Sols.dvi Daphne Koller, Benjamin Packer Instructor’s Manual For Probabilistic Graphical S (2010)
User Manual:
Open the PDF directly: View PDF ![]() .
.
Page Count: 59
Instructor’s Manual for Probabilistic Graphical Models
Daphne Koller, Benjamin Packer, and many generations of TAs
October 2010
Foreword and Disclaimer
This instructor’s manual contains solutions for a few of the problems in the textbook Probabilisic
Graphical Models: Principles and Techniques, by Daphne Koller and Nir Friedman. The exercises
for which solutions are provided are those that were used over the years in Daphne Koller’s course
on this topic. (Most of these exercises were included in the textbook, but a few are new.) Hence,
the coverage of the solutions is highly biased to those topics covered in the course.
For some solutions, we have included relative point allocation to different parts of the question,
which can help indicate their relative difficulty. To assist in grading, we have also sometimes
included common errors and the number of points deducted.
Since the solutions were developed over several years, while the book was being written (and
rewritten), the notation and formatting used might not always be entirely consistent with the
final version of the book. There may also be slight inaccuracies and errors. For all of these we
apologize.
We hope that this instructor’s manual will be an ongoing effort, with solutions added and
improved over time. In particular, any instructor who wants to contribute material — new
solutions to exercises, improvements or corrections to solutions provided, or even entirely new
problems and solutions — please send an email to pgm-solutions@cs.stanford.edu, and I will
add them to this instructor’s manual (with attribution). Thank you.
1

1 Chapter 2
Exercise 2.7 — Independence properties [17 points] Note that P(X|Z=z) is undefined
if P(Z=z) = 0, so be sure to consider the definition of conditional independence when proving
these properties.
1. [7 points] Prove that the Weak Union and Contraction properties hold for any probability
distribution P.
Weak Union:
(X⊥Y,W|Z) =⇒(X⊥Y|Z,W)
Answer: It is important to understand that the independence statements above hold for all
specific values of the variables X, Y, Z, and W. Implicit in every such statement, and every
probability statement such as P(X, Y, W |Z) = P(X|Z)·P(Y, W |Z), is the qualifier “for
every possible possible of X, Y, Z, and W.” See, for example, Def. 2.1.6 and the surrounding
discussion.
So our goal is to prove that the above statement holds for all possible values of the variables.
We proceed by cases, first examining the cases in which the probabilities of some values may
be 0, and then considering all other cases.
If P(W=w, Z =z) = 0, then (X⊥Y|Z, W )holds trivially from Def. 2.1.4. Similarly, if
P(Z=z) = 0 =⇒P(W=w, Z =z) = 0, so (X⊥Y|Z, W )also holds.
Now consider the case that P(Z)6= 0, P (Z, W )6= 0. We have
P(X, Y |Z, W ) = P(X, Y, W |Z)
P(W|Z)[cond.indep rule, P (W|Z)6= 0 by assumption]
=P(X|Z)·P(Y, W |Z)
P(W|Z)[since (X⊥Y, W |Z)]
=P(X|Z)P(Y|Z, W )
We can also use the Decomposition rule (2.8) (X⊥Y, W |Z) =⇒(X⊥W, Z)to deduce
(X⊥W, Z)⇐⇒ P(X|Z) = P(X|W, Z). Thus, we obtain
P(X, Y |Z, W ) = P(X|Z, W )P(Y|Z, W )
which implies (X⊥Y|Z, W ).
It’s important to note that (X⊥Y, W |Z)does not necessarily mean that P(X, Y, W |Z) =
P(X|Z)P(Y, W |Z); if P(Z=z) = 0 for any z∈Val(Z), then the conditional probabilities
in the latter equations are undefined.
Contraction:
(X⊥W|Z,Y) & (X⊥Y|Z) =⇒(X⊥Y,W|Z).
Answer: Again, if P(Z=z) = 0,(X⊥Y, W |Z)holds trivially from the definition. If
P(Z=z)6= 0 but P(Z=z, Y =y) = 0 you can check that P(X, Y, W |Z) = 0 = P(X|
Z)P(W, Y |Z).
Now assume P(Z=z)6= 0, P (Z=z, Y =y)6= 0. Then
P(X, Y, W |Z) = P(X, W |Z, Y )P(Y|Z)
=P(X|Z, Y )P(W|Z, Y )P(Y|Z) [since (X⊥W|Z, Y )]
=P(X|Z, Y )P(W, Y |Z)
=P(X|Z)P(W, Y |Z) [since (X⊥Y|Z)]
which proves (X⊥Y, W |Z).
This proves the Contraction rule for all distributions P.
Here, the common short proof was that P(X|Y, W, Z) = P(X|Y, Z) = P(X|Z)where
the first step follows from (X⊥W|Z, Y )and the second step follow sfrom (X⊥Y|Z).
Again, this fails if P(X|Y, W, Z)is undefined.
2. [7 points] Prove that the Intersection property holds for any positive probability distri-
bution P. You should assume that X,Y,Z, and Ware disjoint.
Intersection:
(X⊥Y|Z,W) & (X⊥W|Z,Y) =⇒(X⊥Y,W|Z).
Answer: If we could prove (X⊥Y|Z), we can use the Contraction rule to derive the
desired conditional independence: (X⊥W|Z, Y ) & (X⊥Y|Z) =⇒(X⊥Y, W |Z).
P(X|Z) = X
w∈W
P(X, w |Z) = X
w∈W
P(X|Z, w)P(w|Z)
=X
w∈W
P(X|Y, w, Z)P(w|Z) [since (X⊥Y|Z, W )]
=X
w∈W
P(X|Y, Z)P(w|Z) [since (X⊥W|Z, Y )]
=P(X|Y, Z)X
w∈W
P(w|Z) = P(X|Y, Z)
This proves (X⊥Y|Z), and by applying Contraction rule we are done. Note that if the
distribution is non-positive, many of the conditional probabilities we use in the proof may be
undefined.
3. [3 points] Provide a counter-example to the Intersection property in cases where the
distribution Pis not positive.
Answer: Consider a distribution where X=Y=Walways holds, and their values are
independent of the value of Z. Then (X⊥W|Z, Y ), since Ydirectly determines X, and
similarly (X⊥Y|Z, W ). However, it is not the case that (X⊥Y, W |Z)because knowing
Zdoes not help us choose between the values X=Y=W= 1 or X=Y=W= 0.
Note that the independence (X⊥Y|Z)does not hold here. It is not the case that for any
value of Y=y,P(X|Z) = P(X|Y=y, Z).
Chapter 3
Exercise 3.11 — Marginalization and independencies [24 points]
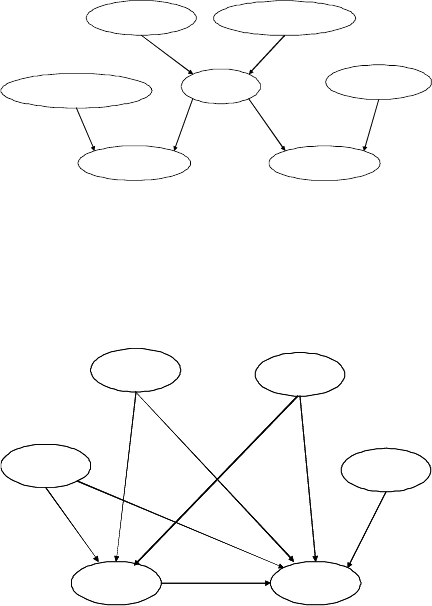
1. [6 points] Consider the alarm network shown below:
Burglary Earthquake
Alarm
JohnCall MaryCall
SportsOnTV Naptime
Construct a Bayesian network structure with nodes Burglary, Earthquake, JohnCall, MaryCall,
SportsOnTV, and Naptime, which is a minimal I-map for the marginal distribution over
those variables defined by the above network. Be sure to get all dependencies that remain
from the original network.
Answer:
Burglary Earthquake
JohnCall MaryCall
Naptime
SportsOnTv
Burglary Earthquake
JohnCall MaryCall
Naptime
SportsOnTv
In order to construct a minimal I-map, we would like to preserve all independencies (assum-
ing Alarm is always unobserved) that were present in the original graph, without adding any
unnecessary edges. Let’s start with the remaining nodes and add edges only as needed.
We see that with Alarm unobserved, there exist active paths between Alarm’s direct ancestors
and children. Thus, direct edges between the parents, Burglary and Earthquake, should be
added to connect to both children, JohnCall and Mary Call. Similarly, since any two children
of Alarm also now have an active path between them, a direct edge between JohnCall and
MaryCall should be added. Without loss of generality, we direct this edge to go from JohnCall
to MaryCall.
Next, since SportsOnTv and JohnCall as well as Naptime and MaryCall were directly connected
in the original graph, removing Alarm doesn’t affect their dependencies and the two edges must
be preserved.
Now we must consider any independencies that may have changed. In the old graph, because
of the v-structure between Alarm and co-parent SportsOnTv, if Alarm was unobserved and
JohnCall observed, there existed an active path between SportsOnTv and MaryCall. In the
new graph however, because of the added direct edge between the two children JohnCall and
MaryCall, if JohnCall is observed, the path between SportsOnTv and MaryCall is actually
rendered inactive. Thus, an alternate path that does not introduce any other dependencies
needs to be introduced, and a direct edge is added between SportsOnTv and MaryCall.
Common mistakes:
(a) [3 points] Missing edge from SportsOnTv to MaryCall (or Naptime to John-
Call).
(b) [3 points] Missing edge from JohnCall to MaryCall (or MaryCall to JohnCall).
(c) [1 points] Includes any additional edges not needed for preserving independen-
cies.
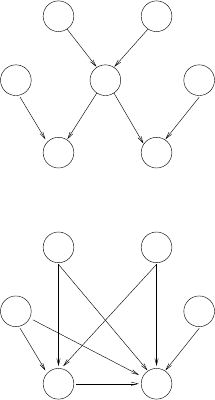
2. [18 points] Generalize the procedure you used above to an arbitrary network. More
precisely, assume we are given a network BN , an ordering X1, . . . , Xnthat is consistent
with the ordering of the variables in BN, and a node Xito be removed. Specify a network
BN ′such that BN ′is consistent with this ordering, and such that BN ′is a minimal I-map
of PB(X1,...,Xi−1, Xi+1,...,Xn). Your answer must be an explicit specification of the
set of parents for each variable in BN ′.
Answer:
X
A B
C D
E F
is transformed into
A B
C D
E F
A general node elimination algorithm goes as follows. Suppose we want to remove Xfrom
BN . This is similar to skipping Xin the I-map construction process. As the distribution in
question is the same except for marginalizing X, the construction process is the same until we
reach the removed node.
Suppose the algorithm now adds the first direct descendent of X, which we’ll call E. What
arcs must be added? Well, all the original parents of Emust be added (or we’d be asserting
incorrect independence assumptions). But how do we replace the arc between Xand E? As
before, we must add arcs between the parents of Xand E— this preserves the v-structure
d-separation between Xand its parents as well as the dependence of Eon the parents of X.
Now suppose we add another direct descendant, called F. Again, all the original parents of
Fmust be added and we also connect the parents of Xto F. Is that all? No, we must also
connect Eto F, in order to preserve the dependence that existed in the original graph (as an
active path existed between Eand Fthrough X). Now is that all? No. Notice that if E, is
observed then there is a active path between Cand F. But this path is blocked in our new
graph if all other parents of F(E, A, B, D) are observed. Hence, we have to add and edge
between Cand F.
So for every direct descendant of X, we add arcs to it from the parents of X, from the other
direct descendants of Xpreviously added and from the parents of the previously added direct
descendants of X.
What about the remaining nodes in the ordering? No changes need to be made for the arcs
added for these nodes: if a node Xmwas independent of X1,...,Xm−1(including X), given
its parents, it is also independent of {X1,...,Xm−1} − {X}given its (same set of) parents.
Guaranteeing that the local Markov assumptions hold for all variables is sufficient to show that
the new graph has the required I-map properties. The following specification captures this
procedure.
Let T={X1,...,Xn}be the topological ordering of the nodes and let C={Xj|Xj∈
ChildrenXi}be the set of children of Xiin BN . For each node X′
jin BN ′we have the
following parent set:
Pa′
Xj=PaXjfor all Xj/∈C
PaXj∪PaXi∪ {Xk,PaXk|Xk∈C, k < j}\Xifor all Xj∈C
Common mistakes
(a) [15 points] Using the I-map construction algorithm or d-separation tests in
order to construct the new graph. The problem asks for a transformation of the
old graph into a new one, but doesn’t ask you to construct the new graph from
scratch. Essentially, we were looking for an efficient algorithm based solely on
the structure of the graph, not one based on expensive d-separation queries.
(b) [5 points] Forgetting that the new graph should maintain consistent ordering
with the new graph.
(c) [5 points] Forgetting original parent set.
(d) [4 points] Forgetting edges from PaXito Xj.
(e) [4 points] Forgetting edges from Xk, k < j to Xj.
(f) [4 points] Forgetting edges from PaXk, k < j to Xj.
(g) [2 points] Adding any additional edges not needed to satisfy I-map require-
ments.
(h) [1 points] Not writing explicit parent sets.
Exercise 3.16 — same skeleton and v-structures ⇒I-equivalence [16 points]
1. [12 points] Prove theorem 3.7: Let G1and G2be two graphs over X. If they have the
same skeleton and the same set of v-structures then they are I-equivalent.
Answer: It suffices to show:
(a) G1and G2have the same set of trails.
(b) a trail is active in G1iff it is active in G2.
We show that if the trail from Ato Cis an active trail in G1, then it is an active trail in G2.
First note that because G1and G2have the same structure, if there is a trail Ato Cis G1,
there is a trail Ato Cin G2.
Let Xbe a node on the active trail from Ato Cin G1. Let Yand Zbe the neighbors of X
on the trail. There are two cases to consider:
(a) (Y, X, Z)is not a v-structure in G1. Then if this subtrail is active, Xis not set. Because G2
has the same v-structures as G1, we know (Y, X, Z)is not a v-structure in G2. Therefore
we know we have one of the following three in G2:Y→X→Z,Y←X→Zand
Y←X←Z. In all three cases, if Xis not set, the subtrail is also active in G2.
(b) (Y, X, Z)is a v-structure in G1. Then if this trail is active either Xis set or one of its
descendants is set. If Xis set in G1, then because G2has the same v-structure as G1,
the subtrail will be active in G2. Suppose it is active through some node X′that is a
descendant of Xin G1, but is not a descendant of Xin G2. Since G1and G2have the
same skeleton, there is a trail from Xto X′in G2. Since X′is not a descendent of X
in G2, there must be some edge that does not point toward X′on the trail from Xto
X′in G2. This is a v-structure in G2that does not exist in G1. We have a contradiction.
Therefore, the subtrail will be active in G2.
We can use a similar argument to show that any active trail in G2is active in G1.
The most common error in this problem was to forget that observing descendants of a v-
structure middle node Xcan activate trails passing through X. Also, we need to prove that if
a node is a descendant of X(the node in the middle of the v-structure) in G1, it must also be
a descendant of this node in G2.
Common mistakes:
(a) [6 points] One of the most common mistakes on this problem was to forget
to address the possibility of a descendant activating a v-structure.
(b) [1 points] Minor logical leap, informality, or ambiguity in the proof.
(c) [3 points] Although slightly less common, some made the mistake of not
addressing the case when a subtrail is not a v-structure. This could be
because the proof dealt with the issue at too abstract a level (not dealing
with active three-node subtrails), or because it was simply missed entirely.
2. [4 points] How many networks are equivalent to the simple directed chain X1→X2→
...→Xn?
Answer: The result in the previous part holds only in one direction: same skeleton and same
set of v-structures guarantees I-equivalent networks. However, the reverse does not always
hold. Instead, we will use Theorem 3.3.13, which says that two I-equivalent graphs must have
the same skeleton and the same set of immoralities.
The first requirement constrains the possible edges to the original edges in the chain. Moreover,
all original edges have to be present, because removing any edge breaks the set of nodes into
two non-interacting subsets.
The second requirement limits us to networks which have no immoralities, and no v-structures
(because the original chain has none). There are a total of n−1such networks, excluding the
original chain, where we are allowed a single structure Xi−1←Xi→Xi+1 in the chain (two
such subgroups would create a v-structure). The n−1possibilities come from,aligning this
structure on top of any node X2,...,Xn, with the rest of the edges propagating away from
node Xi.
Common mistakes:
(a) [1 points] Off by one. (Note that both n and (n-1) were acceptable answers)
(b) [4 points] Missed this part entirely. Answer way off of (n-1) or n. Common
answers here are 2and 2n.
Exercise 3.20 — requisite CPD [15 points] In this question, we will consider the sensitivity
of a particular query P(X|Y) to the CPD of a particular node Z. Let Xand Zbe nodes,
and Ybe a set of nodes. Provide a sound and “complete” criterion for determining when the
result of the query P(X|Y) is not affected by the choice of the CPD P(Z|PaZ). More
precisely, consider two networks B1and B2that have identical graph structure Gand identical
CPDs everywhere except at the node Z. Provide a transformation G′of Gsuch that we can
test whether PB1(Z|PaZ) = PB2(Z|PaZ) using a single d-separation query on G′. Note that
Zmay be the same as X, and that Zmay also belong to Y. Your criterion should always be
sound, but only be complete in the same sense that d-separation is complete, i.e., for “generic”
CPDs.
Hint: Although it is possible to do this problem using laborious case analysis, it is significantly
easier to think of how a d-separation query on a transformed graph G′can be used to detect
whether a perturbation on the CPD P(Z|PaZ) makes a difference to P(X|Y).
