Open Haptics Windows Install Guide
User Manual:
Open the PDF directly: View PDF ![]() .
.
Page Count: 10


3D Systems, Inc. 3
COPYRIGHT
©2015. 3D Systems, Inc. All rights reserved. The content of this manual is furnished for informational use only, is subject to change
without notice, and should not be construed as a commitment by 3D Systems, Inc. This document is copyrighted and contains
proprietary information that is the property of 3D Systems, Inc. Touch, Geomagic Touch, Geomagic Touch X, Geomagic OpenHaptics,
Geomagic, Phantom, Phantom Desktop, Phantom Omni, Sensable, 3D Systems, and the 3D Systems logo are registered trademarks,
and Touch is a trademark, of 3D Systems, Inc. Use of the Cubify.com website constitutes acceptance of its Terms of Service and
Privacy Policy. Any names, places, and/or events in this publication are not intended to correspond or relate in any way to individuals,
groups or associations. Any similarity or likeness of the names, places, and/or events in this publication to those of any individual, living
or dead, place, event, or that of any group or association is purely coincidental and unintentional.
WARRANTY
No warranties of any kind are created or extended by this publication. 3D Systems warrants that the Touch haptic device will be free
from defects in materials and workmanship, during the applicable warranty period, when used under the normal conditions described
in the documentation provided to you, including the respective User Guide. 3D Systems will promptly repair or replace the Touch, if
required, to make it free of defects during the warranty period. This warranty excludes repairs required during the warranty period
because of abnormal use or conditions (such as riots, oods, misuse, neglect or improper service by anyone except 3D Systems or its
authorized service provider). For consumers who are covered by consumer protection laws or regulations in their country of purchase
or, if different, their country of residence, the benets conferred by our standard warranty are in addition to, and operate concurrently
with, all rights and remedies conveyed by such consumer protection laws -and regulations, including but not limited to these additional
rights.
THIS WARRANTY IS THE ONLY WARRANTY PROVIDED FOR THE TOUCH DEVICE. TO THE MAXIMUM EXTENT PERMITTED
BY LAW, 3D SYSTEMS EXPRESSLY DISCLAIMS ALL OTHER WARRANTIES FOR THE TOUCH DEVICE AND EACH OF ITS
COMPONENTS, WHETHER THOSE WARRANTIES ARE EXPRESS, IMPLIED OR STATUTORY, INCLUDING WARRANTIES OF
MERCHANTABILITY AND FITNESS FOR INTENDED OR PARTICULAR PURPOSES.
LIMITATION OF LIABILITY
3D SYSTEMS WILL NOT BE RESPONSIBLE FOR CONSEQUENTIAL, EXEMPLARY OR INCIDENTAL DAMAGES (SUCH AS
LOSS OF PROFIT OR EMPLOYEE’S TIME) REGARDLESS OF THE REASON. IN NO EVENT SHALL THE LIABILITY AND/OR
OBLIGATIONS OF 3D SYSTEMS ARISING OUT OF THE PURCHASE, LEASE, LICENSE AND/OR USE OF THE EQUIPMENT BY
YOU OR OTHERS EXCEED THE PURCHASE PRICE.

3D Systems, Inc. 4
1 INTRODUCTION
Thank you for downloading the OpenHaptics Toolkit version 3.4!
Should you encounter any difculties while setting up or learning the application, we provide a variety of resources to help you learn the
product. These are described below in “Resources for Learning the OpenHaptics Toolkit”.
RESOURCES FOR LEARNING THE OPENHAPTICS TOOLKIT
The following documentation and other materials are provided to assist you in learning about OpenHaptics:
OpenHaptics Installation Guide This guide walks you through installing the toolkit and deploying your haptically enabled
application. Detailed instructions for installing the Geomagic® Touch™ haptic device can be found in the Geomagic Touch Device Guide
that came with your device.
OpenHaptics Programmer’s Guide This guide explains the OpenHaptics toolkit (which includes the QuickHaptics™ micro
API), and introduces you to the architecture of the toolkit, how it works, and what you can do with it. The guide will also introduce you to
the fundamental components of creating haptic environments.
OpenHaptics API Reference This manual is meant to be used as a companion to the OpenHaptics Toolkit Programmer’s Guide.
It contains reference pages to all the QuickHaptics micro API and OpenHaptics toolkit HDAPI and HLAPI functions and types as well as
appendices with tables that describe all the parameters.
Source Code Examples & Guide Several examples with source code to illustrate commonly used functionality of the HDAPI
and HLAPI are installed with the toolkit. These include both console examples and graphics examples. A guide to these examples is
located in <OpenHaptics_Developer_Edition directory>\doc.
