Manual
User Manual:
Open the PDF directly: View PDF ![]() .
.
Page Count: 94
- Overview
- Familiarization: The Digital Storage Oscilloscope (DSO)
- Experiment: Characterization of a CMOS Inverter
- Familiarization: The Krypton CPLD kit
- Experiment: Combinational logic implementation on the Krypton kit
- Logic Design
- Implementation in VHDL
- VHDL Implementation of the Priority Encoder With Scalar Interface
- Concept of a test-bench
- Results obtained by simulating the TestBench together with the PriorityEncoder
- Experimental procedure
- Issues
- Installing and using GHDL
- Synthesis using Quartus tools
- Download the SVF file onto Krypton card
- Familiarization: A scan-chain based circuit tester
- Experiment: Implement an 8-Bit ALU using the KRYPTON CPLD card
- Experiment: Implement a simple string recognizer using the KRYPTON CPLD card
- Experiment: Implement a greatest-common-divisor circuit using the KRYPTON CPLD card
- Experiment: RTL with SRAM
- Introduction to the use of a logic analyzer
DRAFT
Digital Systems Laboratory Manual
Vineesh V.S.
Piyush Soni
Arjun Vishnoria
Raunak Gupta
Soumik Sarkar
Avirup Mullick
Madhumita Date
Madhav Desai
Department of Electrical Engineering
IIT-Bombay, Mumbai
February 22, 2016
DRAFT
Chapter 1
Overview
This manual has been designed to guide a student through a laboratory
course in Digital Systems Design. It may be viewed as a series of experiments
which are of two types:
•Familiarization with tools and instruments: students should use these
to familiarize themselves with the important technology to be used in
the experiments.
•Experiments using the tools and instruments: these experiments are
designed to take a student through different aspects of digital design:
from CMOS inverter characterization up to complex Register-Transfer-
Level (RTL) descriptions.
The manual is to be followed in sequence.
1. In Chapter 2, the student is introduced to the digital storage oscillo-
scope.
2. In Chapter 3, the student characterizes a CMOS inverter to understand
its DC characteristics as well as its transient characteristics.
3. In Chapter 4, the student is introduced to the Krypton CPLD board
which will be used in subsequent experiments.
4. In Chapter 5, the student implements a simple combinational circuit
on the Krypton CPLD board and verifies it using switches and LED’s
on the board.
5. In Chapter 6, the student is introduced to the use of a scan-chain
based test scheme.
1
DRAFT
6. In Chapter 7, the student implements a more complex combinational
circuit on the Krypton CPLD board and verifies the functionality using
the scan-chain based tester.
7. In Chapter 8, the student implements a finite state machine on the
Krypton CPLD board and verifies the functionality using the scan-
chain based tester.
8. In Chapter 9, the student implements a Register-transfer-level (RTL)
description on the Krypton CPLD board and verifies the functionality
using the scan-chain based tester.
9. In Chapter 10, the student implements a RTL circuit with SRAM
on the Krypton CPLD board and verifies the functionality using the
scan-chain based tester.
10. In Chapter 11, the student is introduced to the use of a logic analyzer.
Some of the advanced experiments in RTL may need two weeks to complete.
Additional experiments and modifications to suggested experiments are of
course possible, depending on the instructor.
The manual was prepared with contributions from a group of students
and staff at the Wadhwani Electronics Laboratory in the Department of
Electrical Engineering at IIT Bombay.
2

DRAFT
Chapter 2
Familiarization: The Digital
Storage Oscilloscope (DSO)
Oscilloscopes are electronic instruments used to observe time-varying elec-
trical signals. Plots of signal voltage values can be displayed as a function
of time. Two types of oscilloscopes are usually used:
•Cathode-ray oscilloscope (CRO): A CRO uses analog circuits to sense
and display information on a screen. Typically, it does not have the
ability to store information about captured waveforms.
•Digital storage oscilloscope (DSO): A DSO typically digitizes and
stores captured signals in an internal memory. The stored signals
can then be analyzed and displayed on a screen. This offers great
flexibility in analysis of the captured waveforms.
2.1 The Tektronix TDS 200 series Digital Storage
Oscilloscope
We will describe the Tektronix TDS 200 series DSO1. A representation of
its front panel is shown in Figure 2.1.
This DSO has the following features:
•Handle signals of frequency upto 60 MHz
•Can display two signals simultaneously
1Some other DSOs available in the lab are TDS1002,TDS1002B and GDS-1072A-U-
GW INSTEK
3

DRAFT
Figure 2.1: TDS 210/220 two channel digital real-time oscilloscope
•Cursors with readout
•Autoset for quick setup
2.1.1 First look: verify that the instrument is working cor-
rectly
Let’s do a quick functional check to verify that instrument is working cor-
rectly. See Figure 2.1 to identify the connection points on the DSO front-
panel.
•Turn on the device and wait until the display shows that all the self
tests passed.
•Take the signal probe (Eg: TDS2200). This probe has two attenuation
settings, 1X and 10X. Set the attenuation button at the tip of the probe
to 1X.
•Now, attach the probe tip to the PROBE COMP 5V connector and
the probe reference lead to the PROBE COMP ground connector.
•Plug the probe into Channel 1 on the oscilloscope and push the AU-
TOSET 2button. On the display you should see a square wave of ap-
proximately 5V peak-to-peak at 1KHz, as shown in Figure 2.2. This
21 in Figure 2.1
4

DRAFT
(a) (b)
Figure 2.2: Testing the probe
ensures proper probe compensation3). Inform the lab staff if you ob-
serve something very different.
2.2 Capture a signal using the DSO
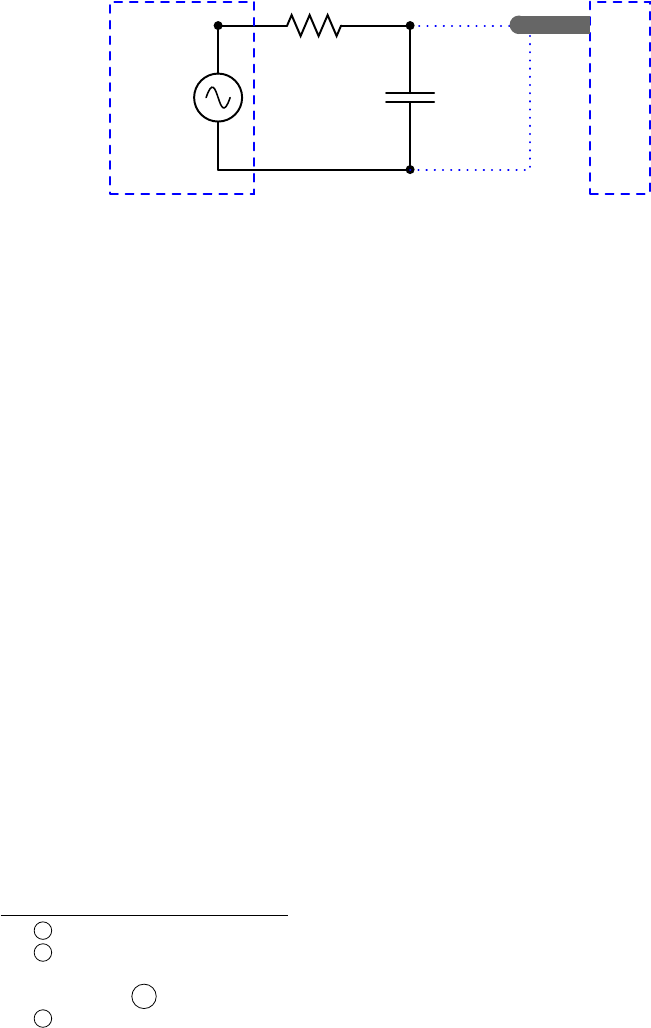
We will construct a test circuit and capture its waveforms using the DSO.
The test circuit is shown in Figure 2.3.
Connect the output of our circuit (node 2) to Channel 1 of the DSO as
shown in Figure 2.34. Are you able to see a stable waveform? If not you
may need to use a triggering mechanism to capture the waveform.
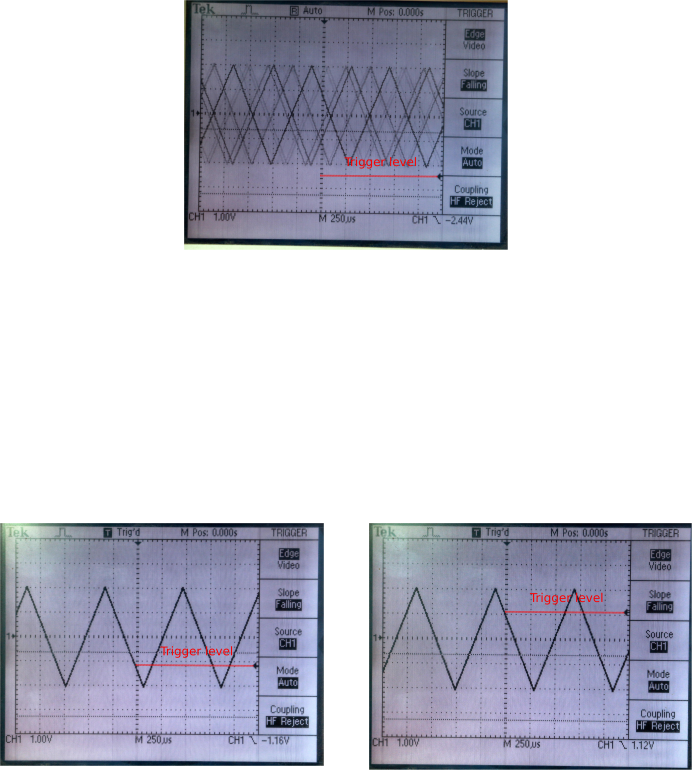
2.3 Use triggering to observe stable waveforms
If the signal being observed is not stable5, we can use a trigger to tell the
oscilloscope the point from which the display of information should start.
Note that the signal must be approximately periodic. There are three types
of triggering.
•Auto: In this mode, DSO will display stable waveform in the presence
of a valid trigger and unstable waveforms when no valid trigger is given
•Normal: DSO will display stable waveforms in the presence of a valid
trigger and will retain the previous stable waveform in the presence of
invalid trigger
3Probe compensation is a method to match the probe impedence to the input channel
of the DSO
4The ground wire of the probe has to be connected to node 3
5Either moving waveforms or multiple waveforms displayed on screen
5
DRAFT
1.8 kΩ 2
1
3
5 V
1 kHz
Probe
DSOFunction generator
0.1 µF
Figure 2.3: Test circuit with nodes for observing the signals
•Single: In this mode, waveform is acquired each time when the RUN/STOP6
button is pressed and a trigger condition is detected
Use the following steps to obtain a stable waveform.
•Push the MENU button7in the TRIGGER section
•Select Auto in the Mode section8
•Select CH1 in the Source section since we have connected the output
of the circuit to channel 1
•Adjust the LEVEL knob9and keep the trigger level somewhere be-
tween the peaks of the input waveform. You will be able to see a small
arrow on the right side moving up and down with your LEVEL knob
•You should be able to see a stable waveform on the display. Try out
Normal and Single triggering modes by varying the trigger level and
frequency of the input sine waveform (in function generator)
Type of triggering and various sources used for triggering are discussed
in the Appendix
62 in Figure 2.1
73 in Figure 2.1
8Mode button can be found from the set of buttons shown at the right side of the DSO
panel. Labelled 12 figure 2.1
94 in Figure 2.1
6

DRAFT
2.4 Measure signal parameters
To measure signal frequency, period peak-to-peak amplitude etc. of the
output waveform follow the steps given below
•Push the AUTOSET button footnoteIt automatically sets the trigger
levels and displays the waveforms
•Push the MEASURE button10 to go to the Measure menu
•Push the top menu box button to select Source
•Select CH1 for the first three measurements
•Push the top menu box button to select Type
•Push the first CH1 menu box button to select Freq
•Push the second CH1 menu box button to select Period
•Push the third CH1 menu box button to select Pk-Pk
2.5 Use cursors to take measurements
Using this one can vary the position of two cursor lines, get the voltage and
time values corresponding to the position of the cursors, difference between
them etc.
•Push the CURSOR button to go to the Cursor menu
•Push the top menu box button and select Type as Voltage11
•Set the Source option to CH1
•Vary the position of the two horizontal cursor lines using the CURSOR
1and CURSOR 2 knobes
•Observe the voltage values corresponding to cursors under Cursor 1
and Cursor 2 the difference between them under Delta
•Push the top menu box button and select Type as Time
•Vary the cursors using the previous knobs and observe the time values
10 5 in Figure 2.1
11Two horizontal lines will appear if you set Type as Voltage and two vertical lines will
show up if you set it as Time
7

DRAFT
2.6 Display two waveforms
There are two channels in the DSO which can be controlled independently
•Take another probe and plug it to the Channel 2 on the oscilloscope
•Connect its tip to the node 1 in the example circuit
•Push AUTOSET button
•Push CH 1 MENU 12
•Push the Coupling button on the right side of the display and see the
various coupling options
•Push Invert button to invert polarity of the signal
•Push CH 2 MENU 13 and repeat the above two steps
You can also get a plot of one signal versus the other (its called XY
mode). Follow the steps below to get a plot with channel-1 voltage on the
X-axis and channel-2 voltage on the Y-axis
•Push CH 1 MENU and use Coupling button to change the coupling
to Ground
•Use the POSITION 14 knob of channel-1 to bring the ground line of
channel-1 to the center of the display
•Change the coupling back to AC
•Push CH 2 MENU and use Coupling button to change the coupling
to Ground
•Use the POSITION knob of channel-2 to bring the ground line of
channel-2 to the center of the display
•Change the coupling back to AC
•Push the DISPLAY button15
12 7 in Figure 2.1
13 8 in Figure 2.1
14 9 in Figure 2.1
15 10 in Figure 2.1
8

DRAFT
•Push the FORMAT button and select XY format
•You will see a ellipse shaped plot on the display
•Change the amplitude and frequency of the input sine wave. What do
you observe?
Change the Format back to XT when you are done
2.7 Perform mathematical operations
DSO has the capability to perform some basic mathematical operations with
the input signals.
•Push MATH MENU button16
•Push the Operation button to change the operation to +,-and FFT
2.8 Appendix
2.8.1 More about triggering
•Trigger sources: The source for triggering can be AC line, External
sources or one of the input oscilloscope channels
•Type of triggering: Two types of triggering exists - edge triggering and
video triggering. In edge triggering, an edge occurs when the trigger
input passes through a specified voltage level in the specified direction.
Video triggering is used on fields or lines of standard video signals
2.8.2 Data acquisition
On acquiring analog data, the oscilloscope converts it into a digital form.
The 3 different acquisition modes include: Sample, Peak Detect and Aver-
age.
•Sample: The signal is sampled at equal intervals to reconstruct the
waveform and is more accurate. But sampling will not include the
narrow pulses in between the sampling intervals
16 11 in Figure 2.1
9
DRAFT
Figure 2.4: Untriggered waveform
Figure 2.5: Displayed waveform with
trigger level set below zero
Figure 2.6: Dispayed waveform with
trigger level set above zero
10
DRAFT
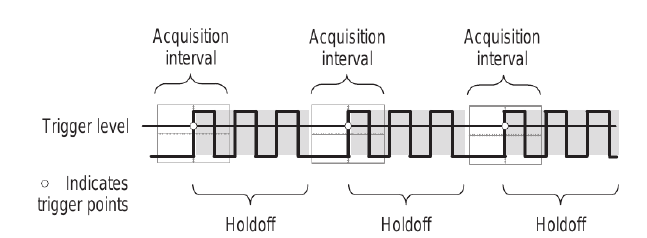
Figure 2.7: Holdoff- triggering not done
•Peak Detect: Detects the peaks over a specified interval and these are
used to display the waveform. Detecting the peaks will enable the
detection of narrow pulses
•Average: In this mode the average of several samples are acquired and
displayed.
2.8.3 Hold off
Hold-off time is the period that follows each acquisition. Triggers are not
recognized during the hold-off time. Sometimes for complex signals like a
digital pulse train, it might be required to use hold-off. Ref Fig 2.7 .
11
DRAFT
Bibliography
[1] http://mmrc.caltech.edu/Oscilliscope/TDS210%20Digital%20Os%20User%20
Manual.pdf (Accessed: 03-09-2015)
[2] www.tek.com/datasheet/tds200-series (Accessed: 04-09-2015)
[3] Photo credits: Anil R. Gawai, WEL, IIT Bombay
12
DRAFT
Chapter 3
Experiment:
Characterization of a CMOS
Inverter
The CMOS inverter is the simplest static complementary CMOS logic gate.
It is also representative of all static complementary logic gates, in the sense
that the qualitative behaviour of an arbitrary static complementary gate is
captured by that of the inverter.
In this experiment we will characterize a CMOS inverter. To characterize
a CMOS inverter, we will do a DC (or steady state behaviour) characteriza-
tion by measuring its transfer characteristics and output characteristics. We
will also do an AC (or transient behaviour) characterization and measure
the inverter delay and its dependence on the power supply, and will observe
the currents drawn from the power supply.
3.1 Components required and pre-requisites
•Familiarization with DSO.
•IC MM74C04 - 4
•Breadboard.
•Decoupling capacitors -0.1 µF.
•1 Ω Resistor for switching current.
•1.2 KΩ Resistor for output characteristics.
13
DRAFT
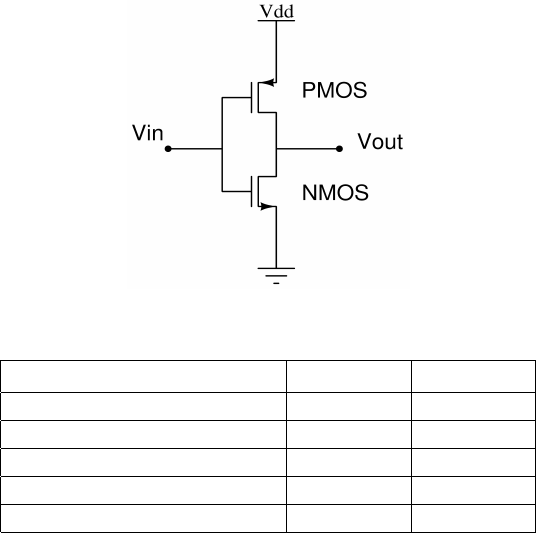
Figure 3.1: CMOS inverter
Condition PMOS NMOS
0≤Vin < Vtn Linear Cutoff
Vtn ≤Vin < VDD /2 Linear Saturation
Vin =VDD /2 Saturation Saturation
VDD /2< Vin ≤VDD − |Vtp|Saturation Linear
Vin ≥VDD − |Vtp|Cutoff Linear
Table 3.1: Different regions of operation of the MOSFETs in the inverter
•20 KΩ potentiometer for output characteristics.
•Opamp as buffer - TL072.
•Connecting wires, voltmeter, Ammeter.
3.2 DC Transfer Characteristics
The physical structure of a CMOS inverter consists of a PMOS and NMOS
in series as shown in Figure 3.1. The drains and gates of the PMOS and
NMOS are tied together, and the sources of the PMOS and NMOS are
connected to VDD and gnd respectively. When the input voltage changes
from 0 V to VDD , the complementary NMOS and PMOS devices are forced
to operate in different regions as shown in Table 3.1. In this table Vtn and Vtp
are the threshold voltages of the NMOS and PMOS transistors respectively.
By convention, Vtp <0. Sometimes we will use Vtto refer to either Vtn or
−Vtp depending on the context.
14

