Neural Network User Guide
User Manual:
Open the PDF directly: View PDF ![]() .
.
Page Count: 558 [warning: Documents this large are best viewed by clicking the View PDF Link!]
Neural Network Toolbox™
User's Guide
Mark Hudson Beale
Martin T. Hagan
Howard B. Demuth
R2018a

How to Contact MathWorks
Latest news: www.mathworks.com
Sales and services: www.mathworks.com/sales_and_services
User community: www.mathworks.com/matlabcentral
Technical support: www.mathworks.com/support/contact_us
Phone: 508-647-7000
The MathWorks, Inc.
3 Apple Hill Drive
Natick, MA 01760-2098
Neural Network Toolbox
™
User's Guide
© COPYRIGHT 1992–2018 by The MathWorks, Inc.
The software described in this document is furnished under a license agreement. The software may be used
or copied only under the terms of the license agreement. No part of this manual may be photocopied or
reproduced in any form without prior written consent from The MathWorks, Inc.
FEDERAL ACQUISITION: This provision applies to all acquisitions of the Program and Documentation by,
for, or through the federal government of the United States. By accepting delivery of the Program or
Documentation, the government hereby agrees that this software or documentation qualies as commercial
computer software or commercial computer software documentation as such terms are used or dened in
FAR 12.212, DFARS Part 227.72, and DFARS 252.227-7014. Accordingly, the terms and conditions of this
Agreement and only those rights specied in this Agreement, shall pertain to and govern the use,
modication, reproduction, release, performance, display, and disclosure of the Program and
Documentation by the federal government (or other entity acquiring for or through the federal government)
and shall supersede any conicting contractual terms or conditions. If this License fails to meet the
government's needs or is inconsistent in any respect with federal procurement law, the government agrees
to return the Program and Documentation, unused, to The MathWorks, Inc.
Trademarks
MATLAB and Simulink are registered trademarks of The MathWorks, Inc. See
www.mathworks.com/trademarks for a list of additional trademarks. Other product or brand
names may be trademarks or registered trademarks of their respective holders.
Patents
MathWorks products are protected by one or more U.S. patents. Please see
www.mathworks.com/patents for more information.
Revision History
June 1992 First printing
April 1993 Second printing
January 1997 Third printing
July 1997 Fourth printing
January 1998 Fifth printing Revised for Version 3 (Release 11)
September 2000 Sixth printing Revised for Version 4 (Release 12)
June 2001 Seventh printing Minor revisions (Release 12.1)
July 2002 Online only Minor revisions (Release 13)
January 2003 Online only Minor revisions (Release 13SP1)
June 2004 Online only Revised for Version 4.0.3 (Release 14)
October 2004 Online only Revised for Version 4.0.4 (Release 14SP1)
October 2004 Eighth printing Revised for Version 4.0.4
March 2005 Online only Revised for Version 4.0.5 (Release 14SP2)
March 2006 Online only Revised for Version 5.0 (Release 2006a)
September 2006 Ninth printing Minor revisions (Release 2006b)
March 2007 Online only Minor revisions (Release 2007a)
September 2007 Online only Revised for Version 5.1 (Release 2007b)
March 2008 Online only Revised for Version 6.0 (Release 2008a)
October 2008 Online only Revised for Version 6.0.1 (Release 2008b)
March 2009 Online only Revised for Version 6.0.2 (Release 2009a)
September 2009 Online only Revised for Version 6.0.3 (Release 2009b)
March 2010 Online only Revised for Version 6.0.4 (Release 2010a)
September 2010 Online only Revised for Version 7.0 (Release 2010b)
April 2011 Online only Revised for Version 7.0.1 (Release 2011a)
September 2011 Online only Revised for Version 7.0.2 (Release 2011b)
March 2012 Online only Revised for Version 7.0.3 (Release 2012a)
September 2012 Online only Revised for Version 8.0 (Release 2012b)
March 2013 Online only Revised for Version 8.0.1 (Release 2013a)
September 2013 Online only Revised for Version 8.1 (Release 2013b)
March 2014 Online only Revised for Version 8.2 (Release 2014a)
October 2014 Online only Revised for Version 8.2.1 (Release 2014b)
March 2015 Online only Revised for Version 8.3 (Release 2015a)
September 2015 Online only Revised for Version 8.4 (Release 2015b)
March 2016 Online only Revised for Version 9.0 (Release 2016a)
September 2016 Online only Revised for Version 9.1 (Release 2016b)
March 2017 Online only Revised for Version 10.0 (Release 2017a)
September 2017 Online only Revised for Version 11.0 (Release 2017b)
March 2018 Online only Revised for Version 11.1 (Release 2018a)
Neural Network Toolbox Design Book
Neural Network Objects, Data, and Training Styles
1
Workow for Neural Network Design .................... 1-2
Four Levels of Neural Network Design ................... 1-4
Neuron Model ....................................... 1-5
Simple Neuron .................................... 1-5
Transfer Functions ................................. 1-6
Neuron with Vector Input ............................ 1-7
Neural Network Architectures ......................... 1-11
One Layer of Neurons .............................. 1-11
Multiple Layers of Neurons ......................... 1-13
Input and Output Processing Functions ................ 1-15
Create Neural Network Object ......................... 1-17
Congure Neural Network Inputs and Outputs ........... 1-21
Understanding Neural Network Toolbox Data Structures ... 1-23
Simulation with Concurrent Inputs in a Static Network ..... 1-23
Simulation with Sequential Inputs in a Dynamic Network ... 1-24
Simulation with Concurrent Inputs in a Dynamic Network .. 1-26
Neural Network Training Concepts ..................... 1-28
Incremental Training with adapt ...................... 1-28
Batch Training ................................... 1-31
v
Contents

Training Feedback ................................ 1-34
Deep Networks
2
Deep Learning in MATLAB ............................. 2-2
What Is Deep Learning? ............................. 2-2
Try Deep Learning in 10 Lines of MATLAB Code ........... 2-5
Start Deep Learning Faster Using Transfer Learning ....... 2-7
Train Classiers Using Features Extracted from
Pretrained Networks ............................. 2-8
Deep Learning with Big Data on CPUs, GPUs, in Parallel, and on
the Cloud ...................................... 2-8
Try Deep Learning in 10 Lines of MATLAB Code .......... 2-10
Deep Learning with Big Data on GPUs and in Parallel ..... 2-13
Training with Multiple GPUs ......................... 2-15
Fetch and Preprocess Data in Background .............. 2-16
Deep Learning in the Cloud ......................... 2-17
Construct Deep Network Using Autoencoders ............ 2-18
Pretrained Convolutional Neural Networks .............. 2-21
Download Pretrained Networks ...................... 2-22
Transfer Learning ................................. 2-24
Feature Extraction ................................ 2-25
Learn About Convolutional Neural Networks ............. 2-27
List of Deep Learning Layers .......................... 2-31
Specify Layers of Convolutional Neural Network .......... 2-36
Image Input Layer ................................ 2-37
Convolutional Layer ............................... 2-37
Batch Normalization Layer .......................... 2-39
ReLU Layer ..................................... 2-39
Cross Channel Normalization (Local Response Normalization)
Layer ........................................ 2-40
Max- and Average-Pooling Layers ..................... 2-40
vi Contents
Dropout Layer ................................... 2-41
Fully Connected Layer ............................. 2-41
Output Layers ................................... 2-42
Set Up Parameters and Train Convolutional Neural
Network ......................................... 2-46
Specify Solver and Maximum Number of Epochs ......... 2-46
Specify and Modify Learning Rate .................... 2-47
Specify Validation Data ............................. 2-48
Select Hardware Resource .......................... 2-48
Save Checkpoint Networks and Resume Training ......... 2-49
Set Up Parameters in Convolutional and Fully Connected
Layers ....................................... 2-49
Train Your Network ............................... 2-50
Resume Training from a Checkpoint Network ............ 2-51
Dene Custom Deep Learning Layers ................... 2-56
Layer Templates .................................. 2-57
Layer Architecture ................................ 2-60
Check Validity of Layer ............................. 2-64
Output Layer Architecture .......................... 2-66
Dene a Custom Deep Learning Layer with Learnable
Parameters ....................................... 2-73
Layer with Learnable Parameters Template ............. 2-74
Name the Layer .................................. 2-75
Declare Properties and Learnable Parameters ........... 2-76
Create Constructor Function ........................ 2-77
Create Forward Functions .......................... 2-79
Create Backward Function .......................... 2-80
Completed Layer ................................. 2-82
GPU Compatibility ................................ 2-83
Check Validity of Layer Using checkLayer ............... 2-84
Include User-Dened Layer in Network ................ 2-85
Dene a Custom Regression Output Layer ............... 2-87
Regression Output Layer Template .................... 2-87
Name the Layer .................................. 2-88
Declare Layer Properties ........................... 2-89
Create Constructor Function ........................ 2-89
Create Forward Loss Function ....................... 2-90
Create Backward Loss Function ...................... 2-92
vii
Completed Layer ................................. 2-92
GPU Compatibility ................................ 2-93
Include Custom Regression Output Layer in Network ...... 2-94
Dene a Custom Classication Output Layer ............. 2-97
Classication Output Layer Template .................. 2-97
Name the Layer .................................. 2-98
Declare Layer Properties ........................... 2-99
Create Constructor Function ....................... 2-100
Create Forward Loss Function ...................... 2-100
Create Backward Loss Function ..................... 2-102
Completed Layer ................................ 2-102
GPU Compatibility ............................... 2-103
Include Custom Classication Output Layer in Network ... 2-104
Check Custom Layer Validity ......................... 2-107
List of Tests .................................... 2-107
Diagnostics .................................... 2-109
Check Validity of Layer Using checkLayer .............. 2-114
Long Short-Term Memory Networks ................... 2-116
LSTM Network Architecture ........................ 2-116
Layers ........................................ 2-119
Classication and Prediction ........................ 2-120
Sequence Padding, Truncation, and Splitting ........... 2-120
LSTM Layer Architecture .......................... 2-122
Preprocess Images for Deep Learning .................. 2-127
Resize Images .................................. 2-127
Augment Images for Training ....................... 2-128
Advanced Image Preprocessing ..................... 2-129
Develop Custom Mini-Batch Datastore ................. 2-131
Overview ...................................... 2-131
Implement MiniBatchable Datastore .................. 2-132
Add Support for Shuing .......................... 2-135
Add Support for Parallel and Multi-GPU Training ........ 2-136
Add Support for Background Dispatch ................ 2-137
Validate Custom Mini-Batch Datastore ................ 2-138
viii Contents

Deep Learning in the Cloud
3
Scale Up Deep Learning in Parallel and in the Cloud ........ 3-2
Deep Learning on Multiple GPUs ...................... 3-2
Deep Learning in the Cloud .......................... 3-4
Advanced Support for Fast Multi-Node GPU
Communication ................................. 3-5
Deep Learning with MATLAB on Multiple GPUs ............ 3-7
Select Particular GPUs to Use for Training ............... 3-7
Train Network in the Cloud Using Built-in Parallel Support ... 3-8
Multilayer Neural Networks and Backpropagation
Training
4
Multilayer Neural Networks and Backpropagation
Training .......................................... 4-2
Multilayer Neural Network Architecture .................. 4-4
Neuron Model (logsig, tansig, purelin) .................. 4-4
Feedforward Neural Network ......................... 4-5
Prepare Data for Multilayer Neural Networks ............. 4-8
Choose Neural Network Input-Output Processing
Functions ......................................... 4-9
Representing Unknown or Don't-Care Targets ........... 4-11
Divide Data for Optimal Neural Network Training ......... 4-12
Create, Congure, and Initialize Multilayer
Neural Networks .................................. 4-14
Other Related Architectures ......................... 4-15
Initializing Weights (init) ........................... 4-15
Train and Apply Multilayer Neural Networks ............. 4-17
Training Algorithms ............................... 4-18
ix

Training Example ................................. 4-20
Use the Network ................................. 4-22
Analyze Shallow Neural Network Performance After
Training ......................................... 4-24
Improving Results ................................ 4-29
Limitations and Cautions ............................. 4-30
Dynamic Neural Networks
5
Introduction to Dynamic Neural Networks ................ 5-2
How Dynamic Neural Networks Work .................... 5-3
Feedforward and Recurrent Neural Networks ............. 5-3
Applications of Dynamic Networks .................... 5-10
Dynamic Network Structures ........................ 5-10
Dynamic Network Training .......................... 5-11
Design Time Series Time-Delay Neural Networks ......... 5-13
Prepare Input and Layer Delay States .................. 5-17
Design Time Series Distributed Delay Neural Networks .... 5-19
Design Time Series NARX Feedback Neural Networks ..... 5-22
Multiple External Variables .......................... 5-29
Design Layer-Recurrent Neural Networks ............... 5-30
Create Reference Model Controller with MATLAB Script ... 5-33
Multiple Sequences with Dynamic Neural Networks ....... 5-40
Neural Network Time-Series Utilities ................... 5-41
Train Neural Networks with Error Weights ............... 5-43
Normalize Errors of Multiple Outputs ................... 5-46
xContents
Multistep Neural Network Prediction ................... 5-51
Set Up in Open-Loop Mode .......................... 5-51
Multistep Closed-Loop Prediction From Initial Conditions ... 5-52
Multistep Closed-Loop Prediction Following Known
Sequence ..................................... 5-52
Following Closed-Loop Simulation with Open-Loop
Simulation .................................... 5-53
Control Systems
6
Introduction to Neural Network Control Systems .......... 6-2
Design Neural Network Predictive Controller in Simulink ... 6-4
System Identication ............................... 6-4
Predictive Control .................................. 6-5
Use the Neural Network Predictive Controller Block ........ 6-6
Design NARMA-L2 Neural Controller in Simulink ......... 6-14
Identication of the NARMA-L2 Model ................. 6-14
NARMA-L2 Controller .............................. 6-16
Use the NARMA-L2 Controller Block .................. 6-18
Design Model-Reference Neural Controller in Simulink .... 6-23
Use the Model Reference Controller Block .............. 6-24
Import-Export Neural Network Simulink Control Systems .. 6-31
Import and Export Networks ........................ 6-31
Import and Export Training Data ..................... 6-35
Radial Basis Neural Networks
7
Introduction to Radial Basis Neural Networks ............. 7-2
Important Radial Basis Functions ...................... 7-2
xi

Radial Basis Neural Networks .......................... 7-3
Neuron Model .................................... 7-3
Network Architecture ............................... 7-4
Exact Design (newrbe) .............................. 7-6
More Eicient Design (newrb) ........................ 7-7
Examples ........................................ 7-8
Probabilistic Neural Networks .......................... 7-9
Network Architecture ............................... 7-9
Design (newpnn) ................................. 7-10
Generalized Regression Neural Networks ................ 7-12
Network Architecture .............................. 7-12
Design (newgrnn) ................................. 7-14
Self-Organizing and Learning Vector Quantization
Networks
8
Introduction to Self-Organizing and LVQ ................. 8-2
Important Self-Organizing and LVQ Functions ............. 8-2
Cluster with a Competitive Neural Network ............... 8-3
Architecture ...................................... 8-3
Create a Competitive Neural Network .................. 8-4
Kohonen Learning Rule (learnk) ....................... 8-5
Bias Learning Rule (learncon) ......................... 8-5
Training ......................................... 8-6
Graphical Example ................................. 8-8
Cluster with Self-Organizing Map Neural Network ......... 8-9
Topologies (gridtop, hextop, randtop) .................. 8-11
Distance Functions (dist, linkdist, mandist, boxdist) ....... 8-14
Architecture ..................................... 8-17
Create a Self-Organizing Map Neural Network
(selforgmap) ................................... 8-18
Training (learnsomb) .............................. 8-19
Examples ....................................... 8-22
xii Contents
Learning Vector Quantization (LVQ) Neural Networks ..... 8-34
Architecture ..................................... 8-34
Creating an LVQ Network ........................... 8-35
LVQ1 Learning Rule (learnlv1) ....................... 8-38
Training ........................................ 8-39
Supplemental LVQ2.1 Learning Rule (learnlv2) ........... 8-41
Adaptive Filters and Adaptive Training
9
Adaptive Neural Network Filters ........................ 9-2
Adaptive Functions ................................. 9-2
Linear Neuron Model ............................... 9-3
Adaptive Linear Network Architecture .................. 9-4
Least Mean Square Error ............................ 9-6
LMS Algorithm (learnwh) ............................ 9-7
Adaptive Filtering (adapt) ............................ 9-7
Advanced Topics
10
Neural Networks with Parallel and GPU Computing ....... 10-2
Deep Learning ................................... 10-2
Modes of Parallelism .............................. 10-2
Distributed Computing ............................. 10-3
Single GPU Computing ............................. 10-5
Distributed GPU Computing ......................... 10-8
Parallel Time Series .............................. 10-10
Parallel Availability, Fallbacks, and Feedback ........... 10-10
Optimize Neural Network Training Speed and Memory .... 10-12
Memory Reduction ............................... 10-12
Fast Elliot Sigmoid ............................... 10-12
Choose a Multilayer Neural Network Training Function ... 10-16
SIN Data Set ................................... 10-17
PARITY Data Set ................................. 10-19
xiii
ENGINE Data Set ................................ 10-22
CANCER Data Set ............................... 10-24
CHOLESTEROL Data Set .......................... 10-26
DIABETES Data Set .............................. 10-28
Summary ...................................... 10-30
Improve Neural Network Generalization and Avoid Overttin
g.............................................. 10-32
Retraining Neural Networks ........................ 10-34
Multiple Neural Networks ......................... 10-35
Early Stopping .................................. 10-36
Index Data Division (divideind) ...................... 10-37
Random Data Division (dividerand) ................... 10-37
Block Data Division (divideblock) .................... 10-37
Interleaved Data Division (divideint) .................. 10-38
Regularization .................................. 10-38
Summary and Discussion of Early Stopping and
Regularization ................................ 10-41
Posttraining Analysis (regression) .................... 10-43
Edit Shallow Neural Network Properties ................ 10-46
Custom Network ................................ 10-46
Network Denition ............................... 10-47
Network Behavior ............................... 10-57
Custom Neural Network Helper Functions .............. 10-60
Automatically Save Checkpoints During Neural Network
Training ........................................ 10-61
Deploy Trained Neural Network Functions .............. 10-63
Deployment Functions and Tools for Trained Networks .... 10-63
Generate Neural Network Functions for Application
Deployment .................................. 10-64
Generate Simulink Diagrams ....................... 10-67
Deploy Training of Neural Networks ................... 10-68
xiv Contents

Historical Neural Networks
11
Historical Neural Networks Overview ................... 11-2
Perceptron Neural Networks .......................... 11-3
Neuron Model ................................... 11-3
Perceptron Architecture ............................ 11-5
Create a Perceptron ............................... 11-6
Perceptron Learning Rule (learnp) .................... 11-8
Training (train) .................................. 11-10
Limitations and Cautions .......................... 11-15
Linear Neural Networks ............................. 11-18
Neuron Model .................................. 11-18
Network Architecture ............................. 11-19
Least Mean Square Error .......................... 11-22
Linear System Design (newlind) ..................... 11-23
Linear Networks with Delays ....................... 11-24
LMS Algorithm (learnwh) .......................... 11-26
Linear Classication (train) ........................ 11-28
Limitations and Cautions .......................... 11-30
Neural Network Object Reference
12
Neural Network Object Properties ...................... 12-2
General ........................................ 12-2
Architecture ..................................... 12-2
Subobject Structures .............................. 12-6
Functions ....................................... 12-8
Weight and Bias Values ............................ 12-12
Neural Network Subobject Properties .................. 12-14
Inputs ........................................ 12-14
Layers ........................................ 12-16
Outputs ....................................... 12-22
Biases ........................................ 12-24
Input Weights ................................... 12-25
Layer Weights .................................. 12-27
xv
Bibliography
13
Neural Network Toolbox Bibliography ................... 13-2
Mathematical Notation
A
Mathematics and Code Equivalents ...................... A-2
Mathematics Notation to MATLAB Notation .............. A-2
Figure Notation ................................... A-2
Neural Network Blocks for the Simulink Environment
B
Neural Network Simulink Block Library .................. B-2
Transfer Function Blocks ............................ B-3
Net Input Blocks .................................. B-3
Weight Blocks .................................... B-3
Processing Blocks ................................. B-4
Deploy Neural Network Simulink Diagrams ............... B-5
Example ......................................... B-5
Suggested Exercises ............................... B-7
Generate Functions and Objects ....................... B-8
Code Notes
C
Neural Network Toolbox Data Conventions ................ C-2
Dimensions ...................................... C-2
Variables ........................................ C-2
xvi Contents
Neural Network Toolbox Design
Book
The developers of the Neural Network Toolbox software have written a textbook, Neural
Network Design (Hagan, Demuth, and Beale, ISBN 0-9717321-0-8). The book presents the
theory of neural networks, discusses their design and application, and makes
considerable use of the MATLAB® environment and Neural Network Toolbox software.
Example programs from the book are used in various sections of this documentation. (You
can nd all the book example programs in the Neural Network Toolbox software by typing
nnd.)
Obtain this book from John Stovall at (303) 492-3648, or by email at
John.Stovall@colorado.edu.
The Neural Network Design textbook includes:
• An Instructor's Manual for those who adopt the book for a class
• Transparency Masters for class use
If you are teaching a class and want an Instructor's Manual (with solutions to the book
exercises), contact John Stovall at (303) 492-3648, or by email at
John.Stovall@colorado.edu
To look at sample chapters of the book and to obtain Transparency Masters, go directly to
the Neural Network Design page at:
http://hagan.okstate.edu/nnd.html
From this link, you can obtain sample book chapters in PDF format and you can download
the Transparency Masters by clicking Transparency Masters (3.6MB).
You can get the Transparency Masters in PowerPoint or PDF format.
xvii
Neural Network Objects, Data, and
Training Styles
•“Workow for Neural Network Design” on page 1-2
• “Four Levels of Neural Network Design” on page 1-4
• “Neuron Model” on page 1-5
• “Neural Network Architectures” on page 1-11
• “Create Neural Network Object” on page 1-17
•“Congure Neural Network Inputs and Outputs” on page 1-21
• “Understanding Neural Network Toolbox Data Structures” on page 1-23
• “Neural Network Training Concepts” on page 1-28
1

Workow for Neural Network Design
The work ow for the neural network design process has seven primary steps. Referenced
topics discuss the basic ideas behind steps 2, 3, and 5.
1Collect data
2Create the network — “Create Neural Network Object” on page 1-17
3Congure the network — “Congure Neural Network Inputs and Outputs” on page 1-
21
4Initialize the weights and biases
5Train the network — “Neural Network Training Concepts” on page 1-28
6Validate the network
7Use the network
Data collection in step 1 generally occurs outside the framework of Neural Network
Toolbox software, but it is discussed in general terms in “Multilayer Neural Networks and
Backpropagation Training” on page 4-2. Details of the other steps and discussions of
steps 4, 6, and 7, are discussed in topics specic to the type of network.
The Neural Network Toolbox software uses the network object to store all of the
information that denes a neural network. This topic describes the basic components of a
neural network and shows how they are created and stored in the network object.
After a neural network has been created, it needs to be congured and then trained.
Conguration involves arranging the network so that it is compatible with the problem
you want to solve, as dened by sample data. After the network has been congured, the
adjustable network parameters (called weights and biases) need to be tuned, so that the
network performance is optimized. This tuning process is referred to as training the
network. Conguration and training require that the network be provided with example
data. This topic shows how to format the data for presentation to the network. It also
explains network conguration and the two forms of network training: incremental
training and batch training.
1Neural Network Objects, Data, and Training Styles
1-2


Four Levels of Neural Network Design
There are four dierent levels at which the Neural Network Toolbox software can be
used. The rst level is represented by the GUIs that are described in “Getting Started
with Neural Network Toolbox”. These provide a quick way to access the power of the
toolbox for many problems of function tting, pattern recognition, clustering and time
series analysis.
The second level of toolbox use is through basic command-line operations. The command-
line functions use simple argument lists with intelligent default settings for function
parameters. (You can override all of the default settings, for increased functionality.) This
topic, and the ones that follow, concentrate on command-line operations.
The GUIs described in Getting Started can automatically generate MATLAB code les
with the command-line implementation of the GUI operations. This provides a nice
introduction to the use of the command-line functionality.
A third level of toolbox use is customization of the toolbox. This advanced capability
allows you to create your own custom neural networks, while still having access to the full
functionality of the toolbox.
The fourth level of toolbox usage is the ability to modify any of the code les contained in
the toolbox. Every computational component is written in MATLAB code and is fully
accessible.
The rst level of toolbox use (through the GUIs) is described in Getting Started which also
introduces command-line operations. The following topics will discuss the command-line
operations in more detail. The customization of the toolbox is described in “Dene
Shallow Neural Network Architectures”.
See Also
More About
•“Workow for Neural Network Design” on page 1-2
1Neural Network Objects, Data, and Training Styles
1-4
Neuron Model
In this section...
“Simple Neuron” on page 1-5
“Transfer Functions” on page 1-6
“Neuron with Vector Input” on page 1-7
Simple Neuron
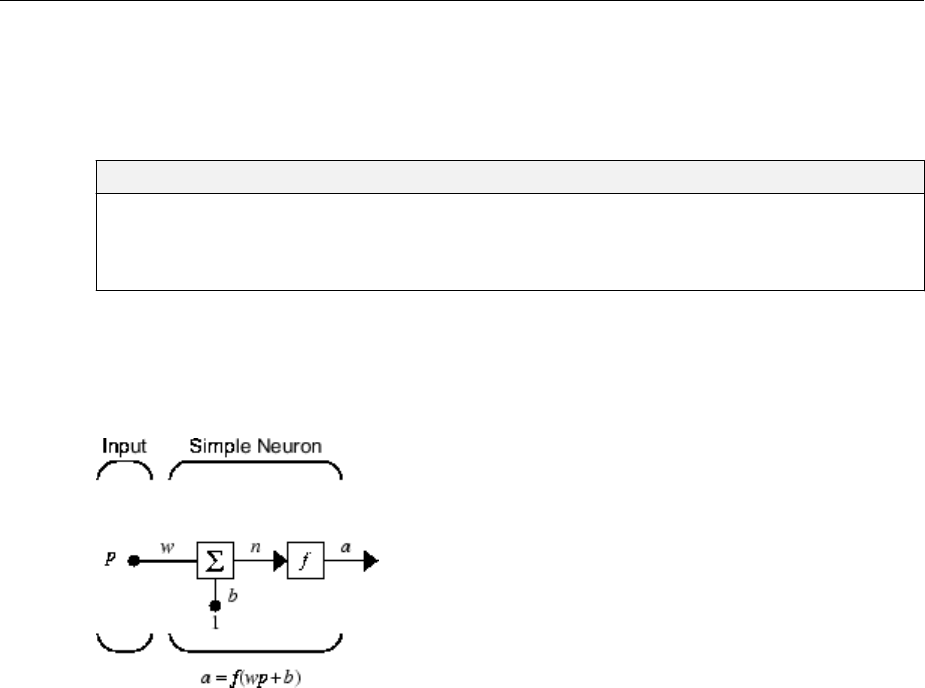
The fundamental building block for neural networks is the single-input neuron, such as
this example.
There are three distinct functional operations that take place in this example neuron.
First, the scalar input p is multiplied by the scalar weight w to form the product wp, again
a scalar. Second, the weighted input wp is added to the scalar bias b to form the net input
n. (In this case, you can view the bias as shifting the function f to the left by an amount b.
The bias is much like a weight, except that it has a constant input of 1.) Finally, the net
input is passed through the transfer function f, which produces the scalar output a. The
names given to these three processes are: the weight function, the net input function and
the transfer function.
For many types of neural networks, the weight function is a product of a weight times the
input, but other weight functions (e.g., the distance between the weight and the input, |w
− p|) are sometimes used. (For a list of weight functions, type help nnweight.) The
most common net input function is the summation of the weighted inputs with the bias,
but other operations, such as multiplication, can be used. (For a list of net input functions,
type help nnnetinput.) “Introduction to Radial Basis Neural Networks” on page 7-2
Neuron Model
1-5
discusses how distance can be used as the weight function and multiplication can be used
as the net input function. There are also many types of transfer functions. Examples of
various transfer functions are in “Transfer Functions” on page 1-6. (For a list of
transfer functions, type help nntransfer.)
Note that w and b are both adjustable scalar parameters of the neuron. The central idea
of neural networks is that such parameters can be adjusted so that the network exhibits
some desired or interesting behavior. Thus, you can train the network to do a particular
job by adjusting the weight or bias parameters.
All the neurons in the Neural Network Toolbox software have provision for a bias, and a
bias is used in many of the examples and is assumed in most of this toolbox. However, you
can omit a bias in a neuron if you want.
Transfer Functions
Many transfer functions are included in the Neural Network Toolbox software.
Two of the most commonly used functions are shown below.
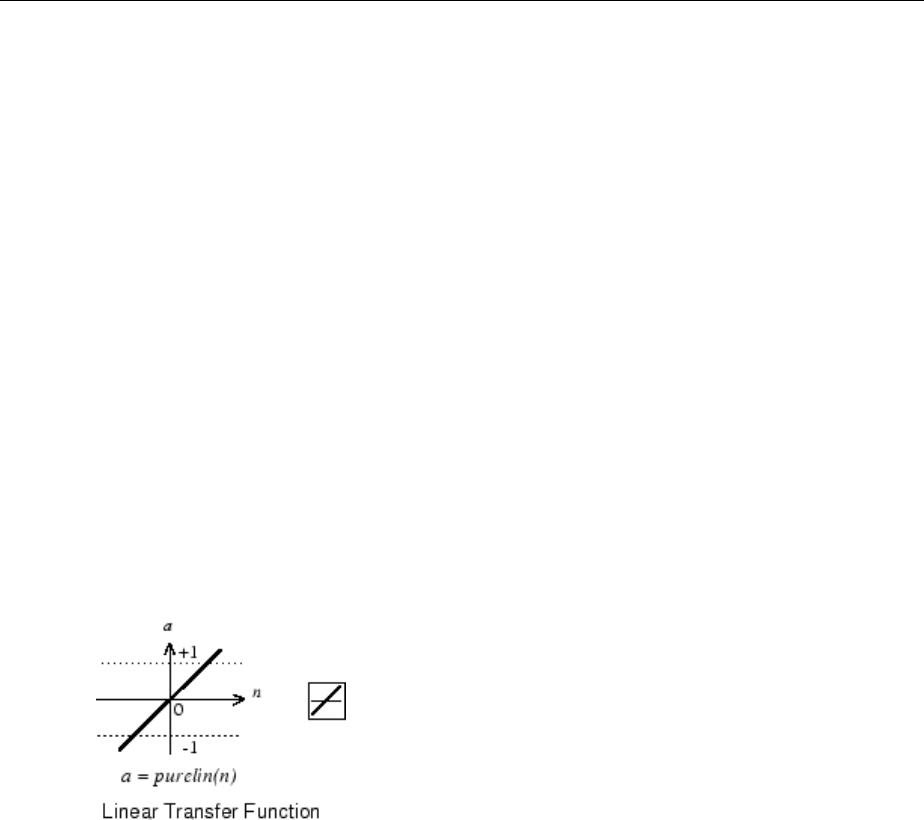
The following gure illustrates the linear transfer function.
Neurons of this type are used in the nal layer of multilayer networks that are used as
function approximators. This is shown in “Multilayer Neural Networks and
Backpropagation Training” on page 4-2.
The sigmoid transfer function shown below takes the input, which can have any value
between plus and minus innity, and squashes the output into the range 0 to 1.
1Neural Network Objects, Data, and Training Styles
1-6
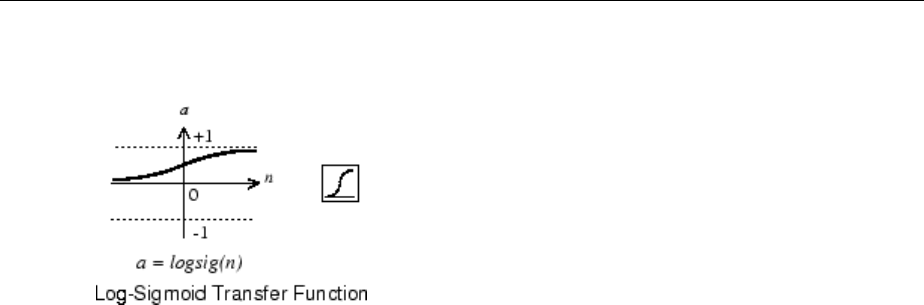
This transfer function is commonly used in the hidden layers of multilayer networks, in
part because it is dierentiable.
The symbol in the square to the right of each transfer function graph shown above
represents the associated transfer function. These icons replace the general f in the
network diagram blocks to show the particular transfer function being used.
For a complete list of transfer functions, type help nntransfer. You can also specify
your own transfer functions.
You can experiment with a simple neuron and various transfer functions by running the
example program nnd2n1.
Neuron with Vector Input
The simple neuron can be extended to handle inputs that are vectors. A neuron with a
single R-element input vector is shown below. Here the individual input elements
p p pR1 2
,,…
are multiplied by weights
w w w R1 1 1 2 1, , ,
, ,…
and the weighted values are fed to the summing junction. Their sum is simply Wp, the dot
product of the (single row) matrix W and the vector p. (There are other weight functions,
in addition to the dot product, such as the distance between the row of the weight matrix
and the input vector, as in “Introduction to Radial Basis Neural Networks” on page 7-
2.)
Neuron Model
1-7
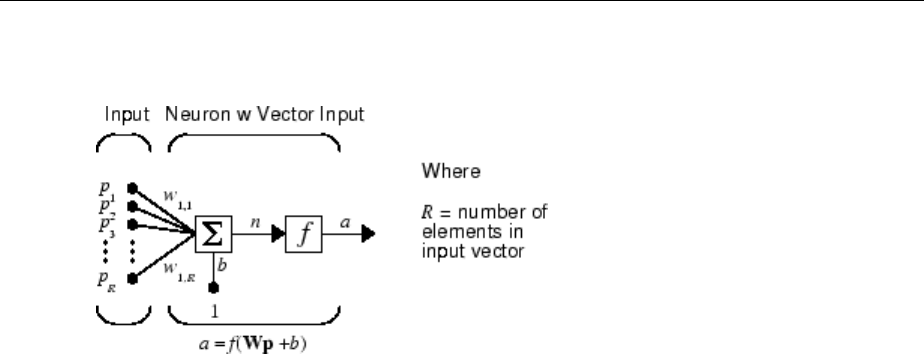
The neuron has a bias b, which is summed with the weighted inputs to form the net input
n. (In addition to the summation, other net input functions can be used, such as the
multiplication that is used in “Introduction to Radial Basis Neural Networks” on page 7-
2.) The net input n is the argument of the transfer function f.
n w p w p w p b
R R
= + + + +
1 1 1 1 2 2 1, , ,
…
This expression can, of course, be written in MATLAB code as
n = W*p + b
However, you will seldom be writing code at this level, for such code is already built into
functions to dene and simulate entire networks.
Abbreviated Notation
The gure of a single neuron shown above contains a lot of detail. When you consider
networks with many neurons, and perhaps layers of many neurons, there is so much
detail that the main thoughts tend to be lost. Thus, the authors have devised an
abbreviated notation for an individual neuron. This notation, which is used later in
circuits of multiple neurons, is shown here.
1Neural Network Objects, Data, and Training Styles
1-8
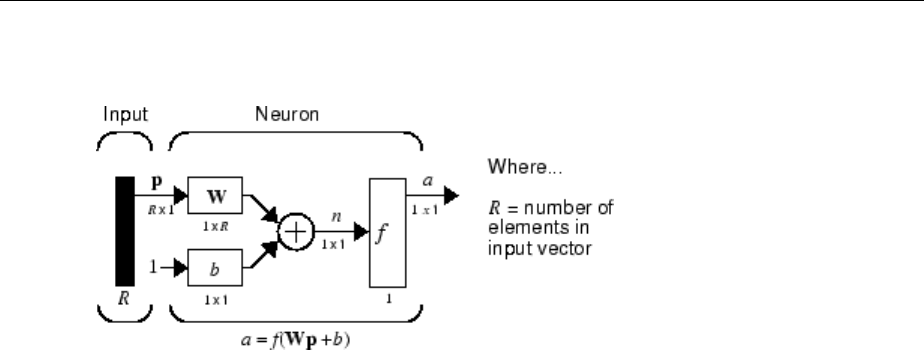
Here the input vector p is represented by the solid dark vertical bar at the left. The
dimensions of p are shown below the symbol p in the gure as R × 1. (Note that a capital
letter, such as R in the previous sentence, is used when referring to the size of a vector.)
Thus, p is a vector of R input elements. These inputs postmultiply the single-row, R-
column matrix W. As before, a constant 1 enters the neuron as an input and is multiplied
by a scalar bias b. The net input to the transfer function f is n, the sum of the bias b and
the product Wp. This sum is passed to the transfer function f to get the neuron's output a,
which in this case is a scalar. Note that if there were more than one neuron, the network
output would be a vector.
A layer of a network is dened in the previous gure. A layer includes the weights, the
multiplication and summing operations (here realized as a vector product Wp), the bias b,
and the transfer function f. The array of inputs, vector p, is not included in or called a
layer.
As with the “Simple Neuron” on page 1-5, there are three operations that take place in
the layer: the weight function (matrix multiplication, or dot product, in this case), the net
input function (summation, in this case), and the transfer function.
Each time this abbreviated network notation is used, the sizes of the matrices are shown
just below their matrix variable names. This notation will allow you to understand the
architectures and follow the matrix mathematics associated with them.
As discussed in “Transfer Functions” on page 1-6, when a specic transfer function is to
be used in a gure, the symbol for that transfer function replaces the f shown above. Here
are some examples.
Neuron Model
1-9

Neural Network Architectures
In this section...
“One Layer of Neurons” on page 1-11
“Multiple Layers of Neurons” on page 1-13
“Input and Output Processing Functions” on page 1-15
Two or more of the neurons shown earlier can be combined in a layer, and a particular
network could contain one or more such layers. First consider a single layer of neurons.
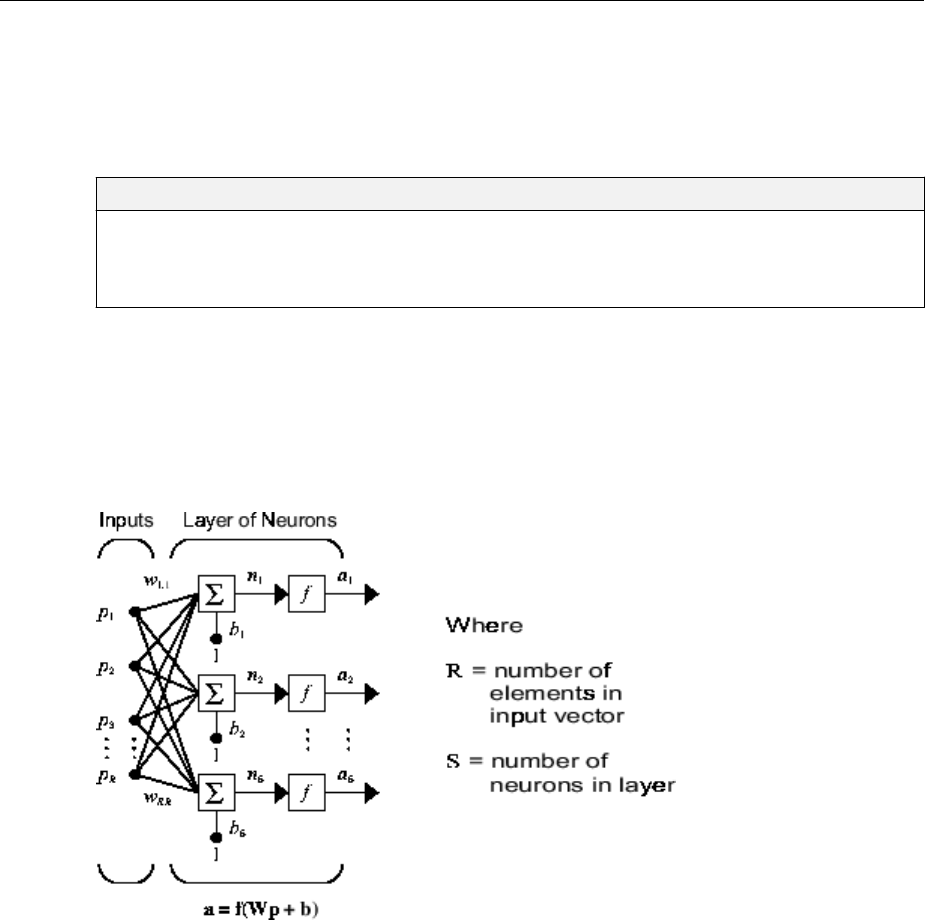
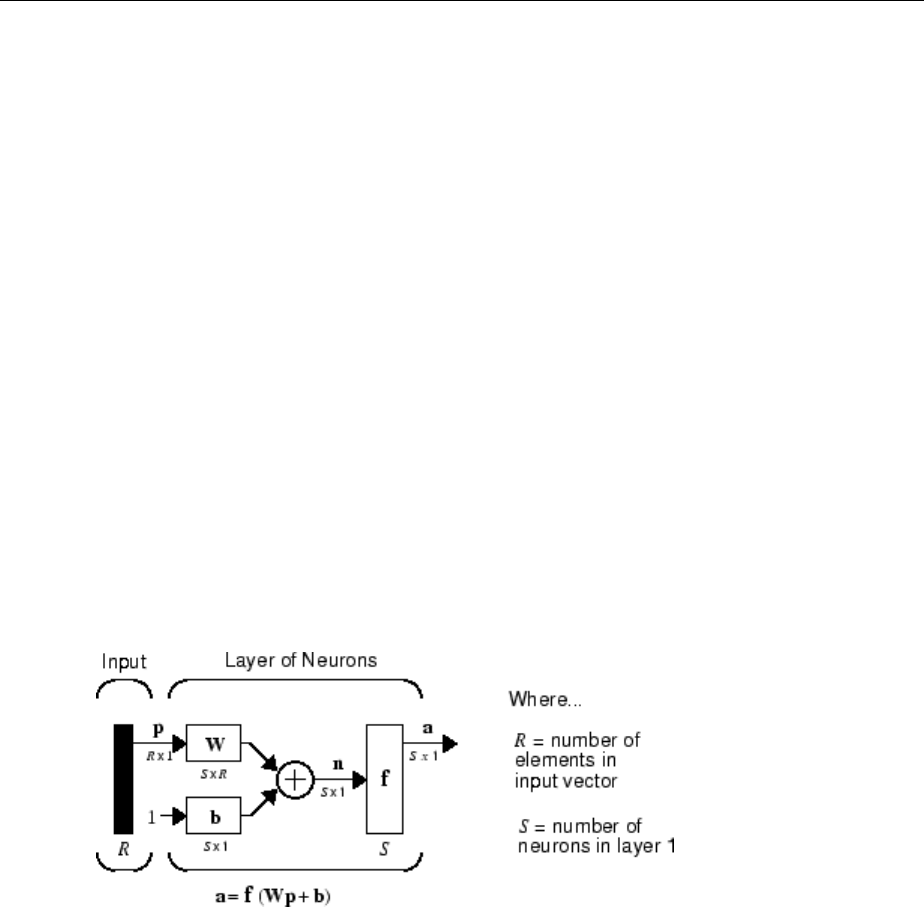
One Layer of Neurons
A one-layer network with R input elements and S neurons follows.
In this network, each element of the input vector p is connected to each neuron input
through the weight matrix W. The ith neuron has a summer that gathers its weighted
inputs and bias to form its own scalar output n(i). The various n(i) taken together form an
S-element net input vector n. Finally, the neuron layer outputs form a column vector a.
The expression for a is shown at the bottom of the gure.
Neural Network Architectures
1-11
Note that it is common for the number of inputs to a layer to be dierent from the number
of neurons (i.e., R is not necessarily equal to S). A layer is not constrained to have the
number of its inputs equal to the number of its neurons.
You can create a single (composite) layer of neurons having dierent transfer functions
simply by putting two of the networks shown earlier in parallel. Both networks would
have the same inputs, and each network would create some of the outputs.
The input vector elements enter the network through the weight matrix W.
W=
È
Î
Í
Í
Í
Í
Í
˘
˚
˙
˙
˙
˙
˙
w w w
w w w
w w w
R
R
S S S R
1 1 1 2 1
2 1 2 2 2
1 2
, , ,
, , ,
, , ,
…
…
…
Note that the row indices on the elements of matrix W indicate the destination neuron of
the weight, and the column indices indicate which source is the input for that weight.
Thus, the indices in w1,2 say that the strength of the signal from the second input element
to the rst (and only) neuron is w1,2.
The S neuron R-input one-layer network also can be drawn in abbreviated notation.
Here p is an R-length input vector, W is an S × R matrix, a and b are S-length vectors. As
dened previously, the neuron layer includes the weight matrix, the multiplication
operations, the bias vector b, the summer, and the transfer function blocks.
1Neural Network Objects, Data, and Training Styles
1-12
Inputs and Layers
To describe networks having multiple layers, the notation must be extended. Specically,
it needs to make a distinction between weight matrices that are connected to inputs and
weight matrices that are connected between layers. It also needs to identify the source
and destination for the weight matrices.
We will call weight matrices connected to inputs input weights; we will call weight
matrices connected to layer outputs layer weights. Further, superscripts are used to
identify the source (second index) and the destination (rst index) for the various weights
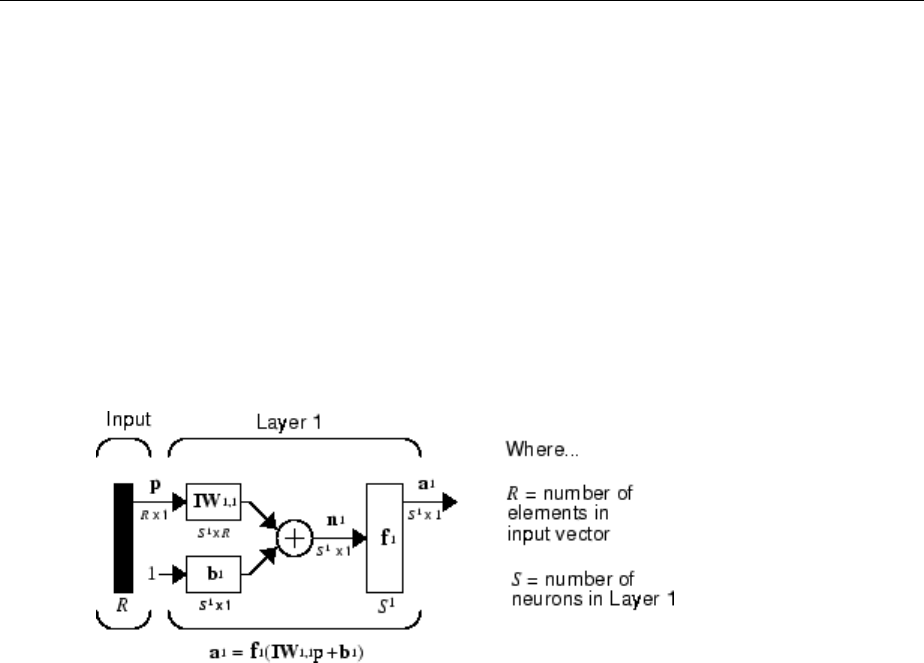
and other elements of the network. To illustrate, the one-layer multiple input network
shown earlier is redrawn in abbreviated form here.
As you can see, the weight matrix connected to the input vector p is labeled as an input
weight matrix (IW1,1) having a source 1 (second index) and a destination 1 (rst index).
Elements of layer 1, such as its bias, net input, and output have a superscript 1 to say that
they are associated with the rst layer.
“Multiple Layers of Neurons” on page 1-13 uses layer weight (LW) matrices as well as
input weight (IW) matrices.
Multiple Layers of Neurons
A network can have several layers. Each layer has a weight matrix W, a bias vector b, and
an output vector a. To distinguish between the weight matrices, output vectors, etc., for
each of these layers in the gures, the number of the layer is appended as a superscript
to the variable of interest. You can see the use of this layer notation in the three-layer
network shown next, and in the equations at the bottom of the gure.
Neural Network Architectures
1-13
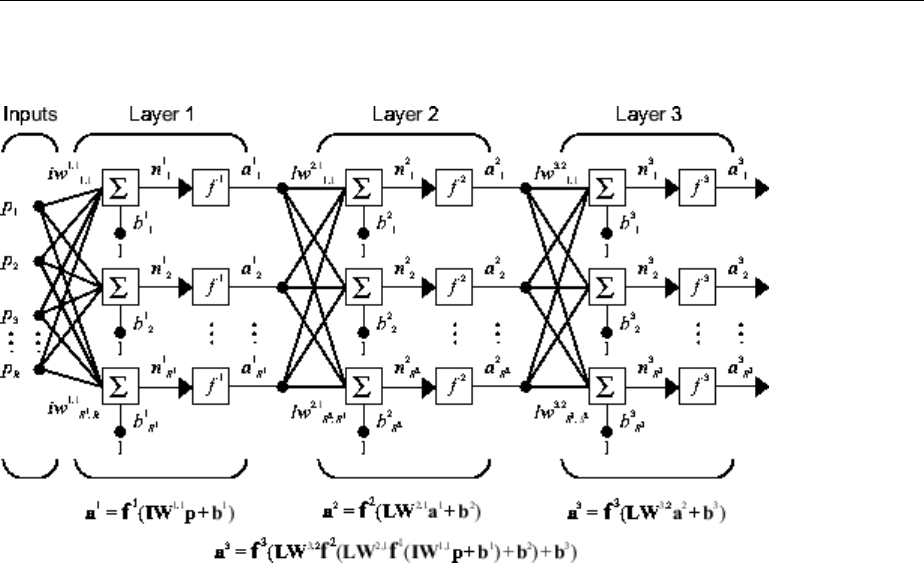
The network shown above has R1 inputs, S1 neurons in the rst layer, S2 neurons in the
second layer, etc. It is common for dierent layers to have dierent numbers of neurons.
A constant input 1 is fed to the bias for each neuron.
Note that the outputs of each intermediate layer are the inputs to the following layer.
Thus layer 2 can be analyzed as a one-layer network with S1 inputs, S2 neurons, and an S2
× S1 weight matrix W2. The input to layer 2 is a1; the output is a2. Now that all the
vectors and matrices of layer 2 have been identied, it can be treated as a single-layer
network on its own. This approach can be taken with any layer of the network.
The layers of a multilayer network play dierent roles. A layer that produces the network
output is called an output layer. All other layers are called hidden layers. The three-layer
network shown earlier has one output layer (layer 3) and two hidden layers (layer 1 and
layer 2). Some authors refer to the inputs as a fourth layer. This toolbox does not use that
designation.
The architecture of a multilayer network with a single input vector can be specied with
the notation R − S1 − S2 −...− SM, where the number of elements of the input vector and
the number of neurons in each layer are specied.
The same three-layer network can also be drawn using abbreviated notation.
1Neural Network Objects, Data, and Training Styles
1-14

Multiple-layer networks are quite powerful. For instance, a network of two layers, where
the rst layer is sigmoid and the second layer is linear, can be trained to approximate any
function (with a nite number of discontinuities) arbitrarily well. This kind of two-layer
network is used extensively in “Multilayer Neural Networks and Backpropagation
Training” on page 4-2.
Here it is assumed that the output of the third layer, a3, is the network output of interest,
and this output is labeled as y. This notation is used to specify the output of multilayer
networks.
Input and Output Processing Functions
Network inputs might have associated processing functions. Processing functions
transform user input data to a form that is easier or more eicient for a network.
For instance, mapminmax transforms input data so that all values fall into the interval
[−1, 1]. This can speed up learning for many networks. removeconstantrows removes
the rows of the input vector that correspond to input elements that always have the same
value, because these input elements are not providing any useful information to the
network. The third common processing function is fixunknowns, which recodes
unknown data (represented in the user's data with NaN values) into a numerical form for
the network. fixunknowns preserves information about which values are known and
which are unknown.
Similarly, network outputs can also have associated processing functions. Output
processing functions are used to transform user-provided target vectors for network use.
Neural Network Architectures
1-15

Then, network outputs are reverse-processed using the same functions to produce output
data with the same characteristics as the original user-provided targets.
Both mapminmax and removeconstantrows are often associated with network outputs.
However, fixunknowns is not. Unknown values in targets (represented by NaN values) do
not need to be altered for network use.
Processing functions are described in more detail in “Choose Neural Network Input-
Output Processing Functions” on page 4-9.
See Also
More About
• “Neuron Model” on page 1-5
•“Workow for Neural Network Design” on page 1-2
1Neural Network Objects, Data, and Training Styles
1-16

Create Neural Network Object
This topic is part of the design workow described in “Workow for Neural Network
Design” on page 1-2.
The easiest way to create a neural network is to use one of the network creation
functions. To investigate how this is done, you can create a simple, two-layer feedforward
network, using the command feedforwardnet:
net = feedforwardnet
net =
Neural Network
name: 'Feed-Forward Neural Network'
userdata: (your custom info)
dimensions:
numInputs: 1
numLayers: 2
numOutputs: 1
numInputDelays: 0
numLayerDelays: 0
numFeedbackDelays: 0
numWeightElements: 10
sampleTime: 1
connections:
biasConnect: [1; 1]
inputConnect: [1; 0]
layerConnect: [0 0; 1 0]
outputConnect: [0 1]
subobjects:
inputs: {1x1 cell array of 1 input}
layers: {2x1 cell array of 2 layers}
outputs: {1x2 cell array of 1 output}
biases: {2x1 cell array of 2 biases}
inputWeights: {2x1 cell array of 1 weight}
layerWeights: {2x2 cell array of 1 weight}
Create Neural Network Object
1-17

functions:
adaptFcn: 'adaptwb'
adaptParam: (none)
derivFcn: 'defaultderiv'
divideFcn: 'dividerand'
divideParam: .trainRatio, .valRatio, .testRatio
divideMode: 'sample'
initFcn: 'initlay'
performFcn: 'mse'
performParam: .regularization, .normalization
plotFcns: {'plotperform', plottrainstate, ploterrhist,
plotregression}
plotParams: {1x4 cell array of 4 params}
trainFcn: 'trainlm'
trainParam: .showWindow, .showCommandLine, .show, .epochs,
.time, .goal, .min_grad, .max_fail, .mu, .mu_dec,
.mu_inc, .mu_max
weight and bias values:
IW: {2x1 cell} containing 1 input weight matrix
LW: {2x2 cell} containing 1 layer weight matrix
b: {2x1 cell} containing 2 bias vectors
methods:
adapt: Learn while in continuous use
configure: Configure inputs & outputs
gensim: Generate Simulink model
init: Initialize weights & biases
perform: Calculate performance
sim: Evaluate network outputs given inputs
train: Train network with examples
view: View diagram
unconfigure: Unconfigure inputs & outputs
evaluate: outputs = net(inputs)
This display is an overview of the network object, which is used to store all of the
information that denes a neural network. There is a lot of detail here, but there are a
few key sections that can help you to see how the network object is organized.
1Neural Network Objects, Data, and Training Styles
1-18

The dimensions section stores the overall structure of the network. Here you can see that
there is one input to the network (although the one input can be a vector containing many
elements), one network output, and two layers.
The connections section stores the connections between components of the network. For
example, there is a bias connected to each layer, the input is connected to layer 1, and the
output comes from layer 2. You can also see that layer 1 is connected to layer 2. (The
rows of net.layerConnect represent the destination layer, and the columns represent
the source layer. A one in this matrix indicates a connection, and a zero indicates no
connection. For this example, there is a single one in element 2,1 of the matrix.)
The key subobjects of the network object are inputs, layers, outputs, biases,
inputWeights, and layerWeights. View the layers subobject for the rst layer with
the command
net.layers{1}
Neural Network Layer
name: 'Hidden'
dimensions: 10
distanceFcn: (none)
distanceParam: (none)
distances: []
initFcn: 'initnw'
netInputFcn: 'netsum'
netInputParam: (none)
positions: []
range: [10x2 double]
size: 10
topologyFcn: (none)
transferFcn: 'tansig'
transferParam: (none)
userdata: (your custom info)
The number of neurons in a layer is given by its size property. In this case, the layer has
10 neurons, which is the default size for the feedforwardnet command. The net input
function is netsum (summation) and the transfer function is the tansig. If you wanted to
change the transfer function to logsig, for example, you could execute the command:
net.layers{1}.transferFcn = 'logsig';
To view the layerWeights subobject for the weight between layer 1 and layer 2, use the
command:
Create Neural Network Object
1-19

net.layerWeights{2,1}
Neural Network Weight
delays: 0
initFcn: (none)
initConfig: .inputSize
learn: true
learnFcn: 'learngdm'
learnParam: .lr, .mc
size: [0 10]
weightFcn: 'dotprod'
weightParam: (none)
userdata: (your custom info)
The weight function is dotprod, which represents standard matrix multiplication (dot
product). Note that the size of this layer weight is 0-by-10. The reason that we have zero
rows is because the network has not yet been congured for a particular data set. The
number of output neurons is equal to the number of rows in your target vector. During the
conguration process, you will provide the network with example inputs and targets, and
then the number of output neurons can be assigned.
This gives you some idea of how the network object is organized. For many applications,
you will not need to be concerned about making changes directly to the network object,
since that is taken care of by the network creation functions. It is usually only when you
want to override the system defaults that it is necessary to access the network object
directly. Other topics will show how this is done for particular networks and training
methods.
To investigate the network object in more detail, you might nd that the object listings,
such as the one shown above, contain links to help on each subobject. Click the links, and
you can selectively investigate those parts of the object that are of interest to you.
1Neural Network Objects, Data, and Training Styles
1-20

Congure Neural Network Inputs and Outputs
This topic is part of the design workow described in “Workow for Neural Network
Design” on page 1-2.
After a neural network has been created, it must be congured. The conguration step
consists of examining input and target data, setting the network's input and output sizes
to match the data, and choosing settings for processing inputs and outputs that will
enable best network performance. The conguration step is normally done automatically,
when the training function is called. However, it can be done manually, by using the
conguration function. For example, to congure the network you created previously to
approximate a sine function, issue the following commands:
p = -2:.1:2;
t = sin(pi*p/2);
net1 = configure(net,p,t);
You have provided the network with an example set of inputs and targets (desired
network outputs). With this information, the configure function can set the network
input and output sizes to match the data.
After the conguration, if you look again at the weight between layer 1 and layer 2, you
can see that the dimension of the weight is 1 by 20. This is because the target for this
network is a scalar.
net1.layerWeights{2,1}
Neural Network Weight
delays: 0
initFcn: (none)
initConfig: .inputSize
learn: true
learnFcn: 'learngdm'
learnParam: .lr, .mc
size: [1 10]
weightFcn: 'dotprod'
weightParam: (none)
userdata: (your custom info)
In addition to setting the appropriate dimensions for the weights, the conguration step
also denes the settings for the processing of inputs and outputs. The input processing
can be located in the inputs subobject:
Congure Neural Network Inputs and Outputs
1-21

net1.inputs{1}
Neural Network Input
name: 'Input'
feedbackOutput: []
processFcns: {'removeconstantrows', mapminmax}
processParams: {1x2 cell array of 2 params}
processSettings: {1x2 cell array of 2 settings}
processedRange: [1x2 double]
processedSize: 1
range: [1x2 double]
size: 1
userdata: (your custom info)
Before the input is applied to the network, it will be processed by two functions:
removeconstantrows and mapminmax. These are discussed fully in “Multilayer Neural
Networks and Backpropagation Training” on page 4-2 so we won't address the
particulars here. These processing functions may have some processing parameters,
which are contained in the subobject net1.inputs{1}.processParam. These have
default values that you can override. The processing functions can also have conguration
settings that are dependent on the sample data. These are contained in
net1.inputs{1}.processSettings and are set during the conguration process. For
example, the mapminmax processing function normalizes the data so that all inputs fall in
the range [−1, 1]. Its conguration settings include the minimum and maximum values in
the sample data, which it needs to perform the correct normalization. This will be
discussed in much more depth in “Multilayer Neural Networks and Backpropagation
Training” on page 4-2.
As a general rule, we use the term “parameter,” as in process parameters, training
parameters, etc., to denote constants that have default values that are assigned by the
software when the network is created (and which you can override). We use the term
“conguration setting,” as in process conguration setting, to denote constants that are
assigned by the software from an analysis of sample data. These settings do not have
default values, and should not generally be overridden.
For more information, see also “Understanding Neural Network Toolbox Data Structures”
on page 1-23.
1Neural Network Objects, Data, and Training Styles
1-22
Understanding Neural Network Toolbox Data Structures
In this section...
“Simulation with Concurrent Inputs in a Static Network” on page 1-23
“Simulation with Sequential Inputs in a Dynamic Network” on page 1-24
“Simulation with Concurrent Inputs in a Dynamic Network” on page 1-26
This topic discusses how the format of input data structures aects the simulation of
networks. It starts with static networks, and then continues with dynamic networks. The
following section describes how the format of the data structures aects network
training.
There are two basic types of input vectors: those that occur concurrently (at the same
time, or in no particular time sequence), and those that occur sequentially in time. For
concurrent vectors, the order is not important, and if there were a number of networks
running in parallel, you could present one input vector to each of the networks. For
sequential vectors, the order in which the vectors appear is important.
Simulation with Concurrent Inputs in a Static Network
The simplest situation for simulating a network occurs when the network to be simulated
is static (has no feedback or delays). In this case, you need not be concerned about
whether or not the input vectors occur in a particular time sequence, so you can treat the
inputs as concurrent. In addition, the problem is made even simpler by assuming that the
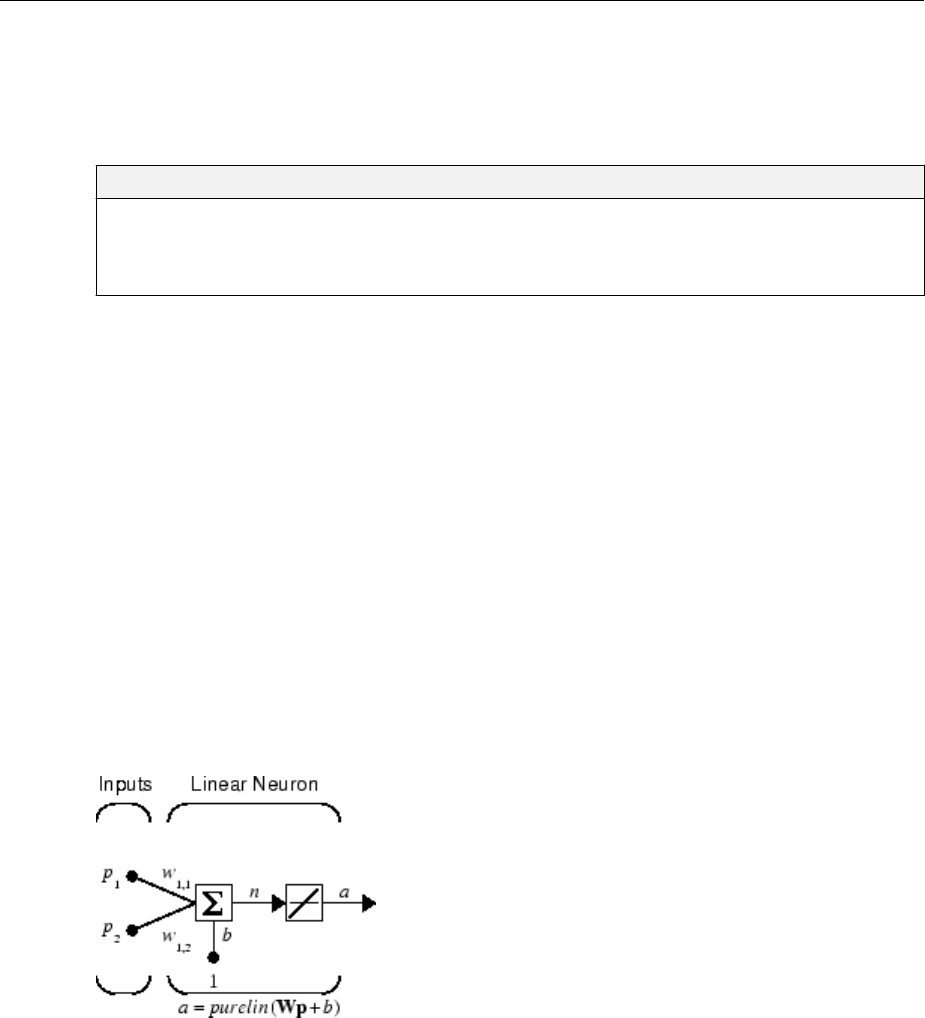
network has only one input vector. Use the following network as an example.
To set up this linear feedforward network, use the following commands:
Understanding Neural Network Toolbox Data Structures
1-23

net = linearlayer;
net.inputs{1}.size = 2;
net.layers{1}.dimensions = 1;
For simplicity, assign the weight matrix and bias to be W = [1 2] and b = [0].
The commands for these assignments are
net.IW{1,1} = [1 2];
net.b{1} = 0;
Suppose that the network simulation data set consists of Q = 4 concurrent vectors:
p p p p
1 2 3 4
1
2
2
1
2
3
3
1
=È
Î
͢
˚
˙=È
Î
͢
˚
˙=È
Î
͢
˚
˙=È
Î
͢
˚
˙
,,,
Concurrent vectors are presented to the network as a single matrix:
P = [1 2 2 3; 2 1 3 1];
You can now simulate the network:
A = net(P)
A =
5 4 8 5
A single matrix of concurrent vectors is presented to the network, and the network
produces a single matrix of concurrent vectors as output. The result would be the same if
there were four networks operating in parallel and each network received one of the
input vectors and produced one of the outputs. The ordering of the input vectors is not
important, because they do not interact with each other.
Simulation with Sequential Inputs in a Dynamic Network
When a network contains delays, the input to the network would normally be a sequence
of input vectors that occur in a certain time order. To illustrate this case, the next gure
shows a simple network that contains one delay.
1Neural Network Objects, Data, and Training Styles
1-24
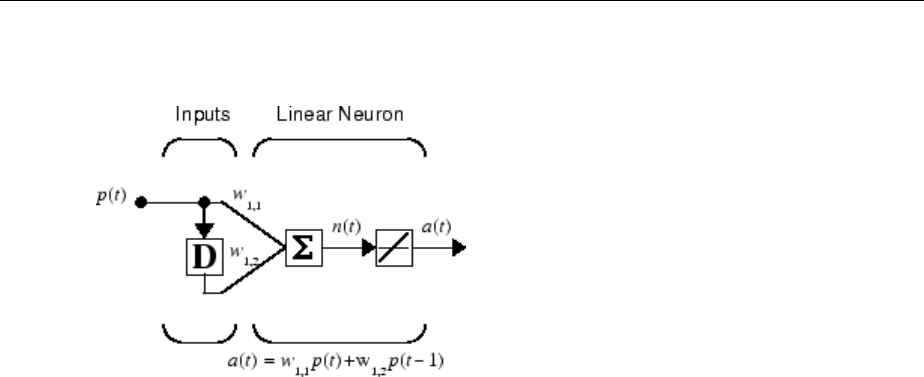
The following commands create this network:
net = linearlayer([0 1]);
net.inputs{1}.size = 1;
net.layers{1}.dimensions = 1;
net.biasConnect = 0;
Assign the weight matrix to be W = [1 2].
The command is:
net.IW{1,1} = [1 2];
Suppose that the input sequence is:
p p p p
1 2 3 4
1 2 3 4=
[ ]
=
[ ]
=
[ ]
=
[ ]
,,,
Sequential inputs are presented to the network as elements of a cell array:
P = {1 2 3 4};
You can now simulate the network:
A = net(P)
A =
[1] [4] [7] [10]
You input a cell array containing a sequence of inputs, and the network produces a cell
array containing a sequence of outputs. The order of the inputs is important when they
are presented as a sequence. In this case, the current output is obtained by multiplying
Understanding Neural Network Toolbox Data Structures
1-25

the current input by 1 and the preceding input by 2 and summing the result. If you were
to change the order of the inputs, the numbers obtained in the output would change.
Simulation with Concurrent Inputs in a Dynamic Network
If you were to apply the same inputs as a set of concurrent inputs instead of a sequence of
inputs, you would obtain a completely dierent response. (However, it is not clear why
you would want to do this with a dynamic network.) It would be as if each input were
applied concurrently to a separate parallel network. For the previous example,
“Simulation with Sequential Inputs in a Dynamic Network” on page 1-24, if you use a
concurrent set of inputs you have
p p p p
1 2 3 4
1 2 3 4=
[ ]
=
[ ]
=
[ ]
=
[ ]
,,,
which can be created with the following code:
P = [1 2 3 4];
When you simulate with concurrent inputs, you obtain
A = net(P)
A =
1 2 3 4
The result is the same as if you had concurrently applied each one of the inputs to a
separate network and computed one output. Note that because you did not assign any
initial conditions to the network delays, they were assumed to be 0. For this case the
output is simply 1 times the input, because the weight that multiplies the current input is
1.
In certain special cases, you might want to simulate the network response to several
dierent sequences at the same time. In this case, you would want to present the network
with a concurrent set of sequences. For example, suppose you wanted to present the
following two sequences to the network:
p p p p
p p
1 1 1 1
2 2
1 1 2 2 3 3 4 4
1 4 2 3
( ) , ( ) , ( ) , ( )
( ) , ( )
=
[ ]
=
[ ]
=
[ ]
=
[ ]
=
[ ]
=
[ ]
,, ( ) , ( )p p
2 2
3 2 4 1=
[ ]
=
[ ]
The input P should be a cell array, where each element of the array contains the two
elements of the two sequences that occur at the same time:
1Neural Network Objects, Data, and Training Styles
1-26
P = {[1 4] [2 3] [3 2] [4 1]};
You can now simulate the network:
A = net(P);
The resulting network output would be
A = {[1 4] [4 11] [7 8] [10 5]}
As you can see, the rst column of each matrix makes up the output sequence produced
by the rst input sequence, which was the one used in an earlier example. The second
column of each matrix makes up the output sequence produced by the second input
sequence. There is no interaction between the two concurrent sequences. It is as if they
were each applied to separate networks running in parallel.
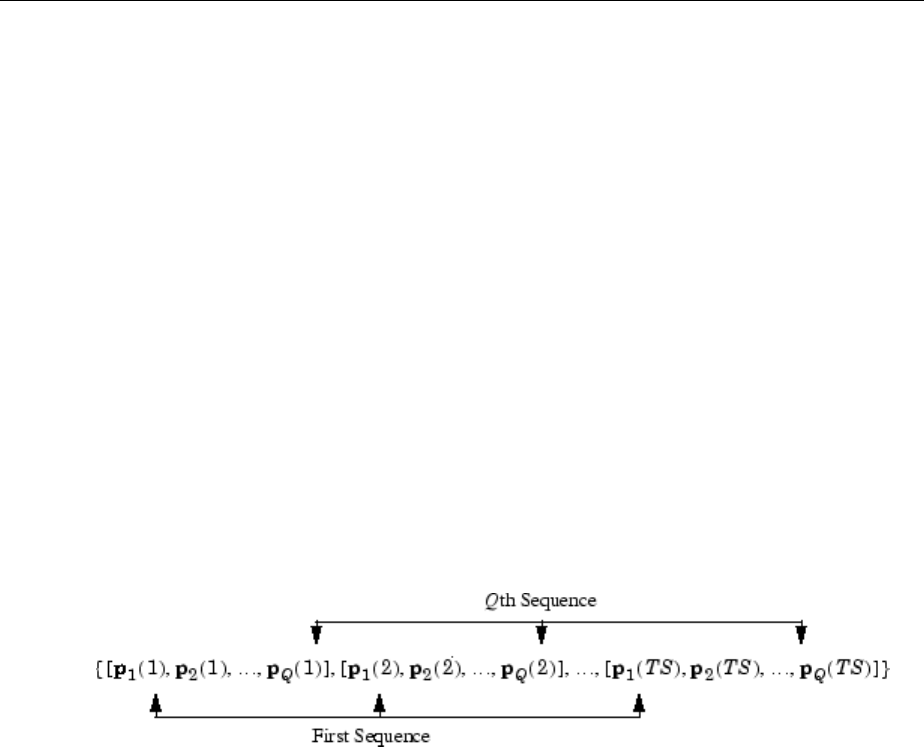
The following diagram shows the general format for the network input P when there are
Q concurrent sequences of TS time steps. It covers all cases where there is a single input
vector. Each element of the cell array is a matrix of concurrent vectors that correspond to
the same point in time for each sequence. If there are multiple input vectors, there will be
multiple rows of matrices in the cell array.
In this topic, you apply sequential and concurrent inputs to dynamic networks. In
“Simulation with Concurrent Inputs in a Static Network” on page 1-23, you applied
concurrent inputs to static networks. It is also possible to apply sequential inputs to static
networks. It does not change the simulated response of the network, but it can aect the
way in which the network is trained. This will become clear in “Neural Network Training
Concepts” on page 1-28.
See also “Congure Neural Network Inputs and Outputs” on page 1-21.
Understanding Neural Network Toolbox Data Structures
1-27
Neural Network Training Concepts
In this section...
“Incremental Training with adapt” on page 1-28
“Batch Training” on page 1-31
“Training Feedback” on page 1-34
This topic is part of the design workow described in “Workow for Neural Network
Design” on page 1-2.
This topic describes two dierent styles of training. In incremental training the weights
and biases of the network are updated each time an input is presented to the network. In
batch training the weights and biases are only updated after all the inputs are presented.
The batch training methods are generally more eicient in the MATLAB environment, and
they are emphasized in the Neural Network Toolbox software, but there some
applications where incremental training can be useful, so that paradigm is implemented
as well.
Incremental Training with adapt
Incremental training can be applied to both static and dynamic networks, although it is
more commonly used with dynamic networks, such as adaptive lters. This section
illustrates how incremental training is performed on both static and dynamic networks.
Incremental Training of Static Networks
Consider again the static network used for the rst example. You want to train it
incrementally, so that the weights and biases are updated after each input is presented. In
this case you use the function adapt, and the inputs and targets are presented as
sequences.
Suppose you want to train the network to create the linear function:
t p p= +21 2
Then for the previous inputs,
p p p p
1 2 3 4
1
2
2
1
2
3
3
1
=È
Î
͢
˚
˙=È
Î
͢
˚
˙=È
Î
͢
˚
˙=È
Î
͢
˚
˙
,,,
1Neural Network Objects, Data, and Training Styles
1-28

the targets would be
t t t t
1 2 3 4
4577=
[ ]
=
[ ]
=
[ ]
=
[ ]
, , ,
For incremental training, you present the inputs and targets as sequences:
P = {[1;2] [2;1] [2;3] [3;1]};
T = {4 5 7 7};
First, set up the network with zero initial weights and biases. Also, set the initial learning
rate to zero to show the eect of incremental training.
net = linearlayer(0,0);
net = configure(net,P,T);
net.IW{1,1} = [0 0];
net.b{1} = 0;
Recall from “Simulation with Concurrent Inputs in a Static Network” on page 1-23 that,
for a static network, the simulation of the network produces the same outputs whether
the inputs are presented as a matrix of concurrent vectors or as a cell array of sequential
vectors. However, this is not true when training the network. When you use the adapt
function, if the inputs are presented as a cell array of sequential vectors, then the weights
are updated as each input is presented (incremental mode). As shown in the next section,
if the inputs are presented as a matrix of concurrent vectors, then the weights are
updated only after all inputs are presented (batch mode).
You are now ready to train the network incrementally.
[net,a,e,pf] = adapt(net,P,T);
The network outputs remain zero, because the learning rate is zero, and the weights are
not updated. The errors are equal to the targets:
a = [0] [0] [0] [0]
e = [4] [5] [7] [7]
If you now set the learning rate to 0.1 you can see how the network is adjusted as each
input is presented:
net.inputWeights{1,1}.learnParam.lr = 0.1;
net.biases{1,1}.learnParam.lr = 0.1;
[net,a,e,pf] = adapt(net,P,T);
a = [0] [2] [6] [5.8]
e = [4] [3] [1] [1.2]
Neural Network Training Concepts
1-29

The rst output is the same as it was with zero learning rate, because no update is made
until the rst input is presented. The second output is dierent, because the weights have
been updated. The weights continue to be modied as each error is computed. If the
network is capable and the learning rate is set correctly, the error is eventually driven to
zero.
Incremental Training with Dynamic Networks
You can also train dynamic networks incrementally. In fact, this would be the most
common situation.
To train the network incrementally, present the inputs and targets as elements of cell
arrays. Here are the initial input Pi and the inputs P and targets T as elements of cell
arrays.
Pi = {1};
P = {2 3 4};
T = {3 5 7};
Take the linear network with one delay at the input, as used in a previous example.
Initialize the weights to zero and set the learning rate to 0.1.
net = linearlayer([0 1],0.1);
net = configure(net,P,T);
net.IW{1,1} = [0 0];
net.biasConnect = 0;
You want to train the network to create the current output by summing the current and
the previous inputs. This is the same input sequence you used in the previous example
with the exception that you assign the rst term in the sequence as the initial condition
for the delay. You can now sequentially train the network using adapt.
[net,a,e,pf] = adapt(net,P,T,Pi);
a = [0] [2.4] [7.98]
e = [3] [2.6] [-0.98]
The rst output is zero, because the weights have not yet been updated. The weights
change at each subsequent time step.
1Neural Network Objects, Data, and Training Styles
1-30

Batch Training
Batch training, in which weights and biases are only updated after all the inputs and
targets are presented, can be applied to both static and dynamic networks. Both types of
networks are discussed in this section.
Batch Training with Static Networks
Batch training can be done using either adapt or train, although train is generally the
best option, because it typically has access to more eicient training algorithms.
Incremental training is usually done with adapt; batch training is usually done with
train.
For batch training of a static network with adapt, the input vectors must be placed in one
matrix of concurrent vectors.
P = [1 2 2 3; 2 1 3 1];
T = [4 5 7 7];
Begin with the static network used in previous examples. The learning rate is set to 0.01.
net = linearlayer(0,0.01);
net = configure(net,P,T);
net.IW{1,1} = [0 0];
net.b{1} = 0;
When you call adapt, it invokes trains (the default adaption function for the linear
network) and learnwh (the default learning function for the weights and biases). trains
uses Widrow-Ho learning.
[net,a,e,pf] = adapt(net,P,T);
a = 0 0 0 0
e = 4 5 7 7
Note that the outputs of the network are all zero, because the weights are not updated
until all the training set has been presented. If you display the weights, you nd
net.IW{1,1}
ans = 0.4900 0.4100
net.b{1}
ans =
0.2300
This is dierent from the result after one pass of adapt with incremental updating.
Neural Network Training Concepts
1-31

Now perform the same batch training using train. Because the Widrow-Ho rule can be
used in incremental or batch mode, it can be invoked by adapt or train. (There are
several algorithms that can only be used in batch mode (e.g., Levenberg-Marquardt), so
these algorithms can only be invoked by train.)
For this case, the input vectors can be in a matrix of concurrent vectors or in a cell array
of sequential vectors. Because the network is static and because train always operates
in batch mode, train converts any cell array of sequential vectors to a matrix of
concurrent vectors. Concurrent mode operation is used whenever possible because it has
a more eicient implementation in MATLAB code:
P = [1 2 2 3; 2 1 3 1];
T = [4 5 7 7];
The network is set up in the same way.
net = linearlayer(0,0.01);
net = configure(net,P,T);
net.IW{1,1} = [0 0];
net.b{1} = 0;
Now you are ready to train the network. Train it for only one epoch, because you used
only one pass of adapt. The default training function for the linear network is trainb,
and the default learning function for the weights and biases is learnwh, so you should
get the same results obtained using adapt in the previous example, where the default
adaption function was trains.
net.trainParam.epochs = 1;
net = train(net,P,T);
If you display the weights after one epoch of training, you nd
net.IW{1,1}
ans = 0.4900 0.4100
net.b{1}
ans =
0.2300
This is the same result as the batch mode training in adapt. With static networks, the
adapt function can implement incremental or batch training, depending on the format of
the input data. If the data is presented as a matrix of concurrent vectors, batch training
occurs. If the data is presented as a sequence, incremental training occurs. This is not
true for train, which always performs batch training, regardless of the format of the
input.
1Neural Network Objects, Data, and Training Styles
1-32

Batch Training with Dynamic Networks
Training static networks is relatively straightforward. If you use train the network is
trained in batch mode and the inputs are converted to concurrent vectors (columns of a
matrix), even if they are originally passed as a sequence (elements of a cell array). If you
use adapt, the format of the input determines the method of training. If the inputs are
passed as a sequence, then the network is trained in incremental mode. If the inputs are
passed as concurrent vectors, then batch mode training is used.
With dynamic networks, batch mode training is typically done with train only, especially
if only one training sequence exists. To illustrate this, consider again the linear network
with a delay. Use a learning rate of 0.02 for the training. (When using a gradient descent
algorithm, you typically use a smaller learning rate for batch mode training than
incremental training, because all the individual gradients are summed before determining
the step change to the weights.)
net = linearlayer([0 1],0.02);
net.inputs{1}.size = 1;
net.layers{1}.dimensions = 1;
net.IW{1,1} = [0 0];
net.biasConnect = 0;
net.trainParam.epochs = 1;
Pi = {1};
P = {2 3 4};
T = {3 5 6};
You want to train the network with the same sequence used for the incremental training
earlier, but this time you want to update the weights only after all the inputs are applied
(batch mode). The network is simulated in sequential mode, because the input is a
sequence, but the weights are updated in batch mode.
net = train(net,P,T,Pi);
The weights after one epoch of training are
net.IW{1,1}
ans = 0.9000 0.6200
These are dierent weights than you would obtain using incremental training, where the
weights would be updated three times during one pass through the training set. For batch
training the weights are only updated once in each epoch.
Neural Network Training Concepts
1-33

Training Feedback
The showWindow parameter allows you to specify whether a training window is visible
when you train. The training window appears by default. Two other parameters,
showCommandLine and show, determine whether command-line output is generated and
the number of epochs between command-line feedback during training. For instance, this
code turns o the training window and gives you training status information every 35
epochs when the network is later trained with train:
net.trainParam.showWindow = false;
net.trainParam.showCommandLine = true;
net.trainParam.show= 35;
Sometimes it is convenient to disable all training displays. To do that, turn o both the
training window and command-line feedback:
net.trainParam.showWindow = false;
net.trainParam.showCommandLine = false;
The training window appears automatically when you train. Use the nntraintool
function to manually open and close the training window.
nntraintool
nntraintool('close')
1Neural Network Objects, Data, and Training Styles
1-34

Deep Networks
• “Deep Learning in MATLAB” on page 2-2
• “Try Deep Learning in 10 Lines of MATLAB Code” on page 2-10
• “Deep Learning with Big Data on GPUs and in Parallel” on page 2-13
• “Construct Deep Network Using Autoencoders” on page 2-18
• “Pretrained Convolutional Neural Networks” on page 2-21
• “Learn About Convolutional Neural Networks” on page 2-27
• “List of Deep Learning Layers” on page 2-31
• “Specify Layers of Convolutional Neural Network” on page 2-36
• “Set Up Parameters and Train Convolutional Neural Network” on page 2-46
• “Resume Training from a Checkpoint Network” on page 2-51
•“Dene Custom Deep Learning Layers” on page 2-56
•“Dene a Custom Deep Learning Layer with Learnable Parameters” on page 2-73
•“Dene a Custom Regression Output Layer” on page 2-87
•“Dene a Custom Classication Output Layer” on page 2-97
• “Check Custom Layer Validity” on page 2-107
• “Long Short-Term Memory Networks” on page 2-116
• “Preprocess Images for Deep Learning” on page 2-127
• “Develop Custom Mini-Batch Datastore” on page 2-131
2
Deep Learning in MATLAB
In this section...
“What Is Deep Learning?” on page 2-2
“Try Deep Learning in 10 Lines of MATLAB Code” on page 2-5
“Start Deep Learning Faster Using Transfer Learning” on page 2-7
“Train Classiers Using Features Extracted from Pretrained Networks” on page 2-8
“Deep Learning with Big Data on CPUs, GPUs, in Parallel, and on the Cloud” on page 2-
8
What Is Deep Learning?
Deep learning is a branch of machine learning that teaches computers to do what comes
naturally to humans: learn from experience. Machine learning algorithms use
computational methods to “learn” information directly from data without relying on a
predetermined equation as a model. Deep learning is especially suited for image
recognition, which is important for solving problems such as facial recognition, motion
detection, and many advanced driver assistance technologies such as autonomous
driving, lane detection, pedestrian detection, and autonomous parking.
Neural Network Toolbox provides simple MATLAB commands for creating and
interconnecting the layers of a deep neural network. Examples and pretrained networks
make it easy to use MATLAB for deep learning, even without knowledge of advanced
computer vision algorithms or neural networks.
For a free hands-on introduction to practical deep learning methods, see Deep Learning
Onramp.
What Do You Want to Do? Learn More
Perform transfer learning to ne-tune a
network with your data
“Start Deep Learning Faster Using Transfer
Learning” on page 2-7
Tip Fine-tuning a pretrained network to
learn a new task is typically much faster
and easier than training a new network.
2Deep Networks
2-2
What Do You Want to Do? Learn More
Classify images with pretrained networks “Pretrained Convolutional Neural
Networks” on page 2-21
Create a new deep neural network for
classication or regression
“Create Simple Deep Learning Network for
Classication”
“Deep Learning Training from Scratch”
Resize, rotate, or preprocess images for
training or prediction
“Preprocess Images for Deep Learning” on
page 2-127
Label your image data automatically based
on folder names, or interactively using an
app
“Train Network for Image Classication”
Image Labeler
Create deep learning networks for
sequence and time series data.
“Sequence Classication Using Deep
Learning”
“Time Series Forecasting Using Deep
Learning”
Classify each pixel of an image (for
example, road, car, pedestrian)
“Semantic Segmentation Basics” (Computer
Vision System Toolbox)
Detect and recognize objects in images “Deep Learning, Object Detection and
Recognition” (Computer Vision System
Toolbox)
Classify text data “Classify Text Data Using Deep Learning”
(Text Analytics Toolbox)
Classify audio data for speech recognition “Deep Learning Speech Recognition”
Visualize what features networks have
learned
“Deep Dream Images Using AlexNet”
“Visualize Activations of a Convolutional
Neural Network”
Train on CPU, GPU, multiple GPUs, in
parallel on your desktop or on clusters in
the cloud, and work with data sets too large
to t in memory
“Deep Learning with Big Data on GPUs and
in Parallel” on page 2-13
To learn more about deep learning application areas, including automated driving, see
“Deep Learning Applications”.
Deep Learning in MATLAB
2-3
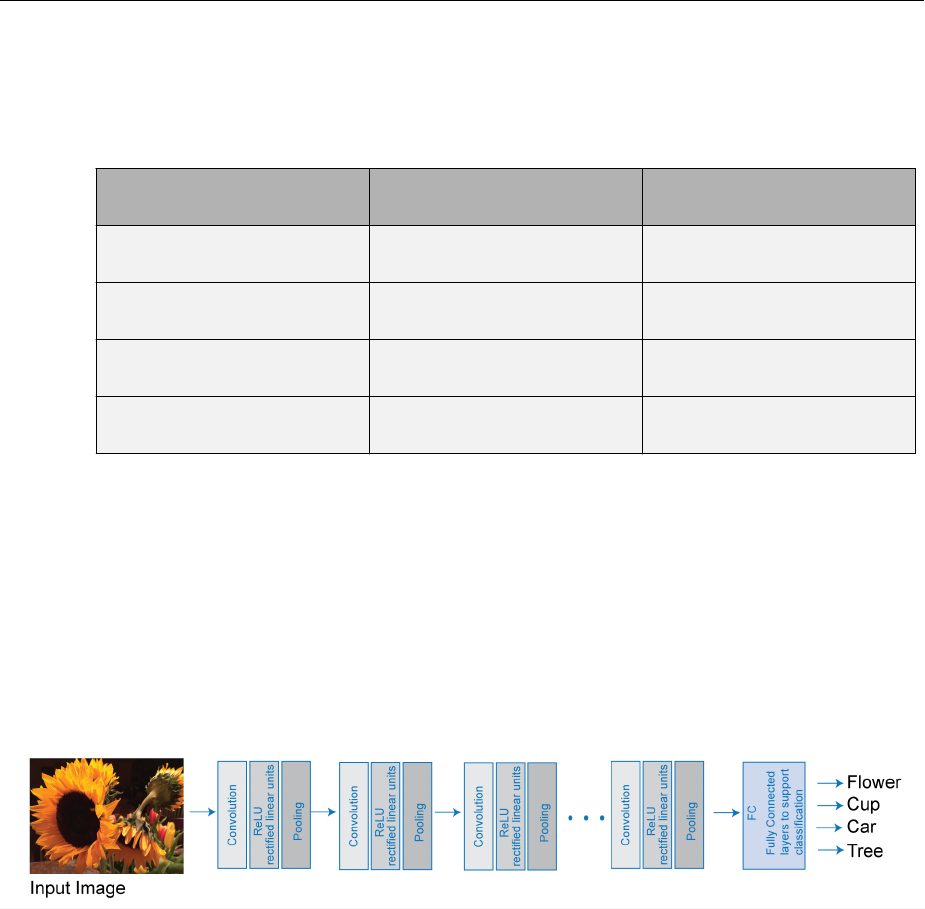
To choose whether to use a pretrained network or create a new deep network, consider
the scenarios in this table.
Use a Pretrained Network
for Transfer Learning
Create a New Deep
Network
Training Data Hundreds to thousands of
labeled images (small)
Thousands to millions of
labeled images
Computation Moderate computation (GPU
optional)
Compute intensive (requires
GPU for speed)
Training Time Seconds to minutes Days to weeks for real
problems
Model Accuracy Good, depends on the
pretrained model
High, but can overt to
small data sets
Deep learning uses neural networks to learn useful representations of features directly
from data. Neural networks combine multiple nonlinear processing layers, using simple
elements operating in parallel and inspired by biological nervous systems. Deep learning
models can achieve state-of-the-art accuracy in object classication, sometimes exceeding
human-level performance.
You train models using a large set of labeled data and neural network architectures that
contain many layers, usually including some convolutional layers. Training these models
is computationally intensive and you can usually accelerate training by using a high
performance GPU. This diagram shows how convolutional neural networks combine layers
that automatically learn features from many images to classify new images.
Many deep learning applications use image les, and sometimes millions of image les. To
access many image les for deep learning eiciently, MATLAB provides the
imageDatastore function. Use this function to:
• Automatically read batches of images for faster processing in machine learning and
computer vision applications
2Deep Networks
2-4

• Import data from image collections that are too large to t in memory
• Label your image data automatically based on folder names
Try Deep Learning in 10 Lines of MATLAB Code
This example shows how to use deep learning to identify objects on a live webcam using
only 10 lines of MATLAB code. Try the example to see how simple it is to get started with
deep learning in MATLAB.
1Run these commands to get the downloads if needed, connect to the webcam, and get
a pretrained neural network.
camera = webcam; % Connect to the camera
net = alexnet; % Load the neural network
The webcam and alexnet functions provide a link to help you download the free add-
ons using Add-On Explorer. Alternatively, see Neural Network Toolbox Model for
AlexNet Network and MATLAB Support Package for USB Webcams.
You can use alexnet to classify images. AlexNet is a pretrained convolutional neural
network (CNN) that has been trained on more than a million images and can classify
images into 1000 object categories (for example, keyboard, mouse, coee mug,
pencil, and many animals).
2To show and classify live images, run the following code. Point the webcam at an
object and the neural network reports what class of object it thinks the webcam is
showing. It keeps classifying images until you press Ctrl+C. The code resizes the
image for the network using imresize.
while true
im = snapshot(camera); % Take a picture
image(im); % Show the picture
im = imresize(im,[227 227]); % Resize the picture for alexnet
label = classify(net,im); % Classify the picture
title(char(label)); % Show the class label
drawnow
end
In this example, the network correctly classies a coee mug. Experiment with
objects in your surroundings to see how accurate the network is.
Deep Learning in MATLAB
2-5
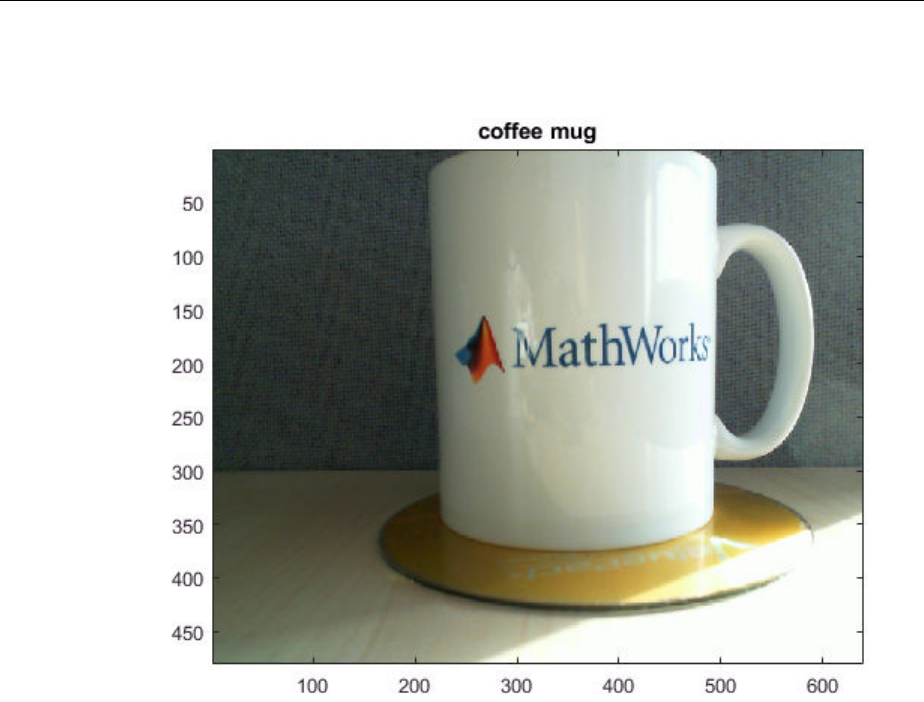
To watch a video of this example, see Deep Learning in 11 Lines of MATLAB Code.
To get the code to extend this example to show the probability scores of classes, see
“Classify Webcam Images Using Deep Learning”.
For next steps in deep learning, you can use the pretrained network for other tasks. Solve
new classication problems on your image data with transfer learning or feature
extraction. For examples, see “Start Deep Learning Faster Using Transfer Learning” on
page 2-7 and “Train Classiers Using Features Extracted from Pretrained Networks”
on page 2-8. To try other pretrained networks, see “Pretrained Convolutional Neural
Networks” on page 2-21.
2Deep Networks
2-6
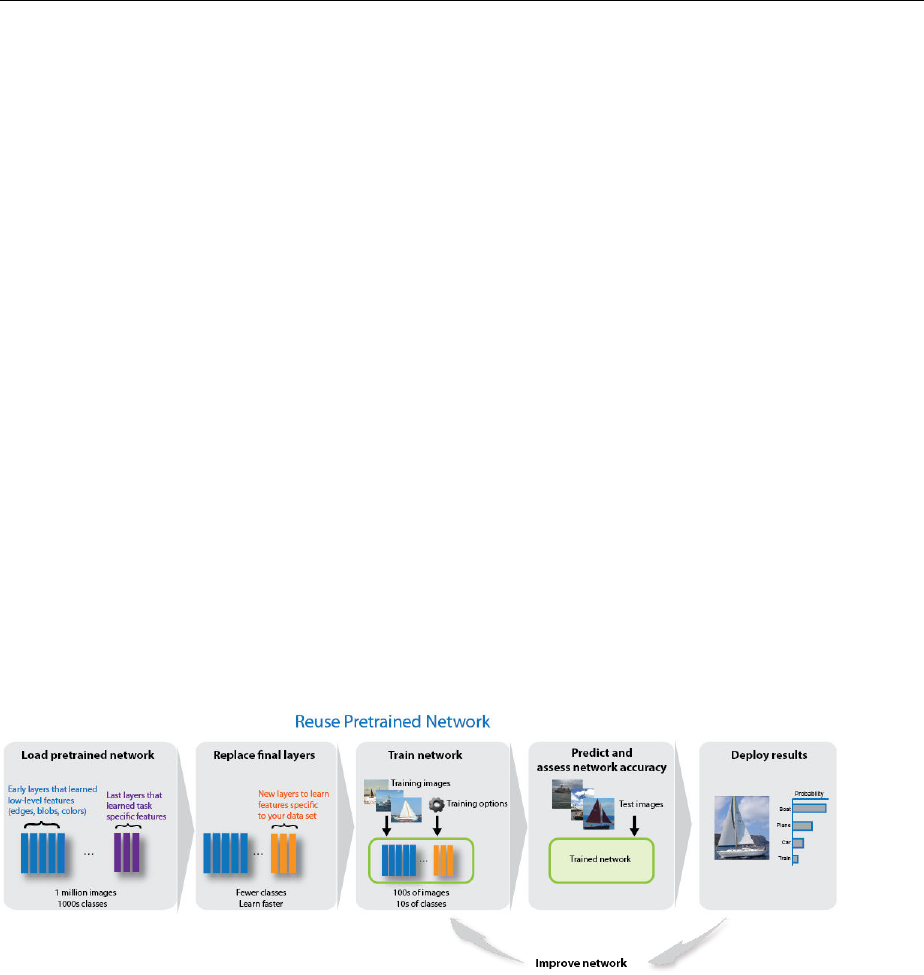
Start Deep Learning Faster Using Transfer Learning
Transfer learning is commonly used in deep learning applications. You can take a
pretrained network and use it as a starting point to learn a new task. Fine-tuning a
network with transfer learning is much faster and easier than training from scratch. You
can quickly make the network learn a new task using a smaller number of training
images. The advantage of transfer learning is that the pretrained network has already
learned a rich set of features that can be applied to a wide range of other similar tasks.
For example, if you take a network trained on thousands or millions of images, you can
retrain it for new object detection using only hundreds of images. You can eectively ne-
tune a pretrained network with much smaller data sets than the original training data. If
you have a very large dataset, then transfer learning might not be faster than training a
new network.
Transfer learning enables you to:
• Transfer the learned features of a pretrained network to a new problem
• Transfer learning is faster and easier than training a new network
• Reduce training time and dataset size
• Perform deep learning without needing to learn how to create a whole new network
For examples, see “Get Started with Transfer Learning”, “Transfer Learning Using
AlexNet”, and “Transfer Learning Using GoogLeNet”.
Deep Learning in MATLAB
2-7

Train Classiers Using Features Extracted from Pretrained
Networks
Feature extraction allows you to use the power of pretrained networks without investing
time and eort into training. Feature extraction can be the fastest way to use deep
learning. You extract learned features from a pretrained network, and use those features
to train a classier, for example, a support vector machine (SVM — requires Statistics and
Machine Learning Toolbox™). For example, if an SVM trained using alexnet can achieve
>90% accuracy on your training and validation set, then ne-tuning with transfer
learning might not be worth the eort to gain some extra accuracy. If you perform ne-
tuning on a small dataset, then you also risk overtting. If the SVM cannot achieve good
enough accuracy for your application, then ne-tuning is worth the eort to seek higher
accuracy.
For an example, see “Feature Extraction Using AlexNet”.
Deep Learning with Big Data on CPUs, GPUs, in Parallel, and
on the Cloud
Neural networks are inherently parallel algorithms. You can take advantage of this
parallelism by using Parallel Computing Toolbox™ to distribute training across multicore
CPUs, graphical processing units (GPUs), and clusters of computers with multiple CPUs
and GPUs.
Training deep networks is extremely computationally intensive and you can usually
accelerate training by using a high performance GPU. If you do not have a suitable GPU,
you can train on one or more CPU cores instead. You can train a convolutional neural
network on a single GPU or CPU, or on multiple GPUs or CPU cores, or in parallel on a
cluster. Using GPU or parallel options requires Parallel Computing Toolbox.
You do not need multiple computers to solve problems using data sets too large to t in
memory. You can use the imageDatastore function to work with batches of data without
needing a cluster of machines. However, if you have a cluster available, it can be helpful
to take your code to the data repository rather than moving large amounts of data around.
To learn more about deep learning hardware and memory settings, see “Deep Learning
with Big Data on GPUs and in Parallel” on page 2-13.
2Deep Networks
2-8

See Also
Related Examples
• “Classify Webcam Images Using Deep Learning”
• “Get Started with Transfer Learning”
• “Pretrained Convolutional Neural Networks” on page 2-21
• “Create Simple Deep Learning Network for Classication”
• “Deep Learning with Big Data on GPUs and in Parallel” on page 2-13
• “Deep Learning, Object Detection and Recognition” (Computer Vision System
Toolbox)
• “Classify Text Data Using Deep Learning” (Text Analytics Toolbox)
See Also
2-9

Try Deep Learning in 10 Lines of MATLAB Code
This example shows how to use deep learning to identify objects on a live webcam using
only 10 lines of MATLAB code. Try the example to see how simple it is to get started with
deep learning in MATLAB.
1Run these commands to get the downloads if needed, connect to the webcam, and get
a pretrained neural network.
camera = webcam; % Connect to the camera
net = alexnet; % Load the neural network
If you need to install the webcam and alexnet add-ons, a message from each
function appears with a link to help you download the free add-ons using Add-On
Explorer. Alternatively, see Neural Network Toolbox Model for AlexNet Network and
MATLAB Support Package for USB Webcams.
After you install Neural Network Toolbox Model for AlexNet Network, you can use it
to classify images. AlexNet is a pretrained convolutional neural network (CNN) that
has been trained on more than a million images and can classify images into 1000
object categories (for example, keyboard, mouse, coee mug, pencil, and many
animals).
2Run the following code to show and classify live images. Point the webcam at an
object and the neural network reports what class of object it thinks the webcam is
showing. It will keep classifying images until you press Ctrl+C. The code resizes the
image for the network using imresize.
while true
im = snapshot(camera); % Take a picture
image(im); % Show the picture
im = imresize(im,[227 227]); % Resize the picture for alexnet
label = classify(net,im); % Classify the picture
title(char(label)); % Show the class label
drawnow
end
In this example, the network correctly classies a coee mug. Experiment with
objects in your surroundings to see how accurate the network is.
2Deep Networks
2-10
To watch a video of this example, see Deep Learning in 11 Lines of MATLAB Code.
To get the code to extend this example to show the probability scores of classes, see
“Classify Webcam Images Using Deep Learning”.
For next steps in deep learning, you can use the pretrained network for other tasks. Solve
new classication problems on your image data with transfer learning or feature
extraction. For examples, see “Start Deep Learning Faster Using Transfer Learning” on
page 2-7 and “Train Classiers Using Features Extracted from Pretrained Networks” on
page 2-8. To try other pretrained networks, see “Pretrained Convolutional Neural
Networks” on page 2-21.
Try Deep Learning in 10 Lines of MATLAB Code
2-11

See Also
Related Examples
• “Classify Webcam Images Using Deep Learning”
• “Get Started with Transfer Learning”
2Deep Networks
2-12
Deep Learning with Big Data on GPUs and in Parallel
Neural networks are inherently parallel algorithms. You can take advantage of this
parallelism by using Parallel Computing Toolbox to distribute training across multicore
CPUs, graphical processing units (GPUs), and clusters of computers with multiple CPUs
and GPUs.
Training deep networks is extremely computationally intensive and you can usually
accelerate training by using a high performance GPU. If you do not have a suitable GPU,
you can train on one or more CPU cores instead. You can train a convolutional neural
network on a single GPU or CPU, or on multiple GPUs or CPU cores, or in parallel on a
cluster. Using GPU or parallel options requires Parallel Computing Toolbox.
Tip GPU support is automatic. By default, the trainNetwork function uses a GPU if
available.
If you have access to a machine with multiple GPUs, simply specify the training option
'ExecutionEnvironment','multi-gpu'.
You do not need multiple computers to solve problems using data sets too large to t in
memory. You can use the imageDatastore function to work with batches of data without
needing a cluster of machines. For an example, see “Train Network for Image
Classication”. However, if you have a cluster available, it can be helpful to take your
code to the data repository rather than moving large amounts of data around.
Deep Learning Hardware
and Memory
Considerations
Recommendations Required Products
Data too large to t in
memory
To import data from image
collections that are too large
to t in memory, use the
imageDatastore function.
This function is designed to
read batches of images for
faster processing in machine
learning and computer
vision applications.
MATLAB
Neural Network Toolbox
Deep Learning with Big Data on GPUs and in Parallel
2-13

Deep Learning Hardware
and Memory
Considerations
Recommendations Required Products
CPU If you do not have a suitable
GPU, you can train on a CPU
instead. By default, the
trainNetwork function
uses the CPU if no GPU is
available.
MATLAB
Neural Network Toolbox
GPU By default, the
trainNetwork function
uses a GPU if available.
Requires a CUDA® enabled
NVIDIA® GPU with compute
capability 3.0 or higher.
Check your GPU using
gpuDevice. Specify the
execution environment
using the
trainingOptions
function.
MATLAB
Neural Network Toolbox
Parallel Computing Toolbox
Parallel on your local
machine using multiple
GPUs or CPU cores
Take advantage of multiple
workers by specifying the
execution environment with
the trainingOptions
function. If you have more
than one GPU on your
machine, specify 'multi-
gpu'. Otherwise, specify
'parallel'.
MATLAB
Neural Network Toolbox
Parallel Computing Toolbox
2Deep Networks
2-14
Deep Learning Hardware
and Memory
Considerations
Recommendations Required Products
Parallel on a cluster or in
the cloud
Scale up to use workers on
clusters or in the cloud to
accelerate your deep
learning computations. Use
trainingOptions and
specify 'parallel' to use
a compute cluster. For more
information, see “Deep
Learning in the Cloud” on
page 2-17.
MATLAB
Neural Network Toolbox
Parallel Computing Toolbox
MATLAB Distributed
Computing Server™
Tip To learn more, see “Scale Up Deep Learning in Parallel and in the Cloud” on page 3-
2.
All functions for deep learning training, prediction, and validation in Neural Network
Toolbox perform computations using single-precision, oating-point arithmetic. Functions
for deep learning include trainNetwork, predict, classify, and activations. The
software uses single-precision arithmetic when you train networks using both CPUs and
GPUs.
Because single-precision and double-precision performance of GPUs can dier
substantially, it is important to know in which precision computations are performed. If
you only use a GPU for deep learning, then single-precision performance is one of the
most important characteristics of a GPU. If you also use a GPU for other computations
using Parallel Computing Toolbox, then high double-precision performance is important.
This is because many functions in MATLAB use double-precision arithmetic by default.
For more information, see “Improve Performance Using Single Precision Calculations”
(Parallel Computing Toolbox).
Training with Multiple GPUs
Cutting-edge neural networks rely on increasingly large training datasets and networks
structures. In turn, this requires increased training times and memory resources. To
support training such networks, MATLAB provides support for training a single network
using multiple GPUs in parallel. If you have more than one GPU on your local machine,
Deep Learning with Big Data on GPUs and in Parallel
2-15

enable multiple GPU training by setting the 'ExecutionEnvironment' option to
'multi-gpu' with the trainingOptions function. If you have access to a cluster or
cloud, specify 'parallel'. To improve convergence and/or performance using multiple
GPUs, try increasing the MiniBatchSize and learning rate.
For optimum performance, you need to experiment with the MiniBatchSize option that
you specify with the trainingOptions function. Convolutional neural networks are
typically trained iteratively using batches of images. This is done because the whole
dataset is far too large to t into GPU memory. The optimal batch size depends on your
exact network, dataset, and GPU hardware, so you need to experiment. Too large a batch
size can lead to slow convergence, while too small a batch size can lead to no
convergence at all. Often the batch size is dictated by the GPU memory available. For
larger networks, the memory requirements per image increases and the maximum batch
size is reduced.
When training with multiple GPUs, each image batch is distributed between the GPUs.
This eectively increases the total GPU memory available, allowing larger batch sizes.
Depending on your application, a larger batch size can provide better convergence or
classication accuracy.
Using multiple GPUs can provide a signicant improvement in performance. To decide if
you expect multi-GPU training to deliver a performance gain, consider the following
factors:
• How long is the iteration on each GPU? If each GPU iteration is short, the added
overhead of communication between GPUs can dominate. Try increasing the
computation per iteration by using a larger batch size.
• Are all the GPUs on a single machine? Communication between GPUs on dierent
machines introduces a signicant communication delay.
To learn more, see “Scale Up Deep Learning in Parallel and in the Cloud” on page 3-2
and “Select Particular GPUs to Use for Training” on page 3-7.
Fetch and Preprocess Data in Background
You can fetch and preprocess data in parallel with network training. To perform data
dispatch in the background, train the network using trainNetwork with data in a mini-
batch datastore with background dispatch enabled. You can use a built-in mini-batch
datastore, such as an augmentedImageDatastore, denoisingImageDatastore, or
pixelLabelImageDatastore. To enable background dispatch, set the
2Deep Networks
2-16

DispatchInBackground property of the datastore to true. You can also use a custom
mini-batch datastore with background dispatch enabled. For more information on
creating custom mini-batch datastores, see “Develop Custom Mini-Batch Datastore” on
page 2-131. For advanced options, you can try modifying the number of workers of the
parallel pool. For more information, see “Specify Your Parallel Preferences” (Parallel
Computing Toolbox). You can also ne-tune the training computation and data dispatch
loads between workers by specifying the 'WorkerLoad' name-value pair argument of
trainingOptions.
Deep Learning in the Cloud
Try your deep learning applications with multiple high-performance GPUs on Amazon®
Elastic Compute Cloud (Amazon EC2®). You can use MATLAB to perform deep learning in
the cloud using Amazon EC2 with P2 instances and data stored in the cloud. If you do not
have a suitable GPU available for faster training of a convolutional neural network, you
can use this feature instead. You can try dierent numbers of GPUs per machine to
accelerate training and use parallel computing to train multiple models at once on the
same data, or train a single network using multiple GPUs. You can compare and explore
the performance of multiple deep neural network congurations to look for the best
tradeo between accuracy and memory use.
To help you get started, see these examples: “Deep Learning in Parallel and in the Cloud”.
See also this white paper that outlines a complete workow: Deep Learning in the Cloud
with MATLAB White Paper.
See Also
trainNetwork | trainingOptions
See Also
Related Examples
• “Scale Up Deep Learning in Parallel and in the Cloud” on page 3-2
• “Deep Learning in Parallel and in the Cloud”
See Also
2-17

Construct Deep Network Using Autoencoders
Load the sample data.
[X,T] = wine_dataset;
Train an autoencoder with a hidden layer of size 10 and a linear transfer function for the
decoder. Set the L2 weight regularizer to 0.001, sparsity regularizer to 4 and sparsity
proportion to 0.05.
hiddenSize = 10;
autoenc1 = trainAutoencoder(X,hiddenSize,...
'L2WeightRegularization',0.001,...
'SparsityRegularization',4,...
'SparsityProportion',0.05,...
'DecoderTransferFunction','purelin');
Extract the features in the hidden layer.
features1 = encode(autoenc1,X);
Train a second autoencoder using the features from the rst autoencoder. Do not scale
the data.
hiddenSize = 10;
autoenc2 = trainAutoencoder(features1,hiddenSize,...
'L2WeightRegularization',0.001,...
'SparsityRegularization',4,...
'SparsityProportion',0.05,...
'DecoderTransferFunction','purelin',...
'ScaleData',false);
Extract the features in the hidden layer.
features2 = encode(autoenc2,features1);
Train a softmax layer for classication using the features, features2, from the second
autoencoder, autoenc2.
softnet = trainSoftmaxLayer(features2,T,'LossFunction','crossentropy');
Stack the encoders and the softmax layer to form a deep network.
deepnet = stack(autoenc1,autoenc2,softnet);
2Deep Networks
2-18

Train the deep network on the wine data.
deepnet = train(deepnet,X,T);
Estimate the wine types using the deep network, deepnet.
wine_type = deepnet(X);
Plot the confusion matrix.
plotconfusion(T,wine_type);
Construct Deep Network Using Autoencoders
2-19
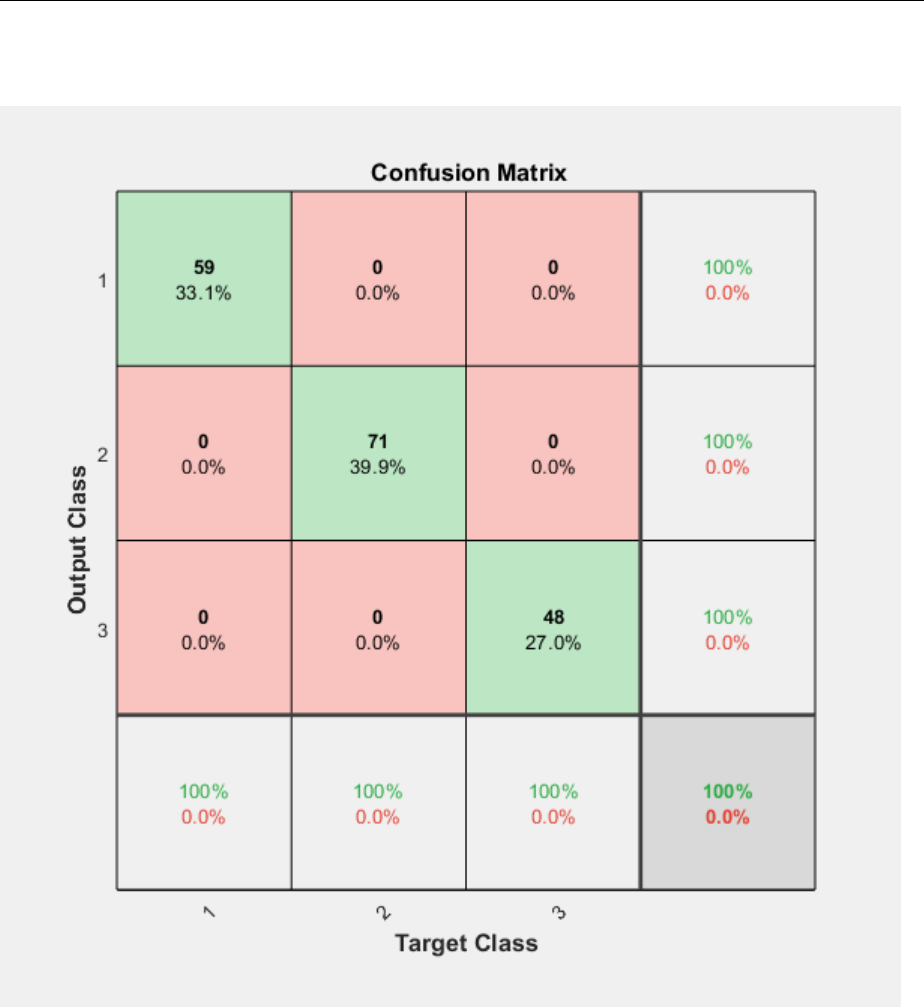
2Deep Networks
2-20
Pretrained Convolutional Neural Networks
In this section...
“Download Pretrained Networks” on page 2-22
“Transfer Learning” on page 2-24
“Feature Extraction” on page 2-25
Fine-tuning a pretrained network with transfer learning is typically much faster and
easier than training from scratch. You can use previously trained networks for the
following purposes.
Purpose Description
Classication Apply pretrained networks directly to
classication problems. To classify a new
image, use classify. For an example
showing how to use a pretrained network
for classication, see “Classify Image Using
GoogLeNet”.
Transfer Learning Take layers from a network trained on a
large data set and ne-tune on a new data
set. For examples showing how to use
pretrained networks for transfer learning,
see “Transfer Learning Using GoogLeNet”
and “Transfer Learning Using AlexNet”.
Feature Extraction Use a pretrained network as a feature
extractor by using the layer activations as
features. You can use these activations as
features to train another classier, such as
a support vector machine (SVM). For an
example showing how to use a pretrained
network for feature extraction, see
“Feature Extraction Using AlexNet”.
Pretrained Convolutional Neural Networks
2-21

Download Pretrained Networks
You can download and install pretrained networks to use for your problems. Use functions
such as alexnet to get links to download pretrained networks from the Add-On Explorer.
To see a list of available downloads, see MathWorks Neural Network Toolbox Team.
The pretrained networks have learned rich feature representations for a wide range of
natural images. You can apply these learned features to a wide range of image
classication problems using transfer learning and feature extraction. The pretrained
models are trained on more than a million images and can classify images into 1000
object categories, such as keyboard, coee mug, pencil, and many animals. The training
images are a subset of the ImageNet database [1], which is used in ImageNet Large-Scale
Visual Recognition Challenge (ILSVRC) [2].
AlexNet
Use the alexnet function to get a link to download a pretrained AlexNet model.
AlexNet won ILSVRC 2012, achieving highest classication performance. AlexNet has 8
layers with learnable weights: 5 convolutional layers, and 3 fully connected layers.
AlexNet is fast for retraining and classifying new images, but it is also large and not as
accurate on the original ILSVRC data set as other, newer pretrained models. For more
information, see alexnet.
VGG-16 and VGG-19
Use the vgg16 and vgg19 functions to get links to download pretrained VGG models.
VGG networks were among the winners of ILSVRC 2014. VGG-16 has 16 layers with
learnable weights: 13 convolutional layers and 3 fully connected layers. VGG-19 has 19
layers with learnable weights: 16 convolutional layers and 3 fully connected layers. In
both networks, all convolutional layers have lters of size 3-by-3. VGG networks are
larger and typically slower than other pretrained networks in Neural Network Toolbox.
For more information, see vgg16 and vgg19.
GoogLeNet
Use the googlenet function to get a link to download a pretrained GoogLeNet model.
GoogLeNet was among the winners of ILSVRC 2014. GoogLeNet is smaller and typically
faster than VGG networks, and smaller and more accurate than AlexNet on the original
ILSVRC data set. GoogLeNet is 22 layers deep. Like Inception-v3 and ResNets,
2Deep Networks
2-22

GoogLeNet has a directed acyclic graph structure. To extract the layers and architecture
of the network for further processing, use layerGraph. For a transfer learning example
using GoogLeNet, see “Transfer Learning Using GoogLeNet”. For more information, see
googlenet.
Inception-v3
Use the inceptionv3 function to get a link to download a pretrained Inception-v3 model.
Inception-v3 is a development of the GoogLeNet architecture. Compared to GoogLeNet,
Inception-v3 is larger, deeper, typically slower, but more accurate on the original ILSVRC
data set. Inception-v3 is 48 layers deep. To extract the layers and architecture of the
network for further processing, use layerGraph. To retrain the network on a new
classication task, follow the steps of “Transfer Learning Using GoogLeNet”. Load the
Inception-v3 model instead of GoogLeNet and change the names of the layers that you
remove and connect to match the names of the Inception-v3 layers: remove the
'predictions', 'predictions_softmax', and
'ClassificationLayer_predictions' layers, and connect to the 'avg_pool' layer.
For more information, see inceptionv3.
ResNet-50 and ResNet-101
Use the resnet50 and resnet101 functions to get links to download pretrained
ResNet-50 and ResNet-101 networks.
The residual connections of ResNets enable training of very deep networks. As the names
suggest, ResNet-50 is 50 layers deep and ResNet-101 is 101 layers deep. To retrain a
network on a new classication task, follow the steps of “Transfer Learning Using
GoogLeNet”. Load a ResNet network instead of GoogLeNet and change the names of the
layers in the end of the network that you remove and connect to match the names of the
ResNet layers. For more information, see resnet50 and resnet101.
importCaeNetwork
You can import pretrained networks from Cae [3] using the importCaffeNetwork.
There are many pretrained networks available in Cae Model Zoo [4]. Locate and
download the desired .prototxt and .caffemodel les and use
importCaffeNetwork to import the pretrained network into MATLAB. For more
information, see importCaffeNetwork.
Pretrained Convolutional Neural Networks
2-23

importCaeLayers
You can import network architectures from Cae using importCaffeLayers.
You can import the network architectures of Cae networks, without importing the
pretrained network weights. Locate and download the desired .prototxt le and use
importCaffeLayers to import the network layers into MATLAB. For more information,
see importCaffeLayers.
importKerasNetwork
You can import pretrained networks from Keras using importKerasNetwork.
You can import the network and weights either from the same HDF5 (.h5) le or separate
HDF5 and JSON (.json) les. For more information, see importKerasNetwork.
importKerasLayers
You can import network architectures from Keras using importKerasLayers.
You can import the network architecture of Keras networks, either with or without
weights. You can import the network architecture and weights either from the same
HDF5 (.h5) le or separate HDF5 and JSON (.json) les. For more information, see
importKerasLayers.
Transfer Learning
Transfer learning is commonly used in deep learning applications. You can take a
pretrained network and use it as a starting point to learn a new task. Fine-tuning a
network with transfer learning is much faster and easier than constructing and training a
new network. You can quickly transfer learning to a new task using a smaller number of
training images. The advantage of transfer learning is that the pretrained network has
already learned a rich set of features. These features can be applied to a wide range of
other similar tasks. For example, you can take a network trained on millions of images
and retrain it for new object classication using only hundreds of images. If you have a
very large data set, then transfer learning might not be faster. For examples showing how
to perform transfer learning, see “Transfer Learning Using AlexNet” and “Transfer
Learning Using GoogLeNet”.
2Deep Networks
2-24
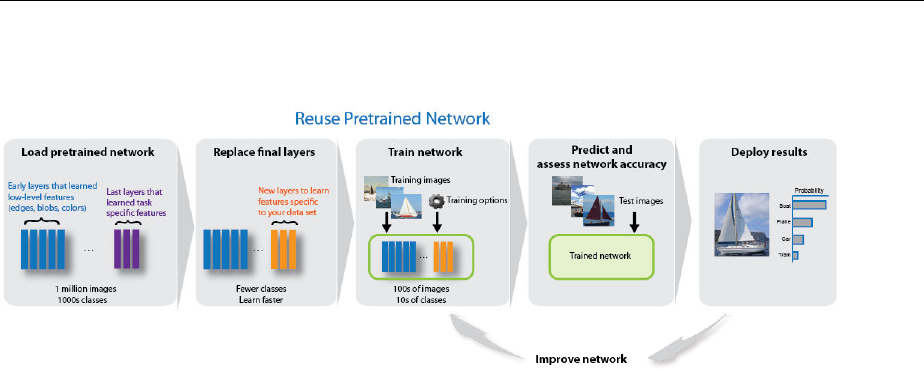
Feature Extraction
Feature extraction is an easy way to use the power of pretrained networks without
investing time and eort into training. Feature extraction can be the fastest way to use
deep learning. You extract learned features from a pretrained network, and use those
features to train a classier, such as a support vector machine using fitcsvm (Statistics
and Machine Learning Toolbox). For example, if an SVM achieves >90% accuracy on your
training and validation set, then ne-tuning might not be worth the eort to increase
accuracy. If you perform ne-tuning on a small data set, you also risk over-tting to the
training data. If the SVM cannot achieve good enough accuracy for your application, then
ne-tuning is worth the eort to seek higher accuracy. For an example showing how to
use a pretrained network for feature extraction, see “Feature Extraction Using AlexNet”.
References
[1] ImageNet. http://www.image-net.org
[2] Russakovsky, O., Deng, J., Su, H., et al. “ImageNet Large Scale Visual Recognition
Challenge.” International Journal of Computer Vision (IJCV). Vol 115, Issue 3,
2015, pp. 211–252
[3] Cae. http://cae.berkeleyvision.org/
[4] Cae Model Zoo. http://cae.berkeleyvision.org/model_zoo.html
Pretrained Convolutional Neural Networks
2-25

