MOM1 Manual
MOM1_manual
User Manual:
Open the PDF directly: View PDF ![]() .
.
Page Count: 46
The G.F.D.L.
Modular Ocean Model
Users Guide
Version 1.0 - September 1991
G.F.D.L. Ocean Group Technical Report Number 2
Ronald C. Pacanowski
Keith W. Dixon
Anthony Rosati
Geophysical Fluid Dynamics Laboratory
Princeton, New Jersey
UNITED STATES DEPARTMENT OF COMMERCE
National Oceanic and Atmospheric Administration
<Pacanowski, Dixon & Rosati - GFDL Ocean Group Tech. Report No. 2>
i
TABLE OF CONTENTS
TABLE OF CONTENTS .................................................................................... i
DISCLAIMER NOTICE ...............................................................................................iii
AVAILABILITY OF THIS DOCUMENT ....................................................................... iii
REFERENCING THE GFDL MODULAR OCEAN MODEL AND THIS DOCUMENT iv
FONTS USED IN THIS DOCUMENT .........................................................................iv
AVAILABILITY OF THE G.F.D.L. MODULAR OCEAN MODEL CODE..................... iv
PREFACE ..........................................................................................................vi
ACKNOWLEDGEMENTS...............................................................................vii
CHAPTER 1: Beginning to Work with the GFDL Modular Ocean Model
(1.1) BRIEF FILE DESCRIPTIONS ..........................................................................1-2
(1.2) REQUIREMENTS FOR RUNNING THE M.O.M. CODE ..................................1-3
(1.3) EXTRACTING THE INDIVIDUAL FORTRAN SOURCE FILES ......................1-4
(1.4) GETTING ACQUAINTED WITH THE M.O.M. CODE ......................................1-5
(1.5) RECOMMENDATIONS FOR M.O.M. CODE MAINTENANCE ........................1-5
CHAPTER 2: Coding Design of the GFDL Modular Ocean Model
(2.1) GENERAL CODING DESIGN ..........................................................................2-2
(2.2) SOME NEW FEATURES & NOTES FOR USERS OF THE COX CODE ........2-3
(2.3) SIMPLIFIED CALLING TREE DIAGRAMS FOR THE GFDL M.O.M. CODE..2-6
CHAPTER 3: Code Options in the GFDL Modular Ocean Model
(3.1) OVERVIEW OF CODE OPTIONS....................................................................3-2
(3.2) GRID OPTIONS................................................................................................3-2
(3.3) EXTERNAL MODE OPTIONS .........................................................................3-3
(3.4) LATERAL MIXING SCHEMES.........................................................................3-4
(3.5) VERTICAL MIXING SCHEMES .......................................................................3-5
(3.6) HYBRID MIXING SCHEME OPTIONS.............................................................3-7
(3.7) OPTIMIZATION OPTIONS ...............................................................................3-8
(3.8) FILTERING OPTIONS......................................................................................3-9
(3.9) I/O OPTIONS..................................................................................................3-10

<Pacanowski, Dixon & Rosati - GFDL Ocean Group Tech. Report No. 2>
ii
(3.10) MISCELLANEOUS CODE OPTIONS ..........................................................3-10
INDEX...........................................................................................................IN-1

<Pacanowski, Dixon & Rosati - GFDL Ocean Group Tech. Report No. 2>
iii
DISCLAIMER NOTICE
Mention of a commercial company or
product does not constitute an
endorsement by NOAA Environmental
Research Laboratories.
Use for publicity or advertising purposes of
information from this report concerning
proprietary products or the tests of such
products is not authorized.
The authors and NOAA Environmental
Research Laboratories assume no
responsibility for errors in, or incorrect use
of the GFDL Modular Ocean Model. It is
first and foremost an ocean modeling
research tool used by researchers at
NOAA’s Geophysical Fluid Dynamics
Laboratory. The model and this Users
Guide have been made available as a
service to the oceanographic community.
No guarantees concerning the code, the
documentation, nor their continued
support are intended. It is left to the
individual user to satisfy (him/her)self that
a particular configuration is working
correctly.
AVAILABILITY OF THIS
DOCUMENT
Copies of GFDL Ocean Group Technical
Reports can be obtained by writing the
authors at...
Geophysical Fluid Dynamics Lab / NOAA
Princeton University, Box 308
Princeton, New Jersey 08542
Postscript files of this report may also be
obtained via anonymous ftp across the
internet from a GFDL server named
gfdl.gov which has the IP address
140.208.1.9
After making the anonymous ftp
connection, the files containing this
document can be found in the directory
named.../pub/GFDL_MOM/UsersGuide
Updates to this Users Guide are planned,
but no timetable has been set for those
updates. Users of the GFDL Modular
Ocean Model who have provided the
authors with an e-mail address that can be
reached via internet connections, will be
notified as updates become available.
<GFDL Modular Ocean Model Users Guide - Version 1.0>
iv
REFERENCING THE GFDL
MODULAR OCEAN MODEL AND
THIS DOCUMENT
Those who use the GFDL Modular Ocean
Model in part of their research should
reference the model in papers and other
publications as as follows:
REFERENCE:
Pacanowski, R., K. Dixon and A. Rosati,
“The GFDL Modular Ocean Model Users
Guide version 1.0”, GFDL Ocean Group
Technical Report #2, (1991).
FONTS USED IN THIS
DOCUMENT
This document was prepared using Frame
Technology Corporation’s copywrited
FrameMaker workstation publishing
software.
In the examples in this document, we have
adopted the convention of representing
user keyboard input in FrameMaker’s
bold Courier font, and computer
responses in a regular Courier
font.
Fortran variable names, UNIX commands
and file names also appear in a regular
Courier font
The names of GFDL Modular Ocean
Model code options enabled through the
use of ifdef directives are shown in a font
FrameMaker calls demibold Avant
G arde.
AVAILABILITY OF THE G.F.D.L.
MODULAR OCEAN MODEL CODE
The Fortran code and related support files
for the GFDL Modular Ocean Model can
be obtained free of cost via anonymous
ftp on the internet. Those wishing to
obtain the model in this manner can find
the files under the /pub/GFDL_MOM
directory of the GFDL server named
gfdl.gov (IP address 140.208.1.9).
Example:
First, on your own machine, make a
directory and a subdirectory and change
to it:
mkdir my_mom (for the MOM files)
cd my_mom
mkdir prep_data (for the DATA files)
cd prep_data
Then, do the ftp and transfer the files:
ftp -i 140.208.1.9
Name (140.208.1.9:xxx): ftp
Password: anything (your last name
would do nicely)
cd pub/GFDL_MOM/PREP_DATA (this
directory contains programs for preparing
data for use with the MOM code. It does
not contain any datasets, and is not
needed to run the model test case.)
mget * (transfer the DATA files)
lcd ../ (change local directory)
cd ../ (change remote directory)
mget * (transfer the MOM files)
quit (close the ftp connection)