DRAFT
i/p o/p
supply
(0 - 5)V
DMM
Figure 3.2: Test circuit (without power supply)
Figure 3.3: Pin diagram of the MM74C04
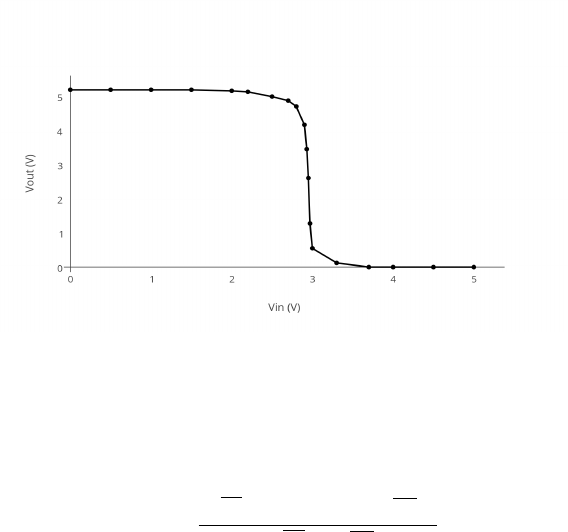
The inverter transfer characteristic is the plot of the output voltage as a
function of the input voltage. As we vary the input voltage from 0Vto VDD ,
the output voltage will change from VDD to 0V. The point in the transfer
characteristic when the input and output voltages are equal is called the
switching point of the inverter.
3.2.1 Experiment setup
Connect pin 7 and pin 14 of the MM74C04 to VSS(ground, that is, 0V)
and VDD = 5Vrespectively. Use one of the inverters in the IC and vary
the input voltage from 0 to 5V (see Figure 3.2) and note down the output
voltage. Plot the inverter transfer characteristics. Take more readings in
the transition region.
From the switching point, we can estimate the βratio of the two tranis-
tors as follows. Since, at the switching point, the same current flows through
PMOS and NMOS:
In=Ip
In=µnCoxW(Vin −Vt)2
2L(3.1)
Ip=µpCoxW(Vin −VDD −Vt)2
2L(3.2)
15
DRAFT
Figure 3.4: Form of the transfer characteristics
where Vtis negative for PMOS. After solving these equations, we get switch-
ing point Vsw as:
Vsw =pβp(VDD −Vt) + √βnVt
pβp+√βn
(3.3)
where, Vt=|Vtp|=Vtn and β=µCoxW/L
From this and your measurements, you can estimate the ratio βP/βN.
3.3 Output Characteristics
The output characteristics give us information about the current sourcing/sink-
ing capability of the inverter. We find how the output voltage varies with
the current drawn from or sunk into the inverter. Note that when the output
of the inverter is high, the output voltage will fall as the current drawn from
the inverter increases. When the output of the inverter is low, the output
voltage will rise as the current sunk by the inverter increases.
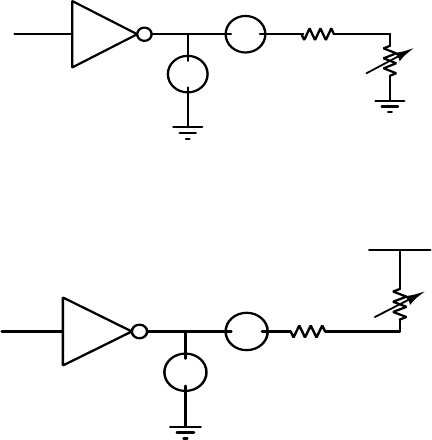
3.3.1 Experimental setup
The experimental setup for the two cases (output high and output low) is
shown in Figure 3.5 and Figure 3.6 respectively.
A 1.2 KΩ resistor is used just to avoid the short circuit between VDD
and VSS when the potentiometer resistance is zero. The values of resistances
16
DRAFT
0A
V
1.2 K
20K
Figure 3.5: Output characteristics when output is high (input = 0V, Supply
voltage = 5V)
5
A
V
1.2 K
520K
Figure 3.6: Output characteristics when output is low (input = VDD, Supply
voltage = 5V)
are chosen depending on IOL and IOH values from datasheet, which is 1.75
mA for MM74C04.
Connect pin 7 and pin 14 of the MM74C04 to VSS and VDD respectively,
as you did earlier. Use one of the inverters as shown in Figure 3.5 and vary
the 20 KΩ potentiometer in steps while ensuring that the magnitude of the
current |Iout|(sourcing/sinking) is not more than 2.75mA. At each step,
note the output current and voltage using the ammeter and voltmeter and
plot the output characteristics in both the cases.
3.4 Delay characterization of the inverter
The delay of an inverter can be modeled as
dabs =k0+k1Cload (3.4)
where k0and k1are constants, Cload is the load capacitance being driven by
the inverter, and dabs is the delay measured in seconds.
Usually, it is convenient to express the load Cload as a multiple of the
17

DRAFT
input capacitance Cin of the inverter. Then, we can write Equation 3.4 as
dabs =k0+τinv
Cload
Cin
(3.5)
where the delay is measured in seconds.
Instead of thinking in terms of seconds, we can think in terms of multiples
of the parameter τinv. The delay can be expressed in multiples of τas
dinv =pinv +Cload
Cin
(3.6)
where pinv =k0/τ is the parasitic delay of the inverter (measured in τunits).
The quantity τis just the slope of the of the line in Equation 3.5,
Let
h=Cout
Cin
(3.7)
Then, the delay of the inverter (in τ) units is just
dinv =pinv +h(3.8)
We will find τand pinv in this experiment.
For a general static complementary gate X, the delay (in τinv units) is
dX=pX+gXh(3.9)
and gX>1. That is, the inverter is the most efficient static complementary
gate, and in general, gXis a measure of the logical complexity of the gate
X.
3.4.1 Experiment setup
Using the tools at our disposal, we will not be able to measure the delay of
a single inverter directly. Instead, we construct a 17 stage ring oscillator.
This ring-oscillator will produce a periodic waveform whose period is
17
X
i=1
(drise(i) + dfall(i)).(3.10)
Thus, measuring the period of this ring oscillator will give us the value
of drise +df all for an inverter (assuming that all inverters in the ring are
identical). We will construct the ring oscillator using several IC’s of type
18
DRAFT
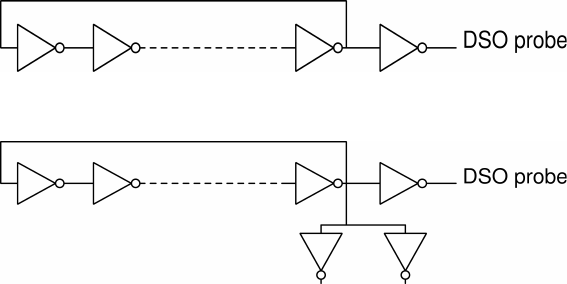
Figure 3.7: Ring oscillator circuit with default load (=2) (supply not shown)
Figure 3.8: Ring oscillator circuit with additional 3-inverter load load (total-
load=4) (supply not shown)
MM74C04, as shown in Figure 3.7. The output of one of the inverters in
the ring can be connected to an extra load as shown in Figure 3.8.
For each IC, connect pin 7 and pin 14 of all ICs to VSS and VDD as
before. Make the 17 stage ring oscillator by connecting inverters back to
back as shown in Figure 3.7. The output of the ring oscillator can be loaded
by multiples of single-inverter loads by connecting inverters as shown in
Figures 3.7 and 3.8 (supply connections for load and ring oscillator are not
shown). Connect the DSO probe as shown in the Figures (at the output of
the buffer), so as to avoid loading on the ring oscillator due to the probe
capacitance.
Vary the number of loads by connecting more inverters to the output
(note that if no additional inverter is connected to the ring oscillator output,
this corresponds to a load of 1 unit (inverter) at the output). Note that the
period of oscillation will be
τ×(34pinv + (32 + (2 ×(1 + AdditionalOutputLoad)))) (3.11)
when measured in seconds (we have assumed that the rise and fall delays of
an inverter are the same).
Measure the period of oscillation by varying the load from 1 to 7 units
and calculate the delay. Plot the period of oscillation versus the load. From
the slope of this plot, find τ. From the value of τand y-intercept, find pinv .
Take a snapshot of the waveform at each load point.
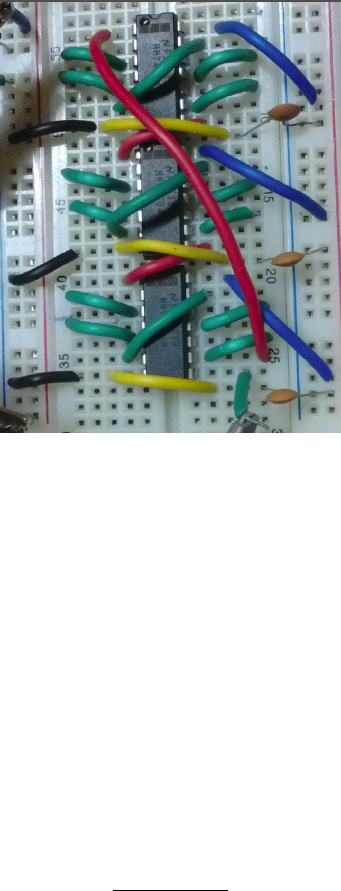
Some precautions when using the breadboard:
•Keep the ICs as close as possible, use short wires and place decoupling
capacitors (0.1 µF) between Vcc (pin 14) and gnd (pin 7) of each IC.
19
DRAFT
Figure 3.9: Connections on the breadboard
•Set the attenuation on probe to 1X(ie no attenuation) and make sure
that attenuation of DSO is also set to 1X.
3.5 Delay variation with supply voltage:
The delay of an inverter varies as the supply voltage is varied. As a first
approximation, the delay of an inverter is proportional to
CloadVDD/ION (3.12)
where ION is proportional to (VDD −Vt)2. Thus, as VDD is varied, the period
of ring oscillator is proportional to
VDD
(VDD −Vt)2(3.13)
Therefore the time period decreases with the increase in supply voltage.
Energy (E) dissipated in each inverter is proportional to V2
DD , which in-
creases with increase in supply voltage. Also the average power dissipated
is proportional to CV 2
DD ×F requency, and also increases as supply voltage
increases.
20

