Drone Assembly Manual Arthur Chuang
User Manual:
Open the PDF directly: View PDF ![]() .
.
Page Count: 8

無人機安裝說明書
(Assembly Manual)
By Arthur Chuang
07/2018

開箱
內容物:
無線接收器
無人機螺旋槳鎖頭
內容物:
四顆無刷馬達
四組馬達的 ESC (控制轉速)
四隻無人機的腳
一組 Pixhawk Kit (飛控)
一組
GPS
內容物:
無人機架
上層板 下層板
無人機手臂 x4
組裝螺絲和皮束帶

組裝
1. 焊接
注意:
焊線的順序分兩組, 這兩組的方向決定馬達的轉向, 所以需要是相反的.
Ex. 第一組: 黑 -> 紅 -> 黃 (逆時針), 第二組: 黑 -> 黃 -> 紅 (順時針)
馬達線需要先剪斷, 撥到外層的絕緣材質後, 再把線焊接上去
內容物:
電池
充電器
螺旋槳
將馬達的三條線分別焊在
馬達 ESC 上
ESC 焊接點
紅
黑
黃
焊接參考圖
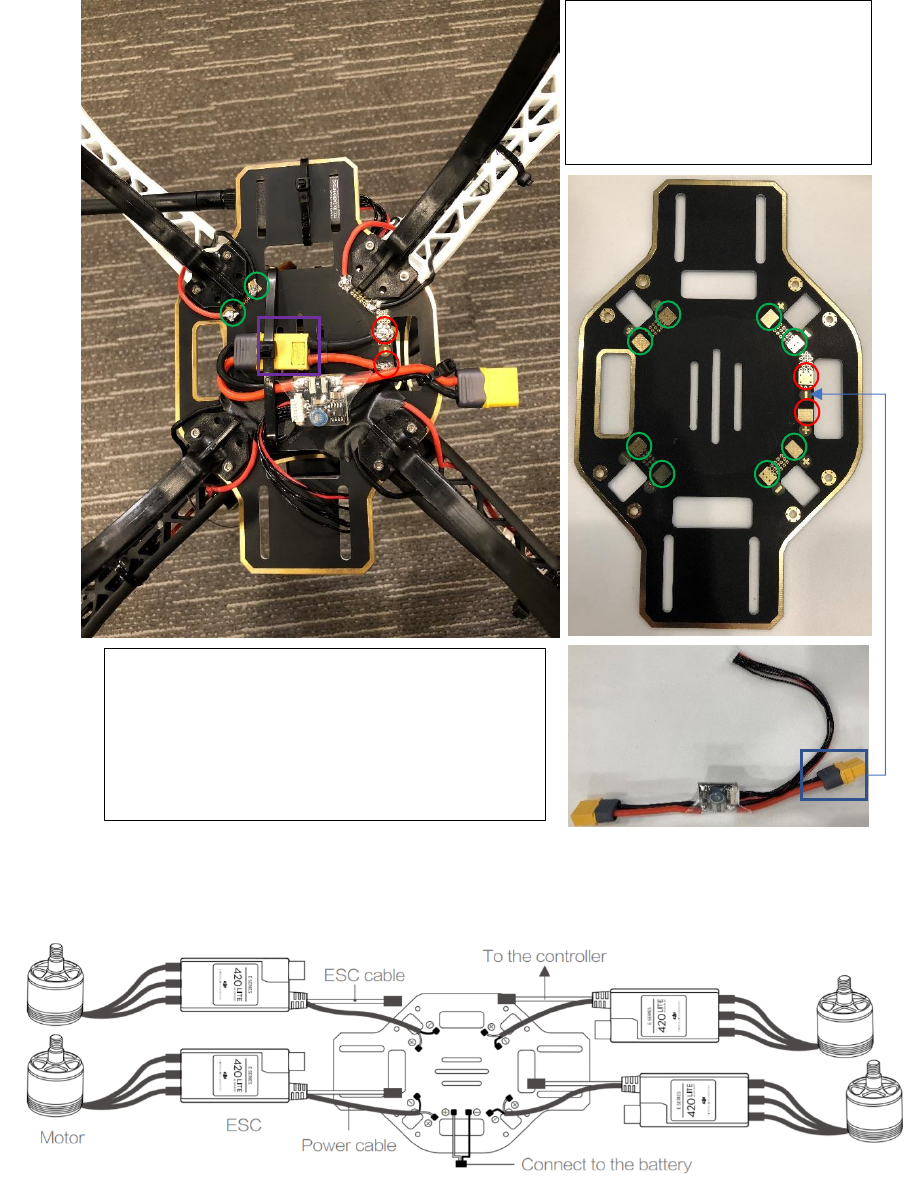
焊接無人機下層版和 ESC 的
線x4 (左圖綠色圈), 以及電池
供電的接口 x1 (左圖橘色圈).
