Manual
User Manual:
Open the PDF directly: View PDF ![]() .
.
Page Count: 23
PLC+ CHALLENGE CROATIA
TEAM KONTI 1
User guide
for team ‘Konti’ solution of PLC+ challenge task
1
PLC+ CHALLENGE CROATIA
TEAM KONTI 2
1. Opening screen
When you start your HMI session with loaded ‘Team Konti's project’, an
opening screen (fig 1.0) should appear. On the opening screen,there are
Login button (fig 1.1) and About button (fig 1.2). When you click the Login
button, login screen should appear (fig 1.3). To enter the Main screen,
you need to have an authorization confirmed by entering both username
and password.
Initial username and password are by default set to :
Username -> Administrator
Password-> 111111
Disclaimer: It is highly advised that you change both username and
password after first usage.
When you click the About button, short explanation of the problem
popup screen (figure 1.4) should appear.
figure 1.0- Opening screen
figure 1.1- Login button
2

PLC+ CHALLENGE CROATIA
TEAM KONTI 3
figure 1.2-About button figure 1.3- Login screen
figure 1.4- short explanation of the problem popup screen
3

PLC+ CHALLENGE CROATIA
TEAM KONTI 4
2. Main screen
Main screen is used for control of crane behaviour and for container
movement, depending of the mode of work. Current mode of work is
shown by color of icon next to button for changing modes, where dark
pink color shows which of four modes is currently active.
Modes of work are by order:
• Automatic mode- crane movement is optimised for minimal number
of manipulations and time elapsed. Operator does not have direct
control of crane movement nor the possibility to choose the next
container for movement. Order of operations is chosen only by PLC
using algorithm made by Team Konti.
• Semi automatic mode - crane movement is optimised for minimal
number of manipulations and time elapsed. Operator has to allow
the next movement of crane, but does not have the possibility to
choose the next container for movement, nor change the next
movement of crane. Order of operations is chosen only by PLC
using algorithm made by Team Konti.
• Manual mode - crane movement and the next container for
movement is controlled and chosen directly by an operator. This
mode of work carries some limitations and risks, so it is not advised
to be used if needed precautions and education are not carried out.
• Stop mode - by choosing Stop mode (not to confuse with
Emergency stop mode, see distinction lower in text), all of modes
mentioned above execute current operation, and program comes to
a halt. Stop mode is used when Load next ship operation is
performed and etc. .
More detailed information about all of modes mentioned above is
located on pages regarding to all of modes each lower in the text.
When in one of modes and after the reinitialization of Data Blocks with
the ship in bay (see example case lower in text) screen always has these
parts:
4

PLC+ CHALLENGE CROATIA
TEAM KONTI 5
• 'Current user' notification and ‘Logout’ button (top right corner) – it
notifies us which user is logged in and allow us to logout
• All ID’S button- It allow us to see current state of all bays not only in
crane view mode, but to see all IDs of containers in all bays.
• Disbalance sliders (located under the ship containers)- they are
used to show disbalance of the current ship
• Current 'Crane position' (located in left part of screen, under Bay 1
containers) – it notifies us what is current crane position
• Current ‘Crane position’ (purple rectangle with transparent middle,
located on top of container depending on the current location)- it
notifies us what is current crane position
• Alarm window (located in bottom of screen) – current alarms show
up on this screen (list of all alarms and alarm explanations is
located lower in the document)
• 'Elapsed time' and 'Current number of manipulations' (located in left
part of screen, under Bay 1 containers) – they are used to notify us
about elapsed time of crane movement and current number of
manipulations made by crane
• 'Emergency stop' button (located in bottom right corner)- it is used
when emergency stop is needed. It changes current PLC mode
from ‘RUN’ mode to ‘STOP’ mode and it immediately stops any
current operation
• 'Reinitialize' button (located in bottom left of the main screen)- It is
used to reinitialize all memory and outputs of PLC to initial state
• 'Stop mode', 'Manual mode', ‘Semi-auto' and 'Automatic' buttons
(located in upper right part of screen)- they are used to choose
wanted mode of work
• ‘Current ship’ and ‘Load next ship’ button- used for loading next
ship into bay and notifying us about current ship number
5

PLC+ CHALLENGE CROATIA
TEAM KONTI 6
In Automatic mode (figure 2.1) crane movement is optimised for
minimal number of manipulations and time elapsed. Operator does not
have direct control of crane movement nor the possibility to choose the
next container for movement. Order of operations is chosen only by PLC
using algorithm made by Team Konti. Input arguments are data blocks
(DB-s) that need to be placed in PLC program and need to be named as:
'From_Bay0_to_Bay12[DB20]- list of containers that need to be moved
from ship to bay, and 'From_Bay12_to_Bay0'[DB21]-list of containers
that need to be moved from bay to ship. If execution of program is not
possible (not enough free space on ship, not enough free space on bay 1
or bay 2, etc.) appropriate alarm will pop up. List of alarms is available
lower in the document.
figure 2.1- Automatic mode of work
.
6

PLC+ CHALLENGE CROATIA
TEAM KONTI 7
• In Semi-automatic mode, crane movement is optimised for
minimal number of manipulations and time elapsed. Operator has
to allow the next movement of crane, but does not have possibility
to choose the next container for movement, nor change the next
movement of crane. Order of operations is chosen only by PLC
using algorithm made by Team Konti. Completion and execution of
next step is triggered by the click of 'Execute' button as shown in
figure (2.2). Algorithm of semi-automatic mode is same as
automatic mode, but is used when an operator needs to watch
every step individually. As shown on example picture, we can see
that next operations are going to be relocations from Bay 0, X
position- 1, Y position- 4 , Z-1 and Z-2, because as shown on
Semiauto mode tab (located in lower right part of screen), we need
to move container from lowest position (Z=3), and we have
containers above. Locations for relocations of containers above are
shown on Pending relocation destinations (located in lower middle
part of screen).
figure 2.2- Semi automatic mode
7

PLC+ CHALLENGE CROATIA
TEAM KONTI 8
In Manual mode, there are two possibilities of choosing a container to
be moved:
• 1. By container ID
• 2. by container coordinates
When choosing the location of container to be moved, an operator
needs to watch on four things :
1. That container with the given ID or at given coordinates exists
2. That the location where the container is going to be moved is
empty
3. That there are no containers above the container that is going to
be moved
4. There are containers under the location the location where the
container is going to be moved
If the operator does not watch on these 4.conditions, an
corresponding alarm will occur(see alarm table lower in the text).