DRAFT
Figure 3.10: Test circuit for measuring the delay as a function of supply
voltage
3.5.1 Experiment setup
Use the same setup as in Figure 3.7, vary the power supply (from 3 to 6
V), and measure the ring oscillator period at each voltage. Plot the period
with power supply voltage, and check that the dependence is as noted in
Equation 3.13. Take a snapshot of the waveforms at 4,5,6V.
3.6 Current drawn by the ring oscillator
Whenever an inverter output switches from low to high, current is drawn
from the power supply. The current drawn is approximately a triangular
pulse whose width is essentially the delay of the gate. Therefore the current
drawn by each inverter in the ring oscillator is a triangular pulse train with
frequency equal to frequency of oscillation. The current drawn by the ring
oscillator is a summation of the individual currents drawn by the inverters
(note that the inverters switching events do not all happen at once). We
can connect a small resistor in series with ground path to observe this in
practice.
3.6.1 Experiment setup
Connect a small resistor in path of gnd in the ring oscillator as shown in
Figure 3.11. The voltage across resistor will be proportional to the switching
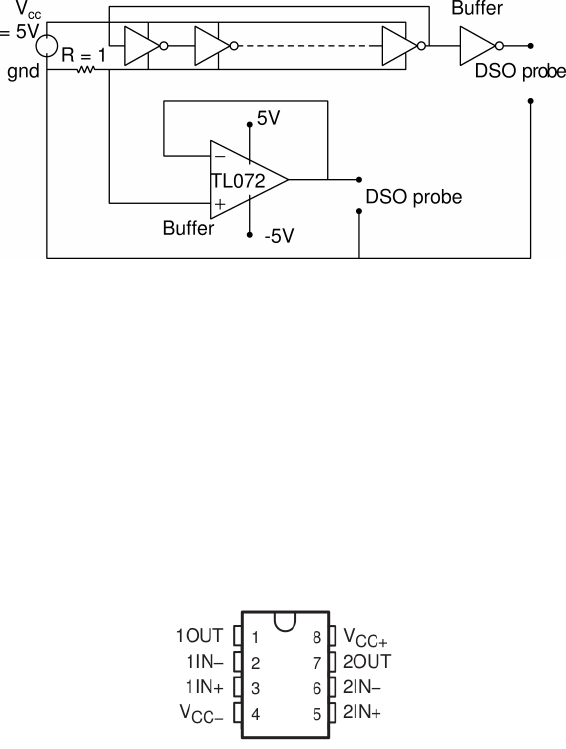
current. To measure this voltage an op-amp (TL072) buffer is used.
•Choose the value of Ras 1Ω, so that the voltage is the switching
current.
•Connect one pair of DSO probe at the output of buffer and other at
output of ring oscillator, as shown in Figure 3.11. Connect the ground
of DSO probes to the closest ground possible in the circuit from the
two measurement points. Set the attenuation on probe to 1X(ie no
attenuation) and make sure that attenuation of DSO is also set to 1X.
21
DRAFT
•Observe both waveforms together on DSO, so that the DSO triggers
correctly using the larger amplitude output voltage.
•Measure all voltages with respect to the common ground point as
shown in Figure 3.11.
•Measure the frequency of voltage across resistor waveform manually (if
needed), using the cursor option (cursor button) of the DSO, The DSO
might show an incorrect frequency, because the amplitude is small.
3.7 Laboratory assignment report submission
Snapshot of DSO submitted should contain frequency, peak-peak amplitude
of both the channels on the display. Compile all your readings, plots, obser-
vations and DSO snapshots in a pdf file and submit it on the online portal.
1. Plot the transfer characteristics of inverter and tabulate the input
and corresponding output voltages. Find the switching point on the
transfer characteristic.
2. Plot the output characteristics of the inverter in the two cases: output-
high and output-low. Tabulate the input and corresponding output
voltages for both the cases.
3. Plot the oscillation period of the ring oscillator as a function of the
load at the output. Find pinv and τ. A snap-shot of the DSO (get
help from Laboratory staff if you do not have a camera) showing the
ring-oscillator output with load = 2 should also be included in the
report.
4. Plot the ring oscillator period as a function of the power supply voltage
(varied from 3Vto 6V). Record your observations in a table. How
does the delay vary with the power supply voltage?
5. Observe the power-supply current drawn by the ring oscillator. Mea-
sure the peak and average value. Include a snapshot of the DSO
measurement.
22
DRAFT
Figure 3.11: Circuit diagram for switching current measurement
Figure 3.12: TL072 pin diagram
23
DRAFT
Chapter 4
Familiarization: The
Krypton CPLD kit
The Krypton kit [1] has been designed at IITB to serve as a platform for
a digital electronics laboratory course. The components of the Krypton kit
are
•The Krypton CPLD card, which uses an Altera MAX V 5M1270ZT144C5N
CPLD.
•An SRAM daughter card (with a Hynix 62256A SRAM).
•A 4x4 keypad.
•8 pin Strip cables.
•A USB cable for programming the CPLD.
•Krypton card USB programming driver (software).
•Supporting files for validation tests (software, documentation).
These components are described in more detail in Section 4.1.
In order to validate these components, we describe a series of tests, each
of which involves connecting components to the CPLD card, programming
the CPLD with a specific bit-stream, and validating the observed results
with those that are expected. These tests are described in Section 4.2.
4.1 The components of the Krypton Kit
We describe the important components of the Krypton kit.
25
DRAFT
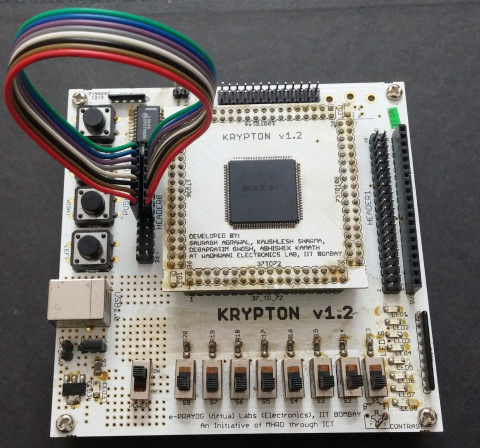
4.1.1 The Krypton board
The Krypton board contains a single Altera CPLD(MAX V - 5M1270ZT144C5N)
and some other peripherals. A photograph of the board is shown in Figure
4.1.
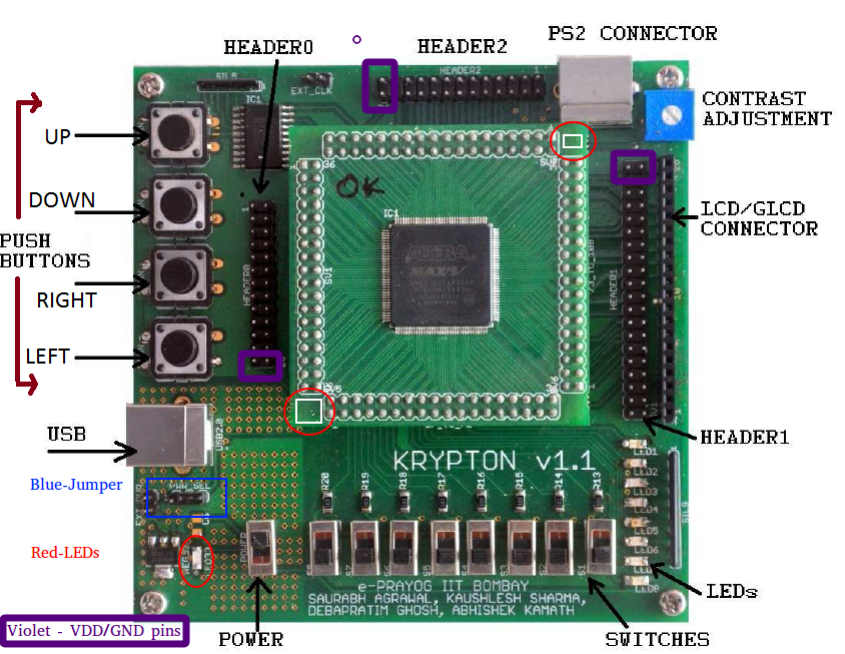
Figure 4.1: Krypton Board Top View. When connected to a host computer,
the three LED’s circled in red should be illuminated. Note the VDD/VSS
pins in each header.
The important elements of the board are
•The CPLD.
•USB connector.
•4 push-buttons.
26
DRAFT
•8 on-board switches.
•8 on-board LEDs.
•20-pin connector for LCD panel.
•Three connection HEADERs (HEADER-0 with 26 pins, HEADER-1
with 40 pins, HEADER-2 with 26 pins) to connect external devices.
–In each header, one pin is tied to VDD and one pin is tied to VSS
as follows: In HEADER-0, pin-26 is tied to VDD and pin-25 is
tied to VSS, in HEADER-1, pin-40 is tied to VDD and pin-39 is
tied to VSS and in HEADER-2, pin-26 is tied to VDD and pin-25
is tied to VSS. Do not connect other signals to these pins!
•5V power connector.
The board is normally powered through the USB connection, but can also be
powered from an external power supply (5V) through the power connector.
A jumper (shown in Figure 4.1) needs to be set to use one of the two power
sources.
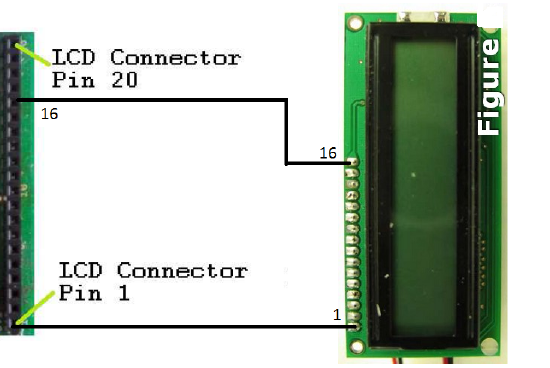
4.1.2 The LCD panel card
The LCD panel card offers a means of displaying information. The 16-
pin LCD card is to be connected to the 20-pin LCD connector. When
connecting the 16-pin LCD card into the 20-pin LCD connector, pins 1-16
of the connector are to be used. The connection is shown in Figure 4.2.
27
DRAFT
Figure 4.2: Connection of LCD Display
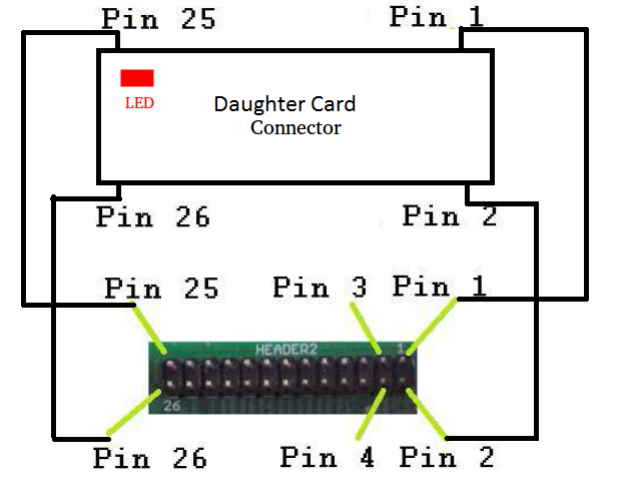
4.1.3 The SRAM daughter card
The SRAM daughter card is used to connect external SRAM to Krypton
CPLD card. On the CPLD card, we use HEADER 2 to connect the SRAM
daughter card. The SRAM daughter card has a 26 pin socket which fits on
the 26 pin HEADER 2 of the CPLD card. The exact connection of daughter
card to HEADER 2 is shown in Figure 4.3. To make sure your connection
is proper, One LED should be lit on the SRAM daughter card.
28
DRAFT
Figure 4.3: Connection of daughter card to HEADER 2 of kit, rectangle in
red displays an LED
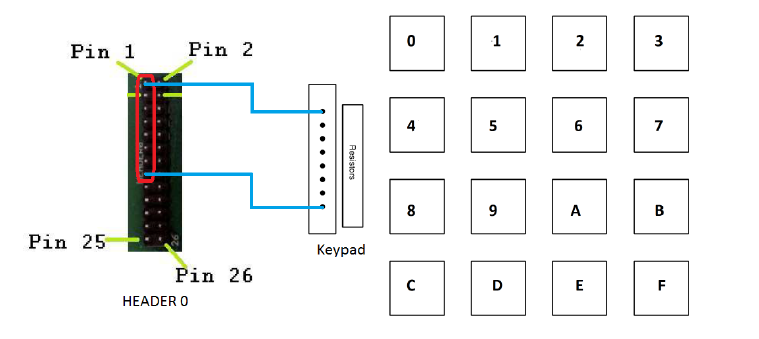
4.1.4 4x4 Keypad
A 4x4 keypad can be connected to the Krypton CPLD card as an input
device. The keypad has an in-built pull up resistor, and no external pull up
resistor is needed. The keypad has four row pins as inputs and four column
pins as outputs (8 I/O pins). It is to be connected to the Krypton card at
HEADER 0. Eight pins of keypad are connected to eight pins of HEADER
0 as shown in Figure 4.4.
29
DRAFT
Figure 4.4: Connection of Keypad to HEADER 0 of kit
4.1.5 8-pin strip cable
This cable can be used to make connections between HEADERs and between
HEADERs and external devices. An example of the use of this cable is shown
in Figure 4.5, where the strip cable is used to make a connection between
two rows of HEADER0.
30
DRAFT
Figure 4.5: Connection between rows of HEADER0 through Strip Cables
4.1.6 USB programming cable
The Krypton CPLD card needs to be programmed using a USB connection.
A standard USB cable is used to make a connection between the Kryp-
ton CPLD card and a host PC (running Linux Ubuntu 12.04/14.04). The
Krypton driver is then used to program the CPLD card.
4.1.7 The Krypton card driver for Linux
You will need to have the Krypton card driver for Linux installed on the host
PC which you will use to program the card. This driver can be downloaded
and installed by following the instructions in [3].
4.1.8 Validation test files
All validation files are of .svf format. The test files can be downloaded from
[4]. These validation files are to be used to program the CPLD card in order
to test various aspects of the Krypton kit.
31
DRAFT
4.2 Validation tests
The validation tests provided in the kit are as follows
•use the host computer to program the Krypton board.
•push-button, LED, switch, clock test.
•LCD test.
•SRAM test.
•Header connectivity test.
•Keypad interfacing test.
We describe these tests in more detail.
4.2.1 Test the USB connection between the host computer
and the Krypton card
A USB cable is connected between host PC and Krypton CPLD card. When
the CPLD board is powered on, three LED’s in the board should light up
(see Figure 4.1 for the location of these LED’s). If the three LED’s are
lit up, we proceed to check whether the CPLD card can be programmed
successfully.
The test circuit that we use is a simple combinational circuit with 3
inputs A, B, C, connected to switches 1, 2 and 3. Each input value can
be set to either 0 or 1 using switch. The output is B(A+C) and is dis-
played at LED-1. Use the Krypton CPLD driver to load the test file called
Program Load.svf file into Krypton Board. You can then use the switches
to check whether the output is as expected.
To load the svf file into the Krypton CPLD card:
•To remove the unwanted modules, type following command1
sudo -i
lsmod
A list of detected modules is seen. We need to remove two of them as
follows:
1You will need super-user permission to do this. If you do not have this permission,
contact a teaching assistant.
32

DRAFT
rmmod ftdi_sio usbserial
•At the command prompt, type the command
jtag
•Now you will be presented with a command console. Type
cable ft2232
An indication should now appear that the driver is connected.
•Now type :
detect
which displays the detected CPLD device (Details like IR&Chain length,
Manufacturer, Device ID, Stepping etc).
•Load the svf file into the CPLD device by typing
svf <full-path-of-svf-file> progress
Thats it, the board is programmed!
More details can be found in reference [2].
4.2.2 Test the LED’s, switches, push-buttons and Clocks
The Krypton CPLD card has several elements built into it:
•Two clock signals, one of 1Hz and other of 50Mhz. These are connected
to CPLD IO pin 18 and pin 89 respectively.
•8 Switches, 8 LEDs and 4 push-buttons with hardware debounce.
To test these elements, load the On board peripheral.svf file into Krypton
board. Initially all switches are to be kept off. For each test, exactly one of
the switches is to be turned on. The tests are as follows:
•Switch s1: The eight LED’s will be lit up to display an 8-bit count
which is updated every 0.04194s.
33
DRAFT
•Switch s2 : The eight LED’s will be lit up to display an 8 bit count
which is updated every second.
•Switch s3 : All LEDs are lit up. There are four push buttons. You
can check each of them by pressing them one at a time and checking
the observations which should be as follows:
–If push-button up is pressed, LED 1 and 5 will turn off.
–If push-button down is pressed, LED 2 and LED 6 will turn off.
–If push-button right is pressed, LED 3 and LED 7 will turn off.
–If push-button left is pressed, LED 4 and LED 8 will turn off.
•Switches s4,s5,s6,s7,s8 (one at a time): The corresponding LED (that
is LED-4 for switch s4 etc.) will turn on.
4.2.3 Test the LCD card
Connect LCD display to LCD connector. The LCD connector is to be
plugged into board directly as shown in Figure 4.2. Use the test file LCD.svf.
After loading the program switch S1 has to turned on. You should see
eventually see activity on the LCD which ends with ”KRYPTON” displayed
on the LCD. The process will take about 45 seconds. Push the up key to
reset the LCD display.
4.2.4 Test the CPLD card headers
There are three headers in the Krypton CPLD card (HEADER-0, HEADER-
1, HEADER-2). Every HEADER has 2 rows of pins. We will check each
header by writing to each pin and reading from each pin. We test one header
at a time by connecting its two rows using strip cables. Before starting the
test, we program the CPLD card using the svf file IO.svf. Now, switches are
used to run the tests. Note that for testing each header, you will to connect
its two rows using strip cables. Note that two pins in each header are
tied to VDD and VSS as described in Section 4.1.1. Be careful
about these! The switch settings for the different tests are describe below.
After changing a switch setting, you will need to press and release the reset
key (push-button up) to start the test.
•Switch 1 : HEADER0 Data sent from first row to second row
•Switch 2 : HEADER0 Data sent from second row to first row
34
DRAFT
•Switch 3 : HEADER1 Data sent from first row to second row
•Switch 4 : HEADER1 Data sent from second row to first row
•Switch 5 : HEADER2 Data sent from first row to second row
•Switch 6 : HEADER2 Data sent from second row to first row
In each case, the output displayed on LED-8 down to LED-1 will be 0x66
(01100110 LED-8 is the most-significant bit) if the test has passed.
4.2.5 Test the keypad
The keypad is connected to HEADER 0 as described in Figure 4.4. Load the
Keypad.svf file into the CPLD card. Now start presssing keys on the keypad.
The current key being pressed is displayed on LED-5 to LED-8 (the hex-
code for the key will be displayed with LED-5 being the most-significant bit
(MSB)), and the last key that you pressed is displayed on LED-1 to LED-4
(LED-1 is the MSB).
4.2.6 Test the SRAM
We test the SRAM by ensuring that all memory elements can be correctly
written into and read from. The SRAM (Hinex 62256) is a high-speed, low
power and 32K x 8-bit (32KB) CMOS Static Random Access Memory. The
SRAM card is connected to the Krypton CPLD card as shown in Figure
4.3. Only 13 bits of the address are actually used so that this SRAM card
provides access to 8KB of memory.
Load the SRAM.svf file into CPLD card. Press the up push key (this
is used as a reset) on the CPLD card. When the reset key is pressed, LED-
1 to LED-8 should display 0xAA (10101010). Now release the reset key.
This will run the test and the test status will eventually be displayed on
LED-1 to LED-8. If the test has passed, LED-1 to LED-8 should display
0x66 (01100110 in binary, LED-8 is the most-significant bit). If the test has
failed, you will either see 0x69 (01101001) which indicates that a 0 could
not be correctly read from or written to a memory location, or you will see
0x96 (10010110) which indicates that a 1 could not be correctly read to or
written from a memory location. If both the 0-read/write and 1-read/write
fail, you will see 0x99 (10011001).
35
DRAFT
Bibliography
[1] Krypton getting started with User Manual available at
http://wel.ee.iitb.ac.in/teaching_labs/WEL%20Site/ee214/
resources/development_boards/krypton/Krypton%20Usermanual.
pdf
[2] UrJTAG PPT available at
http://wel.ee.iitb.ac.in/teaching_labs/WEL%20Site/ee214/
resources/development_boards/krypton/Using%20Quartus%
20and%20UrJTAG%20for%20Krypton.pdf
[3] Krypton drivers
http://wel.ee.iitb.ac.in/teaching_labs/WEL%20Site/ee214/
resources/development_boards/krypton/Kypron%20drivers_
CDM20817.zip
[4] Krypton kit validation test svf files
http://wel.ee.iitb.ac.in/teaching_labs/WEL%20Site/ee214/
resources/development_boards/krypton/Kypron%20test_files.
zip
36
DRAFT
Chapter 5
Experiment: Combinational
logic implementation on the
Krypton kit
We will first demonstrate the implementation of a priority encoder using the
Krypton CPLD kit, and verify that the implementation is correct by using
the on-board switches and LED’s in the kit. The circuit to be implemented
is an 8-to-3 encoder which has 8 inputs signals x7,x6,x5,x4,x3,x2,x1,x0, and
produces 3 bit encoded output s2,s1,s0 and a signal bit N indicating whether
the bits on s2,s1,s0 are valid or not. If all the input bits to the encoder are 0,
then N=1 and s2,s1,s0 are dont-cares. If at least one of the input bits to the
encoder is 1, then N=0, and the bits s2,s1,s0 indicate the binary code for the
lowest index I for which the corresponding input xI is 1. So when multiple
input bits are 1, the encoded bit s2,s1,s0 represent the binary representation
of lowest index I such that xI is 1.
In implementing this circuit, we go through the following steps:
•Design the logic network corresponding to the specification.
•Describe the logic network using VHDL.
•Write a test-bench (in VHDL) to verify the logic network.
•Simulate the test-bench with the logic network in order to verify the
correctness of the implementation.
•Synthesize the logic network for the KRYPTON CPLD. This produces
programming files as well as a post-synthesis logic netlist which you
can then simulate.
37
DRAFT
•Simulated the synthesized network to verify the correctness of the
synthesis.
•Download the programming files onto the KRYPTON CPLD card.
•Test the correctness of the implementation on the KRYPTON CPLD
card using the switches and LED’s on the CPLD card.
5.1 Logic Design
Based on the truth table, we construct the Boolean functions for the outputs
s2,s1,s0 and N as follows:-
N=x7 + x6 + x5 + x4 + x3 + x2 + x1 + x0
s0==x1.x0 + x3.x2.x1.x0 + x5.x4.x3.x2.x1.x0
+x7.x6.x5.x4.x3; .x2.x1.x0
s1x2.x1.x0 + x3.x2.x1.x0 + x6.x5.x4.x3.x2.x1.x0
+x7.x6.x5.x4.x3.x2.x1.x0
s2 = x4.x3.x2.x1.x0 + x5.x4.x3.x2.x1.x0 + x6.x5.x4.x3.x2.x1.x0
+x7.x6.x5.x4.x3.x2.x1.x0
5.2 Implementation in VHDL
The eight inputs are treated as separate scalars x7,x6,x5,x4,x3,x2,x1,x0, and
the three output bits are treated as scalars s2,s1,s0 and N. The interface is
as shown in Figure 5.1.
We implement the four output boolean logic functions for s2,s1,s0 (or
bit vector s) and N using concurrent signal assignment statements.
5.3 VHDL Implementation of the Priority Encoder
With Scalar Interface
The Boolean functions for the four outputs are directly implemented as four
concurrent assignments.
38

