Open Source IP Manual
User Manual:
Open the PDF directly: View PDF ![]() .
.
Page Count: 10
Report of Open-Source IPs
PI: Deming Chen (UIUC)
In collaboration with Zhiru Zhang (Cornell)
February 21, 2019
1 Introduction
This document describes an open-source IP repository specifically designed for machine learning
applications, such as convolution and pooling IPs for convolutional neural network (CNN), long-
term recurrent convolutional network (LRCN), etc. Each IP is provided with: introduction,
interface description, inputs and outputs description, parameter configuration, resource and
performance, as well as a github link to download the source code. The IPs include:
1. Standard convolution IPs
2. Depth-wise seperatable convolution IPs
3. Pooling IPs
4. Bounding box regression IP
5. Long-term Recurrent Convolutional Network IP
The IPs are developed in C/C++. The source code are synthesizable through Xilinx Vivado
High Level Synthesis (VivadoHLS), and Register Transfer Level (RTL) code can be generated
conveniently using VivadoHLS.
The source code for the above mentioned IPs can be found in the github:
https://github.com/DNN-Accelerators/Open-Source-IPs
In addition, we further present two full-fledged FPGA accelerator designs for machine learn-
ing applications: spam filtering and binarized neural networks. A brief introduction to the
accelerator designs is presented in Section 3. The source code of the designs is available at:
https://github.com/cornell-zhang/rosetta
2 IP Repository
2.1 Standard Convolution IPs
2.1.1 Introduction
Convolution computation is the most common component in a DNN model. Given its various
sizes and types of convolution computation, we developed a configurable standard convolution
IP template, which can accept run-time arguments to complete convolution layer tasks in DNN
models with flexible layer configurations. This IP can be configured with hardware parameters
to accommodate different resource and performance requirement.
1
2.1.2 Interface
The interfaces of input/output use memory mapped AXI4 bus protocol. The bus width is 128
bit. The Control signals use AXI-lite GPIO register interface.
2.1.3 Inputs and Outputs
•Inputs: feature map data of size (Hin, Win, Cin). The input feature map size can be
specified by the user according to the input image size or intermediate results. Hin and
Win represents the height and width of the input data, respectively, and Cin represents
the number of input channels. These arguments will also be used for corresponding input
data address computation during the IP’s execution.
•Output: feature map data of size (Hout, Wout, Cout). The output feature map size can be
specified by the user according to the input image size or intermediate results. Hout and
Wout represent the height and width of the output data, respectively, and Cout represents
the number of output channels. These arguments will also be used for corresponding
output data address computation during the IP’s execution.
•Weights: weight data of size (K, K, Cin , Cout) as well as bias data of size (Cout). The
data are supposed to be stored as flattened array in the off-chip memory (DDR).
2.1.4 Parameter Configuration
Configurable Run-time Parameters: The IP is capable of executing different convolution
tasks under different run-time arguments to achieve application flexibility, including:
1. Input feature map dimension size (Hin, Win, Cin). the output feature map dimension is
determined by the IP accordingly.
2. Kernel size Kand kernel stride S. The convolution kernel size and kernel stride can be
parsed into the IPs as argument Kand argument S. These arguments will also be used
for corresponding weight data address computation during IP’s execution.
3. Weight data precision Wdata. The IP can accept 8 or 6 bits as weight precision options.
Configurable Hardware Performance Parameters: The IP can be configured into dif-
ferent block sizes and data precision options to achieve the best efficiency in different platforms,
including:
1. Computation Parallel Factor Din and Dout . The computation parallel factor decides how
many multiply and add operations are performed each cycle in the computation module.
The larger Din and Dout are, the faster the computation can be conducted, and the shorter
the IP latency is, but the more resources (mainly DSPs and LUTs) are occupied. Currently,
Din and Dout can only be set as 8,16 or 32.
