Quad Instructions
User Manual:
Open the PDF directly: View PDF ![]() .
.
Page Count: 24

Crossfire 2 Build Guide
The Crossfire 2 is the result of over a year of open source development by the
Thingiverse community. It has all the elements that made the original Crossfire a
success with many small improvements that make the Crossfire 2 stronger, lighter
and much easier to build and maintain.
Special thanks to everyone who has printed an original Crossfire and to
everyone who has submitted feedback to me. I hope to see many more of these in
the air. Print, fly and enjoy!
!
!
Printing
Printing the crossfire can be time consuming and tricky but if you follow some
simple guidelines you should have very good results. I have printed the original
Crossfire and the Crossfire 2 in ABS. I have spent considerable time testing my
quadcopters with ABS and I feel that it is the way to go. It is very strong and has a bit
of flex to it. ABS however is known to warp and can be tricky to print some parts
with, but following these guidelines should produce very high quality prints. That
being said others have printed in PLA and also had very good results. PLA does not
have as much of a problem with warping but it is also less flexible and more brittle
than ABS. If you decide to print with PLA I would print with higher percent infills
than with ABS to help with the strength.
This guide will concentrate on printing with ABS. All settings that follow are
for ABS, please refer to the original Crossfire page: http://www.thingiverse.com/
thing:32281 for PLA settings that others have used with success.
Many people who are experienced 3D printers will already know this
information but if you are new or your prints are failing please pay special attention
to this section.
!
3 Rules for Successful Prints:
1) LEVEL, LEVEL, LEVEL the bed! Leveling the bed is by far the most important step
in getting a successful print. Without a level bed you are shooting yourself in the
foot. I cannot stress enough how important a level bed is for a successful print
especially for the quadcopter arms which are the most likely to warp. However
most of the the prints, including the Top and Bottom Plate, the Top Cover and

the Battery Tray take up most of the build platform which will show very quickly
if the bed isn't level.
2) Apply ABS “slurry”to the heated build platform to form a layer of ABS that the
print will adhere to. ABS slurry is simply ABS scraps dissolved in Acetone. Pour a
couple ounces of Acetone in a jar and drop in scraps or waste ABS plastic and
allow to fully dissolve. I make ABS slurry for each color that I print with as the
slurry will impart its color on the bottom surface of the print. Apply the ABS
slurry to the heated build platform at roughly 75-80C with a Q-tip in a scratchy or
circular pattern. The entire platform does not need to be coated completely,
applying too thickly may make the object very difficult to remove when finished,
however special attention should be taken at the edges or corners of the object
as that is where the object will start to pull up from.
3) Monitor the first layer very carefully. The first layer of the print is by far the most
important. Monitor the first layer entirely and make small adjustments to the
level if needed. The first layer should be laid down in a nice flat bead. If the
extruded plastic is being laid down too thinly or not at all its because the bed in
that area is too high, lower the bed by 1/8th of a turn or until you get a nice flat
bead. If the bead is too thin or not bonding to the platform the bed is too low
and needs to be raised. If the first layer doesn't bond well to the platform the
odds that the print will fail are very high. Just remember it is much easier to start
the print over after the first layer if it doesn’t look good than it is to leave it and
have it fail after hours of printing.
!
Quadcopter Arms:
HBP Temp: 110C Extruder: 225-230C Infill: 50% (At least 40% to keep the arm from
flexing too much) Supports: ON
It is best to print at least two arms at a time as they are the longest prints by far. Also
as slow of an extruder and travel speed as you can stand. I print at about 100mm/
100mm per second. The arms will probably take at least 6-7 hours for two arms and
can take as long as 9 or 10 hours without acceleration. Supports are required on this
print because of the insets for the lock nuts.
!
Bottom and Top Plate and Top Cover:
HBP Temp: 110C Extruder: 225-230C Infill: 10-20% Supports: ON
!
The plate and cover prints are fairly strait forward. They are not very prone to
warping as they are very thin. As long as the HBP is level and a little slurry is applied
you should have no trouble printing them. As far as infill goes keep in mind that the
Top and Bottom Plate along with the top cover is what provides the frame with it’s
strength. The frame has been tested with as little as 10% infill on the plates and
cover but caution should be taken if you are not experienced with quadcopters.
There is much to be said about a light quadcopter but under a brisk landing the
plates may crack. Supports will be required for the rubber dampener inserts.
!
Battery Tray:
HBP Temp: 110C Extruder: 225-230C Infill: 10-20% Supports: ON
!
Just as above the Batter Tray is strait forward and simple to print and care should be
taken with lower infills. The Battery Tray will carry the battery and if you choose
either a GoPro gimbal or just a GoPro case, you definitely don’t want it too weak.
Supports are required for the rubber dampener inserts because of the overhang.
!

GoPro Case:
HBP Temp: 110C Extruder: 225-230C Infill: 10-20% Supports: ON
!
The GoPro case can be prone to warping because it is thin and tall. Printing with a
slower speed or adding a small delay between layers can help with this. Supports
are required if printing out the GoPro Gimbal Assembly but not for the standard
lightweight case.
!
APM Mount and Gimbal Controller Mount:
HBP Temp: 110C Extruder: 225-230C Infill: 10% or less Supports: OFF
!
The APM Mount and the Gimbal Controller Mount are very strait forward. They have
little or no issues with warping and are non structural so infill can be kept very low.
!
Quadcopter Assembly
The assembly of the Crossfire 2 is very strait forward and has converted to
standardized hardware over the previous version which used a few different types of
hardware.
!
Hardware List:
Most of this hardware can be ordered through Hobby King, or if you have a specialty
hardware store such as Ace, Jax or McGuckins they can be found there a lot of times.
!
!
Socket Head Bolts M3x8mm (38)
-Used in attaching the arms, attaching the controllers and the standoffs.
Socket Head Bolts M3x6mm or M2.5x6mm (12-16)
-Used for mounting motors depending on type. Check your motors.
!
Nylon Standoffs M3x5.6x Assorted lengths (You can never have too many of these)
-Used to mount the various types of controllers used and to mount the Top Cover
!
!
!
!
!
Nylon Nut M3 (15-20)
-Used to mount the various types of controllers used and to mount the Top Cover
!
Washers 3.5mm (30-40)
!
Vibration Dampener Balls (4 for APM Mount 6 for Battery Tray)
-Depending on your setup you will need either 6 or 10 dampeners.
!
