PVCAM 2.7 User Manual
User Manual:
Open the PDF directly: View PDF ![]() .
.
Page Count: 168 [warning: Documents this large are best viewed by clicking the View PDF Link!]
- Table of Contents
- Chapter 1: SDK
- Chapter 2: PVCAM, A High-Level C Library
- Introduction
- System Overview
- Hardware Support
- Library Classes
- Documentation Style
- Defined Types
- Naming Conventions
- Include Files
- Parameter Passing and const
- CCD Coordinates Model
- Port and Speed Choices
- Frame Transfer
- Interline
- Kinetics
- Custom Chip
- Custom Timing
- Image Smear
- Sequences
- Sequence Parameters IDs/Constants
- Circular Buffer
- Clear Modes
- Exposure Modes
- Open Delay, Close Delay
- Shutter Control
- Exposure Loops
- Image Buffers
- Source Code Examples
- Chapter 3: Camera Communications (Class 0)
- Chapter 4: Error Reporting (Class 1)
- Chapter 5: Configuration/Setup (Class 2)
- Chapter 6: Data Acquisition (Class 3)
- Chapter 7: Buffer Manipulation (Class 4)
- Chapter 8: Code Examples
- Appendix A: Error Codes
- Appendix B: Obsolete Functions
- Index
4411-0094
Version 2.7.0
December 28, 2004
4411-0094
© Copyright 2003-2004 Princeton Instruments
a division of Roper Scientific, Inc.
3660 Quakerbridge Rd.
Trenton, NJ 08619
TEL: 800-874-9789 / 609-587-9797
FAX: 609-587-1970
All rights reserved. No part of this publication may be reproduced by any means without the written
permission of Princeton Instruments, a division of Roper Scientific, Inc. ("Princeton Instruments").
Printed in the United States of America.
Macintosh is a registered trademark of Apple Computer, Inc.
Roper Scientific and PVCAM are registered trademarks of Roper Scientific, Inc.
UNIX was a registered trademark of UNIX System Laboratories, Inc. and now is registered to the X/Open
Consortium.
Windows is a registered trademark of Microsoft Corporation.
The information in this publication is believed to be accurate as of the publication release date. However,
Roper Scientific, Inc. does not assume any responsibility for any consequences including any damages
resulting from the use thereof. The information contained herein is subject to change without notice.
Revision of this publication may be issued to incorporate such change.

iii
Table of Contents
Chapter 1: SDK 1
What is the SDK? ............................................................................................................................ 1
Contact Information......................................................................................................................... 1
Chapter 2: PVCAM, A High-Level C Library 3
Introduction...................................................................................................................................... 3
System Overview............................................................................................................................. 3
Hardware Support............................................................................................................................ 3
Library Classes ................................................................................................................................ 4
Documentation Style........................................................................................................................ 4
Defined Types.................................................................................................................................. 5
Naming Conventions ....................................................................................................................... 6
Include Files..................................................................................................................................... 6
Parameter Passing and const............................................................................................................7
CCD Coordinates Model.................................................................................................................. 7
Regions and Images...................................................................................................................7
Binning Factors .........................................................................................................................8
Data Array.................................................................................................................................8
Display Orientation ...................................................................................................................8
Port and Speed Choices ................................................................................................................... 8
Frame Transfer............................................................................................................................... 10
Interline.......................................................................................................................................... 10
Kinetics.......................................................................................................................................... 10
Custom Chip .................................................................................................................................. 11
Custom Timing .............................................................................................................................. 11
Image Smear .................................................................................................................................. 11
Sequences....................................................................................................................................... 12
Sequence Parameters IDs/Constants.............................................................................................. 13
Circular Buffer............................................................................................................................... 13
Clear Modes................................................................................................................................... 15
Exposure Modes ............................................................................................................................ 16
Exposure: TIMED_MODE .....................................................................................................16
Exposure: VARIABLE_TIMED_MODE ...............................................................................16
Exposure: TRIGGER_FIRST_MODE....................................................................................17
Exposure: STROBED_MODE................................................................................................17
Exposure: BULB_MODE .......................................................................................................18
Exposure: FLASH_MODE .....................................................................................................18
Open Delay, Close Delay............................................................................................................... 19
Shutter Control............................................................................................................................... 20

iv PVCAM Manual Version 2.7
Exposure Loops ............................................................................................................................. 20
Image Buffers ................................................................................................................................ 24
Source Code Examples .................................................................................................................. 25
Chapter 3: Camera Communications (Class 0) 27
Introduction.................................................................................................................................... 27
List of Available Class 0 Functions............................................................................................... 27
List of Available Class 0 Parameter IDs........................................................................................ 27
Class 0 Functions........................................................................................................................... 28
Class 0 Parameter IDs.................................................................................................................... 38
Chapter 4: Error Reporting (Class 1) 41
Introduction.................................................................................................................................... 41
Error Codes.................................................................................................................................... 42
List of Available Class 1 Functions............................................................................................... 42
Class 1 Functions........................................................................................................................... 43
Chapter 5: Configuration / Setup (Class 2) 45
Introduction.................................................................................................................................... 45
List of Available Class 2 Functions............................................................................................... 46
List of Available Class 2 Parameter IDs........................................................................................ 46
Class 2 Functions........................................................................................................................... 48
Class 2 Parameter IDs.................................................................................................................... 53
Chapter 6: Data Acquisition (Class 3) 67
Introduction.................................................................................................................................... 67
List of Available Class 3 Functions............................................................................................... 67
List of Available Class 3 Parameter IDs........................................................................................ 67
Defining Exposures........................................................................................................................ 68
New Structures............................................................................................................................... 68
Exposure Mode Constants ............................................................................................................. 69
Class 3 Functions........................................................................................................................... 70
Class 3 Parameter IDs.................................................................................................................... 90
Chapter 7: Buffer Manipulation (Class 4) 93
Introduction.................................................................................................................................... 93
List of Available Class 4 Functions............................................................................................... 93
New Constants ............................................................................................................................... 94
Image Handles and Pointers........................................................................................................... 94
Class 4 Functions........................................................................................................................... 95
Chapter 8: Code Examples 111
Example 1: pl_get_param & pl_get_enum_param ......................................................................111
Example 2: pl_set_param............................................................................................................. 115
Example 3: Circular Buffer.......................................................................................................... 117

Table of Contents v
Latest Frame Mode (FOCUS) ...............................................................................................117
Oldest Frame Mode (NFRAME)...........................................................................................119
Example 4: Standard Mode Acquisition...................................................................................... 121
Appendix A: Error Codes 123
Appendix B: Obsolete Functions 133
Obsolete Class 0 Functions.......................................................................................................... 136
Obsolete Class 2 Functions.......................................................................................................... 143
Obsolete Class 3 Functions.......................................................................................................... 153
Index 157
List of Tables
Table 1. New Number Types.......................................................................................................... 5
Table 2. New Pointer Types............................................................................................................ 6
Table 3. Standard Abbreviations..................................................................................................... 6
Table 4. Two Port Camera Example...............................................................................................9
Table 5. Error Codes................................................................................................................... 123
Table 6. Obsolete Class 0 Functions and Their pl_set_param/pl_set_param Equivalents..........133
Table 7. Obsolete Class 2 Functions and Their pl_set_param/pl_set_param Equivalents..........133
Table 8. Obsolete Class 3 Functions and Their pl_set_param/pl_set_param Equivalents..........135

vi PVCAM Manual Version 2.7
This page intentionally left blank.
1
Chapter 1:
SDK
What is the SDK?
SDK — Roper Scientific’s Software Development Kit — allows programmers to access and use the
capabilities of PVCAM
©
— Programmable Virtual Camera Access Method Library. (PVCAM is
described in detail in the chapters that follow.)
Both the SDK and PVCAM are designed to be platform independent, so the functions described in this
manual work with all supported operating systems. Specific information for installing and using the
library with your particular platform (Windows
©
, Macintosh
©
, or UNIX
©
) is contained in the Read Me
file included on the disk that came with your SDK. Please consult this Read Me file for information on:
• System requirements
• Linking PVCAM to your software
• Initializing PVCAM
• Device drivers
• Platform specific files
Contact Information
Princeton Instruments' manufacturing facility is located at the following address:
Roper Scientific, Inc.
3660 Quakerbridge Road
Trenton, NJ 08619 (USA)
TEL: 800-874-9789 / 609-587-9797
TEL: 609-587-1970
Customer Support E-mail: techsupport@princetoninstruments.com
For technical support and service outside the United States, see our web page at
www.princetoninstruments.com. An up-to-date list of addresses, telephone numbers, and e-mail addresses
of Princeton Instruments' overseas offices and representatives is maintained on the web page.

2 PVCAM Manual Version 2.7
This page intentionally left blank.
3
Chapter 2:
PVCAM, A High-Level C Library
Introduction
PVCAM is an ANSI C library of camera control and data acquisition functions. This library, which is
identical across platforms and operating systems, provides an interface that allows developers to specify
the camera's setup, exposure, and data storage attributes.
Note: Many Photometrics cameras support ICL scripting language that provides detailed low-level
control of exposure and CCD readout. None of the Princeton Instruments cameras support ICL scripting.
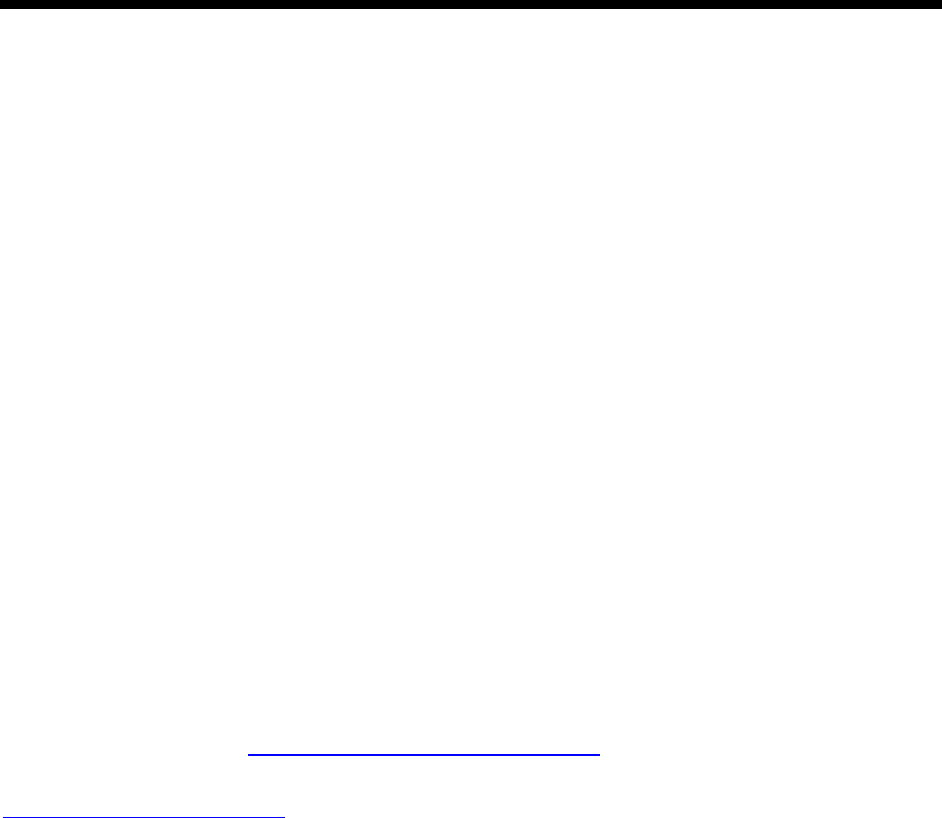
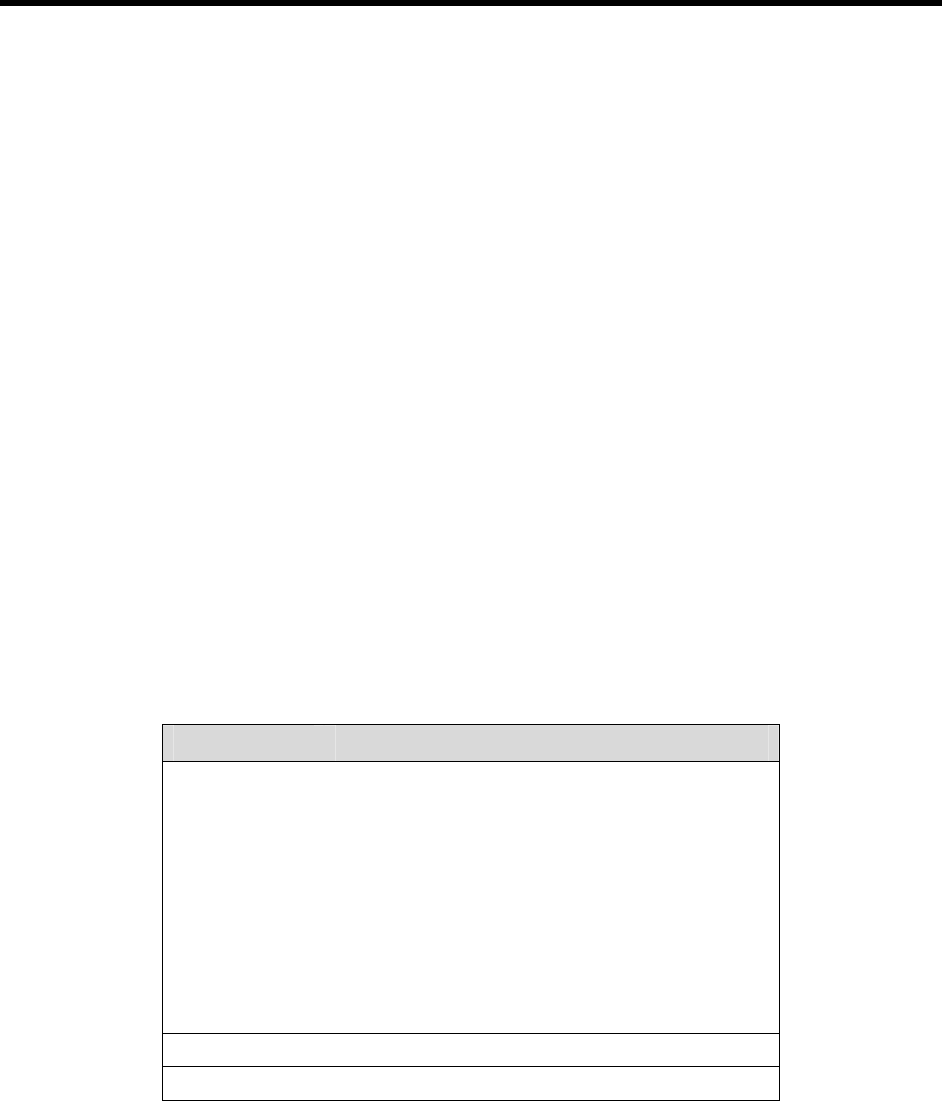
System Overview
To use PVCAM, a system must include camera hardware and software, a host computer, and the
PVCAM library.
Host Computer
Data
Link
Device
Driver
Camera
Interface
Boards
Support
Software
Diagnostics
Application
PVCAM
Camera
Option
Option
Hardware Support
Roper Scientific produces two lines of hardware: Photometrics brand and Princeton Instruments
brand. Version 2.7 of the PVCAM library supports the following Princeton Instruments hardware:
• PentaMAX Version 5.0
• ST-133 Controlled Cameras (PCI and USB 2.0)
• PIXIS
Note: Macintosh
®
computers are not currently supported for Princeton Instruments hardware.
4 PVCAM Manual Version 2.7
Library Classes
The basic PVCAM library supports the following five classes of camera and buffer control:
0. Camera Communications These functions establish communication paths between
the high-level application software and the device driver.
They also establish some low-level functions for
controlling the camera hardware.
1. Error Reporting These functions monitor and report on other library
functions. When an error occurs, a function can be called
to return a unique error code.
2. Configuration/Setup These functions initialize the library and set up the
hardware and software environments. They also control
and monitor the camera hardware, and allow the user to
set parameters such as camera gain and temperature.
3. Data Acquisition These functions define how the image data are collected.
4. Buffer Manipulation These functions report buffer information and control
buffer allocation and editing.
Note: Other classes are supported in optional plug-ins. Contact the factory for more information
about plug-ins for PVCAM.
Documentation Style
This manual describes the functional aspects of using PVCAM and various controls for Roper
Scientific
® cameras (Chapter 2), gives reference pages for all of the function calls (Chapter 3
through Chapter 7), gives code examples (Chapter 8), provides a list of the defined error codes
(Appendix A) and lists the function calls that are obsolete but still supported in the library
(Appendix B).
Chapter 2: PVCAM, A High-Level C Library 5
Defined Types
In order to work effectively across platforms, the number of bytes in a variable must be consistent.
Therefore, new types have been defined for PVCAM. These typedefs are given in the header file
master.h
.
Type Explanation
rs_bool* true (non-0) or false (0) value
int8 signed 8-bit integral value
uns8 unsigned 8-bit integral value
int16 signed 16-bit integral value
uns16 unsigned 16-bit integral value
int32 signed 32-bit integral value
uns32 unsigned 32-bit integral value
enum treat as unsigned 32-bit integral value
flt64 64-bit floating point value
Table 1. New Number Types
*Note: The type ‘rs_bool’ has replaced the deprecated ‘boolean’ type. This is due to a size
difference of the ‘boolean’ type on the Windows platform. Namely, <windows.h> defines a
‘boolean’ type of a different size. Including <windows.h> in the same translation unit as
“master.h” compiles the wrong ‘boolean’ and causes subtle memory access violations. It is
strongly recommended to use the new ‘rs_bool’ type instead to avoid this potential clash.
Since Roper Scientific® camera data and analyses depend on bit depth, the new types give values
that are consistent with the size of the bit depth.
Each new type is composed of the appropriate combinations of int, short, long, or other types that
give the appropriate length for each value. The 8-bit types are the smallest type that holds 8 bits,
16-bit types are the smallest type holding 16 bits, and so forth.
The following list includes the new types defined for use in PVCAM. Additional derived types
always begin with the base name followed by
_ptr
or
_const_ptr
.
Type Pointer Pointer to Constant Type
rs_bool rs_bool_ptr rs_bool_const_ptr
char char_ptr char_const_ptr
int8 int8_ptr int8_const_ptr
uns8 uns8_ptr uns8_const_ptr
int16 int16_ptr int16_const_ptr
uns16 uns16_ptr uns16_const_ptr
int32 int32_ptr int32_const_ptr
uns32 uns32_ptr uns32_const_ptr
flt64 flt64_ptr flt64_const_ptr
6 PVCAM Manual Version 2.7
Type Pointer Pointer to Constant Type
rgn_type rgn_ptr rgn_const_ptr
export_ctrl_type export_ctrl_ptr export_ctrl_const_ptr
Table 2. New Pointer Types
Naming Conventions
To shorten names and improve readability, standard abbreviations are used for common words and
phrases. These abbreviations are used in function and variable names.
adc=analog-to-digital converter dly=delay num=number
addr=address dup=duplicate ofs=offset
bin=binning err = error par=parallel
buf=buffer exp=exposure pix=pixel
cam=camera expt=export ptr=pointer
cfg=configuration hbuf=buffer handle rpt=report
chan=channel hcam=camera handle rgn=region
clr=clear hi=high ser=serial
cmd=command hrgn=region handle shtr=shutter
comm=communication init=initialize spd=speed
ctr=counter len=length tmp=temp
ctrl=control lo=low totl=total
diag=diagnostics mem=memory xfr=transfer
Table 3. Standard Abbreviations
In PVCAM,
num
always means current selection number, while
totl
or
entries
is used for
total different possibilities.
A leading
h
usually signifies a type of handle, such as the camera handle (
hcam
). A handle is a
16-bit number that refers to an object.
Include Files
Any program using PVCAM must include the following files:
•
master.h
system-specific definitions and types
•
pvcam.h
constants and prototypes for all functions
master.h
must be included before
pvcam.h
.
Chapter 2: PVCAM, A High-Level C Library 7
Parameter Passing and const
When parameters are passed in or out of functions, it may be difficult to determine which
parameters the user should set and which parameters are set by the function. This is particularly
difficult in PVCAM, because virtually all information is exchanged through parameters (the
function return value is reserved for indicating errors).
A few simple rules help resolve the confusion:
• Pointers generally return information
from
a function.
• Non-pointers always send information
to
a function.
In a few cases, such as structures and arrays, a pointer is passed even though the data are being sent in
to the function. This is done to reduce overhead and to speed function calls, but it conflicts with the
rules above. To solve this problem, when a structure or array (pointer) is sent as input to a function,
the _const_ptr type is used to indicate that the function will not (and can not) change the data.
Note: const_ptr (pointers to const) always sends data into a function. The data is not altered.
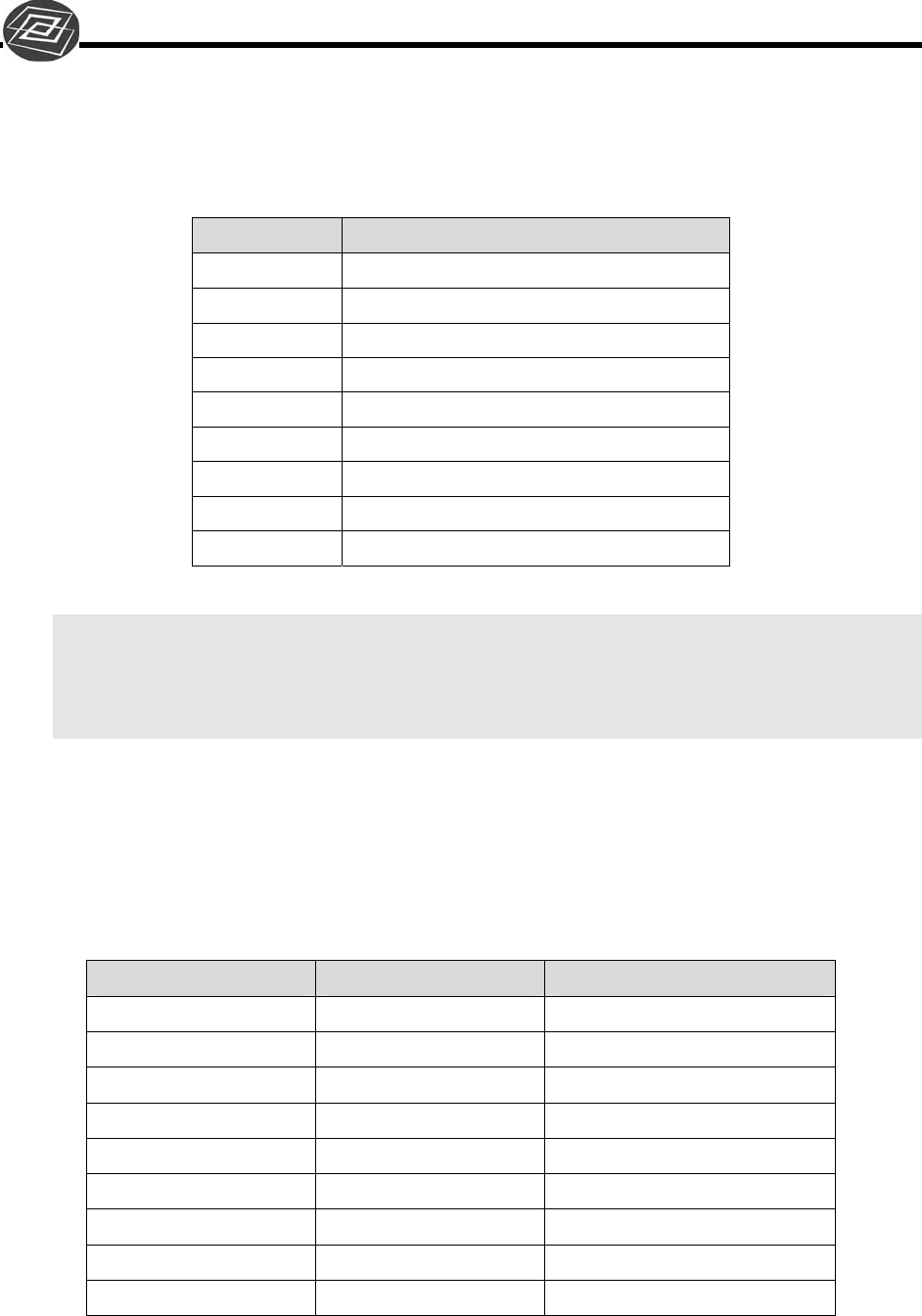
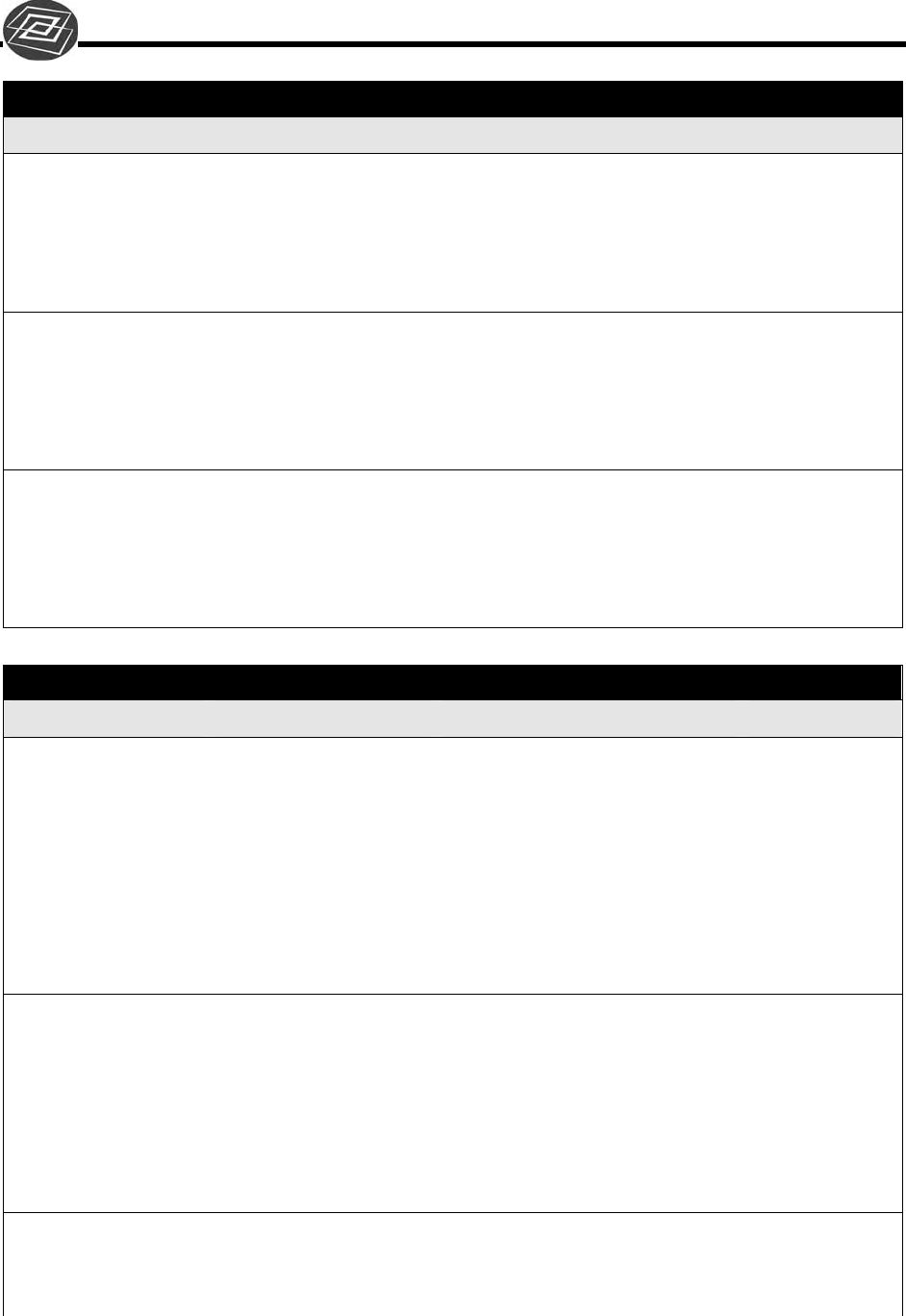
CCD Coordinates Model
In many cameras, the CCD orientation is fixed. This fixed position places the origin in a
predetermined location and gives each pixel an x,y location.
In Roper Scientific cameras, the CCD orientation is not only different from camera to camera, but
the orientation may also change when the application changes. Therefore, we use a serial, parallel
(s,p) coordinates system. In this system, the origin is located in the corner closest to the serial
register readout, and the coordinates increase as the locations move away from the origin. The
diagram below illustrates how the coordinates are unaffected by the CCD orientation.
(
s2, p2)
(s1, p1)
Serial Register
Serial Direction
(0, 0)
CCD
Parallel Direction
Parallel Direction
CCD
Serial Register
Serial Direction
(0, 0)
(
s2, p2)
(s1, p1)
Regions and Images
A region is a user-defined, rectangular exposure area on the CCD. As seen in the diagram above,
the user defines the region by selecting s1,p1 and s2,p2,the diagonal corners of the region.
An image is the data collected from a region. PVCAM reads out the image, then stores it in a buffer.
8 PVCAM Manual Version 2.7
Binning Factors
For data collection, two other parameters are needed: the serial and parallel binning factors. A
binning of 1 in both directions reads out each pixel at full lateral resolution. A binning of 2 in both
directions combines four pixels, cutting the lateral resolution in half, but quadrupling the light-
collecting area. The number of pixels read out are determined as (s2-s1+1)/sbin in the serial
direction, and (p2-p1+1)/pbin in the parallel direction. If these equations do not produce an integer
result, the remaining pixels are ignored.
Including binning, a data collection region can be fully specified with six parameters: s1,
p1,s2,p2,sbin,pbin. Since these values are 0 indexed, the following is true:
smax = serial size -1
pmax = parallel size -1
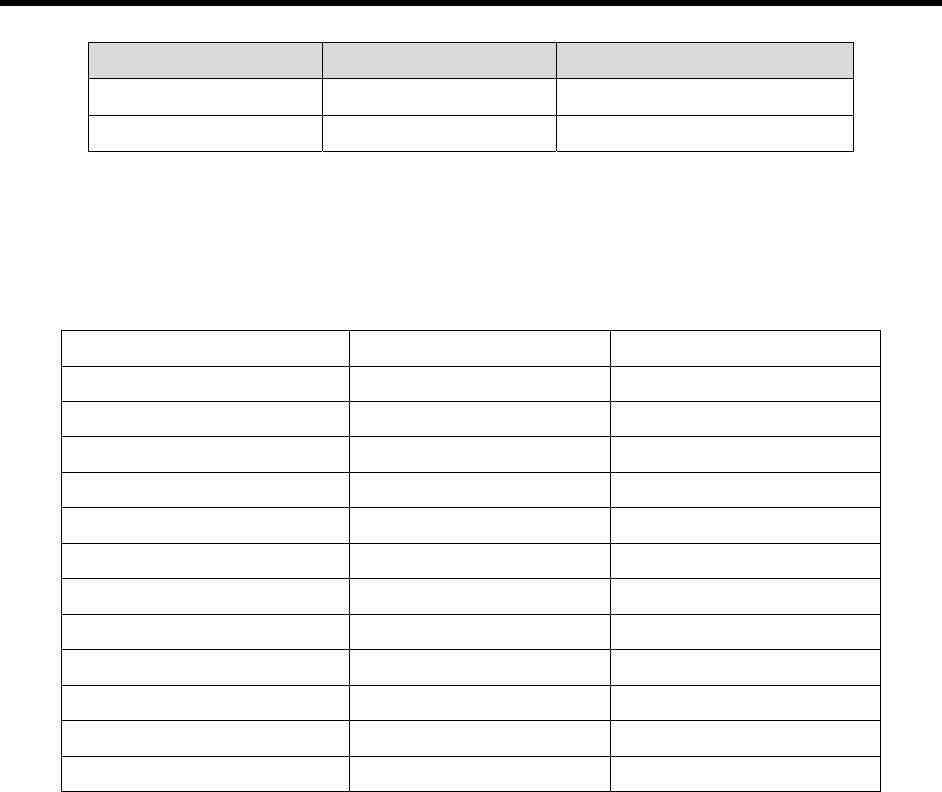
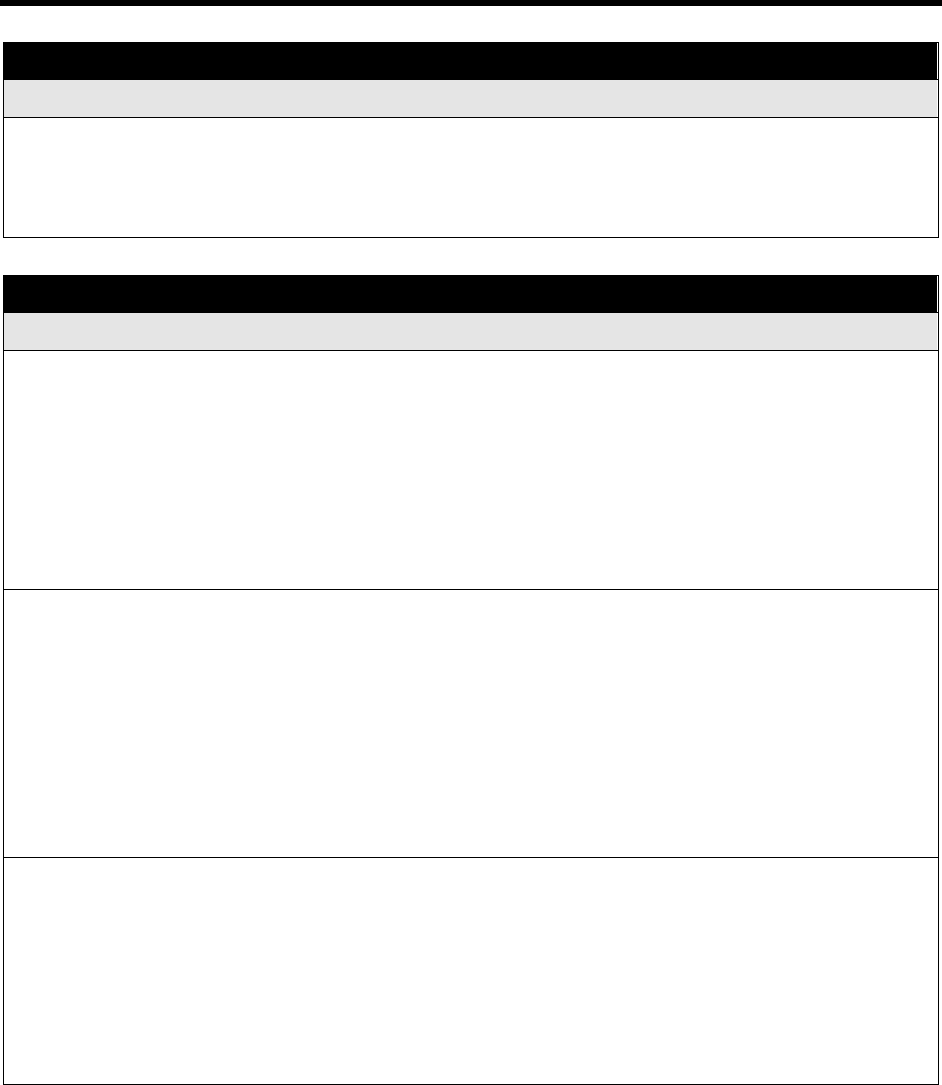
Data Array
When pixels are read out, they are placed in the data array indicated by the pointer passed into
pl_exp_start_cont or pl_exp_start_seq
. The pixels are placed into an array in the
following order:
1413121110987654321 15161718
19 20 21 22 23 24
25 26 27 28 29 30
31 32 33 34 3635
Serial Register
CCD
Data Array
Display Orientation
Some users have expressed an interest in having the data in video coordinates. With video
coordinates, 0,0 is displayed in the upper left corner, and subsequent pixels are painted from left to
right. Although video coordinate configuration can be done in the display routine, factors such as
the optical path, the camera rotation, and which readout port is selected may cause the image to
appear in a different position.
Port and Speed Choices
The CCD in a camera will have one or more output nodes from which the analog pixel stream will
be read. These nodes are referred to as “Readout Ports”. The signal from a readout port is passed to
an analog signal processing chain and then passed to an analog to digital converter (ADC). The
ADC operates at one or more digitization rates and has a set of parameters associated with it. In
PVCAM, the choice of speed (digitization rate) and associated ADC parameters are organized into
a Speed Table. In some cameras, different readout ports will be connected to different analog
processing chains and different ADCs. The most general method for setting up the port and speed
choices is to make the speed choices dependent upon the port selection.
To view the port settings, call
pl_get_param
with
PARAM_READOUT_PORT
with the
ATTR_COUNT
attribute to determine how many ports are available in your camera. Next, iterate
through each choice, calling
pl_get_enum_param
with
PARAM_READOUT_PORT
and record the
enumerated types returned for each valid port. Next, iterate through each of the enumerated valid
Chapter 2: PVCAM, A High-Level C Library 9
ports calling pl_set_param with
PARAM_READOUT_PORT
. For each valid port, build a speed table
that will then be associated with that port.
Camera speed is determined by CCD readout speed. Since readout speed is determined by a number
of constraints, getting consistent results depends on using the appropriate camera and hardware
settings. To maintain consistency, each camera has the appropriate readout speeds and associated
hardware controls loaded into the speed table. To build the speed table, for each valid port call
pl_get_param
with
PARAM_SPDTAB_INDEX
with the
ATTR_COUNT
attribute to determine how
many speed entries are allowed on your camera. Then iterate through each choice to get the
associated information for that entry. The steps you should take in setting up the readout ports and
associated speed tables are as follows:
1.
pl_get_param
with
PARAM_READOUT_PORT
with
ATTR_COUNT
to get the total number
of valid ports.
2.
pl_get_enum_param
with
PARAM_READOUT_PORT
to get the enumerated port constants.
3. For each port constant,
pl_set_param
with
PARAM_READOUT_PORT
, and build a speed
table for each.
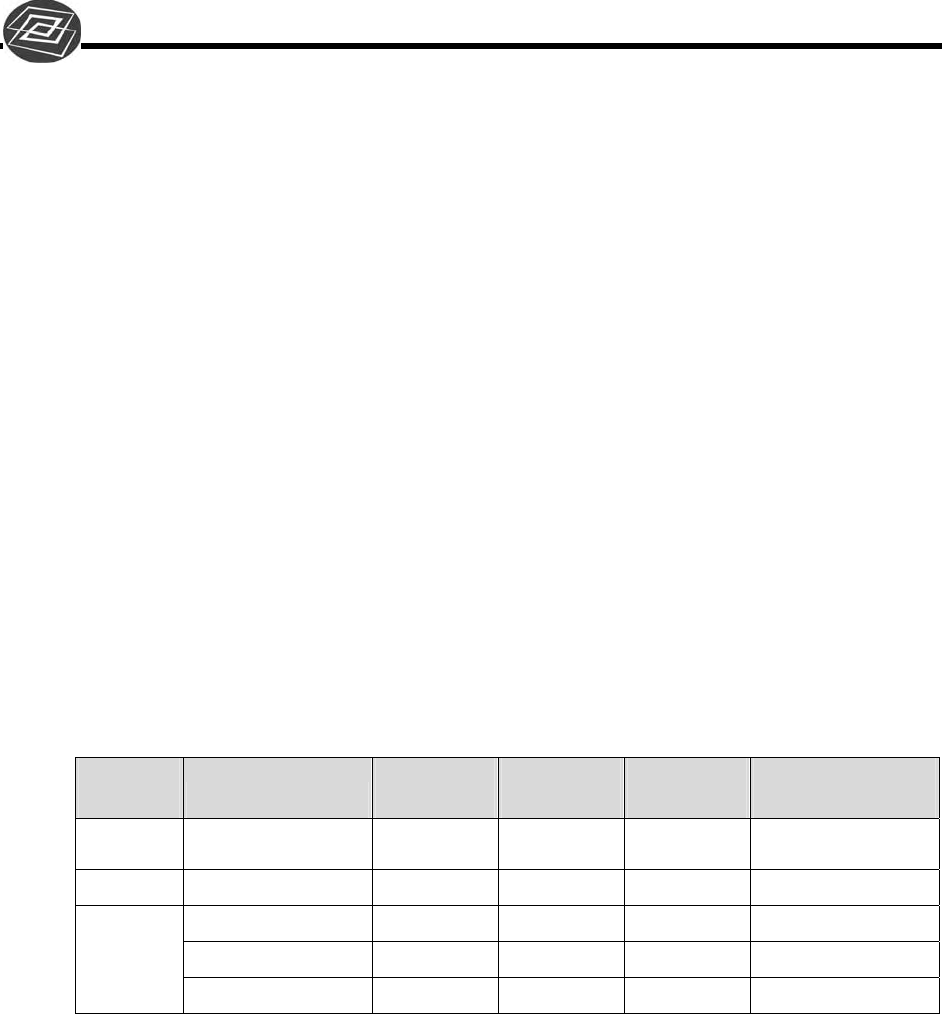
Table 4 is an example of a camera with two readout ports. Port 1 has one speed associated with it
and Port 2 has three speeds. Note that the terms "Port 1" and "Port 2" are generic and are only being
used to illustrate the example.
The user chooses the port and then the speed table entry number, and the camera is configured
accordingly. The user can then choose one of the gain settings available for that speed table entry
number. For example, the user chooses Port 2 and speed index one. This selection provides a 16-bit
camera with a pixel time of 500 nanoseconds (a 2 MHz readout rate). The CCD is reading out of
Port 2. The gain is set to 2.
Readout
Port Entry
Bit
Depth
Pixel
Time
Current
Gain
Max
Gain
PARAM_SPDTAB_INDEX PARAM_BIT
_DEPTH
PARAM_PIX
_TIME
PARAM_GAIN
_INDEX
PARAM_GAIN
_INDEX with ATTR_MAX
PORT 1 0 12 500 2 16
0 12 100 1 3
1 16 500 2 3
PORT 2
2 12 500 2 3
Table 4. Two Port Camera Example
It is the responsibility of the application program to remember variables associated with port and
speed selections. For example, the camera maintains one gain value. Changing this value will
change it for all port and speed choices. However, the application program may maintain gain
values for each setting and then write them to the camera when the user changes the current port or
speed. Read-only values, such as bit depth, may be read at time of open and saved in variables in
the application or may be read each time a user selection changes.
Once a selection is made, all settings remain in effect until the user resets them or until the camera
hardware is powered down or reset. If a camera has multiple speed entry numbers, you may choose
to view the settings located in the speed table. To view the speed table settings, call
pl_get_param
with
PARAM_SPDTAB_INDEX
with the
ATTR_MAX
attribute to determine how
many speed entries are allowed on your camera. Then iterate through each choice to get the
associated information for that entry.
10 PVCAM Manual Version 2.7
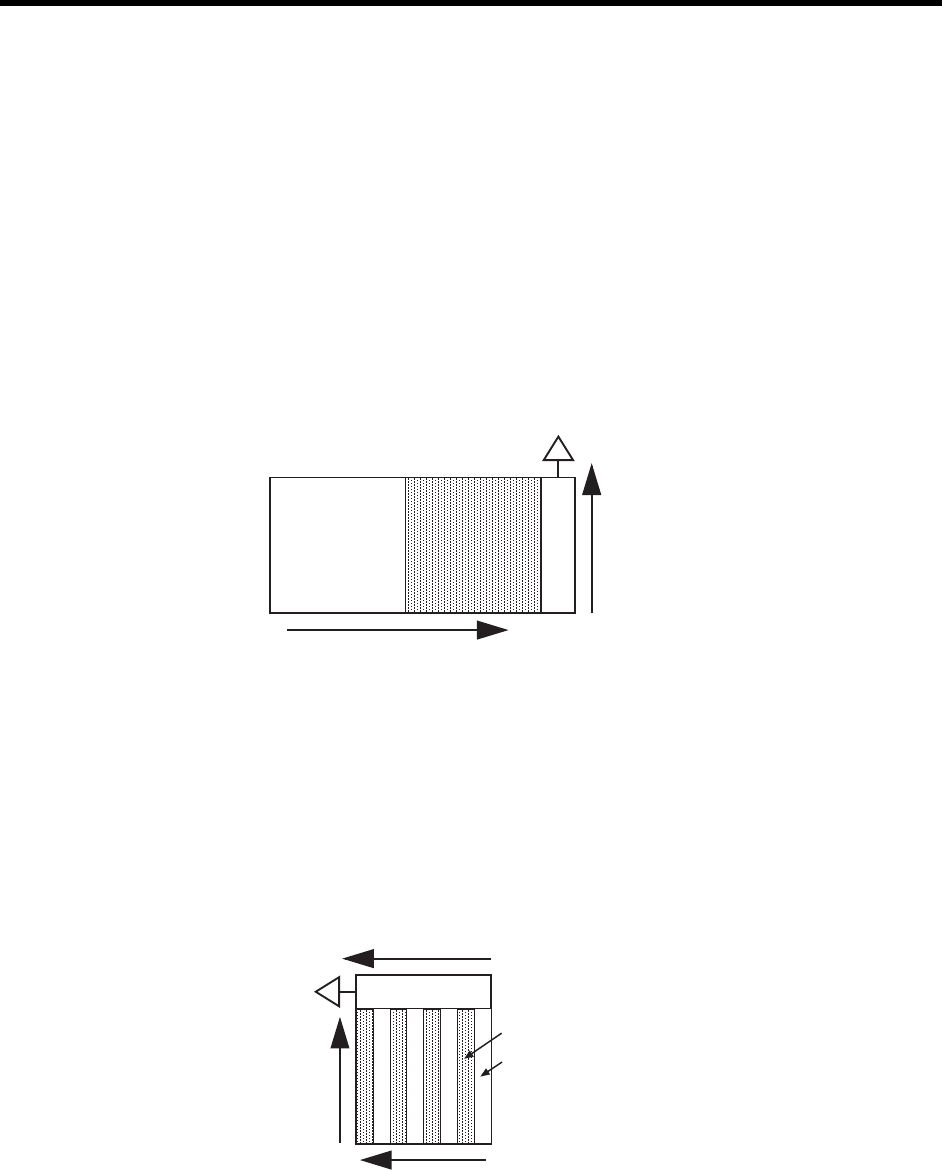
Frame Transfer
With a non-frame transfer CCD, the entire CCD is exposed, and the image read out before the CCD
is exposed again. A frame transfer CCD is divided into two areas: one for image collection and one
for image storage. After the CCD is exposed, the image is shifted to the storage array. A split clock
allows the CCD to expose the next frame of the image array while simultaneously reading out from
the storage array.
Since shifting an image to the storage array is many times faster than reading out the same image,
frame transfer speeds up many sequences.
In a standard frame transfer device, the storage array is usually masked and covers half the CCD.
With this standard configuration, the image in the storage array must be completely read out before
the next image is shifted into the storage array. Therefore, assuming that the
exposure_time
for
each image within a sequence is equal, the shortest possible
exposure_time
would be exactly
equal to the image readout time.
Image shift to Storage Array
Read out
Storage ArrayImage Array
Interline
Interline (PMODE_INTERLINE) CCDs have a parallel register that has been subdivided into stripes so
that the opaque storage register fits between columns of pixels. The electronic image accumulates
in the exposed area of the parallel register. During CCD readout, the entire image is shifted under
the interline mask into a hidden shift register. Register readout then proceeds in normal CCD
fashion. Since the signal is transferred in microseconds, smearing will be undetectable for typical
exposures.
Image shift to
Storage Registers
Read out
Storage Register
Image Array
Kinetics
Kinetics (PMODE_KINETICS) is a special type of operation in which most of the CCD is
mechanically or optically masked, leaving a small section (window) open to light. This section is