Answer:
Construct a new network G′from the original network Gby adding one node Wand one edge from
Wto Z, i.e., Wis an extra parent of Z. We set the CPD for Zso that if W=w1, then Zbehaves as
in B1, and if W=w2, then Zbehaves as in B2. More precisely, P(Z|PaZ, w1) = PB1(Z|PaZ),
and P(Z|PaZ, w2) = PB2(Z|PaZ). It is therefore clear that PB1(X|Y) = PB2(X|Y)if
and only if PB′(X|Y, w1) = PB′(X|Y, w2), where B′is our modified network with W. We
can guarantee that the value of Wdoesn’t matter precisely when Wis d-separated from Xgiven
Y. This criterion is always sound, because when Wis d-separated, the choice of CPD for Zcannot
affect the query P(X|Y). It is complete in the same sense that d-separation is complete: There
might be some configuration of CPDs in the network where the CPD of Zhappens not to make a
difference, although in other circumstances it could. This criterion will not capture cases of this type.
It was possible to earn full points for a case-based solution. The two important points were
1. Unless Z or one of its descendents is instantiated, active paths which reach Z from X through
one of Z’s parents are not “CPD-active”; that is, changing the CPD of Z will not affect X
along this path.
2. The case where Z is in Y needs to be handled, since our definition of d-sep means that if Z is in
Y, d-sep(X;Z—Y), yet paths which reach Z through one of its parents are still “CPD-active”.
Solutions which used the case-based approach were scored based on how they handled these two
issues.
Common mistakes:
1. [11 points] Answer dsep(X;Z|Y)or anything else which doesn’t handle either observed Z or
cases where Z does/does not have observed descedents
2. [3 points] Correct answer, but not fully justified (usually incomplete case analysis)
3. [5 points] Don’t handle cases when Z is observed (in the case-based analysis)
4. [1 points] Minor miscellaneous error
5. [6 points] Don’t correctly deal with case where Z has no observed descendents
6. [3 points] Medium miscellaneous error
Chapter 4
Exercise 4.4 — Canonical parameterization
Prove theorem 4.7 for the case where Hconsists of a single clique.
Answer: Our log probability is defined as:
ln ˜
P(ξ) = X
Di⊆X
ǫDi[ξ].
Substituting in the definition of ǫDi[ξ], we get
ln ˜
P(ξ) = X
DiX
Z⊆Di
(−1)|Di−Z|ℓ(σZ[ξ])
=X
Z
ℓ(σZ[ξ]) X
Di⊇Z
(−1)|Di−Z|.
For all Z6=X, the number of subsets containing Zis even, with exactly half of them having an
odd number of additional elements and the other half having an even number of additional elements.
Hence, the internal summation is zero except for Z=X, giving:
ln ˜
P(ξ) = ℓ(σZ[ξ]) = ln P(ξ),
proving the desired result.
Exercise 4.8 — Pairwise to Markov independencies Prove proposition 4.3. More precisely,
let Psatisfy Iℓ(H), and assume that Xand Yare two nodes in Hthat are not connected directly
by an edge. Prove that Psatisfies (X⊥Y| X − {X, Y }).
Answer: This result follows easily from the Weak Union property. Let Z=NH(X)and let
W=X − Z− {X, Y }. Then the Markov assumption for Xtells us that
(X⊥ {Y} ∪ W|Z).
From the Weak Union property, it follows that
(X⊥Y|Z∪W),
which is precisely the desired property.
Exercise 4.9 — Positive to global independencies
Complete the proof of theorem 4.4. Assume that equation (4.1) holds for all disjoint sets X,Y,Z,
with |Z| ≥ k. Prove that equation (4.1) also holds for any disjoint X,Y,Zsuch that X∪Y∪Z6=
Xand |Z|=k−1.
Answer: Because X∪Y∪Z6=X, there exists at least one node Athat is not in X∪Y∪Z.
From the monotonicity of graph separation, we have that sepH(X;Y|Z∪ {A}).
Because Xand Yare separated given Z, there cannot both be a path between Xand Agiven Z
and between Yand Agiven Z. Assume, without loss of generality, that there is no path between
Xand Agiven Z. By monotonicity of separation, there is also no path between Xand Agiven
Z∪Y. We then have that sepH(X;A|Z∪Y).
The sets Z∪ {A}and Z∪Yhave size at least k. Therefore, the inductive hypothesis equation (4.1)
holds, and we conclude
(X⊥Y|Z∪ {A}) &(X⊥A|Z∪Y).
Because Pis positive, we can apply the intersection property (equation (2.11)) and conclude that P
satisfies (X⊥Y|Z), as required.
Exercise 4.11 — Minimal I-map [15 points]
In this exercise you will prove theorem 4.6. Consider some specific node X, and let Ube the set
of all subsets Usatisfying P|= (X⊥ X − {X} − U|U). Define U∗to be the intersection of all
U∈ U.
1. [8 points] Prove that U∗∈ U. Conclude that M BP(X) = U∗
Answer: This follows directly from the intersection property. Specifically, let U1and U2be
two sets in U, that is, P|= (X⊥ X − {X} − Ui|Ui). Define Yi=Ui−U∗; it now follows
that
P|= (X⊥Y1|U2)
P|= (X⊥Y2|U1)
Equivalently,
P|= (X⊥Y1|U∗∪Y2)
P|= (X⊥Y2|U∗∪Y1)
From the intersection property, it follows that
P|= (X⊥U∗|Y1,Y2).
All that remains is to show that U∗=MBP(X). Recall that M BP(X)is defined to be the
minimal set of nodes Usuch that P|= (X⊥ X − {X} − U|U). This definition implies that
MBP(X)is the minimal set of nodes U∈ U. We see that this is indeed U∗.
A common mistake is to use a form of the intersection property which isn’t explicitly proven.
One such form is (X⊥A,Y|W,Z)and (X⊥A,W|Y,Z)−→ (X⊥A,Y,W|Z).
This is true, but requires a Weak Union step for completeness. Another common mistake in the
first three parts of the problem was to use the monotonic property of conditional independence
relations induced by a graph Hto justify adding variables to the right side of a conditional.
We must remember, however, that in these parts of the problem we are dealing only with a
distribution that may not correspond to a graph.
2. [2 points] Prove that if P|= (X⊥Y| X − {X, Y }) then Y6∈ M BP(X).
Answer: We see that we can rewrite this independence as P|= (X⊥ X − {X} − U′|U′)
where U′=X − {X, Y }. But U′∈ U and Y6∈ U′, thus Ycannot be in the intersection of
all U∈ U. This means Y6∈ U∗or equivalently Y6∈ MBP(X).
3. [3 points] Prove that if Y6∈ MBP(X) then P|= (X⊥Y| X − {X, Y }).
Answer: We know that P|= (X⊥ X − {X} − M BP(X)|MBP(X)). If Y6∈ MBP(X)
then we must have Y∈ X − {X} − MBP(X), allowing us to rewrite the independency
as P|= (X⊥ {Y},X − {X, Y } − MBP(X)|MBP(X)). By weak union we then have
P|= (X⊥ {Y} | X − {X, Y } − M BP(X), MBP(X)) or just P|= (X⊥Y| X − {X, Y }).
4. [2 points] Conclude that MBP(X) is precisely the set of neighbors of Xin the graph
defined in theorem 4.5, showing that the construction of theorem 4.6 also produces a
minimal I-map.
Answer: (b) shows that MBP(X)is a subset of the neighbors defined in the graph of
Theorem 4.5, while (c) shows that it is a superset.
Exercise 4.15 — Markov network proof of d-separation [22 points] Prove Proposition
4.10: Let X,Y,Zbe three disjoint sets of nodes in a Bayesian network G. Let U=X∪Y∪Z,
and let G′=G+[U] be the induced Bayesian network over Ancestors(U)∪U. Let Hbe the
moralized graph M[G′]. Prove that d-sepG(X;Y|Z) if and only if sepH(X;Y|Z).
Answer:
[11 points] Suppose not d-sepG(X;Y|Z). Then there is an active path in Gbetween some X∈X
and some Y∈Y. The active path, like any path, is formed of overlapping unidirectional segments
W1→... →Wn. Note that Wnin each segment is either X,Y, or the base of some active
v-structure. As such, either Wnor one of its descendants is in U, and so all nodes and edges in teh
segment W1→... →Wnare in the induced graph over Ancestors(U)∪U. So the active path in
Gis a path in H, and in H, the path can only contain members of Zat the bases of v-structures in
G(otherwise, the path would have been active in G). Because His the moralized graph M[G′], we
know that those members of Zhave been bypassed: their parents in the v-structure must have an
edge between them in H. So there is an active path between Xand Yin H, so not sepH(X;Y|Z).
[11 points] Now we prove the converse. Suppose that Xand Yare d-separated given Z. Consider
an arbitrary path in Gbetween some X∈Xand some Y∈Y. Any path between Xand Yin G
must either be blocked by a member of Zor an inactive v-structure in G. First, suppose the path is
blocked by a member of Z. Then the path in H(if it exists–it may not because His the induced
graph) will also be blocked by that member of Z.
Of course, if the path between Xand Yin Gis not blocked by a member of Z, it must be blocked
by an inactive v-structure. Because the v-structure is inactive, its base (and any of its descendants)
must not be in the induced graph H. As such, the path will not exist in H. Neither the base nor
its descendants can be in Z, and they cannot be in Xor Yeither, because then we would have an
active path from a member of Xto a member of Y.
Recall that the edges added in moralization are necessary to create an active path in Honly when
paths would be blocked by the observed root node of a v-structure in G. In this case, the segment
would have been active in G, so moralization edges cannot effect segments in Hcorresponding to
inactive segments in G; this is what our proof depends on. Because of all the above, there are no
active paths in Hbetween arbitrary X∈Xand Y∈Y, so we have sepH(x;Y|Z).
Common mistakes:
D-separation to separation
1. [4 points]Failed to show that root node of an inactive v-structure in Gwill
not be in H, or that an active path in H through an inactive v-structure is not
possible.
2. [3 points] Failed to show modifications necessary to handle moralized edges.
3. [1 points] Considered only paths existing in G, failed to consider possibility of
entirely new paths in H.
4. [1 points] Described only 3-node paths without demonstrating how the cases
combine into paths of arbitrary length.
5. [1 points] Assumed that for active v-structures, center node must be observed,
didn’t consider its descendants.
6. [3 points] Other significant logical error or omission.
7. [1 points] Other minor logical error/omission.
Separation to d-separation
1. [4 points] Failed to demonstrate that all the nodes along an active path in G
will still appear in H.
2. [3 points] Failed to show that an active v-structure in Gwill not result in
blockage in H.
3. [2 points] Describe only 3-node paths without describing how these combine
into arbitrary paths, in particular, why those nodes will all still appear in H.
4. [1 points] Assumed that for active v-structures, center node must be observed,
didn’t consider its descendants.
5. [3 points] Other significant logical error or omission.
6. [1 points] Other minor logical error/omission.
Exercise 4.18 — Markov networks and Bayesian networks Let Gbe a Bayesian network
with no immoralities. Let Hbe a Markov network with the same skeleton as G. Show that H
is an I-map of I(G).
Answer: We need to prove that I(H)⊂ I(G); that is, if (X⊥Y|Z)∈ I(H)then (X⊥Y|
Z)∈ I(G).
Proving the contrapositive: if (X⊥Y|Z)/∈ I(G)then (X⊥Y|Z)/∈ I(H). Suppose
(X⊥Y|Z)/∈ I(G). Then there is an active trail τfrom Xto Ygiven Zin G. Consider a triplet
A−B−Con t. If it is a v-structure, then by the definition of active trails, Bmust be observed
(B∈Z). Then by the definition of active trails, for all triplets A−B−Con t, it must be the case
that A−B−Cis not a v-structure either it’s not a v-structure and A, B, C /∈Zor it is a v-structure
and B∈Z. If
Let τbe an active trail from some node Xto some node Yin Ggiven a set of nodes E. Then we
can find an active trail from Xto Yin Ggiven Ethat contains no v-structures by the following
recursive process:
1. If τcontains no v-structures, then return T.
2. If τcontains a v-structure, then let A→B←Cbe the v-structure on Tclosest to X. Because
Gcontains no immoralities, there must be an edge from Ato C. Let trail τ′be equal to τ.
(a) If A=X, then replace the edges A→B←Cwith A→Cin τ′.τ′has exactly one
less v-structure than
(b) Otherwise, if the incoming edge to Aon τ′is →, then replace the edges A→B←C
with A→Cin τ′.
(c) Otherwise, if the incoming edge to Aon τ′is ←, then replace the edges A→B←C
with A←Cin τ′.
Chapter 5
Exercise 5.5 — tree-structured factors in a Markov network [15 points]
Instead of using a table to represent the CPD in a Bayesian network we can also use a CPD-tree.
1. [3 points] How can we use a tree in a similar way to represent a factor in a Markov
network? What do the values at the leaves of such a tree represent?
Answer: We use a tree in exactly the same way it is used to represent CPDs. The difference
is that the leaves now store only one value — the factor entry associated with the context of
the leaf, rather than a distribution.
2. [6 points] Given a context U=u, define a simple algorithm that takes a tree factor φ(Y)
(from a Markov network) and returns the reduced factor φ[u](Y−U) (see definition 5.2.7),
also represented as a tree.
Answer: Traverse the tree in any order (DFS, BFS, inorder). For every node X∈Uconnect
the parent of Xwith the one child that is consistent with the context u. Delete X, its children
that were non consistent with u, and their subtrees.
3. [6 points] In some cases it turns out we can further reduce the scope of the resulting tree
factor. Give an example and specify a general rule for when a variable that is not in Ucan
be eliminated from the scope of the reduced tree-factor.
Answer: In the algorithm above, in addition to removing from the tree all the nodes in U,
we also deleted entire subtrees. It might be that by doing that we also removed from the tree
all instances of some other variable Zwhich is not in U. If this is the case, we can safely
remove Zfrom the scope of the reduced tree factor, as its value no-longer depends on the
instantiation of Z. In general, we can remove from the scope of a tree-factor all the variables
that do not appear in it.
Many students gave a slightly different answer. They said that an additional variable can be
removed from the tree (and hence from the scope) if in the resulting reduced factor its children
sub-trees are equivalent. This answer is correct, but it requires further changes to the tree, and
in addition it depends on the actual values of the factor in the leaves. Conversly, in the case
for Zabove, we can safely change the scope of the reduced factor without making any further
changes to the tree, and without considering any specific factor values.
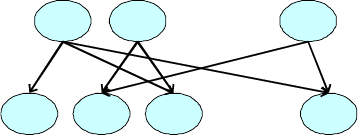
Exercise 5.14 — Simplifying BN2O networks [22 points]
D1
F1
Dn
Fm
D2
F2...
...
F3
Figure 1: A two-layer noisy or network
Consider the network shown in Figure 1, where we assume that all variables are binary, and that
the Fivariables in the second layer all have noisy or CPDs (You can find more details about
this network in Concept 4.3 on page 138). Specifically, the CPD of Fiis given by:
P(f0
i|PaFi) = (1 −λi,0)Y
Dj∈PaFi
(1 −λi,j )dj
where λi,j is the noise parameter associated with parent Djof variable Fi. This network archi-
tecture, called a BN2O network is characteristic of several medical diagnosis applications, where
the Divariables represent diseases (e.g., flu, pneumonia), and the Fivariables represent medical
findings (e.g., coughing, sneezing).
Our general task is medical diagnosis: We obtain evidence concerning some of the findings, and
we are interested in the resulting posterior probability over some subset of diseases. However,
we are only interested in computing the probability of a particular subset of the diseases, so
that we wish (for reasons of computational efficiency) to remove from the network those disease
variables that are not of interest at the moment.
1. [15 points] Begin by considering a particular variable Fi, and assume (without loss of
generality) that the parents of Fiare D1,...,Dk, and that we wish to maintain only the
parents D1,...,Dℓfor ℓ < k. Show how we can construct a new noisy or CPD for Fithat
preserves the correct joint distribution over D1,...,Dℓ, Fi.
Answer: This can be done by summing out the Djvariables that we wish to remove and
incorporating their effects into the leak noise parameter. We show how to remove a single
parent Dk:
P(Fi=f0
i|D1, . . . Dk−1) = X
Dk
P(Fi=f0
i, Dk|D1,...,Dk−1)
=X
Dk
P(Fi=f0
i|D1,...,Dk−1, Dk)P(Dk|D2,...Dk−1)
=X
Dk
P(Fi=f0
i|D1,...Dk)P(Dk)
=X
Dk
(1 −λi,0)
k
Y
j=1
(1 −λi,j )Dj
P(Dk)
= (1 −λi,0)
k−1
Y
j=1
(1 −λi,j )Dj
X
Dk
(1 −λi,k )DkP(Dk)
Thus, we could replace the previous leak parameter λi,0by a new leak parameter λ′i,0=
1−(1 −λ0)PDk(1 −λi,k )DkP(Dk)and we have maintained the noisy OR structure of the Fi
CPD. This process can then be repeated sequentially for Dℓ+1,...,Dk−1. Some of you noted
that PDk(1 −λi,k )DkP(Dk) = (1 −P(d1
k)) + (1 −λi,k )P(d1
k) = 1 −λi,kP(d1
k)which was
fine as well.
If we repeat this process for all the variables that we wish to remove, we come to the solution:
P(Fi=f0
i|D1,...Dl) = (1 −λi,0)
l
Y
j=1
(1 −λi,j )Dj
k
Y
m=l+1 "X
Dm
(1 −λi,m)DmP(Dm)#
producing a final leak parameter λ′
i,0= 1 −(1 −λi,0)Qk
m=l+1 PDm(1 −λi,m)DmP(Dm).
Common errors:
(a) [3 points] Did not show that the transformation results in a noisy-or network.
To receive credit for this, you needed to explicitly show the relationship between
the λ′and the expressions derived above.
(b) [3 points] Minor algebraic error: the final form of the answer for the new leak
parameter was not exactly correct but only due to a small algebraic error in the
derivation.
(c) [7 points] Major algebraic error.
(d) [12 points] More major error.
