ICRA2018 DJI Robo Master AI Challenge Rules Manual V1.1
ICRA2018%20DJI%20RoboMaster%20AI%20Challenge%20Rules%20Manual%20v1.1
User Manual:
Open the PDF directly: View PDF ![]() .
.
Page Count: 31
IEEE International Conference on Robotics and Automation 2018
DJI RoboMaster AI Challenge
ICRA 2018, Brisbane, Australia
Challenge Rules
Version1.1
Feb 2018
Contents
The RoboMaster Organizing Committee reserves the right to revise and interpret the rules.
If you have any questions, please email us: robomaster@dji.com.
Content
Background.............................................................................................. 1
Chapter 1 Introduction ............................................................................. 3
1.1 About the Challenge .................................................................................... 3
1.2 Schedule ...................................................................................................... 4
1.3 Team Requirements ..................................................................................... 4
1.4 Award .......................................................................................................... 5
1.5 Announcement on Intellectual Property ....................................................... 6
1.6 Rules FAQ ................................................................................................... 6
Chapter 2 Robot Specifications ................................................................ 8
2.1 Technical Overview ..................................................................................... 8
2.2 General Technical Requirements .................................................................. 8
2.3 Robot Specifications .................................................................................... 9
2.4 Referee System .......................................................................................... 10
2.4.1 Overview ........................................................................................ 10
2.4.2 Robot Health Point - Deduction Penalty Mechanism ....................... 13
2.5 Safety Guidelines ....................................................................................... 14
Chapter 3 Challenge Field ...................................................................... 15
3.1 Overview ................................................................................................... 15
3.2 Starting Zone ............................................................................................. 15
3.3 Goal Zone .................................................................................................. 16
3.4 Bonus Zone................................................................................................ 16
3.5 Obstacle Block Zone .................................................................................. 17
3.6 Protection Fence ........................................................................................ 18
3.7 17mm Standard Projectiles ......................................................................... 19
Chapter 4 Challenge Procedure .............................................................. 20
4.1 Overview ................................................................................................... 20
4.2 Pre-Challenge Inspection ........................................................................... 20
4.3 Challenge Rundown ................................................................................... 20
4.4 Score Calculation ....................................................................................... 21
4.5 Fouls and Penalties .................................................................................... 24
Appendix I ............................................................................................. 25
Appendix II ............................................................................................ 26
1
Background
DJI initiated RoboMaster in 2015 as an educational robotics competition for talented
engineers and scientists. The annual competition requests teams to build ground
robots that use shooting mechanisms to battle with other robots and the performance
of the robots are monitored by a specially designed Referee System, converting
projectile hits into Health Point deduction of robots. The competition balances
technology and entertainment. Many game elements in the competition are similar to
video games. In August 2017, the final tournament of RoboMaster 2017 attracted over
26 million viewers from over 20 countries around the globe. People can
visit https://www.twitch.tv/robomaster to view game replays and introductory videos.
In recent years, deep learning technology greatly has been reshaping the frontier of
computer vision and many other AI research areas. In robotics research,
deep reinforcement learning allows agents to make decisions based on deep
neural networks (DNN) instead of conventional hand-engineered finite state machines
and if-else branches. Many excellent research platforms emerged from standard video
games such as Doom, DOTA and StarCraft.
RoboMaster also has the potential to become a deep learning platform, with robots
that compete on the field fully commanded by DNN based policies. For one thing,
robots also need to make complex decisions that cannot be done by conventional
methods. For another, RoboMaster is a real game, so algorithms and policies
developed on RoboMaster robots are more practical than those developed in virtual
environments.
Organizer:
SZ DJI Technology Co., Ltd.
IEEE International Conference on Robotics and Automation 2018
Revision Log
Date
Version
Modifies
Feb 1, 2018
1.1
Updated FAQ with answers based on feedback from teams.
Feb 1, 2018
1.1
Specified more General Technical Requirements, especially
Wireless Communication and Optical Element parts.
Feb 1, 2018
1.1
Re-defined Module name of RoboMaster Referee System for
clearer purchasing guidance.

2
Feb 1, 2018
1.1
Stated RMOC official AI Robot User Manuel release date.
Feb 1, 2018
1.1
Updated the newest Challenge Field Map.
Feb 1, 2018
1.1
Clarified Challenge Days arrangement.
Feb 1, 2018
1.1
Released Technical Report Requirements.

3
Chapter 1 Introduction
1.1 About the Challenge
RoboMaster 2018 offers a platform for researchers and university students to make
technological innovations and promotes exchange and dialog among researchers
worldwide. In the RoboMaster arena, teams have the opportunity to showcase and
push the limits of their technical capabilities within a fun and challenging
environment. For the general public audience, it can be an eye-opening experience
into the world of robotics and its close relationship with humans.
To encourage more participation in shaping the future of robotics, RoboMaster 2018
includes, as an individual event, the “ICRA 2018 DJI RoboMaster AI Challenge”
(hereafter referred to as the “Challenge”). It requires robots to complete specific tasks
automatically.
The RoboMaster Organizing Committee’s (hereafter referred to as “RMOC”) R&D
team has developed autonomous robots that can coordinate with each other to fight
opponents automatically (hereafter cited as RoboMaster AI Robot). A RoboMaster AI
Robot has a built-in neural network to make decisions, especially when encountering
ally or opponent robots. At this time, RoboMaster AI Robots cannot defeat robots
controlled by human operators, but they serve as an excellent benchmark to test the
performance of new AI algorithms.
In ICRA 2018 DJI RoboMaster AI Challenge, a team has to build and program ONE
or TWO autonomous robots (hereafter referred as Team Robot) to defeat TWO
RoboMaster AI Robots on a 5m × 8m Challenge Field. In each Challenge Round,
neither Team Robots nor AI Robots can be controlled by human operators. The
winner of the AI Challenge is the team who defeats AI robots in shortest time or less
Health Point (hereafter referred to as the “HP”) reduction.
Teams should submit the registration form through the official website
(https://www.robomaster.com/en-US/robo/know ). Along with the registration form,
teams must submit Technical Proposals. Qualified Technical Proposals will receive
equipment sponsorship as a reward. Teams have to submit their Technical Report
before Apr 20, 2018. Teams that submit the highest quality Technical Report will
receive travel sponsorship to ICRA in Brisbane.
During the Challenge in Brisbane, each finalist team has FOUR Challenge Rounds.
During each round, a team needs to set up robots to automatically fight AI robots. A
scoring formula evaluates the result of each round. The final score of a team is the
highest score achieved over all rounds. Then all final scores of teams are ranked
together. According to the final ranking, teams will get certificates, DJI products, and
cash prizes as awards.
