Arduino Motor Shield (L298) L298 Manual
User Manual:
Open the PDF directly: View PDF ![]() .
.
Page Count: 7
Arduino Motor Shield
(L298)
Manual
This DFRobot L298 DC motor driver shield uses LG’ high
power H-bridge driver Chip L298P, which is able to drive
DC motor, two-phase or four phase stepper motor with a
maximum 2A current.
D_Robotics
4/7/2011

2 | P a g e
Arduino Motor Shield (L298P)
(SKU:DRI0009)
I Introduction
This DFRobot L298 DC motor driver shield uses LG’ high power H-bridge driver Chip L298P,
which is able to drive DC motor, two-phase or four phase stepper motor with a maximum
2A current. The motor output uses eight high-speed Schottky diodes for protection. The
circuit wiring of the shield is well organised and the stack design makes it directly
mountable onto our Arduino compatible Duemilanove 328 or Mega.
The Shield can switch between PWM speed control mode and PLL phase-locked loop mode
through setting the appropriate jumpers. The power supply can be achieved either via
Arduino VIN input or PWRIN input on the sield through setting the appropriate jumpers.
The speed control is achieved through conventional PWM which can be obtained from
Arduino’s PWM output Pins 5 and 6. The enable/disable function of the motor control is
signaled by Arduino Digital Pins 4 and 7.
The Motor shield can be powered directly from Arduino or from external power source. It is
strongly recommended to use external power supply to power the motor shield.
Logic Control Voltage:5V (From Arduino)
Motor Driven Voltage:4.8~35V (From Arduino or External Power Source)
Logic supply current Iss:≤36mA
Motor Driven current Io:≤2A
Maximum power consumption:25W(T=75℃)
PWM、PLL Speed control mode
Control signal level:
High:2.3V≤Vin≤5V
Low:-0.3V≤Vin≤1.5V
II Diagram and Control Mode Setting
3 | P a g e
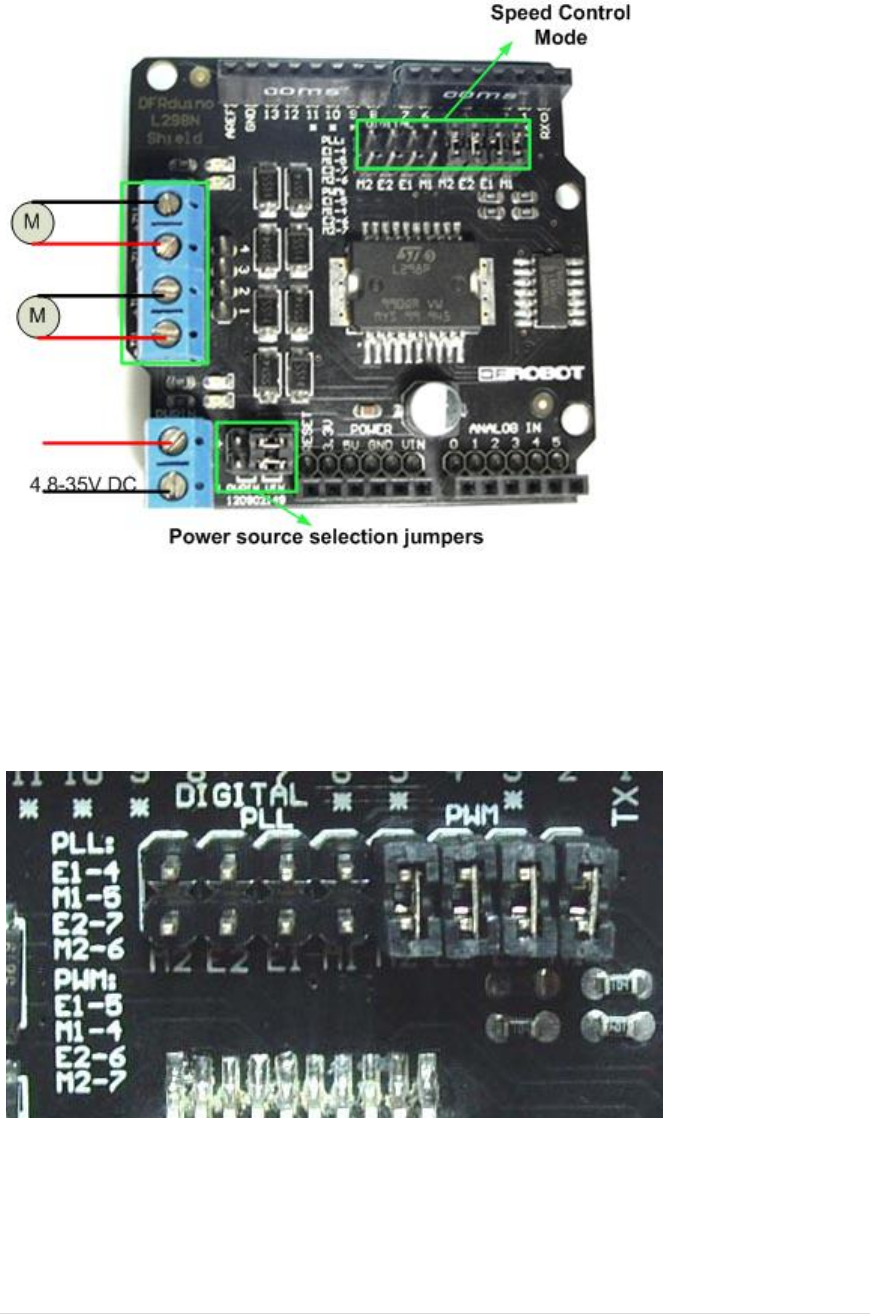
Figure 1 L298 Motor Shield
Control Mode Selection Jumpers (Figure 2 below): The shield supports PWM and PLL
(Phased Locked Loop) control Modes. The PWM mode uses E1 and E2 to generate PWM
signal. The PLL mode uses M1 and M2 to generate phase control signal.
Figure 2 Control Mode Selection Jumpers
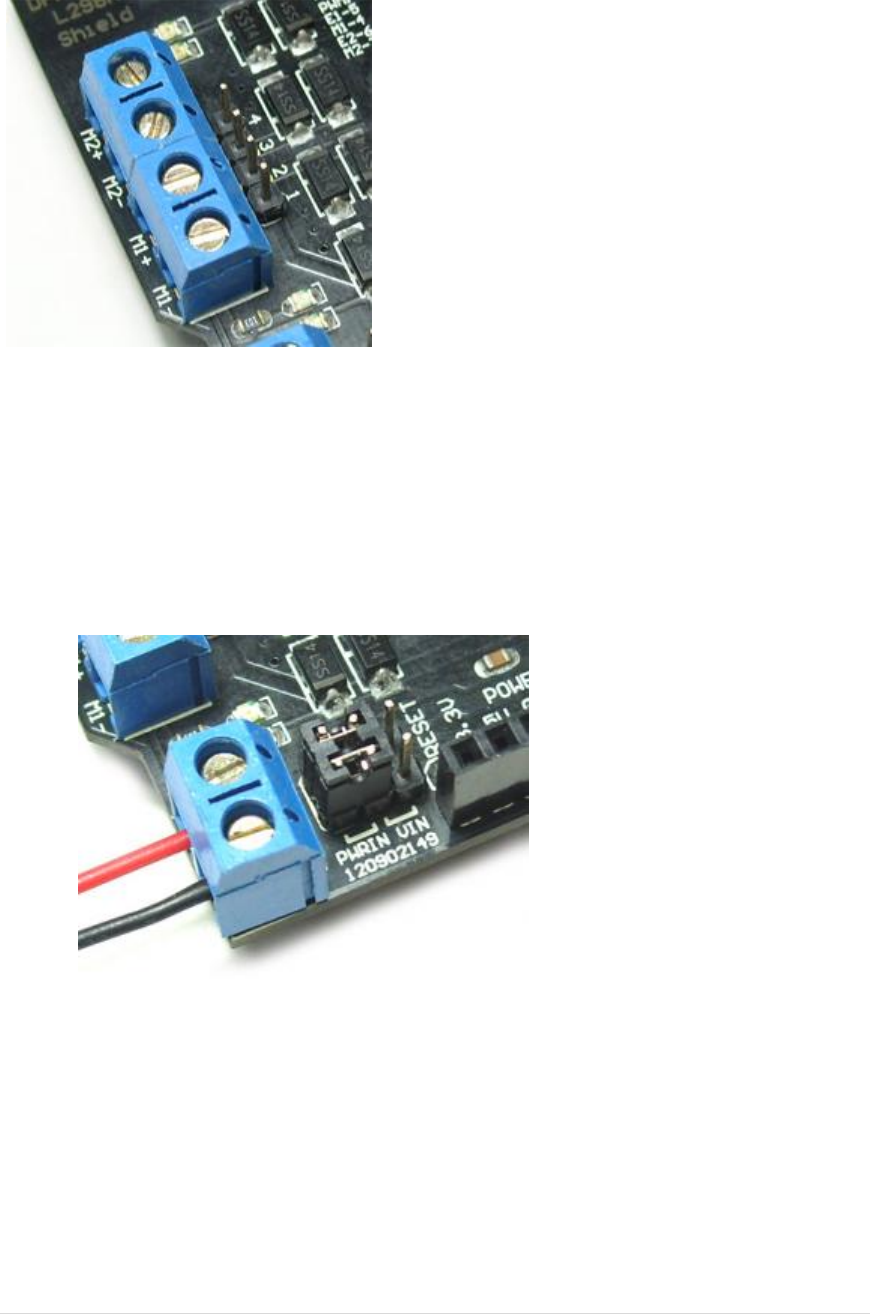
Motor Terminal (Figure 3 below): Two DC motors are connected to blue motor terminals.
The male header behind the terminals are the same as the motor terminals.
