MANUAL
User Manual:
Open the PDF directly: View PDF ![]() .
.
Page Count: 40
Version 1.05
January 2010
Martin Paluszewski, Jes Frellsen and Thomas Hamelryck
Bioinformatics Centre
Department of Biology
University of Copenhagen
Ole Maaloes Vej 5
2200 Copenhagen N
Denmark
E-mail: palu@binf.ku.dk, frellsen@binf.ku.dk, thamelry@binf.ku.dk
Contents
1 What is Mocapy++? 3
1.1 Introduction .................................... 3
1.2 Notation....................................... 3
1.3 Dynamic Bayesian networks . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.4 InferenceinDBNs ................................. 6
1.5 Parameter learning in DBNs . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
1.5.1 Expectation Maximization . . . . . . . . . . . . . . . . . . . . . . . . 7
1.5.2 Monte Carlo EM for DBNs . . . . . . . . . . . . . . . . . . . . . . . . 8
2 Installation, license and other practicalities 10
2.1 Implementation .................................. 10
2.2 ObtainingMocapy++................................ 10
2.3 InstallingMocapy++................................ 10
2.4 Using the Mocapy++ Library . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.5 License ....................................... 11
2.6 OtherDBNpackages ............................... 11
3 Background and Features 12
3.1 Performance .................................... 12
3.2 DBNarchitectures................................. 12
3.3 Nodetypes ..................................... 12
3.3.1 Gaussian, multinomial and discrete nodes . . . . . . . . . . . . . . . 12
3.3.2 Kentnode.................................. 13
3.3.3 Bivariate von Mises node . . . . . . . . . . . . . . . . . . . . . . . . . 13
3.4 Inference ...................................... 14
3.4.1 Deterministic inference . . . . . . . . . . . . . . . . . . . . . . . . . . 14
3.4.1.1 Smoothing............................. 14
3.4.1.2 Viterbipath............................ 14
3.4.2 Stochastic inference . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
3.4.2.1 Smoothing............................. 14
3.4.2.2 Viterbipath............................ 15
3.5 Parameter learning using MC-EM and S-EM . . . . . . . . . . . . . . . . . . 15
3.6 Priors ........................................ 15
3.7 Structure learning is absent! . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
3.8 PythonInterface .................................. 17
4 Using Mocapy++ 18
4.1 Preliminaries .................................... 18
4.2 Representation of the sequence data . . . . . . . . . . . . . . . . . . . . . . 18
4.3 CreatingtheDBN ................................. 19
4.3.1 Creatingthenodes............................. 19
4.3.2 Defining the DBN architecture . . . . . . . . . . . . . . . . . . . . . . 21
1
CONTENTS 2
4.4 Sampling a sequence from a DBN . . . . . . . . . . . . . . . . . . . . . . . . 21
4.5 LogLik of a fully observed sequence . . . . . . . . . . . . . . . . . . . . . . . 22
4.6 Calculation of the posterior distribution . . . . . . . . . . . . . . . . . . . . 22
4.6.1 Approximative method . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
4.7 Calculating the Viterbi path . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
4.7.1 Approximative ............................... 22
4.8 Parameterlearning ................................ 23
4.8.1 S-EMandMC-EM ............................. 23
4.8.2 UsingPriors................................. 24
4.9 DBNPersistence .................................. 24
4.10Inference in hidden Markov models and mixture models . . . . . . . . . . . 25
4.10.1Inference in hidden Markov models . . . . . . . . . . . . . . . . . . . 25
4.10.1.1Calculating probability of output variables . . . . . . . . . . 25
4.10.1.2Sampling ............................. 26
4.10.2Inference in mixture models . . . . . . . . . . . . . . . . . . . . . . . 27
5 Examples 29
5.1 Learning....................................... 29
5.1.1 HMM with discrete output node . . . . . . . . . . . . . . . . . . . . . 29
5.1.2 HMM with Gaussian output node . . . . . . . . . . . . . . . . . . . . 31
5.1.3 Factorial HMM with discrete output node . . . . . . . . . . . . . . . 31
6 Mocapy++’s design 33
7 Extending Mocapy 35
7.1 MoreNodetypes .................................. 35
7.2 Moresamplingmethods.............................. 35
8 Acknowledgements 36
9 GNU general public license 37

Chapter 1
What is Mocapy++?
1.1 Introduction
Mocapy++ is a freely available toolkit for parameter learning and inference in dynamic
Bayesian networks (DBNs) [11], using Markov chain Monte Carlo (MCMC) methods [13].
We routinely use Mocapy++ for datasets that contain several hundred thousands of
observations. Mocapy++ is a general purpose toolkit, but it contains quite some func-
tionality that is specific to the field of bioinformatics, and in particular structural bioin-
formatics.
The name ’Mocapy’ stands for Markov Chain Monte Carlo and Python. These were
the key ingredients in the original implementation of Mocapy by T. Hamelryck dating
back to 2004. The architecture of the DBN can be fully specified by the user, and
various forms of discrete and real valued data are supported. Recently, Mocapy was
for example used for constructing probabilistic models of the 3D structure of proteins
[15, 5] and RNA [10]. Today, Mocapy has been re-implemented in C++, but the name is
kept for historical reasons.
1.2 Notation
We’ll use capital letters to refer to nodes, and small letters for node values. For example:
•P(X): the probability distribution over all values that the node Xcan adopt.
•P(X=x): the probability that node Xadopts value x
•P(x): shorthand for the above
The parents of a node Xare denoted as Pa(X). The number of values that a node can
adopt is denoted as Size(X). The children of Xare Ch(X). In a dynamic Bayesian
network, node nat position tis Xn,t.
1.3 Dynamic Bayesian networks
So what is a Bayesian network? A Bayesian network (BN) [11, 16] is a directed acyclic
graph (DAG) in which the nodes represent random variables and the edges encode the
conditional independencies between the variables1. A BN specifies the joint probability
1Formally, the absence of an edge between two nodes A, B guarantees that there is a set of nodes Zthat
renders these two nodes conditionally independent:
P(A, B |Z) = P(A|Z)P(B|Z)
3

CHAPTER 1. WHAT IS MOCAPY++? 4
Figure 1.1: A very simple BN with 6 nodes and 5 edges.
distribution over its variables. The graph structure is a helpful tool for designing the
probabilistic model and also makes it possible to develop efficient algorithms for learn-
ing and inference. The joint probability distribution of all the variables in a BN is given
by:
P(X1, . . . , Xn) =
n−1
Y
i=0
P(Xi|Pa(Xi))
where the product runs over all nnodes X0, . . . , Xn−1, and Pa(Xi)denotes the parents
of node Xi.
For example, consider the simple BN shown in Fig. 1.1. Nodes A, B are parent nodes
of node C, and node Cis a child node of nodes A, B. The probability of observing a
certain set of values a, b, c, d, e, f for nodes A, B, C, D, E, F is given by:
P(a, b, c, d, e, f) = P(c|a, b)P(d|c, f)P(e|c)P(a)P(b)P(f)
Adynamic Bayesian network (DBN) is a BN that represents sequential data (for a
good overview, see [11, 22]). The term ’dynamic’ refers to the fact that a DBN is often
used to model time sequences. In that respect, sequential Bayesian network would
actually be a better name, since DBNs are also used to model sequences in which time
does not play a role (for example, amino acid or DNA sequences).
The well-known hidden Markov model (HMM, [25, 9]) can be considered as the sim-
plest possible DBN. Variants of the classic HMM such as the factorial HMM [12] can
be treated as a DBN as well. In general, the DBN provides a rich framework in which
many HMM-like and other probabilistic models can be treated in a uniform way. A DBN
toolkit such as Mocapy++ allows the user to concentrate on the model itself, without
having to implement customized inference and learning algorithms.
Another advantage of using the DBN paradigm is that it can lead to a drastic reduc-
tion in the number of parameters as compared to an HMM representation. Consider
a sequence of observations. Each position in the sequence (called a sequence slice) is
characterized by a set of random variables. Each slice in the sequence can be repre-
sented by an ordinary BN, which is said to be duplicated along the sequence positions.
The sequential dependencies are then represented by edges between the consecutive
DBNs. Hence, a DBN is defined by two components:
•A set of nodes that represent all random variables for a given position (called a
slice) in the sequence, and the edges between those nodes (the intra edges). This
set of nodes and edges forms the BN that will be duplicated along the length of the
sequence.
•A set of edges that connect nodes in two consecutive slices in the sequence (the
inter edges).
CHAPTER 1. WHAT IS MOCAPY++? 5
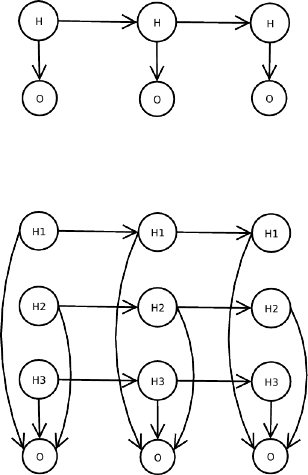
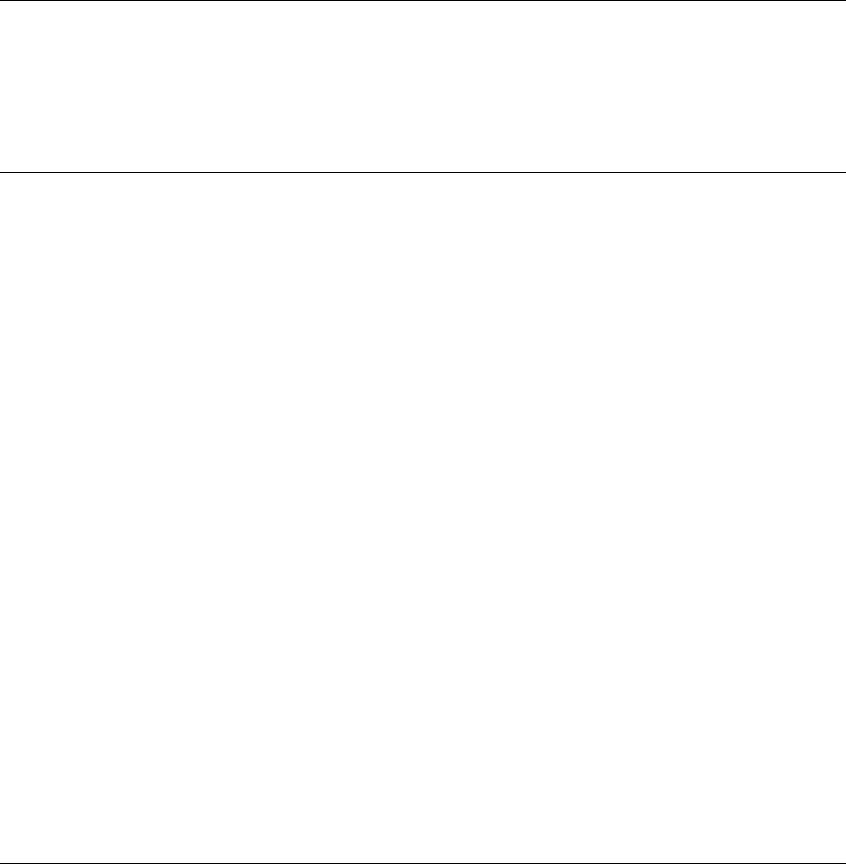
Figure 1.2: Three slices of a simple HMM in the DBN representation. Hidden nodes are
labelled H, observed nodes O.