4
The robots used in the Challenge must comply with the requirements specified in the
challenge rules. Teams can build Team Robots by themselves, or purchase sample
robots from the RMOC to shorten the preparation time. The RMOC will release
purchasing channel afterward on the official website. Other than sample robots, teams
can also purchase Referee System.
1.2 Schedule
Every team should correctly fill in the registration information on the official
RoboMaster application system. Please visit https://www.robomaster.com/en-
US/robo/know and complete the activity requirements before following deadlines.
Teams can only be qualified to participate in the official Challenge after meeting the
requirements of the Technical Report.
The RMOC reserves the rights to change schedule and rules. The RMOC will
announce rules update or related information on the official website.
Key date
Activity
Dec 31, 2017, 23:59*
Deadline for Registration
Jan 1, 2017, 23:59*
Deadline for submission of Technical Proposals
Jan 8, 2018, 23:59*
The announcement of qualified teams that receive
equipment sponsorship.(RoboMaster Standard robot
kit, worth $8,500)
Apr 10, 2018, 23:59*
Deadline for submission of Technical Report
Apr 21, 2018, 23:59*
Announcement of finalist teams that receive $1000
travel sponsorship according to the quality of the
Technical Report
May 21, 2018 - May 25, 2018
DJI RoboMaster AI Challenge @ ICRA 2018
*The time mentioned above is China Standard Time (CST UTC+8).
1.3 Team Requirements
The challenge is open to undergraduate students and graduate students.
General Requirements
1. Each participant is allowed to join only one team.
5
2. Each team must have between 1-10 members. The role and responsibility of each
member must elaborate on the application form.
3. Each team must have 1 Captain who is responsible for the team’s technologies
and strategies. The Captain is the main contact point with the RMOC.
4. The team name is the university name or research organization name of team
members. If team members come from more than one organizations, the team
must decide their primary organization as the team name.
Recommended team structure
1 person (undergraduate or postgraduate) responsible for embedded system
programming.
2 persons (undergraduate) responsible for mechanical support and hardware
maintenance.
3 persons (undergraduate or postgraduate) responsible for software system
architecture, sensor processing.
2 persons (undergraduate or postgraduate) responsible for image processing, computer
vision, sensor fusion.
2 persons (postgraduate) responsible for decision making, trajectory generation &
execution.
While not mandatory, it is recommended for a team to have a Project Manager who
arranges project schedule and utilizes financial resources.
1.4 Award
Award
Prize
1st Prize
Each team member will get one certificate of recognition and one DJI
Phantom 4 Pro.
Winning team will get $20,000 USD (Before Taxes).
2nd Prize
Each team member will get one certificate of recognition and one DJI
Mavic Pro.
Winning team will get $10,000 USD (Before Taxes).
3rd Prize
Each team member will get one certificate of recognition and one DJI
Spark.
Winning team will get $5,000 USD (Before Taxes).

6
Finalist
Each team member will get one certificate of recognition.
The team will get travel sponsorships $1,000 USD (Before Taxes).
*All final scores of teams are ranked together. If multiple teams have the same score,
the weight of their robots will be used to decide ranking, where lighter robots have a
higher ranking.
1.5 Announcement on Intellectual Property
The team owns all the intellectual property developed during the Challenge. The
RMOC does not claim ownership of any code, system design documents or technical
report of teams. The Technical Report submitted to RMOC by teams are only used for
progress checking. The RMOC will not modify, distribute to third parties or duplicate
any submitted Technical Report and other materials.
The RMOC encourages and advocates technical innovation and open-source. The
RMOC will not deal with intellectual property disputes between the members of a
team. Team members should handle the ownership of intellectual property among
members of the school, companies, and other entities.
In the process of using RoboMaster Referee System and other supporting materials
provided by RMOC, teams should respect the ownership of all the intellectual
properties. Teams cannot engage to do any behavior that may damage the intellectual
property such as reverse engineering on products, copy, translation, etc. Open source
codes provided by RMOC are under GPLv3 license.
1.6 Rules FAQ
According to the actual situation before the Challenge, the rules may be updated in
following ways:
1. Minor adjustments to the Challenge schedule.
2. Update more detailed description of the Challenge Field and the Challenge
Rundown.
Based on feedback from teams, the following rules have been amended:
a. Visit https://github.com/robomaster for RoboRTS platform open sourced codes.
The mechanical drawings of the official AI Robot will be released along with
RoboMaster AI Robot User Manuel at official website before the end of Feb 2018.
b. Apart from RoboMaster UWB Locating System, other sensors such as LIDAR
and Cameras for image processing will not be offered by RMOC;
c. At the beginning of each Round, the official AI Robots start on the RED side, and
the Main Control Module’s LED will set to the same color RED. Simultaneously,

7
Team Robots must start on the opposite side opposite to the official and set the
LED color BLUE.
If you have any question about the Challenge, please either send an e-mail to RMOC:
robomaster@dji.com (Subject: “School/Company/Institution Name + DJI
RoboMaster AI Challenge Question”), or leave your questions at GITTER
RoboMaster Community:
https://gitter.im/RoboMaster/RoboRTS?utm_source=badge&utm_medium=badge&ut
m_campaign=pr-badge. RoboMaster staff will reply within 1-2 working days.

8
Chapter 2 Robot Specifications
2.1 Technical Overview
Participating teams can purchase components and modules from the RMOC. All
Team Robots must follow the specifications depicted in this chapter.
All Team Robots must operate autonomously during the Challenge Rounds. However,
Robot can be operated manually during the Setup Period of each Challenge Round, as
long as it has a switching mechanism to switch robot from manual to autonomous
operation by the time the Challenge Round starts.
The RMOC has following advice regarding robot system design:
● Robots sold by the RMOC are just basic prototypes, the team must have dedicated
mechanical and hardware engineers to maintain them.
● To ensure system’s stability, use finished components, rather than building them
yourself (e.g., an ultrasonic sensor).
● Read and analyze the manual carefully.
● Read Referee System specifications carefully. Referee System modules must be
installed correctly before robot inspection.
● A project management plan with highlighting milestones and budgets is
recommended before developing robots.
● Test robots thoroughly to make sure robots can endure multiple rounds,
transportation, and unforeseen accidents.
2.2 General Technical Requirements
To ensure practical, fair, and safe competition, robots must be designed and
engineered in strict accordance with following technical requirements.
Item
Description
Energy requirements
Robots can only be powered by Li-Po batteries manufactured by DJI. Fuel-powered
engines, explosive substances, and hazardous chemical materials are prohibited.
The power supply must consist only of intelligent batteries manufactured by DJI. The
total energy storage of any single robot may not exceed 200Wh.