{kind=link}
{kind=link}
4 | P a g e
Figure 3 L298 Motor terminal
PWRIN (Figure 4 below) : The motors can be powered by external power supply when
the motor current exceeds the limits provided from the Arduino. The switch between
external and Arduino power is implemented by two jumpers.
PWRIN: External Power
VIN: Arduino Power
Figure 4 The motors are powered by external power supply
Figure 5 below demonstrates how the motor shield is set to be powered by Arduino
power only.
{kind=link}
{kind=link}
5 | P a g e
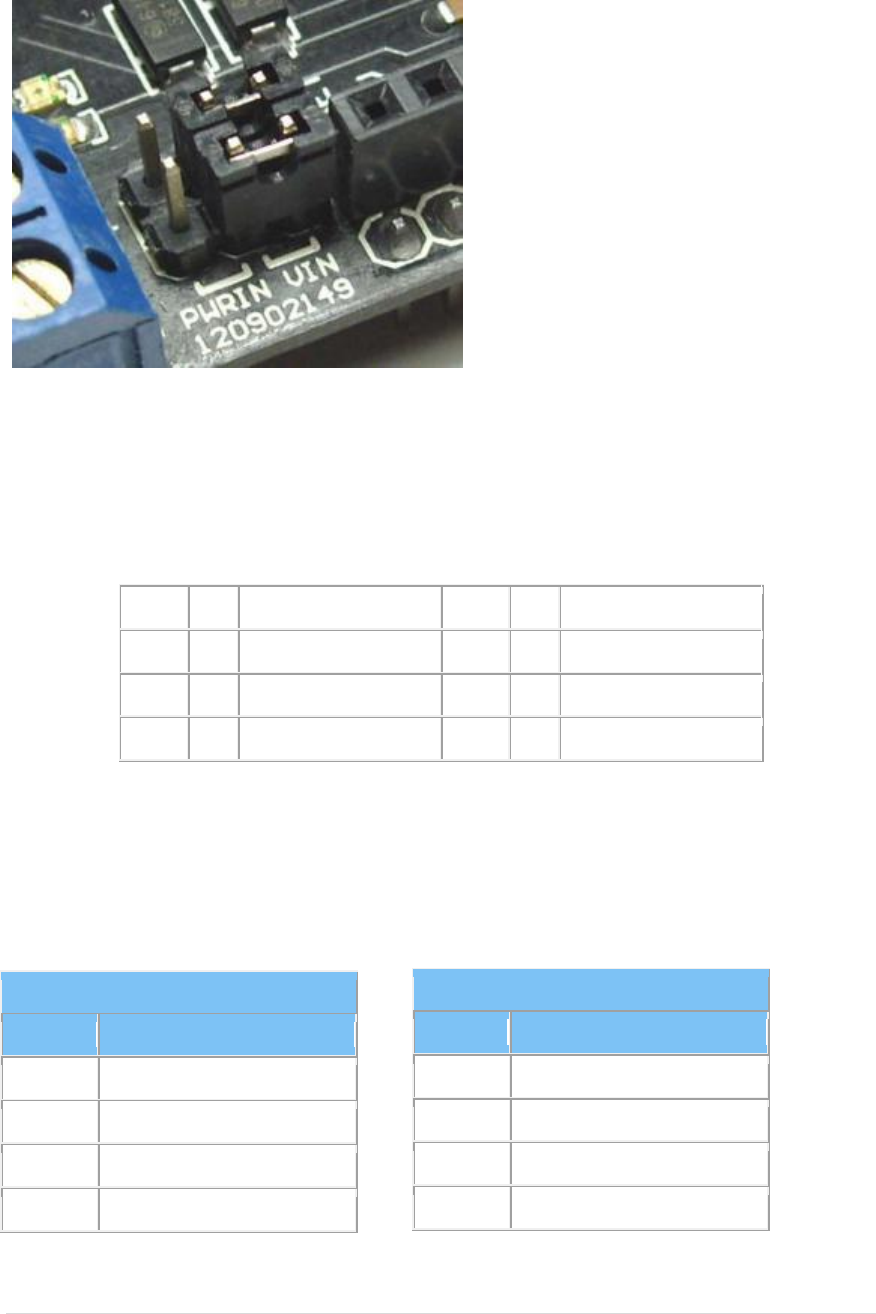
Figure 5 The motors are powered by Arduino power supply
NOTE: When the motor shield is powered by external power source, make sure the external
power source and Arduino have the same GND.
Control Signal Truth Table:
E1
M1
E2
M2
L
X
Motor 1 Disabled
L
X
Motor 2 Disabled
H
H
Motor 1 Backward
H
H
Motor 2 Backward
PWM
X
PWM Speed control
PWM
X
PWM Speed control
Note
:
H is High level; L is Low level; PWM is Pulse Width Modulation signal; X is any voltage
level
III Pin Allocation
"PWM Mode"
Pin
Function
Digital 4
Motor 2 Direction control
Digital 5
Motor 2 PWM control