It is important that after every entry of value into I/O fields,
operator needs to click enter to enter and confirm value.
figure 2.3 – Manual mode
8
PLC+ CHALLENGE CROATIA
TEAM KONTI 9
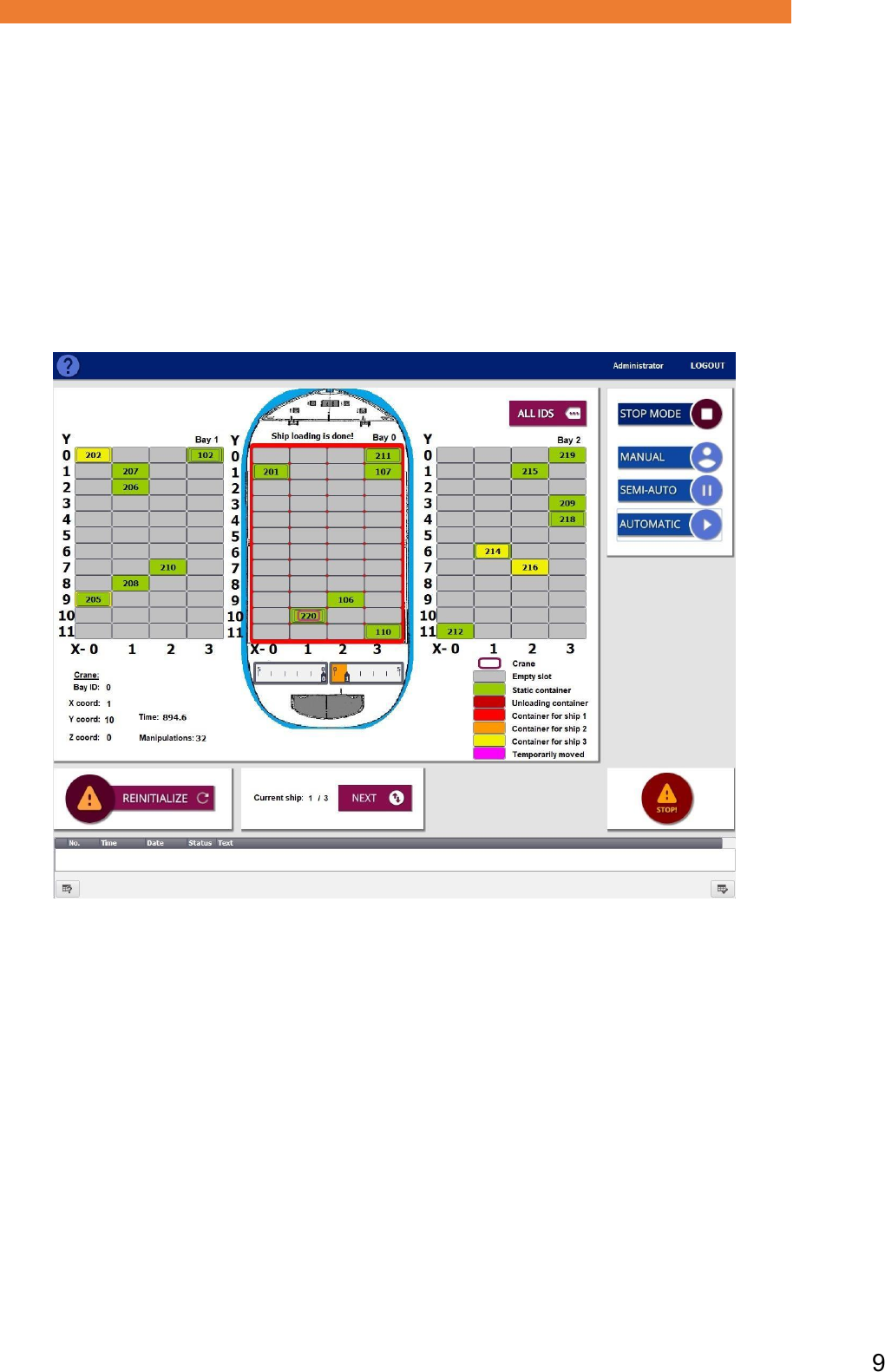
In Stop mode (figure 2.5), any of the 3 modes mentioned earlier (
Automatic mode, Semi-automatic and Manual mode ) comes to a halt,
and by entering into it, last movement is performed and then the crane
waits for the next instruction. Not to confuse with 'Emergency stop'
button, where both PLC and crane go to the stop mode, with that
reinitialising all memory and outputs to initial state. Stop mode is used
when Load next ship operation is performed, and it is highly advised that
before changing current mode, an operator first changes mode to Stop
mode, and then changes to wanted mode.
figure 2.5 -Stop mode
9

PLC+ CHALLENGE CROATIA
TEAM KONTI 10
Alarm table
List of all possible alarms and explanation of the alarms is given in table
1.0 . If any of the alarms occurs in the mode that is not assumed, contact
customer support or manufacturers of the used software.
Alarm name
Explanation of alarm
Not enough space on ship!
This alarm is triggered if you are trying to
load a container to the ship but there is
no space left. Please unload a container
from the ship first in order to free some
space on the ship.
This alarm is also triggered if your
automatic loading/unloading lists would
result in a ship being overloaded and
thereforee disables the automatic
algorithm.
Unable to complete: ship would
not remain balanced!
This alarm is triggered when the next
requested/calculated action would result
in the imbalance of the ship, which is not
allowed. If this happened in manual
mode please check your "to" and "from"
locations and check the ship's balance. If
this occurs in the automatic mode,
please contact engineers for assistance.
Some containers on loading
lists/manual mode do not exist!
This alarm is triggered if one or more
containers from loading/unloading lists
does not exist in a specified bay.
IMPORTANT: Please do not start
automatic mode if you get this alarm or
unexpected behavior could occur. The
algorithm will most likely just ignore the
nonexisting IDs, but this is not
recommended.
This alarm is also triggered if you enter a
container id in manual mode and the
10

PLC+ CHALLENGE CROATIA
TEAM KONTI 11
container can't be found in bay nor on the
ship.
The "FROM" slot is empty!
This alarm is triggered if you are trying to
pick up a container from an empty slot in
manual mode. Please try picking up
another container. If this happens in
automatic mode, please contact the
engineers for assistance.
Not enough space in the bay!
This alarm is triggered if you are trying to
unload a container from the ship and both
Bay 1 and Bay 2 are full. Please try
moving a container from Bay 1 or Bay 2
to free some space.
This alarm is also triggered if your
automatic loading/unloading lists would
result in both bays being overloaded and
therefore disables the automatic
algorithm.
Requested coordinates do not
exist!
