KRS Series_manual__a4 En 1113 Series Manual Eng V2
User Manual:
Open the PDF directly: View PDF ![]() .
.
Page Count: 11
●Donotmaintainthemaximumtorqueoutputforanextendedperiodoftime.
Themaximumindicatedtorqueoutputofthisproductisonlyintendedforshortperiodsoftime.Itisnotrecommendedto
usethisproductinastateofmaximumtorqueoutputforextendedperiodsoftime.Pleaseconsiderthiswhendesigning
yourrobots.
●Avoidfrequentrepetitivemovements.
Rotatingtheservobackandforthalotinashortperiodoftimewillcauseexcessheattobuildupandmayresultin
damagetotheproduct.
●Ensureeachservoreceivesenoughpowerwhenconnectinginadaisychainpattern.
Theoretically,thisproductcanbedaisychainedupto32units.Daisychainingthisproductmayresultinaweakened
signal,alackofpower,orwiringburningout.Whendaisy-chainingthisproduct,werecommendrunningaseparatesignal
wireandpowerwirewithsufficientcapacitytopowertheservos.Thisistoreducethechanceofaweaksignalasacon-
sequenceofaloopconnection.
PrecautionsforUse
Caution!Improperuseofthisproductcouldresultininjuryordamagetoproperty.
●Keepallbodypartsawayfromthisproductduringoperation.Alwayspay
attentionwhileoperatingthisproduct.
Thisproductisdesignedforuseinrobots.Itcannotbe
usedinotherproductssuchasradiocontrolledcars.
Pleasecheckthattheservosmovefreelythroughtheir
rangeofmotionwheninstallingintoyourrobot.
Backlashorloosenessinbracketingmaycausean
unnecessarilyhighloadontheservos,increasing
powerconsumptionandreducingthelifespanofthe
product.
Drycellbatteriesmaynotbesufficientlypowerful
enoughtooperatethisproduct.
Themaximumrangeofmotionthisproductiscapable
ofwilldependontheinputsignal.
●
●
●
●
Takeextracarewhenattemptingtouse
home-builtcontrolboardstocontroltheseservos.
Useunderextremeconditionsmayresultinunder
performanceandaheavilyreducedlife-spanof
thisproduct.
Ifyouhavequestionsrelatingtotheuseand/or
outputofthisproduct,pleasevisitourwebsiteat
http://www.kondo-robot.com.Ifyoucannotfind
theinformationyourequire,contactourservice
departmentwithyourinquiry.
Pleasenotethatwearecannotanswerquestions
oncontrolprogramming.Thankyouforyour
understanding.
●
●Checktheinputsignalandsourcevoltagebefore
operatingthisproduct.
●Payattentiontotheorientationoftheconnectors,
andensuretheyarecorrectlypluggedin.
●Donotusethisproductinaplacewherethereit
maygetwet.
●Donotdismantleormodifythisproductinaway
thatisnotendorsedbythiscompany.
※Donotusesignalsorvoltagesoutsidethe
specifiedrange.Doingsomayresultin
malfunctionordamagetotheproduct.
※Reversalofthepolarityofthepowersource
willdamagetheproduct.
※Allowingwatertogetinsidethisproductmay
causedamageand/ormalfunction.
KRSServoSeries
InstructionManual
ThankyouforpurchasingtheKRSServoSeries.Pleasebesuretothoroughlyreadthroughthisinstructionmanual
beforeuse.Instructionmanuals,servocommandreferencematerial,informationrelatingtothisproduct,andthesoftware
requiredtochangesettingswhenconnectedtoaPCisavailablefordownloadfromourwebsite.
*YouneedtheDualUSBAdapter(Partnumber02116)inordertoconnectthisproducttoaPC.
Informationrelatedtothisproductcanbefoundatthefollowingwebsite:
http://kondo-robot.com/
1
Warning!Improperuseofthisproductcouldresultinseriousinjuryordeath.
ICS3.5Manager,CommandReference,DualUSBAdapter,HSManual,KODriveretc.
Customercenter→InformationSupport→ICS&KRSServoDevelopmentmaterials
SoftwareSamples
※Thereisariskofbonefractureand/oramputationoffingersorotherbodypartsiftheygetcaughtup
inthemovingpartsofthisproduct.Furthermore,thisproductcanbecomeextremelyhotwhenoverloaded.
Takecarenottoburnyourselfwhenhandling.
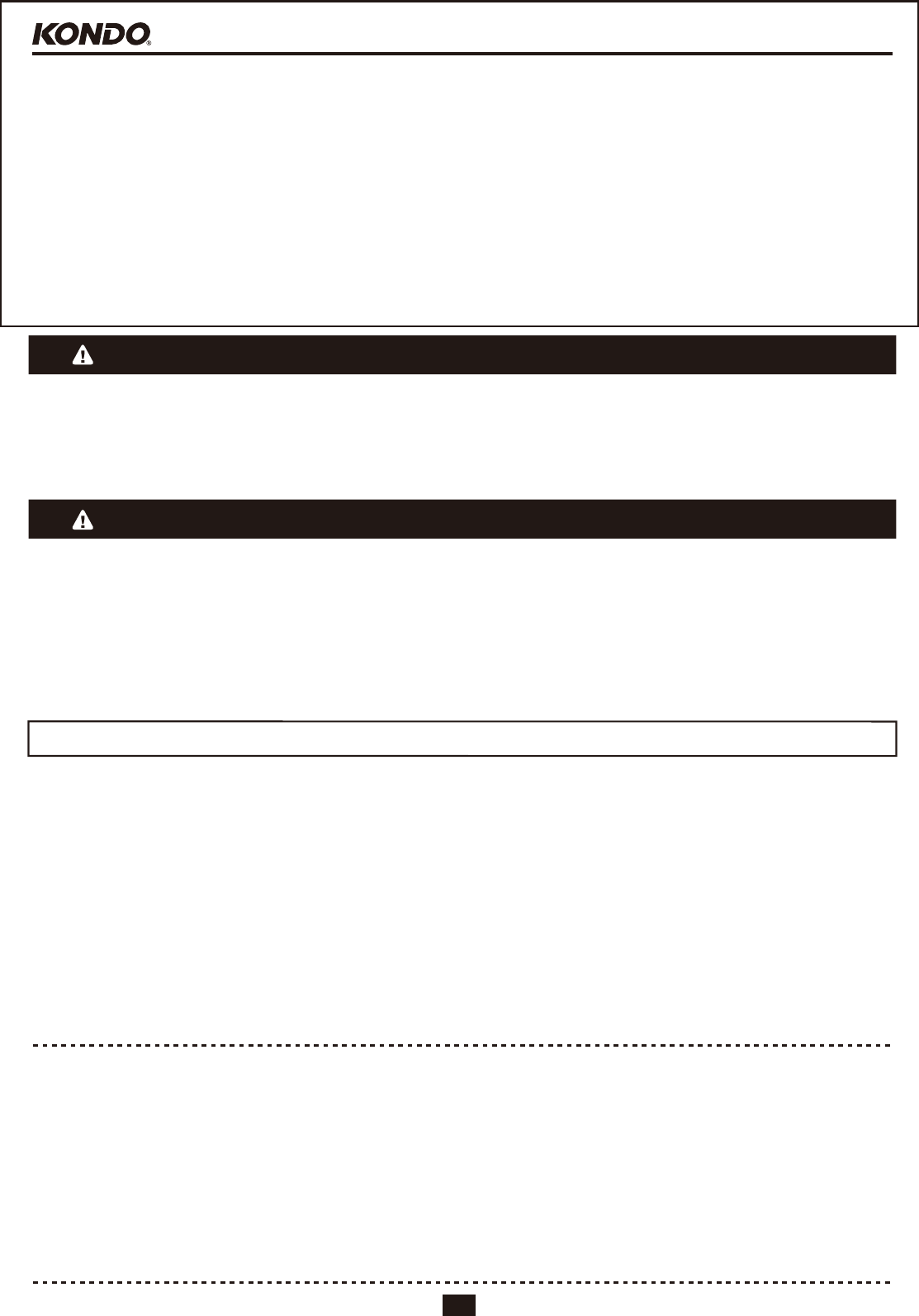
SpecificationsandAccessories
Size:L32.5 ㎜ ×W26.0 ㎜ ×H26.0 ㎜
Operatingvoltage:6.0 〜 7.4V
Weight:33.7g
Maximumoperatingangle:2 7 0 °( ± 1 3 5 °)
Maximumcurrent:2.2A (@7. 4V )
Gearmaterial:Metal
Communicationstandards:ICS3.5
ControlBoards:RCB-4HV、KCB-5、RCB-3HV
KRS-3304ICS
Torque:13.9kg・cm(7.4V)
11.2kg・cm(6.0V)
Speed:0.11sec/60°(7.4V)
0.13sec/60°(6.0V)
Reductionratio:289.22:1
【1pc】
ZHConnectionCableB(300mm) ×1
M3-8LowHeadHornScrew×1
【6pcsset】
ZHConnectionCableA(300mm)×4
ZHConnectionCableB(200mm)×2
M3-8LowHeadHornScrew×6
【18pcsset】
ZHConnectionCableA(300mm)×12
ZHConnectionCableB(200mm)×6
M3-8LowHeadHornScrew×18
【1pc】
M3-8LowHeadHornScrew×1 本
【6pcsset】
M3-8LowHeadHornScrew×6 本
【18pcsset】
M3-8LowHeadHornScrew×18 本
【1pc】
ZHConnectionCableA(300mm)×1
M3-8LowHeadHornScrew×1:2552
2.6-6FlatHeadScrew×1:2542
【6pcsset】
ZHConnectionCableA(300mm)×8
ZHConnectionCableB(200mm)×2
M3-8LowHeadHornScrew×10:2552
2.6-6FlatHeadScrew×10:2542
【1pc】
ConnectionCableG(400mm)×1
M3-8LowHeadHornScrew×1
【6pcsset】
ConnectionCableG(400mm)×6
M3-8LowHeadHornScrew×8
【1pc】
HVConnectionCable(400mm)×1
AluminumCrampHorn×1
【6pcsset】
HVConnectionCable(400mm)×6
AluminumCrampHorn×6
【18pcsset】
HVConnectionCable(400mm)×18
AluminumCrampHorn×18
■KRS-3204and3304servosarenotsuitableforhighvoltageapplications.Operateatlessthan7.4volts.
