STAN User Manual Version 2.17.0
User Manual:
Open the PDF directly: View PDF ![]() .
.
Page Count: 637 [warning: Documents this large are best viewed by clicking the View PDF Link!]
- Preface
- Acknowledgements
- I Introduction
- II Stan Modeling Language
- III Example Models
- Regression Models
- Time-Series Models
- Missing Data & Partially Known Parameters
- Truncated or Censored Data
- Finite Mixtures
- Measurement Error and Meta-Analysis
- Latent Discrete Parameters
- Sparse and Ragged Data Structures
- Clustering Models
- Gaussian Processes
- Directions, Rotations, and Hyperspheres
- Solving Algebraic Equations
- Solving Differential Equations
- IV Programming Techniques
- V Inference
- VI Algorithms & Implementations
- VII Built-In Functions
- VIII Discrete Distributions
- IX Continuous Distributions
- Unbounded Continuous Distributions
- Positive Continuous Distributions
- Non-negative Continuous Distributions
- Positive Lower-Bounded Probabilities
- Continuous Distributions on [0, 1]
- Circular Distributions
- Bounded Continuous Probabilities
- Distributions over Unbounded Vectors
- Simplex Distributions
- Correlation Matrix Distributions
- Covariance Matrix Distributions
- X Software Development
- Appendices

Stan Development Team (2017) Stan Modeling Language: User’s Guide
and Reference Manual. Version 2.17.0.
Copyright © 2011–2017, Stan Development Team.
This document is distributed under the Creative Commons Attribution
4.0 International License (CC BY-ND 4.0). For full details, see
https://creativecommons.org/licenses/by-nd/4.0/legalcode
The Stan logo is distributed under the Creative Commons Attribution-
NoDerivatives 4.0 International License (CC BY-ND 4.0). For full details,
see
https://creativecommons.org/licenses/by-nd/4.0/legalcode
Stan Development Team
Currently Active Developers
This is the list of current developers in order of joining the development team (see
the next section for former development team members).
• Andrew Gelman (Columbia University)
Stan, RStan, RStanArm
• Bob Carpenter (Columbia University)
Stan Math, Stan, CmdStan
• Daniel Lee (Stan Group, Inc.)
Stan Math, Stan, CmdStan, RStan, PyStan, dev ops
• Ben Goodrich (Columbia University)
Stan Math, Stan, RStan, RStanArm
• Michael Betancourt (University of Warwick)
Stan Math, Stan, CmdStan
• Marcus Brubaker (York University)
Stan Math, Stan
• Jiqiang Guo (NPD Group)
Stan Math, Stan, RStan
• Allen Riddell (Indiana University)
PyStan, dev ops
• Marco Inacio (University of São Paulo/UFSCar)
Stan Math, Stan
• Jeffrey Arnold (University of Washington)
Emacs Mode, Pygments mode
• Mitzi Morris (Consultant, New York)
Stan Math, Stan, CmdStan, dev ops
• Rob J. Goedman (Consultant, La Jolla, California)
Stan, Stan.jl
• Brian Lau (CNRS, Paris)
MatlabStan
iii
• Rob Trangucci (Columbia University)
Stan Math, Stan, RStan
• Jonah Sol Gabry (Columbia University)
RStan, RStanArm, ShinyStan, Loo, BayesPlot
• Robert L. Grant (Consultant, London)
StataStan
• Krzysztof Sakrejda (University of Massachusetts, Amherst)
Stan Math, Stan
• Aki Vehtari (Aalto University)
Stan Math, Stan, MatlabStan, RStan, Loo, BayesPlot
• Rayleigh Lei (University of Michigan)
Stan Math, Stan, RStan
• Sebastian Weber (Novartis Pharma)
Stan Math, Stan, RStan, RStanArm, BayesPlot
• Charles Margossian (Metrum LLC)
Stan Math, Stan
• Thel Seraphim (Columbia University)
Stan Math, Stan
• Vincent Picaud (CEA, France)
MathematicaStan
• Imad Ali (Columbia University)
RStan, RStanArm
• Sean Talts (Columbia University)
Stan Math, Stan, dev ops
• Ben Bales (University of California, Santa Barbara)
Stan Math
• Ari Hartikainen (Aalto University)
PyStan
iv
Development Team Alumni
These are developers who have made important contributions in the past, but are no
longer contributing actively.
• Matt Hoffman (while at Columbia University)
Stan Math, Stan, CmdStan
• Michael Malecki (while at Columbia University)
software and graphical design
• Peter Li (while at Columbia University)
Stan Math, Stan
• Yuanjun Guo (while at Columbia University)
Stan
• Alp Kucukelbir (while at Columbia University)
Stan, CmdStan
• Dustin Tran (while at Columbia University)
Stan, CmdStan
v
Contents
Preface x
Acknowledgements xvi
I Introduction 20
1. Overview 21
II Stan Modeling Language 29
2. Encodings, Includes, and Comments 30
3. Data Types and Variable Declarations 33
4. Expressions 53
5. Statements 74
6. Program Blocks 98
7. User-Defined Functions 109
8. Execution of a Stan Program 116
III Example Models 122
9. Regression Models 123
10. Time-Series Models 162
11. Missing Data & Partially Known Parameters 180
12. Truncated or Censored Data 186
13. Finite Mixtures 191
14. Measurement Error and Meta-Analysis 203
15. Latent Discrete Parameters 210
16. Sparse and Ragged Data Structures 230
17. Clustering Models 233
18. Gaussian Processes 246
19. Directions, Rotations, and Hyperspheres 268
20. Solving Algebraic Equations 271
vi
21. Solving Differential Equations 275
IV Programming Techniques 284
22. Reparameterization & Change of Variables 285
23. Custom Probability Functions 296
24. User-Defined Functions 298
25. Problematic Posteriors 309
26. Matrices, Vectors, and Arrays 323
27. Multiple Indexing and Range Indexing 329
28. Optimizing Stan Code for Efficiency 337
V Inference 363
29. Bayesian Data Analysis 364
30. Markov Chain Monte Carlo Sampling 368
31. Penalized Maximum Likelihood Point Estimation 377
32. Bayesian Point Estimation 385
33. Variational Inference 387
VI Algorithms & Implementations 389
34. Hamiltonian Monte Carlo Sampling 390
35. Transformations of Constrained Variables 403
36. Optimization Algorithms 420
37. Variational Inference 423
38. Diagnostic Mode 425
VII Built-In Functions 427
39. Void Functions 428
40. Integer-Valued Basic Functions 429
41. Real-Valued Basic Functions 432
42. Array Operations 457
vii
43. Matrix Operations 464
44. Sparse Matrix Operations 486
45. Mixed Operations 489
46. Compound Arithmetic and Assignment 492
47. Algebraic Equation Solver 496
48. Ordinary Differential Equation Solvers 499
VIII Discrete Distributions 502
49. Conventions for Probability Functions 503
50. Binary Distributions 508
51. Bounded Discrete Distributions 510
52. Unbounded Discrete Distributions 516
53. Multivariate Discrete Distributions 521
IX Continuous Distributions 522
54. Unbounded Continuous Distributions 523
55. Positive Continuous Distributions 531
56. Non-negative Continuous Distributions 539
57. Positive Lower-Bounded Probabilities 541
58. Continuous Distributions on [0, 1] 543
59. Circular Distributions 545
60. Bounded Continuous Probabilities 547
61. Distributions over Unbounded Vectors 548
62. Simplex Distributions 555
63. Correlation Matrix Distributions 556
64. Covariance Matrix Distributions 559
X Software Development 561
65. Model Building as Software Development 562
66. Software Development Lifecycle 568
viii
Preface
Why Stan?
We did not set out to build Stan as it currently exists. We set out to apply full Bayesian
inference to the sort of multilevel generalized linear models discussed in Part II of
(Gelman and Hill,2007). These models are structured with grouped and interacted
predictors at multiple levels, hierarchical covariance priors, nonconjugate coefficient
priors, latent effects as in item-response models, and varying output link functions
and distributions.
The models we wanted to fit turned out to be a challenge for current general-
purpose software. A direct encoding in BUGS or JAGS can grind these tools to a
halt. Matt Schofield found his multilevel time-series regression of climate on tree-
ring measurements wasn’t converging after hundreds of thousands of iterations.
Initially, Aleks Jakulin spent some time working on extending the Gibbs sampler
in the Hierarchical Bayesian Compiler (Daumé,2007), which as its name suggests, is
compiled rather than interpreted. But even an efficient and scalable implementation
does not solve the underlying problem that Gibbs sampling does not fare well with
highly correlated posteriors. We finally realized we needed a better sampler, not a
more efficient implementation.
We briefly considered trying to tune proposals for a random-walk Metropolis-
Hastings sampler, but that seemed too problem specific and not even necessarily
possible without some kind of adaptation rather than tuning of the proposals.
The Path to Stan
We were at the same time starting to hear more and more about Hamiltonian Monte
Carlo (HMC) and its ability to overcome some of the the problems inherent in Gibbs
sampling. Matt Schofield managed to fit the tree-ring data using a hand-coded imple-
mentation of HMC, finding it converged in a few hundred iterations.
HMC appeared promising but was also problematic in that the Hamiltonian dy-
namics simulation requires the gradient of the log posterior. Although it’s possible
to do this by hand, it is very tedious and error prone. That’s when we discovered
reverse-mode algorithmic differentiation, which lets you write down a templated C++
function for the log posterior and automatically compute a proper analytic gradient
up to machine precision accuracy in only a few multiples of the cost to evaluate the
log probability function itself. We explored existing algorithmic differentiation pack-
ages with open licenses such as rad (Gay,2005) and its repackaging in the Sacado
module of the Trilinos toolkit and the CppAD package in the coin-or toolkit. But nei-
ther package supported very many special functions (e.g., probability functions, log
x

gamma, inverse logit) or linear algebra operations (e.g., Cholesky decomposition) and
were not easily and modularly extensible.
So we built our own reverse-mode algorithmic differentiation package. But once
we’d built our own reverse-mode algorithmic differentiation package, the problem
was that we could not just plug in the probability functions from a package like Boost
because they weren’t templated on all the arguments. We only needed algorithmic
differentiation variables for parameters, not data or transformed data, and promotion
is very inefficient in both time and memory. So we wrote our own fully templated
probability functions.
Next, we integrated the Eigen C++ package for matrix operations and linear alge-
bra functions. Eigen makes extensive use of expression templates for lazy evaluation
and the curiously recurring template pattern to implement concepts without virtual
function calls. But we ran into the same problem with Eigen as with the existing prob-
ability libraries — it doesn’t support mixed operations of algorithmic differentiation
variables and primitives like double.
At this point (Spring 2011), we were happily fitting models coded directly in C++
on top of the pre-release versions of the Stan API. Seeing how well this all worked, we
set our sights on the generality and ease of use of BUGS. So we designed a modeling
language in which statisticians could write their models in familiar notation that could
be transformed to efficient C++ code and then compiled into an efficient executable
program. It turned out that our modeling language was a bit more general than we’d
anticipated, and we had an imperative probabilistic programming language on our
hands.1
The next problem we ran into as we started implementing richer models is vari-
ables with constrained support (e.g., simplexes and covariance matrices). Although it
is possible to implement HMC with bouncing for simple boundary constraints (e.g.,
positive scale or precision parameters), it’s not so easy with more complex multi-
variate constraints. To get around this problem, we introduced typed variables and
automatically transformed them to unconstrained support with suitable adjustments
to the log probability from the log absolute Jacobian determinant of the inverse trans-
forms.
Even with the prototype compiler generating models, we still faced a major hurdle
to ease of use. HMC requires a step size (discretization time) and number of steps
(for total simulation time), and is very sensitive to how they are set. The step size
parameter could be tuned during warmup based on Metropolis rejection rates, but
the number of steps was not so easy to tune while maintaining detailed balance in
the sampler. This led to the development of the No-U-Turn sampler (NUTS) (Hoffman
1In contrast, BUGS and JAGS can be viewed as declarative probabilistic programming languages for
specifying a directed graphical model. In these languages, stochastic and deterministic (poor choice of
name) nodes may represent random quantities.
xi
and Gelman,2011,2014), which takes an exponentially increasing number of steps
(structured as a binary tree) forward and backward in time until the direction of the
simulation turns around, then uses slice sampling to select a point on the simulated
trajectory.
Although not part of the original Stan prototype, which used a unit mass matrix,
Stan now allows a diagonal or dense mass matrix to be estimated during warmup.
This allows adjustment for globally scaled or correlated parameters. Without this
adjustment, models with differently scaled parameters could only mix as quickly as
their most constrained parameter allowed.
We thought we were home free at this point. But when we measured the speed of
some BUGS examples versus Stan, we were very disappointed. The very first example
model, Rats, ran more than an order of magnitude faster in JAGS than in Stan. Rats
is a tough test case because the conjugate priors and lack of posterior correlations
make it an ideal candidate for efficient Gibbs sampling. But we thought the efficiency
of compilation might compensate for the lack of ideal fit to the problem.
We realized we were doing redundant calculations, so we wrote a vectorized form
of the normal distribution for multiple variates with the same mean and scale, which
sped things up a bit. At the same time, we introduced some simple template metapro-
grams to remove the calculation of constant terms in the log probability. These both
improved speed, but not enough. Finally, we figured out how to both vectorize and
partially evaluate the gradients of the densities using a combination of expression
templates and metaprogramming. At this point, we are within a small multiple of a
hand-coded gradient function.
Later, when we were trying to fit a time-series model, we found that normalizing
the data to unit sample mean and variance sped up the fits by an order of magnitude.
Although HMC and NUTS are rotation invariant (explaining why they can sample effec-
tively from multivariate densities with high correlations), they are not scale invariant.
Gibbs sampling, on the other hand, is scale invariant, but not rotation invariant.
We were still using a unit mass matrix in the simulated Hamiltonian dynamics.
The last tweak to Stan before version 1.0 was to estimate a diagonal mass matrix
during warmup; this has since been upgraded to a full mass matrix in version 1.2.
Both these extensions go a bit beyond the NUTS paper on arXiv. Using a mass matrix
sped up the unscaled data models by an order of magnitude, though it breaks the
nice theoretical property of rotation invariance. The full mass matrix estimation has
rotational invariance as well, but scales less well because of the need to invert the
mass matrix at the end of adaptation blocks and then perform matrix multiplications
every leapfrog step.
xii
Stan 2
It’s been over a year since the initial release of Stan, and we have been overjoyed by
the quantity and quality of models people are building with Stan. We’ve also been a
bit overwhelmed by the volume of traffic on our user’s list and issue tracker.
We’ve been particularly happy about all the feedback we’ve gotten about instal-
lation issues as well as bugs in the code and documentation. We’ve been pleasantly
surprised at the number of such requests which have come with solutions in the form
of a GitHub pull request. That certainly makes our life easy.
As the code base grew and as we became more familiar with it, we came to realize
that it required a major refactoring (see, for example, (Fowler et al.,1999) for a nice
discussion of refactoring). So while the outside hasn’t changed dramatically in Stan 2,
the inside is almost totally different in terms of how the HMC samplers are organized,
how the output is analyzed, how the mathematics library is organized, etc.
We’ve also improved our original simple optimization algorithms and now use L-
BFGS (a limited memory quasi-Newton method that uses gradients and a short history
of the gradients to make a rolling estimate of the Hessian).
We’ve added more compile-time and run-time error checking for models. We’ve
added many new functions, including new matrix functions and new distributions.
We’ve added some new parameterizations and managed to vectorize all the univariate
distributions. We’ve increased compatibility with a range of C++ compilers.
We’ve also tried to fill out the manual to clarify things like array and vector in-
dexing, programming style, and the I/O and command-line formats. Most of these
changes are direct results of user-reported confusions. So please let us know where
we can be clearer or more fully explain something.
Finally, we’ve fixed all the bugs which we know about. It was keeping up with the
latter that really set the development time back, including bugs that resulted in our
having to add more error checking.
Perhaps most importantly, we’ve developed a much stricter process for unit test-
ing, code review, and automated integration testing (see Chapter 66).
As fast and scalable as Stan’s MCMC sampling is, for large data sets it can still be
prohibitively slow. Stan 2.7 introduced variational inference for arbitrary Stan mod-
els. In contrast to penalized maximum likelihood, which finds the posterior mode,
variational inference finds an approximation to the posterior mean (both methods
use curvature to estimate a multivariate normal approximation to posterior covari-
ance). This promises Bayesian inference at much larger scale than is possible with
MCMC methods. In examples we’ve run, problems that take days with MCMC com-
plete in half an hour with variational inference. There is still a long road ahead in
understanding these variational approximations, both in how good the multivariate
approximation is to the true posterior and which forms of models can be fit efficiently,
xiii
scalably, and reliably.
Stan’s Future
We’re not done. There’s still an enormous amount of work to do to improve Stan.
Some older, higher-level goals are in a standalone to-do list:
https://github.com/stan-dev/stan/wiki/
Longer-Term-To-Do-List
We are gradually weaning ourselves off of the to-do list in favor of the GitHub
issue tracker (see the next section for a link).
Some major features are on our short-term horizon: Riemannian manifold Hamil-
tonian Monte Carlo (RHMC), transformed Laplace approximations with uncertainty
quantification for maximum likelihood estimation, marginal maximum likelihood
estimation, data-parallel expectation propagation, and streaming (stochastic) varia-
tional inference. The latter has been prototyped and described in papers.
We will also continue to work on improving numerical stability and efficiency
throughout. In addition, we plan to revise the interfaces to make them easier to
understand and more flexible to use (a difficult pair of goals to balance).
Later in the Stan 2 release cycle (Stan 2.7), we added variational inference to Stan’s
sampling and optimization routines, with the promise of approximate Bayesian infer-
ence at much larger scales than is possible with Monte Carlo methods. The future
plans involve extending to a stochastic data-streaming implementation for very large-
scale data problems.
You Can Help
Please let us know if you have comments about this manual or suggestions for Stan.
We’re especially interested in hearing about models you’ve fit or had problems fitting
with Stan. The best way to communicate with the Stan team about user issues is
through the following user’s group.
http://groups.google.com/group/stan-users
For reporting bugs or requesting features, Stan’s issue tracker is at the following
location.
https://github.com/stan-dev/stan/issues
xiv

One of the main reasons Stan is freedom-respecting, open-source software2is that
we love to collaborate. We’re interested in hearing from you if you’d like to volunteer
to get involved on the development side. We have all kinds of projects big and small
that we haven’t had time to code ourselves. For developer’s issues, we have a separate
group.
http://groups.google.com/group/stan-dev
To contact the project developers off the mailing lists, send email to
mc.stanislaw@gmail.com
The Stan Development Team
Tuesday 5th September, 2017
2See Appendix Afor more information on Stan’s licenses and the licenses of the software on which it
depends.
xv
Acknowledgements
Institutions
We thank Columbia University along with the Departments of Statistics and Political
Science, the Applied Statistics Center, the Institute for Social and Economic Research
and Policy (iserp), and the Core Research Computing Facility.
Grants and Corporate Support
Without the following grant and consulting support, Stan would not exist.
Current Grants
• U. S. Department of Education Institute of Education Sciences
–Statistical and Research Methodology: Solving Difficult Bayesian Computation
Problems in Education Research Using Stan
• Alfred P. Sloan Foundation
–G-2015-13987: Stan Community and Continuity (non-research)
• U. S. Office of Naval Research (ONR)
–Informative Priors for Bayesian Inference and Regularization
Previous Grants
Stan was supported in part by
• U. S. Department of Energy
–DE-SC0002099: Petascale Computing
• U. S. National Science Foundation
–ATM-0934516: Reconstructing Climate from Tree Ring Data
–CNS-1205516: Stan: Scalable Software for Bayesian Modeling
• U. S. Department of Education Institute of Education Sciences
–ED-GRANTS-032309-005: Practical Tools for Multilevel Hierarchical Modeling in
Education Research
–R305D090006-09A: Practical Solutions for Missing Data
xvi
• U. S. National Institutes of Health
–1G20RR030893-01: Research Facility Improvement Grant
Stan Logo
The original Stan logo was designed by Michael Malecki. The current logo is de-
signed by Michael Betancourt, with special thanks to Stephanie Mannheim (http:
//www.stephaniemannheim.com/) for critical refinements. The Stan logo is copy-
right 2015 Michael Betancourt and released for use under the CC-BY ND 4.0 license
(i.e., no derivative works allowed).
Individuals
We thank John Salvatier for pointing us to automatic differentiation and HMC in the
first place. And a special thanks to Kristen van Leuven (formerly of Columbia’s ISERP)
for help preparing our initial grant proposals.
Code and Doc Patches
Thanks for bug reports, code patches, pull requests, and diagnostics to: Ethan Adams,
Avraham Adler, Jarret Barber, David R. Blair, Miguel de Val-Borro, Ross Boylan, Eric
N. Brown, Devin Caughey, Emmanuel Charpentier, Daniel Chen, Jacob Egner, Ash-
ley Ford, Jan Gläscher, Robert J. Goedman, Danny Goldstein, Tom Haber, B. Harris,
Kevin Van Horn, Stephen Hoover, Andrew Hunter, Bobby Jacob, Bruno Jacobs, Filip
Krynicki Dan Lakeland, Devin Leopold, Nathanael I. Lichti, Jussi Määttä, Titus van
der Malsburg, P. D. Metcalfe, Kyle Meyer, Linas Mockus, Jeffrey Oldham, Tomi Pel-
tola, Joerg Rings, Cody T. Ross, Patrick Snape, Matthew Spencer, Wiktor Soral, Alexey
Stukalov, Fernando H. Toledo, Arseniy Tsipenyuk, Zhenming Su, Matius Simkovic,
Matthew Zeigenfuse, and Alex Zvoleff.
Thanks for documentation bug reports and patches to: alvaro1101 (GitHub han-
dle), Avraham Adler, Chris Anderson, Asim, Jarret Barber, Ryan Batt, Frederik Beau-
jean, Guido Biele, Luca Billi, Chris Black, botanize (GitHub handle), Portia Brat, Arthur
Breitman, Eric C. Brown, Juan Sebastián Casallas, Alex Chase, Daniel Chen, Roman
Cheplyaka, Andy Choi, David Chudzicki, Michael Clerx, Andria Dawson, daydreamt
(GitHub handle), Conner DiPaolo, Eric Innocents Eboulet, José Rojas Echenique, An-
drew Ellis, Gökçen Eraslan, Rick Farouni, Avi Feller, Seth Flaxman, Wayne Folta, Ashley
Ford, Kyle Foreman, Mauricio Garnier-Villarreal, Christopher Gandrud, Jonathan Gilli-
gan, John Hall, David Hallvig, David Harris, C. Hoeppler, Cody James Horst, Herra
Huu, Bobby Jacob, Max Joseph, Julian King, Fränzi Korner-Nievergelt, Juho Kokkala,
xvii

Takahiro Kubo, Mike Lawrence, Louis Luangkesorn, Tobias Madsen, Stefano Mangiola,
David Manheim, Stephen Martin, Sean Matthews, David Mawdsley, Dieter Menne, Eve-
lyn Mitchell, Javier Moreno, Robert Myles,xs Sunil Nandihalli, Eric Novik, Julia Palacios,
Tamas Papp, Anders Gorm Pedersen, Tomi Peltola, Andre Pfeuffer, Sergio Polini, Joerg
Rings, Sean O’Riordain, Brendan Rocks, Cody Ross, Mike Ross, Tony Rossini, Nathan
Sanders, James Savage, Terrance Savitsky, Dan Schrage, Gary Schulz, seldomworks
(GitHub handle), Janne Sinkkonen, skanskan (GitHub handle), Yannick Spill, sskates
(GitHub handle), Martin Stjernman, Dan Stowell, Alexey Stukalov, Dougal Sutherland,
John Sutton, Maciej Swat, J. Takoua, Andrew J. Tanentzap, Shravan Vashisth, Aki Ve-
htari, Damjan Vukcevic, Matt Wand, Amos Waterland, Sebastian Weber, Sam Weiss,
Luke Wiklendt, wrobell (GitHub handle), Howard Zail, Jon Zelner, and Xiubo Zhang
Thanks to Kevin van Horn for install instructions for Cygwin and to Kyle Foreman
for instructions on using the MKL compiler.
Bug Reports
We’re really thankful to everyone who’s had the patience to try to get Stan working
and reported bugs. All the gory details are available from Stan’s issue tracker at the
following URL.
https://github.com/stan-dev/stan/issues
Stanislaw Ulam, namesake of Stan and co-
inventor of Monte Carlo methods (Metropo-
lis and Ulam,1949), shown here holding
the Fermiac, Enrico Fermi’s physical Monte
Carlo simulator for neutron diffusion.
Image from (Giesler,2000).
!"#$%&'()*+,
!"#$%&'( )$"( "%#*+"')( ,-./0"1)",( /'"( -2( #%1,-0( '%0&*+13( )-( '-*4"( %
0%)$"0%)+.%*(&#-5*"0(6%'()$%)(-2(7-0&)"(,"(8/22-1(+1(9::;<(=1()$"(2-**-6+13(1">)()6-
."1)/#+"'?()$+'()".$1+@/"($%,(%(1/05"#(-2(-)$"#(/'"'<((=1()$"(9ABC'?(D1#+.-(E"#0+(/'",(+)
)-( '-*4"( &#-5*"0'(+1( 1"/)#-1( &$F'+.'?( %*)$-/3$( $"( 1"4"#( &/5*+'$",( $+'( #"'/*)'<( ( =1( G-'
H*%0-'(,/#+13(I-#*,(I%#(==?(E"#0+(%*-13(6+)$(J)%1(K*%0?(L-$1(4-1(M"/0%11?(M+.$-*%'
N")#-&-*+'?(%1,(-)$"#'(,+'./''",()$"(%&&*+.%)+-1(-2()$+'(')%)+')+.%*('%0&*+13()".$1+@/"()-
)$"( &#-5*"0'( )$"F( 6"#"( 6-#O+13( -1<( ( K*%0( &-+1)",( -/)( )$"( /'"( -2( "*".)#-0".$%1+.%*
.-0&/)"#'( )-( -4"#.-0"( )$"( *-13( %1,
)",+-/'( 1%)/#"( -2( )$"( .%*./*%)+-1'?( %1,
N")#-&-*+'( 1%0",( )$+'( &#"4+-/'*F( /11%0",
)".$1+@/"(PN-1)"(7%#*-Q(%2)"#(K*%0R'(/1.*"
6$-( 5-##-6",( 0-1"F( 2#-0( #"*%)+4"'
5".%/'"($"(ST/')($%,()-(3-()-(N-1)"(7%#*-Q
U)$"(3%05*+13(.%'+1-V<
W1( N%#.$( 99?( 9AX:?( L-$1( 4-1
M"/0%11('"1)(%(*"))"#(UY+.$)0F"#?(9AX:V()-
)$"( Z$"-#")+.%*( [+4+'+-1( *"%,"#( &#-&-'+13
)$"(/'"(-2()$+'()".$1+@/"(-1(DM=H7()-('-*4"
1"/)#-1( ,+22/'+-1( %1,( 0/*)+&*+.%)+-1
&#-5*"0'<( ( Z$+'( 6%'( )$"( 2+#')( &#-&-'%*( )-
/'"( )$"( N-1)"( 7%#*-( )".$1+@/"( -1( %1
"*".)#-1+.( ,+3+)%*( .-0&/)"#<( ( H*'-( +1( 9AX:?
D1#+.-( E"#0+( $%,( EDYN=H7( UE+3/#"( 9V?( %
0".$%1+.%*( %1%*-3( .-0&/)"#?( &#-3#%00",
)-(#/1(N-1)"(7%#*-(&#-5*"0'<((=1(9AX\?()$"
2+#')( #/1'( -1( %
,+3+)%*( .-0&/)"#
)--O( &*%."( -1
DM=H7( UE+3/#"( ;V<
=1( )$"( *%)"( 9AXC'
%1,( "%#*F( 9A]C'?
0%1F(&%&"#'(6"#"
6#+))"1( ,"'.#+5+13
)$"( N-1)"( 7%#*-
0")$-,( %1,( +)'
/'"( +1( '-*4+13
&#-5*"0'( +1
#%,+%)+-1( %1,
&%#)+.*"( )#%1'&-#)
%1,( -)$"#( %#"%'<
Z$"( 2+#')( -&"1
N-1)"( 7%#*-
.-12"#"1."( 6%'
$"*,( %)( K7GH( +1
)$"( '/00"#( -2
9AXA<( ( N%1F( -2( )$-'"( 0")$-,'( %#"( ')+**( +1( /'"( )-,%F( +1.*/,+13( )$"( #%1,-0( 1/05"#
3"1"#%)+-1(0")$-,(/'",(+1(N7M!<
-'./+0%12%%3#45"
-'./+0%62%%7)89%:;8<%&*;='9.%-3>!45"
xviii
Part I
Introduction
20
1. Overview
This document is both a user’s guide and a reference manual for Stan’s probabilistic
modeling language. This introductory chapter provides a high-level overview of Stan.
The remaining parts of this document include a practically-oriented user’s guide for
programming models and a detailed reference manual for Stan’s modeling language
and associated programs and data formats.
1.1. Stan Home Page
For links to up-to-date code, examples, manuals, bug reports, feature requests, and
everything else Stan related, see the Stan home page:
http://mc-stan.org/
1.2. Stan Interfaces
There are three interfaces for Stan that are supported as part of the Stan project.
Models and their use are the same across the three interfaces, and this manual is the
modeling language manual for all three interfaces. All of the interfaces share initial-
ization, sampling and tuning controls, and roughly share posterior analysis function-
ality.
The interfaces all provide getting-started guides, documentation, and full source
code.
CmdStan
CmdStan allows Stan to be run from the command line. In some sense, CmdStan is
the reference implementation of Stan. The CmdStan documentation used to be part
of this document, but is now its own standalone document. The CmdStan home page
is
http://mc-stan.org/cmdstan.html
RStan
RStan is the R interface to Stan. RStan interfaces to Stan through R’s memory rather
than just calling Stan from the outside, as in the R2WinBUGS and R2jags interfaces
on which it was modeled. The RStan home page is
http://mc-stan.org/rstan.html
21
PyStan
PyStan is the Python interface to Stan. Like RStan, it interfaces at the Python memory
level rather than calling Stan from the outside. The PyStan home page is
http://mc-stan.org/pystan.html
MatlabStan
MatlabStan is the MATLAB interface to Stan. Unlike RStan and PyStan, MatlabStan
currently wraps a CmdStan process. The MatlabStan home page is
http://mc-stan.org/matlab-stan.html
Stan.jl
Stan.jl is the Julia interface to Stan. Like MatlabStan, Stan.jl wraps a CmdStan process.
The Stan.jl home page is
http://mc-stan.org/julia-stan.html
StataStan
StataStan is the Stata interface to Stan. Like MatlabStan, Stan.jl wraps a CmdStan
process. The StataStan home page is
http://mc-stan.org/stata-stan.html
MathematicaStan
MathematicaStan is the Mathematica interface to Stan. Like MatlabStan, Mathemati-
caStan wraps a CmdStan process. The MathematicaStan home page is
http://mc-stan.org/mathematica-stan.html
1.3. Stan Programs
A Stan program defines a statistical model through a conditional probability function
p(θ|y, x), where θis a sequence of modeled unknown values (e.g., model parame-
ters, latent variables, missing data, future predictions), yis a sequence of modeled
known values, and xis a sequence of unmodeled predictors and constants (e.g., sizes,
hyperparameters).
Stan programs consist of variable type declarations and statements. Variable
types include constrained and unconstrained integer, scalar, vector, and matrix types,
22
as well as (multidimensional) arrays of other types. Variables are declared in blocks
corresponding to the variable’s use: data, transformed data, parameter, transformed
parameter, or generated quantity. Unconstrained local variables may be declared
within statement blocks.
The transformed data, transformed parameter, and generated quantities blocks
contain statements defining the variables declared in their blocks. A special model
block consists of statements defining the log probability for the model.
Within the model block, BUGS-style sampling notation may be used as shorthand
for incrementing an underlying log probability variable, the value of which defines the
log probability function. The log probability variable may also be accessed directly,
allowing user-defined probability functions and Jacobians of transforms.
Variable Constraints
Variable constraints are very important in Stan, particularly for parameters. For Stan
to sample efficiently, any parameter values that satisfy the constraints declared for
the parameters must have support in the model block (i.e., must have non-zero pos-
terior density).
Constraints in the data and transformed data block are only used for error check-
ing data input and transforms. Constraints in the transformed parameters block
must be satisfied the same way as parameter constraints or sampling will devolve to
a random walk or fail. Constraints in the generated quantities block must succeed or
sampling will be halted altogether because it is too late to reject a draw at the point
the generated quantities block is evaluated.
Execution Order
Statements in Stan are interpreted imperatively, so their order matters. Atomic state-
ments involve the assignment of a value to a variable. Sequences of statements (and
optionally local variable declarations) may be organized into a block. Stan also pro-
vides bounded for-each loops of the sort used in R and BUGS.
Probabilistic Programming Language
Stan is an imperative probabilistic programming language. It is an instance of
a domain-specific language, meaning that it was developed for a specific domain,
namely statistical inference.
Stan is a probabilistic programming language in the sense that a random variable
is a bona fide first-class object. In Stan, variables may be treated as random, and
among the random variables, some are observed and some are unknown and need to
be estimated or used for posterior predictive inference. Observed random variables
23

are declared as data and unobserved random variables are declared as parameters
(including transformed parameters, generated quantities, and local variables depend-
ing on them). For the unobserved random variables, it is possible to sample them
either marginally or jointly, estimate their means and variance, or plug them in for
downstream posterior predictive inference.
Stan is an imperative language, like C or Fortran (and parts of C++, R, Python, and
Java), in the sense that is based on assignment, loops, conditionals, local variables,
object-level function application, and array-like data structures. In contrast and/or
complement, functional languages typically allow higher-order functions and often
allow reflection of programming language features into the object language, whereas
pure functional languages remove assignment altogether. Object-oriented languages
introduce more general data types with dynamic function dispatch.
Stan’s language is Church-Turing complete Church (1936); Turing (1936); Hopcroft
and Motwani (2006), in the same way that C or R is. That means any program that is
computable on a Turing machine (or in C) can be implemented in Stan (not necessarily
easily, of course). All that is required for Turing completeness is loops, conditionals,
and arrays that can be dynamically (re)sized in a loop.
1.4. Compiling and Running Stan Programs
A Stan program is first translated to a C++ program by the Stan compiler stanc, then
the C++ program compiled to a self-contained platform-specific executable. Stan can
generate executables for various flavors of Windows, Mac OS X, and Linux.1Running
the Stan executable for a model first reads in and validates the known values yand
x, then generates a sequence of (non-independent) identically distributed samples
θ(1), θ(2), . . ., each of which has the marginal distribution p(θ|y, x).
1.5. Sampling
For continuous parameters, Stan uses Hamiltonian Monte Carlo (HMC) sampling (Du-
ane et al.,1987;Neal,1994,2011), a form of Markov chain Monte Carlo (MCMC) sam-
pling (Metropolis et al.,1953). Stan does not provide discrete sampling for param-
eters. Discrete observations can be handled directly, but discrete parameters must
be marginalized out of the model. Chapter 13 and Chapter 15 discuss how finite
discrete parameters can be summed out of models, leading to large efficiency gains
versus discrete parameter sampling.
1A Stan program may also be compiled to a dynamically linkable object file for use in a higher-level
scripting language such as R or Python.
24

HMC accelerates both convergence to the stationary distribution and subsequent
parameter exploration by using the gradient of the log probability function. The un-
known quantity vector θis interpreted as the position of a fictional particle. Each
iteration generates a random momentum and simulates the path of the particle with
potential energy determined by the (negative) log probability function. Hamilton’s
decomposition shows that the gradient of this potential determines change in mo-
mentum and the momentum determines the change in position. These continuous
changes over time are approximated using the leapfrog algorithm, which breaks the
time into discrete steps which are easily simulated. A Metropolis reject step is then
applied to correct for any simulation error and ensure detailed balance of the result-
ing Markov chain transitions (Metropolis et al.,1953;Hastings,1970).
Basic Euclidean Hamiltonian Monte Carlo involves three “tuning” parameters to
which its behavior is quite sensitive. Stan’s samplers allow these parameters to be set
by hand or set automatically without user intervention.
The first tuning parameter is the step size, measured in temporal units (i.e.,
the discretization interval) of the Hamiltonian. Stan can be configured with a user-
specified step size or it can estimate an optimal step size during warmup using dual
averaging (Nesterov,2009;Hoffman and Gelman,2011,2014). In either case, addi-
tional randomization may be applied to draw the step size from an interval of possi-
ble step sizes (Neal,2011).
The second tuning parameter is the number of steps taken per iteration, the prod-
uct of which with the temporal step size determines the total Hamiltonian simulation
time. Stan can be set to use a specified number of steps, or it can automatically adapt
the number of steps during sampling using the No-U-Turn (NUTS) sampler (Hoffman
and Gelman,2011,2014).
The third tuning parameter is a mass matrix for the fictional particle. Stan can be
configured to estimate a diagonal mass matrix or a full mass matrix during warmup;
Stan will support user-specified mass matrices in the future. Estimating a diago-
nal mass matrix normalizes the scale of each element θkof the unknown variable
sequence θ, whereas estimating a full mass matrix accounts for both scaling and ro-
tation,2but is more memory and computation intensive per leapfrog step due to the
underlying matrix operations.
Convergence Monitoring and Effective Sample Size
Samples in a Markov chain are only drawn with the marginal distribution p(θ|y, x)
after the chain has converged to its equilibrium distribution. There are several meth-
ods to test whether an MCMC method has failed to converge; unfortunately, passing
2These estimated mass matrices are global, meaning they are applied to every point in the parameter
space being sampled. Riemann-manifold HMC generalizes this to allow the curvature implied by the mass
matrix to vary by position.
25

the tests does not guarantee convergence. The recommended method for Stan is
to run multiple Markov chains, initialized randomly with a diffuse set of initial pa-
rameter values, discard the warmup/adaptation samples, then split the remainder of
each chain in half and compute the potential scale reduction statistic, ˆ
R(Gelman and
Rubin,1992). If the result is not enough effective samples, double the number of
iterations and start again, including rerunning warmup and everything.3
When estimating a mean based on a sample of Mindependent draws, the estima-
tion error is proportional to 1/√M. If the draws are positively correlated, as they typ-
ically are when drawn using MCMC methods, the error is proportional to 1/√n_eff,
where n_eff is the effective sample size. Thus it is standard practice to also monitor
(an estimate of) the effective sample size until it is large enough for the estimation or
inference task at hand.
Bayesian Inference and Monte Carlo Methods
Stan was developed to support full Bayesian inference. Bayesian inference is based in
part on Bayes’s rule,
p(θ|y, x) ∝p(y|θ, x) p(θ, x),
which, in this unnormalized form, states that the posterior probability p(θ|y, x) of
parameters θgiven data y(and constants x) is proportional (for fixed yand x) to the
product of the likelihood function p(y|θ, x) and prior p(θ, x).
For Stan, Bayesian modeling involves coding the posterior probability function up
to a proportion, which Bayes’s rule shows is equivalent to modeling the product of
the likelihood function and prior up to a proportion.
Full Bayesian inference involves propagating the uncertainty in the value of pa-
rameters θmodeled by the posterior p(θ|y, x). This can be accomplished by basing
inference on a sequence of samples from the posterior using plug-in estimates for
quantities of interest such as posterior means, posterior intervals, predictions based
on the posterior such as event outcomes or the values of as yet unobserved data.
1.6. Optimization
Stan also supports optimization-based inference for models. Given a posterior
p(θ|y), Stan can find the posterior mode θ∗, which is defined by
θ∗=argmaxθp(θ|y).
Here the notation argmaxvf (v) is used to pick out the value of vat which f (v) is
maximized.
3Often a lack of effective samples is a result of not enough warmup iterations. At most this rerunning
strategy will consume about 50% more cycles than guessing the correct number of iterations at the outset.
26
If the prior is uniform, the posterior mode corresponds to the maximum likeli-
hood estimate (MLE) of the parameters. If the prior is not uniform, the posterior
mode is sometimes called the maximum a posteriori (MAP) estimate.
For optimization, the Jacobian of any transforms induced by constraints on vari-
ables are ignored. It is more efficient in many optimization problems to remove lower
and upper bound constraints in variable declarations and instead rely on rejection in
the model block to disallow out-of-support solutions.
Inference with Point Estimates
The estimate θ∗is a so-called “point estimate,” meaning that it summarizes the pos-
terior distribution by a single point, rather than with a distribution. Of course, a point
estimate does not, in and of itself, take into account estimation variance. Posterior
predictive inferences p(˜
y|y) can be made using the posterior mode given data yas
p(˜
y|θ∗), but they are not Bayesian inferences, even if the model involves a prior, be-
cause they do not take posterior uncertainty into account. If the posterior variance is
low and the posterior mean is near the posterior mode, inference with point estimates
can be very similar to full Bayesian inference.
1.7. Variational Inference
Stan also supports variational inference, an approximate Bayesian inference tech-
nique (Jordan et al.,1999;Wainwright and Jordan,2008). Variational inference pro-
vides estimates of posterior means and uncertainty through a parametric approxi-
mation of a posterior that is optimized for its fit to the true posterior. Variational
inference has had a tremendous impact on Bayesian computation, especially in the
machine learning community; it is typically faster than sampling techniques and can
scale to massive datasets (Hoffman et al.,2013).
Variational inference approximates the posterior p(θ |y) with a simple, parame-
terized distribution q(θ |φ). It matches the approximation to the true posterior by
minimizing the Kullback-Leibler divergence,
φ∗=arg min
φ
KL q(θ |φ) kp(θ |y).
This converts Bayesian inference into an optimization problem with a well-defined
metric for convergence. Variational inference can provide orders of magnitude faster
convergence than sampling; the quality of the approximation will vary from model to
model. Note that variational inference is not a point estimation technique; the result
is a distribution that approximates the posterior.
27
Stan implements Automatic Differentiation Variational Inference (ADVI), an algo-
rithm designed to leverage Stan’s library of transformations and automatic differen-
tiation toolbox (Kucukelbir et al.,2015). ADVI circumvents all of the mathematics
typically required to derive variational inference algorithms; it works with any Stan
model.
28
Part II
Stan Modeling Language
29
2. Encodings, Includes, and Comments
This quick chapter covers the character encoding, include mechanism, and comment
syntax for the Stan language.
2.1. Character Encoding
Stan Program
The content of a Stan program must be coded in ASCII. Extended character sets such
as UTF-8 encoded Unicode may not be used for identifiers or other text in a program.
Comments
The content of comments is ignored by the language compiler and may be written us-
ing any character encoding (e.g., ASCII, UTF-8, Latin1, Big5). The comment delimiters
themselves must be coded in ASCII.
2.2. Includes
Stan allows one file to be included within another file with the following syntax. For
example, suppose the file std-normal.stan defines the standard normal log proba-
bility density function (up to an additive constant).
functions {
real std_normal_lpdf(vector y) {
return -0.5 *y' *y;
}
}
Suppose we also have a file containing a Stan program with an include statement.
#include std-normal.stan
parameters {
real y;
}
model {
y ~ std_normal();
}
This Stan program behaves as if the contents of the file std-normal.stan replace the
line with the #include statement, behaving as if a single Stan program were provided.
30
functions {
real std_normal_lpdf(vector y) {
return -0.5 *y' *y;
}
}
parameters {
real y;
}
model {
y ~ std_normal();
}
There are no restrictions on where include statements may be placed within a file
or what the contents are of the replaced file. No additional whitespace is included
beyond what is in the included file.
Recursive Includes
Recursive includes will be ignored. For example, suppose a.stan contains
#include b.stan
and b.stan contains
#include a.stan
The result of processing this file will be empty, because a.stan will include b.stan,
from which the include of a.stan is ignored and a warning printed.
Include Paths
The Stan interfaces provide a mechanism for specifying a sequence of system paths
in which to search for include files. The file included is the first one that is found in
the sequence.
2.3. Comments
Stan supports C++-style line-based and bracketed comments. Comments may be used
anywhere whitespace is allowed in a Stan program.
Line-Based Comments
Any characters on a line following two forward slashes (//) is ignored along with the
slashes. These may be used, for example, to document variables,
31
data {
int<lower=0> N; // number of observations
real y[N]; // observations
}
Bracketed Comments
For bracketed comments, any text between a forward-slash and asterisk pair (/*) and
an asterisk and forward-slash pair (*/) is ignored.
2.4. Whitespace
Whitespace Characters
The whitespace characters (and their ASCII code points) are the space (0x20), tab
(0x09), carriage return (0x0D), and line feed (0x0A).
Whitespace Neutrality
Stan treats these whitespace characters identically. Specifically, there is no signif-
icance to indentation, to tabs, to carriage returns or line feeds, or to any vertical
alignment of text.
Whitespace Location
Zero or more whitespace characters may be placed between symbols in a Stan pro-
gram. For example, zero or more whitespace characters of any variety may be in-
cluded before and after a binary operation such as a*b, before a statement-ending
semicolon, around parentheses or brackets, before or after commas separating func-
tion arguments, etc.
Identifiers and literals may not be separated by whitespace. Thus it is not le-
gal to write the number 10000 as 10 000 or to write the identifier normal_lpdf as
normal _ lpdf.
32
3. Data Types and Variable Declarations
This chapter covers the data types for expressions in Stan. Every variable used in
a Stan program must have a declared data type. Only values of that type will be
assignable to the variable (except for temporary states of transformed data and trans-
formed parameter values). This follows the convention of programming languages
like C++, not the conventions of scripting languages like Python or statistical lan-
guages such as R or BUGS.
The motivation for strong, static typing is threefold.
• Strong typing forces the programmer’s intent to be declared with the variable,
making programs easier to comprehend and hence easier to debug and main-
tain.
• Strong typing allows programming errors relative to the declared intent to be
caught sooner (at compile time) rather than later (at run time). The Stan com-
piler (called through an interface such as CmdStan, RStan, or PyStan) will flag
any type errors and indicate the offending expressions quickly when the pro-
gram is compiled.
• Constrained types will catch runtime data, initialization, and intermediate value
errors as soon as they occur rather than allowing them to propagate and poten-
tially pollute final results.
Strong typing disallows assigning the same variable to objects of different types at
different points in the program or in different invocations of the program.
3.1. Overview of Data Types
Arguments for built-in and user-defined functions and local variables are required to
be basic data types, meaning an unconstrained primitive, vector, or matrix type or an
array of such.
Passing arguments to functions in Stan works just like assignment to basic types.
Stan functions are only specified for the basic data types of their arguments, including
array dimensionality, but not for sizes or constraints. Of course, functions often
check constraints as part of their behavior.
Primitive Types
Stan provides two primitive data types, real for continuous values and int for inte-
ger values.
33
Vector and Matrix Types
Stan provides three matrix-based data types, vector for column vectors, row_vector
for row vectors, and matrix for matrices.
Array Types
Any type (including the constrained types discussed in the next section) can be made
into an array type by declaring array arguments. For example,
real x[10];
matrix[3, 3] m[6, 7];
declares xto be a one-dimensional array of size 10 containing real values, and de-
clares mto be a two-dimensional array of size 6×7containing values that are 3×3
matrices.
Constrained Data Types
Declarations of variables other than local variables may be provided with constraints.
These constraints are not part of the underlying data type for a variable, but deter-
mine error checking in the transformed data, transformed parameter, and generated
quantities block, and the transform from unconstrained to constrained space in the
parameters block.
All of the basic data types may be given lower and upper bounds using syntax
such as
int<lower = 1> N;
real<upper = 0> log_p;
vector<lower = -1, upper = 1>[3] rho;
There are also special data types for structured vectors and matrices. There are
four constrained vector data types, simplex for unit simplexes, unit_vector for
unit-length vectors, ordered for ordered vectors of scalars and positive_ordered
for vectors of positive ordered scalars. There are specialized matrix data types
corr_matrix and cov_matrix for correlation matrices (symmetric, positive defi-
nite, unit diagonal) and covariance matrices (symmetric, positive definite). The type
cholesky_factor_cov is for Cholesky factors of covariance matrices (lower trian-
gular, positive diagonal, product with own transpose is a covariance matrix). The
type cholesky_factor_corr is for Cholesky factors of correlation matrices (lower
triangular, positive diagonal, unit-length rows).
Constraints provide error checking for variables defined in the data,
transformed data,transformed parameters, and generated quantities
34

blocks. Constraints are critical for variables declared in the parameters block, where
they determine the transformation from constrained variables (those satisfying the
declared constraint) to unconstrained variables (those ranging over all of Rn).
It is worth calling out the most important aspect of constrained data types:
The model must have support (non-zero density, equivalently finite log den-
sity) at every value of the parameters that meets their declared constraints.
If this condition is violated with parameter values that satisfy declared constraints
but do not have finite log density, then the samplers and optimizers may have any
of a number of pathologies including just getting stuck, failure to initialize, excessive
Metropolis rejection, or biased samples due to inability to explore the tails of the
distribution.
3.2. Primitive Numerical Data Types
Unfortunately, the lovely mathematical abstraction of integers and real numbers is
only partially supported by finite-precision computer arithmetic.
Integers
Stan uses 32-bit (4-byte) integers for all of its integer representations. The maximum
value that can be represented as an integer is 231 −1; the minimum value is −(231).
When integers overflow, their values wrap. Thus it is up to the Stan programmer
to make sure the integer values in their programs stay in range. In particular, every
intermediate expression must have an integer value that is in range.
Integer arithmetic works in the expected way for addition, subtraction, and multi-
plication, but rounds the result of division (see Section 40.1 for more information).
Reals
Stan uses 64-bit (8-byte) floating point representations of real numbers. Stan roughly1
follows the IEEE 754 standard for floating-point computation. The range of a 64-bit
number is roughly ±21022, which is slightly larger than ±10307 . It is a good idea to
stay well away from such extreme values in Stan models as they are prone to cause
overflow.
64-bit floating point representations have roughly 15 decimal digits of accuracy.
But when they are combined, the result often has less accuracy. In some cases, the
difference in accuracy between two operands and their result is large.
1Stan compiles integers to int and reals to double types in C++. Precise details of rounding will depend
on the compiler and hardware architecture on which the code is run.
35
There are three special real values used to represent (1) not-a-number value for er-
ror conditions, (2) positive infinity for overflow, and (3) negative infinity for overflow.
The behavior of these special numbers follows standard IEEE 754 behavior.
Not-a-number
The not-a-number value propagates. If an argument to a real-valued function is not-a-
number, it either rejects (an exception in the underlying C++) or returns not-a-number
itself. For boolean-valued comparison operators, if one of the arguments is not-a-
number, the return value is always zero (i.e., false).
Infinite values
Positive infinity is greater than all numbers other than itself and not-a-number; neg-
ative infinity is similarly smaller. Adding an infinite value to a finite value returns
the infinite value. Dividing a finite number by an infinite value returns zero; divid-
ing an infinite number by a finite number returns the infinite number of appropriate
sign. Dividing a finite number by zero returns positive infinity. Dividing two infinite
numbers produces a not-a-number value as does subtracting two infinite numbers.
Some functions are sensitive to infinite values; for example, the exponential function
returns zero if given negative infinity and positive infinity if given positive infinity.
Often the gradients will break down when values are infinite, making these boundary
conditions less useful than they may appear at first.
Promoting Integers to Reals
Stan automatically promotes integer values to real values if necessary, but does not
automatically demote real values to integers. For very large integers, this will cause a
rounding error to fewer significant digits in the floating point representation than in
the integer representation.
Unlike in C++, real values are never demoted to integers. Therefore, real values
may only be assigned to real variables. Integer values may be assigned to either
integer variables or real variables. Internally, the integer representation is cast to
a floating-point representation. This operation is not without overhead and should
thus be avoided where possible.
3.3. Univariate Data Types and Variable Declarations
All variables used in a Stan program must have an explicitly declared data type. The
form of a declaration includes the type and the name of a variable. This section covers
36
univariate types, the next section vector and matrix types, and the following section
array types.
Unconstrained Integer
Unconstrained integers are declared using the int keyword. For example, the variable
Nis declared to be an integer as follows.
int N;
Constrained Integer
Integer data types may be constrained to allow values only in a specified interval by
providing a lower bound, an upper bound, or both. For instance, to declare Nto be a
positive integer, use the following.
int<lower=1> N;
This illustrates that the bounds are inclusive for integers.
To declare an integer variable cond to take only binary values, that is zero or one,
a lower and upper bound must be provided, as in the following example.
int<lower=0,upper=1> cond;
Unconstrained Real
Unconstrained real variables are declared using the keyword real, The following ex-
ample declares theta to be an unconstrained continuous value.
real theta;
Constrained Real
Real variables may be bounded using the same syntax as integers. In theory (that
is, with arbitrary-precision arithmetic), the bounds on real values would be exclusive.
Unfortunately, finite-precision arithmetic rounding errors will often lead to values on
the boundaries, so they are allowed in Stan.
The variable sigma may be declared to be non-negative as follows.
real<lower=0> sigma;
The following declares the variable xto be less than or equal to −1.
real<upper=-1> x;
To ensure rho takes on values between −1and 1, use the following declaration.
real<lower=-1,upper=1> rho;
37
Infinite Constraints
Lower bounds that are negative infinity or upper bounds that are positive infinity are
ignored. Stan provides constants positive_infinity() and negative_infinity()
which may be used for this purpose, or they may be read as data in the dump format.
Expressions as Bounds
Bounds for integer or real variables may be arbitrary expressions. The only require-
ment is that they only include variables that have been defined before the declaration.
If the bounds themselves are parameters, the behind-the-scenes variable transform
accounts for them in the log Jacobian.
For example, it is acceptable to have the following declarations.
data {
real lb;
}
parameters {
real<lower=lb> phi;
}
This declares a real-valued parameter phi to take values greater than the value of
the real-valued data variable lb. Constraints may be complex expressions, but must
be of type int for integer variables and of type real for real variables (including
constraints on vectors, row vectors, and matrices). Variables used in constraints can
be any variable that has been defined at the point the constraint is used. For instance,
data {
int<lower=1> N;
real y[N];
}
parameters {
real<lower=min(y), upper=max(y)> phi;
}
This declares a positive integer data variable N, an array yof real-valued data of
length N, and then a parameter ranging between the minimum and maximum value
of y. As shown in the example code, the functions min() and max() may be applied
to containers such as arrays.
3.4. Vector and Matrix Data Types
Stan provides three types of container objects: arrays, vectors, and matrices. Vectors
and matrices are more limited kinds of data structures than arrays. Vectors are in-
38

trinsically one-dimensional collections of reals, whereas matrices are intrinsically two
dimensional. Vectors, matrices, and arrays are not assignable to one another, even if
their dimensions are identical. A 3×4matrix is a different kind of object in Stan than
a3×4array.
The intention of using matrix types is to call out their usage in the code. There
are three situations in Stan where only vectors and matrices may be used,
• matrix arithmetic operations (e.g., matrix multiplication)
• linear algebra functions (e.g., eigenvalues and determinants), and
• multivariate function parameters and outcomes (e.g., multivariate normal dis-
tribution arguments).
Vectors and matrices cannot be typed to return integer values. They are restricted
to real values.2
Indexing from 1
Vectors and matrices, as well as arrays, are indexed starting from one in Stan. This
follows the convention in statistics and linear algebra as well as their implementations
in the statistical software packages R, MATLAB, BUGS, and JAGS. General computer
programming languages, on the other hand, such as C++ and Python, index arrays
starting from zero.
Vectors
Vectors in Stan are column vectors; see the next subsection for information on row
vectors. Vectors are declared with a size (i.e., a dimensionality). For example, a 3-
dimensional vector is declared with the keyword vector, as follows.
vector[3] u;
Vectors may also be declared with constraints, as in the following declaration of a
3-vector of non-negative values.
vector<lower=0>[3] u;
2This may change if Stan is called upon to do complicated integer matrix operations or boolean matrix
operations. Integers are not appropriate inputs for linear algebra functions.
39
Unit Simplexes
A unit simplex is a vector with non-negative values whose entries sum to 1. For in-
stance, (0.2,0.3,0.4,0.1)>is a unit 4-simplex. Unit simplexes are most often used as
parameters in categorical or multinomial distributions, and they are also the sampled
variate in a Dirichlet distribution. Simplexes are declared with their full dimensional-
ity. For instance, theta is declared to be a unit 5-simplex by
simplex[5] theta;
Unit simplexes are implemented as vectors and may be assigned to other vectors
and vice-versa. Simplex variables, like other constrained variables, are validated to
ensure they contain simplex values; for simplexes, this is only done up to a stati-
cally specified accuracy threshold to account for errors arising from floating-point
imprecision.
In high dimensional problems, simplexes may require smaller step sizes in the
inference algorithms in order to remain stable; this can be achieved through higher
target acceptance rates for samplers and longer warmup periods, tighter tolerances
for optimization with more iterations, and in either case, with less dispersed param-
eter initialization or custom initialization if there are informative priors for some
parameters.
Unit Vectors
A unit vector is a vector with a norm of one. For instance, (0.5,0.5,0.5,0.5)>is a unit
4-vector. Unit vectors are sometimes used in directional statistics. Unit vectors are
declared with their full dimensionality. For instance, theta is declared to be a unit
5-vector by
unit_vector[5] theta;
Unit vectors are implemented as vectors and may be assigned to other vectors and
vice-versa. Unit vector variables, like other constrained variables, are validated to
ensure that they are indeed unit length; for unit vectors, this is only done up to a
statically specified accuracy threshold to account for errors arising from floating-
point imprecision.
Ordered Vectors
An ordered vector type in Stan represents a vector whose entries are sorted in ascend-
ing order. For instance, (−1.3,2.7,2.71)>is an ordered 3-vector. Ordered vectors are
most often employed as cut points in ordered logistic regression models (see Sec-
tion 9.8).
The variable cis declared as an ordered 5-vector by
40
ordered[5] c;
After their declaration, ordered vectors, like unit simplexes, may be assigned to other
vectors and other vectors may be assigned to them. Constraints will be checked after
executing the block in which the variables were declared.
Positive, Ordered Vectors
There is also a positive, ordered vector type which operates similarly to ordered vec-
tors, but all entries are constrained to be positive. For instance, (2,3.7,4,12.9)is a
positive, ordered 4-vector.
The variable dis declared as a positive, ordered 5-vector by
positive_ordered[5] d;
Like ordered vectors, after their declaration positive ordered vectors assigned to other
vectors and other vectors may be assigned to them. Constraints will be checked after
executing the block in which the variables were declared.
Row Vectors
Row vectors are declared with the keyword row_vector. Like (column) vectors, they
are declared with a size. For example, a 1093-dimensional row vector uwould be
declared as
row_vector[1093] u;
Constraints are declared as for vectors, as in the following example of a 10-vector
with values between -1 and 1.
row_vector<lower=-1,upper=1>[10] u;
Row vectors may not be assigned to column vectors, nor may column vectors be
assigned to row vectors. If assignments are required, they may be accommodated
through the transposition operator.
Matrices
Matrices are declared with the keyword matrix along with a number of rows and
number of columns. For example,
matrix[3, 3] A;
matrix[M, N] B;
41
declares Ato be a 3×3matrix and Bto be a M×Nmatrix. For the second declaration
to be well formed, the variables Mand Nmust be declared as integers in either the
data or transformed data block and before the matrix declaration.
Matrices may also be declared with constraints, as in this (3×4) matrix of non-
positive values.
matrix<upper=0>[3, 4] B;
Assigning to Rows of a Matrix
Rows of a matrix can be assigned by indexing the left-hand side of an assignment
statement. For example, this is possible.
matrix[M, N] a;
row_vector[N] b;
// ...
a[1] = b;
This copies the values from row vector bto a[1], which is the first row of the matrix
a. If the number of columns in ais not the same as the size of b, a run-time error is
raised; the number of rows of ais N, which is also the size of b.
Assignment works by copying values in Stan. That means any subsequent assign-
ment to a[1] does not affect b, nor does an assignment to baffect a.
Correlation Matrices
Matrix variables may be constrained to represent correlation matrices. A matrix is
a correlation matrix if it is symmetric and positive definite, has entries between −1
and 1, and has a unit diagonal. Because correlation matrices are square, only one
dimension needs to be declared. For example,
corr_matrix[3] Sigma;
declares Sigma to be a 3×3correlation matrix.
Correlation matrices may be assigned to other matrices, including unconstrained
matrices, if their dimensions match, and vice-versa.
Cholesky Factors of Correlation Matrices
Matrix variables may be constrained to represent the Cholesky factors of a correlation
matrix.
A Cholesky factor for a correlation matrix Lis a K×Klower-triangular matrix
with positive diagonal entries and rows that are of length 1 (i.e., PK
n=1L2
m,n =1). If
42
Lis a Cholesky factor for a correlation matrix, then L L>is a correlation matrix (i.e.,
symmetric positive definite with a unit diagonal).
A declaration such as follows.
cholesky_factor_corr[K] L;
declares Lto be a Cholesky factor for a Kby Kcorrelation matrix.
Covariance Matrices
Matrix variables may be constrained to represent covariance matrices. A matrix is a
covariance matrix if it is symmetric and positive definite. Like correlation matrices,
covariance matrices only need a single dimension in their declaration. For instance,
cov_matrix[K] Omega;
declares Omega to be a K×Kcovariance matrix, where Kis the value of the data
variable K.
Cholesky Factors of Covariance Matrices
Matrix variables may be constrained to represent the Cholesky factors of a covariance
matrix. This is often more convenient or more efficient than representing covariance
matrices directly.
A Cholesky factor Lis an M×Nlower-triangular matrix (if m < n then L[m, n] =0)
with a strictly positive diagonal (L[k, k] > 0) and M≥N. If Lis a Cholesky factor, then
Σ=L L>is a covariance matrix. Furthermore, every covariance matrix has a Cholesky
factorization.
The typical case of a square Cholesky factor may be declared with a single dimen-
sion,
cholesky_factor_cov[4] L;
In general, two dimensions may be declared, with the above being equal to
cholesky_factor_cov[4, 4]. The type cholesky_factor_cov[M, N] may be
used for the general M×N.
Assigning Constrained Variables
Constrained variables of all types may be assigned to other variables of the same
unconstrained type and vice-versa. Matching is interpreted strictly as having the same
basic type and number of array dimensions. Constraints are not considered, but
basic data types are. For instance, a variable declared to be real<lower=0,upper=1>
could be assigned to a variable declared as real and vice-versa. Similarly, a variable
43