2. Input/Output buffer size IBUFFSIZE and OBUFFSIZE. These two parameters decide the
size of the input/output ping-pong buffers. IPs with larger buffer size can store more
input/output on-chip data and thus can reduce data communication overhead, but also
occupy more BRAM resource.
2
Table 1: Performance Result in AlexNet
layer Latency
(6 bit)
Latency
(8 bit)
Input Size
(H, W, C)
Output Size
(H, W, C)
Kernel Config
(K, S)
Conv1 0.789 ms 0.871 ms (224,224,3) (55,55,96) (11,4)
Conv2 1.060 ms 1.824 ms (55,55,96) (55,55,256) (5,1)
Conv3 0.660 ms 1.049 ms (27,27,128) (13,13,192) (3,1)
Conv4 0.699 ms 1.045 ms (13,13,192) (13,13,192) (3,1)
Conv5 0.555 ms 0.789 ms (13,13,192) (13,13,128) (3,1)
2.1.5 Resource and Performance:
In Table 1 we use Xilinx Zynq ZCU102 Evaluation Kit as the hardware platform to verify the
IP. We list the IP performance for convolution layers in AlexNet with hardware configuration
of IBUFFSIZE as 8192, OBUFFSIZE as 2048, Din = 16 and Dout = 32 in Table 1.
We are also planning to implement and verify the streaming interface for this IP as our next
step, so that the inter-layer streaming can be possible under proper IP integration and IP task
assignment.
2.2 Depth-wise Separable Convolution IPs
2.2.1 Introduction
The depth-wise Conv K×KIP is used to conduct depthwise separable convolution computation,
which is first proposed in [1] and subsequently used in Inception models [2] to reduce the com-
putation. Different from the standard convolution computations, it does a spatial convolution
performed independently over each channel of the input, followed by a point-wise convolution,
i.e. a 1x1 convolution (to be introduced in Section 2.3), projecting the channels output by
the depthwise convolution onto a new channel space. One of its successful applications is on
the MobileNet [4], which achieves higher classification accuracy on ImageNet with up to 60×
parameter reduction compared to the most popular models such as GoogleNet [5] and VGG [6].
Given the promising performance of depthwise convolution, we provide the depth-wise Conv
K×Kopen source IP to conduct its computation. We will introduce its inputs, outputs,
configurable parameters, implementation block diagrams and performance in detail.
2.2.2 Interface
The communication between Programmable Logic (PL) and Processing System (PS) is memory
mapped AXI4 bus protocol. The bus width is 512 bit.
2.2.3 Inputs and Outputs
Inputs and Outputs:
•Inputs: The IP takes feature map data of size (Hin, Win , Cin) as inputs.
•Outputs: The outputs are feature map data of size (Hout, Wout, Cout), where Cout =Cin .
The data should be stored as three dimension arrays in the on-chip memory (BRAM) to
achieve best computational performance.
•Weights: The IP consumes weights of size (K, K, Cin). Given the property of depth-wise
convolution, the weights does not need a Cout dimension.
3
2.2.4 Parameter Configuration
Configurable Run-time Parameters: The IP is capable of executing different convolution
tasks under different run-time arguments to achieve application flexibility, including:
1. Input feature map dimension (Hin, Win, Cin). The input feature map size can be specified
by the user according to the input image size or intermediate results; the output feature
map dimension is determined by the IP itself accordingly.
2. Kernel size K. The convolution kernel size can be configured by changing parameter K.
Generally the most commonly used kernel sizes are 3, 5 and 7.
3. Stride S. The stride of the convolution computation can be specified by changing param-
eter S. Usually the stride is 1 or 2. When S= 1, the output data dimension is the same
as input, where Hout =Hin,Wout =Win ; when S= 2, the output data dimension will
shrink by 2, where Hout =Hin/2, Wout =Win /2.