Developer Support Center To access the Developer Support Center (DSC), go to http://dsc.sensable.com. The DSC provides
customers with 24 x 7 access to the most current information and forums for the OpenHaptics toolkit. Please note that you will be asked
to create a registration prole and have your customer information authenticated before you will have access to the DSC.
1
3D Systems, Inc. 5
SYSTEM REQUIREMENTS
IMPORTANT See the ReadMe in the <OpenHaptics Install directory> or visit www.geomagic.com for the most current system
requirements information.
The OpenHaptics toolkit requires certain hardware and software components in order to function properly. These requirements are
listed below.
Hardware:
• Intel Core 2 Duo or better
• 512 MB disk space and 2 GB RAM
• One of the supported devices from the Touch™ family of haptic devices (note that PCC stands for Phantom Communication Con-
verter):
Touch 3D stylus haptic device
(USB connection)
Phantom Premium 1.5 6DOF/1.5 HF 6DOF
(Enhanced Parallel Port connection)
Geomagic® Touch™ haptic device
(Ethernet LAN or IEEE 1394A connection)
Phantom Premium 3.0/6DOF
(Enhanced Parallel Port connection)
Geomagic® Touch™ X haptic device
(Ethernet LAN or Enhanced Parallel Port connection)
Phantom Premium A 1.0/1.5/1.5 HF/3.0 3DOF
(Enhanced Parallel Port connection)
Software:
• Windows 7 and Windows 8
Compiler:
• MicroSoft Visual Studio 2005/2008/2010
Drivers:
• Latest Geomagic Touch Device Drivers (GTDD) or Phantom Device Drivers (PDD). Please refer to our web site to download the most
recent drivers: GTDD or PDD (www.support.geomagic.com).

3D Systems, Inc. 6
2 WINDOWS INSTALLATION
OVERVIEW
This installation is for the Windows OS only. Installing the OpenHaptics toolkit is a two step process.
1. Install the required haptic device drivers: Geomagic Touch Device Drivers (GTDD) or Phantom Device Drivers (PDD).
2. Install the OpenHaptics toolkit according to the instructions below.
Step 1: Install Haptic Device Driver (GTDD or PDD)
If you have an older PDD (Phantom Device Driver) installed, you will need to manually uninstall the old device driver before you can use
the OpenHaptics toolkit, then install the most recent haptic device drivers. The haptic device driver installation can be found at support.
geomagic.com, from Products select Scanners and Hardware, then select the Touch device and Downloads. For complete installation
instructions for the device drivers (GTDD or PDD), see the user guide that shipped with your haptic device.
Step 2: Install Software
After you have completed the installation of the haptic device drivers, install the toolkit as described below.
1. First locate the installation les:
If you are installing from software download:
a. Select the appropriate OpenHaptics product from the Developer Support Center.
b. Save the Zip le to your local system.
c. Locate the OpenHaptics Zip le that you saved to your local system.
d. Unzip the data le.
