Manual
User Manual:
Open the PDF directly: View PDF ![]() .
.
Page Count: 2
How to Tracking a Rings Pattern
Daniel Palomino
dpalominop@gmail.com
Abstract— In several machine vision applications, a funda-
mental step is to precisely determine the relation between the
image of the object and its physical dimension by performing
a calibration process. The aim is to devise an enhanced mecha-
nism for camera calibration in order to improve the already
existing methods in OpenCV. A good calibration is important
when we need to reconstruct a world model or interact with
the world as in case of robot, hand-eye coordination. In the
paper that i have based is proposed an enhanced camera
calibration procedure using a special grid pattern of rings.
The overall objective is to minimize the re-projection for good
camera calibration.
I. INTRODUCTION
A la hora de diseñar un sistema de Visión por Compu-
tador siempre se tienen en cuenta una serie de parámetros
que serán decisivos para que la apariencia de los objetos
en la imagen sea la mejor de cara a los posteriores
algoritmos de análisis. Así se elegirá una óptica con una
distancia focal, f, que permita que se observe con el
suficiente tamaño en la imagen el elemento a buscar o
que tenga una lente con la suficiente calidad como para
que los objetos no se vean deformados. Respecto a la
colocación de la cámara, ésta se realizará de forma que se
perciba de la mejor manera posible el espacio por el que
pueden aparecer los objetos. Para muchas aplicaciones
estas medidas son suficientes.
Sin embargo, para aquellos algoritmos de Visión por
Computador que necesiten extraer información 3D de
una imagen o una secuencia de ellas o establecer la
correspondencia entre dos o más cámaras, la calibración
de los parámetros intrínsecos y extrínsecos del sistema de
visión es una etapa fundamental.
II. ALGORITMO
El métrodo propuesto se describe en los siguientes
pasos:
1. Detección de los Círculos en cada imagen.
2. Usando los círculos detectados, encontrar el centro
de cada anillo concéntrico.
3. Separación de los correctos de los incorrectos.
4. Ordenamiento de los centros de todos los puntos en
un órden sistemático que es universalmente seguido
por todas las imágenes.
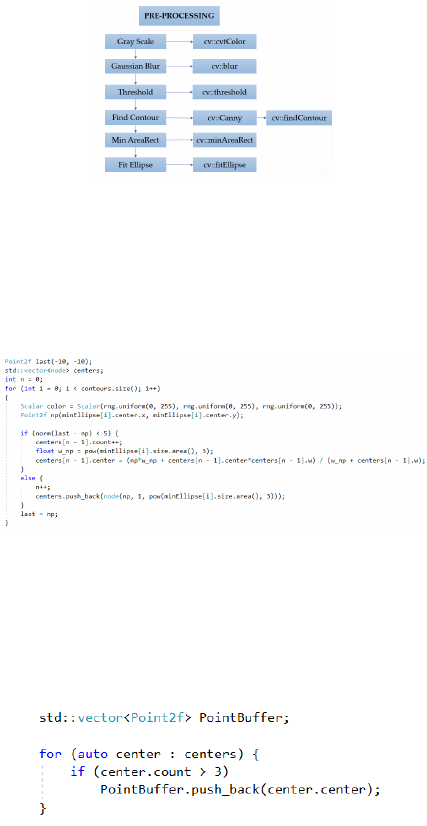
II-A. Detección de los Círculos
La detección de los círculos se realiza con el siguiente
pipeline:
1. Convertir a escala de grises.
2. Suavizado usando filtros gaussianos.
3. Binarización de la imagen.
4. Búsqueda de contornos.
5. Cálculo del mínimo area rectangular que envuelve a
los contornos.
6. Ajuste de elipses a los rectángulos calculados.
Fig. 1. Pipeline de la detección de los Círculos
II-B. Localización de los Centros
El algoritmo de localización de los centros es descrito
en la siguiente figura:
Fig. 2. Algoritmo de Localización de los Centros
II-C. Segregación de los Centros
El algoritmo de segregación de los centros es descrito
en la siguiente figura:
Fig. 3. Algoritmo de Segregación de los Centros
III. RESULTADOS
Para la presentación de los resultados, haré uso de 2
escenarios, uno con padrón rotado y otro con el padrón
original sin rotar.
