CubeADCS Cube ADCS Reference Manual [V3.10]
User Manual:
Open the PDF directly: View PDF ![]() .
.
Page Count: 166 [warning: Documents this large are best viewed by clicking the View PDF Link!]
CubeADCS
The complete ADCS solution
Reference Manual
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 2
Document
CubeADCS Reference Manual
Version
3.10
Domain
Public
Date modified
29 March 2018
Approved by
Name:
Mike-Alec Kearney
Signature:
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 3
Document Version History
Version
Responsible
person(s)
Pages
Date
Description of change
3.0
MK
ALL
20/03/2017
V3 First draft
3.02
WHS
ALL
28/06/2017
V3 Second draft
3.03
MK
ALL
13/07/2017
V3 Third draft (Minor formatting)
3.04
MK
ALL
27/07/2017
Accept/Reject team changes
3.05
HWJ
24, 28, 67,
78, 84 - 88,
106-111,
140
17/10/2017
Added default configuration
telecommand and corrected download
package size. Added scrub settings tlm
and tcm. Updated ADCS state,
Communication status tlm packets
3.06
WHS
31,32
16/01/2018
Update Control Modes
3.07
CJG + HWJ
24, 26, 68,
84 - 88
09/02/2018
Removed command 70, added JPG
conversion telecommand and telemetry
and the CubeACP status telemetry
3.08
CJG
21
12/02/2018
Added a description for SPI
3.09
WHS
21/02/2018
Corrections to magnetometer selection
TC and TLM enums. Cam1 and Cam2
designations.
3.10
LV
21 - 166
9/03/2018
Removed commands and telemetries
specific to the bootloader
Added links to tables
Added ‘save unix time to flash’
command and telemetry pair. Updated
all telecommand and telementry
definitions from node definition XML
documents
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 4
List of Acronyms/Abbreviations
ACP ADCS Control Program
ADCS Attitude Determination and Control System
CSS Coarse Sun Sensor
ESD Electrostatic Discharge
I2C Inter-Integrated Circuit
MCU Microcontroller Unit
MEMS Microelectromechanical System
OBC Onboard Computer
PCB Printed Circuit Board
RTC Real-Time Clock
SBC Satellite Body Coordinate
SPI Serial Peripheral Interface
TC Telecommand
TLM Telemetry
UART Universal Asynchronous Receiver/Transmitter
Relevant reference documents
This document is to be used in combination with the following documents
Reference
Document name
Document version
Ref 1
CubeADCS - ICD
V3.0 or higher
Ref 2
CubeADCS – User Manual
V3.0 or higher
Relevant CubeACP version
This document serves as reference to the CubeACP with the following version numbers
Version
Software version
3.11
Node type identifier
10
Interface version
3

Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 5
Table of Contents
1. Introduction ................................................................................................................... 6
2. ADCS Hardware ............................................................................................................. 7
2.1 Sensor accuracies ................................................................................................................................... 7
2.2 ADCS Hardware Stack .......................................................................................................................... 7
2.3 CubeComputer (ADCS OBC) .............................................................................................................. 8
2.4 CubeControl ............................................................................................................................................. 9
2.5 CubeWheels .......................................................................................................................................... 12
2.6 CubeSense Module ............................................................................................................................ 12
3. Example ADCS Simulation .......................................................................................... 14
3.1 Control Stage 1 .................................................................................................................................... 15
3.2 Control Stage 2 .................................................................................................................................... 16
3.3 Control Stage 3 .................................................................................................................................... 18
4. Software Interface ....................................................................................................... 20
4.1 UART ........................................................................................................................................................ 20
4.2 I2C.............................................................................................................................................................. 20
4.3 CAN .......................................................................................................................................................... 21
4.4 SPI ............................................................................................................................................................. 21
4.5 Telecommands and Telemetries ................................................................................................... 21

Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 6
1. Introduction
This document serves as source of information to refer to when using the User Manual,
Commissioning Manual, and other CubeADCS documentation. The document contains
complete listings of TCs and TLMs, communications examples, and other reference examples
to assist in designing a system which will interface with the ADCS.
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 7
2. ADCS Hardware
This section provides an overview of the hardware that is contained within the ADCS unit.
2.1 Sensor accuracies
The accuracies and strengths of the sensors and actuators contained in the ADCS are shown
in the table below.
Table 1 - ADCS Sensors and Actuators
Sensors & Actuators
Type
Range/FOV
Accuracy (RMS)
Magnetometer
3-axis MagR
± 60 μT
< 40 nT
Sun Sensor
Nadir Sensor
Coarse Sun Sensor
2-axis CMOS
2-axis CMOS
6 Photodiodes
Hemisphere
± 45⁰
Full Sphere
< 0.2°
< 0.2°
< 10°
Rate sensor
3-axis MEMS
± 20 ⁰/sec
< 0.01 ⁰/sec
Star Tracker
2-axis APS
52⁰ x 27⁰
< 0.01⁰ bore sight
< 0.03⁰ rotate
CubeWheel Small
BLDC Motor
± 1.7 mNms
± 0.2 mNm
< 0.0004 mNms
< 0.001 mNm
Magnetorquer Rod
3-axis Ferro-magnetic coils
± 0.24 Am2
< 0.0012 Am2
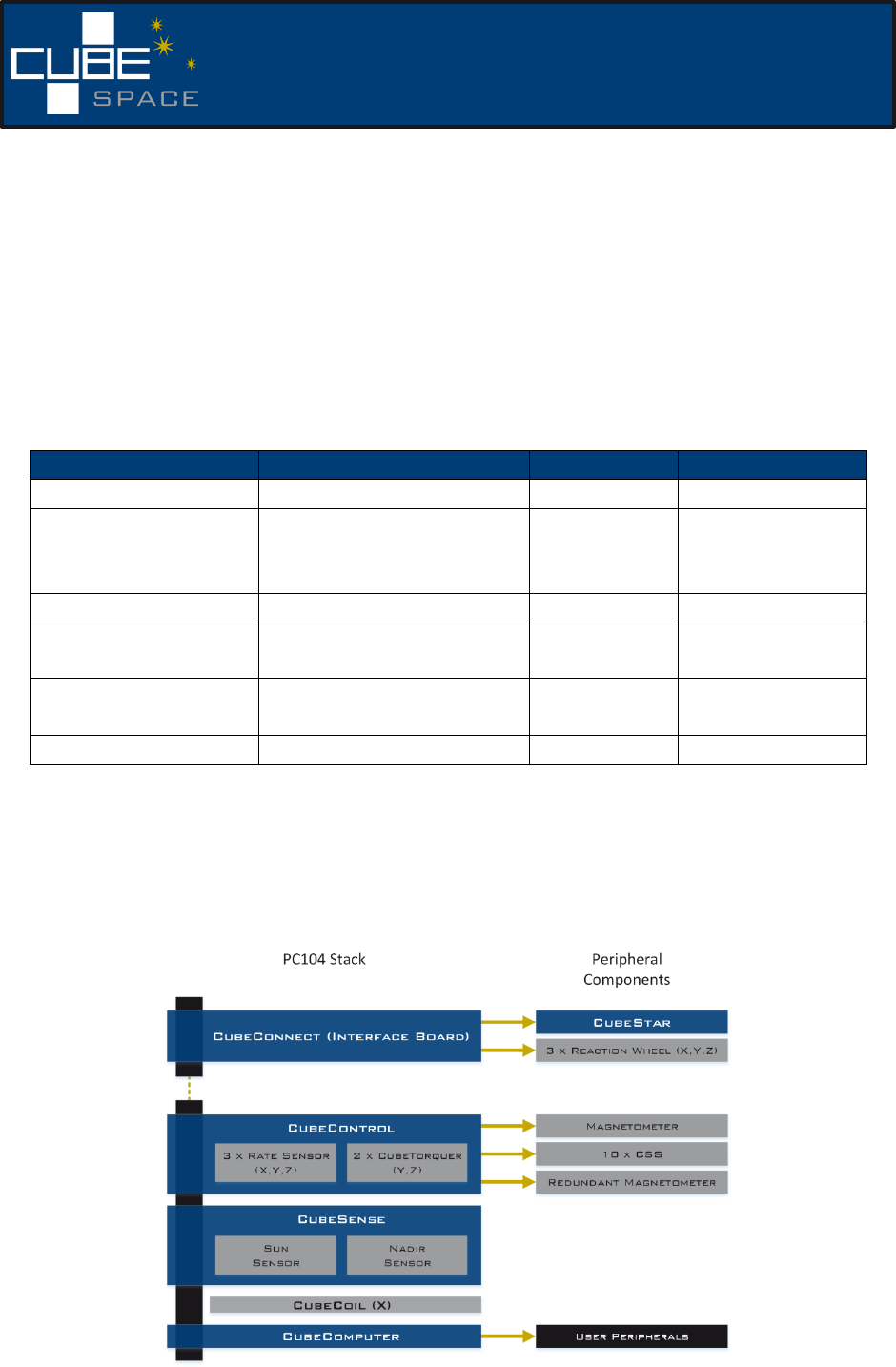
2.2 ADCS Hardware Stack
The ADCS hardware stack depends on the components and options that have been selected.
The figure below shows complete stack with all of the ADCS components.
Figure 1 - ADCS stack
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 8
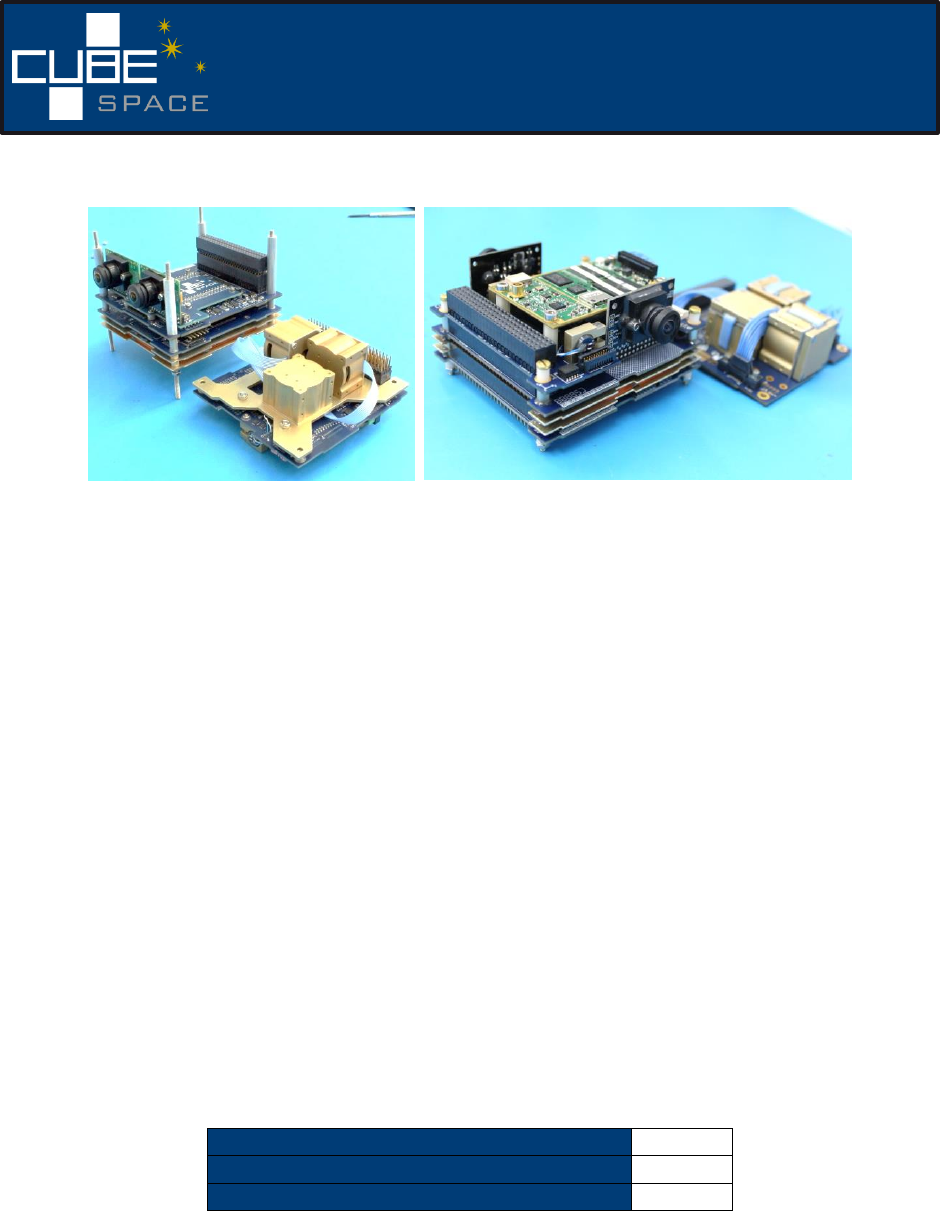
Figure 2 below shows examples of disassembled ADCS stacks.
Figure 2 - ADCS Hardware Stack Examples
2.3 CubeComputer (ADCS OBC)
The controlling unit in the ADCS stack is the CubeComputer OBC. CubeComputer uses a high
performance, low power 32-bit ARM Cortex-M3 based MCU with floating point support. The
computer was developed for ADCS processing and to be used as a general purpose OBC. The
OBC features the following functions as standard:
An integrated RTC and an internal and external watchdog
A 32 kB EEPROM is used for the firmware (boot loader)
A 4 MB Flash for the code and in-flight reprogramming
A FPGA for flow-through EDAC and SEU protection
Current monitoring for SEL (latch-up) protection and power cycling ability
A MicroSD card for 2 GB of data storage
I2C, CAN, UART interfaces to another OBC
The basic physical specifications of the board are shown below:
Table 2 – CubeComputer Physical Specifications
Mass
64g
Average power when running ADCS
120mW
Peak power when running ADCS
180mW
Figure 3 shows a photo of CubeComputer.
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 9
Figure 3 - CubeComputer V4.1
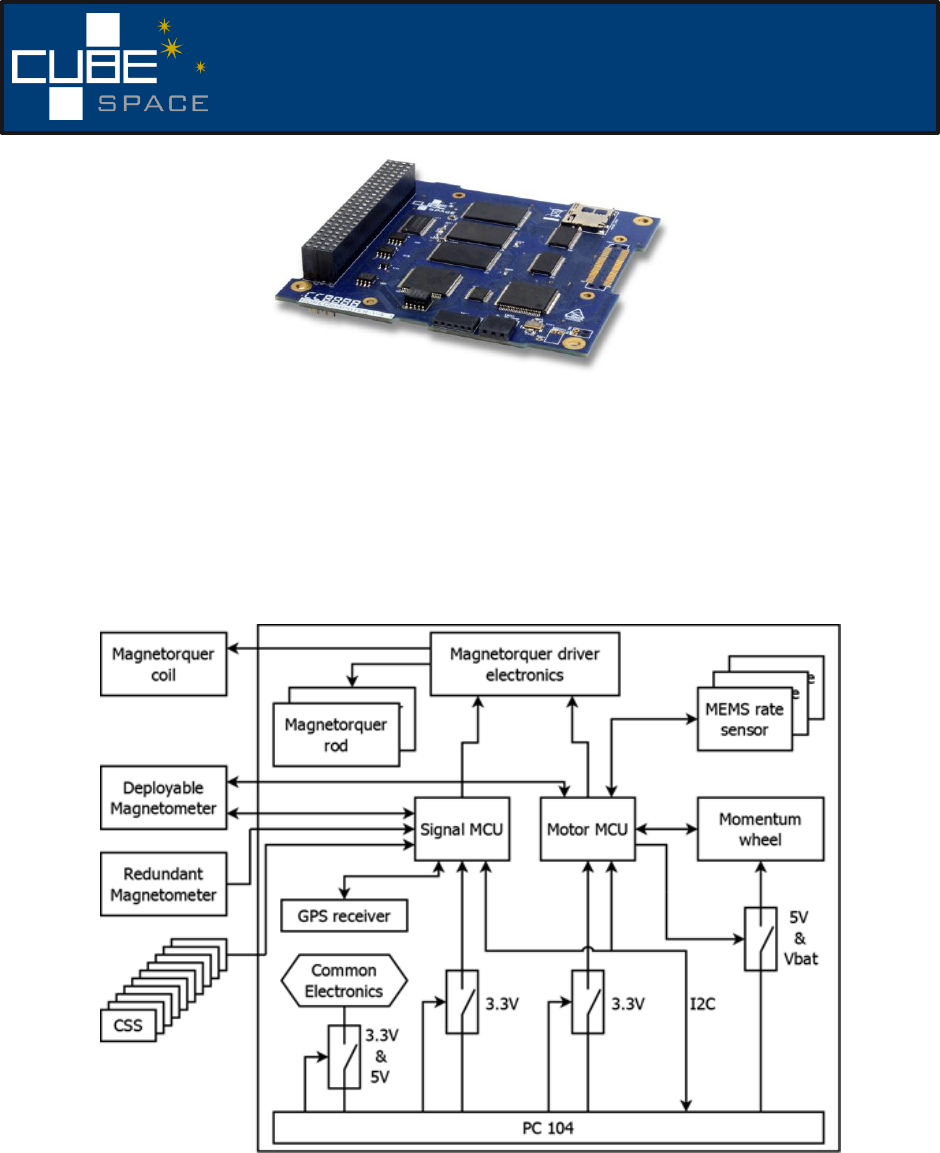
2.4 CubeControl
All attitude sensors and control actuators are accessed at 1 Hz by CubeComputer through the
ADCS actuator module called CubeControl. A block diagram of this module is shown in Figure
4 below.
Figure 4 - CubeControl hardware layout
The digital processing of the module consists of two low power micro-controllers with several
I/O ports, Analog to Digital inputs and a I2C communication bus. The I2C bus is connected to
CubeComputer and CubeSense. Figure 5 shows a photo of CubeControl.
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 10
Figure 5 - CubeControl Module
The peripheral sensors that connect to CubeControl are discussed below.
2.4.1 Coarse sun sensors:
Ten planar photodiodes are mounted on various outside facets of the CubeSat structure. The
short circuit current from these diodes is roughly proportional to the cosine of the sun vector
angle to the photodiode surface’s normal. A current to voltage amplifier is used for each
photodiode to obtain a signal large enough for a 10-bit analogue to digital (A/D) conversion.
The sun vector direction can then be extracted from the largest three photodiode
measurements – assuming no shadowing from any deployed satellite structures. The earth
albedo will contaminate the measurements and reduce the sun vector direction accuracy to a
RMS value of roughly 10⁰.
Figure 6 – Coarse Sun Sensors
2.4.2 Magnetometer:
A magneto-resistive 3-axis magnetic field sensor is used as magnetic sensor. A deployable and
redundant non-deployable option is offered. The deployment of the magnetometer is done
to reduce magnetic noise that the internal subsystems of the satellite may cause. The three
analogue output channels of the magnetometer are low pass filtered and 16-bit A/D converted
on the CubeControl module. Figure 7 shows the magnetometer in stowed and deployed
configuration, also shows the redundant version.
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 11
Figure 7 - Stowed, deployed and redundant magnetometer
2.4.3 MEMS Rate Sensor
Three MEMS type rate sensors are used to measure the X/Y/Z-spin rate during detumbling.
This sensor is mounted on the CubeControl module.
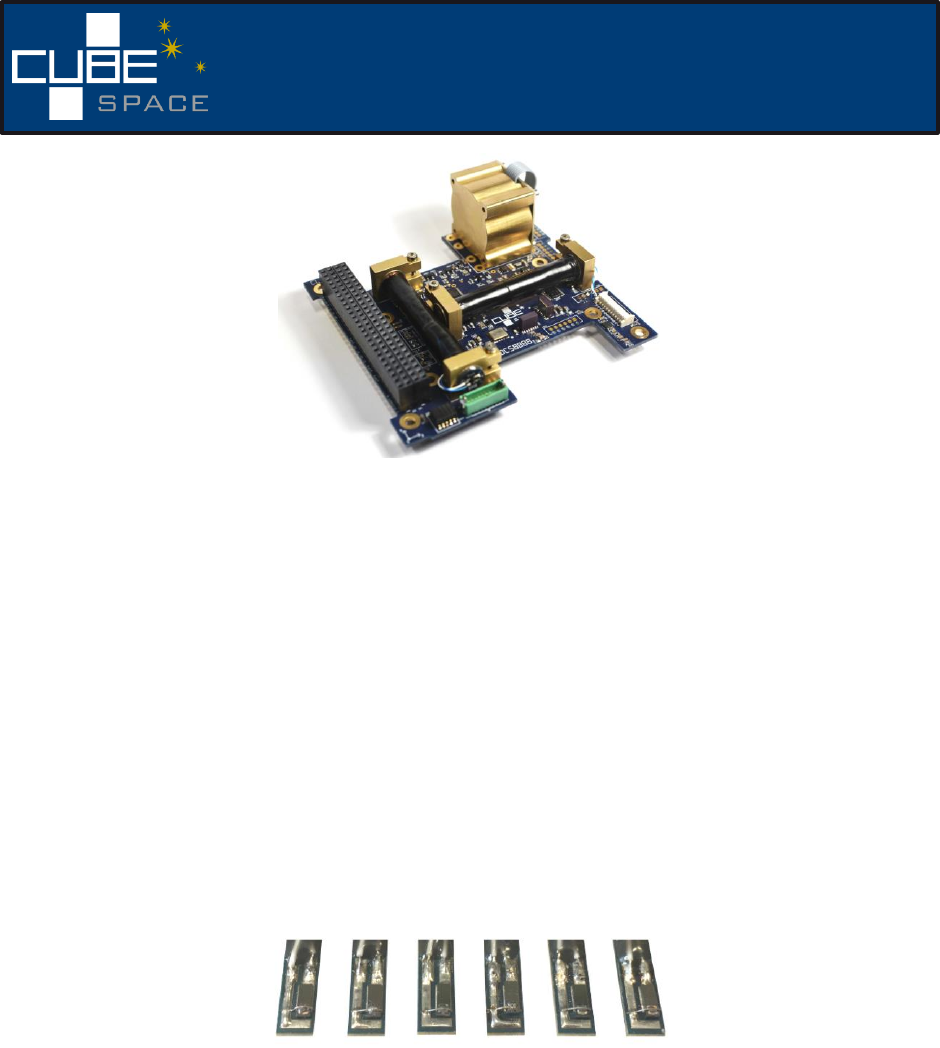
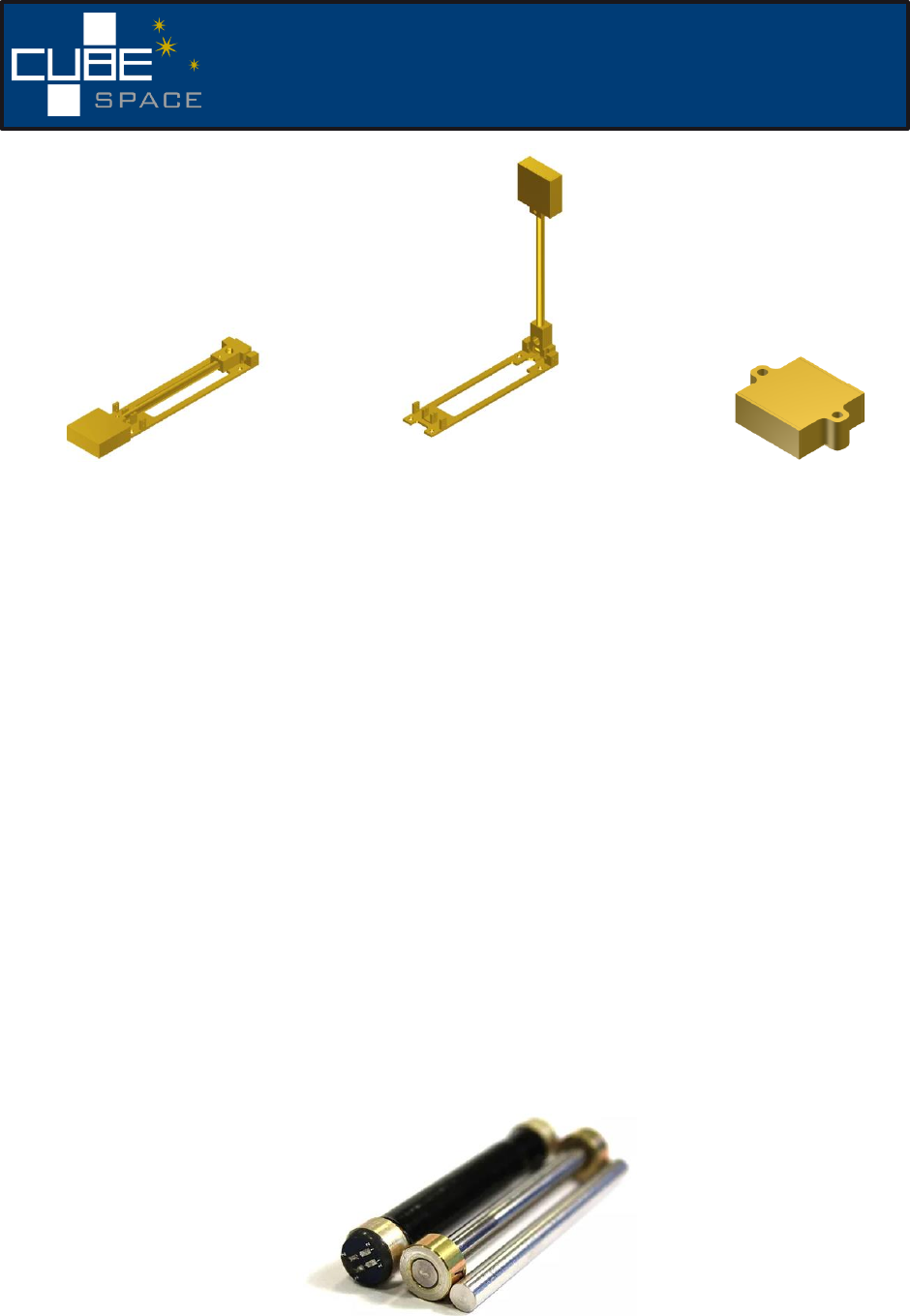
2.4.4 Magnetorquers (CubeTorquers & Cubecoil)
Two magnetorquer rods (CubeTorquers) are used to generate a controlled magnetic moment
in the Y- and Z-body axes. These rods are mounted on the CubeControl module. In the X-
body axis a torquer coil (CubeCoil) will be used. The coil is mounted between two PC104
modules. By pulse width modulation (PWM) of the magnetorquer currents a magnetic
moment vector in a desired direction and size can be obtained. Figure 8 shows the 28 gram
CubeTorquer of length 60 mm and 10 mm diameter. The torquers are manufactured using a
low remanence ferromagnetic core. A nominal magnetic moment of 0.2 Am2 is obtained using
2.1 V at 70 mA current (147 mW). This nominal value is obtained using a 42% PWM duty cycle
from the 5 V regulated bus.
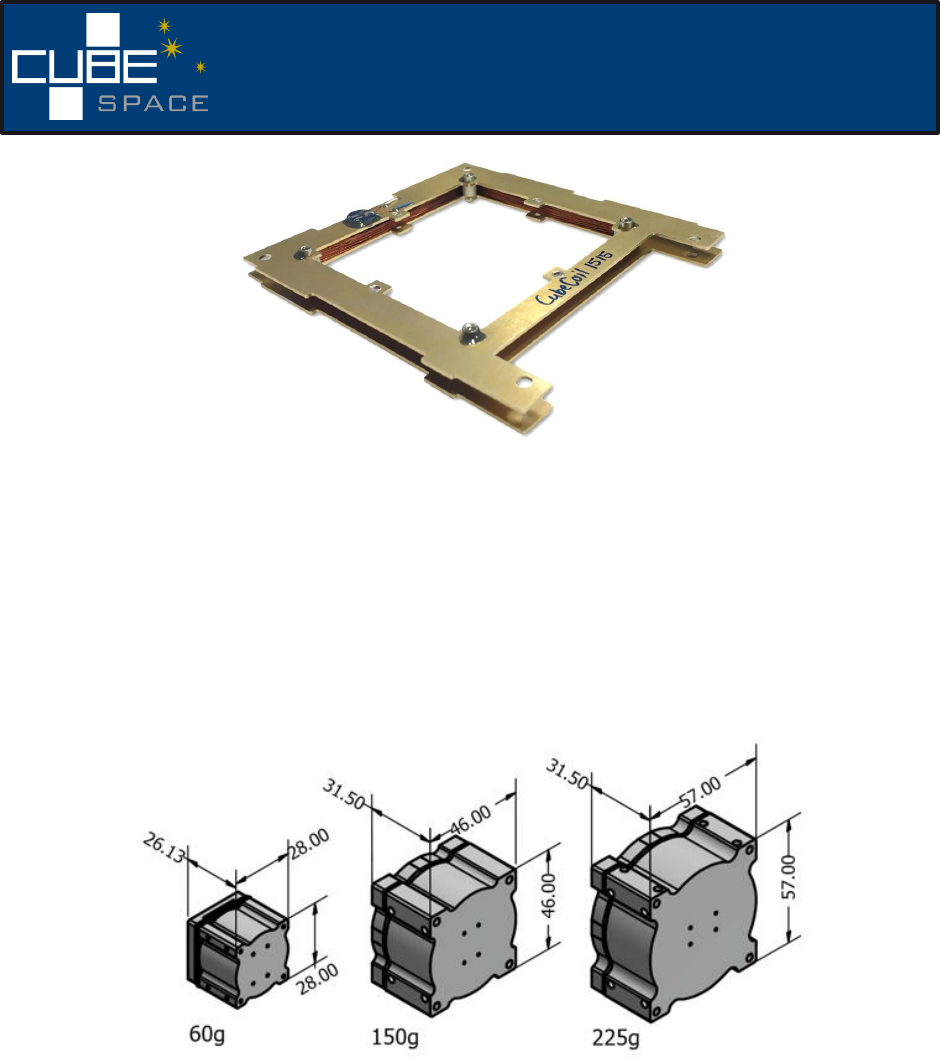
Figure 9 shows the CubeCoil of 46 gram with PC104 form factor. The maximum magnetic
moment is 0.13 Am2 from 5V at 310 mW.
Figure 8 - CubeTorquer Magnetorquer Rod
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 12
Figure 9 - CubeTorquer Magnetorquer Coil
2.5 CubeWheels
CubeWheels come in three sizes (Small, Medium and Large) as shown in Figure 10. These
wheels have integrated digital processing electronics as well as motor drivers. Reference
speeds are sent to the wheels by CubeComputer over the I2C bus. The wheels are either
mounted on a supplied CubeConnect board, or mounted by the user.
Figure 10: Small/Medium/Large CubeWheel Unit
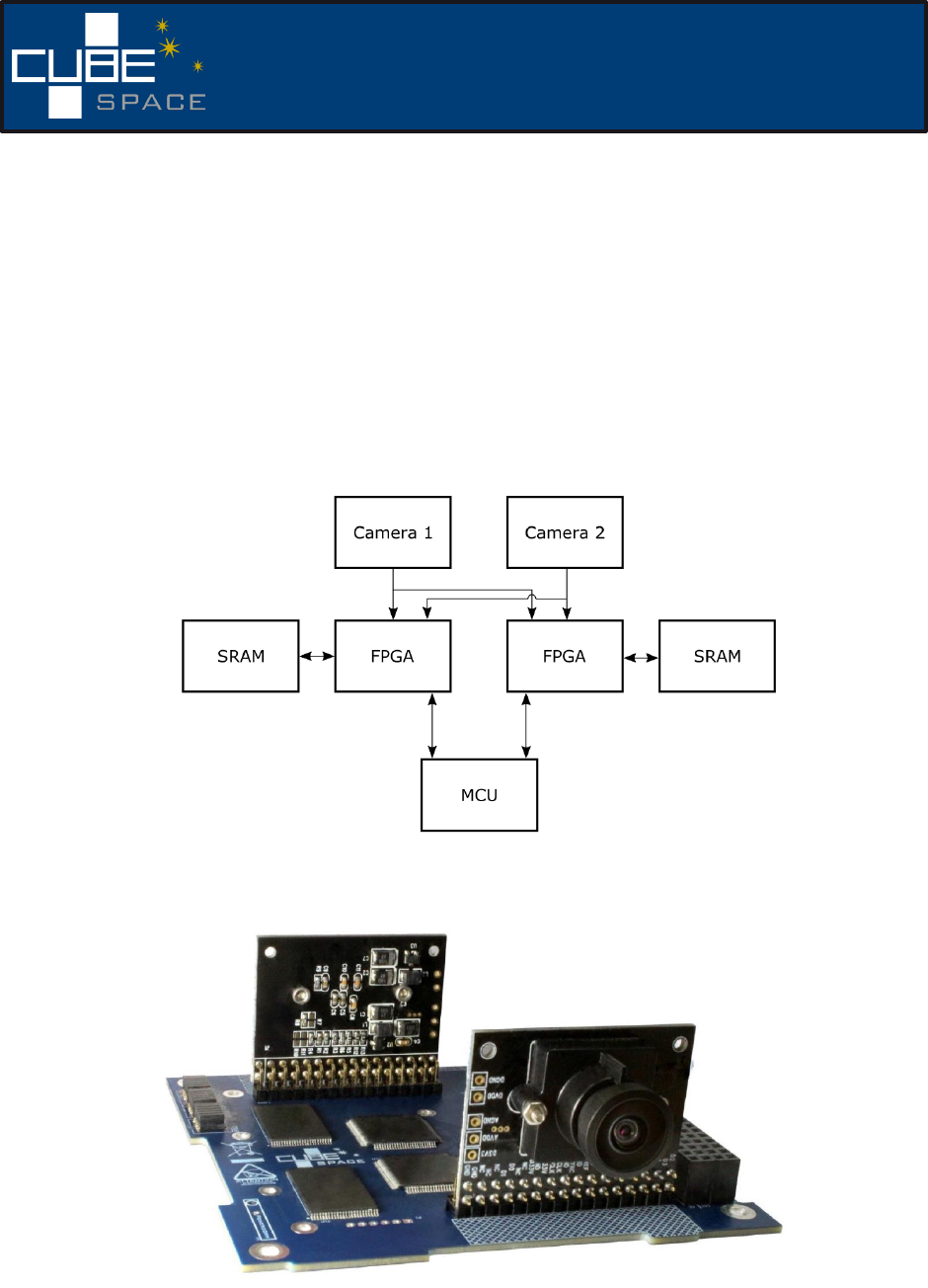
2.6 CubeSense Module
CubeSense is a dual camera sensor. CubeSense uses low power CMOS camera modules with
resolution of 1024x1024 pixels, fitted with a fisheye lens with an effective field of view of 180°.
Each of the two CubeSense cameras can be used as either a sun sensor or a nadir sensor. If
configured as a sun sensor, the camera is fitted with a neutral density filter to reduce the sun
intensity on the image sensor. Both the sun and Nadir sensors does image processing to
determine the center points of the sun and earth, and ultimately to determine accurate vectors
to these bodies.
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 13
CubeSense uses an FPGA to read images from the camera into SRAM. A low-power
microcontroller (MCU) then performs image processing on this stored image to determine the
sun and nadir vectors. Both cameras are connected to both FPGAs to provide redundancy in
case of failure of one of the FPGAs or SRAMs. CubeComputer reads the calculated vectors
from CubeSense at 1Hz. Figure 11 shows a block diagram of the hardware layout of
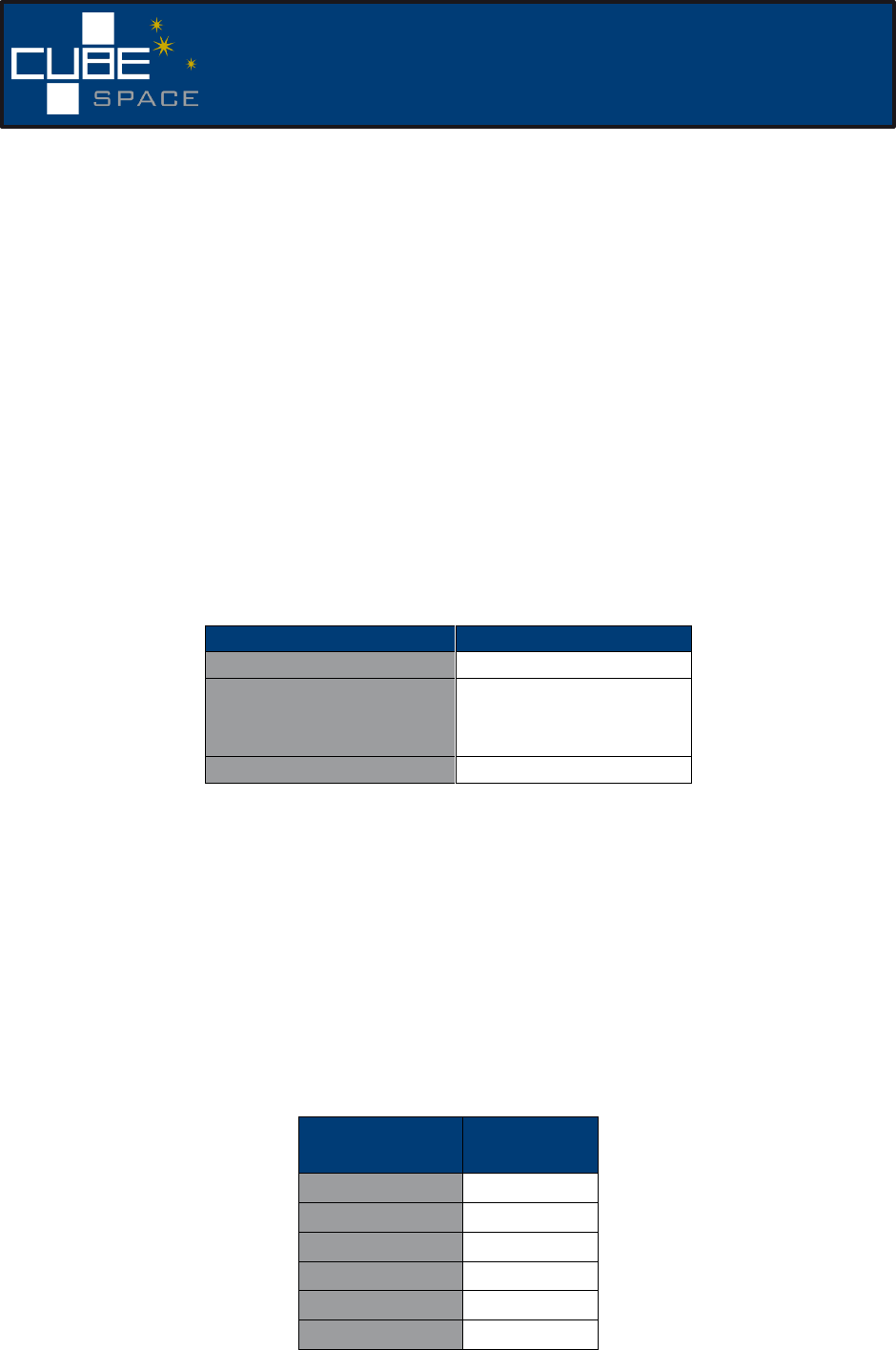
CubeSense. Figure 12 shows a picture of a typical CubeSense unit. The dual (sun and nadir)
cameras can be board-mounted with boresights in opposite or orthogonal directions, but can
also be mounted on a harness for custom placement.