<Pacanowski, Dixon & Rosati - GFDL Ocean Group Tech. Report No. 2>
v
On your local machine, change directories
and list the contents of the directories to
check that you have received the files:
NOTE: the MOM_NEWS file will change size
as bug reports and other updates are
added to it over time.
cd ../
ls -goF
total 1672
-r--r--r-- 1 19413 Apr 24 09:46 MOM_NEWS
dr-xr-xr-x 2 512 Dec 5 1990 prep_data/
-r--r--r-- 1 48290 Dec 14 1990 READ_ME
-r-xr--r-- 1 2109 Dec 14 1990 cray.run*
-r-xr--r-- 1 1524 Dec 14 1990 mergelib*
-r--r--r-- 1 555072 Dec 14 1990 mom_1.0
-r--r--r-- 1 361 Feb 2 1991 ocean.in
-r--r--r-- 1 221239 Dec 14 1990 printout
-r--r--r-- 1 3735 Dec 14 1990 splitlib.c
-r-xr--r-- 1 1188 Dec 14 1990 upgrade*
cd prep_data
ls -goF
total 157
-r--r--r-- 1 8670 Dec 14 1990 READ_ME
-r-xr--r-- 1 39 Dec 14 1990 export.batch*
-r-xr--r-- 1 1282 Dec 14 1990 export.data*
-r--r--r-- 1 14906 Dec 14 1990 ic.F
-r-xr--r-- 1 32 Dec 14 1990 ic.batch*
-r--r--r-- 1 211 Dec 14 1990 ic.i.salt
-r--r--r-- 1 211 Dec 14 1990 ic.i.temp
-r-xr--r-- 1 3418 Dec 14 1990 ic.run*
-r--r--r-- 1 6634 Dec 14 1990 prep_utl.F
-r--r--r-- 1 15068 Dec 14 1990 sbc.F
-r-xr--r-- 1 33 Dec 14 1990 sbc.batch*
-r--r--r-- 1 110 Dec 14 1990 sbc.i
-r-xr--r-- 1 2302 Dec 14 1990 sbc.run*
-r--r--r-- 1 18431 Dec 14 1990 topo.F
-r-xr--r-- 1 34 Dec 14 1990 opo.batch*
-r--r--r-- 1 194 Dec 14 1990 topo.i
-r-xr--r-- 1 2011 Dec 14 1990 topo.run*
-r-xr--r-- 1 39 Dec 14 1990 verify.batch*
-r-xr--r-- 1 1400 Dec 14 1990 verify.data*
<GFDL Modular Ocean Model Users Guide - Version 1.0>
vi
PREFACE
The GFDL Modular Ocean Model is
intended to be a flexible tool for exploring
ocean and coupled air-sea applications
over a wide range of space and time
scales. This model code has been written
as a collaborative effort by Ron
Pacanowski, Keith Dixon and Anthony
Rosati at the National Oceanographic and
Atmospheric Administration’s Geophys-
ical Fluid Dynamics Laboratory in
Princeton, New Jersey. It is the successor
to the code written by Michael Cox, which
he documented in the GFDL Ocean Group
Technical Report #1, (1984).
As was the case for the Cox model, the
GFDL Modular Ocean Model is distributed
freely to members of the oceanographic
community. However, we can not certify
that the code nor its documentation are
free of errors. Also, we can not provide in-
depth support for users of the model.
We recognize that many users will find this
first version of the GFDL Modular Ocean
Model Users Guide to be quite incomplete.
We consider this Users Guide to be a
dynamic document, and one that we will
revise and expand. We also expect the
model itself to continue to be improved
and expanded. Our hope is that the model
and documentation will grow together. Our
goal is to have this Users Guide evolve to
where it thoroughly describes the model
and its options, as well as provides users
with guidelines for its use.
For now, version 1 of the Users Guide is
intended to serve as an introduction to the
GFDL Modular Ocean Model version 1.0.
Users unfamiliar with the earlier Cox
model are referred to Cox’s GFDL Ocean
Tech Report #1 and Kirk Bryan’s 1969
Journal of Computational Physics article
for a discussion of the numerics. As was
the case for the Cox model and the model
of Bert Semtner (1974) that preceded it,
the GFDL Modular Ocean Model is a
Fortran implementation of equations
described by Bryan (1969).
Comments and suggestions concerning
the GFDL Modular Ocean Model are
welcome. Anyone wishing to develop
refinements and/or additions will be
acknowledged for their efforts in
subsequent releases of the code. Please
contact one of us if you have something
you feel might be worthwhile to add to the
model or if you uncover an error in the
existing code. We suggest that when
developing code, the style and modularity
evident in the model be followed. Its
modular design is specifically intended to
aid in ease of use, flexibility, and continued
development without sacrificing clarity.
Ronald C. Pacanowski rcp@gfdl.gov
Keith W. Dixon kd@gfdl.gov
Anthony Rosati ar@gfdl.gov
September 1991
REFERENCES:
Bryan, K., J. Computat. Phys., 4, 347-376,
(1969).
Cox, M. D., “A Primitive Equation, 3-Dimen-
sional Model of the Ocean”, GFDL Ocean
Group Technical Report #1, (1984).
Semtner, A., UCLA Dept. of Meteorology
Tech. Report No. 9, (1974)
<Pacanowski, Dixon & Rosati - GFDL Ocean Group Tech. Report No. 2>
vii
ACKNOWLEDGEMENTS
Various aspects of the GFDL Modular
Ocean Model can be associated with the
efforts of many people over a number of
years. Its lineage can be traced directly
back in time to the codes of Michael Cox,
Bert Semtner, and ultimately to the
equations described by Kirk Bryan in1969.
Numerous others have added useful
refinements to the GFDL Modular Ocean
Model’s predecessors, strengthening its
heritage. We have endeavored to note
contributions by citing names and
references in this document and in the
model code itself. No doubt some have
been omitted through our own oversight or
simply because the collective memory of
GFDL ocean modeling can grow fuzzy
over time. We apologize to those whose
names have been omitted.
Of more recent importance has been the
support we have received that afforded us
the opportunity and freedom needed to
devote time to writing the GFDL Modular
Ocean Model. This continued support has
come from Jerry Mahlman (Director of
GFDL), Kirk Bryan, (GFDL Ocean
Circulation Project Leader), Kikuro
Miyakoda (GFDL Experimental Prediction
Project Leader), and other GFDL
colleagues.
We also wish to thank Christopher Kerr of
Cray Research for his help in getting the
model to autotask and multitask correctly.
This page was intentionally left blank
<GFDL Modular Ocean Model Users Guide - Version 1.0>
viii
<Pacanowski, Dixon & Rosati - GFDL Ocean Group Tech. Report No. 2>
1-1
Once the GFDL Modular Ocean Model
(MOM) files have been obtained, one
naturally asks a question along the lines
of... “I’ve got all these files, so now what
do I do with them?”.
This chapter is intended to begin to
answer the above question by giving the
new user an overview of the contents of
the files and suggestions regarding how to
work with them.
NOTE: The following descriptions assume
that the files have been arranged in UNIX
directories as described earlier in this
document, in the section entitled
“AVAILABILITY OF THE G.F.D.L.
MODULAR OCEAN MODEL CODE”.
CHAPTER 1: Beginning to Work with the
GFDL Modular Ocean Model
<GFDL Modular Ocean Model Users Guide - Version 1.0>
1-2
(1.1) BRIEF FILE DESCRIPTIONS
(a) mom_x ... the MOM source code in
“mergelibed” form (see the entry for
mergelib (g) below). The “x” suffix
represents the version number. i.e.:
mom_1.0)
(b) MOM_NEWS ... this file contains an up
to date list of bugs and problems
associated with the MOM code, along with
recommended fixes, and other relevant
information. This file should be consulted
before a user constructs an ocean model
for his/her own purposes. The bug fixes
will not appear in the current mom_x code
file. Bug fixes will of course be included in
later released versions of the GFDL MOM
code.
(c) printout ... output from a 3x4 degree
idealized world ocean test case executed
on a Cray YMP. Users should compare
this file to results of the test case run on
their own machines. For a description of
the sample test case provided with the
GFDL M.O.M. code, see section (1.7) at
the end of this chapter
(d) ocean.in ... the input file containing
“namelist” input needed to run the test
case.
(e) cray.run ... a sample run deck for
running the test case on a Cray YMP.
While set up for the Cray YMP, this file
should be consulted for running the test
case on other computers as well
(f) READ_ME ... an ASCII text file
containing much of the same information
covered in this document.
(g) mergelib & splitlib.c (two utilities)
mergelib is a UNIX script that can be used
to concatenate all code files with suffixes
F, f, or h (abbreviated as *.[Ffh] files) into
one big file.
USAGE:
mergelib [-h] [-d indir]
[-o ofile] [file...]
-h ; print this summary
-d ; indir ; input directory,
default = current directory
-o ; ofile ; output file,
default is standard output
file... ; files to merge,
default = *.[hfFc]
splitlib does the inverse of
mergelib... breaking the
mergelibed file back into its
component files (*.[Ffh] files).
splitlib is written in the C
programming language and needs
to be compiled.
USAGE:
splitlib [-h] [-d outdir]
[file]
-h ; print this summary
-d outdir ; outdir is the
directory that will contain
the source files that
splitlib will extract. The
default is the current
working directory.
file ;if no file name is
given standard input is
assumed
(NOTE: The UNIX tar command can
perform essentially the same functions as

<Pacanowski, Dixon & Rosati - GFDL Ocean Group Tech. Report No. 2>
1-3
splitlib and mergelib, but we provide
these utilities, since there may be tar
machine dependencies.)
(h) upgrade ... a sample script for source
management on SUN workstations (for
upgrading your changes to future versions
of the MOM code)
(i) PREP_DATA ... is a directory which
contains a collection of files (routines and
rundecks) for interfacing Scripps 1 degree
topography (Smith, Menard and Sharman,
[1966]), Hellerman and Rosenstein (1983)
wind stress, Oort (198?) air temperature,
and Levitus (1982) temperature and
salinity climatologies directly to the MOM
code. Check the READ_ME file included in
the PREP_DATA directory for details.
Refer to Chapter 5 for more detailed
descriptions.
REFERENCES:
Hellerman, S., and M. Rosenstein, J. Phys.
Oceanogr.,13, 1093-1104, (1983).
Levitus, S.,Climatological Atlas of the World
Ocean: NOAA Prof. Paper 13, US Govt.
Printing Office, Washington DC, (1982)
Oort, A., Global Atmospheric Circulation
Statistics 1958-1973: NOAA Prof. Paper
14, US Govt. Printing Office, Washington
DC, (198?)
Smith, S., W. Menard, and G. Sharman,
World-wide ocean depths and continental
elevations averaged for areas
approximating one-degree squares of
latitude and longitude,Ref. 65-80, 14 pp.,
Scripps Instit. of Oceanogr., (1966).
(1.2) REQUIREMENTS FOR
RUNNING THE M.O.M. CODE
In addition to requiring a Fortran compiler,
the C-language preprocessor (cpp) is
required. Any computer that runs the C-
language should have cpp, and many
Fortran compilers have cpp functionality
built into them.
The cpp is used stand alone or by
compilers to allow sections of the GFDL
Modular Ocean Model Fortran code to be
selectively turned on or off for compilation
via ifdef directives. Many compilers
incorporate cpp into their processing, even
if not explicitly stated. We use this feature
of cpp to control which options and/or
modules are used in any specific
configuration of the MOM. code. UNIX
manual pages for the cpp command can
help users become familiar with ifdefs.
<GFDL Modular Ocean Model Users Guide - Version 1.0>
1-4
(1.3) EXTRACTING THE
INDIVIDUAL FORTRAN SOURCE
FILES
When beginning to work with the GFDL
Modular Ocean Model, first create a new
work directory and copy the original files
into the work directory.
This is a good place to be reminded to
always save your originals. They are
needed when upgrading your changes to
newer versions of the MOM code. We
strongly recommend that users change
the file permissions in the directory
containing the original MOM files to “read
only” (chmod 444 *).
Now, in the work directory, break mom_x
into its component files by using the
splitlib utility.
cc splitlib.c -o splitlib
(compile the C-language
program)
splitlib mom_x (to run it)
Now there should be lots of files. They are
classified by their filename suffix:
(a) *.F and *.f files: ....these are the Fortran
source files (subroutines, main programs,
and functions)
(b) *.h files:
....these are the “include” files (groups of
parameter statements, common blocks,
etc., that are inserted into a *.F file (or
other files) via #include directives)
To merge the individual code files back
into “mergelibed” form, do the following:
mergelib > onebigfile
Note that all the *.[Ffh] files are still
left in the directory and there is a new one
named onebigfile.
NOTE: be careful that there are no other
non-MOM .F, .f or .h files in the
directory, or they will be incorporated into
the file onebigfile.