declared as matrix[3, 3] may be assigned to a variable declared as cov_matrix[3]
or cholesky_factor_cov[3], and vice-versa.
Checks are carried out at the end of each relevant block of statements to ensure
constraints are enforced. This includes run-time size checks. The Stan compiler
isn’t able to catch the fact that an attempt may be made to assign a matrix of one
dimensionality to a matrix of mismatching dimensionality.
Expressions as Size Declarations
Variables may be declared with sizes given by expressions. Such expressions are
constrained to only contain data or transformed data variables. This ensures that all
sizes are determined once the data is read in and transformed data variables defined
by their statements. For example, the following is legal.
data {
int<lower=0> N_observed; int<lower=0> N_missing;
// ...
transformed parameters {
vector[N_observed + N_missing] y;
// ...
Accessing Vector and Matrix Elements
If vis a column vector or row vector, then v[2] is the second element in the vector.
If mis a matrix, then m[2, 3] is the value in the second row and third column.
Providing a matrix with a single index returns the specified row. For instance, if m
is a matrix, then m[2] is the second row. This allows Stan blocks such as
matrix[M, N] m;
row_vector[N] v;
real x;
// ...
v = m[2];
x = v[3]; // x == m[2][3] == m[2, 3]
The type of m[2] is row_vector because it is the second row of m. Thus it is possible
to write m[2][3] instead of m[2, 3] to access the third element in the second row.
When given a choice, the form m[2, 3] is preferred.3
3As of Stan version 1.0, the form m[2, 3] is more efficient because it does not require the creation and
use of an intermediate expression template for m[2]. In later versions, explicit calls to m[2][3] may be
optimized to be as efficient as m[2, 3] by the Stan compiler.
44
Size Declaration Restrictions
An integer expression is used to pick out the sizes of vectors, matrices, and arrays.
For instance, we can declare a vector of size M+Nusing
vector[M + N] y;
Any integer-denoting expression may be used for the size declaration, providing all
variables involved are either data, transformed data, or local variables. That is, ex-
pressions used for size declarations may not include parameters or transformed pa-
rameters or generated quantities.
3.5. Array Data Types
Stan supports arrays of arbitrary dimension. The values in an array can be any type,
so that arrays may contain values that are simple reals or integers, vectors, matrices,
or other arrays. Arrays are the only way to store sequences of integers, and some
functions in Stan, such as discrete distributions, require integer arguments.
A two-dimensional array is just an array of arrays, both conceptually and in terms
of current implementation. When an index is supplied to an array, it returns the
value at that index. When more than one index is supplied, this indexing operation is
chained. For example, if ais a two-dimensional array, then a[m, n] is just a conve-
nient shorthand for a[m][n]. Vectors, matrices, and arrays are not assignable to one
another, even if their dimensions are identical.
Declaring Array Variables
Arrays are declared by enclosing the dimensions in square brackets following the
name of the variable.
The variable nis declared as an array of five integers as follows.
int n[5];
A two-dimensional array of real values with three rows and four columns is declared
with the following.
real a[3, 4];
A three-dimensional array zof positive reals with five rows, four columns, and two
shelves can be declared as follows.
real<lower=0> z[5, 4, 2];
Arrays may also be declared to contain vectors. For example,
45
vector[7] mu[3];
declares mu to be an array of size 3 containing vectors with 7 elements. Arrays may
also contain matrices. The example
matrix[7, 2] mu[15, 12];
declares a 15 by 12 array of 7×2matrices. Any of the constrained types may also be
used in arrays, as in the declaration
cholesky_factor_cov[5, 6] mu[2, 3, 4];
of a 2×3×4array of 5×6Cholesky factors of covariance matrices.
Accessing Array Elements and Subarrays
If xis a 1-dimensional array of length 5, then x[1] is the first element in the array and
x[5] is the last. For a 3×4array yof two dimensions, y[1, 1] is the first element
and y[3, 4] the last element. For a three-dimensional array z, the first element is
z[1, 1, 1], and so on.
Subarrays of arrays may be accessed by providing fewer than the full number
of indexes. For example, suppose yis a two-dimensional array with three rows and
four columns. Then y[3] is one-dimensional array of length four. This means that
y[3][1] may be used instead of y[3, 1] to access the value of the first column of
the third row of y. The form y[3, 1] is the preferred form (see Footnote 3in this
chapter).
Assigning
Subarrays may be manipulated and assigned just like any other variables. Similar to
the behavior of matrices, Stan allows blocks such as
real w[9, 10, 11];
real x[10, 11];
real y[11];
real z;
// ...
x = w[5];
y = x[4]; // y == w[5][4] == w[5, 4]
z = y[3]; // z == w[5][4][3] == w[5, 4, 3]
Arrays of Matrices and Vectors
Arrays of vectors and matrices are accessed in the same way as arrays of doubles.
Consider the following vector and scalar declarations.
46
vector[5] a[3, 4];
vector[5] b[4];
vector[5] c;
real x;
With these declarations, the following assignments are legal.
b = a[1]; // result is array of vectors
c = a[1, 3]; // result is vector
c = b[3]; // same result as above
x = a[1, 3, 5]; // result is scalar
x = b[3, 5]; // same result as above
x = c[5]; // same result as above
Row vectors and other derived vector types (simplex and ordered) behave the same
way in terms of indexing.
Consider the following matrix, vector and scalar declarations.
matrix[6, 5] d[3, 4];
matrix[6, 5] e[4];
matrix[6, 5] f;
row_vector[5] g;
real x;
With these declarations, the following definitions are legal.
e = d[1]; // result is array of matrices
f = d[1,3]; // result is matrix
f = e[3]; // same result as above
g = d[1,3,2]; // result is row vector
g = e[3,2]; // same result as above
g = f[2]; // same result as above
x = d[1,3,5,2]; // result is scalar
x = e[3,5,2]; // same result as above
x = f[5,2]; // same result as above
x = g[2]; // same result as above
As shown, the result f[2] of supplying a single index to a matrix is the indexed row,
here row 2 of matrix f.
Partial Array Assignment
Subarrays of arrays may be assigned by indexing on the left-hand side of an assign-
ment statement. For example, the following is legal.
47
real x[I,J,K];
real y[J,K];
real z[K];
// ...
x[1] = y;
x[1,1] = z;
The sizes must match. Here, x[1] is a Jby Karray, as is is y.
Partial array assignment also works for arrays of matrices, vectors, and row vec-
tors.
Mixing Array, Vector, and Matrix Types
Arrays, row vectors, column vectors and matrices are not interchangeable in Stan.
Thus a variable of any one of these fundamental types is not assignable to any of
the others, nor may it be used as an argument where the other is required (use as
arguments follows the assignment rules).
Mixing Vectors and Arrays
For example, vectors cannot be assigned to arrays or vice-versa.
real a[4];
vector[4] b;
row_vector c[4];
// ...
a = b; // illegal assignment of vector to array
b = a; // illegal assignment of array to vector
a = c; // illegal assignment of row vector to array
c = a; // illegal assignment of array to row vector
Mixing Row and Column Vectors
It is not even legal to assign row vectors to column vectors or vice versa.
vector b[4];
row_vector c[4];
// ...
b = c; // illegal assignment of row vector to column vector
c = b; // illegal assignment of column vector to row vector
Mixing Matrices and Arrays
The same holds for matrices, where 2-dimensional arrays may not be assigned to
matrices or vice-versa.
48
real a[3,4];
matrix[3,4] b;
// ...
a = b; // illegal assignment of matrix to array
b = a; // illegal assignment of array to matrix
Mixing Matrices and Vectors
A1×Nmatrix cannot be assigned a row vector or vice versa.
matrix[1,4] a;
row_vector[4] b;
// ...
a = b; // illegal assignment of row vector to matrix
b = a; // illegal assignment of matrix to row vector
Similarly, an M×1matrix may not be assigned to a column vector.
matrix[4,1] a;
vector[4] b;
// ...
a = b; // illegal assignment of column vector to matrix
b = a; // illegal assignment of matrix to column vector
Size Declaration Restrictions
An integer expression is used to pick out the sizes of arrays. The same restrictions
as for vector and matrix sizes apply, namely that the size is declared with an integer-
denoting expression that does not contain any parameters, transformed parameters,
or generated quantities.
Size Zero Arrays
If any of an array’s dimensions is size zero, the entire array will be of size zero. That
is, if we declare
real a[3, 0];
then the resulting size of ais zero and querying any of its dimensions at run time will
result in the value zero. Declared as above, a[1] will be a size-zero one-dimensional
array. For comparison, declaring
real b[0, 3];
49
also produces an array with an overall size of zero, but in this case, there is no way
to index legally into b, because b[0] is undefined. The array will behave at run time
as if it’s a 0×0array. For example, the result of to_matrix(b) will be a 0×0matrix,
not a 0×3matrix.
3.6. Variable Types vs. Constraints and Sizes
The type information associated with a variable only contains the underlying type and
dimensionality of the variable.
Type Information Excludes Sizes
The size associated with a given variable is not part of its data type. For example,
declaring a variable using
real a[3];
declares the variable ato be an array. The fact that it was declared to have size 3 is
part of its declaration, but not part of its underlying type.
When are Sizes Checked?
Sizes are determined dynamically (at run time) and thus cannot be type-checked stat-
ically when the program is compiled. As a result, any conformance error on size will
raise a run-time error. For example, trying to assign an array of size 5 to an array of
size 6 will cause a run-time error. Similarly, multiplying an N×Mby a J×Kmatrix
will raise a run-time error if M≠J.
Type Information Excludes Constraints
Like sizes, constraints are not treated as part of a variable’s type in Stan when it
comes to the compile-time check of operations it may participate in. Anywhere Stan
accepts a matrix as an argument, it will syntactically accept a correlation matrix or
covariance matrix or Cholesky factor. Thus a covariance matrix may be assigned to a
matrix and vice-versa.
Similarly, a bounded real may be assigned to an unconstrained real and vice-versa.
When are Function Argument Constraints Checked?
For arguments to functions, constraints are sometimes, but not always checked when
the function is called. Exclusions include C++ standard library functions. All proba-
bility functions and cumulative distribution functions check that their arguments are
appropriate at run time as the function is called.
50
When are Declared Variable Constraints Checked?
For data variables, constraints are checked after the variable is read from a data file or
other source. For transformed data variables, the check is done after the statements
in the transformed data block have executed. Thus it is legal for intermediate values
of variables to not satisfy declared constraints.
For parameters, constraints are enforced by the transform applied and do not
need to be checked. For transformed parameters, the check is done after the state-
ments in the transformed parameter block have executed.
For all blocks defining variables (transformed data, transformed parameters, gen-
erated quantities), real values are initialized to NaN and integer values are initialized
to the smallest legal integer (i.e., a large absolute value negative number).
For generated quantities, constraints are enforced after the statements in the gen-
erated quantities block have executed.
Type Naming Notation
In order to refer to data types, it is convenient to have a way to refer to them. The
type naming notation outlined in this section is not part of the Stan programming
language, but rather a convention adopted in this document to enable a concise de-
scription of a type.
Because size information is not part of a data type, data types will be written
without size information. For instance, real[] is the type of one-dimensional array
of reals and matrix is the type of matrices. The three-dimensional integer array
type is written as int[ , ,], indicating the number slots available for indexing.
Similarly, vector[ , ] is the type of a two-dimensional array of vectors.
3.7. Compound Variable Declaration and Definition
Stan allows assignable variables to be declared and defined in a single statement.
Assignable variables are
• local variables, and
• variables declared in the transformed data, transformed parameters, or gener-
ated quantities blocks.
For example, the statement
int N = 5;
declares the variable Nto be an integer scalar type and at the same time defines it to
be the value of the expression 5.
51
Assignment Typing
The type of the expression on the right-hand side of the assignment must be
assignable to the type of the variable being declared. For example, it is legal to have
real sum = 0;
even though 0is of type int and sum is of type real, because integer-typed scalar
expressions can be assigned to real-valued scalar variables. In all other cases, the type
of the expression on the right-hand side of the assignment must be identical to the
type of the variable being declared.
Any type may be assigned. For example,
matrix[3, 2] a = b;
declares a matrix variable aand assigns it to the value of b, which must be of type
matrix for the compound statement to be well formed. The sizes of matrices are not
part of their static typing and cannot be validated until run time.
Right-Hand Side Expressions
The right-hand side may be any expression which has a type which is assignable to
the variable being declared. For example,
matrix[3, 2] a = 0.5 *(b + c);
assigns the matrix variable ato half of the sum of band c. The only requirement on b
and cis that the expression b+cbe of type matrix. For example, bcould be of type
matrix and cof type real, because adding a matrix to a scalar produces a matrix,
and the multiplying by a scalar produces another matrix.
The right-hand side expression can be a call to a user defined function, allowing
general algorithms to be applied that might not be otherwise expressible as simple
expressions (e.g., iterative or recursive algorithms).
Scope within Expressions
Any variable that is in scope and any function that is available in the block in which
the compound declaration and definition appears may be used in the expression on
the right-hand side of the compound declaration and definition statement.
52
4. Expressions
An expression is the basic syntactic unit in a Stan program that denotes a value. Every
expression in a well-formed Stan program has a type that is determined statically
(at compile time). If an expressions type cannot be determined statically, the Stan
compiler will report the location of the problem.
This chapter covers the syntax, typing, and usage of the various forms of expres-
sions in Stan.
4.1. Numeric Literals
The simplest form of expression is a literal that denotes a primitive numerical value.
Integer Literals
Integer literals represent integers of type int. Integer literals are written in base
10 without any separators. Integer literals may contain a single negative sign. (The
expression --1 is interpreted as the negation of the literal -1.)
The following list contains well-formed integer literals.
0,1,-1,256,-127098,24567898765
Integer literals must have values that fall within the bounds for integer values (see
Section 3.2).
Integer literals may not contain decimal points (.). Thus the expressions 1. and
1.0 are of type real and may not be used where a value of type int is required.
Real Literals
A number written with a period or with scientific notation is assigned to a the con-
tinuous numeric type real. Real literals are written in base 10 with a period (.) as a
separator. Examples of well-formed real literals include the following.
0.0,1.0,3.14,-217.9387,2.7e3,-2E-5
The notation eor Efollowed by a positive or negative integer denotes a power of 10
to multiply. For instance, 2.7e3 denotes 2.7×103and -2E-5 denotes −2×10−5.
4.2. Variables
A variable by itself is a well-formed expression of the same type as the variable.
Variables in Stan consist of ASCII strings containing only the basic lower-case and
53
upper-case Roman letters, digits, and the underscore (_) character. Variables must
start with a letter (a-z and A-Z) and may not end with two underscores (__).
Examples of legal variable identifiers are as follows.
a,a3,a_3,Sigma,my_cpp_style_variable,myCamelCaseVariable
Unlike in R and BUGS, variable identifiers in Stan may not contain a period character.
Reserved Names
Stan reserves many strings for internal use and these may not be used as the name
of a variable. An attempt to name a variable after an internal string results in the
stanc translator halting with an error message indicating which reserved name was
used and its location in the model code.
Model Name
The name of the model cannot be used as a variable within the model. This is usually
not a problem because the default in bin/stanc is to append _model to the name
of the file containing the model specification. For example, if the model is in file
foo.stan, it would not be legal to have a variable named foo_model when using the
default model name through bin/stanc. With user-specified model names, variables
cannot match the model.
User-Defined Function Names
User-defined function names cannot be used as a variable within the model.
Reserved Words from Stan Language
The following list contains reserved words for Stan’s programming language. Not all
of these features are implemented in Stan yet, but the tokens are reserved for future
use.
for,in,while,repeat,until,if,then,else,true,false
Variables should not be named after types, either, and thus may not be any of the
following.
int,real,vector,simplex,unit_vector,ordered,
positive_ordered,row_vector,matrix,cholesky_factor_corr,
cholesky_factor_cov,corr_matrix,cov_matrix.
Variable names will not conflict with the following block identifiers,
54
functions,model,data,parameters,quantities,transformed,
generated,
Reserved Names from Stan Implementation
Some variable names are reserved because they are used within Stan’s C++ implemen-
tation. These are
var,fvar,STAN_MAJOR,STAN_MINOR,STAN_PATCH,STAN_MATH_MAJOR,
STAN_MATH_MINOR,STAN_MATH_PATCH
Reserved Function and Distribution Names
Variable names will conflict with the names of predefined functions other than con-
stants. Thus a variable may not be named logit or add, but it may be named pi or
e.
Variable names will also conflict with the names of distributions suffixed with
_lpdf,_lpmf,_lcdf, and _lccdf,_cdf, and _ccdf, such as normal_lcdf_log; this
also holds for the deprecated forms _log,_cdf_log, and _ccdf_log,
Using any of these variable names causes the stanc translator to halt and report
the name and location of the variable causing the conflict.
Reserved Names from C++
Finally, variable names, including the names of models, should not conflict with any
of the C++ keywords.
alignas,alignof,and,and_eq,asm,auto,bitand,bitor,bool,
break,case,catch,char,char16_t,char32_t,class,compl,
const,constexpr,const_cast,continue,decltype,default,delete,
do,double,dynamic_cast,else,enum,explicit,export,extern,
false,float,for,friend,goto,if,inline,int,long,mutable,
namespace,new,noexcept,not,not_eq,nullptr,operator,or,or_eq,
private,protected,public,register,reinterpret_cast,return,
short,signed,sizeof,static,static_assert,static_cast,struct,
switch,template,this,thread_local,throw,true,try,typedef,
typeid,typename,union,unsigned,using,virtual,void,volatile,
wchar_t,while,xor,xor_eq
Legal Characters
The legal variable characters have the same ASCII code points in the range 0–127 as
in Unicode.
55

Characters ASCII (Unicode) Code Points
a - z 97 - 122
A - Z 65 - 90
0 - 9 48 - 57
_ 95
Although not the most expressive character set, ASCII is the most portable and least
prone to corruption through improper character encodings or decodings.
Comments Allow ASCII-Compatible Encoding
Within comments, Stan can work with any ASCII-compatible character encoding, such
as ASCII itself, UTF-8, or Latin1. It is up to user shells and editors to display them
properly.
4.3. Vector, Matrix, and Array Expressions
Expressions for the Stan container objects arrays, vectors, and matrices can be con-
structed via a sequence of expressions enclosed in either curly braces for arrays, or
square brackets for vectors and matrices.
Vector Expressions
Square brackets may be wrapped around a sequence of comma separated primi-
tive expressions to produce a row vector expression. For example, the expression
[ 1, 10, 100 ] denotes a row vector of three elements with real values 1.0, 10.0,
and 100.0. Applying the transpose operator to a row vector expression produces a
vector expression. This syntax provides a way declare and define small vectors a
single line, as follows.
row_vector[2] rv2= [ 1, 2 ];
vector[3] v3 = [ 3, 4, 5 ]';
The vector expression values may be compound expressions or variable names,
so it is legal to write [ 2 *3, 1 + 4] or [x,y], providing that xand yare
primitive variables.
Matrix Expressions
A matrix expression consists of square brackets wrapped around a sequence of
comma separated row vector expressions. This syntax provides a way declare and
define a matrix in a single line, as follows.
56
matrix[3,2] m1 = [ [ 1, 2 ], [ 3, 4 ], [5, 6 ] ];
Any expression denoting a row vector can be used in a matrix expression. For
example, the following code is valid:
vector[2] vX = [ 1, 10 ]';
row_vector[2] vY = [ 100, 1000 ];
matrix[3,2] m2 = [ vX', vY, [ 1, 2 ] ];
No empty vector or matrix expressions
The empty expression [ ] is ambiguous and therefore is not allowed and similarly
expressions such as [[]]or [[],[]]are not allowed.
Array Expressions
Curly braces may be wrapped around a sequence of expressions to produce an array
expression. For example, the expression { 1, 10, 100 } denotes an integer array
of three elements with values 1, 10, and 100. This syntax is particularly convenient
to define small arrays in a single line, as follows.
int a[3] = { 1, 10, 100 };
The values may be compound expressions, so it is legal to write
{ 2 *3,1+4}. It is also possible to write two dimensional arrays directly, as
in the following example.
intb[2,3]={{1,2,3},{4,5,6}};
This way, b[1] is {1,2,3}and b[2] is {4,5,6}.
Whitespace is always interchangeable in Stan, so the above can be laid out as
follows to more clearly indicate the row and column structure of the resulting two
dimensional array.
int b[2, 3] = { { 1, 2, 3 },
{4,5,6}};
Array Expression Types
Any type of expression may be used within braces to form an array expression. In the
simplest case, all of the elements will be of the same type and the result will be an
array of elements of that type. For example, the elements of the array can be vectors,
in which case the result is an array of vectors.
57
vector[3] b;
vector[3] c;
...
vector[3] d[2] = { b, c };
The elements may also be a mixture of int and real typed expressions, in which case
the result is an array of real values.
real b[2] = { 1, 1.9 };
Restrictions on Values
There are some restrictions on how array expressions may be used that arise from
their types being calculated bottom up and the basic data type and assignment rules
of Stan.
Rectangular array expressions only
Although it is tempting to try to define a ragged array expression, all Stan data
types are rectangular (or boxes or other higher-dimensional generalizations). Thus
the following nested array expression will cause an error when it tries to create a
non-rectangular array.
{ { 1, 2, 3 }, { 4, 5 } } // compile time error: size mismatch
This may appear to be OK, because it is creating a two-dimensional integer array
(int[ , ]) out of two one-dimensional array integer arrays (int[ ]). But it is not
allowed because the two one-dimensional arrays are not the same size. If the ele-
ments are array expressions, this can be diagnosed at compile time. If one or both
expressions is a variable, then that won’t be caught until runtime.
{ { 1, 2, 3 }, m } // runtime error if m not size 3
No empty array expressions
Because there is no way to infer the type of the result, the empty array expression
({ }) is not allowed. This does not sacrifice expressive power, because a declaration
is sufficient to initialize a zero-element array.
int a[0]; // a is fully defined as zero element array
58
Integer only array expressions
If an array expression contains only integer elements, such as {1,2,3}, then the
result type will be an integer array, int[]. This means that the following will not be
legal.
real a[2] = { -3, 12 }; // error: int[] can't be assigned to real[]
Integer arrays may not be assigned to real values. However, this problem is easily
sidestepped by using real literal expressions.
real a[2] = { -3.0, 12.0 };
Now the types match and the assignment is allowed.
4.4. Parentheses for Grouping
Any expression wrapped in parentheses is also an expression. Like in C++, but unlike
in R, only the round parentheses, (and ), are allowed. The square brackets [and ]
are reserved for array indexing and the curly braces {and }for grouping statements.
With parentheses it is possible to explicitly group subexpressions with operators.
Without parentheses, the expression 1+2*3has a subexpression 2*3and eval-
uates to 7. With parentheses, this grouping may be made explicit with the expression
1 + (2 *3). More importantly, the expression (1 + 2) *3has 1+2as a subex-
pression and evaluates to 9.
4.5. Arithmetic and Matrix Operations on Expressions
For integer and real-valued expressions, Stan supports the basic binary arithmetic
operations of addition (+), subtraction (-), multiplication (*) and division (/) in the
usual ways.
For integer expressions, Stan supports the modulus (%) binary arithmetic opera-
tion. Stan also supports the unary operation of negation for integer and real-valued
expressions. For example, assuming nand mare integer variables and xand yreal
variables, the following expressions are legal.
3.0 + 0.14,-15,2*3+1,(x - y) / 2.0,
(n *(n + 1)) / 2,x/n,m%n
The negation, addition, subtraction, and multiplication operations are extended to
matrices, vectors, and row vectors. The transpose operation, written using an apos-
trophe (’) is also supported for vectors, row vectors, and matrices. Return types for
matrix operations are the smallest types that can be statically guaranteed to contain
59
the result. The full set of allowable input types and corresponding return types is
detailed in Chapter 43.
For example, if yand mu are variables of type vector and Sigma is a variable of
type matrix, then
(y - mu)’ *Sigma *(y - mu)
is a well-formed expression of type real. The type of the complete expression is
inferred working outward from the subexpressions. The subexpression(s) y - mu are
of type vector because the variables yand mu are of type vector. The transpose of
this expression, the subexpression (y - mu)’ is of type row_vector. Multiplication
is left associative and transpose has higher precedence than multiplication, so the
above expression is equivalent to the following well-formed, fully specified form.
(((y - mu)’) *Sigma) *(y - mu)
The type of subexpression (y - mu)’ *Sigma is inferred to be row_vector, being
the result of multiplying a row vector by a matrix. The whole expression’s type is
thus the type of a row vector multiplied by a (column) vector, which produces a real
value.
Stan provides elementwise matrix division and multiplication operations, a .*b
and a ./b. These provide a shorthand to replace loops, but are not intrinsically more
efficient than a version programmed with an elementwise calculations and assign-
ments in a loop. For example, given declarations,
vector[N] a;
vector[N] b;
vector[N] c;
the assignment,
c=a.*b;
produces the same result with roughly the same efficiency as the loop
for (n in 1:N)
c[n] = a[n] *b[n];
Stan supports exponentiation (^) of integer and real-valued expressions. The re-
turn type of exponentiation is always a real-value. For example, assuming nand mare
integer variables and xand yreal variables, the following expressions are legal.
3^2,3.0 ^ -2,3.0 ^ 0.14,
x^n,n^x,n^m,x^y
Exponentiation is right associative, so the expression
60
2^3^4
is equivalent to the following well-formed, fully specified form.
2^(3^4)
Operator Precedence and Associativity
The precedence and associativity of operators, as well as built-in syntax such as ar-
ray indexing and function application is given in tabular form in Figure 4.1. Other
expression-forming operations, such as function application and subscripting bind
more tightly than any of the arithmetic operations.
The precedence and associativity determine how expressions are interpreted. Be-
cause addition is left associative, the expression a+b+c is interpreted as (a+b)+c.
Similarly, a/b*cis interpreted as (a/b)*c.
Because multiplication has higher precedence than addition, the expression a*b+c
is interpreted as (a*b)+c and the expression a+b*cis interpreted as a+(b*c). Simi-
larly, 2*x+3*-y is interpreted as (2*x)+(3*(-y)).
Transposition and exponentiation bind more tightly than any other arithmetic or
logical operation. For vectors, row vectors, and matrices, -u’ is interpreted as -(u’),
u*v’ as u*(v’), and u’*vas (u’)*v. For integer and reals, -n ^ 3 is interpreted as
-(n ^ 3).
4.6. Conditional Operator
Conditional Operator Syntax
The ternary conditional operator is unique in that it takes three arguments and uses
a mixed syntax. If ais an expression of type int and band care expressions that can
be converted to one another (e.g., compared with ==), then
a?b:c
is an expression of the promoted type of band c. The only promotion allowed in Stan
is from integer to real; if one argument is of type int and the other of type real, the
conditional expression as a whole is of type real. In all other cases, the arguments
have to be of the same underlying Stan type (i.e., constraints don’t count, only the
shape) and the conditional expression is of that type.
Conditional Operator Precedence
The conditional operator is the most loosely binding operator, so its arguments rarely
require parentheses for disambiguation. For example,
61
Op. Prec. Assoc. Placement Description
? : 10 right ternary infix conditional
|| 9 left binary infix logical or
&& 8 left binary infix logical and
== 7 left binary infix equality
!= 7 left binary infix inequality
<6 left binary infix less than
<= 6 left binary infix less than or equal
>6 left binary infix greater than
>= 6 left binary infix greater than or equal
+5 left binary infix addition
-5 left binary infix subtraction
*4 left binary infix multiplication
/4 left binary infix (right) division
%4 left binary infix modulus
\3 left binary infix left division
.*2 left binary infix elementwise multiplication
./ 2 left binary infix elementwise division
!1 n/a unary prefix logical negation
-1 n/a unary prefix negation
+1 n/a unary prefix promotion (no-op in Stan)
^0.5 right binary infix exponentiation
’0 n/a unary postfix transposition
() 0 n/a prefix, wrap function application
[] 0 left prefix, wrap array, matrix indexing
Figure 4.1: Stan’s unary, binary, and ternary operators, with their precedences, associativi-
ties, place in an expression, and a description. The last two lines list the precedence of function
application and array, matrix, and vector indexing. The operators are listed in order of prece-
dence, from least tightly binding to most tightly binding. The full set of legal arguments and
corresponding result types are provided in the function documentation in Part VII prefaced with
operator (i.e., operator*(int,int):int indicates the application of the multiplication oper-
ator to two integers, which returns an integer). Parentheses may be used to group expressions
explicitly rather than relying on precedence and associativity.
62
a>0||b<0?c+d:e-f
is equivalent to the explicitly grouped version
(a>0||b<0)?(c+d):(e-f)
The latter is easier to read even if the parentheses are not strictly necessary.
Conditional Operator Associativity
The conditional operator is right associative, so that
a?b:c?d:e
parses as if explicitly grouped as
a?b:(c?d:e)
Again, the explicitly grouped version is easier to read.
Conditional Operator Semantics
Stan’s conditional operator works very much like its C++ analogue. The first argument
must be an expression denoting an integer. Typically this is a variable or a relation
operator, as in the variable ain the example above. Then there are two resulting
arguments, the first being the result returned if the condition evaluates to true (i.e.,
non-zero) and the second if the condition evaluates to false (i.e., zero). In the example
above, the value bis returned if the condition evaluates to a non-zero value and cis
returned if the condition evaluates to zero.
Lazy Evaluation of Results
The key property of the conditional operator that makes it so useful in high-
performance computing is that it only evaluates the returned subexpression, not the
alternative expression. In other words, it is not like a typical function that evaluates
its argument expressions eagerly in order to pass their values to the function. As
usual, the saving is mostly in the derivatives that do not get computed rather than
the unnecessary function evaluation itself.
Promotion to Parameter
If one return expression is a data value (an expression involving only constants and
variables defined in the data or transformed data block), and the other is not, then
the ternary operator will promote the data value to a parameter value. This can cause
needless work calculating derivatives in some cases and be less efficient than a full
if-then conditional statement. For example,
63
data {
real x[10];
...
parameters {
real z[10];
...
model {
y ~ normal(cond ? x : z, sigma);
...
would be more efficiently (if not more transparently) coded as
if (cond)
y ~ normal(x, sigma);
else
y ~ normal(z, sigma);
The conditional statement, like the conditional operator, only evaluates one of the
result statements. In this case, the variable xwill not be promoted to a parameter
and thus not cause any needless work to be carried out when propagating the chain
rule during derivative calculations.
4.7. Indexing
Stan arrays, matrices, vectors, and row vectors are all accessed using the same array-
like notation. For instance, if xis a variable of type real[] (a one-dimensional array
of reals) then x[1] is the value of the first element of the array.
Subscripting has higher precedence than any of the arithmetic operations. For
example, alpha*x[1] is equivalent to alpha*(x[1]).
Multiple subscripts may be provided within a single pair of square brackets. If x
is of type real[ , ], a two-dimensional array, then x[2,501] is of type real.
Accessing Subarrays
The subscripting operator also returns subarrays of arrays. For example, if xis of
type real[ , , ], then x[2] is of type real[ , ], and x[2,3] is of type real[].
As a result, the expressions x[2,3] and x[2][3] have the same meaning.
Accessing Matrix Rows
If Sigma is a variable of type matrix, then Sigma[1] denotes the first row of Sigma
and has the type row_vector.
64
index type example value
integer a[11] value of aat index 11
integer array a[ii] a[ii[1]], ..., a[ii[K]]
lower bound a[3:] a[3], ..., a[N]
upper bound a[:5] a[1], ..., a[5]
range a[2:7] a[2], ..., a[7]
all a[:] a[1],..., a[N]
all a[] a[1],..., a[N]
Figure 4.2: Types of indexes and examples with one-dimensional containers of size Nand an
integer array ii of type int[] size K.
Mixing Array and Vector/Matrix Indexes
Stan supports mixed indexing of arrays and their vector, row vector or matrix values.
For example, if mis of type matrix[ , ], a two-dimensional array of matrices, then
m[1] refers to the first row of the array, which is a one-dimensional array of matrices.
More than one index may be used, so that m[1,2] is of type matrix and denotes the
matrix in the first row and second column of the array. Continuing to add indices,
m[1,2,3] is of type row_vector and denotes the third row of the matrix denoted by
m[1,2]. Finally, m[1,2,3,4] is of type real and denotes the value in the third row
and fourth column of the matrix that is found at the first row and second column of
the array m.
4.8. Multiple Indexing and Range Indexing
In addition to single integer indexes, as described in Section 4.7, Stan supports multi-
ple indexing. Multiple indexes can be integer arrays of indexes, lower bounds, upper
bounds, lower and upper bounds, or simply shorthand for all of the indexes. A com-
plete table of index types is given in Figure 4.2.
Multiple Index Semantics
The fundamental semantic rule for dealing with multiple indexes is the following. If
idxs is a multiple index, then it produces an indexable position in the result. To
evaluate that index position in the result, the index is first passed to the multiple
index, and the resulting index used.
a[idxs, ...][i, ...] = a[idxs[i], ...][...]
65
example row index column index result type
a[i] single n/a row vector
a[is] multiple n/a matrix
a[i, j] single single real
a[i, js] single multiple row vector
a[is, j] multiple single vector
a[is, js] multiple multiple matrix
Figure 4.3: Special rules for reducing matrices based on whether the argument is a single or
multiple index. Examples are for a matrix a, with integer single indexes iand jand integer
array multiple indexes is and js. The same typing rules apply for all multiple indexes.
On the other hand, if idx is a single index, it reduces the dimensionality of the output,
so that
a[idx, ...] = a[idx][...]
The only issue is what happens with matrices and vectors. Vectors work just like
arrays. Matrices with multiple row indexes and multiple column indexes produce
matrices. Matrices with multiple row indexes and a single column index become (col-
umn) vectors. Matrices with a single row index and multiple column indexes become
row vectors. The types are summarized in Figure 4.3.
Evaluation of matrices with multiple indexes is defined to respect the following
distributivity conditions.
m[idxs1, idxs2][i, j] = m[idxs1[i], idxs2[j]]
m[idxs, idx][j] = m[idxs[j], idx]
m[idx, idxs][j] = m[idx, idxs[j]]
Evaluation of arrays of matrices and arrays of vectors or row vectors is defined
recursively, beginning with the array dimensions.
4.9. Function Application
Stan provides a range of built in mathematical and statistical functions, which are
documented in Part VII.
Expressions in Stan may consist of the name of function followed by a sequence
of zero or more argument expressions. For instance, log(2.0) is the expression of
type real denoting the result of applying the natural logarithm to the value of the
real literal 2.0.
Syntactically, function application has higher precedence than any of the other
operators, so that y + log(x) is interpreted as y + (log(x)).
66
Type Signatures and Result Type Inference
Each function has a type signature which determines the allowable type of its ar-
guments and its return type. For instance, the function signature for the logarithm
function can be expressed as
real log(real);
and the signature for the lmultiply function is
real lmultiply(real,real);
A function is uniquely determined by its name and its sequence of argument types.
For instance, the following two functions are different functions.
real mean(real[]);
real mean(vector);
The first applies to a one-dimensional array of real values and the second to a vector.
The identity conditions for functions explicitly forbids having two functions with
the same name and argument types but different return types. This restriction also
makes it possible to infer the type of a function expression compositionally by only
examining the type of its subexpressions.
Constants
Constants in Stan are nothing more than nullary (no-argument) functions. For in-
stance, the mathematical constants πand eare represented as nullary functions
named pi() and e(). See Section 41.2 for a list of built-in constants.
Type Promotion and Function Resolution
Because of integer to real type promotion, rules must be established for which func-
tion is called given a sequence of argument types. The scheme employed by Stan is
the same as that used by C++, which resolves a function call to the function requiring
the minimum number of type promotions.
For example, consider a situation in which the following two function signatures
have been registered for foo.
real foo(real,real);
int foo(int,int);
The use of foo in the expression foo(1.0,1.0) resolves to foo(real,real), and
thus the expression foo(1.0,1.0) itself is assigned a type of real.
67
Because integers may be promoted to real values, the expression foo(1,1) could
potentially match either foo(real,real) or foo(int,int). The former requires two
type promotions and the latter requires none, so foo(1,1) is resolved to function
foo(int,int) and is thus assigned the type int.
The expression foo(1,1.0) has argument types (int,real) and thus does not
explicitly match either function signature. By promoting the integer expression 1to
type real, it is able to match foo(real,real), and hence the type of the function
expression foo(1,1.0) is real.
In some cases (though not for any built-in Stan functions), a situation may arise
in which the function referred to by an expression remains ambiguous. For example,
consider a situation in which there are exactly two functions named bar with the
following signatures.
real bar(real,int);
real bar(int,real);
With these signatures, the expression bar(1.0,1) and bar(1,1.0) resolve to the
first and second of the above functions, respectively. The expression bar(1.0,1.0)
is illegal because real values may not be demoted to integers. The expression
bar(1,1) is illegal for a different reason. If the first argument is promoted to a
real value, it matches the first signature, whereas if the second argument is promoted
to a real value, it matches the second signature. The problem is that these both re-
quire one promotion, so the function name bar is ambiguous. If there is not a unique
function requiring fewer promotions than all others, as with bar(1,1) given the two
declarations above, the Stan compiler will flag the expression as illegal.
Random-Number Generating Functions
For most of the distributions supported by Stan, there is a corresponding random-
number generating function. These random number generators are named by the
distribution with the suffix _rng. For example, a univariate normal random number
can be generated by normal_rng(0,1); only the parameters of the distribution, here
a location (0) and scale (1) are specified because the variate is generated.
Random-Number Generators Locations
The use of random-number generating functions is restricted to the transformed data
and generated quantities blocks; attempts to use them elsewhere will result in a pars-
ing error with a diagnostic message. They may also be used in the bodies of user-
defined functions whose names end in _rng.
This allows the random number generating functions to be used for simulation in
general, and for Bayesian posterior predictive checking in particular.
68
Posterior Predictive Checking
Posterior predictive checks typically use the parameters of the model to generate
simulated data (at the individual and optionally at the group level for hierarchical
models), which can then be compared informally using plots and formally by means
of test statistics, to the actual data in order to assess the suitability of the model; see
(Gelman et al.,2013, Chapter 6) for more information on posterior predictive checks.
4.10. Type Inference
Stan is strongly statically typed, meaning that the implementation type of an expres-
sion can be resolved at compile time.
Implementation Types
The primitive implementation types for Stan are int,real,vector,row_vector, and
matrix. Every basic declared type corresponds to a primitive type; see Figure 4.4 for
the mapping from types to their primitive types. A full implementation type consists
of a primitive implementation type and an integer array dimensionality greater than
or equal to zero. These will be written to emphasize their array-like nature. For ex-
ample, int[] has an array dimensionality of 1, int an array dimensionality of 0, and
int[ , ,] an array dimensionality of 3. The implementation type matrix[ , , ]
has a total of five dimensions and takes up to five indices, three from the array and
two from the matrix.
Recall that the array dimensions come before the matrix or vector dimensions
in an expression such as the following declaration of a three-dimensional array of
matrices.
matrix[M, N] a[I, J, K];
The matrix ais indexed as a[i, j, k, m, n] with the array indices first, followed
by the matrix indices, with a[i, j, k] being a matrix and a[i, j, k, m] being a
row vector.
Type Inference Rules
Stan’s type inference rules define the implementation type of an expression based on
a background set of variable declarations. The rules work bottom up from primitive
literal and variable expressions to complex expressions.
69

Type Primitive Type
int int
real real
matrix matrix
cov_matrix matrix
corr_matrix matrix
cholesky_factor_cov matrix
cholesky_factor_corr matrix
vector vector
simplex vector
unit_vector vector
ordered vector
positive_ordered vector
row_vector row_vector
Figure 4.4: The table shows the variable declaration types of Stan and their corre-
sponding primitive implementation type. Stan functions, operators, and probability
functions have argument and result types declared in terms of primitive types plus
array dimensionality.
Literals
An integer literal expression such as 42 is of type int. Real literals such as 42.0 are
of type real.
Variables
The type of a variable declared locally or in a previous block is determined by its
declaration. The type of a loop variable is int.
There is always a unique declaration for each variable in each scope because Stan
prohibits the redeclaration of an already-declared variables.1
Indexing
If xis an expression of total dimensionality greater than or equal to N, then the type
of expression e[i1, ..., iN] is the same as that of e[i1]...[iN], so it suffices to
1Languages such as C++ and R allow the declaration of a variable of a given name in a narrower scope
to hide (take precedence over for evaluation) a variable defined in a containing scope.
70
define the type of a singly-indexed function. Suppose eis an expression and iis an
expression of primitive type int. Then
• if eis an expression of array dimensionality K > 0, then e[i] has array dimen-
sionality K−1and the same primitive implementation type as e,
• if ehas implementation type vector or row_vector of array dimensionality 0,
then e[i] has implementation type real, and
• if ehas implementation type matrix, then e[i] has type row_vector.
Function Application
If fis the name of a function and e1,...,eN are expressions for N≥0, then
f(e1,...,eN) is an expression whose type is determined by the return type in the
function signature for fgiven e1 through eN. Recall that a function signature is a
declaration of the argument types and the result type.
In looking up functions, binary operators like real *real are defined as
operator*(real,real) in the documentation and index.
In matching a function definition, arguments of type int may be promoted to type
real if necessary (see the subsection on type promotion in Section 4.9 for an exact
specification of Stan’s integer-to-real type-promotion rule).
In general, matrix operations return the lowest inferable type. For example,
row_vector *vector returns a value of type real, which is declared in the function
documentation and index as real operator*(row_vector,vector).
4.11. Chain Rule and Derivatives
Derivatives of the log probability function defined by a model are used in several ways
by Stan. The Hamiltonian Monte Carlo samplers, including NUTS, use gradients to
guide updates. The BFGS optimizers also use gradients to guide search for posterior
modes.
Errors Due to Chain Rule
Unlike evaluations in pure mathematics, evaluation of derivatives in Stan is done
by applying the chain rule on an expression-by-expression basis, evaluating using
floating-point arithmetic. As a result, models such as the following are problematic
for inference involving derivatives.
parameters {
real x;
71
}
model {
x ~ normal(sqrt(x - x), 1);
}
Algebraically, the sampling statement in the model could be reduced to
x ~ normal(0, 1);
and it would seem the model should produce unit normal samples for x. But rather
than canceling, the expression sqrt(x - x) causes a problem for derivatives. The
cause is the mechanistic evaluation of the chain rule,
d
dx √x−x=1
2√x−x×d
dx (x −x)
=1
0×(1−1)
= ∞ × 0
=NaN.
Rather than the x−xcanceling out, it introduces a 0 into the numerator and denom-
inator of the chain-rule evaluation.
The only way to avoid this kind problem is to be careful to do the necessary
algebraic reductions as part of the model and not introduce expressions like sqrt(x
- x) for which the chain rule produces not-a-number values.
Diagnosing Problems with Derivatives
The best way to diagnose whether something is going wrong with the derivatives
is to use the test-gradient option to the sampler or optimizer inputs; this option is
available in both Stan and RStan (though it may be slow, because it relies on finite
differences to make a comparison to the built-in automatic differentiation).
For example, compiling the above model to an executable sqrt-x-minus-x, the
test can be run as
> ./sqrt-x-minus-x diagnose test=gradient
...
TEST GRADIENT MODE
Log probability=-0.393734
param idx value model finite diff error
0 -0.887393 nan 0 nan
72
Even though finite differences calculates the right gradient of 0, automatic differenti-
ation follows the chain rule and produces a not-a-number output.
73

5. Statements
The blocks of a Stan program (see Chapter 6) are made up of variable declarations
and statements. Unlike programs in BUGS, the declarations and statements making
up a Stan program are executed in the order in which they are written. Variables must
be defined to have some value (as well as declared to have some type) before they are
used — if they do not, the behavior is undefined.
The basis of Stan’s execution is the evaluation of a log probability function (specif-
ically, a probability density function) for a given set of (real-valued) parameters. Log
probability function can be constructed by using assignment statements. Statements
may be grouped into sequences and into for-each loops. In addition, Stan allows local
variables to be declared in blocks and also allows an empty statement consisting only
of a semicolon.
5.1. Assignment Statement
An assignment statement consists of a variable (possibly multivariate with indexing
information) and an expression. Executing an assignment statement evaluates the
expression on the right-hand side and assigns it to the (indexed) variable on the left-
hand side. An example of a simple assignment is as follows.1
n = 0;
Executing this statement assigns the value of the expression 0, which is the integer
zero, to the variable n. For an assignment to be well formed, the type of the expression
on the right-hand side should be compatible with the type of the (indexed) variable
on the left-hand side. For the above example, because 0is an expression of type int,
the variable nmust be declared as being of type int or of type real. If the variable
is of type real, the integer zero is promoted to a floating-point zero and assigned
to the variable. After the assignment statement executes, the variable nwill have the
value zero (either as an integer or a floating-point value, depending on its type).
Syntactically, every assignment statement must be followed by a semicolon. Oth-
erwise, whitespace between the tokens does not matter (the tokens here being the left-
hand-side (indexed) variable, the assignment operator, the right-hand-side expression
and the semicolon).
Because the right-hand side is evaluated first, it is possible to increment a variable
in Stan just as in C++ and other programming languages by writing
n=n+1;
1In versions of Stan before 2.17.0, the operator <- was used for assignment rather than using the equal
sign =. The old operator <- is now deprecated and will print a warning. In the future, it will be removed.
74
Such self assignments are not allowed in BUGS, because they induce a cycle into the
directed graphical model.
The left-hand side of an assignment may contain indices for array, matrix, or
vector data structures. For instance, if Sigma is of type matrix, then
Sigma[1, 1] = 1.0;
sets the value in the first column of the first row of Sigma to one.
Assignments can involve complex objects of any type. If Sigma and Omega are
matrices and sigma is a vector, then the following assignment statement, in which
the expression and variable are both of type matrix, is well formed.
Sigma
= diag_matrix(sigma)
*Omega
*diag_matrix(sigma);
This example also illustrates the preferred form of splitting a complex assignment
statement and its expression across lines.
Assignments to subcomponents of larger multi-variate data structures are sup-
ported by Stan. For example, ais an array of type real[ , ] and bis an array of
type real[], then the following two statements are both well-formed.
a[3] = b;
b = a[4];
Similarly, if xis a variable declared to have type row_vector and Yis a variable
declared as type matrix, then the following sequence of statements to swap the first
two rows of Yis well formed.
x = Y[1];
Y[1] = Y[2];
Y[2] = x;
Lvalue Summary
The expressions that are legal left-hand sides of assignment statements are known as
“lvalues.” In Stan, there are only two kinds of legal lvalues,
• a variable, or
• a variable with one or more indices.
To be used as an lvalue, an indexed variable must have at least as many dimensions
as the number of indices provided. An array of real or integer types has as many
75
dimensions as it is declared for. A matrix has two dimensions and a vector or row
vector one dimension; this also holds for the constrained types, covariance and corre-
lation matrices and their Cholesky factors and ordered, positive ordered, and simplex
vectors. An array of matrices has two more dimensions than the array and an array of
vectors or row vectors has one more dimension than the array. Note that the number
of indices can be less than the number of dimensions of the variable, meaning that the
right hand side must itself be multidimensional to match the remaining dimensions.
Multiple Indexes
Multiple indexes, as described in Section 4.8, are also permitted on the left-hand side
of assignments. Indexing on the left side works exactly as it does for expressions,
with multiple indexes preserving index positions and single indexes reducing them.
The type on the left side must still match the type on the right side.
Aliasing
All assignment is carried out as if the right-hand side is copied before the assignment.
This resolves any potential aliasing issues arising from he right-hand side changing
in the middle of an assignment statement’s execution.
Compound Arithmetic and Assignment Statement
Stan’s arithmetic operators may be used in compound arithmetic and assignment
operations. For example, consider the following example of compound addition and
assignment.
real x = 5;
x += 7; // value of x is now 12
The compound arithmetic and assignment statement above is equivalent to the fol-
lowing long form.
x=x+7;
In general, the compound form
x op= y
will be equivalent to
x=xopy;
76
Operation Compound Long
addition x+=y x=x+y
subtraction x-=y x=x-y
multiplication x*=y x=x*y
division x/=y x=x/y
elementwise multiplication x .*=y x=x.*y
elementwise division x./=y x=x./y
Figure 5.1: Stan allows compound arithmetic and assignment statements of the forms listed in
the table above. The compound form is legal whenever the corresponding long form would be
legal and it has the same effect.
The compound statement will be legal whenever the long form is legal. This requires
that the operation x op y must itself be well formed and that the result of the oper-
ation be assignable to x. For the expression xto be assignable, it must be an indexed
variable where the variable is defined in the current block. For example, the following
compound addition and assignment statement will increment a single element of a
vector by two.
vector[N] x;
x[3] += 2;
As a further example, consider
matirx[M, M] x;
vector[M] y;
real z;
x*= x; // OK, (x *x) is a matrix
x*= z; // OK, (x *z) is a matrix
x*= y; // BAD, (x *y) is a vector
The supported compound arithmetic and assignment operations are listed in Fig-
ure 5.1; they are also listed in the index prefaced by operator, e.g., operator+=.
5.2. Increment Log Density
The basis of Stan’s execution is the evaluation of a log probability function (specifi-
cally, a probability density function) for a given set of (real-valued) parameters; this
function returns the log density of the posterior up to an additive constant. Data and
transformed data are fixed before the log density is evaluated. The total log probabil-
ity is initialized to zero. Next, any log Jacobian adjustments accrued by the variable
77
constraints are added to the log density (the Jacobian adjustment may be skipped for
optimization). Sampling and log probability increment statements may add to the log
density in the model block. A log probability increment statement directly increments
the log density with the value of an expression as follows.2
target += -0.5 *y*y;
The keyword target here is actually not a variable, and may not be accessed as such
(though see below on how to access the value of target through a special function).
In this example, the unnormalized log probability of a unit normal variable y
is added to the total log probability. In the general case, the argument can be any
expression.3
An entire Stan model can be implemented this way. For instance, the following
model will draw a single variable according to a unit normal probability.
parameters {
real y;
}
model {
target += -0.5 *y*y;
}
This model defines a log probability function
log p(y) = − y2
2−log Z
where Zis a normalizing constant that does not depend on y. The constant Zis
conventionally written this way because on the linear scale,
p(y) =1
Zexp −y2
2!.
which is typically written without reference to Zas
p(y) ∝exp −y2
2!.
Stan only requires models to be defined up to a constant that does not depend
on the parameters. This is convenient because often the normalizing constant Zis
either time-consuming to compute or intractable to evaluate.
2The current notation replaces two previous versions. Originally, a variable lp__ was directly ex-
posed and manipulated; this is no longer allowed. The original statement syntax for target += u was
increment_log_prob(u), but this form has been deprecated and will be removed in Stan 3.
3Writing this model with the expression -0.5 *y*yis more efficient than with the equivalent expres-
sion y*y / -2 because multiplication is more efficient than division; in both cases, the negation is rolled
into the numeric literal (-0.5 and -2). Writing square(y) instead of y*ywould be even more efficient
because the derivatives can be precomputed, reducing the memory and number of operations required for
automatic differentiation.
78
Relation to compound addition and assignment
The increment log density statement looks syntactically like compound addition and
assignment (see Section 5.1.3, it is treated as a primitive statement because target
is not itself a variable. So, even though
target += lp;
is a legal statement, the corresponding long form is not legal.
target = target + lp; // BAD, target is not a variable
Vectorization
The target += ... statement accepts an argument in place of ... for any expres-
sion type, including integers, reals, vectors, row vectors, matrices, and arrays of any
dimensionality, including arrays of vectors and matrices. For container arguments,
their sum will be added to the total log density.
Accessing the Log Density
To access accumulated log density up to the current execution point, the function
target()() may be used.
5.3. Sampling Statements
Stan supports writing probability statements also in sampling notation, such as
y ~ normal(mu,sigma);
The name “sampling statement” is meant to be suggestive, not interpreted literally.
Conceptually, the variable y, which may be an unknown parameter or known, modeled
data, is being declared to have the distribution indicated by the right-hand side of the
sampling statement.
Executing such a statement does not perform any sampling. In Stan, a sampling
statement is merely a notational convenience. The above sampling statement could
be expressed as a direct increment on the total log probability as
target += normal_lpdf(y | mu, sigma);
In general, a sampling statement of the form
y ~ dist(theta1, ..., thetaN);
79
involving subexpressions yand theta1 through thetaN (including the case where N
is zero) will be well formed if and only if the corresponding assignment statement is
well-formed. For densities allowing real yvalues, the log probability density function
is used,
target += dist_lpdf(y | theta1, ..., thetaN);
For those restricted to integer yvalues, the log probability mass function is used,
target += dist_lpmf(y | theta1, ..., thetaN);
This will be well formed if and only if dist_lpdf(y | theta1, ..., thetaN)
or dist_lpmf(y | theta1, ..., thetaN) is a well-formed expression of type
real.
Log Probability Increment vs. Sampling Statement
Although both lead to the same sampling behavior in Stan, there is one critical differ-
ence between using the sampling statement, as in
y ~ normal(mu, sigma);
and explicitly incrementing the log probability function, as in
target += normal_lpdf(y | mu,sigma);
The sampling statement drops all the terms in the log probability function that are
constant, whereas the explicit call to normal_lpdf adds all of the terms in the defini-
tion of the log normal probability function, including all of the constant normalizing
terms. Therefore, the explicit increment form can be used to recreate the exact log
probability values for the model. Otherwise, the sampling statement form will be
faster if any of the input expressions, y,mu, or sigma, involve only constants, data
variables, and transformed data variables.
User-Transformed Variables
The left-hand side of a sampling statement may be a complex expression. For in-
stance, it is legal syntactically to write
parameters {
real<lower=0> beta;
}
// ...
model {
log(beta) ~ normal(mu, sigma);
}
80
Unfortunately, this is not enough to properly model beta as having a lognormal dis-
tribution. Whenever a nonlinear transform is applied to a parameter, such as the
logarithm function being applied to beta here, and then used on the left-hand side of
a sampling statement or on the left of a vertical bar in a log pdf function, an adjust-
ment must be made to account for the differential change in scale and ensure beta
gets the correct distribution. The correction required is to add the log Jacobian of the
transform to the target log density (see Section 35.1 for full definitions). For the case
above, the following adjustment will account for the log transform.4
target += - log(fabs(y));
Truncated Distributions
Stan supports truncating distributions with lower bounds, upper bounds, or both.
Truncating with lower and upper bounds
A probability density function p(x) for a continuous distribution may be truncated to
an interval [a, b] to define a new density p[a,b](x) with support [a, b] by setting
p[a,b](x) =p(x)
Rb
ap(u) du .
A probability mass function p(x) for a discrete distribution may be truncated to the
closed interval [a, b] by
p[a,b](x) =p(x)
Pb
u=ap(u) .
Truncating with a lower bound
A probability density function p(x) can be truncated to [a, ∞]by defining
p[a,∞](x) =p(x)
R∞
ap(u) du .
A probability mass function p(x) is truncated to [a, ∞]by defining
p[a,∞](x) =p(x)
Pa<=up(u) .
4Because log |d
dy log y| = log |1/y|=−log |y|; see Section 35.1.
81

Truncating with an upper bound
A probability density function p(x) can be truncated to [−∞, b] by defining
p[−∞,b](x) =p(x)
Rb
−∞ p(u) du .
A probability mass function p(x) is truncated to [−∞, b] by defining
p[−∞,b](x) =p(x)
Pu<=bp(u) .
Cumulative distribution functions
Given a probability function pX(x) for a random variable X, its cumulative distribu-
tion function (cdf) FX(x) is defined to be the probability that X≤x,
FX(x) =Pr[X ≤x].
The upper-case variable Xis the random variable whereas the lower-case variable xis
just an ordinary bound variable. For continuous random variables, the definition of
the cdf works out to
FX(x) =Zx
−∞
pX(u) du,
For discrete variables, the cdf is defined to include the upper bound given by the
argument,
FX(x) =X
u≤x
pX(u).
Complementary cumulative distribution functions
The complementary cumulative distribution function (ccdf) in both the continuous
and discrete cases is given by
FC
X(x) =Pr[X > x] =1−FX(x).
Unlike the cdf, the ccdf is exclusive of the bound, hence the event X > x rather than
the cdf’s event X≤x.
For continuous distributions, the ccdf works out to
FC
X(x) =1−Zx
−∞
pX(u) du =Z∞
x
pX(u) du.
82
The lower boundary can be included in the integration bounds because it is a single
point on a line and hence has no probability mass. For the discrete case, the lower
bound must be excluded in the summation explicitly by summing over u > x,
FC
X(x) =1−X
u≤x
pX(u) =X
u>x
pX(u).
Cumulative distribution functions provide the necessary integral calculations to
define truncated distributions. For truncation with lower and upper bounds, the de-
nominator is defined by Zb
a
p(u) du =FX(b) −FX(a).
This allows truncated distributions to be defined as
p[a,b](x) =pX(x)
FX(b) −FX(a) .
For discrete distributions, a slightly more complicated form is required to explic-
itly insert the lower truncation point, which is otherwise excluded from FX(b)−FX(a),
p[a,b](x) =pX(x)
FX(b) −FX(a) +pX(a) .
Truncation with lower and upper bounds in Stan
Stan allows probability functions to be truncated. For example, a truncated unit nor-
mal distributions restricted to [−0.5,2.1]can be coded with the following sampling
statement.
y ~ normal(0, 1) T[-0.5, 2.1];
Truncated distributions are translated as an additional term in the accumulated log
density function plus error checking to make sure the variate in the sampling state-
ment is within the bounds of the truncation.
In general, the truncation bounds and parameters may be parameters or local
variables.
Because the example above involves a continuous distribution, it behaves the same
way as the following more verbose form.
y ~ normal(0, 1);
if (y < -0.5 || y > 2.1)
target += negative_infinity();
else
target += -log_diff_exp(normal_lcdf(2.1 | 0, 1),
normal_lcdf(-0.5 | 0, 1));
83
Because a Stan program defines a log density function, all calculations are on the log
scale. The function normal_lcdf is the log of the cumulative normal distribution
function and the function log_diff_exp(a, b) is a more arithmetically stable form
of log(exp(a) - exp(b)).
For a discrete distribution, another term is necessary in the denominator to ac-
count for the excluded boundary. The truncated discrete distribution
y ~ poisson(3.7) T[2, 10];
behaves in the same way as the following code.
y ~ poisson(3.7);
if(y<2||y>10)
target += negative_infinity();
else
target += -log_sum_exp(poisson_lpmf(2 | 3.7),
log_diff_exp(poisson_lcdf(10 | 3.7),
poisson_lcdf(2 | 3.7)));
Recall that log_sum_exp(a, b) is just the arithmetically stable form of log(exp(a)
+ exp(b)).
Truncation with lower bounds in Stan
For truncating with only a lower bound, the upper limit is left blank.
y ~ normal(0, 1) T[-0.5, ];
This truncated sampling statement has the same behavior as the following code.
y ~ normal(0, 1);
if (y < -0.5)
target += negative_infinity();
else
target += -normal_lccdf(-0.5 | 0, 1);
The normal_lccdf function is the normal complementary cumulative distribution
function.
As with lower and upper truncation, the discrete case requires a more complicated
denominator to add back in the probability mass for the lower bound. Thus
y ~ poisson(3.7) T[2, ];
behaves the same way as
84
y ~ poisson(3.7);
if (y < 2)
target += negative_infinity();
else
target += -log_sum_exp(poisson_lpmf(2 | 3.7),
poisson_lccdf(2 | 3.7));
Truncation with upper bounds in Stan
To truncate with only an upper bound, the lower bound is left blank. The upper
truncated sampling statement
y ~ normal(0, 1) T[ , 2.1];
produces the same result as the following code.
target += normal_lpdf(y | 0, 1);
if (y > 2.1)
target += negative_infinity();
else
target += -normal_lcdf(2.1 | 0, 1);
With only an upper bound, the discrete case does not need a boundary adjustment.
The upper-truncated sampling statement
y ~ poisson(3.7) T[ , 10];
behaves the same way as the following code.
y ~ poisson(3.7);
if (y > 10)
target += negative_infinity();
else
target += -poisson_lcdf(10 | 3.7);
Cumulative distributions must be defined
In all cases, the truncation is only well formed if the appropriate log density or mass
function and necessary log cumulative distribution functions are defined. Not every
distribution built into Stan has log cdf and log ccdfs defined, nor will every user-
defined distribution. Part VIII and Part IX document the available discrete and con-
tinuous cumulative distribution functions; most univariate distributions have log cdf
and log ccdf functions.
85
Type constraints on bounds
For continuous distributions, truncation points must be expressions of type int or
real. For discrete distributions, truncation points must be expressions of type int.
Variates outside of truncation bounds
For a truncated sampling statement, if the value sampled is not within the bounds
specified by the truncation expression, the result is zero probability and the entire
statement adds −∞ to the total log probability, which in turn results in the sample
being rejected; see the subsection of Section 12.2 discussing constraints and out-of-
bounds returns for programming strategies to keep all values within bounds.
Vectorizing Truncated Distributions
Stan does not (yet) support vectorization of distribution functions with truncation.
5.4. For Loops
Suppose Nis a variable of type int,yis a one-dimensional array of type real[], and
mu and sigma are variables of type real. Furthermore, suppose that nhas not been
defined as a variable. Then the following is a well-formed for-loop statement.
for (n in 1:N) {
y[n] ~ normal(mu, sigma);
}
The loop variable is n, the loop bounds are the values in the range 1:N, and the body
is the statement following the loop bounds.
Loop Variable Typing and Scope
The bounds in a for loop must be integers. Unlike in R, the loop is always interpreted
as an upward counting loop. The range L:H will cause the loop to execute the loop
with the loop variable taking on all integer values greater than or equal to Land less
than or equal to H. For example, the loop for (n in 2:5) will cause the body of the
for loop to be executed with nequal to 2, 3, 4, and 5, in order. The variable and bound
for (n in 5:2) will not execute anything because there are no integers greater than
or equal to 5 and less than or equal to 2.
86

