MITSUBISHI Communication Software For CNC FCSB1224W000 Reference Manual
User Manual:
Open the PDF directly: View PDF ![]() .
.
Page Count: 264 [warning: Documents this large are best viewed by clicking the View PDF Link!]
- Front Cover
- INTRODUCTION
- Precautions for Safety
- Trademarks
- CONTENTS
- 1. OUTLINE
- 2. I/F DETAILED SPECIFICATIONS
- 2.1 Common Items
- 2.2 Method List
- 2.3 IEZNcCommunication3 Interface
- 2.4 IEZNcSystem Interface
- 2.5 IEZNcPosition Interface
- 2.5.1 IEZNcPosition::GetWorkPosition
- 2.5.2 IEZNcPosition::GetWorkPosition2
- 2.5.3 IEZNcPosition::GetMachinePosition
- 2.5.4 IEZNcPosition::GetMachinePosition2
- 2.5.5 IEZNcPosition::GetCurrentPosition
- 2.5.6 IEZNcPosition::GetDistance
- 2.5.7 IEZNcPosition::GetDistance
- 2.5.8 IEZNcPosition::GetNextDistance
- 2.5.9 IEZNcPosition::GetFeedSpeed
- 2.5.10 IEZNcPosition::GetTCPSpeed
- 2.5.11 IEZNcPosition::GetManualOverlap
- 2.5.12 IEZNcPosition::GetManualOverlap2
- 2.5.13 IEZNcPosition::GetProgramPosition
- 2.5.14 IEZNcPosition::GetProgramPosition3
- 2.5.15 IEZNcPosition::GetTCPMachinePosition
- 2.5.16 IEZNcPosition::GetTCPWorkPosition
- 2.5.17 IEZNcPosition::GetFeedbackPosition
- 2.5.18 IEZNcPosition::GetTableCoordinationPosition
- 2.5.19 IEZNcPosition::GetWorkInstallationPosition
- 2.5.20 IEZNcPosition::GetInclinedSurfacePosition
- 2.6 IEZNcCommand2 Interface
- 2.7 IEZNcProgram2 Interface
- 2.8 IEZNcTime Interface
- 2.9 IEZNcAxisMonitor Interface
- 2.9.1 IEZNcAxisMonitor::GetServoMonitor
- 2.9.2 IEZNcAxisMonitor::GetServoVersion
- 2.9.3 IEZNcAxisMonitor::GetServoDiagnosis
- 2.9.4 IEZNcAxisMonitor::GetPowerVersion
- 2.9.5 IEZNcAxisMonitor::GetPowerDiagnosis
- 2.9.6 IEZNcAxisMonitor::GetSpindleMonitor
- 2.9.7 IEZNcAxisMonitor::GetSpindleVersion
- 2.9.8 IEZNcAxisMonitor::GetSpindleDiagnosis
- 2.9.9 IEZNcAxisMonitor::GetAbsPositionMonitor
- 2.9.10 IEZNcAxisMonitor::GetAuxAxisMonitor
- 2.9.11 IEZNcAxisMonitor::GetAuxAxisDiagnosis
- 2.9.12 IEZNcAxisMonitor::GetAuxAxisVersion
- 2.9.13 IEZNcAxisMonitor::GetDowelTime
- 2.9.14 IEZNcAxisMonitor:: GetPowerConsumption
- 2.9.15 IEZNcAxisMonitor:: GetIntegralPower
- 2.10 IEZNcRunStatus Interface
- 2.11 IEZNcFile6 Interface
- 2.11.1 IEZNcFile6::FindDir2
- 2.11.2 IEZNcFile6::FindNextDir2
- 2.11.3 IEZNcFile6::ResetDir
- 2.11.4 IEZNcFile6::Copy2
- 2.11.5 IEZNcFile6::Delete2
- 2.11.6 IEZNcFile6::Rename2
- 2.11.7 IEZNcFile6::GetDriveInformation
- 2.11.8 IEZNcFile6::GetDriveSize
- 2.11.9 IEZNcFile6::GetDriveSize2
- 2.11.10 IEZNcFile6::OpenFile3
- 2.11.11 IEZNcFile6::CloseFile2
- 2.11.12 IEZNcFile6::AbortFile2
- 2.11.13 IEZNcFile6::ReadFile2
- 2.11.14 IEZNcFile6::WriteFile
- 2.11.15 IEZNcFile6::OpenNCFile2
- 2.11.16 IEZNcFile6::CloseNCFile
- 2.11.17 IEZNcFile6::AbortNCFile2
- 2.11.18 IEZNcFile6::ReadNCFile2
- 2.11.19 IEZNcFile6::WriteNCFile
- 2.12 IEZNcCommonVariable2 Interface
- 2.13 IEZNcLocalVariable2 Interface
- 2.14 IEZNcTool3 Interface
- 2.14.1 IEZNcTool3::GetToolSetSize
- 2.14.2 IEZNcTool3::GetType
- 2.14.3 IEZNcTool3::GetOffset
- 2.14.4 IEZNcTool3::GetOffset2
- 2.14.5 IEZNcTool3::SetOffset
- 2.14.6 IEZNcTool3::GetToolWorkOffset
- 2.14.7 IEZNcTool3::GetToolWorkOffset2
- 2.14.8 IEZNcTool3:: SetToolWorkOffset
- 2.14.9 IEZNcTool3::SetToolWorkOffset2
- 2.14.10 IEZNcTool3::GetSurface
- 2.14.11 IEZNcTool3::GetSurface2
- 2.14.12 IEZNcTool3::SetSurface
- 2.14.13 IEZNcTool3::GetToolLifeType2
- 2.14.14 IEZNcTool3::SetToolLifeType2
- 2.14.15 IEZNcTool3::GetToolLifeGroupList
- 2.14.16 IEZNcTool3::ChangeToolLifeGroup
- 2.14.17 IEZNcTool3::DeleteToolLifeGroup
- 2.14.18 IEZNcTool3::GetToolLifeToolNoList
- 2.14.19 IEZNcTool3::AddToolLifeToolNo
- 2.14.20 IEZNcTool3::ChangeToolLifeToolNo
- 2.14.21 IEZNcTool3::DeleteToolLifeToolNo
- 2.14.22 IEZNcTool3::GetToolLifeValue
- 2.14.23 IEZNcTool3::SetToolLifeValue
- 2.14.24 IEZNcTool3::SetToolLifeValue2
- 2.15 IEZNcATC3 Interface
- 2.16 IEZNcParameter3 Interface
- 2.17 IEZNcOperation Interface
- 2.18 IEZNcDevice Interface
- 2.19 IEZNcSubFunction3 Interface
- 3. ERROR CODE LIST
- 4. API OPERATING PROCEDURE
- 5. APPLICATION INSTALLATION PROCEDURE
- 6. SAMPLE APPLICATION
- 7. CONSOLE PROGRAM SAMPLE
- Revision History
- Global Service Network
- Back Cover
INTRODUCTION
Thank you for purchasing the Mitsubishi CNC communication software FCSB1224W000. This user's
reference manual describes how to use the OLE/COM interface of FCSB1224W000.
Read this manual before use to get familiar with and correctly use the functions of FCSB1224W000.
Precautions for Safety
(Read carefully before use.)
Before using the product, read the user's reference manual and other related manuals. Pay careful attention to
safety when using the product.
The safety instructions in this manual are intended for this product. Do not use this product until you have a full
knowledge of general and safety information and precautions about the computerized numerical controller.
In this manual, the safety instruction levels are classified into "WARNING" and "CAUTION".
!危険
!注意
Note that even items ranked as
!注意
, may lead to major results depending on the situation. In any case,
important information that must always be observed is described.
Keep this manual in a safe place for future reference.
[Mechanical precautions]
!危険
[Startup and maintenance precautions]
!注意
When there is a great risk that the user could be subject to fatalities
or serious
injuries if handling is mistaken.
When the user could be subject to medium or slight injuries or when physical
damage could occur if handling is mistaken.
-
When connecting the product with the computerized numerical controller, consider the risk of external
power supply failure and computer malfunction, and install the external safety circuit as fail-
safe of the
entire system.
- There is a risk of accident due to output error or malfunction.
- Writing to the computerized numerical controller will directly be reflected in machine control.
- Input error of setup or other parameter may cause accidental operation.
- Check all things before execution.
- Operation error may cause machine damage or accident.
-
Some functions may be different or unavailable depending on the version of the computerized numerical
controller.
DANGER
CAUTI
ON
CAUTION
CAUTION
DANGER
Trademarks
MELDAS, MELSEC, EZSocket, EZMotion, iQ Platform, MELSOFT, GOT, CC-Link, CC-Link/LT and CC-Link
IE are either trademarks or registered trademarks of Mitsubishi Electric Corporation in Japan and/or other
countries.
Ethernet is a registered trademark of Xerox Corporation in the United States and/or other countries.
Microsoft®, Windows, Visual C++® and Visual Basic® are either trademarks or registered trademarks of
Microsoft Corporation in the United States and/or other countries.
CompactFlash and CF are either trademarks or registered trademarks of SanDisk Corporation in the United
States and/or other countries.
SD Logos are trademarks or registered trademarks of SD-3C, LLC in the United States, other countries or
both.
Other company and product names that appear in this manual are trademarks or registered trademarks of the
respective companies.
CONTENTS
1. OUTLINE
1.1 Features ................................................................................................................................................... 1-1
1.2 Applicable Models .................................................................................................................................... 1-1
1.3 Connection Configuration ......................................................................................................................... 1-1
1.3.1 Connection with M700 series ........................................................................................................... 1-2
1.3.2 Connection with M800 series ........................................................................................................... 1-2
1.3.3 Connection with C70 ........................................................................................................................ 1-3
1.4 Development Environment ....................................................................................................................... 1-5
1.5 Installation ................................................................................................................................................ 1-6
1.6 Preparation for Use .................................................................................................................................. 1-6
1.7 Interface .................................................................................................................................................... 1-7
1.7.1 Custom interface .............................................................................................................................. 1-7
1.7.2 Automation interface ........................................................................................................................ 1-8
1.8 Program Flow ........................................................................................................................................... 1-9
1.8.1 VC++ program flow .......................................................................................................................... 1-9
1.8.2 VB program flow ............................................................................................................................ 1-10
2. I/F DETAILED SPECIFICATIONS
2.1 Common Items ......................................................................................................................................... 2-1
2.2 Method List ............................................................................................................................................... 2-3
2.3 IEZNcCommunication3 Interface ............................................................................................................. 2-6
2.4 IEZNcSystem Interface .......................................................................................................................... 2-20
2.5 IEZNcPosition Interface .......................................................................................................................... 2-25
2.6 IEZNcCommand2 Interface .................................................................................................................... 2-45
2.7 IEZNcProgram2 Interface ....................................................................................................................... 2-51
2.8 IEZNcTime Interface ............................................................................................................................... 2-58
2.9 IEZNcAxisMonitor Interface .................................................................................................................... 2-68
2.10 IEZNcRunStatus Interface .................................................................................................................... 2-91
2.11 IEZNcFile6 Interface ............................................................................................................................. 2-98
2.12 IEZNcCommonVariable2 Interface ..................................................................................................... 2-123
2.13 IEZNcLocalVariable2 Interface ........................................................................................................... 2-129
2.14 IEZNcTool3 Interface .......................................................................................................................... 2-132
2.15 IEZNcATC3 Interface.......................................................................................................................... 2-165
2.16 IEZNcParameter3 Interface ................................................................................................................ 2-175
2.17 IEZNcOperation Interface ................................................................................................................... 2-183
2.18 IEZNcDevice Interface ....................................................................................................................... 2-186
2.19 IEZNcSubFunction3 Interface ............................................................................................................ 2-196
3. ERROR CODE LIST
4. API OPERATING PROCEDURE
4. API OPERATING PROCEDURE .............................................................................................................. 4-1
4.1 API Operating Procedure ........................................................................................................................ 4-1
4.2 Initialization for Enabling OLE/COM Interface .......................................................................................... 4-2
4.3 Object Creation......................................................................................................................................... 4-3
4.4 Include Files ............................................................................................................................................. 4-3
4.5 Overview of VB Programming of Automation Interface ............................................................................ 4-4
4.5.1 Using OLE automation interface with VB ........................................................................................ 4-4
4.5.2 VB program flow (1) ......................................................................................................................... 4-6
4.5.3 VB program flow (2) ......................................................................................................................... 4-7
5. APPLICATION INSTALLATION PROCEDURE
5.1 Overview ................................................................................................................................................... 5-1
5.2 Distribution Method with Redistribution Installer ...................................................................................... 5-2
5.2.1 Location where redistribution installer is stored ............................................................................... 5-2
5.2.2 Destination where redistribution installer is installed ....................................................................... 5-2
5.2.3 Specifications for redistribution installer INI file ............................................................................... 5-2
5.2.4 Processing flow and specifications of redistribution installer ........................................................... 5-3
5.2.5 Troubleshooting ............................................................................................................................... 5-6
5.2.6 Precautions ...................................................................................................................................... 5-7
5.3 Terms of Redistribution ............................................................................................................................. 5-8
5.3.1 Redistributable modules .................................................................................................................. 5-8
5.3.2 Redistributable files.......................................................................................................................... 5-8
5.4 Installation Procedure ............................................................................................................................... 5-9
5.4.1 Version upgrade of redistributable files............................................................................................ 5-9
5.4.2 x86 platform ..................................................................................................................................... 5-9
5.4.3 x64 platform ................................................................................................................................... 5-13
6.SAMPLE APPLICATION
6.1 Overview of the Sample Application ......................................................................................................... 6-1
6.2 Position Data Display Application ............................................................................................................. 6-1
6.2.1 Operating requirements ................................................................................................................... 6-1
6.2.2 Installation and uninstallation ........................................................................................................... 6-1
6.2.3 Executing the sample application .................................................................................................... 6-2
6.2.4 Function list ...................................................................................................................................... 6-2
6.2.5 Screen structure and functions ........................................................................................................ 6-3
6.2.6 Setting project workspaces .............................................................................................................. 6-6
6.2.7 IEZNcCommunication object ........................................................................................................... 6-6
6.2.8 IEZNcPosition object ....................................................................................................................... 6-6
6.3 Monitoring Application .............................................................................................................................. 6-7
6.3.1 Operating requirements ................................................................................................................... 6-7
6.3.2 Installation and uninstallation ........................................................................................................... 6-7
6.3.3 Executing the sample application .................................................................................................... 6-7
6.3.4 Function list ...................................................................................................................................... 6-8
6.3.5 Screen structure and functions ........................................................................................................ 6-9
6.3.6 Setting project workspaces ............................................................................................................ 6-10
7. CONSOLE PROGRAM SAMPLE
7.1 Console Program to Connect Mitsubishi CNC C70 (via Ethernet) ........................................................... 7-1
1-1
1. OUTLINE
The Mitsubishi CNC communication software FCSB1224W000 is designed to help development of an
application with Windows interface for Mitsubishi computerized numerical controller CNCM700/M800 series
and CNC C70 series. (Hereinafter referred to as the product.)
The product can accelerate development by eliminating necessity to know about internal processing of the
computerized numerical controller and enabling use of the common OLE interface on the Mitsubishi
computerized numerical controller.
1.1 Features
Functions of Mitsubishi CNC M700/M800 series and CNC C70 series can be used on the Windows
application with VC++, VB or VBA macro language.
Communication and other complex processing with Mitsubishi CNC M700/M800 series and CNC C70
series will be conducted by the product so that the user can focus on development of the value-added
Windows application.
As the product will be upgraded in accordance with new models in the future, upgrading of the
user-created application will also be easy.
1.2 Applicable Models
The product is applicable to the following models. Check compatibility before use.
Mitsubishi CNC M700 series (M700/M700V series, M70/M70V series and E70) (hereinafter referred to as
M700)
Mitsubishi CNC M800 series (M800/M80 series) (hereinafter referred to as M800)
Mitsubishi CNC C70 (hereinafter referred to as C70)
1.3 Connection Configuration
This section explains about connection configuration between the Mitsubishi computerized numerical
controller and personal computer. Prepare the computerized numerical controller, personal computer, cable
and other necessary equipment for communication using this product. For connection of equipment, see the
instruction manual of the computerized numerical controller used.
1-2
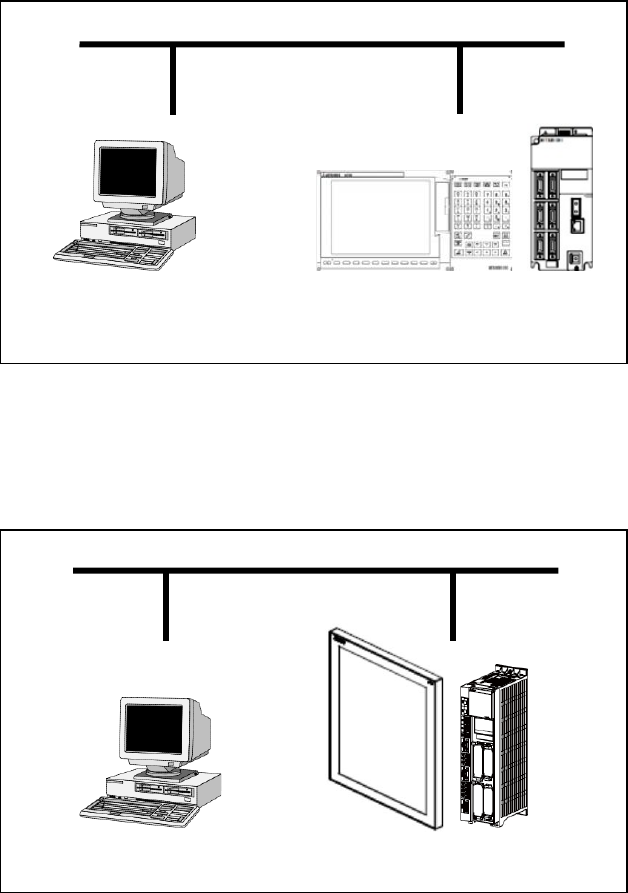
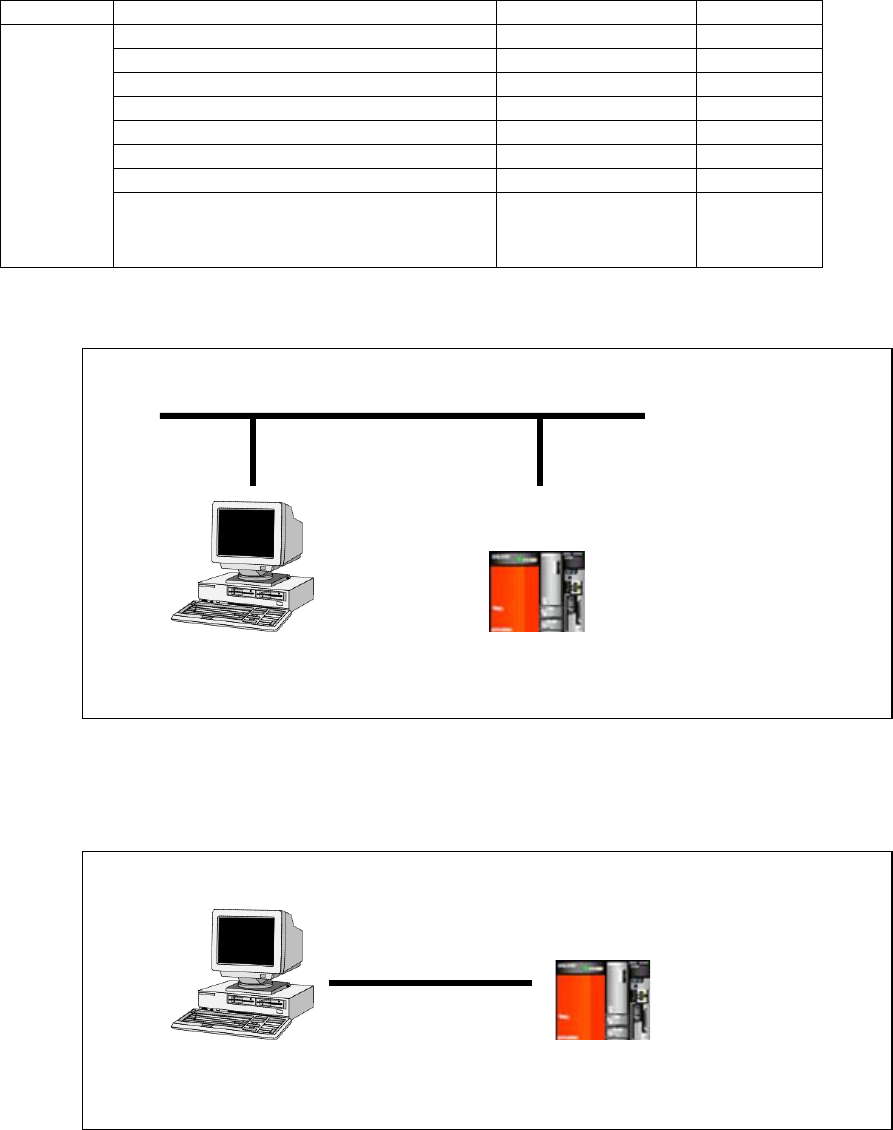
1.3.1 Connection with M700 series
Figure 1-1 Connection with M700 series
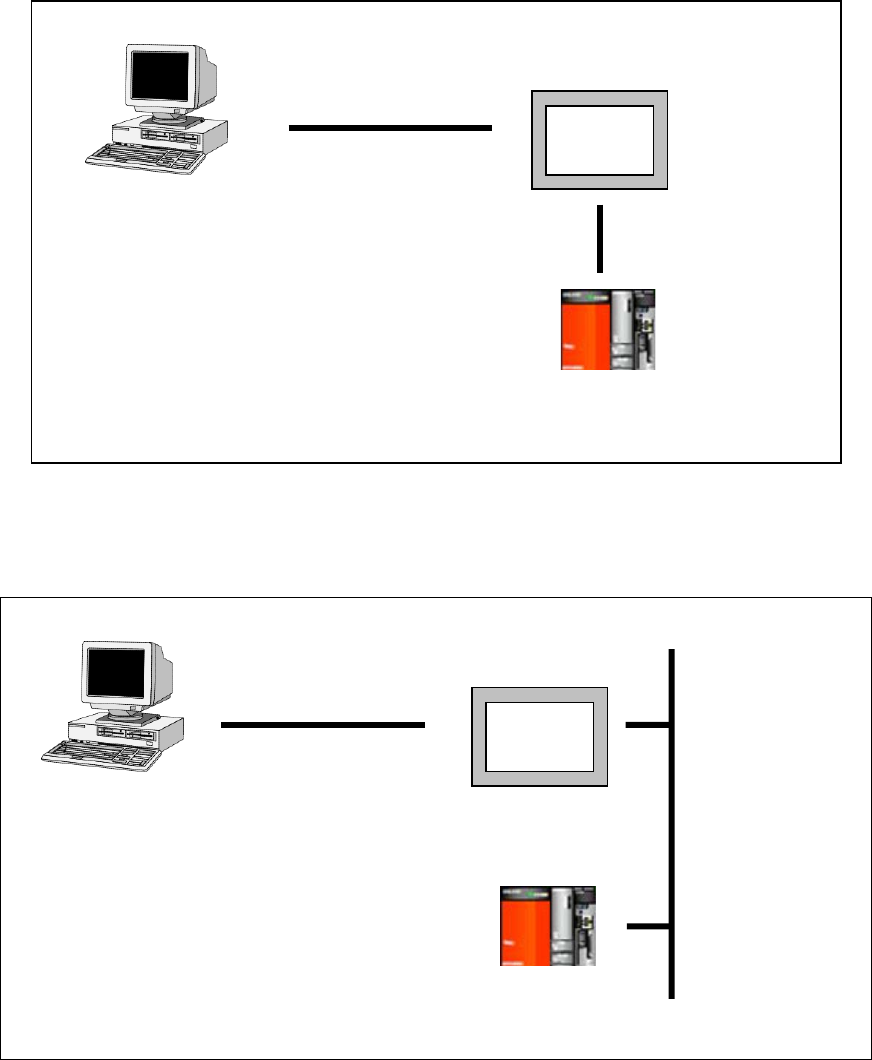
1.3.2 Connection with M800 series
Figure 1-2 Connection with M800 series
Windows personal computer M700
Ethernet
Windows personal computer M800
Ethernet
1-3
1.3.3 Connection with C70
See the connection path between C70 and personal computer.
Table 1-1 C70 Connection path
Model
Connection path
Connection module
Figure
C70
Ethernet connection
C70
Figure 1-3
Ethernet connection via QJ71E71
QJ71E71
Figure 1-3
Ethernet connection via QnUDE
QnUDE
Figure 1-3
USB connection via QnUD
QnUD
Figure 1-4
RS-232C connection via QnUD
QnUD
Figure 1-4
USB connection via QnUDE
QnUDE
Figure 1-4
GOT (bus connection) transparent
Base unit
Figure 1-5
GOT (Ethernet) transparent
C70
QJ71E71
QnUDE
Figure 1-6
Figure 1-3 Ethernet connection with C70
Figure 1-4 QnUD connection with C70
Windows personal computer C70
Ethernet
Connect the Ethernet cable
with C70, QJ71E71 or
QnUDE.
Connect the USB cable
with QnUD
or QnUDE, and
the RS-232C cable
with QnUD.
USB or RS-232C
Windows personal computer C70
1-4
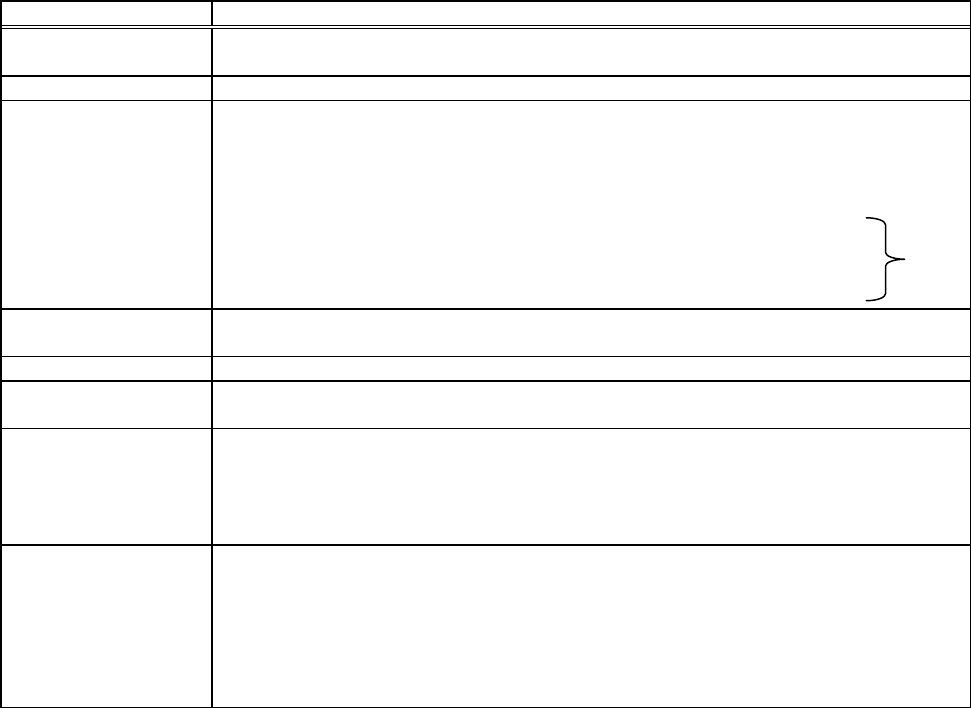
Figure 1-5 C70 and GOT (bus connection) transparent
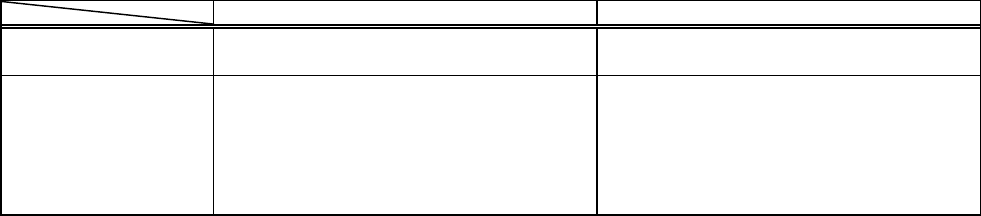
Figure 1-6 C70 and GOT (Ethernet) transparent
USB or RS-232C
GOT1575
Windows personal computer
C70
GOT1000
Bus
USB or RS-232C
GOT1575
Windows personal computer
C70
GOT1000
Ethernet
Connect the Ethernet cable
with C70, QJ71E71 or
QnUDE.
1-5
1.4 Development Environment
Environmental requirements for application development with this product are as below.
Table 1-2 Development and operating environment
Item
Specifications
Personal computer
Personal Computer AT compatible machine (x86 processor)
Personal Computer AT compatible machine (x64 processor)
CPU (*2)
-
OS
Microsoft Windows 7 Home Basic SP1 or later, Japanese/English
Microsoft Windows 7 Home Premium SP1 or later, Japanese/English
Microsoft Windows 7 Professional SP1 or later, Japanese/English
Microsoft Windows 7 Ultimate SP1 or later, Japanese/English
Microsoft Windows 7 Enterprise SP1 or later, Japanese/English
Microsoft Windows 7 Home Premium x64 SP1 or later, Japanese/English
Microsoft Windows 7 Professional x64 SP1 or later, Japanese/English
Microsoft Windows 7 Ultimate x64 SP1 or later, Japanese/English
Microsoft Windows 7 Enterprise x64 SP1 or later, Japanese/English
Required memory
(*2)
-
Disc space (*2)
-
Peripheral equipment
(*2)
-
Development
language (*2)
Microsoft Visual C++.NET 2003, 2005, 2008, 2010 (*1)
Microsoft Visual C++ Ver.5.0, Ver.6.0
Microsoft Visual Basic Ver.5.0, Ver.6.0
Microsoft Visual Basic for Applications Ver.5.0 (Excel 97 VBA equivalent), Ver.6.0
(Excel 2000 VBA equivalent)
Note
(*1) Development with native code (VC++) only. Development with managed code
is not supported.
(*2) See the Windows operati
ng environment recommended by Microsoft
Corporation.
(*3) As the product is 32 bit module, it will run on the Windows 32-bit On Windows
64-
bit (WOW64) subsystem if executed on x64 platform. It does not support 64
bit native operation.
(*3)
1-6
1.5 Installation
Dynamic link library (DLL) of the product is necessary to use its functions.
See the "release note" for how to install the product.
When installting the product on x64 platform, specify the destination folder as below.
C:\Program Files (x86)\EZSocket
1.6 Preparation for Use
To create an application using this product with VC++, VB or VBA, the following appropriate include files or
modules are required. The table below shows the default folders of when the installation is made in the C
drive from DVD-ROM.
Table 1-4 Include files according to development language
VC++
VB or VBA
Installation destination
folder
%ProgramFiles%\EZSocket\EZSocket
Nc\include\Vc
%ProgramFiles%\EZSocket\EZSocket
Nc\include\Vb
File
EZSocketNc.h
EZSocketNcStr.h
EZSocketNc_i.c
EZSocketNcDef.h
EZSocketNcErr.h
EZSocketCommonErr.h
EZNcDef.bas
EZNcErr.bas
EZComErr.bas
To use the product with C70, the MELSEC programmable controller load module needs to be installed
beforehand. See the release note for how to install it.
1-7
1.7 Interface
The product provides two types of interface as DLL inprocess server: custom interface and automation
interface. The two types of interface have similar data access functions.
The custom interface works well with VC++ and the automation interface works well with VB and VBA.
The interface can be selected according to the development language.
As the interfaces of the product are based on Microsoft Component Object Model (COM), general knowledge about
COM will be necessary to use the interfaces from the application. Note that general explanation about COM is not
described in this manual.
1.7.1 Custom interface
See the custom interface list in Table 1-5.
Table 1-5 Custom interface list
Component
Interface
Category
EZNcCommunication
IEZNcCommunication3
Communication
IEZNcSystem
NC System
IEZNcPosition
Position
IEZNcCommand2
Command
IEZNcProgram2
Program
IEZNcTime
Time
IEZNcAxisMonitor
Axis monitor
IEZNcRunStatus
Operation status
IEZNcFile6
File
IEZNcCommonVariable2
Common variable
IEZNcLocalVariable2
Local variable
IEZNcTool3
Tool
IEZNcATC3
ATC
IEZNcParameter3
Parameter
IEZNcOperation
Operation
IEZNcDevice
Programmable controller
device
EZNcSubFunction
IEZNcSubFunction3
Subfunction
(Note 1) Though the interface name may change due to version upgrade, the former interface can still be used
since the new interface inherits its former version.
Example) IEZNcFile5 → IEZNcFile6
Note that the former interface is for backward compatibility and the new interface is required to use the
latest version of product.
(Note 2) C70 does not support automation interface.
1-8
1.7.2 Automation interface
See the automation interface list in Table 1-6.
They are handy for use with VB since all functions are contained in a single automation interface.
Table 1-6 Automation interface list
Component
Interface
Category
DispEZNcCommunication
IDispEZNcCommunication
Communication
NC System
Position
Command
Program
Time
Axis monitor
Operation status
File
Common variable
Local variable
Tool
ATC
Parameter
Programmable controller
device
Operation
DispEZNcSubFunction
IDispEZNcSubFunction
Subfunction
1-9
1.8 Program Flow
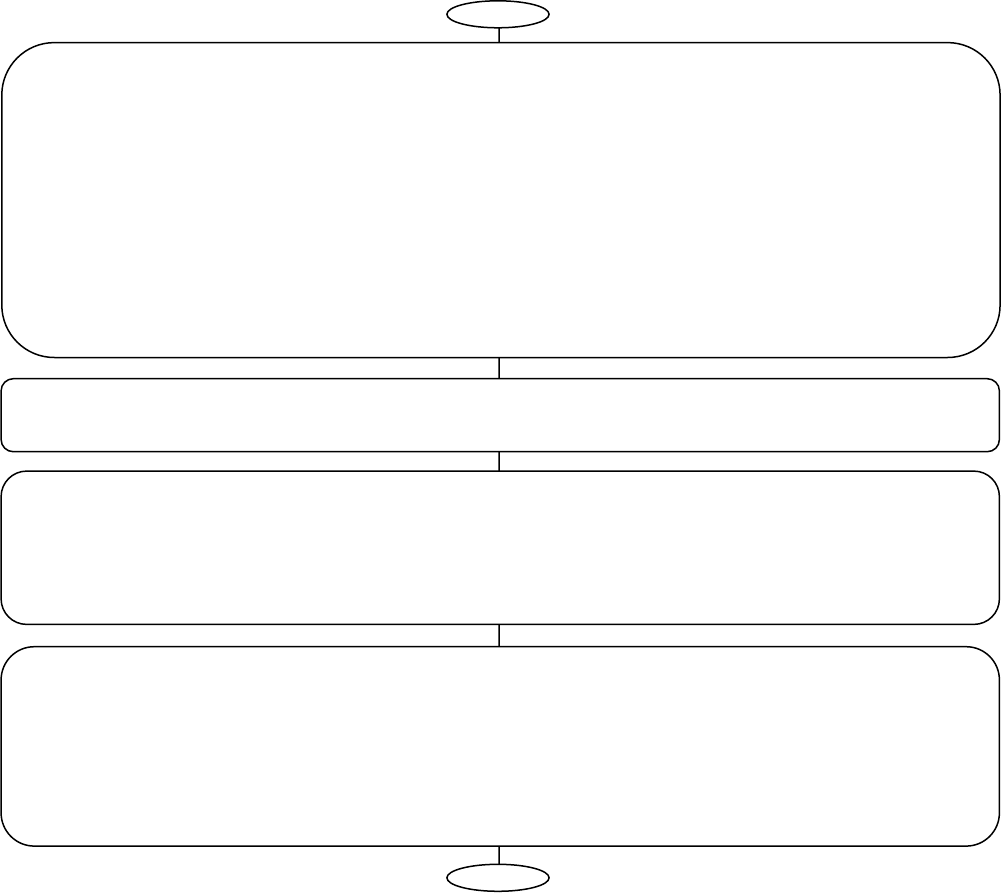
1.8.1 VC++ program flow
This section explains the program flow outline to create an application for M700/M800 series or C70 using the
custom interface with VC++.
*1 In the thread using this product, call the COM library function CoInitialize() before using this product and
CoUninitialize( ) after using this product. When finishing the use of the objects of this product, call Release() to
release the objects (decrement the reference count).
*2 When creating an M700/M800 series application, call SetTCPIPProtocol before Open. When creating a C70
application, call SetMelsecProtocol instead of SetTCPIPProtocol.
lret = m_pezComm SetTCPIPProtocol(...);*2
Opens the communication line lret = m_pezComm Open2(...);
Initializes the COM library lret = CoInitialize(NULL); *1
IEZNcCommunication3* m_pezComm;
IEZNcPosition* m_pezPos;
CLSID clsid;
CLSIDFromProgID(L”EZSocketNc.EZNcCommunication”,&clsid);
Creates a target communication object lret =CoCreateInstance(clsid,
NULL,
CLSCTX_INPROC_SERVER,
IID_IEZNcCommunication3,
(void**)&m_pezComm);
Creates a target operation object lret = m_pezCommQueryInterface(IID_IEZNcPosition,
(void**)&m_pezPos);
Closes the communication line m_pezComm Close(...);
Releases the object m_pezComm Release( );
m_pezComm = NULL;
m_pezPos Release( );
m_pezPos = NULL;
Releases the COM library CoUninitialize( ); *1
lret = m_pezCommSetHead(...);
Processing lret = m_pezPosGetMachinePosition(...);
lret = m_pezPosGetCurrentPosition(...);
lret = m_pezPosGetWorkPosition(...);
1-10
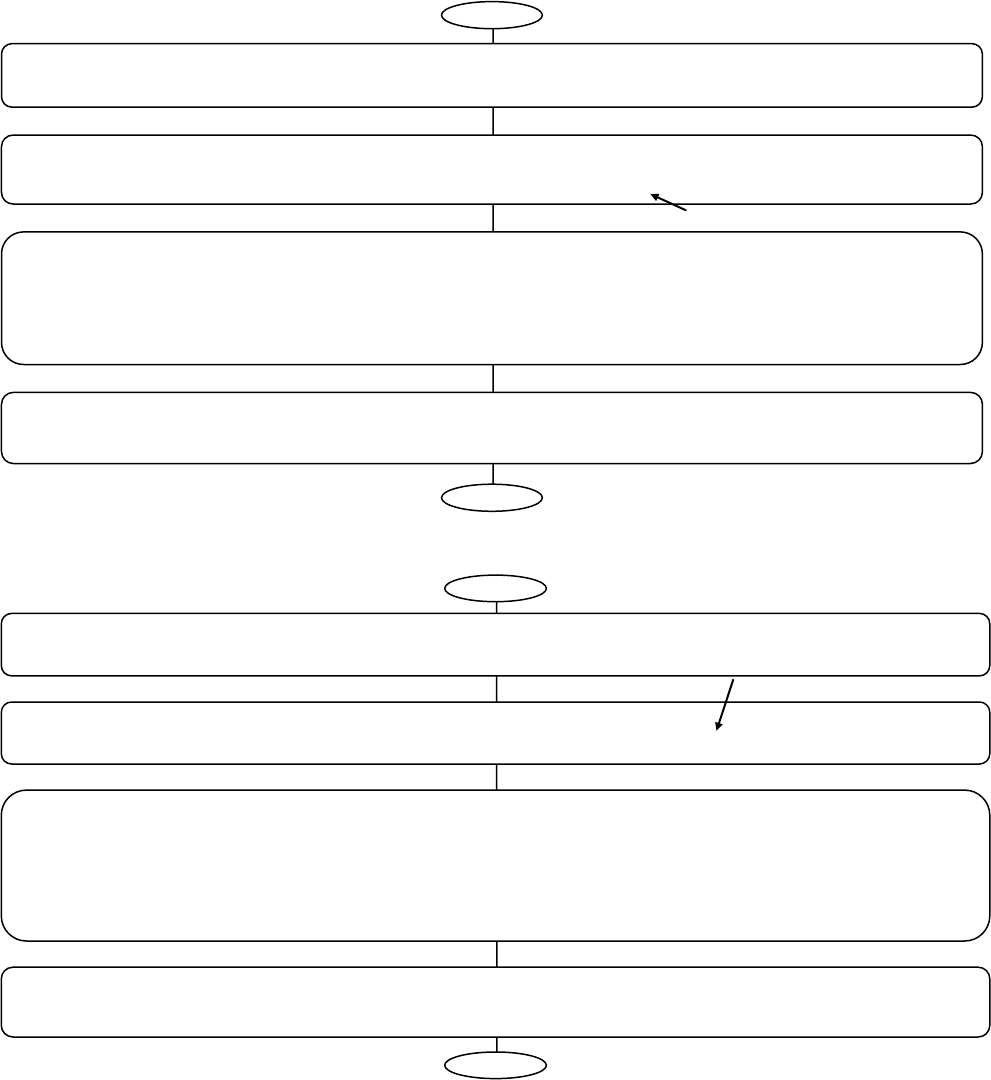
1.8.2 VB program flow
This section explains the program flow outline to create an application for M700/M800 series using the
automation interface with VB.
(1) Early binding call
Early binding requires reference of type library of the automation interface to be set in advance.
(2) Late binding call
Late binding does not require reference setting. Note that the object browser function with VB cannot be
used.
lret = EZNcCom.SetTCPIPProtcol(...)
Opens the communication line lret = EZNcCom.Open2(..., "EZNC_LOCALHOST")
Creates an object Dim EZNcCom As New DispEZNcCommunication
Closes the communication line lret = EZNcCom.Close(...)
Releases the object Set EZNcCom= Nothing
lret = EZNcCom.SetHead(...)
Processing lret = EZNcCom.Position_GetMachinePosition(...)
lret = EZNcCom.Position_GetCurrentPosition(...)
lret = EZNcCom.Position_GetWorkPosition(...)
Indicates the specified local host
lret = EZNcCom.SetTCPIPProtcol(...) *1
Opens the communication line lret = EZNcCom.Open2(..., "EZNC_LOCALHOST")
Declares the object Dim EZNcCom As Object
Creates the object Set EZNcCom=CreateObject(“EZNcAut.DispEZNcCommunication.5”)
Closes the communication line lret = EZNcCom.Close(...)
Releases the object Set EZNcCom= Nothing
lret = EZNcCom.SetHead(...)
Processing lret = EZNcCom.Position_GetMachinePosition(...)
lret = EZNcCom.Position_GetCurrentPosition(...)
lret = EZNcCom.Position_GetWorkPosition(...)
Indicates the specified local host
2-1
2. I/F DETAILED SPECIFICATIONS
2.1 Common Items
(1) Character code
All character string parameters in the interface of this product use UNICODE.
(2) Character string handling
With the method for handling character string data, if returning the character string data to the application,
memory is allocated on the product side. Character string data memory that is no longer needed is freed up
on the application side. If it is not freed up, a memory leak may occur.
To develop applications with custom interfaces for use with VC++, use CoTaskMemFree() to explicitly free
up character string area memory.
To develop applications with automation interfaces for use with VC++, use SysFreeString() to explicitly
free up character string area memory.
(3) Handling of common error codes
The method return value will be either for successful completion (S_OK) or failure (S_FALSE) of the
method.
A detailed method error is returned as an argument.
Commonly used error messages include the following.
EZ_ERR_NOT_OPEN: Communication lines are not open.
EZ_ERR_DOUBLE_OPEN: Double open error
EZ_ERR_DATA_TYPE: Invalid argument data type
EZ_ERR_DATA_RANGE: Invalid argument data range
EZ_ERR_NOT_SUPPORT: Not supported
EZ_ERR_NULLPTR: Argument is NULL pointer
(4) Error handling when calling an I/F incompatible with the model
If the I/F of a function not supported by the model is called, EZ_ERR_NOT_SUPPORT is output as an
unsupported error code.
(5) Notations used in Chapter 2.3 and later in this document
The meaning of notations used on pages describing individual method detailed specifications in Chapter
2.3 and later are as follows.
"□ Argument" section: Describes the argument specifications of the method.
"□ Return value" section: Describes the return values of the method.
"□ Function" section: Describes the general function of the method.
"□ Reference" section: Describes the methods related to the method.
"□ Specification" section: Indicates that specification of the system number (including PLC axis systems)
and axis numbers is necessary when executing the method. If used without specifying, note
that operation will not be guaranteed.
Required specification details are abbreviated with the following marks.
System: Set the part system number. Use SetHead() for the part system number setting.
PLC axis: Set the PLC axis system number. Use SetHead() for PLC axis system number
setting.
Axis number: Set the axis number.

2-2
In addition, even if the System mark is listed, sometimes system specification is not required according to
the argument value, as with the method in Chapter 2.12.1. For more information, see the supplementary
information described in the "□ Specification" section on an individual method's page.
(6) Restrictions on methods that require part system setting
For disabled systems, if a method that requires part system setting is executed, the method's execution
result will be null. Check beforehand whether the set system is an enabled system.
In addition, system 1 will be set after a line opens.
(7) File name specification
In this product, the Mitsubishi CNC (*1) is regarded as a single drive, and the various data on the NC
control unit (machining program, tool offset, etc.) are treated as a file. To access an NC control unit file, set
the file name according to the following form unless otherwise noted.
Drive name + ":" + \directory name + \file name
Make sure to set the file name with an absolute path.*2
Also, the drive name should correspond to an NC control unit number as follows.
NC control unit
number
Drive name (NC memory)
01
M01
02
M02
03
M03
:
:
:
:
FF
MFF
*1: Described in the following sections of this manual as "NC control unit".
*2: Set the file name with upper-case characters.
In English-version operating systems, set by changing "¥" to a backslash.
(8) Restrictions on calls from multiple threads of the C70
With the C70, if the number of threads the product uses exceeds 1000, error codes may no longer be
output correctly.
Keep in mind the number of threads the product uses when creating a C70 application.
2-3
2.2 Method List
Table Interface list ○: Supported, , -: Not supported
Chapter
number
Function class
Interface (operation)
Function
Target
M700
series
M800
series
C70*1
2.3.1
IEZNcCommunication3
Open2
Open NC control unit system line
○
○
○
2.3.2
(Communication)
Close
Close NC control unit system line
○
○
○
2.3.3
SetHead
Set system number
○
○
○
2.3.4
GetHead
Get system number
○
○
○
2.3.5
SetTCPIPProtocol
Set TCPIP communication settings
○
○
-
2.3.6
SetMelsecProtocol
Set MELSEC communication settings
-
-
○
2.4.1
IEZNcSystem
GetVersion
Get system number, name, and control S/W
version
○
○
○
2.4.2
(NC System)
GetSystemInformation
Get NC system information
○
○
○
2.4.3
GetAlarm
Get alarm information
○
-
○
2.4.4
GetAlarm2
Get alarm information
○
○
○
2.5.1
IEZNcPosition
GetWorkPosition
Get workpiece coordinate position (skip
ON-compliant)
○
○
○
2.5.2
(Position)
GetWorkPosition2
Get workpiece coordinate position (skip
ON-compliant)
○
○
○
2.5.3
GetMachinePosition
Get machine position (skip ON-compliant)
○
○
○
2.5.4
GetMachinePosition2
Get machine position (skip ON-compliant)
○
○
○
2.5.5
GetCurrentPosition
Get current position
○
○
○
2.5.6
GetDistance
Get command remaining distance (skip
ON-compliant)
○
○
○
2.5.7
GetDistance2
Get command remaining distance (skip
ON-compliant)
○
○
○
2.5.8
GetNextDistance
Get next travel distance
○
○
○
2.5.9
GetFeedSpeed
Get feed speed
○
○
○
2.5.10
GetTCPSpeed
Get tip speed
○
○
-
2.5.11
GetManualOverlap
Get manual interrupt amount
○
○
○
2.5.12
GetManualOverlap2
Get manual interrupt amount
○
○
○
2.5.13
GetProgramPosition
Get program position
○
○
○
2.5.14
GetProgramPosition3
Get program position
○
○
○
2.5.15
GetTCPMachinePosition
Get tip machine position
○
○
-
2.5.16
GetTCPWorkPosition
Get tip workpiece position
○
○
-
2.5.17
GetFeedbackPosition
Get feedback position
○
○
-
2.5.18
GetTableCoordinationPosition
Get table coordinate system counter
○
○
-
2.5.19
GetWorkInstallationPosition
Get workpiece installation coordinate system
counter
○
○
-
2.5.20
GetInclinedSurfacePosition
Get inclined surface coordinate system counter
○
○
-
2.6.1
IEZNcCommand2
GetGCodeCommand
Get G code modal command value
○
○
○
2.6.2
(Command)
GetToolCommand
Get tool compensation number
○
○
○
2.6.3
GetFeedCommand
Get feed speed command value
○
○
○
2.6.4
GetCommand2
Get M/S/T/B function command modal value
○
○
○
2.6.5
SetCommand2
Set manual numerical value command settings
(M, S, T, B)
○
○
○
2.7.1
IEZNcProgram2
CurrentBlockRead
Read current block
○
○
○
2.7.2
(Program end)
GetProgramNumber2
Get program number (main, sub)
○
○
○
2.7.3
GetSequenceNumber
Get sequence number (main, sub)
○
○
○
2.7.4
GetBlockNumber
Get block number (main, sub)
○
○
○
2.7.5
GetSubProLevel
Get subprogram call level
○
○
○
2.7.6
GetInformation
Get user machining program information
○
○
○
2.7.7
GetCurrentBlockByByte
Get number of bytes from start of program
○
○
-
2.8.1
IEZNcTime
GetClockData
Get date and time
○
○
○
2.8.2
(Time)
SetClockData
Set date and time settings
○
○
○
2.8.3
GetAliveTime
Get power-on time
○
○
○
2.8.4
SetAliveTime
Set power-on time settings
○
○
○
2.8.5
GetRunTime
Get automatic operation time
○
○
○
2.8.6
SetRunTime
Set automatic operation time settings
○
○
○
2.8.7
GetStartTime
Get automatic start time
○
○
○
2.8.8
SetStartTime
Set automatic start time settings
○
○
○
2.8.9
GetEstimateTime
Get external integration time (1, 2)
○
○
○
2.8.10
SetEstimateTime
Set external integration time settings (1, 2)
○
○
○
2-4
hapter
number
Function class
Interface (operation)
Function
Target
M700
series
M800
series
C70*1
2.9.1
IEZNcAxisMonitor
GetServoMonitor
Get servo monitor
○
○
○
2.9.2
(Axis monitor)
GetServoVersion
Get servo version information
○
○
○
2.9.3
GetServoDiagnosis
Get servo diagnostics information
○
○
○
2.9.4
GetPowerVersion
Get power supply version information
○
○
○
2.9.5
GetPowerDiagnosis
Get power supply diagnostics information
○
○
○
2.9.6
GetSpindleMonitor
Monitor spindle
○
○
○
2.9.7
GetSpindleVersion
Get spindle version information
○
○
○
2.9.8
GetSpindleDiagnosis
Get spindle diagnostics information
○
○
○
2.9.9
GetAbsPositionMonitor
Get absolute position monitor information
○
○
○
2.9.10
GetAuxAxisMonitor
Get auxiliary axis monitor information
○
○
-
2.9.11
GetAuxAxisDiagnosis
Get auxiliary axis diagnostics information
○
○
-
2.9.12
GetAuxAxisVersion
Get auxiliary axis version information
○
○
-
2.9.13
GetDowelTime
Get remaining dwell time
○
○
○
2.9.14
GetPowerConsumption
Get current power consumption
-
○
-
2.9.15
GetIntegralPower
Get integral power
-
○
-
2.10.1
IEZNcRunStatus
GetInvalidStatus
Get disabled status
○
○
○
2.10.2
(Operation status)
GetCommandStatus
Get operation command status
○
○
○
2.10.3
GetCuttingMode
Get cutting mode status
○
○
○
2.10.4
GetAxisStatus
Get axis status
○
○
○
2.10.5
GetRunStatus
Get operation status
○
○
○
2.11.1
IEZNcFile6
FindDir2
Search directory
○
○
○
2.11.2
(File)
FindNextDir2
Search next directory
○
○
○
2.11.3
ResetDir
Terminate directory search
○
○
○
2.11.4
Copy2
Copy file
○
○
○
2.11.5
Delete2
Delete file
○
○
○
2.11.6
Rename2
Change file name
○
○
○
2.11.7
GetDriveInformation
Get drive information
○
○
○
2.11.8
GetDriveSize
Get free drive space
○
○
○
2.11.9
GetDriveSize2
Get free drive space
-
○
-
2.11.10
OpenFile3
Open file
○
○
○
2.11.11
CloseFile2
Close file
○
○
○
2.11.12
AbortFile2
Force close file
○
○
○
2.11.13
ReadFile2
Read file
○
○
○
2.11.14
WriteFile
Write file
○
○
○
2.11.15
OpenNCFile2
Open NC program file
○
○
-
2.11.16
CloseNCFile2
Close NC program file
○
○
-
2.11.17
AbortNCFile2
Force close NC program file
○
○
-
2.11.18
ReadNCFile2
Write NC program file
○
○
-
2.11.19
WriteNCFile
Read NC program file
○
○
-
2.12.1
IEZNcCommonVariabl
e2
CommonVRead
Read common variables (#100, #500)
○
○
○
2.12.2
(Common variable)
CommonVWrite
Write common variables (#100, #500)
○
○
○
2.12.3
GetSize
Get number of sets for common variables
(#100, #500)
○
○
○
2.12.4
GetName
Get names of common variables (#500 to 519)
○
○
○
2.12.5
SetName
Set name settings for common variables (#500
to 519)
○
○
○
2.12.6
GetCVNullData
Get value when no numerical value is set
○
○
○
2.13.1
IEZNcLocalVariable2
LocalVRead
Read local variable
○
○
○
2.13.2
(Local variable)
GetMacroLevel
Get macro subprogram execution level (level 0
to 4)
○
○
○
2.13.3
GetLVNullData
Get value when no numerical value is set
○
○
○

2-5
Chapter
number
Function class
Interface (operation)
Function
Target
M700
series
M800
series
C70*1
2.14.1
IEZNcTool3
GetToolSetSize
Get number of sets for tool offset
○
○
○
2.14.2
(Tool)
GetType
Get tool offset type
○
○
○
2.14.3
GetOffset
Get tool offset data
○
○
○
2.14.4
GetOffset2
Get tool offset data
○
○
○
2.14.5
SetOffset
Set tool offset data settings
○
○
○
2.14.6
GetToolWorkOffset
Get workpiece coordinate system offset (#54 to
60)
○
○
○
2.14.7
GetToolWorkOffset2
Get workpiece coordinate system offset (#54 to
60)
○
○
○
2.14.8
SetToolWorkOffset
Set workpiece coordinate system offset settings
(#54 to 60)
○
○
○
2.14.9
SetToolWorkOffset2
Set workpiece coordinate system offset settings
○
○
○
2.14.10
GetSurface
Get reference surface height
○
○
○
2.14.11
GetSurface2
Get reference surface height
○
○
○
2.14.12
SetSurface
Set reference surface height settings
○
○
○
2.14.13
GetToolLifeType2
Get tool life control type 2
○
○
○
2.14.14
SetToolLifeType2
Set tool life control type settings 2
○
○
○
2.14.15
GetToolLifeGroupList
Get tool life control group number list
○
○
○
2.14.16
ChangeToolLifeGroup
Change tool life control group number
○
○
○
2.14.17
DeleteToolLifeGroup
Delete tool life control group number
○
○
○
2.14.18
GetToolLifeToolNoList
Get list of tools within tool life control group
○
○
○
2.14.19
AddToolLifeToolNo
Add tool number to tool life control group
○
○
○
2.14.20
ChangeToolLifeToolNo
Change tool life control tool number
○
○
○
2.14.21
DeleteToolLifeToolNo
Delete tool life control tool number
○
○
○
2.14.22
GetToolLifeValue
Get tool life control data
○
○
○
2.14.23
SetToolLifeValue
Set individual tool life control data settings
○
○
○
2.14.24
SetToolLifeValue2
Set tool life control data settings
○
○
○
2.15.1
IEZNcATC3
GetMGNControl
Get ATC tool registration control parameter
○
○
○
2.15.2
(ATC)
GetMGNSize
Get total number of sets of magazine pots for
ATC tool registration
○
○
○
2.15.3
GetMGNSize2
Get number of sets of pots for each magazine
for ATC tool registration
○
○
○
2.15.4
GetMGNReady2
Get tool number for ATC tool registration
○
○
○
2.15.5
GetMGNPot
Get tool number for magazine pot for ATC tool
registration
○
○
○
2.15.6
GetMGNPot3
Get tool number for each magazine pot for ATC
tool registration
○
○
○
2.15.7
SetMGNPot
Set tool number settings for magazine pots for
ATC tool registration
○
○
○
2.15.8
SetMGNPot3
Set tool number settings for each magazine pot
for ATC tool registration
○
○
○
2.15.9
GetMGNAux
Get user programmable controller interface for
ATC tool registration
○
○
○
2.15.10
SetMGNAux
Set user programmable controller interface
settings for ATC tool registration
○
○
○
2.16.1
IEZNcParameter3
GetParameterData2
Get parameters
○
-
○
2.16.2
(Parameter)
GetParameterData3
Get parameters
○
○
○
2.16.3
SetParameterData2
Set parameter settings
○
-
○
2.16.4
SetParameterData3
Set parameter settings
○
○
○
2.17.1
IEZNcOperation
Search
Operation search
○
○
○
2.17.2
(Operation)
Run
Start programmable controller program
○
○
○
2.17.3
Stop
Stop programmable controller program
○
○
○
2.18.1
IEZNcDevice
SetDevice
Set device settings
○
○
-
2.18.2
(Device)
DeleteDeviceAll
Delete all device settings
○
○
-
2.18.3
ReadDevice
Read device
○
○
-
2.18.4
WriteDevice
Write device
○
○
-
2.18.5
ReadBlockDevice
Batch read devices
○
○
-
2.18.6
WriteBlockDevice
Batch write devices
○
○
-
2.19.1
IEZNcSubFunction3
ChangeInit2
Initialize subfunction
○
○
○
2.19.2
(Subfunction)
GetToolWorkOffsetOfFile
Get workpiece coordinate system offset data
from workpiece offset file
○
○
○
2.19.3
SetToolWorkOffsetOfFile
Set workpiece coordinate system offset data
settings for workpiece offset file
○
○
○
*1) C70 does not support automation interface.
2-6
2.3 IEZNcCommunication3 Interface
2.3.1 IEZNcCommunication3::Open2
C70 M700 M800
2.3.1 IEZNcCommunication3::Open2
Open line
□ Custom call procedure
HRESULT Open2 (
LONG lSystemType, // (I) NC system type
LONG lMachine, // (I) NC control unit
LONG lTimeOut, // (I) Communication time-out value
LONG* plRet // (O) Error code
)
□ Automation call procedure
Open2 (
lSystemType As LONG // (I) NC system type
lMachine As LONG // (I) NC control unit
lTimeOut As LONG // (I) Communication time-out value
lpcwszHostName As STRING // (I) Host name
) As LONG // (O) Error code
□
Argument
lSystemType: Sets the NC system type.
Value Meaning
EZNC_SYS_MELDASC70 With the C70, performs a line connection.
EZNC_SYS_MELDAS700M With M700 M systems, performs a line connection.
EZNC_SYS_MELDAS700L With M700 L system, performs a line connection.
EZNC_SYS_MELDAS800M With M800 M systems, performs a line connection.
EZNC_SYS_MELDAS800L With M800 L system, performs a line connection.
lMachine: Sets the NC control unit number. When connecting to multiple Mitsubishi CNCs,
specify the different NC control unit numbers for each Mitsubishi CNC. Value: 1 to 255
lTimeOut: Sets the communication time-
out value. However, with C70, this value is disabled. The
C70 communication time-out is set by lTimeOut in SetMelsecProtocol().
Value Meaning
1 to 3000 Time-out value (unit: 100 ms)
(M700/M800 series is 10 or more, and if a time-out error occurs, increase the
value.)
lpcwszHostName: Sets the NC system host name to connect. The IP address can also be
specified.
When connecting to a local host, set "EZNC_LOCALHOST" as the character string.
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK: Normal termination
EZ_ERR_DATA_TYPE: Invalid argument data type
EZ_ERR_DATA_RANGE: Invalid argument data range
EZNC_SYSFUNC_IOCTL_ADDR: Invalid NC control unit number
EZNC_SYSFUNC_IOCTL_NOTOPEN: Device is not open
EZNC_SYSFUNC_IOCTL_DATA: Invalid communication parameter data range
EZNC_COMM_NOTSETUP_PROTOCOL
: TCP/IP communication has not been set
(M700/M800 series only)
EZNC_COMM_NOTMODULE: No submodule
EZNC_COMM_CREATEPC: EZSocketPc objects cannot be created (C70 only)
EZNC_COMM_CANNOT_OPEN:When connecting to local host with automation call, host
name EZNC_LOCALHOST has not been set.
2-7
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
Executes connection of the communication line for an IEZNcCommunication3 object.
For the M700/M800 series, before open, make sure to execute SetTCPIPProtocol() to configure
the communication settings. Also, for the C70, before open, make sure to execute
SetMelsecProtocol()
to configure the communication settings. If it is not executed, an error will
occur when Open2() is executed.
(Note 1) The existing interface IEZNcCommunication2::Open (() can be used as a backward
compatible model. Use this method when newly starting use of EZSocket.
□
Reference
Close(), SetTCPIPProtocol(), SetMelsecProtocol()
□
Specifica-
tion
2-8
2.3.2 IEZNcCommunication3::Close
C70 M700 M800
2.3.2 IEZNcCommunication3::Close
Close line
□ Custom call procedure
HRESULT Close (
LONG* plRet // (O) Error code
)
□ Automation call procedure
Close ( ) As LONG // (O) Error code
□
Argument
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK: Normal termination
EZNC_SYSFUNC_IOCTL_NOTOPEN: Device is not open
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Failure
□
Function
The communication lines of IEZNcCommunication3 objects connected by Open2( ) will be
disconnected.
For the M700/M800 series, even if the line is closed, the content set by SetTCPIPProtocol() is
maintained, so Open2() can be performed again.
For the C70, even if the line is closed, the content set by SetMelsecProtocol() is maintained, so
Open2() can be performed again.
□
Reference
Open2(), SetTCPIPProtocol(), SetMelsecProtocol()
□
Specifica-
tion
2-9
2.3.3 IEZNcCommunication3::SetHead
C70 M700 M800
2.3.3 IEZNcCommunication3::SetHead
Set part system number
□ Custom call procedure
HRESULT SetHead(
LONG lHead, // (I) Part system number
LONG* plRet // (O) Error code
)
□ Automation call procedure
SetHead(
lHead As LONG // (I) Part system number.
) As LONG // (O) Error code
□
Argument
lHead: Sets the part system number. or the PLC axis system. Value: The range is determined by
Mitsubishi CNC specifications (optional) and the machine manufacturer setting values
(parameter). A value of 0 means "Not setting". When setting the PLC axis system, sets
EZNC_PLCAXIS.
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK: Normal termination
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Failure
□
Function
Set the NC axis / PLC axis system number.
Set the part system number before executing a method that requires system number. setting.
The set part system remains enabled until it is changed.
System 1 is set after a line opens.
□
Reference
GetHead()
□
Specifica-
tion
2-10
2.3.4 IEZNcCommunication3::GetHead
C70 M700 M800
2.3.4 IEZNcCommunication3::GetHead
Get part system number
□ Custom call procedure
HRESULT GetHead(
LONG* plHead, // (O) Part system number.
LONG* plRet // (O) Error code
)
□ Automation call procedure
GetHead(
plHead As LONG* // (O) Part system number.
) As LONG // (O) Error code
□
Argument
plHead: Returns the part system number. or the PLC axis system. Value: The range is
determined by Mitsubishi CNC specifications (optional) and the machine manufacturer setting
values (parameter). A value of 0 means "Not setting".
The PLC axis system returns EZNC_PLCAXIS.
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK: Normal termination
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Failure
□
Function
Gets the NC axis / PLC axis system number. The PLC axis system number gets
EZNC_PLCAXIS.
□
Reference
SetHead()
□
Specifica-
tion
2-11
2.3.5 IEZNcCommunication3::SetTCPIPProtocol
M700 M800
2.3.5 IEZNcCommunication3::SetTCP/IPProtocol
Set TCP/IP communication
protocol
□ Custom call procedure
HRESULT SetTCPIPProtocol (
LPCOLESTR lpcwszIPAddress, // (I) IP address
LONG lPort, // (I) Port number
LONG* plRet // (O) Error code
)
□ Automation call procedure
SetTCPIPProtocol (
lpcwszIPAddress As STRING // (I) IP address
lPort As LONG // (I) Port number
) As LONG // (O) Error code
□
Argument
lpcwszIPAddress: Sets the IP address of the M700/M800 series connection destination.
(Example: "192.168.1.1")
lPort: Sets the M700/M800 series connection destination port number.
For the port number, check the settings on the Mitsubishi CNC side. For the M700/M800 series,
the port number becomes 683.
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK: Normal termination
EZNC_COMM_ALREADYOPENED: Ca
nnot be set because communication is already in
progress
EZ_ERR_DATA_RANGE: Invalid IP address or port number
EZ_ERR_NOT_SUPPORT: Not supported
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
Sets TCP/IP communication protocol.
For the M700/M800 series, call before performing Open2(). If it is not called, an error will occur
when Open2() is executed.
The setting details are retained until the object is released by Release().
Temporarily, until Close() is performed if Open2() is performed, re-setting with
SetTCPIPProtocol() cannot be done. An error will occur.
This function is not supported with C70. (EZ_ERR_NOT_SUPPORT is returned to plRet.)
□
Reference
Open2(), Close()
□
Specifica-
tion
2-12
2.3.6 IEZNcCommunication3::SetMelsecProtocol
C70 C70
2.3.6 IEZNcCommunication3::SetMelsecProtocol
Set Melsec communication
settings
□ Custom call procedure
HRESULT SetMelsecProtocol (
EZNCST_OPEN* pstOpen, // (I) Line
LONG* plRet // (O) Error code
)
□
Argument
pstOpen: A pointer referring to the EZNCST_OPEN structure which sets the parameters for the
open. Refer to the following for members of the structure of EZNCST_OPEN.
(Note) The st
ructure is created with the assumption of connection types other than Ethernet
communication and serial communication. According to the following structure member
descriptions, set 0 for unneeded parameters.
lNetworkNumber: Sets the network number with MELSECNET/10(H). Sets "0x00" when a
host station is set. When a Qn multi-drop connection (serial communication, via CC-Link
module) is set, the following applies.
Value
Meaning
0x00 Sets a host network
0x01 Sets another network for multi-drop destination
lStationNumber: Sets the station number with MELSECNET and CC-Link. "0xFF" is set when
a host station is set. If accessing the CPU of the CPU board and the AF board, sets a host
station. When a Qn multi-drop connection (serial communication, via CC-Link module) is set,
the following applies.
Value
Meaning
0x00 Set a host network
0x01 Set another network for multi-drop destination
lUnitNumber: Sets sthe module number of the computer link (serial communication) module or
the station number for a Qn communication system intelligent special module. However, sets
"0x00" with the setting of a QnA series host station (module mounted to the host station CPU).
This is disabled with computer link (serial communication) communication and a Qn intelligent
special target. With a multi-
drop link, the module number of the target destination computer
link (serial communication) module station is set.
lConnectUnitNumber: Sets the module number of the computer link (serial communication)
module or the Ethernet module for QnA/Qn. With a multi-drop link, the module number of the
request source computer link (serial communication) module station is set. However, with a
multi-
drop via a CPU direct connection, the module number of the request source station is
not required. ("0x00".) Sets "0x00" when not a multi-drop link. Sets a relay destination station
number when using a QnA or Qn Ethernet module. ("0x00
" is fixed when accessing within a
host network.) If accessing other networks via MNET/10, sets
the station number set in the
parameter of the connected Ethernet module.
2-13
lIONumber: Sets the module I/O number. This parameter sets the target actual input/output
No. (start I/O number ÷ 16) of the serial communication module and intelligent special module
with a multi-drop link or intelligent special module access. (With a multi-drop link, the
station to pass through: request source station I/O number is set.) Sets 0x3E0 to 0x3FF
if accessing other stations via the host station CPU or network.
Value Target
0 to 1FFh
Communication system intelligent special module (start I/O
number ÷ 16)
200 to 3CFh Reserve
3D0h Control system CPU module
3D1h Standby system CPU module
3D2h System A CPU module
3D3h System B CPU module
3D4h CPU module in other system
3D5h to 3DBh Reserve
3DCh System A communication peripheral equipment 1
3DDh System B communication peripheral equipment 1
3DEh System A communication peripheral equipment 2
3DFh System B communication peripheral equipment 2
3E0 to 3E3h Individual CPU module with multiple CPUs (Module 1 to 4)
3F0h Global request with multiple CPUs
3FCh Card next to CPU
3FDh Peripheral equipment 2
3FEh Peripheral equipment 1
3FFh CPU module (including LM)
lCpuType: Sets the target CPU (NC module) that performs communication.
Value Target
CPU_Q17NNCCPU Q173NCCPU (C70)