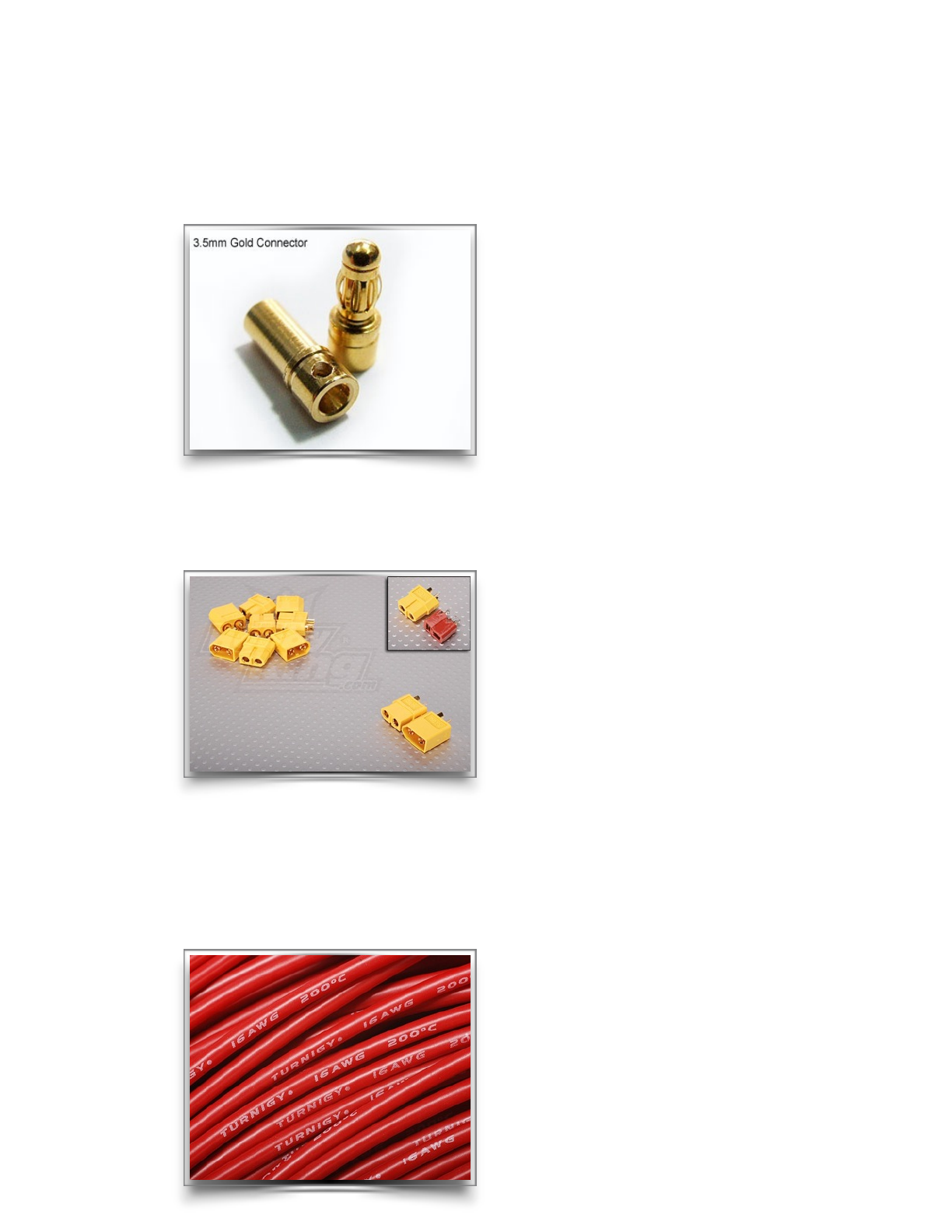
Gold Bullet Connectors (20ish)
-ESCs and power distribution board.
!
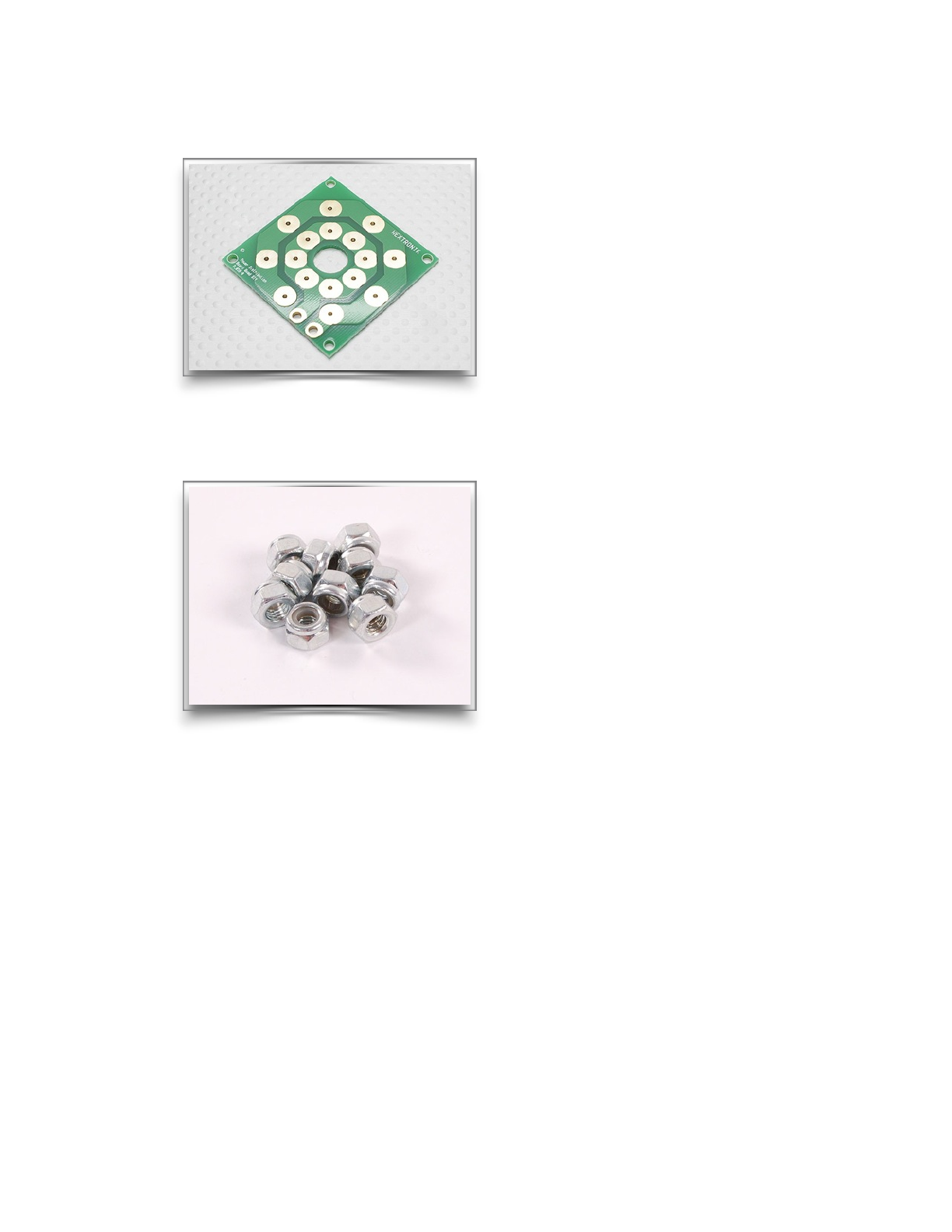
XT60 Connectors (1 Pair)
-Power distribution board to Battery or current sensor.