Remote Controller
Team Robots must be fully autonomous during a Challenge Round, but can be
remote-controlled during the Setup Period (two minutes before the start of each
Round).
9
Wireless Communication
A team can also deploy their Wi-Fi devices for wireless communication among
different robots and external computing devices. The RMOC will only provide an
external power source outside of the Challenge Field at one designated area. Due to
environmental factors such as live streaming devices and personal devices in the
audience, there will be many unknown Wi-Fi signals on the competition site. The
RMOC cannot guarantee the stability of Wi-Fi connection built by teams.
Note:
1. During the Setup Period of each round, competition teams can set up their Wi-Fi
band. We recommend teams utilize reliable Wi-Fi solutions.
2. There are different Wi-Fi frequencies in different countries or regions. Please plan
accordingly.
3. Teams must carry their own Wi-Fi devices during Challenge.
4. To avoid signal interference, team’s Wi-Fi devices are allowed to switch on when:
a. during their Round;
b. hold on the Staging Area.
Optical Elements
The robot is not allowed to use any laser pointers and lighting equipment during the
Challenge. Moreover, reflective materials such as glass or mirror are also forbidden.
Surfaces
There are clear visual features on the armor modules of Referee System; teams are
suggested to develop imaged based target recognition algorithms to detect armor
modules.
It is compulsory to place sensors (e.g., LIDAR, camera, ultrasonic) in a way that does
not block interface with Armor Modules.
The Challenge Field and surrounding environment are complex. Teams should
consider this factor when developing vision algorithms to better adapt to the changing
lighting condition. The RMOC cannot guarantee that the vision features around the
field will not cause any interference to robots’ vision system.
Decorate stickers on the armor modules are not allowed. Any RED and BLUE
(correspondence to the Referee System’s LED bar) materials or paint cannot appear
on Robot’s surface, because that may cause misrecognition.
2.3 Robot Specifications
In each round, teams can use ONE or TWO robots. All robots have to receive
official inspection before entering to the Challenge Field.
Team Robots have to comply with following specifications.
10
Item
Requirement
Penalty
Weight Limit
(kg)
20 (Including the battery, but
excluding Referee System)
A robot that does not conform to
specifications will be rejected during
the official inspection.
Initial Size Limit
(length, width, height)
600mm × 600mm × 500mm
Expansion Size Limit
(length, width, height)
(the maximum size of robots when
they fully expand in the challenge)
700mm × 700mm × 600mm
Projectile Speed Limit
20m/s
HP deduction decided by Referee
System.
Projectile Frequency Limit
10Hz
Chassis Power Consumption
Unlimited
None
The Lower Edge of the Armor Module
(measure from the ground)
50mm – 200mm
Fail to Pre-Challenge Inspection.
Disqualified to attend the Challenge.
2.4 Referee System
2.4.1 Overview
As an essential part of the Challenge, RoboMaster Referee System must be mounted
in each Robot. Therefore, Teams must purchase a RoboMaster Referee System for
each Robot to attend the Challenge. Critical Modules for ICRA2018 AI Challenge
are: a Main Control Module, four packs of Small Armor Module and its Support
Frame, a Speed Measurement Module (17mm projectiles) and an RFID Interaction
Module. While not mandatory, it is optional to purchase Camera Transmission
Module and UWB Locating System depends on each team’s requirements. Please visit
https://www.robomaster.com/en-US/resource/pages/717?type=announcementSub for
purchase instructions. The second batch of RoboMaster products will be available at
1st of March, 2018.
Moreover, teams who submit high-quality Technical Proposals (A list of such teams
will be announced after Technical Proposals Assessment) will get an equipment
sponsorship as a reward. The team gets ranked A will get one RoboMaster Standard
Robot kit for free, and the team ranked B will get one set of Referee System. Those
11
teams that have not passed the Technical Proposals can purchase the Standard Robot
kit and must purchase Referee System. And finalist team who submits high-quality
Technical Report (refer to Technical Report Assessment standard) will get US $1000
travel sponsorship.
Robots with Referee System installed can detect projectile hits on armors,
which trigger HP deduction. Since Referee System on robots are connected to the
Referee Server where all robots upload their HPs and another status, the Referee
Server can calculate total HP of each team and decide the winning team instantly
when a Round ends. Each robot initially has 2000 HP.
To ensure the Challenge is fair and all robots satisfy robot specifications, the Referee
System keeps monitoring robot status during every Challenge Round. If a robot
violates certain Challenge rules, the Referee System on the robot will automatically
reduce its HP accordingly. If HP drops to zero, its power will be shut off by Referee
System.
Please read the RoboMaster2018 Referee System User Manual and ICRA2018 DJI
RoboMaster AI Challenge Specification Manual (https://www.robomaster.com/en-
US/resource/pages/834?type=announcementSub) for installation instruction and
detailed functionality explanations of Referee System.
Referee System consists of following components:
Module
Purpose
Camera Transmission
Module
This module concludes VTM Transmitter and VTM Receiver.
The VTM Transmitter captures the live video, and send a
video stream to VTM Receiver and output as HDMI signal.
VTM transmitter is only for monitoring and inspection
purpose. Robots cannot read data inside the Camera
Transmission Module.
Speed Measurement
Module (17mm
projectile)
Installed on the barrel of launching mechanism. It can detect
the shooting speed of outgoing projectiles. It will deduct
robot’s Health Point when the shooting speed exceeds the
limit. More details state in section 2.4.3.
Small Armor Module
Armor modules have built-in pressure sensors. It can detect
projectile hits and convert it to HP deduction signal through
Referee System.
The lower edge of the Armor Module on the robot should be
50mm to 200mm from the ground.
RFID Interaction
Module
RFID Interaction Module can communicate with the function
points in the Challenge Field.
12
UWB Locating
System
The system contains Tag and Anchor Module, and they can
work together to obtain each robot’s position information on
the Challenge Field.
Parameters of the System: Frequency≈40Hz,
Latency≈100ms, Positioning Accuracy≈100mm.
Teams can purchase the UWB Locating System Tag and
Anchor from RMOC for testing. The UWB products sold for
AI Challenge must collocate with the Referee System. During
Rounds, RMOC will offer Tags that same as sold ones to
teams.
Main Control Module
Main Control Module can monitor the battery power supply
and calculate power consumption. The LED light on top of
the module indicates the amount of remaining HP. The color
of the LED can use to distinguish RED/BLUE side and the
status of robots. It will cut the power supply off when the HP
drops to 0.