See Also
alexnet | googlenet | importCaffeLayers | importCaffeNetwork | inceptionv3
| resnet101 | resnet50 | vgg16 | vgg19
Related Examples
• “Deep Learning in MATLAB” on page 2-2
• “Transfer Learning Using AlexNet”
• “Feature Extraction Using AlexNet”
• “Transfer Learning Using GoogLeNet”
• “Visualize Features of a Convolutional Neural Network”
• “Visualize Activations of a Convolutional Neural Network”
• “Deep Dream Images Using AlexNet”
2Deep Networks
2-26

Learn About Convolutional Neural Networks
Convolutional neural networks (ConvNets) are widely used tools for deep learning. They
are specically suitable for images as inputs, although they are also used for other
applications such as text, signals, and other continuous responses. They dier from other
types of neural networks in a few ways:
Convolutional neural networks are inspired from the biological structure of a visual
cortex, which contains arrangements of simple and complex cells [1]. These cells are
found to activate based on the subregions of a visual eld. These subregions are called
receptive elds. Inspired from the ndings of this study, the neurons in a convolutional
layer connect to the subregions of the layers before that layer instead of being fully-
connected as in other types of neural networks. The neurons are unresponsive to the
areas outside of these subregions in the image.
These subregions might overlap, hence the neurons of a ConvNet produce spatially-
correlated outcomes, whereas in other types of neural networks, the neurons do not share
any connections and produce independent outcomes.
In addition, in a neural network with fully-connected neurons, the number of parameters
(weights) can increase quickly as the size of the input increases. A convolutional neural
network reduces the number of parameters with the reduced number of connections,
shared weights, and downsampling.
A ConvNet consists of multiple layers, such as convolutional layers, max-pooling or
average-pooling layers, and fully-connected layers.
Learn About Convolutional Neural Networks
2-27
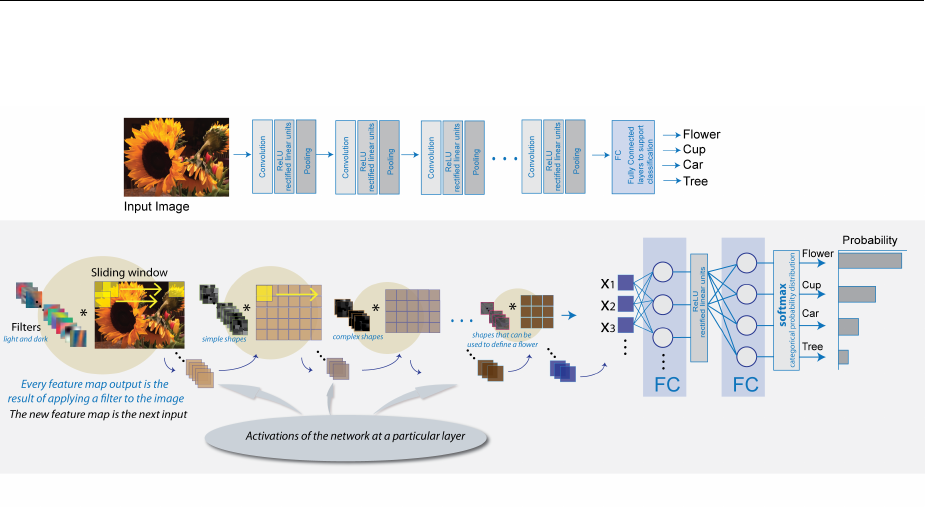
The neurons in each layer of a ConvNet are arranged in a 3-D manner, transforming a 3-D
input to a 3-D output. For example, for an image input, the rst layer (input layer) holds
the images as 3-D inputs, with the dimensions being height, width, and the color channels
of the image. The neurons in the rst convolutional layer connect to the regions of these
images and transform them into a 3-D output. The hidden units (neurons) in each layer
learn nonlinear combinations of the original inputs, which is called feature extraction [2].
These learned features, also known as activations, from one layer become the inputs for
the next layer. Finally, the learned features become the inputs to the classier or the
regression function at the end of the network.
The architecture of a ConvNet can vary depending on the types and numbers of layers
included. The types and number of layers included depends on the particular application
or data. For example, if you have categorical responses, you must have a classication
function and a classication layer, whereas if your response is continuous, you must have
a regression layer at the end of the network. A smaller network with only one or two
convolutional layers might be suicient to learn a small number of gray scale image data.
On the other hand, for more complex data with millions of colored images, you might
need a more complicated network with multiple convolutional and fully connected layers.
You can concatenate the layers of a convolutional neural network in MATLAB in the
following way:
2Deep Networks
2-28

layers = [imageInputLayer([28 28 1])
convolution2dLayer(5,20)
reluLayer
maxPooling2dLayer(2,'Stride',2)
fullyConnectedLayer(10)
softmaxLayer
classificationLayer];
After dening the layers of your network, you must specify the training options using the
trainingOptions function. For example,
options = trainingOptions('sgdm');
Then, you can train the network with your training data using the trainNetwork
function. The data, layers, and training options become the inputs to the training
function. For example,
convnet = trainNetwork(data,layers,options);
For detailed discussion of layers of a ConvNet, see “Specify Layers of Convolutional
Neural Network” on page 2-36. For setting up training parameters, see “Set Up
Parameters and Train Convolutional Neural Network” on page 2-46.
References
[1] Hubel, H. D. and Wiesel, T. N. '' Receptive Fields of Single neurones in the Cat’s
Striate Cortex.'' Journal of Physiology. Vol 148, pp. 574-591, 1959.
[2] Murphy, K. P. Machine Learning: A Probabilistic Perspective. Cambridge,
Massachusetts: The MIT Press, 2012.
See Also
trainNetwork | trainingOptions
More About
• “Deep Learning in MATLAB” on page 2-2
• “Specify Layers of Convolutional Neural Network” on page 2-36
• “Set Up Parameters and Train Convolutional Neural Network” on page 2-46
See Also
2-29

List of Deep Learning Layers
To specify the architecture of a neural network with all layers connected sequentially,
create an array of layers directly. To specify the architecture of a network where layers
can have multiple inputs or outputs, use a LayerGraph object. Use the following
functions to create dierent layer types.
Input Layers
Function Description
imageInputLayer An image input layer inputs images to a
network and applies data normalization.
sequenceInputLayer A sequence input layer inputs sequence
data to a network.
List of Deep Learning Layers
2-31
Learnable Layers
Function Description
convolution2dLayer A 2-D convolutional layer applies sliding
lters to the input. The layer convolves the
input by moving the lters along the input
vertically and horizontally and computing
the dot product of the weights and the
input, and then adding a bias term.
transposedConv2dLayer A transposed 2-D convolution layer
upsamples feature maps.
fullyConnectedLayer A fully connected layer multiplies the input
by a weight matrix and then adds a bias
vector.
lstmLayer An LSTM layer is a recurrent neural
network (RNN) layer that enables support
for time series and sequence data in a
network. The layer performs additive
interactions, which can help improve
gradient ow over long sequences during
training. LSTM layers are best suited for
learning long-term dependencies
(dependencies from distant time steps).
bilstmLayer A bidirectional LSTM (BiLSTM) layer is a
recurrent neural network (RNN) layer. The
layer learns bidirectional long-term
dependencies between time steps. These
dependencies can be useful for when you
want the network to learn from the
complete time series at each time step.
2Deep Networks
2-32
Activation Layers
Function Description
reluLayer A ReLU layer performs a threshold
operation to each element of the input,
where any value less than zero is set to
zero.
leakyReluLayer A leaky ReLU layer performs a simple
threshold operation, where any input value
less than zero is multiplied by a xed scalar.
clippedReluLayer A clipped ReLU layer performs a simple
threshold operation, where any input value
less than zero is set to zero and any value
above the clipping ceiling is set to that
clipping ceiling.
Normalization and Dropout Layers
Function Description
batchNormalizationLayer A batch normalization layer normalizes
each input channel across a mini-batch. The
layer rst normalizes the activations of
each channel by subtracting the mini-batch
mean and dividing by the mini-batch
standard deviation. Then, the layer shifts
the input by a learnable oset β and scales
it by a learnable scale factor γ. Use batch
normalization layers between convolutional
layers and nonlinearities, such as ReLU
layers, to speed up training of convolutional
neural networks and reduce the sensitivity
to network initialization.
crossChannelNormalizationLayer A channel-wise local response (cross-
channel) normalization layer carries out
channel-wise normalization.
dropoutLayer A dropout layer randomly sets input
elements to zero with a given probability.
List of Deep Learning Layers
2-33
Pooling Layers
Function Description
averagePooling2dLayer An average pooling layer performs down-
sampling by dividing the input into
rectangular pooling regions and computing
the average values of each region.
maxPooling2dLayer A max pooling layer performs down-
sampling by dividing the input into
rectangular pooling regions, and computing
the maximum of each region.
maxUnpooling2dLayer A max unpooling layer unpools the output
of a max pooling layer.
Combination Layers
Function Description
additionLayer An addition layer adds multiple inputs
element-wise. Specify the number of inputs
to the layer when you create it. The inputs
have names 'in1','in2',...,'inN',
where N is the number of inputs. Use the
input names when connecting or
disconnecting the layer to other layers
using connectLayers or
disconnectLayers. All inputs to an
addition layer must have the same
dimension.
depthConcatenationLayer A depth concatenation layer takes multiple
inputs that have the same height and width
and concatenates them along the third
dimension (the channel dimension). The
inputs have names
'in1','in2',...,'inN', where N is the
number of inputs. Use the input names
when connecting or disconnecting the layer
to other layers using connectLayers or
disconnectLayers.
2Deep Networks
2-34
Output Layers
Function Description
softmaxLayer A softmax layer applies a softmax function
to the input.
classificationLayer A classication output layer holds the name
of the loss function the software uses for
training the network for multiclass
classication, the size of the output, and
the class labels.
regressionLayer A regression output layer holds the name of
the loss function the software uses for
training the network for regression, and the
response names.
See Also
trainNetwork | trainingOptions
More About
• “Learn About Convolutional Neural Networks” on page 2-27
• “Set Up Parameters and Train Convolutional Neural Network” on page 2-46
• “Resume Training from a Checkpoint Network” on page 2-51
• “Create Simple Deep Learning Network for Classication”
• “Pretrained Convolutional Neural Networks” on page 2-21
• “Deep Learning in MATLAB” on page 2-2
See Also
2-35
Specify Layers of Convolutional Neural Network
In this section...
“Image Input Layer” on page 2-37
“Convolutional Layer” on page 2-37
“Batch Normalization Layer” on page 2-39
“ReLU Layer” on page 2-39
“Cross Channel Normalization (Local Response Normalization) Layer” on page 2-40
“Max- and Average-Pooling Layers” on page 2-40
“Dropout Layer” on page 2-41
“Fully Connected Layer” on page 2-41
“Output Layers” on page 2-42
The rst step of creating and training a new convolutional neural network (ConvNet) is to
dene the network architecture. This topic explains the details of ConvNet layers, and the
order they appear in a ConvNet.
The architecture of a ConvNet can vary depending on the types and numbers of layers
included. The types and number of layers included depends on the particular application
or data. For example, if you have categorical responses, you must have a softmax layer
and a classication layer, whereas if your response is continuous, you must have a
regression layer at the end of the network. A smaller network with only one or two
convolutional layers might be suicient to learn on a small number of grayscale image
data. On the other hand, for more complex data with millions of colored images, you
might need a more complicated network with multiple convolutional and fully connected
layers.
You can dene the layers of a convolutional neural network in MATLAB in an array
format, for example,
layers = [
imageInputLayer([28 28 1])
convolution2dLayer(3,16,'Padding',1)
batchNormalizationLayer
reluLayer
maxPooling2dLayer(2,'Stride',2)
convolution2dLayer(3,32,'Padding',1)
batchNormalizationLayer
2Deep Networks
2-36

reluLayer
fullyConnectedLayer(10)
softmaxLayer
classificationLayer];
layers is an array of Layer objects. layers becomes an input for the training function
trainNetwork.
Image Input Layer
The image input layer denes the size of the input images of a convolutional neural
network and contains the raw pixel values of the images. You can add an input layer using
the imageInputLayer function. Specify the image size using the inputSize argument.
The size of an image corresponds to the height, width, and the number of color channels
of that image. For example, for a grayscale image, the number of channels is 1, and for a
color image it is 3.
This layer can also perform data normalization by subtracting the mean image of the
training set from every input image.
Convolutional Layer
Filters and Stride: A convolutional layer consists of neurons that connect to subregions
of the input images or the outputs of the layer before it. A convolutional layer learns the
features localized by these regions while scanning through an image. You can specify the
size of these regions using the filterSize input argument when you create the layer
using the convolution2dLayer function.
For each region, the trainNetwork function computes a dot product of the weights and
the input, and then adds a bias term. A set of weights that are applied to a region in the
image is called a lter. The lter moves along the input image vertically and horizontally,
repeating the same computation for each region, that is, convolving the input. The step
size with which it moves is called a stride. You can specify this step size with the Stride
name-value pair argument. These local regions that the neurons connect to might overlap
depending on the filterSize and 'Stride' values.
The number of weights used for a lter is h*w*c, where h is the height, and w is the width
of the lter size, and c is the number of channels in the input (for example, if the input is
a color image, the number of color channels is 3). The number of lters determines the
number of channels in the output of a convolutional layer. Specify the number of lters
using the numFilters argument of convolution2dLayer.
Specify Layers of Convolutional Neural Network
2-37

Feature Maps: As a lter moves along the input, it uses the same set of weights and bias
for the convolution, forming a feature map. Hence, the number of feature maps a
convolutional layer has is equal to the number of lters (number of channels). Each
feature map has a dierent set of weights and a bias. So, the total number of parameters
in a convolutional layer is ((h*w*c + 1)*Number of Filters), where 1 is for the bias.
Zero Padding: You can also apply zero padding to input image borders vertically and
horizontally using the 'Padding' name-value pair argument. Padding is basically adding
rows or columns of zeros to the borders of an image input. It helps you control the output
size of the layer.
Output Size: The output height and width of a convolutional layer is (Input Size – Filter
Size + 2*Padding)/Stride + 1. This value must be an integer for the whole image to be
fully covered. If the combination of these parameters does not lead the image to be fully
covered, the software by default ignores the remaining part of the image along the right
and bottom edge in the convolution.
Number of Neurons: The product of the output height and width gives the total number
of neurons in a feature map, say Map Size. The total number of neurons (output size) in a
convolutional layer, then, is Map Size*Number of Filters.
For example, suppose that the input image is a 32-by-32-by-3 color image. For a
convolutional layer with 8 lters and a lter size of 5-by-5, the number of weights per
lter is 5*5*3 = 75, and the total number of parameters in the layer is (75+1) * 8 = 608.
If the stride is 2 in each direction and there are two pixels of zero padding, then each
feature map is 16-by-16. This is because (32 – 5 + 2*2)/2 + 1 = 16.5, and so some of the
outer-most zero padding to the right and bottom of the image is discarded. Finally, the
total number of neurons in the layer is 16*16*8 = 2048.
Learning Parameters: You can also adjust the learning rates and regularization
parameters for this layer using the related name-value pair arguments while dening the
convolutional layer. If you choose not to adjust them, trainNetwork uses the global
training parameters dened by trainingOptions function. For details on global and
layer training options, see “Set Up Parameters and Train Convolutional Neural Network”
on page 2-46.
A convolutional neural network can consist of one or multiple convolutional layers. The
number of convolutional layers depends on the amount and complexity of the data.
2Deep Networks
2-38

Batch Normalization Layer
Use batch normalization layers between convolutional layers and nonlinearities such as
ReLU layers to speed up network training and reduce the sensitivity to network
initialization. The layer rst normalizes the activations of each channel by subtracting the
mini-batch mean and dividing by the mini-batch standard deviation. Then, the layer shifts
the input by an oset β and scales it by a scale factor γ. β and γ are themselves learnable
parameters that are updated during network training. Create a batch normalization layer
using batchNormalizationLayer.
Batch normalization layers normalize the activations and gradients propagating through a
neural network, making network training an easier optimization problem. To take full
advantage of this fact, you can try increasing the learning rate. Since the optimization
problem is easier, the parameter updates can be larger and the network can learn faster.
You can also try reducing the L2 and dropout regularization. With batch normalization
layers, the activations of a specic image are not deterministic, but instead depend on
which images happen to appear in the same mini-batch. To take full advantage of this
regularizing eect, try shuing the training data before every training epoch. To specify
how often to shue the data during training, use the 'Shuffle' name-value pair
argument of trainingOptions.
ReLU Layer
Convolutional and batch normalization layers are usually followed by a nonlinear
activation function such as a rectied linear unit (ReLU), specied by a ReLU layer.
Create a ReLU layer using the reluLayer function. A ReLU layer performs a threshold
operation to each element, where any input value less than zero is set to zero, that is,
f x x x
x
( )
=≥
<
Ï
Ì
Ó
,
,.
0
0 0
The ReLU layer does not change the size of its input.
There are extensions of the standard ReLU layer that perform slightly dierent operations
and can improve performance for some applications. A leaky ReLU layer multiplies input
values less than zero by a xed scalar, allowing negative inputs to “leak” into the output.
Use the leakyReluLayer function to create a leaky ReLU layer. A clipped ReLU layer
sets negative inputs to zero, but also sets input values above a clipping ceiling equal to
that clipping ceiling. This clipping prevents the output from becoming too large. Use the
clippedReluLayer function to create a clipped ReLU layer.
Specify Layers of Convolutional Neural Network
2-39
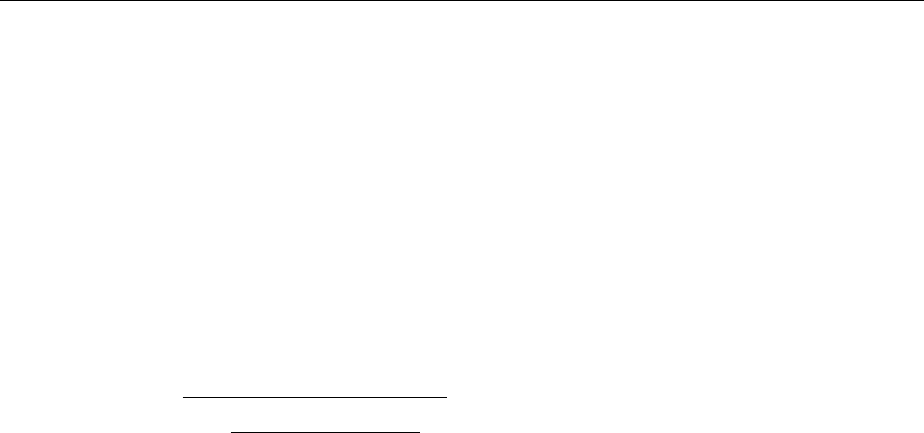
Cross Channel Normalization (Local Response Normalization)
Layer
This layer performs a channel-wise local response normalization. It usually follows the
ReLU activation layer. Create this layer using the crossChannelNormalizationLayer
function. This layer replaces each element with a normalized value it obtains using the
elements from a certain number of neighboring channels (elements in the normalization
window). That is, for each element
x
in the input, trainNetwork computes a normalized
value
x
’
using
xx
Kss
windowChannelSize
’
*
,=
+
Ê
Ë
Áˆ
¯
˜
ab
where K, α, and β are the hyperparameters in the normalization, and ss is the sum of
squares of the elements in the normalization window [2]. You must specify the size of the
normalization window using the windowChannelSize argument of the
crossChannelNormalizationLayer function. You can also specify the
hyperparameters using the Alpha, Beta, and K name-value pair arguments.
The previous normalization formula is slightly dierent than what is presented in [2]. You
can obtain the equivalent formula by multiplying the alpha value by the
windowChannelSize.
Max- and Average-Pooling Layers
Max- and average-pooling layers follow the convolutional layers for down-sampling,
hence, reducing the number of connections to the following layers (usually a fully
connected layer). They do not perform any learning themselves, but reduce the number of
parameters to be learned in the following layers. They also help reduce overtting. Create
these layers using the maxPooling2dLayer and averagePooling2dLayer functions.
A max-pooling layer returns the maximum values of rectangular regions of its input. The
size of the rectangular regions is determined by the poolSize argument of
maxPoolingLayer. For example, if poolSize equals [2,3], then the layer returns the
maximum value in regions of height 2 and width 3.
Similarly, the average-pooling layer outputs the average values of rectangular regions of
its input. The size of the rectangular regions is determined by the poolSize argument of
2Deep Networks
2-40

averagePoolingLayer. For example, if poolSize is [2,3], then the layer returns the
average value of regions of height 2 and width 3. The maxPoolingLayer and
averagepoolingLayer functions scan through the input horizontally and vertically in
step sizes you can specify using the 'Stride' name-value pair argument of either
function. If the poolSize is smaller than or equal to the Stride, then the pooling
regions do not overlap.
For nonoverlapping regions (poolSize and Stride are equal), if the input to the pooling
layer is n-by-n, and the pooling region size is h-by-h, then the pooling layer down-samples
the regions by h [6]. That is, the output of a max- or average-pooling layer for one channel
of a convolutional layer is n/h-by-n/h. For overlapping regions, the output of a pooling
layer is (Input Size – Pool Size + 2*Padding)/Stride + 1.
Dropout Layer
A dropout layer randomly sets the layer’s input elements to zero with a given probability.
Create a dropout layer using the dropoutLayer function.
Although the output of a dropout layer is equal to its input, this operation corresponds to
temporarily dropping a randomly chosen unit and all of its connections from the network
during training. So, for each new input element, trainNetwork randomly selects a
subset of neurons, forming a dierent layer architecture. These architectures use
common weights, but because the learning does not depend on specic neurons and
connections, the dropout layer might help prevent overtting [7], [2]. Similar to max- or
average-pooling layers, no learning takes place in this layer.
Fully Connected Layer
The convolutional (and down-sampling) layers are followed by one or more fully
connected layers. Create a fully connected layer using the fullyConnectedLayer
function.
As the name suggests, all neurons in a fully connected layer connect to all the neurons in
the previous layer. This layer combines all of the features (local information) learned by
the previous layers across the image to identify the larger patterns. For classication
problems, the last fully connected layer combines the features to classify the images. This
is the reason that the outputSize argument of the last fully connected layer of the
network is equal to the number of classes of the data set. For regression problems, the
output size must be equal to the number of response variables.
Specify Layers of Convolutional Neural Network
2-41
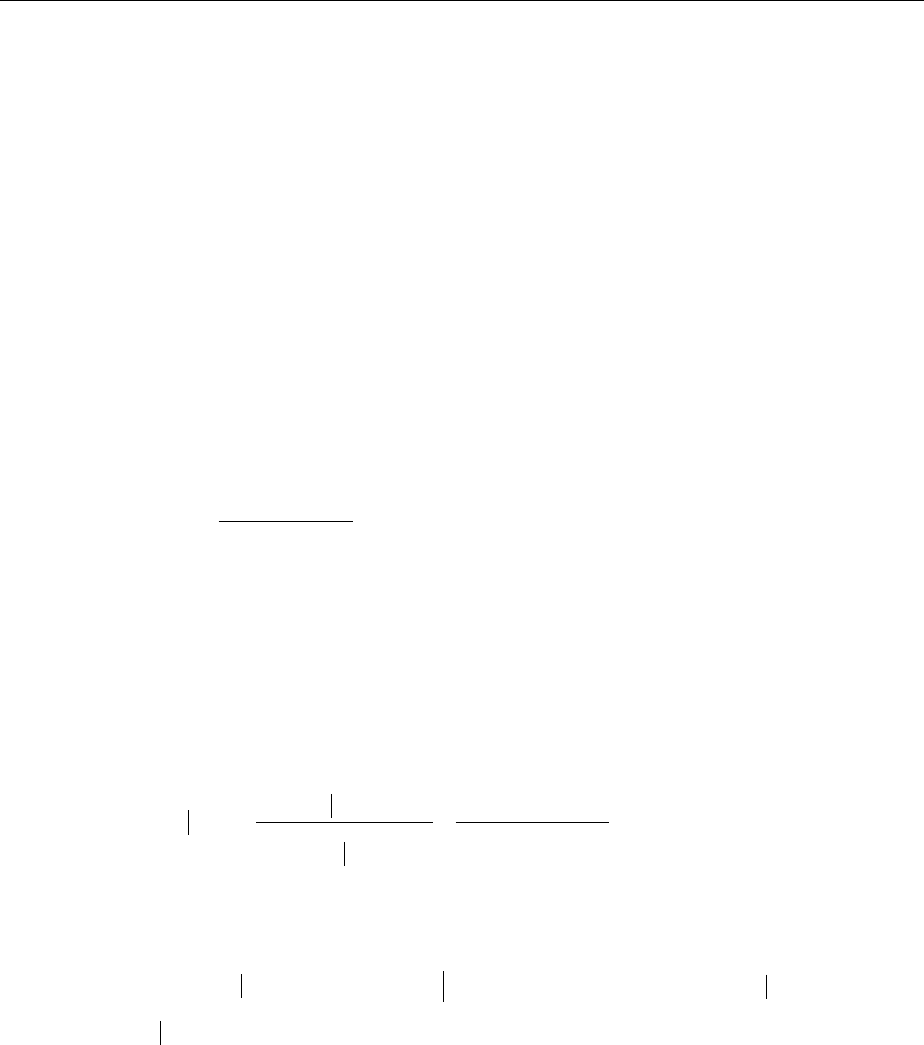
You can also adjust the learning rate and the regularization parameters for this layer
using the related name-value pair arguments when creating the fully connected layer. If
you choose not to adjust them, then trainNetwork uses the global training parameters
dened by the trainingOptions function. For details on global and layer training
options, see “Set Up Parameters and Train Convolutional Neural Network” on page 2-46.
Output Layers
Softmax and Classication Layers
For classication problems, a softmax layer and then a classication layer must follow the
nal fully connected layer. You can create these layers using the softmaxLayer and
classificationLayer functions, respectively.
The output unit activation function is the softmax function:
ya
a
r
r
j
k
j
x
x
x
( )
=
( )
( )
( )
( )
=
Â
exp
exp
,
1
where
0 1£ £yr
and
yj
j
k
=
=
Â1
1
.
The softmax function is the output unit activation function after the last fully connected
layer for multi-class classication problems:
P c P c P c
P c P c
a
a
r
r r
j
k
r
j j j
x
x
x
x
,,
,
exp ,
exp
qq qq
qq
qq
( )
=
( )
( )
( ) ( )
=
( )
( )
=
Â
1
xx,
,
qq
( )
( )
=
Â
j
k
1
where
0 1£
( )
£P crx,
qq
and
P cj
j
k
x,
qq
( )
=
=
Â1
1
. Moreover,
a P c P c
r rr
=
( )
( )
( )
ln x,
qq
,
P cr
x,
qq
( )
is the conditional probability of the sample given class r, and
P cr
( )
is the
class prior probability.
2Deep Networks
2-42

The softmax function is also known as the normalized exponential and can be considered
the multi-class generalization of the logistic sigmoid function [8].
A classication output layer must follow the softmax layer. In the classication output
layer, trainNetwork takes the values from the softmax function and assigns each input
to one of the k mutually exclusive classes using the cross entropy function for a 1-of-k
coding scheme [8]:
E t y
ij j i
j
k
i
n
qq qq
( )
= -
( )
==
ÂÂ ln , ,x
11
where
tij
is the indicator that the ith sample belongs to the jth class,
qq
is the parameter
vector.
yj i
x,
qq
( )
is the output for sample i, which in this case, is the value from the
softmax function. That is, it is the probability that the network associates the ith input
with class j,
P t j i
=
( )
1x
.
Regression Layer
You can also use ConvNets for regression problems, where the target (output) variable is
continuous. In such cases, a regression output layer must follow the nal fully connected
layer. You can create a regression layer using the regressionLayer function. The
default loss function for a regression layer is the mean squared error:
MSE E t y
n
i i
i
n
=
( )
=-
( )
=
Â
qq
2
1
,
where
ti
is the target output, and
yi
is the network’s prediction for the response variable
corresponding to observation i.
References
[1] Murphy, K. P. Machine Learning: A Probabilistic Perspective. Cambridge,
Massachusetts: The MIT Press, 2012.
Specify Layers of Convolutional Neural Network
2-43

[2] Krizhevsky, A., I. Sutskever, and G. E. Hinton. "ImageNet Classication with Deep
Convolutional Neural Networks. " Advances in Neural Information Processing
Systems. Vol 25, 2012.
[3] LeCun, Y., Boser, B., Denker, J.S., Henderson, D., Howard, R.E., Hubbard, W., Jackel,
L.D., et al. ''Handwritten Digit Recognition with a Back-propagation Network.'' In
Advances of Neural Information Processing Systems, 1990.
[4] LeCun, Y., L. Bottou, Y. Bengio, and P. Haner. ''Gradient-based Learning Applied to
Document Recognition.'' Proceedings of the IEEE. Vol 86, pp. 2278–2324, 1998.
[5] Nair, V. and G. E. Hinton. "Rectied linear units improve restricted boltzmann
machines." In Proc. 27th International Conference on Machine Learning, 2010.
[6] Nagi, J., F. Ducatelle, G. A. Di Caro, D. Ciresan, U. Meier, A. Giusti, F. Nagi, J.
Schmidhuber, L. M. Gambardella. ''Max-Pooling Convolutional Neural Networks
for Vision-based Hand Gesture Recognition''. IEEE International Conference on
Signal and Image Processing Applications (ICSIPA2011), 2011.
[7] Srivastava, N., G. Hinton, A. Krizhevsky, I. Sutskever, R. Salakhutdinov. "Dropout: A
Simple Way to Prevent Neural Networks from Overtting." Journal of Machine
Learning Research. Vol. 15, pp. 1929-1958, 2014.
[8] Bishop, C. M. Pattern Recognition and Machine Learning. Springer, New York, NY,
2006.
[9] Ioe, Sergey, and Christian Szegedy. "Batch normalization: Accelerating deep network
training by reducing internal covariate shift." preprint, arXiv:1502.03167 (2015).
See Also
averagePooling2dLayer | batchNormalizationLayer | classificationLayer |
clippedReluLayer | convolution2dLayer | crossChannelNormalizationLayer |
dropoutLayer | fullyConnectedLayer | imageInputLayer | leakyReluLayer |
maxPooling2dLayer | regressionLayer | reluLayer | softmaxLayer |
trainNetwork | trainingOptions
More About
• “Learn About Convolutional Neural Networks” on page 2-27
2Deep Networks
2-44

Set Up Parameters and Train Convolutional Neural
Network
In this section...
“Specify Solver and Maximum Number of Epochs” on page 2-46
“Specify and Modify Learning Rate” on page 2-47
“Specify Validation Data” on page 2-48
“Select Hardware Resource” on page 2-48
“Save Checkpoint Networks and Resume Training” on page 2-49
“Set Up Parameters in Convolutional and Fully Connected Layers” on page 2-49
“Train Your Network” on page 2-50
After you dene the layers of your neural network as described in “Specify Layers of
Convolutional Neural Network” on page 2-36, the next step is to set up the training
options for the network. Use the trainingOptions function to dene the global training
parameters. To train a network, use the object returned by trainingOptions as an
input argument to the trainNetwork function. For example:
options = trainingOptions('adam');
trainedNet = trainNetwork(data,layers,options);
Layers with learnable parameters also have options for adjusting the learning
parameters. For more information, see “Set Up Parameters in Convolutional and Fully
Connected Layers” on page 2-49.
Specify Solver and Maximum Number of Epochs
trainNetwork can use dierent variants of stochastic gradient descent to train the
network. Specify the optimization algorithm by using the solverName argument of
trainingOptions. To minimize the loss, these algorithms update the network
parameters by taking small steps in the direction of the negative gradient of the loss
function.
The 'adam' (derived from adaptive moment estimation) solver is often a good optimizer
to try rst. You can also try the 'rmsprop' (root mean square propagation) and 'sgdm'
(stochastic gradient descent with momentum) optimizers and see if this improves
2Deep Networks
2-46

training. Dierent solvers work better for dierent problems. For more information about
the dierent solvers, see “Stochastic Gradient Descent”.
The solvers update the parameters using a subset of the data each step. This subset is
called a mini-batch. You can specify the size of the mini-batch by using the
'MiniBatchSize' name-value pair argument of trainingOptions. Each parameter
update is called an iteration. A full pass through the entire data set is called an epoch.
You can specify the maximum number of epochs to train for by using the 'MaxEpochs'
name-value pair argument of trainingOptions. The default value is 30, but you can
choose a smaller number of epochs for small networks or for ne-tuning and transfer
learning, where most of the learning is already done.
By default, the software shues the data once before training. You can change this
setting by using the 'Shuffle' name-value pair argument.
Specify and Modify Learning Rate
You can specify the global learning rate by using the 'InitialLearnRate' name-value
pair argument of trainingOptions. By default, trainNetwork uses this value
throughout the entire training process. You can choose to modify the learning rate every
certain number of epochs by multiplying the learning rate with a factor. Instead of using a
small, xed learning rate throughout the training process, you can choose a larger
learning rate in the beginning of training and gradually reduce this value during
optimization. Doing so can shorten the training time, while enabling smaller steps
towards the minimum of the loss as training progresses.
Tip If the mini-batch loss during training ever becomes NaN, then the learning rate is
likely too high. Try reducing the learning rate, for example by a factor of 3, and restarting
network training.
To gradually reduce the learning rate, use the 'LearnRateSchedule','piecewise'
name-value pair argument. Once you choose this option, trainNetwork multiplies the
initial learning rate by a factor of 0.1 every 10 epochs. You can specify the factor by which
to reduce the initial learning rate and the number of epochs by using the
'LearnRateDropFactor' and 'LearnRateDropPeriod' name-value pair arguments,
respectively.
Set Up Parameters and Train Convolutional Neural Network
2-47

Specify Validation Data
To perform network validation during training, specify validation data using the
'ValidationData' name-value pair argument of trainingOptions. By default,
trainNetwork validates the network every 50 iterations by predicting the response of
the validation data and calculating the validation loss and accuracy (root mean square
error for regression networks). You can change the validation frequency using the
'ValidationFrequency' name-value pair argument. If your network has layers that
behave dierently during prediction than during training (for example, dropout layers),
then the validation accuracy can be higher than the training (mini-batch) accuracy.
Network training automatically stops when the validation loss stops improving. By
default, if the validation loss is larger than or equal to the previously smallest loss ve
times in a row, then network training stops. To change the number of times that the
validation loss is allowed to not decrease before training stops, use the
'ValidationPatience' name-value pair argument.
Performing validation at regular intervals during training helps you to determine if your
network is overtting the training data. A common problem is that the network simply
"memorizes" the training data, rather than learning general features that enable it to
make accurate predictions for new data. To check if your network is overtting, compare
the training loss and accuracy to the corresponding validation metrics. If the training loss
is signicantly lower than the validation loss, or the training accuracy is signicantly
higher than the validation accuracy, then your network is overtting.
To reduce overtting, you can try adding data augmentation. Use an
augmentedImageDatastore to perform random transformations on your input images.
This helps to prevent the network from memorizing the exact position and orientation of
objects. You can also try decreasing the network size by reducing the number of layers or
convolutional lters, increasing the L2 regularization using the 'L2Regularization'
name-value pair argument, or adding dropout layers.
Select Hardware Resource
If a GPU is available, then trainNetwork uses it for training, by default. Otherwise,
trainNetwork uses a CPU. Alternatively, you can specify the execution environment you
want using the 'ExecutionEnvironment' name-value pair argument. You can specify a
single CPU ('cpu'), a single GPU ('gpu'), multiple GPUs ('multi-gpu'), or a local
parallel pool or compute cluster ('parallel'). All options other than 'cpu' require
Parallel Computing Toolbox. Training on a GPU requires a CUDA enabled GPU with
compute capability 3.0 or higher.
2Deep Networks
2-48

Save Checkpoint Networks and Resume Training
Neural Network Toolbox enables you to save networks as .mat les after each epoch
during training. This periodic saving is especially useful when you have a large network
or a large data set, and training takes a long time. If the training is interrupted for some
reason, you can resume training from the last saved checkpoint network. If you want
trainNetwork to save checkpoint networks, then you must specify the name of the path
by using the 'CheckpointPath' name-value pair argument of trainingOptions. If
the path that you specify does not exist, then trainingOptions returns an error.
trainNetwork automatically assigns unique names to checkpoint network les, for
example, convnet_checkpoint__351__2016_11_09__12_04_23.mat. In this
example, 351 is the iteration number, 2016_11_09 is the date, and 12_04_23 is the time at
which trainNetwork saves the network. You can load a checkpoint network le by
double-clicking it or using the load command at the command line. For example:
load convnet_checkpoint__351__2016_11_09__12_04_23.mat
You can then resume training by using the layers of the network as an input argument to
trainNetwork. For example:
trainNetwork(XTrain,YTrain,net.Layers,options)
You must manually specify the training options and the input data, because the
checkpoint network does not contain this information. For an example, see “Resume
Training from a Checkpoint Network” on page 2-51.
Set Up Parameters in Convolutional and Fully Connected
Layers
You can set the learning parameters to be dierent from the global values specied by
trainingOptions in layers with learnable parameters, such as convolutional and fully
connected layers. For example, to adjust the learning rate for the biases or weights, you
can specify a value for the BiasLearnRateFactor or WeightLearnRateFactor
properties of the layer, respectively. The trainNetwork function multiplies the learning
rate that you specify by using trainingOptions with these factors. Similarly, you can
also specify the L2 regularization factors for the weights and biases in these layers by
specifying the BiasL2Factor and WeightL2Factor properties, respectively.
trainNetwork then multiplies the L2 regularization factors that you specify by using
trainingOptions with these factors.
Set Up Parameters and Train Convolutional Neural Network
2-49

Initialize Weights in Convolutional and Fully Connected Layers
By default, the initial values of the weights of the convolutional and fully connected layers
are randomly generated from a Gaussian distribution with mean 0 and standard deviation
0.01. The initial biases are by default equal to 0. You can manually change the initial
weights and biases after you create the layers. For examples, see “Specify Initial Weights
and Biases in Convolutional Layer” and “Specify Initial Weights and Biases in Fully
Connected Layer”.
Train Your Network
After you specify the layers of your network and the training parameters, you can train
the network using the training data. The data, layers, and training options are all input
arguments of the trainNetwork function, as in this example.
layers = [imageInputLayer([28 28 1])
convolution2dLayer(5,20)
reluLayer
maxPooling2dLayer(2,'Stride',2)
fullyConnectedLayer(10)
softmaxLayer
classificationLayer];
options = trainingOptions('adam');
convnet = trainNetwork(data,layers,options);
Training data can be an array, a table, or an ImageDatastore object. For more
information, see the trainNetwork function reference page.
See Also
Convolution2dLayer | FullyConnectedLayer | trainNetwork | trainingOptions
More About
• “Learn About Convolutional Neural Networks” on page 2-27
• “Specify Layers of Convolutional Neural Network” on page 2-36
• “Create Simple Deep Learning Network for Classication”
• “Resume Training from a Checkpoint Network” on page 2-51
2Deep Networks
2-50

Resume Training from a Checkpoint Network
This example shows how to save checkpoint networks while training a convolutional
neural network and resume training from a previously saved network.
Load Sample Data
Load the sample data as a 4-D array.
[XTrain,TTrain] = digitTrain4DArrayData;
Display the size of XTrain.
size(XTrain)
ans =
28 28 1 5000
digitTrain4DArrayData loads the digit training set as 4-D array data. XTrain is a 28-
by-28-by-1-by-5000 array, where 28 is the height and 28 is the width of the images. 1 is
the number of channels and 5000 is the number of synthetic images of handwritten digits.
TTrain is a categorical vector containing the labels for each observation.
Display some of the images in XTrain .
figure;
perm = randperm(5000,20);
for i = 1:20
subplot(4,5,i);
imshow(XTrain(:,:,:,perm(i)));
end
Resume Training from a Checkpoint Network
2-51
Dene Layers of Network
Dene the layers of the convolutional neural network.
layers = [imageInputLayer([28 28 1])
convolution2dLayer(5,20)
reluLayer()
maxPooling2dLayer(2,'Stride',2)
fullyConnectedLayer(10)
softmaxLayer()
classificationLayer()];
2Deep Networks
2-52

Specify Training Options with Checkpoint Path and Train Network
Set the options to default settings for the stochastic gradient descent with momentum
and specify the path for saving the checkpoint networks.
options = trainingOptions('sgdm','CheckpointPath','C:\Temp\cnncheckpoint');
Train the network.
convnet = trainNetwork(XTrain,TTrain,layers,options);
Training on single GPU.
Initializing image normalization.
|=========================================================================================|
| Epoch | Iteration | Time Elapsed | Mini-batch | Mini-batch | Base Learning|
| | | (seconds) | Loss | Accuracy | Rate |
|=========================================================================================|
| 1 | 1 | 0.02 | 2.3022 | 7.81% | 0.0100 |
| 2 | 50 | 0.63 | 2.2684 | 31.25% | 0.0100 |
| 3 | 100 | 1.22 | 1.5395 | 53.13% | 0.0100 |
| 4 | 150 | 1.81 | 1.4287 | 50.00% | 0.0100 |
| 6 | 200 | 2.43 | 1.1682 | 60.94% | 0.0100 |
| 7 | 250 | 3.04 | 0.7370 | 77.34% | 0.0100 |
| 8 | 300 | 3.65 | 0.8038 | 71.09% | 0.0100 |
| 9 | 350 | 4.26 | 0.6766 | 78.91% | 0.0100 |
| 11 | 400 | 4.88 | 0.4824 | 89.06% | 0.0100 |
| 12 | 450 | 5.50 | 0.3670 | 90.63% | 0.0100 |
| 13 | 500 | 6.11 | 0.3582 | 92.19% | 0.0100 |
| 15 | 550 | 6.75 | 0.2501 | 93.75% | 0.0100 |
| 16 | 600 | 7.37 | 0.2662 | 93.75% | 0.0100 |
| 17 | 650 | 7.97 | 0.1974 | 96.09% | 0.0100 |
| 18 | 700 | 8.59 | 0.2140 | 97.66% | 0.0100 |
| 20 | 750 | 9.21 | 0.1402 | 99.22% | 0.0100 |
| 21 | 800 | 9.82 | 0.1324 | 97.66% | 0.0100 |
| 22 | 850 | 10.43 | 0.1373 | 96.88% | 0.0100 |
| 24 | 900 | 11.07 | 0.0913 | 100.00% | 0.0100 |
| 25 | 950 | 11.70 | 0.0935 | 98.44% | 0.0100 |
| 26 | 1000 | 12.31 | 0.0647 | 100.00% | 0.0100 |
| 27 | 1050 | 12.92 | 0.0678 | 99.22% | 0.0100 |
| 29 | 1100 | 13.55 | 0.1053 | 98.44% | 0.0100 |
| 30 | 1150 | 14.17 | 0.0714 | 99.22% | 0.0100 |
| 30 | 1170 | 14.41 | 0.0497 | 100.00% | 0.0100 |
|=========================================================================================|
Resume Training from a Checkpoint Network
2-53

trainNetwork uses a GPU if there is one available. If there is no available GPU, then it
uses CPU. Note: For the available hardware options, see the trainingOptions function
page.
Suppose the training was interrupted after the 8th epoch and did not complete. Rather
than restarting the training from the beginning, you can load the last checkpoint network
and resume training from that point.
Load Checkpoint Network and Resume Training
Load the checkpoint network.
load convnet_checkpoint__351__2016_11_09__12_04_23.mat
trainNetwork automatically assigns unique names to the checkpoint network les. For
example, in this case, where 351 is the iteration number, 2016_11_09 is the date and
12_04_21 is the time trainNetwork saves the network.
If you don't have the data and the training options in your working directory, you must
manually load and/or specify them before you can resume training.
Specify the training options to reduce the maximum number of epochs.
options = trainingOptions('sgdm','MaxEpochs',20, ...
'CheckpointPath','C:\Temp\cnncheckpoint');
You can also adjust other training options, such as initial learning rate.
Resume the training using the layers of the checkpoint network you loaded with the new
training options. The name of the network, by default, is net .
convnet2 = trainNetwork(XTrain,TTrain,net.Layers,options)
Training on single GPU.
Initializing image normalization.
|=========================================================================================|
| Epoch | Iteration | Time Elapsed | Mini-batch | Mini-batch | Base Learning|
| | | (seconds) | Loss | Accuracy | Rate |
|=========================================================================================|
| 1 | 1 | 0.02 | 0.5210 | 84.38% | 0.0100 |
| 2 | 50 | 0.62 | 0.4168 | 87.50% | 0.0100 |
| 3 | 100 | 1.23 | 0.4532 | 87.50% | 0.0100 |
| 4 | 150 | 1.83 | 0.3424 | 92.97% | 0.0100 |
| 6 | 200 | 2.45 | 0.3177 | 95.31% | 0.0100 |
2Deep Networks
2-54

| 7 | 250 | 3.06 | 0.2091 | 94.53% | 0.0100 |
| 8 | 300 | 3.67 | 0.1829 | 96.88% | 0.0100 |
| 9 | 350 | 4.27 | 0.1531 | 97.66% | 0.0100 |
| 11 | 400 | 4.91 | 0.1482 | 96.88% | 0.0100 |
| 12 | 450 | 5.58 | 0.1293 | 97.66% | 0.0100 |
| 13 | 500 | 6.31 | 0.1134 | 98.44% | 0.0100 |
| 15 | 550 | 6.94 | 0.1006 | 100.00% | 0.0100 |
| 16 | 600 | 7.55 | 0.0909 | 98.44% | 0.0100 |
| 17 | 650 | 8.16 | 0.0567 | 100.00% | 0.0100 |
| 18 | 700 | 8.76 | 0.0654 | 100.00% | 0.0100 |
| 20 | 750 | 9.41 | 0.0654 | 100.00% | 0.0100 |
| 20 | 780 | 9.77 | 0.0606 | 99.22% | 0.0100 |
|=========================================================================================|
convnet2 =
SeriesNetwork with properties:
Layers: [7×1 nnet.cnn.layer.Layer]
See Also
trainNetwork | trainingOptions
Related Examples
• “Create Simple Deep Learning Network for Classication”
More About
• “Learn About Convolutional Neural Networks” on page 2-27
• “Specify Layers of Convolutional Neural Network” on page 2-36
• “Set Up Parameters and Train Convolutional Neural Network” on page 2-46
See Also
2-55
Dene Custom Deep Learning Layers
Tip This topic explains how to dene custom deep learning layers for your problems. For
a list of built-in layers in Neural Network Toolbox, see “List of Deep Learning Layers” on
page 2-31.
This topic explains the architecture of deep learning layers and how to dene custom
layers to use for your problems.
Type Description
Layer Dene a custom deep learning layer and
specify optional learnable parameters,
forward functions, and a backward
function.
For an example showing how to dene a
custom layer with learnable parameters,
see “Dene a Custom Deep Learning Layer
with Learnable Parameters” on page 2-73.
Classication Output Layer Dene a custom classication output layer
and specify a loss function.
For an example showing how to dene a
custom classication output layer and
specify a loss function, see “Dene a
Custom Classication Output Layer” on
page 2-97.
Regression Output Layer Dene a custom regression output layer
and specify a loss function.
For an example showing how to dene a
custom regression output layer and specify
a loss function, see “Dene a Custom
Regression Output Layer” on page 2-87.
2Deep Networks
2-56

Layer Templates
You can use the following templates to dene new layers.
Layer Template
This template outlines the structure of a layer with learnable parameters. If the layer
does not have learnable parameters, then you can omit the properties (learnable)
section. For an example showing how to dene a layer with learnable parameters, see
“Dene a Custom Deep Learning Layer with Learnable Parameters” on page 2-73.
classdef myLayer < nnet.layer.Layer
properties
% (Optional) Layer properties
% Layer properties go here
end
properties (Learnable)
% (Optional) Layer learnable parameters
% Layer learnable parameters go here
end
methods
function layer = myLayer()
% (Optional) Create a myLayer
% This function must have the same name as the layer
% Layer constructor function goes here
end
function Z = predict(layer, X)
% Forward input data through the layer at prediction time and
% output the result
%
% Inputs:
% layer - Layer to forward propagate through
% X - Input data
% Output:
% Z - Output of layer forward function
% Layer forward function for prediction goes here
end
function [Z, memory] = forward(layer, X)
% (Optional) Forward input data through the layer at training
% time and output the result and a memory value
%
% Inputs:
% layer - Layer to forward propagate through
Dene Custom Deep Learning Layers
2-57

% X - Input data
% Output:
% Z - Output of layer forward function
% memory - Memory value which can be used for
% backward propagation
% Layer forward function for training goes here
end
function [dLdX, dLdW1, …, dLdWn] = backward(layer, X, Z, dLdZ, memory)
% Backward propagate the derivative of the loss function through
% the layer
%
% Inputs:
% layer - Layer to backward propagate through
% X - Input data
% Z - Output of layer forward function
% dLdZ - Gradient propagated from the deeper layer
% memory - Memory value which can be used in
% backward propagation
% Output:
% dLdX - Derivative of the loss with respect to the
% input data
% dLdW1, ..., dLdWn - Derivatives of the loss with respect to each
% learnable parameter
% Layer backward function goes here
end
end
end
Classication Output Layer Template
This template outlines the structure of a classication output layer with a loss function.
For an example showing how to dene a classication output layer and specify a loss
function, see “Dene a Custom Classication Output Layer” on page 2-97.
classdef myClassificationLayer < nnet.layer.ClassificationLayer
properties
% (Optional) Layer properties
% Layer properties go here
end
methods
function layer = myClassificationLayer()
% (Optional) Create a myClassificationLayer
% Layer constructor function goes here
end
function loss = forwardLoss(layer, Y, T)
% Return the loss between the predictions Y and the
2Deep Networks
2-58

% training targets T
%
% Inputs:
% layer - Output layer
% Y – Predictions made by network
% T – Training targets
%
% Output:
% loss - Loss between Y and T
% Layer forward loss function goes here
end
function dLdY = backwardLoss(layer, Y, T)
% Backward propagate the derivative of the loss function
%
% Inputs:
% layer - Output layer
% Y – Predictions made by network
% T – Training targets
%
% Output:
% dLdY - Derivative of the loss with respect to the predictions Y
% Layer backward loss function goes here
end
end
end
Regression Output Layer Template
This template outlines the structure of a regression output layer with a loss function. For
an example showing how to dene a regression output layer and specify a loss function,
see “Dene a Custom Regression Output Layer” on page 2-87.
classdef myRegressionLayer < nnet.layer.RegressionLayer
properties
% (Optional) Layer properties
% Layer properties go here
end
methods
function layer = myRegressionLayer()
% (Optional) Create a myRegressionLayer
% Layer constructor function goes here
end
function loss = forwardLoss(layer, Y, T)
% Return the loss between the predictions Y and the
% training targets T
%
% Inputs:
% layer - Output layer
% Y – Predictions made by network
Dene Custom Deep Learning Layers
2-59

% T – Training targets
%
% Output:
% loss - Loss between Y and T
% Layer forward loss function goes here
end
function dLdY = backwardLoss(layer, Y, T)
% Backward propagate the derivative of the loss function
%
% Inputs:
% layer - Output layer
% Y – Predictions made by network
% T – Training targets
%
% Output:
% dLdY - Derivative of the loss with respect to the predictions Y
% Layer backward loss function goes here
end
end
end
Layer Architecture
A layer has two main components: the forward pass, and the backward pass.
During the forward pass of a network, the layer takes the output x of the previous layer,
applies some function, and then outputs (forward propagates) the result z to the next
layer.
At the end of a forward pass, the network calculates the loss L between the predictions Y
and the true target T.
During the backward pass of a network, each layer takes the derivatives of the loss with
respect to z, computes the derivatives of the loss L with respect to x, and then outputs
(backward propagates) results to the previous layer. If the layer has learnable
parameters, then the layer also computes the derivatives of the layer weights (learnable
parameters) W. The layer uses the derivatives of the weights to update the learnable
parameters.
The following gure describes the ow of data through a deep neural network and
highlights the data ow through the layer.
2Deep Networks
2-60
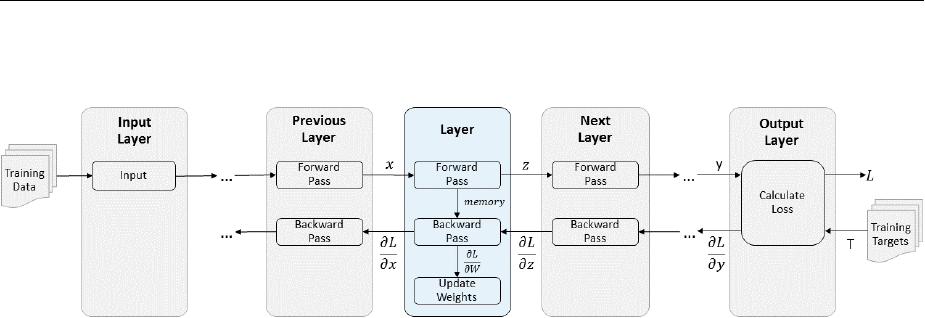
Layer Properties
Declare the layer properties in the properties section of the class denition.
By default, user-dened layers have three properties:
•Name – Name of the layer, specied as a character vector. Use the Name property to
identify and index layers in a network. If you do not set the layer name, then the
software automatically assigns one at training time.
•Description – One-line description of the layer, specied as a character vector. This
description appears when the layer is displayed in a Layer array. The default value is
the layer class name.
•Type – Type of the layer, specied as a character vector. The value of Type appears
when the layer is displayed in a Layer array. The default value is the layer class name.
If the layer has no other properties, then you can omit the properties section.
Learnable Parameters
Declare the layer learnable parameters in the properties (Learnable) section of the
class denition. If the layer has no learnable parameters, then you can omit the
properties (Learnable) section.
Optionally, you can specify the learn rate factor and the L2 factor of the learnable
parameters. By default, each learnable parameter has its learning rate factor and L2
factor set to 1.
You can set and get the learn rate factors and L2 regularization factors using the
following functions. You can use these functions for both built-in layers and user-dened
layers.
Dene Custom Deep Learning Layers
2-61
Function Description
setLearnRateFactor Set the learn rate factor of a learnable
parameter.
setL2Factor Set the L2 regularization factor of a
learnable parameter.
getLearnRateFactor Get the learn rate factor of a learnable
parameter.
getL2Factor Get the L2 regularization factor of a
learnable parameter.
To specify the learning rate factor and the L2 factor of a learnable parameter, use the
syntaxes layer = setLearnRateFactor(layer,'MyParameterName',value) and
layer = setL2Factor(layer,'MyParameterName',value) respectively.
To get the value of the learning rate factor and the L2 factor of a learnable parameter, use
the syntaxes getLearnRateFactor(layer,'MyParameterName') and
getL2Factor(layer,'MyParameterName') respectively.
For example, to set the learn rate factor of the learnable parameter name Alpha to 0.1,
use
layer = setLearnRateFactor(layer,'Alpha',0.1);
Forward Functions
A layer uses two functions for a forward pass: predict and forward. If the forward pass
is at prediction time, then the layer uses the predict function. If the forward pass is at
training time, then the layer uses the forward function. The forward function has an
additional output argument memory which you can use during backward propagation. You
must return a value for memory.
If you do not require two dierent functions for prediction time and training time, then
you do not need to create the forward function. By default, the layer uses predict at
training time.
The syntax for predict is Z = predict(layer,X), where X is the input data and Z is
the output of the layer forward function.
The syntax for forward is [Z,memory] = forward(layer,X), where X is the input
data, Z is the output of the layer forward function, and memory is the memory value to
2Deep Networks
2-62
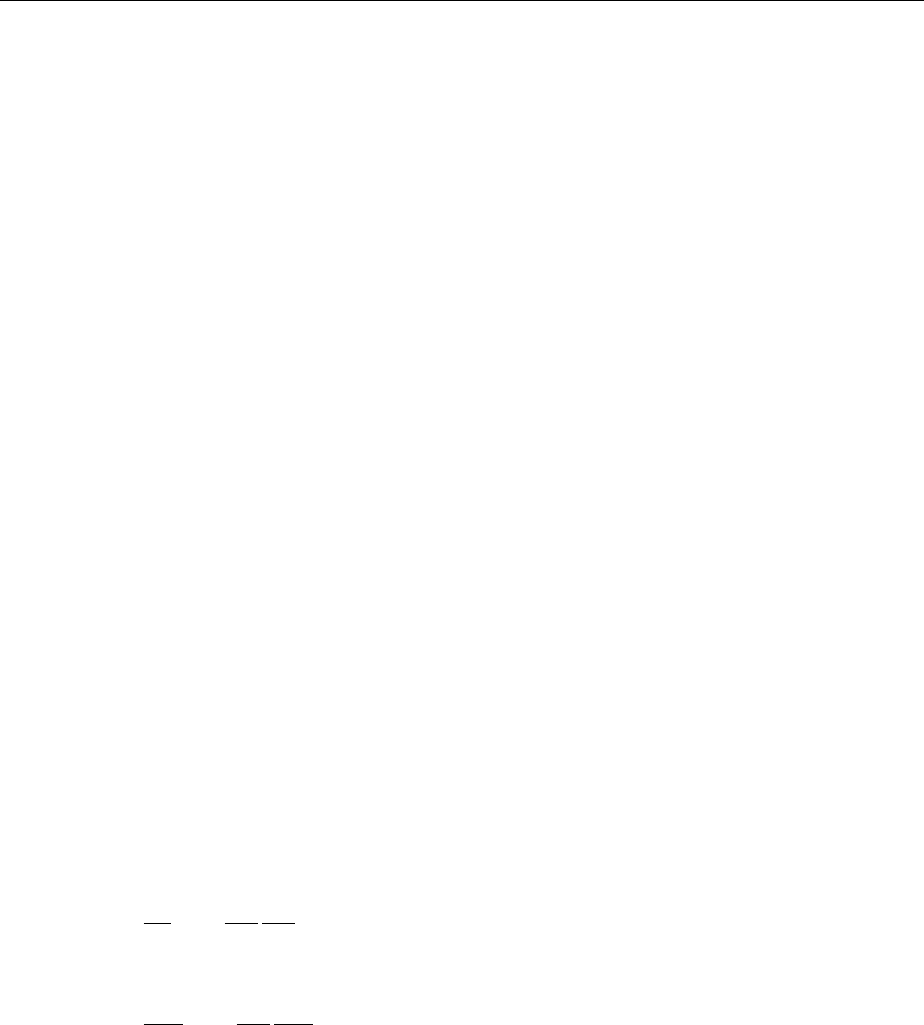
use in backward propagation. memory is a required output argument and it must return a
value. If the layer does not require a memory value, then return an empty value [].
The dimensions of X depend on the output of the previous layer. Similarly, the output Z
must have the appropriate shape for the next layer.
Built-in layers output 4-D arrays with size h-by-w-by-c-by-N, except for LSTM layers and
sequence input layers, which output 3-D arrays of size D-by-N-by-S.
Fully connected, ReLU, dropout, and softmax layers also accept 3-D inputs. When these
layers get inputs of this shape, then they output 3-D arrays of size D-by-N-by-S.
These dimensions correspond to the following:
•h – Height of the output
•w – Width of the output
•c – Number of channels in the output
•N – Number of observations (mini-batch size)
•D – Feature dimension of sequence
•S – Sequence length
Backward Function
The layer uses one function for a backward pass: backward. The backward function
computes the derivatives of the loss with respect to the input data and then outputs
(backward propagates) results to the previous layer. If the layer has learnable
parameters, then backward also computes the derivatives of the layer weights (learnable
parameters). During the backward pass, the layer automatically updates the learnable
parameters using these derivatives.
To calculate the derivatives of the loss, you can use the chain rule:
∂
∂=∂
∂
∂
∂
Â
L
x
L
z
z
x
jj
j
∂
∂=∂
∂
∂
∂
Â
L
W
L
z
z
W
i j
j
i
j
Dene Custom Deep Learning Layers
2-63

The syntax for backward is [dLdX,dLdW1,…,dLdWn] =
backward(layer,X,Z,dLdZ,memory). For the inputs, X is the layer input data, Z is the
output of forward, dLdZ is the gradient backward propagated from the next layer, and
memory is the memory output of forward. For the outputs, dLdX is the derivative of the
loss with respect to the layer input data, and dLdW1,…,dLdWn are the derivatives of the
loss with respect to the learnable parameters.
The dimensions of X and Z are the same as in the forward functions. The dimensions of
dLdZ are the same as the dimensions of Z.
The dimensions and data type of dLdX are the same as the dimensions and data type of X.
The dimensions and data types of dLdW1,…,dLdWn are the same as the dimensions and
data types of W1,…,Wn respectively where Wi is the ith learnable parameter.
During the backward pass, the layer automatically updates the learnable parameters
using the derivatives dLdW1,…,dLdWn.
If you want to include a user-dened layer after a built-in layer in a network, then the
layer functions must accept inputs X which are the outputs of the previous layer, and
backward propagate dLdX with the same size as X. If you want to include a user-dened
layer before a built-in layer, then the forward functions must output arrays Z with the size
expected by the next layer. Similarly, backward must accept inputs dLdZ with the same
size as Z.
GPU Compatibility
For GPU compatibility, the layer functions must support inputs and return outputs of type
gpuArray. Any other functions used by the layer must do the same. Many MATLAB built-
in functions support gpuArray input arguments. If you call any of these functions with at
least one gpuArray as an input, then the function executes on the GPU and returns a
gpuArray. For a list of functions that execute on a GPU, see “Run Built-In Functions on a
GPU” (Parallel Computing Toolbox). To use a GPU for deep learning, you must also have a
CUDA enabled NVIDIA GPU with compute capability 3.0 or higher. For more information
on working with GPUs in MATLAB, see “GPU Computing in MATLAB” (Parallel Computing
Toolbox).
Check Validity of Layer
If you create a custom deep learning layer, then you can use the checkLayer function to
check that the layer is valid. The function checks layers for validity, GPU compatibility,
2Deep Networks
2-64

and correctly dened gradients. To check that a layer is valid, run the following
command:
checkLayer(layer,validInputSize,'ObservationDimension',dim)
where layer is an instance of the layer, validInputSize is a vector specifying the valid
input size to the layer, and dim species the dimension of the observations in the layer
input data.
For more information, see “Check Custom Layer Validity” on page 2-107.
Check Validity of Layer Using checkLayer
Check the layer validity of the example layer examplePreluLayer.
To use the layer examplePreluLayer, add the example folder to the path.
exampleFolder = genpath(fullfile(matlabroot,'examples','nnet'));
addpath(exampleFolder)
Create an instance of the layer and check its validity using checkLayer.
Specify the valid input size to be the size of a single observation of typical input to the
layer. The layer expects 4-D array inputs, where the rst three dimensions correspond to
the height, width, and number of channels of the previous layer output, and the fourth
dimension corresponds to the observations.
Specify the typical size of the input of an observation and set
'ObservationDimension' to 4.
layer = examplePreluLayer(20);
validInputSize = [24 24 20];
checkLayer(layer,validInputSize,'ObservationDimension',4)
Running nnet.checklayer.TestCase
..........
..........
.
Done nnet.checklayer.TestCase
__________
Test Summary:
21 Passed, 0 Failed, 0 Incomplete.
Time elapsed: 6.863 seconds.
Dene Custom Deep Learning Layers
2-65

Here, the function does not detect any issues with the layer.
To remove the example folder, use rmpath.
rmpath(exampleFolder)
Include Layer in Network
You can use your layer in the same way as any other layer in Neural Network Toolbox.
To use the example layer examplePreluLayer, add the example folder to the path.
exampleFolder = genpath(fullfile(matlabroot,'examples','nnet'));
addpath(exampleFolder)
Create a layer array which includes the example layer examplePreluLayer.
layers = [ ...
imageInputLayer([28 28 1])
convolution2dLayer(5,20)
batchNormalizationLayer
examplePreluLayer(20)
fullyConnectedLayer(10)
softmaxLayer
classificationLayer];
Remove the example folder from the path using rmpath.
rmpath(exampleFolder)
Output Layer Architecture
At the end of a forward pass at training time, an output layer takes the predictions
(outputs) y of the previous layer, and calculates the loss L between these predictions and
the training targets. The output layer computes the derivatives of the loss L with respect
to the predictions y and outputs (backward propagates) results to the previous layer.
The following gure describes the ow of data through a convolutional neural network
and an output layer.
2Deep Networks
2-66
Loss Functions
The output layer uses two functions to compute the loss and the derivatives:
forwardLoss and backwardLoss. The forwardLoss function computes the loss L. The
backwardLoss function computes the derivatives of the loss with respect to the
predictions.
The following table describes the input arguments of forwardLoss and backwardLoss.
Input Argument Description
layer Output layer object
YPredictions made by network. These
predictions are the output of the previous
layer
TTraining targets
For classication problems, the dimensions of T depend on the type of problem. The
following table describes the dimensions of T.
Task Dimensions of T
Image classication 4-D array of size 1-by-1-by-K-by-N, where K
is the number of classes, and N is the mini-
batch size.
Dene Custom Deep Learning Layers
2-67
Task Dimensions of T
Sequence-to-label classication Matrix of size K-by-N, where K is the
number of classes, and N is the mini-batch
size.
Sequence-to-sequence classication 3-D array of size K-by-N-by-S, where K is
the number of classes, N is the mini-batch
size, and S is the sequence length.
The size of Y depends on the output of the previous layer. To ensure that Y is the same
size as T, you must include a layer that outputs the correct size before the output layer.
For example, to ensure that Y is a 4-D array of prediction scores for K classes, you can
include a fully connected layer of size K followed by a softmax layer before the output
layer.
For regression problems, the dimensions of T depend on the type of problem. The
following table describes the dimensions of T.
Task Dimensions of T
Image regression 4-D array of size 1-by-1-by-r-by-N, where r
is the number of responses, and N is the
mini-batch size.
Image-to-image regression 4-D array of size h-by-w-by-c-by-N, where h,
w, and c denote the height, width and
number of channels of the output
respectively, and N is the mini-batch size.
Sequence-to-one regression Matrix of size r-by-N, where r is the number
of responses, and N is the mini-batch size.
Sequence-to-sequence regression 3-D array of size r-by-N-by-S, where r is the
number of responses, N is the mini-batch
size, and S
For example, if the network denes an image regression network with one response and
has mini-batches of size 50, then T is a 4-D array of size 1-by-1-by-1-by-50.
The size of Y depends on the output of the previous layer. To ensure that Y is the same
size as T, you must include a layer that outputs the correct size before the output layer.
For example, for image regression with r responses, to ensure that Y is a 4-D array of the
correct size, you can include a fully connected layer of size r before the output layer.
2Deep Networks
2-68
The following table describes the output arguments of forwardLoss and
backwardLoss.
Output Argument Description
loss (forwardLoss only) Calculated loss between the predictions Y
and the true target T
dLdY (backwardLoss only) Derivative of the loss with respect to the
predictions Y.
If you want to include a user-dened output layer after a built-in layer, then
backwardLoss must output dLdY with the size expected by the previous layer. Built-in
layers expect dLdY to be the same size as Y.
GPU Compatibility
For GPU compatibility, the layer functions must support inputs and return outputs of type
gpuArray. Any other functions used by the layer must do the same. Many MATLAB built-
in functions support gpuArray input arguments. If you call any of these functions with at
least one gpuArray as an input, then the function executes on the GPU and returns a
gpuArray. For a list of functions that execute on a GPU, see “Run Built-In Functions on a
GPU” (Parallel Computing Toolbox). To use a GPU for deep learning, you must also have a
CUDA enabled NVIDIA GPU with compute capability 3.0 or higher. For more information
on working with GPUs in MATLAB, see “GPU Computing in MATLAB” (Parallel Computing
Toolbox).
Include User-Dened Regression Output Layer in Network
You can use a user-dened output layer in the same way as any other output layer in
Neural Network Toolbox. This section shows how to create and train a network for
regression using a user-dened output layer.
The example constructs a convolutional neural network architecture, trains a network,
and uses the trained network to predict angles of rotated, handwritten digits. These
predictions are useful for optical character recognition.
To use the example layer exampleRegressionMAELayer, add the example folder to the
path.
exampleFolder = genpath(fullfile(matlabroot,'examples','nnet'));
addpath(exampleFolder)
Load the example training data.
Dene Custom Deep Learning Layers
2-69

[trainImages,~,trainAngles] = digitTrain4DArrayData;
Create a layer array including a user-dened regression output layer
exampleRegressionMAELayer.
layers = [ ...
imageInputLayer([28 28 1])
convolution2dLayer(5,20)
batchNormalizationLayer
reluLayer
fullyConnectedLayer(1)
exampleRegressionMAELayer]
layers =
6x1 Layer array with layers:
1 '' Image Input 28x28x1 images with 'zerocenter' normalization
2 '' Convolution 20 5x5 convolutions with stride [1 1] and padding [0 0 0 0]
3 '' Batch Normalization Batch normalization
4 '' ReLU ReLU
5 '' Fully Connected 1 fully connected layer
6 '' Regression layer Example Regression Layer with MAE loss
Set the training options and train the network.
options = trainingOptions('sgdm');
net = trainNetwork(trainImages,trainAngles,layers,options);
Training on single CPU.
Initializing image normalization.
|========================================================================================|
| Epoch | Iteration | Time Elapsed | Mini-batch | Mini-batch | Base Learning |
| | | (hh:mm:ss) | RMSE | Loss | Rate |
|========================================================================================|
| 1 | 1 | 00:00:00 | 25.52 | 22.0 | 0.0100 |
| 2 | 50 | 00:00:05 | 12.67 | 10.2 | 0.0100 |
| 3 | 100 | 00:00:10 | 12.23 | 9.9 | 0.0100 |
| 4 | 150 | 00:00:15 | 11.56 | 8.9 | 0.0100 |
| 6 | 200 | 00:00:20 | 11.72 | 8.7 | 0.0100 |
| 7 | 250 | 00:00:26 | 11.63 | 7.8 | 0.0100 |
| 8 | 300 | 00:00:31 | 11.09 | 8.3 | 0.0100 |
| 9 | 350 | 00:00:37 | 9.48 | 6.9 | 0.0100 |
| 11 | 400 | 00:00:42 | 9.86 | 7.4 | 0.0100 |
| 12 | 450 | 00:00:47 | 8.14 | 6.0 | 0.0100 |
| 13 | 500 | 00:00:52 | 8.46 | 6.6 | 0.0100 |
2Deep Networks
2-70

| 15 | 550 | 00:00:58 | 7.76 | 5.1 | 0.0100 |
| 16 | 600 | 00:01:03 | 10.24 | 7.8 | 0.0100 |
| 17 | 650 | 00:01:09 | 8.24 | 6.1 | 0.0100 |
| 18 | 700 | 00:01:15 | 7.93 | 5.9 | 0.0100 |
| 20 | 750 | 00:01:20 | 7.94 | 5.6 | 0.0100 |
| 21 | 800 | 00:01:25 | 7.51 | 5.2 | 0.0100 |
| 22 | 850 | 00:01:31 | 7.94 | 6.4 | 0.0100 |
| 24 | 900 | 00:01:36 | 7.16 | 5.3 | 0.0100 |
| 25 | 950 | 00:01:41 | 8.71 | 6.7 | 0.0100 |
| 26 | 1000 | 00:01:46 | 9.56 | 8.0 | 0.0100 |
| 27 | 1050 | 00:01:51 | 7.65 | 5.8 | 0.0100 |
| 29 | 1100 | 00:01:55 | 5.88 | 4.3 | 0.0100 |
| 30 | 1150 | 00:02:00 | 7.19 | 5.4 | 0.0100 |
| 30 | 1170 | 00:02:02 | 7.73 | 6.0 | 0.0100 |
|========================================================================================|
Evaluate the network performance by calculating the prediction error between the
predicted and actual angles of rotation.
[testImages,~,testAngles] = digitTest4DArrayData;
predictedTestAngles = predict(net,testImages);
predictionError = testAngles - predictedTestAngles;
Calculate the number of predictions within an acceptable error margin from the true
angles. Set the threshold to be 10 degrees and calculate the percentage of predictions
within this threshold.
thr = 10;
numCorrect = sum(abs(predictionError) < thr);
numTestImages = size(testImages,4);
accuracy = numCorrect/numTestImages
accuracy = 0.7840
Remove the example layer from the path using rmpath.
rmpath(exampleFolder)
See Also
checkLayer | getL2Factor | getLearnRateFactor | setL2Factor |
setLearnRateFactor
See Also
2-71


Dene a Custom Deep Learning Layer with Learnable
Parameters
If Neural Network Toolbox does not provide the layer you require for your classication
or regression problem, then you can dene your own custom layer using this example as a
guide. This example shows how to create a PReLU layer, which is a layer with a learnable
parameter and use it in a convolutional neural network.
To dene a custom deep learning layer, you can use the template provided in this
example, which takes you through the following steps:
1Name the layer – Give the layer a name so it can be used in MATLAB.
2Declare the layer properties – Specify the properties of the layer and which
parameters are learned during training.
3Create a constructor function (optional) – Specify how to construct the layer and
initialize its properties. If you do not specify a constructor function, then the software
initializes the properties with [] at creation.
4Create forward functions – Specify how data passes forward through the layer
(forward propagation) at prediction time and at training time.
5Create a backward function – Specify the derivatives of the loss with respect to the
input data and the learnable parameters (backward propagation).
A PReLU layer, as described in [1], is similar to a ReLU layer. It lets through everything
that is greater than zero. For values less than zero, a PReLU layer applies scaling
coeicients
a
i
to each channel of the input. These coeicients form a learnable
parameter, which the layer learns during training.
This gure from [1] compares the ReLU and PReLU layer functions.
Dene a Custom Deep Learning Layer with Learnable Parameters
2-73
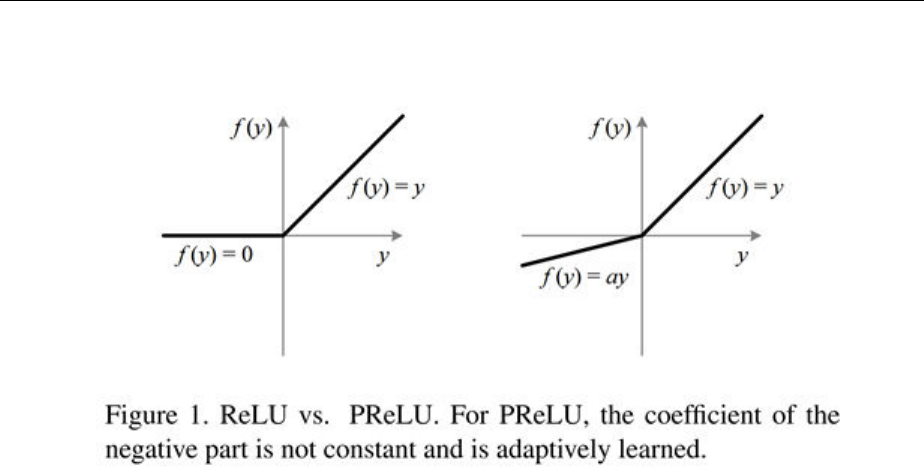
Layer with Learnable Parameters Template
Copy the layer with learnable parameters template into a new le in MATLAB. This
template outlines the structure of a layer with learnable parameters and includes the
functions that dene the layer behavior.
classdef myLayer < nnet.layer.Layer
properties
% (Optional) Layer properties
% Layer properties go here
end
properties (Learnable)
% (Optional) Layer learnable parameters
% Layer learnable parameters go here
end
methods
function layer = myLayer()
% (Optional) Create a myLayer
% This function must have the same name as the layer
% Layer constructor function goes here
end
function Z = predict(layer, X)
% Forward input data through the layer at prediction time and
% output the result
2Deep Networks
2-74

%
% Inputs:
% layer - Layer to forward propagate through
% X - Input data
% Output:
% Z - Output of layer forward function
% Layer forward function for prediction goes here
end
function [Z, memory] = forward(layer, X)
% (Optional) Forward input data through the layer at training
% time and output the result and a memory value
%
% Inputs:
% layer - Layer to forward propagate through
% X - Input data
% Output:
% Z - Output of layer forward function
% memory - Memory value which can be used for
% backward propagation
% Layer forward function for training goes here
end
function [dLdX, dLdW1, …, dLdWn] = backward(layer, X, Z, dLdZ, memory)
% Backward propagate the derivative of the loss function through
% the layer
%
% Inputs:
% layer - Layer to backward propagate through
% X - Input data
% Z - Output of layer forward function
% dLdZ - Gradient propagated from the deeper layer
% memory - Memory value which can be used in
% backward propagation
% Output:
% dLdX - Derivative of the loss with respect to the
% input data
% dLdW1, ..., dLdWn - Derivatives of the loss with respect to each
% learnable parameter
% Layer backward function goes here
end
end
end
Name the Layer
First, give the layer a name. In the rst line of the class le, replace the existing name
myLayer with examplePreluLayer.
Dene a Custom Deep Learning Layer with Learnable Parameters
2-75

classdef examplePreluLayer < nnet.layer.Layer
...
end
Next, rename the myLayer constructor function (the rst function in the methods
section) to have the same name and update the header comment.
methods
function layer = examplePreluLayer()
% Create an examplePreluLayer
% Layer constructor function goes here
end
...
end
Save the Layer
Save the layer class le in a new le named examplePreluLayer.m. The le name must
match the layer name. To use the layer, you must save the le in the current folder or in a
folder on the MATLAB path.
Declare Properties and Learnable Parameters
Declare the layer properties in the properties section and declare learnable
parameters by listing them in the properties (Learnable) section.
By default, user-dened layers have three properties:
•Name – Name of the layer, specied as a character vector. Use the Name property to
identify and index layers in a network. If you do not set the layer name, then the
software automatically assigns one at training time.
•Description – One-line description of the layer, specied as a character vector. This
description appears when the layer is displayed in a Layer array. The default value is
the layer class name.
•Type – Type of the layer, specied as a character vector. The value of Type appears
when the layer is displayed in a Layer array. The default value is the layer class name.
If the layer has no other properties, then you can omit the properties section.
2Deep Networks
2-76

A PReLU layer does not require any additional properties, so you can remove the
properties section.
A PReLU layer has only one learnable parameter, the scaling coeicient a. Declare this
learnable parameter in the properties (Learnable) section and call the parameter
Alpha.
properties (Learnable)
% Layer learnable parameters
% Scaling coefficient
Alpha
end
Create Constructor Function
Create the function that constructs the layer and initializes the layer properties. Specify
any variables required to create the layer as inputs to the constructor function.
The PReLU layer constructor function requires only one input, the number of channels of
the expected input data. This input species the size of the learnable parameter Alpha.
Specify two input arguments named numChannels and name in the
examplePreluLayer function.
function layer = examplePreluLayer(numChannels, name)
% Create an examplePreluLayer
% Layer constructor function goes here
end
Initialize Layer Properties
Initialize the layer properties, including learnable parameters in the constructor function.
Replace the comment % Layer constructor function goes here with code that
initializes the layer properties.
Set the Name property to the optional input argument name.
function layer = examplePreluLayer(numChannels, name)
% Create an examplePreluLayer
% Set layer name
if nargin == 2
Dene a Custom Deep Learning Layer with Learnable Parameters
2-77

layer.Name = name;
end
end
Give the layer a one-line description by setting the Description property of the layer.
Set the description to describe the type of layer and its size.
function layer = examplePreluLayer(numChannels, name)
% Create an examplePreluLayer
% Set layer name
if nargin == 2
layer.Name = name;
end
% Set layer description
layer.Description = ...
['examplePreluLayer with ', num2str(numChannels), ' channels'];
end
For a PReLU layer, when the input values are negative, the layer multiplies each channel
of the input by the corresponding channel of Alpha. Initialize the learnable parameter
Alpha to be a random vector of size 1-by-1-by-numChannels. With the third dimension
specied as size numChannels, the layer can use element-wise multiplication of the input
in the forward function.
Alpha is a property of the layer object, so you must assign the vector to layer.Alpha.
function layer = examplePreluLayer(numChannels, name)
% Create an examplePreluLayer with numChannels channels
% Set layer name
if nargin == 2
layer.Name = name;
end
% Set layer description
layer.Description = ...
['examplePreluLayer with ', num2str(numChannels), ' channels'];
% Initialize scaling coefficient
layer.Alpha = rand([1 1 numChannels]);
end
2Deep Networks
2-78

With this constructor function, the command examplePreluLayer(3) creates a PReLU
layer with three channels.
Create Forward Functions
Create the layer forward functions to use at prediction time and training time.
Create a function named predict that propagates the data forward through the layer at
prediction time and outputs the result. The syntax for predict is Z = predict(layer,
X), where X is the input data and Z is the output of the layer forward function. By default,
the layer uses predict as the forward function at training time. To use a dierent
forward function at training time, or retain a value required for the backward function,
you must also create a function named forward.
The dimensions of X depend on the output of the previous layer. Similarly, the output Z
must have the appropriate shape for the next layer.
Built-in layers output 4-D arrays with size h-by-w-by-c-by-N, except for LSTM layers and
sequence input layers, which output 3-D arrays of size D-by-N-by-S.
Fully connected, ReLU, dropout, and softmax layers also accept 3-D inputs. When these
layers get inputs of this shape, then they output 3-D arrays of size D-by-N-by-S.
These dimensions correspond to the following:
•h – Height of the output
•w – Width of the output
•c – Number of channels in the output
•N – Number of observations (mini-batch size)
•D – Feature dimension of sequence
•S – Sequence length
The forward function propagates the data forward through the layer at training time and
also outputs a memory value. The syntax for forward is [Z, memory] =
forward(layer, X), where memory is the output memory value. You can use this value
as an input to the backward function.
The forward function of a PReLU layer is
Dene a Custom Deep Learning Layer with Learnable Parameters
2-79

f x x
x x
x
i
i i
i i i
( ) =>
£
Ï
Ì
Ó
if
if
0
0
a
where
xi
is the input of the nonlinear activation f on channel i, and
a
i
is the coeicient
controlling the slope of the negative part. The subscript i in
a
i
indicates that the
nonlinear activation can vary on dierent channels.
Implement the forward function in predict. In predict, the input X corresponds to x in
the equation. The output Z corresponds to
f xi
( )
. The PReLU layer does not require
memory or a dierent forward function for training, so you can remove the forward
function from the class le.
function Z = predict(layer, X)
% Forward input data through the layer and output the result
Z = max(0, X) + layer.Alpha .* min(0, X);
end
Create Backward Function
Implement the derivatives of the loss with respect to the input data and the learnable
parameters in the backward function.
The syntax for backward is [dLdX,dLdW1,…,dLdWn] =
backward(layer,X,Z,dLdZ,memory). For the inputs, X is the layer input data, Z is the
output of forward, dLdZ is the gradient backward propagated from the next layer, and
memory is the memory output of forward. For the outputs, dLdX is the derivative of the
loss with respect to the layer input data, and dLdW1,…,dLdWn are the derivatives of the
loss with respect to the learnable parameters.
The dimensions of X and Z are the same as in the forward functions. The dimensions of
dLdZ are the same as the dimensions of Z.
The dimensions and data type of dLdX are the same as the dimensions and data type of X.
The dimensions and data types of dLdW1,…,dLdWn are the same as the dimensions and
data types of W1,…,Wn respectively where Wi is the ith learnable parameter.
2Deep Networks
2-80

During the backward pass, the layer automatically updates the learnable parameters
using the derivatives dLdW1,…,dLdWn.
If you want to include a user-dened layer after a built-in layer in a network, then the
layer functions must accept inputs X which are the outputs of the previous layer, and
backward propagate dLdX with the same size as X. If you want to include a user-dened
layer before a built-in layer, then the forward functions must output arrays Z with the size
expected by the next layer. Similarly, backward must accept inputs dLdZ with the same
size as Z.
The derivative of the loss with respect to the input data is
∂
∂
=∂
∂
∂
∂
L
x
L
f x
f x
x
i i
i
i
( )
( )
where
∂ ∂L f xi
/ ( )
is the gradient propagated from the deeper layer, and the gradient of
the activation is
∂
∂=≥
<
Ï
Ì
Ó
f x
x
x
i
i
i
i i
( ) .
1 0
0
if
if x
a
The derivative of the loss with respect to the learnable parameters is
∂
∂=∂
∂
∂
∂
Â
L L
f x
f x
i ij
ij
i
j
a a
( )
( )
where i indexes the channels, j indexes the elements over height, width, and observations,
and
∂ ∂L f xi
/ ( )
is the gradient propagated from the deeper layer, and the gradient of the
activation is
∂
∂=≥
<
Ï
Ì
Ó
f x x
x x
i
i
i
i i
( ) .
a
0 0
0
if
if
In backward, replace the output dLdW with the output dLdAlpha. In backward, the
input X corresponds to x. The input Z corresponds to
f xi
( )
. The input dLdZ corresponds
Dene a Custom Deep Learning Layer with Learnable Parameters
2-81

to
∂ ∂L f xi
/ ( )
. The output dLdX corresponds to
∂ ∂L xi
/
. The output dLdAlpha
corresponds to
∂ ∂Li
/
a
.
function [dLdX, dLdAlpha] = backward(layer, X, Z, dLdZ, memory)
% Backward propagate the derivative of the loss function through
% the layer
dLdX = layer.Alpha .* dLdZ;
dLdX(X>0) = dLdZ(X>0);
dLdAlpha = min(0,X) .* dLdZ;
dLdAlpha = sum(sum(dLdAlpha,1),2);
% Sum over all observations in mini-batch
dLdAlpha = sum(dLdAlpha,4);
end
Completed Layer
View the completed layer class le.
classdef examplePreluLayer < nnet.layer.Layer
properties (Learnable)
% Layer learnable parameters
% Scaling coefficient
Alpha
end
methods
function layer = examplePreluLayer(numChannels, name)
% Create an examplePreluLayer with numChannels channels
% Set layer name
if nargin == 2
layer.Name = name;
end
% Set layer description
layer.Description = ...
['examplePreluLayer with ', num2str(numChannels), ' channels'];
2Deep Networks
2-82

% Initialize scaling coefficient
layer.Alpha = rand([1 1 numChannels]);
end
function Z = predict(layer, X)
% Forward input data through the layer and output the result
Z = max(0, X) + layer.Alpha .* min(0, X);
end
function [dLdX, dLdAlpha] = backward(layer, X, Z, dLdZ, memory)
% Backward propagate the derivative of the loss function through
% the layer
dLdX = layer.Alpha .* dLdZ;
dLdX(X>0) = dLdZ(X>0);
dLdAlpha = min(0,X) .* dLdZ;
dLdAlpha = sum(sum(dLdAlpha,1),2);
% Sum over all observations in mini-batch
dLdAlpha = sum(dLdAlpha,4);
end
end
end
GPU Compatibility
For GPU compatibility, the layer functions must support inputs and return outputs of type
gpuArray. Any other functions used by the layer must do the same. Many MATLAB built-
in functions support gpuArray input arguments. If you call any of these functions with at
least one gpuArray as an input, then the function executes on the GPU and returns a
gpuArray. For a list of functions that execute on a GPU, see “Run Built-In Functions on a
GPU” (Parallel Computing Toolbox). To use a GPU for deep learning, you must also have a
CUDA enabled NVIDIA GPU with compute capability 3.0 or higher. For more information
on working with GPUs in MATLAB, see “GPU Computing in MATLAB” (Parallel Computing
Toolbox).
The MATLAB functions used in predict, forward, and backward in
examplePreluLayer all support gpuArray inputs, so the layer is GPU-compatible.
Dene a Custom Deep Learning Layer with Learnable Parameters
2-83

Check Validity of Layer Using checkLayer
Check the layer validity of the example layer examplePreluLayer.
To use the layer examplePreluLayer, add the example folder to the path.
exampleFolder = genpath(fullfile(matlabroot,'examples','nnet'));
addpath(exampleFolder)
Create an instance of the layer and check its validity using checkLayer.
Specify the valid input size to be the size of a single observation of typical input to the
layer. The layer expects 4-D array inputs, where the rst three dimensions correspond to
the height, width, and number of channels of the previous layer output, and the fourth
dimension corresponds to the observations.
Specify the typical size of the input of an observation and set
'ObservationDimension' to 4.
layer = examplePreluLayer(20);
validInputSize = [24 24 20];
checkLayer(layer,validInputSize,'ObservationDimension',4)
Running nnet.checklayer.TestCase
..........
..........
.
Done nnet.checklayer.TestCase
__________
Test Summary:
21 Passed, 0 Failed, 0 Incomplete.
Time elapsed: 6.863 seconds.
Here, the function does not detect any issues with the layer.
To remove the example folder, use rmpath.
rmpath(exampleFolder)
2Deep Networks
2-84

Include User-Dened Layer in Network
You can use a user-dened layer in the same way as any other layer in Neural Network
Toolbox. This section shows how to create and train a network for digit classication
using the PReLU layer you created earlier.
Load the example training data.
[XTrain,YTrain] = digitTrain4DArrayData;
Create a layer array including the user-dened layer examplePreluLayer.
layers = [ ...
imageInputLayer([28 28 1])
convolution2dLayer(5,20)
batchNormalizationLayer
examplePreluLayer(20)
fullyConnectedLayer(10)
softmaxLayer
classificationLayer];
Set the training options and train the network.
options = trainingOptions('adam','MaxEpochs',10);
net = trainNetwork(XTrain,YTrain,layers,options);
Training on single CPU.
Initializing image normalization.
|========================================================================================|
| Epoch | Iteration | Time Elapsed | Mini-batch | Mini-batch | Base Learning |
| | | (hh:mm:ss) | Accuracy | Loss | Rate |
|========================================================================================|
| 1 | 1 | 00:00:00 | 10.94% | 2.6157 | 0.0010 |
| 2 | 50 | 00:00:07 | 77.34% | 0.7741 | 0.0010 |
| 3 | 100 | 00:00:14 | 91.41% | 0.3383 | 0.0010 |
| 4 | 150 | 00:00:21 | 95.31% | 0.2010 | 0.0010 |
| 6 | 200 | 00:00:28 | 96.88% | 0.1289 | 0.0010 |
| 7 | 250 | 00:00:35 | 99.22% | 0.0762 | 0.0010 |
| 8 | 300 | 00:00:43 | 100.00% | 0.0625 | 0.0010 |
| 9 | 350 | 00:00:50 | 100.00% | 0.0369 | 0.0010 |
| 10 | 390 | 00:00:56 | 100.00% | 0.0318 | 0.0010 |
|========================================================================================|
Evaluate the network performance by predicting on new data and calculating the
accuracy.
Dene a Custom Deep Learning Layer with Learnable Parameters
2-85

[XTest,YTest] = digitTest4DArrayData;
YPred = classify(net,XTest);
accuracy = sum(YTest==YPred)/numel(YTest)
accuracy = 0.9436
References
[1] He, Kaiming, Xiangyu Zhang, Shaoqing Ren, and Jian Sun. "Delving deep into
rectiers: Surpassing human-level performance on ImageNet classication." In
Proceedings of the IEEE international conference on computer vision, pp.
1026-1034. 2015.
See Also
More About
• “Deep Learning in MATLAB” on page 2-2
• “Check Custom Layer Validity” on page 2-107
•“Dene Custom Deep Learning Layers” on page 2-56
•“Dene a Custom Classication Output Layer” on page 2-97
•“Dene a Custom Regression Output Layer” on page 2-87
2Deep Networks
2-86
Dene a Custom Regression Output Layer
To create a regression output layer with mean squared error loss, use
regressionLayer. If you want to use a dierent loss function for your regression
problems, then you can dene a custom regression output layer using this example as a
guide. This example shows how to create a custom regression output layer with the mean
absolute error (MAE) loss.
To dene a custom regression output layer, you can use the template provided in this
example, which takes you through the following steps:
1Name the layer – Give the layer a name so it can be used in MATLAB.
2Declare the layer properties – Specify the properties of the layer.
3Create a constructor function (optional) – Specify how to construct the layer and
initialize its properties. If you do not specify a constructor function, then the software
initializes the properties with [] at creation.
4Create a forward loss function – Specify the loss between the predictions and the
training targets.
5Create a backward loss function – Specify the derivative of the loss with respect to
the predictions.
MAE loss is an error measure between two continuous random variables. For predictions
Y and training targets T, the MAE loss between Y and T is given by
L
r
Y T
i
i i
r
= -
=
Â
1
1
where r is the number of responses.
Regression Output Layer Template
Copy the regression output layer template into a new le in MATLAB. This template
outlines the structure of a regression output layer and includes the functions that dene
the layer behavior.
classdef myRegressionLayer < nnet.layer.RegressionLayer
properties
% (Optional) Layer properties
Dene a Custom Regression Output Layer
2-87

% Layer properties go here
end
methods
function layer = myRegressionLayer()
% (Optional) Create a myRegressionLayer
% Layer constructor function goes here
end
function loss = forwardLoss(layer, Y, T)
% Return the loss between the predictions Y and the
% training targets T
%
% Inputs:
% layer - Output layer
% Y – Predictions made by network
% T – Training targets
%
% Output:
% loss - Loss between Y and T
% Layer forward loss function goes here
end
function dLdY = backwardLoss(layer, Y, T)
% Backward propagate the derivative of the loss function
%
% Inputs:
% layer - Output layer
% Y – Predictions made by network
% T – Training targets
%
% Output:
% dLdY - Derivative of the loss with respect to the predictions Y
% Layer backward loss function goes here
end
end
end
Name the Layer
First, give the layer a name. In the rst line of the class le, replace the existing name
myRegressionLayer with exampleRegressionMAELayer.
classdef exampleRegressionMAELayer < nnet.layer.RegressionLayer
...
end
Next, rename the myRegressionLayer constructor function (the rst function in the
methods section) to have the same name, and update the header comment.
methods
function layer = exampleRegressionMAELayer()
2Deep Networks
2-88

% Create an exampleRegressionMAELayer
% Layer constructor function goes here
end
...
end
Save the Layer
Save the layer class le in a new le named exampleRegressionMAELayer.m. The le
name must match the layer name. To use the layer, you must save the le in the current
folder or in a folder on the MATLAB path.
Declare Layer Properties
Declare the layer properties in the properties section.
By default, user-dened layers have three properties:
•Name – Name of the layer, specied as a character vector. Use the Name property to
identify and index layers in a network. If you do not set the layer name, then the
software automatically assigns one at training time.
•Description – One-line description of the layer, specied as a character vector. This
description appears when the layer is displayed in a Layer array. The default value is
the layer class name.
•Type – Type of the layer, specied as a character vector. The value of Type appears
when the layer is displayed in a Layer array. The default value is the layer class name.
If the layer has no other properties, then you can omit the properties section.
The layer does not require any additional properties, so you can remove the properties
section.
Create Constructor Function
Create the function that constructs the layer and initializes the layer properties. Specify
any variables required to create the layer as inputs to the constructor function.
To initialize the Name property at creation, specify an optional input argument name
Dene a Custom Regression Output Layer
2-89

function layer = exampleRegressionMAELayer(name)
% Create an exampleRegressionMAELayer
% Layer constructor function goes here
end
Initialize Layer Properties
Replace the comment % Layer constructor function goes here with code that
initializes the layer properties.
Give the layer a one-line description by setting the Description property of the layer.
Set the Name property to the optional input argument name.
Set the description to describe the type of layer and its size.
function layer = exampleRegressionMAELayer(name)
% Create an exampleRegressionMAELayer
% Set layer name
if nargin == 1
layer.Name = name;
end
% Set layer description
layer.Description = 'Example regression layer with MAE loss';
end
Create Forward Loss Function
Create a function named forwardLoss that returns the MAE loss between the
predictions made by the network and the training targets. The syntax for forwardLoss is
loss = forwardLoss(layer, Y, T), where Y is the output of the previous layer and
T contains the training targets.
For regression problems, the dimensions of T depend on the type of problem. The
following table describes the dimensions of T.
2Deep Networks
2-90
Task Dimensions of T
Image regression 4-D array of size 1-by-1-by-r-by-N, where r
is the number of responses, and N is the
mini-batch size.
Image-to-image regression 4-D array of size h-by-w-by-c-by-N, where h,
w, and c denote the height, width and
number of channels of the output
respectively, and N is the mini-batch size.
Sequence-to-one regression Matrix of size r-by-N, where r is the number
of responses, and N is the mini-batch size.
Sequence-to-sequence regression 3-D array of size r-by-N-by-S, where r is the
number of responses, N is the mini-batch
size, and S
For example, if the network denes an image regression network with one response and
has mini-batches of size 50, then T is a 4-D array of size 1-by-1-by-1-by-50.
The size of Y depends on the output of the previous layer. To ensure that Y is the same
size as T, you must include a layer that outputs the correct size before the output layer.
For example, for image regression with r responses, to ensure that Y is a 4-D array of the
correct size, you can include a fully connected layer of size r before the output layer.
For predictions Y and training targets T, the MAE loss between Y and T is given by
L
r
Y T
i
i i
r
= -
=
Â
1
1
where r is the number of responses.
The inputs Y and T correspond to Y and T in the equation, respectively. The output loss
corresponds to L. To ensure that loss is scalar, output the mean loss over the mini-batch.
function loss = forwardLoss(layer, Y, T)
% Returns the MAE loss between the predictions Y and the
% training targets T
% Calculate MAE
R = size(Y,3);
meanAbsoluteError = sum(abs(Y-T),3)/R;
Dene a Custom Regression Output Layer
2-91

% Take mean over mini-batch
N = size(Y,4);
loss = sum(meanAbsoluteError)/N;
end
Create Backward Loss Function
Create the backward loss function.
Create a function named backwardLoss that returns the derivatives of the MAE loss
with respect to the predictions Y. The syntax for backwardLoss is loss =
backwardLoss(layer, Y, T), where Y is the output of the previous layer and T
contains the training targets.
The dimensions of Y and T are the same as the inputs in forwardLoss.
The derivative of the MAE loss with respect to the predictions Y is given by
d
d
L
Y r
Y T
i
i i
= -
1sign( )
where r is the number of responses.
function dLdY = backwardLoss(layer, Y, T)
% Returns the derivatives of the MAE loss with respect to the predictions Y
N = size(Y,4);
R = size(Y,3);
dLdY = sign(Y-T)/N/R;
end
Completed Layer
View the completed regression output layer class le.
classdef exampleRegressionMAELayer < nnet.layer.RegressionLayer
methods
function layer = exampleRegressionMAELayer(name)
% Create an exampleRegressionMAELayer
2Deep Networks
2-92

% Set layer name
if nargin == 1
layer.Name = name;
end
% Set layer description
layer.Description = 'Example regression layer with MAE loss';
end
function loss = forwardLoss(layer, Y, T)
% Returns the MAE loss between the predictions Y and the
% training targets T
% Calculate MAE
R = size(Y,3);
meanAbsoluteError = sum(abs(Y-T),3)/R;
% Take mean over mini-batch
N = size(Y,4);
loss = sum(meanAbsoluteError)/N;
end
function dLdY = backwardLoss(layer, Y, T)
% Returns the derivatives of the MAE loss with respect to the predictions Y
N = size(Y,4);
R = size(Y,3);
dLdY = sign(Y-T)/N/R;
end
end
end
GPU Compatibility
For GPU compatibility, the layer functions must support inputs and return outputs of type
gpuArray. Any other functions used by the layer must do the same. Many MATLAB built-
in functions support gpuArray input arguments. If you call any of these functions with at
least one gpuArray as an input, then the function executes on the GPU and returns a
gpuArray. For a list of functions that execute on a GPU, see “Run Built-In Functions on a
GPU” (Parallel Computing Toolbox). To use a GPU for deep learning, you must also have a
CUDA enabled NVIDIA GPU with compute capability 3.0 or higher. For more information
Dene a Custom Regression Output Layer
2-93

on working with GPUs in MATLAB, see “GPU Computing in MATLAB” (Parallel Computing
Toolbox).
Include Custom Regression Output Layer in Network
You can use a custom output layer in the same way as any other output layer in Neural
Network Toolbox. This section shows how to create and train a network for regression
using the custom output layer you created earlier.
The example constructs a convolutional neural network architecture, trains a network,
and uses the trained network to predict angles of rotated, handwritten digits. These
predictions are useful for optical character recognition.
Load the example training data.
[trainImages,~,trainAngles] = digitTrain4DArrayData;
Create a layer array including the regression output layer
exampleRegressionMAELayer.
layers = [ ...
imageInputLayer([28 28 1])
convolution2dLayer(5,20)
batchNormalizationLayer
reluLayer
fullyConnectedLayer(1)
exampleRegressionMAELayer]
layers =
6x1 Layer array with layers:
1 '' Image Input 28x28x1 images with 'zerocenter' normalization
2 '' Convolution 20 5x5 convolutions with stride [1 1] and padding [0 0 0 0]
3 '' Batch Normalization Batch normalization
4 '' ReLU ReLU
5 '' Fully Connected 1 fully connected layer
6 '' Regression layer Example Regression Layer with MAE loss
Set the training options and train the network.
options = trainingOptions('sgdm');
net = trainNetwork(trainImages,trainAngles,layers,options);
Training on single CPU.
Initializing image normalization.
2Deep Networks
2-94

|========================================================================================|
| Epoch | Iteration | Time Elapsed | Mini-batch | Mini-batch | Base Learning |
| | | (hh:mm:ss) | RMSE | Loss | Rate |
|========================================================================================|
| 1 | 1 | 00:00:00 | 25.52 | 22.0 | 0.0100 |
| 2 | 50 | 00:00:05 | 12.67 | 10.2 | 0.0100 |
| 3 | 100 | 00:00:10 | 12.23 | 9.9 | 0.0100 |
| 4 | 150 | 00:00:16 | 11.56 | 8.9 | 0.0100 |
| 6 | 200 | 00:00:21 | 11.72 | 8.7 | 0.0100 |
| 7 | 250 | 00:00:26 | 11.63 | 7.8 | 0.0100 |
| 8 | 300 | 00:00:32 | 11.09 | 8.3 | 0.0100 |
| 9 | 350 | 00:00:37 | 9.48 | 6.9 | 0.0100 |
| 11 | 400 | 00:00:42 | 9.86 | 7.4 | 0.0100 |
| 12 | 450 | 00:00:47 | 8.14 | 6.0 | 0.0100 |
| 13 | 500 | 00:00:53 | 8.46 | 6.6 | 0.0100 |
| 15 | 550 | 00:00:59 | 7.76 | 5.1 | 0.0100 |
| 16 | 600 | 00:01:06 | 10.24 | 7.8 | 0.0100 |
| 17 | 650 | 00:01:11 | 8.24 | 6.1 | 0.0100 |
| 18 | 700 | 00:01:17 | 7.93 | 5.9 | 0.0100 |
| 20 | 750 | 00:01:23 | 7.94 | 5.6 | 0.0100 |
| 21 | 800 | 00:01:29 | 7.51 | 5.2 | 0.0100 |
| 22 | 850 | 00:01:35 | 7.94 | 6.4 | 0.0100 |
| 24 | 900 | 00:01:42 | 7.16 | 5.3 | 0.0100 |
| 25 | 950 | 00:01:50 | 8.71 | 6.7 | 0.0100 |
| 26 | 1000 | 00:01:58 | 9.56 | 8.0 | 0.0100 |
| 27 | 1050 | 00:02:07 | 7.65 | 5.8 | 0.0100 |
| 29 | 1100 | 00:02:14 | 5.88 | 4.3 | 0.0100 |
| 30 | 1150 | 00:02:22 | 7.19 | 5.4 | 0.0100 |
| 30 | 1170 | 00:02:25 | 7.73 | 6.0 | 0.0100 |
|========================================================================================|
Evaluate the network performance by calculating the prediction error between the
predicted and actual angles of rotation.
[testImages,~,testAngles] = digitTest4DArrayData;
predictedTestAngles = predict(net,testImages);
predictionError = testAngles - predictedTestAngles;
Calculate the number of predictions within an acceptable error margin from the true
angles. Set the threshold to be 10 degrees and calculate the percentage of predictions
within this threshold.
thr = 10;
numCorrect = sum(abs(predictionError) < thr);
Dene a Custom Regression Output Layer
2-95

numTestImages = size(testImages,4);
accuracy = numCorrect/numTestImages
accuracy = 0.7840
See Also
regressionLayer
More About
• “Deep Learning in MATLAB” on page 2-2
•“Dene Custom Deep Learning Layers” on page 2-56
•“Dene a Custom Deep Learning Layer with Learnable Parameters” on page 2-73
2Deep Networks
2-96

Dene a Custom Classication Output Layer
To construct a classication output layer with cross entropy loss for k mutually exclusive
classes, use classificationLayer. If you want to use a dierent loss function for your
classication problems, then you can dene a custom classication output layer using this
example as a guide. This example shows how to dene a custom classication output
layer with the sum of squares error (SSE) loss and use it in a convolutional neural
network.
To dene a custom classication output layer, you can use the template provided in this
example, which takes you through the following steps:
1Name the layer – Give the layer a name so it can be used in MATLAB.
2Declare the layer properties – Specify the properties of the layer.
3Create a constructor function (optional) – Specify how to construct the layer and
initialize its properties. If you do not specify a constructor function, then the software
initializes the properties with [] at creation.
4Create a forward loss function – Specify the loss between the predictions and the
training targets.
5Create a backward loss function – Specify the derivative of the loss with respect to
the predictions.
SSE is an error measure between two continuous random variables. For predictions Y and
training targets T, the SSE loss between Y and T is given by
L Y T
i
i i
K
= -
( )
=
Â
1
2
where K is the number of observations.
Classication Output Layer Template
Copy the classication output layer template into a new le in MATLAB. This template
outlines the structure of a classication output layer and includes the functions that
dene the layer behavior.
classdef myClassificationLayer < nnet.layer.ClassificationLayer
properties
Dene a Custom Classication Output Layer
2-97

% (Optional) Layer properties
% Layer properties go here
end
methods
function layer = myClassificationLayer()
% (Optional) Create a myClassificationLayer
% Layer constructor function goes here
end
function loss = forwardLoss(layer, Y, T)
% Return the loss between the predictions Y and the
% training targets T
%
% Inputs:
% layer - Output layer
% Y – Predictions made by network
% T – Training targets
%
% Output:
% loss - Loss between Y and T
% Layer forward loss function goes here
end
function dLdY = backwardLoss(layer, Y, T)
% Backward propagate the derivative of the loss function
%
% Inputs:
% layer - Output layer
% Y – Predictions made by network
% T – Training targets
%
% Output:
% dLdY - Derivative of the loss with respect to the predictions Y
% Layer backward loss function goes here
end
end
end
Name the Layer
First, give the layer a name. In the rst line of the class le, replace the existing name
myClassificationLayer with exampleClassificationSSELayer.
classdef exampleClassificationSSELayer < nnet.layer.ClassificationLayer
...
end
2Deep Networks
2-98

Next, rename the myClassificationLayer constructor function (the rst function in
the methods section) to have the same name, and update the header comment.
methods
function layer = exampleClassificationSSELayer()
% Create an exampleClassificationSSELayer
% Layer constructor function goes here
end
...
end
Save the Layer
Save the layer class le in a new le named exampleClassificationSSELayer.m. The
le name must match the layer name. To use the layer, you must save the le in the
current folder or in a folder on the MATLAB path.
Declare Layer Properties
Declare the layer properties in the properties section.
By default, user-dened layers have three properties:
•Name – Name of the layer, specied as a character vector. Use the Name property to
identify and index layers in a network. If you do not set the layer name, then the
software automatically assigns one at training time.
•Description – One-line description of the layer, specied as a character vector. This
description appears when the layer is displayed in a Layer array. The default value is
the layer class name.
•Type – Type of the layer, specied as a character vector. The value of Type appears
when the layer is displayed in a Layer array. The default value is the layer class name.
If the layer has no other properties, then you can omit the properties section.
In this example, the layer does not require any additional properties, so you can remove
the properties section.
Dene a Custom Classication Output Layer
2-99

Create Constructor Function
Create the function that constructs the layer and initializes the layer properties. Specify
any variables required to create the layer as inputs to the constructor function.
Specify an optional input argument name to assign to the Name property at creation.
function layer = exampleClassificationSSELayer(name)
% Create an exampleClassificationSSELayer
% Layer constructor function goes here
end
Initialize Layer Properties
Replace the comment % Layer constructor function goes here with code that
initializes the layer properties.
Give the layer a one-line description by setting the Description property of the layer.
Set the Name property to the optional input argument name.
Set the description to describe the type of layer and its size.
function layer = exampleClassificationSSELayer(name)
% Create an exampleClassificationSSELayer
% Set layer name
if nargin == 1
layer.Name = name;
end
% Set layer description
layer.Description = 'Example classification layer with SSE loss';
end
Create Forward Loss Function
Create a function named forwardLoss that returns the SSE loss between the predictions
made by the network and the training targets. The syntax for forwardLoss is loss =
forwardLoss(layer, Y, T), where Y is the output of the previous layer and T
represents the training targets.
2Deep Networks
2-100
For classication problems, the dimensions of T depend on the type of problem. The
following table describes the dimensions of T.
Task Dimensions of T
Image classication 4-D array of size 1-by-1-by-K-by-N, where K
is the number of classes, and N is the mini-
batch size.
Sequence-to-label classication Matrix of size K-by-N, where K is the
number of classes, and N is the mini-batch
size.
Sequence-to-sequence classication 3-D array of size K-by-N-by-S, where K is
the number of classes, N is the mini-batch
size, and S is the sequence length.
The size of Y depends on the output of the previous layer. To ensure that Y is the same
size as T, you must include a layer that outputs the correct size before the output layer.
For example, to ensure that Y is a 4-D array of prediction scores for K classes, you can
include a fully connected layer of size K followed by a softmax layer before the output
layer.
For prediction scores Y and training targets T, the SSE loss between Y and T is given by
L Y T
i
i i
K
= -
( )
=
Â
1
2
where K is the number of classes.
The inputs Y and T correspond to Y and T in the equation, respectively. The output loss
corresponds to L. To ensure that loss is scalar, output the mean loss over the mini-batch.
function loss = forwardLoss(layer, Y, T)
% Returns the SSE loss between the predictions Y and the
% training targets T
% Calculate sum of squares
sumSquares = sum((Y-T).^2);
% Take mean over mini-batch
N = size(Y,4);
Dene a Custom Classication Output Layer
2-101

loss = sum(sumSquares)/N;
end
Create Backward Loss Function
Create the backward loss function.
Create a function named backwardLoss that returns the derivatives of the SSE loss with
respect to the predictions Y. The syntax for backwardLoss is loss =
backwardLoss(layer, Y, T), where Y is the output of the previous layer and T
represents the training targets.
The dimensions of Y and T are the same as the inputs in forwardLoss.
The derivative of the SSE loss with respect to the predictions Y is given by
d
d
L
Y N
Y T
i
i i
= -
2( )
where N is the size of the mini-batch.
function dLdY = backwardLoss(layer, Y, T)
% Returns the derivatives of the SSE loss with respect to the predictions Y
N = size(Y,4);
dLdY = 2*(Y-T)/N;
end
Completed Layer
View the completed classication output layer class le.
classdef exampleClassificationSSELayer < nnet.layer.ClassificationLayer
methods
function layer = exampleClassificationSSELayer(name)
% Create an exampleClassificationSSELayer
% Set layer name
if nargin == 1
layer.Name = name;
2Deep Networks
2-102

end
% Set layer description
layer.Description = 'Example classification layer with SSE loss';
end
function loss = forwardLoss(layer, Y, T)
% Returns the SSE loss between the predictions Y and the
% training targets T
% Calculate sum of squares
sumSquares = sum((Y-T).^2);
% Take mean over mini-batch
N = size(Y,4);
loss = sum(sumSquares)/N;
end
function dLdY = backwardLoss(layer, Y, T)
% Returns the derivatives of the SSE loss with respect to the predictions Y
N = size(Y,4);
dLdY = 2*(Y-T)/N;
end
end
end
GPU Compatibility
For GPU compatibility, the layer functions must support inputs and return outputs of type
gpuArray. Any other functions used by the layer must do the same. Many MATLAB built-
in functions support gpuArray input arguments. If you call any of these functions with at
least one gpuArray as an input, then the function executes on the GPU and returns a
gpuArray. For a list of functions that execute on a GPU, see “Run Built-In Functions on a
GPU” (Parallel Computing Toolbox). To use a GPU for deep learning, you must also have a
CUDA enabled NVIDIA GPU with compute capability 3.0 or higher. For more information
on working with GPUs in MATLAB, see “GPU Computing in MATLAB” (Parallel Computing
Toolbox).
Dene a Custom Classication Output Layer
2-103

Include Custom Classication Output Layer in Network
You can use a custom output layer in the same way as any other output layer in Neural
Network Toolbox. This section shows how to create and train a network for classication
using the custom classication output layer you created earlier.
Load the example training data.
[XTrain, YTrain] = digitTrain4DArrayData;
Create a layer array including the custom classication output layer
exampleClassificationSSELayer.
layers = [ ...
imageInputLayer([28 28 1])
convolution2dLayer(5,20)
batchNormalizationLayer
reluLayer
fullyConnectedLayer(10)
softmaxLayer
exampleClassificationSSELayer]
layers =
7x1 Layer array with layers:
1 '' Image Input 28x28x1 images with 'zerocenter' normalization
2 '' Convolution 20 5x5 convolutions with stride [1 1] and padding [0 0 0 0]
3 '' Batch Normalization Batch normalization
4 '' ReLU ReLU
5 '' Fully Connected 10 fully connected layer
6 '' Softmax softmax
7 '' Classification layer Example classification layer with SSE loss
Set the training options and train the network.
options = trainingOptions('sgdm');
net = trainNetwork(XTrain,YTrain,layers,options);
Training on single CPU.
Initializing image normalization.
|========================================================================================|
| Epoch | Iteration | Time Elapsed | Mini-batch | Mini-batch | Base Learning |
| | | (hh:mm:ss) | Accuracy | Loss | Rate |
|========================================================================================|
| 1 | 1 | 00:00:00 | 14.84% | 0.8972 | 0.0100 |
2Deep Networks
2-104

| 2 | 50 | 00:00:05 | 75.00% | 0.3203 | 0.0100 |
| 3 | 100 | 00:00:10 | 92.97% | 0.1297 | 0.0100 |
| 4 | 150 | 00:00:15 | 93.75% | 0.0868 | 0.0100 |
| 6 | 200 | 00:00:20 | 96.88% | 0.0600 | 0.0100 |
| 7 | 250 | 00:00:25 | 97.66% | 0.0494 | 0.0100 |
| 8 | 300 | 00:00:31 | 100.00% | 0.0084 | 0.0100 |
| 9 | 350 | 00:00:36 | 100.00% | 0.0139 | 0.0100 |
| 11 | 400 | 00:00:42 | 99.22% | 0.0190 | 0.0100 |
| 12 | 450 | 00:00:48 | 100.00% | 0.0059 | 0.0100 |
| 13 | 500 | 00:00:53 | 99.22% | 0.0130 | 0.0100 |
| 15 | 550 | 00:00:59 | 100.00% | 0.0046 | 0.0100 |
| 16 | 600 | 00:01:04 | 99.22% | 0.0132 | 0.0100 |
| 17 | 650 | 00:01:10 | 100.00% | 0.0032 | 0.0100 |
| 18 | 700 | 00:01:16 | 99.22% | 0.0136 | 0.0100 |
| 20 | 750 | 00:01:21 | 99.22% | 0.0131 | 0.0100 |
| 21 | 800 | 00:01:27 | 99.22% | 0.0101 | 0.0100 |
| 22 | 850 | 00:01:32 | 100.00% | 0.0019 | 0.0100 |
| 24 | 900 | 00:01:38 | 100.00% | 0.0017 | 0.0100 |
| 25 | 950 | 00:01:44 | 100.00% | 0.0016 | 0.0100 |
| 26 | 1000 | 00:01:49 | 100.00% | 0.0008 | 0.0100 |
| 27 | 1050 | 00:01:55 | 100.00% | 0.0010 | 0.0100 |
| 29 | 1100 | 00:02:00 | 100.00% | 0.0012 | 0.0100 |
| 30 | 1150 | 00:02:06 | 100.00% | 0.0010 | 0.0100 |
| 30 | 1170 | 00:02:08 | 100.00% | 0.0009 | 0.0100 |
|========================================================================================|
Evaluate the network performance by making predictions on new data and calculating the
accuracy.
[XTest, YTest] = digitTest4DArrayData;
YPred = classify(net, XTest);
accuracy = sum(YTest == YPred)/numel(YTest)
accuracy = 0.9856
See Also
classificationLayer
More About
• “Deep Learning in MATLAB” on page 2-2
See Also
2-105

