During blocking, the ERROR
response is fed back to the 64-bit AHB and an IDLE transfer is issued to the 32-bit AHB. The
blocking ends when a nonsequential transfer request is detected, or if HSELS on the downsizer
module is LOW. This feature ensures that there is no discontinuity in HADDR and HTRANS.
The blocking does not apply to 32, 16, or 8-bit transfers. In these cases, the rest of the transfer
requests pass through as normal. If a busy cycle is detected during burst blocking, the downsizer
module replies with an OKAY response. However, the subsequent SEQUENTIAL transfers are
still blocked.
If the ERROR response occurs in the last cycle of the burst, no blocking is generated because
the next transfer is an IDLE or NONSEQUENTIAL access. In this case, if the next access is
nonsequential, the downsizer module issues an IDLE cycle on the 32-bit AHB in the second
cycle of the ERROR response, stores the transfer control information, and applies it to the 32-bit
AHB in the next cycle.
A wait state is inserted on the 64-bit bus to enable the 32-bit bus to catch up with the transfer.

Advanced AHB-Lite components
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 5-21
ID110117 Non-Confidential
Modification of control signals
Table 5-6 shows that the control signals are modified in the same way for both read and write
transfers.
Table 5-6 Signal mapping when downsizer module is activated
Control signals Master cycle type Replaced by
slave cycles Comments
HTRANS IDLE to IDLE -
BUSY to BUSY -
NONSEQ to NONSEQ, followed
by a SEQ No change if transfer is 8, 16, or 32 bits.
SEQ to SEQ, followed by a
SEQ No change if transfer is 8, 16, or 32 bits.
Exceptions:
• For WRAP16 boundary, WRAP16 is mapped to
INCR and NONSEQ is issued at 32-word
boundary.
• For INCR16, INCR16 is mapped to INCR16 and
NONSEQ is issued at 32-word boundary.
HADDR[2] = 0 to 0 then 1 No change if transfer is 8, 16, or 32 bits.
= 1 - - Not permitted for 64-bit transfer.
HSIZE 8, 16, or 32 bits to 8, 16, or 32 bits No conversion required.
64 bits to 32 bits Conversion process activated.
128 or 256 bits to 32 bits Not supported.
HBURST SINGLE to INCR No change if transfer is 8, 16, or 32 bits.
INCR to INCR No change if transfer is 8, 16, or 32 bits.
INCR4 to INCR8 No change if transfer is 8, 16, or 32 bits.
WRAP4 to WRAP8 No change if transfer is 8, 16, or 32 bits.
INCR8 to INCR16 No change if transfer is 8, 16, or 32 bits.
WRAP8 to WRAP16 No change if transfer is 8, 16, or 32 bits.
INCR16 to INCR16 No change if transfer is 8, 16, or 32 bits.
WRAP16 to INCR No change if transfer is 8, 16, or 32 bits.
NONSEQ broadcast if WRAP boundary is reached.

Advanced AHB-Lite components
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 5-22
ID110117 Non-Confidential
5.3.4 Signal descriptions
Table 5-7 shows the downsizer module signals.
Table 5-7 Downsizer module signals
Signal Direction Description
HCLK Input System bus clock. Logic is triggered on the rising edge of the clock.
HRESETn Input Activate LOW asynchronous reset.
64-bit AHB interface signals, AHB slave
HADDRS[31:0] Input Address from the 64-bit AHB.
HBURSTS[2:0] Input Burst size information on the 64-bit AHB.
HMASTLOCKS Input Indicates that the transfer on the 64-bit AHB is locked.
HPROTS[3:0] Input Protection information on the 64-bit AHB.
HRDATAS[63:0] Output Read data to the 64-bit bus.
HREADYOUTS Output HREADY signal feedback to the 64-bit bus, indicating that the downsizer is ready for the next
operation.
HREADYS Input HREADY signal on the 64-bit AHB bus, indicating the start and end of a transfer on the 64-bit
bus.
HRESPS Output Response from the downsizer module to the 64-bit bus.
HSELS Input Active HIGH select signal to indicate 32-bit memory range is accessed on the 64-bit AHB.
HSIZES[2:0] Input Size of the data on the 64-bit AHB.
HWDATAS[63:0] Input Write data from the 64-bit bus.
HWRITES Input Indication of a read or write operation on the 64-bit AHB.
32-bit AHB interface signals, AHB master
HADDRM[31:0] Output Address for the 32-bit AHB.
HBURSTM[2:0] Output Burst size information on the 32-bit AHB.
HMASTLOCKM Output Indicates that the transfer on the 32-bit AHB is locked.
HPROTM[3:0] Output Protection information on the 32-bit AHB.
HRDATAM[31:0] Input Data read back from AHB slaves.
HREADYM Output HREADY feedback to all slaves on the 32-bit AHB.
HREADYOUTM Input HREADY from the 32-bit AHB slaves or slave multiplexer.
HRESPM Input HRESP from the 32-bit AHB slaves or slave multiplexer.
HSELM Output Active HIGH select signal to indicate that a 32-bit bus is accessed. Use this signal to drive a single
AHB slave directly, or drive a secondary AHB decoder if you use a multiple 32-bit AHB slaves.
HSIZEM[2:0] Output Size of the data on the 32-bit AHB.
HWDATAM[31:0] Output Write data to the 32-bit AHB slaves.
HWRITEM Output Indication of a read or write operation on the 32-bit AHB.

Advanced AHB-Lite components
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 5-23
ID110117 Non-Confidential
Instead of reading HREADY from the 64-bit bus, or HREADYOUT from the 32-bit slave
multiplexer, the AHB slaves on the 32-bit bus must read the HREADYM generated from the
downsizer module. This signal is multiplexed between HREADYOUTM, when a slave
attached to the M port of the downsizer is selected, including during 64-bit to 32-bit conversion,
and HREADYS, when the downsizer is not selected.
Note
For this bridge, Arm recommends that when a slave is not selected with HSELM LOW, it must
respond with HREADYOUTM HIGH and HRESPM LOW.
During a conversion, the 64-bit transfer is split into two 32-bit transfers, and all the AHB slaves
on the 32-bit AHB bus are able to read the HREADY signal that the activated 32-bit slave
generates. However, this HREADY signal must not be passed onto HREADY in the 64-bit bus
system because this requires the insertion of wait states for the second 32-bit AHB transfer.
Because of this, an additional HREADYM signal enables the AHB slave to determine when the
end of an AHB transfer has occurred.
5.3.5 Using AHB downsizer
You can place the AHB downsizer in a number of ways with varied combination of 32-bit or
64-bit AHB system. For example, you can couple the AHB downsizer directly with 32-bit slave
in a 64-bit AHB system as Figure 5-9 shows.
Figure 5-9 Using AHB downsizer, direct connection
You can also have one AHB downsizer to be shared between multiple 32-bit AHB slaves. The
HSEL for the 32-bit AHB slaves must be derived from the HSEL output from the downsizer as
Figure 5-10 on page 5-24 shows.
64-bit AHB Lite
master
64-bit AHB slave
32-bit AHB slave
Address
decoder
HADDR
controls
HREADYOUT
HRDATA
HRESP
HREADYOUTS
HRDATAS, 64-bit
HRESPS
HREADYOUT
HRDATA, 32-bit
HRESP
HSEL
HSELS HSELM
HREADYOUTM
HRDATAM
HRESPM
64-bit
AHB slave
multiplexer
HADDRS HADDRM
HREADY
HRDATA
HRESP
HSEL
AHB downsizer
HWDATA
controls
controls
HWDATAS, 64-bit HWDATAM HWDATA, 32-bit
64-bit HWDATA
64-bit

Advanced AHB-Lite components
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 5-24
ID110117 Non-Confidential
Figure 5-10 Using AHB downsizer, multiple connection
64-bit AHB Lite
master
64-bit AHB slave
64-bit AHB slave
#1
Address
decoder
HADDR
controls
HREADYOUT
HRDATA
HRESP
HREADYOUTS
HRDATAS
HRESPS
HREADYOUT
HRESP
HSEL
HSELS HSELM
HREADYOUTM
HRDATAM
HRESPM
AHB slave
multiplexer
64-bit HADDRS HADDRM
HREADY
HRDATA
HRESP
AHB downsizer
64-bit AHB slave
#2
HREADYOUT
HRESP
AHB slave
multiplexer
32-bit
controls controls
HRDATA, 32-bit
HRDATA, 32-bit
32-bit64-bit
HWDATA
HWDATAS HWDATAM HWDATA, 32-bit
HWDATA, 32-bit
Address
decoder
HSEL

Advanced AHB-Lite components
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 5-25
ID110117 Non-Confidential
5.4 AHB to APB asynchronous bridge
The following sections describe the AHB to APB asynchronous bridge features and its
operation:
•About the AHB to APB asynchronous bridge.
•Cross-clock domain handling in AHB to APB asynchronous bridge on page 5-26.
5.4.1 About the AHB to APB asynchronous bridge
The AHB to APB asynchronous bridge,
cmsdk_ahb_to_apb_async.v
, supports APB2, APB3, and
APB4. Figure 5-11 shows the AHB to APB asynchronous bridge module.
Figure 5-11 AHB to APB asynchronous bridge
Table 5-8 shows the characteristics of the AHB to APB asynchronous bridge.
The AHB to APB bridge has an output called APBACTIVE which is used to control clock
gating cell for generation of a gated PCLK. The gated PCLK is called as PCLKG in the
example system. When there is no APB transfer, this signal is LOW and stops the PCLKG. The
peripherals designed with separate clock pins for bus logic and peripheral operation can take
advantage of the gated PCLK to reduce power consumption.
The APBACTIVE signal is generated in the APB clock domain.
For more information, see AHB to APB sync-down bridge on page 3-17.
cmsdk_ahb_to_apb_async.v
HCLK
HRESETn
HSEL
HADDR[ADDRWIDTH-1:0]
HTRANS[1:0]
HWRITE
HREADYOUT
HRDATA[31:0]
HRESP
HREADY
HWDATA[31:0]
PRDATA[31:0]
PADDR[ADDRWIDTH-1:0]
PENABLE
PSEL
PWRITE
PWDATA[31:0]
APBACTIVE
PSLVERR
PREADY
PCLK
PRESETn
HSIZE[2:0] PSTRB[3:0]
HPROT[3:0] PPROT[2:0]
Table 5-8 AHB to APB asynchronous bridge characteristics
Element name Description
Filename
cmsdk_ahb_to_apb_async.v
Parameter
ADDRWIDTH
Width of the AHB or APB address bus. The default value is 16 (64Kbyte AHB or
APB address space).
Clock domain HCLK
PCLK

Advanced AHB-Lite components
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 5-26
ID110117 Non-Confidential
5.4.2 Cross-clock domain handling in AHB to APB asynchronous bridge
Figure 5-12 shows the structure of the AHB to APB asynchronous bridge. The AHB to APB
asynchronous bridge is divided into AHB clock domain and APB clock domain.
Figure 5-12 Structure of AHB to APB asynchronous bridge
If Static Timing Analysis (STA) is carried out, you can set the cross-clock domain signal path as
false paths to avoid from being reported as timing violated paths.
cmsdk_ahb_to_apb_async_h cmsdk_ahb_to_apb_async_p
s_req_h
s_ack_p
cmsdk_ahb_to_apb_async_syn
(synchronizers)
PCLK PRESETnHCLK HRESETn
s_addr
s_trans_valid
s_write
s_prot
s_strb
s_wdata
s_resp
s_rdata
PADDR
PWRITE
PWDATA
PRDATA
PPROT
PSTRB
PSLVERR
PREADY
PSEL
PENABLE
APBACTIVE
HRDATA
HRESP
HWDATA
HPROT
HWRITE
HADDR
HSIZE
HTRANS
HSEL
HREADY
HREADYOUT
Cross-clock domain signals,
qualify by handshaking
Cross clock domain
handshaking signals with
double flip-flop synchronizers
AHB clock domain APB clock domain

Advanced AHB-Lite components
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 5-27
ID110117 Non-Confidential
5.5 AHB to AHB and APB asynchronous bridge
The following subsections describe the AHB to AHB and APB asynchronous bridge features
and its operation:
•About the AHB to AHB and APB asynchronous bridge.
•Handling of transfers initiated while master side is still in reset on page 5-28.
•Bursts on page 5-28.
•Reset requirements on page 5-28.
•External clock gating using the active signals on page 5-29.
•Clock domain crossing on page 5-29.
5.5.1 About the AHB to AHB and APB asynchronous bridge
The AHB to AHB and APB asynchronous bridge,
cmsdk_ahb_to_ahb_apb_async.v
, supports
AHB-Lite and APB4. Figure 5-13 shows the AHB to AHB and APB asynchronous bridge
module.
Figure 5-13 AHB to AHB and APB asynchronous bridge
cmsdk_ahb_to_ahb_apb_async.v
HCLKM
HRESETMn
HACTIVEM
HADDRM[31:0]
HBURSTM[2:0]
HMASTERM[MW-1:0]
HMASTLOCKM
HPROTM[3:0]
HSIZEM[2:0]
HTRANSM[1:0]
HWDATAM[31:0]
HWRITEM
HRDATAM[31:0]
HREADYM
HRESPM
PACTIVEM
PMASTERM[MW-1:0]
PADDRM[31:0]
PPROTM[2:0]
PWRITEM
PSELM
PSTRBM[3:0]
PENABLEM
PWDATAM[31:0]
PRDATAM[31:0]
PREADYM
PSLVERRM
HCLKS
HRESETSn
HADDRS[31:0]
HBURSTS[2:0]
HMASTLOCKS
HPROTS[3:0]
HSIZES[2:0]
HTRANSS[1:0]
HWDATAS[31:0]
HWRITES
HRDATAM[31:0]
HREADYOUTS
HRESPS
HREADYS
HSELAHBS
HSELAPBS
HMASTERS[MW-1:0]
AHB-Lite
slave interface
AHB-Lite
master interface
APB4
master interface
Master clock
and reset
Slave clock
and reset
External clock gating
control interface