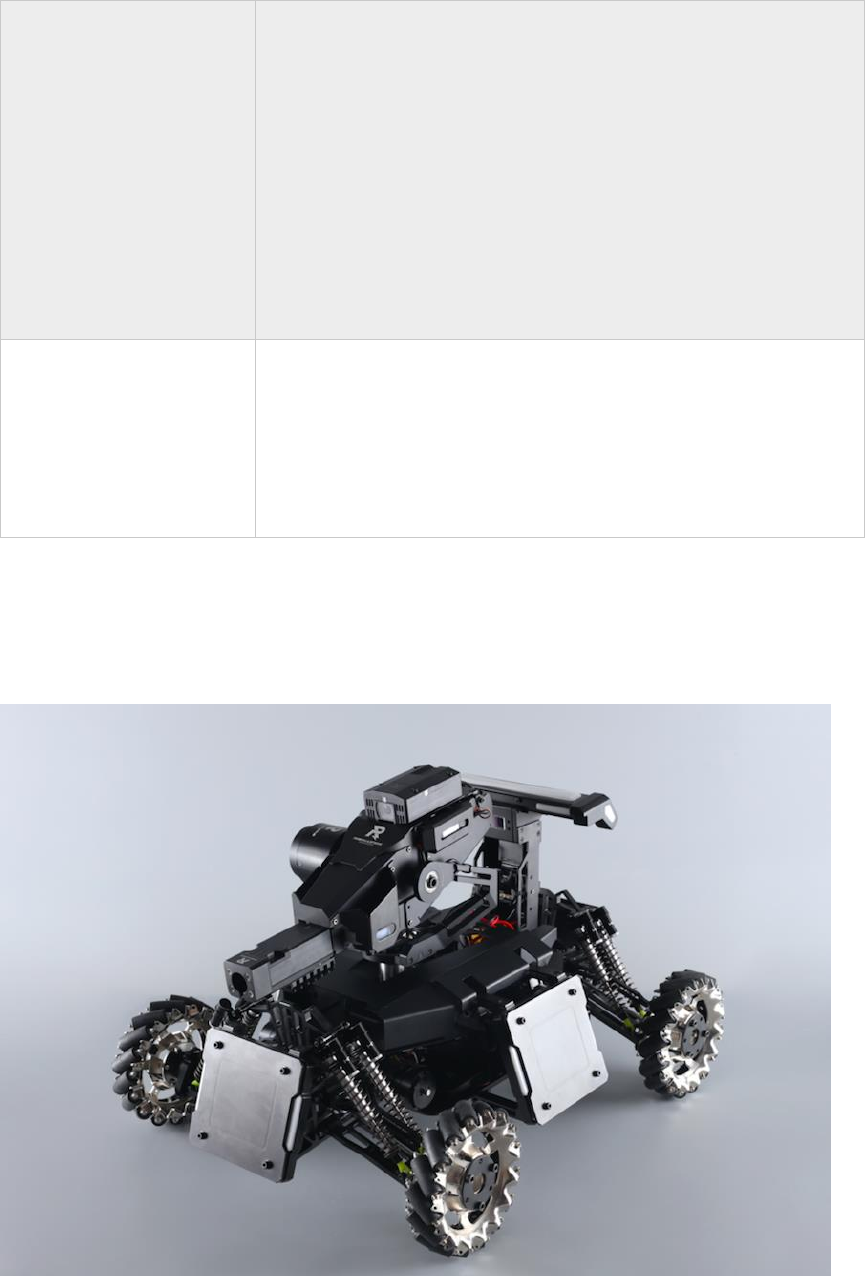
The official AI robots will meet all the specifications stated above. A sample robot is
shown as follows. The RoboMaster AI robot’s User Manuel and its mechanical
drawings will be released at official website – INFORMATION – Announcement
section before the end of Feb 2018.

13
2.4.2 Robot Health Point - Deduction Penalty Mechanism
During a Challenge Round, robots HP will be reduced when:
1. Projectile launching speed or frequency exceeds the limit.
2. Armor module being hit by projectiles or accidentally hit by other robots. While
violently damaging others are not permitted during Challenge Round.
3. Necessarily modules of Referee System do not properly installed.
2.4.3 Projectile Speed Limit
If the speed of 17mm projectile exceeds 20 m/s, the HP will be deducted accordingly:
Each time the referee system detects a 17mm projectile with speed higher than 20m/s,
but lower than 22m/s, HP is reduced by 10% of the maximum HP.
Each time the referee system detects a 17mm projectile with speed higher than
(including) 22m/s, but lower than 24m/s, HP is reduced by 20% of the maximum HP.
Each time Referee System detects a 17mm projectile with a speed of 24m/s or above,
HP is reduced by 40% of the maximum HP.
2.4.4 Projectile Frequency Limit
The projectile launching frequency cannot exceed 10Hz (Within one second, at most
ten projectiles can go through the Speed Measurement Module). Otherwise, each time
Referee System detects a 17mm projectile with exceeding higher than 10Hz will
cause HP deduction of 10% of the maximum HP.
2.4.5 Referee System Going Offline
According to the ICRA2018 DJI RoboMaster AI Challenge Specification Manual,
Robots should ensure the stability of the connection between Referee System modules
and the Server. If critical modules do not correctly connect to the Main Control
Module of Referee System, HP will be deducted accordingly.
The critical modules include Main Control Module, RFID Interaction Module, Speed
Measurement Module (17mm projectile) and Small Armor Module.
14
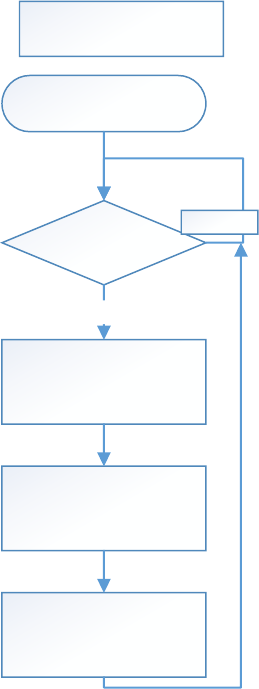
Module self-check
instruction flowchart
Start
Core module
offline
n = Calculated total
number of offline
core modules
Calculate total HP to
be penalized.
Penalized HP = 7 x n
Deduct calculated
HP from robots
Yes
No
2.5 Safety Guidelines
Safety is a basic principle of the Challenge. All participating teams must pay attention
to and take necessary actions to ensure safety when making and operating robots.
1. During research and contest, safety must always regard as a priority. Captains
must take the responsibility to ensure the safety of all team members involved.
2. Error in operation, software, and control, as well as malfunction of components
and equipment, may lead to dangerous and unpredictable robot behaviors that may
cause harm or damage to both operators and robots. Therefore, robots must have
an emergency shutdown switch. During Challenge Round, the Referee will also
shut down such robots through Server of Referee System.
3. The RMOC has the right to take the necessary steps to deal with defective
robots in case of emergency situations during the challenge (fire, explosion,
etc.)