2-14
lUnitType: Sets the module connected to a physical port on the computer.
Value
Meaning
UNIT_ACPU Direct to ACPU-RS422 port
UNIT_QCPU Direct to QnACPU-RS422 port
UNIT_QNCPU Direct to QnCPU (Q mode) RS232C port
UNIT_QNCPU_A Direct to QnCPU (A mode) RS232C
UNIT_QNUSB Direct to QnCPU (Q mode) USB port
UNIT_QNUSB_A Direct to QnCPU (A mode) USB port
UNIT_QNMOTION Direct to Q motion -RS232C port
UNIT_QNMOTIONUSB Direct to Q motion USB port
UNIT_FXCPU Direct to FXCPU-RS422 port
UNIT_C24 Direct to C24 module for A
UNIT_UC24 Direct to UC24 module for A
UNIT_QC24 Direct to QC24 module for QnA
UNIT_QJ71C24 Direct to C24 module for Q
UNIT_FXENET_ADP Connection to Ethernet adapter for FX
UNIT_FX232BD Connection to FXCPU computer link (RS232C)
UNIT_FX485BD Connection to FXCPU computer link (RS485)
UNIT_E71 Connection to Ethernet LAN for A
UNIT_QE71 Connection to Ethernet LAN for QnA
UNIT_QJ71E71 Connection to Ethernet LAN for Q
UNIT_G4ACPU Direct to AJ65BT-G4 (-S3) module (ACPU access)
UNIT_G4QCPU Direct to AJ65BT-G4 (-S3) module (QnA access)
UNIT_G4QNCPU Direct to AJ65BT-G4-S3 module (Qn access)
UNIT_MNET2BOARD Connection to MNET2 board
UNIT_MNET10BOARD Connection to MNET/10 board
UNIT_MNETHBOARD Connection to MNET/H board
UNIT_MNETGBOARD Connection to CC-Link IE controller network board
UNIT_CCLINKBOARD Connection to CC-Link board
UNIT_MSPANUBOARD Connection to CPU board
UNIT_AFBOARD Connection to AF board
UNIT_EMEDBOARD Connection to EmEd board
UNIT_SIMULATOR Connection to simulator (LLT)
UNIT_QBF Connection to personal computer CPU for Q
UNIT_SSCBOARD Connection to SSC net board
UNIT_A900GOT Connection to GOT900 series / 1000 series
UNIT_OTHER Generic connection
UNIT_MNETGBOARD Connection to CC-Link IE controller network board
UNIT_QNETHER Connection to QnCPU (Q mode) Ethernet port
UNIT_QNETHER_DIRECT Direct connection to QnCPU (Q mode) Ethernet port
UNIT_GOT_QJ71E71 Connection to QJ71E71 module through GOT1000 series
UNIT_GOT_QNETHER Connection to QnCPU Ethernet port through GOT1000 series
lPacketType: Sets the computer link or Ethernet packet transmission format. The following
format is set for this parameter.
Value Meaning
PACKET_BINARY1 Dedicated protocol format (when AJ71E71/AJ71QE71 is set)
PACKET_ASCII1 Dedicated protocol format (when AJ71(U)C24, AJ71E71/AJ71QE71
is set)
PACKET_PLC1 CPU protocol format (when AJ71E7/AJ71QE71 or other than
the above is set)
2-15
lProtocolType: Sets the communication protocol type of the module (board) to connect. Select
connection through a serial port + modem with communication via
AJAJ71QC24N/QJ71C24/LJ71C24 + modem. (If directly connecting to
AJ71QC24N/QJ71C24/LJ71C24, select connection through a serial port.) Select connection
through a shared memory server only with a simulator connection, and select connection
through a Q bus only with a personal computer CPU connection.
Value Meaning
PROTOCOL_MNET2 Through MNET II board
PROTOCOL_MNET10 Through MNET/10 board
PROTOCOL_MNETH Through MNET/10H and MNET/25H board
PROTOCOL_MNETG Through CC-Link IE controller network board
PROTOCOL_CCIEF Through CC-Link IE field network board
PROTOCOL_EMED Through EmEd board
PROTOCOL_SERIAL Through serial port
PROTOCOL_USB Through USB port
PROTOCOL_TCPIP Through TCP/IP
PROTOCOL_UDPIP Through UDP/IP
PROTOCOL_SHAREDMEMORY Through shared memory server
PROTOCOL_CCLINK Through CC-Link board
PROTOCOL_MSPANU Through CPU board
PROTOCOL_AF Through AF board
PROTOCOL_SSC Through SSC board
PROTOCOL_TEL Through Q6TEL, A6TEL
PROTOCOL_SERIALMODEM Through serial port + modem
PROTOCOL_QBF Through Q bus
PROTOCOL_USBGOT Through GOT1000 USB port
lPortNumber: Sets the port number for connection between the physical port on the computer
and the module set by lUnitType. For the connectable ports for the connection module, refer to
the connectable ports remarks. However, an arbitrary value is set
as the request source
(personal computer) port number with an Ethernet connection. If "=0" is set
as the port
number, the MNET/10 routing method will be an automatic response method. In addition, set
a fixed value of "5001"
when not selecting an automatic response method via QE71 or when
not setting TCP/IP for E71/QE71.
Value
Meaning
PORT_1 Communication port 1
PORT_2 Communication port 2
PORT_3 Communication port 3
PORT_4 Communication port 4
PORT_5 Communication port 5
PORT_6 Communication port 6
PORT_7 Communication port 7
PORT_8 Communication port 8
PORT_9 Communication port 9
PORT_10 Communication port 10
However, when an Ethernet connection is made, the following is applicable.
Model
Protocol
Port number
QJ71E71
AJ71QE71
(UDP)
UDP
Method other than
automatic
response
5001 is fixed
Automatic
response method
0: Automatically assigns open ports in the
personal computer
Other than 0: Create sockets using specified
port
TCP
-
Fixed to 0: Automatically assigns open ports
in the personal computer
AJ71QE71
(TCP)
AJ71E71
UDP
Sets by matching the port number set in the sequence
TCP
If sets by the sequence: Set by matching the set port number
If not set by the sequence: Arbitrarily set an open port in the
personal computer
2-16
lBaudRate: Sets the baud rate with serial communication. This parameter can be one of the
following values.
Value Meaning
CBR_2400 2400 bps
CBR_4800 4800 bps
CBR_9600 9600 bps
CBR_14400 14400 bps
CBR_19200 19200 bps
CBR_38400 38400 bps
CBR_56000 56000 bps
CBR_57600 57600 bps
CBR_115200 115200 bps
CBR_128000 128000 bps
CBR_256000 256000 bps
lDataBits: Sets the number of sent and received byte data bits (6 to 8).
lParity: Sets the parity bit. This parameter can be one of the following values.
It becomes effective only during serial communication.
Value Meaning
EVENPARITY Even number
ODDPARITY Odd number
MARKPARITY Mark
NOPARITY No parity
lStopBits: Sets the number of stop bits used. This parameter can be one of the following
values. It becomes effective only during serial communication.
Value
Meaning
ONESTOPBIT 1 stop bit
ONE5STOPBITS 1.5 stop bits
TWOSTOPBITS 2 stop bits
lControl: Sets the control signal. This parameter can be one of the following values.
It becomes effective only during serial communication.
Value
Meaning
TRC_NONE No flow control
TRC_DTR DTR control
TRC_RTS RTS control
TRC_DTR_OR_RTS DTR or RTS control
TRC_DTR_CD DTR control (with CD control)
TRC_RTS_CD RTS control (with CD control)
TRC_DTR_OR_RTS_CD DTR or RTS control (with CD control)
lpcwszHostAddress:Sets the connected host name (IP address) as a UNICODE character
string with Ethernet communication. Set NULL when Ethernet is not set.
lCpuTimeOut: Sets the CPU monitoring timer with Ethernet communication. The unit is *250
ms. (The default is 4.)
lTimeOut: Sets the communication time-out value. The unit is ms. (The default is 1000 ms.)
* The time-out starts counting from when data communication ends.
2-17
lSumCheck: Sets whether a sum check is enabled or disabled. One of the following values is
set
for this parameter. It is enabled only when connecting through a computer link module or
an A-series Ethernet module (TCP/IP).
Value Meaning
TRUE There is a sum check
FALSE There is no sum check
lSourceNetworkNumber: Sets the request source network number when Ethernet for QnA and
Qn (via AJ71QE71 and QJ71E71) is set
Sest the same network N
o. (network No. specified by the network parameter) as the
Ethernet for a QnA or Qn connection.
lSourceStationNumber: Sets the request source station number (station number on the
personal computer side) when an Ethernet for QnA and Qn (via AJ71QE71 and QJ71E71) is
set
Sets
the station number so as not to overlap with the QE71 station numbers set in the same
Ethernet loop.
lDestinationPortNumber: Sets the port number of the target destination module when Ethernet
is set. Sets the relay destination po
rt number when accessing other networks. The following
applies when other than an automatic response method, E71, or QE71 (TCP/IP).
QnA (AJ71QE71) (UDP/IP) : "5001" is fixed
Qn (QJ71E71) (TCP/IP) : "5002" is fixed
If the target is a Q redundant CPU, any port number
can also be set.
Qn (QJ71E71) (UDP/IP) : “5001"is fixed
Qn (Ethernet port) (UDP/IP) : “5006" is fixed
Qn (Ethernet port) (TCP/IP) : “5007" is fixed
Qn (Ethernet port direct communication) : “5008" is fixed
lDestinationIONumber: Sets the actual input/output No. (start I/O number ÷ 16) of the last
access target station with a Qn multi-drop connection (via CC-
Link, serial communication).
(When the target is an intelligent special module.) If the target is a CPU module, set between
0x3F0 and 0x3FF. (Refer to "lIONumber".)
lConnectChannelNumber: Sets the connected channel No. (Ch1/Ch2) when connection of the
serial communication module for Qn is set
. Because this is used for system reservation, do
not set anything. (Specify 0x00.)
lMultiDropChannelNumber: Sets the multi-drop connection channel No. (Ch1/Ch2) with a Qn
multidrop connection. This will be invalid if any other connection is set.
Value
Meaning
0x01 Connection to channel 1
0x02 Connection to channel 2
lThroughNetworkType: Sets whether to include MNET/10 mode in the networks to pass
through when accessing other stations via MELSECNET/10H.
Value
Meaning
0x00 Does not include MNET/10 mode
0x01 Includes MNET/10 mode
lIntelligentPreferenceBit: Sets whether to connect through the multi-drop link destination
network with a Qn multi-drop connection (via CC-
Link, serial communication). (This is to
distinguish the host network module.)
Value
Meaning
0x00 Multi-drop does not access other destination networks
0x01 Multi-drop accesses other destination networks
2-18
lDidPropertyBit: With Q series host station intelligent special access (intelligent special
module mounted to the CPU of the host station), by disabling the following settings, it is not
necessary to set "lUnitNumber". (Set only by the module I/O number of "lIONumber".)
Value Meaning
0x00 Enables module number
0x01 Disables module number
lDsidPropertyBit: With a Qn multi-drop connection, as the following are disabled, there is no
need to set "lDestinationIONumber". However, if the following settings are disabl
ed, make
sure to enable "lDidPropertyBit". (Set by "lUnitNumber".)
Value
Meaning
0x00 Enables the I/O number of the last access target station
0x01 Disables the I/O number of the last access target station
plRet: Returns an error code.
S_OK: Normal termination
EZNC_COMM_ALREADYOPENED: Cannot be set because communication is already in
progress
EZ_ERR_DATA_TYPE: Invalid argument data type
EZ_ERR_DATA_RANGE: Invalid argument data range
EZ_ERR_NOT_SUPPORT: Not supported
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
Configures MELSEC communication settings. This is valid only for the C70.
This function is not supported with the M700/M800 Series. (EZ_ERR_NOT_SUPPORT is
returned to plRet.)
Call before executing Open2(). If it is not called, an error will occur when Open2() is executed.
The setting details are retained until the object is released by Release().
Temporarily, until Close() is performed if Open2() is performed, re-setting with
SetMelsecProcotol() cannot be done. An error will occur.
If an error occurs in SetMelsecProcotol(), the setting before the error occurred is maintained.
The setting contents that resulted in the error are disabled.
SetsNULL to the pointer setting argument such as "lpcwszHostAddress" when not used.
(Note) This method does not support automation interfaces. Use is limited to a custom interface.
2-19
□
Structure
typedef struct EZNcStOpen{
LONG lNetworkNumber; // Network number
LONG lStationNumber; // Station number
LONG lUnitNumber; // Module number
LONG lConnectUnitNumber; // Module number
LONG lIONumber; // Module I/O number
LONG lCpuType; // Target CPU
LONG lUnitType; // Connected module
LONG lPacketType; // Packet transmission type
LONG lProtocolType; // Communication protocol type
LONG lPortNumber; // Connection port number
LONG lBaudRate; // Baud rate
LONG lDataBits; // Number of byte data bits
LONG lParity; // Parity bit
LONG lStopBits; // Stop bit
LONG lControl; // Control signal
WCHAR * lpcwszHostAddress; // Connection host name (IP address)
LONG lCpuTimeOut; // CPU monitoring timer
LONG lTimeOut; // Time-out value
LONG lSumCheck; // Sum check
LONG lSourceNetworkNumber; // Request source network number
LONG lSourceStationNumber; // Request source station number
(personal computer side station number)
LONG lDestinationPortNumber; // Port number
LONG lDestinationIONumber; // Actual input/output No.
LONG lConnectChannelNumber; // Channel No.
LONG lMultiDropChannelNumber; // Multi-drop connection channel No.
LONG lThroughNetworkType; // MNET/10 mode
LONG lIntelligentPreferenceBit; // Via multi-drop link destination
LONG lDidPropertyBit; // Intelligent special module setting
LONG lDsidPropertyBit; // Multi-drop connection setting
} EZNCST_OPEN;
□
Reference
Open2(), Close()
□
Specifica-
tion
2-20
2.4 IEZNcSystem Interface
2.4.1 IEZNcSystem::GetVersion
C70 M700 M800
2.4.1 IEZNcSystem::GetVersion Get NC system S/W number,
name
□ Custom call procedure
HRESULT GetVersion(
LONG lAxisNo, // (I) Axis number
LONG lIndex, // (I) Parameter number
LPOLESTR* lppwszBuffer, // (O) NC system S/W number, name
LONG* plRet // (O) Error code
)
□ Automation call procedure
System_GetVersion(
lAxisNo As LONG // (I) Axis number
lIndex As LONG // (I) Parameter number ber
lppwszBuffer As STRING* // (O) NC system S/W number, name
) As LONG // (O) Error code
□
Argument
lAxisNo: Sets the axis number (From Axis 1 = from 1)
lIndex: Sets the parameter number. Refer to the table below.
lppwszBuffer: Returns the system S/W number, name, and control S/W version as a UNICODE
character string.
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK: Normal termination
EZ_ERR_DATA_TYPE: Invalid argument data type
EZNC_DATA_READ_DATASIZE: Application does not fit into prepared buffer
EZNC_DATA_READ_READ: Data is not readable
lIndex
Description
Data range
0
NC system S/W number, name, and PLC version
Depends on the system
specifications.
1
Control unit, extension unit
Depends on the system
specifications.
2
RIO unit, terminal RIO unit
Axis setting is necessary only for C70.
Depends on the system
specifications.
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Failure
2-21
□
Function
Gets the various NC system S/W version information as a UNICODE character string.
0: Gets the system S/W number, name, and PLC version of the NC system.
The format of the character string data becomes as follows.
NC system S/W number\tNC system name\tprogrammable controller system number\0
A TAB code is inserted between the NC system number and the NC system S/W name.
The end of the data becomes a NULL code.
Output example: "BND-2005W000-A0 MITSUBISHI CNC 830WM"
If there is no item, a TAB code will follow. If a termination item does not exist, a NULL
code will follow the TAB code.
1: Gets the control unit and extension unit versions.
The format of the character string data becomes as follows.
Control unit number\tExtension unit number\0
A TAB code is inserted between the control unit number and the extension unit number.
The end of the data becomes a NULL code.
2: Gets the RIO unit and terminal RIO unit versions.
The format of the character string data becomes as follows.
RIO unit number\tTerminal RIO unit number\0
M700 has 24 items with RIO unit 1\t RIO unit 2\t…\0.
M700/M800 series have up to 32 items (*) with RIO unit 1¥t RIO unit 2¥t5 … ¥0.
* Confirm the number of RIO unit with MTB.
A TAB code is inserted between the RIO unit number and the terminal RIO unit number.
The end of the data becomes a NULL code.
As the character string area memory is allocated in this product, clients using VC++ need to
release the character string area memory explicitly with CoTaskMemFree().
□
Reference
□
Specifica-
tion
2-22
2.4.2 IEZNcSystem::GetSystemInformation
C70 M700 M800
2.4.2 IEZNcSystem::GetSystemInformation
Get NC system information
□ Custom call procedure
HRESULT GetSystemInformation(
LONG lType, // (I) Information type
LONG* plSystem, // (O) System information
LONG* plRet // (O) Error code
)
□ Automation call procedure
System_GetSystemInformation(
lType As LONG // (I) Information type
plSystem As LONG* // (O) System information
) As LONG // (O) Error code
□
Argument
lType: Sets the NC system information type. Refer to the table below.
plSystem: Returns the NC system information.
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK: Normal termination
EZ_ERR_DATA_TYPE: Invalid argument data type
EZNC_DATA_READ_READ: Data is not readable
lType
Description
Data range
0
Part system
enabled/disabled
0: Part system disabled
1: Part system enabled
1
Number of axes each part
system
This will be different for NC systems with 1 [Axis]
or more.
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
Gets information regarding the NC system.
□
Reference
□
Specifica-
tion
System
2-23
2.4.3 IEZNcSystem::GetAlarm
C70 M700 M700
2.4.3 IEZNcSystem::GetAlarm
Get alarm information
□ Custom call procedure
HRESULT GetAlarm(
LONG lMessageNumber, // (I) Number of messages to get
LONG lAlarmType, // (I) Alarm type to get
LPOLESTR* lppwszBuffer, // (O) Message character string
LONG* plRet // (O) Error code
)
□ Automation call procedure
System_GetAlarm(
lMessageNumber As LONG // (I) Number of messages to get
lAlarmType As LONG // (I) Alarm type to get
lppwszBuffer As STRING* // (O) Message character string
) As LONG // (O) Error code
□
Argument
lMessageNumber: Sets the number of messages to get. Value: 1 to 10 (maximum)
lAlarmType: Sets the alarm type to get.
Value
Meaning
M_ALM_NC_ALARM NC alarm
M_ALM_STOP_CODE Stop code
M_ALM_PLC_ALARM PLC alarm message
M_ALM_OPE_MSG Operator message
M_ALM_ALL_ALARM No alarm type distinction
lppwszBuffer: Gets the alarm message as a UNICODE character string.
The message format includes CR, LF
codes to distinguish between messages. In addition,
NULL is inserted at the end of the message.
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK: Normal termination
EZNC_OPE_CURRALM_ADDR: Invalid part systems, axes settings
EZNC_OPE_CURRALM_ALMTYPE: Invalid alarm type
EZNC_OPE_CURRALM_DATAERR: Error in communication data between NC
and personal computer
EZNC_OPE_CURRALM_DATASIZE: Application does not fit into prepared buffer
EZNC_OPE_CURRALM_NOS: Invalid number of got messages
EZ_ERR_NOT_SUPPORT
:
Not supported
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
Gets the alarm message of the alarm currently generated in the setting NC control unit. The
language of the alarm message adheres to an NC parameter (#1043 lang).
Messages are retrieved in descending order of importance.
As the character string area memory is allocated in this product, clients using VC++ need to
release the character string area memory explicitly with CoTaskMemFree().
This function is not supported with the M800 Series. (EZ_ERR_NOT_SUPPORT is returned to
plRet.)
□
Reference
□
Specifica-
tion
System (All systems when 0)
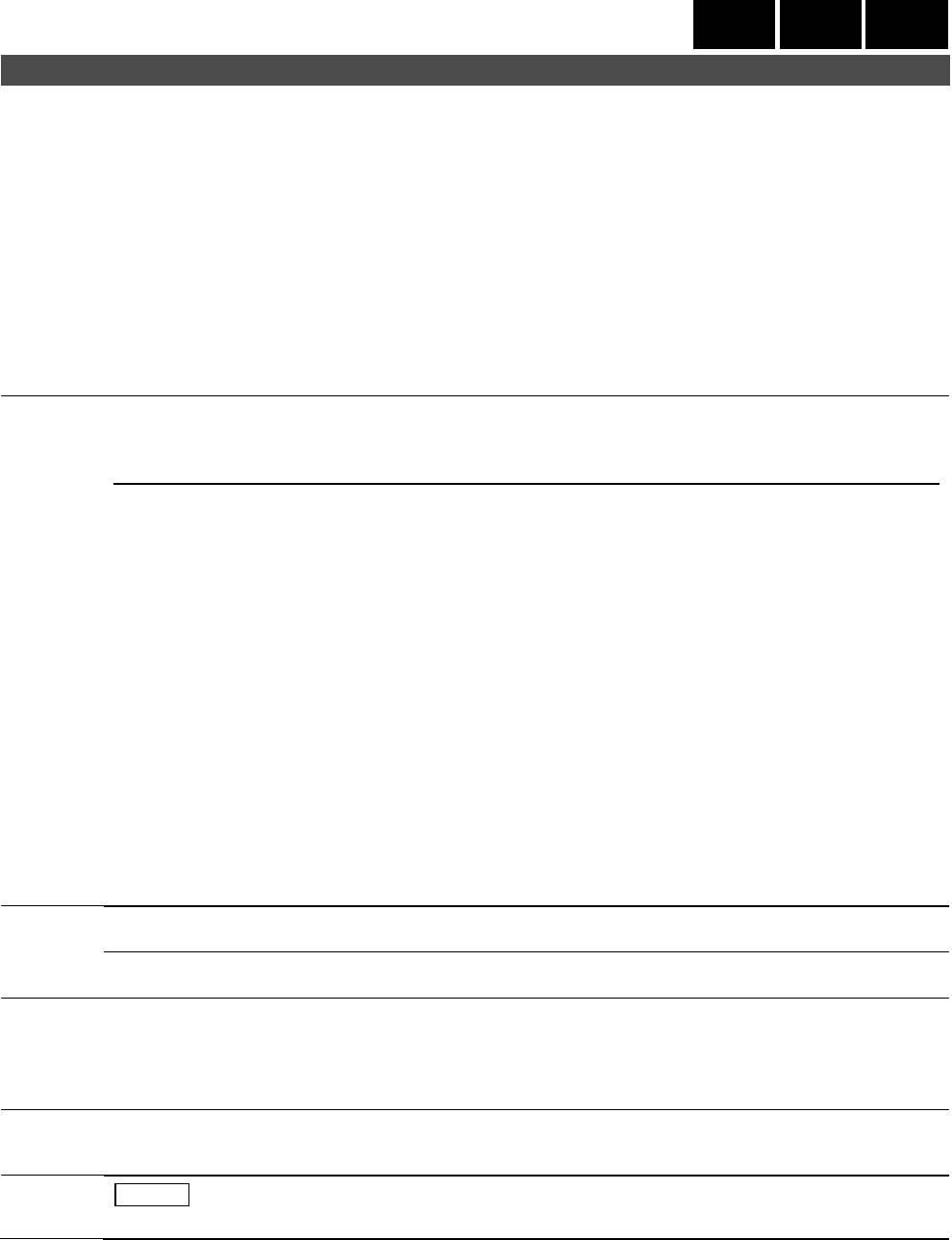
2-24
2.4.4 IEZNcSystem2::GetAlarm2
C70 M700 M800
2.4.4 IEZNcSystem2::GetAlarm2
Get alarm information
□ Custom call procedure
HRESULT GetAlarm2(
LONG lMessageNumber, // (I) Number of messages to get
LONG lAlarmType, // (I) Alarm type to get
LPOLESTR* lppwszBuffer, // (O) Message character string
LONG* plRet // (O) Error code
)
□ Automation call procedure
System_GetAlarm2(
lMessageNumber As LONG // (I) Number of messages to get
lAlarmType As LONG // (I) Alarm type to get
lppwszBuffer As STRING* // (O) Message character string
) As LONG // (O) Error code
□
Argument
lMessageNumber: Sets the number of messages to get. Value: 1 to 10 (maximum)
lAlarmType: Sets the alarm type to get.
Value
Meaning
M_ALM_NC_ALARM NC alarm
M_ALM_STOP_CODE Stop code
M_ALM_PLC_ALARM PLC alarm message
M_ALM_OPE_MSG Operator message
M_ALM_ALL_ALARM No alarm type distinction
lppwszBuffer: Gets the alarm message as a UNICODE character string.
The message format includes CR, LF
codes to distinguish between messages. In addition,
NULL is inserted at the end of the message.
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK: Normal termination
EZNC_OPE_CURRALM_ADDR: Invalid system, spindle specification
EZNC_OPE_CURRALM_ALMTYPE: Invalid alarm type
EZNC_OPE_CURRALM_DATAERR: Error in communication data between NC
and personal computer
EZNC_OPE_CURRALM_DATASIZE: Application does not fit into prepared buffer
EZNC_OPE_CURRALM_NOS: Invalid number of got messages
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
Gets the alarm message of the alarm currently generated in the setting NC control unit. The
language of the alarm message adheres to an NC parameter (#1043 lang).
Messages are retrieved in descending order of importance.
As the character string area memory is allocated in this product, clients using VC++ need to
release the character string area memory explicitly with CoTaskMemFree().
□
Reference
□
Specifica-
tion
System (All systems when 0)
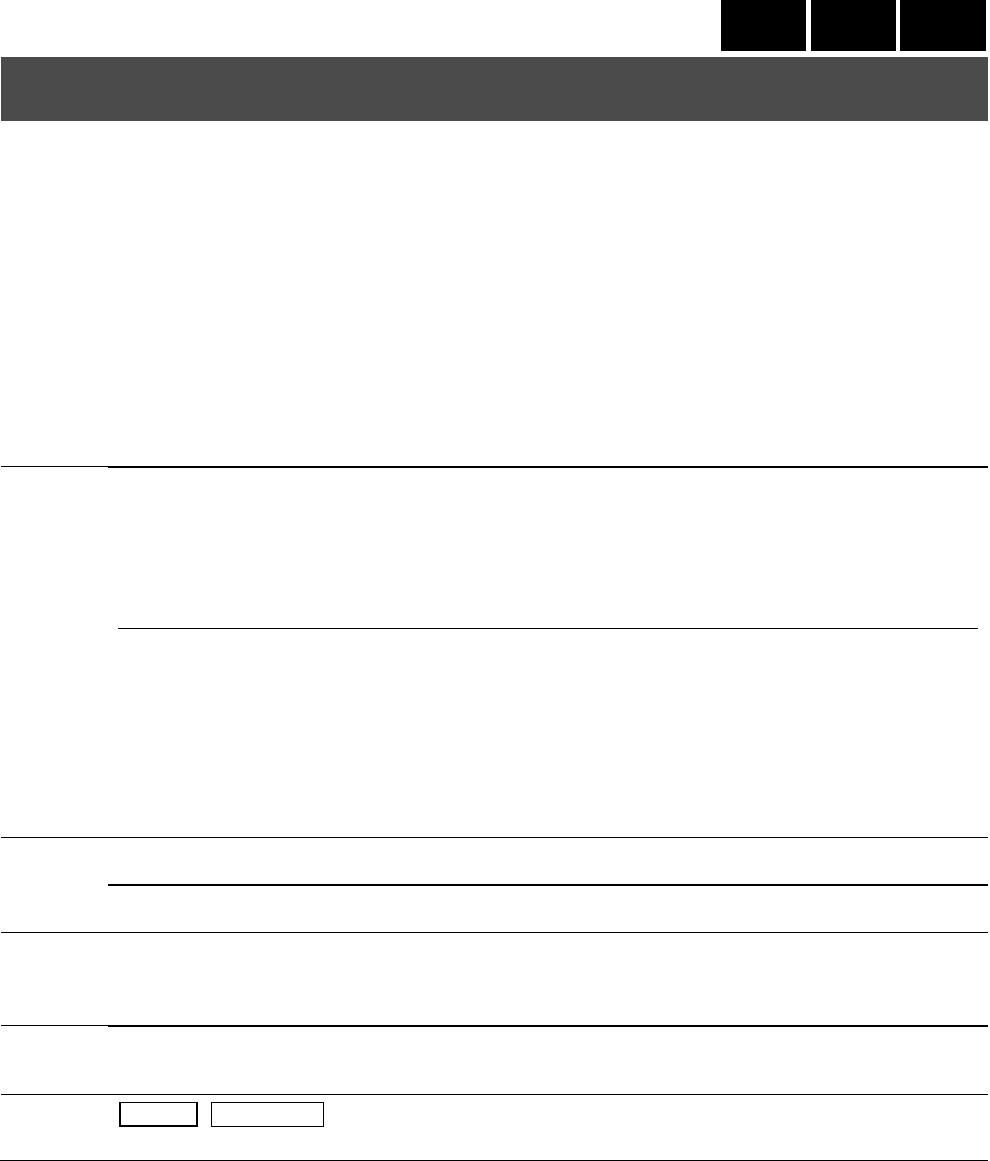
2-25
2.5 IEZNcPosition Interface
2.5.1 IEZNcPosition::GetWorkPosition
C70 M700 M800
2.5.1 IEZNcPosition::GetWorkPosition Get workpiece coordinate
position
□ Custom call procedure
HRESULT GetWorkPosition(
LONG lAxisNo, // (I) Axis number setting
DOUBLE* pdPosition, // (O) Workpiece coordinate position
LONG lSkipOn, // (I) Skip on flag
LONG* plRet // (O) Error code
)
□ Automation call procedure
Position_GetWorkPosition(
lAxisNo As LONG // (I) Axis number setting
pdPosition As DOUBLE* // (O) Workpiece coordinate position
lSkipOn As LONG // (I) Skip on flag
) As LONG // (O) Error code
□
Argument
lAxisNo: Sets the axis number (From Axis 1 = from 1)
pdPosition: Returns the workpiece coordinate position of the set axis number of the set part
system.
Data range: -99,999.999 to 99,999.999 [mm]
lSkipOn : Sets the skip on flag.
Value Meaning
1 Skip is on
0 Normal
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK: Normal termination
EZ_ERR_DATA_TYPE: Invalid argument data type
EZNC_DATA_READ_ADDR: Invalid part system, axis No. setting
EZNC_DATA_READ_READ: Data is not readable
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
Gets the workpiece coordinate position of the set system/axis number
If 1 is set for the skip on flag, the workpiece coordinate position at the time the skip on signal is
input will be got.
□
Reference
□
Specifica-
tion
System Axis number
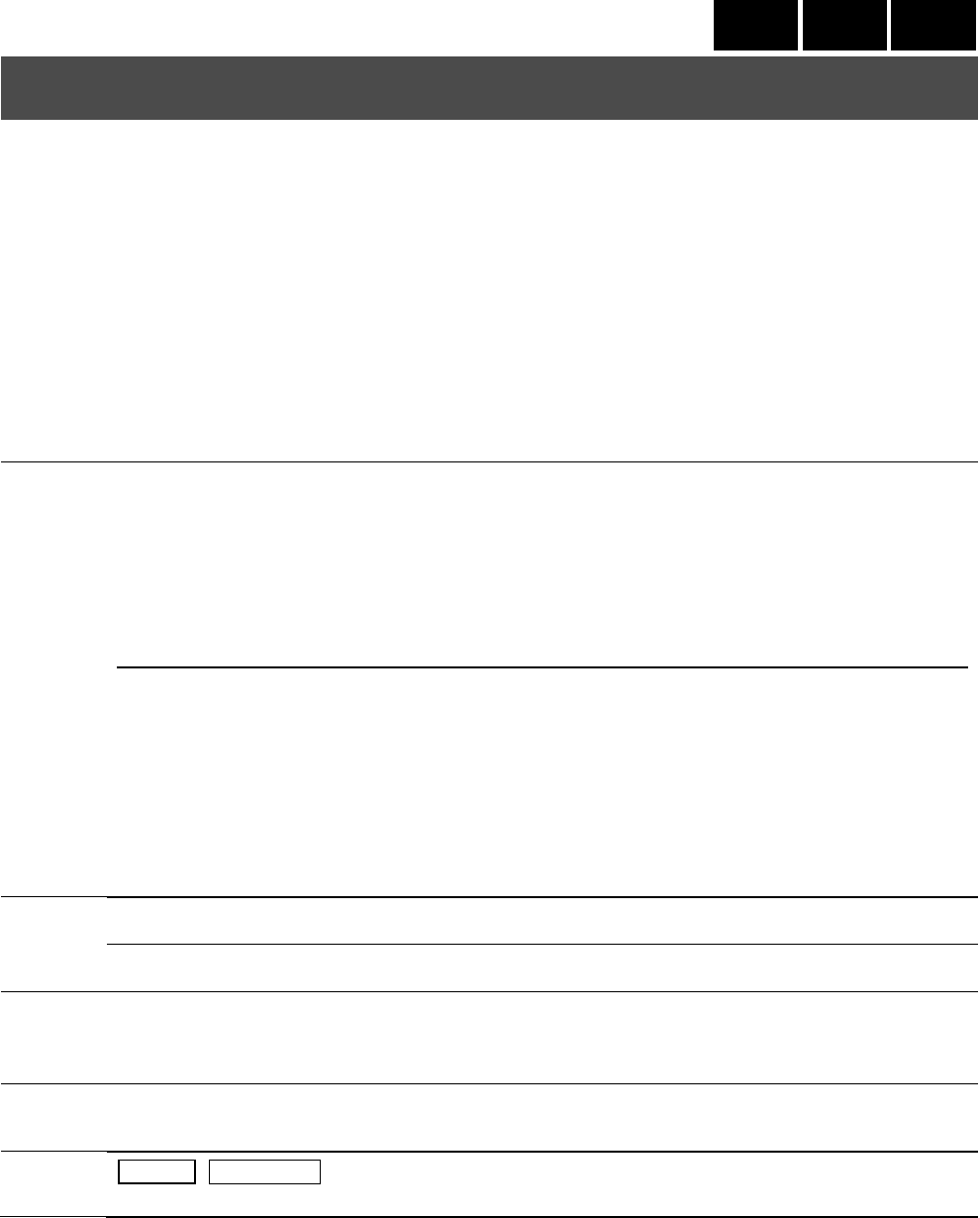
2-26
2.5.2 IEZNcPosition::GetWorkPosition2
C70 M700 M800
2.5.2 IEZNcPosition::GetWorkPosition2
Get workpiece coordinate
position
□ Custom call procedure
HRESULT GetWorkPosition2(
LONG lAxisNo, // (I) Axis number
DOUBLE* pdPosition, // (O) Workpiece coordinate position
LONG lSkipOn, // (I) Skip on flag
LONG* plRet // (O) Error code
)
□ Automation call procedure
Position_GetWorkPosition2(
lAxisNo As LONG // (I) Axis number
pdPosition As DOUBLE* // (O) Workpiece coordinate position
lSkipOn As LONG // (I) Skip on flag
) As LONG // (O) Error code
□
Argument
lAxisNo: Sets the axis number (From Axis 1 = from 1)
pdPosition: Returns the workpiece coordinate position of the set axis number of the set part
system.
Data range: -99,999.999 to 99,999.999 [mm]
This will vary according to the NC system specifications and parameters.
lSkipOn : Sets the skip on flag.
Value Meaning
1 Skip is on
0 Normal
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK: Normal termination
EZ_ERR_DATA_TYPE: Invalid argument data type
EZNC_DATA_READ_ADDR: Invalid part system, axis No. setting
EZNC_DATA_READ_READ: Data is not readable
EZ_ERR_NOT_SUPPORT: Not supported
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
Gets the workpiece coordinate position of the set system/axis number.
If 1 is set for the skip on flag, the workpiece coordinate position at the time the skip on signal is
input will be got.
□
Reference
□
Specifica-
tion
System Axis number
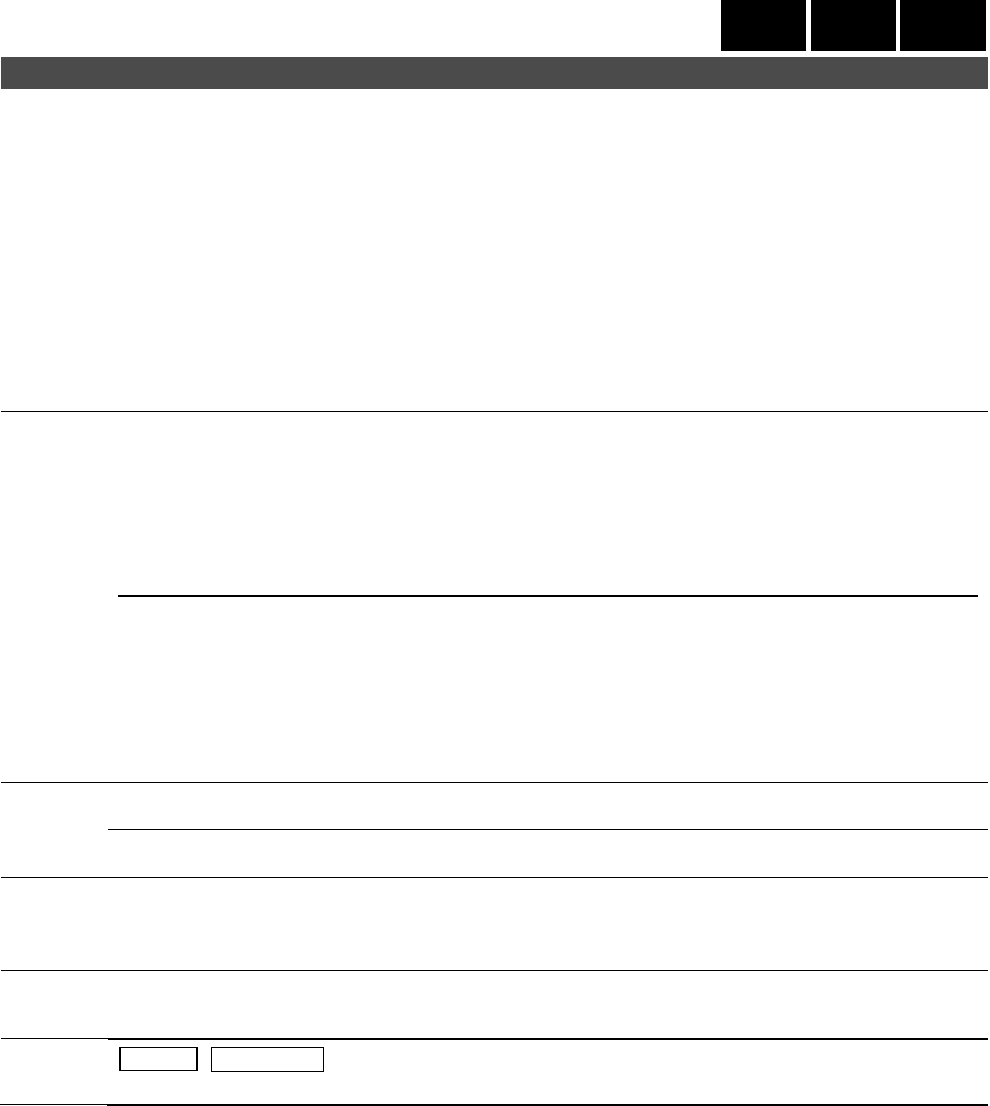
2-27
2.5.3 IEZNcPosition::GetMachinePosition
C70 M700 M800
2.5.3 IEZNcPosition::GetMachinePosition
Get machine position
□ Custom call procedure
HRESULT GetMachinePosition(
LONG lAxisNo, // (I) Axis number
DOUBLE* pdPosition, // (O) Machine position
LONG lSkipOn, // (I) Skip on flag
LONG* plRet // (O) Error code
)
□ Automation call procedure
Position_GetMachinePosition(
lAxisNo As LONG // (I) Axis number
pdPosition As DOUBLE* // (O) Machine position
lSkipOn As LONG // (I) Skip on flag
) As LONG // (O) Error code
□
Argument
lAxisNo: Sets the axis. (From Axis 1 = from 1)
pdPosition: Returns the machine position of the set axis number of the set part system.
Data range: -99,999.999 to 99,999.999 [mm]
This will vary according to the NC system specifications and parameters.
lSkipOn : Sets the skip on flag.
Value Meaning
1 Skip is on
0 Normal
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK: Normal termination
EZNC_DATA_READ_ADDR: Invalid part system, axis number setting
EZNC_DATA_READ_READ: Data is not readable
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
Gets the machine coordinate position for the set system/axis number (coordinate position in a
basic machine coordinate system).
If 1 is set for the skip on flag, the machine coordinate position at the time the skip on signal is
input will be got.
□
Reference
□
Specifica-
tion
System Axis number
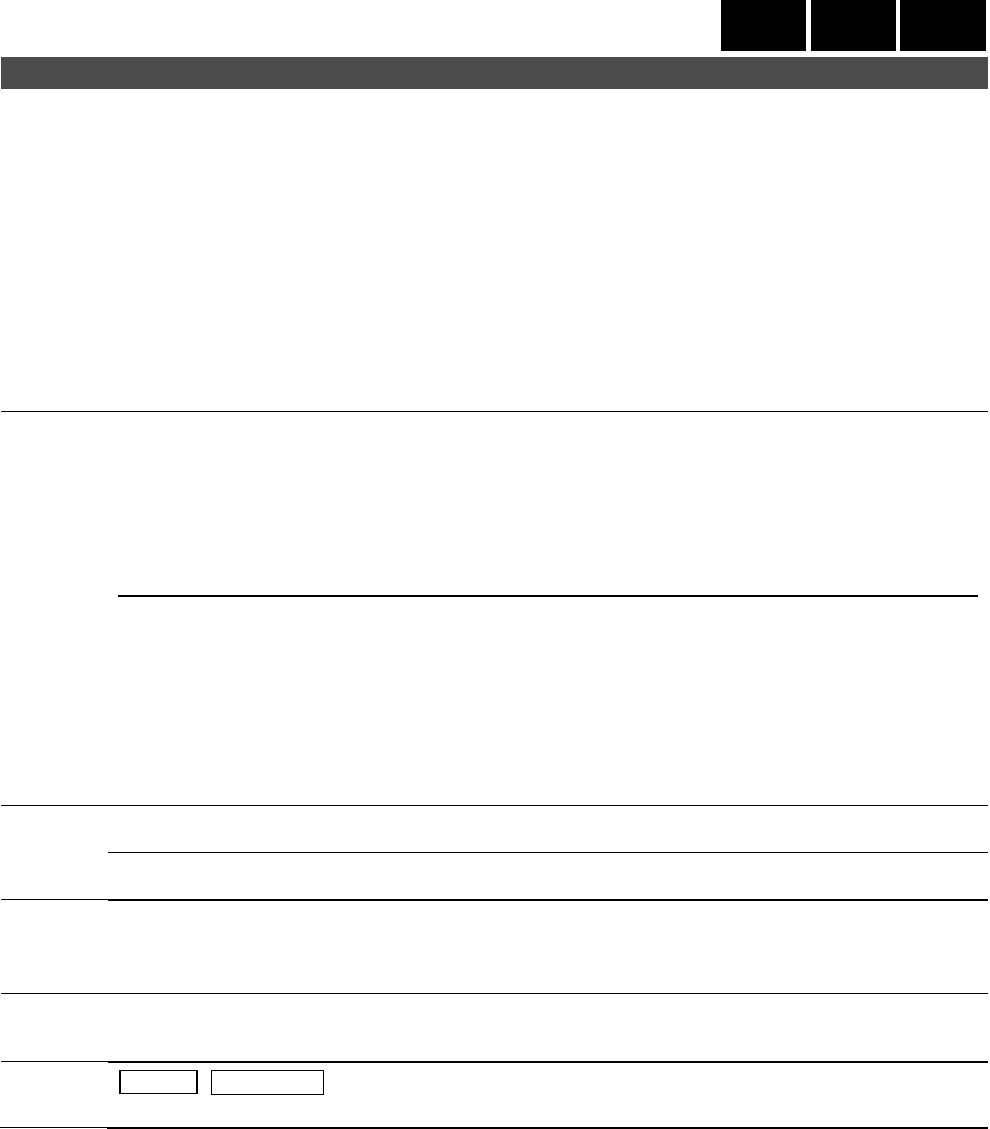
2-28
2.5.4 IEZNcPosition::GetMachinePosition2
C70 M700 M800
2.5.4 IEZNcPosition::GetMachinePosition2
Get machine position
□ Custom call procedure
HRESULT GetMachinePosition2(
LONG lAxisNo, // (I) Axis number
DOUBLE* pdPosition, // (O) Machine position
LONG lSkipOn, // (I) Skip on flag
LONG* plRet // (O) Error code
)
□ Automation call procedure
Position_GetMachinePosition2(
lAxisNo As LONG // (I) Axis number
pdPosition As DOUBLE* // (O) Machine position
lSkipOn As LONG // (I) Skip on flag
) As LONG // (O) Error code
□
Argument
lAxisNo: Sets the axis. (From Axis 1 = from 1)
pdPosition: Returns the machine position of the set axis number of the set part system.
Data range: -99,999.999 to 99,999.999 [mm]
This will vary according to the NC system specifications and parameters.
lSkipOn : Sets the skip on flag.
Value Meaning
1 Skip is on
0 Normal
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK: Normal termination
EZNC_DATA_READ_ADDR: Invalid part system, axis number setting
EZNC_DATA_READ_READ: Data is not readable
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
Gets the machine coordinate position for the set system/axis number (coordinate position in a
basic machine coordinate system).
If 1 is set for the skip on flag, the machine coordinate position at the time the skip on signal is
input will be got.
□
Reference
□
Specifica-
tion
System Axis number
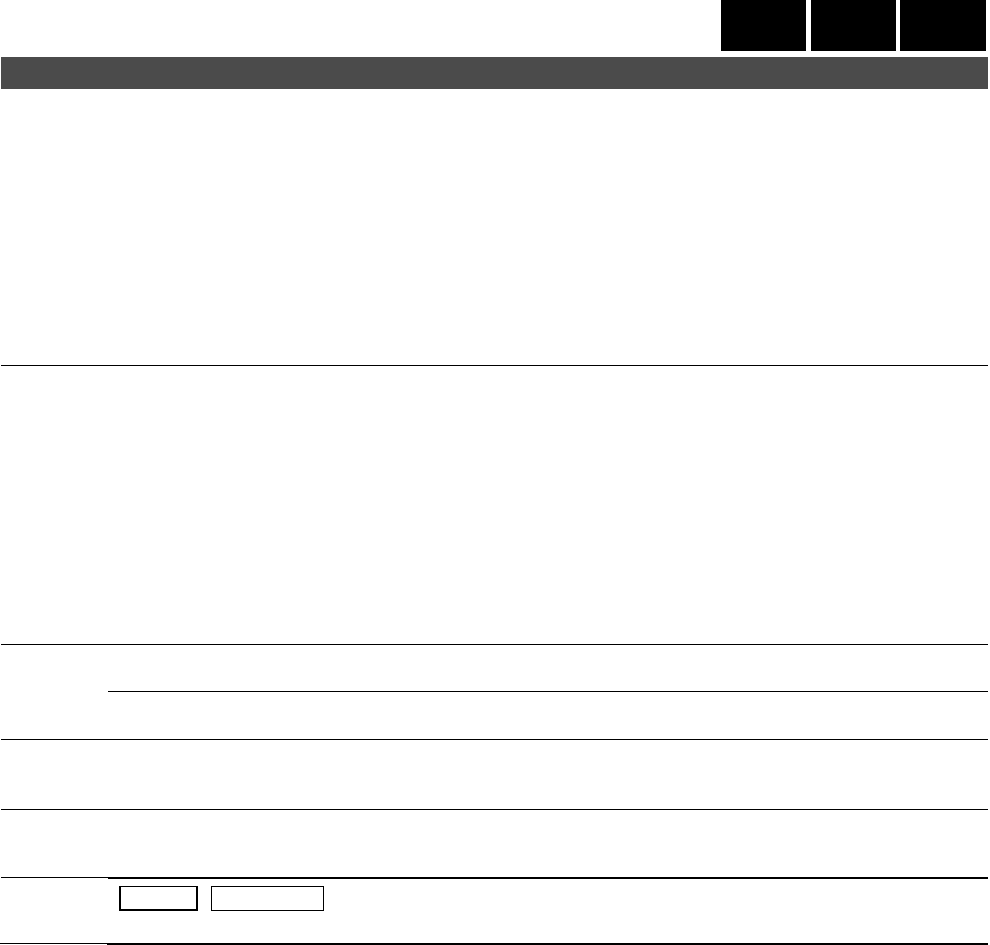
2-29
2.5.5 IEZNcPosition::GetCurrentPosition
C70 M700 M800
2.5.5 IEZNcPosition::GetCurrentPosition
Get relative position
□ Custom call procedure
HRESULT GetCurrentPosition(
LONG lAxisNo, // (I) Axis number
DOUBLE* pdPosition, // (O) Relative position
LONG* plRet // (O) Error code
)
□ Automation call procedure
Position_GetCurrentPosition(
lAxisNo As LONG // (I) Axis number
pdPosition As DOUBLE* // (O) Relative position
) As LONG // (O) Error code
□
Argument
lAxisNo: Sets the axis No. (From Axis 1 = from 1)
pdPosition: Returns the relative position from the position at a completion of the dog type zero
point return or from the preset position configured by G92/origin set/counter set.
Data range: -99,999.999 to 99,999.999 [mm]
This will vary according to the NC system specifications and parameters.
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK: Normal termination
EZNC_DATA_READ_ADDR: Invalid part system, axis number setting
EZNC_DATA_READ_READ: Data is not readable
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
Gets the relative position to the position at a completion of the dog type zero point return or to the
preset position configured by G92/origin set/counter set of the set system/axis number.
□
Reference
□
Specifica-
tion
System Axis number
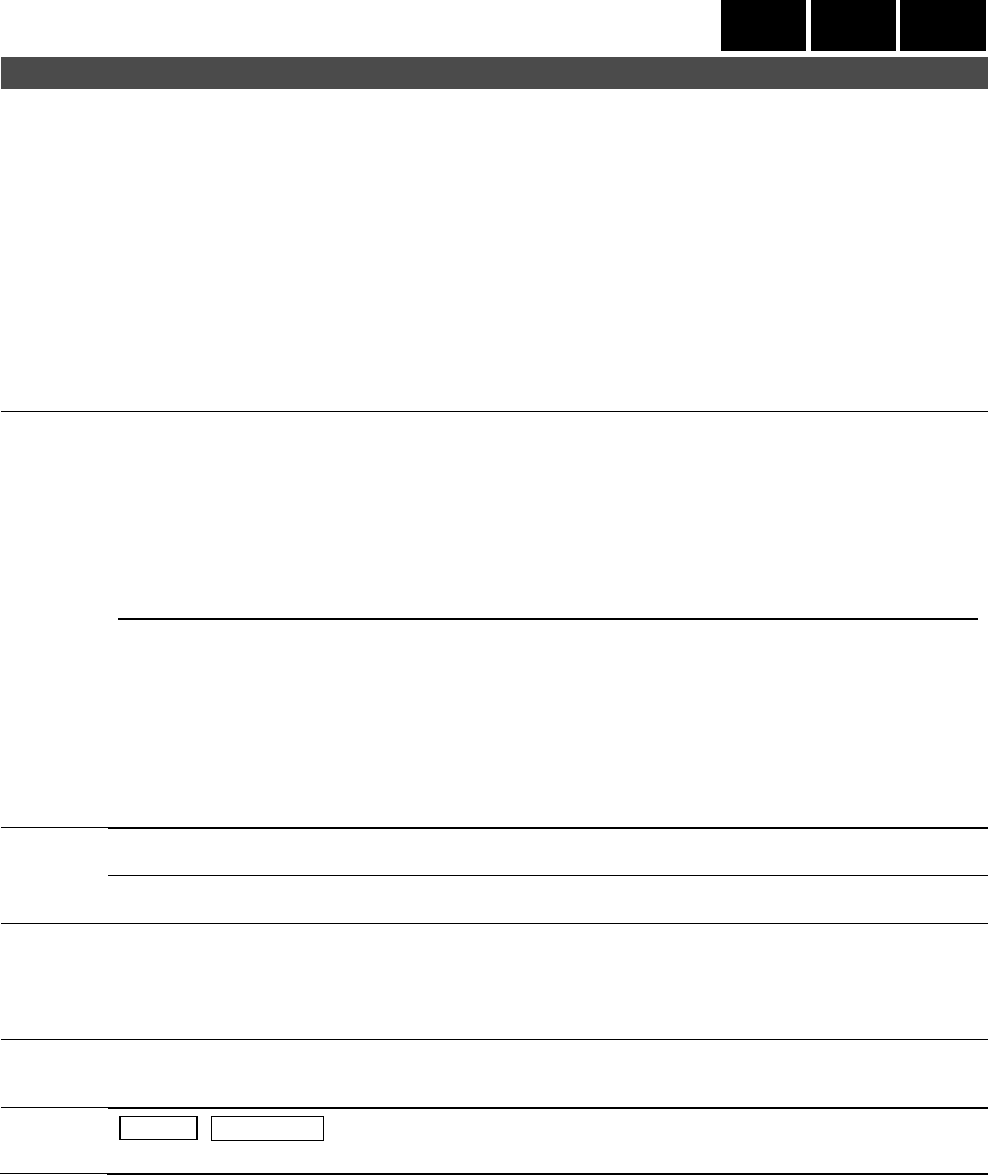
2-30
2.5.6 IEZNcPosition::GetDistance
C70 M700 M800
2.5.6 IEZNcPosition::GetDistance
Get remaining command
□ Custom call procedure
HRESULT GetDistance(
LONG lAxisNo, // (I) Axis number
DOUBLE* pdDistance, // (O) Remaining command
LONG lSkipOn, // (I) Skip on flag
LONG* plRet // (O) Error code
)
□ Automation call procedure
Position_GetDistance(
lAxisNo As LONG // (I) Axis number
pdDistance As DOUBLE* // (O) Rmaining command
lSkipOn As LONG // (I) Skip on flag
) As LONG // (O) Error code
□
Argument
lAxisNo: Sets the axis number (From Axis 1 = from 1)
pdDistance: Returns the remaining command of the travel command being executed in the set
axis No. of the set system.
Data range: -99,999.999 to 99,999.999 [mm]
This will vary according to the NC system specifications and parameters.
lSkipOn : Sets the skip on flag.
Value Meaning
1 Skip is on
0 Normal
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK: Normal termination
EZ_ERR_DATA_TYPE: Invalid argument data type
EZNC_DATA_READ_ADDR: Invalid part system, axis number setting
EZNC_DATA_READ_READ: Data is not readable
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
Gets the remaining command of the travel command being executed for the set part system/axis
number.
If 1 is set for the skip on flag, the remaining command of the travel command at the time the skip
on signal is input will be got.
□
Reference
□
Specifica-
tion
System Axis number
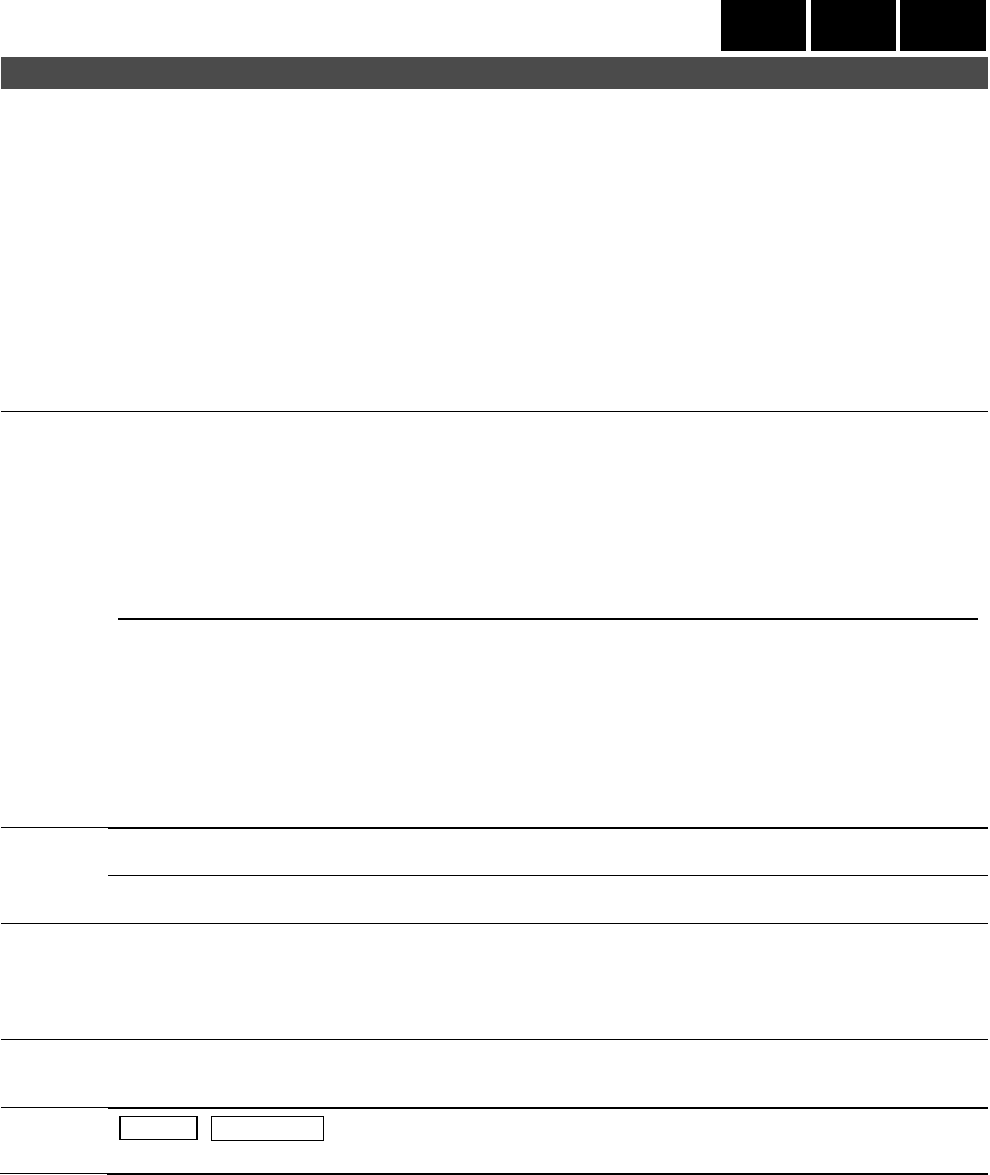
2-31
2.5.7 IEZNcPosition::GetDistance
C70 M700 M800
2.5.7 IEZNcPosition::GetDistance
Get remaining command
□ Custom call procedure
HRESULT GetDistance2(
LONG lAxisNo, // (I) Axis number
DOUBLE* pdDistance, // (O) Remaining command
LONG lSkipOn, // (I) Skip on flag
LONG* plRet // (O) Error code
)
□ Automation call procedure
Position_GetDistance2(
lAxisNo As LONG // (I) Axis number
pdDistance As DOUBLE* // (O) Remaining Command r
lSkipOn As LONG // (I) Skip on flag
) As LONG // (O) Error code
□
Argument
lAxisNo: Sets the axis number. (From Axis 1 = from 1)
pdDistance: Returns the remaining command of the travel command being executed in the set
axis number. of the set system.
Data range: -99,999.999 to 99,999.999 [mm]
This will vary according to the NC system specifications and parameters.
lSkipOn : Sets the skip on flag.
Value Meaning
1 Skip is on
0 Normal
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK: Normal termination
EZ_ERR_DATA_TYPE: Invalid argument data type
EZNC_DATA_READ_ADDR: Invalid part system, axis number setting
EZNC_DATA_READ_READ: Data is not readable
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
Gets the remaining command of the travel command being executed for the set system/axis
number.
If 1 is set for the skip on flag, the remaining command of the travel command at the time the skip
on signal is input will be got.
□
Reference
□
Specifica-
tion
System Axis number
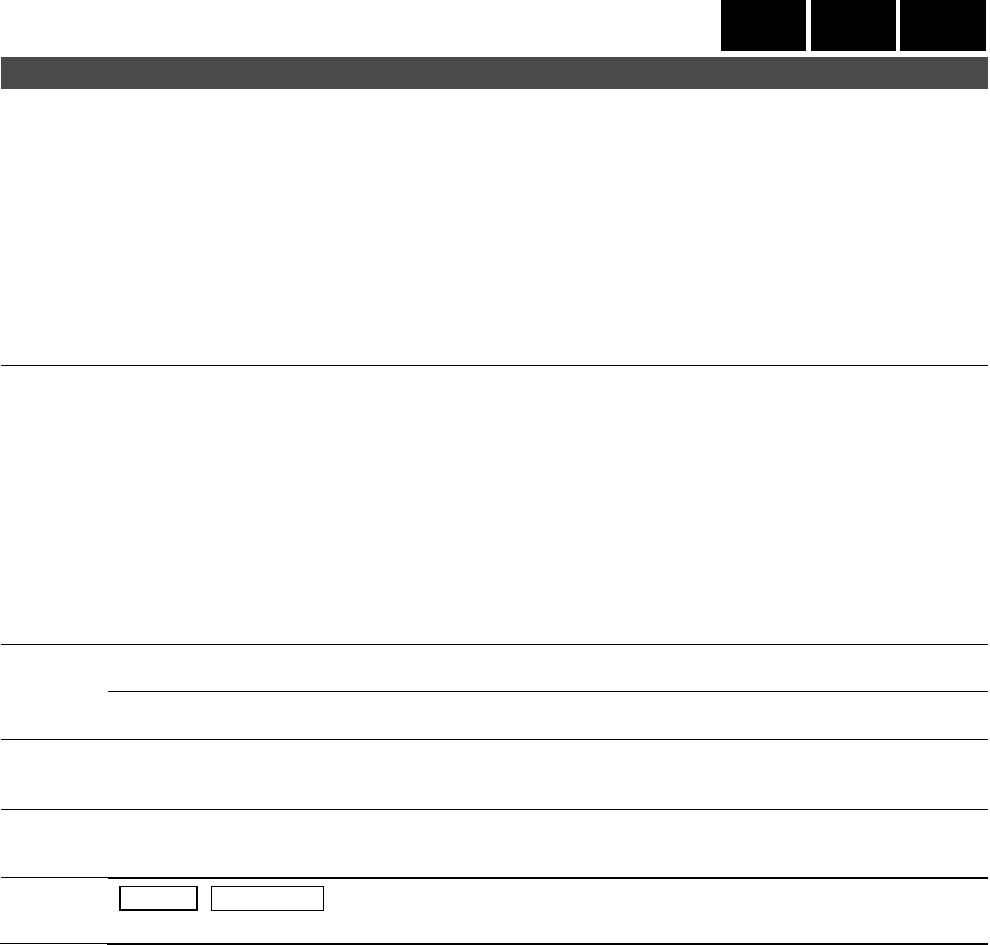
2-32
2.5.8 IEZNcPosition::GetNextDistance
C70 M700 M800
2.5.8 IEZNcPosition::GetNextDistance
Get next command
□ Custom call procedure
HRESULT GetNextDistance(
LONG lAxisNo, // (I) Axis No. setting
DOUBLE* pdDistance, // (O) Next command
LONG* plRet // (O) Error code
)
□ Automation call procedure
Position_GetNextDistance(
lAxisNo As LONG // (I) Axis No. setting
pdDistance As DOUBLE* // (O) Next command
) As LONG // (O) Error code
□
Argument
lAxisNo: Sets the axis No. (From Axis 1 = from 1)
pdDistance: Returns the travel command of the next block for the set axis No. of the set part
system.
Data range: -99,999.999 to 99,999.999 [mm]
This will vary according to the NC system specifications and parameters.
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK: Normal termination
EZNC_DATA_READ_ADDR: Invalid part system, axis No. setting
EZNC_DATA_READ_READ: Data is not readable
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
Gets the travel command of the next block for the set system/axis No.
□
Reference
□
Specifica-
tion
System Axis number
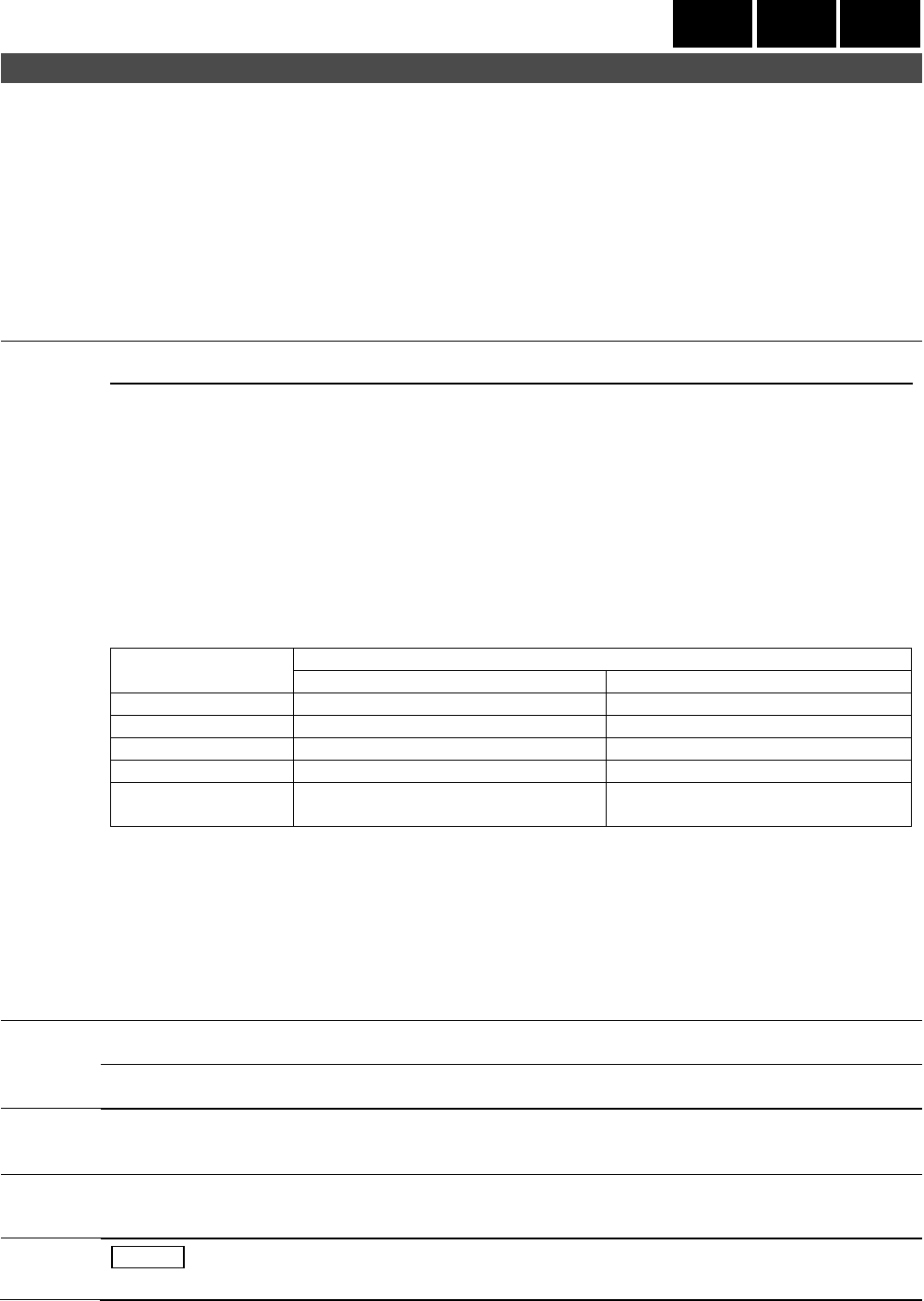
2-33
2.5.9 IEZNcPosition::GetFeedSpeed
C70 M700 M800
2.5.9 IEZNcPosition::GetFeedSpeed
Get feed speed
□ Custom call procedure
HRESULT GetFeedSpeed(
LONG lFeedType, // (I) Feed speed type
DOUBLE* pdSpeed, // (O) Feed speed
LONG* plRet // (O) Error code
)
□ Automation call procedure
Position_GetFeedSpeed(
lFeedType As LONG // (I) Feed speed type
pdSpeed As DOUBLE* // (O) Feed speed
) As LONG // (O) Error code
□
Argument
lFeedType: Sets the type of feed speed to get.
Value Meaning
0 F command feed speed (FA)
1 Manual effective feed speed (FM)
2 Synchronization feed speed (FS)
3 Automatic effective feed speed (Fc)
4 Screw lead (FE)
pdSpeed: Returns the feed speed of the specified system.
Data range: FA : 0.000 to 1000000.000 [mm/min]
FM : 0.000 to 1000000.000 [mm/min]
FS : 0.000 to 1000.0000000 [mm/rev]
FC : 0.000 to 1000000.000 [mm/min]
FE : 0.000 to 1000.0000000 [mm]
Feed speed type
Data range
M700/M800 series
C70
FA
0.000 to 1,000,000.000 [mm/min]
0.000 to 1,000,000.000 [mm/min]
FM
0.000 to 1,000,000.000 [mm/min]
0.000 to 1,000,000.000 [mm/min]
FS
0.000 to 1,000.0000000 [mm/rev]
0.000 to 1,000.0000000 [mm/rev]
Fc
0.000 to 1,000,000.000 [mm/min]
0.000 to 1,000,000.000 [mm/min]
FE
0.000 to 1,000.0000000 [mm]
(Unit will vary)
0.000 to 1,000.0000000 [mm]
The number of digits is determined by the NC type, options, and MTB setting values
(parameters).
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK: Normal termination
EZ_ERR_DATA_TYPE: Invalid argument data type
EZNC_DATA_READ_ADDR: Invalid part system, axis No. setting
EZNC_DATA_READ_READ: Data is not readable
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
Gets the feed speed of the set system.
□
Reference
□
Specifica-
tion
System
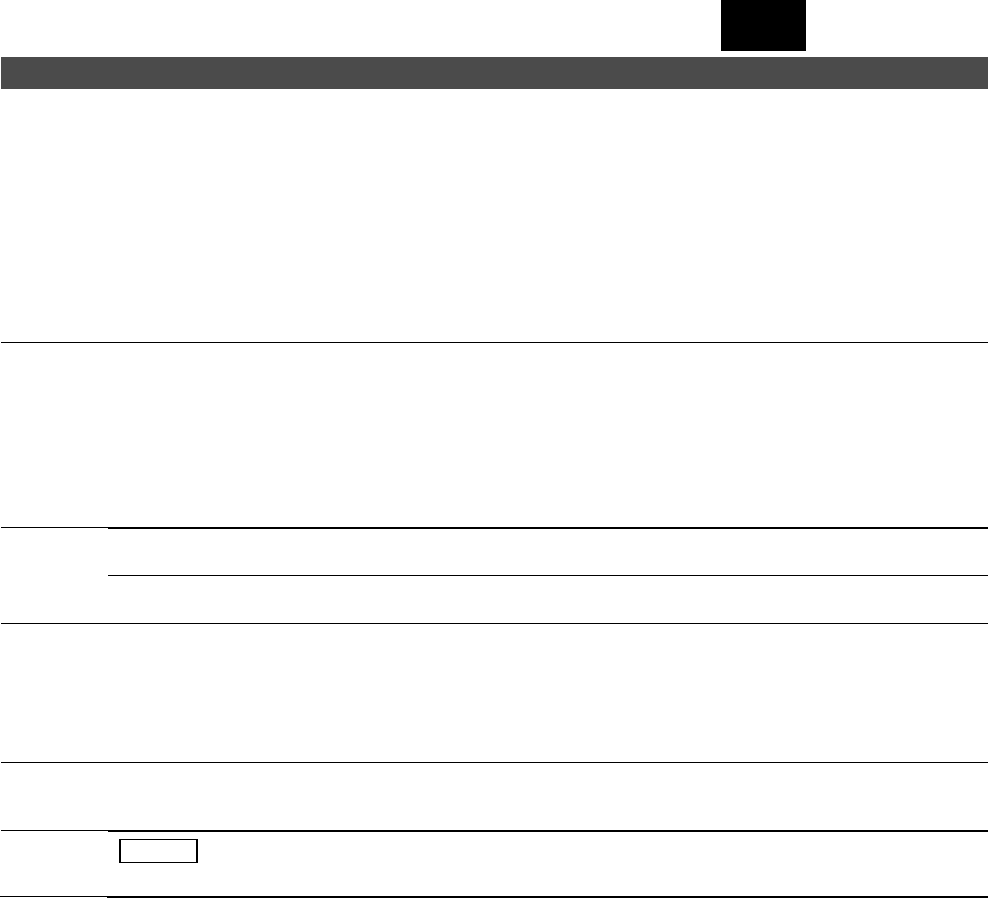
2-34
2.5.10 IEZNcPosition::GetTCPSpeed
C70 M700 M800
2.5.10 IEZNcPosition::GetTCPSpeed
Get tip speed
□ Custom call procedure
HRESULT GetTCPSpeed (
DOUBLE* pdPosition, // (O) Tip speed
LONG* plRet // (O) Error code
)
□ Automation call procedure
Position_ GetTCPSpeed (
pdPosition As DOUBLE* // (O) Tip speed
) As LONG // (O) Error code
□
Argument
pdPosition: Returns the tip speed of the set system.
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK: Normal termination
EZNC_DATA_READ_ADDR: Invalid system specification
EZNC_DATA_READ_READ: Data is not readable
EZ_ERR_NOT_SUPPORT: Not supported
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
Gets the tip speed of the set part system.
If 1 is set for the skip on flag, the workpiece coordinate position at the time the skip on signal is
input will be got.
This is valid only for the M700/M800 series.
This function is not supported with C70.
□
Reference
□
Specifica-
tion
System
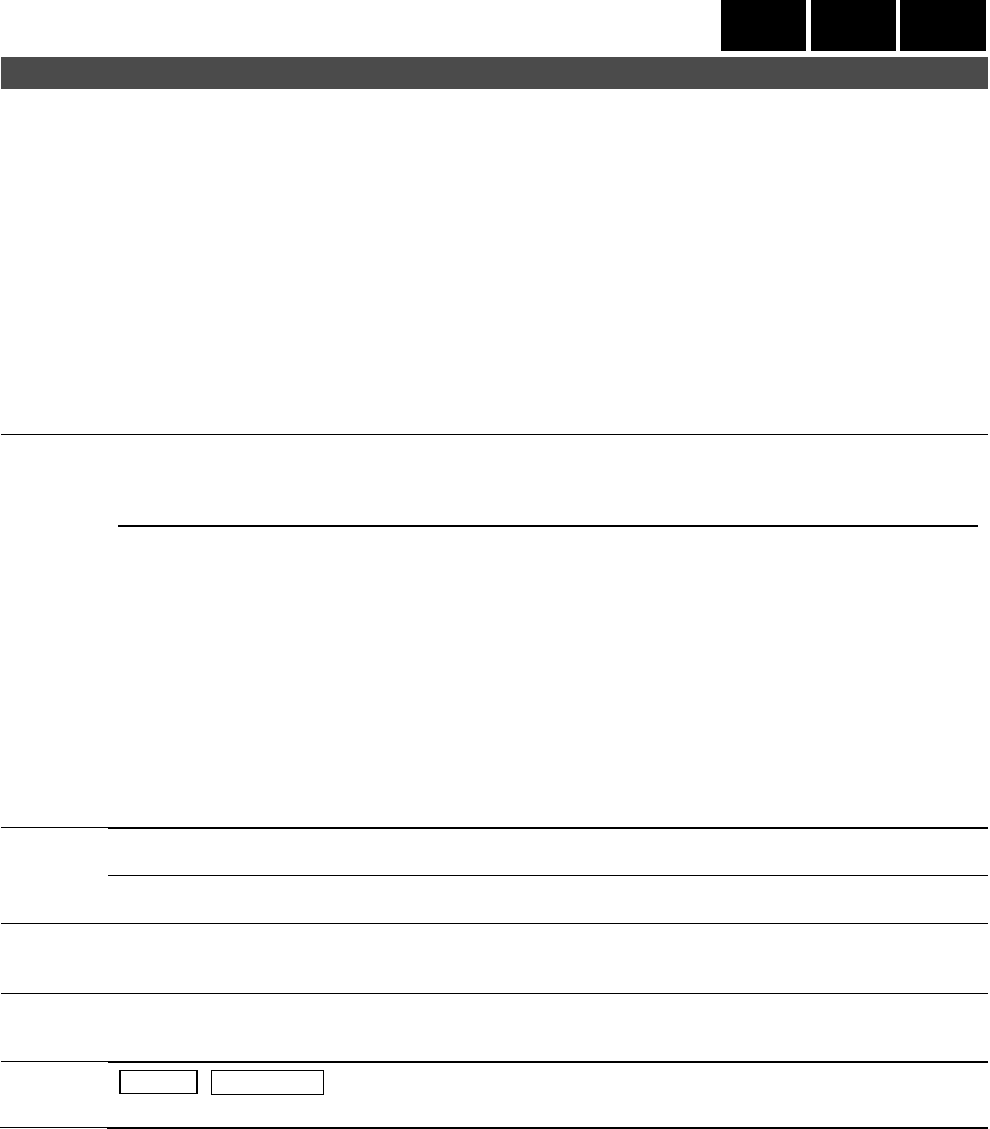
2-35
2.5.11 IEZNcPosition::GetManualOverlap
C70 M700 M800
2.5.11 IEZNcPosition::GetManualOverlap
Get manual interrupt amount
□ Custom call procedure
HRESULT GetManualOverlap(
LONG lAxisNo, // (I) Axis No. setting
LONG lType, // (I) Type
DOUBLE* pdLength, // (O) Manual interrupt amount
LONG* plRet // (O) Error code
)
□ Automation call procedure
Position_GetManualOverlap(
lAxisNo As LONG // (I) Axis No. setting
lType As LONG // (I) Type
pdLength As DOUBLE* // (O) Manual interrupt amount
) As LONG // (O) Error code
□
Argument
lAxisNo: Sets the axis No. (From Axis 1 = from 1)
lType: Sets the manual interrupt amount type to get.
Value Meaning
0 If getting the manual interrupt amount while the manual ABS switch is off
1 If getting the manual interrupt amount while the manual ABS switch is on
pdLength: Returns the manual interrupt amount for the set axis No. of the set part system.
Data range: -99,999.999 to 99,999.999 [mm]
This will vary according to the NC system specifications and parameters.
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK: Normal termination
EZ_ERR_DATA_TYPE: Invalid argument data type
EZNC_DATA_READ_ADDR: Invalid part system, axis No. setting
EZNC_DATA_READ_READ: Data is not readable
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
Gets the manual interrupt amount of the set part system/axis.
□
Reference
□
Specifica-
tion
System Axis number
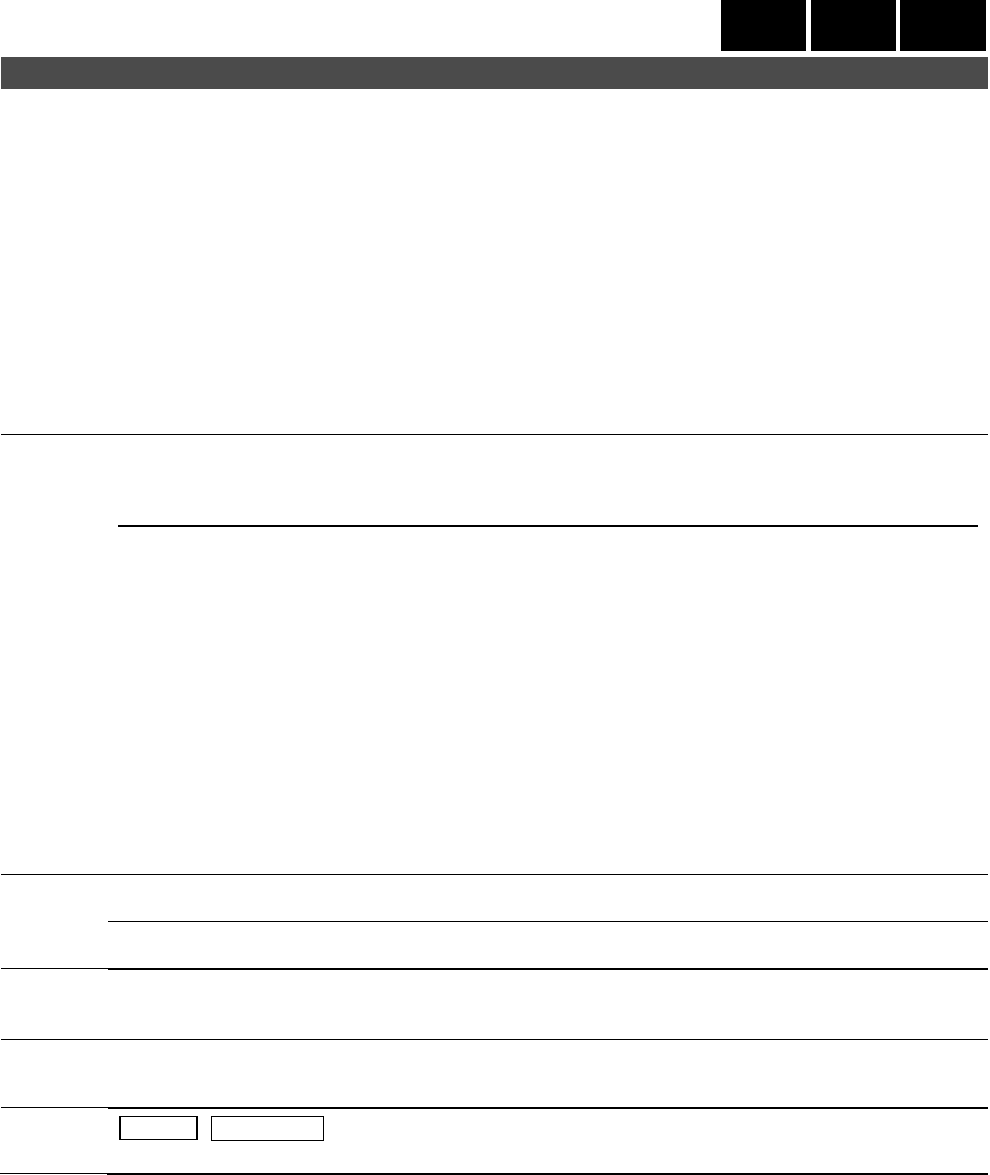
2-36
2.5.12 IEZNcPosition::GetManualOverlap2
C70 M700 M800
2.5.12 IEZNcPosition::GetManualOverlap2
Get manual interrupt amount
□ Custom call procedure
HRESULT GetManualOverlap2(
LONG lAxisNo, // (I) Axis No.
LONG lType, // (I) Type
DOUBLE* pdLength, // (O) Manual interrupt amount
LONG* plRet // (O) Error code
)
□ Automation call procedure
Position_GetManualOverlap2(
lAxisNo As LONG // (I) Axis No.
lType As LONG // (I) Type
pdLength As DOUBLE* // (O) Manual interrupt amount
) As LONG // (O) Error code
□
Argument
lAxisNo: Sets the axis No. (From Axis 1 = from 1)
lType: Sets the manual interrupt amount type to get.
Value Meaning
0 If geting the manual interrupt amount while the manual ABS switch is off
1 If getting the manual interrupt amount while the manual ABS switch is on
pdLength: Returns the manual interrupt amount for the set axis No. of the set part system.
Data range: -99,999.999 to 99,999.999 [mm]
This will vary according to the NC system specifications and parameters.
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK: Normal termination
EZ_ERR_DATA_TYPE: Invalid argument data type
EZNC_DATA_READ_ADDR: Invalid part system, axis specification
EZNC_DATA_READ_READ: Data is not readable
EZ_ERR_NOT_SUPPORT: Not supported
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
Gets the manual interrupt amount of the set part axis of the set part system.
□
Reference
□
Specifica-
tion
System Axis number
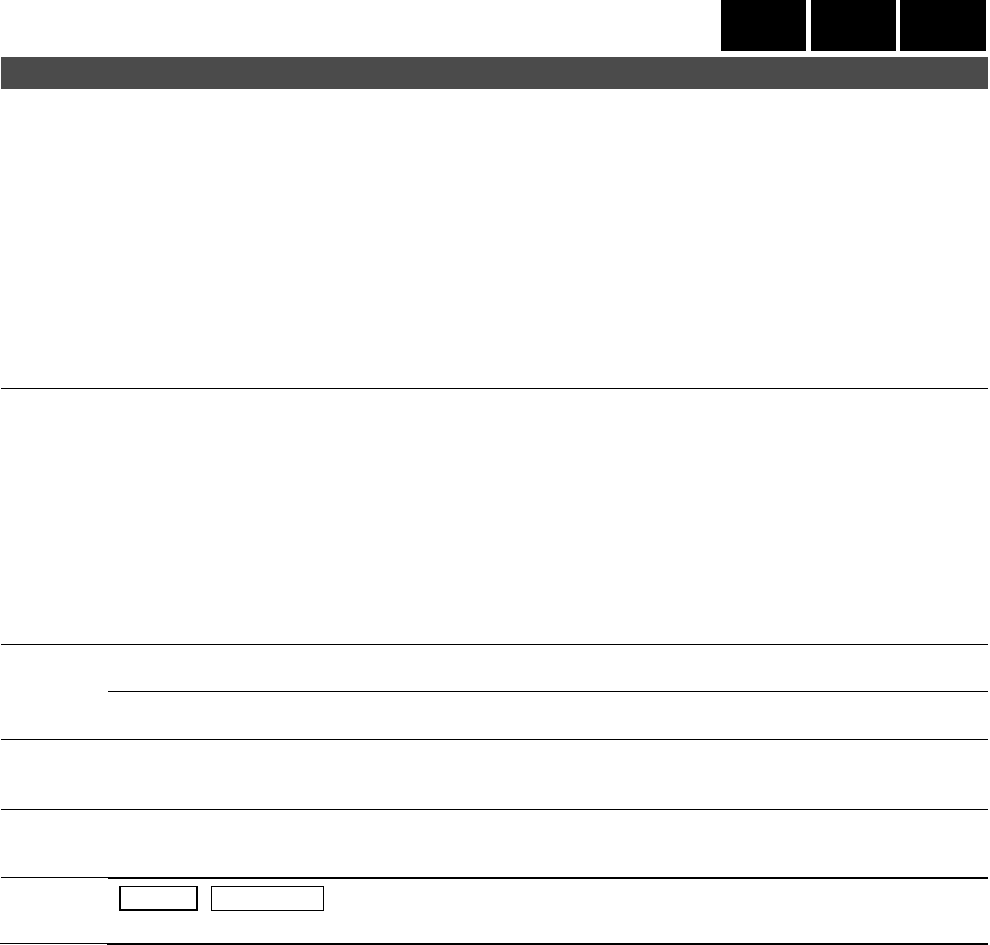
2-37
2.5.13 IEZNcPosition::GetProgramPosition
C70 M700 M800
2.5.13 IEZNcPosition::GetProgramPosition
Get program position
□ Custom call procedure
HRESULT GetProgramPosition(
LONG lAxisNo, // (I) Axis No.
DOUBLE* pdPosition, // (O) Program position
LONG* plRet // (O) Error code
)
□ Automation call procedure
Position_GetProgramPosition(
lAxisNo As LONG // (I) Axis No.
pdPosition As DOUBLE* // (O) Program position
) As LONG // (O) Error code
□
Argument
lAxisNo: Sets the axis No. (From Axis 1 = from 1)
pdPosition: Returns the program position.
Data range: -99,999.999 to 99,999.999 [mm]
This will vary according to the NC system specifications and parameters.
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK: Normal termination
EZNC_DATA_READ_ADDR: Invalid part system, axis No. setting
EZNC_DATA_READ_READ: Data is not readable
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
Gets program position.
□
Reference
□
Specifica-
tion
System Axis number
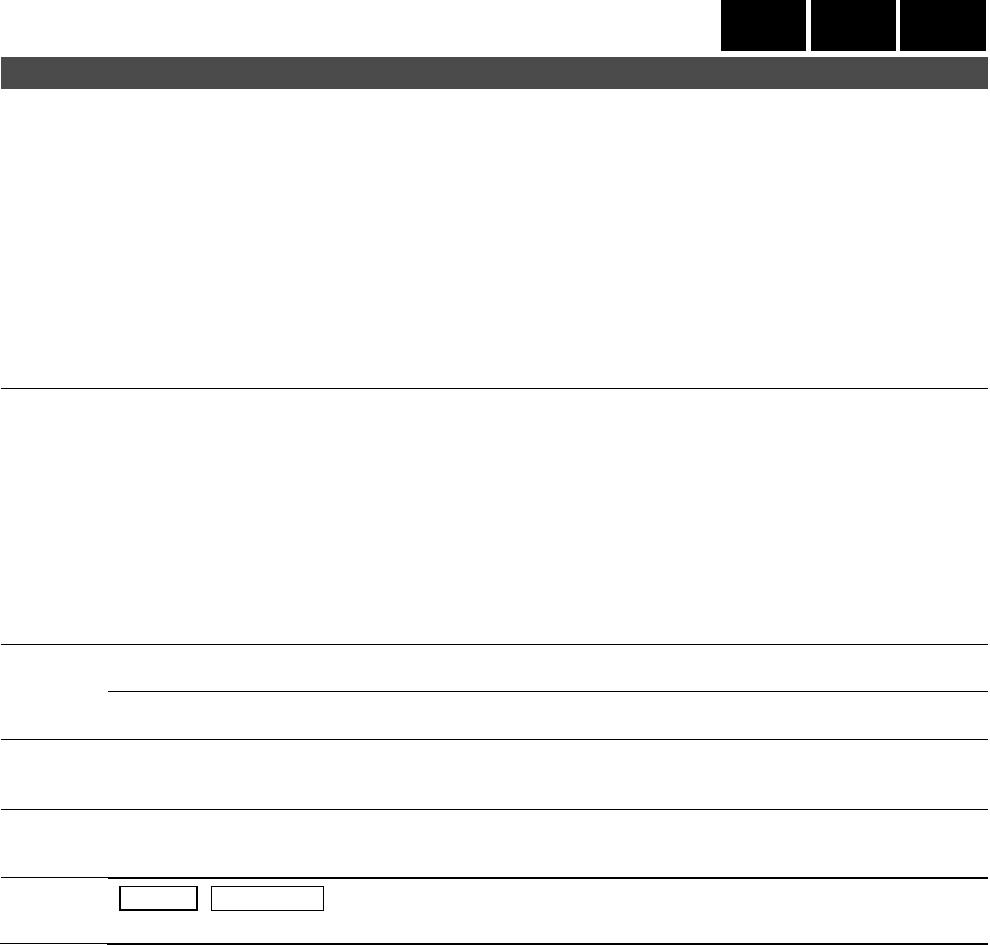
2-38
2.5.14 IEZNcPosition::GetProgramPosition3
C70 M700 M800
2.5.14 IEZNcPosition::GetProgramPosition3
Get program position
□ Custom call procedure
HRESULT GetProgramPosition3(
LONG lAxisNo, // (I) Axis No.
DOUBLE* pdPosition, // (O) Program position
LONG* plRet // (O) Error code
)
□ Automation call procedure
Position_GetProgramPosition3(
lAxisNo As LONG // (I) Axis No.
pdPosition As DOUBLE* // (O) Program position
) As LONG // (O) Error code
□
Argument
lAxisNo: Sets the axis No. (From Axis 1 = from 1)
pdPosition: Returns the program position.
Data range: -99,999.999 to 99,999.999 [mm]
This will vary according to the NC system specifications and parameters.
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK: Normal termination
EZNC_DATA_READ_ADDR: Invalid part system, axis No.setting
EZNC_DATA_READ_READ: Data is not readable
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
Gets program position.
□
Reference
□
Specifica-
tion
System Axis number
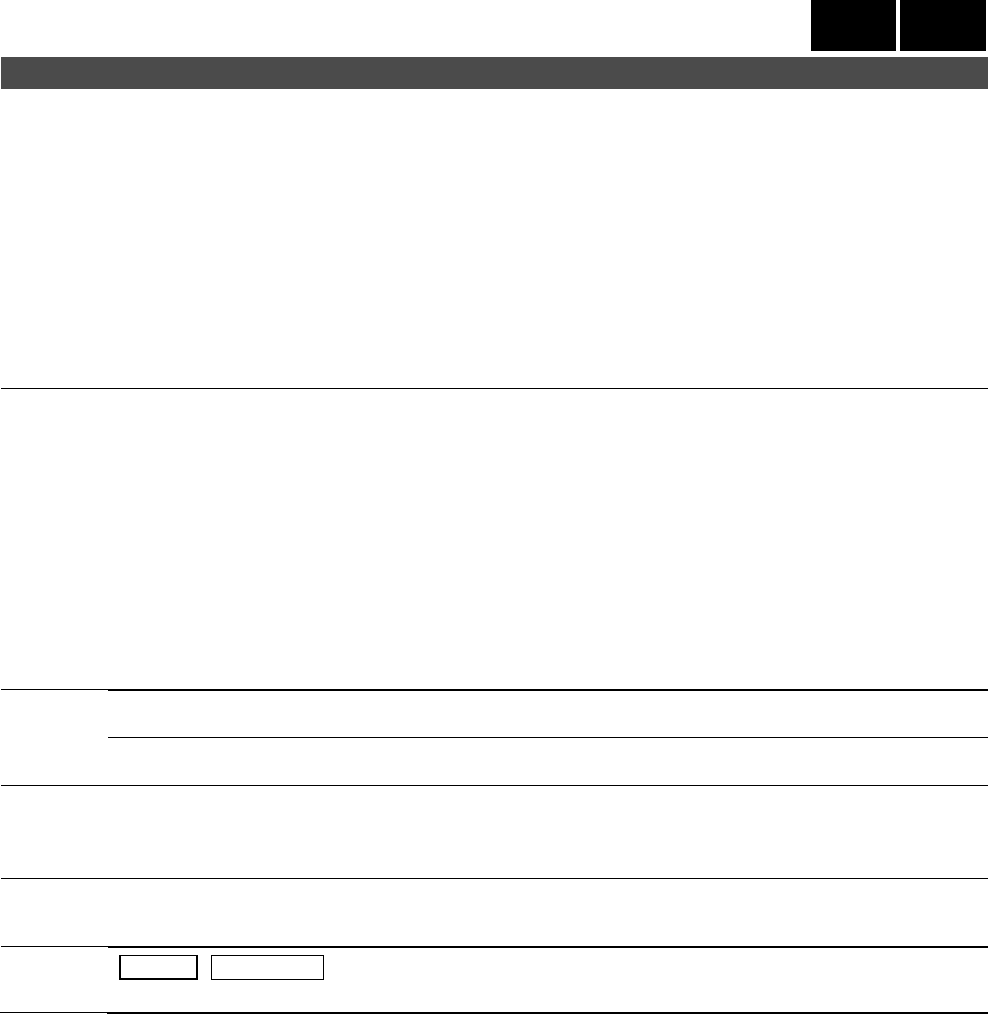
2-39
2.5.15 IEZNcPosition::GetTCPMachinePosition
C70 M700 M800
2.5.15 IEZNcPosition::GetTCPMachinePosition
Get tip machine position
□ Custom call procedure
HRESULT GetTCPMachinePosition (
LONG lAxisNo, // (I) Axis No.
DOUBLE* pdPosition, // (O) Tip machine position
LONG* plRet // (O) Error code
)
□ Automation call procedure
Position_ GetTCPMachinePosition (
lAxisNo As LONG // (I) Axis No.
pdPosition As DOUBLE* // (O) Tip machine position
) As LONG // (O) Error code
□
Argument
lAxisNo: Set the axis No. (From Axis 1 = from 1)
pdPosition: Returns the tip machine position of the set axis No. of the set part system.
Data range: -99,999.999 to 99,999.999 [mm]
This will vary according to the NC system specifications and parameters.
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK: Normal termination
EZNC_DATA_READ_ADDR: Invalid part system, axis No. setting
EZNC_DATA_READ_READ: Data is not readable
EZ_ERR_NOT_SUPPORT: Not supported
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
Gets the tip machine position.
This is valid only for the M700/M800 series.
This function is not supported with C70.
□
Reference
□
Specifica-
tion
System Axis number
2-40
2.5.16 IEZNcPosition::GetTCPWorkPosition
C70 M700 M800
2.5.16 IEZNcPosition::GetTCPWorkPosition
Get tip workpiece position
□ Custom call procedure
HRESULT GetTCPWorkPosition (
LONG lAxisNo, // (I) Axis No.
DOUBLE* pdPosition, // (O) Tip workpiece position
LONG* plRet // (O) Error code
)
□ Automation call procedure
Position_ GetTCPWorkPosition (
lAxisNo As LONG // (I) Axis No.
pdPosition As DOUBLE* // (O) Tip workpiece position
) As LONG // (O) Error code
□
Argument
lAxisNo: Sets the axis No. (From Axis 1 = from 1)
pdPosition: Returns the tip workpiece position of the set axis No. of the set part system.
Data range: -99,999.999 to 99,999.999 [mm]
This will vary according to the NC system specifications and parameters.
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK: Normal termination
EZNC_DATA_READ_ADDR: Invalid part system, axis No. setting
EZNC_DATA_READ_READ: Data is not readable
EZ_ERR_NOT_SUPPORT: Not supported
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
Gets the tip workpiece position.
This is valid only for the M700/M800 series.
This function is not supported with C70.
□
Reference
□
Specifica-
tion
System Axis number
2-41
2.5.17 IEZNcPosition::GetFeedbackPosition
M700 M800
2.5.17 IEZNcPosition::GetFeedbackPosition
Get feedback position
□ Custom call procedure
HRESULT GetFeedbackPosition (
LONG lAxisNo, // (I) Axis No.
DOUBLE* pdPosition, // (O) Feedback position
LONG* plRet // (O) Error code
)
□ Automation call procedure
Position_ GetFeedbackPosition (
lAxisNo As LONG // (I) Axis No.
pdPosition As DOUBLE* // (O) Feedback position
) As LONG // (O) Error code
□
Argument
lAxisNo: Sets the axis No. (From Axis 1 = from 1)
pdPosition: Returns the feedback position of the set axis of the set part system.
Data range: -99,999.999 to 99,999.999 [mm]
This will vary according to the NC system specifications and parameters.
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK: Normal termination
EZNC_DATA_READ_ADDR: Invalid part system, axis No. setting
EZNC_DATA_READ_READ: Data is not readable
EZ_ERR_NOT_SUPPORT: Not supported
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
Gets the feedback position.
This is valid only for the M700/M800 series.
This function is not supported with C70.
□
Reference
□
Specifica-
tion
System Axis number
2-42
2.5.18 IEZNcPosition::GetTableCoordinationPosition
M700 M800
2.5.18 IEZNcPosition::GetTableCoordinationPosition
Get table coordinate system
counter
□ Custom call procedure
HRESULT GetTableCoordinationPosition (
LONG lAxisNo, // (I) Axis No.
DOUBLE* pdPosition, // (O) Table coordinate system counter
LONG* plRet // (O) Error code
)
□ Automation call procedure
Position_ GetTableCoordinationPosition (
lAxisNo As LONG // (I) Axis No.
pdPosition As DOUBLE* // (O) Table coordinate system counter
) As LONG // (O) Error code
□
Argument
lAxisNo: Sets the axis No. (From Axis 1 = from 1)
pdPosition: Returns the table coordinate system counter of the set axis of the set part system.
Data range: -99,999.999 to 99,999.999 [mm]
This will vary according to the NC system specifications and parameters.
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK: Normal termination
EZNC_DATA_READ_ADDR: Invalid part system, axis No. setting
EZNC_DATA_READ_READ: Data is not readable
EZ_ERR_NOT_SUPPORT: Not supported
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
Gets the table coordinate system counter.
This is valid only for the M700/M800 series.
This function is not supported with C70.
□
Reference
□
Specifica-
tion
System Axis number
2-43
2.5.19 IEZNcPosition::GetWorkInstallationPosition
M700 M800
2.5.19 IEZNcPosition::GetWorkInstallationPosition
Get workpiece installation
coordinate system counter
□ Custom call procedure
HRESULT GetWorkInstallationPosition (
LONG lAxisNo, // (I) Axis No.
DOUBLE* pdPosition, // (O) Workpiece installation coordinate system counter
LONG* plRet // (O) Error code
)
□ Automation call procedure
Position_ GetWorkInstallationPosition (
lAxisNo As LONG // (I) Axis No.
pdPosition As DOUBLE* // (O) Workpiece installation coordinate system counter
) As LONG // (O) Error code
□
Argument
lAxisNo: Sets the axis No. (From Axis 1 = from 1)
pdPosition: Returns the workpiece installation coordinate system counter of the set axis of the
set system.
Data range: -99,999.999 to 99,999.999 [mm]
This will vary according to the NC system specifications and parameters.
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK: Normal termination
EZNC_DATA_READ_ADDR: Invalid part system, axis No. setting
EZNC_DATA_READ_READ: Data is not readable
EZ_ERR_NOT_SUPPORT: Not supported
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
Gets the workpiece installation coordinate system counter.
This is valid only for the M700/M800 series.
This function is not supported with C70.
□
Reference
□
Specifica-
tion
System Axis number
2-44
2.5.20 IEZNcPosition::GetInclinedSurfacePosition
M700 M800
2.5.20 IEZNcPosition::GetInclinedSurfacePosition
Get inclined surface
coordinate system counter
□ Custom call procedure
HRESULT GetInclinedSurfacePosition (
LONG lAxisNo, // (I) Axis No.
DOUBLE* pdPosition, // (O) Inclined surface coordinate system counter
LONG* plRet // (O) Error code
)
□ Automation call procedure
Position_ GetInclinedSurfacePosition (
lAxisNo As LONG // (I) Axis No.
pdPosition As DOUBLE* // (O) Inclined surface coordinate system counter
) As LONG // (O) Error code
□
Argument
lAxisNo: Sets the axis No. (From Axis 1 = from 1)
pdPosition: Returns the inclined surface coordinate system counter of the set axis No. of the set
part system.
Data range: -99,999.999 to 99,999.999 [mm]
This will vary according to the NC system specifications and parameters.
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK: Normal termination
EZNC_DATA_READ_ADDR: Invalid part system, axis No. setting
EZNC_DATA_READ_READ: Data is not readable
EZ_ERR_NOT_SUPPORT: Not supported
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
Gets the inclined surface coordinate system counter.
This is valid only for the M700/M800 series.
This function is not supported with C70.
□
Reference
□
Specifica-
tion
System Axis number
2-45
2.6 IEZNcCommand2 Interface
2.6.1 IEZNcCommand2::GetGCodeCommand
C70 M700 M800
2.6.1 IEZNcCommand2::GetGCodeCommand Get G code modal command
value
□ Custom call procedure
HRESULT GetGCodeCommand(
LONG lType, // (I) Type
DOUBLE* pdValue, // (O) Command value
LONG* plRet // (O) Error code
)
□ Automation call procedure
Command_GetGCodeCommand(
lType As LONG // (I) Type
pdValue As DOUBLE* // (O) Command value
) As LONG // (O) Error code
□
Argument
lType: Sets the G code modal command value type to get.
The following describes examples for the M700/M800 series M system. The content will
differ depending on the type and the settings.
Value Meaning
1 Group 1 (Interpolation mode)
G00, G01, G02, G03, G33, G02.1, G03.1, G02.3, G03.3, G02.4,G03.4,
G062 command modal
2 Group 2 (Plane selection) G17, G18, G19 command modal
3 Group 3 (Absolute) G90, (incremental) G91 command modal
4 Group 4 (Chuck barrier) G22, G23 command modal
5 Group 5 (Feed mode) G93, G94, G95 command modal
6 Group 6 (Inch) G20, (millimeter) G21 command modal
7 Group 7 (Radial compensation mode) G40, G41, G42, G41.2, G42.2 command modal
8 Group 8 (Length compensation mode)
G43, G44, G43.1, G43.4, G43.5, G49 command modal
9 Group 9 (Fixed cycle mode)
G70, G71, G72, G73, G74, G75, G76, G77, G78, G79, G80,
G81, G82, G83, G84, G85, G86, G87, G88, G89 command modal
10 Group 10 (Initial point return) G98, (R point return) G99 command modal
11 Group 11 G50, G51 command modal
12 Group 12 (Workpiece coordinate system modal)
G54, G54.1, G55, G56, G57, G58, G59 command modal
13 Group 13 (Cutting mode)
G61, G61.1, G61.2, G62, G63, G63.1, G63.2, G64 command modal
14 Group 14 (Modal call) G66, G66.1, G67 command modal
15 Group 15 (Normal control) G40.1, G41.1, G42.1 command modal
(only for M700/M800 series M system)
16 Group 16 (Coordinate rotation) G68, G68.2, G68.3, G69
(only for M700/M800 series M system)
17 Group 17 (Constant surface speed control) G96, G97 command modal
18 Group 18 (Polar coordinate command) G15, G16 command modal
19 Group 19 (G command mirror image) G50.1, G51.1 command modal
20 Group 20 (Spindle selection) G43.1, G44.1, G47.1 command modal
21 Group 21 (Cylindrical interpolation / polar coordinate interpolation)
G07.1, G107, G12.1, G112, G13.1, G113
(only for M700/M800 series M system)
2-46
pdValue : Returns the current G code modal command value of the set part system.
Value (Example) Meaning
2 G02
17 G17
50.2 G50.2
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK: Normal termination
EZ_ERR_DATA_TYPE: Invalid argument data type
EZNC_DATA_READ_ADDR: Invalid system
EZNC_DATA_READ_READ: Data is not readable
□ Return
value
Value Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
Gets the G code command modal value of the set part system. Refer to the "Programming Manual"
of each model for the individual model's G command and group
list. Also, depending on the
model, different operation than with the original G code command may be incorporated by using
the G code macro call. Check after referring to the instructions issued by MTB
□
Reference
□
Specifica-
tion
System
2-47
2.6.2 IEZNcCommand2::GetToolCommand
C70 M700 M800
2.6.2 IEZNcCommand2::GetToolCommand
Get tool compensation
number
□ Custom call procedure
HRESULT GetToolCommand(
LONG lAxisNo, // (I) Axis No.
LONG lType, // (I) Type
LONG* plValue, // (O) Tool compensation number
LONG* plRet // (O) Error code
)
□ Automation call procedure
Command_GetToolCommand(
lAxisNo As LONG // (I) Axis No.
lType As LONG // (I) Type
plValue As LONG* // (O) Tool compensation number
) As LONG // (O) Error code
□
Argument
lAxisNo: Sets the axis when getting the length compensation number.
(From Axis 1 = from 1)
lType: Sets the tool compensation type to get.
Value Meaning
0 D command value of the shape compensation number
1 D command value of the wear compensation number
2 H command value of the length compensation number
(axis specification necessary)
plValue : Returns the shape/wear compensation number of the tool for the set part system and
the tool length compensation number of the set axis No. in the set part system.
Data range: 1 to 200 (range depends on the number of tool offset sets)
Value meaning: 1 = D1, 1 = H1
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK: Normal termination
EZ_ERR_DATA_TYPE: Invalid argument data type
EZNC_DATA_READ_ADDR: Invalid part system, axis No. setting
EZNC_DATA_READ_READ: Data is not readable
EZ_ERR_NOT_SUPPORT: Not supported
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
Gets the shape/wear compensation number of the tool for the set part system and the tool length
compensation number of the set axis No. in the set part system.
□
Reference
□
Specifica-
tion
System Axis number
2-48
2.6.3 IEZNcCommand2::GetFeedCommand
C70 M700 M800
2.6.3 IEZNcCommand2::GetFeedCommand
Get feed speed command
value
□ Custom call procedure
HRESULT GetFeedCommand(
LONG lType, // (I) Type
DOUBLE* pdValue, // (O) Command value
LONG* plRet // (O) Error code
)
□ Automation call procedure
Command_GetFeedCommand(
lType As LONG // (I) Type
pdValue As DOUBLE* // (O) Command value
) As LONG // (O) Error code
□
Argument
lType: Sets the command value type to get.
Value Meaning
0 F command feed speed (FA)
1 Manual effective feed speed (FM)
2 Synchronization feed speed (FS)
3 Automatic effective feed speed (FC)
4 Screw lead (FE)
5 Tip speed (TCP) (M700/M800 series only)
pdValue : Returns the current feed speed command value of the set part system.
Feed speed type
Data range
M700/M800 series
C70
FA
0.000 to 10,000,000.000 [mm/min]
0.000 to 1,000,000.000 [mm/min]
FM
0.000 to 1,000,000.000 [mm/min]
0.000 to 1,000,000.000 [mm/min]
FS
0.000 to 1,000,000.000000 [mm/rev]
0.000 to 1,000,000.000 [mm/rev]
FC
0.000 to 100,000.000 [mm/min]
0.000 to 1,000,000.000 [mm/min]
FE
0.000 to 100,000.000 [mm/rev]
(Unit will vary)
0.000 to 999.9999 [mm/rev]
The total number of digits is determined by the NC model, options, and MTB setting values
(parameters).
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK: Normal termination
EZ_ERR_DATA_TYPE: Invalid argument data type
EZNC_DATA_READ_ADDR: Invalid system
EZNC_DATA_READ_READ: Data is not readable
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
Gets the current feed speed command value of the set part system.
□
Reference
□
Specifica-
tion
System
2-49
2.6.4 IEZNcCommand2::GetCommand2
C70 M700 M800
2.6.4 IEZNcCommand2::GetCommand2
Get M/S/T/B function command
modal value
□ Custom call procedure
HRESULT GetCommand2(
LONG lType, // (I) Command type
LONG lIndex // (I) Command number
LONG* plValue, // (O) Command value
LONG* plRet // (O) Error code
)
□ Automation call procedure
Command_GetCommand2(
lType As LONG // (I) Command type
lIndex As LONG // (I) Command number
plValue As LONG* // (O) Command value
) As LONG // (O) Error code
□
Argument
lType: Sets the command value type to get.
Value Meaning
EZNC_M M command (sub function M command value)
EZNC_S S command (spindle rotation speed S command value)
EZNC_T T command (tool change T command value)
EZNC_B B command (second sub function command value
(specification of index table position, etc.))
lIndex: Set the command number.
Example) When lType = EZNC_M and lIndex= 1, the M command will be 1.
Model
Command
C70 M700 series M800 series
M
S
T
B
1 to 4
1 to 7
1 to 4
1 to 4
1 to 4
1 to maximum number
of spindles*
1
1 to 4
1 to 4
1 to maximum number
of spindles*
1
1 to 4
*For the maximum number of spindles, refer to the product catalog for each Mitsubishi CNC.
plValue : Returns the current command value of the set part system.
Data range: 0 to 99,999999 (maximum)
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK: Normal termination
EZ_ERR_DATA_TYPE: Invalid argument data type
EZNC_DATA_READ_READ: Data is not readable
EZNC_DATA_READ_ADDR: Invalid part system setting
EZNC_DATA_READ_SUBSECT: Invalid subsection number
EZ_ERR_NOT_SUPPORT: Not supported
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
Gets the current command modal value for the M/S/T/B function of the set part system.
□
Reference
SetCommad2( )
□
Specifica-
tion
System (PLC axis system cannot set)
2-50
2.6.5 IEZNcCommand2::SetCommand2
C70 M700 M800
2.6.5 IEZNcCommand2::SetCommand2
Set manual numerical value command
value settings for M/S/T/B functions
□ Custom call procedure
HRESULT SetCommand2(
LONG lType, // (I) Type
LONG lIndex // (I) Command number
LONG lValue, // (I) Command value
LONG* plRet // (O) Error code
)
□ Automation call procedure
Command_SetCommand2(
lType As LONG // (I) Type
lIndex As LONG // (I) Command number
lValue As LONG // (I) Command value
) As LONG // (O) Error code
□
Argument
lType: Sets the command value type to get.
Value Meaning
EZNC_M M command (sub function M command value)
EZNC_S S command (spindle rotation speed S command value)
EZNC_T T command (tool change T command value)
EZNC_B B command (second sub func
tion command value (specification of
index table position, etc.))
lIndex: Sets the set number.
Example) When lType = EZNC_M and lIndex= 1, the M command will be 1.
Model
Command
C70 M700 series M800 series
M
S
T
B
1 to 4
1 to 7
1 to 4
1 to 4
1 to 4
1 to maximum number
of spindles*
1
1 to 4
1 to 4
1 to maximum number
of spindles*
1
1 to 4
*For the maximum number of spindles, refer to the product catalog for each Mitsubishi CNC.
lValue: Sets the command value of the set part system or the axis No.
Data range: 0 to 99999999 (maximum)
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK: Normal termination
EZ_ERR_DATA_TYPE: Invalid argument data type
EZNC_DATA_WRITE_WRITE: Data is not writable
EZNC_DATA_WRITE_ADDR: Invalid part system setting
EZNC_DATA_WRITE_SUBSECT: Invalid subsection number
EZ_ERR_NOT_SUPPORT: Not supported
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
Sets the manual numerical value command value of the M/S/T/B function of the axis No. or the
set part system.
□
Reference
GetCommand2( )
2-51
2.7 IEZNcProgram2 Interface
2.7.1 IEZNcProgram2::CurrentBlockRead
C70 M700 M800
2.7.1 IEZNcProgram2::CurrentBlockRead
Read current program block
□ Custom call procedure
HRESULT CurrentBlockRead(
LONG lBlockNumber, // (I) Number of blocks
LPOLESTR* lppwszProgramData, // (O) Program storage
LONG* plCurrentBlockNo, // (O) Block number being executed
LONG* plRet // (O) Error code
)
□ Automation call procedure
Program_CurrentBlockRead(
lBlockNumber As LONG // (I) Number of blocks
lppwszProgramData As STRING* // (O) Program storage
plCurrentBlockNo As LONG* // (O) Block number being executed
) As LONG // (O) Error code
□
Argument
lBlockNumber: Sets the number of blocks to get. Value: 1 to 10
lppwszProgramData: Gets the program blocks as a UNICODE
character string. To separate
program blocks, CR, LF codes are inserted between them. In addition, NULL is inserted at the
end.
plCurrentBlockNo: Returns the block number being executed in the got blocks.
Value Meaning
0 Not in operation
1 1st block
2 2nd block
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK : Normal termination
EZNC_OPE_GETPRGBLK_ADDR: Invalid part system setting
EZNC_OPE_GETPRGBLK_DATAERR: Error in communication data between NC and personal
computer
EZNC_OPE_GETPRGBLK_DATASIZE: Application does not fit into prepared buffer
EZNC_OPE_GETPRGBLK_NOS: The number of blocks setting is invalid
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
Gets the program for which the operation search has been completed or the program currently
being executed. Reads the program for which the operation search has been completed for the
set part system or the program block in operation.
If no operation search has been competed, the following applies.
lppwszProgramData = "\0"
plCurrentBlockNo = 0
As the character string area memory is allocated in this product, clients using VC++ need to
release the character string area memory explicitly with CoTaskMemFree().
Even if no operation search has been completed, the character string area memory must be
released.
□
Reference
IEZNcOperation::Search( )
□
Specifica-
tion
System
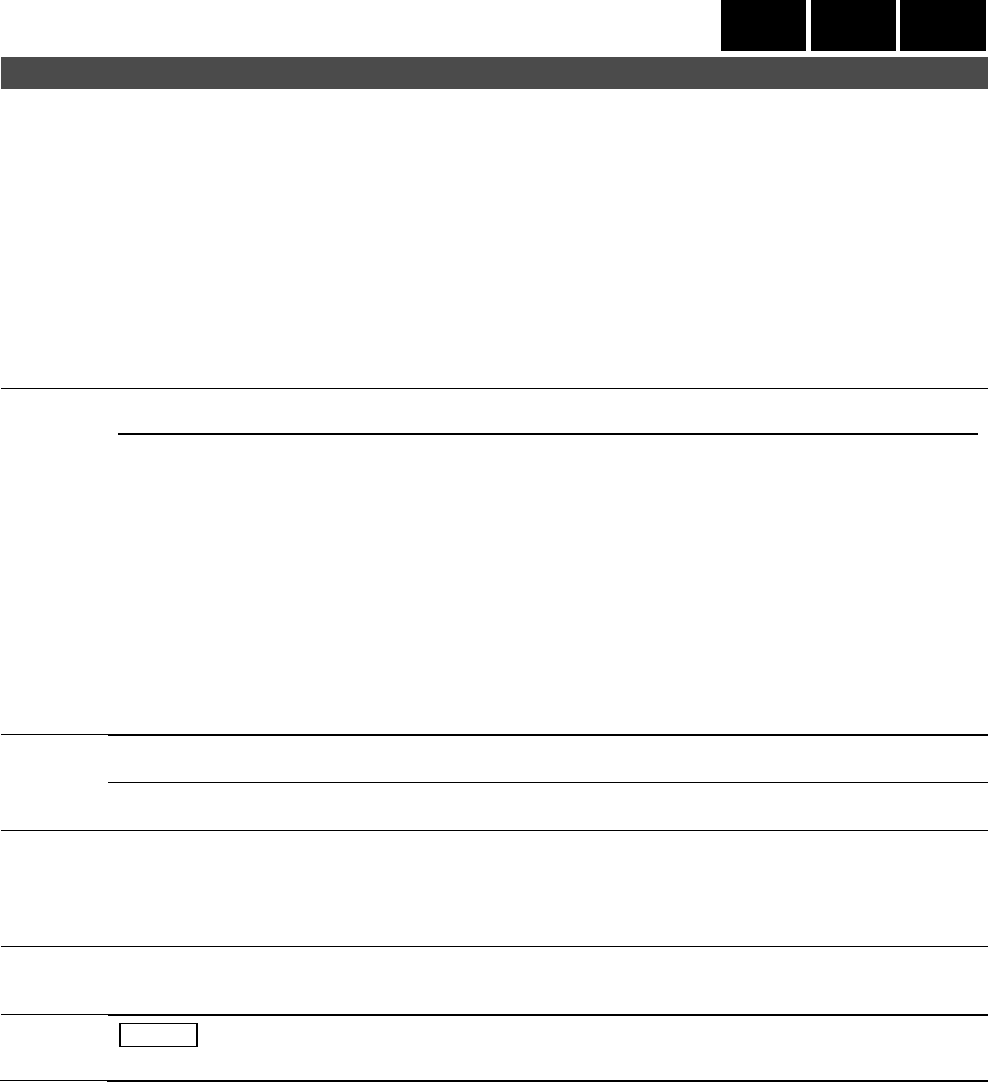
2-52
2.7.2 IEZNcProgram2::GetProgramNumber2
C70 M700 M800
2.7.2 IEZNcProgram2::GetProgramNumber2
Get program number
□ Custom call procedure
HRESULT GetProgramNumber2(
LONG lProgramType, // (I) Program type
LPOLESTR* lppwszProgramNo, // (O) Program No.
LONG* plRet // (O) Error code
)
□ Automation call procedure
Program_GetProgramNumber2(
lProgramType As LONG // (I) Program type
lppwszProgramNo As STRING* // (O) Program No.
) As LONG // (O) Error code
□
Argument
lProgramType: Sets the program type.
Value Meaning
EZNC_MAINPRG Main program
EZNC_SUBPRG Subprogram
lppwszProgramNo: Returns the number of the program for which search has been completed or
currently in automatic operation as a UNICODE character string. The program number is got as
the program file name with the M700/M800 series.
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK: Normal termination
EZ_ERR_DATA_TYPE: Invalid argument data type
EZNC_DATA_READ_ADDR: Invalid part system setting
EZNC_DATA_READ_READ: Data is not readable
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
Returns the number of the program for which search has been completed or currently in
automatic operation.
As the character string area memory is allocated in this product, clients using VC++ need to
release the character string area memory explicitly with CoTaskMemFree().
□
Reference
GetSequenceNumber(), GetBlockNumber(), GetSubProLevel()
□
Specifica-
tion
System
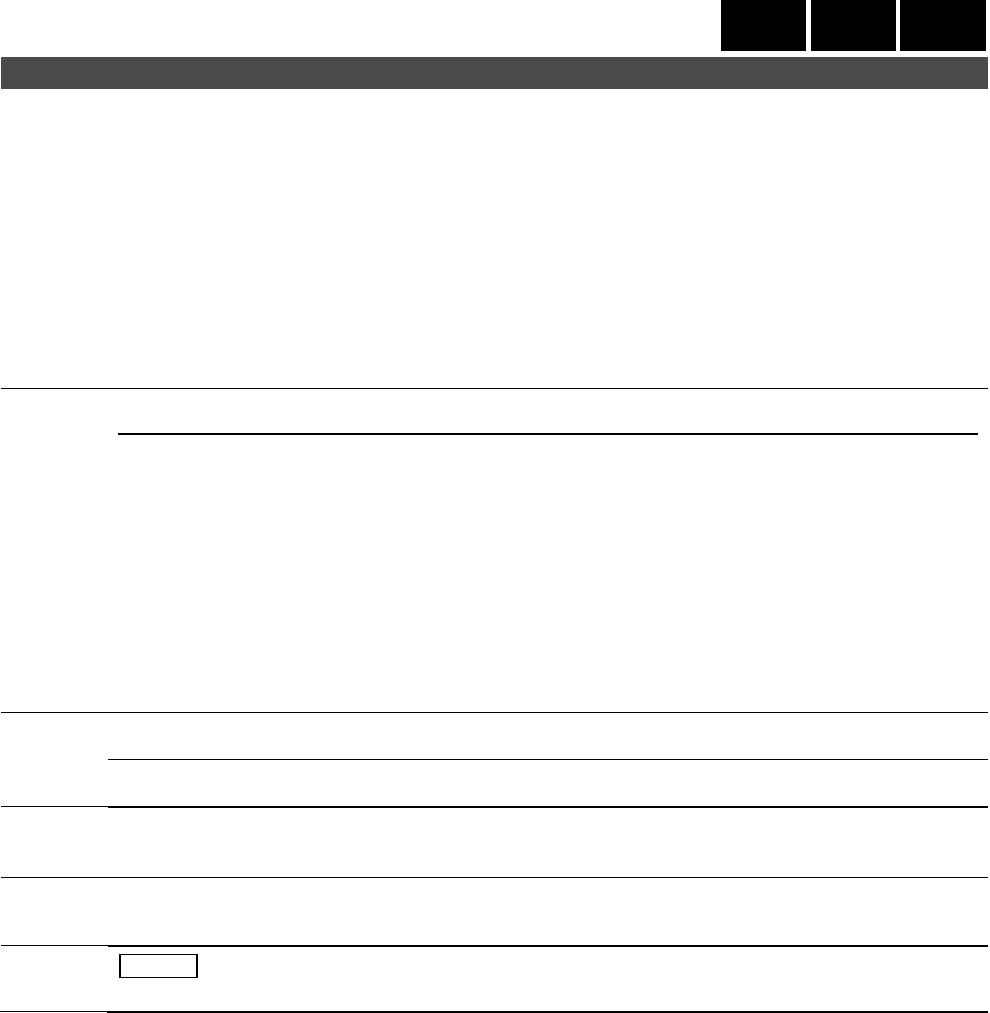
2-53
2.7.3 IEZNcProgram2::GetSequenceNumber
C70 M700 M800
2.7.3 IEZNcProgram2::GetSequenceNumber
Read sequence number
□ Custom call procedure
HRESULT GetSequenceNumber(
LONG lProgramType, // (I) Program type
LONG* plSequenceNo, // (O) Sequence number
LONG* plRet // (O) Error code
)
□ Automation call procedure
Program_GetSequenceNumber(
lProgramType As LONG // (I) Program type
plSequenceNo As LONG* // (O) Sequence number
) As LONG // (O) Error code
□
Argument
lProgramType: Sets the program type.
Value Meaning
EZNC_MAINPRG Main program
EZNC_SUBPRG Subprogram
plSequenceNo
: Returns the sequence number of the program for which search has been
completed or currently in automatic operation.
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK : Normal termination
EZ_ERR_DATA_TYPE : Invalid argument data type
EZNC_DATA_READ_ADDR : Invalid system specification
EZNC_DATA_READ_READ : Data is not readable
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
Returns the sequence number of the program for which search has been completed or currently
in automatic operation.
□
Reference
GetProgramNumber2(), GetBlockNumber(), GetSubProLevel()
□
Specifica-
tion
System
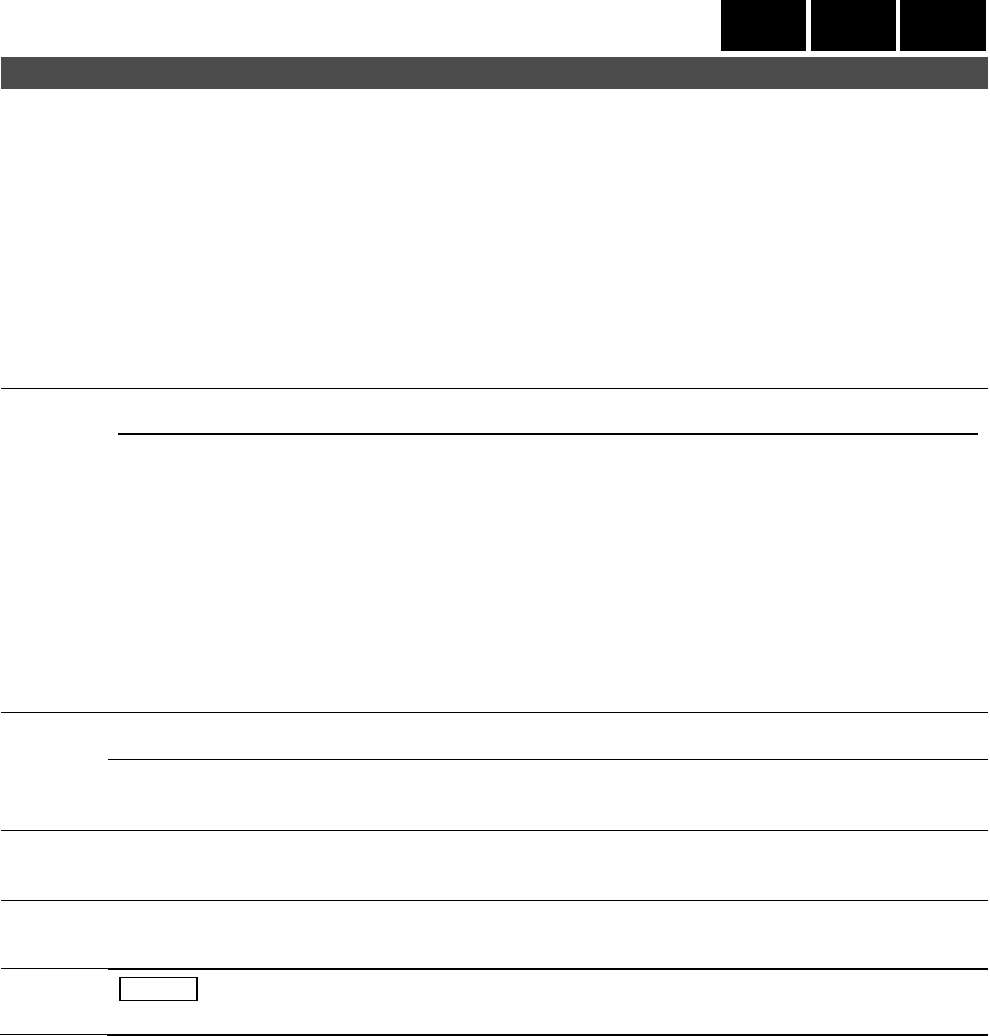
2-54
2.7.4 IEZNcProgram2::GetBlockNumber
C70 M700 M800
2.7.4 IEZNcProgram2::GetBlockNumber
Read block number
□ Custom call procedure
HRESULT GetBlockNumber(
LONG lProgramType, // (I) Program type
LONG* plBlockNo, // (O) Block number
LONG* plRet // (O) Error code
)
□ Automation call procedure
Program_GetBlockNumber(
lProgramType As LONG // (I) Program type
plBlockNo As LONG* // (O) Block number
) As LONG // (O) Error code
□
Argument
lProgramType: Sets the program type.
Value Meaning
EZNC_MAINPRG Main program
EZNC_SUBPRG Subprogram
plBlockNo: Returns the block number of the program for which search has been completed or
currently in automatic operation.
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK: Normal termination
EZ_ERR_DATA_TYPE: Invalid argument data type
EZNC_DATA_READ_ADDR: Invalid part system setting
EZNC_DATA_READ_READ: Data is not readable
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
Returns the block number of the program for which search has been completed or currently in
automatic operation.
□
Reference
GetProgramNumber2(), GetSequenceNumber(), GetSubProLevel()
□
Specifica-
tion
System
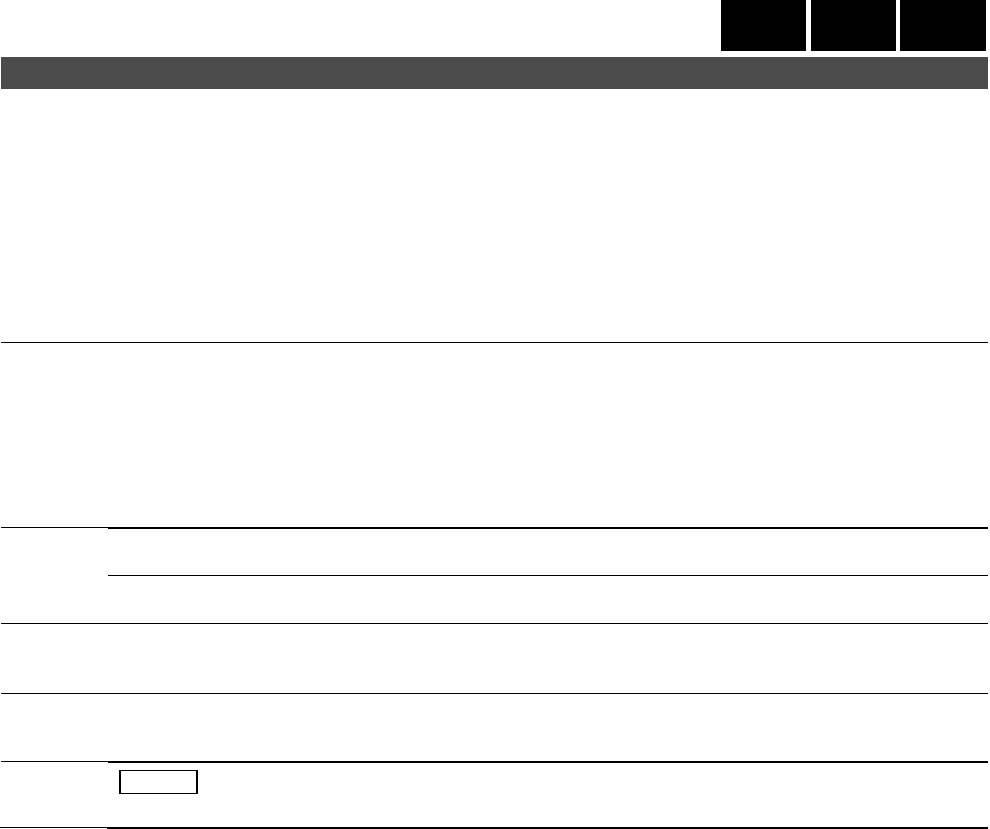
2-55
2.7.5 IEZNcProgram2::GetSubProLevel
C70 M700 M800
2.7.5 IEZNcProgram2::GetSubProLevel
Get subprogram call level
□ Custom call procedure
HRESULT GetSubProLevel(
LONG* plLevel, // (O) Level
LONG* plRet // (O) Error code
)
□ Automation call procedure
Program_GetSubProLevel(
plLevel As LONG* // (O) Level
) As LONG // (O) Error code
□
Argument
plLevel : Returns the subprogram call level.
Value: 0 to 8
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK : Normal termination
EZNC_DATA_READ_ADDR: Invalid part system setting
EZNC_DATA_READ_READ: Data is not readable
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
Gets the sub-program call level of the set system.
□
Reference
GetProgramNumber2(), GetSequenceNumber()
□
Specifica-
tion
System
2-56
2.7.6 IEZNcProgram2::GetInformation
C70 M700 M800
2.7.6 IEZNcProgram2::GetInformation
Get program information
□ Custom call procedure
HRESULT GetInformation(
LONG lInfoType, // (I) Information type
LONG* plInfoData, // (O) User machining program information
LONG* plRet // (O) Error code
)
□ Automation call procedure
Program_GetInformation(
lInfoType As LONG // (I) Information type
plInfoData As LONG* // (O) User machining program information
) As LONG // (O) Error code
□
Argument
lInfoType: Sets the type of information to get.
Value
Meaning
EZNC_PRG_MAXNUM Maximum number of registrable programs
EZNC_PRG_CURNUM Number of programs currently registered
EZNC_PRG_RESTNUM Remaining number of registrable programs
EZNC_PRG_CHARNUM Number of registered characters
EZNC_PRG_RESTCHARNUM
Remaining number of registrable characters (250 character
units)
plInfoData: Returns the program information specified by IInfoType.
If EZNC_PRG_MAXNUM set, lpInfoData
means 1: 200 [programs]. The data range depends on the specifications of the NC control unit.
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK: Normal termination
EZ_ERR_DATA_TYPE: Invalid argument data type
EZNC_DATA_READ_READ: Data is not readable
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
Gets program information.
□
Reference
□
Specifica-
tion
2-57
2.7.7 IEZNcProgram2:: GetCurrentBlockByByte
M700 M800
2.7.7 IEZNcProgram2:: GetCurrentBlockByByte
Get program information
□ Custom call procedure
HRESULT GetCurrentBlockByByte(
LONG* plSize, // (O) Number of bytes
LONG* plRet // (O) Error code
)
□ Automation call procedure
Program_ GetCurrentBlockByByte(
plSize As LONG* // (O) Number of bytes
) As LONG // (O) Error code
□
Argument
plSize : Returns the number of bytes from start of program of the set part system.
Value: From 0
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK: Normal termination
EZNC_DATA_READ_ADDR: Invalid part system setting
EZNC_DATA_READ_READ: Data is not readable
EZ_ERR_NOT_SUPPORT: Not supported
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
Gets the number of bytes from the start of the program in the searched block or the block
currently stopped with single block stop.
This is valid only for the M700/M800 series.
This function is not supported with C70.
□
Reference
□
Specifica-
tion
2-58
2.8 IEZNcTime Interface
2.8.1 IEZNcTime::GetClockData
C70 M700 M800
2.8.1 IEZNcTime::GetClockData
Get date and time
□ Custom call procedure
HRESULT GetClockData(
LONG* plDate, // (O) Year, month, day
LONG* plTime, // (O) Hour, minute, second
LONG* plRet // (O) Error code
)
□ Automation call procedure
Time_GetClockData(
plDate As LONG* // (O) Year, month, day
plTime As LONG* // (O) Hour, minute, second
) As LONG // (O) Error code
□
Argument
plDate: Returns the date (year, month, day).
Output example: 1998/12/05 = 19981205
plTime: Returns the time (hour, minute, second) of the clock in the NC.
Value: 0 to 235959
Output example: 23:59:59 = 235959
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK: Normal termination
EZNC_DATA_READ_READ: Data is not readable
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
Gets the date and time from the clock in the NC.
□
Reference
SetClockData()
□
Specifica-
tion
2-59
2.8.2 IEZNcTime::SetClockData
C70 M700 M800
2.8.2 IEZNcTime::SetClockData
Set date and time
□ Custom call procedure
HRESULT SetClockData(
LONG lDate, // (I) Year, month, day
LONG lTime, // (I) Hour, minute, second
LONG* plRet // (O) Error code
)
□ Automation call procedure
Time_SetClockData(
lDate As LONG // (I) Year, month, day
lTime As LONG // (I) Hour, minute, second
) As LONG // (O) Error code
□
Argument
lDate: Sets the date (year, month, day).
Setting example: 1998/12/05 = 19981205
lTime: Sets the time (hour, minute, second) for the clock in the NC.
Value: 0 to 235959
Setting example: 23:59:59 = 235959
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK: Normal termination
EZNC_DATA_WRITE_WRITE: Data is not writable
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
Sets the date and time for the clock in the NC.
□
Reference
GetClockData()
□
Specifica-
tion
2-60
2.8.3 IEZNcTime::GetAliveTime
C70 M700 M800
2.8.3 IEZNcTime::GetAliveTime
Get power-on time
□ Custom call procedure
HRESULT GetAliveTime(
LONG* plTime, // (O) Power-on time
LONG* plRet // (O) Error code
)
□ Automation call procedure
Time_GetAliveTime(
plTime As LONG* // (O) Power-on time
) As LONG // (O) Error code
□
Argument
plTime: Gets total power-on time (hour, minute, second) from the controller power ON to OF F.
Value: 0 to 99995959
Output example: 9999:59:59 = 99995959
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK: Normal termination
EZNC_DATA_READ_READ: Data is not readable
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
Gets total power-on time (hour, minute, second) from the controller power ON to OFF.
Stops integration when the value reaches the maximum value, and retains the maximum value.
□
Reference
SetAliveTime()
□
Specifica-
tion
2-61
2.8.4 IEZNcTime::SetAliveTime
C70 M700 M800
2.8.4 IEZNcTime::SetAliveTime
Set power-on time
□ Custom call procedure
HRESULT SetAliveTime(
LONG lTime, // (I) Power-on time
LONG* plRet // (O) Error code
)
□ Automation call procedure
Time_SetAliveTime(
lTime As LONG // (I) Power-on time
) As LONG // (O) Error code
□
Argument
lTime: Sets total power-on time (hour, minute, second) from the controller power ON to OFF.
Value: 0 to 99995959
Setting example: 9999:59:59 = 99995959
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK: Normal termination
EZNC_DATA_WRITE_WRITE: Data is not writable
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
Forcibly sets total power-on time (hour, minute, second) from the controller power ON to OFF.
□
Reference
GetAliveTime()
□
Specifica-
tion
2-62
2.8.5 IEZNcTime::GetRunTime
C70 M700 M800
2.8.5 IEZNcTime::GetRunTime
Get automatic operation time
□ Custom call procedure
HRESULT GetRunTime(
LONG* plTime, // (O) Automatic operation time
LONG* plRet // (O) Error code
)
□ Automation call procedure
Time_GetRunTime(
plTime As LONG* // (O) Automatic operation time
) As LONG // (O) Error code
□
Argument
plTime: Returns total processing time (hour, minute, second) from the automatic operation start
using memory (tape) or in MDI mode to the termination by M02/M30 or the reset operation.
Value: 0 to 99995959
Output example: 9999:59:59 = 99995959
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK: Normal termination
EZNC_DATA_READ_READ: Data is not readable
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
Gets total processing time (hour, minute, second) from the automatic operation start using
memory (tape) or in MDI mode to the termination by M02/M30 or the reset operation.
Stops integration when the value reaches the maximum value, and retains the maximum value.
□
Reference
SetRunTime()
□
Specifica-
tion
2-63
2.8.6 IEZNcTime::SetRunTime
C70 M700 M800
2.8.6 IEZNcTime::SetRunTime
Set automatic operation time
□ Custom call procedure
HRESULT SetRunTime(
LONG lTime, // (I) Automatic operation time
LONG* plRet // (O) Error code
)
□ Automation call procedure
Time_SetRunTime(
lTime As LONG // (I) Automatic operation time
) As LONG // (O) Error code
□
Argument
lTime: Sets total processing time (hour, minute, second) from the automatic operation start using
memory (tape) or in MDI mode to the termination by M02/M30 or the reset operation.
Value: 0 to 99995959
Setting example: 9999:59:59 = 99995959
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK: Normal termination
EZNC_DATA_WRITE_WRITE: Data is not writable
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
Forcibly sets total processing time (hour, minute, second) from the automatic operation start
using memory (tape) or in MDI mode to the termination by M02/M30 or the reset operation.
□
Reference
GetRunTime()
□
Specifica-
tion
2-64
2.8.7 IEZNcTime::GetStartTime
C70 M700 M800
2.8.7 IEZNcTime::GetStartTime
Get automatic start time
□ Custom call procedure
HRESULT GetStartTime(
LONG* plTime, // (O) Automatic start time
LONG* plRet // (O) Error code
)
□ Automation call procedure
Time_GetStartTime(
plTime As LONG* // (O) Automatic start time
) As LONG // (O) Error code
□
Argument
plTime: Returns total automatic operation time (hour, minute, second) from the automatic
operation start using memory (tape) or in MDI mode to the termination by feed hold, block stop,
or reset.
Value: 0 to 99995959
Output example: 9999:59:59 = 99995959
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK: Normal termination
EZNC_DATA_READ_READ: Data is not readable
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
Gets total automatic operation time (hour, minute, second) from the automatic operation start
using memory (tape) or in MDI mode to the termination by feed hold, block stop, or reset.
□
Reference
SetStartTime()
□
Specifica-
tion
2-65
2.8.8 IEZNcTime::SetStartTime
C70 M700 M800
2.8.8 IEZNcTime::SetStartTime
Set automatic start time
□ Custom call procedure
HRESULT SetStartTime(
LONG lTime, // (I) Automatic start time
LONG* plRet // (O) Error code
)
□ Automation call procedure
Time_SetStartTime(
lTime As LONG // (I) Automatic start time
) As LONG // (O) Error code
□
Argument
lTime: Setes total automatic operation time (hour, minute, second) from the automatic operation
start using memory (tape) or in MDI mode to the termination by feed hold, block stop, or reset.
Value: 0 to 99995959
Setting example: 9999:59:59 = 99995959
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK: Normal termination
EZNC_DATA_WRITE_WRITE: Data is not writable
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
Sets total automatic operation time (hour, minute, second) from the automatic operation start
using memory (tape) or in MDI mode to the termination by feed hold, block stop, or reset.
□
Reference
GetStartTime()
□
Specifica-
tion
2-66
2.8.9 IEZNcTime::GetEstimateTime
C70 M700 M800
2.8.9 IEZNcTime::GetEstimateTime
Get external integration time
□ Custom call procedure
HRESULT GetEstimateTime(
LONG lKind, // (I) External integration time type
LONG* plTime, // (O) External integration time
LONG* plRet // (O) Error code
)
□ Automation call procedure
Time_GetEstimateTime(
lKind As LONG // (I) External integration time type
plTime As LONG* // (O) External integration time
) As LONG // (O) Error code
□
Argument
lKind: Sets the external integration time type.
Value Meaning
0 External integration time 1 (programmable controller device C70: Y314
M700/M800 series: Y704): When counting with the device turned ON
1 External integration time 2 (programmable controller device C70: Y315
M700/M800 series: Y705): When counting with the device turned ON
plTime: Returns the time (hour, minute, second) controlled by the programmable controller.
Stops integration when the integration time display reaches the maximum value, and retains the
display with the maximum value.
Value: 0 to 99995959
Output example: 9999:59:59 = 99995959
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK: Normal termination
EZNC_DATA_READ_READ: Data is not readable
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
Returns the time (hour, minute, second) controlled by the programmable controller. Starts
counting when the user programmable controller device is turned ON.
Refer to the
programmable controller interface manual for each model because the device number differs
depending on models.
□
Reference
SetEstimateTime()
□
Specifica-
tion
2-67
2.8.10 IEZNcTime::SetEstimateTime
C70 M700 M800
2.8.10 IEZNcTime::SetEstimateTime
Set external integration time
□ Custom call procedure
HRESULT SetEstimateTime(
LONG lKind, // (I) External integration time type
LONG lTime, // (I) External integration time
LONG* plRet // (O) Error code
)
□ Automation call procedure
Time_SetEstimateTime(
lKind As LONG // (I) External integration time type
lTime As LONG // (I) External integration time
) As LONG // (O) Error code
□
Argument
lKind: Sets the external integration time type.
Value Meaning
0 External integration time 1 (programmable controller device C70: Y314
M700/M800 series: Y704): When counting with the device turned ON
1 External integration time 2 (programmable controller device C70: Y315
M700/M800 series: Y705): When counting with the device turned ON
lTime: Sets the time (hour, minute, second) controlled by the PLC.
Stops integration when the integration time display reaches the maximum value, and retains the
display with the maximum value.
Value: 0 to 99995959
Setting example: 9999:59:59 = 99995959
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK: Normal termination
EZNC_DATA_WRITE_WRITE: Data is not writable
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
Sets the time (hour, minute, second) controlled by the programmable controller. Starts counting
when the user programmable controller device is turned ON. Re
fer to the programmable
controller interface manual for each model because the device number differs depending on
models.
□
Reference
GetEstimateTime()
□
Specifica-
tion
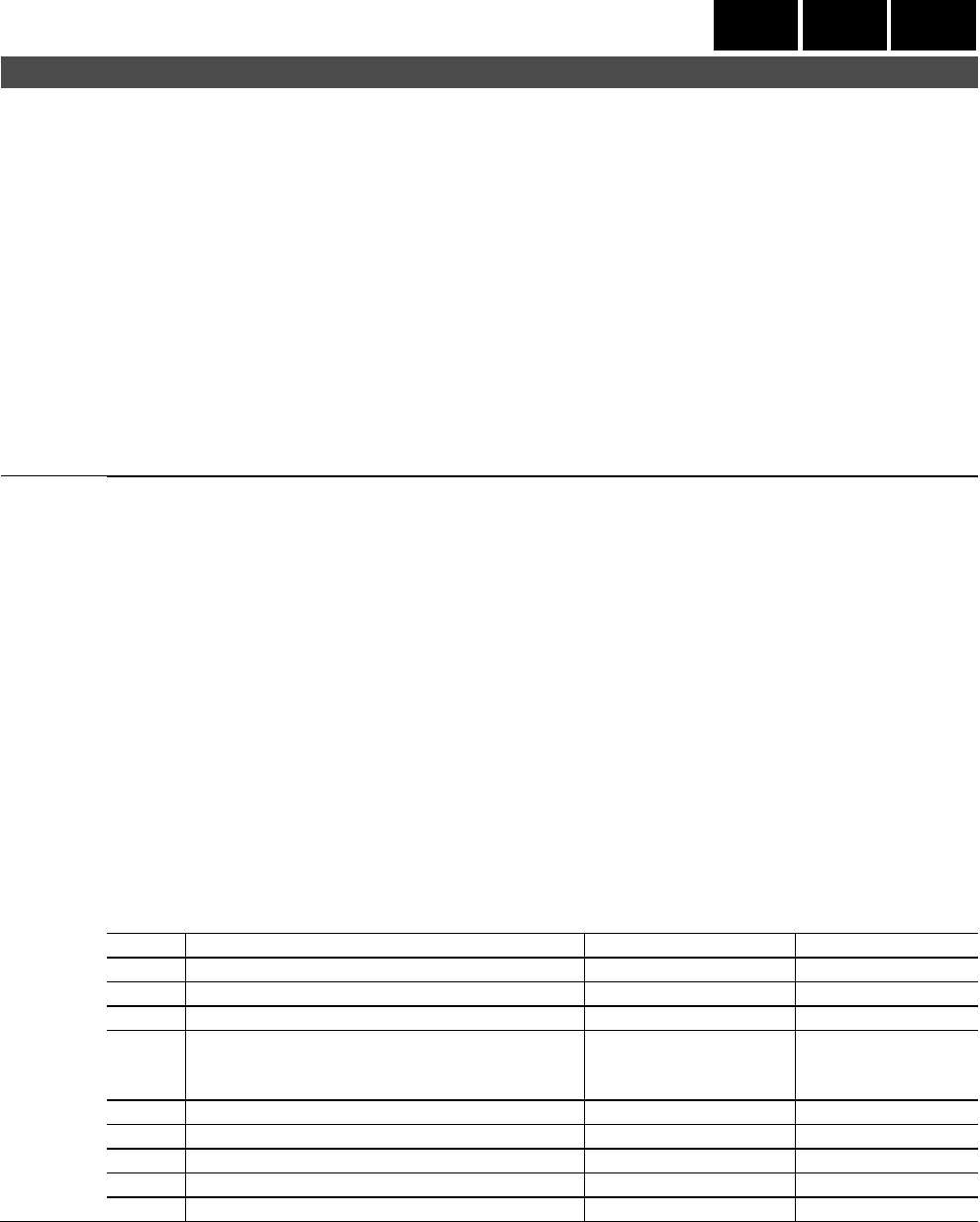
2-68
2.9 IEZNcAxisMonitor Interface
2.9.1 IEZNcAxisMonitor::GetServoMonitor
C70 M700 M800
2.9.1 IEZNcAxisMonitor::GetServoMonitor
Get servo monitor
□ Custom call procedure
HRESULT GetServoMonitor(
LONG lAxisNo, // (I) Axis No.
LONG lIndex, // (I) Monitor data
LONG* plData, // (O) Monitor data
LPOLESTR* lppwszBuffer, // (O) Monitor data character string
LONG* plRet // (O) Error code
)
□ Automation call procedure
Monitor_GetServoMonitor(
lAxisNo As LONG // (I) Axis No.
lIndex As LONG // (I) Monitor data
plData As LONG* // (O) Monitor data
lppwszBuffer As STRING* // (O) Monitor data character string
) As LONG // (O) Error code
□
Argument
lAxisNo: Sets the axis No. (From Axis 1 = from 1)
lIndex: Sets the parameter number for the set axis No. in the set system.
plData: Returns the axis status.
lppwszBuffer: Outputs data (return value) as a UNICODE character string when any of 100 to
104 is set for lIndex.
For the M700/M800 series, outputs data (return value) as a UNICODE character string when any
of 11 to 15, 18 to 20, or 100 to 104 is set for lIndex.
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK: Normal termination
EZNC_DATA_READ_READ: Data is not readable
EZNC_DATA_READ_DATASIZE: Application does not fit into prepared buffer
EZNC_DATA_READ_DATATYPE: Invalid data type (parameter number)
EZNC_DATA_READ_ADDR: Invalid part system, axis No. setting
EZNC_DATA_READ_AXIS: Invalid axis specification
EZ_ERR_DATA_TYPE: Invalid argument data type
lIndex
Description
Data range
Remarks
0
GAIN. Position loop gain status display.
Unit: 1/s
1
DROOP. (tracking delay)
Unit: i
2
SPEED. Actual motor speed.
From 0 [rpm]
3
CURRENT. Load current. Motor current
(displayed by converting to continuous
current when stalled).
From 0 [%]
4
MAXCUR1. Maximum current I.
Unit: %
5
MAXCUR2. Maximum current II.
Unit: %
6
OVER LOAD. Overload.
Unit: %
7
REGEN LOAD. Regenerative load.
Unit: %
10
CYC CNT. Cycle counter.
Unit: Pulse
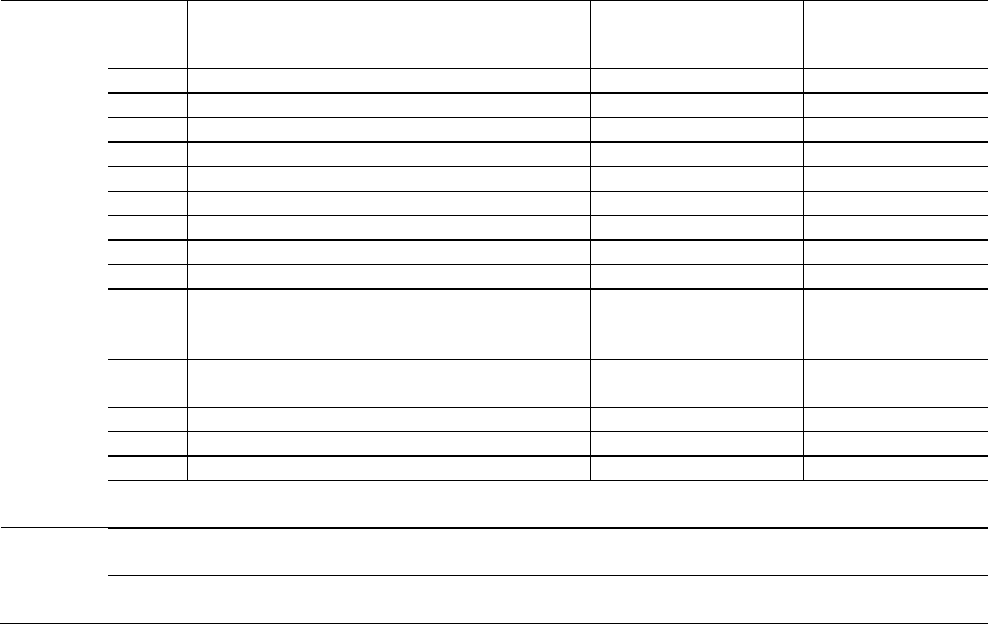
2-69
□
Argument
lIndex
Description
Data range
Remarks
11
GRIDSP. Grid interval.
Unit: Command unit*
12
GRID. Grid amount.
Unit: Command unit*
13
MACPOS. Machine position.
Unit: Command unit*
14
MOT POS. Motor end FB.
Unit: Command unit*
15
SCA POS. Machine end FB.
Unit: Command unit*
16
FB ERROR. FB error.
Unit: i
17
DFB COMP. DFB compensation amount.
18
Remain command
Unit: Command unit*
19
Currnt posn.
Unit: Command unit*
20
Manual interrupt amount.
Unit: Command unit*
100
AMP DISP. Amplifier display. 7-segment
LED display on a drive unite.
Outputs a 3-digit
character string from
"00\0" to "FF\0".
101
Alarm 1.
Outputs a 3-digit
character string.
102
Alarm 2.
Same as above
103
Alarm 3.
Same as above
104
Alarm 4.
Same as above
* The M700/M800 series allows acquisition of value (actual value) converted according to the
command unit as a character string.
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure

2-70
□
Function
Gets servo monitor information of the set axis No. in the set part system.
When the data range in the Index table is [Unit: Command unit], the value got needs to be
converted according to the command unit sets for the Mitsubishi CNC. For the setting unit, refer
to the Mitsubishi CNC specifications.
< For Linear axis>
Metric system Conversion for 1 of LONG type
For 10-µm specifications -999,999.99 to 999,999.99 1 = 1/200 (mm)
For 1-µm specifications -99,999.999 to 99,999.999 1 = 1/2000 (mm)
For 0.1-µm specifications -9,999.9999 to 9,999.9999 1 = 1/20000 (mm)
For 10-nm specifications -999.99999 to 999.99999 1 = 1/200000 (mm)
For 1-nm specifications -99.999999 to 99.999999 1 = 1/2000000 (mm)
Inch system Conversion for 1 of LONG type
For 10-µm specifications -99,999.999 to 99,999.999 1 = 1/200 (inch)
For 1-µm specifications -9,999.9999 to 9,999.9999 1 = 1/2000 (inch)
For 0.1-µm specifications -999.99999 to 999.99999 1 = 1/20000 (inch)
For 10-nm specifications -999.99999 to 999.99999 1 = 1/200000 (inch)
For 1-nm specifications -99.999999 to 99.999999 1 = 1/2000000 (inch)
< For Rotary axis >
Metric system Conversion for 1 of LONG type
For 10-µm specifications -999999.99 to 999999.99 1 = 1/200 (mm)
For 1-µm specifications -99,999.999 to 99,999.999 1 = 1/2000 (mm)
For 0.1-µm specifications -9999.9999 to 9999.9999 1 = 1/20000 (mm)
For 10-nm specifications -999.99999 to 999.99999 1 = 1/200000 (mm)
For 1-nm specifications -99.999999 to 99.999999 1 = 1/2000000 (mm)
Inch system Conversion for 1 of LONG type
For 10-µm specifications -999,999.99 to 999,999.99 1 = 1/200 (inch)
For 1-µm specifications -99,999.999 to 99,999.999 1 = 1/2000 (inch)
For 0.1-µm specifications -9999.9999 to 9999.9999 1 = 1/20000 (inch)
For 10-nm specifications -999.99999 to 999.99999 1 = 1/200000 (inch)
For 1-nm specifications -99.999999 to 99.999999 1 = 1/2000000 (inch)
Conversion example) For the linear axis with the 1-µm specifications in the Metric system, when
the LONG value got is 710001,
710001 ÷
2000 = 355.0005. However, 355.0005 is rounded to minus infinity.
Therefore the result is 355.000.
Data in units of 0.5 µm (1/2000 mm) is rounded to minus infinity when displayed.
This means that +0.5 µm is displayed as 0 and -0.5 µm is displayed as -1 µm.
As the string area memory is allocated in this product, the client using VC++ needs to release the
string area memory explicitly with CoTaskMemFree().
□
Reference
GetServoVersion(), GetServoDiagnosis()
□
Specifica-
tion
System , PLC axis , Axis number
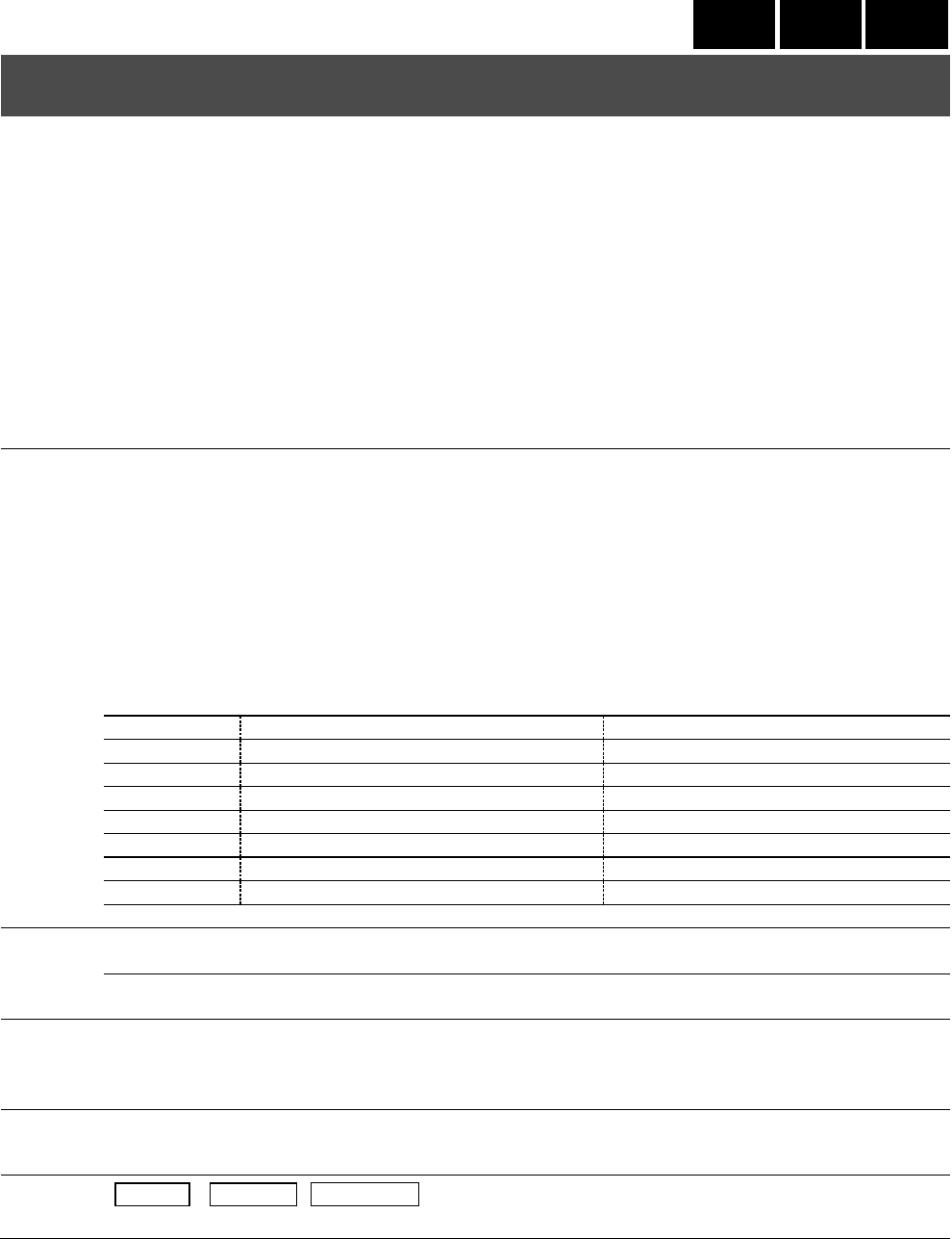
2-71
2.9.2 IEZNcAxisMonitor::GetServoVersion
C70 M700 M800
2.9.2 IEZNcAxisMonitor::GetServoVersion
Get servo axis unit
information
□ Custom call procedure
HRESULT GetServoVersion(
LONG lAxisNo, // (I) Axis No.
LONG lIndex, // (I) Servo information
LPOLESTR* lppwszBuffer, // (O) Servo information
LONG* plRet // (O) Error code
)
□ Automation call procedure
Monitor_GetServoVersion(
lAxisNo As LONG // (I) Axis No.
lIndex As LONG // (I) Servo information
lppwszBuffer As STRING* // (O) Servo information
) As LONG // (O) Error code
□
Argument
lAxisNo: Sets the axis No. (From Axis 1 = from 1)
lIndex: Set the servo information. Refer to the table below.
lppwszBuffer: Sets servo information as a UNICODE character string.
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK: Normal termination
EZNC_DATA_READ_READ: Data is not readable
EZNC_DATA_READ_ADDR: Invalid part system, axis No. setting
EZNC_DATA_READ_AXIS: Invalid axis No. setting
lIndex
Description
Data range
0
Unit type
Up to 17 alphanumeric characters.
1
Unit serial No.
Up to 9 alphanumeric characters.
2
Software version
Up to 17 alphanumeric characters.
3
Control method.
Up to 7 alphanumeric characters.
4
Motor end detector
Up to 9 alphanumeric characters.
5
Machine end detector
Up to 9 alphanumeric characters.
6
Motor
Up to 9 alphanumeric characters.
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
Gets servo version information.
As the string area memory is allocated in this product, the client using VC++ needs to release the
string area memory explicitly with CoTaskMemFree().
□
Reference
GetServoMonitor(), GetServoDiagnosis()
□
Specifica-
tion
System , PLC axis , Axis number
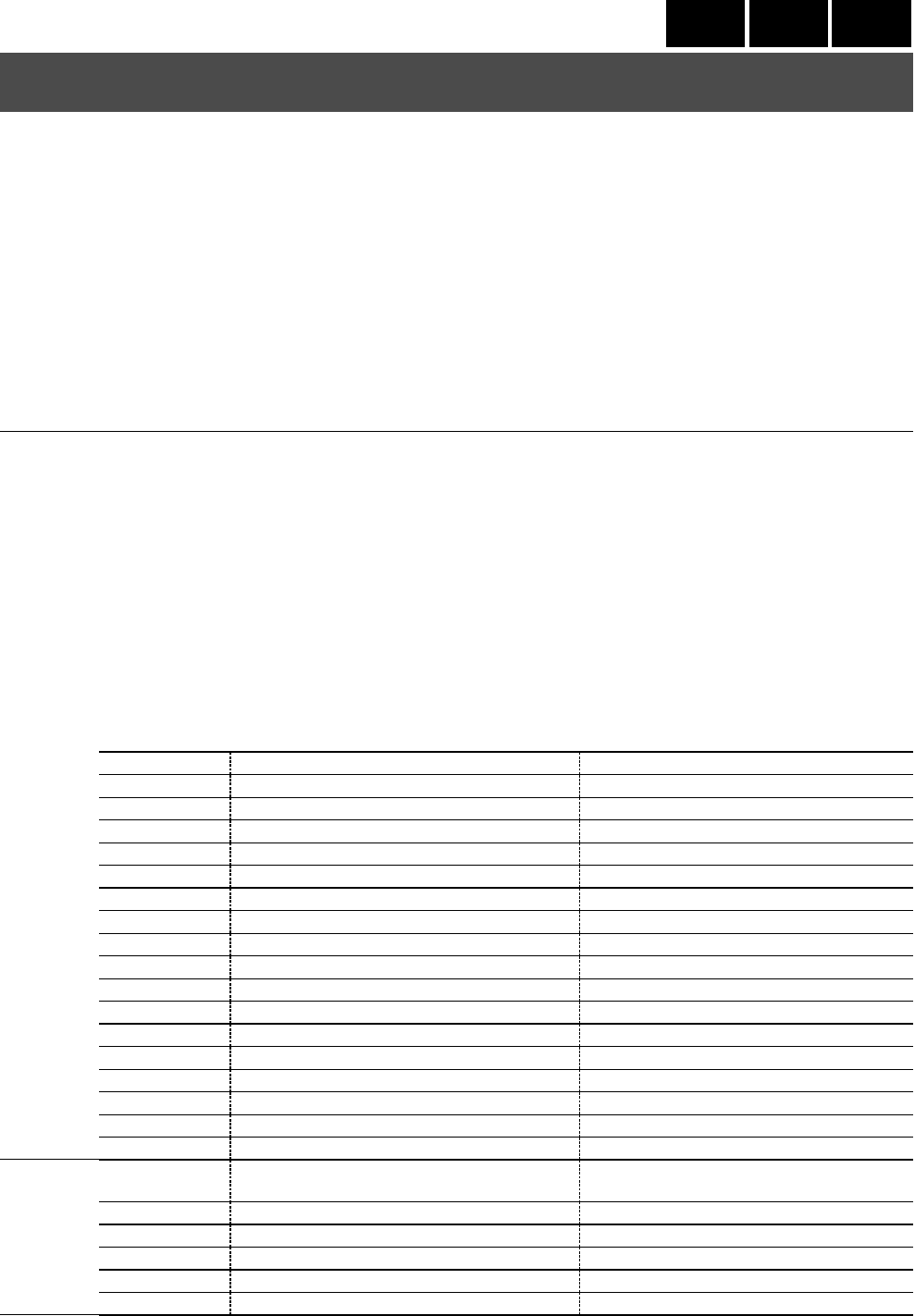
2-72
2.9.3 IEZNcAxisMonitor::GetServoDiagnosis
C70 M700 M800
2.9.3 IEZNcAxisMonitor::GetServoDiagnosis
Get servo diagnostics
information
□ Custom call procedure
HRESULT GetServoDiagnosis(
LONG lAxisNo, // (I) Axis No.
LONG lIndex, // (I) Diagnostics information
LONG* plData, // (O) Diagnostics information value
LPOLESTR* lppwszBuffer, // (O) Diagnostics information character string
LONG* plRet // (O) Error code
)
□ Automation call procedure
Monitor_GetServoDiagnosis(
lAxisNo As LONG // (I) Axis No.
lIndex As LONG // (I) Diagnostics information
plData As LONG* // (O) Diagnostics information value
lppwszBuffer As STRING* // (O) Diagnostics information character string
) As LONG // (O) Error code
□
Argument
lAxisNo: Sets the axis No. (From Axis 1 = from 1)
lIndex: Sets servo diagnostics information. Refer to the table below.
plData: Returns the servo diagnostics information value.
lppwszBuffer: Gets diagnostics information as a UNICODE character string. Outputs a character
string when lIndex is 21 to 30.
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK: Normal termination
EZNC_DATA_READ_READ: Data is not readable
EZNC_DATA_READ_ADDR: Invalid system, spindle specification
EZNC_DATA_READ_AXIS: Invalid axis specification
lIndex
Description
Data range
0
Work time
1
Alarm history 1 (Alarm No).
Previous servo alarm number
2
″ 2 (Alarm No).
Same as above
3
″ 3 (Alarm No).
Same as above
4
″ 4 (Alarm No).
Same as above
5
″ 5 (Alarm No).
Same as above
6
″ 6 (Alarm No).
Same as above
7
″ 7 (Alarm No).
Same as above
8
″ 8 (Alarm No).
Same as above
11
Alarm history 1 (time).
Previous servo alarm occurrence time
12
″ 2 (time).
Same as above
13
″ 3 (time).
Same as above
14
″ 4 (time).
Same as above
15
″ 5 (time).
Same as above
16
″ 6 (time).
Same as above
17
″ 7 (time).
Same as above
18
″ 8 (time).
Same as above
□
Argument
lIndex
Description
Data range
21
MNT (1).
Up to 3 alphanumeric characters
22
MNT (2).
Same as above
23
MNT (3).
Same as above
24
MNT (4).
Same as above
30
SYS.
Up to 2 alphanumeric characters
2-73
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
Gets servo diagnostics information.
As the string area memory is allocated in this product, the client using VC++ needs to release the
string area memory explicitly with CoTaskMemFree().
□
Reference
GetServoMonitor(), GetServoVersion()
□
Specifica-
tion
System , PLC axis , Axis number
2-74
2.9.4 IEZNcAxisMonitor::GetPowerVersion
C70 M700 M800
2.9.4 IEZNcAxisMonitor::GetPowerVersion
Get power supply version
information
□ Custom call procedure
HRESULT GetPowerVersion(
LONG lAxisNo, // (I) Axis No.
LONG lIndex, // (I) Version information
LPOLESTR* lppwszBuffer, //(O)Version information character string
LONG* plRet // (O) Error code
)
□ Automation call procedure
Monitor_GetPowerVersion(
lAxisNo As LONG // (I) Axis No.
lIndex As LONG // (I) Version information
lppwszBuffer As STRING* // (O) Version information
) As LONG // (O) Error code
□
Argument
lAxisNo: Sets the axis No. (From Axis 1 = from 1)
lIndex: Sets version information. Refer to the table below.
lppwszBuffer: Gets version information as a UNICODE character string.
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK: Normal termination
EZNC_DATA_READ_READ: Data is not readable
EZNC_DATA_READ_ADDR: Invalid system, spindle specification
lIndex
Description
Data range
0
Unit type
Up to 17 alphanumeric characters.
1
Unit serial No.
Up to 9 alphanumeric characters.
2
Software version
Up to 17 alphanumeric characters.
3
Connected drive.
1 alphanumeric character.
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
Gets power supply version information.
As the string area memory is allocated in this product, the client using VC++ needs to release the
string area memory explicitly with CoTaskMemFree().
□
Reference
GetPowerDiagnosis()
□
Specifica-
tion
Axis number
2-75
2.9.5 IEZNcAxisMonitor::GetPowerDiagnosis
C70 M700 M800
2.9.5 IEZNcAxisMonitor::GetPowerDiagnosis
Get power supply diagnostics
information
□ Custom call procedure
HRESULT GetPowerDiagnosis(
LONG lAxisNo, // (I) Axis No.
LONG lIndex, // (I) Diagnostics information
LONG* plData, // (O) Diagnostics information value
LPOLESTR* lppwszBuffer, // (O) Diagnostics information character string
LONG* plRet // (O) Error code
)
□ Automation call procedure
Monitor_GetPowerDiagnosis(
lAxisNo As LONG // (I) Axis No.
lIndex As LONG // (I) Diagnostics information
plData As LONG* // (O) Diagnostics information value
lppwszBuffer As STRING* // (O) Diagnostics information character string
) As LONG // (O) Error code
□
Argument
lAxisNo: Sets the axis No. (From Axis 1 = from 1)
lIndex: Sets diagnostics information. Refer to the table below.
plData: Returns the diagnostics information value.
lppwszBuffer: Gets diagnostics information as a UNICODE character string.
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK: Normal termination
EZNC_DATA_READ_READ: Data is not readable
EZNC_DATA_READ_ADDR: Invalid part system, axis No. setting
lIndex
Description
Data range
0
Work time
1
Alarm history 1 (Alarm No).
Previous servo alarm number
2
″ 2 (Alarm No).
Same as above
3
″ 3 (Alarm No).
Same as above
4
″ 4 (Alarm No).
Same as above
5
″ 5 (Alarm No).
Same as above
6
″ 6 (Alarm No).
Same as above
7
″ 7 (Alarm No).
Same as above
8
″ 8 (Alarm No).
Same as above
11
Alarm history 1 (time).
Previous servo alarm occurrence time
12
″ 2 (time).
Same as above
13
″ 3 (time).
Same as above
14
″ 4 (time).
Same as above
15
″ 5 (time).
Same as above
16
″ 6 (time).
Same as above
17
″ 7 (time).
Same as above
18
″ 8 (time).
Same as above
21
MNT (1).
Up to 3 alphanumeric characters
22
MNT (2).
Same as above
23
MNT (3).
Same as above
24
MNT (4).
Same as above
30
SYS
Up to 2 alphanumeric characters
2-76
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
Gets power supply diagnostics information.
As the string area mem
ory is allocated in this product, the client using VC++ needs to release the
string area memory explicitly with CoTaskMemFree().
□
Reference
GetPowerVersion()
□
Specifica-
tion
Axis number
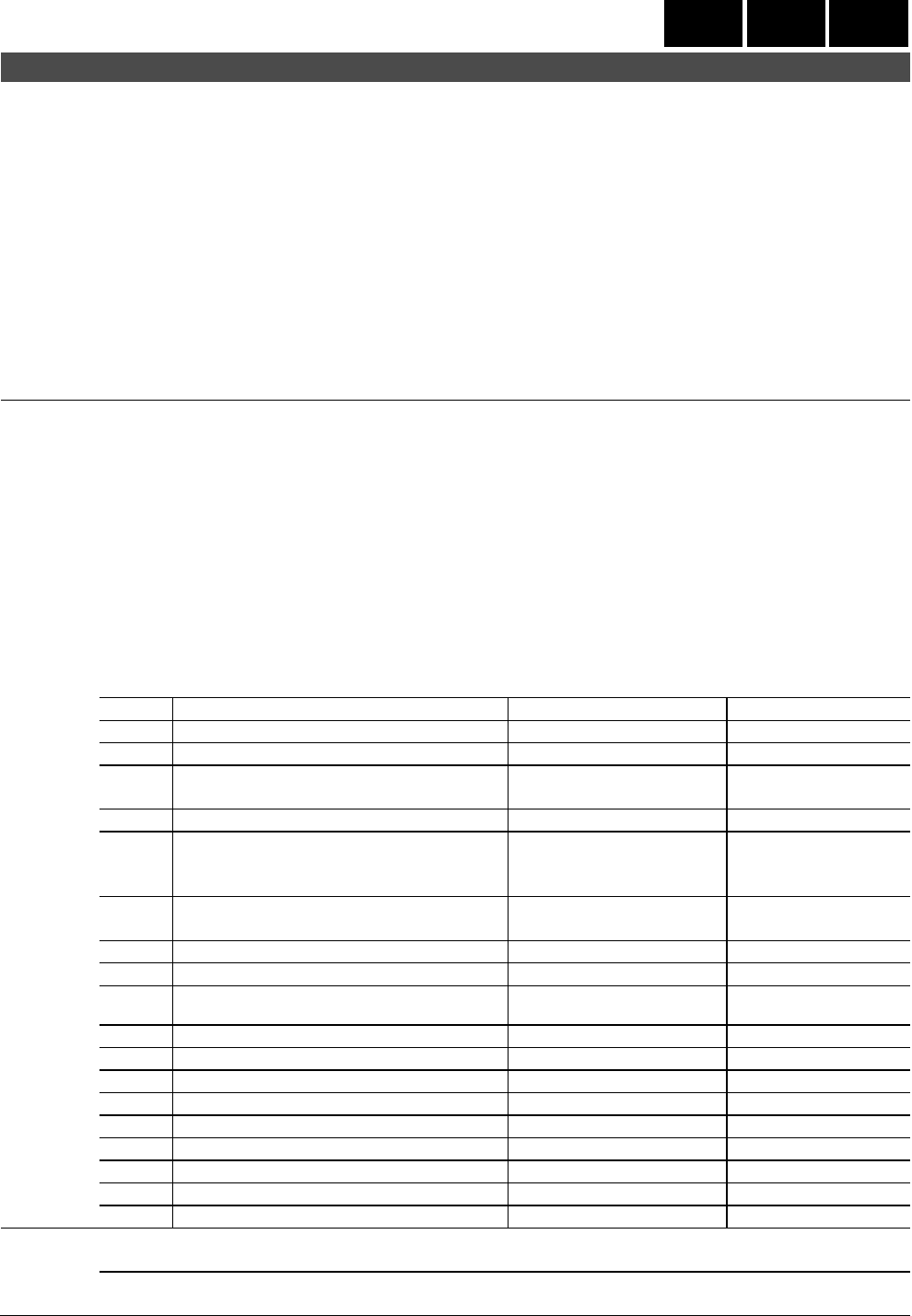
2-77
2.9.6 IEZNcAxisMonitor::GetSpindleMonitor
C70 M700 M800
2.9.6 IEZNcAxisMonitor::GetSpindleMonitor
Monitor spindle
□ Custom call procedure
HRESULT GetSpindleMonitor(
LONG lIndex, // (I) Monitor data
LONG lSpindle, // (I) Spindle number
LONG* plData, // (O) Monitor data value
LPOLESTR* lppwszBuffer, // (O) Monitor data character string
LONG* plRet // (O) Error code
)
□ Automation call procedure
Monitor_GetSpindleMonitor(
lIndex As LONG // (I) Monitor data
lSpindle As LONG // (I) Spindle number
plData As LONG* // (O) Monitor data value
lppwszBuffer As STRING* // (O) Monitor data character string
) As LONG // (O) Error code
□
Argument
lIndex: Sets the parameter number for the set spindle.
lSpindle: Set the spindle number.
plData: Returns the spindle status.
lppwszBuffer: Gets spindle information as a UNICODE character string.
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK: Normal termination
EZNC_DATA_READ_READ: Data is not readable
EZNC_DATA_READ_ADDR: Invalid system, spindle specification
EZ_ERR_DATA_TYPE: Invalid argument data type
lIndex
Description
Data range
Remarks
0
Gain. Spindle position loop gain.
Unit: 1/s
1
Droop. Position deviation amount.
Unit: I
2
Spindle (SR, SF) rotation speed. Actual
spindle motor speed. Including override.
From 0 [rpm]
3
Load. Spindle motor load.
From 0 [%]
4
LED display.
7-segment LED display on a driver.
Outputs a 3-digit
character string from
"00\0" to "FF\0".
5
Alarm 1.
Up to 3 alphanumeric
characters.
6
Alarm 2.
Same as above
7
Alarm 3.
Same as above
8
Alarm 4.
Same as above
M700/M800 series
only
10
Cycle counter.
11
Control input 1.
12
″ 2.
13
″ 3.
14
″ 4.
15
Control output 1.
16
″ 2.
17
″ 3.
18
″ 4.
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure

2-78
□
Function
Gets the set spindle status.
□
Reference
GetSpindleVersion(), GetSpindleDiagnosis()
□
Specifica-
tion
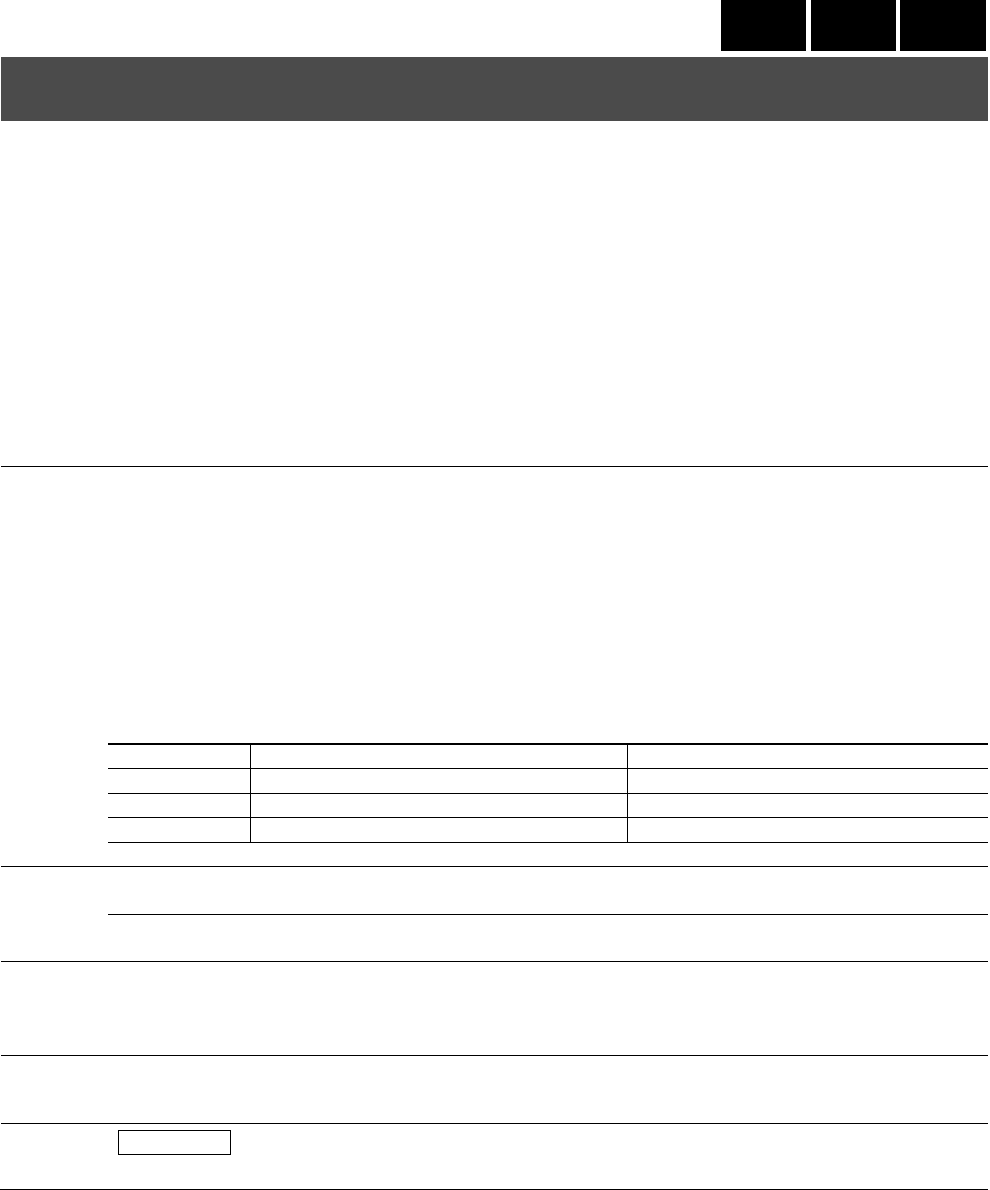
2-79
2.9.7 IEZNcAxisMonitor::GetSpindleVersion
C70 M700 M800
2.9.7 IEZNcAxisMonitor::GetSpindleVersion
Get spindle unit version
information
□ Custom call procedure
HRESULT GetSpindleVersion(
LONG lAxisNo, // (I) Axis No.
LONG lIndex, // (I) Version information
LPOLESTR* lppwszBuffer, // (O) Version information character string
LONG* plRet // (O) Error code
)
□ Automation call procedure
Monitor_GetSpindleVersion(
lAxisNo As LONG // (I) Axis No.
lIndex As LONG // (I) Version information
lppwszBuffer As STRING* // (O) Version information
) As LONG // (O) Error code
□
Argument
lAxisNo: Sets the axis No. (From Axis 1 = from 1)
lIndex: Sets version information. Refer to the table below.
lppwszBuffer: Gets version information as a UNICODE character string.
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK: Normal termination
EZNC_DATA_READ_READ: Data is not readable
EZNC_DATA_READ_ADDR: Invalid part system, spindle setting
EZNC_DATA_READ_AXIS: Invalid axis No. setting
lIndex
Description
Data range
0
Unit type
Up to 17 alphanumeric characters.
1
Unit serial No.
Up to 9 alphanumeric characters.
2
Software version
Up to 17 alphanumeric characters.
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
Gets spindle version information.
As the string area memory is allocated in this product, the client using VC++ needs to release the
string area memory explicitly with CoTaskMemFree().
□
Reference
GetSpindleMonitor(), GetSpindleDiagnosis()
□
Specifica-
tion
Axis number
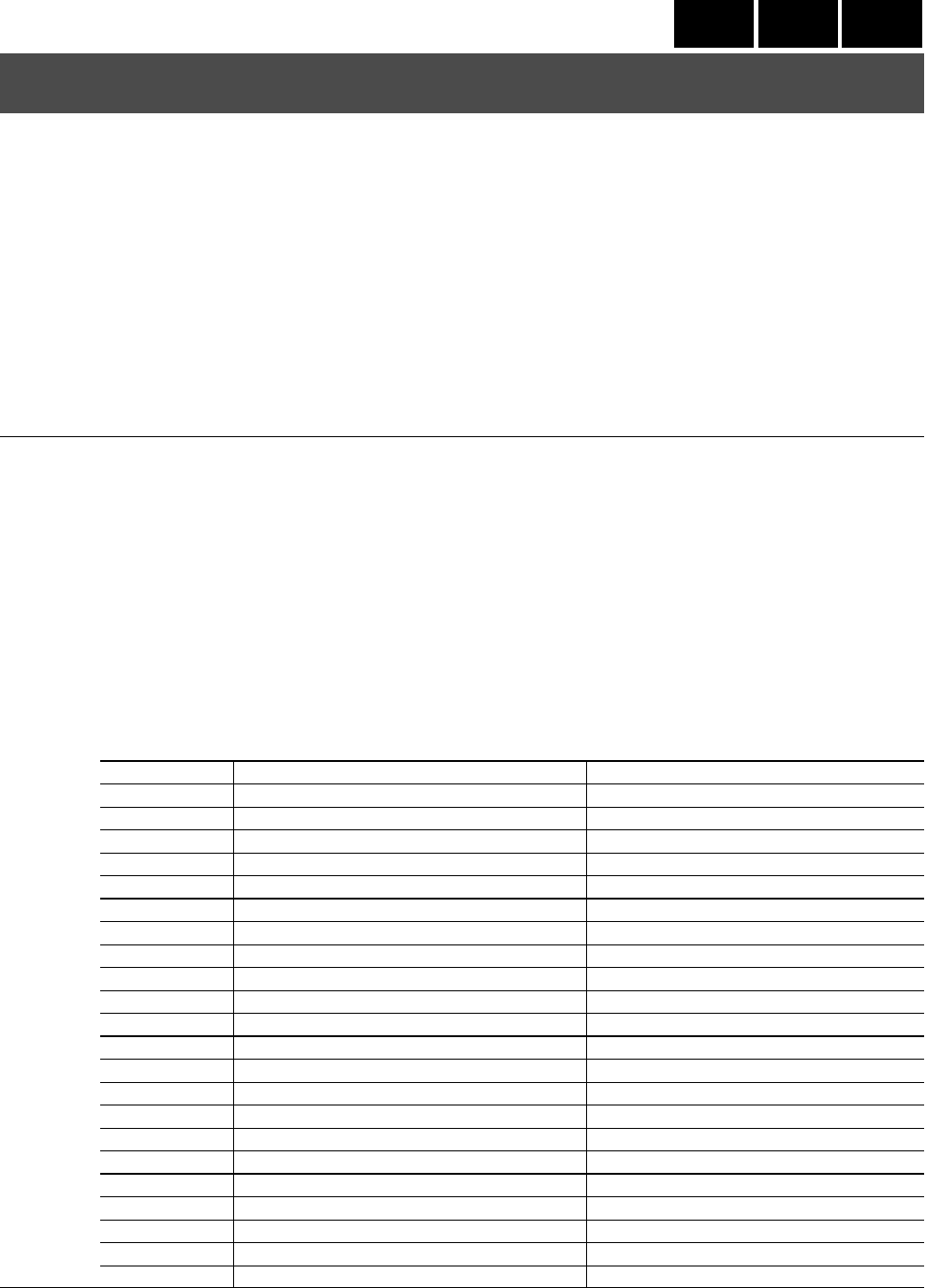
2-80
2.9.8 IEZNcAxisMonitor::GetSpindleDiagnosis
C70 M700 M800
2.9.8 IEZNcAxisMonitor::GetSpindleDiagnosis
Get spindle diagnostics
information
□ Custom call procedure
HRESULT GetSpindleDiagnosis(
LONG lAxisNo, // (I) Axis No.
LONG lIndex, // (I) Diagnostics information
LONG* plData, // (O) Diagnostics information value
LPOLESTR* lppwszBuffer, // (O) Diagnostics information character string
LONG* plRet // (O) Error code
)
□
Automation call procedure
Monitor_GetSpindleDiagnosis(
lAxisNo As LONG // (I) Axis No.
lIndex As LONG // (I) Diagnostics information
plData As LONG* // (O) Diagnostics information value
lppwszBuffer As STRING* // (O) Diagnostics information character string
) As LONG // (O) Error code
□
Argument
lAxisNo: Sets the axis No. (From Axis 1 = from 1)
lIndex: Sets diagnostics information.
plData: Returns the diagnostics information value.
lppwszBuffer: Gets diagnostics information as a UNICODE character string.
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK: Normal termination
EZNC_DATA_READ_READ: Data is not readable
EZNC_DATA_READ_ADDR: Invalid part system, axins No. setting
EZNC_DATA_READ_AXIS: Invalid axis No. setting
EZ_ERR_DATA_TYPE: Invalid argument data type
lIndex
Description
Data range
0
Work time
1
Alarm history 1 (Alarm No).
Previous spindle alarm number
2
″ 2 (Alarm No).
Same as above
3
″ 3 (Alarm No).
Same as above
4
″ 4 (Alarm No).
Same as above
5
″ 5 (Alarm No).
Same as above
6
″ 6 (Alarm No).
Same as above
7
″ 7 (Alarm No).
Same as above
8
″ 8 (Alarm No).
Same as above
11
Alarm history 1 (time).
Previous spindle alarm time
12
″ 2 (time).
Same as above
13
″ 3 (time).
Same as above
14
″ 4 (time).
Same as above
15
″ 5 (time).
Same as above
16
″ 6 (time).
Same as above
17
″ 7 (time).
Same as above
18
″ 8 (time).
Same as above
21
MNT (1).
Up to 3 alphanumeric characters.
22
MNT (2).
Same as above
23
MNT (3).
Same as above
24
MNT (4).
Same as above
30
SYS.
Up to 2 alphanumeric characters.
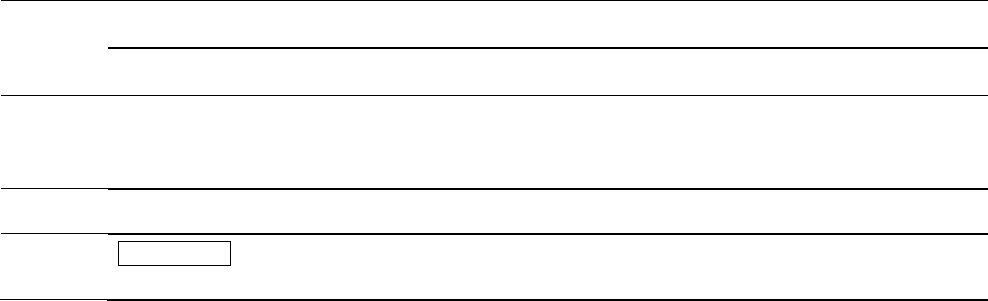
2-81
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
Gets power supply diagnostics information.
As the string area memory is allocated in this product, the client using VC++ needs to release the
string area memory explicitly with CoTaskMemFree().
□
Reference
GetSpindleMonitor(), GetSpindleVersion()
□
Specifica-
tion
Axis number
2-82
2.9.9 IEZNcAxisMonitor::GetAbsPositionMonitor
C70 M700 M700
2.9.9 IEZNcAxisMonitor::GetAbsPositionMonitor
Get absolute position
monitor information
□ Custom call procedure
HRESULT GetAbsPositionMonitor(
LONG lAxisNo, // (I) Axis No.
LONG lIndex, // (I)Axis monitor information
LONG* plData, // (O) Monitor information value
LPOLESTR* lppwszBuffer, // (O) Absolute position monitor information
character string
LONG* plRet // (O) Error code
)
□ Automation call procedure
Monitor_GetAbsPositionMonitor(
lAxisNo As LONG // (I) Axis No.
lIndex As LONG // (I) Monitor information
plData As LONG* // (O) Monitor information value
lppwszBuffer As STRING* // (O) Absolute position monitor information
character string
) As LONG // (O) Error code
□
Argument
lAxisNo: Sets the axis No. (From Axis 1 = from 1)
lIndex: Sets monitor information.
plData: Returns monitor information value.
lppwszBuffer: Gets information about the absolute position monitor as a UNICODE character
string. Outputs a character string when lIndex is 0.
For the M700/M800 series, outputs the result as a UNICODE character string when lIndex is 0 to
3.
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK: Normal termination
EZNC_DATA_READ_READ: Data is not readable
EZNC_DATA_READ_ADDR: Invalid part system, axis No. setting
EZNC_DATA_READ_AXIS: Invalid axis No. setting
EZ_ERR_DATA_TYPE: Invalid argument data type
lIndex
Description
Data range
Syst
em
Axis
PLC
axis
0
ABS SYS. Detection system.
0: Semi closed encoder (ES)
1: Semi closed high-
speed serial
encoder (ESS)
2. Incremental (INC)
○
○
○
1
POF POS. Power off
position.
Unit: Command unit*
○
○
○
2
PON POS. Power on
position.
Unit: Command unit*
○
○
○
3
MAC POS. Current position.
Unit: Command unit*
○
○
○
4
R0.
○
○
○
5
P0.
○
○
○
6
E0.
○
○
○
7
Rn.
○
○
○
8
Pn.
○
○
○
9
En.
○
○
○
10
ABSn.
○
○
○
11
ABS0.
○
○
○
2-83
* The M700/M800 series allows acquisition of value (actual value) converted according to the
command unit as a character string. For conversion according to the command unit, refer to □
Function in IEZNcAxisMonitor::GetServoMonitor().
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
Gets information about the absolute position monitor.
ABS0 is valid only for the M700/M800 series.
As the string area memory is allocated in this product, the client using VC++ needs to release the
string area memory explicitly with CoTaskMemFree().
□
Reference
□
Specifica-
tion
System , PLC axis , Axis number
2-84
2.9.10 IEZNcAxisMonitor::GetAuxAxisMonitor
M700 M800
2.9.10 IEZNcAxisMonitor::GetAuxAxisMonitor
Get auxiliary axis monitor
information
□ Custom call procedure
HRESULT GetAuxAxisMonitor (
LONG lAxisNo, // (I) Axis No.
LONG lIndex, // (I) Auxiliary axis information type
LONG* plData, // (O) Auxiliary axis information value
LPOLESTR* lppwszBuffer, // (O) Auxiliary axis monitor information
character string
LONG* plRet // (O) Error code
)
□ Automation call procedure
Monitor_GetAuxAxisMonitor (
lAxisNo As LONG // (I) Axis No.
lIndex As LONG // (I) Auxiliary axis information type
plData As LONG* // (O) Auxiliary axis information value
lppwszBuffer As STRING* // (O) Auxiliary axis monitor information string
) As LONG // (O) Error code
□
Argument
lAxisNo: Sets the axis No. (From Axis 1 = from 1)
lIndex: Sets the auxiliary axis information type. Refer to the table below.
plData: Returns the auxiliary axis information.
lppwszBuffer: Gets monitor information as a UNICODE string.
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK: Normal termination
EZNC_DATA_READ_READ: Data is not readable
EZNC_DATA_READ_ADDR: Invalid part system, axis No. setting
EZ_ERR_NOT_SUPPORT: Not supported
lIndex
Description
Data range
0
Droop.
-999 to 999
1
Rotation speed.
0 to 9999 [rpm]
2
Load current.
-999 to 999 [%]
3
Maximum current 1.
-999 to 999 [%]
4
Maximum current 2.
-999 to 999 [%]
5
Motor load
-999 to 999 [%]
6
Regen load.
-999 to 999 [%]
7
Current station No.
1 to 360
8
Current position.
Auxiliary axis information:
Parameter value:
Unit: Command unit
Auxiliary axis monitor information
character string:
-99,999.999 to 99,999.999
9
Inst station No.
1 to 360
2-85
□
Argument
lIndex
Description
Data range
10
Inst posn:
Auxiliary axis information:
Parameter value:
Unit: Command unit
Auxiliary axis monitor information
character string:
-99,999.999 to 99,999.999
11
Position loop gain 1.
0 to 999
12
Speed loop gain 1.
0 to 999
13
Position loop gain 2.
0 to 999
14
Speed loop gain 2.
0 to 999
15
Speed integral compensation.
0 to 999
16
Load inertia.
0 to 999.9
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
Gets information about the auxiliary axis monitor.
When the data range in the Index table is [Unit: Command unit], the value got
needs to be
converted according to the command unit set for the Mitsubishi CNC. For the set unit, refer to the
Mitsubishi CNC specifications.
<For Linear axis>
Metric system Conversion for 1 of LONG type
For 10-µm specifications -999,999.99 to 999,999.99 1 = 1/200 (mm)
For 1-µm specifications -99,999.999 to 99,999.999 1 = 1/2000 (mm)
For 0.1-µm specifications -9,999.9999 to 9,999.9999 1 = 1/20000 (mm)
For 10-nm specifications -999.99999 to 999.99999 1 = 1/200000 (mm)
For 1-nm specifications -99.999999 to 99.999999 1 = 1/2000000 (mm)
Inch system Conversion for 1 of LONG type
For 10-µm specifications -99,999.999 to 99,999.999 1 = 1/200 (inch)
For 1-µm specifications -9,999.9999 to 9,999.9999 1 = 1/2000 (inch)
For 0.1-µm specifications -999.99999 to 999.99999 1 = 1/20000 (inch)
For 10-nm specifications -999.99999 to 999.99999 1 = 1/200000 (inch)
For 1-nm specifications -99.999999 to 99.999999 1 = 1/2000000 (inch)
<For Rotary axis>
Metric system Conversion for 1 of LONG type
For 10-µm specifications -999999.99 to 999999.99 1 = 1/200 (mm)
For 1-µm specifications -99,999.999 to 99,999.999 1 = 1/2000 (mm)
For 0.1-µm specifications -9999.9999 to 9999.9999 1 = 1/20000 (mm)
For 10-nm specifications -999.99999 to 999.99999 1 = 1/200000 (mm)
For 1-nm specifications -99.999999 to 99.999999 1 = 1/2000000 (mm)
Inch system Conversion for 1 of LONG type
For 10-µm specifications -999,999.99 to 999,999.99 1 = 1/200 (inch)
For 1-µm specifications -99,999.999 to 99,999.999 1 = 1/2000 (inch)
For 0.1-µm specifications -9999.9999 to 9999.9999 1 = 1/20000 (inch)
For 10-nm specifications -999.99999 to 999.99999 1 = 1/200000 (inch)
For 1-nm specifications -99.999999 to 99.999999 1 = 1/2000000 (inch)
Conversion example) For the linear axis with the 1-µm specifications in the Metric system,
when the LONG value got is 710001,
710001 ÷ 2000 = 355.0005.
However, 355.0005 is rounded to minus infinity. Therefore the result is 355.000.
Data in units of 0.5 µm (1/2000 mm) is rounded to minus infinity when displayed.
This means that +0.5 µm is displayed as 0 and -0.5 µm is displayed as -1 µm.
As the string area memory is allocated in this product, the client using VC++ needs to release the
string area memory explicitly with CoTaskMemFree().
This function is not supported with C70.
□
Reference
□
Specifica-
tion
Axis number
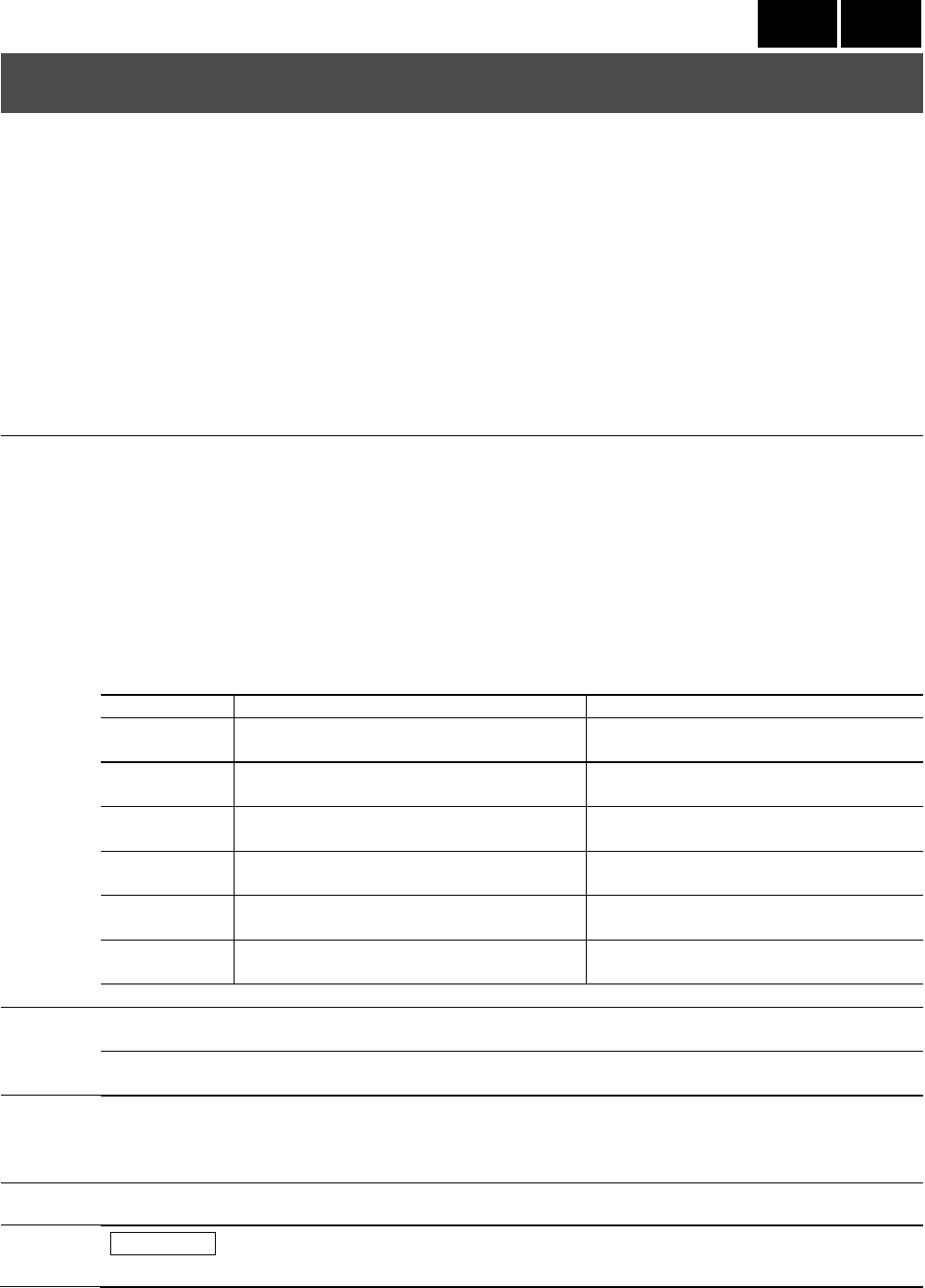
2-86
2.9.11 IEZNcAxisMonitor::GetAuxAxisDiagnosis
M700 M800
2.9.11 IEZNcAxisMonitor::GetAuxAxisDiagnosis
Get auxiliary axis
diagnostics information
□ Custom call procedure
HRESULT GetAuxAxisDiagnosis (
LONG lAxisNo, // (I) Axis No.
LONG lIndex, // (I) Auxiliary axis diagnostics information type
LPOLESTR* lppwszBuffer, // (O) Auxiliary axis diagnostics information
character string
LONG* plRet // (O) Error code
)
□ Automation call procedure
Monitor_GetAuxAxisDiagnosis (
lAxisNo As LONG // (I) Axis No.
lIndex As LONG // (I) Auxiliary axis diagnostics information type
lppwszBuffer As STRING* // (O) Auxiliary axis diagnostics information
character string
) As LONG // (O) Error code
□
Argument
lAxisNo: Sets the axis No. (From Axis 1 = from 1)
lIndex: Sets the auxiliary axis diagnostics information type. Refer to the table below.
lppwszBuffer: Gets the auxiliary axis diagnostics information as a UNICODE character string.
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK: Normal termination
EZNC_DATA_READ_READ: Data is not readable
EZNC_DATA_READ_ADDR: Invalid part system, axis No. setting
EZ_ERR_NOT_SUPPORT: Not supported
lIndex
Description
Data range
0
Alarm history (1).
"Alarm information by type" with 9
alphanumeric characters
1
Alarm history (2).
"Alarm information by type" with 9
alphanumeric characters
2
Alarm history (3).
"Alarm information by type" with 9
alphanumeric characters
3
Alarm history (4).
"Alarm information by type" with 9
alphanumeric characters
4
Alarm history (5).
"Alarm information by type" with 9
alphanumeric characters
5
Alarm history (6).
"Alarm information by type" with 9
alphanumeric characters
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
Gets the auxiliary axis diagnostics information.
As the string area memory is allocated in this product, the client using VC++ needs to release the
string area memory explicitly with CoTaskMemFree().
This function is not supported with C70.
□
Reference
□
Specifica-
tion
Axis number
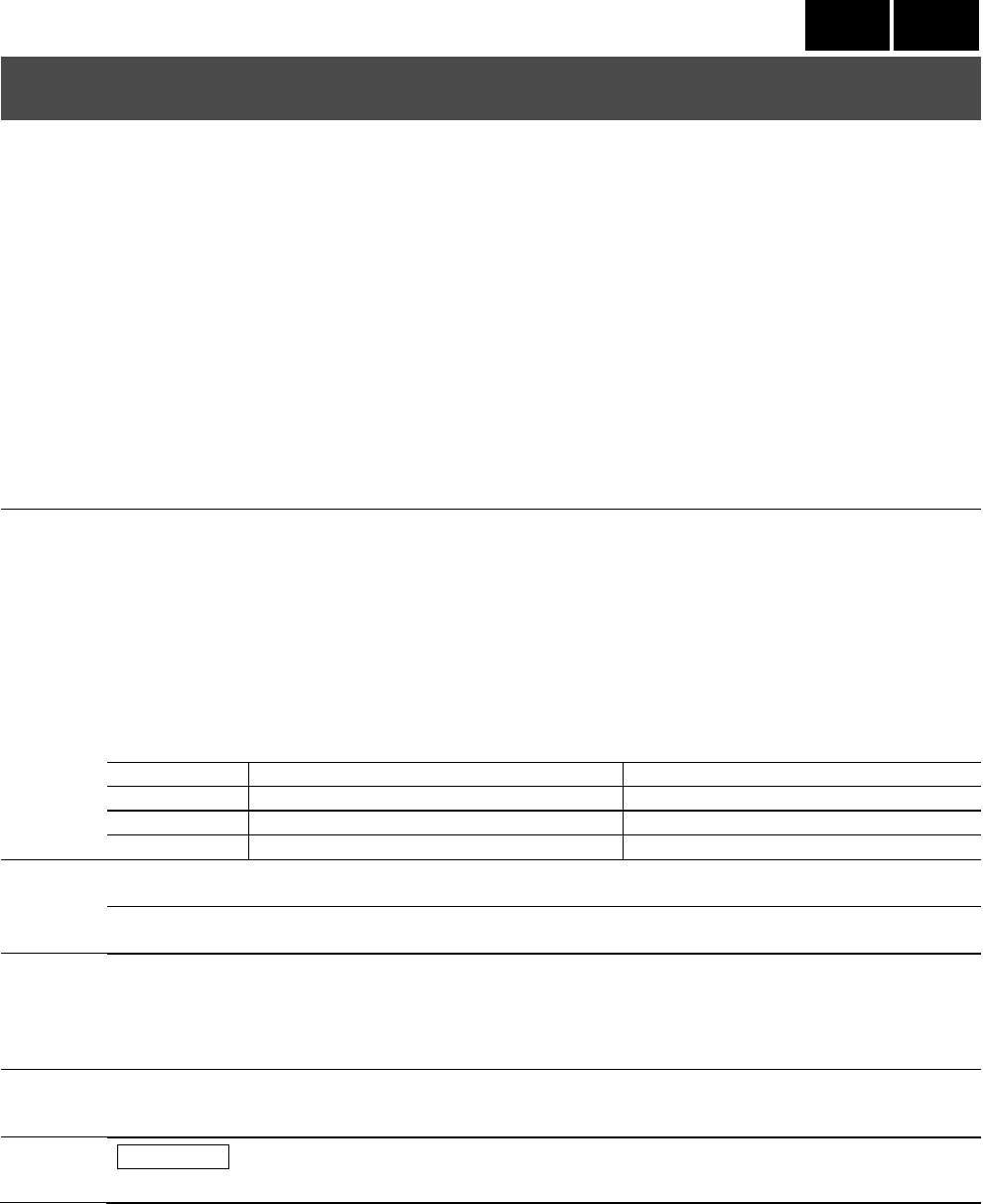
2-87
2.9.12 IEZNcAxisMonitor::GetAuxAxisVersion
M700 M800
2.9.12 IEZNcAxisMonitor::GetAuxAxisVersion
Get auxiliary axis version
information
□ Custom call procedure
HRESULT GetAuxAxisVersion (
LONG lAxisNo, // (I) Axis No.
LONG lIndex, // (I) Auxiliary axis version information type
LPOLESTR* lppwszBuffer, // (O) Auxiliary axis version information
character string
LONG* plRet // (O) Error code
)
□ Automation call procedure
Monitor_GetAuxAxisVersion (
lAxisNo As LONG // (I) Axis No.
lIndex As LONG // (I) Auxiliary axis version information type
lppwszBuffer As STRING* // (O) Auxiliary axis version information
character string
) As LONG // (O) Error code
□
Argument
lAxisNo: Sets the axis No. (From Axis 1 = from 1)
lIndex: Sets the auxiliary axis version information type.
lppwszBuffer: Sets the auxiliary axis version information as a UNICODE character string.
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK: Normal termination
EZNC_DATA_READ_READ: Data is not readable
EZNC_DATA_READ_ADDR: Invalid system, spindle specification
EZ_ERR_NOT_SUPPORT: Not supported
lIndex
Description
Data range
0
Unit type
9 alphanumeric characters
1
Unit serial No.
16 alphanumeric characters
2
Motor
9 alphanumeric characters
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
Gets auxiliary axis version information.
As the string area memory is allocated in this product, the client using VC++ needs to release the
string area memory explicitly with CoTaskMemFree().
This function is not supported with C70.
□
Reference
□
Specifica-
tion
Axis number
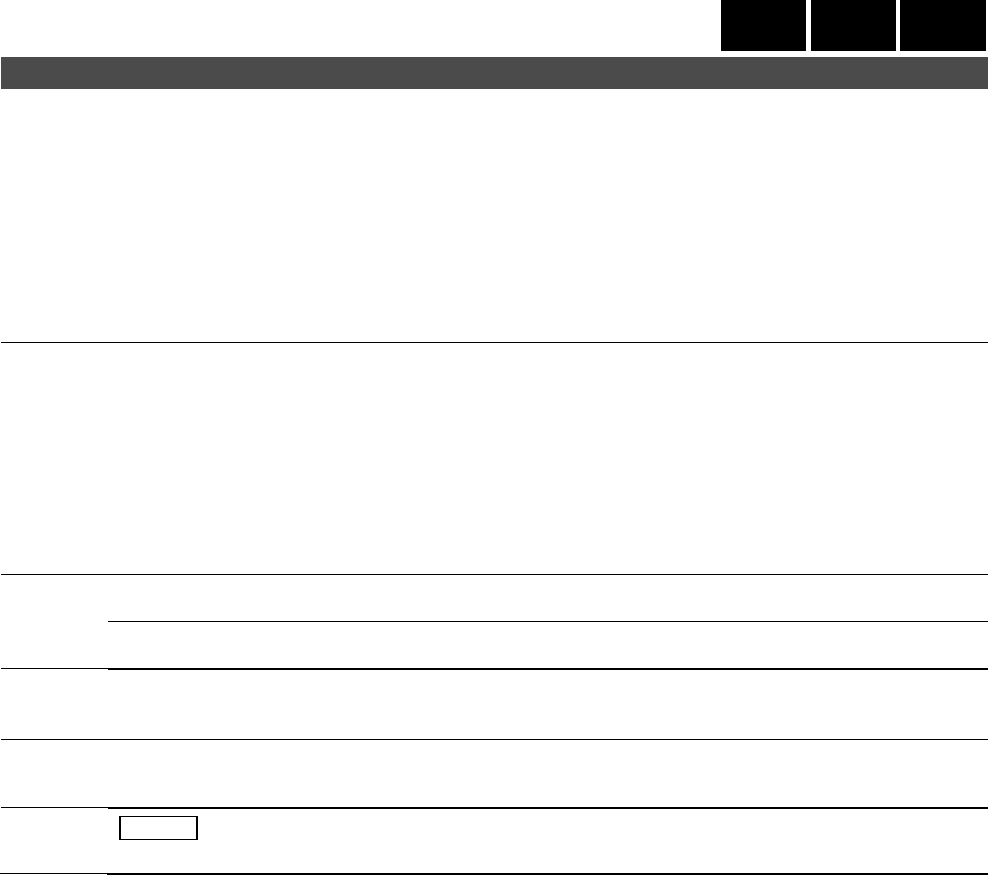
2-88
2.9.13 IEZNcAxisMonitor::GetDowelTime
C70 M700 M800
2.9.13 IEZNcAxisMonitor::GetDowelTime
Get remaining dwell time
□ Custom call procedure
HRESULT GetDowelTime(
DOUBLE* pdTime, // (O) Remaining dwell time
LONG* plRet // (O) Error code
)
□ Automation call procedure
Monitor_GetDowelTime(
pdTime As DOUBLE* // (O) Remaining dwell time
) As LONG // (O) Error code
□
Argument
pdTime: Returns the remaining dwell (G04) time.
Unit: Second
Value: 0.000 to 99,999.999 (s)
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK: Normal termination
EZNC_DATA_READ_READ: Data is not readable
EZNC_DATA_READ_ADDR: Invalid part system, axis No. setting
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
Returns the remaining dwell (G04) time. Unit: Second, output up to second, 1/1000 (second).
□
Reference
□
Specifica-
tion
System
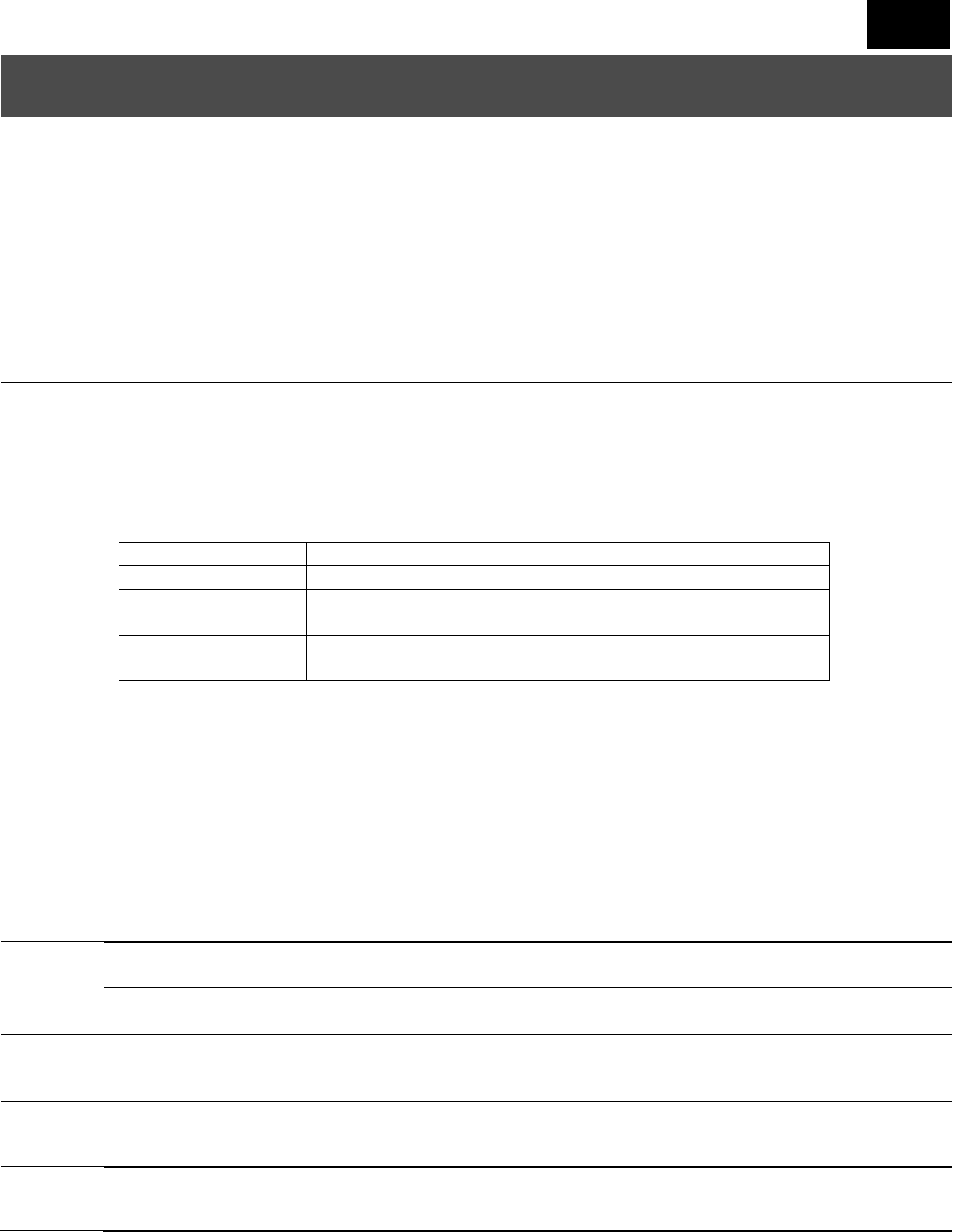
2-89
2.9.14 IEZNcAxisMonitor:: GetPowerConsumption
M800
2.9.14 IEZNcAxisMonitor:: GetPowerConsumption
Get current power
consumption
□ Custom call procedure
HRESULT GetPowerConsumption (
LONG lAxisNo, // (I) Axis No.
DOUBLE** ppdPower, // (O) Power consumption
LONG* plRet // (O) Error code
)
□ Automation call procedure
GetPowerConsumption (
lAxisNo As LONG // (I) Axis No.
pvPower As VARIANT* // (I) Power consumption
) As LONG // (O) Error code
□
Argument
lAxisNo: Sets the axis No. (From Axis 1 = from 1)
ppdPower:
Returns the current total power consumption as an array. The data array is secured
on the EZSocket side, so explicitly release it on the client side using CoTaskMemFree().
Refer to the index table for the got power consumption.
Index table
Array Index
Type of power consumption
0
Present consumption of entire drive system
1
Present power consumption of servo axis in drive system
(fluctuating part)
2
Present power consumption of spindle in drive system
(fluctuating part)
Automation argument:
lAxisNo: See the explanation of lAxisNo.
pvPower : Returns the power consumption array as a VARIANT.
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK: Normal termination
EZNC_DATA_READ_ADDR: Invalid part system, axis No. setting
EZNC_DATA_READ_READ: Data is not readable
EZ_ERR_NOT_SUPPORT: Not supported
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
Gets the present consumption of entire drive system as an array.
This function is not supported with the C70 or M700 series.
□
Reference
□
Specifica-
tion
2-90
2.9.15 IEZNcAxisMonitor:: GetIntegralPower
M800
2.9.15 IEZNcAxisMonitor:: GetIntegralPower
Get integral power
□ Custom call procedure
HRESULT GetPowerConsumption (
LONG lAxisNo, // (I) Axis No.
LONG lIndex, // (I) Parameter number
DOUBLE** ppdPower, // (O) Power consumption
LONG* plRet // (O) Error code
)
□ Automation call procedure
GetPowerConsumption (
lAxisNo As LONG // (I) Axis NO.
lIndex As LONG, // (I) Parameter number
pvPower As VARIANT* // (I) Power consumption
) As LONG // (O) Error code
□
Argument
lAxisNo: Sets the axis No. (From Axis 1 = from 1)
lIndex:Sets the number of the integral power to be got.
ppdPower:
Returns the total power consumption as an array. The data array is secured on the
EZSocket side, so explicitly release it on the client side using CoTaskMemFree().
Refer to the index table for the got power consumption.
Index table
Array Index
Type of power consumption
0
Accumulated consumption of entire drive system
1
Drive system's fixed consumption correction
2
Accumulated consumption of servo axis in drive system
(fluctuating part)
3
Accumulated regeneration of servo axis in drive system
(fluctuating part)
4
Accumulated consumption of spindle in drive system
(fluctuating part)
5
Accumulated regeneration of spindle in drive system
(fluctuating part)
Automation argument:
lAxisNo: See the explanation of lAxisNo.
lIndex:See the explanation of lIndex.
pvPower:Returns the power consumption array as a VARIANT.
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK: Normal termination
EZNC_DATA_READ_ADDR: Invalid part system, axix No. setting
EZ_ERR_DATA_RANGE: Invalid argument data range
EZNC_DATA_READ_READ: Data is not readable
EZ_ERR_NOT_SUPPORT: Not supported
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
Gets the current total power consumption as an array.
This function is not supported with the C70 or M700 series.
□
Reference
□
Specifica-
tion
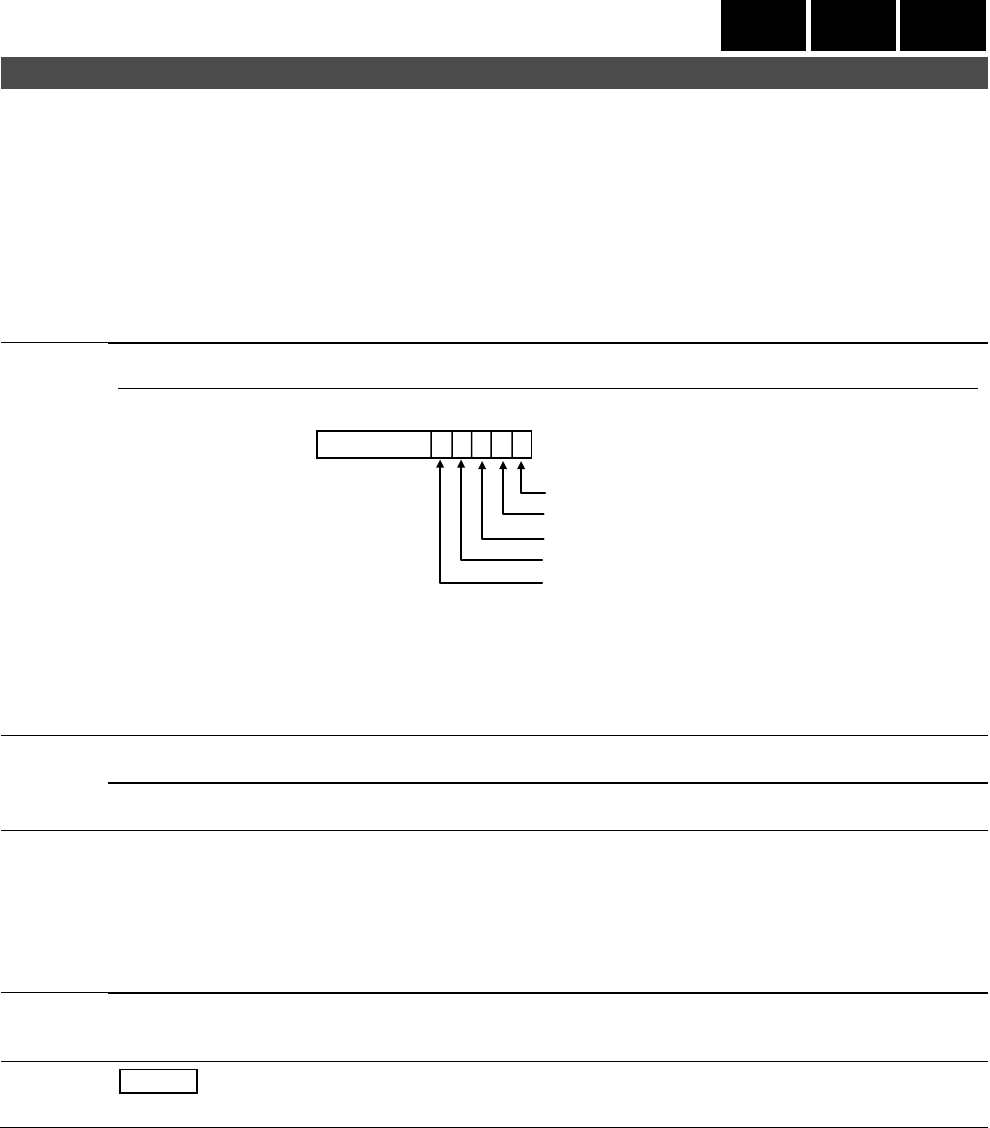
2-91
2.10 IEZNcRunStatus Interface
2.10.1 IEZNcRunStatus::GetInvalidStatus
C70 M700 M800
2.10.1 IEZNcRunStatus::GetInvalidStatus
Get disabled status
□ Custom call procedure
HRESULT GetInvalidStatus(
LONG* plStatus, // (O) Disabled status flag
LONG* plRet // (O) Error code
)
□ Automation call procedure
Status_GetInvalidStatus(
plStatus As LONG* // (O) Disabled status flag
) As LONG // (O) Error code
□
Argument
plStatus : Returns the disabled bit flag.
Value Meaning
0 OFF
1 ON
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK: Normal termination
EZNC_DATA_READ_ADDR: Invalid system specification
EZNC_DATA_READ_READ: Data is not readable
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
Returns the disabled flag.
Disabled status: Disables single block stop
Waits for the MST command completion signal
Disables feed hold
Disables cutting override
Disables G09 block deceleration check
□
Reference
□
Specifica-
tion
System
0 (bit)
1
2
3
4
31
Disables single block stop
Waits for the MST command completion signal
Disables feed hold
Disables cutting override
Disables G09 block deceleration check
2-92
2.10.2 IEZNcRunStatus::GetCommandStatus
C70 M700 M800
2.10.2 IEZNcRunStatus::GetCommandStatus
Get operation command
status
□ Custom call procedure
HRESULT GetCommandStatus(
LONG* plStatus, // (O) Operation command status
LONG* plRet // (O) Error code
)
□ Automation call procedure
Status_GetCommandStatus(
plStatus As LONG // (O) Operation command status
) As LONG // (O) Error code
□
Argument
plStatus : Returns the operation command status with any of the following numbers.
Value Meaning Value Meaning
0 Positioning (independent axis) 15 3rd reference position verification
1 Positioning (linear) 16 4th reference position verification
2 Linear interpolation 17 Automatic reference position return
3 Circular interpolation (CW) 18 Return from the automatic reference position
4 Circular interpolation (CCW) 19 2nd reference position return
5 Helical interpolation (CW) 20 3rd reference position return
6 Helical interpolation (CCW) 21 4th reference position return
7 Reserved 22 Skip function
8 Reserved 23 Multi-skip function 1
9 Reserved 24 Multi-skip function 2
10 Reserved 25 Multi-skip function 3
11 Time command dwell 26 Threading
12 Reserved 27 Reserved
13 1st reference position verification 28 Reserved
14 2nd reference position verification 29 Coordinate system setting
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK: Normal termination
EZNC_DATA_READ_ADDR: Invalid part system setting
EZNC_DATA_READ_READ: Data is not readable
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
Gets the operation command status.
□
Reference
□
Specifica-
tion
System
2-93
2.10.3 IEZNcRunStatus::GetCuttingMode
C70 M700 M800
2.10.3 IEZNcRunStatus::GetCuttingMode
Get cutting mode status
□ Custom call procedure
HRESULT GetCuttingMode(
LONG* plMode, // (O) Cutting mode
LONG* plRet // (O) Error code
)
□ Automation call procedure
Status_GetCuttingMode(
plMode As LONG // (O) Cutting mode
) As LONG // (O) Error code
□
Argument
plMode: Returns the cutting mode.
Value Meaning
1 In G01, G02, G03, G31, G33, G34, or G35 mode
0 In any of other modes
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK: Normal termination
EZNC_DATA_READ_ADDR: Invalid part system setting
EZNC_DATA_READ_READ: Data is not readable
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
Gets the cutting mode.
□
Reference
□
Specifica-
tion
System
2-94
2.10.4 IEZNcRunStatus::GetAxisStatus
C70 M700 M800
2.10.4 IEZNcRunStatus::GetAxisStatus
Get servo axis status
□ Custom call procedure
HRESULT GetAxisStatus(
LONG lAxisNo, // (I) Axis No.
LONG lType, // (I) Status type
LONG* plStatus, // (O) Servo axis status
LONG* plRet // (O) Error code
)
□ Automation call procedure
Status_GetAxisStatus(
lAxisNo As LONG // (I) Axis No.
lType As LONG // (I) Status type
plStatus As LONG* // (O) Servo axis status
) As LONG // (O) Error code
□
Argument
lAxisNo: Sets the axis No. (From Axis 1 = from 1)
Valid when lType = 4. All axes information in the set part system can get when Type =
number other than 4.
lType: Sets the status type.
plStatus : Returns the servo axis status.
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK: Normal termination
EZ_ERR_DATA_TYPE: Invalid argument data type
EZNC_DATA_READ_ADDR: Invalid system, spindle specification
EZNC_DATA_READ_READ: Data is not readable
lType
Description
Data range
0
1st reference position return
completion.
A bit corresponding to the returned axis
becomes 1.
Example) 00000101 = The 1st and 3rd axes
returns have been completed.
1
2nd reference position return
completion.
A bit corresponding to the returned axis
becomes 1.
Example) 00000010 = The 2nd axis return
has been completed.
2
3rd reference position return
completion.
A bit corresponding to the returned axis
becomes 1.
Example) 00001010 = The 2nd and 3th axes
returns have been completed.
3
Fourth reference position
return completion.
A bit corresponding to the returned axis
becomes 1.
Example) 00001000 = The 4th axis return has
been completed.
4
Axis status (axis being
removed).
The axis specification is
required.
0: Axis not being removed
1: Axis being removed
5
Axis status (servo off).
Axis with servo turned off
A bit corresponding to the axis becomes 1.
6
Axis status (mirror image).
Mirror image axis. A bit corresponding to the axis
set for mirror image becomes 1.
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
2-95
□
Function
Gets the servo axis status.
□
Reference
□
Specifica-
tion
System (Part system setting is required when the M700/M800 series is used or lType is 4 or 6.),
Axis number
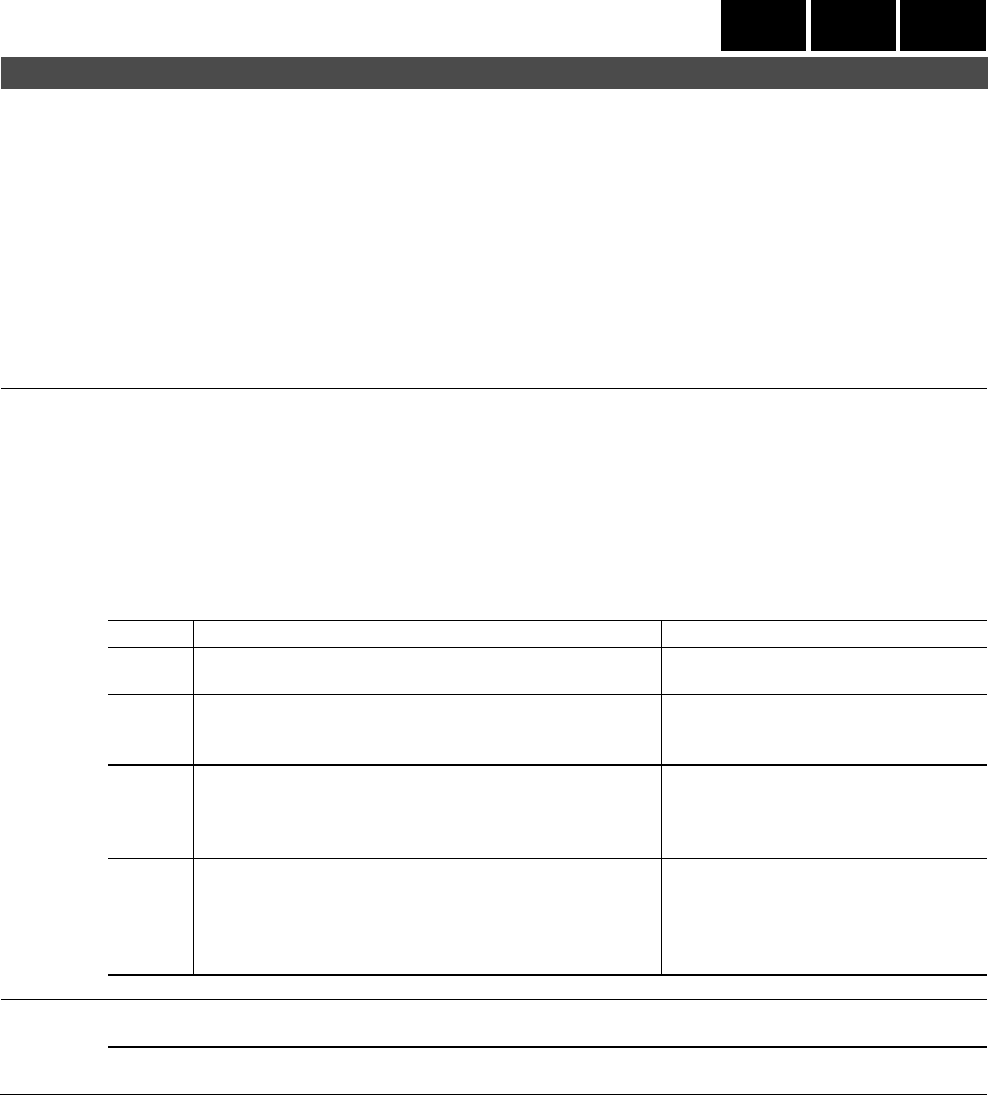
2-96
2.10.5 IEZNcRunStatus::GetRunStatus
C70 M700 M800
2.10.5 IEZNcRunStatus::GetRunStatus
Get operation status
□ Custom call procedure
HRESULT GetRunStatus(
LONG lIndex, // (I) Operation type
LONG* plStatus, // (O) Operation status
LONG* plRet // (O) Error code
)
□ Automation call procedure
Status_GetRunStatus(
lIndex As LONG // (I) Operation type
plStatus As LONG* // (O) Operation status
) As LONG // (O) Error code
□
Argument
lIndex: Sets the status number.
plStatus: Returns the set operation status.
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK: Normal termination
EZ_ERR_DATA_TYPE: Invalid argument data type
EZNC_DATA_READ_ADDR: Invalid part system setting
EZNC_DATA_READ_READ: Data is not readable
lIndex
Description
Data range
0
Tool length measurement.
0: Tool length not being measured
1: Tool length being measured
1
In automatic operation "run".
Gets the status indicating that the system is
operating automatically.
0: Not operating in automatically
1: Operating automatically
2
Automatic operation “start”.
Gets the status indicating that the system is
operating automatically and that a movement
command or M, S, T, B process is being executed.
0: Not starting automatic operation
1: Starting automatic operation
3
Automatic operation "pause"
Gets the status indicating that automatic operation
is paused while executing a movement command
or miscellaneous command with automatic
operation.
0: Automatic operation not paused
1: Automatic operation paused
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
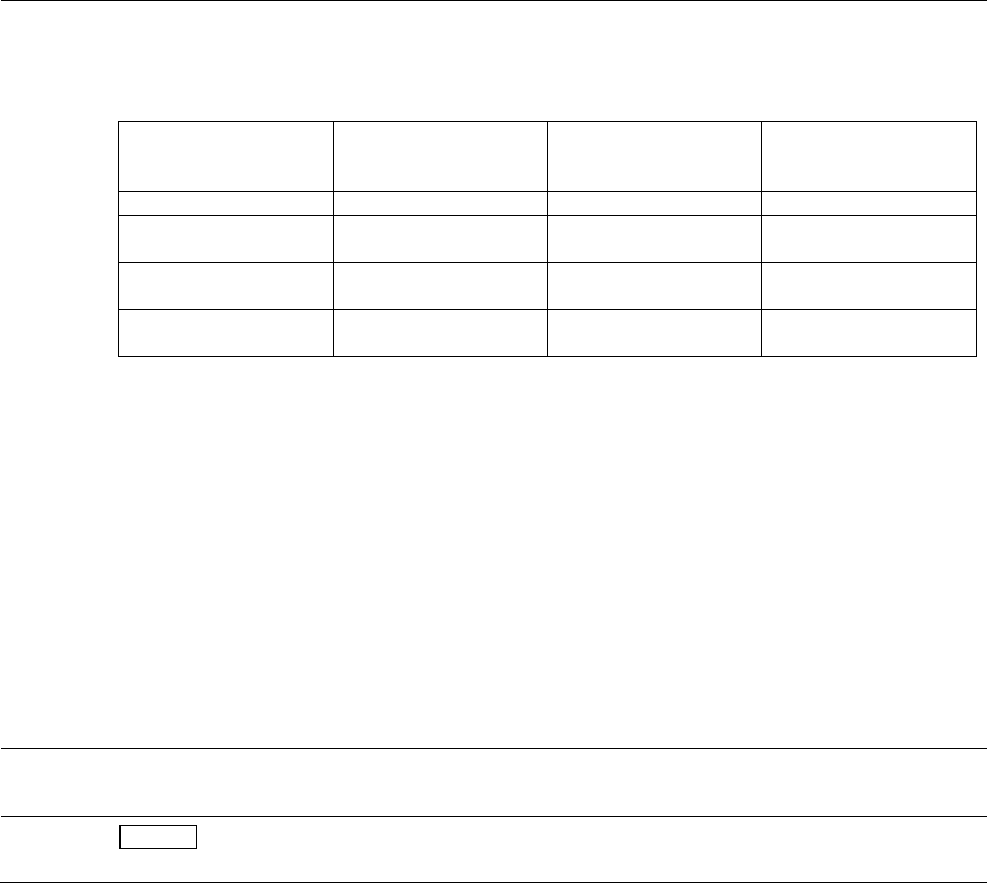
2-97
□
Function
Gets the operation status.
Automatic operation paused is enabled only for the M700/M800 series.
Signals that indicate the status of automatic operation with the PLC interface include ‘in
automatic operation', ‘automatic operation start’, and ‘automatic operation pause’. The ON/OFF
statuses of these three signals in each state are shown below.
Each status represents the following type of state.
* Reset state
Automatic operation is stopped because of the reset conditions.
(All states in which the system is not operating automatically correspond to this.)
* Automatic operation stopped state
Automatic operation is stopped after executing one block.
(Single block stop corresponds to this.)
* Automatic operation pause state
Automatic operation is stopped during the execution of one block.
(The automatic operation pause (*SP) signal OFF state corresponds to this.)
* Automatic operation started state
Automatic operation is actually being executed.
Refer to the PLC Interface Manual for details.
In automatic
operation
"RUN" (OP)
In automatic
operation
"START" (STL)
In automatic
operation
"PAUSE" (SPL)
In "reset"
0
0
0
Automatic
operation
stop condition
1
0
0
Automatic operation
pause condition
1
0
1
Automatic operation
start condition
1
1
0
□
Reference
□
Specifica-
tion
System
2-98
2.11 IEZNcFile6 Interface
2.11.1 IEZNcFile6::FindDir2
C70 M700 M800
2.11.1 IEZNcFile6::FindDir2
Search directory
□ Custom call procedure
HRESULT FindDir2(
LPCOLESTR lpcwszDirectryName, // (I) Directory name
LONG lFileType, // (I) Read type and format
LPOLESTR* lppwszFileInfo, // (O) File information character string
LONG* plRet // (O) Error code
)
□ Automation call procedure
File_FindDir2(
lpcwszDirectryName As STRING // (I) Directory name
lFileType As LONG // (I) Read type and format
lppwszFileInfo As STRING* // (O) File information character string
) As LONG // (O) Error code
□
Argument
lpcwszDirectryName: Sets the directory name as a UNICODE character string.
Specify directory with an absolute path as follows:
Drive name + ":" + \Directory name\File name …Gets the set file name information. (Note 1)
Drive name + ":" + "\Directory name" …Gets the set directory name information. (Note 1)
Drive name + ":" + \Directory name\ …Gets the set directory information.
(Note 1) This setting is for the M700/M800 series.
lFileType: Sets the type and format of data to be read.
The following can also be set with pipe (|). When NULL is set, file information is read.
Value
Meaning
EZNC_DISK_DIRTYPE Directory information read
EZNC_DISK_COMMENT Comment information read (on the NC control unit side only)
EZNC_DISK_DATE Date information read (on the personal computer side only)
EZNC_DISK_SIZE Size information read
lppwszFileInfo: Gets file information as a UNICODE character string.
The format of file information becomes as follows:
File name\tSize\tDate\tComment\0
A TAB code is inserted between file name, size, date, and comments.
The end of the data becomes a NULL code.
plRet: Returns whether or n
ot there is file information read or returns an error code. (Upon
automation, the return value is used.)
0: When there is no file information
1 or more: When there is file information
EZNC_FILE_DIR_DATASIZE: Exceeded maximum data size
EZNC_FILE_DIR_NOTOPEN: Not open
EZNC_FILE_DIR_READ: File information read error
EZNC_FILE_DIR_ALREADYOPENED: A different directory is already opened
EZNC_FILE_DIR_NODRIVE: Drive does not exist
EZNC_FILE_DIR_NODIR: Directory does not exist
(Note 2) If an error occurs on the personal computer, the error code EZNC_FILE_… becomes
EZNC_PCFILE_….
2-99
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
Searches directory.
In FindDir2(), information of one file can be read by reading once. To continuously get directory
information, a list of file names in the set directory can be got by calling FindNextDir2()
repeatedly. The format of file information to be stored in the area indicated by lpszFileInfo is as
follows:
File name\tSize\tDate\tComment\0
A TAB
code is inserted between file name, size, date, and comments. The end of the data
becomes a NULL code. Only information that follows file name set in the read type is stored. For
example, if “EZNC_DISK_COMMENT|EZNC_DISK_DATE” is set, information is as follows:
Filename\tDate\tComment\0
If “EZNC_DISK_SIZE|EZNC_DISK_COMMENT” is set for a file to which comments cannot
be added, the comment information will not be output and the comment will be as follows:
File name\tSize\t\0
For a file from which date cannot get, setting of "EZNC_DISK_SIZE|EZNC_DISK_DATE|EZ
NC_DISK_COMMENT" becomes as follows with no date information output.
File name\tSize\t\tComment\0
* The file from which a date cannot get refers to the file on the NC control unit
side.
As the character string area memory is allocated in this product, the client using VC++ needs to
release the character string area memory explicitly with CoTaskMemFree().
(Note 1) Reading the directory size information on the NC-side compact flash (M700 series) or
SD card (M800 series) is not supported. The directory size information read is invalid.
(Note 2 ) For the C70, when the file on the personal computer is specified and 0 is specified for
lFileType,
\t is added to the end of file information got (filename\t\0).
To use file information got, remove \t before using.
□
Restrictions
When FindDir2() is used, FindDir2(), OpenFile3(),OpenNcFile2() cannot be executed until
ResetDir() is executed.
When executed, an error "EZNC_FILE_DIR_ALREADYOPENED (0x80030101) A different
directory is already opened" occurs. When using it, immediately execute ResetDir() after
executing FindDir2().
□
Reference
FindNextDir2(), ResetDir()
□
Specifica-
tion
2-100
2.11.2 IEZNcFile6::FindNextDir2
C70 M700 M800
2.11.2 IEZNcFile6::FindNextDir2
Search next directory
□ Custom call procedure
HRESULT FindNextDir2(
LPOLESTR* lppwszFileInfo, // (O) File information character string
LONG* plRet // (O) Error code
)
□ Automation call procedure
File_FindNextDir2(
lppwszFileInfo As STRING* // (O) File information character string
) As LONG // (O) Error code
□
Argument
lppwszFileInfo: Gets file information as a UNICODE character string.
The format of file information becomes as follows:
File name\tSize\tDate\tComment\0
A TAB code is inserted between file name, size, date, and comments.
The end of the data becomes a NULL code.
plRet
: Returns whether or not there is file information read or returns an error code. (Upon
automation, the return value is used.)
0: When there is no file information
1 or more: When there is file information
EZNC_FILE_DIR_DATASIZE: Exceeded maximum data size
EZNC_FILE_DIR_NOTOPEN: Not open
EZNC_FILE_DIR_READ: File information read error
EZNC_FILE_DIR_NODRIVE: Drive does not exist
(Note) If an error occurs on the personal computer, the error code EZNC_FILE_… becomes
EZNC_PCFILE_….
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
Continuously searches for a directory.
To continuously get directory information after executing FindDir2(), a list of file names in
the set directory can get by calling FindNextDir2() repeatedly. The format of file informatio
n that is stored in the area indicated by lpszFileInfo is the same as that for FindDir2().
As the character string area memory is allocated in this product, the client using VC++ ne
eds to release the character string area memory explicitly with CoTaskMemFree().
□
Reference
FindDir2(), ResetDir()
□
Specifica-
tion
2-101
2.11.3 IEZNcFile6::ResetDir
C70 M700 M800
2.11.3 IEZNcFile6::ResetDir
Terminate directory search
□ Custom call procedure
HRESULT ResetDir(
LONG* plRet // (O) Error code
)
□ Automation call procedure
File_ResetDir( ) As LONG // (O) Error code
□
Argument
plRet: Returns an error code. (Upon automation, the return value is used.)
EZNC_FILE_DIR_DATASIZE: Exceeded maximum data size
EZNC_FILE_DIR_NOTOPEN: Not open
EZNC_FILE_DIR_READ: File information read error
(Note) If an error occurs on the personal computer, the error code EZNC_FILE_
… becomes
EZNC_PCFILE_….
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
Terminates directory search.
To search for a directory again, execute FindDir2().
□
Reference
FindDir2()
□
Specifica-
tion
2-102
2.11.4 IEZNcFile6::Copy2
C70 M700 M800
2.11.4 IEZNcFile6::Copy2
Copy file
□ Custom call procedure
HRESULT Copy2(
LPCOLESTR lpcwszSrcFileName, // (I) Transfer source file name
LPCOLESTR lpcwszDstFileName, // (I) Transfer destination file name
LONG* plRet // (O) Error code
)
□ Automation call procedure
File_Copy2(
lpcwszSrcFileName As STRING // (I) Transfer source file name
lpcwszDstFileName As STRING // (I) Transfer destination file name
) As LONG // (O) Error code
□
Argument
lpcwszSrcFileName: Sets transfer source file name using UNICODE character strings.
lpcwszDstFileName: Sets transfer destination file name as a UNICODE character strings.
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK: Normal termination
EZNC_FILE_COPY_BUSY: Copy is disabled (during operation)
EZNC_FILE_COPY_ENTRYOVER: Registration limit exceeded
EZNC_FILE_COPY_FILEEXIST: Copy destination file already exists
EZNC_FILE_COPY_FILESYSTEM: File system error
EZNC_FILE_COPY_ILLEGALNAME: Invalid file name format
EZNC_FILE_COPY_MEMORYOVER: Memory capacity exceeded
EZNC_FILE_COPY_NODIR: Directory does not exist
EZNC_FILE_COPY_NODRIVE: Drive does not exist
EZNC_FILE_COPY_NOFILE: File does not exist
EZNC_FILE_COPY_PLCRUN: Copy is disabled (programmable controller in operation)
EZNC_FILE_COPY_READ: Transfer source file is not readable
EZNC_FILE_COPY_WRITE: Transfer destination file is not writable
EZNC_FILE_COPY_PROTECT: Copying is disabled (protected)
EZNC_PCFILE_COPY_CREATE: File cannot be created (PC only)
EZNC_PCFILE_COPY_OPEN: File cannot be opened (personal computer only)
(Note) If an error occurs on the personal computer, the error code EZNC_FILE_… becomes
EZNC_PCFILE_….
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
2-103
□
Function
Copies the file set by lpcwszSrcFileName to lpcwszDstFileName.
Set a file name with an absolute path as follows:
Drive name + ":" + \Directory name\File name
lpcwszDstFileName
must not be a file name that already exists. The transfer destination
directory must already exist.
In the C70, multiple program files under \PRG\
USER can be collectively copied to a file on a
personal computer. In this case, specify "*.*" as a file name for lpcwszSrcFileName (example:
M01:\PRG\USER\*.*). Set any file name on a personal computer for lpcwszDstFileName
(example: C:\PLURAL.PRG). To expand files combined into one in the C70, set any file name on
a personal computer for lpcwszSrcFileName (example: C:\PLURAL.PRG) and set "ALL.PRG" as
a file name under \PRG\USER of lpcwszDstFileName (example: M01:\PRG\USER\ALL.PRG).
This method does not check whether the set directory and file name are appropriate or not. It
is recommended to check the appropriateness of file name and directory for irregular operations
such as transfer between files with different types and applications (example: overwriting the
user program (\PRG\USER\ to.PRG) with p
arameter file (PARAMET.BIN)) or copying a file to a
directory with different purposes.
(Note) Do not perform this operation during automatic operation of the NC control unit. (C70 only)
□
Reference
Delete2(), Rename2()
□
Specifica-
tion
2-104
2.11.5 IEZNcFile6::Delete2
C70 M700 M800
2.11.5 IEZNcFile6::Delete2
Delete file
□ Custom call procedure
HRESULT Delete2(
LPCOLESTR lpcwszFileName, // (I) File name
LONG* plRet // (O) Error code
)
□ Automation call procedure
File_Delete2(
lpcwszFileName As STRING // (I) File name
) As LONG // (O) Error code
□
Argument
lpcwszFileName: Sets the file name as a UNICODE character string.
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK : Normal termination
EZNC_FILE_DEL_BUSY: Deletion is disabled (during operation)
EZNC_FILE_DEL_FILESYSTEM: File system error
EZNC_FILE_DEL_ILLEGALNAME: Invalid file name format
EZNC_FILE_DEL_PROTECT: Deletion is disabled (protected)
EZNC_FILE_DEL_NODIR: Directory does not exist
EZNC_FILE_DEL_NODRIVE: Drive does not exist
EZNC_FILE_DEL_NOFILE: File does not exist
EZNC_PCFILE_DEL_NOTDELETE: File cannot be deleted
(Note) If an error occurs on the personal computer, the error code EZNC_FILE_… becomes
EZNC_PCFILE_….
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
Deletes the file set in lpcwszFileName.
Set a file name with an absolute path as follows:
Drive name + ":" + \Directory name\File name
(Note) Do not perform this operation during automatic operation of the NC control unit. (C70 only)
For the M700/M800 series, the operation can be
performed unless automatic operation of
the file intended for operation is being carried out.
□
Reference
Copy2(), Rename2()
□
Specifica-
tion