Order Sensitivity and Repeated Variables
Unlike in BUGS, Stan allows variables to be reassigned. For example, the variable
theta in the following program is reassigned in each iteration of the loop.
for (n in 1:N) {
theta = inv_logit(alpha + x[n] *beta);
y[n] ~ bernoulli(theta);
}
Such reassignment is not permitted in BUGS. In BUGS, for loops are declarative, defin-
ing plates in directed graphical model notation, which can be thought of as repeated
substructures in the graphical model. Therefore, it is illegal in BUGS or JAGS to have
a for loop that repeatedly reassigns a value to a variable.5
In Stan, assignments are executed in the order they are encountered. As a con-
sequence, the following Stan program has a very different interpretation than the
previous one.
for (n in 1:N) {
y[n] ~ bernoulli(theta);
theta = inv_logit(alpha + x[n] *beta);
}
In this program, theta is assigned after it is used in the probability statement. This
presupposes it was defined before the first loop iteration (otherwise behavior is un-
defined), and then each loop uses the assignment from the previous iteration.
Stan loops may be used to accumulate values. Thus it is possible to sum the values
of an array directly using code such as the following.
total = 0.0;
for (n in 1:N)
total = total + x[n];
After the for loop is executed, the variable total will hold the sum of the elements
in the array x. This example was purely pedagogical; it is easier and more efficient to
write
total = sum(x);
A variable inside (or outside) a loop may even be reassigned multiple times, as in
the following legal code.
5A programming idiom in BUGS code simulates a local variable by replacing theta in the above example
with theta[n], effectively creating Ndifferent variables, theta[1], ..., theta[N]. Of course, this is not a
hack if the value of theta[n] is required for all n.
87
for (n in 1:100) {
y += y *epsilon;
epsilon = 0.5 *epsilon;
y += y *epsilon;
}
5.5. Conditional Statements
Stan supports full conditional statements using the same if-then-else syntax as C++.
The general format is
if (condition1)
statement1
else if (condition2)
statement2
// ...
else if (conditionN-1)
statementN-1
else
statementN
There must be a single leading if clause, which may be followed by any number of
else if clauses, all of which may be optionally followed by an else clause. Each
condition must be a real or integer value, with non-zero values interpreted as true
and the zero value as false.
The entire sequence of if-then-else clauses forms a single conditional statement
for evaluation. The conditions are evaluated in order until one of the conditions
evaluates to a non-zero value, at which point its corresponding statement is executed
and the conditional statement finishes execution. If none of the conditions evaluates
to a non-zero value and there is a final else clause, its statement is executed.
5.6. While Statements
Stan supports standard while loops using the same syntax as C++. The general format
is as follows.
while (condition)
body
The condition must be an integer or real expression and the body can be any state-
ment (or sequence of statements in curly braces).
Evaluation of a while loop starts by evaluating the condition. If the condition
evaluates to a false (zero) value, the execution of the loop terminates and control
88
moves to the position after the loop. If the loop’s condition evaluates to a true (non-
zero) value, the body statement is executed, then the whole loop is executed again.
Thus the loop is continually executed as long as the condition evaluates to a true
value.
5.7. Statement Blocks and Local Variable Declarations
Just as parentheses may be used to group expressions, curly brackets may be used to
group a sequence of zero or more statements into a statement block. At the beginning
of each block, local variables may be declared that are scoped over the rest of the
statements in the block.
Blocks in For Loops
Blocks are often used to group a sequence of statements together to be used in the
body of a for loop. Because the body of a for loop can be any statement, for loops
with bodies consisting of a single statement can be written as follows.
for (n in 1:N)
y[n] ~ normal(mu,sigma);
To put multiple statements inside the body of a for loop, a block is used, as in the
following example.
for (n in 1:N) {
lambda[n] ~ gamma(alpha,beta);
y[n] ~ poisson(lambda[n]);
}
The open curly bracket ({) is the first character of the block and the close curly bracket
(}) is the last character.
Because whitespace is ignored in Stan, the following program will not compile.
for (n in 1:N)
y[n] ~ normal(mu, sigma);
z[n] ~ normal(mu, sigma); // ERROR!
The problem is that the body of the for loop is taken to be the statement directly fol-
lowing it, which is y[n] ~ normal(mu,sigma). This leaves the probability statement
for z[n] hanging, as is clear from the following equivalent program.
for (n in 1:N) {
y[n] ~ normal(mu, sigma);
}
z[n] ~ normal(mu, sigma); // ERROR!
89
Neither of these programs will compile. If the loop variable nwas defined before the
for loop, the for-loop declaration will raise an error. If the loop variable nwas not
defined before the for loop, then the use of the expression z[n] will raise an error.
Local Variable Declarations
A for loop has a statement as a body. It is often convenient in writing programs to be
able to define a local variable that will be used temporarily and then forgotten. For
instance, the for loop example of repeated assignment should use a local variable for
maximum clarity and efficiency, as in the following example.
for (n in 1:N) {
real theta;
theta = inv_logit(alpha + x[n] *beta);
y[n] ~ bernoulli(theta);
}
The local variable theta is declared here inside the for loop. The scope of a local
variable is just the block in which it is defined. Thus theta is available for use inside
the for loop, but not outside of it. As in other situations, Stan does not allow variable
hiding. So it is illegal to declare a local variable theta if the variable theta is already
defined in the scope of the for loop. For instance, the following is not legal.
for (m in 1:M) {
real theta;
for (n in 1:N) {
real theta; // ERROR!
theta = inv_logit(alpha + x[m, n] *beta);
y[m, n] ~ bernoulli(theta);
// ...
The compiler will flag the second declaration of theta with a message that it is al-
ready defined.
No Constraints on Local Variables
Local variables may not have constraints on their declaration. The only types that
may be used are
int,real,vector[K],row_vector[K], and matrix[M, N].
90
Blocks within Blocks
A block is itself a statement, so anywhere a sequence of statements is allowed, one or
more of the statements may be a block. For instance, in a for loop, it is legal to have
the following
for (m in 1:M) {
{
int n = 2 *m;
sum += n;
}
for (n in 1:N)
sum += x[m, n];
}
The variable declaration int n; is the first element of an embedded block and so
has scope within that block. The for loop defines its own local block implicitly over
the statement following it in which the loop variable is defined. As far as Stan is
concerned, these two uses of nare unrelated.
5.8. Break and Continue Statements
The one-token statements continue and break may be used within loops to alter con-
trol flow; continue causes the next iteration of the loop to run immediately, whereas
break terminates the loop and causes execution to resume after the loop. Both con-
trol structures must appear in loops. Both break and continue scope to the most
deeply nested loop, but pass through non-loop statements.
Although these control statements may seem undesirable because of their goto-
like behavior, their judicious use can greatly improve readability by reducing the level
of nesting or eliminating bookkeeping inside loops.
Break Statements
When a break statement is executed, the most deeply nested loop currently being
executed is ended and execution picks up with the next statement after the loop. For
example, consider the following program:
while (1) {
if (n < 0) break;
foo(n);
n=n-1;
}
91
The while (1) loop is a “forever” loop, because 1is the true value, so the test always
succeeds. Within the loop, if the value of nis less than 0, the loop terminates, oth-
erwise it executes foo(n) and then decrements n. The statement above does exactly
the same thing as
while (n >= 0) {
foo(n);
n=n-1;
}
This case is simply illustrative of the behavior; it is not a case where a break simplifies
the loop.
Continue Statements
The continue statement ends the current operation of the loop and returns to the
condition at the top of the loop. Such loops are typically used to exclude some values
from calculations. For example, we could use the following loop to sum the positive
values in the array x,
real sum;
sum = 0;
for (n in 1:size(x)) {
if (x[n] <= 0) continue;
sum += x[n];
}
When the continue statement is executed, control jumps back to the conditional part
of the loop. With while and for loops, this causes control to return to the conditional
of the loop. With for loops, this advances the loop variable, so the the above program
will not go into an infinite loop when faced with an x[n] less than zero. Thus the
above program could be rewritten with deeper nesting by reversing the conditional,
real sum;
sum = 0;
for (n in 1:size(x)) {
if (x[n] > 0)
sum += x[n];
}
While the latter form may seem more readable in this simple case, the former has the
main line of execution nested one level less deep. Instead, the conditional at the top
finds cases to exclude and doesn’t require the same level of nesting for code that’s
not excluded. When there are several such exclusion conditions, the break or continue
versions tend to be much easier to read.
92
Breaking and Continuing Nested Loops
If there is a loop nested within a loop, a break or continue statement only breaks
out of the inner loop. So
while (cond1) {
...
while (cond2) {
...
if (cond3) break;
...
}
// execution continues here after break
...
}
If the break is triggered by cond3 being true, execution will continue after the nested
loop.
As with break statements, continue statements go back to the top of the most
deeply nested loop in which the continue appears.
Although break and continue must appear within loops, they may appear in nested
statements within loops, such as within the conditionals shown above or within
nested statements. The break and continue statements jump past any control struc-
ture other than while-loops and for-loops.
5.9. Print Statements
Stan provides print statements that can print literal strings and the values of expres-
sions. Print statements accept any number of arguments. Consider the following
for-each statement with a print statement in its body.
for (n in 1:N) { print("loop iteration: ", n); ... }
The print statement will execute every time the body of the loop does. Each time
the loop body is executed, it will print the string “loop iteration: ” (with the trailing
space), followed by the value of the expression n, followed by a new line.
Print Content
The text printed by a print statement varies based on its content. A literal (i.e., quoted)
string in a print statement always prints exactly that string (without the quotes).
Expressions in print statements result in the value of the expression being printed.
But how the value of the expression is formatted will depend on its type.
93

Printing a simple real or int typed variable always prints the variable’s value.6
For array, vector, and matrix variables, the print format uses brackets. For example,
a 3-vector will print as
[1, 2, 3]
and a 2×3-matrix as
[[1, 2, 3], [4, 5, 6]]
Printing a more readable version of arrays or matrices can be done with loops. An
example is the print statement in the following transformed data block.
transformed data {
matrix[2, 2] u;
u[1, 1] = 1.0; u[1, 2] = 4.0;
u[2, 1] = 9.0; u[2, 2] = 16.0;
for (n in 1:2)
print("u[", n, "] = ", u[n]);
}
This print statement executes twice, printing the following two lines of output.
u[1] = [1, 4]
u[2] = [9, 16]
Non-void Input
The input type to a print function cannot be void. In particular, it can’t be the result
of a user-defined void function. All other types are allowed as arguments to the print
function.
Print Frequency
Printing for a print statement happens every time it is executed. The transformed
data block is executed once per chain, the transformed parameter and model
blocks once per leapfrog step, and the generated quantities block once per it-
eration.
6The adjoint component is always zero during execution for the algorithmic differentiation variables
used to implement parameters, transformed parameters, and local variables in the model.
94
String Literals
String literals begin and end with a double quote character ("). The characters be-
tween the double quote characters may be the space character or any visible ASCII
character, with the exception of the backslash character (\) and double quote charac-
ter ("). The full list of visible ASCII characters is as follows.
abcdefghijklmnopqrstuvwxyz
ABCDEFGHIJKLMNOPQRSTUVWXYZ
01234567890~@#$%^&*_'`-+={
}[]()<>|/!?.,;:
Debug by print
Because Stan is an imperative language, print statements can be very useful for de-
bugging. They can be used to display the values of variables or expressions at various
points in the execution of a program. They are particularly useful for spotting prob-
lematic not-a-number of infinite values, both of which will be printed.
It is particularly useful to print the value of the log probability accumulator (see
Section 41.4), as in the following example.
vector[2] y;
y[1] = 1;
print("lp before =", target());
y ~ normal(0,1); // bug! y[2] not defined
print("lp after =", target());
The example has a bug in that y[2] is not defined before the vector yis used in the
sampling statement. By printing the value of the log probability accumulator before
and after each sampling statement, it’s possible to isolate where the log probability
becomes ill-defined (i.e., becomes not-a-number).
5.10. Reject Statements
The Stan reject statement provides a mechanism to report errors or problematic
values encountered during program execution and either halt processing or reject
samples or optimization iterations.
Like the print statement, the reject statement accepts any number of quoted
string literals or Stan expressions as arguments.
Reject statements are typically embedded in a conditional statement in order to
detect variables in illegal states. For example, the following code handles the case
where a variable x’s value is negative.
95
if (x < 0)
reject("x must not be negative; found x=", x);
Behavior of Reject Statements
Reject statements have the same behavior as exceptions thrown by built-in Stan func-
tions. For example, the normal_lpdf function raises an exception if the input scale
is not positive and finite. The effect of a reject statement depends on the program
block in which the rejection occurs.
In all cases of rejection, the interface accessing the Stan program should print the
arguments to the reject statement.
Rejections in Functions
Rejections in user-defined functions are just passed to the calling function or program
block. Reject statements can be used in functions to validate the function arguments,
allowing user-defined functions to fully emulate built-in function behavior. It is better
to find out earlier rather than later when there is a problem.
Fatal Exception Contexts
In both the transformed data block and generated quantities block, rejections are
fatal. This is because if initialization fails or if generating output fails, there is no
way to recover values.
Reject statements placed in the transformed data block can be used to validate
both the data and transformed data (if any). This allows more complicated constraints
to be enforced that can be specified with Stan’s constrained variable declarations.
Recoverable Rejection Contexts
Rejections in the transformed parameters and model blocks are not in and of them-
selves instantly fatal. The result has the same effect as assigning a −∞ log probability,
which causes rejection of the current proposal in MCMC samplers and adjustment of
search parameters in optimization.
If the log probability function results in a rejection every time it is called, the
containing application (MCMC sampler or optimization) should diagnose this problem
and terminate with an appropriate error message. To aid in diagnosing problems, the
message for each reject statement will be printed as a result of executing it.
96
Rejection is not for Constraints
Rejection should be used for error handling, not defining arbitrary constraints. Con-
sider the following errorful Stan program.
parameters {
real a;
real<lower=a> b;
real<lower=a, upper=b> theta;
...
model {
// **wrong** needs explicit truncation
theta ~ normal(0, 1);
...
This program is wrong because its truncation bounds on theta depend on parame-
ters, and thus need to be accounted for using an explicit truncation on the distribu-
tion. This is the right way to do it.
theta ~ normal(0, 1) T[a, b];
The conceptual issue is that the prior does not integrate to one over the admissible
parameter space; it integrates to one over all real numbers and integrates to some-
thing less than one over [a, b]; in these simple univariate cases, we can overcome that
with the T[ , ] notation, which essentially divides by whatever the prior integrates
to over [a, b].
This problem is exactly the same problem as you would get using reject state-
ments to enforce complicated inequalities on multivariate functions. In this case, it is
wrong to try to deal with truncation through constraints.
if (theta < a || theta > b)
reject("theta not in (a, b)");
// still **wrong**, needs T[a,b]
theta ~ normal(0, 1);
In this case, the prior integrates to something less than one over the region of the
parameter space where the complicated inequalities are satisfied. But we don’t gener-
ally know what value the prior integrates to, so we can’t increment the log probability
function to compensate.
Even if this adjustment to a proper probability model may seem like “no big deal”
in particular models where the amount of truncated posterior density is negligible or
constant, we can’t sample from that truncated posterior efficiently. Programs need
to use one-to-one mappings that guarantee the constraints are satisfied and only use
reject statements to raise errors or help with debugging.
97
6. Program Blocks
A Stan program is organized into a sequence of named blocks, the bodies of which
consist of variable declarations, followed in the case of some blocks with statements.
6.1. Overview of Stan’s Program Blocks
The full set of named program blocks is exemplified in the following skeletal Stan
program.
functions {
// ... function declarations and definitions ...
}
data {
// ... declarations ...
}
transformed data {
// ... declarations ... statements ...
}
parameters {
// ... declarations ...
}
transformed parameters {
// ... declarations ... statements ...
}
model {
// ... declarations ... statements ...
}
generated quantities {
// ... declarations ... statements ...
}
The function-definition block contains user-defined functions. The data block de-
clares the required data for the model. The transformed data block allows the def-
inition of constants and transforms of the data. The parameters block declares the
model’s parameters — the unconstrained version of the parameters is what’s sam-
pled or optimized. The transformed parameters block allows variables to be defined
in terms of data and parameters that may be used later and will be saved. The model
block is where the log probability function is defined. The generated quantities block
allows derived quantities based on parameters, data, and optionally (pseudo) random
number generation.
98
Optionality and Ordering
All of the blocks are optional. A consequence of this is that the empty string is a valid
Stan program, although it will trigger a warning message from the Stan compiler. The
Stan program blocks that occur must occur in the order presented in the skeletal
program above. Within each block, both declarations and statements are optional,
subject to the restriction that the declarations come before the statements.
Variable Scope
The variables declared in each block have scope over all subsequent statements. Thus
a variable declared in the transformed data block may be used in the model block. But
a variable declared in the generated quantities block may not be used in any earlier
block, including the model block. The exception to this rule is that variables declared
in the model block are always local to the model block and may not be accessed in the
generated quantities block; to make a variable accessible in the model and generated
quantities block, it must be declared as a transformed parameter.
Variables declared as function parameters have scope only within that function
definition’s body, and may not be assigned to (they are constant).
Function Scope
Functions defined in the function block may be used in any appropriate block. Most
functions can be used in any block and applied to a mixture of parameters and data
(including constants or program literals).
Random-number-generating functions are restricted to the generated quantities
block; such functions are suffixed with _rng. Log-probability modifying functions to
blocks where the log probability accumulator is in scope (transformed parameters
and model); such functions are suffixed with _lp.
Density functions defined in the program may be used in sampling statements.
Automatic Variable Definitions
The variables declared in the data and parameters block are treated differently than
other variables in that they are automatically defined by the context in which they are
used. This is why there are no statements allowed in the data or parameters block.
The variables in the data block are read from an external input source such as
a file or a designated R data structure. The variables in the parameters block are
read from the sampler’s current parameter values (either standard HMC or NUTS).
The initial values may be provided through an external input source, which is also
typically a file or a designated R data structure. In each case, the parameters are
instantiated to the values for which the model defines a log probability function.
99

Transformed Variables
The transformed data and transformed parameters block behave similarly to
each other. Both allow new variables to be declared and then defined through a
sequence of statements. Because variables scope over every statement that follows
them, transformed data variables may be defined in terms of the data variables.
Before generating any samples, data variables are read in, then the transformed
data variables are declared and the associated statements executed to define them.
This means the statements in the transformed data block are only ever evaluated
once.1Transformed parameters work the same way, being defined in terms of the
parameters, transformed data, and data variables. The difference is the frequency of
evaluation. Parameters are read in and (inverse) transformed to constrained repre-
sentations on their natural scales once per log probability and gradient evaluation.
This means the inverse transforms and their log absolute Jacobian determinants are
evaluated once per leapfrog step. Transformed parameters are then declared and
their defining statements executed once per leapfrog step.
Generated Quantities
The generated quantity variables are defined once per sample after all the leapfrog
steps have been completed. These may be random quantities, so the block must be
rerun even if the Metropolis adjustment of HMC or NUTS rejects the update proposal.
Variable Read, Write, and Definition Summary
A table summarizing the point at which variables are read, written, and defined is
given in Figure 6.1. Another way to look at the variables is in terms of their function.
To decide which variable to use, consult the charts in Figure 6.2. The last line has
no corresponding location, as there is no need to print a variable every iteration that
does not depend on parameters.2The rest of this chapter provides full details on
when and how the variables and statements in each block are executed.
6.2. Statistical Variable Taxonomy
(Gelman and Hill,2007, p. 366) provides a taxonomy of the kinds of variables used
in Bayesian models. Figure 6.3 contains Gelman and Hill’s taxonomy along with a
1If the C++ code is configured for concurrent threads, the data and transformed data blocks can be
executed once and reused for multiple chains.
2It is possible to print a variable every iteration that does not depend on parameters — just define it (or
redefine it if it is transformed data) in the generated quantities block.
100
Block Stmt Action / Period
data no read / chain
transformed data yes evaluate / chain
parameters no inv. transform, Jacobian / leapfrog
inv. transform, write / sample
transformed parameters yes evaluate / leapfrog
write / sample
model yes evaluate / leapfrog step
generated quantities yes eval / sample
write / sample
(initialization) n/a read, transform / chain
Figure 6.1: The read, write, transform, and evaluate actions and periodicities listed
in the last column correspond to the Stan program blocks in the first column. The
middle column indicates whether the block allows statements. The last row indicates
that parameter initialization requires a read and transform operation applied once per
chain.
Params Log Prob Print Declare In
+ + + transformed parameters
+ + − local in model
+ − − local in generated quantities
+ − + generated quantities
− − + generated quantities∗
− ± − local in transformed data
− + + transformed data and generated quantities∗
Figure 6.2: This table indicates where variables that are not basic data or parameters
should be declared, based on whether it is defined in terms of parameters, whether
it is used in the log probability function defined in the model block, and whether it is
printed. The two lines marked with asterisks (∗) should not be used as there is no need
to print a variable every iteration that does not depend on the value of any parameters
(for information on how to print these if necessary, see Footnote 2in this chapter).
missing-data kind along with the corresponding locations of declarations and defini-
tions in Stan.
Constants can be built into a model as literals, data variables, or as transformed
data variables. If specified as variables, their definition must be included in data files.
101
Variable Kind Declaration Block
unmodeled data data,transformed data
modeled data data,transformed data
missing data parameters,transformed parameters
modeled parameters parameters,transformed parameters
unmodeled parameters data,transformed data
generated quantities transformed data,transformed parameters,
generated quantities
loop indices loop statement
Figure 6.3: Variables of the kind indicated in the left column must be declared in one
of the blocks declared in the right column.
If they are specified as transformed data variables, they cannot be used to specify the
sizes of elements in the data block.
The following program illustrates various variables kinds, listing the kind of each
variable next to its declaration.
data {
int<lower=0> N; // unmodeled data
real y[N]; // modeled data
real mu_mu; // config. unmodeled param
real<lower=0> sigma_mu; // config. unmodeled param
}
transformed data {
real<lower=0> alpha; // const. unmodeled param
real<lower=0> beta; // const. unmodeled param
alpha = 0.1;
beta = 0.1;
}
parameters {
real mu_y; // modeled param
real<lower=0> tau_y; // modeled param
}
transformed parameters {
real<lower=0> sigma_y; // derived quantity (param)
sigma_y = pow(tau_y, -0.5);
}
model {
tau_y ~ gamma(alpha, beta);
mu_y ~ normal(mu_mu, sigma_mu);
102
for (n in 1:N)
y[n] ~ normal(mu_y, sigma_y);
}
generated quantities {
real variance_y; // derived quantity (transform)
variance_y = sigma_y *sigma_y;
}
In this example, y[N] is a modeled data vector. Although it is specified in the data
block, and thus must have a known value before the program may be run, it is mod-
eled as if it were generated randomly as described by the model.
The variable Nis a typical example of unmodeled data. It is used to indicate a size
that is not part of the model itself.
The other variables declared in the data and transformed data block are examples
of unmodeled parameters, also known as hyperparameters. Unmodeled parameters
are parameters to probability densities that are not themselves modeled probabilisti-
cally. In Stan, unmodeled parameters that appear in the data block may be specified
on a per-model execution basis as part of the data read. In the above model, mu_mu
and sigma_mu are configurable unmodeled parameters.
Unmodeled parameters that are hard coded in the model must be declared in the
transformed data block. For example, the unmodeled parameters alpha and beta
are both hard coded to the value 0.1. To allow such variables to be configurable based
on data supplied to the program at run time, they must be declared in the data block,
like the variables mu_mu and sigma_mu.
This program declares two modeled parameters, mu and tau_y. These are the lo-
cation and precision used in the normal model of the values in y. The heart of the
model will be sampling the values of these parameters from their posterior distribu-
tion.
The modeled parameter tau_y is transformed from a precision to a scale param-
eter and assigned to the variable sigma_y in the transformed parameters block.
Thus the variable sigma_y is considered a derived quantity — its value is entirely
determined by the values of other variables.
The generated quantities block defines a value variance_y, which is defined
as a transform of the scale or deviation parameter sigma_y. It is defined in the gen-
erated quantities block because it is not used in the model. Making it a generated
quantity allows it to be monitored for convergence (being a non-linear transform, it
will have different autocorrelation and hence convergence properties than the devia-
tion itself).
In later versions of Stan which have random number generators for the distribu-
tions, the generated quantities block will be usable to generate replicated data
for model checking.
103

Finally, the variable nis used as a loop index in the model block.
6.3. Program Block: data
The rest of this chapter will lay out the details of each block in order, starting with
the data block in this section.
Variable Reads and Transformations
The data block is for the declaration of variables that are read in as data. With
the current model executable, each Markov chain of samples will be executed in a
different process, and each such process will read the data exactly once.3
Data variables are not transformed in any way. The format for data files or data in
memory depends on the interface; see the user’s guides and interface documentation
for PyStan, RStan, and CmdStan for details.
Statements
The data block does not allow statements.
Variable Constraint Checking
Each variable’s value is validated against its declaration as it is read. For example, if a
variable sigma is declared as real<lower=0>, then trying to assign it a negative value
will raise an error. As a result, data type errors will be caught as early as possible.
Similarly, attempts to provide data of the wrong size for a compound data structure
will also raise an error.
6.4. Program Block: transformed data
The transformed data block is for declaring and defining variables that do not need
to be changed when running the program.
Variable Reads and Transformations
For the transformed data block, variables are all declared in the variable declara-
tions and defined in the statements. There is no reading from external sources and
no transformations performed.
3With multiple threads, or even running chains sequentially in a single thread, data could be read only
once per set of chains. Stan was designed to be thread safe and future versions will provide a multithread-
ing option for Markov chains.
104
Variables declared in the data block may be used to declare transformed vari-
ables.
Statements
The statements in a transformed data block are used to define (provide values for)
variables declared in the transformed data block. Assignments are only allowed to
variables declared in the transformed data block.
These statements are executed once, in order, right after the data is read into the
data variables. This means they are executed once per chain (though see Footnote 3
in this chapter).
Variables declared in the data block may be used in statements in the
transformed data block.
Restriction on Operations in transformed data
The statements in the transformed data block are designed to be executed once and
have a deterministic result. Therefore, log probability is not accumulated and sam-
pling statements may not be used. Random number generating functions are also
prohibited.
Variable Constraint Checking
Any constraints on variables declared in the transformed data block are checked
after the statements are executed. If any defined variable violates its constraints,
Stan will halt with a diagnostic error message.
6.5. Program Block: parameters
The variables declared in the parameters program block correspond directly to the
variables being sampled by Stan’s samplers (HMC and NUTS). From a user’s perspec-
tive, the parameters in the program block are the parameters being sampled by Stan.
Variables declared as parameters cannot be directly assigned values. So there is
no block of statements in the parameters program block. Variable quantities derived
from parameters may be declared in the transformed parameters or generated
quantities blocks, or may be defined as local variables in any statement blocks
following their declaration.
There is a substantial amount of computation involved for parameter variables
in a Stan program at each leapfrog step within the HMC or NUTS samplers, and a
bit more computation along with writes involved for saving the parameter values
corresponding to a sample.
105
Constraining Inverse Transform
Stan’s two samplers, standard Hamiltonian Monte Carlo (HMC) and the adaptive No-U-
Turn sampler (NUTS), are most easily (and often most effectively) implemented over a
multivariate probability density that has support on all of Rn. To do this, the parame-
ters defined in the parameters block must be transformed so they are unconstrained.
In practice, the samplers keep an unconstrained parameter vector in memory rep-
resenting the current state of the sampler. The model defined by the compiled Stan
program defines an (unnormalized) log probability function over the unconstrained
parameters. In order to do this, the log probability function must apply the inverse
transform to the unconstrained parameters to calculate the constrained parameters
defined in Stan’s parameters program block. The log Jacobian of the inverse trans-
form is then added to the accumulated log probability function. This then allows the
Stan model to be defined in terms of the constrained parameters.
In some cases, the number of parameters is reduced in the unconstrained space.
For instance, a K-simplex only requires K−1unconstrained parameters, and a K-
correlation matrix only requires K
2unconstrained parameters. This means that the
probability function defined by the compiled Stan program may have fewer parame-
ters than it would appear from looking at the declarations in the parameters program
block.
The probability function on the unconstrained parameters is defined in such a
way that the order of the parameters in the vector corresponds to the order of the
variables defined in the parameters program block. The details of the specific trans-
formations are provided in Chapter 35.
Gradient Calculation
Hamiltonian Monte Carlo requires the gradient of the (unnormalized) log probability
function with respect to the unconstrained parameters to be evaluated during every
leapfrog step. There may be one leapfrog step per sample or hundreds, with more
being required for models with complex posterior distribution geometries.
Gradients are calculated behind the scenes using Stan’s algorithmic differentiation
library. The time to compute the gradient does not depend directly on the number
of parameters, only on the number of subexpressions in the calculation of the log
probability. This includes the expressions added from the transforms’ Jacobians.
The amount of work done by the sampler does depend on the number of uncon-
strained parameters, but this is usually dwarfed by the gradient calculations.
106
Writing Samples
In the basic Stan compiled program, the values of variables are written to a file for
each sample. The constrained versions of the variables are written, again in the or-
der they are defined in the parameters block. In order to do this, the transformed
parameter, model, and generated quantities statements must be executed.
6.6. Program Block: transformed parameters
The transformed parameters program block consists of optional variable declara-
tions followed by statements. After the statements are executed, the constraints on
the transformed parameters are validated. Any variable declared as a transformed
parameter is part of the output produced for samples.
Any variable that is defined wholly in terms of data or transformed data should
be declared and defined in the transformed data block. Defining such quantities in
the transformed parameters block is legal, but much less efficient than defining them
as transformed data.
Constraints are for Error Checking
Like the constraints on data, the constraints on transformed parameters is meant
to catch programming errors as well as convey programmer intent. They are not
automatically transformed in such a way as to be satisfied. What will happen if a
transformed parameter does not match its constraint is that the current parameter
values will be rejected. This can cause Stan’s algorithms to hang or to devolve to
random walks. It is not intended to be a way to enforce ad hoc constraints in Stan
programs. See Section 5.10 for further discussion of the behavior of reject statements.
6.7. Program Block: model
The model program block consists of optional variable declarations followed by state-
ments. The variables in the model block are local variables and are not written as part
of the output.
Local variables may not be defined with constraints because there is no well-
defined way to have them be both flexible and easy to validate.
The statements in the model block typically define the model. This is the block
in which probability (sampling notation) statements are allowed. These are typically
used when programming in the BUGS idiom to define the probability model.
107
6.8. Program Block: generated quantities
The generated quantities program block is rather different than the other blocks.
Nothing in the generated quantities block affects the sampled parameter values. The
block is executed only after a sample has been generated.
Among the applications of posterior inference that can be coded in the generated
quantities block are
• forward sampling to generate simulated data for model testing,
• generating predictions for new data,
• calculating posterior event probabilities, including multiple comparisons, sign
tests, etc.,
• calculating posterior expectations,
• transforming parameters for reporting,
• applying full Bayesian decision theory,
• calculating log likelihoods, deviances, etc. for model comparison.
Forward samples, event probabilities and statistics may all be calculated directly us-
ing plug-in estimates. Stan automatically provides full Bayesian inference by pro-
ducing samples from the posterior distribution of any calculated event probabilities,
predictions, or statistics. See Chapter 29 for more information on Bayesian inference.
Within the generated quantities block, the values of all other variables declared in
earlier program blocks (other than local variables) are available for use in the gener-
ated quantities block.
It is more efficient to define a variable in the generated quantities block instead of
the transformed parameters block. Therefore, if a quantity does not play a role in the
model, it should be defined in the generated quantities block.
After the generated quantities statements are executed, the constraints on the
declared generated quantity variables are validated.
All variables declared as generated quantities are printed as part of the output.
108
7. User-Defined Functions
Stan allows users to define their own functions. The basic syntax is a simplified ver-
sion of that used in C and C++. This chapter specifies how functions are declared,
defined, and used in Stan; see Chapter 24 for a more programming-oriented perspec-
tive.
7.1. Function-Definition Block
User-defined functions appear in a special function-definition block before all of the
other program blocks.
functions {
// ... function declarations and definitions ...
}
data {
// ...
Function definitions and declarations may appear in any order, subject to the con-
dition that a function must be declared before it is used. Forward declarations are
allowed in order to support recursive functions.
7.2. Function Names
The rules for function naming and function-argument naming are the same as for
other variables; see Section 4.2 for more information on valid identifiers. For example,
real foo(real mu, real sigma);
declares a function named foo with two argument variables of types real and real.
The arguments are named mu and sigma, but that is not part of the declaration. Two
user-defined functions may not have the same name even if they have different
sequences of argument types.
7.3. Calling Functions
All function arguments are mandatory—there are no default values.
Functions as Expressions
Functions with non-void return types are called just like any other built-in function in
Stan—they are applied to appropriately typed arguments to produce an expression,
which has a value when executed.
109
Functions as Statements
Functions with void return types may be applied to arguments and used as state-
ments. These act like sampling statements or print statements. Such uses are only
appropriate for functions that act through side effects, such as incrementing the log
probability accumulator, printing, or raising exceptions.
Probability Functions in Sampling Statements
Functions whose name ends in _lpdf or _lpmf (density and mass functions) may be
used as probability functions and may be used in place of parameterized distributions
on the right-hand-side of sampling statements. There is no restriction on where such
functions may be used.
Restrictions on Placement
Functions of certain types are restricted on scope of usage. Functions whose names
end in _lp assume access to the log probability accumulator and are only available in
the transformed parameter and model blocks. Functions whose names end in _rng
assume access to the random number generator and may only be used within the
generated quantities block, transformed data block, and within user-defined func-
tions ending in _rng. See Section 7.5 for more information on these two special types
of function.
7.4. Unsized Argument Types
Stan’s functions all have declared types for both arguments and returned value. As
with built-in functions, user-defined functions are only declared for base argument
type and dimensionality. This requires a different syntax than for declaring other
variables. The choice of language was made so that return types and argument types
could use the same declaration syntax.
The type void may not be used as an argument type, only a return type for a
function with side effects.
Base Variable Type Declaration
The base variable types are integer,real,vector,row_vector, and matrix. No
lower-bound or upper-bound constraints are allowed (e.g., real<lower=0> is illegal).
Specialized types are also not allowed (e.g., simplex is illegal) .
110
Dimensionality Declaration
Arguments and return types may be arrays, and these are indicated with optional
brackets and commas as would be used for indexing. For example, int denotes a sin-
gle integer argument or return, whereas real[ ] indicates a one-dimensional array
of reals, real[ , ] a two-dimensional array and real[ , , ] a three-dimensional
array; whitespace is optional, as usual.
The dimensions for vectors and matrices are not included, so that matrix is the
type of a single matrix argument or return type. Thus if a variable is declared as
matrix a, then ahas two indexing dimensions, so that a[1] is a row vector and
a[1, 1] a real value. Matrices implicitly have two indexing dimensions. The type
declaration matrix[,] b specifies that bis a two-dimensional array of matrices, for
a total of four indexing dimensions, with b[1, 1, 1, 1] picking out a real value.
Dimensionality Checks and Exceptions
Function argument and return types are not themselves checked for dimensionality.
A matrix of any size may be passed in as a matrix argument. Nevertheless, a user-
defined function might call a function (such as a multivariate normal density) that
itself does dimensionality checks.
Dimensions of function return values will be checked if they’re assigned to a pre-
viously declared variable. They may also be checked if they are used as the argument
to a function.
Any errors raised by calls to functions inside user functions or return type mis-
matches are simply passed on; this typically results in a warning message and rejec-
tion of a proposal during sampling or optimization.
7.5. Function Bodies
The body of a function is bounded by curly braces ({and }). The body may contain
local variable declarations at the top of the function body’s block and these scope the
same way as local variables used in any other statement block.
The only restrictions on statements in function bodies are external, and determine
whether the log probability accumulator or random number generators are available;
see the rest of this section for details.
Random Number Generating Functions
Functions that call random number generating functions in their bodies must have a
name that ends in _rng; attempts to use random-number generators in other func-
tions leads to a compile-time error.
111
Like other random number generating functions, user-defined functions with
names that end in _rng may be used only in the generated quantities block and trans-
formed data block, or within the bodies of user-defined functions ending in _rng. An
attempt to use such a function elsewhere results in a compile-time error.
Log Probability Access in Functions
Functions that include sampling statements or log probability increment statements
must have a name that ends in _lp. Attempts to use sampling statements or incre-
ment log probability statements in other functions leads to a compile-time error.
Like the target log density increment statement and sampling statements, user-
defined functions with names that end in _lp may only be used in blocks where the
log probability accumulator is accessible, namely the transformed parameters and
model blocks. An attempt to use such a function elsewhere results in a compile-time
error.
Defining Probability Functions for Sampling Statements
Functions whose names end in _lpdf and _lpmf (density and mass functions) can be
used as probability functions in sampling statements. As with the built-in functions,
the first argument will appear on the left of the sampling statement operator (~) in
the sampling statement and the other arguments follow. For example, suppose a
function returning the log of the density of ygiven parameter theta allows the use
of the sampling statement is defined as follows.
real foo_lpdf(real y, vector theta) { ... }
Note that for function definitions, the comma is used rather than the vertical bar.
Then the shorthand
z ~ foo(phi);
will have exactly the same effect
target += foo_lpdf(z | phi);
Unlike built-in probability functions, user-defined probability functions like the ex-
ample foo above will not automatically drop constant terms.
The same syntax and shorthand works for log probability mass functions with
suffixes _lpmf.
A function that is going to be accessed as distributions must return the log of the
density or mass function it defines.
112

7.6. Parameters are Constant
Within function definition bodies, the parameters may be used like any other variable.
But the parameters are constant in the sense that they can’t be assigned to (i.e., can’t
appear on the left side of an assignment (=) statement. In other words, their value
remains constant throughout the function body. Attempting to assign a value to a
function parameter value will raise a compile-time error.1
Local variables may be declared at the top of the function block and scope as
usual.
7.7. Return Value
Non-void functions must have a return statement that returns an appropriately typed
expression. If the expression in a return statement does not have the same type as
the return type declared for the function, a compile-time error is raised.
Void functions may use return only without an argument, but return statements
are not mandatory.
Return Guarantee Required
Unlike C++, Stan enforces a syntactic guarantee for non-void functions that ensures
control will leave a non-void function through an appropriately typed return state-
ment or because an exception is raised in the execution of the function. To enforce
this condition, functions must have a return statement as the last statement in their
body. This notion of last is defined recursively in terms of statements that qualify as
bodies for functions. The base case is that
• a return statement qualifies,
and the recursive cases are that
• a sequence of statements qualifies if its last statement qualifies,
• a for loop or while loop qualifies if its body qualifies, and
• a conditional statement qualifies if it has a default else clause and all of its body
statements qualify.
These rules disqualify
1Despite being declared constant and appearing to have a pass-by-value syntax in Stan, the implemen-
tation of the language passes function arguments by constant reference in C++.
113
real foo(real x) {
if (x > 2) return 1.0;
else if (x <= 2) return -1.0;
}
because there is no default else clause, and disqualify
real foo(real x) {
real y;
y = x;
while (x < 10) {
if (x > 0) return x;
y=x/2;
}
}
because the return statement is not the last statement in the while loop. A bogus
dummy return could be placed after the while loop in this case. The rules for returns
allow
real log_fancy(real x) {
if (x < 1e-30)
return x;
else if (x < 1e-14)
return x *x;
else
return log(x);
}
because there’s a default else clause and each condition body has return as its final
statement.
7.8. Void Functions as Statements
Void Functions
A function can be declared without a return value by using void in place of a return
type. Note that the type void may only be used as a return type—arguments may not
be declared to be of type void.
Usage as Statement
A void function may be used as a statement after the function is declared; see Sec-
tion 7.9 for rules on declaration.
Because there is no return, such a usage is only for side effects, such as incre-
menting the log probability function, printing, or raising an error.
114
Special Return Statements
In a return statement within a void function’s definition, the return keyword is fol-
lowed immediately by a semicolon (;) rather than by the expression whose value is
returned.
7.9. Declarations
In general, functions must be declared before they are used. Stan supports forward
declarations, which look like function definitions without bodies. For example,
real unit_normal_lpdf(real y);
declares a function named unit_normal_log that consumes a single real-valued in-
put and produces a real-valued output. A function definition with a body simultane-
ously declares and defines the named function, as in
real unit_normal_lpdf(real y) {
return -0.5 *square(y);
}
A user-defined Stan function may be declared and then later defined, or just de-
fined without being declared. No other combination of declaration and definition is
legal, so that, for instance, a function may not be declared more than once, nor may it
be defined more than once. If there is a declaration, there must be a definition. These
rules together ensure that all the declared functions are eventually defined.
Recursive Functions
Forward declarations allow the definition of self-recursive or mutually recursive func-
tions. For instance, consider the following code to compute Fibonacci numbers.
int fib(int n);
int fib(int n) {
if (n < 2) return n;
else return fib(n-1) + fib(n-2);
}
Without the forward declaration in the first line, the body of the definition would not
compile.
115

8. Execution of a Stan Program
This chapter provides a sketch of how a compiled Stan model is executed using sam-
pling. Optimization shares the same data reading and initialization steps, but then
does optimization rather than sampling.
This sketch is elaborated in the following chapters of this part, which cover vari-
able declarations, expressions, statements, and blocks in more detail.
8.1. Reading and Transforming Data
The reading and transforming data steps are the same for sampling, optimization and
diagnostics.
Read Data
The first step of execution is to read data into memory. Data may be read in through
file (in CmdStan) or through memory (RStan and PyStan); see their respective manuals
for details.1All of the variables declared in the data block will be read. If a variable
cannot be read, the program will halt with a message indicating which data variable
is missing.
After each variable is read, if it has a declared constraint, the constraint is vali-
dated. For example, if a variable Nis declared as int<lower=0>, after Nis read, it
will be tested to make sure it is greater than or equal to zero. If a variable violates its
declared constraint, the program will halt with a warning message indicating which
variable contains an illegal value, the value that was read, and the constraint that was
declared.
Define Transformed Data
After data is read into the model, the transformed data variable statements are exe-
cuted in order to define the transformed data variables. As the statements execute,
declared constraints on variables are not enforced.
Transformed data variables are initialized with real values set to NaN and integer
values set to the smallest integer (large absolute value negative number).
After the statements are executed, all declared constraints on transformed data
variables are validated. If the validation fails, execution halts and the variable’s name,
value and constraints are displayed.
1The C++ code underlying Stan is flexible enough to allow data to be read from memory or file. Calls
from R, for instance, can be configured to read data from file or directly from R’s memory.
116
8.2. Initialization
Initialization is the same for sampling, optimization, and diagnosis
User-Supplied Initial Values
If there are user-supplied initial values for parameters, these are read using the same
input mechanism and same file format as data reads. Any constraints declared on
the parameters are validated for the initial values. If a variable’s value violates its
declared constraint, the program halts and a diagnostic message is printed.
After being read, initial values are transformed to unconstrained values that will
be used to initialize the sampler.
Boundary Values are Problematic
Because of the way Stan defines its transforms from the constrained to the uncon-
strained space, initializing parameters on the boundaries of their constraints is usu-
ally problematic. For instance, with a constraint
parameters {
real<lower=0,upper=1> theta;
// ...
}
an initial value of 0 for theta leads to an unconstrained value of −∞, whereas a value
of 1 leads to an unconstrained value of +∞. While this will be inverse transformed
back correctly given the behavior of floating point arithmetic, the Jacobian will be
infinite and the log probability function will fail and raise an exception.
Random Initial Values
If there are no user-supplied initial values, the default initialization strategy is to
initialize the unconstrained parameters directly with values drawn uniformly from
the interval (−2,2). The bounds of this initialization can be changed but it is always
symmetric around 0. The value of 0 is special in that it represents the median of the
initialization. An unconstrained value of 0 corresponds to different parameter values
depending on the constraints declared on the parameters.
An unconstrained real does not involve any transform, so an initial value of 0 for
the unconstrained parameters is also a value of 0 for the constrained parameters.
For parameters that are bounded below at 0, the initial value of 0 on the uncon-
strained scale corresponds to exp(0)=1on the constrained scale. A value of -2
corresponds to exp(−2)=.13 and a value of 2 corresponds to exp(2)=7.4.
117
For parameters bounded above and below, the initial value of 0 on the uncon-
strained scale corresponds to a value at the midpoint of the constraint interval. For
probability parameters, bounded below by 0 and above by 1, the transform is the
inverse logit, so that an initial unconstrained value of 0 corresponds to a constrained
value of 0.5, -2 corresponds to 0.12 and 2 to 0.88. Bounds other than 0 and 1 are just
scaled and translated.
Simplexes with initial values of 0 on the unconstrained basis correspond to sym-
metric values on the constrained values (i.e., each value is 1/K in a K-simplex).
Cholesky factors for positive-definite matrices are initialized to 1 on the diago-
nal and 0 elsewhere; this is because the diagonal is log transformed and the below-
diagonal values are unconstrained.
The initial values for other parameters can be determined from the transform that
is applied. The transforms are all described in full detail in Chapter 35.
Zero Initial Values
The initial values may all be set to 0 on the unconstrained scale. This can be helpful
for diagnosis, and may also be a good starting point for sampling. Once a model is
running, multiple chains with more diffuse starting points can help diagnose prob-
lems with convergence; see Section 30.3 for more information on convergence moni-
toring.
8.3. Sampling
Sampling is based on simulating the Hamiltonian of a particle with a starting posi-
tion equal to the current parameter values and an initial momentum (kinetic energy)
generated randomly. The potential energy at work on the particle is taken to be the
negative log (unnormalized) total probability function defined by the model. In the
usual approach to implementing HMC, the Hamiltonian dynamics of the particle is
simulated using the leapfrog integrator, which discretizes the smooth path of the
particle into a number of small time steps called leapfrog steps.
Leapfrog Steps
For each leapfrog step, the negative log probability function and its gradient need to
be evaluated at the position corresponding to the current parameter values (a more
detailed sketch is provided in the next section). These are used to update the momen-
tum based on the gradient and the position based on the momentum.
For simple models, only a few leapfrog steps with large step sizes are needed. For
models with complex posterior geometries, many small leapfrog steps may be needed
to accurately model the path of the parameters.
118
If the user specifies the number of leapfrog steps (i.e., chooses to use standard
HMC), that number of leapfrog steps are simulated. If the user has not specified the
number of leapfrog steps, the No-U-Turn sampler (NUTS) will determine the number
of leapfrog steps adaptively (Hoffman and Gelman,2011,2014).
Log Probability and Gradient Calculation
During each leapfrog step, the log probability function and its gradient must be cal-
culated. This is where most of the time in the Stan algorithm is spent. This log
probability function, which is used by the sampling algorithm, is defined over the
unconstrained parameters.
The first step of the calculation requires the inverse transform of the uncon-
strained parameter values back to the constrained parameters in terms of which the
model is defined. There is no error checking required because the inverse transform
is a total function on every point in whose range satisfies the constraints.
Because the probability statements in the model are defined in terms of con-
strained parameters, the log Jacobian of the inverse transform must be added to
the accumulated log probability.
Next, the transformed parameter statements are executed. After they complete,
any constraints declared for the transformed parameters are checked. If the con-
straints are violated, the model will halt with a diagnostic error message.
The final step in the log probability function calculation is to execute the state-
ments defined in the model block.
As the log probability function executes, it accumulates an in-memory represen-
tation of the expression tree used to calculate the log probability. This includes all of
the transformed parameter operations and all of the Jacobian adjustments. This tree
is then used to evaluate the gradients by propagating partial derivatives backward
along the expression graph. The gradient calculations account for the majority of the
cycles consumed by a Stan program.
Metropolis Accept/Reject
A standard Metropolis accept/reject step is required to retain detailed balance and
ensure samples are marginally distributed according to the probability function de-
fined by the model. This Metropolis adjustment is based on comparing log proba-
bilities, here defined by the Hamiltonian, which is the sum of the potential (negative
log probability) and kinetic (squared momentum) energies. In theory, the Hamilto-
nian is invariant over the path of the particle and rejection should never occur. In
practice, the probability of rejection is determined by the accuracy of the leapfrog
approximation to the true trajectory of the parameters.
119
If step sizes are small, very few updates will be rejected, but many steps will be
required to move the same distance. If step sizes are large, more updates will be
rejected, but fewer steps will be required to move the same distance. Thus a balance
between effort and rejection rate is required. If the user has not specified a step size,
Stan will tune the step size during warmup sampling to achieve a desired rejection
rate (thus balancing rejection versus number of steps).
If the proposal is accepted, the parameters are updated to their new values. Oth-
erwise, the sample is the current set of parameter values.
8.4. Optimization
Optimization runs very much like sampling in that it starts by reading the data and
then initializing parameters. Unlike sampling, it produces a deterministic output
which requires no further analysis other than to verify that the optimizer itself con-
verged to a posterior mode. The output for optimization is also similar to that for
sampling.
8.5. Variational Inference
Variational inference also runs similar to sampling. It begins by reading the data
and initializing the algorithm. The initial variational approximation is a random draw
from the standard normal distribution in the unconstrained (real-coordinate) space.
Again, similar to sampling, it outputs samples from the approximate posterior once
the algorithm has decided that it has converged. Thus, the tools we use for analyzing
the result of Stan’s sampling routines can also be used for variational inference.
8.6. Model Diagnostics
Model diagnostics are like sampling and optimization in that they depend on a
model’s data being read and its parameters being initialized. The user’s guides for the
interfaces (RStan, PyStan, CmdStan) provide more details on the diagnostics available;
as of Stan 2.0, that’s just gradients on the unconstrained scale and log probabilities.
8.7. Output
For each final sample (not counting samples during warmup or samples that are
thinned), there is an output stage of writing the samples.
120

Generated Quantities
Before generating any output, the statements in the generated quantities block are
executed. This can be used for any forward simulation based on parameters of the
model. Or it may be used to transform parameters to an appropriate form for output.
After the generated quantities statements execute, the constraints declared on
generated quantities variables are validated. If these constraints are violated, the
program will terminate with a diagnostic message.
Write
The final step is to write the actual values. The values of all variables declared as
parameters, transformed parameters, or generated quantities are written. Local vari-
ables are not written, nor is the data or transformed data. All values are written in
their constrained forms, that is the form that is used in the model definitions.
In the executable form of a Stan models, parameters, transformed parameters,
and generated quantities are written to a file in comma-separated value (csv) notation
with a header defining the names of the parameters (including indices for multivariate
parameters).2
2In the R version of Stan, the values may either be written to a csv file or directly back to R’s memory.
121
Part III
Example Models
122
9. Regression Models
Stan supports regression models from simple linear regressions to multilevel gener-
alized linear models.
9.1. Linear Regression
The simplest linear regression model is the following, with a single predictor and a
slope and intercept coefficient, and normally distributed noise. This model can be
written using standard regression notation as
yn=α+βxn+nwhere n∼Normal(0, σ ).
This is equivalent to the following sampling involving the residual,
yn−(α +βXn)∼Normal(0, σ ),
and reducing still further, to
yn∼Normal(α +βXn, σ ).
This latter form of the model is coded in Stan as follows.
data {
int<lower=0> N;
vector[N] x;
vector[N] y;
}
parameters {
real alpha;
real beta;
real<lower=0> sigma;
}
model {
y ~ normal(alpha + beta *x, sigma);
}
There are Nobservations, each with predictor x[n] and outcome y[n]. The intercept
and slope parameters are alpha and beta. The model assumes a normally distributed
noise term with scale sigma. This model has improper priors for the two regression
coefficients.
123

Matrix Notation and Vectorization
The sampling statement in the previous model is vectorized, with
y ~ normal(alpha + beta *x, sigma);
providing the same model as the unvectorized version,
for (n in 1:N)
y[n] ~ normal(alpha + beta *x[n], sigma);
In addition to being more concise, the vectorized form is much faster.1
In general, Stan allows the arguments to distributions such as normal to be vec-
tors. If any of the other arguments are vectors or arrays, they have to be the same
size. If any of the other arguments is a scalar, it is reused for each vector entry. See
Section 49.8 for more information on vectorization of probability functions.
The other reason this works is that Stan’s arithmetic operators are overloaded to
perform matrix arithmetic on matrices. In this case, because xis of type vector and
beta of type real, the expression beta *xis of type vector. Because Stan supports
vectorization, a regression model with more than one predictor can be written directly
using matrix notation.
data {
int<lower=0> N; // number of data items
int<lower=0> K; // number of predictors
matrix[N, K] x; // predictor matrix
vector[N] y; // outcome vector
}
parameters {
real alpha; // intercept
vector[K] beta; // coefficients for predictors
real<lower=0> sigma; // error scale
}
model {
y ~ normal(x *beta + alpha, sigma); // likelihood
}
The constraint lower=0 in the declaration of sigma constrains the value to be greater
than or equal to 0. With no prior in the model block, the effect is an improper prior
1Unlike in Python and R, which are interpreted, Stan is translated to C++ and compiled, so loops and
assignment statements are fast. Vectorized code is faster in Stan because (a) the expression tree used to
compute derivatives can be simplified, leading to fewer virtual function calls, and (b) computations that
would be repeated in the looping version, such as log(sigma) in the above model, will be computed once
and reused.
124
on non-negative real numbers. Although a more informative prior may be added,
improper priors are acceptable as long as they lead to proper posteriors.
In the model above, xis an N×Kmatrix of predictors and beta aK-vector of
coefficients, so x*beta is an N-vector of predictions, one for each of the Ndata
items. These predictions line up with the outcomes in the N-vector y, so the entire
model may be written using matrix arithmetic as shown. It would be possible to
include a column of 1 values in xand remove the alpha parameter.
The sampling statement in the model above is just a more efficient, vector-based
approach to coding the model with a loop, as in the following statistically equivalent
model.
model {
for (n in 1:N)
y[n] ~ normal(x[n] *beta, sigma);
}
With Stan’s matrix indexing scheme, x[n] picks out row nof the matrix x; because
beta is a column vector, the product x[n] *beta is a scalar of type real.
Intercepts as Inputs
In the model formulation
y ~ normal(x *beta, sigma);
there is no longer an intercept coefficient alpha. Instead, we have assumed that the
first column of the input matrix xis a column of 1 values. This way, beta[1] plays
the role of the intercept. If the intercept gets a different prior than the slope terms,
then it would be clearer to break it out. It is also slightly more efficient in its explicit
form with the intercept variable singled out because there’s one fewer multiplications;
it should not make that much of a difference to speed, though, so the choice should
be based on clarity.
9.2. The QR Reparameterization
In the previous example, the linear predictor can be written as η=xβ, where ηis a N-
vector of predictions, xis a N×Kmatrix, and βis a K-vector of coefficients. Presuming
N≥K, we can exploit the fact that any design matrix, xcan be decomposed using the
thin QR decomposition into an orthogonal matrix Qand an upper-triangular matrix
R, i.e. x=QR. See 43.13.4 for more information on the QR decomposition but
note that qr_Q and qr_R implement the fat QR decomposition so here we thin it by
including only Kcolumns in Qand Krows in R. Also, in practice, it is best to write
125

x=Q∗R∗where Q∗=Q×√n−1and R∗=1
√n−1R. Thus, we can equivalently write
η=xβ =QRβ =Q∗R∗β. If we let θ=R∗β, then we have η=Q∗θand β=R∗−1θ. In
that case, the previous Stan program becomes
data {
int<lower=0> N; // number of data items
int<lower=0> K; // number of predictors
matrix[N, K] x; // predictor matrix
vector[N] y; // outcome vector
}
transformed data {
matrix[N, K] Q_ast;
matrix[K, K] R_ast;
matrix[K, K] R_ast_inverse;
// thin and scale the QR decomposition
Q_ast = qr_Q(x)[, 1:K] *sqrt(N - 1);
R_ast = qr_R(x)[1:K, ] / sqrt(N - 1);
R_ast_inverse = inverse(R_ast);
}
parameters {
real alpha; // intercept
vector[K] theta; // coefficients on Q_ast
real<lower=0> sigma; // error scale
}
model {
y ~ normal(Q_ast *theta + alpha, sigma); // likelihood
}
generated quantities {
vector[K] beta;
beta = R_ast_inverse *theta; // coefficients on x
}
Since this Stan program generates equivalent predictions for yand the same posterior
distribution for α,β, and σas the previous Stan program, many wonder why the
version with this QR reparameterization performs so much better in practice, often
both in terms of wall time and in terms of effective sample size. The reasoning is
threefold:
1. The columns of Q∗are orthogonal whereas the columns of xgenerally are not.
Thus, it is easier for a Markov Chain to move around in θ-space than in β-space.
2. The columns of Q∗have the same scale whereas the columns of xgenerally do
not. Thus, a Hamiltonian Monte Carlo algorithm can move around the parame-
ter space with a smaller number of larger steps
126
3. Since the covariance matrix for the columns of Q∗is an identity matrix, θ
typically has a reasonable scale if the units of yare also reasonable. This also
helps HMC move efficiently without compromising numerical accuracy.
Consequently, this QR reparameterization is recommended for linear and generalized
linear models in Stan whenever K > 1and you do not have an informative prior on
the location of β. It can also be worthwhile to subtract the mean from each column
of xbefore obtaining the QR decomposition, which does not affect the posterior dis-
tribution of θor βbut does affect αand allows you to interpret αas the expectation
of yin a linear model.
9.3. Priors for Coefficients and Scales
This section describes the choices available for modeling priors for regression coef-
ficients and scales. Priors for univariate parameters in hierarchical models are dis-
cussed in Section 9.10 and multivariate parameters in Section 9.13. There is also a
discussion of priors used to identify models in Section 9.12.
However, as described in Section 9.2, if you do not have an informative prior on
the location of the regression coefficients, then you are better off reparameterizing
your model so that the regression coefficients are a generated quantity. In that case,
it usually does not matter very much what prior is used on on the reparameterized
regression coefficients and almost any weakly informative prior that scales with the
outcome will do.
Background Reading
See (Gelman,2006) for an overview of choices for priors for scale parameters, (Chung
et al.,2013) for an overview of choices for scale priors in penalized maximum likeli-
hood estimates, and Gelman et al. (2008) for a discussion of prior choice for regres-
sion coefficients.
Improper Uniform Priors
The default in Stan is to provide uniform (or “flat”) priors on parameters over their
legal values as determined by their declared constraints. A parameter declared with-
out constraints is thus given a uniform prior on (−∞,∞)by default, whereas a scale
parameter declared with a lower bound of zero gets an improper uniform prior on
(0,∞). Both of these priors are improper in the sense that there is no way formulate
a density function for them that integrates to 1 over its support.
Stan allows models to be formulated with improper priors, but in order for sam-
pling or optimization to work, the data provided must ensure a proper posterior. This
127
usually requires a minimum quantity of data, but can be useful as a starting point for
inference and as a baseline for sensitivity analysis (i.e., considering the effect the prior
has on the posterior).
Uniform priors are specific to the scale on which they are formulated. For instance,
we could give a scale parameter σ > 0a uniform prior on (0,∞),q(σ ) =c(we use
qbecause the “density” is not only unnormalized, but unnormalizable), or we could
work on the log scale and provide log σa uniform prior on (−∞,∞),q(log σ ) =c.
These work out to be different priors on σdue to the Jacobian adjustment necessary
for the log transform; see Section 35.1 for more information on changes of variables
and their requisite Jacobian adjustments.
Stan automatically applies the necessary Jacobian adjustment for variables de-
clared with constraints to ensure a uniform density on the legal constrained values.
This Jacobian adjustment is turned off when optimization is being applied in order
to produce appropriate maximum likelihood estimates.
Proper Uniform Priors: Interval Constraints
It is possible to declare a variable with a proper uniform prior by imposing both an
upper and lower bound on it, for example,
real<lower=0.1, upper=2.7> sigma;
This will implicitly give sigma aUniform(0.1,2.7)prior.
Matching Support to Constraints
As with all constraints, it is important that the model provide support for all legal
values of sigma. For example, the following code constraints sigma to be positive,
but then imposes a bounded uniform prior on it.
parameters {
real<lower=0> sigma;
...
model {
// *** bad *** : support narrower than constraint
sigma ~ uniform(0.1, 2.7);
The sampling statement imposes a limited support for sigma in (0.1, 2.7), which is
narrower than the support declared in the constraint, namely (0,∞). This can cause
the Stan program to be difficult to initialize, hang during sampling, or devolve to a
random walk.
128
Boundary Estimates
Estimates near boundaries for interval-constrained parameters typically signal that
the prior is not appropriate for the model. It can also cause numerical problems with
underflow and overflow when sampling or optimizing.
“Uninformative” Proper Priors
It is not uncommon to see models with priors on regression coefficients such as
Normal(0,1000).2If the prior scale, such as 1000, is several orders of magnitude
larger than the estimated coefficients, then such a prior is effectively providing no
effect whatsoever.
We actively discourage users from using the default scale priors suggested
through the BUGS examples (Lunn et al.,2012), such as
σ2∼InvGamma(0.001,0.001).
Such priors concentrate too much probability mass outside of reasonable posterior
values, and unlike the symmetric wide normal priors, can have the profound effect of
skewing posteriors; see (Gelman,2006) for examples and discussion.
Truncated Priors
If a variable is declared with a lower bound of zero, then assigning it a normal prior in
a Stan model produces the same effect as providing a properly truncated half-normal
prior. The truncation at zero need not be specified as Stan only requires the density
up to a proportion. So a variable declared with
real<lower=0> sigma;
and given a prior
sigma ~ normal(0, 1000);
gives sigma a half-normal prior, technically
p(σ ) =Normal(σ |0,1000)
1−NormalCDF(0|0,1000)∝Normal(σ |0,1000),
but Stan is able to avoid the calculation of the normal cumulative distribution (CDF)
function required to normalize the half-normal density. If either the prior location or
scale is a parameter or if the truncation point is a parameter, the truncation cannot
be dropped, because the normal CDF term will not be a constant.
2The practice was common in BUGS and can be seen in most of their examples Lunn et al. (2012).
129