Figure 11 - Block Diagram of CubeSense
Figure 12 - CubeSense Module with Sun and Nadir Cameras
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 14
3. Example ADCS Simulation
The orbit used for the simulation tests is a 500 km circular sun-synchronous orbit. The orbit
elements used are presented in Table 3. The simulation was executed using a sample period
of one second for all models, controllers and estimators. In practice the sampling period of
the onboard control loop can be increased to at least ten seconds, without any noticeable
degradation in performance (due to the slow open and closed loop dynamics). However, for
the simulation accuracy of the numeric integrators it was decided to implement the simulation
loop at 1 Hz.
An SGP4 model was used to simulate the satellite’s orbit in combination with an accurate sun
orbit model. The geomagnetic field was simulated using a 10th order IGRF spherical harmonic
model.
Table 3 - Orbit used for the 3U CubeSat ADCS Testing
Orbit Parameter
Value
Semi-major axis
6992 km
Initial Inclination
Orbital Period
Eccentricity
97.98⁰
5818 sec
0.0011
Sun-synchronicity
LTDN 10h25
All the ADCS sensors were modelled with realistic measurement noise and slow varying offset
errors where applicable. The ADCS actuators were modelled with their saturation and
quantization limits.
Table 4 shows the inertia tensor values of the 3U CubeSat as used in the simulations. The
remainder of this section will present graphical simulation results of the ADCS of a satellite
starting with typical initial conditions for the various control stages.
Table 4 - 3U CubeSat MOI & POI values
Inertia
Parameter
Value (kgm2)
Ixx
0.007
Iyy
0.04
Izz
0.038
Ixy
0.000097
Ixz
-0.000068
Iyz
0.000055
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 15
3.1 Control Stage 1
The satellite is detumbled using a BDot controller and MEMS rate sensor for direct
measurement of the body YB angular rate. The initial roll, pitch and yaw angles are 0⁰, 0⁰ and
45⁰ respectively. The initial angular rate vector (orbit referenced) is:
T
OB 0105
/
⁰/sec.
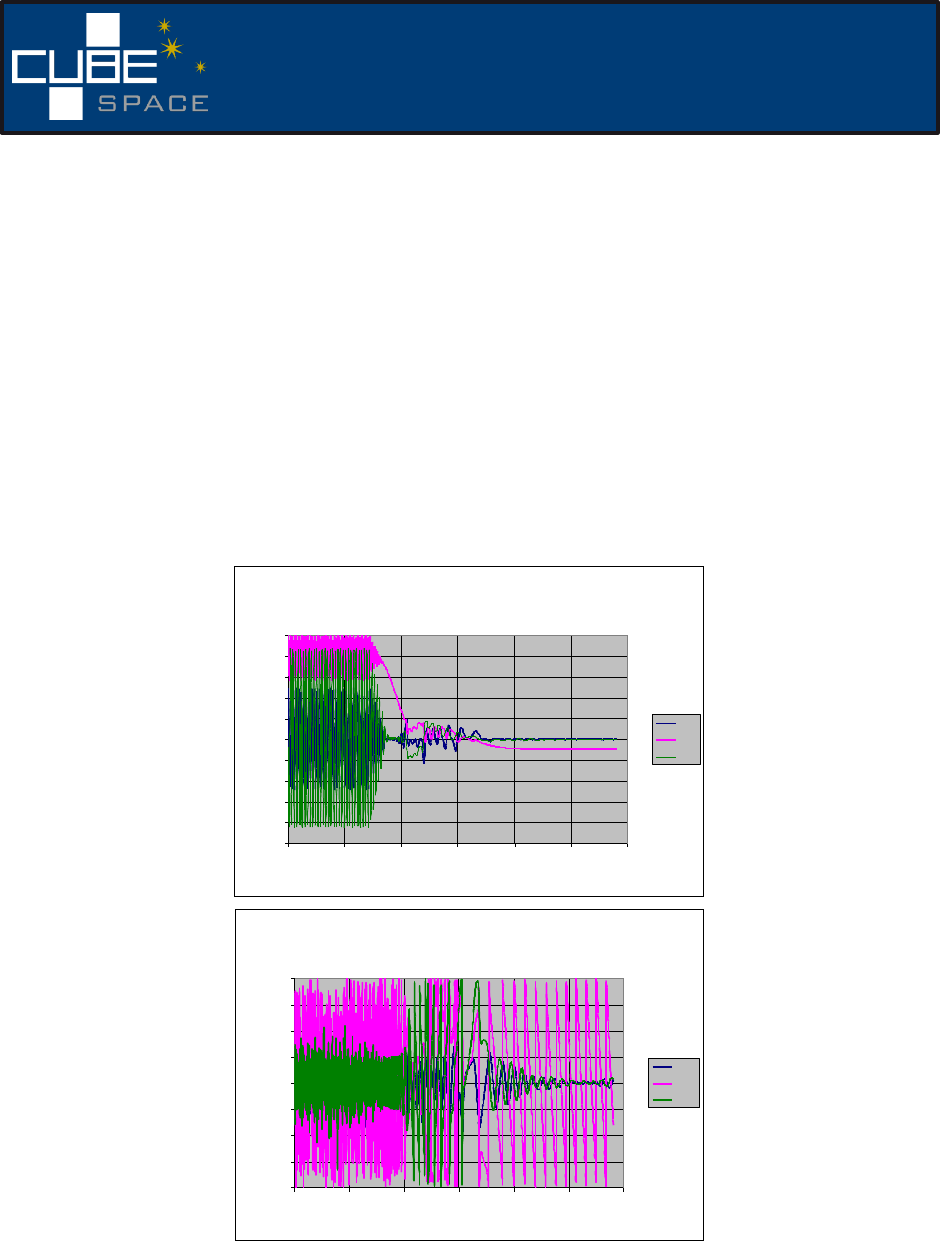
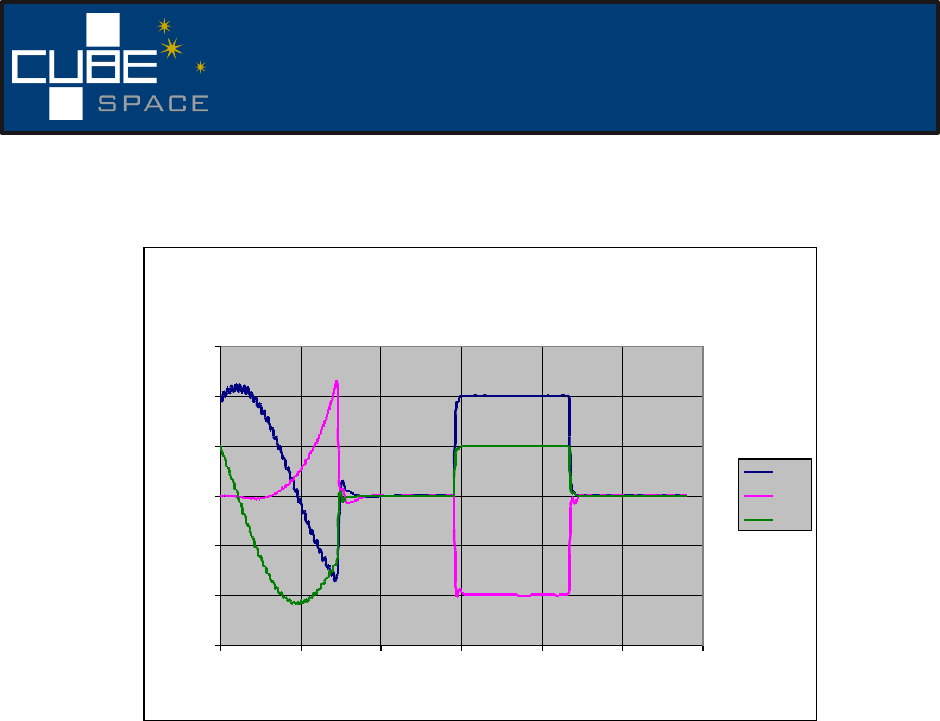
The magnetic controller is enabled after 0.5 orbits. Figure 13 shows the results of Control
Stage 1 from detumble into Y-Thomson stabilization. It is clear how the XB and ZB orbit
referenced (ORC) body rates are quickly dumped after the first controlled orbit. The YB body
rate is controlled to a reference rate of -2 ⁰/sec. The attitude angles are controlled finally into
an almost perfect pitch rotation for a Y-Thomson spin.
Figure 13: Detumbling to Y-Thomson in Control Stage 1
Detumbling to Y-Thomson
(MT-total = 3166 sec)
-10
-8
-6
-4
-2
0
2
4
6
8
10
02000 4000 6000 8000 10000 12000
Time (sec)
ORC Angular rates (deg/s)
Wxo
Wyo
Wzo
Detumbling to Y-Thomson
(MT-total = 3166 sec)
-180
-135
-90
-45
0
45
90
135
180
02000 4000 6000 8000 10000 12000
Time (sec)
RPY Attitude (deg)
Roll
Pitch
Yaw
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 16
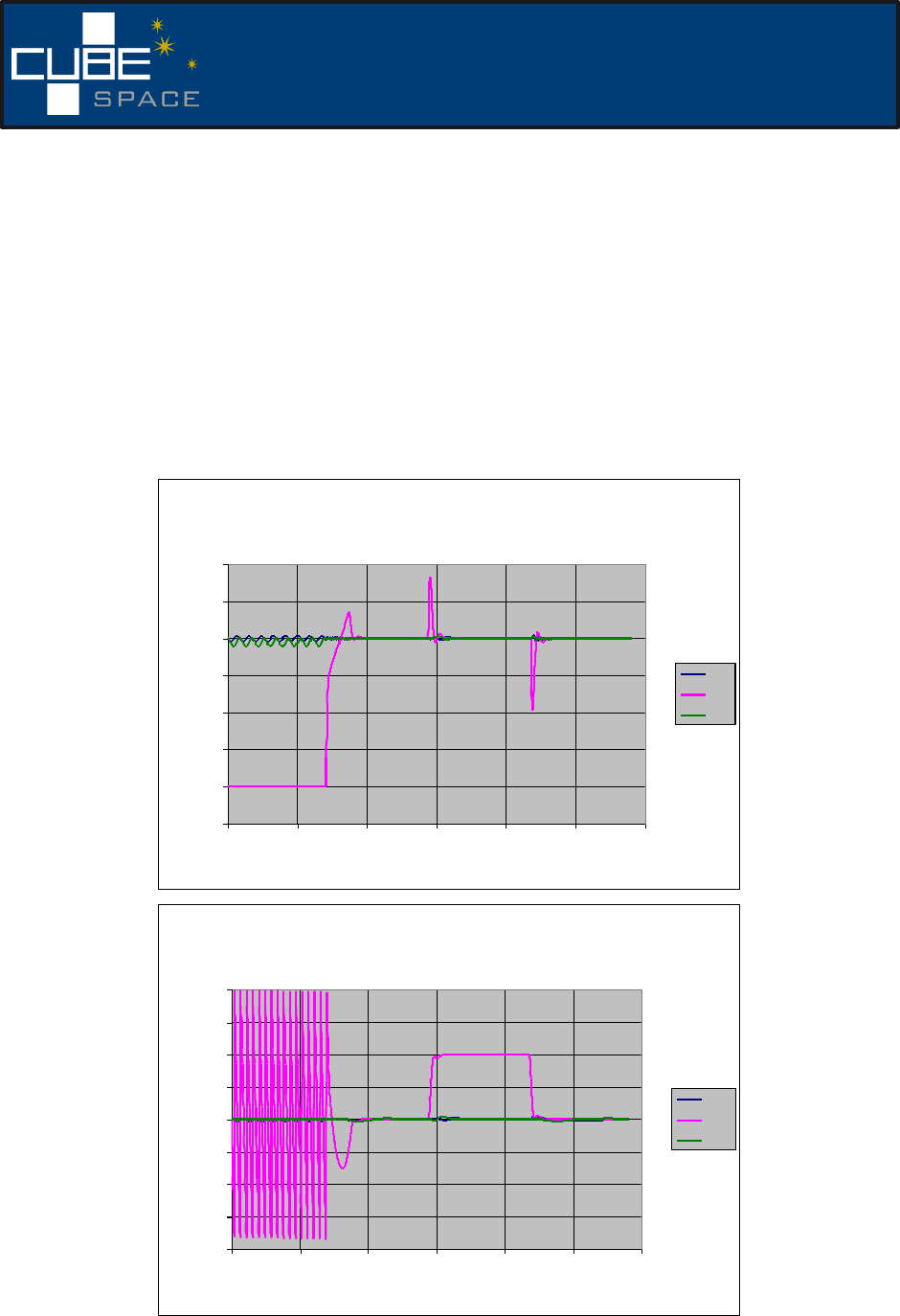
3.2 Control Stage 2
The next simulation starts in a Y-Thomson spin and is left for 0.5 orbits before the Y-wheel
momentum controller is enabled. The Y-wheel momentum is maintained at -0.001 Nms, using
a Cross-product magnetic controller. After 0.5 orbits the Y-wheel controller is also enabled to
3-axis stabilize the attitude angles to zero values (see Figure 14). A pitch attitude maneuver
to +90⁰ and back to 0⁰ can also be seen. These controllers make use of the estimated rate and
quaternion values of the EKF estimator, using only magnetometer measurements and the
CubeSense sensor for sun and nadir measurement vectors, the latter sensor can only supply
measurements during the sunlit part of an orbit.
Figure 14: Y-Thomson to Y-Momentum wheel in Control Stage 2
Y-Thomson to Y-Wheel control
(MT-total = 373 sec)
-2.5
-2
-1.5
-1
-0.5
0
0.5
1
02000 4000 6000 8000 10000 12000
Time (sec)
ORC Angular rates (deg/s)
Wxo
Wyo
Wzo
Y-Thomson to Y-Wheel control
(MT-total = 373 sec)
-180
-135
-90
-45
0
45
90
135
180
02000 4000 6000 8000 10000 12000
Time (sec)
RPY Attitude (deg)
Roll
Pitch
Yaw
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 17
The last simulation for Control Stage 2 presents the nutation damping performance and the
pitch tracking performance using only the Y-wheel and the Cross-Product magnetic controller.
The initial roll, pitch and yaw angles are 10⁰, 0⁰ and 5⁰ respectively and the controllers are only
enabled after 0.5 orbits. The roll and yaw nutation can clearly be seen in Figure 15 for the Y-
wheel momentum of -0.001 Nms. When the controllers are enabled, the nutation angles are
damped within 0.5 orbits and the pitch angle controlled to zero. Figure 18 also shows a 10⁰
pitch rotation maneuver. The maximum attitude RMS errors in the sunlit part of the orbit is
less than 0.4⁰ and in eclipse less than 1⁰.
Figure 15: Y-Momentum wheel control performance in Control Stage 2
Y-Wheel control
(MT-total = 154 sec)
-15
-10
-5
0
5
10
15
02000 4000 6000 8000 10000 12000
Time (sec)
RPY Attitude (deg)
Roll
Pitch
Yaw
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 18
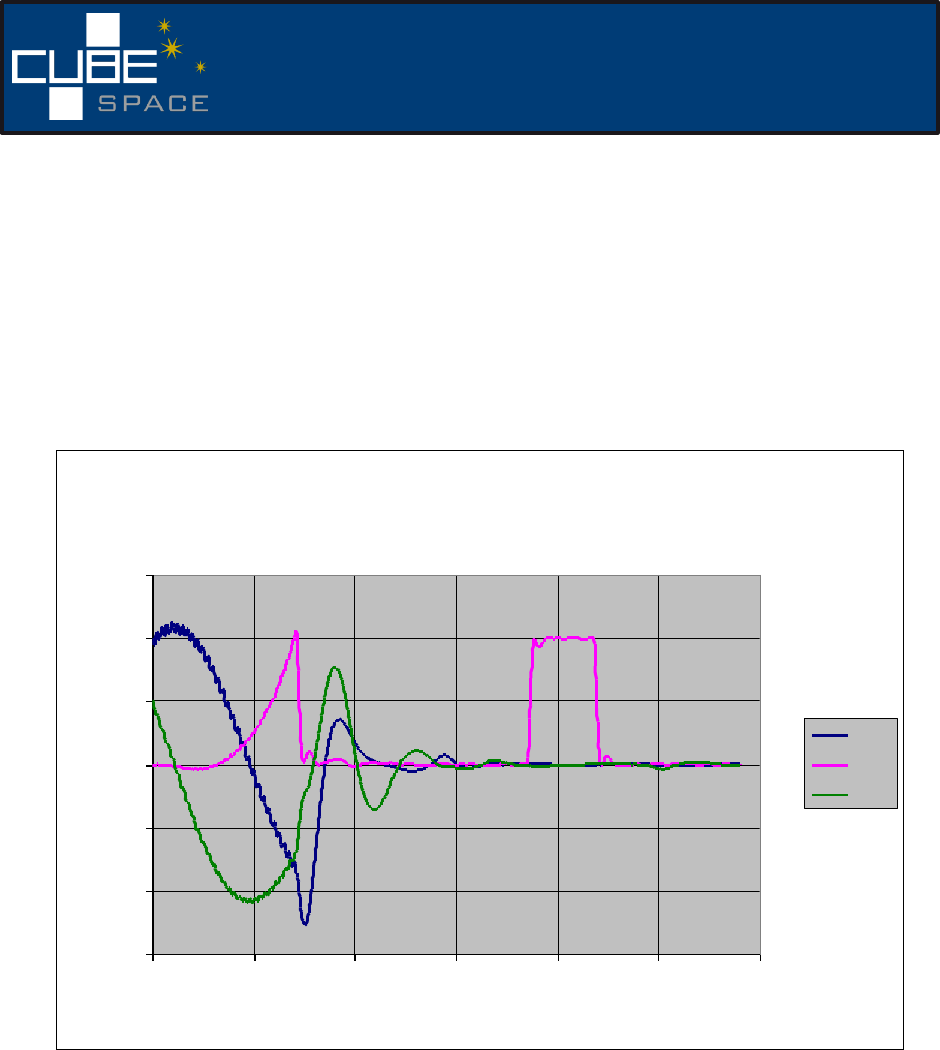
3.3 Control Stage 3
The last couple of simulations show the performance that can be expected with the zero bias
3-axis quaternion feedback reaction wheel controller and the momentum dumping Cross-
Product magnetic controller. The initial roll, pitch and yaw angles are 10⁰, 0⁰ and 5⁰
respectively and the Y-wheel also has an initial angular momentum of -0.001 Nms. The
controllers are enabled after 0.5 orbits (same as previously). Figure 16 shows the performance
when the 3-axis reaction wheel controller is enabled. The roll, pitch and yaw angles are quickly
controlled to below 2⁰ within the 60 second settling time of the controller. The Y-wheel
momentum is dumped to zero by the magnetic controller within 30 minutes.
Figure 16: Reaction wheel control performance in Control Stage 3 without CubeStar
The reason for the initial RPY attitude deviations after the controllers are enabled, has to do
with EKF estimation errors caused by eclipse (when the controllers are enabled there is no
availability of sun and nadir vector measurements) and the Y-wheel momentum that needs to
be dumped. After the end of eclipse (around 4800 seconds) the attitude RMS errors quickly
reduce to about 0.25⁰ in the sunlit part of the orbit and 1⁰ in eclipse). Figure 16 also shows a
10⁰ roll, -10⁰ pitch and 5⁰ yaw rotation maneuver and thereafter a maneuver back to zero
attitude at 8500 seconds.
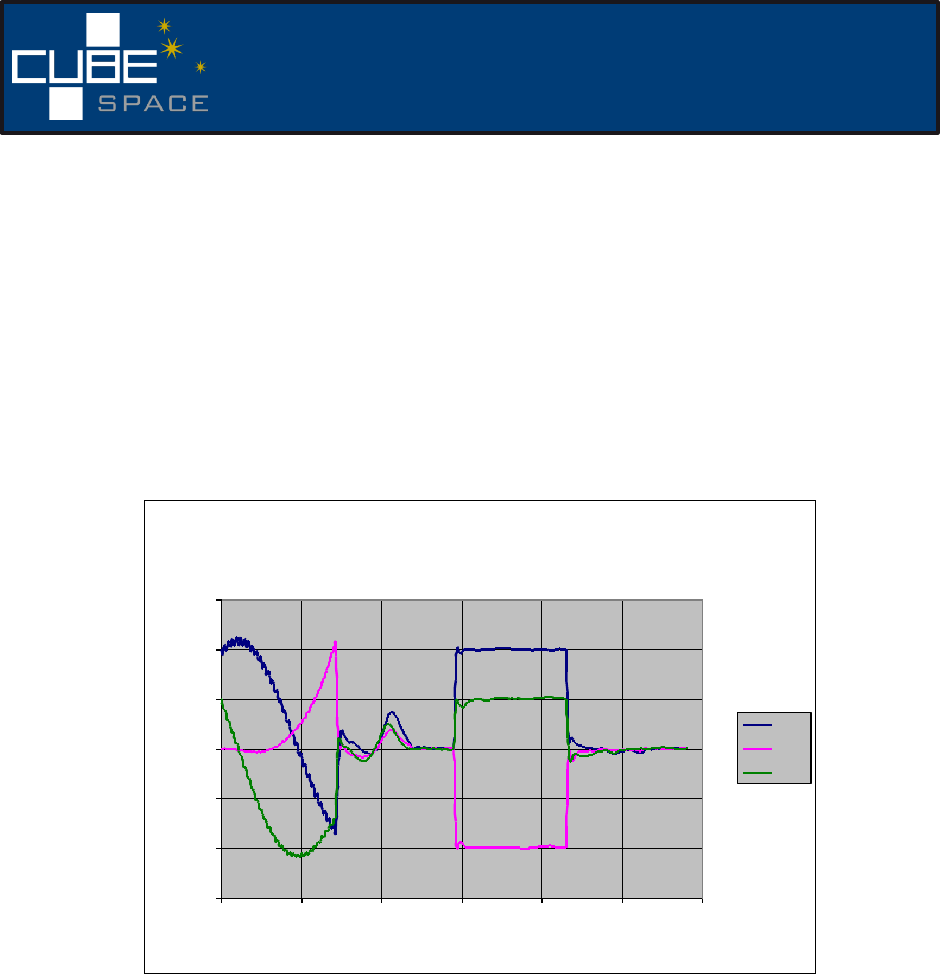
Figure 17 shows the performance when the 3-axis reaction wheel controller is enabled with
CubeStar vector measurements included in the EKF. The roll, pitch and yaw angles are quickly
controlled to below 1⁰ within the 60 second settling time of the controller. The Y-wheel
momentum is dumped to zero by the magnetic controller within 30 minutes. Thereafter the
RPY attitude RMS errors are reduced to below 0.02⁰. Figure 17 also shows a 10⁰ roll, -10⁰ pitch
3-Axis Reaction Wheel control
(MT-total = 155 sec)
-15
-10
-5
0
5
10
15
02000 4000 6000 8000 10000 12000
Time (sec)
RPY Attitude (deg)
Roll
Pitch
Yaw
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 19
and 5⁰ yaw rotation maneuver and thereafter a maneuver back to zero attitude at 8500
seconds.
Figure 17: Reaction wheel control performance in Control Stage 3 with CubeStar
3-Axis Reaction Wheel control (with CubeStar)
(MT-total = 151 sec)
-15
-10
-5
0
5
10
15
02000 4000 6000 8000 10000 12000
Time (sec)
RPY Attitude (deg)
Roll
Pitch
Yaw
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 20
4. Software Interface
4.1 UART
The standard specifications of the CubeADCS UART interfaces are given in Table 5. These
specifications are however customisable if CubeComputer is the main OBC of the satellite.
Table 5 – Standard UART specifications for CubeComputer
Parameter
Value
Baud rate
115200
Data bits
8
Parity
None
Stop bits
1
The UART protocol makes use of start-of-message (SOM 0x7F) and end-of-message (EOM
0xFF) identifiers to mark the beginning and end of a transmission. An escape character (ESC
0x1F) precedes the SOM and EOM identifiers. When decoding a UART message, on reception
of the escape character, the byte following the escape character has the following implications:
Table 6 – UART message decoding
Byte received after
ESC character
Meaning
0x7F
Start of message
0xFF
End of meaasge
0x1F
Data byte 0x1F
other
Should not occur - error
More information regarding the UART protocol can be found in the CubeADCS User Manual
and in Section 4.5.
4.2 I2C
If CubeComputer is not used as the main OBC of the satellite (therefore it is only the ADCS
OBC), it acts as a slave on the system I2C bus with 7-bit addressing. The default 8-bit write and
read addresses of CubeComputer are shown in Table 7. This is the first byte of the I2C
transaction.
Table 7 – CubeComputer (slave node) I2C addresses
Function
I2C address
Write
0xAE
Read
0xAF

Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 21
More details regarding the communications interface (including protocols for TCs, TLM
requests, and file downloading) can be found in the CubeADCS User Manual and in Section
4.5.
4.3 CAN
The CubeADCS unit can act as a slave or a master on a 1 Mbps CAN bus.
The combination of a CAN transceiver and a CAN controller module on CubeComputer allows
CubeADCS unit to interface at CAN bus voltage levels of 3.3 V or 5 V. A termination resistor
between the CANH and CANL lines can be populated if required by the user.
More information regarding the CAN protocol can be found in the CubeADCS ICD.
4.4 SPI
The CubeComputer has an open SPI module which can be connected to the PC104 header.
This optional SPI connection intended use is for an Unlocked ACP (See [Ref 2]). This SPI bus
will allow the CubeComputer to be connected to slave nodes.
The ACP is supplied with a board support package which contains examples of SPI drivers. The
user can make use of these examples to customize the SPI driver to suit their specific needs.
Please note that unlike the I2C, UART and CAN, the SPI cannot be used as a means to
communicate with CubeComputer (ACP). It is provided to expand the CubeComputer’s
capabilities for users who intend to use an Unlocked version of the ACP.
4.5 Telecommands and Telemetries
4.5.1 Telemetry and Telecommand IDs
The first byte of a message will determine whether the message is a telecommand or telemetry
request, and also contain the ID of the telecommand or telemetry request. The most
significant bit determines whether it is a telecommand or telemetry request, and the lower 7
bits contain the ID.
Table 8: Telecommand or telemetry frame ID
Bit(s)
Data
7
0 = telecommand,
1 = telemetry request
0:6
Telecommand or telemetry frame ID
When considering the full byte identifier, telecommands will have values in the range 0-127
and telemetry requests in the range 128-255 because of the value of the most significant bit.
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 22
The format of the message varies for each telecommand and telemetry ID. The length and
content of all the telemetry frames for the ACP are detailed in the tables in section 4.5.7, while
the telecommands are detailed in section 4.5.8.
The commands and telemetry definitions in these table apply to the 3-Axis CubeACP program.
Other versions of the ADCS firmware might have different definitions.
4.5.2 I2C Telemetry request format
Telemetry is requested from the ADCS over the system I2C bus by either performing a
combined read-write operation (repeated start condition) or a separate master write to select
the TLM register, followed by a master read operation. The first write following the start
condition is the address of the node (0xAE). This is followed by the telemetry frame identifier.
In the case of a separate write and read, a stop condition will follow and the master will then
issue another start condition. In the case of the combined write-then-read operation, the
master will issue a repeated start condition (without a preceding stop condition).
The second start condition will be followed by the node read address (0xAF). The master then
issues a number of read cycles depending on the length of the telemetry frame.
S
0xAE
TLM ID
S
0xAF
TLM byte 0
...
P
Master writes
node address
(write operation)
Master writes
telemetry frame ID
Master writes
node address
(read operation)
Master reads
first TLM data
byte
Figure 18: I2C Telemetry request using I2C repeated start condition
Because the master determines the number of bytes that are read, it is possible to read past
the end of a telemetry frame or to read an incomplete telemetry frame. The ADCS will set an
error flag if an incorrect number of bytes are read for a given TLM ID. This flag is stored in the
Communication Status frame (TLMID 144), and can be read using a telemetry request. The flag
will remain set until the Clear Latched Error Flags (TCID 12) is issued.
4.5.3 I2C Telecommand format
Telecommands are sent by performing a master write to the module. The first data byte (after
the address byte) is the telecommand identifier, followed by the telecommand parameters.
S
0xAE
TC ID
TC data 0
...
P
Master writes
node address
(write operation)
Master writes
telecommand ID
Master writes
data bytes
Figure 19: I2C Telecommand
Because the ADCS is an I2C slave, it cannot acknowledge telecommands by performing an I2C
write transaction. The telecommand acknowledge status must therefore be polled via a
telemetry request (TLMID 240).
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 23
It is not a requirement that the telecommand acknowledge status has to be read following a
telecommand, but an error will occur if another telecommand is sent before the Telecommand
Processed flag (contained in the Telecommand Acknowledge frame) has been set. In this case
the telecommand buffer will be overwritten while the first telecommand is being processed,
leading to corrupt telecommand data.
The Processed flag is not an indication of the telecommand execution status. The Processed
flag is only an indication that the module is ready for another telecommand to be sent.
The Telecommand Acknowledge frame also contains a TC Error flag. This flag will be set if an
invalid telecommand ID was received for the last telecommand, or if the number of data bytes
were incorrect or contained invalid data.
The following sequence illustrates the actions that the master has to take to ensure proper
telecommand execution:
1. Send telecommand.
2. Poll Telecommand Acknowledge Telemetry Format until the Processed flag equals 1.
3. Confirm telecommand validity by checking the TC Error flag of the last read
Telecommand Acknowledge Telemetry Format.
4. Back to step 1 (if another telecommand is to be sent)
4.5.4 UART Telemetry request format
A telemetry request via the UART will have the following form:
0x1F
0x7F
TLM ID
0x1F
0xFF
Start-of-message identifier
End-of-message identifier
Figure 20: UART Telemetry request
The reply will then have the following form:
0x1F
0x7F
TLM ID
TLM byte 0
...
0x1F
0xFF
Start-of-message
identifier
End-of-message
identifier
Figure 21: UART Telemetry reply
4.5.5 UART Telecommand format
A telecommand via the UART will have the following form:
0x1F
0x7F
TC ID
TC data byte
0
...
0x1F
0xFF
Start-of-message
identifier
End-of-message
identifier
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 24
Figure 22: UART Telecommand
An acknowledge message will be sent as reply to the telecommand.
0x1F
0x7F
TC ID
TC Error flag
0x1F
0xFF
Start-of-message
identifier
0 = no error
1 = invalid TC ID
2 = invalid parameters
End-of-message
identifier
Figure 23: UART Telecommand acknowledge
The reply will contain two data bytes, the last one being the TC Error flag. The receipt of the
telecommand acknowledge will indicate that another telecommand may be sent. Sending
another telecommand before the acknowledge will corrupt the telecommand buffer.
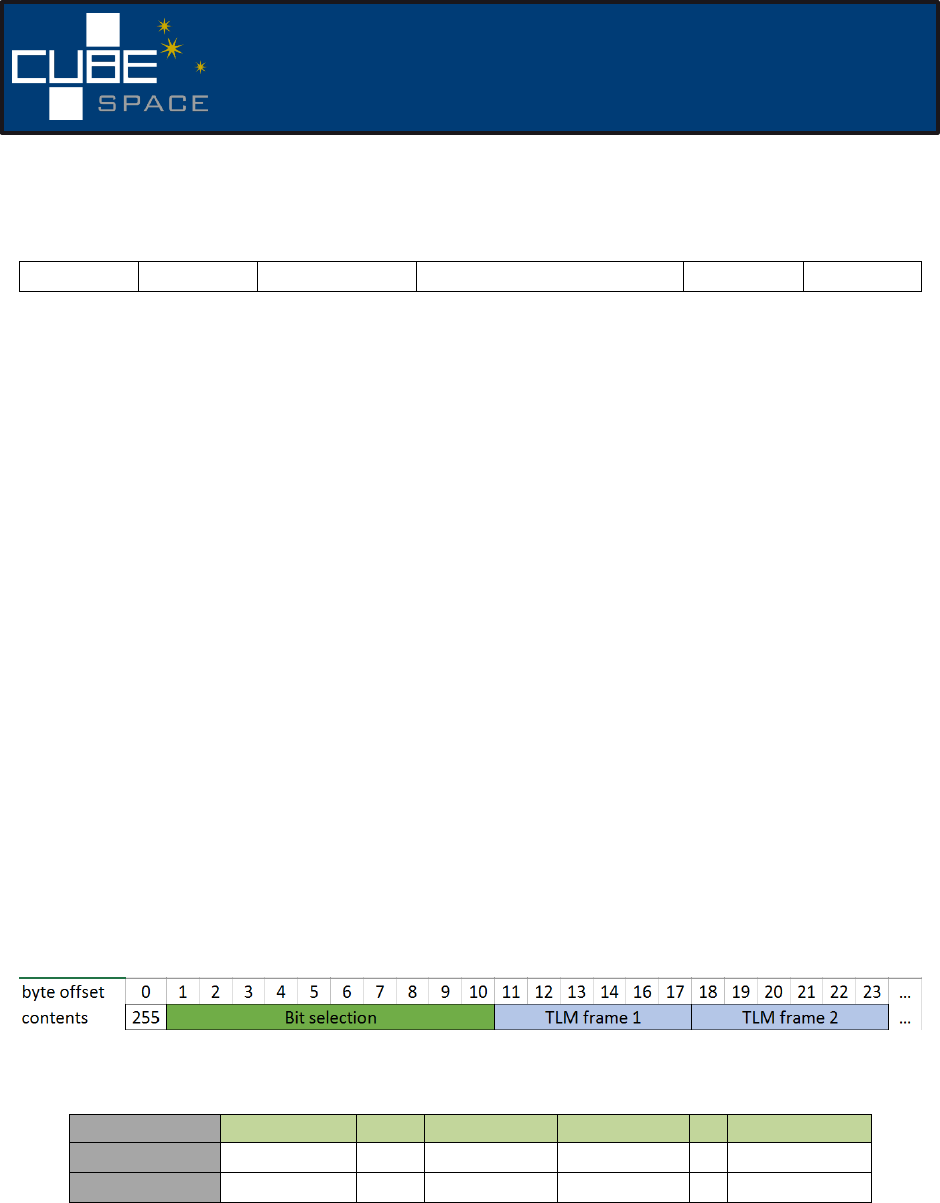
4.5.6 Telemetry logging
The CubeACP can save telemetry frames to a log file on the SD card, and also output
“unsolicited” telemetry on the UART. In both cases, the telemetry frames that are selected for
logging, are specified using a 10-byte mask. The bits in the mask each represent a specific
telemetry frame (with specific ID). Not all telemetry frames can be logged. The frames which
can be logged, their IDs and respective bit-position in the 10-byte mask can be found in
section 4.5.9.
Telemetry log frames which are output on the UART have the following format. The message
identifier is always 255 (0xFF). This is followed by the 10-byte mask which further determines
which telemetry frames follow.
Content
Log ID (0xFF)
Mask
TLM frame 1
TLM frame 2
…
TLM frame N
Offset (bytes)
0
1
11
17
…
11 + (N-1)*6
Len (bytes)
1
10
6
6
…
6
Figure 24 Contents of UART log unsolicited telemetry transmissions
The mask is a 10-byte array, where each bit in the mask identifies a unique 6-byte telemetry
packet. For every bit that is set in the mask there will be a corresponding 6-byte telemetry
frame appended to the UART transmission. The total length of the message is 11+N*6 bytes
where N is the number of bits that are set in the mask.