Chapter 2: PVCAM, A High-Level C Library 11
then shifted under the mask very quickly. The defined clean cycles are used to keep charge from
accumulating on the array while it is waiting for a start exposure signal and after the data has been
readout of the array. The window size is set by PARAM_KIN_WIN_SIZE and must be at least 1 and less
than or equal to the PARAM_PAR_SIZE.
This mode of operation is available for full frame CCDs and requires a mechanical window.
Custom Chip
Normally, not all of the pixels in a CCD array are exposed and read out: a frame of “dummy” pixels
bounds the active area. These dummy pixels are usually masked and are not normally read out.
However, they could be read out by changing the chip definition. For example, in the case of the
EEV 576 × 384, the 576 active rows are preceded by one dummy row and followed by 2 dummy
rows. In addition, there are 12 dummy columns on one side of the active region and 13 dummy
columns on the other side. By changing the chip definition to increase the active area while
decreasing the dummy settings, the dummy cells would be read out. By doing so, one could
measure the dark charge with every readout. (Note that F.T. Dummies are chip-specific and are
dummy rows at the boundary of the masked and visible areas of a frame transfer device.)
It is also possible to increase image acquisition speed by reducing the size of the active area in the
definition. The result will be faster but lower resolution data acquisition. Operating in this mode
would ordinarily require that the chip be masked so that only the reduced active area is exposed. This
will prevent unwanted charge from spilling into the active area or being transferred to the shift
register.
Changing a chip definition requires that the custom chip feature is enabled via PARAM_CUSTOM_CHIP.
This allows the ATTR_ACCESS of the following parameters to change from ACC_READ_ONLY to
ACC_READ_WRITE: PARAM_PREMASK, PARAM_PRESCAN, PARAM_POSTMASK, PARAM_POSTSCAN,
PARAM_PAR_SIZE, PARAM_SER_SIZE, and PARAM_FTSCAN (for CCDS that have frame transfer
dummies between the active and the masked areas).
Custom Timing
Custom Timing (enabled via PARAM_CUSTOM_TIMING) allows you to change the parallel
(PARAM_PAR_SHIFT_TIME) and serial (PARAM_SER_SHIFT_TIME) shift rates for a CCD. Acceptable
shift times must be within the minimum value (ATTR_MIN) and the maximum value (ATTR_MAX),
and use the increment (ATTR_INCREMENT) or a multiple of the increment that falls within the
minimum and maximum values. Increments are in terms of nanoseconds.
Normally, the default timing parameter values have been determined to give the fastest possible
performance without compromising data acquisition performance.
Image Smear
If an image is shifted while the shutter is open, the charge that collects while the image is moving
makes the image look smeared. Smearing can occur in several situations: if the camera is set to read
out without closing the shutter, if the shutter is set to close too slowly, or in frame transfer
sequences where the shutter stays open while the image is shifted to the storage array.
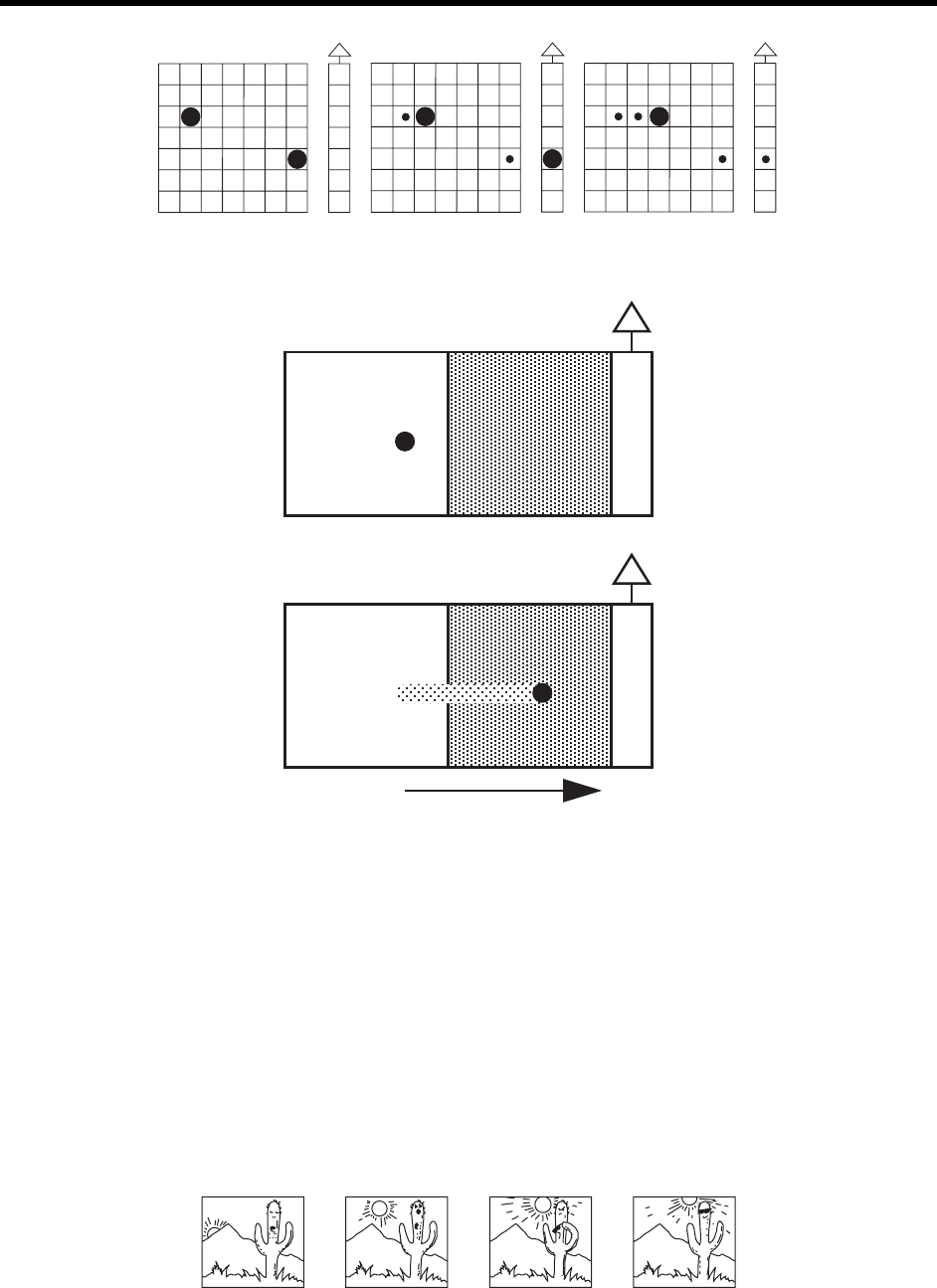
12 PVCAM Manual Version 2.7
In most frame transfer applications, the shutter opens before the sequence begins and closes after
the sequence ends. The charge gathered during the shift creates a smear across the image array.
Image is exposed
Storage ArrayImage Array
Image is shifted to storage array
Storage ArrayImage Array
Although the frame transfer time is usually only a few milliseconds, smearing cannot be eliminated
when the shutter is left open for the entire sequence. The higher the ratio of the
exposure_time
to the frame transfer time, the brighter the image is in comparison to the pattern caused by
smearing. An
exposure_time
that is too long will saturate the pixels and cause the image to lose
all contrast.
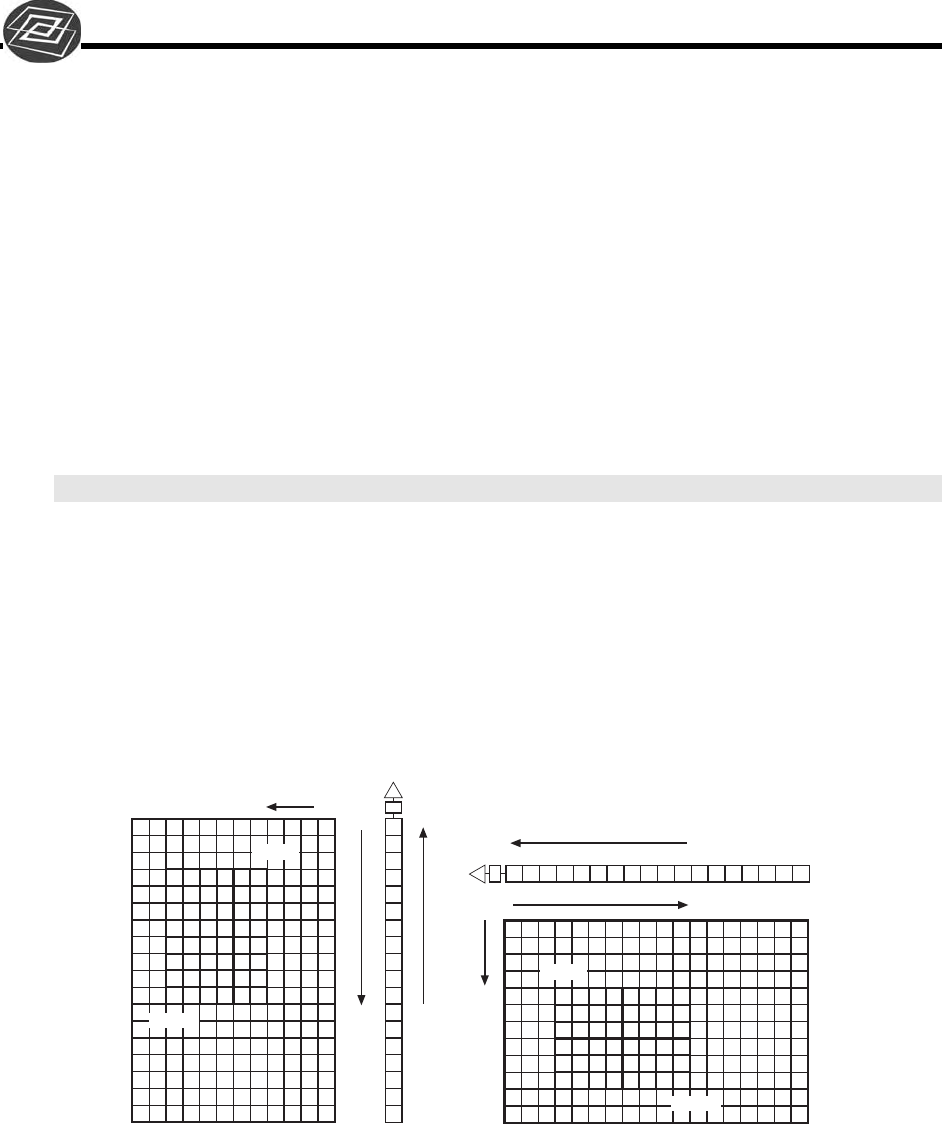
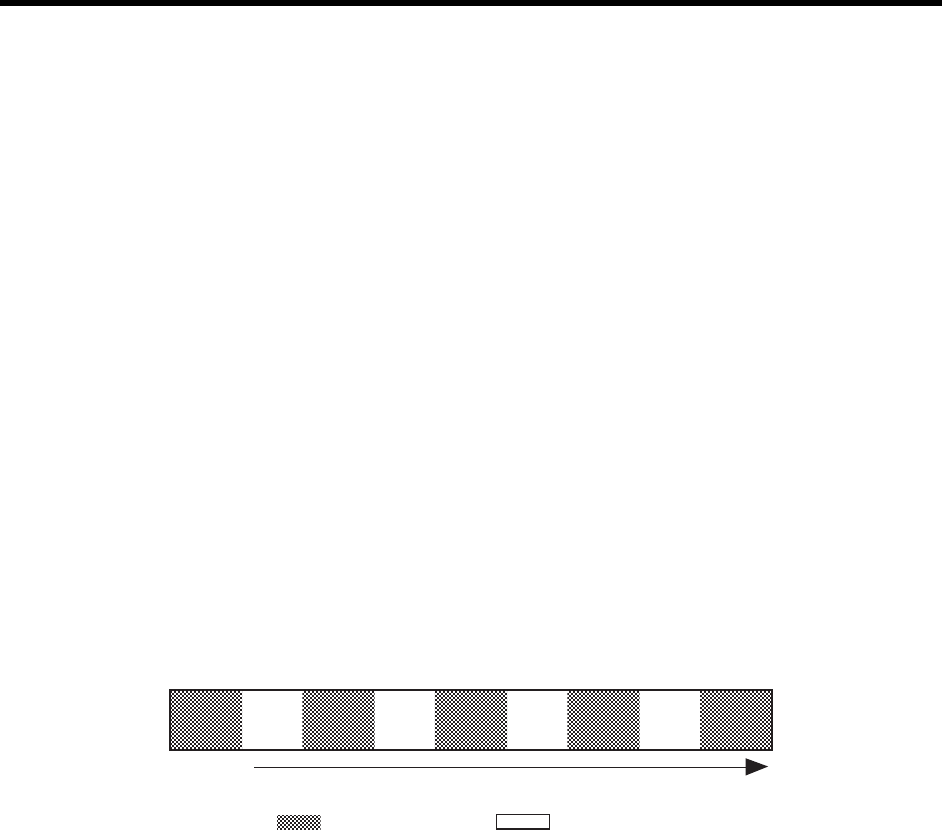
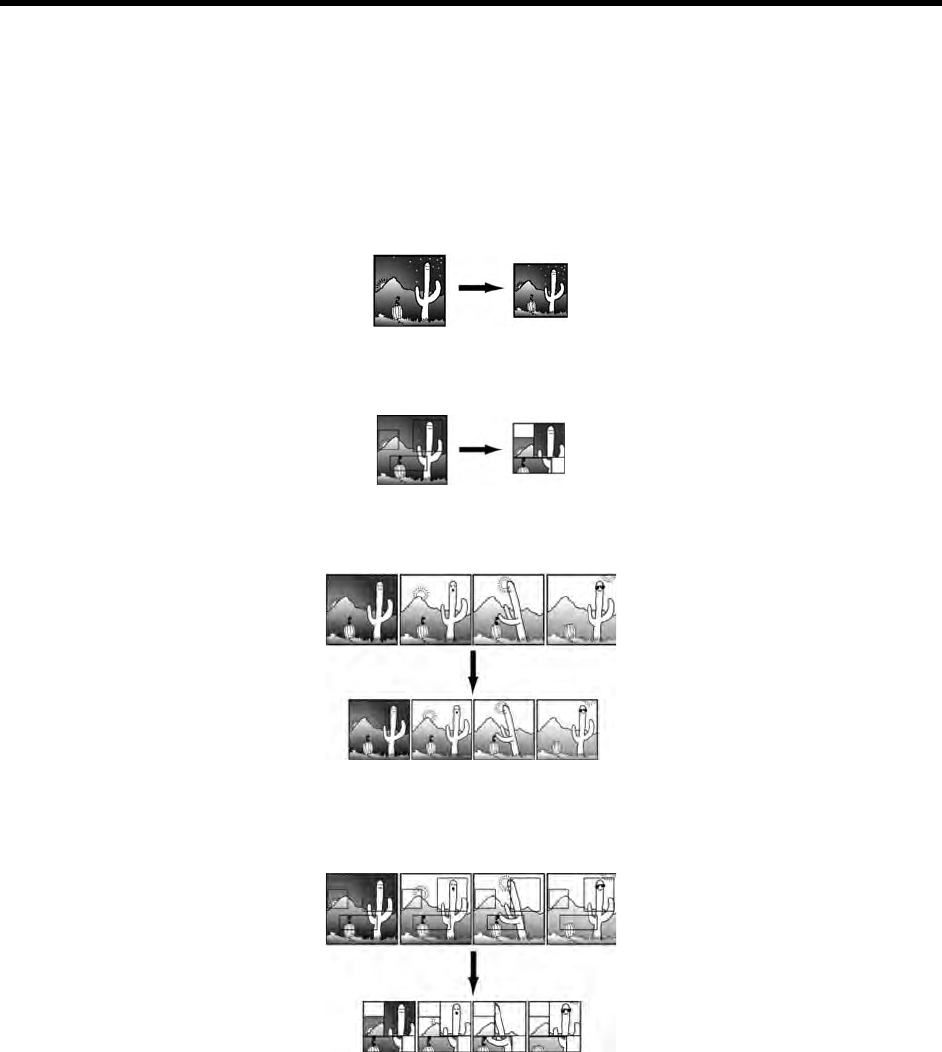
Sequences
A sequence is a programmed series of exposures that is started by a single command. In the least
complex sequences, a setup is called, then the camera takes a series of exposures with a complete
readout between each exposure. In these simple sequences, all the variables in the setup apply to all
the exposures in the sequence. The diagram below illustrates a sequence of exposures taken as the
day passes.
Chapter 2: PVCAM, A High-Level C Library 13
In most camera modes, you must load a new setup into the camera if you want to change a variable
between sequences. PVCAM offers a few exceptions to this rule. Since several PVCAM exposure
modes ignore the setup exposure_time, an external trigger begins each sequence or each exposure in
the sequence. In one exposure mode, calling a command between sequences sets the exposure_time
for the next sequence.
Sequence Parameters IDs/Constants
When constructing a sequence, the following three items determine how the camera behaves before
reading out:
• PARAM_CLEAR_MODE parameter id: Determines if and when the CCD is cleared of
charge.
• BULB_MODE, FLASH_MODE, STROBED_MODE, TIMED_MODE,
TRIGGER_FIRST_MODE, or VARIABLE_ TIMED_MODE constant : Determines if a
program command or an external trigger starts and ends the exposure/nonexposure time
within a sequence.
• PARAM_SHTR_OPEN_MODE parameter id: Determines if and when the shutter opens.
Although a single exposure may be considered a sequence of one, some options in triggering,
shuttering, and CCD clearing only apply to multiple image sequences.
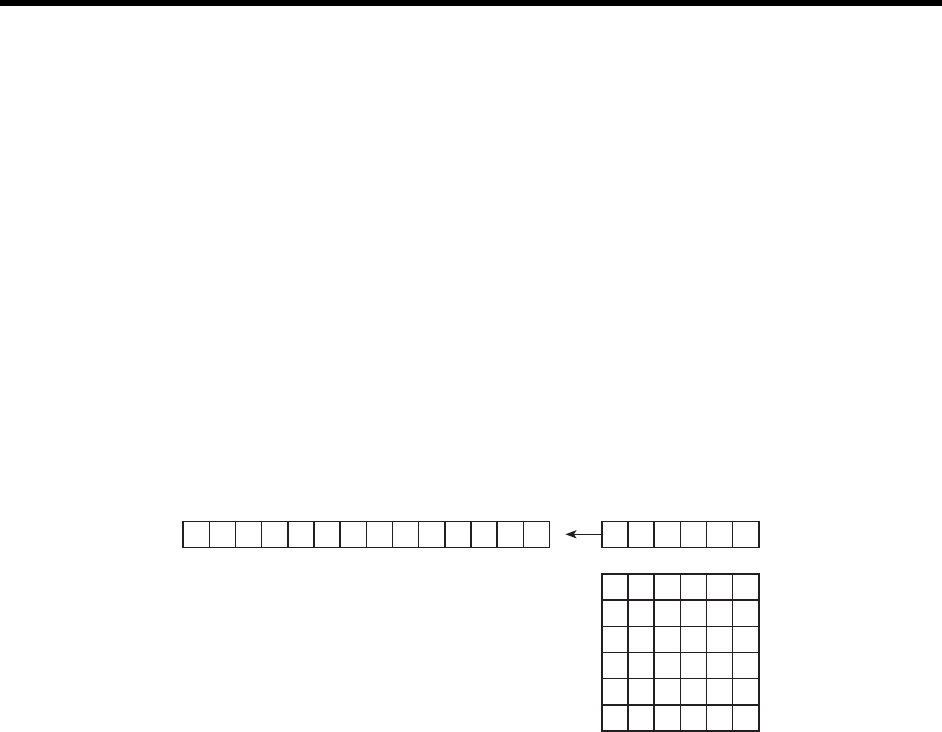
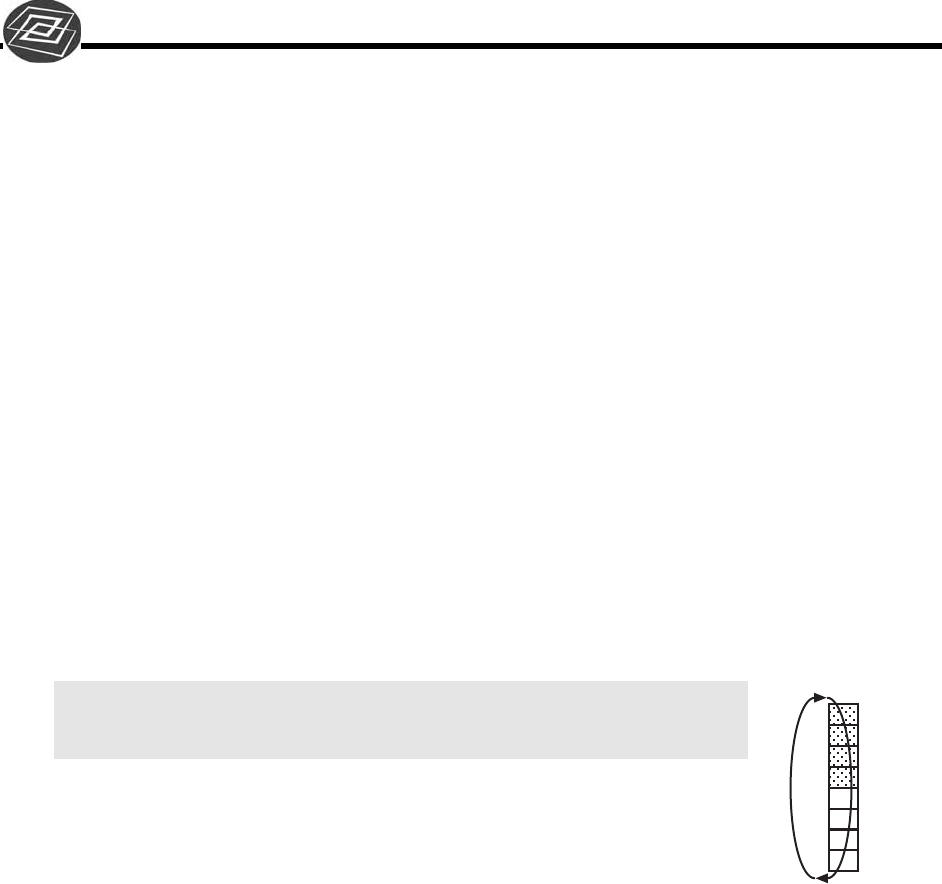
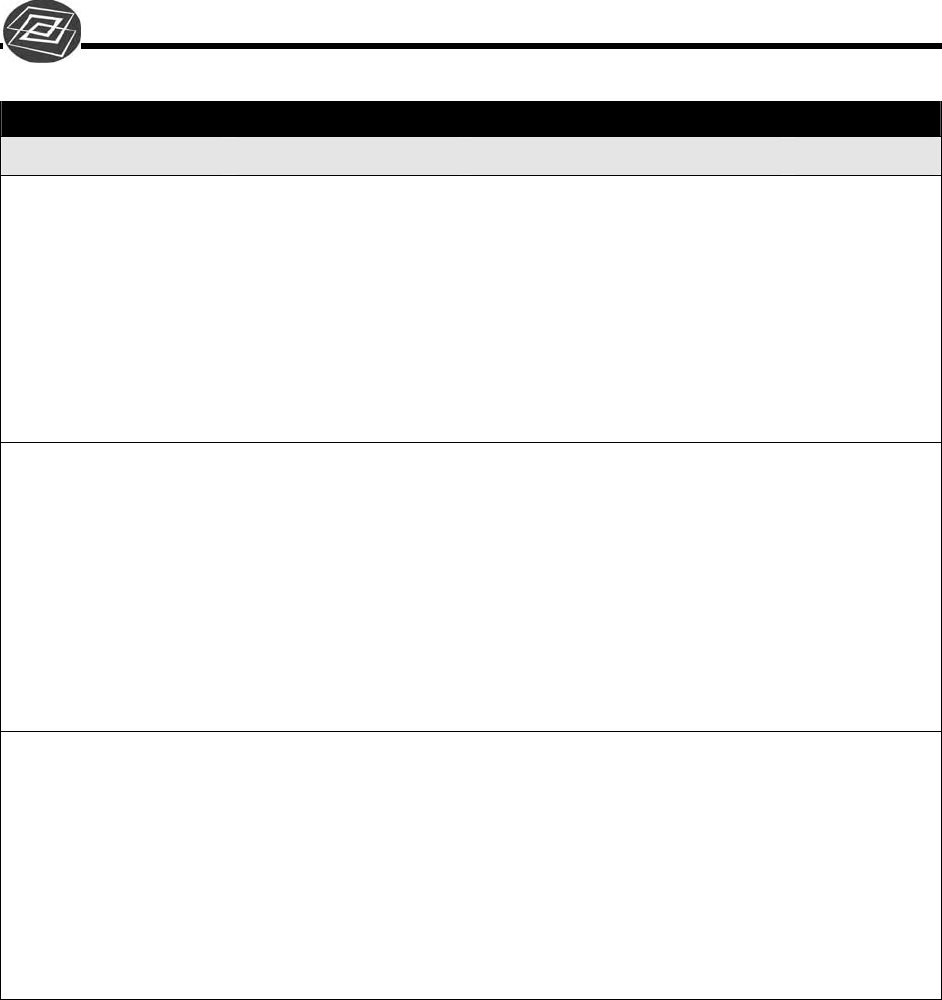
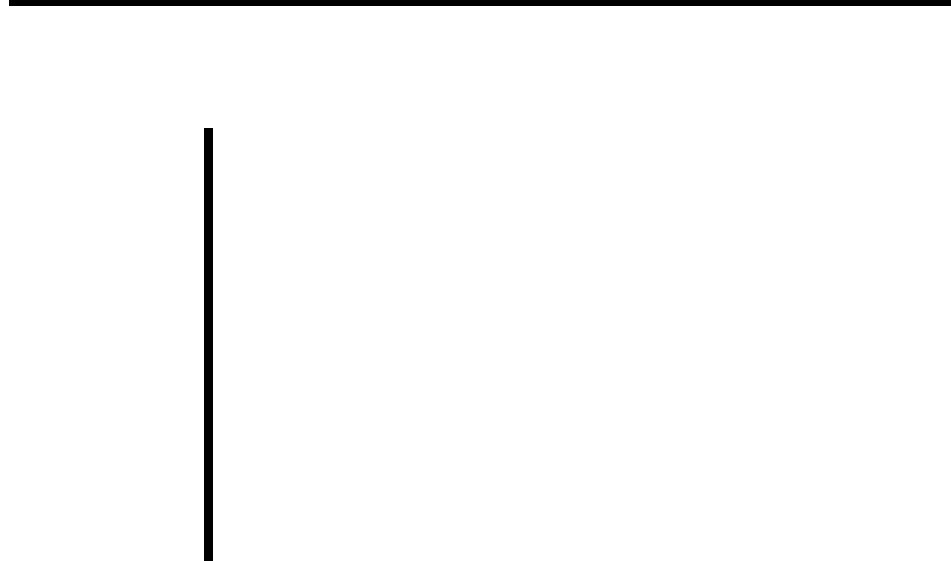
Circular Buffer
Note: Because some cameras do not support circular buffer, use the
parameter id
PARAM_CIRC_BUFFER
with
pl_get_param
to see if the
system can perform circular buffer operations.
Circular buffers are a special case of sequences. In a sequence, you specify
the number of frames to acquire and allocate a buffer large enough to hold all
of the frames. Using a circular buffer allows you to acquire a continuous
sequence; the camera will continue to acquire frames until you decide to stop
it, rather than acquiring a specified number of frames. For a circular buffer,
you allocate a buffer to hold a certain number of frames, and the data from
the camera is stored in the buffer sequentially until the end of the buffer is
Assumes 1 Mb frames
1 Oldest
2
3
4 Latest
5
6
7
8
Fr
om
C
a
me
ra
Data
Data
Data
Data
reached. When the end is reached, the data is stored starting at the beginning of the buffer again,
and so on as shown in the above figure.
The image buffer used for a circular buffer is passed to
pl_exp_start_cont
. The buffer is either
allocated by your application or obtained from the driver as a preallocated contiguous block of
physical memory. The driver buffer pointer is retrieved using the
pl_exp_get_driver_buffer
function. Data read out of the camera is stored in the designated circular buffer until it is retrieved by
the user's data processing routine, it is overwritten, or the buffer is filled. The selected circular buffer
mode determines whether or not buffer data can be overwritten before being retrieved by the
application.
When a circular buffer is running in
CIRC_OVERWRITE
mode, the frames in the buffer are filled as
data becomes available, regardless of whether the application has retrieved the data. This allows for
the fastest possible data display (on the host computer monitor) and is equivalent to the Princeton
Instruments Focus mode. If all frames in the buffer are filled before the application retrieves the
data, the oldest frame will be overwritten with new data. By fetching and displaying the most

14 PVCAM Manual Version 2.7
recently stored frame, image data display can be virtually real-time. Briefly, this mode of circular
buffer is set up and runs as follows:
•
pl_exp_init_seq ()
: The camera is prepared to acquire and readout data.
•
pl_exp_setup_cont (circ_overwrite)
: The circular buffer mode is selected.
•
pl_exp_start_cont ()
: Continuous data acquisition is started.
• Frames begin arriving in the buffer.
•
pl_exp_check_cont_status ()
: The status of the buffer is checked.
•
pl_exp_get_latest_frame ()
: If there are one or more frames of data, the most
recently stored frame is read out.
• Data is processed (for example, the data is displayed).
• The loop is repeated until continuous data acquisition is stopped with
pl_exp_stop_cont ()
,
pl_exp_finish_seq ()
,and
pl_exp_uninit_seq ()
.
When a circular buffer is running in
CIRC_NO_OVERWRITE
mode, the frames in the buffer are
filled as data becomes available until all frames are filled. This mode allows for the fastest possible
frame rate (with regard to data storage) with no skipping of frames and is equivalent to the
Princeton Instruments Nframe mode. If all frames in the buffer are filled before the application
retrieves the data, the latest frame will be lost because the oldest frame will not be overwritten.
Therefore, the user's routine must be able to read the data out of the buffer faster than the camera
can fill the buffer. Briefly, this mode of circular buffer is set up and runs as follows:
•
pl_exp_init_seq ()
: The camera is prepared to acquire and readout data.
•
pl_exp_setup_cont (circ_no_overwrite)
: The circular buffer mode is selected.
•
pl_exp_start_cont ()
: Continuous data acquisition is started.
• Frames begin arriving in the buffer.
•
pl_exp_check_cont_status ()
: The status of the buffer is checked.
•
pl_exp_get_oldest_frame ()
: If there are one or more frames of data, the oldest frame is
read out.
• Data is processed (for example, stored elsewhere).
•
pl_exp_unlock_oldest_frame ()
: The oldest frame is unlocked so it becomes
available for data storage.
• The loop is repeated until the buffer fills up or continuous data acquisition is stopped with
pl_exp_stop_cont ()
,
pl_exp_finish_seq ()
,and
pl_exp_uninit_seq ()
.
Refer to Example 3: Circular Buffer in Chapter 8 for two examples of code for circular buffer
operation.