Configurable Hardware Performance Parameters: The IP can be configured into dif-
ferent block sizes and data precision options to achieve the best efficiency in different platforms,
including:
1. Parallel degree Palong Cdimension. The parallel degree indicates how many multiplica-
tion operations can be executed within a same clock cycle. Given a fixed input size, the
larger Pis, the faster the computation can be conducted, and the shorter the IP latency is,
but the more resources (mainly DSPs and LUTs) are occupied. According to the FPGA
resources, the user can specify the parallel degree. Note that the parallel degree Pshall
be a divisor of Cin.
2. Data precision of input/output feature map and weights. Users can specify the data
precision to be either floating point or fixed point. For fixed point, it can be specified in
the format of < I, F >, where Irepresents the number of integer bits, and Frepresents
the number of fractional bits.
2.2.5 Resource and Performance
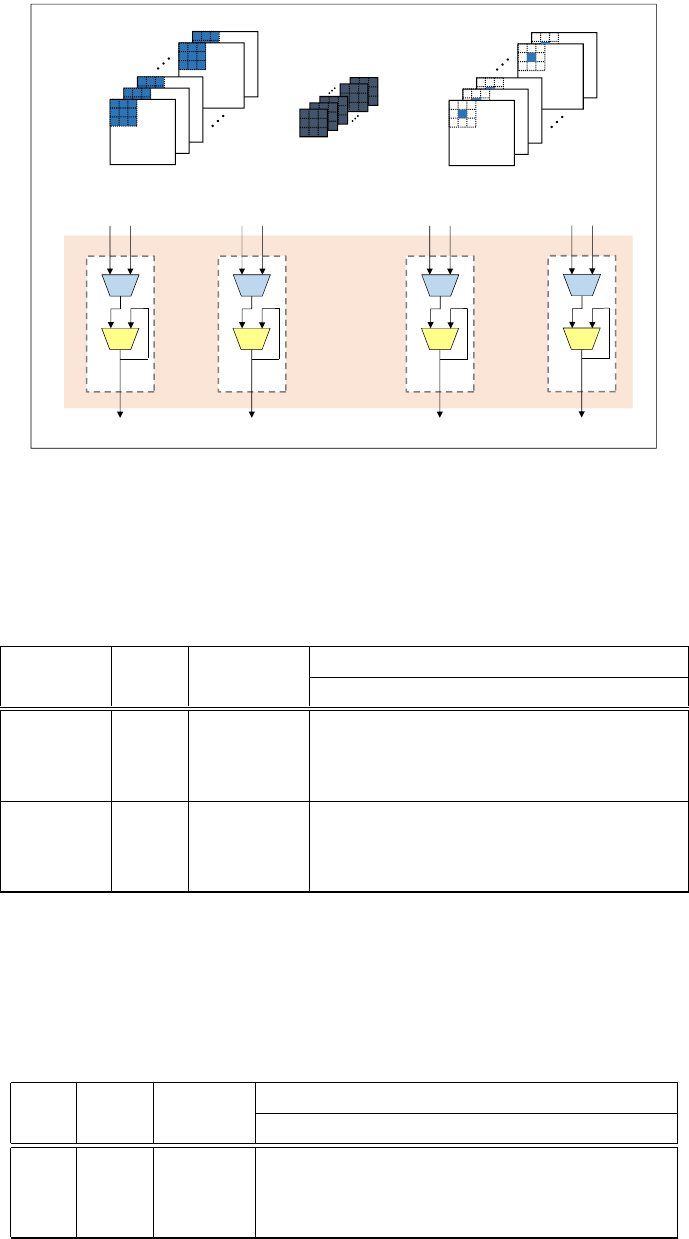
In Figure 1 we show an example diagram of a depth-wise conv 3 ×3 with stride 1 to illus-
trate our IP architecture. In this example the input data dimension is (40,20,16), the output
dimension is (40,20,16), and the parallel degree P= 16. As the figure shows, there are 16
computational units to conduct multiplication in parallel.