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 25
4.5.7 Telecommands
Table 9: List of Telecommands
ID
Name
Description
Length
(bytes)
General
1
Reset
Perform a reset - Table 10: Reset Command
Format
1
2
Current Unix Time
Current Unix Time - Table 11: Current Unix
Time Command Format
6
3
Cache enabled state
Cache enabled state - Table 12: Cache
enabled state Command Format
1
4
Reset Log Pointer
Reset pointer to log buffer (from where
LastLogEvent TLM is returned) - Table 13:
Reset Log Pointer Command Format
0
5
Advance Log Pointer
Advance pointer to log buffer (from where
LastLogEvent TLM is returned) - Table 14:
Advance Log Pointer Command Format
0
6
Reset Boot Registers
Reset Boot Registers - Table 15: Reset Boot
Registers Command Format
0
7
Deploy Magnetometer Boom
Deploy magnetometer boom - Table 16:
Deploy Magnetometer Boom Command
Format
1
8
SRAM Scrub Parameters
SRAM scrubbing size - Table 17: SRAM Scrub
Parameters Command Format
2
9
Unix Time Save to Flash
Configuration settings for unixtime flash
memory persistence - Table 18: Unix Time
Save to Flash Command Format
2
10
ADCS Run Mode
Set ADCS enabled state & control loop
behaviour - Table 19: ADCS Run Mode
Command Format
1
11
ADCS Power Control
Control power to selected components -
Table 21: ADCS Power Control Command
Format
3
12
Clear Errors
Clear Latched Error Flags - Table 23: Clear
Errors Command Format
1
13
Set Attitude Control Mode
Set attitude control mode - Table 24: Set
Attitude Control Mode Command Format
4
14
Set Attitude Estimation Mode
Set attitude estimation mode - Table 26: Set
Attitude Estimation Mode Command Format
1
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 26
15
Commanded Attitude Angles
Commanded attitude angles - Table 28:
Commanded Attitude Angles Command
Format
6
16
Set Magnetorquer Output
Set magnetorquer output (only valid if
Control Mode is None) - Table 29: Set
Magnetorquer Output Command Format
6
17
Set Wheel Speed
Set wheel speed (only valid if Control Mode is
None) - Table 30: Set Wheel Speed Command
Format
6
18
Trigger ADCS Loop
Trigger ADCS to perform one iteration of the
control loop (only valid when ADCS Run
Mode is Triggered) - Table 31: Trigger ADCS
Loop Command Format
0
19
Trigger ADCS Loop with Simulated
Sensor Data
Trigger ADCS to perform one iteration of the
control loop (only valid when ADCS Run
Mode is Triggered) - Table 32: Trigger ADCS
Loop with Simulated Sensor Data Command
Format
90
20
ADCS Configuration
Current configuration - Table 33: ADCS
Configuration Command Format
272
21
Set Magnetorquer Configuration
Set magnetorquer configuration parameters -
Table 37: Set Magnetorquer Configuration
Command Format
3
22
Set Wheel Configuration
Set wheel configuration parameters - Table
38: Set Wheel Configuration Command
Format
4
23
Set Rate Gyro Configuration
Set rate gyro configuration parameters -
Table 39: Set Rate Gyro Configuration
Command Format
3
24
Set CSS Alignment Configuration
Set photodiode pointing directions - Table 40:
Set CSS Alignment Configuration Command
Format
10
25
Set CSS Scale Factor Configuration
Set photodiode scale factors - Table 41: Set
CSS Scale Factor Configuration Command
Format
11
26
Set Cam1 Sensor Configuration
Set Cam1 sensor configuration parameters -
Table 42: Set Cam1 Sensor Configuration
Command Format
15
27
Set Cam2 Sensor Configuration
Set Cam2 sensor configuration parameters -
Table 43: Set Cam2 Sensor Configuration
Command Format
15
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 27
28
Set Nadir Sensor Mask
Configuration 1
Set Nadir Sensor Mask Configuration 1 -
Table 44: Set Nadir Sensor Mask
Configuration 1 Command Format
8
29
Set Nadir Sensor Mask
Configuration 2
Set Nadir Sensor Mask Configuration 2 -
Table 45: Set Nadir Sensor Mask
Configuration 2 Command Format
8
30
Set Nadir Sensor Mask
Configuration 3
Set Nadir Sensor Mask Configuration 3 -
Table 46: Set Nadir Sensor Mask
Configuration 3 Command Format
8
31
Set Nadir Sensor Mask
Configuration 4
Set Nadir Sensor Mask Configuration 4 -
Table 47: Set Nadir Sensor Mask
Configuration 4 Command Format
8
32
Set Nadir Sensor Mask
Configuration 5
Set Nadir Sensor Mask Configuration 5 -
Table 48: Set Nadir Sensor Mask
Configuration 5 Command Format
8
33
Set Magnetometer Mounting
Configuration
Set magnetometer mounting configuration
parameters - Table 49: Set Magnetometer
Mounting Configuration Command Format
6
34
Set Magnetometer Offset and
Scaling Configuration
Set Magnetometer Offset and Scaling
Configuration - Table 50: Set Magnetometer
Offset and Scaling Configuration Command
Format
12
35
Set Magnetometer Sensitivity
Configuration
Set Magnetometer Sensitivity Configuration -
Table 51: Set Magnetometer Sensitivity
Configuration Command Format
12
36
Set Rate Sensor Configuration
Set Rate Sensor Offsets - Table 52: Set Rate
Sensor Configuration Command Format
7
37
Set Star Tracker Configuration
Set configurations of CubeStar - Table 53: Set
Star Tracker Configuration Command Format
26
38
Set Detumbling Control
Parameters
Set controller gains and reference values for
Detumbling control mode - Table 54: Set
Detumbling Control Parameters Command
Format
14
39
Set Y-Wheel Control Parameters
Set controller gains and reference value for Y-
wheel control mode - Table 55: Set Y-Wheel
Control Parameters Command Format
20
40
Set Reaction Wheel Control
Parameters
Set controller gains and reference value for
reaction wheel control mode - Table 56: Set
Reaction Wheel Control Parameters
Command Format
8
41
Set Moments of Inertia
Set satellite moments of inertia - Table 57: Set
Moments of Inertia Command Format
12
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 28
42
Set Products of Inertia
Set satellite products of inertia - Table 58: Set
Products of Inertia Command Format
12
43
Set Estimation Parameters 1
Set estimation noise covariance and sensor
mask 1 - Table 59: Set Estimation Parameters
1 Command Format
16
44
Set Estimation Parameters 2
Set estimation noise covariance and sensor
mask 2 - Table 60: Set Estimation Parameters
2 Command Format
14
45
SGP4 Orbit Parameters
SGP4 Orbit Parameters - Table 61: SGP4 Orbit
Parameters Command Format
64
46
Set SGP4 Orbit Inclination
Set SGP4 Orbit Inclination - Table 63: Set
SGP4 Orbit Inclination Command Format
8
47
Set SGP4 Orbit Eccentricity
Set SGP4 Orbit Eccentricity - Table 64: Set
SGP4 Orbit Eccentricity Command Format
8
48
Set SGP4 Orbit RAAN
Set SGP4 Orbit RAAN - Table 65: Set SGP4
Orbit RAAN Command Format
8
49
Set SGP4 Orbit Argument of
Perigee
Set SGP4 Orbit Argument of Perigee - Table
66: Set SGP4 Orbit Argument of Perigee
Command Format
8
50
Set SGP4 Orbit B-Star Drag term
Set SGP4 Orbit B-Star Drag term - Table 67:
Set SGP4 Orbit B-Star Drag term Command
Format
8
51
Set SGP4 Orbit Mean Motion
Set SGP4 Orbit Mean Motion - Table 68: Set
SGP4 Orbit Mean Motion Command Format
8
52
Set SGP4 Orbit Mean Anomaly
Set SGP4 Orbit Mean Anomaly - Table 69: Set
SGP4 Orbit Mean Anomaly Command Format
8
53
Set SGP4 Orbit Epoch
Set SGP4 Orbit Epoch - Table 70: Set SGP4
Orbit Epoch Command Format
8
54
Set Tracking Controller Gain
Parameters
Set controller gains for tracking control mode
- Table 71: Set Tracking Controller Gain
Parameters Command Format
12
55
Tracking Controller Target
Reference
Target reference for tracking control mode -
Table 72: Tracking Controller Target
Reference Command Format
12
56
Set Mode of Magnetometer
Operation
Use of main or redundant magnetometer -
Table 73: Set Mode of Magnetometer
Operation Command Format
1
57
Convert to JPG file
Convert raw or bmp files to JPG - Table 74:
Convert to JPG file Command Format
3
60
Default Configuration
Retrieves default configuration and saves it to
flash - Table 75: Default Configuration
Command Format
0
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 29
63
Save Configuration
Save current configuration to flash memory -
Table 76: Save Configuration Command
Format
0
64
Save Orbit Parameters
Save current orbit parameters to flash
memory - Table 77: Save Orbit Parameters
Command Format
0
80
Save Image
Save and capture image from one of
CubeSense cameras or CubeStar camera to
SD card - Table 78: Save Image Command
Format
2
104
SD Log1 Configuration
Log selection and period for LOG1 - Table 81:
SD Log1 Configuration Command Format
13
105
SD Log2 Configuration
Log selection and period for LOG2 - Table 83:
SD Log2 Configuration Command Format
13
106
UART Log Configuration
Log selection and period for UART
(unsolicited TLM) - Table 84: UART Log
Configuration Command Format
12
108
Erase File
Erase File - Table 85: Erase File Command
Format
3
112
Load File Download Block
Fill download buffer with file contents - Table
87: Load File Download Block Command
Format
8
113
Advance File List Read Pointer
Advance File List Read Pointer - Table 88:
Advance File List Read Pointer Command
Format
0
114
Initiate File Upload
Initiate File Upload - Table 89: Initiate File
Upload Command Format
2
115
File Upload Packet
File Upload Packet - Table 91: File Upload
Packet Command Format
22
116
Finalize Upload Block
Finalize Uploaded File Block - Table 92:
Finalize Upload Block Command Format
7
117
Reset Upload Block
Reset HoleMap for Upload Block - Table 93:
Reset Upload Block Command Format
0
118
Reset File List Read Pointer
Reset File List Read Pointer - Table 94: Reset
File List Read Pointer Command Format
0
119
Initiate Download Burst
Initiate Download Burst - Table 95: Initiate
Download Burst Command Format
2
120
Hole Map 1
File Upload Hole Map 1 - Table 96: Hole Map
1 Command Format
16
121
Hole Map 2
File Upload Hole Map 2 - Table 97: Hole Map
2 Command Format
16
122
Hole Map 3
File Upload Hole Map 3 - Table 98: Hole Map
3 Command Format
16
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 30
123
Hole Map 4
File Upload Hole Map 4 - Table 99: Hole Map
4 Command Format
16
124
Hole Map 5
File Upload Hole Map 5 - Table 100: Hole
Map 5 Command Format
16
125
Hole Map 6
File Upload Hole Map 6 - Table 101: Hole
Map 6 Command Format
16
126
Hole Map 7
File Upload Hole Map 7 - Table 102: Hole
Map 7 Command Format
16
127
Hole Map 8
File Upload Hole Map 8 - Table 103: Hole
Map 8 Command Format
16
Table 10: Reset Command Format
ID
1
Parameters Length
(bytes)
1
Description
Perform a reset
Parameters
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
0
8
Magic
number
UINT
Magic number to make sure it is a
valid reset command. Should equal
0x5A
Table 11: Current Unix Time Command Format
ID
2
Parameters Length (bytes)
6
Description
Current Unix Time
Parameters
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
0
32
Current Unix Time
UINT
Time in s since 01/01/1970,
00:00. (Unit of measure is [s])
32
16
Milliseconds
UINT
Current millisecond count. (Unit
of measure is [ms])
Table 12: Cache enabled state Command Format
ID
3
Parameters Length (bytes)
1
Description
Cache enabled state
Parameters
Offset (bits)
Length (bits)
Name
Data Type
Description
0
1
Enabled state
BOOL
Enabled state
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 31
Table 13: Reset Log Pointer Command Format
ID
4
Parameters Length (bytes)
0
Description
Reset pointer to log buffer (from where LastLogEvent TLM is returned)
Table 14: Advance Log Pointer Command Format
ID
5
Parameters Length (bytes)
0
Description
Advance pointer to log buffer (from where LastLogEvent TLM is returned)
Table 15: Reset Boot Registers Command Format
ID
6
Parameters Length (bytes)
0
Description
Reset Boot Registers
Table 16: Deploy Magnetometer Boom Command Format
ID
7
Parameters Length
(bytes)
1
Description
Deploy magnetometer boom
Parameters
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
0
8
Timeout
UINT
Deployment actuation timeout
value. (Unit of measure is [s])
Table 17: SRAM Scrub Parameters Command Format
ID
8
Parameters Length (bytes)
2
Description
SRAM scrubbing size
Parameters
Offset (bits)
Length (bits)
Name
Data Type
Description
0
16
Scrub Size
UINT
Scrub Size
Table 18: Unix Time Save to Flash Command Format
ID
9
Parameters Length (bytes)
2
Description
Configuration settings for unixtime flash memory persistence
Parameters
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
0
1
Save Now
BOOL
Save current unixtime to flash
memory
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 32
1
1
Save On Update
BOOL
Save unixtime to flash memory
whenever there is a command to
update the unixtime
2
1
Save Periodic
BOOL
Save unixtime to flash memory
periodically
8
8
Period
UINT
Interval at which to save unixtime
to flash memory. (Unit of measure
is [s])
Table 19: ADCS Run Mode Command Format
ID
10
Parameters
Length (bytes)
1
Description
Set ADCS enabled state & control loop behaviour
Parameters
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
0
8
Enabled
ENUM
Set ADCS enabled state. When disabled
the CubeACP will not use the ADCS I2C
bus. Possible values are in Table 20:
AdcsRunMode Enumeration Values
Table 20: AdcsRunMode Enumeration Values
Numeric Value
Name
Description
0
Off
ADCS loop is inactive
1
Enabled
ADCS 1Hz loop is active
2
Triggered
ADCS will execute control loop only when
triggered
3
Simulation
ADCS is in simulation mode
Table 21: ADCS Power Control Command Format
ID
11
Parameters Length (bytes)
3
Description
Control power to selected components
Parameters
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
0
2
CubeControl Signal
Power Selection
ENUM
Control power to electronics of
CubeControl Signal PIC. Possible
values are in Table 22:
PowerSelect Enumeration Values
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 33
2
2
CubeControl Motor
Power Selection
ENUM
Control power to electronics of
CubeControl Motor PIC. Possible
values are in Table 22:
PowerSelect Enumeration Values
4
2
CubeSense Power
Selection
ENUM
Control power to the CubeSense.
Possible values are in Table 22:
PowerSelect Enumeration Values
6
2
CubeStarPower
Power Selection
ENUM
Control power to the CubeStar.
Possible values are in Table 22:
PowerSelect Enumeration Values
8
2
CubeWheel1Power
Power Selection
ENUM
Control power to the
CubeWheel1. Possible values are
in Table 22: PowerSelect
Enumeration Values
10
2
CubeWheel2Power
Power Selection
ENUM
Control power to the
CubeWheel2. Possible values are
in Table 22: PowerSelect
Enumeration Values
12
2
CubeWheel3Power
Power Selection
ENUM
Control power to the
CubeWheel3. Possible values are
in Table 22: PowerSelect
Enumeration Values
14
2
Motor Power
ENUM
Control power to Motor
electronics. Possible values are in
Table 22: PowerSelect
Enumeration Values
16
2
GPS Power
ENUM
Control power to GPS LNA.
Possible values are in Table 22:
PowerSelect Enumeration Values
Table 22: PowerSelect Enumeration Values
Numeric Value
Name
Description
0
Permanently Off
Permanently Off
1
Permanently On
Permanently On
2
Power state depends on current
control mode
Power state depends on current control
mode
3
Simulated Auto Mode
Simulate power control - Nodes are not
actually enabled, but the ACP behaves as if
they are. This setting is used for HIL
simulations
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 34
Table 23: Clear Errors Command Format
ID
12
Parameters Length (bytes)
1
Description
Clear Latched Error Flags
Parameters
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
0
1
ADCS Error Flags
BOOL
Clear ADCS error flags
1
1
HK Error Flags
BOOL
Clear HK Error flags
Table 24: Set Attitude Control Mode Command Format
ID
13
Parameters Length (bytes)
4
Description
Set attitude control mode
Parameters
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
0
8
Control Mode
ENUM
Attitude control mode. Possible
values are in Table 25:
ConModeSelect Enumeration
Values
8
1
Override flag
BOOL
Ignore current state and force
control mode (if this flag is not
set, certain control transitions
will not be allowed)
16
16
Timeout
UINT
Control timeout duration. Control
will revert to None when timer
reaches zero. 0xFFFF for infinite
timeout. (Unit of measure is [s])
Table 25: ConModeSelect Enumeration Values
Numeric Value
Name
Description
0
No control
No control
1
Detumbling control
Detumbling control
2
Y-Thomson spin
Y-Thomson spin
3
Y-Wheel momentum stabilized -
Initial Pitch Acquisition
Y-Wheel momentum stabilized - Initial
Pitch Acquisition
4
Y-Wheel momentum stabilized -
Steady State
Y-Wheel momentum stabilized - Steady
State
5
XYZ-Wheel control
XYZ-Wheel control
6
Rwheel sun tracking control
Rwheel sun tracking control
7
Rwheel target tracking control
Rwheel target tracking control
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 35
8
Very Fast-spin Detumbling control
10Hz Detumbling control within
CubeControl
9
Fast-spin Detumbling control
Fast Detumbling control
10
User Defined Control Mode 1
User defined, or custom control mode 1
11
User Defined Control Mode 2
User defined, or custom control mode 2
12
Stop R-wheels
Stop all R-wheels
13
User Coded Control Mode
User coded control mode
Table 26: Set Attitude Estimation Mode Command Format
ID
14
Parameters Length
(bytes)
1
Description
Set attitude estimation mode
Parameters
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
0
8
Attitude
Estimation
Mode
ENUM
Attitude estimation mode. Possible
values are in Table 27:
EstimModeSelect Enumeration
Values
Table 27: EstimModeSelect Enumeration Values
Numeric Value
Name
Description
0
No attitude estimation
No attitude estimation
1
MEMS rate sensing
MEMS rate sensing
2
Magnetometer rate filter
Magnetometer rate filter
3
Magnetometer rate filter with pitch
estimation
Magnetometer rate filter with pitch
estimation
4
Magnetometer and Fine-sun TRIAD
algorithm
Magnetometer and Fine-sun TRIAD
algorithm
5
Full-state EKF
Full-state EKF
6
MEMS gyro EKF
MEMS gyro EKF
Table 28: Commanded Attitude Angles Command Format
ID
15
Parameters Length (bytes)
6
Description
Commanded attitude angles
Parameters
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
0
16
Commanded Roll
Angle
INT
Commanded roll angle. Raw
parameter value is obtained
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 36
using the formula: (raw
parameter) = (formatted
value)*100.0 (formatted value is
in [deg] units)
16
16
Commanded Pitch
Angle
INT
Commanded pitch angle. Raw
parameter value is obtained
using the formula: (raw
parameter) = (formatted
value)*100.0 (formatted value is
in [deg] units)
32
16
Commanded Yaw
Angle
INT
Commanded yaw angle. Raw
parameter value is obtained using
the formula: (raw parameter) =
(formatted value)*100.0
(formatted value is in [deg] units)
Table 29: Set Magnetorquer Output Command Format
ID
16
Parameters Length (bytes)
6
Description
Set magnetorquer output (only valid if Control Mode is None)
Parameters
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
0
16
Commanded X
Magnetorquer duty
cycle
INT
Commanded X-torquer duty
cycle. Raw parameter value is
obtained using the formula: (raw
parameter) = (formatted
value)*1000.0
16
16
Commanded Y
Magnetorquer duty
cycle
INT
Commanded Y-torquer duty
cycle. Raw parameter value is
obtained using the formula: (raw
parameter) = (formatted
value)*1000.0
32
16
Commanded Z
Magnetorquer duty
cycle
INT
Commanded Z-torquer duty
cycle. Raw parameter value is
obtained using the formula: (raw
parameter) = (formatted
value)*1000.0
Table 30: Set Wheel Speed Command Format
ID
17
Parameters Length (bytes)
6
Description
Set wheel speed (only valid if Control Mode is None)
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 37
Parameters
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
0
16
Commanded X
speed
INT
Commanded X-wheel speed.
(Unit of measure is [rpm])
16
16
Commanded Y
speed
INT
Commanded Y-wheel speed.
(Unit of measure is [rpm])
32
16
Commanded Z
speed
INT
Commanded Z-wheel speed.
(Unit of measure is [rpm])
Table 31: Trigger ADCS Loop Command Format
ID
18
Parameters Length (bytes)
0
Description
Trigger ADCS to perform one iteration of the control loop (only valid when ADCS Run
Mode is Triggered)
Table 32: Trigger ADCS Loop with Simulated Sensor Data Command Format
ID
19
Parameters Length (bytes)
90
Description
Trigger ADCS to perform one iteration of the control loop (only valid when ADCS Run
Mode is Triggered)
Parameters
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
0
32
Unix Time
UINT
Unix time for iteration. (Unit of
measure is [s])
32
16
Css Raw 1
UINT
CSS1 raw measurement
48
16
Css Raw 2
UINT
CSS2 raw measurement
64
16
Css Raw 3
UINT
CSS3 raw measurement
80
16
Css Raw 4
UINT
CSS4 raw measurement
96
16
Css Raw 5
UINT
CSS5 raw measurement
112
16
Css Raw 6
UINT
CSS6 raw measurement
128
16
Css Raw 7
UINT
CSS7 raw measurement
144
16
Css Raw 8
UINT
CSS8 raw measurement
160
16
Css Raw 9
UINT
CSS9 raw measurement
176
16
Css Raw 10
UINT
CSS10 raw measurement
192
16
Cam1 Raw X
INT
Cam1 sensor raw X angle
208
16
Cam1 Raw Y
INT
Cam1 sensor raw Y angle
224
8
Cam1 Busy
UINT
Cam1 sensor capture status
232
8
Cam1 Result
UINT
Cam1 sensor detection result
240
16
Cam2 Raw X
INT
Cam2 sensor raw X angle
256
16
Cam2 Raw Y
INT
Cam2 sensor raw Y angle
272
8
Cam2 Busy
UINT
Cam2 sensor capture status
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 38
280
8
Cam2 Result
UINT
Cam2 sensor detection result
288
16
Mag Raw X
INT
Raw magnetometer X
measurement
304
16
Mag Raw Y
INT
Raw magnetometer Y
measurement
320
16
Mag Raw Z
INT
Raw magnetometer Z
measurement
336
16
Rate Raw X
INT
Raw X rate sensor measurement
352
16
Rate Raw Y
INT
Raw Y rate sensor measurement
368
16
Rate Raw Z
INT
Raw Z rate sensor measurement
384
16
Wheel Raw X
INT
Raw X wheel speed
measurement. (Unit of measure
is [rpm])
400
16
Wheel Raw Y
INT
Raw Y wheel speed
measurement. (Unit of measure
is [rpm])
416
16
Wheel Raw Z
INT
Raw Z wheel speed
measurement. (Unit of measure
is [rpm])
432
16
Star1CameraX
INT
Star1 camera X-vector
448
16
Star1CameraY
INT
Star1 camera Y-vector
464
16
Star1CameraZ
INT
Star1 camera Z-vector
480
16
Star1InertialX
INT
Star1 inertial X-vector
496
16
Star1InertialY
INT
Star1 inertial Y-vector
512
16
Star1InertialZ
INT
Star1 inertial Z-vector
528
16
Star2CameraX
INT
Star2 camera X-vector
544
16
Star2CameraY
INT
Star2 camera Y-vector
560
16
Star2CameraZ
INT
Star2 camera Z-vector
576
16
Star2InertialX
INT
Star2 inertial X-vector
592
16
Star2InertialY
INT
Star2 inertial Y-vector
608
16
Star2InertialZ
INT
Star2 inertial Z-vector
624
16
Star3CameraX
INT
Star3 camera X-vector
640
16
Star3CameraY
INT
Star3 camera Y-vector
656
16
Star3CameraZ
INT
Star3 camera Z-vector
672
16
Star3InertialX
INT
Star3 inertial X-vector
688
16
Star3InertialY
INT
Star3 inertial Y-vector
704
16
Star3InertialZ
INT
Star3 inertial Z-vector
Table 33: ADCS Configuration Command Format
ID
20
Parameters Length (bytes)
272
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 39
Description
Current configuration
Parameters
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
0
8
Magnetorquer 1
Configuration
ENUM
Magnetorquer 1 Configuration.
Possible values are in Table 34:
AxisSelect Enumeration Values
8
8
Magnetorquer 2
Configuration
ENUM
Magnetorquer 2 Configuration.
Possible values are in Table 34:
AxisSelect Enumeration Values
16
8
Magnetorquer 3
Configuration
ENUM
Magnetorquer 3 Configuration.
Possible values are in Table 34:
AxisSelect Enumeration Values
24
8
RW1 Configuration
ENUM
RW1 Configuration. Possible
values are in Table 34: AxisSelect
Enumeration Values
32
8
RW2 Configuration
ENUM
RW2 Configuration. Possible
values are in Table 34: AxisSelect
Enumeration Values
40
8
RW3 Configuration
ENUM
RW3 Configuration. Possible
values are in Table 34: AxisSelect
Enumeration Values
48
8
RW4 Configuration
ENUM
RW4 Configuration. Possible
values are in Table 34: AxisSelect
Enumeration Values
56
8
Gyro1
Configuration
ENUM
Gyro1 Configuration. Possible
values are in Table 34: AxisSelect
Enumeration Values
64
8
Gyro2
Configuration
ENUM
Gyro2 Configuration. Possible
values are in Table 34: AxisSelect
Enumeration Values
72
8
Gyro3
Configuration
ENUM
Gyro3 Configuration. Possible
values are in Table 34: AxisSelect
Enumeration Values
80
8
CSS1 Configuration
ENUM
CSS1 Configuration. Possible
values are in Table 34: AxisSelect
Enumeration Values
88
8
CSS2 Configuration
ENUM
CSS2 Configuration. Possible
values are in Table 34: AxisSelect
Enumeration Values
96
8
CSS3 Configuration
ENUM
CSS3 Configuration. Possible
values are in Table 34: AxisSelect
Enumeration Values
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 40
104
8
CSS4 Configuration
ENUM
CSS4 Configuration. Possible
values are in Table 34: AxisSelect
Enumeration Values
112
8
CSS5 Configuration
ENUM
CSS5 Configuration. Possible
values are in Table 34: AxisSelect
Enumeration Values
120
8
CSS6 Configuration
ENUM
CSS6 Configuration. Possible
values are in Table 34: AxisSelect
Enumeration Values
128
8
CSS7 Configuration
ENUM
CSS7 Configuration. Possible
values are in Table 34: AxisSelect
Enumeration Values
136
8
CSS8 Configuration
ENUM
CSS8 Configuration. Possible
values are in Table 34: AxisSelect
Enumeration Values
144
8
CSS9 Configuration
ENUM
CSS9 Configuration. Possible
values are in Table 34: AxisSelect
Enumeration Values
152
8
CSS10
Configuration
ENUM
CSS10 Configuration. Possible
values are in Table 34: AxisSelect
Enumeration Values
160
8
CSS1 Relative Scale
UINT
CSS1 Relative Scaling Factor.
Raw parameter value is obtained
using the formula: (raw
parameter) = (formatted
value)*100.0
168
8
CSS2 Relative Scale
UINT
CSS2 Relative Scaling Factor.
Raw parameter value is obtained
using the formula: (raw
parameter) = (formatted
value)*100.0
176
8
CSS3 Relative Scale
UINT
CSS3 Relative Scaling Factor.
Raw parameter value is obtained
using the formula: (raw
parameter) = (formatted
value)*100.0
184
8
CSS4 Relative Scale
UINT
CSS4 Relative Scaling Factor.
Raw parameter value is obtained
using the formula: (raw
parameter) = (formatted
value)*100.0
192
8
CSS5 Relative Scale
UINT
CSS5 Relative Scaling Factor.
Raw parameter value is obtained
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 41
using the formula: (raw
parameter) = (formatted
value)*100.0
200
8
CSS6 Relative Scale
UINT
CSS6 Relative Scaling Factor.
Raw parameter value is obtained
using the formula: (raw
parameter) = (formatted
value)*100.0
208
8
CSS7 Relative Scale
UINT
CSS7 Relative Scaling Factor.
Raw parameter value is obtained
using the formula: (raw
parameter) = (formatted
value)*100.0
216
8
CSS8 Relative Scale
UINT
CSS8 Relative Scaling Factor.
Raw parameter value is obtained
using the formula: (raw
parameter) = (formatted
value)*100.0
224
8
CSS9 Relative Scale
UINT
CSS9 Relative Scaling Factor.
Raw parameter value is obtained
using the formula: (raw
parameter) = (formatted
value)*100.0
232
8
CSS10 Relative
Scale
UINT
CSS10 Relative Scaling Factor.
Raw parameter value is obtained
using the formula: (raw
parameter) = (formatted
value)*100.0
240
8
CSS Threshold
UINT
CSS Threshold
248
16
Cam1 Sensor
Mounting
Transform Alpha
Angle
INT
Cam1 Sensor Mounting
Transform Alpha Angle. Raw
parameter value is obtained
using the formula: (raw
parameter) = (formatted
value)*100.0 (formatted value is
in [deg] units)
264
16
Cam1 Sensor
Mounting
Transform Beta
Angle
INT
Cam1 Sensor Mounting
Transform Beta Angle. Raw
parameter value is obtained
using the formula: (raw
parameter) = (formatted
value)*100.0 (formatted value is
in [deg] units)
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 42
280
16
Cam1 Sensor
Mounting
Transform Gamma
Angle
INT
Cam1 Sensor Mounting
Transform Gamma Angle. Raw
parameter value is obtained
using the formula: (raw
parameter) = (formatted
value)*100.0 (formatted value is
in [deg] units)
296
8
Cam1 detection
threshold
UINT
304
1
Cam1 sensor auto
adjust mode
BOOL
0 = disabled and 1 = enabled
312
16
Cam1 sensor
exposure time
UINT
exposure time register value
328
16
Cam1 Boresight X
UINT
X Pixel location of Cam1
boresight. Raw parameter value
is obtained using the formula:
(raw parameter) = (formatted
value)*100.0 (formatted value is
in [pixels] units)
344
16
Cam1 Boresight Y
UINT
Y Pixel location of Cam1
boresight. Raw parameter value
is obtained using the formula:
(raw parameter) = (formatted
value)*100.0 (formatted value is
in [pixels] units)
360
1
Cam1 Shift
BOOL
Use Cam2 processing chain for
Cam1 detection
368
16
Cam2 Sensor
Mounting
Transform Alpha
Angle
INT
Cam2 Sensor Mounting
Transform Alpha Angle. Raw
parameter value is obtained
using the formula: (raw
parameter) = (formatted
value)*100.0 (formatted value is
in [deg] units)
384
16
Cam2 Sensor
Mounting
Transform Beta
Angle
INT
Cam2 Sensor Mounting
Transform Beta Angle. Raw
parameter value is obtained
using the formula: (raw
parameter) = (formatted
value)*100.0 (formatted value is
in [deg] units)
400
16
Cam2 Sensor
Mounting
INT
Cam2 Sensor Mounting
Transform Gamma Angle. Raw
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 43
Transform Gamma
Angle
parameter value is obtained
using the formula: (raw
parameter) = (formatted
value)*100.0 (formatted value is
in [deg] units)
416
8
Cam2 detection
threshold
UINT
Cam2 detection threshold
424
1
Cam2 sensor auto
adjust mode
BOOL
0 = disabled and 1 = enabled
432
16
Cam2 sensor
exposure time
UINT
exposure time register value
448
16
Cam2 Boresight X
UINT
X Pixel location of Cam2
boresight. Raw parameter value
is obtained using the formula:
(raw parameter) = (formatted
value)*100.0 (formatted value is
in [pixels] units)
464
16
Cam2 Boresight Y
UINT
Y Pixel location of Cam2
boresight. Raw parameter value
is obtained using the formula:
(raw parameter) = (formatted
value)*100.0 (formatted value is
in [pixels] units)
480
1
Cam2 Shift
BOOL
Use Sun processing chain for
Cam2 detection
488
16
Minimum X of area
1
UINT
Minimum X of Area 1
504
16
Maximum X of area
1
UINT
Maximum X of Area 1
520
16
Minimum Y of area
1
UINT
Minimum Y of Area 1
536
16
Maximum Y of area
1
UINT
Maximum Y of Area 1
552
16
Minimum X of area
2
UINT
Minimum X of Area 2
568
16
Maximum X of area
2
UINT
Maximum X of Area 2
584
16
Minimum Y of area
2
UINT
Minimum Y of Area 2
600
16
Maximum Y of area
2
UINT
Maximum Y of Area 2
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 44
616
16
Minimum X of area
3
UINT
Minimum X of Area 3
632
16
Maximum X of area
3
UINT
Maximum X of Area 3
648
16
Minimum Y of area
3
UINT
Minimum Y of Area 3
664
16
Maximum Y of area
3
UINT
Maximum Y of Area 3
680
16
Minimum X of area
4
UINT
Minimum X of Area 4
696
16
Maximum X of area
4
UINT
Maximum X of Area 4
712
16
Minimum Y of area
4
UINT
Minimum Y of Area 4
728
16
Maximum Y of area
4
UINT
Maximum Y of Area 4
744
16
Minimum X of area
5
UINT
Minimum X of Area 5
760
16
Maximum X of area
5
UINT
Maximum X of Area 5
776
16
Minimum Y of area
5
UINT
Minimum Y of Area 5
792
16
Maximum Y of area
5
UINT
Maximum Y of Area 5
808
16
Magnetometer
Mounting
Transform Alpha
Angle
INT
Magnetometer Mounting
Transform Alpha Angle. Raw
parameter value is obtained
using the formula: (raw
parameter) = (formatted
value)*100.0 (formatted value is
in [deg] units)
824
16
Magnetometer
Mounting
Transform Beta
Angle
INT
Magnetometer Mounting
Transform Beta Angle. Raw
parameter value is obtained
using the formula: (raw
parameter) = (formatted
value)*100.0 (formatted value is
in [deg] units)
840
16
Magnetometer
Mounting
Transform Gamma
Angle
INT
Magnetometer Mounting
Transform Gamma Angle. Raw
parameter value is obtained
using the formula: (raw
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 45
parameter) = (formatted
value)*100.0 (formatted value is
in [deg] units)
856
16
Magnetometer
Channel 1 Offset
INT
Magnetometer Channel 1 Offset.
Raw parameter value is obtained
using the formula: (raw
parameter) = (formatted
value)*1000.0
872
16
Magnetometer
Channel 2 Offset
INT
Magnetometer Channel 2 Offset.
Raw parameter value is obtained
using the formula: (raw
parameter) = (formatted
value)*1000.0
888
16
Magnetometer
Channel 3 Offset
INT
Magnetometer Channel 3 Offset.
Raw parameter value is obtained
using the formula: (raw
parameter) = (formatted
value)*1000.0
904
16
Magnetometer
Sensitivity Matrix
S11
INT
Magnetometer Sensitivity Matrix
S11. Raw parameter value is
obtained using the formula: (raw
parameter) = (formatted
value)*1000.0
920
16
Magnetometer
Sensitivity Matrix
S22
INT
Magnetometer Sensitivity Matrix
S22. Raw parameter value is
obtained using the formula: (raw
parameter) = (formatted
value)*1000.0
936
16
Magnetometer
Sensitivity Matrix
S33
INT
Magnetometer Sensitivity Matrix
S33. Raw parameter value is
obtained using the formula: (raw
parameter) = (formatted
value)*1000.0
952
16
Magnetometer
Sensitivity Matrix
S12
INT
Magnetometer Sensitivity Matrix
S12. Raw parameter value is
obtained using the formula: (raw
parameter) = (formatted
value)*1000.0
968
16
Magnetometer
Sensitivity Matrix
S13
INT
Magnetometer Sensitivity Matrix
S13. Raw parameter value is
obtained using the formula: (raw
parameter) = (formatted
value)*1000.0
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 46
984
16
Magnetometer
Sensitivity Matrix
S21
INT
Magnetometer Sensitivity Matrix
S21. Raw parameter value is
obtained using the formula: (raw
parameter) = (formatted
value)*1000.0
1000
16
Magnetometer
Sensitivity Matrix
S23
INT
Magnetometer Sensitivity Matrix
S23. Raw parameter value is
obtained using the formula: (raw
parameter) = (formatted
value)*1000.0
1016
16
Magnetometer
Sensitivity Matrix
S31
INT
Magnetometer Sensitivity Matrix
S31. Raw parameter value is
obtained using the formula: (raw
parameter) = (formatted
value)*1000.0
1032
16
Magnetometer
Sensitivity Matrix
S32
INT
Magnetometer Sensitivity Matrix
S32. Raw parameter value is
obtained using the formula: (raw
parameter) = (formatted
value)*1000.0
1048
16
X-Rate Sensor
Offset
INT
X-Rate Sensor Offset. Raw
parameter value is obtained
using the formula: (raw
parameter) = (formatted
value)*1000.0 (formatted value is
in [deg/s] units)
1064
16
Y-Rate Sensor
Offset
INT
Y-Rate Sensor Offset. Raw
parameter value is obtained
using the formula: (raw
parameter) = (formatted
value)*1000.0 (formatted value is
in [deg/s] units)
1080
16
Z-Rate Sensor
Offset
INT
Z-Rate Sensor Offset. Raw
parameter value is obtained
using the formula: (raw
parameter) = (formatted
value)*1000.0 (formatted value is
in [deg/s] units)
1096
8
RateSensorMult
UINT
Multiplier of rate sensor
measurement
1104
16
StarTracker
Mounting
INT
StarTracker Mounting Transform
Alpha Angle. Raw parameter
value is obtained using the
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 47
Transform Alpha
Angle
formula: (raw parameter) =
(formatted value)*100.0
(formatted value is in [deg] units)
1120
16
StarTracker
Mounting
Transform Beta
Angle
INT
StarTracker Mounting Transform
Beta Angle. Raw parameter value
is obtained using the formula:
(raw parameter) = (formatted
value)*100.0 (formatted value is
in [deg] units)
1136
16
StarTracker
Mounting
Transform Gamma
Angle
INT
StarTracker Mounting Transform
Gamma Angle. Raw parameter
value is obtained using the
formula: (raw parameter) =
(formatted value)*100.0
(formatted value is in [deg] units)
1152
16
StarTracker
exposure time
UINT
exposure time register value
1168
8
StarTracker
detection threshold
UINT
StarTracker detection threshold
1176
8
StarTracker star
threshold
UINT
StarTracker star threshold
1184
8
Maximum Star
Matched
UINT
Maximum of stars that the star
tracker will match
1192
8
Maximum Star Pixel
UINT
Maximum pixels in a star
1200
8
Maximum Star
Noise
UINT
Maximum star pixel noise
1208
8
Minimum Star Pixel
UINT
Minimum pixels in a star
1216
8
Star Tracker Error
Margin
UINT
% Error margin of the star
identification. Raw parameter
value is obtained using the
formula: (raw parameter) =
(formatted value)*100.0
(formatted value is in [%] units)
1224
32
Star Tracker
Centroid X
FLOAT
Pixel centroid X
1256
32
Star Tracker
Centroid Y
FLOAT
Pixel centroid Y
1288
16
Star Tracker Focal
Length
UINT
Star Tracker Focal Length. Raw
parameter value is obtained
using the formula: (raw
parameter) = (formatted
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 48
value)*10000.0 (formatted value
is in [mm] units)
1304
8
Synch Delay
UINT
Synchronization delay within star
Tracker
1312
32
Detumbling Spin
Gain
FLOAT
Detumbling Spin Gain (Ks)
1344
32
Detumbling
Damping Gain
FLOAT
Detumbling Damping Gain (Kd)
1376
16
Reference spin rate
INT
Reference spin rate (wy-ref).