這裡唯一要注意的地方是正
負極要依照板子上的符號順
序 (正極在右邊)
如右圖, 電源線須連結到下層板電源的位置
(紅色圈). 所以, 可採取的方法有:
1. 把藍方框的頭剪斷後焊接上去
2. 焊接其他的延長接口 (如上圖紫框)
下層板
2. 鎖螺絲
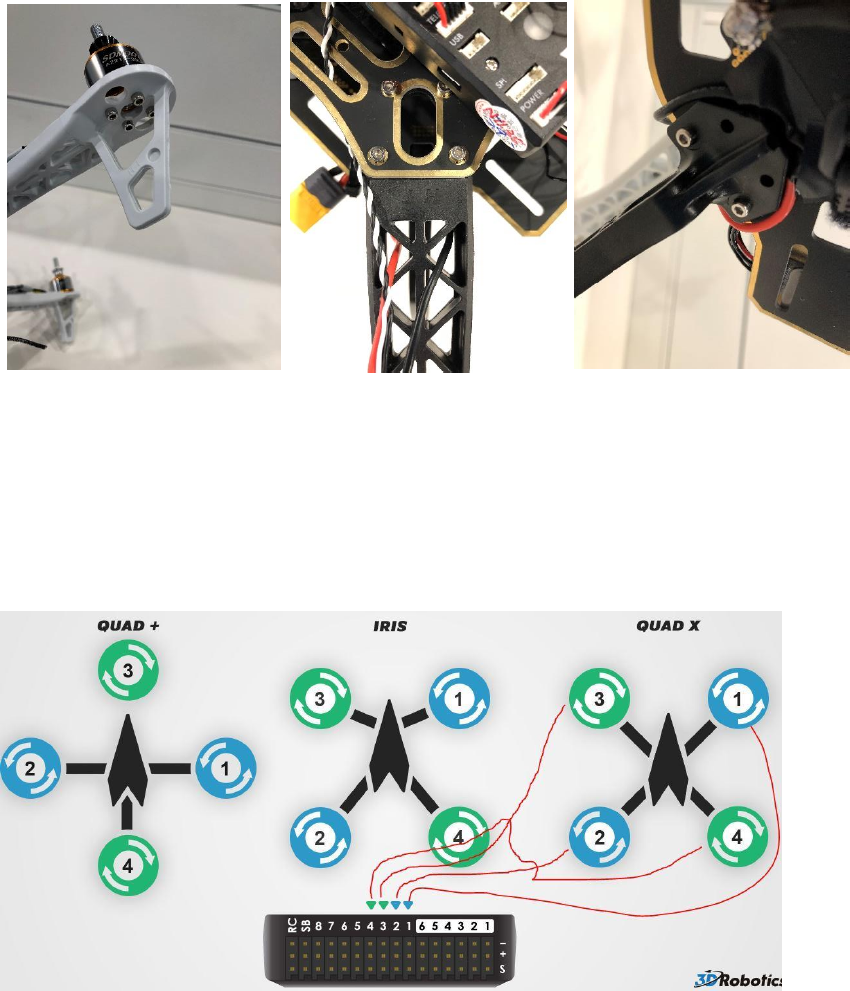
3. 安裝馬達以及連結馬達到 Pixhawk 順序
馬達與無人機架手臂
上層板與無人機架手臂
