SMC Manual 6 0
User Manual:
Open the PDF directly: View PDF ![]() .
.
Page Count: 109 [warning: Documents this large are best viewed by clicking the View PDF Link!]
- Preface
- Section 1: .sm File Layout
- Section 2: From Model to SMC
- Section 3: Adding a State Machine to your Class
- Section 4: Compiling a .sm
- Section 5: Behind the Curtain
- Section 6: For Example ...
- Section 7: Queuing Up
- Section 8: Packages and Namespaces
- Section 9: Be Persistent!
- Section 10: Get the Picture
- Section 11: On Reflection
- Section 12: Getting Noticed
- Section 13: Giving Direction
- Appendix A: SMC EBNF Grammar

SMC Programmer’s Manual
April 2, 2016
SMC Programmer’s Manual
Page 1 of 109

SMC Programmer’s Manual
Page 2 of 109
Table of Contents
Preface ...........................................................................................................................................! 7
Section 1: .sm File Layout ...................................................................................................! 8
!Your Task Class ....................................................................................................................... ! 8
!The Task Finite State Machine ................................................................................................ ! 10
!Creating an SMC .sm File ....................................................................................................... ! 12
!Defining FSM States ............................................................................................................... ! 14
!Defining FSM Transitions ........................................................................................................ ! 15
!Defining FSM Transition Actions ............................................................................................. ! 17
!Defining FSM Default Transitions ............................................................................................. !20
!Defining State Entry/Exit Actions .............................................................................................! 24
!Connecting Task And Task FSM ............................................................................................. ! 26
Section 2: From Model to SMC ........................................................................................! 28
!Instantiating a Finite State Machine ........................................................................................ ! 28
!Simple Transition .................................................................................................................... ! 29
!Jump Transition ...................................................................................................................... ! 29
!External Loopback Transition .................................................................................................. ! 29
!Internal Loopback Transition ................................................................................................... ! 30
!Transition with Actions ............................................................................................................ ! 30
!Transition Guards ................................................................................................................... ! 32
!Transition Arguments .............................................................................................................. ! 34
!Entry and Exit Actions ............................................................................................................. ! 36
SMC Programmer’s Manual
Page 3 of 109
!Table 1: Entry/Exit Execution .................................................................................................. ! 37
!Push Transition ....................................................................................................................... ! 38
!Pop Transition ........................................................................................................................ ! 39
!Default Transitions .................................................................................................................. ! 40
Section 3: Adding a State Machine to your Class ................................... ! 42
!C............................................................................................................................................ ! 45
!C++ ........................................................................................................................................ ! 47
!C++ using -crtp ...................................................................................................................... ! 49
!Objective-C ............................................................................................................................ ! 50
!Java ....................................................................................................................................... ! 50
!Incr Tcl .................................................................................................................................... ! 53
!VB.net .................................................................................................................................... ! 55
!C# .......................................................................................................................................... ! 56
!Groovy ................................................................................................................................... ! 57
!Lua ......................................................................................................................................... ! 59
!Python .................................................................................................................................... ! 60
!PHP ....................................................................................................................................... ! 61
!Perl ......................................................................................................................................... ! 62
!Ruby ...................................................................................................................................... ! 63
!Scala ...................................................................................................................................... ! 64
!JavaScript .............................................................................................................................. ! 66
Section 4: Compiling a .sm ................................................................................................! 67
!Table 2: SMC target languages ............................................................................................... ! 68
!Table 3: SMC command line options ...................................................................................... ! 70
Section 5: Behind the Curtain ...........................................................................................! 71
SMC Programmer’s Manual
Page 4 of 109
Section 6: For Example ... ...................................................................................................! 74
!Example 1 .............................................................................................................................. ! 74
!Example 2 .............................................................................................................................. ! 75
!Example 3 .............................................................................................................................. ! 75
!Example 7 .............................................................................................................................. ! 76
!PHP Example ......................................................................................................................... ! 76
Section 7: Queuing Up .......................................................................................................... ! 77
Section 8: Packages & Namespaces ............................................................................ ! 78
!Fully Qualified Class Names .................................................................................................... ! 79
Section 9: Be Persistent ....................................................................................................... ! 80
!C++ ........................................................................................................................................ ! 80
!Java ....................................................................................................................................... ! 83
![incr Tcl] .................................................................................................................................. ! 85
!VB.net .................................................................................................................................... ! 88
!C# .......................................................................................................................................... ! 90
Section 10: Get the Picture ................................................................................................. ! 92
Section 11: On Reflection .................................................................................................... ! 93
!Java Sample ........................................................................................................................... ! 97
!C# Sample ............................................................................................................................. ! 98
![incr Tcl] Sample ..................................................................................................................... ! 99
Section 12: Getting Noticed ............................................................................................. ! 100
!Java Sample ......................................................................................................................... ! 100
!C# Sample ........................................................................................................................... ! 102
!VB.net Sample ..................................................................................................................... ! 104
SMC Programmer’s Manual
Page 5 of 109
Section 13: Giving Direction ............................................................................................. ! 106
!%start .................................................................................................................................. ! 106
!%class ................................................................................................................................. ! 106
!%fsmclass ............................................................................................................................ ! 106
!%fsmfile ............................................................................................................................... ! 106
!%package ............................................................................................................................ ! 106
!%include .............................................................................................................................. ! 107
!%import ............................................................................................................................... ! 107
!%declare .............................................................................................................................. ! 107
!%access .............................................................................................................................. ! 107
!%map .................................................................................................................................. ! 107
Appendix A: SMC EBNF Grammar .............................................................................. ! 108
SMC Programmer’s Manual
Page 6 of 109

Preface
This manual describes how to use the state machine compiler. Hopefully, you will find this tool as useful as I
have. State machines are a natural way to describe object behavior but there has not been an easy way to
mate state machines with objects. This compiler allows you to add a state machine to just about any class
you desire (more about that later.)
I encourage you to first look at the annotated SMC code in section 1. This code demonstrates SMC's
powerful simplicity. The state machine code is simple, meaning you can easily learn it. Its simplicity also
allows you to readily build powerful, robust finite state machines.
For those of you who hang around comp.lang.c++ or comp.object, you may have read some of Bob Martin's
articles. You may have even read about his state machine compiler and gotten a copy of it. You may then
notice a striking similarity between my compiler and his. There is a reason for that: this compiler was derived
from Bob Martin's original state machine compiler.
While an employee of Clear Communications Corporation (renamed Clear and now defunct), he developed
state machine classes and later a compiler to automatically generate those classes. About this time, I came
to work for the same company and was intrigued by what Bob had done. Some six months later, Bob struck
out on his own to form Object Mentor Associates and I was left to maintain the state machine compiler. I
have added many features to the original system (arguments, default transitions, push and pop transitions,
transition guards, a more YACC-like language structure, etc.)
But no matter how much I have added, the state machine compiler will always be Bob Martin's invention. I'd
like to think that I made a good thing better.
SMC Programmer’s Manual
Page 7 of 109

Section 1: .sm File Layout
Your Task Class
SMC generates finite state machines for objects - not processes or applications but for an individual object. If
you have objects that receive asynchronous callbacks and how objects respond to those callbacks are
based on the object state, then SMC provides a powerful solution.
(Note: this example is based on simple Java and is easily translated to other languages. Also, this example
assumes that you know object-oriented programming and finite state machines (FSMs).)
In this example you are developing a Task object as part of your SuperCron! product:
(Note: The ellipsis (...) code will be filled in as we go along.)
package com.acme.supercron;
public final class Task
implements TaskEventListener, TimerEventListener
{
public Task() {
// Object initialization.
...
}
// TaskEventListener Interface Implemenation.
// Time for the incomplete task to continue its work for the
// specified time slice.
public void start(long timeSlice) { ... }
// Called when a running, incomplete task should suspend
// running even though its time slice is not expired.
// Note: the task's running is also suspended when the time
// slice expires.
public void suspend() { ... }
// Called when an incomplete task is blocked. Blocked tasks
// are able to continue running when unblocked.
SMC Programmer’s Manual
Page 8 of 109

public void block() { ... }
// Called when a blocked task is unblocked and allowed
// to continue running.
public void unblock() { ... }
// Called when an incomplete task is permanently stopped.
// Stopped tasks are then deleted.
public void stop() { ... }
// Called when the task is deleted. Tasks are deleted when
// either 1) the task has completed running and is now
// stopped or 2) when the system is shutting down and all
// are to terminate immediately.
public void delete() { ... }
// TimerEventListener Interface Implementation.
// Called when the time slice timer expires. If running,
// the task is suspended.
public void handleTimeout(TimerEvent event) { ... }
// Remainder of class definition.
...
}
How the Task class should respond to the start, suspend, etc. method calls depends on what the Task is
currently doing - that is, it depends on the Task's state.
SMC Programmer’s Manual
Page 9 of 109
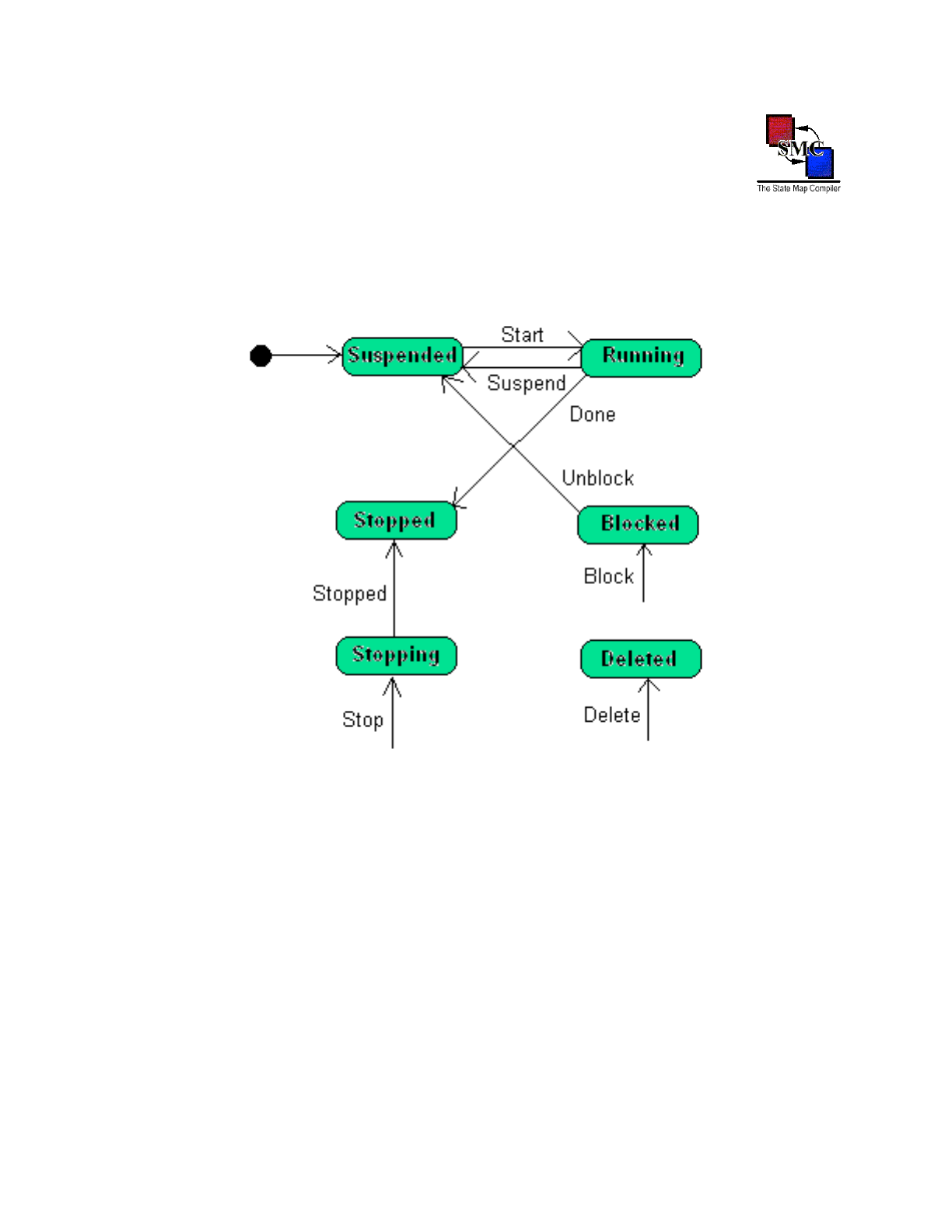
The Task Finite State Machine
The Task Finite State Machine (FSM) diagram is:
The Task's states are:
•Running: the task is actively doing work. The task is allowed to run for a specified time limit.
•Suspended: the task is waiting to run again since it is not yet completed.
•Stopped: the task has either completed running or externally stopped.
•Blocked: the uncompleted task is externally prevented from running again. It will stay in this state until
either stopped or unblocked.
•Stopping: the task is cleaning up allocated resources before entering the stop state.
•Deleted: the task is completely stopped and all associated resources returned. The task may now be
safely deleted.
This is the FSM end state.
Some notes on this FSM:
•The Task object starts in the Suspended state.
SMC Programmer’s Manual
Page 10 of 109

•The transitions match the TaskEventListener interface's methods.
•The Stopped state is reached when either the Running task completes or is externally stopped.
•The Stop, Block and Delete transitions do not start in any specified state. More on that in coding up the
FSM.
Now the problem is: how to take this FSM and put it into your code? The first step in that is encoding the
FSM in the SMC language.
SMC Programmer’s Manual
Page 11 of 109

Creating an SMC .sm file
The .sm listing below is a skeleton with no states or transitions defined. It contains only the following
features:
•A verbatim code section which is copied verbatim into the generated source code file. In this case the
verbatim code is the boilerplate copyright comments. This section is delimited by the %{ %} pair.
•The %class keyword which specifies the application class to which this FSM is associated: Task.
•The %package keyword which specifies to which class package this FSM belongs. This is the same
package as the Task class.
•The %fsmclass keyword specifies the generated finite state machine class name. If %fsmclass is not
specified, then the finite state machine class name would default to TaskContext. This keyword is not
required.
•The %fsmfile keyword specifies the generated finite state machine class file name. The appropriate suffix
for the given programming language is appended to this file name to form the complete file name. This
suffix may be changed from its default using the -suffix and -hsuffix command line parameters. See
this table for the default file name and suffix settings for each supported target language.
•The %access keyword is used to specify the generated class' accessibility level (this works only when
generating Java and C# code). In this case the FSM can only be accessed within the
com.acme.supercron package.
•The %start keyword specifies the FSM's start state. For the Task FSM it is the Suspended state.
•The %map keyword is the FSM's name.
Name the source code file TaskFSM.sm because both the %fsmclass and %fsmfile directives specify
the finite state machine class name as TaskFSM. The .sm suffix is required.
(Note: the %fsmclass directive was added to SMC version 6.0.1 and %fsmfile was added to version
6.6.0.)
%{
//
// Copyright (c) 2005 Acme, Inc.
// All rights reserved.
//
// Acme - a name you can trust!
//
// Author: Wil E. Coyote (Hungericus Vulgarus)
//
%}
// This FSM works for the Task class only and only the Task
SMC Programmer’s Manual
Page 12 of 109

// class may instantiate it.
%class Task
%package com.acme.supercron
%fsmclass TaskFSM
%fsmfile TaskFSM
%access package
// A %map name cannot be the same as the FSM class name.
%start TaskMap::Suspended
%map TaskMap
%%
...
%%
SMC Programmer’s Manual
Page 13 of 109

Defining FSM States
The state definitions are placed inside the %map TaskFSM %% ... %% delimiter:
%{
//
// Copyright (c) 2005 Acme, Inc.
// All rights reserved.
//
// Acme - a name you can trust!
//
// Author: Wil E. Coyote (Hungericus Vulgarus)
//
%}
// This FSM works for the Task class only and only the Task
// class may instantiate it.
%class Task
%package com.acme.supercron
%fsmclass TaskFSM
%fsmfile TaskFSM
%access package
// A %map name cannot be the same as the FSM class name.
%start TaskMap::Suspended
%map TaskMap
%%
Suspended { ... }
Running { ... }
// Wait here to be either unblocked, stopped or deleted.
Blocked { ... }
Stopping { ... }
Stopped { ... }
Deleted { ... }
...
%%
Like all C-syntax languages, the opening, closing braces are not needed if there is only one expression inside
the braces. But like all C-syntax languages, it is good practice to always use them. If you don't follow this
rule now, you will after you spend two days tracking down a bug due entirely to you not following this rule.
Notice the ellipsis before the closing %%? There is one more state to define even though the diagram's six
states are declared. There is an implicit state. Remember how the Stop, Block and Delete transitions have no
start state?
SMC Programmer’s Manual
Page 14 of 109

Defining FSM Transitions
A transition definition consists of four parts:
1. The transition name.
2. An optional transition guard (not used in Task FSM).
3. The transition end state.
4. The transition actions.
Only the “standard” transitions are defined for now. The Stop, Block and Delete transitions will be
covered here.
%{
//
// Copyright (c) 2005 Acme, Inc.
// All rights reserved.
//
// Acme - a name you can trust!
//
// Author: Wil E. Coyote (Hungericus Vulgarus)
//
%}
// This FSM works for the Task class only and only the Task
// class may instantiate it.
%class Task
%package com.acme.supercron
%fsmclass TaskFSM
%fsmfile TaskFSM
%access package
// A %map name cannot be the same as the FSM class name.
%start TaskMap::Suspended
%map TaskMap
%%
Suspended
{
// Time to do more work.
// The timeslice duration is passed in as a transition
// argument.
Start(timeslice: long) // Transition
Running // End state
{
... // Actions go here
}
}
SMC Programmer’s Manual
Page 15 of 109

Running
{
// Wait for another time slice.
Suspend
Suspended
{ ... }
// Task has completed.
Done
Stopped
{ ... }
}
// Wait here to be either unblocked, stopped or deleted.
Blocked
{
// The task may continue working now.
Unblock
Suspended
{ ... }
}
Stopping
{
// The task is now stopped.
Stopped
Stopped
{ ... }
}
Stopped { ... }
Deleted { ... }
...
%%
SMC Programmer’s Manual
Page 16 of 109