If you had a major algebraic error, you most likely lost 6 to 8 points on this problem. The most
common major algebraic errors was the use of the following “identity”: P(F1|D1,...,Dk−1) =
PDkP(F1|D1, . . . , Dk)
2. [7 points] We now remove some fixed set of disease variables Dfrom the network, executing
this pruning procedure for all the finding variables Fi, removing all parents Dj∈D. Is
this transformation exact? In other words, if we compute the posterior probability over
some variable Di6∈ D, will we get the correct posterior probability (relative to our original
model)? Justify your answer.
Answer: In the general case, this transformation is not exact. As an example, consider a
simple network with D1, D2and F1, F2where the parents of F1are D1, D2and the parent of F2
is D2. Before the transformation, D1is not independent of F2given F1. After eliminating D2
from the network, then F2is disconnected from the other variables, giving (D1⊥F2|F1). In
terms of posterior probabilities this means that while for some distributions, P(D1|F1, f0
2)6=
P(D1|F1, f1
2)in the original network, in the transformed network, it is always the case that
P(D1|F1, f0
2) = P(D1|F1, f1
2); thus, the results of the posterior probability calculations are
not necessarily preserved after variable D2is summed out.
Note, however, that if each of the Divariables eliminated has exactly one Fichild in the
network, then this transformation is exact.
Exercise 5.8 — Soundness of CSI-separation[23 points]
Consider a Bayesian network Bparameterized by a set of tree-CPDs. Recall that in such cases,
the network also exhibits context-specific independencies (CSI). In this exercise, we define a
simple graph-based procedure for testing for these independencies; your task will be to prove
that this procedure is sound.
Consider a particular assignment of evidence Z=z. We define an edge X→Yto be spurious
in the context zif, in the tree CPD for Y, all paths down that tree that are consistent with the
context zdo not involve X. (Example 4.3.6 in the notes provides two examples.) We define X
and Yto be CSI-separated given zif they are d-separated in the graph where we remove all
edges that are spurious in the context z.
You will now show that CSI-separation is a sound procedure for detecting independencies. That
is: If Pis the distribution defined by B, and Xand Yare CSI-separated given zin B(written
CSI-sepB(X;Y|z)), then P|= ((X⊥Y|z)).
This proof will 4.9. However, the proof of Theorem 4.9 does not provide enough details, so we
will provide you with an outline of a proof of the above statement, which you must complete.
1. [4 points] Let U=X∪Y∪Z, let G′=G+[U] be the induced Bayesian network over
U∪Ancestors(U), and let B′be the Bayesian network defined over G′as follows: the CPD
for any variable in B′is the same as in B. You may assume without proof for the rest of
this problem that PB′(U) = PB(U).
Define a Markov network Hover the variables U∪Ancestors(U) such that PH=PB′.
Answer: Let Hhave structure M[B′], and have the factors of Hbe the CPDs of B′. Then
PH=PB′.
2. [4 points] Define spurious edges and therefore CSI-separation for Markov networks. Your
definition should be a natural one, but in order to receive credit, parts (3) and (4) must
hold.
Answer: An edge from Xto Yis spurious for a Markov net if no factor contains both X
and Y. Specifically for the case of tree-factors (as used in Problem 3 of Problem Set 1), an
edge from Xto Yis spurious for a Markov net if no reduced factor contains both Xand Y.
Then we define: CSI-sepH(X;Y|z)if sepH′(X;Y|z), where H′is Hwith all spurious edge
removed.
3. [12 points] Show that if CSI-sepB(X;Y|z) then CSI-sepH(X;Y|z). (Hint: as one
part of this step, use proposition 4.10.)
Answer: Let Bcand Hcbe Band H, respectively, with spurious edges (in the context
z) removed, and let Hm=M[Bc]. If CSI-sepB(X;Y|z)then d-sepBc(X;Y|z). Then
sepHm(X;Y|z)due to proposition 4.10.
Now, Hm=Hc, because, by construction, spurious edges in Hexactly correspond to edges in
Bthat are either spurious or are moralizing of spurious edges. Hence, sepHc(X;Y|z)and
therefore, by definition, CSI-sepH(X;Y|z).
4. [2 points] Show that if CSI-sepH(X;Y|z) then PH|= (X⊥Y|z). Answer: If
CSI-sepH(X;Y|z)then sepHc(X;Y|z). By the soundness of Markov nets, PHc|= ((X⊥
Y|z)). Since PHc=PH(since the reduced factors induce the same probability as the full
factors), PH|= ((X⊥Y|z)).
5. [1 points] Conclude that if Xand Yare CSI-separated given zin B, then PB|= (X⊥
Y|z).
Answer: This follows immediately from (d) and the fact that PB=PH.
Chapter 9
Exercise 9.10 — Variable Elimination Ordering Heuristics [25 points]
Greedy VE Ordering
•initialize all nodes as unmarked
•for k= 1 : n
–choose the unmarked node that minimizes some greedy function f
–assign it to be Xkand mark it
–add edges between all of the unmarked neighbors of Xk
•output X1...Xk
Consider three greedy functions ffor the above algorithm:
•fA(Xi) = number of unmarked neighbors of Xi
•fB(Xi) = size of the intermediate factor produced by eliminating Xiat this stage
•fC(Xi) = number of added edges caused by marking Xi
Show that none of the these functions produces an algorithm that dominates the others. That
is, give an example (a BN G) where fAproduces a more efficient elimination ordering than fB.
Then give an example where fBproduces a better ordering than fC. Finally, provide an example
where fCis more efficient than fA. For each case, define the undirected graph, the factors over
it, and the number of values each variable can take. From these three examples, argue that none
of the above heuristic functions are optimal.
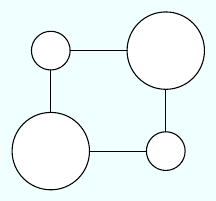
Answer: We will show an example where fBis better than both fAand fCand an example where
fAis better than fC.
Y
Z W
X
Figure 2: fBbetter than fAand fC
Consider Figure (2). Suppose pairwise factors φ(X, Y ),φ(Y, W ),φ(X, Z), and φ(Z, W ). Suppose
|V al(X)|=|V al(W)|=d,|V al(Y)|=|V al(Z)|=D, and D >> d.
fBcould choose the ordering Y,Z,X,W(it’s ensured to pick one of Zor Yfirst to avoid creating
a large factor over both Zand Y). The cost of variable elimination under this ordering is Dd2
multiplications and (D−1)d2additions to eliminate Y,Dd2multiplications and (D−1)d2additions
to eliminate Y,d2multiplications and (d−1)dadditions to eliminate X, and (d−1) additions to
eliminate W.
fAand fCcould each choose the ordering X,Y,Z,W(any possible ordering is equally attractive
to these heuristics because they don’t consider information about domain sizes). The cost of variable
elimination under this ordering is D2dmultiplications and D2(d−1) additions to eliminate X,D2d
multiplications and (D−1)Dd additions to eliminate Y,Dd multiplications and (D−1)dadditions
to eliminate Z, and (d−1) additions to eliminate W.
Since D≫dthe D2(d−1) terms in the cost of variable elimination under an ordering produced by
fCor fAoutweigh the cost of variable elimination under an ordering produced by fB. So neither fA
nor fCdominates. The intuition in this example is that fAand fCcan create unnecessarily large
factors because they don’t consider the domain sizes of variables.
VX WZY
Figure 3: fAbetter than fB
Consider Figure (3). Suppose pairwise factors φ(X, Y ),φ(Y, Z),φ(Z, W ), and φ(W, V ). Suppose
|V al(Y)|=|V al(Z)|=|V al(W)|=d,|V al(X)|=|V al(V)|=D,D= 13, and d= 2.
fAcould choose the ordering X,Y,Z,W,V(it’s ensured to only pick from the ends of chain). The
cost of variable elimination under this ordering is (D−1)dadditions to eliminate X,d2multiplications
and (d−1)dadditions to eliminate Y,d2multiplications and (d−1)dadditions to eliminate Z,Dd
multiplications and (d−1)Dadditions to eliminate W, and (D−1) additions to eliminate V. This
is 34 multiplications and 53 additions.
fBcould choose the ordering Z,X,Y,W,V(it’s ensured to pick Zfirst since the size of a factor
over X,Z,Wis 8, which is less than that for eliminating Xor V(26) and less than that for
eliminating Yor W(52)). The cost of variable elimination under this ordering is d3multiplications
and (d−1)d2additions to eliminate Z,Dd multiplications and (D−1)dadditions to eliminate X,
d2multiplications and (d−1)dadditions to eliminate Y,Dd multiplications and (d−1)Dadditions
to eliminate W, and (D−1) additions to eliminate V. This is 64 multiplications and 55 additions.
So fBdoesn’t dominate. The intuition in this example is that fBcan avoid dealing with large
intermediate factors that it will eventually have to deal with anyways, and in the meantime create a
bigger mess for itself.
Chapter 10
Exercise 10.2 (one direction) — clique-tree sepset separation [20 points]
In this problem, you will show that the set of variables in a clique tree separator separates the
original Markov network into two conditionally independent pieces.
Let Sbe a clique separator in the clique tree T. Let Xbe the set of all variables mentioned in
Ton one side of the separator and let Ybe the set of all variables mentioned on the other side
of the separator. Prove that sepI(X;Y|S).
Answer: First we prove a short lemma: all nodes that are in both Xand Yare in S.
Proof of lemma: Suppose Sseparates C1and C2. Now, consider any node Dthat is in both
Xand Y. Then there must be at least one clique on each side of the clique separator which each
contain D. By the running intersection property, Dis contained in C1and C2. Therefore, Dis in S.
Proof of sepI(X,Y|S):We will prove the result by contradiction. Suppose it is not the case
that sepI(X,Y|S). Then there is some node Xin X, some node Yin Yand a path πin G
between them such that no variable along πis in S. Since we never pass through any variable in
S, the above lemma guarantees that πmust pass directly from some variable Dwhich is in Xbut
not in Yto some variable Ewhich is in Ybut not in X. Since πpasses directly from Dto E, we
know that Dand Eshare an edge in I. So Dand Eform a clique in Iwhich must be part of some
maximal clique in the clique tree. But, by the definition of Xand Ywe know that all cliques in the
tree must be a subset of Xor a subset of Y. So no clique in the tree can contain Dand E, and we
have reached a contradiction. Thus sepI(X,Y|S).
Exercise 10.6 — modifying a clique tree [12 points] Assume that we have constructed a
clique tree Tfor a given Bayesian network graph G, and that each of the cliques in Tcontains
at most knodes. Now the user decides to add a single edge to the Bayesian network, resulting
in a network G′. (The edge can be added between any pair of nodes in the network, as long as it
maintains acyclicity.) What is the tightest bound you can provide on the maximum clique size
in a clique tree T′for G′? Justify your response by explaining how to construct such a clique
tree. (Note: You do not need to provide the optimal clique tree T′. The question asks for the
tightest clique tree that you can construct, using only the fact that Tis a clique tree for G. Hint:
Construct an example.)
Answer: The bound on maximum clique size is k+ 1. Suppose the user decides to add the
edge X→Y. We must update our clique tree to satisfy the family preservation and the running
intersection property. (Note that any tree satisfying these two properties is a valid clique tree.) Since
the original clique satisfies the family preservation property, it must contain a clique Cthat contains
Yand the original parents of Y. Adding Xto Crestores the family preservation property in the
new clique tree. To restore the running intersection property, we simply add Xto all the cliques on
a path between Cand some other clique containing X. Since we added at most one node to each
clique, the bound on maximum clique size is k+ 1.
Exercise 10.15 — Variable Elimination for Pairwise Marginals [10 points] Consider the
task of using a calibrated clique tree Tover factors Fto compute all of the pairwise marginals
of variables, PF(X, Y ) for all X, Y . Assume that our probabilistic network consists of a chain
X1−X2− · · · − Xn, and that our clique tree has the form C1− · · · − Cn−1where Scope[Ci] =
{Xi, Xi+1}. Also assume that each variable Xihas |Val(Xi)|=d.
1. [2 points]
What is the total cost of doing variable elimination over the tree, as described in the
algorithm of Figure 1 of the supplementary handout (see online), for all n
2variable pairs?

Describe the time complexity in term of nand d.
Answer: To compute PF(Xi, Xj)using CTree-Query in Figure 2, we need to eliminate
j−i−1 = O(n)variables. The largest factor generated has three nodes. Therefore, the
complexity for each query is O(nd3), assuming each of X1,...,Xnhas domain size d. Since
we need to run the query n
2=O(n2)times, the total time complexity is O(n3d3).
2. [8 points]
Since we are computing marginals for all variable pairs, we may store any computations
done for the previous pairs and use them to save time for the remaining pairs. Construct
such a dynamic programming algorithm that achieves a running time which is asymptoti-
cally significantly smaller. Describe the time complexity of your algorithm.
Answer: Due to the conditional independence properties implied by the network, we have
that, for i < j −1:
P(Xi, Xj) = X
Xj−1
P(Xi, Xj−1, Xj)
=X
Xj−1
P(Xi, Xj−1)P(Xj|Xi, Xj−1)
=X
Xj−1
P(Xi, Xj−1)P(Xj|Xj−1)
The term P(Xj|Xj−1)can be computed directly from the marginals in the calibrated clique
tree, while P(Xi, Xj−1)is computed and stored from a previous step if we arrange the com-
putation in a proper order. Following is the algorithm:
------------------------
// πj=P(Xj, Xj+1): calibrate potential in clique Cj.
// µj−1,j =P(Xj): message between clique Cj−1and Cj.
µ0,1=PX2π1(X1, X2)
for j = 1 to n - 1 do
ψ(Xj) = πj
µj−1,j
φ(Xj, Xj+1) = πj
for i = 1 to n - 2 do
for j = i + 2 to n do
φ(Xi, Xj) = PXj−1φ(Xi, Xj−1)×ψ(Xj−1)
------------------------
where ψ(Xj) = P(Xj+1|Xj)and φ(Xi, Xj) = P(Xi, Xj).
The algorithm run through the double loop i, j for O(n2)times. Each time, it performs a
Product-Sum of two factors. The immediate factor has three variables and thus it costs O(d3)
time. Therefore, the total time complexity is O(n2d3)which is asymptotically significantly
smaller.
New problem — Maximum expected grade [20 points] You are taking the final exam for
a course on computational complexity theory. Being somewhat too theoretical, your professor
has insidiously snuck in some unsolvable problems, and has told you that exactly Kof the N

problems have a solution. Out of generosity, the professor has also given you a probability
distribution over the solvability of the Nproblems.
To formalize the scenario, let X={X1,...,XN}be binary-valued random variables correspond-
ing to the Nquestions in the exam where Val(Xi) = {0(unsolvable),1(solvable)}. Furthermore,
let Bbe a Bayesian network parameterizing a probability distribution over X(i.e., problem i
may be easily used to solve problem jso that the probabilities that iand jare solvable are not
independent in general).
(Note: Unlike the some of the problems given by professor described above, every part of this
problem is solvable!)
1. [8 points] We begin by describing a method for computing the probability of a question
being solvable. That is we want to compute P(Xi= 1, P ossible(X) = K) where
P ossible(X) = X
i
1{Xi= 1}
is the number of solvable problems assigned by the professor.
To this end, we define an extended factor φas a “regular” factor ψand an index so that it
defines a function φ(X, L) : V al(X)× {0,...,N} 7→ IR where X=Scope[φ]. A projection
of such a factor [φ]lis a regular factor ψ:V al(X)7→ IR, such that ψ(X) = φ(X, l).
Provide a definition of extended factor multiplication and extended factor marginalization
such that
P(Xi, P ossible(X) = K) =
X
X −{Xi}Y
φ∈F
φ
K
(1)
where each φ∈ F is an extended factor corresponding to some CPD of the Bayesian
network, defined as follows:
φXi({Xi} ∪ PaXi, k) = P(Xi|PaXi) if Xi=k
0 otherwise
(Hint: Note the similarity of Eq. (1) to the standard clique tree identities. If you have
done this correctly, the algorithm for clique tree calibration (algorithm 10.2) can be used
as is to compute P(Xi= 1, P ossible(X) = K).)
Answer: Intuitively, what we need to do is to associate the probability mass for each entry
in a factor with the number of problems which are solvable among the variables “seen so far”.
More precisely, we say that a variable Xihas been “seen” in a particular intermediate factor
φwhich arises during variable elimination if its corresponding CPD P(Xi|PaXi)was used
in creating φ. Below, we provide definitions for extended factor product and marginalization
analogous to the definitions in section 7.2.1 of the textbook.
Extended factor product
Let X,Y, and Zbe three disjoint sets of variables, and let φ1(X,Y, k1)and
φ2(Y,Z, k2)be two extended factors. We define the extended factor product φ1×φ2
to be an extended factor ψ:V al(X,Y,Z)× {0,...,N} 7→ IR such that:
ψ(X,Y,Z, k) = X
k1+k2=k
φ1(X,Y, k1)·φ2(Y,Z, k2).

The intuition behind this definition is that when computing some intermediate factor ψ(X,Y,Z, k)
during variable elimination, we want ψ(x,y,z, k)to correspond with the probability mass for
which kof the variables seen so far had a value 1. This can occur if k1variables are “seen”
in φ1and k2=k−k1variables are “seen” in φ2. Notice that in this definition, the factor
corresponding to any CPD P(Xi|PaXi)is never involved in the creation of both φ1and φ2, so
there is no “double-counting” of seen variables. Notice also that there are in general multiple
ways that seen variables might be partitioned between φ1and φ2, so the summation is needed.
Extended factor marginalization
Let Xbe a set of variables, and Y /∈Xa variable. Let φ(X, Y, k)be an extended
factor. We define the extended factor marginalization of Yin φto be an extended
factor ψ:V al(X)× {0,...,N} 7→ IR such that:
ψ(X, k) = X
Y
φ(X, Y, k).