Check Custom Layer Validity
If you create a custom deep learning layer, then you can use the checkLayer function to
check that the layer is valid. The function checks layers for validity, GPU compatibility,
and correctly dened gradients. To check that a layer is valid, run the following
command:
checkLayer(layer,validInputSize,'ObservationDimension',dim)
where layer is an instance of the layer, validInputSize is a vector specifying the valid
input size to the layer, and dim species the dimension of the observations in the layer
input data.
List of Tests
The checkLayer function checks the validity of a custom layer by performing a series of
tests, described in this table.
Test Description
predictSignatureIsWellDefined The signature for predict has exactly two
input arguments and one output argument.
forwardSignatureIsWellDefined The signature for forward has exactly two
input arguments and two output
arguments.
If you have not implemented forward, then
checkLayer does not run this test.
backwardSignatureIsWellDefined The signature for backward has exactly
ve input arguments and 1 + n output
arguments, where n is the number of
learnable parameters.
predictDoesNotError predict does not throw an error.
forwardDoesNotError forward does not throw an error.
If you have not implemented forward, then
checkLayer does not run this test.
backwardDoesNotError backward does not throw an error.
Check Custom Layer Validity
2-107
Test Description
backwardIsConsistentInSize The output of backward is consistent in
size: dLdX must be the same size as X, and
each dLdW must be the same size as W.
predictIsConsistentInType The output of predict is consistent in
type: Z must be the same type as X.
This test also checks for GPU compatibility.
To execute the layer functions on a GPU,
they must support inputs and outputs of
type gpuArray with the underlying data
type single.
forwardIsConsistentInType The output of forward is consistent in
type: Z must be the same type as X.
If you have not implemented forward, then
checkLayer does not run this test.
This test also checks for GPU compatibility.
To execute the layer functions on a GPU,
they must support inputs and outputs of
type gpuArray with the underlying data
type single.
backwardIsConsistentInType The output of backward is consistent in
type: dLdX must be the same type as X, and
each dLdW must be the same type as W.
This test also checks for GPU compatibility.
To execute the layer functions on a GPU,
they must support inputs and outputs of
type gpuArray with the underlying data
type single.
gradientsAreNumericallyCorrect The gradients computed in backward are
consistent with the numerical gradients.
2Deep Networks
2-108
Diagnostics
If a test fails when you use checkLayer, then the function provides a test diagnostic and
a framework diagnostic. The test diagnostic highlights any issues found with the layer.
The framework diagnostic provides more detailed information.
This section describes some of the test diagnostics and gives suggestions for possible
solutions.
Function Inputs and Outputs
The tests predictSignatureIsWellDefined, forwardSignatureIsWellDefined,
and backwardSignatureIsWellDefined check that the layer functions have the
correct inputs and outputs.
Test Diagnostic Description Possible Solution
Incorrect number of
input arguments for
'predict'.
predict must have exactly
two input arguments and
one output argument.
Specify the correct syntax
for predict.
The syntax for predict is Z
= predict(layer,X),
where X is the input data
and Z is the output of the
layer forward function.
Incorrect number of
output arguments for
'predict'.
Incorrect number of
input arguments for
'forward'.
forward must have exactly
two input arguments and
two output arguments.
Specify the correct syntax
for forward.
The syntax for forward is
[Z,memory] =
forward(layer,X), where
X is the input data, Z is the
output of the layer forward
function, and memory is the
memory value to use in
backward propagation.
memory is a required output
argument and it must return
a value. If the layer does not
require a memory value,
Check Custom Layer Validity
2-109
Test Diagnostic Description Possible Solution
Incorrect number of
output arguments for
'forward'.
then return an empty value
[].
Incorrect number of
input arguments for
'backward'.
backward must have
exactly ve input arguments
and 1 + n output
arguments, where n is the
number of learnable
parameters.
Specify the correct syntax
for backward.
The syntax for backward is
[dLdX,dLdW1,…,dLdWn]
=
backward(layer,X,Z,dL
dZ,memory). For the
inputs, X is the layer input
data, Z is the output of
forward, dLdZ is the
gradient backward
propagated from the next
layer, and memory is the
memory output of forward.
For the outputs, dLdX is the
derivative of the loss with
respect to the layer input
data, and dLdW1,…,dLdWn
are the derivatives of the
loss with respect to the
learnable parameters.
Incorrect number of
output arguments for
'backward'.
2Deep Networks
2-110
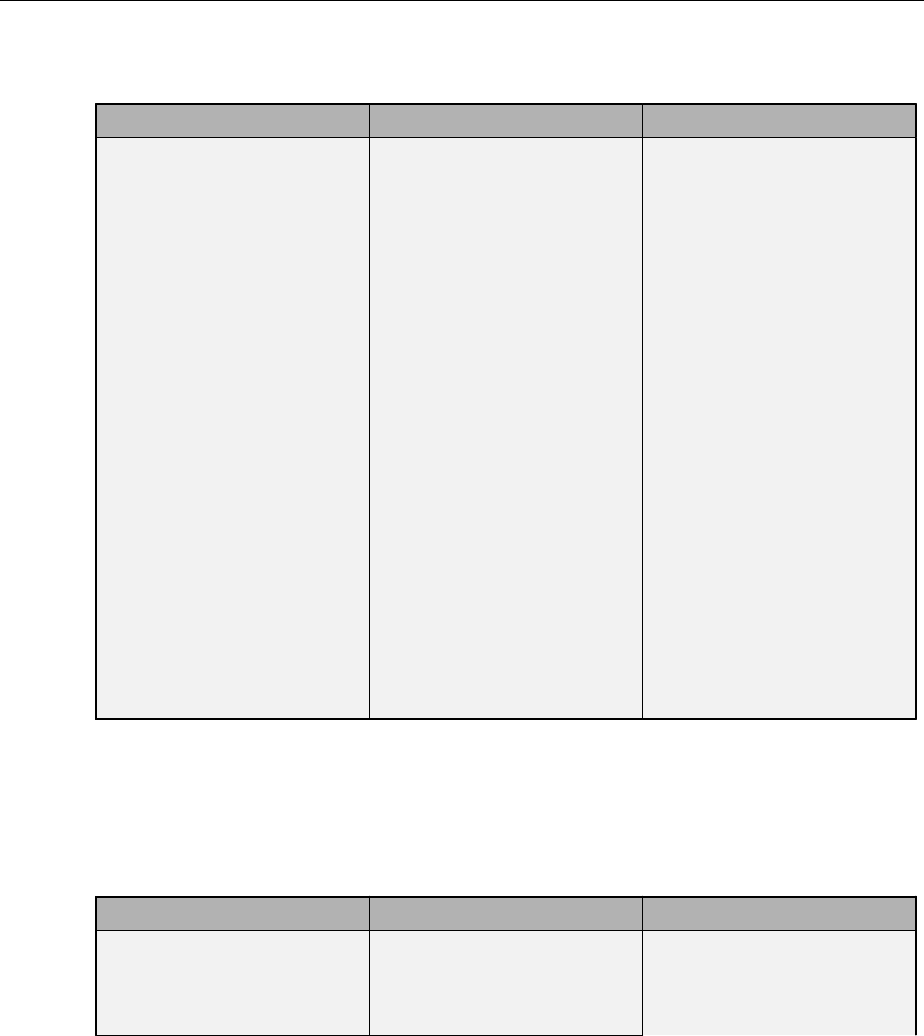
Test Diagnostic Description Possible Solution
To enable checks with
multiple
observations, specify
the
'ObservationDimension
' parameter in
checkLayer.
If you do not specify the
'ObservationDimension
' parameter in
checkLayer, then the
function skips the tests that
check data with multiple
observations.
Use the command
checkLayer(layer,vali
dInputSize,'Observati
onDimension',dim),
where layer is an instance
of the layer,
validInputSize is a
vector specifying the valid
input size to the layer, and
dim species the dimension
of the observations in the
layer input.
For example, if layer is a
convolutional layer that
accepts input of size h-by-w-
by-c-by-N, where N is the
number of observations,
then set dim to 4. If layer
is a recurrent layer that
accepts input of size D-by-N-
by-S, where N is the number
of observations, then set
dim to 2.
Functions Do Not Throw Errors
The tests predictDoesNotError, forwardDoesNotError, and
backwardDoesNotError check that the layer functions do not throw errors when passed
inputs of valid size. If you specify an observation dimension, then the function checks the
layer for both a single observation and multiple observations.
Test Diagnostic Description Possible Solution
The function
'predict' threw an
error:
The predict function
threw an error when passed
data of size
validInputSize.
Address the error described
in the Framework
Diagnostic section.
Check Custom Layer Validity
2-111
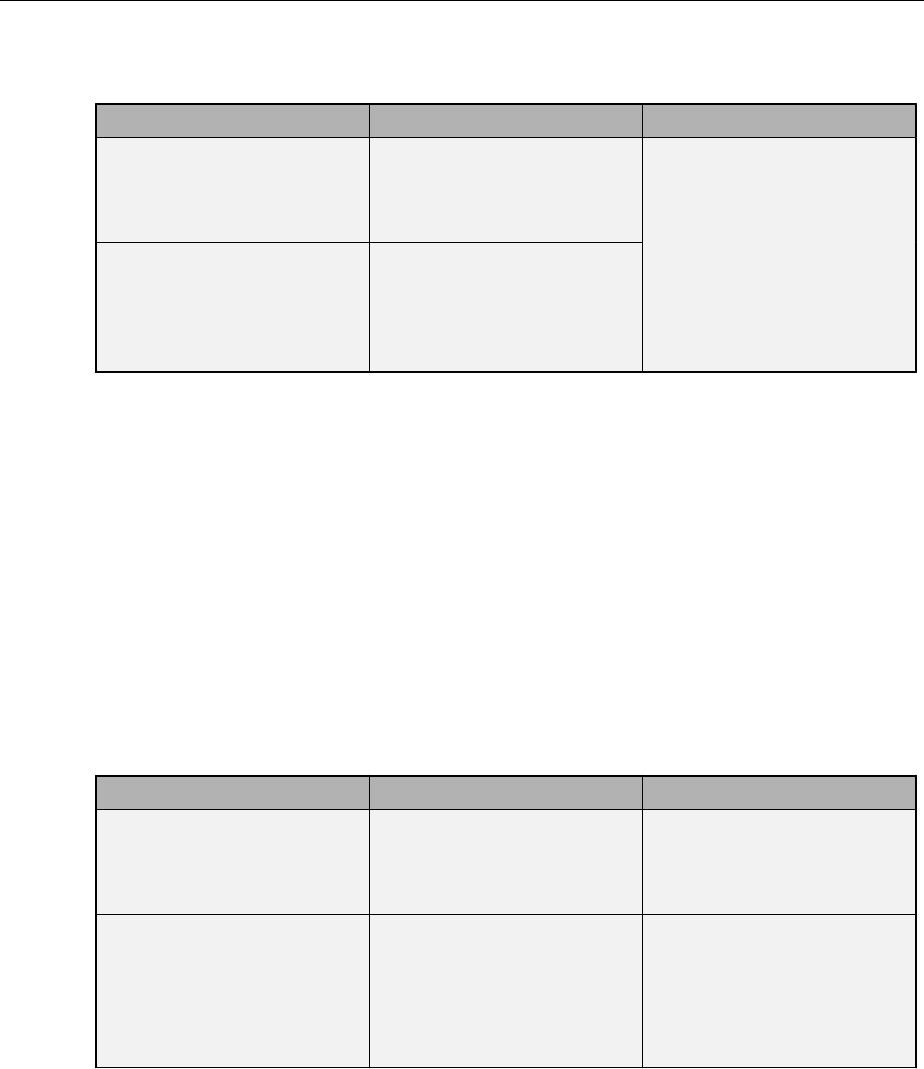
Test Diagnostic Description Possible Solution
The function
'forward' threw an
error:
The forward function
threw an error when passed
data of size
validInputSize.
The function
'backward' threw an
error:
The backward function
threw an error when passed
the output of predict with
data of size
validInputSize.
Derivatives Are Consistent in Size
The test backwardIsConsistentInSize checks that the backward function outputs
derivatives of the correct size.
The syntax for backward is [dLdX,dLdW1,…,dLdWn] =
backward(layer,X,Z,dLdZ,memory). For the inputs, X is the layer input data, Z is the
output of forward, dLdZ is the gradient backward propagated from the next layer, and
memory is the memory output of forward. For the outputs, dLdX is the derivative of the
loss with respect to the layer input data, and dLdW1,…,dLdWn are the derivatives of the
loss with respect to the learnable parameters.
dLdX must be the same size as the layer input X, and dLdW1,…,dLdWn must be the same
size as the corresponding learnable parameters. The sizes must be consistent for input
data with single and multiple observations.
Test Diagnostic Description Possible Solution
Incorrect size of
'dLdX' for 'backward'.
The derivatives of the loss
with respect to the layer
input must be the same size
as the layer input.
Return derivative dLdX with
the same size as the layer
input X.
Incorrect size of the
derivative of loss
with respect to 'W'
for 'backward'.
The derivatives of the loss
with respect to the learnable
parameters must be the
same size as the
corresponding learnable
parameters.
Return derivatives dLdW1,
…,dLdWn with the same size
as the corresponding
learnable parameters.
2Deep Networks
2-112
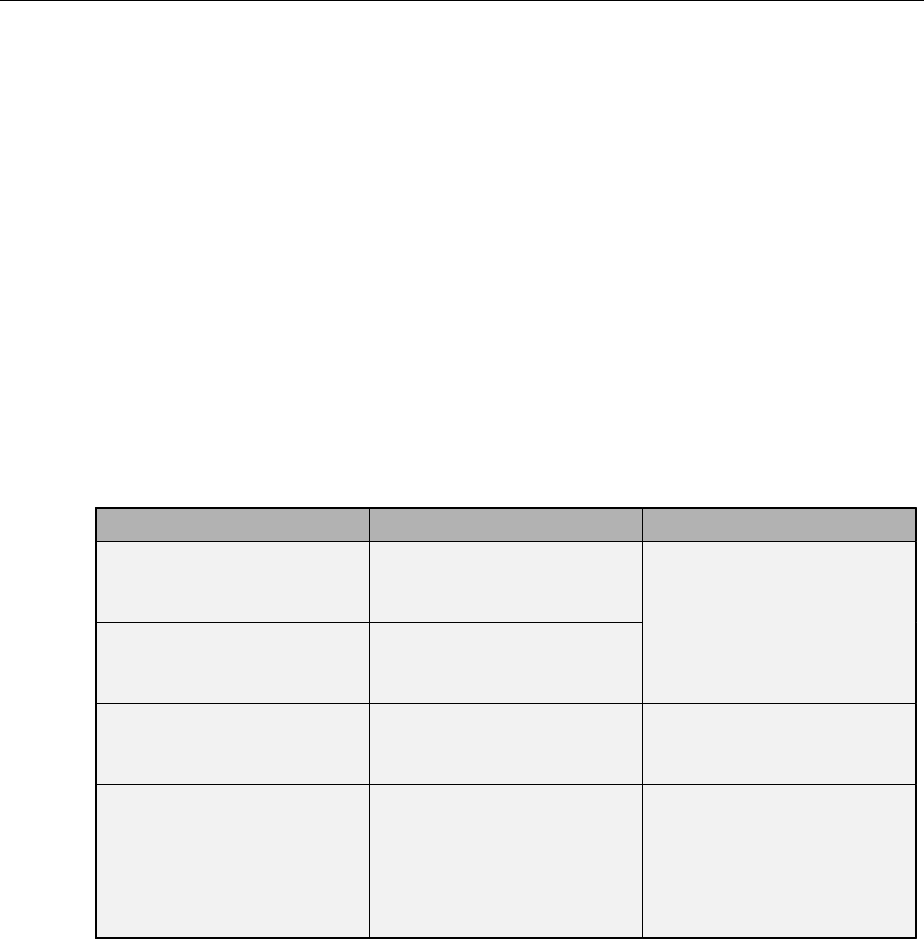
Consistent Data Types and GPU Compatibility
The tests predictIsConsistentInType, forwardIsConsistentInType, and
backwardIsConsistentInType check that the layer functions output variables of the
correct data type. The tests check that the layers return consistent data types when given
inputs of the data types single, double, and gpuArray.
For GPU compatibility, the layer functions must support inputs and return outputs of type
gpuArray. Any other functions used by the layer must do the same. Many MATLAB built-
in functions support gpuArray input arguments. If you call any of these functions with at
least one gpuArray as an input, then the function executes on the GPU and returns a
gpuArray. For a list of functions that execute on a GPU, see “Run Built-In Functions on a
GPU” (Parallel Computing Toolbox). To use a GPU for deep learning, you must also have a
CUDA enabled NVIDIA GPU with compute capability 3.0 or higher. For more information
on working with GPUs in MATLAB, see “GPU Computing in MATLAB” (Parallel Computing
Toolbox).
Test Diagnostic Description Possible Solution
Incorrect type of 'Z'
for 'predict'.
The type of the output Z of
predict must be consistent
with the input X.
Return Z with the same type
as the input X.
Incorrect type of 'Z'
for 'forward'.
The type of the output Z of
forward must be consistent
with the input X.
Incorrect type of
'dLdX' for 'backward'.
The type of the output dLdX
of backward must be
consistent with the input X.
Return dLdX with the same
type as the input X.
Incorrect type of the
derivative of loss
with respect to 'W'
for 'backward'.
The type of the derivative of
the loss of the learnable
parameters must be
consistent with the
corresponding learnable
parameters.
For each learnable
parameter, return the
derivative with the same
type as the corresponding
learnable parameter.
Gradients Are Numerically Correct
The function gradientsAreNumericallyCorrect tests that the gradients computed in
backward are numerically correct.
Check Custom Layer Validity
2-113
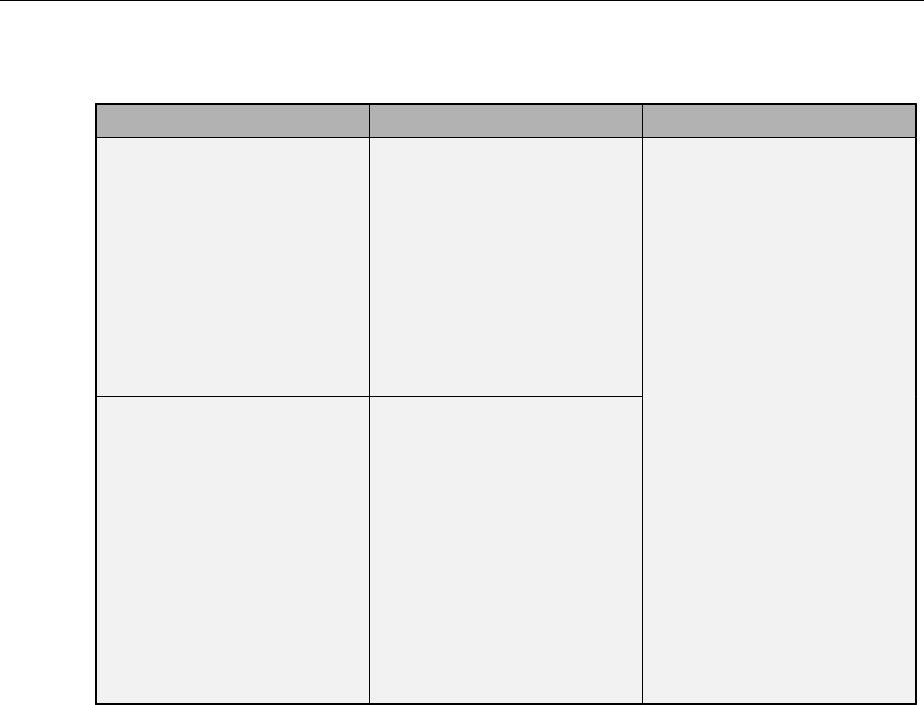
Test Diagnostic Description Possible Solution
The derivative 'dLdX'
for 'backward' is
inconsistent with the
numerical gradient.
One or more of the
following:
•dLdX is incorrectly
computed.
• Function is non-
dierentiable at some
input points.
• Error tolerance is too
small.
Check that the derivatives in
backward are correctly
computed.
If the derivatives are
correctly computed, then in
the Framework
Diagnostic section,
manually check the absolute
and relative error between
the actual and expected
values of the derivative.
If the absolute and relative
errors are within an
acceptable margin of the
tolerance, then you can
ignore this test diagnostic.
The derivative of
loss with respect to
'W' for 'backward' is
inconsistent with the
numerical gradient.
One or more of the
following:
• The derivative with
respect to the learnable
parameter W is
incorrectly computed
• Function is non-
dierentiable at some
input points
• Error tolerance is too
small
Check Validity of Layer Using checkLayer
Check the layer validity of the example layer examplePreluLayer.
To use the layer examplePreluLayer, add the example folder to the path.
exampleFolder = genpath(fullfile(matlabroot,'examples','nnet'));
addpath(exampleFolder)
Create an instance of the layer and check its validity using checkLayer.
Specify the valid input size to be the size of a single observation of typical input to the
layer. The layer expects 4-D array inputs, where the rst three dimensions correspond to
the height, width, and number of channels of the previous layer output, and the fourth
dimension corresponds to the observations.
2Deep Networks
2-114

Specify the typical size of the input of an observation and set
'ObservationDimension' to 4.
layer = examplePreluLayer(20);
validInputSize = [24 24 20];
checkLayer(layer,validInputSize,'ObservationDimension',4)
Running nnet.checklayer.TestCase
..........
..........
.
Done nnet.checklayer.TestCase
__________
Test Summary:
21 Passed, 0 Failed, 0 Incomplete.
Time elapsed: 6.863 seconds.
Here, the function does not detect any issues with the layer.
To remove the example folder, use rmpath.
rmpath(exampleFolder)
See Also
checkLayer
More About
• “Deep Learning in MATLAB” on page 2-2
•“Dene Custom Deep Learning Layers” on page 2-56
•“Dene a Custom Deep Learning Layer with Learnable Parameters” on page 2-73
•“Dene a Custom Classication Output Layer” on page 2-97
•“Dene a Custom Regression Output Layer” on page 2-87
See Also
2-115
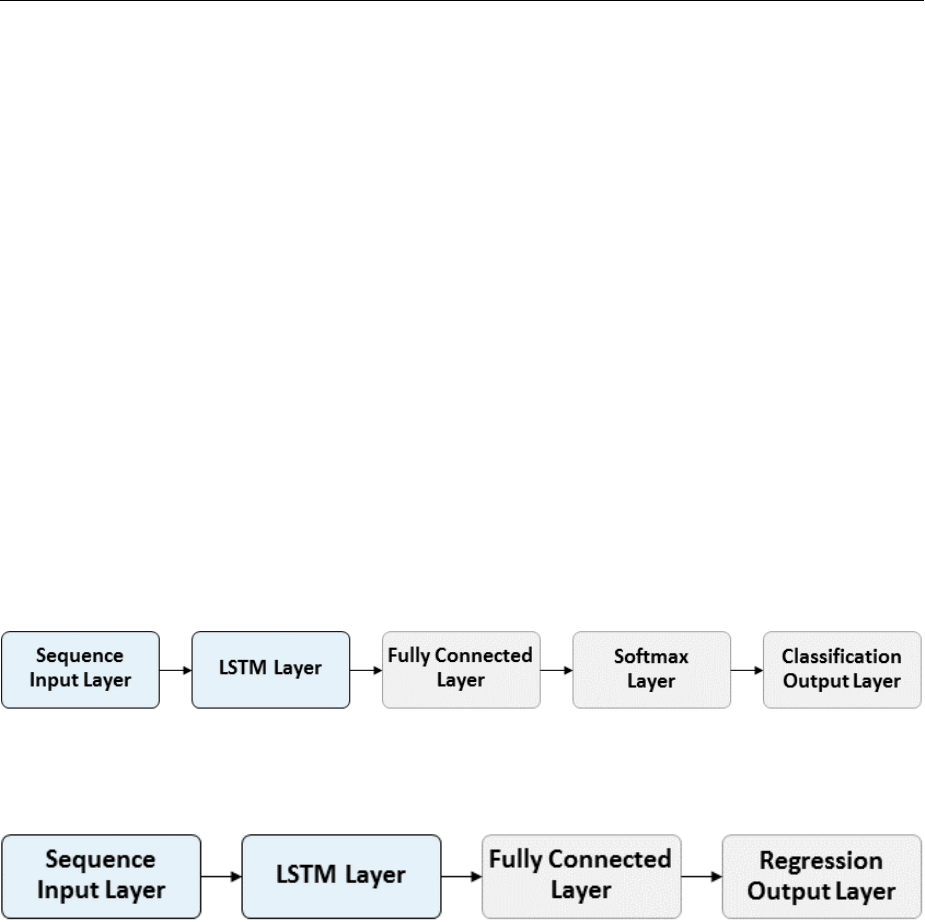
Long Short-Term Memory Networks
This topic explains how to work with sequence and time series data for classication and
regression tasks using long short-term memory (LSTM) networks. For an example
showing how to classify sequence data using an LSTM network, see “Sequence
Classication Using Deep Learning”.
An LSTM network is a type of recurrent neural network (RNN) that can learn long-term
dependencies between time steps of sequence data.
LSTM Network Architecture
The core components of an LSTM network are a sequence input layer and an LSTM layer.
A sequence input layer inputs sequence or time series data into the network. An LSTM
layer learns long-term dependencies between time steps of sequence data.
This diagram illustrates the architecture of a simple LSTM network for classication. The
network starts with a sequence input layer followed by an LSTM layer. To predict class
labels, the network ends with a fully connected layer, a softmax layer, and a classication
output layer.
This diagram illustrates the architecture of a simple LSTM network for regression. The
network starts with a sequence input layer followed by an LSTM layer. The network ends
with a fully connected layer and a regression output layer.
Classication LSTM Networks
To create an LSTM network for sequence-to-label classication, create a layer array
containing a sequence input layer, an LSTM layer, a fully connected layer, a softmax layer,
and a classication output layer.
2Deep Networks
2-116

Specify the size of the sequence input layer to be the feature dimension of the input data.
Specify the size of the fully connected layer to be the number of classes.
For the LSTM layer, choose an output size, and specify the output mode 'last'.
inputSize = 12;
numHiddenUnits = 100;
numClasses = 9;
layers = [ ...
sequenceInputLayer(inputSize)
lstmLayer(numHiddenUnits,'OutputMode','last')
fullyConnectedLayer(numClasses)
softmaxLayer
classificationLayer];
For an example showing how to train an LSTM network for sequence-to-label
classication and classify new data, see “Sequence Classication Using Deep Learning”.
To create an LSTM network for sequence-to-sequence regression, use the same
architecture for sequence-to-labe classication, but set the output mode of the LSTM
layer to 'sequence'.
inputSize = 12;
numHiddenUnits = 100;
numClasses = 9;
layers = [ ...
sequenceInputLayer(inputSize)
lstmLayer(numHiddenUnits,'OutputMode','sequence')
fullyConnectedLayer(numClasses)
softmaxLayer
classificationLayer];
Regression LSTM Networks
To create an LSTM network for sequence-to-one regression, create a layer array
containing a sequence input layer, an LSTM layer, a fully connected layer, and a
regression output layer.
Specify the size of the sequence input layer to be the feature dimension of the input data.
Specify the size of the fully connected layer to be the number of responses.
For the LSTM layer, choose an output size, and specify the output mode 'last'.
Long Short-Term Memory Networks
2-117

inputSize = 12;
outputSize = 125;
numResponses = 1;
layers = [ ...
sequenceInputLayer(inputSize)
lstmLayer(outputSize,'OutputMode','last')
fullyConnectedLayer(numResponses)
regressionLayer];
To create an LSTM network for sequence-to-sequence regression, use the same
architecture for sequence-to-one regression, but set the output mode of the LSTM layer to
'sequence'.
inputSize = 12;
outputSize = 125;
numResponses = 1;
layers = [ ...
sequenceInputLayer(inputSize)
lstmLayer(outputSize,'OutputMode','sequence')
fullyConnectedLayer(numResponses)
regressionLayer];
For an example showing how to train an LSTM network for sequence-to-sequence
regression and predict on new data, see “Sequence-to-Sequence Regression Using Deep
Learning”.
Deeper LSTM Networks
You can make LSTM networks deeper by inserting extra LSTM layers with the output
mode 'sequence' before the LSTM layer.
For sequence-to-label classication networks, the output mode of the last LSTM layer
must be 'last'.
inputSize = 12;
numHiddenUnits1 = 125;
numHiddenUnits2 = 100;
numClasses = 9;
layers = [ ...
sequenceInputLayer(inputSize)
lstmLayer(numHiddenUnits1,'OutputMode','sequence')
lstmLayer(numHiddenUnits2,'OutputMode','last')
fullyConnectedLayer(numClasses)
2Deep Networks
2-118

softmaxLayer
classificationLayer];
For sequence-to-sequence classication networks, the output mode of the last LSTM layer
must be 'sequence'.
inputSize = 12;
numHiddenUnits1 = 125;
numHiddenUnits2 = 100;
numClasses = 9;
layers = [ ...
sequenceInputLayer(inputSize)
lstmLayer(numHiddenUnits1,'OutputMode','sequence')
lstmLayer(numHiddenUnits2,'OutputMode','sequence')
fullyConnectedLayer(numClasses)
softmaxLayer
classificationLayer];
Layers
Sequence Input Layer
A sequence input layer inputs sequence data to a network. You can create a sequence
input layer using sequenceInputLayer.
LSTM Layer
An LSTM layer is a recurrent neural network (RNN) layer that enables support for time
series and sequence data in a network. The layer performs additive interactions, which
can help improve gradient ow over long sequences during training. LSTM layers are
best suited for learning long-term dependencies (dependencies from distant time steps).
Create an LSTM layer using lstmLayer.
Bidirectional LSTM Layer
A bidirectional LSTM (BiLSTM) layer is an RNN layer that learns bidirectional long-term
dependencies between time steps. These dependencies can be useful when you want the
network to learn from the complete time series at each time step.
Create a BiLSTM layer using bilstmLayer.
Long Short-Term Memory Networks
2-119

Classication and Prediction
To classify or make predictions on new data, use classify and predict.
LSTM networks can remember the state of the network between predictions. The network
state is useful when you do not have the complete time series in advance, or if you want
to make multiple predictions on a long time series.
To predict and classify on parts of a time series and update the network state, you can use
predictAndUpdateState and classifyAndUpdateState. To reset the network state
between predictions, use resetState.
For an example showing how to forecast future time steps of a sequence, see “Time
Series Forecasting Using Deep Learning”.
Sequence Padding, Truncation, and Splitting
When passing data through the network, the software pads, truncates, or splits sequences
in each mini-batch to have the specied length. You can specify the sequence lengths and
the value used to pad the sequences using the SequenceLength and
SequencePaddingValue name-value pair arguments in trainingOptions.
Sort Sequences by Length
If you sort your data by sequence length, then you might reduce the amount of padding or
discarded data when padding or truncating the sequences.
To sort the data by sequence length, rst get the number of columns of each sequence by
applying size(X,2) to every sequence using cellfun. Then sort the sequence lengths
using sort, and use the second output to reorder the original sequences.
sequenceLengths = cellfun(@(X) size(X,2), XTrain);
[sequenceLengthsSorted,idx] = sort(sequenceLengths);
XTrain = XTrain(idx);
The following gures show the sequence lengths of the sorted and unsorted data in bar
charts.
2Deep Networks
2-120
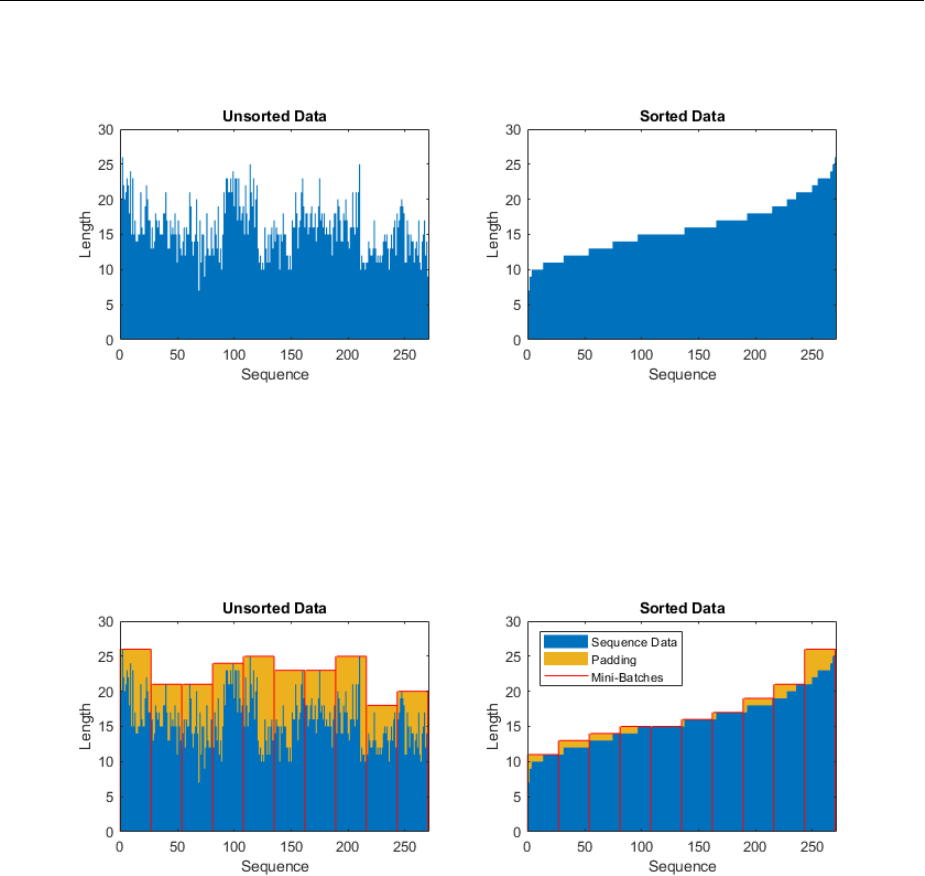
Pad Sequences
If you specify the sequence length 'longest', then the software pads the sequences in
each mini-batch to have the same length as the longest sequence in that mini-batch. This
option is the default.
The follow gures illustrate the eect of setting 'SequenceLength' to 'longest'.
Truncate Sequences
If you specify the sequence the length to be 'shortest', then the software truncates the
sequences in each mini-batch to have the same length as the shortest sequence in that
mini-batch. The remaining data in the sequences is discarded.
The following gures illustrate the eect of setting 'SequenceLength' to 'shortest'.
Long Short-Term Memory Networks
2-121
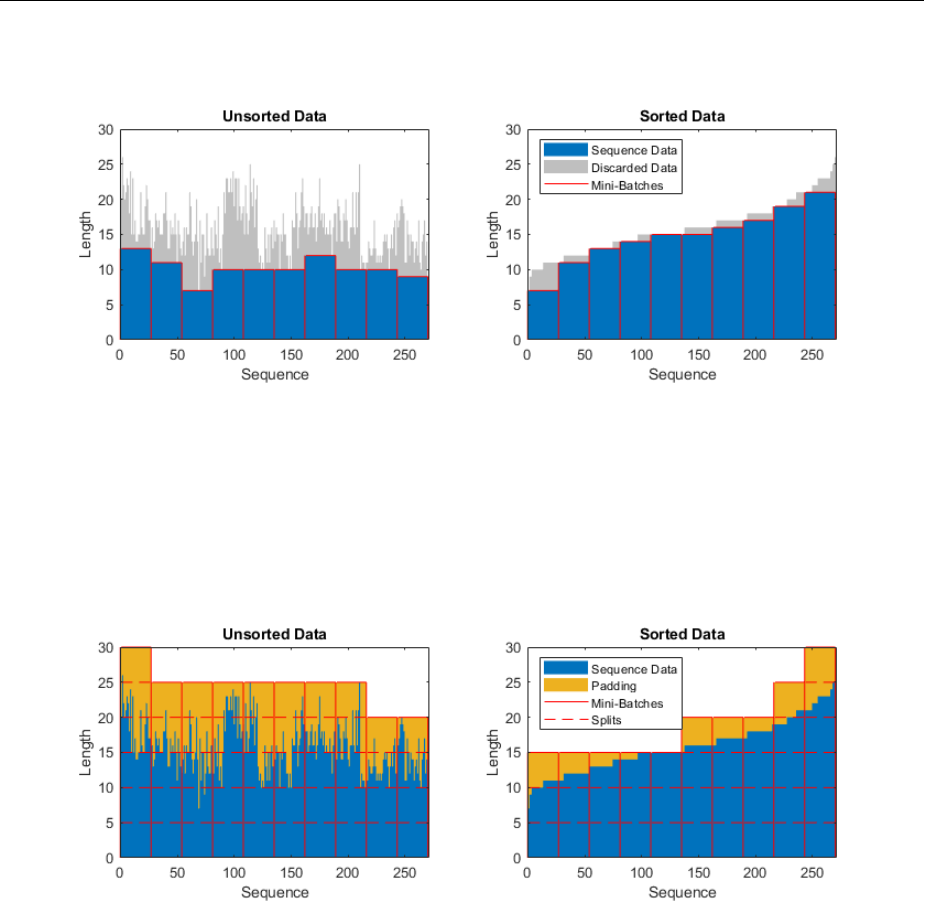
Split Sequences
If you specify sequence the length to be an integer value, then the software pads the
sequences in each mini-batch to have the same length as the longest sequence, then splits
the sequences into smaller sequences of the specied length. If splitting occurs, then the
software creates extra mini-batches.
The follow gures illustrate the eect of setting 'SequenceLength' to 5.
LSTM Layer Architecture
This diagram illustrates the ow of a time series X with D features of length S through an
LSTM layer. In this diagram, h denotes the output (also known as the hidden state) and c
denotes the cell state.
2Deep Networks
2-122
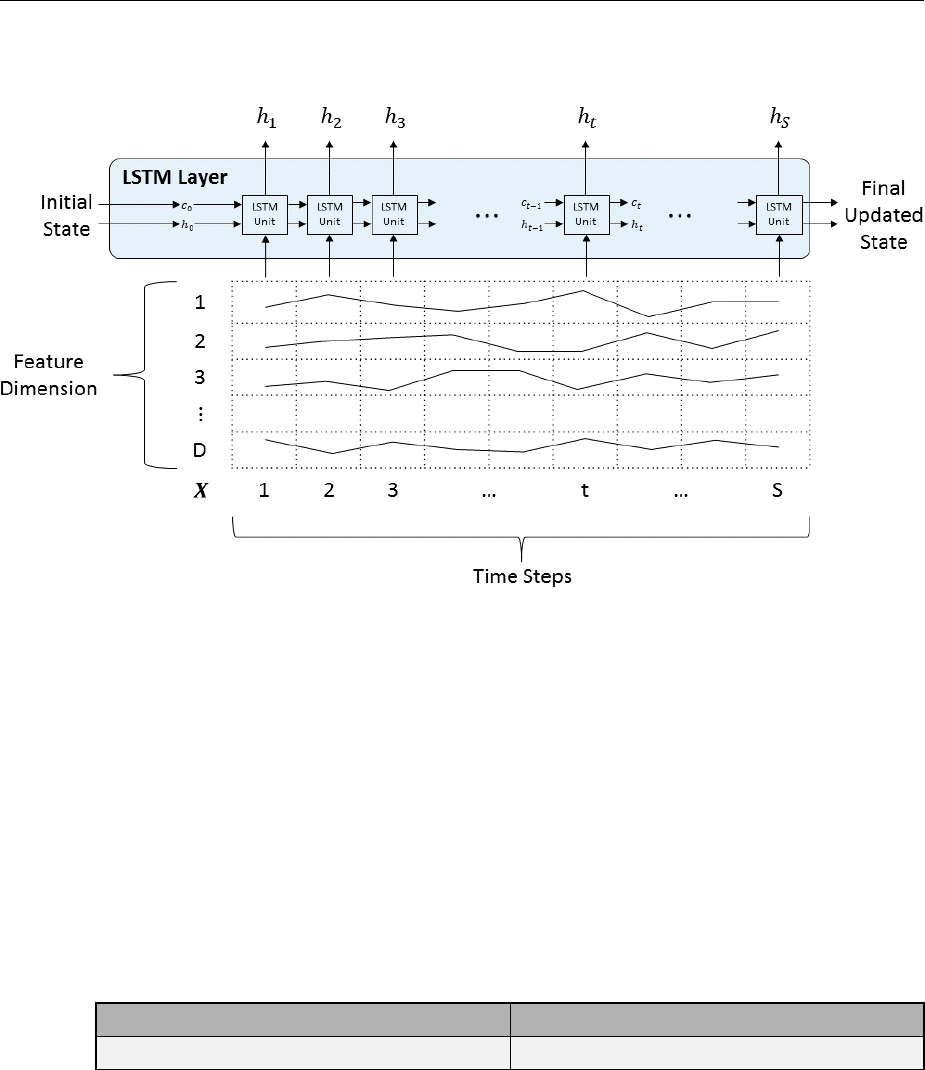
The rst LSTM unit takes the initial state of the network and the rst time step of the
sequence
X1
, and then computes the rst output
h1
and the updated cell state
c
1
. At
time step t, the unit takes the current state of the network
( , )c h
t t- -1 1
and the next time
step of the sequence
Xt
, and then computes the output
ht
and the updated cell state
ct
.
The state of the layer consists of the output state (also known as the hidden state) and the
cell state. The output state at time step t contains the output of the LSTM layer for this
time step. The cell state contains information learned from the previous time steps. At
each time step, the layer adds information to or removes information from the cell state,
where the layer controls these updates using gates.
This table summarizes the components that control the cell state and output state of the
layer.
Component Purpose
Input gate (i) Control level of cell state update
Long Short-Term Memory Networks
2-123
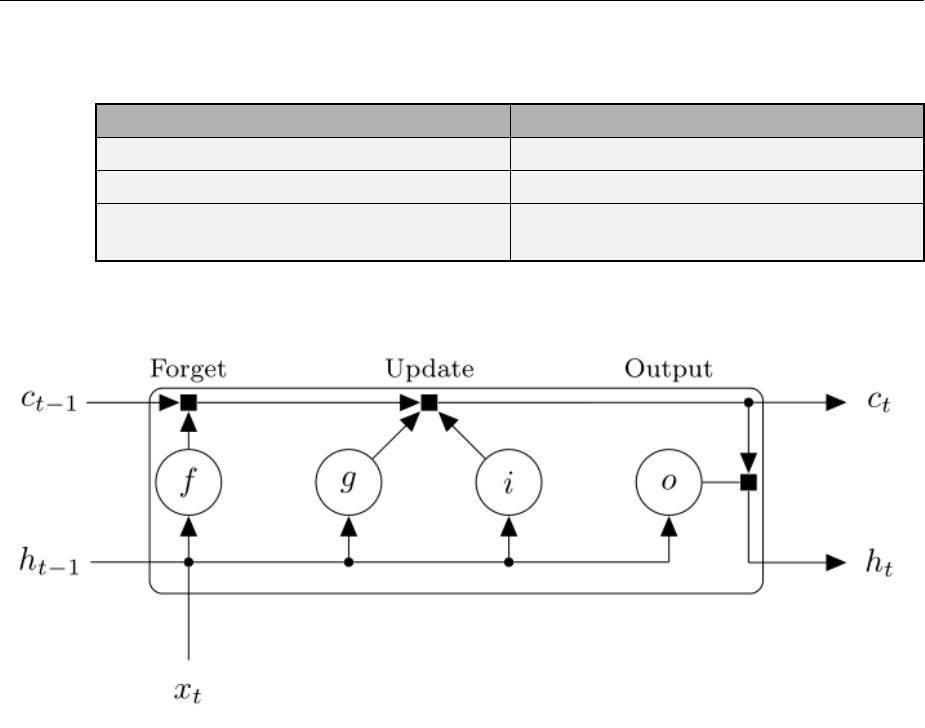
Component Purpose
Forget gate (f) Control level of cell state reset (forget)
Layer input (g) Add information to cell state
Output gate (o) Control level of cell state added to output
state
This diagram illustrates the ow of data at time step t. The diagram highlights how the
gates forget, update, and output the cell and output states.
The learnable weights of an LSTM layer are the input weights W (InputWeights), the
recurrent weights R (RecurrentWeights), and the bias b (Bias). The matrices W, R,
and b are concatenations of the input weights, the recurrent weights, and the bias of each
component, respectively. These matrices are concatenated as follows:
W
W
W
W
W
R b
R
R
R
R
b
b
b
b
i
f
g
o
i
f
g
o
i
f
g
o
=
È
Î
Í
Í
Í
Í
˘
˚
˙
˙
˙
˙
=
È
Î
Í
Í
Í
Í
˘
˚
˙
˙
˙
˙
=
È
Î
, ,
ÍÍ
Í
Í
Í
˘
˚
˙
˙
˙
˙
,
2Deep Networks
2-124
where i, f, g, and o denote the input gate, forget gate, layer input, and output gate,
respectively.
The cell state at time step t is given by
c c gf i
t t t t t
= +
-
e e
1,
where
e
denotes the Hadamard product (element-wise multiplication of vectors).
The output (hidden) state at time step t is given by
h o c
t t t
=etanh( ).
This table shows the formula for each component at time step t.
Component Formula
Input gate
i W x h b
t i t i t i
= + +
-
s
( )R 1
Forget gate
f W x h b
t f t f t f
= + +
-
s
( )R 1
Layer input
g W x h b
t t tg g g
= + +
-
tanh R( )
1
Output gate
o W x h b
t t to o o
= + +
-
s
( )R 1
Here,
s
denotes the sigmoid function given by
s
( ) ( )x e x
= + - -
11
.
References
[1] Hochreiter, S, and J. Schmidhuber, 1997. Long short-term memory. Neural
computation, 9(8), pp.1735–1780.
See Also
bilstmLayer | classifyAndUpdateState | lstmLayer | predictAndUpdateState |
resetState | sequenceInputLayer
See Also
2-125


Preprocess Images for Deep Learning
Training a network and making predictions on new data require that images match the
input size of the network. To resize images to match the input size of the network, you
can use imresize or augmentedImageDatastore.
In addition to resizing images, you can perform additional preprocessing to augment
training, validation, and test data sets. Augmenting training images helps to prevent the
network from overtting and memorizing the exact details of the training images.
Resize Images
To nd the image input size of the network, get the rst two elements of the InputSize
property of the imageInputLayer of the network. For example, to get the image input
size for the AlexNet pretrained network:
net = alexnet;
inputSize = net.Layers(1).InputSize(1:2)
inputSize =
227 227
The method to resize images depends on the image data type.
• To rescale a 3-D array representing a single color image, a single multispectral image,
or a stack of grayscale images, use imresize. For example, to resize images in the 3-
D array im3d:
im = imresize(im3d,inputSize);
• To rescale a 4-D array representing a stack of images, you can use imresize. For
example, to rescale images in the 4-D array im4d:
im = imresize(im4d,inputSize);
Alternatively, you can rescale or crop images in the 4-D array to the desired size by
using augmentedImageDatastore. By default, augmentedImageDatastore
rescales images to the desired size. If instead you want to crop images from the center
or from random positions in the image, you can use the 'OutputSizeMode' name-
value pair argument. For example, to crop images in the 4-D array im4d from the
center of each image:
Preprocess Images for Deep Learning
2-127
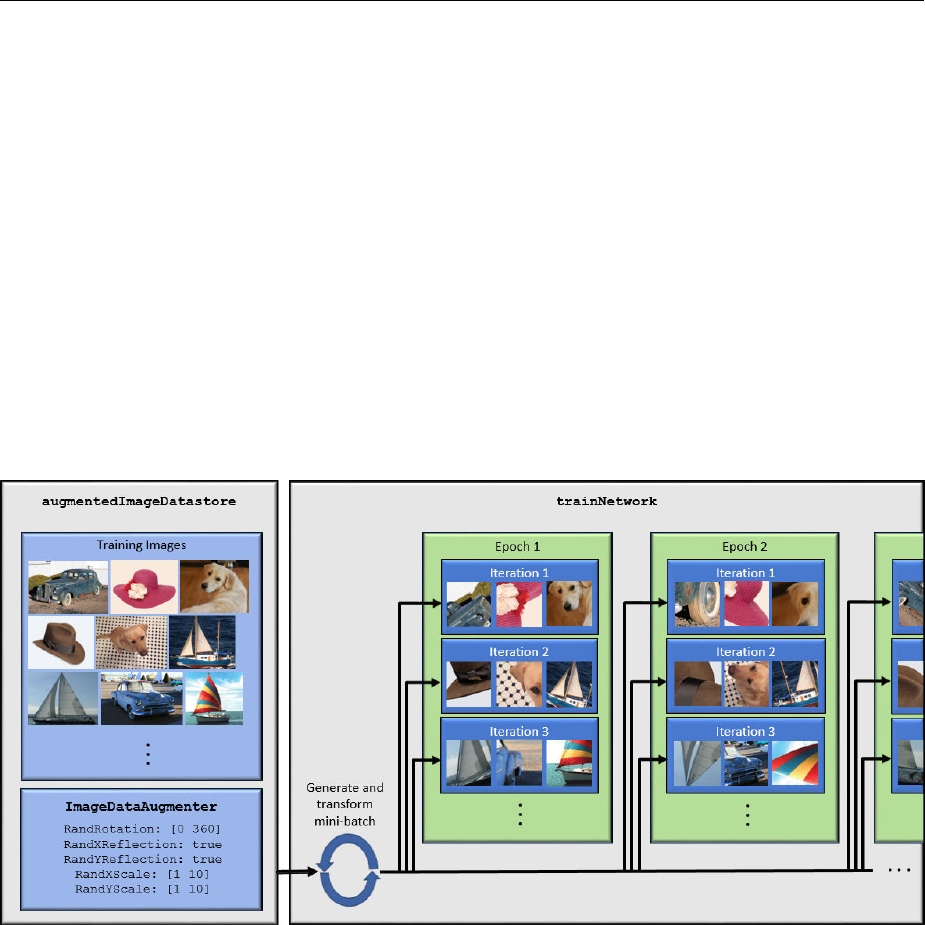
auimds = augmentedImageDatastore(inputSize,im4d,'OutputSizeMode','centercrop');
• To rescale or crop images in an ImageDatastore or table, use
augmentedImageDatastore. For example, to rescale images in the image datastore
imds:
auimds = augmentedImageDatastore(inputSize,imds);
You can use an augmented image datastore or a resized 4-D array for training, prediction,
and classication. You can use a resized 3-D array for prediction and classication only.
Augment Images for Training
In addition to resizing images, an augmentedImageDatastore enables you to augment
images by applying rotation, reection, shear, and translation. The diagram shows a
typical workow for training a network using an augmented image datastore.
•Dene your training images. You can store the images as an ImageDatastore, a 4-D
numeric array, or a table. An ImageDatastore enables you to import data from image
collections that are too large to t in memory. This function is designed to read
batches of images for faster processing in machine learning and computer vision
applications.
2Deep Networks
2-128
•Congure image preprocessing options, such as the range of rotation angles and
whether to apply reection at random, by creating an imageDataAugmenter.
• Create an augmentedImageDatastore, specifying the training images, the size of
output images, and the imageDataAugmenter. The size of output images must be
compatible with the size of the imageInputLayer of the network.
• Train the network, specifying the augmented image datastore as the data source for
trainNetwork. For each iteration of training, the augmented image datastore
generates one mini-batch of training data by applying random transformations to the
training images.
Note Each mini-batch contains augmented images instead of training images, not in
addition to training images. Therefore, image data augmentation does not increase the
number of images in each epoch. Images generated by the augmented image
datastore are not stored in memory.
For an example of the workow, see “Train Network with Augmented Images”.
Advanced Image Preprocessing
If you want to perform image preprocessing beyond the transformations oered by
augmentedImageDatastore, then you can use a mini-batch datastore to perform data
augmentation. A mini-batch datastore refers to any built-in or custom datastore that
oers support for reading data in batches. You can use a mini-batch datastore as a source
of training, validation, and test data sets for deep learning applications that use Neural
Network Toolbox.
These built-in mini-batch datastores perform specic image preprocessing operations
when they read a batch of data:
Type of Mini-Batch
Datastore
Description
augmentedImageDa
tastore
Apply random aine geometric transformations, including
resizing, rotation, reection, shear, and translation, for training
deep neural networks.
Preprocess Images for Deep Learning
2-129
Type of Mini-Batch
Datastore
Description
pixelLabelImageD
atastore
Apply identical aine geometric transformations to images and
corresponding ground truth labels for training semantic
segmentation networks (requires Computer Vision System
Toolbox™).
denoisingImageDa
tastore
Apply randomly generated Gaussian noise for training denoising
networks (requires Image Processing Toolbox™).
To preprocess images using your own image processing pipeline, you can implement a
custom mini-batch datastore. For more information, see “Develop Custom Mini-Batch
Datastore” on page 2-131.
See Also
classify | imresize | predict | trainNetwork
Related Examples
• “Deep Learning in MATLAB” on page 2-2
• “Train Network with Augmented Images”
• “Develop Custom Mini-Batch Datastore” on page 2-131
• “Transfer Learning Using GoogLeNet”
2Deep Networks
2-130

Develop Custom Mini-Batch Datastore
A mini-batch datastore is an implementation of a datastore with support for reading data
in batches. You can use a mini-batch datastore as a source of training, validation, and test
data sets for deep learning applications that use Neural Network Toolbox.
For certain applications, you can use a built-in mini-batch datastore that performs specic
image preprocessing operations when reading batches of data. For example, an
augmentedImageDatastore generates mini-batches by resizing, rotating, reecting,
and performing other aine geometric transformations of input images. For a full list of
built-in mini-batch datastores with their typical applications, see “Advanced Image
Preprocessing” on page 2-129. If you do not want to read images in batches, then you can
use an ImageDatastore to store your training, validation, and test images.
For full exibility in preprocessing images, build your own mini-batch datastore using the
framework described here. You can optionally add support for functionality such as
shuing during training, parallel and multi-GPU training, and background dispatch.
Overview
Build your custom datastore interface using the custom datastore classes and objects.
Then, use the custom datastore to bring your data into MATLAB.
Designing your custom mini-batch datastore involves inheriting from the Datastore and
MiniBatchable classes, and implementing the required properties and methods. You
can optionally inherit from any combination of additional classes to satisfy your
processing needs.
Processing Needs Classes
Mini-batch datastore for training,
validation, and test data sets in Neural
Network Toolbox
Datastore and MiniBatchable
See “Implement MiniBatchable Datastore”
on page 2-132.
Mini-batch datastore with support for
shuing during training
Datastore, MiniBatchable, and
Shuffleable
See “Add Support for Shuing” on page 2-
135.
Develop Custom Mini-Batch Datastore
2-131
Processing Needs Classes
Mini-batch datastore with support for
parallel and multi-GPU training (requires
Parallel Computing Toolbox)
Datastore, MiniBatchable, and
PartitionableByIndex
See “Add Support for Parallel and Multi-
GPU Training” on page 2-136.
Mini-batch datastore with support for
background dispatch (prefetch) during
training, prediction, classication, and
validation (requires Parallel Computing
Toolbox)
Datastore, MiniBatchable, and
BackgroundDispatchable
See “Add Support for Background Dispatch”
on page 2-137.
For an example of dening a custom mini-batch datastore, see the
vdsrImagePatchDatastore.m supporting le from “Single Image Super-Resolution
Using Deep Learning” (Image Processing Toolbox). This mini-batch datastore creates
batches of upsampled low-resolution patches and corresponding residual patches, with
support for shuing during training.
Implement MiniBatchable Datastore
To implement a custom mini-batch datastore named MyDatastore, create a script
MyDatastore.m. The script must be on the MATLAB path and should contain code that
inherits from the appropriate class and denes the required methods. The code for
creating a mini-batch datastore for training, validation, and test data sets in Neural
Network Toolbox must:
• Inherit from the classes Datastore and MiniBatchable.
•Dene these properties: MiniBatchSize and NumObservations.
•Dene these methods: hasdata, read, reset, and progress.
In addition to these steps, you can dene any other properties or methods that you need
to process and analyze your data.
Note If you are training a network and trainingOptions species:
•'Shuffle' as 'once' or 'every-epoch', then you must also inherit from the
Shuffleable class. For more information, see “Add Support for Shuing” on page 2-
135.
2Deep Networks
2-132
•'ExecutionEnvironment' as 'gpu', 'multi-gpu', or 'parallel', then you
must also inherit from the PartitionableByIndex class. For more information, see
“Add Support for Parallel and Multi-GPU Training” on page 2-136.
This example shows how to create a custom mini-batch datastore called an associated
image datastore, which keeps two image datastores synchronized. Each image in one
datastore is paired with a specic image in the other datastore. Save the script in a le
called associatedImageDatastore.m.
Develop Custom Mini-Batch Datastore
2-133

Steps Implementation
1Begin dening
your class. Inherit
from the base
class Datastore
and the
MiniBatchable
class.
2Dene properties.
• You must
redene the
MiniBatchSiz
e and
NumObservati
ons properties.
You can
optionally
assign
additional
property
attributes to
either property.
For more
information,
see “Property
Attributes”
(MATLAB).
• You can also
dene
properties
unique to your
custom mini-
batch
datastore.
classdef associatedImageDatastore < matlab.io.Datastore & ...
matlab.io.datastore.MiniBatchable
properties
MiniBatchSize
end
properties(SetAccess = protected)
NumObservations
end
properties(Access = private)
% This property is inherited from Datastore
CurrentFileIndex
% These custom properties store copies of the two ImageDatastores
InputImds
OutputImds
end
methods
function ds = associatedImageDatastore(inputImds,outputImds,miniBatchSize)
% Construct an associatedImageDatastore object
ds.InputImds = copy(inputImds);
ds.OutputImds = copy(outputImds);
ds.InputImds.ReadSize = miniBatchSize;
ds.OutputImds.ReadSize = miniBatchSize;
ds.NumObservations = length(inputImds.Files);
ds.MiniBatchSize = miniBatchSize;
ds.CurrentFileIndex = 1;
end
function tf = hasdata(ds)
% Return true if more data is available
tf = hasdata(ds.InputImds);
end
function [data,info] = read(ds)
% Read one batch of data
inputImageData = read(ds.InputImds);
outputImageData = read(ds.OutputImds);
data = table(inputImageData,outputImageData);
info.batchSize = size(data,1);
ds.CurrentFileIndex = ds.CurrentFileIndex + info.batchSize;
info.currentFileIndex = ds.CurrentFileIndex;
end
function reset(ds)
% Reset to the start of the data
reset(ds.InputImds);
reset(ds.OutputImds);
ds.CurrentFileIndex = 1;
2Deep Networks
2-134

Steps Implementation
3Dene methods.
• Implement the
custom mini-
batch datastore
constructor.
• Implement the
hasdata
method.
• Implement the
read method,
which must
return data as
a table.
• Implement the
reset method.
• Implement the
progress
method.
• You can also
dene methods
unique to your
custom mini-
batch
datastore.
4End the classdef
section.
end
end
methods (Hidden = true)
function frac = progress(ds)
% Determine percentage of data read from datastore
frac = (ds.CurrentFileIndex-1)/ds.NumObservations;
end
end
end % end class definition
Add Support for Shuing
To add support for shuing, rst follow the instructions in “Implement MiniBatchable
Datastore” on page 2-132 and then update your implementation code in MyDatastore.m
to:
Develop Custom Mini-Batch Datastore
2-135
• Inherit from an additional class Shuffleable.
•Dene the additional method shuffle.
This example code adds shuing support to the associatedImageDatastore class.
Vertical ellipses indicate where you should copy code from the
associatedImageDatastore implementation.
Steps Implementation
1Update the class
denition to also
inherit from the
Shuffleable
class.
2Add the denition
for shuffle to the
existing methods
section.
classdef associatedImageDatastore < matlab.io.Datastore & ...
matlab.io.datastore.MiniBatchable & ...
matlab.io.datastore.Shuffleable
% previously defined properties
.
.
.
methods
% previously defined methods
.
.
.
function dsnew = shuffle(ds)
dsnew = copy(ds);
shuffledIndexOrder = randperm(ds.NumObservations);
dsnew.InputImds.Files = dsnew.InputImds.Files(shuffledIndexOrder);
dsnew.OutputImds.Files = dsnew.OutputImds.Files(shuffledIndexOrder);
end
end
end
Add Support for Parallel and Multi-GPU Training
To add support for parallel processing with Parallel Computing Toolbox, rst follow the
instructions in “Implement MiniBatchable Datastore” on page 2-132 and then update your
implementation code in MyDatastore.m to:
2Deep Networks
2-136
• Inherit from an additional class PartitionableByIndex.
•Dene the additional method partitionByIndex.
This example code adds support for parallel processing to the
associatedImageDatastore class. Vertical ellipses indicate where you should copy
code from the associatedImageDatastore implementation.
Steps Implementation
1Update the class
denition to also
inherit from the
PartitionableB
yIndex class.
2Add the denition
for
partitionByInd
ex to the existing
methods section.
classdef associatedImageDatastore < matlab.io.Datastore & ...
matlab.io.datastore.MiniBatchable & ...
matlab.io.datastore.PartitionableByIndex
% previously defined properties
.
.
.
methods
% previously defined methods
.
.
.
function dsnew = partitionByIndex(ds,indices)
dsnew = copy(ds);
dsnew.InputImds.Files = dsnew.InputImds.Files(indices);
dsnew.OutputImds.Files = dsnew.OutputImds.Files(indices);
end
end
end
Add Support for Background Dispatch
To add support for background dispatch (prefetch) during training, prediction,
classication, and validation, rst follow the instructions in “Implement MiniBatchable
Datastore” on page 2-132 and then update your implementation code in MyDatastore.m
to:
• Inherit from an additional class BackgroundDispatchable.
•Dene the additional method readByIndex.
For a sample implementation, follow these steps. This example code adds support for
prefetching to the associatedImageDatastore class. Vertical ellipses indicate where
you should copy code from the associatedImageDatastore implementation.
Develop Custom Mini-Batch Datastore
2-137

Steps Implementation
1Update the class
denition to also
inherit from the
BackgroundDisp
atchable class.
2Add the denition
for readByIndex
to the existing
methods section.
classdef associatedImageDatastore < matlab.io.Datastore & ...
matlab.io.datastore.MiniBatchable & ...
matlab.io.datastore.BackgroundDispatchable
% previously defined properties
.
.
.
methods
% previously defined methods
.
.
.
function [data,info] = readByIndex(ds,indices)
inputImdsNew = copy(ds.InputImds);
outputImdsNew = copy(ds.OutputImds);
inputImdsNew.Files = inputImdsNew.Files(indices);
outputImdsNew.Files = outputImdsNew.Files(indices);
X = readall(inputImdsNew);
Y = readall(outputImdsNew);
data = table(X,Y);
info.CurrentReadIndices = indices;
end
end
end
Validate Custom Mini-Batch Datastore
If you have followed all the instructions presented here, then the implementation of your
custom mini-batch datastore is complete. Before using this datastore, qualify it using the
guidelines presented in “Testing Guidelines for Custom Datastores” (MATLAB).
2Deep Networks
2-138

See Also
BackgroundDispatchable | MiniBatchable | PartitionableByIndex |
Shuffleable | matlab.io.Datastore | trainNetwork
More About
• “Getting Started with Datastore” (MATLAB)
• “Develop Custom Datastore” (MATLAB)
• “Developing Classes — Typical Workow” (MATLAB)
• “Testing Guidelines for Custom Datastores” (MATLAB)
• “Deep Learning in MATLAB” on page 2-2
• “Preprocess Images for Deep Learning” on page 2-127
See Also
2-139

Scale Up Deep Learning in Parallel and in the Cloud
In this section...
“Deep Learning on Multiple GPUs” on page 3-2
“Deep Learning in the Cloud” on page 3-4
“Advanced Support for Fast Multi-Node GPU Communication” on page 3-5
Deep Learning on Multiple GPUs
Neural networks are inherently parallel algorithms. You can take advantage of this
parallelism by using Parallel Computing Toolbox to distribute training across multicore
CPUs, graphical processing units (GPUs), and clusters of computers with multiple CPUs
and GPUs.
Training deep networks is extremely computationally intensive and you can usually
accelerate training by using a high performance GPU. If you do not have a suitable GPU,
you can train on one or more CPU cores instead, or rent GPUs in the cloud. You can train
a convolutional neural network on a single GPU or CPU, or on multiple GPUs or CPU
cores, or in parallel on a cluster. Using GPU or any parallel option requires Parallel
Computing Toolbox.
Tip GPU support is automatic. By default, the trainNetwork function uses a GPU if
available.
If you have access to a machine with multiple GPUs, simply specify the training option
'ExecutionEnvironment','multi-gpu'.
If you want to use more resources, you can scale up deep learning training to the cloud.
3Deep Learning in the Cloud
3-2
Deep Learning Built-In Parallel Support
Training Resource Settings Learn More
Single GPU on local
machine
Automatic. By default, the
trainNetwork function
uses a GPU if available.
“'ExecutionEnvironment'”
“Create Simple Deep
Learning Network for
Classication”
Multiple GPUs on local
machine
Specify
'ExecutionEnvironment
','multi-gpu' with the
trainingOptions
function.
“'ExecutionEnvironment'”
“Select Particular GPUs to
Use for Training” on page 3-
7
Multiple CPU cores on local
machine
Specify
'ExecutionEnvironment
','parallel'.
With default settings,
'parallel' uses the local
cluster prole. Only use
CPUs if you do not have a
GPU, because CPUs are
generally far slower than
GPUs for training.
“'ExecutionEnvironment'”
Cluster or in the cloud After setting a default
cluster, specify
'ExecutionEnvironment
','parallel' with the
trainingOptions
function.
Training executes on the
cluster and returns the
built-in progress plot to your
local MATLAB.
“Train Network in the Cloud
Using Built-in Parallel
Support”
Scale Up Deep Learning in Parallel and in the Cloud
3-3
Train Multiple Deep Networks in Parallel
Training Scenario Recommendations Learn More
Interactively on your local
machine or in the cloud
Use a parfor loop to train
multiple networks, and plot
results using the
OutputFcn. Runs locally by
default, or choose a
dierent cluster prole.
“Use parfor to Train
Multiple Deep Learning
Networks”
In the background on your
local machine or in the
cloud
Use parfeval to train
without blocking your local
MATLAB, and plot results
using the OutputFcn. Runs
locally by default, or choose
a dierent cluster prole.
“Use parfeval to Train
Multiple Deep Learning
Networks”
On a cluster, and turn o
your local machine
Use the batch function to
send training code to the
cluster. You can close
MATLAB and fetch results
later.
“Send Deep Learning Batch
Job To Cluster”
Deep Learning in the Cloud
If your deep learning training takes hours or days, you can rent high performance GPUs
in the cloud to accelerate training. Working in the cloud requires some initial setup, but
after the initial setup using the cloud can reduce training time, or allow you to train more
networks in the same time. To try deep learning in the cloud, you can follow example
steps to set up your accounts, copy your data into the cloud, and create a cluster. After
this initial setup, you can run your training code with minimal changes to run in the
cloud. After setting up your default cluster, simply specify the training option
'ExecutionEnvironment','parallel' to train networks on your cloud cluster on
multiple GPUs.
Congure Deep Learning
in the Cloud
Notes Learn More
Set up MathWorks Cloud
Center and Amazon
accounts
One-time setup. Getting Started with Cloud
Center
3Deep Learning in the Cloud
3-4
Congure Deep Learning
in the Cloud
Notes Learn More
Create a cluster Use Cloud Center to set up
and run clusters in the
Amazon cloud. For deep
learning, choose a machine
type with GPUs such as the
P2 or G3 instances.
Create a Cloud Cluster
Upload data to the cloud To work with data in the
cloud, upload to Amazon S3.
Use datastores to access the
data in S3 from your
desktop client MATLAB, or
from your cluster workers,
without changing your code.
“Upload Deep Learning
Data to the Cloud”
Advanced Support for Fast Multi-Node GPU Communication
If you are using a Linux compute cluster with fast interconnects between machines such
as Inniband, or fast interconnects between GPUs on dierent machines, such as
GPUDirect RDMA, you might be able to take advantage of fast multi-node support in
MATLAB. Enable this support on all the workers in your pool by setting the environment
variable MDCS_FAST_MULTINODE_GPU_COMMUNICATION to 1. Set this environment
variable in the Cluster Prole Manager.
This feature is part of the NVIDIA NCCL library for GPU communication. To congure it,
you must set additional environment variables to dene the network interface protocol,
especially NCCL_SOCKET_IFNAME. For more information, see the NCCL documentation
and in particular the section on NCCL Knobs.
See Also
More About
• “Deep Learning with MATLAB on Multiple GPUs” on page 3-7
• “Send Deep Learning Batch Job To Cluster”
See Also
3-5

• “Use parfeval to Train Multiple Deep Learning Networks”
• “Use parfor to Train Multiple Deep Learning Networks”
• “Upload Deep Learning Data to the Cloud”
3Deep Learning in the Cloud
3-6

Deep Learning with MATLAB on Multiple GPUs
Neural networks are inherently parallel algorithms. You can take advantage of this
parallelism by using Parallel Computing Toolboxto distribute training across multicore
CPUs, graphical processing units (GPUs), and clusters of computers with multiple CPUs
and GPUs.
If you have access to a machine with multiple GPUs, you can simply specify the training
option 'multi-gpu'.
If you want to use more resources, you can scale up deep learning training to clusters or
the cloud. To learn more about parallel options, see “Scale Up Deep Learning in Parallel
and in the Cloud” on page 3-2. To try an example, see “Train Network in the Cloud Using
Built-in Parallel Support” on page 3-8.
Select Particular GPUs to Use for Training
To use all available GPUs on your machine, simply specify the training option
'ExecutionEnvironment','multi-gpu'.
To select one of multiple GPUs to use to train a single model, use:
gpuDevice(index)
If you want to train a single model using multiple GPUs, and do not want to use all your
GPUs, open the parallel pool in advance, and select the GPUs manually. To select
particular GPUs, use the following code, where gpuIndices are the indices of the GPUs:
parpool('local', numel(gpuIndices));
spmd, gpuDevice(gpuIndices(labindex)); end
When you run trainNetwork with the ‘multi-gpu’ ExecutionEnvironment (or
‘parallel’ for the same result), the training function will use this pool and not open a
new one.
Another option is to select workers using the ‘WorkerLoad’ option in
trainingOptions. For example:
parpool('local', 5);
opts = trainingOptions('sgdm', 'WorkerLoad', [1 1 1 0 1], ...)
Deep Learning with MATLAB on Multiple GPUs
3-7

In this case, the 4th worker is part of the pool but idle, which is not an ideal use of the
parallel resources. It is more eicient to specify GPUs with gpuDevice.
If you want to train multiple models with one GPU each, start a MATLAB session for each
and select a device using gpuDevice.
Alternatively, use a parfor loop:
parfor i=1:gpuDeviceCount
trainNetwork(…);
end
Train Network in the Cloud Using Built-in Parallel Support
This example shows how to train a convolutional neural network on CIFAR-10 using
MATLAB's built-in support for parallel training. Deep Learning training often takes hours
or days. You can use parallel computing to speed up your training using multiple GPUs
locally or in a cluster in the cloud. If you have access to a machine with multiple GPUs,
then you can run this script on a local copy of the data set after setting the
ExecutionEnvironment value to multi-gpu in your training options. If you want to
use more resources, then you can scale up deep learning training to the cloud. This
example guides you through the steps to train a deep neural network in a cluster in the
cloud using MATLAB's built-in parallel support.
Before you can run this example, you need to congure a cluster and upload your data to
the cloud. To get started with the cloud, set up Cloud Center, link it to an Amazon Web
Services (AWS) account, and create a cluster. For instructions, see Getting Started with
Cloud Center. After that, upload your data to an Amazon S3 bucket and use it directly
from MATLAB. For instructions, see “Upload Deep Learning Data to the Cloud”.
Set Up a Parallel Pool
Start a parallel pool in the cluster and set the number of workers to the number of GPUs
on your cluster. If you specify more workers than GPUs, then the remaining workers will
be idle. This assumes that the cluster you want to use is set as default in cluster proles.
numberOfWorkers = 8;
parpool(numberOfWorkers);
Starting parallel pool (parpool) using the 'MyClusterInTheCloudAWS' profile ...
connected to 8 workers.
3Deep Learning in the Cloud
3-8

Load the Data Set from the Cloud
Load the training and test data set from the cloud using imageDatastore. This example
shows how to use a copy of CIFAR-10 data that is already stored in Amazon S3. To ensure
that the workers have access to the datastore in the cloud, make sure that the
environment variables for the AWS credentials has been set correctly. For instructions,
see “Upload Deep Learning Data to the Cloud”.
imdsTrain = imageDatastore('s3://cifar10cloud/cifar10/train', ...
'IncludeSubfolders',true, ...
'LabelSource','foldernames');
imdsTest = imageDatastore('s3://cifar10cloud/cifar10/test', ...
'IncludeSubfolders',true, ...
'LabelSource','foldernames');
To train the network with augmented image data, create an
augmentedImageDatastore object. Use random translations and horizontal reections.
Data augmentation helps prevent the network from overtting and memorizing the exact
details of the training images.
imageSize = [32 32 3];
pixelRange = [-4 4];
imageAugmenter = imageDataAugmenter( ...
'RandXReflection',true, ...
'RandXTranslation',pixelRange, ...
'RandYTranslation',pixelRange);
augmentedImdsTrain = augmentedImageDatastore(imageSize,imdsTrain, ...
'DataAugmentation',imageAugmenter, ...
'OutputSizeMode','randcrop');
Dene Network Architecture and Training Options
Dene a network architecture for CIFAR-10. To simplify the code, use convolutional
blocks containing several convolutional layers that convolve the input. The pooling layers
downsample the spatial dimensions.
netDepth = 4; % netDepth controls the depth of the convolutional blocks
netWidth = 32; % netWidth controls the number of filters in a convolutional block
layers = [
imageInputLayer(imageSize)
convolutionalBlock(netWidth,netDepth)
Deep Learning with MATLAB on Multiple GPUs
3-9

maxPooling2dLayer(2,'Stride',2)
convolutionalBlock(2*netWidth,netDepth)
maxPooling2dLayer(2,'Stride',2)
convolutionalBlock(4*netWidth,netDepth)
averagePooling2dLayer(8)
fullyConnectedLayer(10)
softmaxLayer
classificationLayer
];
Dene the training options. To train the network in parallel using the current cluster, set
the execution environment to parallel. Scale the learning rate according to the mini-
batch size. Use a learning rate schedule to drop the learning rate as the training
progresses. Turn on the training progress plot to obtain visual feedback during training.
miniBatchSize = 64 * numberOfWorkers;
initialLearnRate = 1e-1 * miniBatchSize/256;
options = trainingOptions('sgdm', ...
'ExecutionEnvironment','parallel', ... % Turn on built-in parallel support.
'InitialLearnRate',initialLearnRate, ... % Set the initial learning rate.
'MiniBatchSize',miniBatchSize, ... % Set the MiniBatchSize.
'Verbose',false, ... % Do not send command line output.
'Plots','training-progress', ... % Turn on the training progress plot.
'L2Regularization',1e-10, ...
'MaxEpochs',30, ...
'Shuffle','every-epoch', ...
'ValidationData',imdsTest, ...
'ValidationFrequency',floor(numel(imdsTrain.Files)/miniBatchSize), ...
'ValidationPatience',Inf, ...
'LearnRateSchedule','piecewise', ...
'LearnRateDropFactor',0.1, ...
'LearnRateDropPeriod',25);
Train the Network and Use It for Classication
Train the network in the cluster. During training, the plot displays the progress.
net = trainNetwork(augmentedImdsTrain,layers,options)
net =
SeriesNetwork with properties:
3Deep Learning in the Cloud
3-10
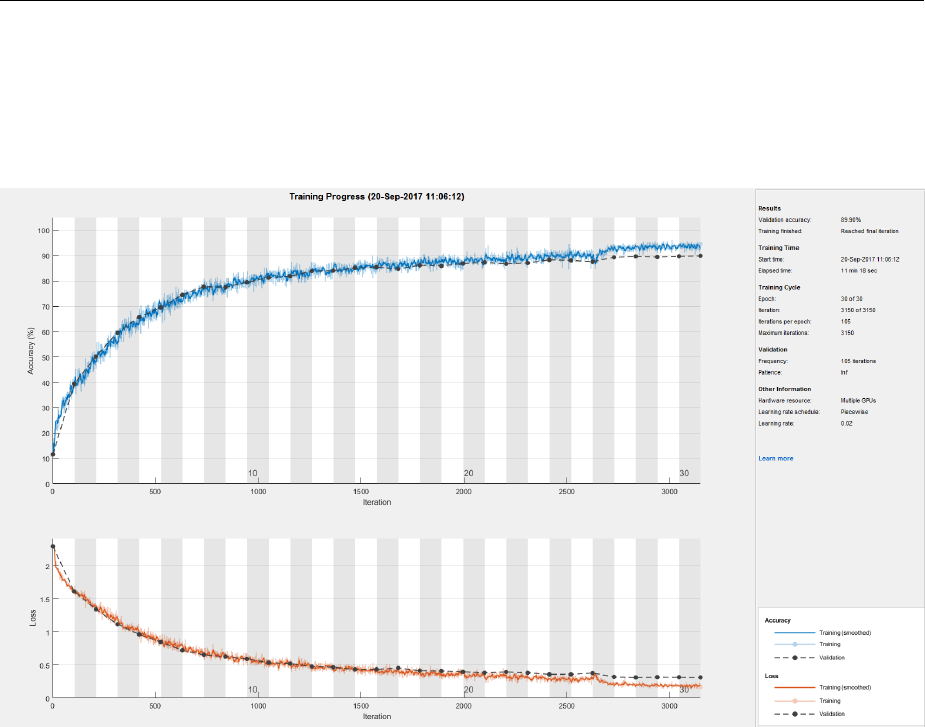
Layers: [43×1 nnet.cnn.layer.Layer]
To obtain the accuracy of this network, use the trained network to classify the test images
on the local machine and compare this to the actual labels.
YPredicted = classify(net,imdsTest);
accuracy = sum(YPredicted == imdsTest.Labels)/numel(imdsTest.Labels)
accuracy =
0.9036
Deep Learning with MATLAB on Multiple GPUs
3-11

Dene Helper Functions
Dene a function to make easier the creation of convolutional blocks in the network
architecture.
function layers = convolutionalBlock(numFilters,numConvLayers)
layers = [
convolution2dLayer(3,numFilters,'Padding','same')
batchNormalizationLayer
reluLayer
];
layers = repmat(layers,numConvLayers,1);
end
See Also
gpuDevice | imageDatastore | spmd | trainNetwork | trainingOptions
Related Examples
• “Upload Deep Learning Data to the Cloud”
• “Use parfor to Train Multiple Deep Learning Networks”
• “Scale Up Deep Learning in Parallel and in the Cloud” on page 3-2
3Deep Learning in the Cloud
3-12
Multilayer Neural Networks and
Backpropagation Training
• “Multilayer Neural Networks and Backpropagation Training” on page 4-2
• “Multilayer Neural Network Architecture” on page 4-4
• “Prepare Data for Multilayer Neural Networks” on page 4-8
• “Choose Neural Network Input-Output Processing Functions” on page 4-9
• “Divide Data for Optimal Neural Network Training” on page 4-12
• “Create, Congure, and Initialize Multilayer Neural Networks” on page 4-14
• “Train and Apply Multilayer Neural Networks” on page 4-17
• “Analyze Shallow Neural Network Performance After Training” on page 4-24
• “Limitations and Cautions” on page 4-30
4
Multilayer Neural Networks and Backpropagation
Training
The multilayer feedforward neural network is the workhorse of the Neural Network
Toolbox software. It can be used for both function tting and pattern recognition
problems. With the addition of a tapped delay line, it can also be used for prediction
problems, as discussed in “Design Time Series Time-Delay Neural Networks” on page 5-
13. This topic shows how you can use a multilayer network. It also illustrates the basic
procedures for designing any neural network.
Note The training functions described in this topic are not limited to multilayer
networks. They can be used to train arbitrary architectures (even custom networks), as
long as their components are dierentiable.
The work ow for the general neural network design process has seven primary steps:
1Collect data
2Create the network
3Congure the network
4Initialize the weights and biases
5Train the network
6Validate the network (post-training analysis)
7Use the network
Step 1 might happen outside the framework of Neural Network Toolbox software, but this
step is critical to the success of the design process.
Details of this workow are discussed in these sections:
• “Multilayer Neural Network Architecture” on page 4-4
• “Prepare Data for Multilayer Neural Networks” on page 4-8
• “Create, Congure, and Initialize Multilayer Neural Networks” on page 4-14
• “Train and Apply Multilayer Neural Networks” on page 4-17
• “Analyze Shallow Neural Network Performance After Training” on page 4-24
4Multilayer Neural Networks and Backpropagation Training
4-2

• “Use the Network” on page 4-22
• “Limitations and Cautions” on page 4-30
Optional workow steps are discussed in these sections:
• “Choose Neural Network Input-Output Processing Functions” on page 4-9
• “Divide Data for Optimal Neural Network Training” on page 4-12
• “Neural Networks with Parallel and GPU Computing” on page 10-2
For time series, dynamic modeling, and prediction, see this section:
• “How Dynamic Neural Networks Work” on page 5-3
Multilayer Neural Networks and Backpropagation Training
4-3
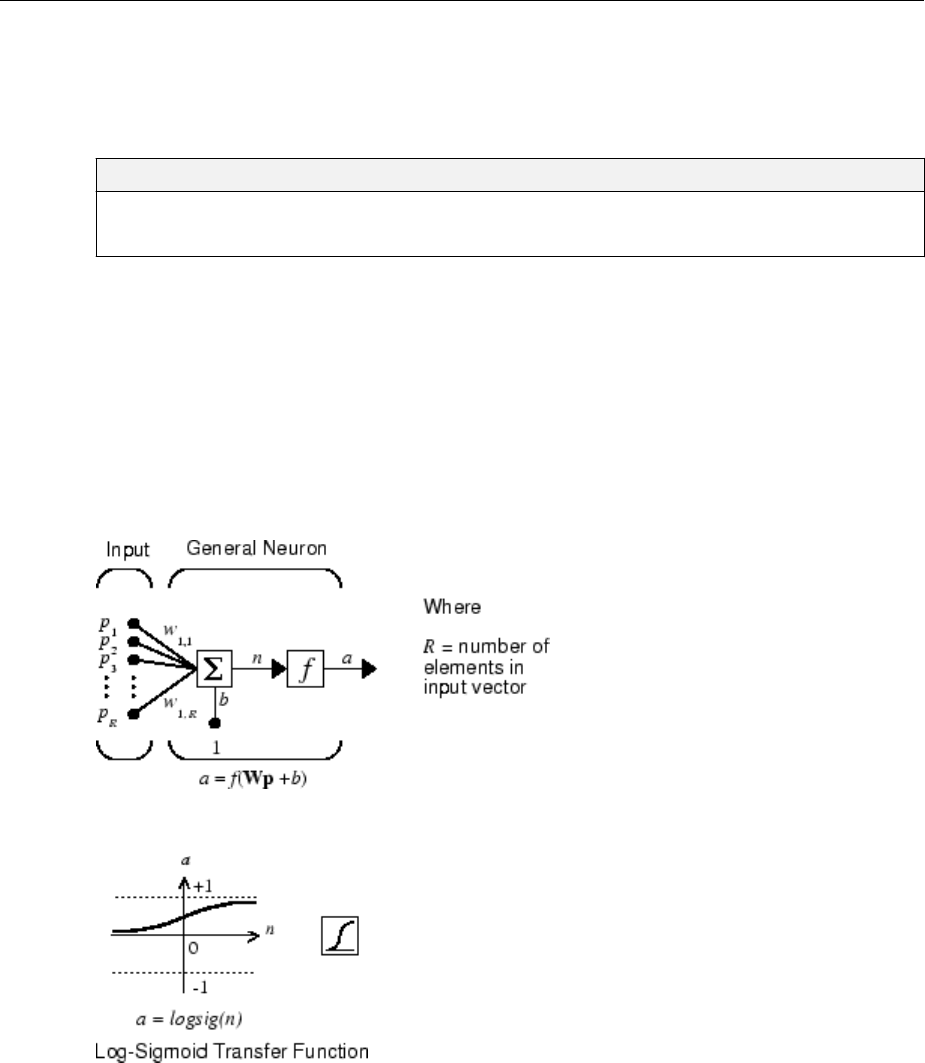
Multilayer Neural Network Architecture
In this section...
“Neuron Model (logsig, tansig, purelin)” on page 4-4
“Feedforward Neural Network” on page 4-5
This topic presents part of a typical multilayer network workow. For more information
and other steps, see “Multilayer Neural Networks and Backpropagation Training” on
page 4-2.
Neuron Model (logsig, tansig, purelin)
An elementary neuron with R inputs is shown below. Each input is weighted with an
appropriate w. The sum of the weighted inputs and the bias forms the input to the
transfer function f. Neurons can use any dierentiable transfer function f to generate
their output.
Multilayer networks often use the log-sigmoid transfer function logsig.
4Multilayer Neural Networks and Backpropagation Training
4-4
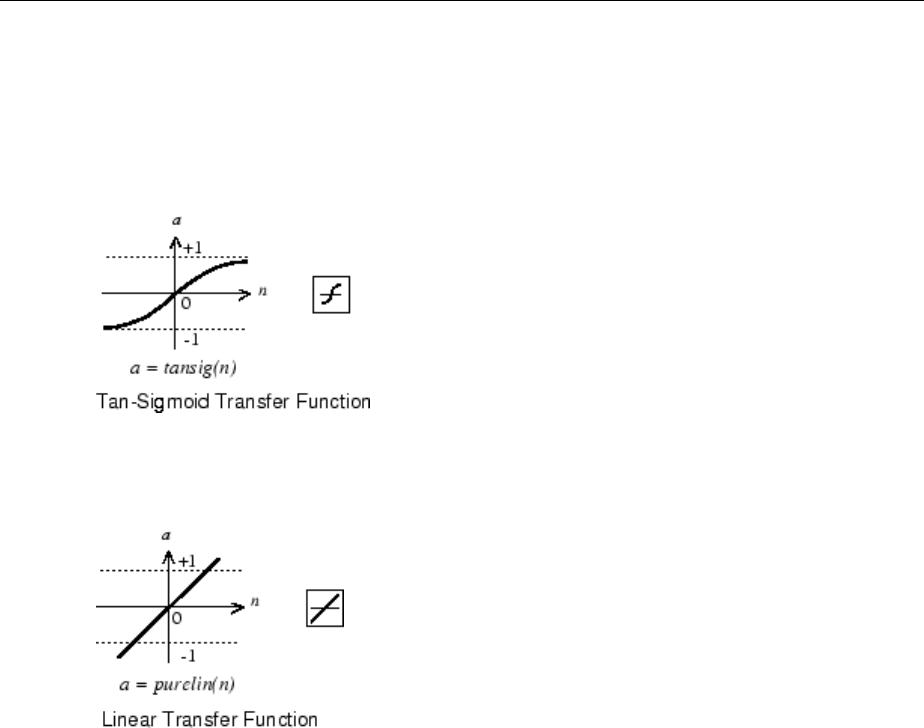
The function logsig generates outputs between 0 and 1 as the neuron's net input goes
from negative to positive innity.
Alternatively, multilayer networks can use the tan-sigmoid transfer function tansig.
Sigmoid output neurons are often used for pattern recognition problems, while linear
output neurons are used for function tting problems. The linear transfer function
purelin is shown below.
The three transfer functions described here are the most commonly used transfer
functions for multilayer networks, but other dierentiable transfer functions can be
created and used if desired.
Feedforward Neural Network
A single-layer network of S logsig neurons having R inputs is shown below in full detail
on the left and with a layer diagram on the right.
Multilayer Neural Network Architecture
4-5
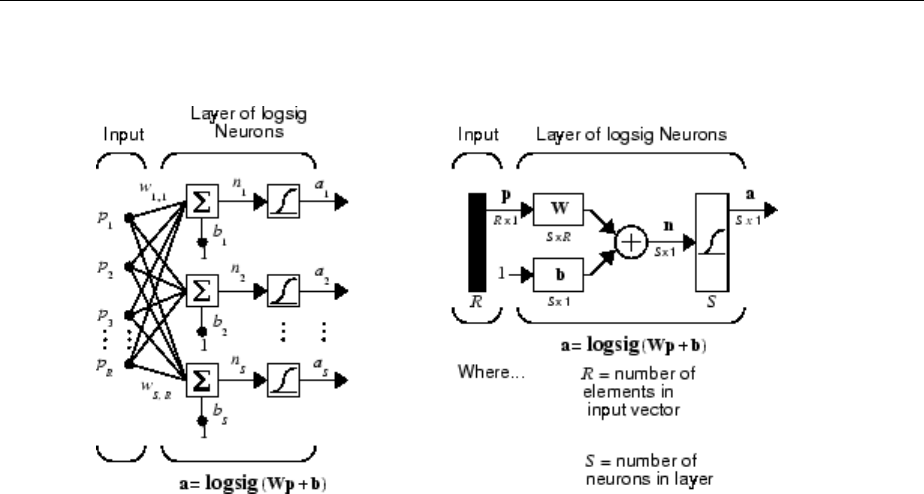
Feedforward networks often have one or more hidden layers of sigmoid neurons followed
by an output layer of linear neurons. Multiple layers of neurons with nonlinear transfer
functions allow the network to learn nonlinear relationships between input and output
vectors. The linear output layer is most often used for function tting (or nonlinear
regression) problems.
On the other hand, if you want to constrain the outputs of a network (such as between 0
and 1), then the output layer should use a sigmoid transfer function (such as logsig).
This is the case when the network is used for pattern recognition problems (in which a
decision is being made by the network).
For multiple-layer networks the layer number determines the superscript on the weight
matrix. The appropriate notation is used in the two-layer tansig/purelin network
shown next.
4Multilayer Neural Networks and Backpropagation Training
4-6
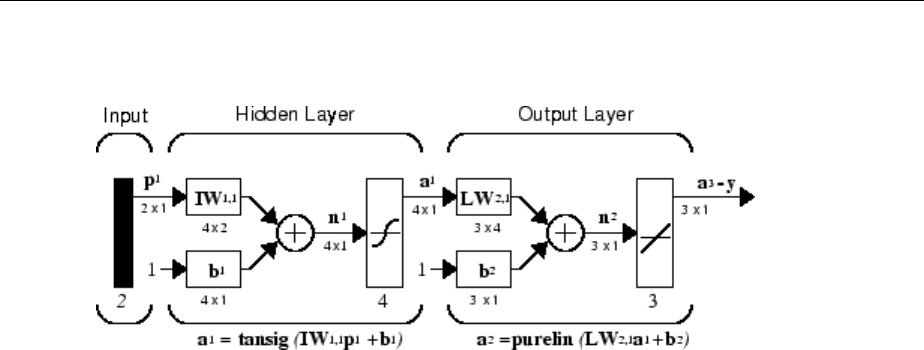
This network can be used as a general function approximator. It can approximate any
function with a nite number of discontinuities arbitrarily well, given suicient neurons in
the hidden layer.
Now that the architecture of the multilayer network has been dened, the design process
is described in the following sections.
Multilayer Neural Network Architecture
4-7
Prepare Data for Multilayer Neural Networks
Tip To learn how to prepare image data for deep learning networks, see “Preprocess
Images for Deep Learning” on page 2-127.
This topic presents part of a typical multilayer network workow. For more information
and other steps, see “Multilayer Neural Networks and Backpropagation Training” on
page 4-2.
Before beginning the network design process, you rst collect and prepare sample data.
It is generally diicult to incorporate prior knowledge into a neural network, therefore
the network can only be as accurate as the data that are used to train the network.
It is important that the data cover the range of inputs for which the network will be used.
Multilayer networks can be trained to generalize well within the range of inputs for which
they have been trained. However, they do not have the ability to accurately extrapolate
beyond this range, so it is important that the training data span the full range of the input
space.
After the data have been collected, there are two steps that need to be performed before
the data are used to train the network: the data need to be preprocessed, and they need
to be divided into subsets.
4Multilayer Neural Networks and Backpropagation Training
4-8

Choose Neural Network Input-Output Processing
Functions
This topic presents part of a typical multilayer network workow. For more information
and other steps, see “Multilayer Neural Networks and Backpropagation Training” on
page 4-2.
Neural network training can be more eicient if you perform certain preprocessing steps
on the network inputs and targets. This section describes several preprocessing routines
that you can use. (The most common of these are provided automatically when you create
a network, and they become part of the network object, so that whenever the network is
used, the data coming into the network is preprocessed in the same way.)
For example, in multilayer networks, sigmoid transfer functions are generally used in the
hidden layers. These functions become essentially saturated when the net input is greater
than three (exp (−3) ≅ 0.05). If this happens at the beginning of the training process, the
gradients will be very small, and the network training will be very slow. In the rst layer
of the network, the net input is a product of the input times the weight plus the bias. If
the input is very large, then the weight must be very small in order to prevent the
transfer function from becoming saturated. It is standard practice to normalize the inputs
before applying them to the network.
Generally, the normalization step is applied to both the input vectors and the target
vectors in the data set. In this way, the network output always falls into a normalized
range. The network output can then be reverse transformed back into the units of the
original target data when the network is put to use in the eld.
It is easiest to think of the neural network as having a preprocessing block that appears
between the input and the rst layer of the network and a postprocessing block that
appears between the last layer of the network and the output, as shown in the following
gure.
Choose Neural Network Input-Output Processing Functions
4-9
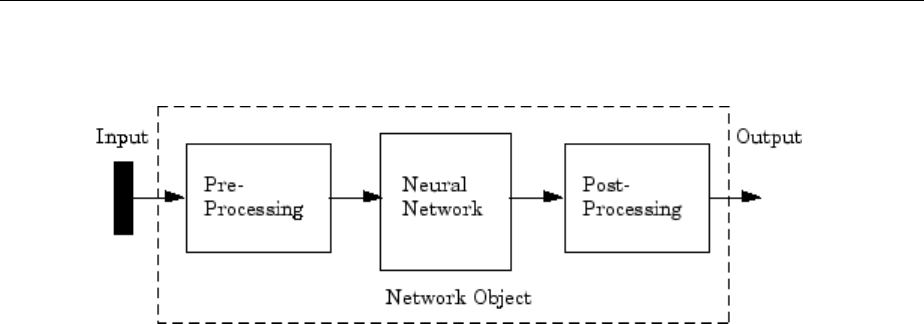
Most of the network creation functions in the toolbox, including the multilayer network
creation functions, such as feedforwardnet, automatically assign processing functions
to your network inputs and outputs. These functions transform the input and target
values you provide into values that are better suited for network training.
You can override the default input and output processing functions by adjusting network
properties after you create the network.
To see a cell array list of processing functions assigned to the input of a network, access
this property:
net.inputs{1}.processFcns
where the index 1 refers to the rst input vector. (There is only one input vector for the
feedforward network.) To view the processing functions returned by the output of a two-
layer network, access this network property:
net.outputs{2}.processFcns
where the index 2 refers to the output vector coming from the second layer. (For the
feedforward network, there is only one output vector, and it comes from the nal layer.)
You can use these properties to change the processing functions that you want your
network to apply to the inputs and outputs. However, the defaults usually provide
excellent performance.
Several processing functions have parameters that customize their operation. You can
access or change the parameters of the ith input processing function for the network
input as follows:
net.inputs{1}.processParams{i}
4Multilayer Neural Networks and Backpropagation Training
4-10
You can access or change the parameters of the ith output processing function for the
network output associated with the second layer, as follows:
net.outputs{2}.processParams{i}
For multilayer network creation functions, such as feedforwardnet, the default input
processing functions are removeconstantrows and mapminmax. For outputs, the
default processing functions are also removeconstantrows and mapminmax.
The following table lists the most common preprocessing and postprocessing functions. In
most cases, you will not need to use them directly, since the preprocessing steps become
part of the network object. When you simulate or train the network, the preprocessing
and postprocessing will be done automatically.
Function Algorithm
mapminmax Normalize inputs/targets to fall in the range [−1,
1]
mapstd Normalize inputs/targets to have zero mean and
unity variance
processpca Extract principal components from the input
vector
fixunknowns Process unknown inputs
removeconstantrows Remove inputs/targets that are constant
Representing Unknown or Don't-Care Targets
Unknown or “don't care” targets can be represented with NaN values. We do not want
unknown target values to have an impact on training, but if a network has several
outputs, some elements of any target vector may be known while others are unknown.
One solution would be to remove the partially unknown target vector and its associated
input vector from the training set, but that involves the loss of the good target values. A
better solution is to represent those unknown targets with NaN values. All the
performance functions of the toolbox will ignore those targets for purposes of calculating
performance and derivatives of performance.
Choose Neural Network Input-Output Processing Functions
4-11
Divide Data for Optimal Neural Network Training
This topic presents part of a typical multilayer network workow. For more information
and other steps, see “Multilayer Neural Networks and Backpropagation Training” on
page 4-2.
When training multilayer networks, the general practice is to rst divide the data into
three subsets. The rst subset is the training set, which is used for computing the
gradient and updating the network weights and biases. The second subset is the
validation set. The error on the validation set is monitored during the training process.
The validation error normally decreases during the initial phase of training, as does the
training set error. However, when the network begins to overt the data, the error on the
validation set typically begins to rise. The network weights and biases are saved at the
minimum of the validation set error. This technique is discussed in more detail in
“Improve Neural Network Generalization and Avoid Overtting” on page 10-32.
The test set error is not used during training, but it is used to compare dierent models.
It is also useful to plot the test set error during the training process. If the error on the
test set reaches a minimum at a signicantly dierent iteration number than the
validation set error, this might indicate a poor division of the data set.
There are four functions provided for dividing data into training, validation and test sets.
They are dividerand (the default), divideblock, divideint, and divideind. The
data division is normally performed automatically when you train the network.
Function Algorithm
dividerand Divide the data randomly (default)
divideblock Divide the data into contiguous blocks
divideint Divide the data using an interleaved selection
divideind Divide the data by index
You can access or change the division function for your network with this property:
net.divideFcn
Each of the division functions takes parameters that customize its behavior. These values
are stored and can be changed with the following network property:
net.divideParam
4Multilayer Neural Networks and Backpropagation Training
4-12

The divide function is accessed automatically whenever the network is trained, and is
used to divide the data into training, validation and testing subsets. If net.divideFcn is
set to 'dividerand' (the default), then the data is randomly divided into the three
subsets using the division parameters net.divideParam.trainRatio,
net.divideParam.valRatio, and net.divideParam.testRatio. The fraction of
data that is placed in the training set is trainRatio/(trainRatio+valRatio
+testRatio), with a similar formula for the other two sets. The default ratios for
training, testing and validation are 0.7, 0.15 and 0.15, respectively.
If net.divideFcn is set to 'divideblock', then the data is divided into three subsets
using three contiguous blocks of the original data set (training taking the rst block,
validation the second and testing the third). The fraction of the original data that goes
into each subset is determined by the same three division parameters used for
dividerand.
If net.divideFcn is set to 'divideint', then the data is divided by an interleaved
method, as in dealing a deck of cards. It is done so that dierent percentages of data go
into the three subsets. The fraction of the original data that goes into each subset is
determined by the same three division parameters used for dividerand.
When net.divideFcn is set to 'divideind', the data is divided by index. The indices
for the three subsets are dened by the division parameters
net.divideParam.trainInd, net.divideParam.valInd and
net.divideParam.testInd. The default assignment for these indices is the null array,
so you must set the indices when using this option.
Divide Data for Optimal Neural Network Training
4-13
Create, Congure, and Initialize Multilayer Neural
Networks
In this section...
“Other Related Architectures” on page 4-15
“Initializing Weights (init)” on page 4-15
This topic presents part of a typical multilayer network workow. For more information
and other steps, see “Multilayer Neural Networks and Backpropagation Training” on
page 4-2.
After the data has been collected, the next step in training a network is to create the
network object. The function feedforwardnet creates a multilayer feedforward
network. If this function is invoked with no input arguments, then a default network
object is created that has not been congured. The resulting network can then be
congured with the configure command.
As an example, the le bodyfat_dataset.mat contains a predened set of input and
target vectors. The input vectors dene data regarding physical attributes of people and
the target values dene percentage body fat of the people. Load the data using the
following command:
load bodyfat_dataset
Loading this le creates two variables. The input matrix bodyfatInputs consists of 252
column vectors of 13 physical attribute variables for 252 dierent people. The target
matrix bodyfatTargets consists of the corresponding 252 body fat percentages.
The next step is to create the network. The following call to feedforwardnet creates a
two-layer network with 10 neurons in the hidden layer. (During the conguration step, the
number of neurons in the output layer is set to one, which is the number of elements in
each vector of targets.)
net = feedforwardnet;
net = configure(net, bodyfatInputs, bodyfatTargets);
Optional arguments can be provided to feedforwardnet. For instance, the rst
argument is an array containing the number of neurons in each hidden layer. (The default
setting is 10, which means one hidden layer with 10 neurons. One hidden layer generally
produces excellent results, but you may want to try two hidden layers, if the results with
4Multilayer Neural Networks and Backpropagation Training
4-14

one are not adequate. Increasing the number of neurons in the hidden layer increases the
power of the network, but requires more computation and is more likely to produce
overtting.) The second argument contains the name of the training function to be used.
If no arguments are supplied, the default number of layers is 2, the default number of
neurons in the hidden layer is 10, and the default training function is trainlm. The
default transfer function for hidden layers is tansig and the default for the output layer
is purelin.
The configure command congures the network object and also initializes the weights
and biases of the network; therefore the network is ready for training. There are times
when you might want to reinitialize the weights, or to perform a custom initialization.
“Initializing Weights (init)” on page 4-15 explains the details of the initialization process.
You can also skip the conguration step and go directly to training the network. The
train command will automatically congure the network and initialize the weights.
Other Related Architectures
While two-layer feedforward networks can potentially learn virtually any input-output
relationship, feedforward networks with more layers might learn complex relationships
more quickly. For most problems, it is best to start with two layers, and then increase to
three layers, if the performance with two layers is not satisfactory.
The function cascadeforwardnet creates cascade-forward networks. These are similar
to feedforward networks, but include a weight connection from the input to each layer,
and from each layer to the successive layers. For example, a three-layer network has
connections from layer 1 to layer 2, layer 2 to layer 3, and layer 1 to layer 3. The three-
layer network also has connections from the input to all three layers. The additional
connections might improve the speed at which the network learns the desired
relationship.
The function patternnet creates a network that is very similar to feedforwardnet,
except that it uses the tansig transfer function in the last layer. This network is
generally used for pattern recognition. Other networks can learn dynamic or time-series
relationships.
Initializing Weights (init)
Before training a feedforward network, you must initialize the weights and biases. The
configure command automatically initializes the weights, but you might want to
reinitialize them. You do this with the init command. This function takes a network
Create, Congure, and Initialize Multilayer Neural Networks
4-15

object as input and returns a network object with all weights and biases initialized. Here
is how a network is initialized (or reinitialized):
net = init(net);
4Multilayer Neural Networks and Backpropagation Training
4-16
Train and Apply Multilayer Neural Networks
In this section...
“Training Algorithms” on page 4-18
“Training Example” on page 4-20
“Use the Network” on page 4-22
Tip To train a deep learning network, use trainNetwork.
This topic presents part of a typical multilayer network workow. For more information
and other steps, see “Multilayer Neural Networks and Backpropagation Training” on
page 4-2.
When the network weights and biases are initialized, the network is ready for training.
The multilayer feedforward network can be trained for function approximation (nonlinear
regression) or pattern recognition. The training process requires a set of examples of
proper network behavior—network inputs p and target outputs t.
The process of training a neural network involves tuning the values of the weights and
biases of the network to optimize network performance, as dened by the network
performance function net.performFcn. The default performance function for
feedforward networks is mean square error mse—the average squared error between the
network outputs a and the target outputs t. It is dened as follows:
F mse
N
e
N
t a
i
i
N
i i
i
N
= = = -
= =
 Â
1 1
2
1
2
1
( ) ( )
(Individual squared errors can also be weighted. See “Train Neural Networks with Error
Weights” on page 5-43.) There are two dierent ways in which training can be
implemented: incremental mode and batch mode. In incremental mode, the gradient is
computed and the weights are updated after each input is applied to the network. In
batch mode, all the inputs in the training set are applied to the network before the
weights are updated. This topic describes batch mode training with the train command.
Incremental training with the adapt command is discussed in “Incremental Training with
adapt” on page 1-28. For most problems, when using the Neural Network Toolbox
software, batch training is signicantly faster and produces smaller errors than
incremental training.
Train and Apply Multilayer Neural Networks
4-17
For training multilayer feedforward networks, any standard numerical optimization
algorithm can be used to optimize the performance function, but there are a few key ones
that have shown excellent performance for neural network training. These optimization
methods use either the gradient of the network performance with respect to the network
weights, or the Jacobian of the network errors with respect to the weights.
The gradient and the Jacobian are calculated using a technique called the
backpropagation algorithm, which involves performing computations backward through
the network. The backpropagation computation is derived using the chain rule of calculus
and is described in Chapters 11 (for the gradient) and 12 (for the Jacobian) of [HDB96 on
page 13-2].
Training Algorithms
As an illustration of how the training works, consider the simplest optimization algorithm
— gradient descent. It updates the network weights and biases in the direction in which
the performance function decreases most rapidly, the negative of the gradient. One
iteration of this algorithm can be written as
x x g
k k k k+= -
1
a
where xk is a vector of current weights and biases, gk is the current gradient, and αk is
the learning rate. This equation is iterated until the network converges.
A list of the training algorithms that are available in the Neural Network Toolbox software
and that use gradient- or Jacobian-based methods, is shown in the following table.
For a detailed description of several of these techniques, see also Hagan, M.T., H.B.
Demuth, and M.H. Beale, Neural Network Design, Boston, MA: PWS Publishing, 1996,
Chapters 11 and 12.
Function Algorithm
trainlm Levenberg-Marquardt
trainbr Bayesian Regularization
trainbfg BFGS Quasi-Newton
trainrp Resilient Backpropagation
trainscg Scaled Conjugate Gradient
4Multilayer Neural Networks and Backpropagation Training
4-18
Function Algorithm
traincgb Conjugate Gradient with Powell/Beale Restarts
traincgf Fletcher-Powell Conjugate Gradient
traincgp Polak-Ribiére Conjugate Gradient
trainoss One Step Secant
traingdx Variable Learning Rate Gradient Descent
traingdm Gradient Descent with Momentum
traingd Gradient Descent
The fastest training function is generally trainlm, and it is the default training function
for feedforwardnet. The quasi-Newton method, trainbfg, is also quite fast. Both of
these methods tend to be less eicient for large networks (with thousands of weights),
since they require more memory and more computation time for these cases. Also,
trainlm performs better on function tting (nonlinear regression) problems than on
pattern recognition problems.
When training large networks, and when training pattern recognition networks,
trainscg and trainrp are good choices. Their memory requirements are relatively
small, and yet they are much faster than standard gradient descent algorithms.
See “Choose a Multilayer Neural Network Training Function” on page 10-16 for a full
comparison of the performances of the training algorithms shown in the table above.
As a note on terminology, the term “backpropagation” is sometimes used to refer
specically to the gradient descent algorithm, when applied to neural network training.
That terminology is not used here, since the process of computing the gradient and
Jacobian by performing calculations backward through the network is applied in all of the
training functions listed above. It is clearer to use the name of the specic optimization
algorithm that is being used, rather than to use the term backpropagation alone.
Also, the multilayer network is sometimes referred to as a backpropagation network.
However, the backpropagation technique that is used to compute gradients and Jacobians
in a multilayer network can also be applied to many dierent network architectures. In
fact, the gradients and Jacobians for any network that has dierentiable transfer
functions, weight functions and net input functions can be computed using the Neural
Network Toolbox software through a backpropagation process. You can even create your
own custom networks and then train them using any of the training functions in the table
above. The gradients and Jacobians will be automatically computed for you.
Train and Apply Multilayer Neural Networks
4-19

Training Example
To illustrate the training process, execute the following commands:
load bodyfat_dataset
net = feedforwardnet(20);
[net,tr] = train(net,bodyfatInputs,bodyfatTargets);
Notice that you did not need to issue the configure command, because the
conguration is done automatically by the train function. The training window will
appear during training, as shown in the following gure. (If you do not want to have this
window displayed during training, you can set the parameter
net.trainParam.showWindow to false. If you want training information displayed in
the command line, you can set the parameter net.trainParam.showCommandLine to
true.)
This window shows that the data has been divided using the dividerand function, and
the Levenberg-Marquardt (trainlm) training method has been used with the mean
square error performance function. Recall that these are the default settings for
feedforwardnet.
During training, the progress is constantly updated in the training window. Of most
interest are the performance, the magnitude of the gradient of performance and the
number of validation checks. The magnitude of the gradient and the number of validation
checks are used to terminate the training. The gradient will become very small as the
training reaches a minimum of the performance. If the magnitude of the gradient is less
than 1e-5, the training will stop. This limit can be adjusted by setting the parameter
net.trainParam.min_grad. The number of validation checks represents the number of
successive iterations that the validation performance fails to decrease. If this number
reaches 6 (the default value), the training will stop. In this run, you can see that the
training did stop because of the number of validation checks. You can change this
criterion by setting the parameter net.trainParam.max_fail. (Note that your results
may be dierent than those shown in the following gure, because of the random setting
of the initial weights and biases.)
4Multilayer Neural Networks and Backpropagation Training
4-20
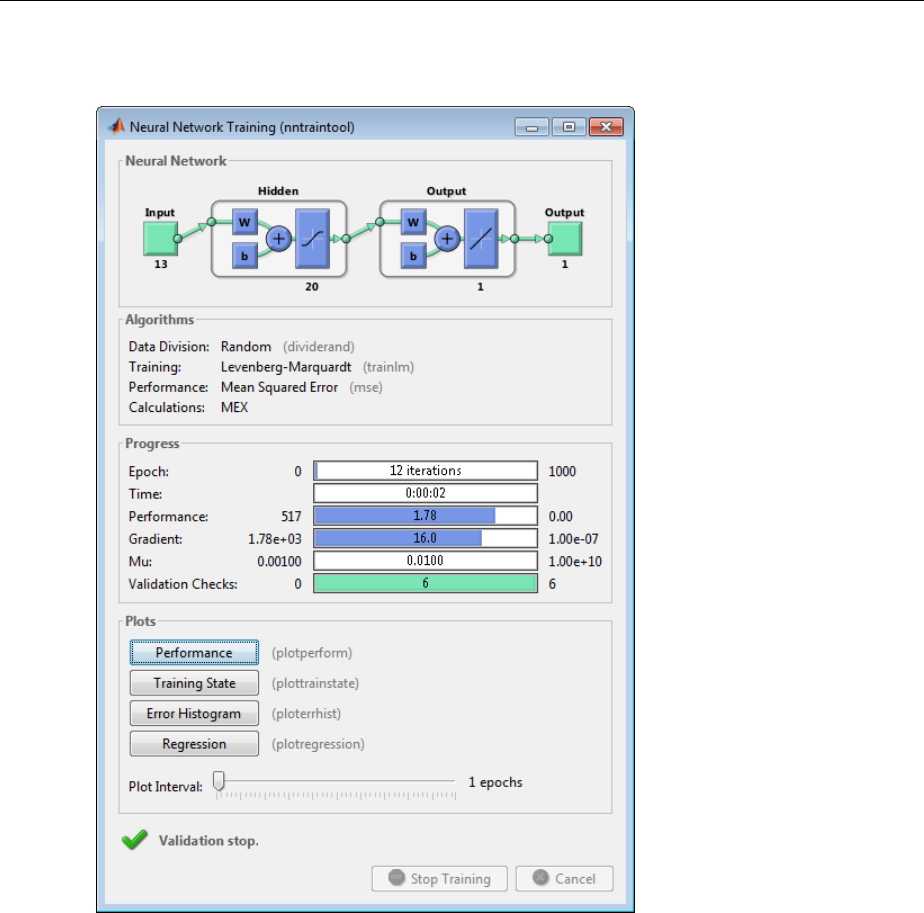
There are other criteria that can be used to stop network training. They are listed in the
following table.
Train and Apply Multilayer Neural Networks
4-21
Parameter Stopping Criteria
min_grad Minimum Gradient Magnitude
max_fail Maximum Number of Validation Increases
time Maximum Training Time
goal Minimum Performance Value
epochs Maximum Number of Training Epochs (Iterations)
The training will also stop if you click the Stop Training button in the training window.
You might want to do this if the performance function fails to decrease signicantly over
many iterations. It is always possible to continue the training by reissuing the train
command shown above. It will continue to train the network from the completion of the
previous run.
From the training window, you can access four plots: performance, training state, error
histogram, and regression. The performance plot shows the value of the performance
function versus the iteration number. It plots training, validation, and test performances.
The training state plot shows the progress of other training variables, such as the
gradient magnitude, the number of validation checks, etc. The error histogram plot shows
the distribution of the network errors. The regression plot shows a regression between
network outputs and network targets. You can use the histogram and regression plots to
validate network performance, as is discussed in “Analyze Shallow Neural Network
Performance After Training” on page 4-24.
Use the Network
After the network is trained and validated, the network object can be used to calculate
the network response to any input. For example, if you want to nd the network response
to the fth input vector in the building data set, you can use the following
a = net(bodyfatInputs(:,5))
a =
27.3740
If you try this command, your output might be dierent, depending on the state of your
random number generator when the network was initialized. Below, the network object is
called to calculate the outputs for a concurrent set of all the input vectors in the body fat
data set. This is the batch mode form of simulation, in which all the input vectors are
4Multilayer Neural Networks and Backpropagation Training
4-22

placed in one matrix. This is much more eicient than presenting the vectors one at a
time.
a = net(bodyfatInputs);
Each time a neural network is trained, can result in a dierent solution due to dierent
initial weight and bias values and dierent divisions of data into training, validation, and
test sets. As a result, dierent neural networks trained on the same problem can give
dierent outputs for the same input. To ensure that a neural network of good accuracy
has been found, retrain several times.
There are several other techniques for improving upon initial solutions if higher accuracy
is desired. For more information, see “Improve Neural Network Generalization and Avoid
Overtting” on page 10-32.
Train and Apply Multilayer Neural Networks
4-23

Analyze Shallow Neural Network Performance After
Training
This topic presents part of a typical shallow neural network workow. For more
information and other steps, see “Multilayer Neural Networks and Backpropagation
Training” on page 4-2. To learn about how to monitor deep learning training progress, see
“Monitor Deep Learning Training Progress”.
When the training in “Train and Apply Multilayer Neural Networks” on page 4-17 is
complete, you can check the network performance and determine if any changes need to
be made to the training process, the network architecture, or the data sets. First check
the training record, tr, which was the second argument returned from the training
function.
tr
tr = struct with fields:
trainFcn: 'trainlm'
trainParam: [1x1 struct]
performFcn: 'mse'
performParam: [1x1 struct]
derivFcn: 'defaultderiv'
divideFcn: 'dividerand'
divideMode: 'sample'
divideParam: [1x1 struct]
trainInd: [1x176 double]
valInd: [1x38 double]
testInd: [1x38 double]
stop: 'Validation stop.'
num_epochs: 9
trainMask: {[1x252 double]}
valMask: {[1x252 double]}
testMask: {[1x252 double]}
best_epoch: 3
goal: 0
states: {1x8 cell}
epoch: [0 1 2 3 4 5 6 7 8 9]
time: [1x10 double]
perf: [1x10 double]
vperf: [1x10 double]
tperf: [1x10 double]
mu: [1x10 double]
gradient: [1x10 double]
4Multilayer Neural Networks and Backpropagation Training
4-24

val_fail: [0 0 0 0 1 2 3 4 5 6]
best_perf: 12.3078
best_vperf: 16.6857
best_tperf: 24.1796
This structure contains all of the information concerning the training of the network. For
example, tr.trainInd, tr.valInd and tr.testInd contain the indices of the data
points that were used in the training, validation and test sets, respectively. If you want to
retrain the network using the same division of data, you can set net.divideFcn to
'divideInd', net.divideParam.trainInd to tr.trainInd,
net.divideParam.valInd to tr.valInd, net.divideParam.testInd to
tr.testInd.
The tr structure also keeps track of several variables during the course of training, such
as the value of the performance function, the magnitude of the gradient, etc. You can use
the training record to plot the performance progress by using the plotperf command:
plotperf(tr)
Analyze Shallow Neural Network Performance After Training
4-25
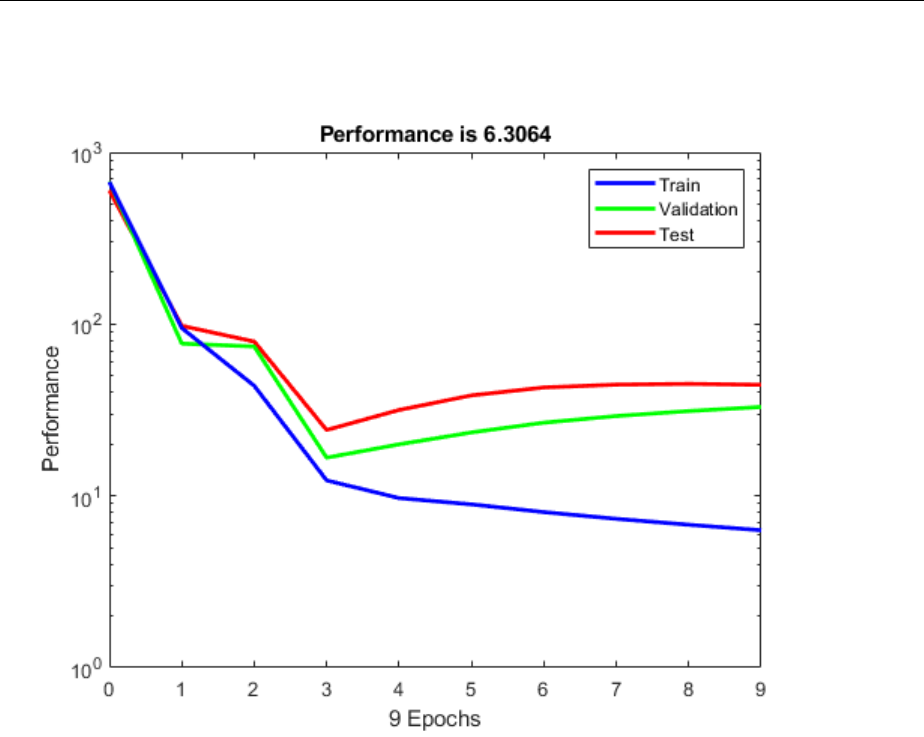
The property tr.best_epoch indicates the iteration at which the validation performance
reached a minimum. The training continued for 6 more iterations before the training
stopped.
This gure does not indicate any major problems with the training. The validation and
test curves are very similar. If the test curve had increased signicantly before the
validation curve increased, then it is possible that some overtting might have occurred.
The next step in validating the network is to create a regression plot, which shows the
relationship between the outputs of the network and the targets. If the training were
perfect, the network outputs and the targets would be exactly equal, but the relationship
is rarely perfect in practice. For the body fat example, we can create a regression plot
with the following commands. The rst command calculates the trained network response
4Multilayer Neural Networks and Backpropagation Training
4-26

to all of the inputs in the data set. The following six commands extract the outputs and
targets that belong to the training, validation and test subsets. The nal command creates
three regression plots for training, testing and validation.
bodyfatOutputs = net(bodyfatInputs);
trOut = bodyfatOutputs(tr.trainInd);
vOut = bodyfatOutputs(tr.valInd);
tsOut = bodyfatOutputs(tr.testInd);
trTarg = bodyfatTargets(tr.trainInd);
vTarg = bodyfatTargets(tr.valInd);
tsTarg = bodyfatTargets(tr.testInd);
plotregression(trTarg, trOut, 'Train', vTarg, vOut, 'Validation', tsTarg, tsOut, 'Testing')
Analyze Shallow Neural Network Performance After Training
4-27
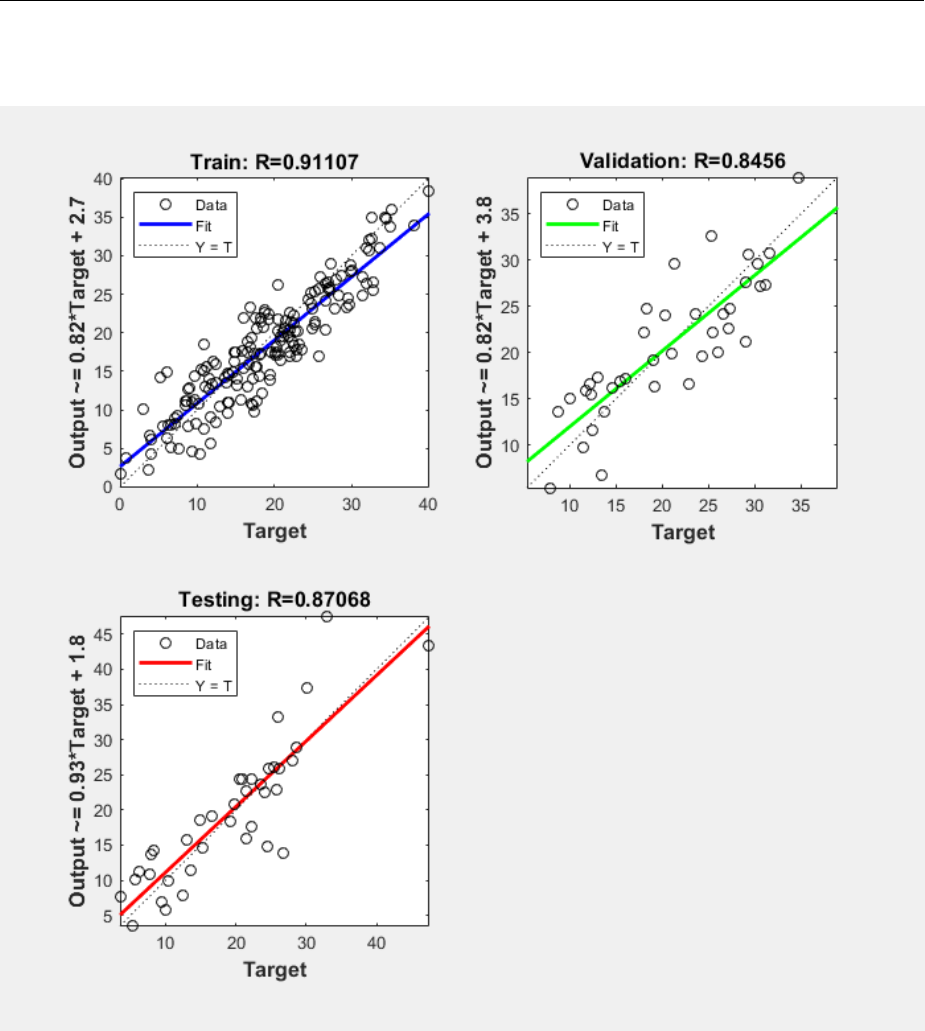
4Multilayer Neural Networks and Backpropagation Training
4-28

The three plots represent the training, validation, and testing data. The dashed line in
each plot represents the perfect result – outputs = targets. The solid line represents the
best t linear regression line between outputs and targets. The R value is an indication of
the relationship between the outputs and targets. If R = 1, this indicates that there is an
exact linear relationship between outputs and targets. If R is close to zero, then there is
no linear relationship between outputs and targets.
For this example, the training data indicates a good t. The validation and test results
also show large R values. The scatter plot is helpful in showing that certain data points
have poor ts. For example, there is a data point in the test set whose network output is
close to 35, while the corresponding target value is about 12. The next step would be to
investigate this data point to determine if it represents extrapolation (i.e., is it outside of
the training data set). If so, then it should be included in the training set, and additional
data should be collected to be used in the test set.
Improving Results
If the network is not suiciently accurate, you can try initializing the network and the
training again. Each time your initialize a feedforward network, the network parameters
are dierent and might produce dierent solutions.
net = init(net);
net = train(net, bodyfatInputs, bodyfatTargets);
As a second approach, you can increase the number of hidden neurons above 20. Larger
numbers of neurons in the hidden layer give the network more exibility because the
network has more parameters it can optimize. (Increase the layer size gradually. If you
make the hidden layer too large, you might cause the problem to be under-characterized
and the network must optimize more parameters than there are data vectors to constrain
these parameters.)
A third option is to try a dierent training function. Bayesian regularization training with
trainbr, for example, can sometimes produce better generalization capability than using
early stopping.
Finally, try using additional training data. Providing additional data for the network is
more likely to produce a network that generalizes well to new data.
Analyze Shallow Neural Network Performance After Training
4-29

