Kobuki Turtlebot 2 User's Manual Kinetic V1
Kobuki-Turtlebot%202%20User's%20Manual%20Kinetic%20-%20v1
Kobuki-Turtlebot%202%20User's%20Manual%20Kinetic%20-%20v1
Kobuki-Turtlebot%202%20User's%20Manual%20Kinetic%20-%20v1
Kobuki-Turtlebot%202%20User's%20Manual%20Kinetic%20-%20v1
Kobuki-Turtlebot%202%20User's%20Manual%20Kinetic%20-%20v1
User Manual:
Open the PDF directly: View PDF ![]() .
.
Page Count: 37
Kobuki Turtlebot II. User’s Manual
TURTLEBOT II
User’s Manual
Robotnik Automation, S.L.L.
Kinetic v1
1

Kobuki Turtlebot II. User’s Manual
Index
1. Robot description
1.1 Functional Specification
1.2 Hardware Specification
1.3 Software Specification
2. Components list
2.1 Basic components
2.2 Additional components
3. Assembly instructions
3.1 Assembling the robot
3.2 Connectors
3.3 Swapping batteries
4. Installation and Configuration
4.1 Default User & Password
4.2 Installing from Robotnik’s USB Installer
4.3 ROS package installation
4.4 Upgrading the firmware
4.5 Additional components
4.5.1 RPLIDAR
4.5.2 Hokuyo URG04LX
4.5.3 WidowX Arm
4.5.4 PhantomX Reactor Arm
4.5.5 Hokuyo UST10LX
4.6 Additional WiFi router
5. First steps
5.1 Launching Kobuki
5.2 Testing the hardware
5.3 Launching the RGBD camera
5.3 Controlling the Kobuki robot with a joystick
5.3.1 PS3 gamepad
5.3.2 PS4 gamepad
6. Netbook cable modification
Appendixes
Appendix 1 - Setting up Arbotix board
2
Kobuki Turtlebot II. User’s Manual
1. Robot description
Kobuki Turtlebot 2 is a low-cost mobile research base designed for education and
research on state of art robotics. With continuous operation in mind, Kobuki provides
power supplies for an external computer as well as additional sensors and actuators. Its
highly accurate odometry, amended by our factory calibrated gyroscope, enables precise
navigation.
This robot is a compatible replacement for the iRobot Create. Although most of the
accessories are fully compatible, be careful when plugging any device from the iRobot
version to Kobuki version, because the connectors pin-out could be different.
1.1 Functional Specification
● Maximum translational velocity: 65 cm/s
● Maximum rotational velocity: 3.14 rad/s
● Payload: 5 kg (hard floor), 4 kg (carpet)
● Cliff: will not drive off a cliff with a depth greater than 5 cm
● Threshold Climbing: climbs thresholds of 12 mm or lower
● Rug Climbing: climbs rugs of 12 mm or lower
● Expected Operating Time: 3/7 hours (small/large battery)
● Expected Charging Time: 1.5/2.6 hours (small/large battery)
● Docking: can perform docking within a 2mx5m area in front of the docking station
1.2 Hardware Specification
● PC Connection: usb or via RX/TX pins on the parallel port
● Motor Overload Detection : disables power to motors on detecting high current
● Odometry: 25718.16 ticks/revolution, 11.7 ticks/mm
● Gyro: factory calibrated, 1 axis (100 deg/s)
● Bumpers: left, center, right
● Cliff sensors: left, center, right
● Wheel drop sensor: left, right
● Power connectors: 5V/1A, 12V/1.5A, 12V/5A
● Docking recharging connector: 19V/2.1A- Expansion pins: 3.3V/1A, 5V/1A, 4 x
analog in, 4 x digital in, 4 x digital out
● Audio : several programmable beep sequences
● Programmable LED: 2 x two-coloured LED
● State LED: 1 x two coloured LED [blinking - charging, Green - high level, Orange -
low level]
● Buttons: 3 x touch buttons
● Battery: 14.8 V lithium-Ion 2200 mAh (small) 4400 mAh (large)
3

Kobuki Turtlebot II. User’s Manual
● Firmware upgradeable: via usb
● Sensor Data Rate: 50Hz
● Recharging Adapter: Input: 100-240V AC, 50/60Hz, 1.5A max; Output: 19V DC,
3.16A
● Netbook recharging connector (only enabled when robot is recharging): 19V/2.1A
DC
● Docking IR Receiver: left, centre, right
1.3 Software Specification
● Kobuki drivers for ROS and non-ROS in C++
● Kobuki and Turtlebot simulator (Gazebo)
● Kobuki and Turtlebot apps
4
Kobuki Turtlebot II. User’s Manual
2. Components list
2.1 Basic components
Kobuki base
Mobile base.
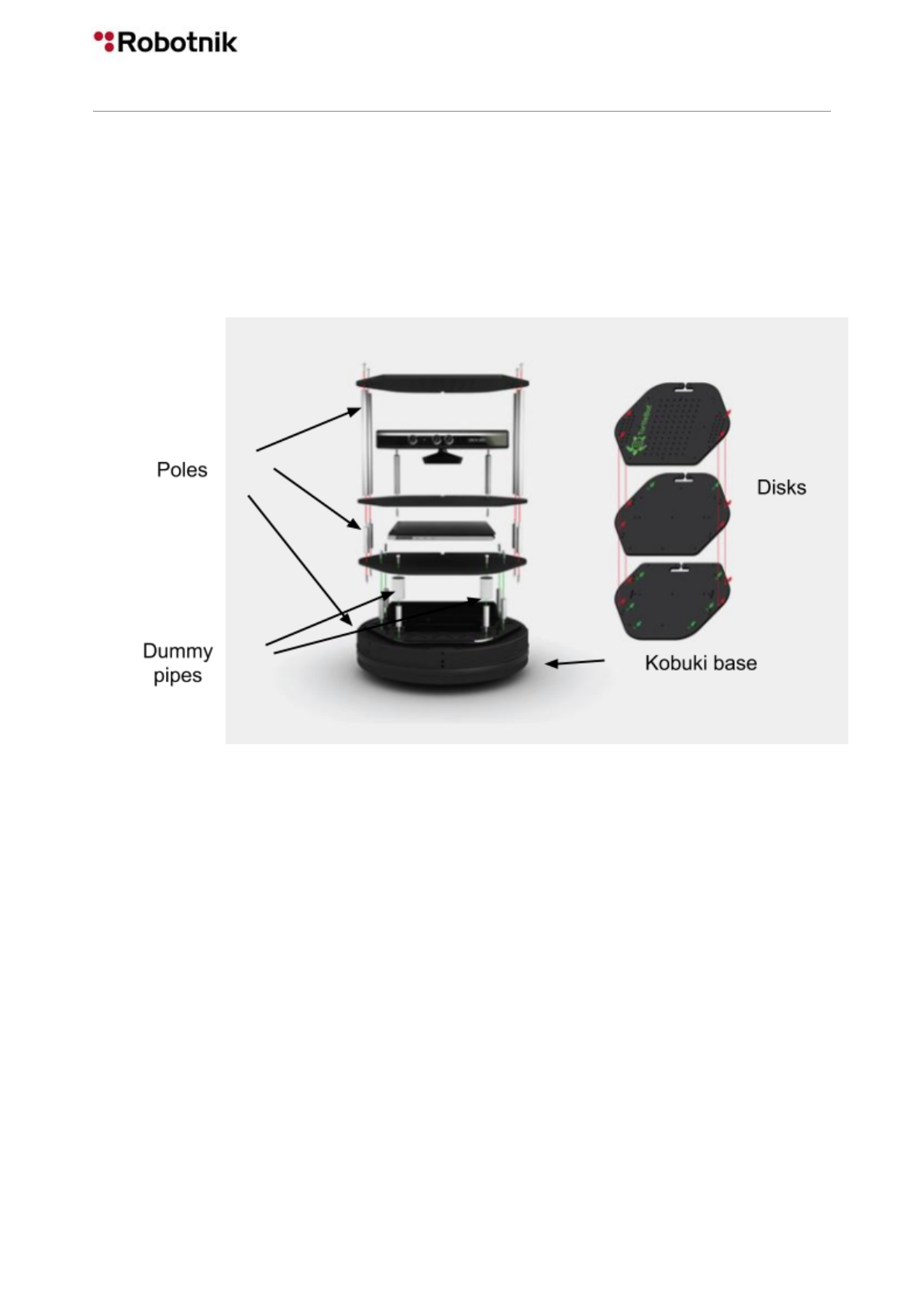
Kobuki Hardware
It’s the hardware mounted over the base.
It includes:
○ 16 Poles
○ 3 Disks
○ 2 Dummy pipes
Battery
The 4S1P battery 2200 mAh. It provides 3 hours of operational time.
Kinect cable
5

Kobuki Turtlebot II. User’s Manual
Cable to power the Kinect sensor directly from the robot’s battery.
Usb communication cable
Cable to control the Kobuki base from a PC.
Recharging adapter
Standard adapter to charge the battery manually.
2.2 Additional components
3D sensor
The Turtlebot 2 is intended to use a 3D sensor in order to navigate autonomously and
map. By default, the Kinect sensor is provided with the robot, but any other sensor can be
attached.
Docking station
Battery charger intended to carry out an autonomous battery charge.
Large battery
The 4S2P battery 4400 mAh. It provides 7 hours of operational time.
Netbook
Netbook installed and configured to control the robot and all of its accessories.
It is also possible to use other controllers or pcs.
6
{kind=link}