In Table 2 we provide some data of IP performance and resource usage under different
configurations on the Pynq-Z1 FPGA board. In this table, the data precision for feature map
is 8 bit fixed point with 2-bit integer, and the weights are 10 bit fixed point with 1-bit integer.
The parallel factors are set to be 4, 8 and 16, respectively. The latency is represented as the
number of clock cycles under different parallel configuration. As shown in the table, the larger
the parallel factor is, the shorter latency is, and the more resources are occupied.
2.3 Point-wise Convolution 1×1IP
The point-wise convolution 1 ×1 IP is usually used after a depthwise separable convolution
to combine the output channels, as described in Section 2.2. Actually it can be regarded as
a special case of a standard convolution computation, which have been discussed in Section
2.1, so we omit detailed descriptions here. Similar to the depthwise conv IP, Table 3 shows its
performance and resource usage on the Pynq-Z1 board.
4
*
data_in1weight1
+
data_out1
*
+
*
+
…
channel 1 channel 2 channel 15
…
accumulate
*
+
channel 16
data_out2data_out15 data_out16
data_in2weight2data_in15 weight15 data_in16 weight16
di1
data in
di2
di16
w1
weight
w2
w16
16 input
channels
data out
do1
do2
do16
16 output
channels
Figure 1: Depth-wise 3 ×3 convolutional IP design
Table 2: Performance of Depth-Wise 3 ×3 IP on Pynq-z1 Board [3]
IP Paral. Latency Resource
Factor # of cycles LUT DSP Flip-Flop
DW-Conv 4 53206 1866 (1.4%) 16 (7.3%) 722 (0.7%)
3x3 8 38807 2177 (1.2%) 16 (7.3%) 1549 (1.5%)
16 18117 4394 (8.3%) 36 (16.4%) 2027 (2.0%)
DW-Conv 4 120075 2001 (3.8%) 16 (7.3%) 738 (0.7%)
5x5 8 64007 2668 (5.0%) 16 (7.3%) 554 (0.5%)
16 30996 4966 (9.3%) 36 (16.4%) 1045 (1.0%)
Table 3: Performance of Point-Wise 1 ×1 IP on Pynq-z1 Board [3]
IP Paral. Latency Resource
Factor # of clks LUT DSP Flip-Flop
Conv 4 50012 3318 (6.2%) 48 (21.8%) 4517 (4.6%)
1x1 8 29875 5076 (9.5%) 64 (29.1%) 4920 (4.6%)
16 14378 11871 (22.3%) 130 (59.1%) 10580 (9.9%)
5
Table 4: Performance of Max Pooling 2 ×2 IP on Pynq-z1 Board [3]
IP Paral. Latency Resource
Factor # of clks LUT DSP Flip-Flop
Pooling 4 2805 1037 (2.0%) 4 (1.8%) 825 (0.8%)
2x2 8 1411 895 (1.7%) 4 (1.8%) 758 (0.7%)
16 815 807 (1.5%) 4 (1.8%) 739 (0.7%)
2.4 Down-sampling (pooling) IP
Down sampling, also called pooling, is another very common component in most deep neural
networks. Pooling is used to reduce the spatial dimensions, which helps gain computation
performance, avoid over-fitting and improve translation invariance. The interface protocols are
the same as above mentioned IPs.
•Input and Output: The inputs and outputs of pooling IP are similar to the depth-wise
conv IP but no weights are required. The input/out data shall also be stored in the on-chip
memory.
•Configurable Parameters: The parameters for Pooling K×KIP include:
1. Pooling size K, which indicates how much the input is down sampled by its spacial
dimension. Most common choices are K= 2 and K= 3. When K= 2, the xand y
dimensions of the input data are downsampled by a factor of 2, and when K= 3, x
and ydimensions are downsampled by a factor of 3.
2. Pooling method. We support three most commonly used pooling methods: max
pooling, average pooling and sum pooling.
3. Input feature map dimension (Hin, Win, Cin). Similar to depthwise conv IP, the
output data dimension is decided by the pooling size.