Limitations and Cautions
You would normally use Levenberg-Marquardt training for small and medium size
networks, if you have enough memory available. If memory is a problem, then there are a
variety of other fast algorithms available. For large networks you will probably want to
use trainscg or trainrp.
Multilayer networks are capable of performing just about any linear or nonlinear
computation, and they can approximate any reasonable function arbitrarily well.
However, while the network being trained might theoretically be capable of performing
correctly, backpropagation and its variations might not always nd a solution. See page
12-8 of [HDB96 on page 13-2] for a discussion of convergence to local minimum points.
The error surface of a nonlinear network is more complex than the error surface of a
linear network. To understand this complexity, see the gures on pages 12-5 to 12-7 of
[HDB96 on page 13-2], which show three dierent error surfaces for a multilayer
network. The problem is that nonlinear transfer functions in multilayer networks
introduce many local minima in the error surface. As gradient descent is performed on
the error surface, depending on the initial starting conditions, it is possible for the
network solution to become trapped in one of these local minima. Settling in a local
minimum can be good or bad depending on how close the local minimum is to the global
minimum and how low an error is required. In any case, be cautioned that although a
multilayer backpropagation network with enough neurons can implement just about any
function, backpropagation does not always nd the correct weights for the optimum
solution. You might want to reinitialize the network and retrain several times to guarantee
that you have the best solution.
Networks are also sensitive to the number of neurons in their hidden layers. Too few
neurons can lead to undertting. Too many neurons can contribute to overtting, in which
all training points are well tted, but the tting curve oscillates wildly between these
points. Ways of dealing with various of these issues are discussed in “Improve Neural
Network Generalization and Avoid Overtting” on page 10-32. This topic is also
discussed starting on page 11-21 of [HDB96 on page 13-2].
For more information about the workow with multilayer networks, see “Multilayer
Neural Networks and Backpropagation Training” on page 4-2.
4Multilayer Neural Networks and Backpropagation Training
4-30
Dynamic Neural Networks
• “Introduction to Dynamic Neural Networks” on page 5-2
• “How Dynamic Neural Networks Work” on page 5-3
• “Design Time Series Time-Delay Neural Networks” on page 5-13
• “Design Time Series Distributed Delay Neural Networks” on page 5-19
• “Design Time Series NARX Feedback Neural Networks” on page 5-22
• “Design Layer-Recurrent Neural Networks” on page 5-30
• “Create Reference Model Controller with MATLAB Script” on page 5-33
• “Multiple Sequences with Dynamic Neural Networks” on page 5-40
• “Neural Network Time-Series Utilities” on page 5-41
• “Train Neural Networks with Error Weights” on page 5-43
• “Normalize Errors of Multiple Outputs” on page 5-46
• “Multistep Neural Network Prediction” on page 5-51
5

Introduction to Dynamic Neural Networks
Neural networks can be classied into dynamic and static categories. Static (feedforward)
networks have no feedback elements and contain no delays; the output is calculated
directly from the input through feedforward connections. In dynamic networks, the output
depends not only on the current input to the network, but also on the current or previous
inputs, outputs, or states of the network.
Details of this workow are discussed in the following sections:
• “Design Time Series Time-Delay Neural Networks” on page 5-13
• “Prepare Input and Layer Delay States” on page 5-17
• “Design Time Series Distributed Delay Neural Networks” on page 5-19
• “Design Time Series NARX Feedback Neural Networks” on page 5-22
• “Design Layer-Recurrent Neural Networks” on page 5-30
Optional workow steps are discussed in these sections:
• “Choose Neural Network Input-Output Processing Functions” on page 4-9
• “Divide Data for Optimal Neural Network Training” on page 4-12
• “Train Neural Networks with Error Weights” on page 5-43
5Dynamic Neural Networks
5-2
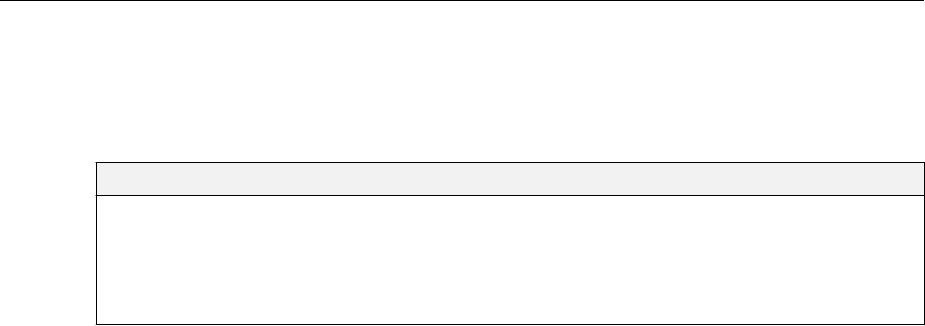
How Dynamic Neural Networks Work
In this section...
“Feedforward and Recurrent Neural Networks” on page 5-3
“Applications of Dynamic Networks” on page 5-10
“Dynamic Network Structures” on page 5-10
“Dynamic Network Training” on page 5-11
Feedforward and Recurrent Neural Networks
Dynamic networks can be divided into two categories: those that have only feedforward
connections, and those that have feedback, or recurrent, connections. To understand the
dierences between static, feedforward-dynamic, and recurrent-dynamic networks, create
some networks and see how they respond to an input sequence. (First, you might want to
review “Simulation with Sequential Inputs in a Dynamic Network” on page 1-24.)
The following commands create a pulse input sequence and plot it:
p = {0 0 1 1 1 1 0 0 0 0 0 0};
stem(cell2mat(p))
How Dynamic Neural Networks Work
5-3

Now create a static network and nd the network response to the pulse sequence. The
following commands create a simple linear network with one layer, one neuron, no bias,
and a weight of 2:
net = linearlayer;
net.inputs{1}.size = 1;
net.layers{1}.dimensions = 1;
net.biasConnect = 0;
net.IW{1,1} = 2;
view(net)
5Dynamic Neural Networks
5-4
You can now simulate the network response to the pulse input and plot it:
a = net(p);
stem(cell2mat(a))
How Dynamic Neural Networks Work
5-5
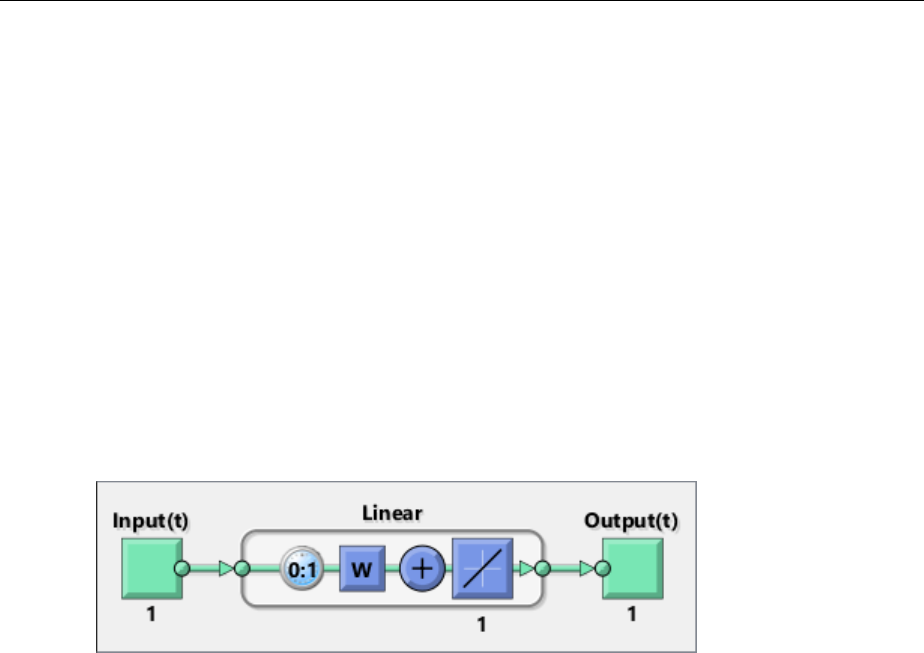
Note that the response of the static network lasts just as long as the input pulse. The
response of the static network at any time point depends only on the value of the input
sequence at that same time point.
Now create a dynamic network, but one that does not have any feedback connections (a
nonrecurrent network). You can use the same network used in “Simulation with
Concurrent Inputs in a Dynamic Network” on page 1-26, which was a linear network with
a tapped delay line on the input:
net = linearlayer([0 1]);
net.inputs{1}.size = 1;
net.layers{1}.dimensions = 1;
net.biasConnect = 0;
net.IW{1,1} = [1 1];
view(net)
You can again simulate the network response to the pulse input and plot it:
a = net(p);
stem(cell2mat(a))
5Dynamic Neural Networks
5-6
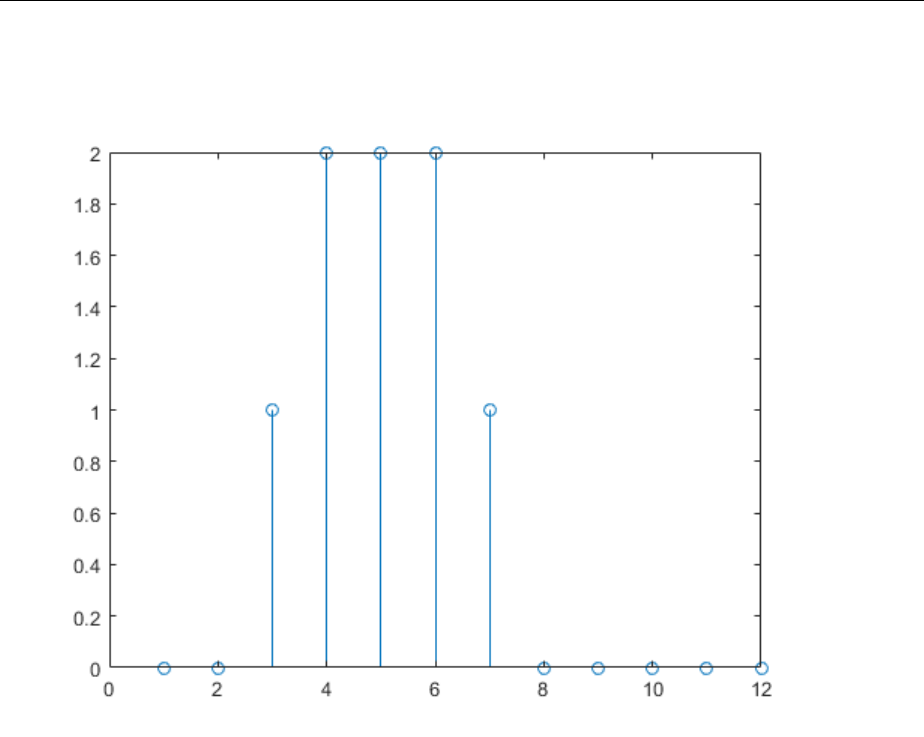
The response of the dynamic network lasts longer than the input pulse. The dynamic
network has memory. Its response at any given time depends not only on the current
input, but on the history of the input sequence. If the network does not have any feedback
connections, then only a nite amount of history will aect the response. In this gure
you can see that the response to the pulse lasts one time step beyond the pulse duration.
That is because the tapped delay line on the input has a maximum delay of 1.
Now consider a simple recurrent-dynamic network, shown in the following gure.
How Dynamic Neural Networks Work
5-7
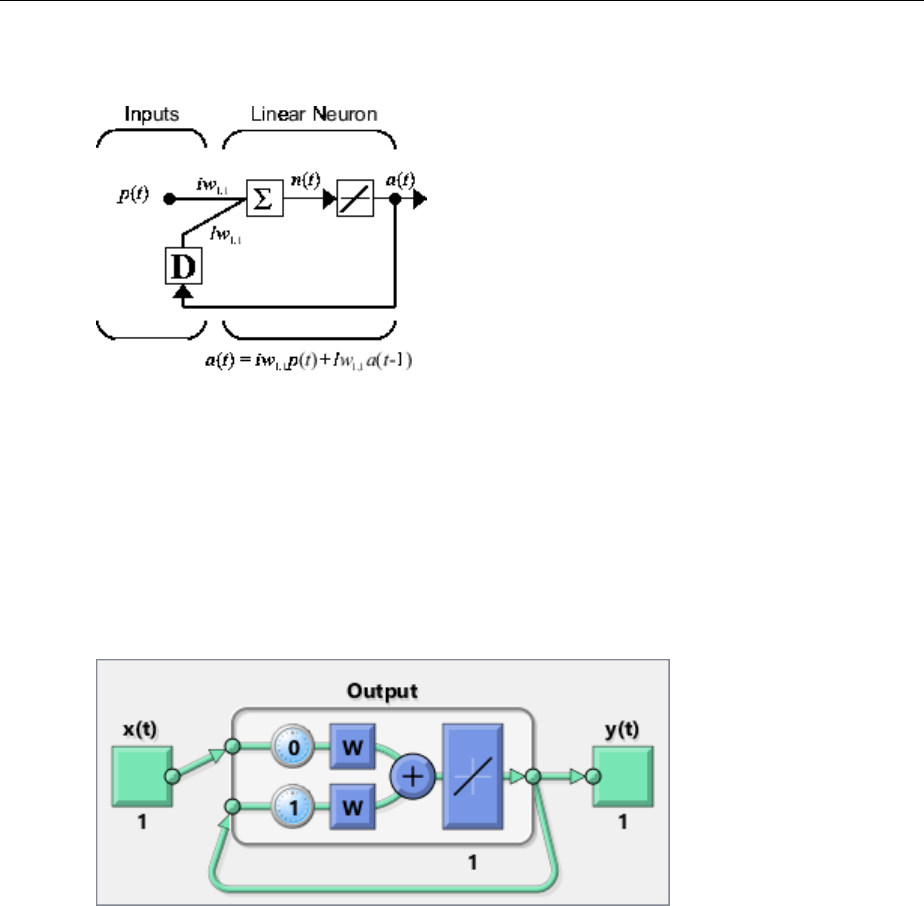
You can create the network, view it and simulate it with the following commands. The
narxnet command is discussed in “Design Time Series NARX Feedback Neural
Networks” on page 5-22.
net = narxnet(0,1,[],'closed');
net.inputs{1}.size = 1;
net.layers{1}.dimensions = 1;
net.biasConnect = 0;
net.LW{1} = .5;
net.IW{1} = 1;
view(net)
The following commands plot the network response.
a = net(p);
stem(cell2mat(a))
5Dynamic Neural Networks
5-8
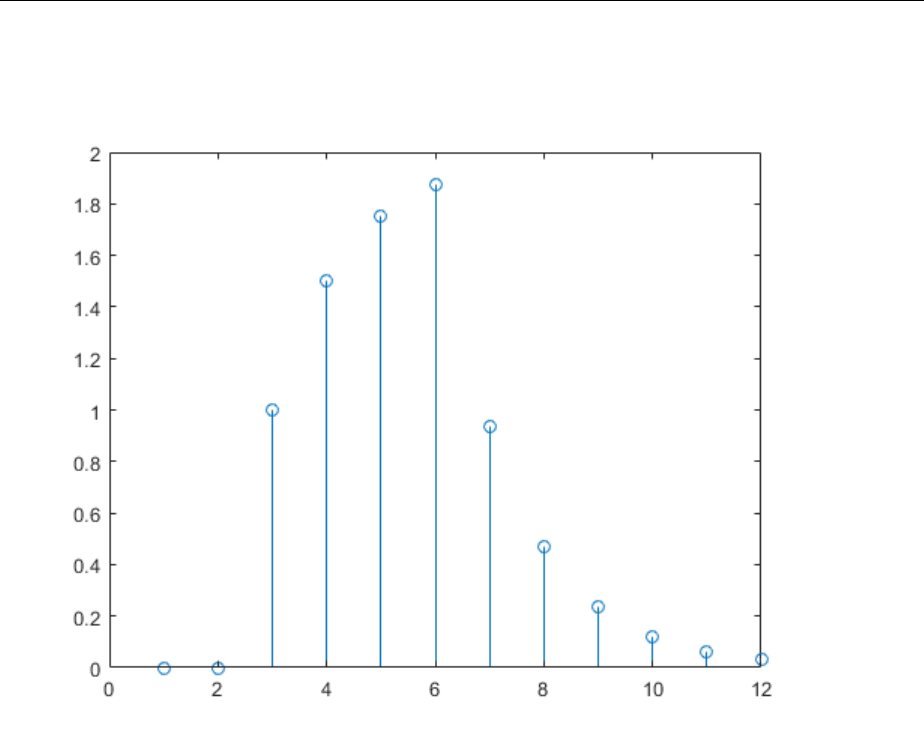
Notice that recurrent-dynamic networks typically have a longer response than
feedforward-dynamic networks. For linear networks, feedforward-dynamic networks are
called nite impulse response (FIR), because the response to an impulse input will
become zero after a nite amount of time. Linear recurrent-dynamic networks are called
innite impulse response (IIR), because the response to an impulse can decay to zero (for
a stable network), but it will never become exactly equal to zero. An impulse response for
a nonlinear network cannot be dened, but the ideas of nite and innite responses do
carry over.
How Dynamic Neural Networks Work
5-9

Applications of Dynamic Networks
Dynamic networks are generally more powerful than static networks (although somewhat
more diicult to train). Because dynamic networks have memory, they can be trained to
learn sequential or time-varying patterns. This has applications in such disparate areas as
prediction in nancial markets [RoJa96 on page 13-2], channel equalization in
communication systems [FeTs03 on page 13-2], phase detection in power systems
[KaGr96 on page 13-2], sorting [JaRa04 on page 13-2], fault detection [ChDa99 on
page 13-2], speech recognition [Robin94 on page 13-2], and even the prediction of
protein structure in genetics [GiPr02 on page 13-2]. You can nd a discussion of many
more dynamic network applications in [MeJa00 on page 13-2].
One principal application of dynamic neural networks is in control systems. This
application is discussed in detail in “Neural Network Control Systems”. Dynamic
networks are also well suited for ltering. You will see the use of some linear dynamic
networks for ltering in and some of those ideas are extended in this topic, using
nonlinear dynamic networks.
Dynamic Network Structures
The Neural Network Toolbox software is designed to train a class of network called the
Layered Digital Dynamic Network (LDDN). Any network that can be arranged in the form
of an LDDN can be trained with the toolbox. Here is a basic description of the LDDN.
Each layer in the LDDN is made up of the following parts:
• Set of weight matrices that come into that layer (which can connect from other layers
or from external inputs), associated weight function rule used to combine the weight
matrix with its input (normally standard matrix multiplication, dotprod), and
associated tapped delay line
• Bias vector
• Net input function rule that is used to combine the outputs of the various weight
functions with the bias to produce the net input (normally a summing junction,
netprod)
• Transfer function
The network has inputs that are connected to special weights, called input weights, and
denoted by IWi,j (net.IW{i,j} in the code), where j denotes the number of the input
vector that enters the weight, and i denotes the number of the layer to which the weight
5Dynamic Neural Networks
5-10
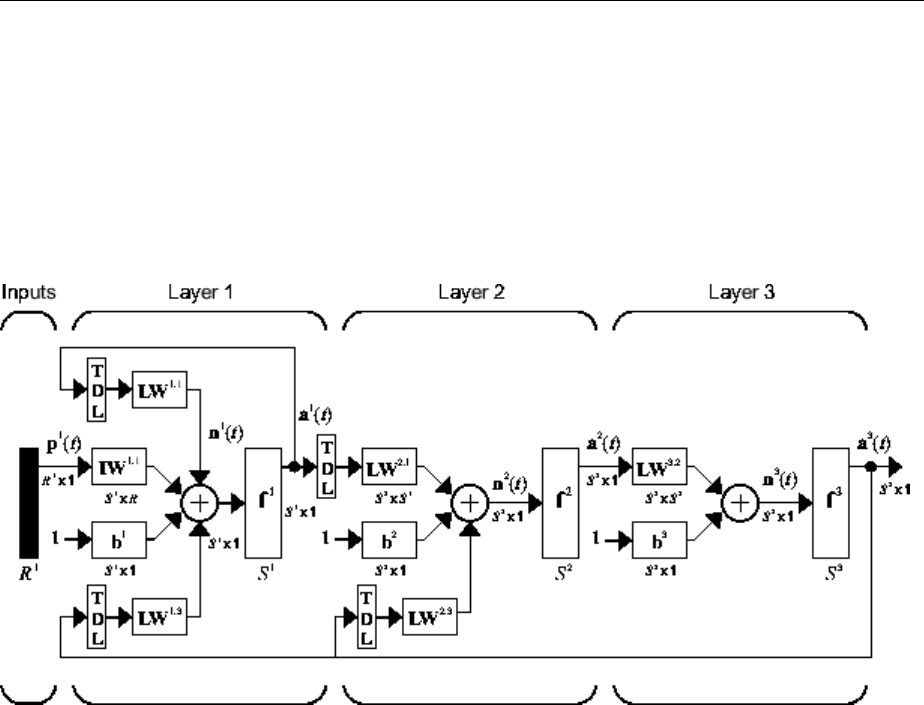
is connected. The weights connecting one layer to another are called layer weights and
are denoted by LWi,j (net.LW{i,j} in the code), where j denotes the number of the layer
coming into the weight and i denotes the number of the layer at the output of the weight.
The following gure is an example of a three-layer LDDN. The rst layer has three
weights associated with it: one input weight, a layer weight from layer 1, and a layer
weight from layer 3. The two layer weights have tapped delay lines associated with them.
The Neural Network Toolbox software can be used to train any LDDN, so long as the
weight functions, net input functions, and transfer functions have derivatives. Most well-
known dynamic network architectures can be represented in LDDN form. In the
remainder of this topic you will see how to use some simple commands to create and train
several very powerful dynamic networks. Other LDDN networks not covered in this topic
can be created using the generic network command, as explained in “Dene Shallow
Neural Network Architectures”.
Dynamic Network Training
Dynamic networks are trained in the Neural Network Toolbox software using the same
gradient-based algorithms that were described in “Multilayer Neural Networks and
Backpropagation Training” on page 4-2. You can select from any of the training functions
that were presented in that topic. Examples are provided in the following sections.
How Dynamic Neural Networks Work
5-11
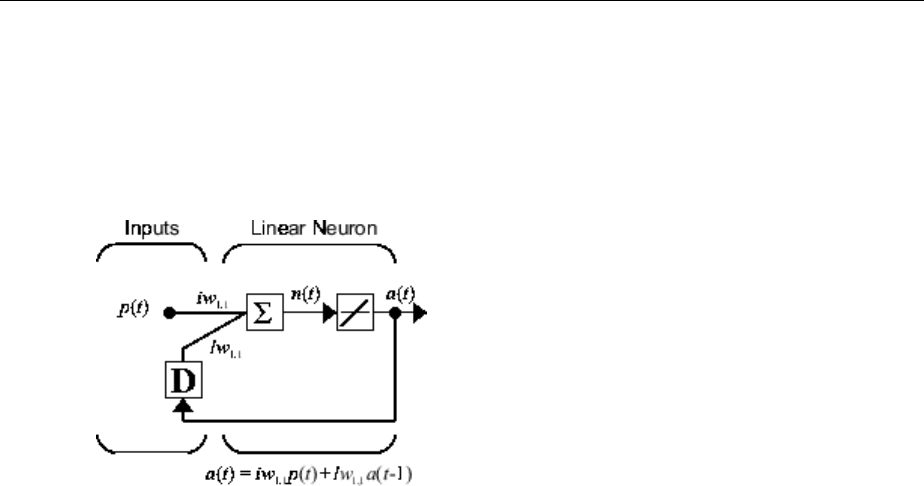
Although dynamic networks can be trained using the same gradient-based algorithms that
are used for static networks, the performance of the algorithms on dynamic networks can
be quite dierent, and the gradient must be computed in a more complex way. Consider
again the simple recurrent network shown in this gure.
The weights have two dierent eects on the network output. The rst is the direct eect,
because a change in the weight causes an immediate change in the output at the current
time step. (This rst eect can be computed using standard backpropagation.) The
second is an indirect eect, because some of the inputs to the layer, such as a(t − 1), are
also functions of the weights. To account for this indirect eect, you must use dynamic
backpropagation to compute the gradients, which is more computationally intensive. (See
[DeHa01a on page 13-2], [DeHa01b on page 13-2] and [DeHa07 on page 13-2].)
Expect dynamic backpropagation to take more time to train, in part for this reason. In
addition, the error surfaces for dynamic networks can be more complex than those for
static networks. Training is more likely to be trapped in local minima. This suggests that
you might need to train the network several times to achieve an optimal result. See
[DHH01 on page 13-2] and [HDH09 on page 13-2] for some discussion on the
training of dynamic networks.
The remaining sections of this topic show how to create, train, and apply certain dynamic
networks to modeling, detection, and forecasting problems. Some of the networks require
dynamic backpropagation for computing the gradients and others do not. As a user, you
do not need to decide whether or not dynamic backpropagation is needed. This is
determined automatically by the software, which also decides on the best form of dynamic
backpropagation to use. You just need to create the network and then invoke the standard
train command.
5Dynamic Neural Networks
5-12
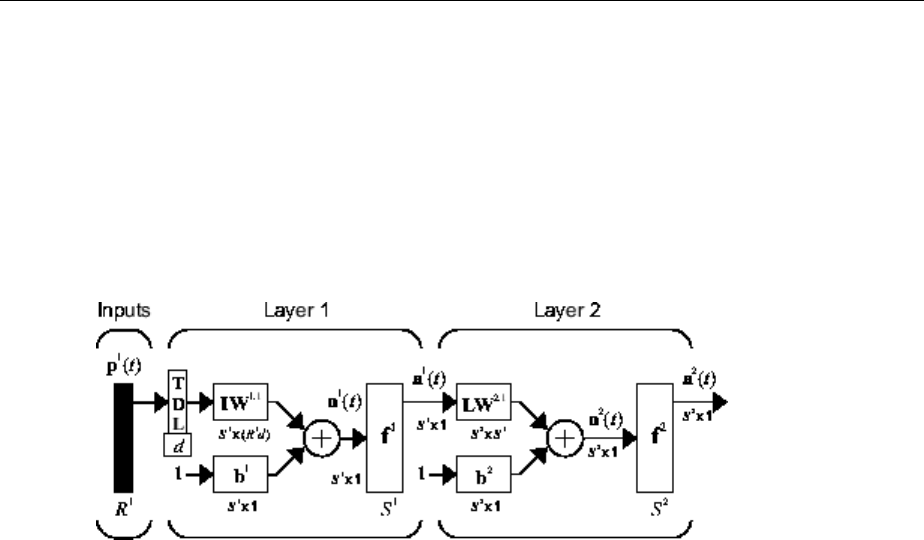
Design Time Series Time-Delay Neural Networks
Begin with the most straightforward dynamic network, which consists of a feedforward
network with a tapped delay line at the input. This is called the focused time-delay neural
network (FTDNN). This is part of a general class of dynamic networks, called focused
networks, in which the dynamics appear only at the input layer of a static multilayer
feedforward network. The following gure illustrates a two-layer FTDNN.
This network is well suited to time-series prediction. The following example the use of the
FTDNN for predicting a classic time series.
The following gure is a plot of normalized intensity data recorded from a Far-Infrared-
Laser in a chaotic state. This is a part of one of several sets of data used for the Santa Fe
Time Series Competition [WeGe94 on page 13-2]. In the competition, the objective was
to use the rst 1000 points of the time series to predict the next 100 points. Because our
objective is simply to illustrate how to use the FTDNN for prediction, the network is
trained here to perform one-step-ahead predictions. (You can use the resulting network
for multistep-ahead predictions by feeding the predictions back to the input of the
network and continuing to iterate.)
Design Time Series Time-Delay Neural Networks
5-13
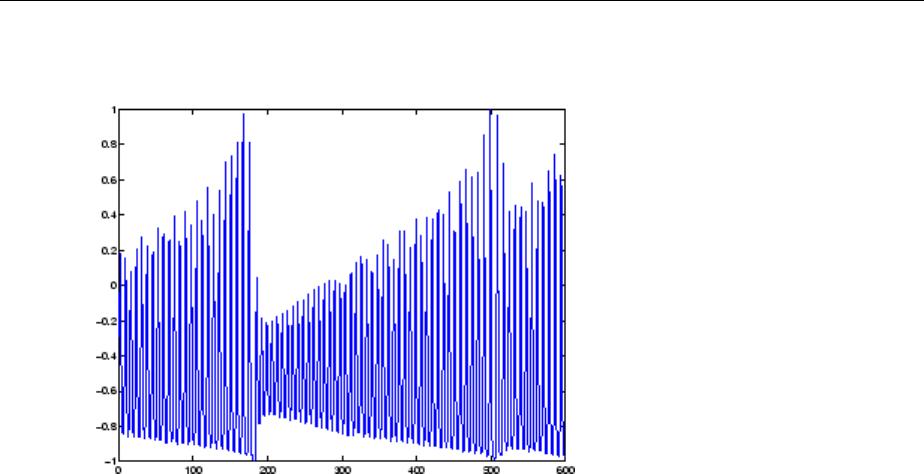
The rst step is to load the data, normalize it, and convert it to a time sequence
(represented by a cell array):
y = laser_dataset;
y = y(1:600);
Now create the FTDNN network, using the timedelaynet command. This command is
similar to the feedforwardnet command, with the additional input of the tapped delay
line vector (the rst input). For this example, use a tapped delay line with delays from 1 to
8, and use ten neurons in the hidden layer:
ftdnn_net = timedelaynet([1:8],10);
ftdnn_net.trainParam.epochs = 1000;
ftdnn_net.divideFcn = '';
Arrange the network inputs and targets for training. Because the network has a tapped
delay line with a maximum delay of 8, begin by predicting the ninth value of the time
series. You also need to load the tapped delay line with the eight initial values of the time
series (contained in the variable Pi):
p = y(9:end);
t = y(9:end);
Pi=y(1:8);
ftdnn_net = train(ftdnn_net,p,t,Pi);
5Dynamic Neural Networks
5-14
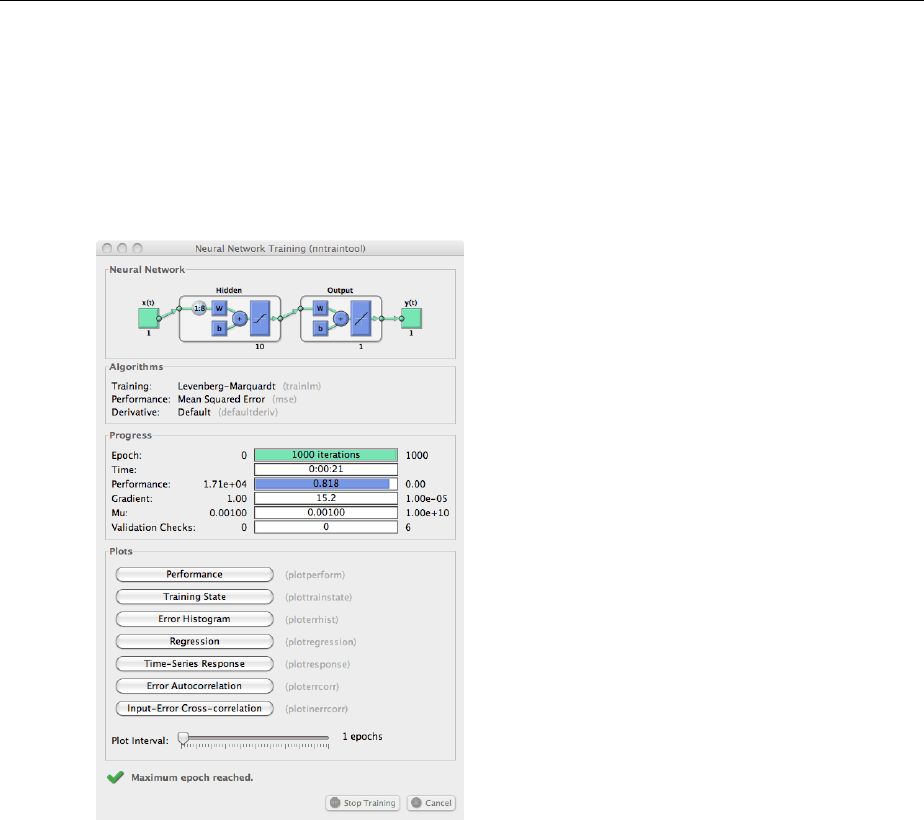
Notice that the input to the network is the same as the target. Because the network has a
minimum delay of one time step, this means that you are performing a one-step-ahead
prediction.
During training, the following training window appears.
Training stopped because the maximum epoch was reached. From this window, you can
display the response of the network by clicking Time-Series Response. The following
gure appears.
Design Time Series Time-Delay Neural Networks
5-15
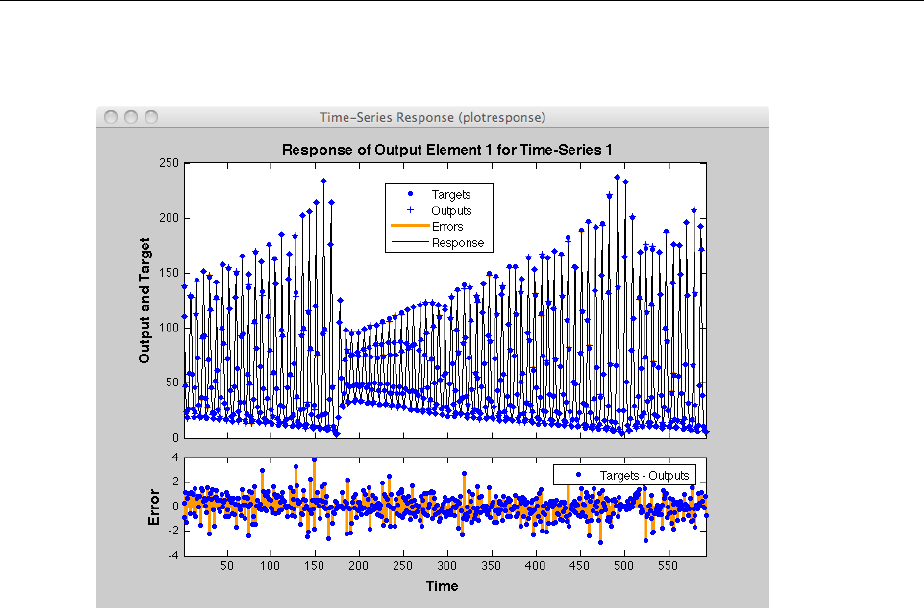
Now simulate the network and determine the prediction error.
yp = ftdnn_net(p,Pi);
e = gsubtract(yp,t);
rmse = sqrt(mse(e))
rmse =
0.9740
(Note that gsubtract is a general subtraction function that can operate on cell arrays.)
This result is much better than you could have obtained using a linear predictor. You can
verify this with the following commands, which design a linear lter with the same tapped
delay line input as the previous FTDNN.
lin_net = linearlayer([1:8]);
lin_net.trainFcn='trainlm';
[lin_net,tr] = train(lin_net,p,t,Pi);
lin_yp = lin_net(p,Pi);
lin_e = gsubtract(lin_yp,t);
lin_rmse = sqrt(mse(lin_e))
5Dynamic Neural Networks
5-16

lin_rmse =
21.1386
The rms error is 21.1386 for the linear predictor, but 0.9740 for the nonlinear FTDNN
predictor.
One nice feature of the FTDNN is that it does not require dynamic backpropagation to
compute the network gradient. This is because the tapped delay line appears only at the
input of the network, and contains no feedback loops or adjustable parameters. For this
reason, you will nd that this network trains faster than other dynamic networks.
If you have an application for a dynamic network, try the linear network rst
(linearlayer) and then the FTDNN (timedelaynet). If neither network is satisfactory,
try one of the more complex dynamic networks discussed in the remainder of this topic.
Each time a neural network is trained, can result in a dierent solution due to dierent
initial weight and bias values and dierent divisions of data into training, validation, and
test sets. As a result, dierent neural networks trained on the same problem can give
dierent outputs for the same input. To ensure that a neural network of good accuracy
has been found, retrain several times.
There are several other techniques for improving upon initial solutions if higher accuracy
is desired. For more information, see “Improve Neural Network Generalization and Avoid
Overtting” on page 10-32.
Prepare Input and Layer Delay States
You will notice in the last section that for dynamic networks there is a signicant amount
of data preparation that is required before training or simulating the network. This is
because the tapped delay lines in the network need to be lled with initial conditions,
which requires that part of the original data set be removed and shifted. There is a
toolbox function that facilitates the data preparation for dynamic (time series) networks -
preparets. For example, the following lines:
p = y(9:end);
t = y(9:end);
Pi = y(1:8);
can be replaced with
[p,Pi,Ai,t] = preparets(ftdnn_net,y,y);
Design Time Series Time-Delay Neural Networks
5-17

The preparets function uses the network object to determine how to ll the tapped
delay lines with initial conditions, and how to shift the data to create the correct inputs
and targets to use in training or simulating the network. The general form for invoking
preparets is
[X,Xi,Ai,T,EW,shift] = preparets(net,inputs,targets,feedback,EW)
The input arguments for preparets are the network object (net), the external (non-
feedback) input to the network (inputs), the non-feedback target (targets), the
feedback target (feedback), and the error weights (EW) (see “Train Neural Networks
with Error Weights” on page 5-43). The dierence between external and feedback
signals will become clearer when the NARX network is described in “Design Time Series
NARX Feedback Neural Networks” on page 5-22. For the FTDNN network, there is no
feedback signal.
The return arguments for preparets are the time shift between network inputs and
outputs (shift), the network input for training and simulation (X), the initial inputs (Xi)
for loading the tapped delay lines for input weights, the initial layer outputs (Ai) for
loading the tapped delay lines for layer weights, the training targets (T), and the error
weights (EW).
Using preparets eliminates the need to manually shift inputs and targets and load tapped
delay lines. This is especially useful for more complex networks.
5Dynamic Neural Networks
5-18
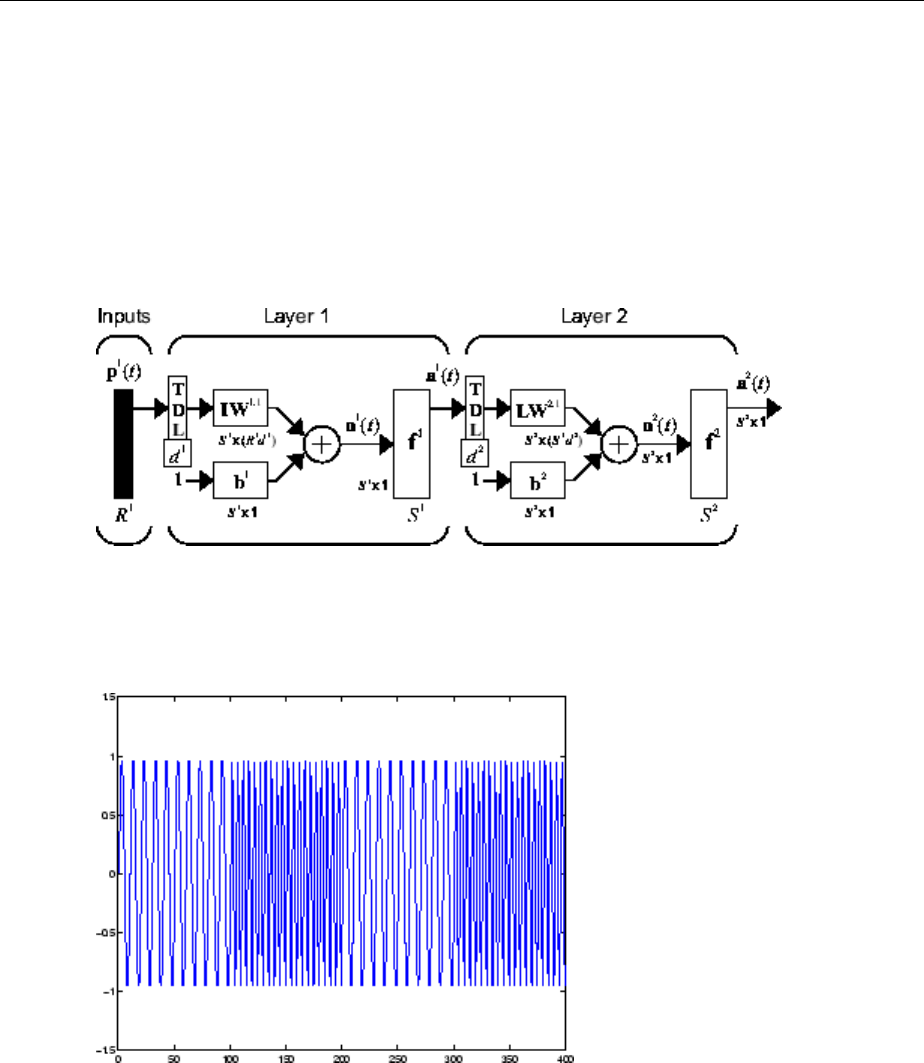
Design Time Series Distributed Delay Neural Networks
The FTDNN had the tapped delay line memory only at the input to the rst layer of the
static feedforward network. You can also distribute the tapped delay lines throughout the
network. The distributed TDNN was rst introduced in [WaHa89 on page 13-2] for
phoneme recognition. The original architecture was very specialized for that particular
problem. The following gure shows a general two-layer distributed TDNN.
This network can be used for a simplied problem that is similar to phoneme recognition.
The network will attempt to recognize the frequency content of an input signal. The
following gure shows a signal in which one of two frequencies is present at any given
time.
Design Time Series Distributed Delay Neural Networks
5-19

The following code creates this signal and a target network output. The target output is 1
when the input is at the low frequency and -1 when the input is at the high frequency.
time = 0:99;
y1 = sin(2*pi*time/10);
y2 = sin(2*pi*time/5);
y = [y1 y2 y1 y2];
t1 = ones(1,100);
t2 = -ones(1,100);
t = [t1 t2 t1 t2];
Now create the distributed TDNN network with the distdelaynet function. The only
dierence between the distdelaynet function and the timedelaynet function is that
the rst input argument is a cell array that contains the tapped delays to be used in each
layer. In the next example, delays of zero to four are used in layer 1 and zero to three are
used in layer 2. (To add some variety, the training function trainbr is used in this
example instead of the default, which is trainlm. You can use any training function
discussed in “Multilayer Neural Networks and Backpropagation Training” on page 4-2.)
d1 = 0:4;
d2 = 0:3;
p = con2seq(y);
t = con2seq(t);
dtdnn_net = distdelaynet({d1,d2},5);
dtdnn_net.trainFcn = 'trainbr';
dtdnn_net.divideFcn = '';
dtdnn_net.trainParam.epochs = 100;
dtdnn_net = train(dtdnn_net,p,t);
yp = sim(dtdnn_net,p);
plotresponse(t,yp)
5Dynamic Neural Networks
5-20
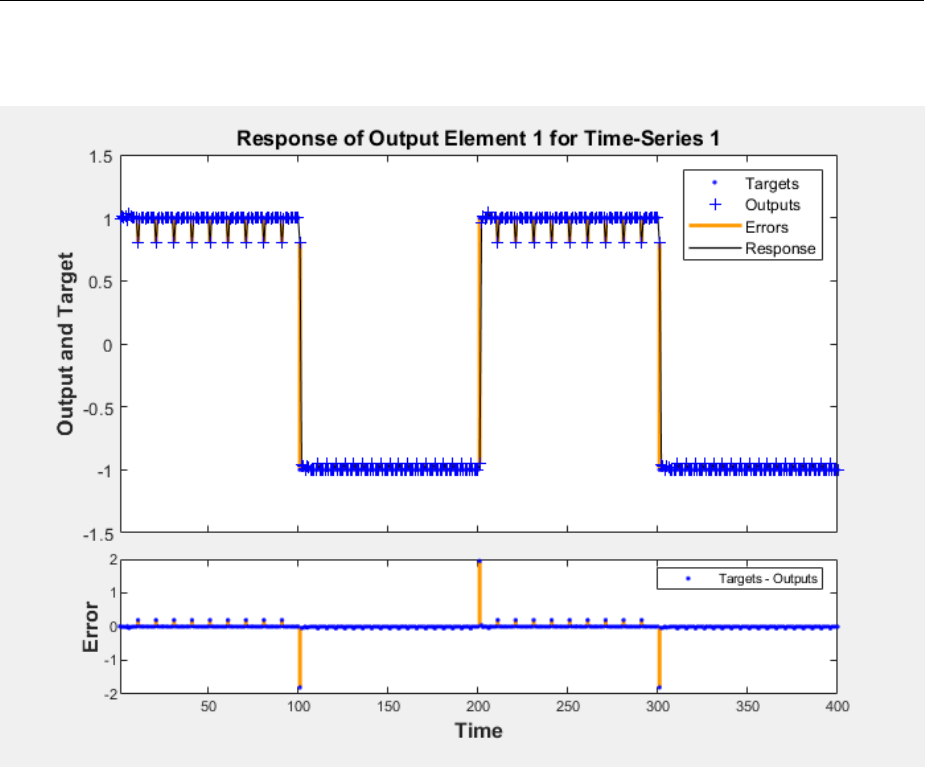
The network is able to accurately distinguish the two “phonemes.”
You will notice that the training is generally slower for the distributed TDNN network
than for the FTDNN. This is because the distributed TDNN must use dynamic
backpropagation.
Design Time Series Distributed Delay Neural Networks
5-21
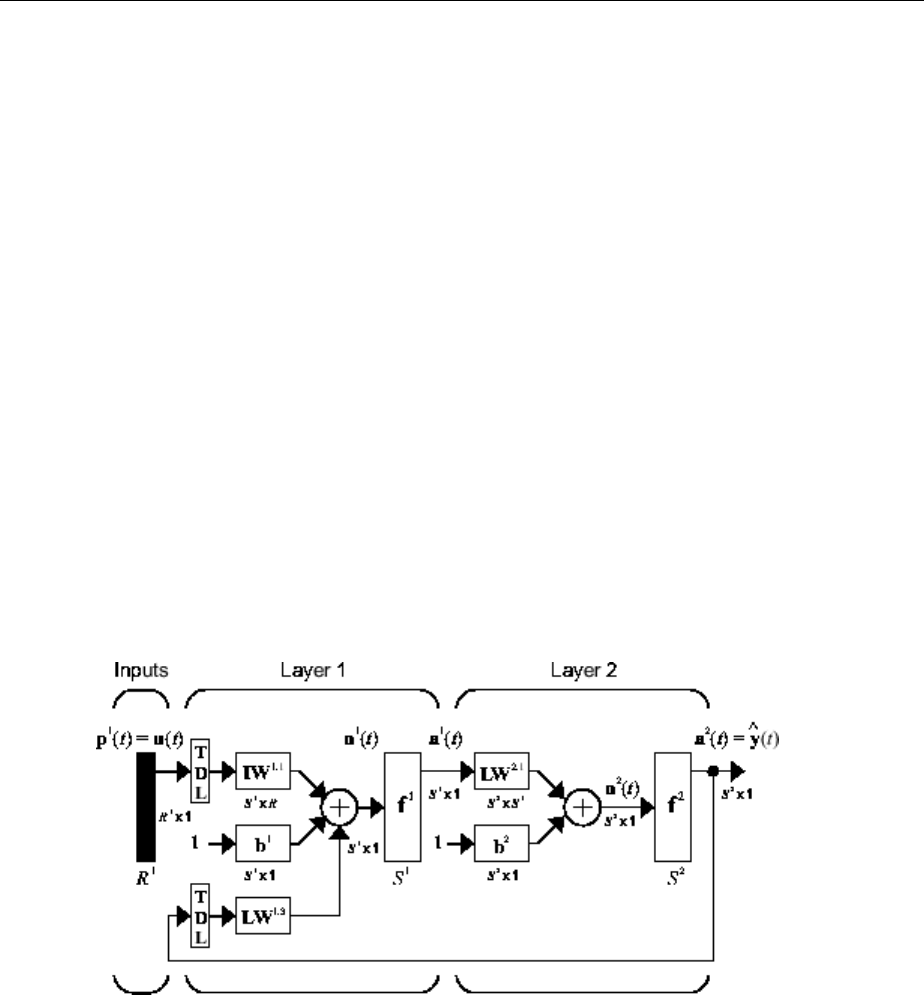
Design Time Series NARX Feedback Neural Networks
To see examples of using NARX networks being applied in open-loop form, closed-loop
form and open/closed-loop multistep prediction see “Multistep Neural Network
Prediction” on page 5-51.
All the specic dynamic networks discussed so far have either been focused networks,
with the dynamics only at the input layer, or feedforward networks. The nonlinear
autoregressive network with exogenous inputs (NARX) is a recurrent dynamic network,
with feedback connections enclosing several layers of the network. The NARX model is
based on the linear ARX model, which is commonly used in time-series modeling.
The dening equation for the NARX model is
y t f y t y t y t n u t u t u t n
y u
( ) ( ( ), ( ), , ( ), ( ), ( ), , ( ))= - - - - - -1 2 1 2… …
where the next value of the dependent output signal y(t) is regressed on previous values
of the output signal and previous values of an independent (exogenous) input signal. You
can implement the NARX model by using a feedforward neural network to approximate
the function f. A diagram of the resulting network is shown below, where a two-layer
feedforward network is used for the approximation. This implementation also allows for a
vector ARX model, where the input and output can be multidimensional.
There are many applications for the NARX network. It can be used as a predictor, to
predict the next value of the input signal. It can also be used for nonlinear ltering, in
5Dynamic Neural Networks
5-22
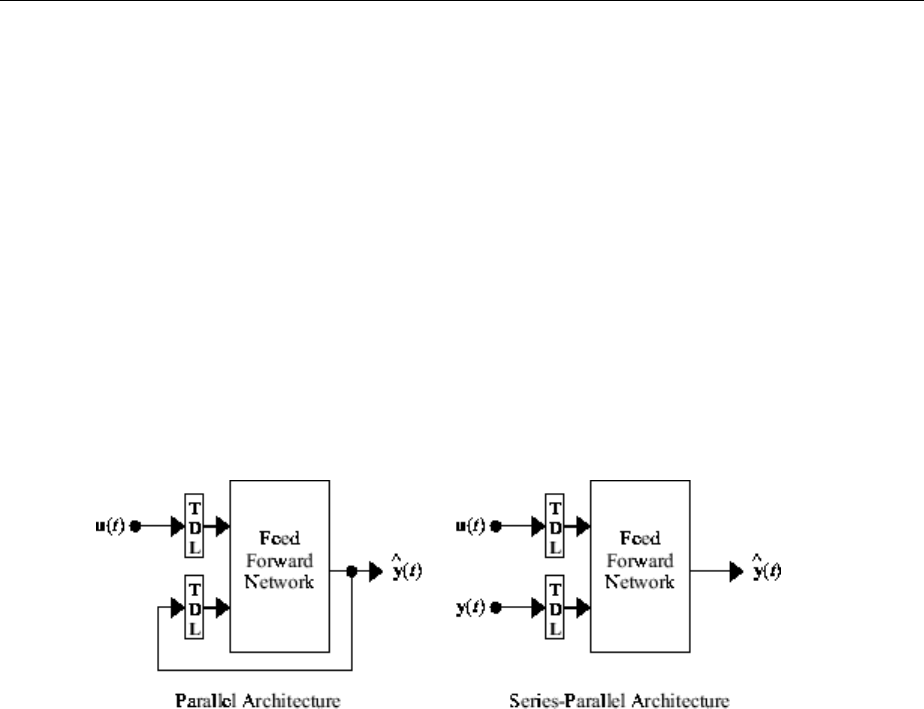
which the target output is a noise-free version of the input signal. The use of the NARX
network is shown in another important application, the modeling of nonlinear dynamic
systems.
Before showing the training of the NARX network, an important conguration that is
useful in training needs explanation. You can consider the output of the NARX network to
be an estimate of the output of some nonlinear dynamic system that you are trying to
model. The output is fed back to the input of the feedforward neural network as part of
the standard NARX architecture, as shown in the left gure below. Because the true
output is available during the training of the network, you could create a series-parallel
architecture (see [NaPa91 on page 13-2]), in which the true output is used instead of
feeding back the estimated output, as shown in the right gure below. This has two
advantages. The rst is that the input to the feedforward network is more accurate. The
second is that the resulting network has a purely feedforward architecture, and static
backpropagation can be used for training.
The following shows the use of the series-parallel architecture for training a NARX
network to model a dynamic system.
The example of the NARX network is the magnetic levitation system described beginning
in “Use the NARMA-L2 Controller Block” on page 6-18. The bottom graph in the
following gure shows the voltage applied to the electromagnet, and the top graph shows
the position of the permanent magnet. The data was collected at a sampling interval of
0.01 seconds to form two time series.
The goal is to develop a NARX model for this magnetic levitation system.
Design Time Series NARX Feedback Neural Networks
5-23
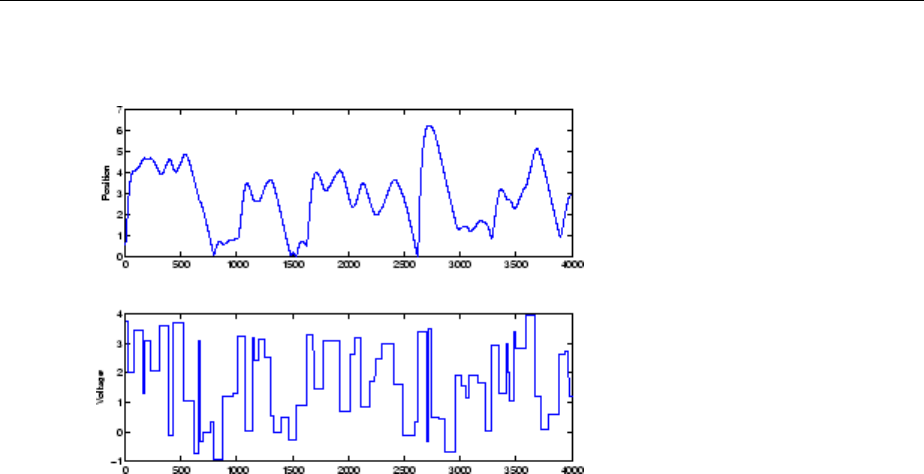
First, load the training data. Use tapped delay lines with two delays for both the input and
the output, so training begins with the third data point. There are two inputs to the
series-parallel network, the u(t) sequence and the y(t) sequence.
load magdata
y = con2seq(y);
u = con2seq(u);
Create the series-parallel NARX network using the function narxnet. Use 10 neurons in
the hidden layer and use trainlm for the training function, and then prepare the data
with preparets:
d1 = [1:2];
d2 = [1:2];
narx_net = narxnet(d1,d2,10);
narx_net.divideFcn = '';
narx_net.trainParam.min_grad = 1e-10;
[p,Pi,Ai,t] = preparets(narx_net,u,{},y);
(Notice that the y sequence is considered a feedback signal, which is an input that is also
an output (target). Later, when you close the loop, the appropriate output will be
connected to the appropriate input.) Now you are ready to train the network.
narx_net = train(narx_net,p,t,Pi);
5Dynamic Neural Networks
5-24
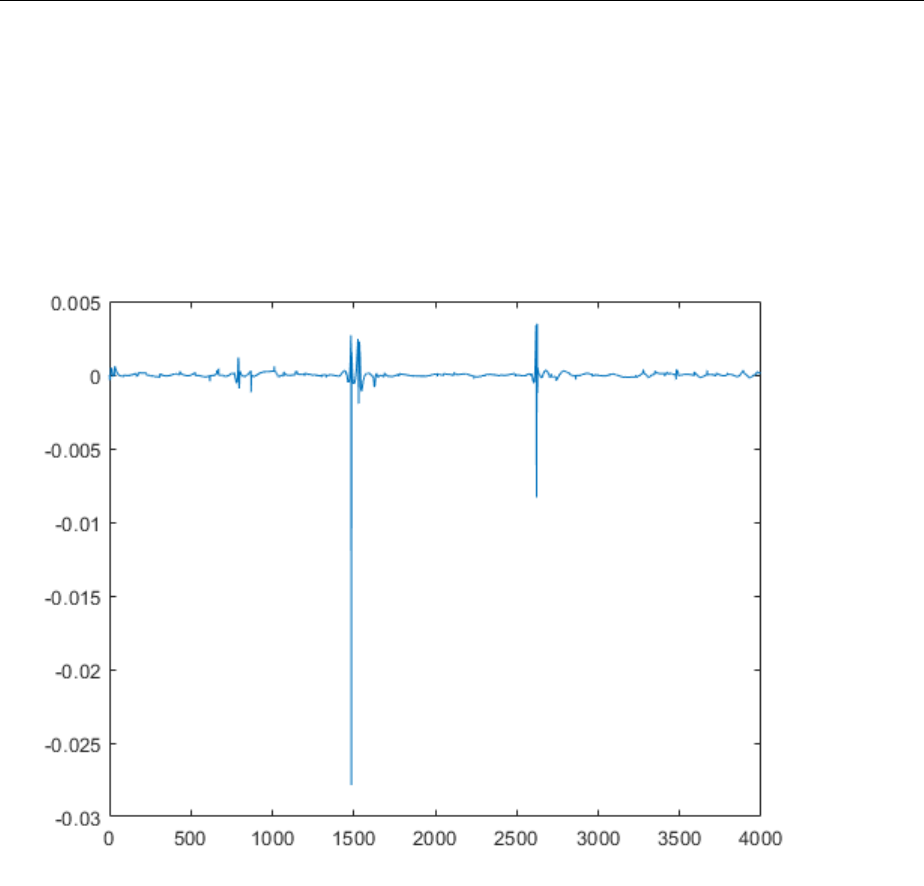
You can now simulate the network and plot the resulting errors for the series-parallel
implementation.
yp = sim(narx_net,p,Pi);
e = cell2mat(yp)-cell2mat(t);
plot(e)
You can see that the errors are very small. However, because of the series-parallel
conguration, these are errors for only a one-step-ahead prediction. A more stringent test
would be to rearrange the network into the original parallel form (closed loop) and then
to perform an iterated prediction over many time steps. Now the parallel operation is
shown.
Design Time Series NARX Feedback Neural Networks
5-25
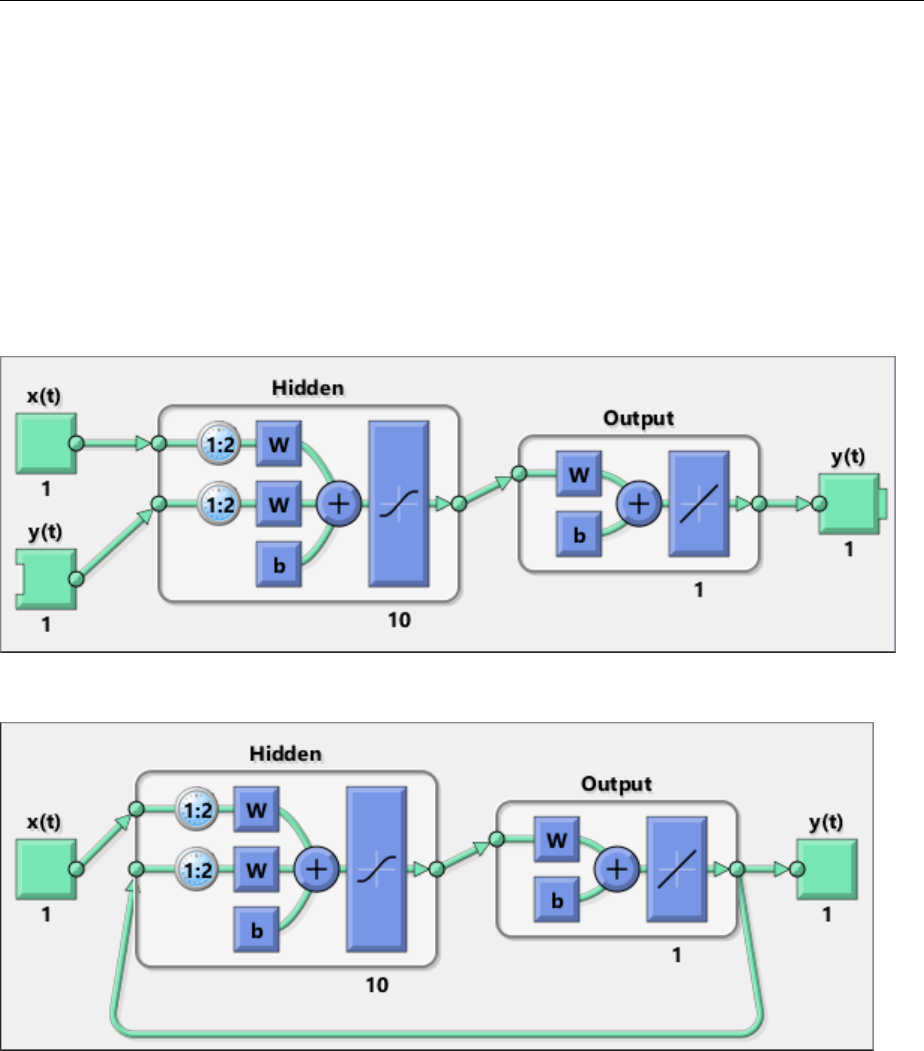
There is a toolbox function (closeloop) for converting NARX (and other) networks from
the series-parallel conguration (open loop), which is useful for training, to the parallel
conguration (closed loop), which is useful for multi-step-ahead prediction. The following
command illustrates how to convert the network that you just trained to parallel form:
narx_net_closed = closeloop(narx_net);
To see the dierences between the two networks, you can use the view command:
view(narx_net)
view(narx_net_closed)
5Dynamic Neural Networks
5-26

All of the training is done in open loop (also called series-parallel architecture), including
the validation and testing steps. The typical workow is to fully create the network in
open loop, and only when it has been trained (which includes validation and testing steps)
is it transformed to closed loop for multistep-ahead prediction. Likewise, the R values in
the GUI are computed based on the open-loop training results.
You can now use the closed-loop (parallel) conguration to perform an iterated prediction
of 900 time steps. In this network you need to load the two initial inputs and the two
initial outputs as initial conditions. You can use the preparets function to prepare the
data. It will use the network structure to determine how to divide and shift the data
appropriately.
y1 = y(1700:2600);
u1 = u(1700:2600);
[p1,Pi1,Ai1,t1] = preparets(narx_net_closed,u1,{},y1);
yp1 = narx_net_closed(p1,Pi1,Ai1);
TS = size(t1,2);
plot(1:TS,cell2mat(t1),'b',1:TS,cell2mat(yp1),'r')
Design Time Series NARX Feedback Neural Networks
5-27
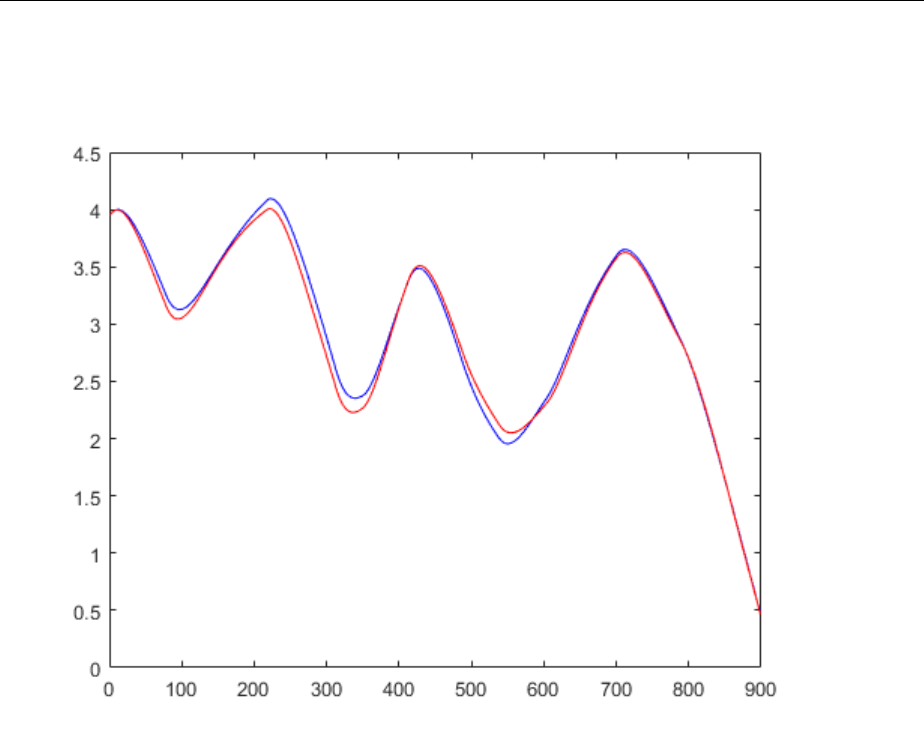
The gure illustrates the iterated prediction. The blue line is the actual position of the
magnet, and the red line is the position predicted by the NARX neural network. Even
though the network is predicting 900 time steps ahead, the prediction is very accurate.
In order for the parallel response (iterated prediction) to be accurate, it is important that
the network be trained so that the errors in the series-parallel conguration (one-step-
ahead prediction) are very small.
You can also create a parallel (closed loop) NARX network, using the narxnet command
with the fourth input argument set to 'closed', and train that network directly.
Generally, the training takes longer, and the resulting performance is not as good as that
obtained with series-parallel training.
5Dynamic Neural Networks
5-28

Each time a neural network is trained, can result in a dierent solution due to dierent
initial weight and bias values and dierent divisions of data into training, validation, and
test sets. As a result, dierent neural networks trained on the same problem can give
dierent outputs for the same input. To ensure that a neural network of good accuracy
has been found, retrain several times.
There are several other techniques for improving upon initial solutions if higher accuracy
is desired. For more information, see “Improve Neural Network Generalization and Avoid
Overtting” on page 10-32.
Multiple External Variables
The maglev example showed how to model a time series with a single external input value
over time. But the NARX network will work for problems with multiple external input
elements and predict series with multiple elements. In these cases, the input and target
consist of row cell arrays representing time, but with each cell element being an N-by-1
vector for the N elements of the input or target signal.
For example, here is a dataset which consists of 2-element external variables predicting a
1-element series.
[X,T] = ph_dataset;
The external inputs X are formatted as a row cell array of 2-element vectors, with each
vector representing acid and base solution ow. The targets represent the resulting pH of
the solution over time.
You can reformat your own multi-element series data from matrix form to neural network
time-series form with the function con2seq.
The process for training a network proceeds as it did above for the maglev problem.
net = narxnet(10);
[x,xi,ai,t] = preparets(net,X,{},T);
net = train(net,x,t,xi,ai);
y = net(x,xi,ai);
e = gsubtract(t,y);
To see examples of using NARX networks being applied in open-loop form, closed-loop
form and open/closed-loop multistep prediction see “Multistep Neural Network
Prediction” on page 5-51.
Design Time Series NARX Feedback Neural Networks
5-29
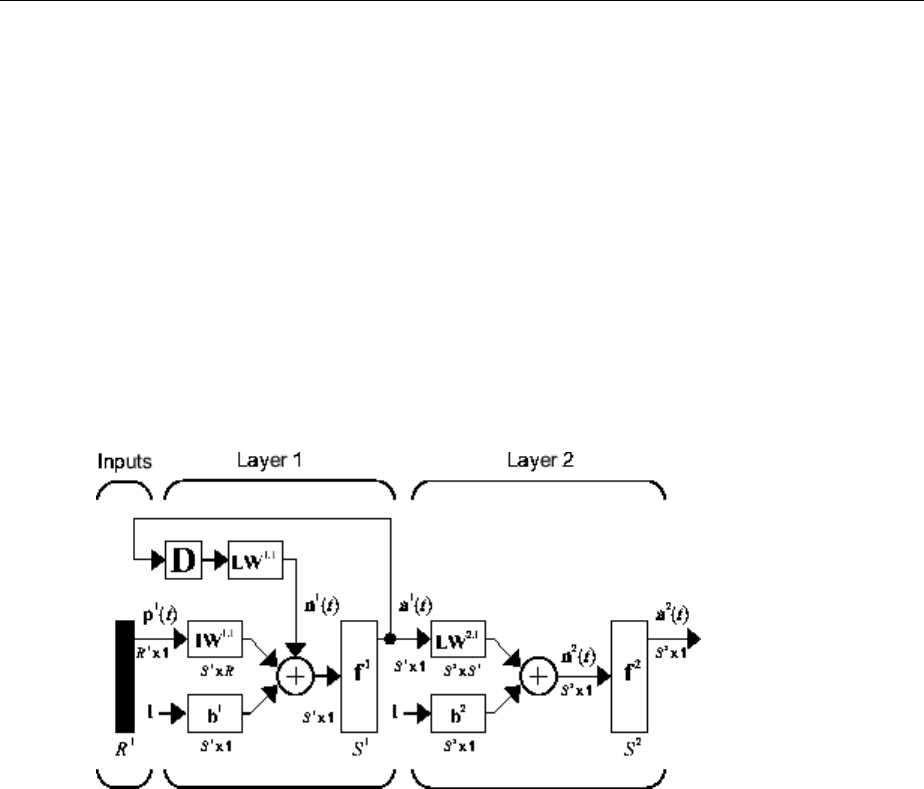
Design Layer-Recurrent Neural Networks
The next dynamic network to be introduced is the Layer-Recurrent Network (LRN). An
earlier simplied version of this network was introduced by Elman [Elma90 on page 13-
2]. In the LRN, there is a feedback loop, with a single delay, around each layer of the
network except for the last layer. The original Elman network had only two layers, and
used a tansig transfer function for the hidden layer and a purelin transfer function for
the output layer. The original Elman network was trained using an approximation to the
backpropagation algorithm. The layrecnet command generalizes the Elman network to
have an arbitrary number of layers and to have arbitrary transfer functions in each layer.
The toolbox trains the LRN using exact versions of the gradient-based algorithms
discussed in “Multilayer Neural Networks and Backpropagation Training” on page 4-2.
The following gure illustrates a two-layer LRN.
The LRN congurations are used in many ltering and modeling applications discussed
already. To show its operation, this example uses the “phoneme” detection problem
discussed in “Design Time Series Distributed Delay Neural Networks” on page 5-19. Here
is the code to load the data and to create and train the network:
load phoneme
p = con2seq(y);
t = con2seq(t);
lrn_net = layrecnet(1,8);
lrn_net.trainFcn = 'trainbr';
lrn_net.trainParam.show = 5;
5Dynamic Neural Networks
5-30
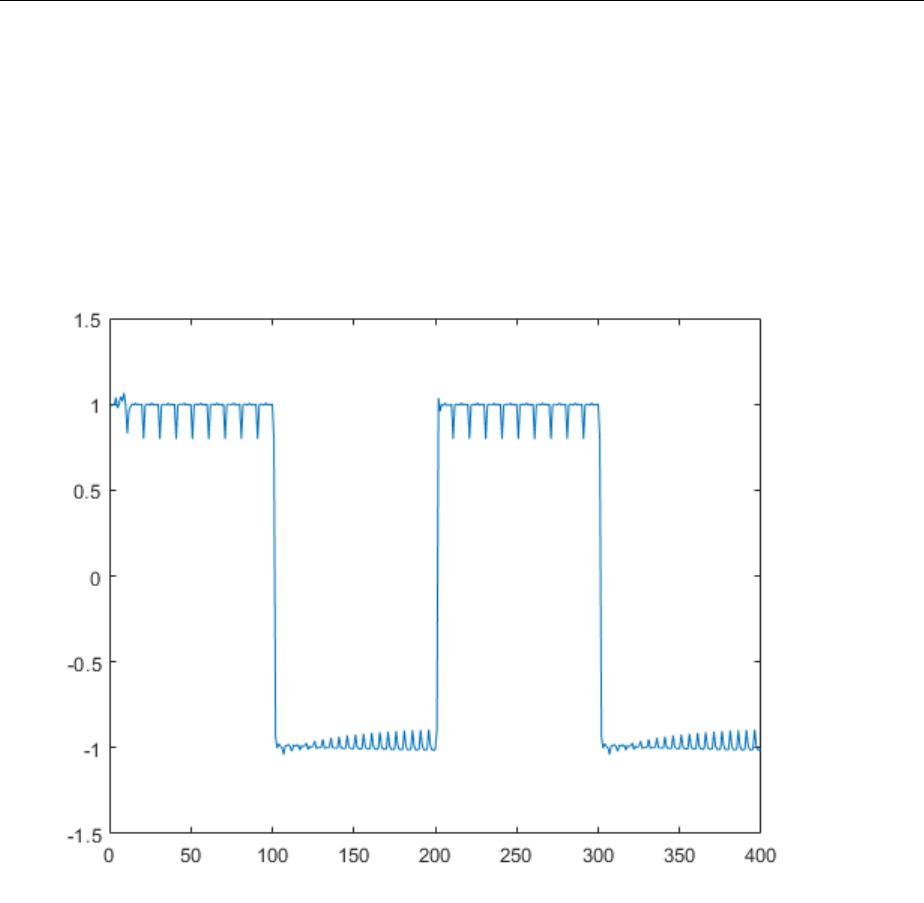
lrn_net.trainParam.epochs = 50;
lrn_net = train(lrn_net,p,t);
After training, you can plot the response using the following code:
y = lrn_net(p);
plot(cell2mat(y))
The plot shows that the network was able to detect the “phonemes.” The response is very
similar to the one obtained using the TDNN.
Each time a neural network is trained, can result in a dierent solution due to dierent
initial weight and bias values and dierent divisions of data into training, validation, and
test sets. As a result, dierent neural networks trained on the same problem can give
Design Layer-Recurrent Neural Networks
5-31

dierent outputs for the same input. To ensure that a neural network of good accuracy
has been found, retrain several times.
There are several other techniques for improving upon initial solutions if higher accuracy
is desired. For more information, see “Improve Neural Network Generalization and Avoid
Overtting” on page 10-32.
5Dynamic Neural Networks
5-32

Create Reference Model Controller with MATLAB Script
So far, this topic has described the training procedures for several specic dynamic
network architectures. However, any network that can be created in the toolbox can be
trained using the training functions described in “Multilayer Neural Networks and
Backpropagation Training” on page 4-2 so long as the components of the network are
dierentiable. This section gives an example of how to create and train a custom
architecture. The custom architecture you will use is the model reference adaptive
control (MRAC) system that is described in detail in “Design Model-Reference Neural
Controller in Simulink” on page 6-23.
As you can see in “Design Model-Reference Neural Controller in Simulink” on page 6-23,
the model reference control architecture has two subnetworks. One subnetwork is the
model of the plant that you want to control. The other subnetwork is the controller. You
will begin by training a NARX network that will become the plant model subnetwork. For
this example, you will use the robot arm to represent the plant, as described in “Design
Model-Reference Neural Controller in Simulink” on page 6-23. The following code will
load data collected from the robot arm and create and train a NARX network. For this
simple problem, you do not need to preprocess the data, and all of the data can be used
for training, so no data division is needed.
[u,y] = robotarm_dataset;
d1 = [1:2];
d2 = [1:2];
S1 = 5;
narx_net = narxnet(d1,d2,S1);
narx_net.divideFcn = '';
narx_net.inputs{1}.processFcns = {};
narx_net.inputs{2}.processFcns = {};
narx_net.outputs{2}.processFcns = {};
narx_net.trainParam.min_grad = 1e-10;
[p,Pi,Ai,t] = preparets(narx_net,u,{},y);
narx_net = train(narx_net,p,t,Pi);
narx_net_closed = closeloop(narx_net);
view(narx_net_closed)
Create Reference Model Controller with MATLAB Script
5-33
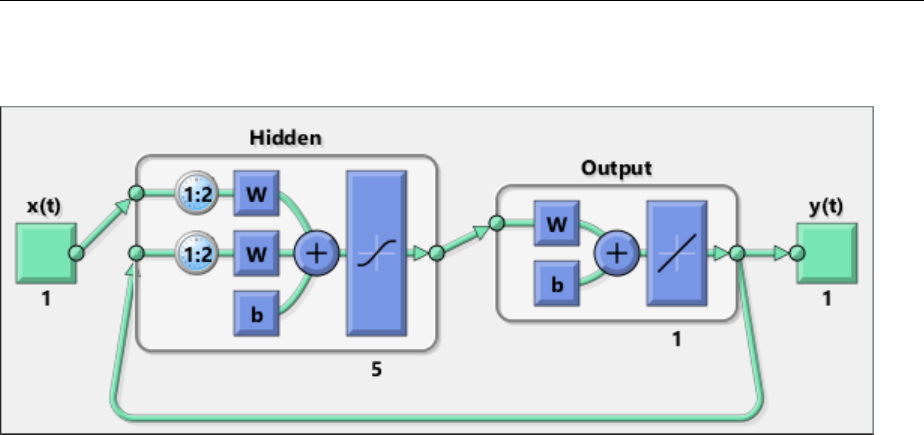
The resulting network is shown in the gure.
Now that the NARX plant model is trained, you can create the total MRAC system and
insert the NARX model inside. Begin with a feedforward network, and then add the
feedback connections. Also, turn o learning in the plant model subnetwork, since it has
already been trained. The next stage of training will train only the controller subnetwork.
mrac_net = feedforwardnet([S1 1 S1]);
mrac_net.layerConnect = [0 1 0 1;1 0 0 0;0 1 0 1;0 0 1 0];
mrac_net.outputs{4}.feedbackMode = 'closed';
mrac_net.layers{2}.transferFcn = 'purelin';
mrac_net.layerWeights{3,4}.delays = 1:2;
mrac_net.layerWeights{3,2}.delays = 1:2;
mrac_net.layerWeights{3,2}.learn = 0;
mrac_net.layerWeights{3,4}.learn = 0;
mrac_net.layerWeights{4,3}.learn = 0;
mrac_net.biases{3}.learn = 0;
mrac_net.biases{4}.learn = 0;
The following code turns o data division and preprocessing, which are not needed for
this example problem. It also sets the delays needed for certain layers and names the
network.
mrac_net.divideFcn = '';
mrac_net.inputs{1}.processFcns = {};
mrac_net.outputs{4}.processFcns = {};
mrac_net.name = 'Model Reference Adaptive Control Network';
mrac_net.layerWeights{1,2}.delays = 1:2;
5Dynamic Neural Networks
5-34
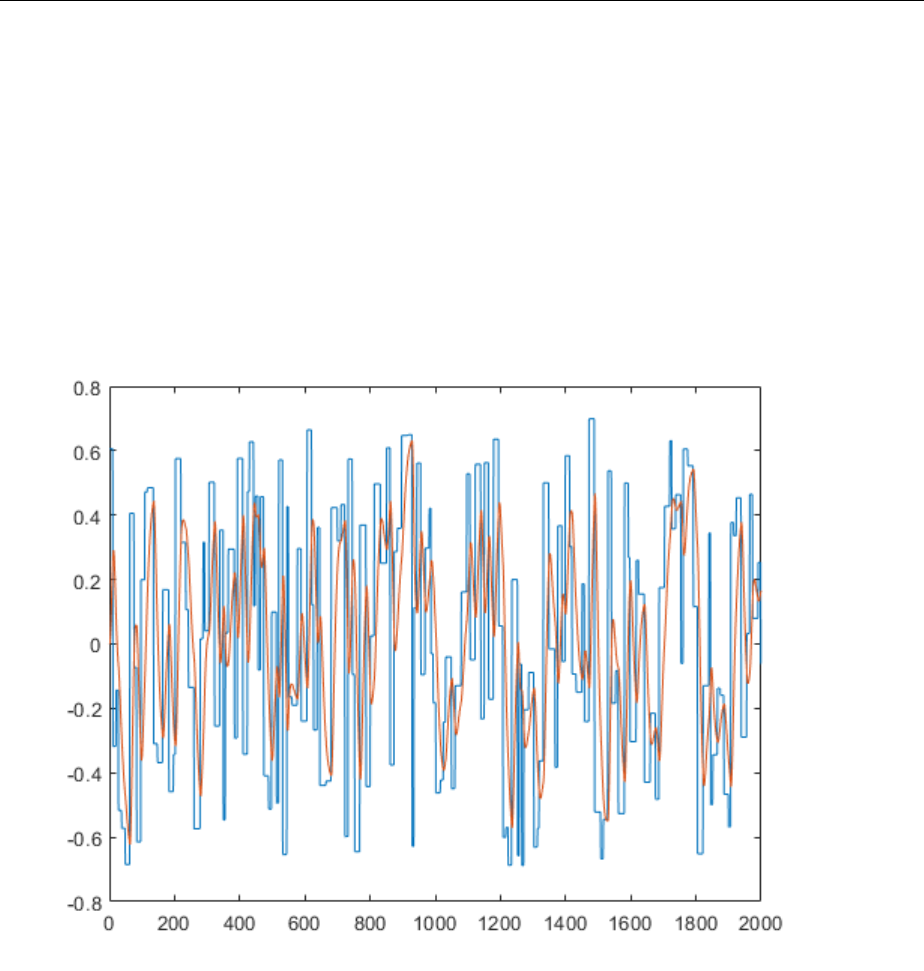
mrac_net.layerWeights{1,4}.delays = 1:2;
mrac_net.inputWeights{1}.delays = 1:2;
To congure the network, you need some sample training data. The following code loads
and plots the training data, and congures the network:
[refin,refout] = refmodel_dataset;
ind = 1:length(refin);
plot(ind,cell2mat(refin),ind,cell2mat(refout))
mrac_net = configure(mrac_net,refin,refout);
You want the closed-loop MRAC system to respond in the same way as the reference
model that was used to generate this data. (See “Use the Model Reference Controller
Block” on page 6-24 for a description of the reference model.)
Create Reference Model Controller with MATLAB Script
5-35
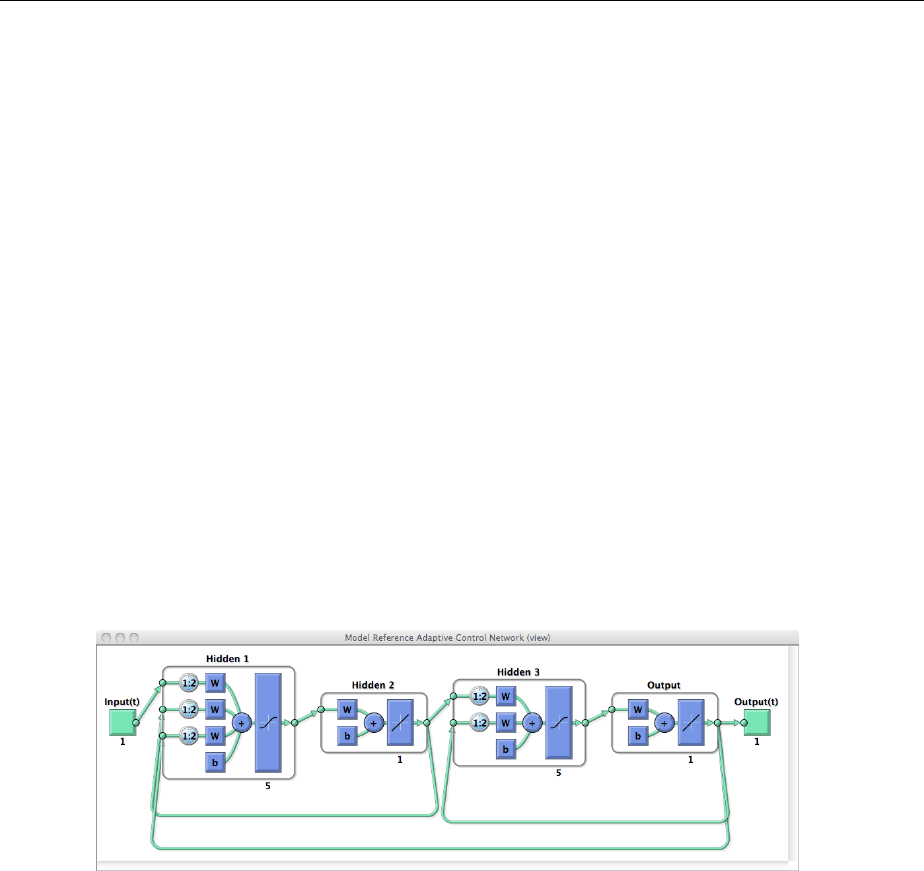
Now insert the weights from the trained plant model network into the appropriate
location of the MRAC system.
mrac_net.LW{3,2} = narx_net_closed.IW{1};
mrac_net.LW{3,4} = narx_net_closed.LW{1,2};
mrac_net.b{3} = narx_net_closed.b{1};
mrac_net.LW{4,3} = narx_net_closed.LW{2,1};
mrac_net.b{4} = narx_net_closed.b{2};
You can set the output weights of the controller network to zero, which will give the plant
an initial input of zero.
mrac_net.LW{2,1} = zeros(size(mrac_net.LW{2,1}));
mrac_net.b{2} = 0;
You can also associate any plots and training function that you desire to the network.
mrac_net.plotFcns = {'plotperform','plottrainstate',...
'ploterrhist','plotregression','plotresponse'};
mrac_net.trainFcn = 'trainlm';
The nal MRAC network can be viewed with the following command:
view(mrac_net)
Layer 3 and layer 4 (output) make up the plant model subnetwork. Layer 1 and layer 2
make up the controller.
You can now prepare the training data and train the network.
[x_tot,xi_tot,ai_tot,t_tot] = ...
preparets(mrac_net,refin,{},refout);
mrac_net.trainParam.epochs = 50;
5Dynamic Neural Networks
5-36
mrac_net.trainParam.min_grad = 1e-10;
[mrac_net,tr] = train(mrac_net,x_tot,t_tot,xi_tot,ai_tot);
Note Notice that you are using the trainlm training function here, but any of the
training functions discussed in “Multilayer Neural Networks and Backpropagation
Training” on page 4-2 could be used as well. Any network that you can create in the
toolbox can be trained with any of those training functions. The only limitation is that all
of the parts of the network must be dierentiable.
You will nd that the training of the MRAC system takes much longer that the training of
the NARX plant model. This is because the network is recurrent and dynamic
backpropagation must be used. This is determined automatically by the toolbox software
and does not require any user intervention. There are several implementations of dynamic
backpropagation (see [DeHa07 on page 13-2]), and the toolbox software automatically
determines the most eicient one for the selected network architecture and training
algorithm.
After the network has been trained, you can test the operation by applying a test input to
the MRAC network. The following code creates a skyline input function, which is a
series of steps of random height and width, and applies it to the trained MRAC network.
testin = skyline(1000,50,200,-.7,.7);
testinseq = con2seq(testin);
testoutseq = mrac_net(testinseq);
testout = cell2mat(testoutseq);
figure
plot([testin' testout'])
Create Reference Model Controller with MATLAB Script
5-37
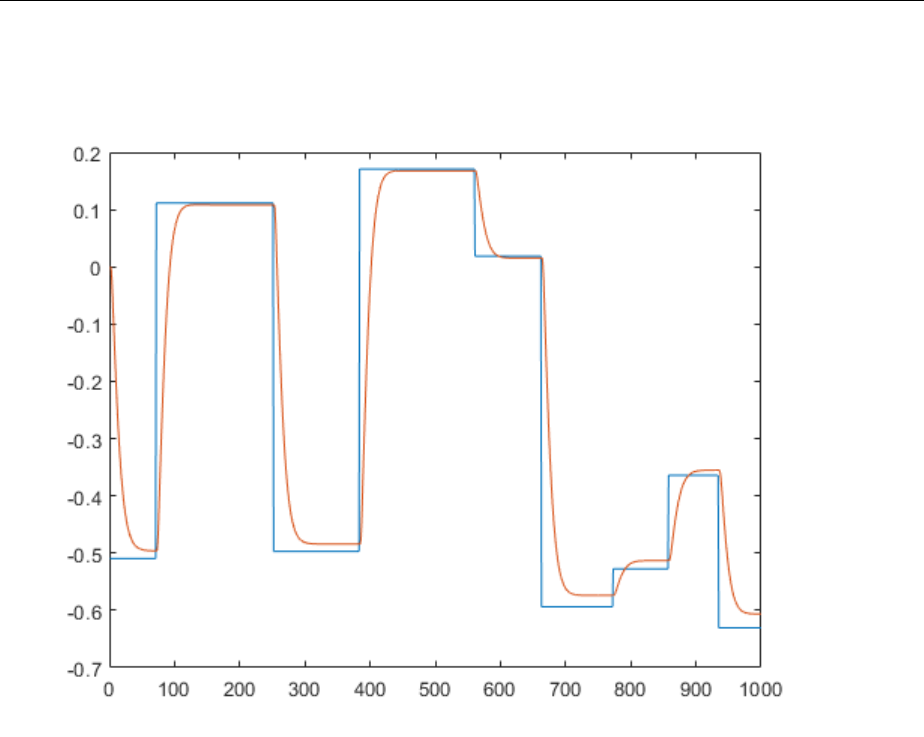
From the gure, you can see that the plant model output does follow the reference input
with the correct critically damped response, even though the input sequence was not the
same as the input sequence in the training data. The steady state response is not perfect
for each step, but this could be improved with a larger training set and perhaps more
hidden neurons.
The purpose of this example was to show that you can create your own custom dynamic
network and train it using the standard toolbox training functions without any
modications. Any network that you can create in the toolbox can be trained with the
standard training functions, as long as each component of the network has a dened
derivative.
5Dynamic Neural Networks
5-38


Multiple Sequences with Dynamic Neural Networks
There are times when time-series data is not available in one long sequence, but rather as
several shorter sequences. When dealing with static networks and concurrent batches of
static data, you can simply append data sets together to form one large concurrent batch.
However, you would not generally want to append time sequences together, since that
would cause a discontinuity in the sequence. For these cases, you can create a concurrent
set of sequences, as described in “Understanding Neural Network Toolbox Data
Structures” on page 1-23.
When training a network with a concurrent set of sequences, it is required that each
sequence be of the same length. If this is not the case, then the shorter sequence inputs
and targets should be padded with NaNs, in order to make all sequences the same length.
The targets that are assigned values of NaN will be ignored during the calculation of
network performance.
The following code illustrates the use of the function catsamples to combine several
sequences together to form a concurrent set of sequences, while at the same time
padding the shorter sequences.
load magmulseq
y_mul = catsamples(y1,y2,y3,'pad');
u_mul = catsamples(u1,u2,u3,'pad');
d1 = [1:2];
d2 = [1:2];
narx_net = narxnet(d1,d2,10);
narx_net.divideFcn = '';
narx_net.trainParam.min_grad = 1e-10;
[p,Pi,Ai,t] = preparets(narx_net,u_mul,{},y_mul);
narx_net = train(narx_net,p,t,Pi);
5Dynamic Neural Networks
5-40
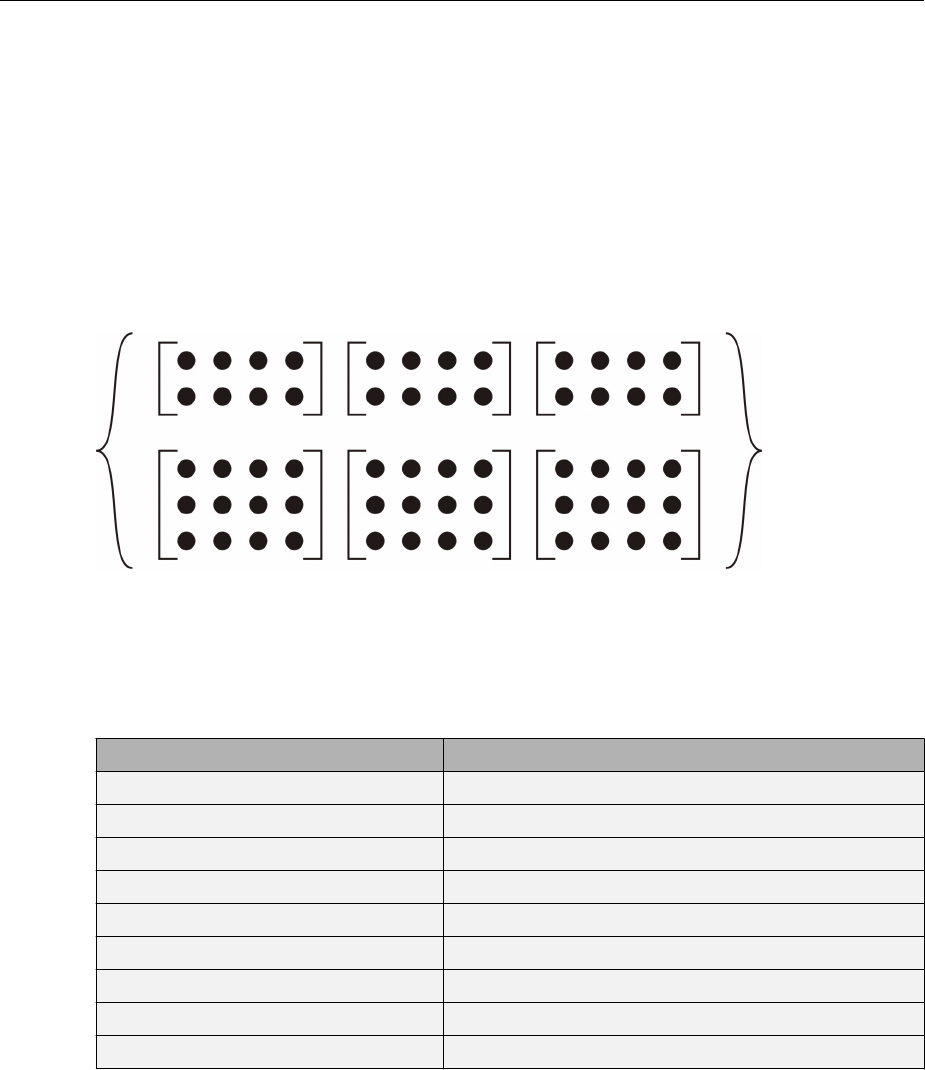
Neural Network Time-Series Utilities
There are other utility functions that are useful when manipulating neural network data,
which can consist of time sequences, concurrent batches or combinations of both. It can
also include multiple signals (as in multiple input, output or target vectors). The following
diagram illustrates the structure of a general neural network data object. For this
example there are three time steps of a batch of four samples (four sequences) of two
signals. One signal has two elements, and the other signal has three elements.
The following table lists some of the more useful toolbox utility functions for neural
network data. They allow you to do things like add, subtract, multiply, divide, etc.
(Addition and subtraction of cell arrays do not have standard denitions, but for neural
network data these operations are well dened and are implemented in the following
functions.)
Function Operation
gadd Add neural network (nn) data.
gdivide Divide nn data.
getelements Select indicated elements from nn data.
getsamples Select indicated samples from nn data.
getsignals Select indicated signals from nn data.
gettimesteps Select indicated time steps from nn data.
gmultiply Multiply nn data.
gnegate Take the negative of nn data.
gsubtract Subtract nn data.
Neural Network Time-Series Utilities
5-41
Function Operation
nndata Create an nn data object of specied size, where
values are assigned randomly or to a constant.
nnsize Return number of elements, samples, time steps
and signals in an nn data object.
numelements Return the number of elements in nn data.
numsamples Return the number of samples in nn data.
numsignals Return the number of signals in nn data.
numtimesteps Return the number of time steps in nn data.
setelements Set specied elements of nn data.
setsamples Set specied samples of nn data.
setsignals Set specied signals of nn data.
settimesteps Set specied time steps of nn data.
There are also some useful plotting and analysis functions for dynamic networks that are
listed in the following table. There are examples of using these functions in the “Getting
Started with Neural Network Toolbox”.
Function Operation
ploterrcorr Plot the autocorrelation function of the error.
plotinerrcorr Plot the crosscorrelation between the error and
the input.
plotresponse Plot network output and target versus time.
5Dynamic Neural Networks
5-42
Train Neural Networks with Error Weights
In the default mean square error performance function (see “Train and Apply Multilayer
Neural Networks” on page 4-17), each squared error contributes the same amount to the
performance function as follows:
F mse
N
e
N
t a
i
i
N
i i
i
N
= = = -
= =
 Â
1 1
2
1
2
1
( ) ( )
However, the toolbox allows you to weight each squared error individually as follows:
F mse
N
w e
N
w t a
i
e
i
i
N
i
e
i i
i
N
= = = -
= =
 Â
1 1
2
1
2
1
( ) ( )
The error weighting object needs to have the same dimensions as the target data. In this
way, errors can be weighted according to time step, sample number, signal number or
element number. The following is an example of weighting the errors at the end of a time
sequence more heavily than errors at the beginning of a time sequence. The error
weighting object is passed as the last argument in the call to train.
y = laser_dataset;
y = y(1:600);
ind = 1:600;
ew = 0.99.^(600-ind);
figure
plot(ew)
Train Neural Networks with Error Weights
5-43
ew = con2seq(ew);
ftdnn_net = timedelaynet([1:8],10);
ftdnn_net.trainParam.epochs = 1000;
ftdnn_net.divideFcn = '';
[p,Pi,Ai,t,ew1] = preparets(ftdnn_net,y,y,{},ew);
[ftdnn_net1,tr] = train(ftdnn_net,p,t,Pi,Ai,ew1);
The gure illustrates the error weighting for this example. There are 600 time steps in
the training data, and the errors are weighted exponentially, with the last squared error
having a weight of 1, and the squared error at the rst time step having a weighting of
0.0024.
The response of the trained network is shown in the following gure. If you compare this
response to the response of the network that was trained without exponential weighting
5Dynamic Neural Networks
5-44
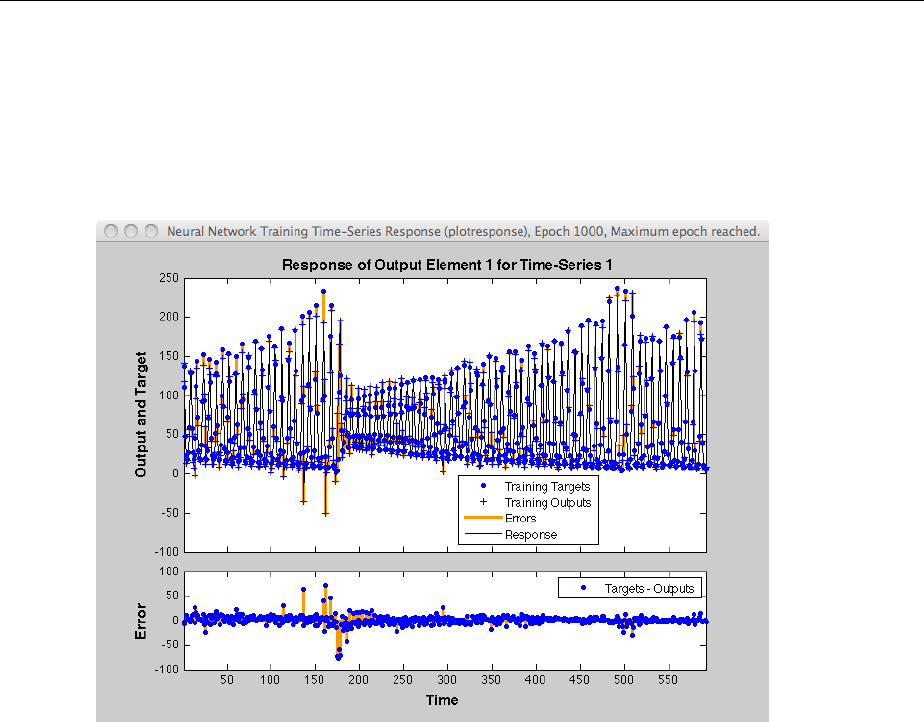
on the squared errors, as shown in “Design Time Series Time-Delay Neural Networks” on
page 5-13, you can see that the errors late in the sequence are smaller than the errors
earlier in the sequence. The errors that occurred later are smaller because they
contributed more to the weighted performance index than earlier errors.
Train Neural Networks with Error Weights
5-45

Normalize Errors of Multiple Outputs
The most common performance function used to train neural networks is mean squared
error (mse). However, with multiple outputs that have dierent ranges of values, training
with mean squared error tends to optimize accuracy on the output element with the wider
range of values relative to the output element with a smaller range.
For instance, here two target elements have very dierent ranges:
x = -1:0.01:1;
t1 = 100*sin(x);
t2 = 0.01*cos(x);
t = [t1; t2];
The range of t1 is 200 (from a minimum of -100 to a maximum of 100), while the range of
t2 is only 0.02 (from -0.01 to 0.01). The range of t1 is 10,000 times greater than the
range of t2.
If you create and train a neural network on this to minimize mean squared error, training
favors the relative accuracy of the rst output element over the second.
net = feedforwardnet(5);
net1 = train(net,x,t);
y = net1(x);
Here you can see that the network has learned to t the rst output element very well.
figure(1)
plot(x,y(1,:),x,t(1,:))
5Dynamic Neural Networks
5-46
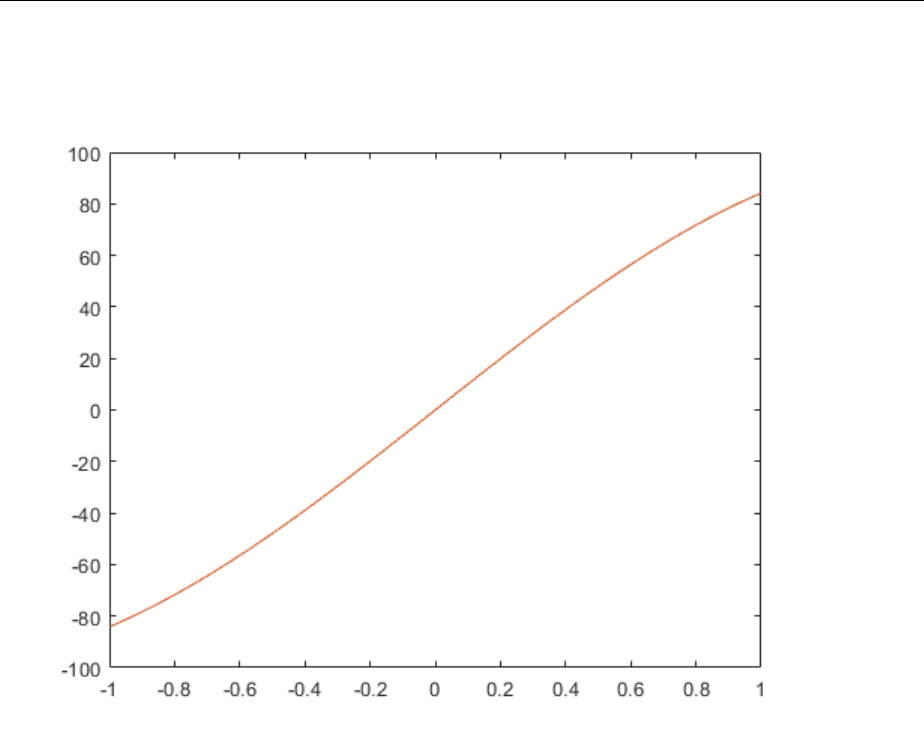
However, the second element’s function is not t nearly as well.
figure(2)
plot(x,y(2,:),x,t(2,:))
Normalize Errors of Multiple Outputs
5-47
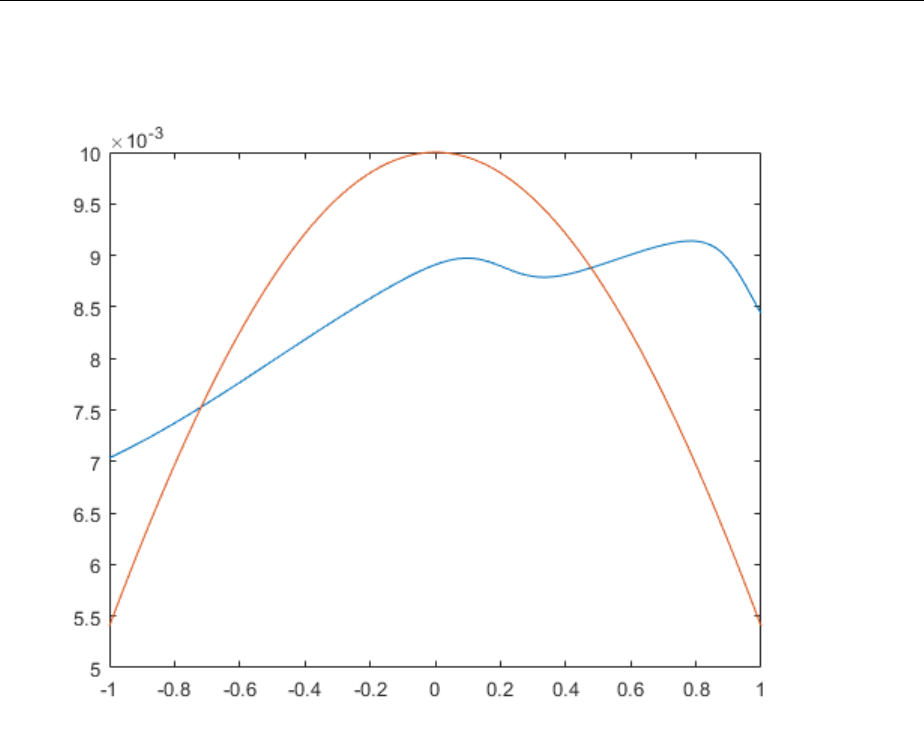
To t both output elements equally well in a relative sense, set the normalization
performance parameter to 'standard'. This then calculates errors for performance
measures as if each output element has a range of 2 (i.e., as if each output element’s
values range from -1 to 1, instead of their diering ranges).
net.performParam.normalization = 'standard';
net2 = train(net,x,t);
y = net2(x);
Now the two output elements both t well.
figure(3)
plot(x,y(1,:),x,t(1,:))
5Dynamic Neural Networks
5-48
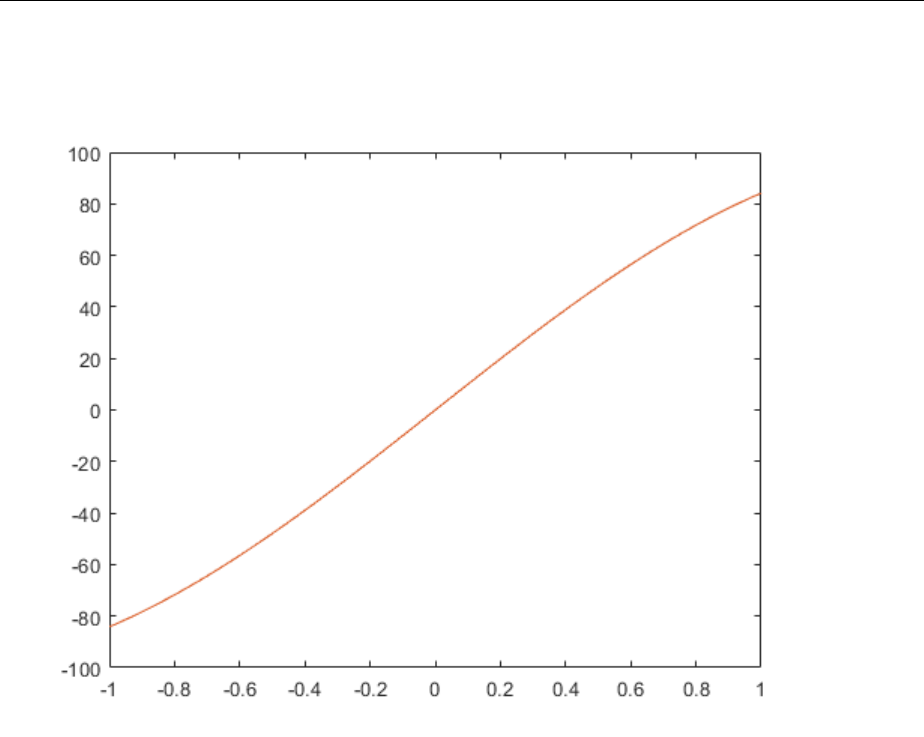
figure(4)
plot(x,y(2,:),x,t(2,:))
Normalize Errors of Multiple Outputs
5-49
5Dynamic Neural Networks
5-50
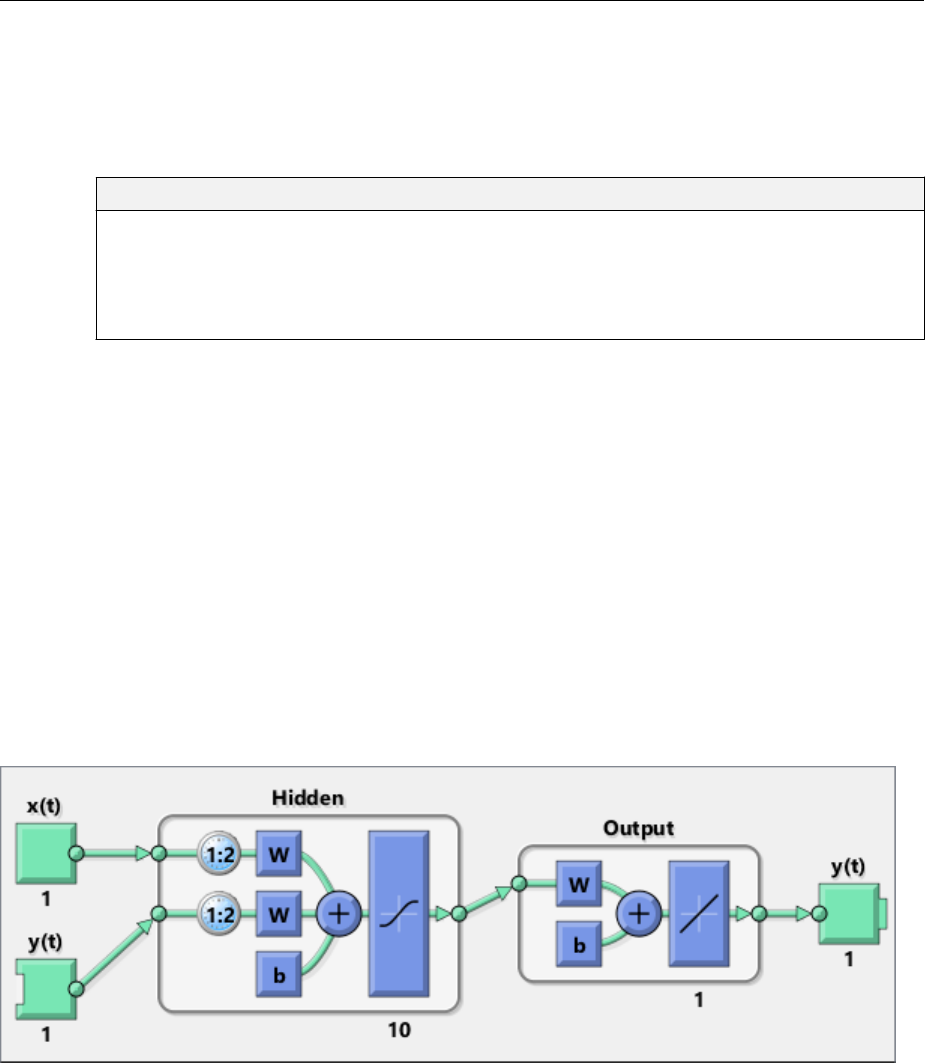
Multistep Neural Network Prediction
In this section...
“Set Up in Open-Loop Mode” on page 5-51
“Multistep Closed-Loop Prediction From Initial Conditions” on page 5-52
“Multistep Closed-Loop Prediction Following Known Sequence” on page 5-52
“Following Closed-Loop Simulation with Open-Loop Simulation” on page 5-53
Set Up in Open-Loop Mode
Dynamic networks with feedback, such as narxnet and narnet neural networks, can be
transformed between open-loop and closed-loop modes with the functions openloop and
closeloop. Closed-loop networks make multistep predictions. In other words they
continue to predict when external feedback is missing, by using internal feedback.
Here a neural network is trained to model the magnetic levitation system and simulated
in the default open-loop mode.
[X,T] = maglev_dataset;
net = narxnet(1:2,1:2,10);
[x,xi,ai,t] = preparets(net,X,{},T);
net = train(net,x,t,xi,ai);
y = net(x,xi,ai);
view(net)
Multistep Neural Network Prediction
5-51
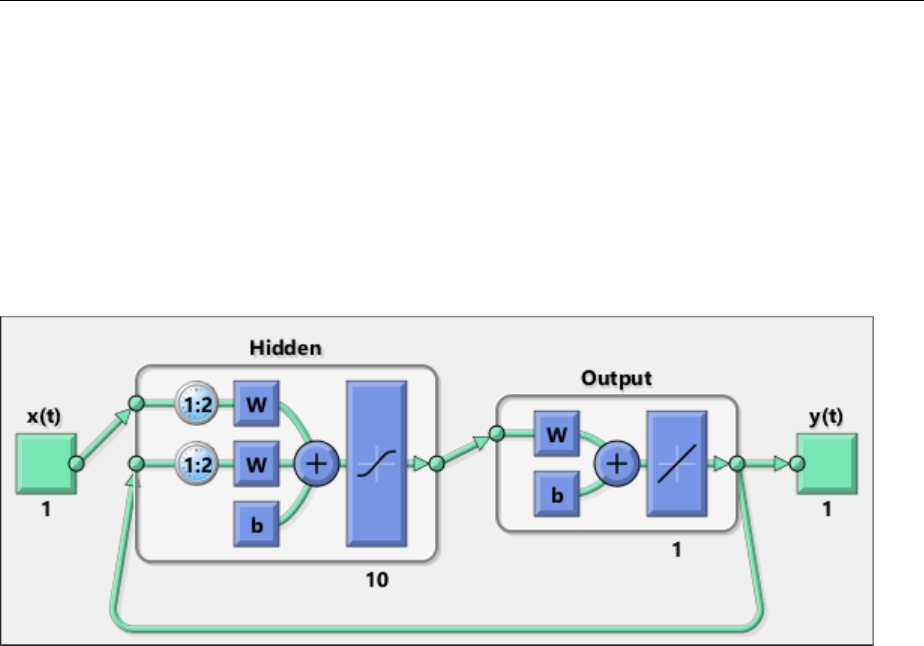
Multistep Closed-Loop Prediction From Initial Conditions
A neural network can also be simulated only in closed-loop form, so that given an external
input series and initial conditions, the neural network performs as many predictions as
the input series has time steps.
netc = closeloop(net);
view(netc)
Here the training data is used to dene the inputs x, and the initial input and layer delay
states, xi and ai, but they can be dened to make multiple predictions for any input
series and initial states.
[x,xi,ai,t] = preparets(netc,X,{},T);
yc = netc(x,xi,ai);
Multistep Closed-Loop Prediction Following Known Sequence
It can also be useful to simulate a trained neural network up the present with all the
known values of a time-series in open-loop mode, then switch to closed-loop mode to
continue the simulation for as many predictions into the future as are desired.
Just as openloop and closeloop can be used to transform between open- and closed-
loop neural networks, they can convert the state of open- and closed-loop networks. Here
are the full interfaces for these functions.
5Dynamic Neural Networks
5-52

[open_net,open_xi,open_ai] = openloop(closed_net,closed_xi,closed_ai);
[closed_net,closed_xi,closed_ai] = closeloop(open_net,open_xi,open_ai);
Consider the case where you might have a record of the Maglev’s behavior for 20 time
steps, and you want to predict ahead for 20 more time steps.
First, dene the rst 20 steps of inputs and targets, representing the 20 time steps where
the known output is dened by the targets t. With the next 20 time steps of the input are
dened, use the network to predict the 20 outputs using each of its predictions feedback
to help the network perform the next prediction.
x1 = x(1:20);
t1 = t(1:20);
x2 = x(21:40);
The open-loop neural network is then simulated on this data.
[x,xi,ai,t] = preparets(net,x1,{},t1);
[y1,xf,af] = net(x,xi,ai);
Now the nal input and layer states returned by the network are converted to closed-loop
form along with the network. The nal input states xf and layer states af of the open-
loop network become the initial input states xi and layer states ai of the closed-loop
network.
[netc,xi,ai] = closeloop(net,xf,af);
Typically use preparets to dene initial input and layer states. Since these have already
been obtained from the end of the open-loop simulation, you do not need preparets to
continue with the 20 step predictions of the closed-loop network.
[y2,xf,af] = netc(x2,xi,ai);
Note that you can set x2 to dierent sequences of inputs to test dierent scenarios for
however many time steps you would like to make predictions. For example, to predict the
magnetic levitation system’s behavior if 10 random inputs are used:
x2 = num2cell(rand(1,10));
[y2,xf,af] = netc(x2,xi,ai);
Following Closed-Loop Simulation with Open-Loop Simulation
If after simulating the network in closed-loop form, you can continue the simulation from
there in open-loop form. Here the closed-loop state is converted back to open-loop state.
Multistep Neural Network Prediction
5-53

(You do not have to convert the network back to open-loop form as you already have the
original open-loop network.)
[~,xi,ai] = openloop(netc,xf,af);
Now you can dene continuations of the external input and open-loop feedback, and
simulate the open-loop network.
x3 = num2cell(rand(2,10));
y3 = net(x3,xi,ai);
In this way, you can switch simulation between open-loop and closed-loop manners. One
application for this is making time-series predictions of a sensor, where the last sensor
value is usually known, allowing open-loop prediction of the next step. But on some
occasions the sensor reading is not available, or known to be erroneous, requiring a
closed-loop prediction step. The predictions can alternate between open-loop and closed-
loop form, depending on the availability of the last step’s sensor reading.
5Dynamic Neural Networks
5-54
Control Systems
• “Introduction to Neural Network Control Systems” on page 6-2
• “Design Neural Network Predictive Controller in Simulink” on page 6-4
• “Design NARMA-L2 Neural Controller in Simulink” on page 6-14
• “Design Model-Reference Neural Controller in Simulink” on page 6-23
• “Import-Export Neural Network Simulink Control Systems” on page 6-31
6

Introduction to Neural Network Control Systems
Neural networks have been applied successfully in the identication and control of
dynamic systems. The universal approximation capabilities of the multilayer perceptron
make it a popular choice for modeling nonlinear systems and for implementing general-
purpose nonlinear controllers [HaDe99 on page 13-2]. This topic introduces three
popular neural network architectures for prediction and control that have been
implemented in the Neural Network Toolbox software, and presents brief descriptions of
each of these architectures and shows how you can use them:
• Model Predictive Control
• NARMA-L2 (or Feedback Linearization) Control
• Model Reference Control
There are typically two steps involved when using neural networks for control:
1System identication
2Control design
In the system identication stage, you develop a neural network model of the plant that
you want to control. In the control design stage, you use the neural network plant model
to design (or train) the controller. In each of the three control architectures described in
this topic, the system identication stage is identical. The control design stage, however,
is dierent for each architecture:
• For model predictive control, the plant model is used to predict future behavior of the
plant, and an optimization algorithm is used to select the control input that optimizes
future performance.
• For NARMA-L2 control, the controller is simply a rearrangement of the plant model.
• For model reference control, the controller is a neural network that is trained to
control a plant so that it follows a reference model. The neural network plant model is
used to assist in the controller training.
The next three sections discuss model predictive control, NARMA-L2 control, and model
reference control. Each section consists of a brief description of the control concept,
followed by an example of the use of the appropriate Neural Network Toolbox function.
These three controllers are implemented as Simulink® blocks, which are contained in the
Neural Network Toolbox blockset.
6Control Systems
6-2