Must always be smaller than 0.
Raw parameter value is obtained
using the formula: (raw
parameter) = (formatted
value)*1000.0 (formatted value is
in [deg/s] units)
1392
32
Fast BDot
Detumbling Gain
FLOAT
Fast BDot Detumbling Gain (Kdf)
1424
32
Y-Momentum
Control Gain
FLOAT
Y-Momentum Control Gain (Kh)
1456
32
Y-momentum
Nutation Damping
Gain
FLOAT
Y-momentum Nutation Damping
Gain (Kn)
1488
32
Y-momentum
Proportional Gain
FLOAT
Y-momentum Proportional Gain
(Kp1)
1520
32
Y-momentum
Derivative Gain
FLOAT
Y-momentum Derivative Gain
(Kd1)
1552
32
Reference Wheel
Momentum
FLOAT
Reference Wheel Momentum (H-
ref). Must always be smaller than
0. (Unit of measure is [Nms])
1584
32
RWheel
Proportional Gain
FLOAT
RWheel Proportional Gain (Kp2)
1616
32
RWheel Derivative
Gain
FLOAT
RWheel Derivative Gain (Kd2)
1648
32
Tracking
Proportional Gain
FLOAT
Tracking Proportional Gain (Kp3)
1680
32
Tracking Derivative
Gain
FLOAT
Tracking Derivative Gain (Kd3)
1712
32
Tracking Integral
Gain
FLOAT
Tracking Integral Gain (Ki3)
1744
32
Moment Of Inertia
- Ixx
FLOAT
Moment Of Inertia - Ixx. (Unit of
measure is [kg.m^2])
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 49
1776
32
Moment Of Inertia
- Iyy
FLOAT
Moment Of Inertia - Iyy. (Unit of
measure is [kg.m^2])
1808
32
Moment Of Inertia -
Izz
FLOAT
Moment Of Inertia - Izz. (Unit of
measure is [kg.m^2])
1840
32
Moment Of Inertia
- Ixy
FLOAT
Moment Of Inertia - Ixy. (Unit of
measure is [kg.m^2])
1872
32
Moment Of Inertia
- Ixz
FLOAT
Moment Of Inertia - Ixz. (Unit of
measure is [kg.m^2])
1904
32
Moment Of Inertia -
Iyz
FLOAT
Moment Of Inertia - Iyz. (Unit of
measure is [kg.m^2])
1936
32
Magnetometer
Rate Filter System
Noise
FLOAT
Magnetometer Rate Filter
System Noise
1968
32
EKF System Noise
FLOAT
EKF System Noise
2000
32
CSS Measurement
Noise
FLOAT
CSS Measurement Noise
2032
32
Sun Sensor
Measurement
Noise
FLOAT
Sun Sensor Measurement Noise
2064
32
Nadir Sensor
Measurement
Noise
FLOAT
Nadir Sensor Measurement
Noise
2096
32
Magnetometer
Measurement
Noise
FLOAT
Magnetometer Measurement
Noise
2128
32
Star Tracker
Measurement
Noise
FLOAT
Star Tracker Measurement Noise
2160
1
Use Sun Sensor
BOOL
Use Sun Sensor measurement in
EKF
2161
1
Use Nadir Sensor
BOOL
Use Nadir Sensor measurement
in EKF
2162
1
Use CSS
BOOL
Use CSS measurement in EKF
2163
1
Use Star Tracker
BOOL
Use Star Tracker measurement in
EKF
2164
2
Magnetometer
Mode
ENUM
Mode describing which
magnetometer is used for
estimation and control. Possible
values are in Table 35:
MagModeVal Enumeration
Values
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 50
2168
8
Cam1 and Cam2
Sampling Period
UINT
Cam1 and Cam2 sensor sampling
period. Lower four bits are Cam1
period and upper four bits the
Cam2 period. Setting period to
zero for sensor will disable
sampling of sensor.. (Unit of
measure is [s])
Table 34: AxisSelect Enumeration Values
Numeric Value
Name
Description
0
Positive X
Positive X
1
Negative X
Negative X
2
Positive Y
Positive Y
3
Negative Y
Negative Y
4
Positive Z
Positive Z
5
Negative Z
Negative Z
6
Not Used
Not Used
Table 35: MagModeVal Enumeration Values
Numeric Value
Name
Description
0
MainMagOnly
Only main magnetometer is sampled and
used
1
RedMagOnly
Only redundant magnetometer is sampled
and used
2
BothMagMainUsed
Both magnetometers are sampled but
main is used
3
BothMagRedUsed
Both magnetometers are sampled but
redundant is used
Table 36: Parts of ADCS Configuration command (ID 20), sent using shorter telecommands
ID
Partial Commands
Length
(bytes)
Bit
offset
Bit
length
Overlapping ADCS Configuration
Telecommand Parameters
21
Set Magnetorquer
Configuration - Table
37: Set Magnetorquer
Configuration
Command Format
3
0
8
Magnetorquer 1 Configuration
8
8
Magnetorquer 2 Configuration
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 51
16
8
Magnetorquer 3 Configuration
22
Set Wheel
Configuration - Table
38: Set Wheel
Configuration
Command Format
4
24
8
RW1 Configuration
32
8
RW2 Configuration
40
8
RW3 Configuration
48
8
RW4 Configuration
23
Set Rate Gyro
Configuration - Table
39: Set Rate Gyro
Configuration
Command Format
3
56
8
Gyro1 Configuration
64
8
Gyro2 Configuration
72
8
Gyro3 Configuration
24
Set CSS Alignment
Configuration - Table
40: Set CSS Alignment
Configuration
Command Format
10
80
8
CSS1 Configuration
88
8
CSS2 Configuration
96
8
CSS3 Configuration
104
8
CSS4 Configuration
112
8
CSS5 Configuration
120
8
CSS6 Configuration
128
8
CSS7 Configuration
136
8
CSS8 Configuration
144
8
CSS9 Configuration
152
8
CSS10 Configuration
25
Set CSS Scale Factor
Configuration - Table
41: Set CSS Scale
Factor Configuration
Command Format
11
160
8
CSS1 Relative Scale
168
8
CSS2 Relative Scale
176
8
CSS3 Relative Scale
184
8
CSS4 Relative Scale
192
8
CSS5 Relative Scale
200
8
CSS6 Relative Scale
208
8
CSS7 Relative Scale
216
8
CSS8 Relative Scale
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 52
224
8
CSS9 Relative Scale
232
8
CSS10 Relative Scale
240
8
CSS Threshold
26
Set Cam1 Sensor
Configuration - Table
42: Set Cam1 Sensor
Configuration
Command Format
15
248
16
Cam1 Sensor Mounting Transform
Alpha Angle
264
16
Cam1 Sensor Mounting Transform
Beta Angle
280
16
Cam1 Sensor Mounting Transform
Gamma Angle
296
8
Cam1 detection threshold
304
1
Cam1 sensor auto adjust mode
312
16
Cam1 sensor exposure time
328
16
Cam1 Boresight X
344
16
Cam1 Boresight Y
360
1
Cam1 Shift
27
Set Cam2 Sensor
Configuration - Table
43: Set Cam2 Sensor
Configuration
Command Format
15
368
16
Cam2 Sensor Mounting Transform
Alpha Angle
384
16
Cam2 Sensor Mounting Transform
Beta Angle
400
16
Cam2 Sensor Mounting Transform
Gamma Angle
416
8
Cam2 detection threshold
424
1
Cam2 sensor auto adjust mode
432
16
Cam2 sensor exposure time
448
16
Cam2 Boresight X
464
16
Cam2 Boresight Y
480
1
Cam2 Shift
28
Set Nadir Sensor
Mask Configuration 1
- Table 44: Set Nadir
Sensor Mask
Configuration 1
Command Format
8
488
16
Minimum X of area 1
504
16
Maximum X of area 1
520
16
Minimum Y of area 1
536
16
Maximum Y of area 1
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 53
29
Set Nadir Sensor
Mask Configuration 2
- Table 45: Set Nadir
Sensor Mask
Configuration 2
Command Format
8
552
16
Minimum X of area 2
568
16
Maximum X of area 2
584
16
Minimum Y of area 2
600
16
Maximum Y of area 2
30
Set Nadir Sensor
Mask Configuration 3
- Table 46: Set Nadir
Sensor Mask
Configuration 3
Command Format
8
616
16
Minimum X of area 3
632
16
Maximum X of area 3
648
16
Minimum Y of area 3
664
16
Maximum Y of area 3
31
Set Nadir Sensor
Mask Configuration 4
- Table 47: Set Nadir
Sensor Mask
Configuration 4
Command Format
8
680
16
Minimum X of area 4
696
16
Maximum X of area 4
712
16
Minimum Y of area 4
728
16
Maximum Y of area 4
32
Set Nadir Sensor
Mask Configuration 5
- Table 48: Set Nadir
Sensor Mask
Configuration 5
Command Format
8
744
16
Minimum X of area 5
760
16
Maximum X of area 5
776
16
Minimum Y of area 5
792
16
Maximum Y of area 5
33
Set Magnetometer
Mounting
Configuration - Table
49: Set Magnetometer
Mounting
6
808
16
Magnetometer Mounting Transform
Alpha Angle
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 54
Configuration
Command Format
824
16
Magnetometer Mounting Transform
Beta Angle
840
16
Magnetometer Mounting Transform
Gamma Angle
34
Set Magnetometer
Offset and Scaling
Configuration - Table
50: Set Magnetometer
Offset and Scaling
Configuration
Command Format
12
856
16
Magnetometer Channel 1 Offset
872
16
Magnetometer Channel 2 Offset
888
16
Magnetometer Channel 3 Offset
904
16
Magnetometer Sensitivity Matrix
S11
920
16
Magnetometer Sensitivity Matrix
S22
936
16
Magnetometer Sensitivity Matrix
S33
35
Set Magnetometer
Sensitivity
Configuration - Table
51: Set Magnetometer
Sensitivity
Configuration
Command Format
12
952
16
Magnetometer Sensitivity Matrix
S12
968
16
Magnetometer Sensitivity Matrix
S13
984
16
Magnetometer Sensitivity Matrix
S21
1000
16
Magnetometer Sensitivity Matrix
S23
1016
16
Magnetometer Sensitivity Matrix
S31
1032
16
Magnetometer Sensitivity Matrix
S32
36
Set Rate Sensor
Configuration - Table
52: Set Rate Sensor
7
1048
16
X-Rate Sensor Offset
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 55
Configuration
Command Format
1064
16
Y-Rate Sensor Offset
1080
16
Z-Rate Sensor Offset
1096
8
RateSensorMult
37
Set Star Tracker
Configuration - Table
53: Set Star Tracker
Configuration
Command Format
26
1104
16
StarTracker Mounting Transform
Alpha Angle
1120
16
StarTracker Mounting Transform
Beta Angle
1136
16
StarTracker Mounting Transform
Gamma Angle
1152
16
StarTracker exposure time
1168
8
StarTracker detection threshold
1176
8
StarTracker star threshold
1184
8
Maximum Star Matched
1192
8
Maximum Star Pixel
1200
8
Maximum Star Noise
1208
8
Minimum Star Pixel
1216
8
Star Tracker Error Margin
1224
32
Star Tracker Centroid X
1256
32
Star Tracker Centroid Y
1288
16
Star Tracker Focal Length
1304
8
Synch Delay
38
Set Detumbling
Control Parameters -
Table 54: Set
Detumbling Control
Parameters Command
Format
14
1312
32
Detumbling Spin Gain
1344
32
Detumbling Damping Gain
1376
16
Reference spin rate
1392
32
Fast BDot Detumbling Gain
39
Set Y-Wheel Control
Parameters - Table 55:
Set Y-Wheel Control
Parameters Command
Format
20
1424
32
Y-Momentum Control Gain
1456
32
Y-momentum Nutation Damping
Gain
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 56
1488
32
Y-momentum Proportional Gain
1520
32
Y-momentum Derivative Gain
1552
32
Reference Wheel Momentum
40
Set Reaction Wheel
Control Parameters -
Table 56: Set Reaction
Wheel Control
Parameters Command
Format
8
1584
32
RWheel Proportional Gain
1616
32
RWheel Derivative Gain
54
Set Tracking
Controller Gain
Parameters - Table 71:
Set Tracking
Controller Gain
Parameters Command
Format
12
1648
32
Tracking Proportional Gain
1680
32
Tracking Derivative Gain
1712
32
Tracking Integral Gain
41
Set Moments of
Inertia - Table 57: Set
Moments of Inertia
Command Format
12
1744
32
Moment Of Inertia - Ixx
1776
32
Moment Of Inertia - Iyy
1808
32
Moment Of Inertia - Izz
42
Set Products of Inertia
- Table 58: Set
Products of Inertia
Command Format
12
1840
32
Moment Of Inertia - Ixy
1872
32
Moment Of Inertia - Ixz
1904
32
Moment Of Inertia - Iyz
43
Set Estimation
Parameters 1 - Table
59: Set Estimation
Parameters 1
Command Format
16
1936
32
Magnetometer Rate Filter System
Noise
1968
32
EKF System Noise
2000
32
CSS Measurement Noise
2032
32
Sun Sensor Measurement Noise
44
Set Estimation
Parameters 2 - Table
60: Set Estimation
14
2064
32
Nadir Sensor Measurement Noise
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 57
Parameters 2
Command Format
2096
32
Magnetometer Measurement Noise
2128
32
Star Tracker Measurement Noise
2160
1
Use Sun Sensor
2161
1
Use Nadir Sensor
2162
1
Use CSS
2163
1
Use Star Tracker
2164
2
Magnetometer Mode
2168
8
Cam1 and Cam2 Sampling Period
Table 37: Set Magnetorquer Configuration Command Format
ID
21
Parameters Length (bytes)
3
Description
Set magnetorquer configuration parameters
Parameters
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
0
8
Magnetorquer 1
Configuration
ENUM
Magnetorquer 1 Configuration.
Possible values are in Table 34:
AxisSelect Enumeration Values
8
8
Magnetorquer 2
Configuration
ENUM
Magnetorquer 2 Configuration.
Possible values are in Table 34:
AxisSelect Enumeration Values
16
8
Magnetorquer 3
Configuration
ENUM
Magnetorquer 3 Configuration.
Possible values are in Table 34:
AxisSelect Enumeration Values
Table 38: Set Wheel Configuration Command Format
ID
22
Parameters Length (bytes)
4
Description
Set wheel configuration parameters
Parameters
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
0
8
RW1 Configuration
ENUM
RW1 Configuration. Possible
values are in Table 34: AxisSelect
Enumeration Values
8
8
RW2 Configuration
ENUM
RW2 Configuration. Possible
values are in Table 34: AxisSelect
Enumeration Values
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 58
16
8
RW3 Configuration
ENUM
RW3 Configuration. Possible
values are in Table 34: AxisSelect
Enumeration Values
24
8
RW4 Configuration
ENUM
RW4 Configuration. Possible
values are in Table 34: AxisSelect
Enumeration Values
Table 39: Set Rate Gyro Configuration Command Format
ID
23
Parameters Length (bytes)
3
Description
Set rate gyro configuration parameters
Parameters
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
0
8
Gyro1
Configuration
ENUM
Gyro1 Configuration. Possible
values are in Table 34: AxisSelect
Enumeration Values
8
8
Gyro2
Configuration
ENUM
Gyro2 Configuration. Possible
values are in Table 34: AxisSelect
Enumeration Values
16
8
Gyro3
Configuration
ENUM
Gyro3 Configuration. Possible
values are in Table 34: AxisSelect
Enumeration Values
Table 40: Set CSS Alignment Configuration Command Format
ID
24
Parameters Length (bytes)
10
Description
Set photodiode pointing directions
Parameters
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
0
8
CSS1 Configuration
ENUM
CSS1 Configuration. Possible
values are in Table 34: AxisSelect
Enumeration Values
8
8
CSS2 Configuration
ENUM
CSS2 Configuration. Possible
values are in Table 34: AxisSelect
Enumeration Values
16
8
CSS3 Configuration
ENUM
CSS3 Configuration. Possible
values are in Table 34: AxisSelect
Enumeration Values
24
8
CSS4 Configuration
ENUM
CSS4 Configuration. Possible
values are in Table 34: AxisSelect
Enumeration Values
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 59
32
8
CSS5 Configuration
ENUM
CSS5 Configuration. Possible
values are in Table 34: AxisSelect
Enumeration Values
40
8
CSS6 Configuration
ENUM
CSS6 Configuration. Possible
values are in Table 34: AxisSelect
Enumeration Values
48
8
CSS7 Configuration
ENUM
CSS7 Configuration. Possible
values are in Table 34: AxisSelect
Enumeration Values
56
8
CSS8 Configuration
ENUM
CSS8 Configuration. Possible
values are in Table 34: AxisSelect
Enumeration Values
64
8
CSS9 Configuration
ENUM
CSS9 Configuration. Possible
values are in Table 34: AxisSelect
Enumeration Values
72
8
CSS10
Configuration
ENUM
CSS10 Configuration. Possible
values are in Table 34: AxisSelect
Enumeration Values
Table 41: Set CSS Scale Factor Configuration Command Format
ID
25
Parameters Length (bytes)
11
Description
Set photodiode scale factors
Parameters
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
0
8
CSS1 Relative Scale
UINT
CSS1 Relative Scaling Factor. Raw
parameter value is obtained
using the formula: (raw
parameter) = (formatted
value)*100.0
8
8
CSS2 Relative Scale
UINT
CSS2 Relative Scaling Factor. Raw
parameter value is obtained
using the formula: (raw
parameter) = (formatted
value)*100.0
16
8
CSS3 Relative Scale
UINT
CSS3 Relative Scaling Factor. Raw
parameter value is obtained
using the formula: (raw
parameter) = (formatted
value)*100.0
24
8
CSS4 Relative Scale
UINT
CSS4 Relative Scaling Factor. Raw
parameter value is obtained
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 60
using the formula: (raw
parameter) = (formatted
value)*100.0
32
8
CSS5 Relative Scale
UINT
CSS5 Relative Scaling Factor. Raw
parameter value is obtained
using the formula: (raw
parameter) = (formatted
value)*100.0
40
8
CSS6 Relative Scale
UINT
CSS6 Relative Scaling Factor. Raw
parameter value is obtained
using the formula: (raw
parameter) = (formatted
value)*100.0
48
8
CSS7 Relative Scale
UINT
CSS7 Relative Scaling Factor. Raw
parameter value is obtained
using the formula: (raw
parameter) = (formatted
value)*100.0
56
8
CSS8 Relative Scale
UINT
CSS8 Relative Scaling Factor. Raw
parameter value is obtained
using the formula: (raw
parameter) = (formatted
value)*100.0
64
8
CSS9 Relative Scale
UINT
CSS9 Relative Scaling Factor. Raw
parameter value is obtained
using the formula: (raw
parameter) = (formatted
value)*100.0
72
8
CSS10 Relative
Scale
UINT
CSS10 Relative Scaling Factor.
Raw parameter value is obtained
using the formula: (raw
parameter) = (formatted
value)*100.0
80
8
CSS Threshold
UINT
CSS Threshold
Table 42: Set Cam1 Sensor Configuration Command Format
ID
26
Parameters Length (bytes)
15
Description
Set Cam1 sensor configuration parameters
Parameters
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 61
0
16
Cam1 Sensor
Mounting
Transform Alpha
Angle
INT
Cam1 Sensor Mounting
Transform Alpha Angle. Raw
parameter value is obtained
using the formula: (raw
parameter) = (formatted
value)*100.0 (formatted value is
in [deg] units)
16
16
Cam1 Sensor
Mounting
Transform Beta
Angle
INT
Cam1 Sensor Mounting
Transform Beta Angle. Raw
parameter value is obtained
using the formula: (raw
parameter) = (formatted
value)*100.0 (formatted value is
in [deg] units)
32
16
Cam1 Sensor
Mounting
Transform Gamma
Angle
INT
Cam1 Sensor Mounting
Transform Gamma Angle. Raw
parameter value is obtained
using the formula: (raw
parameter) = (formatted
value)*100.0 (formatted value is
in [deg] units)
48
8
Cam1 detection
threshold
UINT
56
1
Cam1 sensor auto
adjust mode
BOOL
0 = disabled and 1 = enabled
64
16
Cam1 sensor
exposure time
UINT
exposure time register value
80
16
Cam1 Boresight X
UINT
X Pixel location of Cam1
boresight. Raw parameter value
is obtained using the formula:
(raw parameter) = (formatted
value)*100.0 (formatted value is
in [pixels] units)
96
16
Cam1 Boresight Y
UINT
Y Pixel location of Cam1
boresight. Raw parameter value
is obtained using the formula:
(raw parameter) = (formatted
value)*100.0 (formatted value is
in [pixels] units)
112
1
Cam1 Shift
BOOL
Use Cam2 processing chain for
Cam1 detection
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 62
Table 43: Set Cam2 Sensor Configuration Command Format
ID
27
Parameters Length (bytes)
15
Description
Set Cam2 sensor configuration parameters
Parameters
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
0
16
Cam2 Sensor
Mounting
Transform Alpha
Angle
INT
Cam2 Sensor Mounting
Transform Alpha Angle. Raw
parameter value is obtained
using the formula: (raw
parameter) = (formatted
value)*100.0 (formatted value is
in [deg] units)
16
16
Cam2 Sensor
Mounting
Transform Beta
Angle
INT
Cam2 Sensor Mounting
Transform Beta Angle. Raw
parameter value is obtained
using the formula: (raw
parameter) = (formatted
value)*100.0 (formatted value is
in [deg] units)
32
16
Cam2 Sensor
Mounting
Transform Gamma
Angle
INT
Cam2 Sensor Mounting
Transform Gamma Angle. Raw
parameter value is obtained
using the formula: (raw
parameter) = (formatted
value)*100.0 (formatted value is
in [deg] units)
48
8
Cam2 detection
threshold
UINT
Cam2 detection threshold
56
1
Cam2 sensor auto
adjust mode
BOOL
0 = disabled and 1 = enabled
64
16
Cam2 sensor
exposure time
UINT
exposure time register value
80
16
Cam2 Boresight X
UINT
X Pixel location of Cam2
boresight. Raw parameter value
is obtained using the formula:
(raw parameter) = (formatted
value)*100.0 (formatted value is
in [pixels] units)
96
16
Cam2 Boresight Y
UINT
Y Pixel location of Cam2
boresight. Raw parameter value
is obtained using the formula:
(raw parameter) = (formatted
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 63
value)*100.0 (formatted value is
in [pixels] units)
112
1
Cam2 Shift
BOOL
Use Sun processing chain for
Cam2 detection
Table 44: Set Nadir Sensor Mask Configuration 1 Command Format
ID
28
Parameters Length (bytes)
8
Description
Set Nadir Sensor Mask Configuration 1
Parameters
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
0
16
Minimum X of area
1
UINT
Minimum X of Area 1
16
16
Maximum X of area
1
UINT
Maximum X of Area 1
32
16
Minimum Y of area
1
UINT
Minimum Y of Area 1
48
16
Maximum Y of area
1
UINT
Maximum Y of Area 1
Table 45: Set Nadir Sensor Mask Configuration 2 Command Format
ID
29
Parameters Length (bytes)
8
Description
Set Nadir Sensor Mask Configuration 2
Parameters
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
0
16
Minimum X of area
2
UINT
Minimum X of Area 2
16
16
Maximum X of area
2
UINT
Maximum X of Area 2
32
16
Minimum Y of area
2
UINT
Minimum Y of Area 2
48
16
Maximum Y of area
2
UINT
Maximum Y of Area 2
Table 46: Set Nadir Sensor Mask Configuration 3 Command Format
ID
30
Parameters Length (bytes)
8
Description
Set Nadir Sensor Mask Configuration 3
Parameters
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 64
0
16
Minimum X of area
3
UINT
Minimum X of Area 3
16
16
Maximum X of area
3
UINT
Maximum X of Area 3
32
16
Minimum Y of area
3
UINT
Minimum Y of Area 3
48
16
Maximum Y of area
3
UINT
Maximum Y of Area 3
Table 47: Set Nadir Sensor Mask Configuration 4 Command Format
ID
31
Parameters Length (bytes)
8
Description
Set Nadir Sensor Mask Configuration 4
Parameters
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
0
16
Minimum X of area
4
UINT
Minimum X of Area 4
16
16
Maximum X of area
4
UINT
Maximum X of Area 4
32
16
Minimum Y of area
4
UINT
Minimum Y of Area 4
48
16
Maximum Y of area
4
UINT
Maximum Y of Area 4
Table 48: Set Nadir Sensor Mask Configuration 5 Command Format
ID
32
Parameters Length (bytes)
8
Description
Set Nadir Sensor Mask Configuration 5
Parameters
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
0
16
Minimum X of area
5
UINT
Minimum X of Area 5
16
16
Maximum X of area
5
UINT
Maximum X of Area 5
32
16
Minimum Y of area
5
UINT
Minimum Y of Area 5
48
16
Maximum Y of area
5
UINT
Maximum Y of Area 5
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 65
Table 49: Set Magnetometer Mounting Configuration Command Format
ID
33
Parameters Length (bytes)
6
Description
Set magnetometer mounting configuration parameters
Parameters
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
0
16
Magnetometer
Mounting
Transform Alpha
Angle
INT
Magnetometer Mounting
Transform Alpha Angle. Raw
parameter value is obtained
using the formula: (raw
parameter) = (formatted
value)*100.0 (formatted value is
in [deg] units)
16
16
Magnetometer
Mounting
Transform Beta
Angle
INT
Magnetometer Mounting
Transform Beta Angle. Raw
parameter value is obtained
using the formula: (raw
parameter) = (formatted
value)*100.0 (formatted value is
in [deg] units)
32
16
Magnetometer
Mounting
Transform Gamma
Angle
INT
Magnetometer Mounting
Transform Gamma Angle. Raw
parameter value is obtained using
the formula: (raw parameter) =
(formatted value)*100.0
(formatted value is in [deg] units)
Table 50: Set Magnetometer Offset and Scaling Configuration Command Format
ID
34
Parameters Length (bytes)
12
Description
Set Magnetometer Offset and Scaling Configuration
Parameters
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
0
16
Magnetometer
Channel 1 Offset
INT
Magnetometer Channel 1 Offset.
Raw parameter value is obtained
using the formula: (raw
parameter) = (formatted
value)*1000.0
16
16
Magnetometer
Channel 2 Offset
INT
Magnetometer Channel 2 Offset.
Raw parameter value is obtained
using the formula: (raw
parameter) = (formatted
value)*1000.0
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 66
32
16
Magnetometer
Channel 3 Offset
INT
Magnetometer Channel 3 Offset.
Raw parameter value is obtained
using the formula: (raw
parameter) = (formatted
value)*1000.0
48
16
Magnetometer
Sensitivity Matrix
S11
INT
Magnetometer Sensitivity Matrix
S11. Raw parameter value is
obtained using the formula: (raw
parameter) = (formatted
value)*1000.0
64
16
Magnetometer
Sensitivity Matrix
S22
INT
Magnetometer Sensitivity Matrix
S22. Raw parameter value is
obtained using the formula: (raw
parameter) = (formatted
value)*1000.0
80
16
Magnetometer
Sensitivity Matrix
S33
INT
Magnetometer Sensitivity Matrix
S33. Raw parameter value is
obtained using the formula: (raw
parameter) = (formatted
value)*1000.0
Table 51: Set Magnetometer Sensitivity Configuration Command Format
ID
35
Parameters Length (bytes)
12
Description
Set Magnetometer Sensitivity Configuration
Parameters
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
0
16
Magnetometer
Sensitivity Matrix
S12
INT
Magnetometer Sensitivity Matrix
S12. Raw parameter value is
obtained using the formula: (raw
parameter) = (formatted
value)*1000.0
16
16
Magnetometer
Sensitivity Matrix
S13
INT
Magnetometer Sensitivity Matrix
S13. Raw parameter value is
obtained using the formula: (raw
parameter) = (formatted
value)*1000.0
32
16
Magnetometer
Sensitivity Matrix
S21
INT
Magnetometer Sensitivity Matrix
S21. Raw parameter value is
obtained using the formula: (raw
parameter) = (formatted
value)*1000.0
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 67
48
16
Magnetometer
Sensitivity Matrix
S23
INT
Magnetometer Sensitivity Matrix
S23. Raw parameter value is
obtained using the formula: (raw
parameter) = (formatted
value)*1000.0
64
16
Magnetometer
Sensitivity Matrix
S31
INT
Magnetometer Sensitivity Matrix
S31. Raw parameter value is
obtained using the formula: (raw
parameter) = (formatted
value)*1000.0
80
16
Magnetometer
Sensitivity Matrix
S32
INT
Magnetometer Sensitivity Matrix
S32. Raw parameter value is
obtained using the formula: (raw
parameter) = (formatted
value)*1000.0
Table 52: Set Rate Sensor Configuration Command Format
ID
36
Parameters Length (bytes)
7
Description
Set Rate Sensor Offsets
Parameters
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
0
16
X-Rate Sensor
Offset
INT
X-Rate Sensor Offset. Raw
parameter value is obtained
using the formula: (raw
parameter) = (formatted
value)*1000.0 (formatted value is
in [deg/s] units)
16
16
Y-Rate Sensor
Offset
INT
Y-Rate Sensor Offset. Raw
parameter value is obtained
using the formula: (raw
parameter) = (formatted
value)*1000.0 (formatted value is
in [deg/s] units)
32
16
Z-Rate Sensor
Offset
INT
Z-Rate Sensor Offset. Raw
parameter value is obtained
using the formula: (raw
parameter) = (formatted
value)*1000.0 (formatted value is
in [deg/s] units)
48
8
RateSensorMult
UINT
Multiplier of rate sensor
measurement
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 68
Table 53: Set Star Tracker Configuration Command Format
ID
37
Parameters Length (bytes)
26
Description
Set configurations of CubeStar
Parameters
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
0
16
StarTracker
Mounting
Transform Alpha
Angle
INT
StarTracker Mounting Transform
Alpha Angle. Raw parameter
value is obtained using the
formula: (raw parameter) =
(formatted value)*100.0
(formatted value is in [deg] units)
16
16
StarTracker
Mounting
Transform Beta
Angle
INT
StarTracker Mounting Transform
Beta Angle. Raw parameter value
is obtained using the formula:
(raw parameter) = (formatted
value)*100.0 (formatted value is
in [deg] units)
32
16
StarTracker
Mounting
Transform Gamma
Angle
INT
StarTracker Mounting Transform
Gamma Angle. Raw parameter
value is obtained using the
formula: (raw parameter) =
(formatted value)*100.0
(formatted value is in [deg] units)
48
16
StarTracker
exposure time
UINT
exposure time register value
64
8
StarTracker
detection threshold
UINT
StarTracker detection threshold
72
8
StarTracker star
threshold
UINT
StarTracker star threshold
80
8
Maximum Star
Matched
UINT
Maximum of stars that the star
tracker will match
88
8
Maximum Star Pixel
UINT
Maximum pixels in a star
96
8
Maximum Star
Noise
UINT
Maximum star pixel noise
104
8
Minimum Star Pixel
UINT
Minimum pixels in a star
112
8
Star Tracker Error
Margin
UINT
% Error margin of the star
identification. Raw parameter
value is obtained using the
formula: (raw parameter) =
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 69
(formatted value)*100.0
(formatted value is in [%] units)
120
32
Star Tracker
Centroid X
FLOAT
Pixel centroid X
152
32
Star Tracker
Centroid Y
FLOAT
Pixel centroid Y
184
16
Star Tracker Focal
Length
UINT
Star Tracker Focal Length. Raw
parameter value is obtained
using the formula: (raw
parameter) = (formatted
value)*10000.0 (formatted value
is in [mm] units)
200
8
Synch Delay
UINT
Synchronization delay within star
Tracker
Table 54: Set Detumbling Control Parameters Command Format
ID
38
Parameters Length (bytes)
14
Description
Set controller gains and reference values for Detumbling control mode
Parameters
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
0
32
Detumbling Spin
Gain
FLOAT
Detumbling Spin Gain (Ks)
32
32
Detumbling
Damping Gain
FLOAT
Detumbling Damping Gain (Kd)
64
16
Reference spin rate
INT
Reference spin rate (wy-ref).
Must always be smaller than 0.