2-105
2.11.6 IEZNcFile6::Rename2
C70 M700 M800
2.11.6 IEZNcFile6::Rename2
Change file name
□ Custom call procedure
HRESULT Rename2(
LPCOLESTR lpcwszSrcFileName, // (I) Old file name
LPCOLESTR lpcwszDstFileName, // (I) New file name
LONG* plRet // (O) Error code
)
□ Automation call procedure
File_Rename2(
lpcwszSrcFileName As STRING // (I) Old file name
lpcwszDstFileName As STRING // (I) New file name
) As LONG // (O) Error code
□
Argument
lpcwszSrcFileName: Sets an old file name.
lpcwszDstFileName: Sets a new file name.
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK : Normal termination
EZNC_FILE_REN_BUSY: Rename is disabled (during operation)
EZNC_FILE_REN_FILEEXIST: New file name already exists
EZNC_FILE_REN_FILESYSTEM: File system error
EZNC_FILE_REN_ILLEGALNAME: Invalid file name format
EZNC_FILE_REN_PROTECT: Rename is disabled (protected)
EZNC_FILE_REN_NODIR: Directory does not exist
EZNC_FILE_REN_NODRIVE: Drive does not exist
EZNC_FILE_REN_NOFILE: File does not exist
EZNC_PCFILE_REN_NOTRENAME: Rename is disabled
EZNC_PCFILE_REN_SAMENAME: New and old file names are identical
(Note) If an error occurs on the personal computer, the error code EZNC_FILE_… becomes
EZNC_PCFILE_….
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
Changes the file name set for lpcwszSrcFileName to that set for lpcwszDstFileName.
For lpszSrcFileName, set with an absolute path.
Drive name + ":" + \Directory name\File name
For lpcwszDstFileName, set only file name without drive name and directory
. For
lpcwszDstFileName, a file name that already exists must not be set.
(Note) Do not perform this operation during automatic operation of the NC control unit. (C70 only)
For the M700/M800 series, the operation can be perf
ormed during automatic operation of
the NC control unit
, unless automatic operation of the file intended for operation is being
carried out.
□
Reference
Copy2(), Delete2()
□
Specifica-
tion
2-106
2.11.7 IEZNcFile6::GetDriveInformation
C70 M700 M800
2.11.7 IEZNcFile6::GetDriveInformation
Get drive information
□ Custom call procedure
HRESULT GetDriveInformation(
LPOLESTR* lppwszDriveInfo, // (O) Drive information character string
LONG* plRet // (O) Error code
)
□ Automation call procedure
File_GetDriveInformation(
lppwszDriveInfo As STRING* // (O): Drive information character string
) As LONG // (O) Error code
□
Argument
lppwszDriveInfo: Gets drive information as a UNICODE character string.
The format of drive information is as follows:
Drive name:CRLFDrive name:CRLF…Drive name:CRLF\0
To separate drive names, CR, LF codes are inserted between
them. The end of the data
becomes CR, LF codes and a NULL code. The end of the data becomes a NULL code.
plRet: Returns the size of drive information got
or an error code. (Upon automation, the return
value is used.)
0: When a drive does not exist
1 or more: Number of bytes
EZNC_FILE_DRVLIST_READ: Drive information read error
EZNC_FILE_DIR_NODRIVE: Drive does not exist
(Note) If an error occurs on the personal computer, the error code EZNC_FILE_… becomes
EZNC_PCFILE_….
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
Reads drive information of the NC control unit that is currently connected.
The format of drive information is as follows:
Drive name:CRLFDrive name:CRLF…Drive name:CRLF\0
To separate drive names, CR, LF codes are inserted between them. The end of the data
becomes CR, LF codes and a NULL code. The end of the data becomes a NULL code.
Drive information on a personal computer cannot be read.
As the character st
ring area memory is allocated in this product, the client using VC++ needs
to release the character string area memory explicitly with CoTaskMemFree().
□
Reference
GetDriveSize()
□
Specifica-
tion
2-107
2.11.8 IEZNcFile6::GetDriveSize
C70 M700 M800
2.11.8 IEZNcFile6::GetDriveSize
Get free drive space
□ Custom call procedure
HRESULT GetDriveSize(
LPCOLESTR lpcwszDirectryName, // (I) Directory name
LONG* plDriveSize, // (O) Free space
LONG* plRet // (O) Error code
)
□ Automation call procedure
File_GetDriveSize(
lpcwszDirectryName As STRING // (I) Directory name
plDriveSize As LONG* // (O) Free space
) As LONG // (O) Error code
□
Argument
lpcwszDirectryName: Sets the directory name as a UNICODE character string.
Directory is set with an absolute path as follows:
Drive name + ":" + \Directory name\
plDriveSize: Gets free space of the set directory. (unit: byte)
plRet: Returns an error code. (Upon automation, the return value is used.)
EZNC_FILE_REN_FILESYSTEM: File system error
EZNC_FILE_DIR_NODRIVE: Drive does not exist
EZNC_FILE_DISKFREE_NODIR: Directory does not exist
EZNC_FILE_DISKFREE_NODRIVE: Drive does not exist
(Note) If an error occurs on the personal computer, the error code EZNC_FILE_… becomes
EZNC_PCFILE_….
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
Returns free space of the directory specified for lpcwszDirectryName.
The unit of free space is a byte.
Directory is specified with an absolute path as follows:
Drive name + ":" + \Directory name\
When a drive on a personal computer is set for drive name, setting of directory is ignored, and
free space of the drive is returned.
When the NC control unit is set for a drive name, free space of the set directory is returned.
When a subdirectory exists in the set
directory, usage in the subdirectory is excluded from
calculation of free space.
(Note) When a directory name (M01:\IC1\
) that corresponds to the compact flash (M700 series)
or SD card (M800 series) on the NC side is set, up to 2GB can get.
□
Reference
GetDriveInformation()
□
Specifica-
tion
2-108
2.11.9 IEZNcFile6::GetDriveSize2
C70 M800
2.11.9 IEZNcFile6::GetDriveSize2
Get free drive space
□ Custom call procedure
HRESULT GetDriveSize2(
LPCOLESTR lpcwszDirectryName, // (I) Directory name
LONG* plDriveSize, // (O) Free space
LONG* plRet // (O) Error code
)
□ Automation call procedure
File_GetDriveSize2(
lpcwszDirectryName As STRING // (I) Directory name
plDriveSize As LONG* // (O) Free space
) As LONG // (O) Error code
□
Argument
lpcwszDirectryName: Sets the directory name as a UNICODE character string.
Directory is set with an absolute path as follows:
Drive name + ":" + \Directory name\
plDriveSize: Gets free space of the set directory. (unit: byte)
Automation argument:
lpcwszDirectryName: See the explanation of lpcwszDirectryName.
pvDriveSize: Gets the free space of the set directory as a character string.
plRet: Returns an error code. (Upon automation, the return value is used.)
EZNC_FILE_REN_FILESYSTEM: File system error
EZNC_FILE_DIR_NODRIVE: Drive does not exist
EZNC_FILE_DISKFREE_NODIR: Directory does not exist
EZNC_FILE_DISKFREE_NODRIVE: Drive does not exist
(Note) If an error occurs on the personal computer, the error code EZNC_FILE_… becomes
EZNC_PCFILE_….
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
Returns free space of the directory set for lpcwszDirectryName.
The unit of free space is a byte.
Directory is set with an absolute path as follows:
Drive name + ":" + \Directory name\
When a drive on a personal computer is set for drive name, setting of directory is ignored, and
free space of the drive is returned.
When the NC control unit is set for a drive name, free space of the set directory is returned.
When a subdirectory exists in the set directory, usage in the subd
irectory is excluded from
calculation of free space.
This is valid only for the M800 series.
This function is not supported with C70.
□
Reference
GetDriveInformation()
□
Specifica-
tion
2-109
2.11.10 IEZNcFile6::OpenFile3
C70 M700 M800
2.11.10 IEZNcFile6::OpenFile3
Open file
□ Custom call procedure
HRESULT OpenFile3(
LPCOLESTR lpcwszFileName, // (I) File name containing a path
LONG lMode, // (I) Open mode
LONG* plRet // (O) Error code
)
□ Automation call procedure
File_OpenFile3(
bstrFileName As STRING // (I) File name containing a path
lModeAs LONG // (I) Open mode
) As LONG // (O) Error code
□
Argument
lpcwszFileName: Sets the file name containing a path as a UNICODE character string.
A file is set with an absolute path as follows:
Drive name + ":" + \Directory name\File name
For a list of files in the NC control unit that is accessible, refer to Table 2-1, Table 2-2 and Table
2-3. All files except for machining programs in the NC control unit can be backed up, but cannot
be edited.
bstrFileName: Refer to the explanation of lpcwszFileName.
lMode: Sets open mode.
Value
Meaning
EZNC_FILE_READ Read mode
EZNC_FILE_WRITE Write mode
EZNC_FILE_OVERWRITE Overwrite mode (writes even if the specified file exists.)
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK: Normal termination
EZNC_FILE_OPEN_OPEN: File cannot be opened
EZNC_FILE_OPEN_ALREADYOPENED: File is already open
EZNC_FILE_OPEN_FILEEXIST: File already exists (in write mode)
EZNC_FILE_OPEN_FILENOEXIST: File does not exist (in read mode)
EZNC_FILE_OPEN_MODE: Invalid open mode
EZNC_FILE_OPEN_NOTOPEN: File cannot be opened
EZNC_FILE_OPEN_CREATE: Temporary file cannot be created (in write mode)
EZNC_FILE_READFILE_CREATE: Temporary file cannot be created (in read mode)
EZNC_FILE_DIR_NODRIVE: Drive does not exist
EZNC_FILE_DIR_ALREADYOPENED: A different directory is already opened
EZNC_FILE_OPEN_ILLEGALPATH: Invalid file path
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
2-110
□
Function
Opens a file in the specified mode. The directory that creates a temporary file is created in the
following order of priority:
Directory set with environment variable TMP
Directory to which the product is installed
The temporary file name is MELDASn. A number is placed in n.
(Note 1) Make sure to close the open file with CloseFile2() (or AbortFile2()). The temporary file
will remain if CloseFile2() is not used.
(Note 2) Do not perform write or overwrite operation during automatic operation of the NC control
unit. (C70 only)
For the M700/M800 series
, write or overwrite operation can be performed during automatic
operation of the NC control unit
, unless automatic operation of the file intended for
operation is being carried out. Read operation can be performed during automatic operation
of the NC control unit.
(Note 3) It takes C70 approximately 20 s to read SRAM.BIN (SRAM data (binary format)). Other
methods cannot be used during that time.
□
Reference
CloseFile2(), AbortFile2(), ReadFile2(), WriteFile()
□
Specifica-
tion
2-111
Table 2-1 M700 series (version A0 or later) List of accessible files
File description
Directory
File name
Remarks
Machining program
M01:\PRG\USER\
Program No.
MTB macro
M01:\PRG\MMACRO\
Program No.
Program No. is O100001000 to O199999999.
Fixed cycle program
M01:\PRG\FIX\
Program No.
Program No. is 0100000010 to 100009999.
MDI program
M01:\PRG\MDI\
MDI.PRG
Parameters [User, machine]
M01:\PRM\
ALL.PRM
Auxiliary axis parameter
M01:\PRM\
AUXAXIS.PRM
M700/M700VW only
DeviceNet parameter file
M01:\PRM\
DEVICENT.PRM
Rotary axis geometric deviation
parameter file
M01:\PRM\
GEOMETRY.PRM
PLC program
M01:\LAD\
USERPLC.LAD
Workpiece offset data
M01:\DAT\
WORK.OFS
Tool compensation amount data
M01:\DAT\
TOOL.OFS
Common variable data
M01:\DAT\
COMMON.VAR
Custom variable data
M01:\DAT\
CUSTOM.VAR
SRAM data (binary format)
M01:\DAT\
SRAM.BIN
Sampling data file (binary format)
M01:\DAT\
SAMPLE.BIN
Tool life management data file
M01:\DAT\
TLIFE.TLF
Tool management data file
M01:\DAT\
TOOLMNG.DAT
SRAM open data file
M01:\DAT\
SRAMOPEN.DAT
Device open data file
M01:\DAT\
DEVOPEN.DAT
Machining surface data
M01:\DAT\
RNAVI.DAT
Extended SRAM data (binary format)
M01:\DAT\
EXTSRAM.BIN
All history
M01:\LOG\
ALLLOGLOG
Key history, alarm history, programmable controller
I/O signal history, AC input power supply faults
history
Key history
M01:\LOG\
KEYLOGLOG
Sampling data file
M01:\LOG\
NCSAMP.CSV
NC-side compact flash
M01:\IC1\
Any
The NC-side compact flash (hereinafter referred to
as the "NC-side CF card")
is recognized as DS (data server) from the NC
control unit. Used for data backup, storing
large-capacity programs, etc.
2-112
Table 2-2 M800 series List of accessible files
File description
Directory
File name
Remarks
Machining program
M01:\PRG\USER\
Program No.
MTB macro
M01:\PRG\MMACRO\
Program No.
Program No. is 100010000 to 199999999.
Fixed cycle program
M01:\PRG\FIX\
Program No.
Program No. is 100000010 to 100009999.
MDI program
M01:\PRG\MDI\
MDI.PRG
Parameters [User, machine]
M01:\PRM\
ALL.PRM
The header (1st line) is different from the M700
series.
An M700 file can be used with M800, but an
M800 file cannot be used with the M800 series.
Auxiliary axis parameter
M01:\PRM\
AUXAXIS.PRM
DeviceNet parameter file
M01:\PRM\
DEVICENT.PRM
Rotary axis geometric deviation
parameter file
M01:\PRM\
GEOMETRY.PRM
Safety parameter file
M01:\PRM\
SAFEPARA.BIN
System files for maintenance and
service
M01:\PRM\
SYSTEM.PRM
This cannot be accessed by the user.
PLC program file
M01:\LAD\
USERPLC.LAD
Not compatible with M700 series.
PLC program file for each project
M01:\LAD\
PROJECTxx.LAD
xx01 to usable project numbers
Own station safety PLC program file
M01:\LAD\
SAFEPLC1.LAD
Other station safety PLC program file
M01:\LAD\
SAFEPLC2.LAD
Workpiece offset data file
M01:\DAT\
WORK.OFS
Tool compensation amount data
M01:\DAT\
TOOL.OFS
Tool life management data file
M01:\DAT\
TLIFE.TLF
Common variable data file
M01:\DAT\
COMMON.VAR
The format is different from M700 series
SRAM data
M01:\DAT\
SRAM.BIN
Not compatible with M700 series.
Tool management data file
M01:\DAT\
TOOLMNG.DAT
SRAM open data file
M01:\DAT\
SRAMOPEN.DAT
Device open data file
M01:\DAT\
DEVOPEN.DAT
Machining surface data
M01:\DAT\
RNAVI.DAT
Tool safety data file
M01:\DAT\
TOOLALL.DAT
Machine manufacturer macro variable
data file
M01:\DAT\
MMACRO.VAR
All history
M01:\LOG\
ALLLOGLOG
The format is different from M700 series.
Key history data file
M01:\LOG\
KEYLOGLOG
The format is different from M700 series.
Touchscreen history
M01:\LOG\
TOUCHLOG.LOG
Sampling data file
M01:\LOG\
NCSAMP.CSV
Sampling data file
M01:\LOG\
NCSAMP.BIN
PLC message data file (English)
M01:\PLCMSG\
PLCMSG_ENG.TXT
PLC message data file (Japanese)
M01:\PLCMSG\
PLCMSG_JPN.TXT,
etc.
NC-side SD card
M01:\IC1\
Any
The NC-side SD card is recognized as DS (data
server) from the NC control unit. Used for data
backup, storing large-capacity programs, etc.
Table 2-3 C70 List of accessible files
File description
Directory
File name
Remarks
Machining program
M01:\PRG\USER\
Program No. PRG
Fixed cycle program
M01:\PRG\FIX\
Program No. PRG
MDI program
M01:\PRG\MDI\
MDI.PRG
Parameters [User, machine]
M01:\PRM\
ALL.PRM
PLC program file
M01:\LAD\
USERPLC.LAD
Workpiece offset
M01:\DAT\
WORK.OFS
Tool offset data
M01:\DAT\
TOOL.OFS
Common variable data
M01:\DAT\
COMMON.VAR
SRAM data (binary format)
M01:\DAT\
SRAM.BIN
For maintenance
Sampling data
M01:\LOG\
NCSAMP.CSV
For maintenance
Operation history data
M01:\LOG\
TRACE.TRC
For maintenance
!危険
Cautions for writing to a file
Carefully check a file before writing to the file for the NC control unit. Writing to an incorrect file may cause
unexpected operation, resulting in a serious accident.
DANGER
2-113
2.11.11 IEZNcFile6::CloseFile2
C70 M700 M800
2.11.11 IEZNcFile6::CloseFile2
Close file
□ Custom call procedure
HRESULT CloseFile2(
LONG* plRet // (O) Error code
)
□ Automation call procedure
File_CloseFile2(
) As LONG // (O) Error code
□
Argument
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK: Normal termination
EZNC_FILE_WRITEFILE_WRITE: File is not writable
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
Closes a file. When the file was opened with OpenFile3(), make sure to close it with
CloseFile2() (or AbortFile2()).
(Note) Do not perform this operation during automatic operation of the NC control unit. (C70 only)
For the M700/M800 series, the operation can be performed during automatic operation of
the NC control unit
, unless automatic operation of the file intended for operation is being
carried out.
□
Reference
OpenFile3(), AbortFile2(), ReadFile2(), WriteFile()
□
Specifica-
tion
2-114
2.11.12 IEZNcFile6::AbortFile2
C70 M700 M800
2.11.12 IEZNcFile6::AbortFile2
Force close file
□ Custom call procedure
HRESULT AbortFile2(
LONG* plRet // (O) Error code
)
□ Automation call procedure
File_AbortFile2(
) As LONG // (O) Error code
□
Argument
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK: Normal termination
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
Forcibly closes an open file. Use this to stop writing. After writing is stopped, the file which was
being written to will be deleted.
The difference from CloseFile2() is that an error is not output.
□
Reference
OpenFile3(), CloseFile2(), ReadFile2(), WriteFile()
□
Specifica-
tion
2-115
2.11.13 IEZNcFile6::ReadFile2
C70 M700 M800
2.11.13 IEZNcFile6::ReadFile2
Read file
□ Custom call procedure
HRESULT ReadFile2(
DWORD dwLength, // (I) Size of data to be read
BYTE** ppbData, // (O) Read data
DWORD* pdwNumRead, // (O) Read data size
LONG* plRet // (O) Error code
)
□ Automation call procedure
File_ReadFile2(
lLength As LONG // (I) Size of data to be read
pvData As VARIANT* // (O) Read data
) As LONG // (O) Error code
□
Argument
dwLength: Sets the size of data to be read at a time in the number of bytes.
ppbData
: Returns the pointer for the read byte data array. As the read data area is allocated in
this product, the client needs to release it explicitly with CoTaskMemFree().
pdwNumRead:
Returns the number of bytes that were actually read. In automation call, the
VARIANT data includes the number of bytes.
Automation argument:
lLength: Refer to the explanation of dwLength.
pvData: Returns the read byte data array in VARIANT.
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK: Normal termination
EZNC_FILE_READFILE_NOTOPEN: No file is open in the read mode
EZNC_FILE_READFILE_READ: File is not readable
EZNC_FILE_READFILE_CREATE: Temporary file cannot be created
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
Reads data from the file opened with OpenFile3(). Data to be read returns a byte data array and
its number of bytes. Determines as the end of file when pdwNumRead is smaller than dwLength.
Setting the size of data to be read at a time. When reading a large file, it can be read in multiple
parts. The file can be read in sequence until CloseFile2() is executed.
□
Reference
OpenFile3(), CloseFile2(), AbortFile2(), WriteFile()
□
Specifica-
tion
2-116
2.11.14 IEZNcFile6::WriteFile
C70 M700 M800
2.11.14 IEZNcFile6::WriteFile
Write file
□ Custom call procedure
HRESULT WriteFile(
DWORD dwLength, // (I) Size of data to be written
BYTE* pbData, // (I) Data to be written
LONG* plRet // (O) Error code
)
□ Automation call procedure
File_WriteFile(
vData As VARIANT // (I) Data to be written
) As LONG // (O) Error code
□
Argument
dwLength: Sets the size of data that is written at a time in the number of bytes.
pbData: Sets data to be written as byte array.
Automation argument:
vData: Creates data to be written as a byte array and sets it by substituting it in vData (VARIANT
type) as shown in the example below.
Example) Dim vWriteFile As Variant
Dim byteWrite() As Byte
vWriteFile = byteWrite
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK: Normal termination
EZNC_FILE_WRITEFILE_NOTOPEN: No file is open in write mode
EZNC_FILE_WRITEFILE_WRITE: Cannot be written to a file
EZNC_FILE_LENGTH: Invalid write data size
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
Writes data to a file opened with OpenFile3(). Data to be written is data in a byte array.
Set
s the size of data to be written at a time. When writing a large amount of data, it can be
written in multiple parts. Data can be written in sequence until CloseFile2() is executed.
(Note 1) When a file in the NC control unit except for a machining program is changed, extra care
should be taken because it may cause the NC control unit malfunction. Make sure to back
up in advance to restore to its original state.
□
Reference
OpenFile3(), CloseFile2(), AbortFile2(), ReadFile2()
□
Specifica-
tion
!危険
Cautions for writing to a file
Carefully check a file before writing to the file for the NC control unit. Writing to an incorrect file may cause
unexpected operation, resulting in a serious accident.
DANGER

2-117
2.11.15 IEZNcFile6::OpenNCFile2
M700 M800
2.11.15 IEZNcFile6::OpenNCFile2
Open machining program dedicated
file
□ Custom call procedure
HRESULT OpenNCFile2 (
LPCOLESTR lpcwszFileName, // (I) File name containing a path
LONG lMode, // (I) Open mode
LONG* plRet // (O) Error code
)
□ Automation call procedure
File_OpenNCFile2 (
bstrFileName As STRING // (I) File name containing a path
lMode As LONG // (I) Open mode
) As LONG // (O) Error code
□
Argument
lpcwszFileName: Sets the file name containing a path as a UNICODE character string.
A file is set with an absolute path as follows:
Drive name + ":" + \Directory name\File name
Paths other than those shown below cannot be used.
Model
Machining program
M700 series
M01:\PRG\USER\Machining Program No.
M01:\PRG\UMACRO\Machining Program No.
M01:\PRG\MMACRO\Machining Program No.
M01:\PRG\FIX\Machining Program No.
M01:\PRG\MDI\Machining Program No.
M800 series
M01:\PRG\USER\Machining Program Name (32 or less alphanumeric
characters including extension)
M01:\PRG\MMACRO\Machining Program No. (100010000
–199999999)
M01:\PRG\FIX\Machining Program No. (100000010 –100009999)
M01:\PRG\MDI\MDI.PRG
bstrFileName: Refer to the explanation of lpcwszFileName.
lMode:Sets open mode.
Value
Meaning
EZNC_FILE_READ Read mode
EZNC_FILE_WRITE Write mode
EZNC_FILE_OVERWRITE Overwrite mode (writes even if the specified file exists.)
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK: Normal termination
EZNC_FILE_OPEN_ALREADYOPENED: File is already open
EZNC_FILE_OPEN_FILEEXIST: File already exists (in write mode)
EZNC_FILE_OPEN_MODE: Invalid open mode
EZNC_FILE_OPEN_NOTOPEN: File cannot be opened
EZNC_FILE_OPEN_CREATE: File cannot be created (in write mode)
EZNC_FILE_OPEN_ILLEGALPATH: Invalid path
EZNC_FILE_OPEN_FILENOTEXIST: File does not exist
EZNC_FILE_OPEN_OPEN: File cannot be opened
EZNC_FILE_DIR_ALREADYOPENED: A different directory is already opened
EZ_ERR_NOT_SUPPORT: Not supported
2-118
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
Opens the machining program file in the set mode. The directory that creates a temporary file is
created in the following order of priority:
Directory specified with environment variable TMP
Directory to which the product is installed
The temporary file name is "MELDASn". A number is placed in n.
OpenFile3() cannot be used concurrently.
This function is not supported with C70. (EZ_ERR_NOT_SUPPORT is returned to plRet.)
(Note 1) Make sure to close the open file with CloseNCFile2() (or AbortNCFile2()
). If
CloseNCFile2() is not used, a temporary file will remain.
(Note 2)For the M700/M800 series
, write or overwrite operation can be performed during
automatic operation of the NC control unit, unless automatic operation of the file intended
for operation is being carried out. Read operation
can be performed during automatic
operation of the NC control unit.
□
Reference
CloseNCFile2(), AbortNCFile2(), ReadNCFile2(), WriteNCFile()
□
Specifica-
tion
2-119
2.11.16 IEZNcFile6::CloseNCFile
M700 M800
2.11.16 IEZNcFile6::CloseNCFile2
Close machining program dedicated
file
□ Custom call procedure
HRESULT CloseNCFile2(
LONG* plRet // (O) Error code
)
□ Automation call procedure
File_CloseNCFile2(
) As LONG // (O) Error code
□
Argument
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK: Normal termination
EZNC_FILE_WRITEFILE_WRITE: File is not writable
EZ_ERR_NOT_SUPPORT: Not supported
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
Closes the machining program file.
This function is not supported with C70. (EZ_ERR_NOT_SUPPORT is returned to plRet.)
(Note 1) For the M700/M800 series, the operation can be performed during automatic operation
of the NC control unit, unless automatic operation of the file intended for operation is being
carried out.
(Note 2) When the file was opened with OpenNCFile2()
, make sure to close it with
CloseNCFile2() (or AborNCtFile2()).
□
Reference
OpenNCFile2(), AbortNCFile2(), ReadNCFile2(), WriteNCFile()
□
Specifica-
tion

2-120
2.11.17 IEZNcFile6::AbortNCFile2
M700 M800
2.11.17 IEZNcFile6::AbortNCFile2
Force close machining program
dedicated file
□ Custom call procedure
HRESULT AbortNCFile2(
LONG* plRet // (O) Error code
)
□ Automation call procedure
File_AbortNCFile2(
) As LONG // (O) Error code
□
Argument
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK: Normal termination
EZ_ERR_NOT_SUPPORT: Not supported
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
Force closes the open machining program file. Use this to stop writing. After writing is stopped,
the file which was being written to will be deleted.
The difference from CloseNCFile2() is that an error is not output.
This function is not supported with C70. (EZ_ERR_NOT_SUPPORT is returned to plRet.)
2-121
2.11.18 IEZNcFile6::ReadNCFile2
M700 M800
2.11.18 IEZNcFile6::ReadNCFile2
Read machining program dedicated
file
□ Custom call procedure
HRESULT ReadNCFile2(
DWORD dwLength, // (I) Size of data to be read
BYTE** ppbData, // (O) Read data
DWORD* pdwNumRead, // (O) Read data size
LONG* plRet // (O) Error code
)
□ Automation call procedure
File_ReadNCFile2(
lLength As LONG // (I) Size of data to be read
pvData As VARIANT* // (O) Read data
) As LONG // (O) Error code
□
Argument
dwLength: Setss the size of data to be read at a time in the number of bytes.
ppbData
: Returns the pointer for the read byte data array. As the read data area is allocated in
this product, the client needs to release it explicitly with CoTaskMemFree().
pdwNumRead: Returns the
number of bytes that were actually read. In automation call, the
VARIANT data includes the number of bytes.
Automation argument:
lLength: Refer to the explanation of dwLength.
pvData: Returns the read byte data array in VARIANT.
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK: Normal termination
EZNC_FILE_READFILE_NOTOPEN: No file is open in the read mode
EZNC_FILE_READFILE_READ: File is not readable
EZNC_FILE_READFILE_CREATE: Temporary file cannot be created
EZ_ERR_NOT_SUPPORT: Not supported
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
Data is read from the machining program file opened with OpenNCFile2(). Data to be read
returns a byte data array and its number of
bytes. Determines as the end of file when
pdwNumRead is smaller than dwLength.
Set
s the size of data to be read at a time. When reading a large file, it can be read in multiple
parts. The file can be read in sequence until CloseNCFile2() is executed.
This function is not supported with C70. (EZ_ERR_NOT_SUPPORT is returned to plRet.)
□
Reference
OpenNCFile2(), CloseNCFile2(), AbortNCFile2(), WriteNCFile()
□
Specifica-
tion
2-122
2.11.19 IEZNcFile6::WriteNCFile
M700 M800
2.11.19 IEZNcFile6::WriteNCFile
Write machining program dedicated
file
□ Custom call procedure
HRESULT WriteNCFile(
DWORD dwLength, // (I) Size of data to be written
BYTE* pbData, // (I) Data to be written
LONG* plRet // (O) Error code
)
□ Automation call procedure
File_WriteNCFile(
vData As VARIANT // (I) Data to be written
) As LONG // (O) Error code
□
Argument
dwLength: Sets the size of data that is written at a time in the number of bytes.
pbData: Set
s data to be written as byte array. In automation call, vData includes the number of
bytes.
Automation argument:
vData: Creates data to be written as a byte array and sets it by substituting it in vData (VARIANT
type) as shown in the example below.
Example) Dim vWriteFile As Variant
Dim byteWrite() As Byte
vWriteFile = byteWrite
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK: Normal termination
EZNC_FILE_WRITEFILE_NOTOPEN: No file is open in write mode
EZNC_FILE_WRITEFILE_WRITE: Cannot be written to a file
EZNC_FILE_LENGTH: Invalid write data size
EZ_ERR_NOT_SUPPORT: Not supported
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
Data is written to the machining program file opened with OpenNCFile2(). Data to be written is
data in a byte array.
Sets the size of da
ta to be written at a time. When writing a large amount of data, it can be
written in multiple parts. Data can be written in sequence until CloseNCFile2() is executed.
This function is not supported with C70. (EZ_ERR_NOT_SUPPORT is returned to plRet.)
(Note) For the M700/M800 series, when edit lock B (#8105) parameter is 1, programs 8000 to
9999 cannot be written.
When edit lock C (#1121) parameter is 1, programs 9000 to 9999
cannot be written.
□
Reference
OpenNCFile2(), CloseNCFile2(), AbortNCFile2(), ReadNCFile2()
□
Specifica-
tion
!危険
Cautions for writing to a file
Carefully check a file before writing to the file for the NC control unit. Writing to an incorrect file may cause
unexpected operation, resulting in a serious accident.
DANGER
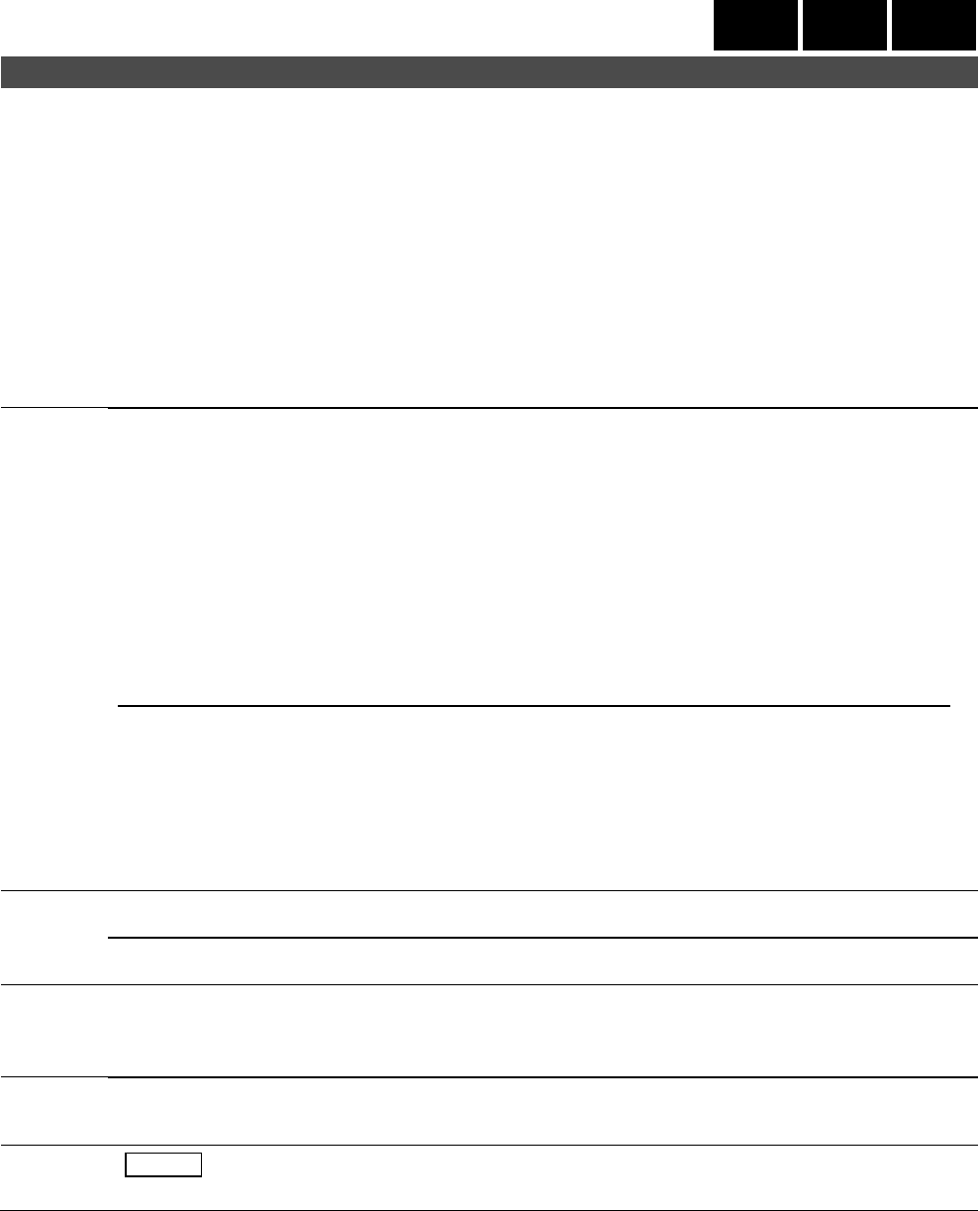
2-123
2.12 IEZNcCommonVariable2 Interface
2.12.1 IEZNcCommonVariable2::CommonVRead
C70 M700 M800
2.12.1 IEZNcCommonVariable2::CommonVRead
Read common variables
□ Custom call procedure
HRESULT CommonVRead(
LONG lIndex, // (I) Variable number
DOUBLE* pdData, // (O) Variable value
LONG* plType // (O) Type
LONG* plRet // (O) Error code
)
□ Automation call procedure
CommonVariable_Read2(
lIndex As LONG // (I) Variable number
pdData As DOUBLE* // (O) Variable value
plType As LONG* // (O) Type
) As LONG // (O) Error code
□
Argument
lIndex: Sets the common variable number to be read.
Value:
(For C70)
100 to 199, 500 to 999
(For M700/M800 series)
100 to 199、400 to 999, 100100 to 100199, 200100 to 200199, 300100 to 300199
400100 to 400199, 500100 to 500199, 600100 to 600199
700100 to 700199, 800100 to 800199, 900000 to 907399
pdData: Returns the common variable value of the set common variable number.
plType: Returns the variable value type. (For the M700/M800 series, enabled.)
Value Meaning
1 Numerical value
0 Not set
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK: Normal termination
EZNC_DATA_READ_ADDR: Invalid system specification
EZNC_DATA_READ_READ: Data is not readable
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
Reads common variables. There is limit to the common variable number that can be handled,
depending on specifications for the number of sets for common variables. For common variables
#100 to #199, system specification is necessary.
□
Reference
CommonVWrite(), GetSize()
□
Specifica-
tion
(System common variables #100 to #199 only)
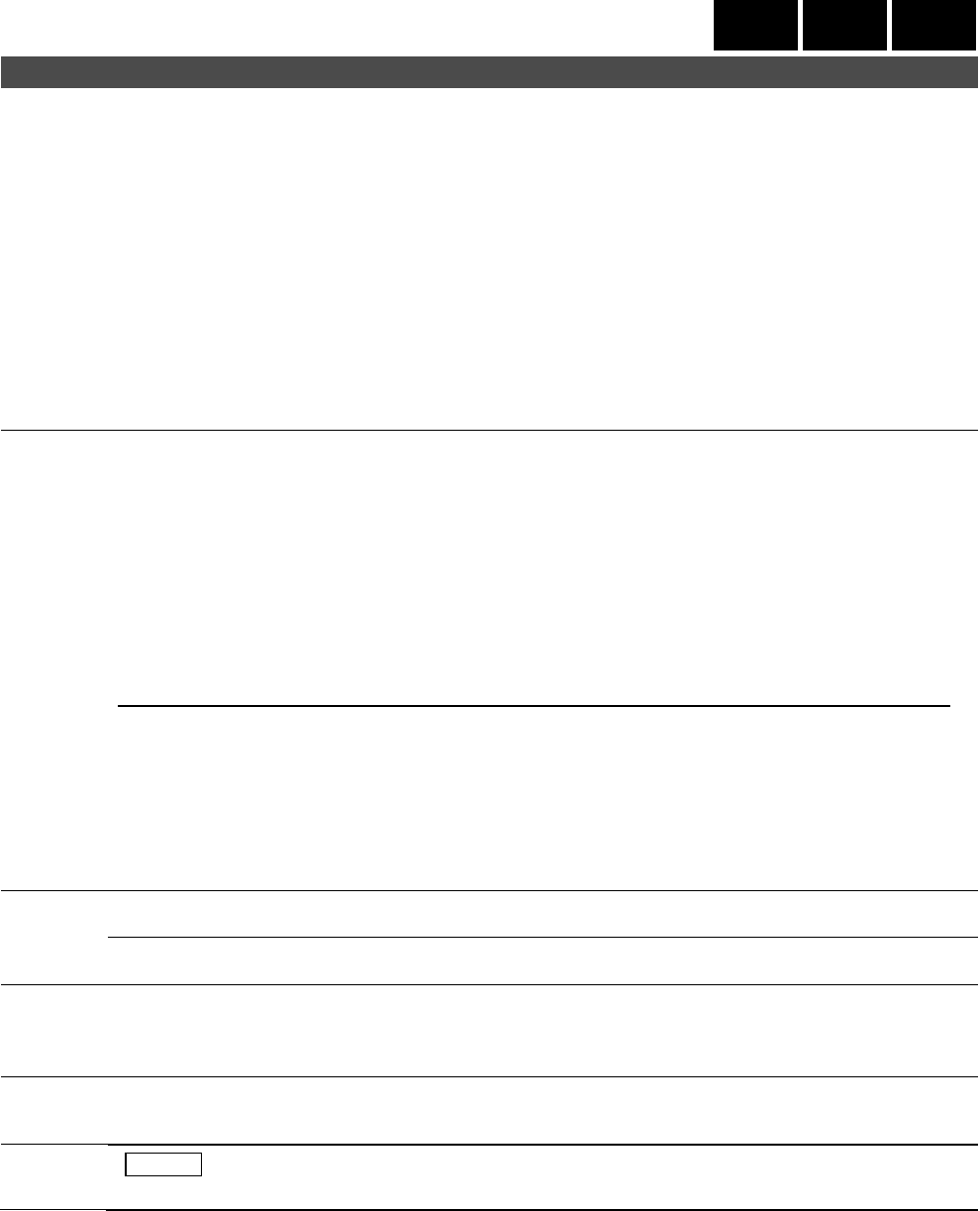
2-124
2.12.2 IEZNcCommonVariable2::CommonVWrite
C70 M700 M800
2.12.2 IEZNcCommonVariable2::CommonVWrite
Write common variables
□ Custom call procedure
HRESULT CommonVWrite(
LONG lIndex, // (I) Variable number
DOUBLE dData, // (I) Variable value
LONG lType, // (I) Type
LONG* plRet // (O) Error code
)
□ Automation call procedure
CommonVariable_Write2(
lIndex As LONG // (I) Variable number
dData As DOUBLE // (I) Variable value
lType As LONG // (I) Type
) As LONG // (O) Error code
□
Argument
lIndex: Set the common variable number to be written.
Value:
(For C70)
100 to 199, 500 to 999
(For M700/M800 series)
100 to 199, 400 to 999, 100100 to 100199, 200100 to 200199、300100 to 300199
400100 to 400199, 500100 to 500199, 600100 to 600199
700100 to 700199, 800100 to 800199, 900000 to 907399
dData: Sets the common variable value to be written to the set common variable number.
lType: Specifies the type. (For the M700/M800, enabled.)
Value Meaning
1 Numerical value
0 Not set
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK: Normal termination
EZNC_DATA_WRITE_ADDR: Invalid part system setting
EZNC_DATA_WRITE_WRITE: Data is not writable
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
Writes common variables. There is limit to the common variable number that can be handled,
depending on specifications for the number of sets for common variables. For common variables
#100 to #199, part system setting is necessary.
□
Reference
CommonVRead(), GetSize()
□
Specifica-
tion
(System common variables #100 to #199 only)
2-125
2.12.3 IEZNcCommonVariable2::GetSize
C70 M700 M800
2.12.3 IEZNcCommonVariable2::GetSize
Get number of sets for
common variables
□ Custom call procedure
HRESULT GetSize(
LONG lType, // (I) Common variable type
LONG* plData, // (O) Number of sets
LONG* plRet // (O) Error code
)
□ Automation call procedure
CommonVariable_GetSize(
lType As LONG // (I) Common variable type
plData As LONG* // (O) Number of sets
) As LONG // (O) Error code
□
Argument
lType: Specifies the common variable type to be read.
Value Meaning
0 When the number of sets of common variables #100 and greater is got.
1 When the number of sets of common variables #500 and greater is got.
plData: Returns the number of sets of common variable type.
Value meaning: 40 = 40 [sets]
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK: Normal termination
EZNC_DATA_READ_ADDR: Invalid part system setting
EZNC_DATA_READ_READ: Data is not readable
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
Reads the number of sets of common variables. For common variables #100 to #199, part
system setting is necessary.
□
Reference
CommonVRead(), CommonVWrite()
□
Specifica-
tion
(System common variables #100 to #199 only)
2-126
2.12.4 IEZNcCommonVariable2::GetName
C70 M700 M800
2.12.4 IEZNcCommonVariable2::GetName
Get names of common
variables
□ Custom call procedure
HRESULT GetName(
LONG lIndex, // (I) Common variable number
LPOLESTR* lppwszName, // (O) Common variable name character string
LONG* plRet // (O) Error code
)
□ Automation call procedure
CommonVarialbe_GetName(
lIndex As LONG // (I) Common variable number
lppwszName As STRING* // (O) Common variable name character string
) As LONG // (O) Error code
□
Argument
lIndex: Sets the common variable number to be read.
Value:
(For M700 series and C70)
500 to 519
(For M800 series)
500 to 599
lppwszName: Returns the common variable name as a UNICODE character string.
Names are seven alphanumeric characters starting with an alphabet letter. The
character string ends with a NULL code.
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK: Normal termination
EZNC_DATA_READ_READ: Data is not readable
EZNC_DATA_READ_DATASIZE: Exceeded maximum data size
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
Reads common variable names. Names are seven alphanumeric characters starting with an
alphabet letter. The character string ends with a NULL code.
As the character string area memory is allocated in this product, the client using VC++ needs to
release the character string area memory explicitly with CoTaskMemFree().
□
Reference
CommonVRead(), CommonVWrite()
□
Specifica-
tion
2-127
2.12.5 IEZNcCommonVariable2::SetName
C70 M700 M800
2.12.5 IEZNcCommonVariable2::SetName
Set name settings for
common variables
□ Custom call procedure
HRESULT SetName(
LONG lIndex, // (I) Common variable number
LPCOLESTR lpcwszName, // (I) Common variable name character string
LONG* plRet // (O) Error code
)
□ Automation call procedure
CommonVariable_SetName(
lIndex As LONG // (I) Common variable number
lpcwszName As STRING // (I) Common variable name character string
) As LONG // (O) Error code
□
Argument
lIndex: Sets the common variable number to be written.
Value:
(For M700 series and C70)
500 to 519
(For M800 series)
500 to 599
lpcwszName: Set the common variable name as a UNICODE character string.
Names are seven alphanumeric characters starting with an alphabet letter. The
character string ends with a NULL code.
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK: Normal termination
EZNC_DATA_WRITE_WRITE: Data is not writable
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
Writes common variable names. Names are seven alphanumeric characters starting with an
alphabet letter. The character string ends with a NULL code.
□
Reference
GetName()
□
Specifica-
tion
2-128
2.12.6 IEZNcCommonVariable2::GetCVNullData
C70 M700 M800
2.12.6 IEZNcCommonVariable2::GetCVNullData
Get value when no numerical
value is set
□ Custom call procedure
HRESULT GetCVNullData(
DOUBLE* pdData, // (O) Value when no numerical value is set
LONG* plRet // (O) Error code
)
□ Automation call procedure
CommonVariable_GetNullData(
pdData As DOUBLE* // (O) Value when no numerical value is set
) As LONG // (O) Error code
□
Argument
pdData: Returns the value when no numerical value is set.
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK: Normal termination
EZNC_DATA_READ_READ: Data is not readable
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
Gets the value when no numerical value of variable (#100 to 199, #500 to 519) is set.
□
Reference
□
Specifica-
tion
2-129
2.13 IEZNcLocalVariable2 Interface
2.13.1 IEZNcLocalVariable2::LocalVRead
C70 M700 M800
2.13.1 IEZNcLocalVariable2::LocalVRead
Read local variable
□ Custom call procedure
HRESULT LocalVRead(
LONG lIndex, // (I) Variable number
LONG lLevel, // (I) Level
DOUBLE* pdData, // (O) Variable value
LONG* plType // (O) Type
LONG* plRet // (O) Error code
)
□ Automation call procedure
LocalVariable_Read2(
lIndex As LONG // (I) Variable number
lLevel As LONG // (I) Level
pdData As DOUBLE* // (O) Variable value
plType AS LONG* // (O) Type
) As LONG // (O) Error code
□
Argument
lIndex: Sets the common variable number to be read.
Value: 1 to 33
lLevel: Sets the macro subprogram execution level.
Value: 0 to 4
pdData: Returns the local variable value of the set local variable number of the set system.
plType: Returns the type. (Unused)
Value Meaning
1 Numerical value
0 Not set
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK: Normal termination
EZNC_DATA_READ_ADDR: Invalid part system setting
EZNC_DATA_READ_READ: Data is not readable
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
Reads the local variable value of the specified system.
□
Reference
GetMacroLevel()
□
Specifica-
tion
System
2-130
2.13.2 IEZNcLocalVariable2::GetMacroLevel
C70 M700 M800
2.13.2 IEZNcLocalVariable2::GetMacroLevel
Get macro subprogram call
level
□ Custom call procedure
HRESULT GetMacroLevel(
LONG* plData, // (O) Level
LONG* plRet // (O) Error code
)
□ Automation call procedure
LocalVariable_GetMacroLevel(
plData As LONG // (O) Level
) As LONG // (O) Error code
□
Argument
plData: Returns the macro subprogram call level.
Value: 0 to 8
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK: Normal termination
EZNC_DATA_READ_ADDR: Invalid part system setting
EZNC_DATA_READ_READ: Data is not readable
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
Gets the macro subprogram call level.
□
Reference
□
Specifica-
tion
System
2-131
2.13.3 IEZNcLocalVariable2::GetLVNullData
C70 M700 M800
2.13.3 IEZNcLocalVariable2::GetLVNullData
Get value when no numerical
value is set
□ Custom call procedure
HRESULT GetLVNullData(
DOUBLE* pdData, // (O) Value when no numerical value is set
LONG* plRet // (O) Error code
)
□ Automation call procedure
LocalVariable_GetNullData(
pdData As DOUBLE* // (O) Value when no numerical value is set
) As LONG // (O) Error code
□
Argument
pdData: Returns the value when no numerical value is set.
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK: Normal termination
EZNC_DATA_READ_READ: Data is not readable
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
Gets the value when no numerical value of variable (#1 to 33) is set.
□
Reference
□
Specifica-
tion

2-132
2.14 IEZNcTool3 Interface
2.14.1 IEZNcTool3::GetToolSetSize
C70 M700 M800
2.14.1 IEZNcTool3::GetToolSetSize Get number of sets for tool
offset
□ Custom call procedure
HRESULT GetToolSetSize(
LONG* plSize, // (O) Number of sets
LONG* plRet // (O) Error code
)
□ Automation call procedure
Tool_GetToolSetSize(
plSize As LONG* // (O) Number of sets
) As LONG // (O) Error code
□
Argument
plSize: Returns the number of sets for tool offset of the set part system.
The number of sets is determined by NC specifications.
Value meaning: 200 = 200 [sets]
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK: Normal termination
EZNC_DATA_READ_READ: Data is not readable
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
Gets the number of sets for tool offset of the set part system. The number of sets is determined
by NC specifications.
□
Reference
GetType()
□
Specifica-
tion
System
2-133
2.14.2 IEZNcTool3::GetType
C70 M700 M800
2.14.2 IEZNcTool3::GetType
Get tool offset type
□ Custom call procedure
HRESULT GetType(
LONG* plType, // (O) Type
LONG* plRet // (O) Error code
)
□ Automation call procedure
Tool_GetType(
plType As LONG* // (O) Type
) As LONG // (O) Error code
□
Argument
plType: Returns the tool offset type of the set part system.
Value Meaning
1 M system type I: 1 axis compensation amount
4 M system type II: 1 axis compensation amount with wear compensation amount
6 L system type: 2 axises compensation amount
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK: Normal termination
EZNC_DATA_READ_READ: Data is not readable
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
Gets the tool offset type of the set part system.
□
Reference
GetToolSetSize()
□
Specifica-
tion
System
2-134
2.14.3 IEZNcTool3::GetOffset
C70 M700 M800
2.14.3 IEZNcTool3::GetOffset
Get tool offset amount
□ Custom call procedure
HRESULT GetOffset(
LONG lType, // (I) Tool offset type
LONG lKind, // (I) Offset amount type
LONG lToolSetNo, // (I) Tool set number
DOUBLE* pdOffset, // (O) Offset amount
LONG* plNo, // (O) Hypothetical tool nose pointnumber
LONG* plRet // (O) Error code
)
□ Automation call procedure
Tool_GetOffset(
lType As LONG // (I) Tool offset type
lKind As LONG // (I) Offset amount type
lToolSetNo As LONG // (I) Tool set number
pdOffset As DOUBLE* // (O) Offset amount
plNo As LONG* // (O) Hypothetical tool nose point number
) As LONG // (O) Error code
□
Argument
lType: Sets the tool offset type. Refer to the parameter table.
lKind: Sets the type of tool offset amount. Refer to the parameter table.
lToolSetNo: Set the tool offset set number.
The number of sets can be got with GetToolSetSize().
pdOffset : Returns the tool offset amount. Refer to the parameter table.
plNo: Returns the hypothetical tool nose point number. Refer to the parameter table.
L system type only. Returns none except for the L system type.
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK: Normal termination
EZNC_DATA_READ_READ: Data is not readable
EZNC_DATA_READ_DATATYPE: Invalid data type
EZNC_DATA_READ_SUBSECT: Invalid subsection number
EZ_ERR_NOT_SUPPORT: Not supported
2-135
Parameter table
Value: Type
Value: Type of tool offset
amount
Data range
1: M system type I
0: Tool offset amount
-99,999.999 to 99,999.999 [mm]
4: M system type
II
0: Tool length compensation
amount (dimensions)
-99,999.999 to 99,999.999 [mm]
1: (Wear)
2: Tool radius compensation
amount (dimensions)
3: (Wear)
6: L system type
0: Tool length compensation
amount X
C70 : -99.999 to 99.999 [mm]
M700/M800 series : -99,
999.999 to
99,999.999 [mm]
1: Z
2: C (Y*)
3: Tool length offset amount
X
C70: -999.999 to 999.999 [mm]
M700/M800 series : -99,
999.999 to
99,999.999 [mm]
4: Z
5: C (Y*)
6: Tool radius (nose R) R
C70 : 0 to 99.999 [mm]
M700/M800 series : 0 to 99,999.999 [mm]
7: Tool radius (nose R) wear
amount r
C70 : 0 to 99.999 [mm]
M700/M800 series : 0 to 99,999.999 [mm]
8: Hypothetical tool nose
point number P
0 to 8 (Refer to Figure 1)
* For the M700/M800 series
Z
X
4
3
8
0
5
7
6
1
2
3
刃先点
図1.仮想刃先点番号
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
Gets the tool offset amount of the set part system/axis No. The range shown in the parameter
table varies depending on the command unit such as inch system and metric system of the
Mitsubishi CNC. For details, refer to the installation manual of each Mitsubishi CNC.
□
Reference
GetType(), SetOffset(), GetToolSetSize()
□
Specifica-
tion
System
Figure 1 Hypothetical tool nose point number
Tool
nose
point
2-136
2.14.4 IEZNcTool3::GetOffset2
C70 M700 M800
2.14.4 IEZNcTool3::GetOffset2
Get tool offset amount
□ Custom call procedure
HRESULT GetOffset2(
LONG lType, // (I) Tool offset type
LONG lKind, // (I) Offset amount type
LONG lToolSetNo, // (I) Tool set number
DOUBLE* pdOffset, // (O) Offset amount
LONG* plNo, // (O) Hypothetical tool nose point number
LONG* plRet // (O) Error code
)
□ Automation call procedure
Tool_GetOffset2(
lType As LONG // (I) Tool offset type
lKind As LONG // (I) Offset amount type
lToolSetNo As LONG // (I) Tool set number
pdOffset As DOUBLE* // (O) Offset amount
plNo As LONG* // (O) Hypothetical tool nose point number
) As LONG // (O) Error code
□
Argument
lType: Sets the tool offset type. Refer to the parameter table.
lKind: Sets the type of tool offset amount. Refer to the parameter table.
lToolSetNo: Sets the tool offset set number.
The number of sets can get with GetToolSetSize().
pdOffset : Returns the tool offset amount. Refer to the parameter table.
plNo: Returns the Hypothetical tool nose point number. Refer to the parameter table.
L system type only. Returns none except for the L system type.
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK: Normal termination
EZNC_DATA_READ_READ: Data is not readable
EZNC_DATA_READ_DATATYPE: Invalid data type
EZNC_DATA_READ_SUBSECT: Invalid subsection number
2-137
Parameter table
Value: Type
Value: Type of tool offset
amount
Data range
1: M system type I
0: Tool offset amount
-99,999.999 to 99,999.999 [mm]
4: M system type
II
0: Tool length compensation
amount (dimensions)
-99,999.999 to 99,999.999 [mm]
1: (Wear)
2: Tool radius compensation
amount (dimensions)
3: (Wear)
6: L system type
0: Tool length compensation
amount
C70 : -99.999 to 99.999 [mm]
M700/M800 series : -99,
999.999 to
99,999.999 [mm]
1: Z
2: C (Y*)
3: Tool length offset amount
X
C70: -999.999 to 999.999 [mm]
M700/M800 series : -99,
999.999 to
99,999.999 [mm]
4: Z
5: C (Y*)
6: Tool radius (nose R) R
C70 : 0 to 99.999 [mm]
M700/M800 series : 0 to 99,999.999 [mm]
7: Tool radius (nose R) wear
amount r
C70 : 0 to 99.999 [mm]
M700/M800 series : 0 to 99,999.999 [mm]
8: Hypothetical tool nose
point number P
0 to 8 (Refer to Figure 1)
* For the M700/M800 series
Z
X
4
3
8
0
5
7
6
1
2
3
刃先点
図1.仮想刃先点番号
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
Gets the tool offset amount of the set part system/axis No. The range shown in the parameter
table varies depending on the command unit such as inch system and metrik system of the
Mitsubishi CNC. For details, refer to the installation manual of each Mitsubishi CNC.
□
Reference
GetType(), SetOffset(), GetToolSetSize()
□
Specifica-
tion
System
Figure 1 Hypothetical tool nose point
Tool
nose
point

2-138
2.14.5 IEZNcTool3::SetOffset
C70 M700 M800
2.14.5 IEZNcTool3::SetOffset
Set tool offset amount
settings
□ Custom call procedure
HRESULT SetOffset(
LONG lType, // (I) Tool offset type
LONG lKind, // (I) Offset amount type
LONG lToolSetNo, // (I) Tool set number
DOUBLE dOffset, // (I) Offset amount
LONG lNo, // (I) Hypothetical tool nose point number
LONG* plRet // (O) Error code
)
□ Automation call procedure
Tool_SetOffset(
lType As LONG // (I) Tool offset type
lKind As LONG // (I) Offset amount type
lToolSetNo As LONG // (I) Tool set number
dOffset As DOUBLE // (I) Offset amount
lNo As LONG // (I) Hypothetical tool nose point point number
) As LONG // (O) Error code
□
Argument
lType: Sets the tool offset type. Refer to the parameter table.
lKind: Sets the type of tool offset amount. Refer to the parameter table.
lToolSetNo: Sets the tool offset set number.
The number of sets can get with GetToolSetSize().
dOffset: Sets the tool offset amount. Refer to the parameter table.
lNo: Sets the hypothetical tool nose point number. Refer to the parameter table.
L system type only. Disabled for the M system type.
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK: Normal termination
EZNC_DATA_WRITE_WRITE: Data is not writable
EZNC_DATA_WRITE_DATATYPE: Invalid data type
EZNC_DATA_WRITE_SUBSECT: Invalid subsection number
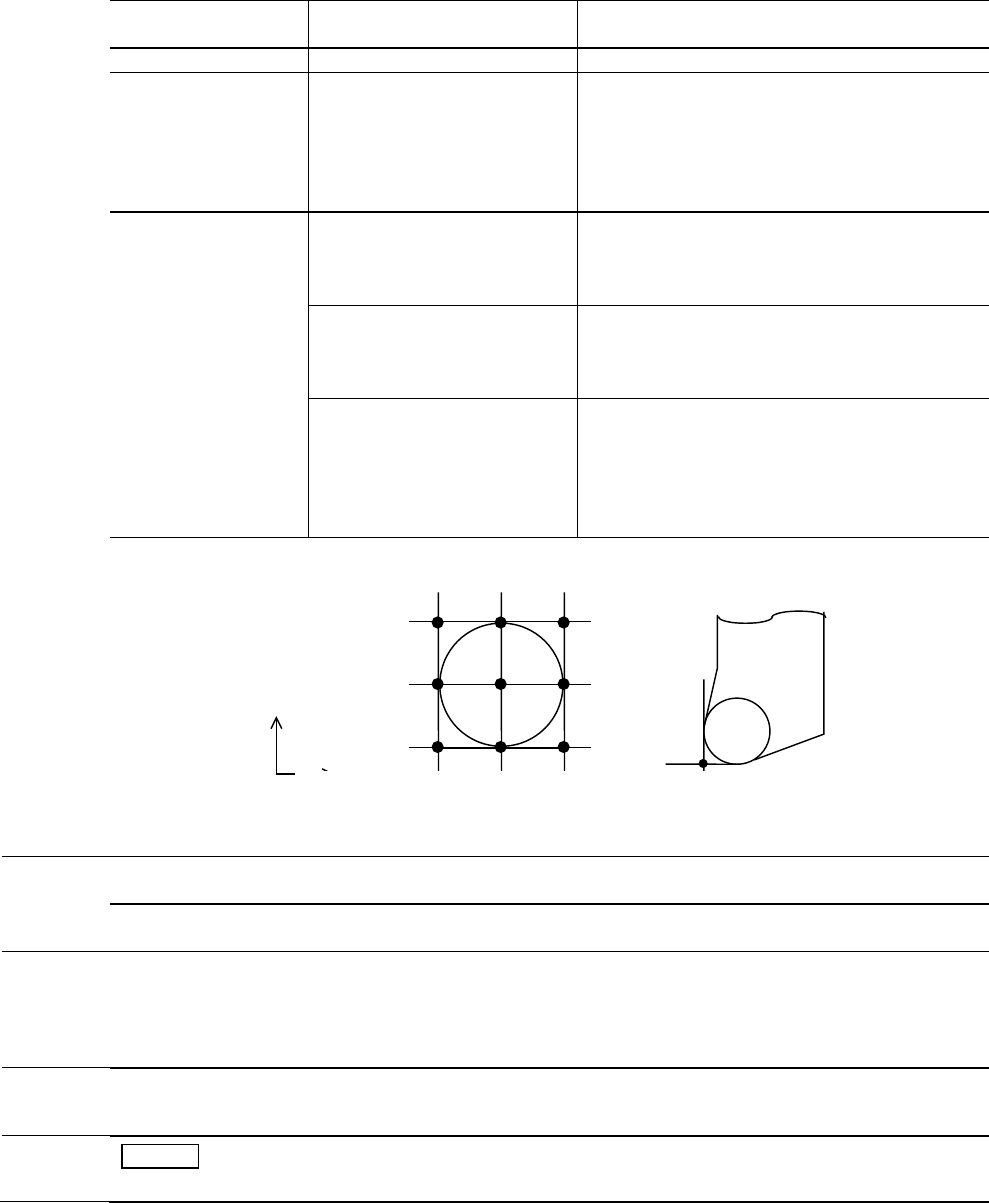
2-139
Parameter table
Value: Type
Value: Type of tool offset
amount
Data range
1: M system type I
0: Tool offset amount
-99,999.999 to 99,999.999 [mm]
4: M system type II
0: Tool length compensation
amount (dimensions)
-99,999.999 to 99,999.999 [mm]
1: (Wear)
2: Tool radius compensation
amount (dimensions)
3: (Wear)
6: L system type
0: Tool length compensation
amount X
C70 : -99.999 to 99.999 [mm]
M700/M800 series : -99,999.999 to
99,999.999 [mm]
1: Z
2: C (Y*)
3: Tool length offset amount
X
C70 : -999.999 to 999.999 [mm]
M700/M800 series : -99,999.999 to
99,999.999 [mm]
4: Z
5: C (Y*)
6: Tool radius (nose R) R
C70 : 0 to 99.999 [mm]
M700/M800 series : 0 to 99,999.999 [mm]
7: Tool radius (nose R)
wear amount r
C70 : 0 to 99.999 [mm]
M700/M800 series : 0 to 99,999.999 [mm]
8: Hypothetical tool nose
point number P
0 to 8 (Refer to Figure 1)
* For the M700/M800 series
Z
X
4
3
8
0
5
7
6
1
2
3
刃先点
図1.仮想刃先点番号
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
Configures the tool offset amount of the set part system/axis No. The range shown in the
parameter table varies depending on the command unit such as inch system and metrik system
of the Mitsubishi CNC. For details, refer to the installation manual of each Mitsubishi CNC.
□
Reference
GetType(), GetOffset(), GetToolSetSize()
□
Specifica-
tion
System
Figure 1 Hypothetical tool nose point number
Tool
nose
point
2-140
2.14.6 IEZNcTool3::GetToolWorkOffset
C70 M700 M800
2.14.6 IEZNcTool3::GetToolWorkOffset
Get workpiece coordinate
offset
□ Custom call procedure
HRESULT GetToolWorkOffset(
LONG lAxisNo, // (I) Axis No.
LONG lIndex, // (I) Workpiece coordinate system number
DOUBLE* pdOffset, // (O) Offset value
LONG* plRet // (O) Error code
)
□ Automation call procedure
Tool_GetToolWorkOffset(
lAxisNo As LONG // (I) Axis No.
lIndex As LONG // (I) Workpiece coordinate system number
pdOffset As DOUBLE* // (O) Offset value
) As LONG // (O) Error code
□
Argument
lAxisNo: Sets the axis. (From Axis 1 = from 1)
lIndex: Sets the workpiece coordinate system number to be read.
Value Meaning
54 G54 offset
55 G55 offset
56 G56 offset
57 G57 offset
58 G58 offset
59 G59 offset
60 EXT offset
pdOffset: Returns the offset value of the workpiece coordinate of the set part system/axis No.
Value: -99,999.999~99,999.999 [mm]
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK: Normal termination
EZNC_DATA_READ_ADDR: Invalid part system setting
EZNC_DATA_READ_READ: Data is not readable
EZNC_DATA_READ_AXIS: Invalid axis No. setting
EZ_ERR_NOT_SUPPORT: Not supported
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
Gets the offset value of the workpiece coordinate of the set part system/axis No. For details, refer
to the installation guide.
Refer to the instruction manual for each numerical controller for details.
□
Reference
□
Specifica-
tion
System , Axis number
2-141
2.14.7 IEZNcTool3::GetToolWorkOffset2
C70 M700 M800
2.14.7 IEZNcTool3::GetToolWorkOffset2
Get workpiece coordinate
offset
□ Custom call procedure
HRESULT GetToolWorkOffset2(
LONG lAxisNo, // (I) Axis No.
LONG lIndex, // (I) Workpiece coordinate system number
DOUBLE* pdOffset, // (O) Offset value
LONG* plRet // (O) Error code
)
□ Automation call procedure
Tool_GetToolWorkOffset2(
lAxisNo As LONG // (I) Axis No.
lIndex As LONG // (I) Workpiece coordinate system number
pdOffset As DOUBLE* // (O) Offset value
) As LONG // (O) Error code
□
Argument
lAxisNo: Sets the axis No. (From Axis 1 = from 1)
lIndex: Sets the workpiece coordinate system number to be read.
Value Meaning
54 G54 offset
55 G55 offset
56 G56 offset
57 G57 offset
58 G58 offset
59 G59 offset
60 EXT offset
pdOffset: Returns the offset value of the workpiece coordinate of the set part system/axis No.
Value: -99,999.999~99,999.999 [mm]
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK: Normal termination
EZNC_DATA_READ_ADDR: Invalid parft system setting
EZNC_DATA_READ_READ: Data is not readable
EZNC_DATA_READ_AXIS: Invalid axis No. setting
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
Gets the offset value of the workpiece coordinate of the set part system/axis No. For details, refer
to the installation guide.
Refer to the instruction manual for each numerical controller for details.
Setting mode
(1) For setting absolute value,
Sets the set offset value as the current offset value.
(2) For setting additional value,
Sets the offset value got by adding the set offset value to the current offset value.
□
Reference
□
Specifica-
tion
System , Axis number
2-142
2.14.8 IEZNcTool3:: SetToolWorkOffset
C70 M700 M800
2.14.8 IEZNcTool3:: SetToolWorkOffset
Set workpiece coordinate
offset settings
□ Custom call procedure
HRESULT SetToolWorkOffset(
LONG lAxisNo, // (I) Axis No.
LONG lIndex, // (I) Workpiece coordinate system number
DOUBLE dOffset, // (I) Offset value
LONG lMode, // (I) Mode
LONG* plRet // (O) Error code
)
□ Automation call procedure
Tool_SetToolWorkOffset(
lAxisNo As LONG // (I) Axis No.
lIndex As LONG // (I) Workpiece coordinate system number
dOffset As DOUBLE // (I) Offset value
lMode As LONG // (I) Mode
) As LONG // (O) Error code
□
Argument
lAxisNo: Sets the axis No. (From Axis 1 = from 1)
lIndex: Sets the workpiece coordinate system number to be read.
Value Meaning
54 G54 offset
55 G55 offset
56 G56 offset
57 G57 offset
58 G58 offset
59 G59 offset
60 EXT offset
dOffset: Sets the offset value of the workpiece coordinate of the set part system/axis No.
Value: -99,999.999~99,999.999 [mm]
lMode: Sets the setting mode (absolute value setting/additional value setting).
Value Meaning
0 Sets absolute value
1 Sets additional value
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK: Normal termination
EZNC_DATA_WRITE_ADDR: Invalid part system setting
EZNC_DATA_WRITE_WRITE: Data is not writable
EZNC_DATA_WRITE_AXIS: Invalid axis No. setting
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
2-143
□
Function
Sets the offset value of the workpiece coordinate of the set part system/axis No.
For details, refer to the instruction manual for each Mitsubishi CNC.
Setting mode
(1) For setting absolute value,
Sets the set offset value as the current offset value.
(2) For setting additional value,
Sets the offset value got by adding the set offset value to the current offset value.
□
Reference
□
Specifica-
tion
System , Axis number
2-144
2.14.9 IEZNcTool3::SetToolWorkOffset2
C70 M700 M800
2.14.9 IEZNcTool3:: SetToolWorkOffset9
Set workpiece coordinate
offset settings
□ Custom call procedure
HRESULT SetToolWorkOffset2(
LONG lAxisNo, // (I) Axis No.
LONG lIndex, // (I) Workpiece coordinate system number
DOUBLE dOffset, // (I) Offset value
LONG lMode, // (I) Mode
LONG* plRet // (O) Error code
)
□ Automation call procedure
Tool_SetToolWorkOffset2(
lAxisNo As LONG // (I) Axis No.
lIndex As LONG // (I) Workpiece coordinate system number
dOffset As DOUBLE // (I) Offset value
lMode As LONG // (I) Mode
) As LONG // (O) Error code
□
Argument
lAxisNo: Sets the axis No. (From Axis 1 = from 1)
lIndex: Sets the workpiece coordinate system number to be read.
Value Meaning
54 G54 offset
55 G55 offset
56 G56 offset
57 G57 offset
58 G58 offset
59 G59 offset
60 EXT offset
dOffset: Sets the offset value of the workpiece coordinate of the set part system/axis No.
Value: -99,999.999~99,999.999 [mm]
lMode: Sets the setting mode (absolute value setting/additional value setting).
Value Meaning
0 Sets absolute value
1 Sets additional value
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK: Normal termination
EZNC_DATA_WRITE_ADDR: Invalid part system setting
EZNC_DATA_WRITE_WRITE: Data is not writable
EZNC_DATA_WRITE_AXIS: Invalid axisNo. setting
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
2-145
□
Function
Configures the offset value of the workpiece coordinate of the set part system/axis No.
Refer to the instruction manual for each Mitsubishi CNC for details.
Setting mode
(1) For setting absolute value,
Sets the set offset value as the current offset value.
(2) For setting additional value,
Sets the offset value got by adding the set offset value to the current offset value.
□
Reference
□
Specifica-
tion
System , Axis number
2-146
2.14.10 IEZNcTool3::GetSurface
C70 M700 M800
2.14.10 IEZNcTool3::GetSurface
Get reference surface height
□ Custom call procedure
HRESULT GetSurface(
LONG lAxisNo, // (I) Axis No.
DOUBLE* pdHight, // (O) Reference surface height
LONG* plRet // (O) Error code
)
□ Automation call procedure
Tool_GetSurface(
lAxisNo As LONG // (I) Axis No.
pdHight As DOUBLE* // (O) Reference surface height
) As LONG // (O) Error code
□
Argument
lAxisNo: Sets the axis No. (From Axis 1 = from 1)
pdHight: Returns the reference surface coordinate position of the tool length measurement II of
the set part system/axis No.
Value: -99999.999 to 99999.999 [mm]
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK: Normal termination
EZNC_DATA_READ_READ: Data is not readable
EZNC_DATA_READ_ADDR: Invalid part system, axis No. setting
EZNC_DATA_READ_AXIS: Invalid axis No. setting
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
Gets the reference surface coordinate position of the tool length measurement II of the set part
system/axis No.
□
Reference
□
Specifica-
tion
System , Axis number
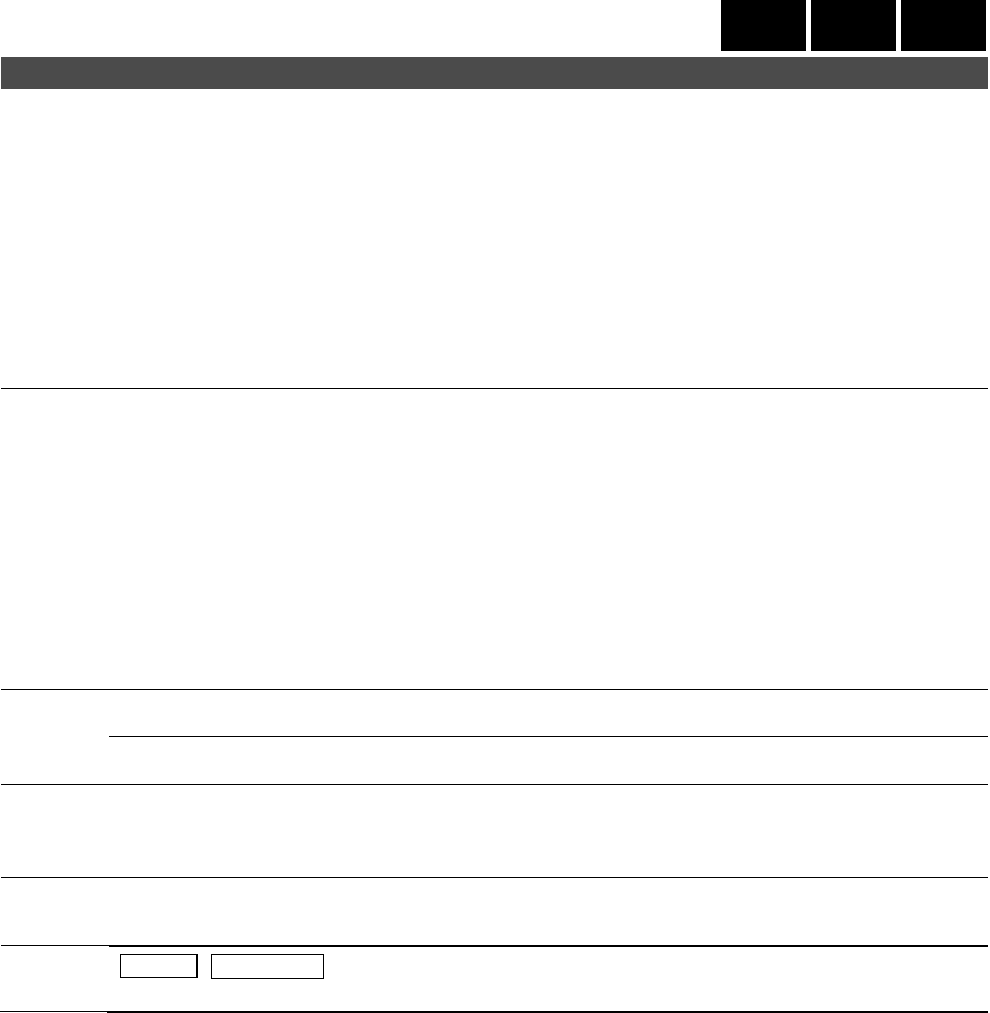
2-147
2.14.11 IEZNcTool3::GetSurface2
C70 M700 M800
2.14.11 IEZNcTool3::GetSurface2
Get reference surface height
□ Custom call procedure
HRESULT GetSurface2(
LONG lAxisNo, // (I) Axis No.
DOUBLE* pdHight, // (O) Reference surface height
LONG* plRet // (O) Error code
)
□ Automation call procedure
Tool_GetSurface2(
lAxisNo As LONG // (I) Axis No.
pdHight As DOUBLE* // (O) Reference surface height
) As LONG // (O) Error code
□
Argument
lAxisNo: Sets the axis No. (From Axis 1 = from 1)
pdHight: Returns the reference surface coordinate position of the tool length measurement II of
the set part system/axis No.
Value: -99,999.999 to 99,999.999 [mm]
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK: Normal termination
EZNC_DATA_READ_READ: Data is not readable
EZNC_DATA_READ_ADDR: Invalid part system, axis No. setting
EZNC_DATA_READ_AXIS: Invalid axis No. setting
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
Gets the reference surface coordinate position of the tool length measurement II of the set axis
No. of the set part system.
□
Reference
□
Specifica-
tion
System , Axis number
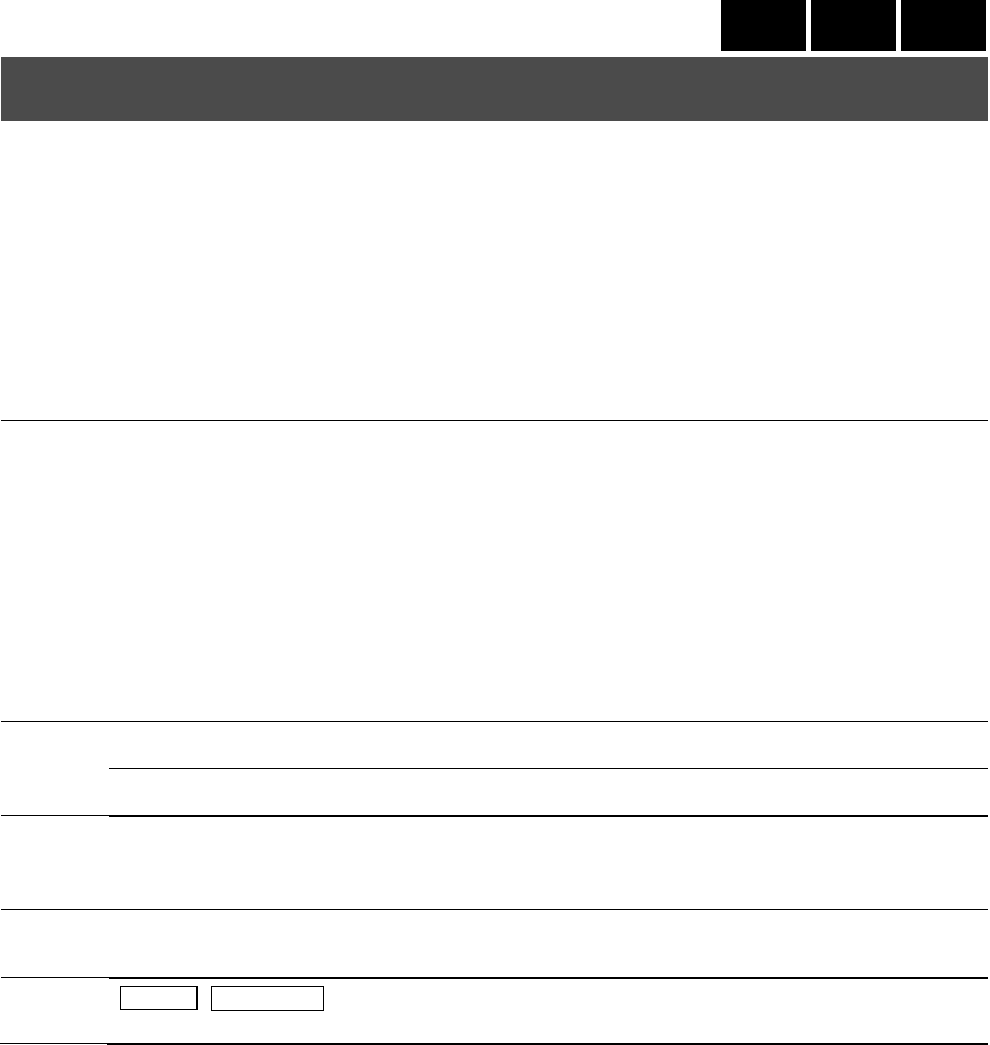
2-148
2.14.12 IEZNcTool3::SetSurface
C70 M700 M800
2.14.12 IEZNcTool3::SetSurface
Set reference surface height
settings
□ Custom call procedure
HRESULT SetSurface(
LONG lAxisNo, // (I) Axis No.
DOUBLE dHight, // (I) Reference surface height
LONG* plRet // (O) Error code
)
□ Automation call procedure
Tool_SetSurface(
lAxisNo As LONG // (I) Axis No.
dHight As DOUBLE* // (O) Reference surface height
) As LONG // (O) Error code
□
Argument
lAxisNo: Sets the axis No. (From Axis 1 = from 1)
dHight: Sets the reference surface coordinate position of the tool length measurement II of the
set part system/axis No.
Value: -99999.999 to 99999.999 [mm]
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK: Normal termination
EZNC_DATA_WRITE_WRITE: Data is not writable
EZNC_DATA_WRITE_ADDR: Invalid part system, axis No. setting
EZNC_DATA_WRITE_AXIS: Invalid axis No. setting
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
Sets the reference surface coordinate position of the tool length measurement II of the set part
system/axis No.
□
Reference
□
Specifica-
tion
System , Axis number
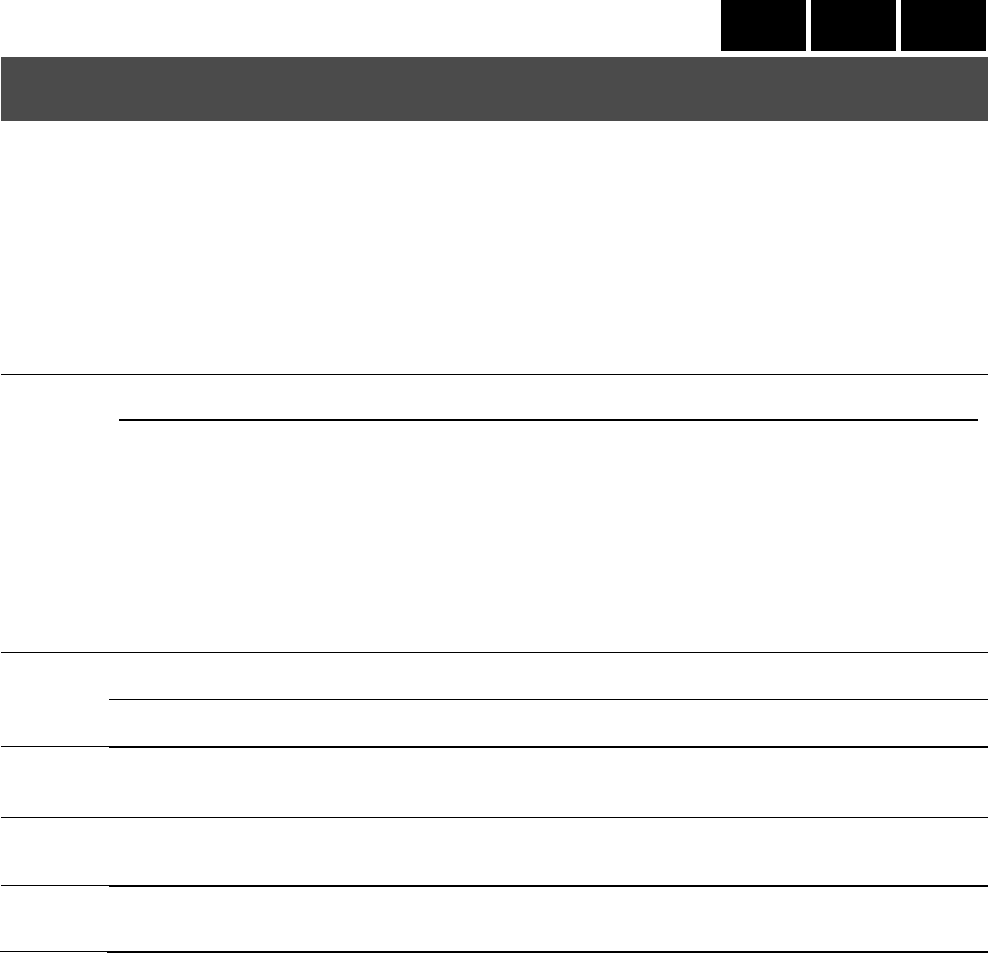
2-149
2.14.13 IEZNcTool3::GetToolLifeType2
C70 M700 M800
2.14.13 IEZNcTool3::GetToolLifeType2
Get tool life management
method
□ Custom call procedure
HRESULT GetToolLifeType2(
LONG* plType, // (O) Tool life management method
LONG* plRet // (O) Error code
)
□ Automation call procedure
Tool_GetToolLifeType2(
plType As LONG* // (O) Tool life management method
) As LONG // (O) Error code
□
Argument
plType: Returns the tool life control type.
Value Meaning
0 Disabled
1 Type I
2 Type II
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK: Normal termination
EZNC_DATA_READ_READ: Data is not readable
EZ_ERR_DATA_RANGE: Invalid argument data range
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
Gets tool life management method.
□
Reference
SetToolLifeType2()
□
Specifica-
tion
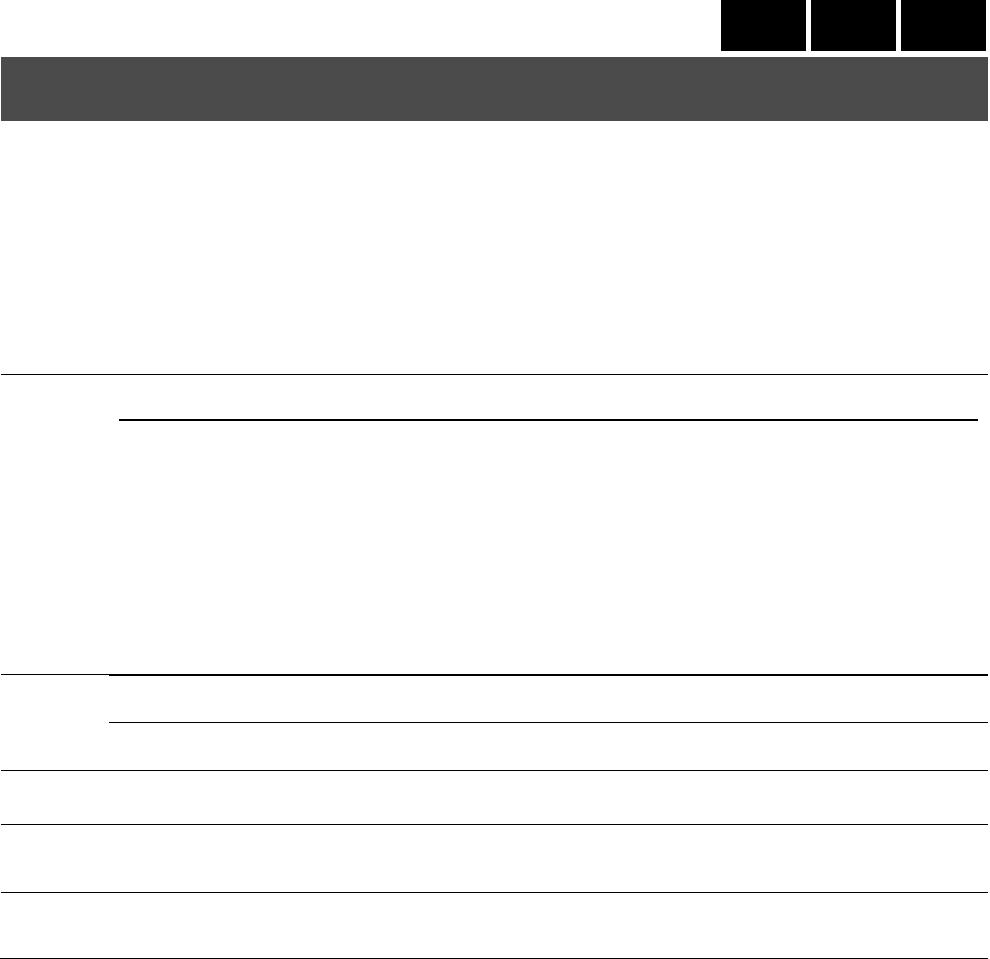
2-150
2.14.14 IEZNcTool3::SetToolLifeType2
C70 M700 M800
2.14.14 IEZNcTool3::SetToolLifeType2
Select Tool life management
method
□ Custom call procedure
HRESULT SetToolLifeType2(
LONG lType, // (I) Tool life management method
LONG* plRet // (O) Error code
)
□ Automation call procedure
Tool_SetToolLifeType2(
lType As LONG // (O) Tool life management method
) As LONG // (O) Error code
□
Argument
lType: Sets the tool life management method.
Value Meaning
0 Disabled (For the C70, cannot be specified.)
1 Tool life management I
2 Tool life management II
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK: Normal termination
EZNC_DATA_WRITE_WRITE: Data is not writable
EZ_ERR_DATA_RANGE: Invalid argument data range
EZ_ERR_DATA_TYPE: Invalid argument data type
EZ_ERR_NOT_SUPPORT: Not supported
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
Selects tool life management I or II. Write is inhibited by password mode.
(EZNC_DATA_WRITE_WRITE is returned.)
□
Reference
GetToolLifeType2()
□
Specifica-
tion
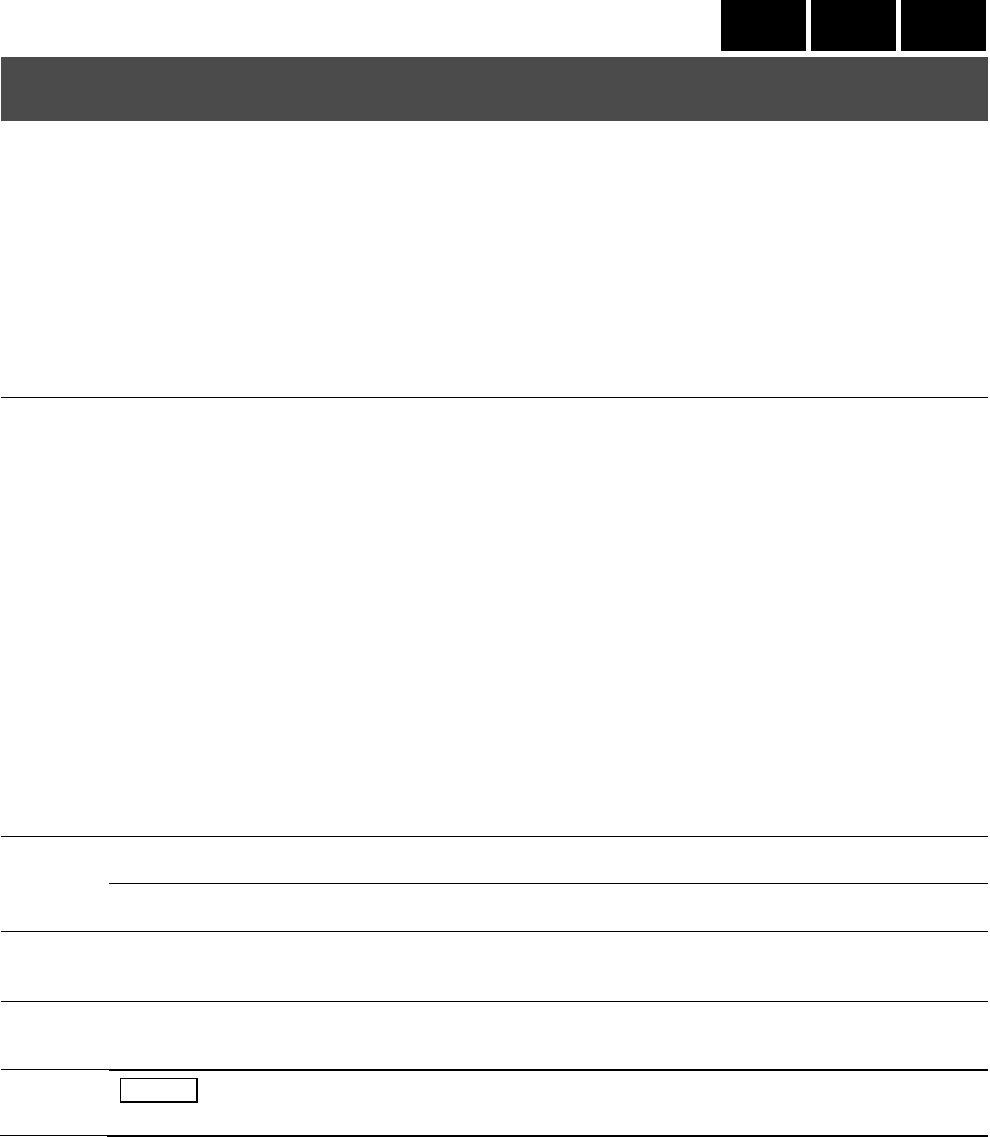
2-151
2.14.15 IEZNcTool3::GetToolLifeGroupList
C70 M700 M800
2.14.15 IEZNcTool3::GetToolLifeGroupList
Get Tool Life management group No
list
□ Custom call procedure
HRESULT GetToolLifeGroupList (
LPDWORD lpdwLength, // (O) Number of groups
LPDWORD* lppdwGroup, // (O) Array of group numbers
LONG* plRet // (O) Error code
)
□ Automation call procedure
Tool_GetToolLifeGroupList(
pvGroup As VARIANT* // (O) Group number
) As LONG // (O) Error code
□
Argument
lpdwLength: Returns the number of sets of groups.
lppdwGroup: Returns the list of group numbers as an array. As the group number array is
allocated in this product, the client needs to release it explicitly with
CoTaskMemFree().
Automation argument:
pvGroup: Returns the group number array as VARIANT.
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK: Normal termination
EZNC_DATA_READ_READ: Data is not readable
EZ_ERR_MEMORY_ALLOC: Memory cannot be allocated.
EZ_ERR_DATA_RANGE: Invalid argument data range
EZNC_DATA_READ_ADDR: Invalid part system setting
EZNC_DATA_TLFGROUP_ADDR: Invalid address (system specification)
EZNC_DATA_TLFGROUP_OUTOFSPEC: The set group number is out of specifications
EZ_ERR_NOT_SUPPORT: Not supported
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
Gets tool life management group No.
□
Reference
AddToolLifeGroup(), ChangeToolLifeGroup(), DeleteToolLifeGroup()
□
Specifica-
tion
System (M700/M800 series only)
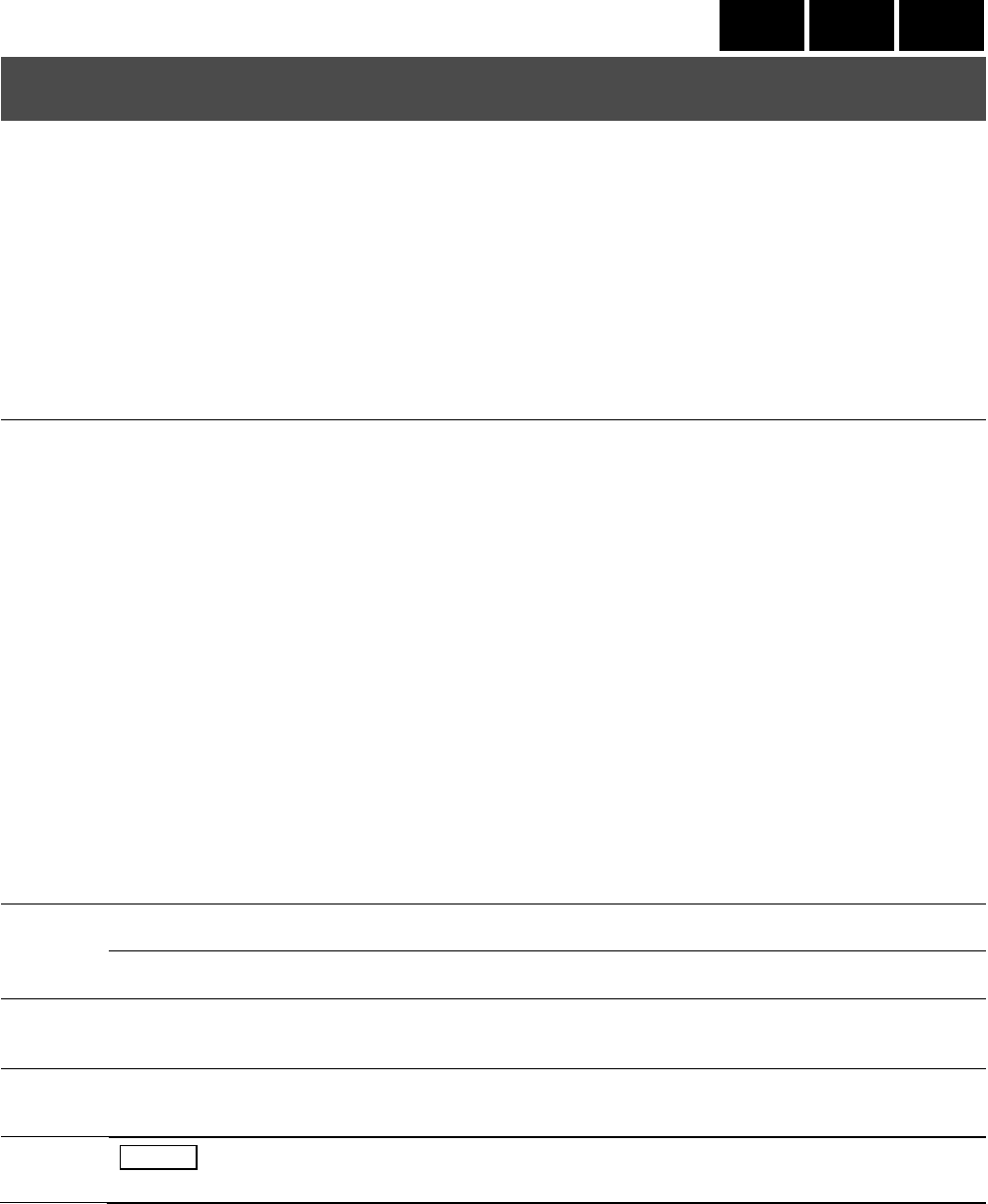
2-152
2.14.16 IEZNcTool3::ChangeToolLifeGroup
C70 M700 M800
2.14.16 IEZNcTool3::ChangeToolLifeGroup
Change tool life management
group No
□ Custom call procedure
HRESULT ChangeToolLifeGroup (
DWORD dwSrcGroup, // (I) Old group number
DWORD dwDstGroup, // (I) New group number
LONG* plRet // (O) Error code
)
□ Automation call procedure
Tool_ChangeToolLifeGroup(
lSrcGroup As LONG
// (I) Old group number
lDstGroup As LONG
// (I) New group number
) As LONG // (O) Error code
□
Argument
dwSrcGroup: Sets the old group number.
dwDstGroup: Sets the new group number.
Automation argument:
lSrcGroup: Refer to the explanation of dwSrcGroup.
lDstGroup: Refer to the explanation of dwDstGroup.
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK: Normal termination
EZNC_DATA_WRITE_WRITE: Data is not writable.
EZNC_DATA_NOT_EXIST: Data does not exist
EZ_ERR_DATA_RANGE: Invalid argument data range
EZNC_DATA_READ_ADDR: Invalid part system setting
EZNC_DATA_READ_READ: Data is not readable
EZNC_DATA_TLFGROUP_ADDR: Invalid address (system specification)
EZNC_DATA_TLFGROUP_EXIST: Group number already exists
EZNC_DATA_TLFGROUP_NONEXIST: Group number does not exist
EZNC_DATA_TLFGROUP_OUTOFSPEC: The set group number is out of specifications
EZ_ERR_NOT_SUPPORT: Not supported
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
Changes the set group number to the new group number.
The set old group tool is changed to the new group.
□
Reference
GetToolLifeGroupList(), AddToolLifeGroup(), DeleteToolLifeGroup()
□
Specifica-
tion
System (M700/M800 series only)
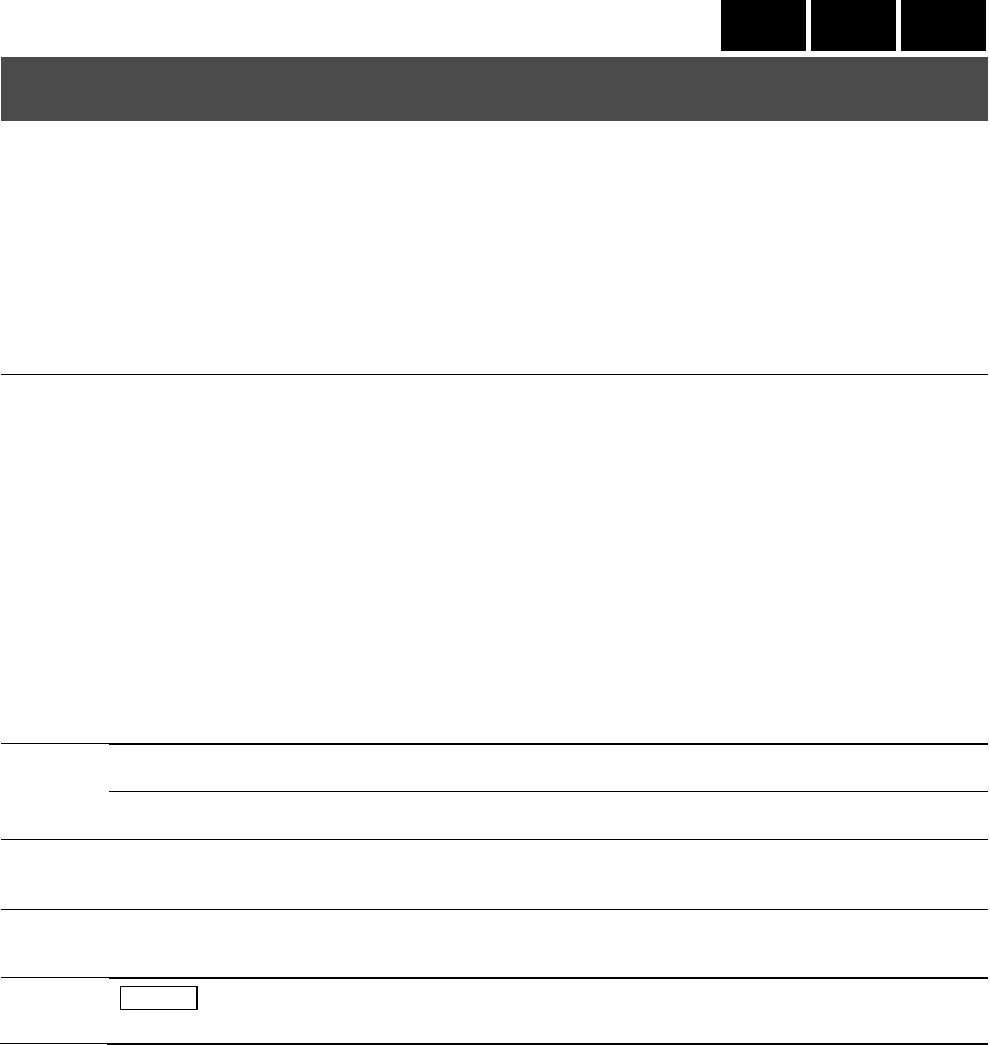
2-153
2.14.17 IEZNcTool3::DeleteToolLifeGroup
C70 M700 M800
2.14.17 IEZNcTool3::DeleteToolLifeGroup
Delete tool life management
group No
□ Custom call procedure
HRESULT DeleteToolLifeGroup (
DWORD dwGroup, // (I) Group number
LONG* plRet // (O) Error code
)
□ Automation call procedure
Tool_DeleteToolLifeGroup(
lGroup As LONG // (I) Group number
) As LONG // (O) Error code
□
Argument
dwGroup: Sets the group number to be deleted.
Automation argument:
lGroup: Refer to the explanation of dwGroup.
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK: Normal termination
EZNC_DATA_WRITE_WRITE: Data is not writable.
EZNC_DATA_NOT_EXIST: Data does not exist
EZ_ERR_DATA_RANGE: Invalid argument data range
EZNC_DATA_READ_ADDR: Invalid part system setting
EZNC_DATA_TLFGROUP_ADDR: Invalid address (part system setting)
EZNC_DATA_TLFGROUP_NONEXIST: Group number does not exist
EZNC_DATA_TLFGROUP_OUTOFSPEC: The set group number is out of specifications
EZ_ERR_NOT_SUPPORT: Not supported
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
Deletes the group number.
□
Reference
GetToolLifeGroupList(), AddToolLifeGroup(), ChangeToolLifeGroup()
□
Specifica-
tion
System
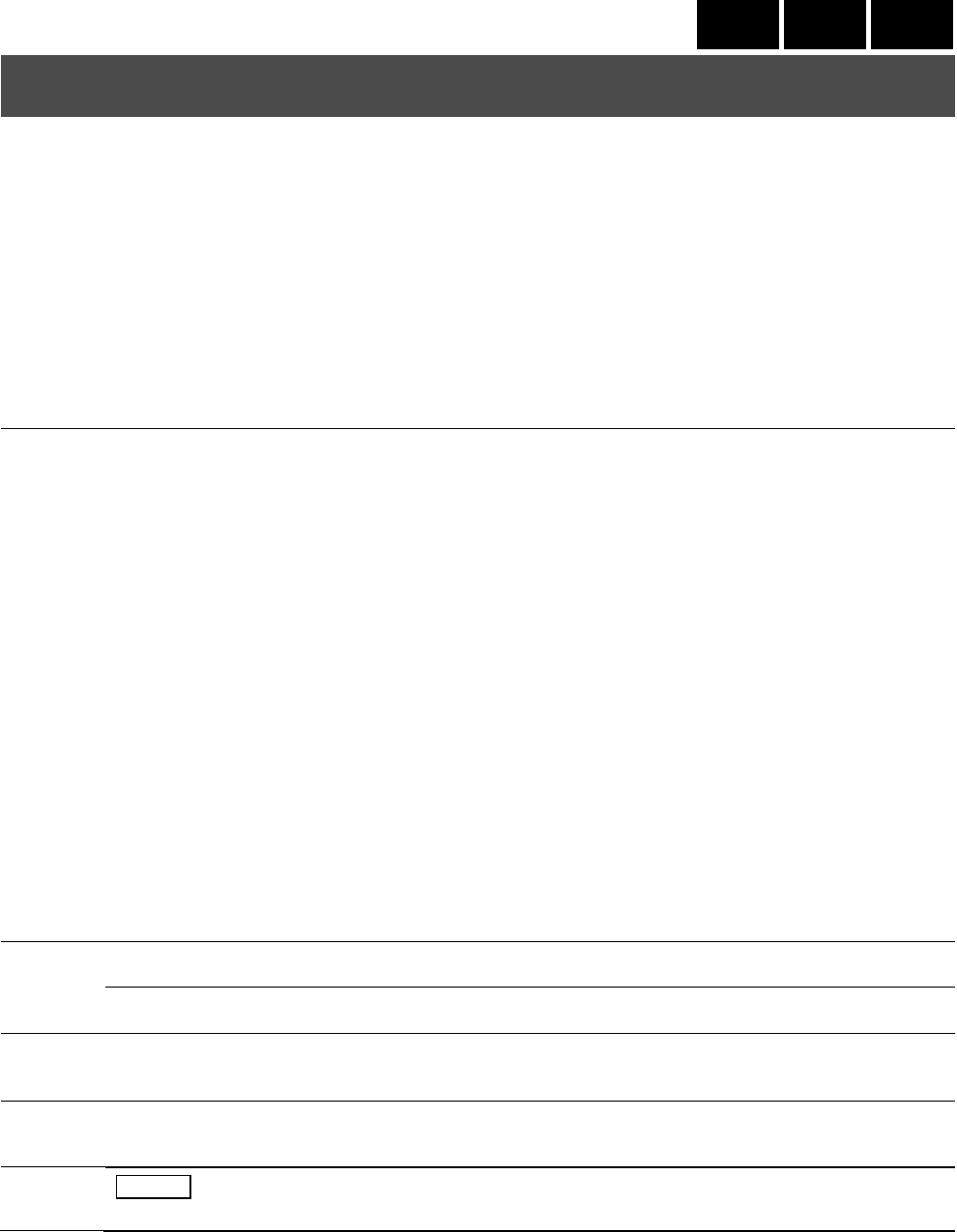
2-154
2.14.18 IEZNcTool3::GetToolLifeToolNoList
C70 M700 M800
2.14.18 IEZNcTool3::GetToolLifeToolNoList
Get list of tool numbers within Life
management group
□ Custom call procedure
HRESULT GetToolLifeToolNoList (
DWORD dwGroup, // (I) Group number
LPDWORD lpdwLength, // (O) Number of registered tools
LPDWORD *lppdwToolNo, // (O) Array of tool numbers
LONG* plRet // (O) Error code
)
□ Automation call procedure
Tool_ GetToolLifeToolNoList (
lGroup As LONG // (I) Group number
pvToolNo As VARIANT // (O) Array of tool numbers
) As LONG // (O) Error code
□
Argument
dwGroup: Sets the group number for which the list of tool numbers is got.
lpdwLength: Returns the number of registered tools included in the group (array length of the list
of tool numbers).
lppdwToolNo: Returns the list of tool numbers inc
luded in the group as an array. As the tool
number list array is allocated in this product, the client needs to release it explicitly
with CoTaskMemFree().
Automation argument:
lGroup: Refer to the explanation of dwGroup.
pvToolNo: Returns the list of tool numbers included in the group as VARIANT.
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK: Normal termination
EZNC_DATA_READ_READ: Data is not readable
EZ_ERR_MEMORY_ALLOC: Memory cannot be allocated
EZ_ERR_DATA_RANGE: Invalid argument data range
EZNC_DATA_TLFGROUP_ADDR: Invalid address (system specification)
EZNC_DATA_TLFGROUP_NONEXIST: Group number does not exist
EZNC_DATA_TLFGROUP_OUTOFSPEC: The set group number is out of specifications
EZ_ERR_NOT_SUPPORT: Not supported
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
Gets the list of tool numbers of the set group.
□
Reference
AddToolLifeToolNo(), ChangeToolLifeToolNo(), DeleteToolLifeToolNo()
□
Specifica-
tion
System
2-155
2.14.19 IEZNcTool3::AddToolLifeToolNo
C70 M700 M800
2.14.19 IEZNcTool3::AddToolLifeToolNo
Add tool number to tool life
management group No
□ Custom call procedure
HRESULT AddToolLifeToolNo (
DWORD dwGroup, // (I) Group number
DWORD dwToolNo, // (I) Tool number
LONG* plRet // (O) Error code
)
□ Automation call procedure
Tool_ AddToolLifeToolNo (
lGroup As LONG // (I) Group number
lToolNo As LONG // (I) Tool number
) As LONG // (O) Error code
□
Argument
dwGroup: Sets the group numbers to which tool numbers are added.
dwToolNo: Sets the tool numbers to be added.
Automation argument:
lGroup: Refer to the explanation of dwGroup.
lToolNo: Refer to the explanation of dwToolNo.
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK: Normal termination
EZNC_DATA_WRITE_WRITE: Data is not writable
EZNC_DATA_DUPLICATE: Duplicated numbers
EZ_ERR_DATA_RANGE: Invalid argument data range
EZNC_DATA_TLFGROUP_ADDR: Invalid address (system specification)
EZNC_DATA_TLFGROUP_OUTOFSPEC: The set group number is out of specifications
EZNC_DATA_TLFTOOL_EXIST: Tool number already exists
EZNC_DATA_TLFTOOL_OUTOFSPEC: Set tool number is out of specifications
EZ_ERR_NOT_SUPPORT: Not supported
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
Adds the tool numbers to the specified group.
□
Reference
GetToolLifeToolNoList(), ChangeToolLifeToolNo(), DeleteToolLifeToolNo()
□
Specifica-
tion
System
2-156
2.14.20 IEZNcTool3::ChangeToolLifeToolNo
C70 M700 M800
2.14.20 IEZNcTool3::ChangeToolLifeToolNo
Change tool life management
group No
□ Custom call procedure
HRESULT ChangeToolLifeToolNo(
DWORD dwGroup, // (I) Group number
DWORD dwSrcToolNo, // (I) Old tool number
DWORD dwDstToolNo, // (I) New tool number
LONG* plRet // (O) Error code
)
□ Automation call procedure
Tool_ ChangeToolLifeToolNo (
lGroup As LONG // (I) Group number
lSrcToolNo As LONG // (I) Old tool number
lDstToolNo As LONG // (I) New tool number
) As LONG // (O) Error code
□
Argument
dwGroup: Sets the group number in which the tool number is changed.
dwSrcToolNo: Sets the old tool number.
dwDstToolNo: Sets the new tool number.
Automation argument:
lGroup: Refer to the explanation of dwGroup.
lSrcToolNo: Refer to the explanation of dwSrcToolNo.
lDstToolNo: Refer to the explanation of dwDstToolNo.
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK: Normal termination
EZNC_DATA_WRITE_WRITE: Data is not writable
EZNC_DATA_NOT_EXIST: Data does not exist
EZ_ERR_DATA_RANGE: Invalid argument data range
EZNC_DATA_READ_READ: Data is not readable
EZNC_DATA_TLFGROUP_ADDR: Invalid address (system specification)
EZNC_DATA_TLFGROUP_NONEXIST: Group number does not exist
EZNC_DATA_TLFGROUP_OUTOFSPEC: The set group number is out of specifications
EZNC_DATA_TLFTOOL_EXIST: Tool number already exists
EZNC_DATA_TLFTOOL_NONEXIST: Tool number does not exist
EZNC_DATA_TLFTOOL_OUTOFSPEC: Set tool number is out of specifications
EZ_ERR_NOT_SUPPORT: Not supported
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
Changes the set tool number to the new tool number.
□
Reference
GetToolLifeToolNoList(), AddToolLifeToolNo(), DeleteToolLifeToolNo()
□
Specifica-
tion
System
2-157
2.14.21 IEZNcTool3::DeleteToolLifeToolNo
C70 M700 M800
2.14.21 IEZNcTool3::DeleteToolLifeToolNo
Delete tool life management
tool number
□ Custom call procedure
HRESULT DeleteToolLifeToolNo (
DWORD dwGroup, // (I) Group number
DWORD dwToolNo, // (I) Tool number
LONG* plRet // (O) Error code
)
□ Automation call procedure
Tool_ DeleteToolLifeToolNo (
lGroup As LONG // (I) Group number
lToolNo As LONG // (I) Tool number
) As LONG // (O) Error code
□
Argument
dwGroup: Sets the group number from which tool numbers are deleted.
dwToolNo: Sets the tool numbers to be deleted.
Automation argument:
lGroup: Refer to the explanation of dwGroup.
lToolNo: Refer to the explanation of dwToolNo.
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK: Normal termination
EZNC_DATA_WRITE_WRITE: Data is not writable
EZNC_DATA_NOT_EXIST: Data does not exist
EZ_ERR_DATA_RANGE: Invalid argument data range
EZNC_DATA_READ_READ: Data is not readable
EZNC_DATA_TLFGROUP_ADDR: Invalid address (system specification)
EZNC_DATA_TLFGROUP_NONEXIST: Group number does not exist
EZNC_DATA_TLFGROUP_OUTOFSPEC: The set group number is out of specifications
EZNC_DATA_TLFTOOL_NONEXIST: Tool number does not exist
EZNC_DATA_TLFTOOL_OUTOFSPEC: Set tool number is out of specifications
EZ_ERR_NOT_SUPPORT: Not supported
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
Deletes the set tool numbers.
□
Reference
GetToolLifeToolNoList(), AddToolLifeToolNo(), ChangeToolLifeToolNo()
□
Specifica-
tion
System