Kobuki Turtlebot II. User’s Manual
Turtlebot’s USB stick
USB stick that contains all the manuals, and a recovery image of the provided netbook.
7
Kobuki Turtlebot II. User’s Manual
3. Assembly instructions
In this section will be described how to assembly the robot and some other useful
information. This guide is based on the information available on the official site
http://kobuki.yujinrobot.com.
3.1 Assembling the robot
Please refer to the provided assembly guide.
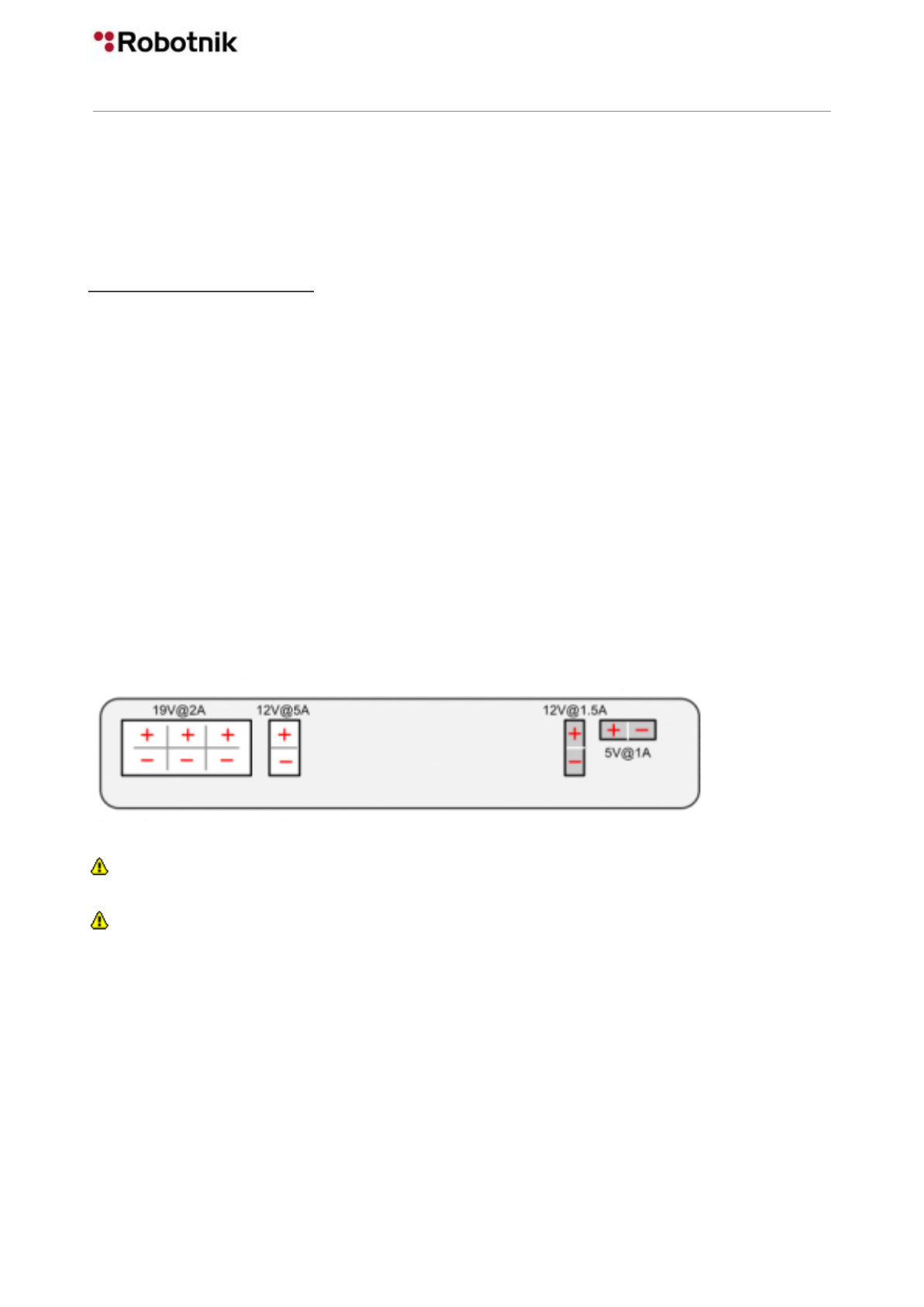
3.2 Connectors
Power
5V@1A Molex PN : 43650-0218 - for custom boards
12V@1.5A : Molex PN : 43045-0224 - specially supporting the kinect
12V@5A : Molex PN : 5566-02B2 - for high powered accessories (e.g. robotic arm)
19V@2A : Molex PN : 3928-9048 - for recharging netbooks
WARNING: This pin-out can differ from the Turtlebot 1. Please be careful when
connecting accessories.
WARNING: Please verify the pinout or the provided connector before connecting
any external device.
Cable
Note, if you click on the preceding links for the power connectors, under the heading
Mates with Part(s) you can find the compatible connector to use with each power source.
The most important one being of course:
12V@1.5A : Molex PN : 43025-0200 - specially supporting the kinect