Defining FSM Transition Actions
Transition actions are the first coupling between the FSM and the application class Task. Actions are Task
methods. These method must have the following attributes:
•Be accessible to the FSM. This means at least public methods or, if in the same package, then package
methods.
•Have a void return type. If the method does return a value, the FSM ignores it.
SMC places no syntax limitations on transition arguments except they are enclosed in parens "()" and are
comma-separated. Go here for more information on transition actions.
%{
//
// Copyright (c) 2005 Acme, Inc.
// All rights reserved.
//
// Acme - a name you can trust!
//
// Author: Wil E. Coyote (Hungericus Vulgarus)
//
%}
// This FSM works for the Task class only and only the Task
// class may instantiate it.
%class Task
%package com.acme.supercron
%fsmclass TaskFSM
%fsmfile TaskFSM
%access package
// A %map name cannot be the same as the FSM class name.
%start TaskMap::Suspended
%map TaskMap
%%
Suspended
{
// Time to do more work.
// The timeslice duration is passed in as a transition
// argument.
Start(timeslice: long) // Transition
Running // End state
{
continueTask();
startSliceTimer(timeslice);
}
}
SMC Programmer’s Manual
Page 17 of 109

Running
{
// Wait for another time slice.
Suspend
Suspended
{
stopSliceTimer();
suspendTask();
}
// Task has completed.
Done
Stopped
{
stopSliceTimer();
releaseResources();
}
}
// Wait here to be either unblocked, stopped or deleted.
Blocked
{
// The task may continue working now.
Unblock
Suspended
{}
}
Stopping
{
// The task is now stopped.
Stopped
Stopped
{
releaseResources();
}
}
Stopped { ... }
Deleted { ... }
...
%%
SMC Programmer’s Manual
Page 18 of 109

The transition actions methods in Task are:
package com.acme.supercron;
public final class Task
implements TaskEventListener, TimerEventListener {
public Task() {...}
// TaskEventListener Interface Implementation.
<snip>
// TimerEventListener Interface Implementation.
<snip>
// State Machine Actions.
// Activate the underlying task and get it running again.
/* package */ void continueTask() {
...
return;
}
// Inactivate the underlying task.
/* package */ void suspendTask() {
...
return;
}
// Start the timeslice timer for the given milliseconds.
/* package */ void startSliceTimer(long timeslice) {
...
return;
}
// Stop the timeslice timer.
/* package */ void stopSliceTimer() {
...
return;
}
// Return system resources from whence they came.
/* package */ void releaseResources() {
...
return;
}
...
}
SMC Programmer’s Manual
Page 19 of 109

Defining FSM Default Transitions
Now the mystery transitions Stop, Block and Delete are defined. The reason why these transitions have
no start state is because they are taken no matter the current state. Well, not exactly.
•Stop: If a task is still alive ( in the Suspended, Running or Blocked state), then it must immediately
transition to the Stopping state. If a task is not alive (in the other three states), this transition is ignored
because the task is no longer alive.
•Block: If a task is either Suspended or Running, then it transitions to the Blocked state. Otherwise this
request is ignored.
•Delete: If a task is in any state other than Deleted, then it must transition to the Deleted state.
SMC provides two ways to define default transitions: the Default state and the Default transtion. Manual
section 2 describes how Default state and transition work. Go there to learn more about them. Task.sm
is updated with the default Stop, Block and Delete transition definitions:
%{
//
// Copyright (c) 2005 Acme, Inc.
// All rights reserved.
//
// Acme - a name you can trust!
//
// Author: Wil E. Coyote (Hungericus Vulgarus)
//
%}
// This FSM works for the Task class only and only the Task
// class may instantiate it. %class Task
%package com.acme.supercron
%fsmclass TaskFSM
%fsmfile TaskFSM
%access package
// A %map name cannot be the same as the FSM class name.
%start TaskMap::Suspended %map TaskMap
%%
Suspended {
// Time to do more work.
// The timeslice duration is passed in as a transition
// argument.
Start(timeslice: long)
Running {
continueTask();
startSliceTimer(timeslice);
SMC Programmer’s Manual
Page 20 of 109

}
Block
Blocked {
blockTask();
}
}
Running {
// Wait for another time slice.
Suspend
Suspended {
stopSliceTimer();
suspendTask();
}
Block
Blocked {
stopSliceTimer();
blockTask();
}
// Task has completed.
Done
Stopped {
stopSliceTimer();
releaseResources();
}
}
// Wait here to be either unblocked, stopped or deleted.
Blocked {
// The task may continue working now.
// No actions needed.
Unblock
Suspended {}
}
Stopping {
// The task is now stopped.
Stopped
Stopped {
releaseResources();
}
// We are stopping.
Stop
nil {}
}
SMC Programmer’s Manual
Page 21 of 109

Stopped {
// We are stopped.
Stop
nil {}
// Ignore all transitions until deleted.
Default
nil {}
}
Deleted {
// Define all known transitions as loopbacks.
Start(timeslice: long)
nil {}
Suspend()
nil {}
Block()
nil {}
Unblock()
nil {}
Done()
nil {}
Stop()
nil {}
Stopped()
nil {}
Delete()
nil {}
}
Default {
// Three states follow this transition, three states ignore.
// So define the active definition.
Stop
Stopping {
stopTask();
}
// Block is ignored by four of six states.
// Force the other two states to define this.
// Note the "nil" end state. This is a loopback transition
Block
nil {}
SMC Programmer’s Manual
Page 22 of 109

// All but the Delete state follow this transition. Define it here.
Delete
Deleted {}
// Ignore a transition by default.
Default
nil {}
}
%%
The blockTask() and stopTask() methods are added to the Task class:
package com.acme.supercron;
public final class Task
implements TaskEventListener, TimerEventListener {
public Task() { ... }
<snip>
// State Machine Actions.
<snip>
// Block the underlying task from running.
/* package */ void blockTask() {
...
return;
}
// Permanently stop the underlying task.
/* package */ void stopTask() {
...
return;
}
<snip>
...
}
There is one more improvement to the FSM that needs to be made before we finish. Notice that the
Running state's transitions must stop the slice timer. If a new transition is added to Running, the
developer must remember to include the stopSliceTimer() action. This is a potential problem because a
different developer maintaining this FSM may not know about this. But there is a solution to this.
SMC Programmer’s Manual
Page 23 of 109

Defining State Entry/Exit Actions
The slice timer should be stopped when not in the Running state. The way to enforce this is to add an
Exit block to Running and move the stopSliceTimer() action there.
Since the state's Exit actions are being defined, it would appear natural to put the startSliceTimer()
action into a Entry block. But there two reasons against it:
1. There is only one transition into the Running state. Moving startSliceTimer() from Suspended's
Start transition to Running's entry actions gains nothing.
2. startSliceTimer() takes the Start transition's timeslice argument. If startSliceTimer()
is an entry action, then it cannot access that transition argument. The only way around it is to store the
slice time in the Task class and then retrieve it immediately in the entry action
( startSliceTimer(ctxt.getSliceTime())). Now moving the action to the entry block is worse
than doing nothing.
(Go here to learn more about state entry and exit actions.)
%{
//
// Copyright (c) 2005 Acme, Inc.
// All rights reserved.
//
// Acme - a name you can trust!
//
// Author: Wil E. Coyote (Hungericus Vulgarus)
//
%}
// This FSM works for the Task class only and only the Task
// class may instantiate it.
%class Task
%package com.acme.supercron
%fsmclass TaskFSM
%fsmfile TaskFSM
%access package
// A %map name cannot be the same as the FSM class name.
%start TaskMap::Suspended
%map TaskMap
%%
<snip>
SMC Programmer’s Manual
Page 24 of 109
Running
Exit { stopSliceTimer(); }
{
// Wait for another time slice.
Suspend
Suspended {
// stopSliceTimer(); moved.
suspendTask();
}
Block
Blocked {
// stopSliceTimer(); moved.
blockTask();
}
// Task has completed.
Done
Stopped {
// stopSliceTimer(); moved.
releaseResources();
}
}
<snip>
}
%%
There is one final task: connecting the task FSM to the Task application class.
SMC Programmer’s Manual
Page 25 of 109
// State
Idle
{
// Trans Next State Actions
Timeout Idle {}
}

Connecting Task and Task FSM
Connecting FSMs to their application class is as simple as:
•Add the data member TaskFSM _fsm to Task class.
•Instantiate TaskFSM in Task’s constructor.
•If the start state has entry actions that must be executed when the FSM is created, then call
_fsm.enterStartState() outside of Task’s constructor.
•When you need to issue a transition, call _fsm’s appropriate transition method. For example:
!_fsm.Start(timeSlice);
package com.acme.supercron;
public final class Task
implements TaskEventListener, TimerEventListener {
public Task() {
...
// Instantiate the FSM here but perform the initial
// state's entry actions outside of the constructor
// to prevent referencing this object before its
// initialization is complete.
_fsm = new TaskFSM(this);
}
// Execute the start state's entry actions by calling this
// method. This method should be called only once and prior to
// issuing any transitions. Therefore this method should be
// called before registering this Task instance as a task and
// timer event listener.
public void startFSM() {
_fsm.enterStartState();
TaskManager.addListener(this);
}
// TaskEventListener Interface Implementation.
// Time for the incomplete task to continue its work for the
// specified time slice.
public void start(long timeSlice) {
_fsm.Start(timeSlice);
}
// Called when a running, incomplete task should suspend
// running even though its time slice is not expired.
// Note: the task's running is also suspended when the time
SMC Programmer’s Manual
Page 26 of 109

// slice expires.
public void suspend() {
_fsm.Suspend();
}
// Called when an incomplete task is blocked. Blocked tasks
// are able to continue running when unblocked.
public void block() {
_fsm.Block();
}
// Called when a blocked task is unblocked and allowed
// to continue running.
public void unblock() {
_fsm.Unblock();
}
// Called when an incomplete task is permanently stopped.
// Stopped tasks are then deleted.
public void stop() {
_fsm.Stop();
}
// Called when the task is deleted. Tasks are deleted when
// either 1) the task has completed running and is now
// stopped or 2) when the system is shutting down and all
// are to terminate immediately.
public void delete() {
_fsm.Delete();
}
// TimerEventListener Interface Implementation.
// Called with the time slice timer has expired. If running,
// the task is suspended.
public void handleTimeout(TimerEvent event) {
_fsm.Suspend();
}
<snip>
// The associated finite state machine.
private final TaskFSM _fsm;
}
Voíla! Task's behavior is now defined by a finite state machine.
SMC Programmer’s Manual
Page 27 of 109