2-158
2.14.22 IEZNcTool3::GetToolLifeValue
C70 M700 M800
2.14.22 IEZNcTool3::GetToolLifeValue
Get tool life management
data
□ Custom call procedure
HRESULT GetToolLifeValue (
DWORD dwGroup, // (I) Group number
DWORD dwToolNo, // (I) Tool number
LPOLESTR** lpppwszData, // (O) Tool life management data value
character string array
LONG* plRet // (O) Error code
)
□ Automation call procedure
Tool_GetToolLifeValue (
lGroup As LONG // (I) Group number
lToolNo As LONG // (I) Tool number
pvData As VARIANT* // (O) Tool life management data value
character string
) As LONG // (O) Error code
□
Argument
dwGroup: Sets the group number for which tool life is got.
dwToolNo: Sets the tool number for which tool life is got.
lpppwszData: Returns the life management data value as a UNICODE character string array. As
the data value array is allocated in this product, the client needs to release it
explicitly with CoTaskMemFree (). Refer to the index table.
Automation argument:
lGroup: Refer to the explanation of dwGroup.
lToolNo: Refer to the explanation of dwToolNo.
pvData: Returns the life control data value (UNICODE character string)
array as VARIANT. For
life control data values, refer to the index.
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK: Normal termination
EZNC_DATA_READ_READ: Data is not readable
EZNC_DATA_NOT_EXIST: Data does not exist
EZ_ERR_MEMORY_ALLOC: Memory cannot be allocated
EZ_ERR_DATA_RANGE: Invalid argument data range
EZNC_DATA_TLFGROUP_ADDR: Invalid address (system specification)
EZNC_DATA_TLFGROUP_NONEXIST: Group number does not exist
EZNC_DATA_TLFGROUP_OUTOFSPEC: The set group number is out of specifications
EZNC_DATA_TLFTOOL_NONEXIST: Tool number does not exist
EZNC_DATA_TLFTOOL_OUTOFSPEC: Set tool number is out of specifications
EZ_ERR_NOT_SUPPORT: Not supported
2-159
Index table
Array
Index
Tool life type (data range)
C70 M system
M700/M800 series M system
0
Tool number (1 to 99999999)
Tool number (1 to 99999999)
1
Status (depends on MTB specifications)
Status (0x00 to 0xFF)
2
Method (000 to 222)*
Method (000 to 222)*
3
Length dimension (±1 to 99999.999)
Length dimension (±9999.999)
4
Radius dimension (±1 to 99999.999)
Radius dimension (±9999.999)
5
Life (Time: 0 to 4000, Count: 0 to 65000)
Life (Time: 0 to 4000, Count: 0 to
65000)
6
Used (Time: 0 to 4000,Count: 0 to
65000)
Used (Time: 0 to 4000, Count: 0 to
65000)
7
Auxiliary (0 to 65535, depends on MTBr
specifications)
Auxiliary (0 to 65535, depends on MTB
specifications)
8
Length wear (Reserved: 0)
Length wear (Reserved: 0)
9
Radius wear (Reserved: 0)
Radius wear (Reserved: 0)
10
Group (1 to 99999999)
Group (1 to 99999999)
Array
Index
Tool life type (data range)
M700/M800 series L system (TYPE
I),C70 L system (TYPE I)
M700/M800 series L system (TYPE II)
0
Application of time management (0 to
995959)
Tool number (1 to 999999)
1
Application of number of times
management (0 to 9999)
Compensation number (0 to 80)
2
Status A (0 to 2)
Usage (Time: 0 to 99999999, Count: 0
to 999999)
3
Life of time management (0 to 995959)
ST (0 to 3)
4
Life of count management (0 to 9999)
Method (Time: 0, Count: 1)
5
Status B (depends on MTB specifications)
Life (0 to 999999)
6 to 10
-
-
Array
Index
Tool life type (data range)
C70 L system (TYPE II)
0
Tool umber (1 to 999999)
1
Group (1 to 9999)
2
Method (0: Time, 1: Count)
3
Compensation number (1 to 80)
4
Status (0 to 3)
5
Life (Time: 0 to 999999, Count: 0 to 999999)
6
Used (Time: 0 to 999999,Count: 0 to 999999)
7 to 10
-
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
Gets life control data for the set tool number. Note that the number of elements of the character
string array that returns life control data varies depending on models.
* For the "method" for tool life management data, refer to the installation manual
of each
Mitsubishi CNC.
□
Reference
SetToolLifeValue()
□
Specifica-
tion
System

2-160
2.14.23 IEZNcTool3::SetToolLifeValue
C70 M700 M800
2.14.23 IEZNcTool3::SetToolLifeValue
Set individual tool life
management data
□ Custom call procedure
HRESULT SetToolLifeValue (
DWORD dwGroup, // (I) Group number
DWORD dwToolNo, // (I) Tool number
DWORD dwKind, // (I) Type of tool life management data
LPCOLESTR lpcwszData, // (I) Tool life management
LONG* plRet // (O) Error code
)
□ Automation call procedure
Tool_ SetToolLifeValue (
lGroup As LONG // (I) Group number
lToolNo As LONG // (I) Tool number
lKind As LONG // (I) Type of tool life management l data
lpcwszData As STRING // (I) Tool life management data
) As LONG // (O) Error code
□
Argument
dwGroup: Sets the group number for which tool life is set.
dwToolNo: Sets the tool number for which tool life is set.
dwKind: Sets the type of tool life. Refer to the parameter table.
lpcwszData: Sets the specified type of life data.
Automation argument:
lGroup: Refer to the explanation of dwGroup.
lToolNo: Refer to the explanation of dwToolNo.
lKind: Refer to the explanation of dwKind.
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK: Normal termination
EZNC_DATA_WRITE_WRITE: Data is not writable
EZNC_DATA_NOT_EXIST: Data does not exist
EZNC_DATA_READ_READ: Data is not readable
EZ_ERR_DATA_RANGE: Invalid argument data range (dwKind)
EZ_ERR_DATA_TYPE: Invalid argument data type
EZNC_DATA_TLFGROUP_ADDR: Invalid address (system specification)
EZNC_DATA_TLFGROUP_NONEXIST: Group number does not exist
EZNC_DATA_TLFGROUP_OUTOFSPEC: The set group number is out of specifications
EZNC_DATA_TLFTOOL_NONEXIST: Tool number does not exist
EZNC_DATA_TLFTOOL_PARAMERR: Invalid type specified for life control data
EZNC_DATA_TLFTOOL_MAXMINERR: Setting data is out of range
EZNC_DATA_TLFTOOL_OUTOFSPEC: Set tool number is out of specifications
EZ_ERR_NOT_SUPPORT: Not supported
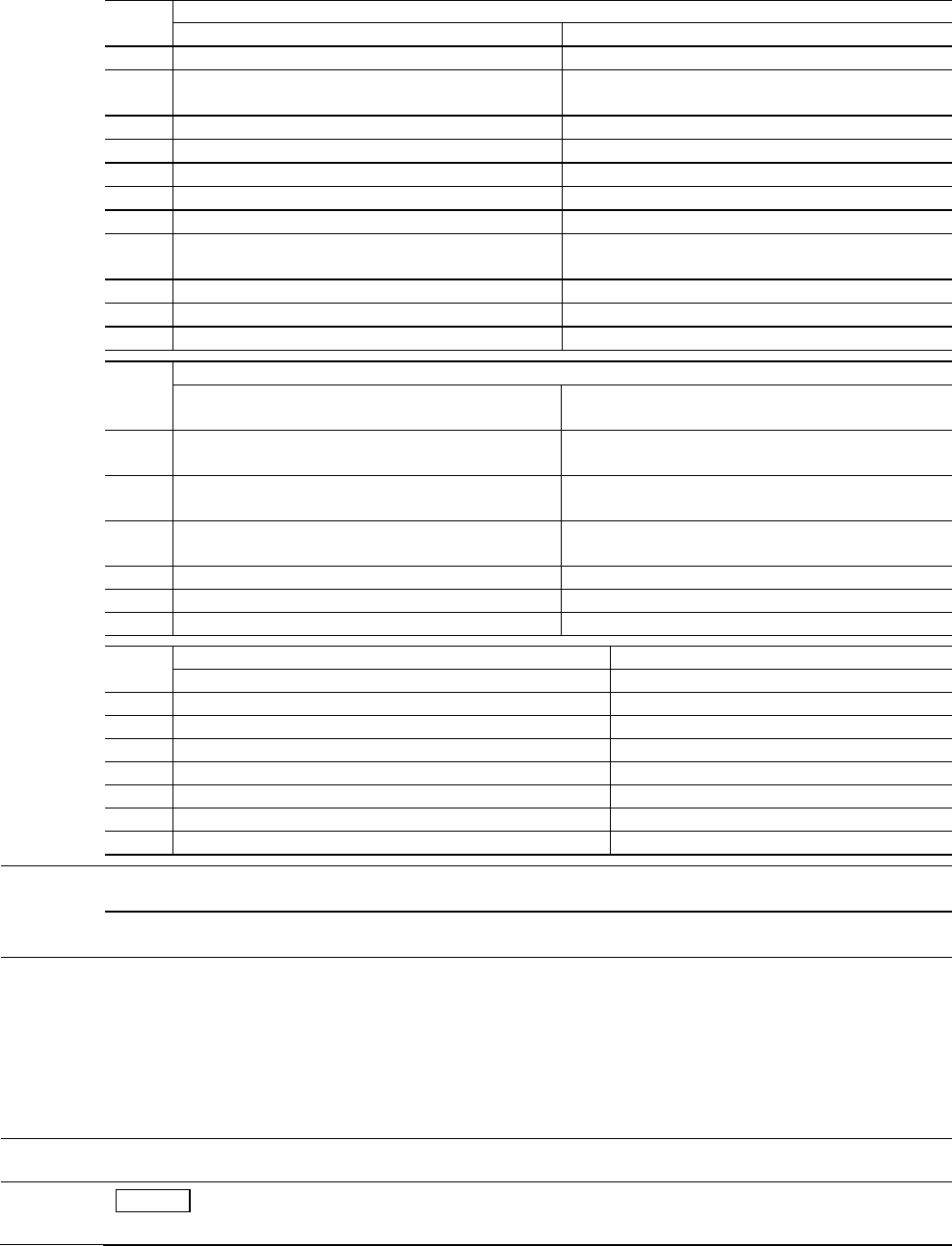
2-161
Parameter table
Value
Tool life type (data range)
C70 M system
M700/M800 series M system
1
Tool number (1 to 99999999)
Tool number (1 to 99999999)
2
Status (depends on machine manufacturer
specifications)
Status (0x00 to 0xFF)
3
Method (000 to 222)*
Method (000 to 222)*
4
Length dimension (±99999.999)
Length dimension (±9999.999)*
5
Radius dimension (±99999.999)
Radius dimension (±9999.999)*
6
Life (Time: 0 to 4000, Count: 0 to 9999)
Life (Time: 0 to 4000, Count: 0 to 9999/65000)
7
Used (Time: 0 to 4000,Count: 0 to 9999)
Used (Time: 0 to 4000,Count: 0 to 9999/65000)
8
Auxiliary (0 to 65535, depends on MTB
specifications)
Auxiliary (0 to 65535, depends on MTB
specifications)
9
Length wear (Reserved: 0)
Length wear (Reserved: 0)
10
Radius wear (Reserved: 0)
Radius wear (Reserved: 0)
11
Group (1 to 99999999)
Group (1 to 99999999)
Value
Tool life type (data range)
M700/M800 series L system (TYPE I), C70
L system (TYPE I)
M700/M800 series L system (TYPE II)
1
Application of time management (0 to
995959)
Tool number (1 to 999999)
2
Application of count management (0 to
9999)
Compensation number (0 to 80)
3
Status A (0 to 2)
Used (Time: 0 to 99999999, Count: 0 to
999999)
4
Life of time management (0 to 995959)
ST (0 to 3)
5
Life of count management (0 to 9999)
Method (Time: 0, Count: 1)
6
Status B (depends on MTB specifications)
Life (0 to 999999)
Value
Tool life type (data range)
C70 L system (TYPE II)
1
Tool number (1 to 999999)
2
Group (1 to 9999)
3
Method (0: Time, 1: Count)
4
Compensation number (1 to 80)
5
Status (0 to 3)
6
Life (Time: 0 to 999999, Count: 0 to 999999)
7
Used (Time: 0 to 999999, Count: 0 to 999999)
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
Individually sets life control data for the set tool number. This method is used for updating. To
newly add a tool, use the following procedure.
1) AddToolLifeGroup( )
2) AddToolLifeToolNo( )
3) SetToolLifeValue( )
* For the "method" for tool life management data, refer to the installation guide of each Mitsubishi
CNC.
□
Reference
GetToolLifeValue(), AddToolLifeGroup(), AddToolLifeToolNo()
□
Specifica-
tion
System
2-162
2.14.24 IEZNcTool3::SetToolLifeValue2
C70 M700 M800
2.14.24 IEZNcTool3::SetToolLifeValue2
Set tool life management
data
□ Custom call procedure
HRESULT SetToolLifeValue2 (
DWORD dwGroup, // (I) Group number
DWORD dwToolNo, // (I) Tool number
LPCOLESTR* lppcwszData, // (I) Tool life management data character
string array
LONG* plRet // (O) Error code
)
□ Automation call procedure
Tool_ SetToolLifeValue2 (
lGroup As LONG // (I) Group number
lToolNo As LONG // (I) Tool number
vData As VARIANT // (I) Tool life management data character
string array
) As LONG // (O) Error code
□
Argument
DwGroup: Sets the group number for which tool life is set.
dwToolNo: Sets the tool number for which tool life is set.
lppcwszData: Sets a UNICODE character string array for the set type of life data.
Automation argument:
lGroup: Refer to the explanation of dwGroup.
lToolNo: Refer to the explanation of dwToolNo.
vData: Creates a UNICODE
character string array for the specified type of life data and sets by
substituting it in vData
(VARIANT type). For examples of substitution, refer to " 2.11.13
WriteFile".
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK: Normal termination
EZNC_DATA_WRITE_WRITE: Data is not writable
EZNC_DATA_NOT_EXIST: Data does not exist
EZ_ERR_DATA_RANGE: Invalid argument data range (dwGroup, dwToolNo)
EZ_ERR_NULLPTR: Argument is NULL pointer
EZNC_DATA_TLFGROUP_ADDR: Invalid address (system specification)
EZNC_DATA_TLFGROUP_NONEXIST: Group number does not exist
EZNC_DATA_TLFGROUP_OUTOFSPEC: The set group number is out of specifications
EZNC_DATA_TLFTOOL_NONEXIST: Tool number does not exist
EZNC_DATA_TLFTOOL_MAXMINERR: Setting data is out of range
EZNC_DATA_TLFTOOL_OUTOFSPEC: Set tool number is out of specifications
EZ_ERR_NOT_SUPPORT: Not supported
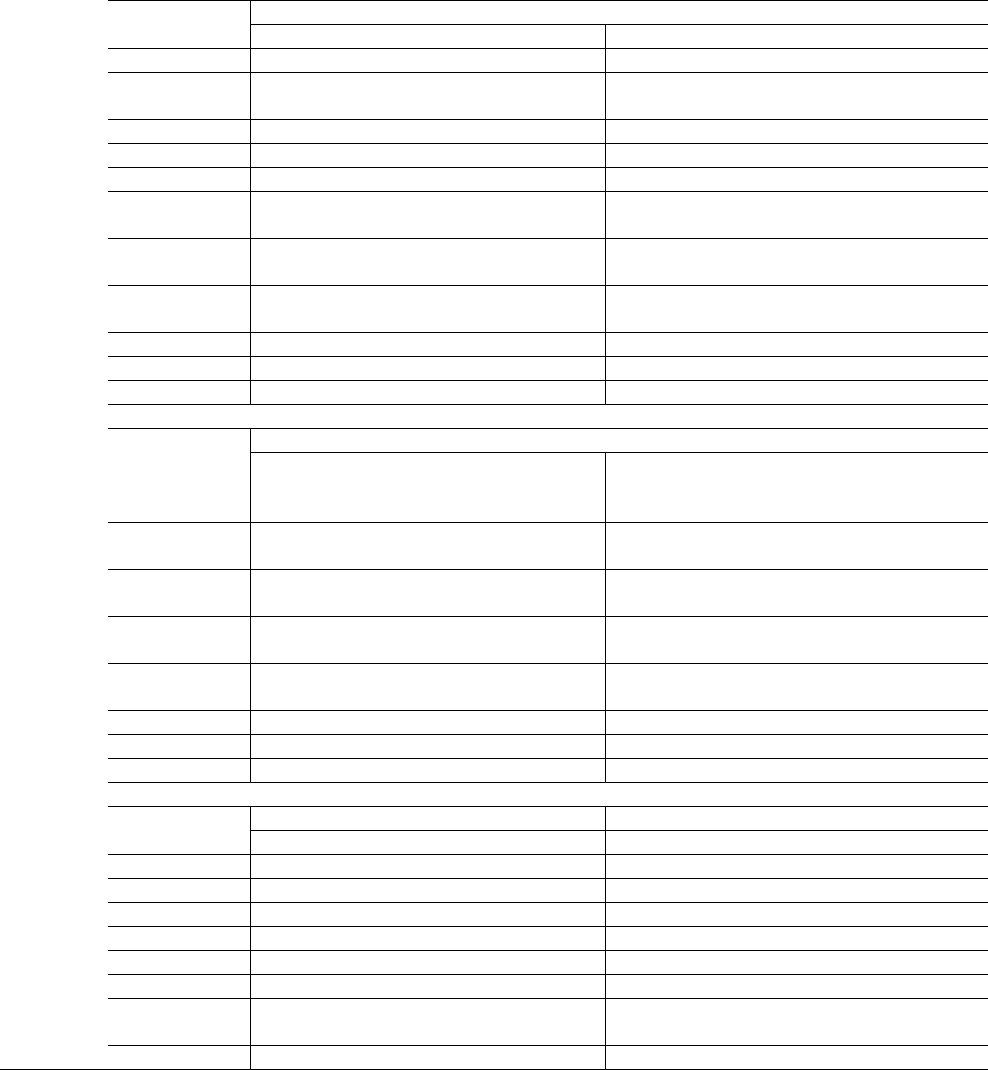
2-163
Parameter table
Array
Index
Tool life type (data range)
C70 M system
M700/M800 series M system
0
Tool number (1 to 99999999)
Tool number (Reserved: 0)
1
Status (depends on MTB
specifications)
Status (0x00 to 0xFF)
2
Method (000 to 222)*
Method (000 to 222)*
3
Length dimension (±99999.999)
Length dimension (±9999.999)*
4
Radius dimension (±99999.999)
Radius dimension (±9999.999)*
5
Life (Time: 0 to 4000,Count: 0 to
9999)
Life (Time: 0 to 4000, Count: 0 to 65000)
6
Used (Time: 0 to 4000,Count: 0 to
9999)
Usage (Time: 0 to 4000, Count: 0 to 65000)
7
Auxiliary (0 to 65535, depends on
MTB specifications)
Auxiliary (0 to 65535, depends on MTB
specifications)
8
Length wear (Reserved: 0)
Length wear (Reserved: 0)
9
Radius wear (Reserved: 0)
Radius wear (Reserved: 0)
10
Group (1 to 99999999)
Group (Reserved: 0)
Array
Index
Tool life type (data range)
M700/M800 series L system (TYPE
I),
C70 L system (TYPE I)
M700/M800 series L system (TYPE II)
0
Application of time management (0 to
995959)
Tool number (Reserved: 0)
1
Application of count management (0
to 9999)
Compensation number (0 to 80)
2
Status A (0 to 2)
Usage (Time: 0 to 99999999, Number of
times: 0 to 999999)
3
Life of time management (0 to
995959)
ST (0 to 3)
4
Life of count management (0 to 9999)
Method (Time: 0,Count: 1)
5
Status B (depends on MTB specifications)
Life (0 to 999999)
6 to 10
-
-
Array
Index
Tool life type (data range)
C70 L system (TYPE II)
0
Tool number (1 to 999999)
1
Group (1 to 9999)
2
Method (0: Time, 1:Count)
3
Compensation number (1 to 80)
4
Status (0 to 3)
5
Life (Time: 0 to 999999, Count: 0 to 999999)
6
Usage (Time: 0 to 999999, Count: 0 to
999999)
7 to 10
-
2-164
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
Sets tool life management data for the set tool number. This method is used for updating. To
newly add a tool, use the following procedure.
1) AddToolLifeGroup( )
2) AddToolLifeToolNo( )
3) SetToolLifeValue2( )
For the "method" for tool life management data, refer to the installation guide of each Mitsubishi
CNC.
[Example]
LPOLESTR* lppwszData;
lppwszData = new LPOLESTR[11];
lppwszData[0] =L"0";
lppwszData[1] =L"1";
lppwszData[2] =L"220";
lppwszData[3] =L"10.000";
lppwszData[4] =L"20.000";
lppwszData[5] =L"40.000";
lppwszData[6] =L"18.000";
lppwszData[7] =L"0";
lppwszData[8] =L"0.000";
lppwszData[9] =L"0.000";
lppwszData[10] =L"0";
hr = pIEZNcTool->SetToolLifeValue2( 1, 100, (LPCOLESTR*)lppwszData, &lRet);
if( S_OK != hr ){
wprintf(L"HRESULT Code = 0x%x, lRet Code = 0x%x\n", hr, lRet );
}
delete[ ] lppwszData;
□
Reference
GetToolLifeValue(), AddToolLifeGroup(), AddToolLifeToolNo()
□
Specifica-
tion
System
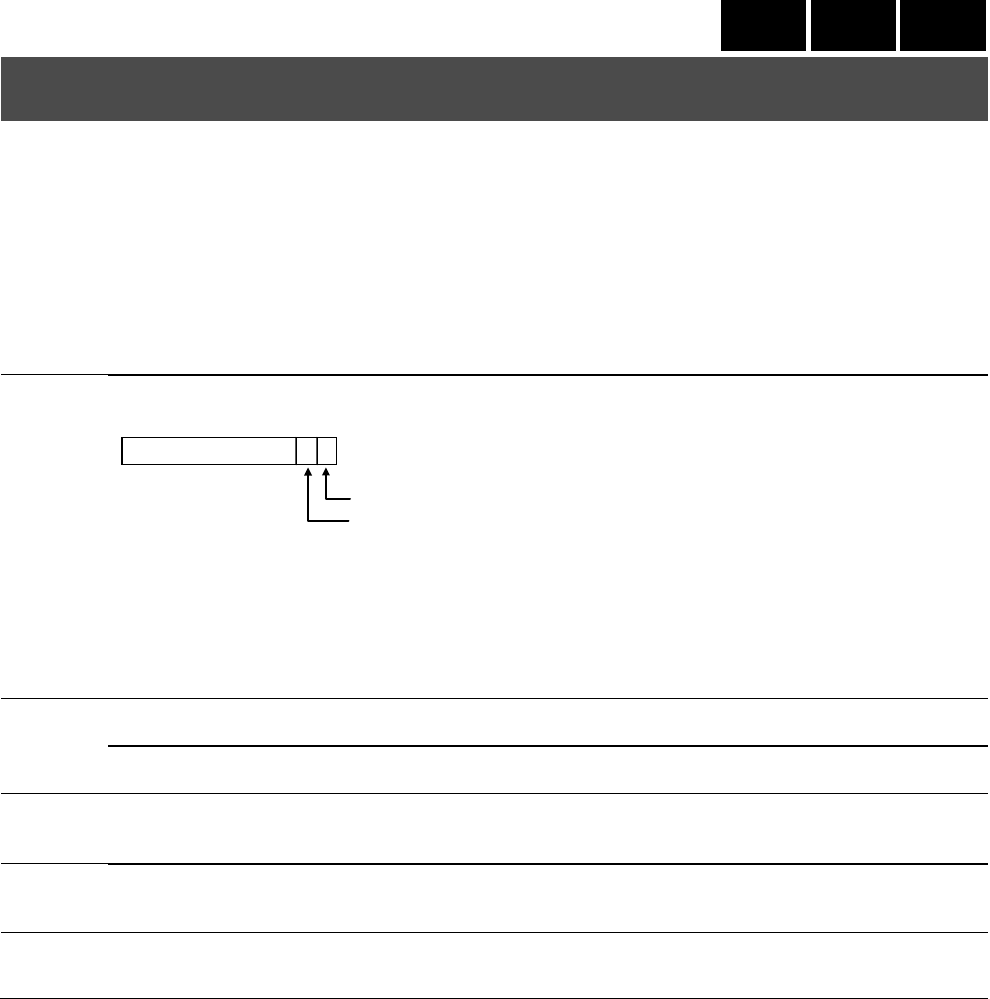
2-165
2.15 IEZNcATC3 Interface
2.15.1 IEZNcATC3::GetMGNControl
C70 M700 M800
2.15.1 IEZNcATC3::GetMGNControl Get ATC tool registration control
parameter
□ Custom call procedure
HRESULT GetMGNControl(
LONG* plData, // (O) Parameter value
LONG* plRet // (O) Error code
)
□ Automation call procedure
ATC_GetMGNControl(
plData As LONG* // (O) Parameter value
) As LONG // (O) Error code
□
Argument
plData: Returns a parameter that controls start magazine.
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK: Normal termination
EZNC_DATA_READ_READ: Data is not readable
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
Gets the control parameter value for ATC tool registration.
□
Reference
□
Specifica-
tion
0: T 4 digits, 1: T 8 digits
0: 1 Start magazine, 1: 0 Start magazine
0 (bit)
1
31
2-166
2.15.2 IEZNcATC3::GetMGNSize
C70 M700 M800
2.15.2 IEZNcATC3::GetMGNSize
Get total number of sets of magazine
pots for ATC tool registration
□ Custom call procedure
HRESULT GetMGNSize(
LONG* plSize, // (O) Total number of sets of magazine pots
LONG* plRet // (O) Error code
)
□ Automation call procedure
ATC_GetMGNSize(
plSize As LONG* // (O) Total number of sets of magazine pots
) As LONG // (O) Error code
□
Argument
plSize: Returns the total number of sets of magazine pots.
Value: 0 to 360 (maximum)
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK: Normal termination
EZNC_DATA_READ_READ: Data is not readable
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
Gets the total number of sets of magazine pots.
□
Reference
□
Specifica-
tion
2-167
2.15.3 IEZNcATC3::GetMGNSize2
C70 M700 M800
2.15.3 IEZNcATC3::GetMGNSize2
Get number of sets of pots for each
magazine for ATC tool registration
□ Custom call procedure
HRESULT GetMGNSize2(
LONG lMagazineNo, // (I) Magazine number
LONG* plSize, // (O) Number of sets of magazine pots
LONG* plRet // (O) Error code
)
□ Automation call procedure
ATC_GetMGNSize2(
lMagazineNo As LONG // (I) Magazine number
plSize As LONG* // (O) Number of sets of magazine pots
) As LONG // (O) Error code
□
Argument
lMagazineNo: Set the magazine number.
Value: 1 to 5 (maximum) M700/M800 series
Value: 1 to 3 (maximum) C70
plSize: Returns the number of sets of magazine pots.
Value: 0 to 360 (maximum) M700/M800 series
Value: 0 to 80 (maximum) C70
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK: Normal termination
EZNC_DATA_READ_READ: Data is not readable
EZ_ERR_DATA_RANGE: Invalid argument data range (lMagazineNo)
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
Gets the number of sets of the set magazine pots.
□
Reference
□
Specifica-
tion
2-168
2.15.4 IEZNcATC3::GetMGNReady2
C70 M700 M800
2.15.4 IEZNcATC3::GetMGNReady2
Get tool number for ATC tool
registration
□ Custom call procedure
HRESULT GetMGNReady2(
LONG lMagazineNo, // (I) Magazine number
LONG lReady, // (I) On standby
LONG* plToolNo, // (O) Tool number
LONG* plRet // (O) Error code
)
□ Automation call procedure
ATC_GetMGNReady2(
lMagazineNo As LONG // (I) Magazine number
lReady As LONG // (I) On standby
plToolNo As LONG* // (O) Tool number
) As LONG // (O) Error code
□
Argument
lMagazineNo: Sets the magazine number.
Value: 1 to 2 (Even if value is set for M700/M800 series, it is invalid.)
lReady: Sets standby state.
Value Meaning
0 Tool number to be installed
1 Tool number on standby 1
2 Tool number on standby 2
3 Tool number on standby 3
4 Tool number on standby 4
plToolNo: Returns the tool number.
Value: 1 to 99999999 (maximum)
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK: Normal termination
EZNC_DATA_READ_READ: Data is not readable
EZ_ERR_DATA_RANGE: Invalid argument data range (lMagazineNo, lReady)
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
Gets the tool number for ATC tool registration.
□
Reference
□
Specifica-
tion
2-169
2.15.5 IEZNcATC3::GetMGNPot
C70 M700 M800
2.15.5 IEZNcATC3::GetMGNPot
Get tool number for magazine pot for ATC
tool registration
□ Custom call procedure
HRESULT GetMGNPot(
LONG lIndex, // (I) Magazine pot number
LONG* plToolNo, // (O) Tool number
LONG* plRet // (O) Error code
)
□ Automation call procedure
ATC_GetMGNPot(
lIndex As LONG // (I) Magazine pot number
plToolNo As LONG* // (O) Tool number
) As LONG // (O) Error code
□
Argument
lIndex: Sets the magazine pot number.
Value: 1 to 360 (maximum) M700/M800 series
Value: 1 to 80 (maximum) C70
plToolNo: Returns the tool number.
Value: 0 to 99999999 (maximum)
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK: Normal termination
EZNC_DATA_READ_READ: Data is not readable
EZ_ERR_DATA_RANGE: Invalid argument data range (lIndex)
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
Gets the tool number which is stored in the set pot of the magazine.
□
Reference
SetMGNPot(), GetMGNPotEx()
□
Specifica-
tion
2-170
2.15.6 IEZNcATC3::GetMGNPot3
C70 M700 M800
2.15.6 IEZNcATC3::GetMGNPot3
Get tool number for each magazine pot for ATC
tool registration
□ Custom call procedure
HRESULT GetMGNPot3(
LONG lMagazineNo, // (I) Magazine number
LONG lIndex, // (I) Pot number
LONG* plToolNo, // (O) Tool number
LONG* plRet // (O) Error code
)
□ Automation call procedure
ATC_GetMGNPot3(
lMagazineNo As LONG // (I) Magazine number
lIndex As LONG // (I) Pot number
plToolNo As LONG* // (O) Tool number
) As LONG // (O) Error code
□
Argument
lMagazineNo: Sets the magazine number.
Value: 1 to 5 (maximum) M700/M800 series
Value: 1 to 3 (maximum) C70
lIndex: Sets the pot number.
Value: 1 to 360 (maximum) M700/M800 series
Value: 1 to 80 (maximum) C70
plToolNo: Returns the tool number.
Value: 0 to 99999999 (maximum)
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK: Normal termination
EZNC_DATA_READ_READ: Data is not readable
EZ_ERR_DATA_RANGE: Invalid argument data range (lMagazineNo, lIndex)
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
Gets the tool number which is stored in the pot of the set magazine number.
□
Reference
SetMGNPot3()
□
Specifica-
tion
2-171
2.15.7 IEZNcATC3::SetMGNPot
C70 M700 M800
2.15.7 IEZNcATC3::SetMGNPot
Set tool number for magazine pots for ATC
tool registration
□ Custom call procedure
HRESULT SetMGNPot(
LONG lIndex, // (I) Pot number
LONG lToolNo, // (I) Tool number
LONG* plRet // (O) Error code
)
□ Automation call procedure
ATC_SetMGNPot(
lIndex As LONG // (I) Pot number
lToolNo As LONG // (I) Tool number
) As LONG // (O) Error code
□
Argument
lIndex: Sets the pot number.
Value: 1 to 360 (maximum) M700/M800 series
Value: 1 to 80 (maximum) C70
lToolNo: Sets the tool number.
Value: 1 to 99999999 (maximum)
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK: Normal termination
EZNC_DATA_WRITE_WRITE: Data is not writable
EZ_ERR_DATA_RANGE: Invalid argument data range (lIndex, lToolNo)
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
Sets the tool number to be stored in the magazine pot. Care should be taken to avoid overlaps in
tool numbers because double registration of a tool number is not checked. An alarm is raised
when double registration is made. Alarm information can be got with GetAlarm().
For the M700/M800 series, if the tool number of the Mitsubishi CNC is specified for 4 digits, the
lower 4 digits are registered when the number with 5 digits or more is specified, and the 5th digit
and higher will be discarded.
□
Reference
GetMGNPot(), SetMGNPotEx(), GetAlarm()
□
Specifica-
tion
2-172
2.15.8 IEZNcATC3::SetMGNPot3
C70 M700 M800
2.15.8 IEZNcATC3::SetMGNPot3
Set tool number for each magazine pot for ATC
tool registration
□ Custom call procedure
HRESULT SetMGNPot3(
LONG lMagazineNo, // (I) Magazine number
LONG lIndex, // (I) Pot number
LONG lToolNo, // (I) Tool number
LONG* plRet // (O) Error code
)
□ Automation call procedure
ATC_SetMGNPot3(
lMagazineNo As LONG // (I) Magazine number
lIndex As LONG // (I) Pot number
lToolNo As LONG // (I) Tool number
) As LONG // (O) Error code
□
Argument
lMagazineNo: Sets the magazine number.
Value: 1 to 5 (maximum) M700/M800 series
Value: 1 to 3 (maximum) C70
lIndex: Sets the pot number.
Value: 1 to 360 (maximum) M700/M800 series
Value: 1 to 80 (maximum) C70
lToolNo: Sets the tool number.
Value: 1 to 99999999 (maximum)
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK: Normal termination
EZNC_DATA_WRITE_WRITE: Data is not writable
EZ_ERR_DATA_RANGE: Invalid argument data range (lMagazineNo, lIndex, lToolNo)
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
Sets the tool number to be stored in the pot of the set magazine number. Care should be taken to
avoid overlaps in tool numbers because double registration of a tool number is not checked. An
alarm is raised when double registration is made. Alarm information can be got with GetAlarm().
If the tool number of the Mitsubishi CNC is specified for 4 digits, the lower 4 digits are registered
when the number with 5 digits or more is specified, and the 5th digit and higher will be discarded.
□
Reference
GetMGNPot3(), GetAlarm()
□
Specifica-
tion
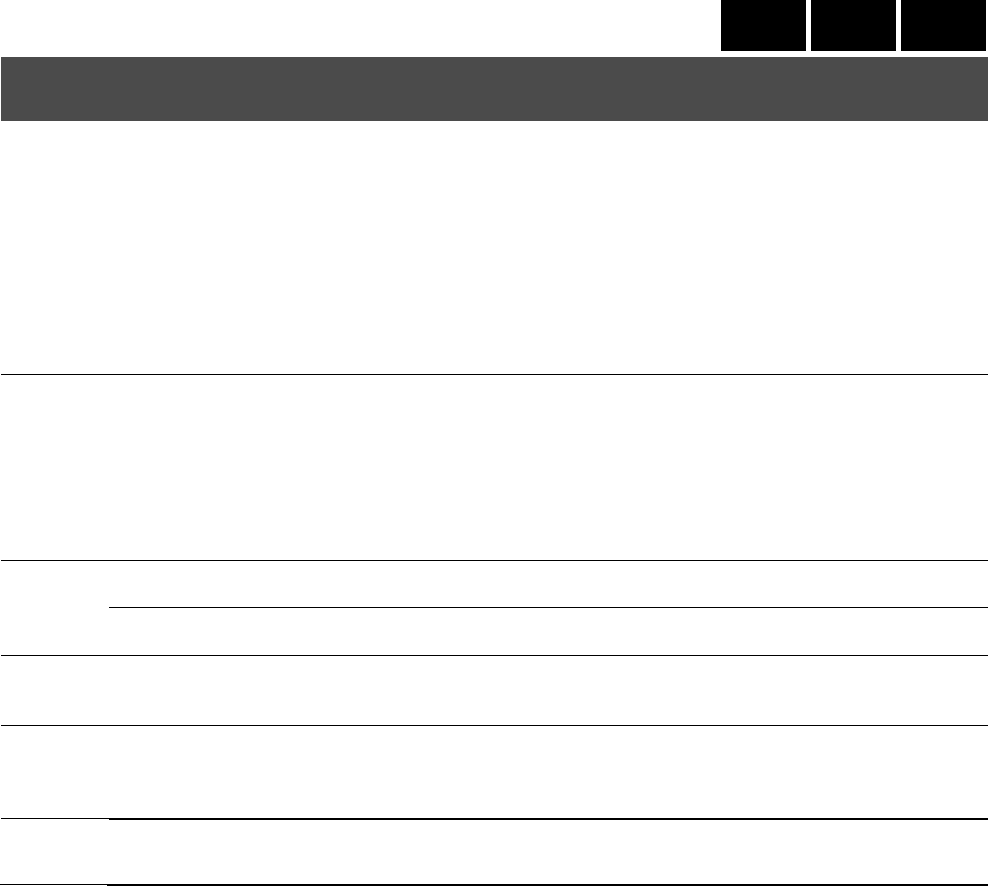
2-173
2.15.9 IEZNcATC3::GetMGNAux
C70 M700 M800
2.15.9 IEZNcATC3::GetMGNAux
Get user PLC interface for ATC tool
registration
□ Custom call procedure
HRESULT GetMGNAux(
LONG* plData, // (O) Data
LONG* plRet // (O) Error code
)
□ Automation call procedure
ATC_GetMGNAux(
plData As LONG* // (O) Data
) As LONG // (O) Error code
□
Argumen
t
plData: Returns sequence processing data for user programmable controller.
Value: 0 to 65535
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK: Normal termination
EZNC_DATA_READ_READ: Data is not readable
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
Returns sequence processing data for user PLC.
□
Referenc
e
□
Specifica-
tion
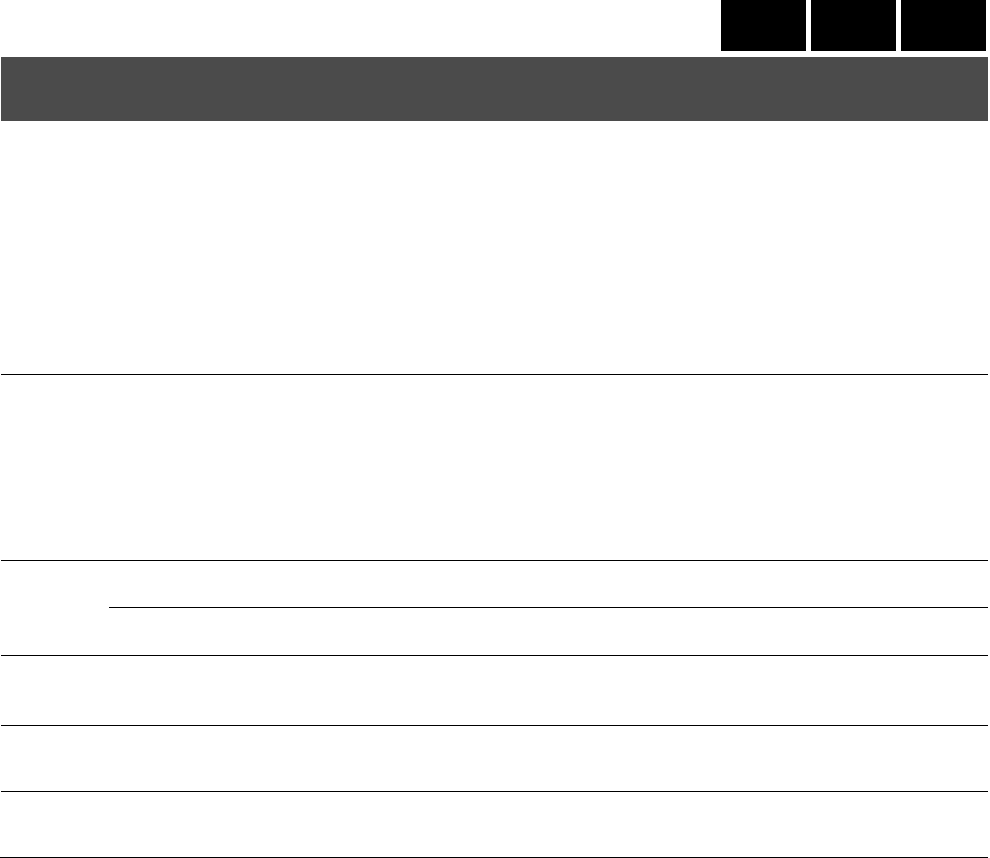
2-174
2.15.10 IEZNcATC3::SetMGNAux
C70 M700 M800
2.15.10 IEZNcATC3::SetMGNAux
Set user PLC interface for ATC tool
registration
□ Custom call procedure
HRESULT SetMGNAux(
LONG lData, // (I) Data
LONG* plRet // (O) Error code
)
□ Automation call procedure
ATC_SetMGNAux(
lData As LONG // (I) Data
) As LONG // (O) Error code
□
Argument
lData: Sets sequence processing data for userPLC.
Value: 0 to 65535
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK: Normal termination
EZNC_DATA_READ_READ: Data is not readable
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
Sets sequence processing data for user PLC.
□
Reference
□
Specifica-
tion
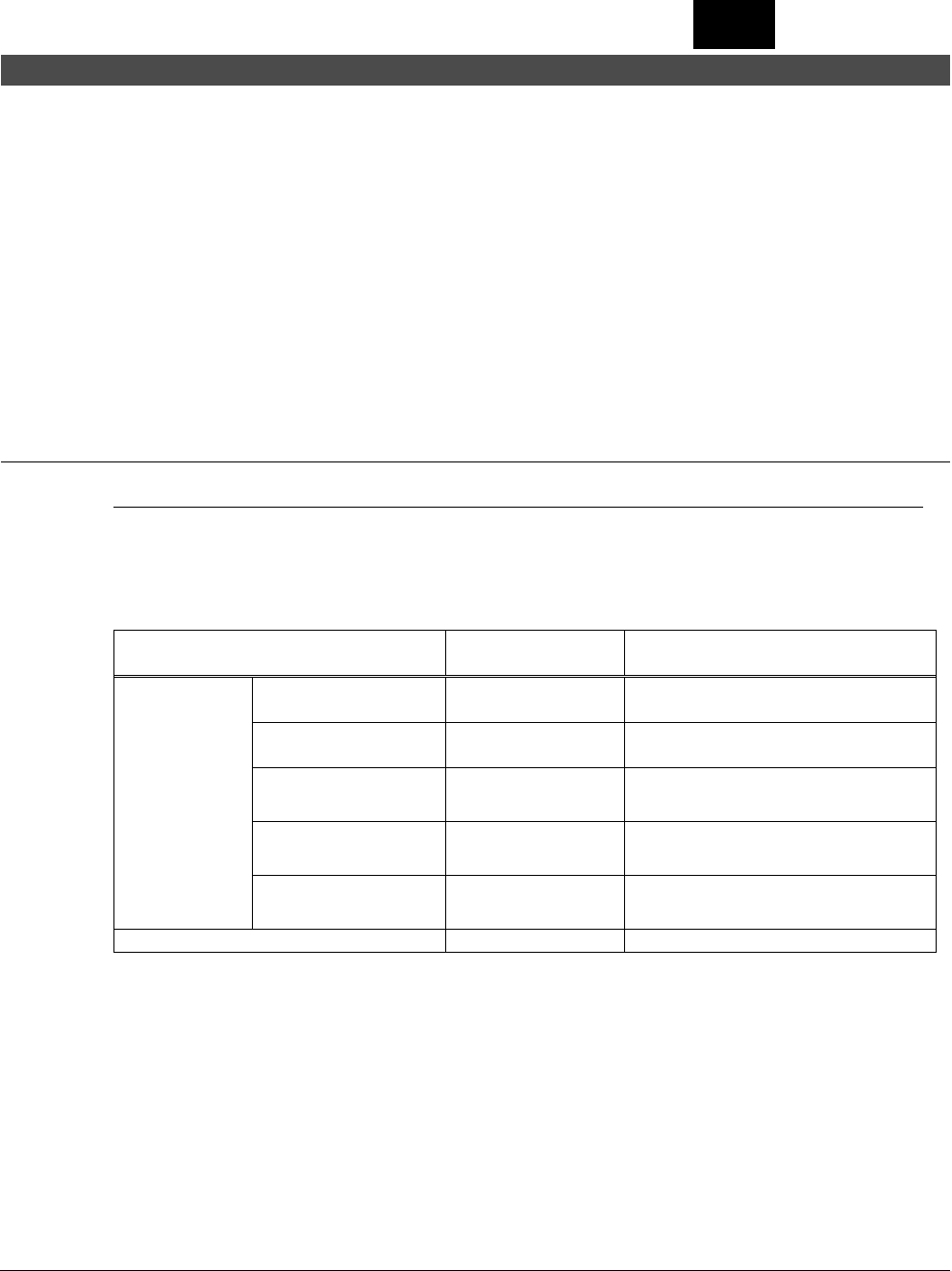
2-175
2.16 IEZNcParameter3 Interface
2.16.1 IEZNcParameter3::GetParameterData2
C70 M700 M700
2.16.1 IEZNcParameter3::GetParameterData2
Get parameters
□ Custom call procedure
HRESULT GetParameterData2(
LONG lGroup, // (I) Group number
LONG lItem, // (I) First item number
LONG lSize, // (I) Number of items
LONG lAxis, // (I) Axis No.
LPOLESTR* lppwszValue, // (O) Parameter value character string array
LONG* plRet // (O) Error code
)
□ Automation call procedure
Parameter_GetData2(
lGroup As LONG // (I) Group number
lItem As LONG // (I) First item number
lSize As LONG // (I) Number of items
lAxis As LONG // (I) Axis No.
pvValue As VARIANT* // (O) Parameter value character string array
) As LONG // (O) Error code
□
Argument
lGroup: Sets the group number of parameter.
Model Setting
M700 series Disabled
C70 Disabled
lItem: Sets the first item number of parameter. This must be set. T
he parameter number
described in setup manuals of each CNC will be this item number.
Model
IB# of parameter
manual
Item number to be set
M700 series
Mitsubishi CNC
M700 series
IB-1500123
Parameter number
Mitsubishi CNC
M700VS series
IB-1500905
Parameter number
Mitsubishi CNC
M700VW series
IB-1500932
Parameter number
Mitsubishi CNC
M70 series
IB-1500878
Parameter number
Mitsubishi CNC
M70V series
IB-1500957
Parameter number
C70
IB-1500264
Parameter number
lSize: Sets the number of items of parameter. The range starts from 1.
lAxis: Sets the axis No. whose parameter is to be got. This argument needs not be set unless the
parameter to be got is axis-dependent.
lppwszValue: Gets the parameter value as a UNICODE
character string array. Though the
character string area will internally be allocated in this product, the pointer of the
character string (for ISize
) needs to be reserved by the client. As the character
string area is internally allocated in this product, the client using VC++ needs to
release the memory area explicitly with CoTaskMemFree().
The parameter value will be got as signed value regardless of its item number. In
the case of unsigned SHORT type data "65535", "-1" will be got.
pvValue: See the explanation of lppwszValue.
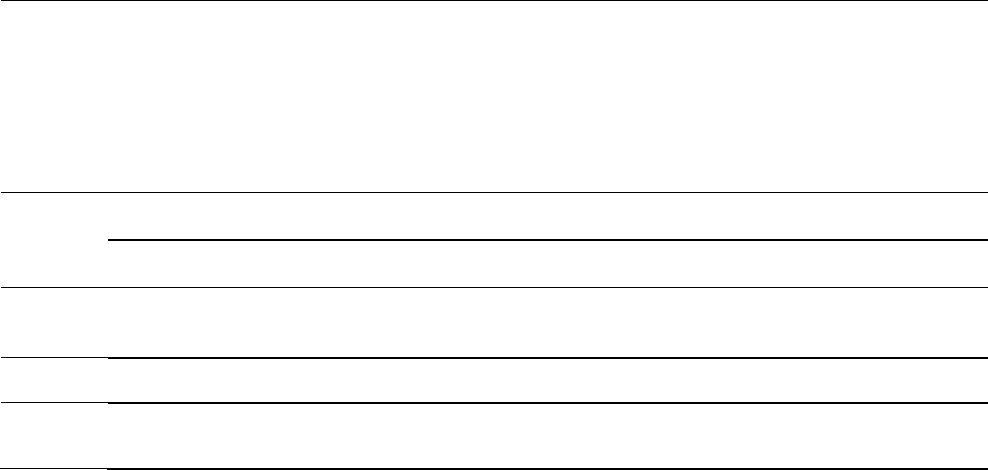
2-176
□
Argument
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK: Normal termination
EZNC_DATA_READ_ADDR: Invalid part system, axis No. setting
EZNC_PARAM_FILENOTEXIST: No parameter information file
EZNC_DATA_NOT_EXIST: Data does not exist
EZ_ERR_NOT_SUPPORT: Not supported
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
Gets the parameter.
This function is not supported with the M800 Series. (EZ_ERR_NOT_SUPPORT is returned to
plRet.)
□
Reference
SetParameterData2()
□
Specifica-
tion
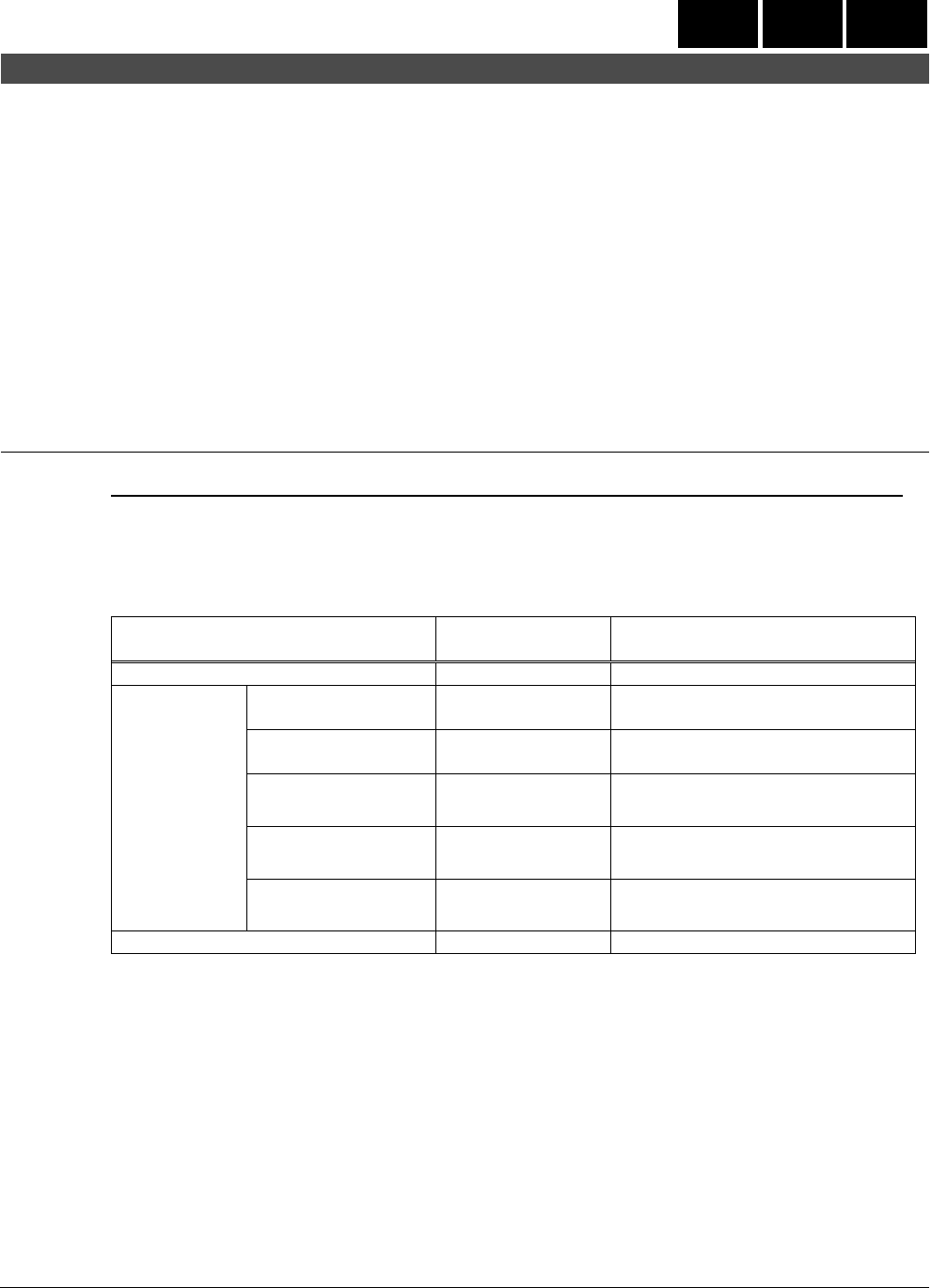
2-177
2.16.2 IEZNcParameter3::GetParameterData3
C70 M700 M800
2.16.2 IEZNcParameter3::GetParameterData3
Get parameters
□ Custom call procedure
HRESULT GetParameterData3(
LONG lGroup, // (I) Group number
LONG lItem, // (I) First item number
LONG lSize, // (I) Number of items
LONG lAxis, // (I) Aaxis No.
LPOLESTR* lppwszValue, // (O) Parameter value character string array
LONG* plRet // (O) Error code
)
□ Automation call procedure
Parameter_GetData3(
lGroup As LONG // (I) Group number
lItem As LONG // (I) First item number
lSize As LONG // (I) Number of items
lAxis As LONG // (I) Axis No.
pvValue As VARIANT* // (O) Parameter value character string array
) As LONG // (O) Error code
□
Argument
lGroup: Sets the group number of parameter.
Model Setting
C70 Disabled
M700/M800 series Disabled
lItem: Sets the first item number of parameter. This must be set. T
he parameter number
described in setup manuals of each CNC will be this item number.
Model
IB# of parameter
manual
Item number to be set
C70
IB-1500264
Parameter number
M700 series
Mitsubishi CNC
M700 series
IB-1500123
Parameter number
Mitsubishi CNC
M700VS series
IB-1500905
Parameter number
Mitsubishi CNC
M700VW series
IB-1500932
Parameter number
Mitsubishi CNC
M70 series
IB-1500878
Parameter number
Mitsubishi CNC
M70V series
IB-1500957
Parameter number
M800 series
IB-1501265
Parameter number
lSize: Sets the number of items of parameter. The range starts from 1.
lAxis: Sets the axis whose parameter is to be got. This argument needs not be set unless the
parameter to be got is axis-dependent.
lppwszValue: Gets the parameter value as a UNICODE
character string array. Though the
character string area will internally be allocated in this product, the pointer of the
character string (for ISize
) needs to be reserved by the client. As the character
string area is internally allocated in this product, the client using VC++ needs to
release the memory area explicitly with CoTaskMemFree().
The parameter value will be got as signed value regardless of its item number. In
the case of unsigned SHORT type data "65535", "-1" will be got.
pvValue: See the explanation of lppwszValue.
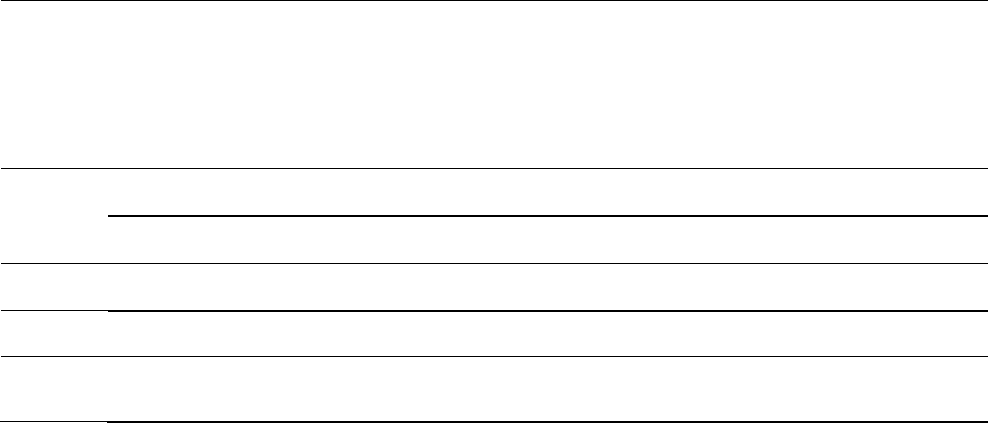
2-178
□
Argument
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK: Normal termination
EZNC_DATA_READ_ADDR: Invalid part system, axis No. setting
EZNC_PARAM_FILENOTEXIST: No parameter information file
EZNC_DATA_NOT_EXIST: Data does not exist
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
Gets the parameter.
□
Reference
SetParameterData3()
□
Specifica-
tion
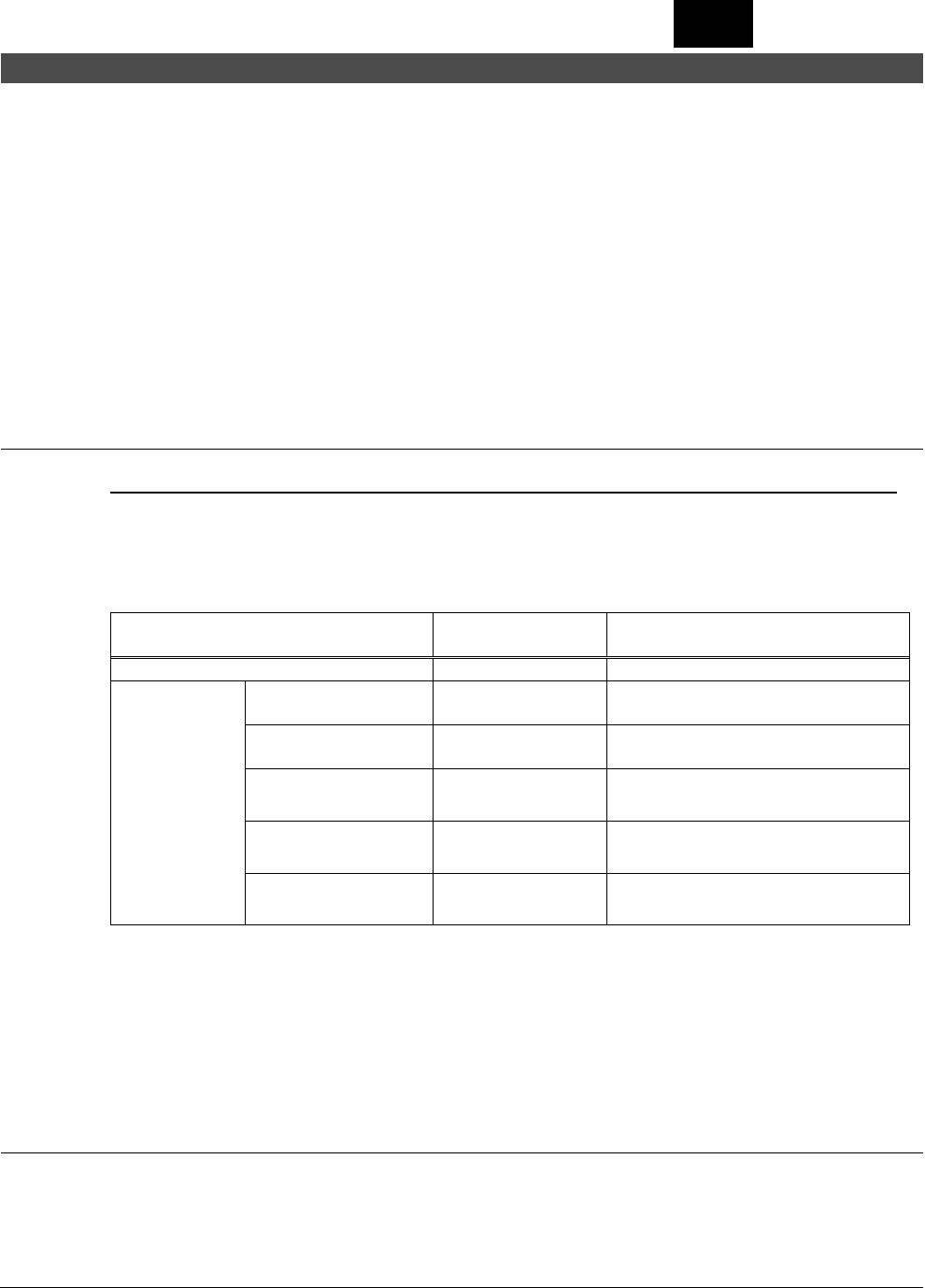
2-179
2.16.3 IEZNcParameter3::SetParameterData2
C70 M700 M700
2.16.3 IEZNcParameter3::SetParameterData2
Set parameters
□ Custom call procedure
HRESULT GetParameterData2(
LONG lGroup, // (I) Group number
LONG lItem, // (I) First item number
LONG lSize, // (I) Number of items
LONG lAxis, // (I) Axis No.
LPOLESTR* lppwszValue, // (O) Parameter value character string array
LONG* plRet // (O) Error code
)
□ Automation call procedure
Parameter_GetData2(
lGroup As LONG // (I) Group number
lItem As LONG // (I) First item number
lSize As LONG // (I) Number of items
lAxis As LONG // (I) Axis No.
pvValue As VARIANT* // (O) Parameter value character string array
) As LONG // (O) Error code
□
Argument
lGroup: Sets the group number of parameter.
Model Setting
C70 Disabled
M700 series Disabled
lItem: Sets the first item number of parameter. This must be set. The parameter number
described in setup manuals of each CNC will be this item number.
Model
IB# of parameter
manual
Item number to be set
C70
IB-1500264
Parameter number
M700 series
Mitsubishi CNC
M700 series
IB-1500123
Parameter number
Mitsubishi CNC
M700VS series
IB-1500905
Parameter number
Mitsubishi CNC
M700VW series
IB-1500932
Parameter number
Mitsubishi CNC
M70 series
IB-1500878
Parameter number
Mitsubishi CNC
M70V series
IB-1500957
Parameter number
lSize: Sets the number of items of parameter. The range starts from 1.
lAxis: Sets the axis whose parameter is to be got. This argument needs not be set unless the
parameter to be got is axis-dependent.
lppwszValue: Gets the parameter value as a UNICODE character string array.
Automation argument:
vValue: See the explanation of lppwszValue.
□
Argument
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK: Normal termination
EZNC_DATA_READ_ADDR: Invalid part system, axis No. setting
EZNC_PARAM_FILENOTEXIST: No parameter information file
EZNC_DATA_NOT_EXIST: Data does not exist
EZ_ERR_NOT_SUPPORT: Not supported
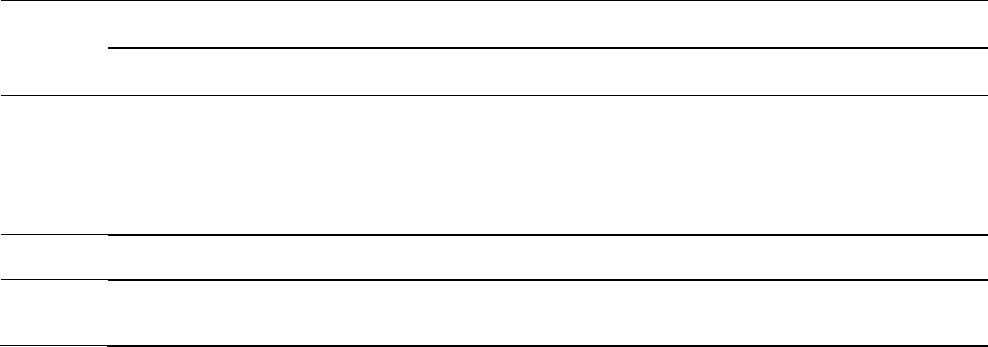
2-180
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
Gets the parameter.
When setting the machine parameters, the NC must be set to the machine parameter setting
mode state. Refer to the Setup Manual for each CNC
for details on setting the machine
parameter setting mode.
This function is not supported with the M800 Series. (EZ_ERR_NOT_SUPPORT is returned to
plRet.)
□
Reference
SetParameterData2()
□
Specifica-
tion
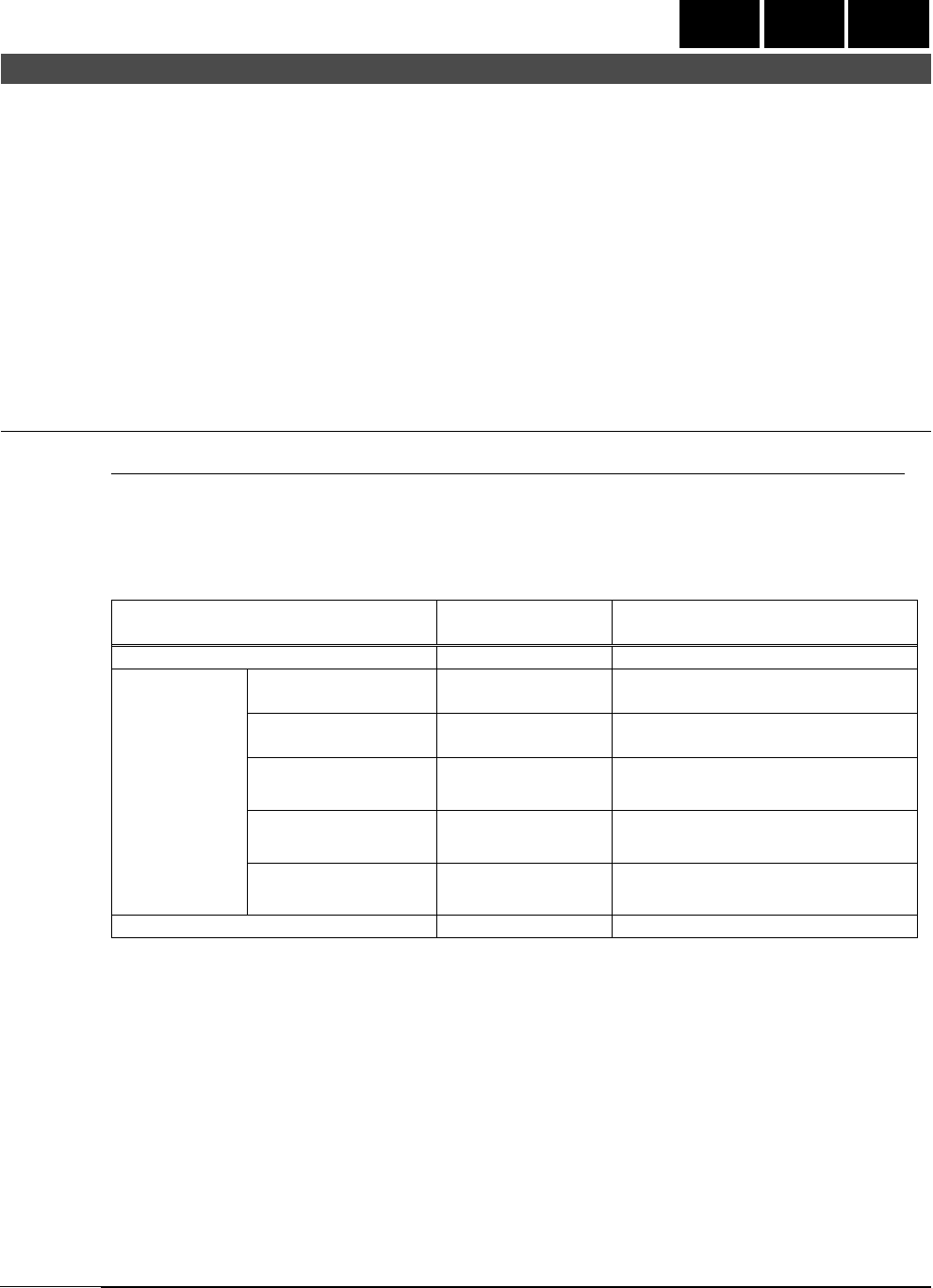
2-181
2.16.4 IEZNcParameter3::SetParameterData3
C70 M700 M700
2.16.4 IEZNcParameter3::SetParameterData3
Set Parameters
□ Custom call procedure
HRESULT SetParameterData3(
LONG lGroup, // (I) Group number
LONG lItem, // (I) First item number
LONG lSize, // (I) Number of items
LONG lAxis, // (I) Axis No.
LPCOLESTR* lppcwszValue, // (I) Parameter value character string array
LONG* plRet // (O) Error code
)
□ Automation call procedure
Parameter_SetData3(
lGroup As LONG // (I) Group number
lItem As LONG // (I) First item number
lAxis As LONG // (I) Axis No.
vValue As VARIANT // (I) Parameter value character string array
) As LONG // (O) Error code
□
Argument
lGroup: Sets the group number of parameter.
Model Setting
C70 Disabled
M700/M800 series Disabled
lItem: Sets the first item number of parameter. This must be set. The pa
rameter number
described in setup manuals of each CNC will be this item number.
Model
IB# of parameter
manual
Item number to be set
C70
IB-1500264
Parameter number
M700 series
Mitsubishi CNC
M700 series
IB-1500123
Parameter number
Mitsubishi CNC
M700VS series
IB-1500905
Parameter number
Mitsubishi CNC
M700VW series
IB-1500932
Parameter number
Mitsubishi CNC
M70 series
IB-1500878
Parameter number
Mitsubishi CNC
M70V series
IB-1500957
Parameter number
M800 series
IB-1501265
Parameter number
lSize: Sets the number of items of parameter. The range starts from 1.
lAxis: Sets the axis whose parameter is to be got. This argument needs not be set unless the
parameter to be got is axis-dependent.
lppcwszValue: Sets the parameter value as a UNICODE character string array.
vValue: See the explanation of lppcwszValue.
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK: Normal termination
EZNC_DATA_WRITE_ADDR: Invalid part system, axis No.setting
EZNC_PARAM_FILENOTEXIST: No parameter information file
EZNC_DATA_NOT_EXIST: Data does not exist
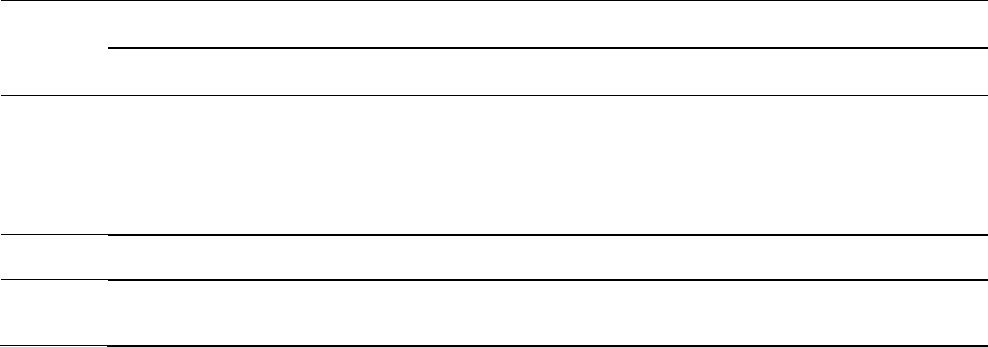
2-182
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
Sets the parameter.
To set a machine parameter, the NC needs to be in the machine parameter setting mode. For
how to set the NC to the machine parameter setting mode, see the setup manual of the
Mitsubishi CNC.
□
Reference
GetParameterData3()
□
Specifica-
tion