DRAFT
Figure 5.1: 8-to-3 Priority Encoder With Scalar Interface
5.3.1 VHDL code of PriorityEncoder
1library ieee;
use ieee.std_logic_1164.all ;
3entity Pri ori tyE nco der is
port(x7 , x6 , x5 , x4 , x3 ,x2 ,x1 , x0 :in bit ;
5s2 ,s1 , s0 , N: out bit ) ;
end P rio rit yEncode r ;
7architecture comb of PriorityEncoder is
begin
9N <= not( x7 or x6 or x5 or x4 or x3 or x2 or x1 or x0 ) ;
s0 <= ( x1 and not x0 ) or
11 ( x3 and not x2 and not x1 and not x0 ) or
( x5 and not x4 and not x3 and not x2 and
13 not x1 and not x0 ) or
( x7 and not x6 and not x5 and not x4
15 and not x3 and not x2 and not x1
and not x0 ) ;
17 s1 <= ( x2 and not x1 and not x0 ) or
( x3 and not x2 and not x1 and not x0 ) or
19 ( x6 and not x5 and not x4 and not x3 and
not x2 and not x1 and not x 0 ) or
21 ( x7 and not x6 and not x5 and not x4 and
not x3 and not x2 and not x1 and not x0 ) ;
23 s2 <= ( x4 and not x3 and not x2 and
not x1 and not x0 ) or
25 ( x5 and not x4 and not x3 and not x2 and
not x1 and not x 0 ) or
27 ( x6 and not x5 and not x4 and not x3
and not x2 and not x1 and not x0 ) or
29 ( x7 and not x6 and not x5 and not x4 and not x3
and not x2 and not x1 and not x0 ) ;
31 end comb;
39

DRAFT
5.4 Concept of a test-bench
For every entity described in VHDL, a self-checking test-bench is necessary
to verify whether the entity is working correctly or not. The testbench is
basically another VHDL file which applies a set of input combinations to
the entity being tested (termed as the design-under-test (DUT)), and checks
whether it produces the correct and expected output or not.
In our case, the DUT is a 8-to-3 Priority Encoder as discussed above.
Our testbench applies all the possible 256 input combinations and checks
whether the output is as expected or not. If the output is not as expected,
it reports that particular input combination along with the expected output
and produced/actual output. It also keeps a count of the number of input
combinations for which the test fails. If the test passes for all possible 256
input combinations, we can conclude that our implementation of the test-
bench is correct.
Note: it is not possible to exhaustively test a combinational circuit if the
number of inputs is very large. In such cases, at the minimum, we choose a
set of tests such that every output bit takes a value of 0 in at least one test
and a value of 1 in at least one test.
We have implemented the Testbench in two ways.
•The working operation of the priority encoder is modelled in Python
programming language, and the expected output is written in a text
file. Basically this file is a text file which contains all the 256 lines
(corresponding to 256 possible input combinations). Each line consists
of an 8-bit input vector x, and the corresponding expected 3-bit output
vectors s, and the output bit N, each field separated by a blank space.
In the VHDL description of the test-bench, this text file is read one line
at a time and the corresponding input bit vector x, output bit vector
s and output bit N are separated out. Then the input bit vector x is
applied to the component DUT and the output s and N are matched
with the one in the file. If it matches, it goes to the next line until the
end of the file is reached. If the outputs doesnt match, it reports an
error indicating the input vector, the expected output and produced
output. It also keeps a count of the number of times the test fails.
40

DRAFT
When the test is completed, it prints the number of successes and
failures.
•In the second form, we have generated all possible 256 input com-
binations inside the architecture of VHDL testbench file itself, and
applied it to the component DUT. The expected output is also com-
puted within the test-bench and compared with the observed output.
5.4.1 VHDL code of the testbench
To test the entity PriorityEncoder, we implemented the testbench in two
possible ways as was described above. In one implementation, we generated
a text file outputs.txt which contains all the inputs and corresponding ex-
pected outputs and matched each line of this file with the output generated
by the entity PriorityEncoder. In the other implementation, the input com-
binations are generated inside the testbench code itself and the outputs are
matched with the expected output. We present both the implementations
of the test-bench.
Testbench using a file to match the results
1library ieee;
use ieee.std_logic_1164.all ;
3use std . t ex ti o . all ;
5
entity tes t_match is
7end t est_ match ;
9architecture test bench of test_match is
signal x7 ,x6 , x5 , x4 , x3 ,x2 ,x1 , x0 ,s2 ,s1 , s0 ,N : bit := ’0 ’;
11
comp onen t PriorityEncoder
13 port(x7 , x6 , x5 , x4 , x3 ,x2 ,x1 , x0 :in bit ;
s2 ,s1 , s0 ,N : out bit ) ;
15 end c omp one nt ;
17 function bit ve c_ to_s tr ( x: bit _vec tor ) return String is
variable L: line ;
19 variable W: St ring (1 to x ’ le ng th ) :=( others=> ’ ’);
begin
21 write ( L ,x );
W(L.all ’range ) := L . all;
23 Deallocate (L );
return W;
41

DRAFT
25 end b itvec_t o_s tr ;
27 begin
process
29 file f: text open re ad_mo de is " out pu ts . tx t ";
variable x: b it_v ector (7 downto 0) ;
31 variable s_temp : bit _v ec to r (2 downto 0) ;
variable N_te mp : b it ;
33 variable L: line ;
variable fail , su ccess : intege r :=0;
35 variable s: b it_v ector (2 downto 0) ;
begin
37 while not endfile(f) loop
re ad li ne (f , L) ;
39 read ( L ,x );
read ( L , s_t em p ) ;
41 read ( L , N_t em p ) ;
x7 <= x (7) ;
43 x6 <= x (6) ;
x5 <= x (5) ;
45 x4 <= x (4) ;
x3 <= x (3) ;
47 x2 <= x (2) ;
x1 <= x (1) ;
49 x0 <= x (0) ;
wait for 10 ns ;
51 s (2) := s 2 ;
s (1) := s 1 ;
53 s (0) := s 0 ;
wait for 0 n s ;
55 if not (x=" 0000000 0 ")then
assert(s = s_ temp )
57 report " Error . Input is " & bitvec_ to _str ( x) &
" Expe cted " & bit ve c_to _s tr ( s_tem p ) &
59 " Prod uced " & bi tv ec_t o_ str ( s)
severity error ;
61 end if ;
assert(N = N_ temp )
63 report " Error in N. Input is "& b itvec_t o_s tr (x ) &
" Expe cted " & bit ’ imag e ( N_te mp ) & " Produced
"
65 & bit ’ image ( N)
severity error ;
67 if (x=" 0000000 0 ")then
if no t (N= N_te mp ) then
69 fail := fail +1;
end if ;
71 elsif not (s=s_temp and N=N_temp) then
fail := fail +1;
42
DRAFT
73 end if ;
end loop ;
75 succ ess :=256 - fail ;
assert false report " Test c omple ted . " &
77 integer ’ image ( suc ces s ) &
" suc cesses . " & integer ’ image ( fail ) & "
fail ures . "
79 severity note;
wait;
81 end process ;
dut : P ri ori tyE nc ode r
83 port map ( x7 = > x7 , x 6 => x6 , x5 = >x5 , x4 = > x4 ,
x3 = > x3 , x 2 => x2 , x1 = >x1 , x0 = > x0 ,
85 s2 = > s2 , s 1 => s1 , s0 = >s0 , N= >N );
end t estbe nch ;
87
The testbench code uses a function called bitvect to str which converts
a bit vector to String. This is required because in the report statement,
we indicate the input combination, the expected, and produced output if an
error occurs. Since these are of the type bit vector, and the report statement
only accepts a String, we need to convert bit vector to String in order to
report it.
Let us examine this testbench in detail. A small portion of the out-
puts.txt file is shown below.
10011100 010 0 <----
10011101 000 0
10011110 001 0
10011111 000 0
10100000 101 0
Suppose we are currently examining the line indicated by arrow.
readline(f,L);
43
DRAFT
This reads the entire line from the file and stores in L.
read(L,x);
read(L,s_temp);
read(L,N_temp);
This section reads each word from the line L one after the another and
stores it in different bit vectors. So x gets the input combination 10011100,
s temp gets 010 which is the expected output and N temp gets 0 which is
the expected value of N.
Then from the bit vector x, all the bits are assigned to signals x7, x6, x5,
x4, x3, x2, x1, x0 which are mapped to input ports of the entity PriorityEn-
coder. The entity produces the output bits s2,s1,s0,N as described in the
architecture of the entity. The output bits s2,s1,s0 are stored in a bit vector
s. Now two assert statements are used to check whether s temp (containing
the expected output of s2,s1,s0 from file) matches with s (containing the
produced output s2,s1,s0 from DUT) and N temp (containing the expected
output N from file) matches with s (containing the produced output N from
DUT). At the end it reports that the test has completed along with the
number of successful and failed test cases.
One special case occurs when the input is 00000000. The corresponding
output s2,s1,s0 should be dont cares, meaning that the value contained by
them is meaningless. The outputs.txt file contains 000 as output for this
case. Therefore we should not check whether s2,s1,s0 matches expected
output for this case. So in the code for this input, only the N bit is checked.
5.4.2 Testbench which generates the inputs and expected
outputs and does the check
This approach is more efficient when the number of patterns to be applied
is very large. When calculating the expected output you should use an
algorithm that is different from the one used in the DUT for computing the
output (Why?).
1library ieee;
use ieee.std_logic_1164.all ;
3use i eee . num eric _b it . all ;
use std . t ex ti o . all ;
5
entity test_self is
7end t est_s elf ;
44

DRAFT
9architecture test bench of tes t_se lf is
signal x7 ,x6 , x5 , x4 , x3 ,x2 ,x1 , x0 ,s2 ,s1 , s0 ,N : bit := ’0 ’;
11
comp onen t PriorityEncoder
13 port(x7 , x6 , x5 , x4 , x3 ,x2 ,x1 , x0 :in bit ;
s2 ,s1 , s0 ,N : out bit ) ;
15 end c omp one nt ;
17 function bit ve c_ to_s tr ( x: bit _vec tor ) return String is
-- AS BEFORE ---
19 begin
-- AS BEFORE ---
21 end f unction bitvect_to_str;
begin
23
for iin 0to 255 loop
25 x := bi t_vector ( to _u nsig ned (i ,8) );
wait for 0 n s ;
27 x7 <= x (7) ;
x6 <= x (6) ;
29 x5 <= x (5) ;
x4 <= x (4) ;
31 x3 <= x (3) ;
x2 <= x (2) ;
33 x1 <= x (1) ;
x0 <= x (0) ;
35 wait for 10 ns ;
s (2) := s 2 ;
37 s (1) := s 1 ;
s (0) := s 0 ;
39
if ( x0 = ’1 ’) then
41 assert(s=" 000 " and N = ’0 ’)
report " Error . Input is " & bitvec_ to _str ( x) &
43 " Expe cted S =000 N =0 Pr oduce d S= " &
bit vec _to_ st r (s )& " N="&bit ’ im age ( N)
45 severity error ;
if no t (s=" 000 " and N = ’0 ’) then fail := fail +1;
47 end if ;
elsif ( x1 = ’1 ’) then
49 assert(s=" 001 " and N = ’0 ’)
report " Error . Input is " & bitvec_ to _str ( x) &
51 " Expe cted S =001 N =0 Pr oduce d S= " &
bit vec _to_ str (s ) & " N= " & bit ’ image ( N)
53 severity error ;
if no t (s=" 001 " and N = ’0 ’) then fail := fail +1;
55 end if ;
elsif ( x2 = ’1 ’) then
45

DRAFT
57 assert(s=" 010 " and N = ’0 ’)
report " Error . Input is " & bitvec_ to _str ( x) &
59 " Expe cted S =010 N =0 Pr oduce d S= " &
bit vec _to_ st r (s ) &
" N= " & bit ’ image ( N)
61 severity error ;
if no t (s=" 010 " and N = ’0 ’) then fail := fail +1;
63 end if ;
elsif ( x3 = ’1 ’) then
65 assert(s=" 011 " and N = ’0 ’)
report " Error . Input is " & bi tve c_to _s tr (x ) &
67 " Expe cted S =011 N =0 Pr oduce d S= " &
bit vec _to_ st r (s ) &
" N= " & bit ’ image ( N)
69 severity error ;
if no t (s=" 011 " and N = ’0 ’) then fail := fail +1;
71 end if ;
elsif ( x4 = ’1 ’) then
73 assert(s=" 100 " and N = ’0 ’)
report " Error . Input is " & bi tve c_to _s tr (x ) &
75 " Expe cted S =100 N =0 Pr oduce d S= " &
bit vec _to_ st r (s ) &
" N= " & bit ’ image ( N)
77 severity error ;
if no t (s=" 100 " and N = ’0 ’) then fail := fail +1;
79 end if ;
elsif ( x5 = ’1 ’) then
81 assert(s=" 101 " and N = ’0 ’)
report " Error . Input is " & bi tve c_to _s tr (x ) &
83 " Expe cted S =101 N =0 Pr oduce d S= " &
bit vec _to_ st r (s ) &
" N= " & bit ’ image ( N)
85 severity error ;
if no t (s=" 101 " and N = ’0 ’) then fail := fail +1;
87 end if ;
elsif ( x6 = ’1 ’) then
89 assert(s=" 110 " and N = ’0 ’)
report " Error . Input is " & bi tve c_to _s tr (x ) &
91 " Expe cted S =110 N =0 Pr oduce d S= " &
bit vec _to_ st r (s ) &
" N="& bit ’ image ( N)
93 severity error ;
if no t (s=" 110 " and N = ’0 ’) then fail := fail +1;
95 end if ;
elsif ( x7 = ’1 ’) then
97
assert(s=" 111 " and N = ’0 ’)
99 report " Error . Input is " & bi tve c_to _s tr (x ) &
" Expe cted S =111 N =0 Pr oduce d S= " &
46

DRAFT
bit vec _to_ st r (s ) &
101 " N="& bit ’ image ( N)
severity error ;
103 if no t (s=" 111 " and N = ’0 ’) then fail := fail +1;
end if ;
105 else
assert( N = ’1 ’)
107 report " Error in N. Input is " & bitve c_t o_st r (x) &
" Expe cted N =1 Pro duced " & bit ’ image (N )
109 severity error ;
if no t (N = ’1 ’ ) then fail := fail +1;
111 end if ;
end if ;
113
end loop ;
115 succ ess :=256 - fail ;
assert false report " Test c omple ted . " &
117 integer ’ image ( suc ces s ) & " su cces ses . " &
integer ’ image ( fail )& " fa ilure s ."
119 severity note;
wait;
121 end process ;
dut : P ri ori tyE nc ode r
123 port map ( x7 = > x7 , x 6 => x6 , x5 = >x5 , x4 = > x4 ,
x3 = > x3 , x2 = >x2 , x1 = > x1 , x0 = >x0 ,
125 s2 = > s2 , s 1 => s1 , s0 = >s0 , N= >N );
end t estbe nch ;
127
In this testbench the inputs are generated inside the code using a loop
which runs from 0 to 255, each time converting the loop variable i to a
bit vector x.
x:=bit_vector(to_unsigned(i,8));
Then from the bit vector x, all the bits are assigned to signals x7, x6,
x5, x4, x3, x2, x1, x0 which are mapped to input ports of the entity Prior-
ityEncoder. The entity produces output bits s2,s1,s0,N as described in the
architecture of the entity. The output bits s2,s1,s0 are stored in a bit vector
s. Then the output is checked to see whether it matches the expected output
or not. The different cases are quite obvious which is represented here in
the form of a pseudo code for convenience.
if x0 ==1
2s=000 and N =0
47
DRAFT
else if x1 ==1
4s=001 and N =0
else if x2 ==1
6s=010 and N =0
else if x3 ==1
8s=011 and N =0
else if x4 ==1
10 s=100 and N =0
else if x5 ==1
12 s=101 and N =0
else if x6 ==1
14 s=110 and N =0
else if x7 ==1
16 s=111 and N =0
else
18 s = xxx and N =1
20
So for each input, the outputs are compared and checked to see if there
are any errors or not. At the end it reports test completion along with the
number of successful and failed test cases.
5.4.3 Python Code for creating the test trace file used in the
test-bench (first form)
1def t ob ina ry ( n, width ) :
s=’’
3for iin range ( width ) :
s =s+ str ( n %2)
5n =n /2
s =s [:: -1]
7return s
9f= open( ’ ou tput s .txt ’, ’w ’)
f. seek (0)
11 f. tr unc ate ()
for iin range ( 256) :
13 x= to bin ary (i ,8)
s = ’000 ’
15 if x == ’00000000 ’:
N = ’1 ’
17 else:
N = ’0 ’
19 if x [7]== ’1 ’:
48