<Pacanowski, Dixon & Rosati - GFDL Ocean Group Tech. Report No. 2>
1-5
(1.4) GETTING ACQUAINTED
WITH THE M.O.M. CODE
We recommend that after reading this
documentation, you begin your exploration
of the GFDL Modular Ocean Model by
scanning the “.h” files. A convenient way
to do this (under UNIX) is to use:
cat *.h > allh
This concatenates all the “.h” files together
into the file named allh.
One can then print the allh file and
browse through its contents. All variables
contained in common blocks should be
described in the comments (if we missed
some, please let us know). By reading
through the “.h” “Include” files, one can
become acquainted with the variable
names used in the model, and with some
of the model organization.
Next, take a look at the model results from
the test case stored in file printout.
Locate the section in the printout file
which lists the model options available to
the user. This list is produced by the
subroutine found in file docmnt.F. One of
the ways in which the GFDL MOM code
may be customized for a particular
application is by selecting various
combinations of these options. The
options are described in more detail in
chapter 3 of this Users Guide.
(1.5) RECOMMENDATIONS FOR
M.O.M. CODE MAINTENANCE
It is strongly recommended that source
management be done on a UNIX based
computer (workstation or mainframe).
While we do source code management
and version control using the UNIX Source
Code Control System (SCCS), the method
of source management is left to the
individual. We’ve included our own
upgrade utility based on SCCS, as an
example of one way to do source
management on a SUN workstation:
AN EXAMPLE USING THE “upgrade”
UTILITY:
Suppose you have been working with a
version of the GFDL Modular Ocean
Model (let’s call it MOM.old) and have
added local changes to make
MOM.yours. When the next version of
MOM (MOM.new) is released, you would
like to take advantage of its new features.
How do you get MOM.yours upgraded
from MOM.old to MOM.new?
If your modifications are mostly sections of
code grouped together (as opposed to
being strewn everywhere) you might
simply “cut & paste” them into MOM.new.
More extensive changes can be handled
more or less in an automated way. An
example using the upgrade script follows:
First, create a new working directory and
copy four files into it: the mergelibed forms
of MOM.old, MOM.yours and MOM.new
along with the upgrade script itself.
Next, to run the script type upgrade and
at the prompts input MOM.old,

<GFDL Modular Ocean Model Users Guide - Version 1.0>
1-6
MOM.yours and MOM.new. The script will
produce a file named new_source which
is MOM.yours upgraded to MOM.new.
The upgrade script will also likely point
out places where possible problems and
conflicts occurred by showing the line
numbers in new_source.
After investigating and fixing all problems
and conflicts (start from the highest line
numbers (bottom) and work backwards in
your favorite editor), you should then
compare the new_source with MOM.new,
as in:
diff MOM.new new_source > my.chgs
Inspect the file my.chgs to make sure that
your modifications went into new_source
properly.
NOTE: If code is altered in MOM.yours
and the same code is altered in MOM.new
but NOT in MOM.old, both the altered
code from MOM.yours and MOM.new will
appear in new_source.
Once one is satisfied that the upgrade has
been completed and checked, the
component *.[Ffh] files may be
generated by using:
splitlib new_source
(1.6) NOTES ON THE M.O.M.
TEST CASE:
The GFDL Modular Ocean Model code
obtained from GFDL’s anonymous ftp
server is fully functional and ready to run a
sample test case. We recommend that
users attempt to run the test case on their
machine of choice after they become
familiar with the code.
To run the sample test case, one needs to
select the set of ifdef code options listed
in the sample cray.run file, and then
compile the code. When successfully
compiled, one should use the sample
ocean.in file provided, and make a short
test run that will produce output that
should be compared with the sample
printout file.
The test case uses an idealized
configuration that permits the model
resolution to be changed to fit on various
computers without having to worry about
land/sea geometry, model bathymetry,
boundary conditions or initial conditions.
All of the above automatically adapt
themselves to changes in resolution.
However, it should be noted that the
intended purpose of the test case is to test
the model code. The test case is not
meant to be a scientifically meaningful
configuration of the GFDL M.O.M. code.
The test case’s land/sea geometry
resembles the gross features of present
day continental outlines. The model
bathymetry, however, is unrealistic (there
is a ridge in the Pacific, but most
everywhere else there is a flat bottom).
For the default sample provided, a 3x4

<Pacanowski, Dixon & Rosati - GFDL Ocean Group Tech. Report No. 2>
1-7
degree horizontal resolution was
specified.
Initial conditions for the test case call for
potential temperatures to vary with depth
and latitude in a manner roughly
consistent with observations. Salinity is
initially constant everywhere.
Surface boundary conditions are held
constant in time, in the test case. They
vary with latitude, but not longitude. The
surface momentum flux is given by the x
and y components of the zonally averaged
annual mean wind stresses (Hellerman
and Rosenstein, (1983). Surface salinities
and temperatures are damped back
towards zonally averaged, annual mean
values calculated from Levitus (1982).
When comparing results with the sample
printout file, we suggest that users first
check that the land/sea geometries match.
A quick look at the global surface area and
volume statistics will reveal if there is good
agreement. If this comparison reveals
differences larger than those one might
expect from roundoff errors, a check of the
model bathymetry is called for in order to
determine the location(s) where the
sample Cray version differs from the
user’s run. The scheme use to determine
land/sea boundaries can be sensitive to
the precision or the way in which number
are represented, causing variations in the
model’s continental outlines to arise on
different machines.
REFERENCES:
Hellerman, S., and M. Rosenstein, J. Phys.
Oceanogr.,13, 1093-1104, (1983).
Levitus, S.,Climatological Atlas of the World
Ocean: NOAA Prof. Paper 13, US Govt.
Printing Office, Washington DC, (1982)
This page was intentionally left blank
1-8
<GFDL Modular Ocean Model Users Guide - Version 1.0>
<GFDL Modular Ocean Model Users Guide - Version 1.0>
2-1
As mentioned in the Preface, one of the
primary goals in constructing the GFDL
Modular Ocean Model (MOM) was to
produce a model that was easily to
configure and work with, while at the same
time being flexible enough to be a
research tool for various scientific
problems. Increased flexibility and clarity
have been achieved through modularity.
This chapter describes the ways in which
the modular design and structure of the
GFDL MOM code works toward this goal.
Since the GFDL MOM code is not
intended to be a static product, we
welcome user input as to how it may
evolve to better achieve our goal of having
a truly flexible and easy to use research
tool.
CHAPTER 2: Coding Design of the GFDL
Modular Ocean Model
<Pacanowski, Dixon & Rosati - GFDL Ocean Group Tech. Report No. 2>
2-2
(2.1) GENERAL CODING DESIGN
Users of previous versions of GFDL’s
ocean model codes will notice that there
are many more subroutines in the MOM
code. The modular design is intended to
aid in the logical organization of the code
with “hooks” readily available for adding
new options to the model.
Deciding which modules to use is done at
the pre-processing level. Modules do not
interact with each other, but interact with
the main code in only a few places through
a short argument list and/or the include
files. This approach to interfacing tends to
localize code modifications, thereby
keeping the code structure simple, under-
standable, and easily supplemented.
Again, we strongly suggest that this
approach, some of which is outlined
below, be followed when users make their
own code modifications.
The GFDL Modular Ocean Model code is
written in standard Fortran-77, except for
the use of the common extension of
namelist.
Variable organization: variables have been
organized and grouped in terms of
physical (or where appropriate logical)
significance. This allows for better
modularity. Look at the *.h files. Note that
all variables are commented. To find out
where variable yyy is used, use the UNIX
command:
grep -i -n yyy *.[Ffh]
which searches all files with .F, .f, or
.h suffixes for the string yyy. The use of
grep is invaluable in tracing variables and
options and its use is strongly
encouraged. Note also that the include
files may be nested (see the bottom of file
param.h for example).
When modifying the code, one should
consider whether it is appropriate to add
new variables to existing common blocks
and “.h” files, or if a new “.h” file and
common block are called for to enhance
modularity. When in doubt, try to minimize
the interactions between various parts of
the code.
No out-of-bounds references are found in
the MOM code. This can simplify
debugging new code by turning on a
compiler’s bounds checking option. If, on
execution, an array subscript goes out of
bounds, the compiler’s bounds checker
will let you know where and when this
important design feature has been
violated.
Statement functions are used to define
physical operators. This allows one to
write code that more closely resembles
the equations. Another advantage is that
complicated code can be made more
understandable. At the same time, more
operations per loop often allows a
compiler to generate more efficient code.
On computers like the Cray YMP, this can
lead to significantly more parallelism. Look
in file tracer.F and clinic.F to see
how we have used them. We have also
included an ifdef option named
keepterms, that allows the use of arrays

<GFDL Modular Ocean Model Users Guide - Version 1.0>
2-3
(instead of statement functions) to retain
terms in momentum and tracer equations.
This can be useful when using the terms
often in more than one place. The price for
this is increased memory (but less
computation).
Naming conventions have also been
adopted, and appear as comments in the
model. Conventions exist for naming
numerical constants, grid variables,
reciprocals, etc. (see file pconst.h). By
adhering to these rules, one can more
easily analyze unfamiliar sections of the
code.
The slab variables have been defined as
four dimensional variables, utilizing the
concept of a memory slab window. Look at
file slabs.h for details. This increases
the generality and flexibility of the code
and simplifies management of the data
flow from disk through memory. In addition
to longitude and depth indicators, the
dimensions on the slabs include time level
and j-row location “pointers”. So instead of
shuffling data into the “correct slab
positions”, the MOM code simply updates
pointers to existing data
The MOM code has been written with the
underlying assumption that memory size
has been increasing for the types of
computers that the code is typically run on.
So, there are places where we trade-off
extra memory usage in order to achieve
clarity, modularity, and to minimize the
probability of introducing errors when
modifying the code in the future.
(2.2) SOME NEW FEATURES &
NOTES FOR USERS OF THE COX
CODE
As noted before, the GFDL Modular
Ocean Model code is intended to be much
more modular in design than the Cox
(1984) model and other earlier codes.
Increased modularity and an increased
number of code options result in there
being many more subroutines and include
files in the MOM code. The simplified flow
chart provided in this document (see
section 2.3) should help users familiar with
the Cox code to follow the flow of the
MOM code. In this section, we point out
some of the more substantial differences
users will encounter when migrating from
the Cox code to the GFDL MOM code.
Customizing via ifdef directives: Refer to the
sample printout file and chapter 3 of
this Users Guide for the complete list of
currently allowable ifdef options
available for customization of the model.
Note that there is a skipland option for
doing calculations only over ocean points
(as opposed to everywhere), options for
choosing various lateral and vertical
mixing parameterizations (explicit or
implicitly solved), plus a selection of
Poisson solvers including a very accurate
9 point conjugate gradient scheme which
allows for direct reconstruction of the rigid
lid surface pressure.
Various MOM code options are controlled
by ifdef options, rather than Cox’s
UPDOC program. It is recommended that
users put ifdef directives around
<Pacanowski, Dixon & Rosati - GFDL Ocean Group Tech. Report No. 2>
2-4
personal code modules and that users try
to keep modules from interacting, as in the
base MOM code. Some UNIX tools for
source management include: diff,
sdiff, diff3, and SCCS. UNIX
manual pages for the cpp command can
help users become familiar with ifdefs.
No boundary conditions in the slabs: Note
also that the slabs are defined in a way
such that no boundary conditions have
been added onto the slabs as in Cox’s
code. The vertical boundary conditions
can be found in their own common block in
file cvbc.h (common of vertical boundary
conditions). By increasing the number of
dimensions on the slabs to include time
level and j-row location “pointers”, the
number of slab variable names and do
loops that switch time and j-row positions
have been reduced.
New and redefined variables: New variables
have been added and some old ones
redefined (see file coord.h for
examples). There are also “source terms”
for the momentum and tracer equations
(variables sourcu,sourcv and sourct)
which allow easy inclusion of sources and
sinks (i.e.: biology, imposing baroclinic
flows, etc.).
Consistency checks are carried out for
ifdef options along with various other
conditions by code found in file checks.F.
Notice the “warning” and “error”
messages. that are generated by
checks.F. Warnings allow the model to
procede, but error messages terminate
execution.
Island calculations are done by line (rather
than area) integrals and the island
definition has been simplified by the
automatic calculation of island perimeters
(see file iperim.F) requiring only that
one point within the island be specified.
This allows for easy use of islands within
complex geometries.
A time manager (see file tmngr.F and
ctmngr.h) controls all time dependent
decisions within the model. Time
dependent information such as length of
integration, time between energy
diagnostics, etc., are entered through
namelist in units of days (only variable
nmix, the number of timesteps between
mixing timesteps, is not in units of days).
This information is used by the time
manager to decide how logical variables in
file switch.h are to be set each time
step. These logical variables control time
dependent data flow.
Included in tmngr.F are utilities for aiding
in interpolating time dependent boundary
conditions (i.e.: monthly wind stress, etc.)
to the time step. However, these are not
used in the test case.
Finding the nearest model grid point:
Another utility is function indp, found in
file setgrid.F. This function is used in
many places and provides users with an
easy way to map real world coordinates
(latitudes, longitudes and depths) to the
nearest model grid point. This allows all
spatial information to be independent of
changes in model resolution.