This alarm triggers if you enter the
coordinates outside of an acceptable
range in auto mode.
Please check that your coordinates are
within following limits:
To/from "X": 0-3
To/from "Y": 0-11
To/from "BAY": 0-2
The "TO" slot is already
occupied!
This alarm is triggered if you are
trying to move a container to a slot
that is already occupied in manual
mode. Please try moving a
container to another slot. If this
alarm triggers in automatic mode,
please contact the engineers for
assistance.
11
PLC+ CHALLENGE CROATIA
TEAM KONTI 12
There are no more ships to load
today!
This alarm is raised when you try to load
a next ship and there are none left. If you
think you shouldn't be seeing this alarm
at this time, please contact the
programmers for assistance.
No conts bellow destination
coordinates. Can't drop in
midair!
This alarm is rised when you are trying to
put the container down at the position
where there are no containers bellow it
and it's not the lowest position. Doing
this would result in the container being
dropped in mid-air and that is not
allowed. Please check your manual
coordinates and try again.
If this happens in automatic mode, please
contact the algorithm creators for
assistance.
There are conts on top of the
origin coordinates!
This alarm is rised when you are trying to
pick up a container that has other
containers on top of it. You must first
move those containers elsewhere and
then try again.
If this occurs in automatic mode, please
contact algorithm creators for assistance.
There is no ship in bay0 at this
time!
This alarm is rised when you try to
perform any action (starting AUTO mode,
moving containers to/from ship, etc)
involving a ship (Bay0) and one isn't
present in the bay. Please load a ship
first and then try again.
If this occurs in automatic mode, please
contact algorithm creators for assistance.
Unable to change ship! Please
switch to STOP mode first!
You can only load next ship while in
"STOP" mode for safety and reliability
purposes. Please change to stop mode
first and then proceed loading the next
ship.
Table 1.0- List of all possible alarms
12

PLC+ CHALLENGE CROATIA
TEAM KONTI 13
Example project
Disclaimer: time elapsed and number of manipulations in this example can be equal
or bigger than in real simulations. The code can be subjected to minor optimisations
and last version of code can be different than the version for which this example
project was made. This example project was tested in v 2.0
At this part of manual, we are going to show basic steps to successfully
unload/load ships and show how to use Team Kontis project solution in a
good way, with that minimising the probability of malfunctioning and
unexpected behaviour.
First step is to load example Data blocks in program. Example blocks that
need to be located in program are:
'From_Bay0_to_Bay12[DB20] - list of containers that need to be moved from ship to
bay.
'From_Bay12_to_Bay0'[DB21] - list of containers that need to be moved from bay to
ship.
‘Current_state_of_Bay_0[DB10] - list of containers that are located in Ship 1, Ship 2
and Ship 3 [Bay0] accordingly
‘Current_state_of_Bay12[DB11] – list of containers that are located in Bay 1 and Bay
2, accordingly
After compilation of the program, download program to PLC. Start the
HMI simulation and if there are no problems, Login screen (fig 3.0)
should appear. After login, Main screen should appear (fig 3.1). At this
point, it is highly advisable to click ‘Reinitialize’ button located in bottom
left corner, and by doing that reinitialize all the outputs and memory
blocks in the PLC.
figure 3.0- Login screen
13
PLC+ CHALLENGE CROATIA
TEAM KONTI 14
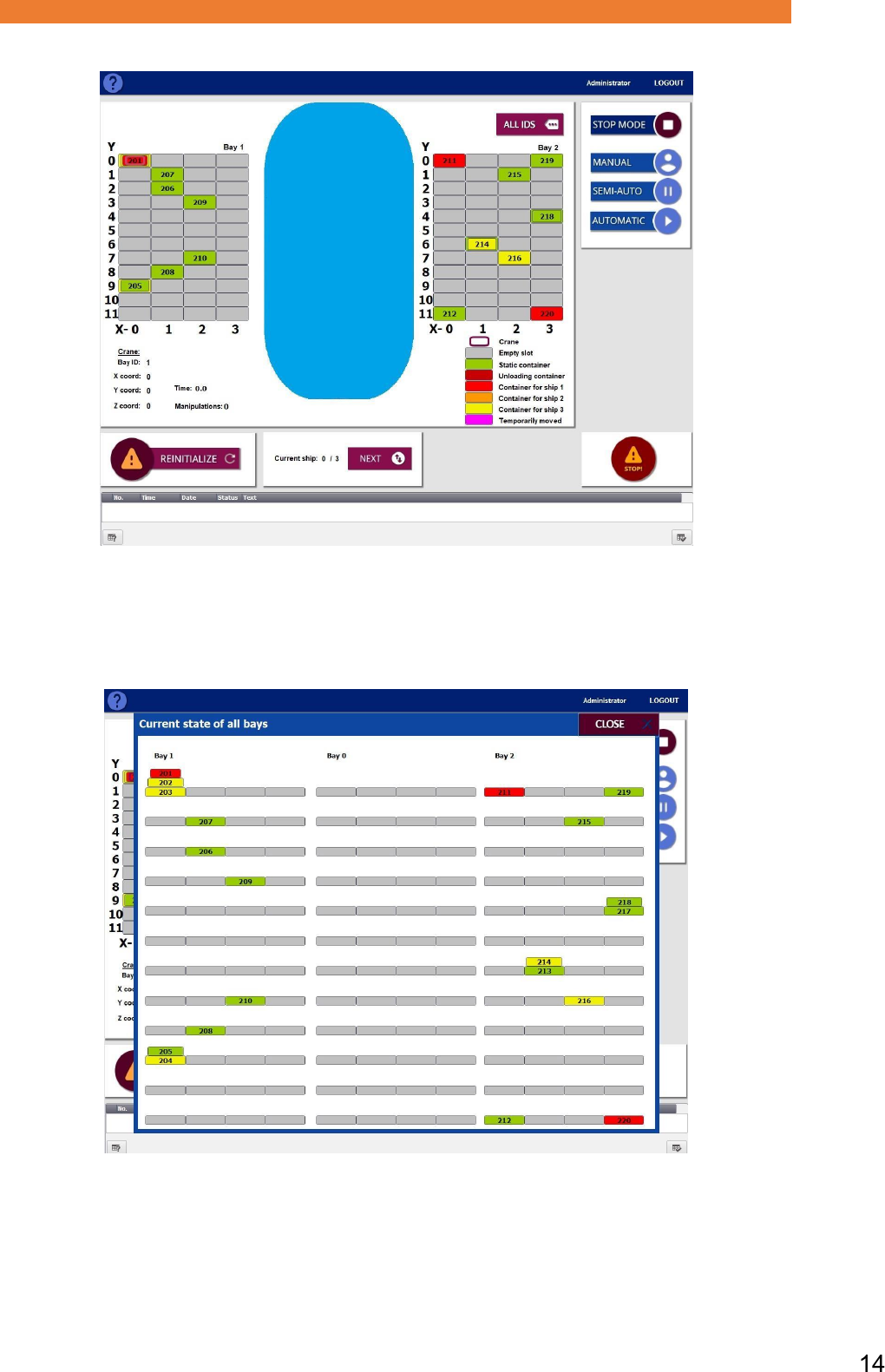
figure 3.1- Main screen after clicking ‘Reinitialize’ button
By clicking the ‘ALL ID’S’ button located in the upper middle of the
screen, popup screen pops up (figure 3.2), showing current state of all
bays.