Section 2: From Model to SMC
This section shows a quasi-UML state machine snippet and the equivalent SMC code. I use the word "quasi"
because SMC is not directly derived from UML or Harel state machines. That means that there are
capabilities in UML that are not in SMC and vice versa. See the SMC FAQ for why this is.
Instantiating a Finite State Machine
Care must be taken when instantiating an SMC-generated finite state machine. The application class passes
a its reference to the FSM context and this reference is used when FSM actions are performed. It is safe to
instantiation an FSM within a constructor but unsafe to enter the start state while in a constructor because
the start state entry actions will call your application object before its constructor has completed.
private final AppClassContext _fsm;
public AppClass() {
// Initialize you application class. Instantiate your finite state
// machine.
// Note: it is safe to pass this to the the FSM constructor because
// the FSM constructor only stores this in a data member.
_fsm = new AppClassContext(this);
}
// Enter the FSM start state after instantiating this application object.
public void startWorking() {
_fsm.enterStartState();
return;
}
Prior to SMC v. 6, the FSM constructor incorrectly used the this pointer which meant instantiating the FSM
within the application constructor could lead to incorrect behavior. SMC v. 6 corrects this problem and it is
now safe to instantiate the FSM within your application constructor.
The enterStartState method should be called only once after instantiating the finite state machine
and prior to issuing any transition. This method is unprotected and does not prevent its being
called multiple times. If enterStartState is called after the first transition, then incorrect behavior
may occur.
SMC Programmer’s Manual
Page 28 of 109
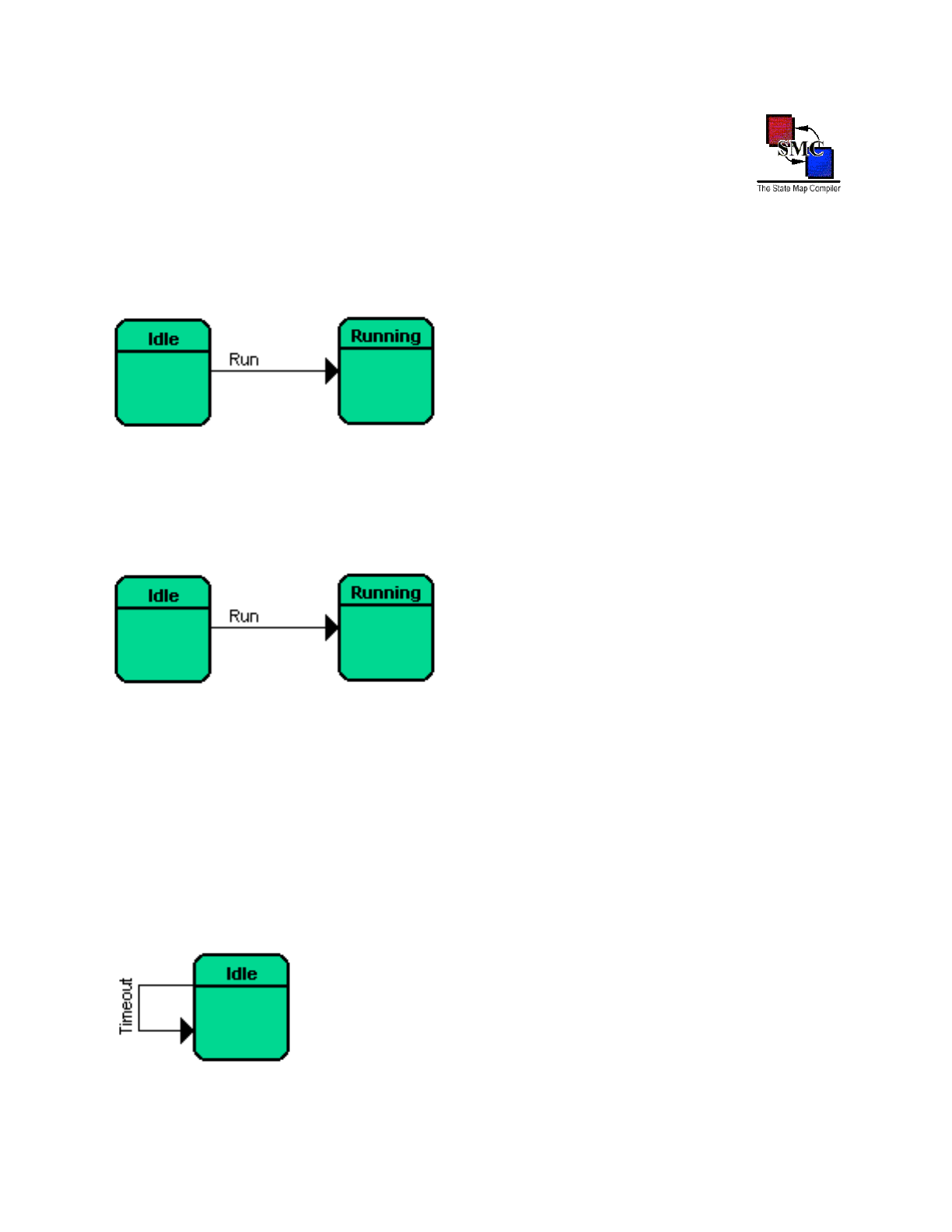
Simple Transition
A state and transition names must have the form "[A-Za-z_][A-Za-z0-9_]*".
Jump Transition
The Jump transition is equivalent to the Simple Transition and is provided since this transition is used in an
Augmented Transition Network.
In a future SMC release, the Jump transition will become the only way for make an end state
outside the current map. The syntax will be: jump(AnotherMap::NextState)
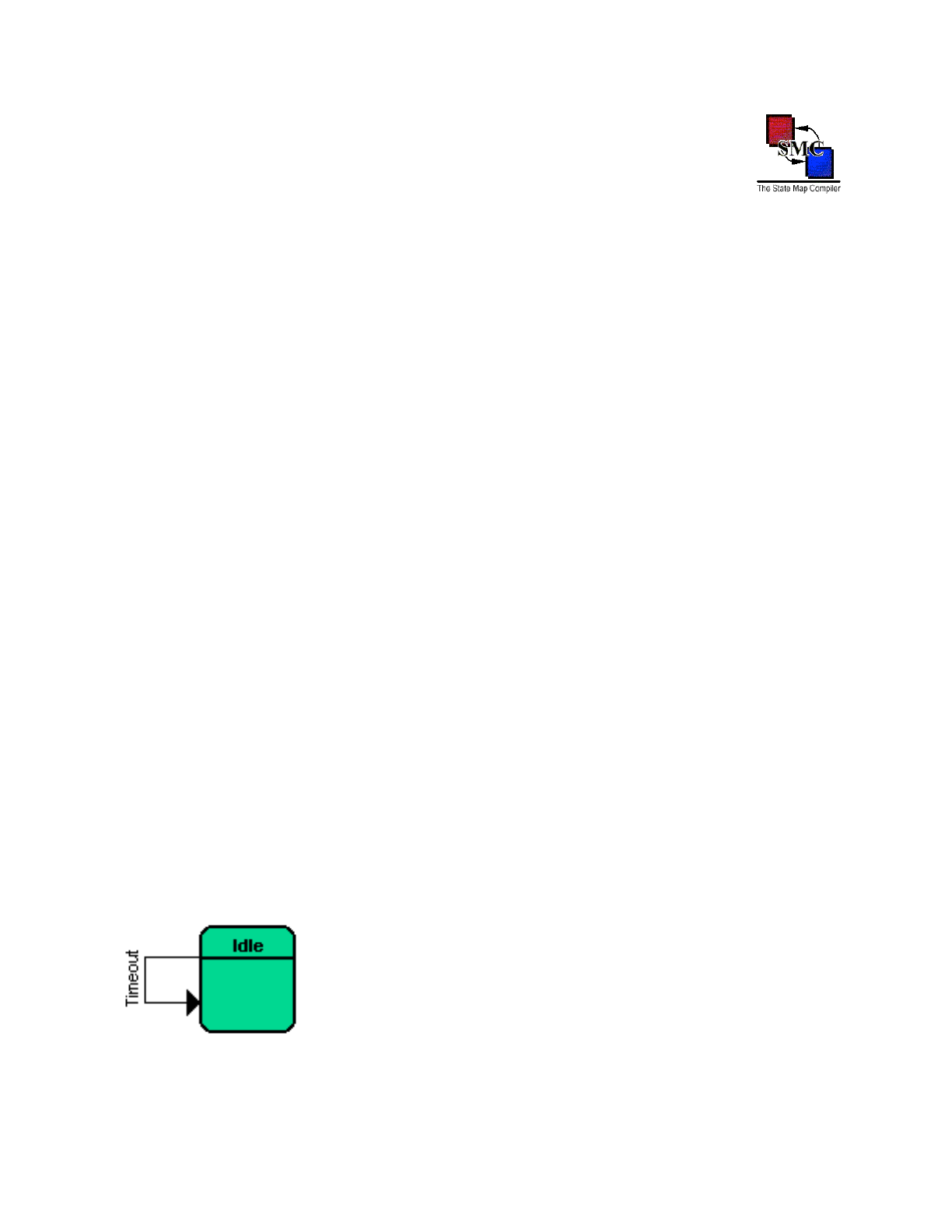
External Loopback Transition
An external loopback does leave the current state and comes back to it. This means that the state's exit and
entry actions are executed. This is in contrast to an internal loopback transition.
// State
Idle
{
// Trans Next State Actions
Run Idle {}
}
// State
Idle
{
// Trans Next State Actions
Run Running {}
}
// State
Idle
{
// Trans Next State Actions
Run jump(Running) {}
}
SMC Programmer’s Manual
Page 29 of 109
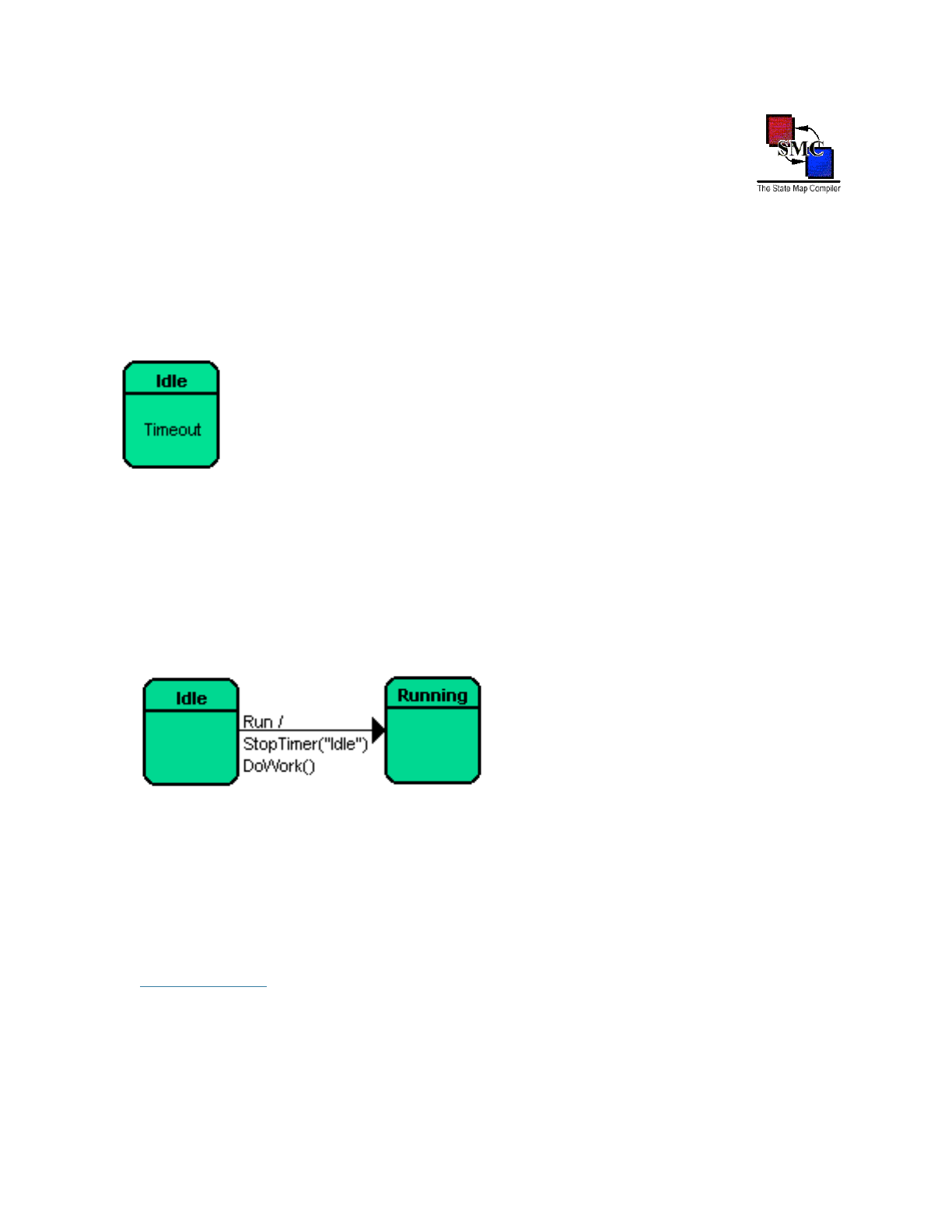
Internal Loopback Transition
Using "nil" as the next state causes the transition to remain in the current state and not leave it. This means
that the state's exit and entry actions are not executed. This is in contrast to an external loopback transition.
Transition with Actions
1. A transition’s actions must be enclosed in a {} pair.
2. The action’s form is [A-Za-z][A-Za-z0-9_-]*(<argument list>). The argument list must be
either empty or consist of comma-separated literals. Examples of literals are: integers (positive or
negative, decimal, octal or hexadecimal), floating point, strings enclosed in double quotes, constants and
transition arguments.
3. Actions must be member functions in the %class class and accessible by the state machine. Usually that
means public member functions in C++ or package in Java.
Action arguments include:
•An integer number (e.g. 1234).
// State
Idle
{
// Trans Next State Actions
Timeout nil {}
}
// State
Idle {
// Trans
Run
// Next State
Running {
// Actions
StopTimer("Idle");
DoWork();
}
}
SMC Programmer’s Manual
Page 30 of 109
•A float number (e.g. 12.34)
•A string (e.g. “abcde”)
•A transition argument
•A constant, #define, or global variable.
•An Independent subroutine or method call (e.g. event.getType()). Note: this subroutine/method call may
also include arguments.
If you want to call a method in the context class, then use the ctxt variable. For example, if the context
class contains a method getName() and you want to call it inside an action's argument list, then write
ctxt.getName().
Go here for sample code using the ctxt variable.
Note: Only use ctxt inside argument lists and transition guards.
SMC Programmer’s Manual
Page 31 of 109
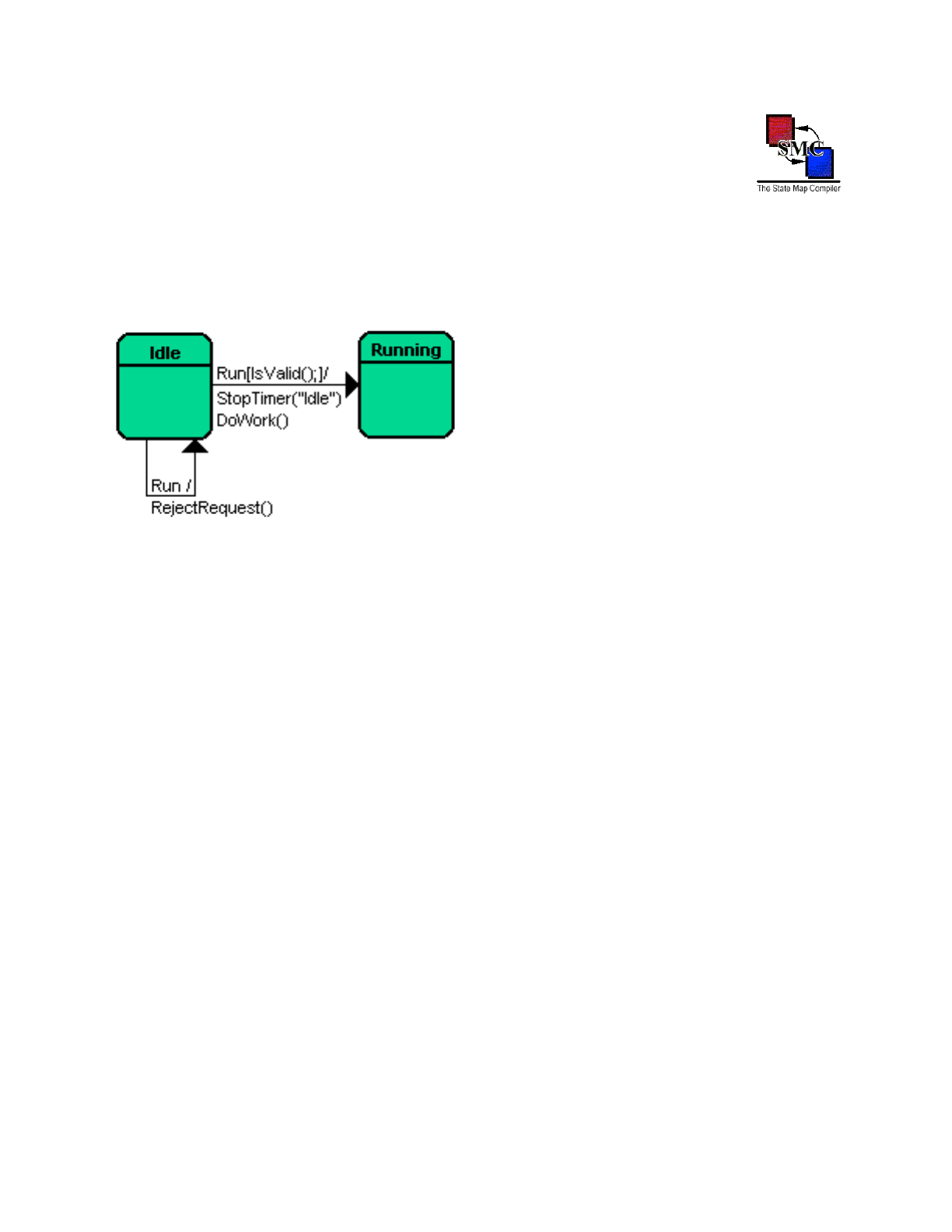
Transition Guards
The guard must contain a condition that is valid target language source code - that is, it would be a valid "if"
statement. Your guard may contain &&s, ||s, comparison operators (==, <, etc.) and nested expressions.
SMC copies your guard condition verbatim into the generated output.
Note: If your are calling a context class method, then you must prefix the method with ctxt - SMC will not
append ctxt for you.
If the guard condition evaluates to true, then the transition is taken. If the guard condition evaluates to false,
then one of the following occurs (ordered by precedence):
1. If the state has another guarded transition with the same name and arguments, that transition's guard is
checked.
// State
Idle {
// Trans
Run
// Guard condition
[ctxt.isProcessorAvailable() == true &&
ctxt.getConnection().isOpen() == true]
// Next State
Running {
// Actions
StopTimer("Idle");
DoWork();
}
Run nil {RejectRequest();}
}
SMC Programmer’s Manual
Page 32 of 109

2. Failing that, If the state has another unguarded transition with the same name and argument list, that
transition is taken.
3. If none of the above, then the default transition logic is followed.
A state may have multiple transitions with the same name and argument list as long as they all have unique
guards. When a state does have multiple transitions with the same name, care must be taken when ordering
them. The state machine compiler will check the transitions in the same top-to-bottom order that you use
except for the unguarded version. That will always be taken only if all the guarded versions fail. Guard
ordering is only important if the guards are not mutually exclusive, i.e., it is possible for multiple guards to
evaluate to true for the same event.
Allowable argument types for a transition guard are the same as for a transition action.
SMC Programmer’s Manual
Page 33 of 109
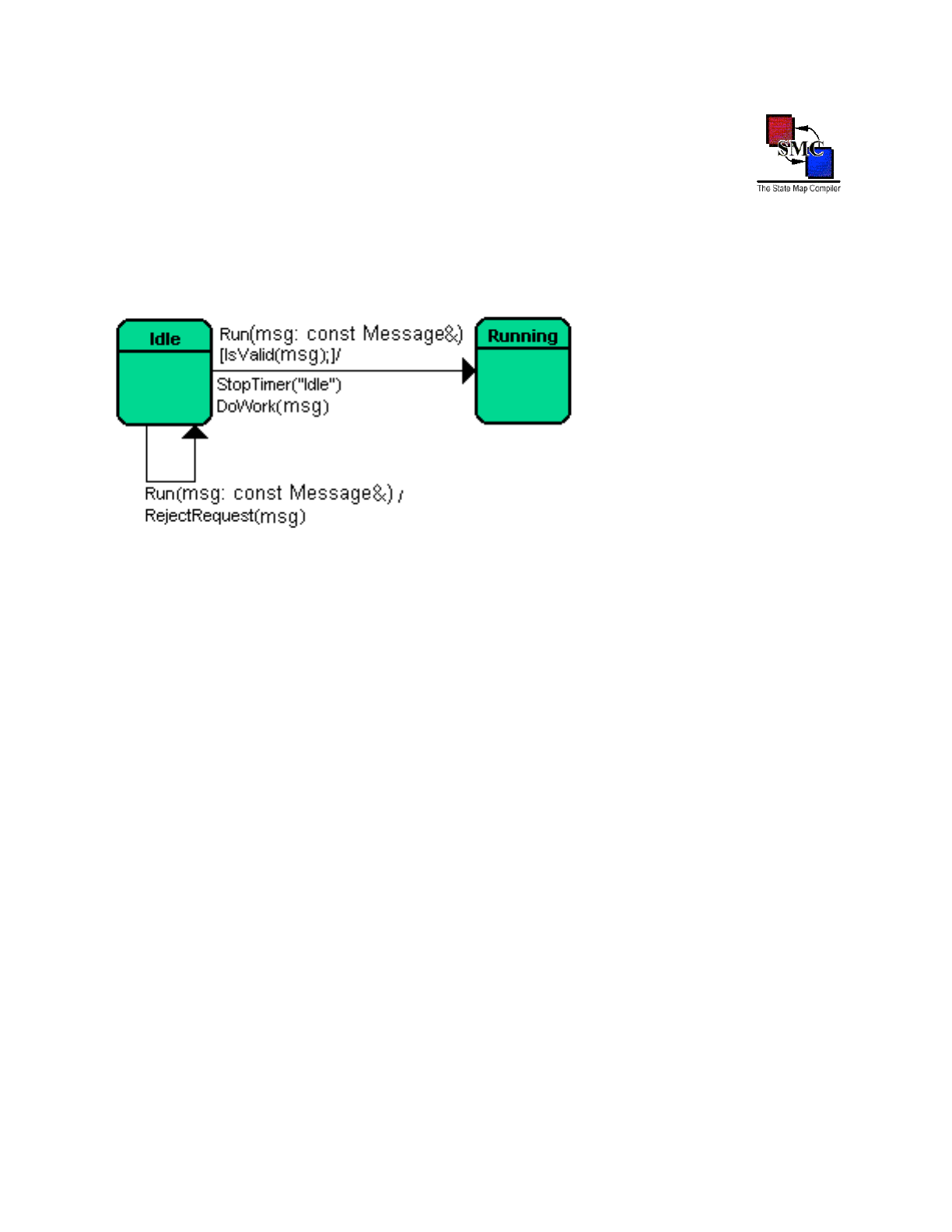
Transition Arguments
Note: When using transition guards and transition arguments, multiple instances of the same transition must
have the same argument list. Just as with C++ and Java methods, the transitions Run(msg: const
Message&) and Run() are not the same transition. Failure to use the identical argument list when defining
the same transition with multiple guards will result in incorrect code being generated.
// State
Idle {
// Transition
Run(msg: const Message&)
// Guard condition
[ctxt.isProcessorAvailable() == true &&
msg.isValid() == true]
// Next State
Running {
// Actions
StopTimer("Idle");
DoWork(msg);
}
Run(msg: const Message&)
// Next State Actions
nil {RejectRequest(msg);}
}
SMC Programmer’s Manual
Page 34 of 109