!
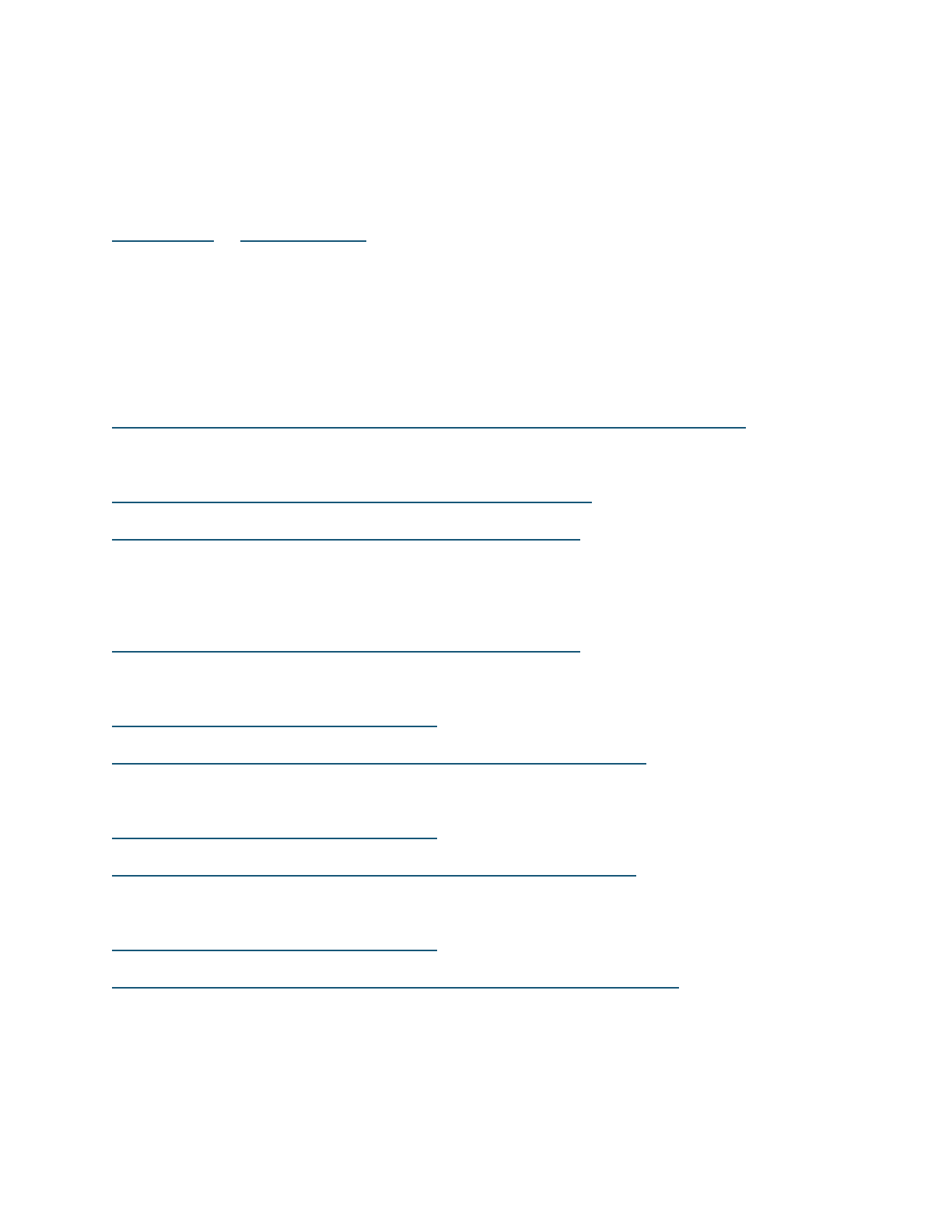
Silicone Wire 16 AWG (1 meter black and red)
Multi-Rotor Power Distribution Board (1)
!
M3 Hex Lock Nuts (24)
!
3M Double Sided Tape (1 Roll)
-Mounting RC Rx, VTx, APM, Compass etc.
!
Zip Ties (Lots and lots)
-For mounting ESCs and tidying up wires. Zip ties are your friend!
!
Electronics List:
The following is my electronics list. Keep in mind that there are many
different electronics combinations. There are different ESC, motor, prop and flight
controller setups. The same goes for FPV setups if that is the route you are going to
take. This combination has worked very well for me but it is only one of many.
Quadcopter electronics have come a long way in the last couple years and checking
FPVlab.com or RCGroups.com can give you lots of different options and ideas as far
as your own setup.
!
Motors: AX-4008D 620KV (Check Hobby King as their links change)
ESCs: Lumenier 30A with SimonK firmware
http://www.getfpv.com/electronics/electronic-speed-controllers-esc.html
Props: APC 10x4.7 Slowflyer 2 CW, 2 CCW
http://www.getfpv.com/propellers/apc-10x4-7-sfp.html
http://www.getfpv.com/propellers/apc-10x4-7-sf.html
Battery: Turnigy nano-tech 4S 35-70C (Check Hobby King as their links change)
Flight Controller: 3D Robotics APM 2.6
http://www.getfpv.com/propellers/apc-10x4-7-sf.html
Video Transmitter: Immersion RC 600mW 5.8Ghz
http://hobbywireless.com/index.php?
main_page=product_info&cPath=111_115&products_id=522
FPV Camera: CCD Killer Camera600 lines NTSC
http://hobbywireless.com/index.php?
main_page=product_info&cPath=122_6&products_id=1093
Goggles: DOMINATOR - FATSHARK MODULAR VIDEO GLASSES
http://hobbywireless.com/index.php?
main_page=product_info&cPath=52_123_124&products_id=672
!
!
!

Assembly:
Find yourself a clean place to work, put on some tunes, find some basic tools
like allen wrenches, screw drivers, dykes, hammer, super glue and a few beers (2 six
packs to a case should be enough to get you through). Assembling the quadcopter
also requires some basic soldering skills. If you have never done it before, it is not
rocket surgery. Check out some videos on Youtube and practice a little before
starting this project. One bad or broken connection anywhere in the system will
cause a crash followed soon after by many (many) choice words, so do yourself a
favor and do it right the first time.
!
!