8
Kobuki Turtlebot II. User’s Manual
Battery
●4S1P, 2200 mAh. Default Battery Pack Connector
●4S2P, 4400 mAh. Extra Battery Pack Connector
IO Port
DB25 pin D-SUB Female connector that provides the following functionality.
4 x Digital Input
4 x Digital Output
4 x Analog Input
RX/TX
3.3V
5V
3.3 Swapping batteries
Parts
1 x 4S1P Lithium-Ion battery - default
1 x 4S2P Lithium-Ion battery - optional (longer life)
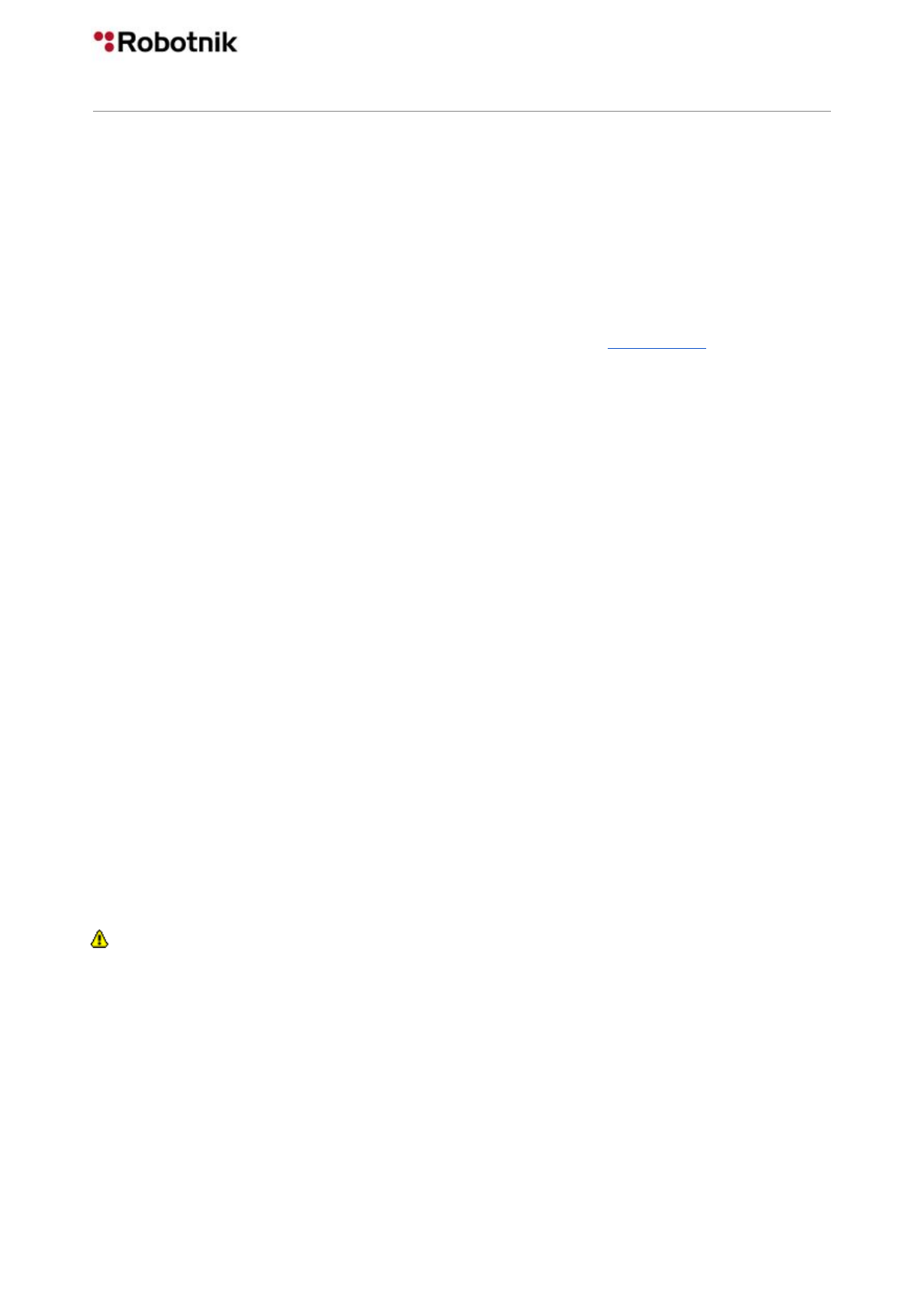
Default - 4S1P Battery Pack
By default, Kobuki comes with a 4S1P battery pack that is stored underneath robot behind
a cover at the middle of the base.
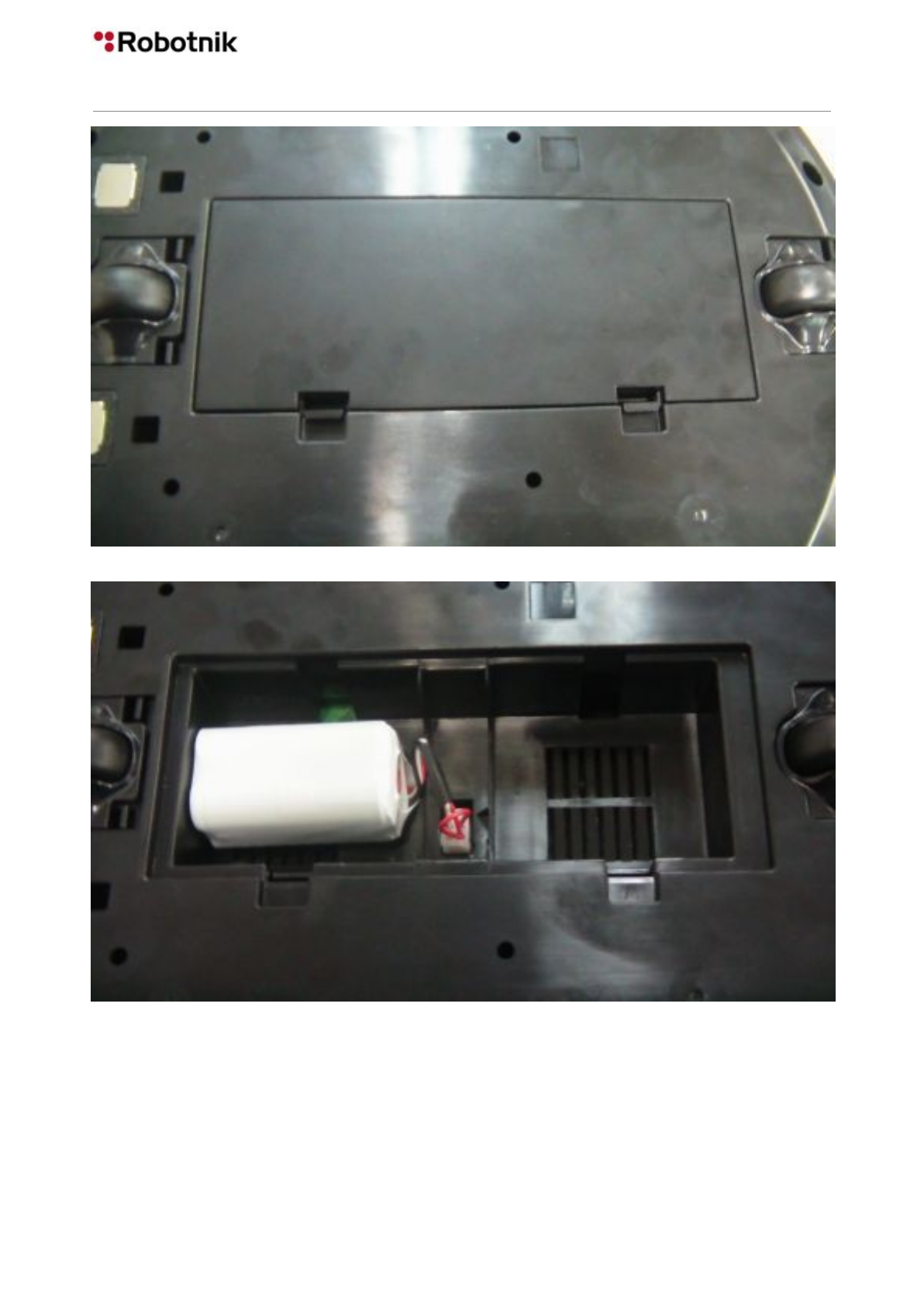
Optional - 4s2p Battery Pack
For longer life, the 4S2P pack can be used.
You cannot use 4S1P and 4S2P packs at the same time!
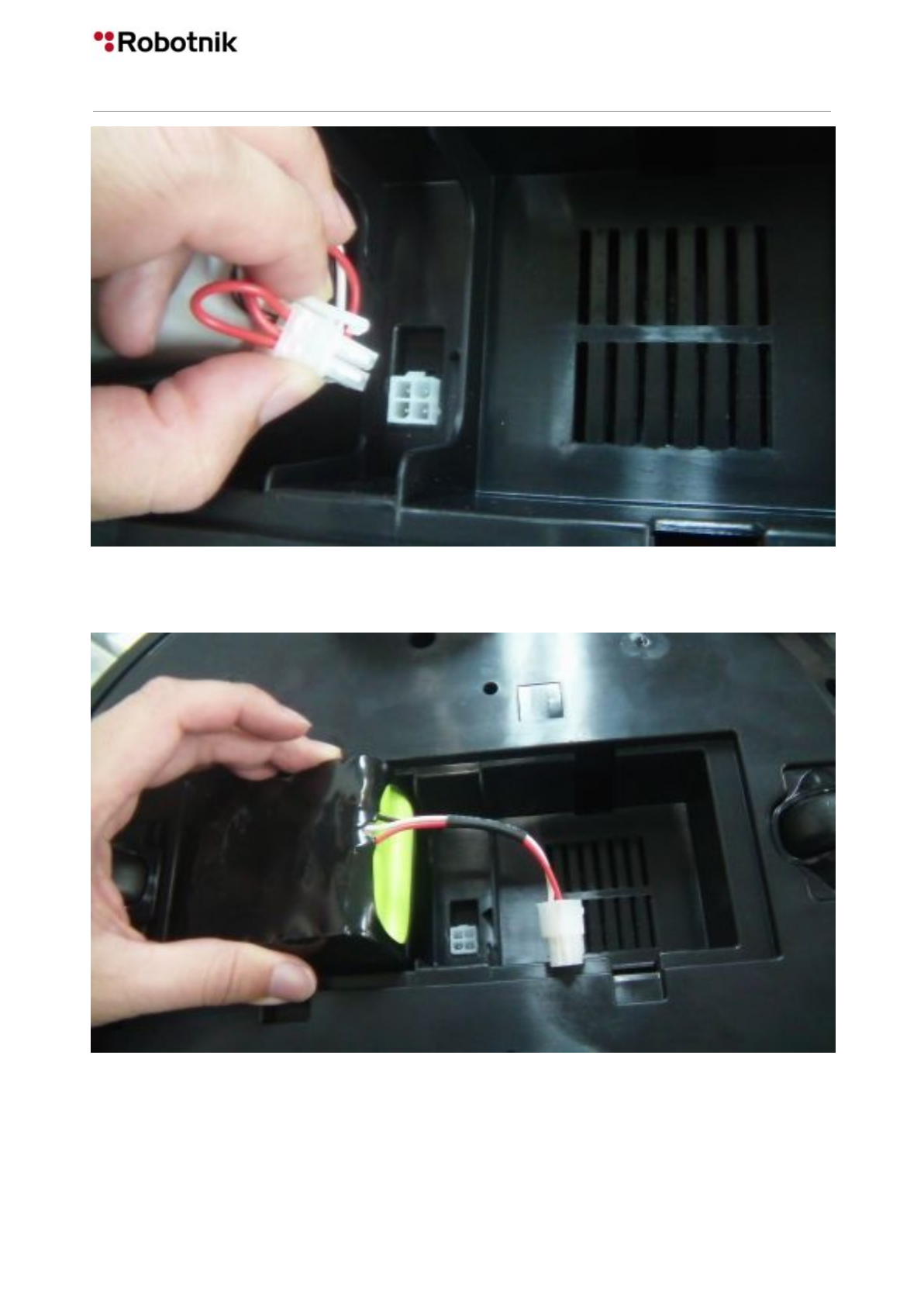
Remove the 4S1P battery from the base compartment.
Optional - 2x4s2p Battery Pack in parallel
For configurations working with NUC controllers, it is recommended the use of a custom
battery pack made from two standard 4S2P batteries.
9
Kobuki Turtlebot II. User’s Manual
10
Kobuki Turtlebot II. User’s Manual
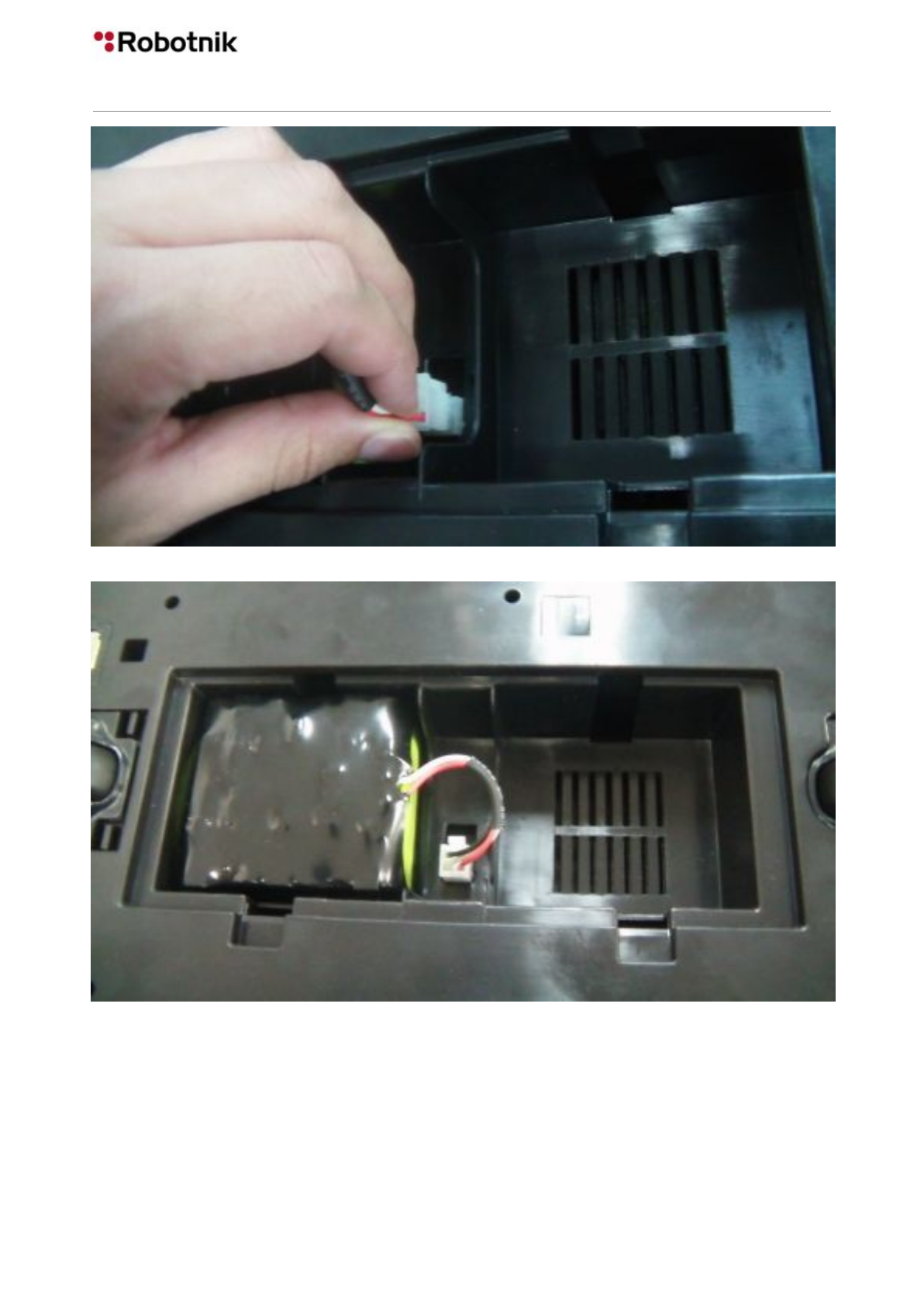
Plug the 4S2P battery into the connector.
11
Kobuki Turtlebot II. User’s Manual
12