Tcl “arguments”:
While Tcl is a type-less language, Tcl does distinguish between call-by-value and call-by-reference. By default
SMC will generate call-by-value Tcl code if the transition argument has no specified type. But you may use
the artificial types "value" or "reference".
If your Tcl-targeted FSM has a transition:!!!then the generated Tcl is:
DoWork(task: value) public method DoWork {task} {
Working { workOn $this $task;
workOn(task); }
}
If your Tcl-targeted FSM has a transition:!!!then the generated Tcl is:
DoWork(task: reference) public method DoWork {task} {
Working { workOn $this task;
workOn(task); }
}
The method workOn must upvar the task parameter:
public method workOn {taskName} {
upvar $taskName task;
...
}
Lua/Python/Ruby “arguments”:
While Lua/Python/Ruby is a dynamically typed language and does not use types for function parameter
definitions, you could provide a optional data type for transition arguments. This "data type" is ignored when
generating the target Lua/Python/Ruby code. I suggest using meaningful type names.
DoWork(task: TaskObj, runtime: Ticks)
Working {
...
}
Groovy/PHP “arguments”:
While Groovy/PHP gives the choice between static and dynamic typing, you could provide a optional data
type for transition arguments. In this case, the type is used when generating the target Groovy/PHP code.
The PHP variable syntax is like Perl (named with '$').
Perl “arguments”:
SMC Programmer’s Manual
Page 35 of 109
While Perl is a dynamically typed language and does not use types for function parameter definitions, you
could provide a optional data type for transition arguments. This "data type" is ignored when generating the
target Perl code. I suggest using meaningful type names.
Only Perl scalar values (i.e., named with '$') are allowed.
DoWork($task: TaskObj, $runtime: Ticks)
Working {
...
}
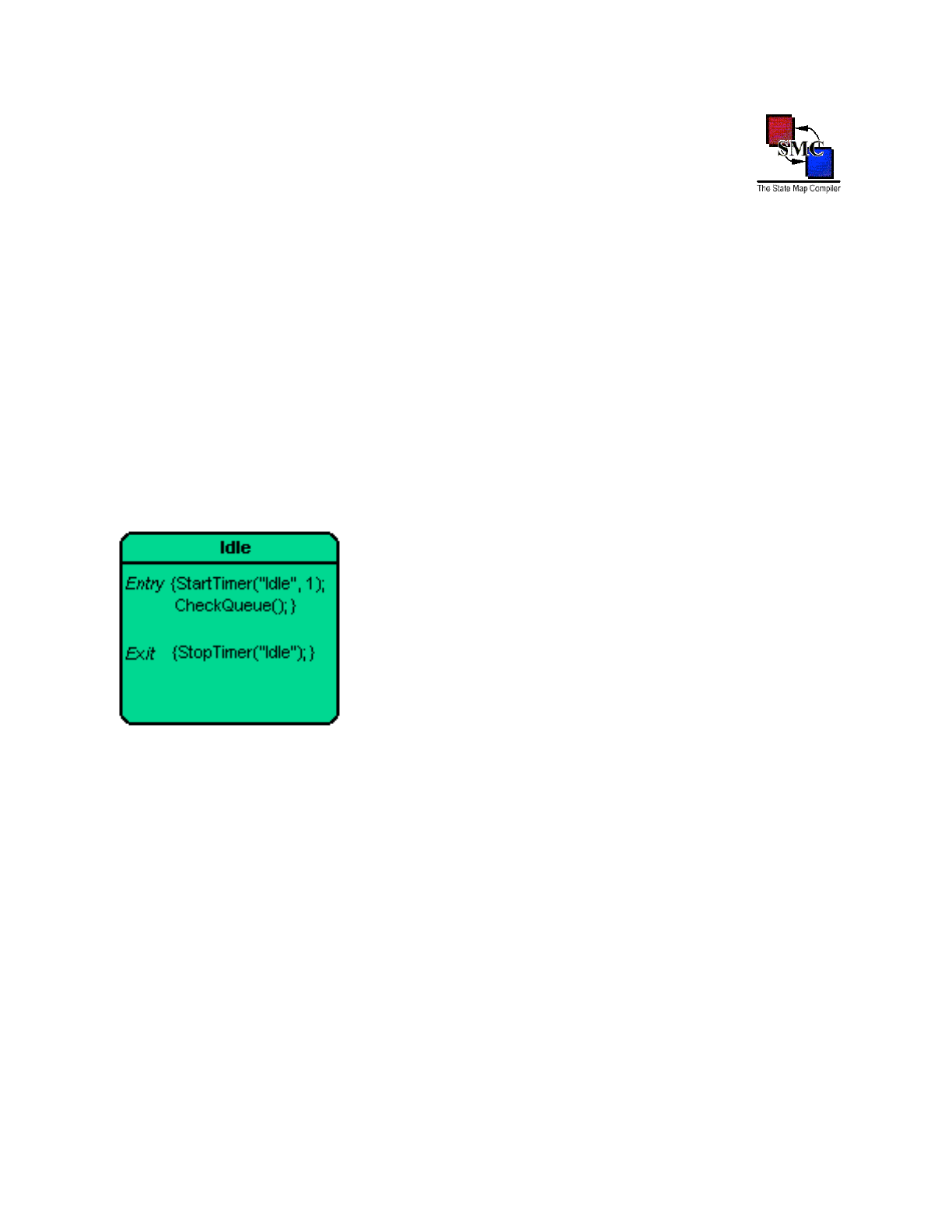
Entry and Exit Actions
When a transition leaves a state, it executes the state’s exit actions before any of the transition actions. When
a transition enters a state, it executes the state’s entry actions. A transition executes actions in this order:
1. “From” state’s exit actions.
2. Set the current state to null. This denotes that a transition is in progress.
3. The transition actions in the same order as defined in the .sm file.
4. Set the current state to the “to” state.
5. “To” state’s entry actions.
As of version 6.0.0, SMC generates a enterStartState method which executes the start state's entry
acitons. It is now up to the application to call the start method after instantiating the finite state machine
context. If it is not appropriate to execute the entry actions upon start up, then do not call
enterStartState. You are not required to call this method to set the finite state machine start state. That
is done when the FSM is instantiated. This method is used only to execute the start state's entry actions.
// State
Idle
Entry {StartTimer("Idle", 1); CheckQueue();}
Exit {StopTimer("Idle");}
{
// Transitions
}
SMC Programmer’s Manual
Page 36 of 109
If you do call this method, be sure to do it outside of the context class' constructor. This is because entry
actions call context class methods. If you call enterStateState from within you context class'
constructor, the context instance will be referenced before it has completed initializing which is a bad thing to
do.
enterStartState does not protect against being called multiple times. It should be called at most
once and prior to issuing any transitions. Failure to follow this requirement may result in inappropriate finite
state machine behavior.
Whether a state's Entry and Exit actions are executed depends on the type of transition taken. The
following table shows which transitions execute the "from" state's Exit actions and which transitions
execute the "to" state's Entry actions.
Transition Type
Execute “From” State’s Exit
Actions?
Execute “To” State’s Entry
Actions?
Simple Transition
Yes.
Yes.
External Loopback Transition
Yes.
Yes.
Internal Loopback Transition
No.
No.
Push Transition
No.
Yes.
Pop Transition
Yes.
No.
Table 1: Entry/Exit Execution.
WARNING! Entry and exit actions are not supported for the Default state which is not an actual state. See
more in the Default Transitions section.
From this point on, SMC diverges from UML. SMC uses the idea of multiple machines and pushing
and popping states as way of breaking complicated behavior up into simpler parts. UML achieves much
the same by grouping states into superstates. They may be equivalent in ability but I find the idea of
pushing to a new state easier to understand because it is similar to the subroutine call.
SMC Programmer’s Manual
Page 37 of 109
Push Transition
Note: The end state does not have to be in another map - it could be in the same %map construct.
Conversely, a plain transition's end state may be in another map. But chances are that you will set up maps
so that you will push to another map's state and simple transitions will stay within the same map. You use
multiple maps for the same reason you create multiple subroutines: to separate out functionality into easy-to-
understand pieces.
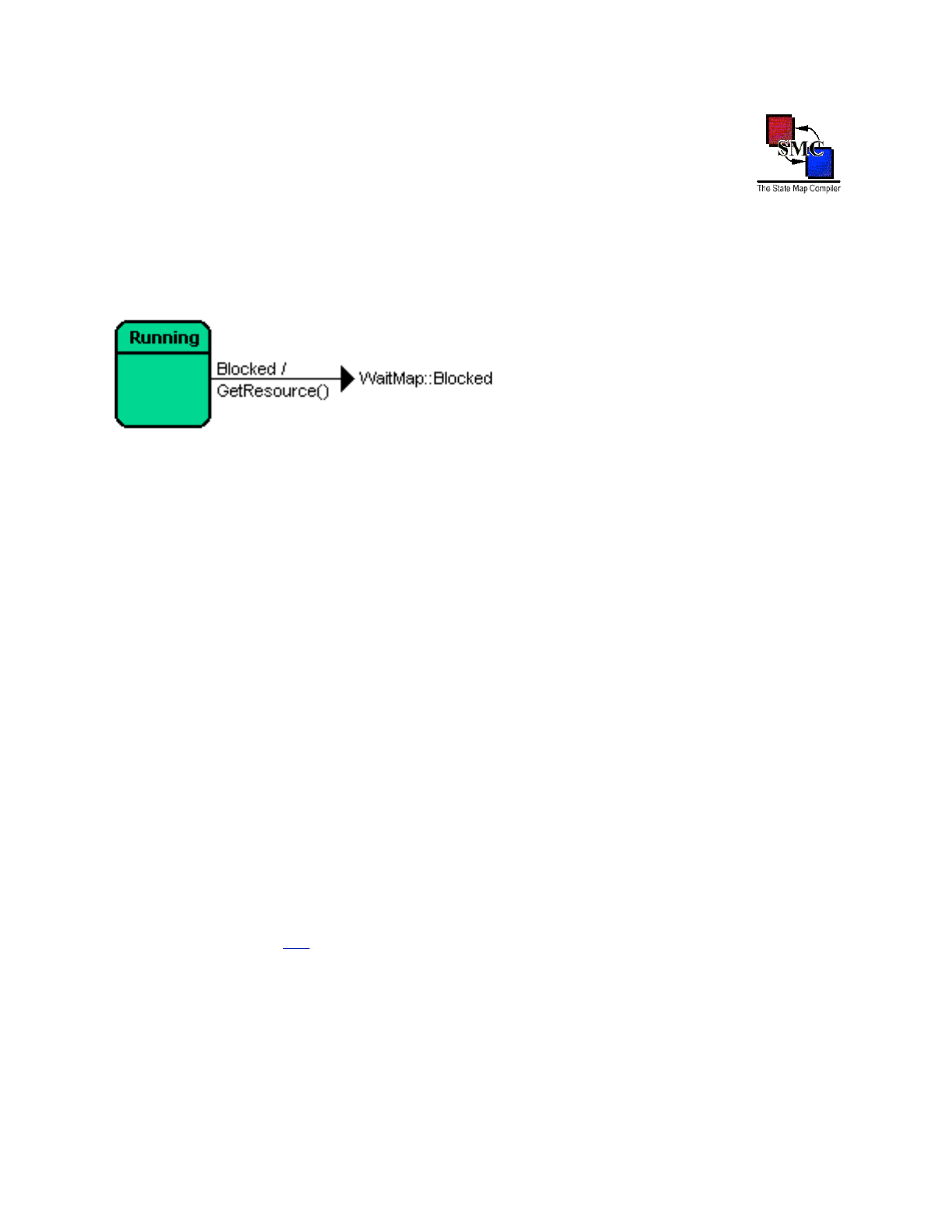
With SMC v. 1.3.2, the push syntax was modified yet is backward compatible with the initial syntax. The new
syntax is:
Running {
Blocked
BlockPop/push(WaitMap::Blocked) {
GetResource();
}
}
This causes the state machine to:
1. Transition to the BlockPop state.
2. Execute the BlockPop entry actions.
3. Push to the WaitMap::Blocked state.
4. Execute the WaitMap::Blocked entry actions.
When WaitMap issues a pop transition, control will return to BlockPop and the pop transition issued from
there.
Use this new syntax when a state has two different transitions which push to the same state but need to
handle the pop transition differently. For example:
Running {
Blocked
push(WaitMap::Blocked) {
GetResource();
}
}
SMC Programmer’s Manual
Page 38 of 109
Idle {
NewTask NewTask/push(DoTask) {}
RestartTask OldTask/push(DoTask) {}
}
NewTask {
TaskDone Idle {}
// Try running the task one more time.
TaskFailed OldTask/push(DoTask) {}
}
OldTask {
TaskDone Idle {}
TaskFailed Idle {logFailure();}
}
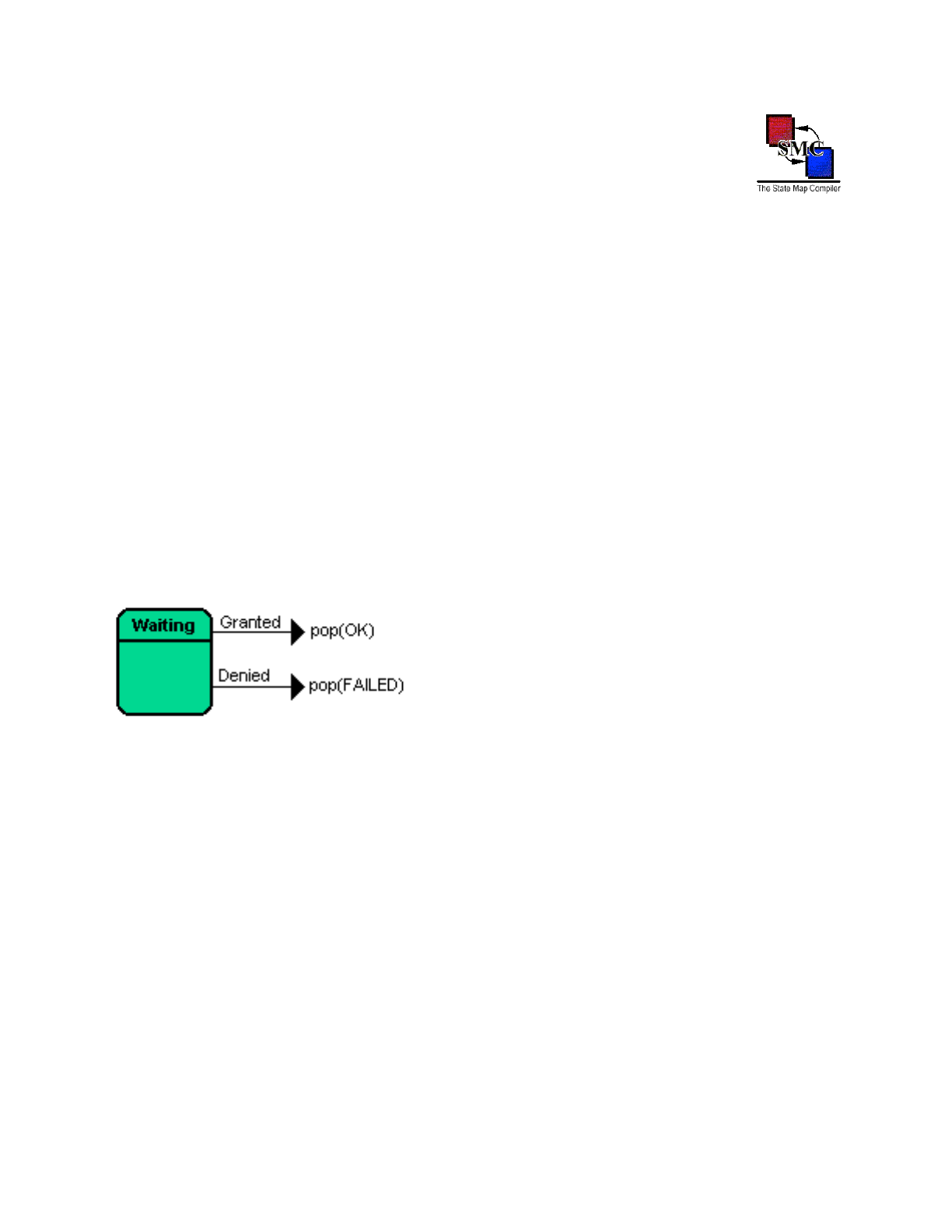
Pop Transition
The pop transition differs from the simple and push transition in that:
•The end state is not specified. That is because the pop transition will return to whatever state issued the
corresponding push.
•There pop transition has an optional argument: a transition name.
In the above example, if the resource request is granted, the state machine returns to the corresponding
state that did the push and then takes that state's OK transition. If the request is denied, the same thing
happens except the FAILED transition is taken. The code for the corresponding push transition is:
Running {
Blocked push(WaitMap::Blocked) {GetResource();}
// Handle the return "transitions" from WaitMap.
OK nil {}
FAILED Idle {Abend(INSUFFICIENT_RESOURCES);}
}
Waiting
{
Granted pop(OK) {cleanUp();}
Denied pop(FAILED) {cleanUp();}
}
SMC Programmer’s Manual
Page 39 of 109

As of SMC v. 1.2.0, additional arguments may be added after the pop transition's transition argument. These
additional arguments are like any others passed to an action and will be passed into the named transition.
Following the above example, given the pop transition pop(FAILED, errorCode, reason), then the FAILED
should be coded as:
FAILED(errorCode: ErrorCode, reason: string)
Idle {
Abend(errorCode, reason);
}
Default Transitions
What happens if a state receives a transition that is not defined in that state? SMC has two separate
mechanisms for handling that situation.
The first is the "Default" state. Every %map may have a special state named "Default" (the uppercase D is
significant). Like all other states, the Default state contains transitions.
Default {
// Valid run request but transition occurred in an invalid
// state. Send a reject reply to valid messages.
Run(msg: const Message&)
[ctxt.isProcessorAvailable() == true && msg.isValid() == true]
nil {
RejectRequest(msg);
}
// Ignore invalid messages are ignored when received in
// an invalid state.
Run(msg: const Message&)
nil
{}
Shutdown
ShuttingDown {
StartShutdown();
}
}
Default state transitions may have guards and arguments features as non-default transitions. This means the
Default state may contain multiple guarded and one unguarded definition for the same transition.
SMC Programmer’s Manual
Page 40 of 109
The second mechanism is the "Default" transition. This is placed inside a state and is used to back up all
transitions.
Connecting {
// We are now connected to the far-end. Now we can logon.
Connected
Connected {
logon();
}
// Any other transition at this point is an error.
// Stop the connecting process and retry later.
Default
RetryConnection {
stopConnecting();
}
}
Because any transition can fall through to the Default transition, Default transitions:
•May not have an argument list.
•A Default transition may take a guard.
•Putting a Default transition in the Default state means that all transitions will be handled - it is the transition
definition of last resort.
Transition Precedence
Transition definitions have the following precedence:
1. Guarded transition.
2. Unguarded transition.
3. The Default state’s guarded definition.
4. The Default state’s unguarded definition.
5. The current state’s guarded Default transition.
6. The current state’s unguarded Default transition.
7. The Default state’s guarded Default transition.
8. The Default state’s unguarded Default transition.
Since SMC does not force you to specify a Default state or Default transition, it is possible that
there is no transition defined. If SMC falls through this list, it will throw a “Transition Undefined”
exception.
SMC Programmer’s Manual
Page 41 of 109

Section 3: Adding a State Machine to
your Class
The SMC-generated code is designed to be loosely coupled with your application software. The only
changes that you need to make to your code is to:
1. Include the SMC class definitions into your application (stored in smc/lib by programming language
name):
•C: Have lib/C/statemap.h in the include path.
•C++: Have lib/C++/statemap.h in the include path.
•C#: Have lib/DotNet/statemap.dll included in the build library list.
•Groovy: Have lib/Groovy/statemap.jar in the class path.
•Java: Have lib/Java/statemap.jar in the classpath.
•JavaScript: Have lib/JavaScript/statemap.js accessible to <script> tag.
•Lua: Have the lib/Lua/statemap.lua module on you Lua package.path (initialized by the environment
variable LUA_PATH).
•Objective-C: Have lib/ObjC/statemap.h in the include path.
•Perl: Have StateMachine::Statemap module on you Per library path @INC.
•PHP: Have StateMachine/statemap.php in your PHP include_path.
•Python: Have the statemap module on your import source path sys.path.
•Ruby: Have the statemap module on your Ruby library path $LOAD_PATH.
•Scala: Have lib/Scala/statemap.jar in the classpath.
•Tcl: Have the lib/Tcl/statemap1.0 package on you path.
•VB.net: Have lib/DotNet/statemap.dll included in the build library list.
2. Include the state machine source file:
•C: #include “AppClass_sm.h”
•C++: #include “AppClass_sm.h”
•C#: put the AppClass_sm.cs file into the product source list.
•Groovy: If AppClassContext class is in the same package as AppClass, no importation is needed.
SMC Programmer’s Manual
Page 42 of 109