Advanced AHB-Lite components
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 5-28
ID110117 Non-Confidential
Table 5-9 shows the characteristics of the AHB to AHB and APB asynchronous bridge.
5.5.2 Handling of transfers initiated while master side is still in reset
When a transfer is initiated on the slave side while the master side is in reset or coming out of
reset, the bridge inserts wait states until the master is ready to process the transfer.
5.5.3 Bursts
The bridge handles beats in a burst as single beat transfers. It:
• Ignores HTRANSS[0] and HBURSTS.
• Always drives HTRANSM[0] LOW, causing HTRANSM to indicate either an IDLE or
NONSEQ transfer.
• Always drives HBURSTM to
0b000
, indicating a SINGLE burst transfer.
5.5.4 Reset requirements
The reset requirements for the AHB to AHB and APB asynchronous bridge are:
• The slave and master resets must become asserted together, from not asserted.
• The slave reset must be asserted for at least two slave clock cycles. The slave reset must
be deasserted synchronously to the slave clock.
• The master reset must be asserted for at least two master clock cycles. The master reset
must be deasserted synchronously to the master clock.
Figure 5-14 shows an example reset synchronizer that fits these requirements.
Figure 5-14 Example reset synchronizer
Table 5-9 AHB to AHB and APB asynchronous bridge characteristics
Element name Description
Filename
cmsdk_ahb_to_ahb_apb_async.v
Parameter
MW
Width of the HMASTERS, HMASTERM, and PMASTERM sideband signals.
These address signals are intended to identify the master that initiated the transfer.
The default value is 1.
Clock domain HCLKS
HCLKM
DQ
RST
V
DD
DQ
RST
DQ
RST
DQ
RST
HCLKS
HRESETSn
HCLKM
HRESETMn
RESETREQ
1
V
DD
1

Advanced AHB-Lite components
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 5-29
ID110117 Non-Confidential
5.5.5 External clock gating using the active signals
The AHB to AHB and APB asynchronous bridge has two outputs, HACTIVEM and
PACTIVEM, that respectively indicate whether the AHB-Lite master interface and APB4
master interface are active.
Use these outputs to control clock gating to the system connected to the bridge AHB-Lite and
APB4 master port respectively.
The bridge master clock HCLKM must always be driven, regardless of the value of
HACTIVEM and PACTIVEM.
5.5.6 Clock domain crossing
If Static Timing Analysis (STA) is carried out, you can set clock domain crossing paths through
the following signals as false paths to prevent your timing analysis tool from reporting them as
violations.
Note
Ideally, do not use false paths for asynchronous signals during synthesis. Use multicycle paths
or max delay instead.
Slave clock domain to master clock domain
•s_tx_sema_q.
•s_hmastlock_q.
•m_haddr_q.
•m_hmaster_q.
•m_hmastlock_q.
•m_hprot_q.
•m_hselapb_q.
•m_hsize_1to0_q.
•m_hwdata_q.
•m_hwrite_q.
•m_need_unlock_q.
Master clock domain to slave clock domain
•m_tx_sema_q.
•s_hrdata_q.
•s_hresp_q.
The AHB-Lite to AHB-Lite and APB asynchronous bridge instantiates special modules for
clock domain crossing:
•
cmsdk_ahb_to_ahb_apb_async_launch.v
.
•
cmsdk_ahb_to_ahb_apb_async_sample_and_hold.v
.
•
cmsdk_ahb_to_ahb_apb_async_synchronizer.v
.
You must modify these modules to use library-specific cells before you implement your design
to ensure correct clock domain crossing operation.

Advanced AHB-Lite components
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 5-30
ID110117 Non-Confidential
5.6 AHB to AHB synchronous bridge
The following sections describe the AHB to AHB synchronous bridge features and its
operation:
•About the AHB to AHB synchronous bridge.
•Using AHB to AHB synchronous bridge on page 5-31.
•Component dependency on page 5-31.
5.6.1 About the AHB to AHB synchronous bridge
The AHB to AHB synchronous bridge,
cmsdk_ahb_to_ahb_sync.v
, provides timing isolation in a
large AHB system.
Figure 5-15 shows the AHB to AHB synchronous bridge.
Figure 5-15 AHB to AHB synchronous bridge
Table 5-10 shows the characteristics of the AHB to AHB synchronous bridge.
cmsdk_ahb_to_ahb_sync.v
HCLK
HRESETn
HSELS
HADDRS[AW-1:0]
HTRANSS[1:0]
HWRITES
HREADYOUTS
HRDATAS[DW-1:0]
HRESPS
HREADYS
HWDATAS[DW-1:0]
HSIZES[2:0]
HMASTLOCKS
HPROTS[3:0]
HBURSTS[2:0]
HMASTERS[MW-1:0]
HADDRM[AW-1:0]
HTRANSM[1:0]
HSIZEM[2:0]
HWRITEM
HREADYM
HRDATAM[DW-1:0]
HRESPM
HPROTM[3:0]
HBURSTM[2:0]
HMASTLOCKM
HWDATAM[DW-1:0]
HMASTERM[MW-1:0]
Table 5-10 AHB to AHB synchronous bridge characteristics
Element name Description
Filename
cmsdk_ahb_to_ahb_sync.v
Parameter The parameters are as follows:
AW
Address width of the AHB address bus. This is set to 32 by default.
MW
Width of the HMASTER signal. This is set to 4 by default.
BURST
Set to:
0 Does not support burst by default. Burst transfers are converted to single transfers.
1 Burst support present.
DW
Data width. You can configure the width to either 64 bits or 32 bits. This is set to 32 by default.
Clock domain HCLK
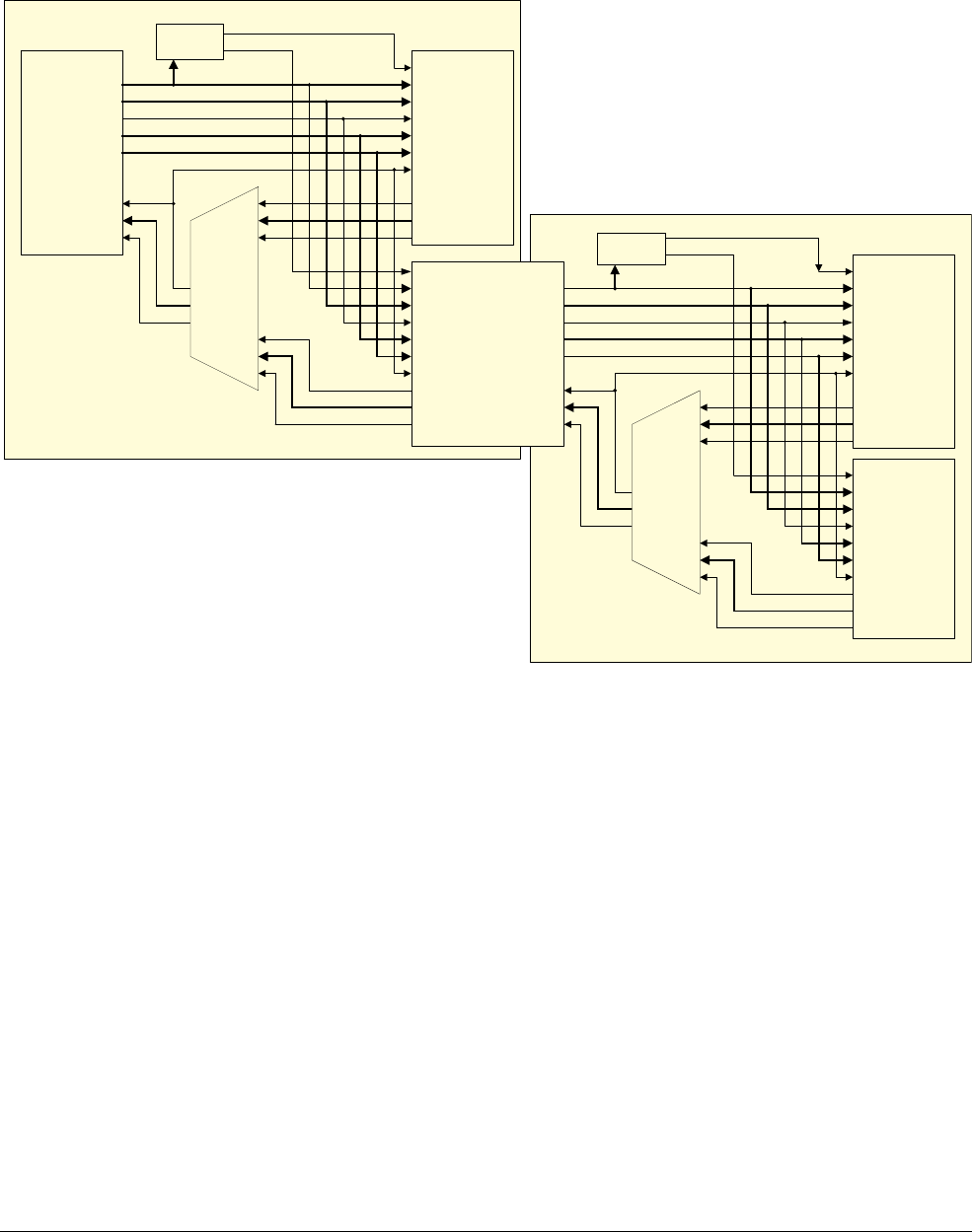
Advanced AHB-Lite components
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 5-31
ID110117 Non-Confidential
5.6.2 Using AHB to AHB synchronous bridge
Figure 5-16 shows the method to use the AHB to AHB synchronous bridge to isolate timing
paths between two AHB segments.
Figure 5-16 Using AHB to AHB synchronous bridge
The AHB to AHB synchronous bridge is useful for designs with multiple FPGAs when the AHB
segment is divided into multiple devices. It registers both slave interface signals and master
interface signals. When single direction registering is required, you can use either the AHB to
AHB sync-up bridge or the AHB to AHB sync-down bridge.
5.6.3 Component dependency
The AHB to AHB synchronous bridge contains one component that is shared with the AHB to
AHB sync-down bridge:
cmsdk_ahb_to_ahb_sync_down/verilog/cmsdk_ahb_to_ahb_sync_error_canc.v.
When using AHB to AHB synchronous bridge, ensure that either:
• The RTL search path includes
logical/cmsdk_ahb_to_ahb_sync_down/verilog
.
• The component listed above is explicitly included in the project.
HRDATA
HRESP
HREADY
HWDATA
AHB slave
multiplexer
HREADYOUT
HRDATA
HRESP
32-bit AHB Lite master
HADDR
HTRANS
HWRITE
HSIZE
HREADY
AHB slave
Address
decoder
HSEL
HSEL
HREADYOUTS
HRDATAS
HRESPS
HSELS
HREADYM
HRDATAM
HRESPM
HADDRS HADDRM
AHB to AHB synchronous bridge
HSIZES
HWRITEM
HWDATAS HWDATAM
HWRITES
HSIZEM
HTRANSS
HREADYS
HSELS
HADDRS
HSIZES
HWDATAS
HWRITES
HTRANSS
HTRANSM
AHB slave
multiplexer
Address
decoder
HSEL
HSEL
HREADYOUT
HRDATA
HRESP
HREADY
AHB slave
HSELS
HADDRS
HSIZES
HWDATAS
HWRITES
HTRANSS
HREADYOUT
HRDATA
HRESP
HREADY
AHB slave
HSELS
HADDRS
HSIZES
HWDATAS
HWRITES
HTRANSS
Second AHB segment
First AHB segment

Advanced AHB-Lite components
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 5-32
ID110117 Non-Confidential
5.7 AHB to AHB sync-down bridge
The following subsections describe the AHB to AHB sync-down bridge features and its
operation:
•About the AHB to AHB sync-down bridge.
•Using the AHB to AHB sync-down bridge on page 5-33.
•Optional write buffer on page 5-34.
•Synthesizing the AHB to AHB sync-down bridge on page 5-35.
•Component dependency on page 5-36.
5.7.1 About the AHB to AHB sync-down bridge
The AHB to AHB sync-down bridge,
cmsdk_ahb_to_ahb_sync_down.v
, syncs-down the AHB
domain from a higher frequency to a lower frequency if required. The supported features are as
follows:
• Optional write buffer that you can enable or disable using HPROT[2].
• Registered address and control path.
• Unregistered feedback path, except error response case.
•BWERR for Buffered Write Error, returned to the processor as an interrupt pulse.
• Optional burst support.
Figure 5-17 shows the AHB to AHB sync-down bridge.
Figure 5-17 AHB to AHB sync-down bridge
You can configure this design as follows:
• If you set the
BURST
parameter to 0, burst transfers are converted into single transfers.
•The HCLK signal of the slower AHB domain is divided from the HCLK of the faster
AHB domain using HCLKEN.
cmsdk_ahb_to_ahb_sync_down.v
HCLK
HRESETn
HSELS
HADDRS[AW-1:0]
HTRANSS[1:0]
HWRITES
HREADYOUTS
HRDATAS[DW-1:0]
HRESPS
HREADYS
HWDATAS[DW-1:0]
HSIZES[2:0]
HMASTLOCKS
HPROTS[3:0]
HBURSTS[2:0]
HMASTERS[MW-1:0]
HADDRM[AW-1:0]
HTRANSM[1:0]
HSIZEM[2:0]
HWRITEM
HREADYM
HRDATAM[DW-1:0]
HRESPM
HPROTM[3:0]
HBURSTM[2:0]
HMASTLOCKM
HWDATAM[DW-1:0]
HMASTERM[MW-1:0]
HCLKEN
BWERR

Advanced AHB-Lite components
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 5-33
ID110117 Non-Confidential
Table 5-11 shows the characteristics of the AHB to AHB sync-down bridge.
If a buffered write error occurs, it generates a single-cycle BWERR pulse in the fast HCLK
domain.
5.7.2 Using the AHB to AHB sync-down bridge
The AHB to AHB sync-down bridge has an HCLKEN signal that is used to indicate the clock
division between the fast AHB and the slow AHB. Figure 5-18 shows the clock divide operation
for a 3 to 1 clock divide ratio.
Figure 5-18 Clock divide operation
The HCLKEN must be synchronous to HCLK. It can be generated by a programmable counter.
The slow AHB bus can use HCLKEN as a clock gating control to generate a clock-gated slow
AHB which is used by the components connected to the slower AHB. See Figure 5-19 on
page 5-34.
Table 5-11 AHB to AHB sync-down bridge characteristics
Element name Description
Filename
cmsdk_ahb_to_ahb_sync_down.v
Parameter The parameters are as follows:
AW
Address width of the AHB address bus. This is set to 32 by default.
MW
Width of the HMASTER signal. This is set to 1 by default.
DW
Data width. You can configure the width to either 64 bits or 32 bits. This is set to 32 by default.
BURST
When set to 0, burst transactions are converted into single transactions. When set to 1, burst
transactions are supported. Removing burst support reduces the gate count. This is set to 0 by
default.
WB
Write buffer support. Set to 1 to include a single-level write buffer. Set to 0 to remove write buffer.
This is set to 0 by default.
Clock domain HCLK
HCLK
HCLKEN
Fast AHB
cycle
12345678
Slow AHB
cycle
12 34
Clock-gated
slow AHB