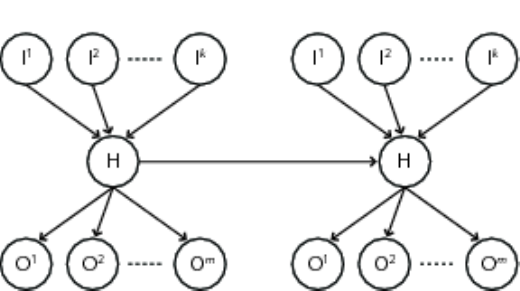
Figure 1.3: Three slices of a Factorial HMM. Hidden nodes are labelled H1, H2, H3,
observed nodes are labelled O.
A DBN’s structure can be specified conveniently by specifying all the nodes and edges
that belong to two consecutive slices. This set of nodes and edges is then duplicated
as necessary to model a given sequence. Some examples will probably make this more
clear.
Fig. 1.2 shows the DBN representation of a HMM. In the figure, three slices are
shown, corresponding to a sequence of length 3. The BN describing each slice consists
simply of the hidden node H, the observed node O, and an edge that connects these two
nodes. Two consecutive slices are connected by an edge between the two consecutive
hidden nodes H. Note that we leave out the sequence postion index of the nodes for
clarity.
Note that this diagram should not be confused with the typical diagrams that are
used to represent HMMs. In a BN diagram, the nodes are random variables and the
edges encode the conditional independencies. In a HMM diagram, the nodes are states
and the edges represent possible transitions between states. In a DBN diagram of an
ordinary HMM, an HMM state corresponds to a value of the hidden random variable,
and a transition between states corresponds to a non-zero entry in the conditional
probability table of the corresponding DBN.
Fig. 1.3 represents a Factorial HMM [12]. In this case, there are three hidden nodes
(H1to H3), which are the parents of the observed node O. The value of the observed
node Odepends on the values of the three hidden Hnodes. The BN corresponding to
each slice consists of nodes H1, H2, H3and O, and the connections between the Hnodes
and the Onode. The edges that connect the consecutive BNs are the (H1, H1),(H2, H2)
and (H3, H3)edges.
A DBN usually models a sequence by considering a set of observed nodes whose val-
ues depend on a set of hidden nodes (that is, nodes whose values cannot be observed).
The process of assigning probabilities to the possible values of the hidden nodes given
the values of the observed nodes is called inference. For HMMs, inference is typically
done using the forward-backward algorithm.
Once the architecture of a DBN is defined, its parameters are typically optimized in a
CHAPTER 1. WHAT IS MOCAPY++? 6
learning step, using a set of training sequences. This is typically done using the expec-
tation maximization (EM) algorithm, which is called the Baum-Welch algorithm in the
HMM world. The EM algorithm produces a maximum likelihood (ML) point estimate of
the parameters. An alternative is a full Bayesian procedure, which produces a posterior
probability distribution of the parameters, as opposed to a point estimate.
This is of course a very rudimentary, informal and incomplete introduction to HMMs,
BNs and DBNs. Luckily, there are many excellent introductory books and articles
available (for example [25, 11, 16, 3, 9, 21, 22]).
1.4 Inference in DBNs
Inference in DBNs can be done in many different ways. Deterministic algorithms such
as junction tree inference are based on deterministic message-passing algorithms, while
non-deterministic algorithms use various sampling methods to perform inference.
Mocapy++ uses a MCMC technique called Gibbs sampling to perform inference
[23, 13, 6], i.e. to approximate the probability distribution over the values of the hid-
den nodes. Sampling methods such as Gibbs sampling are attractive for the following
reasons:
•They are comparatively easy to parallelize efficiently on a cluster computer with a
minimum of performance loss due to sending messages between the cluster nodes.
•They allow complicated network architectures and large datasets, especially when
implemented on cluster computers.
•They are flexible: it is quite easy to try out various sampling variants (for example
blocaked Gibbs sampling), and to use non-standard node types (i.e. apart from the
standard discrete and Gaussian nodes).
Tests with Mocapy++ show that the combination of Gibbs sampling and DBNs is quite
powerful. How does Gibbs sampling work? Gcycles (or sweeps) of Gibbs sampling are
performed like this:
1. The values of the hidden nodes are initialised somehow, for example by sampling
according to P(Hn,t |Pa(Hn,t)), where Hn,t is the hidden node nat sequence posi-
tion t, and Pa(Hn,t)are the values of the parents of node nat position t.
2. Pick a random hidden node Hn,t (i.e. hidden node nat sequence position t).
3. Sample a value hn,t for Hn,t based on the values of the nodes in its so-called Markov
Blanket, i.e. the values of the child and parent nodes of node Hn,t:
hn,t ∼P(Hn,t |Pa(Hn,t)) Y
C∈Ch(Hn,t)
P(C|Pa(C))
The product runs over all children Cof Hn,t.
4. Go to step 2, until the sequence has been sampled Gtimes.
Let us illustrate the concept of the Markov Blanket with an example. Suppose node C
has two parents A, B and two children D, E (see Fig. 1.1). In addition, node Dhas Fas
its single parent. All nodes except Care observed (with node values a, b, d, e, f). Then, a
node value cfor node Cwill be sampled from the following distribution:
c∼P(C|a, b)P(e|C)P(d|C, f )
CHAPTER 1. WHAT IS MOCAPY++? 7
The above algorithm describes a random sweep Gibbs sampler, i.e. the nodes and
sequence positions are traversed in a random way during one sampling cycle. Other
traversals are also possible in principle. In a DBN, parents and children might be
present in three different slices (for example, Amight be in slice t−1,B, D, F in slice t
and Ein slice t+ 1). This makes the bookkeeping in a DBN slightly more complicated
than in a BN.
Typically, the first cycles of Gibbs sampling (called the burn in period) are discarded,
because the values of the sampled nodes need some time to reach a stationary dis-
tribution. There are unfortunately no simple rules that tell you how long the burn in
period needs to be. Testing convergence on an artificial dataset for which the expected
parameter values are known is an accepted way to evaluate convergence. This arti-
ficial dataset can for example be generated by generating a set of sequences through
sampling the DBN or by using a standard data set.
Each time a hidden node is sampled, the sampled node value is stored. When
the sampling is finished, the sampled node values can be used to approximate the
probability distribution of the node values of the hidden nodes.
1.5 Parameter learning in DBNs
1.5.1 Expectation Maximization
Parameter learning of a DBN with hidden nodes is often done using the expectation
maximization (EM) method (for a good introduction to learning in BNs, see [11, 16, 22],
a very clear explanation of the EM algorithm can be found in [9]). In the E-step, the
values of the hidden nodes are inferred using the current DBN parameter setting. In
the subsequent M-step, the inferred values of the hidden nodes are used to update the
DBN’s parameters. The E- and M-step cycles are repeated until convergence (or until
the user’s patience is exhausted). The EM method produces a maximum likelihood
point estimate of the parameters.
Let’s take a look at this in a bit more detail (the following discussion is largely based
on [11]). In learning using ML estimation, we want to maximize the log likelihood
(LogLik) L(θ)in function of the DBN’s parameters θ:
L(θ) = log X
h
P(h,o|θ)
where the sum runs over all possible sets of hidden node values, and o=o1, . . . , onis
the set of observed node values. In practice, this computation is typically intractable
using a brute force approach. However, the problem can be simplified by making use
of a lower bound F(θ)of L(θ). First, we introduce an arbitrary probability distribution
q(h)over h:
L(θ) = log X
h
q(h)P(h,o|θ)
q(h)
Because the log function is a concave function, we can apply Jensen’s inequality2to
obtain a lower bound Fof L. Hence:
L(θ)≥ F(q, θ) = X
h
q(h) log P(h,o|θ)
q(h)
F(q, θ) = X
h
q(h) log P(h,o|θ)−X
h
q(h) log q(h)
2For any concave function f the following is true: E[f(x)] ≤f(E[x]), where E[·]is the expectation according
to P(x). To apply the inequality in the above case, note that the summation in the L(θ)expression is simply
the expectation of P(h,o|θ)
q(h)with respect to q(h).

CHAPTER 1. WHAT IS MOCAPY++? 8
This expression is similar to the free energy expression in statistical mechanics, where
the first term is an energy term3and the second term is an entropy term. In the EM
procedure, F(q, θ)is first optimized with respect to qkeeping θfixed at its current value
θcurr, and then with respect to θusing qobtained from the E-step (qnext).
E-step:
qnext =argmax(q)F(q, θcurr)
M-step:
θnext =argmax(θ)hF(qnext, θ)i
The maximum in the E-step arises for the following value of q:
q(h) = P(h|o, θcurr)
In Mocapy++, this distribution is approximated using Gibbs sampling.
The EM cycle is repeated until convergence or until the maximum number of cycles
is reached. In the next section, we will explain how Mocapy++ does this in practice
using MCMC EM.
