DVS Flyer 128 Dcdb5b
User Manual: DVS-128
Open the PDF directly: View PDF ![]() .
.
Page Count: 2
DVS128
Dynamic Vision Sensor
with USB 2.0 or AER interface
Freeing Vision from Frames
Conventional vision sensors see the world as a series of frames. Successive frames
contain enormously redundant information, wasting energy, computational power and
time. In addition, each frame imposes the same exposure time on every pixel, making it
impossible to process scenes containing very dark and very bright regions.
The DVS (Dynamic Vision Sensor) solves these problems by using patented technology
that works like your own retina. Instead of wastefully sending entire images at fixed
frame rates, only the local pixel-level changes caused by moving in a scene are
transmitted – at exactly the time they occur. The result is a stream of events at
microsecond time resolution, equivalent to or better than conventional high-speed vision
sensors running at thousands of frames per second. Power, data storage and
computational requirements are also drastically reduced, and dynamic sensor range is
increased by orders of magnitude due to the local processing.
DVS Advantages
Conventional high-speed
vision systems DVS128 DVS Benefits
Requires powerful PC Works with any laptop
Lower costs
Lower power consumption
Extremely large (many TB),
highly redundant data sets
Minimal data size
No redundant data
Lower costs
More portable
Easier data management
Custom interface cards USB 2.0 or Address
Event Representation
(AER); Java API
More portable
Easier programming
Batch-mode acquisition
Off-line post-processing
Real-time acquisition
Extremely low latency
Continuous processing
No downtime, lower costs
Low sensitivity; need