4. Parallel degree Palong Cdimension, data precision of input/output feature map.
These parameters are similar to depthwise conv IP.
•Resource and Performance: In Table 4 we provide some performance data of pooling
IP. The configuration is K= 2, S= 1, and it is demonstrated using max pooling method.
2.5 Bounding Box Regression
Most IPs we provide are convolution and pooling, which are mostly used for feature extraction
in image classification. In order to support more types of deep neural networks for different
applications, we provide an IP for object detection task. Different from image classification,
object detection requires the neural network to draw a bounding box on the detected object.
It is usually done by a bounding box regression component after convolutional layers. For this
purpose, we borrow the regression algorithm from the popular YOLO [7], and implement it as
a configurable IP on FPGA.
The input of this IP is the feature map of the last convolution layer, and the output is the
coordinates of the detected bounding boxes. The configurable parameters of this IP include: 1)
the input feature map dimension; 2) the intermediate data precision during regression; and 3)
the number of anchor boxes and their aspect ratios, as described in [7]. It provides the flexibility
that the user can alter this IP according to the object features to be detected.
6
2.6 Long-term Recurrent Convolution Network IP
2.6.1 Introduction
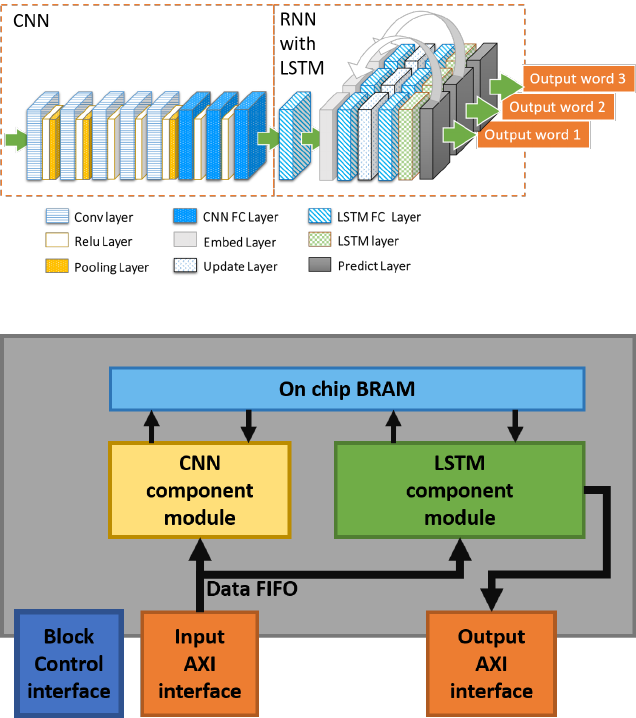
Apart from General purpose DNN component IPs, we also developed an image content recogni-
tion IP based on Long-term Recurrent Convolution Network. The IP takes image as input and
generates descriptive sentence as output. The overall network flow is shown in figure 2. The
input image is first processed by the CNN module for feature extraction. The extracted feature
vector is then fed into the RNN module for recurrent word generation. The LRCN computation
flow is implemented and packed into a single IP with the structure shown in figure 3. The IP
have two memory AXI interface for input/output data transportation and one block control
interface for operation control. The input interface module is responsible for reading in input
data (including image data and neural network parameters) and stream the data into CNN com-
ponent and LSTM component in requested order. The output interface module is responsible
for writing data out back to the off chip memory.
2.6.2 Interface
The input and output interfaces between IP and DDR are memory mapped AXI4 bus protocol.
The bus width is 512 bit. The Control signals use AXI-lite GPIO register interface.
Figure 2: LRCN Network Flow
Figure 3: LRCN IP Structure
•Input and Output: The overall LRCN IP accepts image and rearranged weight data as
input and generates word index sequence as the output.
7
•Configurable Components: The CNN component and RNN component is composed by
configurable convolution and fully connected modules. The users may alter these modules
for different CNN or LSTM structures.