<GFDL Modular Ocean Model Users Guide - Version 1.0>
2-5
Minimize equivalence statements: In addition
to outlawing out-of bounds references in
order to improve the code’s clarity, an
attempt has been made to minimize
equivalence statements. Equivalence
statements should be added with caution.
Regional averages and term balances: The
ability to compute volume weighted tracer
averages, surface fluxes, and term
balances for the momentum and tracer
equations has been added to facilitate
analysis and debugging. These
computations can be done over arbitrary
volumes in arbitrary locations. The volume
sizes and locations can be specified using
horizontal and vertical masks (see files
ocean.F and cregin.h and option
readrmsk).
Writing data for off-line analysis: The GFDL
Modular Ocean Model code provides the
user with a ”snapshot” feature to write
instantaneous data for offl-ine analysis.
(see variable snaps in file switch.h and file
iounit.h for details). Many users will
want to modify or supplement this feature
for their own local purposes.
Bottom drag in the MOM code is controlled
by the linear drag coefficient variable
cdbot. There is no bottom drag when
cdbot = 0.0 (see files scalar.h and
blkdta.F). As in the Cox model, lateral
boundaries are no slip for momentum and
no flux across boundaries for tracers.
Run-time documentation: The MOM code
uses file docmnt.F to arrange data to be
written out as a form of documentation
summarizing the model characteristics
that uniquely define a given model run. It
also lists the requested ifdef options.
The user will need to review this routine
when configuring a model run or adding
new options to the code. This feature can
be beneficial to those setting up new
model runs, comparing different model
runs, and for analysis purposes.
REFERENCE:
Cox, M. D., “A Primitive Equation, 3-Dimen-
sional Model of the Ocean”, GFDL Ocean
Group Technical Report #1, (1984).

<Pacanowski, Dixon & Rosati - GFDL Ocean Group Tech. Report No. 2>
2-6
The firstcalling tree represents the EQSTAT program found in file denscoef.F, which
generates a dncoef.h file.
EQST
A
T (main program for deriving coefficients of polynomial approximations for the equation of state)
{
KNUEKM
}
or
{
UNESCO
}
(routines returning density as a function of T, S and P)
POTEM (returns potential temperature for in situ temperature, salinity and pressure)
{
KNUEKM
}
or
{
UNESCO
}
(routines returning density as a function of T, S and P)
LSQSL
2
(iteratively computes a least squares fit)
The stand alone depths program generates a thick.h file of model layer thicknesses.
DEPTHS
The stand alone size program determines memory and disk requirements for various
configurations of the GFDL MOM code.
SIZE
The following flowchart is for the GFDL MOM code’s main ocean program.
(2.3) SIMPLIFIED CALLING TREE
DIAGRAMS FOR THE GFDL
M.O.M. CODE
These calling tree diagrams are intended
to help illustrate how the coding design
discussed previously has been
implemented in the GFDL Modular Ocean
Model code.
However, for clarity, not all calls are
represented in the calling tree for the main
ocean model program shown on the next
page. The calls that have been omitted
tend to appear often in the code (a sign of
their modularity).
Specifically, calls which printout informa-
tion using the code in file matrix.F
have been omitted. Those involving the i/
o routines odam.F and getvar.F have
been omitted also. So too have
references to function indp, a utility
found in file setgrd.F that is used to
find the nearest grid point to a specified
location.
Calls which are conditional upon the
ifdef options a user has defined
appear within curly brackets {}.