To assist you in determining the best controller for your application, the following list
summarizes the key controller features. Each controller has its own strengths and
weaknesses. No single controller is appropriate for every application.
•Model Predictive Control — This controller uses a neural network model to predict
future plant responses to potential control signals. An optimization algorithm then
computes the control signals that optimize future plant performance. The neural
network plant model is trained oine, in batch form. (This is true for all three control
architectures.) The controller, however, requires a signicant amount of online
computation, because an optimization algorithm is performed at each sample time to
compute the optimal control input.
•NARMA-L2 Control — This controller requires the least computation of these three
architectures. The controller is simply a rearrangement of the neural network plant
model, which is trained oine, in batch form. The only online computation is a
forward pass through the neural network controller. The drawback of this method is
that the plant must either be in companion form, or be capable of approximation by a
companion form model. (“Identication of the NARMA-L2 Model” on page 6-14
describes the companion form model.)
•Model Reference Control — The online computation of this controller, like NARMA-
L2, is minimal. However, unlike NARMA-L2, the model reference architecture requires
that a separate neural network controller be trained oine, in addition to the neural
network plant model. The controller training is computationally expensive, because it
requires the use of dynamic backpropagation [HaJe99 on page 13-2]. On the
positive side, model reference control applies to a larger class of plant than does
NARMA-L2 control.
Introduction to Neural Network Control Systems
6-3
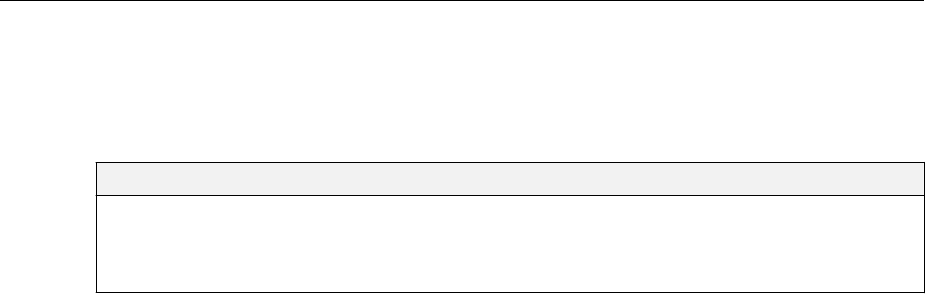
Design Neural Network Predictive Controller in Simulink
In this section...
“System Identication” on page 6-4
“Predictive Control” on page 6-5
“Use the Neural Network Predictive Controller Block” on page 6-6
The neural network predictive controller that is implemented in the Neural Network
Toolbox software uses a neural network model of a nonlinear plant to predict future plant
performance. The controller then calculates the control input that will optimize plant
performance over a specied future time horizon. The rst step in model predictive
control is to determine the neural network plant model (system identication). Next, the
plant model is used by the controller to predict future performance. (See the Model
Predictive Control Toolbox™ documentation for complete coverage of the application of
various model predictive control strategies to linear systems.)
The following section describes the system identication process. This is followed by a
description of the optimization process. Finally, it discusses how to use the model
predictive controller block that is implemented in the Simulink environment.
System Identication
The rst stage of model predictive control is to train a neural network to represent the
forward dynamics of the plant. The prediction error between the plant output and the
neural network output is used as the neural network training signal. The process is
represented by the following gure:
6Control Systems
6-4
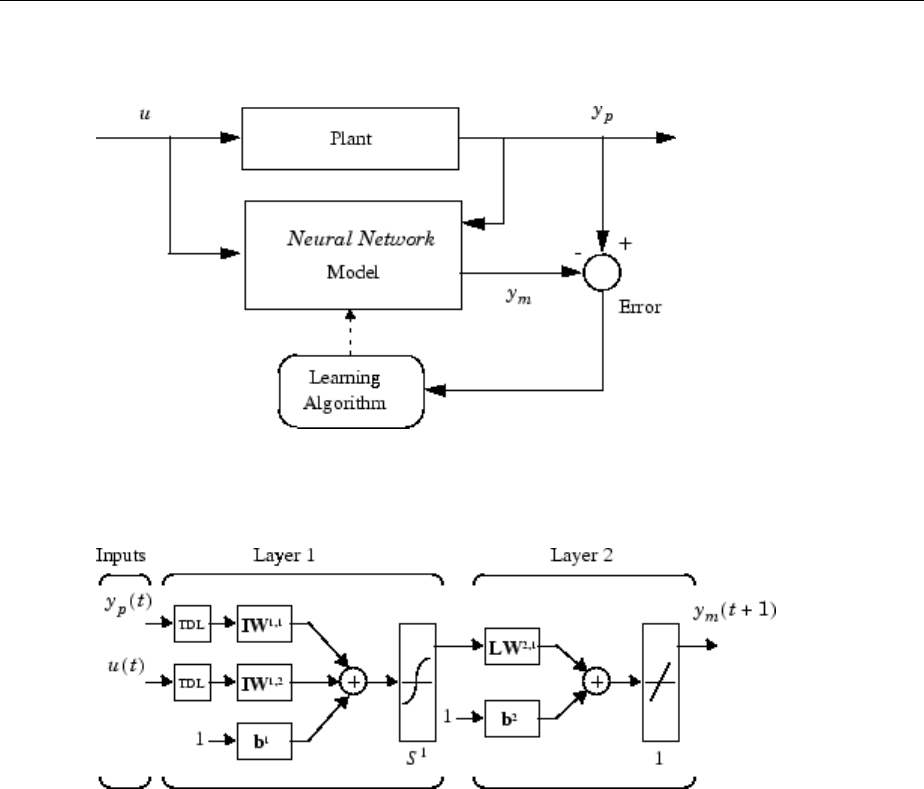
The neural network plant model uses previous inputs and previous plant outputs to
predict future values of the plant output. The structure of the neural network plant model
is given in the following gure.
This network can be trained oine in batch mode, using data collected from the
operation of the plant. You can use any of the training algorithms discussed in “Multilayer
Neural Networks and Backpropagation Training” on page 4-2 for network training. This
process is discussed in more detail in following sections.
Predictive Control
The model predictive control method is based on the receding horizon technique [SoHa96
on page 13-2]. The neural network model predicts the plant response over a specied
time horizon. The predictions are used by a numerical optimization program to determine
Design Neural Network Predictive Controller in Simulink
6-5
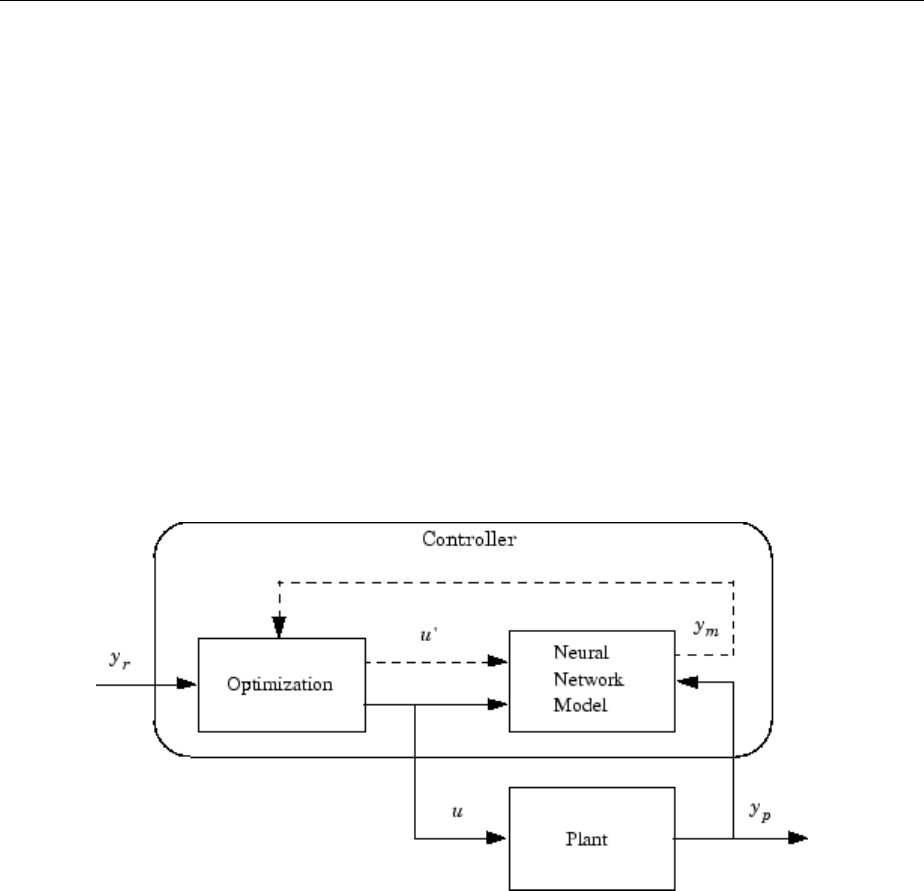
the control signal that minimizes the following performance criterion over the specied
horizon
J y t j y t j u t j u t j
r m
j
N
j N
Nu
= + - + + + - - + -
==
ÂÂ ( ( ) ( )) ( ( ) ( ))
2 2
1
1 2
1
2
r
¢ ¢
where N1, N2, and Nu dene the horizons over which the tracking error and the control
increments are evaluated. The u′ variable is the tentative control signal, yr is the desired
response, and ym is the network model response. The ρ value determines the contribution
that the sum of the squares of the control increments has on the performance index.
The following block diagram illustrates the model predictive control process. The
controller consists of the neural network plant model and the optimization block. The
optimization block determines the values of u′ that minimize J, and then the optimal u is
input to the plant. The controller block is implemented in Simulink, as described in the
following section.
Use the Neural Network Predictive Controller Block
This section shows how the NN Predictive Controller block is used. The rst step is to
copy the NN Predictive Controller block from the Neural Network Toolbox block library to
the Simulink Editor. See the Simulink documentation if you are not sure how to do this.
This step is skipped in the following example.
6Control Systems
6-6
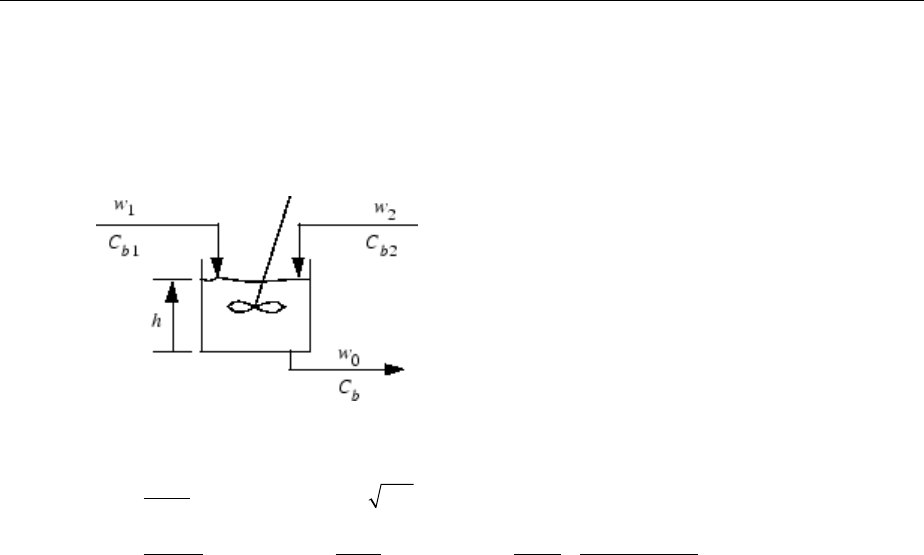
An example model is provided with the Neural Network Toolbox software to show the use
of the predictive controller. This example uses a catalytic Continuous Stirred Tank
Reactor (CSTR). A diagram of the process is shown in the following gure.
The dynamic model of the system is
dh t
dt
w t w t h t
dC t
dt
C C t w t
h t
b
b b
( ) ( ) ( ) . ( )
( ) ( ( )) ( )
( ) (
=+-
= - +
1 2
11
0 2
CC C t w t
h t
k C t
k C t
b b
b
b
22 1
2
2
1
- -
+
( )) ( )
( )
( )
( ( ))
where h(t) is the liquid level, Cb(t) is the product concentration at the output of the
process, w1(t) is the ow rate of the concentrated feed Cb1, and w2(t) is the ow rate of
the diluted feed Cb2. The input concentrations are set to Cb1 = 24.9 and Cb2 = 0.1. The
constants associated with the rate of consumption are k1 = 1 and k2 = 1.
The objective of the controller is to maintain the product concentration by adjusting the
ow w1(t). To simplify the example, set w2(t) = 0.1. The level of the tank h(t) is not
controlled for this experiment.
To run this example:
1Start MATLAB.
2Type predcstr in the MATLAB Command Window. This command opens the
Simulink Editor with the following model.
Design Neural Network Predictive Controller in Simulink
6-7
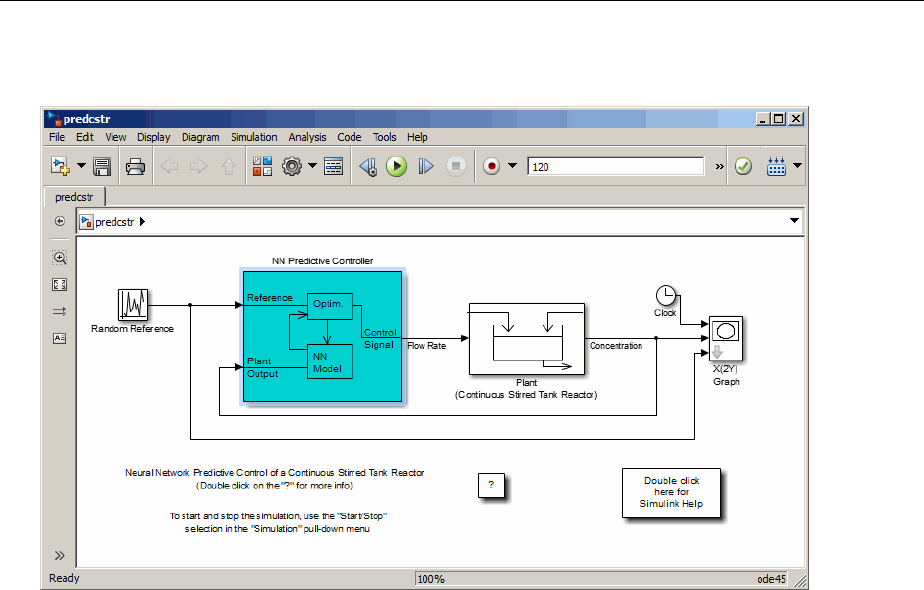
The Plant block contains the Simulink CSTR plant model. The NN Predictive
Controller block signals are connected as follows:
• Control Signal is connected to the input of the Plant model.
• The Plant Output signal is connected to the Plant block output.
• The Reference is connected to the Random Reference signal.
3Double-click the NN Predictive Controller block. This opens the following window for
designing the model predictive controller. This window enables you to change the
controller horizons N2 and Nu. (N1 is xed at 1.) The weighting parameter ρ,
described earlier, is also dened in this window. The parameter α is used to control
the optimization. It determines how much reduction in performance is required for a
successful optimization step. You can select which linear minimization routine is used
by the optimization algorithm, and you can decide how many iterations of the
optimization algorithm are performed at each sample time. The linear minimization
routines are slight modications of those discussed in “Multilayer Neural Networks
and Backpropagation Training” on page 4-2.
6Control Systems
6-8
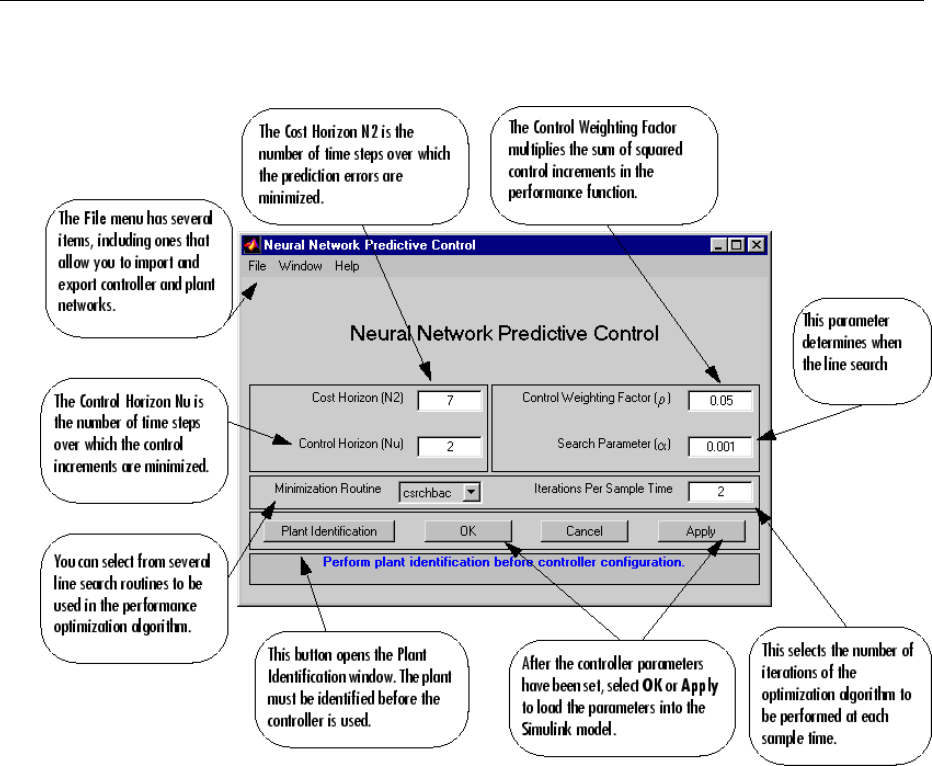
4Select Plant Identication. This opens the following window. You must develop the
neural network plant model before you can use the controller. The plant model
predicts future plant outputs. The optimization algorithm uses these predictions to
determine the control inputs that optimize future performance. The plant model
neural network has one hidden layer, as shown earlier. You select the size of that
layer, the number of delayed inputs and delayed outputs, and the training function in
this window. You can select any of the training functions described in “Multilayer
Neural Networks and Backpropagation Training” on page 4-2 to train the neural
network plant model.
Design Neural Network Predictive Controller in Simulink
6-9
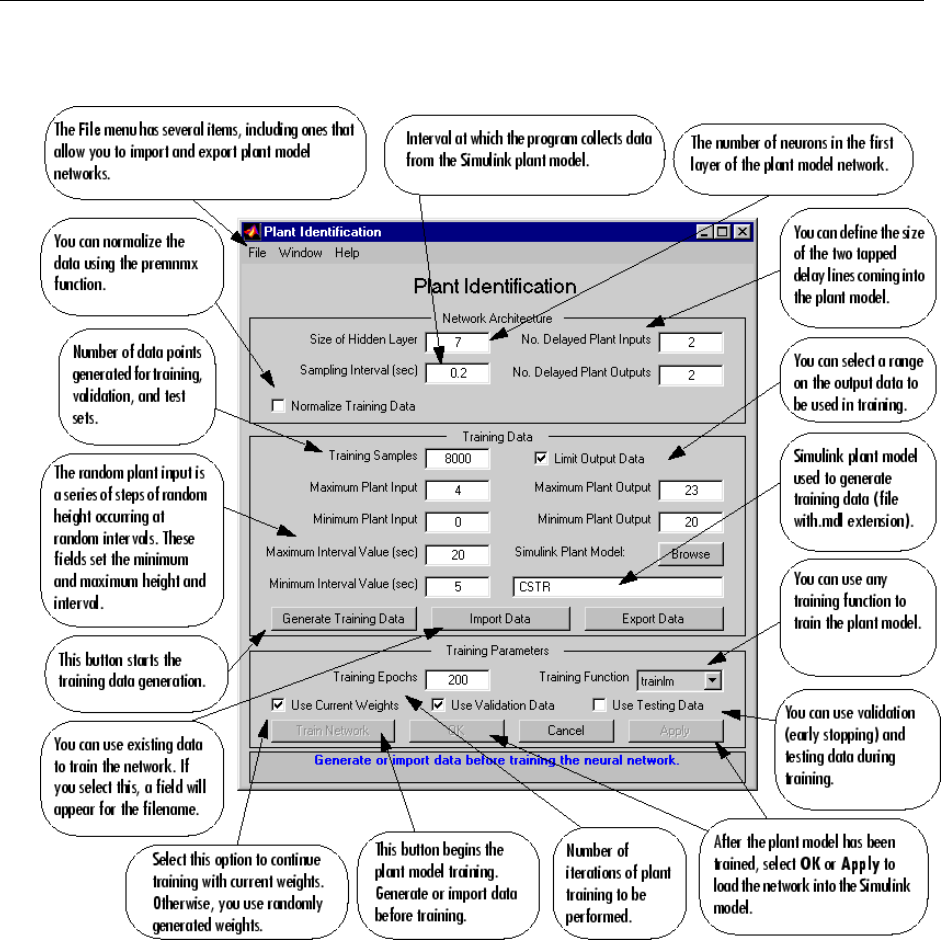
5Click Generate Training Data. The program generates training data by applying a
series of random step inputs to the Simulink plant model. The potential training data
is then displayed in a gure similar to the following.
6Control Systems
6-10
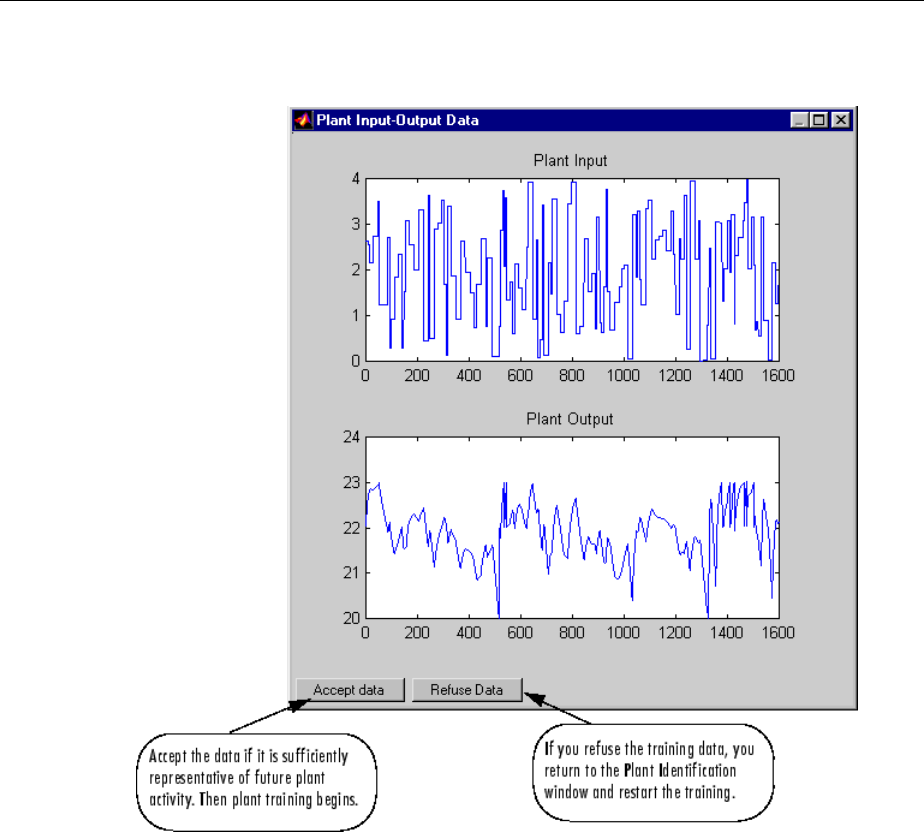
6Click Accept Data, and then click Train Network in the Plant Identication window.
Plant model training begins. The training proceeds according to the training
algorithm (trainlm in this case) you selected. This is a straightforward application
of batch training, as described in “Multilayer Neural Networks and Backpropagation
Training” on page 4-2. After the training is complete, the response of the resulting
plant model is displayed, as in the following gure. (There are also separate plots for
validation and testing data, if they exist.)
Design Neural Network Predictive Controller in Simulink
6-11
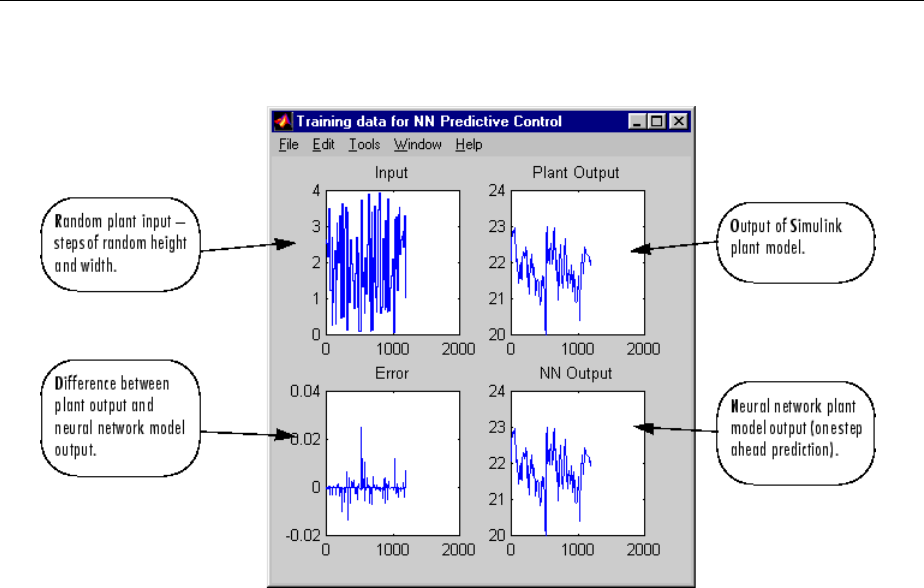
You can then continue training with the same data set by selecting Train Network
again, you can Erase Generated Data and generate a new data set, or you can
accept the current plant model and begin simulating the closed loop system. For this
example, begin the simulation, as shown in the following steps.
7Select OK in the Plant Identication window. This loads the trained neural network
plant model into the NN Predictive Controller block.
8Select OK in the Neural Network Predictive Control window. This loads the controller
parameters into the NN Predictive Controller block.
9Return to the Simulink Editor and start the simulation by choosing the menu option
Simulation > Run. As the simulation runs, the plant output and the reference signal
are displayed, as in the following gure.
6Control Systems
6-12
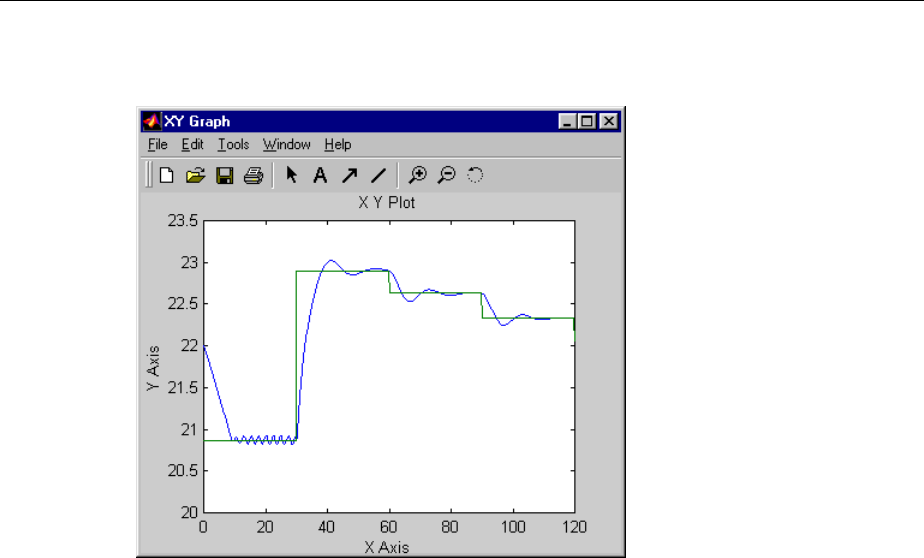
Design Neural Network Predictive Controller in Simulink
6-13
Design NARMA-L2 Neural Controller in Simulink
In this section...
“Identication of the NARMA-L2 Model” on page 6-14
“NARMA-L2 Controller” on page 6-16
“Use the NARMA-L2 Controller Block” on page 6-18
The neurocontroller described in this section is referred to by two dierent names:
feedback linearization control and NARMA-L2 control. It is referred to as feedback
linearization when the plant model has a particular form (companion form). It is referred
to as NARMA-L2 control when the plant model can be approximated by the same form.
The central idea of this type of control is to transform nonlinear system dynamics into
linear dynamics by canceling the nonlinearities. This section begins by presenting the
companion form system model and showing how you can use a neural network to identify
this model. Then it describes how the identied neural network model can be used to
develop a controller. This is followed by an example of how to use the NARMA-L2 Control
block, which is contained in the Neural Network Toolbox blockset.
Identication of the NARMA-L2 Model
As with model predictive control, the rst step in using feedback linearization (or
NARMA-L2) control is to identify the system to be controlled. You train a neural network
to represent the forward dynamics of the system. The rst step is to choose a model
structure to use. One standard model that is used to represent general discrete-time
nonlinear systems is the nonlinear autoregressive-moving average (NARMA) model:
y k d N y k y k y k n u k u k u k n( ) [ ( ), ( ), , ( ), ( ), ( ), , ( )]+ = - - + - - +1 1 1 1… …
where u(k) is the system input, and y(k) is the system output. For the identication phase,
you could train a neural network to approximate the nonlinear function N. This is the
identication procedure used for the NN Predictive Controller.
If you want the system output to follow some reference trajectory
y(k + d) = yr(k + d), the next step is to develop a nonlinear controller of the form:
u k G y k y k y k n y k d u k u k m
r
( ) [ ( ), ( ), , ( ), ( ), ( ), , ( )]= - - + + - - +1 1 1 1… …
The problem with using this controller is that if you want to train a neural network to
create the function G to minimize mean square error, you need to use dynamic
6Control Systems
6-14

backpropagation ([NaPa91 on page 13-2] or [HaJe99 on page 13-2]). This can be
quite slow. One solution, proposed by Narendra and Mukhopadhyay [NaMu97 on page 13-
2], is to use approximate models to represent the system. The controller used in this
section is based on the NARMA-L2 approximate model:
ˆ( ) [ ( ), ( ), , ( ), ( ), , ( )]
[ ( )
y k d f y k y k y k n u k u k m
g y k
+ = - - + - - +
+
1 1 1 1… …
,, ( ), , ( ), ( ), , ( )] ( )y k y k n u k u k m u k- - + - - + ◊1 1 1 1… …
This model is in companion form, where the next controller input u(k) is not contained
inside the nonlinearity. The advantage of this form is that you can solve for the control
input that causes the system output to follow the reference y(k + d) = yr(k + d). The
resulting controller would have the form
u k y k d f y k y k y k n u k u k n
g
r
( ) ( ) [ ( ), ( ), , ( ), ( ), , ( )]
[
=
+ - - - + - - +1 1 1 1… …
yy k y k y k n u k u k n( ), ( ), , ( ), ( ), , ( )]- - + - - +1 1 1 1… …
Using this equation directly can cause realization problems, because you must determine
the control input u(k) based on the output at the same time, y(k). So, instead, use the
model
y k d f y k y k y k n u k u k u k n
g
( ) [ ( ), ( ), , ( ), ( ), ( ), , ( )]
[
+ = - - + - - +
+
1 1 1 1… …
yy k y k n u k u k n u k( ), , ( ), ( ), , ( )] ( )… …- + - + ◊ +1 1 1
where d ≥ 2. The following gure shows the structure of a neural network representation.
Design NARMA-L2 Neural Controller in Simulink
6-15
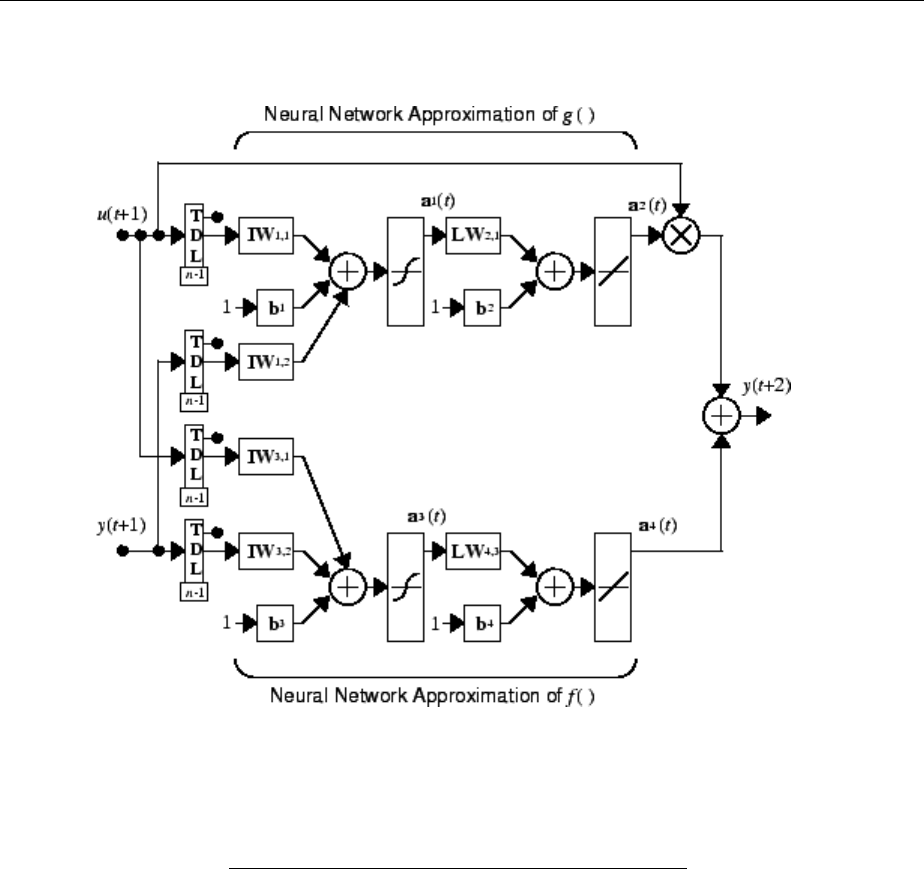
NARMA-L2 Controller
Using the NARMA-L2 model, you can obtain the controller
u k y k d f y k y k n u k u k n
g y k
r
( ) ( ) [ ( ), , ( ), ( ), , ( )]
[ ( ), ,
+ =
+ - - + - +
11 1… …
…yy k n u k u k n( ), ( ), , ( )]- + - +1 1…
which is realizable for d ≥ 2. The following gure is a block diagram of the NARMA-L2
controller.
6Control Systems
6-16
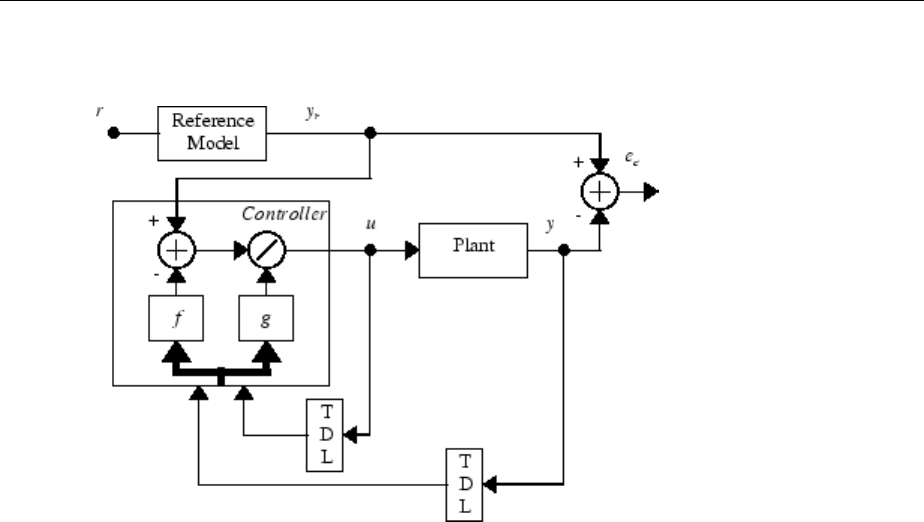
This controller can be implemented with the previously identied NARMA-L2 plant model,
as shown in the following gure.
Design NARMA-L2 Neural Controller in Simulink
6-17
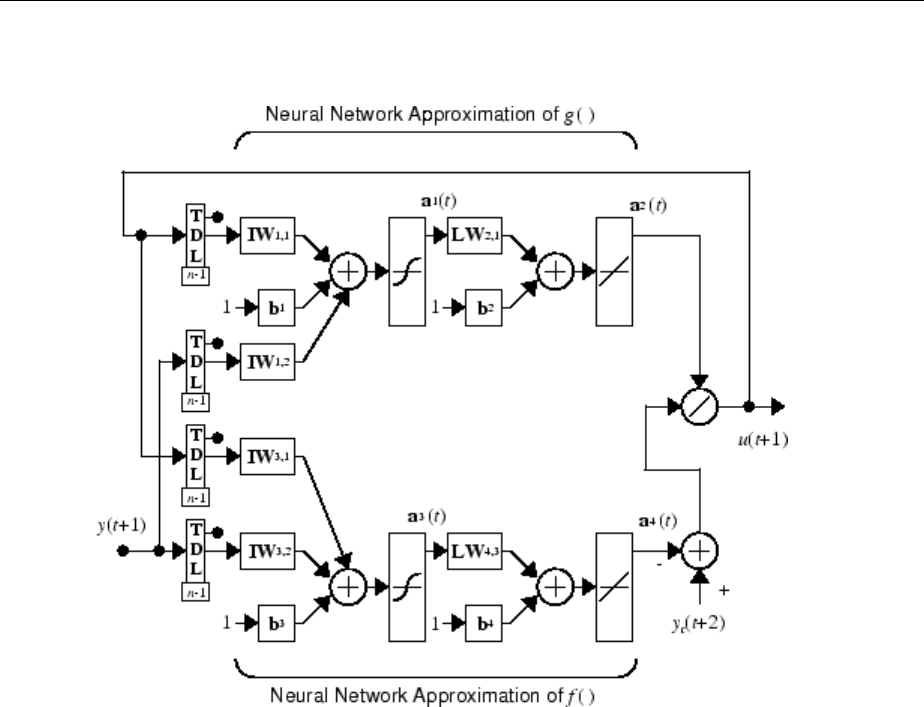
Use the NARMA-L2 Controller Block
This section shows how the NARMA-L2 controller is trained. The rst step is to copy the
NARMA-L2 Controller block from the Neural Network Toolbox block library to the
Simulink Editor. See the Simulink documentation if you are not sure how to do this. This
step is skipped in the following example.
An example model is provided with the Neural Network Toolbox software to show the use
of the NARMA-L2 controller. In this example, the objective is to control the position of a
magnet suspended above an electromagnet, where the magnet is constrained so that it
can only move in the vertical direction, as in the following gure.
6Control Systems
6-18
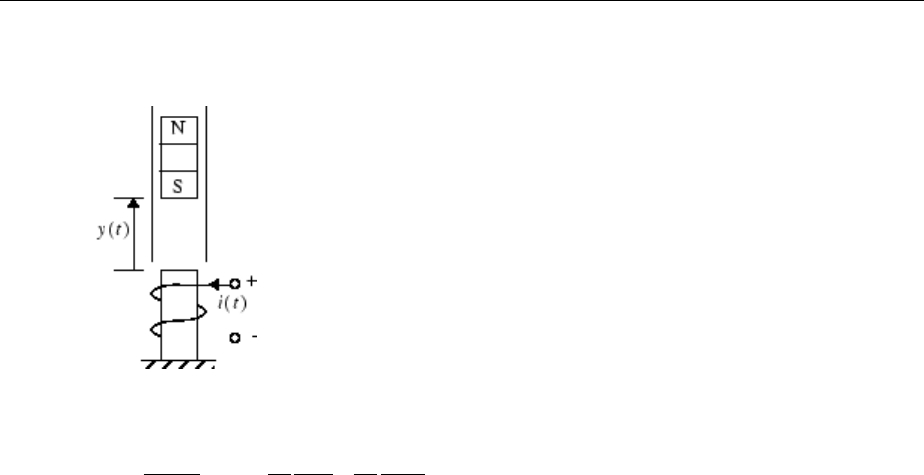
The equation of motion for this system is
d y t
dt
gM
i t
y t M
dy t
dt
2
2
2
( ) ( )
( )
( )
= - + -
a b
where y(t) is the distance of the magnet above the electromagnet, i(t) is the current
owing in the electromagnet, M is the mass of the magnet, and g is the gravitational
constant. The parameter β is a viscous friction coeicient that is determined by the
material in which the magnet moves, and α is a eld strength constant that is determined
by the number of turns of wire on the electromagnet and the strength of the magnet.
To run this example:
1Start MATLAB.
2Type narmamaglev in the MATLAB Command Window. This command opens the
Simulink Editor with the following model. The NARMA-L2 Control block is already in
the model.
Design NARMA-L2 Neural Controller in Simulink
6-19
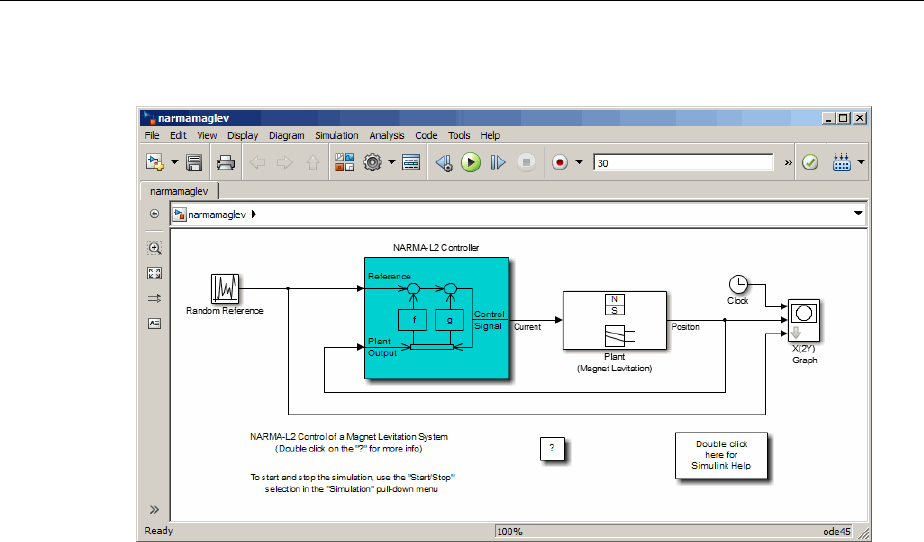
3Double-click the NARMA-L2 Controller block. This opens the following window. This
window enables you to train the NARMA-L2 model. There is no separate window for
the controller, because the controller is determined directly from the model, unlike
the model predictive controller.
6Control Systems
6-20
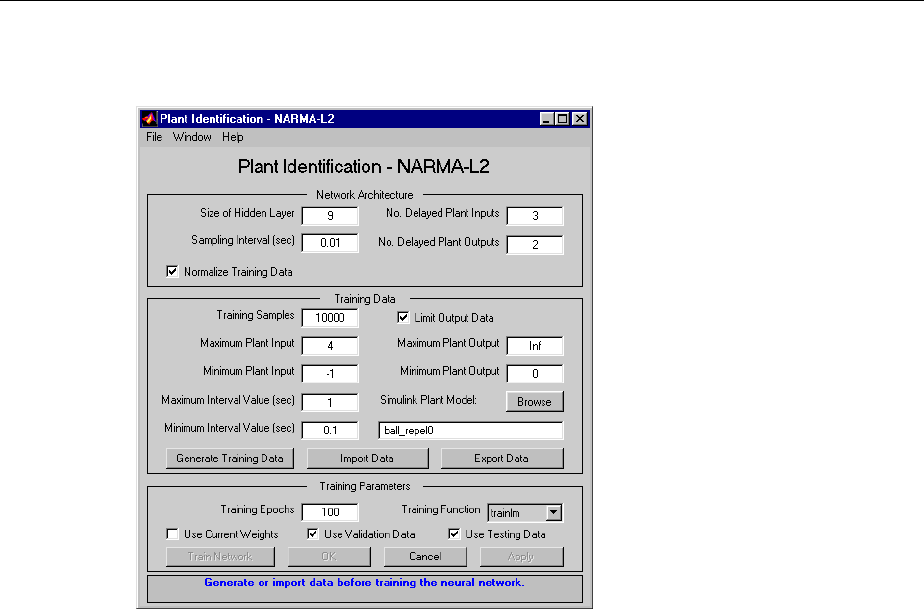
4This window works the same as the other Plant Identication windows, so the
training process is not repeated. Instead, simulate the NARMA-L2 controller.
5Return to the Simulink Editor and start the simulation by choosing the menu option
Simulation > Run. As the simulation runs, the plant output and the reference signal
are displayed, as in the following gure.
Design NARMA-L2 Neural Controller in Simulink
6-21
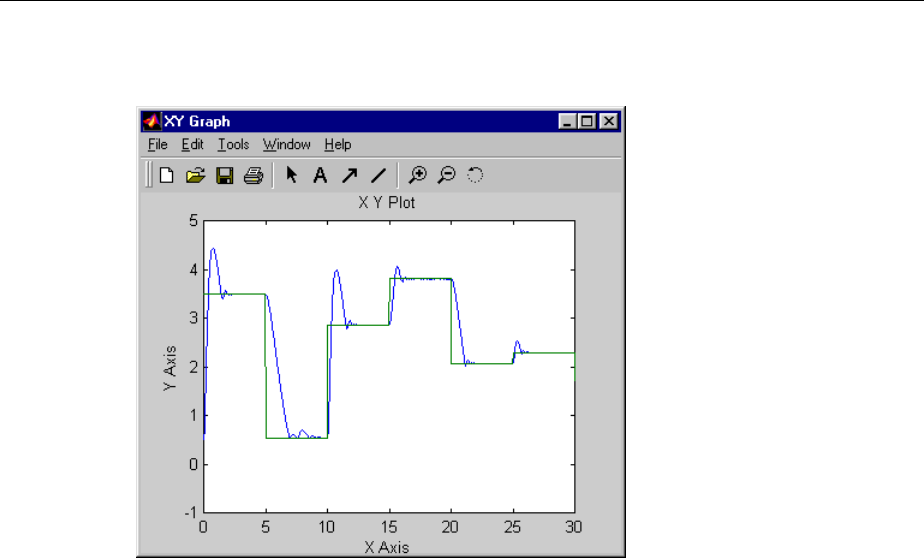
6Control Systems
6-22
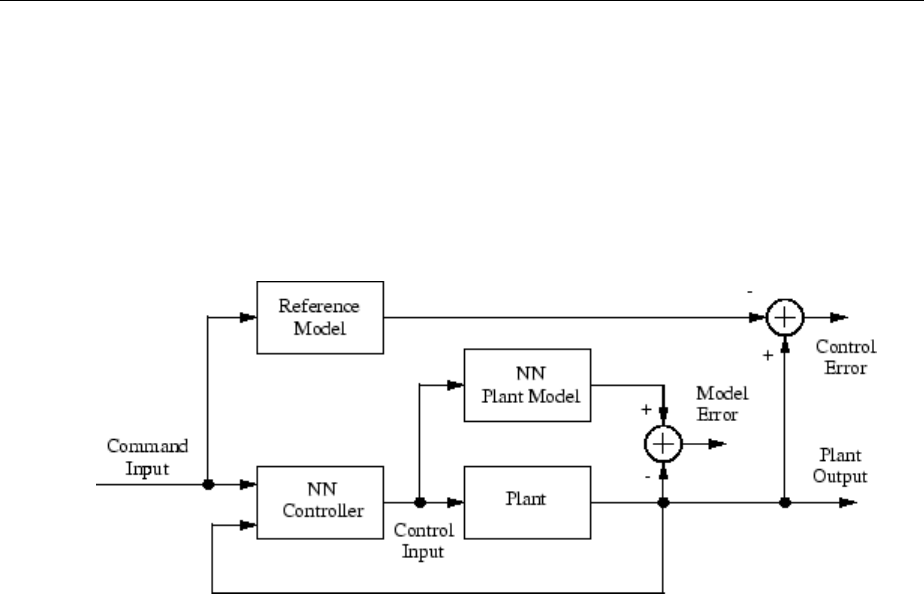
Design Model-Reference Neural Controller in Simulink
The neural model reference control architecture uses two neural networks: a controller
network and a plant model network, as shown in the following gure. The plant model is
identied rst, and then the controller is trained so that the plant output follows the
reference model output.
The following gure shows the details of the neural network plant model and the neural
network controller as they are implemented in the Neural Network Toolbox software.
Each network has two layers, and you can select the number of neurons to use in the
hidden layers. There are three sets of controller inputs:
• Delayed reference inputs
• Delayed controller outputs
• Delayed plant outputs
For each of these inputs, you can select the number of delayed values to use. Typically,
the number of delays increases with the order of the plant. There are two sets of inputs to
the neural network plant model:
• Delayed controller outputs
• Delayed plant outputs
As with the controller, you can set the number of delays. The next section shows how you
can set the parameters.
Design Model-Reference Neural Controller in Simulink
6-23
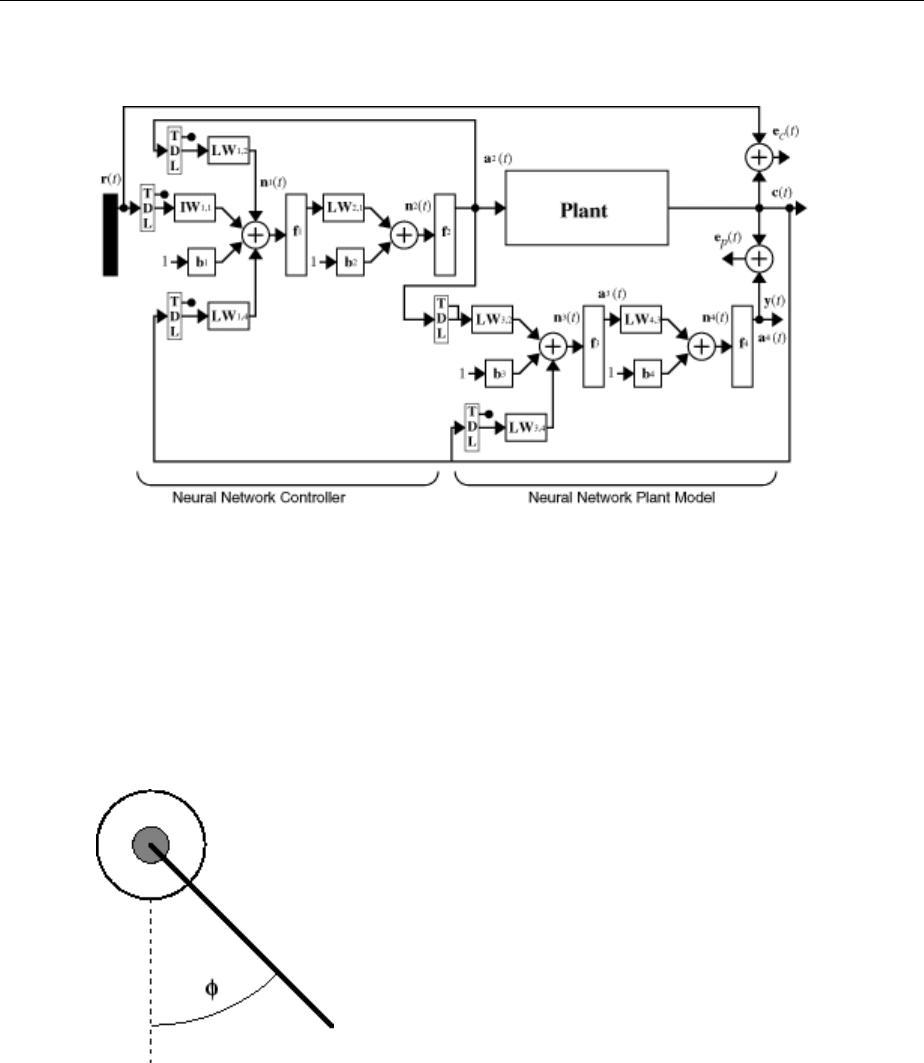
Use the Model Reference Controller Block
This section shows how the neural network controller is trained. The rst step is to copy
the Model Reference Control block from the Neural Network Toolbox blockset to Simulink
Editor. See the Simulink documentation if you are not sure how to do this. This step is
skipped in the following example.
An example model is provided with the Neural Network Toolbox software to show the use
of the model reference controller. In this example, the objective is to control the
movement of a simple, single-link robot arm, as shown in the following gure:
6Control Systems
6-24
The equation of motion for the arm is
d
dt
d
dt
u
2
210 2
fff
= - - +sin
where ϕ is the angle of the arm, and u is the torque supplied by the DC motor.
The objective is to train the controller so that the arm tracks the reference model
d y
dt
ydy
dt r
rrr
2
29 6 9= - - +
where yr is the output of the reference model, and r is the input reference signal.
This example uses a neural network controller with a 5-13-1 architecture. The inputs to
the controller consist of two delayed reference inputs, two delayed plant outputs, and one
delayed controller output. A sampling interval of 0.05 seconds is used.
To run this example:
1Start MATLAB.
2Type mrefrobotarm in the MATLAB Command Window. This command opens the
Simulink Editor with the Model Reference Control block already in the model.
Design Model-Reference Neural Controller in Simulink
6-25
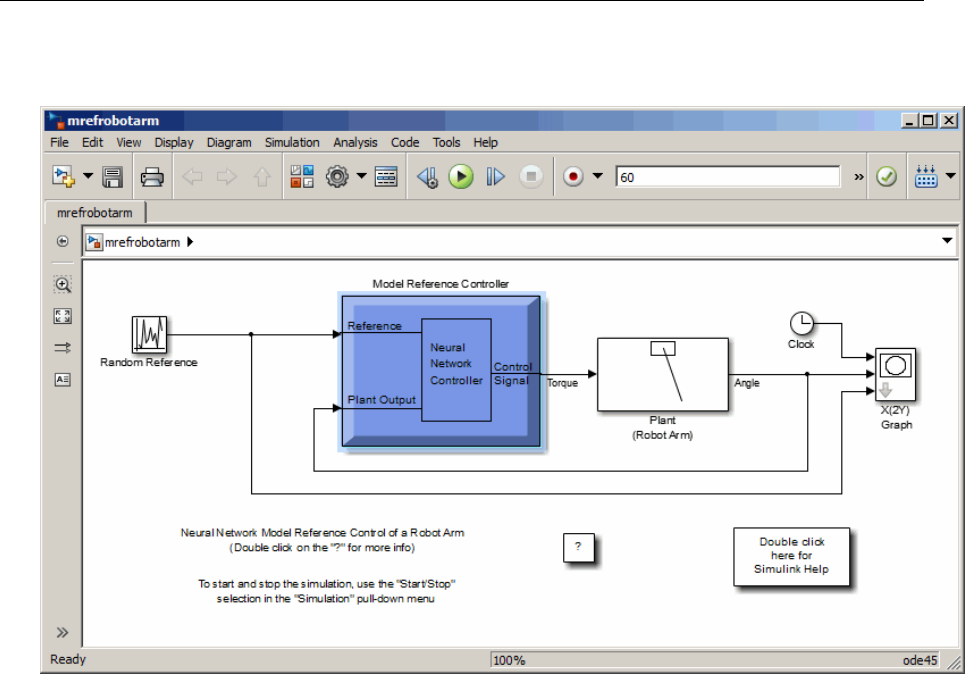
3Double-click the Model Reference Control block. This opens the following window for
training the model reference controller.
6Control Systems
6-26
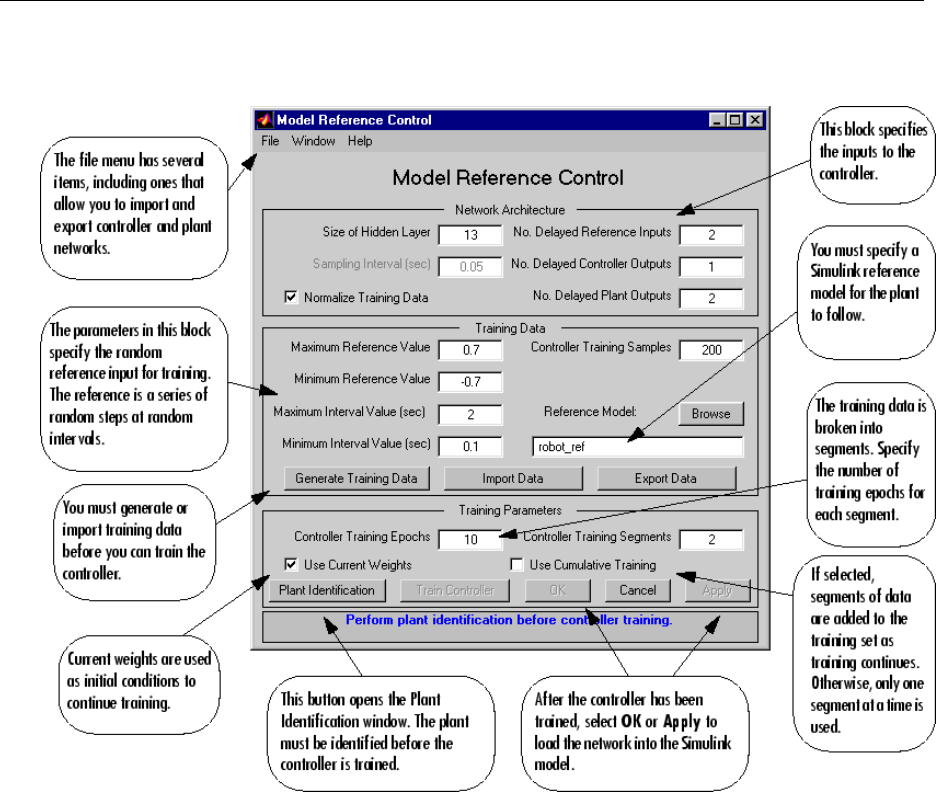
4The next step would normally be to click Plant Identication, which opens the Plant
Identication window. You would then train the plant model. Because the Plant
Identication window is identical to the one used with the previous controllers, that
process is omitted here.
5Click Generate Training Data. The program starts generating the data for training
the controller. After the data is generated, the following window appears.
Design Model-Reference Neural Controller in Simulink
6-27
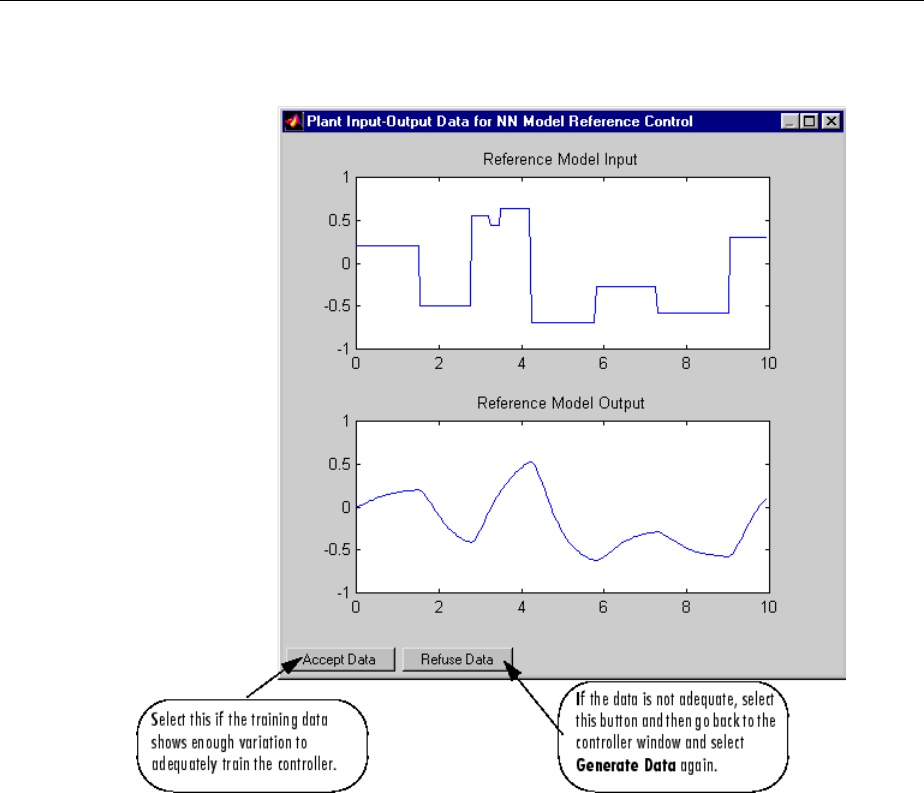
6Click Accept Data. Return to the Model Reference Control window and click Train
Controller. The program presents one segment of data to the network and trains the
network for a specied number of iterations (ve in this case). This process
continues, one segment at a time, until the entire training set has been presented to
the network. Controller training can be signicantly more time consuming than plant
model training. This is because the controller must be trained using dynamic
backpropagation (see [HaJe99 on page 13-2]). After the training is complete, the
response of the resulting closed loop system is displayed, as in the following gure.
6Control Systems
6-28
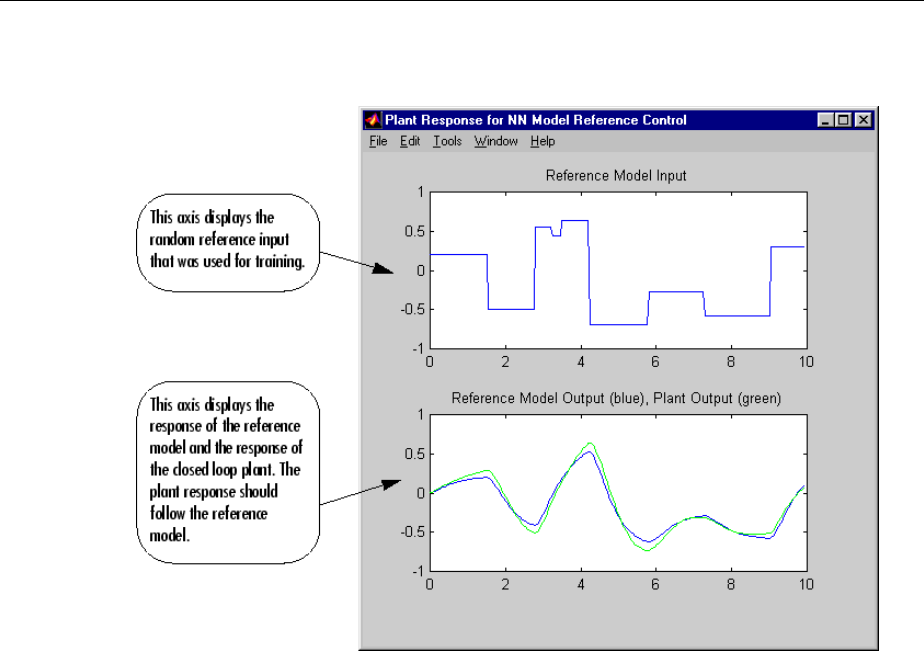
7Go back to the Model Reference Control window. If the performance of the controller
is not accurate, then you can select Train Controller again, which continues the
controller training with the same data set. If you would like to use a new data set to
continue training, select Generate Data or Import Data before you select Train
Controller. (Be sure that Use Current Weights is selected if you want to continue
training with the same weights.) It might also be necessary to retrain the plant
model. If the plant model is not accurate, it can aect the controller training. For this
example, the controller should be accurate enough, so select OK. This loads the
controller weights into the Simulink model.
8Return to the Simulink Editor and start the simulation by choosing the menu option
Simulation > Run. As the simulation runs, the plant output and the reference signal
are displayed, as in the following gure.
Design Model-Reference Neural Controller in Simulink
6-29
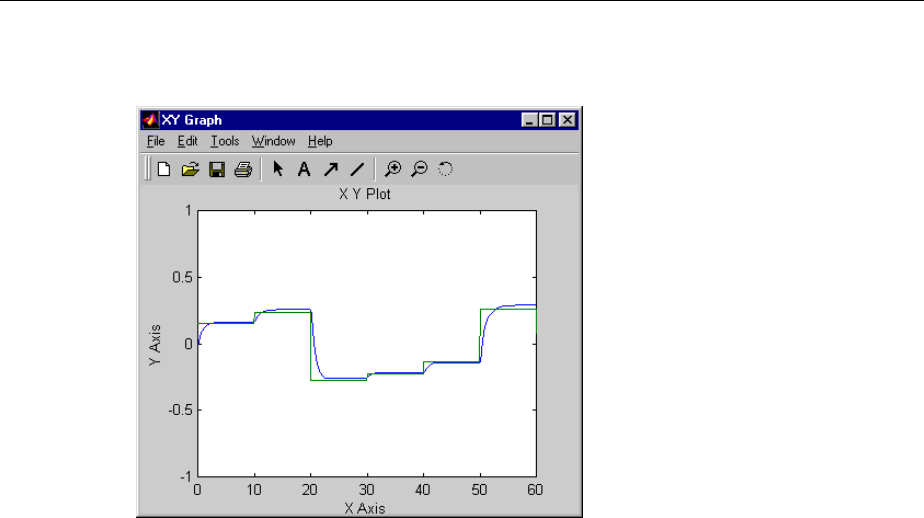
6Control Systems
6-30
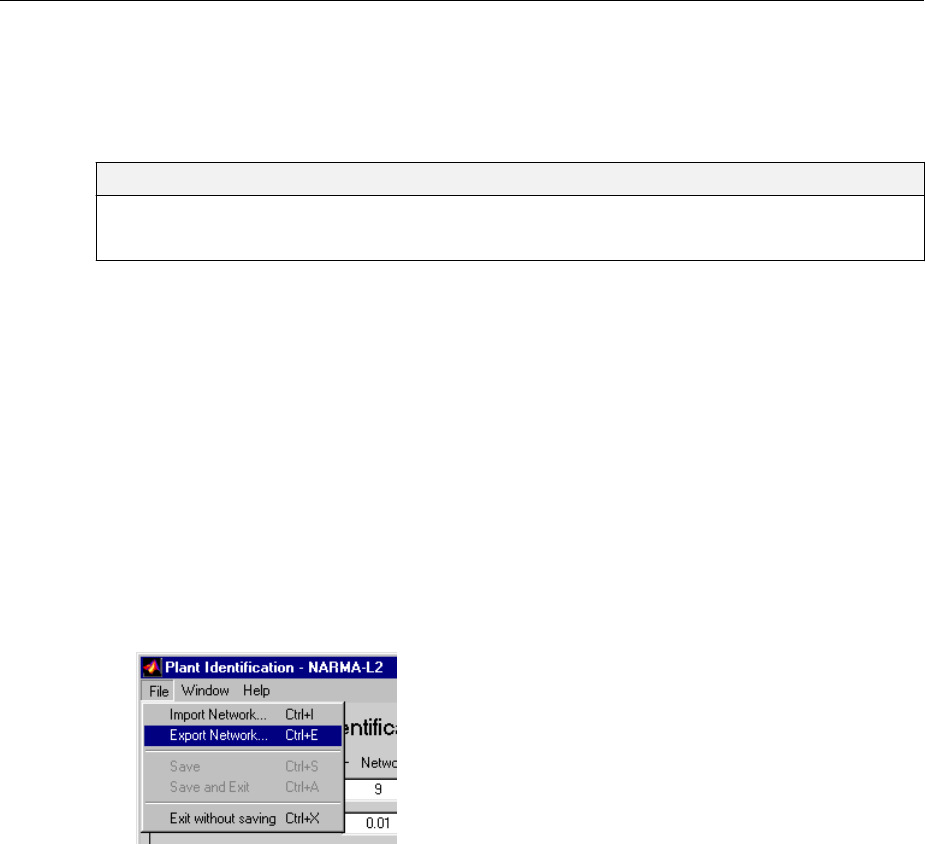
Import-Export Neural Network Simulink Control Systems
In this section...
“Import and Export Networks” on page 6-31
“Import and Export Training Data” on page 6-35
Import and Export Networks
The controller and plant model networks that you develop are stored within Simulink
controller blocks. At some point you might want to transfer the networks into other
applications, or you might want to transfer a network from one controller block to
another. You can do this by using the Import Network and Export Network menu
options. The following example leads you through the export and import processes. (The
NARMA-L2 window is used for this example, but the same procedure applies to all the
controllers.)
1Repeat the rst three steps of the NARMA-L2 example in “Use the NARMA-L2
Controller Block” on page 6-18. The NARMA-L2 Plant Identication window should
now be open.
2Select File > Export Network, as shown below.
This opens the following window.
Import-Export Neural Network Simulink Control Systems
6-31
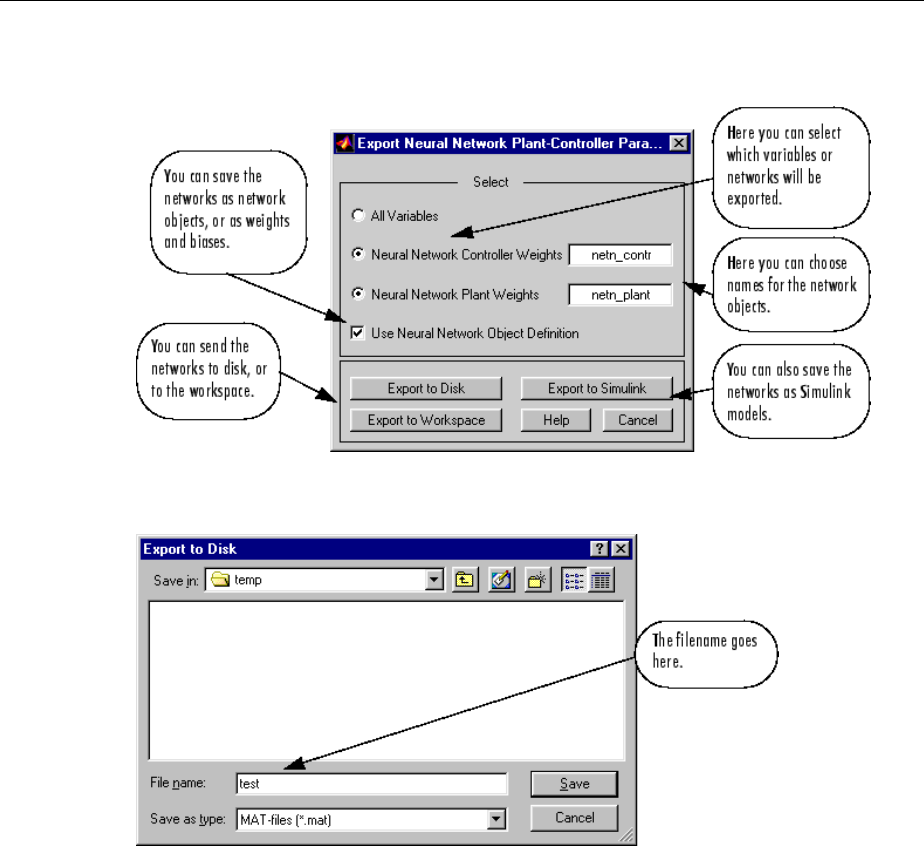
3Select Export to Disk. The following window opens. Enter the le name test in the
box, and select Save. This saves the controller and plant networks to disk.
4Retrieve that data with the Import menu option. Select File > Import Network, as
in the following gure.
6Control Systems
6-32
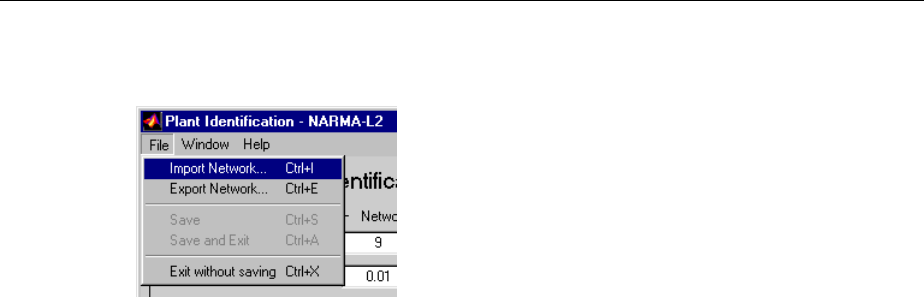
This causes the following window to appear. Follow the steps indicated to retrieve the
data that you previously exported. Once the data is retrieved, you can load it into the
controller block by clicking OK or Apply. Notice that the window only has an entry
for the plant model, even though you saved both the plant model and the controller.
This is because the NARMA-L2 controller is derived directly from the plant model, so
you do not need to import both networks.
Import-Export Neural Network Simulink Control Systems
6-33
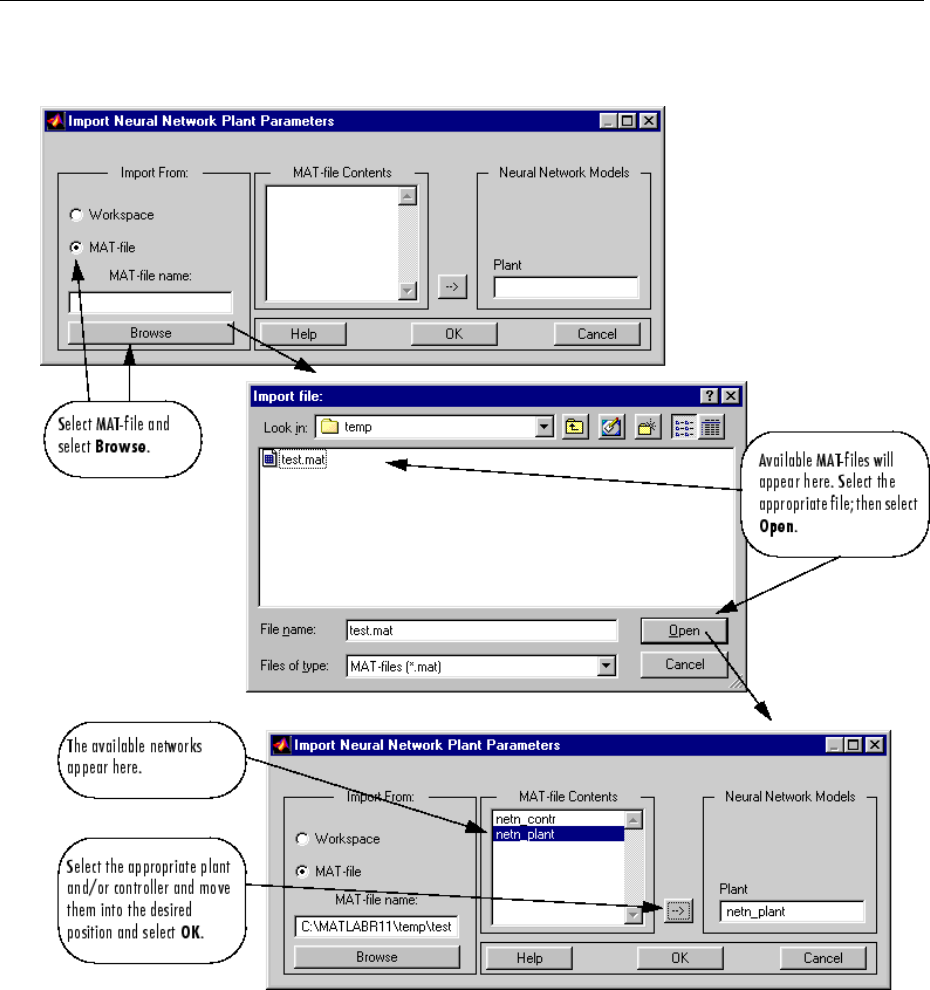
6Control Systems
6-34
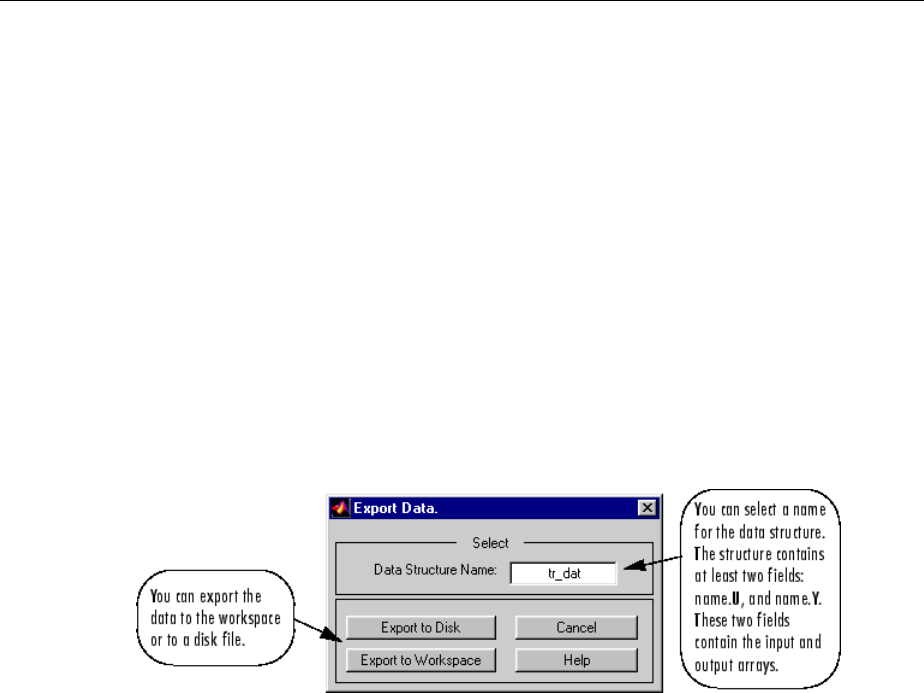
Import and Export Training Data
The data that you generate to train networks exists only in the corresponding plant
identication or controller training window. You might want to save the training data to
the workspace or to a disk le so that you can load it again at a later time. You might also
want to combine data sets manually and then load them back into the training window.
You can do this by using the Import and Export buttons. The following example leads
you through the import and export processes. (The NN Predictive Control window is used
for this example, but the same procedure applies to all the controllers.)
1Repeat the rst ve steps of the NN Predictive Control example in “Use the Neural
Network Predictive Controller Block” on page 6-6. Then select Accept Data. The
Plant Identication window should then be open, and the Import and Export buttons
should be active.
2Click Export to open the following window.
3Click Export to Disk. The following window opens. Enter the lename testdat in
the box, and select Save. This saves the training data structure to disk.
Import-Export Neural Network Simulink Control Systems
6-35
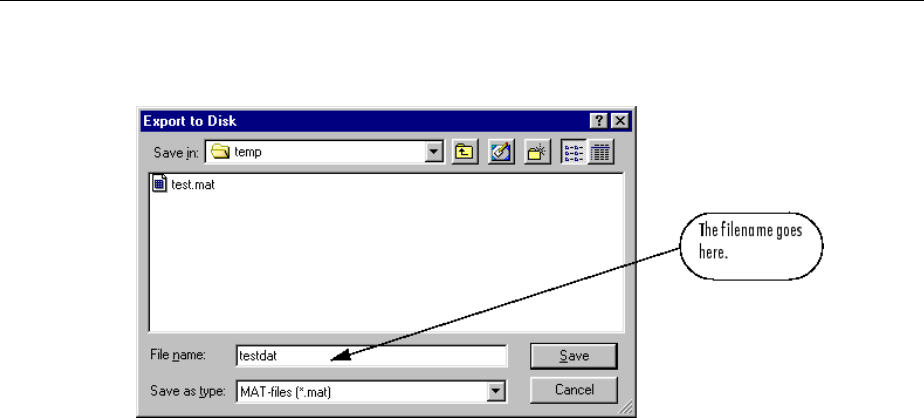
4Now retrieve the data with the import command. Click Import in the Plant
Identication window to open the following window. Follow the steps indicated on the
following page to retrieve the data that you previously exported. Once the data is
imported, you can train the neural network plant model.
6Control Systems
6-36
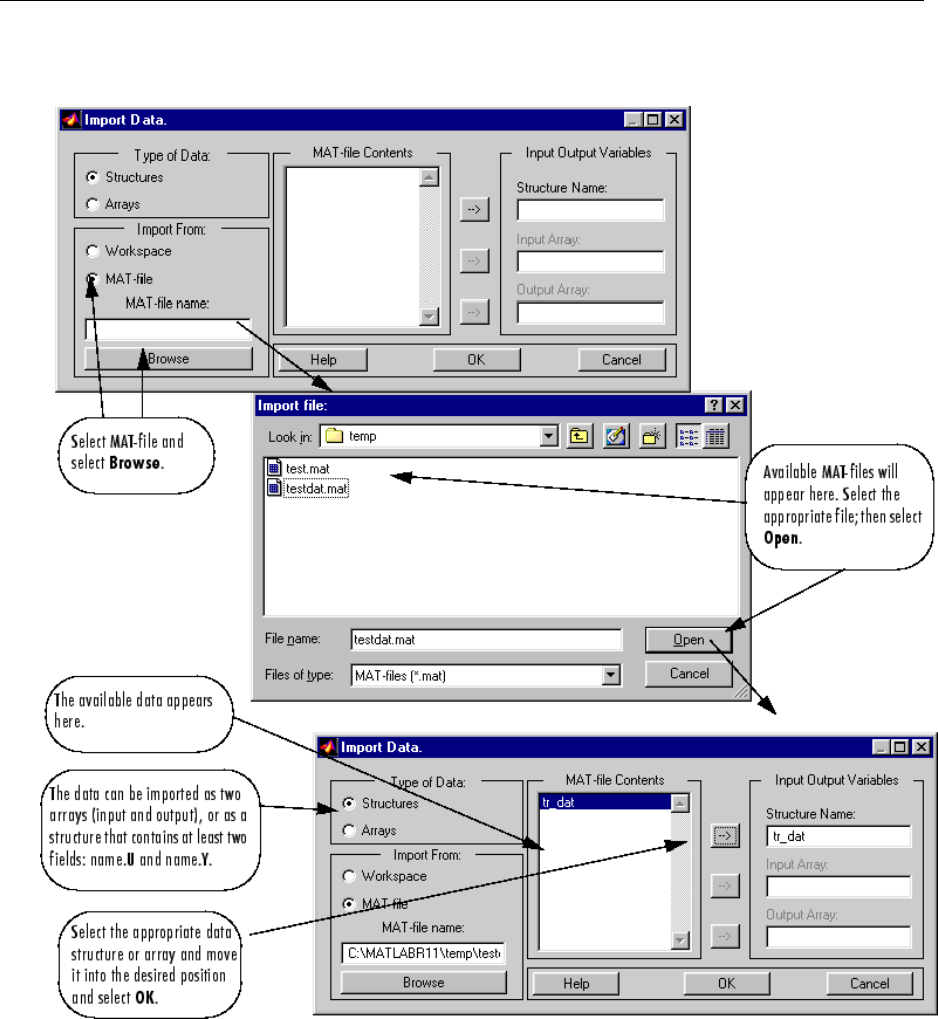
Import-Export Neural Network Simulink Control Systems
6-37


Introduction to Radial Basis Neural Networks
Radial basis networks can require more neurons than standard feedforward
backpropagation networks, but often they can be designed in a fraction of the time it
takes to train standard feedforward networks. They work best when many training
vectors are available.
You might want to consult the following paper on this subject: Chen, S., C.F.N. Cowan, and
P.M. Grant, “Orthogonal Least Squares Learning Algorithm for Radial Basis Function
Networks,” IEEE Transactions on Neural Networks, Vol. 2, No. 2, March 1991, pp. 302–
309.
This topic discusses two variants of radial basis networks, generalized regression
networks (GRNN) and probabilistic neural networks (PNN). You can read about them in
P.D. Wasserman, Advanced Methods in Neural Computing, New York: Van Nostrand
Reinhold, 1993, on pp. 155–61 and pp. 35–55, respectively.
Important Radial Basis Functions
Radial basis networks can be designed with either newrbe or newrb. GRNNs and PNNs
can be designed with newgrnn and newpnn, respectively.
7Radial Basis Neural Networks
7-2
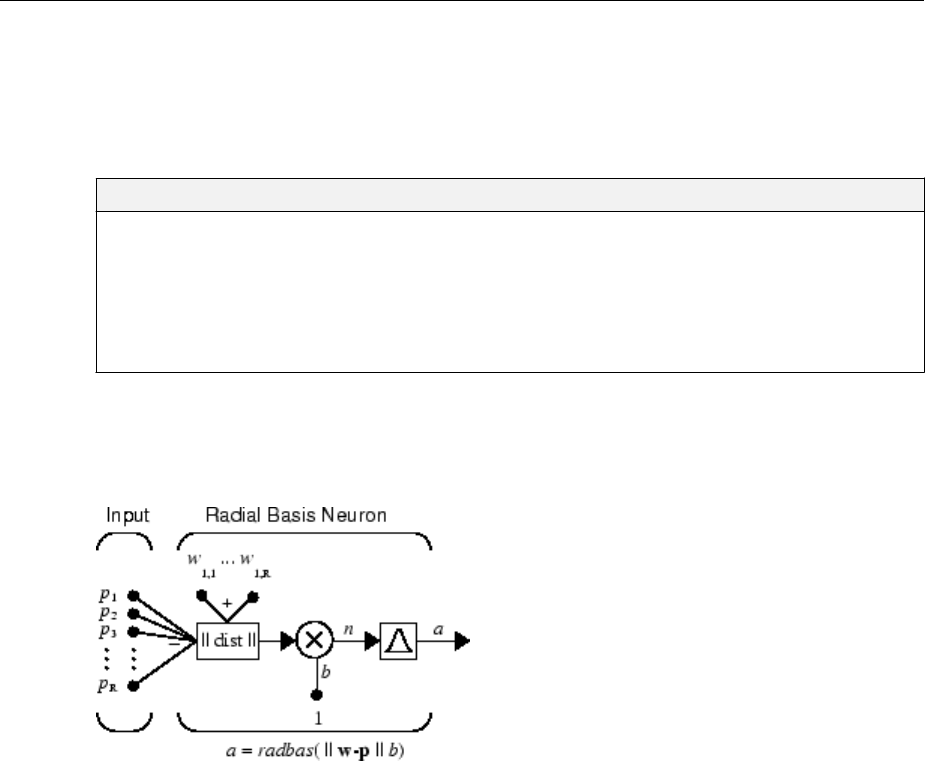
Radial Basis Neural Networks
In this section...
“Neuron Model” on page 7-3
“Network Architecture” on page 7-4
“Exact Design (newrbe)” on page 7-6
“More Eicient Design (newrb)” on page 7-7
“Examples” on page 7-8
Neuron Model
Here is a radial basis network with R inputs.
Notice that the expression for the net input of a radbas neuron is dierent from that of
other neurons. Here the net input to the radbas transfer function is the vector distance
between its weight vector w and the input vector p, multiplied by the bias b. (The ||
dist || box in this gure accepts the input vector p and the single row input weight
matrix, and produces the dot product of the two.)
The transfer function for a radial basis neuron is
radbas n e n
( ) =
-
2
Here is a plot of the radbas transfer function.
Radial Basis Neural Networks
7-3
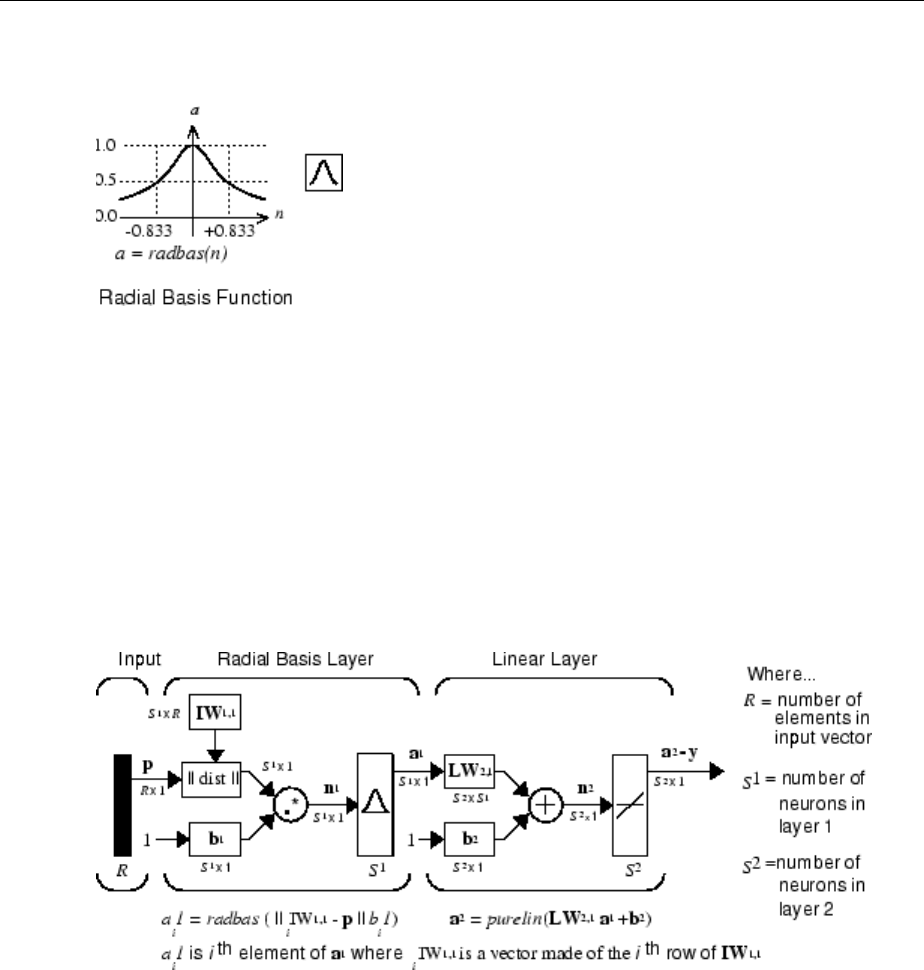
The radial basis function has a maximum of 1 when its input is 0. As the distance between
w and p decreases, the output increases. Thus, a radial basis neuron acts as a detector
that produces 1 whenever the input p is identical to its weight vector w.
The bias b allows the sensitivity of the radbas neuron to be adjusted. For example, if a
neuron had a bias of 0.1 it would output 0.5 for any input vector p at vector distance of
8.326 (0.8326/b) from its weight vector w.
Network Architecture
Radial basis networks consist of two layers: a hidden radial basis layer of S1 neurons, and
an output linear layer of S2 neurons.
The || dist || box in this gure accepts the input vector p and the input weight matrix
IW1,1, and produces a vector having S1 elements. The elements are the distances between
the input vector and vectors iIW1,1 formed from the rows of the input weight matrix.
7Radial Basis Neural Networks
7-4

The bias vector b1 and the output of || dist || are combined with the MATLAB
operation .* , which does element-by-element multiplication.
The output of the rst layer for a feedforward network net can be obtained with the
following code:
a{1} = radbas(netprod(dist(net.IW{1,1},p),net.b{1}))
Fortunately, you won't have to write such lines of code. All the details of designing this
network are built into design functions newrbe and newrb, and you can obtain their
outputs with sim.
You can understand how this network behaves by following an input vector p through the
network to the output a2. If you present an input vector to such a network, each neuron in
the radial basis layer will output a value according to how close the input vector is to
each neuron's weight vector.
Thus, radial basis neurons with weight vectors quite dierent from the input vector p
have outputs near zero. These small outputs have only a negligible eect on the linear
output neurons.
In contrast, a radial basis neuron with a weight vector close to the input vector p
produces a value near 1. If a neuron has an output of 1, its output weights in the second
layer pass their values to the linear neurons in the second layer.
In fact, if only one radial basis neuron had an output of 1, and all others had outputs of 0s
(or very close to 0), the output of the linear layer would be the active neuron's output
weights. This would, however, be an extreme case. Typically several neurons are always
ring, to varying degrees.
Now look in detail at how the rst layer operates. Each neuron's weighted input is the
distance between the input vector and its weight vector, calculated with dist. Each
neuron's net input is the element-by-element product of its weighted input with its bias,
calculated with netprod. Each neuron's output is its net input passed through radbas. If
a neuron's weight vector is equal to the input vector (transposed), its weighted input is 0,
its net input is 0, and its output is 1. If a neuron's weight vector is a distance of spread
from the input vector, its weighted input is spread, its net input is sqrt(−log(.5)) (or
0.8326), therefore its output is 0.5.
Radial Basis Neural Networks
7-5

Exact Design (newrbe)
You can design radial basis networks with the function newrbe. This function can produce
a network with zero error on training vectors. It is called in the following way:
net = newrbe(P,T,SPREAD)
The function newrbe takes matrices of input vectors P and target vectors T, and a spread
constant SPREAD for the radial basis layer, and returns a network with weights and biases
such that the outputs are exactly T when the inputs are P.
This function newrbe creates as many radbas neurons as there are input vectors in P,
and sets the rst-layer weights to P'. Thus, there is a layer of radbas neurons in which
each neuron acts as a detector for a dierent input vector. If there are Q input vectors,
then there will be Q neurons.
Each bias in the rst layer is set to 0.8326/SPREAD. This gives radial basis functions that
cross 0.5 at weighted inputs of +/− SPREAD. This determines the width of an area in the
input space to which each neuron responds. If SPREAD is 4, then each radbas neuron will
respond with 0.5 or more to any input vectors within a vector distance of 4 from their
weight vector. SPREAD should be large enough that neurons respond strongly to
overlapping regions of the input space.
The second-layer weights IW 2,1 (or in code, IW{2,1}) and biases b2 (or in code, b{2})
are found by simulating the rst-layer outputs a1 (A{1}), and then solving the following
linear expression:
[W{2,1} b{2}] * [A{1}; ones(1,Q)] = T
You know the inputs to the second layer (A{1}) and the target (T), and the layer is linear.
You can use the following code to calculate the weights and biases of the second layer to
minimize the sum-squared error.
Wb = T/[A{1}; ones(1,Q)]
Here Wb contains both weights and biases, with the biases in the last column. The sum-
squared error is always 0, as explained below.
There is a problem with C constraints (input/target pairs) and each neuron has C +1
variables (the C weights from the C radbas neurons, and a bias). A linear problem with C
constraints and more than C variables has an innite number of zero error solutions.
7Radial Basis Neural Networks
7-6

Thus, newrbe creates a network with zero error on training vectors. The only condition
required is to make sure that SPREAD is large enough that the active input regions of the
radbas neurons overlap enough so that several radbas neurons always have fairly large
outputs at any given moment. This makes the network function smoother and results in
better generalization for new input vectors occurring between input vectors used in the
design. (However, SPREAD should not be so large that each neuron is eectively
responding in the same large area of the input space.)
The drawback to newrbe is that it produces a network with as many hidden neurons as
there are input vectors. For this reason, newrbe does not return an acceptable solution
when many input vectors are needed to properly dene a network, as is typically the case.
More Ecient Design (newrb)
The function newrb iteratively creates a radial basis network one neuron at a time.
Neurons are added to the network until the sum-squared error falls beneath an error goal
or a maximum number of neurons has been reached. The call for this function is
net = newrb(P,T,GOAL,SPREAD)
The function newrb takes matrices of input and target vectors P and T, and design
parameters GOAL and SPREAD, and returns the desired network.
The design method of newrb is similar to that of newrbe. The dierence is that newrb
creates neurons one at a time. At each iteration the input vector that results in lowering
the network error the most is used to create a radbas neuron. The error of the new
network is checked, and if low enough newrb is nished. Otherwise the next neuron is
added. This procedure is repeated until the error goal is met or the maximum number of
neurons is reached.
As with newrbe, it is important that the spread parameter be large enough that the
radbas neurons respond to overlapping regions of the input space, but not so large that
all the neurons respond in essentially the same manner.
Why not always use a radial basis network instead of a standard feedforward network?
Radial basis networks, even when designed eiciently with newrbe, tend to have many
times more neurons than a comparable feedforward network with tansig or logsig
neurons in the hidden layer.
This is because sigmoid neurons can have outputs over a large region of the input space,
while radbas neurons only respond to relatively small regions of the input space. The
Radial Basis Neural Networks
7-7

result is that the larger the input space (in terms of number of inputs, and the ranges
those inputs vary over) the more radbas neurons required.
On the other hand, designing a radial basis network often takes much less time than
training a sigmoid/linear network, and can sometimes result in fewer neurons' being
used, as can be seen in the next example.
Examples
The example demorb1 shows how a radial basis network is used to t a function. Here the
problem is solved with only ve neurons.
Examples demorb3 and demorb4 examine how the spread constant aects the design
process for radial basis networks.
In demorb3, a radial basis network is designed to solve the same problem as in demorb1.
However, this time the spread constant used is 0.01. Thus, each radial basis neuron
returns 0.5 or lower for any input vector with a distance of 0.01 or more from its weight
vector.
Because the training inputs occur at intervals of 0.1, no two radial basis neurons have a
strong output for any given input.
demorb3 showed that having too small a spread constant can result in a solution that
does not generalize from the input/target vectors used in the design. Example demorb4
shows the opposite problem. If the spread constant is large enough, the radial basis
neurons will output large values (near 1.0) for all the inputs used to design the network.
If all the radial basis neurons always output 1, any information presented to the network
becomes lost. No matter what the input, the second layer outputs 1's. The function newrb
will attempt to nd a network, but cannot because of numerical problems that arise in
this situation.
The moral of the story is, choose a spread constant larger than the distance between
adjacent input vectors, so as to get good generalization, but smaller than the distance
across the whole input space.
For this problem that would mean picking a spread constant greater than 0.1, the interval
between inputs, and less than 2, the distance between the leftmost and rightmost inputs.
7Radial Basis Neural Networks
7-8
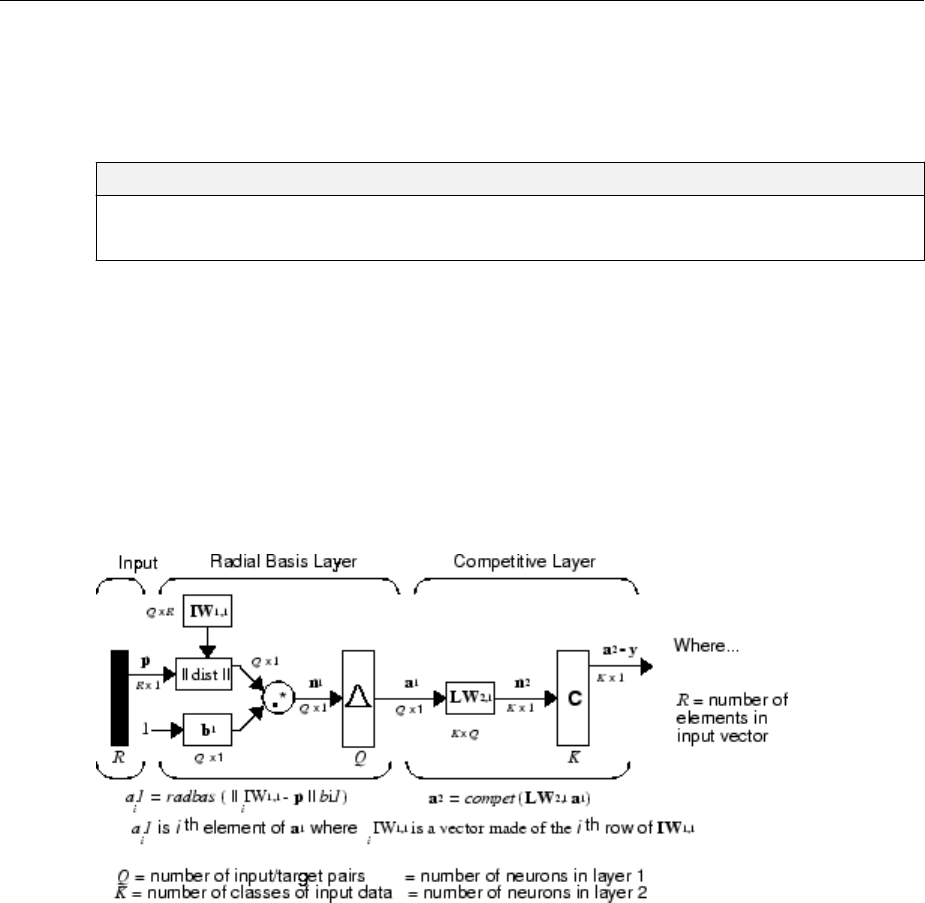
Probabilistic Neural Networks
In this section...
“Network Architecture” on page 7-9
“Design (newpnn)” on page 7-10
Probabilistic neural networks can be used for classication problems. When an input is
presented, the rst layer computes distances from the input vector to the training input
vectors and produces a vector whose elements indicate how close the input is to a
training input. The second layer sums these contributions for each class of inputs to
produce as its net output a vector of probabilities. Finally, a compete transfer function on
the output of the second layer picks the maximum of these probabilities, and produces a 1
for that class and a 0 for the other classes. The architecture for this system is shown
below.
Network Architecture
It is assumed that there are Q input vector/target vector pairs. Each target vector has K
elements. One of these elements is 1 and the rest are 0. Thus, each input vector is
associated with one of K classes.
The rst-layer input weights, IW1,1 (net.IW{1,1}), are set to the transpose of the matrix
formed from the Q training pairs, P'. When an input is presented, the || dist || box
Probabilistic Neural Networks
7-9

produces a vector whose elements indicate how close the input is to the vectors of the
training set. These elements are multiplied, element by element, by the bias and sent to
the radbas transfer function. An input vector close to a training vector is represented by
a number close to 1 in the output vector a1. If an input is close to several training vectors
of a single class, it is represented by several elements of a1 that are close to 1.
The second-layer weights, LW1,2 (net.LW{2,1}), are set to the matrix T of target vectors.
Each vector has a 1 only in the row associated with that particular class of input, and 0s
elsewhere. (Use function ind2vec to create the proper vectors.) The multiplication Ta1
sums the elements of a1 due to each of the K input classes. Finally, the second-layer
transfer function, compet, produces a 1 corresponding to the largest element of n2, and
0s elsewhere. Thus, the network classies the input vector into a specic K class because
that class has the maximum probability of being correct.
Design (newpnn)
You can use the function newpnn to create a PNN. For instance, suppose that seven input
vectors and their corresponding targets are
P = [0 0;1 1;0 3;1 4;3 1;4 1;4 3]'
which yields
P =
0 1 0 1 3 4 4
0 1 3 4 1 1 3
Tc = [1 1 2 2 3 3 3]
which yields
Tc =
1 1 2 2 3 3 3
You need a target matrix with 1s in the right places. You can get it with the function
ind2vec. It gives a matrix with 0s except at the correct spots. So execute
T = ind2vec(Tc)
which gives
T =
(1,1) 1
(1,2) 1
7Radial Basis Neural Networks
7-10

(2,3) 1
(2,4) 1
(3,5) 1
(3,6) 1
(3,7) 1
Now you can create a network and simulate it, using the input P to make sure that it does
produce the correct classications. Use the function vec2ind to convert the output Y into
a row Yc to make the classications clear.
net = newpnn(P,T);
Y = sim(net,P);
Yc = vec2ind(Y)
This produces
Yc =
1 1 2 2 3 3 3
You might try classifying vectors other than those that were used to design the network.
Try to classify the vectors shown below in P2.
P2 = [1 4;0 1;5 2]'
P2 =
1 0 5
4 1 2
Can you guess how these vectors will be classied? If you run the simulation and plot the
vectors as before, you get
Yc =
2 1 3
These results look good, for these test vectors were quite close to members of classes 2,
1, and 3, respectively. The network has managed to generalize its operation to properly
classify vectors other than those used to design the network.
You might want to try demopnn1. It shows how to design a PNN, and how the network
can successfully classify a vector not used in the design.
Probabilistic Neural Networks
7-11
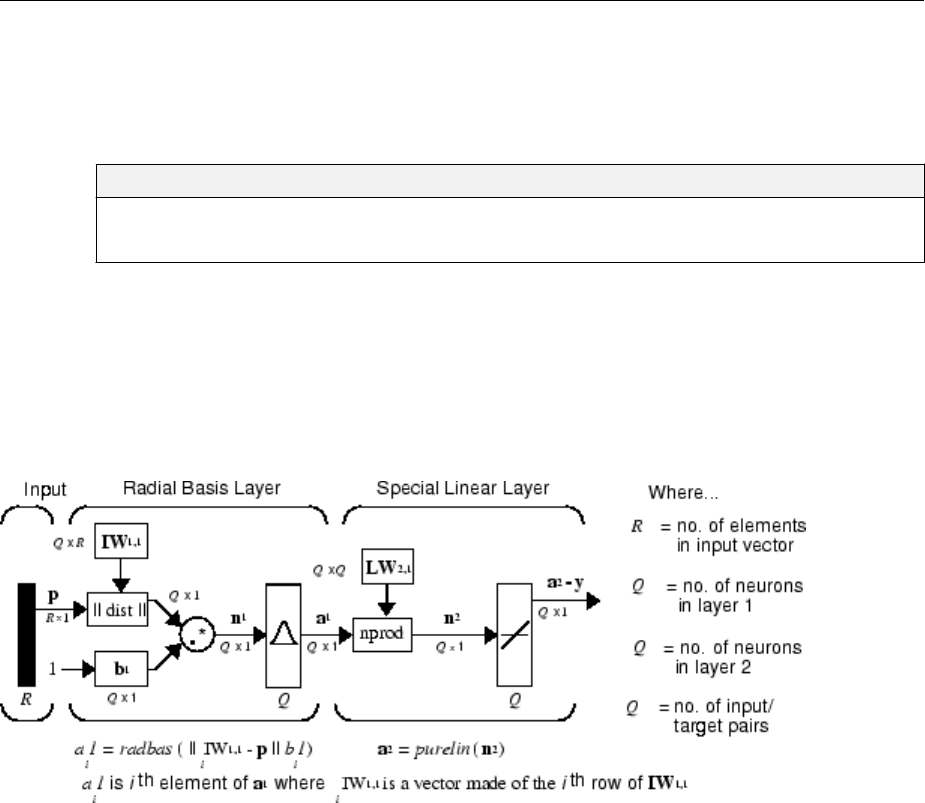
Generalized Regression Neural Networks
In this section...
“Network Architecture” on page 7-12
“Design (newgrnn)” on page 7-14
Network Architecture
A generalized regression neural network (GRNN) is often used for function
approximation. It has a radial basis layer and a special linear layer.
The architecture for the GRNN is shown below. It is similar to the radial basis network,
but has a slightly dierent second layer.
Here the nprod box shown above (code function normprod) produces S2 elements in
vector n2. Each element is the dot product of a row of LW2,1 and the input vector a1, all
normalized by the sum of the elements of a1. For instance, suppose that
LW{2,1}= [1 -2;3 4;5 6];
a{1} = [0.7;0.3];
Then
aout = normprod(LW{2,1},a{1})
aout =
7Radial Basis Neural Networks
7-12

0.1000
3.3000
5.3000
The rst layer is just like that for newrbe networks. It has as many neurons as there are
input/ target vectors in P. Specically, the rst-layer weights are set to P'. The bias b1 is
set to a column vector of 0.8326/SPREAD. The user chooses SPREAD, the distance an input
vector must be from a neuron's weight vector to be 0.5.
Again, the rst layer operates just like the newrbe radial basis layer described previously.
Each neuron's weighted input is the distance between the input vector and its weight
vector, calculated with dist. Each neuron's net input is the product of its weighted input
with its bias, calculated with netprod. Each neuron's output is its net input passed
through radbas. If a neuron's weight vector is equal to the input vector (transposed), its
weighted input will be 0, its net input will be 0, and its output will be 1. If a neuron's
weight vector is a distance of spread from the input vector, its weighted input will be
spread, and its net input will be sqrt(−log(.5)) (or 0.8326). Therefore its output will be
0.5.
The second layer also has as many neurons as input/target vectors, but here LW{2,1} is
set to T.
Suppose you have an input vector p close to pi, one of the input vectors among the input
vector/target pairs used in designing layer 1 weights. This input p produces a layer 1 ai
output close to 1. This leads to a layer 2 output close to ti, one of the targets used to form
layer 2 weights.
A larger spread leads to a large area around the input vector where layer 1 neurons will
respond with signicant outputs. Therefore if spread is small the radial basis function is
very steep, so that the neuron with the weight vector closest to the input will have a much
larger output than other neurons. The network tends to respond with the target vector
associated with the nearest design input vector.
As spread becomes larger the radial basis function's slope becomes smoother and
several neurons can respond to an input vector. The network then acts as if it is taking a
weighted average between target vectors whose design input vectors are closest to the
new input vector. As spread becomes larger more and more neurons contribute to the
average, with the result that the network function becomes smoother.
Generalized Regression Neural Networks
7-13
Design (newgrnn)
You can use the function newgrnn to create a GRNN. For instance, suppose that three
input and three target vectors are dened as
P = [4 5 6];
T = [1.5 3.6 6.7];
You can now obtain a GRNN with
net = newgrnn(P,T);
and simulate it with
P = 4.5;
v = sim(net,P);
You might want to try demogrn1. It shows how to approximate a function with a GRNN.
Function Description
compet Competitive transfer function.
dist Euclidean distance weight function.
dotprod Dot product weight function.
ind2vec Convert indices to vectors.
negdist Negative Euclidean distance weight function.
netprod Product net input function.
newgrnn Design a generalized regression neural network.
newpnn Design a probabilistic neural network.
newrb Design a radial basis network.
newrbe Design an exact radial basis network.
normprod Normalized dot product weight function.
radbas Radial basis transfer function.
vec2ind Convert vectors to indices.
7Radial Basis Neural Networks
7-14


Introduction to Self-Organizing and LVQ
Self-organizing in networks is one of the most fascinating topics in the neural network
eld. Such networks can learn to detect regularities and correlations in their input and
adapt their future responses to that input accordingly. The neurons of competitive
networks learn to recognize groups of similar input vectors. Self-organizing maps learn to
recognize groups of similar input vectors in such a way that neurons physically near each
other in the neuron layer respond to similar input vectors. Self-organizing maps do not
have target vectors, since their purpose is to divide the input vectors into clusters of
similar vectors. There is no desired output for these types of networks.
Learning vector quantization (LVQ) is a method for training competitive layers in a
supervised manner (with target outputs). A competitive layer automatically learns to
classify input vectors. However, the classes that the competitive layer nds are dependent
only on the distance between input vectors. If two input vectors are very similar, the
competitive layer probably will put them in the same class. There is no mechanism in a
strictly competitive layer design to say whether or not any two input vectors are in the
same class or dierent classes.
LVQ networks, on the other hand, learn to classify input vectors into target classes chosen
by the user.
You might consult the following reference: Kohonen, T., Self-Organization and Associative
Memory, 2nd Edition, Berlin: Springer-Verlag, 1987.
Important Self-Organizing and LVQ Functions
You can create competitive layers and self-organizing maps with competlayer and
selforgmap, respectively.
You can create an LVQ network with the function lvqnet.
8Self-Organizing and Learning Vector Quantization Networks
8-2
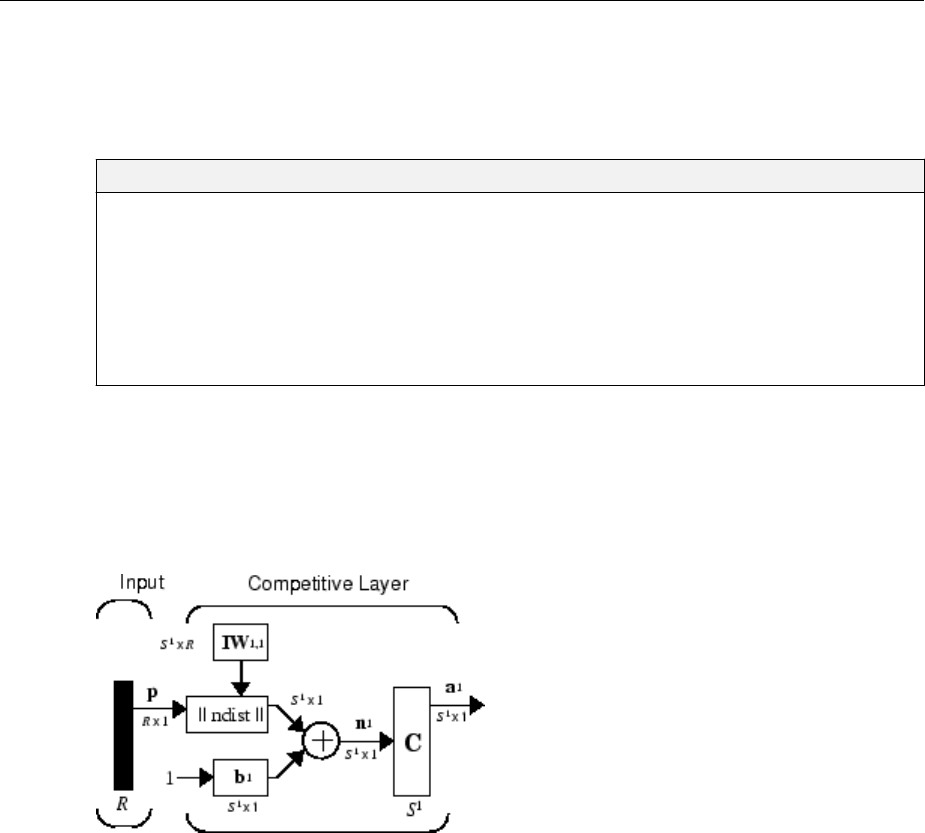
Cluster with a Competitive Neural Network
In this section...
“Architecture” on page 8-3
“Create a Competitive Neural Network” on page 8-4
“Kohonen Learning Rule (learnk)” on page 8-5
“Bias Learning Rule (learncon)” on page 8-5
“Training” on page 8-6
“Graphical Example” on page 8-8
The neurons in a competitive layer distribute themselves to recognize frequently
presented input vectors.
Architecture
The architecture for a competitive network is shown below.
The ‖ dist ‖ box in this gure accepts the input vector p and the input weight matrix
IW1,1, and produces a vector having S1 elements. The elements are the negative of the
distances between the input vector and vectors iIW1,1 formed from the rows of the input
weight matrix.
Compute the net input n1 of a competitive layer by nding the negative distance between
input vector p and the weight vectors and adding the biases b. If all biases are zero, the
maximum net input a neuron can have is 0. This occurs when the input vector p equals
that neuron's weight vector.
Cluster with a Competitive Neural Network
8-3