Kobuki Turtlebot II. User’s Manual
Offline Charging
There is also an accessory for those who'd like to offline charge the robot (a pseudo
continuous operation mode). Just directly connect... For both online/offline charging, it
should take approximately 2 hours to recharge the 4s1p battery fully, and over 3 hours for
the 4s2p one.
13

Kobuki Turtlebot II. User’s Manual
4. Installation and Configuration
In this section will be described the installation process of the netbook recovery image and
the installation of the Turtlebot packages from the official repository.
4.1 Default User & Password
User: turtlebot
Password: ros
4.2 Installing from Robotnik’s USB Installer
In this section will be described the installation of the system by using the USB installer
provided by Robotnik.
The provided usb contains either a Ubuntu 14.04 Installer with ROS and the Turtlebot 2
packages, or an image of the system provided (netbook or pc).
4.3 ROS package installation
In this section will be described the ROS package installation from scratch. For further
information about this process or about ROS, please refer to www.ros.org.
These packages are supported for Kinetic (current version) version.
Install ROS bases
Install ROS in Ubuntu 16.04 (Trusty):
$> sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu
$(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
$> sudo apt-key adv --keyserver hkp://ha.pool.sks-keyservers.net:80
--recv-key 421C365BD9FF1F717815A3895523BAEEB01FA116
$> sudo apt-get update
$> sudo apt-get install ros-kinetic-desktop-full
$> sudo apt-get install ros-kinetic-kobuki*
$> sudo apt-get install ros-kinetic-turtlebot*
$> sudo apt-get install ros-kinetic-openni* (if using rgbd compatible
camera
)
14
Kobuki Turtlebot II. User’s Manual
$> sudo apt-get install ros-kinetic-astra* (for the camera astra
)
$> sudo apt-get install ros-kinetic-urg-node (for the hokuyo lasers
)
Rosdep
Install all dependencies of kobuki_node
$> sudo rosdep init
$> rosdep update
ROS environment variables
$> echo "source /opt/ros/kinetic/setup.bash" >> ~/.bashrc
$> source ~/.bashrc
Set udev Rule
Copy across a udev rule for /dev/kobuki
and add the user to the dialout group (you may
need to logout and log back in). See kobuki_ftdi
for more details.
$> roscd kobuki_ftdi
$> rosrun kobuki_ftdi create_udev_rules
$> sudo udevadm trigger
For the Astra cameras
It is possible to copy or following the installation instructions at
https://github.com/tfoote/ros_astra_camera.
$> cd /etc/udev/rules.d/
Create a new file as sudo:
$> sudo gedit 56-orbbec.rules
Copy the following lines:
SUBSYSTEM=="usb", ATTR{idProduct}=="0400", ATTR{idVendor}=="2bc5", MODE:="0666", OWNER:="root",
GROUP:="video"
SUBSYSTEM=="usb", ATTR{idProduct}=="0401", ATTR{idVendor}=="2bc5", MODE:="0666", OWNER:="root",
GROUP:="video"
SUBSYSTEM=="usb", ATTR{idProduct}=="0402", ATTR{idVendor}=="2bc5", MODE:="0666", OWNER:="root",
GROUP:="video"
SUBSYSTEM=="usb", ATTR{idProduct}=="0403", ATTR{idVendor}=="2bc5", MODE:="0666", OWNER:="root",
GROUP:="video"
SUBSYSTEM=="usb", ATTR{idProduct}=="0404", ATTR{idVendor}=="2bc5", MODE:="0666", OWNER:="root",
15
Kobuki Turtlebot II. User’s Manual
GROUP:="video"
SUBSYSTEM=="usb", ATTR{idProduct}=="0405", ATTR{idVendor}=="2bc5", MODE:="0666", OWNER:="root",
GROUP:="video"
SUBSYSTEM=="usb", ATTR{idProduct}=="0406", ATTR{idVendor}=="2bc5", MODE:="0666", OWNER:="root",
GROUP:="video"
SUBSYSTEM=="usb", ATTR{idProduct}=="0407", ATTR{idVendor}=="2bc5", MODE:="0666", OWNER:="root",
GROUP:="video"
SUBSYSTEM=="usb", ATTR{idProduct}=="0408", ATTR{idVendor}=="2bc5", MODE:="0666", OWNER:="root",
GROUP:="video"
SUBSYSTEM=="usb", ATTR{idProduct}=="0409", ATTR{idVendor}=="2bc5", MODE:="0666", OWNER:="root",
GROUP:="video"
SUBSYSTEM=="usb", ATTR{idProduct}=="040a", ATTR{idVendor}=="2bc5", MODE:="0666", OWNER:="root",
GROUP:="video"
Restart the udev system service:
$> sudo service udev reload
$> sudo service udev restart
Unplug the camera and plug it again.
Keyboard Teleoperation
If you followed the instruction well with no error pop-up, you should be able to telop your
kobuki around with your keyboard!
$> roslaunch kobuki_node minimal.launch
$> roslaunch kobuki_keyop keyop.launch
Install other useful packages
$> sudo apt-get install ssh
16