•Java: If AppClassContext class is in the same package as AppClass, no importation is needed.
•JavaScript: Have AppClass_sm.js file accessible to <script> tag.
•Lua: require ‘AppClass_sm’.
•Objective-C: #import “AppClass_sm.h”
•Perl: use AppClass_sm;
•PHP: require_once ‘AppClass_sm’;
•Python: import AppClass_sm
•Ruby: require ‘AppClass_sm’
•Scala: If AppClassContext class is in the same package as AppClass, no importation is needed.
•Tcl: source ./AppClass_sm.tcl
•VB.net: put the AppClass_sm.vb file into the project source list.
3. Instantiate the state machine context object.
4. If you want to execute the start state's entry actions call the state machine context's
enterStartState method. This is not needed to set the start state as that is done when the state
machine context is instantiated. enterStartState only executes the start state's entry actions (if any
exist).
That's all you need to do. Whenever you want to issue a transition, call the context's object transition
method.
SMC does not change your code or require you to change your code's logic. SMC does not require that your
class inherit or implement any SMC class. SMC state machines are easy to add with minimal impact to your
existing code.
CAUTION: THIS BEARS REPEATING. Do NOT issue a transition from within an action - it will cause the state
machine to throw an exception since actions are not allowed to issue a transitions.
For an explanation of why this is, see the SMC FAQ question: Why can't an action issue a transition?
If you do need to issue a transition from an action, see the section 7, "Queuing Up" explaining how to use a
"transition queue".
Cautions
The following class and file names are generated by SMC. Be careful not to use them yourself.
•<AppClass>Context
•<AppClass>State
•<MapName>
SMC Programmer’s Manual
Page 43 of 109

•<MapName>_Default
•<MapName>_<StateName>
•<smc file name stem>_sm.h
•<smc file name stem>_sm.<ext>
where:
•<AppClass> is the name of your application class using that FSM.
•<MapName> is a %map <MapName> in <smc file name stem>.sm.
•<StateName> is a state in <smc file name stem>.sm.
•<smc file name stem> is that part of the .sm file's name before the ".".
•<ext> is the source file extension used for the target programming language.
SMC Programmer’s Manual
Page 44 of 109
C
C language is not Object Oriented. But this behavior could be emulated in order to follow the SMC State
pattern.
Assumptions
•Your application class is named NetworkIF.
•Your class is stored in NetworkIF.h and NetworkIF.c.
•The state machine is in NetworkIF.sm.
•As explained in section 1, you have added the lines:
%class NetworkIF
%header NetworkIF.h
%start MainMap::Start
at the appropriate location in NetworkIF.sm. Note: your .sm file does not need to use the map name
MainMap nor have a state named Start. This is for example purposes only.
•You have successfully compiled NetworkIF.sm.
Changes to NetworkIF.h
1. Add the following #include to NetworkIF.h:
#include “NetworkIF_sm.h”
2. Add the data member to NetworkIF:
struct NetworkIFContext _fsm;
(I use _fsm but you can use another name.)
Changes to NetworkIF.c
1. In NetworkIF initializer NetworkIF_init, add the line:
void NetworkIF_Init(struct NetworkIF *network) {
NetworkIFContext_Init(&this->_fsm, network);
}
Again, the data member does not have to be named _fsm. Add the following line if Push transitions
are used:
FSM_STACK(&network->_fsm, AppStack);
SMC Programmer’s Manual
Page 45 of 109

where AppStack is a memory location used to store the state stack.
2. If the start state has entry actions and these actions need to be executed before any transitions are
issued, then add the following code:
NetworkIFContext_EnterStartState(&network->_fsm);
3. Whenever you want to issue a state machine transition, add the following line of code:
NetworkIFContext_<transition>(&network->_fsm, ...);
where <transition> is the transition name. If the transition takes arguments, then pass them in
the transition call:
NetworkIFContext_Connect(&network->_fsm, “192.168.3.100”, 80);
Changes to Makefile
Add NetworkIF_sm.c to the source file list and link NetworkIF_sm.o into your application.
#includes in NetworkIF.sm
If you need to include header files in your .sm file, use the %include keyword:
%include <util/logger.h>
SMC Programmer’s Manual
Page 46 of 109
Assumptions
•Your application class is named NetworkIF.
•Your class is stored in NetworkIF.h and NetworkIF.cpp.
•The state machine is in NetworkIF.sm.
•As explained in section 1, you have added the lines:
%class NetworkIF
%header NetworkIF.h
%start MainMap::Start
at the appropriate location in NetworkIF.sm. Note: your .sm file does not need to use the map name
MainMap nor have a state named Start. This is for example purposes only.
•You have successfully compiled NetworkIF.sm.
Changes to NetworkIF.h
1. Add the following #include to NetworkIF.h:
#include “NetworkIF_sm.h”
2. Add the data member to NetworkIF:
NetworkIFContext _fsm;
This data member can be either public, protected, or private and can have any name (I use
“_fsm” but you can use another name).
3. All state machine actions must be implemented as NetworkIF public methods. For an explanation as to
why these methods must be public, see the answer to the FAQ question: Why do actions have to be
declared as public?
Changes to NetworkIF.cpp
1. In all NetworkIF constructors, add the following initialization:
_fsm(*this)
Again, the data member does not need to be named _fsm.
SMC Programmer’s Manual
Page 47 of 109

2. If the start state has entry actions which must be executed before any transitions are issued, add the
following code outside any NetworkIF constructors:
_fsm.enterStartState();
3. Whenever you want to issue a state machine transition, add the following line of code:
_fsm.<transition>(...);
where <transition> is the transition name. If the transition takes arguments, then pass them in
the transition call:
_fsm.Connect(“192.168.3.100”, 80);
Changes to Makefile
Add NetworkIF_sm.cpp to the source file list and link NetworkIF_sm.o into your application.
#includes in NetworkIF.sm
If you need to include header files in your .sm file, use the %include keyword:
%include <util/logger.h>
SMC Programmer’s Manual
Page 48 of 109
(using -crtp: Curiously Recurring Template Pattern)
Assumptions
Same as C++ assumptions.
Changes to NetworkIF.h
1. Add the following #include to NetworkIF.h:
#include “NetworkIF_sm.h”
2. Inherit the context template:
class NetworkIF : public NetworkIFContext<NetworkIF>
This must be a public inheritance, otherwise the SMC-generated code will not compile.
3. All state machine actions must be implemented as NetworkIF public methods. For an explanation as to
why these methods must be public, see the answer to the FAQ question: Why do actions have to be
declared as public?
Changes to NetworkIF.cpp
1. If the start state has actions which must be executed before any transitions are issued, add the following
code outside any NetworkIF constructors:
enterStartState();
2. Wherever you want to issue a state machine transition, add the following line of code:
<transition>(...);
where <transition> is the transition name. If the transition takes arguments, then pass them in
the transition call:
Connect(“192.168.3.100”, 80);
Changes to Makefile
Add NetworkIF_sm.cpp to the source file list and link NetworkIF_sm.o into your application.
#includes in NetworkIF.sm
Same as in C++.
SMC Programmer’s Manual
Page 49 of 109
[Objective-C]
Assumptions:
•Your application class is named NetworkIF.
•Your class is stored in NetworkIF.h and NetworkIF.cpp.
•The state machine is in NetworkIF.sm.
•As explained in section 1, you have added the lines:
%class NetworkIF
%header NetworkIF.h
%start MainMap::Start
at the appropriate location in NetworkIF.sm. Note: your .sm file does not need to use the map name
MainMap nor have a state named Start. This is for example purposes only.
•You have successfully compiled NetworkIF.sm
Changes to NetworkIF.h
1. Forward declare the FSM class by adding this line to NetworkIF.h:
@class NetworkIFContext;
2. Add the data member to class NetworkIF:
NetworkIFContext *_fsm;
Changes to NetworkIF.m
1. Import the FSM header:
#import “NetworkIF_sm.h”
2. When allocating the FSM, pass in the NetworkIF instance reference:
_fsm = [[NetworkIF alloc] initWithOwner:self];
3. If the start state has entry actions which must be executed prior to issuing any transitions, add the
following code outside any NetworkIF constructors:
[_fsm enterStartState];
4. When you want to issue a state machine transition, add the following line of code:
[_fsm <transition>];
where <transition> is the transition name.
SMC Programmer’s Manual
Page 50 of 109
Assumptions
•You have a Java class named NetworkIF defined in the file NetworkIF.java.
•The state machine is in NetworkIF.sm.
•You have successfully compiled NetworkIF.sm
Changes to NetworkIF.java
1. Add the following data member to class NetworkIF:
private NetworkIFContext _fsm;
The data member does not have to be private but may be public or protected. Also, the
variable name does not have to be _fsm.
2. Guarantee that the following line is executed by all NetworkIF constructors:
_fsm = new NetworkIFContext(this);
3. If the start state has entry actions which must be executed prior to issuing any transitions, add the
following code outside the NetworkIF constructors:
_fsm.enterStartState();
4. Wherever you want to issue a transition, all you need to do is:
_fsm.<transition>(...);
where <transition> is the transition name. If the transition takes arguments then pass them in the
transition call:
_fsm.Connect(“192.168.3.100”, 80);
5. All state machine actions may be implemented in NetworkIF as either public or package private
methods so that the SMC-generated code may access them.
package in NetworkIF.sm
If you need to place the SMC-generated classes into a Java package, then see section 8.
SMC Programmer’s Manual
Page 51 of 109

import in NetworkIF.sm
If you need to use import statements in you .sm file, use the %import keyword at the top of the .sm file:
%import java.net.InetAddress
%import java.util.Calendar
SMC Programmer’s Manual
Page 52 of 109
Assumptions:
•You have an [incr Tcl] class named NetworkIF defined in the file NetworkIF.tcl
•The state machine is in NetworkIF.sm.
•You have successfully compiled NetworkIF.sm.
Changes to NetworkIF.tcl
Adding the state machine to NetworkIF requires the following changes to NetworkIF.tcl:
1. At the top of the file, add:
source NetworkIF_sm.tcl
2. Add the following data member declaration to class NetworkIF:
private variable _fsm
3. In the NetworkIF constructor, create the state machine object and place the name into your previously
declared data member:
set _fsm [NetworkIFContext #auto $this];
You don’t have to use #auto to name the object but you do have to pass in the NetworkIF object’s
name to the NetworkIFContext constructor.
4. If the start state has entry actions which must be executed prior to issuing any transitions, add this code
outside the NetworkIF constructors:
$_fsm enterStartState
5. Wherever you want to issue a transition, all you need to do is:
$_fsm <transition> ...
Where <transition> is the transition name. If the transition takes arguments, pass them in the
transition call:
$_fsm Connect “192.168.3.100” 80;
SMC Programmer’s Manual
Page 53 of 109
6. All state machine actions must be implemented in NetworkIF as public methods. For an explanation as
to why these methods must be public, see the answer to the FAQ question: Why do actions have to be
declared as public?
“namespace eval” in NetworkIF.sm
If you need to place the SMC-generated classes into a Tcl namespace, then see Section 8.
“package require” in NetworkIF.sm
If you need to use package require or source statements in your .sm file, place these statements
inside the verbatim code section at the top of the .sm file:
%{
package require NetworkUtil;
%}
SMC Programmer’s Manual
Page 54 of 109

VB.net
Assumptions
•You have an VB.net class named NetworkIF defined in the file NetworkIF.vb
•The state machine is in NetworkIF.sm.
•You have successfully compiled NetworkIF.sm.
Changes to NetworkIF.vb
Adding the state machine to NetworkIF requires the following changes to NetworkIF.vb:
1. Add the following data member to class NetworkIF:
Private _fsm As NetworkIFContext
You can use any variable name you want. I use _fsm.
2. In the New() constructors add the line:
_fsm = New NetworkIFContext(Me)
3. If the start state has entry actions which must be executed prior to issuing any transitions add the
following code outside the NetworkIF constructors:
_fsm.EnterStartState()
4. Whenever you want to issue a transition all you need to do is:
_fsm.<transition>(...)
where <transition> is the transition name. If the transition takes arguments then pass them in
the transition call:
_fsm.Connect("192.168.3.100", 80)
5. All state machine actions must be implemented in NetworkIF as Public methods so that the SMC
generated code can access them.
Imports in NetworkIF.sm
f you need to use Imports in your .sm file, use the %import keyword in the top of your .sm file:
%import System.Drawing
SMC Programmer’s Manual
Page 55 of 109

C#
Assumptions
•You have an C# class named NetworkIF defined in the file NetworkIF.cs
•The state machine is in NetworkIF.sm.
•You have successfully compiled NetworkIF.sm.
Changes to NetworkIF.cs
Adding the state machine to NetworkIF requires the following changes to NetworkIF.vb:
1. Add the following data member to class NetworkIF:
private NetworkIFContext _fsm;
You can use any variable name you want. I use _fsm.
2. In the New() constructors add the line:
_fsm = new NetworkIFContext(this);
3. If the start state has entry actions which must be executed prior to issuing any transitions add the
following code outside the NetworkIF constructors:
_fsm.enterStartState()
4. Whenever you want to issue a transition all you need to do is:
_fsm.<transition>(...);
where <transition> is the transition name. If the transition takes arguments then pass them in
the transition call:
_fsm.Connect("192.168.3.100", 80);
5. All state machine actions must be implemented in NetworkIF as Public methods so that the SMC
generated code can access them.
Imports in NetworkIF.sm
f you need to use import in your .sm file, use the %import keyword in the top of your .sm file:
%import System.Drawing
SMC Programmer’s Manual
Page 56 of 109
Assumptions
•You have a Groovy class named NetworkIF defined in the file NetworkIF.groovy
•The state machine is in NetworkIF.sm.
•You have successfully compiled NetworkIF.sm.
Changes to NetworkIF.groovy
Adding the state machine to NetworkIF requires the following changes to NetworkIF.groovy:
1. Add the following data member to class NetworkIF:
private def _fsm
The data member does not have to be private. Also, the variable name does not have to be _fsm.
2. Guarantee that all constructors execute the following line:
_fsm = new NetworkIFContext(this)
3. If the start state has entry actions which must be executed prior to issuing any transitions, add the
following code outside NetworkIF constructors:
_fsm.enterStartState()
4. Wherever you want to issue a transition, all you need to do is:
_fsm.<transition>(...)
where <transition> is the transition name. If the transition takes arguments then pass them in the
transition call.
_fsm.Connect(“192.168.3.100”, 80)
5. All state machine actions may be implemented in NetworkIF as either public or package private
methods, allowing the SMC-generated code to access said methods.
SMC Programmer’s Manual
Page 57 of 109

package in NetworkIF.sm
If you need to place the SMC-generated classes into a Groovy package, then see Section 8.
import in Network.sm
If you need to use import statements in your .sm file, use the %import keyword at the top of the .sm file:
%import groovy.util
%import java.net.InetAddress
%import java.util.Calendar
SMC Programmer’s Manual
Page 58 of 109
Assumptions
•You have an Lua class named NetworkIF defined in the file NetworkIF.lua
•The state machine is in NetworkIF.sm.
•You have successfully compiled NetworkIF.sm.
Changes to NetworkIF.lua
Adding the state machine to NetworkIF requires the following changes to NetworkIF.lua:
1. In the NetworkIF new methods, add the line:
o._fsm = NetworkIF_sm.sm:new({_owner = 0})
2. If the start state has entry actions which must be executed prior to issuing any transitions add the
following code outside the NetworkIF constructors:
self.fsm:enterStartState()
3. Wherever you want to issue a transition, all you need to do is:
self._fsm:<transition>(...)
where <transition> is the transition name. If the transition takes arguments then pass them in
the transition call:
self._fsm:Connect(“192.168.3.100”, 80)
Imports in NetworkIF.sm
If you need to use require in your .sm file, use the %import keyword in the top of your .sm file:
%import System.Drawing
SMC Programmer’s Manual
Page 59 of 109
Python
Assumptions
•You have an Python class named NetworkIF defined in the file NetworkIF.py
•The state machine is in NetworkIF.sm.
•You have successfully compiled NetworkIF.sm.
Changes to NetworkIF.py
Adding the state machine to NetworkIF requires the following changes to NetworkIF.py:
1. In the NetworkIF __init__ methods, add the line:
self._fsm = NetworkIF_sm.NetworkIF_sm(self)
2. If the start state has entry actions which must be executed prior to issuing any transitions, add the
following code outside the NetworkIF constructors:
self._fsm.enterStartState()
3. Wherever you want to issue a transition, all you need to do is:
self._fsm.<transition>(...)
where <transition> is the transition name. If the transition takes arguments, then pass them in
the transition call:
self._fsm.Connect(“192.168.3.100”, 80)
Imports in NetworkIF.sm
If you need to use import in your .sm file, use the %import keyword in the top of your .sm file:
%import System.Drawing
SMC Programmer’s Manual
Page 60 of 109
Assumptions
•You have an PHP class named NetworkIF defined in the file NetworkIF.php
•The state machine is in NetworkIF.sm.
•You have successfully compiled NetworkIF.sm.
Changes to NetworkIF.php
Adding the state machine to NetworkIF requires the following changes to NetworkIF.php:
1. In the NetworkIF __construct methods, add the line:
$this->_fsm = new NetworkIF_sm($this);
2. If the start state has entry actions which must be executed prior to issuing any transitions, add the
following code outside the NetworkIF constructors:
$this->_fsm->enterStartState();
3. Wherever you want to issue a transition, all you need to do is:
$this->_fsm-><transition>(...);
where <transition> is the transition name. If the transition takes arguments, then pass them in
the transition call:
$this->_fsm->Connect(“192.168.3.100”, 80);
Imports in NetworkIF.sm
If you need to use require_once in your .sm file, use the %import keyword in the top of your .sm file:
%import Event/Dispatcher.php
SMC Programmer’s Manual
Page 61 of 109
Perl
Assumptions
•You have an Perl module named NetworkIF defined in the file NetworkIF.pm
•The state machine is in NetworkIF.sm.
•You have successfully compiled NetworkIF.sm.
Changes to NetworkIF.pm
Adding the state machine to NetworkIF requires the following changes to NetworkIF.pm:
1. In the NetworkIF new methods, add the line:
$self->{_fsm} = new NetworkIF_sm($self);
2. If the start state has entry actions which must be executed prior to issuing any transitions, add the
following code outside the NetworkIF constructors:
$self->{_fsm}->enterStartState();
3. Wherever you want to issue a transition, all you need to do is:
$self->{_fsm}-><transition>(...);
where <transition> is the transition name. If the transition takes arguments, then pass them in
the transition call:
$self->{_fsm}->Connect(“192.168.3.100”, 80);
Imports in NetworkIF.sm
If you need to use use in your .sm file, use the %import keyword in the top of your .sm file:
%import System.Drawing
SMC Programmer’s Manual
Page 62 of 109
Ruby
Assumptions
•You have an Ruby class named NetworkIF defined in the file NetworkIF.rb
•The state machine is in NetworkIF.sm.
•You have successfully compiled NetworkIF.sm.
Changes to NetworkIF.rb
Adding the state machine to NetworkIF requires the following changes to NetworkIF.rb:
1. In the NetworkIF initialize methods, add the line:
@_fsm = NetworkIF_sm::new(self)
2. If the start state has entry actions which must be executed prior to issuing any transitions, add the
following code outside the NetworkIF constructors:
@_fsm.enterStartState
3. Wherever you want to issue a transition, all you need to do is:
@_fsm.<transition>(...)
where <transition> is the transition name. If the transition takes arguments, then pass them in
the transition call:
@_fsm.Connect(“192.168.3.100”, 80)
Imports in NetworkIF.sm
If you need to use require in your .sm file, use the %import keyword in the top of your .sm file:
%import System.Drawing
SMC Programmer’s Manual
Page 63 of 109
Assumptions
•You have an Scala class named NetworkIF defined in the file NetworkIF.scala
•The state machine is in NetworkIF.sm.
•You have successfully compiled NetworkIF.sm.
Changes to NetworkIF.scala
Adding the state machine to NetworkIF requires the following changes to NetworkIF.scala:
1. Add the following data member to class NetworkIF:
private val _fsm = new NetworkIFContext(this)
The data member does have to be private but may be public or protected. Also the variable
name does not have to be _fsm.
2. If the start state has entry actions which must be executed prior to issuing any transitions, add the
following code outside the NetworkIF constructors:
_fsm.enterStartState()
3. Wherever you want to issue a transition, all you need to do is:
_fsm.<transition>(...)
where <transition> is the transition name. If the transition takes arguments, then pass them in
the transition call:
_fsm.Connect(“192.168.3.100”, 80)
4. All state machine actions may be implemented in NetworkIF as either public or package-private
methods, so long as the SMC-generated code can access these methods.
package in NetworkIF.sm
If you need to place the SMC-generated classes into a Scala a package, then see Section 8.
import in NetworkIF.sm
SMC Programmer’s Manual
Page 64 of 109