<GFDL Modular Ocean Model Users Guide - Version 1.0>
2-7
OCE
A
N (main program)
BLKDT
A
(initialize variables)
GRIDS(set up the grids: in file setgrd.F)
MESH (utility for setting up grids: in file setgrd.F)
CMESH (utility for setting up grids: in file setgrd.F)
DOCMNT (documents the run)
OCN1ST (set up initial conditions on the first timestep)
TOPOG (set up idealized world topography)
SETKMP (set the number of levels for the t,s grid)
RDREST (read the restart file if it is not the first timestep: in file restio.F)
{
REG1ST
}
(set up for regional averages of tracers)
{
IPERIM
}
(calculate island perimeters)
{
FINDEX
}
(calculate indices for filtering)
CHECKS(test for consistency of configuration)
TMNGR(time manager called once per timestep)
TMNSET (function to set time dependent logical switches: in file tmngr.F)
STEP (cycle latitude rows between disk & memory slab window)
{
DELSQ
}
(calculate quantities for biharmonic mixing)
SET
V
BC (set vertical boundary conditions)
BCEST (get surface boundary conditions for test case)
{
PPMIX
}
(Pacanowski/Philander richardson mixing)
ST
A
TEC (density calculation for vertical stability)
{
CN
V
MIX
}
(set coefficients for constant vertical mixing)
{
ST
A
TEC
}
(densities for vertical stability if implicitvmix: in file state.F)
{
TCMIX
}
(Mellor-Yamada turbulence closure mixing)
ST
A
TEC (density calculation for vertical stability: in file state.F)
{
IMPLQ
}
(for implicit vetical mixing)
{
ISOP0
}
(Isopycnal mixing set up: in file isopyc.F)
ST
A
TEC(called 3 times for densities for isopycnal slopes: in file state.F)
{
CFL
}
(for cfl monitoring)
CLINIC (calculate internal mode velocities)
ST
A
TE (density calculations for pressure gradients)
{
NLMIX
}
(nonlinear Smagorinsky mixing)
{
IN
V
TRI
}
(for implicit vertical diffusion)
{
FILU
V
}
(filtering u & v at high latitudes)
{
FILTR
}
(if fourfil option was selected)
{
FILFIR
}
(if firfil option was selected)
TR
A
CER (calculate tracers)
{
ISOP1
}
(finish isopycnal mixing: in file isopyc.F)
{
IN
V
TRI
}
(for implicit vertical diffusion)
ST
A
TEC (density calculation for vertical stability: in file state.F)
{
FILT
}
(filtering tracers at high latitudes)
{
FILTR
}
(if fourfil option was selected)
{
FILFIR
}
(if firfil option was selected)
REGION (periodically does basin averages of tracers)
DI
A
G (periodic energy diagnostic and term balance calculations)
V
ORT (calculates vorticity)
{
FILZ
}
(filtering vorticity at high latitudes)
{
FILTR
}
(if fourfil option was selected
{
FILFIR
}
(if firfil option was selected)
{
REL
A
X
}
,
{
H
Y
PER
}
,
{
CONGR
5
}
,
{
CONGR9
}
(Poisson solvers for external mode)
DI
A
G
2
(periodic energy diagnostic & term balance printouts)
DOCMNT (document the run)
RDREST (write the restart file )
This page was intentionally left blank
<GFDL Modular Ocean Model Users Guide - Version 1.0>
2-8
<GFDL Modular Ocean Model Users Guide - Version 1.0>
3-1
As discussed earlier, a very powerful
feature of the GFDL Modular Ocean
Model (MOM) is the ability to define
ifdef options so as to configure the
model in a manner suitable for the
problem a user wishes to investigate. We
also feel that the use of cpp (the C-
language preprocesor) and ifdef
directives helped us write a model in
which numerous code options could co-
exist and still leave the code readable and
receptive for future development.
This chapter contains brief descriptions of
the various MOM code customization
options that a user may turn on or off
through the use of cpp and ifdef
directives. It is suggested that the user
examine at the code itself and read the
references given, in order to develop a
fuller understanding of the options.
These descriptions introduce users of the
GFDL MOM code to what it has to offer
now. We will also briefly mention some
tentative plans for future work. We invite
users to sharie with us their ideas and
code modules so that together the ocean
modeling community can enhance this
widely distributed research tool.
CHAPTER 3: Code Options in the GFDL
Modular Ocean Model
<Pacanowski, Dixon & Rosati - GFDL Ocean Group Tech. Report No. 2>
3-2
(3.1) OVERVIEW OF CODE
OPTIONS
The options available in the MOM code
are quite extensive and range from
various subgrid mixing parameterizations
to computing performance enhancements.
The current implementation is such that if
there are more than two options within a
category of code options, there is no
default value, so care should be taken to
define the desired option.
Within the MOM code, subroutine checks
(see the checks.F file) searches the
selected options to determine if the user
has asked for conflicting options.
For example, if a user in selecting an I/O
scheme turned on both diskless (fully
contained within memory) and fio (Fortran
direct access), an obvious inconsistency
exists and a message to this effect will be
printed and execution of the model will
halt.
Many Fortran compilers allow ifdef
options to be enabled (defined) by using
the “-D” option on the compile statement
(as shown in the next chapter). This form
of using a “-D” option may also be used
with the cpp command (see file
cray.run) to preprocess the code before
sending separately it to the compiler.
(3.2) GRID OPTIONS
cyclic is an option for setting cyclic
boundary conditons in a zonal direction. If
enabled, anything exiting the eastern side
of the MOM model grid comes back in
through the western side. If not enabled,
then solid walls are assumed on the
eastern and western boundaries of the
model.
symmetry is an option for setting a
symmetric condition across the northern
boundary of the model. The condition is :
Tracers at row jmt on the “t” grid = tracers
at row jmt-1 on the “t” grid. zonal velocity
at row jmt-1 on the “u” grid = zonal velocity
at row jmt-2 on the “u” grid. meridional
velocity at row jmt-1 on the “u” grid is zero.
meridional velocity at row jmt on the “u”
grid is the negative of the meridional
velocity at row jmt-2 on the “u” grid. If not
enabled, solid walls exist at the northern
and southern boundaries.
<GFDL Modular Ocean Model Users Guide - Version 1.0>
3-3
(3.3) EXTERNAL MODE OPTIONS
Basically, there are four Poisson solvers
provided in the GFDL MOM code. All of
them require the rigidlid option to also be
enabled.
oldrelax duplicates the meothod used in
Mike Cox’s (1984) ocean model base
code. If you use it, you should twiddle with
variable sor (the overrelaxation constant)
to minimize the number of scans for your
geometry. Variable crit (which along with
sor can be specified through the
namelist) controls the accuracy. See file
relax.F for more details.
congrad5pt is an option which specifies
the use of a conjugate gradient technique.
Variable sor is not needed here, but the
convergence criterion crit, which when
satisfied halts the iterative scheme, is
used. This scheme is generally faster (in
terms of cpu time) than oldrelax, but may
be a bit less stable in the presence of
steep topographic gradients. With
congrad5pt defined, the surface
pressure is calculated only as a basis for
comparison with the congrad9pt option.
See file congr5.F for more details.
congrad9pt is another conjugate
gradient solver that uses a 9 point
laplacian instead of the 5 point laplacians
used by the other schemes. Its advantage
is that it is the most accurate and thus
allows the surface pressure to be
calculated directly. Reducing crit when
using congrad9pt will give better results
(as shown by the closed line surface
pressure integrals in the test case) than
congrad5pt (this is because there is
significant truncation due to the 5 point
numerics). In fact, the accuracy of the
congrad9pt scheme’s streamfunction
solution is limited only by the variable
crit and computer precision.The 9 point
scheme’s down sides are that it may have
stability problems for topographies with
sharp gradients and it will take more cpu
time. How much you ask? It depends
greatly on your configuration. Try it and
see. See file congr9.F for more details.
hypergrid is a variation of oldrelax
solved using a checkerboard technique:
first on the black squares, then on the red
ones: Numerically it is very similar to
oldrelax (sor and crit comments
apply), however it does run somewhat
faster than oldrelax on some types of
computer architectures.
REFERENCES:
Cox, M. D., “A Primitive Equation, 3-Dimen-
sional Model of the Ocean”, GFDL Ocean
Group Technical Report #1, (1984).
<Pacanowski, Dixon & Rosati - GFDL Ocean Group Tech. Report No. 2>
3-4
(3.4) LATERAL MIXING SCHEMES
Lateral mixing applies to both momentum
and tracers. One (and only one) scheme
must be enabled.
consthmix enables a linear second order
mixing scheme with constant eddy
coefficients: variable am is the eddy
coefficient for momentum while variable
ah is for heat and the other tracers. One
usually attempts to choose these values to
be just large enough to suppress small
scale numerical noise. A typical value for
variable am in a one degree resolution
configuration of the MOM code might be
1.0 x 107 cm2 sec-1. Usually variable ah is
chosen to be smaller so as not to diffuse
away frontal features.
biharmonic selects a linear fourth order
mixing with constant coefficients as in
consthmix:am for momentum and ah for
heat, salinity, and other tracers if present.
The biharmonic scheme is more scale
selective than the consthmix option (ie:
more severly damps the small scale
features). For a 1/3 degree resolution
version of the MOM code, variable am
should be roughly 1019 to 1020 cm4 sec-1
(the minus sign is in the equations and
thus does not appear in the eddy
coefficients).
nlhmix is the non-linear horizontal
subgrid-scale mixingoption, based upon
Smagorinsky’s non-linear viscocity
scheme as implemented and described in
Rosati and Miyakoda (1988). In this
formulation, the horizontal eddy diffusion
coefficient is proportional to the horizontal
grid length and to the local deformation
field. The eddy coefficients computed by
the scheme are sensitive to the spatial
scales of motion. Accordingly, mixing
coefficients are relatively small in the open
ocean, where the scales of motion are
comparatively large, and are relatively
large in regions where the scales of
motion are comparatively small.
REFERENCES:
Rosati, A., and K. Miyakoda, J. Phys.
Oceanogr., 18, ??-??, (1988)..
<GFDL Modular Ocean Model Users Guide - Version 1.0>
3-5
(3.5) VERTICAL MIXING
SCHEMES
Vertical mixing applies to both momentum
and tracers. One (and only one) scheme
must be enabled. The default is for explicit
solution. Choosing the implicitvmix
option will cause the vertical mixing
equations to be solved implicitly. NOTE: in
the GFDL MOM code, explicitfor the
solution unstable density profiles lead to
tracers being mixed via convective
adjustment but NOT momenum. But both
momentum and the tracers are vertically
mixed when the implicitvmix option has
been defined by the user.
implicitvmix solves the vertical diffusion
term implicitly for all vertical mixing
schemes. This allows for large mixing
coefficients without the need to reduce the
timestep. With this option enabled,
convective adjustment is not done in file
tracer.F and the unstable density
profile is mixed using large mixing
coefficient limits (see variables vvclim
and vdclim). For the constvmix and
ppvmix options, these limits are set in the
blkdta.F file and for option tcvmix the
coefficients are computed. Selecting the
implicitvmix option also requires that
varaible aidif (the implicit factor) be set
(see files cvmix.h, and blkdta.F and
the namelist inputs).
0.5 < aidif < 1 ; always stable
0 < aidif < 0.5 ; stable if ...
dt
dz()
2
×1
24aidif×()
<
where is the maximum vertical mixing
coefficient.
constvmix utilizes constant eddy
coefficients (variables fkpm and fkph for
momentum and heat, respectively) for
linear second order mixing of momentum
and tracers in the vertical. In the explicit
case (when implicitvmix has not been
defined), convective adjustment handles
regions of gravitational instability for the
tracers. If implicitvmixis defined, then
the convective section is bypassed and
the large mixing coefficient values (limits
set in variables vdclim and vvclim)
are used to set the vertical mixing
coefficients to handle the instability for
both the tracers and momentum.
ppvmix is a vertical mixing option based
on the Pacanowski and Philander (1981)
Richardson mixing scheme. This
parameterization was designed primarily
for equatorial models with vertical
resolution of about 10 meters between
levels in the upper ocean (we were most
interested in the structure of the
undercurrent). Previous versions of this
code assumed the “t,s” grid was
coincident with the “u,v” grid and gave
good results. In the present case, we have
relaxed this assumption. We tried this
newer, more consistent version a few
ways and got lots of numerical noise, at
first (particularly on the equator off Brazil).
The present configuration minimizes
noise. If noise develops off steep shelf
breaks it can sometimes be suppressed
by turning on a bottom drag (see variable
cdbot). The background mixing variable
bvdc should be kept much less than 1.0 to
<Pacanowski, Dixon & Rosati - GFDL Ocean Group Tech. Report No. 2>
3-6
avoid diffusing the thermocline away on
long time scales.
In regions of gravitational instability,
ppvmix uses the vertical mixing limit
variables vdclim and vvclim to set the
vertical eddy coefficients. In the explicit
case they must satisfy the “CFL” criterion
and may be too small to remove the
instability. However, the convective
adjustment is operative and tries to
remove the instability. Whether it does or
not depends on the ncon variable (setable
through namelist), which controlls the
number of passes through the convective
adjustment section of code in file
tracer.F. If implicitvmix is used,
vdclim and vvclim are set large and
the convective adjustment section is
bypassed. The ppvmix scheme also
assumes the use of equal timesteps on
the density and momentum equations. If a
longer time step is desired, try using the
implicitvmix option.
tcvmix invokes the Mellor-Yamada level
2.5 turbulence closure scheme. Here the
mixing coefficients are a function of the
turbulence length scale (l), the turbulent
kinetic energy (q2), the analytically derived
stability factors (Sm & Sh), and the
boundary conditions. There are two
options within tcvmix to compute the
length scale:
leq solves an additional equation for q2
from which the length scale may be
derived at each level.
lalg, obtains the length scale from an
algebraic relationship. The lalg option
may be sufficient for the boundary layer
but not in cases where there would be
multiple turbulent regimes. The horizontal
diffusion coefficient of turbulent kinetic
energy is set using the variable aq (see
files ctcmix.h, blkdta.F and the namelist
input). For this scheme to be effective the
implicitvmix option should be enabled
and also the vertical resolution should be
sufficient.
REFERENCES:
Pacanowski, R. and S.G. Philander, J. Phys.
Oceaonogr., 11, ??-??, (1981)
Mellor, G. and Yamata ?????