figure 3.2 – ‘Current state of all bays’ popup screen
14
PLC+ CHALLENGE CROATIA
TEAM KONTI 15
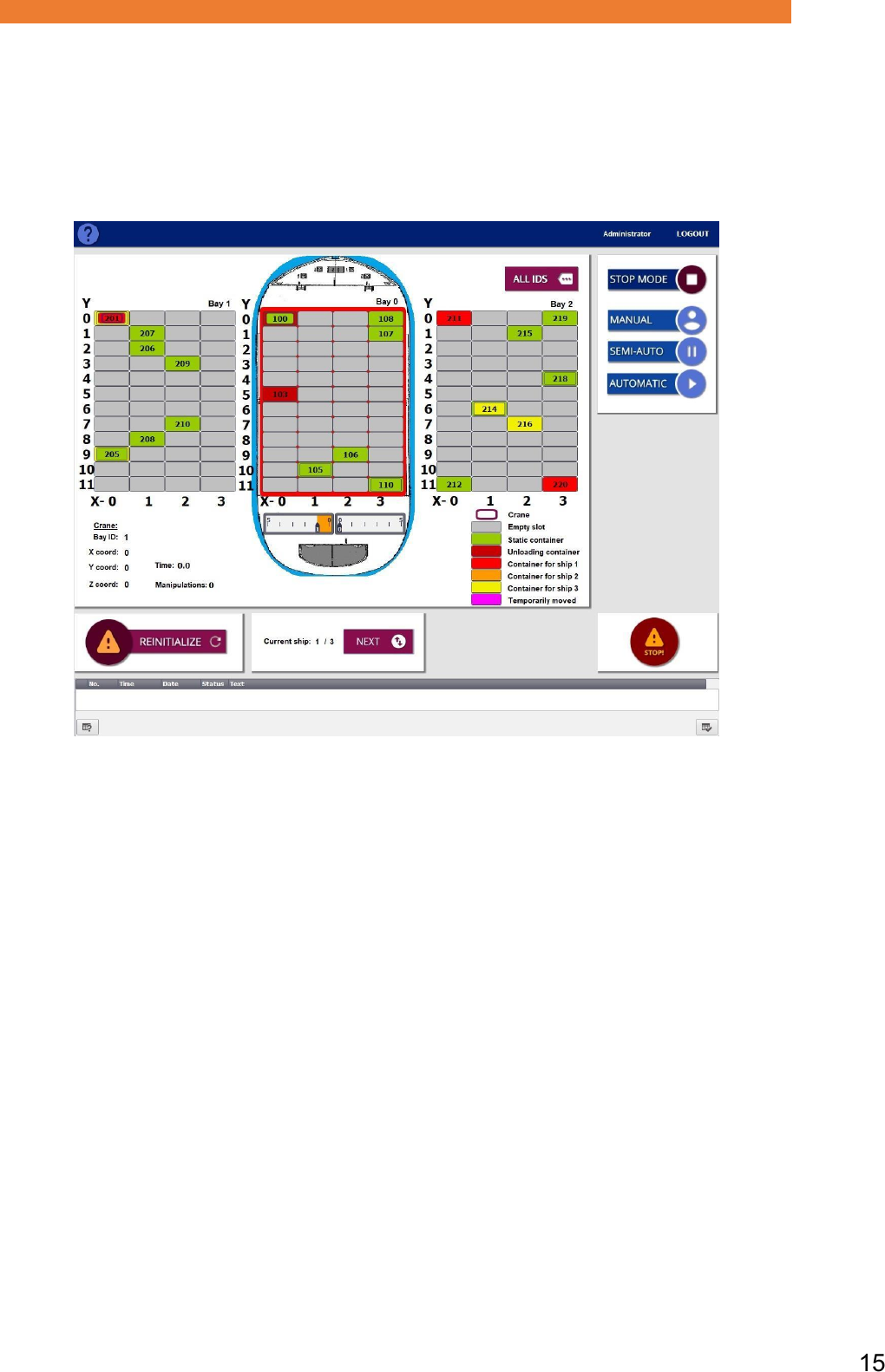
Click the ‘close’ button on popup screen to close the popup screen, and
after that click Next button (located under bay 0 ) to move the next ship
into harbour. After the ship has entered the harbour, screen should
look like this (figure 3.3). Current mode needs to be ‘Stop mode before
clicking ‘Next button’.