Advanced AHB-Lite components
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 5-34
ID110117 Non-Confidential
Figure 5-19 Using AHB to AHB sync-down bridge
If HCLKEN is tied HIGH, the two AHB segments have the same operation speed. However,
the signals flowing from master to slave direction are registered so there is an additional latency
cycle.
5.7.3 Optional write buffer
The optional write buffer of the AHB to AHB sync-down bridge can reduce the wait state, when
writing a data to a peripheral or to a memory location in the slower clock domain. Without the
write buffer, the bus master must wait until the transfer gets complete in the slower AHB. If the
write buffer is present and the transfer is a bufferable write, then the write buffer returns an
OKAY response to the bus master, and the actual write operation is performed later on the
downstream AHB.
Write transfers with HPROT[2] set HIGH are considered bufferable, and read transfers are
considered non-bufferable.
If the bus bridge is used for connecting peripherals, with some of the registers being
non-bufferable, you can edit the top-level file of the bus bridge to include an address decoding
logic to disable write buffering of these registers. For example, the peripheral registers for
clearing interrupt request must be non-bufferable.
If the bus bridge is used in a multiprocessor design with a bus level exclusive access monitor,
exclusive stores must be handled as non-bufferable.
HCLK
HCLKEN
Fast AHB
cycle 12345678
Slow AHB
cycle 12 34
Clock-gated
slow AHB
HRDATA
HRESP
HREADY
HWDATA
AHB slave
multiplexer
HREADYOUT
HRDATA
HRESP
32-bit AHB Lite master
HADDR
HTRANS
HWRITE
HSIZE
HREADY
AHB slave
Address
decoder
HSEL
HSEL
HREADYOUTS
HRDATAS
HRESPS
HSELS
HREADYM
HRDATAM
HRESPM
HADDRS HADDRM
AHB to AHB sync-down bridge
HSIZES HSIZEM
HWDATAS HWDATAM
HWRITES HWRITEM
HTRANSS
HREADYS
HSELS
HADDRS
HSIZES
HWDATAS
HWRITES
HTRANSS
HTRANSM
AHB slave
multiplexer
Address
decoder
HSEL
HSEL
HREADYOUT
HRDATA
HRESP
HREADY
AHB slave
HSELS
HADDRS
HSIZES
HWDATAS
HWRITES
HTRANSS
HREADYOUT
HRDATA
HRESP
HREADY
AHB slave
HSELS
HADDRS
HSIZES
HWDATAS
HWRITES
HTRANSS
Slow AHB segment
Fast AHB segment HCLK
HCLKEN
Fast HCLK HCLKEN
Slow HCLK
Clock controller

Advanced AHB-Lite components
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 5-35
ID110117 Non-Confidential
The optional write buffer is one-level deep. If the bus master issues another transfer to the same
AHB segment while the previous buffer write is on-going, then the transfer request is reserved
on hold in the write buffer, and wait states are inserted. When the downstream AHB completes
the previous transfer, the held transfer is sent to the downstream AHB. If the held transfer is a
bufferable write, then the write buffer returns OKAY response to the AHB master issuing the
transfer.
5.7.4 Synthesizing the AHB to AHB sync-down bridge
The AHB to AHB sync-down bridge contains combinational paths from the slow AHB domain
to the fast AHB domain because of the unregistered feedback path feature. These signals include
HRDATA, and HREADYOUT. The unregistered feedback path permits lower access latency,
but few precautions are required when synthesizing the system.
The following precautions are required during the system synthesis:
• The synthesis of the AHB to AHB sync-down bridge is targeted at the frequency of the
faster AHB. The design has only one HCLK input, so you must connect the input to the
fast AHB clock signal.
• If the synthesis of the slow AHB and the fast AHB system are carried out separately, the
timing constraints of the signals from the slow AHB to the bridge are controlled properly
to prevent timing violation.
For example, when synthesizing the slow clock domain logic, if the synthesis process is
partitioned into fast clock domain and slow clock domain, then you must setup the timing
constraints of the read data signal, HRDATA based on the overall timing path. See Figure 5-20.
Figure 5-20 Synthesizing the AHB to AHB sync-down bridge
The simplest arrangement is to restrict the whole path to just one fast HCLK cycle. If this is not
possible, you can use a multicycle path. You might have to mask the HRDATAS output from
the AHB to AHB sync-down bridge to 0, when HREADYOUTS is LOW, to prevent
metastability issues.
cmsdk_ahb_to_ahb_sync_down
HRDATAMHRDATAS
AHB slave #1
AHB slave #2
AHB slave #3
AHB slave #4
ahb_slave_mux
DFF
Register
ahb_slave_mux
DFF
Registers
Unregistered
combinational
paths
Fast clock domain Slow clock domain
Bus master
For example, processor
Timing constraint
Timing constraint
HREADYMHREADYOUTS
HRESPS HRESPM
Path contain
register stage

Advanced AHB-Lite components
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 5-36
ID110117 Non-Confidential
Similar handling is required for the HREADYOUT and HRESP from the slow clock domain.
There is an unregistered combinational path for the HREADYOUT connection in the AHB to
AHB sync-down bridge. The HRESPS output from bridge is generated from registered logic
within the bridge, but timing constraints are still required to ensure that there is no timing
violation from HRESP source in the slow clock domain to the registers within the AHB to AHB
sync-down bridge.
5.7.5 Component dependency
The AHB to AHB sync-down bridge contains two subcomponents that are shared with other
components:
•
cmsdk_ahb_to_ahb_sync_down/verilog/cmsdk_ahb_to_ahb_sync_error_canc.v
, shared with
the AHB to AHB sync-up bridge and the AHB to AHB synchronous bridge.
•
cmsdk_ahb_to_ahb_sync_down/verilog/cmsdk_ahb_to_ahb_sync_wb.v
, shared with the AHB
to AHB sync-up bridge.
As a result, if you modify these subcomponents, it can affect the other AHB components.

Advanced AHB-Lite components
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 5-37
ID110117 Non-Confidential
5.8 AHB to AHB sync-up bridge
The following subsections describe the AHB to AHB sync-down bridge features and its
operation:
•Overview of the AHB to AHB sync-up bridge.
•Using the AHB to AHB sync-up bridge on page 5-38.
•Synthesizing the AHB to AHB sync-up bridge on page 5-39.
•Component dependency on page 5-40.31
5.8.1 Overview of the AHB to AHB sync-up bridge
The AHB to AHB sync-up bridge,
cmsdk_ahb_to_ahb_sync_up.v
, enables you to sync-up the
AHB from a lower frequency to a higher frequency if required. The supported features are as
follows:
• Optional write buffer, you can enable or disable the buffering using HPROT[2].
• Unregistered address and control path.
• Registered feedback path.
•BWERR for Buffered Write Error, return to processor as interrupt pulse.
• Optional burst support.
Figure 5-21 shows the AHB to AHB sync-up bridge module.
Figure 5-21 AHB to AHB sync-up bridge
You can configure this design as follows:
• If you set the
BURST
parameter to 0, the burst transfers are converted into single transfers.
•The HCLK signal of the slower AHB domain is divided from the HCLK of the faster
AHB domain using HCLKEN.
cmsdk_ahb_to_ahb_sync_up.v
HCLK
HRESETn
HSELS
HADDRS[AW-1:0]
HTRANSS[1:0]
HWRITES
HREADYOUTS
HRDATAS[31:0]
HRESPS
HREADYS
HWDATAS[31:0]
HSIZES[2:0]
HMASTLOCKS
HPROTS[3:0]
HBURSTS[2:0]
HMASTERS[MW-1:0]
HADDRM[AW-1:0]
HTRANSM[1:0]
HSIZEM[2:0]
HWRITEM
HREADYM
HRDATAM[31:0]
HRESPM
HPROTM[3:0]
HBURSTM[2:0]
HMASTLOCKM
HWDATAM[31:0]
HMASTERM[MW-1:0]
HCLKEN
BWERR

Advanced AHB-Lite components
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 5-38
ID110117 Non-Confidential
Table 5-12 shows the characteristics of the AHB to AHB sync-up bridge.
If a buffered write error occurs, it generates a single-cycle pulse BWERR in the fast HCLK
domain. For more information on the optional write buffer, see Optional write buffer on
page 5-34.
5.8.2 Using the AHB to AHB sync-up bridge
The AHB to AHB sync-up bridge has a HCLKEN signal which is used to indicate the clock
division between the fast AHB and the slow AHB. Figure 5-22 shows the clock divide operation
for a 3-1 clock divide ratio.
Figure 5-22 Clock divide operation
The HCLKEN must be synchronous to HCLK. It can be generated by a programmable counter.
The slow AHB bus can use HCLKEN as a clock gating control to generate a clock-gated slow
AHB which is used by the components that are connected to the slower AHB.
Table 5-12 AHB to AHB sync-up bridge characteristics
Element name Description
Filename
cmsdk_ahb_to_ahb_sync_up.v
Parameter The parameters are as follows:
AW
Address width of the AHB address bus. This is set to 32 by default.
MW
Width of the HMASTER signal. This is set to 1 by default.
DW
Data width. You can configure the width to either 64 bits or 32 bits. This is set to 32 by default.
BURST
When set to 0, burst transactions are converted into single transactions. When set to 1, burst
transactions are supported. Removing burst support reduces the gate count. This is set to 0 by
default.
WB
Write buffer support. Set to 1 to include a single-level write buffer. Set to 0 to remove write buffer.
This is set to 0 by default.
Clock domain HCLK
HCLK
HCLKEN
Fast AHB
cycle 12345678
Slow AHB
cycle 12 34
Clock-gated
slow AHB

Advanced AHB-Lite components
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 5-39
ID110117 Non-Confidential
Figure 5-23 Using AHB to AHB sync-up bridge
If HCLKEN is tied HIGH, the two AHB segments have the same operation speed. However,
the signals flowing from slaves to master direction are registered so there is an additional latency
cycle.
For more information on write buffer option, see Optional write buffer on page 5-34.
5.8.3 Synthesizing the AHB to AHB sync-up bridge
The AHB to AHB sync-up bridge contains combinational address, and control paths from the
slow AHB domain to the fast AHB domain. These signals include HADDRM, HTRANSM,
HSIZEM, HWRITEM, HPROTM, HMASTERM, HMASTLOCKM, and HWDATAM.
The unregistered paths permits lower access latency, but few precautions are required when
synthesizing the system. See Synthesizing the AHB to AHB sync-down bridge on page 5-35 for
precautions.
For example, if the synthesis process is partitioned into fast clock domain and slow clock
domain, when synthesizing the slow clock domain logic, you must set up the timing constraints
of these signals based on the overall timing path so that they do not cause timing violation in the
fast clock domain as Figure 5-24 on page 5-40 shows.
HRDATA
HRESP
HREADY
HWDATA
AHB slave
multiplexer
HREADYOUT
HRDATA
HRESP
32-bit AHB Lite
master
HADDR
HTRANS
HWRITE
HSIZE
HREADY
AHB slave
Address
decoder
HSEL
HSEL
HREADYOUTS
HRDATAS
HRESPS
HSELS
HREADYM
HRDATAM
HRESPM
HADDRS HADDRM
AHB to AHB
sync up bridge
HSIZES HSIZEM
HWDATAS HWDATAM
HWRITES HWRITEM
HTRANSS
HREADYS
HSELS
HADDRS
HSIZES
HWDATAS
HWRITES
HTRANSS
HTRANSM
AHB slave
multiplexer
Address
decoder
HSEL
HSEL
HREADYOUT
HRDATA
HRESP
HREADY
AHB slave
HSELS
HADDRS
HSIZES
HWDATAS
HWRITES
HTRANSS
HREADYOUT
HRDATA
HRESP
HREADY
AHB slave
HSELS
HADDRS
HSIZES
HWDATAS
HWRITES
HTRANSS
Fast AHB segment
Slow AHB segment
HCLK
HCLKEN
Slow HCLK HCLKEN Fast HCLK
Clock controller

Advanced AHB-Lite components
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 5-40
ID110117 Non-Confidential
Figure 5-24 Combinational paths from slow AHB to fast AHB
5.8.4 Component dependency
The AHB to AHB sync-up bridge contains two components that are shared with the AHB to
AHB sync-down bridge:
•
cmsdk_ahb_to_ahb_sync_down/verilog/cmsdk_ahb_to_ahb_sync_error_canc.v
.
•
cmsdk_ahb_to_ahb_sync_down/verilog/cmsdk_ahb_to_ahb_sync_wb.v
.
When using AHB to AHB sync up bridge, ensure that either:
• The RTL search path includes
logical/cmsdk_ahb_to_ahb_sync_down/verilog
.
• The two components listed above are explicitly included in the project.
DFF
Registers
Bus master
For example, processor
HADDR
HTRANS
HPROT
HSIZE
HWRITE
HBURST
HMASTLOCK
HWDATA
HMASTER
cmsdk_ahb_to_ahb_sync_up Fast AHB
Unregistered
combinational
paths
AHB slave #1
AHB slave #2
AHB slave #N
Slow clock domain Fast clock domain

ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 6-1
ID110117 Non-Confidential
Chapter 6
Behavioral memory models
This chapter describes the behavioral models in the Cortex-M System Design Kit. It contains the
following sections:
•ROM model wrapper on page 6-2.
•RAM model wrapper on page 6-6.
•Behavioral SRAM model with AHB interface on page 6-10.
•32-bit flash ROM behavioral model on page 6-11.
•16-bit flash ROM behavioral model on page 6-12.
•FPGA SRAM synthesizable model on page 6-13.
•FPGA ROM on page 6-14.
•External asynchronous 8-bit SRAM on page 6-15.
•External asynchronous 16-bit SRAM on page 6-16.