Weakly Informative Priors
Typically a researcher will have some knowledge of the scale of the variables being
estimated. For instance, if we’re estimating an intercept-only model for the mean
population height for adult women, then we know the answer is going to be some-
where in the one to three meter range. That gives us information around which to
form a weakly informative prior.
Similarly, a logistic regression with predictors on the standard scale (roughly zero
mean, unit variance) is unlikely to have a coefficient that’s larger than five in absolute
value. In these cases, it makes sense to provide a weakly informative prior such as
Normal(0,5)for such a coefficient.
Weakly informative priors help control inference computationally and statisti-
cally. Computationally, a prior increases the curvature around the volume where
the solution is expected to lie, which in turn guides both gradient-based like L-BFGS
and Hamiltonian Monte Carlo sampling by not allowing them to stray too far from the
location of a surface. Statistically, a weakly informative prior is more sensible for a
problem like women’s mean height, because a very diffuse prior like Normal(0,1000)
will ensure that the vast majority of the prior probability mass is outside the range
of the expected answer, which can overwhelm the inferences available from a small
data set.
Bounded Priors
Consider the women’s height example again. One way to formulate a proper prior
is to impose a uniform prior on a bounded scale. For example, we could declare the
parameter for mean women’s height to have a lower bound of one meter and an upper
bound of three meters. Surely the answer has to lie in that range.
Similarly, it is not uncommon to see priors for scale parameters that impose lower
bounds of zero and upper bounds of very large numbers, such as 10,000.3This
provides roughly the same problem for estimation as a very diffuse inverse gamma
prior on variance. We prefer to leave parameters which are not absolutely physically
constrained to float and provide them informative priors. In the case of women’s
height, such a prior might be Normal(2,0.5)on the scale of meters; it concentrates
95% of its mass in the interval (1,3), but still allows values outside of that region.
In cases where bounded priors are used, the posterior fits should be checked
to make sure the parameter is not estimated at or very close to a boundary. This
will not only cause computational problems, it indicates a problem with the way the
model is formulated. In such cases, the interval should be widened to see where the
3This was also a popular strategy in the BUGS example models (Lunn et al.,2012), which often went one
step further and set the lower bounds to a small number like 0.001 to discourage numerical underflow to
zero.
130

parameter fits without such constraints, or boundary-avoid priors should be used (see
Section 9.10.)
Fat-Tailed Priors and “Default” Priors
A reasonable alternative if we want to accommodate outliers is to use a prior that
concentrates most of mass around the area where values are expected to be, but still
leaves a lot of mass in its tails. The usual choice in such a situation is to use a Cauchy
distribution for a prior, which can concentrate its mass around its median, but has
tails that are so fat that the variance is infinite.
Without specific information, the Cauchy prior is a very good default parameter
choice for regression coefficients (Gelman et al.,2008) and the half-Cauchy (coded
implicitly in Stan) a good default choice for scale parameters (Gelman,2006).
Informative Priors
Ideally, there will be substantive information about a problem that can be included
in an even tighter prior than a weakly informative prior. This may come from actual
prior experiments and thus be the posterior of other data, it may come from meta-
analysis, or it may come simply by soliciting it from domain experts. All the goodness
of weakly informative priors applies, only with more strength.
Conjugacy
Unlike in Gibbs sampling, there is no computational advantage to providing conjugate
priors (i.e., priors that produce posteriors in the same family) in a Stan program.4Nei-
ther the Hamiltonian Monte Carlo samplers or the optimizers make use of conjugacy,
working only on the log density and its derivatives.
9.4. Robust Noise Models
The standard approach to linear regression is to model the noise term as having a
normal distribution. From Stan’s perspective, there is nothing special about normally
distributed noise. For instance, robust regression can be accommodated by giving the
noise term a Student-tdistribution. To code this in Stan, the sampling distribution is
changed to the following.
4BUGS and JAGS both support conjugate sampling through Gibbs sampling. JAGS extended the range of
conjugacy that could be exploited with its GLM module. Unlike Stan, both BUGS and JAGS are restricted to
conjugate priors for constrained multivariate quantities such as covariance matrices or simplexes.
131
data {
...
real<lower=0> nu;
}
...
model {
y ~ student_t(nu, alpha + beta *x, sigma);
}
The degrees of freedom constant nu is specified as data.
9.5. Logistic and Probit Regression
For binary outcomes, either of the closely related logistic or probit regression models
may be used. These generalized linear models vary only in the link function they
use to map linear predictions in (−∞,∞)to probability values in (0,1). Their respec-
tive link functions, the logistic function and the unit normal cumulative distribution
function, are both sigmoid functions (i.e., they are both S-shaped).
A logistic regression model with one predictor and an intercept is coded as fol-
lows.
data {
int<lower=0> N;
vector[N] x;
int<lower=0,upper=1> y[N];
}
parameters {
real alpha;
real beta;
}
model {
y ~ bernoulli_logit(alpha + beta *x);
}
The noise parameter is built into the Bernoulli formulation here rather than specified
directly.
Logistic regression is a kind of generalized linear model with binary outcomes and
the log odds (logit) link function, defined by
logit(v) =log v
1−v.
The inverse of the link function appears in the model.
logit−1(u) =1
1+exp(−u) .
132
The model formulation above uses the logit-parameterized version of the
Bernoulli distribution, which is defined by
BernoulliLogit(y|α) =Bernoulli(y|logit−1(α)).
The formulation is also vectorized in the sense that alpha and beta are scalars and
xis a vector, so that alpha + beta *xis a vector. The vectorized formulation is
equivalent to the less efficient version
for (n in 1:N)
y[n] ~ bernoulli_logit(alpha + beta *x[n]);
Expanding out the Bernoulli logit, the model is equivalent to the more explicit, but
less efficient and less arithmetically stable
for (n in 1:N)
y[n] ~ bernoulli(inv_logit(alpha + beta *x[n]));
Other link functions may be used in the same way. For example, probit regression
uses the cumulative normal distribution function, which is typically written as
Φ(x) =Zx
−∞
Normal(y|0,1) dy.
The cumulative unit normal distribution function Φis implemented in Stan as the
function Phi. The probit regression model may be coded in Stan by replacing the
logistic model’s sampling statement with the following.
y[n] ~ bernoulli(Phi(alpha + beta *x[n]));
A fast approximation to the cumulative unit normal distribution function Φis im-
plemented in Stan as the function Phi_approx. The approximate probit regression
model may be coded with the following.
y[n] ~ bernoulli(Phi_approx(alpha + beta *x[n]));
9.6. Multi-Logit Regression
Multiple outcome forms of logistic regression can be coded directly in Stan. For in-
stance, suppose there are Kpossible outcomes for each output variable yn. Also
suppose that there is a D-dimensional vector xnof predictors for yn. The multi-logit
model with Normal(0,5)priors on the coefficients is coded as follows.
133
data {
int K;
int N;
int D;
int y[N];
vector[D] x[N];
}
parameters {
matrix[K,D] beta;
}
model {
for (k in 1:K)
beta[k] ~ normal(0, 5);
for (n in 1:N)
y[n] ~ categorical(softmax(beta *x[n]));
}
See Section 43.11 for a definition of the softmax function. A more efficient way to
write the final line is
y[n] ~ categorical_logit(beta *x[n]);
The categorical_logit distribution is like the categorical distribution, with
the parameters on the logit scale (see Section 51.5 for a full definition of
categorical_logit).
The first loop may be made more efficient by vectorizing the first loop by convert-
ing the matrix beta to a vector,
to_vector(beta) ~ normal(0, 5);
Constraints on Data Declarations
The data block in the above model is defined without constraints on sizes K,N, and D
or on the outcome array y. Constraints on data declarations provide error checking
at the point data is read (or transformed data is defined), which is before sampling
begins. Constraints on data declarations also make the model author’s intentions
more explicit, which can help with readability. The above model’s declarations could
be tightened to
int<lower=2> K;
int<lower=0> N;
int<lower=1> D;
int<lower=1,upper=K> y[N];
134
These constraints arise because the number of categories, K, must be at least two in
order for a categorical model to be useful. The number of data items, N, can be zero,
but not negative; unlike R, Stan’s for-loops always move forward, so that a loop extent
of 1:N when Nis equal to zero ensures the loop’s body will not be executed. The
number of predictors, D, must be at least one in order for beta *x[n] to produce
an appropriate argument for softmax(). The categorical outcomes y[n] must be
between 1and Kin order for the discrete sampling to be well defined.
Constraints on data declarations are optional. Constraints on parameters declared
in the parameters block, on the other hand, are not optional—they are required to
ensure support for all parameter values satisfying their constraints. Constraints on
transformed data, transformed parameters, and generated quantities are also op-
tional.
Identifiability
Because softmax is invariant under adding a constant to each component of its input,
the model is typically only identified if there is a suitable prior on the coefficients.
An alternative is to use (K −1)-vectors by fixing one of them to be zero. Sec-
tion 11.2 discusses how to mix constants and parameters in a vector. In the multi-
logit case, the parameter block would be redefined to use (K −1)-vectors
parameters {
matrix[K - 1, D] beta_raw;
}
and then these are transformed to parameters to use in the model. First, a trans-
formed data block is added before the parameters block to define a row vector of
zero values,
transformed data {
row_vector[D] zeros;
zeros = rep_row_vector(0, D);
}
which can then be appended to beta_row to produce the coefficient matrix beta,
transformed parameters {
matrix[K, D] beta;
beta = append_row(beta_raw, zeros);
}
See Section 43.7 for a definition of rep_row_vector and Section 43.10 for a definition
of append_row.
135
This is not quite the same model as using K-vectors as parameters, because now
the prior only applies to (K −1)-vectors. In practice, this will cause the maximum
likelihood solutions to be different and also the posteriors to be slightly different
when taking priors centered around zero, as is typical for regression coefficients.
9.7. Parameterizing Centered Vectors
It is often convenient to define a parameter vector βthat is centered in the sense of
satisfying the sum-to-zero constraint,
K
X
k=1
βk=0.
Such a parameter vector may be used to identify a multi-logit regression parameter
vector (see Section 9.6), or may be used for ability or difficulty parameters (but not
both) in an IRT model (see Section 9.11).
K−1Degrees of Freedom
There is more than one way to enforce a sum-to-zero constraint on a parameter vec-
tor, the most efficient of which is to define the K-th element as the negation of the
sum of the elements 1through K−1.
parameters {
vector[K-1] beta_raw;
...
transformed parameters {
vector[K] beta; // centered
for (k in 1:(K-1)) {
beta[k] = beta_raw[k];
}
beta[K] = -sum(beta_raw);
...
Placing a prior on beta_raw in this parameterization leads to a subtly different
posterior than that resulting from the same prior on beta in the original parameteri-
zation without the sum-to-zero constraint. Most notably, a simple prior on each com-
ponent of beta_raw produces different results than putting the same prior on each
component of an unconstrained K-vector beta. For example, providing a Normal(0,5)
prior on beta will produce a different posterior mode than placing the same prior on
beta_raw.
136
Translated and Scaled Simplex
An alternative approach that’s less efficient, but amenable to a symmetric prior, is to
offset and scale a simplex.
parameters {
simplex[K] beta_raw;
real beta_scale;
...
transformed parameters {
vector[K] beta;
beta = beta_scale *(beta_raw - 1.0 / K);
...
Given that beta_raw sums to 1 because it is a simplex, the elementwise subtraction
of 1/K is guaranteed to sum to zero (note that the expression 1.0 / K is used rather
than 1/Kto prevent integer arithmetic rounding down to zero). Because the magni-
tude of the elements of the simplex is bounded, a scaling factor is required to provide
beta with Kdegrees of freedom necessary to take on every possible value that sums
to zero.
With this parameterization, a Dirichlet prior can be placed on beta_raw, perhaps
uniform, and another prior put on beta_scale, typically for “shrinkage.”
Soft Centering
Adding a prior such as β∼Normal(0, σ ) will provide a kind of soft centering of a
parameter vector βby preferring, all else being equal, that PK
k=1βk=0. This approach
is only guaranteed to roughly center if βand the elementwise addition β+cfor a
scalar constant cproduce the same likelihood (perhaps by another vector αbeing
transformed to α−c, as in the IRT models). This is another way of achieving a
symmetric prior.
9.8. Ordered Logistic and Probit Regression
Ordered regression for an outcome yn∈ {1, . . . , k}with predictors xn∈RDis de-
termined by a single coefficient vector β∈RDalong with a sequence of cutpoints
c∈RK−1sorted so that cd< cd+1. The discrete output is kif the linear predictor xnβ
falls between ck−1and ck, assuming c0= −∞ and cK= ∞. The noise term is fixed by
the form of regression, with examples for ordered logistic and ordered probit models.
137
Ordered Logistic Regression
The ordered logistic model can be coded in Stan using the ordered data type for the
cutpoints and the built-in ordered_logistic distribution.
data {
int<lower=2> K;
int<lower=0> N;
int<lower=1> D;
int<lower=1,upper=K> y[N];
row_vector[D] x[N];
}
parameters {
vector[D] beta;
ordered[K-1] c;
}
model {
for (n in 1:N)
y[n] ~ ordered_logistic(x[n] *beta, c);
}
The vector of cutpoints cis declared as ordered[K-1], which guarantees that c[k]
is less than c[k+1].
If the cutpoints were assigned independent priors, the constraint effectively trun-
cates the joint prior to support over points that satisfy the ordering constraint. Luck-
ily, Stan does not need to compute the effect of the constraint on the normalizing
term because the probability is needed only up to a proportion.
Ordered Probit
An ordered probit model could be coded in exactly the same way by swapping the
cumulative logistic (inv_logit) for the cumulative normal (Phi).
data {
int<lower=2> K;
int<lower=0> N;
int<lower=1> D;
int<lower=1,upper=K> y[N];
row_vector[D] x[N];
}
parameters {
vector[D] beta;
ordered[K-1] c;
}
138
model {
vector[K] theta;
for (n in 1:N) {
real eta;
eta = x[n] *beta;
theta[1] = 1 - Phi(eta - c[1]);
for (k in 2:(K-1))
theta[k] = Phi(eta - c[k-1]) - Phi(eta - c[k]);
theta[K] = Phi(eta - c[K-1]);
y[n] ~ categorical(theta);
}
}
The logistic model could also be coded this way by replacing Phi with inv_logit,
though the built-in encoding based on the softmax transform is more efficient and
more numerically stable. A small efficiency gain could be achieved by computing the
values Phi(eta - c[k]) once and storing them for re-use.
9.9. Hierarchical Logistic Regression
The simplest multilevel model is a hierarchical model in which the data is grouped
into Ldistinct categories (or levels). An extreme approach would be to completely
pool all the data and estimate a common vector of regression coefficients β. At the
other extreme, an approach with no pooling assigns each level lits own coefficient
vector βlthat is estimated separately from the other levels. A hierarchical model is
an intermediate solution where the degree of pooling is determined by the data and
a prior on the amount of pooling.
Suppose each binary outcome yn∈ {0,1}has an associated level, lln∈ {1, . . . , L}.
Each outcome will also have an associated predictor vector xn∈RD. Each level lgets
its own coefficient vector βl∈RD. The hierarchical structure involves drawing the co-
efficients βl,d ∈Rfrom a prior that is also estimated with the data. This hierarchically
estimated prior determines the amount of pooling. If the data in each level are very
similar, strong pooling will be reflected in low hierarchical variance. If the data in the
levels are dissimilar, weaker pooling will be reflected in higher hierarchical variance.
The following model encodes a hierarchical logistic regression model with a hier-
archical prior on the regression coefficients.
data {
int<lower=1> D;
int<lower=0> N;
int<lower=1> L;
int<lower=0,upper=1> y[N];
139
int<lower=1,upper=L> ll[N];
row_vector[D] x[N];
}
parameters {
real mu[D];
real<lower=0> sigma[D];
vector[D] beta[L];
}
model {
for (d in 1:D) {
mu[d] ~ normal(0, 100);
for (l in 1:L)
beta[l,d] ~ normal(mu[d], sigma[d]);
}
for (n in 1:N)
y[n] ~ bernoulli(inv_logit(x[n] *beta[ll[n]]));
}
The standard deviation parameter sigma gets an implicit uniform prior on (0,∞)be-
cause of its declaration with a lower-bound constraint of zero. Stan allows improper
priors as long as the posterior is proper. Nevertheless, it is usually helpful to have
informative or at least weakly informative priors for all parameters; see Section 9.3
for recommendations on priors for regression coefficients and scales.
Optimizing the Model
Where possible, vectorizing sampling statements leads to faster log probability and
derivative evaluations. The speed boost is not because loops are eliminated, but
because vectorization allows sharing subcomputations in the log probability and gra-
dient calculations and because it reduces the size of the expression tree required for
gradient calculations.
The first optimization vectorizes the for-loop over Das
mu ~ normal(0, 100);
for (l in 1:L)
beta[l] ~ normal(mu, sigma);
The declaration of beta as an array of vectors means that the expression beta[l]
denotes a vector. Although beta could have been declared as a matrix, an array of
vectors (or a two-dimensional array) is more efficient for accessing rows; see Sec-
tion 26.3 for more information on the efficiency tradeoffs among arrays, vectors, and
matrices.
140
This model can be further sped up and at the same time made more arithmetically
stable by replacing the application of inverse-logit inside the Bernoulli distribution
with the logit-parameterized Bernoulli,
for (n in 1:N)
y[n] ~ bernoulli_logit(x[n] *beta[ll[n]]);
See Section 50.2 for a definition of bernoulli_logit.
Unlike in R or BUGS, loops, array access and assignments are fast in Stan because
they are translated directly to C++. In most cases, the cost of allocating and assigning
to a container is more than made up for by the increased efficiency due to vectorizing
the log probability and gradient calculations. Thus the following version is faster than
the original formulation as a loop over a sampling statement.
{
vector[N] x_beta_ll;
for (n in 1:N)
x_beta_ll[n] = x[n] *beta[ll[n]];
y ~ bernoulli_logit(x_beta_ll);
}
The brackets introduce a new scope for the local variable x_beta_ll; alternatively,
the variable may be declared at the top of the model block.
In some cases, such as the above, the local variable assignment leads to models
that are less readable. The recommended practice in such cases is to first develop and
debug the more transparent version of the model and only work on optimizations
when the simpler formulation has been debugged.
9.10. Hierarchical Priors
Priors on priors, also known as “hyperpriors,” should be treated the same way as
priors on lower-level parameters in that as much prior information as is available
should be brought to bear. Because hyperpriors often apply to only a handful of
lower-level parameters, care must be taken to ensure the posterior is both proper and
not overly sensitive either statistically or computationally to wide tails in the priors.
Boundary-Avoiding Priors for MLE in Hierarchical Models
The fundamental problem with maximum likelihood estimation (MLE) in the hierar-
chical model setting is that as the hierarchical variance drops and the values cluster
141
around the hierarchical mean, the overall density grows without bound. As an il-
lustration, consider a simple hierarchical linear regression (with fixed prior mean) of
yn∈Ron xn∈RK, formulated as
yn∼Normal(xnβ, σ )
βk∼Normal(0, τ)
τ∼Cauchy(0,2.5)
In this case, as τ→0and βk→0, the posterior density
p(β, τ, σ |y, x) ∝p(y|x, β, τ, σ )
grows without bound. There is a plot of a Neal’s funnel density in Figure 28.1, which
has similar behavior.
There is obviously no MLE estimate for β, τ, σ in such a case, and therefore the
model must be modified if posterior modes are to be used for inference. The approach
recommended by Chung et al. (2013) is to use a gamma distribution as a prior, such
as
σ∼Gamma(2,1/A),
for a reasonably large value of A, such as A=10.
9.11. Item-Response Theory Models
Item-response theory (IRT) models the situation in which a number of students each
answer one or more of a group of test questions. The model is based on parameters
for the ability of the students, the difficulty of the questions, and in more articu-
lated models, the discriminativeness of the questions and the probability of guessing
correctly; see (Gelman and Hill,2007, pps. 314–320) for a textbook introduction to
hierarchical IRT models and (Curtis,2010) for encodings of a range of IRT models in
BUGS.
Data Declaration with Missingness
The data provided for an IRT model may be declared as follows to account for the
fact that not every student is required to answer every question.
data {
int<lower=1> J; // number of students
int<lower=1> K; // number of questions
int<lower=1> N; // number of observations
142

int<lower=1,upper=J> jj[N]; // student for observation n
int<lower=1,upper=K> kk[N]; // question for observation n
int<lower=0,upper=1> y[N]; // correctness for observation n
}
This declares a total of Nstudent-question pairs in the data set, where each nin 1:N
indexes a binary observation y[n] of the correctness of the answer of student jj[n]
on question kk[n].
The prior hyperparameters will be hard coded in the rest of this section for sim-
plicity, though they could be coded as data in Stan for more flexibility.
1PL (Rasch) Model
The 1PL item-response model, also known as the Rasch model, has one parameter
(1P) for questions and uses the logistic link function (L).
The model parameters are declared as follows.
parameters {
real delta; // mean student ability
real alpha[J]; // ability of student j - mean ability
real beta[K]; // difficulty of question k
}
The parameter alpha[j] is the ability coefficient for student jand beta[k] is the dif-
ficulty coefficient for question k. The non-standard parameterization used here also
includes an intercept term delta, which represents the average student’s response
to the average question.5The model itself is as follows.
model {
alpha ~ normal(0, 1); // informative true prior
beta ~ normal(0, 1); // informative true prior
delta ~ normal(0.75, 1); // informative true prior
for (n in 1:N)
y[n] ~ bernoulli_logit(alpha[jj[n]] - beta[kk[n]] + delta);
}
This model uses the logit-parameterized Bernoulli distribution, where
bernoulli_logit(y|α) =bernoulli(y|logit−1(α)).
5(Gelman and Hill,2007) treat the δterm equivalently as the location parameter in the distribution of
student abilities.
143
The key to understanding it is the term inside the bernoulli_logit distribution,
from which it follows that
Pr[yn=1]=logit−1(αjj[n] −βkk[n] +δ).
The model suffers from additive identifiability issues without the priors. For example,
adding a term ξto each αjand βkresults in the same predictions. The use of priors
for αand βlocated at 0 identifies the parameters; see (Gelman and Hill,2007) for a
discussion of identifiability issues and alternative approaches to identification.
For testing purposes, the IRT 1PL model distributed with Stan uses informative
priors that match the actual data generation process used to simulate the data in R
(the simulation code is supplied in the same directory as the models). This is unre-
alistic for most practical applications, but allows Stan’s inferences to be validated. A
simple sensitivity analysis with fatter priors shows that the posterior is fairly sensi-
tive to the prior even with 400 students and 100 questions and only 25% missingness
at random. For real applications, the priors should be fit hierarchically along with the
other parameters, as described in the next section.
Multilevel 2PL Model
The simple 1PL model described in the previous section is generalized in this section
with the addition of a discrimination parameter to model how noisy a question is and
by adding multilevel priors for the question difficulty and discrimination parameters.
The model parameters are declared as follows.
parameters {
real mu_beta; // mean student ability
real alpha[J]; // ability for j - mean
real beta[K]; // difficulty for k
real<lower=0> gamma[K]; // discrimination of k
real<lower=0> sigma_beta; // scale of difficulties
real<lower=0> sigma_gamma; // scale of log discrimination
}
The parameters should be clearer after the model definition.
model {
alpha ~ normal(0, 1);
beta ~ normal(0, sigma_beta);
gamma ~ lognormal(0, sigma_gamma);
mu_beta ~ cauchy(0, 5);
sigma_alpha ~ cauchy(0, 5);
sigma_beta ~ cauchy(0, 5);
144
sigma_gamma ~ cauchy(0, 5);
for (n in 1:N)
y[n] ~ bernoulli_logit(gamma[kk[n]]
*(alpha[jj[n]] - (beta[kk[n]] + mu_beta)));
}
This is similar to the 1PL model, with the additional parameter gamma[k] modeling
how discriminative question kis. If gamma[k] is greater than 1, responses are more
attenuated with less chance of getting a question right at random. The parameter
gamma[k] is constrained to be positive, which prohibits there being questions that
are easier for students of lesser ability; such questions are not unheard of, but they
tend to be eliminated from most testing situations where an IRT model would be
applied.
The model is parameterized here with student abilities alpha being given a unit
normal prior. This is to identify both the scale and the location of the parameters,
both of which would be unidentified otherwise; see Chapter 25 for further discussion
of identifiability. The difficulty and discrimination parameters beta and gamma then
have varying scales given hierarchically in this model. They could also be given weakly
informative non-hierarchical priors, such as
beta ~ normal(0, 5);
gamma ~ lognormal(0, 2);
The point is that the alpha determines the scale and location and beta and gamma
are allowed to float.
The beta parameter is here given a non-centered parameterization, with param-
eter mu_beta serving as the mean beta location. An alternative would’ve been to
take:
beta ~ normal(mu_beta, sigma_beta);
and
y[n] ~ bernoulli_logit(gamma[kk[n]] *(alpha[jj[n]] - beta[kk[n]]));
Non-centered parameterizations tend to be more efficient in hierarchical models; see
Section 28.6 for more information on non-centered reparameterizations.
The intercept term mu_beta can’t itself be modeled hierarchically, so it is given
a weakly informative Cauchy(0,5)prior. Similarly, the scale terms, sigma_alpha,
sigma_beta, and sigma_gamma, are given half-Cauchy priors. The truncation in the
half-Cauchy prior is implicit; explicit truncation is not necessary because the log
probability need only be calculated up to a proportion and the scale variables are
constrained to (0,∞)by their declarations.
145
9.12. Priors for Identifiability
Location and Scale Invariance
One application of (hierarchical) priors is to identify the scale and/or location of a
group of parameters. For example, in the IRT models discussed in the previous sec-
tion, there is both a location and scale non-identifiability. With uniform priors, the
posteriors will float in terms of both scale and location. See Section 25.1 for a simple
example of the problems this poses for estimation.
The non-identifiability is resolved by providing a unit normal (i.e., Normal(0,1))
prior on one group of coefficients, such as the student abilities. With a unit normal
prior on the student abilities, the IRT model is identified in that the posterior will pro-
duce a group of estimates for student ability parameters that have a sample mean of
close to zero and a sample variance of close to one. The difficulty and discrimination
parameters for the questions should then be given a diffuse, or ideally a hierarchi-
cal prior, which will identify these parameters by scaling and locating relative to the
student ability parameters.
Collinearity
Another case in which priors can help provide identifiability is in the case of collinear-
ity in a linear regression. In linear regression, if two predictors are collinear (i.e, one
is a linear function of the other), then their coefficients will have a correlation of 1 (or
-1) in the posterior. This leads to non-identifiability. By placing normal priors on the
coefficients, the maximum likelihood solution of two duplicated predictors (trivially
collinear) will be half the value than would be obtained by only including one.
Separability
In a logistic regression, if a predictor is positive in cases of 1 outcomes and negative
in cases of 0 outcomes, then the maximum likelihood estimate for the coefficient for
that predictor diverges to infinity. This divergence can be controlled by providing a
prior for the coefficient, which will “shrink” the estimate back toward zero and thus
identify the model in the posterior.
Similar problems arise for sampling with improper flat priors. The sampler will
try to draw very large values. By providing a prior, the posterior will be concentrated
around finite values, leading to well-behaved sampling.
146
9.13. Multivariate Priors for Hierarchical Models
In hierarchical regression models (and other situations), several individual-level vari-
ables may be assigned hierarchical priors. For example, a model with multiple varying
intercepts and slopes within might assign them a multivariate prior.
As an example, the individuals might be people and the outcome income, with
predictors such as education level and age, and the groups might be states or other
geographic divisions. The effect of education level and age as well as an intercept
might be allowed to vary by state. Furthermore, there might be state-level predictors,
such as average state income and unemployment level.
Multivariate Regression Example
(Gelman and Hill,2007, Chapter 13, Chapter 17) discuss a hierarchical model with
Nindividuals organized into Jgroups. Each individual has a predictor row vector
xnof size K; to unify the notation, they assume that xn,1=1is a fixed “intercept”
predictor. To encode group membership, they assume individual nbelongs to group
jj[n] ∈1:J. Each individual nalso has an observed outcome yntaking on real values.
Likelihood
The model is a linear regression with slope and intercept coefficients varying by
group, so that βjis the coefficient K-vector for group j. The likelihood function
for individual nis then just
yn∼Normal(xnβjj[n], σ ) for n∈1:N.
Coefficient Prior
Gelman and Hill model the coefficient vectors βjas being drawn from a multivariate
distribution with mean vector µand covariance matrix Σ,
βj∼MultiNormal(µ, Σ)for j∈1:J.
Below, we discuss the full model of Gelman and Hill, which uses group-level predic-
tors to model µ; for now, we assume µis a simple vector parameter.
Hyperpriors
For hierarchical modeling, the group-level mean vector µand covariance matrix Σ
must themselves be given priors. The group-level mean vector can be given a reason-
able weakly-informative prior for independent coefficients, such as
µj∼Normal(0,5).
147

Of course, if more is known about the expected coefficient values βj,k, this informa-
tion can be incorporated into the prior for µk.
For the prior on the covariance matrix, Gelman and Hill suggest using a scaled in-
verse Wishart. That choice was motivated primarily by convenience as it is conjugate
to the multivariate likelihood function and thus simplifies Gibbs sampling.
In Stan, there is no restriction to conjugacy for multivariate priors, and we in fact
recommend a slightly different approach. Like Gelman and Hill, we decompose our
prior into a scale and a matrix, but are able to do so in a more natural way based on
the actual variable scales and a correlation matrix. Specifically, we define
Σ=diag_matrix(τ) Ωdiag_matrix(τ),
where Ωis a correlation matrix and τis the vector of coefficient scales. This mapping
from scale vector τand correlation matrix Ωcan be inverted, using
τk=qΣk,k
and
Ωi,j =Σi,j
τiτj
.
The components of the scale vector τcan be given any reasonable prior for scales,
but we recommend something weakly informative like a half-Cauchy distribution with
a small scale, such as
τk∼Cauchy(0,2.5)for k∈1:Kconstrained by τk>0.
As for the prior means, if there is information about the scale of variation of co-
efficients across groups, it should be incorporated into the prior for τ. For large
numbers of exchangeable coefficients, the components of τitself (perhaps excluding
the intercept) may themselves be given a hierarchical prior.
Our final recommendation is to give the correlation matrix Ωan LKJ prior with
shape ν≥1,
Ω∼LKJCorr(ν).
The LKJ correlation distribution is defined in Section 63.1, but the basic idea for mod-
eling is that as νincreases, the prior increasingly concentrates around the unit corre-
lation matrix (i.e., favors less correlation among the components of βj). At ν=1, the
LKJ correlation distribution reduces to the identity distribution over correlation ma-
trices. The LKJ prior may thus be used to control the expected amount of correlation
among the parameters βj.
148
Group-Level Predictors for Prior Mean
To complete Gelman and Hill’s model, suppose each group j∈1:Jis supplied with
an L-dimensional row-vector of group-level predictors uj. The prior mean for the βj
can then itself be modeled as a regression, using an L-dimensional coefficient vector
γ. The prior for the group-level coefficients then becomes
βj∼MultiNormal(ujγ, Σ)
The group-level coefficients γmay themselves be given independent weakly infor-
mative priors, such as
γl∼Normal(0,5).
As usual, information about the group-level means should be incorporated into this
prior.
Coding the Model in Stan
The Stan code for the full hierarchical model with multivariate priors on the group-
level coefficients and group-level prior means follows its definition.
data {
int<lower=0> N; // num individuals
int<lower=1> K; // num ind predictors
int<lower=1> J; // num groups
int<lower=1> L; // num group predictors
int<lower=1,upper=J> jj[N]; // group for individual
matrix[N, K] x; // individual predictors
row_vector[L] u[J]; // group predictors
vector[N] y; // outcomes
}
parameters {
corr_matrix[K] Omega; // prior correlation
vector<lower=0>[K] tau; // prior scale
matrix[L, K] gamma; // group coeffs
vector[K] beta[J]; // indiv coeffs by group
real<lower=0> sigma; // prediction error scale
}
model {
tau ~ cauchy(0, 2.5);
Omega ~ lkj_corr(2);
to_vector(gamma) ~ normal(0, 5);
{
row_vector[K] u_gamma[J];
for (j in 1:J)
149
u_gamma[j] = u[j] *gamma;
beta ~ multi_normal(u_gamma, quad_form_diag(Omega, tau));
}
for (n in 1:N)
y[n] ~ normal(x[n] *beta[jj[n]], sigma);
}
The hyperprior covariance matrix is defined implicitly through the a quadratic
form in the code because the correlation matrix Omega and scale vector tau
are more natural to inspect in the output; to output Sigma, define it as
a transformed parameter. The function quad_form_diag is defined so that
quad_form_diag(Sigma, tau) is equivalent to diag_matrix(tau) *Sigma *
diag_matrix(tau), where diag_matrix(tau) returns the matrix with tau on the di-
agonal and zeroes off diagonal; the version using quad_form_diag should be faster.
See Section 43.2 for more information on specialized matrix operations.
Optimization through Vectorization
The code in the Stan program above can be sped up dramatically by replacing:
for (n in 1:N)
y[n] ~ normal(x[n] *beta[jj[n]], sigma);
with the vectorized form:
{
vector[N] x_beta_jj;
for (n in 1:N)
x_beta_jj[n] = x[n] *beta[jj[n]];
y ~ normal(x_beta_jj, sigma);
}
The outer brackets create a local scope in which to define the variable x_beta_jj,
which is then filled in a loop and used to define a vectorized sampling statement. The
reason this is such a big win is that it allows us to take the log of sigma only once
and it greatly reduces the size of the resulting expression graph by packing all of the
work into a single density function.
Although it is tempting to redeclare beta and include a revised model block sam-
pling statement,
parameters {
matrix[J, K] beta;
...
model {
y ~ normal(rows_dot_product(x, beta[jj]), sigma);
...
150

this fails because it breaks the vectorization of sampling for beta,6
beta ~ multi_normal(...);
which requires beta to be an array of vectors. Both vectorizations are important, so
the best solution is to just use the loop above, because rows_dot_product cannot do
much optimization in and of itself because there are no shared computations.
The code in the Stan program above also builds up an array of vectors for the
outcomes and for the multivariate normal, which provides a very significant speedup
by reducing the number of linear systems that need to be solved and differentiated.
{
matrix[K, K] Sigma_beta;
Sigma_beta = quad_form_diag(Omega, tau);
for (j in 1:J)
beta[j] ~ multi_normal((u[j] *gamma)', Sigma_beta);
}
In this example, the covariance matrix Sigma_beta is defined as a local variable so as
not to have to repeat the quadratic form computation Jtimes. This vectorization can
be combined with the Cholesky-factor optimization in the next section.
Optimization through Cholesky Factorization
The multivariate normal density and LKJ prior on correlation matrices both require
their matrix parameters to be factored. Vectorizing, as in the previous section, en-
sures this is only done once for each density. An even better solution, both in terms
of efficiency and numerical stability, is to parameterize the model directly in terms
of Cholesky factors of correlation matrices using the multivariate version of the non-
centered parameterization. For the model in the previous section, the program frag-
ment to replace the full matrix prior with an equivalent Cholesky factorized prior is
as follows.
data {
matrix[J, L] u;
...
parameters {
matrix[K, J] z;
cholesky_factor_corr[K] L_Omega;
...
transformed parameters {
matrix[J, K] beta;
beta = u *gamma + (diag_pre_multiply(tau,L_Omega) *z)';
6Thanks to Mike Lawrence for pointing this out in the GitHub issue for the manual.
151
}
model {
to_vector(z) ~ normal(0, 1);
L_Omega ~ lkj_corr_cholesky(2);
...
The data variable uwas originally an array of vectors, which is efficient for access;
here it is redeclared as a matrix in order to use it in matrix arithmetic. The new
parameter L_Omega is the Cholesky factor of the original correlation matrix Omega, so
that
Omega = L_Omega *L_Omega'
The prior scale vector tau is unchanged, and furthermore, Pre-multiplying the
Cholesky factor by the scale produces the Cholesky factor of the final covariance
matrix,
Sigma_beta
= quad_form_diag(Omega, tau)
= diag_pre_multiply(tau, L_Omega) *diag_pre_multiply(tau, L_Omega)'
where the diagonal pre-multiply compound operation is defined by
diag_pre_multiply(a, b) = diag_matrix(a) *b
The new variable zis declared as a matrix, the entries of which are given independent
unit normal priors; the to_vector operation turns the matrix into a vector so that it
can be used as a vectorized argument to the univariate normal density. Multiplying
the Cholesky factor of the covariance matrix by zand adding the mean (u *gamma)’
produces a beta distributed as in the original model.
Omitting the data declarations, which are the same as before, the optimized model
is as follows.
parameters {
matrix[K, J] z;
cholesky_factor_corr[K] L_Omega;
vector<lower=0,upper=pi()/2>[K] tau_unif;
matrix[L, K] gamma; // group coeffs
real<lower=0> sigma; // prediction error scale
}
transformed parameters {
matrix[J, K] beta;
vector<lower=0>[K] tau; // prior scale
for (k in 1:K) tau[k] = 2.5 *tan(tau_unif[k]);
beta = u *gamma + (diag_pre_multiply(tau,L_Omega) *z)';
152
}
model {
to_vector(z) ~ normal(0, 1);
L_Omega ~ lkj_corr_cholesky(2);
to_vector(gamma) ~ normal(0, 5);
y ~ normal(rows_dot_product(beta[jj] , x), sigma);
}
This model also reparameterizes the prior scale tau to avoid potential prob-
lems with the heavy tails of the Cauchy distribution. The statement tau_unif
uniform(0,pi()/2) can be omitted from the model block because stan increments
the log posterior for parameters with uniform priors without it.
9.14. Prediction, Forecasting, and Backcasting
Stan models can be used for “predicting” the values of arbitrary model unknowns.
When predictions are about the future, they’re called “forecasts;” when they are pre-
dictions about the past, as in climate reconstruction or cosmology, they are some-
times called “backcasts” (or “aftcasts” or “hindcasts” or “antecasts,” depending on
the author’s feelings about the opposite of “fore”).
Programming Predictions
As a simple example, the following linear regression provides the same setup for
estimating the coefficients beta as in our very first example above, using yfor the N
observations and xfor the Npredictor vectors. The model parameters and model for
observations are exactly the same as before.
To make predictions, we need to be given the number of predictions, N_new, and
their predictor matrix, x_new. The predictions themselves are modeled as a param-
eter y_new. The model statement for the predictions is exactly the same as for the
observations, with the new outcome vector y_new and prediction matrix x_new.
data {
int<lower=1> K;
int<lower=0> N;
matrix[N, K] x;
vector[N] y;
int<lower=0> N_new;
matrix[N_new, K] x_new;
}
parameters {
vector[K] beta;
153
real<lower=0> sigma;
vector[N_new] y_new; // predictions
}
model {
y ~ normal(x *beta, sigma); // observed model
y_new ~ normal(x_new *beta, sigma); // prediction model
}
Predictions as Generated Quantities
Where possible, the most efficient way to generate predictions is to use the generated
quantities block. This provides proper Monte Carlo (not Markov chain Monte Carlo)
inference, which can have a much higher effective sample size per iteration.
...data as above...
parameters {
vector[K] beta;
real<lower=0> sigma;
}
model {
y ~ normal(x *beta, sigma);
}
generated quantities {
vector[N_new] y_new;
for (n in 1:N_new)
y_new[n] = normal_rng(x_new[n] *beta, sigma);
}
Now the data is just as before, but the parameter y_new is now declared as a generated
quantity, and the prediction model is removed from the model and replaced by a
pseudo-random draw from a normal distribution.
Overflow in Generated Quantities
It is possible for values to overflow or underflow in generated quantities. The prob-
lem is that if the result is NaN, then any constraints placed on the variables will be
violated. It is possible to check a value assigned by an RNG and reject it if it over-
flows, but this is both inefficient and leads to biased posterior estimates. Instead, the
conditions causing overflow, such as trying to generate a negative binomial random
variate with a mean of 231. These must be intercepted and dealt with, typically be
154
reparameterizing or reimplementing the random number generator using real values
rather than integers, which are upper-bounded by 231 −1in Stan.
9.15. Multivariate Outcomes
Most regressions are set up to model univariate observations (be they scalar, boolean,
categorical, ordinal, or count). Even multinomial regressions are just repeated cate-
gorical regressions. In contrast, this section discusses regression when each observed
value is multivariate. To relate multiple outcomes in a regression setting, their error
terms are provided with covariance structure.
This section considers two cases, seemingly unrelated regressions for continuous
multivariate quantities and multivariate probit regression for boolean multivariate
quantities.
Seemingly Unrelated Regressions
The first model considered is the “seemingly unrelated” regressions (SUR) of econo-
metrics where several linear regressions share predictors and use a covariance error
structure rather than independent errors (Zellner,1962;Greene,2011).
The model is easy to write down as a regression,
yn=xnβ+n
n∼MultiNormal(0,Σ)
where xnis a J-row-vector of predictors (xis an (N ×J)-matrix), ynis a K-vector of
observations, βis a (K ×J)-matrix of regression coefficients (vector βkholds coeffi-
cients for outcome k), and Σis covariance matrix governing the error. As usual, the
intercept can be rolled into xas a column of ones.
The basic Stan code is straightforward (though see below for more optimized code
for use with LKJ priors on correlation).
data {
int<lower=1> K;
int<lower=1> J;
int<lower=0> N;
vector[J] x[N];
vector[K] y[N];
}
parameters {
matrix[K, J] beta;
cov_matrix[K] Sigma;
}
155
model {
vector[K] mu[N];
for (n in 1:N)
mu[n] = beta *x[n];
y ~ multi_normal(mu, Sigma);
}
For efficiency, the multivariate normal is vectorized by precomputing the array of
mean vectors and sharing the same covariance matrix.
Following the advice in Section 9.13, we will place a weakly informative normal
prior on the regression coefficients, an LKJ prior on the correlations and a half-Cauchy
prior on standard deviations. The covariance structure is parameterized in terms of
Cholesky factors for efficiency and arithmetic stability.
...
parameters {
matrix[K, J] beta;
cholesky_factor_corr[K] L_Omega;
vector<lower=0>[K] L_sigma;
}
model {
vector[K] mu[N];
matrix[K, K] L_Sigma;
for (n in 1:N)
mu[n] = beta *x[n];
L_Sigma = diag_pre_multiply(L_sigma, L_Omega);
to_vector(beta) ~ normal(0, 5);
L_Omega ~ lkj_corr_cholesky(4);
L_sigma ~ cauchy(0, 2.5);
y ~ multi_normal_cholesky(mu, L_Sigma);
}
The Cholesky factor of the covariance matrix is then reconstructed as a local variable
and used in the model by scaling the Cholesky factor of the correlation matrices.
The regression coefficients get a prior all at once by converting the matrix beta to a
vector.
If required, the full correlation or covariance matrices may be reconstructed from
their Cholesky factors in the generated quantities block.
156
Multivariate Probit Regression
The multivariate probit model generates sequences of boolean variables by applying
a step function to the output of a seemingly unrelated regression.
The observations ynare D-vectors of boolean values (coded 0 for false, 1 for true).
The values for the observations ynare based on latent values zndrawn from a seem-
ingly unrelated regression model (see the previous section),
zn=xnβ+n
n∼MultiNormal(0,Σ)
These are then put through the step function to produce a K-vector znof boolean
values with elements defined by
yn,k =I(zn,k >0),
where I() is the indicator function taking the value 1 if its argument is true and 0
otherwise.
Unlike in the seemingly unrelated regressions case, here the covariance matrix Σ
has unit standard deviations (i.e., it is a correlation matrix). As with ordinary probit
and logistic regressions, letting the scale vary causes the model (which is defined only
by a cutpoint at 0, not a scale) to be unidentified (see (Greene,2011)).
Multivariate probit regression can be coded in Stan using the trick introduced
by Albert and Chib (1993), where the underlying continuous value vectors ynare
coded as truncated parameters. The key to coding the model in Stan is declaring the
latent vector zin two parts, based on whether the corresponding value of yis 0 or 1.
Otherwise, the model is identical to the seemingly unrelated regression model in the
previous section.
First, we introduce a sum function for two-dimensional arrays of integers; this is
going to help us calculate how many total 1 values there are in y.
functions {
int sum(int[,] a) {
int s = 0;
for (i in 1:size(a))
s += sum(a[i]);
return s;
}
}
The function is trivial, but it’s not a built-in for Stan and it’s easier to understand the
rest of the model if it’s pulled into its own function so as not to create a distraction.
The data declaration block is much like for the seemingly unrelated regressions,
but the observations yare now integers constrained to be 0 or 1.
157
data {
int<lower=1> K;
int<lower=1> D;
int<lower=0> N;
int<lower=0,upper=1> y[N,D];
vector[K] x[N];
}
After declaring the data, there is a rather involved transformed data block whose
sole purpose is to sort the data array yinto positive and negative components, keep-
ing track of indexes so that zcan be easily reassembled in the transformed parame-
ters block.
transformed data {
int<lower=0> N_pos;
int<lower=1,upper=N> n_pos[sum(y)];
int<lower=1,upper=D> d_pos[size(n_pos)];
int<lower=0> N_neg;
int<lower=1,upper=N> n_neg[(N *D) - size(n_pos)];
int<lower=1,upper=D> d_neg[size(n_neg)];
N_pos = size(n_pos);
N_neg = size(n_neg);
{
int i;
int j;
i = 1;
j = 1;
for (n in 1:N) {
for (d in 1:D) {
if (y[n,d] == 1) {
n_pos[i] = n;
d_pos[i] = d;
i += 1;
} else {
n_neg[j] = n;
d_neg[j] = d;
j += 1;
}
}
}
}
}
The variables N_pos and N_neg are set to the number of true (1) and number of false
158
(0) observations in y. The loop then fills in the sequence of indexes for the positive
and negative values in four arrays.
The parameters are declared as follows.
parameters {
matrix[D, K] beta;
cholesky_factor_corr[D] L_Omega;
vector<lower=0>[N_pos] z_pos;
vector<upper=0>[N_neg] z_neg;
}
These include the regression coefficients beta and the Cholesky factor of the correla-
tion matrix, L_Omega. This time there is no scaling because the covariance matrix has
unit scale (i.e., it is a correlation matrix; see above).
The critical part of the parameter declaration is that the latent real value zis
broken into positive-constrained and negative-constrained components, whose size
was conveniently calculated in the transformed data block. The transformed data
block’s real work was to allow the transformed parameter block to reconstruct z.
transformed parameters {
vector[D] z[N];
for (n in 1:N_pos)
z[n_pos[n], d_pos[n]] = z_pos[n];
for (n in 1:N_neg)
z[n_neg[n], d_neg[n]] = z_neg[n];
}
At this point, the model is simple, pretty much recreating the seemingly unrelated
regression.
model {
L_Omega ~ lkj_corr_cholesky(4);
to_vector(beta) ~ normal(0, 5);
{
vector[D] beta_x[N];
for (n in 1:N)
beta_x[n] = beta *x[n];
z ~ multi_normal_cholesky(beta_x, L_Omega);
}
}
This simple form of model is made possible by the Albert and Chib-style constraints
on z.
Finally, the correlation matrix itself can be put back together in the generated
quantities block if desired.
159
generated quantities {
corr_matrix[D] Omega;
Omega = multiply_lower_tri_self_transpose(L_Omega);
}
Of course, the same could be done for the seemingly unrelated regressions in the
previous section.
9.16. Applications of Pseudorandom Number Generation
The main application of pseudorandom number generator (PRNGs) is for posterior
inference, including prediction and posterior predictive checks. They can also be
used for pure data simulation, which is like a posterior predictive check with no
conditioning. See Section 49.6 for a description of their syntax and the scope of their
usage.
Prediction
Consider predicting unobserved outcomes using linear regression. Given predictors
x1, . . . , xNand observed outcomes y1, . . . , yN, and assuming a standard linear regres-
sion with intercept α, slope β, and error scale σ, along with improper uniform priors,
the posterior over the parameters given xand yis
p(α, β, σ |x, y) ∝
N
Y
n=1
Normal(yn|α+βxn, σ ).
For this model, the posterior predictive inference for a new outcome ˜
ymgiven a pre-
dictor ˜
xm, conditioned on the observed data xand y, is
p(˜
yn|˜
xn, x, y) =Z(α,β,σ )
Normal(˜
yn|α+β˜
xn, σ ) ×p(α, β, σ |x, y) d(α, β, σ ).
To code the posterior predictive inference in Stan, a standard linear regression is
combined with a random number in the generated quantities block.
data {
int<lower=0> N;
vector[N] y;
vector[N] x;
int<lower=0> N_tilde;
vector[N_tilde] x_tilde;
}
parameters {
160
real alpha;
real beta;
real<lower=0> sigma;
}
model {
y ~ normal(alpha + beta *x, sigma);
}
generated quantities {
vector[N_tilde] y_tilde;
for (n in 1:N_tilde)
y_tilde[n] = normal_rng(alpha + beta *x_tilde[n], sigma);
}
Given observed predictors xand outcomes y,y_tilde will be drawn according to
p(˜
y|˜
x, y, x). This means that, for example, the posterior mean for y_tilde is the
estimate of the outcome that minimizes expected square error (conditioned on the
data and model, of course).
Posterior Predictive Checks
A good way to investigate the fit of a model to the data, a critical step in Bayesian
data analysis, is to generate simulated data according to the parameters of the model.
This is carried out with exactly the same procedure as before, only the observed data
predictors xare used in place of new predictors ˜
xfor unobserved outcomes. If the
model fits the data well, the predictions for ˜
ybased on xshould match the observed
data y.
To code posterior predictive checks in Stan requires only a slight modification of
the prediction code to use xand Nin place of ˜
xand ˜
N,
generated quantities {
vector[N] y_tilde;
for (n in 1:N)
y_tilde[n] = normal_rng(alpha + beta *x[n], sigma);
}
Gelman et al. (2013) recommend choosing several posterior draws ˜
y(1),...,˜
y(M) and
plotting each of them alongside the data ythat was actually observed. If the model
fits well, the simulated ˜
ywill look like the actual data y.
161
10. Time-Series Models
Times series data come arranged in temporal order. This chapter presents two kinds
of time series models, regression-like models such as autoregressive and moving av-
erage models, and hidden Markov models.
Chapter 18 presents Gaussian processes, which may also be used for time-series
(and spatial) data.
10.1. Autoregressive Models
A first-order autoregressive model (AR(1)) with normal noise takes each point ynin a
sequence yto be generated according to
yn∼Normal(α +βyn−1, σ ).
That is, the expected value of ynis α+βyn−1, with noise scaled as σ.
AR(1) Models
With improper flat priors on the regression coefficients for slope (β), intercept (α),
and noise scale (σ), the Stan program for the AR(1) model is as follows.
data {
int<lower=0> N;
vector[N] y;
}
parameters {
real alpha;
real beta;
real<lower=0> sigma;
}
model {
for (n in 2:N)
y[n] ~ normal(alpha + beta *y[n-1], sigma);
}
The first observed data point, y[1], is not modeled here because there is nothing to
condition on; instead, it acts to condition y[2]. This model also uses an improper
prior for sigma, but there is no obstacle to adding an informative prior if information
is available on the scale of the changes in yover time, or a weakly informative prior
to help guide inference if rough knowledge of the scale of yis available.
162
Slicing for Efficiency
Although perhaps a bit more difficult to read, a much more efficient way to write the
above model is by slicing the vectors, with the model above being replaced with the
one-liner
model {
y[2:N] ~ normal(alpha + beta *y[1:(N - 1)], sigma);
}
The left-hand side slicing operation pulls out the last N−1elements and the right-
hand side version pulls out the first N−1.
Extensions to the AR(1) Model
Proper priors of a range of different families may be added for the regression co-
efficients and noise scale. The normal noise model can be changed to a Student-t
distribution or any other distribution with unbounded support. The model could also
be made hierarchical if multiple series of observations are available.
To enforce the estimation of a stationary AR(1) process, the slope coefficient beta
may be constrained with bounds as follows.
real<lower=-1,upper=1> beta;
In practice, such a constraint is not recommended. If the data is not stationary, it is
best to discover this while fitting the model. Stationary parameter estimates can be
encouraged with a prior favoring values of beta near zero.
AR(2) Models
Extending the order of the model is also straightforward. For example, an AR(2) model
could be coded with the second-order coefficient gamma and the following model state-
ment.
for (n in 3:N)
y[n] ~ normal(alpha + beta*y[n-1] + gamma*y[n-2], sigma);
AR(K) Models
A general model where the order is itself given as data can be coded by putting the
coefficients in an array and computing the linear predictor in a loop.
data {
int<lower=0> K;
int<lower=0> N;
163

real y[N];
}
parameters {
real alpha;
real beta[K];
real sigma;
}
model {
for (n in (K+1):N) {
real mu = alpha;
for (k in 1:K)
mu += beta[k] *y[n-k];
y[n] ~ normal(mu, sigma);
}
}
ARCH(1) Models
Econometric and financial time-series models usually assume heteroscedasticity (i.e.,
they allow the scale of the noise terms defining the series to vary over time). The sim-
plest such model is the autoregressive conditional heteroscedasticity (ARCH) model
(Engle,1982). Unlike the autoregressive model AR(1), which modeled the mean of the
series as varying over time but left the noise term fixed, the ARCH(1) model takes
the scale of the noise terms to vary over time but leaves the mean term fixed. Of
course, models could be defined where both the mean and scale vary over time; the
econometrics literature presents a wide range of time-series modeling choices.
The ARCH(1) model is typically presented as the following sequence of equations,
where rtis the observed return at time point tand µ,α0, and α1are unknown regres-
sion coefficient parameters.
rt=µ+at
at=σtt
t∼Normal(0,1)
σ2
t=α0+α1a2
t−1
In order to ensure the noise terms σ2
tare positive, the scale coefficients are con-
strained to be positive, α0, α1>0. To ensure stationarity of the time series, the slope
is constrained to to be less than one, α1<1.1The ARCH(1) model may be coded
directly in Stan as follows.
1In practice, it can be useful to remove the constraint to test whether a non-stationary set of coefficients
provides a better fit to the data. It can also be useful to add a trend term to the model, because an unfitted
trend will manifest as non-stationarity.
164
data {
int<lower=0> T; // number of time points
real r[T]; // return at time t
}
parameters {
real mu; // average return
real<lower=0> alpha0; // noise intercept
real<lower=0,upper=1> alpha1; // noise slope
}
model {
for (t in 2:T)
r[t] ~ normal(mu, sqrt(alpha0 + alpha1 *pow(r[t-1] - mu,2)));
}
The loop in the model is defined so that the return at time t=1is not modeled; the
model in the next section shows how to model the return at t=1. The model can be
vectorized to be more efficient; the model in the next section provides an example.
10.2. Modeling Temporal Heteroscedasticity
A set of variables is homoscedastic if their variances are all the same; the variables are
heteroscedastic if they do not all have the same variance. Heteroscedastic time-series
models allow the noise term to vary over time.
GARCH(1,1) Models
The basic generalized autoregressive conditional heteroscedasticity (GARCH) model,
GARCH(1,1), extends the ARCH(1) model by including the squared previous difference
in return from the mean at time t−1as a predictor of volatility at time t, defining
σ2
t=α0+α1a2
t−1+β1σ2
t−1.
To ensure the scale term is positive and the resulting time series stationary, the coef-
ficients must all satisfy α0, α1, β1>0and the slopes α1+β1<1.
data {
int<lower=0> T;
real r[T];
real<lower=0> sigma1;
}
parameters {
real mu;
real<lower=0> alpha0;
165
real<lower=0,upper=1> alpha1;
real<lower=0,upper=(1-alpha1)> beta1;
}
transformed parameters {
real<lower=0> sigma[T];
sigma[1] = sigma1;
for (t in 2:T)
sigma[t] = sqrt(alpha0
+ alpha1 *pow(r[t-1] - mu, 2)
+ beta1 *pow(sigma[t-1], 2));
}
model {
r ~ normal(mu, sigma);
}
To get the recursive definition of the volatility regression off the ground, the data
declaration includes a non-negative value sigma1 for the scale of the noise at t=1.
The constraints are coded directly on the parameter declarations. This declaration
is order-specific in that the constraint on beta1 depends on the value of alpha1.
A transformed parameter array of non-negative values sigma is used to store the
scale values at each time point. The definition of these values in the transformed pa-
rameters block is where the regression is now defined. There is an intercept alpha0, a
slope alpha1 for the squared difference in return from the mean at the previous time,
and a slope beta1 for the previous noise scale squared. Finally, the whole regression
is inside the sqrt function because Stan requires scale (deviation) parameters (not
variance parameters) for the normal distribution.
With the regression in the transformed parameters block, the model reduces a
single vectorized sampling statement. Because rand sigma are of length T, all of the
data is modeled directly.
10.3. Moving Average Models
A moving average model uses previous errors as predictors for future outcomes. For
a moving average model of order Q, MA(Q), there is an overall mean parameter µand
regression coefficients θqfor previous error terms. With tbeing the noise at time t,
the model for outcome ytis defined by
yt=µ+θ1t−1+ ··· + θQt−Q+t,
with the noise term tfor outcome ytmodeled as normal,
t∼Normal(0, σ ).
In a proper Bayesian model, the parameters µ,θ, and σmust all be given priors.
166
MA(2)Example
An MA(2)model can be coded in Stan as follows.
data {
int<lower=3> T; // number of observations
vector[T] y; // observation at time T
}
parameters {
real mu; // mean
real<lower=0> sigma; // error scale
vector[2] theta; // lag coefficients
}
transformed parameters {
vector[T] epsilon; // error terms
epsilon[1] = y[1] - mu;
epsilon[2] = y[2] - mu - theta[1] *epsilon[1];
for (t in 3:T)
epsilon[t] = ( y[t] - mu
- theta[1] *epsilon[t - 1]
- theta[2] *epsilon[t - 2] );
}
model {
mu ~ cauchy(0, 2.5);
theta ~ cauchy(0, 2.5);
sigma ~ cauchy(0, 2.5);
for (t in 3:T)
y[t] ~ normal(mu
+ theta[1] *epsilon[t - 1]
+ theta[2] *epsilon[t - 2],
sigma);
}
The error terms tare defined as transformed parameters in terms of the observa-
tions and parameters. The definition of the sampling statement (defining the like-
lihood) follows the definition, which can only be applied to ynfor n > Q. In this
example, the parameters are all given Cauchy (half-Cauchy for σ) priors, although
other priors can be used just as easily.
This model could be improved in terms of speed by vectorizing the sampling
statement in the model block. Vectorizing the calculation of the tcould also be sped
up by using a dot product instead of a loop.
167
Vectorized MA(Q) Model
A general MA(Q) model with a vectorized sampling probability may be defined as
follows.
data {
int<lower=0> Q; // num previous noise terms
int<lower=3> T; // num observations
vector[T] y; // observation at time t
}
parameters {
real mu; // mean
real<lower=0> sigma; // error scale
vector[Q] theta; // error coeff, lag -t
}
transformed parameters {
vector[T] epsilon; // error term at time t
for (t in 1:T) {
epsilon[t] = y[t] - mu;
for (q in 1:min(t - 1, Q))
epsilon[t] = epsilon[t] - theta[q] *epsilon[t - q];
}
}
model {
vector[T] eta;
mu ~ cauchy(0, 2.5);
theta ~ cauchy(0, 2.5);
sigma ~ cauchy(0, 2.5);
for (t in 1:T) {
eta[t] = mu;
for (q in 1:min(t - 1, Q))
eta[t] = eta[t] + theta[q] *epsilon[t - q];
}
y ~ normal(eta, sigma);
}
Here all of the data is modeled, with missing terms just dropped from the regres-
sions as in the calculation of the error terms. Both models converge very quickly and
mix very well at convergence, with the vectorized model being quite a bit faster (per
iteration, not to converge — they compute the same model).
168
10.4. Autoregressive Moving Average Models
Autoregressive moving-average models (ARMA), combine the predictors of the autore-
gressive model and the moving average model. An ARMA(1,1) model, with a single
state of history, can be encoded in Stan as follows.
data {
int<lower=1> T; // num observations
real y[T]; // observed outputs
}
parameters {
real mu; // mean coeff
real phi; // autoregression coeff
real theta; // moving avg coeff
real<lower=0> sigma; // noise scale
}
model {
vector[T] nu; // prediction for time t
vector[T] err; // error for time t
nu[1] = mu + phi *mu; // assume err[0] == 0
err[1] = y[1] - nu[1];
for (t in 2:T) {
nu[t] = mu + phi *y[t-1] + theta *err[t-1];
err[t] = y[t] - nu[t];
}
mu ~ normal(0, 10); // priors
phi ~ normal(0, 2);
theta ~ normal(0, 2);
sigma ~ cauchy(0, 5);
err ~ normal(0, sigma); // likelihood
}
The data is declared in the same way as the other time-series regressions and the
parameters are documented in the code.
In the model block, the local vector nu stores the predictions and err the errors.
These are computed similarly to the errors in the moving average models described
in the previous section.
The priors are weakly informative for stationary processes. The likelihood only
involves the error term, which is efficiently vectorized here.
Often in models such as these, it is desirable to inspect the calculated error terms.
This could easily be accomplished in Stan by declaring err as a transformed parame-
ter, then defining it the same way as in the model above. The vector nu could still be
a local variable, only now it will be in the transformed parameter block.
169