2. Double-click OpenHaptics_Developer_Edition.exe to begin the installation.
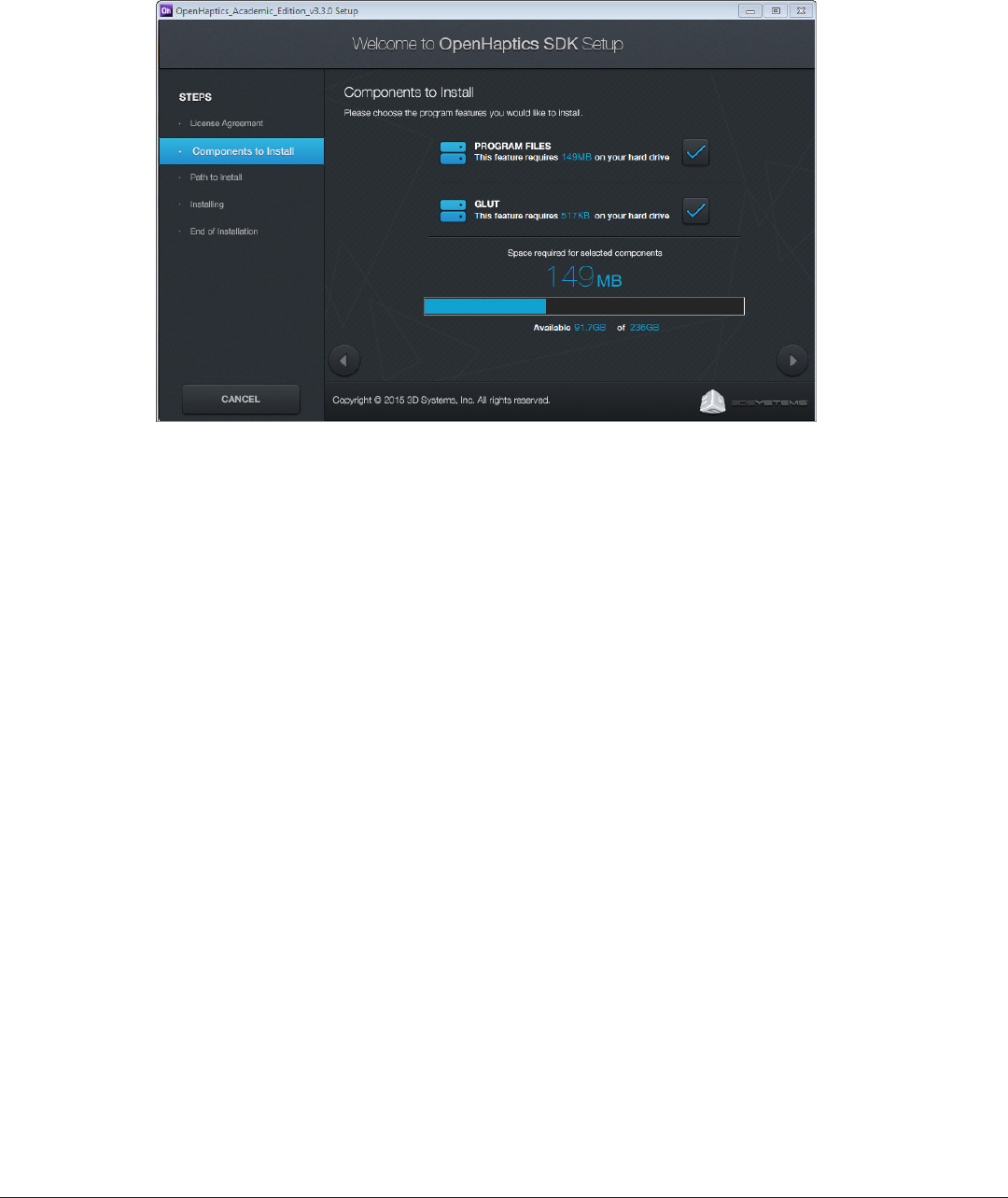
The Welcome to OpenHaptics SDK Setup window appears.
3. Read and then click the “Do You Accept” button to display Yes to accept the License Agreement, then to continue with the
installation, click the Next Arrow.
2
3D Systems, Inc. 7
4. In the Components to Install window, by default Program Files and GLUT are selected, click the Next Arrow.
• Program Files: Installs all of the necessary program les, including examples and help documentation.
• GLUT is selected for install. If you do not already have GLUT installed on your computer, make sure GLUT is selected for install.
These are recommended to incorporate visualizations with your haptics programs and are needed to build many of the sample
programs.
5. In the Path to Install window, select the destination folder for the install directory. The installation wizard will add a new environment
variable, OH_SDK_BASE, which will point to the install directory.
6. Click the Install button.
When the installation is complete, you will receive notication that the installation process was successful.
If you need to end the installation at any time, click Cancel.
7. Click the Close button to close the installation window.
NOTE: The OpenHaptics installation directory is labeled \OpenHaptics\Developer.
File access permissions may not be uniform across all platforms. In some cases, it may be necessary to remove a previous
OpenHaptics installation manually before reinstalling the software. Please make sure to back up the code for your project solutions
before doing this.

3D Systems, Inc. 8
DIRECTORY STRUCTURE
The toolkit is broadly partitioned into the following directories: Lib, Include, Utilities, Examples, Runtime1, and Docs.
Upon installation, the user can specify an installation directory and optionally install GLUT (see page 7.) The default value of the
installation directory is C:\Openhaptics. The installation program also adds a new environment variable, OH_SDK_BASE. Upon
successful installation of the toolkit, the environment variable points to the install directory. All subdirectories described in this directory
are relative to the OH_SDK_BASE directory.
doc - Contains documents such as the License Agreement, the API Reference, the Programmer’s Guide, this Installation Guide, the
QuickHaptics Doxygen docs and an HTML page that provides a guide and link to the source code examples.
examples - The standard installation includes various examples including complete programs for illustrating: how to query buttons,
position, velocity, the end-effector transform matrix as well as basic HLAPI rendering. You may need to copy the examples to your
desktop or My Documents directory in order to compile the examples. Within the examples directory are three sub directories.
bin - Contains the pre-built executables of the source code examples.