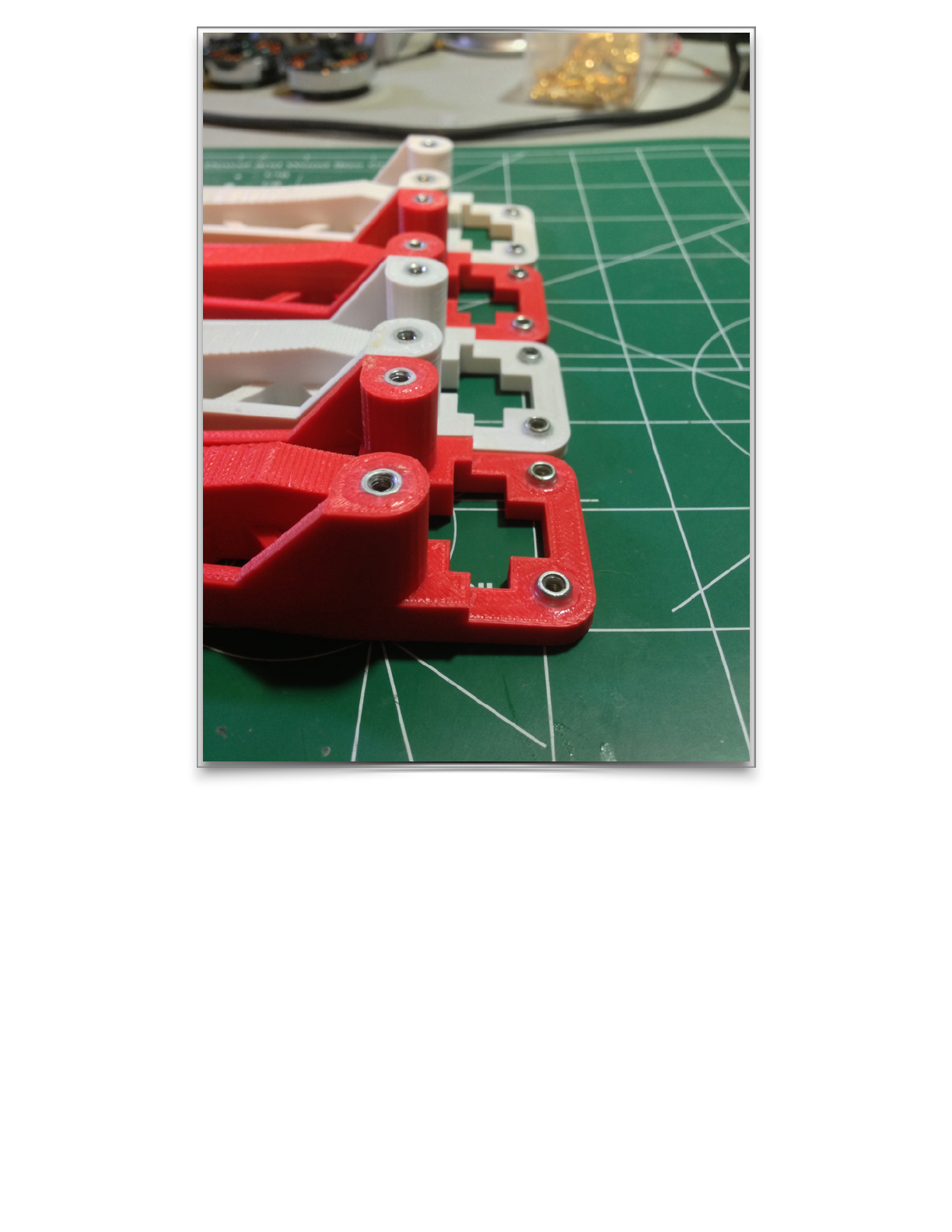
1) Start out with the arms. The arms are designed to receive M3 hex lock nuts.
Each arm takes six, four on top and two on the bottom. The tolerances are such
they they need to be seated with a hammer. It helps to take an exacto knife and
flare out the opening. The four outside holes (the ones towards the motors,
there are two on the top and two on the bottom) need the hex nuts seated so
that they are flush with the top and bottom edge. The two holes towards the
inside of the arm need the hex nuts seated with the flat edge of the nut facing
the the top edge of the arm. A small amount of super glue should be applied
inside the holes before the hex nuts are seated. Align the hex nut on the hole
and swiftly tap it in. It should seat flush. The inside hex nuts don't need glue
before you seat them as they are being pulled to the inside by the bolts. Because