Wayne Folta suggested encoding the model without local vector variables as fol-
lows.
model {
real err;
mu ~ normal(0, 10);
phi ~ normal(0, 2);
theta ~ normal(0, 2);
sigma ~ cauchy(0, 5);
err = y[1] - mu + phi *mu;
err ~ normal(0, sigma);
for (t in 2:T) {
err = y[t] - (mu + phi *y[t-1] + theta *err);
err ~ normal(0, sigma);
}
}
This approach to ARMA models provides a nice example of how local variables, such
as err in this case, can be reused in Stan. Folta’s approach could be extended to
higher order moving-average models by storing more than one error term as a local
variable and reassigning them in the loop.
Both encodings are very fast. The original encoding has the advantage of vector-
izing the normal distribution, but it uses a bit more memory. A halfway point would
be to vectorize just err.
Identifiability and Stationarity
MA and ARMA models are not identifiable if the roots of the characteristic polyno-
mial for the MA part lie inside the unit circle, so it’s necessary to add the following
constraint.2
real<lower = -1, upper = 1> theta;
When the model is run without the constraint, using synthetic data generated from
the model, the simulation can sometimes find modes for (theta,phi) outside the
[−1,1]interval, which creates a multiple mode problem in the posterior and also
causes the NUTS tree depth to get very large (often above 10). Adding the constraint
both improves the accuracy of the posterior and dramatically reduces the tree depth,
which speeds up the simulation considerably (typically by much more than an order
of magnitude).
Further, unless one thinks that the process is really non-stationary, it’s worth
adding the following constraint to ensure stationarity.
2This subsection is a lightly edited comment of Jonathan Gilligan’s on GitHub; see https://github.
com/stan-dev/stan/issues/1617#issuecomment-160249142.
170

read<lower = -1, upper = 1> phi;
10.5. Stochastic Volatility Models
Stochastic volatility models treat the volatility (i.e., variance) of a return on an asset,
such as an option to buy a security, as following a latent stochastic process in discrete
time (Kim et al.,1998). The data consist of mean corrected (i.e., centered) returns
yton an underlying asset at Tequally spaced time points. Kim et al. formulate a
typical stochastic volatility model using the following regression-like equations, with
a latent parameter htfor the log volatility, along with parameters µfor the mean log
volatility, and φfor the persistence of the volatility term. The variable trepresents
the white-noise shock (i.e., multiplicative error) on the asset return at time t, whereas
δtrepresents the shock on volatility at time t.
yt=texp(ht/2),
ht+1=µ+φ(ht−µ) +δtσ
h1∼Normal
µ, σ
q1−φ2
t∼Normal(0,1);δt∼Normal(0,1)
Rearranging the first line, t=ytexp(−ht/2), allowing the sampling distribution for
ytto be written as
yt∼Normal(0,exp(ht/2)).
The recurrence equation for ht+1may be combined with the scaling and sampling of
δtto yield the sampling distribution
ht∼Normal(µ +φ(ht−µ), σ ).
This formulation can be directly encoded, as shown in the following Stan model.
data {
int<lower=0> T; // # time points (equally spaced)
vector[T] y; // mean corrected return at time t
}
parameters {
real mu; // mean log volatility
real<lower=-1,upper=1> phi; // persistence of volatility
real<lower=0> sigma; // white noise shock scale
vector[T] h; // log volatility at time t
}
171
model {
phi ~ uniform(-1, 1);
sigma ~ cauchy(0, 5);
mu ~ cauchy(0, 10);
h[1] ~ normal(mu, sigma / sqrt(1 - phi *phi));
for (t in 2:T)
h[t] ~ normal(mu + phi *(h[t - 1] - mu), sigma);
for (t in 1:T)
y[t] ~ normal(0, exp(h[t] / 2));
}
Compared to the Kim et al. formulation, the Stan model adds priors for the parame-
ters φ,σ, and µ. Note that the shock terms tand δtdo not appear explicitly in the
model, although they could be calculated efficiently in a generated quantities block.
The posterior of a stochastic volatility model such as this one typically has high
posterior variance. For example, simulating 500 data points from the above model
with µ= −1.02,φ=0.95, and σ=0.25 leads to 95% posterior intervals for µof
(−1.23,−0.54), for φof (0.82,0.98)and for σof (0.16,0.38).
The samples using NUTS show a high degree of autocorrelation among the sam-
ples, both for this model and the stochastic volatility model evaluated in (Hoffman
and Gelman,2011,2014). Using a non-diagonal mass matrix provides faster conver-
gence and more effective samples than a diagonal mass matrix, but will not scale to
large values of T.
It is relatively straightforward to speed up the effective samples per second gen-
erated by this model by one or more orders of magnitude. First, the sampling state-
ments for return yis easily vectorized to
y ~ normal(0, exp(h / 2));
This speeds up the iterations, but does not change the effective sample size because
the underlying parameterization and log probability function have not changed. Mix-
ing is improved by by reparameterizing in terms of a standardized volatility, then
rescaling. This requires a standardized parameter h_std to be declared instead of h.
parameters {
...
vector[T] h_std; // std log volatility time t
The original value of his then defined in a transformed parameter block.
transformed parameters {
vector[T] h = h_std *sigma; // now h ~ normal(0, sigma)
h[1] /= sqrt(1 - phi *phi); // rescale h[1]
h += mu;
172
for (t in 2:T)
h[t] += phi *(h[t-1] - mu);
}
The first assignment rescales h_std to have a Normal(0, σ ) distribution and tem-
porarily assigns it to h. The second assignment rescales h[1] so that its prior differs
from that of h[2] through h[T]. The next assignment supplies a mu offset, so that
h[2] through h[T] are now distributed Normal(µ, σ ); note that this shift must be
done after the rescaling of h[1]. The final loop adds in the moving average so that
h[2] through h[T] are appropriately modeled relative to phi and mu.
As a final improvement, the sampling statement for h[1] and loop for sampling
h[2] to h[T] are replaced with a single vectorized unit normal sampling statement.
model {
...
h_std ~ normal(0, 1);
Although the original model can take hundreds and sometimes thousands of itera-
tions to converge, the reparameterized model reliably converges in tens of iterations.
Mixing is also dramatically improved, which results in higher effective sample sizes
per iteration. Finally, each iteration runs in roughly a quarter of the time of the origi-
nal iterations.
10.6. Hidden Markov Models
A hidden Markov model (HMM) generates a sequence of Toutput variables ytcon-
ditioned on a parallel sequence of latent categorical state variables zt∈ {1, . . . , K}.
These “hidden” state variables are assumed to form a Markov chain so that ztis
conditionally independent of other variables given zt−1. This Markov chain is param-
eterized by a transition matrix θwhere θkis a K-simplex for k∈ {1, . . . , K}. The
probability of transitioning to state ztfrom state zt−1is
zt∼Categorical(θz[t−1]).
The output ytat time tis generated conditionally independently based on the latent
state zt.
This section describes HMMs with a simple categorical model for outputs yt∈
{1, . . . , V }. The categorical distribution for latent state kis parameterized by a V-
simplex φk. The observed output ytat time tis generated based on the hidden state
indicator ztat time t,
yt∼Categorical(φz[t]).
In short, HMMs form a discrete mixture model where the mixture component indica-
tors form a latent Markov chain.
173
Supervised Parameter Estimation
In the situation where the hidden states are known, the following naive model can be
used to fit the parameters θand φ.
data {
int<lower=1> K; // num categories
int<lower=1> V; // num words
int<lower=0> T; // num instances
int<lower=1,upper=V> w[T]; // words
int<lower=1,upper=K> z[T]; // categories
vector<lower=0>[K] alpha; // transit prior
vector<lower=0>[V] beta; // emit prior
}
parameters {
simplex[K] theta[K]; // transit probs
simplex[V] phi[K]; // emit probs
}
model {
for (k in 1:K)
theta[k] ~ dirichlet(alpha);
for (k in 1:K)
phi[k] ~ dirichlet(beta);
for (t in 1:T)
w[t] ~ categorical(phi[z[t]]);
for (t in 2:T)
z[t] ~ categorical(theta[z[t - 1]]);
}
Explicit Dirichlet priors have been provided for θkand φk; dropping these two state-
ments would implicitly take the prior to be uniform over all valid simplexes.
Start-State and End-State Probabilities
Although workable, the above description of HMMs is incomplete because the start
state z1is not modeled (the index runs from 2 to T). If the data are conceived as
a subsequence of a long-running process, the probability of z1should be set to the
stationary state probabilities in the Markov chain. In this case, there is no distinct
end to the data, so there is no need to model the probability that the sequence ends
at zT.
An alternative conception of HMMs is as models of finite-length sequences. For
example, human language sentences have distinct starting distributions (usually a
capital letter) and ending distributions (usually some kind of punctuation). The sim-
plest way to model the sequence boundaries is to add a new latent state K+1, generate
174

the first state from a categorical distribution with parameter vector θK+1, and restrict
the transitions so that a transition to state K+1is forced to occur at the end of the
sentence and is prohibited elsewhere.
Calculating Sufficient Statistics
The naive HMM estimation model presented above can be sped up dramatically by
replacing the loops over categorical distributions with a single multinomial distribu-
tion.3The data is declared as before, but now a transformed data blocks computes
the sufficient statistics for estimating the transition and emission matrices.
transformed data {
int<lower=0> trans[K, K];
int<lower=0> emit[K, V];
for (k1 in 1:K)
for (k2 in 1:K)
trans[k1, k2] = 0;
for (t in 2:T)
trans[z[t - 1], z[t]] += 1;
for (k in 1:K)
for (v in 1:V)
emit[k,v] = 0;
for (t in 1:T)
emit[z[t], w[t]] += 1;
}
The likelihood component of the model based on looping over the input is replaced
with multinomials as follows.
model {
...
for (k in 1:K)
trans[k] ~ multinomial(theta[k]);
for (k in 1:K)
emit[k] ~ multinomial(phi[k]);
}
In a continuous HMM with normal emission probabilities could be sped up in the
same way by computing sufficient statistics.
3The program is available in the Stan example model repository; see http://mc-stan.org/
documentation.
175

Analytic Posterior
With the Dirichlet-multinomial HMM, the posterior can be computed analytically be-
cause the Dirichlet is the conjugate prior to the multinomial. The following example4
illustrates how a Stan model can define the posterior analytically. This is possible in
the Stan language because the model only needs to define the conditional probability
of the parameters given the data up to a proportion, which can be done by defining
the (unnormalized) joint probability or the (unnormalized) conditional posterior, or
anything in between.
The model has the same data and parameters as the previous models, but now
computes the posterior Dirichlet parameters in the transformed data block.
transformed data {
vector<lower=0>[K] alpha_post[K];
vector<lower=0>[V] beta_post[K];
for (k in 1:K)
alpha_post[k] = alpha;
for (t in 2:T)
alpha_post[z[t-1], z[t]] += 1;
for (k in 1:K)
beta_post[k] = beta;
for (t in 1:T)
beta_post[z[t], w[t]] += 1;
}
The posterior can now be written analytically as follows.
model {
for (k in 1:K)
theta[k] ~ dirichlet(alpha_post[k]);
for (k in 1:K)
phi[k] ~ dirichlet(beta_post[k]);
}
Semisupervised Estimation
HMMs can be estimated in a fully unsupervised fashion without any data for which
latent states are known. The resulting posteriors are typically extremely multimodal.
An intermediate solution is to use semisupervised estimation, which is based on a
combination of supervised and unsupervised data. Implementing this estimation
strategy in Stan requires calculating the probability of an output sequence with an
4The program is available in the Stan example model repository; see http://mc-stan.org/
documentation.
176

unknown state sequence. This is a marginalization problem, and for HMMs, it is
computed with the so-called forward algorithm.
In Stan, the forward algorithm is coded as follows.5First, two additional data
variable are declared for the unsupervised data.
data {
...
int<lower=1> T_unsup; // num unsupervised items
int<lower=1,upper=V> u[T_unsup]; // unsup words
...
The model for the supervised data does not change; the unsupervised data is handled
with the following Stan implementation of the forward algorithm.
model {
...
{
real acc[K];
real gamma[T_unsup, K];
for (k in 1:K)
gamma[1, k] = log(phi[k, u[1]]);
for (t in 2:T_unsup) {
for (k in 1:K) {
for (j in 1:K)
acc[j] = gamma[t-1, j] + log(theta[j, k]) + log(phi[k, u[t]]);
gamma[t, k] = log_sum_exp(acc);
}
}
target += log_sum_exp(gamma[T_unsup]);
}
The forward values gamma[t, k] are defined to be the log marginal probability of the
inputs u[1],...,u[t] up to time tand the latent state being equal to kat time t; the
previous latent states are marginalized out. The first row of gamma is initialized by
setting gamma[1, k] equal to the log probability of latent state kgenerating the first
output u[1]; as before, the probability of the first latent state is not itself modeled.
For each subsequent time tand output j, the value acc[j] is set to the probability
of the latent state at time t-1 being j, plus the log transition probability from state
jat time t-1 to state kat time t, plus the log probability of the output u[t] being
generated by state k. The log_sum_exp operation just multiplies the probabilities for
each prior state jon the log scale in an arithmetically stable way.
The brackets provide the scope for the local variables acc and gamma; these could
have been declared earlier, but it is clearer to keep their declaration near their use.
5The program is available in the Stan example model repository; see http://mc-stan.org/
documentation.
177
Predictive Inference
Given the transition and emission parameters, θk,k0and φk,v and an observation se-
quence u1, . . . , uT∈ {1, . . . , V }, the Viterbi (dynamic programming) algorithm com-
putes the state sequence which is most likely to have generated the observed output
u.
The Viterbi algorithm can be coded in Stan in the generated quantities block as
follows. The predictions here is the most likely state sequence y_star[1], ...,
y_star[T_unsup] underlying the array of observations u[1], ..., u[T_unsup].
Because this sequence is determined from the transition probabilities theta and
emission probabilities phi, it may be different from sample to sample in the pos-
terior.
generated quantities {
int<lower=1,upper=K> y_star[T_unsup];
real log_p_y_star;
{
int back_ptr[T_unsup, K];
real best_logp[T_unsup, K];
real best_total_logp;
for (k in 1:K)
best_logp[1, K] = log(phi[k, u[1]]);
for (t in 2:T_unsup) {
for (k in 1:K) {
best_logp[t, k] = negative_infinity();
for (j in 1:K) {
real logp;
logp = best_logp[t-1, j]
+ log(theta[j, k]) + log(phi[k, u[t]]);
if (logp > best_logp[t, k]) {
back_ptr[t, k] = j;
best_logp[t, k] = logp;
}
}
}
}
log_p_y_star = max(best_logp[T_unsup]);
for (k in 1:K)
if (best_logp[T_unsup, k] == log_p_y_star)
y_star[T_unsup] = k;
for (t in 1:(T_unsup - 1))
y_star[T_unsup - t] = back_ptr[T_unsup - t + 1,
y_star[T_unsup - t + 1]];
}
178
}
The bracketed block is used to make the three variables back_ptr,best_logp, and
best_total_logp local so they will not be output. The variable y_star will hold
the label sequence with the highest probability given the input sequence u. Unlike
the forward algorithm, where the intermediate quantities were total probability, here
they consist of the maximum probability best_logp[t, k] for the sequence up to
time twith final output category kfor time t, along with a backpointer to the source
of the link. Following the backpointers from the best final log probability for the final
time tyields the optimal state sequence.
This inference can be run for the same unsupervised outputs uas are used to
fit the semisupervised model. The above code can be found in the same model file
as the unsupervised fit. This is the Bayesian approach to inference, where the data
being reasoned about is used in a semisupervised way to train the model. It is not
“cheating” because the underlying states for uare never observed — they are just
estimated along with all of the other parameters.
If the outputs uare not used for semisupervised estimation but simply as the basis
for prediction, the result is equivalent to what is represented in the BUGS modeling
language via the cut operation. That is, the model is fit independently of u, then those
parameters used to find the most likely state to have generated u.
179

11. Missing Data & Partially Known Parame-
ters
Bayesian inference supports a very general approach to missing data in which any
missing data item is represented as a parameter that is estimated in the posterior
(Gelman et al.,2013). If the missing data is not explicitly modeled, as in the predictors
for most regression models, then the result is an improper prior on the parameter
representing the missing predictor.
Mixing arrays of observed and missing data can be difficult to include in Stan,
partly because it can be tricky to model discrete unknowns in Stan and partly be-
cause unlike some other statistical languages (for example, R and Bugs), Stan requires
observed and unknown quantities to be defined in separate places in the model. Thus
it can be necessary to include code in a Stan program to splice together observed and
missing parts of a data structure. Examples are provided later in the chapter.
11.1. Missing Data
Stan treats variables declared in the data and transformed data blocks as known
and the variables in the parameters block as unknown.
An example involving missing normal observations1could be coded as follows.
data {
int<lower=0> N_obs;
int<lower=0> N_mis;
real y_obs[N_obs];
}
parameters {
real mu;
real<lower=0> sigma;
real y_mis[N_mis];
}
model {
y_obs ~ normal(mu, sigma);
y_mis ~ normal(mu, sigma);
}
The number of observed and missing data points are coded as data with non-negative
integer variables N_obs and N_mis. The observed data is provided as an array data
1A more meaningful estimation example would involve a regression of the observed and missing obser-
vations using predictors that were known for each and specified in the data block.
180
variable y_obs. The missing data is coded as an array parameter, y_mis. The or-
dinary parameters being estimated, the location mu and scale sigma, are also coded
as parameters. The model is vectorized on the observed and missing data; combin-
ing them in this case would be less efficient because the data observations would be
promoted and have needless derivatives calculated.
11.2. Partially Known Parameters
In some situations, such as when a multivariate probability function has partially ob-
served outcomes or parameters, it will be necessary to create a vector mixing known
(data) and unknown (parameter) values. This can be done in Stan by creating a vector
or array in the transformed parameters block and assigning to it.
The following example involves a bivariate covariance matrix in which the vari-
ances are known, but the covariance is not.
data {
int<lower=0> N;
vector[2] y[N];
real<lower=0> var1; real<lower=0> var2;
}
transformed data {
real<lower=0> max_cov = sqrt(var1 *var2);
real<upper=0> min_cov = -max_cov;
}
parameters {
vector[2] mu;
real<lower=min_cov, upper=max_cov> cov;
}
transformed parameters {
matrix[2, 2] Sigma;
Sigma[1, 1] = var1; Sigma[1, 2] = cov;
Sigma[2, 1] = cov; Sigma[2, 2] = var2;
}
model {
y ~ multi_normal(mu, Sigma);
}
The variances are defined as data in variables var1 and var2, whereas the covariance
is defined as a parameter in variable cov. The 2×2covariance matrix Sigma is defined
as a transformed parameter, with the variances assigned to the two diagonal elements
and the covariance to the two off-diagonal elements.
The constraint on the covariance declaration ensures that the resulting covariance
matrix sigma is positive definite. The bound, plus or minus the square root of the
181
product of the variances, is defined as transformed data so that it is only calculated
once.
The vectorization of the multivariate normal is critical for efficiency here. The
transformed parameter Sigma could be defined as a local variable within the model
block if
11.3. Sliced Missing Data
If the missing data is part of some larger data structure, then it can often be effectively
reassembled using index arrays and slicing. Here’s an example for time-series data,
where only some entries in the series are observed.
data {
int<lower = 0> N_obs;
int<lower = 0> N_mis;
int<lower = 1, upper = N_obs + N_mis> ii_obs[N_obs];
int<lower = 1, upper = N_obs + N_mis> ii_mis[N_mis];
real y_obs[N_obs];
}
transformed data {
int<lower = 0> N = N_obs + N_mis;
}
parameters {
real y_mis[N_mis];
real<lower=0> sigma;
}
transformed parameters {
real y[N];
y[ii_obs] = y_obs;
y[ii_mis] = y_mis;
}
model {
sigma ~ gamma(1, 1);
y[1] ~ normal(0, 100);
y[2:N] ~ normal(y[1:(N - 1)], sigma);
}
The index arrays ii_obs and ii_mis contain the indexes into the final array yof
the observed data (coded as a data vector y_obs) and the missing data (coded as a
parameter vector y_mis). See Chapter 10 for further discussion of time-series model
and specifically Section 10.1 for an explanation of the vectorization for yas well as
an explanation of how to convert this example to a full AR(1) model. To ensure y[1]
182
has a proper posterior in case it is missing, we have given it an explicit, albeit broad,
prior.
Another potential application would be filling the columns of a data matrix of
predictors for which some predictors are missing; matrix columns can be accessed as
vectors and assigned the same way, as in
x[N_obs_2, 2] = x_obs_2;
x[N_mis_2, 2] = x_mis_2;
where the relevant variables are all hard coded with index 2because Stan doesn’t
support ragged arrays. These could all be packed into a single array with more fiddly
indexing that slices out vectors from longer vectors (see Section 16.2 for a general
discussion of coding ragged data structures in Stan).
11.4. Loading matrix for factor analysis
Rick Farouni, on the Stan users group, inquired as to how to build a Cholesky fac-
tor for a covariance matrix with a unit diagonal, as used in Bayesian factor analysis
Aguilar and West (2000). This can be accomplished by declaring the below-diagonal
elements as parameters, then filling the full matrix as a transformed parameter.
data {
int<lower=2> K;
}
transformed data {
int<lower=1> K_choose_2;
K_choose_2 = (K *(K - 1)) / 2;
}
parameters {
vector[K_choose_2] L_lower;
}
transformed parameters {
cholesky_factor_cov[K] L;
for (k in 1:K)
L[k, k] = 1;
{
int i;
for (m in 2:K) {
for (n in 1:(m - 1)) {
L[m, n] = L_lower[i];
L[n, m] = 0;
i += 1;
}
183

}
}
}
It is most convenient to place a prior directly on L_lower. An alternative would be a
prior for the full Cholesky factor L, because the transform from L_lower to Lis just
the identity and thus does not require a Jacobian adjustment (despite the warning
from the parser, which is not smart enough to do the code analysis to infer that the
transform is linear). It would not be at all convenient to place a prior on the full
covariance matrix L*L’, because that would require a Jacobian adjustment; the
exact adjustment is provided in the subsection of Section 35.1 devoted to covariance
matrices.
11.5. Missing Multivariate Data
It’s often the case that one or more components of a multivariate outcome are miss-
ing.2As an example, we’ll consider the bivariate distribution, which is easily marginal-
ized. The coding here is brute force, representing both an array of vector observations
yand a boolean array y_observed to indicate which values were observed (others can
have dummy values in the input).
vector[2] y[N];
int<lower=0, upper=1> y_observed[N, 2];
If both components are observed, we model them using the full multi-normal,
otherwise we model the marginal distribution of the component that is observed.
for (n in 1:N) {
if (y_observed[n, 1] && y_observed[n, 2])
y[n] ~ multi_normal(mu, Sigma);
else if (y_observed[n, 1])
y[n, 1] ~ normal(mu[1], sqrt(Sigma[1, 1]));
else if (y_observed[n, 2])
y[n, 2] ~ normal(mu[2], sqrt(Sigma[2, 2]));
}
It’s a bit more work, but much more efficient to vectorize these sampling state-
ments. In transformed data, build up three vectors of indices, for the three cases
above:
2Note that this is not the same as missing components of a multivariate predictor in a regression prob-
lem; in that case, you will need to represent the missing data as a parameter and impute missing values in
order to feed them into the regression.
184
transformed data {
int ns12[observed_12(y_observed)];
int ns1[observed_1(y_observed)];
int ns2[observed_2(y_observed)];
}
You will need to write functions that pull out the count of observations in each of the
three sampling situations. This must be done with functions because the result needs
to go in top-level block variable size declaration. Then the rest of transformed data
just fills in the values using three counters.
int n12 = 1;
int n1 = 1;
int n2 = 1;
for (n in 1:N) {
if (y_observed[n, 1] && y_observed[n, 2]) {
ns12[n12] = n;
n12 += 1;
} else if (y_observed[n, 1]) {
ns1[n1] = n;
n1 += 1;
} else if (y_observed[n, 2]) {
ns2[n2] = n;
n2 += 1;
}
}
Then, in the model block, everything’s nice and vectorizable using those indexes con-
structed once in transformed data:
y[ns12] ~ multi_normal(mu, Sigma);
y[ns1] ~ normal(mu[1], sqrt(Sigma[1, 1]));
y[ns2] ~ normal(mu[2], sqrt(Sigma[2, 2]));
The result will be much more efficient than using latent variables for the missing
data, but requires the multivariate distribution to be marginalized analytically. It’d
be more efficient still to precompute the three arrays in the transformed data block,
though the efficiency improvement will be relatively minor compared to vectorizing
the probability functions.
This approach can easily be generalized with some index fiddling to the general
multivariate case. The trick is to pull out entries in the covariance matrix for the
missing components. It can also be used in situations such as multivariate differen-
tial equation solutions where only one component is observed, as in a phase-space
experiment recording only time and position of a pendulum (and not recording mo-
mentum).
185
12. Truncated or Censored Data
Data in which measurements have been truncated or censored can be coded in Stan
following their respective probability models.
12.1. Truncated Distributions
Truncation in Stan is restricted to univariate distributions for which the correspond-
ing log cumulative distribution function (cdf) and log complementary cumulative dis-
tribution (ccdf) functions are available. See the subsection on truncated distributions
in Section 5.3 for more information on truncated distributions, cdfs, and ccdfs.
12.2. Truncated Data
Truncated data is data for which measurements are only reported if they fall above a
lower bound, below an upper bound, or between a lower and upper bound.
Truncated data may be modeled in Stan using truncated distributions. For exam-
ple, suppose the truncated data is ynwith an upper truncation point of U=300 so
that yn<300. In Stan, this data can be modeled as following a truncated normal
distribution for the observations as follows.
data {
int<lower=0> N;
real U;
real<upper=U> y[N];
}
parameters {
real mu;
real<lower=0> sigma;
}
model {
for (n in 1:N)
y[n] ~ normal(mu, sigma) T[,U];
}
The model declares an upper bound Uas data and constrains the data for yto respect
the constraint; this will be checked when the data is loaded into the model before
sampling begins.
This model implicitly uses an improper flat prior on the scale and location param-
eters; these could be given priors in the model using sampling statements.
186
Constraints and Out-of-Bounds Returns
If the sampled variate in a truncated distribution lies outside of the truncation range,
the probability is zero, so the log probability will evaluate to −∞. For instance, if
variate yis sampled with the statement.
for (n in 1:N)
y[n] ~ normal(mu, sigma) T[L,U];
then if the value of y[n] is less than the value of Lor greater than the value of
U, the sampling statement produces a zero-probability estimate. For user-defined
truncation, this zeroing outside of truncation bounds must be handled explicitly.
To avoid variables straying outside of truncation bounds, appropriate constraints
are required. For example, if yis a parameter in the above model, the declaration
should constrain it to fall between the values of Land U.
parameters {
real<lower=L,upper=U> y[N];
...
If in the above model, Lor Uis a parameter and yis data, then Land Umust be
appropriately constrained so that all data is in range and the value of Lis less than
that of U(if they are equal, the parameter range collapses to a single point and the
Hamiltonian dynamics used by the sampler break down). The following declarations
ensure the bounds are well behaved.
parameters {
real<upper=min(y)> L; // L < y[n]
real<lower=fmax(L, max(y))> U; // L < U; y[n] < U
Note that for pairs of real numbers, the function fmax is used rather than max.
Unknown Truncation Points
If the truncation points are unknown, they may be estimated as parameters. This can
be done with a slight rearrangement of the variable declarations from the model in
the previous section with known truncation points.
data {
int<lower=1> N;
real y[N];
}
parameters {
real<upper = min(y)> L;
real<lower = max(y)> U;
187
real mu;
real<lower=0> sigma;
}
model {
L ~ ...;
U ~ ...;
for (n in 1:N)
y[n] ~ normal(mu, sigma) T[L,U];
}
Here there is a lower truncation point Lwhich is declared to be less than or equal
to the minimum value of y. The upper truncation point Uis declared to be larger
than the maximum value of y. This declaration, although dependent on the data,
only enforces the constraint that the data fall within the truncation bounds. With N
declared as type int<lower=1>, there must be at least one data point. The constraint
that Lis less than Uis enforced indirectly, based on the non-empty data.
The ellipses where the priors for the bounds Land Ushould go should be filled
in with a an informative prior in order for this model to not concentrate Lstrongly
around min(y) and Ustrongly around max(y).
12.3. Censored Data
Censoring hides values from points that are too large, too small, or both. Unlike with
truncated data, the number of data points that were censored is known. The textbook
example is the household scale which does not report values above 300 pounds.
Estimating Censored Values
One way to model censored data is to treat the censored data as missing data that is
constrained to fall in the censored range of values. Since Stan does not allow unknown
values in its arrays or matrices, the censored values must be represented explicitly,
as in the following right-censored case.
data {
int<lower=0> N_obs;
int<lower=0> N_cens;
real y_obs[N_obs];
real<lower=max(y_obs)> U;
}
parameters {
real<lower=U> y_cens[N_cens];
real mu;
real<lower=0> sigma;
188
}
model {
y_obs ~ normal(mu, sigma);
y_cens ~ normal(mu, sigma);
}
Because the censored data array y_cens is declared to be a parameter, it will be
sampled along with the location and scale parameters mu and sigma. Because the
censored data array y_cens is declared to have values of type real<lower=U>, all
imputed values for censored data will be greater than U. The imputed censored data
affects the location and scale parameters through the last sampling statement in the
model.
Integrating out Censored Values
Although it is wrong to ignore the censored values in estimating location and scale,
it is not necessary to impute values. Instead, the values can be integrated out. Each
censored data point has a probability of
Pr[y > U] =Z∞
U
Normal(y|µ, σ ) dy =1−Φy−µ
σ,
where Φ() is the unit normal cumulative distribution function. With Mcensored
observations, the total probability on the log scale is
log
M
Y
m=1
Pr[ym> U] =log 1−Φy−µ
σM
=Mnormal_lccdf(y|µ, σ ),
where normal_lccdf is the log of complementary CDF (Stan provides
<distr>_lccdf for each distribution implemented in Stan).
The following right-censored model assumes that the censoring point is known,
so it is declared as data.
data {
int<lower=0> N_obs;
int<lower=0> N_cens;
real y_obs[N_obs];
real<lower=max(y_obs)> U;
}
parameters {
real mu;
real<lower=0> sigma;
}
model {
189
y_obs ~ normal(mu, sigma);
target += N_cens *normal_lccdf(U | mu, sigma);
}
For the observed values in y_obs, the normal sampling model is used without trunca-
tion. The log probability is directly incremented using the calculated log cumulative
normal probability of the censored data items.
For the left-censored data the CDF (normal_lcdf) has to be used instead of com-
plementary CDF. If the censoring point variable (L) is unknown, its declaration should
be moved from the data to the parameters block.
data {
int<lower=0> N_obs;
int<lower=0> N_cens;
real y_obs[N_obs];
}
parameters {
real<upper=min(y_obs)> L;
real mu;
real<lower=0> sigma;
}
model {
L ~ normal(mu, sigma);
y_obs ~ normal(mu, sigma);
target += N_cens *normal_lcdf(L | mu, sigma);
}
190
13. Finite Mixtures
Finite mixture models of an outcome assume that the outcome is drawn from one
of several distributions, the identity of which is controlled by a categorical mixing
distribution. Mixture models typically have multimodal densities with modes near
the modes of the mixture components. Mixture models may be parameterized in
several ways, as described in the following sections. Mixture models may be used
directly for modeling data with multimodal distributions, or they may be used as
priors for other parameters.
13.1. Relation to Clustering
Clustering models, as discussed in Chapter 17, are just a particular class of mixture
models that have been widely applied to clustering in the engineering and machine-
learning literature. The normal mixture model discussed in this chapter reappears
in multivariate form as the statistical basis for the K-means algorithm; the latent
Dirichlet allocation model, usually applied to clustering problems, can be viewed as a
mixed-membership multinomial mixture model.
13.2. Latent Discrete Parameterization
One way to parameterize a mixture model is with a latent categorical variable in-
dicating which mixture component was responsible for the outcome. For example,
consider Knormal distributions with locations µk∈Rand scales σk∈(0,∞). Now
consider mixing them in proportion λ, where λk≥0and PK
k=1λk=1(i.e., λlies in the
unit K-simplex). For each outcome ynthere is a latent variable znin {1, . . . , K}with a
categorical distribution parameterized by λ,
zn∼Categorical(λ).
The variable ynis distributed according to the parameters of the mixture component
zn,
yn∼Normal(µz[n], σz[n]).
This model is not directly supported by Stan because it involves discrete parameters
zn, but Stan can sample µand σby summing out the zparameter as described in the
next section.
191
13.3. Summing out the Responsibility Parameter
To implement the normal mixture model outlined in the previous section in Stan, the
discrete parameters can be summed out of the model. If Yis a mixture of Knormal
distributions with locations µkand scales σkwith mixing proportions λin the unit
K-simplex, then
pY(y|λ, µ, σ ) =
K
X
k=1
λkNormal(y |µk, σk).
13.4. Log Sum of Exponentials: Linear Sums on the Log Scale
The log sum of exponentials function is used to define mixtures on the log scale. It is
defined for two inputs by
log_sum_exp(a, b) =log(exp(a) +exp(b)).
If aand bare probabilities on the log scale, then exp(a) +exp(b) is their sum on
the linear scale, and the outer log converts the result back to the log scale; to sum-
marize, log_sum_exp does linear addition on the log scale. The reason to use Stan’s
built-in log_sum_exp function is that it can prevent underflow and overflow in the
exponentiation, by calculating the result as
log exp(a) +exp(b)=c+log exp(a −c) +exp(b −c),
where c=max(a, b). In this evaluation, one of the terms, a−cor b−c, is zero and
the other is negative, thus eliminating the possibility of overflow or underflow in the
leading term and eking the most arithmetic precision possible out of the operation.
For example, the mixture of Normal(−1,2)and Normal(3,1)with mixing propor-
tion λ=(0.3,0.7)>can be implemented in Stan as follows.
parameters {
real y;
}
model {
target += log_sum_exp(log(0.3) + normal_lpdf(y | -1, 2),
log(0.7) + normal_lpdf(y | 3, 1));
}
192

The log probability term is derived by taking
log pY(y|λ, µ, σ ) =log(0.3×Normal(y| − 1,2)+0.7×Normal(y|3,1) )
=log(exp(log(0.3×Normal(y| − 1,2)))
+exp(log(0.7×Normal(y|3,1))) )
=log_sum_exp(log(0.3)+log Normal(y| − 1,2),
log(0.7)+log Normal(y|3,1) ).
Dropping uniform mixture ratios
If a two-component mixture has a mixing ratio of 0.5, then the mixing ratios can be
dropped, because
neg_log_half = -log(0.5);
for (n in 1:N)
target
+= log_sum_exp(neg_log_half + normal_lpdf(y[n] | mu[1], sigma[1]),
neg_log_half + normal_lpdf(y[n] | mu[2], sigma[2]));
then the −log 0.5term isn’t contributing to the proportional density, and the above
can be replaced with the more efficient version
for (n in 1:N)
target += log_sum_exp(normal_lpdf(y[n] | mu[1], sigma[1]),
normal_lpdf(y[n] | mu[2], sigma[2]));
The same result holds if there are Kcomponents and the mixing simplex λis sym-
metric, i.e.,
λ=1
K,..., 1
K.
The result follows from the identity
log_sum_exp(c +a, c +b) =c+log_sum_exp(a, b)
and the fact that adding a constant cto the log density accumulator has no effect
because the log density is only specified up to an additive constant in the first place.
There is nothing specific to the normal distribution here; constants may always be
dropped from the target.
Estimating Parameters of a Mixture
Given the scheme for representing mixtures, it may be moved to an estimation set-
ting, where the locations, scales, and mixture components are unknown. Further gen-
eralizing to a number of mixture components specified as data yields the following
model.
193
data {
int<lower=1> K; // number of mixture components
int<lower=1> N; // number of data points
real y[N]; // observations
}
parameters {
simplex[K] theta; // mixing proportions
ordered mu[K]; // locations of mixture components
vector<lower=0>[K] sigma; // scales of mixture components
}
model {
real log_theta[K] = log(theta); // cache log calculation
sigma ~ lognormal(0, 2);
mu ~ normal(0, 10);
for (n in 1:N) {
real lps[K] = log_theta;
for (k in 1:K)
lps[k] += normal_lpdf(y[n] | mu[k], sigma[k]);
target += log_sum_exp(lps);
}
}
The model involves Kmixture components and Ndata points. The mixing proportion
parameter theta is declared to be a unit K-simplex, whereas the component location
parameter mu and scale parameter sigma are both defined to be K-vectors.
The location parameter mu is declared to be an ordered vector in order to identify
the model. This will not affect inferences that do not depend on the ordering of the
components as long as the prior for the components mu[k] is symmetric, as it is here
(each component has an independent Normal(0,10)prior). It would even be possible
to include a hierarchical prior for the components.
The values in the scale array sigma are constrained to be non-negative, and have
a weakly informative prior given in the model chosen to avoid zero values and thus
collapsing components.
The model declares a local array variable lps to be size Kand uses it to accumulate
the log contributions from the mixture components. The main action is in the loop
over data points n. For each such point, the log of θk×Normal(yn|µk, σk)is calculated
and added to the array lpps. Then the log probability is incremented with the log sum
of exponentials of those values.
194
13.5. Vectorizing Mixtures
There is (currently) no way to vectorize mixture models at the observation level in
Stan. This section is to warn users away from attempting to vectorize naively, as it re-
sults in a different model. A proper mixture at the observation level is defined as fol-
lows, where we assume that lambda,y[n],mu[1], mu[2], and sigma[1], sigma[2]
are all scalars and lambda is between 0 and 1.
for (n in 1:N) {
target += log_sum_exp(log(lambda)
+ normal_lpdf(y[n] | mu[1], sigma[1]),
log1m(lambda)
+ normal_lpdf(y[n] | mu[2], sigma[2]));
or equivalently
for (n in 1:N)
target += log_mix(lambda,
normal_lpdf(y[n] | mu[1], sigma[1]),
normal_lpdf(y[n] | mu[2], sigma[2])));
This definition assumes that each observation ynmay have arisen from either of the
mixture components. The density is
p(y |λ, µ, σ ) =
N
Y
n=1
(λ ×Normal(yn|µ1, σ1)+(1−λ) ×Normal(yn|µ2, σ2).
Contrast the previous model with the following (erroneous) attempt to vectorize the
model.
target += log_sum_exp(log(lambda)
+ normal_lpdf(y | mu[1], sigma[1]),
log1m(lambda)
+ normal_lpdf(y | mu[2], sigma[2]));
or equivalently,
target += log_mix(lambda,
normal_lpdf(y | mu[1], sigma[1]),
normal_lpdf(y | mu[2], sigma[2]));
This second definition implies that the entire sequence y1, . . . , ynof observations
comes form one component or the other, defining a different density,
p(y |λ, µ, σ ) =λ×
N
Y
n=1
Normal(yn|µ1, σ1)+(1−λ) ×
N
Y
n=1
Normal(yn|µ2, σ2).
195

13.6. Inferences Supported by Mixtures
In many mixture models, the mixture components are underlyingly exchangeable in
the model and thus not identifiable. This arises if the parameters of the mixture com-
ponents have exchangeable priors and the mixture ratio gets a uniform prior so that
the parameters of the mixture components are also exchangeable in the likelihood.
We have finessed this basic problem by ordering the parameters. This will allow
us in some cases to pick out mixture components either ahead of time or after fitting
(e.g., male vs. female, or Democrat vs. Republican).
In other cases, we do not care about the actual identities of the mixture compo-
nents and want to consider inferences that are independent of indexes. For example,
we might only be interested in posterior predictions for new observations.
Mixtures with Unidentifiable Components
As an example, consider the normal mixture from the previous section, which pro-
vides an exchangeable prior on the pairs of parameters (µ1, σ1)and (µ2, σ2),
µ1, µ2∼Normal(0,10)
σ1, σ2∼HalfNormal(0,10)
The prior on the mixture ratio is uniform,
λ∼Uniform(0,1),
so that with the likelihood
p(yn|µ, σ ) =λNormal(yn|µ1, σ1)+(1−λ) Normal(yn|µ2, σ2),
the joint distribution p(y, µ, σ , λ) is exchangeable in the parameters (µ1, σ1)and
(µ2, σ2)with λflipping to 1−λ.1
Inference under Label Switching
In cases where the mixture components are not identifiable, it can be difficult to di-
agnose convergence of sampling or optimization algorithms because the labels will
switch, or be permuted, in different MCMC chains or different optimization runs.
Luckily, posterior inferences which do not refer to specific component labels are in-
variant under label switching and may be used directly. This subsection considers a
pair of examples.
1Imposing a constraint such as θ < 0.5will resolve the symmetry, but fundamentally changes the model
and its posterior inferences.
196

Predictive likelihood
Predictive likelihood for a new observation ˜
ygiven the complete parameter vector θ
will be
p(˜
y|y) =Zθ
p(˜
y|θ) p(θ|y) dθ.
The normal mixture example from the previous section, with θ=(µ, σ , λ), shows
that the likelihood returns the same density under label switching and thus the pre-
dictive inference is sound. In Stan, that predictive inference can be done either by
computing p(˜
y|y), which is more efficient statistically in terms of effective sample
size, or simulating draws of ˜
y, which is easier to plug into other inferences. Both
approaches can be coded directly in the generated quantities block of the program.
Here’s an example of the direct (non-sampling) approach.
data {
int<lower = 0> N_tilde;
vector[N_tilde] y_tilde;
...
generated quantities {
vector[N_tilde] log_p_y_tilde;
for (n in 1:N_tilde)
log_p_y_tilde[n]
= log_mix(lambda,
normal_lpdf(y_tilde[n] | mu[1], sigma[1])
normal_lpdf(y_tilde[n] | mu[2], sigma[2]));
}
It is a bit of a bother afterwards, because the logarithm function isn’t linear and
hence doesn’t distribute through averages (Jensen’s inequality shows which way the
inequality goes). The right thing to do is to apply log_sum_exp of the posterior draws
of log_p_y_tilde. The average log predictive density is then given by subtracting
log(N_new).
Clustering and similarity
Often a mixture model will be applied to a clustering problem and there might be
two data items yiand yjfor which there is a question of whether they arose from
the same mixture component. If we take ziand zjto be the component responsibility
discrete variables, then the quantity of interest is zi=zj, which can be summarized
as an event probability
Pr[zi=zj|y] =ZθP1
k=0p(zi=k, zj=k, yi, yj|θ)
P1
k=0P1
m=0p(zi=k, zj=m, yi, yj|θ) p(θ |y) dθ.
197
As with other event probabilities, this can be calculated in the generated quantities
block either by sampling ziand zjand using the indicator function on their equality,
or by computing the term inside the integral as a generated quantity. As with predic-
tive likelihood, working in expectation is more statistically efficient than sampling.
13.7. Zero-Inflated and Hurdle Models
Zero-inflated and hurdle models both provide mixtures of a Poisson and Bernoulli
probability mass function to allow more flexibility in modeling the probability of a
zero outcome. Zero-inflated models, as defined by Lambert (1992), add additional
probability mass to the outcome of zero. Hurdle models, on the other hand, are
formulated as pure mixtures of zero and non-zero outcomes.
Zero inflation and hurdle models can be formulated for discrete distributions
other than the Poisson. Zero inflation does not work for continuous distributions
in Stan because of issues with derivatives; in particular, there is no way to add a point
mass to a continuous distribution, such as zero-inflating a normal as a regression
coefficient prior.
Zero Inflation
Consider the following example for zero-inflated Poisson distributions. It uses a pa-
rameter theta here there is a probability θof drawing a zero, and a probability 1−θ
of drawing from Poisson(λ) (now θis being used for mixing proportions because λ
is the traditional notation for a Poisson mean parameter). The probability function is
thus
p(yn|θ, λ) =
θ+(1−θ) ×Poisson(0|λ) if yn=0,and
(1−θ) ×Poisson(yn|λ) if yn>0.
The log probability function can be implemented directly in Stan as follows.
data {
int<lower=0> N;
int<lower=0> y[N];
}
parameters {
real<lower=0, upper=1> theta;
real<lower=0> lambda;
}
model {
for (n in 1:N) {
if (y[n] == 0)
target += log_sum_exp(bernoulli_lpmf(1 | theta),
198

bernoulli_lpmf(0 | theta)
+ poisson_lpmf(y[n] | lambda));
else
target += bernoulli_lpmf(0 | theta)
+ poisson_lpmf(y[n] | lambda);
}
}
The log_sum_exp(lp1,lp2) function adds the log probabilities on the linear scale;
it is defined to be equal to log(exp(lp1) + exp(lp2)), but is more arithmetically
stable and faster. This could also be written using the conditional operator; see Sec-
tion 4.6.
Hurdle Models
The hurdle model is similar to the zero-inflated model, but more flexible in that the
zero outcomes can be deflated as well as inflated. The probability mass function for
the hurdle likelihood is defined by
p(y|θ, λ) =
θif y=0,and
(1−θ) Poisson(y|λ)
1−PoissonCDF(0|λ) if y > 0,
where PoissonCDF is the cumulative distribution function for the Poisson distribution.
The hurdle model is even more straightforward to program in Stan, as it does not
require an explicit mixture.
if (y[n] == 0)
1 ~ bernoulli(theta);
else {
0 ~ bernoulli(theta);
y[n] ~ poisson(lambda) T[1, ];
}
The Bernoulli statements are just shorthand for adding log θand log(1−θ) to the
log density. The T[1,] after the Poisson indicates that it is truncated below at 1;
see Section 12.1 for more about truncation and Section 52.5 for the specifics of the
Poisson CDF. The net effect is equivalent to the direct definition of the log likelihood.
if (y[n] == 0)
target += log(theta);
else
target += log1m(theta) + poisson_lpmf(y[n] | lambda)
- poisson_lccdf(0 | lambda));
199
Julian King pointed out that because
log (1−PoissonCDF(0|λ)) =log (1−Poisson(0|λ)) =log(1−exp(−λ))
the CCDF in the else clause can be replaced with a simpler expression.
target += log1m(theta) + poisson_lpmf(y[n] | lambda)
- log1m_exp(-lambda));
The resulting code is about 15% faster than the code with the CCDF.
This is an example where collecting counts ahead of time can also greatly speed
up the execution speed without changing the density. For data size N=200 and
parameters θ=0.3and λ=8, the speedup is a factor of 10; it will be lower for
smaller Nand greater for larger N; it will also be greater for larger θ.
To achieve this speedup, it helps to have a function to count the number of non-
zero entries in an array of integers,
functions {
int num_zero(int[] y) {
int nz = 0;
for (n in 1:size(y))
if (y[n] == 0)
nz += 1;
return nz;
}
}
Then a transformed data block can be used to store the sufficient statistics,
transformed data {
int<lower=0, upper=N> N0 = num_zero(y);
int<lower=0, upper=N> Ngt0 = N - N0;
int<lower=1> y_nz[N - num_zero(y)];
{
int pos = 1;
for (n in 1:N) {
if (y[n] != 0) {
y_nz[pos] = y[n];
pos += 1;
}
}
}
}
The model block can then be reduced to three statements.
200
model {
N0 ~ binomial(N, theta);
y_nz ~ poisson(lambda);
target += -Ngt0 *log1m_exp(-lambda);
}
The first statement accounts for the Bernoulli contribution to both the zero and non-
zero counts. The second line is the Poisson contribution from the non-zero counts,
which is now vectorized. Finally, the normalization for the truncation is a single
line, so that the expression for the log CCDF at 0 isn’t repeated. Also note that the
negation is applied to the constant Ngt0; whenever possible, leave subexpressions
constant because then gradients need not be propagated until a non-constant term is
encountered.
13.8. Priors and Effective Data Size in Mixture Models
Suppose we have a two-component mixture model with mixing rate λ∈(0,1). Be-
cause the likelihood for the mixture components is proportionally weighted by the
mixture weights, the effective data size used to estimate each of the mixture com-
ponents will also be weighted as a fraction of the overall data size. Thus although
there are Nobservations, the mixture components will be estimated with effective
data sizes of θ N and (1−θ) N for the two components for some θ∈(0,1). The
effective weighting size is determined by posterior responsibility, not simply by the
mixing rate λ.
Comparison to Model Averaging
In contrast to mixture models, which create mixtures at the observation level, model
averaging creates mixtures over the posteriors of models separately fit with the en-
tire data set. In this situation, the priors work as expected when fitting the models
independently, with the posteriors being based on the complete observed data y.
If different models are expected to account for different observations, we recom-
mend building mixture models directly. If the models being mixed are similar, often a
single expanded model will capture the features of both and may be used on its own
for inferential purposes (estimation, decision making, prediction, etc.). For example,
rather than fitting an intercept-only regression and a slope-only regression and av-
eraging their predictions, even as a mixture model, we would recommend building a
single regression with both a slope and an intercept. Model complexity, such as hav-
ing more predictors than data points, can be tamed using appropriately regularizing
priors. If computation becomes a bottleneck, the only recourse can be model aver-
aging, which can be calculated after fitting each model independently (see (Hoeting
201
14. Measurement Error and Meta-Analysis
Most quantities used in statistical models arise from measurements. Most of these
measurements are taken with some error. When the measurement error is small
relative to the quantity being measured, its effect on a model is usually small. When
measurement error is large relative to the quantity being measured, or when very
precise relations can be estimated being measured quantities, it is useful to introduce
an explicit model of measurement error. One kind of measurement error is rounding.
Meta-analysis plays out statistically very much like measurement error models,
where the inferences drawn from multiple data sets are combined to do inference
over all of them. Inferences for each data set are treated as providing a kind of
measurement error with respect to true parameter values.
14.1. Bayesian Measurement Error Model
A Bayesian approach to measurement error can be formulated directly by treating the
true quantities being measured as missing data (Clayton,1992;Richardson and Gilks,
1993). This requires a model of how the measurements are derived from the true
values.
Regression with Measurement Error
Before considering regression with measurement error, first consider a linear regres-
sion model where the observed data for Ncases includes a predictor xnand outcome
yn. In Stan, a linear regression for ybased on xwith a slope and intercept is modeled
as follows.
data {
int<lower=0> N; // number of cases
real x[N]; // predictor (covariate)
real y[N]; // outcome (variate)
}
parameters {
real alpha; // intercept
real beta; // slope
real<lower=0> sigma; // outcome noise
}
model {
y ~ normal(alpha + beta *x, sigma);
alpha ~ normal(0, 10);
beta ~ normal(0, 10);
203
sigma ~ cauchy(0, 5);
}
Now suppose that the true values of the predictors xnare not known, but for
each n, a measurement xmeas
nof xnis available. If the error in measurement can be
modeled, the measured value xmeas
ncan be modeled in terms of the true value xn
plus measurement noise. The true value xnis treated as missing data and estimated
along with other quantities in the model. A very simple approach is to assume the
measurement error is normal with known deviation τ. This leads to the following
regression model with constant measurement error.
data {
...
real x_meas[N]; // measurement of x
real<lower=0> tau; // measurement noise
}
parameters {
real x[N]; // unknown true value
real mu_x; // prior location
real sigma_x; // prior scale
...
}
model {
x ~ normal(mu_x, sigma_x); // prior
x_meas ~ normal(x, tau); // measurement model
y ~ normal(alpha + beta *x, sigma);
...
}
The regression coefficients alpha and beta and regression noise scale sigma are the
same as before, but now xis declared as a parameter rather than as data. The data
is now x_meas, which is a measurement of the true xvalue with noise scale tau. The
model then specifies that the measurement error for x_meas[n] given true value x[n]
is normal with deviation tau. Furthermore, the true values xare given a hierarchical
prior here.
In cases where the measurement errors are not normal, richer measurement error
models may be specified. The prior on the true values may also be enriched. For
instance, (Clayton,1992) introduces an exposure model for the unknown (but noisily
measured) risk factors xin terms of known (without measurement error) risk factors
c. A simple model would regress xnon the covariates cnwith noise term υ,
xn∼Normal(γ>c, υ).
This can be coded in Stan just like any other regression. And, of course, other expo-
sure models can be provided.
204
Rounding
A common form of measurement error arises from rounding measurements. Round-
ing may be done in many ways, such as rounding weights to the nearest milligram, or
to the nearest pound; rounding may even be done by rounding down to the nearest
integer.
Exercise 3.5(b) from (Gelman et al.,2013) provides an example.
3.5. Suppose we weigh an object five times and measure weights, rounded
to the nearest pound, of 10, 10, 12, 11, 9. Assume the unrounded mea-
surements are normally distributed with a noninformative prior distribu-
tion on µand σ2.
(b) Give the correct posterior distribution for (µ, σ 2), treating the mea-
surements as rounded.
Letting znbe the unrounded measurement for yn, the problem as stated assumes the
likelihood
zn∼Normal(µ, σ ).
The rounding process entails that zn∈(yn−0.5, yn+0.5). The probability mass func-
tion for the discrete observation yis then given by marginalizing out the unrounded
measurement, producing the likelihood
p(yn|µ, σ ) =Zyn+0.5
yn−0.5
Normal(zn|µ, σ ) dzn=Φyn+0.5−µ
σ−Φyn−0.5−µ
σ.
Gelman’s answer for this problem took the noninformative prior to be uniform in the
variance σ2on the log scale, which yields (due to the Jacobian adjustment), the prior
density
p(µ, σ 2)∝1
σ2.
The posterior after observing y=(10,10,12,11,9)can be calculated by Bayes’s rule
as
p(µ, σ 2|y) ∝p(µ, σ 2) p(y |µ, σ 2)
∝1
σ2
5
Y
n=1Φyn+0.5−µ
σ−Φyn−0.5−µ
σ.
The Stan code simply follows the mathematical definition, providing an example
of the direct definition of a probability function up to a proportion.
205
data {
int<lower=0> N;
vector[N] y;
}
parameters {
real mu;
real<lower=0> sigma_sq;
}
transformed parameters {
real<lower=0> sigma;
sigma = sqrt(sigma_sq);
}
model {
target += -2 *log(sigma);
for (n in 1:N)
target += log(Phi((y[n] + 0.5 - mu) / sigma)
- Phi((y[n] - 0.5 - mu) / sigma));
}
Alternatively, the model may be defined with latent parameters for the unrounded
measurements zn. The Stan code in this case uses the likelihood for zndirectly while
respecting the constraint zn∈(yn−0.5, yn+0.5). Because Stan does not allow vary-
ing upper- and lower-bound constraints on the elements of a vector (or array), the
parameters are declared to be the rounding error y−z, and then zis defined as a
transformed parameter.
data {
int<lower=0> N;
vector[N] y;
}
parameters {
real mu;
real<lower=0> sigma_sq;
vector<lower=-0.5, upper=0.5>[N] y_err;
}
transformed parameters {
real<lower=0> sigma;
vector[N] z;
sigma = sqrt(sigma_sq);
z = y + y_err;
}
model {
target += -2 *log(sigma);
z ~ normal(mu, sigma);
}
206

This explicit model for the unrounded measurements zproduces the same posterior
for µand σas the previous model that marginalizes zout. Both approaches mix
well, but the latent parameter version is about twice as efficient in terms of effective
samples per iteration, as well as providing a posterior for the unrounded parameters.
14.2. Meta-Analysis
Meta-analysis aims to pool the data from several studies, such as the application of
a tutoring program in several schools or treatment using a drug in several clinical
trials.
The Bayesian framework is particularly convenient for meta-analysis, because
each previous study can be treated as providing a noisy measurement of some un-
derlying quantity of interest. The model then follows directly from two components,
a prior on the underlying quantities of interest and a measurement-error style model
for each of the studies being analyzed.
Treatment Effects in Controlled Studies
Suppose the data in question arise from a total of Mstudies providing paired binomial
data for a treatment and control group. For instance, the data might be post-surgical
pain reduction under a treatment of ibuprofen (Warn et al.,2002) or mortality after
myocardial infarction under a treatment of beta blockers (Gelman et al.,2013, Sec-
tion 5.6).
Data
The clinical data consists of Jtrials, each with nttreatment cases, nccontrol cases, rt
successful outcomes among those treated and rcsuccessful outcomes among those
in the control group. This data can be declared in Stan as follows.1
data {
int<lower=0> J;
int<lower=0> n_t[J]; // num cases, treatment
int<lower=0> r_t[J]; // num successes, treatment
int<lower=0> n_c[J]; // num cases, control
int<lower=0> r_c[J]; // num successes, control
}
1Stan’s integer constraints are not powerful enough to express the constraint that r_t[j] ≤n_t[j],
but this constraint could be checked in the transformed data block.
207
Converting to Log Odds and Standard Error
Although the clinical trial data is binomial in its raw format, it may be transformed
to an unbounded scale by considering the log odds ratio
yj=log rt
j/(nt
j−rt
j)
rc
j/(nc
j−rc
j)!=log rt
j
nt
j−rt
j!−log rc
j
nc
j−rc
j!
and corresponding standard errors
σj=s1
rT
i+1
nT
i−rT
i+1
rC
i+1
nC
i−rC
i
.
The log odds and standard errors can be defined in a transformed parameter block,
though care must be taken not to use integer division (see Section 40.1).
transformed data {
real y[J];
real<lower=0> sigma[J];
for (j in 1:J)
y[j] = log(r_t[j]) - log(n_t[j] - r_t[j])
- (log(r_c[j]) - log(n_c[j] - r_c[j]);
for (j in 1:J)
sigma[j] = sqrt(1 / r_t[j] + 1 / (n_t[j] - r_t[j])
+ 1 / r_c[j] + 1 / (n_c[j] - r_c[j]));
}
This definition will be problematic if any of the success counts is zero or equal to
the number of trials. If that arises, a direct binomial model will be required or other
transforms must be used than the unregularized sample log odds.
Non-Hierarchical Model
With the transformed data in hand, two standard forms of meta-analysis can be ap-
plied. The first is a so-called “fixed effects” model, which assumes a single parameter
for the global odds ratio. This model is coded in Stan as follows.
parameters {
real theta; // global treatment effect, log odds
}
model {
y ~ normal(theta, sigma);
}
The sampling statement for yis vectorized; it has the same effect as the following.
208

for (j in 1:J)
y[j] ~ normal(theta, sigma[j]);
It is common to include a prior for theta in this model, but it is not strictly necessary
for the model to be proper because yis fixed and Normal(y|µ, σ ) =Normal(µ|y, σ ).
Hierarchical Model
To model so-called “random effects,” where the treatment effect may vary by clinical
trial, a hierarchical model can be used. The parameters include per-trial treatment
effects and the hierarchical prior parameters, which will be estimated along with other
unknown quantities.
parameters {
real theta[J]; // per-trial treatment effect
real mu; // mean treatment effect
real<lower=0> tau; // deviation of treatment effects
}
model {
y ~ normal(theta, sigma);
theta ~ normal(mu, tau);
mu ~ normal(0, 10);
tau ~ cauchy(0, 5);
}
Although the vectorized sampling statement for yappears unchanged, the parameter
theta is now a vector. The sampling statement for theta is also vectorized, with
the hyperparameters mu and tau themselves being given wide priors compared to the
scale of the data.
Rubin (1981) provided a hierarchical Bayesian meta-analysis of the treatment ef-
fect of Scholastic Aptitude Test (SAT) coaching in eight schools based on the sample
treatment effect and standard error in each school.2
Extensions and Alternatives
Smith et al. (1995) and Gelman et al. (2013, Section 19.4) provide meta-analyses based
directly on binomial data. Warn et al. (2002) consider the modeling implications of
using alternatives to the log-odds ratio in transforming the binomial data.
If trial-specific predictors are available, these can be included directly in a regres-
sion model for the per-trial treatment effects θj.
2The model provided for this data in (Gelman et al.,2013, Section 5.5) is included with the data in the
Stan example model repository, http://mc-stan.org/documentation.
209