Kobuki Turtlebot II. User’s Manual
4.4 Upgrading the firmware
One of the nice features of Kobuki is that the user can update the firmware released by
Yujin themselves. When a new firmware version is uploaded, this can be manually flashed
onto the robot via usb without the need for special equipment like JTAG devices.
Follow the instructions matching the operating system you will connect to the robot for the
flashing operation. For further information, please refer to the official site
http://kobuki.yujinrobot.com.
*All robots are provided with the last firmware by default.
4.5 Additional components
The installation of additional components like 2D lasers, arms, ... requires some additional
configuration efforts.
1. Create a catkin workspace.
2. Installation of Robotnik alternative Turtlebot repository
a. https://github.com/RobotnikAutomation/turtlebot
b. Clone the repository into the workspace (catkin_ws/src) and compile it
c. Add the following into the .bashrc
i. source ~/catkin_ws/devel/setup.bash
3. Other dependencies to install:
a. https://github.com/RobotnikAutomation/widowx_arm
b. https://github.com/RobotnikAutomation/phantomx_reactor_arm
4. catkin_make desde la carpeta ~/catkin_ws.
4.5.1 RPLIDAR
Dependencies:
c d
*ros-kinetic-rplidar-ros
Add the following variable environments into the .bashrc and reload it:
export TURTLEBOT_TOP_PLATE_DEVICE=rplidar
export TURTLEBOT_3D_SENSOR=no3d
1. Create the udev rules:
a. > roscd turtlebot_scripts
2. Run the script contained in the scripts folder:
a. > ./scripts/create_rplidar_udev_rules
b. The device should be linked in /dev/rplidar
17
Kobuki Turtlebot II. User’s Manual
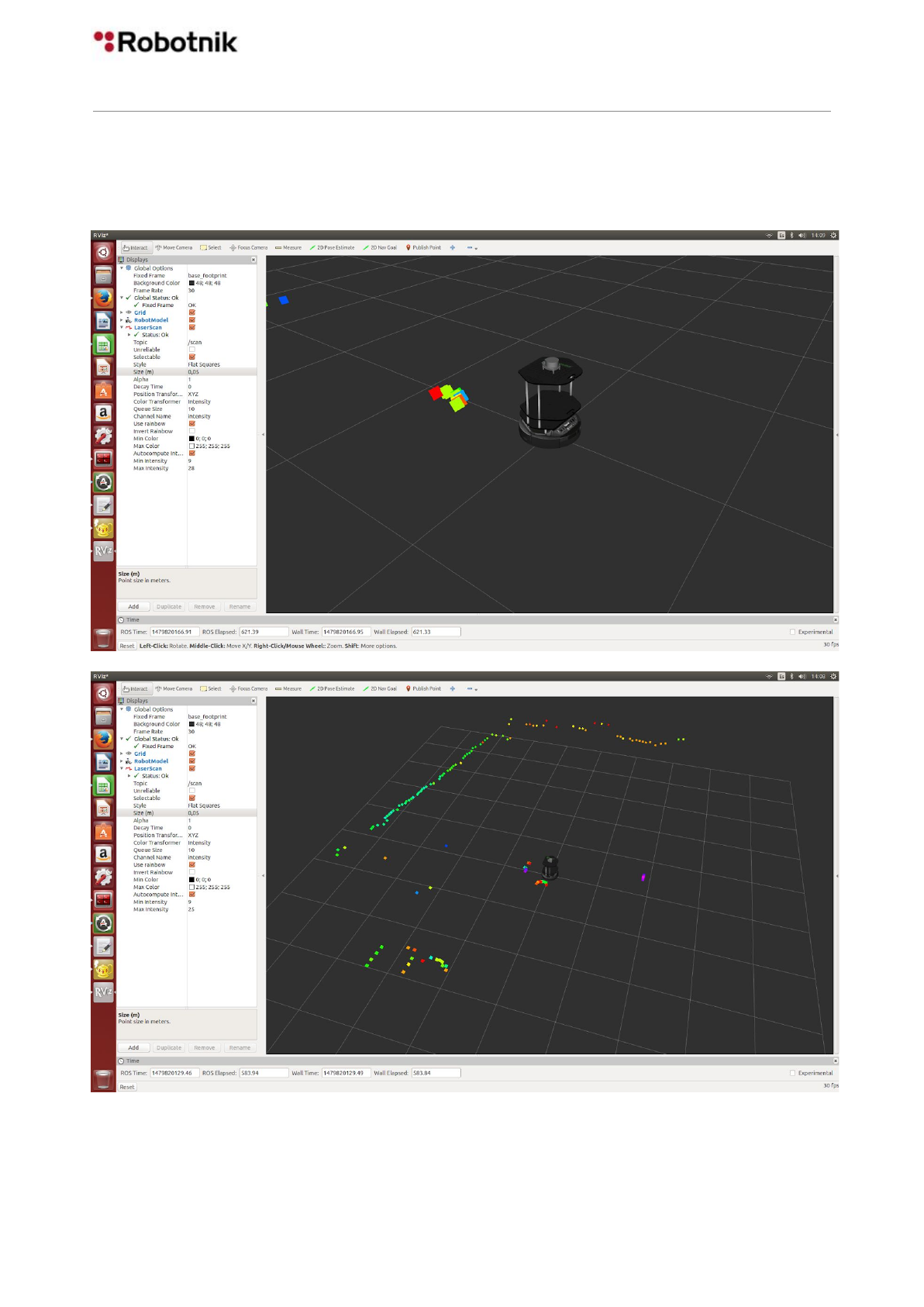
3. To launch the sensor:
a. > roslaunch turtlebot_bringup rplidar.launch
18

Kobuki Turtlebot II. User’s Manual
4.5.2 Hokuyo URG04LX
Dependencies:
*ros-kinetic-urg-node
Set the user permissions:
> sudo usermod -a -G dialout turtlebot
Add the following variable environments into the .bashrc and reload it:
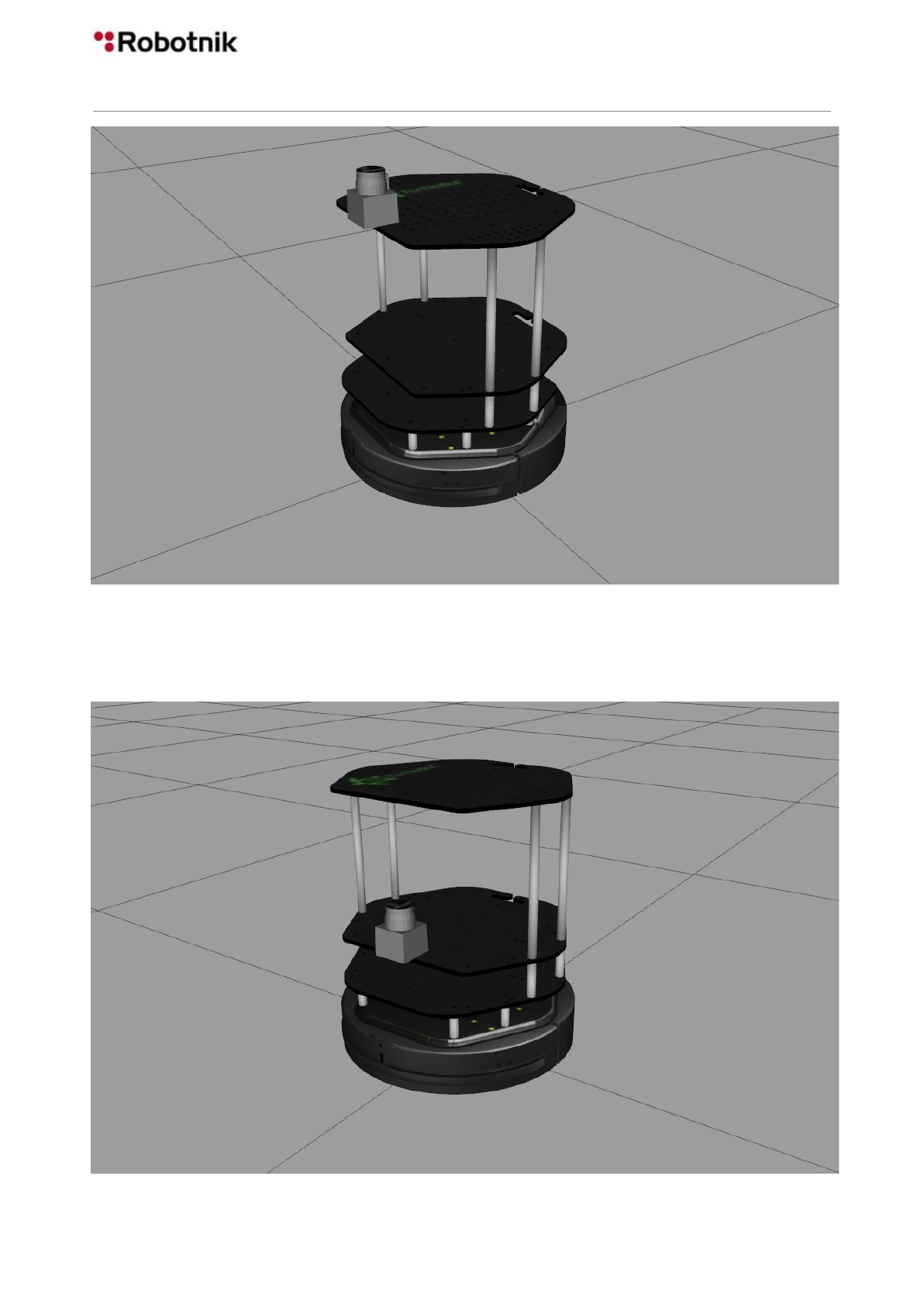
Configuration with the sensor on the top plate:
export TURTLEBOT_TOP_PLATE_DEVICE=urg04lx
export TURTLEBOT_3D_SENSOR=no3d
Configuration with the sensor on the middle plate:
export TURTLEBOT_TOP_PLATE_DEVICE=notop
export TURTLEBOT_3D_SENSOR=urg04lx
1. To launch the sensor:
a. > roslaunch turtlebot_bringup minimal.launch
b. > roslaunch turtlebot_bringup hokuyo_urg04lx.launch
19
Kobuki Turtlebot II. User’s Manual
20

Kobuki Turtlebot II. User’s Manual
4.5.3 WidowX Arm
Dependencies:
*ros-kinetic-arbotix*
Set the user permissions:
> sudo usermod -a -G dialout turtlebot
Add the following variable environments into the .bashrc and reload it:
export TURTLEBOT_TOP_PLATE_DEVICE=widowx
Create the udev rule:
> udevadm info -a -n /dev/ttyUSBXX (device connected to the arm)
Get the information of the attribute ATTRS{serial}=="A904NK42".
Create a new rule in /etc/udev/rules.d/58-widowx.rules with the following data:
SUBSYSTEM=="tty", ATTRS{idVendor}=="0403", ATTRS{idProduct}=="6001",
ATTRS{serial}=="A904NK42", MODE:="0666", GROUP
:="dialout", SYMLINK+="ttyUSB_WIDOWX"
Run the following commands to restart the udev daemon:
> sudo restart udev
> udevadm trigger
See Appendix 1 - Setting up Arbotix board to configure the Arbotix.
Then start the arm controller with:
> roslaunch widowx_arm_controller widowx_arm_controller.launch
In the widowx_arm_controller.launch are specified two nodes. The first node is the
arbotix_driver node and the second is a node to control the gripper.
To control the aperture of the gripper in linear mode, the range allowed is from 0 to 0.03 m.
You could use the following commands:
rostopic pub /gripper_prismatic_joint/command std_msgs/Float64
“data=0.00” to close the gripper
rostopic pub /gripper_prismatic_joint/command std_msgs/Float64
“data=0.03” to open the gripper completely.
21
Kobuki Turtlebot II. User’s Manual
4.5.4 PhantomX Reactor Arm
Dependencies:
22