2-183
2.17 IEZNcOperation Interface
2.17.1 IEZNcOperation::Search
C70 M700 M800
2.17.1 IEZNcOperation::Search
Operation search
□ Custom call procedure
HRESULT Search(
LPCOLESTR lpcwszSelectProgram, // (I) Program file name
LONG lSequenceNo, // (I) Sequence number
LONG lBlockNo, // (I) Block number
LONG* plRet // (O) Error code
)
□ Automation call procedure
Operation_Search(
lpcwszSelectProgram As STRING // (I) Program file name
lSequenceNo As LONG // (I) Sequence number
lBlockNo As LONG // (I) Block number
) As LONG // (O) Error code
□
Argument
lpcwszSelectProgram: Sets the program file name for operation search as a UNICODE character
string.
lSequenceNo: Sets the sequence number to be searched.
lBlockNo: Sets the block number to be searched.
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK : Normal termination
EZNC_OPE_SELECTPRG_ADDR: Invalid system specification
EZNC_OPE_SELECTPRG_FILESYSTEM: File system error
EZNC_OPE_SELECTPRG_NOPRG: No program file
EZNC_OPE_SELECTPRG_PRGFORMAT: Invalid program file name format
EZNC_OPE_SELECTPRG_RUNNING: Program operation in progress
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
Executes operation search.
Use lpwcszSelectProgram to set the program file name whose operation is to be started.
The name of the program files in the \PRG\USER\ directory of NC control unit or in
the M□:\IC1\ directory of NC's CF card or NC’s SD card (M800S/M80: at the front panel SD card
slot, M800W: at the rear panel SD card slot #2) can be set.
Note that the file name of the program file in the \PRG\USER\ directory of NC control unit does
not need to contain the drive name and directory path.
Use a character string as below to specify the program file name.
C70: "<program number>.PRG" Example) "1000.PRG"
M700/M800 series: "<program file name>" Example) "1000"
M700/M800 series: "M□:\IC1\<program file name>" Example) "M01:\IC1\1000"
lSequenceNo or lBlockNo can be used to set the sequence number or block number whose
operation is to be started. Set 0 in lSequenceNo and lBlockNo when operation is to be started
from the top of the program.
□
Reference
IEZNcProgram::CurrentBlockRead()
□
Specifica-
tion
System
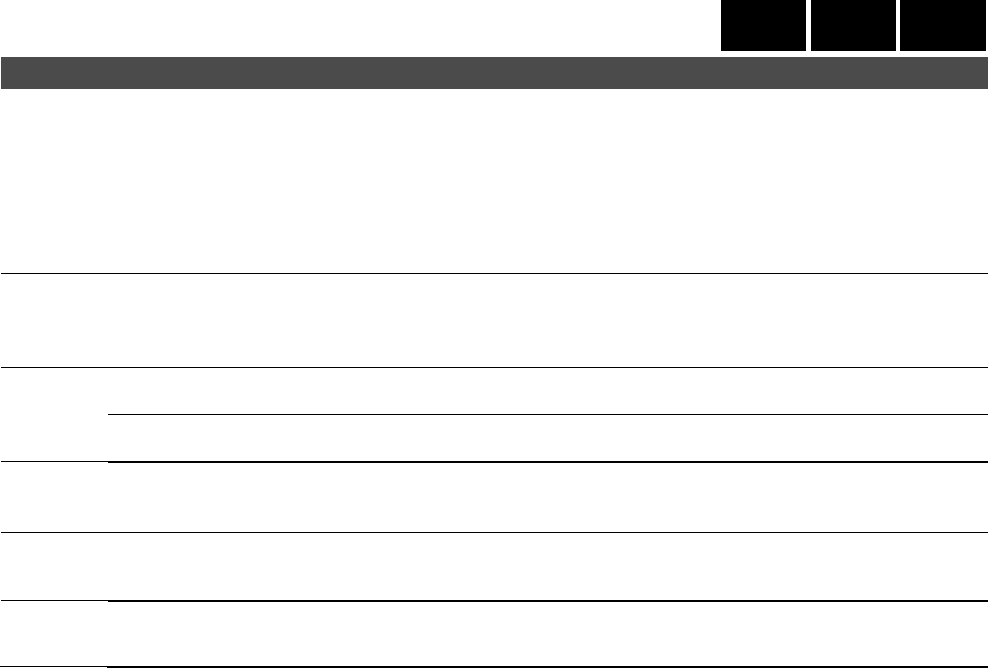
2-184
2.17.2 IEZNcOperation::Run
C70 M700 M800
2.17.2 IEZNcOperation::Run
Start PLC program
□ Custom call procedure
HRESULT Run(
LONG* plRet // (O) Error code
)
□ Automation call procedure
Operation_Run( ) As LONG // (O) Error code
□
Argument
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK : Normal termination
EZNC_OPE_ACTPLC_ADDR: Invalid NC control unit
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
Starts the PLC program.
□
Reference
Stop()
□
Specifica-
tion
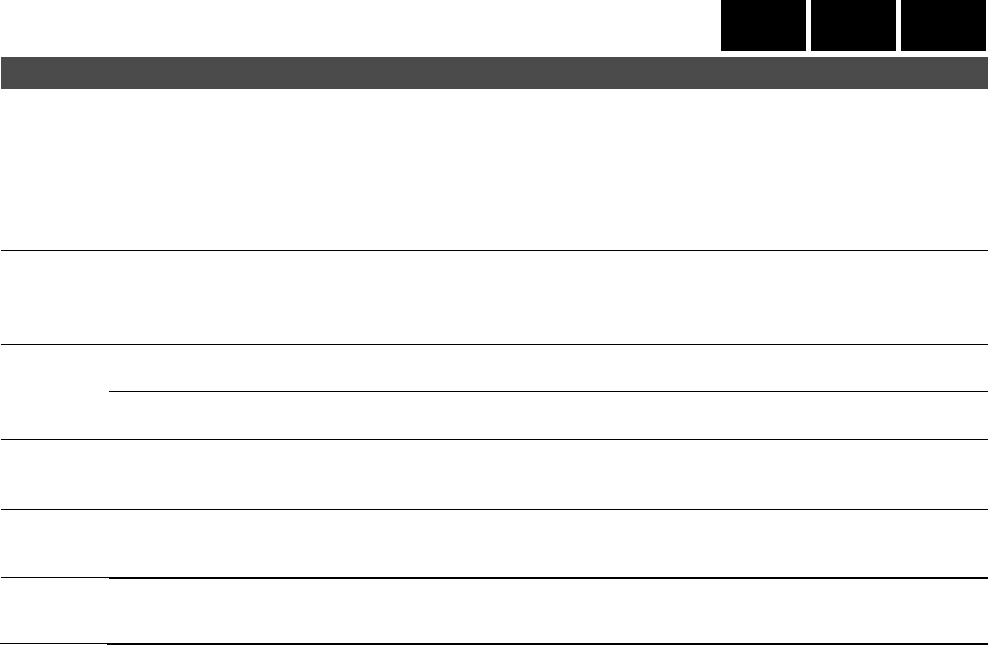
2-185
2.17.3 IEZNcOperation::Stop
C70 M700 M800
2.17.3 IEZNcOperation::Stop
Stop PLC program
□ Custom call procedure
HRESULT Stop(
LONG* plRet // (O) Error code
)
□ Automation call procedure
Operation_Stop( ) As LONG // (O) Error code
□
Argument
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK : Normal termination
EZNC_OPE_ACTPLC_ADDR: Invalid NC control unit
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
Stops the PLC program.
□
Reference
Run()
□
Specifica-
tion
2-186
2.18 IEZNcDevice Interface
2.18.1 IEZNcDevice::SetDevice
M700 M800
2.18.1 IEZNcDevice::SetDevice
Set device settings
□ Custom call procedure
HRESULT SetDevice(
DWORD dwLength, // (I) Number of device points
LPCOLESTR* lppcwszDevice, // (I) Device character string
LPDWORD lpdwDataType, // (I) Data type
LPDWORD lpdwValue, // (I) Device value array
LONG* plRet // (O) Error code
)
□ Automation call procedure
Device_SetDevice(
vDevice As VARIANT, // (I) Device character string
vDataType As VARIANT, // (I) Data type
vValue As VARIANT // (I) Device value array
) As LONG // (O) Error code
□
Argument
dwLength: Sets the number of device points to be set. The maximum value is 1K points.
lppcwszDevice: Sets the array of the device character string to be set. The device character
string needs to be specified as UNICODE string. However if word format (or
double word format) is set in the data type, the device character string needs to
be set in multiples of 16 (or 32).
lpdwDataType: Sets each data type of the device to be set as an array.
Value Meaning Unit in Table 2-4
EZNC_PLC_BIT Bit 1 bit
EZNC_PLC_WORD Word 16 bits
EZNC_PLC_DWORD Double word 32 bits
lpdwValue: Sets the array used to set the device value. When reading, set a dummy value that
has the same number of array elements as that of the device character string.
Automation argument:
vDevice: Sets the array of the device character string to be set as VARIANT. It needs to be sets
as UNICODE character string. However if word format (or double word format) is set in
the data type, the device character string needs to be set in multiples of 16 (or 32).
vDataType: Sets the array of the data type of the device value to be set as VARIANT.
Value Meaning Unit in Table 2-4
EZNC_PLC_BIT Bit 1 bit
EZNC_PLC_WORD Word 16 bits
EZNC_PLC_DWORD Double word 32 bits
vValue: Sets the array of the device value to be set as VARIANT. When reading, set a dummy
value that has the same number of array elements as that of the device character string.
2-187
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK: Normal termination
EZNC_DATA_READ_DATATYPE: Invalid data type
EZ_ERR_NOT_SUPPORT: Not supported
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
Defines the device to be used in the user PLC. The device settings are all based on one-shot
operation. The settings for one-shot operation may return to the original state after one cycle of
the PLC operation. The settings cannot be retrieved when making the settings next time.
This function is not supported with C70. (EZ_ERR_NOT_SUPPORT is returned to plRet.)
□
Reference
ReadDevice(), WriteDevice(), DeleteDeviceAll()
□
Specifica-
tion
2-188
Table 2-4 Applicable devices list
Device
name
Name Unit
Model
M700
M800
B
Counter (fixed counter)
1 bit/16 bits/32 bits
B0
~
B1FFF (8192 points)
B0
~
B1BFFF (114688 points)
CI
Counter coil
1 bit/16 bits/32 bits
C0
~
C1255 (1256 points)
C0
~
C101023 (101024 points)
D
Data register
16 bits/32 bits
D0
~
D2047 (2048 points)
D0
~
D8191 (8192 points)
E
Special relay
1 bit/16 bits/32 bits
E0
~
E127 (128 points)
E0
~
E9999 (10000 points)
F
Alarm message interface.
Temporary memory.
1 bit/16 bits/32 bits
F0
~
F1024 (1025 points)
F0
~
F4095 (4096 points)
G
Temporary memory
1 bit/16 bits/32 bits
G0
~
G3071 (3072 points)
-
I
I device
1 bit/16 bits/32 bits
I0
~
I3FF (1024 points)
-
J
J device
1 bit/16 bits/32 bits
J0
~
J63F (1600 points)
-
L
Latch relay (backup memory)
1 bit/16 bits/32 bits
L0
~
L511 (512 points)
L0
~
L2047 (2048 points)
M
Temporary memory
1 bit/16 bits/32 bits
M0
~
M10239 (10240 points)
M0
~
M122879 (122880 points)
Q
Q device
1 bit/16 bits/32 bits
Q0
~
Q1151 (1152 points)
Q0
~
Q2047 (2048 points)
R
File register *1
16 bits/32 bits
R0
~
R32767 (32768 points)
R0
~
R32767 (32768 points)
SM
Special relay *1
1 bit/16 bits/32 bits
SM0
~
SM127 (128 points)
SM0
~
SM16383 (16384 points)
SB
Special relay (for link)
1 bit/16 bits/32 bits
SB0
~
SB1FF (512 points)
SB0
~
SB7FF (2048 points)
SD
Special register
16 bits/32 bits
SD0
~
SD127 (128 points)
SD0
~
SD16383 (16384 points)
ST
Cumulative timer
1 bit/16 bits/32 bits
ST0
~
ST1063 (1064 points)
ST0
~
ST1255 (1256 points)
SW
Special register (for link)
16 bits/32 bits
SW0
~
SWFDF (4064 points)
SW0
~
SW7FF (2048 points)
TI
10 ms unit timer coil
1 bit
T0
~
T1703 (1704 points)
T0
~
104095 (104096 points)
U
For two input signal lines to
programmable controller *1
1 bit/16 bits/32 bits
U0
~
T17F (384 points)
-
V
V device
1 bit/16 bits/32 bits
V0
~
V255 (256 points)
V0
~
V1023 (1024 points)
W
For two output signal lines to
programmable controller *1
1 bit/32 bits
W0
~
W1FF (512 points)
W0
~
W5FFF (24576 points)
X
Input signal to programmable
controller *1
1 bit/16 bits/32 bits
X0
~
X1FFF (8192 points)
X0
~
X1FFF (8192 points)
Y
Output signal to
programmable controller *1
1 bit/16 bits/32 bits
Y0
~
Y1FFF (8192 points)
Y0
~
Y1FFF (8192 points)
ZR
File register
16 bits/32 bits
ZR0
~
ZR32767 (32768 points)
*1: The intended purpose of this device cannot be changed. Do not use any other device (including
undefined device) than that corresponding to the I/O signal of the machine.
*2: The devices are read-only.
2-189
2.18.2 IEZNcDevice::DeleteDeviceAll
M700 M800
2.18.2 IEZNcDevice::DeleteDeviceAll
Delete all device settings
□ Custom call procedure
HRESULT DeleteDeviceAll(
LONG* plRet // (O) Error code
)
□ Automation call procedure
Device_DeleteAll( ) As LONG // (O) Error code
□
Argument
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK: Normal termination
EZ_ERR_NOT_SUPPORT: Not supported
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
Deletes all the data set in SetDevice().
This function is not supported with C70. (EZ_ERR_NOT_SUPPORT is returned to plRet.)
□
Reference
SetDevice()
□
Specifica-
tion
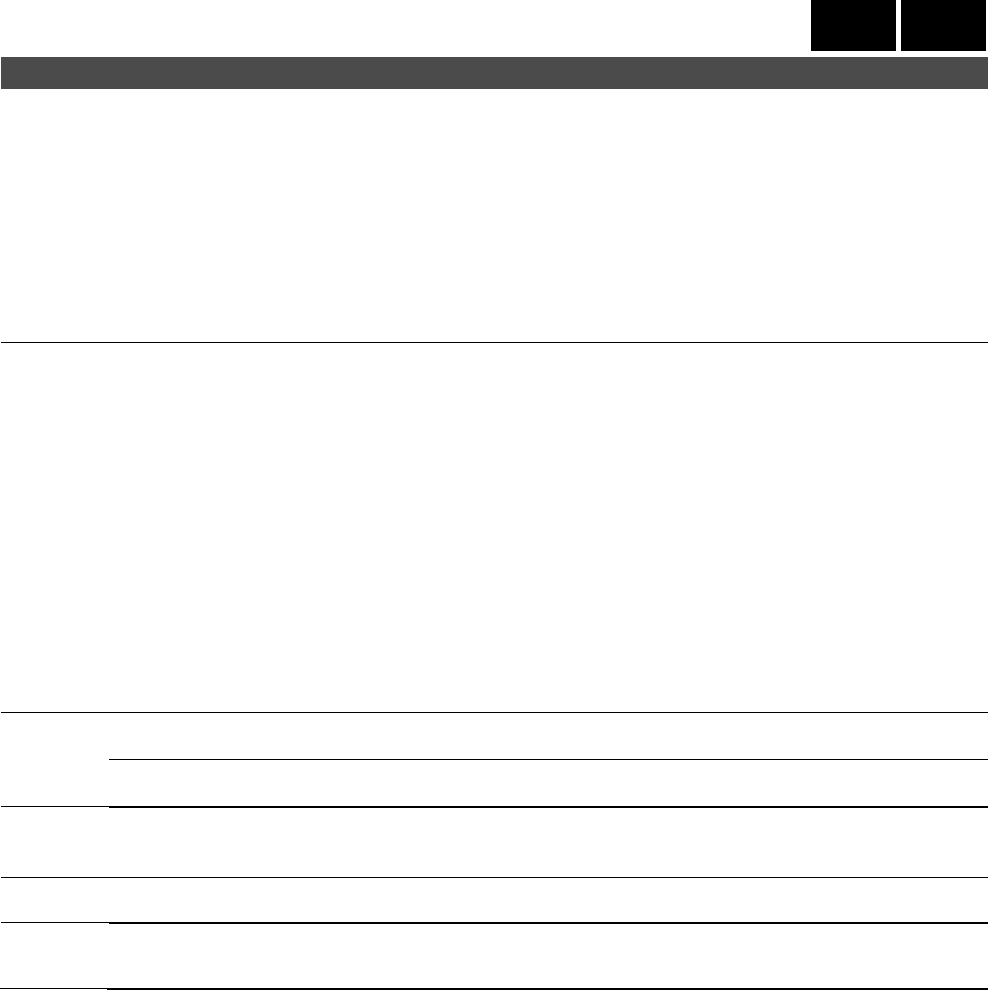
2-190
2.18.3 IEZNcDevice::ReadDevice
M700 M800
2.18.3 IEZNcDevice::ReadDevice
Read device
□ Custom call procedure
HRESULT ReadDevice(
LPDWORD lpdwLength, // (O) Number of read device points
LPDWORD* lppdwValue, // (O) Array of read device value
LONG* plRet // (O) Error code
)
□ Automation call procedure
Device_Read(
pvValue As VARIANT* // (O) Device value array
) As LONG // (O) Error code
□
Argument
lpdwLength: Returns the number of read devices.
lppdwValue
: Returns the array that contains the device value. As the device value array is
allocated in this product, the client needs to release it explicitly with
CoTaskMemFree().
Automation argument:
pvValue: Returns the array of the device value as VARIANT.
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK: Normal termination
EZNC_DATA_READ_DATATYPE: Invalid data type
EZNC_DATA_READ_READ: Data is not readable.
EZNC_DATA_READ_WRITEONLY: Write-only data
EZ_ERR_NOT_SUPPORT: Not supported
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
Reads all the devices set in SetDevice().
This function is not supported with C70. (EZ_ERR_NOT_SUPPORT is returned to plRet.)
□
Reference
SetDevice(), WriteDevice()
□
Specifica-
tion
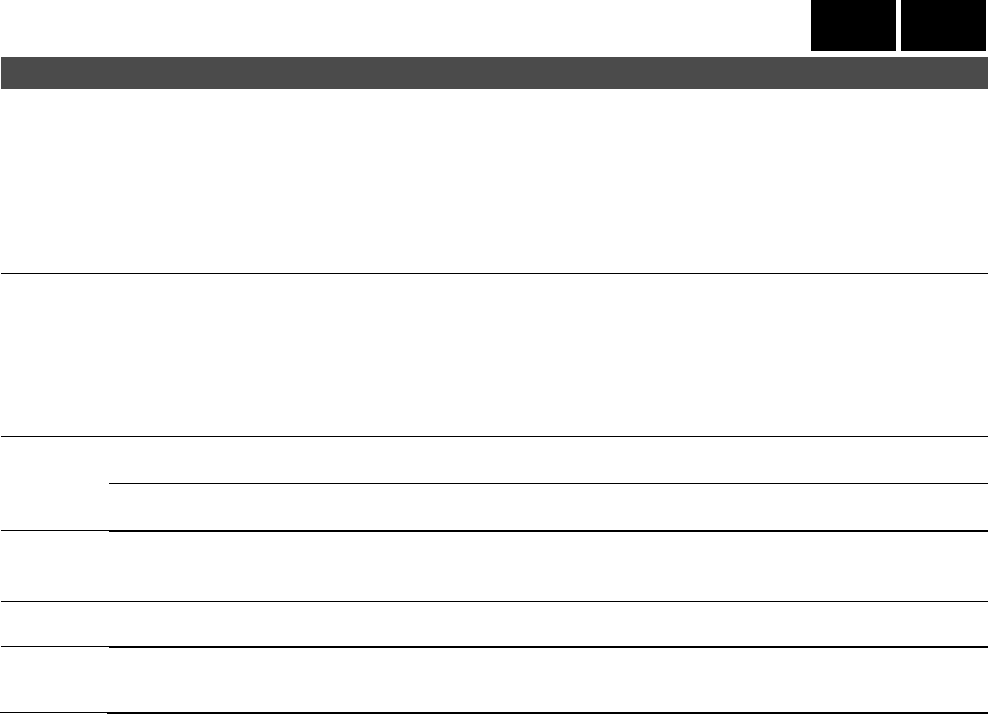
2-191
2.18.4 IEZNcDevice::WriteDevice
M700 M800
2.18.4 IEZNcDevice::WriteDevice
Write device
□ Custom call procedure
HRESULT WriteDevice(
LONG* plRet // (O) Error code
)
□ Automation call procedure
Device_Write( ) As LONG // (O) Error code
□
Argument
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK: Normal termination
EZNC_DATA_WRITE_DATATYPE: Invalid data type
EZNC_DATA_WRITE_WRITE: Data is not writable.
EZNC_DATA_WRITE_READONLY: Read-only data
EZ_ERR_NOT_SUPPORT: Not supported
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
Writes all the devices set in SetDevice().
This function is not supported with C70. (EZ_ERR_NOT_SUPPORT is returned to plRet.)
□
Reference
SetDevice(), ReadDevice()
□
Specifica-
tion
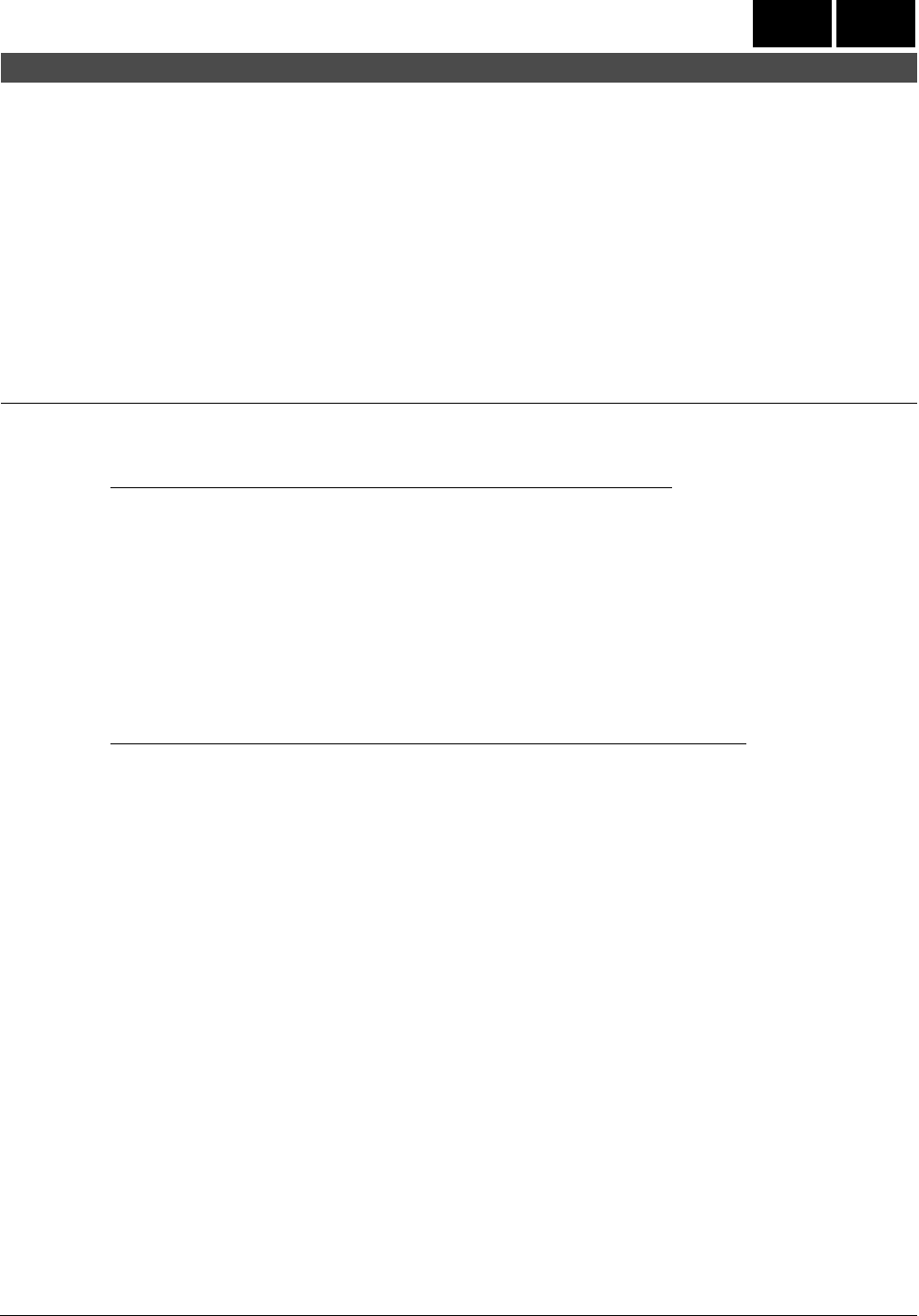
2-192
2.18.5 IEZNcDevice::ReadBlockDevice
M700 M800
2.18.5 IEZNcDevice::ReadBlockDevice
Batch read devices
□ Custom call procedure
HRESULT ReadBlockDevice(
DWORD dwLength, // (I) Number of device points
LPCOLESTR lpcwszDevice, // (I) Head device character string
DWORD dwDataType, // (I) Data type
LPDWORD* lppdwValues, // (I) Read device value array
LONG* plRet // (O) Error code
)
□ Automation call procedure
Device_ReadBlock(
lLength As LONG // (I) Number of device points
bstrDevice As STRING // (I) Head device character string
lDataType As LONG // (I) Data type
pvValues As VARIANT* // (I) Read device value array
) As LONG // (O) Error code
□
Argument
dwLength: Sets the number of device points to be set. (2 or more)
The maximum number of points that can be got is determined by the data type of the device
being got.
Device data type Maximum number of getting points
EZNC_PLC_BIT 1280 points
EZNC_PLC_BYTE 1280 points
EZNC_PLC_WORD 640 points
EZNC_PLC_DWORD 320 points
lppcwszDevice: Sets the array of the head device character string to be set.
The device
character string needs to be set as UNICODE string. However if word format (or
double word format) is set in the data type, the device character string needs to
be set in multiples of 16 (or 32).
dwDataType: Sets each data type of the device to be set.
Value Meaning Unit in
EZNC_PLC_BIT Bit 1 bit
EZNC_PLC_BYTE Byte 8 bit
EZNC_PLC_WORD Word 16 bits
EZNC_PLC_DWORD Double word 32 bits
lpdwValue: Sets the array used to set the device value. The data array is secured on the
EZSocket side, so explicitly release it on the client side using CoTaskMemFree().
The values are got in the device corresponds to the size for the data type at the lower end of the
array.
Example) Data type: EZNC_PLC_BYTE, Set device value: 0x82
Read device value: 0x00000082
Automation argument:
lLength:See the explanation of dwLength.
bstrDevice:See the explanation of lpcwszDevice.
lDataType: See the explanation of lpdwDataType.
pvValue:Returns the device value array in VARIANT.
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK: Normal termination
EZNC_DATA_READ_DATATYPE: Invalid data type
EZNC_DATA_READ_READ: Data is not readable.
EZNC_DATA_READ_WRITEONLY: Write-only data
EZ_ERR_NOT_SUPPORT: Not supported
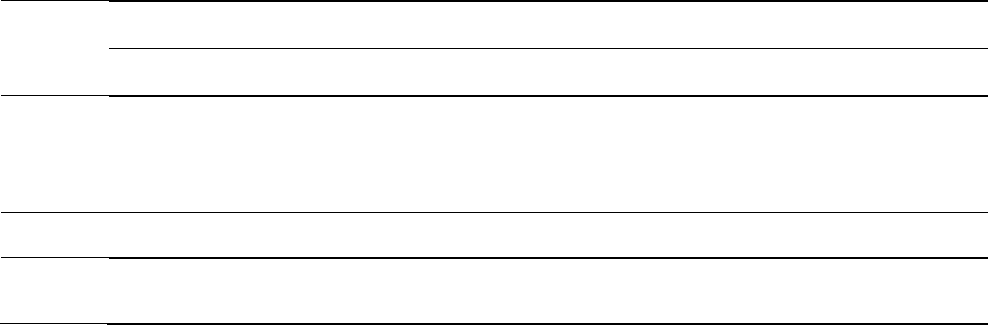
2-193
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
A device with continuous device points from the head device character string is read out.
This is valid only for the M700V/M70V/M800 series.
This function is not supported with C70 and M700/M70 series. (EZ_ERR_NOT_SUPPORT is
returned to plRet.)
□
Reference
WriteBlockDevice()
□
Specifica-
tion
2-194
2.18.6 IEZNcDevice::WriteBlockDevice
M700 M800
2.18.6 IEZNcDevice::WriteBlockDevice
Batch write devices
□ Custom call procedure
HRESULT WriteBlockDevice(
DWORD dwLength, // (I) Number of device points
LPCOLESTR lpcwszDevice, // (I) Head device character string
DWORD dwDataType, // (I) Data type
LPDWORD lppdwValues, // (I) Write device value array
LONG* plRet // (O) Error code
)
□ Automation call procedure
Device_WriteBlock(
lLength As LONG // (I) Number of device points
bstrDevice As STRING // (I) Head device character string
lDataType As LONG // (I) Data type
vValues As VARIANT // (I) Write device value array
) As LONG // (O) Error code
□
Argument
dwLength: Sets the number of device points to be set. (2 or more)
The maximum number of points that can be got is determined by the data type of the device
being got.
Device data type Maximum number of gettable points
EZNC_PLC_BIT 1280 points
EZNC_PLC_BYTE 1280 points
EZNC_PLC_WORD 640 points
EZNC_PLC_DWORD 320 points
lppcwszDevice: Sets the array of the head device character string to be set. The device character
string needs to be set as UNICODE string. However if word format (or double
word format) is set in the data type, the device character string needs to be set
in multiples of 16 (or 32).
dwDataType: Sets each data type of the device to be set.
Value Meaning Unit in Table 2-4
EZNC_PLC_BIT Bit 1 bit
EZNC_PLC_BYTE Byte 8 bit
EZNC_PLC_WORD Word 16 bits
EZNC_PLC_DWORD Double word 32 bits
lpdwValue: Sets the array used to set the device value.
The value set in the device corresponds to the size for the data type at the lower end of the array.
Example) Data type: EZNC_PLC_BYTE, Written device value: 0x12345678
Set device value: 0x78
Automation argument:
lLength:See the explanation of dwLength.
bstrDevice:See the explanation of lpcwszDevice.
lDataType: See the explanation of lpdwDataType.
vValue:Returns the device value array in VARIANT.
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK: Normal termination
EZNC_DATA_READ_DATATYPE: Invalid data type
EZNC_DATA_WRITE_WRITE: Data is not writable.
EZNC_DATA_ WRITE_READONLY: Read-only data
EZ_ERR_NOT_SUPPORT: Not supported
2-195
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
A device with continuous device points from the head device character string is read out.
This is valid only for the M700V/M70V/M800 series.
This function is not supp
orted with C70 and M700/M70 series. (EZ_ERR_NOT_SUPPORT is
returned to plRet.)
□
Reference
ReadBlockDevice()
□
Specifica-
tion
2-196
2.19 IEZNcSubFunction3 Interface
2.19.1 IEZNcSubFunction3::ChangeInit2
C70 M700 M800
2.19.1 IEZNcSubFunction3::ChangeInit2
Initialize subfunction
□ Custom call procedure
HRESULT ChangeInit2 (
LONG lSystemType, // (I) Mitsubishi CNC type
LONG lReserve1, // (I) Reservation 1
LONG lReserve2, // (I) Reservation 2
LONG* plRet // (O) Error code
)
□ Automation call procedure
ChangeInit2 (
lSystemType As LONG // (I) Mitsubishi CNC type
lReserve1 As LONG // (I) Reservation 1
lReserve2 As LONG // (I) Reservation 2
) As LONG // (O) Error code
□
Argument
lSystemType: Sets the Mitsubishi CNC type.
Value Meaning
EZNC_SYS_MELDASC70 Perform initialization on C70.
EZNC_SYS_MELDAS700M Perform initialization on M700 M series.
EZNC_SYS_MELDAS700L Perform initialization on M700 L series.
EZNC_SYS_MELDAS800M Perform initialization on M800 M series.
EZNC_SYS_MELDAS800L Perform initialization on M800 L series.
lReserve1: Not used. (Always set 0.)
lReserve2: Not used. (Always set 0.)
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK: Normal termination
EZ_ERR_DATA_RANGE: Invalid data range
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
Initializes IEZNcSubFunction.
□
Reference
□
Specifica-
tion
2-197
2.19.2 IEZNcSubFunction3::GetToolWorkOffsetOfFile
C70 M700 M800
2.19.2 IEZNcSubFunction3::GetToolWorkOffsetOfFile
Get data from workpiece
offset file
□ Custom call procedure
HRESULT GetToolWorkOffsetOfFile(
LPCOLESTR lpcwszFileName, // (I) File name containing a path
LONG lHead, // (I) Part system
LONG lIndex, // (I) Workpiece coordinate system number
LPCOLESTR* lppcwszAxis, // (I) Axis name character string array
LPOLESTR** lpppwszData, // (O) Workpiece coordinate data value
character string array
LONG* plRet // (O) Error code
)
□ Automation call procedure
GetToolWorkOffsetOfFile(
bstrFileName As STRING // (I) File name containing a path
lHeadAs LONG // (I) Part system
lIndex As LONG // (I) Workpiece coordinate system number
vAxis As VARIANT // (I) Axis name character string array
pvData As VARIANT* // (O) Workpiece coordinate data value
character string array
) As LONG // (O) Error code
□
Argument
lpcwszFileName: Sets the file name including path of the workpiece offset file as a UNICODE
character string.
Set the file with absolute path as below.
Drive name + ":" + \directory name\file name
lHead: Sets the system.
lIndex: Sets the workpiece coordinate system number to be read.
Value Meaning
54 G54 offset
55 G55 offset
56 G56 offset
57 G57 offset
58 G58 offset
59 G59 offset
60 EXT offset
61 P1 offset
62 P2 offset
: :
108 P48 offset
lppcwszAxis: Sets the axis name as a UNICODE
character string array. (Example: "X") The
number of array elements is 8 (0 to 7). Set a NULL character string to the axes not
applicable. (A NULL pointer cannot be set.) This is used only in C70. Set a NULL
character string to all elements in any other model.
2-198
lpppwszData: Returns the workpiece offset data value as a UNICODE character string array. As
the data value array is allocated in this product, the client needs to release it explicitly with
CoTaskMemFree ().
lpppwszData
Tool change data type
Remarks
0
1st axis
1
2nd axis
2
3rd axis
3
4th axis
4
5th axis
5
6th axis
6
7th axis
7
8th axis
The unit is [inch] or [mm] depending on the parameter setting of NC.
Automation argument:
bstrFileName: See the explanation of lpcwszFileName.
vAxis: See the explanation of lppcwszAxis.
pvData: Returns the workpiece offset data value as VARIANT.
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK: Normal termination
EZNC_FILE_OPEN_FILENOTEXIST: File does not exist
EZNC_FILE_OPEN_OPEN: File cannot be opened
EZNC_FILE_READFILE_READ: Data is not readable
EZNC_DATA_NOT_EXIST: Data does not exist
EZ_ERR_MEMORY_ALLOC: Memory cannot be allocated.
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
Gets the offset value of the workpiece coordinate system of the set part system and axis No.
□
Reference
OpenFile3(), CloseFile2(), ReadFile2(), WriteFile(), SetToolWorkOffsetFile()
□
Specifica-
tion
2-199
2.19.3 IEZNcSubFunction3::SetToolWorkOffsetOfFile
C70 M700 M800
2.19.3 IEZNcSubFunction3::SetToolWorkOffsetOfFile
Set data to workpiece offset
file
□ Custom call procedure
HRESULT SetToolWorkOffsetOfFile(
LPCOLESTR lpcwszFileName, // (I) File name containing a path
LONG lMode, // (I) Setting mode
LONG lHead, // (I) Part System
LONG lIndex, // (I) Workpiece coordinate system number
LPCOLESTR* lppcwszAxis, // (I) Axis name string character array
LPCOLESTR* lppcwszData, // (I) Workpiece coordinate data value
character string array
LONG* plRet // (O) Error code
)
□ Automation call procedure
SetToolWorkOffsetOfFile(
bstrFileName As STRING // (I) File name containing a path
lModeAs LONG // (I) Setting mode
lHeadAs LONG // (I) Part system
lIndex As LONG // (I) Workpiece coordinate system number
vAxis As VARIANT // (I) Axis name character string array
vData As VARIANT // (I) Workpiece coordinate data value
character string array
) As LONG // (O) Error code
□
Argument
lpcwszFileName: Sets the file name including path of the workpiece offset file as a UNICODE
character string.
Set the file with absolute path as below.
Drive name + ":" + \directory name\file name
lMode: Sets the setting mode of the tool life management file.
Value Meaning
EZNC_FILE_CREATE Creates a new tool life management file.
EZNC_FILE_OPEN Modifies an existing tool life management file
lHead: Sets the system.
lIndex: Sets the workpiece coordinate system number to be written to.
Value Meaning
54 G54 offset
55 G55 offset
56 G56 offset
57 G57 offset
58 G58 offset
59 G59 offset
60 EXT offset
61 P1 offset
62 P2 offset
: :
108 P48 offset
2-200
lppcwszAxis: Sets the axis name as a UNICODE character string. Set a NULL character string
to the axes that do not exist. This is used only in C70. Set a NULL character
string to all elements in any other model.
lppcwszData: Returns the workpiece offset data as a UNICODE character string. Set a NULL
character string to the axes that do not exist.
The unit is [inch] or [mm] depending on the parameter setting of CNC.
lppcwszData
Tool change data type
Remarks
0
1st axis
1
2nd axis
2
3rd axis
3
4th axis
4
5th axis
5
6th axis
6
7th axis
7
8th axis
Automation argument:
bstrFileName: See the explanation of lpcwszFileName.
vAxis: See the explanation of lppcwszAxis.
vData
: Creates the workpiece offset data as a UNICODE character string and sets it by
substituting it in vD
ata(VARIANT). For details of the workpiece offset data, see the
explanation of lppcwszData and the index above.
plRet: Returns an error code. (Upon automation, the return value is used.)
S_OK: Normal termination
EZNC_FILE_OPEN_FILENOTEXIST: File does not exist
EZNC_FILE_OPEN_OPEN: File cannot be opened
EZNC_FILE_WRITEFILE_WRITE: Data is not writable
EZ_ERR_NULLPTR: Argument is NULL pointer
2-201
[Example]
LPOLESTR* lppwszAxis;
lppwszAxis = new LPOLESTR[8];
lppwszAxis [0] =L"";
lppwszAxis [1] =L"";
lppwszAxis [2] =L"";
lppwszAxis [3] =L"";
lppwszAxis [4] =L"";
lppwszAxis [5] =L"";
lppwszAxis [6] =L"";
lppwszAxis [7] =L"";
LPOLESTR* lppwszData;
lppwszData = new LPOLESTR[11];
lppwszData[0] =L"-1.000";
lppwszData[1] =L"1.000";
lppwszData[2] =L"3.000";
lppwszData[3] =L"";
lppwszData[4] =L"";
lppwszData[5] =L"";
lppwszData[6] =L"";
lppwszData[7] =L"";
hr = pIEZNcTool->SetToolLifeValueOfFile(L"C:\TEMP\OFFSET.WRK",EZNC_FILE_OPEN, 1, 54,
(LPCOLESTR*)lppwszAxis,(LPCOLESTR*)lppwszData, &lRet);
if( S_OK != hr ){
wprintf(L"HRESULT Code = 0x%x, lRet Code = 0x%x\n", hr, lRet );
}
delete[ ] lppwszData;
□ Return
value
Value
Meaning
S_OK
Normal termination
S_FALSE
Communication failure
□
Function
Sets the offset value of the workpiece coordinate system of the set part system and axis No.
□
Referenc
e
OpenFile3(), CloseFile2(), ReadFile2(), WriteFile(), GetToolWorkOffsetFile()
□
Specifica-
tion
3-1
3. ERROR CODE LIST
This section provides a list of error codes.
Table 3-1 Error code list
No.
Error code
Number
Description
1.
EZ_ERR_NOT_OPEN
0x80A00101
Communication lines are not open.
2.
EZ_ERR_DOUBLE_OPEN
0x80A00104
Double open error.
3.
EZ_ERR_DATA_TYPE
0x80A00105
Invalid argument data type.
4.
EZ_ERR_DATA_RANGE
0x80A00106
Invalid argument data range.
5.
EZ_ERR_NOT_SUPPORT
0x80A00107
Not supported.
6.
EZ_ERR_CANNOT_OPEN
0x80A00109
Communication line cannot be opened.
7.
EZ_ERR_NULLPTR
0x80A0010A
Argument is NULL pointer.
8.
EZ_ERR_DATA_LENGTH
0x80A0010B
Invalid argument data.
9.
EZ_ERR_OPEN_COMM
0x80A0010C
COMM port handle error.
10.
EZ_ERR_MEMORY_ALLOC
0x80B00101
Memory cannot be allocated.
11.
EZNC_ERR_CANNOT_GETPCERR
0x80B00102
EZSocketPc error cannot be obtained.
12.
EZNC_FILE_OPEN_MODE
0x80B00201
Invalid mode specification.
13.
EZNC_FILE_OPEN_NOTOPEN
0x80B00202
File is not open.
14.
EZNC_FILE_OPEN_FILEEXIST
0x80B00203
File already exists.
15.
EZNC_FILE_OPEN_ALREADYOPENED
0x80B00204
File is already open.
16.
EZNC_FILE_OPEN_CREATE
0x80B00205
Temporary file cannot be created.
17.
EZNC_FILE_WRITEFILE_NOTOPEN
0x80B00206
File is open without write mode specification.
18.
EZNC_FILE_WRITEFILE_LENGTH
0x80B00207
Invalid write data size.
19.
EZNC_FILE_WRITEFILE_WRITE
0x80B00208
Not writable.
20.
EZNC_FILE_READFILE_NOTOPEN
0x80B00209
File is open without read mode specification.
21.
EZNC_FILE_READFILE_READ
0x80B0020A
Not readable.
22.
EZNC_FILE_READFILE_CREATE
0x80B0020B
Temporary file cannot be created.
23.
EZNC_FILE_OPEN_FILENOTEXIST
0x80B0020C
File does not exist (READ mode).
24.
EZNC_FILE_OPEN_OPEN
0x80B0020D
File cannot be opened.
25.
EZNC_FILE_OPEN_ILLEGALPATH
0x80B0020E
Invalid file path.
26.
EZNC_FILE_READFILE_ILLEGALFILE
0x80B0020F
Invalid read file.
27.
EZNC_FILE_WRITEFILE_ILLEGALFILE
0x80B00210
Invalid write file.
28.
EZNC_COMM_CANNOT_OPEN 0x80B00301
Host name for local connection used for
automation call is invalid.
29.
EZNC_COMM_NOTSETUP_PROTOCOL
0x80B00302
TCP/IP communication is not configured.
30.
EZNC_COMM_ALREADYOPENED 0x80B00303
Cannot be set because communication is
already in progress.
31.
EZNC_COMM_NOTMODULE
0x80B00304
No submodule.
32.
EZNC_COMM_CREATEPC
0x80B00305
EZSocketPc objects cannot be created.
33.
EZNC_DATA_NOT_EXIST
0x80B00401
Data does not exist.
34.
EZNC_DATA_DUPLICATE
0x80B00402
Duplicate data.
35.
EZNC_PARAM_FILENOTEXIST
0x80B00501
No parameter information file.
36.
EZNC_SYSFUNC_IOCTL_ADDR
0x80020190
Invalid NC control unit number.
37.
EZNC_SYSFUNC_IOCTL_NOTOPEN
0x80020102
Device is not open.
38.
EZNC_SYSFUNC_IOCTL_FUNCTION
0x80020132
Invalid command.
39.
EZNC_SYSFUNC_IOCTL_DATA
0x80020133
Invalid communication parameter data range.
40.
EZNC_FILE_DIR_FILESYSTEM
0x80030143
File system error.
41.
EZNC_FILE_DIR_NODIR
0x80030191
Directory does not exist.
42.
EZNC_FILE_DIR_NODRIVE
0x8003019B
Drive does not exist.
43.
EZNC_PCFILE_DIR_NODIR
0x800301A2
Directory does not exist.
44.
EZNC_PCFILE_DIR_NODRIVE
0x800301A8
Drive does not exist.
45.
EZNC_OPE_CURRALM_ADDR
0x80050D90
Invalid system, spindle specification.
46.
EZNC_OPE_CURRALM_ALMTYPE
0x80050D02
Invalid alarm type.
47.
EZNC_OPE_CURRALM_DATAERR 0x80050D03
Error in communication data between NC and
personal computer.
48.
EZ_ERR_NOT_OPEN
0x80A00101
Communication lines are not open.
49.
EZ_ERR_DOUBLE_OPEN
0x80A00104
Double open error.
50.
EZ_ERR_DATA_TYPE
0x80A00105
Invalid argument data type.
3-2
No.
Error code
Number
Description
51.
EZ_ERR_DATA_RANGE
0x80A00106
Invalid argument data range.
52.
EZ_ERR_NOT_SUPPORT
0x80A00107
Not supported.
53.
EZ_ERR_CANNOT_OPEN
0x80A00109
Communication line cannot be opened.
54.
EZ_ERR_NULLPTR
0x80A0010A
Argument is NULL pointer.
55.
EZ_ERR_DATA_LENGTH
0x80A0010B
Invalid argument data.
56.
EZ_ERR_OPEN_COMM
0x80A0010C
COMM port handle error.
57.
EZ_ERR_MEMORY_ALLOC
0x80B00101
Memory cannot be allocated.
58.
EZNC_ERR_CANNOT_GETPCERR
0x80B00102
EZSocketPc error cannot be obtained.
59.
EZNC_FILE_OPEN_MODE
0x80B00201
Invalid mode specification.
60.
EZNC_FILE_OPEN_NOTOPEN
0x80B00202
File is not open.
61.
EZNC_FILE_OPEN_FILEEXIST
0x80B00203
File already exists.
62.
EZNC_FILE_OPEN_ALREADYOPENED
0x80B00204
File is already open.
63.
EZNC_FILE_OPEN_CREATE
0x80B00205
Temporary file cannot be created.
64.
EZNC_FILE_WRITEFILE_NOTOPEN
0x80B00206
File is open without write mode specification.
65.
EZNC_FILE_WRITEFILE_LENGTH
0x80B00207
Invalid write data size.
66.
EZNC_FILE_WRITEFILE_WRITE
0x80B00208
Not writable.
67.
EZNC_FILE_READFILE_NOTOPEN
0x80B00209
File is open without read mode specification.
68.
EZNC_FILE_READFILE_READ
0x80B0020A
Not readable.
69.
EZNC_FILE_READFILE_CREATE
0x80B0020B
Temporary file cannot be created.
70.
EZNC_FILE_OPEN_FILENOTEXIST
0x80B0020C
File does not exist (READ mode).
71.
EZNC_FILE_OPEN_OPEN
0x80B0020D
File cannot be opened.
72.
EZNC_FILE_OPEN_ILLEGALPATH
0x80B0020E
Invalid file path.
73.
EZNC_FILE_READFILE_ILLEGALFILE
0x80B0020F
Invalid read file.
74.
EZNC_FILE_WRITEFILE_ILLEGALFILE
0x80B00210
Invalid write file.
75.
EZNC_COMM_CANNOT_OPEN 0x80B00301
Host name for local connection used for
automation call is invalid.
76.
EZNC_COMM_NOTSETUP_PROTOCOL
0x80B00302
TCP/IP communication is not configured.
77.
EZNC_COMM_ALREADYOPENED 0x80B00303
Cannot be set because communication is
already in progress.
78.
EZNC_COMM_NOTMODULE
0x80B00304
No submodule.
79.
EZNC_COMM_CREATEPC
0x80B00305
EZSocketPc objects cannot be created.
80.
EZNC_DATA_NOT_EXIST
0x80B00401
Data does not exist.
81.
EZNC_DATA_DUPLICATE
0x80B00402
Duplicate data.
82.
EZNC_PARAM_FILENOTEXIST
0x80B00501
No parameter information file.
83.
EZNC_SYSFUNC_IOCTL_ADDR
0x80020190
Invalid NC control unit number.
84.
EZNC_SYSFUNC_IOCTL_NOTOPEN
0x80020102
Device is not open.
85.
EZNC_SYSFUNC_IOCTL_FUNCTION
0x80020132
Invalid command.
86.
EZNC_SYSFUNC_IOCTL_DATA
0x80020133
Invalid communication parameter data range.
87.
EZNC_FILE_DIR_FILESYSTEM
0x80030143
File system error.
88.
EZNC_FILE_DIR_NODIR
0x80030191
Directory does not exist.
89.
EZNC_FILE_DIR_NODRIVE
0x8003019B
Drive does not exist.
90.
EZNC_PCFILE_DIR_NODIR
0x800301A2
Directory does not exist.
91.
EZNC_PCFILE_DIR_NODRIVE
0x800301A8
Drive does not exist.
92.
EZNC_OPE_CURRALM_ADDR
0x80050D90
Invalid system, spindle specification.
93.
EZNC_OPE_CURRALM_ALMTYPE
0x80050D02
Invalid alarm type.
94.
EZNC_OPE_CURRALM_DATAERR 0x80050D03
Error in communication data between NC and
personal computer.
95.
EZNC_DATA_TLFTOOL_PARAMERR
0x80041194
Invalid type specified for life control data.
96.
EZNC_DATA_TLFTOOL_MAXMINERR
0x80041195
Setting data is out of range.
97.
EZNC_DATA_TLFTOOL_UNMACH
0x80041196
Specified tool number mismatch.
98.
EZNC_DATA_TLFTOOL_OUTOFSPEC
0x80041197
Specified tool number is out of specifications.
99.
EZNC_DATA_READ_ADDR
0x80040190
Invalid system, spindle specification.
100.
EZNC_DATA_READ_SECT
0x80040191
Invalid section number.
3-3
No.
Error code
Number
Description
101.
EZNC_DATA_READ_SUBSECT
0x80040192
Invalid subsection number.
102.
EZNC_DATA_READ_DATASIZE
0x80040196
Application does not fit into prepared buffer.
103.
EZNC_DATA_READ_DATATYPE
0x80040197
Invalid data type.
104.
EZNC_DATA_READ_READ
0x8004019D
Data is not readable.
105.
EZNC_DATA_READ_WRITEONLY
0x8004019F
Write-only data.
106.
EZNC_DATA_READ_AXIS
0x800401A0
Invalid axis specification.
107.
EZNC_DATA_READ_DATANUM
0x800401A1
Invalid data number.
108.
EZNC_DATA_READ_NODATA
0x800401A3
Read data not found
109.
EZNC_DATA_READ_VALUE
0x8004019A
Invalid read data range.
110.
EZNC_DATA_WRITE_ADDR
0x80040290
Invalid system, spindle specification.
111.
EZNC_DATA_WRITE_SECT
0x80040291
Invalid section number.
112.
EZNC_DATA_WRITE_SUBSECT
0x80040292
Invalid subsection number.
113.
EZNC_DATA_WRITE_DATASIZE
0x80040296
Application does not fit into prepared buffer.
114.
EZNC_DATA_WRITE_DATATYPE
0x80040297
Invalid data type.
115.
EZNC_DATA_WRITE_READONLY
0x8004029B
Read-only data.
116.
EZNC_DATA_WRITE_WRITE
0x8004029E
Data is not writable.
117.
EZNC_DATA_WRITE_AXIS
0x800402A0
Invalid axis specification.
118.
EZNCDATA_WRITE_SAFETYPWLOCK
0x8004024D
Safety password locked.
119.
EZNCDATA_WRITE_UOPEN_FORMAT 0x800402A2
Formatting canceled because of invalid
SRAM open parameter.
120.
EZNCDATA_WRITE_EDTFILE_REGIST 0x800402A4
Cannot register edit file (already being
edited).
121.
EZNCDATA_WRITE_EDTFILE_RELEASE
0x800402A5
Cannot release edit file.
122.
EZNCDATA_WRITE_NODATA
0x800402A3
No data at write destination.
123.
EZNCDATA_WRITE_VALUE
0x8004029A
Invalid write data range.
124.
EZNCDATA_WRITE_SAFE_NOPASSWD
0x800402A6
Safety password not set.
125.
EZNCDATA_WRITE_SAFE_CHECKERR
0x800402A7
Safety data consistency check error
126.
EZNCDATA_WRITE_SAFE_DATATYPE
0x800402A9
Safety data type invalid
127.
EZNCDATA_WRITE_SORT
0x800402A8
Cannot write while sorting tool data.
128.
EZNC_DATA_MDLCANCEL_NOTREGIST
0x80040501
Not registered for fast read.
129.
EZNC_DATA_MDLREGIST_PRIORITY
0x80040402
Invalid priority specification.
130.
EZNC_DATA_MDLREGIST_REGIST
0x80040401
Exceeded the limit of registrations.
131.
EZNC_DATA_MDLREGIST_ADDR
0x80040490
Invalid address.
132.
EZNC_DATA_MDLREGIST_SECT
0x80040491
Invalid section number.
133.
EZNC_DATA_MDLREGIST_SUBSECT
0x80040492
Invalid subsection number.
134.
EZNC_DATA_MDLREGIST_DATATYPE
0x80040497
Invalid data type.
135.
EZNC_DATA_MDLREGIST_READONLY
0x8004049B
Read-only data.
136.
EZNC_DATA_MDLREGIST_READ
0x8004049D
Data is not readable.
137.
EZNC_DATA_MDLREGIST_WRITEONLY
0x8004049F
Write-only data.
138.
EZNC_DATA_MDLREGIST_AXIS
0x800404A0
Invalid axis specification.
139.
EZNC_DATA_RETHREADWRITE_NODATA
0x80040BA3
Rethread cut position not set.
140.
EZNC_FILE_DIR_ALREADYOPENED
0x80030101
A different directory is already opened.
141.
EZNC_FILE_DIR_DATASIZE
0x80030103
Exceeded maximum data size.
142.
EZNC_FILE_DIR_NAMELENGTH
0x80030148
File name is too long.
143.
EZNC_FILE_DIR_ILLEGALNAME
0x80030198
Invalid file name format.
144.
EZNC_FILE_DIR_NOTOPEN
0x80030190
Not open.
145.
EZNC_FILE_DIR_READ
0x80030194
File information read error.
146.
EZNC_PCFILE_DIR_ALREADYOPENED 0x80030102
A different directory is already opened
(personal computer only).
147.
EZNC_PCFILE_DIR_NOTOPEN
0x800301A0
Not open.
148.
EZNC_PCFILE_DIR_NOFILE
0x800301A1
File does not exist.
149.
EZNC_PCFILE_DIR_READ
0x800301A5
File information read error.
150.
EZNC_FILE_COPY_BUSY
0x80030447
Copying is disabled (during operation).
3-4
No.
Error code
Number
Description
151.
EZNC_FILE_COPY_ENTRYOVER
0x80030403
Exceeded the limit of registrations.
152.
EZNC_FILE_COPY_FILEEXIST
0x80030401
Copy destination file already exists.
153.
EZNC_FILE_COPY_FILESYSTEM
0x80030443
File system error.
154.
EZNC_FILE_COPY_NAMELENGTH
0x80030448
File name is too long.
155.
EZNC_FILE_COPY_ILLEGALNAME
0x80030498
Invalid file name format.
156.
EZNC_FILE_COPY_MEMORYOVER
0x80030404
Memory capacity exceeded.
157.
EZNC_FILE_COPY_NODIR
0x80030491
Directory does not exist.
158.
EZNC_FILE_COPY_NODRIVE
0x8003049B
Drive does not exist.
159.
EZNC_FILE_COPY_NOFILE
0x80030442
File does not exist.
160.
EZNC_FILE_COPY_PLCRUN
0x80030446
Copying is disabled (PLC in operation).
161.
EZNC_FILE_COPY_READ
0x80030494
Transfer source file is not readable.
162.
EZNC_FILE_COPY_WRITE
0x80030495
Transfer destination file is not writable.
163.
EZNC_FILE_COPY_PROTECT
0x8003044A
Copying is disabled (protected).
164.
EZNC_FILE_COPY_DIFFER
0x80030405
Verification error.
165.
EZNC_FILE_COPY_NOTSUPPORTED
0x80030449
Verification function is not supported.
166.
EZNC_FILE_COPY_EXECUTING
0x8003044C
Copying file.
167.
EZNC_FILE_COPY_NOTOPEN
0x80030490
File is not open.
168.
EZNC_FILE_COPY_WRITE_WARNING
0x80030495
Transfer destination file is not writable.
169.
EZNC_FILE_COPY_SAFETYPWLOCK
0x8003044D
Safety password locked.
170.
EZNC_FILE_COPY_ILLEGALFORMAT
0x8003049D
Invalid file format.
171.
EZNC_FILE_COPY_WRONGPASSWORD
0x8003049E
Password is wrong.
172.
EZNC_PCFILE_COPY_CREATE 0x800304A4
File cannot be created (personal computer
only).
173.
EZNC_PCFILE_COPY_OPEN 0x800304A3
File cannot be opened (personal computer
only).
174.
EZNC_PCFILE_COPY_FILEEXIST
0x80030402
Copy destination file already exists.
175.
EZNC_PCFILE_COPY_ILLEGALNAME
0x800304A7
Invalid file name format.
176.
EZNC_PCFILE_COPY_NODIR
0x800304A2
Directory does not exist.
177.
EZNC_PCFILE_COPY_NODRIVE
0x800304A8
Drive does not exist.
178.
EZNC_PCFILE_COPY_NOFILE
0x800304A1
File does not exist.
179.
EZNC_PCFILE_COPY_READ
0x800304A5
Transfer source file is not readable.
180.
EZNC_PCFILE_COPY_WRITE
0x800304A6
Transfer destination file is not writable.
181.
EZNC_PCFILE_COPY_MEMORYOVER
0x80030406
Disk space exceeded.
182.
EZNC_PCFILE_COPY_NOTOPEN
0x800304A0
File is not open.
183.
EZNC_FILE_DEL_NOTDELETE
0x80030201
File cannot be deleted.
184.
EZNC_FILE_DEL_NOFILE
0x80030242
File does not exist.
185.
EZNC_FILE_DEL_FILESYSTEM
0x80030243
File system error.
186.
EZNC_FILE_DEL_BUSY
0x80030247
Deletion is disabled (during operation).
187.
EZNC_FILE_DEL_NAMELENGTH
0x80030248
File name is too long.
188.
EZNC_FILE_DEL_PROTECT
0x8003024A
Deletion is disabled (protected).
189.
EZNC_FILE_DEL_NODIR
0x80030291
Directory does not exist.
190.
EZNC_FILE_DEL_ILLEGALNAME
0x80030298
Invalid file name format.
191.
EZNC_FILE_DEL_NODRIVE
0x8003029B
Drive does not exist.
192.
EZNC_PCFILE_DEL_NOTDELETE
0x80030202
File cannot be deleted.
193.
EZNC_PCFILE_DEL_ILLEGALNAME
0x800302A7
Invalid file name format.
194.
EZNC_PCFILE_DEL_NODIR
0x800302A2
Directory does not exist.
195.
EZNC_PCFILE_DEL_NODRIVE
0x800302A8
Drive does not exist.
196.
EZNC_PCFILE_DEL_NOFILE
0x800302A1
File does not exist.
197.
EZNC_FILE_REN_FILEEXIST
0x80030301
New file name already exists.
198.
EZNC_FILE_REN_NOFILE
0x80030342
File does not exist.
199.
EZNC_FILE_REN_FILESYSTEM
0x80030343
File system error.
200.
EZNC_FILE_REN_BUSY
0x80030347
Renaming is disabled (during operation).
3-5
No.
Error code
Number
Description
201.
EZNC_FILE_REN_NAMELENGTH
0x80030348
File name is too long.
202.
EZNC_FILE_REN_PROTECT
0x8003034A
Renaming is disabled (protected).
203.
EZNC_FILE_REN_NODIR
0x80030391
Directory does not exist.
204.
EZNC_FILE_REN_ILLEGALNAME
0x80030398
Invalid file name format.
205.
EZNC_FILE_REN_NODRIVE
0x8003039B
Drive does not exist.
206.
EZNC_PCFILE_REN_NOTRENAME
0x80030303
Renaming is disabled.
207.
EZNC_PCFILE_REN_SAMENAME
0x80030305
New and old file names are identical.
208.
EZNC_PCFILE_REN_FILEEXIST
0x80030302
New file name already exists.
209.
EZNC_PCFILE_REN_ILLEGALNAME
0x800303A7
Invalid file name format.
210.
EZNC_PCFILE_REN_NODIR
0x800303A2
Directory does not exist.
211.
EZNC_PCFILE_REN_NODRIVE
0x800303A8
Drive does not exist.
212.
EZNC_PCFILE_REN_NOFILE
0x800303A1
File does not exist.
213.
EZNC_FILE_DISKFREE_NODIR
0x80030691
Directory does not exist.
214.
EZNC_FILE_DISKFREE_NODRIVE
0x8003069B
Drive does not exist.
215.
EZNC_FILE_DISKFREE_FILESYSTEM
0x80030643
File system error.
216.
EZNC_FILE_DISKFREE_NAMELENGTH
0x80030648
File name is too long.
217.
EZNC_FILE_DISKFREE_ILLEGALNAME
0x80030648
Invalid file name format.
218.
EZNC_PCFILE_DISKFREE_NODIR 0x800306A2
Directory does not exist (personal computer
only).
219.
EZNC_PCFILE_DISKFREE_NODRIVE 0x800306A8
Drive does not exist (personal computer
only).
220.
EZNC_FILE_DRVLIST_DATASIZE
0x80030701
Application does not fit into prepared buffer.
221.
EZNC_FILE_DRVLIST_READ
0x80030794
Drive information read error.
222.
EZNC_ENET_ALREADYOPEN
0x82020001
Already open.
223.
EZNC_ENET_NOTOPEN
0x82020002
Not open.
224.
EZNC_ENET_CARDNOTEXIST
0x82020004
Card does not exist.
225.
EZNC_ENET_BADCHANNEL
0x82020006
Invalid channel number.
226.
EZNC_ENET_BADFD
0x82020007
Invalid file descriptor.
227.
EZNC_ENET_NOTCONNECT
0x8202000A
Not connected.
228.
EZNC_ENET_NOTCLOSE
0x8202000B
Not closed.
229.
EZNC_ENET_TIMEOUT
0x82020014
Time-out.
230.
EZNC_ENET_DATAERR
0x82020015
Invalid data.
231.
EZNC_ENET_CANCELED
0x82020016
Terminated by cancel request.
232.
EZNC_ENET_ILLEGALSIZE
0x82020017
Invalid packet size.
233.
EZNC_ENET_TASKQUIT
0x82020018
Terminated due to by end of task.
234.
EZNC_ENET_UNKNOWNFUNC
0x82020032
Invalid command.
235.
EZNC_ENET_SETDATAERR
0x82020033
Invalid setting data.
236.
EZNC_READ_CACHE_REGIST
0x80060001
Invalid data read cache.
237.
EZNC_READ_CACHE_ADDR
0x80060090
Invalid address.
238.
EZNC_READ_CACHE_SECT
0x80060091
Invalid section number.
239.
EZNC_READ_CACHE_SUBSECT
0x80060092
Invalid subsection number.
240.
EZNC_READ_CACHE_DATATYPE
0x80060097
Invalid data type.
241.
EZNC_READ_CACHE_DATA
0x8006009A
Invalid data range.
242.
EZNC_READ_CACHE_READ
0x8006009D
Data is not readable.
243.
EZNC_READ_CACHE_WRITEONLY
0x8006009F
Invalid data type.
244.
EZNC_READ_CACHE_AXIS
0x800600A0
Invalid axis specification.
245.
EZNC_FS_OPEN_FILE_MALLOC
0x80070140
Work area cannot be allocated.
246.
EZNC_FS_OPEN_FILE_OPEN
0x80070142
File cannot be opened.
247.
EZNC_FS_OPEN_FILE_BUSY
0x80070147
File cannot be opened (during operation).
248.
EZNC_FS_OPEN_FILE_NAMELENGTH
0x80070148
File path is too long.
249.
EZNC_FS_OPEN_FILE_NOTSUPPORTED
0x80070149
Not supported (CF not supported).
250.
EZNC_FS_OPEN_FILE_ALREADYOPEN
0x80070192
Already open.
3-6
No.
Error code
Number
Description
251.
EZNC_FS_OPEN_FILE_FILEFULL
0x80070199
Maximum number of open files exceeded.
252.
EZNC_FS_OPEN_FILE_ALREADYOPEN
0x80070192
Already open.
253.
EZNC_FS_OPEN_FILE_SORT
0x8007019F
Cannot open while sorting tool data.
254.
EZNC_FS_OPEN_FILE_SAFE_NOPASSWD
0x800701B0
Safety password not authenticated.
255.
EZNC_FS_CLOSE_FILE_NOTOPEN
0x80070290
File is not open.
256.
EZNC_FS_CREATE_FILE_MALLOC
0x80070340
Work area cannot be allocated.
257.
EZNC_FS_CREATE_FILE_BUSY
0x80070347
File cannot be created (during operation).
258.
EZNC_FS_CREATE_FILE_NAMELENGTH
0x80070348
File path is too long.
259.
EZNC_FS_CREATE_FILE_NOTSUPPORTED
0x80070349
Not supported (CF not supported).
260.
EZNC_FS_CREATE_FILE_ALREADYOPEN
0x80070392
Already created.
261.
EZNC_FS_CREATE_FILE_CREATE
0x80070393
File cannot be created.
262.
EZNC_FS_CREATE_FILE_FILEFULL
0x80070399
Maximum number of open files exceeded.
263.
EZNC_FS_CREATE_FILE_NODRIVE
0x8007039B
Drive does not exist.
264.
EZNC_FS_READ_FILE_NOTOPEN
0x80070490
File is not open.
265.
EZNC_FS_READ_FILE_READ
0x80070494
File information read error.
266.
EZNC_FS_WRITE_FILE_NOTSUPPORTED
0x80070549
Write is not available.
267.
EZNC_FS_WRITE_FILE_NOTOPEN
0x80070590
File is not open.
268.
EZNC_FS_WRITE_FILE_WRITE
0x80070595
File write error.
269.
EZNC_FS_REMOVE_FILE_REMOVEERR
0x80070740
File deletion error.
270.
EZNC_FS_REMOVE_FILE_NOFILE
0x80070742
File does not exist.
271.
EZNC_FS_REMOVE_FILE_BUSY
0x80070747
File cannot be deleted (during operation).
272.
EZNC_FS_REMOVE_FILE_NAMELENGTH
0x80070748
File path is too long.
273.
EZNC_FS_REMOVE_FILE_NOTSUPPORTED
0x80070749
Not supported (CF not supported).
274.
EZNC_FS_REMOVE_FILE_ALREADYOPEN
0x80070792
File is already open.
275.
EZNC_FS_REMOVE_FILE_NODRIVE
0x8007079B
Drive does not exist.
276.
EZNC_FS_RENAME_FILE_NOFILE
0x80070842
File does not exist.
277.
EZNC_FS_RENAME_FILE_NOTRENAME
0x80070843
File cannot be renamed.
278.
EZNC_FS_RENAME_FILE_NAMELENGTH
0x80070848
File path is too long.
279.
EZNC_FS_RENAME_FILE_NOTSUPPORTED
0x80070849
Not supported (CF not supported).
280.
EZNC_FS_RENAME_FILE_ALREADYOPEN
0x80070892
File is already open.
281.
EZNC_FS_RENAME_FILE_FILEFULL
0x80070899
Maximum number of open files exceeded.
282.
EZNC_FS_RENAME_FILE_NODRIVE
0x8007089B
Drive does not exist.
283.
EZNC_FS_IOCTL_FILE_FUNCTION
0x80070944
Invalid command (not supported).
284.
EZNC_FS_IOCTL_FILE_NOTOPEN
0x80070990
Not open.
285.
EZNC_FS_IOCTL_FILE_READ
0x80070994
Read error.
286.
EZNC_FS_IOCTL_FILE_WRITE
0x80070995
Write error.
287.
EZNC_FS_IOCTL_FILE_DATASIZE
0x80070996
Application does not fit into prepared buffer.
288.
EZNC_FS_IOCTL_FILE_DATATYPE
0x80070997
Invalid data type.
289.
EZNC_FS_IOCTL_FILE_NOTSUPPORTED
0x80070949
Not supported (CF not supported).
290.
EZNC_FS_OPEN_DIR_MALLOC
0x80070A40
Work area cannot be allocated.
291.
EZNC_FS_OPEN_DIR_BUSY 0x80070A47
Directory cannot be opened (during
operation).
292.
EZNC_FS_OPEN_DIR_NAMELENGTH
0x80070A48
File path is too long.
293.
EZNC_FS_OPEN_DIR_NOTSUPPORTED
0x80070A49
Not supported (CF not supported).
294.
EZNC_FS_OPEN_DIR_NODIR
0x80070A91
Directory does not exist.
295.
EZNC_FS_OPEN_DIR_NOTOPEN
0x80070A92
Already open.
296.
EZNC_FS_OPEN_DIR_FILEFULL 0x80070A99
Maximum number of open directories
exceeded.
297.
EZNC_FS_OPEN_DIR_NODRIVE
0x80070A9B
Drive does not exist.
298.
EZNC_FS_READ_DIR_NOTOPEN
0x80070B90
Directory is not open.
299.
EZNC_FS_READ_DIR_NODIR
0x80070B91
Directory does not exist.
300.
EZNC_FS_READ_DIR_DATASIZE
0x80070B96
Application does not fit into prepared buffer.
3-7
No.
Error code
Number
Description
301.
EZNC_FS_CLOSE_DIR_NOTOPEN
0x80070D90
Directory is not open.
302.
EZNC_FS_STAT_FILE_NAMELENGTH
0x80070E48
File path is too long.
303.
EZNC_FS_STAT_FILE_NOTSUPPORTED
0x80070E49
Supported (CF not supported).
304.
EZNC_FS_STAT_FILE_STATERR
0x80070E94
File information read error.
305.
EZNC_FS_STAT_FILE_FILEFULL
0x80070E99
Maximum number of open files exceeded.
306.
EZNC_FS_STAT_FILE_NODRIVE
0x80070E9B
Drive does not exist.
307.
EZNC_FS_FSTAT_FILE_NAMELENGTH
0x80070F48
File path is too long.
308.
EZNC_FS_FSTAT_FILE_NOTSUPPORTED
0x80070F49
Not supported (CF not supported).
309.
EZNC_FS_FSTAT_FILE_STATERR
0x80070F94
File information read error.
310.
EZNC_FS_FSTAT_FILE_NOTOPEN
0x80070F90
File is not open.
311.
EZNC_FS_FSTAT_FILE_NODRIVE
0x80070F9B
Drive does not exist.
312.
EZNC_FS_IOCTL_UOPEN_FORMAT 0x8007099C
Formatting canceled because of invalid
SRAM open parameter.
313.
Error codes output by NC control unit.
0xF00000FF
Invalid argument.
314.
Error codes output by NC control unit.
0xFFFFFFFF
Data is not readable/writable.
315.
Error codes output by EZSocket (EZSocketPc) for
MELSEC programmable controllers (C70 only)
0x01XXXXXX
0x02XXXXXX
0x03XXXXXX
0x04XXXXXX
0x10XXXXXX
For details, refer to the following manuals:
EZSocket Standard, Reference Manual (for
MELSEC)(BAD-801Q013)
EZSocket Pro-FX CPU-supported Edition,
Reference Manual (for
MELSEC)(BAD-801Q025)
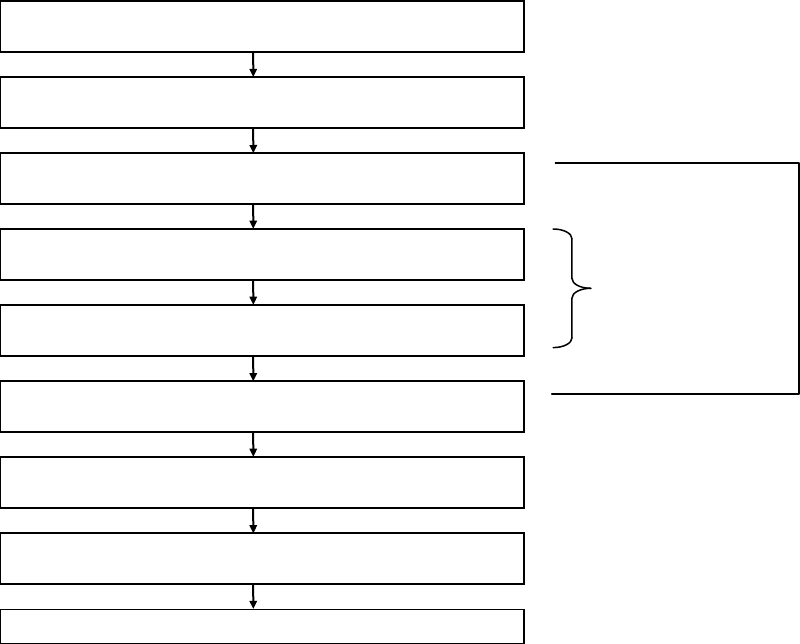
4-1
4. API OPERATING PROCEDURE
4.1 API Operating Procedure
This section provides instructions and procedures for using the product.
Use the product by performing the following steps:
Processing range
for NC
-specific
function's object
s
NC control
unit
connection
End of flow
Obtain position data with IEZNcPosition object
ObjPos->GetWorkPosition(...)
Specify system with IEZNcCommunication3 object
ObjCom->SetHead(...)
Create IEZNcPosition object
ObjCom→QueryInterface(ObjPos) (*1)
Create IEZNcCommunication3
CoCreateInstance(ObjCom)
Open with IEZNcCommunication3 object
ObjCom->Open2(...)
Close IEZNcCommunication3 object
ObjCom->Close()
Release IEZNcPosition object
ObjPos->Release()
Release IEZNcCommunication3 object
ObjCom->Release()
4-2
4.2 Initialization for Enabling OLE/COM Interface
The product uses the OLE/COM interface. Thus, the VC++ project must support OLE/COM. For the project
that was created without OLE/COM being enabled, it is possible to enable OLE/COM by modifying appropriate
parts of the two files created by VC++, as shown below.
Note that a project name is Project in the explanation below.
Project.cpp
BOOL CProjectApp::InitInstance()
{
// Initialize OLE library.
if (!AfxOleInit())
{
// Show error message.
return FALSE;
}
// The rest is omitted.
}
Stdafx.h
// stdafx.h: Describes standard system include files
// or project specific include files that are used frequently
// but changed infrequently.
//
#define VC_EXTRALEAN // Excludes rarely-used stuff from Windows headers.
//
#include <afxwin.h> // MFC core and standard components
#include <afxext.h> // MFC extensions
#include <afxdisp.h> // MFC OLE/COM
#ifndef _AFX_NO_AFXCMN_SUPPORT
#include <afxcmn.h> // MFC support for Windows Common Controls
#endif // _AFX_NO_AFXCMN_SUPPORT
4-3
4.3 Object Creation
The product uses the OLE/COM interface; therefore, objects must be created/released in the thread
where OLE/COM initialization was performed. This is not a matter of concern if your program is
single-threaded.
In the sample below, the application is for displaying position data, and it is display-centric and
single-threaded. Thus, objects are created when the View window is created, and released when the
window is closed.
First, create an IEZNcCommunication3 communication object by using CoCreateInstance in the COM library.
Then, from the created communication object, create an IEZNcPosition object and other objects by using
QueryInterface. The following shows how to create IEZNcCommunication3 and IEZNcPosition objects.
Table 4-1 Creation of IEZNcCommunication3 object
Creation of IEZNcCommunication3 communication object
Calling procedure
CLSID clsid;
IEZNcCommunication pComm;
HRESULT hr = CLSIDFromProgID(L"EZSocketNc.EZNcCommunication",&clsid); *1
hr = CoCreateInstance( clsid,
NULL,
CLSCTX_INPROC_SERVER,
IID_IEZNcCommunication3,
(VOID**)&pComm);
Return value
S_OK is returned if the object is successfully created, and if not, another value is
returned.
Function
Creates a communication object and returns its address in the parameter pComm.
*1 Refer to *2 in "1.8.1 VC++ program flow (1)".
Table 4-2 Creation of IEZNcPosition object
Creation of IEZNcPosition parameter object
Calling procedure
IEZNcPosition pPos;
HRESUTL hr = pComm->QueryInterface(IID_IEZNcPosition,(void**)&pPos);
Return value
S_OK is returned if the object is successfully created, and if not, another value is
returned.
Function
Creates a parameter object and returns its address in the parameter pPos.
4.4 Include Files
To use the product, include the following header files in the project as necessary.
#include "EZSocketNc.h" ……… Header file for method definitions
#include "EZSocketNcStr.h" ……… Header file for structure definitions (*)
#include "EZSocketNcDef.h" ……… Header file for miscellaneous definitions
#include "EZSocketNcErr.h" ……… Header file for error definitions
#include "EasysocketDef.h" ……… Header file for miscellaneous definitions (*)
(*) These are necessary when the product is used in the C70.
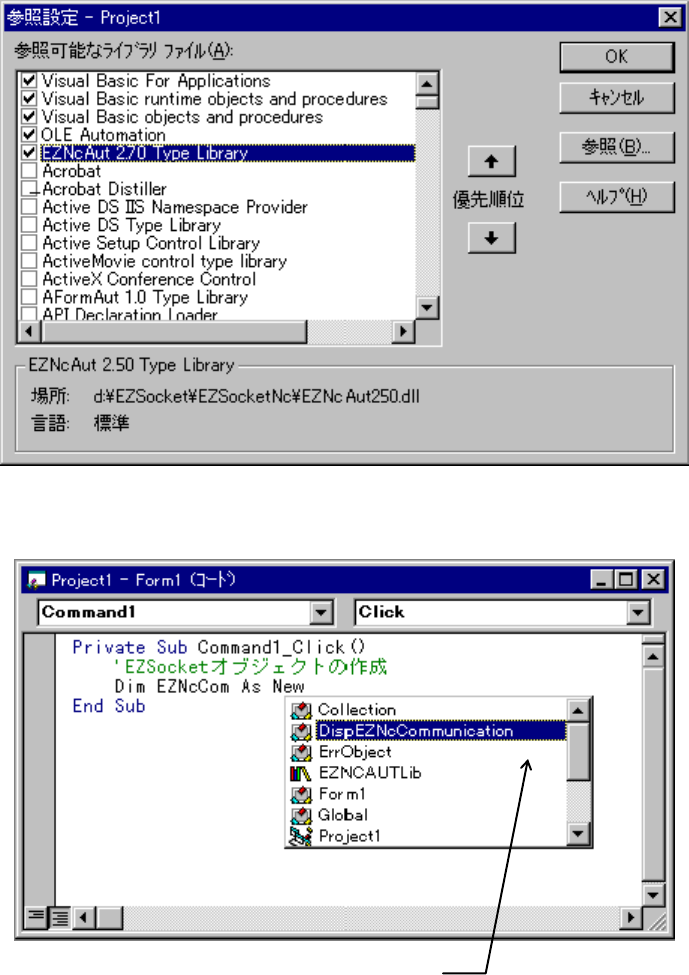
4-4
4.5 Overview of VB Programming of Automation Interface
This section explains programming with Microsoft Visual Basic (hereinafter referred to as "VB"). The VC++
programs and VB programs can be written in a similar flow; therefore, VB can be used to create a prototype
of your application and verify it at an early stage.
VB's functions that assist programming also help make programming efficient.
4.5.1 Using OLE automation interface with VB
(1) Setting references: Check (select) object libraries.
This section describes a way to enable early binding by setting references. Setting references
will enable VB's object browsing function.
(Install the product prior to this procedure.)
(2) Object browser: In your programming window, select the EZNcCommunication object.
Object browser
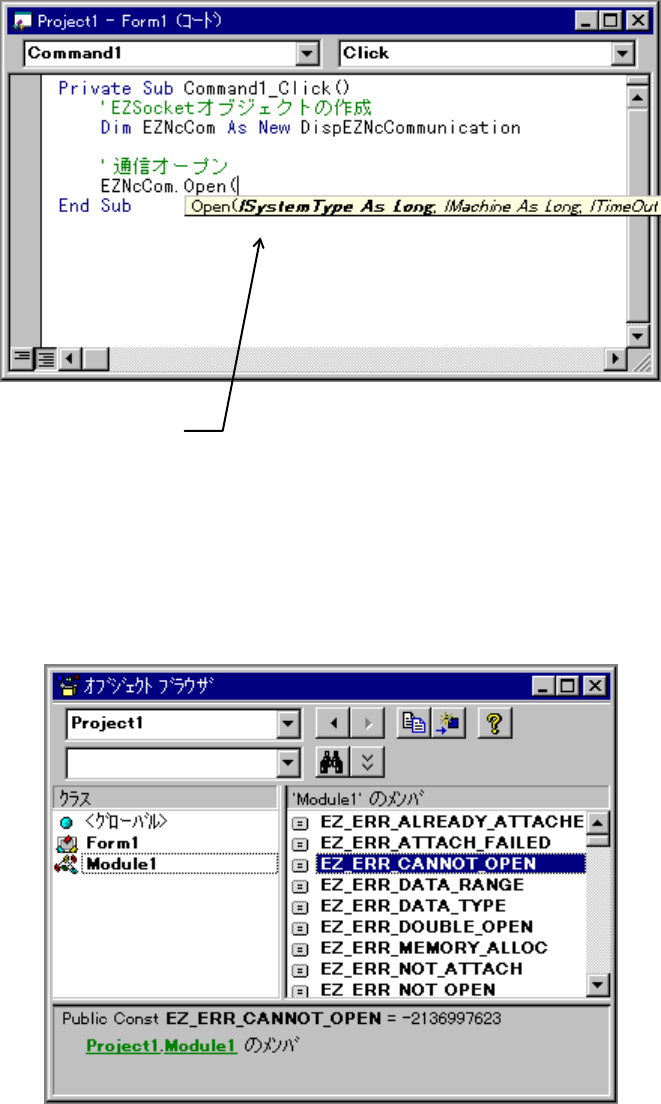
4-5
(3) Method browser: In your programming window, select a method for the EZNcCom object and check
its argument.
(4) Module file: Sets definitions and error code references.
Add a module file so that the definitions of the product and error codes can be used in the VB. Select
"Project", "Add a standard module", and then "Existing file" to add EZNcDef.bas, EZNcErr.bas, and
EZComErr.bas module files to the project.
Definitions and error codes can now be referred to easily through VB's object browser function.
Method browser
4-6
4.5.2 VB program flow (1)
This section shows the flow of the program that uses early binding. Reference setting in the product is
required.
Private Sub Command1_Click()
'Create object.
Dim EZNcCom As New DispEZNcCommunication
'Open communication.
Dim lRet As Long
lRet = EZNcCom.Open2(EZNC_SYS_MAGICBOARD64, 1, 1)
If lRet <> 0 Then GoTo Error_Proc
'Processing
lRet = EZNcCom.SetHead(1)
If lRet <> 0 Then GoTo Error_Proc
Dim CurPos(1 To 3) As Double
For Axis = 1 To 3
lRet = EZNcCom.Position_GetCurrentPosition(Axis,CurPos(Axis))
If lRet <> 0 Then GoTo Error_Proc
Next Axis
X.Text = CurPos(1)
Y.Text = CurPos(2)
Z.Text = CurPos(3)
'Close.
lRet = EZNcCom.Close
If lRet <> 0 Then GoTo Error_Proc
GoTo Last_Proc
Error_Proc:
MsgBox ("Error! Code = " + "&H" + CStr(Hex(lRet)))
Last_Proc:
'Release object.
Set EZNcCom = Nothing
End Sub
4-7
4.5.3 VB program flow (2)
This section shows the flow of the program that uses late binding. Reference setting in the product is not
required. Note that the object browser function with VB cannot be used.
Private Sub Command1_Click()
'Create object.
Dim EZNcCom As Object
Set EZNcCom = CreateObject("EZNcAut.DispEZNcCommunication","10.20.123.12")
'Open communication.
Dim lRet As Long
lRet = EZNcCom.Open2(EZNC_SYS_MAGICBOARD64, 1, 1)
If lRet <> 0 Then GoTo Error_Proc
'Processing
lRet = EZNcCom.SetHead(1)
If lRet <> 0 Then GoTo Error_Proc
Dim CurPos(1 To 3) As Double
For Axis = 1 To 3
lRet = EZNcCom.Position_GetCurrentPosition(Axis,CurPos(Axis))
If lRet <> 0 Then GoTo Error_Proc
Next Axis
X.Text = CurPos(1)
Y.Text = CurPos(2)
Z.Text = CurPos(3)
'Close.
lRet = EZNcCom.Close
If lRet <> 0 Then GoTo Error_Proc
GoTo Last_Proc
Error_Proc:
MsgBox ("Error! Code = " + "&H" + CStr(Hex(lRet)))
Last_Proc:
'Release object.
Set EZNcCom = Nothing
End Sub
(Note) For the first argument setting of CreateObject(), refer to *2 in "1.8.1 VC++ program flow (1)".
Specify the
connection
destination's IP
address or domain
name.
5-1
5. APPLICATION INSTALLATION PROCEDURE
5.1 Overview
To redistribute the application that uses the product and to run it on other computers, it is necessary to copy
the user-developed software modules as well as files contained in the product to the computers, and set them
properly in their system registry.
This section provides the guideline and the procedure for these steps.
There are two methods to redistribute the product. Choose one that suits your application environment.
(1) Method to use the redistribution installer contained in the enclosed DVD-ROM.
(2) Method to use your own installer created according to the redistribution procedure.
<<Tips and Precautions for selecting a method>>
The method (1) above is time saving in that the installer does not need to be created. It is still necessary to
add a mechanism to execute the redistribution installer from your application's installer.
For the method (2), the installer created according to the redistribution procedure can be directly and
suitably embedded to your application's installer. This method is suitable especially when it is difficult to
embed the redistribution installer in your application's installer.
Please be aware that the product may be used by more than one application. When installing/uninstalling
your application, please make sure to follow the instructions and procedures specified in this document, to
avoid causing problems to the operation of other applications.
<<Installation specifications for different platforms>>
The installation specifications of the product are different for different platforms. The table shows the
differences in the specifications.
Table 5-1 Installation specifications for different platforms
Operating environment
Specifications
x86 platform
x64 platform
EZSocket (32-bit)
EZSocket (32-bit)
Destination of installation
Recommended folder (Any folder
may be specified.)
%ProgramFiles%\EZSocket
Recommended folder (*1)
%ProgramFiles%\EZSocket
Actual destination of installation
c:\Program Files
∟ \EZSocket
* This applies when recommended
values are specified.
c:\Program Files (x86)
∟ \EZSocket
* This applies when recommended
values are specified.
Destination registry
HKEY_LOCAL_MACHINE
∟ SOFTWARE
∟ MITSUBISHI
∟ EZSocketNc
HKEY_LOCAL_MACHINE
∟ SOFTWARE
∟ Wow6432Node
∟ MITSUBISHI
∟ EZSocketNc
(*1) For x64 platform, install the product in the recommended folder.
5-2
5.2 Distribution Method with Redistribution Installer
This section explains the redistribution method that uses the redistribution installer contained in the enclosed
DVD-ROM.
Distribution is easy with the redistribution installer because it has been created in compliance with "5.3 Terms
of Redistribution".
5.2.1 Location where redistribution installer is stored
The redistribution installer that can be embedded in your product is stored in the following folder on the
enclosed DVD-ROM:
EZSocketNc\RedistributableInstaller
5.2.2 Destination where redistribution installer is installed
The product is installed in the location specified in the INI file described in the section 5.2.3. Any location may
be specified. (Note that this applies only when the product is installed on the target computer for the first
time. If the product already exists on the computer, it must be installed in the existing directory and the new
installation overwrites the old one.)
For x64 platform, install the product in the recommended folder, C:\Program Files (x86)\EZSocket.
5.2.3 Specifications for redistribution installer INI file
This file is used for interaction between your product's installer and the redistribution installer.
Section
Key
Description
I/O
USER
Name
User name.
IN
Company
Company name.
SETUP
Target
Installation destination folder.
The recommended folder is %ProgramFiles%\EZSocket. If this
key
is not specified, the product is installed in the recommended
folder.
Example) C:\Program Files\EZSocket
Specify the full path of the folder. (Environment variables
cannot be
used.)
ERROR
ERROR
Error flag
0: No error
1: Error occurred
OUT
DETAIL
Error details
0: Other error
1: Insufficient capacity in installation destination
* When ERROR=0, this key is not set.
DOINSTALL
START
1: Start installation
END
1: End installation
5-3
5.2.4 Processing flow and specifications of redistribution installer
This section explains the processing flow and specifications of the redistribution installer.
Make sure to perform thorough operation check when embedding the redistribution installer in your product.
No.
Processing flow
Specifications
1
Your product's installer is executed.
Your product's installer should:
Create an EZSNCSET.INI file in the folder that can be
managed by your product's installer.
The specifications of the EZSNCSET.INI file are as
follows:
[Specifications of EZSNCSET.INI]
[USER] section:
Register the Name value under Name in Table 5-2.
Register the Company value under Organization in
Table 5-2.
[SETUP] section:
Register the Target value to InstallPath in Table 5-2.
However, if InstallPath is already registered, prioritize
it.
The product is installed in (Target)\EZSocketNc.
It is recommended that the follow
ing folder be
specified as Target:
x86 platform:
Target=C:\Program Files\EZSocket
x64 platform:
Target=C:\Program Files (x86)\EZSocket
[Example of EZSNCSET.INI]
2
Your product's installer executes the
redistribution installer.
Execute the redistribution installer's Setup.exe, which
is stored on your product's media (for example,
DVD-ROM), with the following command line:
Setup.exe△
full path to where EZSNCSET.INI is
located
where the symbol △ means a space.
Example) Setup.exe C:\temp
Place EZSNCSET.INI in the C:\temp folder.
[USER]
Name=user name (maximum 256 bytes)
Company=user's company name (maximum 256 bytes)
[SETUP]
Target=path to installation destination
[USER]
Name=Taro Mitsubishi
Company=Mitsubishi Electric Corporation
[SETUP]
Target=C:\Program Files\EZSocket
5-4
No.
Processing flow
Specifications
3
The window that indicates that the
redistribution installer is preparing is displayed.
The installation preparation window is displayed.
If the language of the operating system is other than
Japanese, the display language is English.
4
Make sure that your product's installer refers to
the START value of the [DOINSTALL] section
of EZSNCSET.INI, and that the redistribution
installer has started. (*1)
Set the installation start flag in the EZSNCSET.INI.
Specifications of [EZSNCSET.INI]
[USER]
Name=user name (maximum 256 bytes)
Company=user's company name (maximum
256 bytes)
[SETUP]
Target=EZSocket installation folder
[DOINSTALL]
START=1
[DOINSTALL] section:
The redistribution installer sets the START value to 1
when the installation is started, and the END value to
1 when the installation is
completed.
5
The "Installing...:" window is displayed.
Perform the installation.
If the language of the operating system is other than
Japanese, the display language is English.
6
The "Registering registry" window is displayed.
Register registry information required for this product
according to the installation procedure.
If the language of the operating system is other than
Japanese, the display language is English.
7
When the registry registration is completed, the
window closes and the installation finishes.
When the registry registration is completed, the
"Registering registry" window closes and the
installation finishes.
5-5
8
Make sure that your product's installer refers to
the END value of the [DOINSTALL] section of
EZSNCSET.INI, and that the redistribution
installer is completed. (*1)
Also, check the ERROR and DETAIL values in
the [ERROR] section of EZSNCSET.INI, and
perform post-installation processes.
If the redist
ribution installer is abnormally
terminated, resolve the error status, and then
execute the installer by following the procedure
again. For common errors, refer to 5.2.5
Troubleshooting.
After the installer is finished, record results in
EZSNCSET.INI.
Specifications of [EZSNCSET.INI]
[ERROR] section:
The Error value is set to 0 when the installation is
successfully completed, and set to 1 when it is
abnormally terminated.
When ERROR=1, set error details to the DETAIL key.
9
Your product's installer deletes EZSNCSET.INI.
EZSNCSET.INI must be deleted at the end because it
is a common file.
(*1) Refer to "5. 2. 6 Precautions".
[USER]
Name=user name (maximum 256 bytes)
Company=user's company name (maximum 256 bytes)
[SETUP]
Target=Installation destination folder
[DOINSTALL]
START=1
END=1
[ERROR]
Error=0 *0=completed successfully,
1=terminated abnormally
5-6
5.2.5 Troubleshooting
This section explains how to handle errors that may occur in the installer.
No
.
Error case
Action
1.
If EZSNCSET.INI is invalid,
the window below is displayed. Click [OK] to
close.
If the language of the operating system is other
than Japanese, the display language is
English.
[Possible cause]
1)
User name or user company name cannot be
obtained.
2) U
ser name/user company name exceeds
256-byte limit.
[Action]
EZSNCSET.INI
Check the contents of EZSNCSET.INI, and set them
correctly. Or, place EZSNCSET.INI in the specified
folder.
2.
If the path to the installation destination is
incorrect,
the windo
w below is displayed. Click [OK] to
close.
If the language of the operating system is other
than Japanese, the display language is
English.
[Possible cause]
The read path to the installation destination is
incorrect.
[Action]
EZSNCSET.INI
The path sp
ecified in Target of EZSNCSET.INI is
incorrect. Set the path correctly.
[ERROR]
Error=1
[ERROR]
Error=1
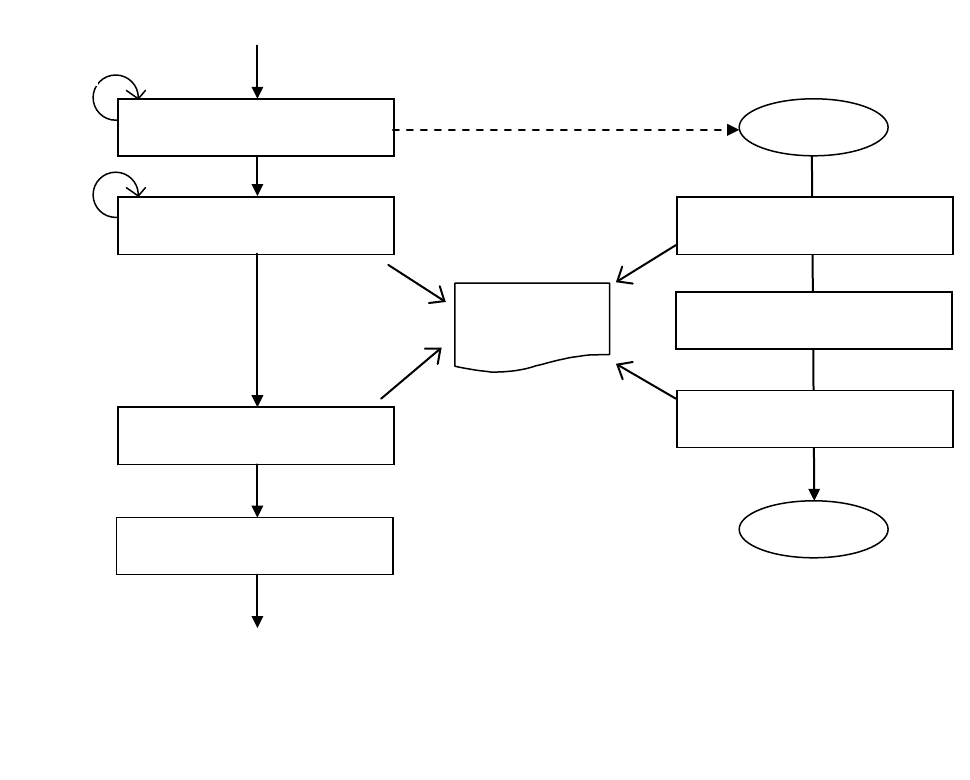
5-7
5.2.6 Precautions
Starting of redistribution installer
If your product's installer uses the LaunchAppAndWait() function to start the redistribution installer, it may
give a return value before the installation of the product is completed. To avoid this, it is necessary to have
your product's installer monitor the completion of the redistribution installer.
For this monitoring, use the START and END values in the [DOINSTALL] section of EZSNCSET.INI. For the
specifications of the INI file, refer to section 5. 2. 3.
Your product's installer
Launch of installer
Waiting for start
(Poll START=1)
Waiting for end
(Poll END-1)
Check results
(Check ERROR)
To next process
[DOINSTALL]
Setup.exe
End
EZSNCSET.INI
Ref
Set
LaunchAppAndWait()
Set START=1
Installing...
Set END=1
*
* The installer cannot set the START value in the [DOINSTALL] section if the cancel button is pressed
on the InstallShield initial screen. Make sure to set time-outs for waiting for start.