The definition for extended factor marginalization is almost exactly the same as in the case
of regular factor marginalization. Here, it is important to note that summing out a variable
should not change the value of kassociated with some particular probability mass—kacts as
a label of how many variables are set to 1 among those “seen” thus far. In the final potential,
kgives the total number of variables set to 1 in X.
To show that these definitions actually work (though we didn’t require it), one can show by
induction (using the definition of initial factors in the problem set) that
ψ(X1,...,Xi,PaX1,...,PaXi, k) = 1{X1+...+Xi=k}
i
Y
j=1
P(Xj|PaXj)
and the result follows since X1+...+XN=Kis equivalent to P ossible(X) = K. Showing
that variable elimination works requires that we show a result for the commutativity of the sum
and product operators analogous to that for regular factors.
2. [6 points] Realistically, you will have time to work on exactly Mproblems (1 ≤M≤N).
Obviously, your goal is to maximize the expected number of solvable problems that you
finish (you neither gain nor lose credit for working on an unsolvable problem). Let Ybe
a subset of Xindicating exactly Mproblems you choose to work on and let
Correct(X,Y) = X
Xi∈Y
1{Xi= 1}
be the number of solvable problems that you attempt (luckily for you, every solvable
problem that you attempt you will solve correctly!). Thus, your goal is to find
argmaxY:|Y|=ME[Correct(X,Y)|P ossible(X) = K].
Show that
argmaxY:|Y|=ME[Correct(X,Y)] 6= argmaxY:|Y|=ME[Correct(X,Y)|P ossible(X) = K]
by constructing a simple example in which equality fails to hold.
Answer: Consider a case in which N= 3, and M= 1, and suppose the Bayesian network
Bencodes the following distribution:
•with probability p,X1is solvable while X2and X3are not, and
•with probability 1−p,X2and X3are solvable while X1is not.
If exactly K= 2 problems are solvable, we know automatically that X2and X3must be
solvable and that X1is not:
YE[Correct(X,Y)] E[Correct(X,Y)|P ossible(X) = K]
{X1}1p+ 0(1 −p) = p0
{X2or X3}0p+ 1(1 −p) = 1 −p1
Thus, the problems chosen by the two methods differ when p > 1−p(i.e., p > 1/2).
3. [6 points] Using the posterior probabilities calculated in (a), give an efficient algorithm
for computing E[Correct(X,Y)|P ossible(X) = K]. Based on this, give an efficient
algorithm for finding argmaxY:|Y|=ME[Correct(X,Y)|P ossible(X) = K]. (Hint: Use
linearity of expectations.)
Answer: Note that
E[Correct(X,Y)|P ossible(X) = K] = E"X
Xi∈Y
1{Xi= 1}|P ossible(X) = K#
=X
Xi∈Y
E[1{Xi= 1}|P ossible(X) = K]
=X
Xi∈Y
P(Xi= 1|P ossible(X) = K)
=1
ZX
Xi∈Y
P(Xi= 1, P ossible(X) = K).
where Z=P(P ossible(X) = K)is a normalizing constant. To maximize this expression over
all sets Ysuch that |Y|=M, note that the contribution of each selected element Xi∈Y
is independent of the contributions of all other selected elements. Thus, it suffices to find the
Mlargest values in the set {P(Xi= 1, P ossible(X) = K) : 1 ≤i≤N}and select their
corresponding problems.
Chapter 11
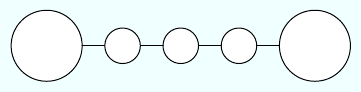
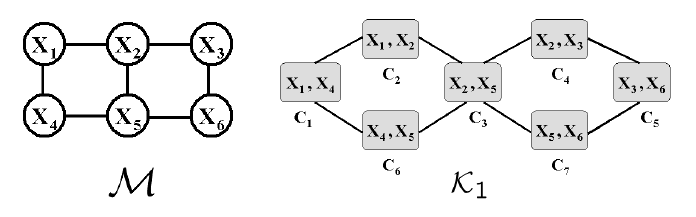
Exercise 11.17 — Markov Networks for Image Segmentation [18 points]
In class we mentioned that Markov Networks are commonly used for many image processing
tasks. In this problem, we will investigate how to use such a network for image segmentation.
The goal of image segmentation is to divide the image into large contiguous regions (segments),
such that each segment is internally consistent in some sense.
We begin by considering the case of a small 3 ×2 image. We define a variable Xifor each
node (pixel) in the network, and each can take on the values 1...K for Kimage segments. The
resulting Markov Network Mis shown in Figure 4.
Figure 4: Markov Network for image segmentation.
We will perform our segmentation by assigning factors to this network over pairs of variables.
Specifically, we will introduce factors φi,j over neighboring pixels iand jthat quantify how
strong the affinity between the two pixels are (i.e., how strongly the two pixels in question want
to be assigned to the same segment).
We now want to perform inference in this network to determine the segmentation. Because we
eventually want to scale to larger networks, we have chosen to use loopy belief propagation on a
cluster graph. Figure 4 also shows the cluster graph K1that we will use for inference.
1. [1 points] Write the form of the message δ3→6that cluster C3will send to cluster C6
during the belief update, in terms of the φ’s and the other messages.
Answer: The form of the message is:
δ3→6(X5) = X
X2
φ2,5(X2, X5)δ2→3(X2)δ4→3(X2)δ7→3(X5).
2. [6 points] Now, consider the form of the initial factors. We are ambivalent to the actual
segment labels, but we want to choose factors that make two pixels with high “affinity”
(similarity in color, texture, intensity, etc.) more likely to be assigned together. In order
to do this, we will choose factors of the form (assume K= 2):
φi,j (Xi, Xj) = αi,j 1
1αi,j (2)
Where αi,j is the affinity between pixels iand j. A large αi,j makes it more likely that
Xi=Xj(i.e., pixels iand jare assigned to the same segment), and a small value makes it

less likely. With this set of factors, compute the initial message δ3→6, assuming that this
is the first message sent during loopy belief propagation. Note that you can renormalize
the messages at any point, because everything will be rescaled at the end anyway. What
will be the final marginal probability, P(X4, X5), in cluster C6? What’s wrong with this
approach?
Answer: The form of the message is:
δ3→6(X5) = 1 + α2,5
1 + α2,5∝1
1
Here we see that the initial message (and indeed all subsequent messages) will be equal to the
1message. This means that the cluster beliefs will never be updated. Therefore:
P(X4, X5)∝π6(X4, X5) = φ4,5
P(X4, X5) = (1
2+2α4,5if X46=X5,
α4,5
2+2α4,5if X4=X5,
In this approach, because the initial potentials are symmetric, and the messages are over single
variables, no information is ever propagated around the cluster graph. This results in the final
beliefs being the same as the initial beliefs. This construction is, as a result, completely useless
for this task.
Chapter 12
Exercise 12.13 — Stationary distribution for Gibbs chain [18 points]
Show directly from Eq. (12.21) (without using the detailed balance equation) that the posterior
distribution P(X | e) is a stationary distribution of the Gibbs chain (Eq. (12.22)). In other
words, show that, if a sample xis generated from this posterior distribution, and x′is the next
sample generated by the Gibbs chain starting from x, then x′is also generated from the posterior
distribution.
Answer: The time tdistribution is:
P(t)(x′)≈P(t+1)(x′) = X
x∈Val(X)
P(t)(x)T(x→x′).
Equation (12.21) refers to the global transition model, which in the case of the Gibbs Chain corre-
sponds to the probability of choosing a variable to flip and then applying the local transition model.
All variables are equally likely to be flipped. The varable xiis sampled from the distribution P(xi|ui)
where uiis the assignment to all variables other than xi.
Notice in the case of the Gibbs chain, only one value is changed at a time.
1
|X | X
k∈|X | X
xk∈Val(Xk)
P(xk,uk|e)P(x′
k|uk,e)
1
|X | X
k∈|X | X
xk∈Val(Xk)
P(xk|uk)P(x′
k,uk|e)
P(X′|e)1
|X | X
k∈|X | X
xk∈Val(Xk)
P(xk|uk)
P(X′|e)
New exercise— Data Association and Collapsed MCMC [20 points]
Consider a data association problem for an airplane tracking application. We have a set of K
sensor measurements blips on a radar screen U={u1,...,uK}and another set of Mairplanes
V={v1,...,vM}, and we wish to map U’s to V’s. We introduce a set of correspondence
variables C={C1,...,CK}such that Val(Ci) = {1,...,M}. Here, Ci=jindicates that ui
is matched to vj(The fact that each variable Citakes on only a single value implies that each
measurement is derived from only a single object. But the mutual exclusion constraints in the
other direction are not forced.). In addition, for each ui, we have a set of readings denoted
as a vector Bi= (Bi1, Bi2,...,BiL); for each vj, we have a three dimensional random vector
Aj= (Aj1, Aj2, Aj3) corresponding to the location of the airplane vjin the space. (Assume
that |V al(Ajk )|=d, which is not too large in the sense that summing over all values of Ajis
tractable.)
Now suppose that we have a prior distribution over the location of vj, i.e., we have P(Aj), and
we have observed all Bi, and a set of φij (Aj,Bi, Ci) such that φij (aj,bi, Ci) = 1 for all aj,bi
if Ci6=j. The model contains no other potentials.
We wish to compute the posterior over Ajusing collapsed Gibbs sampling, where we sample the
Ci’s but maintain a closed form posterior over the Aj’s.
1. [1 points] Briefly explain why sampling the Ci’s would be a good idea.
Answer: To compute the posterior over all joint Aj’s or a single Ajusing exact inference
is hard, since it requires exponentially large computation. We use sampling based method to
approximate the posterior by sampling Ci’s resulting in the conditional independence between
Aj’s given Bi’s and Ci’s. This factorization gives us a closed form over each Aj, which makes
the computation tractable. Moveover, since Ci’s serve as selector variables, the context after
sampling them further reduces many factors to be uniform (context independence: Ajdoesn’t
change the belief over Biif Ci6=j). In addition, the space over the joint Aj’s (d3M) might
be larger than that of Ci’s (MK), since dis usually much larger than Mand K, and Mis
likely to be larger than K. Sampling in a lower dimensional space is better in terms of smaller
number of samples and better approximation.
2. [6 points] Show clearly the sampling distribution for the Civariables and the correspond-
ing Markov chain kernels.
Answer: Let Φdenote the set of all factors (note that P(Aj)’s are also the factors in our
model), then the distribution over Ci’s which we want to sample from is
P(C1, C2, . . . , CK|b1,b2,...,bK) = PΦ[¯
b](C1, C2,...,CK) (3)
=1
ZX
A′
jsY
j
P(Aj)Y
i
φij (Aj,bi, Ci) (4)
where Zis the partition function. In order to get samples from the posterior above, we can
sample from a Markov chain whose stationary distribution is our target. To do so, we define
the Markov chain kernel for each Ckas:
PΦ[¯
b](Ck|c−k) = PΦ[¯
b](Ck,c−k)
PC′
kPΦ[¯
b](C′
k,c−k).(5)
For each value of Ck=ck, ck= 1,2,...,M, we have
PΦ[¯
b](Ck=ck|c−k) = PΦ[¯
b](ck,c−k)
PΦ[¯
b](c−k)(6)
=1
ZX
A1,A2,...,AM
PΦ[¯
b](ck,c−k,A1,A2,...,AM) (7)
=1
ZX
A1,A2,...,AM
M
Y
j=1
P(Aj)Y
i:ci=j
φij (Aj,bi, j) (8)
=1
Z
M
Y
j=1 X
Aj
P(Aj)Y
i:ci=j
φij (Aj,bi, j)
(9)
=1
Z
M
Y
j=1 X
Aj
Ψj,[c1,c2,...,cK](Aj) (10)
where
Ψj,[c1,c2,...,cK](Aj) = P(Aj)Y
i:ci=j
φij (Aj,bi, j) (11)
and
Z=X
ck
M
Y
j=1 X
Aj
Ψj,[ck,c−k](Aj) (12)
Note that to the summation over Aj’s can be pushed into the product so that when we sum
over a specific Aj, the summation is only over a factor Ψj,[c1,c2,...,cK](Aj)whose scope only
contains Aj. And as mentioned in the question, we assume that summing over a single Ajis
tractable.
3. [8 points] Give a closed form equation for the distribution over the Ajvariables given the
assignment to the Ci’s. (A closed form equation must satisfy two criteria: it must contain
only terms whose values we have direct access to, and it must be tractable to compute.)
Answer: Since Aj’s are independent given all Ci’s, the joint distribution over Aj’s can be
factorized as the product of the marginal distributions over each single Aj. Therefore, we only
specify the marginal distribution over a single Aj:
P(Aj|¯
b,¯c) = 1
ZP(Aj)Y
i:ci=j
φij (Aj,bi, ci).(13)
where, Z=PAjP(Aj)Qi:ci=jφ(Aj,bi, ci),¯
b={b1,b2,...,bK}and ¯c={c1,...,cK}.
4. [5 points] Show the equation for computing the posterior over Ajbased on the two steps
above.
Answer: After the Markov chain converges to its stationary distribution, i.e., the posterior
over Ci’s, we can collect Minstances each of which is denoted by ¯c[m], m = 1,2,...,M, and
with their distributional parts P(Aj|¯
b, ¯c[m]), we can estimate the posterior over Ajas:
ˆ
P(Aj=aj|¯
b) = 1
M
M
X
m=1
1
Z[m]P(aj)Y
i:ci[m]=j
φij (aj,bi, ci[m]) (14)
=1
M
M
X
m=1
P(aj)Qi:ci[m]=jφij (aj,bi, ci[m])
Pa′
jP(a′
j)Qi:ci[m]=jφij (a′
j,bi, ci[m]) (15)
where ajis a specific value that Ajtakes.
Chapter 15
Exercise 15.3 — Entanglement in DBNs I [6 points]
Prove Proposition 15.1:
Let Ibe the influence graph for a 2-TBN B→. Then Icontains a directed path from Xto Yif
and only if, in the unrolled DBN, for every t, there exists a directed path from X(t)to Y(t′)for
some t′≥t.
Answer: First, we will prove the only if direction. Let the path between Xand Yin Ibe the set
of nodes (X, X1,··· , Y ). By definition of I, for every two consecutive nodes Xi—Xi+1 in this set,
for every t, there exists a directed edge from X(t)
ito X(t+1)
i+1 or X(t)
i+1. Now, starting at Xt, construct
the directed path in the unrolled by joining these directed edges. This construction holds for any t.
Hence, we shown the existence of the path in the unrolled DBN.
To prove the if direction, let us look at a path in the unrolled DBN, starting at any X(t)represented
by X, X1,··· , Y . Consider the directed edge from Xito Xi+1 on this path for any i; there must be a
directed edge in the influence graph Ifrom the node corresponding to Xito the node corresponding
to Xi+1. This is true otherwise it violates the construction of the influence graph. Now, connect all
the directed edges in the influrence graph corresponding to the path in the unrolled DBN. Hence, we
have shown that such a path always exists. concludes our proof.
Exercise 15.4 — Entanglement in DBNs II [14 points]
1. [10 points] Prove the entanglement theorem, Theorem 15.1:
Let hG0,G→ibe a fully persistent DBN structure over X=X∪O, where the state variables
X(t)are hidden in every time slice, and the observation variables O(t)are observed in every
time slice. Furthermore, assume that, in the influence graph for G→:
•there is a trail (not necessarily a directed path) between every pair of nodes, i.e., the
graph is connected;
•every state variable Xhas some directed path to some evidence variable in O.
Then there is no persistent independence (X⊥Y|Z) which holds for every DBN hB0,B→i
over this DBN structure.
Answer: Note that we will need the additional assumption that Z∩(X∪Y)6=∅. We first
show that I(X,Y| ∅)cannot hold persistently.
Assume by contradiction that I(X,Y| ∅)does indeed hold persistently. By decomposition
this implies that I(X, Y | ∅)must hold persistently for all X∈Xand Y∈Y. We now pick a
particular t,X, and Yand examine the statement we have assumed to hold: I(X(t), Y (t)| ∅).
We first prove the existence of a trail between X(t)and Y(t)in our DBN. As our influence
graph is connected it must contain a trail from Xto Y. As the influence graph was defined
over the 2-TBN this implies a trail in the 2-TBN (using persistence edges to alternate between
interface variables and non-interface variables as necessary). This trail implies the existence of
a corresponding trail between X(t)and Y(t)in the tand t+ 1 timeslices of the DBN. Call this
trail π. For I(X(t), Y (t)| ∅)to hold we must have that πis not active. This can occur in two
ways:
(a) πgoes through an observed node that is not the center of a v-structure. This is impossible
as our only observed nodes are leaves in the DBN.
(b) πgoes through a v-structure A→B←Cwhere neither Bnor any of its descendents
are observed. This cannot be the case because either B∈Oor Bis a state variable.
However, if Bis a state variable we know that a descendant of Bis in Oby Proposition
19.3.4 and our assumption that every state variable has a directed path to an observation
variable in the influence graph.
Thus the trail must be active, giving us a contradiction.
We’ve thus shown that I(X,Y| ∅)does not hold persistently and will prove that I(X,Y|
Z). To do this we note that by decomposition we must have I(X, Y |Z)(and also by our
assumption X, Y /∈Z). Part (c) will prove that this cannot be the case when we have that
I(X, Y | ∅)does not hold persistently (as we have shown above.)
We now prove that I(X,Y|Z)does not hold persistently with the additional assumption
that X, Y /∈Z.
Assume by contradiction that I(X, Y |Z)holds persistently but that I(X, Y | ∅)does not.
By assumption there must exist some time tsuch that I(X(t), Y (t)| ∅)does not hold. This
implies the existence of an active trail πbetween X(t)and Y(t)in the unrolled DBN. We then
consider some time slice t′which has no nodes in common with π. By assumption we must
have I(X(t′), Y (t′)|Z(t′)). But now we can construct an active trail π′between X(t′)and
Y(t′)given Z(t′). We do so by first going from X(t′)to X(t)in πvia the persistance edges,
travelling through π, and then connecting Y(t)and Y(t′)via the persistence edges between
them. Note that Z(t′)cannot interfere by the assumption that timeslice t′contained no nodes
in πand that X, Y /∈Z. This active trail, however, implies that I(X, Y |Z)does not hold at
time t′and thus is not a persistent independence. Therefore, we have a contradiction.