■Ourhighvoltageservoproductsoperateatadifferentvoltagetothisproduct.Usinghighandlowvoltageservosin
thesamerobotrequiresseparatecircuitry.
※Casescrew:1.7mm
KRS-3304ICS
KRS-3204ICS
ImportantPoints
Size:L33.0 ㎜ ×W15.0 ㎜ ×H26.0 ㎜
Operatingvoltage:6.0 〜 7.4V
Weight:27. 2g
Maximumoperatingangle:2 7 0 °( ± 1 3 5 °)
Maximumcurrent:2.2A(@7.4V)
Gearmaterial:Metal
Communicationstandards:ICS3.5
ControlBoards:RCB-4HV、KCB-5、RCB-3HV
※Cablelength:350mm(Fixed)
KRS-3204ICS
Torque:9.3kg・cm(7.4V)
7.5kg・cm(6.0V)
Speed:0.13sec/60°(7.4V)
0.18sec/60°(6.0V)
Reductionratio:290.17:1
※Changesorimprovementsmaybemadetothisproductwithoutpriornotice.
KRS-2572HV/2552RHV/2542HVICS
Size:L41㎜×W21㎜×H30.5㎜
Operatingvoltage:9 〜 12V
Weight:47.7g/41.5g/35.5g
Maximumoperatingangle:2 7 0 °( ± 1 3 5 °)
Maximumcurrent:25722.5A(@11.1V)
2552/25421.3A(@11.1V)
Gearmaterial:Metal+(Nylon:2542)
Communicationstandards:ICS3.5(Serial/PWM)
ControlBoards:RCB-4HV、KCB-5、RCB-3HV
KRS-2572HV
Torque:25.0kg・cm
Speed:0.13sec/60°
Reductionratio:309.11:1
KRS-2552RHV
Torque:14.0kg・cm
Speed:0.14sec/60°
Reductionratio:312.40:1
KRS-2542HVICS
Torque:11.0kg・cm
Speed:0.12sec/60°
Reductionratio:193.18:1
Specs. Performance
Accessories
KRS-4034/4033/4032HV/4031HVICS
Size:L43 ㎜ ×W32 ㎜ ×H32.5 ㎜
Operatingvoltage:9 〜 12V
Weight:61.2g/61.4g/61.2g/55.2g
Maximumoperatingangle:2 7 0 °( ± 1 3 5 °)
Maximumcurrent:3.1A(@11.1V)
Gearmaterial:Aluminum+Steel/POM
Communicationstandards:ICS3.5(Serial/PWM)
ControlBoards:RCB-4HV、KCB-5、RCB-3HV
KRS-6003RHVICS
Size:L51 ㎜ ×W32 ㎜ ×H39.5 ㎜
Operatingvoltage:9 〜 12V
Weight:103g
Maximumoperatingangle:2 7 0 °( ± 1 3 5 °)
Maximumcurrent:6.1A(@11.1V)
Gearmaterial:Aluminum+Stainless
Communicationstandards:ICS3.5(Serial/PWM)
ControlBoards:RCB-4HV、KCB-5、RCB-3HV
KRS-4034HV
Torque:41.7kg・cm
Speed:0.17s/60°
Reductionratio:381.2:1
KRS-4033HV
Torque:30.6kg・cm
Speed:0.12s/60°
Reductionratio:249.6:1
KRS-4032HV
Torque:19.8kg・cm
Speed:0.08/60°
Reductionratio:167.2:1
KRS-4031HVICS
Torque:13.0kg・cm
Speed:0.16sec/60°
Reductionratio:346.6:1
KRS-6003RHVICS
Torque:67.0kg・cm
Speed:0.22s/60°
Reductionratio:362.88:1
※Torque/Speed@11.1V
※Torque/Speed@11.1V
※Torque/Speed@11.1V
2
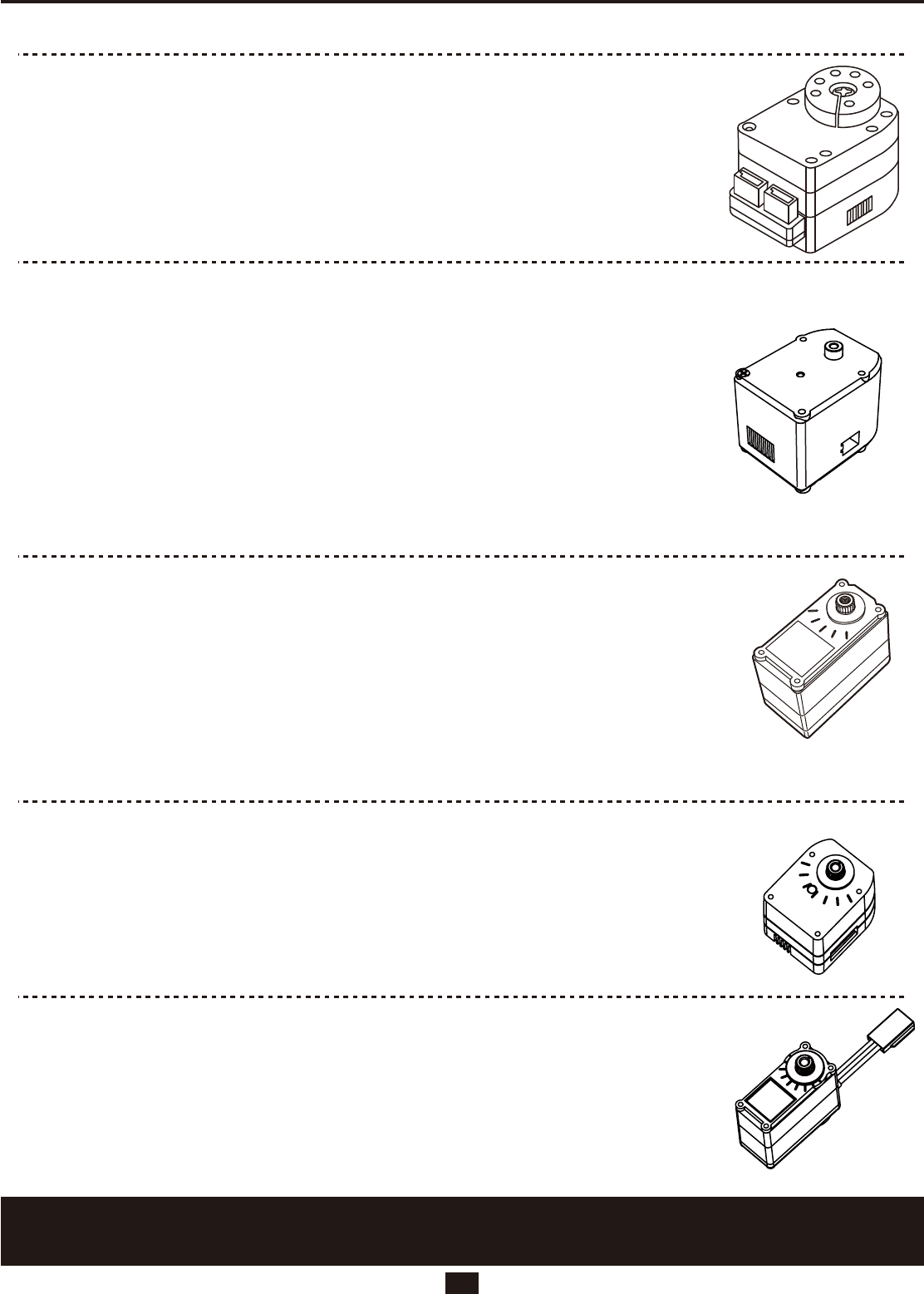
Signal
Power(Vcc)
Power(GND)
Signal
Power(Vcc)
Power(GND)
Signal
Power
Power
※Cableisfixed.