15
Chapter 3 Challenge Field
3.1 Overview
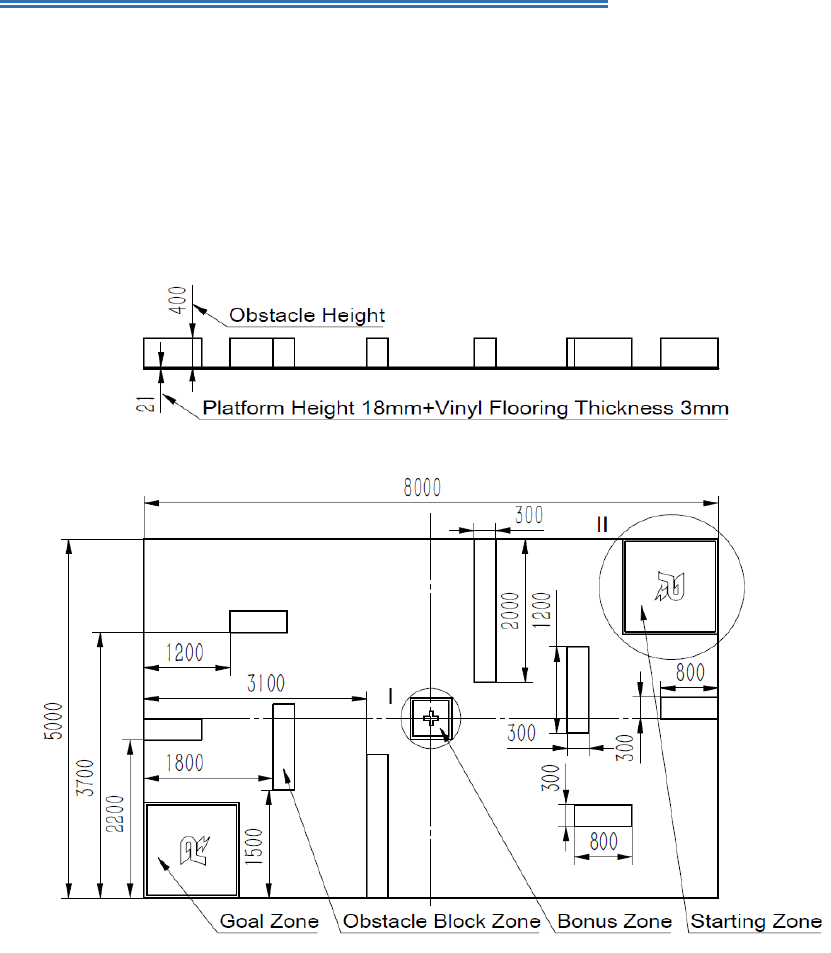
The size of the Challenge Field is 8000mm × 5000mm and will be covered by a gray
non-slip rubber mat above the wooden floor. The Challenge Field contains Starting
Zone, Goal Zone, Obstacle Block Zone, and Bonus Zone. All zones on where they set
illustrated in the following figures.
Figure 1. Dimensional Drawings of the Challenge Field
Note: All figures are in millimeters (mm).
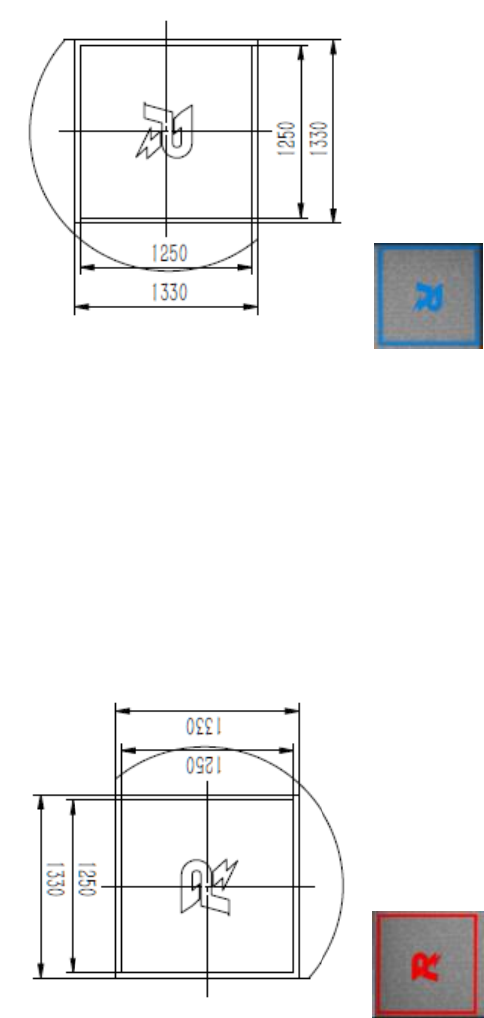
3.2 Starting Zone
Starting Zone is the initial location for Team Robots. When a Challenge Round
starts, Team Robots must be located within Starting Zone. After the challenge round
starts, Team Robots can freely move to anywhere on the field. The dimensional
drawing of the Starting Zone show as follows.
16
Figure 2. Sizes and Color of the Starting Zone
Note: All figures are in millimeters (mm)
3.3 Goal Zone
Goal Zone is the initial location for RoboMaster AI Robots. Similar to Team
Robots, RoboMaster AI Robots can also leave the Goal Zone after the Challenge
Round starts. The dimensional drawing of the Goal Zone show as follows.