Behavioral memory models
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 6-2
ID110117 Non-Confidential
6.1 ROM model wrapper
The AHB ROM wrapper model,
cmsdk_ahb_rom.v
, permits easy switching between the
following implementations of ROM:
• None.
• Behavioral ROM model, using behavioral SRAM with write disabled.
• SRAM model with an AHB SRAM interface module, suitable for FPGA flow, and
permitting read and write operations.
• Flash wrapper with simple 32-bit flash memory.
• Flash wrapper with simple 16-bit flash memory.
Table 6-1 shows the characteristics of the ROM model wrapper.
Table 6-2 shows the configuration of the
cmsdk_ahb_rom.v
, that a
MEM_TYPE
Verilog parameter
defines.
Table 6-1 ROM model wrapper characteristics
Element name Description
Filename
cmsdk_ahb_rom.v
Parameters The parameters are as follows:
MEM_TYPE
The
MEM_TYPE
value ranges from 0-4. See Table 6-2.
AW
Address width. The default value is 16.
filename
File name for memory image.
WS_N
First access or NONSEQUENTIAL access wait state. The default value is 0.
WS_S
Sequential access wait state. The default value is 0.
BE
Big-endian. The default value is 0, little-endian. Set the value to 1 for big-endian configuration.
Note
This parameter is a placeholder to permit the possibility of propagating endian configuration to a
specific memory implementation. Currently, it is not used by existing memory implementations
that this design kit provides.
Clock domain HCLK
Table 6-2 Configuration of cmsdk_ahb_rom.v
MEM_TYPE Design of
cmsdk_ahb_rom.v
Configurability
0,
AHB_ROM_NONE
See Figure 6-1 on page 6-3 None.
1,
AHB_ROM_BEH_MODEL
See Figure 6-2 on page 6-3
AW
Address width.
filename
File name for memory image.
WS_N
First access or NONSEQUENTIAL access wait state.
WS_S
Sequential access wait state.
2,
AHB_ROM_FPGA_SRAM_MODEL
See Figure 6-3 on page 6-4
AW
Address width.
filename
File name for memory image.
Always in zero wait state.

Behavioral memory models
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 6-3
ID110117 Non-Confidential
Figure 6-1 shows the design of
cmsdk_ahb_rom.v
for
AHB_ROM_NONE
.
Figure 6-1 Design of cmsdk_ahb_rom.v for AHB_ROM_NONE
Figure 6-2 shows the design of
cmsdk_ahb_rom.v
for
AHB_ROM_BEH_MODEL
.
Figure 6-2 Design of cmsdk_ahb_rom.v for AHB_ROM_BEH_MODEL
Figure 6-3 on page 6-4 shows the design of
cmsdk_ahb_rom.v
for
AHB_ROM_FPGA_SRAM_MODEL
.
3,
AHB_ROM_FLASH32_MODEL
See Figure 6-4 on page 6-4
AW
Address width.
filename
File name for memory image.
WS_N
First access or NONSEQUENTIAL access wait state.
4,
AHB_ROM_FLASH16_MODEL
See Figure 6-5 on page 6-5
AW
Address width.
filename
File name for memory image.
WS_N
First access or NONSEQUENTIAL access wait state.
Table 6-2 Configuration of cmsdk_ahb_rom.v (continued)
MEM_TYPE Design of
cmsdk_ahb_rom.v
Configurability
cmsdk_ahb_rom.v
HCLK
HRESETn
HSEL
HADDR[AW-1:0]
HTRANS[1:0]
HWRITE
HREADYOUT
HRDATA[31:0]
HRESP
HREADY
HWDATA[31:0]
HSIZE[2:0]
1'b1
1'b0
{32{1'b0}}
MEM_TYPE = 0
cmsdk_ahb_rom.v
HCLK
HRESETn
HSEL
HADDR[AW-1:0]
HTRANS[1:0]
HWRITE
HREADYOUT
HRDATA[31:0]
HRESP
HREADY
HWDATA[31:0]
HSIZE[2:0]
MEM_TYPE = 1
cmsdk_ahb_rom_beh.v
0
0

Behavioral memory models
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 6-4
ID110117 Non-Confidential
Figure 6-3 Design of cmsdk_ahb_rom.v for AHB_ROM_FPGA_SRAM_MODEL
Figure 6-4 shows the design of
cmsdk_ahb_rom.v
for
AHB_ROM_FLASH32_MODEL
.
Figure 6-4 Design of cmsdk_ahb_rom.v for AHB_ROM_FLASH32_MODEL
Figure 6-5 on page 6-5 shows the design of
cmsdk_ahb_rom.v
for
AHB_ROM_FLASH16_MODEL
. This
design requires a downsizer module,
cm0p_32to16_dnsize.v
, which is supplied with the
integration kit of the Cortex-M0+ processor.
cmsdk_ahb_rom.v
HCLK
HRESETn
HSEL
HADDR[AW-1:0]
HTRANS[1:0]
HWRITE
HREADYOUT
HRDATA[31:0]
HRESP
HREADY
HWDATA[31:0]
HSIZE[2:0]
SRAMRDATA
MEM_TYPE = 2
cmsdk_ahb_to_sram.v
SRAMADDR
SRAMWDATA
SRAMWEN[3:0]
cmsdk_fpga_rom.v
SRAMCS
cmsdk_ahb_rom.v
HCLK
HRESETn
HSEL
HADDR[AW-1:0]
HTRANS[1:0]
HWRITE
HREADYOUT
HRDATA[31:0]
HRESP
HREADY
HWDATA[31:0]
HSIZE[2:0]
MEM_TYPE = 3
0
0
cmsdk_ahb_to_flash32.v
FLASHADDR
FLASHRDATA
cmsdk_flash_rom32.v

Behavioral memory models
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 6-5
ID110117 Non-Confidential
Figure 6-5 Design of cmsdk_ahb_rom.v for AHB_ROM_FLASH16_MODEL
cmsdk_ahb_rom.v
HCLK
HRESETn
HSEL
HADDR[AW-1:0]
HTRANS[1:0]
HWRITE
HREADYOUT
HRDATA[31:0]
HRESP
HREADY
HWDATA[31:0]
HSIZE[2:0]
MEM_TYPE = 4
0
0
cmsdk_ahb_to_
flash16.v
FLASHADDR
FLASHRDATA
cmsdk_flash_
rom16.v
cm0p_32to16_
dnsize.v*
HRDATA[15:0]
HRESP
HREADYOUT
HWDATA[15:0]
HREADY
HWRITE
HSIZE[2:0]
HTRANS[1:0]
HADDR[AW-1:0]
HSEL
HRESETn
HCLK
* Supplied with Cortex-M0+ processor

Behavioral memory models
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 6-6
ID110117 Non-Confidential
6.2 RAM model wrapper
The AHB RAM wrapper model,
cmsdk_ahb_ram.v
, permits easy switching between the
following implementations of RAM:
• Behavioral RAM model.
• SRAM model with an AHB SRAM interface module, suitable for ASIC or FPGA flow.
Table 6-3 shows the characteristics of the RAM model wrapper.
Table 6-4 shows the configuration of
cmsdk_ahb_ram.v,
that a
MEM_TYPE
Verilog parameter
defines.
Figure 6-6 on page 6-7 shows the design of
cmsdk_ahb_ram.v
for
AHB_RAM_NONE
.
Table 6-3 RAM model wrapper characteristics
Element name Description
Filename
cmsdk_ahb_ram.v
Parameter The parameters are as follows:
MEM_TYPE
The
MEM_TYPE
value ranges from 0-4. See Table 6-4.
AW
Width of the address bus. The default value is 16.
filename
File name for memory image.
WS_N
First access or NONSEQUENTIAL access wait state. The default value is 0.
WS_S
Sequential access wait state. The default value is 0.
BE
Big-endian. The default value is 0, little-endian. Set the value to 1 for big-endian configuration.
Clock domain HCLK
Table 6-4 Configuration of cmsdk_ahb_ram.v
MEM_TYPE Design of
cmsdk_ahb_ram.v
Configurability
0,
AHB_RAM_NONE
See Figure 6-6 on page 6-7 None
1,
AHB_RAM_BEH_MODEL
See Figure 6-7 on page 6-7
AW
Address width.
filename
File name for memory image.
WS_N
First access or NONSEQUENTIAL access wait
state.
WS_S
Sequential access wait state.
2,
AHB_RAM_FPGA_SRAM_MODEL
See Figure 6-8 on page 6-8
AW
Address width.
filename
File name for memory image.
Always in zero wait state.
3,
AHB_RAM_EXT_SRAM16_MODEL
See Figure 6-9 on page 6-8
AW
Address width.
WS_N
Additional wait state for read, write, and turnaround
cycle.
4,
AHB_RAM_EXT_SRAM8_MODEL
See Figure 6-10 on page 6-9
AW
Address width.
WS_N
Additional wait state for read, write, and turnaround
cycle.

Behavioral memory models
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 6-7
ID110117 Non-Confidential
Figure 6-6 Design of cmsdk_ahb_ram.v for AHB_RAM_NONE
Figure 6-7 shows the design of
cmsdk_ahb_ram.v
for
AHB_RAM_BEH_MODEL
.
Figure 6-7 Design of cmsdk_ahb_ram.v for AHB_RAM_BEH_MODEL
Figure 6-8 on page 6-8 shows the design of
cmsdk_ahb_ram.v
for
AHB_FPGA_SRAM_MODEL
.
cmsdk_ahb_ram.v
HCLK
HRESETn
HSEL
HADDR[AW-1:0]
HTRANS[1:0]
HWRITE
HREADYOUT
HRDATA[31:0]
HRESP
HREADY
HWDATA[31:0]
HSIZE[2:0]
1'b1
1'b0
{32{1'b0}}
MEM_TYPE = 0
cmsdk_ahb_ram.v
HCLK
HRESETn
HSEL
HADDR[AW-1:0]
HTRANS[1:0]
HWRITE
HREADYOUT
HRDATA[31:0]
HRESP
HREADY
HWDATA[31:0]
HSIZE[2:0]
MEM_TYPE = 1
cmsdk_ahb_ram_beh.v

Behavioral memory models
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 6-8
ID110117 Non-Confidential
Figure 6-8 Design of cmsdk_ahb_ram.v for AHB_RAM_FPGA_SRAM_MODEL
Figure 6-9 shows the design of
cmsdk_ahb_ram.v
for
AHB_RAM_EXT_SRAM16_MODEL
.
Figure 6-9 Design of cmsdk_ahb_ram.v for AHB_RAM_EXT_SRAM16_MODEL
Figure 6-10 on page 6-9 shows the design of
cmsdk_ahb_ram.v
for
AHB_RAM_EXT_SRAM8_MODEL
.
cmsdk_ahb_ram.v
HCLK
HRESETn
HSEL
HADDR[AW-1:0]
HTRANS[1:0]
HWRITE
HREADYOUT
HRDATA[31:0]
HRESP
HREADY
HWDATA[31:0]
HSIZE[2:0]
SRAMRDATA
MEM_TYPE = 2
cmsdk_ahb_to_sram.v
SRAMADDR
SRAMWDATA
SRAMWEN[3:0]
cmsdk_fpga_sram.v
SRAMCS
cmsdk_ahb_ram.v
HCLK
HRESETn
HSEL
HADDR[AW-1:0]
HTRANS[1:0]
HWRITE
HREADYOUT
HRDATA[31:0]
HRESP
HREADY
HWDATA[31:0]
HSIZE[2:0]
MEM_TYPE = 3
cmsdk_ahb_to_extmem16.v EMIMEMADDR
EMIDATAOEn
cmsdk_sram256x16
EMICEn
EMIDATAOUT
EMIDATAIN
EMIOEn
EMILBn
EMIUBn
1CFGSIZE

Behavioral memory models
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 6-9
ID110117 Non-Confidential
Figure 6-10 Design of cmsdk_ahb_ram.v for AHB_RAM_EXT_SRAM8_MODEL
The
AHB_RAM_EXT_SRAM16_MODEL
and
AHB_RAM_EXT_SRAM8_MODEL
options are not illustrations of real
system designs. The external memory interface module,
cmsdk_ahb_to_extmem16
, normally
connects to off-chip memory. In the case of
cmsdk_ahb_ram.v,
these configuration options permit
you to perform benchmarking with your own external memory model.
cmsdk_ahb_ram.v
HCLK
HRESETn
HSEL
HADDR[AW-1:0]
HTRANS[1:0]
HWRITE
HREADYOUT
HRDATA[31:0]
HRESP
HREADY
HWDATA[31:0]
HSIZE[2:0]
MEM_TYPE = 4
cmsdk_ahb_to_extmem16.v
EMIMEMADDR
EMIDATAOEn
cmsdk_sram256x8
EMICEn
EMIDATAOUT
EMIDATAIN
EMIOEn
0CFGSIZE

Behavioral memory models
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 6-10
ID110117 Non-Confidential
6.3 Behavioral SRAM model with AHB interface
The behavioral AHB SRAM model,
cmsdk_ahb_ram_beh.v
, enables you to define an initial
memory image and generate wait states for both NONSEQUENTIAL and SEQUENTIAL
transfers. The model always replies with an OKAY response. Figure 6-11 shows the behavioral
SRAM model with AHB interface.
Figure 6-11 Behavioral SRAM model with AHB interface
Table 6-5 shows the characteristics of the behavioral SRAM model with an AHB interface.
Note
• Arm expects you to replace the generic behavioral models of memory with your own
RAMs.
• Arm recommends that you add DFTRAMHOLD to memory wrapper
logical/models/memories/cmsdk_ahb_ram.v
to disable chip selects to the RAMs, which
prevents modification of the data in the RAMs.
cmsdk_ahb_ram_beh.v
HCLK
HRESETn
HSEL
HADDR[AW-1:0]
HTRANS[1:0]
HWRITE
HREADYOUT
HRDATA[31:0]
HRESP
HREADY
HWDATA[31:0]
HSIZE[2:0]
Table 6-5 Behavioral SRAM model with an AHB interface characteristics
Element name Description
Filename
cmsdk_ahb_ram_beh.v
Parameter The parameters are as follows:
AW
Address width. The default value is 16.
filename
File name for memory image.
WS_N
First access or NONSEQUENTIAL access wait state. The default value is 0.
WS_S
Sequential access wait state. The default value is 0.
Clock domain HCLK

Behavioral memory models
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 6-11
ID110117 Non-Confidential
6.4 32-bit flash ROM behavioral model
The 32-bit flash ROM behavioral model,
cmsdk_flash_rom32.v
, is a simple behavioral model for
32-bit flash memory. Reset and clock signals perform wait state behavioral modeling.
Figure 6-12 shows the 32-bit flash ROM behavioral model.
Figure 6-12 32-bit flash ROM behavioral model
Table 6-6 shows the characteristics of the 32-bit flash ROM behavioral model.
6.4.1 Signal descriptions
Table 6-7 shows the signal descriptions of the 32-bit flash ROM behavioral model.
cmsdk_flash_rom32.v
rst_n
clk
addr[AW-3:0]
rdata[31:0]
Table 6-6 32-bit flash ROM behavioral model characteristics
Element name Description
Filename
cmsdk_flash_rom32.v
Parameter The parameters are as follows:
AW
Width of address bus. The default value is 16.
filename
File name for memory image.
WS
Wait state or required read cycle. The default value is 0.
Clock domain CLK. In the example system that is provided, CLK is the same as
HCLK.
Note
The connections for clocks and resets are for the wait state modeling.
Table 6-7 32-bit flash ROM behavioral model signals
Signal Type Description
addr[AW-3:0] Input Address
rdata[31:0] Output Read data