of the flat edges it can be hard to seat and glue may cause it to get stuck at an
improper angle. If the angle is wrong thread a bolt in and use it to align the
angle. After all hex nuts are seated add another bead of super glue around the
edges to make sure they aren’t going to go anywhere. After you are done with
the four arms put them aside and the the glue fully cure.
!
!
!
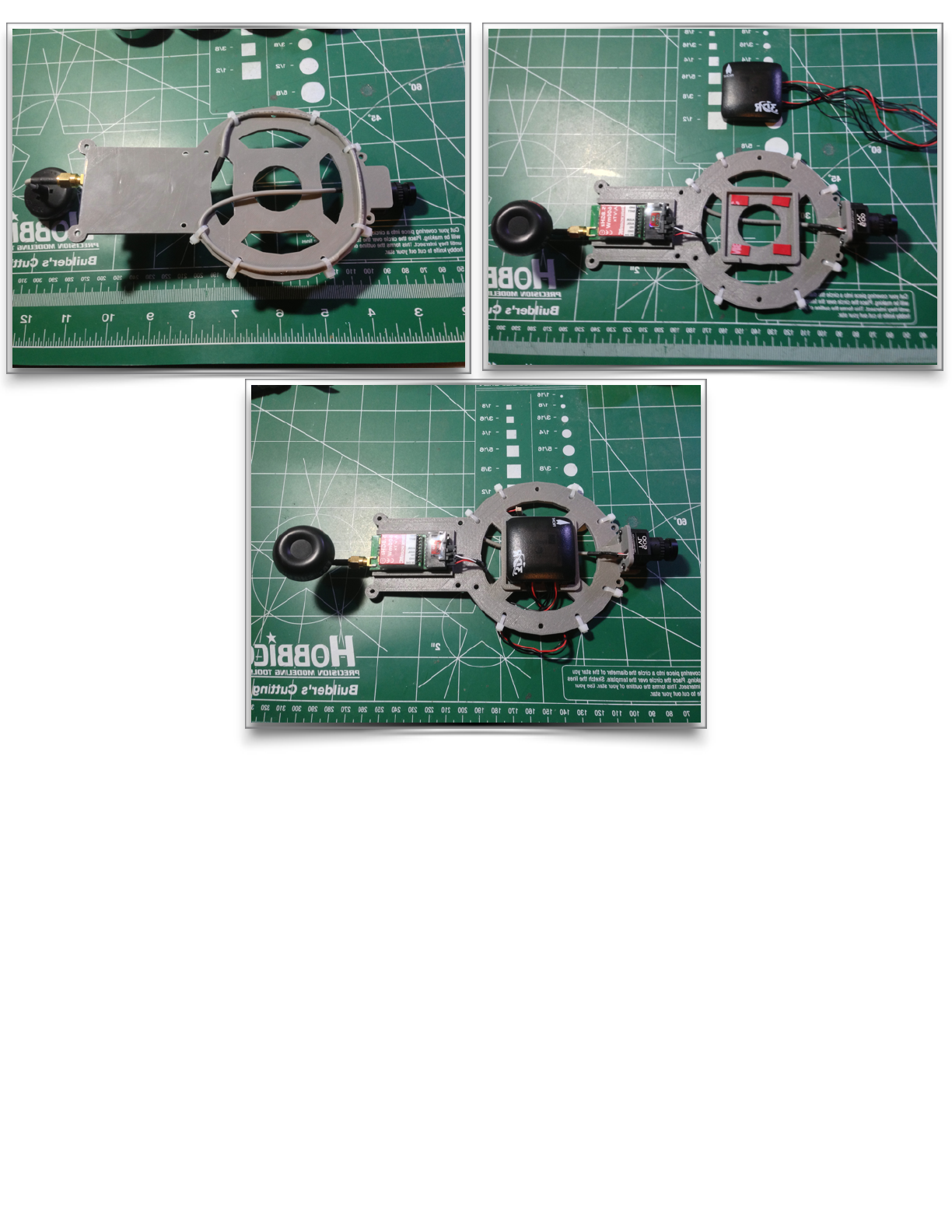
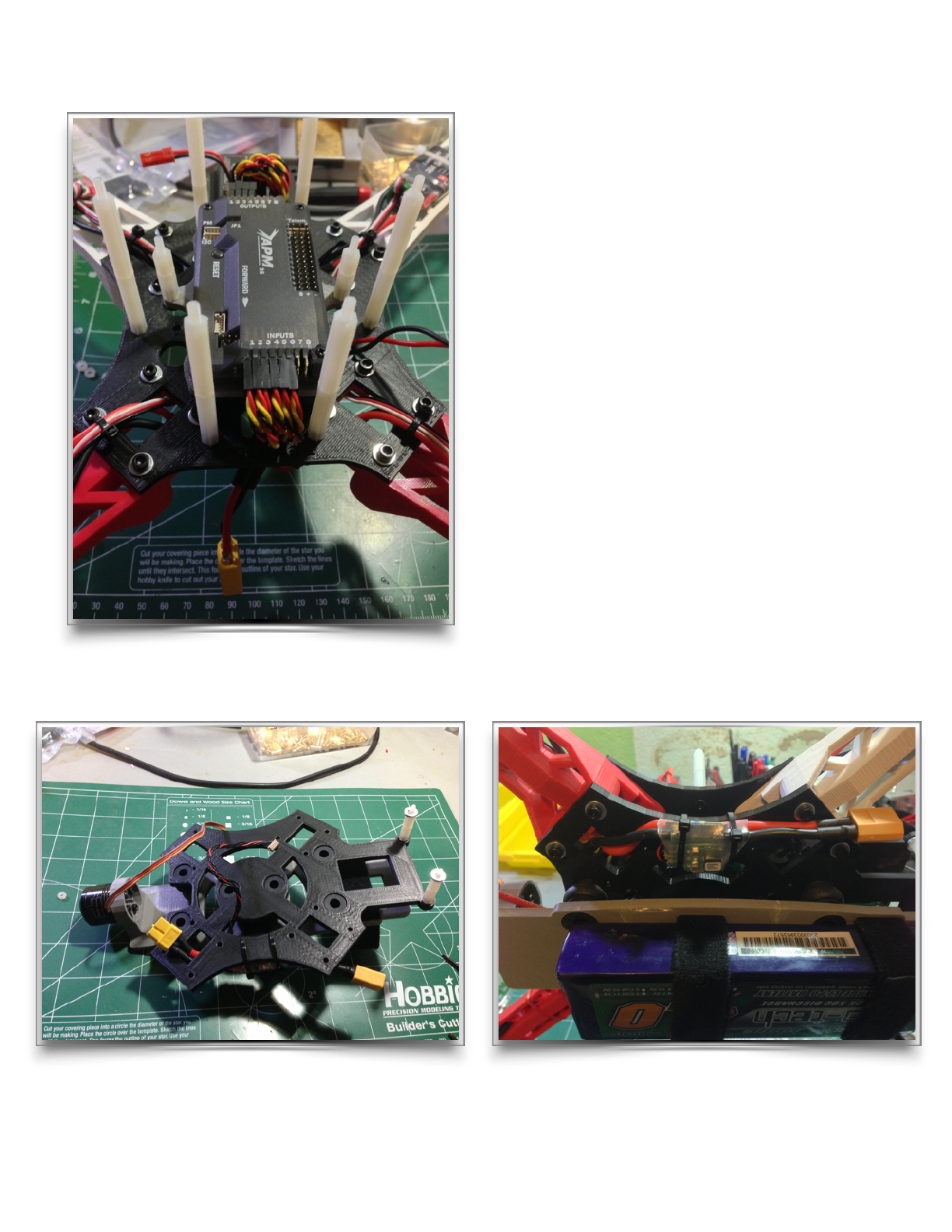
2) Assemble the Top Cover. As I mentioned earlier I am using an APM 2.6, I designed
the top cover for the GPS and compass module as well as my video transmitter and
FPV camera. Use 3M tape to adhere the video transmitter, GPS/compass module and
FPV camera in place. Use zip ties on unused holes to route the camera cable on the
bottom of the top cover. Refer to the pictures for which holes to use zip ties on and
which holes to leave for the standoffs.
!
!