Figure 3. Sizes and Color of the Goal Zone
Note: All figures are in millimeters (mm)
3.4 Bonus Zone
There is one Bonus Zone in the center of the Field. Both official AI Robots and
Team Robots can activate it. When a Robot resides completely inside Bonus Zone
for more than five seconds, a Bonus enhancement will be triggered and added to all
Robots on the activated side. This enhancement increases damage by 50% for the rest
of the Round. For example, if a robot causes 50 HP damage from a single projectile
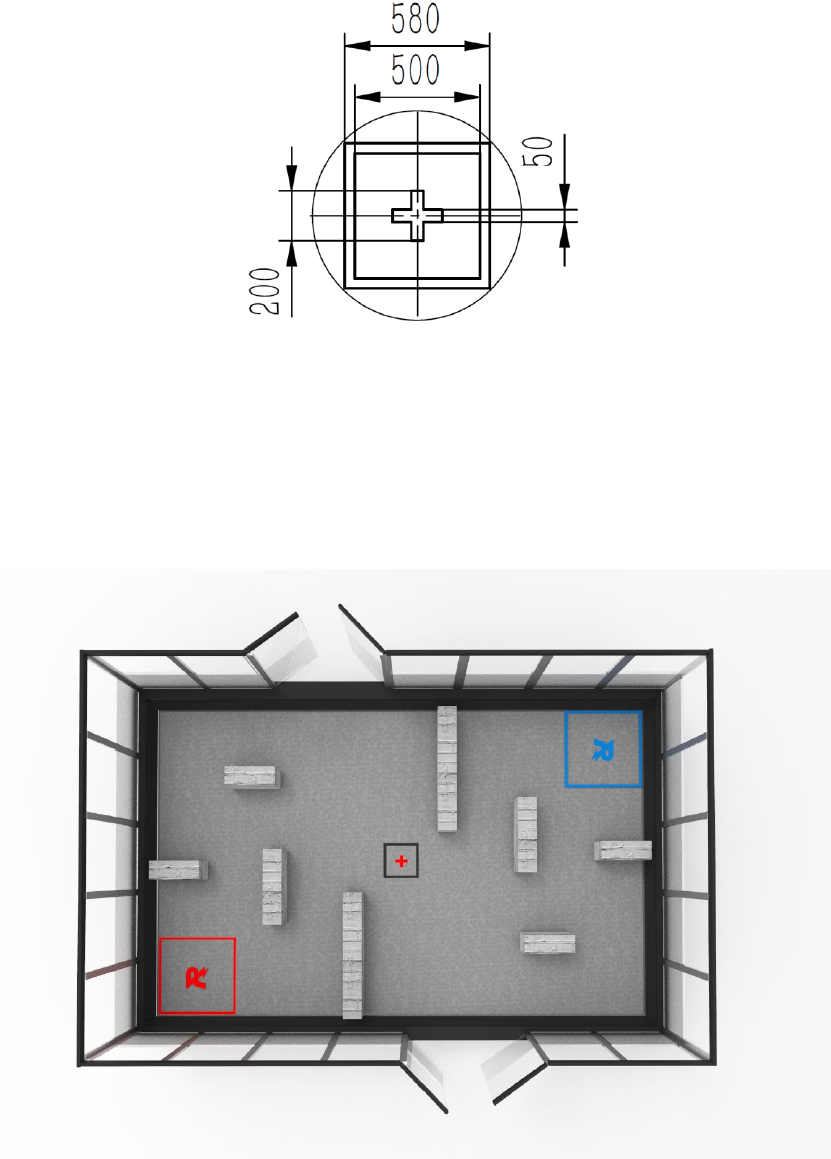
17
hit, it will increase to 75. On each Round, the Bonus Zone can only be activated by
ONE robot once. Any other robot cannot re-active it in the same Round.
Figure 4. Sizes of the Bonus Zone
Note: All figures are in millimeters (mm).
3.5 Obstacle Block Zone
There are eight unmovable obstacles placed at certain designated locations.
Figure 5. Bird View of the Challenge Field
Note: Units are in millimeters (mm).
Please note that obstacle blocks are attached to the ground and constructed of wood.
18
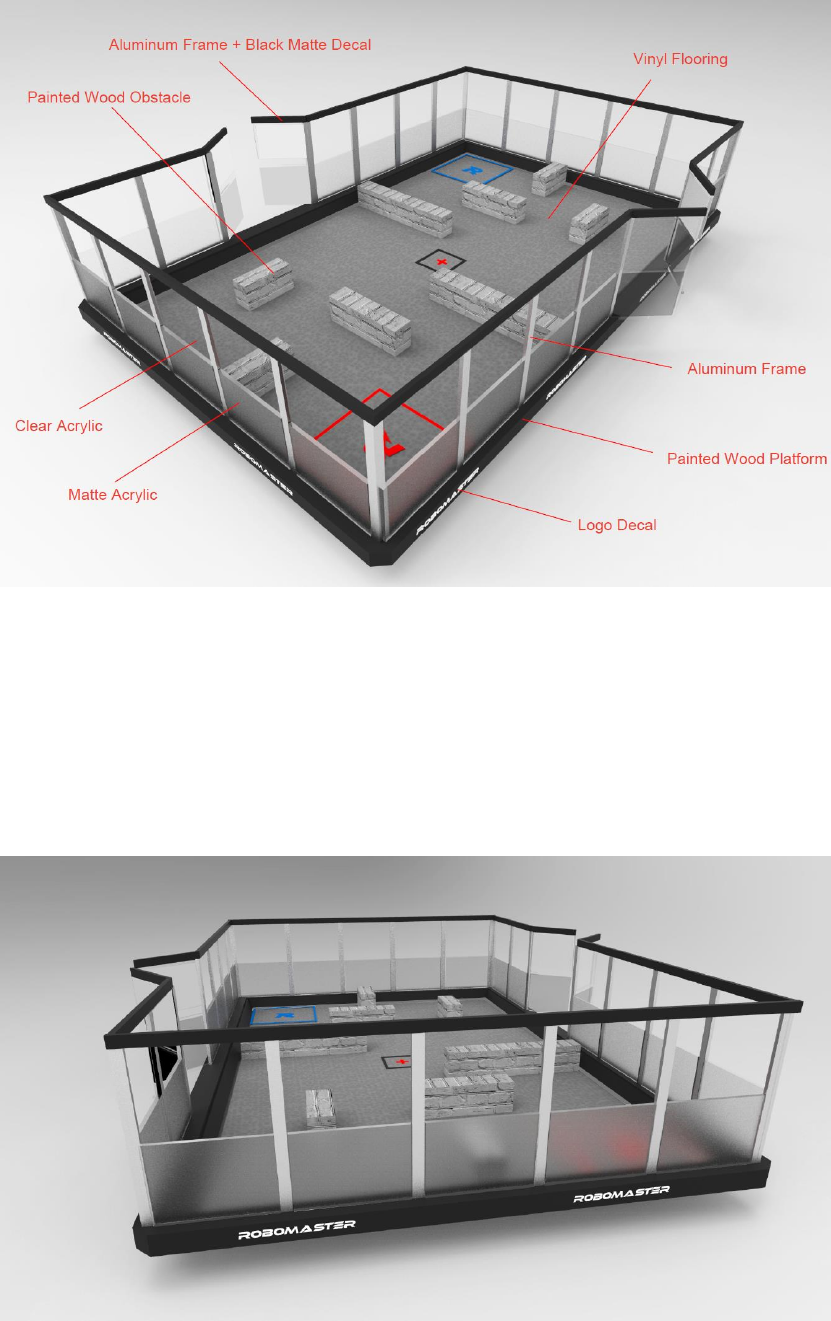
Other elements and materials information show as follows.
Figure 6. Field Materials
Note: Materials may slightly change in actual Challenge.
3.6 Protection Fence
To ensure that projectiles will not injure audiences, the Challenge Field is surrounded
by Protection Fences. The sample fences are illustrated below:
19
Figure 7. Side View of the Challenge Field
Note: Fences are estimated to be 2 meters height.