※LEDisnotincluded.
Usingtheconnectionadapterdescribedbelow
togetherwiththeICSmanagersoftwareonyour
PCtochangealltheservoparametersettings
andassignservoIDs.Youmayalsocontrolyour
servosdirectlyviayourPCorcompactmother-
board.
・DualUSBAdapterHS(soldseparately)
・KODriver(freedownload)
・ICS3.5Manager(freedownload)
・ICS3.5CommandReference(freedownload)
(TheoldversionofICSisalsoavailablefor
downloadonthewebsite)
UsingtheKONDOcontrolboardinconjunction
withtheseservosallowsyoutouseeitherour
HearttoHeartrobotcontrolsoftware,orC
programminglanguage.Italsoallowsfortheuse
ofBluetoothandWi-Ficonnections,gyrosand
accelerometers,andwirelesscontrol.
Usingtheincluded(oroptional)cables,connectoneendtothesignalterminalofthecontrolboard,andthe
otherendtothesignalterminaloftheservo.Thetwosignalterminalsontheservosareinternallyconnectedin
parallel,soyoumayconnecttoeitherone.Pleaserefertopage6ofthismanualifyouwishtoconnectmultiple
servosusingthesameterminalinamulti-droparrangement.
6000Series 2500Series
4000Series 3300Series
3200Series ■ConnectingtoaPC
■ConnectiontotheKONDOControlBoard
●Plugtheconnectorsintotheterminalsvertically.(Theplasticpart
oftheconnectorwillsitflushwiththeservowhenconnected
correctly)
Tab(凸) Slit(凹) Tab(凸) Slit(凹)
(Servo)(Connector) (Servo)(Connector)
ServoConnector ZHConnector
LED
LED
LED
LED
※6003HV Red Version is serial communication only.
ConnectingtheServos
3
※Refertopages6through9ofthismanualfor
furtherdetailsaboutICSmanagementsoftware
andcommunicationsystems.
※Refertopage10ofthismanualforfurtherdetails
aboutoptionalparts.
※Refertoeachmanualforfurtherdetails.
●M2×24
(Framet=1mm)
●2-5LowHeadTappingScrew