1.5.2 Monte Carlo EM for DBNs
Often, inference of the hidden nodes in a DBN cannot be done (efficiently) using deter-
ministic methods. A solution is to use a stochastic inference method, i.e. the hidden
node values are inferred by sampling. Several versions of the EM algorithm exist that
use some form of stochastic inference for the E-step. Mocapy++ uses Gibbs sampling
to infer the hidden node values in the E-step, and supports two different types of EM.
In Monte Carlo EM (MC-EM) a large number of samples is used in the E-step [1]. In
stochastic EM (S-EM) only one sample is generated for each hidden node [8, 1], and one
essentially makes use of a ’completed’ dataset where the hidden node values are filled
in.
Mocapy++ supports both forms of EM. Tests have pointed out that S-EM is both fast
and efficient if you have a lot of data (for example, we routinely use several of 100.000s
slices in combination with S-EM). If data is sparse, it probably makes more sense to
use MC-EM, unless you want to locate several maxima of the LogLik function by using
S-EM [13].
We briefly sketch the background of the EM method with a stochastic E-step. Recall
the distribution q(h)of subsection 1.5.1:
q(h) = P(h|o, θcurr)
In Mocapy++, q(h)is approximated by sampling a set of hidden node values from
P(h|o, θcurr)by Gibbs sampling. Each hidden node value is sampled conditional upon
all the other node values by Markov blanket sampling. At the end of this E-step, the
sampled hidden node values and the values of the observed nodes can be treated as a
completed dataset in which all node values are observed (S-EM), or the samples can be
used to approximate q(h)(MC-EM). In the M-step, the completed dataset (S-EM) or the
samples (MC-EM) are then used to update the parameters of the model.
How is this all performed in practice? One typically starts with a DBN initiated
with random values for the parameters and the hidden nodes, or starting values that
somehow ’make sense’. In the E-step (which is the inference step), the values of the
hidden nodes are inferred using the current DBN parameter values, i.e. a set of samples
is generated by Gibbs sampling. Each time a node is sampled, the expected sufficient
3The energy of a configuration (h,o)is in this case defined as E(h,o) = log P(h,o|θ).
CHAPTER 1. WHAT IS MOCAPY++? 9
statistics (ESS) for a hidden node are updated. Essentially, the ESS are set of values
that describe the samples in such a way that the parameters of a node’s probability
distribution can be calculated from them. The ESS of all samples are then used in the
M-step to update the parameters.
For example, in the case of discrete nodes (with the categorical distribution), the ESS
are simply the counts of the parent/child value combinations observed in the generated
samples [11]. The categorical distribution of the discrete node is characterized by a
conditional probability density (CPD). In the case of the discrete node, the CPD is a
matrix that holds the probabilities of each combination of node and parent values. For
example, a discrete node of size 2with two parents of sizes 3and 4respectively will have
a3×4×2matrix as its CPD. The sum of the matrix values (that is, of the probabilities
of all the parent and node value combinations) needs to be 1.
During the Gibbs sampling cycle, each time a discrete node is sampled, the values
of the node and of its parents are evaluated and the relevant count in the CPD matrix
is incremented. In the M-step, parent/child counts are then used to update the param-
eters of the discrete node, which in this case just means normalizing each row of the
CPD matrix so it sums to one.
Chapter 2
Installation, license and other
practicalities
2.1 Implementation
Mocapy++ is implemented as a static program library in C++. The library is highly mod-
ular and new nodes (that is, probability distributions) can be added easily. Mocapy++’s
design aims to be clear, but also efficient. For object serialization and special math
functions the Boost C++ library is used and for linear algebra the LAPACK library [2]
is used. Mocapy++ uses CMake [26] to locate packages and configure the build sys-
tem. All objects are serializable, meaning that Mocapy++ can be suspended and later
resumed at any state during training or sampling.
2.2 Obtaining Mocapy++
Mocapy++ and its documentation can be downloaded from SourceForge (https://
sourceforge.net/projects/mocapy/) as a gzipped tar file containing the source code.
Simply unzip and untar it in a suitable directory. The SVN repository of Mocapy++ is
also located on SourceForge. It is possible for everyone to get the very latest version
from this repository, but some features might, of course, be untested.
2.3 Installing Mocapy++
Installing Mocapy++ is in most cases simple. From the root of the Mocapy++ directory
(the directory containing src and examples directories) type:
cmake . (Remember the dot)
make
CMake will check if dependent packages are installed on the system and construct the
necessary makefiles. The make command compiles and links the Mocapy++ library and
the example programs.
The required programs/libraries are:
•GCC (version 4.1.2 or later. Should work on other C++ compilers, but this is
currently untested)
•CMake (version 2.6 or later)
10
CHAPTER 2. INSTALLATION, LICENSE AND OTHER PRACTICALITIES 11
•Boost (version 1.36 or later)
•LAPACK (version 3.2 or later)
•GNU Fortrain (version 4.3 or later)
If CMake complains about variables that are set to NOTFOUND, it means that it cannot
find one or more required packages. This happens when packages are not installed
at their default location. In that case, you can help CMake by pointing to the correct
packages yourself. For example, if CMake cannot find LAPACK because it is installed
in a subdirectory of /usr/lib/ you can do something like:
cmake -DLAPACK_LIBRARY:FILEPATH=”/usr/lib/atlas/liblapack.so.3” . (again remember the dot)
2.4 Using the Mocapy++ Library
Source code using Mocapy++ must always include the mocapy.h header like this:
#include “mocapy.h”
When compiling your Mocapy++ dependent source code, the required libraries (LAPACK,
Boost and Mocapy++) must also be linked with your program. The easiest way to do this,
is to place your source code in the examples directory and add it to the list of programs
in the CMakeLists.txt file (the PROGS variable). Then CMake will automatically generate
the correct makefile for your program. Chapter 4 describes how to use Mocapy++ in
more details.
2.5 License
Mocapy++ comes with the GNU General Public License (see section 9 for more informa-
tion). Informally speaking (please refer to the license file itself for the legally binding
license), that all modified or altered versions of this Mocapy++ release will be free soft-
ware as well.
2.6 Other DBN packages
Is Mocapy++ the best available tool for you? That depends entirely on what you want
to do, how much data you have, the available computer power, etc. As far as we know,
Mocapy++ is the only publically available toolkit that can handle directional statistics,
such as the bivariate von Mises and Kent probability distributions. Before you decide
to use Mocapy++, you might want to take a look at the following packages for example:
•Kevin Murphy’s Bayes Net Toolbox for Matlab (BNT, http://www.cs.ubc.ca/
~murphyk/Software/BNT/bnt.html): this widely used toolkit supports HMMs
and general DBNs. Unlike Mocapy++, it mainly focuses on deterministic meth-
ods like junction tree inference.
•The Graphical Models Toolkit (GMTK, http://ssli.ee.washington.edu/~bilmes/
gmtk/): Specially focused on DBNs, but only binaries are available.
Chapter 3
Background and Features
3.1 Performance
Mocapy++ is designed to deal with large datasets. we routinely use datasets with
250.000 slices (corresponding to 1600 protein sequences), in combination with a HMM
with an observed Kent node (ie. each slice consists of a discrete value and a 3D real
vector). It takes less than 10h to do 250 S-EM steps (including 50 burn-in steps). Con-
vergence was reached after about 50 EM steps (including 50 burn-in steps, i.e. after
about 3h 30min).
3.2 DBN architectures
The architecture of the DBN, i.e. the number and type of the nodes and the connections
between the nodes, can be specified by the user. In principle, there are no limits with
respect to the number of nodes, edges between nodes or data size, provided that you
have enough memory and patience. Gaussian, Kent, von Mises, Poisson and multino-
mial nodes need to have exactly one discrete parent node, and they need to be in the
same slice as their parent. Partly observed nodes (i.e. some values are missing in the
sequence for a particular node) are supported.
3.3 Node types
Currently, Mocapy++ has 7 different node types, each based on a specific probability
distribution: categorical (which we will call discrete node here), uni- and multivariate
Gaussian, von Mises (univariate on the circle, and bivariate on the torus), Poisson,
multinomial and Kent (on the sphere). In the future, more node types might be added.
Adding a new node simply means implementing new distribution and ESS classes as
described in Chapter 6.
3.3.1 Gaussian, multinomial and discrete nodes
Categorical (for discrete, categorical data), multinomial (for vectors of counts) and Gaus-
sian distributions are standard, so they’ll not be discussed at length here. The tech-
nicalities of parameter estimation for Gaussian nodes can be found in [22]. Mocapy++
supports Gaussian distributions with unconstrained, spherical and diagonal covariance
matrices.
12

CHAPTER 3. BACKGROUND AND FEATURES 13
3.3.2 Kent node
The Kent distribution [17, 19, 24, 18, 4, 15], also known as the 5-parameter Fisher-
Bingham distribution, is a directional distribution, in this case on the 2D sphere1. It
is the 2D member of a larger class of N-dimensional distributions called the Fisher-
Bingham class of distributions. For this class of distributions, parameter estimation
becomes difficult if the dimension becomes larger than 2 (which is the dimension of the
Kent distribution). The density function of the Kent distribution is:
Kκ,β,γ1,γ2,γ3(x) = C(κ, β) exp κx·γ1+β(x·γ2)2−(x·γ3)2
where xis a 3D unit vector that specifies a point on the 2D sphere.
The various parameters can be interpreted as follows:
•κ: a concentration parameter. The higher κ, the more concentrated the density
becomes.
•β: determines how elliptical the equal probability contours of the distribution will
be. The larger β(with condition κ > 2β), the more elliptical. If β= 0, the Kent
distribution becomes the von Mises-Fisher distribution on the 2D sphere.
•γ1: the mean vector. The three εvectors are unit vectors on the 2D sphere.
•γ2: the main axis of the elliptical equal probability contours.
•γ3: the secondary axis of the elliptical equal probability contours.
The normalizing factor C(κ, β)is given by:
C(κ, β) = p(κ−2β)(κ+ 2β)
2πeκ
The advantage of the Kent distribution over the von Mises-Fisher distribution on
the 2D sphere is that the equal probability contours of the density are not restricted
to be circular: they can be elliptical as well. The Kent distribution is equivalent to a
Gaussian distribution with unrestricted covariance. Hence, for 2D directional data the
Kent distribution is richer than the corresponding von Mises-Fisher distribution, i.e. it
might be more suited if the data contains non-circular clusters.
3.3.3 Bivariate von Mises node
Another directional distribution is the bivariate von Mises distribution on the torus.