DRAFT
s = ’000 ’
21 elif x [6]== ’1 ’:
s = ’001 ’
23 elif x [5]== ’1 ’:
s = ’010 ’
25 elif x [4]== ’1 ’:
s = ’011 ’
27 elif x [3]== ’1 ’:
s = ’100 ’
29 elif x [2]== ’1 ’:
s = ’101 ’
31 elif x [1]== ’1 ’:
s = ’110 ’
33 elif x [0]== ’1 ’:
s = ’111 ’
35 f. writ e (x +" " +s+" "+N+"\n")
f. clos e ()
37
This code generates the file named outputs.txt which contains the test-
bench data.
5.5 Results obtained by simulating the TestBench
together with the PriorityEncoder
Here we show the output of the testbench when applied to the DUT.
5.5.1 Case 1: No errors
1te stb en ch_ mat ch . vhd :60 :1 6: @25 60 ns :( as se rt ion note ) : Test
comp le ted . 256 s uccess . 0 failure .
5.5.2 Case 2: Output bit s2 is intentionally stuck at 0
1tes tben ch_m at ch . vhd : 48: 24 : @170 ns :( a ss er tio n err or ) : Error .
Input is 0 00100 00 Ex pected 100 Pro duced 000
tes tben ch_m at ch . vhd : 48: 24 : @330 ns :( a ss er tio n err or ) : Error .
Input is 0 01000 00 Ex pected 101 Pro duced 001
49

DRAFT
3tes tben ch_m at ch . vhd : 48: 24 : @490 ns :( a ss er tio n err or ) : Error .
Input is 0 01100 00 Ex pected 100 Pro duced 000
tes tben ch_m at ch . vhd : 48: 24 : @650 ns :( a ss er tio n err or ) : Error .
Input is 0 10000 00 Ex pected 110 Pro duced 010
5tes tben ch_m at ch . vhd : 48: 24 : @810 ns :( a ss er tio n err or ) : Error .
Input is 0 10100 00 Ex pected 100 Pro duced 000
tes tben ch_m at ch . vhd : 48: 24 : @970 ns :( a ss er tio n err or ) : Error .
Input is 0 11000 00 Ex pected 101 Pro duced 001
7te stb en ch_ mat ch . vhd :48 :2 4: @11 30 ns :( as se rt ion e rror ) :
Error . Input is 0111000 0 Exp ected 100 Pro duced 000
te stb en ch_ mat ch . vhd :48 :2 4: @12 90 ns :( as se rt ion e rror ) :
Error . Input is 1000000 0 Exp ected 111 Pro duced 011
9te stb en ch_ mat ch . vhd :48 :2 4: @14 50 ns :( as se rt ion e rror ) :
Error . Input is 1001000 0 Exp ected 100 Pro duced 000
te stb en ch_ mat ch . vhd :48 :2 4: @16 10 ns :( as se rt ion e rror ) :
Error . Input is 1010000 0 Exp ected 101 Pro duced 001
11 te stb en ch_ mat ch . vhd :48 :2 4: @17 70 ns :( as se rt ion e rror ) :
Error . Input is 1011000 0 Exp ected 100 Pro duced 000
te stb en ch_ mat ch . vhd :48 :2 4: @19 30 ns :( as se rt ion e rror ) :
Error . Input is 1100000 0 Exp ected 110 Pro duced 010
13 te stb en ch_ mat ch . vhd :48 :2 4: @20 90 ns :( as se rt ion e rror ) :
Error . Input is 1101000 0 Exp ected 100 Pro duced 000
te stb en ch_ mat ch . vhd :48 :2 4: @22 50 ns :( as se rt ion e rror ) :
Error . Input is 1110000 0 Exp ected 101 Pro duced 001
15 te stb en ch_ mat ch . vhd :48 :2 4: @24 10 ns :( as se rt ion e rror ) :
Error . Input is 1111000 0 Exp ected 100 Pro duced 000
te stb en ch_ mat ch . vhd :60 :1 6: @25 60 ns :( as se rt ion note ) : Test
comp le ted . 241 s uccess . 15 failure .
17
5.6 Experimental procedure
•Implement the priority encoder and its test-bench as described above.
Prepare two text files.
•Use a VHDL simulator to simulate the test-bench with the priority
encoder instantiated as the DUT. You may need to generate a trace
file if you use the test-bench which needs the trace file. You may use
either the simulator in the Altera Quartus tools, or use GHDL (see
Section 5.8 for details on how to use GHDL).
•If the simulation indicates that the priority encoder implementation
works for all 256 input combinations, proceed to the implementation.
50
DRAFT
You will need to synthesize the priority encoder description using the
Altera tools targeting the Krypton CPLD. Synthesis instructions are
summarized in Section 5.9.
–Map the eight inputs to the priority encoder to the pins on the
Krypton CPLD which are connected to the eight switches on the
Krypton CPLD card.
–Map the four outputs of the priority encoder to the pins on the
Krypton card which are connected to the LED’s on the Krypton
CPLD card.
•Do a post-synthesis simulation of the net-list produced by the synthesis
tool to confirm that the synthesis tool has not made an error.
•If the post-synthesis simulation has passed, download the synthesized
bit-stream to the Krypton CPLD using the programming cable. Down-
load instructions are summarized in Section 5.10.
•Confirm that your circuit is working on the CPLD card by trying
the following nine combinations: all 0-s, eight possible combinations
in which exactly one of the inputs is 1. Use the switches to set the
values, and observe the results on the LED’s.
You will need to summarize your results at each step in preparing a report
for your experiment.
5.7 Issues
The procedure that you have used for testing your design in hardware is not
very satisfactory, because it cannot be scaled to circuits with a large number
of inputs and outputs. In such cases, we need an automated mechanism
to apply inputs and observe outputs. You will be introduced to such a
mechanism which you will then use to verify more complex circuits.
5.8 Installing and using GHDL
GHDL is a free VHDL simulator which was developed by Tristan Gingold.
You can use it on a Linux machine or a Windows machine.
51

DRAFT
5.8.1 Installing ghdl on Windows
Go to the following website.
http://sourceforge.net/projects/ghdl-updates/
Download ghdl-0.31-mcode-win32.zip and follow the following instructions.
1. Create a ghdl directory where desired, e.g. C:\ghdl
2. Unzip ghdl-0.31-mcode-win32.zip into C:\ghdl
3. Open a command shell and cd into the resulting installation directory,
C:\ghdl\ghdl-0.31-mcode-win32
4. Run the batch files named setghdlpath.bat and reanalyzelibraries.bat
5. Now set PATH and GHDL PREFIX in the Windows SYSTEM or
USER environment variables by following steps:
•Go to Start→Settings→Control Panel→System→Advanced
system settings→Environment Variables
•Prefix the existing PATH with C:\ghdl\ghdl-0.31-mcode-win32\bin;
•Add a new environment variable GHDL PREFIX=c:\ghdl\ghdl-
0.31-mcode-win32\lib
Installation check on Windows
Once ghdl is set up, issuing the following command:
C:\textbackslash ghdl\textbackslash ghdl-0.31-mcode-win32>ghdl -v
This should print the version should see
GHDL 0.31 (20140108) [Dunoon edition] + ghdl-0.31-mcode-win32.patch
Compiled with GNAT Version: GPL 2013 (20130314)
mcode code generator
Written by Tristan Gingold.
Copyright (C) 2003 - 2014 Tristan Gingold.
GHDL is free software, covered by the GNU General Public License. There is NO
warranty; not even for MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE.
C:\textbackslash ghdl\textbackslash ghdl-0.31-mcode-win32>ghdl --dispconfig
52
DRAFT
This should print the configuration information and you should see
command line prefix (--PREFIX): (not set)
environment prefix (GHDL_PREFIX): C:\Ghdl\ghdl-0.31-mcode-win32\lib
default prefix: C:\Ghdl\ghdl-0.31-mcode-win32\lib
actual prefix: C:\Ghdl\ghdl-0.31-mcode-win32\lib
command_name: C:\Ghdl\ghdl-0.31-mcode-win32\bin\ghdl.exe
default library pathes:
C:\Ghdl\ghdl-0.31-mcode-win32\lib\v93\std\
C:\Ghdl\ghdl-0.31-mcode-win32\lib\v93\ieee\
Alternative way to install on Windows
If you are too lazy to perform the steps described above, there is a quick
way to install an older version of GHDL. Go to the following link.
http://ghdl.free.fr/download.html
and scroll down to the bottom of the page. Then inside Binaries (Windows),
download ghdl-installer-0.29.1.exe. After downloading, just run the .exe
file and it will do the rest for you.
5.8.2 Installing GHDL on Linux
We describe the installation procedure onto an Ubuntu system. GHDL has
been an essential tool for VHDL simulations on Linux systems, especially
Ubuntu and its derivatives. But, recently it has been removed from the
official Ubuntu repositories and cannot be installed directly. There is an
unofficial PPA hosting these packages, and you can use the following com-
mands to install ghdl from there.
1. sudo add-apt-repository ppa:pgavin/ghd
2. sudo apt-get update
3. sudo apt-get install ghdl
Thanks to Peter Gavin for compiling and hosting these packages. You
can get more details about the PPA on this link.
https://launchpad.net/~pgavin/+archive/ubuntu/ghdl
53