No.02084(100pcs)
●2×20LowHeadTappingScrew
(Casescrew)
●M1.7×20LowHeadScrew
x4
x4
*Reuse
*Reuse
*Soldseparately
*Donotuse
2mmscrew.
Caseswillbe
damaged.
x4
*Reuse
x4
x4
●M2.6-15(Framet=2mm)
*Soldseparately
x8
●M2-15(Framet=2mm)
No.01127(50pcs)
*Soldseparately
*Soldseparately
(Framet=1mm)
●2-5LowHeadTappingScrew
No.02084(100pcs)
(Framet=1mm)
●1.7-5LowHeadTappingScrew
No.02162(100pcs)
x4
*Soldseparately
x4
*Soldseparately
x4
●M2.6-27(Flamet=2mm)
4000Series
6000Series
2500Series 3300Series 3200Series
Pleaseremove2screws,
ifyoumountframesbothsides.
Pleasekeepscrewsforreuse.
Pleaseremove2screws,
ifyoumountframesbothsides.
Pleasekeepscrewsforreuse.
M2.6×13
Countersunkheadscrew
M2×15
Countersunkheadscrew
M2×10
Countersunkheadscrew
M2.6×25
Countersunkheadscrew
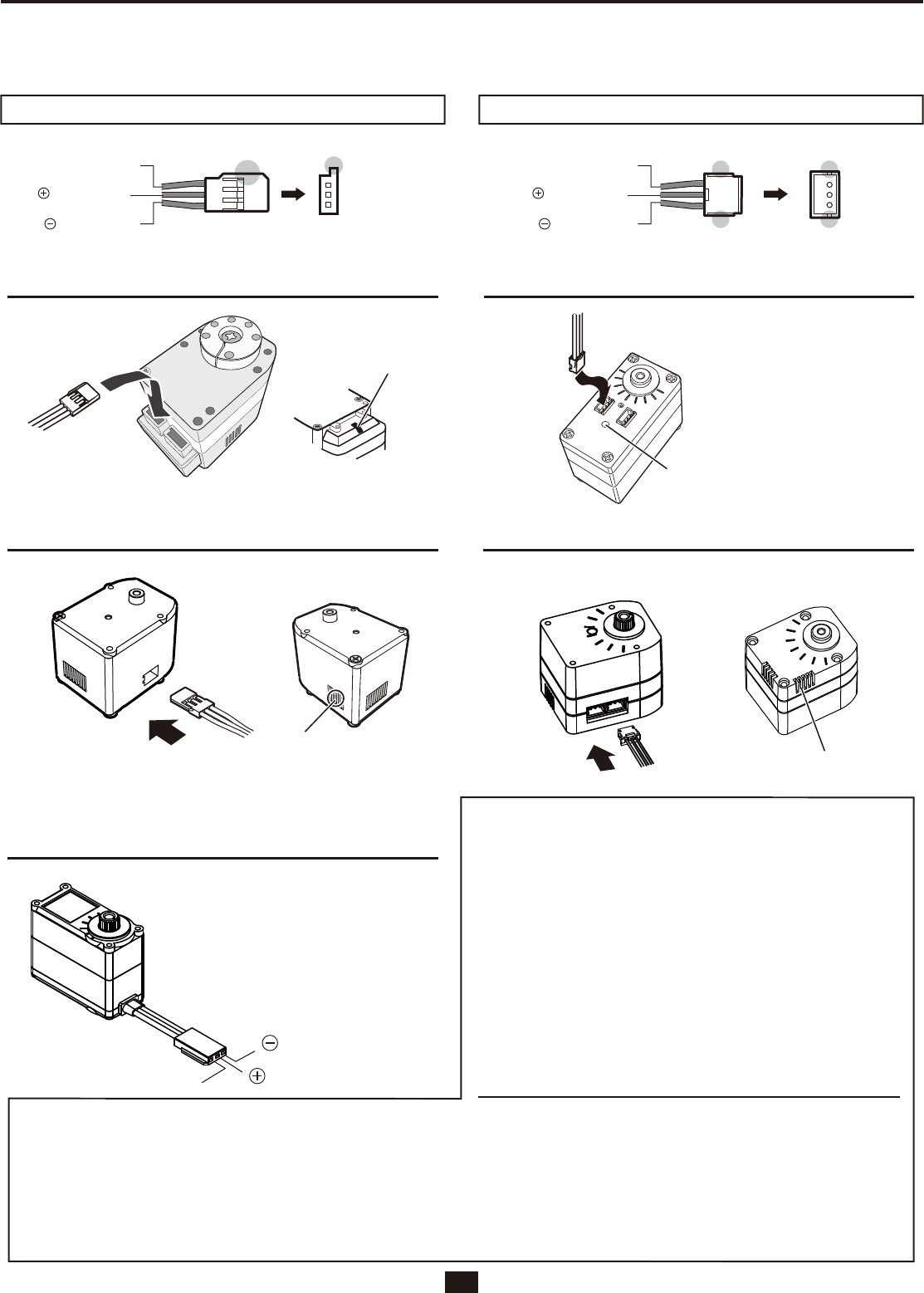
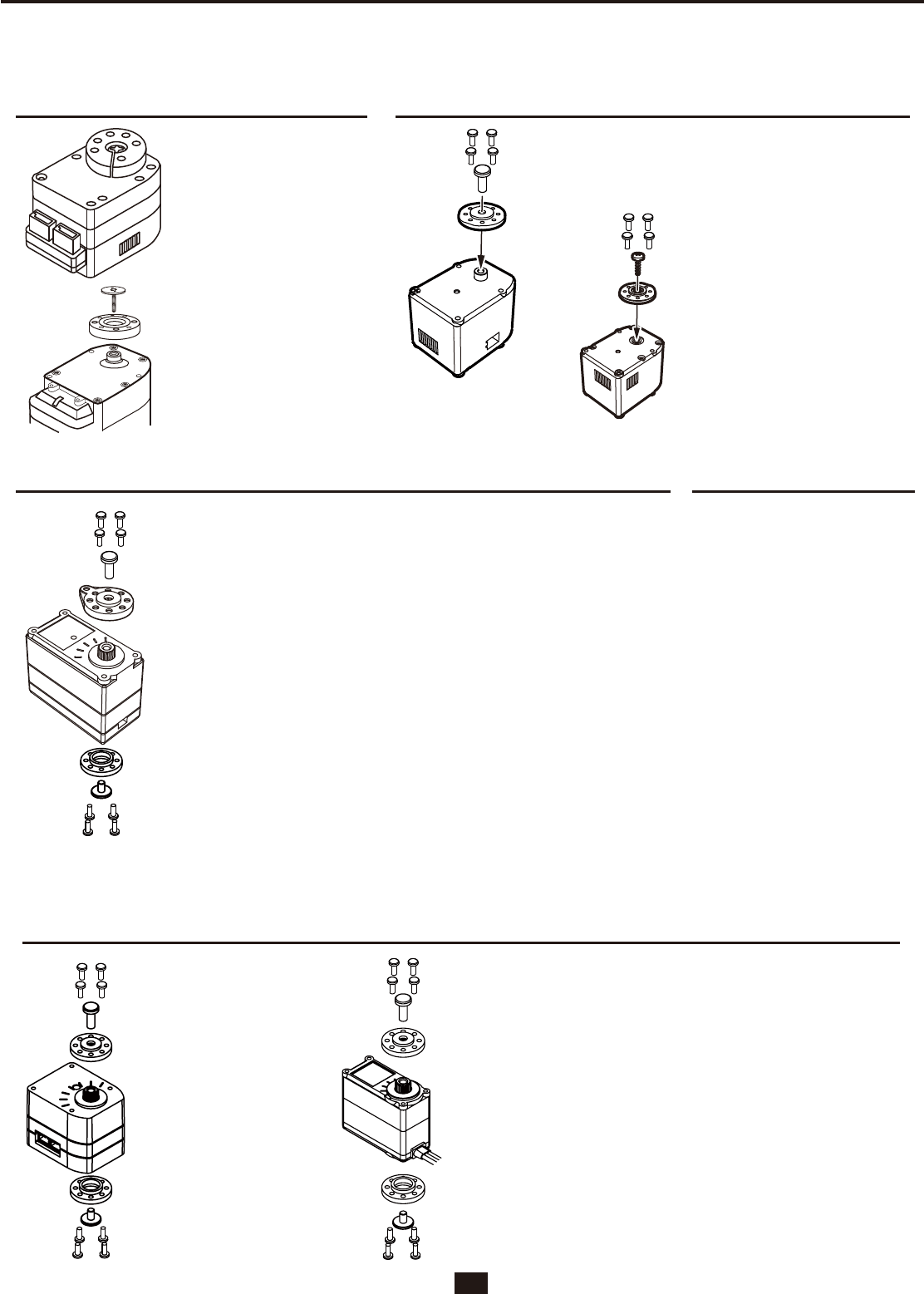
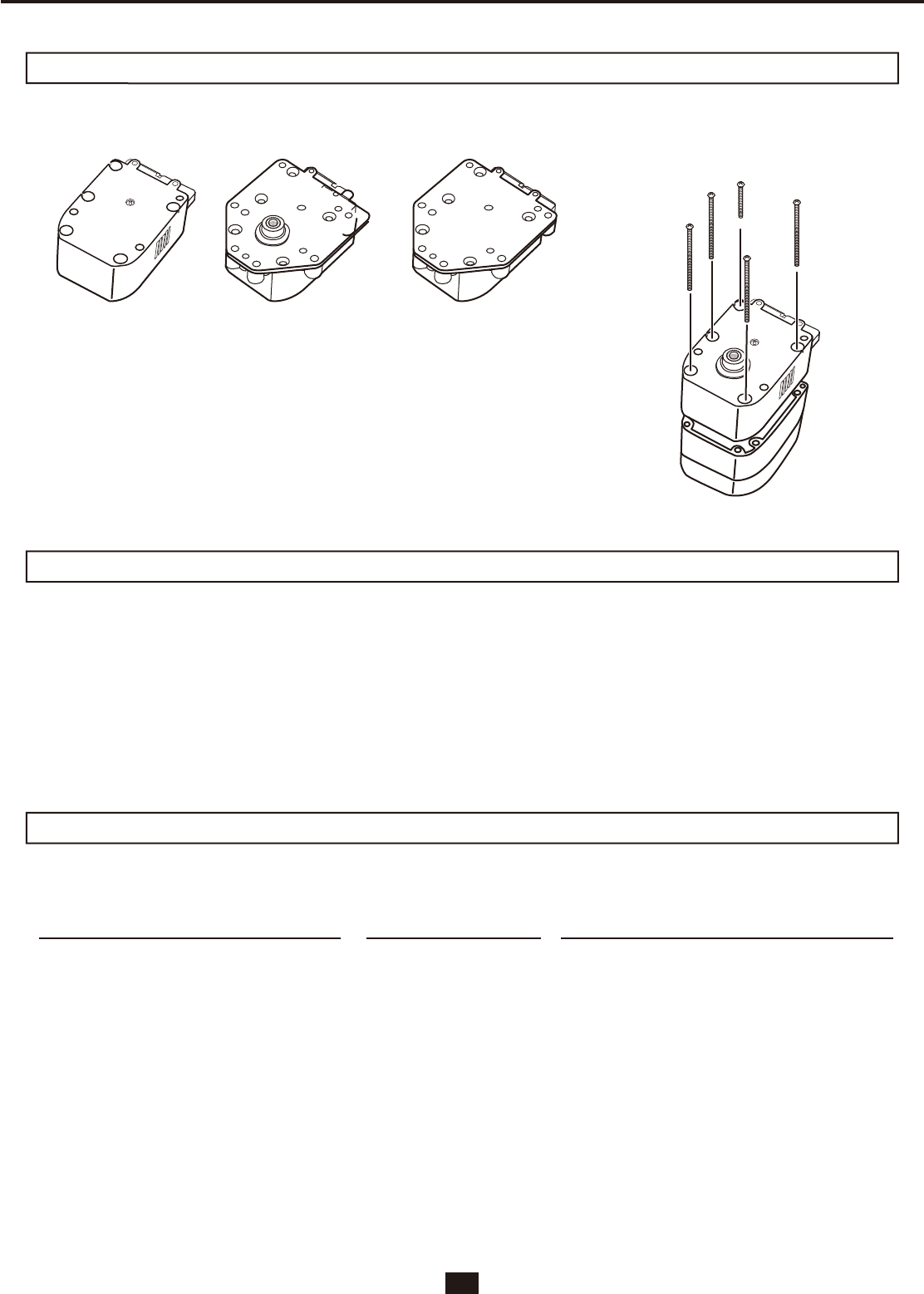
Servoscanbeanchoredtohome-madeframesorbracketsusingupto8screws.Refertothetableinthediagram
belowforrecommendedscrewsizes.
○6000/4000series:(Whenframethicknessis2mm)
1)Removetwoscrewsshownindiagrambelow.2)Secureupperandlowerbracketingusingdesignatedscrews.
○2000/3000series:(Whenframethicknessis1mm)
1)Removescrewsfromservocase.2)Secureservotoframeusingscrewsremovedfromcaseanddesignatedscrews.
※Removingthescrewsfromtheservocasingmayresultinthecasingcomingapart.Takecarenottolettheinternalpartsfalloutorcome
apart. ※*Screwsforanchoringtheservosaresoldseparately.Eitherpurchaseouroptionalscrewsorusecommerciallyavailablescrews.
※Fordetailsonscrewlocations,refertotheexternaldiagramsincludedafterpage12inthismanual.Youcanalsodownloadexternaldiagrams
fromourwebsite.