This distribution can be used to model bivariate angular data. We used this distribution
to capture the properties of the Ramachandran plot [5].
The density function of the bivariate von Mises (cosine variant) distribution is:
f(φ, ψ) = c(κ1, κ2, κ3) exp (κ1cos (φ−µ) + κ2cos (ψ−ν)−κ3cos (φ−µ−ψ+ν))
where φ, ψ are angles in [0,2π[.Such an angle pair defines a point on the torus.
The distribution has 5 parameters:
•µand νare the means for φand ψrespectively.
•κ1and κ2are the concentration of φand ψrespectively.
•κ3is related to their correlation.
This distribution is described in greater detail in Mardia et al. [20] and Boomsma et al.
[5]
1The 2D sphere is the surface of the 3D ball.
CHAPTER 3. BACKGROUND AND FEATURES 14
3.4 Inference
Inference in our case means estimating the values of the hidden nodes, given a set
of values for the observed nodes. Mocapy++ provides two approaches to inference:
approximative methods based on Gibbs sampling and deterministic methods based on
treating the DBN as a HMM.
Calculating the probability distribution over the values of the hidden nodes (i.e. the
smoothing distribution) and calculating the most probably combination of the hidden
node values (i.e. the Viterbi path) can be done in a deterministic way by treating the
DBN as a HMM, and applying classic HMM algorithms.
Turning the DBN into a HMM can lead to intractable calculation when you have a
lot of hidden nodes that can adopt a large number of values. If you have 10 discrete
hidden nodes that each can adopt 4 different values, this would lead to a HMM with
one hidden node that can adopt 410 = 1048576 states. In this case, one can approximate
the smoothing distribution and the Viterbi path using approximative methods based on
Gibbs sampling.
3.4.1 Deterministic inference
3.4.1.1 Smoothing
The task of calculating the probabilty distribution P(Hn,t |o)for any hidden node H
with index nand sequence position tis generally called smoothing. This task can be
performed by treating the DBN as a HMM and applying the forward-backward algorithm
[3, 9]. Scaling of the probabilities is done as described in [3], appendix D.
3.4.1.2 Viterbi path
The Viterbi path is the sequence of hidden node values that best explains the values of
the observed nodes (i.e. that leads to the highest likelihood value). In other words it
means calculating the following:
hv= arg max
h[P(h|o)]
where o=o1, . . . , onare the values of the observed nodes and hv=hv
1, . . . , hv
mis the
Viterbi path. The Viterbi path plays a crucial role in many Bioinformatics applications
[3, 9].
The Viterbi path can be calculated by treating the DBN as a HMM and applying a
dynamic programming algorithm [3, 9]. Mocapy++’s Viterbi path calculation uses log
probabilities to avoid underflows.
3.4.2 Stochastic inference
3.4.2.1 Smoothing
For large DBNs, the forward-backward algorithm can become intractable. In that case
one can approximate the posterior distribution by generating a large set of samples
(by Gibbs sampling) and examining the values of the hidden nodes. The quality of the
approximation will of course depend on the complexity of your model and the number
of samples used.
CHAPTER 3. BACKGROUND AND FEATURES 15
3.4.2.2 Viterbi path
As is the case for the forward-backward algorithm, the deterministic calculation of the
Viterbi path can become intractable for large DBNs. Again, one can use an approxima-
tive algorithm based on Gibbs sampling.
In principle, one could generate a large set of samples and simply pick the one with
the highest LogLik. In practice, the number of possible hidden node combinations
is vast and this approach becomes infeasible. A good solution to this problem is to
generate a set of samples (say 100) and to construct a sequence with a high LogLik by
tying together fragments from the samples.
The algorithm to approximate a Viterbi path using a set of sampled sequences uses a
Dynamic Programming approach to combine the best hidden node values from a set of
sampled sequences (see Algorithm 1). The algorithm is conceptually similar to a Viterbi
path approximation algorithm [14] which uses a set of samples generated by particle
filtering, an online stochastic inference method. The latter algorithm was applied to an
HMM with continuous hidden and observed states.
The algorithm can be used in an iterative manner. In the first run, an initial Viterbi
path approximation is calculated from a set of samples. In the next steps, new samples
are generated but this time the Viterbi path approximation that was calculated in the
previous step is added to the set of samples. In this way, one gradually improves
the approximation. The procedure can be stopped when the LogLik seems to have
converged. This procedure can of course get stuck in a local maximum.
3.5 Parameter learning using MC-EM and S-EM
Parameter learning is done using MC-EM or S-EM, making use of Gibbs sampling for
the E-step (the inference step). When new sampling methods are added, these will also
become available for the MC-EM procedure.
3.6 Priors
In Mocapy++, so far only the discrete node supports the use of a prior. First, let’s
consider how an entry in a CPD of a discrete node His calculated. A CPD is a matrix
filled with values of the type P(H=n|Pa(H) = p), which corresponds to the chance of
observing value nfor node Hwhen H’s parent nodes Pa(H)adopt values p=p1, . . . , ps
(where sis the number of parents). If all sequence node values are known, this is simply
calculated as follows:
P(H=h|Pa(H) = p) = counts(H=h, Pa(H) = p)
PSize(H)−1
i=0 counts(H=i, Pa(H) = p)
where counts(H=h, Pa(H) = p)is the number of times the node value his observed for
node Htogether with parent values pin the sequences. The sum runs over all possible
node values for H. For discrete nodes, a simple pseudo-count prior is supported (which
corresponds to a Dirichlet prior). The CPD entries are calculated as follows:
P(H=h|Pa(H) = p) = counts(H=h, Pa(H) = p) + ch
PSize(H)−1
i=0 [counts(H=i, Pa(H) = p) + ci]
where cis the pseudo count vector (with dimension equal to Size(H)).
CHAPTER 3. BACKGROUND AND FEATURES 16
Algorithm 1 Mocapy++’s Viterbi path approximation algorithm. samples[m, l]corre-
sponds to slice lin sample m.P(samples[m, l]|samples[n, l −1]) is the likelihood of all
the node values in slice l, where the values for the nodes are taken from position lof
sample m, and the nodes’ parent values in the previous slice are taken from position
l−1of sample n. Sequence indices run from 0to L−1. If a previous approximation of
the Viterbi path is available, it can be added to the initial list of samples. The procedure
will then come up with an improved variant of it or produce the same path.
S=number of samples
L=sequence length
V=number of scalars in a sequence slice
samples=sequence (S×L×Vmatrix)
score=matrix(S×L)
path=matrix(S×L)
#Start of dynamic programming
#1. Initialization
for m= 0 to S−1:
score[m, 0]=log P(samples[m, 0]])
#2. Recursion
for l= 0 to L−1:
for m= 0 to S−1:
p=matrix(S)
for n= 0 to S−1:
p[n]=log P(samples[m, l]|samples[n, l −1])
index=argmax(p)
score[m, l]=score[m, l −1]+p[index]
path[m, l]=index
#3. Termination
index=argmax(score[L−1])
viterbi=matrix(L×V)
viterbi[L−1]=samples[index, L −1]
#4. Backtracking
for l=L−2to 0:
index=path[index, l]
viterbi[l]=samples[index, l]
report viterbi
CHAPTER 3. BACKGROUND AND FEATURES 17
3.7 Structure learning is absent!
Structure learning is absent in Mocapy++. We also have no plans to implement it,
since we do not need it, at least not at the moment. Anybody who wants to add this
functionality to Mocapy++ is welcome to contact us.
3.8 Python Interface
A Python interface to Mocapy++ can be made through SWIG (www.swig.org) and an
example of a SWIG interface file is included in the package (pythoninterface.i). A Python
application using the example interface is able to create a DBN, load parameters and
sample sequences. Additional interface methods can be added to pythoninterface.i as
needed. Read examples/pythoninterface.txt for information on how to compile a Python
interface.
Chapter 4
Using Mocapy++
Here we describe the details of constructing the nodes, creating the DBN and using the
DBN in various ways. Another way of learning to use Mocapy++ is to read the example
programs in the examples directory. The basic idea behind the example programs is to
set up a DBN with user specified parameters and generate samples from this network.
Then, another DBN with initially random parameters use the samples and the EM
algorithm to learn the parameters of the network generating the samples.
4.1 Preliminaries
Programs using the Mocapy++ library must be linked with not only Mocapy++, but also
LAPACK and Boost. The easiest way to do this is to let CMake build the makefiles auto-
matically. This can be done by copying your main source file to the examples directory
and add the file name (without extension) to the PROGS line in the CMakeLists.txt file.
Future calls of make will now also compile your program.
When using Mocapy++, the first step is to import the headers and preferably use the
mocapy namespace:
#include “mocapy.h”
using namespace mocapy;
Obviously, sampling depends to a great extend on the generation of random numbers.
By using a specific seed for the random number generating that Mocapy++ is using,
one can make the process reproducible, if that is desirable. Mocapy++ uses the random
number generator in the Boost library. This random number generator can be seeded
to reproduce a Mocapy++ run exactly:
mocapy_seed(a);
4.2 Representation of the sequence data
Mocapy++ stores data in vectors of multidimensional arrays (MDArray). Each sequence
corresponds to one MDArray. Another array, the mismask array, indicates whether the
value of a certain node at a certain position in the sequence is observed or not. MO-
CAPY_OBSERVED in the mismask array indicates the node value is observed, while
MOCAPY_HIDDEN indicates the node value is not observed. Finally, it is also possi-
ble to flag some nodes as simply absent at some points in the sequence using MO-
CAPY_MISSING.
18
CHAPTER 4. USING MOCAPY++ 19
This is most easily explained with a simple example. Suppose the DBN has two
nodes, a 2-dim Gaussian child node and a discrete (unobserved) parent node. Suppose
the sequence is 100 slices long. The following code creates suitable data and mismask
arrays:
MDArray<double> data = MDArray<double>(vec(100, 3));
MDArray<eMISMASK> mismask = MDArray<eMISMASK>(vec(100,2));
mismask.set_wildcard(vec(ALL,0), MOCAPY_HIDDEN);
Columns 1 and 2 in the data array will hold the real values that are associated with
the 2-dim Gaussian node, while column zero holds the integer value of the discrete
node. Of course, it is your responsibility to fill the data array with meaningful values
somehow. Note that the order of the nodes in the DBN definition determines the order
of the values in the data array. Parents need to come first, followed by their children.