下層板與無人機腳
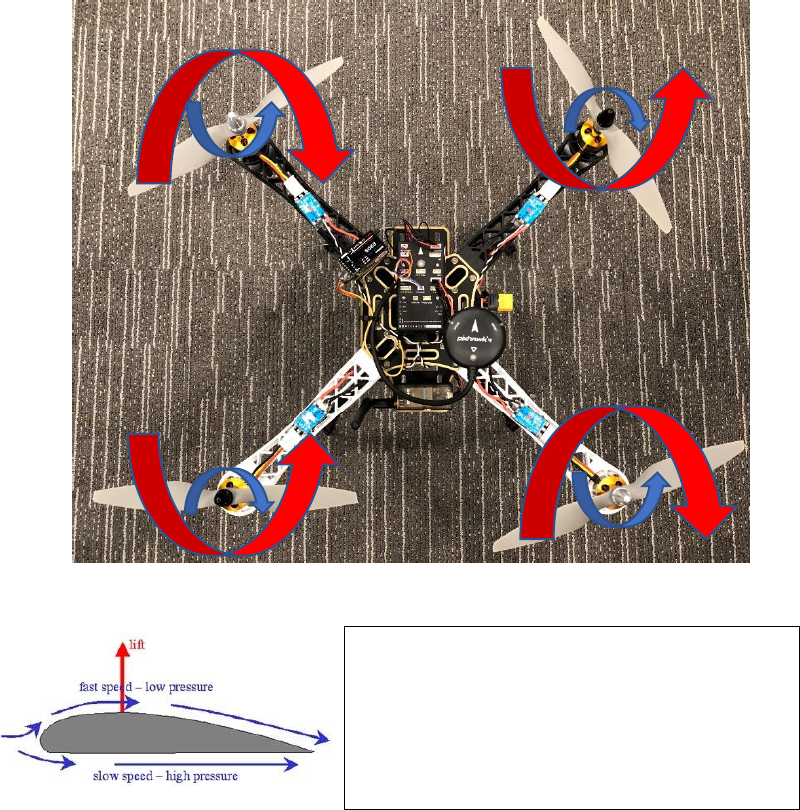
4. 安裝螺旋槳 和 螺旋槳蓋子 的順序
紅色箭頭是螺旋槳轉向, 藍色箭頭是螺旋槳反向上鎖的方向
安裝螺旋槳方向必須要配合起飛的方向:
順時針的方位使用 MRP 槳, 並且 “MRP” logo
朝上.
逆時針方位使用 MR 槳, 並且 “MR” logo 朝上.
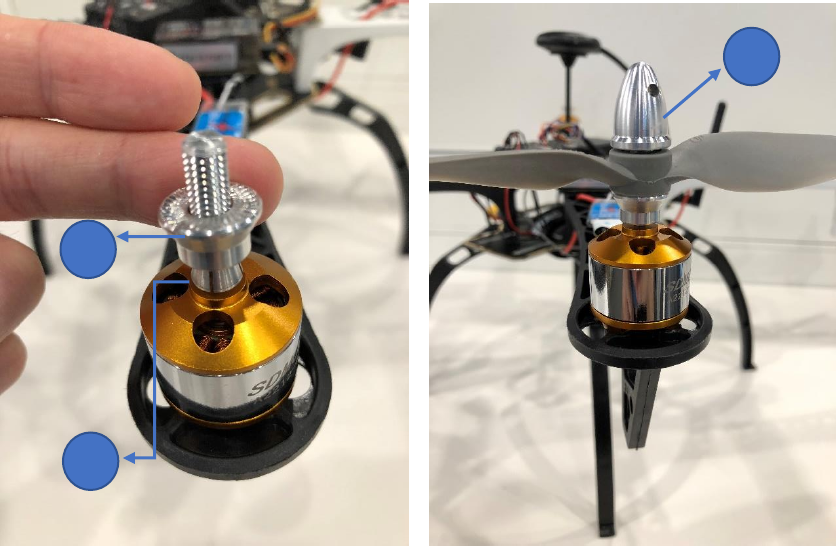