<GFDL Modular Ocean Model Users Guide - Version 1.0>
3-7
(3.6) HYBRID MIXING SCHEME
OPTIONS
We are using the term “hybrid” here to
describe schemes which apply to either
momentum or tracers but not both. For all
cases in which implicitvmix is not
enabled, convective adjustment is the
default. Recall that when solved explicitly
convective adjustment mixes tracers
vertically in regions of gravitational
instability, but not momentum. The
effectiveness of convective adjustment is
controlled by variable ncon which is the
number of passes through the convective
section (use grep -i -n ncon *.[Ffh] to see
its usage). If impllicitvmix is enabled, the
convective adjustment section is
bypassed. in file tracer.F. The
assumption is that the vertical mixing
schemes will handle it.
isopycmix is a scheme in which a mixing
tensor is computed from the local
isopycnal slope and the diffusion of tracers
is then conducted along that direction. It
therefore influences both the lateral and
vertical mixing of tracers in the model. Its
use is intended to partially mitigate a
perceived shortcoming of z-coordinate
primitive equation ocean models in
parameterizing oceanic mixing due to
mesoscale motions. Since such mixing is
believed to take place along isopycnal
surfaces, the isopycmix option seeks to
orient the mixing of tracers along
isopycnal surfaces rather than purely
horizontal surfaces, as described by Redi
(1982).
As described by Cox (1987), in addition to
specifying the mixing coefficient for along
isopycnal diffusion (variable ahisop), a
non-zero background horizontal mixing
coefficient (here we use variable ah) is
often needed to supress gridpoint noise.
Additionally, a constraint is placed on the
steepest isopycnal slope (see varable
slmxr) that the scheme will consider
when computing the components of the
mixing tensor. A typical value of slmxr is
100.0, which translates into a slope of
1:100. Steeper slopes would then be
considered to be 1:100 for the purpose of
computing the mixing tensor.
A vertical mixing scheme must be
specified for use with isopycmix. The zz
component of the isopycnal mixing is
added to the vertical diffusion coefficient
produced by the vertical mixing scheme.
Since isopycmix only affects tracers, one
must also specify a lateral mixing scheme
from the above list to be used for
momentum. This additional lateral mixing
scheme has no effect on tracer diffusion.
REFERENCES:
Cox, M., Ocean Modelling, issue 74, 1-5,
(1987)
Redi, M., J. Phys. Oceanogr., 12, 1154-1158,
(1982).
<Pacanowski, Dixon & Rosati - GFDL Ocean Group Tech. Report No. 2>
3-8
(3.7) OPTIMIZATION OPTIONS
skipland is an option that allows
calculations in the GFDL Modular Ocean
Model to be done over blocks of ocean
while skipping land points. The trade off
here is the time saved by not doing the
calculation over land versus the time used
in starting and stopping a lot of vectors.
Whether or not cp time will be saved by
using this option is largely a function of
land mass geometry and grid resolution. A
global ocean would be a good candidate
for this option, but a idealized basin would
not.
timing is an option that cp and wall clock
times for running on a Cray YMP.
Additionally, the time per grid point per
time step is calculated.
multitasking is an option that was
developed with the Cray YMP in mind. It
allows the slabs to be divided into a series
of tasks. Each task contains approximately
the same number of slabs and there
should ideally be one task per processor.
This is all handled by simply specifying
variable ntasks to be the number of
processors (we’ve defaulted it to 8 in file
blkdta.F).
The idea behind multitasking is that since
all tasks are independent, all tasks can be
worked on simultaneously. This reduces
the total wall clock time for the job but
NOT the total cpu time. Note: the
ntasks variable may be set > 1 even
when unitasking (running on one
processor), but this is not recommended,
since there is extra work being done at the
interfaces between tasks. Also, on
diagnostic, tracer averaging, and data
saving time steps, the MOM code will
revert to one task of jmt-2 slabs, so
effectively multitasking is shut down for
these time steps.
The multitasking option currently does
not work with the diskless option (see
below) because only two time levels are
used for slabs on simulated disk
(ntlev=2) to save memory and this is
incompatible with ntasks > 1. This
condition may, in principle, be removed by
setting parameter ntlev = 3 when
enabling the diskless option. We haven’t
explored it yet.
To date, we have confirmed that all
combinations of unitasked, multitasked,
and autotasked runs give the same
answers down to the last hex digit on the
Cray YMP. To really utilize this feature on
the Cray YMP, the SSD (solid state disk)
must be used for the slabs (unless large
memory and the diskless option is used).
We have not yet added the best i/o
scheme for the SSD, so the wall clock
times are higher than they could be.

<GFDL Modular Ocean Model Users Guide - Version 1.0>
3-9
(3.8) FILTERING OPTIONS
Filtering is used to combat the effect of the
convergence of meridians (shrinking
longitudinal grid spacing) near the poles.
The problem is that the grid spacing
severly limits the time step (especially
when using large density time steps) due
to the “CFL” criterion. Filtering relaxes this
constraint by truncating high wave
numbers. Users should be aware that the
filtering options can be time consuming,
and alter the model solution, and therefore
should be used only as a last resort
Configurations of the GFDL Modular
Ocean Model code that are prime
candidates for filtering are coarse
resolution global models used to examine
long term climate. The timestep
constraints imposed by including the Arctic
Ocean, and the timescales of the problem
being studied, often lead to the need for
filtering at high latitudes.
fourfil is a fourier filter which acts on
longitudinal strips of ocean points. The
number of wave numbers to be allowed at
each latitude is decided upon and
wavenumbers above are truncated
(without using any reasonable window).
This option is provided as a backward
compatability feature for the Cox (1984)
code. Note: Both in the MOM code and in
the Cox code, the amount of filtering
depends on the number of ocean points
within the longitudinal strip (determined by
lmodel bathymetry). This actually leads to
possibly different truncations at the same
latitude!
firfil is a simple finite impluse response
filter based on the familiar 1/4, 1/2, 1/4
weights (the response function is a
cosine). It comes in two flavors: One to
with symmetric boundary conditions (ie:
for tracers) and one for asymmetric
boundary conditons (ie: momentum).
The firfil option also works on longitudinal
strips of ocean points, and may be applied
an arbitrary number of times for an
arbitrary number of latitudes. While the
firfil option is far less cp time intensive
alternative to fourfil, we really have not
done any long running comparisons to
comapre the two schemes
<Pacanowski, Dixon & Rosati - GFDL Ocean Group Tech. Report No. 2>
3-10
(3.9) I/O OPTIONS
diskless simulates disk usage using an
array in memory. Since when using this
option no “wall clock” time lost during disk
transfers (because they are memory to
memory transfers), this method gives the
best efficiency (cp time / total time). The
cost for achieving this cpu time efficiency
is that the model may not be able to fit into
available memory.
As a memory saving feature, diskless
keeps only two time levels of prognostic
variables (ntlev=2) instead of the usual
three. See the size.F file to examine
resource requirements. Users may wish to
read the discussion of the multitasking
option for related information.
crayio is an option tested on GFDL’s Cray
YMP. Currently, it uses the “getwa/
putwa” routines. If the disk units are set
up on “non SSD” type disk, then the
efficiency (cp time / total time) will be bad.
This shows the mismatch in speed
between computationand disk use. SSD
(solid state disk), however, is really the
preferred way to go. It can be looked at as
an extended memory and the efficiency is
much better.
fio is the option for using standard Fortran
direct access i/o. The comments from
crayioapply here also.
(3.10) MISCELLANEOUS CODE
OPTIONS
:keepterms is an option allows the use of
arrays instead of statement functions for
component terms in the MOM code’s
tracer and momentum equations. This
may be desirable when using component
terms over and over for some purpose.
The trade off is the extra memory needed
for the arrays versus the extra time
needed to recalculate the statement
functions. See the size.F file to look at
resource requirements.
nohilatsstands for no high latitudes. If the
latitudinal domain of the model is limited to
equatorial redions, for instance, then the
metric nonlinear terms in the momentum
equations may be dropped. Defining the
nohilats option will save some cp time and
allows for backward compatibility with the
Cox (1984) code.
restorst stands for restore surface tracers
to some prescribed values by a newtonian
damping term. In the sample test case of
the GFDL Modular Ocean Model code,
temperatures and salinities are restored
back toward zonally averaged annual
mean conditions on a time scale of 50
days (ee file setvbc.F). Without much
work, this option could easily be extended
to damp certain regions while leaving
others alone by simple making the
damping time scale a function of latitude,
for instance.

<GFDL Modular Ocean Model Users Guide - Version 1.0>
3-11
testcfltests whether any velocity exceeds
the local “CFL” criterion by a factor of
cflcrt(see file blkdta.F for where
variable cflcrt is set). This option will
print out the places where the CFL
criterion is most nearly met on diagnostic
time steps. If the cflcrt factor is
exceeded on any time step, the MOM
code will stop its execution and print out
the surrounding variables.
NOTE: the testcfl option is not meant to
be left on all the time, since is uses much
cp time. It is best used as an analysis aid.
For example, it can be used infrequently
on a model that is being run for a long
time, or should a version of the model
“blow up”, it can be useful in pointing to
where the problem arises.
This page was intentionally left blank
<GFDL Modular Ocean Model Users Guide - Version 1.0>
3-12
<Pacanowski, Dixon & Rosati - GFDL Ocean Group Tech. Report No. 2>
4-1
Any general circulation model contains an
intimidating number of “things” to keep
track of. For a new user, deciding which
things to study in detail first so that other
portions of the model can be understood
can be important question. This chapter
seeks to describe for the user several of
the basic building blocks that one needs to
know in order to develop working
knowldege of the GFDL MOM code. We
expect that more seasoned users will refer
to these pages when seeking to refresh
their memories.
The discussion of building blocks begins
with the model grid itself. However, while
describing the grid, we will also introduce
some specifics concerning conventions
used in the naming of variables.
CHAPTER 4: Some Basics of the GFDL
Modular Ocean Model