figure 3.3 – main screen after moving the ship into harbour
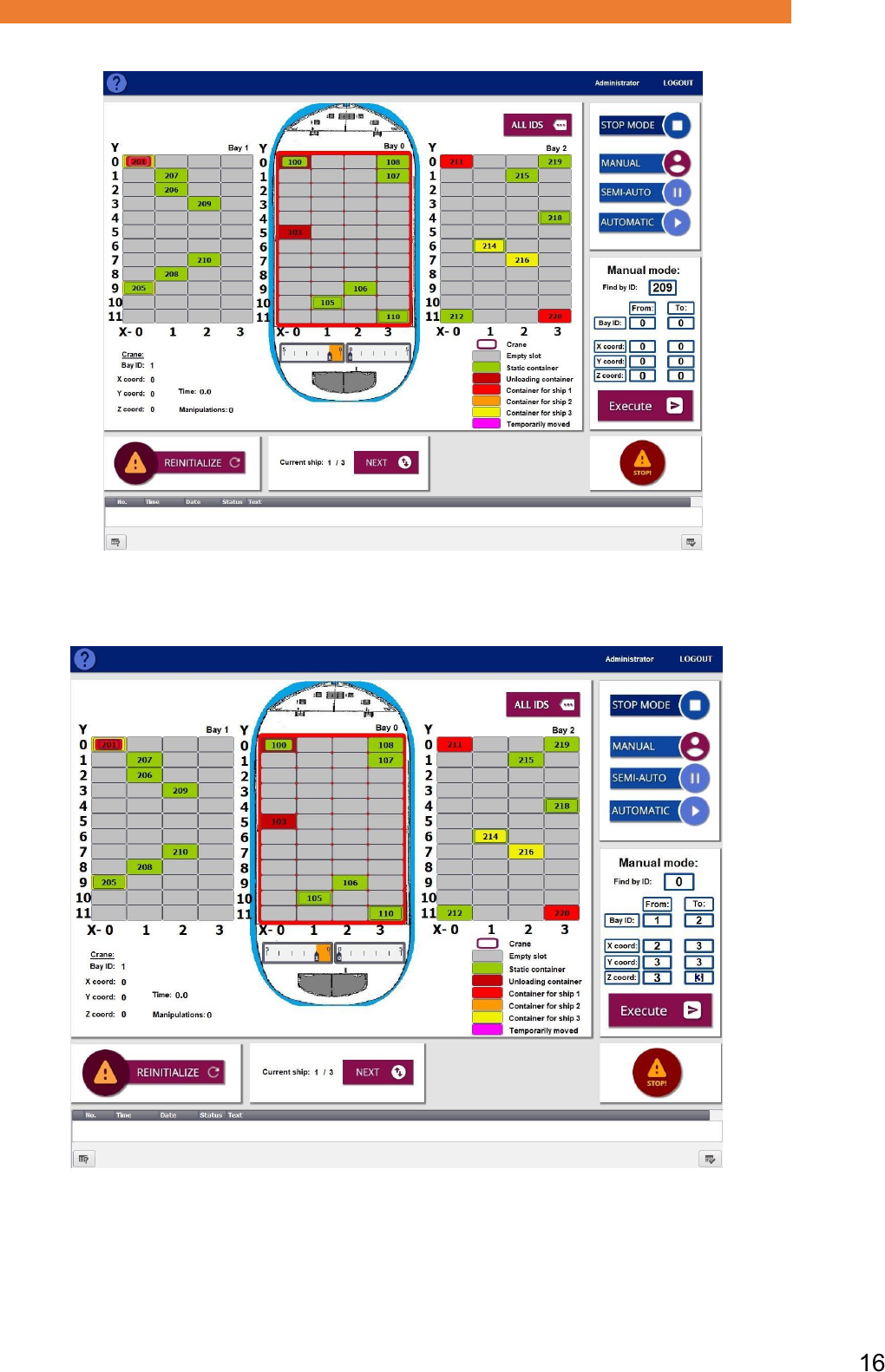
Change the current mode of work to ‘Manual mode’(fig. 3.4) (by clicking
the ‘Manual’ button) and enter number ID 209 into ‘Find by ID’ input field
located in the ‘Manual mode:’ tab. After that, click enter to acknowledge
the ID. Screen should look like this: (fig. 3.5). Find by ID input field
becomes 0, and From I/O fields are loaded with the location of container
with the ID 209. Enter coordinates to TO fields located in the ‘Manual
mode’ tab accordingly : Bay ID 2, X coord: 3, Y coord 3, Z coord 3. It is
important that after every of every value into I/O fields, operator
needs to click enter to confirm and acknowledge value. After clicking
‘Execute’ button located in the ‘Manual mode’ tab, container with ID 209
should be moved to wanted location (fig 3.6).
15
PLC+ CHALLENGE CROATIA
TEAM KONTI 16
figure 3.4- Manual mode before clicking enter for searching by ID
figure 3.5 Manual before clicking ‘Execute’ button
16
PLC+ CHALLENGE CROATIA
TEAM KONTI 17
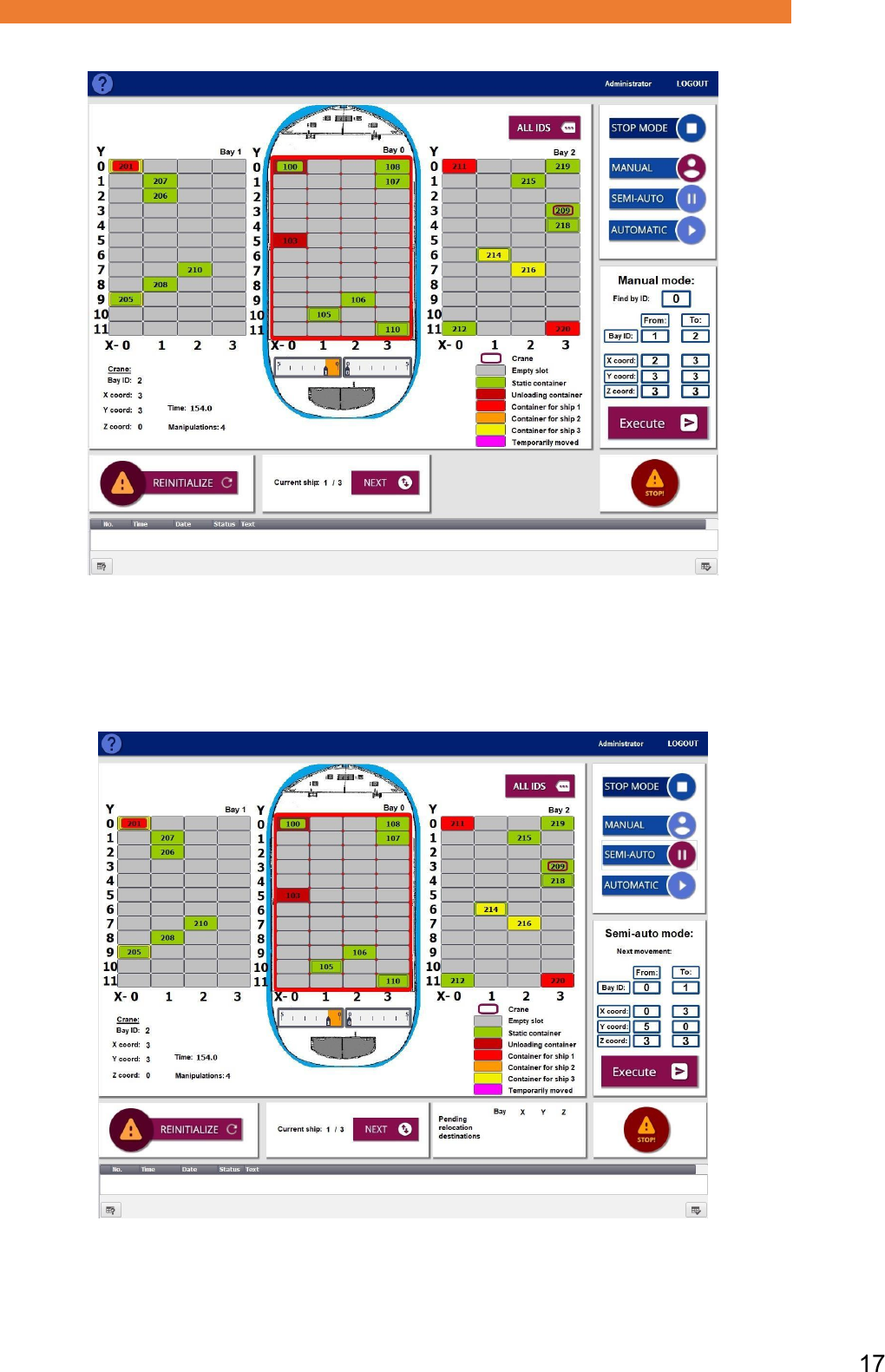
figure 3.6 Manual mode after moving container with ID 209
This was the example for Manual mode. Click on the ‘Semi-auto’ button
to change the current mode to ‘Semi-auto’ mode. After clicking the
button, mode should change (fig 3.7).