HD - Contains console and graphics directories for the Haptic Device API examples.
HL- Contains console and graphics directories for the Haptic Library API examples. Within the HD and HL directories you will nd the
following: (Not included with all editions of OpenHaptics. See your license agreement.)
console -Examples that only employ a windows command prompt.
graphics - Examples that use OpenGL®; most also use GLUT.
include - Contains the header les of the Openhaptics SDK. It is the main include directory of the Openhaptics suite. It is most
conveniently referenced by adding $(OH_SDK_ BASE)\include to the include path to your project settings.
lib - Contains the library objects (.lib) les as well as the dynamically linked libraries (.dll) les. Note that the default runtime path is
not set to include this directory, therefore the DLLs that live in this directory will not be loaded by default. We placed the DLLs in this
directory to make it easier for end users to maintain multiple versions of the SDK.
runtime - Contains the runtime installer that can be used for deployment of the OpenHaptics runtime components. Depending on your
license agreement, this directory may not be included.The right to deploy is subject to a separate agreement, and it is not automatically
granted to Openhaptics SDK developers.
utilities - Utilities include various functions such as simple vector and matrix math, haptic workspace to camera mapping, a haptic
device C++ wrapper for state, event synchronization and servo loop data logging and Haptic Mouse which allows users to use the
Touch device, in addition to the standard mouse, to manipulate Windows GUI objects.
These are intended to facilitate development by providing commonly used pieces of functionality to support HDAPI and HLAPI. Source
code is provided for all utilities. These classes and functions are not required to use the HLAPI and HDAPI. Their interfaces are subject
to change with new releases of OpenHaptics. However, they are provided as statically linked libraries so that binary compatibility of
programs using HLAPI and HDAPI may be maintained even if the utilities change.
Within utilities you will nd the following:
include If you want to use the facilities exposed by the utilities, you must add
$(OH_SDK_BASE)\utilities\include to the include path. Each utility is located in a separate subdirectory.
• GL (only if you selected to install GLUT les)
• HapticMouse
• HLU
• HDU
• SnapConstraints
lib - This directory contains the .lib les for all the utilities. If you modify and rebuild the utilities source, this will update the .lib les in
this directory as a post-build step.
src - Like the include subdirectory, each utility library is located in a separate subdirectory.
• HapticMouse
• HLU
• HDU
• SnapConstraints
All utility libraries by default are compiled from MS Visual Studio 2010 developer platform. If you want to use the MS Visual Studio
2005/2008 platform, you must recompile all of the utility libraries. MS Visual Studio 2003 is no longer supported.
3D Systems, Inc. 9
QuickHaptics
Contains the library objects, header les, pre-built executables, and source code examples for the QuickHaptics micro API. The includ-
ed Project Solution les use the OH_SDK_ BASE environment variable to locate these les.
Examples - Contains the C++ source code for all the QuickHaptics examples described in the OpenHaptics Programmer’s Guide.
Please note that since relative pathnames are used, if application les are moved then the associated model les should be moved as
well.
header - Contains the C++ header les that need to be included for a QuickHaptics application
lib - This directory contains the .lib les needed to link QuickHaptics applications. This directory also includes a subdirectory for
FreeType.
Portions of this software are copyright © 2006 The FreeType Project (www.freetype.org). All rights reserved.
EXTERNAL MODULES
The toolkit installation includes, as an option, the ability to install the GLUT (Graphics Library Utility Toolkit). This library is used by most
of the graphics enabled examples that are included (with source code) in the SDK distribution.
The les and installation directories are:
glut32.dll System directory
glut32.lib $(OH_SDK_BASE)\utilities\lib
glut.h $(OH_SDK_BASE)\utilities\include\GL
LICENSING
The Developer Edition does not require a license for development and is free for anyone to download and develop haptics-enabled
applications. Commercial distribution of any application developed using the Developer Edition is prohibited by the Licensing Terms
which are shown during installation and can be found in the installation directory. 3D Systems must be contacted to discuss the terms
for commercial distribution.

3D Systems, Inc.
333 Three D Systems Circle | Rock Hill, SC | 29730
www.3dsystems.com
©2014 3D Systems, Inc. All rights reserved.
The 3D Systems logo, 3D Systems, Geomagic and Geomagic
Product are registered trademarks of 3D Systems, Inc .
pn 391573-00 Rev. B