AnchoringServos
4
(Casescrew)
(Casescrew)
(Casescrew) (Casescrew)
2500Series 4000/2500Series
3300/3200Series
3300Series 3200Series
①
①
②
③
④
②
③
④
④
④
SmallDiameterHornC
(PCDΦ12-M2-offset0)
No.02159(2pcs)
No.02160(12pcs)
SmallFreeHornC
(PCDΦ12-M2-offset0)
No.02159(2pcs)
No.02160(12pcs)
SmallDiameterHornB
(PCDΦ12-M2-offset0)
No.02157(2pcs)
No.02158(12pcs)
SmallDiameterHornB
(PCDΦ12-M2-offset0)
No.02157(2pcs)
No.02158(12pcs)
M2-4LowHeadScrew
No.02086(100pcs)
*Flamet=1mm
*Flamet=1mm
*Forplasticgearmodel
2.6-4FlatHeadTappingScrew
No.02164(100pcs)
①
①
①
②
③
④
①
②
③
④
M2-4LowHeadScrew
No.02086(100pcs)
2.6-6FlatHeadScrew
No.01094(50pcs)
3-6FlatHeadScrew
No.02090(100pcs)
①
①
②
②
③④
④
4000Series
6000Series
No.02137
No.02138(6pcs)
*M3-8(6000series)
M3-6(B3Mseries)
No.02031
No.02032(6pcs)
Option
(PCDΦ17-M2.6-offset+2)
(Associated)
(Associated)
(PCDΦ17-M2.6-offset0)
No.02083(50pcs)
Option
ServoHorn
ServoHorn
ServoHorn
ServoHorn
②FreeHorn
②FreeHorn
③FreeHornScrew
④HornScrew
FreeHorn
FreeHorn
FreeHornScrew
FreeHornScrew FreeHornScrew
HornScrew
HornScrew HornScrew
④HornScrew *M2.6/M2
*3-10
*M2.6/M2
HornScrew
HornScrew
ServoHorn
FreeHorn
HornScrew
AluminumFreeHornwithBearing
forB3M/KRS-6000series
No.01140(1pc)
No.01141(6pcs)
AluminumFreeHornwithBearing
forKRS-4000series
AluminumCrampHorn
(PCDΦ14-M2-offset0)
No.01158(1pc)
No.01159(6pcs)
FreeHornforKRS-4024/4031
(PCDΦ14-M2-offset0)
No.02075(1pc)
No.02076(6pcs)
(PCDΦ17-M2.6-offset+2)
AluminumCrampHorn
No.01042(1pc)
No.01043(6pcs)
(PCDΦ14-M2-offset0)
AluminumLowheightServoHorn
No.02093(1pc)
No.02094(6pcs)
(PCDΦ12-M2-offset0)
AluminumSmallDiameterHorn
No.02079(1pc)
No.02080(6pcs)
(PCDΦ14-M2-offset0)
AluminumFreeHorn2500A
No.02049(2pcs)
No.02050(12pcs)
(PCDΦ12-M2-offset+2)
FreeHorn2500B
No.02047(2pcs)
No.02048(6pcs)
(PCDΦ12-M2-offset0)
SmallDiameterHorn
No.01029(2pcs)
No.01030(12pcs)
(PCDΦ14-M2)
LowheightServoHorn
M3-8LowHeadHornScrew
No.01183(4pcs)
⑤ServoArm
ServoArm4000ABlack
No.01211(4pcs)
ServoArm4000BBlack
No.02046(4pcs)
⑤ServoArm
ServoArm2500A
M3-8LowHeadHornScrew
M3-8LowHeadHornScrew
2.6-6FlatHeadScrew(2542)
M3-8LowHeadHornScrew
※Seeourwebsiteformoreinformation.
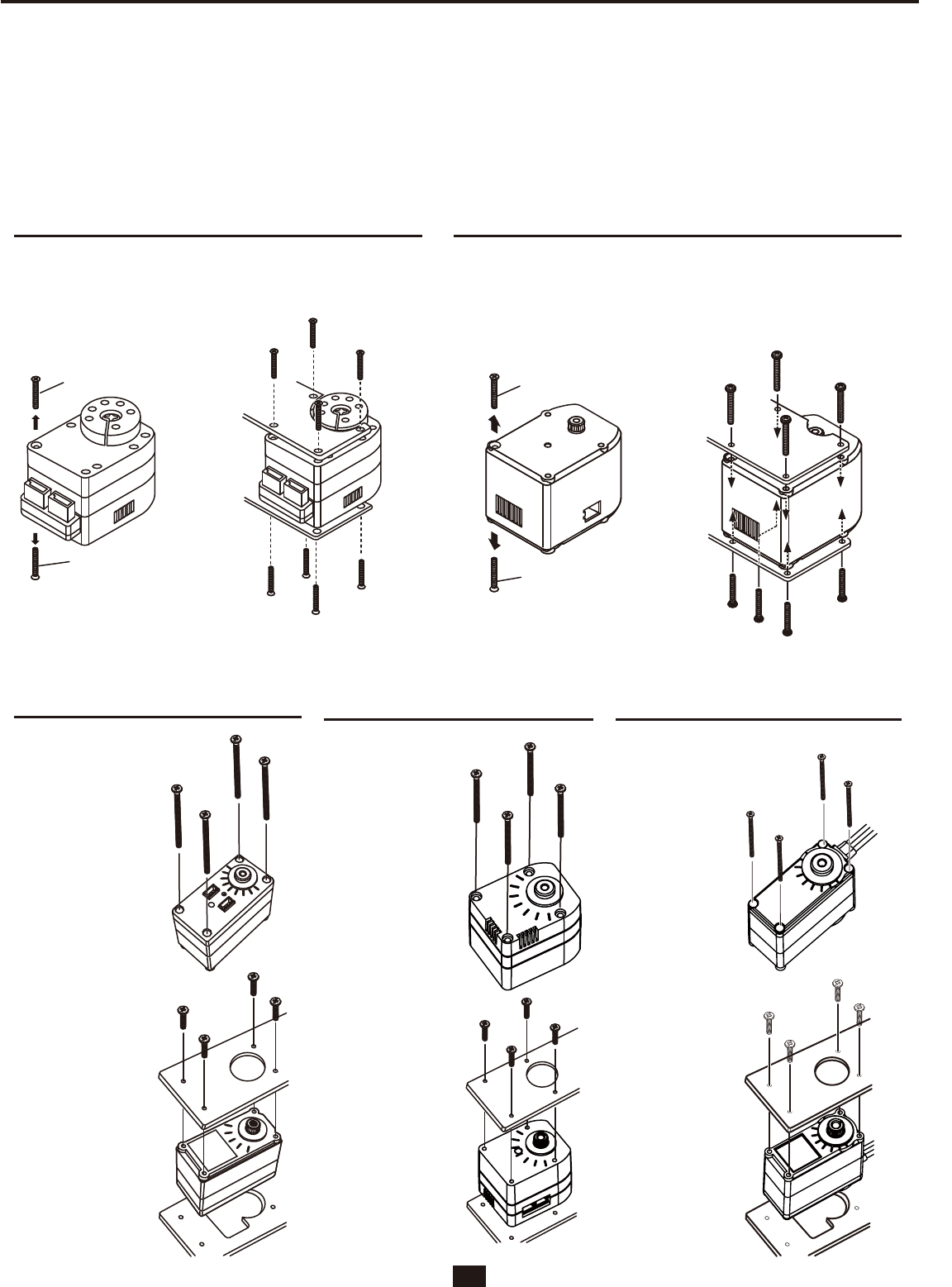
AllservosononesideandFreehornscanbeusedtoachieveddualsupport.Allourservosincludethescrews
requiredtosecuretheservohorntotheservo.(Aluminumclamphornsareincludedwiththe6000series)Only
installoptionalpartsthatcomplywithourservohorns.
InstallationofServoHorns
5

6
CommunicationsStandardICS3.5
ICSisouruniquecommunicationsstandardforcommunicationbetweenICScompatibledevices,ourservosand
yourPC.
●PreviousservosystemshaveusedthePWMsignaltocontroltheservoangle.Anewstandardinsignalwas
introducedtoallowforgreaterfidelityofcontrol.ICS3.5alsoallowsfortheuseofaPWMsignal.
●TheICS3.5SerialManagerconnectionsoftwareandeitheranICS-USBAdapterHS(partnumber02043)or
aDualUSBAdapterHS(partnumber02116)areneededtore-writeservoparameters.Thesoftwareand
instructionmanualsareavailableforfreedownloadfromourwebsite.
●ParametersthatcanbechangedarelistedbelowundertheDescriptionofICSMenusheading.
WhatisICS(InteractiveCommunicationSystem)?
DescriptionofICSMenus
※UseoftheoldtypeICS-USBAdapter(partnumber01106)willlimityoutoamaximumsignalspeedof115200bps.
※ConnectiontoanRCB-4HVwillallowyoutochangetheIDandtheBaudRate.PleaserefertotheRCB-4HVmanualfor
furtherinformation.