The fence’s wood platform is attached to the ground and is 400mm height.
However, in the actual Challenge, the color, material, and exact size of the Protection
Fences may be different from the figure above. Their appearance and distance to the
field should not be utilized in robot localization and decision-making algorithms.
3.7 17mm Standard Projectiles
The only legitimate method to destroy robot is by 17mm projectile hits. Projectile
specifications are as follows:
Appearance
Color
Size
Weight
Shore
Hardness
Material
Sphere
White
16.9 (±0.1) mm
3.4 (±0.1) g
90A
TPE
Figure 8. Appearance of Projectiles
*All robots must use projectiles provided by RMOC; any others will not be accepted.

20
Chapter 4 Challenge Procedure
4.1 Overview
The Challenge lasts for several days, including one day for Warm-up and two to three
days for the Challenge. Teams are required to arrive and check-in at the venue before
Warm-Up, and further to place their robots and devices in Preparation Areas.
On Warm-up Day, each team has about 10 to 20 minutes for testing. The specific time
subject to schedule changes.
On the Challenge Days, teams compete in turns, and they can modify, reprogram, and
fine-tune their robots between Rounds. Each team has 4 Challenge Rounds in total.
Every Challenge day has multiple Rounds. During the Challenge, each team prepares
for the Challenge at the Preparation Areas, reaches the Inspection Areas for official
pre-Challenge Inspection of robots, waits for the Challenge starts at the Staging
Areas, and finally enters the Challenge Field. Each team is required to leave the field
and return to the Preparation Areas upon the end of each Round.
Details of Areas mentioned above and latest schedule will be specified in the official
manual, which will be released one week before actual Challenge starts.
4.2 Pre-Challenge Inspection
60 minutes before every Challenge Round, the RMOC will inspect the robots to
appear on the Challenge Field, making sure that the weight, voltage, size and Referee
System comply with specifications. Only the teams that pass Inspection are eligible to
compete in the challenge.
4.3 Challenge Rundown
After the Pre-Challenge Inspection, teams take their robots to the Staging Areas next
to the Challenge Field. The referee will notify team members the time when start to
move their robots into the field. Once robots enter the field, the Setup Period of the
Challenge Round starts.
Each Challenge Round consists of three phases: Setup Period, Referee System
Initialization and Challenge Round.
Challenge Rundown Phases
Setup Period
120 seconds
Referee System Initialization
20 seconds

21
Challenge Round
180 seconds
Referee System will count the time automatically, linking all phases.
During the Setup Period, team members can power up and set up robots. No more
than 5 team members can enter the Challenge Field. When the Setup Period
ends, all team members must leave the Field.
Each robot (both official AI and Team robot) preloads 200 projectiles before each
Round. The Referee will load the projectiles for official AI robots. The referee will
also distribute projectiles – 2 bags of 100 if using ONE robot, 4 bags of 100 if using
TWO robots to a team member before the Setup Period; then the projectiles can be
loaded to robots. After each Round, the team must take all projectiles out from
robots. The ones left in the feeding tube can be reserved only if removal requires a
disassembling procedure.
Referee System Initialization is for Referee System to check the connectivity of
robots. During this 20s period, referees can enter the Challenge Field in case of
system failure. If a system failure occurs, team members must wait for the orders
given by referees to enter the Field and help referees to resolve problems; otherwise,
they cannot enter the Field.
A Challenge Round starts immediately after Referee System Initialization finishes.
Team members can only remotely trigger Team Robots with a remotely connected
laptop or other communication devices. Afterwards, team members shall not control
or communicate with Team Robots for any reason. For safety considering, team
members are allowed to continue monitoring the status of robots using their video
transmission technologies and notify referees when an emergency occurs.
During the Challenge Round, if robots demonstrate abnormal behavior due to
program malfunctions, team members can call for an Emergency Termination. The
referee will review the situation and then shut down all robots through Referee
System interface. When an Emergency Termination occurs, the current Challenge
Round ends immediately, and the team who called for Emergency Termination gets a
Round score of 0.
When a Challenge Round starts, each robot has 2000 HP. Each projectile hits will
reduce 50 HP from the corresponding robot. Bonus can augment projectile hits (See
3.4 ).
Challenge Round ends when Round time expires or when all robots of either side are
destroyed.
4.4 Score Calculation
After one Challenge Round, the team score is calculated in the following scheme:
Score = α × X + β × Y - γ × Z

22
Where α, β and γ represent coefficients with the following values:
1. α = 6.0/(4.0+NUMBER OF ROBOTS);
2. β = 75.0/(4.0+NUMBER OF ROBOTS);
3. γ = 2.0/(1.0+NUMBER OF ROBOTS).
NUMBER OF ROBOTS can be 1 or 2, depending on the number of robots that enter
the Challenge Round. RMOC will always present Two Robots no matter how many
Team Robots stay in the Field.
And X, Y and Z represent the following:
1. X is the HP reduction of RoboMaster AI robots;
2. Y is the remaining time (in seconds) when both RoboMaster AI robots are
destroyed. If the challenge time ends before both AI robots are destroyed, Y is 0;
3. Z is the HP reduction of Team Robots.
In this first example, a team uses 2 robots in a Challenge Round. Their robots destroy
RoboMaster AI Robots within 50 seconds, and after the Round ends, one robot still
has 850 HP, while the other has 1000 HP. Their total round score is,
α = 6.0/6.0
β = 75.0/6.0
γ = 2.0/3.0
X = 2000 × 2 = 4000
Y = 180 - 50
Z = (2000 - 850) + (2000 - 1000) = 1150+1000
Score = α × X + β × Y – γ × Z = 6.0 / 6.0 × 4000 + 75.0 / 6.0 × (180 - 50) - 2.0/3.0 ×
(1150 + 1000) = 2941.6
In this second example, a team uses 1 robot in a Challenge Round. This robot destroys
RoboMaster AI Robots within 150 seconds, and after the round ends, this robot still
has 250 HP. Its total round score is,
α = 6.0/5.0
β = 75.0/5.0
γ = 2.0/2.0
X = 2000 × 2 = 4000
Y = 180-150
Z = (2000-250) = 1750

23
Score = α × X + β × Y – γ × Z = 6.0/5.0 × 4000 + 75.0/5.0 × (180-150) - 2.0/2.0 ×
(1750) = 3500
In this third example, a team uses two robots in a Challenge Round. After Challenge
Round expires, both RoboMaster AI Robots remain 100 HP. And both Team Robots
have 200 HP left. Then the total round score is,
α = 6.0/6.0
β = 75.0/6.0
γ = 2.0/3.0
X = (2000-100) + (2000-100)=1900+1900
Y = 180-180
Z = (2000-200) + (2000-200)=1800+1800
Score = α × X + β × Y – γ × Z = 6.0/6.0 × (1900+1900) + 75.0/6.0 × (180-180) -
2.0/3.0 × (1800+1800) = 1400
It is recommended to use two Team Robots for the challenge, since more launching
mechanism can generate damage more efficiently, and the score scheme reduces the
coefficient for HP reduction of Team Robots if there are more than one Team Robot
on the Challenge Field.