If you need to use import in your .sm file, use the %import keyword in the top of your .sm file:
%import scala.concurrent
%import java.net.InetAddress
%import java.util.Calendar
SMC Programmer’s Manual
Page 65 of 109

JavaScript
Assumptions
•You have an JavaScript class named NetworkIF defined in the file NetworkIF.js
•The state machine is in NetworkIF.sm.
•You have successfully compiled NetworkIF.sm.
Changes to NetworkIF.js
Adding the state machine to NetworkIF requires the following changes to NetworkIF.js:
1. In the NetworkIF constructor, add the line:
this._fsm = new NetworkIF_sm(this);
2. If the start state has entry actions which must be executed prior to issuing any transitions, add the
following code outside the NetworkIF constructors:
this._fsm.enterStartState();
3. Wherever you want to issue a transition, all you need to do is:
this._fsm.<transition>(...);
where <transition> is the transition name. If the transition takes arguments, then pass them in
the transition call:
this._fsm.Connect(“192.168.3.100”, 80);
SMC Programmer’s Manual
Page 66 of 109
Section 4: Compiling a .sm
These instructions assume that:
•Java 1.7 or newer is properly installed, javac, java and jar executables are in you PATH environment
variable. The standard Java Development Kit (JDK) may be obtained for free from Oracle.
•The SMC_HOME environment variable contains the path to where SMC is installed.
The following table explains the default file name and suffix used for each target language supported by
SMC. The default file name suffix may be changed by using the -suffix and -hsuffix command line
parameters. By default, SMC places the generated file(s) in the current working directory. This may be altered
using the -d and -headerd command line parameters.
The following table assumes that the input file is named AppClass.sm:
Target Language
Command Line
Option
Base File Name
Default File
Name Suffix
Complete File Name
C
-c
AppClass_sm
.h, .c
AppClass_sm.h
AppClass_sm.c
C++
-c++
(including -crtp)
AppClass_sm
.h, .cpp
AppClass_sm.h
AppClass_sm.cpp
C#
-csharp
AppClass_sm
.cs
AppClass_sm.cs
GraphViz
-graph
AppClass_sm
.dot
AppClass_sm.dot
Groovy
-groovy
AppClassContext
.groovy
AppClassContext.groovy
Java
-java, -java7
AppClassContext
.java
AppClassContext.java
JavaScript
-js
AppClass_sm
.js
AppClass_sm.js
Lua
-lua
AppClass_sm
.lua
AppClass_sm.lua
SMC Programmer’s Manual
Page 67 of 109
Target Language
Command Line
Option
Base File Name
Default File
Name Suffix
Complete File Name
Objective-C
-objc
AppClass_sm
.h, .m
AppClass_sm.h
AppClass_sm.m
Perl
-perl
AppClass_sm
.pm
AppClass_sm.pm
PHP
-php
AppClass_sm
.php
AppClass_sm.php
Python
-python
AppClass_sm
.py
AppClass_sm.py
Ruby
-ruby
AppClass_sm
.rb
AppClass_sm.rb
Scala
-scala
AppClassContext
.scala
AppClassContext.scala
HTML Table
-table
AppClass_sm
.html
AppClass_sm.html
Tcl
-tcl
AppClass_sm
.tcl
AppClass_sm.tcl
VB.net
-vb
AppClass_sm
.vb
AppClass_sm.vb
Table 2: SMC target languages.
The steps in compiling a .sm file are:
1. From a shell (Unix or Windows CMD), go to the directory containing the .sm file.
2. $java -jar $SMC_HOME/bin/Smc.jar <target language option> <fsm_source_file>.sm
If you are using ant to build your application, then you can use smc-ant.jar to compile you .sm file using
the following target:
<taskdef classname="net.sf.smc.ant.SmcJarWrapper"
classpath="${smc-ant.jar}" name="smc-compile" />
<smc-compile smcjar="${smc.jar}" classpath="${smc.classpath}"
target="java7" destdir="${src.dir}/appclass/" smfile="${AppClass.sm}" />
where ${smc-ant.jar} references the location of smc-ant.jar, ${smc.jar} references the location
of Smc.jar, and ${smc.classpath}is a Java classpath containing the path to statemap.jar. The
attribute target=”<target language>” must be one of the support target languages listed in the table
above.
At a minimum, the SMC command line must contain either -<target language>, -help, or -version.
All other command line options are optional. These optional options are:
SMC Programmer’s Manual
Page 68 of 109
Option
Target Language
Description
-access <level>
-java
-java7
Generate SM class access level.
-suffix <suffix>
All
Use this suffix for the output file.
-g, -g0
All
Add level 0 debugging output to
generated code.
-g1
All
Add level 1 debugging output to
generated code.
-nostreams
-c++
Do not use C++ iostreams for
debugging output.
-crtp
-c++
Generate state machine using
CRTP.
-verbose
All
Output compiler messages (SMC is
silent by default)
-vverbose
All
Output more compiler messages.
-sync
-csharp
-groovy
-java
-java7
-scala
-vb
Synchronize access to transition
methods. Necessary to make
generated code thread safe.
-noex
-c++
Do not generate C++ exception
throws.
-nocatch
All
Do not generate try/catch/re-throw
code (not recommended).
-stack <max-depth>
-c++
Specifies a fixed-size state stack,
using no dynamic memory
allocation.
-protocol
-objc
FSM context extends a @protocol
and referenced via protocol.
SMC Programmer’s Manual
Page 69 of 109
Option
Target Language
Description
-serial
All
Generate serialization code.
-return
All
Smc.main() returns instead of
exiting. Use this option with ant.
-reflect
-csharp, -groovy, -java, -
java7, -js, -lua, -perl, -
php, -python, -ruby, -scala,
-tcl, -vb
Generate reflection code.
-generic
-csharp, -java, -java7, -
vb
Use generic collections.
-generic7
-java7
Use Java 7 generic collections.
-cast <type>
-c++
Use this C++ cast type.
-d <directory>
All
Placed generated files in
<directory>.
-headerd <directory>
-c, -c++, -objc
Placed generated header files in
<directory>.
-hsuffix <suffix>
-c, -c++, -objc
Add this suffix to output header files.
-glevel <n>
-graph
Detail level from 0 (least) to 2
(greatest).
Table 3: SMC command line options.
SMC Programmer’s Manual
Page 70 of 109
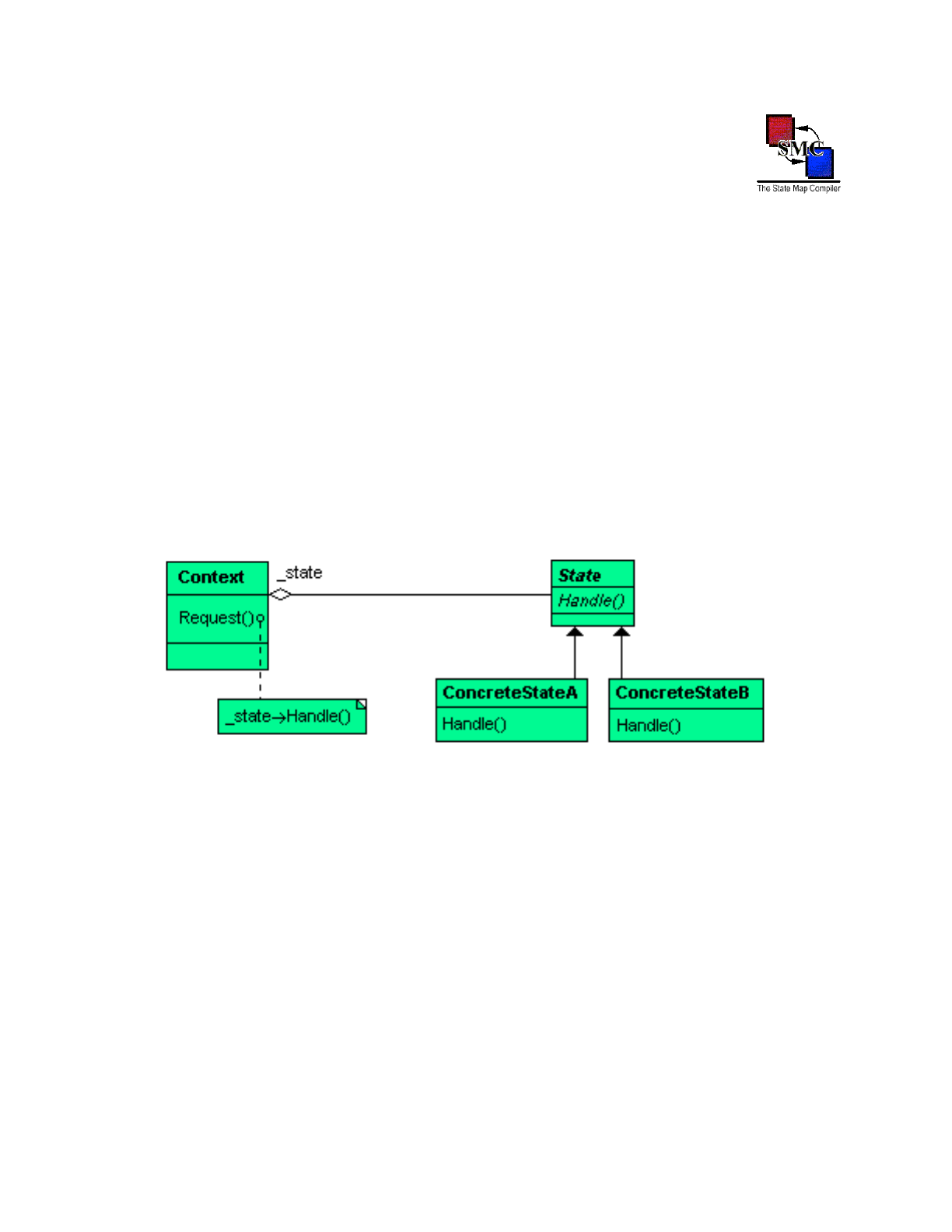
Section 5: Behind the Curtain
SMC is so straight forward and easy to use, that it is unnecessary to know anything about the code it
generates in order to use it. But for the curious, here is an explanation.
The SMC-generated code follows the State pattern as described in Gamma, Helm, Johnson and Vlissides
"Design Patterns" book (pp. 305 to 313):
The SMC State pattern is different due to support for multiple machines, a default state, default transition
and push/pop transitions:
SMC Programmer’s Manual
Page 71 of 109
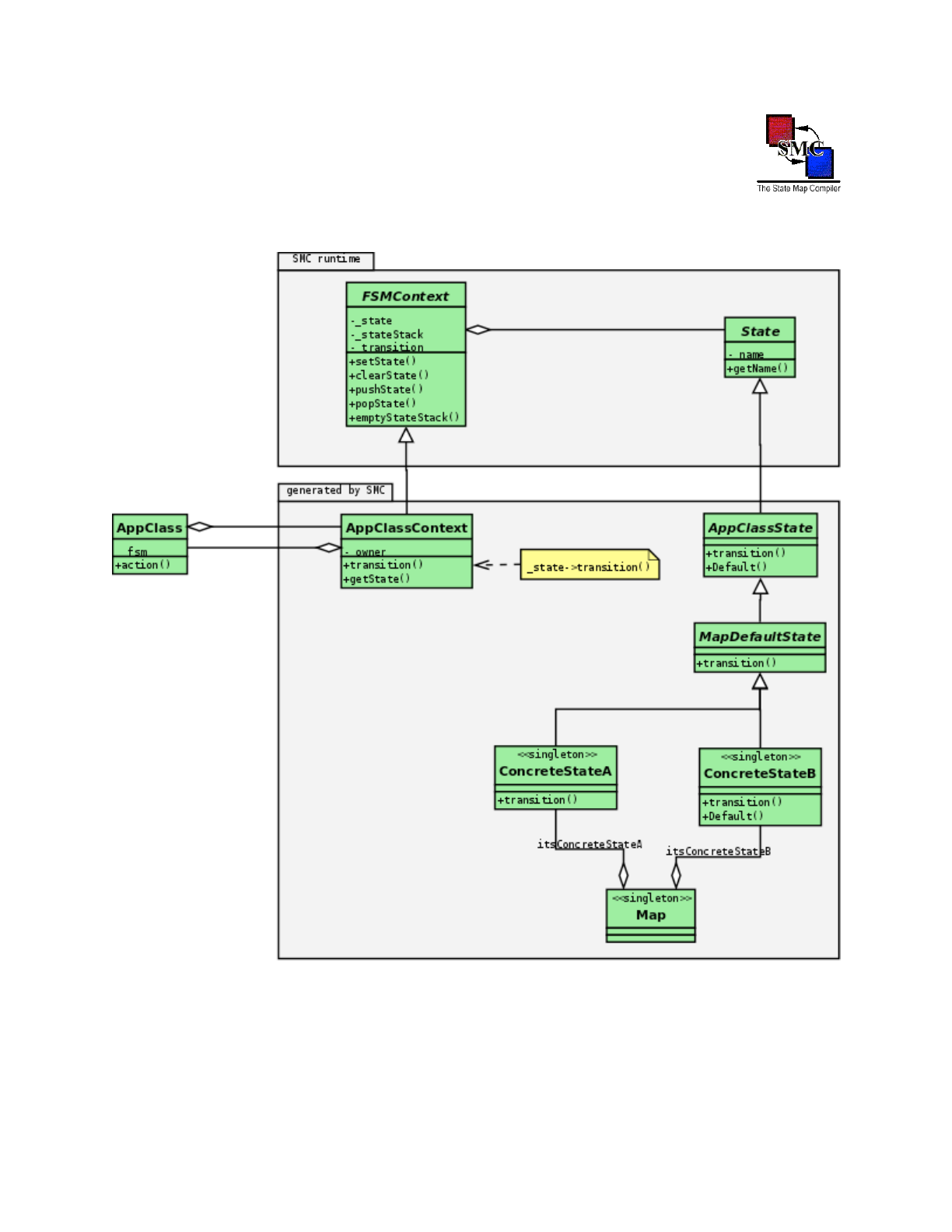
SMC deviates from the State pattern as follows:
•The Context class was broken into two classes: an abstract FSMContext class (not generated but
provided with the SMC compiler) and <AppClass>Context class.
SMC Programmer’s Manual
Page 72 of 109
FSMContext stores both the current state and the state stack (used for pushing and popping states).
FSMContext also defines methods for setting the state, and pushing and popping states.
<AppClass>Context inherits from FSMContext, defines the getState() (which returns the current
state as a <AppClass>State object and not a State object - that is why this method is not in
FSMContext), provides access to all transitions defined in all machines and maintains a reference back to
its owner <AppClass> object.
•The state pattern has an abstract State class and ConcreteState classes which inherit from State. SMC
expands this hierarchy to four levels: State, <AppClass>State, Map Default state and concrete
states.
This hierarchy is used to support SMC's default transitions. <AppClass>State has a virtual method for
each transition appearing in all state machines. These transition methods call <AppClass>State's
Default transition method. This global Default transition throws a "Transition Undefined" exception
when called.
The map default state class contain the Default state's transitions.
Each concrete state is a class which inherits from its map's default state class. The state class methods
implement state machine transitions.
Each map class statically declares one instance of each of its states since concrete state classes are
singletons. The map class has no methods and is itself a singleton. The map class' purpose is to gather a
map's state instances into a single location.
While SMC generates many classes, they take up little run time space. There is only one instance of each
concrete state class. Only one <AppClass>Context class need be instantiated for each <AppClass>
class instance.
Finally, the SMC State pattern is hidden from the application class. All a developer needs to do is instantiate
<AppClass>Context, passing to it the <AppClass> object. After that, it's only a matter of calling the
Context object's transition methods.
For further examples on using the State Machine Compiler, see Section 6: For Example ... .
SMC Programmer’s Manual
Page 73 of 109