※RefertotheICS3.5Manager/controlboardmanualforfurtherinformation.
■ID:NominatetheservoIDsusingnumbers0through31.
(Range:0˜31.)
■Response:Sethowfasttheservosrespondtoinput.Thesmallerthenumber,theslowertheresponse.
Thehigherthenumber,thefastertheresponse.
(Range:1istheslowest.5isthefastest.)
■Deadband:Youareabletosetthedeadbandwidthoftheservo.Thesizeoftheneutralpositionis
determinedbythisdeadbandwidth.Thehigherthenumber,thelargertheneutralposition.
Thesmallerthenumber,thenarrowertheneutralpositionbecomes.Settingthedeadbandwidth
toosmallcanresultinslightvibrations(jitter).
(Range:0isthenarrowest.10isthewidest.)
■Punch:Youcansettheinitialresponseleveloftheservomotors.Thehigherthenumber,thestrongerthe
initialresponsetoinput.
(Range:0isthelowest.10isthehighest.)
■Rotationmode:Rotationmodeenablestheservostorotatecontinuously.
(Range:On/Off)
■Slave:SlavemodeenablesmultipleservosusingthesameIDtomoveinunisonwhentetheredtoasingle
serialsignal.
(Range:On/Off)
■Serialsignal:ThismodedisablestheuseofPWMsignalbasedmovement,andenablestheexclusiveuse
ofserialsignalmode.
(Range:On/Off)
■Reverse:
Enablingreversemodewillreversetheservosdirectionofmovementinrelationtotheinputsignal.
(Range:On/Off)
■Speed:Settheservosmaximumoutput(dutyrate).Thehigherthenumber,thehighertheoutputand
consequentlythehigherthespeedatwhichitwillmove.
(Valuerange:1istheslowest.127isthefastest.)
■Stretchsettings1,2and3:ChangebetweenthreepresetstretchsettingswhenworkingwithaPWM
signal.Thesetvalueaboveisalwayscalledimmediatelyafterturningtheservopoweron.
Changingthestretchpresetsduringoperationwillresultinachangeinthecharacteristicsofthe
movementoftheservos.
■Stretch::
Youareabletosettheretentionpropertyfortheservos.Thehigherthenumber,themoreretention.
(Range:1isthesoftestand127isthehardest.)
■MOVE:Rangeofmovement:Servosrotateoutputshaftinresponsetoinputofserialsignal.
(Range:3500(-135°)to7500(0°)to11500(+135°))
■Baudrate:Choosetransmissionspeeds.
(Range:115200,625000and1250000.)
7
※PleaseUse3204withbelowparameters.
Stretch/Speed:Lessthan100 Response:Lessthan1
■Damping:Changingthedampingaltersthelevelofbrakingappliedtotheservo.Asmallsettingincreasesthe
levelofbrakingappliedtoarotatingservo,slowingitdownjustbeforeitreachesthepositionitwas
movingto.Alargersettingreducesthisbrakingeffect,butincreasesthechanceoftheservo
overshootingandrotatingfurtherthanitmeantto.
(Range:1istheweakest.255isthestrongest.)
■Protection:Whentheservosdetectalockedoutcondition,theywillgointoprotectionmodeandshutdownto
savethemotorsfromburningout.Thissettingsetstheamountoftimebeforetheservosgointo
protectionmode.Thebiggerthenumber,thelongertheywillwaitbeforegoingintoprotectionmode.
(Valuerange:10istheshortest.255isthelongest.)
■Limiter(normalrotation):Youcansetthemaximumrangeofmovementfornormalrotation.
(Valuerange:Minimum8000Maximum11500.)
■Limiter(reverserotation):Youcansetthemaximumrangeofmovementforreverserotation.
(Valuerange:Minimum3500Maximum7000.)
■Temperaturerestriction:Thismodeenablesalimittobeplacedontheelectricalcurrent.Settingahighervalue
raisesthemaximumelectricalcurrentthreshold.Ifanelectricalcurrentgreaterthanthesetthreshold
isdetected,thelimiterwillcomeintoeffectandrestrictthecurrenttothemaximumsetbytheuser.
(Range:Thehighestthresholdis1.Thelowestthresholdis127.)
■Currentrestriction:Thismodeenablesalimittobeplacedontheelectricalcurrent.Settingahighervalueraises
themaximumelectricalcurrentthreshold.Ifanelectricalcurrentgreaterthanthesetthresholdis
detected,thelimiterwillcomeintoeffectandrestrictthecurrenttothemaximumsetbytheuser.
(Range:Thelowestcurrentis1.Thehighestcurrentis63.)
■Useroffset:Thisenablestheusertotrimthestartingpositionoftheservos.
(Range:From-127ofreverserotationto127ofnormalrotation.)
■Firmwareversion:Displaysinformationabouttheservofirmware.Firmwarecannotbeupdatedbytheuser.
0
115 2 0 0
60
60/30/90
127
OFF
ON
OFF
OFF
1
1
3
128
250
115 0 0
3500
30
63
0
6
ID
RATE
Stretch
Stretch1/2/3
Speed
Reverse
Sirialsignal
Slave
Rotationmode
Punch
Deadband
Response
Damping
Protection
Limiter
(normalrotation)
Limiter
(reverserotation)
Temperaturerestriction
Currentrestriction
Useroffset
Firmeareversion
6003R
0
115 2 0 0
60
60/30/90
127
OFF
ON
OFF
OFF
0
4
3
40
20
115 0 0
3500
75
40
0
3
4034/3/2
0
115 2 0 0
60
60/30/90
127
OFF
ON
OFF
OFF
0
4
3
40
20
115 0 0
3500
10
40
0
3
4031
0
115 2 0 0
60
60/30/90
127
OFF
ON
OFF
OFF
0
2
3
12
250
115 0 0
3500
10
63
0
7
2572
InitialParameters
0
115 2 0 0
60
60/30/90
127
OFF
ON
OFF
OFF
0
6
3
32
20
115 0 0
3500
80
20
0
254
2552R
0
115 2 0 0
30
30/15/60
127
OFF
ON
OFF
OFF
0
2
3
25
250
115 0 0
3500
10
13
0
254
2542
0
115 2 0 0
100
60/30/90
100
OFF
OFF
OFF
OFF
0
2
1
25
250
115 0 0
3500
40
40
0
11
3204
※
※
※
0
115 2 0 0
127
60/30/127
127
OFF
OFF
OFF
OFF
0
1
1
40
250
115 0 0
3500
75
40
0
20
3304
(Firmwarecannotbeupdatedbytheuser.)
8
OperationandConnectionofServos
ThisproductcanbecontrolledusingeitheraPWMorserialsignal.UsetheSerialSignalmenufunctionin
theICSmanagersoftwaretochangebetweenaPWMsignalandaserialsignal.UnchecktheSerialSignal
boxtooperateservosusingaPWMsignal.