DRAFT
5.8.3 Using GHDL
If you are trying ghdl for the first time, the following commands would be
useful for simulating your VHDL codes.
1. To compile all the VHDL files in a directory
ghdl -a *.vhd *.vhdl
2. After compilation, use the following command to create an executable,
ghdl -m top_entity_name
This produces an executable called top entity name. You can run this
executable directly.
3. Finally, to run the simulation and generate the waveforms,
./top_entity_name --stop-time=XXXns --wave=waveform.ghw
or
ghdl -r top_entity_name --stop-time=XXXns --wave=waveform.ghw
The generated waveforms can be viewed using gtkwave, which you
need to install in your machine.
5.9 Synthesis using Quartus tools
The Quartus synthesis tools provide an integrated synthesis and simula-
tion environment for Altera FPGA’s and CPLDS (KRYPTON is an Altera
CPLD).
1. Open the Quartus II IDE. A pop-up will appear asking you to either
create a new project or open an existing one. Click on Create New
Project. Alternatively, you may click on File −→ New Project Wizard.
2. An Introduction page opens up. Click on Next.
54
DRAFT
3. This opens up Page 1. Here, you need to specify a working directory
for your project. Click Browse (...) to create a new folder for this
project. Next specify the project name and top level design entity.
Important: This is a very critical step in your design. Top level design
entity refers to the name of the entity in your VHDL code which you
wish to implement. By default the entity name follows the same name
as the project. In our case, the top-entity name is PriorityEncoder.
After setting the names, click Next.
4. This opens up ’Page 2’. Click on ’Empty Project’ and click on ’Next’.
5. This opens up Page 3. This page allows you to include any existing
VHDL program files as part of your project. We add the name of the
file in which you have implemented the PriorityEncoder. Click Next.
6. On Page 4, you are asked for the family and device settings, i.e. the
target CPLD on which you wish to implement your design. Important:
This is a very crucial step.. do not select the wrong device!
7. Click on the Family drop-down list and select MAX V. The device
window shows a long list of devices available in the MAX V family.
8. On the right side of the window, you can filter out the device list by
selecting Package as TQFP,Pin Count as 144 and Speed Grade as
5. You will see that the list is now quite short. Select the device
5M1270ZT144C5 and click Next.
9. In the Page 5 window, you will be asked to select a simulation tool.
Again, this is not mandatory and can be skipped. Click Next, and on
Page 5 you will be shown a project summary. You may use this to
review your settings, and can go back to rectify any mistake. Once
confirmed, click Finish. The project is now created.
10. Go to Assignments −→ Settings. A new window will appear. On the
left tab, under EDA Tool Settings, click on Simulation. On the right
side click on Compile test bench and click on Test Benches. A new
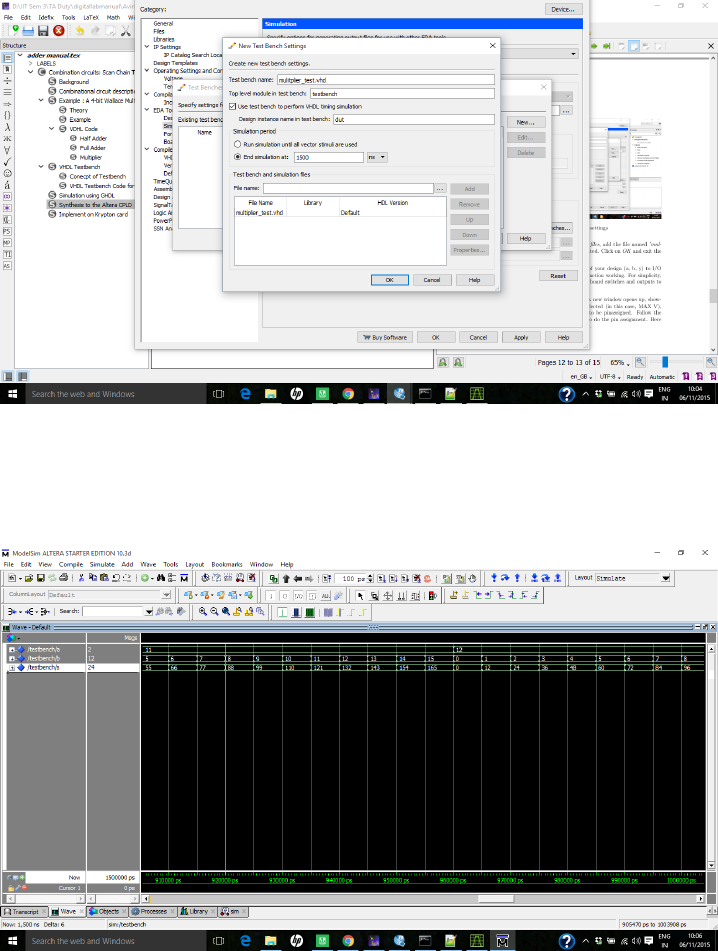
window will appear. Fill up the boxes as shown in the Figure 5.2.
Then under Test bench and simulation files, add the name of the file
in which you have implemented the test-bench. Click on OK and exit
the settings.
11. Run RTL Simulation and check waveforms in ModelSim (something
like Figure 5.3).
55
DRAFT
Figure 5.2: Testbench settings
Figure 5.3: RTL Simulation ModelSim waveform
56
DRAFT
12. To confirm the post-synthesis correctness, run Gate Level Simulation
from Tools −→ Run Simulation Tool −→ Gate Level Simulation and
check the waveforms in ModelSim.
13. To finish the implementation, you need to now assign the port pins
of your design (a, b, y) to I/O pins on the CPLD to verify the logic
function working. For simplicity, we will assign the input lines to
the on-board switches and outputs to on-board LEDs using the pin
assignments described in Chapter 4.
14. Go to Assignments −→ Pin Planner. A new window opens up, show-
ing you the schematic of the device selected (in this case, MAX V),
and below, the signal lines that need to be pinassigned. Follow the
information given in Krypton manual to do the pin assignment.
15. Once the pin assignment is complete, compile the design. Go to Pro-
cessing −→ Start Compilation. This starts the compilation process,
and errors in the code, if any, are shown on the post-compilation re-
port.
16. Now go to Tools −→ Programmer. A programmer window will open.
You should see the project output file PriorityEncoder.pof in this win-
dow. If not, you have messed up somewhere. Call for help.
17. In the programmer window, go to File −→ Generate (JAM, SVF...).
A new window will open. Select the programming file type as Serial
Vector Format (SVF). Browse to the directory where you wish to store
the .svf file. The filename need not be the same as the project name.
Click on Generate. The programming file is now ready.
5.10 Download the SVF file onto Krypton card
Assume that you have your programming file created from Quartus II. Con-
nect the programming cable to the Krypton card and download the SVF
file to the card (Follow the instructions in Chapter 4) using the urjtag util-
ity. Once the card is programmed, you are free to play around with it.
Set the state of the switches S7-S0 as you wish and observe the results on
LED7-LED0. All the best.
57
DRAFT
Chapter 6
Familiarization: A scan-chain
based circuit tester
Testing a complex digital system using switches and LED’s is not possible
for two reasons: complex systems can have many inputs and outputs, and to
test them, one has to apply several test patterns. An automated mechanism
for testing complex systems is necessary. Such a mechanism is called a tester.
We will describe a simple tester that you can use to test your design on the
Krypton CPLD card.
The mechanism uses three steps:
•The design that you wish to test (the DUT) is to be implemented in
the Krypton card by connecting a scan-chain to it. The scan-chain is
used to send the input pattern to the DUT and to extract the response
of the DUT. This is done by instantiating the VHDL description of
the DUT with a scan-chain component which will be provided to you.
•A test-pattern file needs to be created on a host computer. The test-
pattern file specifies the input patterns and the expected outputs. You
can generate the test pattern file using a VHDL simulation of the DUT
together with a testbench.
•The host computer needs to be connected to the Krypton card using
a microcontroller bridge which allows the host to download patterns
to the Krypton card and extract the response from the Krypton card.
In this document we describe, using an example, the three step mecha-
nism outlined above. In Section 6.1, we describe how the scan-chain is to
be interfaced to the DUT at the VHDL description level. In Section 6.2,
58
DRAFT
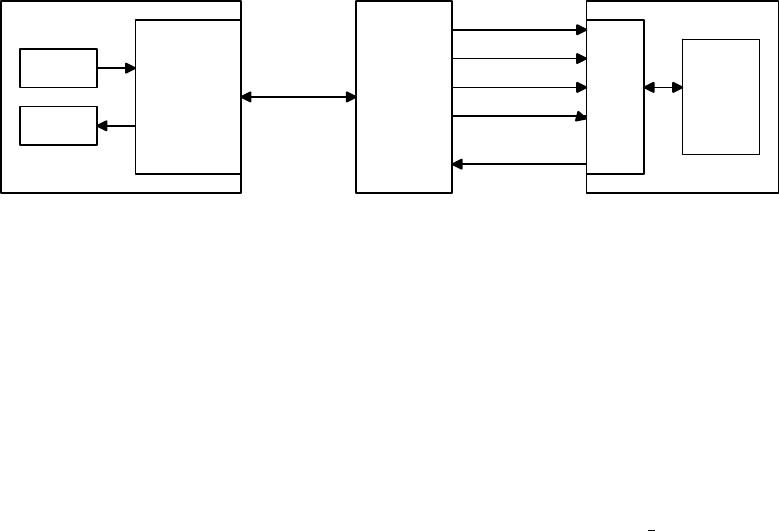
Python
script
Scan Chain
in.txt
out.txt
PC uC Krypton
USB link DUT
TDI
TCLK
TMS
TRST
TDO
Figure 6.1: Tester Architecture
we describe the format of the test-pattern file. In Section 6.3, we describe
the way in which the microcontroller bridge card can be used to connect the
host computer to the Krypton card. Finally, in Section 6.4, we illustrate the
test procedure from the host computer.
6.1 Scan Chain Insertion
The user has to write a top level entity which uses the DUT and Scan Chain
module as components. The top level entity will have only these two com-
ponents communicating with each other. It will have 5 interface signals (1
bit each) TDI,TMS,TCLK,TRST and TDO; and should be connected to pins of
the CPLD using Pin Assignment feature of Altera-Quartus.
Suppose you wish to test a particular design of addition of two 16-bit
vectors. with the following VHDL description.
library ieee;
use ieee.std_logic_1164.all;
use ieee.numeric_std.all;
entity DUT is
port (
clock, reset: in std_logic;
A, B: in std_logic_vector(15 downto 0);
Sum: out std_logic_vector(15 downto 0));
end entity;
architecture Behave of DUT is
signal sumvector: std_logic_vector(15 downto 0);
59
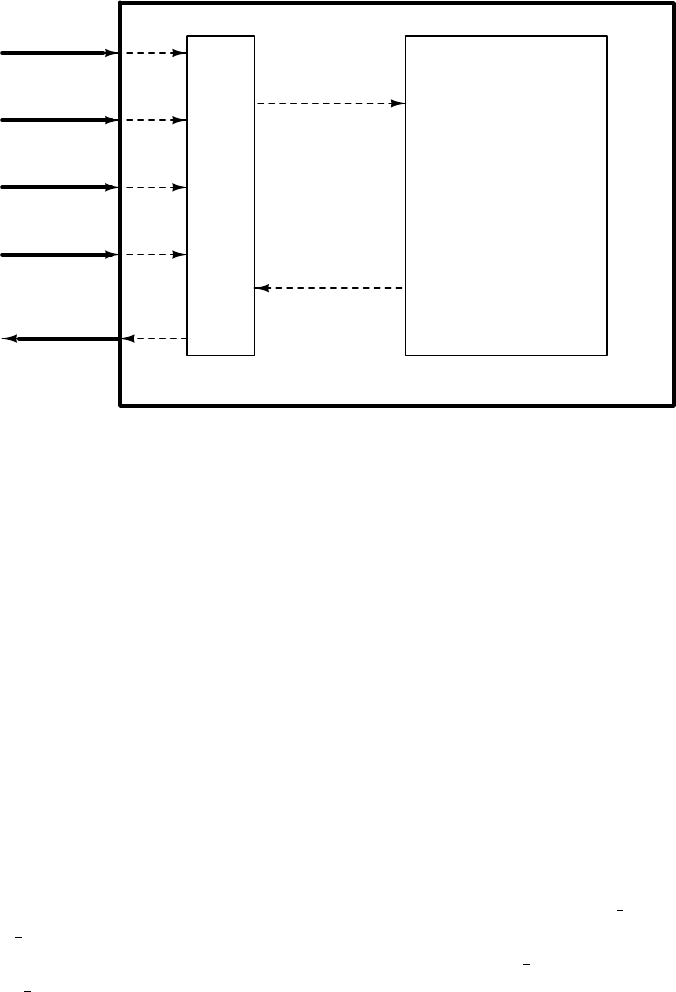
DRAFT
dut_in
dut_out
TDI
TCLK
TMS
TRST
TDO
DUT
TopLevel
Scan_Chain
Figure 6.2: Top Level entity to be implemented into the Krypton CPLD
begin
process(clock, reset)
begin
if (reset = ‘1’) then
sumvector <= std_logic_vector(to_unsigned(0, sumvector’length));
elsif (clock’event and clock = ‘1’) then
sumvector <= std_logic_vector(unsigned(A) + unsigned(B));
end if;
end process;
Sum <= sumvector;
end Behave;
This DUT has 34 inputs and 16 outputs. To test it we will use a scan
chain.
The scan chain module has two configurable parameters (in pins &
out pins) indicating the number of input and output bits to the DUT,
which can be generic mapped. It also has one output (dut in) and one input
(dut out) that should be connected to the DUT. Internally it contains an
FSM, one input scan register and one output scan register. The entity of
the scan chain module is given below:
60
DRAFT
entity Scan_Chain is
generic (
in_pins : integer; -- Number of input pins
out_pins : integer -- Number of output pins
);
port (
TDI : in std_logic; -- Test Data In
TDO : out std_logic; -- Test Data Out
TMS : in std_logic; -- TAP controller signal
TCLK : in std_logic; -- Test clock
TRST : in std_logic; -- Test reset
dut_in : out std_logic_vector(in_pins-1 downto 0); -- Input for the DUT
dut_out : in std_logic_vector(out_pins-1 downto 0); -- Output from the DUT
);
end Scan_Chain;
The scan-chain and the DUT are instantiated together in a top-level
entity as follows
entity TopLevel is
port (
TDI : in std_logic; -- Test Data In
TDO : out std_logic; -- Test Data Out
TMS : in std_logic; -- TAP controller signal
TCLK : in std_logic; -- Test clock
TRST : in std_logic; -- Test reset
);
end TopLevel;
architecture Struct of TopLevel is
-- declare DUT component
component DUT is
port (
clock, reset: in std_logic;
A, B: in std_logic_vector(15 downto 0);
Sum: out std_logic_vector(15 downto 0));
end component;
-- declare Scan-chain component.
component Scan_Chain is
generic (
61
DRAFT
in_pins : integer; -- Number of input pins
out_pins : integer -- Number of output pins
);
port (
TDI : in std_logic; -- Test Data In
TDO : out std_logic; -- Test Data Out
TMS : in std_logic; -- TAP controller signal
TCLK : in std_logic; -- Test clock
TRST : in std_logic; -- Test reset
dut_in : out std_logic_vector(in_pins-1 downto 0); -- Input for the DUT
dut_out : in std_logic_vector(out_pins-1 downto 0); -- Output from the DUT
);
end component;
-- declare I/O signals to DUT component
signal clock, reset: std_logic;
signal A, B, Sum: std_logic_vector(15 downto 0);
-- declare signals to Scan-chain component.
signal scan_chain_parallel_in : std_logic_vector(33 downto 0);
signal scan_chain_parallel_out: std_logic_vector(15 downto 0);
begin
scan_instance: Scan_Chain
generic map(in_pins => 34, out_pins => 16)
port map (TDI => TDI,
TDO => TDO,
TMS => TMS,
TCLK => TCLK,
TRST => TRST,
dut_in => scan_chain_parallel_in,
dut_out => scan_chain_parallel_out);
dut_instance: DUT
port map(clock => clock, reset => reset, A => A, B => B, Sum => Sum);
-- connections between DUT and Scan_Chain
reset <= scan_chain_parallel_in(33);
clock <= scan_chain_parallel_in(32);
A <= scan_chain_parallel_in(31 downto 16);
B <= scan_chain_parallel_in(15 downto 0);
scan_chain_parallel_out <= Sum;
end Struct;
62
DRAFT
6.1.1 Synthesis Project using Quartus
•Open Quartus.
•Go to File ->Open New Project Wizard.
•Specify the working directory for the project.
•Write the name of top-level entity in the name of the project. (TopLevel
in the present example)
•Click “Next”.
•Ensure the Project type is Empty Project. Click “Next”.
•Add all the VHDL files that you created for this project. The files
include all the VHDL files related to your DUT, the TopLevel entity,
the Scan Chain entity (Scan Chain.vhd) and the Scan Register entity
(Scan Reg.vhd). The Scan Chain and Scan Register VHDL files are
provided to you. Click “Next”.
•In the Family & Device Settings, select Family ->MAX V, Package
->TQFP, Pin count ->144, Core Speed Grade ->5, and select device
5M1270ZT144C5. Click “Next” twice & “Finish”.
•Now compile the design by pressing Ctrl+L.
After compilation, if there are no errors observed, we will do the pin
assignment by going to the menu Assignments ->Pin Planner. The Pin
Planner will open in a new window. You will see the port names of the
top-level entity already specified in the Node Name column. Fill the values
in the location column as given in Table 6.1.
Node Name Location
TDO PIN 3
TDI PIN 5
TMS PIN 7
TRST PIN 21
TCLK PIN 23
Table 6.1: Pin Planning
Compile the design again (Press Ctrl+L).
63
DRAFT
Go to Tools ->Programmer. A new window opens up and you should
see the name of your top-level entity (TopLevel.pof ). If you don’t, go to
“Add File” in the left panel, select the .pof file (TopLevel.pof ). You can
find it in the “Output Files”.
To create a flashable file, go to File ->Create JAM, JBC, SVF or ISC
file menu. Select .svf format from the File Format drop down menu. Do
not change any other parameters and click “OK”. You should see a .svf file
generated in your project folder.
Flash the .svf file into CPLD using UrJTAG. Follow UrJTAG User Man-
ual [2].
6.2 Test Input Format
The text file to be passed to the python script for test execution has to be
written in following format. Specify only the values written in italics.
•SDR inpins TDI(input)outpins TDO(output) MASK(maskbits)
The inpins &outpins contain the number of input & output pins
of the DUT, respectively, in decimal format. The attributes (input) &
(output) contain the input vector to be applied and its expected output
vector, respectively, in hex notation. The maskbits are used to specify if
any of the output bits of the CPLD need to be compared with the expected
output. A bit value ‘1’ signifies that comparison is required. The mask bits
are also specified in hex notation.
This instruction loads the input into the Scan Chain register inside the
CPLD. Also, if any of the mask bits are set, it reads data from the Scan
Chain register.
•RUNTEST delay msec
As the previous instruction loads the input and samples the output, this
instruction is used to apply the input combination to the DUT and run the
test for delay msec.
For example, the input text file for the design described in Section 6.1,
and the waveform in Fig.6.3 will be written as follows:
64
DRAFT
reset
clock
A
B
t0Time t1 t2 t3
Figure 6.3: Example Waveform
# @t0
SDR 34 TDI(200000000) 16 TDO(0000) MASK(0000)
RUNTEST 1 MSEC
# @t1
SDR 34 TDI(051267A5C) 16 TDO(0000) MASK(0000)
RUNTEST 1 MSEC
# @t2
SDR 34 TDI(151267A5C) 16 TDO(0000) MASK(0000)
RUNTEST 1 MSEC
# @t3
SDR 34 TDI(051267A5C) 16 TDO(CB82) MASK(FFFF)
RUNTEST 1 MSEC
Note that you can use ‘#’ for a single-line comment.
6.3 Hardware connections
The physical connections among the host PC, microcontroller board and the
user module(CPLD) are specified as follows. The host PC is connected to
the microcontroller board through USB cable. Use 8-Pin Female Connector
for connecting microcontroller board to CPLD.
Two different microcontroller boards are available, Tiva-C and Ptx-128.
You can use any one of the two.
65
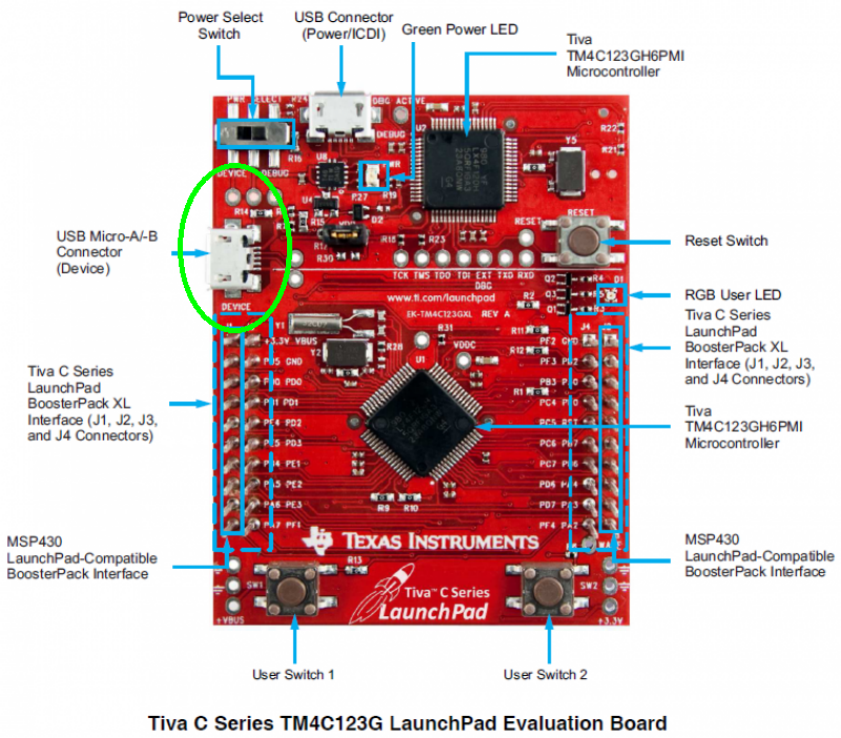
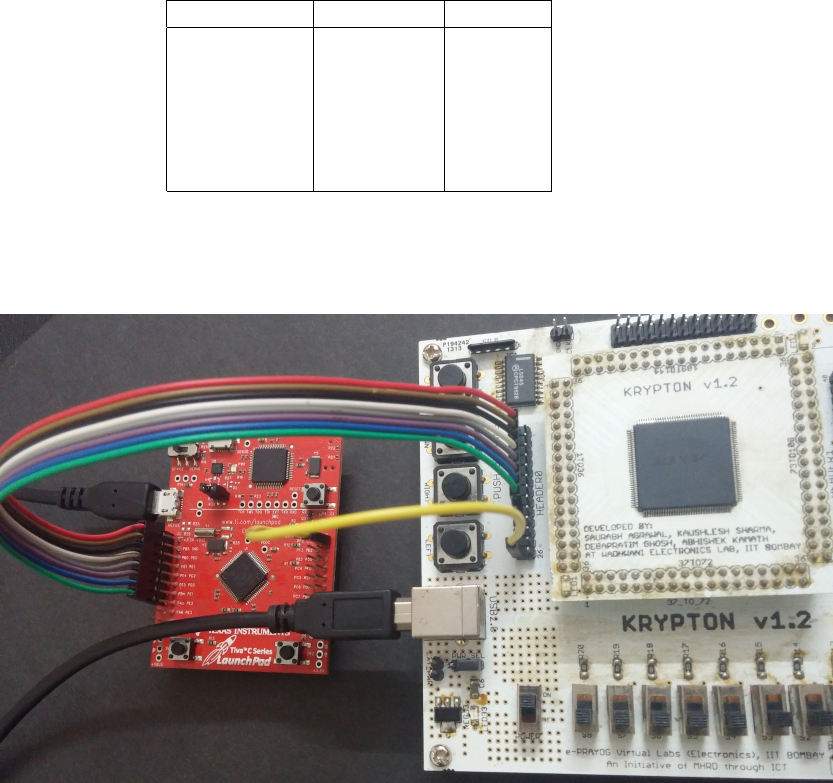
DRAFT
CPLD Pin Tiva-C Pin Function
Header 0: 3 J1:PB5 TDO
Header 0: 5 J1:PB0 TDI
Header 0: 7 J1:PB1 TMS
Header 0: 13 J1:PB4 TRST
Header 0: 15 J1:PA5 TCLK
Header 0: 25 J2:GND GND
Table 6.2: Hardware Connections
Figure 6.5: Hardware Connection between CPLD and Tiva-C using 8-PIN
Female Connector
6.3.2 Using Ptx-128 microcontroller
Host-PC with Ptx-128
Use USB Cable for connection.
67
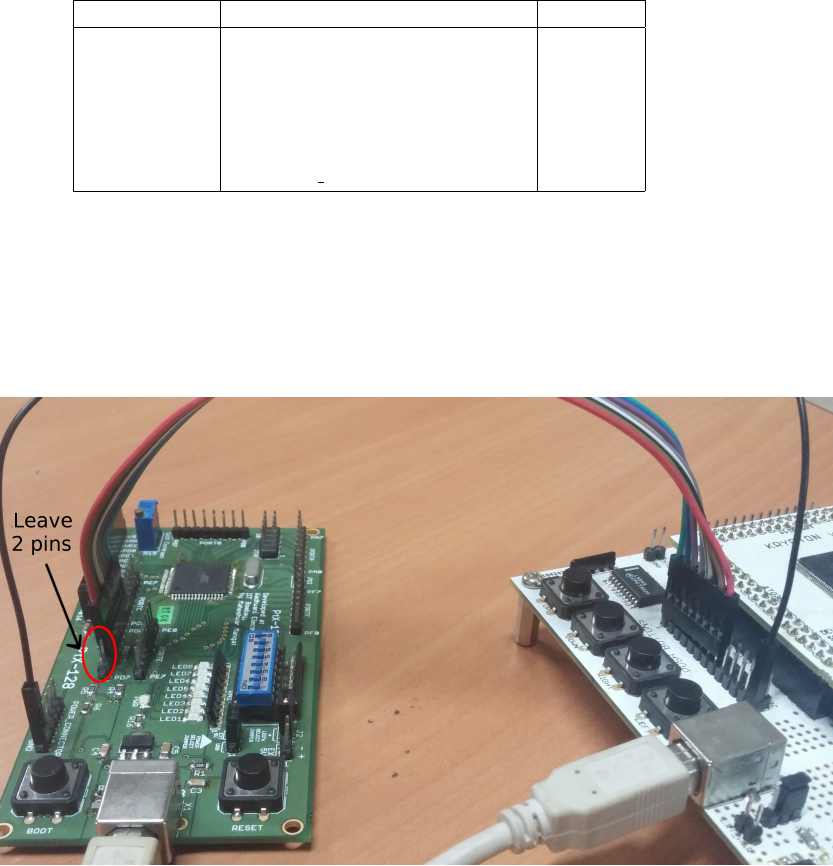
DRAFT
CPLD Pin Ptx-128 Pin Function
Header 0: 3 PORTC:PC0 TDO
Header 0: 5 PORTD:PD0 TDI
Header 0: 7 PORTD:PD1 TMS
Header 0: 13 PORTD:PD4 TRST
Header 0: 15 PORTD:PD5 TCLK
Header 0: 25 POWER CONNECTOR:GND GND
Table 6.3: Hardware Connections
CPLD with Ptx-128
Make the connections as shown in Table 6.3 and Fig. 6.6.
Figure 6.6: Hardware Connection between CPLD and Ptx-128 using 8-PIN
Female Connector
68
DRAFT
6.4 Running the test
6.4.1 Installation
1. goto→http://sourceforge.net/projects/pyusb/ or google Pyusb
2. Download 1.0.0 version and extract it to any folder
3. Open folder and you will see docs,usb,setup.py etc. file and folder.
4. Open terminal, goto the present directory and run following two com-
mands:
(a) Install Python and other dependencies:
sudo apt-get install python libusb-1.0.0
(b) Install PyUSB:
sudo python setup.py install
6.4.2 Running the Python script
After the installation run the scan.py script with the following command.
For Tiva-C : sudo python scan.py input file output file tiva
For Ptx-128: sudo python scan.py input file output file ptx
Where the input file should contain all the commands to be executed as
described in Section 6.2, output file should be an empty file for storing the
results back.
6.4.3 Seeing Results
The output file lists the results under the following headers
Expected Output Received Output Remarks
============================================
The first column under “Expected Output” lists the outputs that are
expected from the CPLD, the second column under “Received Output” lists
the bits received from the CPLD, and the third column under “Remarks”
specifies the result. If the Expected Output matches with the Received
Output, the Remark is “Success”, and if not, the Remark is “Failure”.
For example, the correct result of the example input text file described
in Section 6.2, and the waveform in Fig.6.3 will be as follows:
69
DRAFT
Expected Output Received Output Remarks
============================================
1100101110000010 1100101110000010 Success
70
DRAFT
Bibliography
[1] Texas Instruments, “Tiva-C Series TM4C123G LaunchPad Evaluation
Board User’s Guide”, Texas Instruments, 2013.
[2] Debapratim Ghosh, “Using Quartus II and UrJTAG for Krypton”,
Wadhwani Electronics Laboratory, 2013.
[3] Titto Thomas, “Scan chain based testing mechanism for digital sys-
tems”, Wadhwani Electronics Laboratory, 2015.
71
DRAFT
Chapter 7
Experiment: Implement an
8-Bit ALU using the
KRYPTON CPLD card
Implement an 8-bit ALU with the following specifications. There are two
8-bit inputs X and Y, and it produces an 8-bit output Z. The operation to be
performed is selected by a 2-bit operation code op code. The functionality
of the ALU based on the op code bits is shown in Table 7.1. The numbers
X, Y, Z are to be viewed as integers represented in 2-s complement form.
The shifts are logical, so that a right shift does not do carry extension.
You will implement the 8-bit ALU in a systematic manner (as outlined
in Chapter 5.
1. Logic design: Logic design will be done using two-input AND, OR and
NOT gates only.
2. VHDL description of the ALU.
3. Testbench design and implementation. All possible input combina-
Op Code (op code) Operation Operands Result
00 Addition X,Y Z=X+Y
01 Subtraction X,Y Z=X-Y
10 Logical Right Shift X,Y Z=XY
11 Logical Left Shift X,Y Z=XY
Table 7.1: Op-codes for the ALU
72
DRAFT
tions are to be checked.
4. From the testbench, you will need to generate a trace file to feed to
the scan-chain based tester in order to test your design (the format of
the file is described in Chapter 6).
5. Simulation of the testbench with the ALU to check correctness.
6. Synthesize the ALU and simulate the post-synthesis logic network to
confirm correctness.
At this point, you will diverge from the path taken in Chapter 5, and
attempt to verify the hardware implementation of your ALU by using the
scan-chain based tester described in Chapter 6.
1. Wrap your ALU entity by integrating it with the scan-chain entity as
described in Chapter 6.
2. Synthesize the wrapped entity using the ALTERA Quartus tools (pin
mapping as described in Chapter 6).
3. Program the KRYPTON CPLD using the program file generated by
synthesis.
4. Connect the scan-chain test setup as described in Chapter 6.
5. Run the tester script with the reference trace file that you have gen-
erated earlier (use the correct script options depending on the type of
micro-controller card that you are using).
6. Summarize the results.
73
DRAFT
Chapter 8
Experiment: Implement a
simple string recognizer
using the KRYPTON CPLD
card
Implement a simple string recognizer which is given a sequence of alphabets
as an input. The input and output alphabet consists of {a, b, c, d, . . . , z}(ie,
the 26 lower-case letters in the English alphabet) together with the blank-
space character. The behaviour of the string recognizer is as follows:
•If at any point k, the sequence of letters seen thus far contains one of
the following sub-sequences, then the machine outputs the letter ”y”.
Otherwise, it outputs the letter ”n”.
bomb
gun
knife
terror
For example: suppose the input string is
bring the oil to my building
This string contains the subsequence ”bomb”
bring the oil to my building
^ ^ ^ ^
74
DRAFT
Thus, the input and output sequences when lined up will look like:
bring the oil to my building
nnnnnnnnnnnnnnnnnnnnynnnnnnn
Design a Mealy machine for implementing this string recognizer.
1. First of all, note that you can do this by a parallel combination of sim-
pler Mealy machines, each of which recognizes one of the four simple
substrings specified.
2. Identify a suitable set of states for implementing the state machine(s).
Note that in each machine, one of the states must be the reset state.
3. Write the next state and output functions in a table with the following
format:
present-state input-symbol next-state output-symbol
To implement the Mealy machine in VHDL (for eventual implementa-
tion on the KRYPTON CPLD card), we will encode the input and out-
put alphabet. the 26 letters and blank-space are coded by using 5 bits
X4,X3,X2,X1,X0 as follows:
letter X4 X3 X2 X1 X0
a 0 0 0 0 1
b 0 0 0 1 0
c 0 0 0 1 1
d 0 0 1 0 0
..
w 1 0 1 1 1
x 1 1 0 0 0
y 1 1 0 0 1
z 1 1 0 1 0
space 1 1 0 1 1
The output symbols n, y can be coded with a single bit Was
symbol W
n 0
y 1
In addition, the string recognizer has a reset and clock as is usual. Thus,
the top-level entity for your string-recognizer could look like this
75
DRAFT
entity StringRecognizer
port (X4,X3,X2,X1,X0: in std_logic; W: out std_logic;
clk,reset: in std_logic);
end entity StringRecognizer;
The architecture of each FSM in your string recognizer will consist of a
single process statement which implements the Mealy machine that you have
designed. It is a direct translation of the state transition table to VHDL.
-- signals declared in architecture..
type FsmState is (S1,S2,...,SK); -- list of states
signal Q: FsmState; -- Q need not be encoded into bits
------
process(Q, ... input-variables ...,clk,reset)
variable nQ: FsmState;
variable ... output-variables ... : std_logic;
begin
-- default values.
nQ := Q;
... initialize-output-variables ...
-- calculate nQ, output variables
case Q is
when S1 =>
-- nQ,output-variables
-- depending on X’s,Q.
when S2 =>
-- nQ,output-variables
-- depending on X’s,Q.
...
when SK =>
-- nQ,output-variables
-- depending on X’s,Q.
end case;
-- machine outputs.
output-signals <= output-variables;
-- next-state to state.
76
DRAFT
if (clk’event and clk = ’1’) then
if(reset = ’1’) then
Q <= S1; -- S1 is reset state
else
nQ <= Q;
end if;
end if;
end process;
-- rest of architecture....
You will have to write a test-bench for this design. Try the following
sequence to the implementation to begin with:
he was in born in mumbai i knew that i felt good inspite of errors
This pattern hits all four key words:
he was in born in mumbai he knew that it felt good unite of errors
^^ ^ ^ ^^ ^ ^^ ^ ^^ ^^ ^^^^
bo m b kn i fe g un te rror
The expected response (lined up with the input string) is:
he was in born in mumbai he knew that it felt good unite of errors
nnnnnnnnnnnnnnnnnnnnnynnnnnnnnnnnnnnnnnnnnynnnnnnnnnynnnnnnnnnnnyn
8.1 Laboratory assignment
Complete the implementation of the Mealy FSM by going through the fol-
lowing steps (in your laboratory report, you should give a summary of the
results obtained at each step):
1. If you use a parallel decomposition (you should), then for each con-
stituent FSM:
•Determine the number of states needed to implement the FSM,
and design the state transition graph (next-state, output tables).
•Describe the FSM in VHDL.
2. Assemble the individual process statements for the FSM’s in a single
entity architecture description.
77
DRAFT
3. Write a test-bench which reads a trace file and checks that the machine
produces the expected outputs.
4. Simulate the test-bench with the entity/architecture and confirm that
your implementation is functional. Use the test-bench to generate a
trace file to be used with the scan-based tester.
•IMPORTANT: clock and reset are also inputs to the system. The
rising edge of the clock should be used to implement the delay
element. Your trace file should ensure that when data is changed,
clock is not rising (why?). Thus, your trace file should look like
clk input-data expected-output-data
0 x(0) y(0)
1 x(0) --
0 x(1) y(1)
1 x(1) --
..
0 x(k) y(k)
1 x(k) --
0 x(k+1) y(k+1)
... etc. ...
5. If the verification of your design is successful, proceed to synthesize
your design and simulate the gate-level netlist to confirm correctness
of the hardware implementation.
6. Now, integrate your entity with the scan-based tester, and synthesize
the integrated description (produce a programming file for the CPLD).
7. Download the program file to the Krypton card, and verify the imple-
mentation using the scan-based tester.
78
DRAFT
Chapter 9
Experiment: Implement a
greatest-common-divisor
circuit using the KRYPTON
CPLD card
You will implement a greatest-common-divisor (GCD) computation circuit
in two steps. First implement a divider and then use the divider to imple-
ment a GCD circuit.
9.1 An unsigned divider
Design an unsigned integer divider with the following interface
entity unsigned_divider is
port(clk: in bit;
reset: in bit;
-- the two inputs
dividend: in bit_vector(15 downto 0);
divisor : in bit_vector(15 downto 0);
-- the next two implement a ready-ready
-- protocol to start the division
inputs_ready: in bit;
divider_ready : out bit;
-- the two outputs
quotient : out bit_vector(15 downto 0);
79