Chapter 2: PVCAM, A High-Level C Library 15
Clear Modes
Clearing removes charge from the CCD by clocking the charge to the serial register then directly to
ground. This process is much faster than a readout, because the charge does not go through the
readout node or the amplifier. Note that not all clearing modes are available for all cameras. Be
sure to check availability of a mode before attempting to set it.
The clear modes are described below:
•
CLEAR_NEVER:
Don't ever clear the CCD. Useful for performing a readout after an
exposure has been aborted.
•
CLEAR_PRE_EXPOSURE:
Before each exposure, clears the CCD the number of times
specified by the clear_cycles variable. This mode can be used in a sequence. It is most useful
when there is a considerable amount of time between exposures.
•
CLEAR_PRE_SEQUENCE:
Before each sequence, clears the CCD the number of times
specified by the clear_cycles variable. If no sequence is set up, this mode behaves as if the
sequence has one exposure. The result is the same as using CLEAR_PRE_EXPOSURE.
•
CLEAR_POST_SEQUENCE:
Clears continuously after the sequence ends. The camera
continues clearing until a new exposure is set up or started, the abort command is sent, the
speed entry number is changed, or the camera is reset.
•
CLEAR_PRE_POST_SEQUENCE:
Clears clear_cycles times before each sequence and clears
continuously after the sequence ends. The camera continues clearing until a new exposure is
set up or started, the abort command is sent, the speed entry number is changed, or the
camera is reset.
•
CLEAR_PRE_EXPOSURE_POST_SEQ:
Clears clear_cycles times before each exposure and
clears continuously after the sequence ends. The camera continues clearing until a new
exposure is set up or started, the abort command is sent, the speed entry number is changed,
or the camera is reset.
Normally during the idle period, the Camera Control Subsystem (CCS) parallel and serial clock
drivers revert to a low power state that saves both power and heat. When CLEAR_..._POST options are
used, the continuous clearing prevents these systems from entering low-power mode. This state
generates a small amount of additional heat in the electronics unit and the camera head.
The pl_exp_abort() function stops the data acquisition and the camera goes into the clean cycle.
Again, the CCD chip is continuously being cleaned.
Clear Modes decide when to clean the CCD arrays. However, since PI cameras always clean the
CCDs at idle times, Clear Modes do not apply to PI cameras and therefore the feature is not
available for PI cameras.
16 PVCAM Manual Version 2.7
Exposure Modes
During sequences, the exposure mode determines how and when each exposure begins and ends:
TIMED_MODE STROBED_MODE
VARIABLE_ TIMED_MODE BULB_MODE
TRIGGER_FIRST_MODE FLASH_MODE
In general, the settings in
pl_exp_setup_seq
apply to each exposure within a sequence. They
also apply to every sequence until the setup is reset. The only exceptions are in
VARIABLE_TIMED_MODE
and
BULB_MODE
. These two modes ignore the
exposure_time
parameter in setup, and rely on a function or trigger to determine the exposure time.
Every sequence has alternating periods of exposure and nonexposure time. During the time the CCD
is not exposing, the camera could be in several states, such as waiting for
pl_exp_start_seq
,
reading out, or performing continuous clearing. In the diagrams that follow, each exposure mode
shows the exposure time in white and the time between exposures in gray.
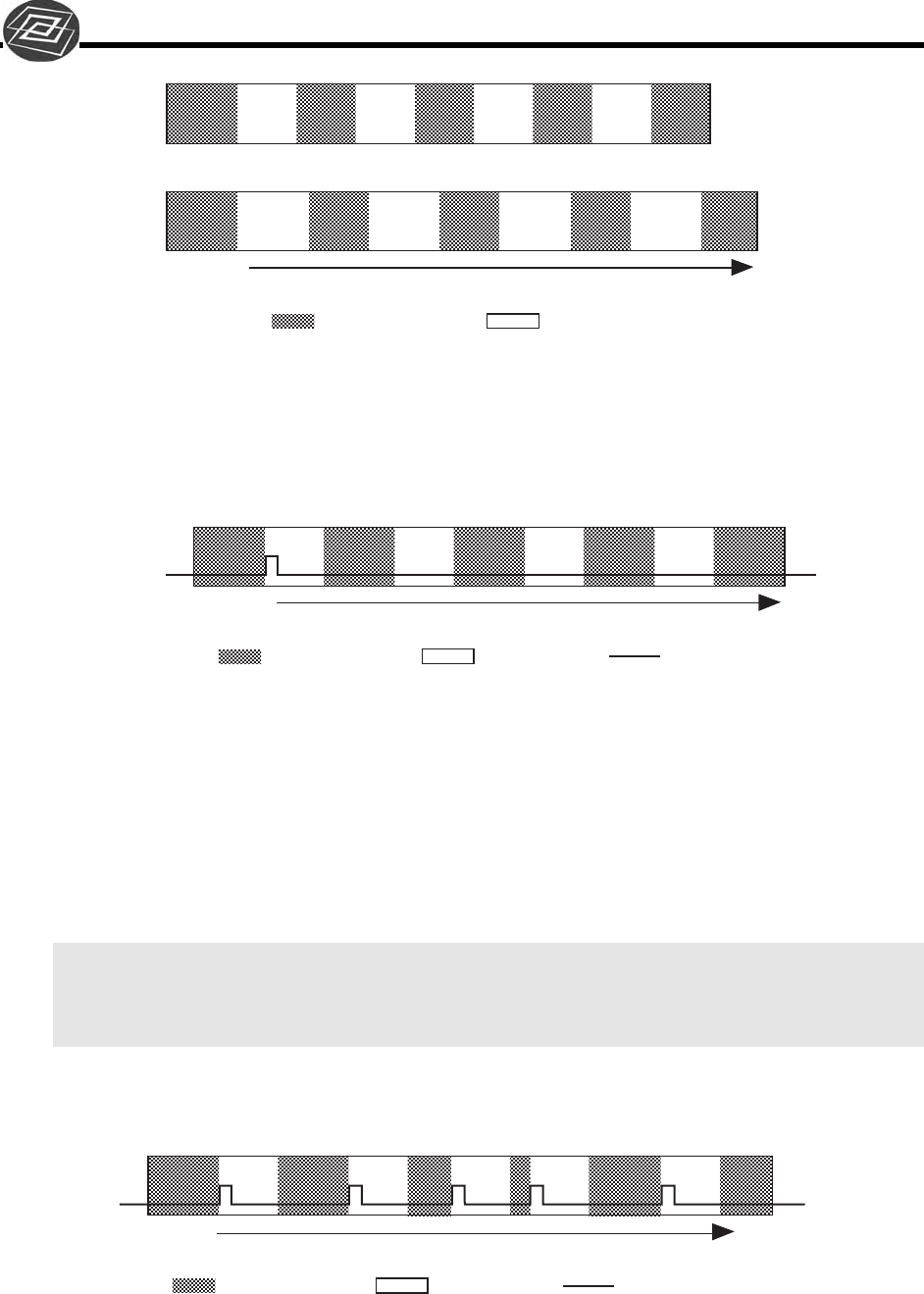
Exposure: TIMED_MODE
In
TIMED_MODE
, all settings are read from the setup parameters, making the duration of each
exposure time constant and the interval times between exposures constant. In this mode, every
sequence has the same settings.
The diagram below represents a sequence in
TIMED_MODE
.
Time in ms
Nonexposure Time Exposure Time
0 50 100 150 200 250 300 350 400
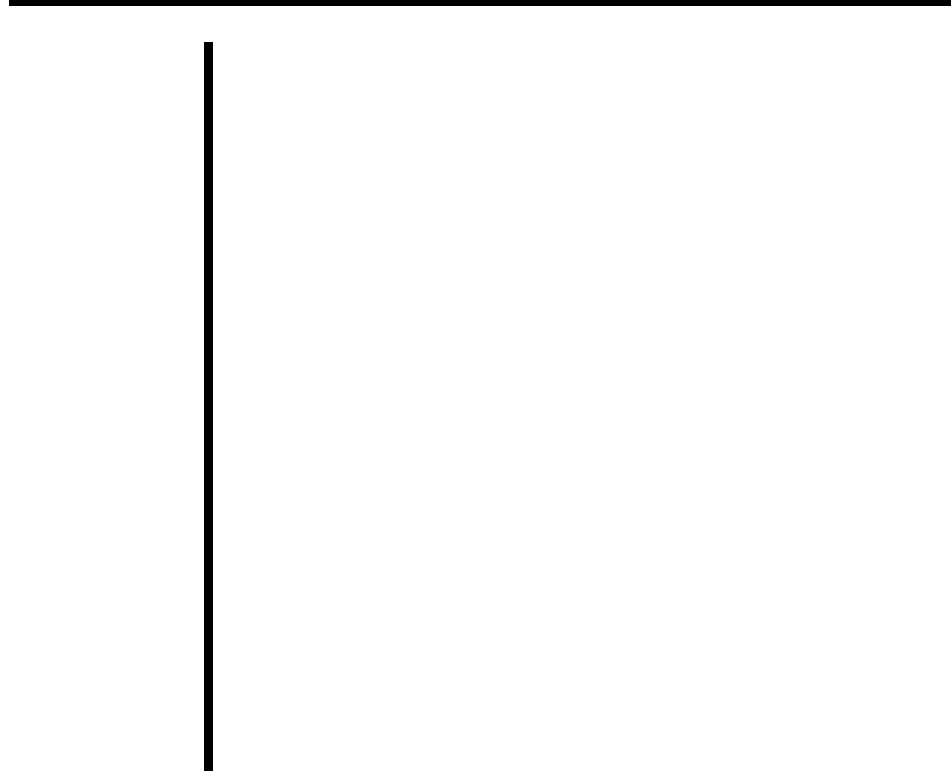
Exposure: VARIABLE_TIMED_MODE
Use
VARIABLE_TIMED_MODE
when you want to change the exposure_time between sequences.
In
VARIABLE_TIMED_MODE
, all settings except
exposure_time
are read from the setup
parameters. The
exposure_time
must be set with parameter id
PARAM_EXP_TIME
. If you do not
call
PARAM_EXP_TIME
before the first sequence, a random time will be assigned. The camera will
not read the first exposure time from the
exposure_time
in setup, because this mode ignores the
exposure_time
parameter.
Application example: A filter wheel is used to change the filter color between sequences. The
exposure time needed for the darkest filter saturates the pixels when lighter filters are used. The
diagram on the next page shows two sample sequences from this example.
Chapter 2: PVCAM, A High-Level C Library 17
Time in ms
Nonexposure Time Exposure Time
0 50 100 150 200 250 300 350 400
The first sequence runs with a filter that uses exposure and nonexposure times that are equal. In the
second sequence, the exposure time is longer, but the time between exposures remains the same as
in the first sequence.
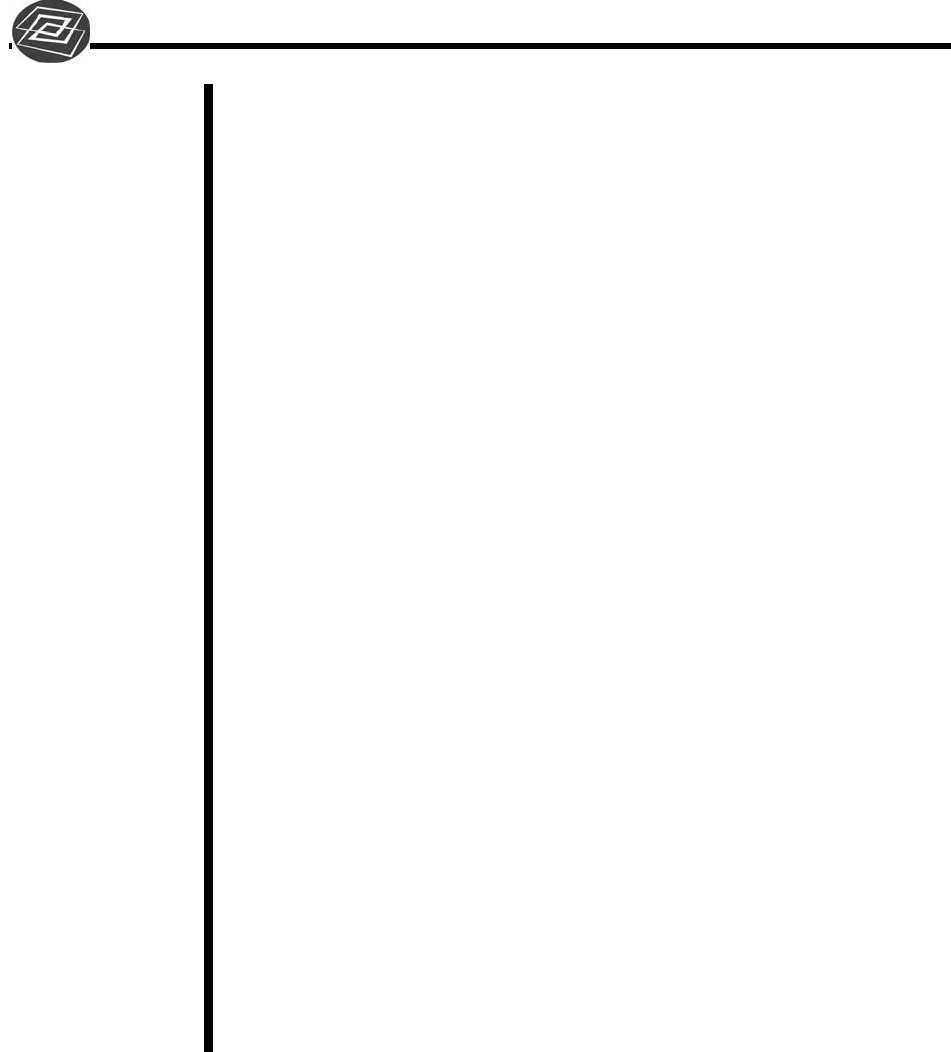
Exposure: TRIGGER_FIRST_MODE
Use
TRIGGER_FIRST_MODE
when you want an external trigger to signal the start of the sequence.
Time in ms
Nonexposure Time Exposure Time
0 50 100 150 200 250 300 350 400
Trigger Signal
In
TRIGGER_FIRST_MODE
,
pl_exp_start_seq
starts the camera, which enters the clear mode
while it waits for a trigger signal. The black line in the diagram illustrates a trigger signal coming
from an external trigger source.
Once the outside event triggers the camera to start exposing, the sequence follows the conditions
generated in
pl_exp_setup_seq
. Note that all exposure times are equal, and the time intervals
between exposures are equal.
You must have an external trigger signal connected to your camera for
TRIGGER_FIRST_MODE
to
function. If your equipment fails to send a trigger signal, you can stop the sequence by calling
pl_exp_abort
.
Note: If you do not use one of the
CLEAR_PRE_EXPOSURE
modes, the CCD will begin exposing
immediately after
pl_exp_start_seq
is called. Once the trigger is received, the CCD will
continue to expose for the
exposure_time
specified in
pl_exp_setup_seq
. In other words, the
first exposure in your sequence may have a longer exposure time than the subsequent exposures.
Exposure: STROBED_MODE
Use
STROBED_MODE
when you want an external trigger to start each exposure in the sequence.
Time in ms
Nonexposure Time Exposure Time
0 50 100 150 200 250 300 350 400
Trigger Signal
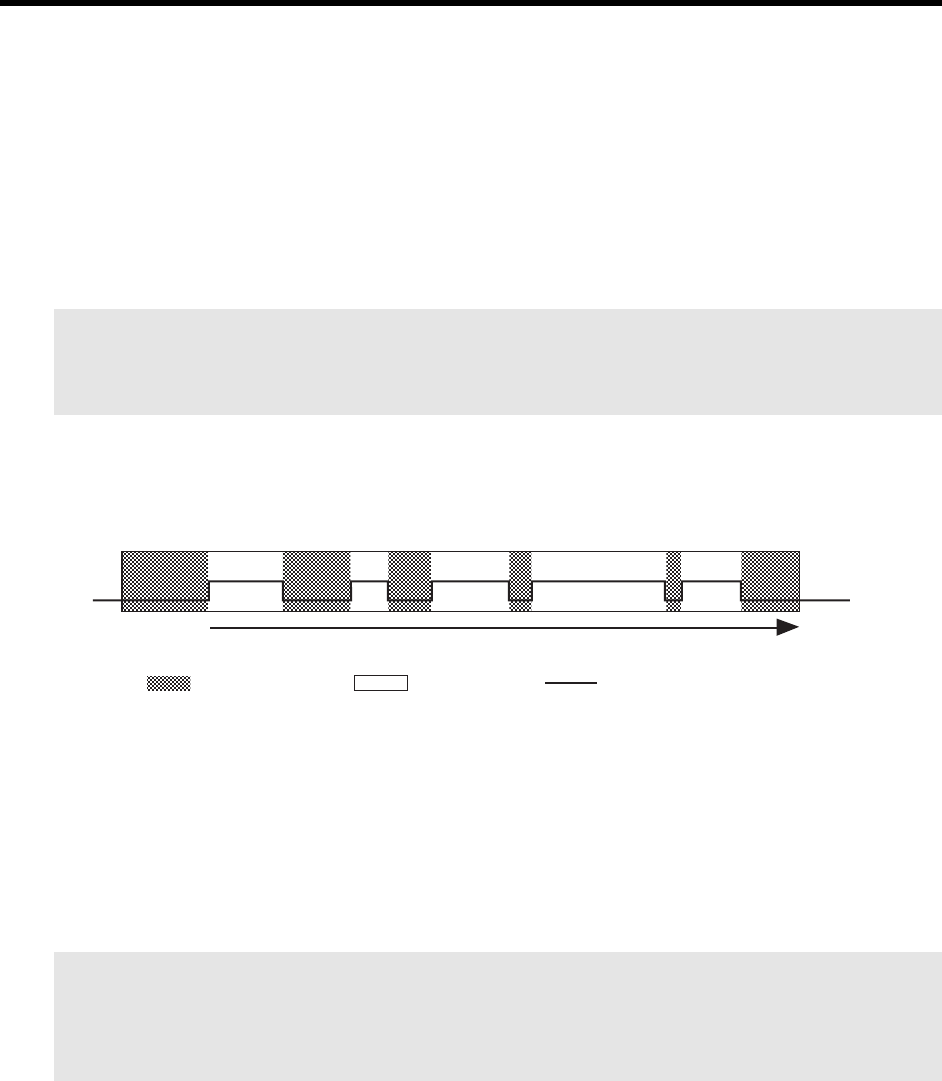
18 PVCAM Manual Version 2.7
In
STROBED_MODE, pl_exp_start_seq
starts the camera. The camera enters clear mode
while it waits for the first trigger signal to start the first exposure. As shown in the diagram above,
each new exposure waits for an external trigger signal. Notice that the intervals between exposures
can vary greatly, but the exposure times are constant.
You must have an external trigger signal connected to your camera for this mode to function. If your
equipment fails to send a trigger signal, you can stop the sequence by calling
pl_exp_abort
.
Application example: In a nature study of birds passing through a restricted area, the motion of
each bird sends a trigger signal to the camera. The camera exposes, reads out, and waits for the next
trigger signal. The result is an image of each bird as it crosses the camera's field of view.
Note: If you do not use one of the
CLEAR_PRE_EXPOSURE
modes, the CCD will begin exposing
immediately after
pl_exp_start_seq
is called. Once the trigger is received, the CCD will
continue to expose for the
exposure_time
specified in
pl_exp_setup_seq
. In other words, the
first exposure in your sequence may have a longer exposure time than the subsequent exposures.
Exposure: BULB_MODE
Use
BULB_MODE
, when you want an external trigger signal to control the beginning and end of
each exposure.
Time in ms
Nonexposure Time Exposure Time
0 50 100 150 200 250 300 350 400
Trigger Signal
450
In
BULB_MODE, pl_exp_start_seq
calls the setup. The camera enters clear mode while it
waits for a true external trigger signal to start each exposure. The CCD continues to expose until a
false trigger signal ends the exposure. In the diagram above, the trigger signal line moves up to
represent a true trigger and down to represent a false trigger.
Notice that the exposure times and the intervals between exposures vary greatly. Since the true and
false signals determine exposure time, the
exposure_time
set in
pl_exp_setup_seq
is ignored.
You must have an external trigger signal connected to your camera for
BULB_MODE
to function. If
your equipment fails to send a trigger signal, you can stop the sequence by calling
pl_exp_abort
.
Note: If you do not use one of the
CLEAR_PRE_EXPOSURE
modes, the CCD exposes until
receiving a false trigger signal, then reads out. After reading out, the CCD exposes again without
clearing and waits for the true trigger. Once the external event causes a true trigger, the CCD
continues to expose until receiving a false trigger, then reads out. In other words, the CCD will
expose from the end of readout until the next false trigger.
Exposure: FLASH_MODE
Some PVCAM cameras include a flash port—several outside pins with a software-controllable
signal. Photometrics uses these pins to drive factory test fixturing. However, the signal can be used
to drive other equipment. Aside from the signal on the pins,
FLASH_MODE
is identical to
TIMED_MODE
. Consult your camera hardware documentation to see flash port availability and
electrical specifications.
Chapter 2: PVCAM, A High-Level C Library 19
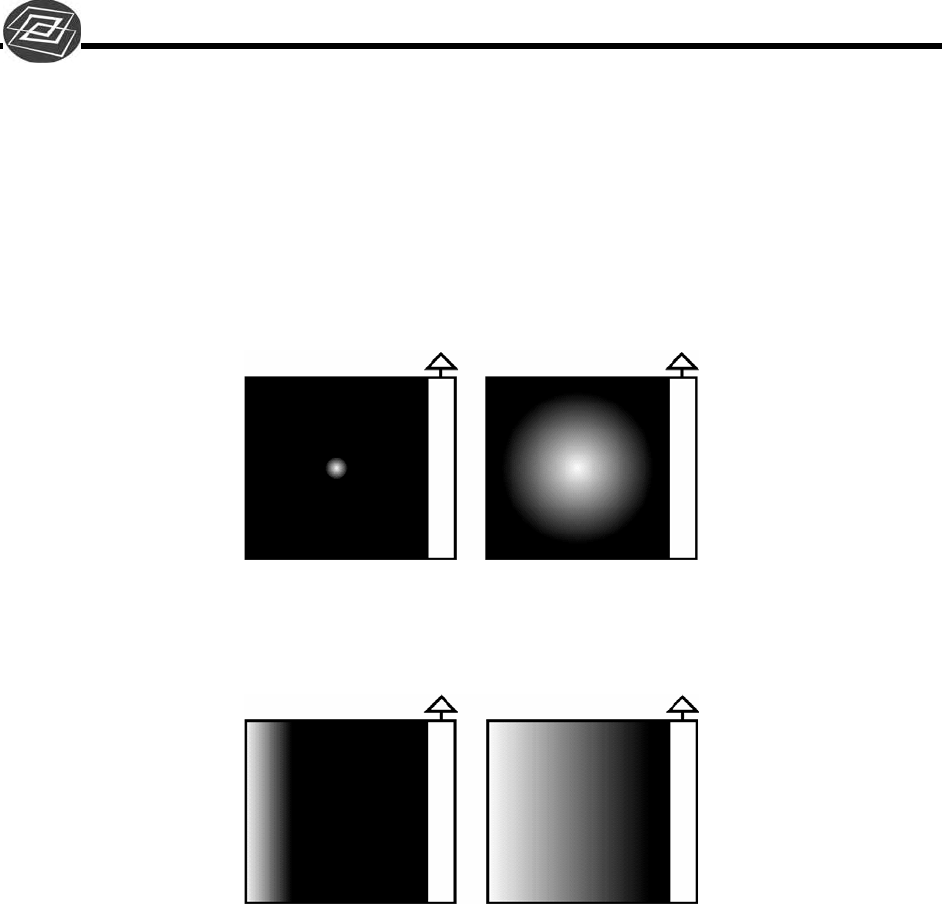
Open Delay, Close Delay
In order to ensure that the entire CCD is exposed for the specified
exposure_time
, the
mechanical limitations of the shutter must be considered. Open delay
(
PARAM_SHTR_OPEN_DELAY
), close delay (
PARAM_SHTR_CLOSE_DELAY
), and time units
(
PARAM_SHTR_CLOSE_DELAY_UNIT)
account for the time necessary for the shutter to open and
close. Remember that the camera is exposing while the shutter is opening and closing, so some
pixels are exposed longer than others.
Iris Shutter
An Iris shutter opens in an expanding circular pattern.
Barn Door Shutter
A Barn Door shutter slides across the exposure area.
If the shutter is still closing when the image shifts for a frame transfer or readout, the image will
smear. (See the section "Image Smear", page 11, for a more complete explanation on smearing.)
PARAM_SHTR_CLOSE_DELAY
allows time for the shutter to close before the image shifts.
The default open and close delay values will vary depending on the brand of camera and the shutter
used. Open delay may be up to 15 milliseconds with a close delay of up to 30 milliseconds. Change
the default values only if you are using a shutter other than the shutter shipped with your camera. If
you are using a standard Photometrics or Princeton Instruments shutter, changing
PARAM_SHTR_OPEN_DELAY/CLOSE_DELAY
default values will not increase the frame transfer
rate.
20 PVCAM Manual Version 2.7
Shutter Control
The shutter open modes determine how the shutter in a camera behaves when a single exposure is
taken or when a sequence is run. Remember that the camera is exposing while the shutter is
opening. Because not all supported cameras have programmable shutter control, remember to
check for availability of a particular mode.
•
OPEN_PRE_EXPOSURE:
Opens the shutter before every exposure, then closes the shutter
after the exposure is finished.
•
OPEN_PRE_SEQUENCE:
Opens the shutter before the sequence begins, then closes the shutter
after the sequence is finished.
•
OPEN_PRE_TRIGGER:
Opens the shutter, then clears or exposes (set in clear mode) until a
trigger signal starts the exposure.
•
OPEN_NEVER:
Keeps shutter closed during the exposure. Used for dark exposures.
•
OPEN_NO_CHANGE:
Sends no signals to open or close the shutter.
Exposure Loops
Within an exposure loop, the interaction of the exposure, clear, and shutter open modes determines
how the camera behaves during a sequence. In the following pages, sample command sequences
show how each exposure mode acts in combination with each clear and shutter open mode. As
mentioned above in "Shutter Control", not all supported cameras have programmable shutter
control, remember to check for availability of a particular mode.
Key Description
ClearN Clear CCD N times as specified in clear_cycles
OS Open shutter and perform PARAM_SHTR_OPEN_DELAY
CS Close shutter and perform PARAM_SHTR_CLOSE_DELAY
EXP Expose CCD for exposure_time
I->S Transfer image array to storage array (frame transfer)
Readout Readout CCD (readout storage array for frame transfer)
WaitT Wait until trigger
EXP Until notT Expose CCD until trigger end
(
BULB_MODE)
Items in ITALICS repeat M times for a sequence of M exposures.
Items in BOLD are outside of the sequence loop.
EXPOSURE: TIMED_MODE
Chapter 2: PVCAM, A High-Level C Library 21
EXPOSURE: TIMED_MODE
Clear Mode Shutter Mode Command Sequence Notes
CLEAR_PRE_EXPOSURE OPEN_PRE_EXPOSURE
OPEN_PRE_SEQUENCE
OPEN_PRE_TRIGGER
OPEN_NO_CHANGE
OPEN_NEVER
ClearN, OS, EXP, CS, I->S, Readout
OS , ClearN, EXP, I->S, Readout, CS
ClearN, OS, EXP, CS, I->S, Readout
ClearN, EXP, I->S, Readout
CS, ClearN, EXP, I->S, Readout
Photometrics
only
CLEAR_PRE_SEQUENCE OPEN_PRE_EXPOSURE
OPEN_PRE_SEQUENCE
OPEN_PRE_TRIGGER
OPEN_NO_CHANGE
OPEN_NEVER
ClearN,OS, EXP, CS, I->S, Readout
OS, ClearN, EXP, I->S, Readout, CS
ClearN, OS, EXP, CS, I->S, Readout
ClearN, EXP, I->S, Readout
CS, ClearN, EXP, I->S, Readout
CLEAR_NEVER OPEN_PRE_EXPOSURE
OPEN_PRE_SEQUENCE
OPEN_PRE_TRIGGER
OPEN_NO_CHANGE
OPEN_NEVER
OS, EXP, CS, I->S, Readout
OS, EXP, I->S, Readout, CS
OS, EXP, CS, I->S, Readout
EXP, I->S, Readout
CS, EXP, I->S, Readout
Photometrics
only
EXPOSURE: TRIGGER_FIRST_MODE
Clear Mode Shutter Mode Command Sequence Notes
CLEAR_PRE_EXPOSURE OPEN_PRE_EXPOSURE EXP+WaitT, ClearN, OS, EXP, CS,
I->S, Readout
Photometrics
only
OPEN_PRE_SEQUENCE OS, EXP+WaitT, ClearN, EXP, I->S,
Readout, CS
OPEN_PRE_TRIGGER EXP+WaitT, OS, ClearN, EXP, CS,
I->S, Readout
OPEN_NO_CHANGE EXP+WaitT, ClearN, EXP, I->S,
Readout
OPEN_NEVER CS, EXP+WaitT, ClearN, EXP, I->S,
Readout
CLEAR_PRE_SEQUENCE OPEN_PRE_EXPOSURE Clear+WaitT, ClearN, OS, EXP, CS,
I->S, Readout
OPEN_PRE_SEQUENCE OS, Clear+WaitT, EXP, I->S,
Readout, CS
OPEN_PRE_TRIGGER Clear+WaitT, OS, EXP, CS, I->S,
Readout
OPEN_NO_CHANGE Clear+WaitT, EXP, I->S, Readout
OPEN_NEVER CS, Clear+WaitT, EXP, I->S, Readout
CLEAR_NEVER OPEN_PRE_EXPOSURE EXP+WaitT, ClearN, OS, EXP, CS,
I->S, Readout Photometrics
only
OPEN_PRE_SEQUENCE OS, EXP+WaitT, EXP, I->S, Readout,
CS
22 PVCAM Manual Version 2.7
EXPOSURE: TRIGGER_FIRST_MODE
Clear Mode Shutter Mode Command Sequence Notes
OPEN_PRE_TRIGGER EXP+WaitT, OS, EXP, CS, I->S,
Readout
OPEN_NO_CHANGE EXP+WaitT, EXP, I->S, Readout
OPEN_NEVER CS, EXP+WaitT, EXP, I->S, Readout
EXPOSURE: STROBED_MODE
Clear Mode Shutter Mode Command Sequence Notes
CLEAR_PRE_EXPOSURE OPEN_PRE_EXPOSURE Clear+WaitT, OS, EXP, CS, I->S,
Readout
OPEN_PRE_SEQUENCE OS, Clear+WaitT, EXP, I->S, Readout,
CS
Uses
Continuous
Cleans
OPEN_PRE_TRIGGER OS, Clear+WaitT, EXP, CS, I->S,
Readout
OPEN_NO_CHANGE Clear+WaitT, EXP, I->S, Readout
OPEN_NEVER CS, Clear+WaitT, EXP, I->S, Readout
CLEAR_PRE_SEQUENCE OPEN_PRE_EXPOSURE ClearN, EXP+WaitT, OS, EXP, CS,
I->S, Readout
OPEN_PRE_SEQUENCE OS, ClearN, EXP+WaitT, EXP, I->S,
Readout, CS
OPEN_PRE_TRIGGER ClearN, OS, EXP+WaitT, EXP, CS,
I->S, Readout
OPEN_NO_CHANGE ClearN, EXP+WaitT, EXP, I->S,
Readout
OPEN_NEVER CS, ClearN, EXP+WaitT, EXP, I->S,
Readout
CLEAR_NEVER OPEN_PRE_EXPOSURE EXP+WaitT, OS, EXP, CS, I->S,
Readout
Photometrics
only
OPEN_PRE_SEQUENCE OS, EXP+WaitT, EXP, I->S, Readout,
CS
OPEN_PRE_TRIGGER OS, EXP+WaitT, EXP, CS, I->S,
Readout
OPEN_NO_CHANGE EXP+WaitT, EXP, I->S, Readout
OPEN_NEVER CS, EXP+WaitT, EXP, I->S, Readout
Chapter 2: PVCAM, A High-Level C Library 23
EXPOSURE: BULB_MODE
Clear Mode Shutter Mode Command Sequence Notes
CLEAR_PRE_EXPOSURE OPEN_PRE_EXPOSURE Clear+WaitT, OS, EXP Until notT,
CS, I->S, Readout
Photometrics
only
OPEN_PRE_SEQUENCE OS, Clear+WaitT, EXP Until notT,
I->S, Readout, CS
OPEN_PRE_TRIGGER OS, Clear+WaitT, EXP Until notT,
CS, I->S, Readout
OPEN_NO_CHANGE Clear+WaitT, EXP Until notT, I->S,
Readout
OPEN_NEVER CS, Clear+WaitT, EXP Until notT,
I->S, Readout
CLEAR_PRE_SEQUENCE OPEN_PRE_EXPOSURE ClearN, EXP+WaitT, OS, EXP Until
notT, CS, I->S, Readout
Photometrics
only
OPEN_PRE_SEQUENCE OS, ClearN, EXP+WaitT, EXP Until
notT,
I->S, Readout, CS
OPEN_PRE_TRIGGER ClearN, OS, EXP+WaitT, EXP Until
notT, CS, I->S, Readout
OPEN_NO_CHANGE ClearN, EXP+WaitT, EXP Until notT, I-
>S, Readout
OPEN_NEVER CS, ClearN, EXP+WaitT, EXP Until
notT, I->S, Readout
CLEAR_NEVER OPEN_PRE_EXPOSURE EXP+WaitT, OS, EXP Until notT, CS,
I->S, Readout
Photometrics
only
OPEN_PRE_SEQUENCE OS, EXP+WaitT, EXP Until notT,
I->S, Readout, CS
OPEN_PRE_TRIGGER OS, EXP+WaitT, EXP Until notT, CS,
I->S, Readout
OPEN_NO_CHANGE EXP+WaitT, EXP Until notT, I->S,
Readout
OPEN_NEVER CS, EXP+WaitT, EXP Until notT,
I->S, Readout
24 PVCAM Manual Version 2.7
Image Buffers
When exposures include multiple images and complex sequences, you may choose to store the
images in a buffer. PVCAM has a number of buffer routines that handle memory allocation and
freeing. The following list describes images you may choose to store in a buffer.
• Full CCD: A single exposure where the entire CCD is treated as one region and image data
are collected over the full CCD. All the data are stored in a single buffer.
• Single Exposure, Multiple Images: A single exposure with multiple regions. The data are
stored in several image arrays that are stored inside a single buffer.
• Sequences: A series of exposures with identical regions. The data are stored in several image
arrays that are stored inside a single buffer.
• Multiple Exposures, Multiple Images: A series of exposures with multiple regions. Each
exposure must have identical regions. The data are stored in several image arrays that are
stored inside a single buffer.
Class 4 places the following constraints on data stored in buffers:
• All exposures in a buffer must have the same set of images (the size, position, and binning
must match).
• All data in a buffer must be at the same bit depth (16-bit signed, 16- bit unsigned, 32-bit
signed, and so forth.)
• All data in an image are stored in a standard C, two-dimensional array, with the second
subscript varying most rapidly.

Chapter 2: PVCAM, A High-Level C Library 25
PVCAM collects data very efficiently, but moving the data in and out of a buffer involves extra
processing time. If speed is crucial, the following options may minimize processing time:
• Don’t use a buffer. The data are collected in a user-specified pixel stream at maximum
efficiency (see
pl_exp_start_seq
). As discussed in "Data Array", this array can be
accessed directly. However, when multiple regions are collected, the stream becomes more
complex. If the regions overlap in the serial direction, the data from one region are
interleaved with the data from another region.
• Use a buffer. If the data are in multiple regions,
pl_exp_finish_seq
decodes the
pixel_stream
data into the regions. Once decoded, each region can be retrieved as a
simple array (see "Data Array"). Even though it takes extra time to decode the data and load
the buffer, retrieving the data is simple.
• Defer decoding. The original call to
pl_exp_setup_seq
sets up internal structures used to
decode
pixel_stream
into a buffer structure. However,
pl_exp_finish_seq
does not
need to be called immediately. As long as the camera (and library) remain open, and
pl_exp_setup_seq
is not called with a new setup, the decoding structures remain valid.
This allows a program to collect data quickly, then decode the data when more time is
available. Of course, this is impossible if users must be given immediate feedback.
Source Code Examples
Refer to Chapter 8, pages 111-122, for code examples.

26 PVCAM Manual Version 2.7
This page intentionally left blank.

27
Chapter 3:
Camera Communications (Class 0)
Introduction
The functions in this category provide a pipeline for bidirectional communications. The table below
lists the current Class 0 functions, and the "Class 0 Functions" section provides detailed
descriptions of each. If the Class 0 functions you are interested in are not listed below, check
"Appendix B: Obsolete Functions". The Class 0 functions that have been made obsolete now have
equivalent
pl_get_param
and
pl_set_param
functions. For more information about the
pl_get_param
and
pl_set_param
parameter ids, refer to "Chapter 5:Configuration/Setup
(Class 2)", starting on page 45.
List of Available Class 0 Functions
Library Camera
pl_pvcam_init pl_cam_check
pl_pvcam_uninit pl_cam_close
pl_pvcam_get_ver pl_cam_get_diags
pl_cam_get_name
Device Driver
pl_cam_get_total
pl_ddi_get_ver
pl_cam_open
List of Available Class 0 Parameter IDs
The following are available Class 0 parameters used with
pl_get_param()
,
pl_set_param()
,
pl_get_enum_param()
, and
pl_enum_str_length()
functions specified in Chapter 5.
PARAM_DD_INFO PARAM_DD_TIMEOUT
PARAM_DD_INFO_LENGTH PARAM_DD_VERSION
PARAM_DD_RETRIES
28 PVCAM Manual Version 2.7
Class 0 Functions
PVCAM Class 0: Camera Communications pl_cam_check(0)
NAME
pl_cam_check —
fails if hcam is not the handle of an open camera.
SYNOPSIS
rs_bool
pl_cam_check(int16 hcam)
DESCRIPTION This is a fast check, used internally by many other functions before they access
hardware. This function checks whether the input handle, hcam, refers to an open
camera.
RETURN VALUE TRUE for a valid handle, FALSE for an invalid handle.
SEE ALSO
pl_cam_open(0), pl_cam_close(0)
NOTES Since this function is a frequent call, it is designed to be highly efficient. It does
not access hardware, it checks the internal state tables that are set by
pl_cam_open
and
pl_cam_close
.

Chapter 3: Camera Communications (Class 0) 29
PVCAM Class 0: Camera Communications pl_cam_close(0)
NAME
pl_cam_close —
frees the current camera, prepares it for power-down.
SYNOPSIS
rs_bool
pl_cam_close(int16 hcam)
DESCRIPTION This has two effects. First, it removes the listed camera from the reserved list,
allowing other users to open and use the hardware. Second, it performs all
cleanup, close-down, and shutdown preparations needed by the hardware. A
camera can only be closed if it was previously opened;
hcam
must be a valid
camera handle.
RETURN VALUE TRUE for success, FALSE for a failure. Failure sets
pl_error_code
.
SEE ALSO
pl_cam_open(0),pl_pvcam_init(0),pl_pvcam_uninit(0)
NOTES pl_pvcam_uninit automatically calls a
pl_cam_close
on all cameras opened
by the current user.
30 PVCAM Manual Version 2.7
PVCAM Class 0: Camera Communications pl_cam_get_diags(0)
NAME
pl_cam_get_diags —
fails and returns an error if there are any problems with
the camera.
SYNOPSIS
rs_bool
pl_cam_get_diags(int16 hcam)
DESCRIPTION All functions that open or reset the camera perform a short set of checks and
diagnostics. The error codes set in these diagnostics are stored in a table. When
hcam
is a valid camera handle,
pl_cam_get_diags
(called immediately after
pl_cam_open
) reads the table and reports any critical error condition by
returning FALSE.
Both critical and noncritical subsystem error codes are set, although only critical
subsystem failures return a FALSE. Critical subsystems are defined as systems
that, if they fail, may prevent the camera from acquiring or reading out an image.
Critical and noncritical errors are listed in
pl_error_code
.
RETURN VALUE FALSE indicates that a critical subsystem is not working, and therefore the
camera may not be able to acquire or read out an image. TRUE indicates that no
error codes have been set for critical subsystems, but there may be error codes
set for noncritical subsystems. Noncritical subsystem errors are considered
warnings. Critical and noncritical errors are listed in
pl_error_code
.
SEE ALSO
pl_cam_open(0)
NOTES This function call is designed to be fast, therefore to ensure that camera hardware
is attached and functional,
pl_cam_get_diags
can be called before every
exposure.
Chapter 3: Camera Communications (Class 0) 31
PVCAM Class 0: Camera Communications pl_cam_get_name(0)
NAME
pl_cam_get_name —
returns the name of a camera.
SYNOPSIS
rs_bool
pl_cam_get_name(int16 cam_num,char_ptr cam_name)
DESCRIPTION This function allows a user to learn the string identifier associated with every
camera on the current system. This is a companion to the
pl_cam_get_total
function. Cam_num input can run from 0 to (
total_cams
- 1), inclusive. The
user must pass in a string that is at least
CAM_NAME_LEN
characters long;
pl_cam_get_name
then fills that string with an appropriate null-terminated
string.
Cam_name
can be passed directly into the
pl_cam_open
function. It has
no other use, aside from providing a brief description of the camera.
RETURN VALUE TRUE for success, FALSE for a failure. Failure sets
pl_error_code
.
SEE ALSO
pl_cam_get_total(0),pl_cam_open(0),pl_cam_close(0)
NOTES This call reports the names of all cameras on the system, even if all the cameras
are not available. If the hardware is turned off, or if another user has a camera
open, the camera name is reported, but is not available.
Pl_cam_get_name
returns a name, and
pl_cam_open
gives information on
availability of that camera. This function actually searches for all device drivers
on the system, without checking hardware. To build a complete list of every
camera on the system, it is necessary to cycle through all entries, as shown
below:
int total_cameras;
char cam_name[CAM_NAME_LEN];
…
pl_cam_get_total(&total_cameras );
for( I=0; I<total_cameras; I++ ) {
pl_cam_get_name(I,cam_name);
printf("Camera%d is called '%s’\n",I,cam_name);
}
32 PVCAM Manual Version 2.7
PVCAM Class 0: Camera Communication pl_cam_get_total(0)
NAME
pl_cam_get_total —
returns the number of cameras attached to the system.
SYNOPSIS
rs_bool
pl_cam_get_total(int16_ptr total_cams)
DESCRIPTION This reports on the number of cameras on the system. All listed cameras may not
all be available; on multi-tasking systems, some cameras may already be in use
by other users. A companion function,
pl_cam_get_name
, can be used to learn
the string identifier associated with each camera.
RETURN VALUE TRUE for success, FALSE for a failure. Failure sets
pl_error_code
.
SEE ALSO
pl_cam_get_name(0),pl_cam_open(0),pl_cam_close(0)
NOTES This function actually searches for all device drivers on the system, without
checking hardware. The list of cameras is obtained during
pl_pvcam_init
.
Thus, if a new camera (new device driver) is added after the library was opened,
the system won't know that the new camera is there. The system also won't
notice if a camera is removed. (Obviously, this is only important on multi-
tasking systems). A cycle of
uninit/init
regenerates the list of available
cameras, updating the system for any additions or deletions.
Chapter 3: Camera Communications (Class 0) 33
PVCAM Class 0: Camera Communications pl_cam_open(0)
NAME
pl_cam_open —
reserves and initializes the camera hardware.
SYNOPSIS
rs_bool
pl_cam_open(char_ptr cam_name,int16_ptr hcam,int16 o_mode)
DESCRIPTION The string cam_name should be identical to one of the valid camera names
returned by
pl_cam_get_name
. If the name is valid,
pl_camera_open
completes a short set of checks and diagnostics as it attempts to establish
communications with the camera electronics unit. If successful, the camera is
opened and a valid camera handle is passed back in
hcam
. Otherwise,
pl_cam_open
returns with a failure. An explanation is shown in
pl_error_code
.
The
o_mode
setting controls the mode under which the camera is opened.
Currently, the only possible choice is
OPEN_EXCLUSIVE
. On multi-user
systems, opening a camera under the exclusive mode reserves it for the current
user, locking out all other users on the system. If
pl_cam_open
is successful,
the user has sole access to that camera until the camera is closed or
pl_pvcam_uninit
is called.
WARNING Despite the above paragraph, a successful
pl_cam_open
does not mean that the
camera is in working order. It does mean that you can communicate with the
camera electronics unit. After a successful
pl_cam_open
, call
pl_cam_get_diags
, which reports any error conditions.
RETURN VALUE TRUE for success, FALSE for a failure. Failure sets
pl_error_code
.
SEE ALSO
pl_cam_get_diags(0), pl_cam_get_name(0),
pl_cam_get_total(0), pl_cam_close(0), pl_pvcam_init(0),
pl_pvcam_uninit(0)
NOTES
34 PVCAM Manual Version 2.7
PVCAM Class 0: Camera Communications pl_ddi_get_ver(0)
NAME
pl_ddi_get_ver —
returns version number of the current DDI (device driver
interface)
SYNOPSIS
rs_bool
pl_ddi_get_ver(uns16_ptr version)
DESCRIPTION This returns a version number for the current device driver interface. The version
is a formatted hexadecimal number, of the style:
low byte
------------ -------------
high byte hi nibble low nibble
major version minor version trivial version
For example, the number 0x11F1 indicates major release 17, minor release 15,
and trivial change 1.
A major release is defined as anything that alters the interface, calling sequence,
parameter list, or parameter interpretation of any function in the DDI library. A
new major release will often require a change in the PVCAM library, but,
wherever possible, major releases will be backward compatible with earlier
releases.
A minor release should be completely transparent to higher-level software
(PVCAM), but may include internal enhancements. The trivial version is
reserved for use by the software staff to keep track of extremely minor
variations. The last digit may also be used to flag driver versions constructed for
unique customers or situations. Minor and trivial releases should require no
change in the calling software.
RETURN VALUE TRUE for success, FALSE for a failure. Failure sets
pl_error_code
.
SEE ALSO Parameter id
PARAM_DD_VERSION(0),pl_pvcam_get_ver(0)
NOTES The DDI is the glue layer that lies between PVCAM and the actual device driver.
For most users, this function and the DDI itself should be completely ignored. In
some rare cases, the DDI library will be shipped separately from the PVCAM
library. In those situations, this function will be necessary to ensure that PVCAM
and the DDI are compatible versions.
Chapter 3: Camera Communications (Class 0) 35
PVCAM Class 0: Camera Communication pl_pvcam_get_ver(0)
NAME
pl_pvcam_get_ver —
returns the PVCAM version number.
SYNOPSIS
rs_bool
pl_pvcam_get_ver(uns16_ptr version)
DESCRIPTION This returns a version number for this edition of PVCAM. The version is a
highly formatted hexadecimal number, of the style:
low byte ------------ -------------
high byte hi nibble low nibble
major version minor version trivial version
For example, the number 0x11F1 indicates major release 17, minor release 15,
and trivial change 1.
A major release is defined as anything that alters the interface, calling sequence,
parameter list, or interpretation of any function in the library. This includes new
functions and alterations to existing functions, but it does not include alterations
to the options libraries, which sit on top of PVCAM (each option library includes
its own, independent version number).
A new major release often requires a change in the PVCAM library, but
wherever possible, major releases are backward compatible with earlier releases.
A minor release should be completely transparent to higher-level software
(PVCAM) but may include internal enhancements. The trivial version is reserved
for use by the software staff to keep track of extremely minor variations. The last
digit may also be used to flag versions of the driver constructed for unique
customers or situations. Minor and trivial releases should require no change in
the calling software.
RETURN VALUE TRUE for success, FALSE for a failure. Failure sets
pl_error_code
.
SEE ALSO
pl_ddi_get_ver(0),
parameter id
param_dd_version
NOTES
36 PVCAM Manual Version 2.7
PVCAM Class 0: Camera Communication pl_pvcam_init(0)
NAME
pl_pvcam_init —
opens and initializes the library.
SYNOPSIS
rs_bool
pl_pvcam_init(void)
DESCRIPTION The PVCAM library requires significant system resources: memory, hardware
access, etc.
pl_pvcam_init
prepares these resources for use, as well as
allocating whatever static memory the library needs. Until
pl_pvcam_init
is
called, every PVCAM function (except for the error reporting functions) will fail
and return an error message that corresponds to "
library has not been
initialized
".
RETURN VALUE TRUE for success, FALSE for a failure. Failure sets
pl_error_code.
SEE ALSO
pl_pvcam_uninit(0),pl_cam_open(0),pl_error_code(1)
NOTES If this call fails,
pl_error_code
contains the code that lists the reason for
failure.
Chapter 3: Camera Communications (Class 0) 37
PVCAM Class 0: Camera Communication pl_pvcam_uninit(0)
NAME
pl_pvcam_uninit —
closes the library, closes all devices, frees memory.
SYNOPSIS
rs_bool
pl_pvcam_uninit(void)
DESCRIPTION This releases all system resources that
pl_pvcam_init
acquired. It also
searches for all cameras that the user has opened. If it finds any, it will close
them before exiting. It will also unlock and free memory, and clean up after itself
as much as possible.
RETURN VALUE TRUE for success, FALSE for a failure. Failure sets
pl_error_code
.
SEE ALSO
pl_pvcam_init(0),pl_cam_close(0),pl_error_code(1)
KNOWN BUGS If the hardware is involved in acquiring data, the system may not be able to
disconnect immediately.
38 PVCAM Manual Version 2.7
Class 0 Parameter IDs
The following parameter IDs are used with
pl_get_param
,
pl_set_param
,
pl_get_enum_param
, and
pl_enum_str_length
functions described in Chapter 5.
Note:
Camera Dependent
indicates that this parameter or function is not available to all
Roper Scientific cameras. If a parameter or function is marked
Camera Dependent
, an
ATTR_AVAIL should be called to see if the camera supports it.
Class 0 Parameter ID Description
PARAM_DD_INFO
Camera Dependent
Returns an information message for each device. Some
devices have no message. The user is responsible for
allocating enough memory to hold the message string
(
PARAM_DD_INFO_LENGTH
).
Datatype:
char_ptr
PARAM_DD_INFO_LENGTH
Camera Dependent
Returns the length of an information message for each
device. Some devices have no message. In other words,
they return a value of 0 for bytes.
Datatype:
int16
PARAM_DD_RETRIES
Camera Dependent
Reads/sets the maximum number of command
retransmission attempts that are allowed. When a
command or status transmission is garbled, the system
signals for a retransmission. After a certain number of
failed transmissions (an initial attempt + max_retries),
the system abandons the attempt and concludes that the
communications link has failed. The camera won't
close, but the command or status read returns with an
error. The maximum number of retries is initially set by
the device driver, and is matched to the
communications link, hardware platform, and operating
system. It may also be reset by the user.
Datatype:
uns16
PARAM_DD_TIMEOUT
Camera Dependent
Reads/sets the maximum time the driver waits for
acknowledgment (i.e., the slowest allowable response
speed from the camera). This is a crucial factor used in
the device driver for communications control. If the
driver sends a command to the camera and doesn't
receive acknowledgment within the timeout period, the
driver times out and returns an error. Unless reset by
the user, this timeout is a default setting that is
contained in the device driver and is matched to the
communications link, hardware platform, and operating
system.
Datatype:
uns16
Chapter 3: Camera Communications (Class 0) 39
Class 0 Parameter ID Description
PARAM_DD_VERSION
Returns a version number for the device driver used to
access the camera
hcam
. The version is a formatted
hexadecimal number, of the style:
high byte low byte
------------ ------------ -------------
hi nibble low nibble
major version minor version trivial version
For example, the number 0xB1C0 indicates major
release 177, minor release 12, and trivial change 0.
A major release is defined as anything that alters the
user interface, calling sequence, or parameter
interpretation of any device driver interface function
(anything that would alter the driver's API). A new
major release often requires the calling software to
change, but wherever possible, major releases are
backward compatible with earlier releases.
A minor release should be completely transparent to
higher level software, but may include internal
enhancements. A trivial change is reserved for use by
the software staff to keep track of extremely minor
variations. The last digit may also be used to flag
versions of the driver constructed for unique customers
or situations. Minor and trivial releases should require
no change in the calling software.
Open the camera before calling this parameter. Note
that different cameras on the same system may use
different drivers. Thus, each camera can have its own
driver, and its own driver version.
Datatype:
uns16

40 PVCAM Manual Version 2.7
This page intentionally left blank.

41
Chapter 4:
Error Reporting (Class 1)
Introduction
Virtually every PVCAM function resets the error code to 0 (no error). This means that
pl_error_code only reports the error status of the most recent function used. Since all PVCAM
functions universally return a TRUE for no error/success, and a FALSE for a failure, you can use
the following construction to report errors:
char msg[ERROR_MSG_LEN];
if (! pl_pvcam_do_something(. . .) ) {
pl_error_message ( pl_errror_code(),msg ) ;
printf("pvcam_do_thing failed with message ’%s’/n",msg):
}
If you need to check whether the function works before executing further code, you could use the
sample construction below:
if(pl_pvcam_do_something(. . .) ) { /* function succeeded */
. . . code . . .
}
else { /* function failed, print msg*/
pl_error_message(pl_error_code(),msg);
printf("pvcam_do_thing failed with message’%s’/n",msg):
}
Although the (
function==TRUE
) style works well in many cases, you may prefer a more
explanatory comparison. In that case, the following two constants are defined for your use:
#define PV_OK TRUE
#define PV_FAIL FALSE
Using these two constants, the code above can be rewritten as follows:
if(pvcam_do_thing()==PV_OK){ /*func succeeded */
. . .
or
if(pvcam_do_thing()==PV_FAIL){/*func failed, print msg*/
. . .
Use any of the styles illustrated above in any mix. The differences are only a matter of stylistic
preference.

42 PVCAM Manual Version 2.7
Error Codes
All successful functions reset
pl_error_code
to 0, which produces the message "
No error".
All unsuccessful functions return a numeric value, where that value corresponds to a number linked
to a published list of error code messages. Appendix A of this manual lists all error code messages.
List of Available Class 1 Functions
Class 1 Error Code functions are listed below:
pl_error_code
pl_error_message
Chapter 4: Error Reporting (Class 1) 43
Class 1 Functions
PVCAM Class 1: Error Reporting pl_error_code(1)
NAME
pl_error_code —
returns the most recent error condition.
SYNOPSIS
int16
pl_error_code(void)
DESCRIPTION As every PVCAM function begins, it resets the error code to 0. If an error occurs
later in the function, the error code is set to a corresponding value. Consult
Appendix A in this manual for a complete list of error codes.
RETURN VALUE The current error code. Note that a call to
pl_error_code
does not reset the
error code.
SEE ALSO
pl_error_message(1)
NOTES
pl_error_code
works even before
pl_pvcam_init
is called. This allows a
message to be returned if
pl_pvcam_init
fails.
In the error codes structure, the thousands digit indicates the class of the failed
function.
KNOWN BUGS The PVCAM library does not intercept signals. Errors that interrupt the normal
process (divide by zero, etc.) may cause the software to crash, and
pl_error_code
may or may not contain useful information.
44 PVCAM Manual Version 2.7
PVCAM Class 1: Error Reporting pl_error_message(1)
NAME
pl_error_message —
returns a string explaining input error code.
SYNOPSIS
rs_bool
pl_error_message(int16 err_code,char_ptr msg)
DESCRIPTION This function fills in the character string
msg
with a message that corresponds to
the value in
err_code
. The msg string is allocated by the user, and should be at
least
ERROR_MSG_LEN
elements long.
RETURN VALUE TRUE if a message is found corresponding to the input code, FALSE if the code
is out of range or does not have a corresponding message (
msg
will be filled with
the string "
unknown error
"). Even if a FALSE is returned, the value of
pl_error_code
is not altered.
SEE ALSO
pl_error_code(1)
NOTES
pl_error_message
works even before
pl_pvcam_init
is called. This
allows a message to be printed if
pl_pvcam_init
fails.
Most error messages are lower case sentence fragments with no ending period.

45
Chapter 5:
Configuration / Setup (Class 2)
Note:
pl_pvcam_init
must be called before any other function in the library! Until it is called,
all functions will fail and return a FALSE.
pl_pvcam_init
is necessary, even if no hardware
interaction is going to occur.
Introduction
The basic idea of Get/Set functions is to determine if a feature exists in a camera set, what its
attributes are, and how can it be changed (if at all). The main function is
pl_get_param
. This
function is called with a parameter id (
param_id
) and an attribute (
param_attrib
) and returns
the attribute for that parameter. Usually, the user would start off with
ATTR_AVAIL
, which checks
to see if the
param_id
is supported in the software and hardware. If FALSE is returned in the
param_value
, the
param_id
is not supported in either the software or the hardware. If TRUE is
returned, the
param_id
is supported and the user can get the access rights (
ATTR_ACCESS
).
ATTR_ACCESS
tells if the
param_id
can be written to or read or, if it cannot be written to or read,
tells whether a feature is possible. If the parameter can be either written to or read the next step is to
determine its data type.
Data type determination can be done by calling the parameter id with the attribute of data type
(
ATTR_TYPE
), this will report the data type: string (
TYPE_CHAR_PTR
), integer (
TYPE_INT8,
TYPE_UNS8, TYPE_INT16, TYPE_UNS16, TYPE_INT32, TYPE_UNS32
), floating point
(
TYPE_FLT64
), boolean (
TYPE_BOOLEAN
), or an enumerated type (
TYPE_ENUM
). The user can
then get the current value (
ATTR_CURRENT
) and the default value (
ATTR_DEFAULT
) for the
parameter id. If the data type is not the enumerated type, the user can also get the minimum value
(
ATTR_MIN
), the maximum value (
ATTR_MAX
), and the increment (
ATTR_INCREMENT
). Finally, if
the data type is enumerated, the user can get the number of enumerated types that are legal
(
ATTR_COUNT
), and passing the parameter id and index (which has to be between 0 and less than
ATTR_COUNT
), the user can call
pl_get_enum_param
and get the exact enumerated value along
with a string that describes the enumerated type.
Notes:
•
hcam
specifies which camera and which device driver are being used.
hcam
must be a valid
camera handle.
• If the data type coming back from
ATTR_TYPE
is
TYPE_CHAR_PTR
(and not an enumerated
type), then the
ATTR_COUNT
is the number of characters in the string plus a
NULL
terminator.