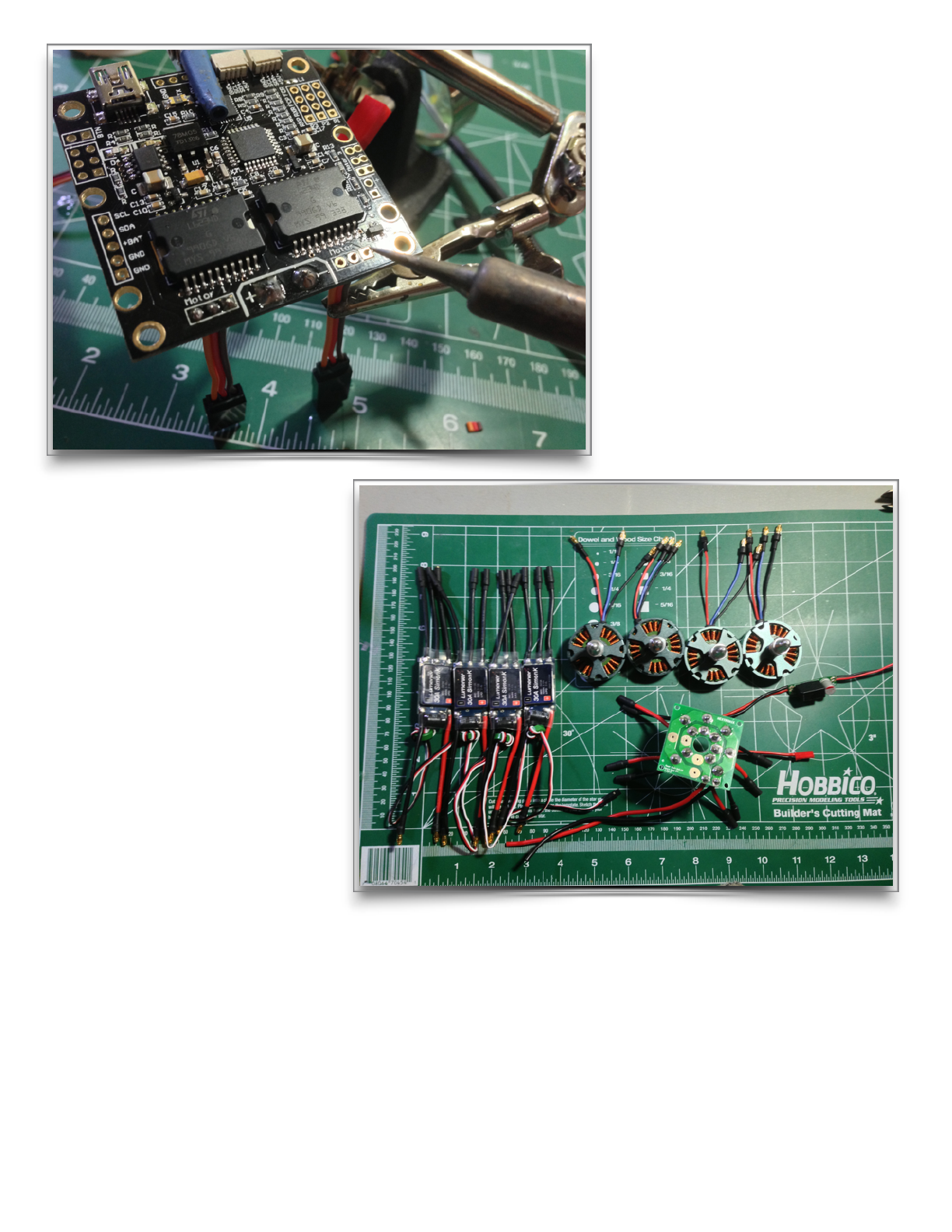
3) Solder electronics. Break out the soldering iron and get to work. Bullet
connectors need to be soldered onto the motors, ESCs and the power distribution
board. Use male connectors for the motors. Female connectors for the three wires
from the ESC to the motors and male connectors for the positive and negative ESC
wires. Use female connectors for the positive and negative leads from the power
distribution board. Next solder the power distribution board. Measure out the
16AWG wire so that the ESCs will sit where you want them on the arm. Also at this
point you will want to add your power leads for your video system (adding an LC
filter inline will help with
clean video if you are
powering everything from
one battery) and your
gimbal controller if you
have one. Lay everything
out and make sure things
are where you want them
before you start to solder.
Heat shrink everything.
You can leave the battery
lead until later. You will
want to measure out
where you want your
XT60 connector so leave
the leads long and solder
them after the quad is
assembled. Pro tip:
remember to put the heat
shrink on before you
solder the XT60, ask me
how many times I have forgot!
!
!
4) Mount the power distribution board to the bottom of the Top Plate using short
standoffs, M3 bolts and nylon nuts. Make sure all power leads are oriented the way

they should be and that all the solder joints look good. Use the nylon nuts to attach
the the power distribution board to the standoffs. Take care not to over torque the
nylon nuts as they can strip their threads easily. Your RC receiver can also be affixed
at this point with 3M tape.
!
5) Pop 4 vibration dampeners into the APM Plate and affix the APM controller using
3M tape. If you are using another controller such as a KK 2.0 or KK Blackboard use
the provided 50x50mm mounting holes. One set mounts at 45 deg. (Blackboard)
while the other mounts perpendicularly (KK 2.0). A gimbal controller can also be
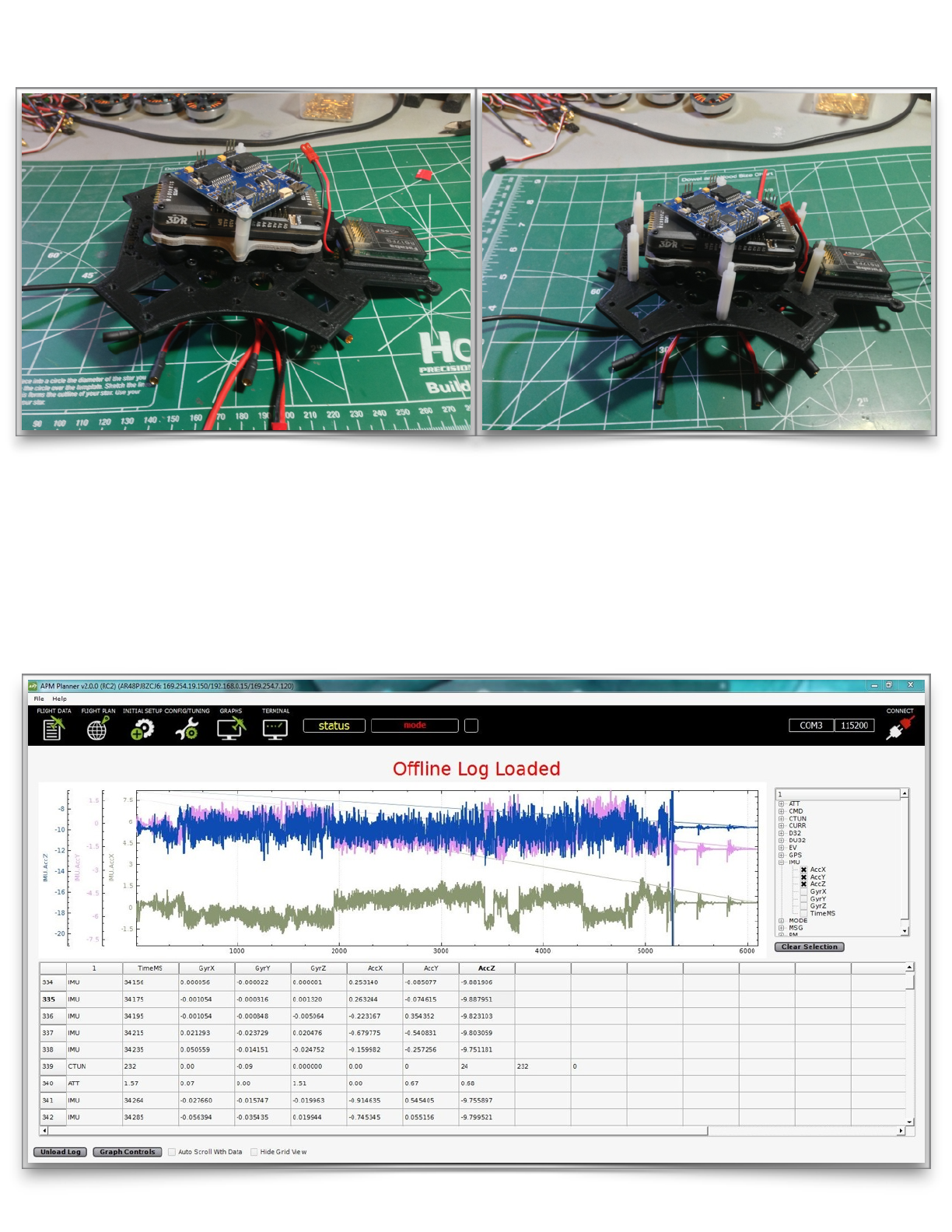
mounted above the APM either at 45 deg. or by using the Gimbal Mount Plate.