There are helper functions to fill in the values of the data and mismask arrays from
files:
MDArray<double> data = data_loader(“data.dat”);
MDArray<eMISMASK> mismask = toMismask(
data_loader(“mismask.dat”) );
The format of the data files is:
•A line contains values in a slice separated by space (or another character specified
as argument to the data loader)
•A block of lines represents a sequence.
•An empty line separates two sequences.
•Lines starting with # are ignored
It is the users responsibility that the input files have the correct format since little
format checking is done. An example of a file is:
# This line is ignored
0 5.4 0 1
0 3.1 6 1
0 4.0 1 8
0 8.0 7 5
0 3.5 4 0
0 5.7 5 5
Reading in the lines above results in two sequences of length three having four values
in a slice. The example file hmm_simple.cpp shows examples of how data and mismask
arrays can be loaded from files.
4.3 Creating the DBN
4.3.1 Creating the nodes
The first step in the definition of a DBN is the creation of the appropriate nodes. For
example, the following code creates a discrete node with node size 4 (i.e. it can adopt
values 0,1,2 or 3):
CHAPTER 4. USING MOCAPY++ 20
Node*dnode = NodeFactory::new_discrete_node(4);
The node size is the number of different values the node can adopt, starting from 0.
Since no initial values are specified for the conditional probability density (CPD), they are
initiated to random values (while avoiding transition probabilities that are 0). The CPD
is a matrix that holds the probabilities of each combination of node and parent values.
For example, a discrete node of size 2with two parents of sizes 3and 4respectively will
have a 3×4×2matrix as its CPD. The sum of the matrix values (i.e. of the probabilities
of all the parent and node value combinations) needs to be 1.
Of course, one can initiate a discrete parent with specific CPD values. For the above
described node a possible initialisation is:
CPD cpd(vec(3,4,2));
cpd.normalize();
Node*dnode = NodeFactory::new_discrete_node(2, “dnode_cpd”,
false, cpd);
The second argument of the factory command above is the name of the node. The third
argument specifies how the parameters should be initialized (false: random, true:
uniform). The fourth argument is the user specified CPD.
Similarly, Gaussian, Kent, multinomial, Von-Mises and Poisson nodes are created
as follows:
Node*gnode = NodeFactory::new_gaussian_node(n);
Node*mnode = NodeFactory::new_multinomial_node(n);
Node*knode = NodeFactory::new_kent_node();
Node*vm1D = NodeFactory::new_vonmises_node();
Node*vm2D = NodeFactory::new_vonmises2d_node();
Node*pnode = NodeFactory::new_poisson_node();
Note that the dimensionality of the Kent, VM and Poisson nodes is fixed and can there-
fore not be specified as argument.
Initialization with specific values for the Gaussian node is done like this:
MDArray<double> means(vec(2,2));
means.set_values( vec(0.0, 0.0, 10.0, 10.0) );
MDArray<double> covs(vec(2,2));
covs.set_values( vec(1.0, 0.0, 2.0, 0.5) );
Node*gnode = NodeFactory::new_gaussian_node(2, “gnode”,
false, means, covs, FULL);
For the Gaussian node, there are three possible choices for the covariance matrix: full,
spherical or diagonal. This is specified by the 6th parameter, which should be ’FULL’,
’SPHE’ or ’DIAG’.
When the Kent node is created with random parameters, the maximum values for the
κand βparameters can be specified. The default values are 5000 and 100, respectively.
Keep in mind that κ > 2β. Note that the dimension does not need to be specified for
the Kent node because the Kent distribution is a distribution on the 3D sphere (i.e.
dim = 3). For example:
vector<double> kappas, betas;
vector<MDArray<double> > es;
Node*knode = NodeFactory::new_kent_node(“knode”, kappas,
betas, es, 40.0, 4.0);
Specific values for κ,βand the γ1, γ2, γ3vectors can also be given of course.
Sometimes it is useful to fix a node’s parameters during learning. This can be done
by setting the node.fixed attribute to true. Setting the attribute to false will allow
the parameters to be updated again in the following EM steps.
CHAPTER 4. USING MOCAPY++ 21
4.3.2 Defining the DBN architecture
After creating the necessary node objects, the next step is to specify the DBN architec-
ture.
•Define the nodes in two consecutive slices. These nodes are arguments to the
set_slices method.
•Specify the connections between the nodes, both inside the slices and between the
two slices. This is done using the add_intra and add_inter methods of the DBN
object.
•Finally, initialize the DBN by calling the construct method.
The following example is typical for a HMM:
// We assume that nodes h0, o0, h1 and o1 are created
DBN dbn;
vector<Node*> start_nodes = vec(h0, o0);
vector<Node*> end_nodes = vec(h1, o1);
dbn.set_slices(start_nodes, end_nodes);
dbn.add_intra(“h0”, “o0”);
dbn.add_inter(“h0”, “h1”);
dbn.construct();
The arguments to the add_intra and add_inter methods are either indices that refer
to the position of the nodes in the lists of start and end nodes or their names. Note that
the nodes in these two lists need to be in topological order! Parents should come first,
followed by their children later in the list.
In the above HMM example, the observed nodes are untied, i.e. the observed node
that models the observations at l= 0 is different from the observed node that models
those at l > 0. It is possible to use tied nodes as well, by using the same observed node
ot for all positions l:
DBN dbn;
vector<Node*> start_nodes = vec(h0, ot);
vector<Node*> end_nodes = vec(h1, ot);
dbn.set_slices(start_nodes, end_nodes);
dbn.add_intra(“h0”, “ot”);
dbn.add_inter(“h0”, “h1”);
Note that node ot is connected to both h0 and h1. It is not possible to tie h0 and h1,
because they have different conditional probability distributions (h0 has no parents,
while h1 has one discrete hidden parent).
4.4 Sampling a sequence from a DBN
Once a DBN is created, it is easy to sample a sequence using the sample_sequence
function:
pair<Sequence, double> seq_ll = dbn.sample_sequence(100);
The method returns a sequence (here of length 100) and the LogLik. This method is of
course ideal to create a test for the learning procedure.
Like all data (see next section), the returned sequence is a vector of MDArray. It’s
dimensions are (output_size, sequence_length). The output size is the number
of numbers that fill in the values of all nodes. For example, the output size for a 2D
Gaussian node and a discrete node is 2 + 1 = 3.
CHAPTER 4. USING MOCAPY++ 22
4.5 LogLik of a fully observed sequence
When all nodes are observed, calculation of the LogLik is of course trivial. In this case,
the calculation can be done using a DBN object:
double ll=dbn.calc_ll(seq);
The returned LogLik is the LogLik divided by the number of sequence slices (i.e. LM).
4.6 Calculation of the posterior distribution
4.6.1 Approximative method
Approximative calculation of the posterior distribution is done using an InfEngineMCMC
object. This object is created using four arguments:
•ADBN object.
•A sampler object. This object takes care of sampling the hidden nodes in the DBN.
Currently, this needs to be a GibbsRandom object.
•A sequence object, i.e. an MDArray containing the data.
•A mismask object, which indicates which nodes are hidden where in the sequence.
The InfEngine objects is created as follows:
GibbsRandom sampler = GibbsRandom(dbn);
InfEngineMCMC inf = InfEngineMCMC(dbn, &sampler, seq,
mismask);
Sampling in Mocapy++ is simply done by generating a set of sequences where the hidden
nodes have been sampled using Gibbs sampling. The probability of each hidden node
value given the observed node values can then be calculated easily from the set of
generated sequences. The likelihood of a sequence can be calculated in a similar way
from the likelihoods of the generated sequences.
4.7 Calculating the Viterbi path
4.7.1 Approximative
Mocapy++ can approximate the Viterbi path using a set of sampled sequences. This is
done by applying a dynamic programming algorithm that strings together pieces of the
sampled sequences so as to find the sequence with the highest likelihood.
The path is calculated by the InfEngineMCMC class. First, one creates a Viterbi path
generator object:
GibbsRandom mcmc = GibbsRandom(dbn);
InfEngineMCMC inf = InfEngineMCMC(dbn, &mcmc, seq, mismask);
inf.initialize_viterbi_generator(50, 50, true);
CHAPTER 4. USING MOCAPY++ 23
Burn-in and random initialisation are done once initially as explained in the previous
section. The first time the next method of the Viterbi path generator is called, it gener-
ates 50 sequence samples, and uses these to approximate the Viterbi path. Subsequent
calls of the ’next’ method again sample 50 sequences. But this time, the previously
generated Viterbi path is added to this set before a new Viterbi path approximation is
calculated. In other words, after the initial next call, subsequent calls try to improve
the initially generated Viterbi path approximation:
for (uint i=0; i<1000; i++) {
Sample s = inf.viterbi_next();
cout < < “LL=” < < s.ll/s.slice_count;
}
The sequence of next calls is typically stopped when the LogLik has converged. The
more sequences are sampled and the higher the number of next calls, the more precise
the Viterbi path will be. Keep in mind that it is in principle possible to get stuck in a
local LogLik maximum, so you might want to retry the procedure with different seed
values (using mocapy_seed) and select the best Viterbi path. The complexity of the
procedure to calculate the Viterbi path is O2, so the method can become slow if you use
many sequences and next calls.
4.8 Parameter learning
4.8.1 S-EM and MC-EM
Parameter learning is done using the EMEngine class. The E- and M-step are done by
the do_E_step and do_M_step, respectively. The average conditional LogLik per slice
is returned by the get_loglik method.
The number of burn-in steps and the number of mcmc steps of the sampling are
specified by the first and second arguments of the do_E_step method. Arguments to
EMEngine are the DBN object whose parameters will be updated and the object that
will actually perform the sampling steps. Currently, Mocapy++ only implements Gibbs
sampling in the GibbsRandom class, but more sampling method will be added. In ad-
dition, it is also possible to attach weights to the sequences using the weight_list
argument: this should be a list of weights (from 0.0 to 1.0) for each sequence.
The following code shows the MC-EM procedure (100 EM steps). Each E-step initial-
izes the hidden node values to random values, performs 10 burn-in steps and generates
10 sequence samples for each sequence. The M-step uses the latter 10 samples to up-
date the parameters.