special lighting (lasers,
strobes, etc.)
High sensitivity; no
special lighting needed
Lower costs
Simpler data acquisition
Limited dynamic range,
typically 50 dB
Very high dynamic range
(120 dB)
Useable in challenging real-
world situations
Application Areas
• Machine vision
• Robotics: real-time, mobile, fixed
• Microscopy
• High-speed tracking
info@inilabs.com
www.inilabs.com
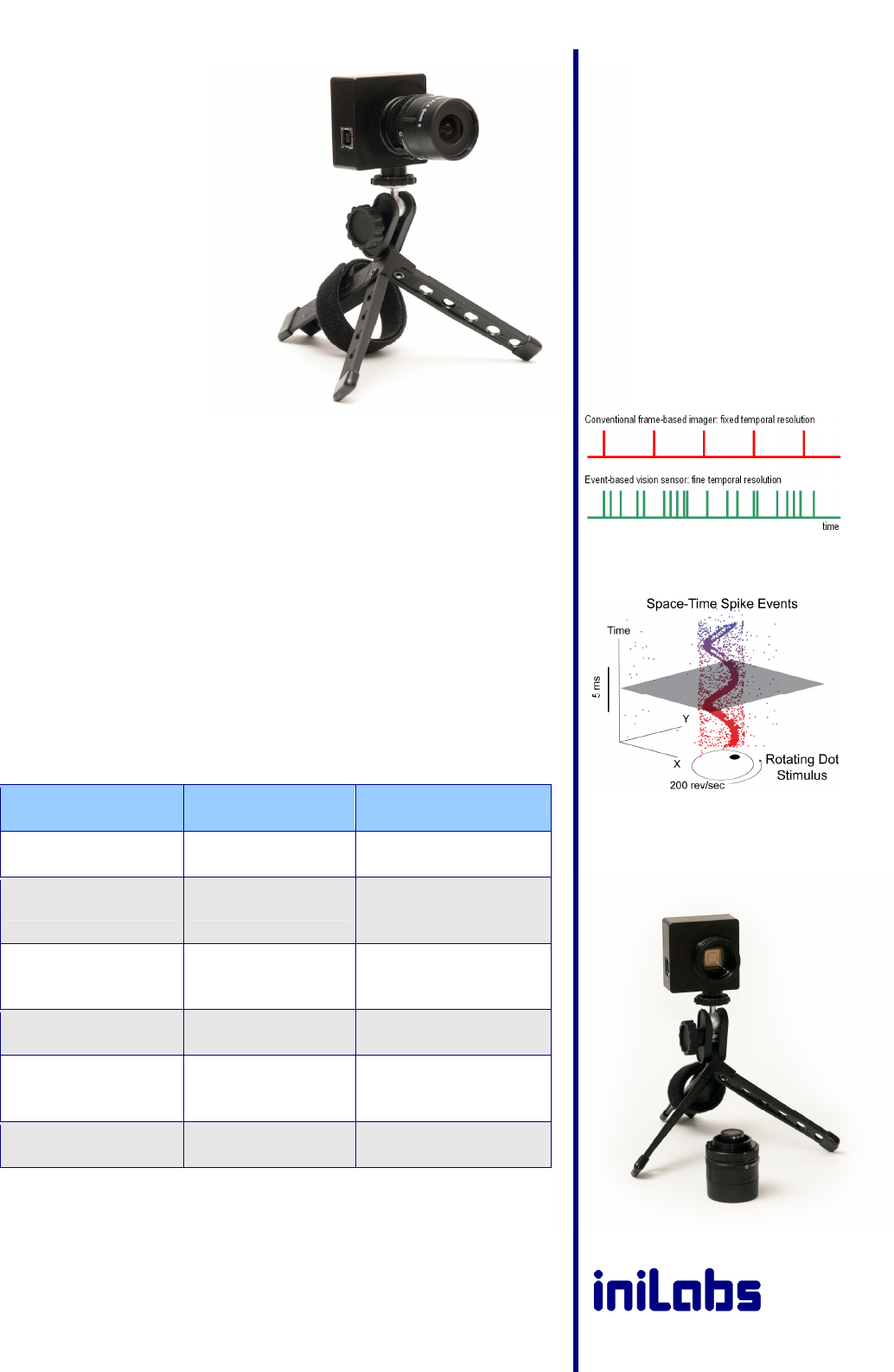
Temporal resolution advantage of DVS event-
based vision sensors
DVS in use: events from a spinning dot stimulus,
displayed in space-time. The DVS records
movements smoothly and continuously, not in a
stroboscopic fashion like classical frame-based
cameras.
© 2013 iniLabs Ltd. All rights reserved. All specifications subject to change without notice. 1/9/2013 ke
Case Studies
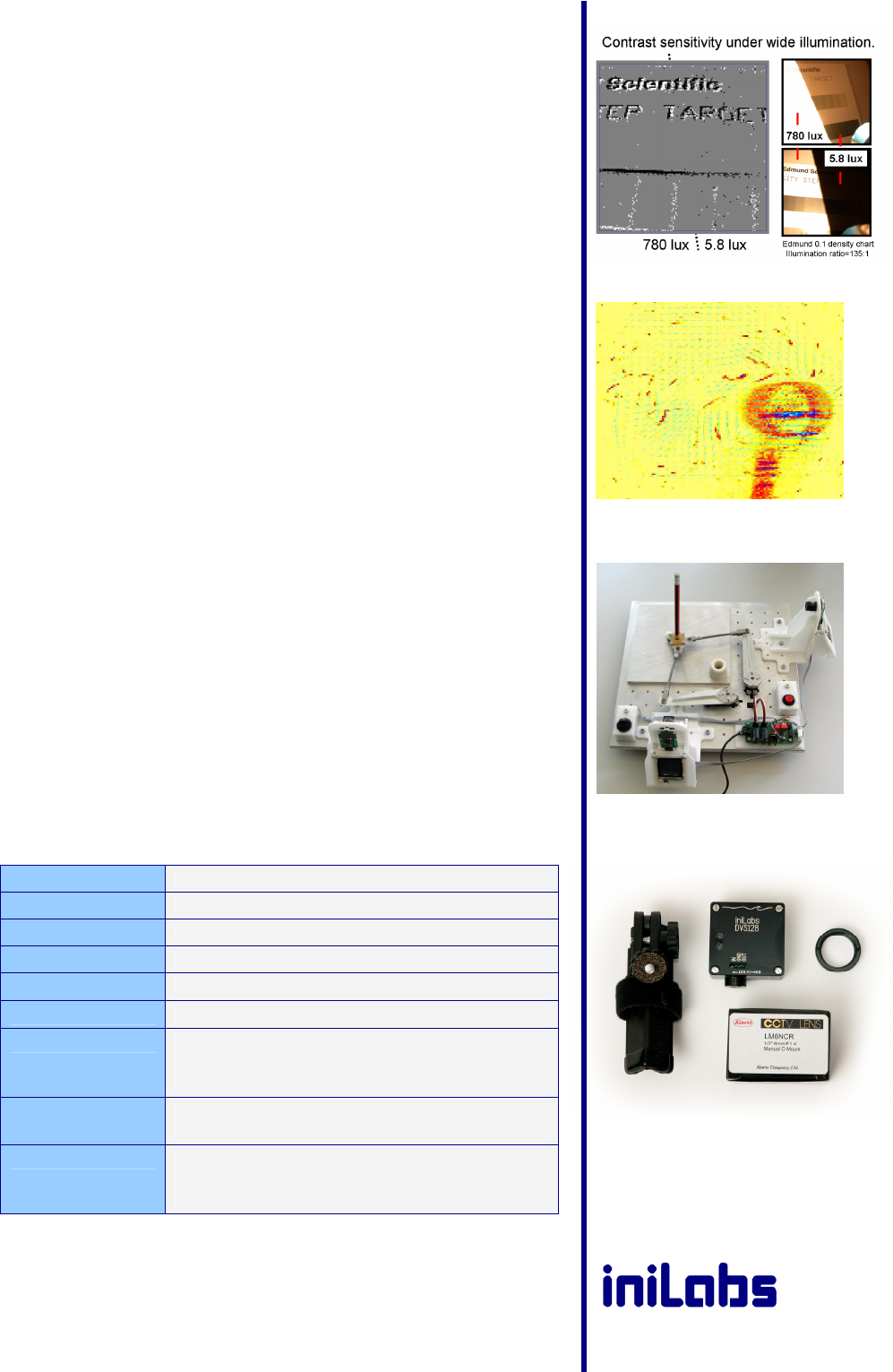
Case Study 1: Vision in Challenging Environments
Problem: You need to recognize objects in an environment with very bright lights and dark
shadows. Conventional video cameras either over-expose or under-expose part of
the scene, losing important objects in the process.
Solution: The DVS automatically adapts to differing lighting conditions in different parts of an
image without any calibration. Its high dynamic range reveals details that cannot be
detected with conventional vision systems.
Case Study 2: Fluid Particle Image Velocimetry
Problem: You are analyzing turbulent fluid flow. Your conventional high-speed vision setup
requires a cumbersome and expensive high-speed PC, lots of hard disk space,
custom interface cards and high-intensity laser strobe lighting to illuminate the fluid.
After each test run you have to wait minutes or hours while the data is processed.