Digital 6
Motor 1 PWM control
Digital 7
Motor 1 Direction control
"PLL Mode"
Pin
Function
Digital 4
Motor 2 Enable control
Digital 5
Motor 2 Direction control
Digital 6
Motor 1 Direction control
Digital 7
Motor 1 Enable control
{kind=link}

6 | P a g e
IV Sample Code
PWM Speed Control
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
//Arduino PWM Speed Control:
int E1 = 6;
int M1 = 7;
int E2 = 5;
int M2 = 4;
void setup()
{
pinMode(M1, OUTPUT);
pinMode(M2, OUTPUT);
}
void loop()
{
int value;
for(value = 0 ; value <= 255; value+=5)
{
digitalWrite(M1,HIGH);
digitalWrite(M2, HIGH);
analogWrite(E1, value); //PWM Speed Control
analogWrite(E2, value); //PWM Speed Control
delay(30);
}
}
PLL Speed Control
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
//Arduino PLL Speed Control:
int E1 = 7;
int M1 = 6;
int E2 = 4;
int M2 = 5;
void setup()
{
pinMode(M1, OUTPUT);
pinMode(M2, OUTPUT);
}
void loop()
{
int value;
for(value = 0 ; value <= 255; value+=5)
{

7 | P a g e
18
19
20
21
22
23
24
digitalWrite(M1,HIGH);
digitalWrite(M2, HIGH);
analogWrite(E1, value); //PLL Speed Control
analogWrite(E2, value); //PLL Speed Control
delay(30);
}
}