Section 6: For Example ...
The State Machine Compiler download contains both simple and complex examples using all SMC features -
simple transitions, default states, default transitions, state entry and exit actions and pushing and popping.
Each example is presented in C, C++, Java, [incr Tcl], VB.net, C#, Groovy, Lua, Python, Perl, PHP, Ruby and
Scala. The first examples are the simplest and gradually become more complex.
These examples are in SMC's "example" directory. All examples contain README text files describing what
the example does, how to build it and run it.
Example 1
Describes a system that determines whether a string is acceptable or not. The intent is to process a string of
bits having a specific pattern “0*1*”. That is:
•Anything other than a 0 or a 1 will trigger an Unknown transition, producing an Unacceptable result.
•Once a 1 is encountered, a 0 may no longer appear.
The Error state is designed specifically to collect unacceptable strings. Unknown transitions (regardless of
state) and transitions from 1 to 0 both end up in the final Error state.
We can walk through the bit string 0000111 which is acceptable to gain some understanding of the FSM’s
function:
1. Start in the Start state and walk the bits from left to right.
2. 0 is the first transition, moving to the Zero state.
3. Subsequent 0’s keep the FSM in the Zero state.
4. The first 1 transitions the FSM to the One state.
5. Additional 1’s keep the FSM in the One state.
6. Finally the EOS transition is issued when the bit string end is reached. EOS transitions the FSM to the final
OK state.
SMC Programmer’s Manual
Page 74 of 109

The EOS transition has an Acceptable action which sets AppClass’s boolean acceptable property to
true. Conversely, the EOS transition in Error state sets acceptable to false (unacceptable).
Both OK and Error states are final. Once entered, there is no way to transition out of the error state.
Example 2
This example refactors example 1. Notice that the same Unknown transition applies for all states except OK
state. Rather than define Unknown repeatedly for every state, this transition is placed in the Default state
which acts as a fallback mechanism. No if an Unknown transition is encountered in any state, the Default
state’s Unknown transition is taken. It doesn’t matter is this means adding an Unknown transition to the OK
state because we have already reached the string’s end at that point. Technically the OK state is no longer a
final state but practically it still is.
Example 3
This example is the textbook demonstration of a push-down finite state machine. This FSM checks for
palindromes using a three character alphabet {0, 1, c}. Palindromes read the same way from left to right as
they do from right to left (case-insensitively):
Able was I ere I saw Elba
Each side is a mirror image of the other. The 'c' is used to demarcate the middle point (palindromes are odd).
This examples shows SMC push and pop transitions in action. It contains three %maps. The basic behavior
of this FSM is to keep pushing the next bit encountered onto the stack until the middle point is reached. The
stack acts as a sort of memory for the bits encountered. If you're in Map1 that means you've been
encountering zeros. If you're in Map2, that means you've been encountering ones. When you get to the
center ('c'), it's a signal to start popping or consuming the stack. When we were pushing, we were always in
a map's PushIt state; now that we're popping we move to the map's PopIt state.
To see this in action is to turn on debugging by uncommenting the setDebugFlag line in AppClass.java.
For strings that at least are in the alphabet (0, 1, c) and that at least have the same number of characters to
each side of 'c', you should see that number of pushes follows by the same number of pops.
So this dictates the transitions for both maps:
•In ZerosMap if a zero is popped, that is OK. Otherwise, it is an error.
•In OnesMap if a one is popped, that is OK. Otherwise, it is an error.
SMC Programmer’s Manual
Page 75 of 109

That is the gist of this exercise.
Notice a small nuance in the code: there's an action called emptyStack. Typically all action methods are
defined in AppClass but you'll see no such method in AppClass. emptyStack is a reserved action
method name defined in FSMContext. SMC looks for such reserved names and makes sure to generate
source code that reroutes such calls to context (the FSMContext class) instead of ctxt (the AppClass).
Example 7
Java, Ant, Python, Perl and Ruby example EX7 uses the push/pop transition in a more realistic way. %map
PhoneNumber is used to collect the dialed telephone number. If the dialed number was acceptable, then
the PhoneNumber map pops the transition:
pop(DialingDone, callType, areaCode, exchange, local)
where DialingDone is transition name and callType, areaCode, exchange, and local are transition
parameters. The push transition itself is different:
Dialing/push(PhoneNumber::DialTone)
This has the FSM first go to the Dialing state and then push to the PhoneNumber::DialTone state.
The popped DialingDone or InvalidDigit transition is taken from the Dialing state.
PHP Example
PHP example web is an example for building stateless dynamic web pages with a state machine. It
implements a simple RPN calculator which preserves its state and calculation stack across HTTP requests
with a hidden input field.
SMC Programmer’s Manual
Page 76 of 109

Section 7: Queuing Up
SMC does not allow a transition to issue a transition itself. The reason for this is explained in SMC's FAQ.
Firstly, it is suggested that your AppClass issue transitions from a single thread. Doing so means that a
second transition call cannot be issued until the first transition call returns.
But if AppClass will be accessed by multiple threads and so issue transition calls from multiple threads, then
you must synchronize the transition calls so that only one transition is taken at a time. The simplest way to
do this is by SMC’s -sync command line option. This uses a programming language feature to synchronize
access to the FSM transition method. This option is only available for C#, VB.net , Java (-java and -java7),
Groovy, and Scala.
For all other languages, the developer must implement a multi-threaded protection scheme for transition
method access.
SMC Programmer’s Manual
Page 77 of 109

Section 8: Packages and
Namespaces
Putting the SMC-generated classes into a specific Java package/C++ namespace/Tcl namespace/Groovy
package/Perl package/Ruby module/Scala package is as easy placing the %package keyword at the top of
your .sm file along with the %class keyword.
(Aside: Remember to place namespace import <::namespace::*> after sourcing in a *_sm.tcl file.)
To import a C++ namespace, Java class, Tcl package, VB.net, C# namespace, Groovy class, Lua module,
Python module, Perl module, PHP file, Ruby module or Scala class, use the %import keyword:
%import <name>
(Note: There is no semicolon at the line's end.)
The %import is translated into the following syntax:
•C++: using namespace <name>;
•Java: import <name>;
•Tcl: package require <name>
•VB.net: Imports <name>
•C#: using <name>
•Groovy: import <name>
•Lua: require '<name>'
•Python: import <name>
•Perl: use <name>;
•PHP: require_once '<name>';
•Ruby: require '<name>'
•Scala: import <name>
SMC Programmer’s Manual
Page 78 of 109

See examples/Java/EX4, C++/EX4, Tcl/EX4, VB/EX4, CSharp/EX4, Perl/EX4 and Ruby/EX4 for sample code
which uses packages/namespaces with SMC.
Fully Qualified Class Names
If you are not able to place the SMC-generated classes into the same package/namespace as the %class
context class, then you will need to specify the context class' fully qualified name. The SMC %class key
supports Java, C++ and Tcl fully qualified name syntax. For example, the following are accepted:
// For a Java, VB.net and C# application
%class com.acme.project.AppClass
and
// For a C++ or Tcl application
%class ::acme::project::AppClass
SMC Programmer’s Manual
Page 79 of 109
Section 9: Be Persistent!
This section describes how to persist an SMC-generated finite state machine and restore it at a later date. In
the following examples I persist the FSM to a flat file but they can be modified to work with other storage
types. The focus is only capturing the FSM's current state and state stack. There is no other data to persist
in the SMC-generated code.
The examples use the class AppClass which has an associated finite state machine stored in its data
member _fsm.
Note: the following sample code requires the .sm file be compiled with the -serial option.
If you are not using push/pop transitions, then the use the following code to persist the current state:
int
AppClass::serialize(const char *filename) const {
int fd;
int stateId(_fsm.getState().getId());
int retcode(-1);
fd = open(filename,
(O_WRONLY | O_CREAT | O_TRUNC),
(S_IRUSR | S_IWUSR | S_IRGRP | S_IROTH));
if (fd >= 0) {
retcode = write(fd, &stateId, sizeof(int));
(void) close(fd);
fd = -1;
}
return (retcode);
}
SMC Programmer’s Manual
Page 80 of 109

Deserializing is the mirror:
int AppClass::deserialize(const char *filename) const {
int fd;
int stateId;
int retcode(-1);
// This code assumes _fsm is already instantiated.
fd = open(filename, O_RDONLY);
if (fd >= 0) {
retcode = read(fd, &stateId, sizeof(int));
if (retcode >= 0) {
_fsm.setState(_fsm.valueOf(stateId));
}
(void) close(fd);
fd = -1;
}
return (retcode);
}
If you are using push/pop transitions, then the serialization will be require your to persist the state stack in
reverse order (bottom to top) followed by the current state.
Warning! Reading in the state stack results in emptying the stack and corrupting the FSM. This should not
be a problem because you are persisting the FSM for use later when you will restore the state stack.
int AppClass::serialize(const char *filename) const {
int fd;
int retcode(-1);
fd = open(filename,
(O_WRONLY | O_CREAT | O_TRUNC),
(S_IRUSR | S_IWUSR | S_IRGRP | S_IROTH));
if (fd >= 0) {
int size(_fsm.getStateStackDepth() + 1);
int bufferSize(size * sizeof(int));
int buffer[size + 1];
int i;
// Copy the states into the buffer in reverse order:
// from the state stack bottom to the top and the current
// state last. The first element is the number of states.
buffer[0] = size;
buffer[size] = (_fsm.getState()).getId();
for (i = (size - 1); i > 0; --i) {
SMC Programmer’s Manual
Page 81 of 109

_fsm.popState();
buffer[i] = (_fsm.getState()).getId();
}
retcode = write(fd, buffer, (bufferSize + sizeof(int)));
(void) close(fd);
fd = -1;
}
return (retcode);
}
When reading in the persisted FSM, first read the state count and then read in the states:
int AppClass::deserialize(const char *filename) {
int fd;
int size;
int retcode(-1);
// The FSM's current state is probably set to the start state. Clear it
// out because it is not correct.
_fsm.clearState();
// Open the file for reading and then read in the number of persisted
// states.
fd = open(filename, O_RDONLY);
if (fd >= 0 && read(fd, &size, sizeof(int)) >= 0) {
int bufferSize(size * sizeof(int));
int buffer[size];
if (read(fd, buffer, bufferSize) >= 0) {
int i;
// Note: Do not call setState for the final current state because
// pushState actually sets the current state while pushing the
// next state on the stack.
for (i = 0; i < size; ++i) {
_fsm.pushState(_fsm.valueOf(buffer[i]));
}
}
}
// Make sure the file is closed before leaving.
if (fd >= 0) { (void) close(fd); }
return (retcode);
}
SMC Programmer’s Manual
Page 82 of 109
SMC makes full use of Java's object serialization. Assuming that AppClass declares implements
java.io.Serializable and that the _fsm member data is not marked as transient, then serializing
the AppClass instance also serializes the FSM.
SMC considers the code it generates to be subservient to the application code. For this reason the SMC
code does not serialize its references to the FSM context owner or property listeners. The application code
after deserializing the FSM must call the setOwner method to re-establish the application/FSM link. If the
application listens for FSM state transitions addStateChangeListener must also be called to put the
listeners in place.
public final class AppClass implements java.io.Serializable {
private AppClassContext _fsm;
public AppClass() { _fsm = new AppClassContext(); }
// Restore the FSM context's reference to this object. This is necessary
// because AppClass and AppClassContext reference each other. When
// AppClass is serialized, its AppClassContext instance is serialized.
// But when AppClassContext is serialized, its AppClass instance is not
// serialized which breaks the circular reference. When AppClassContext
// is deserialized, its AppClass reference is null. Hence the need to
// implement readObject and reset AppClassContext's AppClass reference.
// The state change property listeners list is empty for the same reason.
private void readObject(java.io.ObjectInputStream istream)
throws java.io.IOException, ClassNotFoundException
{
// Do the default read first which sets _fsm to null.
istream.defaultReadObject();
// Now set the FSM's owner.
_fsm.setOwner(this);
// State change listeners must also be added back.
_fsm.addStateChangeListener(_stateListener);
return;
}
SMC Programmer’s Manual
Page 83 of 109

public static void main(String[] args) {
Serialize();
Deserialize();
}
public static void Serialize() {
AppClass appInstance = new AppClass();
ObjectOutputStream ostream =
new ObjectOutputStream(new FileOutputStream("./fsm_serial.bin"));
try {
ostream.writeObject(appInstance);
} catch (java.io.IOException ioex) {
// Handle serialization exception.
} finally {
ostream.close();
}
}
...
}
Recreating the persisted AppClass instance is equally simple:
public static void Deserialize() {
AppClass appInstance = null;
ObjectInputStream istream =
new ObjectInputStream(new FileInputStream("./fsm_serial.bin"));
try {
appInstance = (AppClass) istream.readObject();
} catch (java.io.IOException ioex) {
// Handle deserialization exception.
} finally {
istream.close();
}
}
SMC Programmer’s Manual
Page 84 of 109
Note: the following sample code requires the .sm file is compiled with the -serial option.
Tcl persistence is similar to C++. If you are not using push/pop transitions, then the use the following code to
persist the current state:
public method serialize {fileName} {
if [catch {open $fileName w 0644} fileId] {
set retcode error;
set retval "Failed to open ${filename} for writing";
} else {
puts $fileId [[$_fsm getState] getId];
close $fileId;
set retcode ok;
set retval "";
}
return -code ${retcode} ${retval};
}
The following deserializes the current state:
public method deserialize {fileName} {
if [catch {open $fileName r} fileId] {
set retcode error;
set retval "Failed to open ${filename} for reading";
} else {
gets $fileId stateId;
$_fsm setState [$_fsm valueOf $stateId];
close $fileId;
set retcode ok;
set retval "";
}
return -code ${retcode} ${retval};
}
SMC Programmer’s Manual
Page 85 of 109

If you are using push/pop transitions, then the serialization will be require your to persist the state stack in
reverse order (bottom to top) followed by the current state.
Warning! Reading in the state stack results in emptying the stack and corrupting the FSM. This should not
be a problem because you are persisting the FSM for use later when you will restore the state stack.
public method serialize {fileName} {
if [catch {open $fileName w 0644} fileId] {
set retcode error;
set retval "${fileName} open failed";
} else {
set state [$_fsm getState];
set states {};
lappend states [$state getId];
while {[catch {$_fsm popState} retcode] == 0} {
set state [$_fsm getState];
set states [linsert $states 0 [$state getId]];
}
set size [llength $states];
puts $fileId $size;
foreach stateId $states {
puts $fileId $stateId;
}
close $fileId;
set retcode ok;
set retval "";
}
return -code ${retcode} ${retval};
}
SMC Programmer’s Manual
Page 86 of 109

When reading in the persisted FSM, first read the state count and then read in the states:
public method deserialize {fileName} {
if [catch {open $fileName r} fileId] {
set retcode error;
set retval "${fileName} open failed";
} else {
# Clear out the default start state.
$_fsm clearState;
gets $fileId size;
for {set i 0} {$i < $size} {incr i} {
gets $fileId stateId;
set state [$_fsm valueOf $stateId];
$_fsm pushState $state;
}
close $fileId;
set retcode ok;
set retval "";
}
return -code ${retcode} ${retval};
}
SMC Programmer’s Manual
Page 87 of 109

VB.net
SMC makes full use of .net's object serialization. Assuming that AppClass has the <Serializable()>
attribute and that the _fsm member data is not marked as <NonSerializable()>, then serializing the
AppClass instance will also serialize the FSM.
SMC considers the code it generates to be subservient to the application code. For this reason the SMC
code does not serialize its references to the FSM context owner or property listeners. The application code
after deserializing the FSM must call the Owner property setter to re-establish the application/FSM link. If the
application listens for FSM state transitions, then event handlers must also be put back in place.
Imports System
Imports System.IO
Imports System.Runtime.Serialization
Imports System.Runtime.Serialization.Formatters.Binary
<Serializable()> Public Class AppClass
Implements IDeserializationCallback
Private _fsm As AppClassContext
Public Sub New()
_fsm = New AppClassContext(Me)
End Sub
' Restore the FSM context's reference to this object. This is necessary
' because AppClass and AppClassContext reference each other. When
' AppClass is serialized, its AppClassContext instance is serialized. But
' when AppClassContext is serialized, its AppClass instance is not
' serialized which breaks the circular reference. When AppClassContext is
' deserialized, its AppClass reference is Nothing. Hence the need to
' implement IDeserialization and reset AppClassContext's AppClass
' reference. Event handlers must also be put back in place for the same
' reason.
Private Sub OnDeserialization(ByVal send As Object) _
Implements IDeserializationCallback.OnDeserialization
_fsm.Owner = Me
AddHandler _fsm.StateChange, handler
End Sub
Shared Sub Main()
Serialize()
SMC Programmer’s Manual
Page 88 of 109

Deserialize()
End Sub
Shared Sub Serialize()
Dim appInstance As New AppClass()
Dim stream As Stream = File.Open("fsm_serial.bin", FileMode.Create)
Dim formatter As New BinaryFormatter()
Try
formatter.Serialize(stream, appInstance)
Catch serialex As SerializationException
' Handle serialization failure.
Finally
stream.Close()
End Try
End Sub
...
End Class
Recreating the persisted AppClass instance is equally simple:
Shared Sub Deserialize()
Dim appInstance As AppClass = Nothing
Dim stream As Stream = File.Open("fsm_serial.bin", FileMode.Open)
Dim formatter As New BinaryFormatter()
Try
appInstance = CType(formatter.Deserialize(stream), AppClass)
Catch serialex As SerializationException
' Handle deserialization failure.
Finally
stream.Close()
End Try
End Sub
SMC Programmer’s Manual
Page 89 of 109