The competitive transfer function accepts a net input vector for a layer and returns
neuron outputs of 0 for all neurons except for the winner, the neuron associated with the
most positive element of net input n1. The winner's output is 1. If all biases are 0, then the
neuron whose weight vector is closest to the input vector has the least negative net input
and, therefore, wins the competition to output a 1.
Reasons for using biases with competitive layers are introduced in “Bias Learning Rule
(learncon)” on page 8-5.
Create a Competitive Neural Network
You can create a competitive neural network with the function competlayer. A simple
example shows how this works.
Suppose you want to divide the following four two-element vectors into two classes.
p = [.1 .8 .1 .9; .2 .9 .1 .8]
p =
0.1000 0.8000 0.1000 0.9000
0.2000 0.9000 0.1000 0.8000
There are two vectors near the origin and two vectors near (1,1).
First, create a two-neuron competitive layer.:
net = competlayer(2);
Now you have a network, but you need to train it to do the classication job.
The rst time the network is trained, its weights will initialized to the centers of the input
ranges with the function midpoint. You can check see these initial values using the
number of neurons and the input data:
wts = midpoint(2,p)
wts =
0.5000 0.5000
0.5000 0.5000
These weights are indeed the values at the midpoint of the range (0 to 1) of the inputs.
The initial biases are computed by initcon, which gives
8Self-Organizing and Learning Vector Quantization Networks
8-4

biases = initcon(2)
biases =
5.4366
5.4366
Recall that each neuron competes to respond to an input vector p. If the biases are all 0,
the neuron whose weight vector is closest to p gets the highest net input and, therefore,
wins the competition, and outputs 1. All other neurons output 0. You want to adjust the
winning neuron so as to move it closer to the input. A learning rule to do this is discussed
in the next section.
Kohonen Learning Rule (learnk)
The weights of the winning neuron (a row of the input weight matrix) are adjusted with
the Kohonen learning rule. Supposing that the ith neuron wins, the elements of the ith
row of the input weight matrix are adjusted as shown below.
i i i
q q q qIW IW p IW
1 1 1 1 1 1
1 1
, , ,
( ) ( ) ( ( ) ( ))= - + - -
a
The Kohonen rule allows the weights of a neuron to learn an input vector, and because of
this it is useful in recognition applications.
Thus, the neuron whose weight vector was closest to the input vector is updated to be
even closer. The result is that the winning neuron is more likely to win the competition
the next time a similar vector is presented, and less likely to win when a very dierent
input vector is presented. As more and more inputs are presented, each neuron in the
layer closest to a group of input vectors soon adjusts its weight vector toward those input
vectors. Eventually, if there are enough neurons, every cluster of similar input vectors will
have a neuron that outputs 1 when a vector in the cluster is presented, while outputting a
0 at all other times. Thus, the competitive network learns to categorize the input vectors
it sees.
The function learnk is used to perform the Kohonen learning rule in this toolbox.
Bias Learning Rule (learncon)
One of the limitations of competitive networks is that some neurons might not always be
allocated. In other words, some neuron weight vectors might start out far from any input
vectors and never win the competition, no matter how long the training is continued. The
Cluster with a Competitive Neural Network
8-5

result is that their weights do not get to learn and they never win. These unfortunate
neurons, referred to as dead neurons, never perform a useful function.
To stop this, use biases to give neurons that only win the competition rarely (if ever) an
advantage over neurons that win often. A positive bias, added to the negative distance,
makes a distant neuron more likely to win.
To do this job a running average of neuron outputs is kept. It is equivalent to the
percentages of times each output is 1. This average is used to update the biases with the
learning function learncon so that the biases of frequently active neurons become
smaller, and biases of infrequently active neurons become larger.
As the biases of infrequently active neurons increase, the input space to which those
neurons respond increases. As that input space increases, the infrequently active neuron
responds and moves toward more input vectors. Eventually, the neuron responds to the
same number of vectors as other neurons.
This has two good eects. First, if a neuron never wins a competition because its weights
are far from any of the input vectors, its bias eventually becomes large enough so that it
can win. When this happens, it moves toward some group of input vectors. Once the
neuron's weights have moved into a group of input vectors and the neuron is winning
consistently, its bias will decrease to 0. Thus, the problem of dead neurons is resolved.
The second advantage of biases is that they force each neuron to classify roughly the
same percentage of input vectors. Thus, if a region of the input space is associated with a
larger number of input vectors than another region, the more densely lled region will
attract more neurons and be classied into smaller subsections.
The learning rates for learncon are typically set an order of magnitude or more smaller
than for learnk to make sure that the running average is accurate.
Training
Now train the network for 500 epochs. You can use either train or adapt.
net.trainParam.epochs = 500;
net = train(net,p);
Note that train for competitive networks uses the training function trainru. You can
verify this by executing the following code after creating the network.
net.trainFcn
8Self-Organizing and Learning Vector Quantization Networks
8-6

ans =
trainru
For each epoch, all training vectors (or sequences) are each presented once in a dierent
random order with the network and weight and bias values updated after each individual
presentation.
Next, supply the original vectors as input to the network, simulate the network, and
nally convert its output vectors to class indices.
a = sim(net,p);
ac = vec2ind(a)
ac =
1 2 1 2
You see that the network is trained to classify the input vectors into two groups, those
near the origin, class 1, and those near (1,1), class 2.
It might be interesting to look at the nal weights and biases.
net.IW{1,1}
ans =
0.1000 0.1500
0.8500 0.8500
net.b{1}
ans =
5.4367
5.4365
(You might get dierent answers when you run this problem, because a random seed is
used to pick the order of the vectors presented to the network for training.) Note that the
rst vector (formed from the rst row of the weight matrix) is near the input vectors close
to the origin, while the vector formed from the second row of the weight matrix is close to
the input vectors near (1,1). Thus, the network has been trained—just by exposing it to
the inputs—to classify them.
During training each neuron in the layer closest to a group of input vectors adjusts its
weight vector toward those input vectors. Eventually, if there are enough neurons, every
cluster of similar input vectors has a neuron that outputs 1 when a vector in the cluster is
presented, while outputting a 0 at all other times. Thus, the competitive network learns to
categorize the input.
Cluster with a Competitive Neural Network
8-7
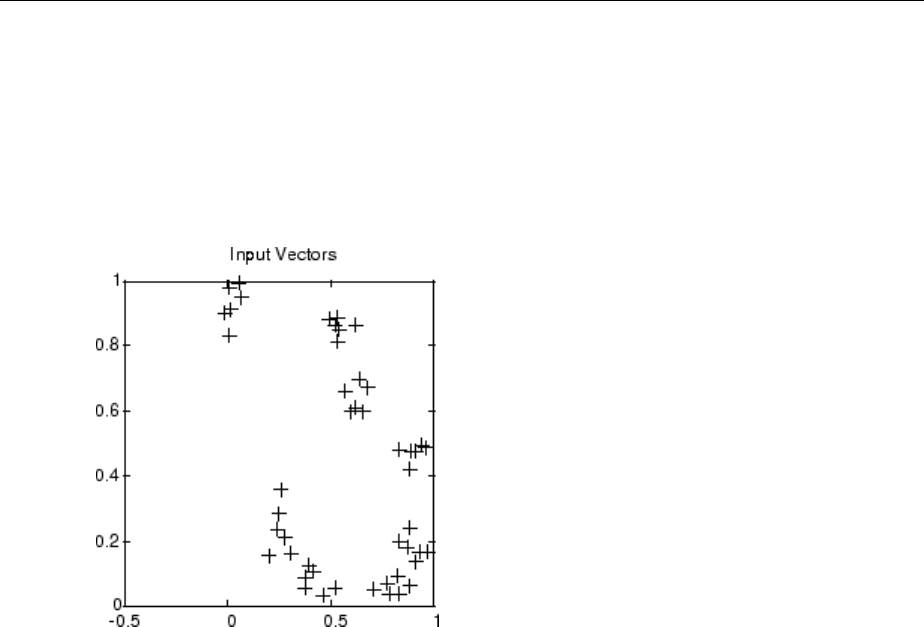
Graphical Example
Competitive layers can be understood better when their weight vectors and input vectors
are shown graphically. The diagram below shows 48 two-element input vectors
represented with + markers.
The input vectors above appear to fall into clusters. You can use a competitive network of
eight neurons to classify the vectors into such clusters.
Try democ1 to see a dynamic example of competitive learning.
8Self-Organizing and Learning Vector Quantization Networks
8-8
Cluster with Self-Organizing Map Neural Network
In this section...
“Topologies (gridtop, hextop, randtop)” on page 8-11
“Distance Functions (dist, linkdist, mandist, boxdist)” on page 8-14
“Architecture” on page 8-17
“Create a Self-Organizing Map Neural Network (selforgmap)” on page 8-18
“Training (learnsomb)” on page 8-19
“Examples” on page 8-22
Self-organizing feature maps (SOFM) learn to classify input vectors according to how they
are grouped in the input space. They dier from competitive layers in that neighboring
neurons in the self-organizing map learn to recognize neighboring sections of the input
space. Thus, self-organizing maps learn both the distribution (as do competitive layers)
and topology of the input vectors they are trained on.
The neurons in the layer of an SOFM are arranged originally in physical positions
according to a topology function. The function gridtop, hextop, or randtop can
arrange the neurons in a grid, hexagonal, or random topology. Distances between neurons
are calculated from their positions with a distance function. There are four distance
functions, dist, boxdist, linkdist, and mandist. Link distance is the most common.
These topology and distance functions are described in “Topologies (gridtop, hextop,
randtop)” on page 8-11 and “Distance Functions (dist, linkdist, mandist, boxdist)” on
page 8-14.
Here a self-organizing feature map network identies a winning neuron i* using the same
procedure as employed by a competitive layer. However, instead of updating only the
winning neuron, all neurons within a certain neighborhood Ni* (d) of the winning neuron
are updated, using the Kohonen rule. Specically, all such neurons i ∊ Ni* (d) are adjusted
as follows:
i i i
q q q qw w p w( ) ( ) ( ( ) ( ))= - + - -1 1
a
or
i i
q q qw w p( ) ( ) ( ) ( )= - - +1 1
a a
Cluster with Self-Organizing Map Neural Network
8-9
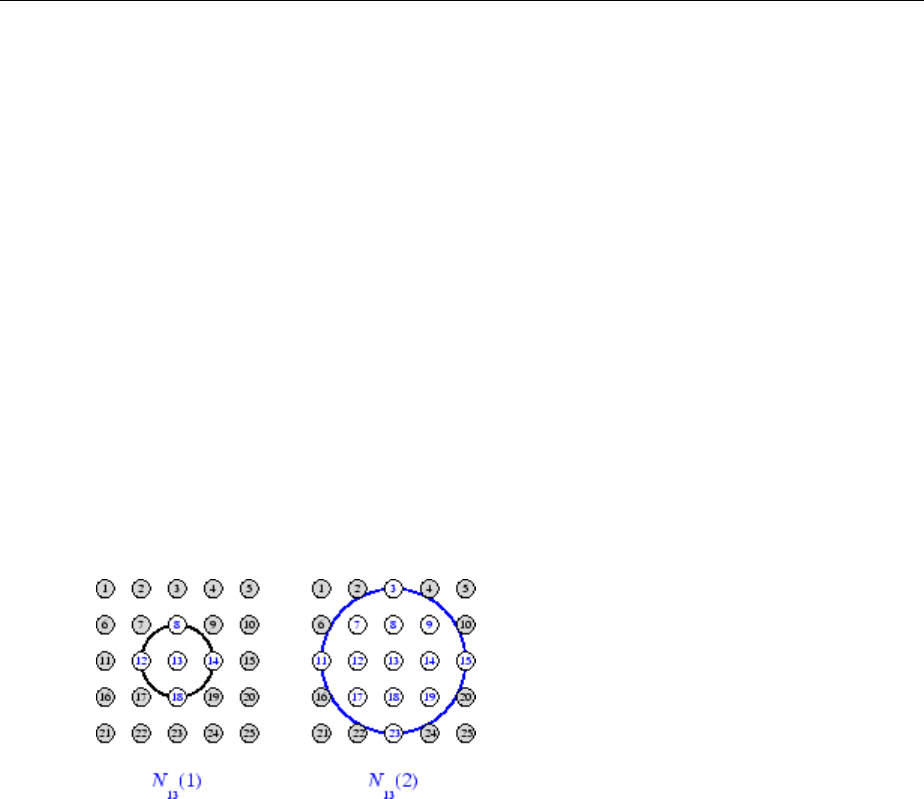
Here the neighborhood Ni* (d) contains the indices for all of the neurons that lie within a
radius d of the winning neuron i*.
N d j d d
i ij
( ) ,= £
{ }
Thus, when a vector p is presented, the weights of the winning neuron and its close
neighbors move toward p. Consequently, after many presentations, neighboring neurons
have learned vectors similar to each other.
Another version of SOFM training, called the batch algorithm, presents the whole data set
to the network before any weights are updated. The algorithm then determines a winning
neuron for each input vector. Each weight vector then moves to the average position of all
of the input vectors for which it is a winner, or for which it is in the neighborhood of a
winner.
To illustrate the concept of neighborhoods, consider the gure below. The left diagram
shows a two-dimensional neighborhood of radius d = 1 around neuron 13. The right
diagram shows a neighborhood of radius d = 2.
These neighborhoods could be written as N13(1) = {8, 12, 13, 14, 18} and
N13(2) = {3, 7, 8, 9, 11, 12, 13, 14, 15, 17, 18, 19, 23}.
The neurons in an SOFM do not have to be arranged in a two-dimensional pattern. You
can use a one-dimensional arrangement, or three or more dimensions. For a one-
dimensional SOFM, a neuron has only two neighbors within a radius of 1 (or a single
neighbor if the neuron is at the end of the line). You can also dene distance in dierent
ways, for instance, by using rectangular and hexagonal arrangements of neurons and
neighborhoods. The performance of the network is not sensitive to the exact shape of the
neighborhoods.
8Self-Organizing and Learning Vector Quantization Networks
8-10
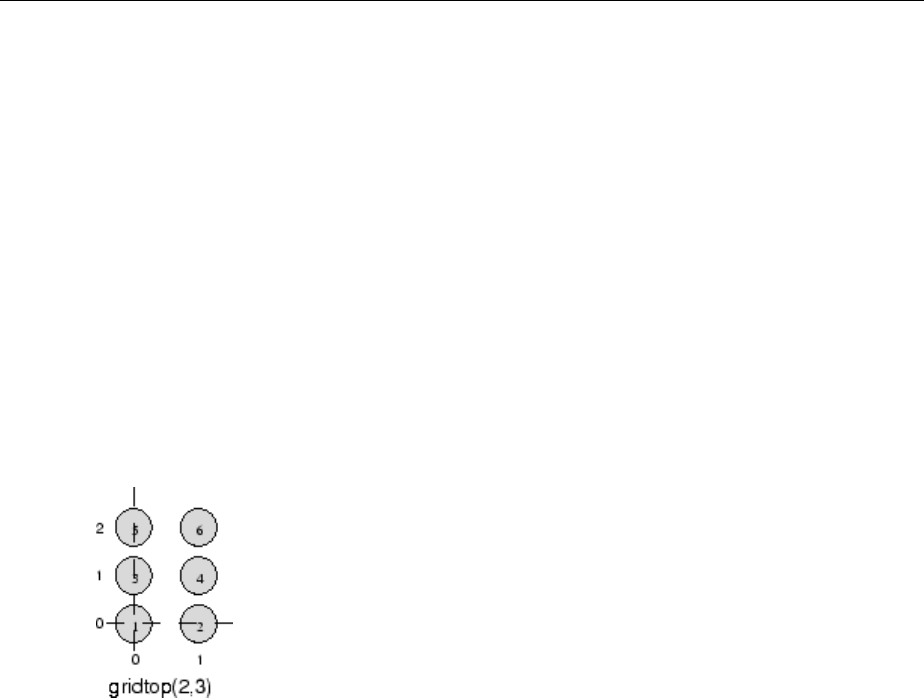
Topologies (gridtop, hextop, randtop)
You can specify dierent topologies for the original neuron locations with the functions
gridtop, hextop, and randtop.
The gridtop topology starts with neurons in a rectangular grid similar to that shown in
the previous gure. For example, suppose that you want a 2-by-3 array of six neurons. You
can get this with
pos = gridtop([2, 3])
pos =
0 1 0 1 0 1
0 0 1 1 2 2
Here neuron 1 has the position (0,0), neuron 2 has the position (1,0), and neuron 3 has
the position (0,1), etc.
Note that had you asked for a gridtop with the dimension sizes reversed, you would
have gotten a slightly dierent arrangement:
pos = gridtop([3, 2])
pos =
0 1 2 0 1 2
0 0 0 1 1 1
You can create an 8-by-10 set of neurons in a gridtop topology with the following code:
pos = gridtop([8 10]);
plotsom(pos)
Cluster with Self-Organizing Map Neural Network
8-11
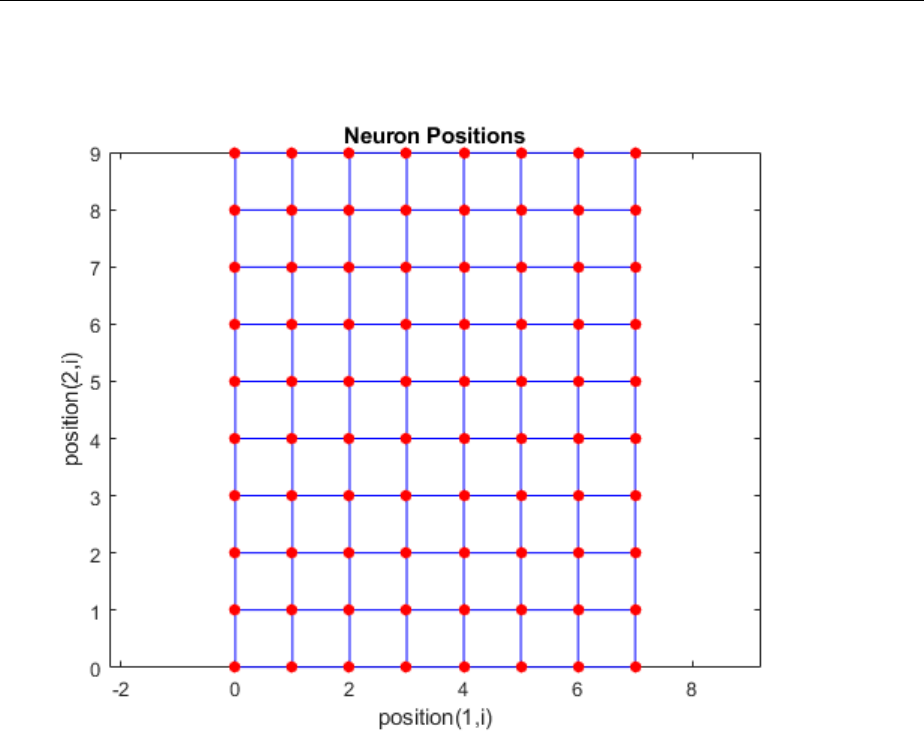
As shown, the neurons in the gridtop topology do indeed lie on a grid.
The hextop function creates a similar set of neurons, but they are in a hexagonal pattern.
A 2-by-3 pattern of hextop neurons is generated as follows:
pos = hextop([2, 3])
pos =
0 1.0000 0.5000 1.5000 0 1.0000
0 0 0.8660 0.8660 1.7321 1.7321
Note that hextop is the default pattern for SOM networks generated with selforgmap.
You can create and plot an 8-by-10 set of neurons in a hextop topology with the following
code:
8Self-Organizing and Learning Vector Quantization Networks
8-12
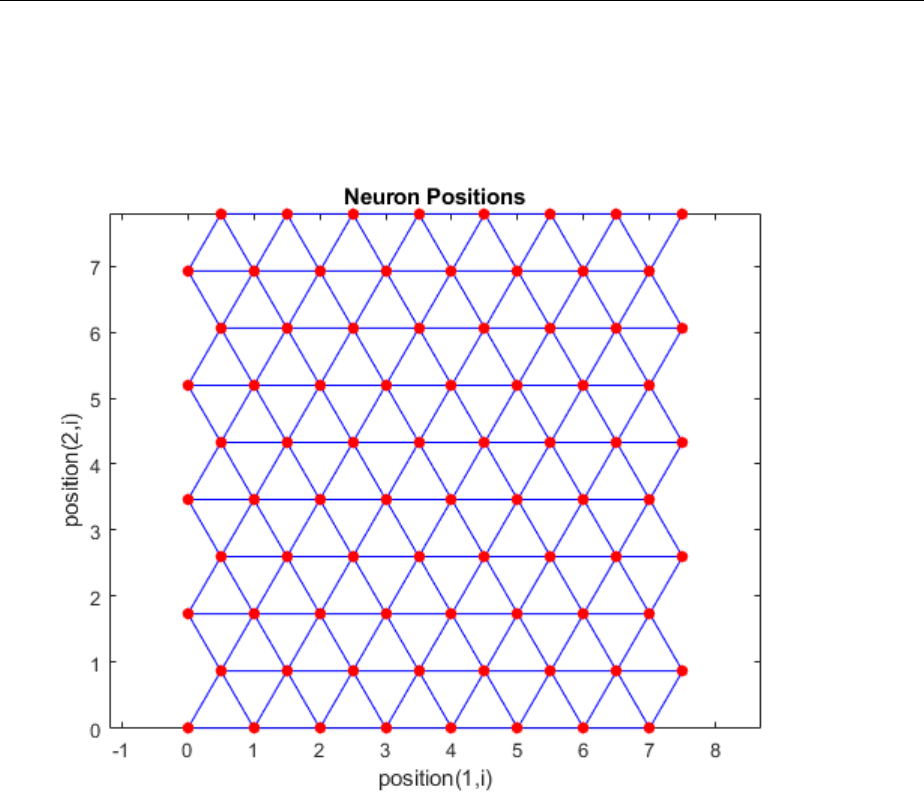
pos = hextop([8 10]);
plotsom(pos)
Note the positions of the neurons in a hexagonal arrangement.
Finally, the randtop function creates neurons in an N-dimensional random pattern. The
following code generates a random pattern of neurons.
pos = randtop([2, 3])
pos =
0 0.7620 0.6268 1.4218 0.0663 0.7862
0.0925 0 0.4984 0.6007 1.1222 1.4228
Cluster with Self-Organizing Map Neural Network
8-13
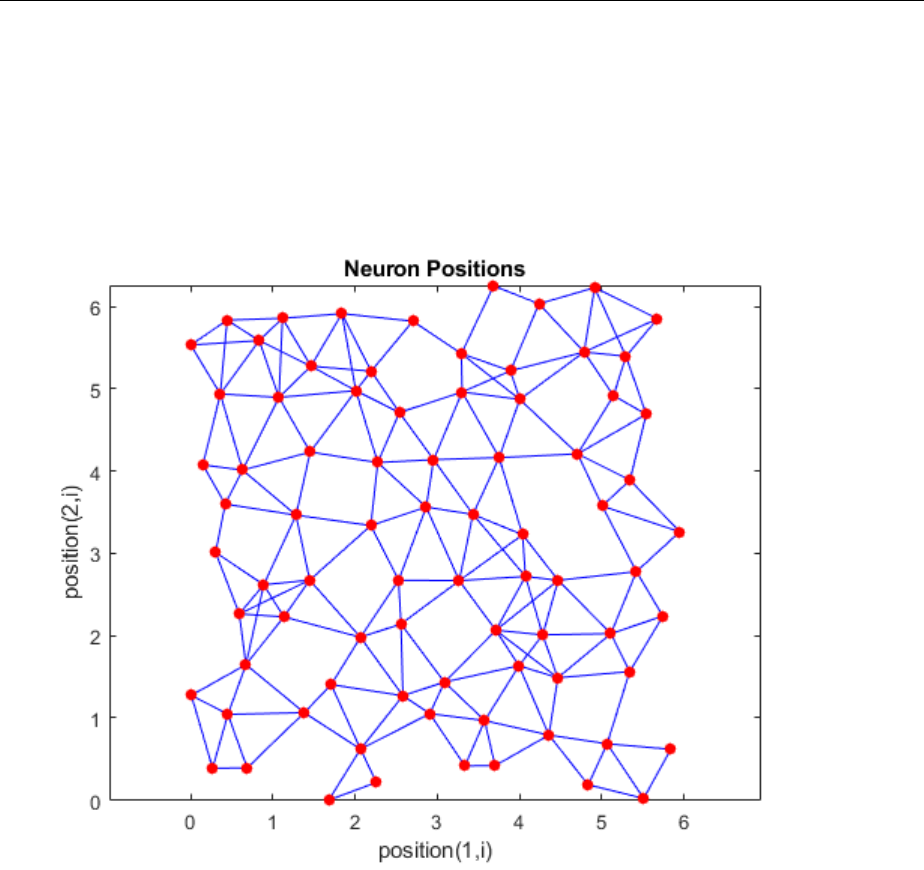
You can create and plot an 8-by-10 set of neurons in a randtop topology with the
following code:
pos = randtop([8 10]);
plotsom(pos)
For examples, see the help for these topology functions.
Distance Functions (dist, linkdist, mandist, boxdist)
In this toolbox, there are four ways to calculate distances from a particular neuron to its
neighbors. Each calculation method is implemented with a special function.
8Self-Organizing and Learning Vector Quantization Networks
8-14
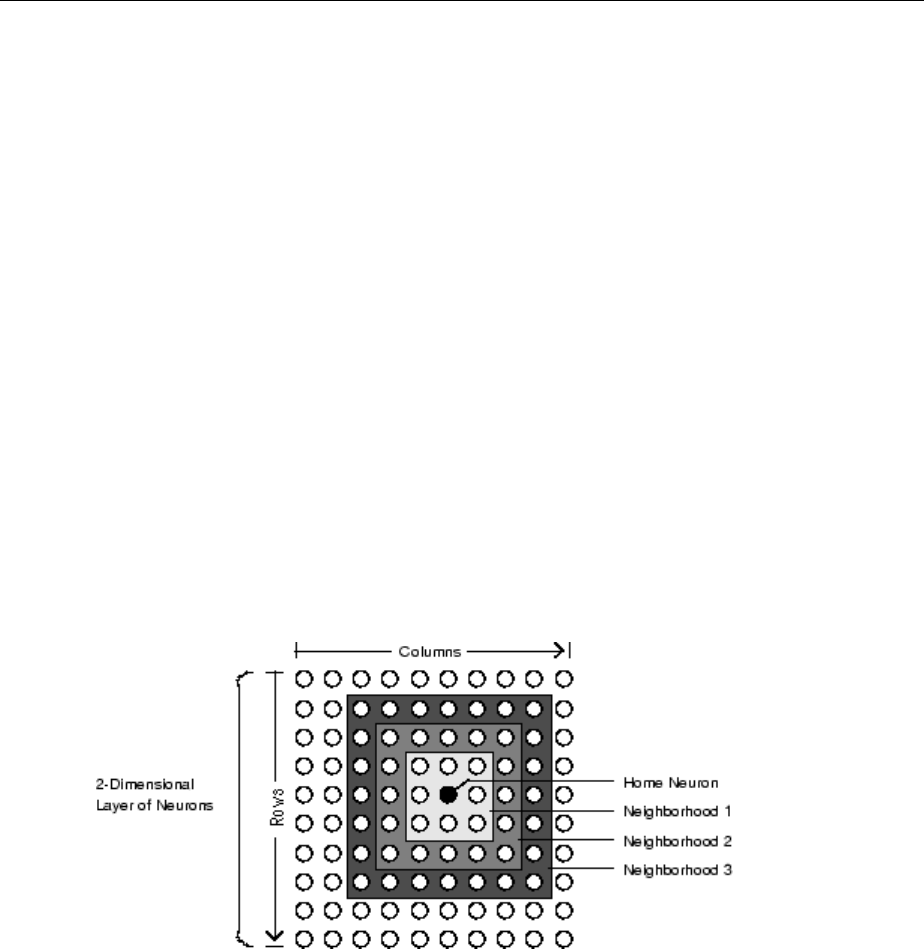
The dist function calculates the Euclidean distances from a home neuron to other
neurons. Suppose you have three neurons:
pos2 = [0 1 2; 0 1 2]
pos2 =
0 1 2
0 1 2
You nd the distance from each neuron to the other with
D2 = dist(pos2)
D2 =
0 1.4142 2.8284
1.4142 0 1.4142
2.8284 1.4142 0
Thus, the distance from neuron 1 to itself is 0, the distance from neuron 1 to neuron 2 is
1.4142, etc.
The graph below shows a home neuron in a two-dimensional (gridtop) layer of neurons.
The home neuron has neighborhoods of increasing diameter surrounding it. A
neighborhood of diameter 1 includes the home neuron and its immediate neighbors. The
neighborhood of diameter 2 includes the diameter 1 neurons and their immediate
neighbors.
As for the dist function, all the neighborhoods for an S-neuron layer map are
represented by an S-by-S matrix of distances. The particular distances shown above (1 in
the immediate neighborhood, 2 in neighborhood 2, etc.), are generated by the function
boxdist. Suppose that you have six neurons in a gridtop conguration.
Cluster with Self-Organizing Map Neural Network
8-15

pos = gridtop([2, 3])
pos =
0 1 0 1 0 1
0 0 1 1 2 2
Then the box distances are
d = boxdist(pos)
d =
0 1 1 1 2 2
1 0 1 1 2 2
1 1 0 1 1 1
1 1 1 0 1 1
2 2 1 1 0 1
2 2 1 1 1 0
The distance from neuron 1 to 2, 3, and 4 is just 1, for they are in the immediate
neighborhood. The distance from neuron 1 to both 5 and 6 is 2. The distance from both 3
and 4 to all other neurons is just 1.
The link distance from one neuron is just the number of links, or steps, that must be taken
to get to the neuron under consideration. Thus, if you calculate the distances from the
same set of neurons with linkdist, you get
dlink =
0 1 1 2 2 3
1 0 2 1 3 2
1 2 0 1 1 2
2 1 1 0 2 1
2 3 1 2 0 1
3 2 2 1 1 0
The Manhattan distance between two vectors x and y is calculated as
D = sum(abs(x-y))
Thus if you have
W1 = [1 2; 3 4; 5 6]
W1 =
1 2
3 4
5 6
and
8Self-Organizing and Learning Vector Quantization Networks
8-16
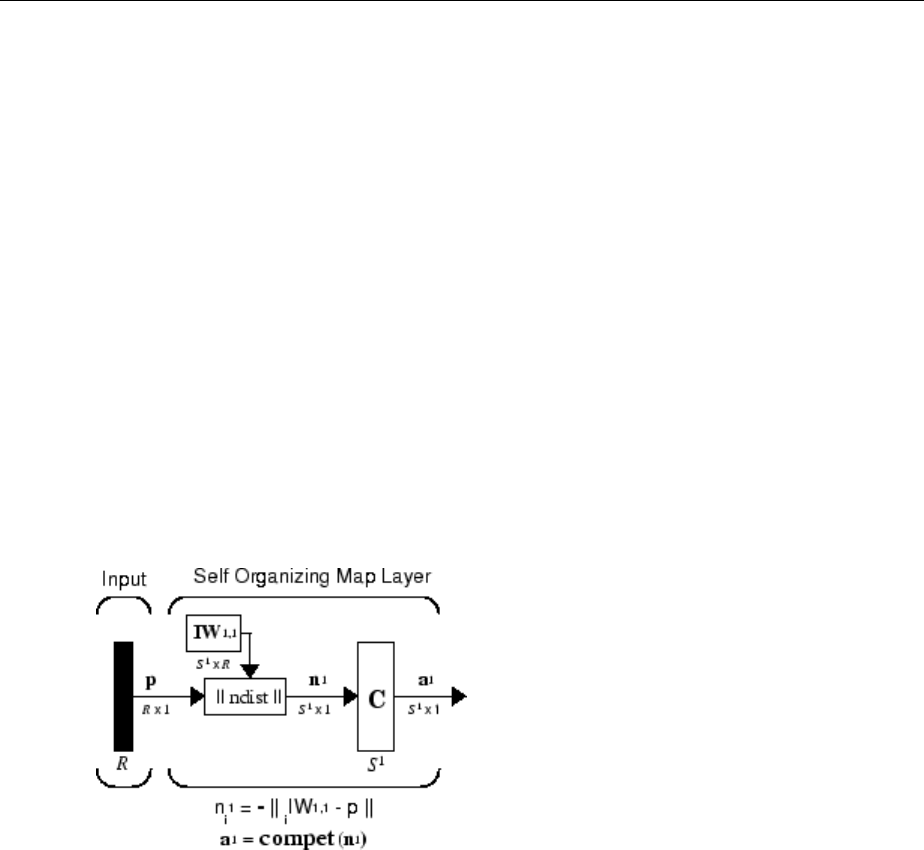
P1 = [1;1]
P1 =
1
1
then you get for the distances
Z1 = mandist(W1,P1)
Z1 =
1
5
9
The distances calculated with mandist do indeed follow the mathematical expression
given above.
Architecture
The architecture for this SOFM is shown below.
This architecture is like that of a competitive network, except no bias is used here. The
competitive transfer function produces a 1 for output element a1i corresponding to i*, the
winning neuron. All other output elements in a1 are 0.
Now, however, as described above, neurons close to the winning neuron are updated
along with the winning neuron. You can choose from various topologies of neurons.
Similarly, you can choose from various distance expressions to calculate neurons that are
close to the winning neuron.
Cluster with Self-Organizing Map Neural Network
8-17

Create a Self-Organizing Map Neural Network (selforgmap)
You can create a new SOM network with the function selforgmap. This function denes
variables used in two phases of learning:
• Ordering-phase learning rate
• Ordering-phase steps
• Tuning-phase learning rate
• Tuning-phase neighborhood distance
These values are used for training and adapting.
Consider the following example.
Suppose that you want to create a network having input vectors with two elements, and
that you want to have six neurons in a hexagonal 2-by-3 network. The code to obtain this
network is:
net = selforgmap([2 3]);
Suppose that the vectors to train on are:
P = [.1 .3 1.2 1.1 1.8 1.7 .1 .3 1.2 1.1 1.8 1.7;...
0.2 0.1 0.3 0.1 0.3 0.2 1.8 1.8 1.9 1.9 1.7 1.8];
You can congure the network to input the data and plot all of this with:
net = configure(net,P);
plotsompos(net,P)
8Self-Organizing and Learning Vector Quantization Networks
8-18
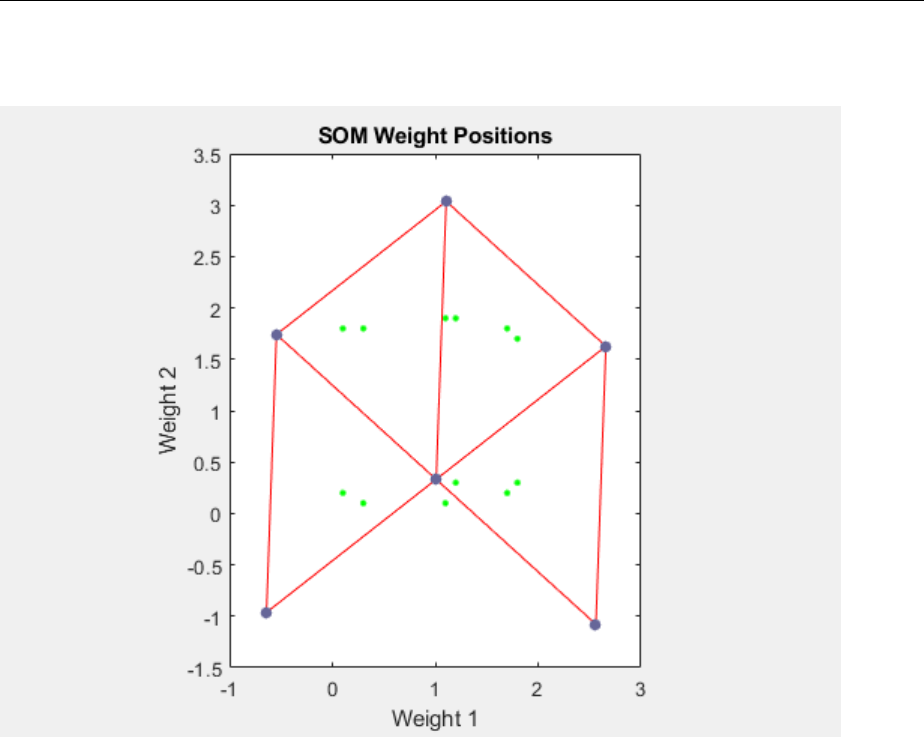
The green spots are the training vectors. The initialization for selforgmap spreads the
initial weights across the input space. Note that they are initially some distance from the
training vectors.
When simulating a network, the negative distances between each neuron’s weight vector
and the input vector are calculated (negdist) to get the weighted inputs. The weighted
inputs are also the net inputs (netsum). The net inputs compete (compet) so that only the
neuron with the most positive net input will output a 1.
Training (learnsomb)
The default learning in a self-organizing feature map occurs in the batch mode
(trainbu). The weight learning function for the self-organizing map is learnsomb.
Cluster with Self-Organizing Map Neural Network
8-19
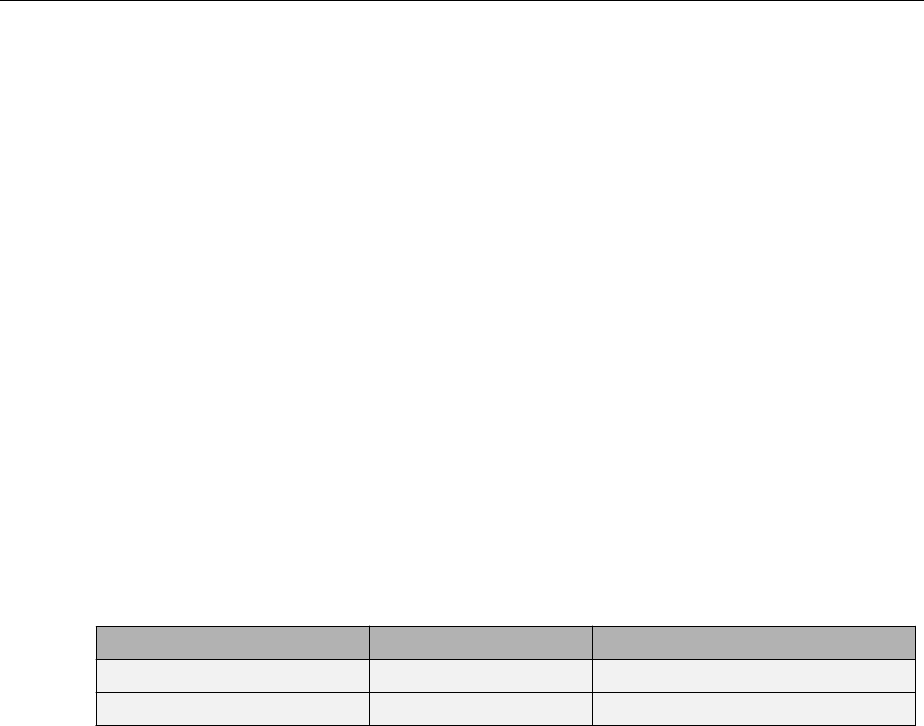
First, the network identies the winning neuron for each input vector. Each weight vector
then moves to the average position of all of the input vectors for which it is a winner or
for which it is in the neighborhood of a winner. The distance that denes the size of the
neighborhood is altered during training through two phases.
Ordering Phase
This phase lasts for the given number of steps. The neighborhood distance starts at a
given initial distance, and decreases to the tuning neighborhood distance (1.0). As the
neighborhood distance decreases over this phase, the neurons of the network typically
order themselves in the input space with the same topology in which they are ordered
physically.
Tuning Phase
This phase lasts for the rest of training or adaption. The neighborhood size has decreased
below 1 so only the winning neuron learns for each sample.
Now take a look at some of the specic values commonly used in these networks.
Learning occurs according to the learnsomb learning parameter, shown here with its
default value.
Learning Parameter Default Value Purpose
LP.init_neighborhood 3 Initial neighborhood size
LP.steps 100 Ordering phase steps
The neighborhood size NS is altered through two phases: an ordering phase and a tuning
phase.
The ordering phase lasts as many steps as LP.steps. During this phase, the algorithm
adjusts ND from the initial neighborhood size LP.init_neighborhood down to 1. It is
during this phase that neuron weights order themselves in the input space consistent with
the associated neuron positions.
During the tuning phase, ND is less than 1. During this phase, the weights are expected to
spread out relatively evenly over the input space while retaining their topological order
found during the ordering phase.
Thus, the neuron's weight vectors initially take large steps all together toward the area of
input space where input vectors are occurring. Then as the neighborhood size decreases
8Self-Organizing and Learning Vector Quantization Networks
8-20

to 1, the map tends to order itself topologically over the presented input vectors. Once
the neighborhood size is 1, the network should be fairly well ordered. The training
continues in order to give the neurons time to spread out evenly across the input vectors.
As with competitive layers, the neurons of a self-organizing map will order themselves
with approximately equal distances between them if input vectors appear with even
probability throughout a section of the input space. If input vectors occur with varying
frequency throughout the input space, the feature map layer tends to allocate neurons to
an area in proportion to the frequency of input vectors there.
Thus, feature maps, while learning to categorize their input, also learn both the topology
and distribution of their input.
You can train the network for 1000 epochs with
net.trainParam.epochs = 1000;
net = train(net,P);
plotsompos(net,P)
Cluster with Self-Organizing Map Neural Network
8-21
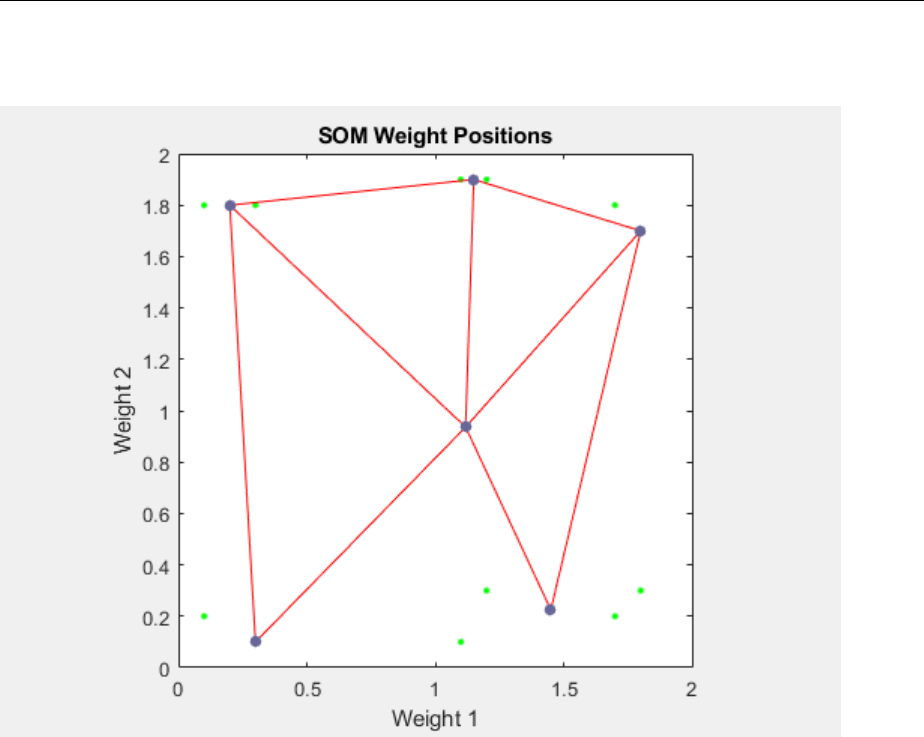
You can see that the neurons have started to move toward the various training groups.
Additional training is required to get the neurons closer to the various groups.
As noted previously, self-organizing maps dier from conventional competitive learning in
terms of which neurons get their weights updated. Instead of updating only the winner,
feature maps update the weights of the winner and its neighbors. The result is that
neighboring neurons tend to have similar weight vectors and to be responsive to similar
input vectors.
Examples
Two examples are described briey below. You also might try the similar examples
demosm1 and demosm2.
8Self-Organizing and Learning Vector Quantization Networks
8-22
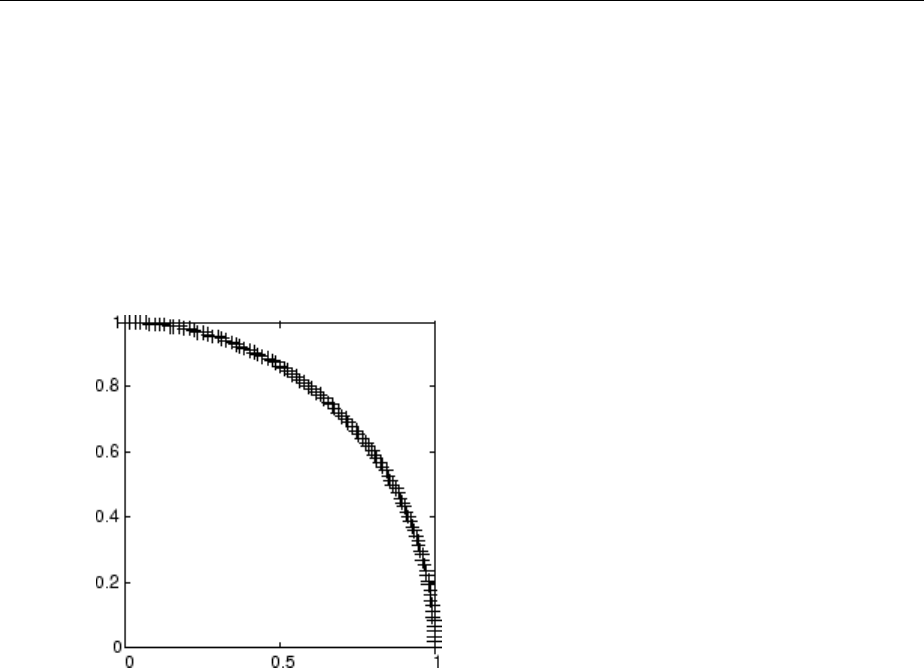
One-Dimensional Self-Organizing Map
Consider 100 two-element unit input vectors spread evenly between 0° and 90°.
angles = 0:0.5*pi/99:0.5*pi;
Here is a plot of the data.
P = [sin(angles); cos(angles)];
A self-organizing map is dened as a one-dimensional layer of 10 neurons. This map is to
be trained on these input vectors shown above. Originally these neurons are at the center
of the gure.
Cluster with Self-Organizing Map Neural Network
8-23
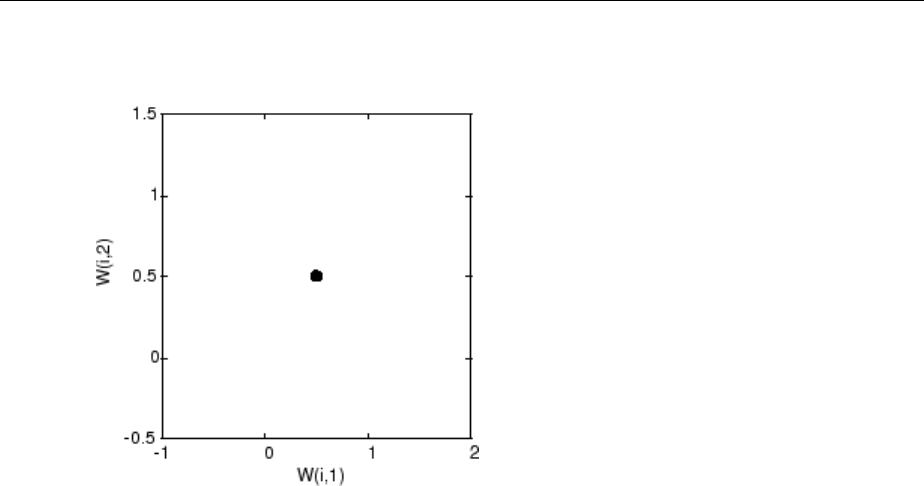
Of course, because all the weight vectors start in the middle of the input vector space, all
you see now is a single circle.
As training starts the weight vectors move together toward the input vectors. They also
become ordered as the neighborhood size decreases. Finally the layer adjusts its weights
so that each neuron responds strongly to a region of the input space occupied by input
vectors. The placement of neighboring neuron weight vectors also reects the topology of
the input vectors.
8Self-Organizing and Learning Vector Quantization Networks
8-24
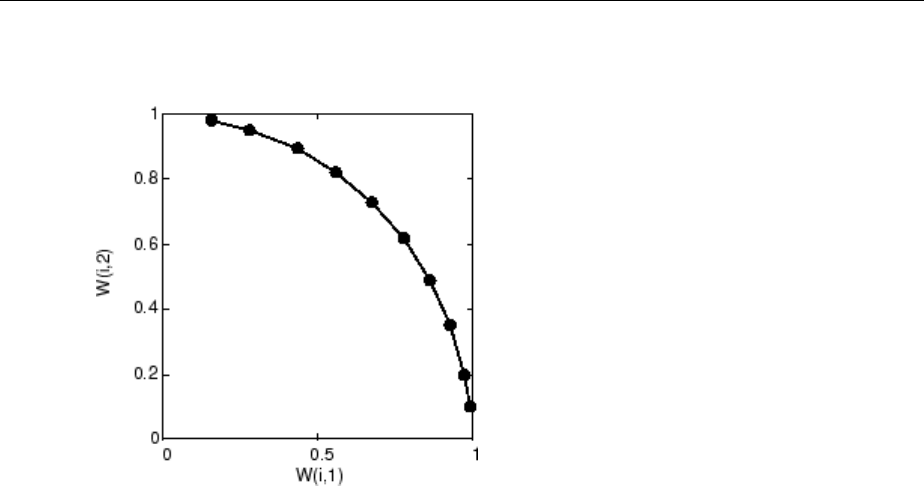
Note that self-organizing maps are trained with input vectors in a random order, so
starting with the same initial vectors does not guarantee identical training results.
Two-Dimensional Self-Organizing Map
This example shows how a two-dimensional self-organizing map can be trained.
First some random input data is created with the following code:
P = rands(2,1000);
Here is a plot of these 1000 input vectors.
Cluster with Self-Organizing Map Neural Network
8-25
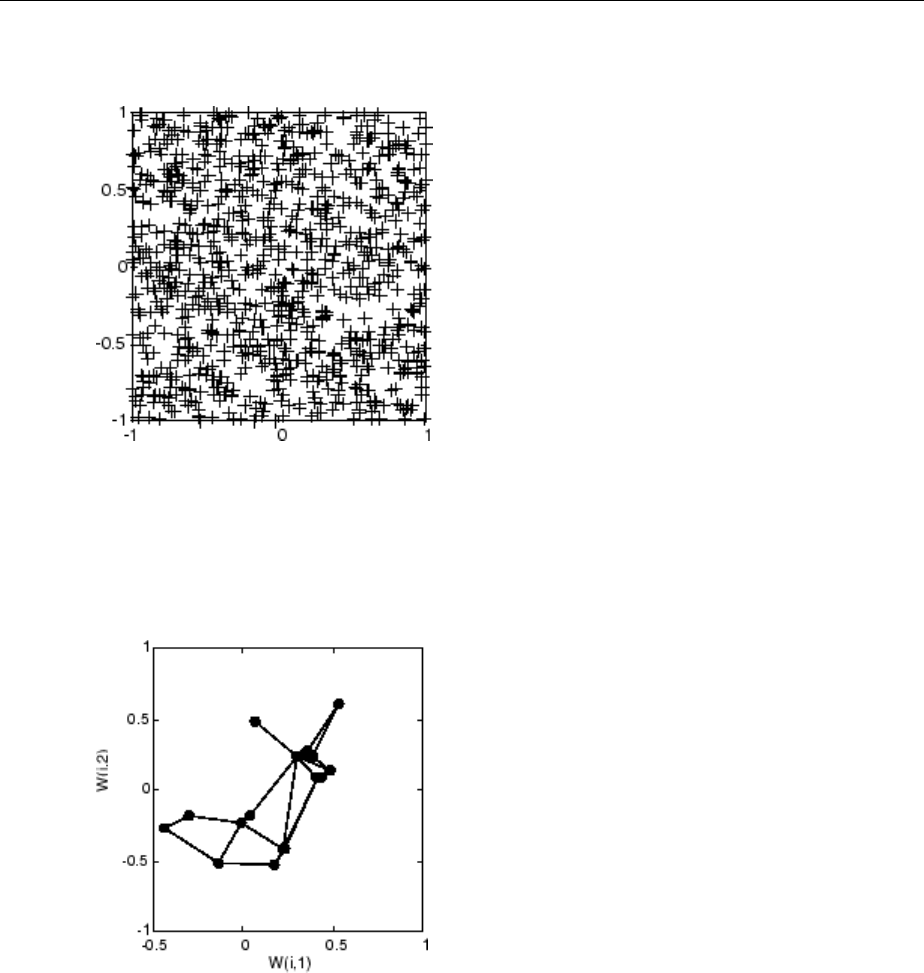
A 5-by-6 two-dimensional map of 30 neurons is used to classify these input vectors. The
two-dimensional map is ve neurons by six neurons, with distances calculated according
to the Manhattan distance neighborhood function mandist.
The map is then trained for 5000 presentation cycles, with displays every 20 cycles.
Here is what the self-organizing map looks like after 40 cycles.
The weight vectors, shown with circles, are almost randomly placed. However, even after
only 40 presentation cycles, neighboring neurons, connected by lines, have weight
vectors close together.
8Self-Organizing and Learning Vector Quantization Networks
8-26
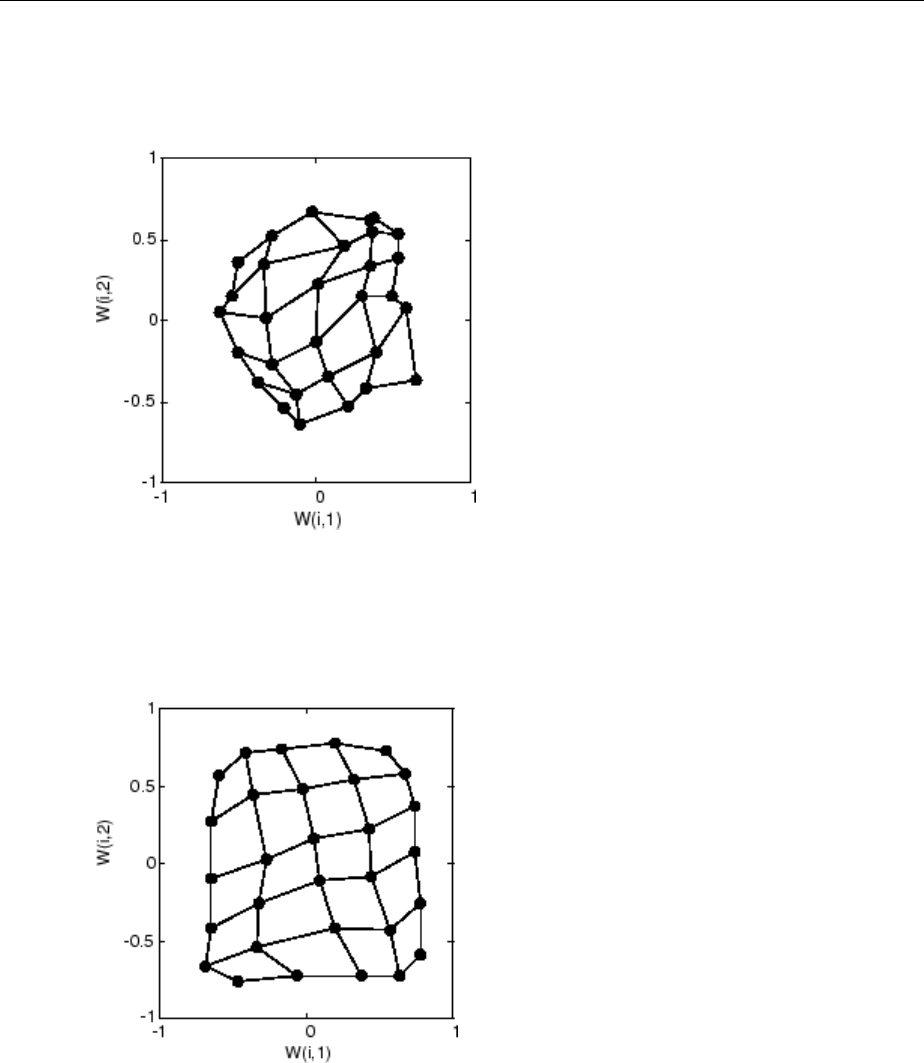
Here is the map after 120 cycles.
After 120 cycles, the map has begun to organize itself according to the topology of the
input space, which constrains input vectors.
The following plot, after 500 cycles, shows the map more evenly distributed across the
input space.
Cluster with Self-Organizing Map Neural Network
8-27
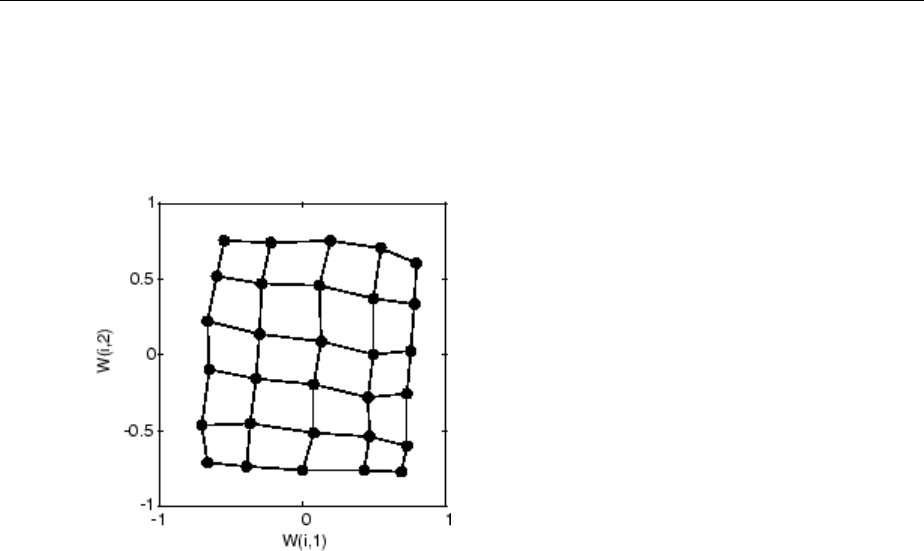
Finally, after 5000 cycles, the map is rather evenly spread across the input space. In
addition, the neurons are very evenly spaced, reecting the even distribution of input
vectors in this problem.
Thus a two-dimensional self-organizing map has learned the topology of its inputs' space.
It is important to note that while a self-organizing map does not take long to organize
itself so that neighboring neurons recognize similar inputs, it can take a long time for the
map to nally arrange itself according to the distribution of input vectors.
Training with the Batch Algorithm
The batch training algorithm is generally much faster than the incremental algorithm,
and it is the default algorithm for SOFM training. You can experiment with this algorithm
on a simple data set with the following commands:
x = simplecluster_dataset
net = selforgmap([6 6]);
net = train(net,x);
This command sequence creates and trains a 6-by-6 two-dimensional map of 36 neurons.
During training, the following gure appears.
8Self-Organizing and Learning Vector Quantization Networks
8-28
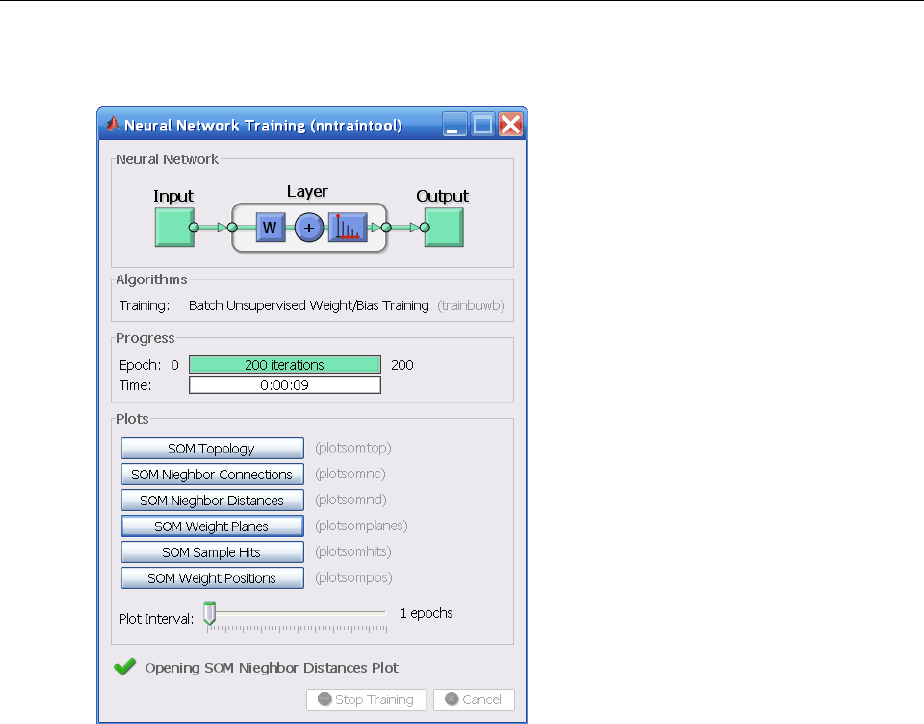
There are several useful visualizations that you can access from this window. If you click
SOM Weight Positions, the following gure appears, which shows the locations of the
data points and the weight vectors. As the gure indicates, after only 200 iterations of the
batch algorithm, the map is well distributed through the input space.
Cluster with Self-Organizing Map Neural Network
8-29
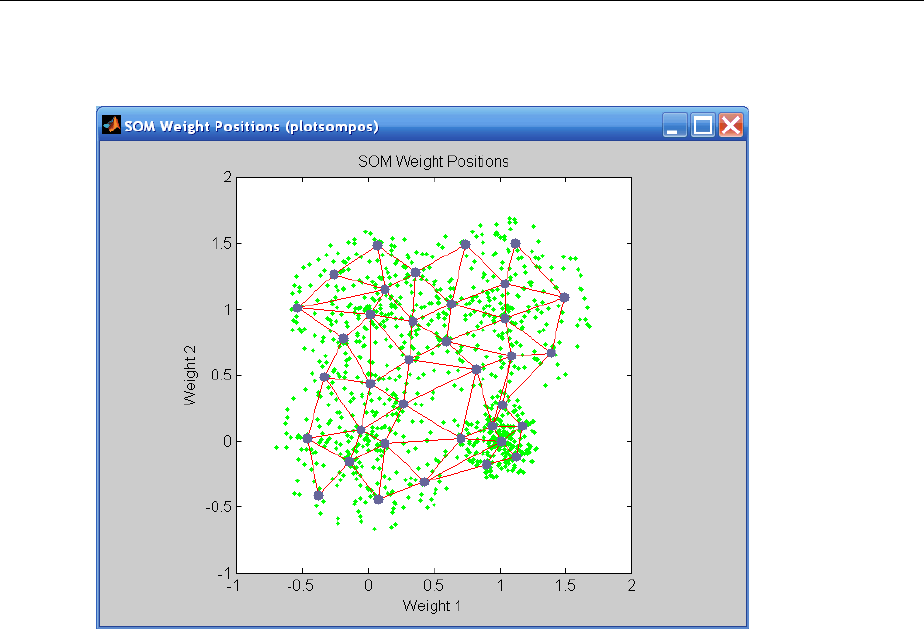
When the input space is high dimensional, you cannot visualize all the weights at the
same time. In this case, click SOM Neighbor Distances. The following gure appears,
which indicates the distances between neighboring neurons.
This gure uses the following color coding:
• The blue hexagons represent the neurons.
• The red lines connect neighboring neurons.
• The colors in the regions containing the red lines indicate the distances between
neurons.
• The darker colors represent larger distances.
• The lighter colors represent smaller distances.
A group of light segments appear in the upper-left region, bounded by some darker
segments. This grouping indicates that the network has clustered the data into two
groups. These two groups can be seen in the previous weight position gure. The lower-
8Self-Organizing and Learning Vector Quantization Networks
8-30
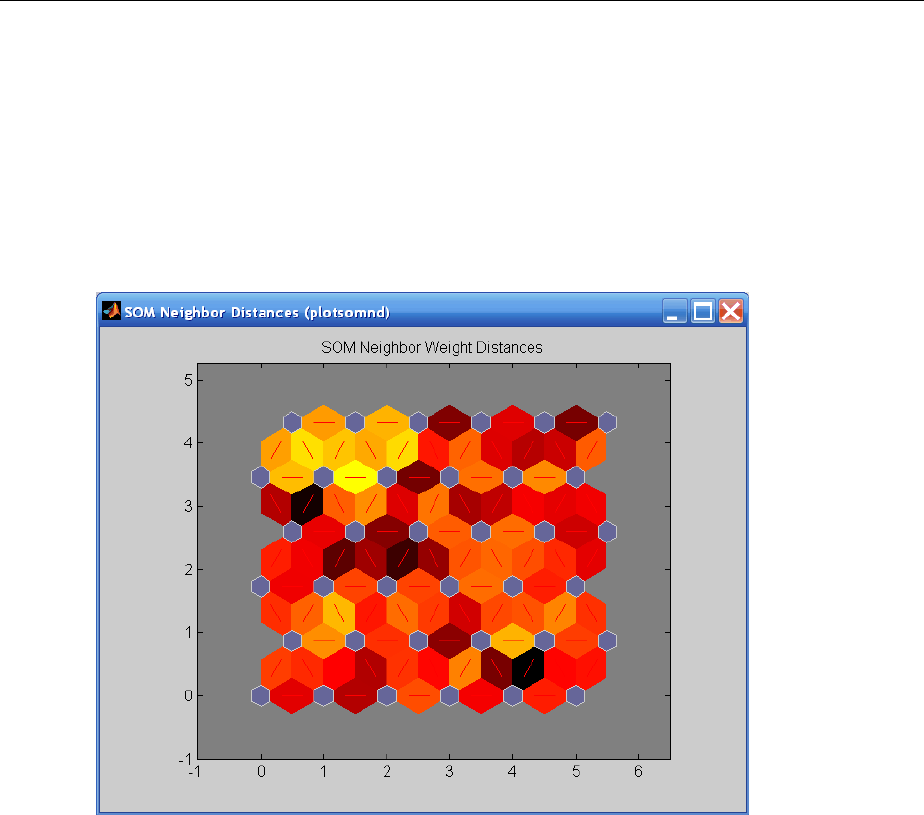
right region of that gure contains a small group of tightly clustered data points. The
corresponding weights are closer together in this region, which is indicated by the lighter
colors in the neighbor distance gure. Where weights in this small region connect to the
larger region, the distances are larger, as indicated by the darker band in the neighbor
distance gure. The segments in the lower-right region of the neighbor distance gure
are darker than those in the upper left. This color dierence indicates that data points in
this region are farther apart. This distance is conrmed in the weight positions gure.
Another useful gure can tell you how many data points are associated with each neuron.
Click SOM Sample Hits to see the following gure. It is best if the data are fairly evenly
distributed across the neurons. In this example, the data are concentrated a little more in
the upper-left neurons, but overall the distribution is fairly even.
Cluster with Self-Organizing Map Neural Network
8-31
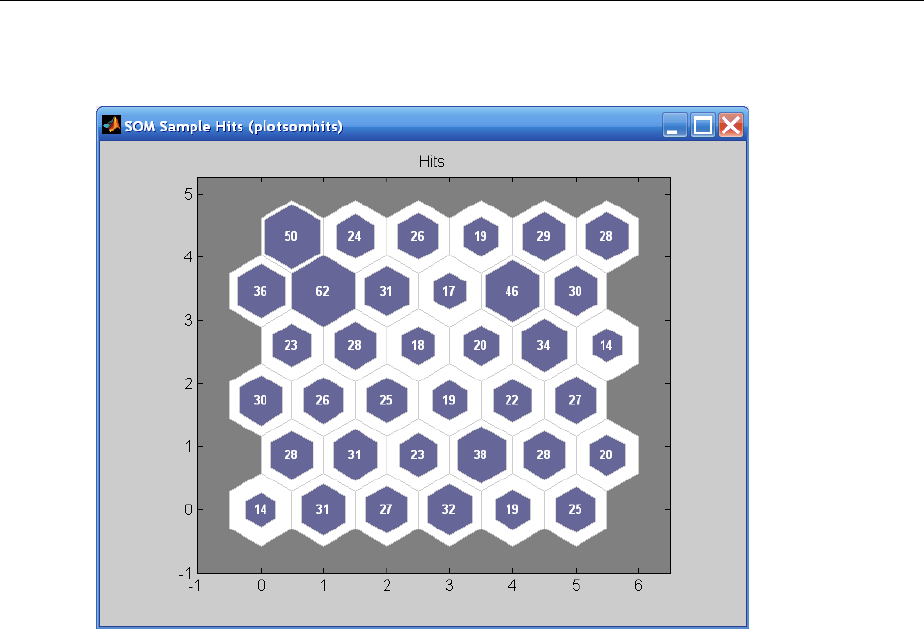
You can also visualize the weights themselves using the weight plane gure. Click SOM
Weight Planes in the training window to obtain the next gure. There is a weight plane
for each element of the input vector (two, in this case). They are visualizations of the
weights that connect each input to each of the neurons. (Lighter and darker colors
represent larger and smaller weights, respectively.) If the connection patterns of two
inputs are very similar, you can assume that the inputs were highly correlated. In this
case, input 1 has connections that are very dierent than those of input 2.
8Self-Organizing and Learning Vector Quantization Networks
8-32
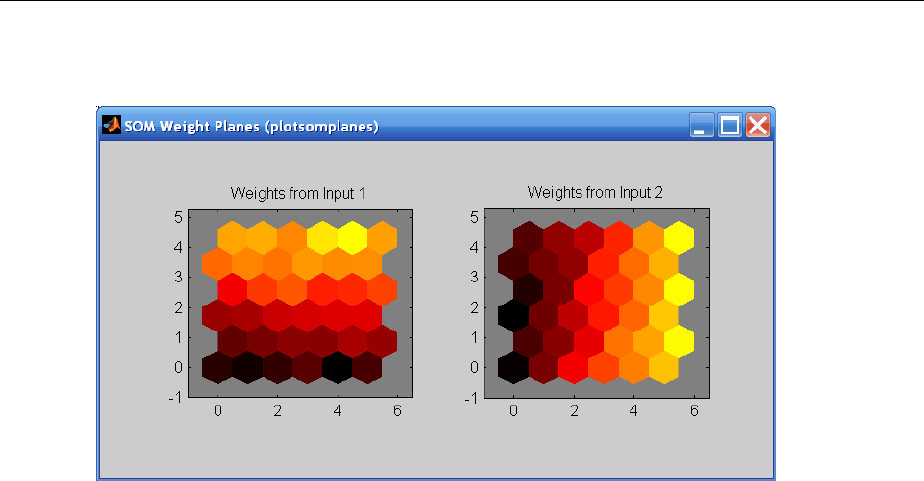
You can also produce all of the previous gures from the command line. Try these plotting
commands: plotsomhits, plotsomnc, plotsomnd, plotsomplanes, plotsompos, and
plotsomtop.
Cluster with Self-Organizing Map Neural Network
8-33
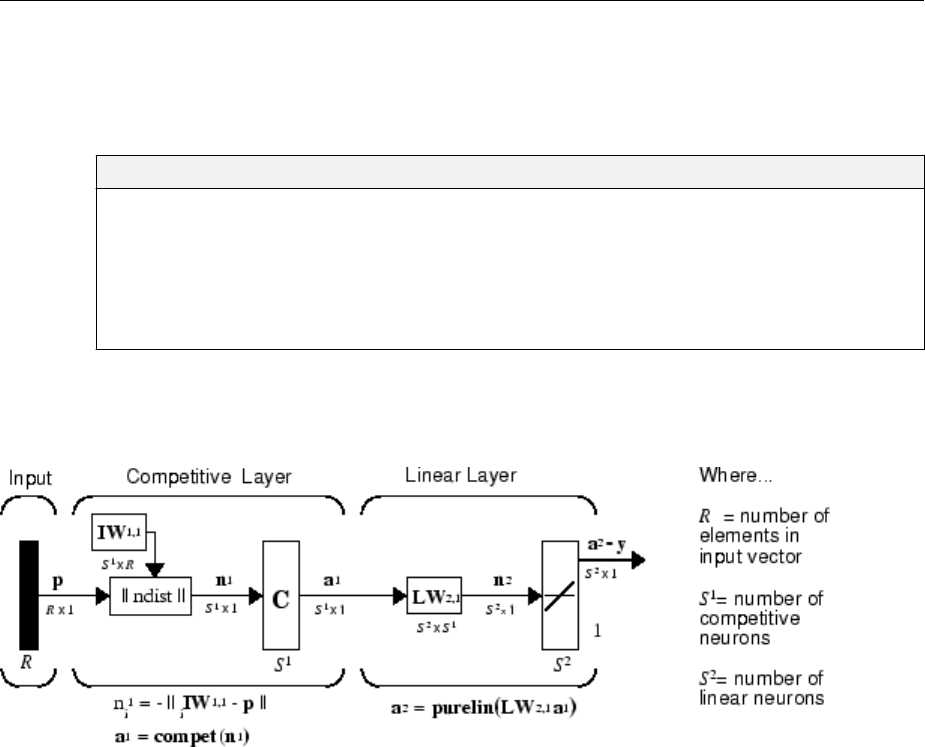
Learning Vector Quantization (LVQ) Neural Networks
In this section...
“Architecture” on page 8-34
“Creating an LVQ Network” on page 8-35
“LVQ1 Learning Rule (learnlv1)” on page 8-38
“Training” on page 8-39
“Supplemental LVQ2.1 Learning Rule (learnlv2)” on page 8-41
Architecture
The LVQ network architecture is shown below.
An LVQ network has a rst competitive layer and a second linear layer. The competitive
layer learns to classify input vectors in much the same way as the competitive layers of
“Cluster with Self-Organizing Map Neural Network” on page 8-9 described in this topic.
The linear layer transforms the competitive layer’s classes into target classications
dened by the user. The classes learned by the competitive layer are referred to as
subclasses and the classes of the linear layer as target classes.
Both the competitive and linear layers have one neuron per (sub or target) class. Thus,
the competitive layer can learn up to S1 subclasses. These, in turn, are combined by the
linear layer to form S2 target classes. (S1 is always larger than S2.)
For example, suppose neurons 1, 2, and 3 in the competitive layer all learn subclasses of
the input space that belongs to the linear layer target class 2. Then competitive neurons
8Self-Organizing and Learning Vector Quantization Networks
8-34

1, 2, and 3 will have LW2,1 weights of 1.0 to neuron n2 in the linear layer, and weights of 0
to all other linear neurons. Thus, the linear neuron produces a 1 if any of the three
competitive neurons (1, 2, or 3) wins the competition and outputs a 1. This is how the
subclasses of the competitive layer are combined into target classes in the linear layer.
In short, a 1 in the ith row of a1 (the rest to the elements of a1 will be zero) eectively
picks the ith column of LW2,1 as the network output. Each such column contains a single
1, corresponding to a specic class. Thus, subclass 1s from layer 1 are put into various
classes by the LW2,1a1 multiplication in layer 2.
You know ahead of time what fraction of the layer 1 neurons should be classied into the
various class outputs of layer 2, so you can specify the elements of LW2,1 at the start.
However, you have to go through a training procedure to get the rst layer to produce the
correct subclass output for each vector of the training set. This training is discussed in
“Training” on page 8-6. First, consider how to create the original network.
Creating an LVQ Network
You can create an LVQ network with the function lvqnet,
net = lvqnet(S1,LR,LF)
where
•S1 is the number of rst-layer hidden neurons.
•LR is the learning rate (default 0.01).
•LF is the learning function (default is learnlv1).
Suppose you have 10 input vectors. Create a network that assigns each of these input
vectors to one of four subclasses. Thus, there are four neurons in the rst competitive
layer. These subclasses are then assigned to one of two output classes by the two neurons
in layer 2. The input vectors and targets are specied by
P = [-3 -2 -2 0 0 0 0 2 2 3; 0 1 -1 2 1 -1 -2 1 -1 0];
and
Tc = [1 1 1 2 2 2 2 1 1 1];
It might help to show the details of what you get from these two lines of code.
P,Tc
P =
Learning Vector Quantization (LVQ) Neural Networks
8-35
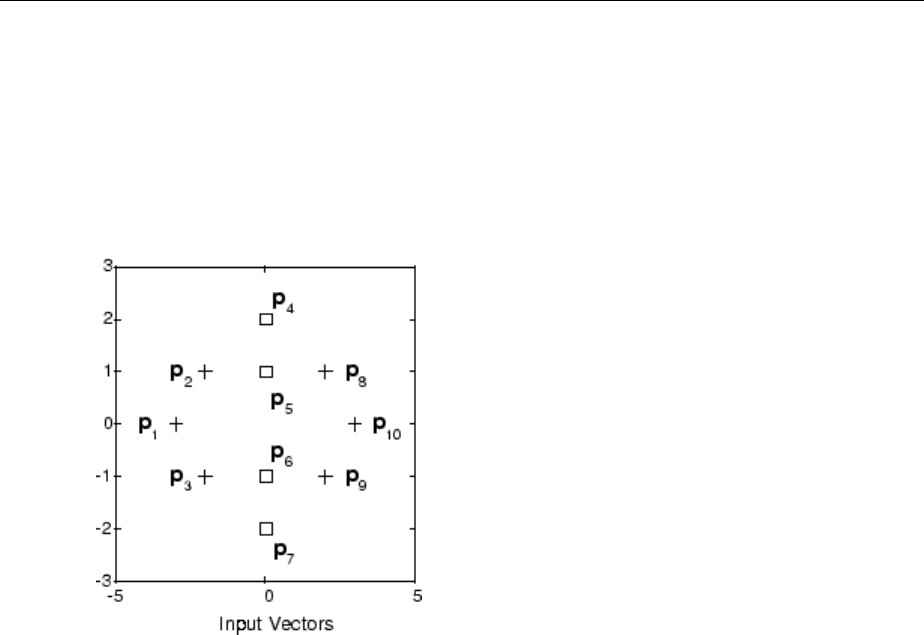
-3 -2 -2 0 0 0 0 2 2 3
0 1 -1 2 1 -1 -2 1 -1 0
Tc =
1 1 1 2 2 2 2 1 1 1
A plot of the input vectors follows.
As you can see, there are four subclasses of input vectors. You want a network that
classies p1, p2, p3, p8, p9, and p10 to produce an output of 1, and that classies vectors
p4, p5, p6, and p7 to produce an output of 2. Note that this problem is nonlinearly
separable, and so cannot be solved by a perceptron, but an LVQ network has no diiculty.
Next convert the Tc matrix to target vectors.
T = ind2vec(Tc);
This gives a sparse matrix T that can be displayed in full with
targets = full(T)
which gives
targets =
1 1 1 0 0 0 0 1 1 1
0 0 0 1 1 1 1 0 0 0
8Self-Organizing and Learning Vector Quantization Networks
8-36

This looks right. It says, for instance, that if you have the rst column of P as input, you
should get the rst column of targets as an output; and that output says the input falls
in class 1, which is correct. Now you are ready to call lvqnet.
Call lvqnet to create a network with four neurons.
net = lvqnet(4);
Congure and conrm the initial values of the rst-layer weight matrix are initialized by
the function midpoint to values in the center of the input data range.
net = configure(net,P,T);
net.IW{1}
ans =
0 0
0 0
0 0
0 0
Conrm that the second-layer weights have 60% (6 of the 10 in Tc) of its columns with a 1
in the rst row, (corresponding to class 1), and 40% of its columns have a 1 in the second
row (corresponding to class 2). With only four columns, the 60% and 40% actually round
to 50% and there are two 1's in each row.
net.LW{2,1}
ans =
1 1 0 0
0 0 1 1
This makes sense too. It says that if the competitive layer produces a 1 as the rst or
second element, the input vector is classied as class 1; otherwise it is a class 2.
You might notice that the rst two competitive neurons are connected to the rst linear
neuron (with weights of 1), while the second two competitive neurons are connected to
the second linear neuron. All other weights between the competitive neurons and linear
neurons have values of 0. Thus, each of the two target classes (the linear neurons) is, in
fact, the union of two subclasses (the competitive neurons).
You can simulate the network with sim. Use the original P matrix as input just to see what
you get.
Y = net(P);
Yc = vec2ind(Y)
Learning Vector Quantization (LVQ) Neural Networks
8-37

Yc =
1 1 1 1 1 1 1 1 1 1
The network classies all inputs into class 1. Because this is not what you want, you have
to train the network (adjusting the weights of layer 1 only), before you can expect a good
result. The next two sections discuss two LVQ learning rules and the training process.
LVQ1 Learning Rule (learnlv1)
LVQ learning in the competitive layer is based on a set of input/target pairs.
p t p t p t
1 1 2 2
, , , , ,
{ } { }
{ }
…Q Q
Each target vector has a single 1. The rest of its elements are 0. The 1 tells the proper
classication of the associated input. For instance, consider the following training pair.
p t
1 1
2
1
0
0
0
1
0
= -
È
Î
Í
Í
Í
˘
˚
˙
˙
˙
=
È
Î
Í
Í
Í
Í
˘
˚
˙
˙
˙
˙
Ï
Ì
Ô
Ô
Ó
Ô
Ô
¸
˝
Ô
Ô
˛
Ô
Ô
,
Here there are input vectors of three elements, and each input vector is to be assigned to
one of four classes. The network is to be trained so that it classies the input vector
shown above into the third of four classes.
To train the network, an input vector p is presented, and the distance from p to each row
of the input weight matrix IW1,1 is computed with the function negdist. The hidden
neurons of layer 1 compete. Suppose that the ith element of n1 is most positive, and
neuron i* wins the competition. Then the competitive transfer function produces a 1 as
the i*th element of a1. All other elements of a1 are 0.
When a1 is multiplied by the layer 2 weights LW2,1, the single 1 in a1 selects the class k*
associated with the input. Thus, the network has assigned the input vector p to class k*
and α2k* will be 1. Of course, this assignment can be a good one or a bad one, for tk* can
be 1 or 0, depending on whether the input belonged to class k* or not.
Adjust the i*th row of IW1,1 in such a way as to move this row closer to the input vector p
if the assignment is correct, and to move the row away from p if the assignment is
incorrect. If p is classied correctly,
8Self-Organizing and Learning Vector Quantization Networks
8-38

a
k k
t
* *
= =
( )
21
compute the new value of the i*th row of IW1,1 as
i i i
q q q q
* * *
= - + - -IW IW p IW
11 1 1 1 1
1 1
, , ,
( ) ( ) ( ( ) ( ))
a
On the other hand, if p is classied incorrectly,
a
k k
t
* *
= π =
( )
21 0
compute the new value of the i*th row of IW1,1 as
i i i
q q q q
* * *
= - - - -IW IW p IW
11 1 1 1 1
1 1
, , ,
( ) ( ) ( ( ) ( ))
a
You can make these corrections to the i*th row of IW1,1 automatically, without aecting
other rows of IW1,1, by back-propagating the output errors to layer 1.
Such corrections move the hidden neuron toward vectors that fall into the class for which
it forms a subclass, and away from vectors that fall into other classes.
The learning function that implements these changes in the layer 1 weights in LVQ
networks is learnlv1. It can be applied during training.
Training
Next you need to train the network to obtain rst-layer weights that lead to the correct
classication of input vectors. You do this with train as with the following commands.
First, set the training epochs to 150. Then, use train:
net.trainParam.epochs = 150;
net = train(net,P,T);
Now conrm the rst-layer weights.
net.IW{1,1}
ans =
0.3283 0.0051
-0.1366 0.0001
Learning Vector Quantization (LVQ) Neural Networks
8-39
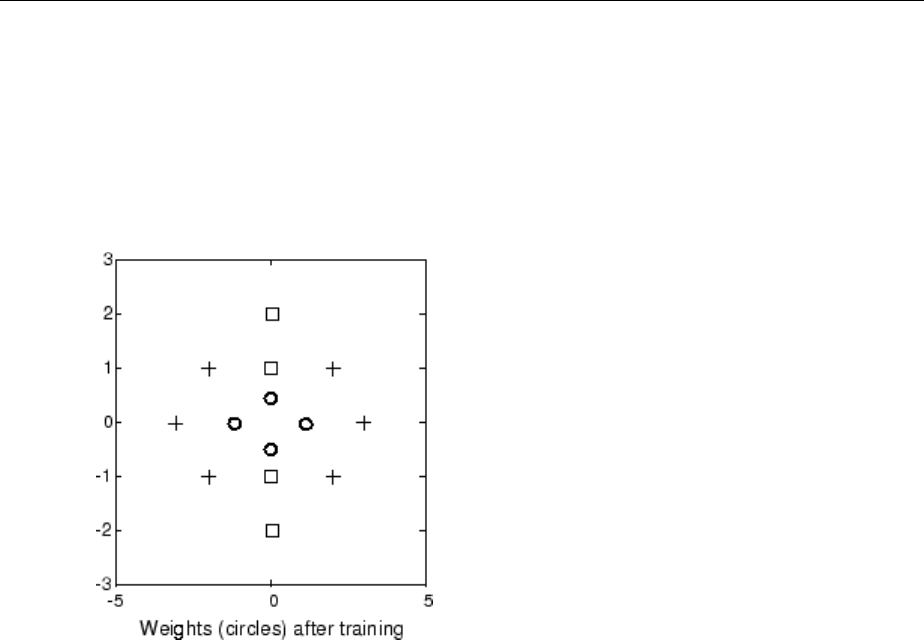
-0.0263 0.2234
0 -0.0685
The following plot shows that these weights have moved toward their respective
classication groups.
To conrm that these weights do indeed lead to the correct classication, take the matrix
P as input and simulate the network. Then see what classications are produced by the
network.
Y = net(P);
Yc = vec2ind(Y)
This gives
Yc =
1 1 1 2 2 2 2 1 1 1
which is expected. As a last check, try an input close to a vector that was used in training.
pchk1 = [0; 0.5];
Y = net(pchk1);
Yc1 = vec2ind(Y)
This gives
8Self-Organizing and Learning Vector Quantization Networks
8-40

Yc1 =
2
This looks right, because pchk1 is close to other vectors classied as 2. Similarly,
pchk2 = [1; 0];
Y = net(pchk2);
Yc2 = vec2ind(Y)
gives
Yc2 =
1
This looks right too, because pchk2 is close to other vectors classied as 1.
You might want to try the example program demolvq1. It follows the discussion of
training given above.
Supplemental LVQ2.1 Learning Rule (learnlv2)
The following learning rule is one that might be applied after rst applying LVQ1. It can
improve the result of the rst learning. This particular version of LVQ2 (referred to as
LVQ2.1 in the literature [Koho97 on page 13-2]) is embodied in the function learnlv2.
Note again that LVQ2.1 is to be used only after LVQ1 has been applied.
Learning here is similar to that in learnlv2 except now two vectors of layer 1 that are
closest to the input vector can be updated, provided that one belongs to the correct class
and one belongs to a wrong class, and further provided that the input falls into a
“window” near the midplane of the two vectors.
The window is dened by
min ,
d
d
d
ds
i
j
j
i
Ê
Ë
Á
Á
ˆ
¯
˜
˜>
where
s
w
w
∫
-
+
1
1
Learning Vector Quantization (LVQ) Neural Networks
8-41
(where di and dj are the Euclidean distances of p from i*IW1,1 and j*IW1,1, respectively).
Take a value for w in the range 0.2 to 0.3. If you pick, for instance, 0.25, then s = 0.6. This
means that if the minimum of the two distance ratios is greater than 0.6, the two vectors
are adjusted. That is, if the input is near the midplane, adjust the two vectors, provided
also that the input vector p and j*IW1,1 belong to the same class, and p and i*IW1,1 do not
belong in the same class.
The adjustments made are
i i i
q q q q
* * *
= - - - -IW IW p IW
11 1 1 1 1
1 1
, , ,
( ) ( ) ( ( ) ( ))
a
and
j j j
q q q q
* * *
= - + - -IW IW p IW
1 1 1 1 1 1
1 1
, , ,
( ) ( ) ( ( ) ( ))
a
Thus, given two vectors closest to the input, as long as one belongs to the wrong class
and the other to the correct class, and as long as the input falls in a midplane window, the
two vectors are adjusted. Such a procedure allows a vector that is just barely classied
correctly with LVQ1 to be moved even closer to the input, so the results are more robust.
Function Description
competlayer Create a competitive layer.
learnk Kohonen learning rule.
selforgmap Create a self-organizing map.
learncon Conscience bias learning function.
boxdist Distance between two position vectors.
dist Euclidean distance weight function.
linkdist Link distance function.
mandist Manhattan distance weight function.
gridtop Gridtop layer topology function.
hextop Hexagonal layer topology function.
randtop Random layer topology function.
lvqnet Create a learning vector quantization network.
learnlv1 LVQ1 weight learning function.
8Self-Organizing and Learning Vector Quantization Networks
8-42

Function Description
learnlv2 LVQ2 weight learning function.
Learning Vector Quantization (LVQ) Neural Networks
8-43
Adaptive Filters and Adaptive
Training
9
Adaptive Neural Network Filters
In this section...
“Adaptive Functions” on page 9-2
“Linear Neuron Model” on page 9-3
“Adaptive Linear Network Architecture” on page 9-4
“Least Mean Square Error” on page 9-6
“LMS Algorithm (learnwh)” on page 9-7
“Adaptive Filtering (adapt)” on page 9-7
The ADALINE (adaptive linear neuron) networks discussed in this topic are similar to the
perceptron, but their transfer function is linear rather than hard-limiting. This allows
their outputs to take on any value, whereas the perceptron output is limited to either 0 or
1. Both the ADALINE and the perceptron can solve only linearly separable problems.
However, here the LMS (least mean squares) learning rule, which is much more powerful
than the perceptron learning rule, is used. The LMS, or Widrow-Ho, learning rule
minimizes the mean square error and thus moves the decision boundaries as far as it can
from the training patterns.
In this section, you design an adaptive linear system that responds to changes in its
environment as it is operating. Linear networks that are adjusted at each time step based
on new input and target vectors can nd weights and biases that minimize the network's
sum-squared error for recent input and target vectors. Networks of this sort are often
used in error cancelation, signal processing, and control systems.
The pioneering work in this eld was done by Widrow and Ho, who gave the name
ADALINE to adaptive linear elements. The basic reference on this subject is Widrow, B.,
and S.D. Sterns, Adaptive Signal Processing, New York, Prentice-Hall, 1985.
The adaptive training of self-organizing and competitive networks is also considered in
this section.
Adaptive Functions
This section introduces the function adapt, which changes the weights and biases of a
network incrementally during training.
9Adaptive Filters and Adaptive Training
9-2
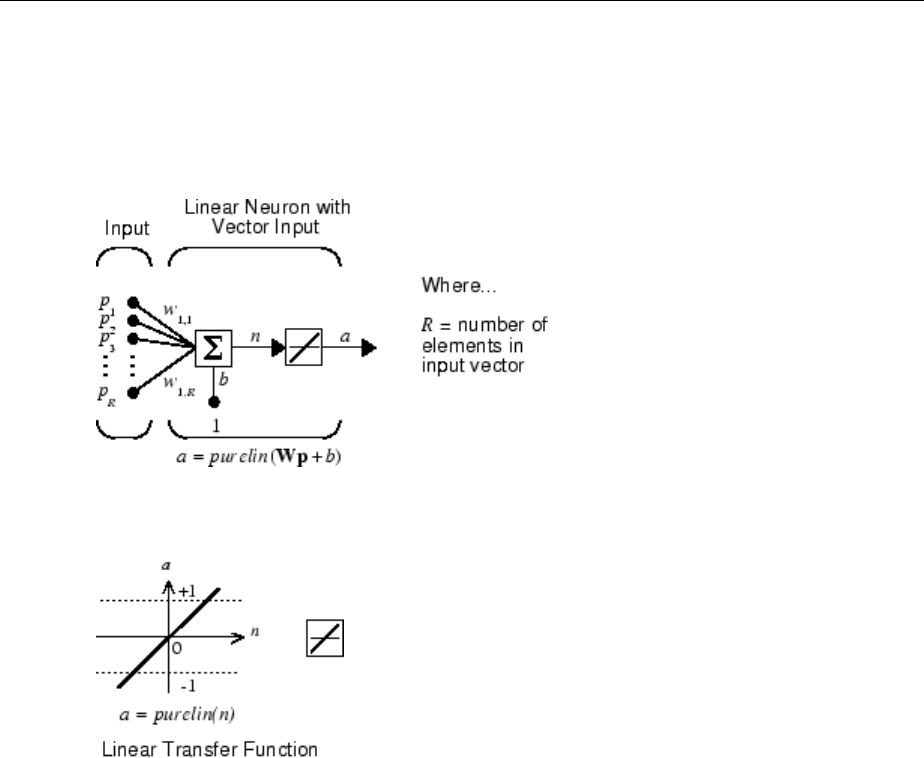
Linear Neuron Model
A linear neuron with R inputs is shown below.
This network has the same basic structure as the perceptron. The only dierence is that
the linear neuron uses a linear transfer function, named purelin.
The linear transfer function calculates the neuron's output by simply returning the value
passed to it.
α = purelin(n) = purelin(Wp + b) = Wp + b
This neuron can be trained to learn an aine function of its inputs, or to nd a linear
approximation to a nonlinear function. A linear network cannot, of course, be made to
perform a nonlinear computation.
Adaptive Neural Network Filters
9-3
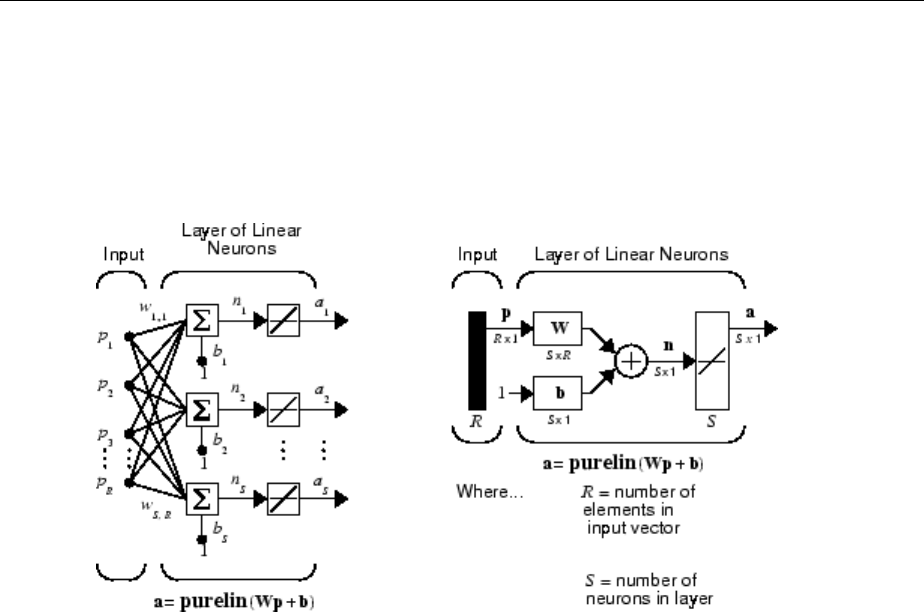
Adaptive Linear Network Architecture
The ADALINE network shown below has one layer of S neurons connected to R inputs
through a matrix of weights W.
This network is sometimes called a MADALINE for Many ADALINEs. Note that the gure
on the right denes an S-length output vector a.
The Widrow-Ho rule can only train single-layer linear networks. This is not much of a
disadvantage, however, as single-layer linear networks are just as capable as multilayer
linear networks. For every multilayer linear network, there is an equivalent single-layer
linear network.
Single ADALINE (linearlayer)
Consider a single ADALINE with two inputs. The following gure shows the diagram for
this network.
9Adaptive Filters and Adaptive Training
9-4
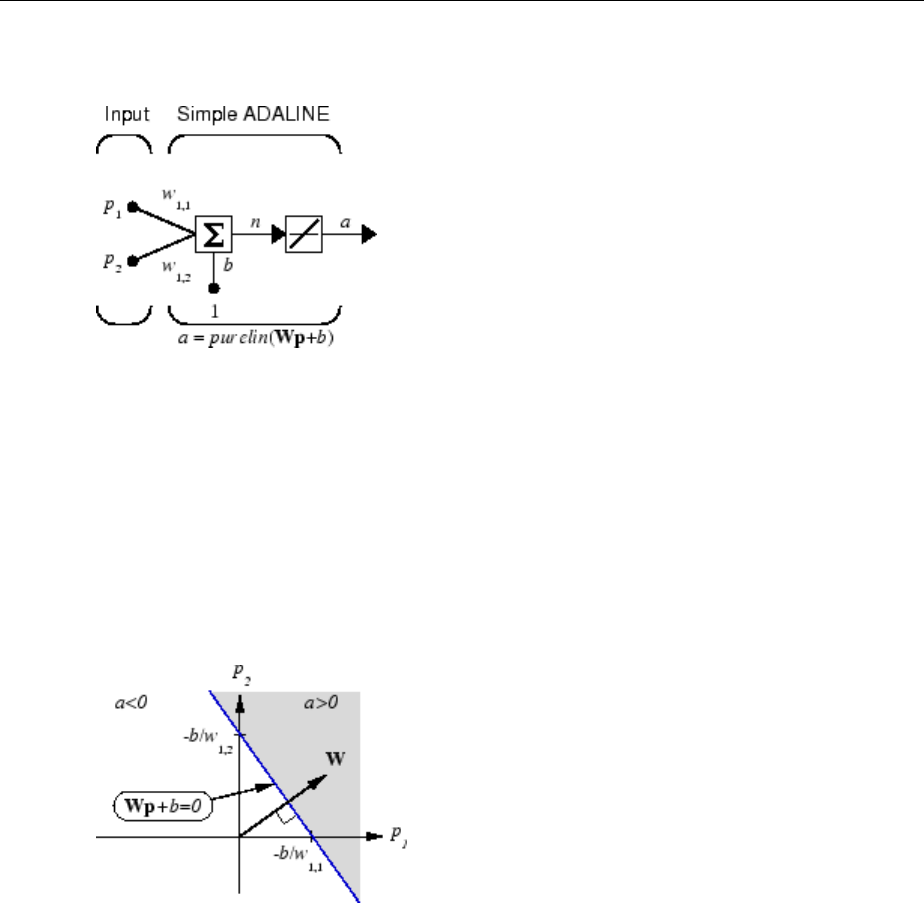
The weight matrix W in this case has only one row. The network output is
α = purelin(n) = purelin(Wp + b) = Wp + b
or
α = w1,1p1 + w1,2p2 + b
Like the perceptron, the ADALINE has a decision boundary that is determined by the
input vectors for which the net input n is zero. For n = 0 the equation Wp + b = 0
species such a decision boundary, as shown below (adapted with thanks from [HDB96 on
page 13-2]).
Input vectors in the upper right gray area lead to an output greater than 0. Input vectors
in the lower left white area lead to an output less than 0. Thus, the ADALINE can be used
to classify objects into two categories.
However, ADALINE can classify objects in this way only when the objects are linearly
separable. Thus, ADALINE has the same limitation as the perceptron.
Adaptive Neural Network Filters
9-5

You can create a network similar to the one shown using this command:
net = linearlayer;
net = configure(net,[0;0],[0]);
The sizes of the two arguments to congure indicate that the layer is to have two inputs
and one output. Normally train does this conguration for you, but this allows us to
inspect the weights before training.
The network weights and biases are set to zero, by default. You can see the current values
using the commands:
W = net.IW{1,1}
W =
0 0
and
b = net.b{1}
b =
0
You can also assign arbitrary values to the weights and bias, such as 2 and 3 for the
weights and −4 for the bias:
net.IW{1,1} = [2 3];
net.b{1} = -4;
You can simulate the ADALINE for a particular input vector.
p = [5; 6];
a = sim(net,p)
a =
24
To summarize, you can create an ADALINE network with linearlayer, adjust its
elements as you want, and simulate it with sim.
Least Mean Square Error
Like the perceptron learning rule, the least mean square error (LMS) algorithm is an
example of supervised training, in which the learning rule is provided with a set of
examples of desired network behavior.
9Adaptive Filters and Adaptive Training
9-6
p t p t p t
1 1 2 2
, , , , ,
{ } { }
{ }
…Q Q
Here pq is an input to the network, and tq is the corresponding target output. As each
input is applied to the network, the network output is compared to the target. The error is
calculated as the dierence between the target output and the network output. The goal
is to minimize the average of the sum of these errors.
mse Qe k Qt k k
k
Q
k
Q
= = -
= =
 Â
1 1
2
1
2
1
( ) ( ) ( ))
a
The LMS algorithm adjusts the weights and biases of the ADALINE so as to minimize this
mean square error.
Fortunately, the mean square error performance index for the ADALINE network is a
quadratic function. Thus, the performance index will either have one global minimum, a
weak minimum, or no minimum, depending on the characteristics of the input vectors.
Specically, the characteristics of the input vectors determine whether or not a unique
solution exists.
You can learn more about this topic in Chapter 10 of [HDB96 on page 13-2].
LMS Algorithm (learnwh)
Adaptive networks will use the LMS algorithm or Widrow-Ho learning algorithm based
on an approximate steepest descent procedure. Here again, adaptive linear networks are
trained on examples of correct behavior.
The LMS algorithm, shown here, is discussed in detail in “Linear Neural Networks” on
page 11-18.
W(k + 1) = W(k) + 2αe(k)pT(k)
b(k + 1) = b(k) + 2αe(k)
Adaptive Filtering (adapt)
The ADALINE network, much like the perceptron, can only solve linearly separable
problems. It is, however, one of the most widely used neural networks found in practical
applications. Adaptive ltering is one of its major application areas.
Adaptive Neural Network Filters
9-7
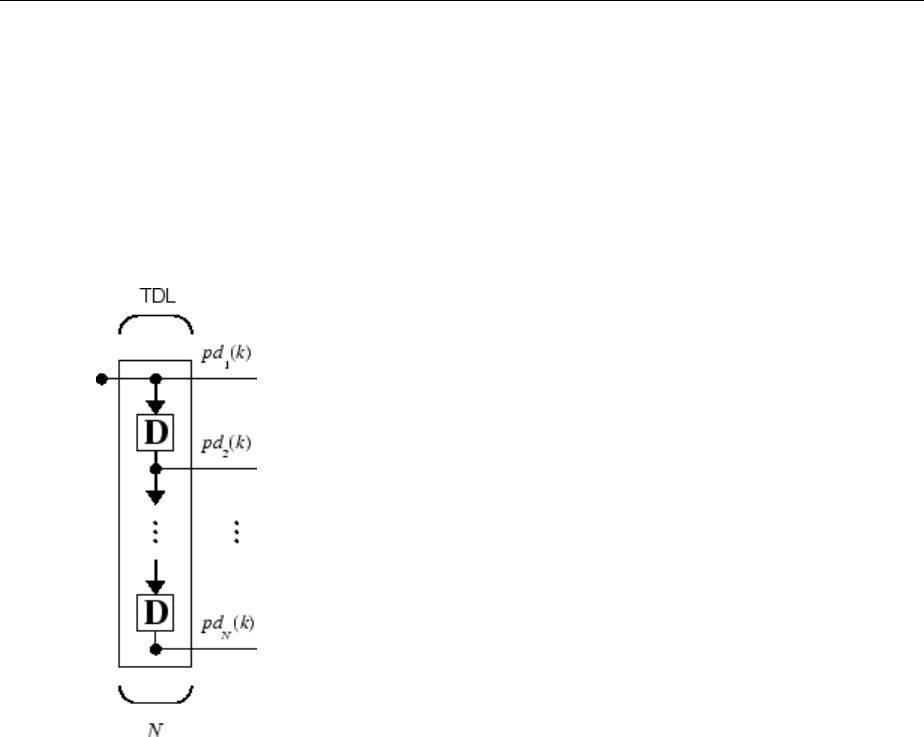
Tapped Delay Line
You need a new component, the tapped delay line, to make full use of the ADALINE
network. Such a delay line is shown in the next gure. The input signal enters from the
left and passes through N-1 delays. The output of the tapped delay line (TDL) is an N-
dimensional vector, made up of the input signal at the current time, the previous input
signal, etc.
Adaptive Filter
You can combine a tapped delay line with an ADALINE network to create the adaptive
lter shown in the next gure.
9Adaptive Filters and Adaptive Training
9-8
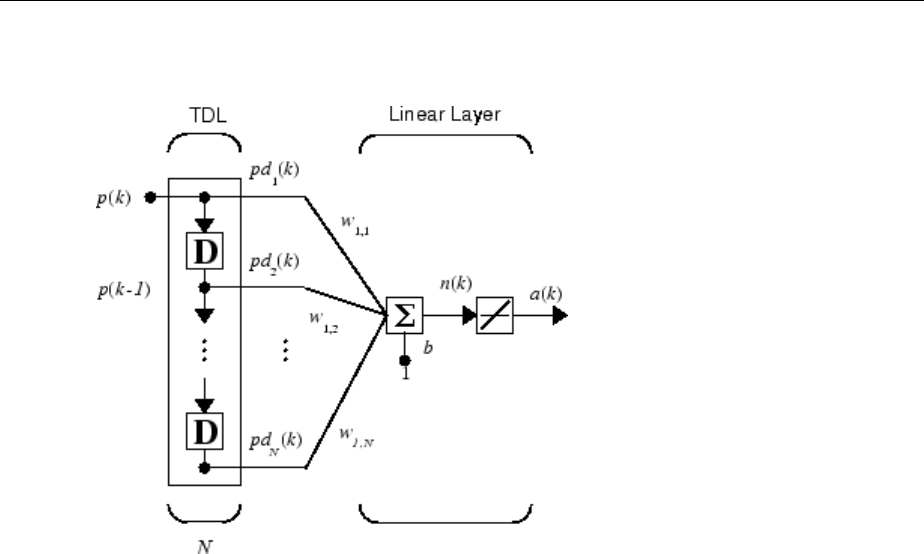
The output of the lter is given by
a a
( ) ( ) ( )
,
k purelin b w k i b
i
i
R
= + = - + +
=
Â
Wp 1
1
1
In digital signal processing, this network is referred to as a nite impulse response (FIR)
lter [WiSt85 on page 13-2]. Take a look at the code used to generate and simulate
such an adaptive network.
Adaptive Filter Example
First, dene a new linear network using linearlayer.
Adaptive Neural Network Filters
9-9
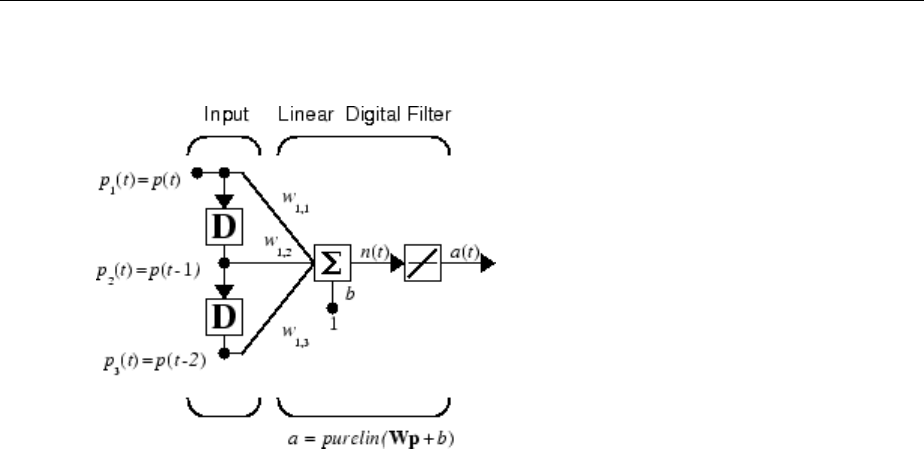
Assume that the linear layer has a single neuron with a single input and a tap delay of 0,
1, and 2 delays.
net = linearlayer([0 1 2]);
net = configure(net,0,0);
You can specify as many delays as you want, and can omit some values if you like. They
must be in ascending order.
You can give the various weights and the bias values with
net.IW{1,1} = [7 8 9];
net.b{1} = [0];
Finally, dene the initial values of the outputs of the delays as
pi = {1 2};
These are ordered from left to right to correspond to the delays taken from top to bottom
in the gure. This concludes the setup of the network.
To set up the input, assume that the input scalars arrive in a sequence: rst the value 3,
then the value 4, next the value 5, and nally the value 6. You can indicate this sequence
by dening the values as elements of a cell array in curly braces.
p = {3 4 5 6};
9Adaptive Filters and Adaptive Training
9-10

Now, you have a network and a sequence of inputs. Simulate the network to see what its
output is as a function of time.
[a,pf] = sim(net,p,pi)
This simulation yields an output sequence
a
[46] [70] [94] [118]
and nal values for the delay outputs of
pf
[5] [6]
The example is suiciently simple that you can check it without a calculator to make sure
that you understand the inputs, initial values of the delays, etc.
The network just dened can be trained with the function adapt to produce a particular
output sequence. Suppose, for instance, you want the network to produce the sequence of
values 10, 20, 30, 40.
t = {10 20 30 40};
You can train the dened network to do this, starting from the initial delay conditions
used above.
Let the network adapt for 10 passes over the data.
for i = 1:10
[net,y,E,pf,af] = adapt(net,p,t,pi);
end
This code returns the nal weights, bias, and output sequence shown here.
wts = net.IW{1,1}
wts =
0.5059 3.1053 5.7046
bias = net.b{1}
bias =
-1.5993
y
y =
[11.8558] [20.7735] [29.6679] [39.0036]
Adaptive Neural Network Filters
9-11
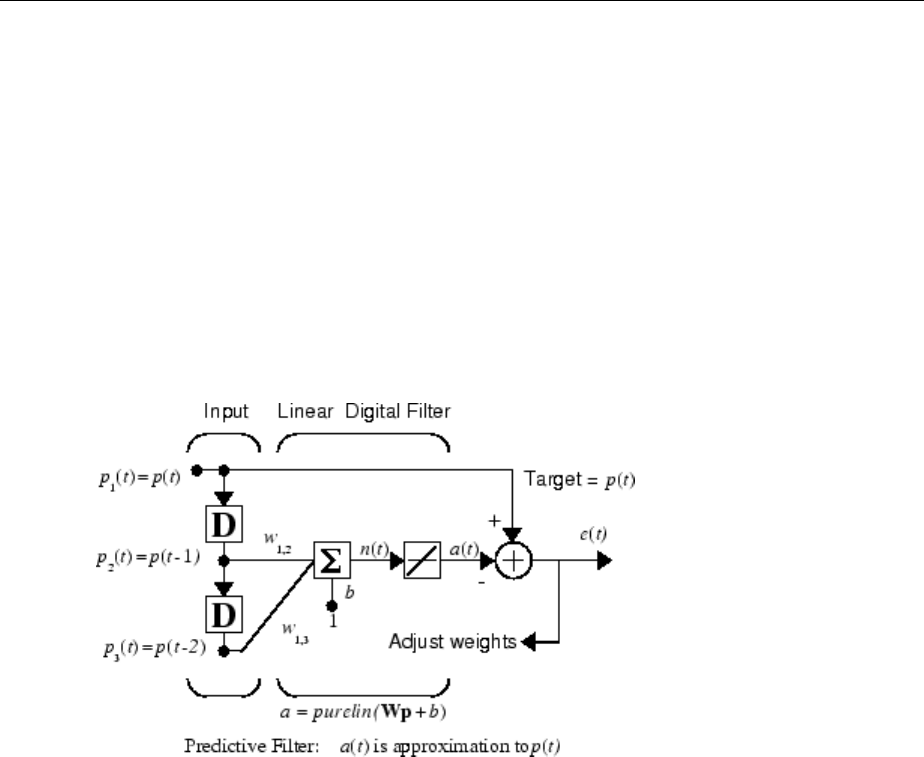
Presumably, if you ran additional passes the output sequence would have been even
closer to the desired values of 10, 20, 30, and 40.
Thus, adaptive networks can be specied, simulated, and nally trained with adapt.
However, the outstanding value of adaptive networks lies in their use to perform a
particular function, such as prediction or noise cancelation.
Prediction Example
Suppose that you want to use an adaptive lter to predict the next value of a stationary
random process, p(t). You can use the network shown in the following gure to do this
prediction.
The signal to be predicted, p(t), enters from the left into a tapped delay line. The previous
two values of p(t) are available as outputs from the tapped delay line. The network uses
adapt to change the weights on each time step so as to minimize the error e(t) on the far
right. If this error is 0, the network output a(t) is exactly equal to p(t), and the network
has done its prediction properly.
Given the autocorrelation function of the stationary random process p(t), you can
calculate the error surface, the maximum learning rate, and the optimum values of the
weights. Commonly, of course, you do not have detailed information about the random
process, so these calculations cannot be performed. This lack does not matter to the
network. After it is initialized and operating, the network adapts at each time step to
minimize the error and in a relatively short time is able to predict the input p(t).
9Adaptive Filters and Adaptive Training
9-12
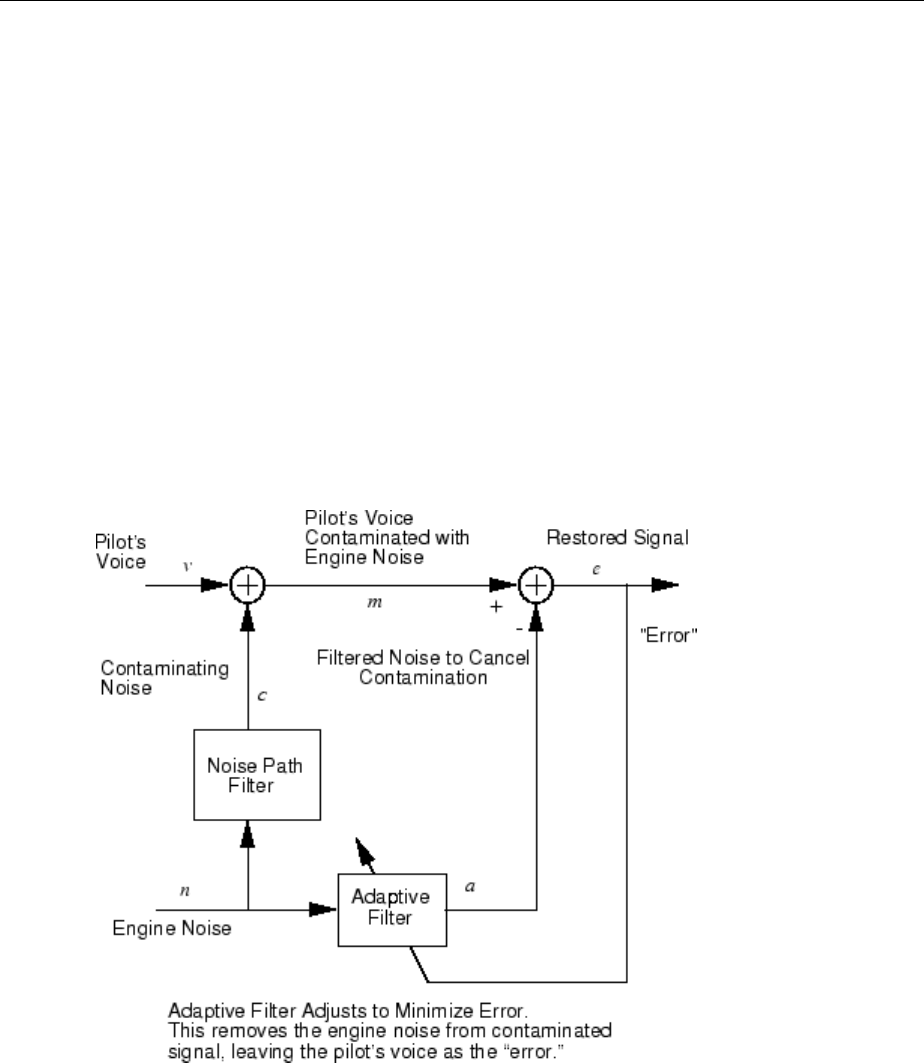
Chapter 10 of [HDB96 on page 13-2] presents this problem, goes through the analysis,
and shows the weight trajectory during training. The network nds the optimum weights
on its own without any diiculty whatsoever.
You also can try the example nnd10nc to see an adaptive noise cancelation program
example in action. This example allows you to pick a learning rate and momentum (see
“Multilayer Neural Networks and Backpropagation Training” on page 4-2), and shows the
learning trajectory, and the original and cancelation signals versus time.
Noise Cancelation Example
Consider a pilot in an airplane. When the pilot speaks into a microphone, the engine noise
in the cockpit combines with the voice signal. This additional noise makes the resultant
signal heard by passengers of low quality. The goal is to obtain a signal that contains the
pilot's voice, but not the engine noise. You can cancel the noise with an adaptive lter if
you obtain a sample of the engine noise and apply it as the input to the adaptive lter.
Adaptive Neural Network Filters
9-13
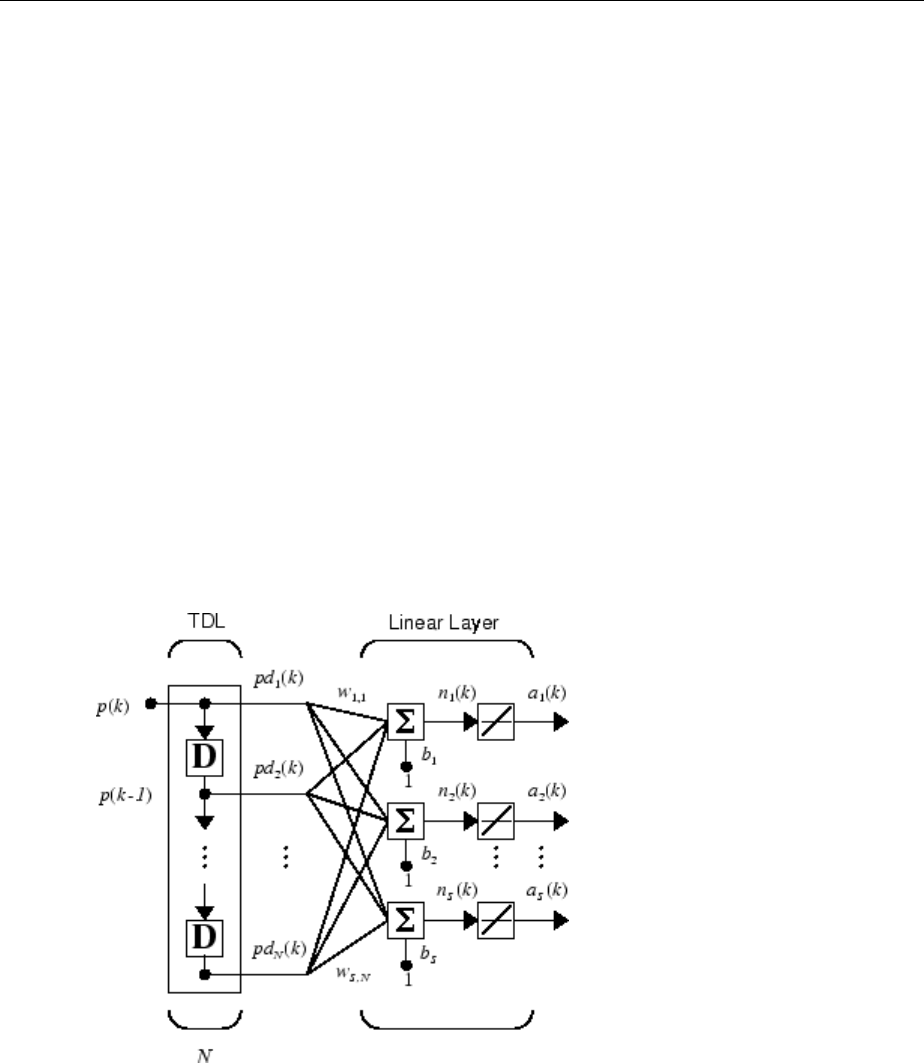
As the preceding gure shows, you adaptively train the neural linear network to predict
the combined pilot/engine signal m from an engine signal n. The engine signal n does not
tell the adaptive network anything about the pilot's voice signal contained in m. However,
the engine signal n does give the network information it can use to predict the engine's
contribution to the pilot/engine signal m.
The network does its best to output m adaptively. In this case, the network can only
predict the engine interference noise in the pilot/engine signal m. The network error e is
equal to m, the pilot/engine signal, minus the predicted contaminating engine noise
signal. Thus, e contains only the pilot's voice. The linear adaptive network adaptively
learns to cancel the engine noise.
Such adaptive noise canceling generally does a better job than a classical lter, because it
subtracts from the signal rather than ltering it out the noise of the signal m.
Try demolin8 for an example of adaptive noise cancelation.
Multiple Neuron Adaptive Filters
You might want to use more than one neuron in an adaptive system, so you need some
additional notation. You can use a tapped delay line with S linear neurons, as shown in the
next gure.
9Adaptive Filters and Adaptive Training
9-14
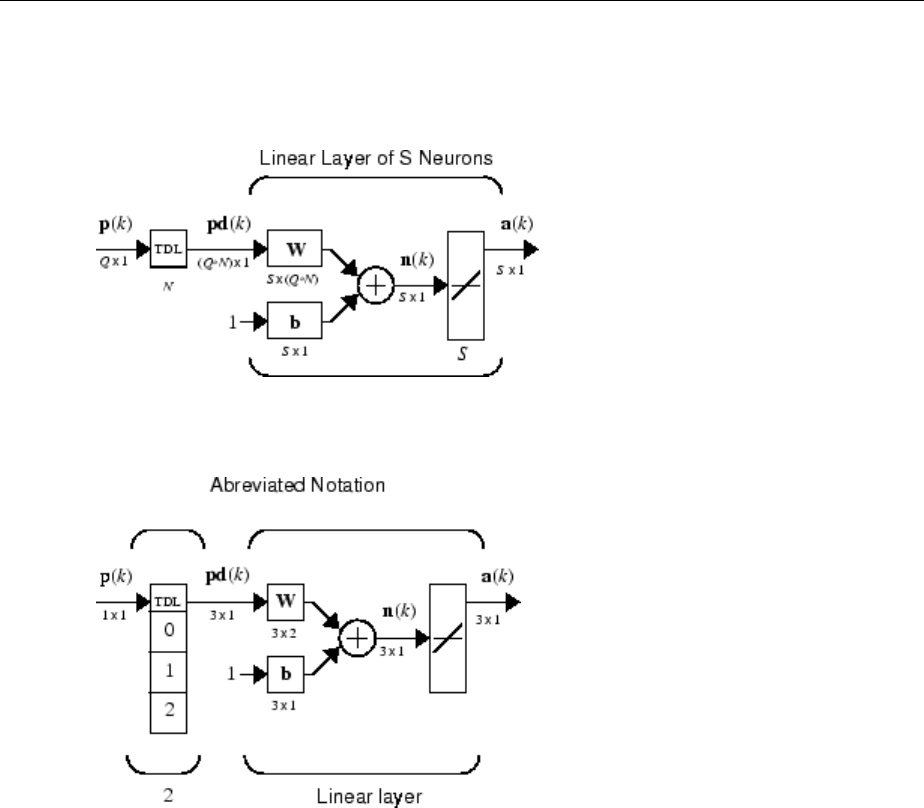
Alternatively, you can represent this same network in abbreviated form.
If you want to show more of the detail of the tapped delay line—and there are not too
many delays—you can use the following notation:
Here, a tapped delay line sends to the weight matrix:
• The current signal
• The previous signal
• The signal delayed before that
You could have a longer list, and some delay values could be omitted if desired. The only
requirement is that the delays must appears in increasing order as they go from top to
bottom.
Adaptive Neural Network Filters
9-15
Advanced Topics
• “Neural Networks with Parallel and GPU Computing” on page 10-2
• “Optimize Neural Network Training Speed and Memory” on page 10-12
• “Choose a Multilayer Neural Network Training Function” on page 10-16
• “Improve Neural Network Generalization and Avoid Overtting” on page 10-32
• “Edit Shallow Neural Network Properties” on page 10-46
• “Custom Neural Network Helper Functions” on page 10-60
• “Automatically Save Checkpoints During Neural Network Training” on page 10-61
• “Deploy Trained Neural Network Functions” on page 10-63
• “Deploy Training of Neural Networks” on page 10-68
10
Neural Networks with Parallel and GPU Computing
In this section...
“Deep Learning” on page 10-2
“Modes of Parallelism” on page 10-2
“Distributed Computing” on page 10-3
“Single GPU Computing” on page 10-5
“Distributed GPU Computing” on page 10-8
“Parallel Time Series” on page 10-10
“Parallel Availability, Fallbacks, and Feedback” on page 10-10
Deep Learning
You can train a convolutional neural network (CNN, ConvNet) using the trainNetwork
function. You can choose the execution environment (CPU, GPU, multi-GPU, and parallel)
using trainingOptions.
Training in parallel, or on a GPU, requires Parallel Computing Toolbox. For more
information on deep learning with GPUs and in parallel, see “Deep Learning with Big
Data on CPUs, GPUs, in Parallel, and on the Cloud” on page 2-8.
Modes of Parallelism
Neural networks are inherently parallel algorithms. Multicore CPUs, graphical processing
units (GPUs), and clusters of computers with multiple CPUs and GPUs can take advantage
of this parallelism.
Parallel Computing Toolbox, when used in conjunction with Neural Network Toolbox,
enables neural network training and simulation to take advantage of each mode of
parallelism.
For example, the following shows a standard single-threaded training and simulation
session:
[x, t] = bodyfat_dataset;
net1 = feedforwardnet(10);
net2 = train(net1, x, t);
y = net2(x);
10 Advanced Topics
10-2

The two steps you can parallelize in this session are the call to train and the implicit call
to sim (where the network net2 is called as a function).
In Neural Network Toolbox you can divide any data, such as x and t in the previous
example code, across samples. If x and t contain only one sample each, there is no
parallelism. But if x and t contain hundreds or thousands of samples, parallelism can
provide both speed and problem size benets.
Distributed Computing
Parallel Computing Toolbox allows neural network training and simulation to run across
multiple CPU cores on a single PC, or across multiple CPUs on multiple computers on a
network using MATLAB Distributed Computing Server.
Using multiple cores can speed calculations. Using multiple computers can allow you to
solve problems using data sets too big to t in the RAM of a single computer. The only
limit to problem size is the total quantity of RAM available across all computers.
To manage cluster congurations, use the Cluster Prole Manager from the MATLAB
Home tab Environment menu Parallel > Manage Cluster Proles.
To open a pool of MATLAB workers using the default cluster prole, which is usually the
local CPU cores, use this command:
pool = parpool
Starting parallel pool (parpool) using the 'local' profile ... connected to 4 workers.
When parpool runs, it displays the number of workers available in the pool. Another way
to determine the number of workers is to query the pool:
pool.NumWorkers
4
Now you can train and simulate the neural network with data split by sample across all
the workers. To do this, set the train and sim parameter 'useParallel' to 'yes'.
net2 = train(net1,x,t,'useParallel','yes')
y = net2(x,'useParallel','yes')
Use the 'showResources' argument to verify that the calculations ran across multiple
workers.
Neural Networks with Parallel and GPU Computing
10-3

net2 = train(net1,x,t,'useParallel','yes','showResources','yes');
y = net2(x,'useParallel','yes','showResources','yes');
MATLAB indicates which resources were used. For example:
Computing Resources:
Parallel Workers
Worker 1 on MyComputer, MEX on PCWIN64
Worker 2 on MyComputer, MEX on PCWIN64
Worker 3 on MyComputer, MEX on PCWIN64
Worker 4 on MyComputer, MEX on PCWIN64
When train and sim are called, they divide the input matrix or cell array data into
distributed Composite values before training and simulation. When sim has calculated a
Composite, this output is converted back to the same matrix or cell array form before it is
returned.
However, you might want to perform this data division manually if:
• The problem size is too large for the host computer. Manually dening the elements of
Composite values sequentially allows much bigger problems to be dened.
• It is known that some workers are on computers that are faster or have more memory
than others. You can distribute the data with diering numbers of samples per worker.
This is called load balancing.
The following code sequentially creates a series of random datasets and saves them to
separate les:
pool = gcp;
for i=1:pool.NumWorkers
x = rand(2,1000);
save(['inputs' num2str(i)],'x');
t = x(1,:) .* x(2,:) + 2 * (x(1,:) + x(2,:));
save(['targets' num2str(i)],'t');
clear x t
end
Because the data was dened sequentially, you can dene a total dataset larger than can
t in the host PC memory. PC memory must accommodate only a sub-dataset at a time.
Now you can load the datasets sequentially across parallel workers, and train and
simulate a network on the Composite data. When train or sim is called with Composite
data, the 'useParallel' argument is automatically set to 'yes'. When using
10 Advanced Topics
10-4

Composite data, congure the network’s input and outputs to match one of the datasets
manually using the configure function before training.
xc = Composite;
tc = Composite;
for i=1:pool.NumWorkers
data = load(['inputs' num2str(i)],'x');
xc{i} = data.x;
data = load(['targets' num2str(i)],'t');
tc{i} = data.t;
clear data
end
net2 = configure(net1,xc{1},tc{1});
net2 = train(net2,xc,tc);
yc = net2(xc);
To convert the Composite output returned by sim, you can access each of its elements,
separately if concerned about memory limitations.
for i=1:pool.NumWorkers
yi = yc{i}
end
Combined the Composite value into one local value if you are not concerned about
memory limitations.
y = {yc{:}};
When load balancing, the same process happens, but, instead of each dataset having the
same number of samples (1000 in the previous example), the numbers of samples can be
adjusted to best take advantage of the memory and speed dierences of the worker host
computers.
It is not required that each worker have data. If element i of a Composite value is
undened, worker i will not be used in the computation.
Single GPU Computing
The number of cores, size of memory, and speed eiciencies of GPU cards are growing
rapidly with each new generation. Where video games have long beneted from improved
GPU performance, these cards are now exible enough to perform general numerical
computing tasks like training neural networks.
Neural Networks with Parallel and GPU Computing
10-5