2. [4 points] Is there any 2-TBN (not necessarily fully persistent) whose unrolled DBN is a
single connected component, for which (X⊥Y|Z) holds persistently but (X⊥Y| ∅)
does not? If so, give an example. If not, explain formally why not.
Answer: There are many counterexamples for the case that the 2-TBN is not fully persistent.
One such example has persistent edge X2→X′
2and other edges X′
1←X′
2→X′
3. Here
X(t)
1⊥X(t)
3|X(t)
2holds persistently, but X(t)
1⊥X(t)
3| ∅ does not.
Exercise 15.13 — Collapsed MCMC for Particle Filtering [22 points]
Consider a robot moving around in a space with nstationary landmarks. The positions of the
robot and the landmarks are unknown. The position of the robot (also called a pose) at time tis
denoted X(t). The (fixed) position of landmark iis denoted Li. At each time t, the robot obtains
a (noisy) measurement O(t)
iof its current position relative to each landmark k. The model is
parameterized using two components. Robot poses evolve via a motion model:P(X(t+1) |X(t)).
Sensor measurements are governed by a measurement model:P(O(t)
i|X(t), Li). Both the motion
model and the measurement model are known.
Denote X(1:t)={X(1), . . . , X(t)},L={L1,...,Ln}, and O(1:t)={O(1)
1,...,O(1)
n, O(2)
1,...,O(t)
n}.
We want to use the measurements O(1:t)to localize both the robot and landmarks; i.e., we want
to compute P(X(t),L|o(1:t)).
1. [2 points] Draw a DBN model for this problem. What is the dimension (number of
variables) of the belief state for one time slice in this problem? (Assume that the belief
state at time tis over all variables about which we are uncertain at time t.)
Answer: The simplest way to represent this is to extend our model for a DBN to allow some static
variables, which are not part of each timeslice. We can think of them as existing before the first
timeslice. Unrolled, it looks like this:
But to store it compactly, whereas we previously needed only representations of B0and B→, repre-
senting the initial state and transition model, here we have a third network, representing the static
variables, which we will denote Bs. Note that in principle, with this extension to the notion of a
DBN, the static variables could actually be a standard Bayes net, with some of them depending on
each other; but in our case they will not, so their CPDs have no parents to condition on. However,
the CPDs in B→can then use the variables in Bsas parents, in addition to any inter-timeslice and
intra-timeslice edges.
Of course, we could alternately represent it by including all the static variables in the 2-TBN, each
with a deterministic CPD simply propagating its values forward, never changing.
A belief state now corresponds to a set of beliefs for the static variables as well as the state variables
of the current timeslice, so in our DBN, the belief state will have a dimension of n+ 1.
We want to use particle filtering to solve our tracking problem, but particle filtering tends to
break down in very high dimensional spaces. To address this issue, we plan to use particle filtering
with collapsed particles. For our localization and mapping problem, we have two obvious ways of
constructing these collapsed particles. We now consider one such approach in detail, and briefly
consider the implications of the other.
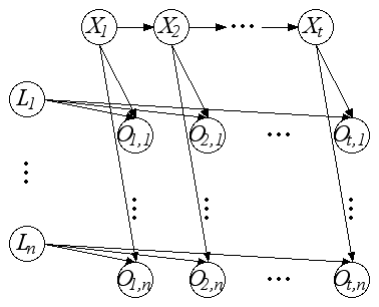
1. [15 points] We select the robot pose trajectory X(1:t)as the set of sampled variables, and
maintain a closed form distribution over L. Thus, at time twe have a set of weighted
particles, each of which specifies a full sampled trajectory x(1:t)[m], a distribution over
landmark locations P(t)
m(L), and a weight w(t)[m].
(a) The distribution over Lis still exponentially large in principle. Show how you can
represent it compactly in closed form. (Hint: Write out the full form of P(t)
m(L)
recalling the definition of collapsed particles, and note that our samples represent
entire pose trajectories X(1:t). )
Answer: Since each particle instantiates all of x(1:t)[m]and o(1:t)[m], there is no active
trail from Lito Ljfor i6=j, and so the Livariables are all independent, given a particle.
Also, each landmark’s location is independent of the observations of the other landmarks,
given a trajectory. Thus we can decompose our distribution over the landmarks’ locations

as the following product of marginals:
P(t)
m(L) = P(L|x(1:t)[m],o(1:t)[m])
=Y
i
P(Li|x(1:t)[m],o(1:t)[m])
=Y
i
P(Li|x(1:t)[m], o(1:t)
i[m])
=Y
i
P(t)
m(Li)
Note that it is not in closed form yet. We will show how to compute P(t)
m(Li)in part ii.
(b) Describe how to perform a forward propagation step in our collapsed particle filtering
algorithm. Specifically show how to:
•generate a new set of particles for time t+ 1
•compute the weight w(t+1)[m] of each particle;
•compute the distribution P(t+1)
m(L).
Answer: To generate new particles, we basically just follow standard particle filtering –
normalize the weights of the particles from the previous timeslice; select a particle under
that normalized distribution; then sample its forward propagation based on the motion model
P(X(t+1) |X(t)).
To see how to compute our new distribution over L, we first make the following observation:
P(t+1)
m(Li) = P(Li|x(1:t+1)[m], o(1:t+1)
i[m])
=1
ZP(o(1:t+1)
i[m]|Li, x(1:t+1)[m])P(Li|x(1:t+1)[m])
=1
ZP(o(1:t+1)
i[m]|Li, x(1:t+1)[m])P(Li)
=1
ZP(Li)
t+1
Y
t′=1
P(o(t′)
i[m]|Li, x(t′)[m])
for some normalizing constant
Z=X
li
P(li)
t+1
Y
t′=1
P(o(t′)
i[m]|li, x(t′)[m])
which does not depend on Li. Note that P(Li)is the prior for the location of the landmark,
as encoded by Bs(or B0if using deterministic CPDs to propagate the Livariables through all
timeslices); and each factor of the product is just a lookup in the known measurement model.
However, since
P(t)
m(Li) = 1
Z′P(Li)
t
Y
t′=1
P(o(t′)
i[m]|Li, x(t′)[m])
for some other normalizing constant
Z′=X
li
P(li)
t
Y
t′=1
P(o(t′)
i[m]|li, x(t′)[m])

which similarly does not depend on Li, then
P(t+1)
m(Li) = 1
Z′′ P(t)
m(Li)P(o(t+1)
i[m]|Li, x(t+1)[m])
for some normalizing constant Z′′ =Z
Z′which does not depend on Li. Thus, to update our
beliefs about the location of the landmarks, we just multiply in the probability of the new
observations from the measurement model and renormalize.
Having updated our distribution over the locations of the landmarks, we now need to compute
the weight for the particle. In standard particle filtering, we use the likelihood of the new
observations given the complete particle; here, our particle does not contain the location of the
landmarks, so we must compute our weights using the other given information. We can consider
the reweighting to be given all of the previously sampled variables together with all observations.
Using this insight, we can compute the particles by marginalizing out the landmark locations:
w(t+1)[m] = P(o(t+1)[m]|x(1:t+1)[m],o(1:t)[m])
=X
l∈V al(L)
P(o(t+1)[m],l|x(1:t+1)[m],o(1:t)[m])
=X
l∈V al(L)
P(l|x(1:t+1)[m],o(1:t)[m])P(o(t+1)[m]|x(1:t+1)[m],o(1:t)[m],l)
=X
l∈V al(L)
P(l|x(1:t)[m],o(1:t)[m])P(o(t+1)[m]|x(t+1)[m],l)
=X
l∈V al(L)
n
Y
i=1
P(li|x(1:t)[m], o(1:t)
i[m])P(o(t+1)
i[m]|x(t+1)[m], li)
=X
l∈V al(L)
n
Y
i=1
P(t)
m(li)P(o(t+1)
i[m]|x(t+1)[m], li)
Thus we see how to compute the weight for the particle in the new timeslice using the normal-
ized distribution P(t)
m(L)from the previous timeslice, together with our measurement model
P(o(t)
i[m]|x(t)[m], li).
2. [5 points] As another alternative, we can select the landmark positions Las our set of
sampled variables. Thus, for each particle l[m], we maintain a distribution P(t)
m(X(t)).
Without describing the details of how to perform a forward propagation step in our col-
lapsed particle filtering algorithm, we can think about the effectiveness of such an approach.
In this algorithm, what will happen to the particles and their weights eventually (i.e., after
a large number of time steps)? What are the necessary conditions for this algorithm to
converge to the correct map?
Answer: Since we never generate any new assignments l[m], on each forward propagation,
with some nonzero probability, one or more of the particles will “die off”. Thus eventually, we
will be left with a single particle l[m]with a weight of 1.
The single map to which we converge will be the correct map only if our initial generation of
particles included the correct map among its hypotheses. Since we never generate any new
hypotheses, we certainly cannot converge on the right one if we failed to start with it as a
hypothesis. However, although this is necessary, it is not sufficient, since even if we start with
the correct hypothesis as an available option, it is possible that by chance we might discard it,
especially early on when, with few observations, its weight may not be much more than that
of the other hypotheses.
As there are exponentially many assignments to L, unless we have a very well-specified prior
over them, it is highly unlikely the correct solution will be generated as an initial hypothesis.

Chapter 18
Exercise 18.8 — Bayesian score structure equivalence I [5 points]
Show that if Gis I-equivalent to G′, then if we use table CPDs, we have that scoreL(G:D) =
scoreL(G′:D) for any choice of D.
Hint: consider the set of distributions that can be represented by parameterization each network
structure.
Answer: Using table CPDs for G, we can represent any joint probability distribution that complies
with the conditional independence implied by the G. Since G′implies the same conditional indepen-
dence as G, they represent exactly the same set of distributions. Therefore, for any parameterization
θGof G, there is a corresponding parameterization θG′of G′which generates the same distribution.
Since the likelihood of data set Donly depends on the underlying distribution, we have:
scoreL(G:D) = ℓ(hG,ˆ
θGi:D) = ℓ(hG′,θG′i:D)≤scoreL(G′:D)
where ˆ
θGare the maximum likelihood parameters for G, and θG′are the corresponding parameters
in G′.
By the same reasoning, we have scoreL(G′:D)≤scoreL(G:D). Therefore:
scoreL(G:D) = scoreL(G′:D)
Exercise 18.9 — Bayesian score structure equivalence II [10 points]
Show that if Gis I-equivalent to G′, then if we use table CPDs, we have that scoreBIC (G:D) =
scoreBIC (G′:D) for any choice of D.
Answer: The BIC score is defined as: scoreBIC (G:D) = scoreL(G:D)−log M
2Dim[G]and
by (6a) we know scoreL(G:D) = scoreL(G′:D). Therefore, to prove scoreBIC (G:D) =
scoreBIC (G′:D), we only need to show Dim[G] = Dim[G′].
We first consider the case where Gand G′only differs by one safe edge reversal such that X→Y∈ G
and X←Y∈ G′. All the other variables except Xand Yhave the same parents in Gand G′and
thus have the same number of parameters. Assume variables Zare the common parents of Xand
Y. Denote SIZEG(N)to be the number of parameters for variable Nin G:
Dim[G]
=X
N∈G
N6=X,Y
SIZEG(N) + SIZEG(X) + SIZEG(Y)
=X
N∈G
N6=X,Y
SIZEG(N) + (|Val(()X)| − 1)|V al(Z)|+ (|V al(Y)| − 1)|V al(Z)||V al(X)|
=X
N∈G
N6=X,Y
SIZEG(N) + (|V al(Y)||V al(Z)||V al(X)| − |V al(Z)|
=X
N∈G′
N6=X,Y
SIZEG′(N) + (|Val(()Y)| − 1)|V al(Z)|+ (|V al(X)| − 1)|V al(Z)||V al(Y)|
=X
N∈G′
N6=X,Y
SIZEG′(N) + SIZEG′(Y) + SIZEG′(X)
= Dim[G′]
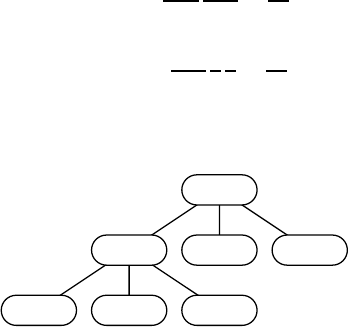
In general, for any two I-equivalent Gand G′, they can be connected by a sequence of safe edge
reversal. Therefore, Gand G′have the same number of parameters and thus the same BIC score.
Exercise 18.10 — Bayesian score structure equivalence III [10 points]
Show that the Bayesian score with a K2 prior in which we have a Dirichlet prior Dirichlet(1,1,...,1)
for each set of multinomial parameters is not score equivalent.
Hint: construct a data set for which the score of the network X→Ydiffers from the score of
the network X←Y.
Answer: Construct Gto be X→Yand G′to be X←Y. They are I-equivalent. Construct Dto
be {(x1, y1),(x1, y0)}.
P(D|G) = 1·2
2·3
1·1
2·3=1
18
On the other hand:
P(D|G′) = 1·1
2·3
1
2
1
2=1
24
Therefore, their Bayesian scores are different assuming equal structure prior.
Exercise 18.26 — Ordering-based search in structure learning [12 points]
1, 2, 3, 4
2, 1, 3, 4 1, 3, 2, 4 1, 2, 4, 3
2, 3, 1, 41, 2, 3, 4 2, 1, 4, 2
Figure 5: Partial search tree example for orderings over variables
X1, X2, X3, X4. Successors to ≺= (1,2,3,4) and ≺′= (2,1,3,4)
shown.
Consider learning the structure of a Bayesian network for some given ordering, ≺, of the variables,
X1,...,Xn. This can be done efficiently, as described in section 18.4.2 of the course reader. Now
assume that we want to perform search over the space of orderings, i.e. we are searching for
the network (with bounded in-degree k) that has the highest score. We do this by defining the
score of an ordering as the score of the (bounded in-degree) network with the maximum score
consistent with that ordering, and then searching for the ordering with the highest score. We
bound the in-degree so that we have a smaller and smoother search space.
We will define our search operator, o, to be “Swap Xiand Xi+1” for some i= 1,...,n−1.
Starting from some given ordering, ≺, we evaluate the BIC-score of all successor orderings, ≺′,
where a successor ordering is found by applying oto ≺(see Figure 5). We now choose a particular
successor, ≺′. Provide an algorithm for computing as efficiently as possible the BIC-score for the
successors of the new ordering, ≺′, given that we have already computed the scores for successors
of ≺.
Answer: Notation: Let hbe the variable that was swapped for ≺′, let ibe the variable to be
swapped for candidate ≺′′, and let Succj(≺)be the jth candidate successor of ≺.
The BIC-score is decomposable so we only need to consider the family scores. We cache all family
scores of ≺as well as all family scores of all candidates for ≺′. We can discard all previously cached
values prior to those pertaining to ≺. We consider the family score FamScorej(≺′′ :D)for each
variable Xj, j = 1,...,n:
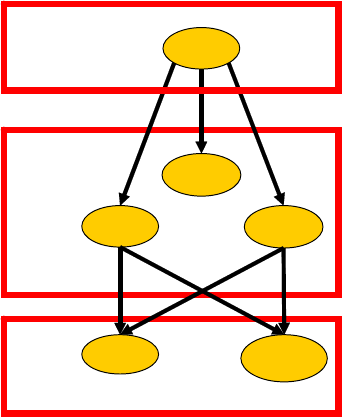
•If j > i + 1,FamScorej(≺′′ :D) = FamScorej(≺′:D).
•If j < i,FamScorej(≺′′ :D) = FamScorej(≺′:D).
•If j=ior j=i+ 1:
–If i=h,FamScorej(≺′′ :D) = FamScorej(≺:D).
–If i > h + 1 or i < h −1,FamScorej(≺′′ :D) = FamScorej(Succi(≺) : D).
–If i=h+ 1 or i=h−1, compute the family score from scratch: FamScorej(≺′′ :D) =
argmaxU∈{Xk:Xk≺′′ Xj}FamScore(Xj|Uj:D)
Problem 18.22 — Module network learning [15 points]
In this problem, we will consider the task of learning a generalized type of Bayesian networks
that involves shared structure and parameters. Let Xbe a set of variables, which we assume are
all binary-valued. A module network over Xpartitions the variables Xinto Kdisjoint clusters,
for K≪n=|X |. All of the variables assigned to the same cluster have precisely the same
parents and CPD. More precisely, such a network defines:
•An assignment function A, which defines for each variable X, a cluster assignment A(X)∈
{C1,...,CK}.
•For each cluster Ck(k= 1,...,K), a graph Gwhich defines a set of parents PaCk=Uk⊂ X
and a CPD Pk(X|Uk).
The cluster network structure defines a ground Bayesian network where, for each variable X, we
have the parents Ukfor k=A(X) and the CPD Pk(X|Uk). Figure 6 shows an example of
such a network.
D
A
B
C
EF
Cluster III
Cluster II
Cluster I
Figure 6: A simple module network
Assume that our goal is to learn a cluster network that maximizes the BIC score given a data set
D, where we need to learn both the assignment of variables to clusters and the graph structure.
1. [5 points] Define an appropriate set of parameters and an appropriate notion of sufficient
statistics for this class of models, and write down a precise formula for the likelihood
function of a pair (A,G) in terms of the parameters and sufficient statistics.