Behavioral memory models
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 6-12
ID110117 Non-Confidential
6.5 16-bit flash ROM behavioral model
The 16-bit flash ROM behavioral model,
cmsdk_flash_rom16.v
, is a simple behavioral model for
16-bit flash memory. Reset and clock signals perform wait state behavioral modeling.
Figure 6-13 shows the 16-bit flash ROM behavioral model.
Figure 6-13 16-bit flash ROM behavioral model
Table 6-8 shows the characteristics of the 16-bit flash ROM behavioral model.
6.5.1 Signal descriptions
Table 6-9 shows the signal descriptions of the 16-bit flash ROM behavioral model.
cmsdk_flash_rom16.v
rst_n
clk
addr[AW-3:0]
rdata[15:0]
Table 6-8 16-bit flash ROM behavioral model characteristics
Element name Description
Filename
cmsdk_flash_rom16.v
Parameter The parameters are as follows:
AW
Width of address bus. The default value is 16.
filename
File name for memory image.
WS
Wait state or required read cycle. The default value is 0.
Clock domain CLK. In the example system that is provided, CLK is the same as
HCLK.
Note
The connections for clocks and resets are for the wait state modeling.
Table 6-9 16-bit flash ROM behavioral model signals
Signal Type Description
ADDR[AW-3:0] Input Address
RDATA[15:0] Output Read data

Behavioral memory models
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 6-13
ID110117 Non-Confidential
6.6 FPGA SRAM synthesizable model
The FPGA SRAM synthesizable model,
cmsdk_fpga_sram.v
, is a model for SRAM that behaves
like simple synchronous RAM in ASIC or FPGA. This memory does not have an AHB
interface, and the AHB to SRAM interface module is required to connect this memory to AHB.
It demonstrates how to use the AHB to SRAM interface module. This model is suitable for
FPGA synthesis. Figure 6-14 shows the SRAM synthesizable model.
Figure 6-14 FPGA SRAM
Table 6-10 shows the characteristics of the FPGA SRAM model.
6.6.1 Signal descriptions
Table 6-11 shows the FPGA SRAM signals.
cmsdk_fpga_sram.v
CLK
ADDR[AW-1:2]
RDATA[31:0]
WDATA[31:0]
WREN[3:0]
CS
Table 6-10 FPGA SRAM characteristics
Element name Description
Filename
cmsdk_fpga_sram.v
Parameter
AW
Address width. The default value is 16.
Clock domain CLK
Table 6-11 FPGA SRAM signals
Signal Type Description
ADDR[AW-1:2] Input Address
WDATA[31:0] Input Write data
WREN[3:0] Input Write enable
CS Input Chip select
RDATA[31:0] Output Read data

Behavioral memory models
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 6-14
ID110117 Non-Confidential
6.7 FPGA ROM
The FPGA ROM,
cmsdk_fpga_rom.v
, is a model that behaves like a simple synchronous RAM in
FPGA. This memory does not have an AHB interface, and the AHB to SRAM interface module
is required to connect this memory to AHB. It demonstrates how to use the AHB to SRAM
interface module. This module is suitable for FPGA synthesis. Unlike the FPGA SRAM model,
this model contains initialization of memory. Figure 6-15 shows the FPGA ROM model.
Figure 6-15 FPGA ROM
Table 6-12 shows the characteristics of the FPGA ROM.
6.7.1 Signal descriptions
Table 6-13 shows the FPGA ROM signals.
cmsdk_fpga_rom.v
CLK
ADDR[AW-1:2]
RDATA[31:0]
WDATA[31:0]
WREN[3:0]
CS
Table 6-12 FPGA ROM characteristics
Element name Description
Filename
cmsdk_fpga_rom.v
Parameter The parameters are as follows:
AW
Address width.
filename
File name for memory image.
Clock domain CLK. In the example system that is provided, CLK is same as
HCLK.
Table 6-13 FPGA ROM signals
Signal Type Description
ADDR[AW-1:2] Input Address
WDATA[31:0] Input Write data
WREN[3:0] Input Write enable
CS Input Chip select
RDATA[31:0] Output Read data

Behavioral memory models
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 6-15
ID110117 Non-Confidential
6.8 External asynchronous 8-bit SRAM
The external asynchronous 8-bit SRAM,
cmsdk_sram256x8.v
, is a behavioral model for external
8-bit SRAM that behaves like a typical asynchronous SRAM component. This memory model
is compatible with the AHB to external memory interface. Figure 6-16 shows the external
asynchronous 8-bit SRAM.
Figure 6-16 External asynchronous 8-bit SRAM
Table 6-14 shows the external asynchronous 8-bit SRAM characteristics.
6.8.1 Signal descriptions
Table 6-15 shows the external asynchronous 8-bit SRAM signals.
cmsdk_sram256x8.v
Address[AW-1:0]
CEn
DataIO[7:0]
WEn
OEn
Table 6-14 External asynchronous 8-bit SRAM characteristics
Element name Description
Filename
cmsdk_sram256x8.v
Parameter The parameters are as follows:
AW
Address width. The default value is 18.
filename
File name for initial SRAM content. Default to
NULL
that means no initial memory
image.
Clock domain Not applicable.
Table 6-15 External asynchronous 8-bit SRAM signals
Signal Type Description
ADDR[AW-1:0] Input Address.
DATAIO[7:0] Bidirectional Data.
WEn Input Write enable. Active LOW for write operation.
OEn Input Output enable. Active LOW for read operations.
CEn Input Chip enable. Active LOW for both read and write operations.

Behavioral memory models
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 6-16
ID110117 Non-Confidential
6.9 External asynchronous 16-bit SRAM
The external asynchronous 16-bit SRAM,
cmsdk_sram256x16.v
, is a behavioral model for
external 16-bit SRAM that behaves like a typical asynchronous SRAM component. This
memory model is compatible with the AHB to external memory interface. Figure 6-17 shows
the external asynchronous 16-bit SRAM.
Figure 6-17 External asynchronous 16-bit SRAM
Table 6-16 shows the external asynchronous 16-bit SRAM characteristics.
6.9.1 Signal descriptions
Table 6-17 shows the external asynchronous 16-bit SRAM signals.
cmsdk_sram256x16.v
Address[AW-1:0]
CEn
DataIO[15:0]
WEn
OEn
LBn
UBn
Table 6-16 External asynchronous 16-bit SRAM characteristics
Element name Description
Filename
cmsdk_sram256x16.v
Parameter The parameters are as follows:
AW
Address width. The default value is 18.
filename
File name for initial SRAM content. The default is
NULL
and this means no initial memory image.
Clock domain Not applicable.
Table 6-17 External asynchronous 16-bit SRAM signals
Signal Type Description
ADDR[AW-1:0] Input Address.
DATAIO[15:0] Bidirectional Data.
WEn Input Write enable. Active LOW for write operation.
OEn Input Output enable. Active LOW for read operations.
CEn Input Chip enable. Active LOW for both read and write operations.
LBn Input Lower byte enable. Active LOW.
UBn Input Upper byte enable. Active LOW.

ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 7-1
ID110117 Non-Confidential
Chapter 7
Verification components
This chapter describes the verification components in the Cortex-M System Design Kit. It
contains the following sections:
•AHB-Lite protocol checker on page 7-2.
•APB protocol checker on page 7-5.
•AHB FRBM on page 7-7.

Verification components
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 7-2
ID110117 Non-Confidential
7.1 AHB-Lite protocol checker
The AHB-Lite protocol checker,
AhbLitePC.v
, is a simulation model that you can use to detect
bus protocol violations during simulation. The AHB-Lite protocol checker is located in
logical/models/protocol_checkers/AhbLitePC/verilog
. The design is based on OVL. To use the
AHB-Lite protocol checker, you must download the OVL Verilog library from Accellera, and
add the OVL library path in the include and search paths of your simulator setup. Figure 7-1
shows the AHB-Lite protocol checker.
Figure 7-1 AHB-Lite protocol checker
The example systems and a number of components already contain usage examples of the
AHB-Lite protocol checker. The instantiation of AHB-Lite protocol checker is conditional in
the examples, only when you set the
ARM_AHB_ASSERT_ON
compile directive. When using the
AHB-Lite protocol checker in your design, you can use the compiler directive of your choice.
Use of conditional compilation is required because the AHB-Lite protocol checker is not a
synthesizable component.
When an AHB-Lite bus protocol violation is detected, error or warning messages are shown in
the console or transcript window of the simulator.
Table 7-1 shows the characteristics of the AHB-Lite protocol checker.
AhbLitePC.v
HCLK
HRESETn
HSELx
HADDR[ADDR_WIDTH-1:0]
HTRANS[1:0]
HWRITE
HREADYOUT
HRDATA[DATA_WIDTH-1:0]
HRESP
HREADY
HWDATA[DATA_WIDTH-1:0]
HSIZE[2:0]
HMASTLOCK
HPROT[3:0]
HBURST[2:0]
Table 7-1 AHB-Lite protocol checker characteristics
Element name Description
Filename
AhbLitePC.v
Parameters See Table 7-2 on page 7-3
Clock domain HCLK

Verification components
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 7-3
ID110117 Non-Confidential
Table 7-2 shows the Verilog parameters and their descriptions.
Table 7-3 shows the use of the property type parameters.
Table 7-2 AHB-Lite Verilog parameter descriptions
Parameter Description
ADDR_WIDTH
Width of the address bus, from 1-32 bits. The default value is 32 bits.
DATA_WIDTH
Width of the data bus, from 1-32 bits. The default value is 32 bits.
BIG_ENDIAN
Data endianness:
0 Little-endian. This is the default.
1 Big-endian.
MASTER_TO_INTERCONNECT
Where in the system the protocol checker is instantiated. Mainly specifies the existence of
functional HSEL and HREADYOUT:
0 Between interconnect master interface and AHB-Lite slave. HSEL and
HREADYOUT functional. This is the default.
1 Between AHB-Lite master and interconnect slave interface. HSEL and
HREADYOUT non-functional.
EARLY_BURST_TERMINATION
Interconnect master interface capable of early burst termination:
0 No. This is the default.
1 Yes.
MASTER_REQUIREMENT_PROPTYPE
Property types:
0 Assert. This is the default.
1 Assume.
2 Ignore.
MASTER_RECOMMENDATION_PROPTYPE
MASTER_XCHECK_PROPTYPE
SLAVE_REQUIREMENT_PROPTYPE
SLAVE_RECOMMENDATION_PROPTYPE
SLAVE_XCHECK_PROPTYPE
INTERCONNECT_REQUIREMENT_PROPTYPE
INTERCONNECT_RECOMMENDATION_PROPTYPE
INTERCONNECT_XCHECK_PROPTYPE
Table 7-3 Use of property type parameters
Type of verification
environment MASTER_*_PROPTYPE SLAVE_*_PROPTYPE INTERCONNECT_*_PROPTYPE
Simulation-based
verification 0 (assert) to check
master-generated signals 0 (assert) to check
slave-generated signals 0 (assert) to check
interconnect-generated signals

Verification components
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 7-4
ID110117 Non-Confidential
Note
The AHB-Lite protocol checker is intended to be used to assist the detection of common
AHB-Lite operation issues. It does not provide definitive checking of all bus protocol violation
scenarios and does not provide all the constraints that formal verification requires.
Formal verification of
an AHB-Lite master 0 (assert) to check
master-generated output signals 1 (assume) to constrain
slave-generated input signals 1 (assume) to constrain
interconnect-generated input signals
Formal verification of
an AHB-Lite
interconnect master
interface that generates
HSEL and HREADY
output signals
0 (assert) to check
master-generated output signals 1 (assume) to constrain
slave-generated input signals 0 (assert) to check
interconnect-generated output signals
Formal verification of
an AHB-Lite slave 1 (assume) to constrain
master-generated input signals 0 (assert) to check
slave-generated output signals 1 (assume) to constrain
interconnect-generated input signals
Table 7-3 Use of property type parameters (continued)
Type of verification
environment MASTER_*_PROPTYPE SLAVE_*_PROPTYPE INTERCONNECT_*_PROPTYPE

Verification components
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 7-5
ID110117 Non-Confidential
7.2 APB protocol checker
The APB protocol checker,
ApbPC.v
, is a simulation model that you can use to detect bus
protocol violations during simulation. The
ApbPC.v
supports APB2, APB3, and APB4. The APB
protocol checker is located in
logical/models/protocol_checkers/ApbPC/verilog
.
To use the APB protocol checker, you must download the OVL Verilog library from Accellera,
and add the OVL library path in the include and search paths of your simulator setup.
The example systems, and a number of components, already contain usage examples of the APB
protocol checker in the AHB to APB bridge. The instantiation of the APB protocol checker is
conditional in the examples, only when you set the
ARM_APB_ASSERT_ON
compile directive. When
using the APB protocol checker in your design, you can use a compile directive of your choice.
Use of conditional compilation is required because the APB protocol checker is not a
synthesizable component.
Figure 7-2 shows the APB protocol checker.
Figure 7-2 APB protocol checker
When an APB bus protocol violation is detected, the transcript window of the simulator shows
error or warning messages.
Table 7-4 shows the characteristics of the APB protocol checker.
ApbPC.v
PRESETn
PENABLE
PWRITE
PREADY
PSLVERR
PCLK
PSTRB[((DATA_WIDTH+7)/8)-1:0]
PPROT[2:0]
PSELx[SEL_WIDTH-1:0]
PADDR[ADDR_WIDTH-1:0]
PWDATA[DATA_WIDTH-1:0]
PRDATA[DATA_WIDTH-1:0]
Table 7-4 APB protocol checker characteristics
Element name Description
Filename
ApbPC.v
Parameters See Table 7-5 on page 7-6
Clock domain PCLK