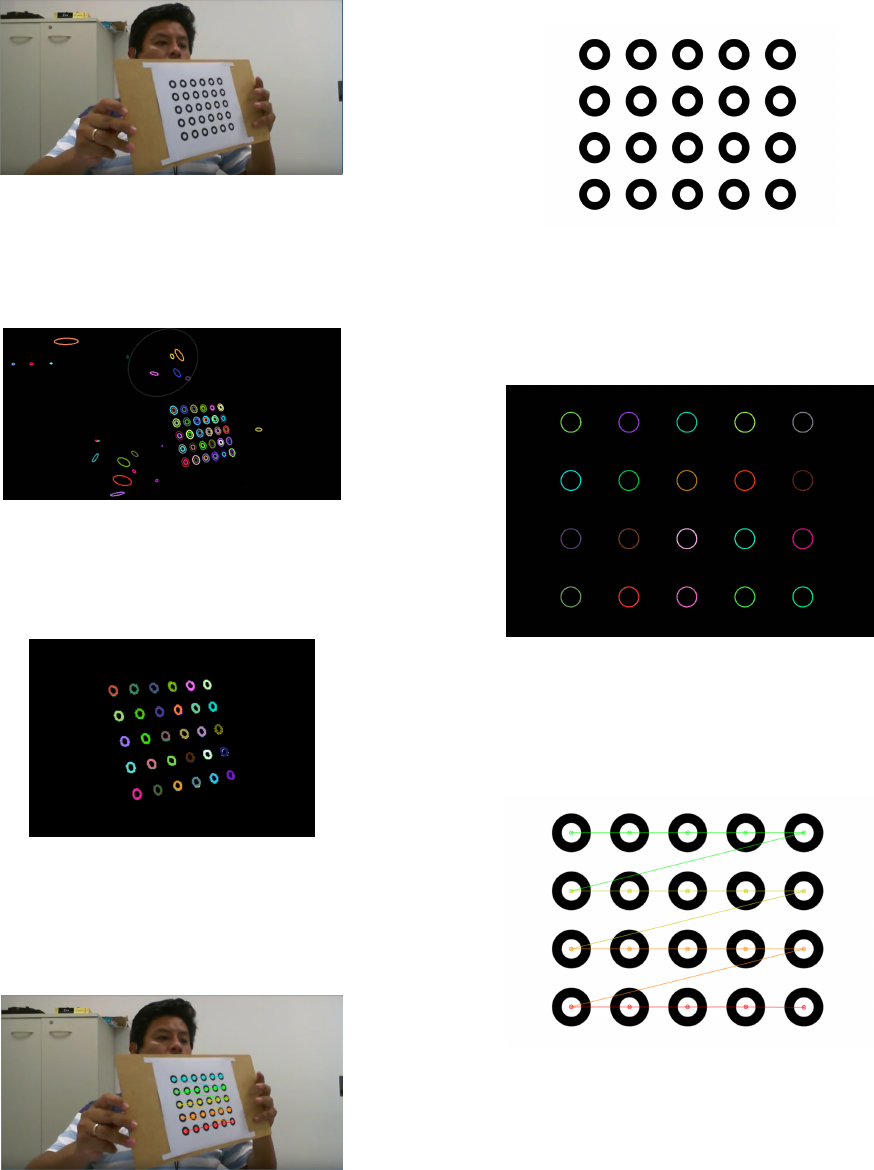
III-A. Padrón Rotado
El padrón a utilizar es el mostrado en la siguiente figura:
Fig. 4. Frame usado como imagen fuente
Luego de terminado la detección de los círculos, en
la etapa de preprocesamiento, se obtiene el siguiente
resultado:
Fig. 5. Resultado luego del pre-procesamiento
Seguidamente, se realiza la ubicación de los centros y
su posterior segregación:
Fig. 6. Resultado luego de la segregación de los centros
Finalmente, luego de la ubicación de los centro co-
rrectos, se procede a ubicar la grilla padrón dentro de
la imagen original:
Fig. 7. Detección del padrón dentro de la imagen original
III-B. Padrón Original sin Rotar
Al igual que en el caso anterior, primero se define el
frame a utilizar, el cual es mostrado en la siguiente figura:
Fig. 8. Frame que contiene el padrón original sin rotar
Luego, se realiza el preprocesamiento para la detección
de los círculos, seguido de la ubicación de sus centro y
su posterior segregación:
Fig. 9. Resultado luego de la segregación de los círculos correctos
Finalmente, luego de la ubicación de los centro co-
rrectos, se procede a ubicar la grilla padrón dentro de
la imagen original:
Fig. 10. Detección del padrón dentro de la imagen original
REFERENCES
[1] Asthana, Shubham. (2014). Enhanced Camera Calibration for Ma-
chine Vision using OpenCV. International Journal of Artificial Inte-
lligence. Volume 3.
[2] https://docs.opencv.org/