GibbsRandom mcmc = GibbsRandom(model_dbn);
EMEngine em = EMEngine(model_dbn, seq_list, mismask_list);
for (uint i=0; i<100; i++) {
em.do_E_step(50, 50, true);
double ll = em.get_loglik();
em.do_M_step();
cout < < “LL=” < < ll < < endl;
}
The next code snippet shows an S-EM procedure. At the first iteration, the hidden
node values are initialised to random values, and 50 burn-in steps are done. After that,
the hidden node values are re-used between E-steps. Each E-step generates a single
sample for each sequence, which is then used in the M-step.
CHAPTER 4. USING MOCAPY++ 24
GibbsRandom mcmc = GibbsRandom(model_dbn);
EMEngine em = EMEngine(model_dbn, seq_list, mismask_list);
for (uint i=0; i<100; i++) {
if (i==0) {
em.do_E_step(1, 50, true);
}
else {
em.do_E_step(1, 0, false);
}
double ll = em.get_loglik();
em.do_M_step();
cout < < “LL=” < < ll < < endl;
}
Other approaches are possible. After a certain amount of iterations of MC-EM, when
the parameters are getting closer to their optimal values, one can skip the burn-in steps
and the random initialisation of the hidden nodes. It is of course also possible to turn
off the random initialisation while still having a burn in period, which can give the
values of the hidden nodes the chance to adjust to the new parameters.
4.8.2 Using Priors
Mocapy++ supports a pseudo count prior for the discrete nodes (PseudoCountPrior
class). Creating PseudoCountPrior objects is done as follows (for a DiscreteNode
with node_size=2 that has one parent with node_size=3):
MDArray<double> pcounts(vec(3,2));
pcounts.set(10,10,10);
PseudoCountPrior prior(pcounts);
The prior object is passed to the density object of the DiscreteNode after creation;
Node*n = NodeFactory::new_discrete_node(O_SIZE, "n");
((DiscreteNode*)n)->get_densities()->set_prior(&prior);
4.9 DBN Persistence
After an expensive learning step, one probably wants to save the trained DBN for future
use. It’s quite easy to save a trained DBN by making use of Boost’s built-in persistency
features.
Saving a trained DBN object can be done as follows:
dbn.save(“dbn.pickle”)
Loading the DBN again is done with the load function:
dbn.load(“dbn.pickle”)
You can for example save a copy of the DBN object after every EM-step, and re-use a
saved DBN object when something goes wrong during learning (i.e. a power failure).
Saving and loading DBNs is done using the functionality of the Boost library. You
can use this mechanism to save and retrieve any Mocapy++ object if needed.
CHAPTER 4. USING MOCAPY++ 25
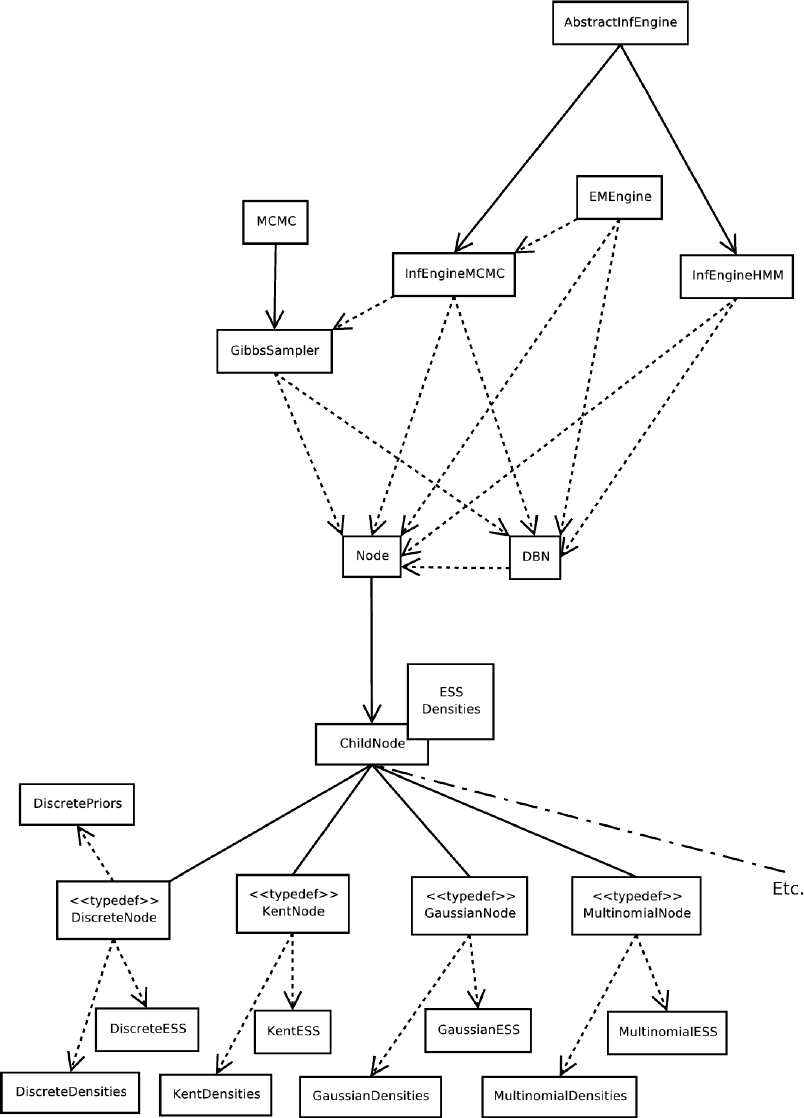
Figure 4.1: Two slices of an input-output HMM with multiple inputs and outputs. For
a given slice, j, the DBN has a set of input variables Ij={I1
j, . . . , Ik
j}, a hidden state Hj
and a set of output variables Oj={O1
j, . . . , Om
j}.Iand Hare all discrete variables, while
each of the variables in Ocan be either discrete or continuous.
4.10 Inference in hidden Markov models and mixture
models
Mocapy++ provides exact methods for doing inference in hidden Markov models (HMMs)
and mixture models (MMs). In particular, Mocapy++ implements algorithms for sam-
pling and calculating probabilities of partially observed data given the models.
4.10.1 Inference in hidden Markov models
Mocapy++ implements exact methods for doing inference in the class of hidden Markov
models that can be described by the DBN depicted in Figure 4.1. We will denote this type
of models input-output HMMs (IOHMMs) with multiple inputs and outputs, though the
term IOHMM often is used for a broader class of models [21]. The IOHMMs can have an
arbitrary number of input and output variables; in fact the input variables are optional
while a least one output variable is required. The DBN in Figure 4.1 corresponds to the
factorization
P(I,H,O) = Y
j
P(Ij)P(Hj|Hj−1,Ij)P(Oj|Hj),
where Ij={I1
j, . . . , Ik
j}is the set of input variables and Oj={O1
j, . . . , Om
j}is the set of
output variables in slice j.
In the following sections we will assume that the output variables are divided into
two mutually exclusive sets: a set of observed variables Oobs and a set of unobserved
variables Ounobs. An output node can be in the observed set in one slice while the
corresponding node in the following slice can be in the unobserved set; as an example
you could have O1
j∈Oobs and O1
j+1 ∈Ounobs. In practice the division is declared using
a mismask array and flagging the observed variables as MOCAPY_OBSERVED and the
unobserved variables as MOCAPY_HIDDEN.
4.10.1.1 Calculating probability of output variables
The LikelihoodInfEngineHMM class is used to calculate the probability of the observed
subset, Oobs, conditioned on the input variables
P(Oobs|I) = X
HY
j
P(Hj|Ij, Hj−1)P(Oobs
j|Hi).
CHAPTER 4. USING MOCAPY++ 26
In the implementation, the sum over hidden states is calculated using a slightly modi-
fied version of the classical forward algorithm [8].
The LikelihoodInfEngineHMM class has the constructor:
LikelihoodInfEngineHMM(DBN*newdbn, uint newhiddennodeindex,
bool checkdbn=true)
The argument new_dbn is a pointer to the DBN object and new_hidden_node_index
specifies the index of the hidden node within a slice of the model. If the argument
check_dbn is set to true then the constructor checks if the model complies with the
structure from figure 4.1.
After an LikelihoodInfEngineHMM object has been constructed, the calc_ll method
can be used for calculating the probability of a sequence, seq, based on a given mis-
mask, mismask. The method has the prototype:
double LikelihoodInfEngineHMM::calcll(Sequence & seq,
MDArray<eMISMASK> & mismask, int start=0,
int end=-1, bool multiplybyinput=false)
The arguments start and end can be used to calculate the probability of a subsequence
of the slices in the dataset, that is P(Oobs
j=start...end−1|I, Hstart−1, Hend). The default
value of −1for end means the end of the sequence. If multiply_by_input is set to true
the input variables are included in the probability, in other words the method calculates
P(Oobs,I). Note that the method assumes that all input variables are always observed –
event if they are flagged as otherwise in the mismask.
4.10.1.2 Sampling
The SampleInfEngineHMM class is used to sample the sequence of hidden states, H,
and the output variables flagged as unobserved, Ounobs, from the conditional distribu-
tion P(H,Ounobs|Oobs,I). This is done using a slightly modified version of the forward-
backtrack algorithm [7].
The class constructor has the prototype:
SampleInfEngineHMM(DBN*newdbn, Sequence & newseq,
MDArray<eMISMASK> & newmismask, uint newhiddennodeindex,
bool checkdbn=true, double newweight=1.0);
The first argument new_dbn is a pointer to the DBN, new_seq is the initial sequence
used for sampling and new_mismask is the mismask defining which output variables
are observed and which are unobserved. Again new_hidden_node_index specifies the
index of the hidden node within a slice of the model and if the argument check_dbn is
set to true then constructor checks if the model complies with the structure from Figure
4.1.
After an SampleInfEngineHMM object has been constructed, the sample_next method
can be used for sampling Hand Ounobs :
Sequence & SampleInfEngineHMM::samplenext()
The method takes no arguments and returns the new sample. The probability of this
sample can be calculated using the method:
double SampleInfEngineHMM::calcll(MDArray<eMISMASK> & mismask,
int start=0, int end=-1, bool multiplybyinput=false)
CHAPTER 4. USING MOCAPY++ 27
Figure 4.2: Two slices of an input-output MM (IOMM) with multiple inputs and outputs.