46 PVCAM Manual Version 2.7
List of Available Class 2 Functions
Class 2 functions represent camera settings. The current Class 2 functions are listed below
according to their respective types and are further described in the "Class 2 Functions" section,
starting on page 48. If the Class 2 functions you are interested in are not listed below, check
"Obsolete Functions" in Appendix B (page 143). Although these functions have been superseded
by
pl_get_param
and
pl_set_param
parameter ids, the list of these functions and their
descriptions have been included for reference purposes.
Camera Settings
pl_get_param
pl_set_param
pl_get_enum_param
pl_enum_str_length
List of Available Class 2 Parameter IDs
The following are available Class 2 parameters used with
pl_get_param()
,
pl_set_param()
,
pl_get_enum_param()
, and
pl_enum_str_length()
functions specified in Chapter 5.
CCD Clearing CCD Physical Attributes
PARAM_ANTI_BLOOMING PARAM_COLOR_MODE
PARAM_CLEAR_CYCLES PARAM_CUSTOM_CHIP
PARAM_CLEAR_MODE PARAM_FTSCAN
PARAM_CONT_CLEARS PARAM_FWELL_CAPACITY
PARAM_MIN_BLOCK PARAM_KIN_WIN_SIZE
PARAM_NUM_MIN_BLOCK PARAM_PAR_SIZE
PARAM_NUM_OF_STRIPS_PER_CLR PARAM_PIX_PAR_DIST
PARAM_SKIP_AT_ONCE_BLK PARAM_PIX_PAR_SIZE
PARAM_PIX_SER_DIST
Temperature Control
PARAM_PIX_SER_SIZE
PARAM_COOLING_MODE PARAM_POSTMASK
PARAM_TEMP PARAM_POSTSCAN
PARAM_TEMP_SETPOINT PARAM_PIX_TIME
PARAM_PREMASK
PARAM_PRESCAN
PARAM_SER_SIZE
PARAM_SUMMING_WELL

Chapter 5: Configuration / Setup (Class 2) 47
Gain CCD Readout
PARAM_GAIN_INDEX PARAM_CCS_STATUS
PARAM_GAIN_MULT_ENABLE PARAM_CUSTOM_TIMING
PARAM_GAIN_MULT_FACTOR PARAM_EDGE_TRIGGER
PARAM_INTENSIFIER_GAIN PARAM_PAR_SHIFT_TIME
PARAM_PREAMP_DELAY PARAM_PMODE
PARAM_PREAMP_OFF_CONTROL PARAM_READOUT_PORT
PARAM_READOUT_TIME
Shutter
PARAM_SER_SHIFT_TIME
PARAM_EXPOSURE_MODE
PARAM_PREFLASH
ADC Attributes
PARAM_SHTR_CLOSE_DELAY PARAM_ADC_OFFSET
PARAM_SHTR_CLOSE_DELAY_UNIT PARAM_BIT_DEPTH
PARAM_SHTR_GATE_MODE PARAM_SPDTAB_INDEX
PARAM_SHTR_OPEN_DELAY
PARAM_SHTR_OPEN_MODE
Cabilities
PARAM_SHTR_STATUS PARAM_ACCUM_CAPABLE
PARAM_FRAME_CAPABLE
I/O
PARAM_MPP_CAPABLE
PARAM_IO_ADDR
PARAM_IO_BITDEPTH
Other
PARAM_IO_DIRECTION PARAM_CAM_FW_VERSION
PARAM_IO_STATE PARAM_CHIP_NAME
PARAM_IO_TYPE PARAM_CONTROLLER_ALIVE
PARAM_LOGIC_OUTPUT PARAM_HEAD_SER_NUM_ALPHA
PARAM_PCI_FW_VERSION
PARAM_SERIAL_NUM
48 PVCAM Manual Version 2.7
Class 2 Functions
PVCAM Class 2: Configuration/Setup pl_get_param(2)
NAME
pl_get_param —
returns the requested attribute for a PVCAM parameter.
SYNOPSIS
rs_bool
pl_get_param (int16 hcam,uns32 param
_
id,int16 param
_
attrib,
void_ptr param_value)
DESCRIPTION This function returns the requested attribute for a PVCAM parameter.
param_id
is an enumerated type that indicates the parameter in question. See
"Class 0 Parameter IDs", "Class 2 Parameter IDs", and "Class 3 Parameter
IDs" for information about valid parameter ids.
param_value
points to the value of the requested attribute for the parameter. It
is a
void_ptr
because it can be different data types: the user is responsible for
passing in the correct data type (see attribute descriptions that follow).
param_attrib
is used to retrieve characteristics of the parameter. Possible
values for
param_attrib
are:
ATTR_ACCESS ATTR_INCREMENT
ATTR_AVAIL ATTR_MAX
ATTR_COUNT ATTR_MIN
ATTR_CURRENT ATTR_TYPE
ATTR_DEFAULT
ATTR_ACCESS
Reports if the
param_id
can be written to and/or read or (if it cannot be written
to and/or read) tells whether a feature exists. If the
param_id
can be either
written to or read, the next step is to determine its data type.
The access types are enumerated:
ACC_ERROR ACC_EXIST_CHECK_ONLY
ACC_READ_ONLY ACC_WRITE_ONLY
ACC_READ_WRITE
The data type for this attribute is
TYPE_UNS16
.
Note: This is an exception where an enum type is not treated as an unsigned 32-
bit integral value
ATTR_AVAIL
Feature available with attached hardware and software. The data type for this
attribute is
TYPE_BOOLEAN
.
Chapter 5: Configuration / Setup (Class 2) 49
PVCAM Class 2: Configuration/Setup pl_get_param(2)
ATTR_COUNT
Number of possible values for enumerated and/or array data types. If the data
type returned by
ATTR_TYPE
is
TYPE_CHAR_PTR
(and not an enumerated
type), then the
ATTR_COUNT
is the number of characters in the string plus a
NULL terminator. If 0 or 1 is returned,
ATTR_COUNT
is a scalar (single
element) of the following data types:
TYPE_INT8
,
TYPE_UNS8
,
TYPE_INT16
,
TYPE_UNS16
,
TYPE_INT32
,
TYPE_UNS32
,
TYPE_FLT64
,
TYPE_BOOLEAN
.
The data type for
ATTR_COUNT
is
TYPE_UNS32
.
ATTR_CURRENT
Current value. The data type for this attribute is defined by
ATTR_TYPE
.
ATTR_DEFAULT
Default value. The data type for this attribute is defined by
ATTR_TYPE
.
ATTR_INCREMENT
Step size for values (zero if non-linear or has no increment). The data type for
this attribute is defined by
ATTR_TYPE
.
ATTR_MAX
Maximum value. The data type for this attribute is defined by
ATTR_TYPE
.
ATTR_MIN
Minimum value. The data type for this attribute is defined by
ATTR_TYPE
.
ATTR_TYPE
Data type of parameter (int16, float 64, enumerated, etc.). The data type for this
is
TYPE_UNS16
. If the data type coming back from
ATTR_TYPE
is
TYPE_CHAR_PTR
(and not an enumerated type), then the
ATTR_COUNT
is the
number of characters in the string plus a NULL terminator.
Data type used by
pl_get_param
with attribute type (
ATTR_TYPE
).
TYPE_CHAR_PTR
string
TYPE_INT8
TYPE_UNS8
TYPE_INT16
TYPE_UNS16
TYPE_INT32
TYPE_UNS32
TYPE_FLT64
TYPE_ENUM
treat as uns32
TYPE_BOOLEAN
TYPE_VOID_PTR
ptr to void
TYPE_VOID_PTR_PTR
ptr to a void ptr
RETURN VALUE TRUE for success, FALSE for a failure. Failure sets
pl_error_code
.
SEE ALSO
pl_set_param and pl_get_enum_param
NOTES The data type of
param_value
is documented in
PVCAM.H
for each
param_id
. It can be retrieved using the
pl_get_param
function, with the
ATTR_TYPE
attribute.
50 PVCAM Manual Version 2.7
PVCAM Class 2: Configuration/Setup pl_set_param(2)
NAME
pl_set_param —
sets the current value for a PVCAM parameter.
SYNOPSIS
rs_bool
pl_set_param(int16 hcam,uns32 param_id,void_ptr
param_value)
DESCRIPTION This function sets the current value for a PVCAM parameter.
param_id
is an enumerated type that indicates the parameter in question. See
"Class 0 Parameter IDs", "Class 2 Parameter IDs", and "Class 3 Parameter
IDs" for information about valid parameter ids.
param_value
points to the new value of the parameter.
RETURN VALUE TRUE for success, FALSE for a failure. Failure sets
pl_error_code
.
SEE ALSO
pl_get_param(2)
NOTES The data type of
param_value
is documented in
PVCAM.H
for each
param_id
. It can be retrieved using the
pl_get_param
function, using the
ATTR_TYPE
attribute.
The user should call the
pl_get_param
function with the attribute
ATTR_ACCESS
, to verify that the parameter id is writeable (settable), before
calling the
pl_set_param
function.
Chapter 5: Configuration / Setup (Class 2) 51
PVCAM Class 2: Configuration/Setup pl_get_enum_param(2)
NAME
pl_get_enum_param —
returns the enumerated value of the parameter
param_id
at
index
.
SYNOPSIS
rs_bool
pl_get_enum_param (int16 hcam,uns32 param_id,uns32
index,int32_ptr value,char_ptr
desc,uns32 length)
DESCRIPTION This function will return the enumerated value of the parameter
param_id
at
index
. It also returns a string associated with the enumerated type (
desc
).
length
indicates the maximum length allowed for the returned description. See
"Class 0 Parameter IDs", "Class 2 Parameter IDs", and "Class 3 Parameter
IDs" for information about valid parameter ids.
RETURN VALUE TRUE for success, FALSE for a failure. Failure sets
pl_error_code
.
SEE ALSO
pl_get_param, pl_set_param, and pl_enum_str_length
NOTES The user should call the
pl_get_param
function with the attribute
ATTR_TYPE
, to verify that the parameter id is an enumerated data type before
calling the
pl_get_enum_param
. The user should also call the
pl_get_param
function with the attribute
ATTR_COUNT
to determine how
many valid enumerated values the parameter id has.
Example: Suppose there is a parameter for camera readout speed. This
parameter can be set to 1MHz, 5MHz, or 10MHz. If the readout speed is
currently set to 5MHz, a call to
pl_get_param
returns a value of 1. A call to
pl_get_enum_param
for the readout speed parameter at
index
1 returns the
enumerated type
5MHz
(which may or may not be equal to 1). The
desc
would
contain "5Mhz".
52 PVCAM Manual Version 2.7
PVCAM Class 2: Configuration/Setup pl_enum_str_length(2)
NAME
pl_enum_str_length —
returns the length of the descriptive string for the
parameter param_id at index.
SYNOPSIS
rs_bool
pl_enum_str_length(int16 hcam,uns32 param_id,uns32 index,
uns32_ptr length)
DESCRIPTION This function will return the length (length) of the descriptive string for the
parameter param_id at index. The length includes the terminating null ("\0")
character.
RETURN VALUE TRUE for success, FALSE for a failure. Failure sets
pl_error_code
.
SEE ALSO
pl_get_enum_param
NOTES This function can be used to determine the amount of memory to allocate for the
descriptive string when calling the
pl_get_enum_param
function. Using the
example in
pl_get_enum_param
, the length returned would be 5 (4 printable
characters plus 1 null character).
Chapter 5: Configuration / Setup (Class 2) 53
Class 2 Parameter IDs
The following parameter IDs are used with
pl_get_param
,
pl_set_param
,
pl_get_enum_param
, and
pl_enum_str_length
functions described in Chapter 5.
Note:
Camera Dependent
indicates that this parameter or function is not available to all
Roper Scientific cameras. If a parameter or function is marked
Camera Dependent
, an
ATTR_AVAIL should be called to see if the camera supports it.
Class 2 Parameter ID Description
PARAM_ACCUM_CAPABLE
Camera Dependent
Returns TRUE if the camera has accumulation capability.
Accumulation functionality is provided with the Class 93
FF plug-in.
Datatype:
rs_bool
PARAM_ADC_OFFSET
Camera Dependent
Bias offset voltage. The units do not correspond to the
output pixel values in any simple fashion (the conversion
rate should be linear, but may differ from system to
system) but a lower offset voltage will yield a lower
value for all output pixels. Pixels brought below zero by
this method will be clipped at zero. Pixels raised above
saturation will be clipped at saturation. Before you can
change the offset level, you must read the current offset
level. The default offset level will also vary from system
to system and may change with each speed and gain
setting.
Note: THIS VALUE IS SET AT THE FACTORY AND
SHOULD NOT BE CHANGED. If you would like to
change this value, please contact customer service before
doing so.
Datatype:
int16
PARAM_ANTI_BLOOMING
Camera Dependent
Does not apply to all cameras. Enables or disables anti-
blooming. Possible values are:
ANTIBLOOM_NOTUSED
ANTIBLOOM_INACTIVE
ANTIBLOOM_ACTIVE
Note: The
ATTR_AVAIL
attribute can be used to tell the
application if this feature is supported.
Datatype:
enum
PARAM_BIT_DEPTH
Number of bits output by the currently selected speed
choice. Although this number might range between 6 and
16, the data will always be returned in an unsigned 16-bit
word. This value indicates the number of valid bits within
that word.
Datatype:
int16
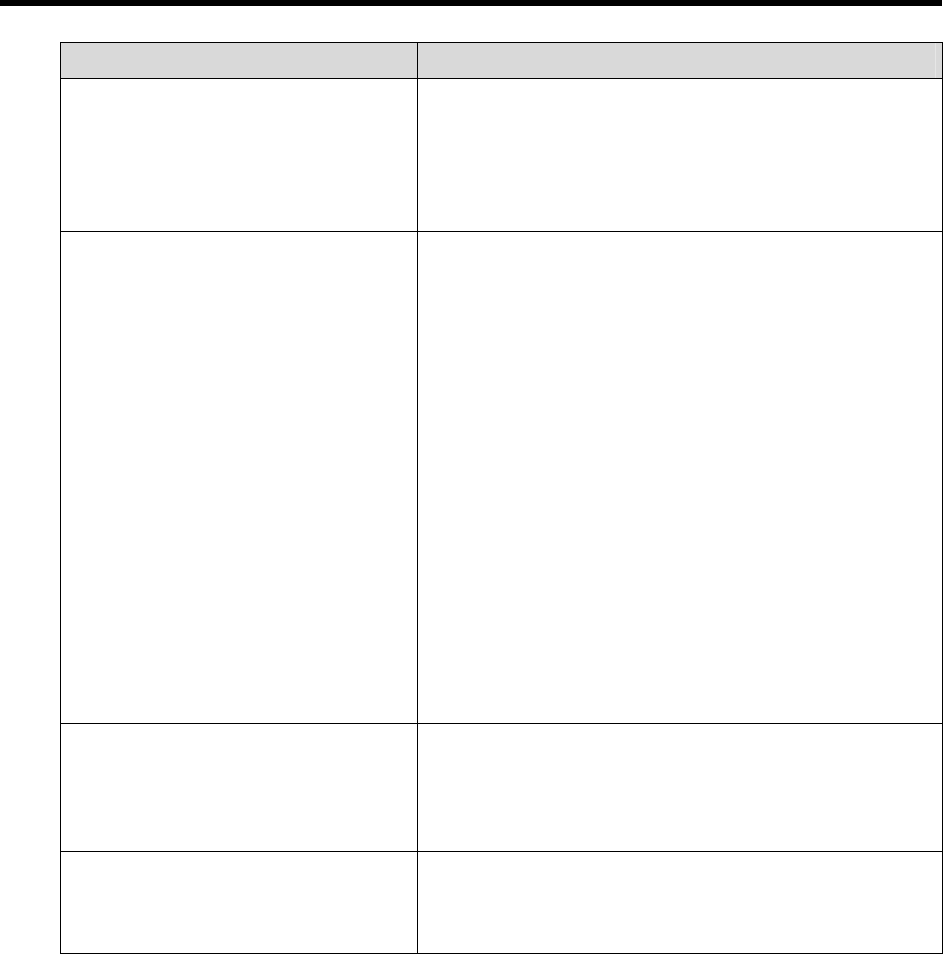
54 PVCAM Manual Version 2.7
Class 2 Parameter ID Description
PARAM_CAM_FW_VERSION
Camera Dependent
Returns the firmware version of the camera, as a
hexadecimal number in the form MMmm, where MM is
the major version and mm is the minor version. For
example, 0x0814 corresponds to version 8.20.
Datatype:
uns16
PARAM_CCS_STATUS
Camera Dependent
This holds sixteen bits of status data from the Camera
Control Subsystem (CCS). Only the lowest 2 bits are
currently implemented. These 2 bits give the status of the
CCS:
Value CCS State
0 idle
1 initializing
2 running
3 continuously clearing
A running state occurs any time the CCS is in the process
of performing a camera operation (including opening or
closing the shutter, exposing, clearing the CCD before a
sequence or exposure, parallel or serial shifting, and
readout/digitization). After the CCD has finished reading
out, the setup determines if the CCS goes to idle or enters
continuous clearing mode.
Datatype:
int16
PARAM_CHIP_NAME
The name of the CCD. The name is a null-terminated text
string. The user must pass in a character array that is at
least
CCD_NAME_LEN
elements long.
Datatype:
char_ptr
PARAM_CLEAR_CYCLES
This is the number of times the CCD must be cleared to
completely remove charge from the parallel register.
Datatype:
uns16
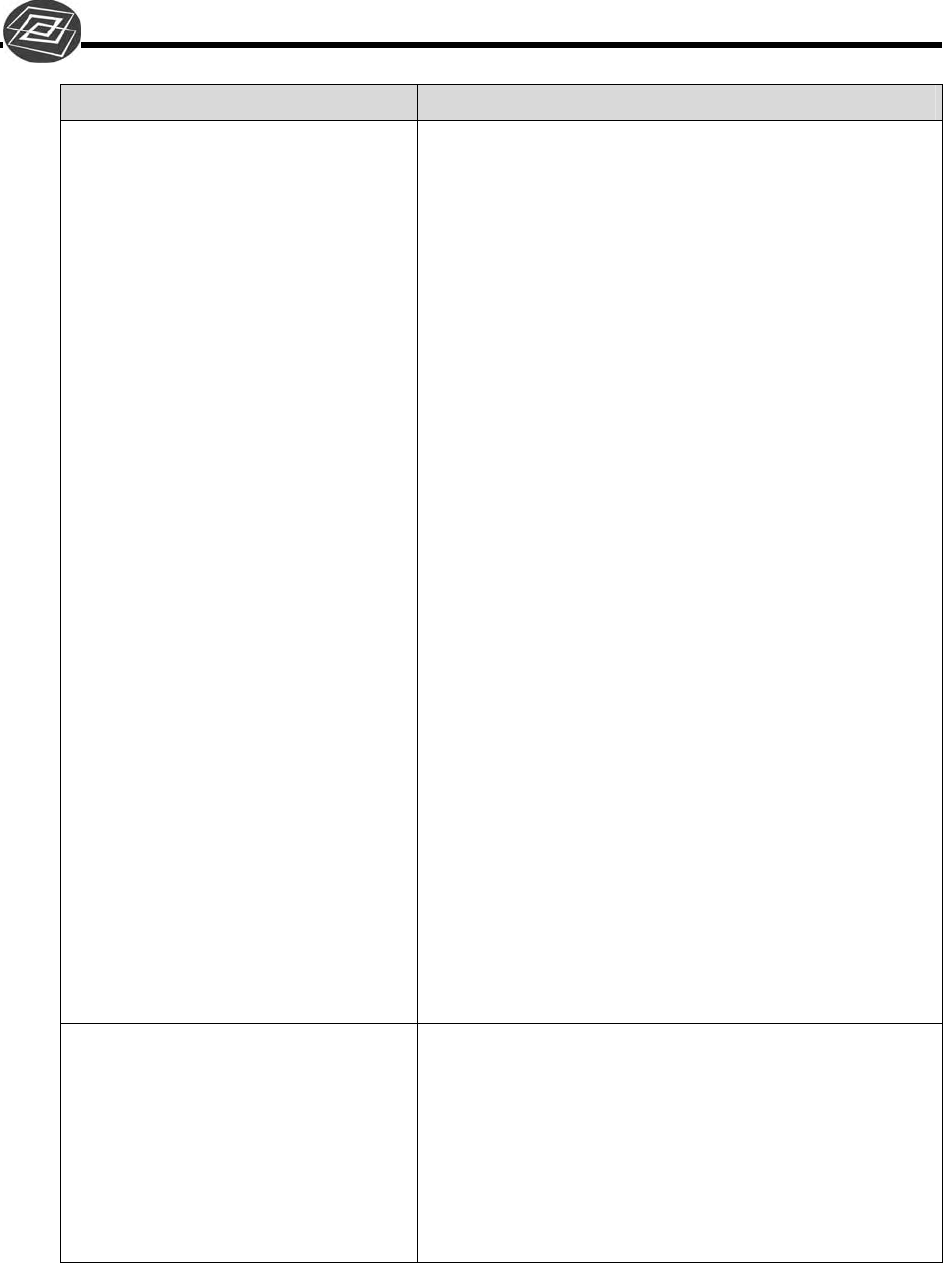
Chapter 5: Configuration / Setup (Class 2) 55
Class 2 Parameter ID Description
PARAM_CLEAR_MODE
Camera Dependent
This defines when clearing takes place. See enum below
for possible values.
CLEAR_NEVER
CLEAR_PRE_EXPOSURE
CLEAR_PRE_SEQUENCE
CLEAR_POST_SEQUENCE
CLEAR_PRE_POST_SEQUENCE
CLEAR_PRE_EXPOSURE_POST_SEQ
CLEAR_NEVER
Don't ever clear the CCD.
CLEAR_PRE_EXPOSURE
Clear clear_cycles times before each exposure starts.
CLEAR_PRE_SEQUENCE
Clear clear_cycles times before the sequence starts.
CLEAR_POST_SEQUENCE
Do continuous clearing after the sequence ends.
CLEAR_PRE_POST_SEQUENCE
Clear clear_cycles times before the sequence starts
and continuous clearing after the sequence ends.
CLEAR_PRE_EXPOSURE_POST_SEQ
Clear clear_cycles times before each exposure starts
and continuous clearing after the sequence ends.
The
CLEAR_NEVER
setting is particularly useful for
performing a readout after an exposure has been aborted.
Note that normally during the idle period, the CCS
parallel clock drivers and serial drivers revert to a low
power state. This saves on both power and heat. If any
CLEAR_..._POST
options are used, these systems will
not enter low power mode. This will generate extra heat
in both the electronics unit and the camera head.
Datatype:
enum
PARAM_COLOR_MODE
Camera Dependent
The color mode of the CCD. See enum below for
possible values.
COLOR_NONE=0
COLOR_RGGB=2
COLOR_NONE
= monochrome
COLOR_RGGB
= RGGB color mask
Datatype:
enum

56 PVCAM Manual Version 2.7
Class 2 Parameter ID Description
PARAM_CONTROLLER_ALIVE
This is a general parameter that checks to see if the
controller is on and running. Returns a TRUE if the
controller is "alive".
Datatype:
rs_bool
PARAM_COOLING_MODE
This is the type of cooling used by the current camera.
See enum below for possible values.
NORMAL_COOL=TE_COOLED
CRYO_COOL=LN_COOLED
NORMAL_COOL
This is a thermo-electrically (TE)-cooled camera with
air or liquid assisted cooling.
CRYO_COOL
The camera is cryogenically cooled. A camera cooled
via Liquid Nitrogen (LN) in an attached Dewar is an
example of a cryo-cooled camera.
Datatype:
enum
PARAM_CUSTOM_CHIP
Camera Dependent
Enables the custom chip option. This option allows the
user to change the CCD's dimensions in software. The
ROI setting after the custom chip has been defined are
based on the custom chip dimensions, not on the the
actual physical dimensions of the array. This feature
enables over-scans, TDI (Time-delay integration) data
acquisitions, and virtual chip operations.
When the custom chip option is enabled, the
ATTR_ACCESS of the following parameters changes from
ACC_READ_ONLY to ACC_READ_WRITE:
PARAM_PREMASK PARAM_PRESCAM
PARAM_POSTMASK PARAM_POSTSCAN
PARAM_PAR_SIZE PARAM_SER_SIZE
Datatype:
rs_bool
PARAM_CUSTOM_TIMING
Camera Dependent
Enables the custom timing option. This option allows the
user to change the shift time. This capability is mostly
used for kinetics operation but may also be used with
frame transfer chips. Readout time will be recalculated
for the new speed. PARAM-PAR_SHIFT_TIME and
PARAM_SER_SHIFT_TIME are the params used to change
the shift time.
Datatype:
rs_bool
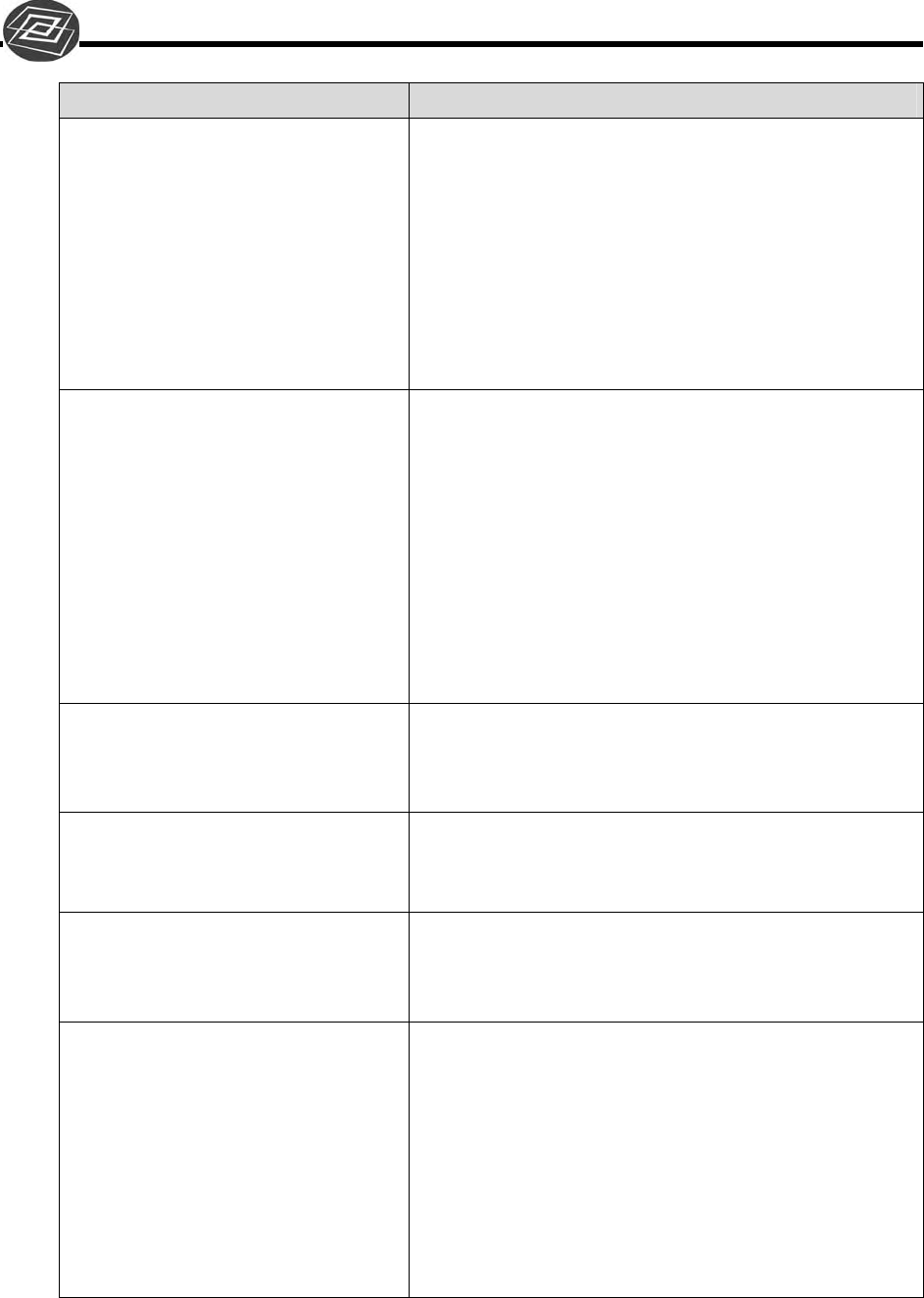
Chapter 5: Configuration / Setup (Class 2) 57
Class 2 Parameter ID Description
PARAM_EDGE_TRIGGER
Camera Dependent
Does not apply to all cameras. Edge Trigger defines
whether the external sync trigger is positive or negative
edge active. This is for the ST133 family (1 and 5 MHz)
and PentaMAX V5.0. Possible values:
EDGE_TRIG_POS=2
EDGE_TRIG_NEG
Note: The
ATTR_AVAIL
attribute can be used to tell the
application if this feature is supported.
Datatype:
enum
PARAM_EXPOSURE_MODE
This parameter cannot be set but its value can be
retrieved. Possible values:
TIMED_MODE
STROBED_MODE
BULB_MODE
TRIGGER_FIRST_MODE
FLASH_MODE
VARIABLE_TIMED_MODE
Note: See "Exposure Mode Constants" on page 69 for
information about these modes.
Datatype:
enum
PARAM_FRAME_CAPABLE
Camera Dependent
If true, this camera can run in frame transfer mode (set
through
PARAM_PMODE
).
Datatype:
rs_bool
PARAM_FTSCAN
Camera Dependent
This is the number of frame transfer dummies between
the active and masked areas.
Datatype:
uns16
PARAM_FWELL_CAPACITY
Camera Dependent
Gets the full-well capacity of this CCD, measured in
electrons.
Datatype:
uns32
PARAM_GAIN_INDEX
Gain setting for the current speed choice. The valid range
for a gain setting is 1 through
PARAM_GAIN_INDEX
with
ATTR_MAX
, where the max gain may be as high as 16.
Values outside this range will be ignored. Note that gain
settings may not be linear! Values 1-16 may not
correspond to 1x - 16x, and there are holes between the
values. However, when the camera is initialized, and every
time a new speed is selected, the system will always reset
to run at a gain of 1x.
Datatype:
int16

58 PVCAM Manual Version 2.7
Class 2 Parameter ID Description
PARAM_GAIN_MULT_ENABLE
Camera Dependent
Gain multiplier on/off indicator for cameras with the
multiplication gain functionality.
This parameter may be read-only, in which case the gain
is always on.
Datatype:
rs_bool
PARAM_GAIN_MULT_FACTOR
Camera Dependent
Gain multiplication factor for cameras with multiplication
gain functionality. The valid range is 1 through
PARAM_GAIN_MULT_FACTOR
with
ATTR_MAX
.
Datatype:
uns1
6
PARAM_HEAD_SER_NUM_ALPHA
Camera Dependent
Returns the alphanumeric serial number for the camera
head. The serial number for Photometrics-brand cameras
has a maximum length of
MAX_ALPHA_SER_NUM_LEN
.
Datatype:
char_ptr
PARAM_INTENSIFIER_GAIN
Camera Dependent
Does not apply to all cameras. Intensifier gain has a range
of 0-255.
Note: The
ATTR_AVAIL
attribute can be used to tell the
application if this feature is supported.
Datatype:
int16
PARAM_IO_ADDR
Camera Dependent
Sets and gets the currently active I/O address. The
number of available I/O addresses can be obtained using
the
ATTR_COUNT
attribute with the
PARAM_IO_ADDR
parameter ID.
Datatype:
uns16
PARAM_IO_BITDEPTH
Camera Dependent
Gets the bit depth for the signal at the current address.
The bit depth has different meanings, depending on the
I/O Type:
IO_TYPE_TTL
The number of bits read or written at this address.
IO_TYPE_DAC
The number of bits written to the DAC.
Datatype:
uns16
PARAM_IO_DIRECTION
Camera Dependent
Gets the direction of the signal at the current address.
Possible values are:
IO_DIR_INPUT
IO_DIR_OUTPUT
IO_DIR_INPUT_OUTPUT
Datatype:
enum
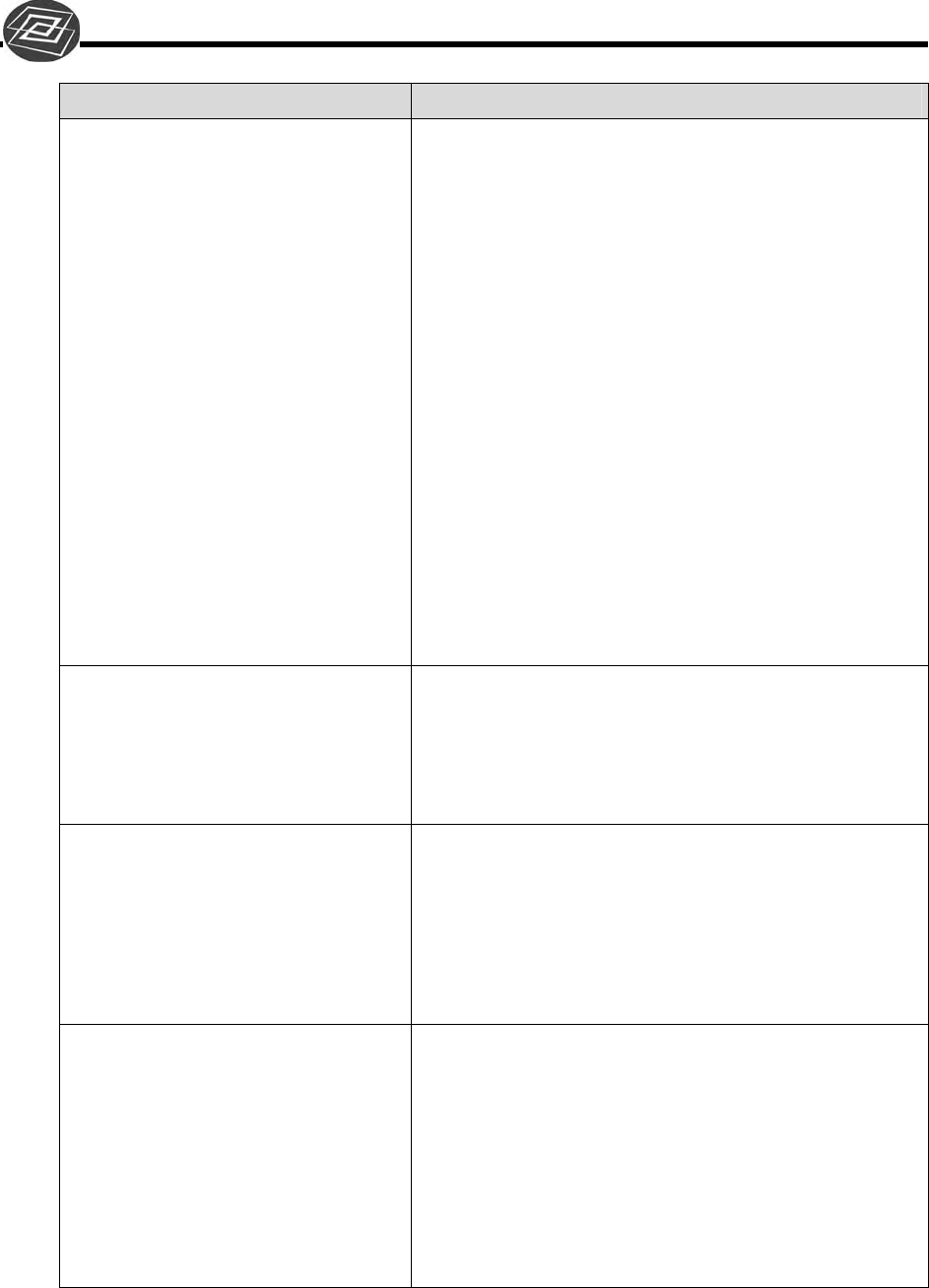
Chapter 5: Configuration / Setup (Class 2) 59
Class 2 Parameter ID Description
PARAM_IO_STATE
Camera Dependent
Sets and gets the state of the currently active I/O signal.
The new (when setting) or return (when getting) value
has different meanings, depending on the I/O Type:
IO_TYPE_TTL
A bit pattern, indicating the current state (0 or 1) of
each of the control lines (bit 0 indicates line 0 state,
etc.).
IO_TYPE_DAC
The value of the desired analog output (only applies
to pl_set_param).
The minimum and maximum range for the signal can be
obtained using the
ATTR_MIN
and
ATTR_MAX
attributes, respectively, with the
PARAM_IO_ADDR
parameter ID.
When outputting signals, the state is the desired output.
For example, when setting the output of a 12-bit DAC
with a range of 0-5V to half-scale, the state should be 2.5
(volts), not 1024 (bits).
Datatype:
flt64
PARAM_IO_TYPE
Camera Dependent
Gets the type of I/O available at the current address.
Possible values are:
IO_TYPE_TTL
IO_TYPE_DAC
Datatype:
enum
PARAM_KIN_WIN_SIZE
Camera Dependent
This is used to enter the size of the kinetics window
(a partial area that is exposed to light). Data is
acquired in this area and then shifted to the masked
area repeatedly until the CCD array is full and is then
read out. The window size must be 1 or greater and
less than or equal to the number of rows on the array.
Datatype:
unsign16
PARAM_LOGIC_OUTPUT
Camera Dependent
Kinds of output are:
OUTPUT_NOT_SCAN
OUTPUT_SHUTTER
OUTPUT_NOT_RDY
OUTPUT_LOGIC0
OUTPUT_CLEARING
OUTPUT_NOT_FT_IMAGE_SHIFT
OUTPUT_RESERVED
OUTPUT_LOGIC1
Datatype:
enum