Solution: The DVS enables you to replace your entire system with a single standard PC with a
USB connection. Normal collimated light is sufficient to illuminate the fluid. The low-
bandwidth data flow can be processed in real time, enabling you to work continuously
and adjust experimental parameters on the fly.
Case Study 3: Real-Time Robotics
Problem: You are developing a robot that needs to rely on visual input and react fast to
changes in the world. You are operating under tight constraints of power
consumption, space and weight. Conventional vision processing systems consume
far too much power to fit on the robot platform. The standard method is to send the
images for off-line processing, requiring a separate server, increasing response times
and limiting the range of the robot.
Solution: The DVS does all of the front-end processing, giving you only the “interesting” events
in a scene. You can integrate all of your processing hardware on-board.
Specifications
Resolution 128 x 128 pixels
Fabrication Standard CMOS
Dynamic range 120 dB
Power consumption 5 VDC, <0.5 W total (USB bus powered)
Latency 15 µs
Time resolution Down to 1 µs per event
Interface DVS128: USB 2.0, Windows XP driver
DVS128-AER: Address Event Representation output
Java API (Sourceforge) & Matlab output file format
Optics Standard C-mount or CS-mount lenses
Other custom mounts available
Synchronization Several DVS128 can be synchronized for multi-camera
systems. Timestamp synchronization to external clock is
also possible
About Us
iniLabs Ltd is a spin-off company of the Institute of Neuroinformatics of the University of Zurich
and the ETH Zurich. We design, produce and sell neurotechnological systems.
info@inilabs.com
www.inilabs.com