For a given slice, j, the the DBN has a set of input variables Ij={I1
j, . . . , Ik
j}, a hidden
state Hjand a set of output variables Oj={O1
j, . . . , Om
j}.Iand Hare all discrete
variables, while each of the variables in Ocan be either discrete or continuous.
The arguments has the same meaning as for the cacl_ll method for the LikelihoodInfEngineHMM
class.
The method set_start_end can be used to only sample a subsequence of the slices;
the method has the prototype:
SampleInfEngineHMM::setstartend(int start=0, int end=-1);
The default values of start and end means that the whole sequence is sampled in each
call to the method sample_next. By calling this method and changing these values, the
subsequence calls of sample_next will only sample the subsequence Hj=start...end−1
and Ounobs
j=start...end−1from the conditional distribution
P(Hj=start...end−1,Oj=start...end−1|Oobs,I, Hstart−1, Hend).
Note that objects of both the SampleInfEngineHMM and LikelihoodInfEngineHMM
class assumes that the DBN given to the constructor stays unchanged within the life-
time of the object. If the distributions in the DBN are changed the methods will give
incorrect results.
4.10.2 Inference in mixture models
Mocapy++ also implements exact methods for doing inference in the class of mixture
models (MM) that can described by the DBN in Figure 4.2. We call this type of models
for input-output MMs (IOMMs) with multiple inputs and outputs. As for the IOHMMs,
the IOMMs can have an arbitrary number of input and output variables. The DBN in
Figure 4.2 corresponds to the factorization
P(I,H,O) = Y
j
P(Ij)P(Hj|Ij)P(Oj|Hj),
where Ij={I1
j, . . . , Ik
j}is the set of input variables and Oj={O1
j, . . . , Om
j}is the set of
output variables in slice j. As for the IOHMMs, we will assume that the output variables
are divided into two mutually exclusive sets: a set of observed variables Oobs and a set
of unobserved variables Ounobs.
Mocapy++ provides two classes for doing inference in IOMMs: the LikelihoodInfEngineMM
class and the SampleInfEngineMM class. These classes have the same interface as the
CHAPTER 4. USING MOCAPY++ 28
corresponding classes for IOHMMs. The classes only differ in how to calculate the dis-
tribution over the hidden states. For IOHMM this distribution, P(H|Oobs
j,I), can be
calculated directly due the absence of dependencies between the hidden states.
Chapter 5
Examples
5.1 Learning
5.1.1 HMM with discrete output node
This example shows how a simple HMM with discrete output is implemented in Mo-
capy++. The program first creates a DBN object with random parameters and samples
a set of sequences from it for use as artificial training data. Then, a second DBN object
with random parameters is trained using these generated sequences. During learning,
the LogLik values are printed.
#include <iostream>
#include <stdio.h>
#include <stdlib.h>
#include "mocapy.h"
using namespace mocapy;
int main(void) {
mocapy_seed(574);
// Number of trainining sequences
int N = 100;
// Sequence lengths
int T = 100;
// Gibbs sampling parameters
int MCMC_BURN_IN = 10;
// HMM hidden and observed node sizes
uint H_SIZE=2;
uint O_SIZE=2;
bool init_random=false;
CPD th0_cpd;
th0_cpd.set_shape(2); th0_cpd.set_values(vec(0.1, 0.9));
CPD th1_cpd;
th1_cpd.set_shape(2,2); th1_cpd.set_values( vec(0.95, 0.05, 0.1, 0.9));
CPD to0_cpd;
to0_cpd.set_shape(2,2); to0_cpd.set_values( vec(0.1, 0.9, 0.8, 0.2));
// The target DBN (This DBN generates the data)
Node*th0 = NodeFactory::new_discrete_node(H_SIZE, "th0", init_random, th0_cpd);
Node*th1 = NodeFactory::new_discrete_node(H_SIZE, "th1", init_random, th1_cpd);
Node*to0 = NodeFactory::new_discrete_node(O_SIZE, "to0", init_random, to0_cpd);
DBN tdbn;
29
CHAPTER 5. EXAMPLES 30
tdbn.set_slices(vec(th0, to0), vec(th1, to0));
tdbn.add_intra("th0", "to0");
tdbn.add_inter("th0", "th1");
tdbn.construct();
// The model DBN (this DBN will be trained)
// For mh0, get the CPD from th0 and fix parameters
Node*mh0 = NodeFactory::new_discrete_node(H_SIZE, "mh0", init_random, CPD(), th0, true );
Node*mh1 = NodeFactory::new_discrete_node(H_SIZE, "mh1", init_random);
Node*mo0 = NodeFactory::new_discrete_node(O_SIZE, "mo0", init_random);
DBN mdbn;
mdbn.set_slices(vec(mh0, mo0), vec(mh1, mo0));
mdbn.add_intra("mh0", "mo0");
mdbn.add_inter("mh0", "mh1");
mdbn.construct();
cout < < "*** TARGET ***" < < endl;
cout < < "th0: " < < *th0 < < endl;
cout < < "th1: " < < *th1 < < endl;
cout < < "to0: " < < *to0 < < endl;
cout < < "*** MODEL ***" < < endl;
cout < < "mh0: " < < *mh0 < < endl;
cout < < "mh1: " < < *mh1 < < endl;
cout < < "mo0: " < < *mo0 < < endl;
vector<Sequence> seq_list;
vector< MDArray<eMISMASK> > mismask_list;
cout < < "Generating data" < < endl;
MDArray<eMISMASK> mismask;
mismask.repeat(T, vec(MOCAPY_HIDDEN, MOCAPY_OBSERVED));
// Generate the data
double sum_LL(0);
for (int i=0; i<N; i++) {
pair<Sequence, double> seq_ll = tdbn.sample_sequence(T);
sum_LL += seq_ll.second;
seq_list.push_back(seq_ll.first);
mismask_list.push_back(mismask);
}
cout < < "Average LL: " < < sum_LL/N < < endl;
GibbsRandom mcmc = GibbsRandom(&mdbn);
EMEngine em = EMEngine(&mdbn, &mcmc, &seq_list, &mismask_list);
cout < < "Starting EM loop" < < endl;
double bestLL=-1000;
uint it_no_improvement(0);
uint i(0);
// Start EM loop
while (it_no_improvement<100) {
em.do_E_step(1, MCMC_BURN_IN, true);
double ll = em.get_loglik();
cout < < "LL= " < < ll;
if (ll > bestLL) {
cout < < " *saving model *" < < endl;
mdbn.save("discrete_hmm.dbn");
bestLL = ll;
it_no_improvement=0;
}
else { it_no_improvement++; cout < < endl; }
CHAPTER 5. EXAMPLES 31
i++;
em.do_M_step();
}
cout < < "DONE" < < endl;
mdbn.load("discrete_hmm.dbn");
cout < < "*** TARGET ***" < < endl;
cout < < "th0: " < < *th0 < < endl;
cout < < "th1: " < < *th1 < < endl;
cout < < "to0: " < < *to0 < < endl;
cout < < "*** MODEL ***" < < endl;
cout < < "mh0: " < < *mh0 < < endl;
cout < < "mh1: " < < *mh1 < < endl;
cout < < "mo0: " < < *mo0 < < endl;
delete th0;
delete th1;
delete to0;
delete mh0;
delete mh1;
delete mo0;
return EXIT_SUCCESS;
}
5.1.2 HMM with Gaussian output node
Changing the above HMM into an HMM with real valued Gaussian observations is triv-
ial. Below only the relevant difference with the previous HMM code is shown.
MDArray<double> means( vec(2,2) );
means.set_values( vec(0.0,0.0,10.0,10.0) );
Node*to0 = NodeFactory::new_gaussian_node(O_SIZE, "to0",
false, means);
Node*mo0 = NodeFactory::new_gaussian_node(O_SIZE, "mo0",
true);
5.1.3 Factorial HMM with discrete output node
The following code fragment illustrates how to implement the Factorial HMM that is
shown in figure 1.3:
// HMM hidden and observed node sizes
uint H_SIZE=5;
uint O_SIZE=3;
Node*th1 = NodeFactory::new_discrete_node(H_SIZE, "th1");
Node*th2 = NodeFactory::new_discrete_node(H_SIZE, "th2");
Node*th3 = NodeFactory::new_discrete_node(H_SIZE, "th3");
Node*th01 = NodeFactory::new_discrete_node(H_SIZE, "th01");
Node*th02 = NodeFactory::new_discrete_node(H_SIZE, "th02");
Node*th03 = NodeFactory::new_discrete_node(H_SIZE, "th03");
Node*to = NodeFactory::new_discrete_node(O_SIZE, "to");
DBN tdbn;
tdbn.set_slices(vec(th01, th02, th03, to),
vec(th1, th2, th3, to));
tdbn.add_intra("th1", "to");
tdbn.add_intra("th2", "to");
CHAPTER 5. EXAMPLES 32
tdbn.add_intra("th3", "to");
tdbn.add_inter("th1", "th01");
tdbn.add_inter("th2", "th02");
tdbn.add_inter("th3", "th03");
tdbn.construct();
Chapter 6
Mocapy++’s design
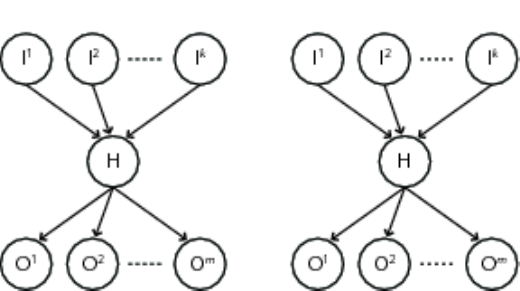
Mocapy++’s design is fairly transparent. Figure 6.1 shows a UML-like diagram of its
architecture, featuring inheritance and interactions among the classes. Some points to
note are:
•All node classes are instantiated from the ChildNode template class which is de-
rived from the Node class.
•The type parameters of the ChildNode template are the ESS class and the Densities
class.
•The ESS class contains the Expected Sufficient Statistics (ESS) for the given node.
Basically it implements how a sample (from the Gibbs sampler) should be added
and stored, such that estimation of the distributions parameters can be done. An
ESS class must be implemented for each node type.