Raw parameter value is obtained
using the formula: (raw
parameter) = (formatted
value)*1000.0 (formatted value is
in [deg/s] units)
80
32
Fast BDot
Detumbling Gain
FLOAT
Fast BDot Detumbling Gain (Kdf)
Table 55: Set Y-Wheel Control Parameters Command Format
ID
39
Parameters Length (bytes)
20
Description
Set controller gains and reference value for Y-wheel control mode
Parameters
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 70
0
32
Y-Momentum
Control Gain
FLOAT
Y-Momentum Control Gain (Kh)
32
32
Y-momentum
Nutation Damping
Gain
FLOAT
Y-momentum Nutation Damping
Gain (Kn)
64
32
Y-momentum
Proportional Gain
FLOAT
Y-momentum Proportional Gain
(Kp1)
96
32
Y-momentum
Derivative Gain
FLOAT
Y-momentum Derivative Gain
(Kd1)
128
32
Reference Wheel
Momentum
FLOAT
Reference Wheel Momentum (H-
ref). Must always be smaller than
0. (Unit of measure is [Nms])
Table 56: Set Reaction Wheel Control Parameters Command Format
ID
40
Parameters Length (bytes)
8
Description
Set controller gains and reference value for reaction wheel control mode
Parameters
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
0
32
RWheel
Proportional Gain
FLOAT
RWheel Proportional Gain (Kp2)
32
32
RWheel Derivative
Gain
FLOAT
RWheel Derivative Gain (Kd2)
Table 57: Set Moments of Inertia Command Format
ID
41
Parameters Length (bytes)
12
Description
Set satellite moments of inertia
Parameters
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
0
32
Moment Of Inertia
- Ixx
FLOAT
Moment Of Inertia - Ixx. (Unit of
measure is [kg.m^2])
32
32
Moment Of Inertia
- Iyy
FLOAT
Moment Of Inertia - Iyy. (Unit of
measure is [kg.m^2])
64
32
Moment Of Inertia -
Izz
FLOAT
Moment Of Inertia - Izz. (Unit of
measure is [kg.m^2])
Table 58: Set Products of Inertia Command Format
ID
42
Parameters Length (bytes)
12
Description
Set satellite products of inertia
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 71
Parameters
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
0
32
Moment Of Inertia
- Ixy
FLOAT
Moment Of Inertia - Ixy. (Unit of
measure is [kg.m^2])
32
32
Moment Of Inertia
- Ixz
FLOAT
Moment Of Inertia - Ixz. (Unit of
measure is [kg.m^2])
64
32
Moment Of Inertia -
Iyz
FLOAT
Moment Of Inertia - Iyz. (Unit of
measure is [kg.m^2])
Table 59: Set Estimation Parameters 1 Command Format
ID
43
Parameters Length (bytes)
16
Description
Set estimation noise covariance and sensor mask 1
Parameters
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
0
32
Magnetometer
Rate Filter System
Noise
FLOAT
Magnetometer Rate Filter
System Noise
32
32
EKF System Noise
FLOAT
EKF System Noise
64
32
CSS Measurement
Noise
FLOAT
CSS Measurement Noise
96
32
Sun Sensor
Measurement
Noise
FLOAT
Sun Sensor Measurement Noise
Table 60: Set Estimation Parameters 2 Command Format
ID
44
Parameters Length (bytes)
14
Description
Set estimation noise covariance and sensor mask 2
Parameters
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
0
32
Nadir Sensor
Measurement
Noise
FLOAT
Nadir Sensor Measurement
Noise
32
32
Magnetometer
Measurement
Noise
FLOAT
Magnetometer Measurement
Noise
64
32
Star Tracker
Measurement
Noise
FLOAT
Star Tracker Measurement Noise
96
1
Use Sun Sensor
BOOL
Use Sun Sensor measurement in
EKF
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 72
97
1
Use Nadir Sensor
BOOL
Use Nadir Sensor measurement
in EKF
98
1
Use CSS
BOOL
Use CSS measurement in EKF
99
1
Use Star Tracker
BOOL
Use Star Tracker measurement in
EKF
100
2
Magnetometer
Mode
ENUM
Mode describing which
magnetometer is used for
estimation and control. Possible
values are in Table 35:
MagModeVal Enumeration
Values
104
8
Cam1 and Cam2
Sampling Period
UINT
Cam1 and Cam2 sensor sampling
period. Lower four bits are Cam1
period and upper four bits the
Cam2 period. Setting period to
zero for sensor will disable
sampling of sensor.. (Unit of
measure is [s])
Table 61: SGP4 Orbit Parameters Command Format
ID
45
Parameters Length (bytes)
64
Description
SGP4 Orbit Parameters
Parameters
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
0
64
Inclination
DOUBLE
Inclination. (Unit of measure
is [deg])
64
64
Eccentricity
DOUBLE
Eccentricity
128
64
Right-ascension of
the Ascending
Node
DOUBLE
Right-ascension of the
Ascending Node. (Unit of
measure is [deg])
192
64
Argument of
Perigee
DOUBLE
Argument of Perigee. (Unit
of measure is [deg])
256
64
B-Star drag term
DOUBLE
B-Star drag term
320
64
Mean Motion
DOUBLE
Mean Motion. (Unit of
measure is [orbits/day])
384
64
Mean Anomaly
DOUBLE
Mean Anomaly. (Unit of
measure is [deg])
448
64
Epoch
DOUBLE
Epoch (year.day). (Unit of
measure is [year.day])
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 73
Table 62: Parts of SGP4 Orbit Parameters command (ID 45), sent using shorter telecommands
ID
Partial Commands
Length
(bytes)
Bit
offset
Bit
length
Overlapping ADCS Configuration
Telecommand Parameters
46
Set SGP4 Orbit
Inclination - Table 63:
Set SGP4 Orbit
Inclination Command
Format
8
0
64
Inclination
47
Set SGP4 Orbit
Eccentricity - Table 64:
Set SGP4 Orbit
Eccentricity Command
Format
8
64
64
Eccentricity
48
Set SGP4 Orbit RAAN
- Table 65: Set SGP4
Orbit RAAN
Command Format
8
128
64
Right-ascension of the Ascending
Node
49
Set SGP4 Orbit
Argument of Perigee -
Table 66: Set SGP4
Orbit Argument of
Perigee Command
Format
8
192
64
Argument of Perigee
50
Set SGP4 Orbit B-Star
Drag term - Table 67:
Set SGP4 Orbit B-Star
Drag term Command
Format
8
256
64
B-Star drag term
51
Set SGP4 Orbit Mean
Motion - Table 68: Set
SGP4 Orbit Mean
Motion Command
Format
8
320
64
Mean Motion
52
Set SGP4 Orbit Mean
Anomaly - Table 69:
Set SGP4 Orbit Mean
Anomaly Command
Format
8
384
64
Mean Anomaly
53
Set SGP4 Orbit Epoch
- Table 70: Set SGP4
Orbit Epoch
Command Format
8
448
64
Epoch
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 74
Table 63: Set SGP4 Orbit Inclination Command Format
ID
46
Parameters Length
(bytes)
8
Description
Set SGP4 Orbit Inclination
Parameters
Offset
(bits)
Length
(bits)
Name
Data Type
Description
0
64
Inclination
DOUBLE
Inclination. (Unit of measure
is [deg])
Table 64: Set SGP4 Orbit Eccentricity Command Format
ID
47
Parameters Length (bytes)
8
Description
Set SGP4 Orbit Eccentricity
Parameters
Offset (bits)
Length (bits)
Name
Data Type
Description
0
64
Eccentricity
DOUBLE
Eccentricity
Table 65: Set SGP4 Orbit RAAN Command Format
ID
48
Parameters Length (bytes)
8
Description
Set SGP4 Orbit RAAN
Parameters
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
0
64
Right-ascension of
the Ascending
Node
DOUBLE
Right-ascension of the
Ascending Node. (Unit of
measure is [deg])
Table 66: Set SGP4 Orbit Argument of Perigee Command Format
ID
49
Parameters Length
(bytes)
8
Description
Set SGP4 Orbit Argument of Perigee
Parameters
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
0
64
Argument of
Perigee
DOUBLE
Argument of Perigee. (Unit of
measure is [deg])
Table 67: Set SGP4 Orbit B-Star Drag term Command Format
ID
50
Parameters Length (bytes)
8
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 75
Description
Set SGP4 Orbit B-Star Drag term
Parameters
Offset (bits)
Length (bits)
Name
Data Type
Description
0
64
B-Star drag term
DOUBLE
B-Star drag term
Table 68: Set SGP4 Orbit Mean Motion Command Format
ID
51
Parameters Length
(bytes)
8
Description
Set SGP4 Orbit Mean Motion
Parameters
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
0
64
Mean
Motion
DOUBLE
Mean Motion. (Unit of measure
is [orbits/day])
Table 69: Set SGP4 Orbit Mean Anomaly Command Format
ID
52
Parameters Length
(bytes)
8
Description
Set SGP4 Orbit Mean Anomaly
Parameters
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
0
64
Mean
Anomaly
DOUBLE
Mean Anomaly. (Unit of
measure is [deg])
Table 70: Set SGP4 Orbit Epoch Command Format
ID
53
Parameters Length
(bytes)
8
Description
Set SGP4 Orbit Epoch
Parameters
Offset
(bits)
Length
(bits)
Name
Data Type
Description
0
64
Epoch
DOUBLE
Epoch (year.day). (Unit of
measure is [year.day])
Table 71: Set Tracking Controller Gain Parameters Command Format
ID
54
Parameters Length (bytes)
12
Description
Set controller gains for tracking control mode
Parameters
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 76
0
32
Tracking
Proportional Gain
FLOAT
Tracking Proportional Gain (Kp3)
32
32
Tracking Derivative
Gain
FLOAT
Tracking Derivative Gain (Kd3)
64
32
Tracking Integral
Gain
FLOAT
Tracking Integral Gain (Ki3)
Table 72: Tracking Controller Target Reference Command Format
ID
55
Parameters Length (bytes)
12
Description
Target reference for tracking control mode
Parameters
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
0
32
Geocentric
longitude of target
FLOAT
Geocentric longitude of target.
(Unit of measure is [deg])
32
32
Geocentric latitude
of target
FLOAT
Geocentric latitude of target.
(Unit of measure is [deg])
64
32
Geocentric altitude
of target
FLOAT
Geocentric altitude of target.
(Unit of measure is [meter])
Table 73: Set Mode of Magnetometer Operation Command Format
ID
56
Parameters Length
(bytes)
1
Description
Use of main or redundant magnetometer
Parameters
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
0
8
Magnetometer
Mode
ENUM
Mode describing which
magnetometer is used for
estimation and control. Possible
values are in Table 35: MagModeVal
Enumeration Values
Table 74: Convert to JPG file Command Format
ID
57
Parameters Length (bytes)
3
Description
Convert raw or bmp files to JPG
Parameters
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
0
8
Source File Counter
UINT
Source File Counter
8
8
Quality Factor
UINT
Quality Factor
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 77
16
8
White Balance
UINT
White Balance
Table 75: Default Configuration Command Format
ID
60
Parameters Length (bytes)
0
Description
Retrieves default configuration and saves it to flash
Table 76: Save Configuration Command Format
ID
63
Parameters Length (bytes)
0
Description
Save current configuration to flash memory
Table 77: Save Orbit Parameters Command Format
ID
64
Parameters Length (bytes)
0
Description
Save current orbit parameters to flash memory
Table 78: Save Image Command Format
ID
80
Parameters Length (bytes)
2
Description
Save and capture image from one of CubeSense cameras or CubeStar camera to SD
card
Parameters
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
0
8
Camera Select
ENUM
Camera Selection. Possible
values are in Table 79: CamSelect
Enumeration Values
8
8
Image Size
ENUM
Image size selection. Possible
values are in Table 80: ImSize
Enumeration Values
Table 79: CamSelect Enumeration Values
Numeric Value
Name
Description
0
Cam1
Cam1 camera
1
Cam2
Cam2 camera
2
Star
Star camera
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 78
Table 80: ImSize Enumeration Values
Numeric Value
Name
Description
0
Size 0
1024 x 1024 pixels
1
Size 1
512 x 512 pixels
2
Size 2
256 x 256 pixels
3
Size 3
128 x 128 pixels
4
Size 4
64 x 64 pixels
Table 81: SD Log1 Configuration Command Format
ID
104
Parameters Length (bytes)
13
Description
Log selection and period for LOG1
Parameters
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
0
80
Log Selection
ARRAY
Log Selection - up to 80 flags
indicating which telemetry
frames should be logged
80
16
Log Period
UINT
Log period. Set to 0 to disable
logging
96
8
Log Destination
ENUM
Which SD card to use to store log
file. Possible values are in Table
82: SdLogSelect Enumeration
Values
Table 82: SdLogSelect Enumeration Values
Numeric Value
Name
Description
0
Primary SD Card
Use Primary (on-board) SD card for log file
1
Secondary SD Card
Use Secondary SD card for log file
Table 83: SD Log2 Configuration Command Format
ID
105
Parameters Length (bytes)
13
Description
Log selection and period for LOG2
Parameters
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
0
80
Log Selection
ARRAY
Log Selection - up to 80 flags
indicating which telemetry
frames should be logged
80
16
Log Period
UINT
Log period. Set to 0 to disable
logging
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 79
96
8
Log Destination
ENUM
Which SD card to use to store log
file. Possible values are in Table
82: SdLogSelect Enumeration
Values
Table 84: UART Log Configuration Command Format
ID
106
Parameters Length (bytes)
12
Description
Log selection and period for UART (unsolicited TLM)
Parameters
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
0
80
Log Selection
ARRAY
Log Selection - up to 80 flags
indicating which telemetry
frames should be logged
80
16
Log Period
UINT
Log period. Set to 0 to disable
logging
Table 85: Erase File Command Format
ID
108
Parameters Length (bytes)
3
Description
Erase File
Parameters
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
0
8
File Type
ENUM
File Type. Possible values are in
Table 86: FileType Enumeration
Values
8
8
File Counter
UINT
File Counter
16
1
Erase All
BOOL
Erase All
Table 86: FileType Enumeration Values
Numeric Value
Name
Description
0
Binary
Binary File
1
Event Log
Event Log File
2
Telemetry Log
Telemetry Log File
3
JPG Image
JPG Image File
4
BMP Image
BMP Image File
5
Payload1
Payload1 File
6
Payload2
Payload2 File
7
Payload3
Payload3 File
8
Payload4
Payload4 File
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 80
15
Index
Index File
Table 87: Load File Download Block Command Format
ID
112
Parameters Length (bytes)
8
Description
Fill download buffer with file contents
Parameters
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
0
8
File Type
ENUM
File Type. Possible values are in
Table 86: FileType Enumeration
Values
8
8
Counter
UINT
Counter
16
32
Offset
UINT
Offset
48
16
BlockLength
UINT
Block Length
Table 88: Advance File List Read Pointer Command Format
ID
113
Parameters Length (bytes)
0
Description
Advance File List Read Pointer
Table 89: Initiate File Upload Command Format
ID
114
Parameters Length (bytes)
2
Description
Initiate File Upload
Parameters
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
0
8
Destination
ENUM
Destination. Possible values are
in Table 90:
FileUploadDestination
Enumeration Values
8
8
BlockSize
UINT
Block Size
Table 90: FileUploadDestination Enumeration Values
Numeric Value
Name
Description
2
EEPROM
EEPROM
3
Flash program 1
Flash program 1
4
Flash program 2
Flash program 2
5
Flash program 3
Flash program 3
6
Flash program 4
Flash program 4
7
Flash program 5
Flash program 5
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 81
8
Flash program 6
Flash program 6
9
Flash program 7
Flash program 7
10
SD User file 1
SD User file 1
11
SD User file 2
SD User file 2
12
SD User file 3
SD User file 3
13
SD User file 4
SD User file 4
14
SD User file 5
SD User file 5
15
SD User file 6
SD User file 6
16
SD User file 7
SD User file 7
17
SD User file 8
SD User file 8
Table 91: File Upload Packet Command Format
ID
115
Parameters Length (bytes)
22
Description
File Upload Packet
Parameters
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
0
16
Packet Number
UINT
Packet Number
16
160
File Bytes
ARRAY
File Bytes
Table 92: Finalize Upload Block Command Format
ID
116
Parameters Length (bytes)
7
Description
Finalize Uploaded File Block
Parameters
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
0
8
Destination
ENUM
Destination. Possible values are
in Table 90:
FileUploadDestination
Enumeration Values
8
32
Offset
UINT
Offset into file
40
16
Block Length
UINT
Length of block
Table 93: Reset Upload Block Command Format
ID
117
Parameters Length (bytes)
0
Description
Reset HoleMap for Upload Block
Table 94: Reset File List Read Pointer Command Format
ID
118
Parameters Length (bytes)
0
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 82
Description
Reset File List Read Pointer
Table 95: Initiate Download Burst Command Format
ID
119
Parameters Length (bytes)
2
Description
Initiate Download Burst
Parameters
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
0
8
Message Length
UINT
Message Length
8
1
Ignore Hole Map
BOOL
Ignore Hole Map
Table 96: Hole Map 1 Command Format
ID
120
Parameters Length (bytes)
16
Description
File Upload Hole Map 1
Parameters
Offset (bits)
Length (bits)
Name
Data Type
Description
0
128
Hole Map
ARRAY
Hole Map
Table 97: Hole Map 2 Command Format
ID
121
Parameters Length (bytes)
16
Description
File Upload Hole Map 2
Parameters
Offset (bits)
Length (bits)
Name
Data Type
Description
0
128
Hole Map
ARRAY
Hole Map
Table 98: Hole Map 3 Command Format
ID
122
Parameters Length (bytes)
16
Description
File Upload Hole Map 3
Parameters
Offset (bits)
Length (bits)
Name
Data Type
Description
0
128
Hole Map
ARRAY
Hole Map
Table 99: Hole Map 4 Command Format
ID
123
Parameters Length (bytes)
16
Description
File Upload Hole Map 4
Parameters
Offset (bits)
Length (bits)
Name
Data Type
Description
0
128
Hole Map
ARRAY
Hole Map
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 83
Table 100: Hole Map 5 Command Format
ID
124
Parameters Length (bytes)
16
Description
File Upload Hole Map 5
Parameters
Offset (bits)
Length (bits)
Name
Data Type
Description
0
128
Hole Map
ARRAY
Hole Map
Table 101: Hole Map 6 Command Format
ID
125
Parameters Length (bytes)
16
Description
File Upload Hole Map 6
Parameters
Offset (bits)
Length (bits)
Name
Data Type
Description
0
128
Hole Map
ARRAY
Hole Map
Table 102: Hole Map 7 Command Format
ID
126
Parameters Length (bytes)
16
Description
File Upload Hole Map 7
Parameters
Offset (bits)
Length (bits)
Name
Data Type
Description
0
128
Hole Map
ARRAY
Hole Map
Table 103: Hole Map 8 Command Format
ID
127
Parameters Length (bytes)
16
Description
File Upload Hole Map 8
Parameters
Offset (bits)
Length (bits)
Name
Data Type
Description
0
128
Hole Map
ARRAY
Hole Map
4.5.8 Telemetry
Table 104: List of Telemetry Frames
ID
Name
Description
Length
(bytes)
General
128
Identification
Identification information for this node -
Table 105: Identification Telemetry Format
8
129
Unix Time Save to Flash
Configuration settings for unixtime flash
memory persistence - Table 106: Unix Time
Save to Flash Telemetry Format
2
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 84
130
Boot Index and Status
Current selected boot index and status of last
boot - Table 107: Boot Index and Status
Telemetry Format
2
131
Cache enabled state
Cache enabled state - Table 110: Cache
enabled state Telemetry Format
1
132
Boot And Running Program Status
Boot And Running Program Status - Table
111: Boot And Running Program Status
Telemetry Format
6
133
JPG Conversion Progress
Conversion progress - Table 114: JPG
Conversion Progress Telemetry Format
3
134
SRAM Scrub Parameters
SRAM scrubbing size - Table 116: SRAM
Scrub Parameters Telemetry Format
2
135
CubeACP State
Contains flags regarding the state of the ACP
- Table 117: CubeACP State Telemetry Format
1
140
Current Unix Time
Current Unix Time - Table 118: Current Unix
Time Telemetry Format
6
141
Last Logged Event
Last Logged Event (relative to pointer -
adjusted via Advance and Reset TCs (3 & 4) -
Table 119: Last Logged Event Telemetry
Format
6
142
SRAM Latchup counters
SRAM Latchup counters - Table 120: SRAM
Latchup counters Telemetry Format
6
143
EDAC Error Counters
EDAC Error Counters - Table 121: EDAC Error
Counters Telemetry Format
6
144
Communication Status
Communication status - includes command
and telemetry counters and error flags - Table
122: Communication Status Telemetry Format
6
145
Current ADCS State
Current state of the Attitude Control
Processor - Table 123: Current ADCS State
Telemetry Format
6
146
Estimated Attitude Angles
Estimated attitude angles - Table 124:
Estimated Attitude Angles Telemetry Format
6
147
Estimated Angular Rates
Estimated angular rates relative to orbit
reference frame - Table 125: Estimated
Angular Rates Telemetry Format
6
148
Satellite Position (ECI)
Satellite position in ECI frame - Table 126:
Satellite Position (ECI) Telemetry Format
6
149
Satellite Velocity (ECI)
Satellite velocity in ECI frame - Table 127:
Satellite Velocity (ECI) Telemetry Format
6
150
Satellite Position (LLH)
Satellite position in WGS-84 coordinate frame
- Table 128: Satellite Position (LLH) Telemetry
Format
6
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 85
151
Magnetic Field Vector
Measured magnetic field vector - Table 129:
Magnetic Field Vector Telemetry Format
6
152
Coarse Sun Vector
Measured coarse sun vector - Table 130:
Coarse Sun Vector Telemetry Format
6
153
Fine Sun Vector
Measured fine sun vector - Table 131: Fine
Sun Vector Telemetry Format
6
154
Nadir Vector
Measured nadir vector - Table 132: Nadir
Vector Telemetry Format
6
155
Rate Sensor Rates
Rate sensor measurements - Table 133: Rate
Sensor Rates Telemetry Format
6
156
Wheel Speed
Wheel speed measurement - Table 134:
Wheel Speed Telemetry Format
6
157
Magnetorquer Command
Magnetorquer commands - Table 135:
Magnetorquer Command Telemetry Format
6
158
Wheel Speed Commands
Wheel speed commands - Table 136: Wheel
Speed Commands Telemetry Format
6
159
IGRF Modelled Magnetic Field
Vector
IGRF modelled magnetic field vector (orbit
frame referenced) - Table 137: IGRF Modelled
Magnetic Field Vector Telemetry Format
6
160
Modelled Sun Vector
Modelled sun vector (orbit frame referenced)
- Table 138: Modelled Sun Vector Telemetry
Format
6
161
Estimated Gyro Bias
Estimated rate sensor bias - Table 139:
Estimated Gyro Bias Telemetry Format
6
162
Estimation Innovation Vector
Estimation innovation vector - Table 140:
Estimation Innovation Vector Telemetry
Format
6
163
Quaternion Error Vector
Quaternion error vector - Table 141:
Quaternion Error Vector Telemetry Format
6
164
Quaternion Covariance
Quaternion covariance - Table 142:
Quaternion Covariance Telemetry Format
6
165
Angular Rate Covariance
Angular rate covariance - Table 143: Angular
Rate Covariance Telemetry Format
6
166
Raw Cam2 Sensor
Cam2 sensor capture and detection result -
Table 144: Raw Cam2 Sensor Telemetry
Format
6
167
Raw Cam1 Sensor
Cam1 sensor capture and detection result -
Table 147: Raw Cam1 Sensor Telemetry
Format
6
168
Raw CSS 1 to 6
Raw CSS measurements 1 to 6 - Table 148:
Raw CSS 1 to 6 Telemetry Format
6
169
Raw CSS 7 to 10
Raw CSS measurements 7 to 10 - Table 149:
Raw CSS 7 to 10 Telemetry Format
6
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 86
170
Raw Magnetometer
Raw magnetometer measurements - Table
150: Raw Magnetometer Telemetry Format
6
171
CubeSense Current Measurements
CubeSense current measurements - Table
151: CubeSense Current Measurements
Telemetry Format
6
172
CubeControl Current
Measurements
CubeControl current measurements - Table
152: CubeControl Current Measurements
Telemetry Format
6
173
Wheel Currents
XYZ Wheel current measurement - Table 153:
Wheel Currents Telemetry Format
6
174
ADCS Temperatures
Magnetometer + MCU temperature
measurements - Table 154: ADCS
Temperatures Telemetry Format
6
175
Rate sensor temperatures
Rate sensor temperatures - Table 155: Rate
sensor temperatures Telemetry Format
6
176
Raw GPS Status
Raw GPS status - Table 156: Raw GPS Status
Telemetry Format
6
177
Raw GPS Time
Raw GPS time - Table 158: Raw GPS Time
Telemetry Format
6
178
Raw GPS X
Raw GPS X position and velocity (ECI
referenced) - Table 159: Raw GPS X Telemetry
Format
6
179
Raw GPS Y
Raw GPS Y position and velocity (ECI
referenced) - Table 160: Raw GPS Y Telemetry
Format
6
180
Raw GPS Z
Raw GPS Z position and velocity (ECI
referenced) - Table 161: Raw GPS Z Telemetry
Format
6
181
Star 1 Body Vector
Star 1 Body Vector - Table 162: Star 1 Body
Vector Telemetry Format
6
182
Star 2 Body Vector
Star 2 Body Vector - Table 163: Star 2 Body
Vector Telemetry Format
6
183
Star 3 Body Vector
Star 3 Body Vector - Table 164: Star 3 Body
Vector Telemetry Format
6
184
Star 1 Orbit Vector
Star 1 Orbit Vector - Table 165: Star 1 Orbit
Vector Telemetry Format
6
185
Star 2 Orbit Vector
Star 2 Orbit Vector - Table 166: Star 2 Orbit
Vector Telemetry Format
6
186
Star 3 Orbit Vector
Star 3 Orbit Vector - Table 167: Star 3 Orbit
Vector Telemetry Format
6
187
Star Magnitude
Instrument magnitude of identified stars -
Table 168: Star Magnitude Telemetry Format
6
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 87
188
Star Performance
Performance parameters of star measurement
- Table 169: Star Performance Telemetry
Format
6
189
Star Timing
Timing information of star measurement -
Table 171: Star Timing Telemetry Format
6
190
ADCS State
Current ADCS state - Table 172: ADCS State
Telemetry Format
48
191
ADCS Measurements
Calibrated sensor measurements - Table 174:
ADCS Measurements Telemetry Format
72
192
Actuator Commands
Actuator commands - Table 176: Actuator
Commands Telemetry Format
12
193
Estimation Data
Estimation meta-data - Table 178: Estimation
Data Telemetry Format
42
194
Raw Sensor Measurements
Raw sensor measurements - Table 180: Raw
Sensor Measurements Telemetry Format
28
195
Power and Temperature
Measurements
Power and temperature measurements -
Table 182: Power and Temperature
Measurements Telemetry Format
34
196
Adcs Execution Times
Returns information about execution times of
ACP functions - Table 184: Adcs Execution
Times Telemetry Format
8
197
ADCS Power Control
Control power to selected components -
Table 185: ADCS Power Control Telemetry
Format
3
198
ADCS Misc Current Measurements
CubeStar and Torquer current measurements
- Table 186: ADCS Misc Current
Measurements Telemetry Format
6
199
Commanded Attitude Angles
Commanded attitude angles - Table 187:
Commanded Attitude Angles Telemetry
Format
6
200
Tracking Controller Target
Reference
Target reference for tracking control mode -
Table 188: Tracking Controller Target
Reference Telemetry Format
12
206
ADCS Configuration
Current configuration - Table 189: ADCS
Configuration Telemetry Format
272
207
SGP4 Orbit Parameters
SGP4 Orbit Parameters - Table 190: SGP4
Orbit Parameters Telemetry Format
64
210
Raw GPS Measurements
Raw GPS measurements - Table 191: Raw GPS
Measurements Telemetry Format
36
211
Raw Star Tracker
Raw Star Tracker Measurement - Table 193:
Raw Star Tracker Telemetry Format
36
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 88
212
Star 1 Raw Data
Catalogue index and detected coordinates for
star 1 - Table 195: Star 1 Raw Data Telemetry
Format
6
213
Star 2 Raw Data
Catalogue index and detected coordinates for
star 2 - Table 196: Star 2 Raw Data Telemetry
Format
6
214
Star 3 Raw Data
Catalogue index and detected coordinates for
star 3 - Table 197: Star 3 Raw Data Telemetry
Format
6
215
Redundant Magnetometer Raw
Measurements
Redundant Magnetometer raw measurements
- Table 198: Redundant Magnetometer Raw
Measurements Telemetry Format
6
218
Estimated Quaternion
Estimated quaternion set - Table 199:
Estimated Quaternion Telemetry Format
6
219
ECEF Position
Satellite position in ECEF coordinates - Table
200: ECEF Position Telemetry Format
6
220
ACP Execution State
Returns information about the ACP loop -
Table 201: ACP Execution State Telemetry
Format
3
233
Status of Image Capture and Save
Operation
Status of Image Capture and Save Operation -
Table 203: Status of Image Capture and Save
Operation Telemetry Format
2
235
SD Log1 Configuration
Log selection and period for LOG1 - Table
205: SD Log1 Configuration Telemetry Format
13
236
SD Log2 Configuration
Log selection and period for LOG2 - Table
206: SD Log2 Configuration Telemetry Format
13
237
UART Log Configuration
Log selection and period for UART
(unsolicited TLM) - Table 207: UART Log
Configuration Telemetry Format
12
240
Telecommand Acknowledge
Telemetry frame with acknowledge status of
the previously sent command - Table 208:
Telecommand Acknowledge Telemetry
Format
4
241
File Download Buffer with File
Contents
File Download buffer 20-byte packet - Table
210: File Download Buffer with File Contents
Telemetry Format
22
242
Download Block Ready
Status about download block preparation -
Table 211: Download Block Ready Telemetry
Format
5
243
File Information
File Information - Table 212: File Information
Telemetry Format
12
244
Initialize Upload Complete
Initialize Upload Complete - Table 213:
Initialize Upload Complete Telemetry Format
1
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 89
245
Upload Block Complete
Finalize Upload Block Complete - Table 214:
Upload Block Complete Telemetry Format
1
246
Block Checksum
File upload Block CRC16 Checksum - Table
215: Block Checksum Telemetry Format
2
247
Hole Map 1
File Upload Hole Map 1 - Table 216: Hole
Map 1 Telemetry Format
16
248
Hole Map 2
File Upload Hole Map 2 - Table 217: Hole
Map 2 Telemetry Format
16
249
Hole Map 3
File Upload Hole Map 3 - Table 218: Hole
Map 3 Telemetry Format
16
250
Hole Map 4
File Upload Hole Map 4 - Table 219: Hole
Map 4 Telemetry Format
16
251
Hole Map 5
File Upload Hole Map 5 - Table 220: Hole
Map 5 Telemetry Format
16
252
Hole Map 6
File Upload Hole Map 6 - Table 221: Hole
Map 6 Telemetry Format
16
253
Hole Map 7
File Upload Hole Map 7 - Table 222: Hole
Map 7 Telemetry Format
16
254
Hole Map 8
File Upload Hole Map 8 - Table 223: Hole
Map 8 Telemetry Format
16
Table 105: Identification Telemetry Format
ID
128
Frame Length (bytes)
8
Description
Identification information for this node
Channels
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
0
8
Node type
UINT
Node type identifier.
8
8
Interface version
UINT
Interface version. This field
should have a value of 1
16
8
Firmware version
(Major)
UINT
Firmware version (Major)
24
8
Firmware version
(Minor)
UINT
Firmware version (Minor)
32
16
Runtime (seconds)
UINT
Number of seconds since
processor start-up
48
16
Runtime
(milliseconds)
UINT
Number of milliseconds (after the
integer second) since processor
start-up
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 90
Table 106: Unix Time Save to Flash Telemetry Format
ID
129
Frame Length (bytes)
2
Description
Configuration settings for unixtime flash memory persistence
Channels
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
0
1
Save Now
BOOL
Save current unixtime to flash
memory
1
1
Save On Update
BOOL
Save unixtime to flash memory
whenever there is a command to
update the unixtime
2
1
Save Periodic
BOOL
Save unixtime to flash memory
periodically
8
8
Period
UINT
Interval at which to save unixtime
to flash memory. (Unit of measure
is [s])
Table 107: Boot Index and Status Telemetry Format
ID
130
Frame Length (bytes)
2
Description
Current selected boot index and status of last boot
Channels
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
0
8
Program Index
ENUM
Program Index. Possible values
are in Table 108:
BootProgramsList Enumeration
Values
8
8
Boot Status
ENUM
Boot Status. Possible values are in
Table 109: BootStatus
Enumeration Values
Table 108: BootProgramsList Enumeration Values
Numeric Value
Name
Description
0
Bootloader
Bootloader
1
Internal Flash Program
Internal Flash Program
2
EEPROM
EEPROM
3
External Flash Program 1
External Flash Program 1
4
External Flash Program 2
External Flash Program 2
5
External Flash Program 3
External Flash Program 3
6
External Flash Program 4
External Flash Program 4
7
External Flash Program 5
External Flash Program 5
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 91
8
External Flash Program 6
External Flash Program 6
9
External Flash Program 7
External Flash Program 7
Table 109: BootStatus Enumeration Values
Numeric Value
Name
Description
0
New Selection
New Selection
1
Boot Success
Boot Success
2
1 Failed boot attempt
1 Failed boot attempt
3
2 Failed boot attempts
2 Failed boot attempts
4
3 Failed boot attempts
3 Failed boot attempts
Table 110: Cache enabled state Telemetry Format
ID
131
Frame Length (bytes)
1
Description
Cache enabled state
Channels
Offset (bits)
Length (bits)
Name
Data Type
Description
0
1
Enabled state
BOOL
Enabled state
Table 111: Boot And Running Program Status Telemetry Format
ID
132
Frame Length (bytes)
6
Description
Boot And Running Program Status
Channels
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
0
4
Cause of MCU
Reset
ENUM
Cause of MCU reset. Possible
values are in Table 112:
ResetCause Enumeration Values
4
4
Boot Cause
ENUM
Cause of last reboot. Possible
values are in Table 113:
BootCause Enumeration Values
8
16
Boot Counter
UINT
Number of times CubeComputer
has booted
24
8
Boot Program
Index
ENUM
Index of current running
program in flash programs list.
Possible values are in Table 108:
BootProgramsList Enumeration
Values
32
8
Firmware version
(Major)
UINT
Firmware version (Major)
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 92
40
8
Firmware version
(Minor)
UINT
Firmware version (Minor)
Table 112: ResetCause Enumeration Values
Numeric Value
Name
Description
0
Power-On Reset
Power-On Reset
1
Brown-Out Detected on Regulated
Power
Brown-Out Detected on Regulated Power
2
Brown-Out Detected on
Unregulated Power
Brown-Out Detected on Unregulated
Power
3
External Watchdog Reset
External Watchdog Reset
4
External Reset
External Reset
5
Watchdog Reset
Watchdog Reset
6
Lockup System Reset
Lockup System Reset
7
Lockup Reset
Lockup Reset
8
System Request Reset
System Request Reset
9
Backup Brown-Out
Backup domain brown-out reset
10
Backup Mode Reset
Backup mode reset
11
Backup Mode RST and Backup
Brown-Out Vdd Regulated
Backup Mode reset and Backup domain
brown-out on VDD regulated
12
BackupModeRST and Backup
Brown-Out Vdd Regulated and
Brown-Out Regulated
Backup Mode reset and Backup domain
brown-out on VDD regulated and brown
out on regulated
13
Backup Mode RST and Watchdog
Reset
Backup mode reset and Watchdog reset
14
Backup Brown-Out Buvin and
System Request Reset
Backup Domain brown-out on BUVIN and
System request reset.
15
Unkown Reset Cause
Unkown Reset Cause
Table 113: BootCause Enumeration Values
Numeric Value
Name
Description
0
Unexpected
Unexpected reset
1
Not Used
2
Communications Timeout
Timeout due to lack of communications
3
Commanded
Software commanded MCU reset
4
Not Used
5
SRAM Latchup
Latchup detected in SRAM
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 93
Table 114: JPG Conversion Progress Telemetry Format
ID
133
Frame Length (bytes)
3
Description
Conversion progress
Channels
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
0
8
Progress
Percentage
UINT
Progress %
8
8
Conversion Result
ENUM
JPG Conversion Result. Possible
values are in Table 115:
JpgConvertResult Enumeration
Values
16
8
Output File Counter
UINT
Output File Counter
Table 115: JpgConvertResult Enumeration Values
Numeric Value
Name
Description
0
Nothing Converted Yet
Nothing Converted Yet
1
Success
Success
2
File Load Error
File Load Error
3
Busy
Busy
Table 116: SRAM Scrub Parameters Telemetry Format
ID
134
Frame Length (bytes)
2
Description
SRAM scrubbing size
Channels
Offset (bits)
Length (bits)
Name
Data Type
Description
0
16
Scrub Size
UINT
Scrub Size
Table 117: CubeACP State Telemetry Format
ID
135
Frame Length (bytes)
1
Description
Contains flags regarding the state of the ACP
Channels
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
0
1
ADCS Config Load
Error
BOOL
Flag to indicate that the ADCS
configuartion was not read
successfully out of flash
1
1
Orbit Parameter
Load Error
BOOL
Flag to indicate that the Orbit
parameters were not read
successfully out of flash
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 94
Table 118: Current Unix Time Telemetry Format
ID
140
Frame Length (bytes)
6
Description
Current Unix Time
Channels
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
0
32
Current Unix Time
UINT
Time in s since 01/01/1970,
00:00. (Unit of measure is [s])
32
16
Milliseconds
UINT
Current millisecond count. (Unit
of measure is [ms])
Table 119: Last Logged Event Telemetry Format
ID
141
Frame Length (bytes)
6
Description
Last Logged Event (relative to pointer - adjusted via Advance and Reset TCs (3 & 4)
Channels
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
0
32
Time of Event
UINT
32
8
Event ID
UINT
Event ID
40
8
Event Parameter
UINT
Event Parameter
Table 120: SRAM Latchup counters Telemetry Format
ID
142
Frame Length (bytes)
6
Description
SRAM Latchup counters
Channels
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
0
16
SRAM1 latchups
UINT
The number of SRAM1 latchups
detected
16
16
SRAM2 latchups
UINT
The number of SRAM2 latchups
detected
Table 121: EDAC Error Counters Telemetry Format
ID
143
Frame Length (bytes)
6
Description
EDAC Error Counters
Channels
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
0
16
Single SRAM upsets
UINT
The number of single SRAM
upsets (per byte) detected
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 95
16
16
Double SRAM
upsets
UINT
The number of double SRAM
upsets (per byte) detected
32
16
Multiple SRAM
upsets
UINT
The number of multiple SRAM
upsets (per byte) deteced
Table 122: Communication Status Telemetry Format
ID
144
Frame Length (bytes)
6
Description
Communication status - includes command and telemetry counters and error flags
Channels
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
0
16
Telecommand
counter
UINT
No. of telecommands received
16
16
Telemetry request
counter
UINT
No. of telemetry requests
received
32
1
Telecommand
buffer overrun
BOOL
TC buffer was overrun while
receiving a telecommand
33
1
UART protocol
error
BOOL
UART protocol error occurred
34
1
UART incomplete
message
BOOL
UART start-of-message identifier
was received without a preceding
end-of-message
35
1
I2C telemetry error
BOOL
Number of data clocked out was
more than telemetry package
36
1
I2C telecommand
buffer error
BOOL
Telecommand sent exceeds
buffer size
37
1
CAN telecommand
buffer error
BOOL
Telecommand sent exceeds
buffer size
Table 123: Current ADCS State Telemetry Format
ID
145
Frame Length (bytes)
6
Description
Current state of the Attitude Control Processor
Channels
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
0
4
Attitude Estimation
Mode
ENUM
Current attitude estimation
mode. Possible values are in
Table 27: EstimModeSelect
Enumeration Values
4
4
Control Mode
ENUM
Current attitude control mode.
Possible values are in Table 25:
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 96
ConModeSelect Enumeration
Values
8
2
ADCS Run Mode
ENUM
Current ADCS Running mode.