<GFDL Modular Ocean Model Users Guide - Version 1.0>
4-2
(4.1)THE THREE DIMENSIONAL
GRID
The structure of the model grid itself is a
reasonable topic to tackle first when
building up knowledge of the GFDL
Modular Ocean Model code.
Understanding the layout of the grid and
some of the MOM code’s naming
conventions that relate to grid locations is
crucial if one it to be able to mentally
translate many parts of the code into
visual images.
Figure 4.1.1 displays the horizontal grid
structure used in the MOM code and
Figure 4.1.2 displays the vertical grid..
Variables are arranged in the manner of
the “B-grid” convention described by
Arakawa and Lamb (1977). Users may
refer to the coord.h and grdvar.h files
for lists and descriptions of many of the
variables relating to the grid.
Parameters used to set the number of
model grid points in the west-to-east,
south-to-north, and top-to-bottom
directions are imt,jmt, and km,
respectively (see the param.h file). Thus,
variables aligned along a specific latitude
can be referred to as being in the same “j-
row”, with values of i increasing as one
moves eastward. The first j-row (j=1) lies
at the southern limit of the model domain,
and values of j increase as one moves
northward. In the vertical, values of k
increase as one moves downward to
greater depths.
Since the GFDL MOM code employs the
B-grid, tracer quantities (potential
temperature, salinity, and other tracers)
are defined in the horizontal at different
locations than the velocity component
variables u and v. As shown in Figure
4.1.1, a “u,v” grid point with a given i,j
designation is located to the northeast of
the tracer grid location having the same
i,j values. The two-dimensional volume
transport streamfunction (variable p in
the emode.h file) is also aligned on the
horizontal tracer grid.
In the GFDL Modular Ocean Model,
horizontal grid locations are carried in
terms of degrees of latitude and longitude.
Variable xt(i) represents the longitude
of the “i-th” point on the tracer grid, and
variable xu(i) represents the longitude of
the “i-th” point on the u,v grid. Similarly,
variable yt(j) represents the latitude of
the “j-th” model row on the tracer grid,
while the latitude of the “j-th”u,v j-row is
stored in variable yu(j).
In the horizontal, tracer grid points lie in
the exact center of tracer grid box cells.
The four points of a tracer grid cell lie at
u,v grid point locations. The distance (in
centimeters) across a tracer grid box cell
in the north-south (meridional) direction at
location i,j is stored in variable dyt(j),
while the distance in the east-west (zonal)
direction at the Equator is stored in
variable dxt(i)(see the grdvar.h file).
As depicted in Figure 4.1.1, the GFDL
Modular Ocean Model allows for variable
grid spacing in the horizontal. Therefore,
u,v grid points do not necessarily lie in
the center of the four surrounding tracer
gridpoints. Distances across u,v grid cells
are given by variables dyu and dxu, and
correspond to the distances (in
centimeters) between tracer grid points in
the north-south and east-west directions,
respectively.
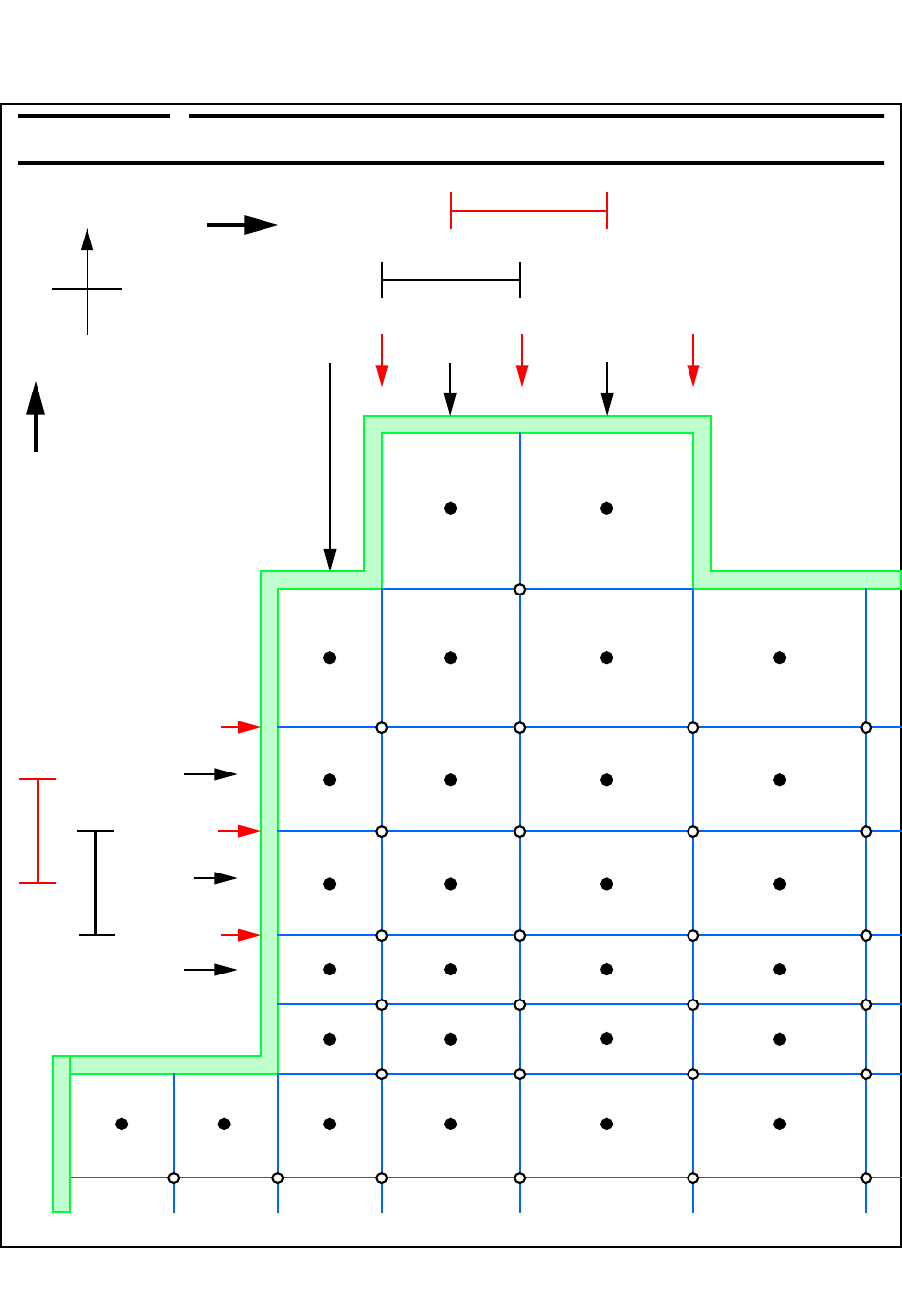
<Pacanowski, Dixon & Rosati - GFDL Ocean Group Tech. Report No. 2>
4-3
N
W
E
S
T
T
T
T
T
T
T
T
T
T
T
T
T
T
T
T
T
T
T
T
T
T
T
T
T
T
TT
u v
u v
u v
u v(i,j)
u v
u v
u v
u v
u v
u v
u v
u v
u v
u v
u v
u v
u v
u v
u v
u v
u v
u v
u v
u v
u v
u vu v
yu(j)
yu(j+1)
yu(j-1)
yt( j )
yt( j+1)
xt(i)xt(i+1)
xt(i-1)
xu(i) xu(i+1)
xu(i-1)
dxt( i )
dxu(i)
dyu(j)
dyt( j )
FIGURE 4.1.1 Skematic view of the GFDL Modular Ocean Model’s horizontal grid arrangement.
yt( j-1)
(i,j)
<GFDL Modular Ocean Model Users Guide - Version 1.0>
4-4
Since the dxu and dxu variables are
calculated as the distance (in centimeters)
across a grid cell in the zonal direction at
the Equator, one must multiply these
variables by the cosine of the latitude of
the j-row of interest in order to determine
the true east-west distance between grid
points at a given latitude. The cosines of
the latitudes of tracer grid points (yt(j))
are stored in variable cst(j), and the
cosines of the u,v grid point latitudes
(yv(j)) of tracer grid points are stored in
variable csu(j) (see file grdvar.h).
The following sentence attempts to tie
together some of the elements presented
thus far concerning the horizontal grid
used in the GFDL MOM code:
The east-west distance, in centimeters,
across the southern face of the tracer grid
box cell centered at latitude yt(j) and
longitude xt(i) is equal to the distance
from longitude xu(i-1) to xu(i) at
latitude yu(j), which can be computed
as... csu(j-1) * dxu(i)
With the above preliminaries out of the
way we can now turn to the question of
how a user specifies the horizontal grid
desired for a particular application in the
MOM code. The process begins when
program ocean calls subroutine
grids.Subroutine grids, and
supporting subroutines mesh and
cmesh and function indp are found in
file setgrid.F.
Upon entering subroutine grids, a call to
subroutine mesh is made in order to
determine tracer grid cell widths dxt and
dyt. All other grid variables are calculated
within the subroutine grids from
these two variables.
As alluded to earlier, the GFDL MOM code
provides a means by which variable grid
spacing can be incorporated into the
model. This is achieved in subroutine
mesh. The nxres and nyres parameters
are the number of subdomains of either
constant or smoothly varying grid cell
dimensions. For the simplest case of a
grid that is uniform in terms of latitude and
longitude grid spacing, parameters nxres
and nyres are set to be equal to one in
file param.h. This was done for the sample
configuration of the MOM code.
Variables used to determine the grid
spacing (be the spacing either uniform or
variable) are set by the user in the
blkdta.F file. These variables (namely,
variables stlon, xmax, xmin, xwid
and idir for longitudinal subdomains,
and stlat, ymax, ymin, ywid and
jdir for the latitudinal subdomains) are
described in the comments found in the
coord.h file.
For each of the longitudinal and latitudinal
subdomains asked for (nxres and
nyres) the user must specify the sum of
the distances (in degrees) to be covered
by tracer grid box cells within that
subdomain. Subdomain widths are given
by xwid(nx) and ywid(ny), where ny
goes from 1 to nxres and ny from 1 to
nyres. Variables xmax and xmin and
ymax and ymin are used to specify the
minimum and maximum tracer grid box
cell widths within the given domain.
Uniform spacing within a subdomain can
be achieved by setting the minimum and
maximum widths to be equal. Otherwise,
smoothly varying grid cell widths will be
computeda, and the idir and jdir
variables are set to either +1 or -1 to
signify whether the grid box cells are to

<Pacanowski, Dixon & Rosati - GFDL Ocean Group Tech. Report No. 2>
4-5
increase or decrease as one moves
across the subdomain to higher i or j
values. The calculations for the variable
tracer grid cell widths are performed in
subroutine cmesh.
The model grid point located in the far
southwest of the entire model domain is a
tracer grid point with an i,j location of
(1,1). All model grid locations are
computed using this position as a starting
point.. This starting location for the model
grid is given (in degrees) by variables
stlat and stlon.
Variables xt,yt,xt and xu are each
monotonically increasing in the MOM
code. In cases of an ocean model with
pseudo-realistic geometry, the cyclic
option needs to be specified, and thus the
sum of all the longitudinal subdomains
must be greater than 360 degrees (as in
the sample case).
Should a user have a special application in
which it is desired to have latiitudal and/or
longitudinal grid spacing that varies in a
way not readily produced by the above
described method, we suggest the
following get-around. Add a new ifdef
option to the code, such that when it is
defined subroutine grids calls a new, user
supplied routine, rather than subroutine
mesh.. This new routine should return
variables dxt and dyt. Once that is
accomplished, all other grid variables will
be computed, starting at the stlat and
stlon tracer gridpoint location.
REFERENCES
Arakawa, A., and V. Lamb, “Computational
Design of the basic dynamical processes
of the UCLA general circulation model”,
Methods in Computational Physics, vol 17,
Academic Press, (1977)