Answer: To parameterize a module network, we only need one CPD for each cluster,
i.e., Pk(X|Uk), k = 1,2,...,K. The set of parameters for each Pk(X|Uk)is {θx1|uk|uk∈
|V al(Uk)|}. The sufficient statistics for each CPD are simply aggregated from each family in
the cluster. Given the sufficient statistics for each cluster, the likelihood function looks the
same as the ordinary BN case (view each cluster as a single family with the CPD Pk(X|Uk)).
2. We use greedy local search to learn the structure of the cluster network. We will use the
following types of operators (each operation should remain the graph acyclic):
•Add operators that add a parent for a cluster;
•Delete operators that delete a parent for a cluster;
•Node-Move operators ok→k′(X)that change from A(X) = kto A(X) = k′. (If
X∈PaCk′, moving Xto k′is not allowed.)
As usual, we want to reduce the computational cost by caching our evaluations of operators
and reusing them from step to step.
(a) [2 points] Why did we not include edge reversal in our set of operators? Answer: In
ordinary BN, an edge represents a one-to-one relationship between two variable, however,
in the module networks, an edge from a variable to another variable actually represents
a one-to-many relation between the variable and all the variables in the cluster. So the
relation is not symmetry, reversing the edge is not well-defined.
(b) [2 points] Describe an efficient implementation for the update associated with the
Node-Move operator. Answer: When Xis moved from cluster kto k′, only the
local scores of these two modules change. So the rescoring of these two modules can be
efficiently calculated by substracting X’s statistics from the sufficient statistics of Ckand
adding the sufficient statistics regarding Xto the overall sufficient statistics of Ck′.
(c) [6 points] For each type of operator, specify which other operators need to be reeval-
uated once the operator has been taken. Briefly justify your response. (Suppose that
we cache and update evaluations of operators and reuse them to save the computa-
tion.)
Answer: For adding and deleting operators, if the operator changes the parents of
cluster Ck, then we only need to update the changes in score for those operators that
involve Ck. For moving operators, if the operator is to move a variable from cluster kto
k′, then we only need to update the changes in score for those operators that involve Ck
and Ck′.
New exercise (chapters 12, 18) — Sampling on a Tree [15 points]
Suppose we have a distribution P(X,E) over two sets of variables Xand E. Our distribution
is represented by a nasty Bayes Net with very dense connectivity, and our sets of variables X
and Eare spread arbitrarily throughout the network. In this problem our goal is to use the
sampling methods we learned in class to estimate the posterior probability P(X=x|E=e).
More specifically, we will use a tree-structured Bayes Net as the proposal distribution for use in
the importance sampling algorithm.
1. [1 points] For a particular value of xand e, can we compute P(x|e) exactly, in a
tractable way? Can we sample directly from the distribution P(X|e)? Can we compute
˜
P(x|e) = P(x,e) exactly, in a tractable way? For each question, provide a Yes/No
answer and a single sentence explanation or description.
Answer: No, No, Yes
2. [7 points] Now, suppose your friendly TAs have given you a tree network, where X1is the
root and each Xifor i6= 1 has exactly one parent Xp(i). They tell you that the distribution
Q(X,E) defined by this network is “close” to the distribution P(X,E). You now want to
use the posterior in Qas your proposal distribution for importance sampling.
(a) Show how to sample from the posterior in Q. More specifically, provide an explicit
construction for a clique tree over this network, and show how to use it to compute
the posterior Q(X|E=e). Describe how to sample from this posterior, once it has
been computed. Answer: Create a clique tree where each clique is a pair of variables
(child and parent). Multiply in the indicator functions for the evidence E=e. The
distribution across the tree now represents Q(X,E|E=e). Calibrate the tree. Now,
the belief at a clique over (X, PaX)is proportional to Q(X, PaX|E=e). From this
belief, we can easily compute Q(X|PaX,E=e)(use Bayes’ Rule). Using these CPDs,
we can now forward sample directly from the posterior in Q(sample the first variable,
then instantiate it in neighboring cliques, repeating to forward sample).
(b) Now you must reweight the samples according to the rules of importance sampling.
You want your weighted samples to accurately represent the actual posterior in the
original network P(X|E=e). Show precisely how you determine the weights w[m]
for the samples. Answer: The weight of the particle is:
w[m] = P′(x[m],e[m])
Q(x[m],e[m]|e)
(c) Show the form of the final estimator ˆ
P(X=x|E=e) for P(X=x|E=e),
in terms of the samples from part i, and the weights from part ii. Answer: The
estimator:
ˆ
P(X=x|E=e) = PM
m=1 w[m]1{x[m] = x}
PM
m=1 w[m]
3. [7 points] Examining the results of your sampling, you find that your TAs were wrong,
and the original tree from which you sampled did not provide very good estimates for
the posterior. You therefore decide to produce a better tree, and rerun the importance
sampling again. This better tree should represent a distribution which is “closer” to the
posterior from which you are trying to sample. Show how you can use the samples produced
in the previous step to learn the best tree (i.e., a tree that best represents the posterior
distribution as estimated in part b, according to the likelihood score). Assume you have
access to a maximum spanning tree algorithm, and your job is to define the weights for
the edges in terms of the estimator computed above. Answer: We will use the maximum
spanning tree algorithm to select edges where the weight for a candidate edge between Xiand
Xjis computed as:

wij =F amScore(Xi|Xj:D)−F amScore(Xi:D)
=I(Xi;Xj) + H(Xi)
=X
xiX
xj
¯
M[xi, xj] log ¯
M[xi, xj]
¯
M[xi]−X
xi
¯
M[xi] log ¯
M[xi]
¯
M
where the ¯
Mterms are the sufficient statistics from the weighted dataset:
¯
M[xi, xj] = X
m
1{xi[m] = xi, xj[m] = xj}w[m],
etc.
Exercise 18.23 — Optimal reinsertion structure learning [10 points]
More complex search operators are sometimes useful in Bayesian Network structure learning.
In the problem we will consider an operator that we will call the Reinsertion operator. This
operator works as follows:
Assume that we have been searching for awhile, and our current structure is Gt. We now choose
a variable Xto be our target variable. The first step is to remove the variable from the network,
by severing all connections into and out of this target variable. We then select the optimal set of
parents and children for X, and reinsert it into the network with edges from the selected parents
and to the selected children. In addition, consider that we will limit the number of parents to a
variable to Kpand the number of children to Kc. This restriction helps us to avoid the need to
consider overly complex networks.
Throughout this problem, assume the use of the BIC score for structure evaluation.
1. [2 points] Let Xibe our current target variable, and assume for the moment that we have
somehow chosen Uito be optimal parents of Xi. Consider the case of Kc= 1, where we
want to choose the single optimal child for Xi. Candidate children — those that do not
introduce a cycle in the graph — are Y1,...,Yℓ. Write an argmax expression for finding
the optimal child C. Explain your answer.
Answer: Because the BIC score is decomposable by family, we can consider only the family
of the proposed child when computing the change in score that would result from adding that
child. Thus, we choose the child YCsuch that:
YC= arg max
Yi
F amScore(Yi|PaYi, X)
= arg max
YiMII ˆ
P(Yi;PaYi, X)−II ˆ
P(Yi;PaYi)−log M
2∆Dim
We choose this Yconly among variables that are not ancestors of any of the variables in Ui.
2. [4 points] Now consider the case of Kc= 2. How do we find the optimal pair of children?
Assuming that our family score for any {Xk,Uk}can be computed in a constant time
f, what is the best asymptotic computational complexity of finding the optimal pair of
children? Explain. Extend your analysis to larger values of Kc. What is the computational
complexity of this task?
Answer: For the same reason as above, we can “score” each child independently, and
choose the top Kcof them. The total cost for Kc= 2 children is O(fN)and for general

Kcwe can compute the scores, sort them, and select the top candidates. The complexity of
this is O(f N +Nlog N). It is also possible to use a better sort if you only need the top Kc
candidates, and that the complexity becomes O(f N +Nlog Kc).
3. [3 points] We now consider the choice of parents for Xi. We now assume that we have
already somehow chosen the optimal set of children and will hold them fixed. Can we do
the same trick when choosing the parents? If so, show how. If not, argue why not.
Answer: No we cannot do this. The family score for the child cannot be evaluated indepen-
dently for each parent. Instead we must consider all combinations of parents. The complexity
of this task is exponential in Kp.
New exercise — Structure learning for tree-augmented naive Bayes [21 points] Now, consider
the problem of learning a classifier network structure which augments the Naive Bayes model.
Here, we have a class variable Cin addition to the feature variables X1,...,Xn.
1. [5 points] We begin by assuming that the class variable Cis connected to each of the
Xi’s, but in addition, each of the Xi’s may have at most one additional parent. Modify the
algorithm of section 18.4.1 to find the highest-scoring network subject to these constraints.
You may assume that we use a structure-equivalent scoring function.
Answer: In this problem, we again are optimizing with respect to the BIC score, but this
time, our baseline graph is the regular Naive Bayes model (which we shall call GN B ), which
contains an edge from the class variable Cto each feature Xi. Thus, we are interested in
maximizing
∆(G) = score(G:D)−score(GN B :D).
To do this, we redefine the weights
wXj→Xi= FamScore(Xi|Xj, C :D)−FamScore(Xi|C:D)
=M[II ˆ
P(Xi;Xj, C)−II ˆ
P(Xi;C)] −log M
2|Val(Xi)−1||Val(Xj)−1||C|
=M[II ˆ
P(Xi;Xj, C)−II ˆ
P(Xi;C)] −log M.
As before, it is a useful and easy exercise to check that wXj→Xi=wXi→Xj. Thus, picking a
graph which maximizes ∆(G)simply involves using an maximum weight undirected spanning
tree or forest approach identical to the procedure given in part (a). Using such a method to
find edges between the Xi’s, we finish by directing all edges (as before) and adding an edge
from Cto each Xi.
2. [16 points] (*) Now, assume that we allow ourselves even more flexibility: for each Xi,
we need to decide separately whether to add Cas a parent or not. We want to pick the
highest scoring network where each node Ximay or may not have Cas a parent, and
each Xican have at most one additional parent Xj. (The node Cis always a root.) Show
how to reduce this problem to one of finding the maximum-weight directed spanning tree.
(Hint: Consider separately each possible family for each node Xi.)
Note: You do not need to present an algorithm for computing maximum-weight directed
spanning trees, but only to show how you could solve the problem of finding an optimal
BN of this type if you had a maximum-weight directed spanning tree algorithm to use as
a subroutine.
Answer: There are several possible correct answers to this problems; we sketch a few working
approaches here.
Method 1
We start with the empty graph (G0) as our baseline. For each Xi, the possible (non-empty)
parent sets of Xiare: (1) {Xj}(for some Xj), (2) {Xj, C}(for some Xj), and (3) {C}.
Relative to the empty graph, the change in BIC score resulting from using each of the parent
sets above is:
∆{Xj}= FamScore(Xi|Xj:D)−FamScore(Xi:D)
=MII ˆ
P(Xi;Xj)−log M
2
∆{Xj,C}= FamScore(Xi|Xj, C :D)−FamScore(Xi:D)
=MII ˆ
P(Xi;Xj, C)−3 log M
2
∆{C}= FamScore(Xi|C:D)−FamScore(Xi:D)
=MII ˆ
P(Xi;C)−log M
2
Our goal is to pick a single parent set (which may be empty) for each Xiwhile making sure that
the generated network is acyclic. To do this, consider a graph over the nodes C, X1,...,Xn,
with edges from the class variable Cto each feature Xiand from each feature Xjto every other
feature Xi. We use the edge weights wC→Xi= ∆{C}and wXj→Xi= max(∆{Xj,C},∆{Xj}).
Note that in the latter term, we take a max since the presence or absence of Cin the parent
set of Xidoes not make a difference with regard to acyclicity of the generated network, as
sorted out during the maximum directed spanning forest algorithm; thus, we can simply use
the higher scoring option.
Given a maximum directed spanning forest Ffor this graph, we define the parent set of each
feature Xiin the resulting network as follows:
PaG
i=
{Xj}if Xj→Xi∈ F and ∆{Xj}≥∆{Xj,C},
{Xj, C}if Xj→Xi∈ F and ∆{Xj}<∆{Xj,C},
{C}if C→Xi∈ F, and
∅otherwise.
By construction, these four cases are disjoint and hence the parent set of each feature is well-
defined. Furthermore, it is easy to verify that any cycle in the generated network implies the
existence of a corresponding cycle in F, an impossibility. (To see this, note that Xj→Xi
in the network can only happen if Xj→Xi∈ F by the definition given above; apply this
to all edges in a cycle of the generated network.) Thus, any spanning forest gives a well-
formed Bayesian network. Similarly, one may also show that any valid Bayesian network which
meets the constraints of the problem statement gives rise to a valid directed spanning forest.
Since total weight of any forest is identical to the BIC score of the corresponding network, it
follows that this algorithm generates an optimal BIC-scoring network subject to the problem
constraints.
As a final note, if we are restricted to using a maximum weighted directed spanning tree
algorithm, the method of zeroing out negative weights described in part (a) works here as well.

Method 2
We again use G0as our baseline, and define ∆{Xj},∆{Xj,C}, and ∆{C}as before for each
Xi. For the reduction to the maximum weighted directed spanning forest problem, we define
a graph containing Cand X1,...,Xnas before, with directed edges from Cto each Xiand
from each Xjto Xi. This time, however, we also introduce new nodes CX1,...,CXn, and
create edges from CXjto Xifor all i6=j, and edges from Xito CXifor all i. For each Xi,
the weight of the Cto Xiedge is ∆{C}, the weight of the Xjto Xiedge (for all j6=i) is
∆{Xj}, the weight of the CXjto Xiedge (for all j6=i) is ∆{Xj,C}, and the weight of the Xi
to CXiis set to a sufficiently large positive constant (to ensure that the Xito CXiis always
selected by the maximum weighted directed spanning forest algorithm).
Given a maximum directed spanning forest Ffor this graph, we define the parent set of each
feature Xiin the resulting network as follows:
PaG
i=
{Xj}if Xj→Xi∈ F
{Xj, C}if CXj→Xi∈ F
{C}if C→Xi∈ F, and
∅otherwise.
Clearly, the parent set of each Xiis well-defined. Again, we can check that cycles in the
generated network imply cycles in F. (As a simple example, note that if Xj→Xi∈ F, then
selecting either Xi→Xjor CXi→Xjfor the spanning forest will generate a cycle because
of the required edge Xi→CXi; you can generalize this reasoning to cycles of length greater
than two.) The remaining arguments for correctness follow similarly to those given in Method
1.
Method 3
In the last method, we do not use G0as the baseline; rather, we use a graph G′
0in which we
include the C→Xiedge for each Xisuch that ∆{C}>0(using the definition from Method
1). We then redefine for each Xi,
∆{Xj}= FamScore(Xi|Xj:D)−max(FamScore(Xi:D),FamScore(Xi|C:D))
∆{Xj,C}= FamScore(Xi|Xj, C :D)−max(FamScore(Xi:D),FamScore(Xi|C:D))
and create a graph over only the Xi’s such that each edge Xj→Xiis given weight max(∆{Xj},∆{Xj,C}).
Given a maximum directed spanning forest Ffor this graph, we define the parent set of each
feature Xiin the resulting network as follows:
PaG
i=
{Xj}if Xj→Xi∈ F and ∆{Xj}≥∆{Xj,C},
{Xj, C}if Xj→Xi∈ F and ∆{Xj}<∆{Xj,C},
{C}if Xj→Xi/∈ F and C→Xi∈ G′
0, and
∅if Xj→Xi/∈ F and C→Xi/∈ G′
0.
Arguing that the choice of parent set is well-defined and that the resulting Bayesian network
must be acyclic is easy (a cycle in the generated network implies a cycle in Fby construction).
This time, it is not true that any valid Bayesian network fitting the constraints in the problem
corresponds to some directed spanning forest; in particular, it might be the case that for some
network where Xihas parent set ∅, no corresponding directed forest exists since C→Xi∈ G′
0.
However, one can argue that the highest scoring Bayesian network does correspond to some
directed spanning forest. To see why, note that in the previous scenario, C→Xi∈ G′
0implies
that ∆{C}>0for Xi, so changing the parent set of Xito {C}yields an improvement in
the total score of the network without generating cycles. Thus, any network which has no
corresponding directed spanning forest cannot be optimal.
Finally, it suffices to note that the weight of any directed spanning forest is equal to the
score corresponding Bayesian network minus the score of G′
0, so an maximum weight directed
spanning forest implies a maximal scoring Bayesian network.
Common errors:
(a) Constructions similar to Method 3, but which used G0as the baseline graph and attempted
to account for C→Xiedges as a postprocessing step. This fails for a simple network
X1←C→X2in which all three variables are strongly correlated (but X1and X2are
conditionally independent given C). The score for adding an X1→X2edge (with or
without Cas another parent of X2) is certainly higher than that of not including X1→X2
in the baseline graph G0(where X1and X2are independent of C). Thus, the maximum
weighted directed spanning forest algorithm will be forced to select an X1→X2edge
even though such an edge does not exist in the true network.
(b) Constructions similar to Method 2, but which failed to include the forced edges Xi→
CXi, resulting in possible cycles in the resulting network. Without these forced edges, a
maximum weight directed spanning forest might contain both CXj→Xiand CXi→Xj,
causing the resulting network to have an Xi↔Xjcycle.
(c) [4 points] Constructions similar to Method 1, but which omitted the Cvariable and
instead set edge weights wXj→Xi= max(∆{Xj,C},∆{Xj},∆{C}). A minor problem here
is that for a network with nfeature variables, we know that any maximum weight directed
spanning tree contains at most n−1edges. Hence, we can make decisions for the parent
set of at most n−1feature variables. In the degenerate case of a network with one
feature variable X1, the returned network will always have Cdisconnected from X1.
(d) [6 points] Constructions which omit the possibility of letting Xihave the parent set {C}.