Mount the APM Plate to the Top Plate with the vibration dampeners. The vibration
dampener balls can be very effective at isolating vibrations from the APM. Below is a
graph showing measured vibrations that are half of what is acceptable levels with no
balancing of the props. Also before you are done with the Top Plate add six nylon

standoffs that are high enough to offset
the Top Cover above the controllers
!
6) Mount the motors using whatever
hardware your specific motor requires.
Plug the motors into the ESCs. Don’t
worry about which wire goes where, you
will fix that later when you spin the
motors to determine which way they
need to spin. If they spin the wrong
direction just swap any two wires. Affix
the ESC to the arm with either 3M or zip
ties.
!
7) Affix the Battery Tray to the Bottom
Plate using the vibration dampeners. It is
easiest to thread velcro straps through
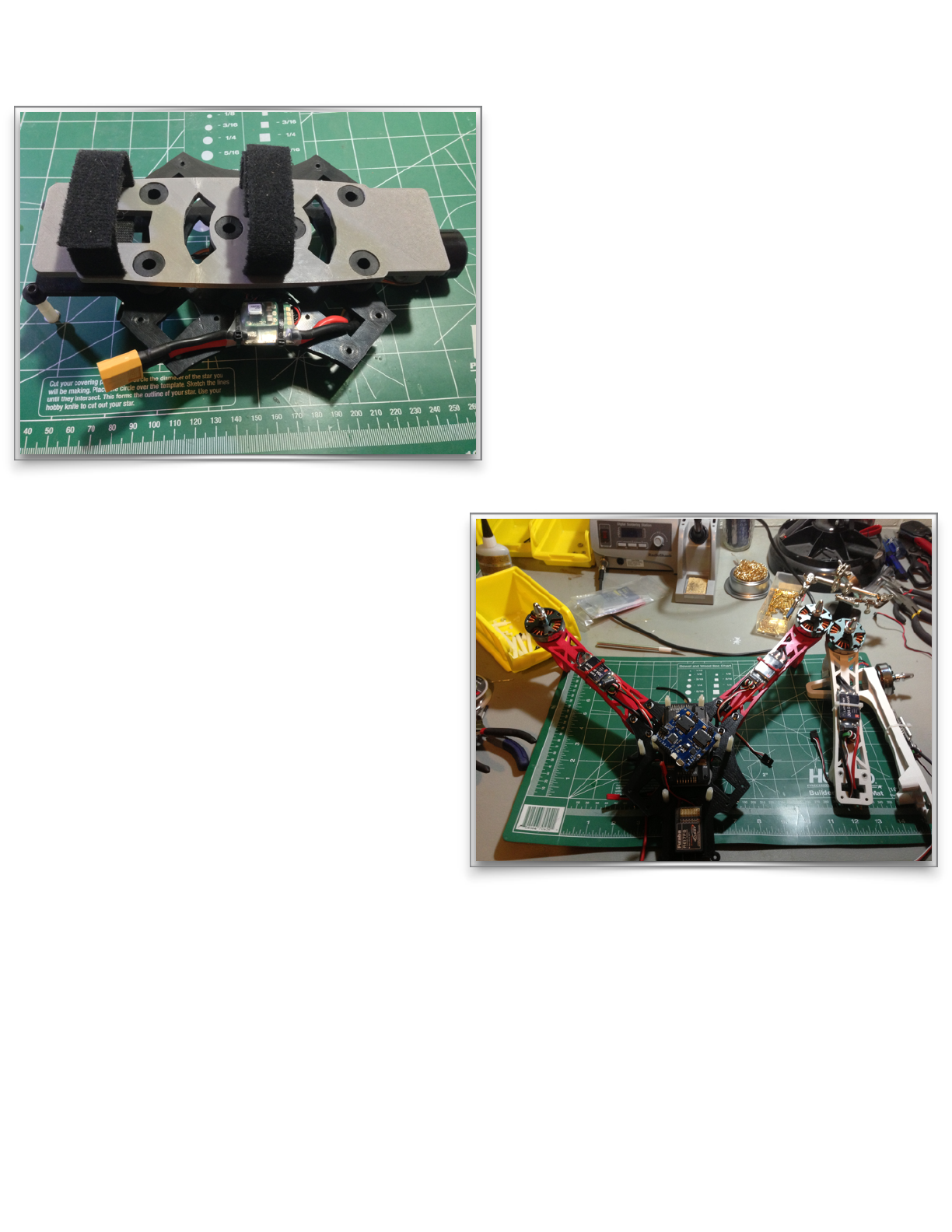
the Battery Tray before securing it to
the Bottom Plate. It is also easiest to
add all six dampeners to the Battery
tray then attach to the Bottom Plate.
Also add two standoffs (1”) at the aft
part of the frame. If you are using
metric standoffs you may need to add a
couple washers to get the spacing
correct. Its also a good idea to route
and affix your current sensor if you are
using an APM. This is how I secured
mine. As mentioned before I left the
ship’s power lead long so that I can
trim it to the proper length when the
quadcopter is assembled.
!
8) Putting it all together. Start by
affixing the arms to the top plate using
M3 bolts and washers. Thread the ESC
and power wires down through the
rectangular hole and plug the power
wires into the Power Distribution Board. Black to black, red to red. I know it sounds
stupid but double check everything is plugged in correctly. Cross a wire here and
you can screw some shit up!