For the latest GPU requirements, see the web page for Parallel Computing Toolbox; or
query MATLAB to determine whether your PC has a supported GPU. This function returns
the number of GPUs in your system:
count = gpuDeviceCount
count =
1
If the result is one or more, you can query each GPU by index for its characteristics. This
includes its name, number of multiprocessors, SIMDWidth of each multiprocessor, and
total memory.
gpu1 = gpuDevice(1)
gpu1 =
CUDADevice with properties:
Name: 'GeForce GTX 470'
Index: 1
ComputeCapability: '2.0'
SupportsDouble: 1
DriverVersion: 4.1000
MaxThreadsPerBlock: 1024
MaxShmemPerBlock: 49152
MaxThreadBlockSize: [1024 1024 64]
MaxGridSize: [65535 65535 1]
SIMDWidth: 32
TotalMemory: 1.3422e+09
AvailableMemory: 1.1056e+09
MultiprocessorCount: 14
ClockRateKHz: 1215000
ComputeMode: 'Default'
GPUOverlapsTransfers: 1
KernelExecutionTimeout: 1
CanMapHostMemory: 1
DeviceSupported: 1
DeviceSelected: 1
The simplest way to take advantage of the GPU is to specify call train and sim with the
parameter argument 'useGPU' set to 'yes' ('no' is the default).
10 Advanced Topics
10-6

net2 = train(net1,x,t,'useGPU','yes')
y = net2(x,'useGPU','yes')
If net1 has the default training function trainlm, you see a warning that GPU
calculations do not support Jacobian training, only gradient training. So the training
function is automatically changed to the gradient training function trainscg. To avoid
the notice, you can specify the function before training:
net1.trainFcn = 'trainscg';
To verify that the training and simulation occur on the GPU device, request that the
computer resources be shown:
net2 = train(net1,x,t,'useGPU','yes','showResources','yes')
y = net2(x,'useGPU','yes','showResources','yes')
Each of the above lines of code outputs the following resources summary:
Computing Resources:
GPU device #1, GeForce GTX 470
Many MATLAB functions automatically execute on a GPU when any of the input
arguments is a gpuArray. Normally you move arrays to and from the GPU with the
functions gpuArray and gather. However, for neural network calculations on a GPU to
be eicient, matrices need to be transposed and the columns padded so that the rst
element in each column aligns properly in the GPU memory. Neural Network Toolbox
provides a special function called nndata2gpu to move an array to a GPU and properly
organize it:
xg = nndata2gpu(x);
tg = nndata2gpu(t);
Now you can train and simulate the network using the converted data already on the
GPU, without having to specify the 'useGPU' argument. Then convert and return the
resulting GPU array back to MATLAB with the complementary function gpu2nndata.
Before training with gpuArray data, the network’s input and outputs must be manually
congured with regular MATLAB matrices using the configure function:
net2 = configure(net1,x,t); % Configure with MATLAB arrays
net2 = train(net2,xg,tg); % Execute on GPU with NNET formatted gpuArrays
yg = net2(xg); % Execute on GPU
y = gpu2nndata(yg); % Transfer array to local workspace
On GPUs and other hardware where you might want to deploy your neural networks, it is
often the case that the exponential function exp is not implemented with hardware, but
Neural Networks with Parallel and GPU Computing
10-7

with a software library. This can slow down neural networks that use the tansig sigmoid
transfer function. An alternative function is the Elliot sigmoid function whose expression
does not include a call to any higher order functions:
(equation) a = n / (1 + abs(n))
Before training, the network’s tansig layers can be converted to elliotsig layers as
follows:
for i=1:net.numLayers
if strcmp(net.layers{i}.transferFcn,'tansig')
net.layers{i}.transferFcn = 'elliotsig';
end
end
Now training and simulation might be faster on the GPU and simpler deployment
hardware.
Distributed GPU Computing
Distributed and GPU computing can be combined to run calculations across multiple
CPUs and/or GPUs on a single computer, or on a cluster with MATLAB Distributed
Computing Server.
The simplest way to do this is to specify train and sim to do so, using the parallel pool
determined by the cluster prole you use. The 'showResources' option is especially
recommended in this case, to verify that the expected hardware is being employed:
net2 = train(net1,x,t,'useParallel','yes','useGPU','yes','showResources','yes')
y = net2(x,'useParallel','yes','useGPU','yes','showResources','yes')
These lines of code use all available workers in the parallel pool. One worker for each
unique GPU employs that GPU, while other workers operate as CPUs. In some cases, it
might be faster to use only GPUs. For instance, if a single computer has three GPUs and
four workers each, the three workers that are accelerated by the three GPUs might be
speed limited by the fourth CPU worker. In these cases, you can specify that train and
sim use only workers with unique GPUs.
net2 = train(net1,x,t,'useParallel','yes','useGPU','only','showResources','yes')
y = net2(x,'useParallel','yes','useGPU','only','showResources','yes')
As with simple distributed computing, distributed GPU computing can benet from
manually created Composite values. Dening the Composite values yourself lets you
10 Advanced Topics
10-8

indicate which workers to use, how many samples to assign to each worker, and which
workers use GPUs.
For instance, if you have four workers and only three GPUs, you can dene larger
datasets for the GPU workers. Here, a random dataset is created with dierent sample
loads per Composite element:
numSamples = [1000 1000 1000 300];
xc = Composite;
tc = Composite;
for i=1:4
xi = rand(2,numSamples(i));
ti = xi(1,:).^2 + 3*xi(2,:);
xc{i} = xi;
tc{i} = ti;
end
You can now specify that train and sim use the three GPUs available:
net2 = configure(net1,xc{1},tc{1});
net2 = train(net2,xc,tc,'useGPU','yes','showResources','yes');
yc = net2(xc,'showResources','yes');
To ensure that the GPUs get used by the rst three workers, manually converting each
worker’s Composite elements to gpuArrays. Each worker performs this transformation
within a parallel executing spmd block.
spmd
if labindex <= 3
xc = nndata2gpu(xc);
tc = nndata2gpu(tc);
end
end
Now the data species when to use GPUs, so you do not need to tell train and sim to do
so.
net2 = configure(net1,xc{1},tc{1});
net2 = train(net2,xc,tc,'showResources','yes');
yc = net2(xc,'showResources','yes');
Ensure that each GPU is used by only one worker, so that the computations are most
eicient. If multiple workers assign gpuArray data on the same GPU, the computation will
still work but will be slower, because the GPU will operate on the multiple workers’ data
sequentially.
Neural Networks with Parallel and GPU Computing
10-9

Parallel Time Series
For time series networks, simply use cell array values for x and t, and optionally include
initial input delay states xi and initial layer delay states ai, as required.
net2 = train(net1,x,t,xi,ai,'useGPU','yes')
y = net2(x,xi,ai,'useParallel','yes','useGPU','yes')
net2 = train(net1,x,t,xi,ai,'useParallel','yes')
y = net2(x,xi,ai,'useParallel','yes','useGPU','only')
net2 = train(net1,x,t,xi,ai,'useParallel','yes','useGPU','only')
y = net2(x,xi,ai,'useParallel','yes','useGPU','only')
Note that parallelism happens across samples, or in the case of time series across
dierent series. However, if the network has only input delays, with no layer delays, the
delayed inputs can be precalculated so that for the purposes of computation, the time
steps become dierent samples and can be parallelized. This is the case for networks
such as timedelaynet and open-loop versions of narxnet and narnet. If a network has
layer delays, then time cannot be “attened” for purposes of computation, and so single
series data cannot be parallelized. This is the case for networks such as layrecnet and
closed-loop versions of narxnet and narnet. However, if the data consists of multiple
sequences, it can be parallelized across the separate sequences.
Parallel Availability, Fallbacks, and Feedback
As mentioned previously, you can query MATLAB to discover the current parallel
resources that are available.
To see what GPUs are available on the host computer:
gpuCount = gpuDeviceCount
for i=1:gpuCount
gpuDevice(i)
end
To see how many workers are running in the current parallel pool:
poolSize = pool.NumWorkers
To see the GPUs available across a parallel pool running on a PC cluster using MATLAB
Distributed Computing Server:
10 Advanced Topics
10-10

spmd
worker.index = labindex;
worker.name = system('hostname');
worker.gpuCount = gpuDeviceCount;
try
worker.gpuInfo = gpuDevice;
catch
worker.gpuInfo = [];
end
worker
end
When 'useParallel' or 'useGPU' are set to 'yes', but parallel or GPU workers are
unavailable, the convention is that when resources are requested, they are used if
available. The computation is performed without error even if they are not. This process
of falling back from requested resources to actual resources happens as follows:
• If 'useParallel' is 'yes' but Parallel Computing Toolbox is unavailable, or a
parallel pool is not open, then computation reverts to single-threaded MATLAB.
• If 'useGPU' is 'yes' but the gpuDevice for the current MATLAB session is
unassigned or not supported, then computation reverts to the CPU.
• If 'useParallel' and 'useGPU' are 'yes', then each worker with a unique GPU
uses that GPU, and other workers revert to CPU.
• If 'useParallel' is 'yes' and 'useGPU' is 'only', then workers with unique
GPUs are used. Other workers are not used, unless no workers have GPUs. In the case
with no GPUs, all workers use CPUs.
When unsure about what hardware is actually being employed, check gpuDeviceCount,
gpuDevice, and pool.NumWorkers to ensure the desired hardware is available, and call
train and sim with 'showResources' set to 'yes' to verify what resources were
actually used.
Neural Networks with Parallel and GPU Computing
10-11
Optimize Neural Network Training Speed and Memory
In this section...
“Memory Reduction” on page 10-12
“Fast Elliot Sigmoid” on page 10-12
Memory Reduction
Depending on the particular neural network, simulation and gradient calculations can
occur in MATLAB or MEX. MEX is more memory eicient, but MATLAB can be made more
memory eicient in exchange for time.
To determine whether MATLAB or MEX is being used, use the 'showResources' option,
as shown in this general form of the syntax:
net2 = train(net1,x,t,'showResources','yes')
If MATLAB is being used and memory limitations are a problem, the amount of temporary
storage needed can be reduced by a factor of N, in exchange for performing the
computations N times sequentially on each of N subsets of the data.
net2 = train(net1,x,t,'reduction',N);
This is called memory reduction.
Fast Elliot Sigmoid
Some simple computing hardware might not support the exponential function directly,
and software implementations can be slow. The Elliot sigmoid elliotsig function
performs the same role as the symmetric sigmoid tansig function, but avoids the
exponential function.
Here is a plot of the Elliot sigmoid:
n = -10:0.01:10;
a = elliotsig(n);
plot(n,a)
10 Advanced Topics
10-12
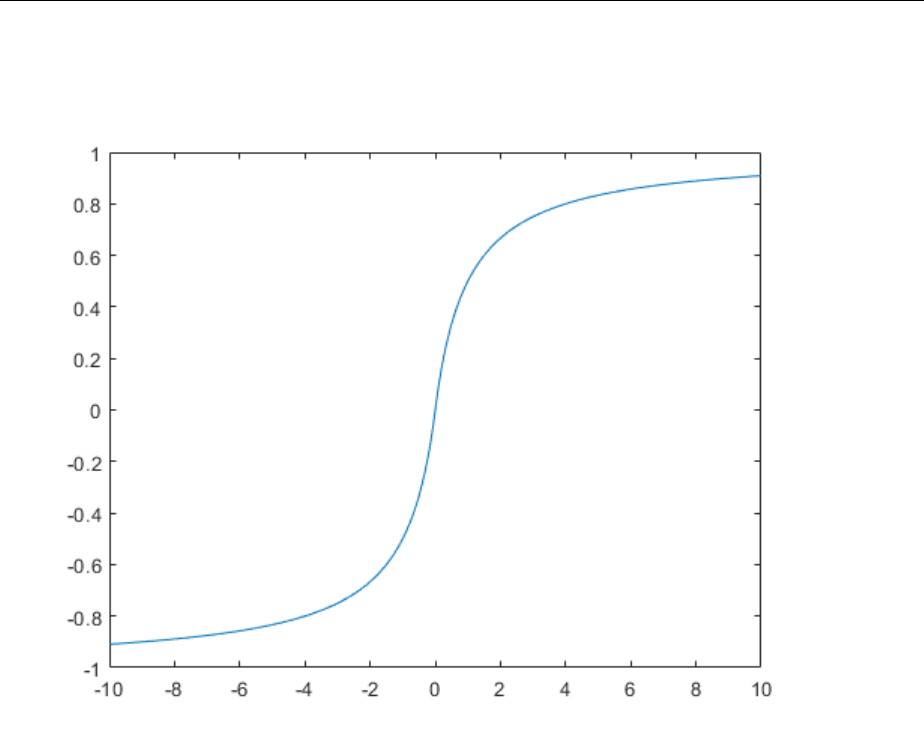
Next, elliotsig is compared with tansig.
a2 = tansig(n);
h = plot(n,a,n,a2);
legend(h,'elliotsig','tansig','Location','NorthWest')
Optimize Neural Network Training Speed and Memory
10-13
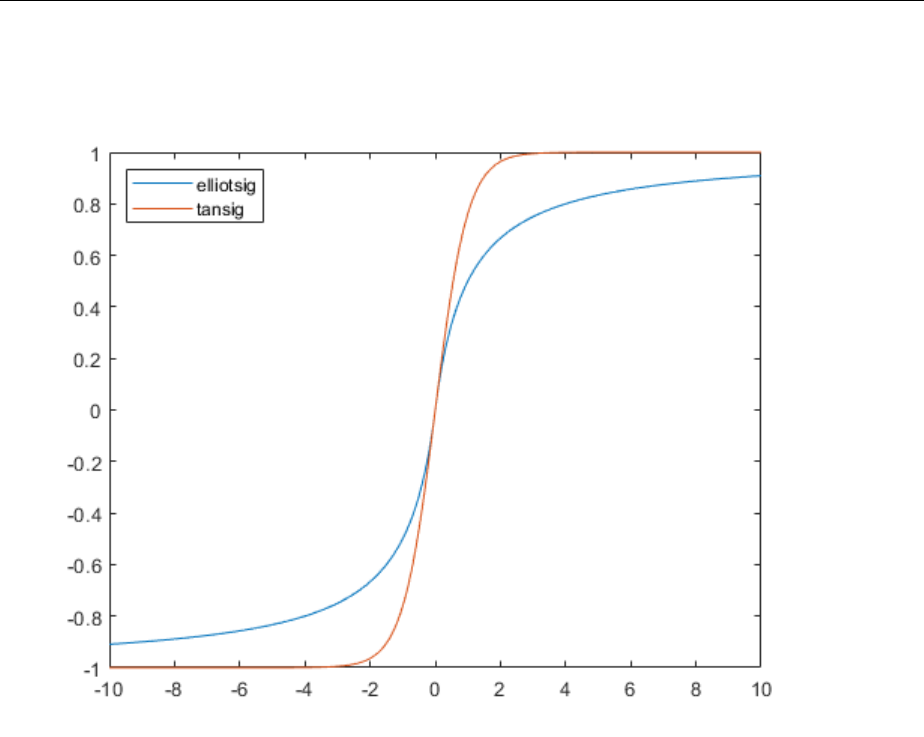
To train a neural network using elliotsig instead of tansig, transform the network’s
transfer functions:
[x,t] = bodyfat_dataset;
net = feedforwardnet;
view(net)
net.layers{1}.transferFcn = 'elliotsig';
view(net)
net = train(net,x,t);
y = net(x)
Here, the times to execute elliotsig and tansig are compared. elliotsig is
approximately four times faster on the test system.
10 Advanced Topics
10-14

n = rand(5000,5000);
tic,for i=1:100,a=tansig(n); end, tansigTime = toc;
tic,for i=1:100,a=elliotsig(n); end, elliotTime = toc;
speedup = tansigTime / elliotTime
speedup =
4.1406
However, while simulation is faster with elliotsig, training is not guaranteed to be
faster, due to the dierent shapes of the two transfer functions. Here, 10 networks are
each trained for tansig and elliotsig, but training times vary signicantly even on
the same problem with the same network.
[x,t] = bodyfat_dataset;
tansigNet = feedforwardnet;
tansigNet.trainParam.showWindow = false;
elliotNet = tansigNet;
elliotNet.layers{1}.transferFcn = 'elliotsig';
for i=1:10, tic, net = train(tansigNet,x,t); tansigTime = toc, end
for i=1:10, tic, net = train(elliotNet,x,t), elliotTime = toc, end
Optimize Neural Network Training Speed and Memory
10-15
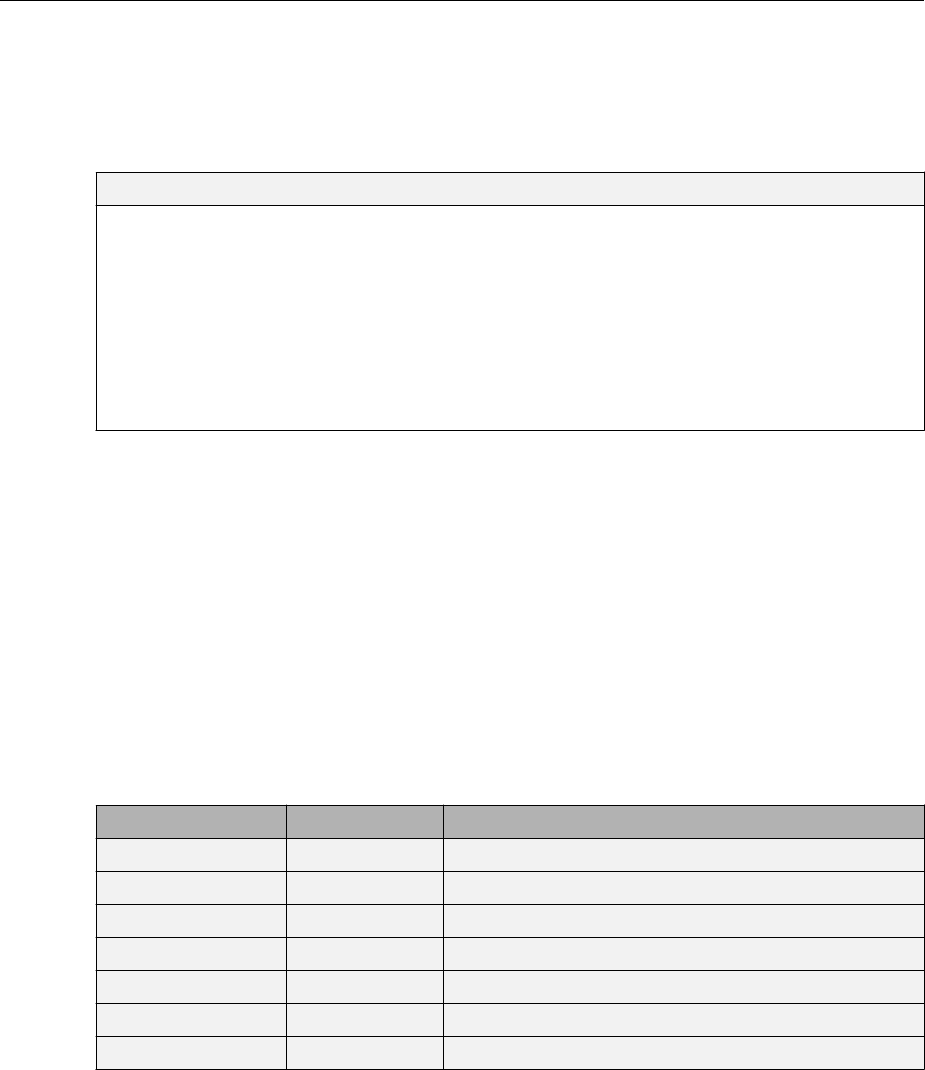
Choose a Multilayer Neural Network Training Function
In this section...
“SIN Data Set” on page 10-17
“PARITY Data Set” on page 10-19
“ENGINE Data Set” on page 10-22
“CANCER Data Set” on page 10-24
“CHOLESTEROL Data Set” on page 10-26
“DIABETES Data Set” on page 10-28
“Summary” on page 10-30
It is very diicult to know which training algorithm will be the fastest for a given problem.
It depends on many factors, including the complexity of the problem, the number of data
points in the training set, the number of weights and biases in the network, the error
goal, and whether the network is being used for pattern recognition (discriminant
analysis) or function approximation (regression). This section compares the various
training algorithms. Feedforward networks are trained on six dierent problems. Three of
the problems fall in the pattern recognition category and the three others fall in the
function approximation category. Two of the problems are simple “toy” problems, while
the other four are “real world” problems. Networks with a variety of dierent
architectures and complexities are used, and the networks are trained to a variety of
dierent accuracy levels.
The following table lists the algorithms that are tested and the acronyms used to identify
them.
Acronym Algorithm Description
LM trainlm Levenberg-Marquardt
BFG trainbfg BFGS Quasi-Newton
RP trainrp Resilient Backpropagation
SCG trainscg Scaled Conjugate Gradient
CGB traincgb Conjugate Gradient with Powell/Beale Restarts
CGF traincgf Fletcher-Powell Conjugate Gradient
CGP traincgp Polak-Ribiére Conjugate Gradient
10 Advanced Topics
10-16
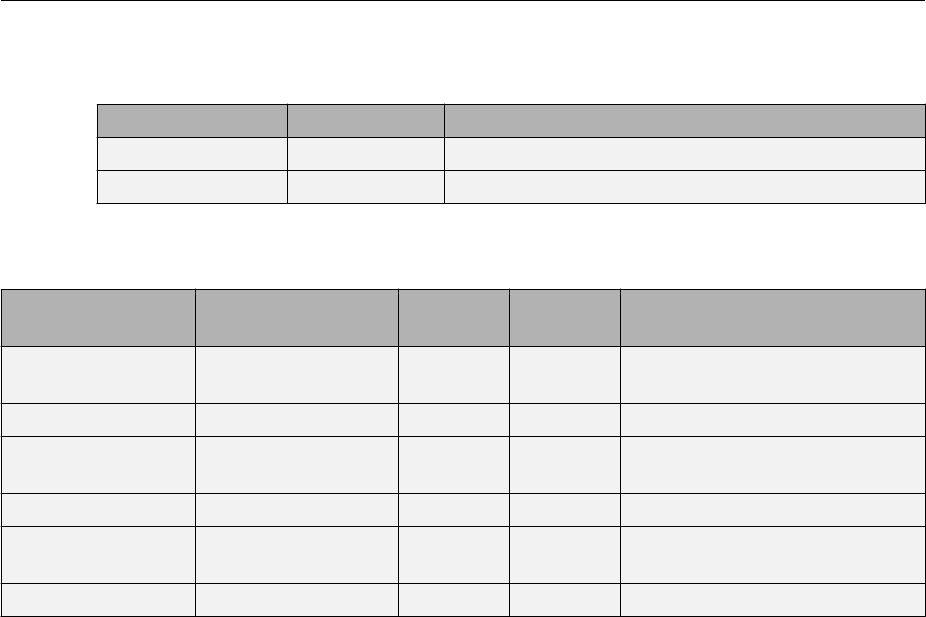
Acronym Algorithm Description
OSS trainoss One Step Secant
GDX traingdx Variable Learning Rate Backpropagation
The following table lists the six benchmark problems and some characteristics of the
networks, training processes, and computers used.
Problem Title Problem Type Network
Structure
Error
Goal
Computer
SIN Function
approximation
1-5-1 0.002 Sun Sparc 2
PARITY Pattern recognition 3-10-10-1 0.001 Sun Sparc 2
ENGINE Function
approximation
2-30-2 0.005 Sun Enterprise 4000
CANCER Pattern recognition 9-5-5-2 0.012 Sun Sparc 2
CHOLESTEROL Function
approximation
21-15-3 0.027 Sun Sparc 20
DIABETES Pattern recognition 8-15-15-2 0.05 Sun Sparc 20
SIN Data Set
The rst benchmark data set is a simple function approximation problem. A 1-5-1
network, with tansig transfer functions in the hidden layer and a linear transfer function
in the output layer, is used to approximate a single period of a sine wave. The following
table summarizes the results of training the network using nine dierent training
algorithms. Each entry in the table represents 30 dierent trials, where dierent random
initial weights are used in each trial. In each case, the network is trained until the
squared error is less than 0.002. The fastest algorithm for this problem is the Levenberg-
Marquardt algorithm. On the average, it is over four times faster than the next fastest
algorithm. This is the type of problem for which the LM algorithm is best suited—a
function approximation problem where the network has fewer than one hundred weights
and the approximation must be very accurate.
Choose a Multilayer Neural Network Training Function
10-17
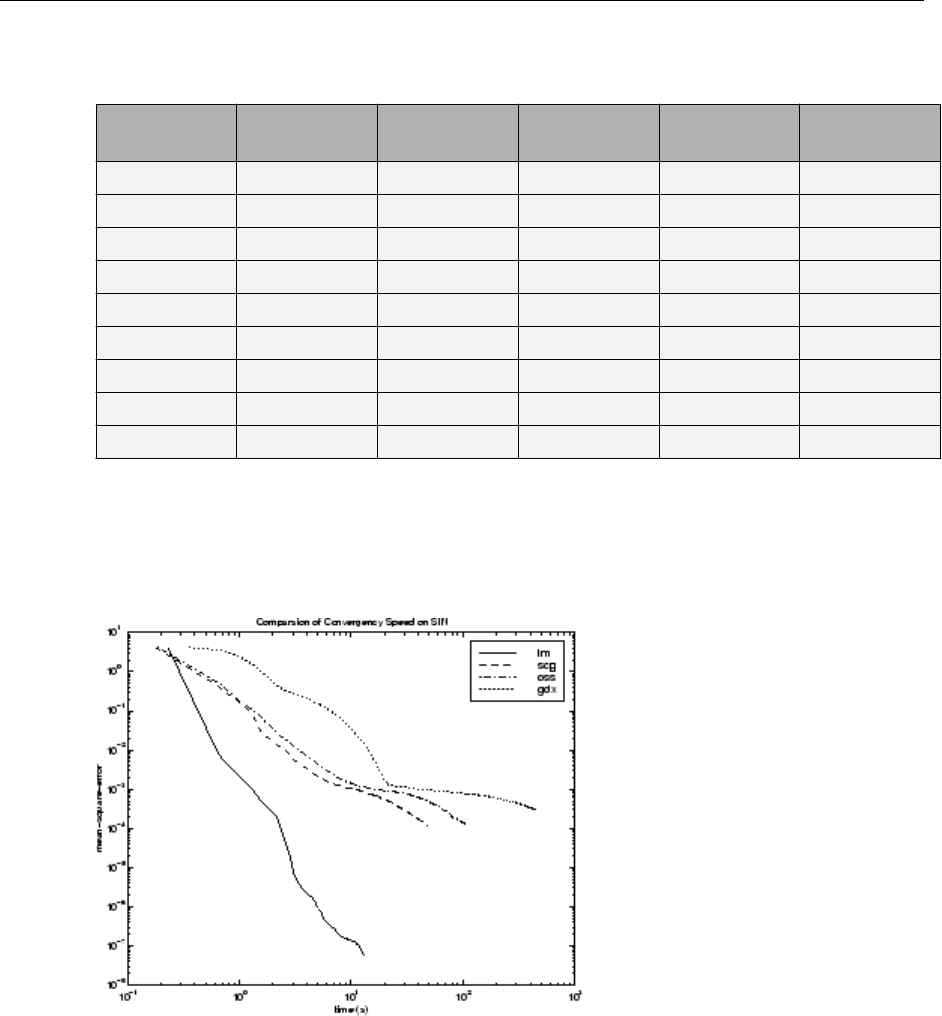
Algorithm Mean Time
(s)
Ratio Min. Time
(s)
Max. Time
(s)
Std. (s)
LM 1.14 1.00 0.65 1.83 0.38
BFG 5.22 4.58 3.17 14.38 2.08
RP 5.67 4.97 2.66 17.24 3.72
SCG 6.09 5.34 3.18 23.64 3.81
CGB 6.61 5.80 2.99 23.65 3.67
CGF 7.86 6.89 3.57 31.23 4.76
CGP 8.24 7.23 4.07 32.32 5.03
OSS 9.64 8.46 3.97 59.63 9.79
GDX 27.69 24.29 17.21 258.15 43.65
The performance of the various algorithms can be aected by the accuracy required of
the approximation. This is shown in the following gure, which plots the mean square
error versus execution time (averaged over the 30 trials) for several representative
algorithms. Here you can see that the error in the LM algorithm decreases much more
rapidly with time than the other algorithms shown.
10 Advanced Topics
10-18
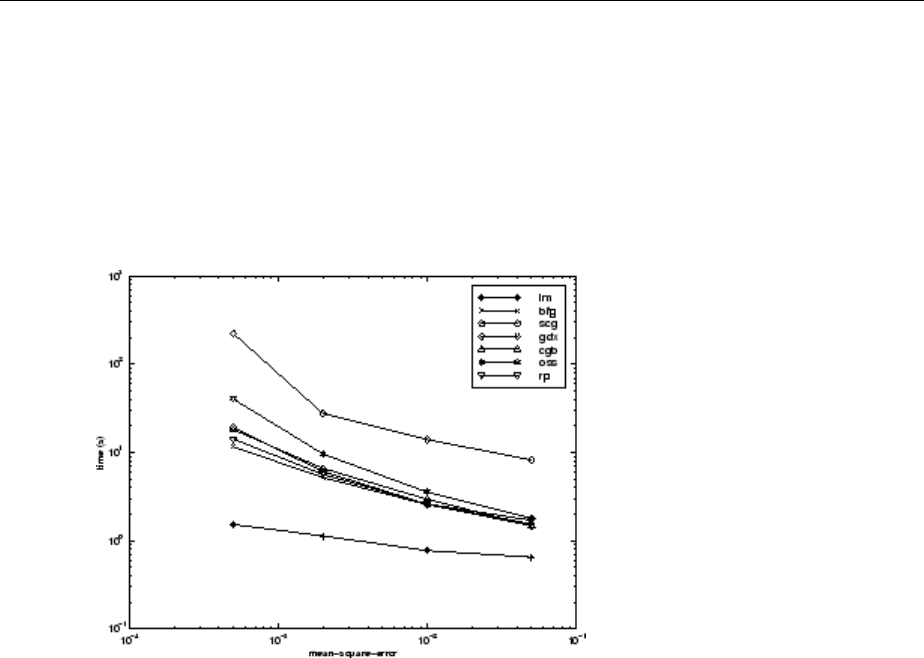
The relationship between the algorithms is further illustrated in the following gure,
which plots the time required to converge versus the mean square error convergence
goal. Here you can see that as the error goal is reduced, the improvement provided by the
LM algorithm becomes more pronounced. Some algorithms perform better as the error
goal is reduced (LM and BFG), and other algorithms degrade as the error goal is reduced
(OSS and GDX).
PARITY Data Set
The second benchmark problem is a simple pattern recognition problem—detect the
parity of a 3-bit number. If the number of ones in the input pattern is odd, then the
network should output a 1; otherwise, it should output a -1. The network used for this
problem is a 3-10-10-1 network with tansig neurons in each layer. The following table
summarizes the results of training this network with the nine dierent algorithms. Each
entry in the table represents 30 dierent trials, where dierent random initial weights are
used in each trial. In each case, the network is trained until the squared error is less than
0.001. The fastest algorithm for this problem is the resilient backpropagation algorithm,
although the conjugate gradient algorithms (in particular, the scaled conjugate gradient
algorithm) are almost as fast. Notice that the LM algorithm does not perform well on this
problem. In general, the LM algorithm does not perform as well on pattern recognition
problems as it does on function approximation problems. The LM algorithm is designed
for least squares problems that are approximately linear. Because the output neurons in
Choose a Multilayer Neural Network Training Function
10-19
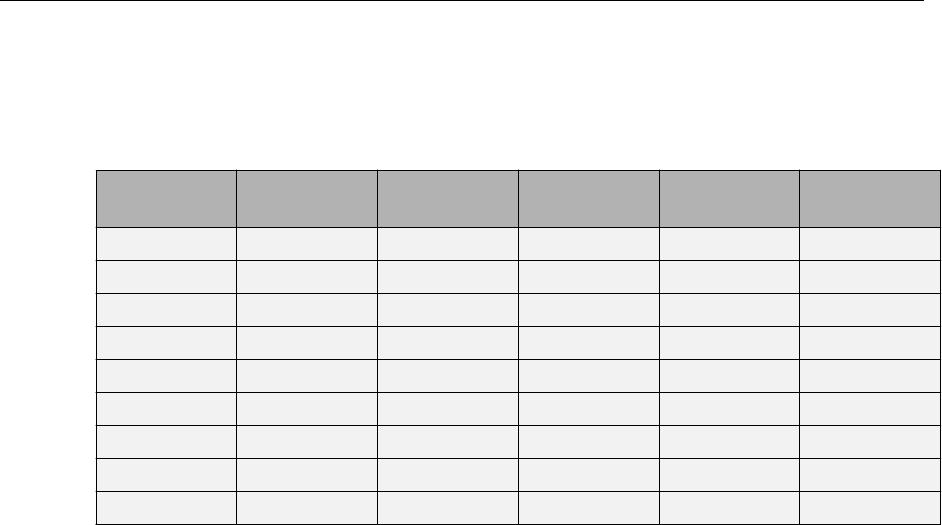
pattern recognition problems are generally saturated, you will not be operating in the
linear region.
Algorithm Mean Time
(s)
Ratio Min. Time
(s)
Max. Time
(s)
Std. (s)
RP 3.73 1.00 2.35 6.89 1.26
SCG 4.09 1.10 2.36 7.48 1.56
CGP 5.13 1.38 3.50 8.73 1.05
CGB 5.30 1.42 3.91 11.59 1.35
CGF 6.62 1.77 3.96 28.05 4.32
OSS 8.00 2.14 5.06 14.41 1.92
LM 13.07 3.50 6.48 23.78 4.96
BFG 19.68 5.28 14.19 26.64 2.85
GDX 27.07 7.26 25.21 28.52 0.86
As with function approximation problems, the performance of the various algorithms can
be aected by the accuracy required of the network. This is shown in the following gure,
which plots the mean square error versus execution time for some typical algorithms. The
LM algorithm converges rapidly after some point, but only after the other algorithms have
already converged.
10 Advanced Topics
10-20
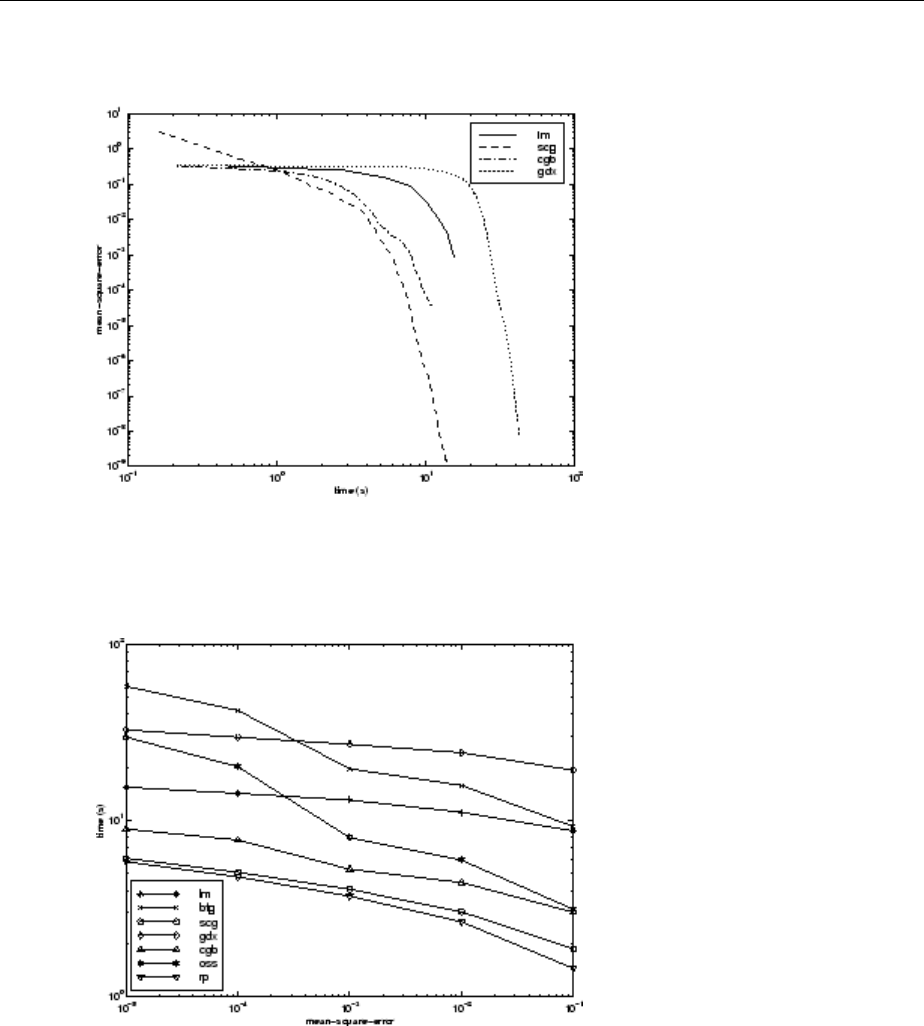
The relationship between the algorithms is further illustrated in the following gure,
which plots the time required to converge versus the mean square error convergence
goal. Again you can see that some algorithms degrade as the error goal is reduced (OSS
and BFG).
Choose a Multilayer Neural Network Training Function
10-21
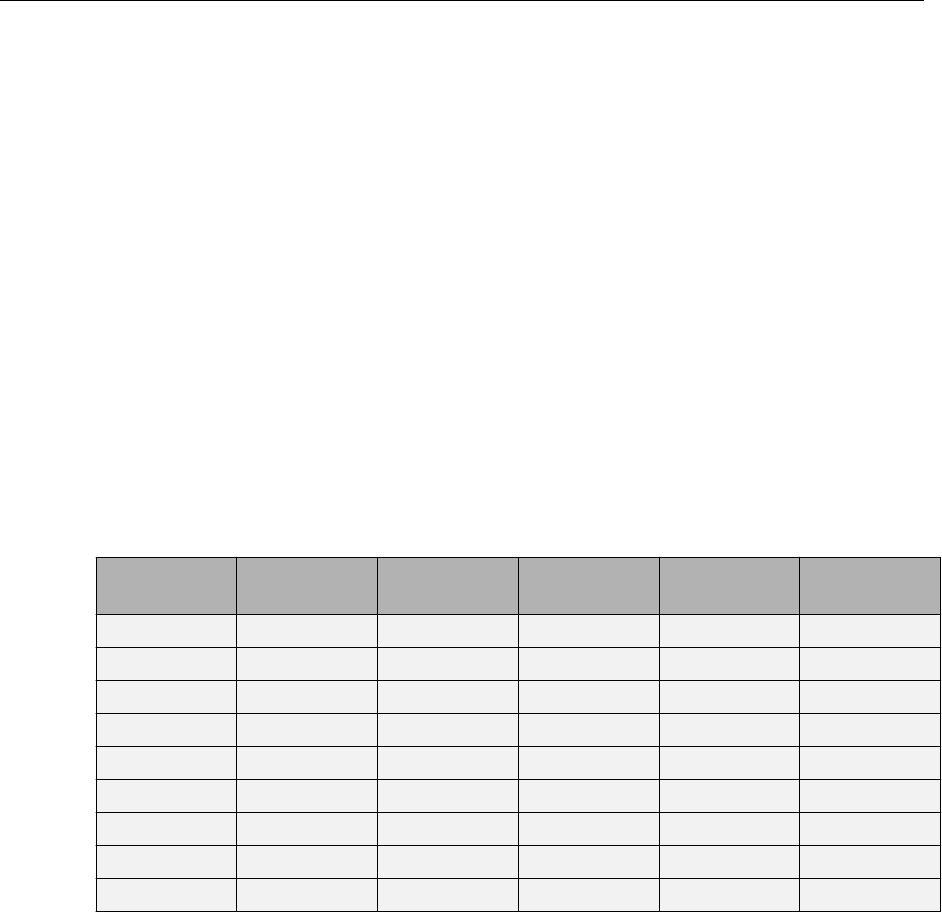
ENGINE Data Set
The third benchmark problem is a realistic function approximation (or nonlinear
regression) problem. The data is obtained from the operation of an engine. The inputs to
the network are engine speed and fueling levels and the network outputs are torque and
emission levels. The network used for this problem is a 2-30-2 network with tansig
neurons in the hidden layer and linear neurons in the output layer. The following table
summarizes the results of training this network with the nine dierent algorithms. Each
entry in the table represents 30 dierent trials (10 trials for RP and GDX because of time
constraints), where dierent random initial weights are used in each trial. In each case,
the network is trained until the squared error is less than 0.005. The fastest algorithm for
this problem is the LM algorithm, although the BFGS quasi-Newton algorithm and the
conjugate gradient algorithms (the scaled conjugate gradient algorithm in particular) are
almost as fast. Although this is a function approximation problem, the LM algorithm is not
as clearly superior as it was on the SIN data set. In this case, the number of weights and
biases in the network is much larger than the one used on the SIN problem (152 versus
16), and the advantages of the LM algorithm decrease as the number of network
parameters increases.
Algorithm Mean Time
(s)
Ratio Min. Time
(s)
Max. Time
(s)
Std. (s)
LM 18.45 1.00 12.01 30.03 4.27
BFG 27.12 1.47 16.42 47.36 5.95
SCG 36.02 1.95 19.39 52.45 7.78
CGF 37.93 2.06 18.89 50.34 6.12
CGB 39.93 2.16 23.33 55.42 7.50
CGP 44.30 2.40 24.99 71.55 9.89
OSS 48.71 2.64 23.51 80.90 12.33
RP 65.91 3.57 31.83 134.31 34.24
GDX 188.50 10.22 81.59 279.90 66.67
The following gure plots the mean square error versus execution time for some typical
algorithms. The performance of the LM algorithm improves over time relative to the other
algorithms.
10 Advanced Topics
10-22
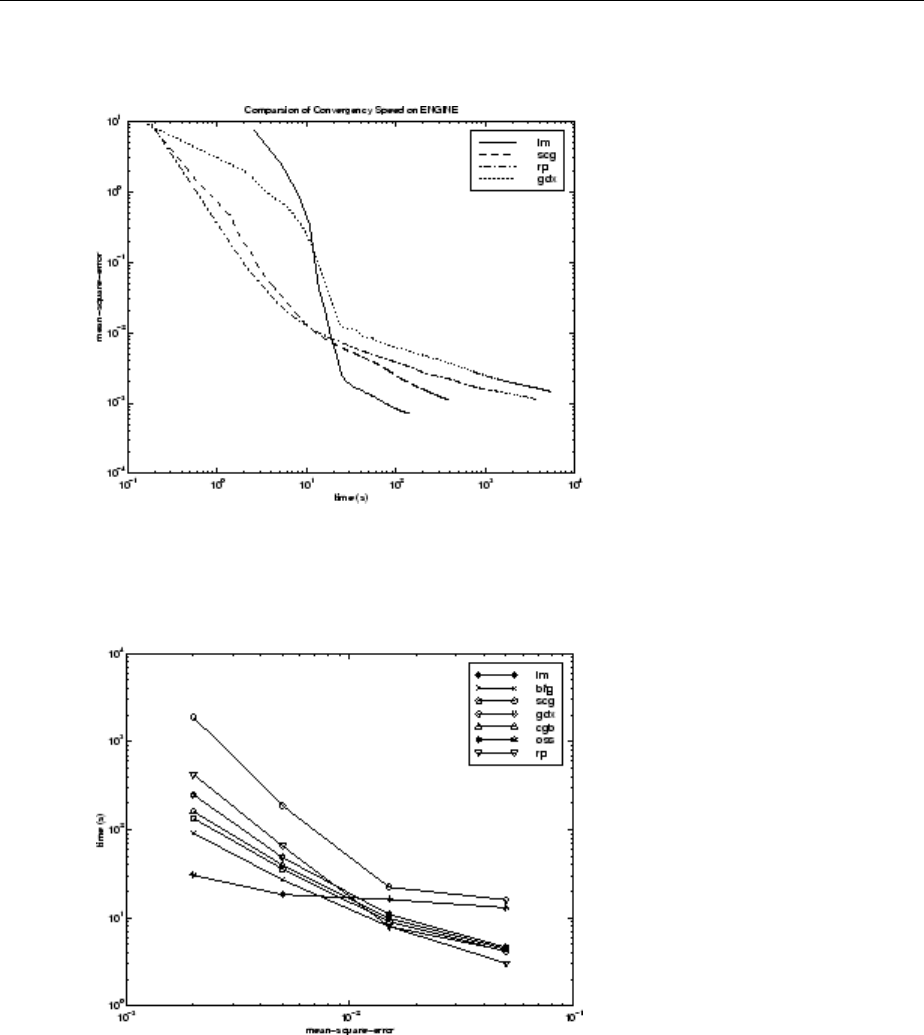
The relationship between the algorithms is further illustrated in the following gure,
which plots the time required to converge versus the mean square error convergence
goal. Again you can see that some algorithms degrade as the error goal is reduced (GDX
and RP), while the LM algorithm improves.
Choose a Multilayer Neural Network Training Function
10-23
CANCER Data Set
The fourth benchmark problem is a realistic pattern recognition (or nonlinear
discriminant analysis) problem. The objective of the network is to classify a tumor as
either benign or malignant based on cell descriptions gathered by microscopic
examination. Input attributes include clump thickness, uniformity of cell size and cell
shape, the amount of marginal adhesion, and the frequency of bare nuclei. The data was
obtained from the University of Wisconsin Hospitals, Madison, from Dr. William H.
Wolberg. The network used for this problem is a 9-5-5-2 network with tansig neurons in
all layers. The following table summarizes the results of training this network with the
nine dierent algorithms. Each entry in the table represents 30 dierent trials, where
dierent random initial weights are used in each trial. In each case, the network is
trained until the squared error is less than 0.012. A few runs failed to converge for some
of the algorithms, so only the top 75% of the runs from each algorithm were used to
obtain the statistics.
The conjugate gradient algorithms and resilient backpropagation all provide fast
convergence, and the LM algorithm is also reasonably fast. As with the parity data set,
the LM algorithm does not perform as well on pattern recognition problems as it does on
function approximation problems.
Algorithm Mean Time
(s)
Ratio Min. Time
(s)
Max. Time
(s)
Std. (s)
CGB 80.27 1.00 55.07 102.31 13.17
RP 83.41 1.04 59.51 109.39 13.44
SCG 86.58 1.08 41.21 112.19 18.25
CGP 87.70 1.09 56.35 116.37 18.03
CGF 110.05 1.37 63.33 171.53 30.13
LM 110.33 1.37 58.94 201.07 38.20
BFG 209.60 2.61 118.92 318.18 58.44
GDX 313.22 3.90 166.48 446.43 75.44
OSS 463.87 5.78 250.62 599.99 97.35
The following gure plots the mean square error versus execution time for some typical
algorithms. For this problem there is not as much variation in performance as in previous
problems.
10 Advanced Topics
10-24
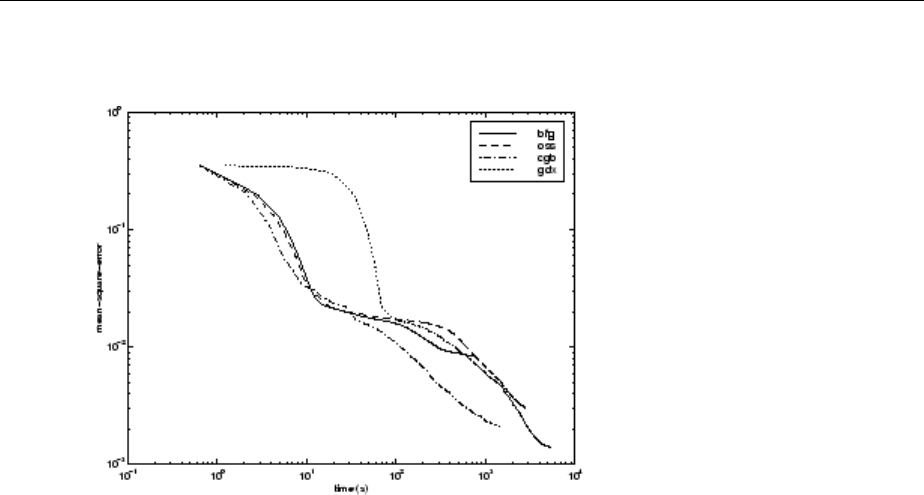
The relationship between the algorithms is further illustrated in the following gure,
which plots the time required to converge versus the mean square error convergence
goal. Again you can see that some algorithms degrade as the error goal is reduced (OSS
and BFG) while the LM algorithm improves. It is typical of the LM algorithm on any
problem that its performance improves relative to other algorithms as the error goal is
reduced.
Choose a Multilayer Neural Network Training Function
10-25
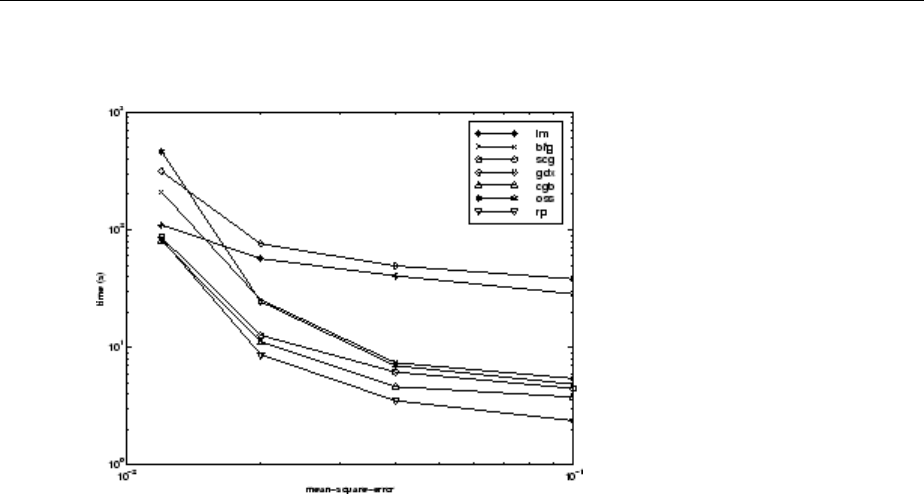
CHOLESTEROL Data Set
The fth benchmark problem is a realistic function approximation (or nonlinear
regression) problem. The objective of the network is to predict cholesterol levels (ldl, hdl,
and vldl) based on measurements of 21 spectral components. The data was obtained from
Dr. Neil Purdie, Department of Chemistry, Oklahoma State University [PuLu92 on page
13-2]. The network used for this problem is a 21-15-3 network with tansig neurons in
the hidden layers and linear neurons in the output layer. The following table summarizes
the results of training this network with the nine dierent algorithms. Each entry in the
table represents 20 dierent trials (10 trials for RP and GDX), where dierent random
initial weights are used in each trial. In each case, the network is trained until the
squared error is less than 0.027.
The scaled conjugate gradient algorithm has the best performance on this problem,
although all the conjugate gradient algorithms perform well. The LM algorithm does not
perform as well on this function approximation problem as it did on the other two. That is
because the number of weights and biases in the network has increased again (378
versus 152 versus 16). As the number of parameters increases, the computation required
in the LM algorithm increases geometrically.
10 Advanced Topics
10-26
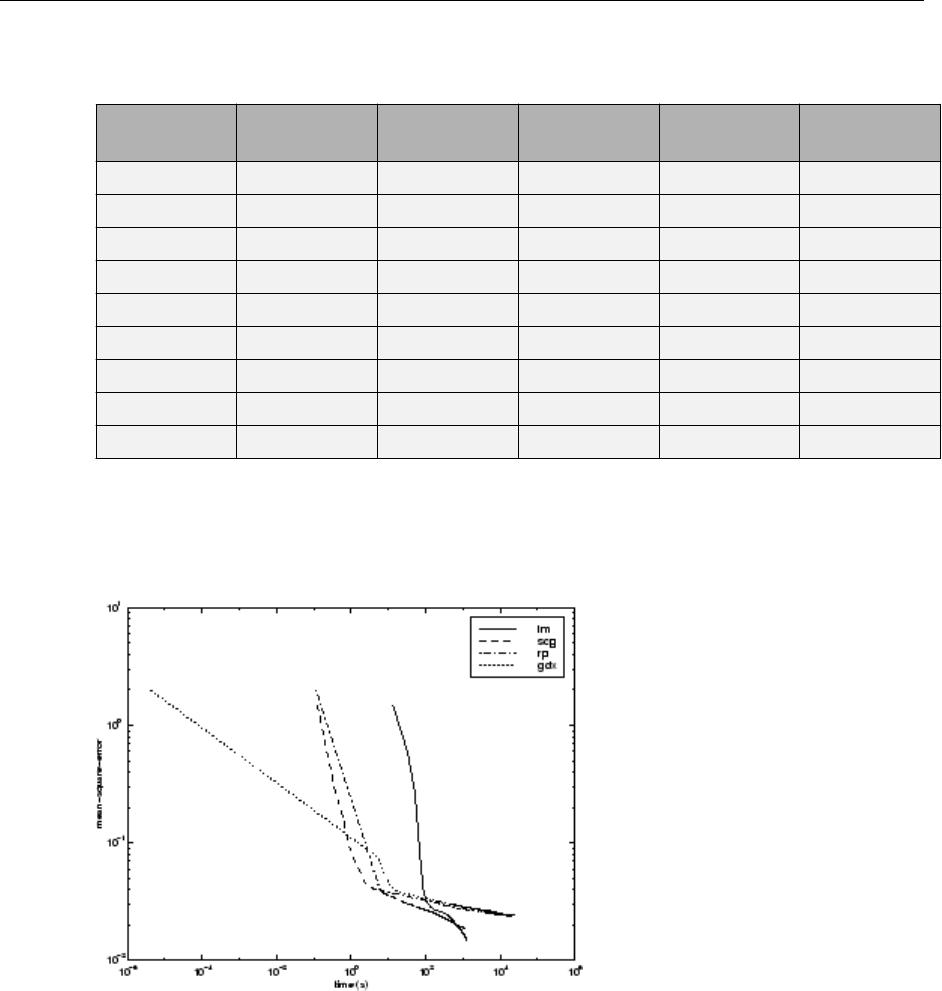
Algorithm Mean Time
(s)
Ratio Min. Time
(s)
Max. Time
(s)
Std. (s)
SCG 99.73 1.00 83.10 113.40 9.93
CGP 121.54 1.22 101.76 162.49 16.34
CGB 124.06 1.2 107.64 146.90 14.62
CGF 136.04 1.36 106.46 167.28 17.67
LM 261.50 2.62 103.52 398.45 102.06
OSS 268.55 2.69 197.84 372.99 56.79
BFG 550.92 5.52 471.61 676.39 46.59
RP 1519.00 15.23 581.17 2256.10 557.34
GDX 3169.50 31.78 2514.90 4168.20 610.52
The following gure plots the mean square error versus execution time for some typical
algorithms. For this problem, you can see that the LM algorithm is able to drive the mean
square error to a lower level than the other algorithms. The SCG and RP algorithms
provide the fastest initial convergence.
The relationship between the algorithms is further illustrated in the following gure,
which plots the time required to converge versus the mean square error convergence
Choose a Multilayer Neural Network Training Function
10-27
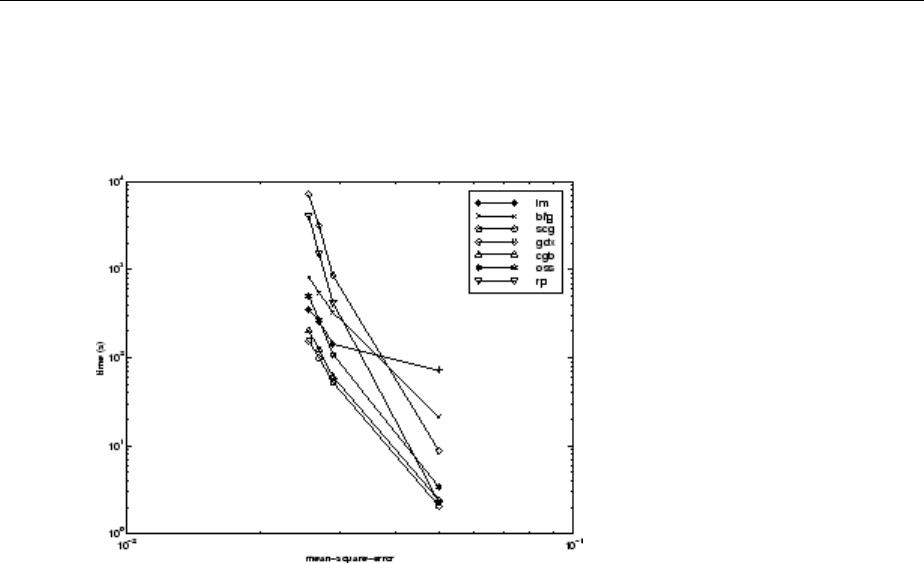
goal. You can see that the LM and BFG algorithms improve relative to the other
algorithms as the error goal is reduced.
DIABETES Data Set
The sixth benchmark problem is a pattern recognition problem. The objective of the
network is to decide whether an individual has diabetes, based on personal data (age,
number of times pregnant) and the results of medical examinations (e.g., blood pressure,
body mass index, result of glucose tolerance test, etc.). The data was obtained from the
University of California, Irvine, machine learning data base. The network used for this
problem is an 8-15-15-2 network with tansig neurons in all layers. The following table
summarizes the results of training this network with the nine dierent algorithms. Each
entry in the table represents 10 dierent trials, where dierent random initial weights are
used in each trial. In each case, the network is trained until the squared error is less than
0.05.
The conjugate gradient algorithms and resilient backpropagation all provide fast
convergence. The results on this problem are consistent with the other pattern
recognition problems considered. The RP algorithm works well on all the pattern
recognition problems. This is reasonable, because that algorithm was designed to
overcome the diiculties caused by training with sigmoid functions, which have very
small slopes when operating far from the center point. For pattern recognition problems,
10 Advanced Topics
10-28
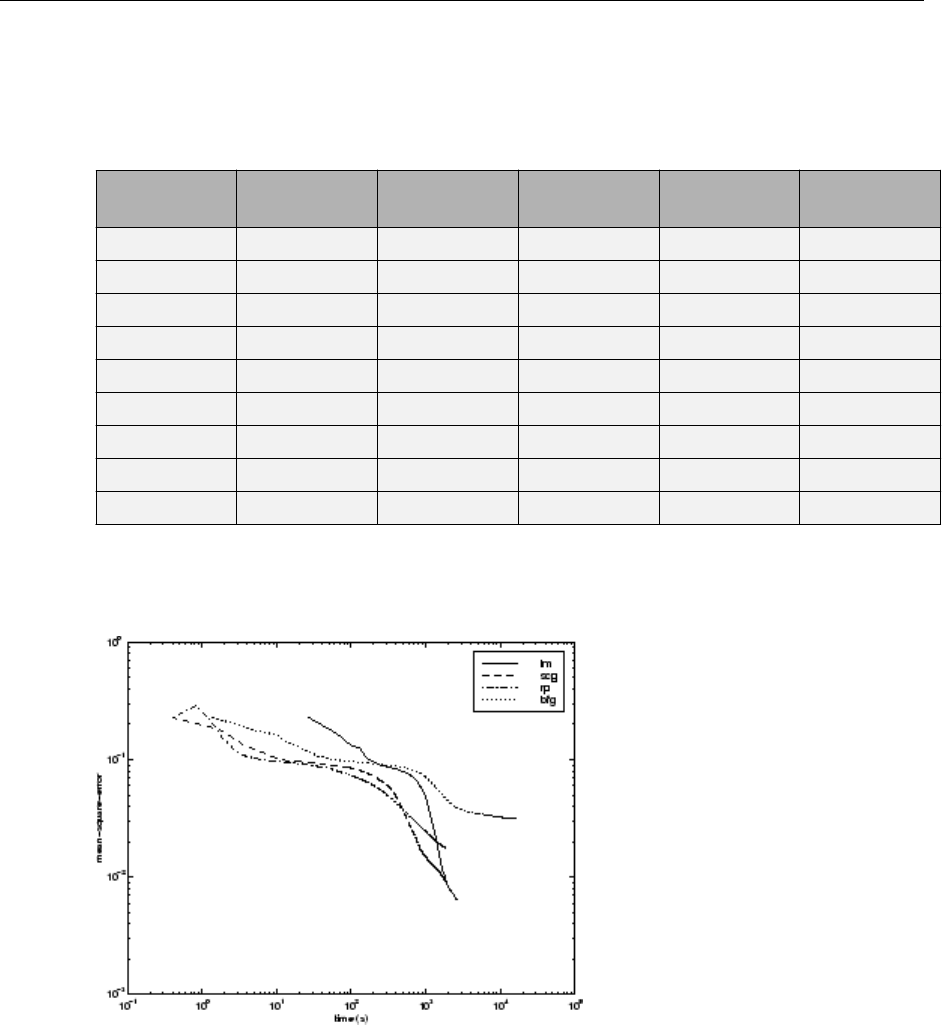
you use sigmoid transfer functions in the output layer, and you want the network to
operate at the tails of the sigmoid function.
Algorithm Mean Time
(s)
Ratio Min. Time
(s)
Max. Time
(s)
Std. (s)
RP 323.90 1.00 187.43 576.90 111.37
SCG 390.53 1.21 267.99 487.17 75.07
CGB 394.67 1.22 312.25 558.21 85.38
CGP 415.90 1.28 320.62 614.62 94.77
OSS 784.00 2.42 706.89 936.52 76.37
CGF 784.50 2.42 629.42 1082.20 144.63
LM 1028.10 3.17 802.01 1269.50 166.31
BFG 1821.00 5.62 1415.80 3254.50 546.36
GDX 7687.00 23.73 5169.20 10350.00 2015.00
The following gure plots the mean square error versus execution time for some typical
algorithms. As with other problems, you see that the SCG and RP have fast initial
convergence, while the LM algorithm is able to provide smaller nal error.
Choose a Multilayer Neural Network Training Function
10-29
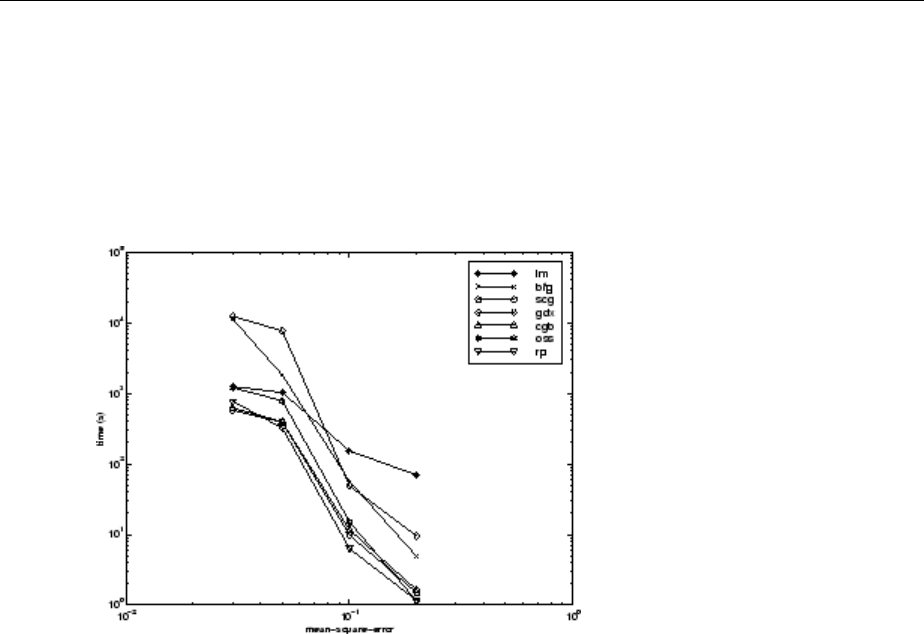
The relationship between the algorithms is further illustrated in the following gure,
which plots the time required to converge versus the mean square error convergence
goal. In this case, you can see that the BFG algorithm degrades as the error goal is
reduced, while the LM algorithm improves. The RP algorithm is best, except at the
smallest error goal, where SCG is better.
Summary
There are several algorithm characteristics that can be deduced from the experiments
described. In general, on function approximation problems, for networks that contain up
to a few hundred weights, the Levenberg-Marquardt algorithm will have the fastest
convergence. This advantage is especially noticeable if very accurate training is required.
In many cases, trainlm is able to obtain lower mean square errors than any of the other
algorithms tested. However, as the number of weights in the network increases, the
advantage of trainlm decreases. In addition, trainlm performance is relatively poor on
pattern recognition problems. The storage requirements of trainlm are larger than the
other algorithms tested.
The trainrp function is the fastest algorithm on pattern recognition problems. However,
it does not perform well on function approximation problems. Its performance also
degrades as the error goal is reduced. The memory requirements for this algorithm are
relatively small in comparison to the other algorithms considered.
10 Advanced Topics
10-30

The conjugate gradient algorithms, in particular trainscg, seem to perform well over a
wide variety of problems, particularly for networks with a large number of weights. The
SCG algorithm is almost as fast as the LM algorithm on function approximation problems
(faster for large networks) and is almost as fast as trainrp on pattern recognition
problems. Its performance does not degrade as quickly as trainrp performance does
when the error is reduced. The conjugate gradient algorithms have relatively modest
memory requirements.
The performance of trainbfg is similar to that of trainlm. It does not require as much
storage as trainlm, but the computation required does increase geometrically with the
size of the network, because the equivalent of a matrix inverse must be computed at each
iteration.
The variable learning rate algorithm traingdx is usually much slower than the other
methods, and has about the same storage requirements as trainrp, but it can still be
useful for some problems. There are certain situations in which it is better to converge
more slowly. For example, when using early stopping you can have inconsistent results if
you use an algorithm that converges too quickly. You might overshoot the point at which
the error on the validation set is minimized.
Choose a Multilayer Neural Network Training Function
10-31
Improve Neural Network Generalization and Avoid
Overtting
In this section...
“Retraining Neural Networks” on page 10-34
“Multiple Neural Networks” on page 10-35
“Early Stopping” on page 10-36
“Index Data Division (divideind)” on page 10-37
“Random Data Division (dividerand)” on page 10-37
“Block Data Division (divideblock)” on page 10-37
“Interleaved Data Division (divideint)” on page 10-38
“Regularization” on page 10-38
“Summary and Discussion of Early Stopping and Regularization” on page 10-41
“Posttraining Analysis (regression)” on page 10-43
Tip To learn how to set up parameters for a deep learning network, see “Set Up
Parameters and Train Convolutional Neural Network” on page 2-46.
One of the problems that occur during neural network training is called overtting. The
error on the training set is driven to a very small value, but when new data is presented
to the network the error is large. The network has memorized the training examples, but
it has not learned to generalize to new situations.
The following gure shows the response of a 1-20-1 neural network that has been trained
to approximate a noisy sine function. The underlying sine function is shown by the dotted
line, the noisy measurements are given by the + symbols, and the neural network
response is given by the solid line. Clearly this network has overtted the data and will
not generalize well.
10 Advanced Topics
10-32
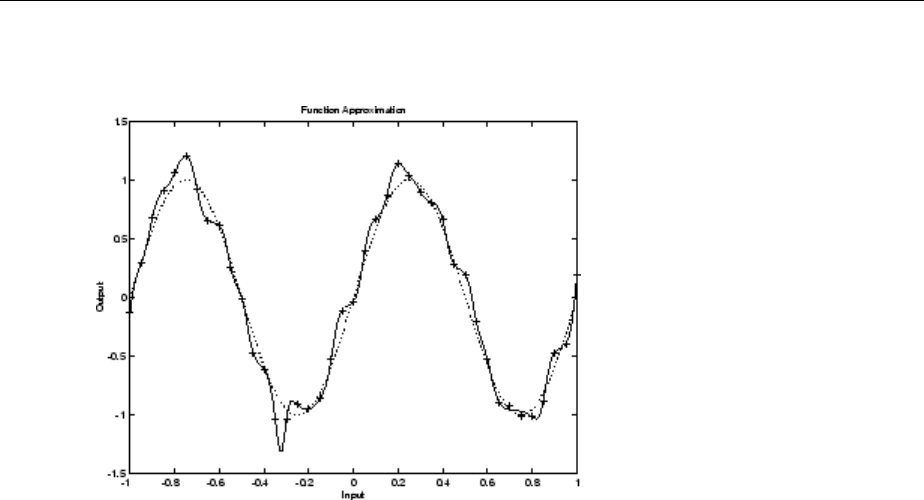
One method for improving network generalization is to use a network that is just large
enough to provide an adequate t. The larger network you use, the more complex the
functions the network can create. If you use a small enough network, it will not have
enough power to overt the data. Run the Neural Network Design example nnd11gn
[HDB96 on page 13-2] to investigate how reducing the size of a network can prevent
overtting.
Unfortunately, it is diicult to know beforehand how large a network should be for a
specic application. There are two other methods for improving generalization that are
implemented in Neural Network Toolbox software: regularization and early stopping. The
next sections describe these two techniques and the routines to implement them.
Note that if the number of parameters in the network is much smaller than the total
number of points in the training set, then there is little or no chance of overtting. If you
can easily collect more data and increase the size of the training set, then there is no
need to worry about the following techniques to prevent overtting. The rest of this
section only applies to those situations in which you want to make the most of a limited
supply of data.
Improve Neural Network Generalization and Avoid Overtting
10-33

Retraining Neural Networks
Typically each backpropagation training session starts with dierent initial weights and
biases, and dierent divisions of data into training, validation, and test sets. These
dierent conditions can lead to very dierent solutions for the same problem.
It is a good idea to train several networks to ensure that a network with good
generalization is found.
Here a dataset is loaded and divided into two parts: 90% for designing networks and 10%
for testing them all.
[x, t] = bodyfat_dataset;
Q = size(x, 2);
Q1 = floor(Q * 0.90);
Q2 = Q - Q1;
ind = randperm(Q);
ind1 = ind(1:Q1);
ind2 = ind(Q1 + (1:Q2));
x1 = x(:, ind1);
t1 = t(:, ind1);
x2 = x(:, ind2);
t2 = t(:, ind2);
Next a network architecture is chosen and trained ten times on the rst part of the
dataset, with each network’s mean square error on the second part of the dataset.
net = feedforwardnet(10);
numNN = 10;
NN = cell(1, numNN);
perfs = zeros(1, numNN);
for i = 1:numNN
fprintf('Training %d/%d\n', i, numNN);
NN{i} = train(net, x1, t1);
y2 = NN{i}(x2);
perfs(i) = mse(net, t2, y2);
end
Each network will be trained starting from dierent initial weights and biases, and with a
dierent division of the rst dataset into training, validation, and test sets. Note that the
test sets are a good measure of generalization for each respective network, but not for all
the networks, because data that is a test set for one network will likely be used for
training or validation by other neural networks. This is why the original dataset was
divided into two parts, to ensure that a completely independent test set is preserved.
10 Advanced Topics
10-34

The neural network with the lowest performance is the one that generalized best to the
second part of the dataset.
Multiple Neural Networks
Another simple way to improve generalization, especially when caused by noisy data or a
small dataset, is to train multiple neural networks and average their outputs.
For instance, here 10 neural networks are trained on a small problem and their mean
squared errors compared to the means squared error of their average.
First, the dataset is loaded and divided into a design and test set.
[x, t] = bodyfat_dataset;
Q = size(x, 2);
Q1 = floor(Q * 0.90);
Q2 = Q - Q1;
ind = randperm(Q);
ind1 = ind(1:Q1);
ind2 = ind(Q1 + (1:Q2));
x1 = x(:, ind1);
t1 = t(:, ind1);
x2 = x(:, ind2);
t2 = t(:, ind2);
Then, ten neural networks are trained.
net = feedforwardnet(10);
numNN = 10;
nets = cell(1, numNN);
for i = 1:numNN
fprintf('Training %d/%d\n', i, numNN)
nets{i} = train(net, x1, t1);
end
Next, each network is tested on the second dataset with both individual performances and
the performance for the average output calculated.
perfs = zeros(1, numNN);
y2Total = 0;
for i = 1:numNN
neti = nets{i};
y2 = neti(x2);
perfs(i) = mse(neti, t2, y2);
Improve Neural Network Generalization and Avoid Overtting
10-35

y2Total = y2Total + y2;
end
perfs
y2AverageOutput = y2Total / numNN;
perfAveragedOutputs = mse(nets{1}, t2, y2AverageOutput)
The mean squared error for the average output is likely to be lower than most of the
individual performances, perhaps not all. It is likely to generalize better to additional new
data.
For some very diicult problems, a hundred networks can be trained and the average of
their outputs taken for any input. This is especially helpful for a small, noisy dataset in
conjunction with the Bayesian Regularization training function trainbr, described
below.
Early Stopping
The default method for improving generalization is called early stopping. This technique
is automatically provided for all of the supervised network creation functions, including
the backpropagation network creation functions such as feedforwardnet.
In this technique the available data is divided into three subsets. The rst subset is the
training set, which is used for computing the gradient and updating the network weights
and biases. The second subset is the validation set. The error on the validation set is
monitored during the training process. The validation error normally decreases during
the initial phase of training, as does the training set error. However, when the network
begins to overt the data, the error on the validation set typically begins to rise. When the
validation error increases for a specied number of iterations
(net.trainParam.max_fail), the training is stopped, and the weights and biases at the
minimum of the validation error are returned.
The test set error is not used during training, but it is used to compare dierent models.
It is also useful to plot the test set error during the training process. If the error in the
test set reaches a minimum at a signicantly dierent iteration number than the
validation set error, this might indicate a poor division of the data set.
There are four functions provided for dividing data into training, validation and test sets.
They are dividerand (the default), divideblock, divideint, and divideind. You
can access or change the division function for your network with this property:
net.divideFcn
10 Advanced Topics
10-36

Each of these functions takes parameters that customize its behavior. These values are
stored and can be changed with the following network property:
net.divideParam
Index Data Division (divideind)
Create a simple test problem. For the full data set, generate a noisy sine wave with 201
input points ranging from −1 to 1 at steps of 0.01:
p = [-1:0.01:1];
t = sin(2*pi*p)+0.1*randn(size(p));
Divide the data by index so that successive samples are assigned to the training set,
validation set, and test set successively:
trainInd = 1:3:201
valInd = 2:3:201;
testInd = 3:3:201;
[trainP,valP,testP] = divideind(p,trainInd,valInd,testInd);
[trainT,valT,testT] = divideind(t,trainInd,valInd,testInd);
Random Data Division (dividerand)
You can divide the input data randomly so that 60% of the samples are assigned to the
training set, 20% to the validation set, and 20% to the test set, as follows:
[trainP,valP,testP,trainInd,valInd,testInd] = dividerand(p);
This function not only divides the input data, but also returns indices so that you can
divide the target data accordingly using divideind:
[trainT,valT,testT] = divideind(t,trainInd,valInd,testInd);
Block Data Division (divideblock)
You can also divide the input data randomly such that the rst 60% of the samples are
assigned to the training set, the next 20% to the validation set, and the last 20% to the
test set, as follows:
[trainP,valP,testP,trainInd,valInd,testInd] = divideblock(p);
Improve Neural Network Generalization and Avoid Overtting
10-37

Divide the target data accordingly using divideind:
[trainT,valT,testT] = divideind(t,trainInd,valInd,testInd);
Interleaved Data Division (divideint)
Another way to divide the input data is to cycle samples between the training set,
validation set, and test set according to percentages. You can interleave 60% of the
samples to the training set, 20% to the validation set and 20% to the test set as follows:
[trainP,valP,testP,trainInd,valInd,testInd] = divideint(p);
Divide the target data accordingly using divideind.
[trainT,valT,testT] = divideind(t,trainInd,valInd,testInd);
Regularization
Another method for improving generalization is called regularization. This involves
modifying the performance function, which is normally chosen to be the sum of squares of
the network errors on the training set. The next section explains how the performance
function can be modied, and the following section describes a routine that automatically
sets the optimal performance function to achieve the best generalization.
Modied Performance Function
The typical performance function used for training feedforward neural networks is the
mean sum of squares of the network errors.
F mse
N
e
N
t
i
i
N
i i
i
N
= = = -
= =
 Â
1 1
2
1
2
1
( ) ( )
a
It is possible to improve generalization if you modify the performance function by adding
a term that consists of the mean of the sum of squares of the network weights and biases
msereg msw mse= + -
( )
g g
* *1
, where
g
is the performance ratio, and
msw nwj
j
n
=
=
Â
12
1
10 Advanced Topics
10-38

Using this performance function causes the network to have smaller weights and biases,
and this forces the network response to be smoother and less likely to overt.
The following code reinitializes the previous network and retrains it using the BFGS
algorithm with the regularized performance function. Here the performance ratio is set to
0.5, which gives equal weight to the mean square errors and the mean square weights.
[x,t] = simplefit_dataset;
net = feedforwardnet(10,'trainbfg');
net.divideFcn = '';
net.trainParam.epochs = 300;
net.trainParam.goal = 1e-5;
net.performParam.regularization = 0.5;
net = train(net,x,t);
The problem with regularization is that it is diicult to determine the optimum value for
the performance ratio parameter. If you make this parameter too large, you might get
overtting. If the ratio is too small, the network does not adequately t the training data.
The next section describes a routine that automatically sets the regularization
parameters.
Automated Regularization (trainbr)
It is desirable to determine the optimal regularization parameters in an automated
fashion. One approach to this process is the Bayesian framework of David MacKay
[MacK92 on page 13-2]. In this framework, the weights and biases of the network are
assumed to be random variables with specied distributions. The regularization
parameters are related to the unknown variances associated with these distributions. You
can then estimate these parameters using statistical techniques.
A detailed discussion of Bayesian regularization is beyond the scope of this user guide. A
detailed discussion of the use of Bayesian regularization, in combination with Levenberg-
Marquardt training, can be found in [FoHa97 on page 13-2].
Bayesian regularization has been implemented in the function trainbr. The following
code shows how you can train a 1-20-1 network using this function to approximate the
noisy sine wave shown in the gure in “Improve Neural Network Generalization and
Avoid Overtting” on page 10-32. (Data division is cancelled by setting net.divideFcn
so that the eects of trainbr are isolated from early stopping.)
x = -1:0.05:1;
t = sin(2*pi*x) + 0.1*randn(size(x));
Improve Neural Network Generalization and Avoid Overtting
10-39

net = feedforwardnet(20,'trainbr');
net = train(net,x,t);
One feature of this algorithm is that it provides a measure of how many network
parameters (weights and biases) are being eectively used by the network. In this case,
the nal trained network uses approximately 12 parameters (indicated by #Par in the
printout) out of the 61 total weights and biases in the 1-20-1 network. This eective
number of parameters should remain approximately the same, no matter how large the
number of parameters in the network becomes. (This assumes that the network has been
trained for a suicient number of iterations to ensure convergence.)
The trainbr algorithm generally works best when the network inputs and targets are
scaled so that they fall approximately in the range [−1,1]. That is the case for the test
problem here. If your inputs and targets do not fall in this range, you can use the function
mapminmax or mapstd to perform the scaling, as described in “Choose Neural Network
Input-Output Processing Functions” on page 4-9. Networks created with
feedforwardnet include mapminmax as an input and output processing function by
default.
The following gure shows the response of the trained network. In contrast to the
previous gure, in which a 1-20-1 network overts the data, here you see that the
network response is very close to the underlying sine function (dotted line), and,
therefore, the network will generalize well to new inputs. You could have tried an even
larger network, but the network response would never overt the data. This eliminates
the guesswork required in determining the optimum network size.
When using trainbr, it is important to let the algorithm run until the eective number of
parameters has converged. The training might stop with the message "Maximum MU
reached." This is typical, and is a good indication that the algorithm has truly converged.
You can also tell that the algorithm has converged if the sum squared error (SSE) and
sum squared weights (SSW) are relatively constant over several iterations. When this
occurs you might want to click the Stop Training button in the training window.
10 Advanced Topics
10-40
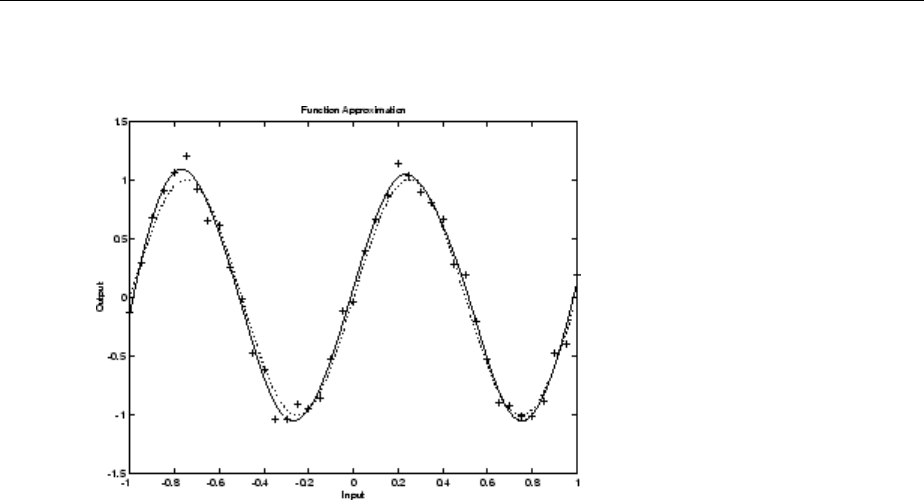
Summary and Discussion of Early Stopping and Regularization
Early stopping and regularization can ensure network generalization when you apply
them properly.
For early stopping, you must be careful not to use an algorithm that converges too rapidly.
If you are using a fast algorithm (like trainlm), set the training parameters so that the
convergence is relatively slow. For example, set mu to a relatively large value, such as 1,
and set mu_dec and mu_inc to values close to 1, such as 0.8 and 1.5, respectively. The
training functions trainscg and trainbr usually work well with early stopping.
With early stopping, the choice of the validation set is also important. The validation set
should be representative of all points in the training set.
When you use Bayesian regularization, it is important to train the network until it reaches
convergence. The sum-squared error, the sum-squared weights, and the eective number
of parameters should reach constant values when the network has converged.
With both early stopping and regularization, it is a good idea to train the network starting
from several dierent initial conditions. It is possible for either method to fail in certain
circumstances. By testing several dierent initial conditions, you can verify robust
network performance.
Improve Neural Network Generalization and Avoid Overtting
10-41
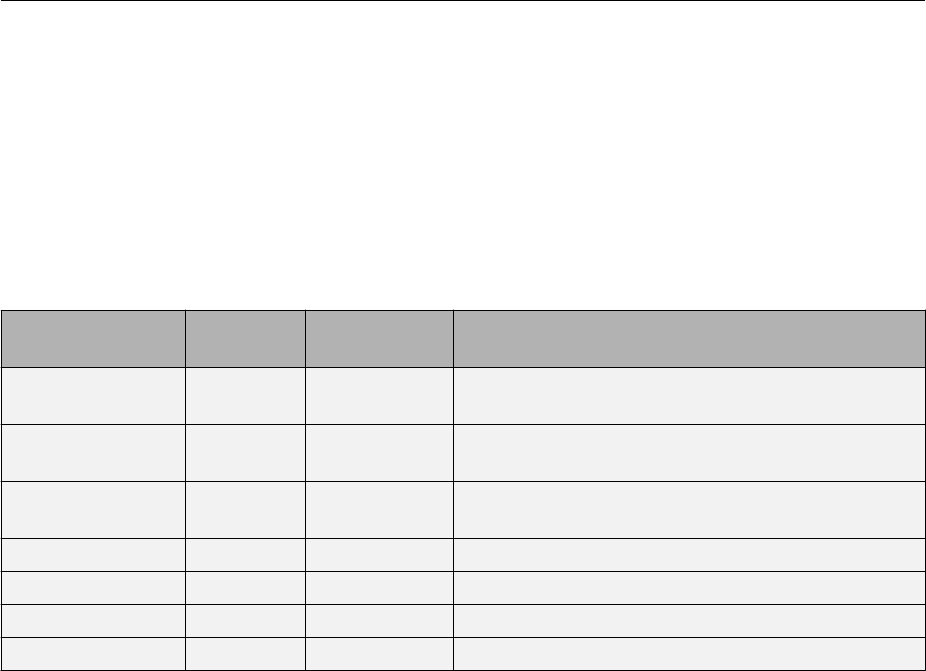
When the data set is small and you are training function approximation networks,
Bayesian regularization provides better generalization performance than early stopping.
This is because Bayesian regularization does not require that a validation data set be
separate from the training data set; it uses all the data.
To provide some insight into the performance of the algorithms, both early stopping and
Bayesian regularization were tested on several benchmark data sets, which are listed in
the following table.
Data Set Title Number of
Points
Network Description
BALL 67 2-10-1 Dual-sensor calibration for a ball position
measurement
SINE (5% N) 41 1-15-1 Single-cycle sine wave with Gaussian noise at 5%
level
SINE (2% N) 41 1-15-1 Single-cycle sine wave with Gaussian noise at 2%
level
ENGINE (ALL) 1199 2-30-2 Engine sensor—full data set
ENGINE (1/4) 300 2-30-2 Engine sensor—1/4 of data set
CHOLEST (ALL) 264 5-15-3 Cholesterol measurement—full data set
CHOLEST (1/2) 132 5-15-3 Cholesterol measurement—1/2 data set
These data sets are of various sizes, with dierent numbers of inputs and targets. With
two of the data sets the networks were trained once using all the data and then retrained
using only a fraction of the data. This illustrates how the advantage of Bayesian
regularization becomes more noticeable when the data sets are smaller. All the data sets
are obtained from physical systems except for the SINE data sets. These two were
articially created by adding various levels of noise to a single cycle of a sine wave. The
performance of the algorithms on these two data sets illustrates the eect of noise.
The following table summarizes the performance of early stopping (ES) and Bayesian
regularization (BR) on the seven test sets. (The trainscg algorithm was used for the
early stopping tests. Other algorithms provide similar performance.)
10 Advanced Topics
10-42
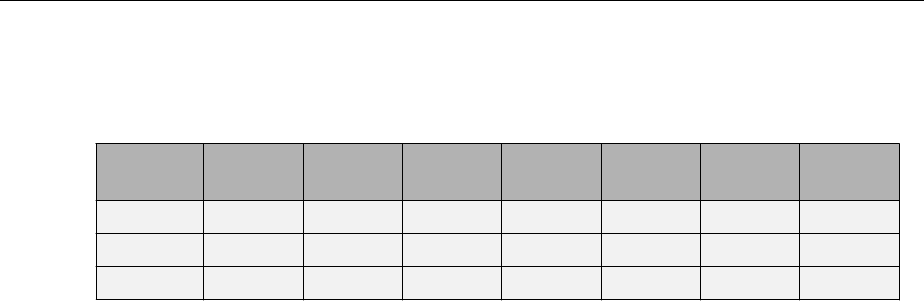
Mean Squared Test Set Error
Method Ball Engine
(All)
Engine
(1/4)
Choles
(All)
Choles
(1/2)
Sine (5%
N)
Sine (2%
N)
ES 1.2e-1 1.3e-2 1.9e-2 1.2e-1 1.4e-1 1.7e-1 1.3e-1
BR 1.3e-3 2.6e-3 4.7e-3 1.2e-1 9.3e-2 3.0e-2 6.3e-3
ES/BR 92 5 4 1 1.5 5.7 21
You can see that Bayesian regularization performs better than early stopping in most
cases. The performance improvement is most noticeable when the data set is small, or if
there is little noise in the data set. The BALL data set, for example, was obtained from
sensors that had very little noise.
Although the generalization performance of Bayesian regularization is often better than
early stopping, this is not always the case. In addition, the form of Bayesian regularization
implemented in the toolbox does not perform as well on pattern recognition problems as
it does on function approximation problems. This is because the approximation to the
Hessian that is used in the Levenberg-Marquardt algorithm is not as accurate when the
network output is saturated, as would be the case in pattern recognition problems.
Another disadvantage of the Bayesian regularization method is that it generally takes
longer to converge than early stopping.
Posttraining Analysis (regression)
The performance of a trained network can be measured to some extent by the errors on
the training, validation, and test sets, but it is often useful to investigate the network
response in more detail. One option is to perform a regression analysis between the
network response and the corresponding targets. The routine regression is designed to
perform this analysis.
The following commands illustrate how to perform a regression analysis on a network
trained.
x = [-1:.05:1];
t = sin(2*pi*x)+0.1*randn(size(x));
net = feedforwardnet(10);
net = train(net,x,t);
y = net(x);
[r,m,b] = regression(t,y)
Improve Neural Network Generalization and Avoid Overtting
10-43

r =
0.9935
m =
0.9874
b =
-0.0067
The network output and the corresponding targets are passed to regression. It returns
three parameters. The rst two, m and b, correspond to the slope and the y-intercept of
the best linear regression relating targets to network outputs. If there were a perfect t
(outputs exactly equal to targets), the slope would be 1, and the y-intercept would be 0. In
this example, you can see that the numbers are very close. The third variable returned by
regression is the correlation coeicient (R-value) between the outputs and targets. It is
a measure of how well the variation in the output is explained by the targets. If this
number is equal to 1, then there is perfect correlation between targets and outputs. In the
example, the number is very close to 1, which indicates a good t.
The following gure illustrates the graphical output provided by regression. The
network outputs are plotted versus the targets as open circles. The best linear t is
indicated by a dashed line. The perfect t (output equal to targets) is indicated by the
solid line. In this example, it is diicult to distinguish the best linear t line from the
perfect t line because the t is so good.
10 Advanced Topics
10-44
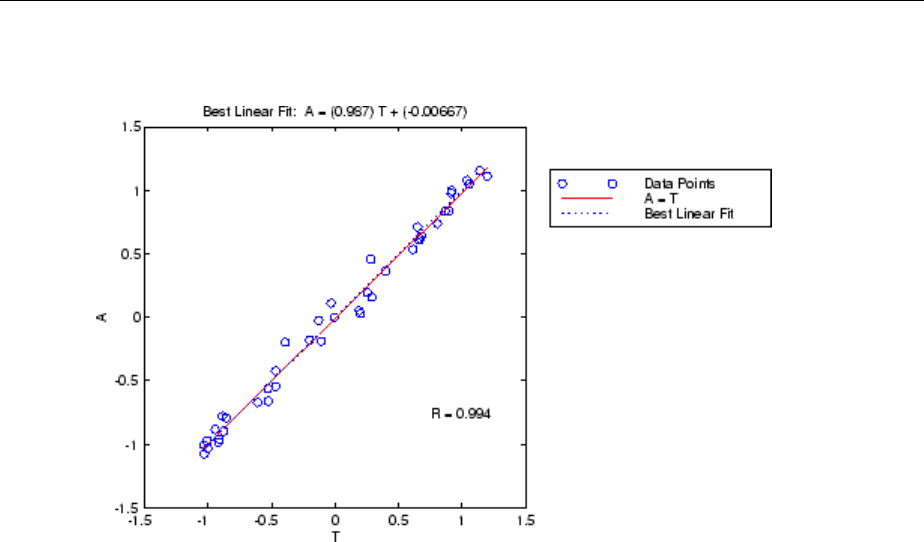
Improve Neural Network Generalization and Avoid Overtting
10-45
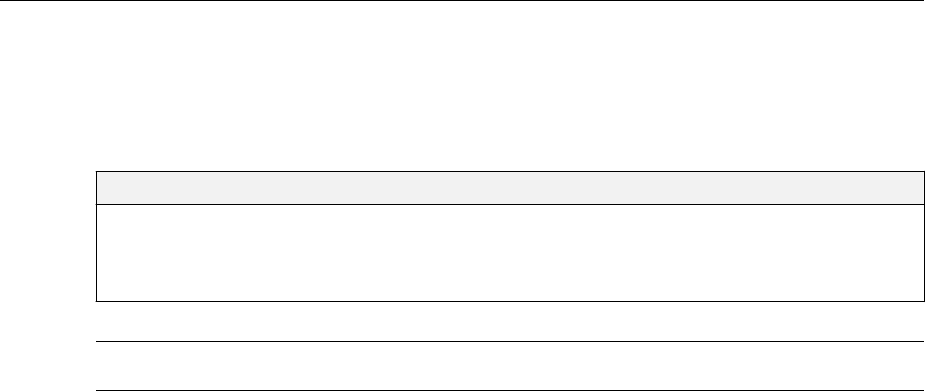
Edit Shallow Neural Network Properties
In this section...
“Custom Network” on page 10-46
“Network Denition” on page 10-47
“Network Behavior” on page 10-57
Tip To learn how to dene your own layers for deep learning networks, see “Dene
Custom Deep Learning Layers” on page 2-56.
Neural Network Toolbox software provides a exible network object type that allows
many kinds of networks to be created and then used with functions such as init, sim,
and train.
Type the following to see all the network creation functions in the toolbox.
help nnnetwork
This exibility is possible because networks have an object-oriented representation. The
representation allows you to dene various architectures and assign various algorithms to
those architectures.
To create custom networks, start with an empty network (obtained with the network
function) and set its properties as desired.
net = network
The network object consists of many properties that you can set to specify the structure
and behavior of your network.
The following sections show how to create a custom network by using these properties.
Custom Network
Before you can build a network you need to know what it looks like. For dramatic
purposes (and to give the toolbox a workout) this section leads you through the creation
of the wild and complicated network shown below.
10 Advanced Topics
10-46
Each of the two elements of the rst network input is to accept values ranging between 0
and 10. Each of the ve elements of the second network input ranges from −2 to 2.
Before you can complete your design of this network, the algorithms it employs for
initialization and training must be specied.
Each layer's weights and biases are initialized with the Nguyen-Widrow layer initialization
method (initnw). The network is trained with Levenberg-Marquardt backpropagation
(trainlm), so that, given example input vectors, the outputs of the third layer learn to
match the associated target vectors with minimal mean squared error (mse).
Network Denition
The rst step is to create a new network. Type the following code to create a network and
view its many properties:
net = network
Edit Shallow Neural Network Properties
10-47

Architecture Properties
The rst group of properties displayed is labeled architecture properties. These
properties allow you to select the number of inputs and layers and their connections.
Number of Inputs and Layers
The rst two properties displayed in the dimensions group are numInputs and
numLayers. These properties allow you to select how many inputs and layers you want
the network to have.
net =
dimensions:
numInputs: 0
numLayers: 0
...
Note that the network has no inputs or layers at this time.
Change that by setting these properties to the number of inputs and number of layers in
the custom network diagram.
net.numInputs = 2;
net.numLayers = 3;
net.numInputs is the number of input sources, not the number of elements in an input
vector (net.inputs{i}.size).
Bias Connections
Type net and press Enter to view its properties again. The network now has two inputs
and three layers.
net =
Neural Network:
dimensions:
numInputs: 2
numLayers: 3
Examine the next four properties in the connections group:
biasConnect: [0; 0; 0]
inputConnect: [0 0; 0 0; 0 0]
10 Advanced Topics
10-48

layerConnect: [0 0 0; 0 0 0; 0 0 0]
outputConnect: [0 0 0]
These matrices of 1s and 0s represent the presence and absence of bias, input weight,
layer weight, and output connections. They are currently all zeros, indicating that the
network does not have any such connections.
The bias connection matrix is a 3-by-1 vector. To create a bias connection to the ith layer
you can set net.biasConnect(i) to 1. Specify that the rst and third layers are to have
bias connections, as the diagram indicates, by typing the following code:
net.biasConnect(1) = 1;
net.biasConnect(3) = 1;
You could also dene those connections with a single line of code.
net.biasConnect = [1; 0; 1];
Input and Layer Weight Connections
The input connection matrix is 3-by-2, representing the presence of connections from two
sources (the two inputs) to three destinations (the three layers). Thus,
net.inputConnect(i,j) represents the presence of an input weight connection going
to the ith layer from the jth input.
To connect the rst input to the rst and second layers, and the second input to the
second layer (as indicated by the custom network diagram), type
net.inputConnect(1,1) = 1;
net.inputConnect(2,1) = 1;
net.inputConnect(2,2) = 1;
or this single line of code:
net.inputConnect = [1 0; 1 1; 0 0];
Similarly, net.layerConnect(i.j) represents the presence of a layer-weight
connection going to the ith layer from the jth layer. Connect layers 1, 2, and 3 to layer 3
as follows:
net.layerConnect = [0 0 0; 0 0 0; 1 1 1];
Edit Shallow Neural Network Properties
10-49

Output Connections
The output connections are a 1-by-3 matrix, indicating that they connect to one
destination (the external world) from three sources (the three layers).
To connect layers 2 and 3 to the network output, type
net.outputConnect = [0 1 1];
Number of Outputs
Type net and press Enter to view the updated properties. The nal three architecture
properties are read-only values, which means their values are determined by the choices
made for other properties. The rst read-only property in the dimension group is the
number of outputs:
numOutputs: 2
By dening output connection from layers 2 and 3, you specied that the network has two
outputs.
Subobject Properties
The next group of properties in the output display is subobjects:
subobjects:
inputs: {2x1 cell array of 2 inputs}
layers: {3x1 cell array of 3 layers}
outputs: {1x3 cell array of 2 outputs}
biases: {3x1 cell array of 2 biases}
inputWeights: {3x2 cell array of 3 weights}
layerWeights: {3x3 cell array of 3 weights}
Inputs
When you set the number of inputs (net.numInputs) to 2, the inputs property becomes
a cell array of two input structures. Each ith input structure (net.inputs{i}) contains
additional properties associated with the ith input.
To see how the input structures are arranged, type
net.inputs
ans =
[1x1 nnetInput]
[1x1 nnetInput]
10 Advanced Topics
10-50

To see the properties associated with the rst input, type
net.inputs{1}
The properties appear as follows:
ans =
name: 'Input'
feedbackOutput: []
processFcns: {}
processParams: {1x0 cell array of 0 params}
processSettings: {0x0 cell array of 0 settings}
processedRange: []
processedSize: 0
range: []
size: 0
userdata: (your custom info)
If you set the exampleInput property, the range, size, processedSize, and
processedRange properties will automatically be updated to match the properties of the
value of exampleInput.
Set the exampleInput property as follows:
net.inputs{1}.exampleInput = [0 10 5; 0 3 10];
If you examine the structure of the rst input again, you see that it now has new values.
The property processFcns can be set to one or more processing functions. Type help
nnprocess to see a list of these functions.
Set the second input vector ranges to be from −2 to 2 for ve elements as follows:
net.inputs{1}.processFcns = {'removeconstantrows','mapminmax'};
View the new input properties. You will see that processParams, processSettings,
processedRange and processedSize have all been updated to reect that inputs will
be processed using removeconstantrows and mapminmax before being given to the
network when the network is simulated or trained. The property processParams
contains the default parameters for each processing function. You can alter these values,
if you like. See the reference page for each processing function to learn more about their
parameters.
You can set the size of an input directly when no processing functions are used:
Edit Shallow Neural Network Properties
10-51

net.inputs{2}.size = 5;
Layers
When you set the number of layers (net.numLayers) to 3, the layers property becomes
a cell array of three-layer structures. Type the following line of code to see the properties
associated with the rst layer.
net.layers{1}
ans =
Neural Network Layer
name: 'Layer'
dimensions: 0
distanceFcn: (none)
distanceParam: (none)
distances: []
initFcn: 'initwb'
netInputFcn: 'netsum'
netInputParam: (none)
positions: []
range: []
size: 0
topologyFcn: (none)
transferFcn: 'purelin'
transferParam: (none)
userdata: (your custom info)
Type the following three lines of code to change the rst layer’s size to 4 neurons, its
transfer function to tansig, and its initialization function to the Nguyen-Widrow function,
as required for the custom network diagram.
net.layers{1}.size = 4;
net.layers{1}.transferFcn = 'tansig';
net.layers{1}.initFcn = 'initnw';
The second layer is to have three neurons, the logsig transfer function, and be
initialized with initnw. Set the second layer’s properties to the desired values as follows:
net.layers{2}.size = 3;
net.layers{2}.transferFcn = 'logsig';
net.layers{2}.initFcn = 'initnw';
10 Advanced Topics
10-52

The third layer’s size and transfer function properties don't need to be changed, because
the defaults match those shown in the network diagram. You need to set only its
initialization function, as follows:
net.layers{3}.initFcn = 'initnw';
Outputs
Use this line of code to see how the outputs property is arranged:
net.outputs
ans =
[] [1x1 nnetOutput] [1x1 nnetOutput]
Note that outputs contains two output structures, one for layer 2 and one for layer 3.
This arrangement occurs automatically when net.outputConnect is set to [0 1 1].
View the second layer’s output structure with the following expression:
net.outputs{2}
ans =
Neural Network Output
name: 'Output'
feedbackInput: []
feedbackDelay: 0
feedbackMode: 'none'
processFcns: {}
processParams: {1x0 cell array of 0 params}
processSettings: {0x0 cell array of 0 settings}
processedRange: [3x2 double]
processedSize: 3
range: [3x2 double]
size: 3
userdata: (your custom info)
The size is automatically set to 3 when the second layer’s size (net.layers{2}.size)
is set to that value. Look at the third layer’s output structure if you want to verify that it
also has the correct size.
Outputs have processing properties that are automatically applied to target values before
they are used by the network during training. The same processing settings are applied in
reverse on layer output values before they are returned as network output values during
network simulation or training.
Edit Shallow Neural Network Properties
10-53

Similar to input-processing properties, setting the exampleOutput property
automatically causes size, range, processedSize, and processedRange to be
updated. Setting processFcns to a cell array list of processing function names causes
processParams, processSettings, processedRange to be updated. You can then
alter the processParam values, if you want to.
Biases, Input Weights, and Layer Weights
Enter the following commands to see how bias and weight structures are arranged:
net.biases
net.inputWeights
net.layerWeights
Here are the results of typing net.biases:
ans =
[1x1 nnetBias]
[]
[1x1 nnetBias]
Each contains a structure where the corresponding connections (net.biasConnect,
net.inputConnect, and net.layerConnect) contain a 1.
Look at their structures with these lines of code:
net.biases{1}
net.biases{3}
net.inputWeights{1,1}
net.inputWeights{2,1}
net.inputWeights{2,2}
net.layerWeights{3,1}
net.layerWeights{3,2}
net.layerWeights{3,3}
For example, typing net.biases{1} results in the following output:
initFcn: (none)
learn: true
learnFcn: (none)
learnParam: (none)
size: 4
userdata: (your custom info)
10 Advanced Topics
10-54

Specify the weights’ tap delay lines in accordance with the network diagram by setting
each weight’s delays property:
net.inputWeights{2,1}.delays = [0 1];
net.inputWeights{2,2}.delays = 1;
net.layerWeights{3,3}.delays = 1;
Network Functions
Type net and press Return again to see the next set of properties.
functions:
adaptFcn: (none)
adaptParam: (none)
derivFcn: 'defaultderiv'
divideFcn: (none)
divideParam: (none)
divideMode: 'sample'
initFcn: 'initlay'
performFcn: 'mse'
performParam: .regularization, .normalization
plotFcns: {}
plotParams: {1x0 cell array of 0 params}
trainFcn: (none)
trainParam: (none)
Each of these properties denes a function for a basic network operation.
Set the initialization function to initlay so the network initializes itself according to the
layer initialization functions already set to initnw, the Nguyen-Widrow initialization
function.
net.initFcn = 'initlay';
This meets the initialization requirement of the network.
Set the performance function to mse (mean squared error) and the training function to
trainlm (Levenberg-Marquardt backpropagation) to meet the nal requirement of the
custom network.
net.performFcn = 'mse';
net.trainFcn = 'trainlm';
Set the divide function to dividerand (divide training data randomly).
Edit Shallow Neural Network Properties
10-55

net.divideFcn = 'dividerand';
During supervised training, the input and target data are randomly divided into training,
test, and validation data sets. The network is trained on the training data until its
performance begins to decrease on the validation data, which signals that generalization
has peaked. The test data provides a completely independent test of network
generalization.
Set the plot functions to plotperform (plot training, validation and test performance)
and plottrainstate (plot the state of the training algorithm with respect to epochs).
net.plotFcns = {'plotperform','plottrainstate'};
Weight and Bias Values
Before initializing and training the network, type net and press Return, then look at the
weight and bias group of network properties.
weight and bias values:
IW: {3x2 cell} containing 3 input weight matrices
LW: {3x3 cell} containing 3 layer weight matrices
b: {3x1 cell} containing 2 bias vectors
These cell arrays contain weight matrices and bias vectors in the same positions that the
connection properties (net.inputConnect, net.layerConnect, net.biasConnect)
contain 1s and the subobject properties (net.inputWeights, net.layerWeights,
net.biases) contain structures.
Evaluating each of the following lines of code reveals that all the bias vectors and weight
matrices are set to zeros.
net.IW{1,1}, net.IW{2,1}, net.IW{2,2}
net.LW{3,1}, net.LW{3,2}, net.LW{3,3}
net.b{1}, net.b{3}
Each input weight net.IW{i,j}, layer weight net.LW{i,j}, and bias vector net.b{i}
has as many rows as the size of the ith layer (net.layers{i}.size).
Each input weight net.IW{i,j} has as many columns as the size of the jth input
(net.inputs{j}.size) multiplied by the number of its delay values
(length(net.inputWeights{i,j}.delays)).
10 Advanced Topics
10-56

Likewise, each layer weight has as many columns as the size of the jth layer
(net.layers{j}.size) multiplied by the number of its delay values
(length(net.layerWeights{i,j}.delays)).
Network Behavior
Initialization
Initialize your network with the following line of code:
net = init(net);
Check the network's biases and weights again to see how they have changed:
net.IW{1,1}, net.IW{2,1}, net.IW{2,2}
net.LW{3,1}, net.LW{3,2}, net.LW{3,3}
net.b{1}, net.b{3}
For example,
net.IW{1,1}
ans =
-0.3040 0.4703
-0.5423 -0.1395
0.5567 0.0604
0.2667 0.4924
Training
Dene the following cell array of two input vectors (one with two elements, one with ve)
for two time steps (i.e., two columns).
X = {[0; 0] [2; 0.5]; [2; -2; 1; 0; 1] [-1; -1; 1; 0; 1]};
You want the network to respond with the following target sequences for the second layer,
which has three neurons, and the third layer with one neuron:
T = {[1; 1; 1] [0; 0; 0]; 1 -1};
Before training, you can simulate the network to see whether the initial network's
response Y is close to the target T.
Y = sim(net,X)
Y =
Edit Shallow Neural Network Properties
10-57

[3x1 double] [3x1 double]
[ 1.7148] [ 2.2726]
The cell array Y is the output sequence of the network, which is also the output sequence
of the second and third layers. The values you got for the second row can dier from
those shown because of dierent initial weights and biases. However, they will almost
certainly not be equal to targets T, which is also true of the values shown.
The next task is optional. On some occasions you may wish to alter the training
parameters before training. The following line of code displays the default Levenberg-
Marquardt training parameters (dened when you set net.trainFcn to trainlm).
net.trainParam
The following properties should be displayed.
ans =
Show Training Window Feedback showWindow: true
Show Command Line Feedback showCommandLine: false
Command Line Frequency show: 25
Maximum Epochs epochs: 1000
Maximum Training Time time: Inf
Performance Goal goal: 0
Minimum Gradient min_grad: 1e-07
Maximum Validation Checks max_fail: 6
Mu mu: 0.001
Mu Decrease Ratio mu_dec: 0.1
Mu Increase Ratio mu_inc: 10
Maximum mu mu_max: 10000000000
You will not often need to modify these values. See the documentation for the training
function for information about what each of these means. They have been initialized with
default values that work well for a large range of problems, so there is no need to change
them here.
Next, train the network with the following call:
net = train(net,X,T);
Training launches the neural network training window. To open the performance and
training state plots, click the plot buttons.
After training, you can simulate the network to see if it has learned to respond correctly:
10 Advanced Topics
10-58

Y = sim(net,X)
[3x1 double] [3x1 double]
[ 1.0000] [ -1.0000]
The second network output (i.e., the second row of the cell array Y), which is also the
third layer’s output, matches the target sequence T.
Edit Shallow Neural Network Properties
10-59

Custom Neural Network Helper Functions
The toolbox allows you to create and use your own custom functions. This gives you a
great deal of control over the algorithms used to initialize, simulate, and train your
networks.
Be aware, however, that custom functions may need updating to remain compatible with
future versions of the software. Backward compatibility of custom functions cannot be
guaranteed.
Template functions are available for you to copy, rename and customize, to create your
own versions of these kinds of functions. You can see the list of all template functions by
typing the following:
help nncustom
Each template is a simple version of a dierent type of function that you can use with
your own custom networks.
For instance, make a copy of the le tansig.m with the new name mytransfer.m. Start
editing the new le by changing the function name a the top from tansig to
mytransfer.
You can now edit each of the sections of code that make up a transfer function, using the
help comments in each of those sections to guide you.
Once you are done, store the new function in your working folder, and assign the name of
your transfer function to the transferFcn property of any layer of any network object to
put it to use.
10 Advanced Topics
10-60

Automatically Save Checkpoints During Neural Network
Training
During neural network training, intermediate results can be periodically saved to a MAT
le for recovery if the computer fails or you kill the training process. This helps protect
the value of long training runs, which if interrupted would need to be completely
restarted otherwise. This feature is especially useful for long parallel training sessions,
which are more likely to be interrupted by computing resource failures.
Checkpoint saves are enabled with the optional 'CheckpointFile' training argument
followed by the checkpoint le name or path. If you specify only a le name, the le is
placed in the working directory by default. The le must have the .mat le extension, but
if this is not specied it is automatically appended. In this example, checkpoint saves are
made to the le called MyCheckpoint.mat in the current working directory.
[x,t] = bodyfat_dataset;
net = feedforwardnet(10);
net2 = train(net,x,t,'CheckpointFile','MyCheckpoint.mat');
22-Mar-2013 04:49:05 First Checkpoint #1: /WorkingDir/MyCheckpoint.mat
22-Mar-2013 04:49:06 Final Checkpoint #2: /WorkingDir/MyCheckpoint.mat
By default, checkpoint saves occur at most once every 60 seconds. For the previous short
training example, this results in only two checkpoint saves: one at the beginning and one
at the end of training.
The optional training argument 'CheckpointDelay' can change the frequency of saves.
For example, here the minimum checkpoint delay is set to 10 seconds for a time-series
problem where a neural network is trained to model a levitated magnet.
[x,t] = maglev_dataset;
net = narxnet(1:2,1:2,10);
[X,Xi,Ai,T] = preparets(net,x,{},t);
net2 = train(net,X,T,Xi,Ai,'CheckpointFile','MyCheckpoint.mat','CheckpointDelay',10);
22-Mar-2013 04:59:28 First Checkpoint #1: /WorkingDir/MyCheckpoint.mat
22-Mar-2013 04:59:38 Write Checkpoint #2: /WorkingDir/MyCheckpoint.mat
22-Mar-2013 04:59:48 Write Checkpoint #3: /WorkingDir/MyCheckpoint.mat
22-Mar-2013 04:59:58 Write Checkpoint #4: /WorkingDir/MyCheckpoint.mat
22-Mar-2013 05:00:08 Write Checkpoint #5: /WorkingDir/MyCheckpoint.mat
22-Mar-2013 05:00:09 Final Checkpoint #6: /WorkingDir/MyCheckpoint.mat
After a computer failure or training interruption, you can reload the checkpoint structure
containing the best neural network obtained before the interruption, and the training
record. In this case, the stage eld value is 'Final', indicating the last save was at the
Automatically Save Checkpoints During Neural Network Training
10-61

nal epoch because training completed successfully. The rst epoch checkpoint is
indicated by 'First', and intermediate checkpoints by 'Write'.
load('MyCheckpoint.mat')
checkpoint =
file: '/WorkdingDir/MyCheckpoint.mat'
time: [2013 3 22 5 0 9.0712]
number: 6
stage: 'Final'
net: [1x1 network]
tr: [1x1 struct]
You can resume training from the last checkpoint by reloading the dataset (if necessary),
then calling train with the recovered network.
net = checkpoint.net;
[x,t] = maglev_dataset;
load('MyCheckpoint.mat');
[X,Xi,Ai,T] = preparets(net,x,{},t);
net2 = train(net,X,T,Xi,Ai,'CheckpointFile','MyCheckpoint.mat','CheckpointDelay',10);
10 Advanced Topics
10-62
Deploy Trained Neural Network Functions
In this section...
“Deployment Functions and Tools for Trained Networks” on page 10-63
“Generate Neural Network Functions for Application Deployment” on page 10-64
“Generate Simulink Diagrams” on page 10-67
Deployment Functions and Tools for Trained Networks
The function genFunction allows stand-alone MATLAB functions for a trained neural
network. The generated code contains all the information needed to simulate a neural
network, including settings, weight and bias values, module functions, and calculations.
The generated MATLAB function can be used to inspect the exact simulation calculations
that a particular neural network performs, and makes it easier to deploy neural networks
for many purposes with a wide variety of MATLAB deployment products and tools.
The function genFunction is introduced in the deployment panels in the tools nftool,
nctool, nprtool and ntstool. For information on these tool features, see “Fit Data
with a Shallow Neural Network”, “Classify Patterns with a Shallow Neural Network”,
“Cluster Data with a Self-Organizing Map”, and “Shallow Neural Network Time-Series
Prediction and Modeling”.
Deploy Trained Neural Network Functions
10-63
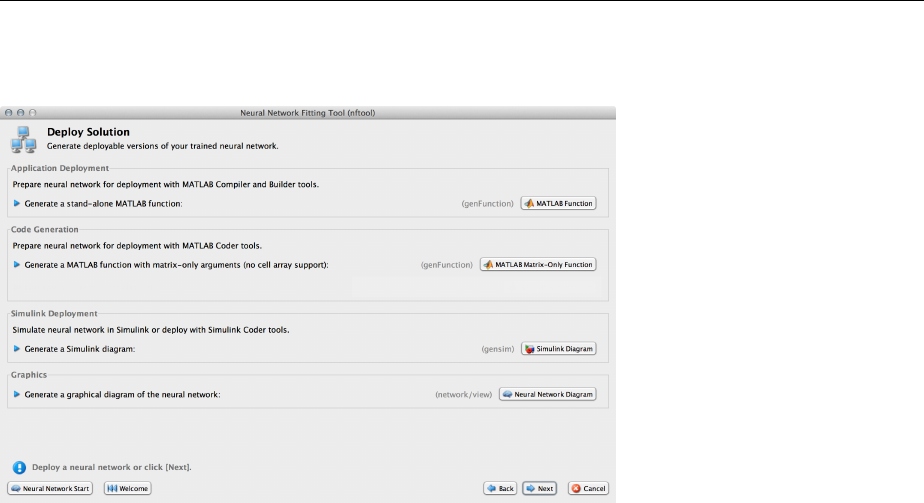
The advanced scripts generated on the Save Results panel of each of these tools includes
an example of deploying networks with genFunction.
Generate Neural Network Functions for Application
Deployment
The function genFunction generates a stand-alone MATLAB function for simulating any
trained neural network and preparing it for deployment. This might be useful for several
tasks:
• Document the input-output transforms of a neural network used as a calculation
template for manual reimplementations of the network
• Use the MATLAB Function block to create a Simulink block
• Use MATLAB Compiler™ to:
• Generate stand-alone executables
• Generate Excel® add-ins
• Use MATLAB Compiler SDK™ to:
• Generate C/C++ libraries
10 Advanced Topics
10-64

• Generate .COM components
• Generate Java® components
• Generate .NET components
• Use MATLAB Coder™ to:
• Generate C/C++ code
• Generate eicient MEX-functions
genFunction(net,'pathname') takes a neural network and le path, and produces a
standalone MATLAB function le filename.m.
genFunction(...,'MatrixOnly','yes') overrides the default cell/matrix notation
and instead generates a function that uses only matrix arguments compatible with
MATLAB Coder tools. For static networks, the matrix columns are interpreted as
independent samples. For dynamic networks, the matrix columns are interpreted as a
series of time steps. The default value is 'no'.
genFunction(___,'ShowLinks','no') disables the default behavior of displaying
links to generated help and source code. The default is 'yes'.
Here a static network is trained and its outputs calculated.
[x, t] = bodyfat_dataset;
bodyfatNet = feedforwardnet(10);
bodyfatNet = train(bodyfatNet, x, t);
y = bodyfatNet(x);
The following code generates, tests, and displays a MATLAB function with the same
interface as the neural network object.
genFunction(bodyfatNet, 'bodyfatFcn');
y2 = bodyfatFcn(x);
accuracy2 = max(abs(y - y2))
edit bodyfatFcn
You can compile the new function with the MATLAB Compiler tools (license required) to a
shared/dynamically linked library with mcc.
mcc -W lib:libBodyfat -T link:lib bodyfatFcn
The next code generates another version of the MATLAB function that supports only
matrix arguments (no cell arrays). This function is tested. Then it is used to generate a
Deploy Trained Neural Network Functions
10-65

MEX-function with the MATLAB Coder tool codegen (license required), which is also
tested.
genFunction(bodyfatNet, 'bodyfatFcn', 'MatrixOnly', 'yes');
y3 = bodyfatFcn(x);
accuracy3 = max(abs(y - y3))
x1Type = coder.typeof(double(0), [13, Inf]); % Coder type of input 1
codegen bodyfatFcn.m -config:mex -o bodyfatCodeGen -args {x1Type}
y4 = bodyfatCodeGen(x);
accuracy4 = max(abs(y - y4))
Here a dynamic network is trained and its outputs calculated.
[x,t] = maglev_dataset;
maglevNet = narxnet(1:2,1:2,10);
[X,Xi,Ai,T] = preparets(maglevNet,x,{},t);
maglevNet = train(maglevNet,X,T,Xi,Ai);
[y,xf,af] = maglevNet(X,Xi,Ai);
Next a MATLAB function is generated and tested. The function is then used to create a
shared/dynamically linked library with mcc.
genFunction(maglevNet,'maglevFcn');
[y2,xf,af] = maglevFcn(X,Xi,Ai);
accuracy2 = max(abs(cell2mat(y)-cell2mat(y2)))
mcc -W lib:libMaglev -T link:lib maglevFcn
The following code generates another version of the MATLAB function that supports only
matrix arguments (no cell arrays). This function is tested. Then it is used to generate a
MEX-function with the MATLAB Coder tool codegen, which is also tested.
genFunction(maglevNet,'maglevFcn','MatrixOnly','yes');
x1 = cell2mat(X(1,:)); % Convert each input to matrix
x2 = cell2mat(X(2,:));
xi1 = cell2mat(Xi(1,:)); % Convert each input state to matrix
xi2 = cell2mat(Xi(2,:));
[y3,xf1,xf2] = maglevFcn(x1,x2,xi1,xi2);
accuracy3 = max(abs(cell2mat(y)-y3))
x1Type = coder.typeof(double(0),[1 Inf]); % Coder type of input 1
x2Type = coder.typeof(double(0),[1 Inf]); % Coder type of input 2
xi1Type = coder.typeof(double(0),[1 2]); % Coder type of input 1 states
xi2Type = coder.typeof(double(0),[1 2]); % Coder type of input 2 states
codegen maglevFcn.m -config:mex -o maglevNetCodeGen ...
-args {x1Type x2Type xi1Type xi2Type}
[y4,xf1,xf2] = maglevNetCodeGen(x1,x2,xi1,xi2);
dynamic_codegen_accuracy = max(abs(cell2mat(y)-y4))
10 Advanced Topics
10-66

Deploy Training of Neural Networks
Tip To learn about GPU code generation for deep learning, see “Deep Learning GPU
Code Generation”.
Use MATLAB Runtime to deploy functions that can train a model. You can deploy MATLAB
code that trains neural networks as described in “Create Standalone Application from
Command Line” (MATLAB Compiler).
The following methods and functions are NOT supported in deployed mode:
• Training progress dialog, nntraintool.
•genFunction and gensim to generate MATLAB code or Simulink blocks
•view method
•nctool, nftool, nnstart, nprtool, ntstool
• Plot functions (such as plotperform, plottrainstate, ploterrhist,
plotregression, plotfit, and so on)
•perceptron, newlind, and elmannet functions.
Here is an example of how you can deploy training of a network. Create a script to train a
neural network, for example, mynntraining.m:
% Create the predictor and response (target)
x = [0.054 0.78 0.13 0.47 0.34 0.79 0.53 0.6 0.65 0.75 0.084 0.91 0.83
0.53 0.93 0.57 0.012 0.16 0.31 0.17 0.26 0.69 0.45 0.23 0.15 0.54];
t = [0.46 0.079 0.42 0.48 0.95 0.63 0.48 0.51 0.16 0.51 1 0.28 0.3];
% Create and display the network
net = fitnet();
disp('Training fitnet')
% Train the network using the data in x and t
net = train(net,x,t);
% Predict the responses using the trained network
y = net(x);
% Measure the performance
perf = perform(net,y,t)
Compile the script mynntraining.m by using the command line:
mcc -m 'mynntraining.m'
10 Advanced Topics
10-68

mcc invokes the MATLAB Compiler to compile code at the prompt. The ag –m compiles a
MATLAB function and generates a standalone executable. The EXE le is now in your
local computer in the working directory.
To run the compiled EXE application on computers that do not have MATLAB installed,
you need to download and install MATLAB Runtime. The readme.txt created in your
working folder has more information about the deployment requirements.
See Also
More About
• “Deploy Trained Neural Network Functions” on page 10-63
See Also
10-69