DRAFT
remainder : out bit_vector(15 downto 0);
-- the output ready-ready handshake
output_ready: out bit;
output_accept: in bit;
);
end entity unsigned_divider;
The input side information is exchanged using the inputs ready/divider ready
pair, and the output side information is exchanged using the output ready/output accept
pair.
The entire divider is to be constructed using only the following building
blocks:
•FSM.
•Registers and D-flipflops.
•Multiplexors.
•AND, OR, NOT gates (equations are OK).
You are NOT ALLOWED to use any of the ieee packages or functions present
in any of the ieee packages.
Implement the divider using the following steps:
•Choose the division algorithm?
•Write an RTL description of the system. First declare the registers,
then describe the RTL algorithm (use the pseudo-code introduced in
class) and verify that the description implements the algorithm.
•Infer a data-path and a control-path.
•Implement the control-path using an FSM.
•Implement the data-path by first implementing the data-path oper-
ators that you need and then hooking up the multiplexors, registers
and operators.
•Verify (with a test-bench) using at least 16 random divisor-dividend
pairs.
•Using the Quartus tools, synthesize the divider and simulate to check
that the synthesized circuit works.
80
DRAFT
9.2 Use the divider to implement a GCD compu-
tation circuit
Use the divider to implement a circuit which accepts eight 16-bit numbers
and outputs the greatest-common-divisor of these numbers. You can use
the Euclidean algorithm to find the GCD of two numbers as the basis for
the circuit. You will perform the GCD operation by using the observation
that
gcd(a, b, c) = gcd(gcd(a, b), c)
so that you need not read in all the numbers in order to start the computa-
tion.
The entity description of the system is
entity System is
port ( din: in bit_vector(15 downto 0);
dout: out bit_vector(15 downto 0);
start: in bit;
done: out bit;
erdy: in bit;
srdy: out bit;
clk: in bit;
reset: in bit);
end entity;
The input data is accepted using the erdy/srdy pair. The system starts
when the start bit is asserted, and indicates completion by asserting the
done bit. When the done bit is asserted, the information at dout must be
valid data.
Follow the same steps as in the previous question, except that for veri-
fication, do so with at least 16 distinct sets of eight numbers.
9.3 Check the GCD circuit on the KRYPTON
CPLD board
Now that your GCD circuit works in simulation, put it into the Krypton
CPLD card (after integrating it with the scan-chain logic) and confirm that
it works.
81
DRAFT
Chapter 10
Experiment: RTL with
SRAM
82
DRAFT
Chapter 11
Introduction to the use of a
logic analyzer
A Logic analyzer is an instrument used to view multiple digital waveforms.
The key features which distinguish it from a digital storage oscilloscope
(DSO) are
•the availability of large number of input channels (32/63/128).
•advanced triggering capabilities based on input conditions, history etc.
•analysis of captured waveforms using high-resolution timing, sample
& hold analysis etc.
A logic analyzer is not to be used for analog measurements since it does not
have the required resolution.
11.1 The TLA5202B logic analyzer
We will describe the Tektronix TLA 5202B Logic Analyzer (most of the
material here is based on Tektronix Logic Analyzer User Guide). A repre-
sentation of its front panel is shown in Figure 11.1.
This logic analyzer has the following features:
•68 channels
•2 GHz, 256 Mb deep timing analysis
•125 ps MagniVu high resolution timing acquisition
83
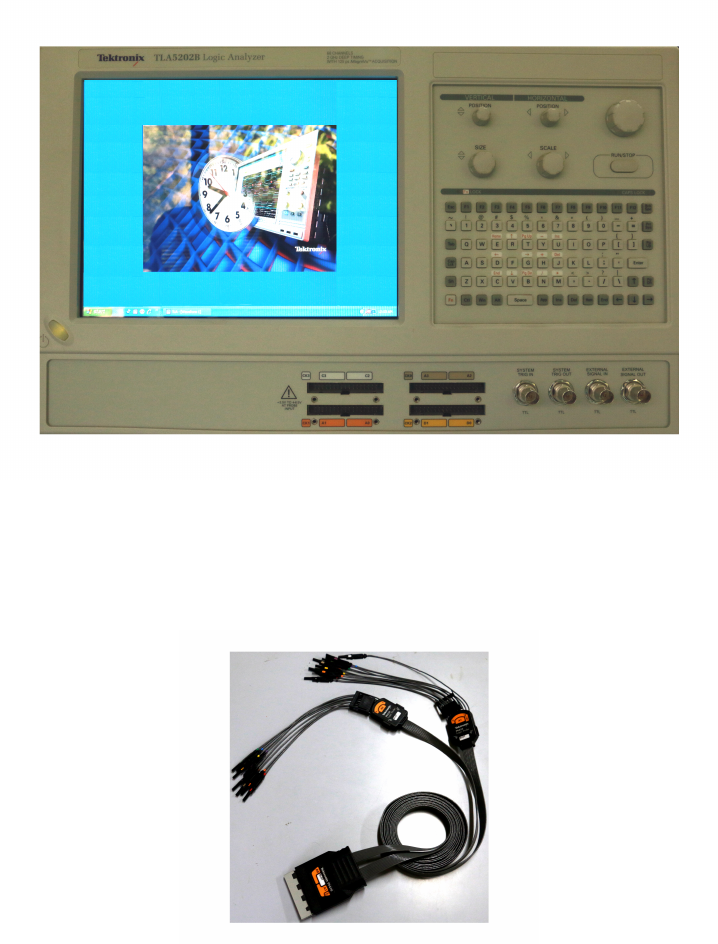
DRAFT
Figure 11.1: TLA 5202B Logic Analyzer Front Panel
Figure 11.2: Logic Analyzer Probes
84
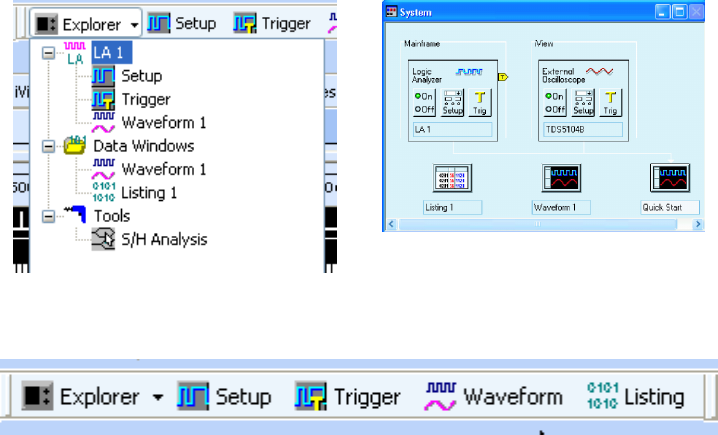
DRAFT
Figure 11.3: TLA explorer
Figure 11.4: System window
Figure 11.5: Toolbar
•Connectorless probing system
Some applications of the logic analyzer include
•Digital hardware verification and debug
•Monitoring and measurement of digital hardware performance
•Single microprocessor or bus debug
11.2 Logic analyzer windows
TLA Explorer: It allows you to access the key windows from a tree structure
System window: It shows the block diagram representation of the modules
and the available data windows
Toolbar buttons: These can be used to navigate between the windows quickly
11.3 Example circuit
We will be using a 4-bit synchronous counter with an enable (called as
COUNT in the manual) and clear for explaining the features of the logic
85