15. Latent Discrete Parameters
Stan does not support sampling discrete parameters. So it is not possible to directly
translate BUGS or JAGS models with discrete parameters (i.e., discrete stochastic
nodes). Nevertheless, it is possible to code many models that involve bounded dis-
crete parameters by marginalizing out the discrete parameters.1This chapter shows
how to code several widely-used models involving latent discrete parameters. The
next chapter, Chapter 17, on clustering models, considers further models involving
latent discrete parameters.
15.1. The Benefits of Marginalization
Although it requires some algebra on the joint probability function, a pleasant
byproduct of the required calculations is the posterior expectation of the marginal-
ized variable, which is often the quantity of interest for a model. This allows far
greater exploration of the tails of the distribution as well as more efficient sampling
on an iteration-by-iteration basis because the expectation at all possible values is be-
ing used rather than itself being estimated through sampling a discrete parameter.
Standard optimization algorithms, including expectation maximization (EM), are
often provided in applied statistics papers to describe maximum likelihood estima-
tion algorithms. Such derivations provide exactly the marginalization needed for
coding the model in Stan.
15.2. Change Point Models
The first example is a model of coal mining disasters in the U.K. for the years 1851–
1962.2
Model with Latent Discrete Parameter
(Fonnesbeck et al.,2013, Section 3.1) provide a Poisson model of disaster rate Dtin
year twith two rate parameters, an early rate (e) and late rate (l), that change at a
1The computations are similar to those involved in expectation maximization (EM) algorithms (Dempster
et al.,1977).
2The original source of the data is (Jarrett,1979), which itself is a note correcting an earlier data collec-
tion.
210
given point in time s. The full model expressed using a latent discrete parameter sis
e∼Exponential(re)
l∼Exponential(rl)
s∼Uniform(1, T )
Dt∼Poisson(t < s ?e:l)
The last line uses the conditional operator (also known as the ternary operator), which
is borrowed from C and related languages. The conditional operator has the same
behavior as the ifelse function in R, but uses a more compact notation involving
separating its three arguments by a question mark (?) and colon (:). The conditional
operator is defined by
c?x1:x2=
x1if cis true (i.e., non-zero), and
x2if cis false (i.e., zero).
As of version 2.10, Stan supports the conditional operator.
Marginalizing out the Discrete Parameter
To code this model in Stan, the discrete parameter smust be marginalized out to
produce a model defining the log of the probability function p(e, l, Dt). The full joint
probability factors as
p(e, l, s, D) =p(e) p(l) p(s) p(D|s, e, l)
=Exponential(e|re)Exponential(l|rl)Uniform(s|1, T )
QT
t=1Poisson(Dt|t < s ?e:l),
To marginalize, an alternative factorization into prior and likelihood is used,
p(e, l, D) =p(e, l) p(D|e, l),
where the likelihood is defined by marginalizing sas
p(D|e, l) =
T
X
s=1
p(s, D|e, l)
=
T
X
s=1
p(s)p(D|s, e, l)
=
T
X
s=1
Uniform(s|1, T )
T
Y
t=1
Poisson(Dt|t < s ?e:l)
211
Stan operates on the log scale and thus requires the log likelihood,
log p(D|e, l) =log_sum_expT
s=1log Uniform(s |1, T )
+PT
t=1log Poisson(Dt|t < s ?e:l),
where the log sum of exponents function is defined by
log_sum_expN
n=1αn=log
N
X
n=1
exp(αn).
The log sum of exponents function allows the model to be coded directly in Stan
using the built-in function log_sum_exp, which provides both arithmetic stability
and efficiency for mixture model calculations.
Coding the Model in Stan
The Stan program for the change point model is shown in Figure 15.1. The trans-
formed parameter lp[s] stores the quantity log p(s, D |e, l).
Although the model in Figure 15.1 is easy to understand, the doubly nested loop
used for sand tis quadratic in T. Luke Wiklendt pointed out that a linear alternative
can be achieved by the use of dynamic programming similar to the forward-backward
algorithm for Hidden Markov models; he submitted a slight variant of the following
code to replace the transformed parameters block of the above Stan program.
transformed parameters {
vector[T] lp;
{
vector[T + 1] lp_e;
vector[T + 1] lp_l;
lp_e[1] = 0;
lp_l[1] = 0;
for (t in 1:T) {
lp_e[t + 1] = lp_e[t] + poisson_lpmf(D[t] | e);
lp_l[t + 1] = lp_l[t] + poisson_lpmf(D[t] | l);
}
lp = rep_vector(log_unif + lp_l[T + 1], T)
+ head(lp_e, T) - head(lp_l, T);
}
}
As should be obvious from looking at it, it has linear complexity in Trather than
quadratic. The result for the mining-disaster data is about 20 times faster; the im-
provement will be greater for larger T.
212
data {
real<lower=0> r_e;
real<lower=0> r_l;
int<lower=1> T;
int<lower=0> D[T];
}
transformed data {
real log_unif;
log_unif = -log(T);
}
parameters {
real<lower=0> e;
real<lower=0> l;
}
transformed parameters {
vector[T] lp;
lp = rep_vector(log_unif, T);
for (s in 1:T)
for (t in 1:T)
lp[s] = lp[s] + poisson_lpmf(D[t] | t < s ? e : l);
}
model {
e ~ exponential(r_e);
l ~ exponential(r_l);
target += log_sum_exp(lp);
}
Figure 15.1: A change point model in which disaster rates D[t] have one rate, e, before
the change point and a different rate, l, after the change point. The change point itself, s,
is marginalized out as described in the text.
The key to understanding Wiklendt’s dynamic programming version is to see
that head(lp_e) holds the forward values, whereas lp_l[T + 1] - head(lp_l,
T) holds the backward values; the clever use of subtraction allows lp_l to be accu-
mulated naturally in the forward direction.
Fitting the Model with MCMC
This model is easy to fit using MCMC with NUTS in its default configuration. Con-
vergence is very fast and sampling produces roughly one effective sample every two
iterations. Because it is a relatively small model (the inner double loop over time is
roughly 20,000 steps), it is very fast.
213

The value of lp for each iteration for each change point is available because it is
declared as a transformed parameter. If the value of lp were not of interest, it could
be coded as a local variable in the model block and thus avoid the I/O overhead of
saving values every iteration.
Posterior Distribution of the Discrete Change Point
The value of lp[s] in a given iteration is given by log p(s, D|e, l) for the values of
the early and late rates, eand l, in the iteration. In each iteration after convergence,
the early and late disaster rates, eand l, are drawn from the posterior p(e, l|D) by
MCMC sampling and the associated lp calculated. The value of lp may be normalized
to calculate p(s|e, l, D) in each iteration, based on on the current values of eand
l. Averaging over iterations provides an unnormalized probability estimate of the
change point being s(see below for the normalizing constant),
p(s|D) ∝q(s|D)
=1
M
M
X
m=1
exp(lp[m, s]).
where lp[m, s] represents the value of lp in posterior draw mfor change point s.
By averaging over draws, eand lare themselves marginalized out, and the result has
no dependence on a given iteration’s value for eand l. A final normalization then
produces the quantity of interest, the posterior probability of the change point being
sconditioned on the data D,
p(s|D) =q(s|D)
PT
s0=1q(s0|D) .
A plot of the values of log p(s|D) computed using Stan 2.4’s default MCMC imple-
mentation is shown in Figure 15.2.
Discrete Sampling
The generated quantities block may be used to draw discrete parameter values us-
ing the built-in pseudo-random number generators. For example, with lp defined as
above, the following program draws a random value for sat every iteration.
generated quantities {
int<lower=1,upper=T> s;
s = categorical_logit_rng(lp);
}
214
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
−60
−40
−20
0
1875 1900 1925 1950
year
log p(change at year)
0
250
500
750
1885 1890 1895 1900
year
frequency in 4000 draws
Figure 15.2: The posterior estimates for the change point. Left) log probability of change point
being in year, calculated analytically using lp;Right) frequency of change point draws in the
posterior generated using lp. The plot on the left is on the log scale and the plot on the right on
the linear scale; note the narrower range of years in the right-hand plot resulting from sampling.
The posterior mean of sis roughly 1891.
A posterior histogram of draws for sis shown on the right side of Figure 15.2.
Compared to working in terms of expectations, discrete sampling is highly inef-
ficient, especially for tails of distributions, so this approach should only be used if
draws from a distribution are explicitly required. Otherwise, expectations should be
computed in the generated quantities block based on the posterior distribution for s
given by softmax(lp).
Posterior Covariance
The discrete sample generated for scan be used to calculate covariance with other
parameters. Although the sampling approach is straightforward, it is more statisti-
cally efficient (in the sense of requiring far fewer iterations for the same degree of
accuracy) to calculate these covariances in expectation using lp.
Multiple Change Points
There is no obstacle in principle to allowing multiple change points. The only issue is
that computation increases from linear to quadratic in marginalizing out two change
points, cubic for three change points, and so on. There are three parameters, e,m,
and l, and two loops for the change point and then one over time, with log densities
being stored in a matrix.
215

matrix[T, T] lp;
lp = rep_matrix(log_unif, T);
for (s1 in 1:T)
for (s2 in 1:T)
for (t in 1:T)
lp[s1,s2] = lp[s1,s2]
+ poisson_lpmf(D[t] | t < s1 ? e : (t < s2 ? m : l));
The matrix can then be converted back to a vector using to_vector before being
passed to log_sum_exp.
15.3. Mark-Recapture Models
A widely applied field method in ecology is to capture (or sight) animals, mark them
(e.g., by tagging), then release them. This process is then repeated one or more times,
and is often done for populations on an ongoing basis. The resulting data may be
used to estimate population size.
The first subsection describes a very simple mark-recapture model that does
not involve any latent discrete parameters. The following subsections describes
the Cormack-Jolly-Seber model, which involves latent discrete parameters for animal
death.
Simple Mark-Recapture Model
In the simplest case, a one-stage mark-recapture study produces the following data
•M: number of animals marked in first capture,
•C: number animals in second capture, and
•R: number of marked animals in second capture.
The estimand of interest is
•N: number of animals in the population.
Despite the notation, the model will take Nto be a continuous parameter; just because
the population must be finite doesn’t mean the parameter representing it must be.
The parameter will be used to produce a real-valued estimate of the population size.
The Lincoln-Petersen (Lincoln,1930;Petersen,1896) method for estimating popu-
lation size is
ˆ
N=MC
R.
216
data {
int<lower=0> M;
int<lower=0> C;
int<lower=0,upper=min(M,C)> R;
}
parameters {
real<lower=(C - R + M)> N;
}
model {
R ~ binomial(C, M / N);
}
Figure 15.3: A probabilistic formulation of the Lincoln-Petersen estimator for population size
based on data from a one-step mark-recapture study. The lower bound on Nis necessary to
efficiently eliminate impossible values.
This population estimate would arise from a probabilistic model in which the number
of recaptured animals is distributed binomially,
R∼Binomial(C, M/N)
given the total number of animals captured in the second round (C) with a recapture
probability of M/N, the fraction of the total population Nmarked in the first round.
The probabilistic variant of the Lincoln-Petersen estimator can be directly coded
in Stan as shown in Figure 15.3. The Lincoln-Petersen estimate is the maximum like-
lihood estimate (MLE) for this model.
To ensure the MLE is the Lincoln-Petersen estimate, an improper uniform prior
for Nis used; this could (and should) be replaced with a more informative prior if
possible based on knowledge of the population under study.
The one tricky part of the model is the lower bound C−R+Mplaced on the
population size N. Values below this bound are impossible because it is otherwise not
possible to draw Rsamples out of the Canimals recaptured. Implementing this lower
bound is necessary to ensure sampling and optimization can be carried out in an
unconstrained manner with unbounded support for parameters on the transformed
(unconstrained) space. The lower bound in the declaration for Cimplies a variable
transform f:(C −R+M, ∞)→(−∞,+∞)defined by f (N) =log(N −(C −R+M)); see
Section 35.2 for more information on the transform used for variables declared with
a lower bound.
217
Cormack-Jolly-Seber with Discrete Parameter
The Cormack-Jolly-Seber (CJS) model (Cormack,1964;Jolly,1965;Seber,1965) is an
open-population model in which the population may change over time due to death;
the presentation here draws heavily on (Schofield,2007).
The basic data is
•I: number of individuals,
•T: number of capture periods, and
•yi,t : boolean indicating if individual iwas captured at time t.
Each individual is assumed to have been captured at least once because an individual
only contributes information conditionally after they have been captured the first
time.
There are two Bernoulli parameters in the model,
•φt: probability that animal alive at time tsurvives until t+1and
•pt: probability that animal alive at time tis captured at time t.
These parameters will both be given uniform priors, but information should be used
to tighten these priors in practice.
The CJS model also employs a latent discrete parameter zi,t indicating for each
individual iwhether it is alive at time t, distributed as
zi,t ∼Bernoulli(zi,t−1?0:φt−1).
The conditional prevents the model positing zombies; once an animal is dead, it stays
dead. The data distribution is then simple to express conditional on zas
yi,t ∼Bernoulli(zi,t ?0:pt)
The conditional enforces the constraint that dead animals cannot be captured.
Collective Cormack-Jolly-Seber Model
This subsection presents an implementation of the model in terms of counts for
different history profiles for individuals over three capture times. It assumes ex-
changeability of the animals in that each is assigned the same capture and survival
probabilities.
In order to ease the marginalization of the latent discrete parameter zi,t , the Stan
models rely on a derived quantity χtfor the probability that an individual is never
218
captured again if it is alive at time t(if it is dead, the recapture probability is zero).
this quantity is defined recursively by
χt=
1if t=T
(1−φt)+φt(1−pt+1)χt+1if t < T
The base case arises because if an animal was captured in the last time period, the
probability it is never captured again is 1 because there are no more capture periods.
The recursive case defining χtin terms of χt+1involves two possibilities: (1) not
surviving to the next time period, with probability (1−φt), or (2) surviving to the
next time period with probability φt, not being captured in the next time period with
probability (1−pt+1), and not being captured again after being alive in period t+1
with probability χt+1.
With three capture times, there are three captured/not-captured profiles an indi-
vidual may have. These may be naturally coded as binary numbers as follows.
captures
profile 1 2 3 probability
0 - - - n/a
1 - - + n/a
2 - + - χ2
3 - + + φ2φ3
4 + - - χ1
5 + - + φ1(1−p2) φ2p3
6 + + - φ1p2χ2
7 + + + φ1p2φ2p3
History 0, for animals that are never captured, is unobservable because only animals
that are captured are observed. History 1, for animals that are only captured in the
last round, provides no information for the CJS model, because capture/non-capture
status is only informative when conditioned on earlier captures. For the remaining
cases, the contribution to the likelihood is provided in the final column.
By defining these probabilities in terms of χdirectly, there is no need for a latent
binary parameter indicating whether an animal is alive at time tor not. The definition
of χis typically used to define the likelihood (i.e., marginalize out the latent discrete
parameter) for the CJS model (Schofield,2007, page 9).
The Stan model defines χas a transformed parameter based on parameters φand
p. In the model block, the log probability is incremented for each history based on its
count. This second step is similar to collecting Bernoulli observations into a binomial
or categorical observations into a multinomial, only it is coded directly in the Stan
program using target += rather than being part of a built-in probability function.
219
data {
int<lower=0> history[7];
}
parameters {
real<lower=0,upper=1> phi[2];
real<lower=0,upper=1> p[3];
}
transformed parameters {
real<lower=0,upper=1> chi[2];
chi[2] = (1 - phi[2]) + phi[2] *(1 - p[3]);
chi[1] = (1 - phi[1]) + phi[1] *(1 - p[2]) *chi[2];
}
model {
target += history[2] *log(chi[2]);
target += history[3] *(log(phi[2]) + log(p[3]));
target += history[4] *(log(chi[1]));
target += history[5] *(log(phi[1]) + log1m(p[2])
+ log(phi[2]) + log(p[3]));
target += history[6] *(log(phi[1]) + log(p[2])
+ log(chi[2]));
target += history[7] *(log(phi[1]) + log(p[2])
+ log(phi[2]) + log(p[3]));
}
generated quantities {
real<lower=0,upper=1> beta3;
beta3 = phi[2] *p[3];
}
Figure 15.4: A Stan program for the Cormack-Jolly-Seber mark-recapture model that considers
counts of individuals with observation histories of being observed or not in three capture periods.
Identifiability
The parameters φ2and p3, the probability of death at time 2 and probability of cap-
ture at time 3 are not identifiable, because both may be used to account for lack of
capture at time 3. Their product, β3=φ2p3, is identified. The Stan model defines
beta3 as a generated quantity. Unidentified parameters pose a problem for Stan’s
samplers’ adaptation. Although the problem posed for adaptation is mild here be-
cause the parameters are bounded and thus have proper uniform priors, it would be
better to formulate an identified parameterization. One way to do this would be to
formulate a hierarchical model for the pand φparameters.
220

Individual Cormack-Jolly-Seber Model
This section presents a version of the Cormack-Jolly-Seber (CJS) model cast at the
individual level rather than collectively as in the previous subsection. It also extends
the model to allow an arbitrary number of time periods. The data will consist of
the number Tof capture events, the number Iof individuals, and a boolean flag yi,t
indicating if individual iwas observed at time t. In Stan,
data {
int<lower=2> T;
int<lower=0> I;
int<lower=0,upper=1> y[I, T];
}
The advantages to the individual-level model is that it becomes possible to add
individual “random effects” that affect survival or capture probability, as well as to
avoid the combinatorics involved in unfolding 2Tobservation histories for Tcapture
times.
Utility Functions
The individual CJS model is written involves several function definitions. The first
two are used in the transformed data block to compute the first and last time period
in which an animal was captured.3
functions {
int first_capture(int[] y_i) {
for (k in 1:size(y_i))
if (y_i[k])
return k;
return 0;
}
int last_capture(int[] y_i) {
for (k_rev in 0:(size(y_i) - 1)) {
int k;
k = size(y_i) - k_rev;
if (y_i[k])
return k;
}
return 0;
}
3An alternative would be to compute this on the outside and feed it into the Stan model as preprocessed
data. Yet another alternative encoding would be a sparse one recording only the capture events along with
their time and identifying the individual captured.
221

...
}
These two functions are used to define the first and last capture time for each indi-
vidual in the transformed data block.4
transformed data {
int<lower=0,upper=T> first[I];
int<lower=0,upper=T> last[I];
vector<lower=0,upper=I>[T] n_captured;
for (i in 1:I)
first[i] = first_capture(y[i]);
for (i in 1:I)
last[i] = last_capture(y[i]);
n_captured = rep_vector(0, T);
for (t in 1:T)
for (i in 1:I)
if (y[i, t])
n_captured[t] = n_captured[t] + 1;
}
The transformed data block also defines n_captured[t], which is the total number
of captures at time t. The variable n_captured is defined as a vector instead of
an integer array so that it can be used in an elementwise vector operation in the
generated quantities block to model the population estimates at each time point.
The parameters and transformed parameters are as before, but now there is a
function definition for computing the entire vector chi, the probability that if an
individual is alive at tthat it will never be captured again.
parameters {
vector<lower=0,upper=1>[T-1] phi;
vector<lower=0,upper=1>[T] p;
}
transformed parameters {
vector<lower=0,upper=1>[T] chi;
chi = prob_uncaptured(T,p,phi);
}
The definition of prob_uncaptured, from the functions block, is
functions {
...
4Both functions return 0 if the individual represented by the input array was never captured. Individuals
with no captures are not relevant for estimating the model because all probability statements are condi-
tional on earlier captures. Typically they would be removed from the data, but the program allows them to
be included even though they make not contribution to the log probability function.
222
vector prob_uncaptured(int T, vector p, vector phi) {
vector[T] chi;
chi[T] = 1.0;
for (t in 1:(T - 1)) {
int t_curr;
int t_next;
t_curr = T - t;
t_next = t_curr + 1;
chi[t_curr] = (1 - phi[t_curr])
+ phi[t_curr]
*(1 - p[t_next])
*chi[t_next];
}
return chi;
}
}
The function definition directly follows the mathematical definition of χt, unrolling
the recursion into an iteration and defining the elements of chi from Tdown to 1.
The Model
Given the precomputed quantities, the model block directly encodes the CJS model’s
log likelihood function. All parameters are left with their default uniform priors
and the model simply encodes the log probability of the observations qgiven the
parameters pand phi as well as the transformed parameter chi defined in terms of
pand phi.
model {
for (i in 1:I) {
if (first[i] > 0) {
for (t in (first[i]+1):last[i]) {
1 ~ bernoulli(phi[t-1]);
y[i, t] ~ bernoulli(p[t]);
}
1 ~ bernoulli(chi[last[i]]);
}
}
}
The outer loop is over individuals, conditional skipping individuals iwhich are never
captured. The never-captured check depends on the convention of the first-capture
and last-capture functions returning 0 for first if an individual is never captured.
223
The inner loop for individual ifirst increments the log probability based on the
survival of the individual with probability phi[t-1]. The outcome of 1 is fixed be-
cause the individual must survive between the first and last capture (i.e., no zombies).
Note that the loop starts after the first capture, because all information in the CJS
model is conditional on the first capture.
In the inner loop, the observed capture status y[i, t] for individual iat time t
has a Bernoulli distribution based on the capture probability p[t] at time t.
After the inner loop, the probability of an animal never being seen again after
being observed at time last[i] is included, because last[i] was defined to be the
last time period in which animal iwas observed.
Identified Parameters
As with the collective model described in the previous subsection, this model does
not identify phi[T-1] and p[T], but does identify their product, beta. Thus beta is
defined as a generated quantity to monitor convergence and report.
generated quantities {
real beta;
...
beta = phi[T-1] *p[T];
...
}
The parameter p[1] is also not modeled and will just be uniform between 0 and 1.
A more finely articulated model might have a hierarchical or time-series component,
in which case p[1] would be an unknown initial condition and both phi[T-1] and
p[T] could be identified.
Population Size Estimates
The generated quantities also calculates an estimate of the population mean at each
time tin the same way as in the simple mark-recapture model as the number of
individuals captured at time tdivided by the probability of capture at time t. This
is done with the elementwise division operation for vectors (./) in the generated
quantities block.
generated quantities {
...
vector<lower=0>[T] pop;
...
pop = n_captured ./ p;
224
pop[1] = -1;
}
Generalizing to Individual Effects
All individuals are modeled as having the same capture probability, but this model
could be easily generalized to use a logistic regression here based on individual-level
inputs to be used as predictors.
15.4. Data Coding and Diagnostic Accuracy Models
Although seemingly disparate tasks, the rating/coding/annotation of items with cat-
egories and diagnostic testing for disease or other conditions share several character-
istics which allow their statistical properties to modeled similarly.
Diagnostic Accuracy
Suppose you have diagnostic tests for a condition of varying sensitivity and speci-
ficity. Sensitivity is the probability a test returns positive when the patient has the
condition and specificity is the probability that a test returns negative when the pa-
tient does not have the condition. For example, mammograms and puncture biopsy
tests both test for the presence of breast cancer. Mammograms have high sensitivity
and low specificity, meaning lots of false positives, whereas puncture biopsies are the
opposite, with low sensitivity and high specificity, meaning lots of false negatives.
There are several estimands of interest in such studies. An epidemiological study
may be interested in the prevalence of a kind of infection, such as malaria, in a pop-
ulation. A test development study might be interested in the diagnostic accuracy of
a new test. A health care worker performing tests might be interested in the disease
status of a particular patient.
Data Coding
Humans are often given the task of coding (equivalently rating or annotating) data.
For example, journal or grant reviewers rate submissions, a political study may code
campaign commercials as to whether they are attack ads or not, a natural language
processing study might annotate Tweets as to whether they are positive or negative
in overall sentiment, or a dentist looking at an X-ray classifies a patient as having a
cavity or not. In all of these cases, the data coders play the role of the diagnostic
tests and all of the same estimands are in play — data coder accuracy and bias, true
categories of items being coded, or the prevalence of various categories of items in
the data.
225

Noisy Categorical Measurement Model
In this section, only categorical ratings are considered, and the challenge in the mod-
eling for Stan is to marginalize out the discrete parameters.
Dawid and Skene (1979) introduce a noisy-measurement model for data coding
and apply in the epidemiological setting of coding what doctor notes say about pa-
tient histories; the same model can be used for diagnostic procedures.
Data
The data for the model consists of Jraters (diagnostic tests), Iitems (patients), and K
categories (condition statuses) to annotate, with yi,j ∈1:Kbeing the rating provided
by rater jfor item i. In a diagnostic test setting for a particular condition, the raters
are diagnostic procedures and often K=2, with values signaling the presence or
absence of the condition.5
It is relatively straightforward to extend Dawid and Skene’s model to deal with the
situation where not every rater rates each item exactly once.
Model Parameters
The model is based on three parameters, the first of which is discrete:
•zi: a value in 1:Kindicating the true category of item i,
•π: a K-simplex for the prevalence of the Kcategories in the population, and
•θj,k : a K-simplex for the response of annotator jto an item of true category k.
Noisy Measurement Model
The true category of an item is assumed to be generated by a simple categorical
distribution based on item prevalence,
zi∼Categorical(π).
The rating yi,j provided for item iby rater jis modeled as a categorical response of
rater ito an item of category zi,6
yi,j ∼Categorical(θj,πz[i] ).
5Diagnostic procedures are often ordinal, as in stages of cancer in oncological diagnosis or the severity
of a cavity in dental diagnosis. Dawid and Skene’s model may be used as is or naturally generalized for
ordinal ratings using a latent continuous rating and cutpoints as in ordinal logistic regression.
6In the subscript, z[i] is written as zito improve legibility.
226
Priors and Hierarchical Modeling
Dawid and Skene provided maximum likelihood estimates for θand π, which allows
them to generate probability estimates for each zi.
To mimic Dawid and Skene’s maximum likelihood model, the parameters θj,k and
πcan be given uniform priors over K-simplexes. It is straightforward to generalize
to Dirichlet priors,
π∼Dirichlet(α)
and
θj,k ∼Dirichlet(βk)
with fixed hyperparameters α(a vector) and β(a matrix or array of vectors). The prior
for θj,k must be allowed to vary in k, so that, for instance, βk,k is large enough to allow
the prior to favor better-than-chance annotators over random or adversarial ones.
Because there are Jcoders, it would be natural to extend the model to include a
hierarchical prior for βand to partially pool the estimates of coder accuracy and bias.
Marginalizing out the True Category
Because the true category parameter zis discrete, it must be marginalized out of the
joint posterior in order to carry out sampling or maximum likelihood estimation in
Stan. The joint posterior factors as
p(y, θ, π) =p(y|θ, π) p(π) p(θ),
where p(y|θ, π) is derived by marginalizing zout of
p(z, y|θ, π) =
I
Y
i=1
Categorical(zi|π)
J
Y
j=1
Categorical(yi,j |θj,z[i])
.
This can be done item by item, with
p(y|θ, π) =
I
Y
i=1
K
X
k=1
Categorical(zi|π)
J
Y
j=1
Categorical(yi,j |θj,z[i])
.
In the missing data model, only the observed labels would be used in the inner prod-
uct.
Dawid and Skene (1979) derive exactly the same equation in their Equation (2.7),
required for the E-step in their expectation maximization (EM) algorithm. Stan re-
quires the marginalized probability function on the log scale,
log p(y|θ, π)
=PI
i=1log PK
k=1exp log Categorical(zi|π) +PJ
j=1log Categorical(yi,j |θj,z[i]),
which can be directly coded using Stan’s built-in log_sum_exp function.
227
data {
int<lower=2> K;
int<lower=1> I;
int<lower=1> J;
int<lower=1,upper=K> y[I, J];
vector<lower=0>[K] alpha;
vector<lower=0>[K] beta[K];
}
parameters {
simplex[K] pi;
simplex[K] theta[J, K];
}
transformed parameters {
vector[K] log_q_z[I];
for (i in 1:I) {
log_q_z[i] = log(pi);
for (j in 1:J)
for (k in 1:K)
log_q_z[i, k] = log_q_z[i, k]
+ log(theta[j, k, y[i, j]]);
}
}
model {
pi ~ dirichlet(alpha);
for (j in 1:J)
for (k in 1:K)
theta[j, k] ~ dirichlet(beta[k]);
for (i in 1:I)
target += log_sum_exp(log_q_z[i]);
}
Figure 15.5: Stan program for the rating (or diagnostic accuracy) model of Dawid and Skene
(1979). The model marginalizes out the discrete parameter z, storing the unnormalized condi-
tional probability log q(zi=k|θ, π) in log_q_z[i, k].
Stan Implementation
The Stan program for the Dawid and Skene model is provided in Figure 15.5. The
Stan model converges quickly and mixes well using NUTS starting at diffuse initial
points, unlike the equivalent model implemented with Gibbs sampling over the dis-
crete parameter. Reasonable weakly informative priors are αk=3and βk,k =2.5K
228
and βk,k0=1if k≠k0. Taking αand βkto be unit vectors and applying optimiza-
tion will produce the same answer as the expectation maximization (EM) algorithm of
Dawid and Skene (1979).
Inference for the True Category
The quantity log_q_z[i] is defined as a transformed parameter. It encodes the
(unnormalized) log of p(zi|θ, π). Each iteration provides a value conditioned on that
iteration’s values for θand π. Applying the softmax function to log_q_z[i] provides
a simplex corresponding to the probability mass function of ziin the posterior. These
may be averaged across the iterations to provide the posterior probability distribution
over each zi.
229
16. Sparse and Ragged Data Structures
Stan does not directly support either sparse or ragged data structures, though both
can be accommodated with some programming effort. Chapter 44 introduces a
special-purpose sparse matrix times dense vector multiplication, which should be
used where applicable; this chapter covers more general data structures.
16.1. Sparse Data Structures
Coding sparse data structures is as easy as moving from a matrix-like data structure
to a database-like data structure. For example, consider the coding of sparse data for
the IRT models discussed in Section 9.11. There are Jstudents and Kquestions, and
if every student answers every question, then it is practical to declare the data as a
J×Karray of answers.
data {
int<lower=1> J;
int<lower=1> K;
int<lower=0,upper=1> y[J, K];
...
model {
for (j in 1:J)
for (k in 1:K)
y[j, k] ~ bernoulli_logit(delta[k] *(alpha[j] - beta[k]));
...
When not every student is given every question, the dense array coding will no
y=
0 1 NA 1
0NA NA 1
NA 0NA NA
jj kk y
1 1 0
1 2 1
1 4 1
2 1 0
2 4 1
3 2 0
Figure 16.1: Example of coding sparse arrays in Stan. On the left is a definition of a sparse
matrix yusing the NA notation from R (which is not supported by Stan). On the right is a
database-like encoding of the same sparse matrix ythat can be used directly in Stan. The first
two columns, jj and kk, denote the indexes and the final column, y, the value. For example, the
fifth row of the database-like data structure on the right indicates that y2,4=1.
230
longer work, because Stan does not support undefined values. Figure 16.1 shows
an example with J=3and K=4, with missing responses shown as NA, as in R.
There is no support within Stan for R’s NA values, so this data structure cannot be
used directly. Instead, it must be converted to a “long form” as in a database, with
columns indicating the jand kindexes along with the value. For instance, with jj
and kk used for the indexes (following (Gelman and Hill,2007)), the data structure
can be coded as in the right-hand example in Figure 16.1. This says that y1,1=0,
y1,2=1, and so on, up to y3,2=1, with all other entries undefined.
Letting Nbe the number of ythat are defined, here N=6, the data and model
can be formulated as follows.
data {
...
int<lower=1> N;
int<lower=1,upper=J> jj[N];
int<lower=1,upper=K> kk[N];
int<lower=0,upper=1> y[N];
...
model {
for (n in 1:N)
y[n] ~ bernoulli_logit(delta[kk[n]]
*(alpha[jj[n]] - beta[kk[n]]));
...
In the situation where there are no missing values, the two model formulations pro-
duce exactly the same log posterior density.
16.2. Ragged Data Structures
Ragged arrays are arrays that are not rectangular, but have different sized entries.
This kind of structure crops up when there are different numbers of observations per
entry.
A general approach to dealing with ragged structure is to move to a full database-
like data structure as discussed in the previous section. A more compact approach is
possible with some indexing into a linear array.
For example, consider a data structure for three groups, each of which has a
different number of observations.
Suppose the model is a very simple varying intercept model, which, using vector-
ized notation, would yield a likelihood
3
Y
n=1
log Normal(yn|µn, σ ).
231
y1=[1.3 2.4 0.9]
y2=[−1.8−0.1]
y3=[12.9 18.7 42.9 4.7]
z=[1.3 2.4 0.9−1.8−0.1 12.9 18.7 42.9 4.7]
s= {324}
Figure 16.2: Example of coding ragged arrays in Stan. On the left is the definition of a ragged
data structure ywith three rows of different sizes (y1is size 3, y2size 2, and y3size 4). On
the right is an example of how to code the data in Stan, using a single vector yto hold all the
values and a separate array of integers sto hold the group row sizes. In this example, y1=z1:3,
y2=z4:5, and y3=z6:9.
There’s no direct way to encode this in Stan.
A full database type structure could be used, as in the sparse example, but this
is inefficient, wasting space for unnecessary indices and not allowing vector-based
density operations. A better way to code this data is as a single list of values, with
a separate data structure indicating the sizes of each subarray. This is indicated on
the right of Figure 16.2. This coding uses a single array for the values and a separate
array for the sizes of each row.
The model can then be coded up using slicing operations as follows.
data {
int<lower=0> N; // # observations
int<lower=0> K; // # of groups
vector[N] y; // observations
int s[K]; // group sizes
...
model {
int pos;
pos = 1;
for (k in 1:K) {
segment(y, pos, s[k]) ~ normal(mu[k], sigma);
pos = pos + s[k];
}
This coding allows for efficient vectorization, which is worth the copy cost entailed
by the segment() vector slicing operation.
232
17. Clustering Models
Unsupervised methods for organizing data into groups are collectively referred to
as clustering. This chapter describes the implementation in Stan of two widely used
statistical clustering models, soft K-means and latent Dirichlet allocation (LDA). In
addition, this chapter includes naive Bayesian classification, which can be viewed as
a form of clustering which may be supervised. These models are typically expressed
using discrete parameters for cluster assignments. Nevertheless, they can be im-
plemented in Stan like any other mixture model by marginalizing out the discrete
parameters (see Chapter 13).
17.1. Relation to Finite Mixture Models
As mentioned in Section 13.1, clustering models and finite mixture models are really
just two sides of the same coin. The “soft” K-means model described in the next
section is a normal mixture model (with varying assumptions about covariance in
higher dimensions leading to variants of K-means). Latent Dirichlet allocation is a
mixed-membership multinomial mixture.
17.2. Soft K-Means
K-means clustering is a method of clustering data represented as D-dimensional vec-
tors. Specifically, there will be Nitems to be clustered, each represented as a vector
yn∈RD. In the “soft” version of K-means, the assignments to clusters will be proba-
bilistic.
Geometric Hard K-Means Clustering
K-means clustering is typically described geometrically in terms of the following al-
gorithm, which assumes the number of clusters Kand data vectors yas input.
1. For each nin 1:N, randomly assign vector ynto a cluster in 1:K;
2. Repeat
(a) For each cluster kin 1:K, compute the cluster centroid µkby averaging the
vectors assigned to that cluster;
(b) For each nin 1:N, reassign ynto the cluster kfor which the (Euclidean)
distance from ynto µkis smallest;
(c) If no vectors changed cluster, return the cluster assignments.
This algorithm is guaranteed to terminate.
233
Soft K-Means Clustering
Soft K-means clustering treats the cluster assignments as probability distributions
over the clusters. Because of the connection between Euclidean distance and multi-
variate normal models with a fixed covariance, soft K-means can be expressed (and
coded in Stan) as a multivariate normal mixture model.
In the full generative model, each data point nin 1:Nis assigned a cluster zn∈1:K
with symmetric uniform probability,
zn∼Categorical(1/K),
where 1is the unit vector of Kdimensions, so that 1/K is the symmetric K-simplex.
Thus the model assumes that each data point is drawn from a hard decision about
cluster membership. The softness arises only from the uncertainty about which clus-
ter generated a data point.
The data points themselves are generated from a multivariate normal distribution
whose parameters are determined by the cluster assignment zn,
yn∼Normal(µz[n],Σz[n])
The sample implementation in this section assumes a fixed unit covariance matrix
shared by all clusters k,
Σk=diag_matrix(1),
so that the log multivariate normal can be implemented directly up to a proportion
by
Normal yn|µk,diag_matrix(1)∝exp
−1
2
D
X
d=1µk,d −yn,d 2
.
The spatial perspective on K-means arises by noting that the inner term is just half
the negative Euclidean distance from the cluster mean µkto the data point yn.
Stan Implementation of Soft K-Means
Consider the following Stan program for implementing K-means clustering.1
data {
int<lower=0> N; // number of data points
int<lower=1> D; // number of dimensions
int<lower=1> K; // number of clusters
vector[D] y[N]; // observations
1The model is available in the Stan example model repository; see http://mc-stan.org/
documentation.
234
}
transformed data {
real<upper=0> neg_log_K;
neg_log_K = -log(K);
}
parameters {
vector[D] mu[K]; // cluster means
}
transformed parameters {
real<upper=0> soft_z[N, K]; // log unnormalized clusters
for (n in 1:N)
for (k in 1:K)
soft_z[n, k] = neg_log_K
- 0.5 *dot_self(mu[k] - y[n]);
}
model {
// prior
for (k in 1:K)
mu[k] ~ normal(0, 1);
// likelihood
for (n in 1:N)
target += log_sum_exp(soft_z[n]));
}
There is an independent unit normal prior on the centroid parameters; this prior
could be swapped with other priors, or even a hierarchical model to fit an overall
problem scale and location.
The only parameter is mu, where mu[k] is the centroid for cluster k. The trans-
formed parameters soft_z[n] contain the log of the unnormalized cluster assign-
ment probabilities. The vector soft_z[n] can be converted back to a normalized
simplex using the softmax function (see Section 43.11), either externally or within the
model’s generated quantities block.
Generalizing Soft K-Means
The multivariate normal distribution with unit covariance matrix produces a log prob-
ability density proportional to Euclidean distance (i.e., L2distance). Other distribu-
tions relate to other geometries. For instance, replacing the normal distribution with
the double exponential (Laplace) distribution produces a clustering model based on
L1distance (i.e., Manhattan or taxicab distance).
Within the multivariate normal version of K-means, replacing the unit covariance
matrix with a shared covariance matrix amounts to working with distances defined in
235
a space transformed by the inverse covariance matrix.
Although there is no global spatial analog, it is common to see soft K-means
specified with a per-cluster covariance matrix. In this situation, a hierarchical prior
may be used for the covariance matrices.
17.3. The Difficulty of Bayesian Inference for Clustering
Two problems make it pretty much impossible to perform full Bayesian inference for
clustering models, the lack of parameter identifiability and the extreme multimodality
of the posteriors. There is additional discussion related to the non-identifiability due
to label switching in Section 25.2.
Non-Identifiability
Cluster assignments are not identified — permuting the cluster mean vectors mu leads
to a model with identical likelihoods. For instance, permuting the first two indexes in
mu and the first two indexes in each soft_z[n] leads to an identical likelihood (and
prior).
The lack of identifiability means that the cluster parameters cannot be compared
across multiple Markov chains. In fact, the only parameter in soft K-means is not
identified, leading to problems in monitoring convergence. Clusters can even fail to
be identified within a single chain, with indices swapping if the chain is long enough
or the data is not cleanly separated.
Multimodality
The other problem with clustering models is that their posteriors are highly multi-
modal. One form of multimodality is the non-identifiability leading to index swap-
ping. But even without the index problems the posteriors are highly multimodal.
Bayesian inference fails in cases of high multimodality because there is no way to
visit all of the modes in the posterior in appropriate proportions and thus no way to
evaluate integrals involved in posterior predictive inference.
In light of these two problems, the advice often given in fitting clustering models
is to try many different initializations and select the sample with the highest overall
probability. It is also popular to use optimization-based point estimators such as
expectation maximization or variational Bayes, which can be much more efficient than
sampling-based approaches.
236

17.4. Naive Bayes Classification and Clustering
Naive Bayes is a kind of mixture model that can be used for classification or for
clustering (or a mix of both), depending on which labels for items are observed.2
Multinomial mixture models are referred to as “naive Bayes” because they are of-
ten applied to classification problems where the multinomial independence assump-
tions are clearly false.
Naive Bayes classification and clustering can be applied to any data with multino-
mial structure. A typical example of this is natural language text classification and
clustering, which is used an example in what follows.
The observed data consists of a sequence of Mdocuments made up of bags of
words drawn from a vocabulary of Vdistinct words. A document mhas Nmwords,
which are indexed as wm,1, . . . , wm,N[m] ∈1:V. Despite the ordered indexing of words
in a document, this order is not part of the model, which is clearly defective for
natural human language data. A number of topics (or categories) Kis fixed.
The multinomial mixture model generates a single category zm∈1:Kfor each
document m∈1:Maccording to a categorical distribution,
zm∼Categorical(θ).
The K-simplex parameter θrepresents the prevalence of each category in the data.
Next, the words in each document are generated conditionally independently of
each other and the words in other documents based on the category of the document,
with word nof document mbeing generated as
wm,n ∼Categorical(φz[m]).
The parameter φz[m] is a V-simplex representing the probability of each word in the
vocabulary in documents of category zm.
The parameters θand φare typically given symmetric Dirichlet priors. The preva-
lence θis sometimes fixed to produce equal probabilities for each category k∈1:K.
Coding Ragged Arrays
The specification for naive Bayes in the previous sections have used a ragged array
notation for the words w. Because Stan does not support ragged arrays, the models
are coded using an alternative strategy that provides an index for each word in a
global list of words. The data is organized as follows, with the word arrays laid out
in a column and each assigned to its document in a second column.
2For clustering, the non-identifiability problems for all mixture models present a problem, whereas there
is no such problem for classification. Despite the difficulties with full Bayesian inference for clustering,
researchers continue to use it, often in an exploratory data analysis setting rather than for predictive
modeling.
237
n w[n] doc[n]
1w1,11
2w1,21
.
.
..
.
..
.
.
N1w1,N[1]1
N1+1w2,12
N1+2w2,22
.
.
..
.
..
.
.
N1+N2w2,N[2]2
N1+N2+1w3,13
.
.
..
.
..
.
.
N=PM
m=1NmwM,N[M] M
The relevant variables for the program are N, the total number of words in all the
documents, the word array w, and the document identity array doc.
Estimation with Category-Labeled Training Data
A naive Bayes model for estimating the simplex parameters given training data with
documents of known categories can be coded in Stan as follows3
data {
// training data
int<lower=1> K; // num topics
int<lower=1> V; // num words
int<lower=0> M; // num docs
int<lower=0> N; // total word instances
int<lower=1,upper=K> z[M]; // topic for doc m
int<lower=1,upper=V> w[N]; // word n
int<lower=1,upper=M> doc[N]; // doc ID for word n
// hyperparameters
vector<lower=0>[K] alpha; // topic prior
vector<lower=0>[V] beta; // word prior
}
parameters {
simplex[K] theta; // topic prevalence
simplex[V] phi[K]; // word dist for topic k
}
model {
theta ~ dirichlet(alpha);
3This model is available in the example model repository; see http://mc-stan.org/documentation.
238
for (k in 1:K)
phi[k] ~ dirichlet(beta);
for (m in 1:M)
z[m] ~ categorical(theta);
for (n in 1:N)
w[n] ~ categorical(phi[z[doc[n]]]);
}
Note that the topic identifiers zmare declared as data and the latent category assign-
ments are included as part of the likelihood function.
Estimation without Category-Labeled Training Data
Naive Bayes models can be used in an unsupervised fashion to cluster multinomial-
structured data into a fixed number Kof categories. The data declaration includes
the same variables as the model in the previous section excluding the topic labels z.
Because zis discrete, it needs to be summed out of the model calculation. This is
done for naive Bayes as for other mixture models. The parameters are the same up to
the priors, but the likelihood is now computed as the marginal document probability
log p(wm,1, . . . , wm,Nm|θ, φ)
=log PK
k=1Categorical(k|θ) ×QNm
n=1Categorical(wm,n|φk)
=log PK
k=1exp log Categorical(k|θ) +PNm
n=1log Categorical(wm,n|φk).
The last step shows how the log_sum_exp function can be used to stabilize the nu-
merical calculation and return a result on the log scale.
model {
real gamma[M, K];
theta ~ dirichlet(alpha);
for (k in 1:K)
phi[k] ~ dirichlet(beta);
for (m in 1:M)
for (k in 1:K)
gamma[m, k] = categorical_lpmf(k | theta);
for (n in 1:N)
for (k in 1:K)
gamma[doc[n], k] = gamma[doc[n], k]
+ categorical_lpmf(w[n] | phi[k]);
for (m in 1:M)
target += log_sum_exp(gamma[m]);
}
239
The local variable gamma[m, k] represents the value
γm,k =log Categorical(k|θ) +
Nm
X
n=1
log Categorical(wm,n|φk).
Given γ, the posterior probability that document mis assigned category kis
Pr[zm=k|w, α, β] =exp
γm,k −log
K
X
k=1
exp γm,k
.
If the variable gamma were declared and defined in the transformed parameter block,
its sampled values would be saved by Stan. The normalized posterior probabilities
could also be defined as generated quantities.
Full Bayesian Inference for Naive Bayes
Full Bayesian posterior predictive inference for the naive Bayes model can be im-
plemented in Stan by combining the models for labeled and unlabeled data. The
estimands include both the model parameters and the posterior distribution over
categories for the unlabeled data. The model is essentially a missing data model as-
suming the unknown category labels are missing completely at random; see (Gelman
et al.,2013;Gelman and Hill,2007) for more information on missing data imputation.
The model is also an instance of semisupervised learning because the unlabeled data
contributes to the parameter estimations.
To specify a Stan model for performing full Bayesian inference, the model for
labeled data is combined with the model for unlabeled data. A second document
collection is declared as data, but without the category labels, leading to new variables
M2 N2,w2,doc2. The number of categories and number of words, as well as the
hyperparameters are shared and only declared once. Similarly, there is only one set
of parameters. Then the model contains a single set of statements for the prior, a set
of statements for the labeled data, and a set of statements for the unlabeled data.
Prediction without Model Updates
An alternative to full Bayesian inference involves estimating a model using labeled
data, then applying it to unlabeled data without updating the parameter estimates
based on the unlabeled data. This behavior can be implemented by moving the defini-
tion of gamma for the unlabeled documents to the generated quantities block. Because
the variables no longer contribute to the log probability, they no longer jointly con-
tribute to the estimation of the model parameters.
240
17.5. Latent Dirichlet Allocation
Latent Dirichlet allocation (LDA) is a mixed-membership multinomial clustering
model (Blei et al.,2003) that generalized naive Bayes. Using the topic and document
terminology common in discussions of LDA, each document is modeled as having a
mixture of topics, with each word drawn from a topic based on the mixing propor-
tions.
The LDA Model
The basic model assumes each document is generated independently based on fixed
hyperparameters. For document m, the first step is to draw a topic distribution sim-
plex θmover the Ktopics,
θm∼Dirichlet(α).
The prior hyperparameter αis fixed to a K-vector of positive values. Each word in
the document is generated independently conditional on the distribution θm. First,
a topic zm,n ∈1:Kis drawn for the word based on the document-specific topic-
distribution,
zm,n ∼Categorical(θm).
Finally, the word wm,n is drawn according to the word distribution for topic zm,n,
wm,n ∼Categorical(φz[m,n]).
The distributions φkover words for topic kare also given a Dirichlet prior,
φk∼Dirichlet(β)
where βis a fixed V-vector of positive values.
Summing out the Discrete Parameters
Although Stan does not (yet) support discrete sampling, it is possible to calculate the
marginal distribution over the continuous parameters by summing out the discrete
parameters as in other mixture models. The marginal posterior of the topic and word
variables is
p(θ, φ|w, α, β) ∝p(θ|α) ×p(φ|β) ×p(w |θ, φ)
=
M
Y
m=1
p(θm|α) ×
K
Y
k=1
p(φk|β) ×
M
Y
m=1
M[n]
Y
n=1
p(wm,n |θm, φ).
241
The inner word-probability term is defined by summing out the topic assignments,
p(wm,n |θm, φ) =
K
X
z=1
p(z, wm,n|θm, φ).
=
K
X
z=1
p(z|θm)×p(wm,n|φz).
Plugging the distributions in and converting to the log scale provides a formula that
can be implemented directly in Stan,
log p(θ, φ|w, α, β)
=PM
m=1log Dirichlet(θm|α) +PK
k=1log Dirichlet(φk|β)
+PM
m=1PN[m]
n=1log PK
z=1Categorical(z|θm)×Categorical(wm,n|φz)
Implementation of LDA
Applying the marginal derived in the last section to the data structure described in
this section leads to the following Stan program for LDA.
data {
int<lower=2> K; // num topics
int<lower=2> V; // num words
int<lower=1> M; // num docs
int<lower=1> N; // total word instances
int<lower=1,upper=V> w[N]; // word n
int<lower=1,upper=M> doc[N]; // doc ID for word n
vector<lower=0>[K] alpha; // topic prior
vector<lower=0>[V] beta; // word prior
}
parameters {
simplex[K] theta[M]; // topic dist for doc m
simplex[V] phi[K]; // word dist for topic k
}
model {
for (m in 1:M)
theta[m] ~ dirichlet(alpha); // prior
for (k in 1:K)
phi[k] ~ dirichlet(beta); // prior
for (n in 1:N) {
real gamma[K];
for (k in 1:K)
gamma[k] = log(theta[doc[n], k]) + log(phi[k, w[n]]);
242
target += log_sum_exp(gamma); // likelihood;
}
}
As in the other mixture models, the log-sum-of-exponents function is used to stabilize
the numerical arithmetic.
Correlated Topic Model
To account for correlations in the distribution of topics for documents, (Blei and
Lafferty,2007) introduced a variant of LDA in which the Dirichlet prior on the per-
document topic distribution is replaced with a multivariate logistic normal distribu-
tion.
The authors treat the prior as a fixed hyperparameter. They use an L1-regularized
estimate of covariance, which is equivalent to the maximum a posteriori estimate
given a double-exponential prior. Stan does not (yet) support maximum a posteriori
estimation, so the mean and covariance of the multivariate logistic normal must be
specified as data.
Fixed Hyperparameter Correlated Topic Model
The Stan model in the previous section can be modified to implement the correlated
topic model by replacing the Dirichlet topic prior alpha in the data declaration with
the mean and covariance of the multivariate logistic normal prior.
data {
... data as before without alpha ...
vector[K] mu; // topic mean
cov_matrix[K] Sigma; // topic covariance
}
Rather than drawing the simplex parameter theta from a Dirichlet, a parameter eta
is drawn from a multivariate normal distribution and then transformed using softmax
into a simplex.
parameters {
simplex[V] phi[K]; // word dist for topic k
vector[K] eta[M]; // topic dist for doc m
}
transformed parameters {
simplex[K] theta[M];
for (m in 1:M)
theta[m] = softmax(eta[m]);
}
243
model {
for (m in 1:M)
eta[m] ~ multi_normal(mu, Sigma);
... model as before w/o prior for theta ...
}
Full Bayes Correlated Topic Model
By adding a prior for the mean and covariance, Stan supports full Bayesian inference
for the correlated topic model. This requires moving the declarations of topic mean
mu and covariance Sigma from the data block to the parameters block and providing
them with priors in the model. A relatively efficient and interpretable prior for the
covariance matrix Sigma may be encoded as follows.
... data block as before, but without alpha ...
parameters {
vector[K] mu; // topic mean
corr_matrix[K] Omega; // correlation matrix
vector<lower=0>[K] sigma; // scales
vector[K] eta[M]; // logit topic dist for doc m
simplex[V] phi[K]; // word dist for topic k
}
transformed parameters {
... eta as above ...
cov_matrix[K] Sigma; // covariance matrix
for (m in 1:K)
Sigma[m, m] = sigma[m] *sigma[m] *Omega[m, m];
for (m in 1:(K-1)) {
for (n in (m+1):K) {
Sigma[m, n] = sigma[m] *sigma[n] *Omega[m, n];
Sigma[n, m] = Sigma[m, n];
}
}
}
model {
mu ~ normal(0, 5); // vectorized, diffuse
Omega ~ lkj_corr(2.0); // regularize to unit correlation
sigma ~ cauchy(0, 5); // half-Cauchy due to constraint
... words sampled as above ...
}
The LkjCorr distribution with shape α > 0has support on correlation matrices (i.e.,
symmetric positive definite with unit diagonal). Its density is defined by
LkjCorr(Ω|α) ∝det(Ω)α−1
244
With a scale of α=2, the weakly informative prior favors a unit correlation matrix.
Thus the compound effect of this prior on the covariance matrix Σfor the multivariate
logistic normal is a slight concentration around diagonal covariance matrices with
scales determined by the prior on sigma.
245
18. Gaussian Processes
Gaussian processes are continuous stochastic processes and thus may be interpreted
as providing a probability distribution over functions. A probability distribution over
continuous functions may be viewed, roughly, as an uncountably infinite collection of
random variables, one for each valid input. The generality of the supported functions
makes Gaussian priors popular choices for priors in general multivariate (non-linear)
regression problems.
The defining feature of a Gaussian process is that the joint distribution of the
function’s value at a finite number of input points is a multivariate normal distribu-
tion. This makes it tractable to both fit models from finite amounts of observed data
and make predictions for finitely many new data points.
Unlike a simple multivariate normal distribution, which is parameterized by a
mean vector and covariance matrix, a Gaussian process is parameterized by a mean
function and covariance function. The mean and covariance functions apply to vec-
tors of inputs and return a mean vector and covariance matrix which provide the
mean and covariance of the outputs corresponding to those input points in the func-
tions drawn from the process.
Gaussian processes can be encoded in Stan by implementing their mean and co-
variance functions and plugging the result into the Gaussian form of their sampling
distribution, or by using the specialized covariance functions outlined below. This
form of model is straightforward and may be used for simulation, model fitting, or
posterior predictive inference. A more efficient Stan implementation for the GP with a
normally distributed outcome marginalizes over the latent Gaussian process, and ap-
plies a Cholesky-factor reparameterization of the Gaussian to compute the likelihood
and the posterior predictive distribution analytically.
After defining Gaussian processes, this chapter covers the basic implementations
for simulation, hyperparameter estimation, and posterior predictive inference for uni-
variate regressions, multivariate regressions, and multivariate logistic regressions.
Gaussian processes are very general, and by necessity this chapter only touches on
some basic models. For more information, see (Rasmussen and Williams,2006).
18.1. Gaussian Process Regression
The data for a multivariate Gaussian process regression consists of a series of N
inputs x1, . . . , xN∈RDpaired with outputs y1, . . . , yN∈R. The defining feature of
Gaussian processes is that the probability of a finite number of outputs yconditioned
on their inputs xis Gaussian:
y∼MultiNormal(m(x), K(x|θ)),
246
where m(x) is an N-vector and K(x|θ) is an N×Ncovariance matrix. The mean
function m:RN×D→RNcan be anything, but the covariance function K:RN×D→
RN×Nmust produce a positive-definite matrix for any input x.1
A popular covariance function, which will be used in the implementations later in
this chapter, is an exponentiated quadratic function,
K(x|α, ρ, σ )i,j =α2exp
−1
2ρ2
D
X
d=1
(xi,d −xj,d )2
+δi,j σ2,
where α,ρ, and σare hyperparameters defining the covariance function and where
δi,j is the Kronecker delta function with value 1 if i=jand value 0 otherwise; note
that this test is between the indexes iand j, not between values xiand xj. Note that
this kernel is obtained through a convolution of two independent Gaussian processes,
f1and f2, with kernels
K1(x|α, ρ)i,j =α2exp
−1
2ρ2
D
X
d=1
(xi,d −xj,d )2
and
K2(x|σ )i,j =δi,j σ2,
The addition of σ2on the diagonal is important to ensure the positive definiteness
of the resulting matrix in the case of two identical inputs xi=xj. In statistical terms,
σis the scale of the noise term in the regression.
The hyperparameter ρis the length-scale, and corresponds to the frequency of
the functions represented by the Gaussian process prior with respect to the domain.
Values of ρcloser to zero lead the GP to represent high-frequency functions, whereas
larger values of ρlead to low-frequency functions. The hyperparameter αis the
marginal standard deviation. It controls the magnitude of the range of the function
represented by the GP. If you were to take the standard deviation of many draws from
the GP f1prior at a single input xconditional on one value of αone would recover α.
The only term in the squared exponential covariance function involving the inputs
xiand xjis their vector difference, xi−xj. This produces a process with stationary
covariance in the sense that if an input vector xis translated by a vector to x+,
the covariance at any pair of outputs is unchanged, because K(x|θ) =K(x +|θ).
The summation involved is just the squared Euclidean distance between xiand
xj(i.e., the L2norm of their difference, xi−xj). This results in support for smooth
functions in the process. The amount of variation in the function is controlled by the
free hyperparameters α,ρ, and σ.
1Gaussian processes can be extended to covariance functions producing positive semi-definite matrices,
but Stan does not support inference in the resulting models because the resulting distribution does not
have unconstrained support.
247

Changing the notion of distance from Euclidean to taxicab distance (i.e., an L1
norm) changes the support to functions which are continuous but not smooth.
18.2. Simulating from a Gaussian Process
It is simplest to start with a Stan model that does nothing more than simulate draws
of functions ffrom a Gaussian process. In practical terms, the model will draw values
yn=f (xn)for finitely many input points xn.
The Stan model defines the mean and covariance functions in a transformed data
block and then samples outputs yin the model using a multivariate normal distri-
bution. To make the model concrete, the squared exponential covariance function
described in the previous section will be used with hyperparameters set to α2=1,
ρ2=1, and σ2=0.1, and the mean function mis defined to always return the
zero vector, m(x) =0. Consider the following implementation of a Gaussian process
simulator.2
data {
int<lower=1> N;
real x[N];
}
transformed data {
matrix[N, N] K;
vector[N] mu = rep_vector(0, N);
for (i in 1:(N - 1)) {
K[i, i] = 1 + 0.1;
for (j in (i + 1):N) {
K[i, j] = exp(-0.5 *square(x[i] - x[j]));
K[j, i] = K[i, j];
}
}
K[N, N] = 1 + 0.1;
}
parameters {
vector[N] y;
}
model {
y ~ multi_normal(mu, K);
}
The above model can also be written more compactly using the specialized covariance
function that implements the exponentiated quadratic kernel.
2This model is available in the example model repository; see http://mc-stan.org/documentation.
248

data {
int<lower=1> N;
real x[N];
}
transformed data {
matrix[N, N] K = cov_exp_quad(x, 1.0, 1.0);
vector[N] mu = rep_vector(0, N);
for (n in 1:N)
K[n, n] = K[n, n] + 0.1;
}
parameters {
vector[N] y;
}
model {
y ~ multi_normal(mu, K);
}
The input data is just the vector of inputs xand its size N. Such a model can be used
with values of xevenly spaced over some interval in order to plot sample draws of
functions from a Gaussian process.
Multivariate Inputs
Only the input data needs to change in moving from a univariate model to a multi-
variate model.3The only lines that change from the univariate model above are as
follows.
data {
int<lower=1> N;
int<lower=1> D;
vector[D] x[N];
}
transformed data {
...
...
The data is now declared as an array of vectors instead of an array of scalars; the
dimensionality Dis also declared.
In the remainder of the chapter, univariate models will be used for simplicity, but
any of the models could be changed to multivariate in the same way as the simple
sampling model. The only extra computational overhead from a multivariate model
is in the distance calculation.
3The model is available in the Stan example model repository; see http://mc-stan.org/
documentation.
249