Verification components
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 7-6
ID110117 Non-Confidential
Table 7-5 shows the Verilog parameters and their descriptions.
Table 7-6 shows the use of the property type parameters.
Note
The APB protocol checker is intended to be used to assist the detection of common APB
operation issues. It does not provide definitive checking of all bus protocol violation scenarios
and does not provide all the constraints that formal verification requires.
Table 7-5 APB Verilog parameter descriptions
Parameter Description
ADDR_WIDTH
Width of the PADDR bus, from 1 to 32 bits. The default value is 32 bits.
DATA_WIDTH
Width of the PxDATA bus, from 1 to 32 bits. The default value is 32 bits.
SEL_WIDTH
Width of the PSELx bus, 1 bit or more. The default value is 1 bit.
MASTER_REQUIREMENT_PROPTYPE
Property types:
0 Assert. This is the default.
1 Assume.
2 Ignore.
SLAVE_REQUIREMENT_PROPTYPE
PREADY_FUNCTIONAL
Optional signals:
0 Not functional.
1 Functional. This is the default.
PSLVERR_FUNCTIONAL
PPROT_FUNCTIONAL
PSTRB_FUNCTIONAL
Table 7-6 Use of property type parameters
Type of verification
environment MASTER_REQUIREMENT_PROPTYPE SLAVE_REQUIREMENT_PROPTYPE
Simulation-based verification 0 (assert) to check master-generated signals 0 (assert) to check slave-generated signals
Formal verification of an APB master 0 (assert) to check master-generated output
signals 1 (assume) to constrain slave-generated
input signals
Formal verification of an APB slave 1 (assume) to constrain master-generated
input signals 0 (assert) to check slave-generated output
signals

Verification components
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 7-7
ID110117 Non-Confidential
7.3 AHB FRBM
The AHB FRBM,
cmsdk_ahb_fileread_master32.v
and
cmsdk_ahb_fileread_master64.v
, enable
designers to simulate AHB systems quickly and efficiently by using them to generate explicit
bus transfers. The FRBM can operate in the Cortex-M System Design Kit with or without an
Arm core present. The FRBM and its Perl script are compatible with the version in the FRBM
in AMBA Design Kit (ADK).
The FRBM is a generic AHB Bus Functional Model (BFM) that directly controls bus activity
by interpreting a stimulus file. The FRBM facilitates the efficient validation of blocks or
systems.
The 64-bit FRBM,
cmsdk_ahb_fileread_master64.v
, is split into the following parts:
• AHB-Lite file reader.
• AHB-Lite to AHB wrapper.
The 32-bit FRBM,
cmsdk_ahb_fileread_master32.v
, has an additional part, the funnel, that
converts 32-bit transfers on a 64-bit bus to 32-bit transfers on a 32-bit bus.
The AHB-Lite file reader can:
• Perform all AHB burst types at data widths of 8, 16, 32, and 64 bits.
• Insert BUSY states during bursts.
• Perform idle transfers.
• Compare received data with the expected data and report the differences during
simulations.
The stimulus file controls the AHB-Lite file reader at simulation runtime. It does not have a
slave interface, and therefore other AHB masters cannot address it.
You must transform the human-readable input stimulus file to a data file in Verilog hexadecimal
format using the
fm2conv.pl
preprocessor script.
The FRBM is designed so that, wherever possible, RTL code is used to describe its logic. All
RTL code is written for synthesis using pragmas where necessary, to enable the block to pass
through synthesis tools.
Figure 7-3 shows the 32-bit AHB FRBM.
Figure 7-3 32-bit AHB FRBM
cmsdk_ahb_fileread_master32.v
HCLK
HRESETn
HADDR[31:0]
HTRANS[1:0]
HSIZE[2:0]
HWRITE
EXRESP
HRDATA[31:0]
HRESP
HREADY
HPROT[3:0]
HBURST[2:0]
HMASTLOCK
HWDATA[31:0]
LINENUM[31:0]
EXREQ
MEMATTR[1:0]

Verification components
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 7-8
ID110117 Non-Confidential
Figure 7-4 shows the 64-bit AHB FRBM.
Figure 7-4 64-bit AHB FRBM
Table 7-7 shows the characteristics of the FRBM.
7.3.1 Programmers model
The
cmsdk_ahb_fileread_master
uses the following Verilog parameters:
InputFileName
This is the name of the stimulus data file to be read. If the file is not found,
simulation is aborted. The default file name is
filestim.m2d
.
MessageTag
A string that is prepended to all stimulation messages from this
cmsdk_ahb_fileread_master
. You can use this tag to differentiate between
messages from multiple FRBMs in a system. The default message tag is
FileReader
.
StimArraySize
The size, in words, of the internal array that is used to store the stimulus
data. This value has a direct effect on the simulation startup time and
memory requirement. This value is large enough to store the whole data
file. If the data file is larger than the array, simulation is aborted. The
default value is 5000.
The following sections describe the AHB-Lite FRBM functions:
•Write command on page 7-9.
•Read command on page 7-9.
•Sequential command on page 7-10.
cmsdk_ahb_fileread_master64.v
HCLK
HRESETn
HADDR[31:0]
HTRANS[1:0]
HSIZE[2:0]
HWRITE
HRDATA[63:0]
HRESP
HREADY
HPROT[3:0]
HBURST[2:0]
HMASTLOCK
HWDATA[63:0]
LINENUM[31:0]
EXRESP
EXREQ
MEMATTR[1:0]
Table 7-7 FRBM characteristics
Element Description
Filenames
cmsdk_ahb_fileread_master32.v
and
cmsdk_ahb_fileread_master64.v
Parameters The parameters are as follows:
InputFileName
Stimulus file. The default value is
filestim.m2d
.
MessageTag
Tag on each FileReader message. The default value is
FileReader
.
StimArraySize
Stimulus data array size. The default value is 5000.
Clock domain HCLK

Verification components
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 7-9
ID110117 Non-Confidential
•Busy command on page 7-11.
•Idle command on page 7-12.
•Poll command on page 7-13.
•Loop command on page 7-14.
•Resp field on page 7-14.
•Clock and reset on page 7-14.
•Error reporting at runtime on page 7-15.
•End of stimulus on page 7-15.
Write command
The
write
command,
W
, starts a write burst and one or more S vectors can follow it. For bursts
of fixed length, the Burst field determines the number of S vectors. For bursts of undefined
length, there can be any number of S vectors provided they do not cause the address to cross a
1KB boundary.
Figure 7-5 shows the
write
command timing.
Figure 7-5 Write command timing
The
write
command operates as follows:
Cycle 1 The file reader sets up the control signals from the command and asserts
HWRITE. HTRANS is NONSEQ to indicate the first transfer of the burst. The
Data field is stored and ready to be driven during the data phase.
If HREADY is asserted, the file reader proceeds to the second control phase.
Cycle 2 This is the first data phase in which the data is driven for the previous cycle.
Unless the Burst field specifies a single transfer, the file reader calculates the next
address based on the Size and Burst values.
Read command
The
read
command,
R
, starts a read burst and one or more S vectors can follow it. For bursts of
fixed length, the Burst field determines the number of S vectors. For bursts of undefined length,
there can be any number of S vectors provided they do not cause the address to cross a 1KB
boundary.
Figure 7-6 on page 7-10 shows the
read
command timing.
Command W
HADDR A1
HTRANS
NONSEQ
HWDATA D1
HWRITE
HREADY
Cycle 1 Cycle 2

Verification components
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 7-10
ID110117 Non-Confidential
Figure 7-6 Read command timing
The
read
command operates as follows:
Cycle 1 The file reader sets up the control signals from the command and deasserts
HWRITE. HTRANS is NONSEQ to indicate the first transfer of a burst.
If HREADY is asserted, the file reader proceeds to the second control phase.
Cycle 2 The data read for the previous cycle is compared with the Data field after applying
the mask and byte lane strobes. Any differences are reported to the simulation
environment. Unless the Burst field indicates a single transfer, the file reader
calculates the next address based on the Size and Burst values.
Sequential command
The
sequential
command,
S
, is a vector that provides data for a single beat within the burst. The
file reader calculates the required address. A
sequential
command is valid when a
read
or
write
command starts a burst transfer.
Figure 7-7 shows the
sequential
command timing.
Figure 7-7 Sequential command timing
Command R
HADDR A1
HTRANS
NONSEQ
HRDATA D1
HWRITE
HREADY
Cycle 1 Cycle 2
Command S
HADDR A(n)
HTRANS
SEQ
HRDATA
HWRITE
HREADY
S
A(n+1)
SEQ
D(n) D(n+1)
R/W
Cycle n Cycle n+1

Verification components
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 7-11
ID110117 Non-Confidential
A
sequential
command is valid when a
read
or
write
command starts a burst transfer and
operates as follows:
Cycle n The file reader drives the calculated address, and HTRANS is SEQ to indicate
the remaining transfers of the burst.
If HREADY is asserted, the file reader proceeds to the second control phase.
Cycle n + 1 In a write burst, the file reader drives the Data field data and ignores the Mask
field.
In a read burst, the file reader applies the Mask and Bstrb fields to the input data
and then compares the Data field with the input data. The file reader reports
differences between the expected data and the read data to the simulation
environment.
Busy command
The
busy
command,
B
, inserts either a BUSY transfer or a BUSY cycle, depending on the Wait
field. A
busy
command is valid when a
read
or
write
command starts a burst transfer.
During a burst with the Wait field not specified, the
busy
command inserts a single HCLK
BUSY transfer on the AHB. A burst can have a
busy
command after its last transfer while the
master determines whether it has another transfer to complete.
Figure 7-8 shows the busy command timing.
Figure 7-8 Busy transfer timing
Cycle n The file reader drives the calculated address and HTRANS is BUSY.
Cycle n + 1 The file reader proceeds to the next control phase. Data is ignored.
During a burst with the Wait field specified, the
busy
command inserts a complete AHB transfer.
See Figure 7-9 on page 7-12.
Command B
HADDR A(n)
HTRANS BUSY
HWDATA or HRDATA
HWRITE
HREADY
S
A(n)
SEQ
D(n)
R/W
Cycle n Cycle n+1

Verification components
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 7-12
ID110117 Non-Confidential
Figure 7-9 Busy cycle timing
The address phase is extended by wait states because of the data phase of a previous transfer, if
present.
Idle command
The
idle
command,
I
, performs either an IDLE transfer or an IDLE cycle, depending on the
Wait field. The options enable you to set up the control information during the IDLE transfer,
and to specify whether the transfer is locked or unlocked.
If the Wait field is not specified, the
idle
command inserts a single HCLK cycle IDLE transfer
on the AHB. See Figure 7-10.
Figure 7-10 Idle transfer timing
Cycle 1 HTRANS is IDLE and the control signals take the default values, except for those
specified in the command.
Cycle 2 The file reader proceeds to the next control phase. Data is ignored.
If the Wait field is specified, the
idle
command inserts a complete AHB transfer. See
Figure 7-11 on page 7-13. The address phase is extended by wait states because of the data
phase of a previous transfer, if present.
Command B + Wait
HADDR A(n)
HTRANS BUSY
HWDATA or HRDATA
HWRITE
HREADY
S
A(n)
SEQ
R/W
Cycle n Cycle n+1
Command I
HADDR A
HTRANS IDLE
HWDATA or HRDATA
HWRITE
HREADY
Cycle 1 Cycle 2
DIR

Verification components
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 7-13
ID110117 Non-Confidential
Figure 7-11 Idle cycle timing
Cycle 1 HTRANS is set to IDLE and the control signals are set to the default values,
except for those specified in the command.
Cycle 2 If the Wait field is not specified, or the Wait field is specified and HREADY is
asserted, then the file reader proceeds to the next control phase. Data is ignored.
Poll command
The
poll
command,
P
, continually reads the input data until it matches the value in the Data field
or until the number of reads equals the number in the Timeout field. If the input data does not
match after the Timeout number, the file reader reports an error. Not specifying a Timeout value
or specifying a Timeout value of 0, causes the
poll
command to read continually until the data
matches the required value. The
poll
command is valid only for INCR or SINGLE burst types
and for aligned addresses.
Figure 7-12 shows the
poll
command timing.
Figure 7-12 Poll command timing
The poll command operates as follows:
Cycle 1 The file reader sets up a read of the single address in the Address field.
If HREADY is asserted, the file reader proceeds to the second control phase.
Command I + Wait
HADDR A
HTRANS IDLE
HWDATA or HRDATA
HWRITE
HREADY
Cycle 1 Cycle 2
DIR
HADDR
Command
HTRANS
HRDATA
A
NONSEQ
P
HWRITE
D'
HREADY
IDLE NONSEQ
D
A
IDLE
Cycle
1
Cycle
2
Cycle
1
Cycle
2

Verification components
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 7-14
ID110117 Non-Confidential
Cycle 2 The file reader issues an IDLE transfer and reads the data for the previous address
value.
Loop command
The
loop
command,
L
, repeats the last command a number of times. When the burst type is
INCR or SINGLE, a
loop
command must follow only a
write
or
read
. Because the file reader
has a 32-bit counter, the maximum number of loops is 232 -1.
Note
Commands that do not directly represent bus transactions, for example, the simulation comment
command
C
, are not looped. Consecutive loops are cumulative and not multiplicative. For
example:
I 0x4000
C Commencing IDLES
L 1000
L 1000
This sequence performs an
idle
command to address
0x4000
, generates the comment, and then
performs 2000 more IDLE accesses to address
0x4000
.
Comment command
The
comment
command,
C
, sends a message to the simulation window.
Quit command
The
quit
command,
Q
, causes the simulation to terminate immediately. Additionally, the
quit
command provides a summary of the number of commands and errors.
Resp field
The
Resp
field tests for the expected response. You must present the
Resp
field on a command
that is expected to receive an ERROR response from a slave.
If the
Resp
field is set to
Errorcont
or
Errorcanc
, and an ERROR response is received, no warning
is issued. If the
Resp
field is set to
Errorcont
or
Errorcanc
, and an ERROR response is not
received, a simulation warning is generated.
If an error occurs during a burst transfer, and the
Resp
field is set to
Errorcont
, the burst
continues.
If an error occurs during a burst transfer and the
Resp
field is set to
Errorcanc
, the burst is
canceled. No attempt is made to retransmit the erroneous transfer. It is not necessary for the
stimulus file to contain the remaining transfers in the burst. An IDLE transfer is always inserted
during the ultimate cycle of the ERROR response if the burst is to be canceled.
Clock and reset
The file reader is synchronous to the AHB bus clock signal HCLK and the AHB reset signal
HRESETn resets it.