One team plays FOUR Rounds in total. The final score for the team is the highest
among all four Rounds.
24
4.5 Fouls and Penalties
In Challenge Round, Referee System automatically monitors the progress of the
Challenge. The referee will monitor the Challenge and issue Foul Penalties. When this
penalty is issued, the Challenge Round will be terminated immediately, and a zero
score is assigned to the team. The penalty will be issued if following fouls occur
during the challenge round:
No.
Type of Foul
1
A robot is about to malfunction or has malfunctioned (quickly moving out of
the field or bumping against one side of the competition area, causing damage).
2
One or more team members enter the Challenge Field without approval during
the Challenge Round.
3
A robot starts to operate before the team members leave the Challenge Field.
4
After the Challenge Round starts, one or more team members manually control
a robot or shift from automatic operation to manual operation.
5
Other behaviors that may affect the integrity of the Challenge.
All teams must abide by referee decisions. Otherwise, the score of a team in a
Challenge Round will be canceled.
Other behaviors that severely violate the spirit of the Challenge will lead to the
disqualification of the team.

25
Appendix I
ICRA2018 DJI RoboMaster AI Challenge
Technical Proposals Requirement
The Technical Proposals is an optional report for ICRA 2018 DJI RoboMaster AI
Challenge. If registered teams choose to submit the Technical Proposals, they must do
so by Jan 1, 2018, 23:59 (UTC+8). Registered teams can choose whether or not to
submit the proposal up to January 1st (China Standard Time). Teams with well-
written and outlined reports will win a RoboMaster robot kit or one set of Referee
System for free.
Ⅰ. Submission
Log in to the submission system with captain’s account and submit online. Each team
is allowed only one submission. The Technical Proposals is due between Dec 1, 00:00
and Jan 1, 2018, 23:59 (UTC+8).
Ⅱ.Requirements
1)Report Format: PDF with file name:School name + team name + ICRA Technical
Proposals.
2)Font: 10 point Times New Roman.
3)Length: Max. 5000 words with figures, flow charts, and design drawings. Logic
data proof and highlights are also significant.
Ⅲ.Key Sections
The following information should be contained in the main body.
1)Team Introduction
Team Captain’s Bio
Each Member’s Bio
2)Technical Proposals
a.Proposed perception system
b.Technical Feasibility Analysis
c.Development Schedule
d.Team Members’ Responsibilities & Task Assignments
3)References (add any cited literature)

26
Appendix II
ICRA2018 DJI RoboMaster AI Challenge
Technical Report Requirement
Technical Report submission is a mandatory procedure for ICRA 2018 DJI
RoboMaster AI Challenge. Only teams with approved Technical Report will be
qualified to participate in the Challenge at Brisbane.
Ⅰ.Who should submit the report
Teams with RoboMaster AI Challenge registration number.
Ⅱ. How to submit
Log in to the RoboMaster Submission System with captain’s account and then submit
online. Each team is allowed to submit the Technical Report only once before 23:59 April 10,
2018, China Standard Time (CST UTC+8).
Ⅲ. What should include in the report
The Technical Report consists of text description and video demonstration. Hence,
a well-edited video and an EN or CN written report should be concluded in the
submission.
1. Video Requirements:
a. Format:
- Teams are allowed to upload password protected videos to YouTube or
another platform. Remember to specify video links along with passwords in
their report.
b. Evaluation Criteria:
- Basic information such as school name, shooting date and location should be
firstly presented at the beginning of the video.
- Videos should be shot in places with the good illuminating condition to
ensure every movement of the robots is seen.
- Do not demonstrate any meaningless scene in the video, try to keep the
video brief and pithy with no more than 5 minutes
- It is recommended to rearrange multiple videos into a single video. But
video editing with any fake effects is not allowed.
- On each part, teams can demonstrate their critical technology including but
27
not limited to mechanical design, detection, localization, planning, decision
making, launching projectiles
- Each procedure needs to come with subtitles or notes and explained by the
video narration.
2. Report Requirements:
a. Include all texts, images, video links and passwords in a PDF with the file name:
school name + team name + ICRA Technical Report. The report should be written in
12 points Times New Roman font and no more than TEN A4 pages.
b. Evaluation Criteria:
- Hardware
a) Mechanical Design
1) Brief descriptions of the Mechanical Design.
b) Sensors
1) Analyze the requirements for detection, localization, obstacle avoidance
and other algorithms.
2) Point out the detailed sensor parameters. For the camera, it should include
shutter, resolution, FOV, max FPS and more. As for LIDAR, it should
conclude range radius, max samples per second, FOV and any other
feature.
c) Computer
1) The number of computers that have been used and detailed information of
each including CPU and GPU.
d) Others
1) Describe the information of other sensors or key devices that have been
used in your robots.
- Software
In the beginning, use a system diagram to describe the software framework.
a) Detection
1) Describe the process of the detection algorithm in detail. For example,
how to measure the distance of robot armor and how to estimate the speed
of the enemy robot.
2) Point out the algorithm performance, such as maximum frequency and
maximum detection distance. Please specify the network framework and
number of layers if you are using deep learning algorithm.
28
b) Localization
1) Describe the localization algorithm and its accuracy performance.
c) Planning
1) Describe global planning algorithm, local planning algorithm, and multi-
robot collision avoidance method you implemented.
2) Specify the performance including but not limited to maximum velocity
and maximum acceleration.
d) Launching Projectiles
1) Analyze key factors that will affect the autonomous launching system.
Describe with solutions.
2) Control Methods.
e) Decision-Making
1) Describe the framework and algorithms of decision making. Specify the
state transfer process if conventional methods such as FSM are used. And
describe the learning framework if learning based methods are used.

29
The Organizing Committee@ICRA2018
The RoboMaster Organizing Committee
Challenge Email: robomaster@dji.com
Website@ICRA2018:http://icra2018.org/
RoboMaster Website:https://www.robomaster.com/en-US
Challenge Tel: 0755-36383255(Monday-Friday CST UTC+8 10:00-19:00)
Address@RoboMaster: Room 202, Floor 2, 1089 Chaguang Road, Xili, Nanshan
District, Shenzhen, Guangdong Province