Cholesky Factored and Transformed Implementation
A more efficient implementation of the simulation model can be coded in Stan by
relocating, rescaling and rotating an isotropic unit normal variate. Suppose ηis an an
isotropic unit normal variate
η∼Normal(0,1),
where 0is an N-vector of 0 values and 1is the N×Nidentity matrix. Let Lbe the
Cholesky decomposition of K(x|θ), i.e., the lower-triangular matrix Lsuch that LL>=
K(x|θ). Then the transformed variable µ+Lη has the intended target distribution,
µ+Lη ∼MultiNormal(µ(x), K(x|θ)).
This transform can be applied directly to Gaussian process simulation.4This
model has the same data declarations for Nand x, and the same transformed data
definitions of mu and Kas the previous model, with the addition of a transformed
data variable for the Cholesky decomposition. The parameters change to the raw pa-
rameters sampled from an isotropic unit normal, and the actual samples are defined
as generated quantities.
...
transformed data {
matrix[N, N] L;
...
L = cholesky_decompose(K);
}
parameters {
vector[N] eta;
}
model {
eta ~ normal(0, 1);
}
generated quantities {
vector[N] y;
y=mu+L*eta;
}
The Cholesky decomposition is only computed once, after the data is loaded and the
covariance matrix Kcomputed. The isotropic normal distribution for eta is specified
as a vectorized univariate distribution for efficiency; this specifies that each eta[n]
has an independent unit normal distribution. The sampled vector yis then defined
as a generated quantity using a direct encoding of the transform described above.
4The code is available in the Stan example model repository; see http://mc-stan.org/
documentation.
250
18.3. Fitting a Gaussian Process
GP with a normal outcome
The full generative model for a GP with a normal outcome, y∈RN, with inputs
x∈RN, for a finite N:
ρ∼InvGamma(5,5)
α∼Normal(0,1)
σ∼Normal(0,1)
f∼MultiNormal (0, K(x|α, ρ))
yi∼Normal(fi, σ ) ∀i∈ {1, . . . , N}
With a normal outcome, it is possible to integrate out the Gaussian process f,
yielding the more parsimonious model:
ρ∼InvGamma(5,5)
α∼Normal(0,1)
σ∼Normal(0,1)
y∼MultiNormal 0, K(x|α, ρ) +INσ2
It can be more computationally efficient when dealing with a normal outcome to
integrate out the Gaussian process, because this yields a lower-dimensional parameter
space over which to do inference. We’ll fit both models in Stan. The former model
will be referred to as the latent variable GP, while the latter will be called the marginal
likelihood GP.
The hyperparameters controlling the covariance function of a Gaussian process
can be fit by assigning them priors, like we have in the generative models above, and
then computing the posterior distribution of the hyperparameters given observed
data. The priors on the parameters should be defined based on prior knowledge of the
scale of the output values (α), the scale of the output noise (σ), and the scale at which
distances are measured among inputs (ρ). See Section 18.3.4 for more information
about how to specify appropriate priors for the hyperparameters.
The Stan program implementing the marginal likelihood GP is shown below. The
program is similar to the Stan programs that implement the simulation GPs above,
251

but because we are doing inference on the hyperparameters, we need to calculate the
covariance matrix Kin the model block, rather than the transformed data block. 5
data {
int<lower=1> N;
real x[N];
vector[N] y;
}
transformed data {
vector[N] mu = rep_vector(0, N);
}
parameters {
real<lower=0> rho;
real<lower=0> alpha;
real<lower=0> sigma;
}
model {
matrix[N, N] L_K;
matrix[N, N] K = cov_exp_quad(x, alpha, rho);
real sq_sigma = square(sigma);
// diagonal elements
for (n in 1:N)
K[n, n] = K[n, n] + sq_sigma;
L_K = cholesky_decompose(K);
rho ~ inv_gamma(5, 5);
alpha ~ normal(0, 1);
sigma ~ normal(0, 1);
y ~ multi_normal_cholesky(mu, L_K);
}
The data block now declares a vector yof observed values y[n] for inputs x[n].
The transformed data block now only defines the mean vector to be zero. The three
hyperparameters are defined as parameters constrained to be non-negative. The com-
putation of the covariance matrix Kis now in the model block because it involves un-
known parameters and thus can’t simply be precomputed as transformed data. The
rest of the model consists of the priors for the hyperparameters and the multivariate
Cholesky-parameterized normal likelihood, only now the value yis known and the
5The program code is available in the Stan example model repository; see http://mc-stan.org/
documentation.
252
covariance matrix Kis an unknown dependent on the hyperparameters, allowing us
to learn the hyperparameters.
We have used the Cholesky parameterized MultiNormal rather than the standard
MultiNormal because it allows us to the cholesky_decompose function which has
been optimized for both small and large matrices. When working with small matrices
the differences in computational speed between the two approaches will not be no-
ticeable, but for larger matrices (NÝ100) the Cholesky decomposition version will
be faster.
Hamiltonian Monte Carlo sampling is quite fast and effective for hyperparameter
inference in this model (Neal,1997). If the posterior is well-concentrated for the
hyperparameters the Stan implementation will fit hyperparameters in models with a
few hundred data points in seconds.
Latent variable GP
We can also explicitly code the latent variable formulation of a GP in Stan. This will be
useful for when the outcome is not normal. We’ll need to add a small positive term, δ
to the diagonal of the covariance matrix in order to ensure that our covariance matrix
remains positive definite.
data {
int<lower=1> N;
real x[N];
vector[N] y;
}
transformed data {
real delta = 1e-9;
}
parameters {
real<lower=0> rho;
real<lower=0> alpha;
real<lower=0> sigma;
vector[N] eta;
}
model {
vector[N] f;
{
matrix[N, N] L_K;
matrix[N, N] K = cov_exp_quad(x, alpha, rho);
// diagonal elements
for (n in 1:N)
K[n, n] = K[n, n] + delta;
253
L_K = cholesky_decompose(K);
f = L_K *eta;
}
rho ~ inv_gamma(5, 5);
alpha ~ normal(0, 1);
sigma ~ normal(0, 1);
eta ~ normal(0, 1);
y ~ normal(f, sigma);
}
Two differences between the latent variable GP and the marginal likelihood GP
are worth noting. The first is that we have augmented our parameter block with a
new parameter vector of length Ncalled eta. This is used in the model block to
generate a multivariate normal vector called f, corresponding to the latent GP. We
put a Normal(0,1)prior on eta like we did in the Cholesky-parameterized GP in the
simulation section. The second difference is that our likelihood is now univariate,
though we could code Nlikelihood terms as one N-dimensional multivariate normal
with an identity covariance matrix multiplied by σ2. However, it is more efficient to
use the vectorized statement as shown above.
Discrete outcomes with Gaussian Processes
Gaussian processes can be generalized the same way as standard linear models by
introducing a link function. This allows them to be used as discrete data models.
Poisson GP
If we want to model count data, we can remove the σparameter, and use
poisson_log, which implements a log link, for our likelihood rather than normal.
We can also add an overall mean parameter, a, which will account for the marginal
expected value for y. We do this because we cannot center count data like we would
for normally distributed data.
data {
...
int<lower=0> y[N];
...
}
...
parameters {
254
real<lower=0> rho;
real<lower=0> alpha;
real a;
vector[N] eta;
}
model {
...
rho ~ inv_gamma(5, 5);
alpha ~ normal(0, 1);
a ~ normal(0, 1);
eta ~ normal(0, 1);
y ~ poisson_log(a + f);
}
Logistic Gaussian Process Regression
For binary classification problems, the observed outputs zn∈ {0,1}are binary. These
outputs are modeled using a Gaussian process with (unobserved) outputs ynthrough
the logistic link,
zn∼Bernoulli(logit−1(yn)),
or in other words,
Pr[zn=1]=logit−1(yn).
We can extend our latent variable GP Stan program to deal with classification
problems. Below ais the bias term, which can help account for imbalanced classes in
the training data:
data {
...
int<lower=0, upper=1> z[N];
...
}
...
model {
...
y ~ bernoulli_logit(a + f);
}
255

Automatic Relevance Determination
If we have multivariate inputs x∈RD, the squared exponential covariance function
can be further generalized by fitting a scale parameter ρdfor each dimension d,
k(x|α, ~
ρ, σ )i,j =α2exp
−1
2
D
X
d=1
1
ρ2
d
(xi,d −xj,d )2
+δi,j σ2.
The estimation of ρwas termed “automatic relevance determination” in (Neal,1996a),
but this is misleading, because the magnitude the scale of the posterior for each ρd
is dependent on the scaling of the input data along dimension d. Moreover, the scale
of the parameters ρdmeasures non-linearity along the d-th dimension, rather than
“relevance” (Piironen and Vehtari,2016).
A priori, the closer ρdis to zero, the more nonlinear the conditional mean in di-
mension dis. A posteriori, the actual dependencies between xand yplay a role. With
one covariate x1having a linear effect and another covariate x2having a nonlinear
effect, it is possible that ρ1> ρ2even if the predictive relevance of x1is higher (Ras-
mussen and Williams,2006, page 80). The collection of ρd(or 1/ρd) parameters can
also be modeled hierarchically.
The implementation of automatic relevance determination in Stan is straight-
forward, though it currently requires the user to directly code the covariance ma-
trix. We’ll write a function to generate the Cholesky of the covariance matrix called
L_cov_exp_quad_ARD.
functions {
matrix L_cov_exp_quad_ARD(vector[] x,
real alpha,
vector rho,
real delta) {
int N = size(x);
matrix[N, N] K;
real sq_alpha = square(alpha);
for (i in 1:(N-1)) {
K[i, i] = sq_alpha + delta;
for (j in (i + 1):N) {
K[i, j] = sq_alpha
*exp(-0.5 *dot_self((x[i] - x[j]) ./ rho));
K[j, i] = K[i, j];
}
}
K[N, N] = sq_alpha + delta;
return cholesky_decompose(K);
}
256
}
data {
int<lower=1> N;
int<lower=1> D;
vector[D] x[N];
vector[N] y;
}
transformed data {
real delta = 1e-9;
}
parameters {
vector<lower=0>[D] rho;
real<lower=0> alpha;
real<lower=0> sigma;
vector[N] eta;
}
model {
vector[N] f;
{
matrix[N, N] L_K = L_cov_exp_quad_ARD(x, alpha, rho, delta);
f = L_K *eta;
}
rho ~ inv_gamma(5, 5);
alpha ~ normal(0, 1);
sigma ~ normal(0, 1);
eta ~ normal(0, 1);
y ~ normal(f, sigma);
}
Priors for Gaussian Process Parameters
Formulating priors for GP hyperparameters requires the analyst to consider the inher-
ent statistical properties of a GP, the GP’s purpose in the model, and the numerical
issues that may arise in Stan when estimating a GP.
Perhaps most importantly, the parameters ρand αare weakly identified (Zhang,
2004). The ratio of the two parameters is well-identified, but in practice we put in-
dependent priors on the two hyperparameters because these two quantities are more
interpretable than their ratio.
257
Priors for length-scale
GPs are a flexible class of priors, and as such, can represent a wide spectrum of
functions. For length scales below the minimum spacing of the covariates the GP
likelihood plateaus. Unless regularized by a prior, this flat likelihood induces consid-
erable posterior mass at small length scales where the observation variance drops to
zero and the functions supported by the GP being to exactly interpolate between the
input data. The resulting posterior not only significantly overfits to the input data, it
also becomes hard to accurately sample using Euclidean HMC.
We may wish to put further soft constraints on the length-scale, but these are
dependent on how the GP is used in our statistical model.
If our model consists of only the GP, i.e.:
f∼MultiNormal (0, K(x|α, ρ))
yi∼Normal(fi, σ ) ∀i∈ {1, . . . , N}
x∈RN×D, f ∈RN
we likely don’t need constraints beyond penalizing small length-scales. We’d like to
allow the GP prior to represent both high-frequency and low-frequency functions, so
our prior should put non-negligible mass on both sets of functions. In this case, an in-
verse gamma, inv_gamma_lpdf in Stan’s language, will work well as it has a sharp left
tail that puts negligible mass on infinitesimal length-scales, but a generous right tail,
allowing for large length-scales. Inverse gamma priors will avoid infinitesimal length-
scales because the density is zero at zero, so the posterior for length-scale will be
pushed away from zero. An inverse gamma distribution is one of many zero-avoiding
or boundary-avoiding distributions. See 9.10.1 for more on boundary-avoiding priors.
If we’re using the GP as a component in a larger model that includes an overall
mean and fixed effects for the same variables we’re using as the domain for the GP,
i.e.:
f∼MultiNormal (0, K(x|α, ρ))
yi∼Normal(β0+xiβ[1:D] +fi, σ ) ∀i∈ {1, . . . , N}
xT
i, β[1:D] ∈RD, x ∈RN×D, f ∈RN
we’ll likely want to constrain large length-scales as well. A length scale that is larger
than the scale of the data yields a GP posterior that is practically linear (with respect
to the particular covariate) and increasing the length scale has little impact on the
likelihood. This will introduce nonidentifiability in our model, as both the fixed effects
and the GP will explain similar variation. In order to limit the amount of overlap
between the GP and the linear regression, we should use a prior with a sharper right
tail to limit the GP to higher-frequency functions. We can use a generalized inverse
258

Gaussian distribution:
f (x|a, b, p) =(a/b)p/2
2Kp(√ab) xp−1exp(−(ax +b/x)/2)
x, a, b ∈R+, p ∈Z
which has an inverse gamma left tail if p≤0and an inverse Gaussian right tail. This
has not yet been implemented in Stan’s math library, but it is possible to implement
as a user defined function:
functions {
real generalized_inverse_gaussian_lpdf(real x, int p,
real a, real b) {
return p *0.5 *log(a / b)
- log(2 *modified_bessel_second_kind(p, sqrt(a *b)))
+ (p - 1) *log(x)
- (a *x+b/x)*0.5;
}
}
data {
...
If we have high-frequency covariates in our fixed effects, we may wish to further
regularize the GP away from high-frequency functions, which means we’ll need to
penalize smaller length-scales. Luckily, we have a useful way of thinking about how
length-scale affects the frequency of the functions supported the GP. If we were to
repeatedly draw from a zero-mean GP with a length-scale of ρin a fixed-domain [0, T ],
we would get a distribution for the number of times each draw of the GP crossed the
zero axis. The expectation of this random variable, the number of zero crossings, is
T /πρ. You can see that as ρdecreases, the expectation of the number of upcrossings
increases as the GP is representing higher-frequency functions. Thus, this is a good
statistic to keep in mind when setting a lower-bound for our prior on length-scale
in the presence of high-frequency covariates. However, this statistic is only valid for
one-dimensional inputs.
Priors for marginal standard deviation
The parameter αcorresponds to how much of the variation is explained by the re-
gression function and has a similar role to the prior variance for linear model weights.
This means the prior can be the same as used in linear models, such as a half-tprior
on α.
A half-tor half-Gaussian prior on alpha also has the benefit of putting nontrivial
prior mass around zero. This allows the GP support the zero functions and allows the
possibility that the GP won’t contribute to the conditional mean of the total output.
259

Predictive Inference with a Gaussian Process
Suppose for a given sequence of inputs xthat the corresponding outputs yare ob-
served. Given a new sequence of inputs ˜
x, the posterior predictive distribution of
their labels is computed by sampling outputs ˜
yaccording to
p(˜
y|˜
x, x, y) =p(˜
y, y|˜
x, x)
p(y|x) ∝p(˜
y, y|˜
x, x).
A direct implementation in Stan defines a model in terms of the joint distribution
of the observed yand unobserved ˜
y.
data {
int<lower=1> N1;
real x1[N1];
vector[N1] y1;
int<lower=1> N2;
real x2[N2];
}
transformed data {
real delta = 1e-9;
int<lower=1> N = N1 + N2;
real x[N];
for (n1 in 1:N1) x[n1] = x1[n1];
for (n2 in 1:N2) x[N1 + n2] = x2[n2];
}
parameters {
real<lower=0> rho;
real<lower=0> alpha;
real<lower=0> sigma;
vector[N] eta;
}
transformed parameters {
vector[N] f;
{
matrix[N, N] L_K;
matrix[N, N] K = cov_exp_quad(x, alpha, rho);
// diagonal elements
for (n in 1:N)
K[n, n] = K[n, n] + delta;
L_K = cholesky_decompose(K);
f = L_K *eta;
}
260

}
model {
rho ~ inv_gamma(5, 5);
alpha ~ normal(0, 1);
sigma ~ normal(0, 1);
eta ~ normal(0, 1);
y1 ~ normal(f[1:N1], sigma);
}
generated quantities {
vector[N2] y2;
for (n2 in 1:N2)
y2[n2] = normal_rng(f[N1 + n2], sigma);
}
The input vectors x1 and x2 are declared as data, as is the observed output vector
y1. The unknown output vector y2, which corresponds to input vector x2, is declared
in the generated quantities block and will be sampled when the model is executed.
A transformed data block is used to combine the input vectors x1 and x2 into a
single vector x.
The model block declares and defines a local variable for the combined output
vector f, which consists of the concatenation of the conditional mean for known
outputs y1 and unknown outputs y2. Thus the combined output vector fis aligned
with the combined input vector x. All that is left is to define the univariate normal
sampling statement for y.
The generated quantities block defines the quantity y2. We generate y2 by sam-
pling N2 univariate normals with each mean corresponding to the appropriate element
in f.6
Predictive Inference in non-Gaussian GPs
We can do predictive inference in non-Gaussian GPs in much the same way as we do
with Gaussian GPs.
Consider the following full model for prediction using logistic Gaussian process
regression. 7
data {
int<lower=1> N1;
real x1[N1];
6The program code is available in the Stan example model repository; see http://mc-stan.org/
documentation.
7The model is available in the Stan example model repository; see http://mc-stan.org/
documentation.
261
int<lower=0, upper=1> z1[N1];
int<lower=1> N2;
real x2[N2];
}
transformed data {
real delta = 1e-9;
int<lower=1> N = N1 + N2;
real x[N];
for (n1 in 1:N1) x[n1] = x1[n1];
for (n2 in 1:N2) x[N1 + n2] = x2[n2];
}
parameters {
real<lower=0> rho;
real<lower=0> alpha;
real a;
vector[N] eta;
}
transformed parameters {
vector[N] f;
{
matrix[N, N] L_K;
matrix[N, N] K = cov_exp_quad(x, alpha, rho);
// diagonal elements
for (n in 1:N)
K[n, n] = K[n, n] + delta;
L_K = cholesky_decompose(K);
f = L_K *eta;
}
}
model {
rho ~ inv_gamma(5, 5);
alpha ~ normal(0, 1);
a ~ normal(0, 1);
eta ~ normal(0, 1);
z1 ~ bernoulli_logit(a + f[1:N1]);
}
generated quantities {
int z2[N2];
for (n2 in 1:N2)
z2[n2] = bernoulli_logit_rng(a + f[N1 + n2]);
}
262

Analytical Form of Joint Predictive Inference
Bayesian predictive inference for Gaussian processes with Gaussian observations can
be sped up by deriving the posterior analytically, then directly sampling from it.
Jumping straight to the result,
p(˜
y|˜
x, y, x) =Normal(K>Σ−1y, Ω−K>Σ−1K),
where Σ=K(x|α, ρ, σ ) is the result of applying the covariance function to the inputs
xwith observed outputs y,Ω=K(˜
x|α, ρ) is the result of applying the covariance
function to the inputs ˜
xfor which predictions are to be inferred, and Kis the matrix of
covariances between inputs xand ˜
x, which in the case of the exponentiated quadratic
covariance function would be
K(x|α, ρ)i,j =η2exp(−1
2ρ2
D
X
d=1
(xi,d −˜
xj,d )2).
There is no noise term including σ2because the indexes of elements in xand ˜
xare
never the same.
8This Stan code below uses the analytic form of the posterior and provides sam-
pling of the resulting multivariate normal through the Cholesky decomposition. The
data declaration is the same as for the latent variable example, but we’ve defined a
function called gp_pred_rng which will generate a draw from the posterior predic-
tive mean conditioned on observed data y1. The code uses a Cholesky decomposition
in triangular solves in order to cut down on the the number of matrix-matrix multi-
plications when computing the conditional mean and the conditional covariance of
p(˜
y).
functions {
vector gp_pred_rng(real[] x2,
vector y1,
real[] x1,
real alpha,
real rho,
real sigma,
real delta) {
int N1 = rows(y1);
int N2 = size(x2);
vector[N2] f2;
{
matrix[N1, N1] L_K;
8The program code is available in the Stan example model repository; see http://mc-stan.org/
documentation.
263
vector[N1] K_div_y1;
matrix[N1, N2] k_x1_x2;
matrix[N1, N2] v_pred;
vector[N2] f2_mu;
matrix[N2, N2] cov_f2;
matrix[N2, N2] diag_delta;
matrix[N1, N1] K;
K = cov_exp_quad(x1, alpha, rho);
for (n in 1:N1)
K[n, n] = K[n,n] + square(sigma);
L_K = cholesky_decompose(K);
K_div_y1 = mdivide_left_tri_low(L_K, y1);
K_div_y1 = mdivide_right_tri_low(K_div_y1',L_K)';
k_x1_x2 = cov_exp_quad(x1, x2, alpha, rho);
f2_mu = (k_x1_x2' *K_div_y1);
v_pred = mdivide_left_tri_low(L_K, k_x1_x2);
cov_f2 = cov_exp_quad(x2, alpha, rho) - v_pred' *v_pred;
diag_delta = diag_matrix(rep_vector(delta,N2));
f2 = multi_normal_rng(f2_mu, cov_f2 + diag_delta);
}
return f2;
}
}
data {
int<lower=1> N1;
real x1[N1];
vector[N1] y1;
int<lower=1> N2;
real x2[N2];
}
transformed data {
vector[N1] mu = rep_vector(0, N1);
real delta = 1e-9;
}
parameters {
real<lower=0> rho;
real<lower=0> alpha;
real<lower=0> sigma;
}
model {
matrix[N1, N1] L_K;
{
matrix[N1, N1] K = cov_exp_quad(x1, alpha, rho);
264
real sq_sigma = square(sigma);
// diagonal elements
for (n1 in 1:N1)
K[n1, n1] = K[n1, n1] + sq_sigma;
L_K = cholesky_decompose(K);
}
rho ~ inv_gamma(5, 5);
alpha ~ normal(0, 1);
sigma ~ normal(0, 1);
y1 ~ multi_normal_cholesky(mu, L_K);
}
generated quantities {
vector[N2] f2;
vector[N2] y2;
f2 = gp_pred_rng(x2, y1, x1, alpha, rho, sigma, delta);
for (n2 in 1:N2)
y2[n2] = normal_rng(f2[n2], sigma);
}
Multiple-output Gaussian processes
Suppose we have observations yi∈RMobserved at xi∈RK. One can model the data
like so:
yi∼MultiNormal(f (xi), IMσ2)
f (x) ∼GP(m(x), K(x|θ, φ))
K(x|θ) ∈RM×M, f (x), m(x) ∈RM
where the K(x, x0|θ, φ)[m,m0]entry defines the covariance between fm(x) and
fm0(x0)(x). This construction of Gaussian processes allows us to learn the covariance
between the output dimensions of f (x). If we parameterize our kernel K:
K(x, x0|θ, φ)[m,m0]=k(x, x0|θ)k(m, m0|φ)
then our finite dimensional generative model for the above is:
f∼MatrixNormal(m(x), K(x|α, ρ), C(φ))
yi,m ∼Normal(fi,m, σ )
f∈RN×M
265
where K(x|α, ρ) is the exponentiated quadratic kernel we’ve used throughout this
chapter, and C(φ) is a positive-definite matrix, parameterized by some vector φ.
The MatrixNormal distribution has two covariance matrices: K(x|α, ρ) to encode
column covariance, and C(φ) to define row covariance. The salient features of the
MatrixNormal are that the rows of the matrix fare distributed:
f[n,] ∼MultiNormal(m(x)[n,], K(x|α, ρ)[n,n]C(φ))
and that the columns of the matrix fare distributed:
f[,m] ∼MultiNormal(m(x)[,m], K(x|α, ρ)C(φ)[m,m])
This also means means that EfTfis equal to trace(K(x|α, ρ)) ×C, whereas Ef f T
is trace(C) ×K(x|α, ρ). We can derive this using properties of expectation and the
MatrixNormal density.
We should set αto 1.0because the parameter is not identified unless we constrain
trace(C) =1. Otherwise, we can multiply αby a scalar dand Cby 1/d and our
likelihood will not change. We can generate a random variable ffrom a MatrixNormal
density in RN×Musing the following algorithm:
ηi,j ∼Normal(0,1)∀i, j
f=LK(x|1.0,ρ) η LC(φ)T
f∼MatrixNormal(0, K(x|1.0, ρ), C(φ))
η∈RN×M
LC(φ) =cholesky_decompose(C(φ))
LK(x|1.0,ρ) =cholesky_decompose(K(x|1.0, ρ))
This can be implemented in Stan using a latent-variable GP formulation. We’ve
used LkjCorr for C(φ), but any positive-definite matrix will do.
data {
int<lower=1> N;
int<lower=1> D;
real x[N];
matrix[N, D] y;
}
transformed data {
real delta = 1e-9;
}
parameters {
real<lower=0> rho;
vector<lower=0>[D] alpha;
266
real<lower=0> sigma;
cholesky_factor_corr[D] L_Omega;
matrix[N, D] eta;
}
model {
matrix[N, D] f;
{
matrix[N, N] K = cov_exp_quad(x, 1.0, rho);
matrix[N, N] L_K;
// diagonal elements
for (n in 1:N)
K[n, n] = K[n, n] + delta;
L_K = cholesky_decompose(K);
f = L_K *eta
*diag_pre_multiply(alpha, L_Omega)';
}
rho ~ inv_gamma(5, 5);
alpha ~ normal(0, 1);
sigma ~ normal(0, 1);
L_Omega ~ lkj_corr_cholesky(3);
to_vector(eta) ~ normal(0, 1);
to_vector(y) ~ normal(to_vector(f), sigma);
}
generated quantities {
matrix[D, D] Omega;
Omega = L_Omega *L_Omega';
}
267

19. Directions, Rotations, and Hyperspheres
Directional statistics involve data and/or parameters that are constrained to be di-
rections. The set of directions forms a sphere, the geometry of which is not smoothly
mappable to that of a Euclidean space because you can move around a sphere and
come back to where you started. This is why it is impossible to make a map of the
globe on a flat piece of paper where all points that are close to each other on the globe
are close to each other on the flat map. The fundamental problem is easy to visualize
in two dimensions, because as you move around a circle, you wind up back where you
started. In other words, 0 degrees and 360 degrees (equivalently, 0 and 2πradians)
pick out the same point, and the distance between 359 degrees and 2 degrees is the
same as the distance between 137 and 140 degrees.
Stan supports directional statistics by providing a unit-vector data type, the values
of which determine points on a hypersphere (circle in two dimensions, sphere in three
dimensions).
19.1. Unit Vectors
The length of a vector x∈RKis given by
kxk = √x>x=qx2
1+x2
2+ ··· + x2
K.
Unit vectors are defined to be vectors of unit length (i.e., length one).
With a variable declaration such as
unit_vector[K] x;
the value of xwill be constrained to be a vector of size Kwith unit length. Section 35.7
provides details on how a parameter constrained to be a unit-vector is transformed
to unconstrained space for use in Stan’s algorithms.
19.2. Circles, Spheres, and Hyperspheres
An n-sphere, written Sn, is defined as the set of (n +1)-dimensional unit vectors,
Sn= {x∈Rn+1:kxk = 1}.
Even though Snis made up of points in (n+1)dimensions, it is only an n-dimensional
manifold. For example, S2is defined as a set of points in R3, but each such point may
be described uniquely by a latitude and longitude. Geometrically, the surface defined
by S2in R3behaves locally like a plane, i.e., R2. However, the overall shape of S2is
268

not like a plane in that is compact (i.e., there is a maximum distance between points).
If you set off around the globe in a “straight line” (i.e., a geodesic), you wind up back
where you started eventually; that is why the geodesics on the sphere (S2) are called
“great circles,” and why we need to use some clever representations to do circular or
spherical statistics.
Even though Sn−1behaves locally like Rn−1, there is no way to smoothly map
between them. For example, because latitude and longitude work on a modular basis
(wrapping at 2πradians in natural units), they do not produce a smooth map.
Like a bounded interval (a, b), in geometric terms, a sphere is compact in that the
distance between any two points is bounded.
19.3. Transforming to Unconstrained Parameters
Stan (inverse) transforms arbitrary points in RK+1to points in SKusing the auxiliary
variable approach of Marsaglia (1972). A point y∈RKis transformed to a point
x∈SK−1by
x=y
py>y.
The problem with this mapping is that it’s many to one; any point lying on a vector
out of the origin is projected to the same point on the surface of the sphere. Marsaglia
(1972) introduced an auxiliary variable interpretation of this mapping that provides
the desired properties of uniformity; see Section 35.7 for details.
Warning: undefined at zero!
The above mapping from Rnto Snis not defined at zero. While this point outcome
has measure zero during sampling, and may thus be ignored, it is the default initial-
ization point and thus unit vector parameters cannot be initialized at zero. A simple
workaround is to initialize from a very small interval around zero, which is an option
built into all of the Stan interfaces.
19.4. Unit Vectors and Rotations
Unit vectors correspond directly to angles and thus to rotations. This is easy to see in
two dimensions, where a point on a circle determines a compass direction, or equiv-
alently, an angle θ). Given an angle θ, a matrix can be defined, the pre-multiplication
by which rotates a point by an angle of θ. For angle θ(in two dimensions), the 2×2
rotation matrix is defined by
Rθ="cos θ−sin θ
sin θcos θ#.
269
Given a two-dimensional vector x,Rθxis the rotation of x(around the origin) by θ
degrees.
19.5. Circular Representations of Days and Years
A 24-hour clock naturally represents the progression of time through the day, moving
from midnight to noon and back again in one rotation. A point on a circle divided
into 24 hours is thus a natural representation for the time of day. Similarly, years
cycle through the seasons and return to the season from which they started.
In human affairs, temporal effects often arise by convention. These can be mod-
eled directly with ad-hoc predictors for holidays and weekends, or with data normal-
ization back to natural scales for daylight savings time.
270
20. Solving Algebraic Equations
Stan provides a built-in mechanism for specifying and solving systems of algebraic
equations, using the Powell hybrid method (Powell,1970). The function signatures for
Stan’s algebraic solver can be found in Chapter 47. Solving any system of algebraic
equations can be translated into a root-finding problem, that is, given a function f,
we wish to find ysuch that f (y) =0.
20.1. Example: System of Nonlinear Algebraic Equations
For systems of linear algebraic equations, we recommend solving the system using
matrix division. The algebraic solver becomes handy when we want to solve non-
linear equations. As an illustrative example, we consider a nonlinear system of two
equations with two unknowns. Our goal is to simultaneously solve all equations for
y1and y2, such that the vector zgoes to 0.
z1=y1−θ1
z2=y1y2+θ2
(20.1)
20.2. Coding an Algebraic System
A system of algebraic equations is coded directly in Stan as a function with a strictly
specified signature. For example, the nonlinear system given by Equation (20.1) can
be coded using the following function in Stan (see Chapter 24 for more information
on coding user-defined functions).
vector system(vector y, // unknowns
vector theta, // parameters
real[] x_r, // data (real)
real[] x_i) { // data (integer)
vector[2] z;
z[1] = y[1] - theta[1];
z[2] = y[1] *y[2] - theta[2];
return z;
}
The function takes the unknowns we wish to solve for in y(a vector), the system
parameters in theta (a vector), the real data in x_r (a real array) and the integer data
in x_i (an integer array). The system function returns the value of the function (a
vector), for which we want to compute the roots. Our example does not use real or
integer data. Nevertheless, these unused arguments must be included in the system
function with exactly the signature above.
271
Strict Signature
The function defining the system must have exactly these argument types and return
type. This may require passing in zero-length arrays for data or a zero-length vector
for parameters if the system does not involve data or parameters.
20.3. Calling the Algebraic Solver
Let’s suppose θ= {3,6}. To call the algebraic solver, we need to provide an initial
guess. This varies on a case-by-case basis, but in general a good guess will speed up
the solver and, in pathological cases, even determine whether the solver converges
or not. If the solver does not converge, the metropolis proposal gets rejected and a
warning message, stating no acceptable solution was found, is issued.
The solver has three tuning parameters to determine convergence: the relative
tolerance, the function tolerance, and the maximum number of steps. Their default
values are respectively 1e-10 (10−10), 1e-6 (10−6), and 1e3 (103). Their behavior is
explained in Section 20.4. The following code returns the solution to our nonlinear
algebraic system:
transformed data {
vector[2] y_guess = {1, 1};
real x_r[0];
int x_i[0];
}
transformed parameters {
vector[2] theta = {3, 6};
vector[2] y;
y = algebra_solver(system, y_guess, theta, x_r, x_i);
}
which returns y= {3,−2}.
Data versus Parameters
The arguments for the initial guess y_guess, the real data x_r, and the integer data
x_i must be expressions that only involve data or transformed data variables. The
parameters theta is the only argument which may involve parameters.
272
Length of the Algebraic Function and of the Vector of Unknowns
The Jacobian of the solution with respect to the parameters is computed using the
implicit function theorem, which imposes certain restrictions. In particular, the Jaco-
bian of the algebraic function fwith respect to the unknowns xmust be invertible.
This requires the Jacobian to be square, meaning f (y) and yhave the same length or,
in other words the number of equations in the system is the same as the number of
unknowns.
Pathological Solutions
Certain systems may be degenerate, meaning they have multiple solutions. The al-
gebraic solver will not report these cases, as the algorithm stops once it has found
an acceptable solution. The initial guess will often determine which solution gets
found first. The degeneracy may be broken by putting additional constraints on the
solution. For instance, it might make physical sense for a solution to be positive or
negative.
On the other hand, a system may not have a solution (for a given point in the
parameter space). In that case, the solver will not converge to a solution. When the
solver fails to do so, the current metropolis proposal gets rejected.
20.4. Control Parameters for the Algebraic Solver
The call to the algebraic solver shown above uses the default control settings. The
solver allows three additional parameters, all of which must be supplied if any of
them is supplied.
y = algebra_solver(system, y_guess, theta, x_r, x_i,
rel_tol, f_tol, max_steps);
The three control arguments are relative tolerance, function tolerance, and maxi-
mum number of steps. Both tolerances need to be satisfied. If one of them is not met,
the metropolis proposal gets rejected with a warning message explaining which crite-
rion was not satisfied. The default values for the control arguments are respectively
1e-10 (10−10), 1e-6 (10−6), and 1e3 (103).
Tolerance
The relative and function tolerances control the accuracy of the solution generated
by the solver. Relative tolerances are relative to the solution value. The function
tolerance is the norm of the algebraic function, once we plug in the proposed solution.
This norm should go to 0 (equivalently, all elements of the vector function are 0). It
273
helps to think about this geometrically. Ideally the output of the algebraic function
is at the origin; the norm measures deviations from this ideal. As the length of the
return vector increases, a certain function tolerance becomes an increasingly difficult
criterion to meet, given each individual element of the vector contribute to the norm.
Smaller relative tolerances produce more accurate solutions but require more
computational time.
Sensitivity Analysis
The tolerances should be set low enough that setting them lower does not change the
statistical properties of posterior samples generated by the Stan program.
Maximum Number of Steps
The maximum number of steps can be used to stop a runaway simulation. This can
arise in MCMC when a bad jump is taken, particularly during warmup. If the limit is
hit, the current metropolis proposal gets rejected. Users will see a warning message
stating the maximum number of steps has been exceeded.
274
21. Solving Differential Equations
Stan provides a built-in mechanism for specifying and solving systems of ordinary
differential equations (ODEs). Stan provides two different integrators, one tuned for
solving non-stiff systems and one for stiff systems.
•rk45: a fourth and fifth order Runge-Kutta method for non-stiff systems (Dor-
mand and Prince,1980;Ahnert and Mulansky,2011), and
•bdf: a variable-step, variable-order, backward-differentiation formula imple-
mentation for stiff systems (Cohen and Hindmarsh,1996;Serban and Hind-
marsh,2005)
For a discussion of stiff ODE systems, see Section 21.5. In a nutshell, the stiff solvers
are slower, but more robust; how much so depends on the system and the region
of parameter space. The function signatures for Stan’s ODE solvers can be found in
Chapter 48.
21.1. Example: Simple Harmonic Oscillator
As a concrete example of a system of ODEs, consider a harmonic oscillator, which
is characterized by an equilibrium position and a restoring force proportional to the
displacement with friction. The system state will be a pair y=(y1, y2)representing
position and momentum (i.e., a point in phase space). The change in the system with
respect to time is given by the following differential equations.1
d
dt y1=y2
d
dt y2= −y1−θy2(21.1)
The state equations implicitly define the system state at a given time as a function of
an initial state, elapsed time since the initial state, and the system parameters.
Solutions Given Initial Conditions
Given a value of the system parameter θand an initial state y(t0)at time t0, it is
possible to simulate the evolution of the solution numerically in order to calculate
y(t) for a specified sequence of times t0< t1< t2<···.
1This example is drawn from the documentation for the Boost Numeric Odeint library (Ahnert and
Mulansky,2011), which Stan uses to implement the rk45 solver.
275
21.2. Coding an ODE System
A system of ODEs is coded directly in Stan as a function with a strictly specified
signature. For example, the simple harmonic oscillator given in Equation (21.1), can
be coded using the following function in Stan (see Chapter 24 for more information
on coding user-defined functions).
real[] sho(real t, // time
real[] y, // state
real[] theta, // parameters
real[] x_r, // data (real)
int[] x_i) { // data (integer)
real dydt[2];
dydt[1] = y[2];
dydt[2] = -y[1] - theta[1] *y[2];
return dydt;
}
The function takes in a time t(a real value), a a system state y(real array), system
parameters theta (a real array), along with real data in variable x_r (a real array) and
integer data in variable x_i (an integer array). The system function returns the array
of derivatives of the system state with respect to time, evaluated at time tand state
y. The simple harmonic oscillator coded here does not have time-sensitive equations;
that is, tdoes not show up in the definition of dydt. The simple harmonic oscillator
does not use real or integer data, either. Nevertheless, these unused arguments must
be included as arguments in the system function with exactly the signature shown
above.
Strict Signature
The function defining the system must have exactly these argument types and re-
turn type. This may require passing in zero-length arrays for data or parameters if
the system does not involve data or parameters. A full example for the simple har-
monic oscillator, which does not depend on any constant data variables, is provided
in Figure 21.2.
Discontinuous ODE System Function
The ODE integrator is able to integrate over discontinuities in the state function,
although the accuracy of points near the discontinuity may be problematic (requiring
many small steps). An example of such a discontinuity is a lag in a pharmacokinetic
276
model, where a concentration is going to be zero for times 0< t < t0for some lag-
time t0, whereas it will be nonzero for times t≥t0. As an example, would involve
code in the system such as
if (t < t_lag)
return 0;
else
... return non-zero value...;
Varying Initial Time
Stan’s ODE solvers require the initial time argument to be a constant (i.e., a function
of data or transformed data variables and constants). This means that, in general,
there’s no way to use the integrate_ode function to accept a parameter for the
initial time and thus no way in general to estimate the initial time of an ODE system
from measurements.
21.3. Solving a System of Linear ODEs using a Matrix Exponential
The solution to d
dt y=ay is y=y0eat , where the constant y0is determined by bound-
ary conditions. We can extend this solution to the vector case:
d
dt y=Ay (21.2)
where yis now a vector of length nand Ais an nby nmatrix. The solution is
then given by:
y=etAy0(21.3)
where the matrix exponential is formally defined by the convergent power series:
etA =∞
X
n=0
tAn
n!=I+tA +t2A2
2!+... (21.4)
We can apply this technique to the simple harmonic oscillator example, by setting
y="y1
y2#A="0 1
−1−θ#(21.5)
The Stan model to simulate noisy observations using a matrix exponential func-
tion is given by Figure 21.1. Note that because we are performing matrix operations,
we declare y0 and y_hat as vectors, instead of using arrays, as in the previous
example code (Figure 21.3).
277

data {
int<lower=1> T;
vector[2] y0;
real ts[T];
real theta[1];
}
model {
}
generated quantities {
vector[2] y_hat[T];
matrix[2, 2] A = [[ 0, 1],
[-1, -theta[1]]]
for (t in 1:T)
y_hat[t] = matrix_exp((t - 1) *A) *y0;
// add measurement error
for (t in 1:T) {
y_hat[t, 1] += normal_rng(0, 0.1);
y_hat[t, 2] += normal_rng(0, 0.1);
}
}
Figure 21.1: Stan program to simulate noisy measurements from a simple harmonic oscillator.
The system of linear differential equations is coded as a matrix. The system parameters theta
and initial state y0 are read in as data along observation times ts. The generated quantities
block is used to solve the ODE for the specified times and then add random measurement er-
ror, producing observations y_hat. Because the ODEs are linear, we can use the matrix_exp
function to solve the system.
In general, computing a matrix exponential will be more efficient than using a
numerical solver. We can however only apply this technique to systems of linear
ODEs.
21.4. Measurement Error Models
Statistical models or differential equations may be used to estimate the parameters
and/or initial state of a dynamic system given noisy measurements of the system
state at a finite number of time points.
For instance, suppose the simple harmonic oscillator has a parameter value of
θ=0.15 and initial state y(t =0)=(1,0). Now suppose the system is observed at
10 time points, say t=1,2, ..., 10, where each measurement of y(t) has independent
Normal(0,0.1)error in both dimensions (y1(t) and y2(t)). A plot of such measure-
ments is shown in Figure 21.2.
278
●
●
●
●
●
●
●
●
●
●
●
t=0
−0.5
0.0
0.5
−1.0 −0.5 0.0 0.5 1.0
y1
y2
Figure 21.2: Trajectory of the simple harmonic oscillator given parameter θ=0.15 and initial
condition y(t =0)=(1,0)with additional independent Normal(0,0.1)measurement error in
both dimensions.
Simulating Noisy Measurements
The data used to make this plot is derived from the Stan model to simulate noisy
observations given in Figure 21.3.
This program illustrates the way in which the ODE solver is called in a Stan pro-
gram,
y_hat = integrate_ode_rk45(sho, y0, t0, ts, theta, x_r, x_i);
This assigns the solutions to the system defined by function sho, given initial state
y0, initial time t0, requested solution times ts, parameters theta, real data x, and
integer data x_int. The call explicitly specifies the Runge-Kutta solver (for non-stiff
systems).
Here, the ODE solver is called in the generated quantities block to provide a 10 ×2
array of solutions y_hat to which measurement error is added using the normal
pseudo-random number generating function normal_rng. The number of rows in
the solution array is the same as the size of ts, the requested solution times.
Data versus Parameters
Unlike other functions, the integration functions for ODEs are limited as to the origins
of variables in their arguments. In particular, the time t, real data x, and integer data
x_int must be expressions that only involve data or transformed data variables. The
initial state yor the parameters theta are the only arguments which may involve
parameters.
279
functions {
real[] sho(real t,
real[] y,
real[] theta,
real[] x_r,
int[] x_i) {
real dydt[2];
dydt[1] = y[2];
dydt[2] = -y[1] - theta[1] *y[2];
return dydt;
}
}
data {
int<lower=1> T;
real y0[2];
real t0;
real ts[T];
real theta[1];
}
transformed data {
real x_r[0];
int x_i[0];
}
model {
}
generated quantities {
real y_hat[T,2] = integrate_ode_rk45(sho, y0, t0, ts, theta, x_r, x_i);
// add measurement error
for (t in 1:T) {
y_hat[t, 1] += normal_rng(0, 0.1);
y_hat[t, 2] += normal_rng(0, 0.1);
}
}
Figure 21.3: Stan program to simulate noisy measurements from a simple harmonic oscillator.
The system of differential equations is coded as a function. The system parameters theta and
initial state y0 are read in as data along with the initial time t0 and observation times ts. The
generated quantities block is used to solve the ODE for the specified times and then add random
measurement error, producing observations y_hat. Because the system is not stiff, the rk45
solver is used.
280

Estimating System Parameters and Initial State
Stan provides statistical inference for unknown initial states and/or parameters. The
ODE solver will be used deterministically to produce predictions, much like the linear
predictor does in a generalized linear model. These states will then be observed with
measurement error.
A Stan program that can be used to estimate both the initial state and param-
eter value for the simple harmonic oscillator given noisy observations is given in
Figure 21.4. Compared to the simulation model in Figure 21.3, the model to esti-
mate parameters uses the integrate_ode function in the model block rather than
the generated quantities block. There are Cauchy priors on the measurement error
scales sigma and unit normal priors on the components of parameter array theta
and initial state parameter array y0. The solutions to the ODE are then assigned to
an array y_hat, which is then used as the location in the observation noise model as
follows.
y_hat = integrate_ode_rk45(sho, y0, t0, ts, theta, x_r, x_i);
for (t in 1:T)
y[t] ~ normal(y_hat[t], sigma);
As with other regression-like models, it’s easy to change the noise model to be robust
(e.g., Student-t distributed), to be correlated in the state variables (e.g., with a multi-
variate normal distribution), or both (e.g., with a multivariate Student-t distribution).
In this simple model with independent noise scales of 0.10, 10 observed data
points for times t=1, ..., 10 is sufficient to reliably estimate the ODE parameter,
initial state, and noise scales.
21.5. Stiff ODEs
A stiff system of ordinary differential equations can be roughly characterized as sys-
tems presenting numerical difficulties for gradient-based stepwise solvers. Stiffness
typically arises due to varying curvature in the dimensions of the state, for instance
one component evolving orders of magnitude more slowly than another.2
Stan provides a specialized solver for stiff ODEs (Cohen and Hindmarsh,1996;
Serban and Hindmarsh,2005). An ODE system is specified exactly the same way with
a function of exactly the same signature. The only difference is in the call to the
integrator for the solution; the rk45 suffix is replaced with bdf, as in
2Not coincidentally, high curvature in the posterior of a general Stan model poses the same kind of
problem for Euclidean Hamiltonian Monte Carlo (HMC) sampling. The reason is that HMC is based on
the leapfrog algorithm, a gradient-based, stepwise numerical differential equation solver specialized for
Hamiltonian systems with separable potential and kinetic energy terms.
281
functions {
real[] sho(real t,
real[] y,
real[] theta,
real[] x_r,
int[] x_i) {
real dydt[2];
dydt[1] = y[2];
dydt[2] = -y[1] - theta[1] *y[2];
return dydt;
}
}
data {
int<lower=1> T;
real y[T,2];
real t0;
real ts[T];
}
transformed data {
real x_r[0];
int x_i[0];
}
parameters {
real y0[2];
vector<lower=0>[2] sigma;
real theta[1];
}
model {
real y_hat[T,2];
sigma ~ cauchy(0, 2.5);
theta ~ normal(0, 1);
y0 ~ normal(0, 1);
y_hat = integrate_ode_rk45(sho, y0, t0, ts, theta, x_r, x_i);
for (t in 1:T)
y[t] ~ normal(y_hat[t], sigma);
}
Figure 21.4: Stan program to estimate unknown initial conditions y0 and system parameter
theta for the simple harmonic oscillator with independent normal measurement error.
282
y_hat = integrate_ode_bdf(sho, y0, t0, ts, theta, x_r, x_i);
Using the stiff (bdf) integrator on a system that is not stiff may be much slower
than using the non-stiff (rk45) integrator; this is because it computes additional Ja-
cobians to guide the integrator. On the other hand, attempting to use the non-stiff
integrator for a stiff system will fail due to requiring a small step size and too many
steps.
21.6. Control Parameters for ODE Solving
The calls to the integrators shown above just used the default control settings. Both
the non-stiff and stiff integrators allow three additional arguments, all of which must
be supplied if any of them is required.
y_hat = integrate_ode_bdf(sho, y0, t0, ts, theta, x_r, x_i,
rel_tol, abs_tol, max_steps);
The three control arguments are relative tolerance, absolute tolerance, and maximum
number of steps. The default values for relative and absolute tolerance are both 1e-6
(10−6), and the default maximum number of steps is 1e6 (106).
Tolerance
The relative and absolute tolerance control the accuracy of the solutions generated by
the integrator. Relative tolerances are relative to the solution value, whereas absolute
tolerances is the maximum absolute error allowed in a solution.
Smaller tolerances produce more accurate solutions. Smaller tolerances also re-
quire more computation time.
Sensitivity Analysis
The tolerances should be set low enough that setting them lower does not change the
statistical properties of posterior samples generated by the Stan program.
Maximum Number of Steps
The maximum number of steps can be used to stop a runaway simulation. This can
arise in MCMC when a bad jump is taken, particularly during warmup. With the
non-stiff solver, this may result in jumping into a stiff region of the parameter space,
which would require a very small step size and very many steps to satisfy even modest
tolerances.
283
Part IV
Programming Techniques
284

22. Reparameterization & Change of Variables
As with BUGS, Stan supports a direct encoding of reparameterizations. Stan also sup-
ports changes of variables by directly incrementing the log probability accumulator
with the log Jacobian of the transform.
22.1. Theoretical and Practical Background
A Bayesian posterior is technically a probability measure, which is a parameterization-
invariant, abstract mathematical object.1Stan’s modeling language, on the other
hand, defines a probability density, which is a non-unique, parameterization-
dependent function in RN→R+. In practice, this means a given model can be repre-
sented different ways in Stan, and different representations have different computa-
tional performances.
As pointed out by Gelman (2004) in a paper discussing the relation between pa-
rameterizations and Bayesian modeling, a change of parameterization often carries
with it suggestions of how the model might change, because we tend to use certain
natural classes of prior distributions. Thus, it’s not just that we have a fixed distri-
bution that we want to sample from, with reparameterizations being computational
aids. In addition, once we reparameterize and add prior information, the model itself
typically changes, often in useful ways.2
22.2. Reparameterizations
Reparameterizations may be implemented directly using the transformed parameters
block or just in the model block.
Beta and Dirichlet Priors
The beta and Dirichlet distributions may both be reparameterized from a vector of
counts to use a mean and total count.
1This is in contrast to (penalized) maximum likelihood estimates, which are not parameterization invari-
ant.
2Gelman’s handy statistical lexicon (http://andrewgelman.com/2009/05/24/handy_statistic/)
calls this The Pinocchio Principle, “A model that is created solely for computational reasons can take on
a life of its own.” This principle is also related to what Gelman calls The Folk Theorem, “When you have
computational problems, often there’s a problem with your model.”
285
Beta Distribution
For example, the Beta distribution is parameterized by two positive count parameters
α, β > 0. The following example illustrates a hierarchical Stan model with a vector
of parameters theta are drawn i.i.d. for a Beta distribution whose parameters are
themselves drawn from a hyperprior distribution.
parameters {
real<lower = 0> alpha;
real<lower = 0> beta;
...
model {
alpha ~ ...
beta ~ ...
for (n in 1:N)
theta[n] ~ beta(alpha, beta);
...
It is often more natural to specify hyperpriors in terms of transformed parame-
ters. In the case of the Beta, the obvious choice for reparameterization is in terms of
a mean parameter
φ=α/(α +β)
and total count parameter
λ=α+β.
Following (Gelman et al.,2013, Chapter 5), the mean gets a uniform prior and the
count parameter a Pareto prior with p(λ) ∝λ−2.5.
parameters {
real<lower=0,upper=1> phi;
real<lower=0.1> lambda;
...
transformed parameters {
real<lower=0> alpha;
real<lower=0> beta;
...
alpha = lambda *phi;
beta = lambda *(1 - phi);
...
model {
phi ~ beta(1, 1); // uniform on phi, could drop
lambda ~ pareto(0.1, 1.5);
for (n in 1:N)
theta[n] ~ beta(alpha, beta);
...
286
The new parameters, phi and lambda, are declared in the parameters block and the
parameters for the Beta distribution, alpha and beta, are declared and defined in
the transformed parameters block. And If their values are not of interest, they could
instead be defined as local variables in the model as follows.
model {
real alpha;
real beta;
alpha = lambda *phi;
beta = lambda *(1 - phi);
...
for (n in 1:N)
theta[n] ~ beta(alpha, beta);
...
}
With vectorization, this could be expressed more compactly and efficiently as follows.
model {
theta ~ beta(lambda *phi, lambda *(1 - phi));
...
}
If the variables alpha and beta are of interest, they can be defined in the transformed
parameter block and then used in the model.
Jacobians not Necessary
Because the transformed parameters are being used, rather than given a distribution,
there is no need to apply a Jacobian adjustment for the transform. For example, in the
beta distribution example, alpha and beta have the correct posterior distribution.
Dirichlet Priors
The same thing can be done with a Dirichlet, replacing the mean for the Beta, which
is a probability value, with a simplex. Assume there are K > 0dimensions being
considered (K=1is trivial and K=2reduces to the beta distribution case). The
traditional prior is
parameters {
vector[K] alpha;
simplex[K] theta[N];
...
model {
alpha ~ ...;
287
for (n in 1:N)
theta[n] ~ dirichlet(alpha);
}
This provides essentially Kdegrees of freedom, one for each dimension of alpha,
and it is not obvious how to specify a reasonable prior for alpha.
An alternative coding is to use the mean, which is a simplex, and a total count.
parameters {
simplex[K] phi;
real<lower=0> kappa;
simplex[K] theta[N];
...
transformed parameters {
vector[K] alpha = kappa *theta;
...
}
model {
phi ~ ...;
kappa ~ ...;
for (n in 1:N)
theta[n] ~ dirichlet(alpha);
Now it is much easier to formulate priors, because phi is the expected value of theta
and kappa (minus K) is the strength of the prior mean measured in number of prior
observations.
Transforming Unconstrained Priors: Probit and Logit
If the variable uhas a distribution, then logit(u) is distributed as Logistic(0,1). This is
because inverse logit is the cumulative distribution function (cdf) for the logistic dis-
tribution, so that the logit function itself is the inverse cdf and thus maps a uniform
draw in (0,1)to a logistically-distributed quantity.
Things work the same way for the probit case: if uhas a Uniform(0,1)distribu-
tion, then Φ−1(u) has a Normal(0,1)distribution. The other way around, if vhas a
Normal(0,1)distribution, then Φ(v) has a Uniform(0,1)distribution.
In order to use the probit and logistic as priors on variables constrained to (0,1),
create an unconstrained variable and transform it appropriately. For comparison, the
following Stan program fragment declares a (0,1)-constrained parameter theta and
gives it a beta prior, then uses it as a parameter in a distribution (here using foo as a
placeholder).
parameters {
real<lower = 0, upper = 1> theta;
288
...
model {
theta ~ beta(a, b);
...
y ~ foo(theta);
...
If the variables aand bare one, then this imposes a uniform distribution theta. If a
and bare both less than one, then the density on theta has a U shape, whereas if they
are both greater than one, the density of theta has an inverted-U or more bell-like
shape.
Roughly the same result can be achieved with unbounded parameters that are
probit or inverse-logit-transformed. For example,
parameters {
real theta_raw;
...
transformed parameters {
real<lower = 0, upper = 1> theta = inv_logit(theta_raw);
...
model {
theta_unc ~ logistic(mu, sigma);
...
y ~ foo(theta);
...
In this model, an unconstrained parameter theta_raw gets a logistic prior, and then
the transformed parameter theta is defined to be the inverse logit of theta_raw.
In this parameterization, inv_logit(mu) is the mean of the implied prior on theta.
The prior distribution on theta will be flat if sigma is one and mu is zero, and will be
U-shaped if sigma is larger than one and bell shaped if sigma is less than one.
When moving from a variable in (0,1)to a simplex, the same trick may be per-
formed using the softmax function, which is a multinomial generalization of the in-
verse logit function. First, consider a simplex parameter with a Dirichlet prior.
parameters {
simplex[K] theta;
...
model {
theta ~ dirichlet(a);
...
y ~ foo(theta);
Now ais a vector with Krows, but it has the same shape properties as the pair aand
bfor a beta; the beta distribution is just the distribution of the first component of
289

a Dirichlet with parameter vector [ab]>. To formulate an unconstrained prior, the
exact same strategy works as for the beta.
parameters {
vector[K] theta_raw;
...
transformed parameters {
simplex[K] theta = softmax(theta_raw);
...
model {
theta_raw ~ multi_normal_cholesky(mu, L_Sigma);
The multivariate normal is used for convenience and efficiency with its Cholesky-
factor parameterization. Now the mean is controlled by softmax(mu), but we have
additional control of covariance through L_Sigma at the expense of having on the
order of K2parameters in the prior rather than order K. If no covariance is desired,
the number of parameters can be reduced back to Kusing a vectorized normal distri-
bution as follows.
theta_raw ~ normal(mu, sigma);
where either or both of mu and sigma can be vectors.
22.3. Changes of Variables
Changes of variables are applied when the transformation of a parameter is character-
ized by a distribution. The standard textbook example is the lognormal distribution,
which is the distribution of a variable y > 0whose logarithm log yhas a normal
distribution. Note that the distribution is being assigned to log y.
The change of variables requires an adjustment to the probability to account for
the distortion caused by the transform. For this to work, univariate changes of vari-
ables must be monotonic and differentiable everywhere in their support.
For univariate changes of variables, the resulting probability must be scaled by
the absolute derivative of the transform (see Section 35.1 for more precise definitions
of univariate changes of variables).
In the case of log normals, if y’s logarithm is normal with mean µand deviation
σ, then the distribution of yis given by
p(y) =Normal(log y|µ, σ )
d
dy log y
=Normal(log y|µ, σ ) 1
y.
Stan works on the log scale to prevent underflow, where
log p(y) =log Normal(log y|µ, σ ) −log y.
290

In Stan, the change of variables can be applied in the sampling statement. To
adjust for the curvature, the log probability accumulator is incremented with the
log absolute derivative of the transform. The lognormal distribution can thus be
implemented directly in Stan as follows.3
parameters {
real<lower=0> y;
...
model {
log(y) ~ normal(mu, sigma);
target += -log(y);
...
It is important, as always, to declare appropriate constraints on parameters; here yis
constrained to be positive.
It would be slightly more efficient to define a local variable for the logarithm, as
follows.
model {
real log_y;
log_y = log(y);
log_y ~ normal(mu, sigma);
target += -log_y;
...
If ywere declared as data instead of as a parameter, then the adjustment can be
ignored because the data will be constant and Stan only requires the log probability
up to a constant.
Change of Variables vs. Transformations
This section illustrates the difference between a change of variables and a simple
variable transformation. A transformation samples a parameter, then transforms it,
whereas a change of variables transforms a parameter, then samples it. Only the
latter requires a Jacobian adjustment.
Note that it does not matter whether the probability function is expressed using a
sampling statement, such as
log(y) ~ normal(mu, sigma);
or as an increment to the log probability function, as in
target += normal_lpmf(log(y) | mu, sigma);
3This example is for illustrative purposes only; the recommended way to implement the lognormal
distribution in Stan is with the built-in lognormal probability function (see Section 55.1).
291

Gamma and Inverse Gamma Distribution
Like the log normal, the inverse gamma distribution is a distribution of variables
whose inverse has a gamma distribution. This section contrasts two approaches, first
with a transform, then with a change of variables.
The transform based approach to sampling y_inv with an inverse gamma distri-
bution can be coded as follows.
parameters {
real<lower=0> y;
}
transformed parameters {
real<lower=0> y_inv;
y_inv = 1 / y;
}
model {
y ~ gamma(2,4);
}
The change-of-variables approach to sampling y_inv with an inverse gamma distri-
bution can be coded as follows.
parameters {
real<lower=0> y_inv;
}
transformed parameters {
real<lower=0> y;
y = 1 / y_inv; // change variables
}
model {
y ~ gamma(2,4);
target += -2 *log(y_inv); // Jacobian adjustment;
}
The Jacobian adjustment is the log of the absolute derivative of the transform, which
in this case is
log
d
du 1
u
=log | − u−2| = log u−2= −2log u.
Multivariate Changes of Variables
In the case of a multivariate transform, the log of the Jacobian of the transform must
be added to the log probability accumulator (see the subsection of Section 35.1 on
292
multivariate changes of variables for more precise definitions of multivariate trans-
forms and Jacobians). In Stan, this can be coded as follows in the general case where
the Jacobian is not a full matrix.
parameters {
vector[K] u; // multivariate parameter
...
transformed parameters {
vector[K] v; // transformed parameter
matrix[K, K] J; // Jacobian matrix of transform
... compute v as a function of u ...
... compute J[m, n] = d.v[m] / d.u[n] ...
target += log(fabs(determinant(J)));
...
model {
v ~ ...;
...
Of course, if the Jacobian is known analytically, it will be more efficient to apply it di-
rectly than to call the determinant function, which is neither efficient nor particularly
stable numerically.
In many cases, the Jacobian matrix will be triangular, so that only the diagonal
elements will be required for the determinant calculation. Triangular Jacobians arise
when each element v[k] of the transformed parameter vector only depends on ele-
ments u[1], ..., u[k] of the parameter vector. For triangular matrices, the determi-
nant is the product of the diagonal elements, so the transformed parameters block of
the above model can be simplified and made more efficient by recoding as follows.
transformed parameters {
...
vector[K] J_diag; // diagonals of Jacobian matrix
...
... compute J[k, k] = d.v[k] / d.u[k] ...
target += sum(log(J_diag));
...
22.4. Vectors with Varying Bounds
Stan only allows a single lower and upper bound to be declared in the constraints
for a container data type. But suppose we have a vector of parameters and a vector
of lower bounds? Then the transforms and Jacobians (all of which are described in
Chapter 35) have to be calculated in Stan.
293
Varying Lower Bounds
For example, suppose there is a vector parameter αwith a vector Lof lower bounds.
The simplest way to deal with this if Lis a constant is to shift a lower-bounded
parameter.
data {
int N;
vector[N] L; // lower bounds
...
parameters {
vector<lower=0>[N] alpha_raw;
...
transformed parameters {
vector[N] alpha = L + alpha_raw;
...
The Jacobian for adding a constant is one, so its log drops out of the log density.
Even if the lower bound is a parameter rather than data, there is no Jacobian
required, because the transform from (L, αraw )to (L +αraw , αraw produces a Jacobian
derivative matrix with a unit determinant.
It’s also possible implement the transform by directly transforming an uncon-
strained parameter and accounting for the Jacobian.
data {
int N;
vector[N] L; // lower bounds
...
parameters {
vector[N] alpha_raw;
...
transformed parameters {
vector[N] alpha;
alpha = L + exp(my_vec_raw);
...
model {
target += sum(alpha_raw); // log Jacobian
...
The adjustment in the the log Jacobian determinant of the transform mapping αraw to
α=L+exp(αraw). The details are simple in this case because the Jacobian is diagonal;
see Section 35.2 for details. Here Lcan even be a vector containing parameters that
don’t depend on αraw; if the bounds do depend on αraw then a revised Jacobian needs
to be calculated taking into account the dependencies.
294
Varying Upper and Lower Bounds
Suppose there are lower and upper bounds that vary by parameter. These can be
applied to shift and rescale a parameter constrained to (0,1).
data {
int N;
vector[N] L; // lower bounds
vector[N] U; // upper bounds
...
parameters {
vector<lower=0, upper=1>[N] alpha_raw;
...
transformed parameters {
vector[N] alpha = L + (U - L) .*alpha_raw;
The expression U-Lis multiplied by alpha_raw elementwise to produce a vector
of variables in (0, U −L), then adding Lresults in a variable ranging between (L, U).
In this case, it is important that Land Uare constants, otherwise a Jacobian would
be required when multiplying by U−L.
295