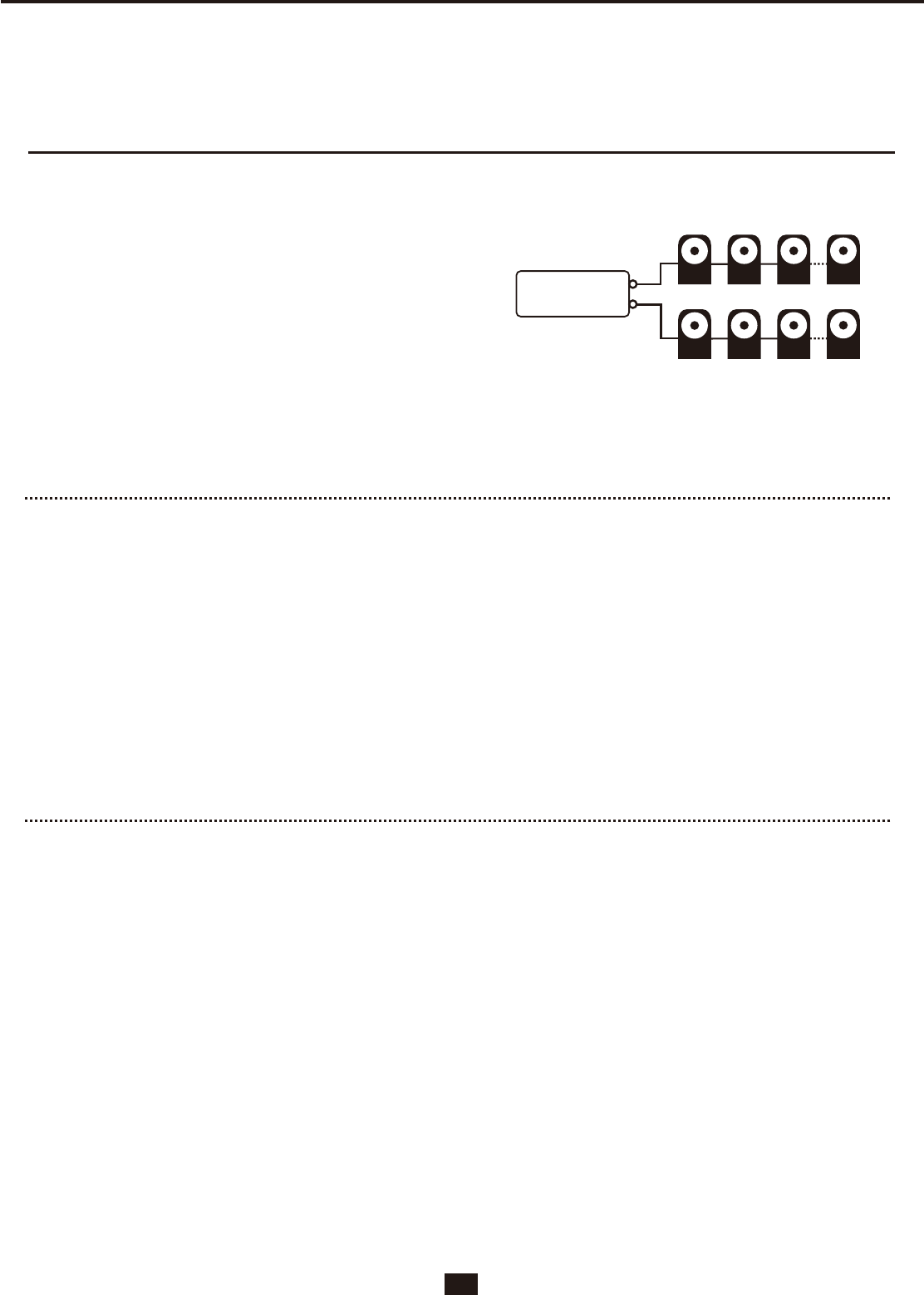
Multipleservoscanbeconnectedtotheoutputofa
singlecontrolboardusingtheserialsignal.Youcan
assignanIDtoeachservoinarangefrom0to31fora
totalof32servos.Thesignalisthentransmittedto
theseservosbasedontheirID.Thediagramtotheright
isarepresentationofthisarrangement.Connectingmul-
tipleservostoasinglelineisknownasamulti-dropor
daisy-chainarrangement.Youcantechnicallyassign
IDstoupto32servos,butdaisy-chainingalarge
numberofservosmayintroducepowersupplyproblems.
Thisalsodependsonthecompatibilityofyourcontrol
board.
UsingaSerialSignal
RCB-4HV:2xserialoutputs.Suitedfordaisy-chainingupto32servos.
R C B - 3 H V :Notcompatiblewithdaisy-chainarrangements.24xserialoutputportsdesignedtoeachconnect
tooneservoforatotalof24servos.
KCB-5:4xserialoutputs.Upto10servoscanbecontrolledperoutput.
※UseClanguageforourKCBseriesservostoallowforgreaterflexibilityofcontrol.
DualUSBAdapterHS:Thisaccessoryallowsyoutosendcommandsandcontrolyourservosdirectlyfrom
yourcomputer.
SerialSignalCompatibleControlBoard
MovementofServosUsingaSerialSignal
Diagramofaserialsignalarrangement
(Connectedinadaisy-chainarrangement)
Controlboard
Servos
IDx x +n
Serialoutput1
Serialoutput2
x+1 x+2
IDy y +n
y+1 y+2
※TheKRS3000seriesservosaredesignedtobeusedatavoltageof6to7.4volts.Pleaseensureyourvoltageinputtothecontrolboardis
withinthisrange.
http://kondo-robot.com/
Customercenter→InformationSupport
→ICSandKRSServoDevelopmentMaterials
■PleaserefertotheCommandReferenceforfurtherinformation.
Thecommandreferenceisavailableasafreedownloadfromthewebsitebelow.
9
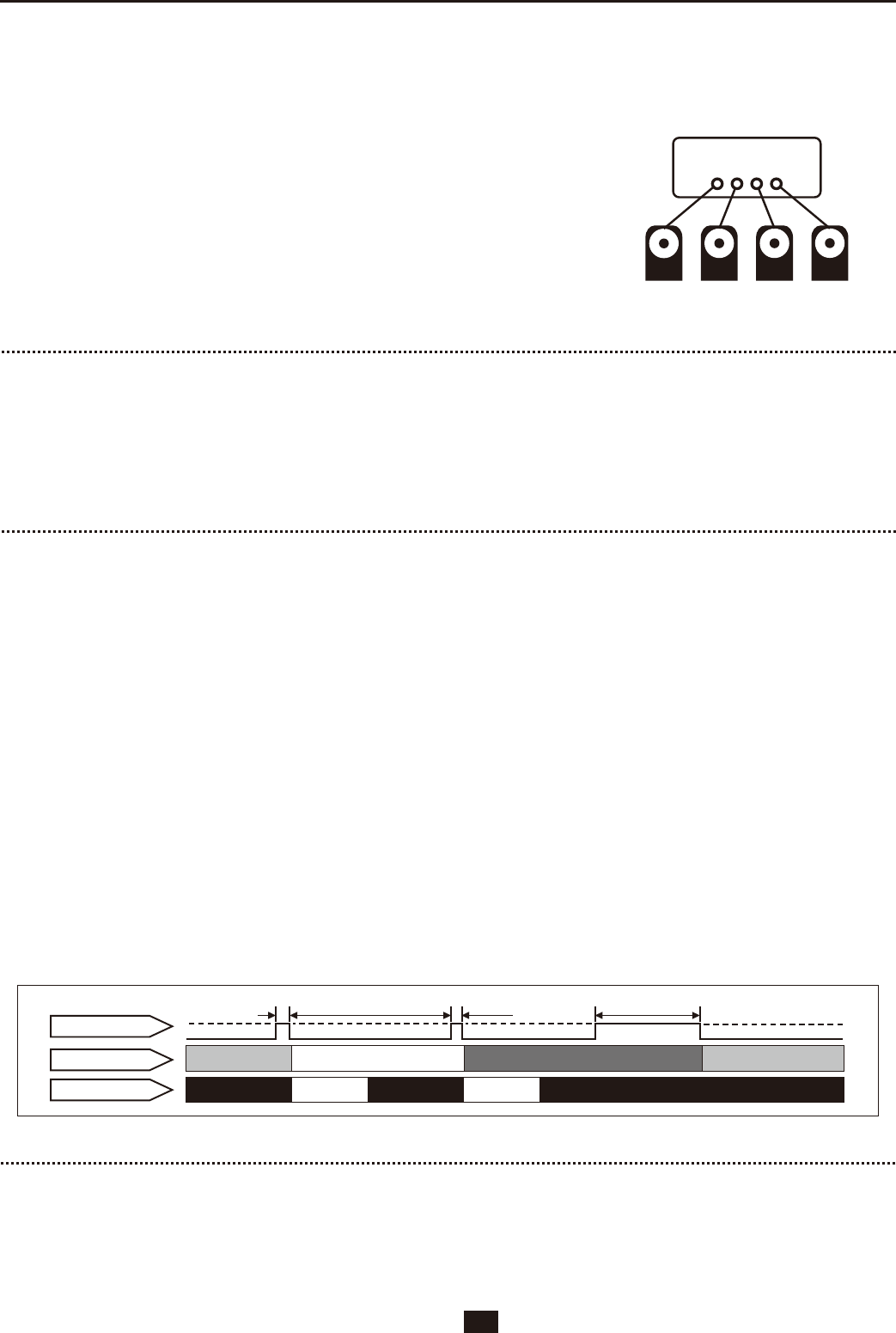
■ControllingServoswithaControlBoard
OnlyoneservoperoutputportmaybeconnectedwhenusingaPWM
signal.UnchecktheSerialSignalcheckbox.
■ControlUsingProgramming
PleaserefertoWhenusingaPWMsignalintheICS3.5Command
ReferencetocontroltheservosinPWMmode.
Exampleofhowservosare
connectedinPWMcontrol
mode.
ControlBoard
Servos
123
‥
n
1 2 3 n
・
(Ch)
※Voltagedropsand/ornoiseinthesignalmaycauseunintentionalmovementduringoperation.Usethis
productwithcaution.