Verification components
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 7-15
ID110117 Non-Confidential
Error reporting at runtime
An error can occur in the following circumstances:
• A read transfer where the expected data does not match the actual data.
• A transfer that receives an AHB ERROR response and the Error field is not set.
• A transfer where the Error field is set and the transfer does not receive an AHB ERROR
response.
•A
Poll
command where the expected data is not received within the timeout number of
attempts.
• The stimulus file is longer than the array size allocated.
When an error is reported, the line number of the corresponding command on the input file is
reported to the simulation window.
End of stimulus
A summary of the number of commands and errors is given when any of the following is
reached:
• A quit command.
• End of input file.
• End of the internal command array.
Simulation is terminated when a
Q
command is encountered.
When the stimulus ends, all AHB signals are set LOW. This implies IDLE read transfers to
address
0x00
.
If the end of the internal command array is reached, and the end of the stimulus file has not been
reached, a warning is issued, and all AHB signals are set LOW. This implies IDLE read transfers
to address
0x00
.
7.3.2 Command syntax
The filename of the stimulus data file is specified using a Verilog parameter, at the point of
instantiation in the HDL code.
The syntax uses a single letter for each command followed by a number of fields.
Command syntax
Table 7-8 shows the stimulus command syntax.
Table 7-8 Stimulus command syntax
Cmd Fields
W
Address Data [Size] [Burst] [Prot] [Lock] [Resp] [Comment]
R
Address Data [Mask] [Size] [Burst] [Prot] [Lock] [Resp] [Comment]
S
- Data [Mask] - - - - [Resp] [Comment]
B
- - - - - - - [Wait] [Comment]
I
[Address] [Dir] - [Size] [Burst] [Prot] [Lock] [Wait] [Comment]

Verification components
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 7-16
ID110117 Non-Confidential
Note
Items in square brackets [] are optional. See Table 7-9 on page 7-17 for default values.
The commands are:
W
The
write
command starts a write burst and one or more S vectors can follow it.
The number of S vectors is set by the size and burst fields for fixed length bursts.
There is no limit to the number of S vectors for undefined length bursts, provided
it does not cause the address to cross a 1KB boundary.
R
The
read
command starts a read burst and one or more S vectors can follow it. The
number of S vectors is set by the size and burst fields for fixed length bursts.
There is no limit to the number of S vectors for undefined length bursts, provided
it does not cause the address to cross a 1KB boundary.
S
The sequential vector provides data for a single beat in the burst. The file reader
calculates the address required.
B
The
busy
command inserts either a BUSY cycle or a BUSY transfer mid burst,
depending on the value of the Wait field. An INCR burst can have a busy after its
last transfer, while the master determines whether it has another transfer to
complete. It is not valid to have a busy command when a burst is not in progress.
I
The
idle
command performs either an IDLE cycle or an IDLE transfer, depending
on the value of the Wait field. The options enables you to set up the control
information during the idle transfer, and to specify whether the transfer is locked
or unlocked.
P
The
poll
command performs a read transfer that repeats until the data matches the
required value. If it repeats this Number times, and the value is not read, then an
error is reported. Either omitting Timeout or setting it to 0 causes the Poll to
repeat continually until the data matches the required value. You can use the poll
vector for INCR or SINGLE burst types and for aligned addresses.
L
The
loop
command repeats the last command a number of times. An
L
command
must only follow a
W
or
R
when the burst type is INCR or SINGLE.
C
The
comment
command,
C
, sends a message to the simulation window.
Q
The
quit
command,
Q
, causes the simulation to terminate immediately.
Additionally, the quit command gives a summary of the number of commands
and errors.
P
Address Data [Mask] [Size] [Burst] [Prot] [Timeout] - [Comment]
L
Number - - - - - - - [Comment]
C
Message - - - - - - - [Comment]
Q
- - - - - - - - [Comment]
Table 7-8 Stimulus command syntax (continued)
Cmd Fields

Verification components
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 7-17
ID110117 Non-Confidential
Table 7-9 shows the stimulus command fields.
Table 7-9 Command fields
Field Default Values Prefix Description
Address
0x00000000
32-bit hex value
0x
, optional First address of burst.
Data - 8, 16, 32, or 64-bit
hex value
0x
, optional Data field for
read
,
write
,
sequential
, and
poll
commands. The width of the Data field must
match either the specified transfer size or the bus
width of the FRBM.
Mask
0xFF
for each active byte lane
as determined by Address and
Size, and
0x00
for inactive
byte lanes, or
0xFFFFFFFF
if
adk1
switch is set
8, 16, 32, or 64-bit
hex value
0x
, optional Bit mask. Enables masking of read data when
testing against required data. You must write the
Mask and Data fields as the same size. They must
match either the specified transfer size or the bus
width of the FRBM.
Size
word
or
doubleword
depending
on user-defined
-buswidth
switch
b | byte | size8 |
h | hword | size16 |
w | word | size32 |
d | dword | size64
- Data size for
read
,
write
,
sequential
, and
poll
commands.
Burst
incr sing | single | incr
| incr4 | wrap4
|
incr8 | wrap8
|
incr16 | wrap16
- Burst type for
read
,
write
, and
idle
transfer
commands. For the
poll
command, the only
permitted values for Burst are
sing
,
single
, or
incr
.
Prot
0000
4-bit binary
p
|
P
Indicates the HPROT value for the transfer.
Lock
nolock nolock
|
lock
- Transfers lock.
Resp
okay okay
|
ok
|
errcanc
|
errcanc
-When
errcont
is specified:a
• If an ERROR response occurs, no warning
is generated. A burst in progress
continues.
• If no ERROR response occurs, a warning
is generated. A burst in progress
continues.
When
errcanc
is specified:
• If an ERROR response occurs, no warning
is generated. A burst in progress is
canceled.b
• If no ERROR response occurs, a warning
is generated. A burst in progress
continues.
Dir
read read
|
write
- Controls the value of HWRITE during an
idle
command.
Number - Decimal value from
1-(232-1)
- Loops repeat value.
Timeout
0
Decimal value from
0-(232-1)
t
|
T
Number of times the
poll
command repeats the
data check before generating an error when data
does not match the expected value. Specifying 0
repeats continuously.

Verification components
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 7-18
ID110117 Non-Confidential
Table 7-10 shows the keyboard characters that are supported by the
comment
command. For other
characters replace with a dash, -, character by the script.
7.3.3 File preprocessing
The stimulus file is converted into a format that can feed directly into the HDL code using the
fm2conv.pl
script. This script verifies that the syntax of the input file is correct. This script
provides useful error messages when the syntax is incorrect. Figure 7-13 shows the process of
stimulus file conversion.
Figure 7-13 Stimulus file conversion
Loops
The
fm2conv.pl
script unfolds loops of S vectors, but relies on the FRBM functionality for other
commands.
Note
Large loops of S vectors can create large stimulus data files.
Wait
nowait wait
|
nowait
- Waits for HREADY before continuing. Makes
an IDLE or BUSY cycle.
Message - 1-80 characters and
symbols. See
Table 7-10 for
supported
characters.
Comment
contained
within
double
quotes
Sends a user-defined comment to the simulation
window.
Comment
Delimiter - ; | # | // | -- - All common comment delimiters are valid.
a. You can use the value
err
or
error
as a synonym for
errcont
for compatibility with legacy BFM versions, but it is not recommended for use
in new development.
b. An IDLE transfer is always inserted in the last cycle of the ERROR response if the burst is canceled. No attempt is made to retransmit the
erroneous transfer. It is not necessary for the stimulus file to contain the remaining transfers of the burst.
Table 7-9 Command fields (continued)
Field Default Values Prefix Description
Table 7-10 Characters supported by
comment
command
Character Symbol
a-z, lower case ! $ % ^ & * ( )
A-Z, upper case _ - + = { } [ ]
0-9 : ; @ '~ # < >
White space , . ? / |
File
coversion
utility
fm2conv.pl
Input stimulus
file format
.m2d file
format
RTL bus master HDL
Behavioral
HDL file reader

Verification components
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 7-19
ID110117 Non-Confidential
Data and mask representations
You can specify data and mask values as any of the following:
• The bus width.
• With the
-buswidth
switch to
fm2conv.pl
.
• The same length as the transfer size with or without a
0x
prefix.
The byte lanes are driven according to both the least significant address bits, and the specified
endian organization. The default is little-endian.
If the data or mask are represented as fewer bits than the data bus, then the transfer size is
implicitly set to be that width. If this value conflicts with an explicit Size field, then an error is
generated. The following examples show data and mask representations of fewer bits than the
data bus:
R 00000002 DD
Read transfer with burst type INCR and implied size BYTE. The Data mask is
0x0000000000FF0000
in default little-endian mode.
R 0000ABCD 0x0123456789ABCDEF AB
The data field is 64 bits, that is, the bus width, and the mask field is BYTE, so the
transfer size is BYTE.
R 00000004 EEEEEEEE FF
Invalid stimulus on a 64-bit system. The data field implies a word transfer
whereas the mask field implies BYTE.
W 000000C0 AB WORD
Invalid stimulus. The Data field implies a byte transfer whereas the Size field
specifies word transfer.
FRBM versions
Because the FRBM and
fm2conv.pl
utilities are closely coupled through the stimulus data file,
you must take care to ensure that you use the correct versions. Table 7-11 shows the
compatibility between versions.
Because of enhancements in FRBM functionality and stimulus extensions, the stimulus files and
data files for the AHB file reader are incompatible with previous versions of the file reader. The
file preprocessor can translate ADK 1.0 stimulus files using the corresponding command-line
switch. You can identify the versions by their ADK version keyword as follows:
ADK_REL1v For previous versions.
ADK2v For the FRBM that this document describes.
Table 7-11 Compatibility between versions of FRBM and
fm2conv.pl
fm2conv.pl
version
ADK 1.0 ADK 2.0
File reader version ADK 1.0 -
- File reader version ADK 2.0

Verification components
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 7-20
ID110117 Non-Confidential
Table 7-12 shows the compatibility between versions.
Endianness
By default, the preprocessor script assumes little-endian data organization. Therefore, if only a
single byte of data is specified for a byte access, it is placed on the byte lane that the little-endian
addressing determines.
Big-endian mode is supported for AMBA 2.0. The type of big-endian is legacy big-endian, also
called Arm big-endian or BE-32. You must specify the data and mask in the same way as for
little-endian mode. The preprocessor script places the data and mask bytes in the correct lanes.
Stimulus file size
When the file reader simulation begins, the entire stimulus file is read into an array. Ensure that
the array size is large enough to store the entire stimulus file. The
fm2conv.pl
utility reports the
array size that is required and the total number of vectors in a summary of the stimulus file
conversion. A warning is generated if the array size is too small for the resulting stimulus file.
If the array size in the RTL file reader bus master is changed from the default value, you can set
the array size using a generic parameter in the FRBM HDL by using the
-stimarraysize
command line switch with the
fm2conv.pl
utility.
File preprocessor usage
Table 7-13 shows the command-line switches that the
fm2conv.pl
preprocessor accepts.
Table 7-12 Compatibility between versions of stimulus file and
fm2conv.pl
fm2conv.pl
version
ADK 1.0 ADK 2.0
Stimulus file version ADK 1.0 Stimulus file version ADK 1.0a
a. Using
-adk 1.0
command-line switch.
- Stimulus file version ADK 2.0
Table 7-13 Preprocessor command-line options
Switch Options Default Description
-help
- - Displays the usage messages.
-quiet
- - Suppresses warning messages.
-adk1
- - Translates an ADK 1.0 stimulus file. You can also specify this option
within the stimulus file.
-endian = <endianness> little
or
big little
The endianness determines the byte lanes that are driven for sparsely
declared Data and Mask fields. This is not supported for v6 stimulus.
Instead, you must specify the full bus width for big-endian transfers. The
big-endian option is implemented as Arm big-endian.
-infile = <filename>
-
filestim.m2i
Input file name.
-outfile = <filename>
-
filestim.m2d
Output file name. This name must match the definition that is specified in
the file reader bus master HDL.

Verification components
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 7-21
ID110117 Non-Confidential
Error reporting during file preprocessing
The script performs additional checks to ensure correct FRBM operation. Table 7-14 shows the
error checks. File conversion is aborted if an error with the command-line options is found. File
conversion continues if any other error is found, so that you can generate non-AMBA compliant
stimulus for test purposes, if required.
-buswidth = <width> 32
or
64 64
Specifies the data bus width of the target FRBM.
-arch = <arch> ahb2
or
V6 ahb2
Specifies the Arm processor architecture version of the target FRBM.
This version of the FRBM does not support V6.
-StimArraySize = <size> <size> 5000
The size of the file reader bus master file array. This size must match the
value set in the FRBM HDL.
Table 7-13 Preprocessor command-line options (continued)
Switch Options Default Description
Table 7-14
fm2conv.pl
error messages
Error number Description
17 Input file is unreadable, does not exist or has incorrect permissions.
20 Input file has the same name as the output file.
21 Cannot create the output file.
32 Unrecognized commands within the file.
36 Required fields are missing or in the wrong format.
37 Loop command has the
Number
field missing.
38
Comment
command requires a string within double quotes.
40
Size
value exceeds the data bus width. The maximum value is
dword | size64
for the ADK 2.0 64-bit version
FRBM, and
word | size32
for the ADK 2.0 32-bit version FRBM.
43 Loop
Number
field is out of range.
44 Poll
TimeOut
field is out of range.
48
Data
field length exceeds the FRBM data bus width.
49
Data
field has an invalid length.
52
Mask
field length exceeds the FRBM data bus width.
53
Mask
field has an invalid length.
56 Mismatch between transfer size, whether specified or implicitly set by the Data or the Mask width, and the
Data or Mask field.
64 Address is not aligned with the size of the transfer.
80 For Poll commands, burst types are not the valid INCR or SINGLE.
84 S or B vectors before a defined-length or undefined-length burst has started.
88 Burst exceeds the 1KB address boundary, for both defined and undefined-length bursts.
89 Loop number exceeds the number of remaining transfers, for each defined-length burst type.