Possible values are in Table 20:
AdcsRunMode Enumeration
Values
10
1
CubeControl Signal
Enabled
BOOL
CubeControl Signal electronics
enabled status
11
1
CubeControl Motor
Enabled
BOOL
CubeControl Motor electronics
enabled status
12
1
CubeSense Enabled
BOOL
CubeSense enabled status
13
1
CubeWheel1
Enabled
BOOL
CubeWheel1 enabled status
14
1
CubeWheel2
Enabled
BOOL
CubeWheel2 enabled status
15
1
CubeWheel3
Enabled
BOOL
CubeWheel3 enabled status
16
1
CubeStar Enabled
BOOL
CubeStar enabled status
17
1
GPS Receiver
Enabled
BOOL
GPS Receiver enabled status
18
1
GPS LNA Power
Enabled
BOOL
GPS Antenna LNA enabled status
19
1
Motor Driver
Enabled
BOOL
Motor Driver Electronics enabled
status
20
1
Sun is Above Local
Horizon
BOOL
Sun is above the local horizon
(elevation > 0)
21
1
CubeSense
Communications
Error
BOOL
Communication error occurred
with the CubeSense
22
1
CubeControl Signal
Communications
Error
BOOL
Communication error occurred
with the CubeControl Signal
MCU
23
1
CubeControl Motor
Communications
Error
BOOL
Communication error occurred
with the CubeControl Motor
MCU
24
1
CubeWheel1
Communications
Error
BOOL
Communication error occurred
with the CubeWheel1
25
1
CubeWheel2
Communications
Error
BOOL
Communication error occurred
with the CubeWheel2
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 97
26
1
CubeWheel3
Communications
Error
BOOL
Communication error occurred
with the CubeWheel3
27
1
CubeStar
Communications
Error
BOOL
Communication error occurred
with the CubeStar
28
1
Magnetometer
Range Error
BOOL
Magnetometer measured
magnetic field with size < 100 nT
or >100,000nT
29
1
Cam1 Sensor
Overcurrent
Detected
BOOL
Cam1 sensor overcurrent
detected
30
1
Cam1 Sensor Busy
Error
BOOL
Cam1 sensor was not idle at the
start of ADCS loop
31
1
Cam1 Sensor
Detection Error
BOOL
Cam1 sensor was unable to
compute angles (could be not in
FOV)
32
1
Sun Sensor Range
Error
BOOL
Detected sun angles were
outside of +/- 90 deg
33
1
Cam2 Sensor
Overcurrent
Detected
BOOL
Cam2 sensor overcurrent
detected
34
1
Cam2 Sensor Busy
Error
BOOL
Cam2 sensor was not idle at the
start of ADCS loop
35
1
Cam2 Sensor
Detection Error
BOOL
Cam2 sensor was unable to
compute angles (could be not in
FOV)
36
1
Nadir Sensor Range
Error
BOOL
Detected nadir angles were
outside of +/- 60 deg
37
1
Rate Sensor Range
Error
BOOL
Measured XYZ-body rate is
outside of the range +/-20 deg/s
38
1
Wheel Speed
Range Error
BOOL
Wheel XYZ speed measurement
was outside the range +/-8500
rpm
39
1
Coarse Sun Sensor
Error
BOOL
Unable to compute Coarse Sun
vector (could be not in FOV)
40
1
StarTracker Match
Error
BOOL
Unable to obtain enough
matched stars
41
1
Star Tracker
Overcurrent
Detected
BOOL
Star tracker overcurrent detected
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 98
42
1
Orbit Parameters
are Invalid
BOOL
Orbit Parameters are not in
allowed bounds (angle
exceeding limits etc.). Failed to
initialize SGP4 propagator using
supplied parameters
43
1
Configuration is
Invalid
BOOL
Magnetorquer Configuration or
CSS in invalid. Each principle axis
should have a torquer output
(1,2, or 3) assigned. At least one
CSS per principle axis needed
44
1
Control Mode
Change is not
allowed
BOOL
Attempt was made to select
control mode without
appropriate estimator, or
command to set Y-momentum
mode while not in steady-state
Y-Thomson
45
1
Estimator Change is
not allowed
BOOL
Attempt was made to change to
an estimation mode that would
be inapropriate for the current
control mode
46
1
Modelled and
measured magnetic
field differs in size
BOOL
Modelled and measured
magnetic field differs in size by
more than 5000 nT
47
1
Node Recovery
Error
BOOL
Failed to Recover an ADCS Node
by successive resets
Table 124: Estimated Attitude Angles Telemetry Format
ID
146
Frame Length (bytes)
6
Description
Estimated attitude angles
Channels
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
0
16
Estimated Roll
Angle
INT
Estimated roll angle. Formatted
value is obtained using the
formula: (formatted value) [deg]
= RAWVAL*0.01
16
16
Estimated Pitch
Angle
INT
Estimated pitch angle. Formatted
value is obtained using the
formula: (formatted value) [deg]
= RAWVAL*0.01
32
16
Estimated Yaw
Angle
INT
Estimated yaw angle. Formatted
value is obtained using the
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 99
formula: (formatted value) [deg]
= RAWVAL*0.01
Table 125: Estimated Angular Rates Telemetry Format
ID
147
Frame Length (bytes)
6
Description
Estimated angular rates relative to orbit reference frame
Channels
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
0
16
Estimated X
Angular Rate
INT
Estimated X angular rate.
Formatted value is obtained
using the formula: (formatted
value) [deg/s] = RAWVAL*0.01
16
16
Estimated Y
Angular Rate
INT
Estimated Y angular rate.
Formatted value is obtained
using the formula: (formatted
value) [deg/s] = RAWVAL*0.01
32
16
Estimated Z Angular
Rate
INT
Estimated Z angular rate.
Formatted value is obtained using
the formula: (formatted value)
[deg/s] = RAWVAL*0.01
Table 126: Satellite Position (ECI) Telemetry Format
ID
148
Frame Length (bytes)
6
Description
Satellite position in ECI frame
Channels
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
0
16
X position
INT
ECI referenced X coordinate .
Formatted value is obtained
using the formula: (formatted
value) [km] = RAWVAL*0.25
16
16
Y position
INT
ECI referenced Y coordinate .
Formatted value is obtained
using the formula: (formatted
value) [km] = RAWVAL*0.25
32
16
Z position
INT
ECI referenced Z coordinate .
Formatted value is obtained using
the formula: (formatted value)
[km] = RAWVAL*0.25
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 100
Table 127: Satellite Velocity (ECI) Telemetry Format
ID
149
Frame Length (bytes)
6
Description
Satellite velocity in ECI frame
Channels
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
0
16
X Velocity
INT
ECI referenced X velocity .
Formatted value is obtained
using the formula: (formatted
value) [m/s] = RAWVAL*0.25
16
16
Y Velocity
INT
ECI referenced Y velocity .
Formatted value is obtained
using the formula: (formatted
value) [m/s] = RAWVAL*0.25
32
16
Z Velocity
INT
ECI referenced Z velocity .
Formatted value is obtained using
the formula: (formatted value)
[m/s] = RAWVAL*0.25
Table 128: Satellite Position (LLH) Telemetry Format
ID
150
Frame Length (bytes)
6
Description
Satellite position in WGS-84 coordinate frame
Channels
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
0
16
Latitude
INT
WGS-84 Latitude angle .
Formatted value is obtained
using the formula: (formatted
value) [deg] = RAWVAL*0.01
16
16
Longitude
INT
Longitude angle. Formatted
value is obtained using the
formula: (formatted value) [deg]
= RAWVAL*0.01
32
16
Altitude
UINT
WGS-84 altitude. Formatted value
is obtained using the formula:
(formatted value) [km] =
RAWVAL*0.01
Table 129: Magnetic Field Vector Telemetry Format
ID
151
Frame Length (bytes)
6
Description
Measured magnetic field vector
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 101
Channels
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
0
16
Magnetic Field X
INT
Magnetic Field X. Formatted
value is obtained using the
formula: (formatted value) [uT] =
RAWVAL*0.01
16
16
Magnetic Field Y
INT
Magnetic Field Y. Formatted
value is obtained using the
formula: (formatted value) [uT] =
RAWVAL*0.01
32
16
Magnetic Field Z
INT
Magnetic Field Z. Formatted value
is obtained using the formula:
(formatted value) [uT] =
RAWVAL*0.01
Table 130: Coarse Sun Vector Telemetry Format
ID
152
Frame Length (bytes)
6
Description
Measured coarse sun vector
Channels
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
0
16
Coarse Sun X
INT
Coarse Sun X. Formatted value is
obtained using the formula:
(formatted value) =
RAWVAL/10000.0
16
16
Coarse Sun Y
INT
Coarse Sun Y. Formatted value is
obtained using the formula:
(formatted value) =
RAWVAL/10000.0
32
16
Coarse Sun Z
INT
Coarse Sun Z. Formatted value is
obtained using the formula:
(formatted value) =
RAWVAL/10000.0
Table 131: Fine Sun Vector Telemetry Format
ID
153
Frame Length (bytes)
6
Description
Measured fine sun vector
Channels
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
0
16
Sun X
INT
Sun X. Formatted value is
obtained using the formula:
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 102
(formatted value) =
RAWVAL/10000.0
16
16
Sun Y
INT
Sun Y. Formatted value is
obtained using the formula:
(formatted value) =
RAWVAL/10000.0
32
16
Sun Z
INT
Sun Z. Formatted value is
obtained using the formula:
(formatted value) =
RAWVAL/10000.0
Table 132: Nadir Vector Telemetry Format
ID
154
Frame Length (bytes)
6
Description
Measured nadir vector
Channels
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
0
16
Nadir X
INT
Nadir X. Formatted value is
obtained using the formula:
(formatted value) =
RAWVAL/10000.0
16
16
Nadir Y
INT
Nadir Y. Formatted value is
obtained using the formula:
(formatted value) =
RAWVAL/10000.0
32
16
Nadir Z
INT
Nadir Z. Formatted value is
obtained using the formula:
(formatted value) =
RAWVAL/10000.0
Table 133: Rate Sensor Rates Telemetry Format
ID
155
Frame Length (bytes)
6
Description
Rate sensor measurements
Channels
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
0
16
X Angular Rate
INT
X Angular Rate. Formatted value
is obtained using the formula:
(formatted value) [deg/s] =
RAWVAL*0.01
16
16
Y Angular Rate
INT
Y Angular Rate. Formatted value
is obtained using the formula:
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 103
(formatted value) [deg/s] =
RAWVAL*0.01
32
16
Z Angular Rate
INT
Z Angular Rate. Formatted value
is obtained using the formula:
(formatted value) [deg/s] =
RAWVAL*0.01
Table 134: Wheel Speed Telemetry Format
ID
156
Frame Length (bytes)
6
Description
Wheel speed measurement
Channels
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
0
16
X Wheel Speed
INT
X Wheel Speed. (Unit of measure
is [rpm])
16
16
Y Wheel Speed
INT
Y Wheel Speed. (Unit of measure
is [rpm])
32
16
Z Wheel Speed
INT
Z Wheel Speed. (Unit of measure
is [rpm])
Table 135: Magnetorquer Command Telemetry Format
ID
157
Frame Length (bytes)
6
Description
Magnetorquer commands
Channels
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
0
16
X Magnetorquer
Command
INT
X Magnetorquer Commanded
on-time. (Unit of measure is
[10ms units])
16
16
Y Magnetorquer
Command
INT
Y Magnetorquer Commanded
on-time. (Unit of measure is
[10ms units])
32
16
Z Magnetorquer
Command
INT
Z Magnetorquer Commanded
on-time. (Unit of measure is
[10ms units])
Table 136: Wheel Speed Commands Telemetry Format
ID
158
Frame Length (bytes)
6
Description
Wheel speed commands
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 104
Channels
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
0
16
X Wheel Speed
INT
X Wheel Speed. (Unit of measure
is [rpm])
16
16
Y Wheel Speed
INT
Y Wheel Speed. (Unit of measure
is [rpm])
32
16
Z Wheel Speed
INT
Z Wheel Speed. (Unit of measure
is [rpm])
Table 137: IGRF Modelled Magnetic Field Vector Telemetry Format
ID
159
Frame Length (bytes)
6
Description
IGRF modelled magnetic field vector (orbit frame referenced)
Channels
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
0
16
IGRF Modelled
Magnetic Field X
INT
IGRF Modelled Magnetic Field X.
Formatted value is obtained
using the formula: (formatted
value) [uT] = RAWVAL*0.01
16
16
IGRF Modelled
Magnetic Field Y
INT
IGRF Modelled Magnetic Field Y.
Formatted value is obtained
using the formula: (formatted
value) [uT] = RAWVAL*0.01
32
16
IGRF Modelled
Magnetic Field Z
INT
IGRF Modelled Magnetic Field Z.
Formatted value is obtained using
the formula: (formatted value)
[uT] = RAWVAL*0.01
Table 138: Modelled Sun Vector Telemetry Format
ID
160
Frame Length (bytes)
6
Description
Modelled sun vector (orbit frame referenced)
Channels
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
0
16
Modelled Sun
Vector X
INT
Modelled Sun Vector X.
Formatted value is obtained
using the formula: (formatted
value) = RAWVAL/10000.0
16
16
Modelled Sun
Vector Y
INT
Modelled Sun Vector Y.
Formatted value is obtained
using the formula: (formatted
value) = RAWVAL/10000.0
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 105
32
16
Modelled Sun
Vector Z
INT
Modelled Sun Vector Z.
Formatted value is obtained using
the formula: (formatted value) =
RAWVAL/10000.0
Table 139: Estimated Gyro Bias Telemetry Format
ID
161
Frame Length (bytes)
6
Description
Estimated rate sensor bias
Channels
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
0
16
Estimated X-gyro
Bias
INT
Estimated X-gyro Bias. Formatted
value is obtained using the
formula: (formatted value)
[deg/s] = RAWVAL*0.001
16
16
Estimated Y-gyro
Bias
INT
Estimated Y-gyro Bias. Formatted
value is obtained using the
formula: (formatted value)
[deg/s] = RAWVAL*0.001
32
16
Estimated Z-gyro
Bias
INT
Estimated Z-gyro Bias. Formatted
value is obtained using the
formula: (formatted value) [deg/s]
= RAWVAL*0.001
Table 140: Estimation Innovation Vector Telemetry Format
ID
162
Frame Length (bytes)
6
Description
Estimation innovation vector
Channels
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
0
16
Innovation Vector X
INT
Innovation Vector X. Formatted
value is obtained using the
formula: (formatted value) =
RAWVAL*0.0001
16
16
Innovation Vector Y
INT
Innovation Vector Y. Formatted
value is obtained using the
formula: (formatted value) =
RAWVAL*0.0001
32
16
Innovation Vector Z
INT
Innovation Vector Z. Formatted
value is obtained using the
formula: (formatted value) =
RAWVAL*0.0001
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 106
Table 141: Quaternion Error Vector Telemetry Format
ID
163
Frame Length (bytes)
6
Description
Quaternion error vector
Channels
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
0
16
Quaternion Error -
Q1
INT
Quaternion Error - Q1. Formatted
value is obtained using the
formula: (formatted value) =
RAWVAL*0.0001
16
16
Quaternion Error -
Q2
INT
Quaternion Error - Q2. Formatted
value is obtained using the
formula: (formatted value) =
RAWVAL*0.0001
32
16
Quaternion Error -
Q3
INT
Quaternion Error - Q3. Formatted
value is obtained using the
formula: (formatted value) =
RAWVAL*0.0001
Table 142: Quaternion Covariance Telemetry Format
ID
164
Frame Length (bytes)
6
Description
Quaternion covariance
Channels
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
0
16
Quaternion
Covariance - Q1
RMS
INT
Quaternion Covariance - Q1
RMS. Formatted value is
obtained using the formula:
(formatted value) =
RAWVAL*0.001
16
16
Quaternion
Covariance - Q2
RMS
INT
Quaternion Covariance - Q2
RMS. Formatted value is
obtained using the formula:
(formatted value) =
RAWVAL*0.001
32
16
Quaternion
Covariance - Q3
RMS
INT
Quaternion Covariance - Q3 RMS.
Formatted value is obtained using
the formula: (formatted value) =
RAWVAL*0.001
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 107
Table 143: Angular Rate Covariance Telemetry Format
ID
165
Frame Length (bytes)
6
Description
Angular rate covariance
Channels
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
0
16
X Angular Rate
Covariance
INT
X Angular Rate Covariance.
Formatted value is obtained
using the formula: (formatted
value) = RAWVAL*0.001
16
16
Y Angular Rate
Covariance
INT
Y Angular Rate Covariance.
Formatted value is obtained
using the formula: (formatted
value) = RAWVAL*0.001
32
16
Z Angular Rate
Covariance
INT
Z Angular Rate Covariance.
Formatted value is obtained using
the formula: (formatted value) =
RAWVAL*0.001
Table 144: Raw Cam2 Sensor Telemetry Format
ID
166
Frame Length (bytes)
6
Description
Cam2 sensor capture and detection result
Channels
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
0
16
Cam2 centroid X
INT
Cam2 azimuth angle
16
16
Cam2 centroid Y
INT
Cam2 elevation angle
32
8
Capture status
ENUM
Cam2 capture status. Possible
values are in Table 145:
CaptureResult Enumeration
Values
40
8
Detection result
ENUM
Cam2 detection result. Possible
values are in Table 146:
DetectResult Enumeration Values
Table 145: CaptureResult Enumeration Values
Numeric Value
Name
Description
0
Startup
Start-up
1
Pending
Capture pending
2
SuccessOwn
Successfully captured (own SRAM)
3
SuccessShift
Successfully captured (Other SRAM)
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 108
4
Timeout
Camera timout
5
SRAMError
SRAM overcurrent
Table 146: DetectResult Enumeration Values
Numeric Value
Name
Description
0
Startup
Start-up
1
NoDetect
No detection scheduled
2
Pending
Detection pending
3
TooManyEdges
Nadir error - too many detected edges
4
TooFewEdges
Nadir error - not enought edges detected
5
BadFit
Nadir error - bad fit
6
SunNotFound
Sun error - sun not found
7
Success
Successful detection
Table 147: Raw Cam1 Sensor Telemetry Format
ID
167
Frame Length (bytes)
6
Description
Cam1 sensor capture and detection result
Channels
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
0
16
Cam1 centroid X
INT
Cam1 azimuth angle
16
16
Cam1 centroid Y
INT
Cam1 elevation angle
32
8
Capture status
ENUM
Cam1 capture status. Possible
values are in Table 145:
CaptureResult Enumeration
Values
40
8
Detection result
ENUM
Cam1 detection result. Possible
values are in Table 146:
DetectResult Enumeration Values
Table 148: Raw CSS 1 to 6 Telemetry Format
ID
168
Frame Length (bytes)
6
Description
Raw CSS measurements 1 to 6
Channels
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
0
8
CSS1
UINT
sampled A/D value - corresponds
to COS(sun_angle)
8
8
CSS2
UINT
sampled A/D value - corresponds
to COS(sun_angle)
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 109
16
8
CSS3
UINT
sampled A/D value - corresponds
to COS(sun_angle)
24
8
CSS4
UINT
sampled A/D value - corresponds
to COS(sun_angle)
32
8
CSS5
UINT
sampled A/D value - corresponds
to COS(sun_angle)
40
8
CSS6
UINT
sampled A/D value - corresponds
to COS(sun_angle)
Table 149: Raw CSS 7 to 10 Telemetry Format
ID
169
Frame Length (bytes)
6
Description
Raw CSS measurements 7 to 10
Channels
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
0
8
CSS7
UINT
sampled A/D value - corresponds
to COS(sun_angle)
8
8
CSS8
UINT
sampled A/D value - corresponds
to COS(sun_angle)
16
8
CSS9
UINT
sampled A/D value - corresponds
to COS(sun_angle)
24
8
CSS10
UINT
sampled A/D value - corresponds
to COS(sun_angle)
Table 150: Raw Magnetometer Telemetry Format
ID
170
Frame Length (bytes)
6
Description
Raw magnetometer measurements
Channels
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
0
16
MagX
INT
sampled A/D value
16
16
MagY
INT
sampled A/D value
32
16
MagZ
INT
sampled A/D value
Table 151: CubeSense Current Measurements Telemetry Format
ID
171
Frame Length (bytes)
6
Description
CubeSense current measurements
Channels
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 110
0
16
CubeSense 3V3
Current
UINT
CubeSense 3V3 Current.
Formatted value is obtained
using the formula: (formatted
value) [mA] = RAWVAL*0.1
16
16
CubeSense Cam2
SRAM Current
UINT
CubeSense Cam2 SRAM Current.
Formatted value is obtained
using the formula: (formatted
value) [mA] = RAWVAL*0.1
32
16
CubeSense Cam1
SRAM Current
UINT
CubeSense Cam1 SRAM Current.
Formatted value is obtained using
the formula: (formatted value)
[mA] = RAWVAL*0.1
Table 152: CubeControl Current Measurements Telemetry Format
ID
172
Frame Length (bytes)
6
Description
CubeControl current measurements
Channels
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
0
16
CubeControl 3V3
Current
UINT
CubeControl 3V3 Current.
Formatted value is obtained
using the formula: (formatted
value) [mA] =
RAWVAL*0.48828125
16
16
CubeControl 5V
Current
UINT
CubeControl 5V Current.
Formatted value is obtained
using the formula: (formatted
value) [mA] =
RAWVAL*0.48828125
32
16
CubeControl Vbat
Current
UINT
CubeControl Vbat Current.
Formatted value is obtained using
the formula: (formatted value)
[mA] = RAWVAL*0.48828125
Table 153: Wheel Currents Telemetry Format
ID
173
Frame Length (bytes)
6
Description
XYZ Wheel current measurement
Channels
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
0
16
Wheel1Current
UINT
Wheel1 Current. Formatted value
is obtained using the formula:
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 111
(formatted value) [mA] =
RAWVAL*0.01
16
16
Wheel2Current
UINT
Wheel2 Current. Formatted value
is obtained using the formula:
(formatted value) [mA] =
RAWVAL*0.01
32
16
Wheel3Current
UINT
Wheel3 Current. Formatted value
is obtained using the formula:
(formatted value) [mA] =
RAWVAL*0.01
Table 154: ADCS Temperatures Telemetry Format
ID
174
Frame Length (bytes)
6
Description
Magnetometer + MCU temperature measurements
Channels
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
0
16
MCU Temperature
INT
MCU Temperature. (Unit of
measure is [C])
16
16
Magnetometer
Temperature
INT
Magnetometer Temperature.
Formatted value is obtained
using the formula: (formatted
value) [C] = RAWVAL/10.0
32
16
Redundant
Magnetometer
Temperature
INT
Redundant Magnetometer
Temperature. Formatted value is
obtained using the formula:
(formatted value) [C] =
RAWVAL/10.0
Table 155: Rate sensor temperatures Telemetry Format
ID
175
Frame Length (bytes)
6
Description
Rate sensor temperatures
Channels
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
0
16
X-Rate Sensor
Temperature
INT
X-Rate sensor Temperature. (Unit
of measure is [C])
16
16
Y-Rate Sensor
Temperature
INT
Y-Rate sensor Temperature. (Unit
of measure is [C])
32
16
Z-Rate Sensor
Temperature
INT
Z-Rate sensor Temperature. (Unit
of measure is [C])
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 112
Table 156: Raw GPS Status Telemetry Format
ID
176
Frame Length (bytes)
6
Description
Raw GPS status
Channels
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
0
8
Gps Solution Status
ENUM
GPS Solution Status. Possible
values are in Table 157:
GpsSolutionStatus Enumeration
Values
8
8
Number of tracked
GPS satellites
UINT
Number of tracked GPS satellites
16
8
Number of GPS
satellites used in
solution
UINT
Number of GPS satellites used in
solution
24
8
Counter for XYZ Lof
from GPS
UINT
Counter for XYZ Lof from GPS
32
8
Counter for RANGE
log from GPS
UINT
Counter for RANGE log from GPS
40
8
Response Message
for GPS log setup
UINT
Response Message for GPS log
setup - p656 of OEMV615
reference manual
Table 157: GpsSolutionStatus Enumeration Values
Numeric Value
Name
Description
0
Solution computed
Solution computed
1
Insufficient observations
Insufficient observations
2
No convergence
No convergence
3
Singularity at parameters matrix
Singularity at parameters matrix
4
Covariance trace exceeds maximum
Covariance trace exceeds maximum
5
Not yet converged from cold start
Not yet converged from cold start
6
Height or velocity limits exceeded
Height or velocity limits exceeded
7
Variance exceeds limits
Variance exceeds limits
8
Large residuals make position
unreliable
Large residuals make position unreliable
9
Calculating comparison to user
provided
Calculating comparison to user provided
10
The fixed position is invalid
The fixed position is invalid
11
Position type is unauthorized
Position type is unauthorized
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 113
Table 158: Raw GPS Time Telemetry Format
ID
177
Frame Length (bytes)
6
Description
Raw GPS time
Channels
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
0
16
GPS Reference
Week
UINT
GPS Reference Week
16
32
GPS Time
Milliseconds
UINT
GPS Time Milliseconds. (Unit of
measure is [ms])
Table 159: Raw GPS X Telemetry Format
ID
178
Frame Length (bytes)
6
Description
Raw GPS X position and velocity (ECI referenced)
Channels
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
0
32
ECEF Position X
INT
ECEF Position X. (Unit of measure
is [m])
32
16
ECEF Velocity X
INT
ECEF Velocity X. (Unit of measure
is [m/s])
Table 160: Raw GPS Y Telemetry Format
ID
179
Frame Length (bytes)
6
Description
Raw GPS Y position and velocity (ECI referenced)
Channels
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
0
32
ECEF Position Y
INT
ECEF Position Y. (Unit of measure
is [m])
32
16
ECEF Velocity Y
INT
ECEF Velocity Y. (Unit of measure
is [m/s])
Table 161: Raw GPS Z Telemetry Format
ID
180
Frame Length (bytes)
6
Description
Raw GPS Z position and velocity (ECI referenced)
Channels
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
0
32
ECEF Position Z
INT
ECEF Position Z. (Unit of measure
is [m])
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 114
32
16
ECEF Velocity Z
INT
ECEF Velocity Z. (Unit of measure
is [m/s])
Table 162: Star 1 Body Vector Telemetry Format
ID
181
Frame Length (bytes)
6
Description
Star 1 Body Vector
Channels
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
0
16
Star1BX
INT
Star1 body X-vector. Formatted
value is obtained using the
formula: (formatted value) =
RAWVAL/10000.0
16
16
Star1BY
INT
Star1 body Y-vector. Formatted
value is obtained using the
formula: (formatted value) =
RAWVAL/10000.0
32
16
Star1BZ
INT
Star1 body Z-vector. Formatted
value is obtained using the
formula: (formatted value) =
RAWVAL/10000.0
Table 163: Star 2 Body Vector Telemetry Format
ID
182
Frame Length (bytes)
6
Description
Star 2 Body Vector
Channels
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
0
16
Star2BX
INT
Star2 body X-vector. Formatted
value is obtained using the
formula: (formatted value) =
RAWVAL/10000.0
16
16
Star2BY
INT
Star2 body Y-vector. Formatted
value is obtained using the
formula: (formatted value) =
RAWVAL/10000.0
32
16
Star2BZ
INT
Star2 body Z-vector. Formatted
value is obtained using the
formula: (formatted value) =
RAWVAL/10000.0
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 115
Table 164: Star 3 Body Vector Telemetry Format
ID
183
Frame Length (bytes)
6
Description
Star 3 Body Vector
Channels
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
0
16
Star3BX
INT
Star3 body X-vector. Formatted
value is obtained using the
formula: (formatted value) =
RAWVAL/10000.0
16
16
Star3BY
INT
Star3 body Y-vector. Formatted
value is obtained using the
formula: (formatted value) =
RAWVAL/10000.0
32
16
Star3BZ
INT
Star3 body Z-vector. Formatted
value is obtained using the
formula: (formatted value) =
RAWVAL/10000.0
Table 165: Star 1 Orbit Vector Telemetry Format
ID
184
Frame Length (bytes)
6
Description
Star 1 Orbit Vector
Channels
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
0
16
Star1OX
INT
Star1 orbit X-vector. Formatted
value is obtained using the
formula: (formatted value) =
RAWVAL/10000.0
16
16
Star1OY
INT
Star1 orbit Y-vector. Formatted
value is obtained using the
formula: (formatted value) =
RAWVAL/10000.0
32
16
Star1OZ
INT
Star1 orbit Z-vector. Formatted
value is obtained using the
formula: (formatted value) =
RAWVAL/10000.0
Table 166: Star 2 Orbit Vector Telemetry Format
ID
185
Frame Length (bytes)
6
Description
Star 2 Orbit Vector
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 116
Channels
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
0
16
Star2OX
INT
Star2 orbit X-vector. Formatted
value is obtained using the
formula: (formatted value) =
RAWVAL/10000.0
16
16
Star2OY
INT
Star2 orbit Y-vector. Formatted
value is obtained using the
formula: (formatted value) =
RAWVAL/10000.0
32
16
Star2OZ
INT
Star2 orbit Z-vector. Formatted
value is obtained using the
formula: (formatted value) =
RAWVAL/10000.0
Table 167: Star 3 Orbit Vector Telemetry Format
ID
186
Frame Length (bytes)
6
Description
Star 3 Orbit Vector
Channels
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
0
16
Star3OX
INT
Star3 orbit X-vector. Formatted
value is obtained using the
formula: (formatted value) =
RAWVAL/10000.0
16
16
Star3OY
INT
Star3 orbit Y-vector. Formatted
value is obtained using the
formula: (formatted value) =
RAWVAL/10000.0
32
16
Star3OZ
INT
Star3 orbit Z-vector. Formatted
value is obtained using the
formula: (formatted value) =
RAWVAL/10000.0
Table 168: Star Magnitude Telemetry Format
ID
187
Frame Length (bytes)
6
Description
Instrument magnitude of identified stars
Channels
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
0
16
Magnitude Star 1
UINT
Instrument magnitude of star 1
16
16
Magnitude Star 2
UINT
Instrument magnitude of star 2
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 117
32
16
Magnitude Star 3
UINT
Instrument magnitude of star 3
Table 169: Star Performance Telemetry Format
ID
188
Frame Length (bytes)
6
Description
Performance parameters of star measurement
Channels
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
0
4
Number of Star
Detected
ENUM
Number of stars detected.
Possible values are in Table 170:
Stars Enumeration Values
4
4
Number of Stars
Identified
ENUM
Number of stars identified.
Possible values are in Table 170:
Stars Enumeration Values
8
8
Star Noise
UINT
Noise level of star image
16
1
Attitude Success
BOOL
Attitude Success
17
1
Image Capture
Success
BOOL
Image Capture Success
18
1
Detection Success
BOOL
Detection Success
19
1
Identification
Success
BOOL
Identification Success
20
1
Loop time Error
BOOL
Loop time Error
21
1
Max Stars Detected
BOOL
Max Stars Detected
22
1
Less than three
stars in FoV
BOOL
Less than three stars in FoV
23
1
Comms error
BOOL
Comms error
24
8
Star1 Confidence
UINT
Confidence factor of star 1
32
8
Star2 Confidence
UINT
Confidence factor of star 2
40
8
Star3 Confidence
UINT
Confidence factor of star 3
Table 170: Stars Enumeration Values
Numeric Value
Name
Description
0
Zero
Zero
1
One
One
2
Two
Two
Table 171: Star Timing Telemetry Format
ID
189
Frame Length (bytes)
6
Description
Timing information of star measurement
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 118
Channels
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
0
16
Capture
UINT
Capture. (Unit of measure is [ms])
16
16
Detection
UINT
Detection. (Unit of measure is
[ms])
32
16
Identification
UINT
Identification. (Unit of measure is
[ms])
Table 172: ADCS State Telemetry Format
ID
190
Frame Length (bytes)
48
Description
Current ADCS state
Channels
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
0
4
Attitude Estimation
Mode
ENUM
Current attitude estimation
mode. Possible values are in
Table 27: EstimModeSelect
Enumeration Values
4
4
Control Mode
ENUM
Current attitude control mode.
Possible values are in Table 25:
ConModeSelect Enumeration
Values
8
2
ADCS Run Mode
ENUM
Current ADCS Running mode.
Possible values are in Table 20:
AdcsRunMode Enumeration
Values
10
1
CubeControl Signal
Enabled
BOOL
CubeControl Signal electronics
enabled status
11
1
CubeControl Motor
Enabled
BOOL
CubeControl Motor electronics
enabled status
12
1
CubeSense Enabled
BOOL
CubeSense enabled status
13
1
CubeWheel1
Enabled
BOOL
CubeWheel1 enabled status
14
1
CubeWheel2
Enabled
BOOL
CubeWheel2 enabled status
15
1
CubeWheel3
Enabled
BOOL
CubeWheel3 enabled status
16
1
CubeStar Enabled
BOOL
CubeStar enabled status
17
1
GPS Receiver
Enabled
BOOL
GPS Receiver enabled status
18
1
GPS LNA Power
Enabled
BOOL
GPS Antenna LNA enabled status
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 119
19
1
Motor Driver
Enabled
BOOL
Motor Driver Electronics enabled
status
20
1
Sun is Above Local
Horizon
BOOL
Sun is above the local horizon
(elevation > 0)
21
1
CubeSense
Communications
Error
BOOL
Communication error occurred
with the CubeSense
22
1
CubeControl Signal
Communications
Error
BOOL
Communication error occurred
with the CubeControl Signal
MCU
23
1
CubeControl Motor
Communications
Error
BOOL
Communication error occurred
with the CubeControl Motor
MCU
24
1
CubeWheel1
Communications
Error
BOOL
Communication error occurred
with the CubeWheel1
25
1
CubeWheel2
Communications
Error
BOOL
Communication error occurred
with the CubeWheel2
26
1
CubeWheel3
Communications
Error
BOOL
Communication error occurred
with the CubeWheel3
27
1
CubeStar
Communications
Error
BOOL
Communication error occurred
with the CubeStar
28
1
Magnetometer
Range Error
BOOL
Magnetometer measured
magnetic field with size < 100 nT
or >100,000nT
29
1
Cam1 Sensor
Overcurrent
Detected
BOOL
Cam1 sensor overcurrent
detected
30
1
Cam1 Sensor Busy
Error
BOOL
Cam1 sensor was not idle at the
start of ADCS loop
31
1
Cam1 Sensor
Detection Error
BOOL
Cam1 sensor was unable to
compute angles (could be not in
FOV)
32
1
Sun Sensor Range
Error
BOOL
Detected sun angles were
outside of +/- 90 deg
33
1
Cam2 Sensor
Overcurrent
Detected
BOOL
Cam2 sensor overcurrent
detected
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 120
34
1
Cam2 Sensor Busy
Error
BOOL
Cam2 sensor was not idle at the
start of ADCS loop
35
1
Cam2 Sensor
Detection Error
BOOL
Cam2 sensor was unable to
compute angles (could be not in
FOV)
36
1
Nadir Sensor Range
Error
BOOL
Detected nadir angles were
outside of +/- 60 deg
37
1
Rate Sensor Range
Error
BOOL
Measured XYZ-body rate is
outside of the range +/-20 deg/s
38
1
Wheel Speed
Range Error
BOOL
Wheel XYZ speed measurement
was outside the range +/-8500
rpm
39
1
Coarse Sun Sensor
Error
BOOL
Unable to compute Coarse Sun
vector (could be not in FOV)
40
1
StarTracker Match
Error
BOOL
Unable to obtain enough
matched stars
41
1
Star Tracker
Overcurrent
Detected
BOOL
Star tracker overcurrent detected
42
1
Orbit Parameters
are Invalid
BOOL
Orbit Parameters are not in
allowed bounds (angle
exceeding limits etc.). Failed to
initialize SGP4 propagator using
supplied parameters
43
1
Configuration is
Invalid
BOOL
Magnetorquer Configuration or
CSS in invalid. Each principle axis
should have a torquer output
(1,2, or 3) assigned. At least one
CSS per principle axis needed
44
1
Control Mode
Change is not
allowed
BOOL
Attempt was made to select
control mode without
appropriate estimator, or
command to set Y-momentum
mode while not in steady-state
Y-Thomson
45
1
Estimator Change is
not allowed
BOOL
Attempt was made to change to
an estimation mode that would
be inapropriate for the current
control mode
46
1
Modelled and
measured magnetic
field differs in size
BOOL
Modelled and measured
magnetic field differs in size by
more than 5000 nT
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 121
47
1
Node Recovery
Error
BOOL
Failed to Recover an ADCS Node
by successive resets
48
16
Estimated Roll
Angle
INT
Estimated roll angle. Formatted
value is obtained using the
formula: (formatted value) [deg]
= RAWVAL*0.01
64
16
Estimated Pitch
Angle
INT
Estimated pitch angle. Formatted
value is obtained using the
formula: (formatted value) [deg]
= RAWVAL*0.01
80
16
Estimated Yaw
Angle
INT
Estimated yaw angle. Formatted
value is obtained using the
formula: (formatted value) [deg]
= RAWVAL*0.01
96
16
Estimated q1
INT
Estimated q1
112
16
Estimated q2
INT
Estimated q2
128
16
Estimated q3
INT
Estimated q3
144
16
Estimated X
Angular Rate
INT
Estimated X angular rate.
Formatted value is obtained
using the formula: (formatted
value) [deg/s] = RAWVAL*0.01
160
16
Estimated Y
Angular Rate
INT
Estimated Y angular rate.
Formatted value is obtained
using the formula: (formatted
value) [deg/s] = RAWVAL*0.01
176
16
Estimated Z Angular
Rate
INT
Estimated Z angular rate.
Formatted value is obtained
using the formula: (formatted
value) [deg/s] = RAWVAL*0.01
192
16
X position
INT
ECI referenced X coordinate .
Formatted value is obtained
using the formula: (formatted
value) [km] = RAWVAL*0.25
208
16
Y position
INT
ECI referenced Y coordinate .
Formatted value is obtained
using the formula: (formatted
value) [km] = RAWVAL*0.25
224
16
Z position
INT
ECI referenced Z coordinate .
Formatted value is obtained
using the formula: (formatted
value) [km] = RAWVAL*0.25
240
16
X Velocity
INT
ECI referenced X velocity .
Formatted value is obtained
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 122
using the formula: (formatted
value) [m/s] = RAWVAL*0.25
256
16
Y Velocity
INT
ECI referenced Y velocity .
Formatted value is obtained
using the formula: (formatted
value) [m/s] = RAWVAL*0.25
272
16
Z Velocity
INT
ECI referenced Z velocity .
Formatted value is obtained
using the formula: (formatted
value) [m/s] = RAWVAL*0.25
288
16
Latitude
INT
WGS-84 Latitude angle .