5. 螺旋槳蓋子安裝方法
當把 3 往下鎖緊時, 2 會將 1 縮緊並且咬在馬達的桿子上
1
2
3
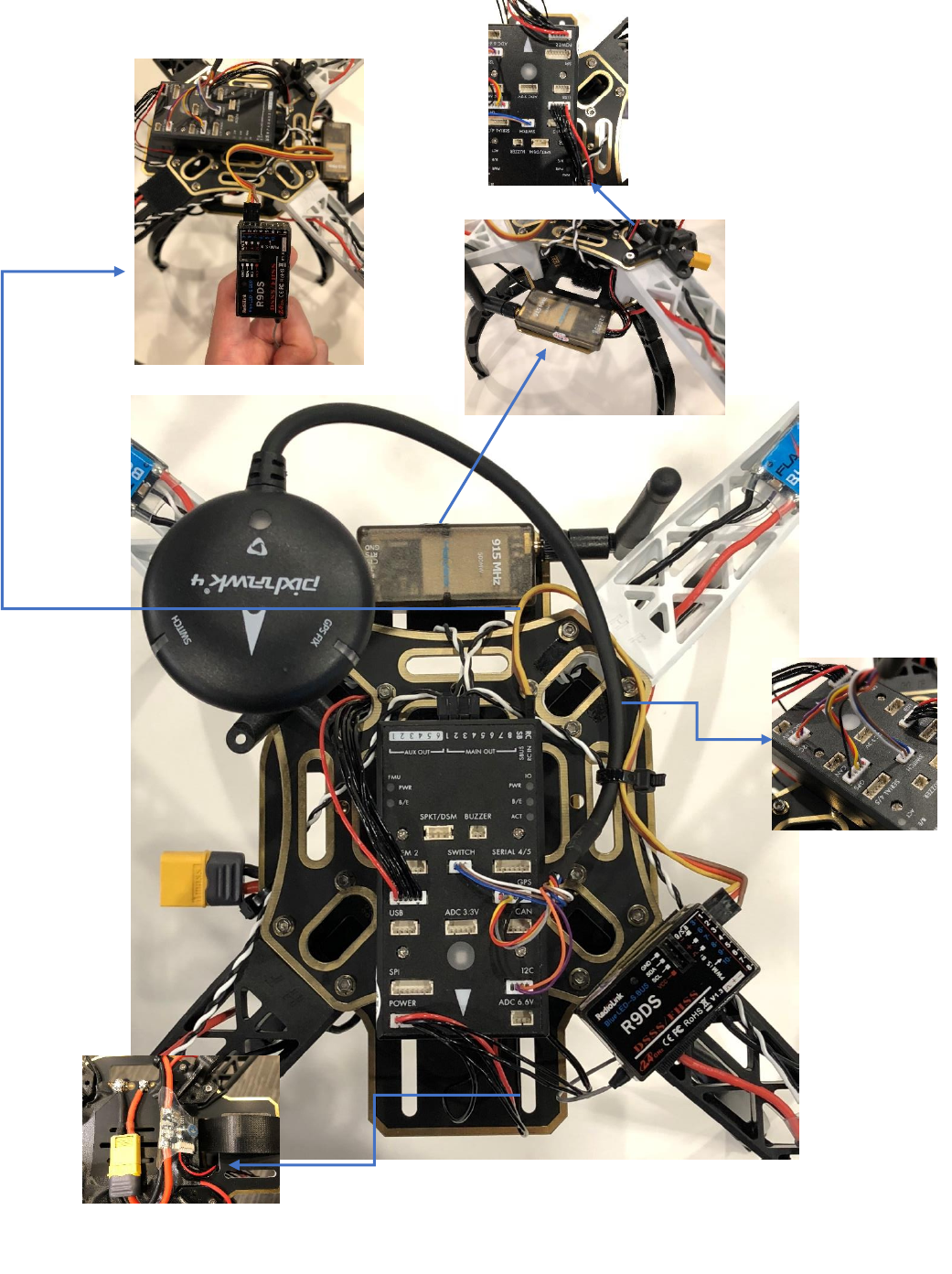
6. PixHawk 和 sensor 連線位置
連線到無線裝置,目的是讓
Pixhawk 和控制中心連線
(信號發射端接在電腦上)
連線到電池
GPS 的連接線分岔
成 Switch, GPS, I2C
連線到遙控
器接收器