As stated earlier in the “Hardware”section, zip ties are your friend. Use
them here to tidy up all that messy wiring. You may also want to mark your ESC
wires at this point. Depending on your flight controller specific ESC signal wires
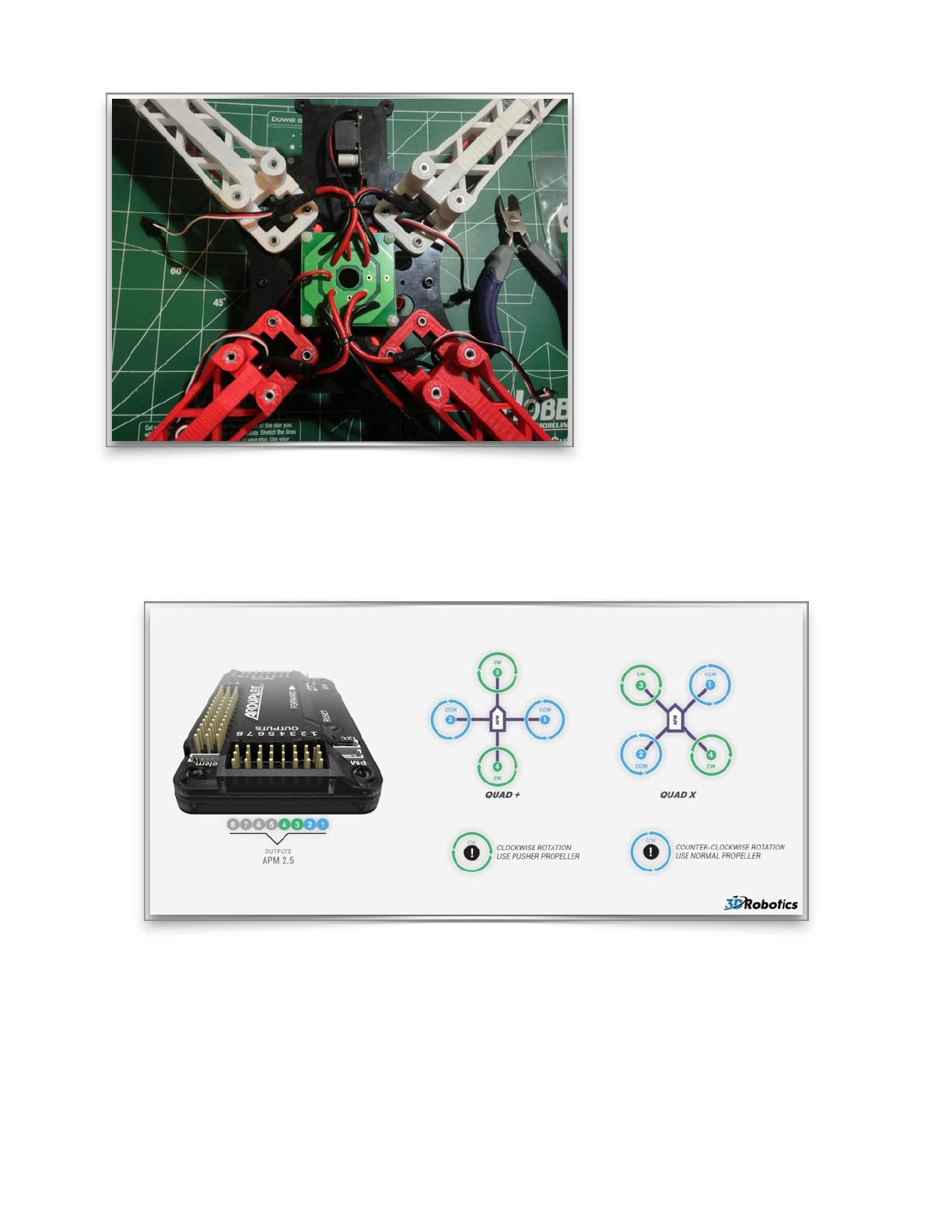
need to be plugged into
specific channels on your
controller. See the photo
below for the APM motor
arrangement. Simply take a
sharpie marker and draw a
1-4 hash marks near the
plug end to identify the wire
when plugging them into
the flight controller outputs.
Depending on your ESC wire lengths you can decide to route them through any
number of holes in the frame. Find the setup that best suits your needs. Keep it as
clean as possible. Remember zip ties are your friend.
!
Flip the quad right side up, or shiny side up as us pilots like to say. ** Quick
side note, I would say that about 90 percent of crashes can be solved by that simple
adage- Keep the shiny side up.** Before you mount your gimbal controller (If you
are using one) route all the signal wires between your RC receiver and the inputs on
your flight controller and all ESC signal
wires to the outputs on your Flight
Controller. You could also probably use
some of those zip ties to keep things nice
here as well.
!
Now flip the quad dirty side up (Again
that’s just a saying, the quad has no dirty
side yet, and because of the four spinning
blades it tends to get dirty everywhere).
Route the current sensor wires up through
the Top Plate and attach the Bottom Plate
to the arms with M3 bolts and washers.
Plug the Current sensor wires into the
APM.
!

Now that you have the main body and all the electronics installed you should
go ahead and measure out the main power lead, cut it to length and solder on a
female XT60 connector. Route it through one of the rectangular holes and plug it
into the current sensor “out”. The only thing left to do is to install the Top Cover.
Plug the GPS/ Compass wires into the APM and attach the Top cover to the nylon
standoffs with nylon nuts. Again take care not to strip the threads by over torquing.
!
There you have it, you’re all done with the assembly! Refer to your flight
controllers directions for setting up and testing your quad for it’s first flight. If you
have never set up one before take great care and throughly understand all the
instructions. Don’t try to skip steps to get into the air faster, you will only end up
crashing and most likely weeping into your hands as you realize how much time and
effort you put into this whole endeavor for a whopping 10 seconds in the air.
!
There you go, you are ready to get flying!

!
!
And now for a disclaimer: I do not take any responsibility for any injury to
persons, damage to property or failure of the airframe. This is an open source
project and you take full responsibility for any incidents involving the operation of
this aircraft. In short you are all grown adults, and if not, where are your parents?
As far as operation of this aircraft goes (this is for those of you new to multi-
rotors, UAVs, FPV or RC in general) if you follow a few basic rules you will have a long
and fun future flying the Crossfire, and hopefully keep all of your fingers.
!
Rule 1) Don’t be a dumbass. This should be self explanatory. Don’t do anything
that could get your or someone else hurt. Use your head.
!

Rule 2) Don’t be an asshole. Also self explanatory. This hobby, and industry is in
it’s infancy. The FAA still has no idea how to regulate this area of aviation. Please
don’t give them the opportunity to make a rule about something you did. Also
there are many out there who are scared or leery of “drones” or being spied on.
Try not to create a negative image for the community as a whole.
!
Rule 3) Don’t try to run before you can walk, take small steps and build your
confidence with the aircraft. Don’t fly over anything that you would’t want the
quad to crash on. That means babies, animals, Ferraris and nuclear power plants.
!
Rule 4) Don’t ever test the quadcopter with the props on until you are sure your
setup is operating correctly. Props spin in excess of 5000 rpms and will literally slice
through your flesh until the prop hits bone. Trust me, I know. I have the scars to
prove it and so do some friends. Refer to rule number 1.
!
Rule 5) Have fun!
!
So go out there and fly the hell out of this thing. Test it.. . torture test it. Find
it’s limits (safely), its weaknesses. Tinker with and modify it. I designed the
Crossfire to push 3D printing forward. Please take my ideas and make them even
better! Innovate! Do something nobody has done before. Create something new.
Get an image or a video that will blow people’s mind. Use it for research or a non-
profit. Run with it and make something that is yours. The open source community
is amazing. All I ask is that you share your own ideas. I can’t wait to see more of
these in the air!
Blue Skies.
-Mike Bristol

!
!