Formatted value is obtained
using the formula: (formatted
value) [deg] = RAWVAL*0.01
304
16
Longitude
INT
Longitude angle. Formatted
value is obtained using the
formula: (formatted value) [deg]
= RAWVAL*0.01
320
16
Altitude
UINT
WGS-84 altitude. Formatted
value is obtained using the
formula: (formatted value) [km] =
RAWVAL*0.01
336
16
ECEF Position X
INT
ECEF Position X. (Unit of measure
is [m])
352
16
ECEF Position Y
INT
ECEF Position Y. (Unit of measure
is [m])
368
16
ECEF Position Z
INT
ECEF Position Z. (Unit of measure
is [m])
Table 173: Parts of ADCS State telemetry frame (ID 190), requested using shorter telemetry
requests
ID
Partial Commands
Length
(bytes)
Bit
offset
Bit
length
Overlapping ADCS Configuration
Telecommand Parameters
145
Current ADCS State -
Table 123: Current
ADCS State Telemetry
Format
6
0
4
Attitude Estimation Mode
4
4
Control Mode
8
2
ADCS Run Mode
10
1
CubeControl Signal Enabled
11
1
CubeControl Motor Enabled
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 123
12
1
CubeSense Enabled
13
1
CubeWheel1 Enabled
14
1
CubeWheel2 Enabled
15
1
CubeWheel3 Enabled
16
1
CubeStar Enabled
17
1
GPS Receiver Enabled
18
1
GPS LNA Power Enabled
19
1
Motor Driver Enabled
20
1
Sun is Above Local Horizon
21
1
CubeSense Communications Error
22
1
CubeControl Signal
Communications Error
23
1
CubeControl Motor
Communications Error
24
1
CubeWheel1 Communications Error
25
1
CubeWheel2 Communications Error
26
1
CubeWheel3 Communications Error
27
1
CubeStar Communications Error
28
1
Magnetometer Range Error
29
1
Cam1 Sensor Overcurrent Detected
30
1
Cam1 Sensor Busy Error
31
1
Cam1 Sensor Detection Error
32
1
Sun Sensor Range Error
33
1
Cam2 Sensor Overcurrent Detected
34
1
Cam2 Sensor Busy Error
35
1
Cam2 Sensor Detection Error
36
1
Nadir Sensor Range Error
37
1
Rate Sensor Range Error
38
1
Wheel Speed Range Error
39
1
Coarse Sun Sensor Error
40
1
StarTracker Match Error
41
1
Star Tracker Overcurrent Detected
42
1
Orbit Parameters are Invalid
43
1
Configuration is Invalid
44
1
Control Mode Change is not
allowed
45
1
Estimator Change is not allowed
46
1
Modelled and measured magnetic
field differs in size
47
1
Node Recovery Error
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 124
146
Estimated Attitude
Angles - Table 124:
Estimated Attitude
Angles Telemetry
Format
6
48
16
Estimated Roll Angle
64
16
Estimated Pitch Angle
80
16
Estimated Yaw Angle
218
Estimated Quaternion
- Table 199: Estimated
Quaternion Telemetry
Format
6
96
16
Estimated q1
112
16
Estimated q2
128
16
Estimated q3
147
Estimated Angular
Rates - Table 125:
Estimated Angular
Rates Telemetry
Format
6
144
16
Estimated X Angular Rate
160
16
Estimated Y Angular Rate
176
16
Estimated Z Angular Rate
148
Satellite Position (ECI)
- Table 126: Satellite
Position (ECI)
Telemetry Format
6
192
16
X position
208
16
Y position
224
16
Z position
149
Satellite Velocity (ECI)
- Table 127: Satellite
Velocity (ECI)
Telemetry Format
6
240
16
X Velocity
256
16
Y Velocity
272
16
Z Velocity
150
Satellite Position (LLH)
- Table 128: Satellite
Position (LLH)
Telemetry Format
6
288
16
Latitude
304
16
Longitude
320
16
Altitude
219
ECEF Position - Table
200: ECEF Position
Telemetry Format
6
336
16
ECEF Position X
352
16
ECEF Position Y
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 125
368
16
ECEF Position Z
Table 174: ADCS Measurements Telemetry Format
ID
191
Frame Length (bytes)
72
Description
Calibrated sensor measurements
Channels
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
0
16
Magnetic Field X
INT
Magnetic Field X. Formatted
value is obtained using the
formula: (formatted value) [uT] =
RAWVAL*0.01
16
16
Magnetic Field Y
INT
Magnetic Field Y. Formatted
value is obtained using the
formula: (formatted value) [uT] =
RAWVAL*0.01
32
16
Magnetic Field Z
INT
Magnetic Field Z. Formatted value
is obtained using the formula:
(formatted value) [uT] =
RAWVAL*0.01
48
16
Coarse Sun X
INT
Coarse Sun X. Formatted value is
obtained using the formula:
(formatted value) =
RAWVAL/10000.0
64
16
Coarse Sun Y
INT
Coarse Sun Y. Formatted value is
obtained using the formula:
(formatted value) =
RAWVAL/10000.0
80
16
Coarse Sun Z
INT
Coarse Sun Z. Formatted value is
obtained using the formula:
(formatted value) =
RAWVAL/10000.0
96
16
Sun X
INT
Sun X. Formatted value is
obtained using the formula:
(formatted value) =
RAWVAL/10000.0
112
16
Sun Y
INT
Sun Y. Formatted value is
obtained using the formula:
(formatted value) =
RAWVAL/10000.0
128
16
Sun Z
INT
Sun Z. Formatted value is
obtained using the formula:
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 126
(formatted value) =
RAWVAL/10000.0
144
16
Nadir X
INT
Nadir X. Formatted value is
obtained using the formula:
(formatted value) =
RAWVAL/10000.0
160
16
Nadir Y
INT
Nadir Y. Formatted value is
obtained using the formula:
(formatted value) =
RAWVAL/10000.0
176
16
Nadir Z
INT
Nadir Z. Formatted value is
obtained using the formula:
(formatted value) =
RAWVAL/10000.0
192
16
X Angular Rate
INT
X Angular Rate. Formatted value
is obtained using the formula:
(formatted value) [deg/s] =
RAWVAL*0.01
208
16
Y Angular Rate
INT
Y Angular Rate. Formatted value
is obtained using the formula:
(formatted value) [deg/s] =
RAWVAL*0.01
224
16
Z Angular Rate
INT
Z Angular Rate. Formatted value
is obtained using the formula:
(formatted value) [deg/s] =
RAWVAL*0.01
240
16
X Wheel Speed
INT
X Wheel Speed. (Unit of measure
is [rpm])
256
16
Y Wheel Speed
INT
Y Wheel Speed. (Unit of measure
is [rpm])
272
16
Z Wheel Speed
INT
Z Wheel Speed. (Unit of measure
is [rpm])
288
16
Star1BX
INT
Star1 body X-vector. Formatted
value is obtained using the
formula: (formatted value) =
RAWVAL/10000.0
304
16
Star1BY
INT
Star1 body Y-vector. Formatted
value is obtained using the
formula: (formatted value) =
RAWVAL/10000.0
320
16
Star1BZ
INT
Star1 body Z-vector. Formatted
value is obtained using the
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 127
formula: (formatted value) =
RAWVAL/10000.0
336
16
Star1OX
INT
Star1 orbit X-vector. Formatted
value is obtained using the
formula: (formatted value) =
RAWVAL/10000.0
352
16
Star1OY
INT
Star1 orbit Y-vector. Formatted
value is obtained using the
formula: (formatted value) =
RAWVAL/10000.0
368
16
Star1OZ
INT
Star1 orbit Z-vector. Formatted
value is obtained using the
formula: (formatted value) =
RAWVAL/10000.0
384
16
Star2BX
INT
Star2 body X-vector. Formatted
value is obtained using the
formula: (formatted value) =
RAWVAL/10000.0
400
16
Star2BY
INT
Star2 body Y-vector. Formatted
value is obtained using the
formula: (formatted value) =
RAWVAL/10000.0
416
16
Star2BZ
INT
Star2 body Z-vector. Formatted
value is obtained using the
formula: (formatted value) =
RAWVAL/10000.0
432
16
Star2OX
INT
Star2 orbit X-vector. Formatted
value is obtained using the
formula: (formatted value) =
RAWVAL/10000.0
448
16
Star2OY
INT
Star2 orbit Y-vector. Formatted
value is obtained using the
formula: (formatted value) =
RAWVAL/10000.0
464
16
Star2OZ
INT
Star2 orbit Z-vector. Formatted
value is obtained using the
formula: (formatted value) =
RAWVAL/10000.0
480
16
Star3BX
INT
Star3 body X-vector. Formatted
value is obtained using the
formula: (formatted value) =
RAWVAL/10000.0
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 128
496
16
Star3BY
INT
Star3 body Y-vector. Formatted
value is obtained using the
formula: (formatted value) =
RAWVAL/10000.0
512
16
Star3BZ
INT
Star3 body Z-vector. Formatted
value is obtained using the
formula: (formatted value) =
RAWVAL/10000.0
528
16
Star3OX
INT
Star3 orbit X-vector. Formatted
value is obtained using the
formula: (formatted value) =
RAWVAL/10000.0
544
16
Star3OY
INT
Star3 orbit Y-vector. Formatted
value is obtained using the
formula: (formatted value) =
RAWVAL/10000.0
560
16
Star3OZ
INT
Star3 orbit Z-vector. Formatted
value is obtained using the
formula: (formatted value) =
RAWVAL/10000.0
Table 175: Parts of ADCS Measurements telemetry frame (ID 191), requested using shorter
telemetry requests
ID
Partial Commands
Length
(bytes)
Bit
offset
Bit
length
Overlapping ADCS Configuration
Telecommand Parameters
151
Magnetic Field Vector
- Table 129: Magnetic
Field Vector Telemetry
Format
6
0
16
Magnetic Field X
16
16
Magnetic Field Y
32
16
Magnetic Field Z
152
Coarse Sun Vector -
Table 130: Coarse Sun
Vector Telemetry
Format
6
48
16
Coarse Sun X
64
16
Coarse Sun Y
80
16
Coarse Sun Z
153
Fine Sun Vector -
Table 131: Fine Sun
Vector Telemetry
Format
6
96
16
Sun X
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 129
112
16
Sun Y
128
16
Sun Z
154
Nadir Vector - Table
132: Nadir Vector
Telemetry Format
6
144
16
Nadir X
160
16
Nadir Y
176
16
Nadir Z
155
Rate Sensor Rates -
Table 133: Rate
Sensor Rates
Telemetry Format
6
192
16
X Angular Rate
208
16
Y Angular Rate
224
16
Z Angular Rate
156
Wheel Speed - Table
134: Wheel Speed
Telemetry Format
6
240
16
X Wheel Speed
256
16
Y Wheel Speed
272
16
Z Wheel Speed
181
Star 1 Body Vector -
Table 162: Star 1 Body
Vector Telemetry
Format
6
288
16
Star1BX
304
16
Star1BY
320
16
Star1BZ
184
Star 1 Orbit Vector -
Table 165: Star 1 Orbit
Vector Telemetry
Format
6
336
16
Star1OX
352
16
Star1OY
368
16
Star1OZ
182
Star 2 Body Vector -
Table 163: Star 2 Body
Vector Telemetry
Format
6
384
16
Star2BX
400
16
Star2BY
416
16
Star2BZ
185
Star 2 Orbit Vector -
Table 166: Star 2 Orbit
Vector Telemetry
Format
6
432
16
Star2OX
448
16
Star2OY
464
16
Star2OZ
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 130
183
Star 3 Body Vector -
Table 164: Star 3 Body
Vector Telemetry
Format
6
480
16
Star3BX
496
16
Star3BY
512
16
Star3BZ
186
Star 3 Orbit Vector -
Table 167: Star 3 Orbit
Vector Telemetry
Format
6
528
16
Star3OX
544
16
Star3OY
560
16
Star3OZ
Table 176: Actuator Commands Telemetry Format
ID
192
Frame Length (bytes)
12
Description
Actuator commands
Channels
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
0
16
X Magnetorquer
Command
INT
X Magnetorquer Commanded
on-time. (Unit of measure is
[10ms units])
16
16
Y Magnetorquer
Command
INT
Y Magnetorquer Commanded
on-time. (Unit of measure is
[10ms units])
32
16
Z Magnetorquer
Command
INT
Z Magnetorquer Commanded
on-time. (Unit of measure is
[10ms units])
48
16
X Wheel Speed
INT
X Wheel Speed. (Unit of measure
is [rpm])
64
16
Y Wheel Speed
INT
Y Wheel Speed. (Unit of measure
is [rpm])
80
16
Z Wheel Speed
INT
Z Wheel Speed. (Unit of measure
is [rpm])
Table 177: Parts of Actuator Commands telemetry frame (ID 192), requested using shorter
telemetry requests
ID
Partial Commands
Length
(bytes)
Bit
offset
Bit
length
Overlapping ADCS Configuration
Telecommand Parameters
157
Magnetorquer
Command - Table
6
0
16
X Magnetorquer Command
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 131
135: Magnetorquer
Command Telemetry
Format
16
16
Y Magnetorquer Command
32
16
Z Magnetorquer Command
158
Wheel Speed
Commands - Table
136: Wheel Speed
Commands Telemetry
Format
6
48
16
X Wheel Speed
64
16
Y Wheel Speed
80
16
Z Wheel Speed
Table 178: Estimation Data Telemetry Format
ID
193
Frame Length (bytes)
42
Description
Estimation meta-data
Channels
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
0
16
IGRF Modelled
Magnetic Field X
INT
IGRF Modelled Magnetic Field X.
Formatted value is obtained
using the formula: (formatted
value) [uT] = RAWVAL*0.01
16
16
IGRF Modelled
Magnetic Field Y
INT
IGRF Modelled Magnetic Field Y.
Formatted value is obtained
using the formula: (formatted
value) [uT] = RAWVAL*0.01
32
16
IGRF Modelled
Magnetic Field Z
INT
IGRF Modelled Magnetic Field Z.
Formatted value is obtained using
the formula: (formatted value)
[uT] = RAWVAL*0.01
48
16
Modelled Sun
Vector X
INT
Modelled Sun Vector X.
Formatted value is obtained
using the formula: (formatted
value) = RAWVAL/10000.0
64
16
Modelled Sun
Vector Y
INT
Modelled Sun Vector Y.
Formatted value is obtained
using the formula: (formatted
value) = RAWVAL/10000.0
80
16
Modelled Sun
Vector Z
INT
Modelled Sun Vector Z.
Formatted value is obtained using
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 132
the formula: (formatted value) =
RAWVAL/10000.0
96
16
Estimated X-gyro
Bias
INT
Estimated X-gyro Bias. Formatted
value is obtained using the
formula: (formatted value)
[deg/s] = RAWVAL*0.001
112
16
Estimated Y-gyro
Bias
INT
Estimated Y-gyro Bias. Formatted
value is obtained using the
formula: (formatted value)
[deg/s] = RAWVAL*0.001
128
16
Estimated Z-gyro
Bias
INT
Estimated Z-gyro Bias. Formatted
value is obtained using the
formula: (formatted value) [deg/s]
= RAWVAL*0.001
144
16
Innovation Vector X
INT
Innovation Vector X. Formatted
value is obtained using the
formula: (formatted value) =
RAWVAL*0.0001
160
16
Innovation Vector Y
INT
Innovation Vector Y. Formatted
value is obtained using the
formula: (formatted value) =
RAWVAL*0.0001
176
16
Innovation Vector Z
INT
Innovation Vector Z. Formatted
value is obtained using the
formula: (formatted value) =
RAWVAL*0.0001
192
16
Quaternion Error -
Q1
INT
Quaternion Error - Q1. Formatted
value is obtained using the
formula: (formatted value) =
RAWVAL*0.0001
208
16
Quaternion Error -
Q2
INT
Quaternion Error - Q2. Formatted
value is obtained using the
formula: (formatted value) =
RAWVAL*0.0001
224
16
Quaternion Error -
Q3
INT
Quaternion Error - Q3. Formatted
value is obtained using the
formula: (formatted value) =
RAWVAL*0.0001
240
16
Quaternion
Covariance - Q1
RMS
INT
Quaternion Covariance - Q1
RMS. Formatted value is
obtained using the formula:
(formatted value) =
RAWVAL*0.001
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 133
256
16
Quaternion
Covariance - Q2
RMS
INT
Quaternion Covariance - Q2
RMS. Formatted value is
obtained using the formula:
(formatted value) =
RAWVAL*0.001
272
16
Quaternion
Covariance - Q3
RMS
INT
Quaternion Covariance - Q3 RMS.
Formatted value is obtained using
the formula: (formatted value) =
RAWVAL*0.001
288
16
X Angular Rate
Covariance
INT
X Angular Rate Covariance.
Formatted value is obtained
using the formula: (formatted
value) = RAWVAL*0.001
304
16
Y Angular Rate
Covariance
INT
Y Angular Rate Covariance.
Formatted value is obtained
using the formula: (formatted
value) = RAWVAL*0.001
320
16
Z Angular Rate
Covariance
INT
Z Angular Rate Covariance.
Formatted value is obtained using
the formula: (formatted value) =
RAWVAL*0.001
Table 179: Parts of Estimation Data telemetry frame (ID 193), requested using shorter telemetry
requests
ID
Partial Commands
Length
(bytes)
Bit
offset
Bit
length
Overlapping ADCS Configuration
Telecommand Parameters
159
IGRF Modelled
Magnetic Field Vector
- Table 137: IGRF
Modelled Magnetic
Field Vector Telemetry
Format
6
0
16
IGRF Modelled Magnetic Field X
16
16
IGRF Modelled Magnetic Field Y
32
16
IGRF Modelled Magnetic Field Z
160
Modelled Sun Vector
- Table 138: Modelled
Sun Vector Telemetry
Format
6
48
16
Modelled Sun Vector X
64
16
Modelled Sun Vector Y
80
16
Modelled Sun Vector Z
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 134
161
Estimated Gyro Bias -
Table 139: Estimated
Gyro Bias Telemetry
Format
6
96
16
Estimated X-gyro Bias
112
16
Estimated Y-gyro Bias
128
16
Estimated Z-gyro Bias
162
Estimation Innovation
Vector - Table 140:
Estimation Innovation
Vector Telemetry
Format
6
144
16
Innovation Vector X
160
16
Innovation Vector Y
176
16
Innovation Vector Z
163
Quaternion Error
Vector - Table 141:
Quaternion Error
Vector Telemetry
Format
6
192
16
Quaternion Error - Q1
208
16
Quaternion Error - Q2
224
16
Quaternion Error - Q3
164
Quaternion
Covariance - Table
142: Quaternion
Covariance Telemetry
Format
6
240
16
Quaternion Covariance - Q1 RMS
256
16
Quaternion Covariance - Q2 RMS
272
16
Quaternion Covariance - Q3 RMS
165
Angular Rate
Covariance - Table
143: Angular Rate
Covariance Telemetry
Format
6
288
16
X Angular Rate Covariance
304
16
Y Angular Rate Covariance
320
16
Z Angular Rate Covariance
Table 180: Raw Sensor Measurements Telemetry Format
ID
194
Frame Length (bytes)
28
Description
Raw sensor measurements
Channels
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
0
16
Cam2 centroid X
INT
Cam2 azimuth angle
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 135
16
16
Cam2 centroid Y
INT
Cam2 elevation angle
32
8
Capture status
ENUM
Cam2 capture status. Possible
values are in Table 145:
CaptureResult Enumeration
Values
40
8
Detection result
ENUM
Cam2 detection result. Possible
values are in Table 146:
DetectResult Enumeration Values
48
16
Cam1 centroid X
INT
Cam1 azimuth angle
64
16
Cam1 centroid Y
INT
Cam1 elevation angle
80
8
Capture status
ENUM
Cam1 capture status. Possible
values are in Table 145:
CaptureResult Enumeration
Values
88
8
Detection result
ENUM
Cam1 detection result. Possible
values are in Table 146:
DetectResult Enumeration Values
96
8
CSS1
UINT
sampled A/D value -
corresponds to COS(sun_angle)
104
8
CSS2
UINT
sampled A/D value -
corresponds to COS(sun_angle)
112
8
CSS3
UINT
sampled A/D value -
corresponds to COS(sun_angle)
120
8
CSS4
UINT
sampled A/D value -
corresponds to COS(sun_angle)
128
8
CSS5
UINT
sampled A/D value -
corresponds to COS(sun_angle)
136
8
CSS6
UINT
sampled A/D value - corresponds
to COS(sun_angle)
144
8
CSS7
UINT
sampled A/D value -
corresponds to COS(sun_angle)
152
8
CSS8
UINT
sampled A/D value -
corresponds to COS(sun_angle)
160
8
CSS9
UINT
sampled A/D value -
corresponds to COS(sun_angle)
168
8
CSS10
UINT
sampled A/D value - corresponds
to COS(sun_angle)
176
16
MagX
INT
sampled A/D value
192
16
MagY
INT
sampled A/D value
208
16
MagZ
INT
sampled A/D value
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 136
Table 181: Parts of Raw Sensor Measurements telemetry frame (ID 194), requested using
shorter telemetry requests
ID
Partial Commands
Length
(bytes)
Bit
offset
Bit
length
Overlapping ADCS Configuration
Telecommand Parameters
166
Raw Cam2 Sensor -
Table 144: Raw Cam2
Sensor Telemetry
Format
6
0
16
Cam2 centroid X
16
16
Cam2 centroid Y
32
8
Capture status
40
8
Detection result
167
Raw Cam1 Sensor -
Table 147: Raw Cam1
Sensor Telemetry
Format
6
48
16
Cam1 centroid X
64
16
Cam1 centroid Y
80
8
Capture status
88
8
Detection result
168
Raw CSS 1 to 6 - Table
148: Raw CSS 1 to 6
Telemetry Format
6
96
8
CSS1
104
8
CSS2
112
8
CSS3
120
8
CSS4
128
8
CSS5
136
8
CSS6
169
Raw CSS 7 to 10 -
Table 149: Raw CSS 7
to 10 Telemetry
Format
6
144
8
CSS7
152
8
CSS8
160
8
CSS9
168
8
CSS10
170
Raw Magnetometer -
Table 150: Raw
Magnetometer
Telemetry Format
6
176
16
MagX
192
16
MagY
208
16
MagZ
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 137
Table 182: Power and Temperature Measurements Telemetry Format
ID
195
Frame Length (bytes)
34
Description
Power and temperature measurements
Channels
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
0
16
CubeSense 3V3
Current
UINT
CubeSense 3V3 Current.
Formatted value is obtained
using the formula: (formatted
value) [mA] = RAWVAL*0.1
16
16
CubeSense Cam2
SRAM Current
UINT
CubeSense Cam2 SRAM Current.
Formatted value is obtained
using the formula: (formatted
value) [mA] = RAWVAL*0.1
32
16
CubeSense Cam1
SRAM Current
UINT
CubeSense Cam1 SRAM Current.
Formatted value is obtained using
the formula: (formatted value)
[mA] = RAWVAL*0.1
48
16
CubeControl 3V3
Current
UINT
CubeControl 3V3 Current.
Formatted value is obtained
using the formula: (formatted
value) [mA] =
RAWVAL*0.48828125
64
16
CubeControl 5V
Current
UINT
CubeControl 5V Current.
Formatted value is obtained
using the formula: (formatted
value) [mA] =
RAWVAL*0.48828125
80
16
CubeControl Vbat
Current
UINT
CubeControl Vbat Current.
Formatted value is obtained using
the formula: (formatted value)
[mA] = RAWVAL*0.48828125
96
16
Wheel1Current
UINT
Wheel1 Current. Formatted value
is obtained using the formula:
(formatted value) [mA] =
RAWVAL*0.01
112
16
Wheel2Current
UINT
Wheel2 Current. Formatted value
is obtained using the formula:
(formatted value) [mA] =
RAWVAL*0.01
128
16
Wheel3Current
UINT
Wheel3 Current. Formatted value
is obtained using the formula:
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 138
(formatted value) [mA] =
RAWVAL*0.01
144
16
CubeStarCurrent
UINT
CubeStar Current. Formatted
value is obtained using the
formula: (formatted value) [mA]
= RAWVAL*0.01
160
16
Magnetorquer
Current
UINT
Magnetorquer Current.
Formatted value is obtained using
the formula: (formatted value)
[mA] = RAWVAL*0.1
176
16
MCU Temperature
INT
MCU Temperature. (Unit of
measure is [C])
192
16
Magnetometer
Temperature
INT
Magnetometer Temperature.
Formatted value is obtained
using the formula: (formatted
value) [C] = RAWVAL/10.0
208
16
Redundant
Magnetometer
Temperature
INT
Redundant Magnetometer
Temperature. Formatted value is
obtained using the formula:
(formatted value) [C] =
RAWVAL/10.0
224
16
X-Rate Sensor
Temperature
INT
X-Rate sensor Temperature. (Unit
of measure is [C])
240
16
Y-Rate Sensor
Temperature
INT
Y-Rate sensor Temperature. (Unit
of measure is [C])
256
16
Z-Rate Sensor
Temperature
INT
Z-Rate sensor Temperature. (Unit
of measure is [C])
Table 183: Parts of Power and Temperature Measurements telemetry frame (ID 195), requested
using shorter telemetry requests
ID
Partial Commands
Length
(bytes)
Bit
offset
Bit
length
Overlapping ADCS Configuration
Telecommand Parameters
171
CubeSense Current
Measurements - Table
151: CubeSense
Current
Measurements
Telemetry Format
6
0
16
CubeSense 3V3 Current
16
16
CubeSense Cam2 SRAM Current
32
16
CubeSense Cam1 SRAM Current
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 139
172
CubeControl Current
Measurements - Table
152: CubeControl
Current
Measurements
Telemetry Format
6
48
16
CubeControl 3V3 Current
64
16
CubeControl 5V Current
80
16
CubeControl Vbat Current
173
Wheel Currents -
Table 153: Wheel
Currents Telemetry
Format
6
96
16
Wheel1Current
112
16
Wheel2Current
128
16
Wheel3Current
198
ADCS Misc Current
Measurements - Table
186: ADCS Misc
Current
Measurements
Telemetry Format
6
144
16
CubeStarCurrent
160
16
Magnetorquer Current
174
ADCS Temperatures -
Table 154: ADCS
Temperatures
Telemetry Format
6
176
16
MCU Temperature
192
16
Magnetometer Temperature
208
16
Redundant Magnetometer
Temperature
175
Rate sensor
temperatures - Table
155: Rate sensor
temperatures
Telemetry Format
6
224
16
X-Rate Sensor Temperature
240
16
Y-Rate Sensor Temperature
256
16
Z-Rate Sensor Temperature
Table 184: Adcs Execution Times Telemetry Format
ID
196
Frame Length (bytes)
8
Description
Returns information about execution times of ACP functions
Channels
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 140
0
16
Time to Perform
ADCS Update
UINT
Time to perform complete ADCS
Update function. (Unit of
measure is [ms])
16
16
Time to Perform
Sensor/Actuator
Communications
UINT
Time to perform Sensor/actuator
communications. (Unit of
measure is [ms])
32
16
Time to Execute
SGP4 Propagator
UINT
Time to execute SGP4
propagator. (Unit of measure is
[ms])
48
16
Time to Execute
IGRF Model
UINT
Time to execute IGRF
computation. (Unit of measure is
[ms])
Table 185: ADCS Power Control Telemetry Format
ID
197
Frame Length (bytes)
3
Description
Control power to selected components
Channels
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
0
2
CubeControl Signal
Power Selection
ENUM
Control power to electronics of
CubeControl Signal PIC. Possible
values are in Table 22:
PowerSelect Enumeration Values
2
2
CubeControl Motor
Power Selection
ENUM
Control power to electronics of
CubeControl Motor PIC. Possible
values are in Table 22:
PowerSelect Enumeration Values
4
2
CubeSense Power
Selection
ENUM
Control power to the CubeSense.
Possible values are in Table 22:
PowerSelect Enumeration Values
6
2
CubeStarPower
Power Selection
ENUM
Control power to the CubeStar.
Possible values are in Table 22:
PowerSelect Enumeration Values
8
2
CubeWheel1Power
Power Selection
ENUM
Control power to the
CubeWheel1. Possible values are
in Table 22: PowerSelect
Enumeration Values
10
2
CubeWheel2Power
Power Selection
ENUM
Control power to the
CubeWheel2. Possible values are
in Table 22: PowerSelect
Enumeration Values
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 141
12
2
CubeWheel3Power
Power Selection
ENUM
Control power to the
CubeWheel3. Possible values are
in Table 22: PowerSelect
Enumeration Values
14
2
Motor Power
ENUM
Control power to Motor
electronics. Possible values are in
Table 22: PowerSelect
Enumeration Values
16
2
GPS Power
ENUM
Control power to GPS LNA.
Possible values are in Table 22:
PowerSelect Enumeration Values
Table 186: ADCS Misc Current Measurements Telemetry Format
ID
198
Frame Length (bytes)
6
Description
CubeStar and Torquer current measurements
Channels
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
0
16
CubeStarCurrent
UINT
CubeStar Current. Formatted
value is obtained using the
formula: (formatted value) [mA]
= RAWVAL*0.01
16
16
Magnetorquer
Current
UINT
Magnetorquer Current.
Formatted value is obtained using
the formula: (formatted value)
[mA] = RAWVAL*0.1
Table 187: Commanded Attitude Angles Telemetry Format
ID
199
Frame Length (bytes)
6
Description
Commanded attitude angles
Channels
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
0
16
Commanded Roll
Angle
INT
Commanded roll angle.
Formatted value is obtained
using the formula: (formatted
value) [deg] = RAWVAL*0.01
16
16
Commanded Pitch
Angle
INT
Commanded pitch angle.
Formatted value is obtained
using the formula: (formatted
value) [deg] = RAWVAL*0.01
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 142
32
16
Commanded Yaw
Angle
INT
Commanded yaw angle.
Formatted value is obtained using
the formula: (formatted value)
[deg] = RAWVAL*0.01
Table 188: Tracking Controller Target Reference Telemetry Format
ID
200
Frame Length (bytes)
12
Description
Target reference for tracking control mode
Channels
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
0
32
Geocentric
longitude of target
FLOAT
Geocentric longitude of target.
(Unit of measure is [deg])
32
32
Geocentric latitude
of target
FLOAT
Geocentric latitude of target.
(Unit of measure is [deg])
64
32
Geocentric altitude
of target
FLOAT
Geocentric altitude of target.
(Unit of measure is [meter])
Table 189: ADCS Configuration Telemetry Format
ID
206
Frame Length (bytes)
272
Description
Current configuration
Channels
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
0
8
Magnetorquer 1
Configuration
ENUM
Magnetorquer 1 Configuration.
Possible values are in Table 34:
AxisSelect Enumeration Values
8
8
Magnetorquer 2
Configuration
ENUM
Magnetorquer 2 Configuration.
Possible values are in Table 34:
AxisSelect Enumeration Values
16
8
Magnetorquer 3
Configuration
ENUM
Magnetorquer 3 Configuration.
Possible values are in Table 34:
AxisSelect Enumeration Values
24
8
RW1 Configuration
ENUM
RW1 Configuration. Possible
values are in Table 34: AxisSelect
Enumeration Values
32
8
RW2 Configuration
ENUM
RW2 Configuration. Possible
values are in Table 34: AxisSelect
Enumeration Values
40
8
RW3 Configuration
ENUM
RW3 Configuration. Possible
values are in Table 34: AxisSelect
Enumeration Values
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 143
48
8
RW4 Configuration
ENUM
RW4 Configuration. Possible
values are in Table 34: AxisSelect
Enumeration Values
56
8
Gyro1
Configuration
ENUM
Gyro1 Configuration. Possible
values are in Table 34: AxisSelect
Enumeration Values
64
8
Gyro2
Configuration
ENUM
Gyro2 Configuration. Possible
values are in Table 34: AxisSelect
Enumeration Values
72
8
Gyro3
Configuration
ENUM
Gyro3 Configuration. Possible
values are in Table 34: AxisSelect
Enumeration Values
80
8
CSS1 Configuration
ENUM
CSS1 Configuration. Possible
values are in Table 34: AxisSelect
Enumeration Values
88
8
CSS2 Configuration
ENUM
CSS2 Configuration. Possible
values are in Table 34: AxisSelect
Enumeration Values
96
8
CSS3 Configuration
ENUM
CSS3 Configuration. Possible
values are in Table 34: AxisSelect
Enumeration Values
104
8
CSS4 Configuration
ENUM
CSS4 Configuration. Possible
values are in Table 34: AxisSelect
Enumeration Values
112
8
CSS5 Configuration
ENUM
CSS5 Configuration. Possible
values are in Table 34: AxisSelect
Enumeration Values
120
8
CSS6 Configuration
ENUM
CSS6 Configuration. Possible
values are in Table 34: AxisSelect
Enumeration Values
128
8
CSS7 Configuration
ENUM
CSS7 Configuration. Possible
values are in Table 34: AxisSelect
Enumeration Values
136
8
CSS8 Configuration
ENUM
CSS8 Configuration. Possible
values are in Table 34: AxisSelect
Enumeration Values
144
8
CSS9 Configuration
ENUM
CSS9 Configuration. Possible
values are in Table 34: AxisSelect
Enumeration Values
152
8
CSS10
Configuration
ENUM
CSS10 Configuration. Possible
values are in Table 34: AxisSelect
Enumeration Values
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 144
160
8
CSS1 Relative Scale
UINT
CSS1 Relative Scaling Factor.
Formatted value is obtained
using the formula: (formatted
value) = RAWVAL*0.01
168
8
CSS2 Relative Scale
UINT
CSS2 Relative Scaling Factor.
Formatted value is obtained
using the formula: (formatted
value) = RAWVAL*0.01
176
8
CSS3 Relative Scale
UINT
CSS3 Relative Scaling Factor.
Formatted value is obtained
using the formula: (formatted
value) = RAWVAL*0.01
184
8
CSS4 Relative Scale
UINT
CSS4 Relative Scaling Factor.
Formatted value is obtained
using the formula: (formatted
value) = RAWVAL*0.01
192
8
CSS5 Relative Scale
UINT
CSS5 Relative Scaling Factor.
Formatted value is obtained
using the formula: (formatted
value) = RAWVAL*0.01
200
8
CSS6 Relative Scale
UINT
CSS6 Relative Scaling Factor.
Formatted value is obtained
using the formula: (formatted
value) = RAWVAL*0.01
208
8
CSS7 Relative Scale
UINT
CSS7 Relative Scaling Factor.
Formatted value is obtained
using the formula: (formatted
value) = RAWVAL*0.01
216
8
CSS8 Relative Scale
UINT
CSS8 Relative Scaling Factor.
Formatted value is obtained
using the formula: (formatted
value) = RAWVAL*0.01
224
8
CSS9 Relative Scale
UINT
CSS9 Relative Scaling Factor.
Formatted value is obtained
using the formula: (formatted
value) = RAWVAL*0.01
232
8
CSS10 Relative
Scale
UINT
CSS10 Relative Scaling Factor.
Formatted value is obtained
using the formula: (formatted
value) = RAWVAL*0.01
240
8
CSS Threshold
UINT
CSS Threshold
248
16
Cam1 Sensor
Mounting
INT
Cam1 Sensor Mounting
Transform Alpha Angle.
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 145
Transform Alpha
Angle
Formatted value is obtained
using the formula: (formatted
value) [deg] = RAWVAL*0.01
264
16
Cam1 Sensor
Mounting
Transform Beta
Angle
INT
Cam1 Sensor Mounting
Transform Beta Angle. Formatted
value is obtained using the
formula: (formatted value) [deg]
= RAWVAL*0.01
280
16
Cam1 Sensor
Mounting
Transform Gamma
Angle
INT
Cam1 Sensor Mounting
Transform Gamma Angle.
Formatted value is obtained
using the formula: (formatted
value) [deg] = RAWVAL*0.01
296
8
Cam1 detection
threshold
UINT
304
1
Cam1 sensor auto
adjust mode
BOOL
0 = disabled and 1 = enabled
312
16
Cam1 sensor
exposure time
UINT
exposure time register value
328
16
Cam1 Boresight X
UINT
X Pixel location of Cam1
boresight. Formatted value is
obtained using the formula:
(formatted value) [pixels] =
RAWVAL*0.01
344
16
Cam1 Boresight Y
UINT
Y Pixel location of Cam1
boresight. Formatted value is
obtained using the formula:
(formatted value) [pixels] =
RAWVAL*0.01
360
1
Cam1 Shift
BOOL
Use Cam2 processing chain for
Cam1 detection
368
16
Cam2 Sensor
Mounting
Transform Alpha
Angle
INT
Cam2 Sensor Mounting
Transform Alpha Angle.
Formatted value is obtained
using the formula: (formatted
value) [deg] = RAWVAL*0.01
384
16
Cam2 Sensor
Mounting
Transform Beta
Angle
INT
Cam2 Sensor Mounting
Transform Beta Angle. Formatted
value is obtained using the
formula: (formatted value) [deg]
= RAWVAL*0.01
400
16
Cam2 Sensor
Mounting
INT
Cam2 Sensor Mounting
Transform Gamma Angle.
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 146
Transform Gamma
Angle
Formatted value is obtained
using the formula: (formatted
value) [deg] = RAWVAL*0.01
416
8
Cam2 detection
threshold
UINT
Cam2 detection threshold
424
1
Cam2 sensor auto
adjust mode
BOOL
0 = disabled and 1 = enabled
432
16
Cam2 sensor
exposure time
UINT
exposure time register value
448
16
Cam2 Boresight X
UINT
X Pixel location of Cam2
boresight. Formatted value is
obtained using the formula:
(formatted value) [pixels] =
RAWVAL*0.01
464
16
Cam2 Boresight Y
UINT
Y Pixel location of Cam2
boresight. Formatted value is
obtained using the formula:
(formatted value) [pixels] =
RAWVAL*0.01
480
1
Cam2 Shift
BOOL
Use Sun processing chain for
Cam2 detection
488
16
Minimum X of area
1
UINT
Minimum X of Area 1
504
16
Maximum X of area
1
UINT
Maximum X of Area 1
520
16
Minimum Y of area
1
UINT
Minimum Y of Area 1
536
16
Maximum Y of area
1
UINT
Maximum Y of Area 1
552
16
Minimum X of area
2
UINT
Minimum X of Area 2
568
16
Maximum X of area
2
UINT
Maximum X of Area 2
584
16
Minimum Y of area
2
UINT
Minimum Y of Area 2
600
16
Maximum Y of area
2
UINT
Maximum Y of Area 2
616
16
Minimum X of area
3
UINT
Minimum X of Area 3
632
16
Maximum X of area
3
UINT
Maximum X of Area 3
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 147
648
16
Minimum Y of area
3
UINT
Minimum Y of Area 3
664
16
Maximum Y of area
3
UINT
Maximum Y of Area 3
680
16
Minimum X of area
4
UINT
Minimum X of Area 4
696
16
Maximum X of area
4
UINT
Maximum X of Area 4
712
16
Minimum Y of area
4
UINT
Minimum Y of Area 4
728
16
Maximum Y of area
4
UINT
Maximum Y of Area 4
744
16
Minimum X of area
5
UINT
Minimum X of Area 5
760
16
Maximum X of area
5
UINT
Maximum X of Area 5
776
16
Minimum Y of area
5
UINT
Minimum Y of Area 5
792
16
Maximum Y of area
5
UINT
Maximum Y of Area 5
808
16
Magnetometer
Mounting
Transform Alpha
Angle
INT
Magnetometer Mounting
Transform Alpha Angle.