Verification components
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 7-22
ID110117 Non-Confidential
The most common AMBA protocol violations are detected by the file preprocessor script, but
the absence of errors and warnings does not guarantee that the stimulus are compliant with the
AMBA protocol.
Table 7-15 shows the warnings. File conversion continues when a warning is issued.
Errors and warnings have the following numbering scheme:
[7] Severity.
[6:4] Error or warning type.
[3:2] Error or warning subtype.
[1:0] Enumerator.
Table 7-16 shows the numbering scheme for bit[7].
Table 7-15
fm2conv.pl
warnings
Warning
number Description
128 Perl version is older than 5.005. Command line switches are not supported.
132 Invalid data bus width is selected.
133 Invalid architecture is selected.
134 ADK 1.0 architecture is selected and the data bus width is not specified as 32 bits.
136 Output file length exceeds the specified size of the
stimarraysize
.
144 EOF found during a burst, and additional transfers are expected.
164 An optional field has an invalid value.
165 Invalid character exists in the comment string.
168 Comment command has a string of length greater than 80 characters.
169 Consecutive blank or commented lines exceed 63 for the line number reporting to work.
216 Number of S vectors following a
W | R
command is incorrect for a fixed length burst, and a burst is terminated
early. This enables the simulation of early-terminated bursts.
240 Unsupported memory command is encountered.
241 Unsupported AltMaster field is encountered and the entire line is ignored.
242 Unsupported DeGrant field is encountered and is ignored.
248 A feature in development status.
254 Currently unsupported value in a field, for example, size > 64.
255 Internal or debug error. Not expected to occur in normal usage.
Table 7-16 Numbering scheme for bit 7
Value Meaning
0 Error
1 Warning

Verification components
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. 7-23
ID110117 Non-Confidential
Table 7-17 shows the numbering scheme for bits[6:4] and bits[3:2].
Table 7-18 shows the numbering scheme for bits[1:0].
Table 7-17 Numbering scheme for bits[6:4] and bits[3:2]
Value bits[6:4] Meaning Value bits[3:2] Meaning
000
Command line
00
Environment
01
Options
10
-
11
-
001
File input or output
00
Input file
01
Output file
10
-
11
-
010
Syntax
00
Command
01
Field
10
Range
11
-
011
Transfer size
00
Data
01
Mask
10
Mismatch
11
-
100
Alignment
00
Address
01
-
10
-
11
-
101
Burst
00
Within burst
01
Outside burst
10
Length
11
-
110
Reserved - -
111
Reserved - -
Table 7-18 Numbering scheme for bits[1:0]
Value Meaning
(any) Creates a unique identifier in conjunction with bits[7:2]

ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. A-1
ID110117 Non-Confidential
Appendix A
IP-XACT descriptions
This appendix describes the location and configuration of the IP-XACT files.
It contains the following sections:
•About IP-XACT for the Cortex-M System Design Kit components on page A-2
•Location of the IP-XACT description files on page A-3
•Generating the IP-XACT description on page A-5
•Using the IP-XACT description on page A-6

IP-XACT descriptions
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. A-2
ID110117 Non-Confidential
A.1 About IP-XACT for the Cortex-M System Design Kit components
IP-XACT for the Cortex-M System Design Kit is an XML description file of each CMSDK
component. These files describe the component interfaces and ports within IP-XACT IEEE
1685-2009.
Because it is supplied in an unconfigured state, you must process the XML description file to
remove information, as appropriate, to match your required configuration. See Generating the
IP-XACT description on page A-5.
See the Accellera website,
www.accellera.org
, for more information about IP-XACT.

IP-XACT descriptions
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. A-3
ID110117 Non-Confidential
A.2 Location of the IP-XACT description files
Table A-1 on page A-4 shows the location of the IP-XACT description file and its associated
Verilog module for the following components, where <component_name> represents the
component name in the path:
Component name Description
cmsdk_ahb_bitband
AHB bit-band wrapper
cmsdk_ahb_busmatrix
AHB bus matrix
cmsdk_ahb_default_slave
AHB default slave
cmsdk_ahb_eg_slave
AHB example slave
cmsdk_ahb_gpio
AHB GPIO
cmsdk_ahb_master_mux
AHB master multiplexer
cmsdk_ahb_slave_mux
AHB slave multiplexer
cmsdk_ahb_timeout_mon
AHB timeout monitor
cmsdk_ahb_fileread_master
AHB File Reader Bus Master (FRBM)
cmsdk_ahb_to_extmem16
AHB to external SRAM interface
cmsdk_ahb_to_flash32
AHB to 32-bit flash interface
cmsdk_ahb_to_flash16
AHB to 16-bit flash interface
cmsdk_ahb_to_sram
AHB to SRAM interface
cmsdk_ahb_downsizer
AHB downsizer
cmsdk_ahb_to_ahb_apb_async
AHB to AHB and APB asynchronous bridge
cmsdk_ahb_to_ahb_sync_down
AHB to AHB sync-down bridge
cmsdk_ahb_to_ahb_sync
AHB to AHB synchronous bridge
cmsdk_ahb_to_ahb_sync_up
AHB to AHB sync-up bridge
cmsdk_ahb_to_apb_async
AHB to APB asynchronous bridge
cmsdk_ahb_to_apb
AHB to APB sync-down bridge
cmsdk_ahb_upsizer
AHB upsizer
cmsdk_apb3_eg_slave
APB3 example slave
cmsdk_apb4_eg_slave
APB4 example slave
cmsdk_apb_timer
APB timer
cmsdk_apb_uart
APB UART
cmsdk_apb_dualtimers
APB dual-input timers

IP-XACT descriptions
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. A-4
ID110117 Non-Confidential
The bus matrix IP-XACT is generated at the same time as the Verilog RTL. By default, the
generated IP-XACT files are located in the
busmatrix
directory. See Table A-2 for more
information.
cmsdk_apb_watchdog
APB watchdog
cmsdk_apb_slave_mux
APB slave multiplexer
cmsdk_apb_timeout_mon
APB timeout monitor
Component name Description
Table A-1 Location of the IP-XACT description file
Verilog module IP-XACT description file Description
<component_name>/verilog/<component_name>.v <component_name>/ipxact/<component_name>.xml
The IP-XACT
description of a
non-configurable
module.
<component_name>/verilog/<component_name>.v <component_name>/ipxact/<component_name>_configurable.xml
The IP-XACT
description of a
configurable
module.
Table A-2 Location of the generated IP-XACT files
File type Location
Verilog module
verilog/built/<component_name>/<component_name>.v
IP-XACT description file
ipxact/built/<component_name>/<component_name>.xml

IP-XACT descriptions
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. A-5
ID110117 Non-Confidential
A.3 Generating the IP-XACT description
This section describes how you can generate an IP-XACT description that is based on your
chosen configuration of the IP.
To generate an IP-XACT description, you must run the
Build_Component
script on an
unconfigured, source IP-XACT file, and supply the Verilog configuration parameters that are
described in the following sections:
Note
•The
Build_Component
script uses the
IPXACT_lib.pm
module. The script requires Perl
utilities and Perl XML libraries. The PERL5LIB environment variable must be updated
to include the path to the
IPXACT_lib.pm
module.
• For more information about the script, see the
README
file in
logical/shared/tools/bin
.
You can run the
Build_Component
script from the
logical/shared/tools/bin directory
:
cd <path>/logical/shared/tools/bin
Run
Build_Component
, supplying the name of the IP-XACT file and the configuration file.
For example:
Build_Component -unconfigured_xml
../../../<component_name>/ipxact/<component_name>_configurable.xml -moduletop <name>
-config <config_file> -keepdepends -override
The configuration file must be in the format:
parameter_name=parameter_value
The
Build_Component
script generates the configured IP-XACT file in the same directory as the
unconfigured source IP-XACT file. The default name for the configured IP-XACT file is the
name of the top-level Verilog module. In this case, the default name is
<component_name>.xml
.
The name can be overridden using the
-moduletop <name>
option.
All this information can also be found in the file
logical/shared/tools/bin/README
.
A.3.1 Bus matrix generator script
The bus matrix uses its own generator as described in Bus matrix configurability on page 5-3.
To generate the IP-XACT file, add the command line switch
-ipxact
when calling
bin/BuildBusmatrix.pl
.
Note
When running the script, two IP-XACT files are generated, one for the AHB-Lite wrapper and
one for the AHB2 component. Either file can be used depending on whether you use the
wrapper. The two IP-XACT files are independent of each other.
Component Configuration parameters described throughout:
AHB-Lite Chapter 3 Basic AHB-Lite components
APB Chapter 4 APB components
Advanced AHB-Lite Chapter 5 Advanced AHB-Lite components

IP-XACT descriptions
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. A-6
ID110117 Non-Confidential
A.4 Using the IP-XACT description
You can use the generated IP-XACT descriptions with IP-XACT aware EDA tools for RTL
stitching. The IP-XACT descriptions refer to bus definition files to describe the module
interfaces. Copies of the Arm bus definition files are in the
shared/ipxact/busdefs
directory.
Figure A-1shows the structure of the IP-XACT
busdefs
directory.
Figure A-1 IP-XACT
busdefs
directory structure
busdefs/
amba.com/
AMBA3/
AHBLiteInitiator/
AHBLiteTarget/
ABP/
AMBA4/
ABP4/
AMBA5/
AHB5Initiator/
AHB5Target/
arm.com/
generic/
DynamicConfig/
GPIO/
interrupt/
RESET/
SRAM_sp_activehigh/
SRAM_sp_basic/
Staticcfg/
Status/

ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. B-1
ID110117 Non-Confidential
Appendix B
Modification rights for supplied components
Depending on the license you signed with Arm, you can modify the function of the following
components beyond the normal configuration options:
Caution
If you modify the function of any of the components, you are responsible for validation of the
resulting RTL and the function of the modified component.
Table B-1 Modification rights for components
Module Additional modification
AHB bus matrix Arbitration scheme
AHB example slave Fully modifiable
AHB master multiplexer Arbitration scheme
APB3 example slave Fully modifiable
APB4 example slave Fully modifiable
Example systems and testbenches Fully modifiable
AHB bit-band wrapper None
AHB default slave None
AHB GPIO None

Modification rights for supplied components
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. B-2
ID110117 Non-Confidential
AHB master multiplexer None
AHB slave multiplexer None
AHB timeout monitor None
AHB to external SRAM interface None
AHB to 16/32-bit flash interfaces None
AHB to SRAM interface None
AHB FRBM None
AHB downsizer None
AHB to AHB and APB
asynchronous bridge None
AHB to AHB sync-down bridge None
AHB to AHB synchronous bridge None
AHB to AHB sync-up bridge None
AHB to APB asynchronous bridge None
AHB to APB sync-down bridge None
AHB upsizer None
APB timer None
APB UART None
APB dual-input timers None
APB watchdog None
APB slave multiplexer None
APB timeout monitor None
Table B-1 Modification rights for components (continued)
Module Additional modification

ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. C-1
ID110117 Non-Confidential
Appendix C
Revisions
This appendix describes the technical changes between released issues of this book.
Table C-1 Differences between issue A and issue B
Change Location Affects
Added content • Method of using AHB upsizer on page 5-14
•Using AHB downsizer on page 5-23
•Cross-clock domain handling in AHB to APB asynchronous bridge on page 5-26
•Using AHB to AHB synchronous bridge on page 5-31
•Using the AHB to AHB sync-down bridge on page 5-33
•Optional write buffer on page 5-34
•Synthesizing the AHB to AHB sync-down bridge on page 5-35.
•Using the AHB to AHB sync-up bridge on page 5-38
•Synthesizing the AHB to AHB sync-up bridge on page 5-39.
r0p0
Table C-2 Differences between issue B and issue C
Change Location Affects
Updated references to Cortex-M0 to include Cortex-M0+ Throughout document r1p0
All module names prefixed with
cmsdk_
Throughout document r1p0
Changed RealView Development Suite (RVDS) to
Development Suite (DS-5) and CodeSourcery g++ to
ARM GCC
Throughout document r1p0

Revisions
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. C-2
ID110117 Non-Confidential
AHB downsizer HRESP signal width changed to 1-bit. Throughout document r1p0
HREADYOUTM signal name changed to HREADYM. Throughout document r1p0
Updated Peripheral ID Register 2 reset value to
0x1B
Throughout document r1p0
Added I/O port GPIO for Cortex-M0+ processor Figure 1-2 on page 1-3
AHB GPIO on page 3-11
r1p0
Extensively revised chapter to reduce duplication Chapter 2 Functional description r1p0
Updated OVL assertions Use of OVL on page 2-6 r1p0
Updated signal names Figure 3-2 on page 3-3
Figure 3-3 on page 3-6
Figure 3-5 on page 3-9.
r1p0
AHB slave multiplexer changed from eight ports to ten
ports AHB slave multiplexer on page 3-6 r1p0
Added AHB master multiplexer limitations Limitations on page 3-10 r1p0
Updated AHB to APB sync-down bridge description AHB to APB sync-down bridge on page 3-17 r1p0
Added AHB to Flash16 interface model AHB to flash interface modules on page 3-21 r1p0
Updated timeout monitor description AHB timeout monitor on page 3-24 r1p0
Updated bit-band description AHB bit-band wrapper on page 3-30 r1p0
Added bit-band limitations Limitations on page 3-33 r1p0
Updated APB slave module diagrams APB example slaves on page 4-2 r1p0
Updated APB UART characteristics Table 4-6 on page 4-9 r1p0
Added APB dual-input timer characteristics Table 4-8 on page 4-11 r1p0
Added APB watchdog characteristics Table 4-16 on page 4-20 r1p0
Updated APB subsystem diagram Figure 4-23 on page 4-27 r1p0
Updated clock and reset signal descriptions Clock and reset signals on page 4-30 r1p0
Updated bus matrix description AHB bus matrix on page 5-2 r1p0
Added AHB to AHB and APB asynchronous bridge AHB to AHB and APB asynchronous bridge on page 5-27 r1p0
Added component dependency descriptions AHB GPIO on page 3-11
AHB to AHB synchronous bridge on page 5-30
AHB to AHB sync-down bridge on page 5-32
AHB to AHB sync-up bridge on page 5-37
r1p0
Added
ahb_rom.v
configuration for 16-bit flash ROM Table 6-2 on page 6-2 and Figure 6-5 on page 6-5 r1p0
Added 16-bit flash ROM behavioral model 16-bit flash ROM behavioral model on page 6-12 r1p0
Updated FPGA SRAM description FPGA SRAM synthesizable model on page 6-13 r1p0
Table C-2 Differences between issue B and issue C (continued)
Change Location Affects

Revisions
ARM DDI 0479D Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. C-3
ID110117 Non-Confidential
Removed AHB protocol checker Chapter 7 Verification components r1p0
Updated AHB-Lite protocol checker description AHB-Lite protocol checker on page 7-2 r1p0
Updated APB protocol checker description APB protocol checker on page 7-5 r1p0
Table C-3 Differences between issue C and issue D
Change Location Affects
Updated RELOAD description in APB timer memory
map. Programmers model on page 4-6 All revisions
Added a limitations section to the AHB downsizer. Limitations on page 5-18 r1p1
Updated exceptions for HTRANS control signal for SEQ Table 5-6 on page 5-21 r1p1
Added m_need_unlock_q signal and added note.about
false paths. Clock domain crossing on page 5-29 r1p1
Added notes about RAMs Behavioral SRAM model with AHB interface on page 6-10 All revisions
Added an appendix for IP-XACT Appendix A IP-XACT descriptions r1p1
Added an appendix for the modification rights Appendix B Modification rights for supplied components r1p1
Table C-2 Differences between issue B and issue C (continued)
Change Location Affects