60 PVCAM Manual Version 2.7
Class 2 Parameter ID Description
PARAM_MIN_BLOCK
Camera Dependent
This is the CCD skip parameter for the amount to group
on the shift register and throw away.
Datatype:
int16
PARAM_MPP_CAPABLE
Camera Dependent
Indicates whether this CCD runs in MPP mode. The
actual value returned is equal to one of four constants:
Possible values.
MPP_UNKNOWN
MPP_ALWAYS_OFF
MPP_ALWAYS_ON
MPP_SELECTABLE
Datatype:
enum
PARAM_NUM_MIN_BLOCK
Camera Dependent
This is the CCD skip parameter for the number of
minimum block groups to use before valid data.
Datatype:
int16
PARAM_NUM_OF_STRIPS_PER_CLR
Camera Dependent
This is the CCD skip parameter for the number of strips
per clear. Used to define how many clears to use for
continuous clears and used with clears to define the clear
area at the beginning of an experiment.
Datatype:
int16
PARAM_PAR_SHIFT_TIME
Camera Dependent
This is the parallel shift time that can be changed after
custom timing has been enabled
(PARAM_CUSTOM_TIMING). The time must fall with the
ATTR_MIN and ATTR_MAX and the ATTR_INCREMENT or a
multiple of the increment that falls within the minimum
and maximum values. Increments are in terms of
nanoseconds.
See also PARAM_SER_SHIFT_TIME.
Datatype:
int16
PARAM_PAR_SIZE
This is the parallel size of the CCD, in active rows. The
full size of the parallel register is actually (
par_size
+
premask
+
postmask
). When the custom chip option is
enabled, the ATTR_ACCESS of the following parameters
changes from ACC_READ_ONLY to ACC_READ_WRITE.
Datatype:
uns16
PARAM_PCI_FW_VERSION
Camera Dependent
Returns the version number of the PCI firmware. This
number is a single 16-bit unsigned value.
Datatype:
uns16
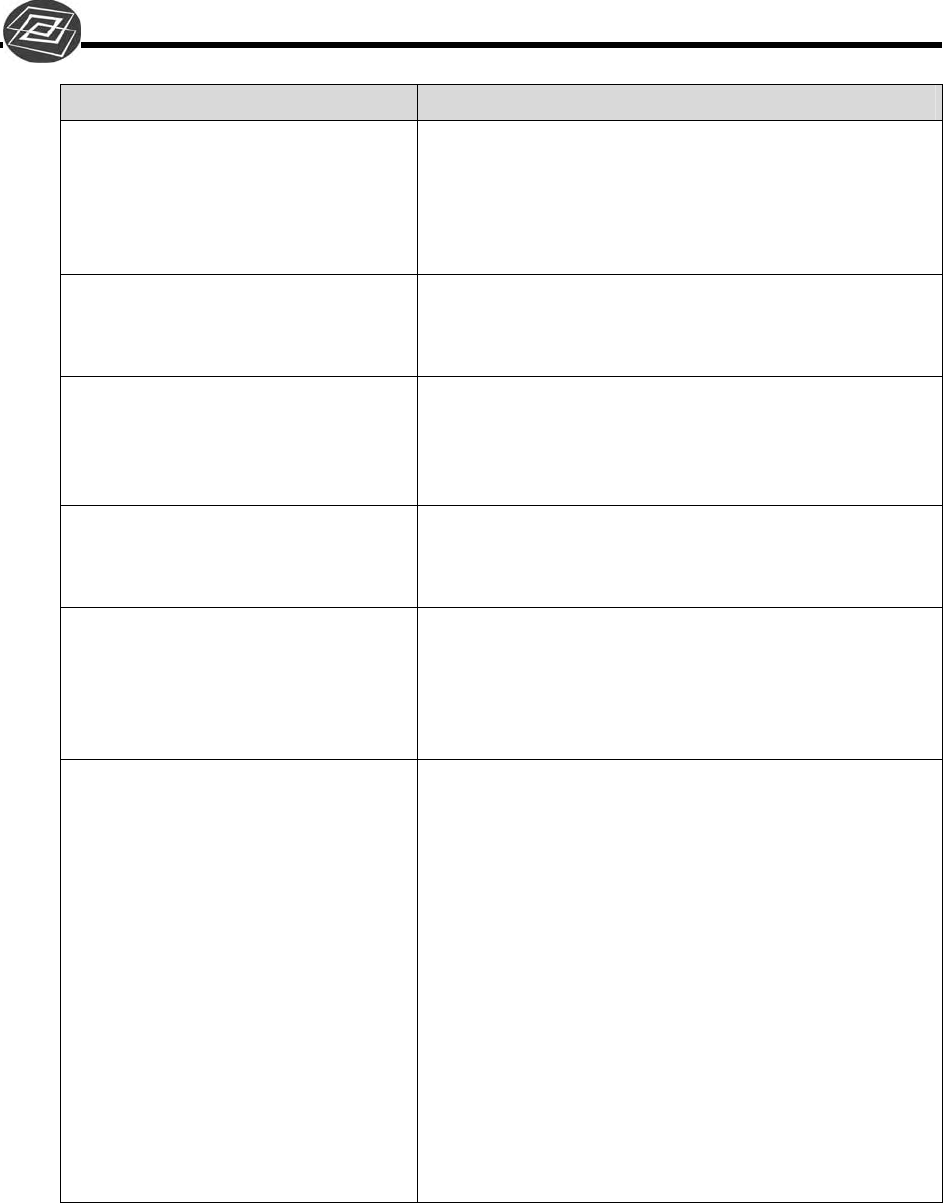
Chapter 5: Configuration / Setup (Class 2) 61
Class 2 Parameter ID Description
PARAM_PIX_PAR_DIST
This is the center-to-center distance between pixels (in
the parallel direction) measured in nanometers. This is
identical to
PARAM_PIX_PAR_SIZE
if there are no
interpixel dead areas.
Datatype:
uns16
PARAM_PIX_PAR_SIZE
This is the size of the active area of a pixel, in the parallel
direction, measured in nanometers.
Datatype:
uns16
PARAM_PIX_SER_DIST
This is the center-to-center distance between pixels (in
the serial direction), in nanometers. This is identical to
PARAM_PIX_SER_SIZE
, if there are no dead areas.
Datatype:
uns16
PARAM_PIX_SER_SIZE
This is the size of a single pixel’s active area, in the serial
direction, measured in nanometers.
Datatype:
uns16
PARAM_PIX_TIME
This is the actual speed for the currently selected speed
choice. It returns the time for each pixel, in nanoseconds.
This readout time will change as new speed choices are
selected.
Datatype:
uns16
PARAM_PMODE
This allows the user to select the parallel clocking
method. Possible values are:
PMODE_NORMAL
PMODE_FT
PMODE_INTERLINE
PMODE_KINETICS
PMODE_MPP
PMODE_FT_MPP
PMODE_ALT_NORMAL
PMODE_ALT_FT
PMODE_ALT_MPP
PMODE_ALT_FT_MPP
where
FT
indicates frame transfer mode,
FT_MPP
indicates both frame transfer and
MPP
mode.
ALT
indicates that custom parameters may be loaded.
Datatype:
enum
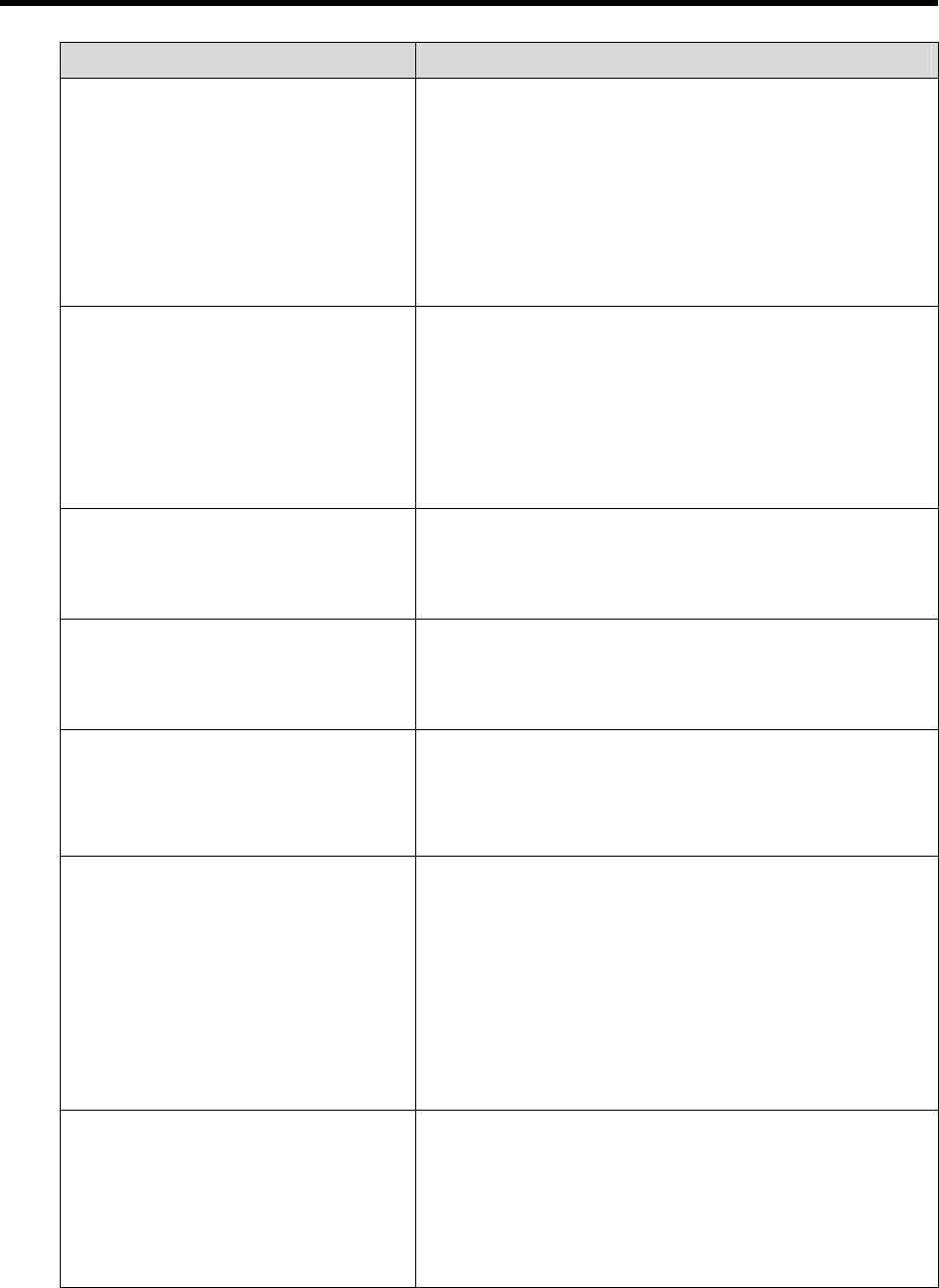
62 PVCAM Manual Version 2.7
Class 2 Parameter ID Description
PARAM_POSTMASK
This is the number of masked lines at the far end of the
parallel register (away from the serial register). This is
the number of additional parallel shifts that need to be
done after readout to clear the parallel register. When the
custom chip option is enabled, the ATTR_ACCESS of the
following parameters changes from ACC_READ_ONLY to
ACC_READ_WRITE.
Datatype:
uns16
PARAM_POSTSCAN
This is the number of pixels to discard from the serial
register after the last real data pixel. These must be read
or discarded to clear the serial register. When the custom
chip option is enabled, the ATTR_ACCESS of the following
parameters changes from ACC_READ_ONLY to
ACC_READ_WRITE.
Datatype:
uns16
PARAM_PREAMP_DELAY
Camera Dependent
This is the number of milliseconds required for the CCD
output preamp to stabilize, after it is turned on.
Datatype:
uns16
PARAM_PREAMP_OFF_CONTROL
Camera Dependent
The exposure time limit in milliseconds above which the
preamp is turned off during exposure.
Datatype:
uns32
PARAM_PREFLASH
Camera Dependent
OBSOLETE
This is the number of milliseconds needed to illuminate
the CCD using the flash diode ring before an exposure,
dark, or bias.
Datatype:
uns16
PARAM_PREMASK
This is the number of masked lines at the near end of the
parallel register, next to the serial register. 0=no mask (no
normal mask). If the
premask
is equal to
par_size
,
this probably indicates a frame transfer device with an
ordinary mask. Accordingly, the CCD should probably be
run in frame transfer mode. When the custom chip option
is enabled, the ATTR_ACCESS of the following parameters
changes from ACC_READ_ONLY to ACC_READ_WRITE.
Datatype:
uns16
PARAM_PRESCAN
This is the number of pixels discarded from the serial
register before the first real data pixel. When the custom
chip option is enabled, the ATTR_ACCESS of the following
parameters changes from ACC_READ_ONLY to
ACC_READ_WRITE.
Datatype:
uns16
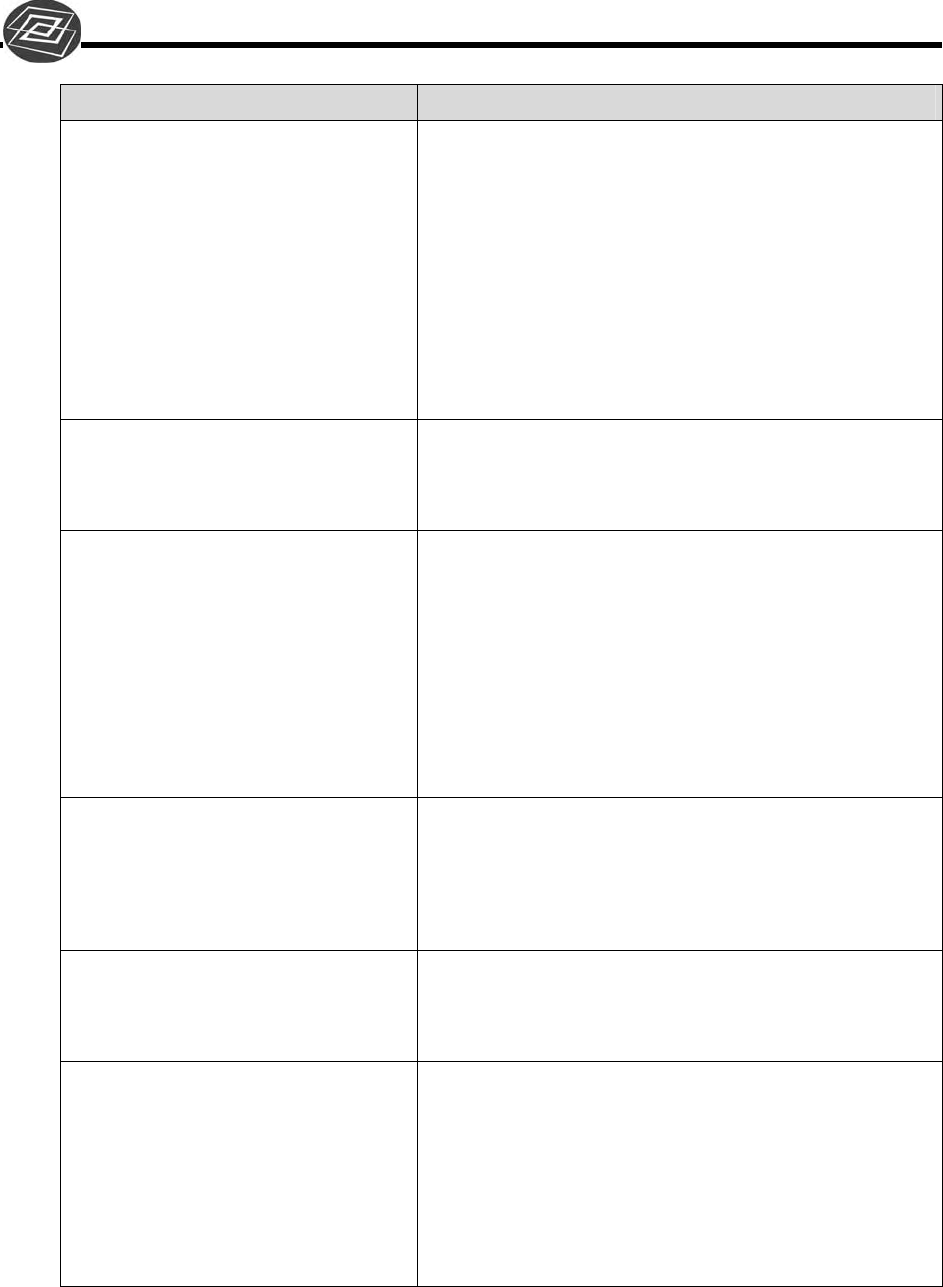
Chapter 5: Configuration / Setup (Class 2) 63
Class 2 Parameter ID Description
PARAM_READOUT_PORT
Camera Dependent
CCD readout port being used by the currently selected
speed. Different readout ports (used for alternate speeds)
flip the image in serial, parallel, or both.
READOUT_PORT_MULT_GAIN
READOUT_PORT_NORMAL
READOUT_PORT_LOW_NOISE
READOUT_PORT_HIGH_CAP
Use
PARAM_READOUT_PORT
with
ATTR_COUNT
to
read out the number of ports on the system.
Datatype:
enum
PARAM_READOUT_TIME
Camera Dependent
Readout time of current ROI, in ms.
Datatype:
flt64
PARAM_SER_SHIFT_TIME
Camera Dependent
This is the serial shift time that can be changed after
custom timing has been enabled
(PARAM_CUSTOM_TIMING). The time must fall with the
ATTR_MIN and ATTR_MAX and the ATTR_INCREMENT or a
multiple of the increment that falls within the minimum
and maximum values. Increments are in terms of
nanoseconds.
See also PARAM_PAR_SHIFT_TIME.
Datatype:
int16
PARAM_SER_SIZE
Defines the serial-dimension of the active area of the
CCD chip. When the custom chip option is enabled, the
ATTR_ACCESS of the following parameters changes from
ACC_READ_ONLY to ACC_READ_WRITE.
Datatype:
uns16
PARAM_SERIAL_NUM
Camera Dependent
This is the serial number of the camera head (not the
electronics unit).
Datatype:
uns16
PARAM_SHTR_GATE_MODE
Camera Dependent
Does not apply to all cameras.
INTENSIFIER_SAFE
INTENSIFIER_GATING
INTENSIFIER_SHUTTER
Note: The
ATTR_AVAIL
attribute can be used to tell the
application if this feature is supported.
Datatype:
enum
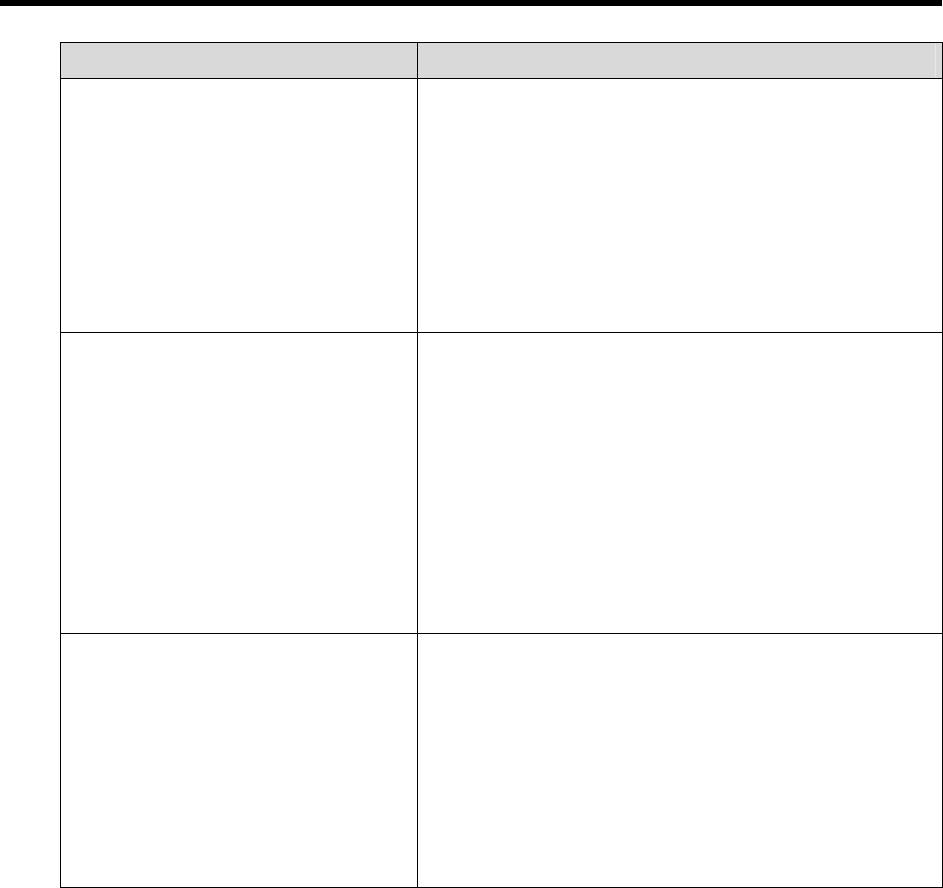
64 PVCAM Manual Version 2.7
Class 2 Parameter ID Description
PARAM_SHTR_CLOSE_DELAY
Camera Dependent
This is the shutter close delay. This is the number of
milliseconds required for the shutter to close. The
software default values compensate for the standard
shutter that is shipped with all cameras. You only need to
set this value if you are using a shutter with
characteristics that differ from the standard shutter. Valid
inputs are any number in the range 0 to 65535
milliseconds.
Datatype:
uns16
PARAM_SHTR_CLOSE_DELAY_UNIT
Camera Dependent
Uses enum TIME_UNITS to specify the time.
TU_DAY=10
TU_HOUR=5
TU_MINUTE=4
TU_SEC=3
TU_MSEC=12 /*millisecond */
TU_USEC=1 /*microsecond */
TU_NSEC=7 /*nanosecond */
TU_PSEC=8 /*picosecond */
TU_FSEC=9 /*femtosecond */
Datatype: enum
PARAM_SHTR_OPEN_DELAY
Camera Dependent
This is the shutter open delay. This is the number of
milliseconds required for the shutter to open. The
software default values compensate for the standard
shutter that is shipped with all cameras. You only need to
set this value if you are using a shutter with
characteristics that differ from the standard shutter. Valid
inputs are any number in the range 0 to 65535
milliseconds.
Datatype:
uns16
Chapter 5: Configuration / Setup (Class 2) 65
Class 2 Parameter ID Description
PARAM_SHTR_OPEN_MODE
Camera Dependent
This is the shutter opening condition. See enum below for
possible values.
OPEN_NEVER
OPEN_PRE_EXPOSURE
OPEN_PRE_SEQUENCE
OPEN_PRE_TRIGGER
OPEN_NO_CHANGE
OPEN_NEVER
The shutter closes before the exposure and stays
closed during the exposure.
OPEN_PRE_EXPOSURE
Opens each exposure. Normal mode.
OPEN_PRE_SEQUENCE
Opens the shutter at the start of each sequence.
Useful for frame transfer and external strobe devices.
OPEN_PRE_TRIGGER
If using a triggered mode, this function causes the
shutter to open before the external trigger is armed. If
using a non-triggered mode, this function operates
identical to
OPEN_PRE_EXPOSURE
.
OPEN_NO_CHANGE
Sends no signals to open or close the shutter. Useful
for frame transfer when you want to open the shutter
and leave it open (see
pl_exp_abort).
For detailed scripts, see "Exposure Loops" in the
PVCAM introduction.
Datatype: enum
PARAM_SHTR_STATUS
Camera Dependent
This is the current state of the camera shutter.
SHTR_FAULT
SHTR_OPENING
SHTR_OPEN
SHTR_CLOSING
SHTR_CLOSED
SHTR_UNKNOWN
If the shutter is run too fast, it will overheat and trigger
SHTR_FAULT
. The shutter electronics will disconnect
until the temperature returns to a suitable range. Note that
although the electronics have reset the voltages to open or
close the shutter, there is a lag time for the physical
mechanism to respond. See also
PARAM_SHTR_OPEN_DLY
and
PARAM_SHTR_CLOSE_DLY
.
Datatype:
enum

66 PVCAM Manual Version 2.7
Class 2 Parameter ID Description
PARAM_SKIP_AT_ONCE_BLK
Camera Dependent
Sets the size of rows skipped at once for PI brand
cameras. This is one method to control discard of
unwanted areas (outside of ROIs).
Datatype:
int32
PARAM_SPDTAB_INDEX
This selects the CCD readout speed from a table of
available choices. Entries are 0-based, so the range of
possible values is 0 to max_entries-1; max_entries can be
determined using
PARAM_SPDTAB_INDEX
with the
ATTR_MAX
attribute. This setting relates to other speed
table values, including
PARAM_BIT_DEPTH,
PARAM_PIX_TIME, PARAM_READOUT_PORT
and
PARAM_GAIN_INDEX
. After setting
PARAM_SPDTAB_INDEX
, the gain setting is always reset
to a value corresponding to 1x gain. To use a different
gain setting, call
pl_set_param
with
PARAM_GAIN_INDEX
after setting the speed table index.
Datatype:
int16
PARAM_SUMMING_WELL
Camera Dependent
Checks to see if the summing well exists. When a TRUE
is returned, the summing well exists.
Datatype:
rs_bool
PARAM_TEMP
Camera Dependent
Returns the current measured temperature of the CCD in
C°x 100. For example, a temperature of minus 35° would
be read as -3500.
Datatype:
int16
PARAM_TEMP_SETPOINT
Camera Dependent
Sets the desired CCD temperature in hundredths of
degrees Celsius (minus 35 °C is represented as -3500).
The hardware attempts to heat or cool the CCD to this
temperature. The min/max allowable temperatures are
given
ATTR_MIN
and
ATTR_MAX
. Settings outside this
range are ignored. Note that this function only sets the
desired temperature. Even if the desired temperature is in
a legal range, it still may be impossible to achieve. If the
ambient temperature is too high, it is difficult to get much
cooling on an air-cooled camera.
Datatype:
int16

67
Chapter 6:
Data Acquisition (Class 3)
Introduction
Class 3 defines CCD readout and specifies regions and binning factors. This class gives you
complete control over exposures and exposure sequences. Camera configurations set in Class 2
must be considered when defining the functions in Class 3.
The current Class 3 functions are listed below. If the Class 3 functions you are interested in are not
listed below, check "Appendix B: Obsolete Functions" section on page 153. Although these functions
have been superseded by
pl_get_param
and
pl_set_param
parameter ids, the list of these
functions and their descriptions have been included for reference purposes.
List of Available Class 3 Functions
The Class 3 functions are listed below:
pl_exp_abort pl_exp_setup_seq
pl_exp_check_cont_status pl_exp_start_cont
pl_exp_check_status pl_exp_start_seq
pl_exp_finish_seq pl_exp_stop_cont
pl_exp_get_driver_buffer pl_exp_uninit_seq
pl_exp_get_latest_frame pl_exp_unlock_oldest_frame
pl_exp_get_oldest_frame pl_exp_unravel
pl_exp_init_seq pl_io_clear_script_control
pl_exp_setup_cont pl_io_script_control
List of Available Class 3 Parameter IDs
The following are available Class 3 parameters used with
pl_get_param()
,
pl_set_param()
,
pl_get_enum_param()
, and
pl_enum_str_length()
functions specified in Chapter 5.
PARAM_BOF_EOF_CLR PARAM_EXP_RES
PARAM_BOF_EOF_COUNT PARAM_EXP_RES_INDEX
PARAM_BOF_EOF_ENABLE PARAM_EXP_TIME
PARAM_CIRC_BUFFER
PARAM_HW_AUTOSTOP
PARAM_EXP_MIN_TIME

68 PVCAM Manual Version 2.7
Defining Exposures
To define an exposure or exposure sequence, you must follow the steps below:
Define the region(s) to be collected by filling a rgn_type
Define the exposure time and mode
Configure any desired camera parameters:
• Apply the settings to the hardware by calling
pl_exp_setup_cont or
pl_exp_setup_seq
• Start the acquisition by calling
pl_exp_start_cont or pl_exp_start_seq
• Monitor the progress of data collection by calling
pl_exp_check_cont_status or
pl_exp_check_status
Decode the multi-region pixel stream into images in a buffer by calling pl_exp_finish_seq
(optional)
New Structures
To handle these tasks, a new structure is used. It is defined in the include file pvcam.h.
typedef struct {
uns16 s1; /*Starting pixel in the serial register */
uns16 s2; /*Ending pixel in the serial register */
uns16 sbin;/*Serial binning for this region */
uns16 p1; /*Starting pixel in the parallel register */
uns16 p2; /* Ending pixel in the parallel register */
uns16 pbin;/* Parallel binning for this region */
}rgn_type,
*rgn_ptr;

Chapter 6: Data Acquisition (Class 3) 69
Exposure Mode Constants
The six constants below define the exposure mode:
TIMED_MODE STROBED_MODE
VARIABLE_TIMED_MODE BULB_MODE
TRIGGER_FIRST_MODE FLASH_MODE
These modes describe how the exposure is controlled:
TIMED_MODE
Begins a single exposure or the first exposure of a sequence.
The internal timer controls the exposure duration.
VARIABLE_TIMED_MODE
Begins a single exposure or the first exposure of a sequence.
This mode ignores the
exposure_time
parameter in setup.
Instead, you must call
pl_exp_set_time
to set the exposure
duration before each sequence. In this mode, you can change
the exposure duration between sequences, and readout in rapid
succession, while maintaining the same readout parameters.
TRIGGER_FIRST_MODE
Waits for a trigger to begin a single exposure or a sequence of
exposures. The exposure duration is controlled by the internal
timer.
STROBED_MODE
Waits for a trigger to begin each exposure in a sequence. The
exposure duration is controlled by the internal timer.
BULB_MODE
Waits for a trigger to begin each exposure in a sequence, then
waits for the end of the trigger to end the exposure. This mode
ignores
exposure_time
parameters in
setup
.
FLASH_MODE
Activates the flash circuit on the trigger port. Used for factory
testing.
70 PVCAM Manual Version 2.7
Class 3 Functions
PVCAM Class 3: Data Acquisition pl_exp_finish_seq(3)
NAME
pl_exp_finish_seq —
finishes and cleans up after
pl_exp_start_seq
.
SYNOPSIS
rs_bool
pl_exp_finish_seq(int16 hcam,void_ptr pixel_stream,int16
hbuf)
DESCRIPTION This cleans up after an exposure started through
pl_exp_start_seq
has
finished readout. If the exposure has not finished readout, this function returns
with an error. If the readout has finished, this function decodes the pixel stream
pointed to by
pixel_stream
and places it into the standard image buffer
hbuf
.
hbuf
must be able to hold the number of exposures specified. Any errors
leave the pixel stream intact, so a further attempt can be made to decode the data
if an error can be corrected. Null is an acceptable value for
hbuf
.
RETURN VALUE TRUE for success, FALSE for a failure. Failure sets
pl_error_code
.
SEE ALSO
pl_exp_abort(3),pl_exp_check_status(3),
pl_exp_setup_seq(3),pl_exp_start_seq(3)
NOTES This function is only necessary when multiple sequences or multiple regions are
defined, or when information such as image data, time, and size needs to be
stored with the
pixel_stream
data. This function and the Class 4 functions
are not required for a single region, single exposure; the pixel stream is the raw
data for that image.
The final format of the image buffer will be the same as that of the readout.
Individual exposures may be appended together to create a single, multiple
exposure image buffer. See "Chapter 7: Buffer Manipulation (Class 4)" for more
information on the use of buffers.
Chapter 6: Data Acquisition (Class 3) 71
PVCAM Class 3: Data Acquisition pl_exp_get_driver_buffer(3)
NAME
pl_exp_get_driver_buffer -
retrieves a pointer to a preallocated image
buffer.
SYNOPSIS
rs_bool
pl_exp_get_driver_buffer(int16 hcam, void_ptr_ptr
pixel_stream, uns32_ptr byte_cnt)
DESCRIPTION This function returns a pointer in
pixel_stream
to the image buffer that has
been previously allocated by a camera device driver. A pointer to the size of the
buffer is returned in
byte_cnt
.
This function is used to retrieve a pointer to the buffer that may be allocated by
the driver. If the driver did not allocate an image buffer, a value of NULL will
be returned for
pixel_stream
, and a value of zero will be returned for
byte_cnt
.
RETURN VALUE TRUE for success, FALSE for a failure. Failure sets
pl_error_code
.
SEE ALSO
NOTES This image buffer is a block of contiguous physical memory that is set aside for
data storage when the operating system is started. This preallocation of memory
ensures that you will have a contiguous memory block to store data when you
are performing continuous data acquisition. A contiguous memory block may be
necessary in some situations in which the host computer is heavily loaded with
tasks. When the buffer is used for Circular Buffer operation, the number of
frames that can be held in the buffer depends on the size of the buffer and the
image size.
72 PVCAM Manual Version 2.7
PVCAM Class 3: Data Acquisition pl_exp_get_latest_frame(3)
NAME
pl_exp_get_latest_frame -
returns pointer to most recent frame in
circular buffer.
SYNOPSIS
rs_bool
pl_exp_get_latest_frame(int16 hcam, void_ptr_ptr frame)
DESCRIPTION This function returns a pointer to the most recently acquired frame in the circular
buffer.
frame
is a pointer to the most recent frame.
RETURN VALUE TRUE for success, FALSE for a failure. Failure sets
pl_error_code
.
SEE ALSO
pl_exp_get_driver_buffer(3), pl_exp_setup_cont(3),
pl_exp_start_cont(3), pl_exp_check_cont_status(3),
and
pl_exp_stop_cont(3)
NOTES If the camera in use is not able to return the latest frame for the current operating
mode, this function will fail. For example, some cameras cannot return the latest
frame in
CIRC_NO_OVERWRITE
mode. Use the parameter id
PARAM_CIRC_BUFFER
with
pl_get_param
to check to see if the system can
perform circular buffer operations.
Chapter 6: Data Acquisition (Class 3) 73
PVCAM Class 3: Data Acquisition pl_exp_get_oldest_frame(3)
NAME
pl_exp_get_oldest_frame -
locks oldest frame in circular buffer and
returns pointer to that frame.
SYNOPSIS
rs_bool
pl_exp_get_oldest_frame(int16 hcam, void_ptr_ptr frame)
DESCRIPTION This function locks the oldest unretrieved frame in the circular buffer, and
returns a pointer to that frame.
frame
is a pointer to the oldest unretrieved
frame.
RETURN VALUE TRUE for success, FALSE for a failure. Failure sets
pl_error_code
.
SEE ALSO
pl_exp_get_driver_buffer(3), pl_exp_setup_cont(3),
pl_exp_start_cont(3), pl_exp_check_cont_status(3),
pl_exp_unlock_oldest_frame(3),
and
pl_exp_stop_cont(3)
NOTES If the camera in use is not able to return the oldest frame for the current
operating mode, this function will fail. For example, some cameras cannot
return the oldest frame in
CIRC_OVERWRITE
mode. Use the parameter id
PARAM_CIRC_BUFFER
with
pl_get_param
to check to see if the system can
perform circular buffer operations.
74 PVCAM Manual Version 2.7
PVCAM Class 3: Data Acquisition pl_exp_init_seq(3)
NAME
pl_exp_init_seq —
initializes the data collection functions.
SYNOPSIS
rs_bool
pl_exp_init_seq(void)
DESCRIPTION This function prepares the portion of the library associated with the exposure
control for operation and must be called before any other Class 3 function.
RETURN VALUE TRUE for success, FALSE for a failure. Failure sets
pl_error_code
.
SEE ALSO
pl_pvcam_init(0),pl_pvcam_uninit(0),pl_exp_uninit_seq(3)
NOTES You must explicitly call this function after calling
pl_pvcam_init
and before
calling any other
pl_exp_
function.
Chapter 6: Data Acquisition (Class 3) 75
PVCAM Class 3: Data Acquisition pl_exp_setup_cont(3)
NAME
pl_exp_setup_cont -
sets circular buffer mode.
SYNOPSIS
rs_bool
pl_exp_setup_cont(int16 hcam,uns16 rgn_total,rgn_const_ptr
rgn_array,int16 mode,uns32
exposure_time,uns32_ptr stream_size,
int16 circ_mode)
DESCRIPTION This function sets the mode of operation for the circular buffer. This function
uses the array of regions, exposure mode, exposure time passed in, and circular
buffer mode and transmits them to the camera.
The pointer
rgn_array
points to
rgn_total
region definitions.
mode
specifies the exposure mode.
exposure_time
specifies the exposure time in the currently selected
exposure time resolution (see
PARAM_EXP_RES
and
PARAM_EXP_RES_INDEX
).
The pointer
stream_size
points to a variable that will be filled with
number of bytes in the pixel stream.
circ_mode
can be set to either
CIRC_OVERWRITE
or
CIRC_NO_OVERWRITE
. This function must be called before calling
pl_exp_start_cont()
.
The settings are then downloaded to the camera. If there is any problem
(overlapping regions or a frame-transfer setting for a camera that lacks that
capability), this function aborts and returns with a failure.
pl_error_code
indicates the definition problem.
The
stream_size
pointer is filled with the number of bytes of memory needed
to buffer the full sequence. (It is the developer's responsibility to allocate a
memory buffer for the pixel stream.)
When this function returns, the camera is ready to begin the exposure.
pl_exp_start_cont
initiates exposure and readout.
RETURN VALUE TRUE for success, FALSE for a failure. Failure sets
pl_error_code
.
SEE ALSO
pl_exp_get_driver_buffer(3), pl_exp_start_cont(3),
pl_exp_check_cont_status(3), pl_exp_get_oldest_frame(3),
pl_exp_get_latest_frame(3),
pl_exp_unlock_oldest_frame(3),
and
pl_exp_stop_cont(3)
NOTES Use the parameter id
PARAM_CIRC_BUFFER
with
pl_get_param
to see if the
system can perform circular buffer operations. The circular buffer is passed to
pl_exp_start_cont
. The buffer is either allocated by your application or
obtained from the driver as a preallocated block of memory, using the
pl_exp_get_driver_buffer
function.
Refer to Example 3: Circular Buffer in "Code Examples" for two examples of
code for circular buffer operation.
76 PVCAM Manual Version 2.7
PVCAM Class 3: Data Acquisition pl_exp_setup_seq(3)
NAME
pl_exp_setup_seq —
prepares the camera to perform a readout.
SYNOPSIS
rs_bool
pl_exp_setup_seq(int16 hcam,uns16 exp_total,uns16
rgn_total,rgn_const_ptr rgn_array,int16
mode,uns32 exposure_time,uns32_ptr
stream_size)
DESCRIPTION This function uses the array of regions, exposure mode, and exposure time
passed in and transmits them to the camera.
exp_total
specifies the number
of images to take. The pointer
rgn_array
points to
rgn_total
region
definitions,
mode
specifies the exposure mode,
exposure_time
specifies the
exposure time in the currently selected exposure time resolution (see
PARAM_EXP_RES
and
PARAM_EXP_RES_INDEX
). The pointer
stream_size
points to a variable that will be filled with number of bytes in the pixel stream.
The settings are then downloaded to the camera. If there is any problem
(overlapping regions or a frame-transfer setting for a camera that lacks that
capability), this function aborts and returns with a failure.
pl_error_code
indicates the definition problem.
The
stream_size
pointer is filled with the number of bytes of memory needed
to buffer the full sequence. (It is the developer's responsibility to allocate a
memory buffer for the pixel stream.)
When this function returns, the camera is ready to begin the exposure.
pl_exp_start_seq
initiates exposure and readout.
RETURN VALUE TRUE for success, FALSE for a failure. Failure
sets pl_error_code
.
SEE ALSO
pl_exp_abort(3),pl_exp_check_status(3),
pl_exp_start_seq(3),pl_exp_finish_seq(3)
NOTES This function downloads new settings. After receiving the settings, the camera
merely waits in an idle state. The
pl_exp_abort
command may be used to
place the camera into some other state, such as continuous clearing, but this will
not alter or affect the downloaded settings. Essentially, the camera is still holding
the exposure sequence and waiting to start, while it clears the CCD charge.
Chapter 6: Data Acquisition (Class 3) 77
PVCAM Class 3: Data Acquisition pl_exp_start_cont(3)
NAME
pl_exp_start_cont -
begins continuous readout into circular buffer
SYNOPSIS
rs_bool
pl_exp_start_cont(int16 hcam, void_ptr pixel_stream,uns32
size)
DESCRIPTION This function will initiate a continuous readout from the camera into a
circ
ular
buffer.
pixel_stream
is a pointer to the circular buffer, and
size
indicates
the number of bytes the buffer can hold.
RETURN VALUE TRUE for success, FALSE for a failure. Failure sets
pl_error_code
.
SEE ALSO
pl_exp_get_driver_buffer(3),
pl_exp_setup_cont(3),
pl_exp_check_cont_status(3),
pl_exp_get_oldest frame(3),
pl_exp_get_latest_frame(3),
pl_exp_unlock_oldest_frame(3),
and
pl_exp_stop_cont(3)
NOTES If
pixel_stream
points to a buffer that is not an integer-multiple of the frame
size for the exposure, this function will return FALSE and set an appropriate
error code in
pl_error_code
. For example, a buffer size of 1000 with a frame
size of 250 is OK, but a buffer size of 900 would cause a failure.
Use the parameter id
PARAM_CIRC_BUFFER
with
pl_get_param
to check to
see if the system can perform circular buffer operations.
78 PVCAM Manual Version 2.7
PVCAM Class 3: Data Acquisition pl_exp_start_seq(3)
NAME
pl_exp_start_seq —
begins exposing, returns immediately.
SYNOPSIS
rs_bool
pl_exp_start_seq(int16 hcam,void_ptr pixel_stream)
DESCRIPTION This is a companion function to
pl_exp_setup_seq
.
pl_exp_setup_seq
must be called first to define the exposure and program this information into the
camera. After that,
pl_exp_start_seq
may be called one or more times. Each
time it is called, it starts one sequence and returns immediately (a sequence may
be one or more exposures).
Progress can be monitored through
pl_exp_check_status
. The next sequence
may be started as soon as the readout has finished or an abort has been performed
(
pl_exp_abort
). The
hcam
parameter defines which camera is used.
The user must allocate an appropriately sized memory buffer for data collection,
pointed to by
pixel_stream
. This buffer must be at least
stream_size
bytes, where
stream_size
is the value returned from
pl_exp_setup_seq
.
In addition, this memory must be page-locked or similarly protected on virtual
memory systems — these requirements are system specific and the responsibility
of the application.
There is a special case for those users who want to use their own frame grabber
(with an appropriately equipped camera). If a null pointer is passed in for
pixel_stream
,
pl_exp_start_seq
will assume that the user is routing the
data to a frame grabber or other device under their control. Under these
conditions,
pl_exp_start_seq
initiates the exposure, but does not attempt to
collect incoming data.
RETURN VALUE TRUE for success, FALSE for a failure. Failure sets pl_error_code.
SEE ALSO
pl_exp_check_status(3),pl_exp_setup_seq(3,
pl_exp_finish_seq(3)
NOTES Technically, this only changes the state of the CCS program. Regardless of
whether the CCS is idle or continuously clearing, this forces the CCS program
into the busy state. The camera settings are not altered by this command, but it
does begin executing. If the CCS is idle, there is no delay and the camera will
begin running immediately. If the CCS is continuously clearing, the system
finishes the current parallel shift (it finishes the current single parallel row) and
then begins running. This produces a delay of up to the parallel-shift time for this
CCD (1–300 microseconds, depending on the CCD). If the camera has been set
up with one of the
CLEAR_PRE_
clearing modes, it will also explicitly clear the
CCD as its first action.
Chapter 6: Data Acquisition (Class 3) 79
PVCAM Class 3: Data Acquisition pl_exp_abort(3)
Name
pl_exp_abort —
stops collecting data, cleans up device driver, halts camera.
SYNOPSIS
rs_bool
pl_exp_abort(int16 hcam,int16 cam_state)
DESCRIPTION
pl_exp_abort
performs two functions: it stops the host device driver, and it
may halt the camera (
hcam
specifies which camera and which device driver are
being used.) Halting the camera halts
readout,clearing,
and all other
camera activity. On the host side, data collection is controlled by a device driver.
If data collection is currently enabled (the image data active state), this function
stops collection, returns the low-level communication hardware and software to
an image data idle state, and disables collection. In the idle state, any data that
arrives is ignored and discarded. The idle state is the normal system default. On
the camera side, the Camera Control Subsystem (CCS) may be in the process of
collecting data, or it may be in one of several idle states (see
pl_get_param
parameter id
PARAM_CCS_STATUS
).
This function always stops the data collection software. In addition, it has the
option of forcing the CCS into a new state by setting the
cam_state
variable to
one of the following constants, which are camera dependent:
CCS_NO_CHANGE
Do not alter the current state of the CCS.
CCS_HALT
Halt all CCS activity, and put the CCS into the
idle state.
CCS_HALT_CLOSE_SHTR
Close the shutter, then halt all CCS activity, and
put the CCS into the idle state.
CCS_CLEAR
Put the CCS into the continuous clearing state.
CCS_CLEAR_CLOSE_SHTR
Close the shutter, then put the CCS into the
continuous clearing state.
CCS_OPEN_SHTR
Open the shutter, then halt all CCS activity, and
put the CCS into the idle state.
CCS_CLEAR_OPEN_SHTR
Open the shutter, then put the CCS into the
continuous clearing state.
RETURN VALUE TRUE for success, FALSE for a failure. Failure sets
pl_error_code
.
SEE ALSO Class 3 data collection functions,
pl_get_param
parameter id
PARAM_CCS_STATUS(2)
80 PVCAM Manual Version 2.7
PVCAM Class 3: Data Acquisition pl_exp_abort(3)
NOTES This may also be called outside of an exposure. It can explicitly open the shutter,
close the shutter, or stop the CCS.
In the idle state, the system takes the least possible amount of action when image
data arrives. On some systems, this involves placing the hardware in reset state,
so it is inactive. On SCSI systems, the driver does not initiate any data transfers,
although a buffer on the camera end may be filling up.
If the CCS is halted and the shutter is closed (
CCS_HALT_CLOSE_SHTR
), the
current image remains on the CCD (although dark charge continues to
accumulate). If
clear_cycles
is zero or the clear mode is
CLEAR_NEVER
, the
image may be read off by performing a bias readout.
In frame transfer mode, you may not want to close the shutter when halting the
CCS. Some frame transfer systems do not include a shutter, in which case an
attempt to open or close the shutter is ignored, but does not cause an error.
Chapter 6: Data Acquisition (Class 3) 81
PVCAM Class 3: Data Acquisition pl_exp_stop_cont(3)
NAME
pl_exp_stop_cont -
stops continuous readout acquisition.
SYNOPSIS
rs_bool
pl_exp_stop_cont(int16 hcam, int16 cam_state)
DESCRIPTION This function halts a continuous readout acquisition into a circular buffer.
cam_state
defines the new state of the Camera Control Subsystem, as
described in the documentation for the
pl_exp_abort()
function.
RETURN VALUE TRUE for success, FALSE for a failure. Failure sets
pl_error_code
.
SEE ALSO
pl_exp_get_driver_buffer(3), pl_exp_setup_cont(3),
pl_exp_start_cont(3), pl_exp_check_cont_status(3),
pl_exp_get_oldest frame(3), pl_exp_get_latest_frame(3),
and pl_exp_unlock_oldest_frame(3)
NOTES Use the parameter id
PARAM_CIRC_BUFFER
with
pl_get_param
to check to
see if the system can perform circular buffer operations.
82 PVCAM Manual Version 2.7
PVCAM Class 3: Data Acquisition pl_exp_check_status(3)
NAME
pl_exp_check_status —
checks the status of the current exposure.
SYNOPSIS
rs_bool
pl_exp_check_status(int16 hcam, int16_ptr status,
uns32_ptr byte_cnt)
DESCRIPTION This is only useful when data collection has been set up and started, as with a
call to the Class 3 functions
pl_exp_setup_seq
and
pl_exp_start_seq
.
In general, Class 3 functions start an exposure then immediately return, allowing
the progress to be monitored. The status gives a quick evaluation of progress.
The variable status returns one of the following values:
READOUT_NOT_ACTIVE
The system is idle, no data is expected. If any
arrives, it will be discarded.
EXPOSURE_IN_PROGRESS
The data collection routines are active. They are
waiting for data to arrive, but none has arrived yet.
READOUT_IN_PROGRESS
The data collection routines are active. The data
has started to arrive.
READOUT_COMPLETE
All the expected data has arrived. Data collection
is complete, and the driver has returned to idle
state.
FRAME_AVAILABLE
See "READOUT_COMPLETE".
READOUT_FAILED
Something went wrong. The function returns a
FALSE and
pl_error_code
is set. (See Return
Value below for more information.)
ACQUISITION_IN_PROGRESS
Indicates that a Princeton Instruments brand
camera is either exposing
(
EXPOSURE_IN_PROGRESS
) or reading out the
data (
READOUT_IN_PROGRESS
); these individual
states are not available with this camera brand.
More detailed information is returned in
byte_cnt
. This reports on exactly how
many bytes of data have arrived so far (divide by two to get the number of
pixels). This level of feedback is unimportant to many users.
RETURN VALUE TRUE means the status was checked successfully, FALSE indicates a bad
handle, a problem communicating with the camera or driver, or some type of
readout failure. In the last case,
pl_error_code
will be set to one of the
following values:
C0_EXP_FIFO_OVERFLOW C0_EXP_XFER_ERR
C0_EXP_NO_ACK C0_EXP_MISSING_DATA
C0_EXP_EXTRA_DATA DDI_UNKNOWN_IM_STATUS
SEE ALSO
pl_exp_setup_seq(3),pl_exp_start_seq(3)
NOTES
Chapter 6: Data Acquisition (Class 3) 83
PVCAM Class 3: Data Acquisition pl_exp_check_cont_status(3)
NAME
pl_exp_check_cont_status
—
checks the continuous readout status from
the camera into a circular buffer.
SYNOPSIS
rs_bool
pl_exp_check_cont_status(int16 hcam, int16_ptr
status,uns32_ptr byte_cnt,
uns32_ptr buffer_cnt)
DESCRIPTION This function will return the status of a continuous readout from the camera into
a circular buffer. status is a pointer to one of the following values:
READOUT_NOT_ACTIVE EXPOSURE_IN_PROGRESS,
READOUT_IN_PROGRESS ACQUISITION_IN_PROGRESS,
READOUT_FAILED READOUT_COMPLETE=FRAME_AVAILABLE
byte_cnt
points to the number of bytes currently stored in the buffer.
buffer_cnt
points to the number of times the buffer has been filled.
ACQUISITION_IN_PROGRESS
indicates that a Princeton Instruments brand
camera is either exposing (
EXPOSURE_IN_PROGRESS
) or reading out the data
(
READOUT_IN_PROGRESS
); the two individual states are not available for a
Princeton Instruments brand camera.
The total number of bytes transferred can be determined as follows:
total_bytes
=
(buffer_cnt * buffer_size)
+ byte_cnt
RETURN VALUE TRUE is returned for success, FALSE for a failure. Failure will set
pl_error_code
.
SEE ALSO
pl_exp_setup_cont(3), pl_exp_start_cont(3),
pl_exp_get_oldest frame(3), pl_exp_get_latest_frame(3),
pl_exp_unlock_oldest_frame(3),
and
pl_exp_stop_cont(3)
NOTES This function only returns meaningful results if a continuous readout from the
camera has been initiated by a call to
pl_exp_start_cont().
Use the
parameter id
PARAM_CIRC_BUFFER
with
pl_get_param
to check to see if the
system can perform circular buffer operations.
84 PVCAM Manual Version 2.7
PVCAM Class 3: Data Acquisition pl_exp_uninit_seq(3)
NAME
pl_exp_uninit_seq —
uninitializes the data collection functions.
SYNOPSIS
rs_bool
pl_exp_uninit_seq(void)
DESCRIPTION This function undoes the preparations done by
pl_exp_init_seq
. After
executing this function, acquisition cannot take place.
RETURN VALUE TRUE for success, FALSE for a failure. Failure sets
pl_error_code
.
SEE ALSO
pl_pvcam_init(0),pl_pvcam_uninit(0),pl_exp_init_seq(3)
NOTES You must explicitly call this function before calling
pl_pvcam_uninit
.
Chapter 6: Data Acquisition (Class 3) 85
PVCAM Class 3: Data Acquisition pl_exp_unlock_oldest_frame(3)
NAME
pl_exp_unlock_oldest_frame -
makes oldest frame in circular buffer
overwriteable.
SYNOPSIS
rs_bool
pl_exp_unlock_oldest_frame(int16 hcam)
DESCRIPTION This function unlocks the oldest frame in the circular buffer; the frame should
have been locked previously by a call to
pl_exp_get_oldest_frame
.
RETURN VALUE TRUE for success, FALSE for a failure. Failure sets
pl_error_code
.
SEE ALSO
pl_exp_get_driver_buffer(3), pl_exp_setup_cont(3),
pl_exp_start_cont(3), pl_exp_check_cont_status(3),
pl_exp_get_oldest frame(3),
pl_exp_unlock_oldest_frame(3),
and
pl_exp_stop_cont(3)
NOTES Failure to call this function after using the frame will cause the continuous
acquisition progress to halt eventually, because the frame cannot be overwritten
when it is locked.
Use the parameter id
PARAM_CIRC_BUFFER
with
pl_get_param
to check to
see if the system can perform circular buffer operations.
86 PVCAM Manual Version 2.7
PVCAM Class 3: Data Acquisition pl_exp_unravel(3)
NAME
pl_exp_unravel -
unravels a single or multiple ROIs from the current data
stream.
SYNOPSIS
rs_bool
pl_exp_unravel(int16 hcam, uns16 exposure, void_ptr
pixel_stream, uns16 rgn_total,
rgn_const_ptr rgn_array, uns16_ptr *
array_list)
DESCRIPTION This function will separate a single or multiple Region of Interest from the data
stream.
int16 hcam
is the handle to open camera
uns16 exposure
is the index into the buffer pointing to a specific frame.
void_ptr pixel_stream
is the pointer to the buffer containing the frame
data.
uns16 rgn_total:
is the total number of ROIs in the frame.
rgn_const_ptr:
is the pointer to the array of region(s).
uns16_ptr* array_list
is the pointer to the array of buffers that the
function unravels the data into.
RETURN VALUE TRUE for success, FALSE for a failure.
SEE ALSO
pl_exp_setup_cont(3), pl_exp_start_cont(3),
pl_exp_check_cont_status(0), pl_exp_get_oldest frame(3),
and
pl_exp_unlock_oldest_frame(3)
NOTES Code example using circular buffer:
rgn_type r[]={{0,19,1,0,9,1},{40,59,1,20,24,1}};
uns32 nBytes;
uns16 numFrames = 5;
if(!pl_exp_setup_cont(hCam, 2, r, TIMED_MODE, 500,
&nBytes,CIRC_NO_OVERWRITE)) return -1;
// Allocating 3x the frame size for a decent circular
buffer
nBytes *= 3;
uns16 *pStream [( nBytes / sizeof(uns16)];
uns16 *pRoi1 [ 200 ]; // size of rgn1{0,19,1,0,9,1}
uns16 *pRoi2 [ 100 ]; // size of
rgn2{40,59,1,20,24,1}
uns16 *pUnraveledData[]={pRoi1,pRoi2};
if(!pl_exp_start_cont(hCam, pStream, nBytes))
return -1;
int16 eStatus;
do
{
Chapter 6: Data Acquisition (Class 3) 87
PVCAM Class 3: Data Acquisition pl_exp_unravel(3)
// Passing 'nBytes' twice as filler since the value of
nBytes isn’t needed.
if(!pl_exp_check_cont_status(hCam, &eStatus,
&nBytes, &nBytes))
return -1;
if(eStatus == READOUT_COMPLETE)
{
uns16 *pFrame;
if(!pl_exp_get_oldest_frame(hCam,
reinterpret_cast<void **>
(&pFrame)))return -1;
if(!pl_exp_unravel(hCam, 0, pFrame, 2, r,
pUnraveledData)) return -1;
if(!pl_exp_unlock_oldest_frame(hCam)) return -1;
--numFrames;
}
}
while( numFrames );
88 PVCAM Manual Version 2.7
PVCAM Class 3: Data Acquisition pl_io_clear_script_control(3)
NAME
pl_io_clear_script_control -
Clears the current setup for control of
the available I/O lines within a camera script.
SYNOPSIS
rs_bool
pl_io_clear_script_control(int16 hcam)
DESCRIPTION This function allows the application program to clear the current setup for
control of the available I/O lines within the script. This allows the user to enter a
new setup for these lines.
RETURN VALUE TRUE for success, FALSE for a failure. Failure sets
pl_error_code
.
SEE ALSO
pl_io_script_control(3)
NOTES
Chapter 6: Data Acquisition (Class 3) 89
PVCAM Class 3: Data Acquisition pl_io_script_control(3)
NAME
pl_io_script_control -
Defines control of an I/O line from within a
camera script.
SYNOPSIS
rs_bool
pl_io_script_control(int16 hcam, uns16 addr, flt64 state,
uns32 location)
DESCRIPTION This function allows the application program to define control of the available
I/O lines from within a script. This allows for more precise control of external
devices. For example, the application could request that a linear stage be indexed
immediately after integration, instead of waiting until after the data is read out,
the shutter is closed, etc.
addr
specifies which I/O address to control.
state
specifies the desired setting for the address being controlled.
state
has different meanings depending on the I/O type:
IO_TYPE_TTL
The bit pattern written to this address.
IO_TYPE_DAC
The value of the desired analog output written to the DAC
at this address.
location
can be set to the following values:
SCR_PRE_OPEN SHTR SCR_POST_OPEN_SHTR
SCR_PRE_FLASH SCR_POST_FLASH
SCR_PRE_INTEGRATE SCR_POST_INTEGRATE
SCR_PRE_READOUT SCR_POST_READOUT
SCR_PRE_CLOSE_SHTR SCR_POST_CLOSE_SHTR
RETURN VALUE TRUE for success, FALSE for a failure. Failure sets
pl_error_code
.
SEE ALSO
pl_io_clear_script_control(3)
NOTES