Kobuki Turtlebot II. User’s Manual
*ros-kinetic-arbotix*
Set the user permissions:
> sudo usermod -a -G dialout turtlebot
Add the following variable environments into the .bashrc and reload it:
export TURTLEBOT_TOP_PLATE_DEVICE=reactor_wrist
Create the udev rule:
> udevadm info -a -n /dev/ttyUSBXX (device connected to the arm)
Get the information of the attribute ATTRS{serial}=="A904NK42".
Create a new rule in /etc/udev/rules.d/59-reactor.rules with the following data:
SUBSYSTEM=="tty", ATTRS{idVendor}=="0403", ATTRS{idProduct}=="6001",
ATTRS{serial}=="A904NK42", MODE:="0666", GROUP
:="dialout", SYMLINK+="ttyUSB_REACTOR"
Run the following commands to restart the udev daemon:
> sudo restart udev
> udevadm trigger
See Appendix 1 - Setting up Arbotix board to configure the Arbotix.
Then start the arm controller with:
>roslaunch turtlebot_bringup
arbotix_phantomx_reactor_arm_wrist.launch
SUMMARY
========
PARAMETERS
* /arbotix/joints/arm_1_joint/id: 1
* /arbotix/joints/arm_1_joint/max_speed: 75.0
* /arbotix/joints/arm_2_1_joint/id: 3
* /arbotix/joints/arm_2_1_joint/max_speed: 75.0
* /arbotix/joints/arm_2_joint/id: 2
* /arbotix/joints/arm_2_joint/max_speed: 75.0
* /arbotix/joints/arm_3_1_joint/id: 5
* /arbotix/joints/arm_3_1_joint/max_speed: 75.0
* /arbotix/joints/arm_3_joint/id: 4
* /arbotix/joints/arm_3_joint/max_speed: 75.0
* /arbotix/joints/arm_4_joint/id: 6
* /arbotix/joints/arm_4_joint/max_speed: 75.0
23

Kobuki Turtlebot II. User’s Manual
* /arbotix/joints/arm_5_joint/id: 7
* /arbotix/joints/arm_5_joint/max_speed: 75.0
* /arbotix/joints/arm_gripper_joint/id: 8
* /arbotix/joints/arm_gripper_joint/max_angle: 0
* /arbotix/joints/arm_gripper_joint/max_speed: 114.0
* /arbotix/joints/arm_gripper_joint/min_angle: -90.0
* /arbotix/joints/arm_gripper_joint/range: 180
* /arbotix/port: /dev/ttyUSB0
* /arbotix/rate: 100
* /robot_description: <?xml version="1....
* /rosdistro: kinetic
* /rosversion: 1.11.21
NODES
/
arbotix (arbotix_python/arbotix_driver)
phantomx_reactor_controller
(phantomx_reactor_arm_controller/phantomx_reactor_parallel_motor_j
oints.py)
robot_state_publisher (robot_state_publisher/state_publisher)
rviz (rviz/rviz)
ROS_MASTER_URI=http://robotnik-GE70:11311
core service [/rosout] found
process[arbotix-1]: started with pid [16444]
process[phantomx_reactor_controller-2]: started with pid [16445]
process[robot_state_publisher-3]: started with pid [16446]
process[rviz-4]: started with pid [16447]
[INFO] [WallTime: 1496152050.354436] Started ArbotiX connection on
port /dev/ttyUSB0.
[INFO] [WallTime: 1496152050.481723] ArbotiX connected.
Note: In the phantomx_reactor_arm_controller.launch are specified two nodes. The first
node is the arbotix_driver node and the second is a node to control the the parallel joints.
Check that the joint values are being published:
>rostopic echo /joint_states
header:
seq: 3766
stamp:
secs: 1496152501
nsecs: 951384067
frame_id: ''
name: ['arm_1_joint', 'arm_2_1_joint', 'arm_2_joint',
'arm_3_1_joint', 'arm_3_joint', 'arm_gripper_joint',
24

Kobuki Turtlebot II. User’s Manual
'arm_4_joint', 'arm_5_joint']
position: [0.0051132692929521375, -0.02556634646476069,
0.02556634646476069, 0.0051132692929521375, -0.02556634646476069,
-0.006135923151542565, -0.010226538585904275,
-0.010226538585904275]
velocity: [-0.042620525427073536, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0,
0.0]
effort: []
Run the rqt_publisher tool to set the position of the joints:
> rosrun rqt_publisher rqt_publisher
4.5.5 Hokuyo UST10LX
Dependencies:
*ros-kinetic-urg-node
Set the user permissions:
> sudo usermod -a -G dialout turtlebot
To launch the sensor:
>roslaunch turtlebot_bringup hokuyo_ust10lx.launch
4.6 Additional WiFi router
25

Kobuki Turtlebot II. User’s Manual
IP: 192.168.0.1
User/Pass: admin/R0b0tn1K
SSID pass: R0b0tn1K
26
Kobuki Turtlebot II. User’s Manual
5. First steps
In this section will be described the procedure to start and test the main parts of the robot.
5.1 Launching Kobuki
First, start minimal.launch to bring up Kobuki's basic software (bootstrap layer). We use the
argument --screen to get verbose output in the terminal.
$> roslaunch kobuki_node minimal.launch --screen
This launch file starts a nodelet manager and loads the Kobuki nodelet (the ROS wrapper around
Kobuki's driver).
$> roslaunch kobuki_keyop keyop.launch
This launch file starts the control of the robot using the keyboard keys.
$> roslaunch kobuki_node kobuki_state_publisher.launch
This launch file starts a node that publish the TF transformation using the robot’s *.urdf file.
5.2 Testing the hardware
The kobuki_testsuite package provides a bunch of scripts to thoroughly test specific kobuki
hardware components.
Testing events
$> rosrun kobuki_testsuite test_events.py
Testing digital ouputs
$> rosrun kobuki_testsuite test_digital_output.py
Testing analog inputs
$> rosrun kobuki_testsuite test_analog_input.py
Testing battery voltage
$> rosrun kobuki_testsuite test_battery_voltage.py
27
Kobuki Turtlebot II. User’s Manual
Testing the gyro
$> rosrun kobuki_testsuite test_gyro.py
Testing the LEDs
$> rosrun kobuki_testsuite test_led_array.py
Testing sounds
$> rosrun kobuki_testsuite test_sounds.py
28