1. Convolution module. Similar to the standard convolution IPs described in Section
2.1, its configurable parameters include: input dimensions IH ×IH ×ID, output
dimensions OH ×OH ×OD, kernel dimensions F W ×F H, data precision (8 bit,
12bit or 16 bit) and input/output parallel factor (8 or 16). The difference is, the
convolution module in the LRCN IP uses stream interface to receive weight data to
achieve best performance.
2. Fully Connected mocules. The configurable parameters include: input vector length
ID, output vector length OD, data precision (8 bit, 12bit or 16 bit) and input/output
parallel factor (8 or 16).
3. LSTM (long short-term memory) module. The LSTM module generates predicted
output, and stores the intermediate data in BRAM. In the next execution, it takes the
stored intermediate data in BRAM as a part of its inputs and generate next output.
The intermediate data are stored in streaming type to achieve lowest latency.
2.6.3 Resource and Performance:
We collect the resource and performance data of the image content recognition IP with AlexNet
as CNN component and LSTM as the RNN component. We used Xilinx Virtex-7 VC709 evalua-
tion platform with XC7VX690T FPGA for LRCN IP evaluation, and used PCIe for the host-chip
data transmission. The LRCN IP performance is shown in Table 5 and Table 6.
Table 5: Resource Consumption of LRCN
BRAM DSP Flip-Flop LUT
1508 3130 321195 316250
Table 6: LRCN performance on FPGA Virtex-7 VC709 with comparisons to CPU and GPU
implementations
Frequency Latency Speedup Power Efficiency
Our LRCN 100MHz 40ms 4.75X 23.6W 0.94J/pic
NVidia K80 562MHz 124ms 1.53X 133W 16.49J/pic
Intel Xeon 2.6GHz 190ms 1.00X 88W 16.72J/pic
3 Open-Source FPGA Accelerators for Machine Learning Ap-
plications
Aside from the open-source IPs for machine learning described in Section 2, in this section we
present two open-source FPGA accelerators for machine learning applications: spam filtering and
binarized neural network. These two open-source designs are implemented in C++, leveraging
the Xilinx SDx design suite for high-level synthesis, logic synthesis, place & route, and bitstream
generation. The designs are currently collected in the Rosetta benchmark suite [8] developed by
Prof. Zhang’s group at Cornell. As a recent benchmark suite for software-programmable FP-
GAs, Rosetta contains fully-developed, complex applications which are representative of realistic
academic and industry accelerator designs. The benchmarks in Rosetta have been tested on a
8
cloud FPGA platform (AWS F1 with Xilinx VU9P FPGA) and an embedded FPGA platform
(Xilinx ZC706). Since the Xilinx toolflow on AWS is being continuously updated, we are also
working on porting the Rosetta designs to the latest AWS flow.
3.1 Spam Filtering
The spam filtering application uses stochastic gradient descent (SGD) to train a logistic regres-
sion model for spam email classification. Different with many FPGA accelerators that target the
inference phase of machine learning models, the spam filtering accelerator tries to achieve high
performance in the training phase. In our current implementation, each email is represented by
a 1024-dimensional vector, thus the weight vector is also 1024-dimensional.
Since the compute kernels in this application are highly parallel, parallelization techniques
such as loop unrolling, loop pipelining and dataflow optimization are applied to improve per-
formance. Our implementation features datatype customization, where the features, weights
and intermediate results are represented using hardware-friendly fixed-point types. The sigmoid
activation function is implemented using a look-up table to avoid exponent and division opera-
tions. Users can adjust the bitwidths of the feature vector and the weight vector, as well as the
parallelization factor of compute kernels. The performance and resource utilization of the spam
filtering accelerator on two Xilinx FPGA platforms are summarized in Table 7.