90 PVCAM Manual Version 2.7
Class 3 Parameter IDs
Note:
Camera Dependent
indicates that this parameter or function is not available to all
Roper Scientific cameras. If a parameter or function is marked
Camera Dependent
, an
ATTR_AVAIL should be called to see if the camera supports it.
Class 3 Parameter ID Description
PARAM_BOF_EOF_CLR
Camera Dependent
Clears the BOF-EOF count when a
pl_set_param
is
performed. This is a write-only parameter.
Datatype:
rs_bool
PARAM_BOF_EOF_COUNT
Camera Dependent
Returns the Begin-Of-Frame and/or End-Of-Frame
count.
BOF_EOF
counting is enabled and configured
with
PARAM_BOF_EOF_ENABLE
.
Datatype:
uns32
PARAM_BOF_EOF_ENABLE
Camera Dependent
Enables and configures the
BOF_EOF
interrupts.
Possible values are:
NO_FRAME_IRQS
BEGIN_FRAME_IRQS
END_FRAME_IRQS
BEGIN_END_FRAME_IRQS
Datatype:
enum
PARAM_CIRC_BUFFER
Tests to see if the hardware/software can perform
circular buffer. When a TRUE is returned, the circular
buffer function can be used.
Datatype:
rs_bool
PARAM_EXP_MIN_TIME
Gets the minimum effective exposure time that can be
set for the camera. For example, the exposure time
may be limited by the required overhead for shifting the
data through the array. This minimum time will be a
floating point value, in seconds. Note that the
minimum exposure time returned by this function will
be greater than zero; any camera can provide a
minimum exposure time of zero.
Datatype:
flt64
PARAM_EXP_RES
Gets the resolution for the current resolution index, as
described for
PARAM_EXP_RES_INDEX
. This value is
an enumerated type, representing the resolution.
Possible values are :
EXP_RES_ONE_MILLISEC
EXP_RES_ONE_MICROSEC
EXP_RES_ONE_SEC
Datatype:
enum
Chapter 6: Data Acquisition (Class 3) 91
Class 3 Parameter ID Description
PARAM_EXP_RES_INDEX
Gets and sets the index into the exposure resolution
table for the camera. The table contains the resolutions
supported by the camera. The value at this index
(PARAM_EXP_RES) is an enumerated type as given by
PARAM_EXP_RES. The number of supported resolutions
can be obtained by using the
ATTR_MIN
and
ATTR_MAX
attributes with the
PARAM_EXP_RES_INDEX
parameter.
Datatype:
uns16
PARAM_EXP_TIME
This is used to examine and change the exposure time
in
VARIABLE_TIMED_MODE
.
Datatype:
uns16
PARAM_HW_AUTOSTOP
Camera Dependent
Sets the number of frames to acquire synchronously
into a register for PI brand cameras. At the data
acquisition, the hardware counts the number of frames
transferred, then stops the acquisition when it reaches
the count set with
PARAM_HW_AUTOSTOP
. The
maximum number the application can set is 254. If an
application needs more than 254, it must set it to
ZERO, i.e., a continuous acquisition and issue the
STOP command manually to halt the acquisition. For
focusing mode, an application should set this parameter
to ZERO.
Datatype:
int16

92 PVCAM Manual Version 2.7
This page intentionally left blank.

93
Chapter 7:
Buffer Manipulation (Class 4)
Introduction
Class 4 places the following constraints on data stored in buffers:
• All exposures in a buffer must have the same set of images (the size, position, and binning
must match).
• All data in a buffer must be at the same bit depth (16-bit signed, 16-bit unsigned, 32-bit
signed, etc.).
• All data in an image is stored in a standard C two-dimensional array, with the second
subscript varying most rapidly.
In addition to the image data itself, a significant amount of auxiliary information is recorded in a
buffer. There is no facility for setting the information (besides setting the date), but you can read the
information with the
get_
functions in the Buffer Information category below.
List of Available Class 4 Functions
The buffer manipulation functions are divided into three categories: Buffer Information, Allocation
and Saving, and Initialization.
Buffer Information Allocation and Saving
pl_buf_get_bits pl_buf_alloc
pl_buf_get_exp_date pl_buf_free
pl_buf_get_exp_time
pl_buf_get_exp_total
pl_buf_get_img_bin
Initialization
pl_buf_get_img_handle pl_buf_init
pl_buf_get_img_ofs pl_buf_uninit
pl_buf_get_img_ptr
pl_buf_get_img_size
pl_buf_get_img_total
pl_buf_get_size
pl_buf_set_exp_date

94 PVCAM Manual Version 2.7
New Constants
Several new constants are used to indicate the bit depth of image data. Since these are constants, not
system-dependent types, they are defined in pvcam.h:
PRECISION_INT8
This is 8-bit, signed data, in the range -128 to 127.
PRECISION_UNS8
This is 8-bit, unsigned data, in the range 0 to 255.
PRECISION_INT16
This is 16-bit, signed data, in the range -32768 to 32767.
PRECISION_UNS16
This is 16-bit, unsigned data, in the range 0 to 65535.
PRECISION_INT32
This is 32-bit, signed data, in the range -2,147,483,648 to
+2,147,483,647.
PRECISION_UNS32
This is 32-bit, unsigned data, in the range 0 to 4 GB-1.
Image Handles and Pointers
An image handle specifies the image. Like camera handles (
hcam
) and buffer handles (
hbuf
), an
image handle (
himg
) is an integer that is an index into a table kept by the PVCAM library. The
image handle, usually having the variable name
himg
, specifies the source buffer, exposure
number, and image number. If that buffer is freed, the handle becomes invalid, causing the table
entry to clear and be freed for new assignment. The handle for any image can be obtained through
pl_buf_get_img_handle
.
A slightly different item is an image pointer. Internally, each image is organized as a flat two-
dimensional array with the following organization:
i0,j0 i0,j1 i0,j2 i0,j3 .... i0,j(j_size-1)i1,j0 i1, j1 i1,
j2 .... i(i_size-1),j(j_size-1)
In other words, this is a standard C two-dimensional array, with the second subscript varying most
rapidly. Immediately after creation, the j dimension is equivalent to the serial direction of the CCD,
while the i dimension is equivalent to the parallel direction. As processing may quickly blur this
relationship, the image buffers are presented with the more neutral i, j scheme instead of the
concepts serial and parallel.
The
pl_buf_get_img_ptr
function returns the address of element 0 of this array. Since
alignment depends on both the current operating system and the current bit depth, a void pointer is
returned. The user is responsible for the details of alignment and array organization.
In addition, no information is given concerning the data that follows the last element. This data may
be a following image, a following exposure, buffer header information, or operating system
memory. In other words, as in normal C memory usage, you are not prevented from writing past the
end of affected memory, but this may have unpredictable consequences.
Chapter 7: Buffer Manipulation (Class 4) 95
Class 4 Functions
PVCAM Class 4: Buffer Manipulation pl_buf_alloc(4)
NAME
pl_buf_alloc —
allocates a buffer based on the current exposure setup.
SYNOPSIS
rs_bool
pl_buf_alloc(int16_ptr hbuf,int16 exp_total,int16
bit_depth,int16 rgn_total,rgn_const_ptr
rgn_array)
DESCRIPTION This routine examines the region definition array pointed to by
rgn_array
to
determine the memory required to store the images from a single exposure. This
routine takes this array as a template for each exposure, and then allows the user
to specify the number of exposures in
exp_total
and the amount of storage per
pixel in
bit_depth
.
bit_depth
must use one of the following constants:
PRECISION_INT8, PRECISION_UNS8, PRECISION_INT16,
PRECISION_UNS16, PRECISION_INT32,
and
PRECISION_UNS32
.
With this information, enough memory is allocated to hold the data from the set
of exposures. A handle to this buffer is passed back in
hbuf
.
RETURN VALUE TRUE for success, FALSE for a failure. Failure sets pl_error_code.
SEE ALSO
pl_buf_free(4),pl_buf_get_bits(4)
NOTES When using this function, the definitions must match the region definitions in the
exposure setup, otherwise memory may be corrupted. If the region definition
changes, the buffer must be freed, and another buffer is allocated. Note that
bit_depth
must be equal to one of the
PRECISION_
constants as described at
the start of this section.
96 PVCAM Manual Version 2.7
PVCAM Class 4: Buffer Manipulation pl_buf_free(4)
NAME
pl_buf_free —
frees the memory and handle used by a buffer.
SYNOPSIS
rs_bool
pl_buf_free(int16 hbuf)
DESCRIPTION This routine frees the memory associated with
hbuf
. The memory is released
and the buffer handle becomes invalid.
RETURN VALUE TRUE for success, FALSE for a failure. Failure sets
pl_error_code
.
SEE ALSO
pl_buf_copy(4),pl_buf_load(4)
NOTES Although the memory is freed, garbage collection is another issue. Many small
buffers may fragment memory, even if most of them are later freed. Garbage
collection is a system-dependent operation.
Chapter 7: Buffer Manipulation (Class 4) 97
PVCAM Class 4: Buffer Manipulation pl_buf_get_bits(4)
NAME
pl_buf_get_bits —
returns the buffer precision.
SYNOPSIS
rs_bool
pl_buf_get_bits(int16 hbuf,int16_ptr bit_depth)
DESCRIPTION Every exposure and every image in a buffer must be at the same bit depth. This
function returns the depth for the images in
hbuf
. The parameter
bit_depth
will be set to one of the following constants (defined in
pvcam.h
):
PRECISION_INT16
PRECISION_UNS16
PRECISION_INT32
Notice that these use the standard PVCAM types (
int16, uns16, int32
)
capitalized with the word
PRECISION_
added.
RETURN VALUE TRUE for success, FALSE for a failure. Failure sets
pl_error_code
.
SEE ALSO
pl_buf_change_bits(4)
NOTES
98 PVCAM Manual Version 2.7
PVCAM Class 4: Buffer Manipulation pl_buf_get_exp_date(4)
NAME
pl_buf_get_exp_date —
returns when a picture was taken.
SYNOPSIS
rs_bool
pl_buf_get_exp_date(int16 hbuf,int16 exp_num,int16_ptr
year,uns8_ptr month,uns8_ptr
day,uns8_ptr hour,uns8_ptr min,
uns8_ptr sec,uns16_ptr msec)
DESCRIPTION This returns the time when the specified exposure was decoded. The format is:
Year current year (i.e. , 2002)
month 1-12 (January through December)
day 1-31 (day number in the current month)
hour 0-23 (24-hour format)
min 0-59
sec 0-59
msec 0-999 milliseconds
To get a time for the entire buffer, it is usually adequate to examine the time for
exp_num 0
, but, depending on the sequence and timing parameters, successive
exposures may be taken hours or even days later. To examine the exact exposure
time for any successive exposure in the sequence, merely specify a different
exp_num
. The exposure end time may be obtained by adding the exposure
duration, obtained from the
pl_buf_get_exp_time
function.
RETURN VALUE TRUE for success, FALSE for a failure. Failure sets
pl_error_code
.
SEE ALSO
pl_buf_set_exp_date(4),pl_buf_get_exp_time(4),
pl_do_exp(3)
KNOWN BUGS If the host computer clock is inaccurate, the time recorded will also be
inaccurate. Although most clocks are not accurate to a millisecond, the recorded
time should help differentiate between the exposures in a fast sequence.
Impossible time values (all 0, for example) usually indicate that the start time
was never set.
Chapter 7: Buffer Manipulation (Class 4) 99
PVCAM Class 4: Buffer Manipulation pl_buf_get_exp_time(4)
NAME pl_buf_get_exp_time — returns exposure duration.
SYNOPSIS
rs_bool
pl_buf_get_exp_time(int16 hbuf,int16 exp_num,uns32_ptr
exp_msec)
DESCRIPTION This returns the exposure duration in milliseconds, in the parameter
exp_msec
.
In most cases, the timing for the first exposure is identical for all exposures. In
BULB_MODE
, however, the exposure time is unknown and can be adjusted for
every exposure. This allows the actual time to be read for the individual
exposures, by specifying the exposure number in
exp_num
(which is zero-
indexed).
RETURN VALUE TRUE for success, FALSE for a failure. Failure sets
pl_error_code
.
SEE ALSO
pl_buf_get_exp_date(4)
NOTES
100 PVCAM Manual Version 2.7
PVCAM Class 4: Buffer Manipulation pl_buf_get_exp_total(4)
NAME
pl_buf_get_exp_total —
returns number of exposures in the buffer.
SYNOPSIS
rs_bool
pl_buf_get_exp_total(int16 hbuf,int16_ptr total_exps)
DESCRIPTION This returns the number of exposures in the specified buffer, inside the variable
totl_exps
. When referring to exposures by number, the first exposure will be
exposure number 0 (in typical C fashion). Therefore, the highest allowable
exposure number is
totl_exps
-1.
RETURN VALUE TRUE for success, FALSE for a failure. Failure sets
pl_error_code
.
SEE ALSO
pl_buf_get_img_total(4),pl_buf_append_exp(4)
NOTES
Chapter 7: Buffer Manipulation (Class 4) 101
PVCAM Class 4: Buffer Manipulation pl_buf_get_img_bin(4)
NAME
pl_buf_get_img_bin —
returns binning factors for the image.
SYNOPSIS
rs_bool
pl_buf_get_img_bin(int16 himg,int16_ptr ibin,int16_ptr
jbin)
DESCRIPTION Default binning is
ibin
=1,
jbin
=1 (no binning, 1 CCD pixel becomes one
image pixel). Binning is set when a buffer is created. This function reports on the
binning that was used during acquisition, for the image indicated by
himg
.
RETURN VALUE TRUE for success, FALSE for a failure. Failure sets
pl_error_code
.
SEE ALSO
pl_buf_get_img_size(4)
NOTES It is assumed that the binning is identical for each exposure. In other words, each
image in an exposure has its own binning values, but this information is only
entered once; it is not repeated for every exposure in the buffer. The value for
exposure 0 will always be identical to the value for every other exposure.
This is usually a safe assumption, but a user might use functions like
pl_buf_get_img_ptr
to insert images that fit, but were taken under radically
different conditions, including different binning. In such a case, the value
reported for binning will not change, but it will no longer be accurate. It then
becomes the user's responsibility to keep track of the binning.
102 PVCAM Manual Version 2.7
PVCAM Class 4: Buffer Manipulation pl_buf_get_img_handle(4)
NAME
pl_buf_get_img_handle —
obtains handle that refers to a single image in
buffer.
SYNOPSIS
rs_bool
pl_buf_get_img_handle(int16 hbuf,int16 exp_num,int16
img_num,int16_ptr himg )
DESCRIPTION The image handle,
himg
, is a special handle that is used by the other image
functions and many higher analysis functions. The handle is a shorthand method
for referring to this image. It specifies the buffer handle,
hbuf
, the exposure
number,
exp_num
, and the image number
img_num
. In most cases, this is an
extremely fast call. It merely fills in table values, assigns a handle, and returns.
RETURN VALUE TRUE for success, FALSE for a failure. Failure sets
pl_error_code
.
SEE ALSO
pl_buf_get_img_ptr(4)
NOTES A pointer to the data in this image is a completely different thing. This address is
given by the function
pl_buf_get_img_ptr
, which requires an image handle
as input. In general, the handle is useful to other PVCAM functions, while the
address is useful to programmers who require direct access to the pixel stream.
Many of the image definition factors: size, offset, and binning, are assumed to be
the same across all exposures in the buffer. In other words, the parameters
reported for
img_num
in exposure 0 are identical to the parameters reported for
img_num
in every exposure.
Note that both
exp_num
and
img_num
are zero-indexed.

Chapter 7: Buffer Manipulation (Class 4) 103
PVCAM Class 4: Buffer Manipulation pl_buf_get_img_ofs(4)
NAME
pl_buf_get_img_ofs —
returns offset position of the image.
SYNOPSIS
rs_bool
pl_buf_get_img_ofs(int16 himg,int16_ptr s_ofs,int16_ptr
p_ofs)
DESCRIPTION Pixel coordinates in an image begin at 0,0, despite its original position on the
CCD. The offset allows that original position to be recreated. The original
coordinates are saved in the offset, so that:
s_ofs = s_offset = s1
(starting serial position)
p_ofs = p_offset = p1
(starting parallel position)
Each exposure in a sequence shares the same setup, therefore only the image
number (specified through
himg
) affects the reported offset. The exposure
number (also specified through
himg
) has no effect.
RETURN VALUE TRUE for success, FALSE for a failure. Failure sets
pl_error_code
.
SEE ALSO
NOTES It is assumed that the offset is identical for each exposure. In other words, each
image has its own offset values, but this information is only entered once; it is
not repeated for every exposure in the buffer. The value reported for exposure 0
will always be identical to the value reported for every other exposure.
This is usually a safe assumption, but a user might use the image address and
direct access to insert images that fit, but were taken under radically different
conditions, including different offset. In such a case, the value reported for offset
will not change, but it will no longer be accurate. It then becomes the user's
responsibility to keep track of the offset.
104 PVCAM Manual Version 2.7
PVCAM Class 4: Buffer Manipulation pl_buf_get_img_ptr(4)
NAME
pl_buf_get_img_ptr —
returns the address of an image in the data buffer.
SYNOPSIS
rs_bool
pl_buf_get_img_ptr(int16 himg,void_ptr_ptr img_addr)
DESCRIPTION This requires an image handle as input. Given that input, this function returns the
address of the first data element inside that image. The user can then directly
manipulate or rewrite the data, as desired. It allows optimum efficiency for data
manipulation, while still staying inside the PVCAM image buffer structure. The
address is returned in
img_addr
, which is defined as a pointer to type void. A
void pointer must be used, since alignment may vary from buffer to buffer. The
user is responsible for knowing the word size and indexing conventions, based
on the
bit_depth, i_size,
and
j_size
of the image.
RETURN VALUE TRUE for success, FALSE for a failure. Failure sets
pl_error_code
.
SEE ALSO
pl_buf_get_img_handle(4)
NOTES
Chapter 7: Buffer Manipulation (Class 4) 105
PVCAM Class 4: Buffer Manipulation pl_buf_get_img_size(4)
NAME
pl_buf_get_img_size —
returns number of pixels in region.
SYNOPSIS
rs_bool
pl_buf_get_img_size(int16 himg,int16_ptr i_size, int16_ptr
j_size)
DESCRIPTION This examines the image specified by the image handle
himg
, and determines
the i and j dimensions. The sizes are returned in
I_size
and
j_size
in pixels.
Since the pixel addresses begin with 0 (following typical C conventions), the
following relationship is true:
i_maximum_element_num = i_size - 1
j_maximum_element_num = j_size - 1
RETURN VALUE TRUE for success, FALSE for a failure. Failure sets
pl_error_code
.
SEE ALSO
pl_buf_get_img_handle(4)
NOTES This size is not necessarily the same as the number of pixels exposed on the
CCD. If the region was binned, the CCD area may have had many more pixels
than the final data set.
The set of images must be the same for every exposure in the buffer. For
example, image 3, exposure 0 must have the same size (and offset and binning)
as image 3, exposure 2. The sizes reported for the images in exposure 0 will
always be identical to the sizes reported for every other exposure.
106 PVCAM Manual Version 2.7
PVCAM Class 4: Buffer Manipulation pl_buf_get_img_total(4)
NAME
pl_buf_get_img_total —
returns number of images in each exposure.
SYNOPSIS
rs_bool
pl_buf_get_img_total(int16 hbuf,int16_ptr img_total)
DESCRIPTION This returns the number of images in the first exposure. Every exposure in the
same buffer will have exactly this many images, no more, no less. When
referring to images by number, counting begins at 0 (in typical C fashion), so the
highest allowed image number is actually
img_total
-1.
RETURN VALUE TRUE for success, FALSE for a failure. Failure sets
pl_error_code
.
SEE ALSO
pl_buf_get_exp_total(4),pl_buf_get_img_ofs(4),
pl_buf_get_img_size(4)
NOTES Every exposure in the buffer must have exactly this many images.
Chapter 7: Buffer Manipulation (Class 4) 107
PVCAM Class 4: Buffer Manipulation pl_buf_get_size(4)
NAME
pl_buf_get_size —
returns size of buffer, in bytes.
SYNOPSIS
rs_bool
pl_buf_get_size(int16 hbuf,uns32_ptr buf_size)
DESCRIPTION This returns the size of a buffer, in bytes, inside the variable
buf_size
. This
value is useful when memory or disk space is tight, before performing operations
such as
pl_buf_copy
.
RETURN VALUE TRUE for success, FALSE for a failure. Failure sets
pl_error_code
.
SEE ALSO
NOTES Buffer size can be estimated if you know the bit depth, number of exposures, and
the size of each image. This isn't completely accurate, though, since other
information is stored in a buffer: the exposure time and date, exposure duration,
size and offset values, etc.
108 PVCAM Manual Version 2.7
PVCAM Class 4: Buffer Manipulation pl_buf_set_exp_date(4)
NAME
pl_buf_set_exp_date —
(re)writes the time that this picture was taken.
SYNOPSIS
rs_bool
pl_buf_set_exp_date(int16 hbuf,int16 exp_num,int16
year,uns8 day,uns8 hour,uns8 min,uns8
sec,uns16 msec)
DESCRIPTION This allows the time of any exposure to be recorded or rewritten. This should be
the time when the exposure started. The format is:
Year current year (i.e. 1995)
month 1-12 (January through December)
day 1-31 (day number in the current month)
hour 0-23 (24-hour format)
min 0-59
sec 0-59
msec 0-999 milliseconds
To set a single time for the entire buffer, it is usually adequate to set the time for
exp_num 0
. (Conversely, this is the time that will be examined when a single
reading is desired for an entire sequence.) But, depending on the sequence and
timing parameters, successive exposures may be taken hours or even days later.
To set the exact exposure date and time for any successive exposure in the
sequence, specify a different
exp_num
. The exposure end time may be obtained
by adding the exposure duration that is obtained from
pl_buf_get_exp_time
function.
RETURN VALUE TRUE for success, FALSE for a failure. Failure sets
pl_error_code
.
SEE ALSO
pl_buf_get_exp_date(4),pl_buf_get_exp_time(4),
pl_exp_start_seq(3)
NOTES In most cases, the system will be unable to obtain a highly accurate value of the
time. (The milliseconds may be particularly inaccurate.) All inputs are checked
for proper ranges on input (using the ranges shown above). The inputs will
generate appropriate errors if they are out of range. Any value is allowed for the
year.
For most exposures, the start of exposure is easy to determine. (Time is
measured immediately before a call to
pl_exp_start_seq
.) In some cases
(such as triggered exposures), determining the start time may be more difficult.
Depending on the communication link to the camera,
pl_exp_check_status
may be a few seconds out of date.
Chapter 7: Buffer Manipulation (Class 4) 109
PVCAM Class 4: Buffer Manipulation pl_buf_init(4)
NAME
pl_buf_init —
initializes the buffer functions.
SYNOPSIS
rs_bool
pl_buf_init(void)
DESCRIPTION This initializes the pointers and memory needed to use the buffer functions.
Since the buffer functions depend on internal tables, these tables must be
allocated and initialized before any buffer functions can be used. This function
should be called soon after
pl_pvcam_init
.
RETURN VALUE TRUE for success. FALSE for a failure. Failure sets
pl_error_code
. If the
initialization fails, the buffer functions may not be used.
SEE ALSO
pl_buf_uninit(4),pl_pvcam_init(0)
NOTES Currently, buffers are only needed if the exposure includes multiple regions or a
complex sequence. In that case, the function
pl_exp_finish_seq
will decode
a pixel stream and put the output onto the buffer.
For simple exposures, it may be easier and more efficient to examine the output
directly, by using the
pixel_stream
array that was passed into
pl_exp_start_seq
. If this is done, the buffer routines will never be needed. It
will save space and time if the buffer routines are never referred to and never
initialized.
110 PVCAM Manual Version 2.7
PVCAM Class 4: Buffer Manipulation pl_buf_uninit(4)
NAME
pl_buf_uninit —
frees and releases the buffer functions.
SYNOPSIS
rs_bool
pl_buf_uninit(void)
DESCRIPTION This frees and releases all pointers and memory allocated by the buffer
initialization. It should be called before calling
pl_pvcam_uninit
. Once the
buffers are uninitialized, buffer functions may not be used until the buffer library
has been reinitialized.
It is safe to call this function redundantly. If the buffer functions were never
initialized, or, if they have already been freed, this does no harm.
RETURN VALUE TRUE for success, FALSE for a failure. Failure sets
pl_error_code
.
SEE ALSO
pl_buf_init(4), pl_pvcam_uninit(0)
NOTES

111
Chapter 8:
Code Examples
Example 1: pl_get_param & pl_get_enum_param
/* This example displays information for currently defined parameter IDs. */
/* Note: depending on the camera system connected the results will change */
/* This example is broken into 3 functions main calls DisplayParamIdInfo */
/* which calls DisplayEnumInfo to display enumerated data types and */
/* DisplayIntsFltsInfo to display non-enum data types. */
#include <stdio.h>
#include <stdlib.h>
#include "master.h"
#include "pvcam.h"
/* Prototype functions */
static void DisplayIntsFltsInfo (int16 hcam, uns32 param_id);
static void DisplayEnumInfo (int16 hcam, uns32 param_id);
static void DisplayParamIdInfo (int16 hcam, uns32 param_id);
int main(int argc, char **argv)
{
char cam_name[CAM_NAME_LEN]; /* camera name */
int16 hCam; /* camera handle */
/* Initialize the PVCam Library and Open the First Camera */
pl_pvcam_init();
pl_cam_get_name( 0, cam_name );
pl_cam_open(cam_name, &hCam, OPEN_EXCLUSIVE );
printf( "\nAnti_Blooming\n");
DisplayParamIdInfo (hCam, PARAM_ANTI_BLOOMING);
printf( "\nLogic Output\n");
DisplayParamIdInfo (hCam, PARAM_LOGIC_OUTPUT);
printf( "\nEdge Trigger\n");
DisplayParamIdInfo (hCam, PARAM_EDGE_TRIGGER);
printf( "\nIntensifier Gain\n");
DisplayParamIdInfo (hCam, PARAM_INTENSIFIER_GAIN);
printf( "\nGate Mode\n");
DisplayParamIdInfo (hCam, PARAM_SHTR_GATE_MODE);
printf( "\nMin Block\n");
DisplayParamIdInfo (hCam, PARAM_MIN_BLOCK);
printf( "\nNum Min Block\n");
DisplayParamIdInfo (hCam, PARAM_NUM_MIN_BLOCK);
printf( "\nStrips Per Clean\n");
DisplayParamIdInfo (hCam, PARAM_NUM_OF_STRIPS_PER_CLR);
printf( "\nReadout Port\n");
DisplayParamIdInfo (hCam, PARAM_READOUT_PORT);
printf( "\nController Alive\n");
DisplayParamIdInfo (hCam, PARAM_CONTROLLER_ALIVE);
printf( "\nReadout Time\n");
DisplayParamIdInfo (hCam, PARAM_READOUT_TIME);
printf( "\nCircular Buffer Support\n");
DisplayParamIdInfo (hCam, PARAM_CIRC_BUFFER);
pl_cam_close( hCam );
pl_pvcam_uninit();
return 0;
}
/* This will display information we can get from parameter id */
void DisplayParamIdInfo (int16 hcam, uns32 param_id)

112 PVCAM Manual Version 2.7
{
rs_bool status, status2; /* status of pvcam functions */
rs_bool avail_flag; /* ATTR_AVAIL, param is available */
uns16 access; /* ATTR_ACCESS, param is read, write or exists */
uns16 type; /* ATTR_TYPE, param data type */
status = pl_get_param(hcam, param_id, ATTR_AVAIL, (void *)&avail_flag);
/* check for errors */
if (status) {
/* check to see if parameter id is supported by hardware or software */
if (avail_flag) {
/* we got a valid parameter, now get access writes and data type
*/
status = pl_get_param(hcam, param_id, ATTR_ACCESS, (void *)&access);
status2 = pl_get_param(hcam, param_id, ATTR_TYPE, (void *) &type);
if (status && status2) {
if (access == ACC_EXIST_CHECK_ONLY) {
printf(" param id %x exists\n", param_id);
}
else if ((access == ACC_READ_ONLY) ||
(access == ACC_READ_WRITE)) {
/* now we can start displaying information */
/* handle enumerated types separate from other data */
if (type == TYPE_ENUM) {
DisplayEnumInfo(hcam, param_id);
}
else {/* take care of the rest of the data types */
DisplayIntsFltsInfo(hcam, param_id);
}
}
else {
printf(" error in access check for param_id %x\n",
param_id);
}
}
else { /* error occurred calling function */
printf( "functions failed pl_get_param, with error code %ld\n",
pl_error_code());
}
}
else { /* parameter id is not available with current setup */
printf( " parameter %x is not available with current hardware"
" or software setup\n", param_id);
}
}
else { /* error occurred calling function print out error code */
printf( "functions failed pl_get_param, with error code %ld\n",
pl_error_code());
}
printf( "Press Enter to Continue..." );
getchar();
fflush( stdin );
} /* end of function DisplayParamIdInfo */
/* This routine assumes the param id is an enumerated type,
it will print out all the enumerated values that are allowed
with the param id and display the associated ASCII text. */
static void DisplayEnumInfo (int16 hcam, uns32 param_id)
{
rs_bool status; /* status of pvcam functions */
uns32 count, index; /* counters for enumerated types */
char enumStr[100]; /* string for enum text */
uns32 enumValue; /* enum value returned for index & param id */
/* get number of enumerated values */
status = pl_get_param(hcam, param_id, ATTR_COUNT, (void *)&count);
if (status) {
printf(" enum values for param id %x\n", param_id);
for (index=0; index < count; index++) {
/* get enum value and enum string */
status = pl_get_enum_param(hcam, param_id, index, &enumValue,
enumStr, 100);

Chapter 8: Code Examples 113
/* if everything alright print out the results */
if (status) {
printf(" index =%ld enum value = %ld, text = %s\n",
index, enumValue, enumStr);
}
else {
printf( "functions failed pl_get_enum_param, "
"with error code %ld\n", pl_error_code());
}
}
}
else {
printf( "functions failed pl_get_param, with error code %ld\n",
pl_error_code());
}
} /* end of function DisplayEnumInfo */
/* This routine displays all the information associated with the parameter id
given. This routine assumes that the data is either uns8, uns16, uns32,
int8, int16, int32, or flt64 */
static void DisplayIntsFltsInfo (int16 hcam, uns32 param_id)
{
/* current, min&max, & default values of parameter id */
union {
flt64 dval;
uns32 ulval;
int32 lval;
uns16 usval;
int16 sval;
uns8 ubval;
int8 bval;
} currentVal, minVal, maxVal, defaultVal, incrementVal;
uns16 type; /* data type of parameter id */
rs_bool status, status2, status3,
status4, status5; /* status of pvcam functions */
/* get the data type of parameter id */
status = pl_get_param(hcam, param_id, ATTR_TYPE, (void *)&type);
/* get the default, current, min and max values for parameter id */
/* Note : since the data type for these depends on the parameter */
/* id you have to call pl_get_param with the correct data type */
/* passed for param_value. */
if (status) {
switch (type) {
case TYPE_INT8:
status = pl_get_param(hcam, param_id, ATTR_CURRENT,
(void *)¤tVal.bval);
status2 = pl_get_param(hcam, param_id, ATTR_DEFAULT,
(void *)&defaultVal.bval);
status3 = pl_get_param(hcam, param_id, ATTR_MAX,
(void *)&maxVal.bval);
status4 = pl_get_param(hcam, param_id, ATTR_MIN,
(void *)&minVal.bval);
status5 = pl_get_param(hcam, param_id, ATTR_INCREMENT,
(void *)&incrementVal.bval);
printf(" param id %x\n", param_id);
printf(" current value = %c\n", currentVal.bval);
printf(" default value = %c\n", defaultVal.bval);
printf(" min = %c, max = %c\n", minVal.bval, maxVal.bval);
printf(" increment = %c\n", incrementVal.bval);
break;
case TYPE_UNS8:
status = pl_get_param(hcam, param_id, ATTR_CURRENT,
(void *)¤tVal.ubval);
status2 = pl_get_param(hcam, param_id, ATTR_DEFAULT,
(void *)&defaultVal.ubval);
status3 = pl_get_param(hcam, param_id, ATTR_MAX,
(void *)&maxVal.ubval);
status4 = pl_get_param(hcam, param_id, ATTR_MIN,
(void *)&minVal.ubval);
status5 = pl_get_param(hcam, param_id, ATTR_INCREMENT,
(void *)&incrementVal.ubval);

114 PVCAM Manual Version 2.7
printf(" param id %x\n", param_id);
printf(" current value = %uc\n", currentVal.ubval);
printf(" default value = %uc\n", defaultVal.ubval);
printf(" min = %uc, max = %uc\n", minVal.ubval, maxVal.ubval);
printf(" increment = %uc\n", incrementVal.ubval);
break;
case TYPE_INT16:
status = pl_get_param(hcam, param_id, ATTR_CURRENT,
(void *)¤tVal.sval);
status2 = pl_get_param(hcam, param_id, ATTR_DEFAULT,
(void *)&defaultVal.sval);
status3 = pl_get_param(hcam, param_id, ATTR_MAX,
(void *)&maxVal.sval);
status4 = pl_get_param(hcam, param_id, ATTR_MIN,
(void *)&minVal.sval);
status5 = pl_get_param(hcam, param_id, ATTR_INCREMENT,
(void *)&incrementVal.sval);
printf(" param id %x\n", param_id);
printf(" current value = %i\n", currentVal.sval);
printf(" default value = %i\n", defaultVal.sval);
printf(" min = %i, max = %i\n", minVal.sval, maxVal.sval);
printf(" increment = %i\n", incrementVal.sval);
break;
case TYPE_UNS16:
status = pl_get_param(hcam, param_id, ATTR_CURRENT,
(void *)¤tVal.usval);
status2 = pl_get_param(hcam, param_id, ATTR_DEFAULT,
(void *)&defaultVal.usval);
status3 = pl_get_param(hcam, param_id, ATTR_MAX,
(void *)&maxVal.usval);
status4 = pl_get_param(hcam, param_id, ATTR_MIN,
(void *)&minVal.usval);
status5 = pl_get_param(hcam, param_id, ATTR_INCREMENT,
(void *)&incrementVal.usval);
printf(" param id %x\n", param_id);
printf(" current value = %u\n", currentVal.usval);
printf(" default value = %u\n", defaultVal.usval);
printf(" min = %uh, max = %u\n", minVal.usval, maxVal.usval);
printf(" increment = %u\n", incrementVal.usval);
break;
case TYPE_INT32:
status = pl_get_param(hcam, param_id, ATTR_CURRENT,
(void *)¤tVal.lval);
status2 = pl_get_param(hcam, param_id, ATTR_DEFAULT,
(void *)&defaultVal.lval);
status3 = pl_get_param(hcam, param_id, ATTR_MAX,
(void *)&maxVal.lval);
status4 = pl_get_param(hcam, param_id, ATTR_MIN,
(void *)&minVal.lval);
status5 = pl_get_param(hcam, param_id, ATTR_INCREMENT,
(void *)&incrementVal.lval);
printf(" param id %x\n", param_id);
printf(" current value = %ld\n", currentVal.lval);
printf(" default value = %ld\n", defaultVal.lval);
printf(" min = %ld, max = %ld\n", minVal.lval, maxVal.lval);
printf(" increment = %ld\n", incrementVal.lval);
break;
case TYPE_UNS32:
status = pl_get_param(hcam, param_id, ATTR_CURRENT,
(void *)¤tVal.ulval);
status2 = pl_get_param(hcam, param_id, ATTR_DEFAULT,
(void *)&defaultVal.ulval);
status3 = pl_get_param(hcam, param_id, ATTR_MAX,
(void *)&maxVal.ulval);
status4 = pl_get_param(hcam, param_id, ATTR_MIN,
(void *)&minVal.ulval);
status5 = pl_get_param(hcam, param_id, ATTR_INCREMENT,
(void *)&incrementVal.ulval);
printf(" param id %x\n", param_id);
printf(" current value = %ld\n", currentVal.ulval);
printf(" default value = %ld\n", defaultVal.ulval);
printf(" min = %ld, max = %ld\n", minVal.ulval, maxVal.ulval);

Chapter 8: Code Examples 115
printf(" increment = %ld\n", incrementVal.ulval);
break;
case TYPE_FLT64:
status = pl_get_param(hcam, param_id, ATTR_CURRENT,
(void *)¤tVal.dval);
status2 = pl_get_param(hcam, param_id, ATTR_DEFAULT,
(void *)&defaultVal.dval);
status3 = pl_get_param(hcam, param_id, ATTR_MAX,
(void *)&maxVal.dval);
status4 = pl_get_param(hcam, param_id, ATTR_MIN,
(void *)&minVal.dval);
status5 = pl_get_param(hcam, param_id, ATTR_INCREMENT,
(void *)&incrementVal.dval);
printf(" param id %x\n", param_id);
printf(" current value = %g\n", currentVal.dval);
printf(" default value = %g\n", defaultVal.dval);
printf(" min = %g, max = %g\n", minVal.dval, maxVal.dval);
printf(" increment = %g\n", incrementVal.dval);
break;
default:
printf(" data type not supported in this functions\n");
break;
}
if (!status || !status2 || !status3 || !status4 || !status5) {
printf( "functions failed pl_get_param, with error code %ld\n",
pl_error_code());
}
}
else {
printf( "functions failed pl_get_param, with error code %ld\n",
pl_error_code());
}
}
Example 2: pl_set_param
This example assumes data type to set is int16. This routine does do the error checks to make sure
you can write to the param and that its param id is an int16.
#include <stdio.h>
#include <stdlib.h>
#include "master.h"
#include "pvcam.h"
/* Prototype functions */
static rs_bool SetParamExample (int16 hcam, uns32 param_id, int16 value);
int main(int argc, char **argv)
{
char cam_name[CAM_NAME_LEN]; /* camera name */
int16 hCam; /* camera handle */
/* Initialize the PVCam Library and Open the First Camera */
pl_pvcam_init();
pl_cam_get_name( 0, cam_name );
pl_cam_open(cam_name, &hCam, OPEN_EXCLUSIVE );
/* Change the min skip block and number of min blocks to 2 and 100 */
SetParamExample(hCam, PARAM_MIN_BLOCK, 2);
SetParamExample(hCam, PARAM_NUM_MIN_BLOCK, 100);
pl_cam_close( hCam );
pl_pvcam_uninit();
return 0;
}
rs_bool SetParamExample (int16 hcam, uns32 param_id, int16 value)

116 PVCAM Manual Version 2.7
{
rs_bool status; /* status of pvcam functions */
rs_bool avail_flag; /* ATTR_AVAIL, param is available */
uns16 access; /* ATTR_ACCESS, param is read, write or exists */
uns16 type; /* ATTR_TYPE, param data type */
status = pl_get_param(hcam, param_id, ATTR_AVAIL, (void *)&avail_flag);
/* check for errors */
if (status) {
/* check to see if parameter id is supported by hardware or software */
if (avail_flag) {
/* we got a valid parameter, now get access rights and data type */
status = pl_get_param(hcam, param_id, ATTR_ACCESS, (void *)&access);
if (status) {
if (access == ACC_EXIST_CHECK_ONLY) {
printf(" error param id %x is an exists check, "
"and not writable\n", param_id);
}
else if (access == ACC_READ_ONLY) {
printf(" error param id %x is a readonly variable, "
"and not writeable\n", param_id);
}
else if (access == ACC_READ_WRITE) {
/* we can set it, let's be safe and check to make sure
it is the right data type */
status = pl_get_param(hcam, param_id, ATTR_TYPE,
(void *) &type);
if (status) {
if (type == TYPE_INT16) {
/* OK lets write to it */
pl_set_param(hcam, param_id, (void *)&value);
printf( "param %x set to %i\n", param_id, value );
}
else {
printf( "data type mismatch for param_id "
"%x\n", param_id );
status = FALSE;
}
}
else {
printf( "functions failed pl_get_param, with "
"error code %ld\n", pl_error_code());
}
}
else {
printf(" error in access check for param_id "
"%x\n", param_id);
}
}
else { /* error occurred calling function */
printf( "functions failed pl_get_param, with error code %ld\n",
pl_error_code());
}
}
else { /* parameter id is not available with current setup */
printf(" parameter %x is not available with current hardware or "
"software setup\n", param_id);
}
}
else { /* error occurred calling function; print out error code */
printf( "functions failed pl_get_param, with error code %ld\n",
pl_error_code());
}
return(status);
}

Chapter 8: Code Examples 117
Example 3: Circular Buffer
Latest Frame Mode (FOCUS)
The following is an example of a circular buffer with the latest frame mode set. The example takes
the proper steps to set the camera up beforehand. (i.e., pl_cam_open, etc. and that
pl_get_param
with parameter id
PARAM_CIRC_BUFFER
was used to verify that the system could perform circular
buffer operations) The following code will return the latest frame in the buffer.
#include <stdio.h>
#include <stdlib.h>
#include "master.h"
#include "pvcam.h"
static void FocusContinuous( int16 hCam );
int main(int argc, char **argv)
{
char cam_name[CAM_NAME_LEN]; /* camera name */
int16 hCam; /* camera handle */
rs_bool avail_flag; /* ATTR_AVAIL, param is available */
/* Initialize the PVCam Library and Open the First Camera */
pl_pvcam_init();
pl_cam_get_name( 0, cam_name );
pl_cam_open(cam_name, &hCam, OPEN_EXCLUSIVE );
/* check for circular buffer support */
if( pl_get_param( hCam, PARAM_CIRC_BUFFER, ATTR_AVAIL, &avail_flag ) &&
avail_flag )
FocusContinuous( hCam );
else
printf( "circular buffers not supported\n" );
pl_cam_close( hCam );
pl_pvcam_uninit();
return 0;
}
void FocusContinuous( int16 hCam )
{
rgn_type region = { 0, 511, 1, 0, 511, 1 };
uns32 buffer_size, frame_size;
uns16 *buffer;
int16 status;
uns32 not_needed;
void_ptr address;
uns16 numberframes = 5;
/* Init a sequence set the region, exposure mode and exposure time */
pl_exp_init_seq();
pl_exp_setup_cont( hCam, 1, ®ion, TIMED_MODE, 100, &frame_size,
CIRC_OVERWRITE );
/* set up a circular buffer of 3 frames */
buffer_size = frame_size * 3;
buffer = (uns16*)malloc( buffer_size );
/* Start the acquisition */
printf( "Collecting %i Frames\n", numberframes );
pl_exp_start_cont(hCam, buffer, buffer_size );
/* ACQUISITION LOOP */
while( numberframes ) {
/* wait for data or error */
while( pl_exp_check_cont_status( hCam, &status, ¬_needed,
¬_needed ) &&

118 PVCAM Manual Version 2.7
(status != READOUT_COMPLETE && status != READOUT_FAILED) );
/* Check Error Codes */
if( status == READOUT_FAILED ) {
printf( "Data collection error: %i\n", pl_error_code() );
break;
}
if ( pl_exp_get_latest_frame( hCam, &address )) {
/* address now points to valid data */
printf( "Center Three Points: %i, %i, %i\n",
*((uns16*)address + frame_size/sizeof(uns16)/2 - 1),
*((uns16*)address + frame_size/sizeof(uns16)/2),
*((uns16*)address + frame_size/sizeof(uns16)/2 + 1) );
numberframes--;
printf( "Remaining Frames %i\n", numberframes );
}
} /* End while */
/* Stop the acquisition */
pl_exp_stop_cont(hCam,CCS_HALT);
/* Finish the sequence */
pl_exp_finish_seq( hCam, buffer, 0);
/*Uninit the sequence */
pl_exp_uninit_seq();
free( buffer );
}