figure 3.7 – Semi automatic mode
17

PLC+ CHALLENGE CROATIA
TEAM KONTI 18
Click ‘Execute’ button and the container that was chosen by the algorithm
to be the most optimal should be moved to the location that was shown to
be the most optimal (fig 3.8).
figure 3.8.-Semi auto mode, container was moved
As we can see on figure 3.8, next container to be moved has other
container above (Pending relocation destination exists), so the next
operation that must be done is to move the container above to optimal
location. In this moment, we are going to change the current mode to
‘Stop’ mode, and then switch to ‘Automatic’ mode. As we can see on
figure 3.9, ‘automatic’ mode has relocated all containers that needed to
be relocated, and we can see on top of the ship that text ‘Ship loading is
done!’ is displayed. The procedure for moving the next ship is following:
1. Put the program into ‘Stop mode.
2.Click the ‘Next’ button to load next ship
3. Click the ‘Automatic’ button to change the current mode from ‘Stop’
mode to ‘Automatic’ mode.
18
PLC+ CHALLENGE CROATIA
TEAM KONTI 19
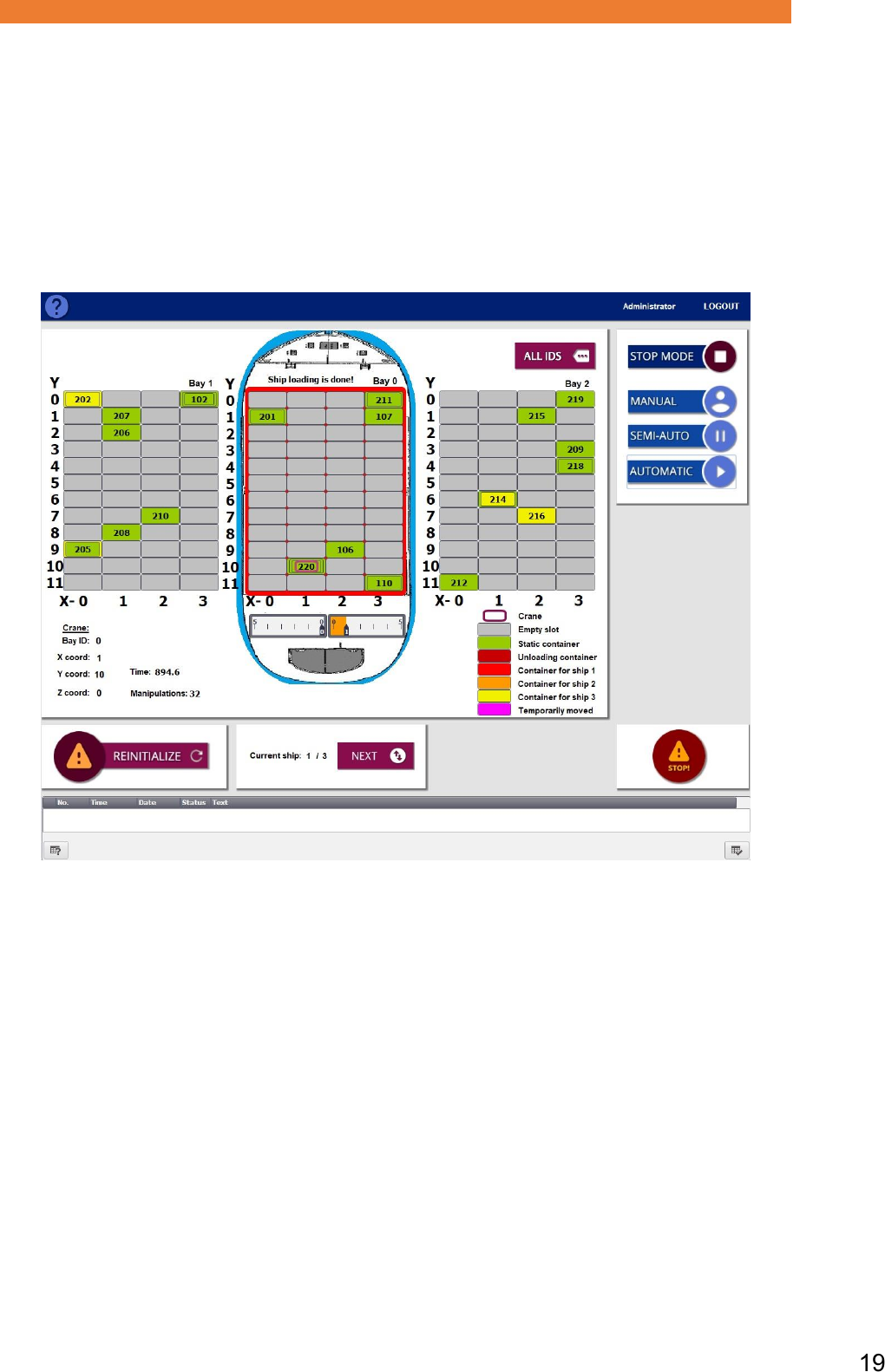
When the containers that are needed to be loaded are loaded and when
the containers that are needed to be unloaded are unloaded, again we
can see on top of the ship that text ‘Ship loading is done!’ is displayed.