Kobuki Turtlebot II. User’s Manual
5.3 Launching the RGBD camera
The openni_kinnect is the stack that contains the Kinect’s drivers.
It is recommended to connect the Kinect’s USB into a USB 2.0 slot.
Open a terminal and launch the openni node.
$> roslaunch openni_launch openni.launch
or
$> roslaunch astra_launch astra.launch
Or
$> roslaunch turtlebot_bringup 3dsensor.launch 3dsensor:=astra
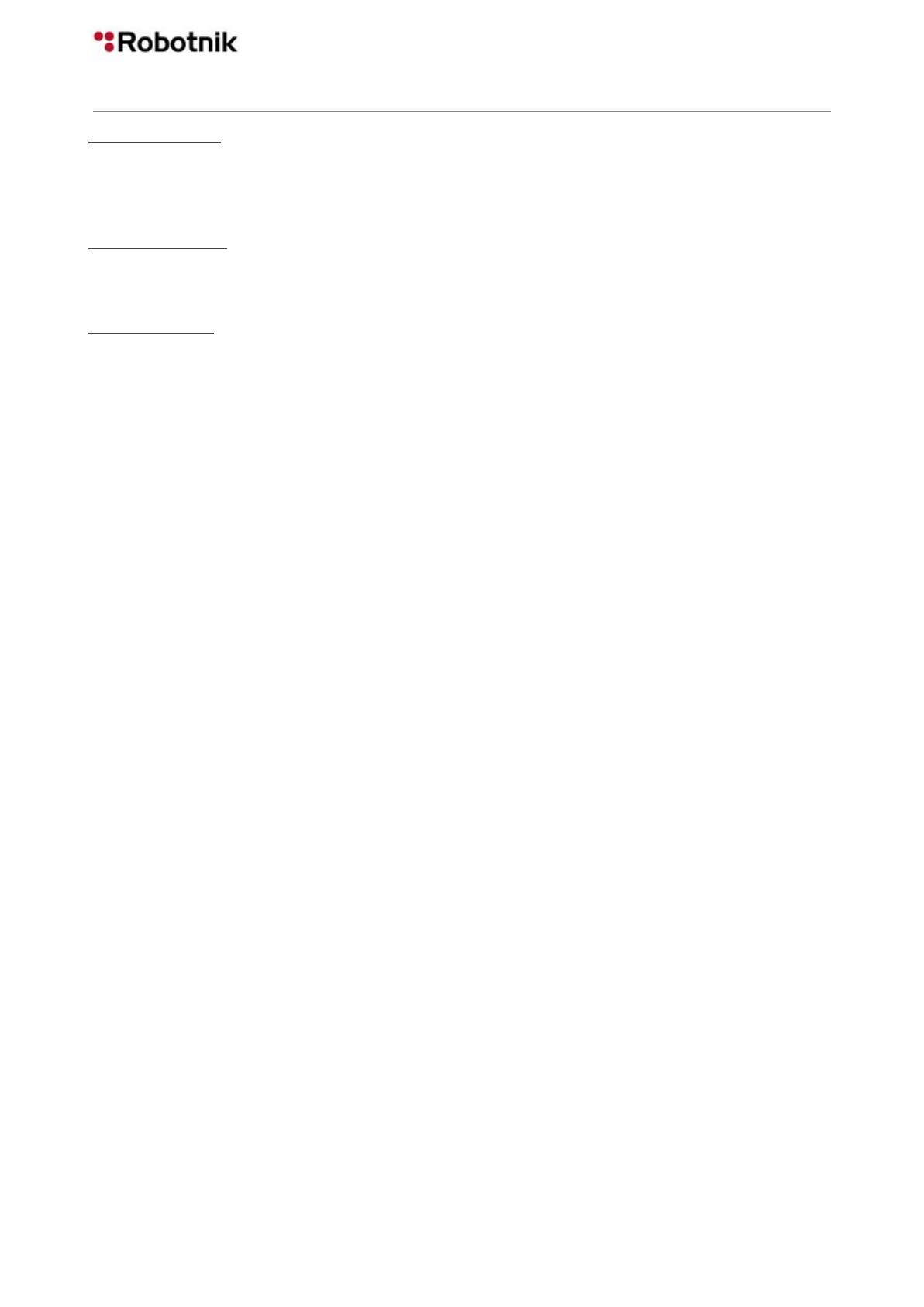
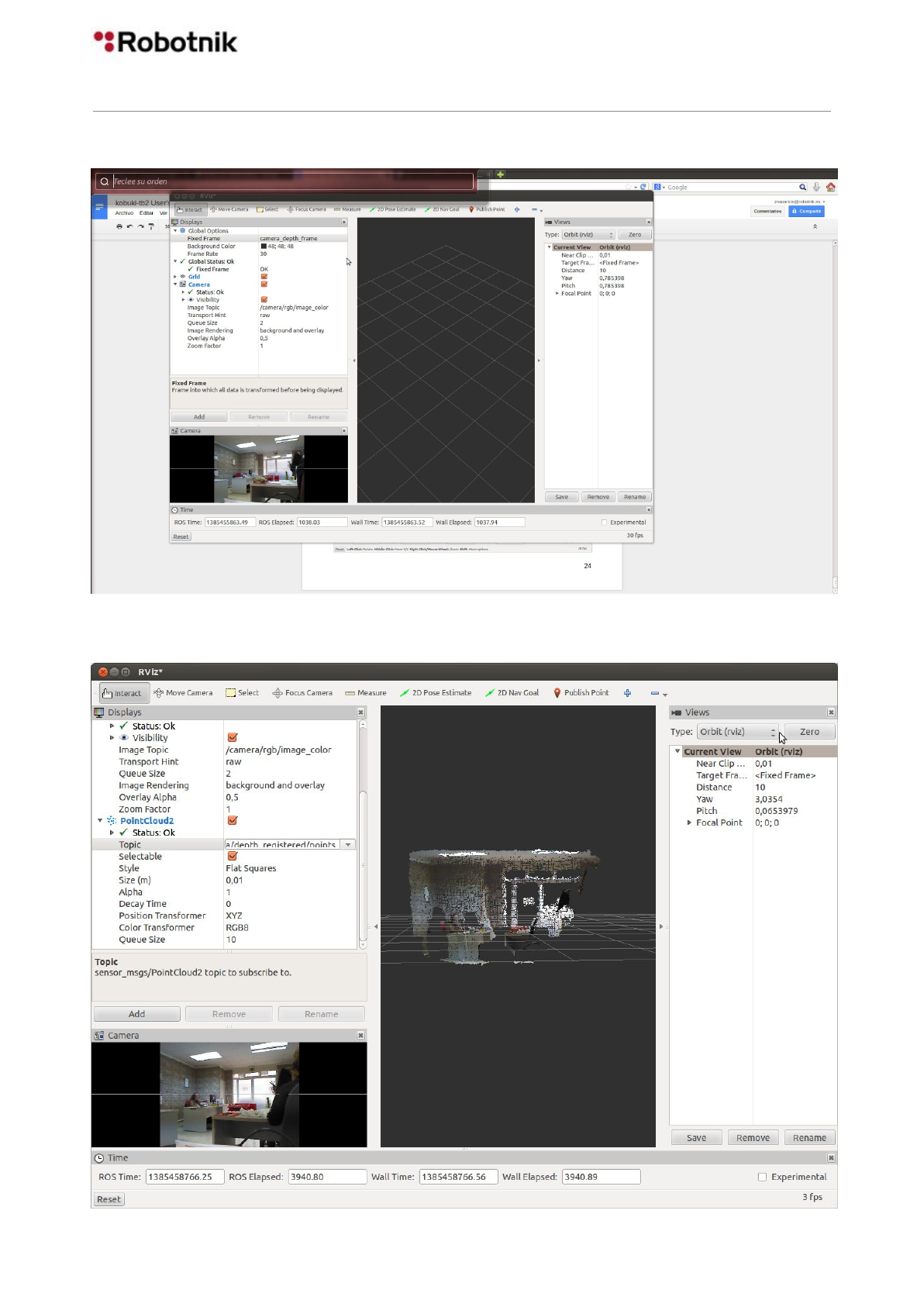
Testing the kinect with rviz
$> rosrun rviz rviz
Press Add Button and add a Camera:
29
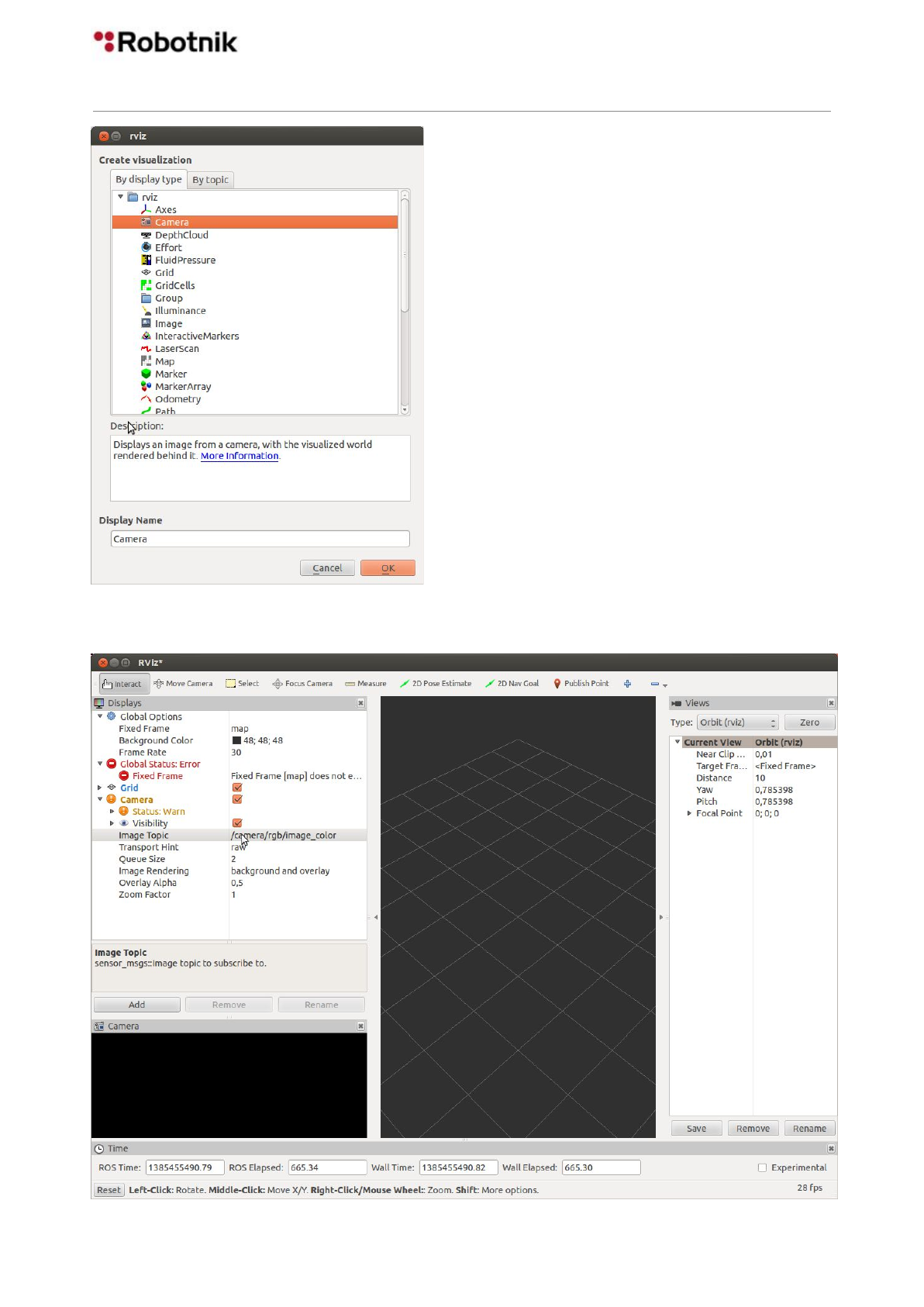
Kobuki Turtlebot II. User’s Manual
It is necessary to select a topic, for example: /camera/rgb/image_color
30
Kobuki Turtlebot II. User’s Manual
And select in Fixed Frame for example: camera_depth_frame
In order to see a point cloud, we have to add a pointcloud2 and select as topic:
camera_depth_registered_points
31