※Usingthepositioncapture(teaching)functioninconjunctionwithahome-madecontrolboardrequires
pull-upresistorinthesignalwirefromthecontrolboardCPU.Furthermore,theCPUservocontrolboard
needstobeabletochangebetweensignalinputandoutput.Kondocontrolboardsarecompatiblewiththe
positioncapturefunction.
PointsofCautionWhenUsingaPWMSignal
UsingaPWMSignal
100〜200μsec 50μsec 700〜2300μsec
■Diagramshowingthetimingofthesignalandservomovement■
■PositionCommand(MOVE)
Theoutputshaftoftheservorotatesinaccor-
dancewiththePWMinputsignal.
700μs(-135 ° )to1500μs(0 ° )to2300μs
( + 1 3 5 °)
■PowerLimitation
Inputtingapulsewidthof50μswillreducethe
poweroutputoftheservos.Thisstateoflimited
poweroutputwillbemaintaineduntiltheservos
receivethenextpositioncommandwithapulse
widthbetween700μsand2300μs.
■CharacteristicChange(Stretchpresetchange)
Inputtingapulsewidthof100μs,150μsor200μ
swillinstructtheservostochangebetweenthree
presetcharacteristics(SET1˜SET3stretchset-
tings)savedwithintheservo.
Theservoswillmaintainthestatetheoutputshaft
wasindirectlybeforetheywereinstructedto
changeposition.
Presetparameters(SET1,SET2andSET3)canbe
changedusingtheICSmenu.Setting1(SET1)will
automaticallybeselectedwhenturningtheservo
poweron.。
Stretch1(SET1) 100μs +/-10μs
Stretch2(SET2) 150μs +/-10μs
Stretch3(SET3) 200μs +/-10μs
■PositionCapture(Teaching)
Inputtingapulsewidthofbetween50μsand200
μswillinstructtheservostooutputapulsewidth
thatindicatesthecurrentpositionoftheservo
outputshaft.Thispulseoutputfromtheservosis
thenreadbythecontrolboardandthecurrentposi-
tionoftheservoscanbeascertained.
MovementofServosUsingaPWMSignal
RCB-3HV
RCB-3J
PWMCompatibleControlBoards
WhenoperatingthisproductusingaPWMsignal,positioncommands
canbemadeusinggeneralradiocontrolsignals.
Functionalitycanalsobeexpandedbyusingotherspecificsignals.
PWMcyclecompatibility:3ms 〜 30ms
Pulsewidth:Normaloperation700μsto2300μs.
Expandedfunction50μsto200μs.
※TheKRS3000seriesisdesignedtobeoperatedbetween6.0and7.4volts.Ensuretheinputcurrentiswithinthatrange.
KCB-5 :6xPWMoutputs.Teachingandcharacteristicchangearepossibledependingontheprogramming.
(Cannotbeusedinconjunctionwithserialterminal,soseparatewiringisrequired.)
:RCB-3HV/RCB-3J:24xPWMoutputs.Upto24servoscanbeconnected.Suitableforteaching
andchangingcharacteristics.
Normalmovement
Normalmovement
Servomovement
inputsignal
Hold
InputInput Input
Servosignalline Output Output
Inputsignalpresent
Noinputsignalpresent
Powerlimitation
10
OptionalExtrasandRelatedProducts
Cases
Changethebottomcasingonthe6000seriesservostomakeiteasyto
adaptthisservotoyourprojectneeds.
*Seeourwebsiteforfurtherinformation.
SpacersandArmSupporters
*Amorestablemovementcanbecreatedthroughtheuseofaspaceroranarmsupporterinbetweenthehornandtheframe.
Electronics
*Awiderangeofmachinescanbedevelopedtomeetvariousobjectivesbyusingacombinationofourcontrolboards,
sensorsandcommunicationdevices.
*AlsoHelptopreventwiresdamageinbetweenFramesandthehorn.
No.02023
No.02024(6pcs)
FlatBottomCase
forKRS-6000HVseries
for4000series
No.01224(4pcs)
SpacerHornA
withHeartToHeart4
No.03076(1pc)
RCB-4HVonlyBoard
ControlBoard
withHeartToHeart3
No.03027(1pc)
RCB-3HVonlyBoard
ProgramableC
No.03081(1pc)
KCB-5
withWiFi
No.03078(1pc)
KCB-4WL
Gsensor
No.03045(1pc)
RAS-2C
Gyrosensor
(Accelerometer)
No.03003(1pc)
KRG-4
forPCLinkwithUSB
No.02116(1pc)
DualUSBAdapterHS
2.4GHzFHSSTx/Rxset
No.03099(1pc)
KRC-5FH
Bluetoothmodule
No.03062(1pc)
KBT-1
for4000series
No.01223(4pcs)
ServoSpacer4000A
for4000series
No.01197(4pcs)
FrictionSpacer4000A
for4000series
No.01204(2pcs)
ExtensionAdapterA
for4000series
No.01195(2pcs)
ArmSupporter4000A
for2500series
No.02052(2pcs)
ArmSupporter2500A
No.02025
No.02026(6pcs)
BottomCase
withFlangeandAxis
forKRS-6000HVseries
No.02027
No.02028(6pcs)
No.02029
No.02030(6pcs)
FlangeFlatBottomCase
forKRS-6000HVseries
BottomCasefordoubleServo
forKRS-6000HVseries
Youcaneasilyjointwoservosinabacktobackarrangementby
usingourflatflangebottomcase.Theseareavailableinaset
knownasthedoubleservobottomcase.Twoflatflange
bottomcasesandtherequiredscrewsareavailableasaset.
M2.6×35
M2.6×35
M2.6×35
M2.6×25
M2.6×35
※Three M2.6 x 35 screws and one single M2.6
x 25 screw are used to secure the casing.
When reinstalling the screws, please be sure
to screw them in to the correct locations as
they are different lengths.
Sensor Communication
*Seeourwebsiteforavailabilityofcasesand/orgearsforrepair/spares.

11
Troubleshooting
■Servosdonotrespondtoaserialsignal.
□TheIDortheBaudRatemaybeincorrect.
AlwayssettheIDas0andtheRATEas115200whenconnectinganRCB-3HVcontrolboard.
■ServosdonotrespondtoaPWMsignal.
□ThePWMsignalmaybeincompatible.
Thisproductisdesignedforuseinroboticsequipment,andmaynotbecompatiblewithsomeradio
controlledreceivers.
□SerialSignalischecked.
■Servoslosepowerduringoperation.
□Thetemperaturelimitermayhavetriggeredtopreventoverheating.
Switchthepoweroffandwaitfortheservostocooldown.Thenre-startandcheckforfullpower.
YoucanchangethethresholdatwhichservosgointotemperaturelimitationmodethroughtheICS
menu.However,loweringthisvalue(andconsequentlyraisingthetemperaturethreshold)increases
thepossibilityofaservofailure.
□
Servomovementmodemayhavebeenchangedduringserialoperation.
SharpdropsinvoltagecancausetheservostochangebetweenserialandPWMmodes.
Switchingthepoweroffandthenonagainwillreturntheservostothecorrectmode.
Whenoperatingservosinserialmode,pleaseensureyouhaveselectedSerialSignalasonintheICSmenu.
ThisisntreallyaproblemwhenoperatingusingPWMmovement.
■Servosmoveerratically.
□Theserialmovementbaudratemaybeunsupported.
Servosmaymoveerraticallywhentheyreceiveasignalbaudratethatisnotsupported.
□
ServosthatwereassignedthesameIDmaybeconnectedinadaisy-chain.
Daisy-chainingservosassignedthesameIDonthesameoutputlinewillresultinproblemswiththesignaland
erraticservomovement.TocontrolservosofthesameIDonasinglesignal,setoneasamasterservoandthe
restasslaveservosthroughtheICSmenu.
□Thereceivedsignalmaybeincompatiblewiththemovementmode.
InputtingincompatiblesignalswhenusingserialorPWMmovementmodescanresultinerratic
movementofservos.
□Theremaybeafaultyconnectionorbrokenwire.
Partofthewiringtotheservosmaybefrayedorseveredandcominginandoutofcontact.
■Diminishedservopower.
□
Servosmayhavedetectedalockedoutconditionandhavegoneintoprotectionmode.
Iftheservosareindeedlockedout,extricatethemfromthatpositionandremovetheloadfromtheservos.
YoucansetthetimethresholdtheservoswillwaitbeforegoingintoprotectionmodeviatheICSmenu.
■Achemical-likesmellisbeingemittedfromtheservosduringoperation.
□Themotorcoilsmaybestartingtoburnout.
Immediatelyturnoffthepowerandallowtheservostocoolbeforeoperatingagain.