Figures 3.9, 4.0,4.1,4.2 and 4.3 show the states of other ships after
automatic loading and unloading is performed
figure 3.9.-Automatic mode, Ship 1 is loaded/unloaded
19
PLC+ CHALLENGE CROATIA
TEAM KONTI 20
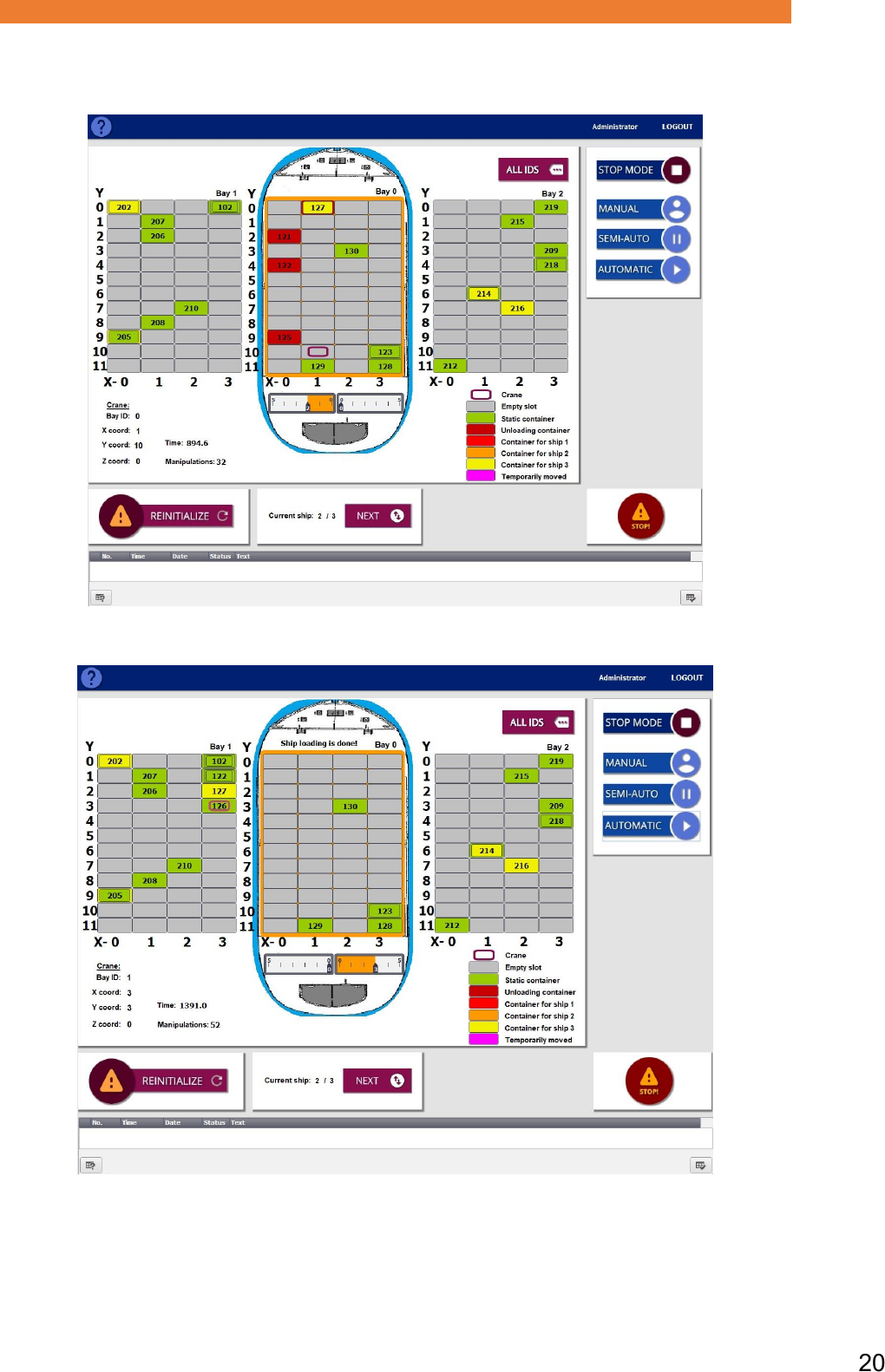
States of ship 2 and harbour before and after loading/unloading
figure 4.0.-Automatic mode, Ship 2 and harbour before unloading/loading
figure 4.1.-Automatic mode, Ship 2 and harbour after unloading/loading
20
PLC+ CHALLENGE CROATIA
TEAM KONTI 21
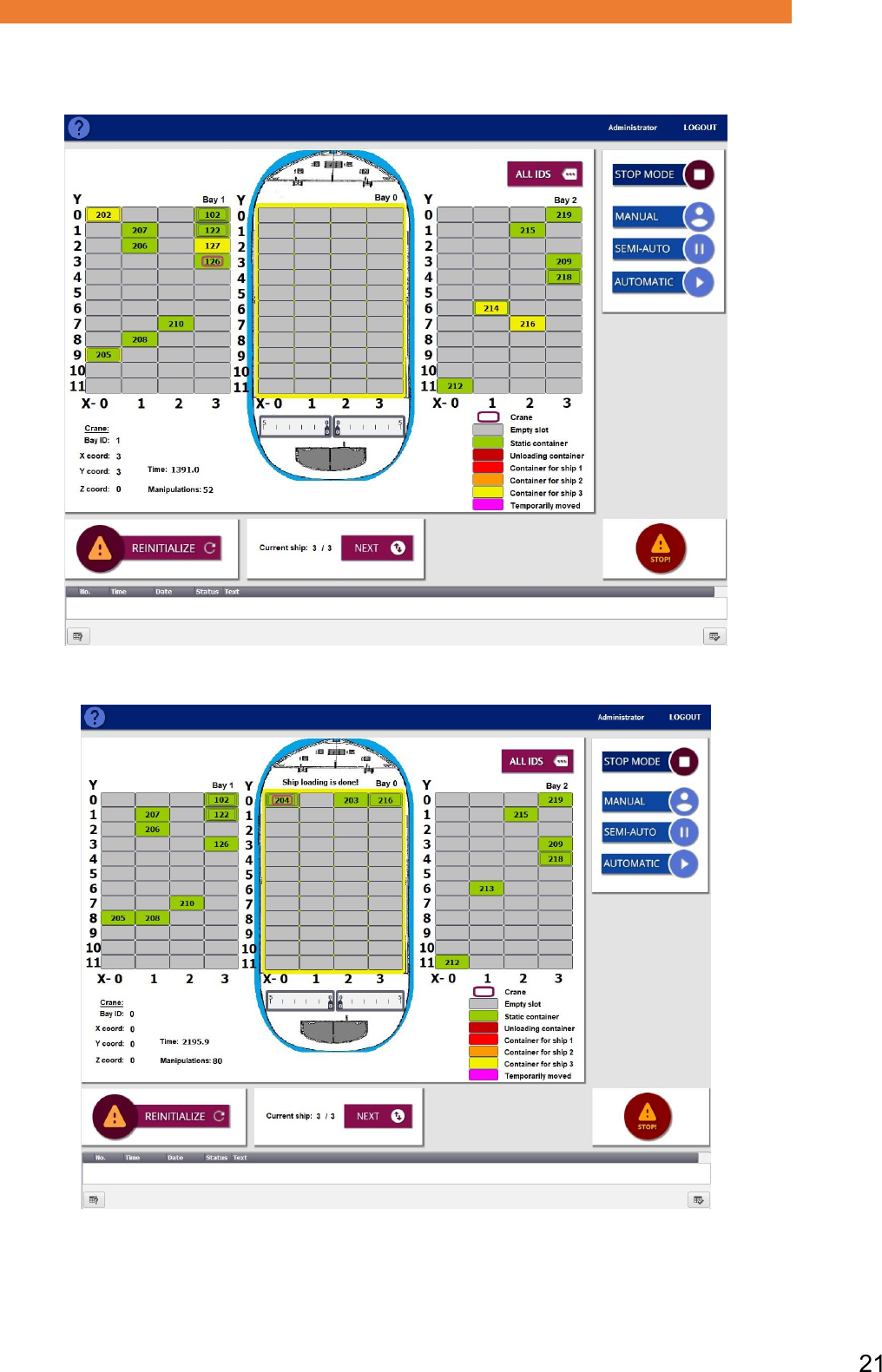
States of ship 3 and harbour before and after loading/unloading
figure 4.2.-Automatic mode, Ship 3 and harbour before unloading/loading
figure 4.3.-Automatic mode, Ship 3 and harbour after unloading/loading
21
PLC+ CHALLENGE CROATIA
TEAM KONTI 22
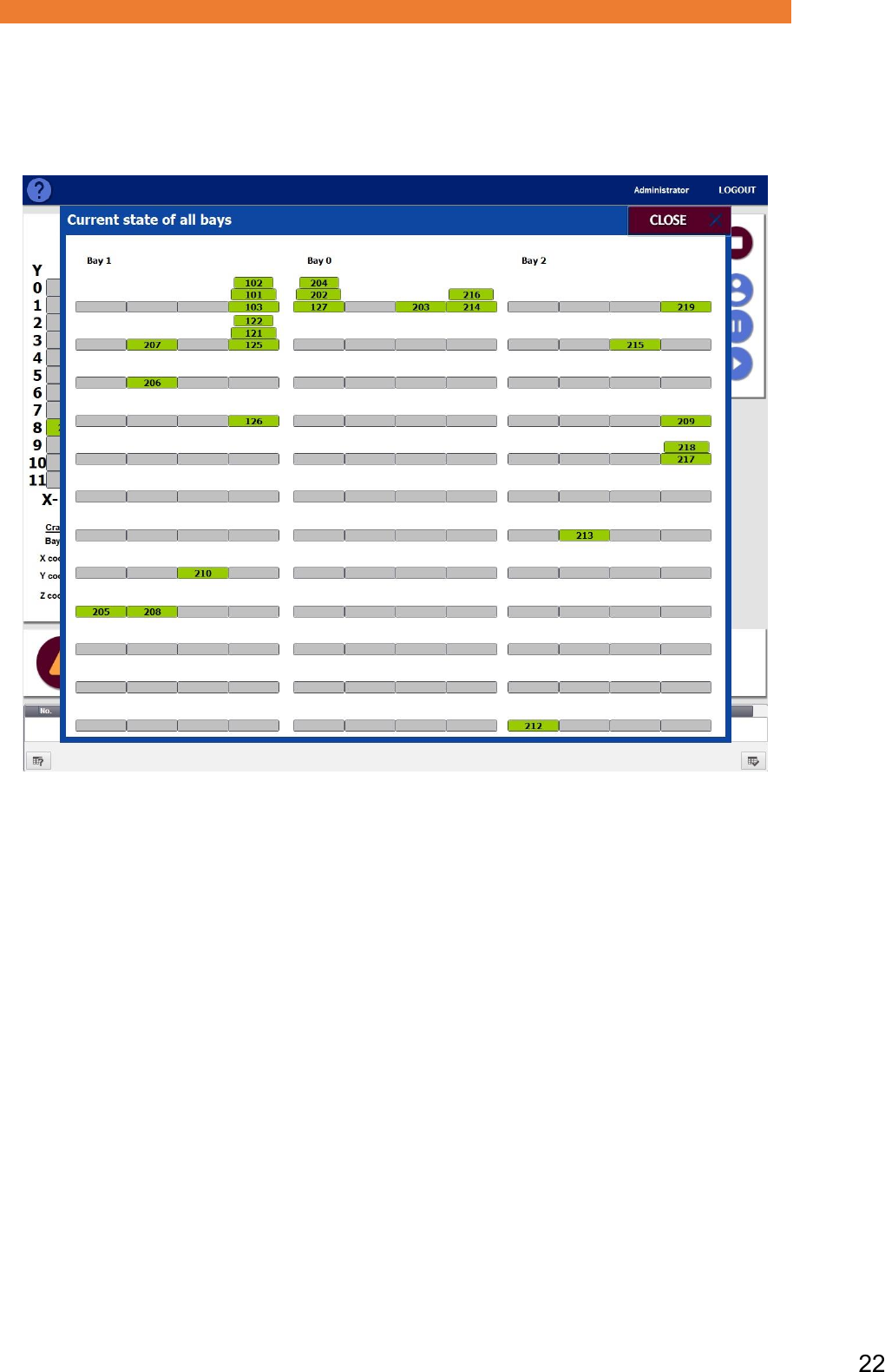
And at the end of this example, we are going to show Current state of all
bays by clicking ‘ALL ID’S’ button(fig 4.4) . We can see that there are no
container for loading/unloading both on ship and on bay 1 and bay 2.
figure 4.4- Final current state of all bays
22

PLC+ CHALLENGE CROATIA
TEAM KONTI 23
If you have any more questions, contact customer support or
manufacturers of the used software. This program is tested with TIA
portal version 15.1. and is functioning properly.
This program is not to be used for commercial purposes without the
permission of its manufacturers, students Dominik Polić, Domagoj
Jurendić and Filip Katulić.
This program can be used freely for educational purposes, but with
with giving credits to the authors of this program solution, students
Dominik Polić, Domagoj Jurendić and Filip Katulić.
23