Kobuki Turtlebot II. User’s Manual
5.3 Controlling the Kobuki robot with a joystick
Install joystick drivers and turtlebot teleop:
$> sudo apt-get install ros-kinetic-joystick-drivers
$> sudo apt-get install ros-kinetic-ps3joy
$> sudo apt-get install ros-kinetic-turtlebot-teleop
$> sudo apt-get install sixad
5.3.1 PS3 gamepad
It’s necessary to make some changes in launch file:
In /opt/ros/kinetic/share/turtlebot_teleop/launch/ps3_teleop.launch
Change the line remap cmd_vel with the following line:
<remap from="turtlebot_teleop_joystick/cmd_vel"
to="mobile_base/commands/velocity"/>
Start kobuki node:
$> roslaunch kobuki_node minimal.launch --screen
In order to pair the joystick:
Obviously it’s necessary a bluetooth dongle, with the joystick connected with usb cable:
You will see something similar to:
Current Bluetooth master: 00:22:b0:d0:5a:09
Setting master bd_addr to 00:22:b0:d0:5a:09
Press Ctrl-D now so that you do not continue to run as root.
If you get something like the following:
Current Bluetooth master: 00:1b:dc:00:07:3c
Unable to retrieve local bd_addr from `hcitool dev`.
Please enable Bluetooth or specify an address manually.
Run the command:
$> hciconfig hci0 reset
and then retry:
$> rosrun ps3joy sixpair
32
Kobuki Turtlebot II. User’s Manual
Then execute joystick node:
$> rosrun ps3joy ps3joy_node.py
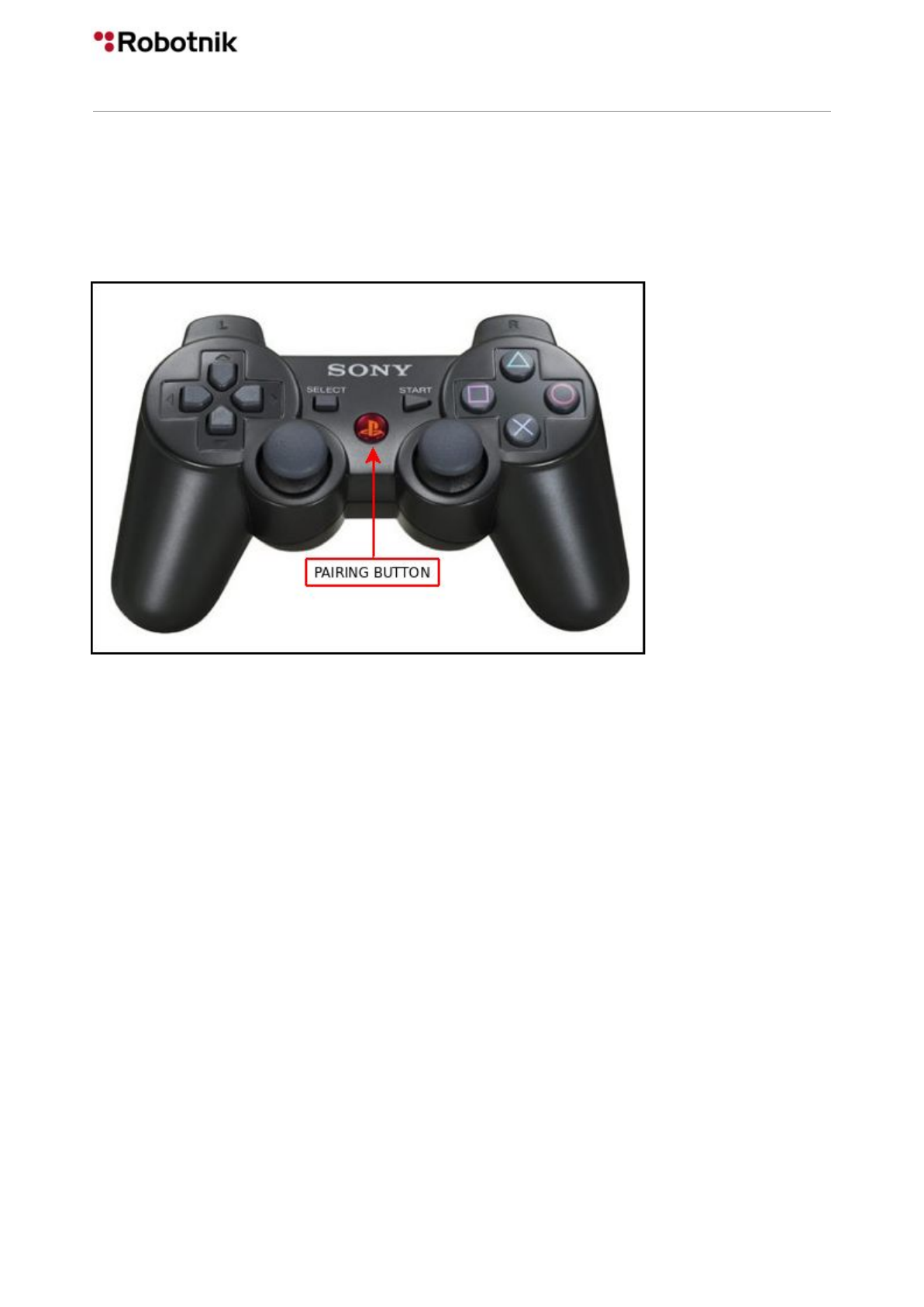
Unplug the joystick and press pairing button.
Execute turtlebot_teleop:
$> roslaunch turtlebot_teleop ps3_teleop.launch
Moving left analog joystick and L1 pressed kobuki should move now.
5.3.2 PS4 gamepad
It’s necessary to make some changes in the launch file (this assumes that you are
modifying the launch file from the original ps3_teleop.launch instead of the one used for
PS3):
In /opt/ros/kinetic/share/turtlebot_teleop/launch/ps3_teleop.launch, change the following
lines from:
<param name="axis_deadman" value="10"/>
<param name="axis_angular" value="0"/>
to:
<param name="axis_deadman" value="5"/>
<param name="axis_angular" value="2"/>
33

Kobuki Turtlebot II. User’s Manual
After conducting the above changes, save the launch file as ps4_teleop.launch.
When using the PS4 gamepad for the first time, you can pair your system with the
gamepad wirelessly over Bluetooth. The first method is conducted via the terminal
window. Follow the below instructions in order to install the required Linux driver (ds4drv)
on your Linux system (stable version):
$> sudo apt-get install python-pip
$> sudo pip install ds4drv
Test the connection with:
$> sudo ds4drv
and then press and hold both the Share and PS buttons for a few seconds to enter the
joystick into pairing mode (press the Share button first). The keyword ´Found device´
should appear once pairing is established.
Please note that if the joystick does not pair successfully, it might be caused by Bluetooth
on the computer being disabled by default. Perform the following to enable it:
$> sudo chmod +x /usr/sbin/bluetoothd
$> sudo service bluetooth restart
You can also pair your system with the gamepad (also wirelessly via Bluetooth) directly on
the Linux graphical user interface. First put the controller into pairing mode by pressing
and holding the Share and PS buttons at the same time (press the Share button first) for a
few seconds. Locate your Bluetooth menu on the desktop and click Bluetooth Settings. On
the bottom-left corner, click the add icon and wait for the PS4 controller to appear on the
found list.
To test controlling the Turtlebot with the PS4 joystick,
Start kobuki node:
$> roslaunch kobuki_node minimal.launch --screen
Execute turtlebot_teleop:
$> roslaunch turtlebot_teleop ps4_teleop.launch
First press and hold R1, and then move the Turtlebot by moving the left analog joystick
vertically. To perform rotation, move the right analog joystick horizontally (while R1 is still
held down).
34

Kobuki Turtlebot II. User’s Manual
6. Netbook cable modification
ATTENTION: This mod is OPTIONAL and may void the warranty of the netbook. This mod
is made under responsibility of the client.
Here you find the instructions to make a custom cable to power your netbook through the
Kobuki base.
6.1 Materials
- Heat shrink tube (2mm and 4mm)
- Scissors
- Soldering iron
- Solder
- Heat gun
6.2 Instructions
- Cut the cables as seen in the image.
- Male connector goes with Netbook plug - Female connector goes with DC adapter.
35

Kobuki Turtlebot II. User’s Manual
- Strip the cables and the the cable sheath. Pass the heat shrink tubes (first the big one)
and match cables as indicated.
- Then solder the cables and heat the shrink tubes. Repeat this with the other cable.
- Test both cables.
NOTE: Cable colours could be different depending on the netbook model. Please
check the polarity.
36
Kobuki Turtlebot II. User’s Manual
Appendixes
Appendix 1 - Setting up Arbotix board
1. Download Arduino ide from https://downloads.arduino.cc/arduino-1.0.6-linux64.tgz
wget https://downloads.arduino.cc/arduino-1.0.6-linux64.tgz
1. Extract to a folder.
2. Download firmware archives from
https://github.com/trossenrobotics/arbotix/archive/master.zip
wget https://github.com/trossenrobotics/arbotix/archive/master.zip
3. Extract to ~/Documents/Arduino
4. Open arduino
a. Cd ~/Downloads/arduino-1.0.6
b. ./arduino
5. Open Arduino IDE and change folder to /Documents/Arduino/arbotixmaster
a. File->Preferences->Sketchbook Location
b. Tools->Board->Arbotix
c. Tools->Serial Port->/dev/ttyUSBX
d. File->Sketchbook->Arbotix Sketches ->ros
e. Verify + Upload
6. The Arbotix is ready to work with ROS
37