Formatted value is obtained
using the formula: (formatted
value) [deg] = RAWVAL*0.01
824
16
Magnetometer
Mounting
Transform Beta
Angle
INT
Magnetometer Mounting
Transform Beta Angle. Formatted
value is obtained using the
formula: (formatted value) [deg]
= RAWVAL*0.01
840
16
Magnetometer
Mounting
Transform Gamma
Angle
INT
Magnetometer Mounting
Transform Gamma Angle.
Formatted value is obtained
using the formula: (formatted
value) [deg] = RAWVAL*0.01
856
16
Magnetometer
Channel 1 Offset
INT
Magnetometer Channel 1 Offset.
Formatted value is obtained
using the formula: (formatted
value) = RAWVAL*0.001
872
16
Magnetometer
Channel 2 Offset
INT
Magnetometer Channel 2 Offset.
Formatted value is obtained
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 148
using the formula: (formatted
value) = RAWVAL*0.001
888
16
Magnetometer
Channel 3 Offset
INT
Magnetometer Channel 3 Offset.
Formatted value is obtained
using the formula: (formatted
value) = RAWVAL*0.001
904
16
Magnetometer
Sensitivity Matrix
S11
INT
Magnetometer Sensitivity Matrix
S11. Formatted value is obtained
using the formula: (formatted
value) = RAWVAL*0.001
920
16
Magnetometer
Sensitivity Matrix
S22
INT
Magnetometer Sensitivity Matrix
S22. Formatted value is obtained
using the formula: (formatted
value) = RAWVAL*0.001
936
16
Magnetometer
Sensitivity Matrix
S33
INT
Magnetometer Sensitivity Matrix
S33. Formatted value is obtained
using the formula: (formatted
value) = RAWVAL*0.001
952
16
Magnetometer
Sensitivity Matrix
S12
INT
Magnetometer Sensitivity Matrix
S12. Formatted value is obtained
using the formula: (formatted
value) = RAWVAL*0.001
968
16
Magnetometer
Sensitivity Matrix
S13
INT
Magnetometer Sensitivity Matrix
S13. Formatted value is obtained
using the formula: (formatted
value) = RAWVAL*0.001
984
16
Magnetometer
Sensitivity Matrix
S21
INT
Magnetometer Sensitivity Matrix
S21. Formatted value is obtained
using the formula: (formatted
value) = RAWVAL*0.001
1000
16
Magnetometer
Sensitivity Matrix
S23
INT
Magnetometer Sensitivity Matrix
S23. Formatted value is obtained
using the formula: (formatted
value) = RAWVAL*0.001
1016
16
Magnetometer
Sensitivity Matrix
S31
INT
Magnetometer Sensitivity Matrix
S31. Formatted value is obtained
using the formula: (formatted
value) = RAWVAL*0.001
1032
16
Magnetometer
Sensitivity Matrix
S32
INT
Magnetometer Sensitivity Matrix
S32. Formatted value is obtained
using the formula: (formatted
value) = RAWVAL*0.001
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 149
1048
16
X-Rate Sensor
Offset
INT
X-Rate Sensor Offset. Formatted
value is obtained using the
formula: (formatted value)
[deg/s] = RAWVAL*0.001
1064
16
Y-Rate Sensor
Offset
INT
Y-Rate Sensor Offset. Formatted
value is obtained using the
formula: (formatted value)
[deg/s] = RAWVAL*0.001
1080
16
Z-Rate Sensor
Offset
INT
Z-Rate Sensor Offset. Formatted
value is obtained using the
formula: (formatted value)
[deg/s] = RAWVAL*0.001
1096
8
RateSensorMult
UINT
Multiplier of rate sensor
measurement
1104
16
StarTracker
Mounting
Transform Alpha
Angle
INT
StarTracker Mounting Transform
Alpha Angle. Formatted value is
obtained using the formula:
(formatted value) [deg] =
RAWVAL*0.01
1120
16
StarTracker
Mounting
Transform Beta
Angle
INT
StarTracker Mounting Transform
Beta Angle. Formatted value is
obtained using the formula:
(formatted value) [deg] =
RAWVAL*0.01
1136
16
StarTracker
Mounting
Transform Gamma
Angle
INT
StarTracker Mounting Transform
Gamma Angle. Formatted value
is obtained using the formula:
(formatted value) [deg] =
RAWVAL*0.01
1152
16
StarTracker
exposure time
UINT
exposure time register value
1168
8
StarTracker
detection threshold
UINT
StarTracker detection threshold
1176
8
StarTracker star
threshold
UINT
StarTracker star threshold
1184
8
Maximum Star
Matched
UINT
Maximum of stars that the star
tracker will match
1192
8
Maximum Star Pixel
UINT
Maximum pixels in a star
1200
8
Maximum Star
Noise
UINT
Maximum star pixel noise
1208
8
Minimum Star Pixel
UINT
Minimum pixels in a star
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 150
1216
8
Star Tracker Error
Margin
UINT
% Error margin of the star
identification. Formatted value is
obtained using the formula:
(formatted value) [%] =
RAWVAL*0.01
1224
32
Star Tracker
Centroid X
FLOAT
Pixel centroid X
1256
32
Star Tracker
Centroid Y
FLOAT
Pixel centroid Y
1288
16
Star Tracker Focal
Length
UINT
Star Tracker Focal Length.
Formatted value is obtained
using the formula: (formatted
value) [mm] = RAWVAL*0.0001
1304
8
Synch Delay
UINT
Synchronization delay within star
Tracker
1312
32
Detumbling Spin
Gain
FLOAT
Detumbling Spin Gain (Ks)
1344
32
Detumbling
Damping Gain
FLOAT
Detumbling Damping Gain (Kd)
1376
16
Reference spin rate
INT
Reference spin rate (wy-ref).
Must always be smaller than 0.
Formatted value is obtained
using the formula: (formatted
value) [deg/s] = RAWVAL*0.001
1392
32
Fast BDot
Detumbling Gain
FLOAT
Fast BDot Detumbling Gain (Kdf)
1424
32
Y-Momentum
Control Gain
FLOAT
Y-Momentum Control Gain (Kh)
1456
32
Y-momentum
Nutation Damping
Gain
FLOAT
Y-momentum Nutation Damping
Gain (Kn)
1488
32
Y-momentum
Proportional Gain
FLOAT
Y-momentum Proportional Gain
(Kp1)
1520
32
Y-momentum
Derivative Gain
FLOAT
Y-momentum Derivative Gain
(Kd1)
1552
32
Reference Wheel
Momentum
FLOAT
Reference Wheel Momentum (H-
ref). Must always be smaller than
0. (Unit of measure is [Nms])
1584
32
RWheel
Proportional Gain
FLOAT
RWheel Proportional Gain (Kp2)
1616
32
RWheel Derivative
Gain
FLOAT
RWheel Derivative Gain (Kd2)
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 151
1648
32
Tracking
Proportional Gain
FLOAT
Tracking Proportional Gain (Kp3)
1680
32
Tracking Derivative
Gain
FLOAT
Tracking Derivative Gain (Kd3)
1712
32
Tracking Integral
Gain
FLOAT
Tracking Integral Gain (Ki3)
1744
32
Moment Of Inertia
- Ixx
FLOAT
Moment Of Inertia - Ixx. (Unit of
measure is [kg.m^2])
1776
32
Moment Of Inertia
- Iyy
FLOAT
Moment Of Inertia - Iyy. (Unit of
measure is [kg.m^2])
1808
32
Moment Of Inertia
- Izz
FLOAT
Moment Of Inertia - Izz. (Unit of
measure is [kg.m^2])
1840
32
Moment Of Inertia
- Ixy
FLOAT
Moment Of Inertia - Ixy. (Unit of
measure is [kg.m^2])
1872
32
Moment Of Inertia
- Ixz
FLOAT
Moment Of Inertia - Ixz. (Unit of
measure is [kg.m^2])
1904
32
Moment Of Inertia
- Iyz
FLOAT
Moment Of Inertia - Iyz. (Unit of
measure is [kg.m^2])
1936
32
Magnetometer
Rate Filter System
Noise
FLOAT
Magnetometer Rate Filter
System Noise
1968
32
EKF System Noise
FLOAT
EKF System Noise
2000
32
CSS Measurement
Noise
FLOAT
CSS Measurement Noise
2032
32
Sun Sensor
Measurement
Noise
FLOAT
Sun Sensor Measurement Noise
2064
32
Nadir Sensor
Measurement
Noise
FLOAT
Nadir Sensor Measurement
Noise
2096
32
Magnetometer
Measurement
Noise
FLOAT
Magnetometer Measurement
Noise
2128
32
Star Tracker
Measurement
Noise
FLOAT
Star Tracker Measurement Noise
2160
1
Use Sun Sensor
BOOL
Use Sun Sensor measurement in
EKF
2161
1
Use Nadir Sensor
BOOL
Use Nadir Sensor measurement
in EKF
2162
1
Use CSS
BOOL
Use CSS measurement in EKF
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 152
2163
1
Use Star Tracker
BOOL
Use Star Tracker measurement in
EKF
2164
2
Magnetometer
Mode
ENUM
Mode describing which
magnetometer is used for
estimation and control. Possible
values are in Table 35:
MagModeVal Enumeration
Values
2168
8
Cam1 and Cam2
Sampling Period
UINT
Cam1 and Cam2 sensor sampling
period. Lower four bits are Cam1
period and upper four bits the
Cam2 period. Setting period to
zero for sensor will disable
sampling of sensor.. (Unit of
measure is [s])
Table 190: SGP4 Orbit Parameters Telemetry Format
ID
207
Frame Length (bytes)
64
Description
SGP4 Orbit Parameters
Channels
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
0
64
Inclination
DOUBLE
Inclination. (Unit of measure is
[deg])
64
64
Eccentricity
DOUBLE
Eccentricity
128
64
Right-ascension of
the Ascending
Node
DOUBLE
Right-ascension of the
Ascending Node. (Unit of
measure is [deg])
192
64
Argument of
Perigee
DOUBLE
Argument of Perigee. (Unit of
measure is [deg])
256
64
B-Star drag term
DOUBLE
B-Star drag term
320
64
Mean Motion
DOUBLE
Mean Motion. (Unit of measure
is [orbits/day])
384
64
Mean Anomaly
DOUBLE
Mean Anomaly. (Unit of measure
is [deg])
448
64
Epoch
DOUBLE
Epoch (year.day). (Unit of
measure is [year.day])
Table 191: Raw GPS Measurements Telemetry Format
ID
210
Frame Length (bytes)
36
Description
Raw GPS measurements
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 153
Channels
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
0
8
Gps Solution Status
ENUM
GPS Solution Status. Possible
values are in Table 157:
GpsSolutionStatus Enumeration
Values
8
8
Number of tracked
GPS satellites
UINT
Number of tracked GPS satellites
16
8
Number of GPS
satellites used in
solution
UINT
Number of GPS satellites used in
solution
24
8
Counter for XYZ Lof
from GPS
UINT
Counter for XYZ Lof from GPS
32
8
Counter for RANGE
log from GPS
UINT
Counter for RANGE log from GPS
40
8
Response Message
for GPS log setup
UINT
Response Message for GPS log
setup - p656 of OEMV615
reference manual
48
16
GPS Reference
Week
UINT
GPS Reference Week
64
32
GPS Time
Milliseconds
UINT
GPS Time Milliseconds. (Unit of
measure is [ms])
96
32
ECEF Position X
INT
ECEF Position X. (Unit of measure
is [m])
128
16
ECEF Velocity X
INT
ECEF Velocity X. (Unit of measure
is [m/s])
144
32
ECEF Position Y
INT
ECEF Position Y. (Unit of measure
is [m])
176
16
ECEF Velocity Y
INT
ECEF Velocity Y. (Unit of measure
is [m/s])
192
32
ECEF Position Z
INT
ECEF Position Z. (Unit of measure
is [m])
224
16
ECEF Velocity Z
INT
ECEF Velocity Z. (Unit of measure
is [m/s])
240
8
X-pos Standard
Deviation
UINT
X-pos Standard Deviation.
Formatted value is obtained
using the formula: (formatted
value) [m] = RAWVAL*0.1
248
8
Y-pos Standard
Deviation
UINT
Y-pos Standard Deviation.
Formatted value is obtained
using the formula: (formatted
value) [m] = RAWVAL*0.1
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 154
256
8
Z-pos Standard
Deviation
UINT
Z-pos Standard Deviation.
Formatted value is obtained
using the formula: (formatted
value) [m] = RAWVAL*0.1
264
8
X-vel Standard
Deviation
UINT
X-vel Standard Deviation. (Unit
of measure is [m/s])
272
8
Y-vel Standard
Deviation
UINT
Y-vel Standard Deviation. (Unit of
measure is [m/s])
280
8
Z-vel Standard
Deviation
UINT
Z-vel Standard Deviation. (Unit of
measure is [m/s])
Table 192: Parts of Raw GPS Measurements telemetry frame (ID 210), requested using shorter
telemetry requests
ID
Partial Commands
Length
(bytes)
Bit
offset
Bit
length
Overlapping ADCS Configuration
Telecommand Parameters
176
Raw GPS Status -
Table 156: Raw GPS
Status Telemetry
Format
6
0
8
Gps Solution Status
8
8
Number of tracked GPS satellites
16
8
Number of GPS satellites used in
solution
24
8
Counter for XYZ Lof from GPS
32
8
Counter for RANGE log from GPS
40
8
Response Message for GPS log
setup
177
Raw GPS Time - Table
158: Raw GPS Time
Telemetry Format
6
48
16
GPS Reference Week
64
32
GPS Time Milliseconds
178
Raw GPS X - Table
159: Raw GPS X
Telemetry Format
6
96
32
ECEF Position X
128
16
ECEF Velocity X
179
Raw GPS Y - Table
160: Raw GPS Y
Telemetry Format
6
144
32
ECEF Position Y
176
16
ECEF Velocity Y
180
Raw GPS Z - Table
161: Raw GPS Z
Telemetry Format
6
192
32
ECEF Position Z
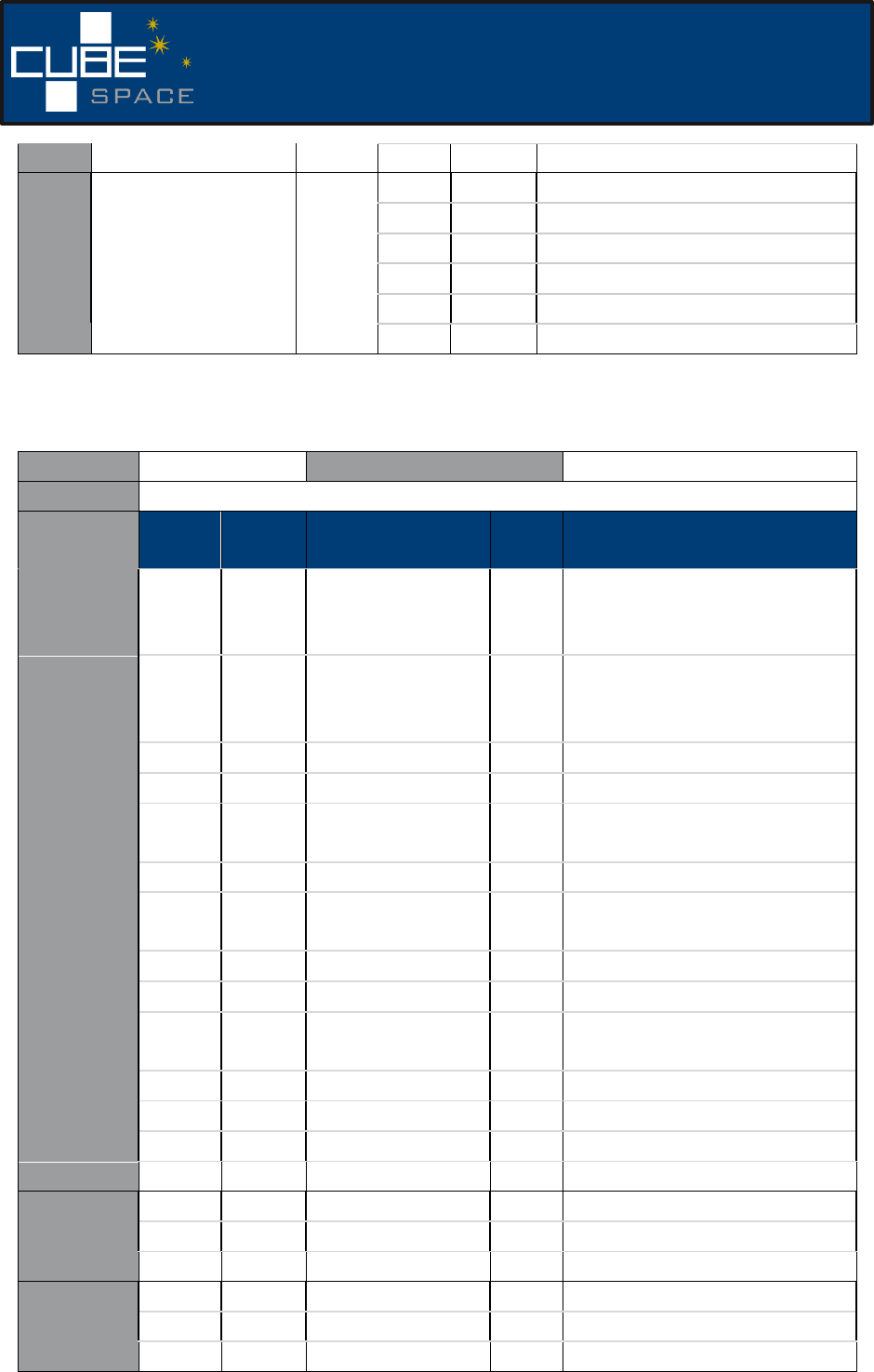
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 155
224
16
ECEF Velocity Z
240
8
X-pos Standard Deviation
248
8
Y-pos Standard Deviation
256
8
Z-pos Standard Deviation
264
8
X-vel Standard Deviation
272
8
Y-vel Standard Deviation
280
8
Z-vel Standard Deviation
Table 193: Raw Star Tracker Telemetry Format
ID
211
Frame Length (bytes)
36
Description
Raw Star Tracker Measurement
Channels
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
0
4
Number of Star
Detected
ENUM
Number of stars detected.
Possible values are in Table 170:
Stars Enumeration Values
4
4
Number of Stars
Identified
ENUM
Number of stars identified.
Possible values are in Table 170:
Stars Enumeration Values
8
8
Star Noise
UINT
Noise level of star image
16
1
Attitude Success
BOOL
Attitude Success
17
1
Image Capture
Success
BOOL
Image Capture Success
18
1
Detection Success
BOOL
Detection Success
19
1
Identification
Success
BOOL
Identification Success
20
1
Loop time Error
BOOL
Loop time Error
21
1
Max Stars Detected
BOOL
Max Stars Detected
22
1
Less than three
stars in FoV
BOOL
Less than three stars in FoV
23
1
Comms error
BOOL
Comms error
24
8
Star1 Confidence
UINT
Confidence factor of star 1
32
8
Star2 Confidence
UINT
Confidence factor of star 2
40
8
Star3 Confidence
UINT
Confidence factor of star 3
48
16
Magnitude Star 1
UINT
Instrument magnitude of star 1
64
16
Magnitude Star 2
UINT
Instrument magnitude of star 2
80
16
Magnitude Star 3
UINT
Instrument magnitude of star 3
96
16
Catalogue Star 1
UINT
Catalogue number of star 1
112
16
Centroid X Star 1
INT
X centroid of star 1
128
16
Centroid Y Star 1
INT
Y centroid of star 1
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 156
144
16
Catalogue Star 2
UINT
Catalogue number of star 2
160
16
Centroid X Star 2
INT
X centroid of star 2
176
16
Centroid Y Star 2
INT
Y centroid of star 2
192
16
Catalogue Star 3
UINT
Catalogue number of star 3
208
16
Centroid X Star 3
INT
X centroid of star 3
224
16
Centroid Y Star 3
INT
Y centroid of star 3
240
16
Capture
UINT
Capture. (Unit of measure is
[ms])
256
16
Detection
UINT
Detection. (Unit of measure is
[ms])
272
16
Identification
UINT
Identification. (Unit of measure is
[ms])
Table 194: Parts of Raw Star Tracker telemetry frame (ID 211), requested using shorter
telemetry requests
ID
Partial Commands
Length
(bytes)
Bit
offset
Bit
length
Overlapping ADCS Configuration
Telecommand Parameters
188
Star Performance -
Table 169: Star
Performance
Telemetry Format
6
0
4
Number of Star Detected
4
4
Number of Stars Identified
8
8
Star Noise
16
1
Attitude Success
17
1
Image Capture Success
18
1
Detection Success
19
1
Identification Success
20
1
Loop time Error
21
1
Max Stars Detected
22
1
Less than three stars in FoV
23
1
Comms error
24
8
Star1 Confidence
32
8
Star2 Confidence
40
8
Star3 Confidence
187
Star Magnitude -
Table 168: Star
Magnitude Telemetry
Format
6
48
16
Magnitude Star 1
64
16
Magnitude Star 2
80
16
Magnitude Star 3
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 157
212
Star 1 Raw Data -
Table 195: Star 1 Raw
Data Telemetry
Format
6
96
16
Catalogue Star 1
112
16
Centroid X Star 1
128
16
Centroid Y Star 1
213
Star 2 Raw Data -
Table 196: Star 2 Raw
Data Telemetry
Format
6
144
16
Catalogue Star 2
160
16
Centroid X Star 2
176
16
Centroid Y Star 2
214
Star 3 Raw Data -
Table 197: Star 3 Raw
Data Telemetry
Format
6
192
16
Catalogue Star 3
208
16
Centroid X Star 3
224
16
Centroid Y Star 3
189
Star Timing - Table
171: Star Timing
Telemetry Format
6
240
16
Capture
256
16
Detection
272
16
Identification
Table 195: Star 1 Raw Data Telemetry Format
ID
212
Frame Length (bytes)
6
Description
Catalogue index and detected coordinates for star 1
Channels
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
0
16
Catalogue Star 1
UINT
Catalogue number of star 1
16
16
Centroid X Star 1
INT
X centroid of star 1
32
16
Centroid Y Star 1
INT
Y centroid of star 1
Table 196: Star 2 Raw Data Telemetry Format
ID
213
Frame Length (bytes)
6
Description
Catalogue index and detected coordinates for star 2
Channels
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
0
16
Catalogue Star 2
UINT
Catalogue number of star 2
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 158
16
16
Centroid X Star 2
INT
X centroid of star 2
32
16
Centroid Y Star 2
INT
Y centroid of star 2
Table 197: Star 3 Raw Data Telemetry Format
ID
214
Frame Length (bytes)
6
Description
Catalogue index and detected coordinates for star 3
Channels
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
0
16
Catalogue Star 3
UINT
Catalogue number of star 3
16
16
Centroid X Star 3
INT
X centroid of star 3
32
16
Centroid Y Star 3
INT
Y centroid of star 3
Table 198: Redundant Magnetometer Raw Measurements Telemetry Format
ID
215
Frame Length (bytes)
6
Description
Redundant Magnetometer raw measurements
Channels
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
0
16
MagX
INT
sampled A/D value
16
16
MagY
INT
sampled A/D value
32
16
MagZ
INT
sampled A/D value
Table 199: Estimated Quaternion Telemetry Format
ID
218
Frame Length (bytes)
6
Description
Estimated quaternion set
Channels
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
0
16
Estimated q1
INT
Estimated q1
16
16
Estimated q2
INT
Estimated q2
32
16
Estimated q3
INT
Estimated q3
Table 200: ECEF Position Telemetry Format
ID
219
Frame Length (bytes)
6
Description
Satellite position in ECEF coordinates
Channels
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 159
0
16
ECEF Position X
INT
ECEF Position X. (Unit of measure
is [m])
16
16
ECEF Position Y
INT
ECEF Position Y. (Unit of measure
is [m])
32
16
ECEF Position Z
INT
ECEF Position Z. (Unit of measure
is [m])
Table 201: ACP Execution State Telemetry Format
ID
220
Frame Length (bytes)
3
Description
Returns information about the ACP loop
Channels
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
0
16
Time Since Iteration
Start
UINT
Time since the start of the
current loop iteration. (Unit of
measure is [ms])
16
8
Current Execution
Point
ENUM
Indicates which part of the loop is
currently executing. Possible
values are in Table 202:
ExecutionWaypoints
Enumeration Values
Table 202: ExecutionWaypoints Enumeration Values
Numeric Value
Name
Description
0
Init
Busy with initialization
1
Idle
Idle
2
Sensor/Actuator Communications
Sensor/Actuator Communications
3
ADCS Update
ADCS Estimation & Control Update
4
Perhipheral Power commands (over
I2C)
Perhipheral Power commands (over I2C)
5
CPU Temperature Sampling
CPU Temperature Sampling
6
Image Download
Image Download
7
Image Compression
Image Compression
8
Saving Image to SD Card
Saving Image to SD Card
9
Logging
Logging
10
Log File Compression
Log File Compression
11
Saving Log to SD Card
Saving Log to SD Card
12
Writing to flash
Writing to flash memory
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 160
Table 203: Status of Image Capture and Save Operation Telemetry Format
ID
233
Frame Length (bytes)
2
Description
Status of Image Capture and Save Operation
Channels
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
0
8
Percentage
Complete
UINT
Current progress of operation.
(Unit of measure is [%])
8
8
Status
ENUM
Current status of operation.
Possible values are in Table 204:
ImSaveStatus Enumeration
Values
Table 204: ImSaveStatus Enumeration Values
Numeric Value
Name
Description
0
No Error
No Error
1
Timeout waiting for sensor to
become available
Timeout waiting for sensor to become
available
2
Timeout waiting for next frame to
become ready
Timeout waiting for next frame to become
ready
3
Checksum mismatch between
donwloaded frame and unit frame
Checksum mismatch between donwloaded
frame and unit frame
4
Error writing to SD card
Error writing to SD card
Table 205: SD Log1 Configuration Telemetry Format
ID
235
Frame Length (bytes)
13
Description
Log selection and period for LOG1
Channels
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
0
80
Log Selection
ARRAY
Log Selection - up to 80 flags
indicating which telemetry
frames should be logged
80
16
Log Period
UINT
Log period. Set to 0 to disable
logging
96
8
Log Destination
ENUM
Which SD card to use to store log
file. Possible values are in Table
82: SdLogSelect Enumeration
Values
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 161
Table 206: SD Log2 Configuration Telemetry Format
ID
236
Frame Length (bytes)
13
Description
Log selection and period for LOG2
Channels
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
0
80
Log Selection
ARRAY
Log Selection - up to 80 flags
indicating which telemetry
frames should be logged
80
16
Log Period
UINT
Log period. Set to 0 to disable
logging
96
8
Log Destination
ENUM
Which SD card to use to store log
file. Possible values are in Table
82: SdLogSelect Enumeration
Values
Table 207: UART Log Configuration Telemetry Format
ID
237
Frame Length (bytes)
12
Description
Log selection and period for UART (unsolicited TLM)
Channels
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
0
80
Log Selection
ARRAY
Log Selection - up to 80 flags
indicating which telemetry
frames should be logged
80
16
Log Period
UINT
Log period. Set to 0 to disable
logging
Table 208: Telecommand Acknowledge Telemetry Format
ID
240
Frame Length (bytes)
4
Description
Telemetry frame with acknowledge status of the previously sent command
Channels
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
0
8
Last TC ID
UINT
ID of last received TC
8
1
Processed flag
BOOL
Flag to indicate if the last TC has
been processed.
16
8
TC error status
ENUM
Status of last processed
telecommand. Possible values
are in Table 209: TcErrorReason
Enumeration Values
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 162
24
8
TC parameter error
index
UINT
Index of incorrect TC parameter
Table 209: TcErrorReason Enumeration Values
Numeric Value
Name
Description
0
No Error
No error
1
Invalid TC
Invalid telecommand ID
2
Incorrect Length
Incorrect TC parameter length
3
Incorrect Parameter
Incorrect TC parameter value
Table 210: File Download Buffer with File Contents Telemetry Format
ID
241
Frame Length (bytes)
22
Description
File Download buffer 20-byte packet
Channels
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
0
16
Packet counter
UINT
Packet counter of this file
download packet
16
160
File bytes
ARRAY
File 20-byte packet
Table 211: Download Block Ready Telemetry Format
ID
242
Frame Length (bytes)
5
Description
Status about download block preparation
Channels
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
0
1
Ready
BOOL
Ready
1
1
ParameterError
BOOL
The combination of message
length and hole map resulted in
invalid array lengths
8
16
Block CRC16
Checksum
UINT
Block CRC16 Checksum
24
16
Block Length
UINT
Block length
Table 212: File Information Telemetry Format
ID
243
Frame Length (bytes)
12
Description
File Information
Channels
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 163
0
4
File Type
ENUM
File Type. Possible values are in
Table 86: FileType Enumeration
Values
4
1
Busy Updating
BOOL
8
8
File Ctr
UINT
File Counter
16
32
File Size
UINT
File Size
48
32
File Data and Time
UINT
File Data and Time (unix). (Unit of
measure is [s])
80
16
File CRC16
Checksum
UINT
File CRC16 Checksum
Table 213: Initialize Upload Complete Telemetry Format
ID
244
Frame Length
(bytes)
1
Description
Initialize Upload Complete
Channels
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
0
1
Busy
BOOL
Busy with file initialization (flash
erase, etc.)
Table 214: Upload Block Complete Telemetry Format
ID
245
Frame Length (bytes)
1
Description
Finalize Upload Block Complete
Channels
Offset
(bits)
Length
(bits)
Name
Data
Type
Description
0
1
Busy
BOOL
Busy with block finalization
1
1
Error
BOOL
Error in block finalization
Table 215: Block Checksum Telemetry Format
ID
246
Frame Length (bytes)
2
Description
File upload Block CRC16 Checksum
Channels
Offset (bits)
Length (bits)
Name
Data Type
Description
0
16
Checksum
UINT
Checksum
Table 216: Hole Map 1 Telemetry Format
ID
247
Frame Length (bytes)
16
Description
File Upload Hole Map 1
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 164
Channels
Offset (bits)
Length (bits)
Name
Data Type
Description
0
128
Hole Map
ARRAY
Hole Map
Table 217: Hole Map 2 Telemetry Format
ID
248
Frame Length (bytes)
16
Description
File Upload Hole Map 2
Channels
Offset (bits)
Length (bits)
Name
Data Type
Description
0
128
Hole Map
ARRAY
Hole Map
Table 218: Hole Map 3 Telemetry Format
ID
249
Frame Length (bytes)
16
Description
File Upload Hole Map 3
Channels
Offset (bits)
Length (bits)
Name
Data Type
Description
0
128
Hole Map
ARRAY
Hole Map
Table 219: Hole Map 4 Telemetry Format
ID
250
Frame Length (bytes)
16
Description
File Upload Hole Map 4
Channels
Offset (bits)
Length (bits)
Name
Data Type
Description
0
128
Hole Map
ARRAY
Hole Map
Table 220: Hole Map 5 Telemetry Format
ID
251
Frame Length (bytes)
16
Description
File Upload Hole Map 5
Channels
Offset (bits)
Length (bits)
Name
Data Type
Description
0
128
Hole Map
ARRAY
Hole Map
Table 221: Hole Map 6 Telemetry Format
ID
252
Frame Length (bytes)
16
Description
File Upload Hole Map 6
Channels
Offset (bits)
Length (bits)
Name
Data Type
Description
0
128
Hole Map
ARRAY
Hole Map
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 165
Table 222: Hole Map 7 Telemetry Format
ID
253
Frame Length (bytes)
16
Description
File Upload Hole Map 7
Channels
Offset (bits)
Length (bits)
Name
Data Type
Description
0
128
Hole Map
ARRAY
Hole Map
Table 223: Hole Map 8 Telemetry Format
ID
254
Frame Length (bytes)
16
Description
File Upload Hole Map 8
Channels
Offset (bits)
Length (bits)
Name
Data Type
Description
0
128
Hole Map
ARRAY
Hole Map
4.5.9 Logging
Table 224: Loggable Telemetry Frames
Mask
Telemetry
ID
Telemetry Frame
01 00 00 00 00 00 00 00 00 00
144
Communication Status
02 00 00 00 00 00 00 00 00 00
143
EDAC Error Counters
04 00 00 00 00 00 00 00 00 00
132
Boot And Running Program Status
08 00 00 00 00 00 00 00 00 00
141
Last Logged Event
10 00 00 00 00 00 00 00 00 00
142
SRAM Latchup counters
20 00 00 00 00 00 00 00 00 00
140
Current Unix Time
80 00 00 00 00 00 00 00 00 00
157
Magnetorquer Command
00 01 00 00 00 00 00 00 00 00
158
Wheel Speed Commands
00 02 00 00 00 00 00 00 00 00
151
Magnetic Field Vector
00 04 00 00 00 00 00 00 00 00
152
Coarse Sun Vector
00 08 00 00 00 00 00 00 00 00
153
Fine Sun Vector
00 10 00 00 00 00 00 00 00 00
154
Nadir Vector
00 20 00 00 00 00 00 00 00 00
155
Rate Sensor Rates
00 40 00 00 00 00 00 00 00 00
156
Wheel Speed
00 80 00 00 00 00 00 00 00 00
181
Star 1 Body Vector
00 00 01 00 00 00 00 00 00 00
184
Star 1 Orbit Vector
00 00 02 00 00 00 00 00 00 00
182
Star 2 Body Vector
00 00 04 00 00 00 00 00 00 00
185
Star 2 Orbit Vector
00 00 08 00 00 00 00 00 00 00
183
Star 3 Body Vector
00 00 10 00 00 00 00 00 00 00
186
Star 3 Orbit Vector
00 00 20 00 00 00 00 00 00 00
171
CubeSense Current Measurements
00 00 40 00 00 00 00 00 00 00
172
CubeControl Current Measurements
Part: CubeADCS
Doc: Reference Manual
Ver: 3.10
Page: 166
00 00 80 00 00 00 00 00 00 00
173
Wheel Currents
00 00 00 01 00 00 00 00 00 00
198
ADCS Misc Current Measurements
00 00 00 02 00 00 00 00 00 00
174
ADCS Temperatures
00 00 00 04 00 00 00 00 00 00
175
Rate sensor temperatures
00 00 00 08 00 00 00 00 00 00
145
Current ADCS State
00 00 00 10 00 00 00 00 00 00
146
Estimated Attitude Angles
00 00 00 20 00 00 00 00 00 00
218
Estimated Quaternion
00 00 00 40 00 00 00 00 00 00
147
Estimated Angular Rates
00 00 00 80 00 00 00 00 00 00
148
Satellite Position (ECI)
00 00 00 00 01 00 00 00 00 00
149
Satellite Velocity (ECI)
00 00 00 00 02 00 00 00 00 00
150
Satellite Position (LLH)
00 00 00 00 04 00 00 00 00 00
219
ECEF Position
00 00 00 00 08 00 00 00 00 00
159
IGRF Modelled Magnetic Field Vector
00 00 00 00 10 00 00 00 00 00
160
Modelled Sun Vector
00 00 00 00 20 00 00 00 00 00
161
Estimated Gyro Bias
00 00 00 00 40 00 00 00 00 00
162
Estimation Innovation Vector
00 00 00 00 80 00 00 00 00 00
163
Quaternion Error Vector
00 00 00 00 00 01 00 00 00 00
164
Quaternion Covariance
00 00 00 00 00 02 00 00 00 00
165
Angular Rate Covariance
00 00 00 00 00 04 00 00 00 00
176
Raw GPS Status
00 00 00 00 00 08 00 00 00 00
177
Raw GPS Time
00 00 00 00 00 10 00 00 00 00
178
Raw GPS X
00 00 00 00 00 20 00 00 00 00
179
Raw GPS Y
00 00 00 00 00 40 00 00 00 00
180
Raw GPS Z
00 00 00 00 00 80 00 00 00 00
166
Raw Cam2 Sensor
00 00 00 00 00 00 01 00 00 00
167
Raw Cam1 Sensor
00 00 00 00 00 00 02 00 00 00
168
Raw CSS 1 to 6
00 00 00 00 00 00 04 00 00 00
169
Raw CSS 7 to 10
00 00 00 00 00 00 08 00 00 00
170
Raw Magnetometer
00 00 00 00 00 00 10 00 00 00
188
Star Performance
00 00 00 00 00 00 20 00 00 00
187
Star Magnitude
00 00 00 00 00 00 40 00 00 00
212
Star 1 Raw Data
00 00 00 00 00 00 80 00 00 00
213
Star 2 Raw Data
00 00 00 00 00 00 00 01 00 00
214
Star 3 Raw Data
00 00 00 00 00 00 00 02 00 00
189
Star Timing
00 00 00 00 00 00 00 04 00 00
215
Redundant Magnetometer Raw Measurements