•The Densities class implements the estimation and sampling procedures of the
given distribution.
•EM learning is done by the EMEngine class.
•Deterministic inference (smoothing and Viterbi) is done by the InfEngineHMM
class. Sampling and stochastic Viterbi is done by the InfEngineMCMC class.
•Currently there is one class that does the actual sampling, i.e. the GibbsSampler
class. It is easy to implement a new sampler class by using the MCMC class as a
base class.
•The EMEngine, InfEngineHMM,InfEngineMCMC and GibbsSampler classes all in-
teract directly with the DBN and Node classes to perform their operations. What
goes on in the Node classes itself is however completely shielded by the uniform
Node class interface.
•The DiscretePriors module contains the prior for discrete node.
33
CHAPTER 6. MOCAPY++’S DESIGN 34
Figure 6.1: Mocapy++’s overall design. Full arrows indicate inheritance, dotted arrows
indicate a dependency (i.e. ’a uses b’). Dotted boxes indicate modules, ordinary boxes
indicate classes.
Chapter 7
Extending Mocapy
We’ve taken great care to document Mocapy++’s code, and have tried to keep it’s archi-
tecture (see previous chapter) as clear as possible without compromising performance
too much. Hence, it should be possible to understand how Mocapy++ works, and sub-
sequently to extend the toolkit.
7.1 More Node types
Adding new node types is easy in Mocapy++. To add a new node X, the following four
files must be created:
{X}ess.{h,cpp} {X}densities.{h,cpp}
The {X}ESS class inherits from the abstract ESSBase class and you must override
the construct and add_ptv methods. In the construct method you must define the
appropriate shape of the ESS, and in add_ptv you must add a sample point to the ESS.
You can look at the existing *ess.cpp files for examples/inspiration.
The {X}Densities class inherits from the abstract DensitiesBase class. You should
write your own constructor with the appropriate parameters for your node.
You must override the following methods:
•construct(parent_sizes): Initialize your parameters (mean, covariance, CPD, etc.).
•estimate(ess): Estimate the parameters of the node based on the ESS (having the
structure you chose in {X}ess.cpp)
•sample(ptv): Return a sample based on indicated parent values. Note that ptv
stand for “parent and this node’s values”: the values of the parents nodes and the
value of the node to which the method belongs.
•get_lik(ptv, log): Return likelihood, P(child |parent)
•get_parameters(): Return the distribution’s parameters
•get_string(): Return string representation of parameters
7.2 More sampling methods
It’s easy to add new sampling algorithms. Sampling is done by a subclass of the MCMC
base class in the MCMC module. Currently, only random-sweep Gibbs sampling is imple-
mented in the GibbsRandom class, which can also be found in the MCMC module. This
can serve as a good example of how to proceed.
35
Chapter 8
Acknowledgements
Mocapy++ is part of a protein structure prediction project at the Bioinformatics Centre,
University of Copenhagen, Denmark.
Funding came from the Lundbeckfond (February 2004-January 2005, www.lundbeckfonden.
dk), a Marie Curie intra-European fellowship within the 6th European community frame-
work programme (February 2005-January 2006) and a grant from the Danish research
council (Fund for technology and production sciences; project “Data driven protein struc-
ture prediction”).
We thank Anders Krogh, Bioinformatics Center, University of Copenhagen, for his
support of this project. John T. Kent, Department of Statistics, University of Leeds, UK,
kindly contributed a method to sample efficiently from the Kent distribution. Kanti
Mardia and Charles C. Taylor, University of Leeds, UK, developed the bivariate von
Mises distribution.
In addition, we thank Ole Winther, Digital Signal Processing, Informatics and Mathe-
matical Modelling, Technical University of Denmark, Niels Hansen, Bioinformatics Center,
University of Copenhagen, Søren Feodor Nielsen, Department of Statistics and Opera-
tions research, Institute for Mathematical Sciences, University of Copenhagen and Jesper
Ferkinghoff-Borg, Niels Bohr Institute, Denmark for interesting discussions and sugges-
tions.
Finally, the authors thank all people at Bioinformatics Centre, University of Copen-
hagen, Denmark who have helped implementing Mocapy++: Christian Andreetta, Wouter
Boomsma, Mikael Borg, Jes Frellsen, Tim Harder and Kasper Stovgaard. All shortcom-
ings in this project are of course due to the authors.
36
Chapter 9
GNU general public license
MOCAPY++: A toolkit for learning and inference in Dynamic Bayesian Networks. Copy-
right (C) 2004, 2009 Martin Paluszewski and Thomas Hamelryck.
This program is free software: you can redistribute it and/or modify it under the
terms of the GNU General Public License as published by the Free Software Foundation,
either version 3 of the License, or (at your option) any later version. This program is
distributed in the hope that it will be useful, but WITHOUT ANY WARRANTY; without
even the implied warranty of MERCHANTABILITY or FITNESS FOR A PARTICULAR
PURPOSE. See the GNU General Public License for more details. You should have
received a copy of the GNU General Public License along with this program. If not, see
<http://www.gnu.org/licenses/>.
37
Bibliography
[1] ANDRIEU, C., DE FREITAS, N., DOUCET, A., AND JORDAN, M. I. An introduction to
MCMC for machine learning. Machine Learning 50 (2003), 5–43.
[2] ANGERSON, E., BAI, Z., DONGARRA, J., GREENBAUM, A., MCKENNEY, A.,
DUCROZ, J., HAMMARLING, S., DEMMEL, J., BISCHOF, C., BISCHOF, C.,
SORENSEN, D., AND A10. Lapack: A portable linear algebra library for high-
performance computers. In Supercomputing ’90. Proceedings of (1990), pp. 2–11.
[3] BALDI, P., AND BRUNAK, S. Bioinformatics : the machine learning approach. MIT
Press, 1998.
[4] BOOMSMA, W., KENT, J., MARDIA, K., TAYLOR, C., AND HAMELRYCK, T. Graphical
models and directional statistics capture protein structure. In Interdisciplinary
Statistics and Bioinformatics (2006), S. Barber, P. Baxter, K. Mardia, and R. Walls,
Eds., vol. 25, Leeds University Press, pp. 91–94.
[5] BOOMSMA, W., MARDIA, K. V., TAYLOR, C. C., FERKINGHOFF-BORG, J., KROGH,
A., AND HAMELRYCK, T. A generative, probabilistic model of local protein structure.
Proceedings of the National Academy of Sciences 105, 26 (July 2008), 8932–8937.
[6] BROOKS, S. Markov chain Monte Carlo method and its applications. The Statisti-
cian 47 (1998), 69–100.
[7] CAWLEY, S. L., AND PACHTER, L. HMM sampling and applications to gene finding
and alternative splicing. Bioinformatics 19 Suppl 2 (October 2003).
[8] DIEBOLT, J., AND IP, E. Markov chain Monte Carlo in practice. Chapman &
Hall/CRC, 1996, ch. 15: Stochastic EM: method and application, pp. 259–273.
[9] DURBIN, R., EDDY, S. R., KROGH, A., AND MITCHISON, G. Biological sequence
analysis: probabilistic models of proteins and nucleic acids. Cambridge Univ. Press,
2000.
[10] FRELLSEN, J., MOLTKE, I., THIIM, M., AND HAMELRYCK, T. A probabilistic model
of RNA conformational space. PLoS Computational Biology (to appear) (2009).
[11] GHAHRAMANI, Z. Learning dynamic Bayesian networks. Lecture Notes in Computer
Science 1387 (1998), 168–197.
[12] GHAHRAMANI, Z., AND JORDAN, M. I. Factorial hidden markov models. Machine
Learning 29 (1997), 245–273.
[13] GILKS, W., RICHARDSON, S., AND SPIEGELHALTER, D., Eds. Markov chain Monte-
Carlo in practice. Chapman & Hall/CRC, London, 1996.
[14] GODSILL, S., DOUCET, A., AND WEST, M. Maximum a posteriori sequence estima-
tion using Monte Carlo particle filters. Ann. Inst. Stat. Math. 53 (2001), 82–96.
38
BIBLIOGRAPHY 39
[15] HAMELRYCK, T., KENT, J., AND KROGH, A. Sampling realistic protein conforma-
tions using local structural bias. PLoS Comput. Biol. 2, 9 (2006), e131.
[16] JORDAN, M., Ed. Learning in graphical models. MIT Press, 1998.
[17] KENT, J. The Fisher-Bingham distribution on the sphere. J. Royal Stat. Soc. 44
(1982), 71–80.
[18] KENT, J., AND HAMELRYCK, T. Using the Fisher-Bingham distribution in stochastic
models for protein structure. In Quantitative Biology, Shape Analysis, and Wavelets
(2005), S. Barber, P. Baxter, K. Mardia, and R. Walls, Eds., vol. 24, Leeds University
Press, pp. 57–60.
[19] LEONG, P., AND CARLILE, S. Methods for spherical data analysis and visualization.
J. Neurosci. Met. 80 (1998), 191–200.
[20] MARDIA, KANTI, V., TAYLOR, CHARLES, C., SUBRAMANIAM,AND GANESH, K. Protein
bioinformatics and mixtures of bivariate von mises distributions for angular data.
Biometrics 63, 2 (June 2007), 505–512.
[21] MURPHY, K. An introduction to graphical models. Tech. rep., UC Berkeley, Com-
puter Science Division, 2001.
[22] MURPHY, K. Dynamic Bayesian Networks: Representation, Inference and Learning.
PhD thesis, UC Berkeley, Computer Science Division, 2002.
[23] NEAL, R. Probablistic inference using markov chain monte carlo methods. Tech.
rep., Dept. of Computer Science, University of Toronto, September 1993.
[24] PEEL, D., WHITEN, W., AND MCLACHLAN, G. Fitting Mixtures of Kent Distributions
to Aid in Joint Set Identification. J. Am. Stat. Ass. 96 (2001), 56–63.
[25] RABINER, L. A Tutorial in Hidden Markov Models and Selected Applications in
Speech Recognition. Proc. of the IEEE 77 (1989), 257–286.
[26] WOJTCZYK, M., AND KNOLL, A. A cross platform development workflow for c/c++
applications. In Software Engineering Advances, 2008. ICSEA ’08. The Third Inter-
national Conference on (2008), pp. 224–229.