<GFDL Modular Ocean Model Users Guide - Version 1.0>
4-6

<Pacanowski, Dixon & Rosati - GFDL Ocean Group Tech. Report No. 2>
IN-1
INDEX
A
ah variable ............................................... 3-4,3-7
see also eddy coefficients
ahisop variable ........................................... 3-7
see also eddy coefficients ........................... 3-7
aidif variable .............................................. 3-5
am variable ....................................................... 3-4
see also eddy coefficients
anonymous ftp, see ftp command .......... iii
aq variable ....................................................... 3-6
see also eddy coefficients .......................... 3-6
B
biharmonic option ........................................... 3-4
blkdta.F file ............... 2-5,3-5,3-6,3-8,3-11
bottom drag ..................................................... 2-5,3-5
boundary conditions
lateral ...................................................................... 2-5
vertical .................................................................... 2-4
Bryan, Kirk ...........................................................vi,vii
bvdc variable ................................................. 3-5
C
calling tree diagrams .......................................... 2-6
cdbot variable .............................................. 3-5
see also bottom drag
cflcrt variable ......................................... 3-11
checks.F file ......................................... 2-4,3-2
C-language preprocessor, see cpp command
clinic.F file ................................................. 2-2
common blocks ..................................... 1-4,1-5,2-2
congr5.F file ................................................. 3-3
congrad5pt option ........................................... 3-3
congrad9pt option ........................................... 3-3
consistency checks ............................................. 2-4
consthmix option .............................................. 3-4
constvmix option ............................................... 3-5
convective adjustment ....................... 3-5,3-6,3-7
coord.h file .................................................... 2-4
Cox, Michael ...................... vi,vii,2-3,2-5,3-3,3-7
cpp command ............................... 1-3,2-4,3-1,3-2
Cray YMP ......................................................... 2-2,3-8
getwa/putwa routines ................................... 3-10
SSD (solid state disk) .......................... 3-8,3-10
cray.run file ......................................... 1-2,3-2
crayio option ..................................................... 3-10
cregin.h file ................................................. 2-5
crit variable ................................................. 3-3
ctcmix.h file ................................................. 3-6
ctmngr.h file ................................................. 2-4
customization options ........................ 1-5,2-3,3-1
see also ifdef directives
cvbc.h file ....................................................... 2-4
cvmix.h file .................................................... 3-5
D
denscoef.F file ........................................... 2-6
depths program .............................................. 2-6
diagnostic timestep ................................... 3-8,3-11
diskless option .................................. 3-2,3-8,3-10
Dixon, Keith .........................................................iv,vi
dncoef.h file ................................................. 2-6
docmnt.F file ......................................... 1-5,2-5
E
eddy coefficients .......................... 3-4,3-5,3-6,3-7
e-mail addresses .....................................................vi
eqstat program .............................................. 2-6
equation of state ................................................... 2-6
equivalence statements ................................... 2-5
external mode
options ................................................................... 3-3
F
filename suffix ................................... 1-4,2-2
filtering options ...................................................... 3-9
finite impluse response filter, see firfil option
3-9
fio option ....................................................... 3-2,3-10
firfil option .............................................................. 3-9
fkph variable ................................................. 3-5
see also eddy coefficients
fkpm variable ................................................. 3-5
see also eddy coefficients
fonts ...............................................................................iv
Fortran-77 ................................................................ 2-2
fourfil option .......................................................... 3-9
fourier filter, see fourfil option ..................... 3-9
fourth order mixing .............................................. 3-4
ftp command ....................................................iii,iv
G
getvar.F file ................................................. 2-6

<GFDL Modular Ocean Model Users Guide - Version 1.0>
IN-2
GFDL Ocean Group Technical Report #1 .vi
GFDL Ocean Group Technical Report #2 .iv
grid options .............................................................. 3-8
H
Hellerman and Rosenstein winds ................ 1-3
horizontal mixing schemes, see lateral mixing
schemes
hybrid mixing schemes ..................................... 3-7
hypergrid option ................................................ 3-3
I
I/O options ............................................................. 3-10
ifdef directives ................................ 1-3,2-3
conflict checks ................................................... 3-2
implicitvmix option .......................... 3-5,3-6,3-7
include files ................................. 1-4,1-5,2-2
indp function ......................................... 2-4,2-6
input/output, see I/O options
internet ....................................................................iii,iv
iounit.h file ................................................. 2-5
iperim.F file ................................................. 2-4
island calculations ............................................... 2-4
isopycmix option .............................................. 3-7
isopycnal mixing, see isopycmix............... 3-7
isopycnal mixing, see isopycmix option
K
keepterms option ................................... 2-2,3-10
Kerr, Christopher ................................................... vii
L
lalg option,see tcvmix option
lateral mixing schemes ............................. 3-4,3-7
leq option,see tcvmix option
Levitus climatology .............................................. 1-3
M
Mahlman, J. ............................................................. vii
matrix.F file ................................................. 2-6
Mellor, George ....................................................... 3-6
Mellor-Yamada turbulence closure, see also
tcvmix option ............................................... 3-6
memory size ........................................................... 2-3
mergelib utility ................................ 1-2,1-4
metric nonlinear terms ..................................... 3-10
Miyakoda, Kikuro ........................................... vii,3-4
modular design ...................................................... 2-2
MOM_NEWS file .............................................v,1-2
multitasking option ................................ 3-8,3-10
my_mom directory ...........................................iv
N
namelist ..................................... 2-2,2-4,3-3,3-5,3-6
naming conventions ........................................... 2-3
ncon variable ......................................... 3-6,3-7
nearest model gridpoint .................................... 2-4
newtonian damping .......................................... 3-10
nlhmix option ....................................................... 3-4
nmix variable ................................................. 2-4
nohilats option .................................................. 3-10
non-linear horizontal subgrid-scale mixing
see also nlhmix option .............................. 3-4
ntasks variable ........................................... 3-8
ntlev parameter ................................. 3-8,3-10
O
ocean program ................................................. 2-6
ocean.F file .................................................... 2-5
ocean.in file ................................................. 1-2
odam.F file ....................................................... 2-6
off-line analysis ..................................................... 2-5
oldrelax option ................................................... 3-3
Oort climatology .................................................... 1-3
optimization options ............................................ 3-8
organization of variables .................................. 2-2
out-of-bounds references ................................ 2-2
P
Pacanowski, Ronald ..............................vi,3-5,3-6
param.h file .................................................... 2-2
parameter statements ....................................... 1-4
pconst.h file ................................................. 2-3
Philander, S.G. .............................................. 3-5,3-6
Poisson solvers, see external mode options
ppvmix option ............................................. 3-5,3-6
PREP_DATA directory ..........................iv,1-3
printout file ......................................... 1-2,1-5
R
READ_ME file ............................................ 1-2,1-3
readrmsk option ................................................ 2-5
readrmsk option ........................................... 2-5
Redi, M. ..................................................................... 3-7
REFERENCES ..........iv,vi,1-3,3-3,3-4,3-6,3-7
region masks
horizontal .............................................................. 2-5
vertical ................................................................... 2-5
regional averages ................................................ 2-5
relax.F file .................................................... 3-3

<Pacanowski, Dixon & Rosati - GFDL Ocean Group Tech. Report No. 2>
IN-3
resource requirements ...................................... 2-6
restorst option .................................................... 3-10
rigidlid option ....................................................... 3-3
Rosati, Anthony .........................................iv,vi,3-4
runtime documentation ..................................... 2-5
S
saving original files .............................................. 1-4
scalar.h file ................................................. 2-5
scale selective mixing ........................................ 3-4
SCCS ................................................................. 1-5,2-4
Scripps topography ............................................. 1-3
second order mixing ................................... 3-4,3-5
Semtner, A. .........................................................vi,vii
setgrd.F file ................................................. 2-6
setgrid.F file .............................................. 2-4
setvbc.F file ............................................... 3-10
size program .................................................... 2-6
size.F file ..................................................... 3-10
skipland option ........................................... 2-3,3-8
slabs ............................................................ 2-3,2-4,3-8
slabs.h file .................................................... 2-3
slmxr variable .............................................. 3-7
Smagorinsky, J. .................................................... 3-4
snaps variable .............................................. 2-5
snapshot option ................................................. 2-5
solid state disk, see Cray YMP ..................... 3-8
sor variable .................................................... 3-3
Source Code Control System, see SCCS
sources and sinks ................................................ 2-4
splitlib utility ........................ 1-2,1-4,1-6
SSD, see Cray YMP ($nopage) ................... 3-8
statement functions ............................................. 2-3
streamfunction
volume transport ............................................... 3-3
switch.h file ......................................... 2-4,2-5
symmetry option ............................................... 3-2
T
tcvmix option ............................................... 3-5,3-6
leq option ........................................................... 3-6
term balances ........................................................ 2-5
testcfl option ....................................................... 3-11
thick.h file .................................................... 2-6
time manager ......................................................... 2-4
timing option ........................................................ 3-8
tmngr.F file .................................................... 2-4
tracer averaging timestep ................................ 3-8
tracer averaging timestep, see also regional
averages ($nopage) ................................... 3-8
tracer.F file ......................... 2-2,3-5,3-6,3-7
tracing variables and options ......................... 2-2
turbulent kinetic energy .................................... 3-6
U
UNIX commands
cat ............................................................................ 1-5
chmod .................................................................... 1-4
cpp, see cpp command ............................... 1-3
diff .................................................................... 1-6,2-4
ftp, see ftp command ................................... iii
grep ................................................................. 2-2,3-7
ls ...................................................................................v
tar ............................................................................. 1-2
UPDOC ..................................................................... 2-3
upgrade utility ........................... 1-3,1-5,1-6
V
vdclim variable ........................................... 3-5
vdclim variable, see also eddy
coefficients ...................................................... 3-5
version number ..................................................... 1-2
vertical mixing schemes ........................... 3-5,3-7
vertical resolution ................................................. 3-6
vvclim variable ........................................... 3-5
vvclim variable, see also eddy
coefficients ...................................................... 3-5
W
wind stress .............................................................. 1-3