DRAFT
analyzer. VHDL code of the above circuit is given in the Appendix 11.5.
The probes of the logic analyzer are connected as shown below 1
•CLR: A1(1)2
•COUNT: A1(2)
•Q(0): A1(3)
•Q(1): A1(4)
•Q(2): A1(5)
•Q(3): A1(6)
11.4 Basic steps for using a logic analyzer
•Configure the setup window to set up the logic analyzer channels,
threshold voltages, clocking etc
•Configure the waveform window
•Acquire data
•Try out different triggering conditions
11.4.1 Configure the setup window
1. Open the setup window from the toolbar buttons (Figure 11.5).
2. Rename probes (Figure 11.6) using using the information given in the
above section (Figure 11.3).
3. Group the four output bits of the counter (Figure 11.7) and create the
bus COUNT OUT (Figure 11.8).
1We will be using the probe A1 of the logic analyzer
2The pin corresponding to the CLR signal of the adder has to be connected to the
probe A1(1) of logic analyzer
86
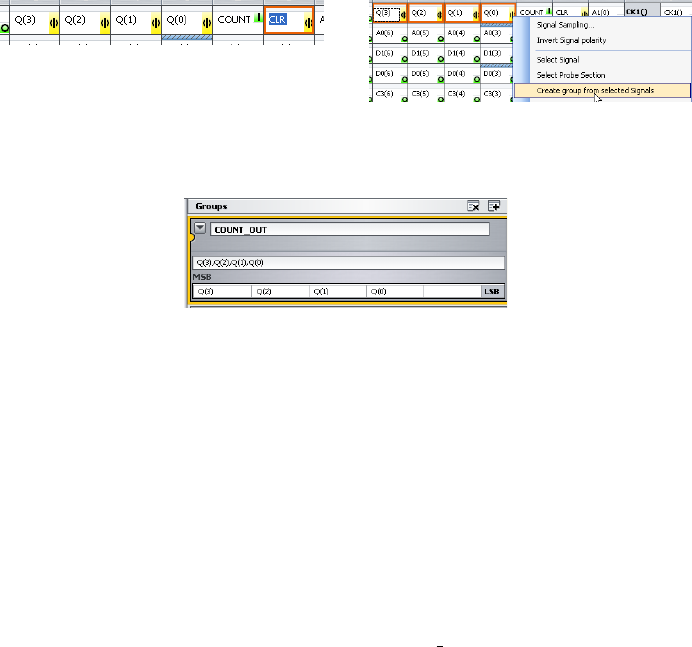
DRAFT
Figure 11.6: Assigning names to the
probes
Figure 11.7: Grouping the signals
Figure 11.8: Assigning names to the group of signals
11.4.2 Configure the waveform window
•Open the setup window from the toolbar buttons (Figure 11.5).
•Right-click in the waveform label area and select Add Waveform (Fig-
ure 11.9).
•Select the signals related to the counter (Figure 11.10) and add it to
the wave window
•Select the output signal group (COUNT OUT) that we had created
earlier
•Click on the Value button (Figure 11.11) to display the values of signals
at the position of the markers (Figure 11.12).
11.4.3 Acquire data
•Enable continuous data acquisiton by clicking on the Repetitive option
from the System dropdown menu (Figure 11.13).
•Click on the run button (Figure 11.14) to start data acquisition. Now
you should be able to see the counter output waveforms (Figure 11.15).
87
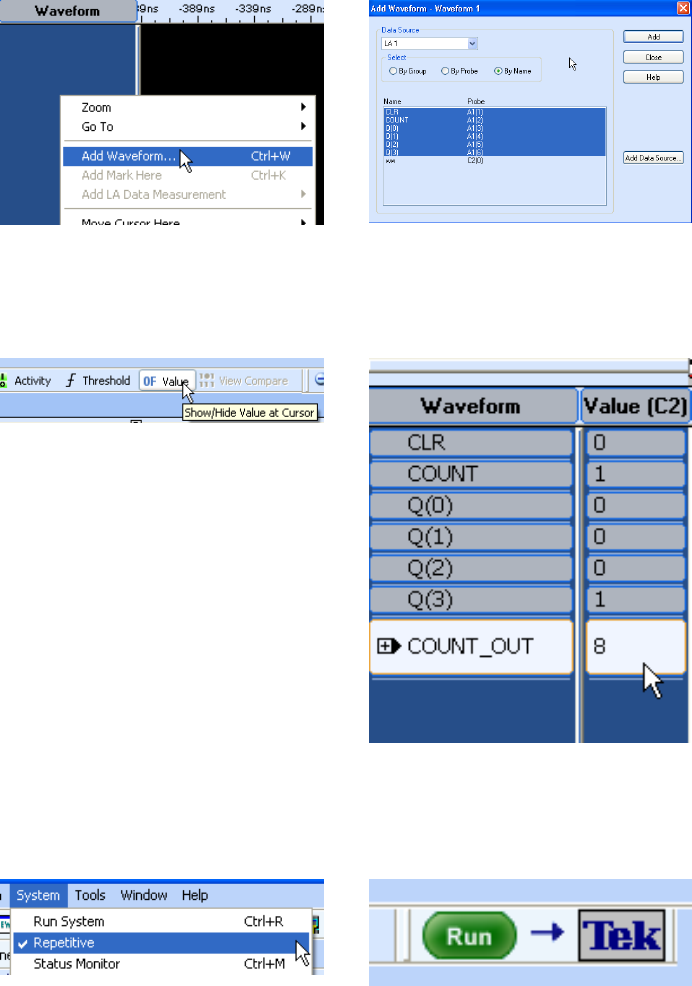
DRAFT
Figure 11.9: Add waveforms Figure 11.10: Selecting signals to be
displayed
Figure 11.11: Value button
Figure 11.12: Displaying the value of
signals at the position of the marker
Figure 11.13: Enabling repetitive run Figure 11.14: The Run button
88
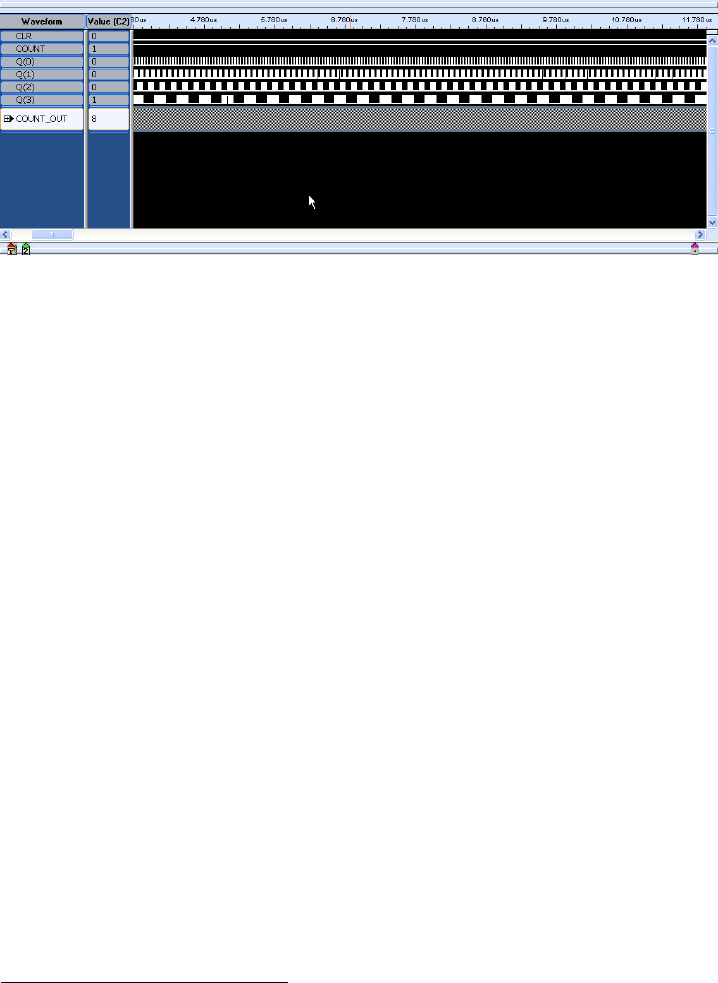
DRAFT
Figure 11.15: Counter signals displayed in the Waveform window
11.4.4 Try out different triggering conditions
•Trigger immediately (default)3
•Trigger on channel transition
•Trigger on a sequence of events
Trigger immediately
This is the default triggering condition (Figure 11.16). The signals will be
captured if any of the signal values changes. We were using this triggering
until now.
Trigger on channel transition
Here we will set the triggering condition as the rising edge of the signal
COUNT (Figure 11.18). You will observe that the wave window will get
updated only when the COUNT is going from LOW to HIGH
•Stop the data acquisition process4by clicking on the STOP button
(Figure 11.17).
•Go to the trigger window
•Click on the Trigger on channel transition (edge)
3We are discussing only 3 out of many possible triggering conditions which can be set
in the logic analyzer
4Only if its running.
89
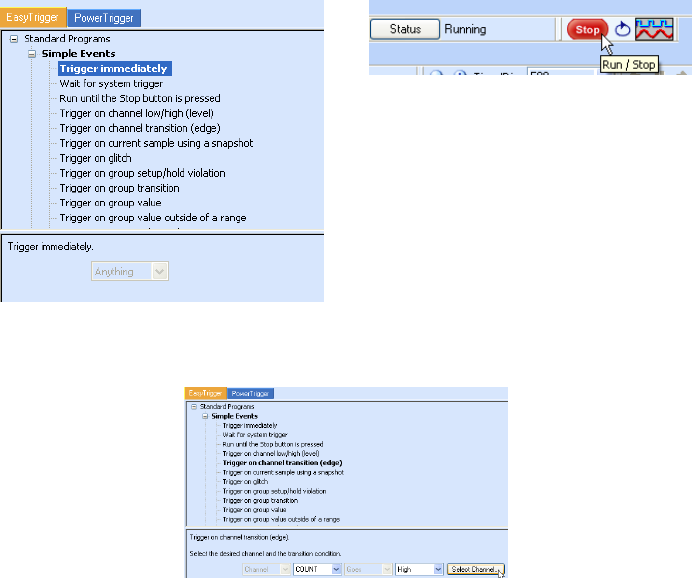
DRAFT
Figure 11.16: Trigger immediately
Figure 11.17: The Stop button
Figure 11.18: Trigger on the rising edge of COUNT
•Select the channel as COUNT and the level as High as shown in Figure
11.18.
Trigger on a sequence of events
Here the triggering will happen only on a sequence of events set by the
user. Here we will set the condition (COUNT=1) & (CLR=0) as the trigger
condition. This can be done using the following steps
•Go to the trigger window and click on the Power Trigger tab
•Click on the box named If/else in the State 1 panel (Figure 11.19)
and set the options as shown in Figure 11.20.
•Click on the box named If/else in the State 2 panel (Figure 11.21)
and set the options as shown in Figure11.22.
90
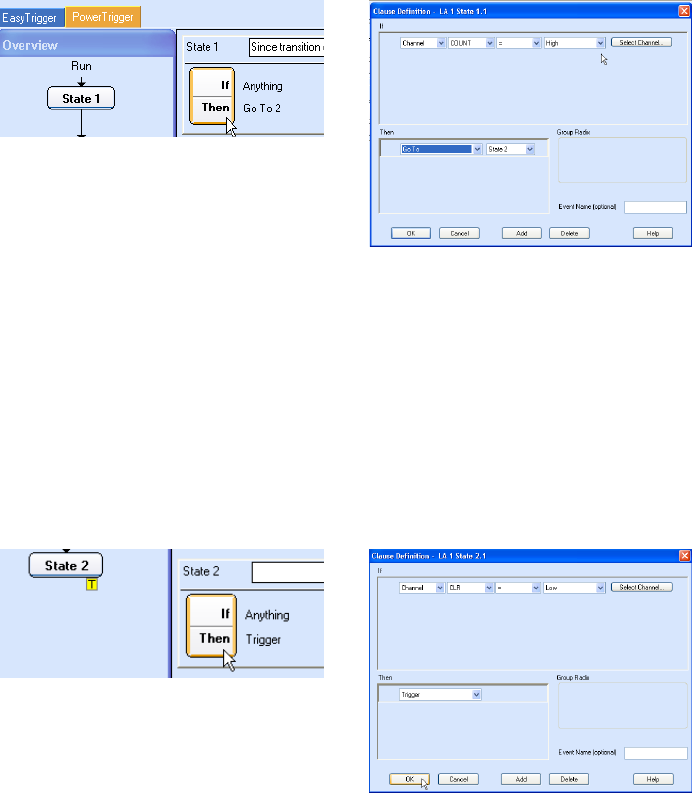
DRAFT
Figure 11.19: State 1 button of
Power Trigger
Figure 11.20: Trigger condition for
state 1
Figure 11.21: State 2 button of
Power Trigger
Figure 11.22: Trigger condition for
state 2
91
DRAFT
11.5 Appendix
The VHDL code of the 4-bit counter referred in this document is given below
1-- 4-bit adder
library ieee ;
3use ieee.std_logic_1164.all;
use ieee.std_logic_unsigned.all;
5entity counter is
generic(n: natural :=4);
7port( clock: in std_logic;
clear: in std_logic;
9count: in std_logic;
Q: out std_logic_vector(n-1 downto 0)
11 );
end counter;
13 architecture behv of counter is
signal Pre_Q: std_logic_vector(n-1 downto 0);
15 begin
process(clock, count, clear)
17 begin
if clear = ’1’ then
19 Pre_Q <= Pre_Q - Pre_Q;
elsif (clock=’1’ and clock’event) then
21 if count = ’1’ then
Pre_Q <= Pre_Q + 1;
23 end if;
end if;
25 end process;
Q <= Pre_Q;
27 end behv;
chapter–11/manual/code snippets/counter.vhdl
92
DRAFT
Bibliography
[1] http://www.tek.com/datasheet/tla5000b-series (Accessed: 17-11-2015)
[2] Photo credits: Anil R. Gawai, WEL, IIT Bombay
93