Chapter 8: Code Examples 119
Oldest Frame Mode (NFRAME)
The following is an example of a circular buffer with the oldest frame mode set. The example takes
the proper steps to set the camera up beforehand. (i.e., pl_cam_open, etc. and that
pl_get_param
with parameter id
PARAM_CIRC_BUFFER
was used to verify that the system could perform circular
buffer operations) This code will return the frames in the order in which they arrived in the buffer,
without skipping a frame.
#include <stdio.h>
#include <stdlib.h>
#include "master.h"
#include "pvcam.h"
static void AcquireContinuous( int16 hCam );
int main(int argc, char **argv)
{
char cam_name[CAM_NAME_LEN]; /* camera name */
int16 hCam; /* camera handle */
rs_bool avail_flag; /* ATTR_AVAIL, param is available */
/* Initialize the PVCam Library and Open the First Camera */
pl_pvcam_init();
pl_cam_get_name( 0, cam_name );
pl_cam_open(cam_name, &hCam, OPEN_EXCLUSIVE );
/* check for circular buffer support */
if( pl_get_param( hCam, PARAM_CIRC_BUFFER, ATTR_AVAIL, &avail_flag ) &&
avail_flag )
AcquireContinuous( hCam );
else
printf( "circular buffers not supported\n" );
pl_cam_close( hCam );
pl_pvcam_uninit();
return 0;
}
void AcquireContinuous( int16 hCam )
{
rgn_type region = { 0, 511, 1, 0, 511, 1 };
uns32 buffer_size, frame_size;
uns16 *buffer;
int16 status;
uns32 not_needed;
void_ptr address;
uns16 numberframes = 5;
/* Init a sequence set the region, exposure mode and exposure time */
pl_exp_init_seq();
pl_exp_setup_cont( hCam, 1, ®ion, TIMED_MODE, 100, &frame_size,
CIRC_NO_OVERWRITE );
/* set up a circular buffer of 3 frames */
buffer_size = frame_size * 3;
buffer = (uns16*)malloc( buffer_size );
/* Start the acquisition */
printf( "Collecting %i Frames\n", numberframes );
pl_exp_start_cont(hCam, buffer, buffer_size );
/* ACQUISITION LOOP */
while( numberframes ) {
/* wait for data or error */
while( pl_exp_check_cont_status( hCam, &status, ¬_needed,
¬_needed ) &&
(status != READOUT_COMPLETE && status != READOUT_FAILED) );

120 PVCAM Manual Version 2.7
/* Check Error Codes */
if( status == READOUT_FAILED ) {
printf( "Data collection error: %i\n", pl_error_code() );
break;
}
if ( pl_exp_get_oldest_frame( hCam, &address )) {
/* address now points to valid data */
printf( "Center Three Points: %i, %i, %i\n",
*((uns16*)address + frame_size/sizeof(uns16)/2 - 1),
*((uns16*)address + frame_size/sizeof(uns16)/2),
*((uns16*)address + frame_size/sizeof(uns16)/2 + 1) );
numberframes--;
printf( "Remaining Frames %i\n", numberframes );
pl_exp_unlock_oldest_frame( hCam );
}
} /* End while */
/* Stop the acquisition */
pl_exp_stop_cont(hCam,CCS_HALT);
/* Finish the sequence */
pl_exp_finish_seq( hCam, buffer, 0);
/*Uninit the sequence */
pl_exp_uninit_seq();
free( buffer );
}

Chapter 8: Code Examples 121
Example 4: Standard Mode Acquisition
The following is a simple example of standard mode acquisitions from PVCAM with the minimum
set of functions for data acquisition. Note the example is hard-coded for a particular image size of
512 x 512; these normally should be variables.
#include <stdio.h>
#include <stdlib.h>
#include "master.h"
#include "pvcam.h"
static void AcquireStandard( int16 hCam );
int main(int argc, char **argv)
{
char cam_name[CAM_NAME_LEN]; /* camera name */
int16 hCam; /* camera handle */
/* Initialize the PVCam Library and Open the First Camera */
pl_pvcam_init();
pl_cam_get_name( 0, cam_name );
pl_cam_open(cam_name, &hCam, OPEN_EXCLUSIVE );
AcquireStandard( hCam );
pl_cam_close( hCam );
pl_pvcam_uninit();
return 0;
}
void AcquireStandard( int16 hCam )
{
rgn_type region = { 0, 511, 1, 0, 511, 1 };
uns32 size;
uns16 *frame;
int16 status;
uns32 not_needed;
uns16 numberframes = 5;
/* Init a sequence set the region, exposure mode and exposure time */
pl_exp_init_seq();
pl_exp_setup_seq( hCam, 1, 1, ®ion, TIMED_MODE, 100, &size );
frame = (uns16*)malloc( size );
/* Start the acquisition */
printf( "Collecting %i Frames\n", numberframes );
/* ACQUISITION LOOP */
while( numberframes ) {
pl_exp_start_seq(hCam, frame );
/* wait for data or error */
while( pl_exp_check_status( hCam, &status, ¬_needed ) &&
(status != READOUT_COMPLETE && status != READOUT_FAILED) );
/* Check Error Codes */
if( status == READOUT_FAILED ) {
printf( "Data collection error: %i\n", pl_error_code() );
break;
}
/* frame now contains valid data */
printf( "Center Three Points: %i, %i, %i\n",
frame[size/sizeof(uns16)/2 - 1],
frame[size/sizeof(uns16)/2],
frame[size/sizeof(uns16)/2 + 1] );

122 PVCAM Manual Version 2.7
numberframes--;
printf( "Remaining Frames %i\n", numberframes );
} /* End while */
/* Finish the sequence */
pl_exp_finish_seq( hCam, frame, 0);
/*Uninit the sequence */
pl_exp_uninit_seq();
free( frame );
}
123
Appendix A:
Error Codes
All successful functions reset
pl_error_code
to 0, which produces the message "
no error
".
All unsuccessful functions return a numeric value, where that value corresponds to a number linked
to an error message. All of the PVCAM error numbers and their linked error messages are listed in
the table that follows. This table will be updated as new error messages are added.
Table 5. Error Codes
Error # Error Message Meaning
0 PVCAM_SUCCESS No error
1 C0_UNKNOWN_ERROR Unexpected, unanticipated, or undocumented
2 DDI_NOT_PV_DEVICE This device driver is not a Roper device
3 DDI_BAD_DEV_NAME No driver found with the specified name
4 DDI_DRIVER_IN_USE This driver is already in use by another user
5 DDI_ALREADY_OPEN This driver has already been opened
6 DDI_CANT_OPEN_DRIVER The driver was found, but could not be opened
7 DDI_CANT_CLOSE_DRIVER Driver is not currently open; it can't be closed
8 DDI_CLOSE_ERROR An error occurred while trying to close the driver
9 DDI_ALREADY_ACTIVE Camera is already taking data; finish or abort
10 DDI_ZERO_SEND_SIZE Invalid request: transmit zero bytes
11 DDI_ZERO_RECV_SIZE Invalid request: receive zero bytes
12 DDI_IOPORT_CONFLICT 2 cameras are using the same I/O port
13 DDI_BOARD_NOT_FOUND Communications board is not at expected location
14 DDI_CABLE_DISCONNECTED Camera electronics unit cable is not connected
15 DDI_MEM_ALLOC_FAILED Device driver could not allocate needed memory
16 DDI_IRQID_CONFLICT 2 open cameras are using the same interrupt ID
17 DDI_DRV_CLOS_CLOSE_CAM Driver not yet opened: pd_cam_close
18 DDI_DRV_CLOS_READ_BYTE Driver not yet opened: pd_cam_write_read, read
19 DDI_DRV_CLOS_SEND_BYTE Driver not yet opened: pd_cam_write_read, write
20 DDI_DRV_CLOS_GET_RETRY Driver not yet opened: pd_driver_get_retries
21 DDI_DRV_CLOS_SET_RETRY Driver not yet opened: pd_driver_set_retries
22 DDI_DRV_CLOS_GET_TIME Driver not yet opened: pd_driver_get_timeout
23 DDI_DRV_CLOS_SET_TIME Driver not yet opened: pd_driver_set_timeout
24 DDI_DRV_CLOS_INFO_LEN Driver not yet opened: pd_driver_get_info_length
25 DDI_DRV_CLOS_INFO_DUMP Driver not yet opened: pd_driver_get_info_dump
124 PVCAM Manual Version 2.7
Error # Error Message Meaning
26 DDI_DRV_CLOS_DRV_VER Driver not yet opened: pd_driver_get_ver
27 DDI_DRV_CLOS_IM_STATUS Driver not open: pd_driver_get_image_data_status
28 DDI_DRV_CLOS_IM_ABORT Driver not open: pd_driver_set_image_data_idle
29 DDI_DRV_CLOS_IM_ACTIVE Driver not open: pd_driver_set_image_data_active
30 DDI_DRV_CLOS_IM_GRAN Driver not open: pd_driver_get_image_data_gran
31 DDI_BAD_DEVH_CLOSE_CAM Illegal device handle: pd_cam_close
32 DDI_BAD_DEVH_READ_BYTE Illegal device handle: pd_cam_write_read, read
33 DDI_BAD_DEVH_SEND_BYTE Illegal device handle: pd_cam_write_read, write
34 DDI_BAD_DEVH_GET_RETRY Illegal device handle: pd_driver_get_retries
35 DDI_BAD_DEVH_SET_RETRY Illegal device handle: pd_driver_set_retries
36 DDI_BAD_DEVH_GET_TIME Illegal device handle: pd_driver_get_timeout
37 DDI_BAD_DEVH_SET_TIME Illegal device handle: pd_driver_set_timeout
38 DDI_BAD_DEVH_INFO_LEN Illegal device handle: pd_driver_get_info_length
39 DDI_BAD_DEVH_INFO_DUMP Illegal device handle: pd_driver_get_info_dump
40 DDI_BAD_DEVH_DRV_VER Illegal device handle: pd_driver_get_ver
41 DDI_BAD_DEVH_IM_STATUS Bad dev handle: pd_driver_get_image_data_status
42 DDI_BAD_DEVH_IM_ABORT Bad dev handle: pd_driver_set_image_data_idle
43 DDI_BAD_DEVH_IM_ACTIVE Bad dev handle: pd_driver_set_image_data_active
44 DDI_BAD_DEVH_IM_GRAN Bad dev handle: pd_driver_get_image_data_gran
45 DDI_SYS_ERR_DEV_DRIVER System error while accessing the device driver
46 DDI_SYS_ERR_INIT System error in pd_ddi_init
47 DDI_SYS_ERR_UNINIT System error in pd_ddi_uninit
48 DDI_SYS_ERR_TOTL_CAMS System error in pd_ddi_get_total_cams
49 DDI_SYS_ERR_CAM_NAME System error in pd_ddi_get_all_cam_names
50 DDI_SYS_ERR_OPEN_CAM System error in pd_cam_open
51 DDI_SYS_ERR_CLOSE_CAM System error in pd_cam_close
52 DDI_SYS_ERR_READ_BYTE System error in pd_cam_write_read, read
53 DDI_SYS_ERR_SEND_BYTE System error in pd_cam_write_read, write
54 DDI_SYS_ERR_GET_RETRY System error in pd_driver_get_retries
55 DDI_SYS_ERR_SET_RETRY System error in pd_driver_set_retries
56 DDI_SYS_ERR_GET_TIME System error in pd_driver_get_timeout
57 DDI_SYS_ERR_SET_TIME System error in pd_driver_set_timeout
58 DDI_SYS_ERR_INFO_LEN System error in pd_driver_get_info_length
59 DDI_SYS_ERR_INFO_DUMP System error in pd_driver_get_info_dump
60 DDI_SYS_ERR_DRV_VER System error in pd_driver_get_ver
Appendix A: Error Codes 125
Error # Error Message Meaning
61 DDI_SYS_ERR_IM_STATUS System error in pd_driver_get_image_data_status
62 DDI_SYS_ERR_IM_ABORT System error in pd_driver_set_image_data_idle
63 DDI_SYS_ERR_IM_ACTIVE System error in pd_driver_set_image_data_active
64 DDI_SYS_ERR_IM_GRAN System error in pd_driver_get_image_data_gran
65 DDI_UNKNOWN_DEV_DRIVER Unknown error while accessing the device driver
66 DDI_UNKNOWN_INIT Unknown error in pd_ddi_init
67 DDI_UNKNOWN_UNINIT Unknown error in pd_ddi_uninit
68 DDI_UNKNOWN_TOTL_CAMS Unknown error in pd_ddi_get_total_cams
69 DDI_UNKNOWN_CAM_NAME Unknown error in pd_ddi_get_all_cam_names
70 DDI_UNKNOWN_OPEN_CAM Unknown error in pd_cam_open
71 DDI_UNKNOWN_CLOSE_CAM Unknown error in pd_cam_close
72 DDI_UNKNOWN_READ_BYTE Unknown error in pd_cam_write_read, read
73 DDI_UNKNOWN_SEND_BYTE Unknown error in pd_cam_write_read,write
74 DDI_UNKNOWN_GET_RETRY Unknown error in pd_driver_get_retries
75 DDI_UNKNOWN_SET_RETRY Unknown error in pd_driver_set_retries
76 DDI_UNKNOWN_GET_TIME Unknown error in pd_driver_get_timeout
77 DDI_UNKNOWN_SET_TIME Unknown error in pd_driver_set_timeout
78 DDI_UNKNOWN_INFO_LEN Unknown error in pd_driver_get_info_length
79 DDI_UNKNOWN_INFO_DUMP Unknown error in pd_driver_get_info_dump
80 DDI_UNKNOWN_DRV_VER Unknown error in pd_driver_get_ver
81 DDI_UNKNOWN_IM_STATUS Unknown error in pd_driver_get_image_data_status
82 DDI_UNKNOWN_IM_ABORT Unknown error in pd_driver_set_image_data_idle
83 DDI_UNKNOWN_IM_ACTIVE Unknown error in pd_driver_set_image_data_active
84 DDI_UNKNOWN_IM_GRAN Unknown error in pd_driver_get_image_data_gran
85 DDI_SCSI_NOT_PV_CAMERA This SCSI device is not a Tucson camera
86 DDI_SCSI_NO_PROTOCOL SCSI protocol breakdown: no device or termination
87 DDI_SCSI_NO_ARBITRATE SCSI arbitration failure: the bus is busy
88 DDI_SCSI_BAD_XFER SCSI bad instruction in transfer instruction bloc
89 DDI_SCSI_PHASE_ERROR SCSI phase error: host & camera disagree on type
90 DDI_SCSI_DATA_ERROR SCSI data comparison error verifying transfer
91 DDI_SCSI_MGR_BUSY SCSI manager is busy with another operation
92 DDI_SCSI_SEQUENCE_ERR SCSI sequencing error
93 DDI_SCSI_BUS_TIMEOUT SCSI bus timeout waiting for data transfer
94 DDI_SCSI_COMPLETE_ERR SCSI completion error
95 DDI_SCSI_INTERNAL_ERR SCSI device indicates an internal error
126 PVCAM Manual Version 2.7
Error # Error Message Meaning
96 DDI_XM_SNDOK XMODEM
97 DDI_XM_NOSOH XMODEM
98 DDI_XM_OVERFLOW XMODEM
99 DDI_XM_RCVOK XMODEM
100 DDI_XM_RCVCAN XMODEM
101 DDI_XM_NOACK XMODEM no ACKnowledge signal received
102 DDI_XM_LASTACK XMODEM
103 DDI_XM_SNDACK XMODEM
104 DDI_XM_SNDCAN XMODEM
105 DDI_XM_MSGEND XMODEM
106 DDI_XM_BADCKV XMODEM
107 DDI_XM_BADSOH XMODEM
108 DDI_XM_NODATA XMODEM
109 DDI_XM_BADPAK XMODEM
110 DDI_XM_PAKNUM XMODEM
111 DDI_XM_PAKSEQ XMODEM
112 DDI_XM_NOSYNC XMODEM no SYNC character seen
113 DDI_XM_SYNCTOUT XMODEM timout while waiting for SYNC
character
114 DDI_XM_XMITLOCK XMODEM transmit ... ?
115 DDI_XM_BADCMD XMODEM bad command
116 C0_INVALID_HANDLE This is not the handle of an open camera
117 C0_CAM_ALREADY_OPEN This user has already opened this camera
118 C0_CAM_NEVER_OPENED Camera was not opened, so this task can't be done
119 C0_CAM_RESERVED The camera is in use by another user
120 C0_DRIVER_OUT_OF_MEM Driver or DDI ran out of (specialized?) memory
121 C0_CANT_READ_TIMEOUT System couldn't read the timeout for this driver
122 C0_CANT_WRIT_TIMEOUT System couldn't set the timeout for this driver
123 C0_CANT_READ_RETRIES System couldn't read the retries for this driver
124 C0_CANT_WRIT_RETRIES System couldn't set the retries for this driver
125 C0_CAM_TIMEOUT No response at all from the camera
126 C0_CAM_TIMEOUT_NOISE Timeout, but some response (noisy line?)
127 C0_RETRIES_EXCEEDED Not a timeout, but retries didn't work (noisy?)
128 C0_CAM_NAME_OUT_OF_RNG The number must be in the range
1<=num<=totl_cams
129 C0_CAM_NAME_NOT_FOUND This is not a valid name for opening the camera
Appendix A: Error Codes 127
Error # Error Message Meaning
130 C0_PACKET_TOO_LARGE A send or read request used a packet >32768 bytes
131 C0_STATUS_TOO_LARGE The status info returned contained too many bytes
132 C0_STATUS_TOO_SMALL The status info returned contained too few bytes
133 C0_NEED_POSITIVE_VAL The input value must be greater than zero
134 C0_NEED_ZERO_OR_MORE The input value must be zero or above
135 C0_NULL_POINTER Input pointer is null, it must be a legal address
136 C0_STSF_EU_CPU Subsystem fault: electronics unit main CPU
137 C0_STSF_EU_SYS_INTEG Subsystem fault: EU internal communications
138 C0_STSF_EU_TO_HOST Subsystem fault: EU-to-host cables
139 C0_STSF_POWER_SUPPLY Subsystem fault: power supply voltage error
140 C0_STSF_CCS_CHIP Subsystem fault: CCS chip or memory
141 C0_STSF_CCS_SCRIPT_MEM Subsystem fault: CCS script memory
142 C0_STSF_CCS_PORTS Subsystem fault: CCS ports
143 C0_STSF_DISPLAY Subsystem fault: EU front panel display
144 C0_STSF_SHUTTER_DRIVE Subsystem fault: shutter driver circuit
145 C0_STSF_TEMP_CONT Subsystem fault: temperature control circuit
146 C0_STSF_PAR_CLOCK_DRV Subsystem fault: parallel clock driver
147 C0_STSF_CH_CABLES Subsystem fault: camera head cables
148 C0_STSF_CH_CPU Subsystem fault: camera head CPU board
149 C0_STSF_CH_CLOCK_BRD Subsystem fault: camera head clock board
150 C0_STSF_CH_POWER_BRD Subsystem fault: camera head power board
151 C0_STSF_CH_VID_BRD_1 Subsystem fault: camera head video board #1
152 C0_STSF_CH_VID_BRD_2 Subsystem fault: camera head video board #2
153 C0_STSF_CH_VID_BRD_3 Subsystem fault: camera head video board #3
154 C0_STSF_CH_VID_BRD_4 Subsystem fault: camera head video board #4
155 C0_STSF_ADC_BOARD_1 Subsystem fault: A/D board #1
156 C0_STSF_ADC_BOARD_2 Subsystem fault: A/D board #2
157 C0_STSF_ADC_BOARD_3 Subsystem fault: A/D board #3
158 C0_STSF_ADC_BOARD_4 Subsystem fault: A/D board #4
159 C0_STSF_OPTION_CARD_1 Subsystem fault: option card #1
160 C0_STSF_OPTION_CARD_2 Subsystem fault: option card #2
161 C0_STSF_OPTION_CARD_3 Subsystem fault: option card #3
162 C0_STSF_OPTION_CARD_4 Subsystem fault: option card #4
163 C0_NO_IMG_DATA Can't collect data: expected data is zero bytes
164 C0_CCL_SCRIPT_INVALID Can't collect data: CCS script is invalid
128 PVCAM Manual Version 2.7
Error # Error Message Meaning
165 C0_EXP_FIFO_OVERFLOW AIA input buffer has overflowed
166 C0_EXP_NO_ACK Camera didn't acknowledge request for image data
167 C0_EXP_XFER_ERR Last data transfer from the camera was garbled
168 C0_EXP_EXTRA_DATA Finished data transfer, but extra data exists
169 C0_EXP_MISSING_DATA Finished data transfer, some data was missing
170 C0_OPEN_MODE_UNAVAIL Camera may not be opened in the mode specified
171 C0_WRONG_READ_CLASS Read operations require the HOST_COMMANDS
class
172 C0_WRITE_BYTES_TOO_SML Command sent to camera must be at least 1 byte
173 C0_WRITE_BYTES_TOO_LRG Cannot send over 32768 bytes in one transaction
174 C0_READ_BYTES_TOO_SML A read transaction must transfer at least 1 byte
175 C0_READ_BYTES_TOO_LRG Cannot read over 32768 bytes in one transaction
176 C0_WRONG_READ_CMD 'read' command is improperly formatted
177 DDI_DRV_CLOS_GET_PIXTIME Driver not yet opened: pd_driver_get_pixtime
178 DDI_SYS_ERR_GET_PIXTIME System error in pd_driver_get_pixtime
179 DDI_BAD_DEVH_GET_PIXTIME Bad dev handle: pd_driver_get_pixtime
180 DDI_UNKNOWN_GET_PIXTIME Unknown error in pd_driver_get_pixtime
181 DDI_CAM_XOFF Camera can't communicate after sending an X-OFF
182 C0_BAD_CONTROLLER Controller for camera not valid
183 C0_CNTRL_CREATE_FAILED Could not create controller object for camera
184 C0_NO_CONT_STATUS Status not available for continuous exposure
185 C0_STAT_CNTRL_ERROR Controller error while requesting status
186 C0_STAT_CMD_ERROR Command error while requesting status
187 C0_STAT_DMA_OVERRUN DMA data overrun has occurred
188 C0_STAT_TAXI_VIOLATION Violation in TAXI communication protocol occurred
189 C0_STAT_MAILBOX_ERROR Mailbox error while requesting status
190 C0_STAT_CH0_ERROR Channel 0 transfer not enabled
191 C0_STAT_CH1_ERROR Channel 1 transfer not enabled
192 C0_CANT_READ_ID System couldn't read the subsystem part numbers
193 C0_CANT_READ_NAME System couldn't read the name for this subsystem
194 C0_DEV_HANDLE_UNAVAIL Camera device handle unavailable
195 C0_PVCAM_NOT_INITED Camera library not initialized
196 C0_NOT_INITIALIZED The pg_decode_info structure is not initialized
1000 C01_START_ERROR unknown error
2000 C2_UNKNOWN_ERROR Unexpected, unanticipated, undocumented
Appendix A: Error Codes 129
Error # Error Message Meaning
2001 C2_PVCAM_ALREADY_INITED Init_pvcam has been called twice without closing
2002 C2_PVCAM_NOT_INITED The PVCAM library was never initialized
2003 C2_FAILED_TO_SET_VALUE The camera did not accept the new setting
2004 C2_NEED_POSITIVE_VAL The input value must be greater than zero
2005 C2_NEED_ZERO_OR_MORE The input value must be zero or above
2006 C2_NULL_POINTER Input pointer is null, it must be a legal address
2007 C2_FRAME_XFER_ILLEGAL This CCD does not allow frame transfer operation
2008 C2_FRAME_XFER_REQUIRED This CCD must be operated in frame transfer mode
2009 C2_MPP_MODE_ILLEGAL This CCD does not allow mpp-mode clocking
2010 C2_MPP_MODE_REQUIRED This CCD requires mpp-mode clocking
2011 C2_CLEAR_MODE_INVALID Requested clear mode is not an allowed choice
2012 C2_SPEED_INVALID No valid speeds between camera/electronics/host
2013 C2_SPEED_OUT_OF_RANGE Selected a non-existant speed table entry
2014 C2_CANT_SET_ADC_OFFSET Camera does not allow offset to be read or set
2015 C2_BAD_CONTROLLER Controller for camera not valid
2016 C2_NOT_AVAILABLE Parameter is not available for camera
2017 C2_FAILED_TO_GET_VALUE The camera did not return the setting
2018 C2_PARAMETER_INVALID The requested parameter is invalid
2019 C2_ATTRIBUTE_INVALID The requested attribute is invalid
2020 C2_INDEX_OUT_OF_RANGE The requested parameter index is out of range
2021 C2_NOT_INPUT The requested I/O port is not an input port
2022 C2_IO_TYPE_INVALID The requested I/O port type is not supported
2023 C2_ADDR_OUT_OF_RANGE The I/O address is out of range
2024 C2_ACCESS_ATTR_INVALID The I/O port returned access attribute is invalid
2025 C2_CANT_SET_PARAMETER The requested parameter cannot be set
2026 C2_IO_DIRECTION_INVALID The returned direction for the I/O port is invalid
2027 C2_NO_ALPHA_SER_NUM Alphanumeric serial # unavailable for this camera
2028 C2_CANT_OVERSCAN Camera does not allow overscanning the CCD
2029 C2_CANT_SET_GAIN_MULT Camera does not allow setting the gain multiplier
3000 C3_INVALID_PIC_TRIGGER_MODE Invalid PIC trigger mode
3001 C3_NO_COMMUNICATIONS_LINK Bogus temp
3002 C3_INVALID_SCRIPT CCL program is not loaded or is invalid
3003 C3_EXP_EXTRA_DATA Extra data acquired during exposure
3004 C3_EXP_NO_DATA_ACQ No data acquired during exposure
3005 C3_EXP_FIFO_OVERFLOW FIFO overflow during exposure
130 PVCAM Manual Version 2.7
Error # Error Message Meaning
3006 C3_EXP_NO_ACKNOWLEDGE Camera did not acknowledge request during exp
3007 C3_EXP_TRANSFER_ERROR Transfer error during exposure
3008 C3_EXP_UNKNOWN_STATE Camera went into unknown state during exp
3009 C3_CANT_DECODE_IN_PROGRESS Can't decode while readout is in progress
3010 C3_RGN_MAX_EXCEEDED Trying to exceed the maximum # of regions
3011 C3_RGN_ILLEGAL_DEFN Dimensions of region to be added is illegal
3012 C3_RGN_ILLEGAL_BINNING Binning of region to be added is illegal
3013 C3_RGN_OUTSIDE_CCD_DIMENS Region def extends beyond CCD dimensions
3014 C3_RGN_OVERLAP Region to be added overlaps a previous region
3015 C3_RGN_INVALID_NUM Invalid region number
3016 C3_RGN_NOT_FOUND Region not found
3017 C3_STREAM_PTR_NOT_DEFINED Pointer to pixel stream is not defined
3018 C3_GROUPS_PTR_NOT_DEFINED Pointer to decode info structure undefined
3019 C3_NOT_INITIALIZED pl_init_exp_seq() has not been called
3020 C3_FAILED_TO_SET_VALUE The value can not be set in the camera
3021 C3_EVENT_NUMBER_INVALID Frame count for generating event <= 0
3022 C3_EVENT_NOT_SUPPORTED Specified event is not supported by the O.S.
3023 C3_BAD_CONTROLLER Controller for camera not valid
3024 C3_EVENT_NOT_SET Event was not set up
3025 C3_CNTRL_INIT_FAILED Controller initialization failed
3026 C3_EXP_MODE_NOT_SUPPORTED Exposure mode not supported by this camera
3027 C3_ILLEGAL_BUFFER_SIZE Buffer must be integer-multiple of frame size
3028 C3_GET_FRAME_NOT_SUPPORTED Camera cannot return the specified frame
3029 C3_FRAME_NOT_RETURNED Specified frame could not be returned
3030 C3_FRAME_BAD_MODE Frame could not be returned in current mode
3031 C3_NO_DRIVER_BUFFER Camera does not provide a driver buffer
3032 C3_BUF_NOT_RETURNED Pointer to buffer could not be returned
3033 C3_BUFFER_OVERRUN Data Buffer is full no place to xfer data
3034 C3_TAXI_VIOLATION Communication with device failed, link broken
3035 C3_EXP_RES_OUT_OF_RANGE Exposure resolution index non-existent
3036 C3_NOT_AVAILABLE Parameter is not available for camera
3037 C3_IO_PORT_INVALID Specified I/O port is invalid
3038 C3_FAILED_TO_GET_VALUE The camera did not return the setting
3039 C3_IO_STATE_OUT_OF_RANGE Requested I/O state out of range for port
3040 C3_IO_LOCATION_INVALID Specified script location is invalid
Appendix A: Error Codes 131
Error # Error Message Meaning
3041 C3_IO_NOT_OUTPUT Specified I/O port is not an output port
3042 C3_EXP_XFER_ERR Last data transfer from the camera was garbled
3043 C3_EXP_MISSING_DATA Finished data transfer, some data was missing
3044 C3_STAT_CNTRL_ERROR Controller error while requesting status
3045 C3_STAT_CMD_ERROR Command error while requesting status
3046 C3_CAM_NEVER_OPENED Camera was not opened, so this task can't be done
3047 C3_STAT_DMA_OVERRUN DMA data overrun has occurred
3048 C3_STAT_TAXI_VIOLATION Violation in TAXI communication protocol occurred
3049 C3_STAT_MAILBOX_ERROR Mailbox error while requesting status
3050 C3_STAT_CH0_ERROR Channel 0 transfer not enabled
3051 C3_STAT_CH1_ERROR Channel 1 transfer not enabled
3052 C3_UNKNOWN_ERROR Unexpected, unanticipated, undocumented
4000 C04_HBUF_OUTOFRANGE HBUF is out of range
4001 C04_HIMG_OUTOFRANGE HIMG is out of range
4002 C04_NO_FREE_BUFFER_HANDLES No free buffer handles available
4003 C04_NO_FREE_IMAGE_HANDLES No free image handles available
4004 C04_BUFFER_ENTRY_ALREADY_SET Buffer entry is already set
4005 C04_BUFFER_ENTRY_ALREADY
_CLEARED Buffer entry is already cleared
4006 C04_IMAGE_ENTRY_ALREADY_SET Image entry is already set
4007 C04_IMAGE_ENTRY_ALREADY
_CLEARED Image entry is already cleared
4008 C04_INVALID_IMAGE_HANDLE Invalid image handle
4009 C04_INVALID_BUFFER_HANDLE Invalid buffer handle
4010 C04_INVALID_BITDEPTH_VALUE Bit depth must be enum PRECISION_...
4011 C04_INVALID_IMAGE_NUMBER Invalid image number
4012 C04_INVALID_EXPOSURE_NUMBER Invalid exposure number
4013 C04_INVALID_TIME The time or date is out of range
4014 C04_INVALID_REGION A region is out of range
14000 C14_UNKNOWN_ERROR Unexpected, unanticipated, undocumented
14001 C14_CANT_READ_INI_FILE Unable to read the current INI file. Please run
RSConfig.exe
29000 C29_UNKNOWN_ERROR Unexpected, unanticipated, undocumented
29001 C29_BDEPTH_ILLEGAL Bit depth must be enum PRECISION_...
29002 C29_BDEPTH_DIFFER Bit depth source much match destination
29003 C29_BUF_NEEDS_1_EXP A buffer needs at least 1 exposure
132 PVCAM Manual Version 2.7
Error # Error Message Meaning
29004 C29_BUF_NEEDS_1_IMG A buffer needs at least 1 image
29005 C29_IMG_DEF_TOO_LARGE Image definition used too large a value
29006 C29_IMG_DEF_TOO_SMALL Image size/bin must be larger than zero
29007 C29_IMG_DEF_DIFFER Image source definition must match dest
29008 C29_IMG_NUM_DIFFER Source # of images must match dest
30000 C30_UNKNOWN_ERROR Unexpected, unanticipated, undocumented
30001 C30_CANT_READ_TIME Unable to read the current system time
30002 C30_END
31000 C31_INVALID_HEAP Invalid heap ID: PUBLIC_MEM, PRIVATE_MEM
31001 C31_MEMALLOC_FAILED Not enough memory to perform alloc
31002 C31_MEMCALLOC_FAILED Not enough memory to perform calloc
31003 C31_MEMREALLOC_FAILED Not enough memory to perform realloc
31004 C31_PRIV_MEM_BLOCK_TOO_BIG Excceeds 64k limit for PRIVATE_MEM
31005 C31_MEMLOCK_FAILED Memory page locking failed
32000 CCL_TOO_COMPLEX Too many script entries
32001 CCL_CANT_FRAME_TRANSFER No frame transfer hardware support
32002 CCL_SCRIPT_IS_NOT_VALID Invalid script
32003 CCL_REGIONS_OVERLAP Regions contain some of the same pixels
32004 CCL_INVALID_SERIAL_BINNING Serial binning == 0 or > region size
32005 CCL_INVALID_PARALLEL_BINNING Parallel binning == 0 or > region size
32006 CCL_NONMATCHED_PARALLEL
_BINNING Conflicting parallel binning values
32007 CCL_PARALLEL_BINNING_MISALIGNED Conflicting parallel binning alignment
32008 CCL_INVALID_REGION Region is not on the CCD
32009 CCL_INVALID_IO_PORT_TYPE Requested I/O port is not a valid type
32010 C32_NOT_INITIALIZED The pg_decode_info structure is not initialized
133
Appendix B:
Obsolete Functions
The following list of functions have been made obsolete through the use of
pl_get_param
,
pl_set_param
,
pl_get_enum_param
, and
pl_enum_str_length
functions. They still
function correctly and are still supported, but for future programming, the following functions
should not be used. For more information about the
pl_get_param
and
pl_set_param
parameter ids, refer to Chapter 5.
Table 6. Obsolete Class 0 Functions and Their pl_set_param/pl_set_param Equivalents
Obsolete Class 0 Function pl_set_param/pl_get_param Equivalent
pl_dd_get_info PARAM_DD_INFO
pl_dd_get_info_length PARAM_DD_INFO_LENGTH
pl_dd_get_retries PARAM_DD_RETRIES
pl_dd_set_retries PARAM_DD_RETRIES
pl_dd_get_timeout PARAM_DD_TIMEOUT
pl_dd_set_timeout PARAM_DD_TIMEOUT
pl_dd_get_ver PARAM_DD_VERSION
Table 7. Obsolete Class 2 Functions and Their pl_set_param/pl_set_param Equivalents
Obsolete Class 2 Function pl_set_param/pl_get_param Equivalent
pl_ccd_get_adc_offset PARAM_ADC_OFFSET
pl_ccd_get_chip_name PARAM_CHIP_NAME
pl_ccd_get_clear_cycles PARAM_CLEAR_CYCLES
pl_ccd_get_clear_mode PARAM_CLEAR_MODE
pl_ccd_get_color_mode PARAM_COLOR_MODE
pl_ccd_get_cooling_mode PARAM_COOLING_MODE
pl_ccd_get_frame_capable PARAM_FRAME_CAPABLE
pl_ccd_get_fwell_capacity PARAM_FWELL_CAPACITY
pl_ccd_get_mpp_capable PARAM_MPP_CAPABLE
pl_ccd_get_par_size PARAM_PAR_SIZE
pl_ccd_get_pix_par_dist PARAM_PIX_PAR_DIST
pl_ccd_get_pix_par_size PARAM_PIX_PAR_SIZE
pl_ccd_get_pix_ser_dist PARAM_PIX_SER_DIST
pl_ccd_get_pix_ser_size PARAM_PIX_SER_SIZE
134 PVCAM Manual Version 2.7
Obsolete Class 2 Function pl_set_param/pl_get_param Equivalent
pl_ccd_get_pmode PARAM_PMODE
pl_ccd_get_postmask PARAM_POSTMASK
pl_ccd_get_postscan PARAM_POSTSCAN
pl_ccd_get_preamp_dly PARAM_PREAMP_DELAY
pl_ccd_get_preamp_off_control PARAM_PREAMP_OFF_CONTROL
pl_ccd_get_preflash PARAM_PREFLASH
pl_ccd_get_premask PARAM_PREMASK
pl_ccd_get_prescan PARAM_PRESCAN
pl_ccd_get_ser_size PARAM_SER_SIZE
pl_ccd_get_serial_num PARAM_SERIAL_NUM
pl_ccd_get_summing_well PARAM_SUMMING_WELL
pl_ccd_get_tmp PARAM_TEMP (pl_get_param only)
pl_ccd_get_tmp_range PARAM_TEMP_SETPOINT (from the
attributes of the get you can get the min
and max allowed temperature settings)
pl_ccd_get_tmp_setpoint PARAM_TEMP_SETPOINT
pl_ccd_set_adc_offset PARAM_ADC_OFFSET
pl_ccd_set_clear_cycles PARAM_CLEAR_CYCLES
pl_ccd_set_clear_mode PARAM_CLEAR_MODE
pl_ccd_set_pmode PARAM_PMODE
pl_ccd_set_preamp_off_control PARAM_PREAMP_OFF_CONTROL
pl_ccd_set_tmp_setpoint PARAM_TEMP_SETPOINT
pl_ccs_get_status PARAM_CCS_STATUS
pl_shtr_get_close_dly PARAM_SHTR_CLOSE_DELAY
pl_shtr_get_open_dly PARAM_SHTR_OPEN_DELAY
pl_shtr_get_open_mode PARAM_SHTR_OPEN_MODE
pl_shtr_get_status PARAM_SHTR_STATUS
pl_shtr_set_close_dly PARAM_SHTR_CLOSE_DELAY
pl_shtr_set_open_dly PARAM_SHTR_OPEN_DELAY
pl_shtr_set_open_mode PARAM_SHTR_OPEN_MODE
pl_spdtab_get_bits PARAM_BIT_DEPTH
pl_spdtab_get_entries PARAM_SPDTAB_INDEX with ATTR_MAX
pl_spdtab_get_max_gain PARAM_GAIN_INDEX with ATTR_MAX
pl_spdtab_get_port PARAM_READOUT_PORT
Appendix B: Obsolete Functions 135
Obsolete Class 2 Function pl_set_param/pl_get_param Equivalent
pl_spdtab_get_port_total PARAM_READOUT_PORT with
ATTR_COUNT
pl_spdtab_get_time PARAM_PIX_TIME
pl_spdtab_get_gain PARAM_GAIN_INDEX
pl_spdtab_get_num PARAM_SPDTAB_INDEX
pl_spdtab_set_gain PARAM_GAIN_INDEX
pl_spdtab_set_num PARAM_SPDTAB_INDEX
Table 8. Obsolete Class 3 Functions and Their pl_set_param/pl_set_param Equivalents
Obsolete Class 3 Function pl_set_param/pl_get_param Equivalent
pl_exp_check_progress
pl_exp_get_time_seq PARAM_EXP_TIME
pl_exp_set_time_seq PARAM_EXP_TIME
pl_exp_set_cont_mode
136 PVCAM Manual Version 2.7
Obsolete Class 0 Functions
PVCAM Class 0: Camera Communications pl_dd_get_info(0)
NAME
pl_dd_get_info —
reads text information about the current device driver.
SYNOPSIS
rs_bool
pl_dd_get_info(int16 hcam,int16 bytes,char_ptr text)
DESCRIPTION This function returns information from the current device driver (specified by
hcam
) including unusual conditions and special information. Since the
information may change from system to system, it is presented as unformatted
text. The input string text must be allocated to be at least bytes characters long.
No more than bytes characters are written into the string text. The size of the
complete message can be obtained from the associated parameter id
PARAM_DD_INFO_LENGTH
.
RETURN VALUE TRUE for success, FALSE for a failure. Failure sets
pl_error_code
.
SEE ALSO parameter id
PARAM_DD_INFO_LENGTH
NOTES On many systems, there is not a message. If there is not a message, parameter id
PARAM_DD_INFO_LENGTH
returns a length of 0.
Appendix B: Obsolete Functions 137
PVCAM Class 0: Camera Communications pl_dd_get_info_length(0)
NAME
pl_dd_get_info_length —
returns length of info message.
SYNOPSIS
rs_bool
pl_dd_get_info_length(int16 hcam,int16_ptr bytes)
DESCRIPTION This is a companion to the
pl_dd_get_info
function, which returns an
information message for each device, as specified by
hcam
. This function returns
the length of that message, in the variable bytes.
RETURN VALUE TRUE for success, FALSE for a failure. Failure sets
pl_error_code
.
SEE ALSO
pl_dd_get_info(0)
NOTES Many devices have no message. In other words, they return a value of 0 for
bytes.