C#
SMC makes full use of .net's object serialization. Assuming that AppClass has the [Serializable]
attribute and that the _fsm member data is not marked as [NonSerialized], then serializing the
AppClass instance will also serialize the FSM.
SMC considers the code it generates to be subservient to the application code. For this reason the SMC
code does not serialize its references to the FSM context owner or property listeners. The application code
after deserializing the FSM must call the Owner property setter to re-establish the application/FSM link. If the
application listens for FSM state transitions, then event handlers must also be put back in place.
using System;
using System.IO;
using System.Runtime.Serialization;
using System.Runtime.Serialization.Formatters.Binary;
[Serializable] public class AppClass : IDeserializationCallback
{
private AppClassContext _fsm;
public AppClass() {
_fsm = new AppClassContext(this);
}
// Restore the FSM context's reference to this object. This is necessary
// because AppClass and AppClassContext reference each other. When
// AppClass is serialized, its AppClassContext instance is serialized.
// But when AppClassContext is serialized, its AppClass instance is not
// serialized which breaks the circular reference. When AppClassContext
// is deserialized, its AppClass reference is null. Hence the need to
// implement IDeserialization and reset AppClassContext's AppClass
// reference. Event handlers must also be put back in place for the same
// reason.
void IDeserializationCallback.OnDeserialization(Object sender) {
_fsm.Owner = this;
_fsm.StateChange += handler;
}
static void Main(string [] args) {
Serialize();
Deserialize();
}
SMC Programmer’s Manual
Page 90 of 109

static void Serialize() {
AppClass appInstance = new AppClass();
FileStream fstream =
new FileStream("fsm_serial.dat", FileMode.Create);
BinaryFormatter formatter = new BinaryFormatter();
try {
formatter.Serialize(fstream, appInstance);
}
catch (SerializationException serialex) {
// Handle exception.
}
finally {
fstream.Close();
}
}
...
}
Recreating the persisted AppClass instance is equally simple:
static void Deserialize() {
AppClass appInstance = null;
FileStream fstream = new FileStream("fsm_serial.dat", FileMode.Open);
BinaryFormatter formatter = new BinaryFormatter();
try {
appInstance = (AppClass) formatter.Deserialize(fstream);
}
catch (SerializationException serialex) {
// Handle exception.
}
finally
{
fstream.Close();
}
}
SMC Programmer’s Manual
Page 91 of 109
Section 10: Get the Picture
The SMC option -graph generates Graphviz DOT files using three detail levels:
๏-glevel 0: Generates the least detail:
•state names,
•transition names, and
•pop transition “nodes” only.
๏-glevel 1: Generates all of the above plus:
•entry and exit actions,
•transition guards, and
•transition actions.
๏-glevel 2: Generates the most detail, which includes all of the above plus:
•entry and exit action arguments,
•transition parameters,
•pop transition arguments, and
•transition action arguments.
SMC generates a rudimentary DOT file - SMC makes no attempt to produce a "pretty" graph because
beauty is in the eye of the beholder. The default Graphviz settings are used. You can then modify the DOT file
to your heart's content.
Note: Be careful modifying the SMC-generated DOT file directly. If you have SMC generate a new DOT file, it
will overwrite your work.
Stroll through the SMC Picture Gallery to see examples of SMC-generated DOT files and what can be done
with them.
SMC Programmer’s Manual
Page 92 of 109

Section 11: On Reflection
SMC v. 4.3.0 introduces the -reflect command line option for the Java, C#, Perl, PHP, Python, Ruby, Tcl and
VB.Net programming languages. This option tells SMC to generate for each state class either a
getTransitions method or a Transitions property for C# and VB.Net. In both cases the method/
property returns the state's defined transitions as a map. The map key is a transition name with an integer
value.
SMC v. 6.0.1 adds the ability to retrieve a list of all states in the finite state machine.
The method definitions are:
•C#: The top-level context class contains the get-only property:
public <context>State[] States
For each of the states, there is the get-only property:
public System.Collections.Dictionary Transitions
where the key is a string and the value is an int.
Note: if the -generic option is used, then SMC emits:
public System.Collections.IDictionary<string, int> Transitions
•Groovy: The top-level context class contains:
final states = [ ... ]
which is a state array.
final transitions = [ ... ]
which is a transition name array.
For each of the states (meaning the following array is contained in the state object), the transitions map is
defined:
final transitions = [<transition>:<integer value>]
SMC Programmer’s Manual
Page 93 of 109

•Java: The top-level context class contains the method:
public <context>State[] getStates()
For each state, there is the method:
public Map getTransitions()
where the map key is a String and the map value is an Integer.
Note: if the -generic option is used, then SMC emits:
public Map<String, Integer> getTransitions()
When -generic7 is used, then SmC emits the <> braces when instantiating generic collection objects.
The top-level context class has a method to return the set of all transitions within the finite state machine:
public Set getTransitions() or public Set<String> getTransitions()
•Lua: The top-level context class contains the methods:
function getStates()
which returns a state array.
function getTransitions()
which returns a transition name array.
For each of the states (meaning the following method is contained in the state object), the transitions map
is defined:
function getTransitions()
which returns a table where the key is a string and the value is an integer.
•Perl: The top-level context class contains the methods:
sub getStates
which returns a state array.
sub getTransitions
which returns a transition name array.
For each of the states (meaning the following method is contained in the state object), the transitions map
is defined:
sub getTransitions
which returns a hash where the key is a string and the value is an integer.
SMC Programmer’s Manual
Page 94 of 109

•PHP: The top-level context class contains the methods:
public function getStates()
which returns a state array.
public function getTransitions()
which returns a transition name array.
For each of the states (meaning the following method is contained in the state object), the transitions map
is defined:
public function getTransitions()
which returns an associative array where the key is a string and the value is an integer.
•Python: The top-level context class contains the methods:
def getStates(self)
which returns a state array.
def getTransitions(self)
which returns a transition name array.
For each of the states (meaning the following method is contained in the state object), the transitions map
is defined:
def getTransitions(self)
which returns a dict where the key is a string and the value is an integer.
•Ruby: The top-level context class contains the methods:
def getStates()
which returns a state array.
def getTransitions()
which returns a transition name array.
For each of the states (meaning the following method is contained in the state object), the transitions map
is defined:
def getTransitions()
which returns a dict where the key is a string and the value is an integer.
SMC Programmer’s Manual
Page 95 of 109

•Scala: The top-level context class contains the methods:
def getStates(): List[<context>State]
which returns a state list.
def getTransitions(): List[String]
which returns a transition name list.
For each of the states (meaning the following method is contained in the state object), the transitions map
is defined:
def getTransitions(): Map[String, int]
which returns a map where the key is a string and the value is an integer.
•[incr Tcl]: The top-level context class contains the methods:
public method getStates{}
which returns a state instances array.
public method getTransitions {}
which returns a transition name array.
•VB.net: The top-level context class contains the get-only property:
Public Property States() As <context>State()
For each of the states, there is the get-only property:
Public ReadOnly Property Transitions() As IDictionary
where the key is a string and the value is an int.
Note: if the -generic option is used, then SMC emits:
Public ReadOnly Property Transitions() As IDictionary(Of String, Integer)
The transition’s associated integer value is limited to:
•0: The transition is undefined in the current state.
•1: The transition is defined in the current state.
•2: The transition is defined in the default state.
This allows an application to discover which transitions a state supports.
Note: the returned transition names map includes the Default transition.
This feature is most useful for user interface developers who need to activate and deactivate features based
on the current state. The user's actions are limited to the current state's transitions.
SMC Programmer’s Manual
Page 96 of 109

Reminder: You cannot call getState() while in a transition because the state is not set. If need to
determine which state you just left while in transition. call getPreviousState().
Java Sample
import java.util.Iterator;
import java.util.Map;
public void processEvent(EventObject event) {
// Transform this event into a FSM transition:
if (event instanceof OpenEvent) {
_fsm.openFile((OpenEvent) event);
}
else if ... {
}
// Now figure out what features are active and inactive based on the
// current state's returned transition map.
Map<String, Integer> transitions = (_fsm.getState()).getTransitions();
String transition;
int status;
for (Map.Entry<String, Integer> entry: transitions.entrySet()) {
transition = entry.getKey();
status = (entry.getValue()).intValue();
// Ignore the Default transition.
if (transitions.equals("Default") == true) {
// no-op
}
// 0 - transition is undefined.
// 1 - transition is explicity defined in the state.
// 2 - transition is defined in Default state.
else if (status == 0) {
// Deactivate feature.
}
else if (status == 1) {
// Activate feature.
}
else {
// Do something else for default definitions.
}
}
}
SMC Programmer’s Manual
Page 97 of 109

C# Sample
using System.Collections.Generic;
public void processEvent(Object event) {
// Transform this event into a FSM transition:
if (event is OpenEvent) {
_fsm.openFile(event);
}
else if ...
// Now figure out what features are active and inactive based on the
// returned transition map.
IDictionary<string, int> transitions = (_fsm.getState()).Transitions;
int status;
foreach (string name in transitions.Keys) {
status = transitions[name];
// Ignore the Default transition.
if (name == "Default") {
// no-op
}
// 0 - transition is undefined.
// 1 - transition is explicity defined in the state.
// 2 - transition is defined in Default state.
else if (status == 0) {
// Deactivate feature.
}
else if (status == 1) {
// Activate feature.
}
else {
// Do something else for default definitions.
}
}
}
SMC Programmer’s Manual
Page 98 of 109

[incr Tcl] Sample
Using System.Collections
public method ProcessEvent{event} {
# Transform this event into a FSM transition:
if {$event = "open"} {
_fsm.Open()
} elseif {...} {
...
}
# Now figure out what features are active and inactive based on the
# returned transition map.
foreach {name status} [[_fsm getState] transitions] {
# Ignore the Default transition.
# 0 - transition is undefined.
# 1 - transition is explicity defined in the state.
# 2 - transition is defined in Default state.
if {$name = "Default"} {
# no-op
} elseif {$status = 0} {
# Deactivate feature.
} elseif {$status = 1} {
# Activate feature.
} else {
# Do something else for default definitions.
}
}
}
SMC Programmer’s Manual
Page 99 of 109

Section 12: Getting Noticed
SMC uses the Java Bean event notification and .Net event raising features to inform listeners when an SMC-
generated finite state machine changes state. The following sample code demonstrates how to use this
feature in Java, C#, VB.net, Groovy, and Scala.
Java Sample
SMC uses Java Beans package for state change notification. statemap.FSMContext defines the
addStateChangeListener and removeStateChangeListener methods. Because the SMC-
generated FSMContext subclass is privately contained within an application class, it will be necessary to
expose the add, remove methods by adding these methods to the application class.
Note: Because applications use multiple state machines and a state change handler may register with
multiple FSMs, I have added the methods FSMContext.getName() and
FSMContext.setName(String). This name should be set and used to distinguish between FSMs.
import java.beans.PropertyChangeListener;
public class AppClass {
...
public void addStateChangeListener(PropertyChangeListener listener) {
_fsm.addStateChangeListener(listener);
return;
}
public void removeStateChangeListener(PropertyChangeListener listener) {
_fsm.removeStateChangeListener(listener);
return;
}
...
private final AppClassContext _fsm;
}
SMC Programmer’s Manual
Page 100 of 109

Implement the java.beans.PropertyChangeListener interface and pass that implementation to
AppClass.addStateChangeListener. When the AppClass finite state machine changes state, the
listener receives a java.beans.PropertyChangeEvent containing:
•the FSMContext instance as the source,
•the “State” property name,
•the previous state (class statemap.State), and
•the new state (also class statemap.State).
import java.beans.PropertyChangeEvent;
import java.beans.PropertyChangeListener;
import statemap.FSMContext;
import statemap.State;
public class StateChangeListener implements PropertyChangeListener {
...
public void propertyChange(PropertyChangeEvent event) {
FSMContext fsm = (FSMContext) event.getSource();
String propertyName = event.getPropertyName();
State previousStatus = (State) event.getOldValue();
State newState = (State) event.getNewValue();
// Handle the state change event.
System.out.println("FSM " +
fsm.getName() +
" went from " +
previousState +
" to " +
newState +
".");
return;
}
}
Register the StateChangeListener with the FSM as follows:
StateChangeListener listener = new StateChangeListener();
AppClass appInstance = new AppClass();
appInstance.addStateChangeListener(listener);
Note: Groovy and Scala also use Java Bean event notification.
SMC Programmer’s Manual
Page 101 of 109

C# Sample
.Net events required listeners to register an event directly with the event-raising object. For SMC, the finite
state machine class FSMContext does the event raising. But the context class should be kept private within
the application class. The following code shows how to add and remove state change listeners indirectly,
leaving the FSM inaccessible.
The StateChangeEventArgs data methods are:
•FSMName() - returns the FSM name as a string.
•TransitionType() - returns one of the following strings: “SET”, “PUSH”, or “POP”.
•PreviousState() - returns the state which the FSM exited.
•NewState() - returns the state which the FSM entered.
Note: Because applications use multiple state machines and a state change handler may register with
multiple FSMs, I have added the property FSMContext.Name. This name is placed into
StateChangeEventArgs to allow ready identification of which FSM changed state. The default state
name is "FSMContext".
use System;
use statemap;
public class AppClass {
....
public void AddStateChangeHandler(StateChangeEventHandler handler) {
_fsm.StateChange += handler;
return;
}
public void RemoveStateChangeHandler(StateChangeEventHandler handler) {
_fsm.StateChange -= handler;
return;
}
}
If a class wishes to receive state change events, then it must implement a method with the following
signature. Note: the method does not have to be named StateChanged.
SMC Programmer’s Manual
Page 102 of 109

use System;
use statemap;
public class StateChangeHandler {
public void StateChanged(object sender, StateChangeEventArgs args) {
//Handle the state change event.
Console.WriteLine("FSM " +
args.FSMName() +
" " +
args.TransitionType() +
" transition from " +
args.PreviousState() +
" to " +
args.NewState() +
".");
return;
}
}
Register the state change handler instance with the FSM as follows:
StateChangeHandler handler = new StateChangeHandler();
AppClass appInstance = new AppClass();
appInstance.AddStateChangeHandler(
new StateChangeEventHandler(handler.StateChange));
SMC Programmer’s Manual
Page 103 of 109

VB.net Sample
State change event handlers register indirectly via these application class methods (which you must add to
your code).
Public Class AppClass
...
Public Sub AddStateChangeHandler(handler As _
statemap.StateChangeEventHandler)
AddHandler _fsm.StateChange, handler
End Sub
Public Sub RemoveStateChangeHandler(handler As _
statemap.StateChangeEventHandler)
RemoveHandler _fsm.StateChange, handler
End Sub
End Class
If a class wishes to receive state change events, then it must implement a method with the following
signature.
(See the C# sample for more about StateChangeEventArgs.)
Imports System
Imports statemap
Public Class StateChangeHandler
...
Public Sub StateChange(sender As Object, e As StateChangeEventArgs)
Console.Write("FSM ")
Console.Write(e.FSMName())
Console.Write(" ")
Console.Write(e.TransitionType())
Console.Write(" transition from ")
Console.Write(e.PreviousState())
Console.Write(" to ")
Console.Write(e.NewState())
Console.WriteLine(".")
End Sub
End Class
SMC Programmer’s Manual
Page 104 of 109

Register the state change handler with the FSM as follows:
Dim handler As StateChangeHandler = new StateChangeHandler()
Dim appInstance As AppClass = new AppClass()
appInstance.addStateChangeHandler(AddressOf handler.StateChange)
SMC Programmer’s Manual
Page 105 of 109
Section 13: Giving Direction
The SMC syntax provides a number of % directives. Each directive's use is described in this section.
% Directives
%start - Specifies the state machine start state in the form <map name>::<state name>
Required: Yes.
Supported target languages: All.
%class - Specifies the associated state machine context class providing the guard and action methods.
Required: Yes.
Supported target languages: All.
%fsmclass - Specifies the generated state machine class name.
Required: No.
Default settings: <%class name>Context
Supported target languages: All.
%fsmfile - Specifies the generated state machine class file name. This filename is appended with the
appropriate suffix to generate the full file name. The file name suffix may be changed from its default, target
language-specific value by using the -suffix and -hsuffix command line parameters.
Required: No.
Default settings: See this table for the default FSM class name, FSM file name, and suffix for each supported
target programming language.
Supported target languages: All.
%package - Puts the generated code into this package/namespace.
Required: No.
Default settings: None.
Supported target languages: All.
SMC Programmer’s Manual
Page 106 of 109

%include - Used to include header file needed by the generated state machine code.
Required: No.
Default setting: No includes.
Supported target languages: C, C++, Objective-C
%import - Used to import/use a class/package needed by the generated state machine code.
Required: No.
Default setting: No imports.
Supported target languages: C#, C++, Groovy, JavaScript, Java, Lua, Perl, PHP, Python, Ruby, Scala, Tcl,
VB.net
%declare - C/C++/Objective-C forward declaration placed in the generated header file.
Required: No.
Default setting: No declarations.
Supported target languages: C, C++, Objective-C
%access - Specifies the generated class accessibility level.
Required: No.
Default setting: None.
Supported target languages: C#
%map - SMC states are grouped into maps. The %map is followed by two %% groups. The state definitions
appear between the %% groups.
SMC Programmer’s Manual
Page 107 of 109

Appendix A: SMC EBNF Grammar
FSM := source? start_state class_name header_file? include_file*
package_name* import* declare* access* map+
source := '%{' raw_code '%}'
start_state := '%start' word
class_name := '%class' word
header_file := '%header' raw_code_line
include_file := '%include' raw_code_line
package_name := '%package' word
import := '%import' raw_code_line
declare := '%declare' raw_code_line
access := '%access' raw_code_line
map := '%map' word '%%' states '%%'
states := word entry? exit? '{' transitions* '}'
entry := 'Entry {' actions* '}'
exit := 'Exit {' actions '}'
transitions := word transition_args? guard? next_state '{' actions '}'
transition_args := '(' parameters ')'
parameters := parameter |
parameter ',' parameters
parameter := word ':' raw_code
guard := '[' raw_code ']'
next_state := word |
'nil' |
push_transition |
pop_transition
push_transition := word '/' 'push(' word ')' |
'nil/push(' word ')' |
'push(' word ')'
SMC Programmer’s Manual
Page 108 of 109

pop_transition := 'pop' |
'pop(' word? ')' |
'pop(' word ',' pop_arguments* ')'
pop_arguments := raw_code |
raw_code ',' pop_arguments
actions := dotnet_assignment |
action |
action actions
dotnet_assignment := word '=' raw_code ';'
action := word '(' arguments* ');' arguments := raw_code |
raw_code ',' arguments
word := [A-Za-z][A-Za-z0-9_.]* |
_[A-Za-z][A-Za-z0-9_.]*
// Reads in code verbatim until end-of-line is reached.
raw_code_line := .* '\n\r\f'
// Read in code verbatim.
raw_code := .*
// Both the // and /* */ comment types are supported.
// Note: SMC honors nested /* */ comments.
comment1 := '//' .* '\n\r\f'
comment2 := '/*' .* '*/'
SMC Programmer’s Manual
Page 109 of 109