Historical Neural Networks Overview
This section covers networks that are of historical interest, but that are not as actively
used today as networks presented in other sections. Two of the networks are single-layer
networks that were the rst neural networks for which practical training algorithms were
developed: perceptron networks and ADALINE networks.
The perceptron network is a single-layer network whose weights and biases can be
trained to produce a correct target vector when presented with the corresponding input
vector. This perceptron rule was the rst training algorithm developed for neural
networks. The original book on the perceptron is Rosenblatt, F., Principles of
Neurodynamics, Washington D.C., Spartan Press, 1961 [Rose61 on page 13-2].
At about the same time that Rosenblatt developed the perceptron network, Widrow and
Ho developed a single-layer linear network and associated learning rule, which they
called the ADALINE (Adaptive Linear Neuron). This network was used to implement
adaptive lters, which are still actively used today. The original paper describing this
network is Widrow, B., and M.E. Ho, “Adaptive switching circuits,” 1960 IRE WESCON
Convention Record, New York IRE, 1960, pp. 96–104.
11 Historical Neural Networks
11-2
Perceptron Neural Networks
In this section...
“Neuron Model” on page 11-3
“Perceptron Architecture” on page 11-5
“Create a Perceptron” on page 11-6
“Perceptron Learning Rule (learnp)” on page 11-8
“Training (train)” on page 11-10
“Limitations and Cautions” on page 11-15
Rosenblatt [Rose61 on page 13-2] created many variations of the perceptron. One of
the simplest was a single-layer network whose weights and biases could be trained to
produce a correct target vector when presented with the corresponding input vector. The
training technique used is called the perceptron learning rule. The perceptron generated
great interest due to its ability to generalize from its training vectors and learn from
initially randomly distributed connections. Perceptrons are especially suited for simple
problems in pattern classication. They are fast and reliable networks for the problems
they can solve. In addition, an understanding of the operations of the perceptron provides
a good basis for understanding more complex networks.
The discussion of perceptrons in this section is necessarily brief. For a more thorough
discussion, see Chapter 4, “Perceptron Learning Rule,” of [HDB1996 on page 13-2],
which discusses the use of multiple layers of perceptrons to solve more diicult problems
beyond the capability of one layer.
Neuron Model
A perceptron neuron, which uses the hard-limit transfer function hardlim, is shown
below.
Perceptron Neural Networks
11-3
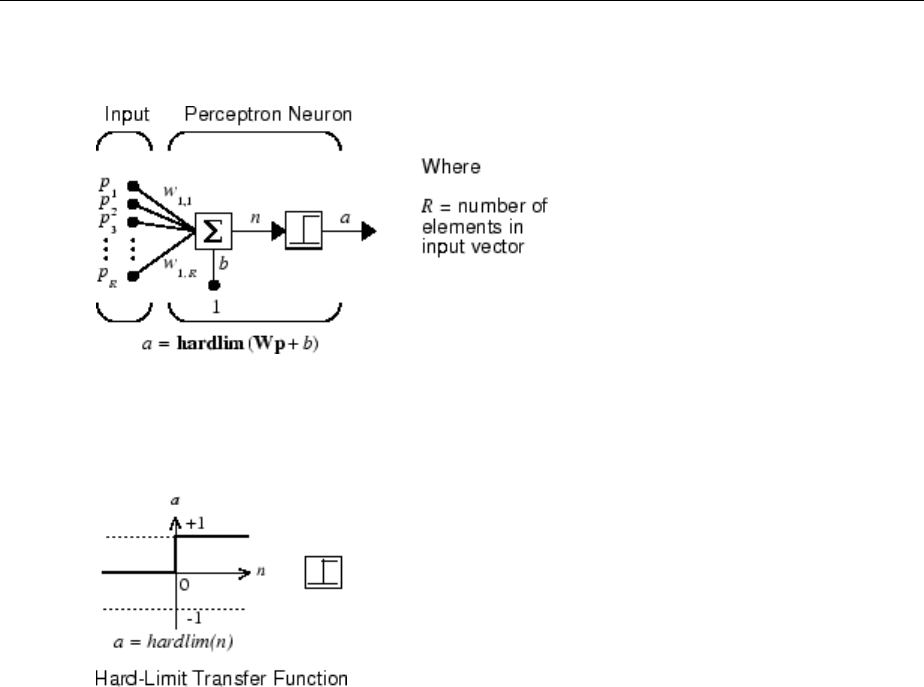
Each external input is weighted with an appropriate weight w1j, and the sum of the
weighted inputs is sent to the hard-limit transfer function, which also has an input of 1
transmitted to it through the bias. The hard-limit transfer function, which returns a 0 or a
1, is shown below.
The perceptron neuron produces a 1 if the net input into the transfer function is equal to
or greater than 0; otherwise it produces a 0.
The hard-limit transfer function gives a perceptron the ability to classify input vectors by
dividing the input space into two regions. Specically, outputs will be 0 if the net input n
is less than 0, or 1 if the net input n is 0 or greater. The following gure show the input
space of a two-input hard limit neuron with the weights w1,1 = −1, w1,2 = 1 and a bias b =
1.
11 Historical Neural Networks
11-4
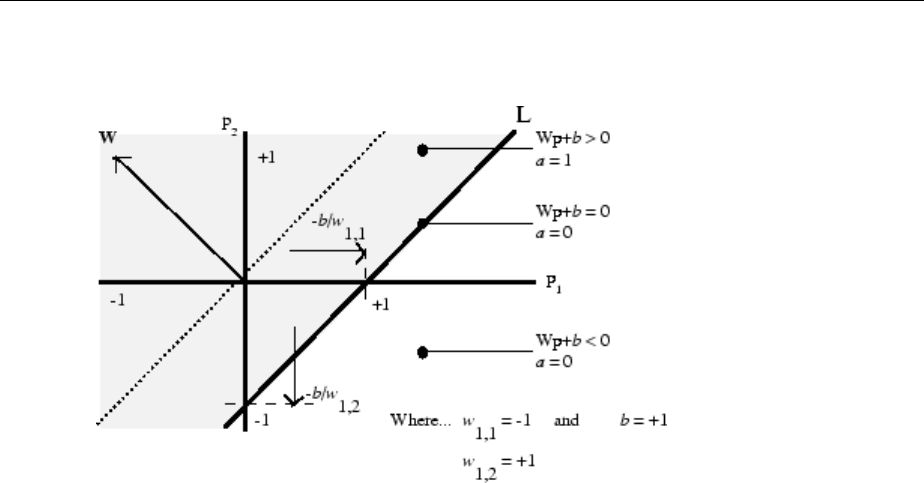
Two classication regions are formed by the decision boundary line L at
Wp + b = 0. This line is perpendicular to the weight matrix W and shifted according to
the bias b. Input vectors above and to the left of the line L will result in a net input
greater than 0 and, therefore, cause the hard-limit neuron to output a 1. Input vectors
below and to the right of the line L cause the neuron to output 0. You can pick weight and
bias values to orient and move the dividing line so as to classify the input space as
desired.
Hard-limit neurons without a bias will always have a classication line going through the
origin. Adding a bias allows the neuron to solve problems where the two sets of input
vectors are not located on dierent sides of the origin. The bias allows the decision
boundary to be shifted away from the origin, as shown in the plot above.
You might want to run the example program nnd4db. With it you can move a decision
boundary around, pick new inputs to classify, and see how the repeated application of the
learning rule yields a network that does classify the input vectors properly.
Perceptron Architecture
The perceptron network consists of a single layer of S perceptron neurons connected to R
inputs through a set of weights wi,j, as shown below in two forms. As before, the network
indices i and j indicate that wi,j is the strength of the connection from the jth input to the
ith neuron.
Perceptron Neural Networks
11-5
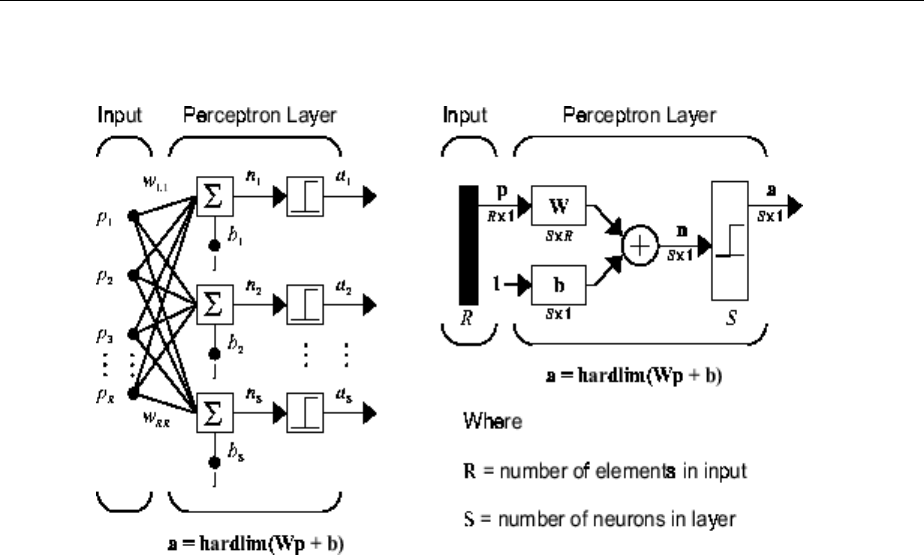
The perceptron learning rule described shortly is capable of training only a single layer.
Thus only one-layer networks are considered here. This restriction places limitations on
the computation a perceptron can perform. The types of problems that perceptrons are
capable of solving are discussed in “Limitations and Cautions” on page 11-15.
Create a Perceptron
You can create a perceptron with the following:
net = perceptron;
net = configure(net,P,T);
where input arguments are as follows:
•P is an R-by-Q matrix of Q input vectors of R elements each.
•T is an S-by-Q matrix of Q target vectors of S elements each.
Commonly, the hardlim function is used in perceptrons, so it is the default.
The following commands create a perceptron network with a single one-element input
vector with the values 0 and 2, and one neuron with outputs that can be either 0 or 1:
11 Historical Neural Networks
11-6

P = [0 2];
T = [0 1];
net = perceptron;
net = configure(net,P,T);
You can see what network has been created by executing the following command:
inputweights = net.inputweights{1,1}
which yields
inputweights =
delays: 0
initFcn: 'initzero'
learn: true
learnFcn: 'learnp'
learnParam: (none)
size: [1 1]
weightFcn: 'dotprod'
weightParam: (none)
userdata: (your custom info)
The default learning function is learnp, which is discussed in “Perceptron Learning Rule
(learnp)” on page 11-8. The net input to the hardlim transfer function is dotprod,
which generates the product of the input vector and weight matrix and adds the bias to
compute the net input.
The default initialization function initzero is used to set the initial values of the weights
to zero.
Similarly,
biases = net.biases{1}
gives
biases =
initFcn: 'initzero'
learn: 1
learnFcn: 'learnp'
learnParam: []
size: 1
userdata: [1x1 struct]
You can see that the default initialization for the bias is also 0.
Perceptron Neural Networks
11-7

Perceptron Learning Rule (learnp)
Perceptrons are trained on examples of desired behavior. The desired behavior can be
summarized by a set of input, output pairs
p t p t p t
1 1 2 1
, , ,…Q Q
where p is an input to the network and t is the corresponding correct (target) output. The
objective is to reduce the error e, which is the dierence t − a between the neuron
response a and the target vector t. The perceptron learning rule learnp calculates
desired changes to the perceptron's weights and biases, given an input vector p and the
associated error e. The target vector t must contain values of either 0 or 1, because
perceptrons (with hardlim transfer functions) can only output these values.
Each time learnp is executed, the perceptron has a better chance of producing the
correct outputs. The perceptron rule is proven to converge on a solution in a nite
number of iterations if a solution exists.
If a bias is not used, learnp works to nd a solution by altering only the weight vector w
to point toward input vectors to be classied as 1 and away from vectors to be classied
as 0. This results in a decision boundary that is perpendicular to w and that properly
classies the input vectors.
There are three conditions that can occur for a single neuron once an input vector p is
presented and the network's response a is calculated:
CASE 1. If an input vector is presented and the output of the neuron is correct (a = t and
e = t – a = 0), then the weight vector w is not altered.
CASE 2. If the neuron output is 0 and should have been 1 (a = 0 and t = 1, and e = t – a
= 1), the input vector p is added to the weight vector w. This makes the weight vector
point closer to the input vector, increasing the chance that the input vector will be
classied as a 1 in the future.
CASE 3. If the neuron output is 1 and should have been 0 (a = 1 and t = 0, and e = t – a
= –1), the input vector p is subtracted from the weight vector w. This makes the weight
vector point farther away from the input vector, increasing the chance that the input
vector will be classied as a 0 in the future.
The perceptron learning rule can be written more succinctly in terms of the error e = t –
a and the change to be made to the weight vector Δw:
11 Historical Neural Networks
11-8

CASE 1. If e = 0, then make a change Δw equal to 0.
CASE 2. If e = 1, then make a change Δw equal to pT.
CASE 3. If e = –1, then make a change Δw equal to –pT.
All three cases can then be written with a single expression:
Dw p p= - =( )t e
T T
a
You can get the expression for changes in a neuron's bias by noting that the bias is simply
a weight that always has an input of 1:
Db t e= - =( )( )
a
1
For the case of a layer of neurons you have
DW t a p e p= - =( )( ) ( )
T T
and
Db t a= - =( ) e
The perceptron learning rule can be summarized as follows:
W W ep
new old T
= +
and
b b e
new old
= +
where e = t – a.
Now try a simple example. Start with a single neuron having an input vector with just two
elements.
net = perceptron;
net = configure(net,[0;0],0);
To simplify matters, set the bias equal to 0 and the weights to 1 and -0.8:
Perceptron Neural Networks
11-9

net.b{1} = [0];
w = [1 -0.8];
net.IW{1,1} = w;
The input target pair is given by
p = [1; 2];
t = [1];
You can compute the output and error with
a = net(p)
a =
0
e = t-a
e =
1
and use the function learnp to nd the change in the weights.
dw = learnp(w,p,[],[],[],[],e,[],[],[],[],[])
dw =
1 2
The new weights, then, are obtained as
w = w + dw
w =
2.0000 1.2000
The process of nding new weights (and biases) can be repeated until there are no errors.
Recall that the perceptron learning rule is guaranteed to converge in a nite number of
steps for all problems that can be solved by a perceptron. These include all classication
problems that are linearly separable. The objects to be classied in such cases can be
separated by a single line.
You might want to try the example nnd4pr. It allows you to pick new input vectors and
apply the learning rule to classify them.
Training (train)
If sim and learnp are used repeatedly to present inputs to a perceptron, and to change
the perceptron weights and biases according to the error, the perceptron will eventually
11 Historical Neural Networks
11-10

nd weight and bias values that solve the problem, given that the perceptron can solve it.
Each traversal through all the training input and target vectors is called a pass.
The function train carries out such a loop of calculation. In each pass the function
train proceeds through the specied sequence of inputs, calculating the output, error,
and network adjustment for each input vector in the sequence as the inputs are
presented.
Note that train does not guarantee that the resulting network does its job. You must
check the new values of W and b by computing the network output for each input vector
to see if all targets are reached. If a network does not perform successfully you can train
it further by calling train again with the new weights and biases for more training
passes, or you can analyze the problem to see if it is a suitable problem for the
perceptron. Problems that cannot be solved by the perceptron network are discussed in
“Limitations and Cautions” on page 11-15.
To illustrate the training procedure, work through a simple problem. Consider a one-
neuron perceptron with a single vector input having two elements:
This network, and the problem you are about to consider, are simple enough that you can
follow through what is done with hand calculations if you want. The problem discussed
below follows that found in [HDB1996 on page 13-2].
Suppose you have the following classication problem and would like to solve it with a
single vector input, two-element perceptron network.
p p p
1 1 2 2 3
2
201
212
2
=È
Î
͢
˚
˙=¸
˝
Ô
˛
Ô=-
È
Î
͢
˚
˙=
Ï
Ì
Ô
Ó
Ô
¸
˝
Ô
˛
Ô=-
È
Î
͢
, ,t t
˚˚
˙=
Ï
Ì
Ô
Ó
Ô
¸
˝
Ô
˛
Ô=-
È
Î
͢
˚
˙
Ï
Ì
Ô
Ó
Ô=
Ï
Ì
Ô
Ó
Ô
¸
˝
Ô
˛
Ô
, ,t t
3 4 4
01
11p
Perceptron Neural Networks
11-11

Use the initial weights and bias. Denote the variables at each step of this calculation by
using a number in parentheses after the variable. Thus, above, the initial values are W(0)
and b(0).
W( ) ( )0 0 0 0 0=
[ ]
=b
Start by calculating the perceptron’s output a for the rst input vector p1, using the initial
weights and bias.
a
= +
=
[ ]
È
Î
͢
˚
˙+
Ê
Ë
Áˆ
¯
˜=
hardlim b
hardlim hardlim
( ( ) ( ))W p0 0
002
20
1
(( )0 1=
The output a does not equal the target value t1, so use the perceptron rule to nd the
incremental changes to the weights and biases based on the error.
e t
e
b e
T
= - = - = -
= = -
[ ]
= - -
[ ]
= = - = -
1
1
0 1 1
1 2 2 2 2
1 1
a
D
D
W p ( )
( )
You can calculate the new weights and bias using the perceptron update rules.
W W ep W
new old T
new old
b b e
= + =
[ ]
+ - -
[ ]
= - -
[ ]
=
= + = + - = -
0 0 2 2 2 2 1
0 1 1
( )
( ) == b( )1
Now present the next input vector, p2. The output is calculated below.
a
= +
= - -
[ ]
-
È
Î
͢
˚
˙-
Ê
Ë
Áˆ
¯
˜=
hardlim b
hardlim hard
( ( ) ( ))W p1 1
221
21
2
llim( )1 1=
On this occasion, the target is 1, so the error is zero. Thus there are no changes in
weights or bias, so W(2) = W(1) = [−2 −2] and b(2) = b(1) = −1.
You can continue in this fashion, presenting p3 next, calculating an output and the error,
and making changes in the weights and bias, etc. After making one pass through all of the
11 Historical Neural Networks
11-12

four inputs, you get the values W(4) = [−3 −1] and b(4) = 0. To determine whether a
satisfactory solution is obtained, make one pass through all input vectors to see if they all
produce the desired target values. This is not true for the fourth input, but the algorithm
does converge on the sixth presentation of an input. The nal values are
W(6) = [−2 −3] and b(6) = 1.
This concludes the hand calculation. Now, how can you do this using the train function?
The following code denes a perceptron.
net = perceptron;
Consider the application of a single input
p = [2; 2];
having the target
t = [0];
Set epochs to 1, so that train goes through the input vectors (only one here) just one
time.
net.trainParam.epochs = 1;
net = train(net,p,t);
The new weights and bias are
w = net.iw{1,1}, b = net.b{1}
w =
-2 -2
b =
-1
Thus, the initial weights and bias are 0, and after training on only the rst vector, they
have the values [−2 −2] and −1, just as you hand calculated.
Now apply the second input vector p2. The output is 1, as it will be until the weights and
bias are changed, but now the target is 1, the error will be 0, and the change will be zero.
You could proceed in this way, starting from the previous result and applying a new input
vector time after time. But you can do this job automatically with train.
Apply train for one epoch, a single pass through the sequence of all four input vectors.
Start with the network denition.
Perceptron Neural Networks
11-13

net = perceptron;
net.trainParam.epochs = 1;
The input vectors and targets are
p = [[2;2] [1;-2] [-2;2] [-1;1]]
t = [0 1 0 1]
Now train the network with
net = train(net,p,t);
The new weights and bias are
w = net.iw{1,1}, b = net.b{1}
w =
-3 -1
b =
0
This is the same result as you got previously by hand.
Finally, simulate the trained network for each of the inputs.
a = net(p)
a =
0 0 1 1
The outputs do not yet equal the targets, so you need to train the network for more than
one pass. Try more epochs. This run gives a mean absolute error performance of 0 after
two epochs:
net.trainParam.epochs = 1000;
net = train(net,p,t);
Thus, the network was trained by the time the inputs were presented on the third epoch.
(As you know from hand calculation, the network converges on the presentation of the
sixth input vector. This occurs in the middle of the second epoch, but it takes the third
epoch to detect the network convergence.) The nal weights and bias are
w = net.iw{1,1}, b = net.b{1}
w =
-2 -3
b =
1
11 Historical Neural Networks
11-14

The simulated output and errors for the various inputs are
a = net(p)
a =
0 1 0 1
error = a-t
error =
0 0 0 0
You conrm that the training procedure is successful. The network converges and
produces the correct target outputs for the four input vectors.
The default training function for networks created with perceptron is trainc. (You can
nd this by executing net.trainFcn.) This training function applies the perceptron
learning rule in its pure form, in that individual input vectors are applied individually, in
sequence, and corrections to the weights and bias are made after each presentation of an
input vector. Thus, perceptron training with train will converge in a nite number of
steps unless the problem presented cannot be solved with a simple perceptron.
The function train can be used in various ways by other networks as well. Type help
train to read more about this basic function.
You might want to try various example programs. For instance, demop1 illustrates
classication and training of a simple perceptron.
Limitations and Cautions
Perceptron networks should be trained with adapt, which presents the input vectors to
the network one at a time and makes corrections to the network based on the results of
each presentation. Use of adapt in this way guarantees that any linearly separable
problem is solved in a nite number of training presentations.
As noted in the previous pages, perceptrons can also be trained with the function train.
Commonly when train is used for perceptrons, it presents the inputs to the network in
batches, and makes corrections to the network based on the sum of all the individual
corrections. Unfortunately, there is no proof that such a training algorithm converges for
perceptrons. On that account the use of train for perceptrons is not recommended.
Perceptron networks have several limitations. First, the output values of a perceptron can
take on only one of two values (0 or 1) because of the hard-limit transfer function.
Second, perceptrons can only classify linearly separable sets of vectors. If a straight line
or a plane can be drawn to separate the input vectors into their correct categories, the
Perceptron Neural Networks
11-15

input vectors are linearly separable. If the vectors are not linearly separable, learning will
never reach a point where all vectors are classied properly. However, it has been proven
that if the vectors are linearly separable, perceptrons trained adaptively will always nd a
solution in nite time. You might want to try demop6. It shows the diiculty of trying to
classify input vectors that are not linearly separable.
It is only fair, however, to point out that networks with more than one perceptron can be
used to solve more diicult problems. For instance, suppose that you have a set of four
vectors that you would like to classify into distinct groups, and that two lines can be
drawn to separate them. A two-neuron network can be found such that its two decision
boundaries classify the inputs into four categories. For additional discussion about
perceptrons and to examine more complex perceptron problems, see [HDB1996 on page
13-2].
Outliers and the Normalized Perceptron Rule
Long training times can be caused by the presence of an outlier input vector whose
length is much larger or smaller than the other input vectors. Applying the perceptron
learning rule involves adding and subtracting input vectors from the current weights and
biases in response to error. Thus, an input vector with large elements can lead to changes
in the weights and biases that take a long time for a much smaller input vector to
overcome. You might want to try demop4 to see how an outlier aects the training.
By changing the perceptron learning rule slightly, you can make training times insensitive
to extremely large or small outlier input vectors.
Here is the original rule for updating weights:
Dw p p= - =( )t e
T T
a
As shown above, the larger an input vector p, the larger its eect on the weight vector w.
Thus, if an input vector is much larger than other input vectors, the smaller input vectors
must be presented many times to have an eect.
The solution is to normalize the rule so that the eect of each input vector on the weights
is of the same magnitude:
Dwp
p
p
p
= - =( )t e
T T
a
11 Historical Neural Networks
11-16

The normalized perceptron rule is implemented with the function learnpn, which is
called exactly like learnp. The normalized perceptron rule function learnpn takes
slightly more time to execute, but reduces the number of epochs considerably if there are
outlier input vectors. You might try demop5 to see how this normalized training rule
works.
Perceptron Neural Networks
11-17
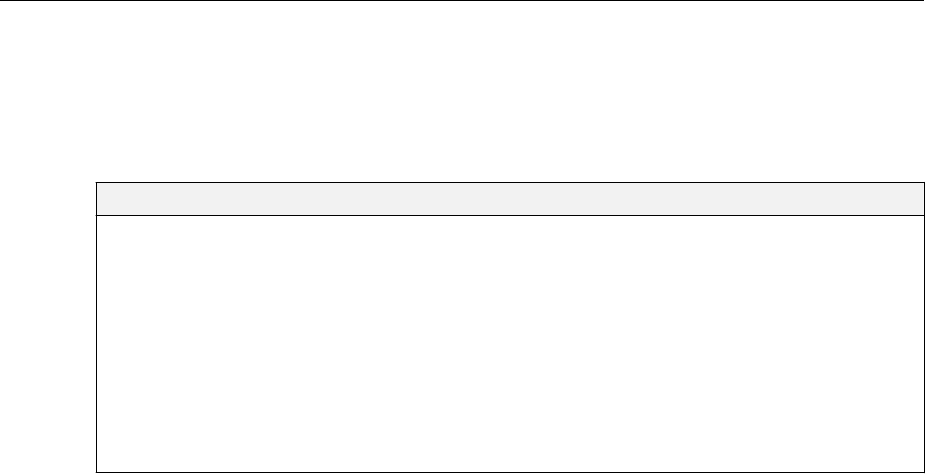
Linear Neural Networks
In this section...
“Neuron Model” on page 11-18
“Network Architecture” on page 11-19
“Least Mean Square Error” on page 11-22
“Linear System Design (newlind)” on page 11-23
“Linear Networks with Delays” on page 11-24
“LMS Algorithm (learnwh)” on page 11-26
“Linear Classication (train)” on page 11-28
“Limitations and Cautions” on page 11-30
The linear networks discussed in this section are similar to the perceptron, but their
transfer function is linear rather than hard-limiting. This allows their outputs to take on
any value, whereas the perceptron output is limited to either 0 or 1. Linear networks, like
the perceptron, can only solve linearly separable problems.
Here you design a linear network that, when presented with a set of given input vectors,
produces outputs of corresponding target vectors. For each input vector, you can
calculate the network's output vector. The dierence between an output vector and its
target vector is the error. You would like to nd values for the network weights and biases
such that the sum of the squares of the errors is minimized or below a specic value. This
problem is manageable because linear systems have a single error minimum. In most
cases, you can calculate a linear network directly, such that its error is a minimum for the
given input vectors and target vectors. In other cases, numerical problems prohibit direct
calculation. Fortunately, you can always train the network to have a minimum error by
using the least mean squares (Widrow-Ho) algorithm.
This section introduces linearlayer, a function that creates a linear layer, and
newlind, a function that designs a linear layer for a specic purpose.
Neuron Model
A linear neuron with R inputs is shown below.
11 Historical Neural Networks
11-18
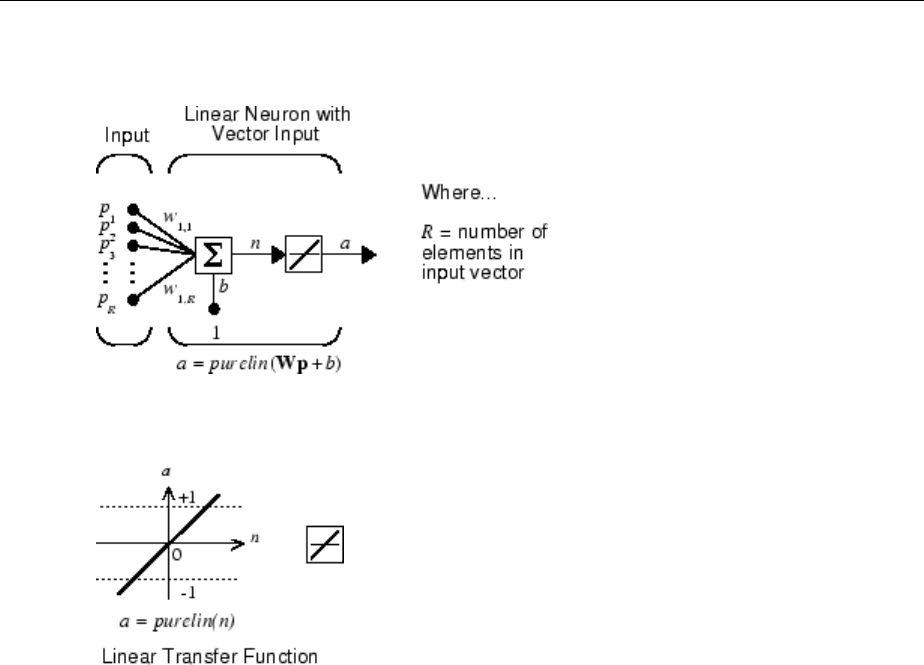
This network has the same basic structure as the perceptron. The only dierence is that
the linear neuron uses a linear transfer function purelin.
The linear transfer function calculates the neuron's output by simply returning the value
passed to it.
a
= = + = +purelin n purelin b b( ) ( )Wp Wp
This neuron can be trained to learn an aine function of its inputs, or to nd a linear
approximation to a nonlinear function. A linear network cannot, of course, be made to
perform a nonlinear computation.
Network Architecture
The linear network shown below has one layer of S neurons connected to R inputs
through a matrix of weights W.
Linear Neural Networks
11-19
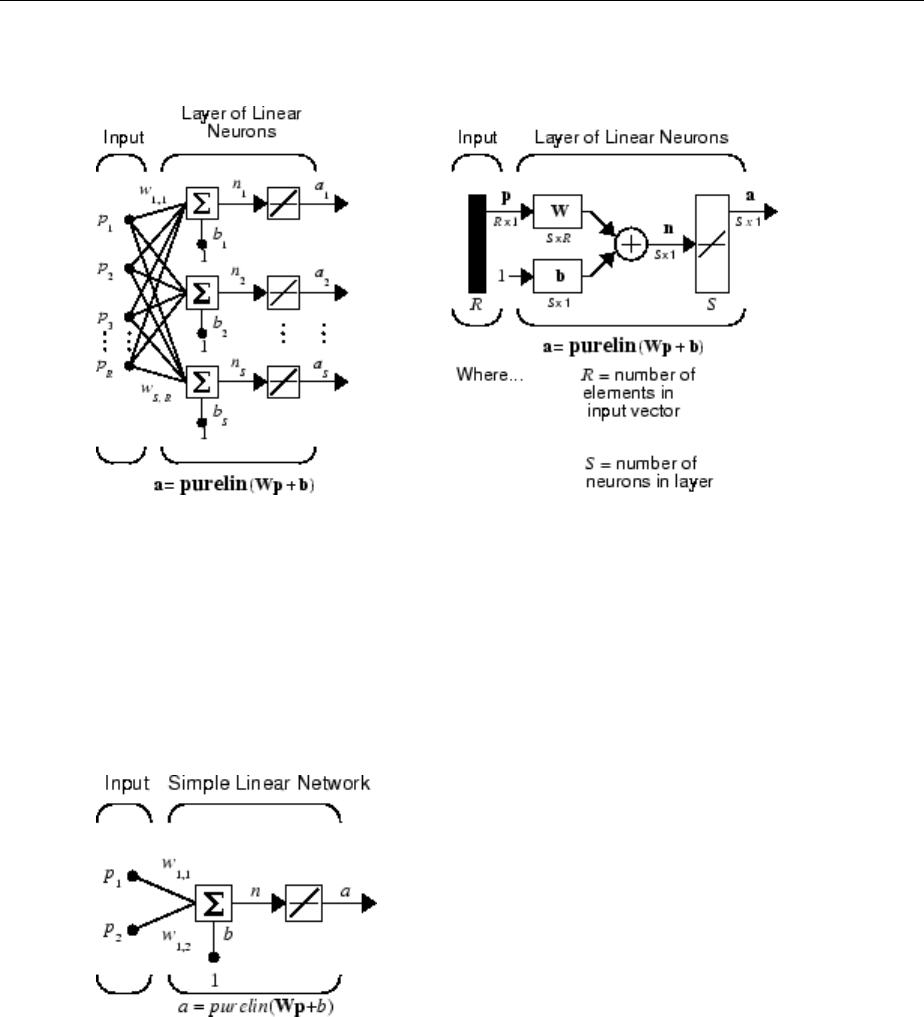
Note that the gure on the right denes an S-length output vector a.
A single-layer linear network is shown. However, this network is just as capable as
multilayer linear networks. For every multilayer linear network, there is an equivalent
single-layer linear network.
Create a Linear Neuron (linearlayer)
Consider a single linear neuron with two inputs. The following gure shows the diagram
for this network.
The weight matrix W in this case has only one row. The network output is
11 Historical Neural Networks
11-20
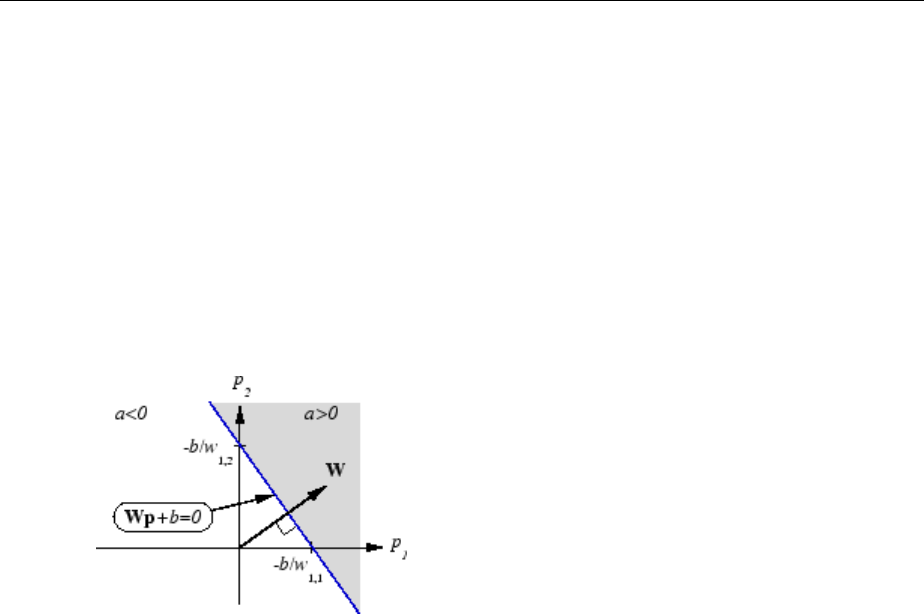
a
= = + = +purelin n purelin b b( ) ( )Wp Wp
or
a
=++w p w p b
1 1 1 1 2 2, ,
Like the perceptron, the linear network has a decision boundary that is determined by the
input vectors for which the net input n is zero. For n = 0 the equation Wp + b = 0
species such a decision boundary, as shown below (adapted with thanks from [HDB96 on
page 13-2]).
Input vectors in the upper right gray area lead to an output greater than 0. Input vectors
in the lower left white area lead to an output less than 0. Thus, the linear network can be
used to classify objects into two categories. However, it can classify in this way only if the
objects are linearly separable. Thus, the linear network has the same limitation as the
perceptron.
You can create this network using linearlayer, and congure its dimensions with two
values so the input has two elements and the output has one.
net = linearlayer;
net = configure(net,[0;0],0);
The network weights and biases are set to zero by default. You can see the current values
with the commands
W = net.IW{1,1}
W =
0 0
and
Linear Neural Networks
11-21

b= net.b{1}
b =
0
However, you can give the weights any values that you want, such as 2 and 3,
respectively, with
net.IW{1,1} = [2 3];
W = net.IW{1,1}
W =
2 3
You can set and check the bias in the same way.
net.b{1} = [-4];
b = net.b{1}
b =
-4
You can simulate the linear network for a particular input vector. Try
p = [5;6];
You can nd the network output with the function sim.
a = net(p)
a =
24
To summarize, you can create a linear network with linearlayer, adjust its elements as
you want, and simulate it with sim.
Least Mean Square Error
Like the perceptron learning rule, the least mean square error (LMS) algorithm is an
example of supervised training, in which the learning rule is provided with a set of
examples of desired network behavior:
p t p t p t
1 1 2 2
, , , , ,
{ } { }
{ }
…Q Q
Here pq is an input to the network, and tq is the corresponding target output. As each
input is applied to the network, the network output is compared to the target. The error is
11 Historical Neural Networks
11-22
calculated as the dierence between the target output and the network output. The goal
is to minimize the average of the sum of these errors.
mse Qe k Qt k k
k
Q
k
Q
= = -
= =
 Â
1 1
2
1
2
1
( ) ( ( ) ( ))
a
The LMS algorithm adjusts the weights and biases of the linear network so as to minimize
this mean square error.
Fortunately, the mean square error performance index for the linear network is a
quadratic function. Thus, the performance index will either have one global minimum, a
weak minimum, or no minimum, depending on the characteristics of the input vectors.
Specically, the characteristics of the input vectors determine whether or not a unique
solution exists.
You can nd more about this topic in Chapter 10 of [HDB96 on page 13-2].
Linear System Design (newlind)
Unlike most other network architectures, linear networks can be designed directly if
input/target vector pairs are known. You can obtain specic network values for weights
and biases to minimize the mean square error by using the function newlind.
Suppose that the inputs and targets are
P = [1 2 3];
T= [2.0 4.1 5.9];
Now you can design a network.
net = newlind(P,T);
You can simulate the network behavior to check that the design was done properly.
Y = net(P)
Y =
2.0500 4.0000 5.9500
Note that the network outputs are quite close to the desired targets.
You might try demolin1. It shows error surfaces for a particular problem, illustrates the
design, and plots the designed solution.
Linear Neural Networks
11-23
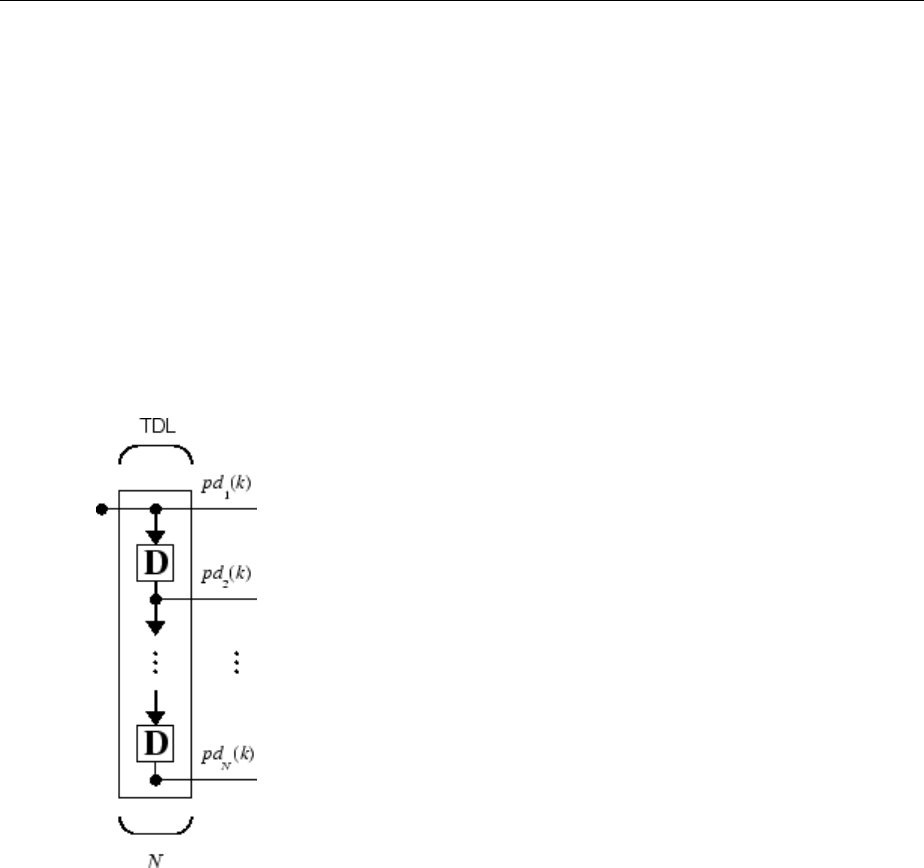
You can also use the function newlind to design linear networks having delays in the
input. Such networks are discussed in “Linear Networks with Delays” on page 11-24.
First, however, delays must be discussed.
Linear Networks with Delays
Tapped Delay Line
You need a new component, the tapped delay line, to make full use of the linear network.
Such a delay line is shown below. There the input signal enters from the left and passes
through N-1 delays. The output of the tapped delay line (TDL) is an N-dimensional vector,
made up of the input signal at the current time, the previous input signal, etc.
Linear Filter
You can combine a tapped delay line with a linear network to create the linear lter
shown.
11 Historical Neural Networks
11-24
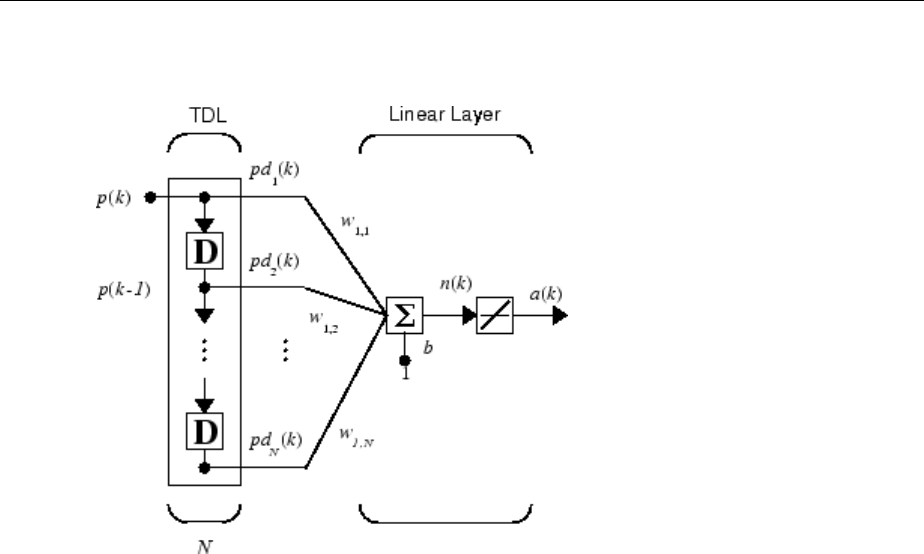
The output of the lter is given by
a
( ) ( ) ( )
,
k purelin b w p k i b
i
i
R
= + = - + +
=
Â
Wp 1
1
1
The network shown is referred to in the digital signal processing eld as a nite impulse
response (FIR) lter [WiSt85 on page 13-2]. Look at the code used to generate and
simulate such a network.
Suppose that you want a linear layer that outputs the sequence T, given the sequence P
and two initial input delay states Pi.
P = {1 2 1 3 3 2};
Pi = {1 3};
T = {5 6 4 20 7 8};
You can use newlind to design a network with delays to give the appropriate outputs for
the inputs. The delay initial outputs are supplied as a third argument, as shown below.
net = newlind(P,T,Pi);
Linear Neural Networks
11-25
You can obtain the output of the designed network with
Y = net(P,Pi)
to give
Y = [2.7297] [10.5405] [5.0090] [14.9550] [10.7838] [5.9820]
As you can see, the network outputs are not exactly equal to the targets, but they are
close and the mean square error is minimized.
LMS Algorithm (learnwh)
The LMS algorithm, or Widrow-Ho learning algorithm, is based on an approximate
steepest descent procedure. Here again, linear networks are trained on examples of
correct behavior.
Widrow and Ho had the insight that they could estimate the mean square error by using
the squared error at each iteration. If you take the partial derivative of the squared error
with respect to the weights and biases at the kth iteration, you have
∂
∂
=∂
∂
e k
we k e k
w
j j
2
1 1
2
( ) ( ) ( )
, ,
for j = 1,2,…,R and
∂
∂
=∂
∂
e k
b
e k e k
b
2
2
( ) ( ) ( )
Next look at the partial derivative with respect to the error.
∂
∂
=∂ -
∂
=∂
∂
- +
e k
w
t k k
w w t k k b
j j j
( ) [ ( ) ( )] [ ( ) ( ( ) )]
, , ,1 1 1
a
Wp
or
∂
∂=∂
∂- +
Ê
Ë
Á
Á
ˆ
¯
˜
˜
È
Î
Í
Í
˘
˚
˙
˙
=
Â
e k
w w t k w p k b
j j
i i
i
R
( ) ( ) ( )
, ,
,
1 1
1
1
11 Historical Neural Networks
11-26

Here pi(k) is the ith element of the input vector at the kth iteration.
This can be simplied to
∂
∂
= -
e k
wp k
jj
( ) ( )
,1
and
∂
∂
= -
e k
b
( ) 1
Finally, change the weight matrix, and the bias will be
2αe(k)p(k)
and
2αe(k)
These two equations form the basis of the Widrow-Ho (LMS) learning algorithm.
These results can be extended to the case of multiple neurons, and written in matrix form
as
W W e p
b b e
( ) ( ) ( ) ( )
( ) ( ) ( )
k k k k
k k k
T
+ = +
+ = +
1 2
1 2
a
a
Here the error e and the bias b are vectors, and α is a learning rate. If α is large, learning
occurs quickly, but if it is too large it can lead to instability and errors might even
increase. To ensure stable learning, the learning rate must be less than the reciprocal of
the largest eigenvalue of the correlation matrix pTp of the input vectors.
You might want to read some of Chapter 10 of [HDB96 on page 13-2] for more
information about the LMS algorithm and its convergence.
Fortunately, there is a toolbox function, learnwh, that does all the calculation for you. It
calculates the change in weights as
dw = lr*e*p'
Linear Neural Networks
11-27
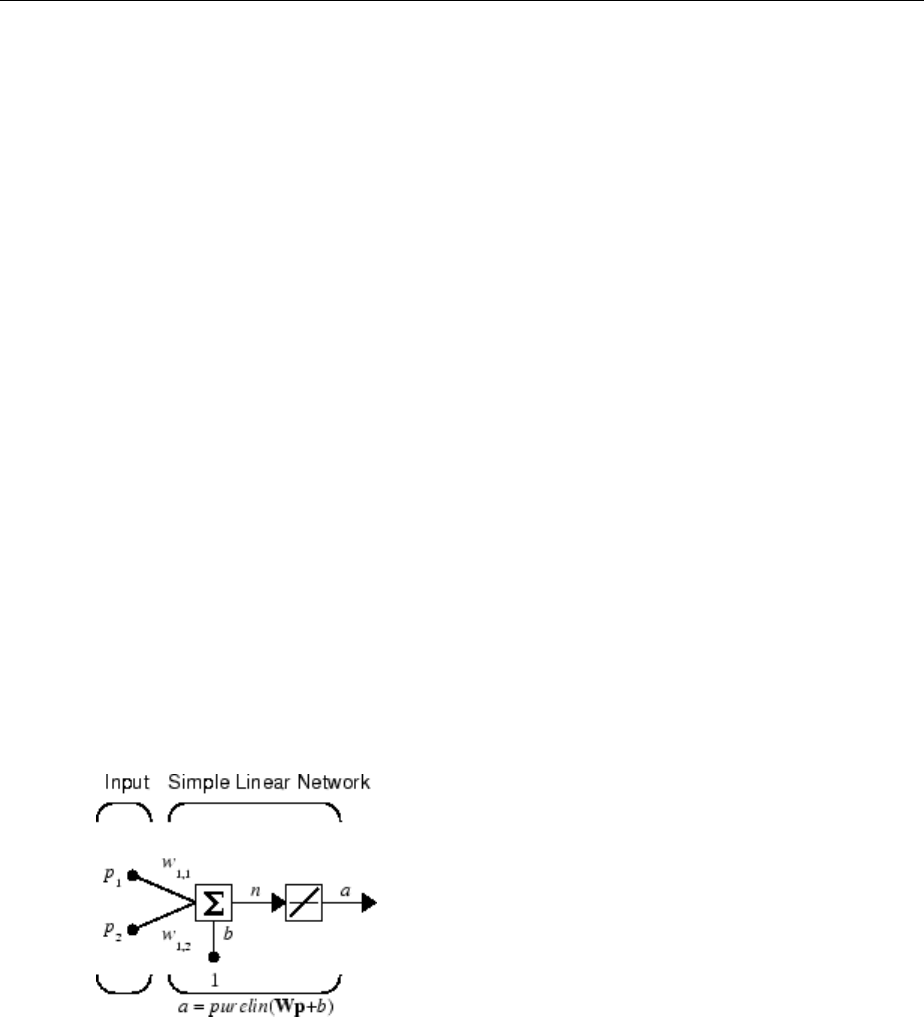
and the bias change as
db = lr*e
The constant 2, shown a few lines above, has been absorbed into the code learning rate
lr. The function maxlinlr calculates this maximum stable learning rate lr as 0.999 *
P'*P.
Type help learnwh and help maxlinlr for more details about these two functions.
Linear Classication (train)
Linear networks can be trained to perform linear classication with the function train.
This function applies each vector of a set of input vectors and calculates the network
weight and bias increments due to each of the inputs according to learnp. Then the
network is adjusted with the sum of all these corrections. Each pass through the input
vectors is called an epoch. This contrasts with adapt which adjusts weights for each
input vector as it is presented.
Finally, train applies the inputs to the new network, calculates the outputs, compares
them to the associated targets, and calculates a mean square error. If the error goal is
met, or if the maximum number of epochs is reached, the training is stopped, and train
returns the new network and a training record. Otherwise train goes through another
epoch. Fortunately, the LMS algorithm converges when this procedure is executed.
A simple problem illustrates this procedure. Consider the linear network introduced
earlier.
Suppose you have the following classication problem.
11 Historical Neural Networks
11-28

p p p
1 1 2 2 3
2
201
212
2
=È
Î
͢
˚
˙=¸
˝
Ô
˛
Ô=-
È
Î
͢
˚
˙=
Ï
Ì
Ô
Ó
Ô
¸
˝
Ô
˛
Ô=-
È
Î
͢
, ,t t
˚˚
˙=
Ï
Ì
Ô
Ó
Ô
¸
˝
Ô
˛
Ô=-
È
Î
͢
˚
˙
Ï
Ì
Ô
Ó
Ô=
Ï
Ì
Ô
Ó
Ô
¸
˝
Ô
˛
Ô
, ,t t
3 4 4
01
11p
Here there are four input vectors, and you want a network that produces the output
corresponding to each input vector when that vector is presented.
Use train to get the weights and biases for a network that produces the correct targets
for each input vector. The initial weights and bias for the new network are 0 by default.
Set the error goal to 0.1 rather than accept its default of 0.
P = [2 1 -2 -1;2 -2 2 1];
T = [0 1 0 1];
net = linearlayer;
net.trainParam.goal= 0.1;
net = train(net,P,T);
The problem runs for 64 epochs, achieving a mean square error of 0.0999. The new
weights and bias are
weights = net.iw{1,1}
weights =
-0.0615 -0.2194
bias = net.b(1)
bias =
[0.5899]
You can simulate the new network as shown below.
A = net(P)
A =
0.0282 0.9672 0.2741 0.4320
You can also calculate the error.
err = T - sim(net,P)
err =
-0.0282 0.0328 -0.2741 0.5680
Note that the targets are not realized exactly. The problem would have run longer in an
attempt to get perfect results had a smaller error goal been chosen, but in this problem it
is not possible to obtain a goal of 0. The network is limited in its capability. See
“Limitations and Cautions” on page 11-30 for examples of various limitations.
Linear Neural Networks
11-29

This example program, demolin2, shows the training of a linear neuron and plots the
weight trajectory and error during training.
You might also try running the example program nnd10lc. It addresses a classic and
historically interesting problem, shows how a network can be trained to classify various
patterns, and shows how the trained network responds when noisy patterns are
presented.
Limitations and Cautions
Linear networks can only learn linear relationships between input and output vectors.
Thus, they cannot nd solutions to some problems. However, even if a perfect solution
does not exist, the linear network will minimize the sum of squared errors if the learning
rate lr is suiciently small. The network will nd as close a solution as is possible given
the linear nature of the network's architecture. This property holds because the error
surface of a linear network is a multidimensional parabola. Because parabolas have only
one minimum, a gradient descent algorithm (such as the LMS rule) must produce a
solution at that minimum.
Linear networks have various other limitations. Some of them are discussed below.
Overdetermined Systems
Consider an overdetermined system. Suppose that you have a network to be trained with
four one-element input vectors and four targets. A perfect solution to wp + b = t for each
of the inputs might not exist, for there are four constraining equations, and only one
weight and one bias to adjust. However, the LMS rule still minimizes the error. You might
try demolin4 to see how this is done.
Underdetermined Systems
Consider a single linear neuron with one input. This time, in demolin5, train it on only
one one-element input vector and its one-element target vector:
P = [1.0];
T = [0.5];
Note that while there is only one constraint arising from the single input/target pair, there
are two variables, the weight and the bias. Having more variables than constraints results
in an underdetermined problem with an innite number of solutions. You can try
demolin5 to explore this topic.
11 Historical Neural Networks
11-30

Linearly Dependent Vectors
Normally it is a straightforward job to determine whether or not a linear network can
solve a problem. Commonly, if a linear network has at least as many degrees of freedom
(S *R + S = number of weights and biases) as constraints (Q = pairs of input/target
vectors), then the network can solve the problem. This is true except when the input
vectors are linearly dependent and they are applied to a network without biases. In this
case, as shown with the example demolin6, the network cannot solve the problem with
zero error. You might want to try demolin6.
Too Large a Learning Rate
You can always train a linear network with the Widrow-Ho rule to nd the minimum
error solution for its weights and biases, as long as the learning rate is small enough.
Example demolin7 shows what happens when a neuron with one input and a bias is
trained with a learning rate larger than that recommended by maxlinlr. The network is
trained with two dierent learning rates to show the results of using too large a learning
rate.
Linear Neural Networks
11-31

Neural Network Object Properties
In this section...
“General” on page 12-2
“Architecture” on page 12-2
“Subobject Structures” on page 12-6
“Functions” on page 12-8
“Weight and Bias Values” on page 12-12
These properties dene the basic features of a network. “Neural Network Subobject
Properties” on page 12-14 describes properties that dene network details.
General
Here are the general properties of neural networks.
net.name
This property consists of a string dening the network name. Network creation functions,
such as feedforwardnet, dene this appropriately. But it can be set to any string as
desired.
net.userdata
This property provides a place for users to add custom information to a network object.
Only one eld is predened. It contains a secret message to all Neural Network Toolbox
users:
net.userdata.note
Architecture
These properties determine the number of network subobjects (which include inputs,
layers, outputs, targets, biases, and weights), and how they are connected.
net.numInputs
This property denes the number of inputs a network receives. It can be set to 0 or a
positive integer.
12 Neural Network Object Reference
12-2

Clarication
The number of network inputs and the size of a network input are not the same thing. The
number of inputs denes how many sets of vectors the network receives as input. The size
of each input (i.e., the number of elements in each input vector) is determined by the
input size (net.inputs{i}.size).
Most networks have only one input, whose size is determined by the problem.
Side Eects
Any change to this property results in a change in the size of the matrix dening
connections to layers from inputs, (net.inputConnect) and the size of the cell array of
input subobjects (net.inputs).
net.numLayers
This property denes the number of layers a network has. It can be set to 0 or a positive
integer.
Side Eects
Any change to this property changes the size of each of these Boolean matrices that
dene connections to and from layers:
net.biasConnect
net.inputConnect
net.layerConnect
net.outputConnect
and changes the size of each cell array of subobject structures whose size depends on the
number of layers:
net.biases
net.inputWeights
net.layerWeights
net.outputs
and also changes the size of each of the network's adjustable parameter's properties:
net.IW
net.LW
net.b
Neural Network Object Properties
12-3

net.biasConnect
This property denes which layers have biases. It can be set to any N-by-1 matrix of
Boolean values, where Nl is the number of network layers (net.numLayers). The
presence (or absence) of a bias to the ith layer is indicated by a 1 (or 0) at
net.biasConnect(i)
Side Eects
Any change to this property alters the presence or absence of structures in the cell array
of biases (net.biases) and, in the presence or absence of vectors in the cell array, of
bias vectors (net.b).
net.inputConnect
This property denes which layers have weights coming from inputs.
It can be set to any Nl × Ni matrix of Boolean values, where Nl is the number of network
layers (net.numLayers), and Ni is the number of network inputs (net.numInputs). The
presence (or absence) of a weight going to the ith layer from the jth input is indicated by
a 1 (or 0) at net.inputConnect(i,j).
Side Eects
Any change to this property alters the presence or absence of structures in the cell array
of input weight subobjects (net.inputWeights) and the presence or absence of
matrices in the cell array of input weight matrices (net.IW).
net.layerConnect
This property denes which layers have weights coming from other layers. It can be set to
any Nl × Nl matrix of Boolean values, where Nl is the number of network layers
(net.numLayers). The presence (or absence) of a weight going to the ith layer from the
jth layer is indicated by a 1 (or 0) at
net.layerConnect(i,j)
Side Eects
Any change to this property alters the presence or absence of structures in the cell array
of layer weight subobjects (net.layerWeights) and the presence or absence of
matrices in the cell array of layer weight matrices (net.LW).
12 Neural Network Object Reference
12-4

net.outputConnect
This property denes which layers generate network outputs. It can be set to any 1 × Nl
matrix of Boolean values, where Nl is the number of network layers (net.numLayers).
The presence (or absence) of a network output from the ith layer is indicated by a 1 (or 0)
at net.outputConnect(i).
Side Eects
Any change to this property alters the number of network outputs (net.numOutputs)
and the presence or absence of structures in the cell array of output subobjects
(net.outputs).
net.numOutputs (read only)
This property indicates how many outputs the network has. It is always equal to the
number of 1s in net.outputConnect.
net.numInputDelays (read only)
This property indicates the number of time steps of past inputs that must be supplied to
simulate the network. It is always set to the maximum delay value associated with any of
the network's input weights:
numInputDelays = 0;
for i=1:net.numLayers
for j=1:net.numInputs
if net.inputConnect(i,j)
numInputDelays = max( ...
[numInputDelays net.inputWeights{i,j}.delays]);
end
end
end
net.numLayerDelays (read only)
This property indicates the number of time steps of past layer outputs that must be
supplied to simulate the network. It is always set to the maximum delay value associated
with any of the network's layer weights:
numLayerDelays = 0;
for i=1:net.numLayers
for j=1:net.numLayers
if net.layerConnect(i,j)
Neural Network Object Properties
12-5

numLayerDelays = max( ...
[numLayerDelays net.layerWeights{i,j}.delays]);
end
end
end
net.numWeightElements (read only)
This property indicates the number of weight and bias values in the network. It is the sum
of the number of elements in the matrices stored in the two cell arrays:
net.IW
new.b
Subobject Structures
These properties consist of cell arrays of structures that dene each of the network's
inputs, layers, outputs, targets, biases, and weights.
The properties for each kind of subobject are described in “Neural Network Subobject
Properties” on page 12-14.
net.inputs
This property holds structures of properties for each of the network's inputs. It is always
an Ni × 1 cell array of input structures, where Ni is the number of network inputs
(net.numInputs).
The structure dening the properties of the ith network input is located at
net.inputs{i}
If a neural network has only one input, then you can access net.inputs{1} without the
cell array notation as follows:
net.input
Input Properties
See “Inputs” on page 12-14 for descriptions of input properties.
12 Neural Network Object Reference
12-6

net.layers
This property holds structures of properties for each of the network's layers. It is always
an Nl × 1 cell array of layer structures, where Nl is the number of network layers
(net.numLayers).
The structure dening the properties of the ith layer is located at net.layers{i}.
Layer Properties
See “Layers” on page 12-16 for descriptions of layer properties.
net.outputs
This property holds structures of properties for each of the network's outputs. It is always
a 1 × Nl cell array, where Nl is the number of network outputs (net.numOutputs).
The structure dening the properties of the output from the ith layer (or a null matrix [])
is located at net.outputs{i} if net.outputConnect(i) is 1 (or 0).
If a neural network has only one output at layer i, then you can access net.outputs{i}
without the cell array notation as follows:
net.output
Output Properties
See “Outputs” on page 12-22 for descriptions of output properties.
net.biases
This property holds structures of properties for each of the network's biases. It is always
an Nl × 1 cell array, where Nl is the number of network layers (net.numLayers).
The structure dening the properties of the bias associated with the ith layer (or a null
matrix []) is located at net.biases{i} if net.biasConnect(i) is 1 (or 0).
Bias Properties
See “Biases” on page 12-24 for descriptions of bias properties.
Neural Network Object Properties
12-7

net.inputWeights
This property holds structures of properties for each of the network's input weights. It is
always an Nl × Ni cell array, where Nl is the number of network layers (net.numLayers),
and Ni is the number of network inputs (net.numInputs).
The structure dening the properties of the weight going to the ith layer from the jth
input (or a null matrix []) is located at net.inputWeights{i,j} if
net.inputConnect(i,j) is 1 (or 0).
Input Weight Properties
See “Input Weights” on page 12-25 for descriptions of input weight properties.
net.layerWeights
This property holds structures of properties for each of the network's layer weights. It is
always an Nl ×Nl cell array, where Nl is the number of network layers (net.numLayers).
The structure dening the properties of the weight going to the ith layer from the jth
layer (or a null matrix []) is located at net.layerWeights{i,j} if
net.layerConnect(i,j) is 1 (or 0).
Layer Weight Properties
See “Layer Weights” on page 12-27 for descriptions of layer weight properties.
Functions
These properties dene the algorithms to use when a network is to adapt, is to be
initialized, is to have its performance measured, or is to be trained.
net.adaptFcn
This property denes the function to be used when the network adapts. It can be set to
the name of any network adapt function. The network adapt function is used to perform
adaption whenever adapt is called.
[net,Y,E,Pf,Af] = adapt(NET,P,T,Pi,Ai)
For a list of functions, type help nntrain.
12 Neural Network Object Reference
12-8

Side Eects
Whenever this property is altered, the network's adaption parameters
(net.adaptParam) are set to contain the parameters and default values of the new
function.
net.adaptParam
This property denes the parameters and values of the current adapt function. Call help
on the current adapt function to get a description of what each eld means:
help(net.adaptFcn)
net.derivFcn
This property denes the derivative function to be used to calculate error gradients and
Jacobians when the network is trained using a supervised algorithm, such as
backpropagation. You can set this property to the name of any derivative function.
For a list of functions, type help nnderivative.
net.divideFcn
This property denes the data division function to be used when the network is trained
using a supervised algorithm, such as backpropagation. You can set this property to the
name of a division function.
For a list of functions, type help nndivision.
Side Eects
Whenever this property is altered, the network's adaption parameters
(net.divideParam) are set to contain the parameters and default values of the new
function.
net.divideParam
This property denes the parameters and values of the current data-division function. To
get a description of what each eld means, type the following command:
help(net.divideFcn)
Neural Network Object Properties
12-9

net.divideMode
This property denes the target data dimensions which to divide up when the data
division function is called. Its default value is 'sample' for static networks and 'time'
for dynamic networks. It may also be set to 'sampletime' to divide targets by both
sample and timestep, 'all' to divide up targets by every scalar value, or 'none' to not
divide up data at all (in which case all data is used for training, none for validation or
testing).
net.initFcn
This property denes the function used to initialize the network's weight matrices and
bias vectors. . The initialization function is used to initialize the network whenever init
is called:
net = init(net)
Side Eects
Whenever this property is altered, the network's initialization parameters
(net.initParam) are set to contain the parameters and default values of the new
function.
net.initParam
This property denes the parameters and values of the current initialization function. Call
help on the current initialization function to get a description of what each eld means:
help(net.initFcn)
net.performFcn
This property denes the function used to measure the network’s performance. The
performance function is used to calculate network performance during training whenever
train is called.
[net,tr] = train(NET,P,T,Pi,Ai)
For a list of functions, type help nnperformance.
12 Neural Network Object Reference
12-10

Side Eects
Whenever this property is altered, the network's performance parameters
(net.performParam) are set to contain the parameters and default values of the new
function.
net.performParam
This property denes the parameters and values of the current performance function. Call
help on the current performance function to get a description of what each eld means:
help(net.performFcn)
net.plotFcns
This property consists of a row cell array of strings, dening the plot functions associated
with a network. The neural network training window, which is opened by the train
function, shows a button for each plotting function. Click the button during or after
training to open the desired plot.
net.plotParams
This property consists of a row cell array of structures, dening the parameters and
values of each plot function in net.plotFcns. Call help on the each plot function to get
a description of what each eld means:
help(net.plotFcns{i})
net.trainFcn
This property denes the function used to train the network. It can be set to the name of
any of the training functions, which is used to train the network whenever train is
called.
[net,tr] = train(NET,P,T,Pi,Ai)
For a list of functions, type help nntrain.
Side Eects
Whenever this property is altered, the network's training parameters (net.trainParam)
are set to contain the parameters and default values of the new function.
Neural Network Object Properties
12-11

net.trainParam
This property denes the parameters and values of the current training function. Call
help on the current training function to get a description of what each eld means:
help(net.trainFcn)
Weight and Bias Values
These properties dene the network's adjustable parameters: its weight matrices and bias
vectors.
net.IW
This property denes the weight matrices of weights going to layers from network inputs.
It is always an Nl × Ni cell array, where Nl is the number of network layers
(net.numLayers), and Ni is the number of network inputs (net.numInputs).
The weight matrix for the weight going to the ith layer from the jth input (or a null matrix
[]) is located at net.IW{i,j} if net.inputConnect(i,j) is 1 (or 0).
The weight matrix has as many rows as the size of the layer it goes to
(net.layers{i}.size). It has as many columns as the product of the input size with the
number of delays associated with the weight:
net.inputs{j}.size * length(net.inputWeights{i,j}.delays)
These dimensions can also be obtained from the input weight properties:
net.inputWeights{i,j}.size
net.LW
This property denes the weight matrices of weights going to layers from other layers. It
is always an Nl × Nl cell array, where Nl is the number of network layers
(net.numLayers).
The weight matrix for the weight going to the ith layer from the jth layer (or a null matrix
[]) is located at net.LW{i,j} if net.layerConnect(i,j) is 1 (or 0).
The weight matrix has as many rows as the size of the layer it goes to
(net.layers{i}.size). It has as many columns as the product of the size of the layer it
comes from with the number of delays associated with the weight:
12 Neural Network Object Reference
12-12

net.layers{j}.size * length(net.layerWeights{i,j}.delays)
These dimensions can also be obtained from the layer weight properties:
net.layerWeights{i,j}.size
net.b
This property denes the bias vectors for each layer with a bias. It is always an Nl × 1 cell
array, where Nl is the number of network layers (net.numLayers).
The bias vector for the ith layer (or a null matrix []) is located at net.b{i} if
net.biasConnect(i) is 1 (or 0).
The number of elements in the bias vector is always equal to the size of the layer it is
associated with (net.layers{i}.size).
This dimension can also be obtained from the bias properties:
net.biases{i}.size
Neural Network Object Properties
12-13
Neural Network Subobject Properties
These properties dene the details of a network's inputs, layers, outputs, targets, biases,
and weights.
In this section...
“Inputs” on page 12-14
“Layers” on page 12-16
“Outputs” on page 12-22
“Biases” on page 12-24
“Input Weights” on page 12-25
“Layer Weights” on page 12-27
Inputs
These properties dene the details of each ith network input.
net.inputs{1}.name
This property consists of a string dening the input name. Network creation functions,
such as feedforwardnet, dene this appropriately. But it can be set to any string as
desired.
net.inputs{i}.feedbackInput (read only)
If this network is associated with an open-loop feedback output, then this property will
indicate the index of that output. Otherwise it will be an empty matrix.
net.inputs{i}.processFcns
This property denes a row cell array of processing function names to be used by ith
network input. The processing functions are applied to input values before the network
uses them.
Side Eects
Whenever this property is altered, the input processParams are set to default values for
the given processing functions, processSettings, processedSize, and
12 Neural Network Object Reference
12-14

processedRange are dened by applying the process functions and parameters to
exampleInput.
For a list of processing functions, type help nnprocess.
net.inputs{i}.processParams
This property holds a row cell array of processing function parameters to be used by ith
network input. The processing parameters are applied by the processing functions to
input values before the network uses them.
Side Eects
Whenever this property is altered, the input processSettings, processedSize, and
processedRange are dened by applying the process functions and parameters to
exampleInput.
net.inputs{i}.processSettings (read only)
This property holds a row cell array of processing function settings to be used by ith
network input. The processing settings are found by applying the processing functions
and parameters to exampleInput and then used to provide consistent results to new
input values before the network uses them.
net.inputs{i}.processedRange (read only)
This property denes the range of exampleInput values after they have been processed
with processingFcns and processingParams.
net.inputs{i}.processedSize (read only)
This property denes the number of rows in the exampleInput values after they have
been processed with processingFcns and processingParams.
net.inputs{i}.range
This property denes the range of each element of the ith network input.
It can be set to any Ri × 2 matrix, where Ri is the number of elements in the input
(net.inputs{i}.size), and each element in column 1 is less than the element next to it
in column 2.
Each jth row denes the minimum and maximum values of the jth input element, in that
order:
Neural Network Subobject Properties
12-15

net.inputs{i}(j,:)
Uses
Some initialization functions use input ranges to nd appropriate initial values for input
weight matrices.
Side Eects
Whenever the number of rows in this property is altered, the input size,
processedSize, and processedRange change to remain consistent. The sizes of any
weights coming from this input and the dimensions of the weight matrices also change.
net.inputs{i}.size
This property denes the number of elements in the ith network input. It can be set to 0
or a positive integer.
Side Eects
Whenever this property is altered, the input range, processedRange, and
processedSize are updated. Any associated input weights change size accordingly.
net.inputs{i}.userdata
This property provides a place for users to add custom information to the ith network
input.
Layers
These properties dene the details of each ith network layer.
net.layers{i}.name
This property consists of a string dening the layer name. Network creation functions,
such as feedforwardnet, dene this appropriately. But it can be set to any string as
desired.
net.layers{i}.dimensions
This property denes the physical dimensions of the ith layer's neurons. Being able to
arrange a layer's neurons in a multidimensional manner is important for self-organizing
maps.
12 Neural Network Object Reference
12-16

It can be set to any row vector of 0 or positive integer elements, where the product of all
the elements becomes the number of neurons in the layer (net.layers{i}.size).
Uses
Layer dimensions are used to calculate the neuron positions within the layer
(net.layers{i}.positions) using the layer's topology function
(net.layers{i}.topologyFcn).
Side Eects
Whenever this property is altered, the layer's size (net.layers{i}.size) changes to
remain consistent. The layer's neuron positions (net.layers{i}.positions) and the
distances between the neurons (net.layers{i}.distances) are also updated.
net.layers{i}.distanceFcn
This property denes which of the distance functions is used to calculate distances
between neurons in the ith layer from the neuron positions. Neuron distances are used
by self-organizing maps. It can be set to the name of any distance function.
For a list of functions, type help nndistance.
Side Eects
Whenever this property is altered, the distances between the layer's neurons
(net.layers{i}.distances) are updated.
net.layers{i}.distances (read only)
This property denes the distances between neurons in the ith layer. These distances are
used by self-organizing maps:
net.layers{i}.distances
It is always set to the result of applying the layer's distance function
(net.layers{i}.distanceFcn) to the positions of the layer's neurons
(net.layers{i}.positions).
net.layers{i}.initFcn
This property denes which of the layer initialization functions are used to initialize the
ith layer, if the network initialization function (net.initFcn) is initlay. If the network
Neural Network Subobject Properties
12-17

initialization is set to initlay, then the function indicated by this property is used to
initialize the layer's weights and biases.
net.layers{i}.netInputFcn
This property denes which of the net input functions is used to calculate the ith layer's
net input, given the layer's weighted inputs and bias during simulating and training.
For a list of functions, type help nnnetinput.
net.layers{i}.netInputParam
This property denes the parameters of the layer's net input function. Call help on the
current net input function to get a description of each eld:
help(net.layers{i}.netInputFcn)
net.layers{i}.positions (read only)
This property denes the positions of neurons in the ith layer. These positions are used by
self-organizing maps.
It is always set to the result of applying the layer's topology function
(net.layers{i}.topologyFcn) to the positions of the layer's dimensions
(net.layers{i}.dimensions).
Plotting
Use plotsom to plot the positions of a layer's neurons.
For instance, if the rst-layer neurons of a network are arranged with dimensions
(net.layers{1}.dimensions) of [4 5], and the topology function
(net.layers{1}.topologyFcn) is hextop, the neurons' positions can be plotted as
follows:
plotsom(net.layers{1}.positions)
12 Neural Network Object Reference
12-18
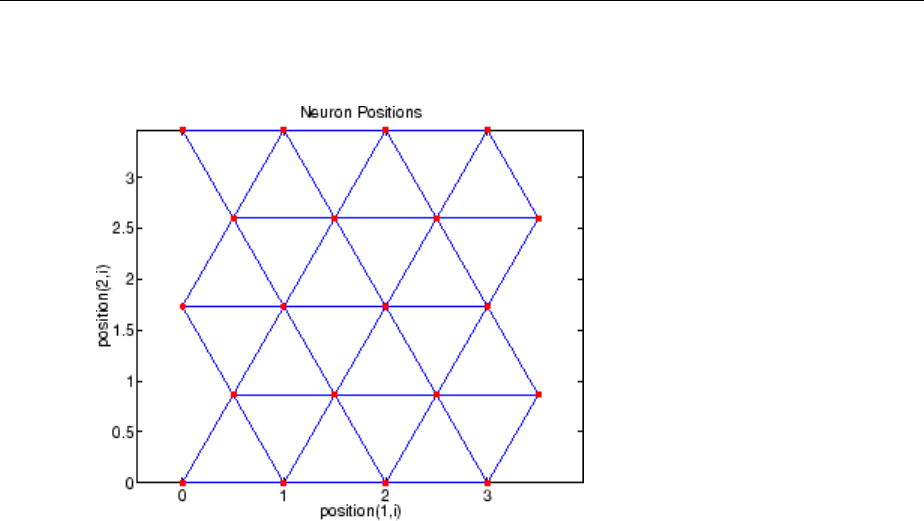
net.layers{i}.range (read only)
This property denes the output range of each neuron of the ith layer.
It is set to an Si × 2 matrix, where Si is the number of neurons in the layer
(net.layers{i}.size), and each element in column 1 is less than the element next to it
in column 2.
Each jth row denes the minimum and maximum output values of the layer's transfer
function net.layers{i}.transferFcn.
net.layers{i}.size
This property denes the number of neurons in the ith layer. It can be set to 0 or a
positive integer.
Side Eects
Whenever this property is altered, the sizes of any input weights going to the layer
(net.inputWeights{i,:}.size), any layer weights going to the layer
(net.layerWeights{i,:}.size) or coming from the layer
(net.inputWeights{i,:}.size), and the layer's bias (net.biases{i}.size),
change.
Neural Network Subobject Properties
12-19

The dimensions of the corresponding weight matrices (net.IW{i,:}, net.LW{i,:},
net.LW{:,i}), and biases (net.b{i}) also change.
Changing this property also changes the size of the layer's output
(net.outputs{i}.size) and target (net.targets{i}.size) if they exist.
Finally, when this property is altered, the dimensions of the layer's neurons
(net.layers{i}.dimension) are set to the same value. (This results in a one-
dimensional arrangement of neurons. If another arrangement is required, set the
dimensions property directly instead of using size.)
net.layers{i}.topologyFcn
This property denes which of the topology functions are used to calculate the ith layer's
neuron positions (net.layers{i}.positions) from the layer's dimensions
(net.layers{i}.dimensions).
For a list of functions, type help nntopology.
Side Eects
Whenever this property is altered, the positions of the layer's neurons
(net.layers{i}.positions) are updated.
Use plotsom to plot the positions of the layer neurons. For instance, if the rst-layer
neurons of a network are arranged with dimensions (net.layers{1}.dimensions) of
[8 10] and the topology function (net.layers{1}.topologyFcn) is randtop, the
neuron positions are arranged to resemble the following plot:
plotsom(net.layers{1}.positions)
12 Neural Network Object Reference
12-20
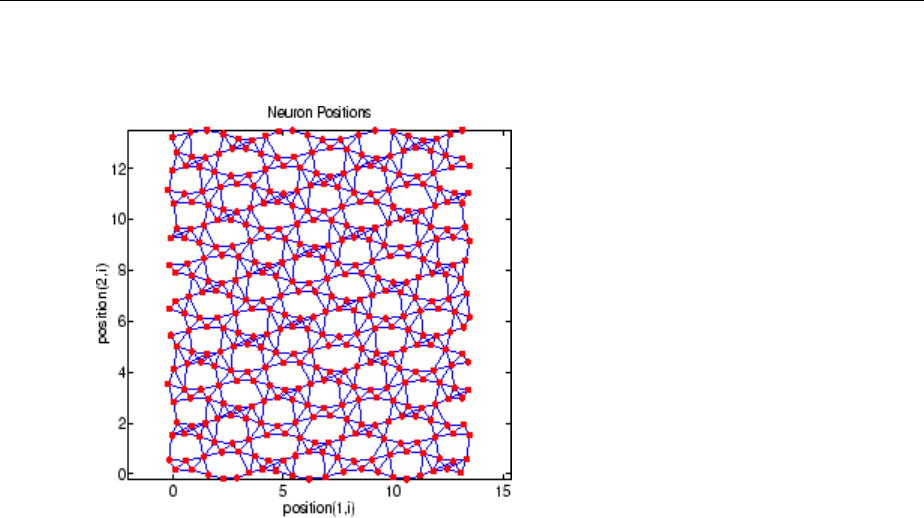
net.layers{i}.transferFcn
This function denes which of the transfer functions is used to calculate the ith layer's
output, given the layer's net input, during simulation and training.
For a list of functions, type help nntransfer.
net.layers{i}.transferParam
This property denes the parameters of the layer's transfer function. Call help on the
current transfer function to get a description of what each eld means:
help(net.layers{i}.transferFcn)
net.layers{i}.userdata
This property provides a place for users to add custom information to the ith network
layer.
Neural Network Subobject Properties
12-21

Outputs
net.outputs{i}.name
This property consists of a string dening the output name. Network creation functions,
such as feedforwardnet, dene this appropriately. But it can be set to any string as
desired.
net.outputs{i}.feedbackInput
If the output implements open-loop feedback (net.outputs{i}.feedbackMode =
'open'), then this property indicates the index of the associated feedback input,
otherwise it will be an empty matrix.
net.outputs{i}.feedbackDelay
This property denes the timestep dierence between this output and network inputs.
Input-to-output network delays can be removed and added with removedelay and
adddelay functions resulting in this property being incremented or decremented
respectively. The dierence in timing between inputs and outputs is used by preparets
to properly format simulation and training data, and used by closeloop to add the
correct number of delays when closing an open-loop output, and openloop to remove
delays when opening a closed loop.
net.outputs{i}.feedbackMode
This property is set to the string 'none' for non-feedback outputs. For feedback outputs
it can either be set to 'open' or 'closed'. If it is set to 'open', then the output will be
associated with a feedback input, with the property feedbackInput indicating the
input's index.
net.outputs{i}.processFcns
This property denes a row cell array of processing function names to be used by the ith
network output. The processing functions are applied to target values before the network
uses them, and applied in reverse to layer output values before being returned as network
output values.
Side Eects
When you change this property, you also aect the following settings: the output
parameters processParams are modied to the default values of the specied
12 Neural Network Object Reference
12-22

processing functions; processSettings, processedSize, and processedRange are
dened using the results of applying the process functions and parameters to
exampleOutput; the ith layer size is updated to match the processedSize.
For a list of functions, type help nnprocess.
net.outputs{i}.processParams
This property holds a row cell array of processing function parameters to be used by ith
network output on target values. The processing parameters are applied by the
processing functions to input values before the network uses them.
Side Eects
Whenever this property is altered, the output processSettings, processedSize and
processedRange are dened by applying the process functions and parameters to
exampleOutput. The ith layer's size is also updated to match processedSize.
net.outputs{i}.processSettings (read only)
This property holds a row cell array of processing function settings to be used by ith
network output. The processing settings are found by applying the processing functions
and parameters to exampleOutput and then used to provide consistent results to new
target values before the network uses them. The processing settings are also applied in
reverse to layer output values before being returned by the network.
net.outputs{i}.processedRange (read only)
This property denes the range of exampleOutput values after they have been
processed with processingFcns and processingParams.
net.outputs{i}.processedSize (read only)
This property denes the number of rows in the exampleOutput values after they have
been processed with processingFcns and processingParams.
net.outputs{i}.size (read only)
This property denes the number of elements in the ith layer's output. It is always set to
the size of the ith layer (net.layers{i}.size).
Neural Network Subobject Properties
12-23

net.outputs{i}.userdata
This property provides a place for users to add custom information to the ith layer's
output.
Biases
net.biases{i}.initFcn
This property denes the weight and bias initialization functions used to set the ith layer's
bias vector (net.b{i}) if the network initialization function is initlay and the ith
layer's initialization function is initwb.
net.biases{i}.learn
This property denes whether the ith bias vector is to be altered during training and
adaption. It can be set to 0 or 1.
It enables or disables the bias's learning during calls to adapt and train.
net.biases{i}.learnFcn
This property denes which of the learning functions is used to update the ith layer's bias
vector (net.b{i}) during training, if the network training function is trainb, trainc,
or trainr, or during adaption, if the network adapt function is trains.
For a list of functions, type help nnlearn.
Side Eects
Whenever this property is altered, the biases learning parameters
(net.biases{i}.learnParam) are set to contain the elds and default values of the
new function.
net.biases{i}.learnParam
This property denes the learning parameters and values for the current learning
function of the ith layer's bias. The elds of this property depend on the current learning
function. Call help on the current learning function to get a description of what each
eld means.
12 Neural Network Object Reference
12-24

net.biases{i}.size (read only)
This property denes the size of the ith layer's bias vector. It is always set to the size of
the ith layer (net.layers{i}.size).
net.biases{i}.userdata
This property provides a place for users to add custom information to the ith layer's bias.
Input Weights
net.inputWeights{i,j}.delays
This property denes a tapped delay line between the jth input and its weight to the ith
layer. It must be set to a row vector of increasing values. The elements must be either 0
or positive integers.
Side Eects
Whenever this property is altered, the weight's size (net.inputWeights{i,j}.size)
and the dimensions of its weight matrix (net.IW{i,j}) are updated.
net.inputWeights{i,j}.initFcn
This property denes which of the Weight and Bias Initialization Functions is used to
initialize the weight matrix (net.IW{i,j}) going to the ith layer from the jth input, if the
network initialization function is initlay, and the ith layer's initialization function is
initwb. This function can be set to the name of any weight initialization function.
net.inputWeights{i,j}.initSettings (read only)
This property is set to values useful for initializing the weight as part of the conguration
process that occurs automatically the rst time a network is trained, or when the function
configure is called on a network directly.
net.inputWeights{i,j}.learn
This property denes whether the weight matrix to the ith layer from the jth input is to be
altered during training and adaption. It can be set to 0 or 1.
net.inputWeights{i,j}.learnFcn
This property denes which of the learning functions is used to update the weight matrix
(net.IW{i,j}) going to the ith layer from the jth input during training, if the network
Neural Network Subobject Properties
12-25

training function is trainb, trainc, or trainr, or during adaption, if the network adapt
function is trains. It can be set to the name of any weight learning function.
For a list of functions, type help nnlearn.
net.inputWeights{i,j}.learnParam
This property denes the learning parameters and values for the current learning
function of the ith layer's weight coming from the jth input.
The elds of this property depend on the current learning function
(net.inputWeights{i,j}.learnFcn). Evaluate the above reference to see the elds
of the current learning function.
Call help on the current learning function to get a description of what each eld means.
net.inputWeights{i,j}.size (read only)
This property denes the dimensions of the ith layer's weight matrix from the jth network
input. It is always set to a two-element row vector indicating the number of rows and
columns of the associated weight matrix (net.IW{i,j}). The rst element is equal to the
size of the ith layer (net.layers{i}.size). The second element is equal to the product
of the length of the weight's delay vectors and the size of the jth input:
length(net.inputWeights{i,j}.delays) * net.inputs{j}.size
net.inputWeights{i,j}.userdata
This property provides a place for users to add custom information to the (i,j)th input
weight.
net.inputWeights{i,j}.weightFcn
This property denes which of the weight functions is used to apply the ith layer's weight
from the jth input to that input. It can be set to the name of any weight function. The
weight function is used to transform layer inputs during simulation and training.
For a list of functions, type help nnweight.
net.inputWeights{i,j}.weightParam
This property denes the parameters of the layer's net input function. Call help on the
current net input function to get a description of each eld.
12 Neural Network Object Reference
12-26

Layer Weights
net.layerWeights{i,j}.delays
This property denes a tapped delay line between the jth layer and its weight to the ith
layer. It must be set to a row vector of increasing values. The elements must be either 0
or positive integers.
net.layerWeights{i,j}.initFcn
This property denes which of the weight and bias initialization functions is used to
initialize the weight matrix (net.LW{i,j}) going to the ith layer from the jth layer, if the
network initialization function is initlay, and the ith layer's initialization function is
initwb. This function can be set to the name of any weight initialization function.
net.layerWeights{i,j}.initSettings (read only)
This property is set to values useful for initializing the weight as part of the conguration
process that occurs automatically the rst time a network is trained, or when the function
configure is called on a network directly.
net.layerWeights{i,j}.learn
This property denes whether the weight matrix to the ith layer from the jth layer is to be
altered during training and adaption. It can be set to 0 or 1.
net.layerWeights{i,j}.learnFcn
This property denes which of the learning functions is used to update the weight matrix
(net.LW{i,j}) going to the ith layer from the jth layer during training, if the network
training function is trainb, trainc, or trainr, or during adaption, if the network adapt
function is trains. It can be set to the name of any weight learning function.
For a list of functions, type help nnlearn.
net.layerWeights{i,j}.learnParam
This property denes the learning parameters elds and values for the current learning
function of the ith layer's weight coming from the jth layer. The elds of this property
depend on the current learning function. Call help on the current net input function to
get a description of each eld.
Neural Network Subobject Properties
12-27

net.layerWeights{i,j}.size (read only)
This property denes the dimensions of the ith layer's weight matrix from the jth layer. It
is always set to a two-element row vector indicating the number of rows and columns of
the associated weight matrix (net.LW{i,j}). The rst element is equal to the size of the
ith layer (net.layers{i}.size). The second element is equal to the product of the
length of the weight's delay vectors and the size of the jth layer.
net.layerWeights{i,j}.userdata
This property provides a place for users to add custom information to the (i,j)th layer
weight.
net.layerWeights{i,j}.weightFcn
This property denes which of the weight functions is used to apply the ith layer's weight
from the jth layer to that layer's output. It can be set to the name of any weight function.
The weight function is used to transform layer inputs when the network is simulated.
For a list of functions, type help nnweight.
net.layerWeights{i,j}.weightParam
This property denes the parameters of the layer's net input function. Call help on the
current net input function to get a description of each eld.
12 Neural Network Object Reference
12-28
Bibliography
13

Neural Network Toolbox Bibliography
[Batt92] Battiti, R., “First and second order methods for learning: Between steepest
descent and Newton's method,” Neural Computation, Vol. 4, No. 2, 1992, pp. 141–166.
[Beal72] Beale, E.M.L., “A derivation of conjugate gradients,” in F.A. Lootsma, Ed.,
Numerical methods for nonlinear optimization, London: Academic Press, 1972.
[Bren73] Brent, R.P., Algorithms for Minimization Without Derivatives, Englewood Clis,
NJ: Prentice-Hall, 1973.
[Caud89] Caudill, M., Neural Networks Primer, San Francisco, CA: Miller Freeman
Publications, 1989.
This collection of papers from the AI Expert Magazine gives an excellent introduction to
the eld of neural networks. The papers use a minimum of mathematics to explain the
main results clearly. Several good suggestions for further reading are included.
[CaBu92] Caudill, M., and C. Butler, Understanding Neural Networks: Computer
Explorations, Vols. 1 and 2, Cambridge, MA: The MIT Press, 1992.
This is a two-volume workbook designed to give students “hands on” experience with
neural networks. It is written for a laboratory course at the senior or rst-year graduate
level. Software for IBM PC and Apple Macintosh computers is included. The material is
well written, clear, and helpful in understanding a eld that traditionally has been buried
in mathematics.
[Char92] Charalambous, C.,“Conjugate gradient algorithm for eicient training of
articial neural networks,” IEEE Proceedings, Vol. 139, No. 3, 1992, pp. 301–310.
[ChCo91] Chen, S., C.F.N. Cowan, and P.M. Grant, “Orthogonal least squares learning
algorithm for radial basis function networks,” IEEE Transactions on Neural Networks,
Vol. 2, No. 2, 1991, pp. 302–309.
This paper gives an excellent introduction to the eld of radial basis functions. The papers
use a minimum of mathematics to explain the main results clearly. Several good
suggestions for further reading are included.
[ChDa99] Chengyu, G., and K. Danai, “Fault diagnosis of the IFAC Benchmark Problem
with a model-based recurrent neural network,” Proceedings of the 1999 IEEE
International Conference on Control Applications, Vol. 2, 1999, pp. 1755–1760.
13 Bibliography
13-2

[DARP88] DARPA Neural Network Study, Lexington, MA: M.I.T. Lincoln Laboratory,
1988.
This book is a compendium of knowledge of neural networks as they were known to 1988.
It presents the theoretical foundations of neural networks and discusses their current
applications. It contains sections on associative memories, recurrent networks, vision,
speech recognition, and robotics. Finally, it discusses simulation tools and implementation
technology.
[DeHa01a] De Jesús, O., and M.T. Hagan, “Backpropagation Through Time for a General
Class of Recurrent Network,” Proceedings of the International Joint Conference on Neural
Networks, Washington, DC, July 15–19, 2001, pp. 2638–2642.
[DeHa01b] De Jesús, O., and M.T. Hagan, “Forward Perturbation Algorithm for a General
Class of Recurrent Network,” Proceedings of the International Joint Conference on Neural
Networks, Washington, DC, July 15–19, 2001, pp. 2626–2631.
[DeHa07] De Jesús, O., and M.T. Hagan, “Backpropagation Algorithms for a Broad Class
of Dynamic Networks,” IEEE Transactions on Neural Networks, Vol. 18, No. 1, January
2007, pp. 14 -27.
This paper provides detailed algorithms for the calculation of gradients and Jacobians for
arbitrarily-connected neural networks. Both the backpropagation-through-time and real-
time recurrent learning algorithms are covered.
[DeSc83] Dennis, J.E., and R.B. Schnabel, Numerical Methods for Unconstrained
Optimization and Nonlinear Equations, Englewood Clis, NJ: Prentice-Hall, 1983.
[DHH01] De Jesús, O., J.M. Horn, and M.T. Hagan, “Analysis of Recurrent Network
Training and Suggestions for Improvements,” Proceedings of the International Joint
Conference on Neural Networks, Washington, DC, July 15–19, 2001, pp. 2632–2637.
[Elma90] Elman, J.L., “Finding structure in time,” Cognitive Science, Vol. 14, 1990, pp.
179–211.
This paper is a superb introduction to the Elman networks described in Chapter 10,
“Recurrent Networks.”
[FeTs03] Feng, J., C.K. Tse, and F.C.M. Lau, “A neural-network-based channel-equalization
strategy for chaos-based communication systems,” IEEE Transactions on Circuits and
Systems I: Fundamental Theory and Applications, Vol. 50, No. 7, 2003, pp. 954–957.
Neural Network Toolbox Bibliography
13-3

[FlRe64] Fletcher, R., and C.M. Reeves, “Function minimization by conjugate gradients,”
Computer Journal, Vol. 7, 1964, pp. 149–154.
[FoHa97] Foresee, F.D., and M.T. Hagan, “Gauss-Newton approximation to Bayesian
regularization,” Proceedings of the 1997 International Joint Conference on Neural
Networks, 1997, pp. 1930–1935.
[GiMu81] Gill, P.E., W. Murray, and M.H. Wright, Practical Optimization, New York:
Academic Press, 1981.
[GiPr02] Gianluca, P., D. Przybylski, B. Rost, P. Baldi, “Improving the prediction of
protein secondary structure in three and eight classes using recurrent neural networks
and proles,” Proteins: Structure, Function, and Genetics, Vol. 47, No. 2, 2002, pp. 228–
235.
[Gros82] Grossberg, S., Studies of the Mind and Brain, Drodrecht, Holland: Reidel Press,
1982.
This book contains articles summarizing Grossberg's theoretical psychophysiology work
up to 1980. Each article contains a preface explaining the main points.
[HaDe99] Hagan, M.T., and H.B. Demuth, “Neural Networks for Control,” Proceedings of
the 1999 American Control Conference, San Diego, CA, 1999, pp. 1642–1656.
[HaJe99] Hagan, M.T., O. De Jesus, and R. Schultz, “Training Recurrent Networks for
Filtering and Control,” Chapter 12 in Recurrent Neural Networks: Design and
Applications, L. Medsker and L.C. Jain, Eds., CRC Press, pp. 311–340.
[HaMe94] Hagan, M.T., and M. Menhaj, “Training feed-forward networks with the
Marquardt algorithm,” IEEE Transactions on Neural Networks, Vol. 5, No. 6, 1999, pp.
989–993, 1994.
This paper reports the rst development of the Levenberg-Marquardt algorithm for
neural networks. It describes the theory and application of the algorithm, which trains
neural networks at a rate 10 to 100 times faster than the usual gradient descent
backpropagation method.
[HaRu78] Harrison, D., and Rubinfeld, D.L., “Hedonic prices and the demand for clean
air,” J. Environ. Economics & Management, Vol. 5, 1978, pp. 81-102.
This data set was taken from the StatLib library, which is maintained at Carnegie Mellon
University.
13 Bibliography
13-4

[HDB96] Hagan, M.T., H.B. Demuth, and M.H. Beale, Neural Network Design, Boston,
MA: PWS Publishing, 1996.
This book provides a clear and detailed survey of basic neural network architectures and
learning rules. It emphasizes mathematical analysis of networks, methods of training
networks, and application of networks to practical engineering problems. It has example
programs, an instructor’s guide, and transparency overheads for teaching.
[HDH09] Horn, J.M., O. De Jesús and M.T. Hagan, “Spurious Valleys in the Error Surface
of Recurrent Networks - Analysis and Avoidance,” IEEE Transactions on Neural
Networks, Vol. 20, No. 4, pp. 686-700, April 2009.
This paper describes spurious valleys that appear in the error surfaces of recurrent
networks. It also explains how training algorithms can be modied to avoid becoming
stuck in these valleys.
[Hebb49] Hebb, D.O., The Organization of Behavior, New York: Wiley, 1949.
This book proposed neural network architectures and the rst learning rule. The learning
rule is used to form a theory of how collections of cells might form a concept.
[Himm72] Himmelblau, D.M., Applied Nonlinear Programming, New York: McGraw-Hill,
1972.
[HuSb92] Hunt, K.J., D. Sbarbaro, R. Zbikowski, and P.J. Gawthrop, Neural Networks for
Control System — A Survey,” Automatica, Vol. 28, 1992, pp. 1083–1112.
[JaRa04] Jayadeva and S.A.Rahman, “A neural network with O(N) neurons for ranking N
numbers in O(1/N) time,” IEEE Transactions on Circuits and Systems I: Regular Papers,
Vol. 51, No. 10, 2004, pp. 2044–2051.
[Joll86] Jollie, I.T., Principal Component Analysis, New York: Springer-Verlag, 1986.
[KaGr96] Kamwa, I., R. Grondin, V.K. Sood, C. Gagnon, Van Thich Nguyen, and J. Mereb,
“Recurrent neural networks for phasor detection and adaptive identication in power
system control and protection,” IEEE Transactions on Instrumentation and Measurement,
Vol. 45, No. 2, 1996, pp. 657–664.
[Koho87] Kohonen, T., Self-Organization and Associative Memory, 2nd Edition, Berlin:
Springer-Verlag, 1987.
This book analyzes several learning rules. The Kohonen learning rule is then introduced
and embedded in self-organizing feature maps. Associative networks are also studied.
Neural Network Toolbox Bibliography
13-5

[Koho97] Kohonen, T., Self-Organizing Maps, Second Edition, Berlin: Springer-Verlag,
1997.
This book discusses the history, fundamentals, theory, applications, and hardware of self-
organizing maps. It also includes a comprehensive literature survey.
[LiMi89] Li, J., A.N. Michel, and W. Porod, “Analysis and synthesis of a class of neural
networks: linear systems operating on a closed hypercube,” IEEE Transactions on
Circuits and Systems, Vol. 36, No. 11, 1989, pp. 1405–1422.
This paper discusses a class of neural networks described by rst-order linear dierential
equations that are dened on a closed hypercube. The systems considered retain the
basic structure of the Hopeld model but are easier to analyze and implement. The paper
presents an eicient method for determining the set of asymptotically stable equilibrium
points and the set of unstable equilibrium points. Examples are presented. The method of
Li, et. al., is implemented in Advanced Topics in the User’s Guide.
[Lipp87] Lippman, R.P., “An introduction to computing with neural nets,” IEEE ASSP
Magazine, 1987, pp. 4–22.
This paper gives an introduction to the eld of neural nets by reviewing six neural net
models that can be used for pattern classication. The paper shows how existing
classication and clustering algorithms can be performed using simple components that
are like neurons. This is a highly readable paper.
[MacK92] MacKay, D.J.C., “Bayesian interpolation,” Neural Computation, Vol. 4, No. 3,
1992, pp. 415–447.
[Marq63] Marquardt, D., “An Algorithm for Least-Squares Estimation of Nonlinear
Parameters,” SIAM Journal on Applied Mathematics, Vol. 11, No. 2, June 1963, pp. 431–
441.
[McPi43] McCulloch, W.S., and W.H. Pitts, “A logical calculus of ideas immanent in
nervous activity,” Bulletin of Mathematical Biophysics, Vol. 5, 1943, pp. 115–133.
A classic paper that describes a model of a neuron that is binary and has a xed
threshold. A network of such neurons can perform logical operations.
[MeJa00] Medsker, L.R., and L.C. Jain, Recurrent neural networks: design and
applications, Boca Raton, FL: CRC Press, 2000.
[Moll93] Moller, M.F., “A scaled conjugate gradient algorithm for fast supervised
learning,” Neural Networks, Vol. 6, 1993, pp. 525–533.
13 Bibliography
13-6

[MuNe92] Murray, R., D. Neumerkel, and D. Sbarbaro, “Neural Networks for Modeling
and Control of a Non-linear Dynamic System,” Proceedings of the 1992 IEEE
International Symposium on Intelligent Control, 1992, pp. 404–409.
[NaMu97] Narendra, K.S., and S. Mukhopadhyay, “Adaptive Control Using Neural
Networks and Approximate Models,” IEEE Transactions on Neural Networks, Vol. 8,
1997, pp. 475–485.
[NaPa91] Narendra, Kumpati S. and Kannan Parthasarathy, “Learning Automata
Approach to Hierarchical Multiobjective Analysis,” IEEE Transactions on Systems, Man
and Cybernetics, Vol. 20, No. 1, January/February 1991, pp. 263–272.
[NgWi89] Nguyen, D., and B. Widrow, “The truck backer-upper: An example of self-
learning in neural networks,” Proceedings of the International Joint Conference on Neural
Networks, Vol. 2, 1989, pp. 357–363.
This paper describes a two-layer network that rst learned the truck dynamics and then
learned how to back the truck to a specied position at a loading dock. To do this, the
neural network had to solve a highly nonlinear control systems problem.
[NgWi90] Nguyen, D., and B. Widrow, “Improving the learning speed of 2-layer neural
networks by choosing initial values of the adaptive weights,” Proceedings of the
International Joint Conference on Neural Networks, Vol. 3, 1990, pp. 21–26.
Nguyen and Widrow show that a two-layer sigmoid/linear network can be viewed as
performing a piecewise linear approximation of any learned function. It is shown that
weights and biases generated with certain constraints result in an initial network better
able to form a function approximation of an arbitrary function. Use of the Nguyen-Widrow
(instead of purely random) initial conditions often shortens training time by more than an
order of magnitude.
[Powe77] Powell, M.J.D., “Restart procedures for the conjugate gradient method,”
Mathematical Programming, Vol. 12, 1977, pp. 241–254.
[Pulu92] Purdie, N., E.A. Lucas, and M.B. Talley, “Direct measure of total cholesterol and
its distribution among major serum lipoproteins,” Clinical Chemistry, Vol. 38, No. 9, 1992,
pp. 1645–1647.
[RiBr93] Riedmiller, M., and H. Braun, “A direct adaptive method for faster
backpropagation learning: The RPROP algorithm,” Proceedings of the IEEE International
Conference on Neural Networks, 1993.
Neural Network Toolbox Bibliography
13-7

[Robin94] Robinson, A.J., “An application of recurrent nets to phone probability
estimation,” IEEE Transactions on Neural Networks, Vol. 5 , No. 2, 1994.
[RoJa96] Roman, J., and A. Jameel, “Backpropagation and recurrent neural networks in
nancial analysis of multiple stock market returns,” Proceedings of the Twenty-Ninth
Hawaii International Conference on System Sciences, Vol. 2, 1996, pp. 454–460.
[Rose61] Rosenblatt, F., Principles of Neurodynamics, Washington, D.C.: Spartan Press,
1961.
This book presents all of Rosenblatt's results on perceptrons. In particular, it presents his
most important result, the perceptron learning theorem.
[RuHi86a] Rumelhart, D.E., G.E. Hinton, and R.J. Williams, “Learning internal
representations by error propagation,” in D.E. Rumelhart and J.L. McClelland, Eds.,
Parallel Data Processing, Vol. 1, Cambridge, MA: The M.I.T. Press, 1986, pp. 318–362.
This is a basic reference on backpropagation.
[RuHi86b] Rumelhart, D.E., G.E. Hinton, and R.J. Williams, “Learning representations by
back-propagating errors,” Nature, Vol. 323, 1986, pp. 533–536.
[RuMc86] Rumelhart, D.E., J.L. McClelland, and the PDP Research Group, Eds., Parallel
Distributed Processing, Vols. 1 and 2, Cambridge, MA: The M.I.T. Press, 1986.
These two volumes contain a set of monographs that present a technical introduction to
the eld of neural networks. Each section is written by dierent authors. These works
present a summary of most of the research in neural networks to the date of publication.
[Scal85] Scales, L.E., Introduction to Non-Linear Optimization, New York: Springer-
Verlag, 1985.
[SoHa96] Soloway, D., and P.J. Haley, “Neural Generalized Predictive Control,”
Proceedings of the 1996 IEEE International Symposium on Intelligent Control, 1996, pp.
277–281.
[VoMa88] Vogl, T.P., J.K. Mangis, A.K. Rigler, W.T. Zink, and D.L. Alkon, “Accelerating the
convergence of the backpropagation method,” Biological Cybernetics, Vol. 59, 1988, pp.
256–264.
Backpropagation learning can be speeded up and made less sensitive to small features in
the error surface such as shallow local minima by combining techniques such as batching,
adaptive learning rate, and momentum.
13 Bibliography
13-8

[WaHa89] Waibel, A., T. Hanazawa, G. Hinton, K. Shikano, and K. J. Lang, “Phoneme
recognition using time-delay neural networks,” IEEE Transactions on Acoustics, Speech,
and Signal Processing, Vol. 37, 1989, pp. 328–339.
[Wass93] Wasserman, P.D., Advanced Methods in Neural Computing, New York: Van
Nostrand Reinhold, 1993.
[WeGe94] Weigend, A. S., and N. A. Gershenfeld, eds., Time Series Prediction:
Forecasting the Future and Understanding the Past, Reading, MA: Addison-Wesley, 1994.
[WiHo60] Widrow, B., and M.E. Ho, “Adaptive switching circuits,” 1960 IRE WESCON
Convention Record, New York IRE, 1960, pp. 96–104.
[WiSt85] Widrow, B., and S.D. Sterns, Adaptive Signal Processing, New York: Prentice-
Hall, 1985.
This is a basic paper on adaptive signal processing.
Neural Network Toolbox Bibliography
13-9
Mathematical Notation
A
Mathematics and Code Equivalents
In this section...
“Mathematics Notation to MATLAB Notation” on page A-2
“Figure Notation” on page A-2
The transition from mathematics to code or vice versa can be made with the aid of a few
rules. They are listed here for reference.
Mathematics Notation to MATLAB Notation
To change from mathematics notation to MATLAB notation:
• Change superscripts to cell array indices. For example,
p p
11Æ{ }
• Change subscripts to indices within parentheses. For example,
p p
22Æ( )
and
p p
2
11 2Æ{ }( )
• Change indices within parentheses to a second cell array index. For example,
p k p k
11 1 1( ) { , }- Æ -
• Change mathematics operators to MATLAB operators and toolbox functions. For
example,
ab a bÆ *
Figure Notation
The following equations illustrate the notation used in gures.
AMathematics and Code Equivalents
A-2

n w p w p p b
R R
= + + + +
1 1 1 1 2 2 1
2
, , ,
...
W
w w w
w w w
w w w
R
R
S S S R
=
È
Î
Í
Í
Í
˘
˚
˙
˙
˙
1 1 1 2 1
2 1 2 2 2
1 2
, , ,
, , ,
, , ,
...
...
...
Mathematics and Code Equivalents
A-3
Neural Network Blocks for the
Simulink Environment
B
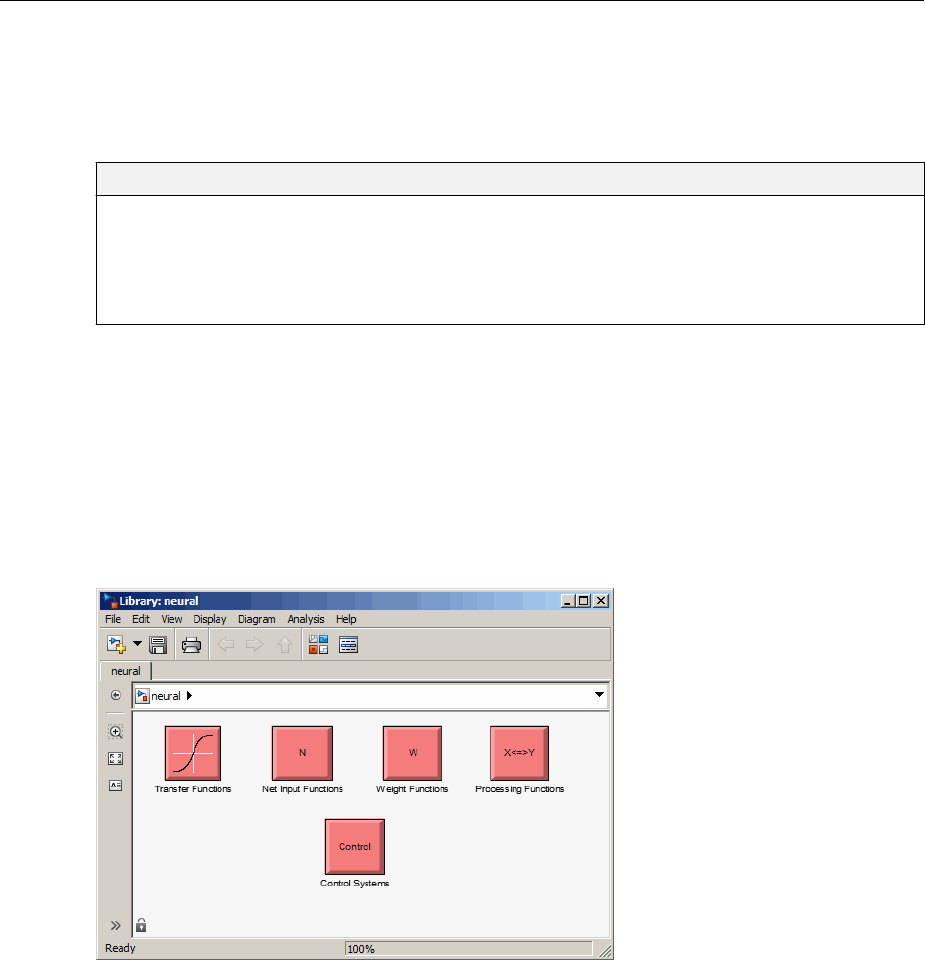
Neural Network Simulink Block Library
In this section...
“Transfer Function Blocks” on page B-3
“Net Input Blocks” on page B-3
“Weight Blocks” on page B-3
“Processing Blocks” on page B-4
The Neural Network Toolbox product provides a set of blocks you can use to build neural
networks using Simulink software, or that the function gensim can use to generate the
Simulink version of any network you have created using MATLAB software.
Open the Neural Network Toolbox block library with the command:
neural
This opens a library window that contains ve blocks. Each of these blocks contains
additional blocks.
BNeural Network Simulink Block Library
B-2
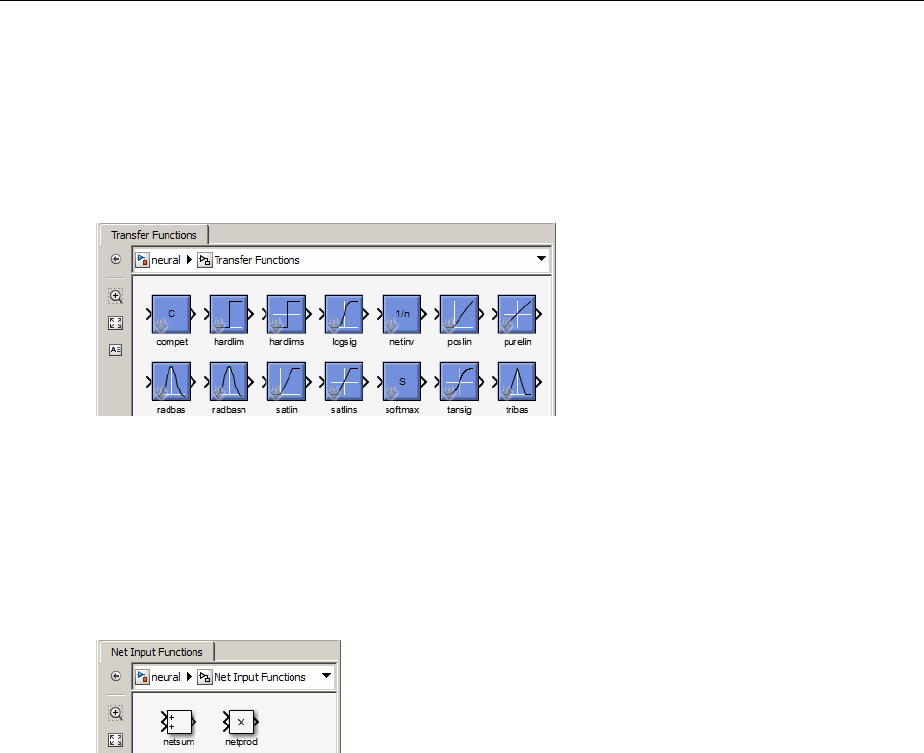
Transfer Function Blocks
Double-click the Transfer Functions block in the Neural library window to open a window
containing several transfer function blocks.
Each of these blocks takes a net input vector and generates a corresponding output
vector whose dimensions are the same as the input vector.
Net Input Blocks
Double-click the Net Input Functions block in the Neural library window to open a
window containing two net-input function blocks.
Each of these blocks takes any number of weighted input vectors, weight layer output
vectors, and bias vectors, and returns a net-input vector.
Weight Blocks
Double-click the Weight Functions block in the Neural library window to open a window
containing three weight function blocks.
Neural Network Simulink Block Library
B-3
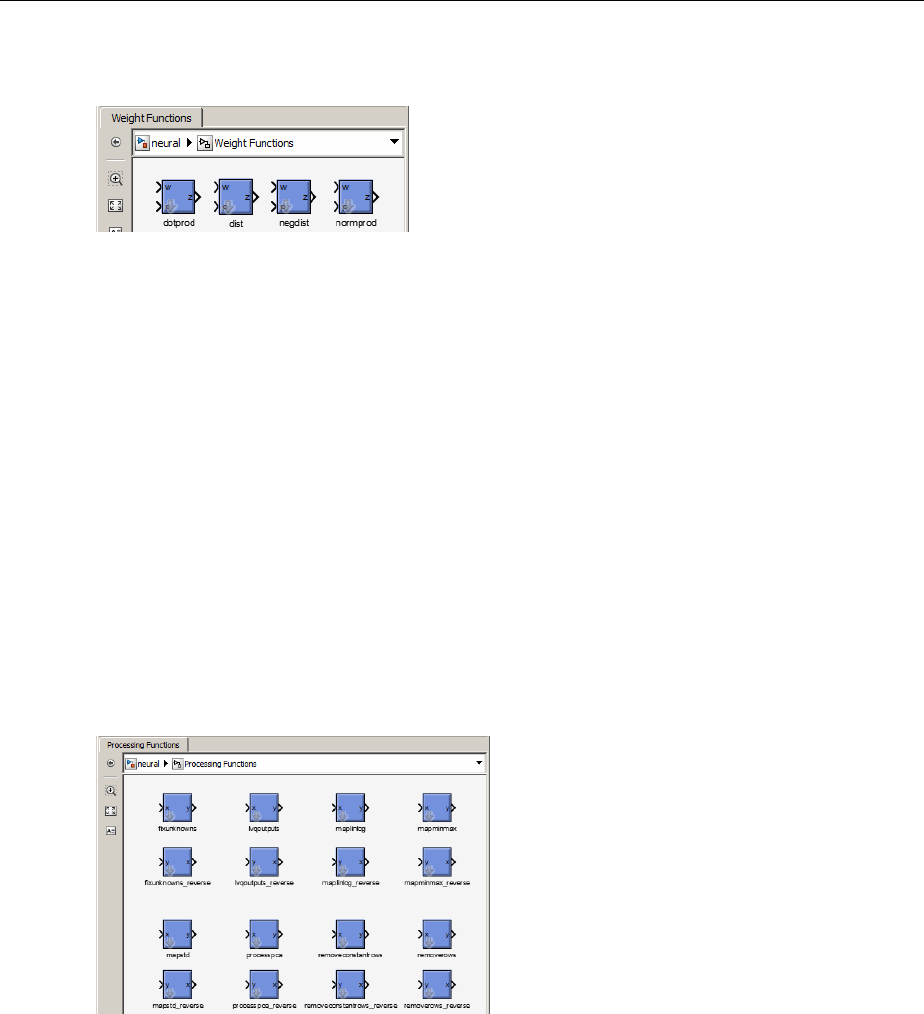
Each of these blocks takes a neuron’s weight vector and applies it to an input vector (or a
layer output vector) to get a weighted input value for a neuron.
It is important to note that these blocks expect the neuron’s weight vector to be dened
as a column vector. This is because Simulink signals can be column vectors, but cannot be
matrices or row vectors.
It is also important to note that because of this limitation you have to create S weight
function blocks (one for each row), to implement a weight matrix going to a layer with S
neurons.
This contrasts with the other two kinds of blocks. Only one net input function and one
transfer function block are required for each layer.
Processing Blocks
Double-click the Processing Functions block in the Neural library window to open a
window containing processing blocks and their corresponding reverse-processing blocks.
Each of these blocks can be used to preprocess inputs and postprocess outputs.
BNeural Network Simulink Block Library
B-4
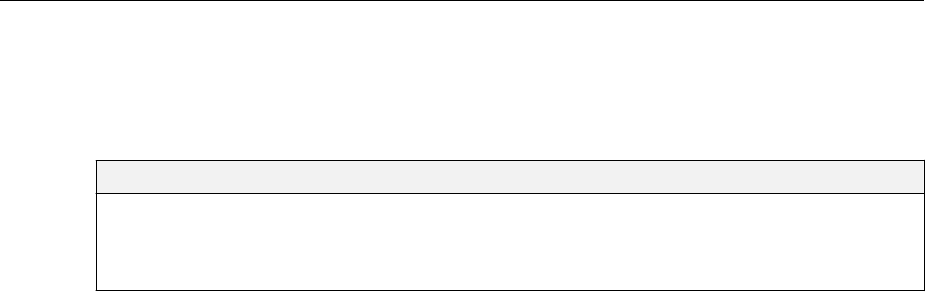
Deploy Neural Network Simulink Diagrams
In this section...
“Example” on page B-5
“Suggested Exercises” on page B-7
“Generate Functions and Objects” on page B-8
The function gensim generates block descriptions of networks so you can simulate them
using Simulink software.
gensim(net,st)
The second argument to gensim determines the sample time, which is normally chosen to
be some positive real value.
If a network has no delays associated with its input weights or layer weights, this value
can be set to -1. A value of -1 causes gensim to generate a network with continuous
sampling.
Example
Here is a simple problem dening a set of inputs p and corresponding targets t.
p = [1 2 3 4 5];
t = [1 3 5 7 9];
The code below designs a linear layer to solve this problem.
net = newlind(p,t)
You can test the network on your original inputs with sim.
y = sim(net,p)
The results show the network has solved the problem.
y =
1.0000 3.0000 5.0000 7.0000 9.0000
Call gensim as follows to generate a Simulink version of the network.
gensim(net,-1)
Deploy Neural Network Simulink Diagrams
B-5
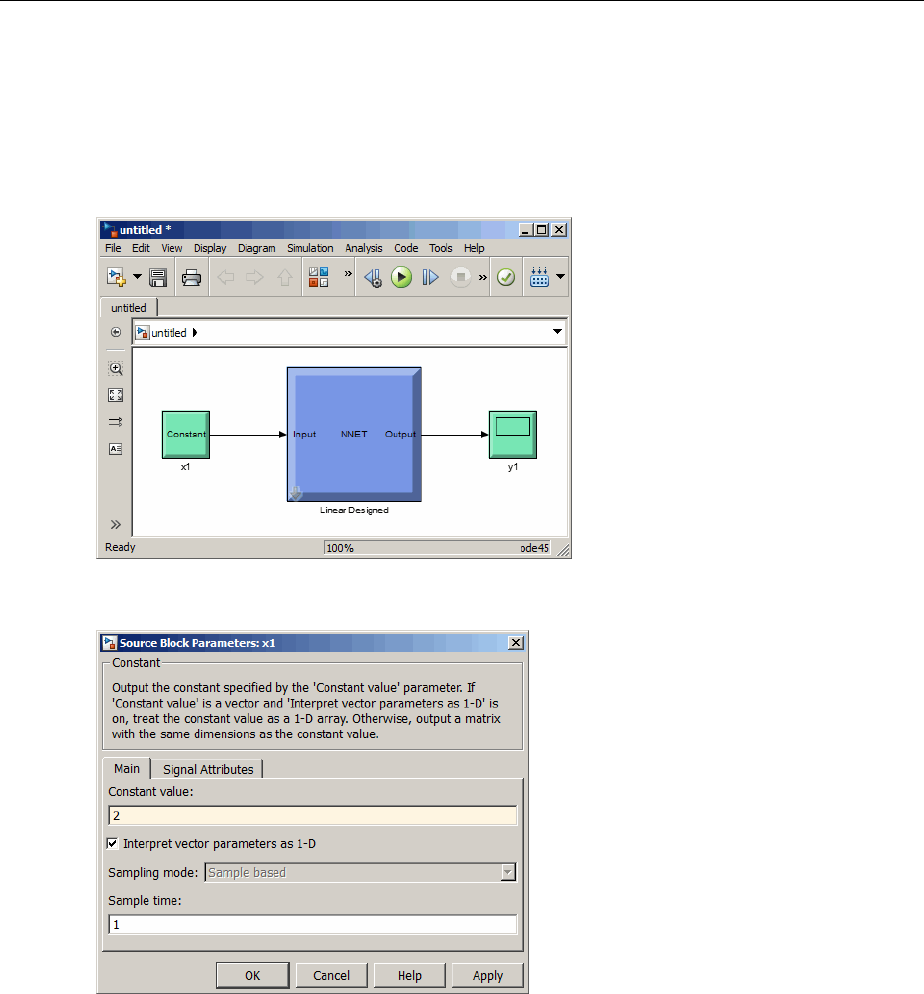
The second argument is -1, so the resulting network block samples continuously.
The call to gensim opens the following Simulink Editor, showing a system consisting of
the linear network connected to a sample input and a scope.
To test the network, double-click the input Constant x1 block on the left.
The input block is actually a standard Constant block. Change the constant value from the
initial randomly generated value to 2, and then click OK.
BDeploy Neural Network Simulink Diagrams
B-6
Select the menu option Simulation > Run. Simulink takes a moment to simulate the
system.
When the simulation is complete, double-click the output y1 block on the right to see the
following display of the network’s response.
Note that the output is 3, which is the correct output for an input of 2.
Suggested Exercises
Here are a couple exercises you can try.
Change the Input Signal
Replace the constant input block with a signal generator from the standard Simulink
Sources blockset. Simulate the system and view the network’s response.
Use a Discrete Sample Time
Recreate the network, but with a discrete sample time of 0.5, instead of continuous
sampling.
gensim(net,0.5)
Again, replace the constant input with a signal generator. Simulate the system and view
the network’s response.
Deploy Neural Network Simulink Diagrams
B-7

Code Notes
C
Neural Network Toolbox Data Conventions
In this section...
“Dimensions” on page C-2
“Variables” on page C-2
Dimensions
The following code dimensions are used in describing both the network signals that users
commonly see, and those used by the utility functions:
Ni = Number of network inputs = net.numInputs
Ri = Number of elements in input i = net.inputs{i}.size
Nl = Number of layers = net.numLayers
Si = Number of neurons in layer i = net.layers{i}.size
Nt = Number of targets
Vi = Number of elements in target i,
equal to Sj, where j is the ith layer with a
target. (A layer n has a target if
net.targets(n) == 1.)
No = Number of network outputs
Ui = Number of elements in output i,
equal to Sj, where j is the ith layer with
an output (A layer n has an output if
net.outputs(n) == 1.)
ID = Number of input delays = net.numInputDelays
LD = Number of layer delays = net.numLayerDelays
TS = Number of time steps
Q = Number of concurrent vectors or
sequences
Variables
The variables a user commonly uses when dening a simulation or training session are
CNeural Network Toolbox Data Conventions
C-2
PNetwork inputs Ni-by-TS cell array, where each element P{i,ts} is
an Ri-by-Q matrix
Pi Initial input delay
conditions
Ni-by-ID cell array, where each element Pi{i,k} is
an Ri-by-Q matrix
Ai Initial layer delay
conditions
Nl-by-LD cell array, where each element Ai{i,k} is
an Si-by-Q matrix
TNetwork targets Nt-by-TS cell array, where each element P{i,ts} is a
Vi-by-Q matrix
These variables are returned by simulation and training calls:
YNetwork outputs No-by-TS cell array, where each element Y{i,ts} is a
Ui-by-Q matrix
ENetwork errors Nt-by-TS cell array, where each element P{i,ts} is a
Vi-by-Q matrix
perf Network performance
Utility Function Variables
These variables are used only by the utility functions.
Pc Combined inputs Ni-by-(ID+TS) cell array, where each element
P{i,ts} is an Ri-by-Q matrix
Pc = [Pi P] = Initial input delay conditions and
network inputs
Neural Network Toolbox Data Conventions
C-3
Pd Delayed inputs Ni-by-Nj-by-TS cell array, where each element
Pd{i,j,ts} is an (Ri*IWD(i,j))-by-Q matrix, and where
IWD(i,j) is the number of delay taps associated with
the input weight to layer i from input j
Equivalently,
IWD(i,j) = length(net.inputWeights{i,j}.delays)
Pd is the result of passing the elements of P through
each input weight's tap delay lines. Because inputs
are always transformed by input delays in the same
way, it saves time to do that operation only once
instead of for every training step.
BZ Concurrent bias vectors Nl-by-1 cell array, where each element BZ{i} is an
Si-by-Q matrix
Each matrix is simply Q copies of the net.b{i} bias
vector.
IWZ Weighted inputs Ni-by-Nl-by-TS cell array, where each element
IWZ{i,j,ts} is an Si-by-???-by-Q matrix
LWZ Weighted layer outputs Ni-by-Nl-by-TS cell array, where each element
LWZ{i,j,ts} is an Si-by-Q matrix
NNet inputs Ni-by-TS cell array, where each element N{i,ts} is
an Si-by-Q matrix
ALayer outputs Nl-by-TS cell array, where each element A{i,ts} is
an Si-by-Q matrix
Ac Combined layer outputs Nl-by-(LD+TS) cell array, where each element
A{i,ts} is an Si-by-Q matrix
Ac = [Ai A] = Initial layer delay conditions and
layer outputs.
Tl Layer targets Nl-by-TS cell array, where each element Tl{i,ts} is
an Si-by-Q matrix
Tl contains empty matrices [] in rows of layers i not
associated with targets, indicated by
net.targets(i) == 0.
CNeural Network Toolbox Data Conventions
C-4
El Layer errors Nl-by-TS cell array, where each element El{i,ts} is
an Si-by-Q matrix
El contains empty matrices [] in rows of layers i not
associated with targets, indicated by
net.targets(i) == 0.
XColumn vector of all
weight and bias values
Neural Network Toolbox Data Conventions
C-5