Chapter 19
Exercise 19.3 — EM for CPD-trees [6 points]
Consider the problem of applying EM to parameter estimation for a variable Xwhose local
probabilistic model is a CPD-tree. We assume that the network structure Gincludes the structure
of the CPD-trees in it, so that we have a structure Tfor X. We are given a data set Dwith
some missing values, and we want to run EM to estimate the parameters of T. Explain how we
can adapt the EM algorithm in order to accomplish this task.
Answer: Consider the leaves of tree T. Each contains a distribution over the values of X
corresponding to a specific set of values qfor Q, where Qis a subset of the parent nodes U. What
does this subset of parent nodes represent? It represents the relevant parents in a given situation,
specifically whenever Q=q. The other parents become irrelevant in this case, as their values do
not change the resulting distribution over values for X. In other words, when Q=q, it is as if X
only has Qas parents. More formally, whenever q⊆u,P(X|U=u) = P(X|Q=q). Notice
that for each leaf Qcorresponds to the variables encountered on the path from the root of the tree
to that leaf.
For simplicity let us assume that all variables are binary. Consider a leaf in the tree. We determine
its relevant subset of parents and the values assigned to this subset (Qand qfrom the above). Then
the parameter that represent that leaf looks like θX|q. We will get a similar parameter for every other
leaf in the tree. If we had complete data, the parameters would be estimated using the sufficient
statistics:
θX|q=Mx,q
Mq
=PM
j=1 1(X[j] = x, Q[j] = q)
PM
j=1 1(Q[j] = q)
Similarly, each iteration then updates the parameters as using the expected sufficient statistics:
θX|q=˜
Mx,q
˜
Mq
=PM
j=1 P(x, q|d[j],θold)
PM
j=1 P(q|d[j],θold)
Exercise 19.4 — EM for noisy-OR [9 points] Consider the problem of applying EM to
parameter estimation for a variable Xwhose local probabilistic model is a noisy-or. Assume that
Xhas parents Y1,...,Yk, so that our task for Xis to estimate the noise parameters λ0,...,λk.
Explain how we can use the EM algorithm to accomplish this task. (Hint: Utilize the structural
decomposition of the noisy-or node, as in figure (4.12) of the reader.)
Answer:
Suppose we decompose the noisy-or node into table CPT nodes as done in figure (4.12) of the reader
(see Figure 7 above). Since X’s CPT becomes a deterministic OR, we leave its CPT fixed in the EM
algorithm. We treat the Y′
ias unobserved variables. The only parameters we need to estimate for
this expanded noisy-or are the noise parameters λicontained in the CPTs for Y′
iand λ0contained
in the CPT for Y′
0. We have λi=θY′
i=1|Yi=1 =P(Y′
i= 1 |Yi= 1) and λ0=θY′
0=1 =P(Y′
0= 1).
The parameters θY′
i=0|Yi=0 and θY′
i=1|Yi=0 are fixed during EM to 1and 0, respectively.
So when we use EM we update these parameters as follows:
λi=PM
j=1 P(Y′
i= 1, Yi= 1 |d[j],θold)
PM
j=1 P(Yi= 1 |d[j],θold)
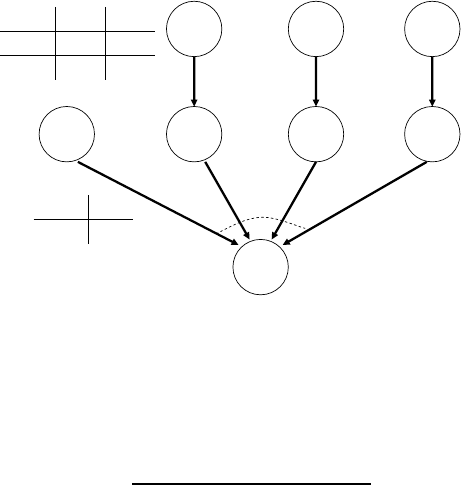
Y1Y2Y3
Y1' Y2' Y3'Y0'
X
OR
λi
0Yi' = 1
1-λi
1Yi' = 0
Yi = 1Yi = 0
λ0
Y0' = 1
1-λ0
Y0' = 0
Figure 7: Noisy Or Decomposition
λ0=PM
j=1 P(Y′
0= 1 |d[j],θold)
M
Exercise 19.15 — Message passing with EM [15 points]
Suppose that we have an incomplete data set D, and network structure Gand matching pa-
rameters. Moreover, suppose that we are interested in learning the parameters of a single CPD
P(Xi|Ui). That is, we assume that the parameters we were given for all other families are
frozen and do not change during the learning. This scenario can arise for several reasons: we
might have good prior knowledge about these parameters; or we might be using an incremental
approach (for example, see the section in Box 19.C on accelerating convergence).
We now consider how this scenario can change the computational cost of the EM algorithm.
1. [10 points] Assume we have a clique tree for the network Gand that the CPD P(Xi|Ui)
was assigned to clique Cj. Analyze which messages change after we update the parameters
for P(Xi|Ui). Use this analysis to show how, after an initial pre-computation step, we
can perform a single iteration of EM over this single family with a computational cost that
depends only on the size of Cjand not the size of the rest of the cluster tree.
Answer: As an initial pre-computation step, we will fully calibrate Mtrees, one for each
instantiation of the observations o[m].
Now suppose we have updated the parameters for P(Xi|Ui), and now will consider what
computation is necessary to perform a full EM step. The E-step involves calibration of the
clique trees. During calibration, only the outgoing messages and other messages pointing away
from Cjwill change. To complete the E-step, we collect the sufficient statistics:
¯
M[xi,ui] =
M
X
m=1
P(xi,ui|o[m], θ)

Then to perform the M-step, which consists of updating P(Xi|Ui), we calculate:
P(Xi|Ui) = ¯
M[xi,ui]
¯
M[ui]
Now we work backward to see what computation was necessary to perform these calculations.
To calculate the probabilities in the E-step, we use part of the result of calibration:
P(xi,¯ui|¯o[m], θ) = X
Cj−{Xi,¯
Ui}
β′
j(Cj|¯o[m], θ)
where β′
jis the updated belief of Cj.
β′
j(Cj|¯o[m], θ) = ψ′
jY
i∈N (|)
δi→j
where ψ′
jis the updated initial belief of Cj.
ψ′
j=Y
k:α(k)=j
φk
where αis the function that assigns factors to cliques; we know that the updated P(Xi|Ui)
is one of these factors for Cj.
Note that the only messages that are used (δi→j) were unchanged during calibration (since
incoming messages to Cjremain unchanged. Therefore, we actually don’t need to perform
any calibration computation at all. Furthermore, the computation described in each of the
equations above only involves the scope of Cj; therefore the computational cost depends only
on the size of Cj(and also on M, since we do this for each of the M trees), and not on the
size of the rest of the tree.
2. [5 points] Would this conclusion change if we update the parameters of several families
that are all assigned to the same cluster in the cluster tree? Explain.
Answer: The conclusion does not change. All of the calculations above remain the same;
the only difference is that multiple factors used to calculate the initial belief ψ′
jwill have been
updated when this calculation is performed.
Exercise 19.16 — Incremental EM Suppose we are given a Bayes net G, and a partition of
the variables into ksubsets, X=X1∪X2∪... ∪Xk. For each M-step, we choose, according to
some strategy, one subset Xi, and then instead of optimizing all the parameters of the network
at once, we optimize only the parameters θX|PaXfor X∈Xi.
Is this modified version of EM still guaranteed to converge? In other words, does
ℓ(θt:D)≤ℓ(θt+1 :D)
still hold? If so, prove the result. If not, explain why not.
Answer: We first use theorem 19.5 to conclude that the improvement in the log-likelihood is
lower-bounded by the expected log-likelihood, i.e.,
ℓ(θt+1 :D)−ℓ(θt:D)≥IEP(H|D,θt)ℓ(θt+1 :D+)−IEP(H|D,θt)ℓ(θt:D+)
The above holds for any choice of parameters, θt+1 and θt. Now, say in the current iteration, we
are maximizing over the parameters in set i. We compute θt+1 by selecting the parameter that
maximizes
IEP(H|D,θt)ℓ(θ:D+)
subject to the constraint that all the parameters not in set iremain the same. Hence, within the
constrained space because of the maximization operation
IEP(H|D,θt)ℓ(θt+1 :D+)−IEP(H|D,θt)ℓ(θt:D+)≥0
Thus, we conclude that the log-likelihood increases at every iteration of EM.
Note that this is not sufficient to say that EM converges. For EM to converge, an upper-bound to the
log-likelihood function must exist. In the case of discrete data, it is at most zero because maximal
likelihood assigns 1 to each instance. However, in the case of continuous distributions, this is untrue
because the density function may assign arbitrarily large support to a point. If the likelihood function
is upper-bounded, then EM will converge to a local maxima, minima or a saddle point.
Exercise 19.27 — Structural EM
Recall that structural EM (SEM) uses the existing candidate Bayesian network to complete the
data, and then uses the completed data to evaluate each candidate successor network. One
possible scheme to discovering hidden variables in a Bayesian network is to introduce a discon-
nected hidden variable Hinto our current candidate, then use structural EM to “hook it up”
to the remaining network. Specifically, assume that our current candidate BN structure in the
structure search contains some set of known variables X1,...,Xn(ones that are observed at
least sometimes) and a hidden variable H(one which is never observed). Our current structure
Ghas the Xi’s connected to each other in some way, but the variable His not connected to
any other variable. As usual, SEM completes the data (including for the hidden variable) using
the network G, and uses the completed data to evaluate the potential successor BNs. It then
greedily chooses the successor network G′that most improves the score (we are using the BIC
(equivalently, MDL) score, so there may be no network improving the score). Show that, in the
chosen successor G′,Hwill still necessarily be disconnected from the Xi’s.
Answer: Recall that in SEM, we perform structure search by completing the data for our original
model G, which we then use to calculate parameters in successor networks G′. In our current candidate
network, we know that His disjoint from the rest of the network and never observed. Because H
is disjoint, we are asserting that His independent of all the other variables in the network no matter
the observation.
In SEM, we maintain a distribution Qover completed datasets implicitly as a pair hGQ,θGQi. An ob-
servation o[i]’s contribution to the expected sufficient statistic for His P(H|o[i],GQ,θGQ). Because
His independent of every other variable in G, though, this is simply the prior probablity of Hin θGQ.
Thus, the expected sufficient statistic for Hover the entire dataset is ¯
M[h] = M·P(h|GQ,θGQ). If
we were running standard parametric EM, H’s parameters would never change.
In the following, we will use the shorthand that P(x|y,GQ,θGQ) = PG(x|y)when it is convenient
(to avoid clutter).
Now, let us consider what happens in SEM. In SEM, we use the current completion of the data
relative to hG,θGQito compute sufficient statistics. Let xbe an instantiation to some subset of the
nodes X1, ...Xn. Then
¯
M[x, h] =
M
X
i=1
P(x, h |o[i],GQ,θGQ)
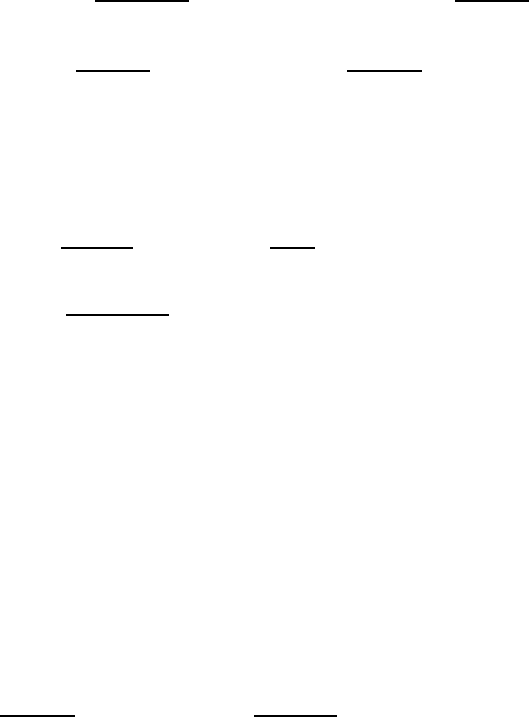
His disconnected from the rest of the nodes, so
¯
M[x, h] =
M
X
i=1
P(x|o[i],GQ,θGQ)P(h|o[i],GQ,θGQ)
Since His also never observed, it is never a part of o[i]. So His independent from any o[i]and
¯
M[x, h] =
M
X
i=1
PG(x|o[i])PG(h) = PG(h)
M
X
i=1
PG(x|o[i]) = PG(h)¯
M[x].
Now, consider what happens if SEM tries to add an edge from Hto some node Xi.PaXiis the set
of parents of Xiin the current network G. The only family that changes in the new network G′is
the family of Xi, so the difference between the log-likelihood scores of Gand G′is:
scoreL(G′:D)−scoreL(G:D)
= FamScoreL(Xi|PaXi∪H:D)−FamScoreL(Xi|PaXi:D)
=X
u∈Val(PaXi),h X
xi
¯
M[xi,u, h] log ¯
M[xi,u, h]
M[u, h]−X
u∈Val(PaXi)X
xi
¯
M[xi,u] log ¯
M[xi,u]
¯
M[u]
=X
uX
xiX
h
PG(h)¯
M[xi,u] log ¯
M[xi,u]
¯
M[u]−X
uX
xi
¯
M[xi,u] log ¯
M[xi,u]
¯
M[u]= 0.
Similarly, if SEM tries to add an edge from Xito Hthe only family that changes is the family of H.
We have
scoreL(G′:D)−scoreL(G:D)
=X
h,xi
¯
M[xi, h] log ¯
M[xi, h]
¯
M[xi]−X
h
¯
M[h] log ¯
M[h]
M
=MX
h,xi
PG(h) log PG(h)¯
M[xi]
¯
M[xi]−MX
h
PG(h) log PG(h) = 0.
So, adding any arc H—Xwould not increase the likelihood component of the BIC score in SEM.
The BIC scoring function penalizes extra parameters, so the sucessor network with an arc between H
and Xwould actually score less than the current candidate network. Thus SEM would never choose
the sucessor network with an edge to or from H.
Exercise 19.28 — EM with Uniform Initialization [8 points]
Consider the Naive Bayes model with class variable Cand discrete evidence variables X1,...,Xn.
The CPDs for the model are parameterized by P(C=c) = θcand P(Xi=x|C=c) = θxi|c
for i= 1,...,n, and for all assignments xi∈Val(Xi) and classes c∈Val(C).
Now given a data set D={x[1],...,x[M]}, where each x[m] is a complete assignment to the
evidence variables, X1, . . . , Xn, we can use EM to learn the parameters of our model. Note that
the class variable, C, is never observed.
Show that if we initialize the parameters uniformly,
θ0
c=1
|Val(C)|and θ0
xi|c=1
|Val(Xi)|,
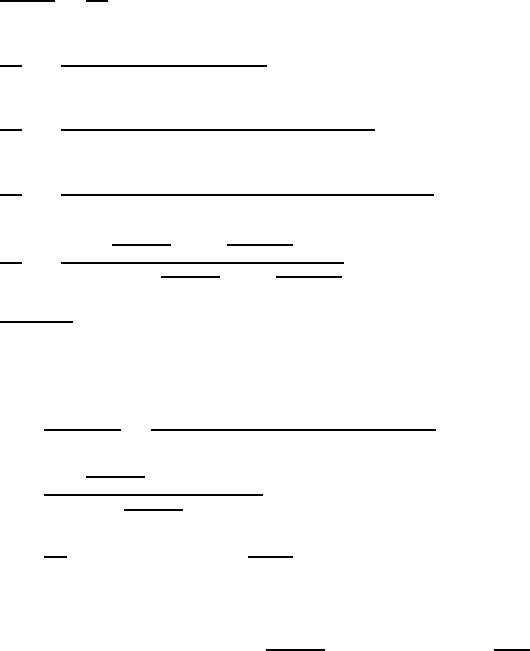
for all xi, c, then the EM algorithm converges in one iteration, and give a closed form expression
for the parameter values at this convergence point.
Answer: Computing the first iteration of EM (with initialization given above) we get:
θ1
C=c=¯
Mθt[c]
M=1
MX
m
P(c|x[m],θ0)
=1
MX
m
P(x[m]|c, θ0)P(c|θ0)
P(x[m]|θ0)
=1
MX
m
P(x[m]|c, θ0)P(c|θ0)
Pc′∈Val(C)P(x[m]|c′,θ0)P(c′|θ0)
=1
MX
m
P(c|θ0)Qn
i=1 P(xi[m]|c, θ0)
Pc′∈Val(C)P(c′|θ0)Qn
i=1 P(xi[m]|c′,θ0)
=1
MX
m
1
|Val(C)|Qn
i=1 1
|Val(Xi)|
Pc′∈Val(C)1
|Val(C)|Qn
i=1 1
|Val(Xi)|
=1
|Val(C)|
and
θ1
Xi=x|C=c=¯
Mθ0[x, c]
¯
Mθ0[c]=PmP(c|x[m],θ0)11{xi[m] = x}
PmP(c|x[m],θ0)
=Pm
1
|Val(C)|11{xi[m] = x}
M
|Val(C)|
from above
=1
MX
m
11{xi[m] = x}=M[x]
M
where M[x]is the number of times Xi=xappears in the data D.