138 PVCAM Manual Version 2.7
PVCAM Class 0: Camera Communications pl_dd_get_retries(0)
NAME
pl_dd_get_retries —
reads the maximum number of command
retransmission attempts that are allowed.
SYNOPSIS
rs_bool
pl_dd_get_retries(int hcam,uns16_ptr max_retries)
DESCRIPTION When a command or status transmission is garbled, the system signals for a
retransmission. After a certain number of failed transmissions (an initial attempt
+ max_retries), the system abandons the attempt and concludes that the
communications link has failed. The camera won't close, but the command or
status read returns with an error. The maximum number of retries is initially set
by the device driver, and is matched to the communications link, hardware
platform, and operating system. It may also be reset by the user.
hcam
must be a
valid camera handle.
RETURN VALUE TRUE for success, FALSE for a failure. Failure sets
pl_error_code
.
SEE ALSO
pl_dd_set_retries(0),pl_dd_get_timeout(0),pl_dd_set_timeo
ut(0)
NOTES When the camera is initially opened, the driver uses a default
timeout
and
max_retries
. These numbers, representing reasonable values, were
specifically set for that communications link, hardware platform, and operating
system. Those values can be examined by calling
pl_dd_get_timeout
and
pl_dd_get_retries
. Both of these values can be changed, but only after the
camera has successfully opened. If both numbers are known, the worst-case
device driver response may be approximated. See
pl_dd_set_timeout
for a
discussion.
The number of retries applies to status communications as well as commands. In
other words, if the camera electronics unit sends status data, but the message is
garbled, the device driver requests a retransmission.
Max_retries
sets the
upper limit to the number of retransmissions that will be requested.
Appendix B: Obsolete Functions 139
PVCAM Class 0: Camera Communications pl_dd_set_retries(0)
NAME
pl_dd_set_retries
— sets the maximum command retry count.
SYNOPSIS
rs_bool
pl_dd_set_retries(int hcam,uns16 max_retries)
DESCRIPTION When a command or status transmission is garbled, the system signals for a
retransmission. After a certain number of failed transmissions (the initial
transmission plus
max_retries
), the system abandons the attempt and
concludes that the communications link has failed. The camera won't close, but
the command or status read returns with an error. This command sets the number
of allowable retries, before an error is generated.
hcam
must be a valid camera
handle.
RETURN VALUE TRUE for success, FALSE for a failure. Failure sets
pl_error_code
.
SEE ALSO
pl_dd_get_retries(0),pl_dd_get_timeout(0),pl_dd_set_timeo
ut(0)
NOTES When the camera is initially opened, the driver uses a default
timeout
and
max_retries
. These numbers were specifically set for that communications
link, hardware platform, and operating system, and represent reasonable values.
Those values may be examined by calling
pl_dd_get_timeout
and
pl_dd_get_retries
, and they can both be changed, but only after the camera
has successfully opened. If both numbers are known, the worst-case device
driver response may be approximated. See
pl_dd_set_timeout
for a
discussion.
Setting
max_retries
to 0 is theoretically reasonable, but in practice, many
systems, such as SCSI, require retries.
140 PVCAM Manual Version 2.7
PVCAM Class 0: Camera Communications pl_dd_get_timeout(0)
NAME
pl_dd_get_timeout —
reads the maximum time the driver waits for
acknowledgment.
SYNOPSIS
rs_bool
pl_dd_get_timeout(int hcam,uns16_ptr m_sec)
DESCRIPTION When
hcam
is a valid camera handle, this function reads the slowest allowable
response speed from the camera. This is a crucial factor used in the device driver
for communications control. If the driver sends a command to the camera, and
doesn't receive acknowledgment within
m_sec
milliseconds, the driver times out
and returns an error. Unless reset by the user, this time out is a default setting
that is contained in the device driver, and is matched to the communications link,
hardware platform, and operating system.
RETURN VALUE TRUE for success, FALSE for a failure. Failure sets
pl_error_code
.
SEE ALSO
pl_dd_set_timeout(0),pl_dd_get_retries(0),pl_dd_set_retri
es(0)
NOTES When the camera is initially opened, the driver uses a default
timeout
and
max_retries
. These numbers, representing reasonable values, were
specifically set for that communications link, hardware platform, and operating
system. Those values can be examined by calling
pl_dd_get_timeout
and
pl_dd_get_retries
. They can both be changed, but only after the camera
has successfully opened.
Appendix B: Obsolete Functions 141
PVCAM Class 0: Camera Communications pl_dd_set_timeout(0)
NAME
pl_dd_set_timeout —
sets the worst-case communications response.
SYNOPSIS
rs_bool
pl_dd_set_timeout(int hcam,uns16 m_sec)
DESCRIPTION When
hcam
is a valid camera handle, this function sets the slowest allowable
response speed from the camera. This is a crucial factor in device driver
communications. If the driver sends a command to the camera, and doesn't
receive some sort of acknowledgment within
m_sec
milliseconds, the driver
times out and returns with an error.
RETURN VALUE TRUE for success, FALSE for a failure. Failure sets
pl_error_code
.
SEE ALSO
pl_dd_get_timeout(0),pl_dd_get_retries(0),pl_dd_set_retri
es(0)
NOTES When the camera is initially opened, the driver uses a default timeout and
max_retries. These numbers, representing reasonable values, were specifically
set for that communications link, hardware platform, and operating system.
Those values may be examined by immediately calling
pl_dd_get_timeout
and
pl_dd_get_retries
. They can both be changed, but only after the
camera has successfully opened.
Changing timeout does not mean that each driver call returns within
m_sec
milliseconds. Retries and other factors must be considered. The driver then sends
the command again.
Timeout
only applies to each send-acknowledge cycle.
The worst-case driver dead time would be given by
timeout * (max_retries+1)
+ overhead
where overhead may involve minor but unpredictable effects like time slicing,
system latency, communications turn around, and driver housekeeping.
When setting
timeout
, it is usually wise to set things a little higher than
expected. When waiting for a response, a few milliseconds extra is not
catastrophic, but terminating prematurely may be.
142 PVCAM Manual Version 2.7
PVCAM Class 0: Camera Communications pl_dd_get_ver(0)
NAME
pl_dd_get_ver —
returns current device driver version number.
SYNOPSIS
rs_bool
pl_dd_get_ver (int16 hcam, uns16_ptr version)
DESCRIPTION This returns a version number for the device driver used to access the camera
hcam
. The version is a formatted hexadecimal number, of the style:
low byte
------------ -------------
high byte hi nibble low nibble
major version minor version trivial version
For example, the number 0xB1C0 indicates major release 177, minor release 12,
and trivial change 0.
A major release is defined as anything that alters the user interface, calling
sequence, or parameter interpretation of any device driver interface function
(anything that would alter the driver's API). A new major release often requires
the calling software to change, but wherever possible, major releases are
backward compatible with earlier releases.
A minor release should be completely transparent to higher level software, but
may include internal enhancements. A trivial change is reserved for use by the
software staff to keep track of extremely minor variations. The last digit may
also be used to flag versions of the driver constructed for unique customers or
situations. Minor and trivial releases should require no change in the calling
software.
RETURN VALUE TRUE for success, FALSE for a failure. Failure sets
pl_error_code
.
SEE ALSO
pl_ddi_get_ver(0),pl_pvcam_get_ver(0)
NOTES Open the camera before calling this function. Note that different cameras on the
same system may use different drivers. Thus, each camera can have its own
driver, and its own driver version.
Appendix B: Obsolete Functions 143
Obsolete Class 2 Functions
PVCAM Class 2: Configuration/Setup pl_ro_get_value(2)
NAME
pl_ro_get_value —
gets a read-only value from the camera hardware.
SYNOPSIS
rs_bool
pl_ccd_get_chip_name(int16 hcam, char_ptr chip_name )
pl_ccd_get_color_mode (int16 hcam, uns16_ptr color_mode)
pl_ccd_get_cooling_mode(int16 hcam, int16_ptr
cooling_mode)
pl_ccd_get_frame_capable(int16 hcam, rs_bool_ptr
frame_capable)
pl_ccd_get_fwell_capacity(int16 hcam, uns32_ptr
fwell_capacity )
pl_ccd_get_mpp_capable(int16 hcam, int16_ptr mpp_capable )
pl_ccd_get_par_size(int16 hcam, uns16_ptr par_size )
pl_ccd_get_pix_par_dist(int16 hcam, uns16_ptr
pix_par_dist)
pl_ccd_get_pix_par_size(int16 hcam, uns16_ptr
pix_par_size)
pl_ccd_get_pix_ser_dist(int16 hcam, uns16_ptr
pix_ser_dist)
pl_ccd_get_pix_ser_size(int16 hcam, uns16_ptr
pix_ser_size)
pl_ccd_get_postmask(int16 hcam, uns16_ptr postmask )
pl_ccd_get_postscan(int16 hcam, uns16_ptr postscan )
pl_ccd_get_preamp_dly(int16 hcam, uns16_ptr preamp_dly )
pl_ccd_get_preflash(int16 hcam, uns16_ptr preflash )
pl_ccd_get_premask(int16 hcam, uns16_ptr premask )
pl_ccd_get_prescan(int16 hcam, uns16_ptr prescan )
pl_ccd_get_ser_size(int16 hcam, uns16_ptr ser_size )
pl_ccd_get_serial_num(int16 hcam, uns16_ptr serial_num )
pl_ccd_get_summing_well(int16 hcam, rs_bool_ptr
s_well_exists)
pl_ccd_get_tmp(int16 hcam, int16_ptr cur_tmp )
pl_ccd_get_tmp_range(int16 hcam, int16_ptr
tmp_hi_val,int16_ptr tmp_lo_val )
pl_ccs_get_status(int16 hcam, int16_ptr ccs_status )
pl_shtr_get_status(int16 hcam, int16_ptr shtr_status )
144 PVCAM Manual Version 2.7
PVCAM Class 2: Configuration/Setup pl_ro_get_value(2)
pl_spdtab_get_bits(int16 hcam, int16_ptr spdtab_bits )
pl_spdtab_get_entries(int16 hcam, int16_ptr
spdtab_entries)
pl_spdtab_get_max_gain(int16 hcam, int16_ptr
spdtab_max_gain)
pl_spdtab_get_port(int16 hcam, int16_ptr spdtab_port )
pl_spdtab_get_port_total(int16 hcam, int16_ptr
total_ports )
pl_spdtab_get_time(int16 hcam, uns16_ptr spdtab_time )
DESCRIPTION When the camera is configured at the factory, it is preset with values based on
the CCD specifications, characterization tests, and other sources. Some of these
functions return information directly from the camera head memory. Some
functions return dynamic conditions (such as temperature) while other settings
are based on several inputs. In all cases, the
hcam
parameter indicates the piece
of hardware from which the information is read.
hcam
must be a valid camera
handle obtained from
pl_cam_open
.
All of these variables are read-only – they are informational parameters and
cannot be reset. The read/write parameters are documented under
pl_rw_get_values
and
pl_values_set
.
The full list of parameters and their meanings are:
chip_name
The name of the CCD. The name is a null-terminated text string. The user must
pass in a character array that is at least
CCD_NAME_LEN
elements long.
ccs_status
This variable holds sixteen bits of status data from the Camera Control
Subsystem. Only the lowest 2 bits are currently implemented. These 2 bits
(
ccs_status
&
0x03
) give the status of the CCS:
Value CCS State
0 idle
1 initializing
2 running
3 continuously clearing
A running state occurs any time the CCS is in the process of performing a
camera operation (including opening or closing the shutter, exposing, clearing
the CCD before a sequence or exposure, parallel or serial shifting, and
readout/digitization). After the CCD has finished reading out, the setup
determines if the CCS goes to idle or enters continuous clearing mode.
color_mode
The color mode of the CCD. Where 0 = mono and 1 = color mosaic RGGB.
This value is stored in the pv_cam_reads structure.
Appendix B: Obsolete Functions 145
PVCAM Class 2: Configuration/Setup pl_ro_get_value(2)
cooling_mode
This is the type of cooling used by the current camera. The value returned will
be one of the following constants:
NORMAL_COOL –
This is an air or water-cooled system.
CRYO_COOL –
The camera has an attached Dewar.
cur_tmp
This reads the current temperature of the CCD in C°x 100. For example, a
temperature of -35° would be read as -3500. Note that this returns the
measured temperature, not the setpoint (which is reported in
pl_ccd_get_tmp_setpoint
.)
frame_capable
If true, this camera can run in frame transfer mode (set through
pl_ccd_set_pmode
).
fwell_capacity
The full-well capacity of this CCD, measured in electrons.
mpp_capable
Indicates whether this CCD runs in MPP mode. The actual value returned is
equal to one of the following four constants:
MPP_UNKNOWN
MPP_ALWAYS_ON
MPP_ALWAYS_OFF
MPP_SELECTABLE
par_size
Parallel size of the CCD, in active rows. The full size of the parallel register is
actually
( par_size + premask + postmask
).
pix_par_size
Size of the active area of a pixel, in the parallel direction, measured in
nanometers.
pix_par_dist
Center-to-center distance between pixels (in the parallel direction) measured in
nanometers. This is identical to
pix_par_size
, if there are no interpixel dead
areas.
pix_ser_size
Size of a single pixel’s active area, in the serial direction, measured in
nanometers.
pix_ser_dist
Center-to-center distance between pixels (in the serial direction), in nanometers.
This is identical to
pix_ser_size
, if there are no dead areas.
postmask
The number of masked lines at the far end of the parallel register (away from
the serial register). This is the number of additional parallel shifts which needs
to be done after readout to clear the parallel register.
postscan
Number of pixels to discard from the serial register after the last real data pixel.
These must be read or discarded to clear the serial register.
preflash
The number of milliseconds needed to illuminate the CCD using the flash diode
ring before an exposure, dark, or bias.
146 PVCAM Manual Version 2.7
PVCAM Class 2: Configuration/Setup pl_ro_get_value(2)
premask
The number of masked lines at the near end of the parallel register, next to the
serial register. 0=no mask (no normal mask). If the premask is equal to
par_size
, this probably indicates a frame transfer device with an ordinary
mask. Accordingly, the CCD should probably be run in frame transfer mode.
preamp_dly
Number of milliseconds required for the CCD output preamp to stabilize, after
it is turned on.
prescan
Number of pixels discarded from the serial register before the first real data
pixel.
s_well_exists
If true, this CCD includes a summing well.
serial_num
This is the serial number of the camera head (not the electronics unit).
ser_size
Serial size of the CCD active area, in pixels.
shtr_status
The current state of the camera shutter (actually, the current state of the driver
voltage to the shutter). The returned value will be equal to one of the following
constants:
SHTR_OPENING,SHTR_OPEN,SHTR_CLOSED,SHTR_CLOSING,
or
SHTR_FAULT
. If the shutter is run too fast, it will overheat and trigger
SHTR_FAULT
. The shutter electronics will disconnect until the temperature
returns to a suitable range. Note that even though the electronics have reset the
voltages to open or close the shutter, there is a lag time for the physical
mechanism to respond. See
pl_shtr_get_open_dly
and
pl_shtr_get_close_dly
in the
pl_rw_get_value
function list.
spdtab_bits
Number of bits output by the currently selected speed choice. Although this
number might range between 6 and 16, the data will always be returned in an
unsigned 16-bit word. This value indicates the number of valid bits within that
word.
spdtab_entries
The number of entries in the speed table. Valid entries range from 0 to
spdtab_entries-1
(inclusive). The current selection may be altered through
pl_spdtab_set_num
. Zero entries is possible and indicates that there are no
valid speeds that span the requirements of the camera head video board, A/D
board, communication channel, and host throughput.
spdtab_max_gain
This reports the maximum gain index setting for the current speed selection, not
the actual gain. The minimum gain index is always 1. The maximum gain index
is usually 16.
spdtab_port
This reports on the CCD readout port being used by the currently selected
speed. Different readout ports (used for alternate speeds) flip the image in X, Y,
or both.
Appendix B: Obsolete Functions 147
PVCAM Class 2: Configuration/Setup pl_ro_get_value(2)
spdtab_time
This is the actual speed for the currently selected speed choice. It returns the
time for each pixel, in nanoseconds. This can be converted to a camera speed in
kiloHertz through the following formula:
10
6
camera_speed (kHz) = pixel_time (nanoseconds)
This readout time will change as new speed choices are selected.
tmp_hi_val
tmp_lo_val
These two values contain the legal range for temperature settings (using the
pl_ccd_set_tmp_setpoint
command) in hundredths of degrees Celsius.
Any number inside this range is legal and will be accepted (-3500 = -35°C).
Numbers outside the range are ignored. However, just because a temperature is
legal does not mean it is possible. The environment and circumstances will
dramatically affect which temperatures can be achieved. An air-cooled camera
in Antarctica will be able to reach much lower temperatures than a water-cooled
camera in the Sahara.
total_ports
1, 2, 3, or 4. The number of ports on the system. This affects the CCS program,
but most users will probably not care since multi-port operation is transparent at
the level of PVCAM.
RETURN VALUE TRUE for success, FALSE for a failure. Failure sets pl_error_code.
SEE ALSO
pl_rw_value(2),pl_set_value(2),pl_cam_open(2),
pl_cam_close(2)
NOTES PVCAM interfaces to some cameras that do not support the full PVCAM
features or variable set. If the user attempts to get a variable that doesn't exist,
the system may either synthesize a value (based on available information) or
return an error.
148 PVCAM Manual Version 2.7
PVCAM Class 2: Configuration/Setup pl_rw_get_value(2)
NAME
pl_rw_get_value—
returns a read/write value from the camera hardware.
SYNOPSIS
rs_bool
pl_ccd_get_adc_offset (int16 hcam, int16_ptr offset)
pl_ccd_get_clear_cycles (int16 hcam, uns16_ptr
clear_cycles)
pl_ccd_get_clear_mode (int16 hcam,int16_ptr
clear_mode)
pl_ccd_get_pmode (int16 hcam, int16_ptr pmode)
pl_ccd_get_preamp_off_control (int16 hcam, uns32_ptr
preamp_off_control)
pl_ccd_get_tmp_setpoint (int16 hcam,int16_ptr tmp_setpoint)
pl_shtr_get_close_dly (int16 hcam, uns16_ptr shtr_close_dly)
pl_shtr_get_open_dly(int16 hcam, uns16_ptr shtr_open_dly)
pl_shtr_get_open_mode (int16 hcam,int16_ptr shtr_open_mode)
pl_spdtab_get_gain (int16 hcam,int16_ptr spdtab_gain)
pl_spdtab_get_num (int16 hcam,int16_ptr spdtab_num)
DESCRIPTION These functions are very similar. Each returns operating conditions and variables
from the camera hardware. The
hcam
parameter indicates from which piece of
hardware to read the setting, and must be a valid camera handle obtained from
pl_cam_open
.
This set of variables is read/write – all values may be altered and written to the
hardware. The write functions are nearly identical, except that they begin with
set_
, and accept non-pointer arguments. A more extensive set of read-only
values are documented under the
pl_ro_get_value
heading.
The full list of parameters and their meaning is listed under
pl_set_values
.
RETURN VALUE TRUE for success, FALSE for a failure. Failure sets
pl_error_code
.
SEE ALSO
pl_ro_get_value(2),pl_cam_open(2),pl_cam_close(2)
NOTES PVCAM interfaces to some cameras that do not support the full PVCAM
features or variable set. If the user attempts to get a variable that doesn't exist, the
system may either synthesize a value (based on available information) or return
an error.
Appendix B: Obsolete Functions 149
PVCAM Class 2: Configuration/Setup pl_set_value(2)
NAME
pl_set_value —
sets a value in the camera hardware.
SYNOPSIS
rs_bool
pl_ccd_set_adc_offset (int16 hcam, int16 offset)
pl_ccd_set_clear_cycles (int16 hcam, uns16 clear_cycles)
pl_ccd_set_clear_mode (int16 hcam, int16 clear_mode)
pl_ccd_set_pmode(int16 hcam, int16 pmode)
pl_ccd_set_preamp_off_control (int16 hcam, uns32
preamp_off_control)
pl_ccd_set_tmp_setpoint (int16 hcam,int16 tmp_setpoint)
pl_shtr_set_close_dly (int16 hcam, uns16 shtr_close_dly)
pl_shtr_set_open_dly (int16 hcam, uns16 shtr_open_dly)
pl_shtr_set_open_mode (int16 hcam, int16 shtr_open_mode)
pl_spdtab_set_gain (int16 hcam, int16 spdtab_gain)
pl_spdtab_set_num (int16 hcam, int16 spdtab_num)
DESCRIPTION These functions set operating conditions and variables in the camera hardware.
The
hcam
parameter indicates which piece of hardware to apply the setting to,
and must be a valid camera handle obtained from
pl_cam_open
. A camera
handle of 0 (normally an invalid handle) will simultaneously send the setting to
all open cameras (if this is possible).
A complementary set of functions allows all of these values to be read back from
the hardware. They are documented under
pl_rw_get_values
. Many of these
settings are also dependent on ranges or capabilities documented in the
pl_ro_get_values
functions, such as
pl_ccd_get_frame_capable
and
pl_ccd_get_tmp_range
.
The full list of parameters and their meanings are:
clear_cycles
This is the number of times the CCD must be cleared to completely remove
charge from the parallel register.
150 PVCAM Manual Version 2.7
PVCAM Class 2: Configuration/Setup pl_set_value(2)
clear_mode clear_mode
defines when clearing takes place:
CLEAR_NEVER Don't ever clear the CCD.
CLEAR_PRE_EXPOSURE Clear clear_cycles times before each
exposure starts.
CLEAR_PRE_SEQUENCE Clear clear_cycles times before the
sequence starts.
CLEAR_POST_SEQUENCE Do continuous clearing after the sequence
ends.
CLEAR_PRE_POST_SEQUENCE Clear clear_cycles times before the
sequence starts and continuous clearing
after the sequence ends.
CLEAR_PRE_EXPOSURE_POST_SEQ Clear clear_cycles times before each
exposure starts and continuous clearing
after the sequence ends.
The
CLEAR_NEVER
setting is particularly useful for performing a readout after
an exposure has been aborted.
Note that normally during the idle period, the CCS parallel clock drivers and
serial drivers revert to a low power state. This saves on both power and heat. If
any
CLEAR_..._POST
options are used, these systems will not enter low power
mode. This will generate extra heat in both the electronics unit and the camera
head.
offset
This allows the user to determine the bias offset voltage. Accepts a signed 16-bit
argument: the new bias voltage to be set; returns a signed 16-bit value listing the
bias offset voltage. The units do not correspond to the output pixel values in any
simple fashion (the conversion rate should be linear, but may differ from system
to system) but a lower offset voltage will yield a lower value for all output
pixels. Pixels brought below zero by this method will be clipped at zero. Pixels
raised above saturation will be clipped at saturation. Plainly, before users can
alter the offset level, they must read the current offset level. The default offset
level will also vary from system to system and may change with each speed and
gain setting.
pmode
This allows the user to select the parallel clocking method. The following list
includes all valid constants:
PMODE_NORMAL PMODE_MPP PMODE_FT
PMODE_FT_MPP PMODE_ALT_NORMAL PMODE_ALT_MPP
PMODE_ALT_FT PMODE_ALT_FT_MPP
where
FT
indicates frame transfer mode, FT_MPP indicates both frame transfer
and
MPP
mode.
ALT
indicates that custom parameters may be loaded.
preamp_off_
control
This is the exposure time limit in milliseconds above which the preamp is turned
off during exposure.
Appendix B: Obsolete Functions 151
PVCAM Class 2: Configuration/Setup pl_set_value(2)
shtr_close_dly
The shutter close delay. This is the number of milliseconds required for the
shutter to close. The software default values compensate for the standard
Photometrics shutter that is shipped with all cameras. You only need to set this
value if you are using a shutter with characteristics that differ from the standard
shutter. Valid inputs are any number in the range 0 to 65535 milliseconds.
shtr_open_dly
The shutter open delay. This is the number of milliseconds required for the
shutter to open. The software default values compensate for the standard
Photometrics shutter that is shipped with all cameras. You only need to set this
value if you are using a shutter with characteristics that differ from the standard
shutter. Valid inputs are any number in the range 0 to 65535 milliseconds.
shtr_open_mode
Shutter opening conditions, set to one of the following
OPEN_NEVER
The shutter closes before the exposure and stays closed
during the exposure.
OPEN_PRE_EXPOSURE
Opens each exposure. Normal mode.
OPEN_PRE_SEQUENCE
Opens the shutter at the start of each sequence. Useful
for frame transfer and external strobe devices.
OPEN_PRE_TRIGGER
If using a triggered mode, this function causes the
shutter to open before the external trigger is armed. If
using a non-triggered mode, this function operates
identical to
OPEN_PRE_EXPOSURE
.
OPEN_NO_CHANGE
Sends no signals to open or close the shutter. Useful for
frame transfer when you want to open the shutter and
leave it open (see
pl_exp_abort).
spdtab_gain
The new gain setting for the current speed choice. The valid range for a gain
setting is 1 through
spdtab_max_gain
, where the max gain may be as high as
16. Values outside this range will be ignored. Note that gain settings may not be
linear! Values 1-16 may not correspond to 1x - 16x, and there are holes between
the values. However, when the camera is initialized, and every time a new speed
is selected, the system will always reset to run at a gain of 1x.
spdtab_num
This selects the CCD readout speed from a table of available choices. Entries
may range from 0 to
spdtab_entries
- 1. This setting affects all other
_spdtab_
values including
spdtab_bits, spdtab_gain,
spdtab_max_gain ,spdtab_time, and spdtab_port
. After this call,
the gain setting always resets to a value that corresponds to 1x. To use a gain
other than 1x,
pl_spdtab_set_gain
must be called after
pl_spdtab_set_num
.
152 PVCAM Manual Version 2.7
PVCAM Class 2: Configuration/Setup pl_set_value(2)
tmp_setpoint
This sets the desired CCD temperature in hundredths of degrees Celsius (-35 °C
is represented as -3500). The hardware attempts to heat or cool the CCD to this
temperature. The min/max allowable temperatures are given by
tmp_hi_val
and
tmp_lo_val
, from the
pl_ccd_get_tmp_range
function. Settings
outside this range are ignored. Note that this function only sets the desired
temperature. Even if the desired temperature is in a legal range, it still may be
impossible to achieve. If the ambient temperature is too high, it's difficult to get
much cooling on an air-cooled camera.
RETURN VALUE TRUE for success, FALSE for a failure. Failure sets pl_error_code.
SEE ALSO
pl_ro_get_value(2),pl_rw_get_value(2),pl_cam_open(0),pl_c
am_close(0)
NOTES PVCAM interfaces to some cameras that do not support the full PVCAM
features or variable set. If the user attempts to get a variable that doesn't exist, the
system may either synthesize a value (based on available information) or return
an error.
Appendix B: Obsolete Functions 153
Obsolete Class 3 Functions
PVCAM Class 3: Data Acquisition pl_exp_check_progress(3)
NAME
pl_exp_check_progress —
checks the progress of the current exposure.
SYNOPSIS
rs_bool
pl_exp_check_progress(int16 hcam, int16_ptr status,
uns32_ptr byte_cnt)
DESCRIPTION This function is similar to
pl_exp_check_status
except that it only returns
one of the following values:
EXPOSURE_IN_PROGRESS
The data collection routines are active. They are
waiting for data to arrive, but none has arrived yet.
READOUT_IN_PROGRESS
The data collection routines are active. The data
has started to arrive.
READOUT_COMPLETE
All the expected data has arrived. Data collection
is complete, and the driver has returned to idle
state.
In order to detect errors during the acquisition process, you must use
pl_exp_check_status
.
byte_cnt
points to the number of bytes of data that
have arrived so far (divide by two to get the number of pixels). This level of
feedback is unimportant to many users.
RETURN VALUE TRUE means the progress was checked successfully. FALSE indicates a bad
handle or a problem communicating with the camera.
SEE ALSO
pl_exp_setup_seq(3),pl_exp_start_seq(3),
pl_exp_check_status(3)
NOTES When using
pl_exp_check_progress
you could call it inside a loop with a
timeout. If the timeout expires, then you could call
pl_exp_check_status
to
determine if an error occurred (
READOUT_FAILED
).
154 PVCAM Manual Version 2.7
PVCAM Class 3: Data Acquisition pl_exp_get_time_seq(3)
NAME
pl_exp_get_time_seq —
only used with
VARIABLE_TIMED_MODE
, this
function returns the exposure time from the camera.
SYNOPSIS
rs_bool
pl_exp_get_time_seq(init16 hcam,uns16_ptr exposure_time)
DESCRIPTION This is a companion function to pl_exp_set_time_seq. The two functions are
used to examine and change the exposure time in
VARIABLE_TIMED_MODE
.
RETURN VALUE TRUE for success, FALSE for a failure. Failure sets
pl_error_code
.
SEE ALSO
pl_exp_set_time_seq(3),pl_exp_setup_seq(3),Exposure Mode
Constants(3)
NOTES
Appendix B: Obsolete Functions 155
PVCAM Class 3: Data Acquisition pl_exp_set_time_seq(3)
NAME
pl_exp_set_time_seq —
only used with
VARIABLE_TIMED_MODE
, this
function sets the exposure time for the next sequence.
SYNOPSIS
rs_bool
pl_exp_set_time_seq(init16 hcam,uns16 exposure_time)
DESCRIPTION This is a companion function to
pl_exp_get_time_seq
. The two functions
are used to examine and change the exposure time in
VARIABLE_TIMED_MODE
.
RETURN VALUE TRUE for success, FALSE for a failure. Failure sets
pl_error_code
.
SEE ALSO
pl_exp_get_time_seq(3),pl_exp_setup_seq(3),Exposure Mode
Constants(3)
NOTES When using
VARIABLE_TIMED_MODE
, this function must be called before the
first sequence is run, because
VARIABLE_TIMED_MODE
ignores the exposure
time in the
pl_exp_setup_seq
.
156 PVCAM Manual Version 2.7
PVCAM Class 3: Data Acquisition pl_exp_set_cont_mode(3)
NAME
pl_exp_set_cont_mode -
sets circular buffer mode.
SYNOPSIS
rs_bool
pl_exp_set_cont_mode(int16 hcam, int16 mode)
DESCRIPTION This function sets the mode of operation for the circular buffer. mode can be set
to either
CIRC_OVERWRITE
or
CIRC_NO_OVERWRITE
. This function must be
called before calling
pl_exp_start_cont()
.
RETURN VALUE TRUE for success, FALSE for a failure. Failure sets
pl_error_code
.
SEE ALSO
pl_exp_get_driver_buffer(3), pl_exp_start_cont(3),
pl_exp_check_cont_status(0), pl_exp_get_oldest_frame(3),
pl_exp_get_latest_frame(3),
pl_exp_unlock_oldest_frame(3),
and
pl_exp_stop_cont(3)
NOTES Use the parameter id
PARAM_CIRC_BUFFER
with
pl_get_param
to see if the
system can perform circular buffer operations. The circular buffer is passed to
pl_exp_start_cont
. The buffer is either allocated by your application or
obtained from the driver as a preallocated block of memory, using the
pl_exp_get_driver_buffer
function.
Refer to Example 3: Circular Buffer in "Chapter 8" for two examples of code
for circular buffer operation.
This function has been replaced by
pl_exp_setup_cont
.

157
Index
_
_const_ptr type...........................................................7
A
Allocation and saving, buffers.................................93
ANSI C library ..........................................................3
Arrays ........................................................................7
ATTR_ACCESS......................................................48
ATTR_AVAIL ........................................................48
ATTR_COUNT.......................................................49
ATTR_CURRENT..................................................49
ATTR_DEFAULT...................................................49
ATTR_INCREMENT .............................................49
ATTR_MAX ...........................................................49
ATTR_MIN.............................................................49
ATTR_TYPE...........................................................49
B
Binning......................................................................8
Bit depth ....................................................................5
Buffer handle...........................................................94
Buffer manipulation..............................................4, 93
Buffers.....................................................................24
BULB_MODE.............................................18, 57, 69
C
Camera
Communication...............................................4, 27
handle..................................................................94
speed......................................................................9
Camera settings .......................................................46
CCD
coordinates model .................................................7
orientation .............................................................7
readout port ...........................................................8
Circular buffers.......13, 72, 73, 75, 77, 81, 83, 85, 90,
117, 119, 156
Class 0 Functions
list of ...................................................................27
pl_cam_check......................................................28
pl_cam_close.......................................................29
pl_cam_get_diags................................................30
pl_cam_get_name ...............................................31
pl_cam_get_total.................................................32
pl_cam_open.......................................................33
pl_ddi_get_ver.....................................................34
pl_pvcam_get_ver...............................................35
pl_pvcam_init......................................................36
pl_pvcam_uninit..................................................37
Class 1 Functions
list of ...................................................................42
pl_error_code ......................................................43
pl_error_message ................................................44
Class 2 Functions
list of ...................................................................46
pl_enum_str_length.............................................52
pl_get_enum_param............................................51
pl_get_param.......................................................48
pl_set_param.......................................................50
Class 3 Functions
list of ...................................................................67
pl_exp_abort........................................................79
pl_exp_check_cont_status...................................83
pl_exp_check_status............................................82
pl_exp_finish_seq ...............................................70
pl_exp_get_driver_buffer....................................71
pl_exp_get_latest_frame .....................................72
pl_exp_get_oldest_frame ....................................73
pl_exp_init_seq ...................................................74
pl_exp_setup_cont...............................................75
pl_exp_setup_seq................................................76
pl_exp_start_cont................................................77
pl_exp_start_seq..................................................78
pl_exp_stop_cont ................................................81
pl_exp_uninit_seq ...............................................84
pl_exp_unlock_oldest_frame ..............................85
pl_exp_unravel....................................................86
pl_io_clear_script_control...................................88
pl_io_script_control ............................................89
Class 4 Functions
list of ...................................................................93
pl_buf_alloc.........................................................95
pl_buf_free..........................................................96
pl_buf_get_bits....................................................97
pl_buf_get_exp_date...........................................98
pl_buf_get_exp_time...........................................99
pl_buf_get_exp_total.........................................100
pl_buf_get_img_bin..........................................101
pl_buf_get_img_handle.....................................102
pl_buf_get_img_ofs ..........................................103
pl_buf_get_img_ptr...........................................104
pl_buf_get_img_size.........................................105
pl_buf_get_img_total........................................106
pl_buf_get_size .................................................107
pl_buf_init.........................................................109
pl_buf_set_exp_date..........................................108
pl_buf_uninit.....................................................110
Clear modes.............................................................13
clear_mode ..............................................................55

158 PVCAM Manual Version 2.7
CLEAR_NEVER...............................................15, 55
CLEAR_NEVER (obsolete)..................................150
CLEAR_POST_SEQUENCE............................15, 55
CLEAR_POST_SEQUENCE (obsolete)...............150
CLEAR_PRE_EXPOSURE..............................15, 55
CLEAR_PRE_EXPOSURE (obsolete) .................150
CLEAR_PRE_EXPOSURE_POST_SEQ...............55
CLEAR_PRE_EXPOSURE_POST_SEQ (obsolete)150
CLEAR_PRE_EXPOSURE_POST_SEQUENCE..15
CLEAR_PRE_POST_SEQUENCE ..................15, 55
CLEAR_PRE_POST_SEQUENCE (obsolete) .....150
CLEAR_PRE_SEQUENCE..............................15, 55
CLEAR_PRE_SEQUENCE (obsolete).................150
Close delay ..............................................................19
Code examples
circular buffer............................................117, 119
Latest Frame Mode............................................117
Oldest Frame Mode...........................................119
pl_get_param & pl_get_enum_param...............111
pl_param_set.....................................................115
standard mode acquisition.................................121
color mode...............................................................55
Configuration/setup.............................................4, 45
Constants .................................................................94
Contact information...................................................1
Custom timing.........................................................11
Customer service .......................................................1
D
Data acquisition ....................................................4, 67
Data arrays.................................................................8
Defined types.............................................................5
Defining exposures..................................................68
Display orientation ....................................................8
E
Error code list ........................................................123
Error conditions.......................................................41
Error reporting......................................................4, 41
Example code
circular buffer............................................117, 119
Latest Frame Mode............................................117
Oldest Frame Mode...........................................119
pl_get_param & pl_get_enum_param...............111
pl_set_param.....................................................115
standard mode acquisition.................................121
Exposure loops ........................................................20
Exposure mode constants ........................................69
Exposure modes.................................................13, 16
Exposure scripts.......................................................20
exposure_time..........................................................16
F
FLASH_MODE...........................................18, 57, 69
Frame transfer..........................................................10
Full lateral resolution.................................................8
Full-CCD image in buffer........................................24
G
Gain ...........................................................................9
Get and Set Parameter Functions
pl_get_enum_param............................................45
pl_get_param.......................................................45
pl_set_param.......................................................45
H
Handle .......................................................................6
hbuf..........................................................................94
hcam ........................................................................94
himg.........................................................................94
I
Image
array ....................................................................10
buffers .................................................................24
handle..................................................................94
pointer .................................................................94
smear...................................................................11
Include files...............................................................6
Initialization functions.............................................27
buffer...................................................................93
Interline CCD ..........................................................10
K
Kinetics....................................................................10
L
Latest Frame Mode code example.........................117
Library classes...........................................................4
M
master.h .................................................................5, 6
Multiple exposures in buffer....................................24
Multiple speed options...............................................9
N
Non-pointers..............................................................7
O
Obsolete Class 0 Functions
pl_dd_get_info ..................................................136
pl_dd_get_info_length ......................................137
pl_dd_get_retries...............................................138
pl_dd_get_timeout.............................................140
pl_dd_get_ver....................................................142
pl_dd_set_retries ...............................................139
pl_dd_set_timeout.............................................141
Obsolete Class 2 Functions
pl_ccd_get_adc_offset.......................................148
pl_ccd_get_chip_name......................................143
pl_ccd_get_clear_cycles....................................148
pl_ccd_get_clear_mode.....................................148
pl_ccd_get_color_mode ....................................143
pl_ccd_get_cooling_mode ................................143
pl_ccd_get_frame_capable................................143
pl_ccd_get_fwell_capacity................................143

Index 159
Obsolete Class 2 Functions (cont.)
pl_ccd_get_mpp_capable..................................143
pl_ccd_get_par_size..........................................143
pl_ccd_get_pix_par_dist ...................................143
pl_ccd_get_pix_par_size...................................143
pl_ccd_get_pix_ser_dist....................................143
pl_ccd_get_pix_ser_size ...................................143
pl_ccd_get_pmode ............................................148
pl_ccd_get_postmask........................................143
pl_ccd_get_postscan..........................................143
pl_ccd_get_preamp_dly ....................................143
pl_ccd_get_preamp_off_control .......................148
pl_ccd_get_preflash ..........................................143
pl_ccd_get_premask..........................................143
pl_ccd_get_prescan...........................................143
pl_ccd_get_ser_size ..........................................143
pl_ccd_get_serial_num......................................143
pl_ccd_get_summing_well................................143
pl_ccd_get_tmp.................................................143
pl_ccd_get_tmp_range......................................143
pl_ccd_get_tmp_setpoint ..................................148
pl_ccd_set_adc_offset.......................................149
pl_ccd_set_clear_cycles....................................149
pl_ccd_set_clear_mode.....................................149
pl_ccd_set_pmode.............................................149
pl_ccd_set_preamp_off_control........................149
pl_ccd_set_tmp_setpoint...................................149
pl_ccs_get_status...............................................143
pl_ro_get_value.................................................143
pl_rw_get_value................................................148
pl_set_value.......................................................149
pl_shtr_get_close_dly........................................148
pl_shtr_get_open_dly........................................148
pl_shtr_get_open_mode ....................................148
pl_shtr_get_status..............................................143
pl_shtr_set_close_dly........................................149
pl_shtr_set_open_dly ........................................149
pl_shtr_set_open_mode.....................................149
pl_spdtab_get_bits.............................................143
pl_spdtab_get_entries........................................144
pl_spdtab_get_gain............................................148
pl_spdtab_get_max_gain...................................144
pl_spdtab_get_num ...........................................148
pl_spdtab_get_port............................................144
pl_spdtab_get_port_total...................................144
pl_spdtab_get_time ...........................................144
pl_spdtab_set_gain............................................149
pl_spdtab_set_num............................................149
Obsolete Class 3 Functions
pl_exp_check_progress.....................................153
pl_exp_get_time_seq.........................................154
pl_exp_set_cont_mode......................................156
pl_exp_set_time_seq.........................................155
Oldest Frame Mode code example ........................119
Open delay, close delay...........................................19
OPEN_NEVER .................................................20, 65
OPEN_NEVER (obsolete).....................................151
OPEN_NO_CHANGE ......................................20, 65
OPEN_NO_CHANGE (obsolete) .........................151
OPEN_PRE_EXPOSURE.................................20, 65
OPEN_PRE_EXPOSURE (obsolete)....................151
OPEN_PRE_SEQUENCE.................................20, 65
OPEN_PRE_SEQUENCE (obsolete)....................151
OPEN_PRE_TRIGGER....................................20, 65
OPEN_PRE_TRIGGER (obsolete) .......................151
Orientation of CCD ...................................................7
P
Parallel.......................................................................7
Parallel binning..........................................................8
PARAM_ACCUM_CAPABLE ..............................53
PARAM_ADC_OFFSET........................................53
PARAM_ANTI_BLOOMING................................53
PARAM_BIT_DEPTH............................................53
PARAM_BOF_EOF_CLR......................................90
PARAM_BOF_EOF_COUNT................................90
PARAM_BOF_EOF_ENABLE..............................90
PARAM_CAM_FW_VERSION.............................54
PARAM_CCS_STATUS ........................................54
PARAM_CHIP_NAME..........................................54
PARAM_CIRC_BUFFER.......................................90
PARAM_CLEAR_CYCLES...................................54
PARAM_CLEAR_MODE......................................55
PARAM_COLOR_MODE......................................55
PARAM_CONTROLLER_ALIVE.........................56
PARAM_COOLING_MODE .................................56
PARAM_CUSTOM_CHIP .....................................56
PARAM_CUSTOM_TIMING................................56
PARAM_DD_INFO................................................38
PARAM_DD_INFO_LENGTH..............................38
PARAM_DD_RETRIES.........................................38
PARAM_DD_TIMEOUT .......................................38
PARAM_DD_VERSION........................................39
PARAM_EDGE_TRIGGER...................................57
PARAM_EXP_MIN_TIME....................................90
PARAM_EXP_RES................................................90
PARAM_EXP_RES_INDEX..................................91
PARAM_EXP_TIME........................................16, 91
PARAM_EXPOSURE_MODE...............................57
PARAM_FRAME_CAPABLE...............................57
PARAM_FTSCAN..................................................57
PARAM_FWELL_CAPACITY..............................57
PARAM_GAIN_INDEX.........................................57
PARAM_GAIN_MULT_ENABLE........................58
PARAM_GAIN_MULT_FACTOR........................58
PARAM_HEAD_SER_NUM_ALPHA..................58
PARAM_HW_AUTOSTOP....................................91
PARAM_INTENSIFIER_GAIN.............................58
PARAM_IO_ADDR ...............................................58
PARAM_IO_BITDEPTH........................................58
PARAM_IO_DIRECTION .....................................58
PARAM_IO_STATE ..............................................59

160 PVCAM Manual Version 2.7
PARAM_IO_TYPE.................................................59
PARAM_KIN_WIN_SIZE......................................59
PARAM_LOGIC_OUTPUT...................................59
PARAM_MIN_BLOCK..........................................60
PARAM_MPP_CAPABLE.....................................60
PARAM_NUM_MIN_BLOCK ..............................60
PARAM_NUM_OF_STRIPS_PER_CLR...............60
PARAM_PAR_SHIFT_TIME ................................60
PARAM_PAR_SIZE...............................................60
PARAM_PCI_FW_VERSION................................60
PARAM_PIX_PAR_DIST......................................61
PARAM_PIX_PAR_SIZE ......................................61
PARAM_PIX_SER_DIST ......................................61
PARAM_PIX_SER_SIZE.......................................61
PARAM_PIX_TIME...............................................61
PARAM_PMODE...................................................61
PARAM_POSTMASK............................................62
PARAM_POSTSCAN.............................................62
PARAM_PREAMP_DELAY..................................62
PARAM_PREAMP_OFF_CONTROL...................62
PARAM_PREFLASH.............................................62
PARAM_PREMASK..............................................62
PARAM_PRESCAN...............................................62
PARAM_READOUT_PORT..................................63
PARAM_READOUT_TIME ..................................63
PARAM_SER_SHIFT_TIME.................................63
PARAM_SER_SIZE...............................................63
PARAM_SERIAL_NUM........................................63
PARAM_SHTR_CLOSE_DELAY.........................64
PARAM_SHTR_CLOSE_DELAY_UNIT.............64
PARAM_SHTR_GATE_MODE ............................63
PARAM_SHTR_OPEN_DELAY...........................64
PARAM_SHTR_OPEN_MODE.............................65
PARAM_SHTR_STATUS......................................65
PARAM_SKIP_AT_ONCE_BLK ..........................66
PARAM_SPDTAB_INDEX ...................................66
PARAM_SUMMING_WELL.................................66
PARAM_TEMP ......................................................66
PARAM_TEMP_SETPOINT..................................66
Parameter passing......................................................7
pbin............................................................................8
pl_buf_alloc.............................................................95
pl_buf_free ..............................................................96
pl_buf_get_bits........................................................97
pl_buf_get_exp_date ...............................................98
pl_buf_get_exp_time...............................................99
pl_buf_get_exp_total.............................................100
pl_buf_get_img_bin...............................................101
pl_buf_get_img_handle.........................................102
pl_buf_get_img_ofs...............................................103
pl_buf_get_img_ptr ...............................................104
pl_buf_get_img_size .............................................105
pl_buf_get_img_total.............................................106
pl_buf_get_size......................................................107
pl_buf_init .............................................................109
pl_buf_set_exp_date..............................................108
pl_buf_uninit .........................................................110
pl_cam_check..........................................................28
pl_cam_close...........................................................29
pl_cam_get_diags....................................................30
pl_cam_get_name....................................................31
pl_cam_get_total .....................................................32
pl_cam_open............................................................33
pl_ccd_get_adc_offset (obsolete)..........................148
pl_ccd_get_chip_name (obsolete) .........................143
pl_ccd_get_clear_cycles (obsolete).......................148
pl_ccd_get_clear_mode (obsolete)........................148
pl_ccd_get_color_mode (obsolete)........................143
pl_ccd_get_cooling_mode (obsolete)....................143
pl_ccd_get_frame_capable (obsolete) ...................143
pl_ccd_get_fwell_capacity (obsolete) ...................143
pl_ccd_get_mpp_capable (obsolete)......................143
pl_ccd_get_par_size (obsolete) .............................143
pl_ccd_get_pix_par_dist (obsolete).......................143
pl_ccd_get_pix_par_size (obsolete) ......................143
pl_ccd_get_pix_ser_dist (obsolete) .......................143
pl_ccd_get_pix_ser_size (obsolete).......................143
pl_ccd_get_pmode (obsolete)................................148
pl_ccd_get_postmask (obsolete)............................143
pl_ccd_get_postscan (obsolete).............................143
pl_ccd_get_preamp_dly (obsolete)........................143
pl_ccd_get_preamp_off_control (obsolete)...........148
pl_ccd_get_preflash (obsolete)..............................143
pl_ccd_get_premask (obsolete) .............................143
pl_ccd_get_prescan (obsolete)...............................143
pl_ccd_get_ser_size (obsolete)..............................143
pl_ccd_get_serial_num (obsolete).........................143
pl_ccd_get_summing_well (obsolete)...................143
pl_ccd_get_tmp (obsolete).....................................143
pl_ccd_get_tmp_range (obsolete)..........................143
pl_ccd_get_tmp_setpoint (obsolete)......................148
pl_ccd_set_adc_offset (obsolete)...........................149
pl_ccd_set_clear_cycles (obsolete)........................149
pl_ccd_set_clear_mode (obsolete).........................149
pl_ccd_set_pmode (obsolete) ........................148, 149
pl_ccd_set_preamp_off_control (obsolete) ...........149
pl_ccd_set_tmp_setpoint (obsolete) ......................149
pl_ccs_get_status (obsolete)..................................143
pl_dd_get_info (obsolete)......................................136
pl_dd_get_info_length (obsolete)..........................137
pl_dd_get_retries (obsolete) ..................................138
pl_dd_get_timeout (obsolete)................................140
pl_dd_get_ver (obsolete).......................................142
pl_dd_set_retries (obsolete)...................................139
pl_dd_set_timeout (obsolete).................................141
pl_ddi_get_ver.........................................................34
pl_enum_str_length.................................................52
pl_error_code.....................................................42, 43
pl_error_message...............................................42, 44
pl_exp_abort............................................................79
pl_exp_check_cont_status.......................................83
pl_exp_check_progress (obsolete).........................153

Index 161
pl_exp_check_status................................................82
pl_exp_finish_seq....................................................70
pl_exp_get_driver_buffer ........................................71
pl_exp_get_latest_frame..........................................72
pl_exp_get_oldest_frame.........................................73
pl_exp_get_time_seq (obsolete)............................154
pl_exp_init_seq........................................................74
pl_exp_set_cont_mode (obsolete) .........................156
pl_exp_set_time_seq (obsolete).............................155
pl_exp_setup_cont...................................................75
pl_exp_setup_seq...............................................16, 76
pl_exp_start_cont.....................................................77
pl_exp_start_seq..................................................8, 78
pl_exp_stop_cont.....................................................81
pl_exp_uninit_seq....................................................84
pl_exp_unlock_oldest_frame...................................85
pl_exp_unravel ........................................................86
pl_get_enum_param ................................................51
pl_get_param...........................................................48
pl_io_clear_script_control.......................................88
pl_io_script_control.................................................89
pl_pvcam_get_ver ...................................................35
pl_pvcam_init....................................................36, 45
pl_pvcam_uninit......................................................37
pl_ro_get_value (obsolete) ....................................143
pl_rw_get_value (obsolete) ...................................148
pl_set_param............................................................50
pl_set_value (obsolete)..........................................149
pl_shtr_get_close_dly (obsolete)...........................148
pl_shtr_get_open_dly (obsolete) ...........................148
pl_shtr_get_open_mode (obsolete)........................148
pl_shtr_get_status (obsolete) .................................143
pl_shtr_set_close_dly (obsolete) ...........................149
pl_shtr_set_open_dly (obsolete)............................149
pl_shtr_set_open_mode (obsolete) ........................149
pl_spdtab_get_bits (obsolete)................................143
pl_spdtab_get_entries (obsolete) ...........................144
pl_spdtab_get_gain (obsolete)...............................148
pl_spdtab_get_max_gain (obsolete) ......................144
pl_spdtab_get_port (obsolete) ...............................144
pl_spdtab_get_port_total (obsolete) ......................144
pl_spdtab_get_time (obsolete)...............................144
pl_spdtab_set_gain (obsolete) ...............................149
pl_spdtab_set_num (obsolete) ...............................149
PMODE_ALT_FT...................................................61
PMODE_ALT_FT (obsolete)................................150
PMODE_ALT_FT_MPP.........................................61
PMODE_ALT_FT_MPP (obsolete)......................150
PMODE_ALT_MPP ...............................................61
PMODE_ALT_MPP (obsolete).............................150
PMODE_ALT_NORMAL......................................61
PMODE_ALT_NORMAL (obsolete) ...................150
PMODE_FT ............................................................61
PMODE_FT (obsolete)..........................................150
PMODE_FT_MPP...................................................61
PMODE_FT_MPP (obsolete)................................150
PMODE_INTERLINE ............................................61
PMODE_KINETICS...............................................61
PMODE_MPP.........................................................61
PMODE_MPP (obsolete) ......................................150
PMODE_NORMAL................................................61
PMODE_NORMAL (obsolete).............................150
Pointers......................................................................7
PVCAM.................................................................1, 3
pvcam.h .....................................................................6
R
Readout port selection ...............................................8
Region .......................................................................7
S
s,p coordinates...........................................................7
sbin ............................................................................8
SDK...........................................................................1
Sequence parameters ...............................................13
Sequences................................................................13
Sequences in buffer .................................................24
Serial binning.............................................................8
Serial register.............................................................7
shtr_open_mode ......................................................65
Shutter open mode.............................................13, 20
Single exposure, multiple images in buffer .............24
Smearing..................................................................11
Source code example...............................................25
Specifying regions.....................................................7
Speed choices ............................................................9
Standard shutter.......................................................19
Storage array............................................................10
STROBED_MODE.....................................17, 57, 69
Structures and arrays ..................................................7
System overview........................................................3
T
Technical support ......................................................1
TIMED_MODE...........................................16, 57, 69
TRIGGER_FIRST_MODE .........................17, 57, 69
V
VARIABLE_TIMED_MODE.....................16, 57, 69
Video coordinates......................................................8

162 PVCAM Manual Version 2.7
This page intentionally left blank.