Table 7: Performance and Resource Utilization of Spam Filtering
Device BRAM DSP Flip-Flop LUT Throughput
Xilinx ZC706 69 224 22134 12678 370k samples/s
Xilinx VU9P 90 224 17434 7207 1.6G samples/s
3.2 Binarized Neural Network
One challenge of implementing efficient neural network accelerators on FPGAs is that floating
point operations are very expensive even on modern FPGA devices. As a result, quantization
techniques are often applied in modern FPGA neural network accelerators, where the features
and weights are quantized to fixed-point datatypes of fewer bits. Binarized neural network
(BNN) [9] is an extreme of quantization, where both the weights and features are represented
using only one bit. For BNNs, the MAC operations in normal neural networks are replaced
by XNORs and popcount operations, which can be efficiently mapped to the LUT-rich FPGA
architecture.
Our binarized neural network accelerator is adopted from [10], where the accelerator targets
the inference phase of the BNN model proposed in [9] and works on CIFAR-10 images. There
are two major compute kernels in the BNN benchmark: binarized convolution for the convo-
lutional layers, and binarized dot product for the fully-connected layers. In order to achieve
high performance, our BNN implementation features intensive memory optimization, where a
specialized line buffer is designed to maximize data reuse within the feature maps. The design
is also parameterizable in that different number of convolutional units can be instantiated to
achieve a trade-off between performance and resource utilization. The performance and resource
utilization of the BNN accelerator on Xilinx ZC706 are summarized in Table 8.
Table 8: Performance and Resource Utilization of BNN
BRAM DSP Flip-Flop LUT Throughput
102 4 46760 46899 200 images/s
9
References
[1] L. Sifre. Rigid-motion scattering for image classification. PhD thesis, Ph. D. thesis, 2014.
[2] S. Ioffe and C. Szegedy. Batch normalization: Accelerating deep network training by reducing
internal covariate shift. arXiv preprint arXiv:1502.03167, 2015.
[3] https://reference.digilentinc.com/reference/programmable-logic/pynq-z1/start
[4] Howard, Andrew G., et al. ”Mobilenets: Efficient convolutional neural networks for mobile
vision applications.” arXiv preprint arXiv:1704.04861 (2017).
[5] C. Szegedy, W. Liu, Y. Jia, P. Sermanet, S. Reed, D. Anguelov, D. Erhan, V. Vanhoucke,
and A. Rabinovich. Going deeper with convolutions. In Proceedings of the IEEE Conference
on Computer Vision and Pattern Recognition, pages 1–9, 2015.
[6] K. Simonyan and A. Zisserman. Very deep convolutional networks for large-scale image
recognition. arXiv preprint arXiv:1409.1556, 2014.
[7] Redmon, Joseph, et al. ”You only look once: Unified, real-time object detection.” Proceed-
ings of the IEEE conference on computer vision and pattern recognition. 2016.
[8] Zhou, Yuan, Udit Gupta, Steve Dai, Ritchie Zhao, Nitish Srivastava, Hanchen Jin, Joseph
Featherston et al. ”Rosetta: A Realistic High-Level Synthesis Benchmark Suite for Software
Programmable FPGAs.” In Proceedings of the 2018 ACM/SIGDA International Symposium
on Field-Programmable Gate Arrays, pp. 269-278. ACM, 2018.
[9] Courbariaux, Matthieu, Itay Hubara, Daniel Soudry, Ran El-Yaniv, and Yoshua Bengio.
”Binarized neural networks: Training deep neural networks with weights and activations
constrained to+ 1 or-1.” arXiv preprint arXiv:1602.02830 (2016).
[10] Zhao, Ritchie, Weinan Song, Wentao Zhang, Tianwei Xing, Jeng-Hau Lin, Mani Srivastava,
Rajesh Gupta, and Zhiru Zhang. ”Accelerating binarized convolutional neural networks with
software-programmable fpgas.” In Proceedings of the 2017 ACM/SIGDA International Sym-
posium on Field-Programmable Gate Arrays, pp. 15-24. ACM, 2017.
10