5-8
5.3 Terms of Redistribution
This section describes the terms of redistribution of the product.
5.3.1 Redistributable modules
Modules that can be redistributed are as follows:
Redistributable files contained in the product
Upon installation of the product on your development machine, these files are installed on the hard disk of
the machine. To make sure that the files of the correct version are distributed when redistributing the
product, copy the product from the installation DVD-ROM, not from the hard disk, and then embed it in a
disk for distribution.
5.3.2 Redistributable files
The following files that are stored on the installation DVD-ROM are redistributable. Make sure to
redistribute both the custom and automation interfaces. The following files need to be same version;
otherwise, an error may occur.
\Lib\EZSocketNc.dll: DLL for custom interface
\Lib\EZNcAutxxx.dll: DLL for automation interface
(where xxx in the file name represents a version-specific number.)
\Lib\CommServer: Related folder
\Lib\Parameter: Related folder
\Lib\Ini\melcfg.ini: Initialization file
5-9
5.4 Installation Procedure
5.4.1 Version upgrade of redistributable files
The redistributable files with the same name but with different versions (older or newer) may be distributed
by different applications. In such cases, make sure that the newer version overwrites the older version, not
the other way around. Normally the setup program performs version check. If the application does not have
a setup program, the user needs to manually check the version before embedding the redistribution program.
(Note 1) If the initialization file melcfg.ini already exists on the personal computer, do not overwrite it however
old it may be.
(Note 2) The DLL file name of the automation interface is different for different versions. Do not delete the
automation interface file that has already been installed. It will cause the application compatible with
the automation interface that has already been installed to fail-to start.
5.4.2 x86 platform
5.4.2.1 Installation directory for files
When installing the product for the first time, it can be installed in any directory. For the second or later
installation, it must be installed in the directory where the product already exists so that more than one
product does not exists on the same computer.
To meet this requirement, follow the procedure below.
(1) Determine if it is the first-time installation or not
Check if the following registry key exists and the correct path to the installation directory is registered as its
data.
Registry key: HKEY_LOCAL_MACHINE\SOFTWARE\MITSUBISHI\EZSocketNc\CurrentVersion\InstallPath
Data (Example): C:\Program Files\EZSocket\EZSocketNc
If the correct path name is registered as registry key data, the product is considered to have been installed
once or more, and if not, for instance, the registry key does not exist, or the path name is not registered, the
product is considered to have never been installed for the first time. Do not add "\" to the end of the path, or
related files cannot be read.
(2) Installing for the first time
Have the user specify the installation directory through a dialog or other appropriate method. Register the
directory in the registry as installation directory. Other registry settings also need to be configured at this time.
For details about registry settings, refer to "5.4.2.3 Registry settings".
(3) Installing from the second time onward
Install the product in the installation directory that is registered to the registry. If the installation directory
does not exist, create one. When copying files, make sure not to overwrite the new version with the old
version.
5-10
5.4.2.2 Configuration of installation directory
The configuration of the installation directory is shown below:
Copy all files stored on the installation DVD-ROM to the directory as follows:
Installation directory Path to the installation files in the installation DVD-ROM
Any desired directory
EZSocketNc
\Lib\EZSocketNc.dll, EZNcAutxxx.dll and other files in the directory
App Application files (for example)
EZSocket
Parameter
Under \Lib\Parameter
M700 Parameter file for the M700
CommServer
Under \Lib\CommServer
M700
C70
C70 Parameter file for the C70
Windows folder
WindowsOS folder
melcfg.ini
\Lib\Ini\melcfg.ini
M800
M800 Parameter file for the M800
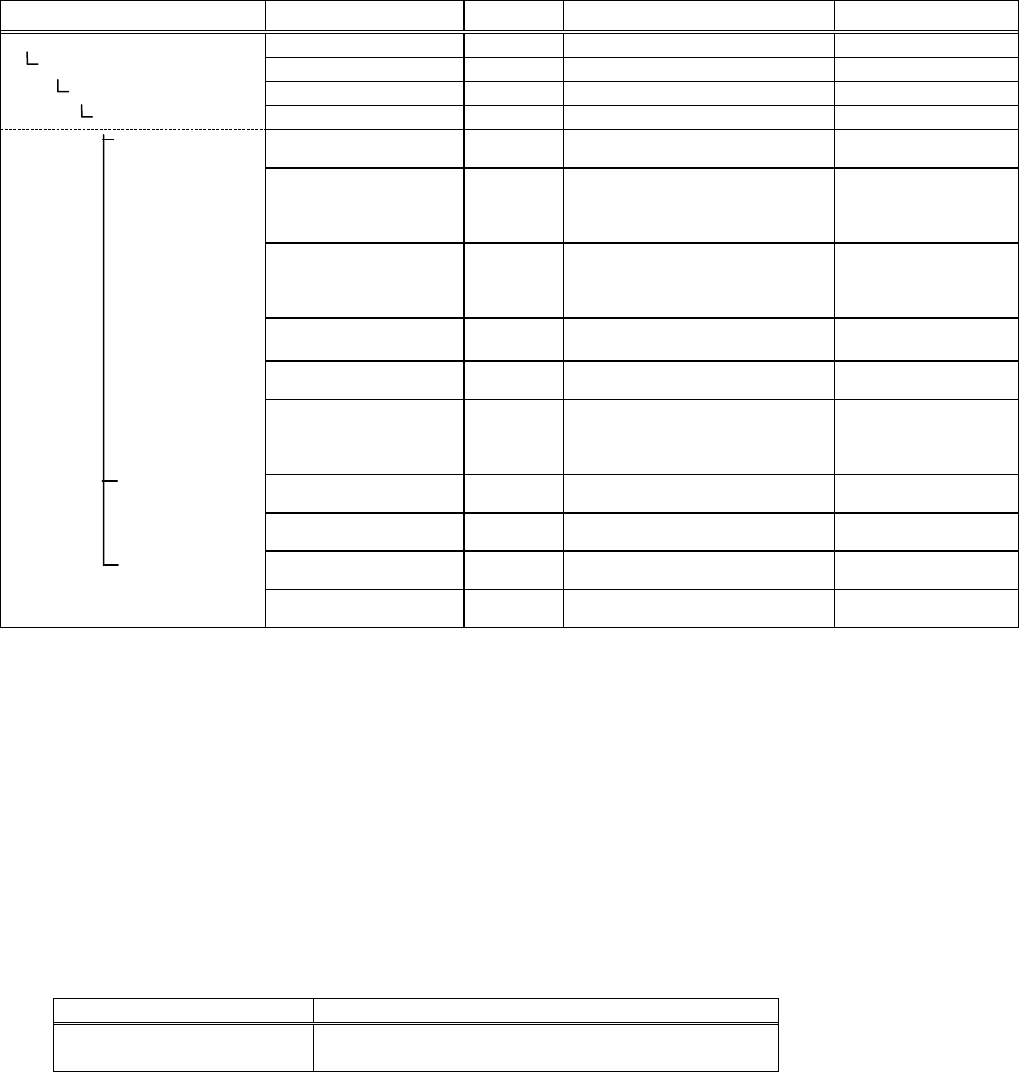
5-11
5.4.2.3 Registry settings
Registries required for the product to run are listed below:
When installing the product, create the registry structure as shown, and register data accordingly.
Table 5-2 List of registries
Key Name Type Data Remarks
HKEY_LOCAL_MACHINE
SOFTWARE
MITSUBISHI
EZSocketNc
CurrentVersion
Description
Character
string
"EZSocketNc" Fixed data.
Organization Character
string User-specified company name
Register the company
name specified by the
user at the time of
installation.
Name Character
string User-specified user name
Register the user
name specified by the
user at the time of
installation.
MajorVersion
DWORD
value
Version
MinorVersion
Character
string
Version
InstallPath (Note 1) Character
string
"User-specified directory
\EZSocketNc"
Register the path
specified by the user
at the time of
installation.
Custom
FileVersion (Note 2)
Character
string
Date of EZSocketNc.dll file YYYY-MM-DD format.
EZSocketNcName
Character
string
“EZSocketNc.dll” Fixed data.
Automation
FileVersion (Note 2)
Character
string
Date of EZNcAut.dll file YYYY-MM-DD format.
EZSocketNcName
Character
string
“EZNcAutxxx.dll”
xxx are numeric
characters.
(Note 1) The data to be registered to "InstallPath" must be "drive: directory specified by the user at the time
of package installation + \EZSocketNc".
(Note 2) After copying installation files to the HD, get the time stamp of the specified file, and register this
data as "FileVersion".
5.4.2.4 System environment variable settings
The system environment variable required for the product to run is shown below.
When installing the product, register it as an additional system environment variable.
The default value is shown in the list below. If the file is not in the specified path, change the path.
Table 5-3 List of system environment variable
Model
System environment variable (default value)
M700/M800
PATH=installation path of the product
(Example: C:\EZSocket\EZSocketNc)
5-12
5.4.2.5 COM information registry settings
For EZSocketNc.dll and EZNcAutxxx.dll stored in the installation directory, COM information must be
registered to the registry. To register the information, use the redistributable REGSVR32.EXE command,
which is shipped with Microsoft Visual C++, at the time of installation. The information is registered as follows:
REGSVR32 /s installation directory\EZSocketNc.dll
REGSVR32 /s installation directory\EZNcAutxxx.dll
5.4.2.6 Precautions for uninstallation
The product may be used by more than one application. If that is the case, and if the product is deleted by
uninstalling one of the applications that are installed, the operation of the remaining applications will be
affected. To avoid this, do not delete the files and the registry of the product by uninstalling the application in
which the product is embedded.
5-13
5.4.3 x64 platform
5.4.3.1 Installation directory for files
Install the files to %ProgramFiles%\EZSocket.
Register the installation destination directory to the registry as installation directory. Other registry settings also
need to be configured at this time. When copying files, make sure not to overwrite the new version with the old
version.
Registry key:
HKEY_LOCAL_MACHINE\SOFTWARE\Wow6432Node\MITSUBISHI\EZSocketNc\CurrentVersion\InstallPath
Data (example): C:\Program Files (x86)\EZSocket\EZSocketNc\
5.4.3.2 Configuration of Installation directory
The configuration of the installation directory is shown below:
Copy all files stored on the installation DVD-ROM to the directory as follows:
Installation directory Path to the installation files in the installation DVD-ROM
%ProgramFiles%
EZSocketNc
\Lib\EZSocketNc.dll, EZNcAutxxx.dll and other files in the directory
App Application files (for example)
EZSocket
Parameter
Under \Lib\Parameter
M700 Parameter file for the M700
CommServer
Under \Lib\CommServer
M700
C70
C70 Parameter file for the C70
Windows folder
WindowsOS folder
melcfg.ini
\Lib\Ini\melcfg.ini
M800
M800 Parameter file for the M800
5-14
5.4.3.3 Registry settings
Registries required for the product to run are listed below:
When installing the product, create the registry structure as shown, and register data accordingly.
Table 5-4 List of registries
Key Name Type Data Remarks
HKEY_LOCAL_MACHINE
SOFTWARE
Wow6432Node
MITSUBISHI
EZSocketNc
CurrentVersion
Description
Character
string
"EZSocketNc" Fixed data.
Organization Character
string User-specified company name
Register the company
name specified by the
user at the time of
installation.
Name Character
string User-specified user name
Register the user
name specified by the
user at the time of
installation.
MajorVersion
DWORD
value
Version
MinorVersion
Character
string
Version
InstallPath (Note 1) Character
string
"%ProgramFiles%directory\EZSock
et\EZSocketNc"
Register the path
specified by the user
at the time of
installation.
Custom
FileVersion (Note 2)
Character
string
Date of EZSocketNc.dll file YYYY-MM-DD format.
EZSocketNcName
Character
string
“EZSocketNc.dll” Fixed data.
Automation
FileVersion (Note 2)
Character
string
Date of EZNcAut.dll file YYYY-MM-DD format.
EZSocketNcName
Character
string
“EZNcAutxxx.dll”
xxx are numeric
characters.
(Note 1) The data to be registered to "InstallPath" must be "%ProgramFiles%\EZSocket\EZSocketNc".
(Note 2) After copying installation files to the HD, get the time stamp of the specified file, and register this
data as "FileVersion".
5.4.3.4 System environment variable settings
The system environment variable required for the product to run is shown below.
When installing the product, register it as an additional system environment variable.
The default value is shown in the list below. If the file is not in the specified path, change the path.
Table 5-5 List of system environment variable
Model
System environment variable (default value)
M700/M800
PATH=installation path of the product
(Example: C:\Program Files (x86)\EZSocket\EZSocketNc)
5-15
5.4.3.5 COM information registry settings
For EZSocketNc.dll and EZNcAutxxx.dll stored in the installation directory, COM information must be
registered to the registry. To register the information, use the redistributable REGSVR32.EXE command,
which is shipped with Microsoft Visual C++, at the time of installation. The information is registered as follows:
REGSVR32 /s installation directory\EZSocketNc.dll
REGSVR32 /s installation directory\EZNcAutxxx.dll
5.4.3.6 Precautions for uninstallation
The product may be used by more than one application. If that is the case, and if the product is deleted by
uninstalling one of the applications that are installed, the operation of the remaining applications will be
affected. To avoid this, do not delete the files and the registry of the product by uninstalling the application in
which the product is embedded.
6-1
6. SAMPLE APPLICATION
6.1 Overview of the Sample Application
The sample application that uses this product is provided with compilable project files for Visual C++ Version
6.0 and Visual Basic Version 6.0. The macro sample program using the OLE interface macros that allow
custom interfaces to be called easily is also provided. The OLE interface macros are provided as samples.
The sample application includes the following:
Position data display application: \samples\Vc\Position\Position.dsw
Monitoring application: \samples\Vb\EZNcAutSample\EZNcAutSample.vbp
Macro sample program: \samples\Vc\Macros\MacSmp\MacSmp.dsw
6.2 Position Data Display Application
This section explains the sample application for Visual C++ Version 6.0 using this product.
6.2.1 Operating requirements
The sample application operates in the following system configuration:
Operating
systems
Windows 2000, Windows XP
Compiler
Microsoft Visual C++ Version 6.0
Controller
Mitsubishi CNC C70,
Mitsubishi CNC M700/M700V/M70/M70V, M800/M80
H/W
Personal computer on which the operating systems, compiler,
and controllers above can be operated
6.2.2 Installation and uninstallation
This section explains installation and uninstallation of the sample application.
For installation of operating systems and VC++ other than the product as well as operations of hardware,
refer to the respective instruction manuals.
(1) Installation
The sample application is created in the samples folder when this product is installed.
The sample application has the subfolders with respective project names and each contains its source
code and execution file. The sample application includes the Visual C++ 6.0 project workspace files. Opening
the corresponding project workspace file enables Visual C++ to open the project.
(2) Uninstallation
To uninstall the sample application, delete the subfolder with the project name or delete the samples folder.
6-2
6.2.3 Executing the sample application
This section explains execution of the sample application.
The execution file is stored under the Debug folder or the Release folder in the sample application folder.
To open the position data display application, execute Position.exe.
For instructions for using the position data display application, refer to the following sections.
Note that this sample application is a monitor application for the Mitsubishi CNC. Operations such as
operation search and cycle start are required for the computerized numerical controller. For details on the
operation methods, refer to the instruction manuals.
6.2.4 Function list
This section explains the functions of the sample application.
The position data display application monitors specified position data and displays values obtained as
counters.
Table 6-1 Position data display application function list
[File]
[Exit application]
Ends the position data display application.
[Edit]
[Position data]
Edits the position data type to be displayed.
Current position
Workpiece coordinate position
Machine position
Command remaining distance
[Display]
[Refresh cycle]
Edits the refresh cycle for the display.
[Communica
tion]
[Communication selection]
Selects a communication target.
CNC C70
CNC M700M (*1)
CNC M700L (*2)
CNC M800M(*3)
CNC M800L(*4)
[Execution]
Starts/Stops communication.
[Help]
[Version information]
Displays version information of the position data
display application.
(*1) A communication target is the Mitsubishi CNC machining center system M700/M700V/M70/M70V.
(*2) A communication target is the Mitsubishi CNC lathe system M700/M700V/M70/M70V.
(*3) A communication target is the Mitsubishi CNC machining center system M800/M80.
(*4) A communication target is the Mitsubishi CNC lathe system M800/M80
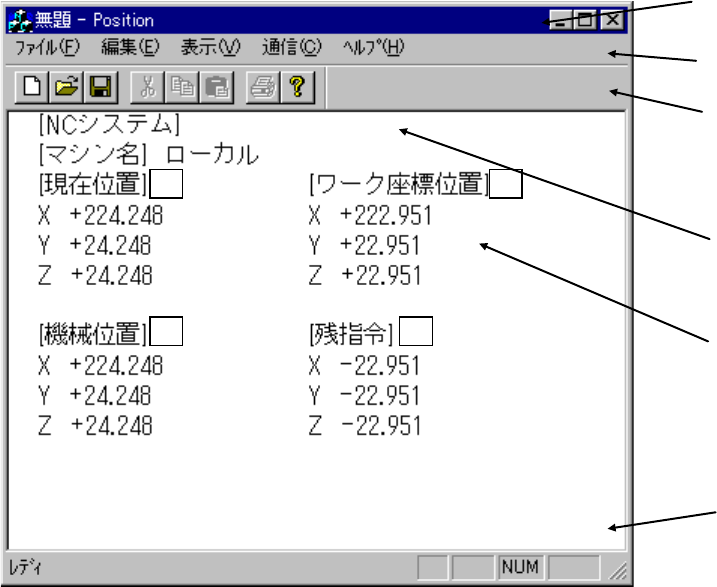
6-3
6.2.5 Screen structure and functions
This section describes the screen structure for the position data display application and the functions for each
menu item.
(1) Basic screen structure
The basic screen is shown below:
(2) File function
In the position data display application, the available file function is the exit of the application only.
There is no file selection function.
1) Title bar
(displays the application title)
2) Menu
3) Docking toolbar
(Display/hide is selectable and
the file function is not available
in the sample.)
5) Screen display area
a. Displays the current position
b. Displays the workpiece position
c. Displays the machine position
d. Displays the command
remaining distance
6) Status line
(Display/hide is selectable.)
4) Communication target display
area
Area for the connected machine
name
a
b
c
d
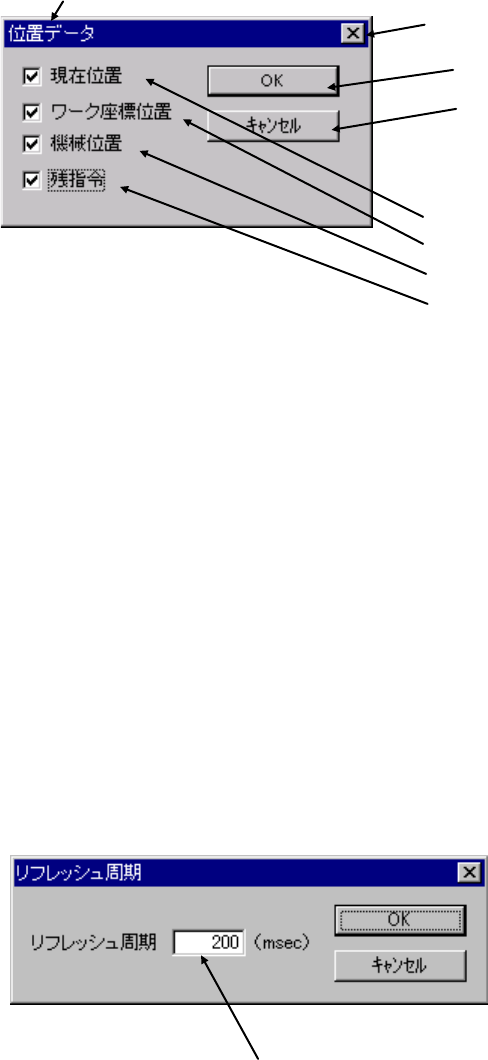
6-4
(3) Edit function
a. Position data function dialog
Selects the position data types to be displayed.
1) to 4): Explanation omitted. The following explanation is also omitted.
5) Check box to display the current position:
Selects whether to display or hide the relative position to the position at a completion of the dog type zero
point return or to the preset position configured by G92/origin set/counter set.
6) Check box to display the workpiece coordinate position:
Selects whether to display or hide the coordinate position in the current workpiece coordinate system.
7) Check box to display the machine position:
Selects whether to display or hide the coordinate position for each axis in the basic machine coordinate
system.
8) Check box to display the command remaining distance:
Selects whether to display or hide the remaining distance for the travel command being executed.
(4) Display function
Refresh cycle function dialog
Sets the refresh cycle for the screen display.
1) Edit box to specify the refresh cycle:
Specifies the refresh cycle for the position data displayed on the screen.
The range is from 200 to 10000 (ms).
1) Edit box to specify the refresh cycle
1) Title bar
2) Cancel button
5) Check box to display the current position
6) Check box to display the workpiece coordinate position
7) Check box to display the machine position
8) Check box to display the command remaining distance
3) OK button
4) Cancel button
6-5
(5) Communication function
Communication selection function dialog
Selects a communication target.
1) Combo box for the remotely connected machine:
Sets the machine name of a personal computer equipped with the NC.
Allows the domain name and IP address to be specified.
2) Combo box for the communication target selection:
Sets an NC control module communication target.
Selection range is as follows: MELDASMAGIC64, MELDAS6x5M, MELDAS6x5L, MELDASC6/C64, CNC
C70, CNC M700M, CNC M700L, CNC M800M, CNC M800L.
(6) Execution function
Connects/disconnects the selected communication target.
If connection fails, an error message is output and the message box appears.
(7) Version display
"Help - Version display" displays the dialog box for version information of the position data display application.
2) Combo box for communication target
selection (*1)
1) Combo box for the remotely connected machine
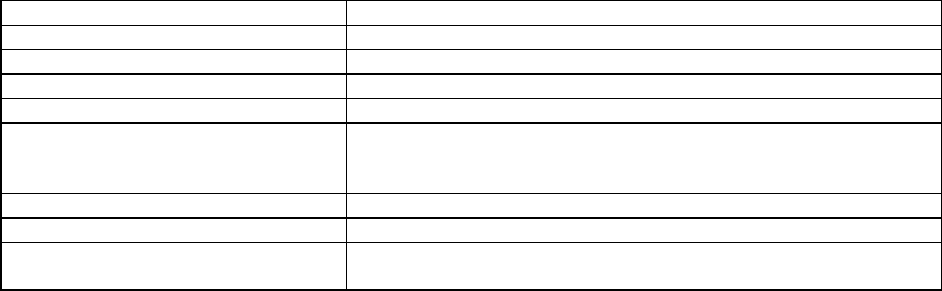
6-6
6.2.6 Setting project workspaces
This section explains how to set the project workspace used for creating the position data display
application. The application project configuration is as follows.
Table 6-2 Project configuration
Setting item
Setting value
Application type
SDI (Single Document Interface).
Database support
Not supported.
Automation support
Supported.
OLE compound document support
Not supported.
Functions to be embedded into the
application
Docking toolbar.
Initial status bar.
3D control.
MAPI support
Not supported.
Windows Sockets support
Not supported.
Number of the latest files to be
displayed.
4 files. (The default value is applied to the advanced settings.)
6.2.7 IEZNcCommunication object
The IEZNcCommunication3 object is used for connection to the communication circuit.
This sample application uses the following methods:
Open2() .…… Open line method
Close() ……… Line disconnect method
SetHead()………………… System specification method
6.2.8 IEZNcPosition object
The IEZNcPosition object executes position information acquisition for the opened NC control module. This
sample application uses the following methods:
GetWorkPosition()……… Workpiece coordinate position acquisition method
GetMachinePosition()… Machine position acquisition method
GetCurrentPosition()… Current position acquisition method
GetDistance()…………… Command remaining distance acquisition method
6-7
6.3 Monitoring Application
This section explains the sample application for Visual Basic Version 6.0 using this product.
6.3.1 Operating requirements
The sample application operates in the following system configuration:
Operating
systems
Windows 2000, Windows XP
Compiler
Microsoft Visual Basic Version 6.0
Controller
Mitsubishi CNC C70,
Mitsubishi CNC M700/M700V/M70/M70V, M800/M80
H/W
Personal computer on which the operating systems, compiler,
and controllers above can be operated
6.3.2 Installation and uninstallation
This section explains installation and uninstallation of the sample application.
For installation of operating systems and VB other than the product as well as operations of hardware, refer
to the respective instruction manual.
(1) Installation
The sample application is created in the samples folder when this product is installed.
The sample application has the subfolders with respective project names and each contains its source
code and execution file. The sample application includes the Visual Basic 6.0 project workspace files.
Opening the corresponding project workspace file enables Visual Basic to open the project.
(2) Uninstallation
To uninstall the sample application, delete the subfolder with the project name or delete the samples folder.
6.3.3 Executing the sample application
This section explains execution of the sample application.
The execution file is stored under the sample application folder. To open the monitoring application, execute
EZNcAutSample.exe.
For instruction for using the monitoring application, refer to the following sections.
Note that this sample application is a monitor application for the computerized numerical controller.
Operations such as operation search and cycle start are required for the computerized numerical controller.
For details on the operation methods, refer to the instruction manuals.
6-8
6.3.4 Function list
This section explains the functions of the sample application.
The monitoring application monitors the currently-running NC program and the current position, and displays
the obtained values as counters.
Table 6-3 Monitoring application function list
Function item
Overview
NC control module
communication start/stop
Sets NC control module communication parameters and
starts/stops communication.
Sets the NC control module number.
Sets communication time-out value.
Executes communication.
Displays the NC system version.
Position display
Reads the position data.
Displays the current coordinate position.
Displays the workpiece coordinate position.
Displays the machine coordinate position.
Alarm display
Displays the current alarm.
Program display
Displays the currently-running program and the ongoing
line position.
Displays the currently-running program list
Displays the running block position and sequence
number.
Error display
Displays the API error codes for this product.
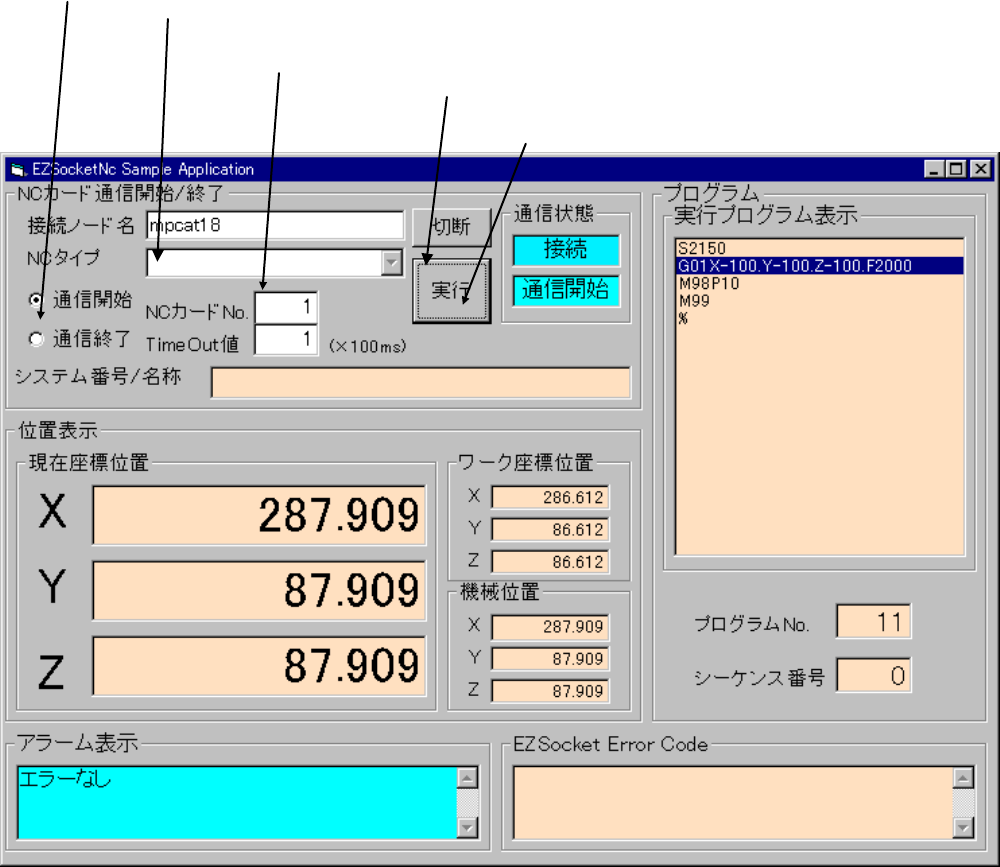
6-9
6.3.5 Screen structure and functions
This section describes the screen structure for the position data display application and the functions for each
menu item.
(1) Basic screen structure
The basic screen is shown below:
1) Edit box for the connected machine name
Sets the machine name of a personal computer equipped with the NC.
Allows the domain name and IP address to be specified.
2) Button for connection/disconnection
Connects/disconnects a specified machine.
3) Edit box for the NC control module number
Sets the NC control module number. The NC control module number is determined when setting up the NC
control module.
4) Edit box for the communication time-out value
Sets the communication time-out value for the NC control module.
5) Radio button to start/stop communication
Sets to start or stop communication with the NC control module.
6) Execution button to start/stop communication
Executes a communication start or stop after setting 1) to 3).
5) Radio button to start/stop
3) Edit box for the NC control module number
4) Edit box for the communication time-out value
1) Edit box for the connected machine name
6) Execution button to start/stop communication
2) Button for connection/disconnection

6-10
6.3.6 Setting project workspaces
This section explains how to set the project workspace used for creating the position data display
application. The application project configuration is as follows.
This project uses late binding to call methods of this product.
Table 6-4 Project configuration
Setting item
Setting value
Application type
Standard EXE
Addition of the standard module
Select EZNcDef.bas or EZNcErr.bas from [Add standard module]
in [Project].
7-1
7. CONSOLE PROGRAM SAMPLE
7.1 Console Program to Connect Mitsubishi CNC C70 (via Ethernet)
//
// Simple sample program for the console application
//
// Copyright(C) 2008 MITSUBISHI ELECTRIC CORPORATION
#include "stdafx.h"
#include "stdio.h"
#include <locale.h>
// EZSocket header file
#include "EZSocketNc.h"
#include "EZSocketNcStr.h"
#include "EZSocketNcDef.h"
#include "EasysocketDef.h"
int main(int argc, char* argv[])
{
HRESULT hr = S_OK;
LONG lRet = 0;
EZNCST_OPEN stOpen;
LPOLESTR lpwszBuffer = NULL;
HANDLE hSampleFile = NULL;
BYTE* pbData = NULL;
const DWORD dwLength = 256;
DWORD dwNumRead = 0;
DWORD dwWrittenSize = 0;
memset(&stOpen, 0x00, sizeof(stOpen));
// COM initialization
hr = CoInitialize(NULL);
if( S_OK != hr ){
wprintf(L"Failed in CoInitialize!\n");
return 0;
}
setlocale( LC_ALL, "Japanese" );
IEZNcCommunication3 *pIEZNcCom = NULL; // Communication object
IEZNcFile6 *pIEZNcFile = NULL; // File object
//
// EZNcCommunication object creation
// For the first argument of CLSIDFromProgID(), refer to *2 in "1.8.1 VC++ program flow (1)".
CLSID clsid;
CLSIDFromProgID( L"EZSocketNc.EZNcCommunication", &clsid );
hr = CoCreateInstance(clsid,
NULL,
CLSCTX_INPROC_SERVER,
IID_IEZNcCommunication3,
(void **)&pIEZNcCom);
if( S_OK != hr )
{
wprintf(L"EZSocket is not installed!\n");
goto END;
}
//
// EZNcFile object creation
//
if(pIEZNcCom->QueryInterface(IID_IEZNcFile6, (void**)&pIEZNcFile) != S_OK){
wprintf(L"EZSocket is not installed!\n");
goto END;
}
//
// Open parameter setting
//
stOpen.lNetworkNumber = 0x01;
7-2
stOpen.lStationNumber = 0x01;
stOpen.lUnitNumber = 0x00;
stOpen.lConnectUnitNumber = 0x00;
stOpen.lIONumber = 0x3E1;
stOpen.lCpuType = CPU_Q17NNCCPU;
stOpen.lUnitType = UNIT_QJ71E71;
stOpen.lPacketType = PACKET_PLC1;
stOpen.lProtocolType = PROTOCOL_UDPIP;
stOpen.lPortNumber = 0x00;
stOpen.lBaudRate = 0x00;
stOpen.lDataBits = 0x00;
stOpen.lParity = 0x00;
stOpen.lStopBits = 0x00;
stOpen.lControl = 0x00;
stOpen.lpcwszHostAddress = L"10.20.123.12";
stOpen.lCpuTimeOut = 0x00;
stOpen.lTimeOut = 1000;
stOpen.lSumCheck = FALSE;
stOpen.lSourceNetworkNumber = 0x01;
stOpen.lSourceStationNumber = 0x04;
stOpen.lDestinationPortNumber = 5001;
stOpen.lDestinationIONumber = 0x00;
stOpen.lConnectChannelNumber = 0x00;
stOpen.lMultiDropChannelNumber = 0x00;
stOpen.lThroughNetworkType = 0x00;
stOpen.lIntelligentPreferenceBit = 0x00;
stOpen.lDidPropertyBit = 0x01;
stOpen.lDsidPropertyBit = 0x01;
hr = pIEZNcCom->SetMelsecProtocol(&stOpen, &lRet);
if( S_OK != hr ){
wprintf(L"Can't SetMelsecProtocol! Error Code = 0x%x\n",lRet);
goto END;
}
// IEZNcCommunication3 open
hr = pIEZNcCom->Open2(EZNC_SYS_MELDASC70, 1, 20, &lRet);
if( S_OK != hr ){
wprintf(L"Can't Open2! Error Code = 0x%x\n",lRet);
goto END;
}
//
// File search
//
hr = pIEZNcFile->FindDir2(L"M01:\\PRG\\USER\\", 0x00, &lpwszBuffer, &lRet);
if( S_OK != hr ){
wprintf(L"Can't FindDir! Error Code = 0x%x\n",lRet);
goto END;
}
while(lRet >= 1){
if(wcscmp(lpwszBuffer, L"10.PRG") == 0){
break;
}
CoTaskMemFree(lpwszBuffer);
lpwszBuffer = NULL;
hr = pIEZNcFile->FindNextDir2(&lpwszBuffer, &lRet);
if( S_OK != hr ){
wprintf(L"Can't FindNextDir! Error Code = 0x%x\n",lRet);
goto END;
}
}
if(lRet == 0){
wprintf(L"File is not found.\n");
pIEZNcFile->ResetDir(&lRet);
goto END;
}
hr = pIEZNcFile->ResetDir(&lRet);
if( S_OK != hr ){
wprintf(L"Can't ResetDir! Error Code = 0x%x\n",lRet);
goto END;
}
//
7-3
// File read
//
hr = pIEZNcFile->OpenFile3(L"M01:\\PRG\\USER\\10.PRG", EZNC_FILE_READ, &lRet);
if( S_OK != hr ){
wprintf(L"Can't OpenFile3! Error Code = 0x%x\n",lRet);
goto END;
}
hSampleFile = ::CreateFile("C:\\SAMPLE.PRG",
GENERIC_WRITE,
FILE_SHARE_READ,
NULL,
OPEN_ALWAYS,
FILE_ATTRIBUTE_NORMAL,
NULL);
if(hSampleFile == INVALID_HANDLE_VALUE ){
wprintf(L"Can't create file.\n");
goto END;
}
do{
hr = pIEZNcFile->ReadFile2(dwLength, &pbData, &dwNumRead, &lRet);
if( S_OK != hr ){
wprintf(L"Can't ReadFile2! Error Code = 0x%x\n",lRet);
pIEZNcFile->AbortFile2(&lRet);
::CloseHandle(hSampleFile);
goto END;
}
if(dwNumRead != 0){
::WriteFile(hSampleFile,
(LPCVOID)pbData,
dwNumRead,
&dwWrittenSize,
NULL);
CoTaskMemFree(pbData);
pbData = NULL;
}
}while(dwLength == dwNumRead);
::CloseHandle(hSampleFile);
hr = pIEZNcFile->CloseFile2(&lRet);
if( S_OK != hr ){
wprintf(L"Can't CloseFile2! Error Code = 0x%x\n",lRet);
goto END;
}
END:
if(lpwszBuffer != NULL){
CoTaskMemFree(lpwszBuffer);
lpwszBuffer = NULL;
}
if(pbData != NULL){
CoTas kMemFree(pbData);
pbData = NULL;
}
// IEZNcCommunication3 close
if(pIEZNcCom != NULL){
pIEZNcCom->Close(&lRet);
}
// Object release
if(pIEZNcFile != NULL){
pIEZNcFile->Release();
pIEZNcFile = NULL;
}
if(pIEZNcCom != NULL){
pIEZNcCom->Release();
pIEZNcCom = NULL;
}
// COM library release
CoUninitialize();
return 0;
}
Revision History
Date of revision
Manual No.
Revision details
Dec.2013
IB-1501209-A
First edition created.
Jan. 2014 IB-1501209-B 1. Changed the compatible NC models
Changed the compatible NC models to be M700 and C70
Corrected the description so that only the compatible models are given in each
item.
2. Added the descriptions and corrections on C70
Added the compatible methods
Added the description and caution on I/F in accordance with the added methods
Added a C70 sample program
3. Added the description on the compatibility with 64bit OS
Added the description and caution on x64 platform
4. Corrected the method versions
Before correction After correction
IEZNcFile5
FindDir
FindNextDir
IEZNcFile6
FindDir2
FindNextDir2
IEZNcATC2
GetMNGReady
IEZNcATC3
GetMNGReady2
IEZNcParameter2
GetParameter
SetParameter
IEZNcParameter3
GetParameter2
SetParameter2
IEZNcSubFunciton
ChangeInit
IEZNcSubFunciton2
ChangeInit2
Applied these version changes also to the other parts of this manual.
5. Error codes
Added the related error codes to the I/F description
Revised the list of error codes
6. Others
Corrected errors, modified the layout, etc.
Jul. 2014 IB-1501209-C 1. Corrected the method versions
Before correction After correction
IEZNcParameter3
GetParameter2
SetParameter2
IEZNcParameter3
GetParameter3
SetParameter3
2. Others
Corrected errors.
Sept. 2015 IB-1501208-D 1. Added information related to M800 series
2. Added and corrected information for M700 series and C70 series
3. Others
Corrected errors, modified the layout, etc.
Global Service Network
AMERICA EUROPE
MITSUBISHI ELECTRIC AUTOMATION INC. (AMERICA FA CENTER) MITSUBISHI ELECTRIC EUROPE B.V.
Central Region Service Center GOTHAER STRASSE 10, 40880 RATINGEN, GERMANY
500 CORPORATE WOODS PARKWAY, VERNON HILLS, ILLINOIS 60061, U.S.A.
TEL: +49-2102-486-0 / FAX: +49-2102-486-5910
TEL: +1-847-478-2500 / FAX: +1-847-478-2650
Germany Service Center
Michigan Service Satellite KURZE STRASSE. 40, 70794 FILDERSTADT-BONLANDEN, GERMANY
ALLEGAN, MICHIGAN 49010, U.S.A.
TEL: + 49-711-770598-123 / FAX: +49-711-770598-141
TEL: +1-847-478-2500 / FAX: +1-847-478-2650
France Service Center DEPARTEMENT CONTROLE NUMERIQUE
Ohio Service Satellite 25, BOULEVARD DES BOUVETS, 92741 NANTERRE CEDEX FRANCE
LIMA, OHIO 45801, U.S.A.
TEL: +33-1-41-02-83-13 / FAX: +33-1-49-01-07-25
TEL: +1-847-478-2500 / FAX: +1-847-478-2650
CINCINATTI, OHIO 45201, U.S.A.
France (Lyon) Service Satellite DEPARTEMENT CONTROLE NUMERIQUE
TEL: +1-847-478-2500 / FAX: +1-847-478-2650
120, ALLEE JACQUES MONOD 69800 SAINT PRIEST FRANCE
TEL: +33-1-41-02-83-13 / FAX: +33-1-49-01-07-25
Minnesota Service Satellite
ROGERS, MINNESOTA 55374, U.S.A.
Italy Service Center
TEL: +1-847-478-2500 / FAX: +1-847-478-2650
VIALE COLLEONI, 7 - CENTRO DIREZIONALE COLLEONI PALAZZO SIRIO INGRESSO 1
20864 AGRATE BRIANZA (MB), ITALY
West Region Service Center TEL: +39-039-6053-342 / FAX: +39-039-6053-206
16900 VALLEY VIEW AVE., LAMIRADA, CALIFORNIA 90638, U.S.A.
TEL: +1-714-699-2625 / FAX: +1-847-478-2650
Italy (Padova) Service Satellite
VIA G. SAVELLI, 24 - 35129 PADOVA, ITALY
Northern CA Satellite TEL: +39-039-6053-342 / FAX: +39-039-6053-206
SARATOGA, CALIFORNIA 95070, U.S.A.
TEL: +1-714-699-2625 / FAX: +1-847-478-2650
U.K. Branch
TRAVELLERS LANE, HATFIELD, HERTFORDSHIRE, AL10 8XB, U.K.
Pennsylvania Service Satellite TEL: +49-2102-486-0 / FAX: +49-2102-486-5910
PITTSBURG, PENNSYLVANIA 15644, U.S.A.
TEL: +1-732-560-4500 / FAX: +1-732-560-4531
Spain Service Center
CTRA. DE RUBI, 76-80-APDO. 420
Connecticut Service Satellite 08173 SAINT CUGAT DEL VALLES, BARCELONA SPAIN
TORRINGTON, CONNECTICUT 06790, U.S.A.
TEL: +34-935-65-2236 / FAX: +34-935-89-1579
TEL: +1-732-560-4500 / FAX: +1-732-560-4531
Poland Service Center
South Region Service Center UL.KRAKOWSKA 50, 32-083 BALICE, POLAND
1845 SATTELITE BOULEVARD STE. 450, DULUTH, GEORGIA 30097, U.S.A.
TEL: +48-12-630-4700 / FAX: +48-12-630-4701
TEL +1-678-258-4529 / FAX +1-678-258-4519
Mitsubishi Electric Turkey A.Ş Ümraniye Şubesi
Texas Service Satellites Turkey Service Center
GRAPEVINE, TEXAS 76051, U.S.A.
ŞERIFALI MAH. NUTUK SOK. NO.5 34775
TEL: +1-678-258-4529 / FAX: +1-678-258-4519
ÜMRANIYE, ISTANBUL, TURKEY
HOUSTON, TEXAS 77001, U.S.A.
TEL: +90-216-526-3990 / FAX: +90-216-526-3995
TEL: +1-678-258-4529 / FAX: +1-678-258-4519
Czech Republic Service Center
Tennessee Service Satellite KAFKOVA 1853/3, 702 00 OSTRAVA 2, CZECH REPUBLIC
Nashville, Tennessee, 37201, U.S.A.
TEL: +420-59-5691-185 / FAX: +420-59-5691-199
TEL: +1-678-258-4529 / FAX: +1-678-258-4519
Russia Service Center
Florida Service Satellite 213, B.NOVODMITROVSKAYA STR., 14/2, 127015 MOSCOW, RUSSIA
WEST MELBOURNE, FLORIDA 32904, U.S.A.
TEL: +7-495-748-0191 / FAX: +7-495-748-0192
TEL: +1-678-258-4529 / FAX: +1-678-258-4519
MITSUBISHI ELECTRIC EUROPE B.V. (SCANDINAVIA)
Canada Region Service Center Sweden Service Center
4299 14TH AVENUE MARKHAM, ONTARIO L3R OJ2, CANADA
HAMMARBACKEN 14 191 49 SOLLENTUNA, SWEDEN
TEL: +1-905-475-7728 / FAX: +1-905-475-7935
TEL: +46-8-6251000 / FAX: +46-8-966877
Canada Service Satellite Bulgaria Service Center
EDMONTON, ALBERTA T5A 0A1, CANADA
4 A.LYAPCHEV BOUL., POB 21, BG-1756 SOFIA, BULGARIA
TEL: +1-905-475-7728 FAX: +1-905-475-7935
TEL: +359-2-8176009 / FAX: +359-2-9744061
Mexico Region Service Center Ukraine (Kharkov) Service Center
MARIANO ESCOBEDO 69 TLALNEPANTLA, 54030 EDO. DE MEXICO
APTEKARSKIY LANE 9-A, OFFICE 3, 61001 KHARKOV, UKRAINE
TEL: +52-55-3067-7500 / FAX: +52-55-9171-7649
TEL: +380-57-732-7774 / FAX: +380-57-731-8721
Monterrey Service Satellite Ukraine (Kiev) Service Center
MONTERREY, N.L., 64720, MEXICO
4-B, M. RASKOVOYI STR., 02660 KIEV, UKRAINE
TEL: +52-81-8365-4171
TEL: +380-44-494-3355 / FAX: +380-44-494-3366
Belarus Service Center
BRAZIL OFFICE 9, NEZAVISIMOSTI PR.177, 220125 MINSK, BELARUS
TEL: +375-17-393-1177 / FAX: +375-17-393-0081
MELCO CNC do Brasil Comércio e Serviços S.A
Brazil Region Service Center South Africa Service Center
ACESSO JOSE SARTORELLI, KM 2.1 CEP 18550-000, BOITUVA-SP, BRAZIL
5 ALBATROSS STREET, RHODESFIELD, KEMPTON PARK 1619, GAUTENG, SOUTH AFRICA
TEL: +55-15-3363-9900 / FAX: +55-15-3363-9911
TEL: +27-11-394-8512 / FAX: +27-11-394-8513
ASEAN CHINA
MITSUBISHI ELECTRIC ASIA PTE. LTD. (ASEAN FA CENTER) MITSUBISHI ELECTRIC AUTOMATION (CHINA) LTD. (CHINA FA CENTER)
Singapore Service Center China (Shanghai) Service Center
307 ALEXANDRA ROAD #05-01/02 MITSUBISHI ELECTRIC BUILDING SINGAPORE 159943
1-3,5-10,18-23/F, NO.1386 HONG QIAO ROAD, CHANG NING QU,
TEL: +65-6473-2308 / FAX: +65-6476-7439
SHANGHAI 200336, CHINA
TEL: +86-21-2322-3030 / FAX: +86-21-2308-3000
Malaysia (KL) Service Center China (Ningbo) Service Dealer
60, JALAN USJ 10 /1B 47620 UEP SUBANG JAYA SELANGOR DARUL EHSAN, MALAYSIA
China (Wuxi) Service Dealer
TEL: +60-3-5631-7605 / FAX: +60-3-5631-7636
China (Jinan) Service Dealer
China (Hangzhou) Service Dealer
Malaysia (Johor Baru) Service Center China (Wuhan) Service Satellite
17 & 17A, JALAN IMPIAN EMAS 5/5, TAMAN IMPIAN EMAS, 81300 SKUDAI, JOHOR MALAYSIA.
TEL: +60-7-557-8218 / FAX: +60-7-557-3404
China (Beijing) Service Center
9/F, OFFICE TOWER 1, HENDERSON CENTER, 18 JIANGUOMENNEI DAJIE,
Philippines Service Center DONGCHENG DISTRICT, BEIJING 100005, CHINA
UNIT NO.411, ALABAMG CORPORATE CENTER KM 25. WEST SERVICE ROAD
TEL: +86-10-6518-8830 / FAX: +86-10-6518-8030
SOUTH SUPERHIGHWAY, ALABAMG MUNTINLUPA METRO MANILA, PHILIPPINES 1771
China (Beijing) Service Dealer
TEL: +63-2-807-2416 / FAX: +63-2-807-2417
China (Tianjin) Service Center
UNIT 2003, TIANJIN CITY TOWER, NO 35 YOUYI ROAD, HEXI DISTRICT,
VIETNAM TIANJIN 300061, CHINA
TEL: +86-22-2813-1015 / FAX: +86-22-2813-1017
MITSUBISHI ELECTRIC VIETNAM CO.,LTD China (Shenyang) Service Satellite
Vietnam (Ho Chi Minh) Service Center China (Changchun) Service Satellite
UNIT 01-04, 10TH FLOOR, VINCOM CENTER 72 LE THANH TON STREET, DISTRICT 1,
HO CHI MINH CITY, VIETNAM
China (Chengdu) Service Center
TEL: +84-8-3910 5945 / FAX: +84-8-3910 5946
ROOM 407-408, OFFICE TOWER AT SHANGRI-LA CENTER, NO. 9 BINJIANG DONG ROAD,
JINJIANG DISTRICT, CHENGDU, SICHUAN 610021, CHINA
Vietnam (Hanoi) Service Satellite TEL: +86-28-8446-8030 / FAX: +86-28-8446-8630
6th Floor, Detech Tower, 8 Ton That Thuyet Street, My Dinh 2 Ward, Nam Tu Liem District, Hanoi,Vietnam
TEL: +84-4-3937-8075 / FAX: +84-4-3937-8076
China (Shenzhen) Service Center
ROOM 2512-2516, 25/F., GREAT CHINA INTERNATIONAL EXCHANGE SQUARE, JINTIAN RD.S.,
FUTIAN DISTRICT, SHENZHEN 518034, CHINA
TEL: +86-755-2399-8272 / FAX: +86-755-8218-4776
INDONESIA China (Xiamen) Service Dealer
China (Dongguan) Service Dealer
PT. MITSUBISHI ELECTRIC INDONESIA
Indonesia Service Center ( Cikarang Office )
JL.Kenari Raya Blok G2-07A Delta Silicon 5, Lippo Cikarang-Bekasi 17550, INDONESIA
KOREA
TEL: +62-21-2961-7797 / FAX: +62-21-2961-7794
MITSUBISHI ELECTRIC AUTOMATION KOREA CO., LTD. (KOREA FA CENTER)
Korea Service Center
THAILAND
8F, Gangseo Hangang Xi-tower, 401 Yangcheon-ro, Gangseo-gu, Seoul 157-801, KOREA
TEL: +82-2-3660-9602 / FAX: +82-2-3664-8668
MITSUBISHI ELECTRIC FACTORY AUTOMATION (THAILAND) CO.,LTD
Thailand Service Center Korea Taegu Service Satellite
12TH FLOOR, SV.CITY BUILDING, OFFICE TOWER 1, NO. 896/19 AND 20 RAMA 3 ROAD, 4F KT BUILDING, 1630 SANGYEOK-DONG, BUK-KU, DAEGU 702-835, KOREA
KWAENG BANGPONGPANG, KHET YANNAWA, BANGKOK 10120,THAILAND
TEL: +82-53-382-7400 / FAX: +82-53-382-7411
TEL: +66-2-682-6522-31 / FAX: +66-2-682-6020
TAIWAN
INDIA
MITSUBISHI ELECTRIC TAIWAN CO., LTD. (TAIWAN FA CENTER)
MITSUBISHI ELECTRIC INDIA PVT. LTD. Taiwan (Taichung) Service Center (Central Area)
India Service Center NO.8-1, INDUSTRIAL 16TH RD., TAICHUNG INDUSTRIAL PARK, SITUN DIST.,
2nd FLOOR, TOWER A & B, DLF CYBER GREENS, DLF CYBER CITY,
TAICHUNG CITY 40768, TAIWAN R.O.C.
DLF PHASE-III, GURGAON 122 002, HARYANA, INDIA
TEL: +886-4-2359-0688 / FAX: +886-4-2359-0689
TEL: +91-124-4630 300 / FAX: +91-124-4630 399
Ludhiana satellite office Taiwan (Taipei) Service Center (North Area)
Jamshedpur satellite office 10F, NO.88, SEC.6, CHUNG-SHAN N. RD., SHI LIN DIST., TAIPEI CITY 11155, TAIWAN R.O.C.
TEL: +886-2-2833-5430 / FAX: +886-2-2833-5433
India (Pune) Service Center
EMERALD HOUSE, EL-3, J-BLOCK, MIDC BHOSARI. PUNE – 411 026, MAHARASHTRA, INDIA
Taiwan (Tainan) Service Center (South Area)
TEL: +91-20-2710 2000 / FAX: +91-20-2710 2100
11F-1., NO.30, ZHONGZHENG S. ROAD, YONGKANG DISTRICT, TAINAN CITY 71067, TAIWAN, R.O.C.
Baroda satellite office TEL: +886-6-252-5030 / FAX: +886-6-252-5031
Mumbai satellite office
India (Bangalore) Service Center
PRESTIGE EMERALD, 6TH FLOOR, MUNICIPAL NO. 2,
LAVELLE ROAD, BANGALORE - 560 043, KAMATAKA, INDIA
TEL: +91-80-4020-1600 / FAX: +91-80-4020-1699
Chennai satellite office
Coimbatore satellite office
OCEANIA
MITSUBISHI ELECTRIC AUSTRALIA LTD.
Australia Service Center
348 VICTORIA ROAD, RYDALMERE, N.S.W. 2116 AUSTRALIA
TEL: +61-2-9684-7269 / FAX: +61-2-9684-7245
Notice
Every effort has been made to keep up with software and hardware revisions in the
contents described in this manual. However, please understand that in some
unavoidable cases simultaneous revision is not possible.
Please contact your Mitsubishi Electric dealer with any questions or comments
regarding the use of this product.
Duplication Prohibited
This manual may not be reproduced in any form, in part or in whole, without written
permission from Mitsubishi Electric Corporation.
2013-2015 MITSUBISHI ELECTRIC CORPORATION
ALL RIGHTS RESERVED.