We will now show by induction that for all t≥1,θt
C=c=1
|Val(C)|and θt
Xi=x|C=c=M[x]
M. The
second parameter implies that P(xi[m]|c, θt) = P(xi[m]|c′,θt)for all c, c′∈Val(C). We have
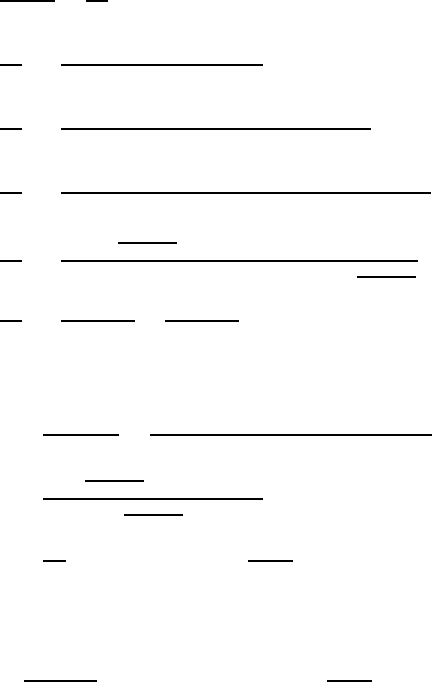
just shown this for t= 1, so assuming true for some t, we have for t+ 1,
θt+1
C=c=¯
Mθt[c]
M=1
MX
m
P(c|x[m],θt)
=1
MX
m
P(x[m]|c, θt)P(c|θt)
P(x[m]|θt)
=1
MX
m
P(x[m]|c, θt)P(c|θt)
Pc′∈Val(C)P(x[m]|c′,θt)P(c′|θt)
=1
MX
m
P(c|θt)Qn
i=1 P(xi[m]|c, θt)
Pc′∈Val(C)P(c′|θt)Qn
i=1 P(xi[m]|c′,θt)
=1
MX
m
1
|Val(C)|Qn
i=1 P(xi[m]|c, θt)
Qn
i=1 P(xi[m]|c, θt)·Pc′∈Val(C)1
|Val(C)|
=1
MX
m
1
|Val(C)|=1
|Val(C)|
and
θt+1
Xi=x|C=c=¯
Mθt[x, c]
¯
Mθt[c]=PmP(c|x[m],θt)11{xi[m] = x}
PmP(c|x[m],θt)
=Pm
1
|Val(C)|11{xi[m] = x}
M
|Val(C)|
from above
=1
MX
m
11{xi[m] = x}=M[x]
M
Thus we have shown that initializing the parameters uniformly the EM algorithm converges in one
iteration to
θt
C=c=1
|Val(C)|and θt
Xi=x|C=c=M[x]
M.
Chapter 20
Exercise 20.11 — Multi-conditional training [12 points] In this problem, we will con-
sider the problem of learning parameters for a Markov network using a specific objective func-
tion. In particular assume that we have two sets of variables Yand X, and a dataset D=
{hx[1],y[1]i,...,hx[m],y[m]i} We will estimate the model parameters θ= [θ1...θn] by maxi-
mizing the following objective function:
f(θ:D) = (1 −α)ℓY|X(θ:D) + αℓX|Y(θ:D)
where ℓX|Y(θ:D) means the conditional log-likelihood of the dataset Dusing the distribution
P(X|Y) defined by the Markov network with parameters θ(similarly for ℓY|X). Thus, our
objective is a mixture of two conditional log-likelihoods (0 < α < 1). As usual, we consider a
log-linear parameterization of a Markov network, using a set of nfeatures φi[Xi,Yi] where Xi
and Yiare some (possibly empty) subsets of the variables Xand Y, respectively.
1. [4 points] Write down the full objective function f(θ:D) in terms of the features φiand
weights θi
Answer: The objective function can be written as:
f(θ:D) =
M
X
m=1 X
i
θiφi[Xi[m],Yi[m]]!−(1 −α) log X
Y
exp X
i
θiφi[Xi[m],Yi]−
αlog X
X
exp X
i
θiφi[X,Yi[m]]
2. [8 points] Derive ∂
∂θif(θ:D): the derivative of the objective with respect to a weight θi.
Write your final answer in terms of feature expectations IEQ[φi], where Qis either: the
empirical distribution of our dataset ˆ
P; or a conditional distribution of the form Pθ(W|
Z=z) (for some sets of variables W,Z, and assignment z.)
Answer: The derivative has the form:
∂
∂θi
f(θ:D) =
M
X
m=1 IE ˆ
P[φi]−(1 −α)IEPθ(Yi|X=x[m])[φi]−αIEPθ(Xi|Y=y[m])[φi]
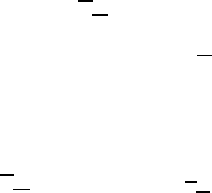
Chapter 21
Exercise 21.1a — Causal query simplification Let Cbe a causal model over the graph
structure G. Then:
P(Y|do(Z:= z),do(X:= x),W=w) = P(Y|do(Z:= z),X=x,W=w)
if Yis d-separated from Xgiven Z,Win the graph GZ X .
Answer: We will prove the contrapositive. Suppose P(Y|do(Z:= z),do(X:= x),W=w)6=
P(Y|do(Z:= z),X=x,W=w). Then there is an active path in GZfrom some observed Uto
some Y∈Ygiven XZW −Uthat contains an edge between some X∈Xand its parent. Choose
the last such segment along the path to Yand the active path from this ˆ
Xto Y. Note that this path
cannot contain a segment between an X′∈Xand its child; otherwise the path would be inactive
since X′is observed and this wouldn’t be a v-structure (since the edge is from X′to its child). So
the path from ˆ
Xto Ywould also be active in GZX and so not d-sepGZ X (Y;X|ZW ).
Exercise 21.3 — Intervention queries
For probabilistic queries, we have that
min
xP(y|x)≤P(y)≤max
xP(y|x).
Show that the same property does not hold for intervention queries. Specifically, provide an
example where it is not the case that:
min
xP(y|do(x)) ≤P(y)≤max
xP(y|do(x)).
Answer: Consider the case of an XOR network over binary variables, where P(Z= 1) = 0.5,
X=Z, and Y=X⊕Z. In this case, P(Y= 1) = 0, but if we intervene at X, we get
P(Y|do(X= 1)) = P(Y|do(X= 0)) = 0.5.
Exercise 21.11 — Causal independence
1. [6 points] As for probabilistic independence, we can define a notion of causal independence:
(X⊥CY|Z) if, for any values x,x′∈Val(X), we have that P(Y|do(Z),do(x)) =
P(Y|do(Z),do(x′)). (Note that, unlike probabilistic independence — (X⊥Y|Z) —
causal independence is not symmetric over X,Y.) Is causal independence equivalent to
the statement: “For any value x∈Val(X), we have that P(Y|do(Z),do(x)) = P(Y|
do(Z)).” (Hint: Use exercise 21.3.)
Answer: No, they are not the same. In the case above, we have that P(Y= 1 |do(X)) = 0.5
for all values of X, but still P(Y= 1) 6=P(Y= 1 |do(X)).
2. [7 points] Prove that (X⊥CY|Z,W) and (W⊥CY|X,Z) implies that (X,W⊥C
Y|Z). Intuitively, this property states that, if changing Xcannot affect P(Y) when W
is fixed, and changing Wcannot affect P(Y) when Xis fixed, then changing Xand W
together cannot affect P(Y).
Answer: Here is a simplified version of the proof:
For any x,x′∈Val(()X)and w,w′∈Val(()W)we have:
P(Y|do(x,w),do(Z)) = P(Y|do(x),do(w),do(Z)) (16)
=P(Y|do(x′),do(w),do(Z)) (17)
=P(Y|do(x′),do(w′),do(Z)) (18)
=P(Y|do(x′,w′),do(Z)) (19)
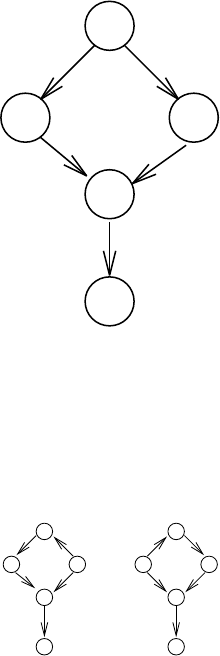
Where line 2 is true from (X⊥CY|Z,W), line 3 is true from (W⊥CY|X,Z). The
result shows that we have (X,W⊥CY|Z).
Exercise 21.12 — Learning Causal Models [17 points]
An important question in scientific discovery is using data to extract causal knowledge, i.e., the
existence of a causal path between two variables. Note that a causal path exists from Xto Yif
in any graph that is an I-map of the distribution, there is a causal (i.e., directed) path from Xto
Y. In this problem, we will consider the interaction between this problem and hidden variables.
Assume that our learning algorithm came up with the following network:
B C
D
E
A
which we are willing to assume is a perfect map for the distribution over the variables A, B, C, D, E
(i.e., it exactly captures the independencies and dependencies among them). Under this assump-
tion, among which pairs of these variables does there necessarily exist a causal path . . .
1. [7 points] . . . if we assume there are no hidden variables?
Answer: From the figures below we can see that the paths from Ato Band from Ato C
are not necessarily causal.
A
B C
D
E E
D
B C
A
The only way we could break the causal chain from Ato Dand Ewould be by making Athe
bottom of a v-structure (we would have to have Band Cas parents. If we do this, however,
we lose the independence assumption that I(B, C |A). We can refer to the arguments from
class to see that the other paths are causal. Thus, we have the following causal paths: Ato
D,Ato E,Bto D,Bto E,Cto D,Cto E, and Dto E.
2. [10 points] . . . if we allow the possibility of one or more hidden variables ?
Answer: We know from part (a) that paths from Ato Band Ato Care not necessarily
causal.
Now, consider the paths from Band Cto D. We know that observing Dmust activate a
path between Band C, which means Dmust be the bottom of a v-structure which links an
active path from Bto Dand an active path from Cto D. Since any new variables we add are
never observed, there can be no new v-structures between Band Dand no new v-structures
between Cand D. (If there were such a v-structure, we would now have the property that
I(B, C |A, D)which does not hold in the original network.)
Since Dmust be the bottom of a v-structure, we know that the paths which link Band C
to Dmust have their arrows pointing towards D. The only way left to break the causal path
from B(or C) to Dis to make a hidden variable a common parent of both Band D(or C
and D). There are 2 ways we might do this while preserving the arcs from Ato Band Ato C:
we can make Ha child of Awith 2 children: B(or C) and D, we can just replace the direct
connection from B(or C) to Dwith a path from Hto B(or C) and a path from Hto D. In
either case we lose the property that I(A, D |B, C)which holds in our original network.
If we reverse the arc from B(or C) to Aas in the figure for part (a), we can replace the link
from B(or C) to Dby a hidden variable Hwhich is a common parent of B(or C) and D.
This network satisfies the same independence assumptions. However, while we lose the direct
causal edge from B(or C) to D, a new causal path through Ais now present. Note that the
only way we were able to do this was by reversing the arc between Aand B(or C), so the only
way this new causal path from B(or C) to Dcan be broken is by breaking the causal path
from Ato Dwhich we consider below.
Thus, the only way of breaking causal paths still open to us is to alter the path from Bto C
through A. We know that observing Amust block an active path between Band C. Clearly, the
active path which observing Ablocks goes through A. Thus there cannot be any v-structures
along the path from Bto Cthrough A. If Awere at the bottom of such a v-structure then
we would activate the path from Bto Cby instantiating Awhich means we would lose the
property that I(B, C |A). If a hidden variable Hwere at the bottom we would break the
active path through A, i.e., we would now have I(B, C)which is not true. (We cannot correct
for this new independence by adding a direct path between Band Cthrough a hidden variable
because we would then lose the property that I(B, C |A).) These remarks hold true whether
we are considering modifications to the initial network (with paths from Ato Band C) or to
either of the modifcations shown in the figures in part (a).
Thus, the paths that are guaranteed to be causal are from Ato D,Ato E,Bto D,Bto E,
Cto D,Cto E, and Dto E.
Chapter 22
New exercise (chapter 22) — Decomposable Utility Functions [8 points]
Recall that a utility function is a mapping from an outcome (assignment to variables) to a
real number. Suppose we have Mvariables, X1...XM, each of which has a domain of size
|Val(Xi)|=d, and a utility function U(X1. . . XM) over these variables. Our goal in this problem
is to find the “ideal” outcome (i.e., the one that gives us the highest utility). Concretely, we are
searching for:
(x∗
1...x∗
M) = arg max
x1...xM
U(x1...xM).
Assume that this outcome is unique (that is, there are no ties for first-place outcome).
Suppose that our Uis decomposable as a sum of utilities for relatively small subsets of the
variables:
U(X1. . . XM) =
k
X
i=1
U(Yi),
where Yi⊂ {X1. . . XM}.
1. [5 points] Describe an algorithm that exactly determines (x∗
1. . . x∗
M) and U(x∗
1...x∗
M)
and that exploits the structure of the utility function to make it computationally more
efficient. You may use as a subroutine any algorithm that we described in class.
Answer: Let V(X) = exp(U(X)). Perform max-product with the set of factors defined
by V. Then U∗=U(x∗) = log V(x∗), where x∗is the maximizing assignment found by
max-product.
2. [3 points] Show that your algorithm requires a computational complexity of O(M d2) for
the case of chain decomposability, where:
U(X1. . . XM) =
M−1
X
i=1
U(Xi, Xi+1).
Answer: The biggest clique you need is of size 2, so you have O(d2)operations per clique,
giving a total run time of O(M d2).
Chapter 23
Exercise 23.14 — Value of Perfect Information [16 points]
1. [10 points] Let Ibe an influence diagram, Da decision variable in I, and Xa chance
variable which is a non-descendant of D. Prove that VPII(D|X)≥0. Moreover, show
that equality is achieved if and only if the decision at Dis unchanged for any value xof
Xand any assignment wto D’s other parents W. (Assume that ties are broken in some
prespecified way when two actions have the same expected utility.)
Answer: We prove this result for the case where Icontains only a single decision variable.
To show that VPII(D|X)≥0, it suffices to show that MEU[I′]≥MEU[I]where I′is the
influence diagram obtained by adding an edge from Xto Din I.
Let σ∗be an optimal strategy corresponding to the maximal expected utility in I, and let
δσ∗
D(D|PaD)be the probability distribution over choices of Dgiven values of its parents
specified by σ∗. Similarly, let γ∗be an optimal strategy for I′, and let δγ∗
D(D|X, PaD)be its
corresponding decision rule. We know that
MEU[I] = arg maxσEU[I[σ]] = EU[I[σ∗]]
=X
U∈U X
u∈Val(U)
uPBI[σ∗](U=u)
=X
U∈U X
u∈Val(U)X
x∈Val(X)X
d∈Val(D)
uP (U=u|x, d)PBI[σ∗](x, d)
where
PBI[σ∗](x, d) = δσ∗
D(d|paD)Y
Y∈X
P(y|paY).
Now, consider a strategy ˆγfor ID′in which we “ignore” the value of Xin our choice of
action at the decision node Dand act optimally otherwise; this corresponds to the decision
rule δˆγ
D(D|X, PaD) = δσ∗
D(D|PaD). Then,
PBI′[ˆγ](x, d) = δˆγ
D(d|paD)Y
Y∈X
P(y|paY)
=δσ∗
D(d|paD)Y
Y∈X
P(y|paY)
=PBI[σ∗](x, d),
so it follows that MEU[I] = EU[I[σ∗]] = EU[I′[ˆγ]] ≤EU[I′[γ∗]] = MEU[I′].
In particular, if the optimal strategy γ∗in I′does not differ from the optimal strategy σ∗in I
for any value xand assignment paD, then γ∗= ˆγ, so the equality holds and VPII(D|X) = 0.
On the other hand, if the optimal strategy γ∗in I′does differ for some value xand assignment
paD, then strategy γ∗must give strictly higher expected utility that strategy ˆγ(otherwise,
our tie-breaking convention would have ensured that we would stay with ˆγ). This implies
that MEU[I′] = EU[I′[γ∗]] >EU[I′[ˆγ]] = EU[I[σ∗]] = MEU[I], or VPII(D|X)>0, as
desired.

2. [6 points] Is the value of learning the values of two variables equal to the sum of the values
of learning each of them? I.e., is VPII(D|Y, Z) = VPII(D|Y) + VPII(D|Z). Either
prove that this assertion holds, or provide a counterexample.
Answer: No, the value of learning the values of two variables is not necessarily equal to the
sum of the values of learning each of them. We provide a counterexample.
Consider an influence diagram consisting of two binary-valued chance variables Yand Z, a
binary-valued decision node D, and a utility node U. Suppose that Yhas a uniform prior over
its two possible values, Zis deterministically related to its parent Yby the relationship Z=Y,
and U(x, y, d)is 1if x=y=dand 0otherwise.
Without additional information, the optimal action at Dis to select randomly. Calling this
strategy σ, we have MEU[I] = EU[I[σ]] = 1
2·0 + 1
2·1 = 1
2. Given knowledge of one of the
variables (say, Y), an optimal action at Dis to pick D=Y. Calling this strategy σ1and letting
the influence diagram I1contain an edge from Yto D, we have MEU[I1] = EU[I1[σ1]] = 1.
If we add another edge from Zto D, however, we don’t have any more information than before.
Calling this strategy σ2and letting the influence diagram I2contain edges from both Yand
Zto D, it follows that MEU[I2] = EU[I2[σ2]] = EU[I1[σ1]] = MEU[I1].
Thus, VPII(D|Z) = VPII(D|Y) = MEU[I1]−MEU[I] = MEU[I2]−MEU[I] =
VPII(D|Z, Y ) = 1
2, so VPII(D|Y, Z) = 1
2<1 = VPII(D|Y) + VPII(D|Z).
New (chapter 23) — Value of Imperfect Information [7 points]
In a decision problem, we know how to calculate the value of perfect information of Xat decision
D. Now imagine that we cannot observe the exact value of X, but we can instead observe a
noisy estimate of X.
For this problem, assume Xis binary. Also assume the noisy observation has a false positive
rate of pand a false negative rate of q. (That is when X= 0 we observe 1 with probability p,
and when X= 1 we observe 0 with probability q.)
Give a simple method by which we can calculate the improvement in MEU from observing this
imperfect information. (Your answer should be just a couple lines long, but you should explain
exactly how pand qare used.)
Answer: We introduce a new node, X′into our influence diagram, as a child of X, and CPD
according to the given noise model - P(X′|X) = 1 −p, q;p, 1−q. Then simply calculate the VPI
for X′at decision D.