23. Custom Probability Functions
Custom distributions may also be implemented directly within Stan’s programming
language. The only thing that is needed is to increment the total log probability. The
rest of the chapter provides two examples.
23.1. Examples
Triangle Distribution
A simple example is the triangle distribution, whose density is shaped like an isosce-
les triangle with corners at specified bounds and height determined by the constraint
that a density integrate to 1. If α∈Rand β∈Rare the bounds, with α < β, then
y∈(α, β) has a density defined as follows.
Triangle(y|α, β) =2
β−α 1−
y−α+β
β−α
!
If α= −1,β=1, and y∈(−1,1), this reduces to
Triangle(y| − 1,1)=1− |y|.
Consider the following Stan implementation of Triangle(−1,1)for sampling.1
parameters {
real<lower=-1,upper=1> y;
}
model {
target += log1m(fabs(y));
}
The single scalar parameter yis declared as lying in the interval (-1,1). The total
log probability is incremented with the joint log probability of all parameters, i.e.,
log Triangle(y| − 1,1). This value is coded in Stan as log1m(fabs(y)). The function
log1m is is defined so that log1m(x) has the same value as log(1.0-x), but the
computation is faster, more accurate, and more stable.
The constrained type real<lower=-1,upper=1> declared for yis critical for cor-
rect sampling behavior. If the constraint on yis removed from the program, say by
declaring yas having the unconstrained scalar type real, the program would compile,
but it would produce arithmetic exceptions at run time when the sampler explored
values of youtside of (−1,1).
1The program is available in the Stan example model repository; see http://mc-stan.org/
documentation.
296

Now suppose the log probability function were extended to all of Ras follows by
defining the probability to be log(0.0), i.e., −∞, for values outside of (−1,1).
target += log(fmax(0.0,1 - fabs(y)));
With the constraint on yin place, this is just a less efficient, slower, and less arithmeti-
cally stable version of the original program. But if the constraint on yis removed, the
model will compile and run without arithmetic errors, but will not sample properly.2
Exponential Distribution
If Stan didn’t happen to include the exponential distribution, it could be coded di-
rectly using the following assignment statement, where lambda is the inverse scale
and ythe sampled variate.
target += log(lambda) - y *lambda;
This encoding will work for any lambda and y; they can be parameters, data, or one
of each, or even local variables.
The assignment statement in the previous paragraph generates C++ code that is
very similar to that generated by the following sampling statement.
y ~ exponential(lambda);
There are two notable differences. First, the sampling statement will check the inputs
to make sure both lambda is positive and yis non-negative (which includes checking
that neither is the special not-a-number value).
The second difference is that if lambda is not a parameter, transformed param-
eter, or local model variable, the sampling statement is clever enough to drop the
log(lambda) term. This results in the same posterior because Stan only needs the
log probability up to an additive constant. If lambda and yare both constants, the
sampling statement will drop both terms (but still check for out-of-domain errors on
the inputs).
2The problem is the (extremely!) light tails of the triangle distribution. The standard HMC and NUTS
samplers can’t get into the corners of the triangle properly. Because the Stan code declares yto be of type
real<lower=-1,upper=1>, the inverse logit transform is applied to the unconstrained variable and its log
absolute derivative added to the log probability. The resulting distribution on the logit-transformed yis
well behaved. See Chapter 35 for more information on the transforms used by Stan.
297

24. User-Defined Functions
This chapter explains functions from a user perspective with examples; see Chapter 7
for the full specification. User-defined functions allow computations to be encapsu-
lated into a single named unit and invoked elsewhere by name. Similarly, functions
allow complex procedures to be broken down into more understandable components.
Writing modular code using descriptively named functions is easier to understand
than a monolithic program, even if the latter is heavily commented.1
24.1. Basic Functions
Here’s an example of a skeletal Stan program with a user-defined relative difference
function employed in the generated quantities block to compute a relative differences
between two parameters.
functions {
real relative_diff(real x, real y) {
real abs_diff;
real avg_scale;
abs_diff = fabs(x - y);
avg_scale = (fabs(x) + fabs(y)) / 2;
return abs_diff / avg_scale;
}
}
...
generated quantities {
real rdiff;
rdiff = relative_diff(alpha, beta);
}
The function is named relative_diff, and is declared to have two real-valued ar-
guments and return a real-valued result. It is used the same way a built-in function
would be used in the generated quantities block.
User-Defined Functions Block
All functions are defined in their own block, which is labeled functions and must
appear before all other program blocks. The user-defined functions block is optional.
1The main problem with comments is that they can be misleading, either due to misunderstandings
on the programmer’s part or because the program’s behavior is modified after the comment is written.
The program always behaves the way the code is written, which is why refactoring complex code into
understandable units is preferable to simply adding comments.
298
Function Bodies
The body (the part between the curly braces) contains ordinary Stan code, including
local variables. The new function is used in the generated quantities block just as any
of Stan’s built-in functions would be used.
Return Statements
Return statements, such as the one on the last line of the definition of relative_diff
above, are only allowed in the bodies of function definitions. Return statements may
appear anywhere in a function, but functions with non-void return types must end in
a return statement; see Section 7.7 for details on how this is enforced.
Reject Statements
The Stan reject statement provides a mechanism to report errors or problematic val-
ues encountered during program execution. It accepts any number of quoted string
literals or Stan expressions as arguments. This statement is typically embedded in a
conditional statement in order to detect bad or illegal outcomes of some processing
step.
Catching errors
Rejection is used to flag errors that arise in inputs or in program state. It is far better
to fail early with a localized informative error message than to run into problems
much further downstream (as in rejecting a state or failing to compute a derivative).
The most common errors that are coded is to test that all of the arguments to a
function are legal. The following function takes a square root of its input, so requires
non-negative inputs; it is coded to guard against illegal inputs.
real dbl_sqrt(real x) {
if (!(x >= 0))
reject("dblsqrt(x): x must be positive; found x = ", x);
return 2 *sqrt(x);
}
The negation of the positive test is important, because it also catches the case where
xis a not-a-number value. If the condition had been coded as (x < 0) it would not
catch the not-a-number case, though it could be written as (x < 0 || is_nan(x)).
The positive infinite case is allowed through, but could also be checked with the
is_inf(x) function. The square root function does not itself reject, but some down-
stream consumer of dbl_sqrt(-2) would be likely to raise an error, at which point
the origin of the illegal input requires detective work. Or even worse, as Matt Simpson
299

pointed out in the GitHub comments, the function could go into an infinite loop if it
starts with an infinite value and tries to reduce it by arithmetic, likely consuming all
available memory and crashing an interface. Much better to catch errors early and
report on their origin.
The effect of rejection depends on the program block in which the rejection is
executed. In transformed data, rejections cause the program to fail to load. In trans-
formed parameters or in the model block, rejections cause the current state to be
rejected in the Metropolis sense.2In generated quantities, rejections cause execution
to halt because there is no way to recover and generate the remaining parameters, so
extra care should be taken in calling functions in the generated quantities block. See
Section Section 5.10 for full details about the reject statement.
Type Declarations for Functions
Function argument and return types for vector and matrix types are not declared
with their sizes, unlike type declarations for variables. Function argument type decla-
rations may not be declared with constraints, either lower or upper bounds or struc-
tured constraints like forming a simplex or correlation matrix, (as is also the case for
local varaibles); see Figure 24.1 for a list.
For example, here’s a function to compute the entropy of a categorical distribution
with simplex parameter theta.
real entropy(vector theta) {
return sum(theta .*log(theta));
}
Although theta must be a simplex, only the type vector is used.3Upper or lower
bounds on values or constrained types are not allowed as return types or argument
types in function declarations.
Array Types for Function Declarations
Array arguments have their own syntax, which follows that used in this manual for
function signatures. For example, a function that operates on a two-dimensional array
to produce a one-dimensional array might be declared as follows.
real[] baz(real[,] x);
2Just because this makes it possible to code a rejection sampler does not make it a good idea. Rejections
break differentiability and the smooth exploration of the posterior. In Hamiltonian Monte Carlo, it can
cause the sampler to be reduced to a diffusive random walk.
3A range of built-in validation routines is coming to Stan soon! Alternatively, the reject statement can
be used to check constraints on the simplex.
300
Functions: Locals Variables: Nonlocal Variables:
Undimensioned Unconstrained Constrained
int int int<lower=L>
int<upper=U>
int<lower=L,upper=U>
real real real<lower=L>
real<upper=U>
real<lower=L,upper=U>
vector vector[N] vector<lower=L>[N]
vector<upper=U>[N]
vector<lower=L,upper=U>[N]
simplex[N]
ordered[N]
positive_ordered[N]
unit_vector[N]
row_vector row_vector[M] row_vector<lower=L>[M]
row_vector<upper=U>[M]
row_vector<lower=L,upper=U>[M]
matrix matrix[M, N] matrix<lower=L>[M, N]
matrix<upper=U>[M, N]
matrix<lower=L,upper=U>[M, N]
cov_matrix[K]
corr_matrix[K]
cholesky_factor_cov[K]
cholesky_factor_corr[K]
Figure 24.1: The leftmost column is a list of the unconstrained and undimensioned basic types;
these are used as function return types and argument types. The middle column is of uncon-
strained types with dimensions; these are used as local variable types. The rightmost column
lists the corresponding constrained types. An expression of any righthand column type may be
assigned to its corresponding lefthand column basic type. At runtime, dimensions are checked
for consistency for all variables; containers of any sizes may be assigned to function arguments.
The constrained matrix types cov_matrix[K],corr_matrix[K],cholesky_factor_cov[K],
and cholesky_factor_corr[K] are only assignable to matrices of dimensions matrix[K, K]
types. Stan also allows arrays of any of these types, with slightly different declarations for func-
tion arguments and return types and variables.
301
The notation [ ] is used for one-dimensional arrays (as in the return above), [ , ] for
two-dimensional arrays, [ , , ] for three-dimensional arrays, and so on.
Functions support arrays of any type, including matrix and vector types. As with
other types, no constraints are allowed.
Data-only Function Arguments
A function argument which is a real-valued type or a container of a real-valued type,
i.e., not an integer type or integer array type, can be qualified using the prefix qualifier
data. The following is an example of a data-only function argument.
real foo(real y, data real mu) {
return -0.5 *(y - mu)^2;
}
This qualifier restricts this argument to being invoked with expressions which
consist only of data variables, transformed data variables, literals, and function calls.
A data-only function argument cannot involve real variables declared in the parame-
ters, transformed parameters, or model block. Attempts to invoke a function using
an expression which contains parameter, transformed parameters, or model block
variables as a data-only argument will result in an error message from the parser.
Use of the data qualifier must be consistent between the forward declaration and
the definition of a functions.
This qualifier should be used when writing functions that call Stan’s built-in ordi-
nary differential equation (ODE) solvers or using Stan’s algebraic solver. These solvers
have strictly specified signatures where some arguments of are data only expressions.
(See Chapter 21, Chapter 48, and Chapter 47,for details.) When writing a function
which calls the ODE or algebraic solver, arguments to that function which are passed
into the call to the solver, either directly or indirectly, should have the data prefix
qualifier. This allows for compile-time type checking and increases overall program
understandability.
24.2. Functions as Statements
In some cases, it makes sense to have functions that do not return a value. For
example, a routine to print the lower-triangular portion of a matrix can be defined as
follows.
functions {
void pretty_print_tri_lower(matrix x) {
if (rows(x) == 0) {
print("empty matrix");
302
return;
}
print("rows=", rows(x), " cols=", cols(x));
for (m in 1:rows(x))
for (n in 1:m)
print("[", m, ",", n, "]=", x[m, n]);
}
}
The special symbol void is used as the return type. This is not a type itself in that
there are no values of type void; it merely indicates the lack of a value. As such,
return statements for void functions are not allowed to have arguments, as in the
return statement in the body of the previous example.
Void functions applied to appropriately typed arguments may be used on their
own as statements. For example, the pretty-print function defined above may be
applied to a covariance matrix being defined in the transformed parameters block.
transformed parameters {
cov_matrix[K] Sigma;
... code to set Sigma ...
pretty_print_tri_lower(Sigma);
...
24.3. Functions Accessing the Log Probability Accumulator
Functions whose names end in _lp are allowed to use sampling statements and
target += statements; other functions are not. Because of this access, their use
is restricted to the transformed parameters and model blocks.
Here is an example of a function to assign standard normal priors to a vector
of coefficients, along with a center and scale, and return the translated and scaled
coefficients; see Section 28.6 for more information on centering.
functions {
vector center_lp(vector beta_raw, real mu, real sigma) {
beta_raw ~ normal(0, 1);
sigma ~ cauchy(0, 5);
mu ~ cauchy(0, 2.5);
return sigma *beta_raw + mu;
}
...
}
parameters {
vector[K] beta_raw;
303
real mu_beta;
real<lower=0> sigma_beta;
...
transformed parameters {
vector[K] beta;
...
beta = center_lp(beta_raw, mu_beta, sigma_beta);
...
24.4. Functions Acting as Random Number Generators
A user-specified function can be declared to act as a (pseudo) random number gener-
ator (PRNG) by giving it a name that ends in _rng. Giving a function a name that ends
in _rng allows it to access built-in functions and user-defined functions that end in
_rng, which includes all the built-in PRNG functions. Only functions ending in _rng
are able access the built-in PRNG functions. The use of functions ending in _rng must
therefore be restricted to transformed data and generated quantities blocks like other
PRNG functions; they may also be used in the bodies of other user-defined functions
ending in _rng.
For example, the following function generates an N×Kdata matrix, the first
column of which is filled with 1 values for the intercept and the remaining entries of
which have values drawn from a unit normal PRNG.
matrix predictors_rng(int N, int K) {
matrix[N, K] x;
for (n in 1:N) {
x[n, 1] = 1.0; // intercept
for (k in 2:K)
x[n, k] = normal_rng(0, 1);
}
return x;
}
The following function defines a simulator for regression outcomes based on a data
matrix x, coefficients beta, and noise scale sigma.
vector regression_rng(vector beta, matrix x, real sigma) {
vector[rows(x)] y;
vector[rows(x)] mu;
mu = x *beta;
for (n in 1:rows(x))
y[n] = normal_rng(mu[n], sigma);
return y;
}
304
These might be used in a generated quantity block to simulate some fake data from
a fitted regression model as follows.
parameters {
vector[K] beta;
real<lower=0> sigma;
...
generated quantities {
matrix[N_sim, K] x_sim;
vector[N_sim] y_sim;
x_sim = predictors_rng(N_sim, K);
y_sim = regression_rng(beta, x_sim, sigma);
}
A more sophisticated simulation might fit a multivariate normal to the predictors x
and use the resulting parameters to generate multivariate normal draws for x_sim.
24.5. User-Defined Probability Functions
Probability functions are distinguished in Stan by names ending in _lpdf for density
functions and _lpmf for mass functions; in both cases, they must have real return
types.
Suppose a model uses several unit normal distributions, for which there is not
a specific overloaded density nor defaults in Stan. So rather than writing out the
location of 0 and scale of 1 for all of them, a new density function may be defined
and reused.
functions {
real unit_normal_lpdf(real y) {
return normal_lpdf(y | 0, 1);
}
}
...
model {
alpha ~ unit_normal();
beta ~ unit_normal();
...
}
The ability to use the unit_normal function as a density is keyed off its name ending
in _lpdf (names ending in _lpmf for probability mass functions work the same way).
In general, if foo_lpdf is defined to consume N+1arguments, then
y ~ foo(theta1, ..., thetaN);
305
can be used as shorthand for
target += foo_lpdf(y | theta1, ..., thetaN);
As with the built-in functions, the suffix _lpdf is dropped and the first argument
moves to the left of the sampling symbol (~) in the sampling statement.
Functions ending in _lpmf (for probability mass functions), behave exactly the
same way. The difference is that the first argument of a density function (_lpdf)
must be continuous (not an integer or integer array), whereas the first argument of a
mass function (_lpmf) must be discrete (integer or integer array).
24.6. Overloading Functions
Stan does not permit overloading user-defined functions. This means that it is not
possible to define two different functions with the same name, even if they have
different signatures.
24.7. Documenting Functions
Functions will ideally be documented at their interface level. The Stan style guide for
function documentation follows the same format as used by the Doxygen (C++) and
Javadoc (Java) automatic documentation systems. Such specifications indicate the
variables and their types and the return value, prefaced with some descriptive text.
For example, here’s some documentation for the prediction matrix generator.
/**
*Return a data matrix of specified size with rows
*corresponding to items and the first column filled
*with the value 1 to represent the intercept and the
*remaining columns randomly filled with unit-normal draws.
*
*@param N Number of rows corresponding to data items
*@param K Number of predictors, counting the intercept, per
*item.
*@return Simulated predictor matrix.
*/
matrix predictors_rng(int N, int K) {
...
The comment begins with /**, ends with */, and has an asterisk (*) on each line. It
uses @param followed by the argument’s identifier to document a function argument.
The tag @return is used to indicate the return value. Stan does not (yet) have an
306

automatic documentation generator like Javadoc or Doxygen, so this just looks like a
big comment starting with /*and ending with */to the Stan parser.
For functions that raise exceptions, exceptions can be documented using
@throws.4For example,
...
*@param theta
*@throws If any of the entries of theta is negative.
*/
real entropy(vector theta) {
...
Usually an exception type would be provided, but these are not exposed as part of
the Stan language, so there is no need to document them.
24.8. Summary of Function Types
Functions may have a void or non-void return type and they may or may not have one
of the special suffixes, _lpdf,_lpmf,_lp, or _rng.
Void vs. Non-Void Return
Only functions declared to return void may be used as statements. These are also
the only functions that use return statements with no arguments.
Only functions declared to return non-void values may be used as expressions.
These functions require return statements with arguments of a type that matches
the declared return type.
Suffixed or Non-Suffixed
Only functions ending in _lpmf or _lpdf and with return type real may be used as
probability functions in sampling statements.
Only functions ending in _lp may access the log probability accumulator through
sampling statements or target += statements. Such functions may only be used in
the transformed parameters or model blocks.
Only functions ending in _rng may access the built-in pseudo-random number
generators. Such functions may only be used in the generated quantities block or
transformed data block, or in the bodies of other user-defined functions ending in
_rng.
4As of Stan 2.9.0, the only way a user-defined producer will raise an exception is if a function it calls
(including sampling statements) raises an exception via the reject statement.
307
24.9. Recursive Functions
Stan supports recursive function definitions, which can be useful for some applica-
tions. For instance, consider the matrix power operation, An, which is defined for a
square matrix Aand positive integer nby
An=
I if n=0,and
A An−1if n > 0.
where I is the identity matrix. This definition can be directly translated to a recursive
function definition.
matrix matrix_pow(matrix a, int n);
matrix matrix_pow(matrix a, int n) {
if (n == 0)
return diag_matrix(rep_vector(1, rows(a)));
else
return a *matrix_pow(a, n - 1);
}
The forward declaration of the function signature before it is defined is necessary
so that the embedded use of matrix_pow is well-defined when it is encountered. It
would be more efficient to not allow the recursion to go all the way to the base case,
adding the following conditional clause.
else if (n == 1)
return a;
308

25. Problematic Posteriors
Mathematically speaking, with a proper posterior, one can do Bayesian inference and
that’s that. There is not even a need to require a finite variance or even a finite
mean—all that’s needed is a finite integral. Nevertheless, modeling is a tricky business
and even experienced modelers sometimes code models that lead to improper priors.
Furthermore, some posteriors are mathematically sound, but ill-behaved in practice.
This chapter discusses issues in models that create problematic posterior inferences,
either in general for Bayesian inference or in practice for Stan.
25.1. Collinearity of Predictors in Regressions
This section discusses problems related to the classical notion of identifiability, which
lead to ridges in the posterior density and wreak havoc with both sampling and infer-
ence.
Examples of Collinearity
Redundant Intercepts
The first example of collinearity is an artificial example involving redundant intercept
parameters.1Suppose there are observations ynfor n∈1:N, two intercept parame-
ters λ1and λ2, a scale parameter σ > 0, and the sampling distribution
yn∼Normal(λ1+λ2, σ ).
For any constant q, the sampling density for ydoes not change if we add qto λ1and
subtract it from λ2, i.e.,
p(y|λ1, λ2, σ ) =p(y|λ1+q, λ2−q, σ ).
The consequence is that an improper uniform prior p(µ, σ ) ∝1leads to an improper
posterior. This impropriety arises because the neighborhoods around λ1+q, λ1−q
have the same mass no matter what qis. Therefore, a sampler would need to spend
as much time in the neighborhood of λ1=1000000000 and λ2= −1000000000 as it
does in the neighborhood of λ1=0and λ2=0, and so on for ever more far-ranging
values.
1This example was raised by Richard McElreath on the Stan users group in a query about the difference
in behavior between Gibbs sampling as used in BUGS and JAGS and the Hamiltonian Monte Carlo (HMC)
and no-U-turn samplers (NUTS) used by Stan.
309

The marginal posterior p(λ1, λ2|y) for this model is thus improper.2The impro-
priety shows up visually as a ridge in the posterior density, as illustrated in the left-
hand figure of Figure 25.1. The ridge for this model is along the line where λ2=λ1+c
for some constant c.
Contrast this model with a simple regression with a single intercept parameter µ
and sampling distribution
yn∼Normal(µ, σ ).
Even with an improper prior, the posterior is proper as long as there are at least two
data points ynwith distinct values.
Ability and Difficulty in IRT Models
Consider an item-response theory model for students j∈1:Jwith abilities αjand
test items i∈1:Iwith difficulties βi. The observed data is an I×Jarray with entries
yi,j ∈ {0,1}coded such that yi,j =1indicates that student janswered question i
correctly. The sampling distribution for the data is
yi,j ∼Bernoulli(logit−1(αj−βi)).
For any constant c, the probability of yis unchanged by adding a constant cto all the
abilities and subtracting it from all the difficulties, i.e.,
p(y|α, β) =p(y|α+c, β −c).
This leads to a multivariate version of the ridge displayed by the regression with two
intercepts discussed above.
General Collinear Regression Predictors
The general form of the collinearity problem arises when predictors for a regression
are collinear. For example, consider a linear regression sampling distribution
yn∼Normal(xnβ, σ )
for an N-dimensional observation vector y, an N×Kpredictor matrix x, and a K-
dimensional coefficient vector β.
Now suppose that column kof the predictor matrix is a multiple of column k0, i.e.,
there is some constant csuch that xn,k =c xn,k0for all n. In this case, the coefficients
βkand βk0can covary without changing the predictions, so that for any d≠0,
p(y|...,βk, . . . , βk0, . . . , σ ) =p(y|. . . , dβk,..., d
cβk0, . . . , σ ).
Even if columns of the predictor matrix are not exactly collinear as discussed
above, they cause similar problems for inference if they are nearly collinear.
2The marginal posterior p(σ |y) for σis proper here as long as there are at least two distinct data points.
310

Multiplicative Issues with Discrimination in IRT
Consider adding a discrimination parameter δifor each question in an IRT model,
with data sampling model
yi,j ∼Bernoulli(logit−1(δi(αj−βi))).
For any constant c≠0, multiplying δby cand dividing αand βby cproduces the
same likelihood,
p(y|δ, α, β) =p(y|cδ, 1
cα, 1
cβ).
If c < 0, this switches the signs of every component in α,β, and δwithout changing
the density.
Softmax with Kvs. K−1Parameters
In order to parameterize a K-simplex (i.e., a K-vector with non-negative values that
sum to one), only K−1parameters are necessary because the Kth is just one minus
the sum of the first K−1parameters, so that if θis a K-simplex,
θK=1−
K−1
X
k=1
θk.
The softmax function (see Section 43.11) maps a K-vector αof linear predictors to a
K-simplex θ=softmax(α) by defining
θk=exp(αk)
PK
k0=1exp(α0
k).
The softmax function is many-to-one, which leads to a lack of identifiability of the
unconstrained parameters α. In particular, adding or subtracting a constant from
each αkproduces the same simplex θ.
Mitigating the Invariances
All of the examples discussed in the previous section allow translation or scaling of
parameters while leaving the data probability density invariant. These problems can
be mitigated in several ways.
Removing Redundant Parameters or Predictors
In the case of the multiple intercepts, λ1and λ2, the simplest solution is to remove
the redundant intercept, resulting in a model with a single intercept parameter µand
sampling distribution yn∼Normal(µ, σ ). The same solution works for solving the
problem with collinearity—just remove one of the columns of the predictor matrix x.
311

Pinning Parameters
The IRT model without a discrimination parameter can be fixed by pinning one of its
parameters to a fixed value, typically 0. For example, the first student ability α1can
be fixed to 0. Now all other student ability parameters can be interpreted as being
relative to student 1. Similarly, the difficulty parameters are interpretable relative to
student 1’s ability to answer them.
This solution is not sufficient to deal with the multiplicative invariance introduced
by the question discrimination parameters δi. To solve this problem, one of the diffi-
culty parameters, say δ1, must also be constrained. Because it’s a multiplicative and
not an additive invariance, it must be constrained to a non-zero value, with 1 being
a convenient choice. Now all of the discrimination parameters may be interpreted
relative to item 1’s discrimination.
The many-to-one nature of softmax(α) is typically mitigated by pinning a compo-
nent of α, for instance fixing αK=0. The resulting mapping is one-to-one from K−1
unconstrained parameters to a K-simplex. This is roughly how simplex-constrained
parameters are defined in Stan; see Section 35.6 for a precise definition. The Stan
code for creating a simplex from a K−1-vector can be written as
vector softmax_id(vector alpha) {
vector[num_elements(alpha) + 1] alphac1;
for (k in 1:num_elements(alpha))
alphac1[k] = alpha[k];
alphac1[num_elements(alphac1)] = 0;
return softmax(alphac1);
}
Adding Priors
So far, the models have been discussed as if the priors on the parameters were im-
proper uniform priors.
A more general Bayesian solution to these invariance problems is to impose
proper priors on the parameters. This approach can be used to solve problems arising
from either additive or multiplicative invariance.
For example, normal priors on the multiple intercepts,
λ1, λ2∼Normal(0, τ),
with a constant scale τ, ensure that the posterior mode is located at a point where
λ1=λ2, because this minimizes log Normal(λ1|0, τ) +log Normal(λ2|0, τ).3The addi-
3A Laplace prior (or an L1 regularizer for penalized maximum likelihood estimation) is not sufficient to
remove this additive invariance. It provides shrinkage, but does not in and of itself identify the parameters
because adding a constant to λ1and subtracting it from λ2results in the same value for the prior density.
312
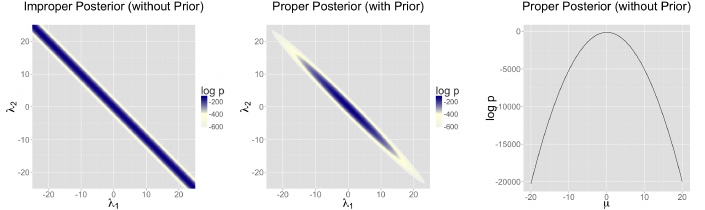
Figure 25.1: Posteriors for two intercept parameterization without prior, two intercept param-
eterization with unit normal prior, and one intercept reparameterization without prior. For all
three cases, the posterior is plotted for 100 data points drawn from a unit normal. Left) The
two intercept parameterization leads to an improper prior with a ridge extending infinitely to
the northwest and southeast. Middle) Adding a unit normal prior for the intercepts results in a
proper posterior. Right) The single intercept parameterization with no prior also has a proper
posterior.
tion of a prior to the two intercepts model is shown in the middle plot in Figure 25.1.
The plot on the right of Figure 25.1 shows the result of reparameterizing to a single
intercept.
An alternative strategy for identifying a K-simplex parameterization θ=
softmax(α) in terms of an unconstrained K-vector αis to place a prior on the com-
ponents of αwith a fixed location (that is, specifically avoid hierarchical priors with
varying location). Unlike the approaching of pinning αK=0, the prior-based ap-
proach models the Koutcomes symmetrically rather than modeling K−1outcomes
relative to the K-th. The pinned parameterization, on the other hand, is usually more
efficient statistically because it does not have the extra degree of (prior constrained)
wiggle room.
Vague, Strongly Informative, and Weakly Informative Priors
Care must be used when adding a prior to resolve invariances. If the prior is taken to
be too broad (i.e., too vague), the resolution is in theory only, and samplers will still
struggle.
Ideally, a realistic prior will be formulated based on substantive knowledge of the
problem being modeled. Such a prior can be chosen to have the appropriate strength
based on prior knowledge. A strongly informative prior makes sense if there is strong
prior information.
When there is not strong prior information, a weakly informative prior strikes the
proper balance between controlling computational inference without dominating the
data in the posterior. In most problems, the modeler will have at least some notion
313
of the expected scale of the estimates and be able to choose a prior for identifica-
tion purposes that does not dominate the data, but provides sufficient computational
control on the posterior.
Priors can also be used in the same way to control the additive invariance of the
IRT model. A typical approach is to place a strong prior on student ability parameters
αto control scale simply to control the additive invariance of the basic IRT model
and the multiplicative invariance of the model extended with a item discrimination
parameters; such a prior does not add any prior knowledge to the problem. Then a
prior on item difficulty can be chosen that is either informative or weakly informative
based on prior knowledge of the problem.
25.2. Label Switching in Mixture Models
Where collinearity in regression models can lead to infinitely many posterior maxima,
swapping components in a mixture model leads to finitely many posterior maxima.
Mixture Models
Consider a normal mixture model with two location parameters µ1and µ2, a shared
scale σ > 0, a mixture ratio θ∈[0,1], and likelihood
p(y|θ, µ1, µ2, σ ) =
N
Y
n=1θNormal(yn|µ1, σ ) +(1−θ) Normal(yn|µ2, σ ).
The issue here is exchangeability of the mixture components, because
p(θ, µ1, µ2, σ |y) =p((1−θ), µ2, µ1, σ |y).
The problem is exacerbated as the number of mixture components Kgrows, as in
clustering models, leading to K! identical posterior maxima.
Convergence Monitoring and Effective Sample Size
The analysis of posterior convergence and effective sample size is also difficult for
mixture models. For example, the ˆ
Rconvergence statistic reported by Stan and the
computation of effective sample size are both compromised by label switching. The
problem is that the posterior mean, a key ingredient in these computations, is affected
by label switching, resulting in a posterior mean for µ1that is equal to that of µ2, and
a posterior mean for θthat is always 1/2, no matter what the data is.
314
Some Inferences are Invariant
In some sense, the index (or label) of a mixture component is irrelevant. Posterior
predictive inferences can still be carried out without identifying mixture components.
For example, the log probability of a new observation does not depend on the identi-
ties of the mixture components. The only sound Bayesian inferences in such models
are those that are invariant to label switching. Posterior means for the parameters
are meaningless because they are not invariant to label switching; for example, the
posterior mean for θin the two component mixture model will always be 1/2.
Highly Multimodal Posteriors
Theoretically, this should not present a problem for inference because all of the inte-
grals involved in posterior predictive inference will be well behaved. The problem in
practice is computation.
Being able to carry out such invariant inferences in practice is an altogether differ-
ent matter. It is almost always intractable to find even a single posterior mode, much
less balance the exploration of the neighborhoods of multiple local maxima according
to the probability masses. In Gibbs sampling, it is unlikely for µ1to move to a new
mode when sampled conditioned on the current values of µ2and θ. For HMC and
NUTS, the problem is that the sampler gets stuck in one of the two “bowls” around
the modes and cannot gather enough energy from random momentum assignment to
move from one mode to another.
Even with a proper posterior, all known sampling and inference techniques are
notoriously ineffective when the number of modes grows super-exponentially as it
does for mixture models with increasing numbers of components.
Hacks as Fixes
Several hacks (i.e., “tricks”) have been suggested and employed to deal with the prob-
lems posed by label switching in practice.
Parameter Ordering Constraints
One common strategy is to impose a constraint on the parameters that identifies
the components. For instance, we might consider constraining µ1< µ2in the two-
component normal mixture model discussed above. A problem that can arise from
such an approach is when there is substantial probability mass for the opposite or-
dering µ1> µ2. In these cases, the posteriors are affected by the constraint and
true posterior uncertainty in µ1and µ2is not captured by the model with the con-
straint. In addition, standard approaches to posterior inference for event probabili-
315

ties is compromised. For instance, attempting to use Mposterior samples to estimate
Pr[µ1> µ2], will fail, because the estimator
Pr[µ1> µ2]≈
M
X
m=1
I(µ(m)
1> µ(m)
2)
will result in an estimate of 0 because the posterior respects the constraint in the
model.
Initialization around a Single Mode
Another common approach is to run a single chain or to initialize the parameters
near realistic values.4This can work better than the hard constraint approach if
reasonable initial values can be found and the labels do not switch within a Markov
chain. The result is that all chains are glued to a neighborhood of a particular mode
in the posterior.
25.3. Component Collapsing in Mixture Models
It is possible for two mixture components in a mixture model to collapse to the same
values during sampling or optimization. For example, a mixture of Knormals might
devolve to have µi=µjand σi=σjfor i≠j.
This will typically happen early in sampling due to initialization in MCMC or opti-
mization or arise from random movement during MCMC. Once the parameters match
for a given draw (m), it can become hard to escape because there can be a trough
of low-density mass between the current parameter values and the ones without col-
lapsed components.
It may help to use a smaller step size during warmup, a stronger prior on each
mixture component’s membership responsibility. A more extreme measure is to in-
clude additional mixture components to deal with the possibility that some of them
may collapse.
In general, it is very difficult to recover exactly the right Kmixture components in
a mixture model as Kincreases beyond one (yes, even a two-component mixture can
have this problem).
4Tempering methods may be viewed as automated ways to carry out such a search for modes, though
most MCMC tempering methods continue to search for modes on an ongoing basis; see (Swendsen and
Wang,1986;Neal,1996b).
316
25.4. Posteriors with Unbounded Densities
In some cases, the posterior density grows without bounds as parameters approach
certain poles or boundaries. In such, there are no posterior modes and numerical
stability issues can arise as sampled parameters approach constraint boundaries.
Mixture Models with Varying Scales
One such example is a binary mixture model with scales varying by component, σ1
and σ2for locations µ1and µ2. In this situation, the density grows without bound as
σ1→0and µ1→ynfor some n; that is, one of the mixture components concentrates
all of its mass around a single data item yn.
Beta-Binomial Models with Skewed Data and Weak Priors
Another example of unbounded densities arises with a posterior such as
Beta(φ|0.5,0.5), which can arise if very “weak” beta priors are used for groups that
have no data. This density is unbounded as φ→0and φ→1. Similarly, a Bernoulli
likelihood model coupled with a “weak” beta prior, leads to a posterior
p(φ|y) ∝Beta(φ|0.5,0.5)×QN
n=1Bernoulli(yn|φ)
=Beta(φ |0.5+PN
n=1yn,0.5+N−PN
n=1yn).
If N=9and each yn=1, the posterior is Beta(φ|9.5,0,5). This posterior is un-
bounded as φ→1. Nevertheless, the posterior is proper, and although there is no
posterior mode, the posterior mean is well-defined with a value of exactly 0.95.
Constrained vs. Unconstrained Scales
Stan does not sample directly on the constrained (0,1)space for this problem, so it
doesn’t directly deal with unconstrained density values. Rather, the probability values
φare logit-transformed to (−∞,∞). The boundaries at 0 and 1 are pushed out to −∞
and ∞respectively. The Jacobian adjustment that Stan automatically applies ensures
the unconstrained density is proper. The adjustment for the particular case of (0,1)
is log logit−1(φ) +log logit(1−φ); see Section 35.4 for the derivation.
There are two problems that still arise, though. The first is that if the posterior
mass for φis near one of the boundaries, the logit-transformed parameter will have
to sweep out very long paths and thus can dominate the U-turn condition imposed
by the no-U-turn sampler (NUTS). The second issue is that the inverse transform from
the unconstrained space to the constrained space can underflow to 0 or overflow to
1, even when the unconstrained parameter is not infinite. Similar problems arise for
317
the expectation terms in logistic regression, which is why the logit-scale parameteri-
zations of the Bernoulli and binomial distributions are more stable.
25.5. Posteriors with Unbounded Parameters
In some cases, the posterior density will not grow without bound, but parameters
will grow without bound with gradually increasing density values. Like the models
discussed in the previous section that have densities that grow without bound, such
models also have no posterior modes.
Separability in Logistic Regression
Consider a logistic regression model with Nobserved outcomes yn∈ {0,1}, an N×K
matrix xof predictors, a K-dimensional coefficient vector β, and sampling distribution
yn∼Bernoulli(logit−1(xnβ)).
Now suppose that column kof the predictor matrix is such that xn,k >0if and only
if yn=1, a condition known as “separability.” In this case, predictive accuracy on
the observed data continue to improve as βk→ ∞, because for cases with yn=1,
xnβ→ ∞ and hence logit−1(xnβ) →1.
With separability, there is no maximum to the likelihood and hence no maximum
likelihood estimate. From the Bayesian perspective, the posterior is improper and
therefore the marginal posterior mean for βkis also not defined. The usual solution
to this problem in Bayesian models is to include a proper prior for β, which ensures
a proper posterior.
25.6. Uniform Posteriors
Suppose your model includes a parameter ψthat is defined on [0,1]and is given a flat
prior Uniform(ψ|0,1). Now if the data don’t tell us anything about ψ, the posterior is
also Uniform(ψ|0,1).
Although there is no maximum likelihood estimate for ψ, the posterior is uni-
form over a closed interval and hence proper. In the case of a uniform posterior on
[0,1], the posterior mean for ψis well-defined with value 1/2. Although there is no
posterior mode, posterior predictive inference may nevertheless do the right thing by
simply integrating (i.e., averaging) over the predictions for ψat all points in [0,1].
318
25.7. Sampling Difficulties with Problematic Priors
With an improper posterior, it is theoretically impossible to properly explore the pos-
terior. However, Gibbs sampling as performed by BUGS and JAGS, although still un-
able to properly sample from such an improper posterior, behaves quite differently in
practice than the Hamiltonian Monte Carlo sampling performed by Stan when faced
with an example such as the two intercept model discussed in Section 25.1 and illus-
trated in Figure 25.1.
Gibbs Sampling
Gibbs sampling, as performed by BUGS and JAGS, may appear to be efficient and well
behaved for this unidentified model, but as discussed in the previous subsection, will
not actually explore the posterior properly.
Consider what happens with initial values λ(0)
1, λ(0)
2. Gibbs sampling proceeds in
iteration mby drawing
λ(m)
1∼p(λ1|λ(m−1)
2, σ (m−1), y)
λ(m)
2∼p(λ2|λ(m)
1, σ (m−1), y)
σ(m) ∼p(σ |λ(m)
1, λ(m)
2, y).
Now consider the draw for λ1(the draw for λ2is symmetric), which is conjugate in this
model and thus can be done very efficiently. In this model, the range from which the
next λ1can be drawn is highly constrained by the current values of λ2and σ. Gibbs
will run very quickly and provide seemingly reasonable inferences for λ1+λ2. But it
will not explore the full range of the posterior; it will merely take a slow random walk
from the initial values. This random walk behavior is typical of Gibbs sampling when
posteriors are highly correlated and the primary reason to prefer Hamiltonian Monte
Carlo to Gibbs sampling for models with parameters correlated in the posterior.
Hamiltonian Monte Carlo Sampling
Hamiltonian Monte Carlo (HMC), as performed by Stan, is much more efficient at
exploring posteriors in models where parameters are correlated in the posterior. In
this particular example, the Hamiltonian dynamics (i.e., the motion of a fictitious
particle given random momentum in the field defined by the negative log posterior)
is going to run up and down along the valley defined by the potential energy (ridges
in log posteriors correspond to valleys in potential energy). In practice, even with a
random momentum for λ1and λ2, the gradient of the log posterior is going to adjust
for the correlation and the simulation will run λ1and λ2in opposite directions along
the valley corresponding to the ridge in the posterior log density (see Figure 25.1.
319
No-U-Turn Sampling
Stan’s default no-U-turn sampler (NUTS), is even more efficient at exploring the pos-
terior (see (Hoffman and Gelman,2011,2014)). NUTS simulates the motion of the
fictitious particle representing the parameter values until it makes a U-turn, it will
be defeated in most cases, as it will just move down the potential energy valley in-
definitely without making a U-turn. What happens in practice is that the maximum
number of leapfrog steps in the simulation will be hit in many of the iterations, caus-
ing a very large number of log probability and gradient evaluations (1000 if the max
tree depth is set to 10, as in the default). Thus sampling will appear to be very slow.
This is indicative of an improper posterior, not a bug in the NUTS algorithm or its im-
plementation. It is simply not possible to sample from an improper posterior! Thus
the behavior of HMC in general and NUTS in particular should be reassuring in that
it will clearly fail in cases of improper posteriors, resulting in a clean diagnostic of
sweeping out very large paths in the posterior.
Examples: Fits in Stan
To illustrate the issues with sampling from non-identified and only weakly identified
models, we fit three models with increasing degrees of identification of their param-
eters. The posteriors for these models is illustrated in Figure 25.1. The first model
is the unidentified model with two location parameters and no priors discussed in
Section 25.1.
data {
int N;
real y[N];
}
parameters {
real lambda1;
real lambda2;
real<lower=0> sigma;
}
transformed parameters {
real mu;
mu = lambda1 + lambda2;
}
model {
y ~ normal(mu, sigma);
}
The second adds priors to the model block for lambda1 and lambda2 to the previous
model.
320
Two Scale Parameters, Improper Prior
Inference for Stan model: improper_stan
Warmup took (2.7, 2.6, 2.9, 2.9) seconds, 11 seconds total
Sampling took (3.4, 3.7, 3.6, 3.4) seconds, 14 seconds total
Mean MCSE StdDev 5% 95% N_Eff N_Eff/s R_hat
lp__ -5.3e+01 7.0e-02 8.5e-01 -5.5e+01 -5.3e+01 150 11 1.0
n_leapfrog__ 1.4e+03 1.7e+01 9.2e+02 3.0e+00 2.0e+03 2987 212 1.0
lambda1 1.3e+03 1.9e+03 2.7e+03 -2.3e+03 6.0e+03 2.1 0.15 5.2
lambda2 -1.3e+03 1.9e+03 2.7e+03 -6.0e+03 2.3e+03 2.1 0.15 5.2
sigma 1.0e+00 8.5e-03 6.2e-02 9.5e-01 1.2e+00 54 3.9 1.1
mu 1.6e-01 1.9e-03 1.0e-01 -8.3e-03 3.3e-01 2966 211 1.0
Two Scale Parameters, Weak Prior
Warmup took (0.40, 0.44, 0.40, 0.36) seconds, 1.6 seconds total
Sampling took (0.47, 0.40, 0.47, 0.39) seconds, 1.7 seconds total
Mean MCSE StdDev 5% 95% N_Eff N_Eff/s R_hat
lp__ -54 4.9e-02 1.3e+00 -5.7e+01 -53 728 421 1.0
n_leapfrog__ 157 2.8e+00 1.5e+02 3.0e+00 511 3085 1784 1.0
lambda1 0.31 2.8e-01 7.1e+00 -1.2e+01 12 638 369 1.0
lambda2 -0.14 2.8e-01 7.1e+00 -1.2e+01 12 638 369 1.0
sigma 1.0 2.6e-03 8.0e-02 9.2e-01 1.2 939 543 1.0
mu 0.16 1.8e-03 1.0e-01 -8.1e-03 0.33 3289 1902 1.0
One Scale Parameter, Improper Prior
Warmup took (0.011, 0.012, 0.011, 0.011) seconds, 0.044 seconds total
Sampling took (0.017, 0.020, 0.020, 0.019) seconds, 0.077 seconds total
Mean MCSE StdDev 5% 50% 95% N_Eff N_Eff/s R_hat
lp__ -54 2.5e-02 0.91 -5.5e+01 -53 -53 1318 17198 1.0
n_leapfrog__ 3.2 2.7e-01 1.7 1.0e+00 3.0 7.0 39 507 1.0
mu 0.17 2.1e-03 0.10 -3.8e-03 0.17 0.33 2408 31417 1.0
sigma 1.0 1.6e-03 0.071 9.3e-01 1.0 1.2 2094 27321 1.0
Figure 25.2: Results of Stan runs with default parameters fit to N=100 data points generated
from yn∼Normal(0,1). On the top is the non-identified model with improper uniform priors
and likelihood yn∼Normal(λ1+λ2, σ ). In the middle is the same likelihood as the middle plus
priors λk∼Normal(0,10). On the bottom is an identified model with an improper prior, with
likelihood yn∼Normal(µ, σ ). All models estimate µat roughly 0.16 with very little Monte Carlo
standard error, but a high posterior standard deviation of 0.1; the true value µ=0is within the
90% posterior intervals in all three models.
321
lambda1 ~ normal(0, 10);
lambda2 ~ normal(0, 10);
The third involves a single location parameter, but no priors.
data {
int N;
real y[N];
}
parameters {
real mu;
real<lower=0> sigma;
}
model {
y ~ normal(mu, sigma);
}
All three of the example models were fit in Stan 2.1.0 with default parameters (1000
warmup iterations, 1000 sampling iterations, NUTS sampler with max tree depth of
10). The results are shown in Figure 25.2. The key statistics from these outputs are
the following.
• As indicated by R_hat column, all parameters have converged other than λ1
and λ2in the non-identified model.
• The average number of leapfrog steps is roughly 3 in the identified model, 150
in the model identified by a weak prior, and 1400 in the non-identified model.
• The number of effective samples per second for µis roughly 31,000 in the
identified model, 1900 in the model identified with weakly informative priors,
and 200 in the non-identified model; the results are similar for σ.
• In the non-identified model, the 95% interval for λ1is (-2300,6000), whereas it
is only (-12,12) in the model identified with weakly informative priors.
• In all three models, the simulated value of µ=0and σ=1are well within the
posterior 90% intervals.
The first two points, lack of convergence and hitting the maximum number of
leapfrog steps (equivalently maximum tree depth) are indicative of improper posteri-
ors. Thus rather than covering up the problem with poor sampling as may be done
with Gibbs samplers, Hamiltonian Monte Carlo tries to explore the posterior and its
failure is a clear indication that something is amiss in the model.
322
26. Matrices, Vectors, and Arrays
This chapter provides pointers as to how to choose among the various matrix, vector,
and array data structures provided by Stan.
26.1. Basic Motivation
Stan provides two basic scalar types, int and real, and three basic linear algebra
types, vector,row_vector, and matrix. Then Stan allows arrays to be of any dimen-
sion and contain any type of element (though that type must be declared and must
be the same for all elements).
This leaves us in the awkward situation of having three one-dimensional contain-
ers, as exemplified by the following declarations.
real a[N];
vector[N] a;
row_vector[N] a;
These distinctions matter. Matrix types, like vector and row vector, are required for
linear algebra operations. There is no automatic promotion of arrays to vectors be-
cause the target, row vector or column vector, is ambiguous. Similarly, row vectors are
separated from column vectors because multiplying a row vector by a column vector
produces a scalar, whereas multiplying in the opposite order produces a matrix.
The following code fragment shows all four ways to declare a two-dimensional
container of size M×N.
real b[M, N]; // b[m] : real[] (efficient)
vector[N] b[M]; // b[m] : vector (efficient)
row_vector[N] b[M]; // b[m] : row_vector (efficient)
matrix[M, N] b; // b[m] : row_vector (inefficient)
The main differences among these choices involve efficiency for various purposes and
the type of b[m], which is shown in comments to the right of the declarations. Thus
the only way to efficiently iterate over row vectors is to use the third declaration, but
if you need linear algebra on matrices, but the only way to use matrix operations is
to use the fourth declaration.
The inefficiencies due to any manual reshaping of containers is usually slight com-
pared to what else is going on in a Stan program (typically a lot of gradient calcula-
tions).
323
26.2. Fixed Sizes and Indexing out of Bounds
Stan’s matrices, vectors, and array variables are sized when they are declared and
may not be dynamically resized. Function arguments do not have sizes, but these
sizes are fixed when the function is called and the container is instantiated. Also,
declarations may be inside loops and thus may change over the course of running a
program, but each time a declaration is visited, it declares a fixed size object.
When an index is provided that is out of bounds, Stan throws a rejection error
and computation on the current log density and gradient evaluation is halted and the
algorithm is left to clean up the error. All of Stan’s containers check the sizes of all
indexes.
26.3. Data Type and Indexing Efficiency
The underlying matrix and linear algebra operations are implemented in terms of
data types from the Eigen C++ library. By having vectors and matrices as basic types,
no conversion is necessary when invoking matrix operations or calling linear algebra
functions.
Arrays, on the other hand, are implemented as instances of the C++ std::vector
class (not to be confused with Eigen’s Eigen::Vector class or Stan vectors). By im-
plementing arrays this way, indexing is very efficient because values can be returned
by reference rather than copied by value.
Matrices vs. Two-Dimensional Arrays
In Stan models, there are a few minor efficiency considerations in deciding between a
two-dimensional array and a matrix, which may seem interchangeable at first glance.
First, matrices use a bit less memory than two-dimensional arrays. This is because
they don’t store a sequence of arrays, but just the data and the two dimensions.
Second, matrices store their data in column-major order. Furthermore, all of the
data in a matrix is guaranteed to be contiguous in memory. This is an important
consideration for optimized code because bringing in data from memory to cache
is much more expensive than performing arithmetic operations with contemporary
CPUs. Arrays, on the other hand, only guarantee that the values of primitive types are
contiguous in memory; otherwise, they hold copies of their values (which are returned
by reference wherever possible).
Third, both data structures are best traversed in the order in which they are
stored. This also helps with memory locality. This is column-major for matrices,
so the following order is appropriate.
324
matrix[M, N] a;
//...
for (n in 1:N)
for (m in 1:M)
// ... do something with a[m, n] ...
Arrays, on the other hand, should be traversed in row-major order (i.e., last index
fastest), as in the following example.
real a[M, N];
// ...
for (m in 1:M)
for (n in 1:N)
// ... do something with a[m, n] ...
The first use of a[m, n] should bring a[m] into memory. Overall, traversing matrices
is more efficient than traversing arrays.
This is true even for arrays of matrices. For example, the ideal order in which to
traverse a two-dimensional array of matrices is
matrix[M, N] b[I, J];
// ...
for (i in 1:I)
for (j in 1:J)
for (n in 1:N)
for (m in 1:M)
... do something with b[i, j, m, n] ...
If ais a matrix, the notation a[m] picks out row mof that matrix. This is a rather
inefficient operation for matrices. If indexing of vectors is needed, it is much better
to declare an array of vectors. That is, this
row_vector[N] b[M];
// ...
for (m in 1:M)
... do something with row vector b[m] ...
is much more efficient than the pure matrix version
matrix b[M, N];
// ...
for (m in 1:M)
// ... do something with row vector b[m] ...
Similarly, indexing an array of column vectors is more efficient than using the col
function to pick out a column of a matrix.
325
In contrast, whatever can be done as pure matrix algebra will be the fastest. So if
I want to create a row of predictor-coefficient dot-products, it’s more efficient to do
this
matrix[N, k] x; // predictors (aka covariates)
// ...
vector[K] beta; // coeffs
// ...
vector[N] y_hat; // linear prediction
// ...
y_hat = x *beta;
than it is to do this
row_vector[K] x[N]; // predictors (aka covariates)
// ...
vector[K] beta; // coeffs
...
vector[N] y_hat; // linear prediction
...
for (n in 1:N)
y_hat[n] = x[n] *beta;
(Row) Vectors vs. One-Dimensional Arrays
For use purely as a container, there is really nothing to decide among vectors, row
vectors and one-dimensional arrays. The Eigen::Vector template specialization
and the std::vector template class are implemented very similarly as containers
of double values (the type real in Stan). Only arrays in Stan are allowed to store
integer values.
26.4. Memory Locality
The key to understanding efficiency of matrix and vector representations is memory
locality and reference passing versus copying.
Memory Locality
CPUs on computers bring in memory in blocks through layers of caches. Fetching
from memory is much slower than performing arithmetic operations. The only way
to make container operations fast is to respect memory locality and access elements
that are close together in memory sequentially in the program.
326
Matrices
Matrices are stored internally in column-major order. That is, an M×Nmatrix stores
its elements in the order
(1,1), (2,1), . . . , (M, 1), (1,2), . . . , (M, 2), . . . , (1, N), . . . , (M, N).
This means that it’s much more efficient to write loops over matrices column by
column, as in the following example.
matrix[M, N] a;
...
for (n in 1:N)
for (m in 1:M)
... do something with a[m, n] ...
It also follows that pulling a row out of a matrix is not memory local, as it has to
stride over the whole sequence of values. It also requires a copy operation into a new
data structure as it is not stored internally as a unit in a matrix. For sequential access
to row vectors in a matrix, it is much better to use an array of row vectors, as in the
following example.
row_vector[N] a[M];
...
for (m in 1:M)
... do something with row vector a[m] ...
Even if what is done involves a function call, the row vector a[m] will not have to be
copied.
Arrays
Arrays are stored internally following their data structure. That means a two dimen-
sional array is stored in row-major order. Thus it is efficient to pull out a “row” of a
two-dimensional array.
real a[M, N];
...
for (m in 1:M)
... do something with a[m] ...
A difference with matrices is that the entries a[m] in the two dimensional array
are not necessarily adjacent in memory, so there are no guarantees on iterating over
all the elements in a two-dimensional array will provide memory locality across the
“rows.”
327
26.5. Converting among Matrix, Vector, and Array Types
There is no automatic conversion among matrices, vectors, and arrays in Stan. But
there are a wide range of conversion functions to convert a matrix into a vector, or a
multi-dimensional array into a one-dimensional array, or convert a vector to an array.
See Chapter 45 for complete details on the available conversion operators as well
as Chapter 27 for some reshaping operations involving multiple indexing and range
indexing.
328
27. Multiple Indexing and Range Indexing
Stan allows multiple indexes to be provided for containers (i.e., arrays, vectors,
and matrices) in a single position, using either an array of integer indexes or range
bounds. This allows many models to be vectorized. For instance, consider the likeli-
hood for a varying-slope, varying-intercept hierarchical linear regression, which could
be coded as
for (n in 1:N)
y[n] ~ normal(alpha[ii[n]] + beta[ii[n]] *x[n], sigma);
With multiple indexing, this can be coded in one line, leading to more efficient vector-
ized code.
y ~ normal( rows_dot_product(alpha[ii] + beta[ii] , x), sigma);
This latter version is equivalent in speed to the clunky assignment to a local variable.
{
vector[N] mu;
for (n in 1:N)
mu[n] = alpha[ii[n]] + beta[ii[n]] *x[n];
y ~ normal(mu, sigma);
}
27.1. Multiple Indexing
The following is the simplest concrete example of multiple indexing with an array of
integers; the ellipses stand for code defining the variables as indicated in the com-
ments.
int c[3];
... // define: c == (5, 9, 7)
int idxs[4];
... // define: idxs == (3, 3, 1, 2)
int d[4];
d = c[idxs]; // result: d == (7, 7, 5, 9)
In general, the multiple indexed expression c[idxs] is defined as follows, assum-
ing idxs is of size K.
c[idxs] = ( c[idxs[1]], c[idxs[2]], ..., c[idxs[K]] )
Thus c[idxs] is of the same size as idxs, which is Kin this example.
Multiple indexing can also be used with multi-dimensional arrays. For example,
consider the following.
329
int c[2, 3];
... // define: c = ((1, 3, 5), ((7, 11, 13))
int idxs[4];
... // define: idxs = (2, 2, 1, 2)
int d[4, 3]
d = c[idxs]; // result: d = ((7, 11, 13), (7, 11, 13),
// (1, 3, 5), (7, 11, 13))
That is, putting an index in the first position acts exactly the same way as defined
above. The fact that the values are themselves arrays makes no difference—the result
is still defined by c[idxs][j] == c[idxs[j]].
Multiple indexing may also be used in the second position of a multi-dimensional
array. Continuing the above example, consider a single index in the first position and
a multiple index in the second.
int e[4];
e = c[2, idxs]; // result: c[2] = (7, 11, 13)
// result: e = (11, 11, 7, 11)
The single index is applied, the one-dimensional result is determined, then the multi-
ple index is applied to the result. That is, c[2,idxs] evaluates to the same value as
c[2][idxs].
Multiple indexing can apply to more than one position of a multi-dimensional
array. For instance, consider the following
int c[2, 3];
... // define: c = ((1, 3, 5), (7, 11, 13))
int idxs1[3];
... // define: idxs1 = (2, 2, 1)
int idxs2[2];
... // define: idxs2 = (1, 3)
int d[3, 2];
d = c[idxs1, idxs2]; // result: d = ((7, 13), (7, 13), (1, 5))
With multiple indexes, we no longer have c[idxs1, idxs2] being the same as
c[idxs1][idxs2]. Rather, the entry d[i, j] after executing the above is given by
d[i, j] == c[idxs1, idxs2][i, j] = c[idxs1[i], idxs2[j]]
This example illustrates the operation of multiple indexing in the general case: a
multiple index like idxs1 converts an index iused on the result (here, c[idxs1,
idxs2]) to index idxs1[i] in the variable being indexed (here, c). In contrast, a
single index just returns the value at that index, thus reducing dimensionality by one
in the result.
330
27.2. Slicing with Range Indexes
Slicing returns a contiguous slice of a one-dimensional array, a contiguous sub-block
of a two-dimensional array, and so on. Semantically, it is just a special form of multi-
ple indexing.
Lower and Upper Bound Indexes
For instance, consider supplying an upper and lower bound for an index.
int c[7];
...
int d[4];
d = c[3:6]; // result: d == (c[3], c[4], c[5], c[6])
The range index 3:6 behaves semantically just like the multiple index (3, 4, 5, 6).
In terms of implementation, the sliced upper and/or lower bounded indices are faster
and use less memory because they do not explicitly create a multiple index, but rather
use a direct loop. They are also easier to read, so should be preferred over multiple
indexes where applicable.
Lower or Upper Bound Indexes
It is also possible to supply just a lower bound, or just an upper bound. Writing c[3:]
is just shorthand for c[3:size(c)]. Writing c[:5] is just shorthand for c[1:5].
Full Range Indexes
Finally, it is possible to write a range index that covers the entire range of an array,
either by including just the range symbol (:) as the index or leaving the index position
empty. In both cases, c[] and c[:] are equal to c[1:size(c)], which in turn is just
equal to c.
27.3. Multiple Indexing on the Left of Assignments
Multiple expressions may be used on the left-hand side of an assignment statement,
where they work exactly the same way as on the right-hand side in terms of picking
out entries of a container. For example, consider the following.
int a[3];
int c[2];
int idxs[2];
... // define: a == (1, 2, 3); c == (5, 9)
331
// idxs = (3,2)
a[idxs] = c; // result: a == (1, 9, 5)
The result above can be worked out by noting that the assignment sets a[idxs[1]]
(a[3]) to c[1] (5) and a[idxs[2]] (a[2]) to c[2] (9).
The same principle applies when there are many multiple indexes, as in the fol-
lowing example.
int a[5, 7];
int c[2, 2];
...
a[2:3, 5:6] = c; // result: a[2, 5] == c[1, 1]; a[2, 6] == c[1, 2]
// a[3, 5] == c[2, 1]; a[3, 6] == c[2, 2]
As in the one-dimensional case, the right-hand side is written into the slice, block, or
general chunk picked out by the left-hand side.
Usage on the left-hand side allows the full generality of multiple indexing, with
single indexes reducing dimensionality and multiple indexes maintaining dimension-
ality while rearranging, slicing, or blocking. For example, it is valid to assign to a
segment of a row of an array as follows.
int a[10, 13];
int c[2];
...
a[4, 2:3] = c; // result: a[4, 2] == c[1]; a[4, 3] == c[2]
Assign-by-Value and Aliasing
Aliasing issues arise when there are references to the same data structure on the
right-hand and left-hand side of an assignment. For example, consider the array ain
the following code fragment.
int a[3];
... // define: a == (5, 6, 7)
a[2:3] = a[1:2];
... // result: a == (5, 5, 6)
The reason the value of aafter the assignment is (5,5,6)rather than (5,5,5)is that
Stan behaves as if the right-hand side expression is evaluated to a fresh copy. As
another example, consider the following.
int a[3];
int idxs[3];
... // define idxs = (2, 1, 3)
a[idxs] = a;
332
In this case, it is evident why the right-hand side needs to be copied before the as-
signment.
It is tempting (but wrong) to think of the assignment a[2:3] = a[1:2] as exe-
cuting the following assignments.
... // define: a = (5, 6, 7)
a[2] = a[1]; // result: a = (5, 5, 7)
a[3] = a[2]; // result: a = (5, 5, 5)!
This produces a different result than executing the assignment because a[2]’s value
changes before it is used.
27.4. Multiple Indexes with Vectors and Matrices
Multiple indexes can be supplied to vectors and matrices as well as arrays of vectors
and matrices.
Vectors
Vectors and row vectors behave exactly the same way as arrays with multiple indexes.
If vis a vector, then v[3] is a scalar real value, whereas v[2:4] is a vector of size 3
containing the elements v[2],v[3], and v[4].
The only subtlety with vectors is in inferring the return type when there are mul-
tiple indexes. For example, consider the following minimal example.
vector[5] v[3];
int idxs[7];
...
vector[7] u;
u = v[2, idxs];
real w[7];
w = v[idxs, 2];
The key is understanding that a single index always reduces dimensionality, whereas
a multiple index never does. The dimensions with multiple indexes (and unindexed
dimensions) determine the indexed expression’s type. In the example above, because
vis an array of vectors, v[2, idxs] reduces the array dimension but doesn’t reduce
the vector dimension, so the result is a vector. In contrast, v[idxs, 2] does not
reduce the array dimension, but does reduce the vector dimension (to a scalar), so
the result type for wis an array of reals. In both cases, the size of the multiple index
(here, 7) determines the size of the result.
333
Matrices
Matrices are a bit trickier because they have two dimensions, but the underlying
principle of type inference is the same—multiple indexes leave dimensions in place,
whereas single indexes reduce them. The following code shows how this works for
multiple indexing of matrices.
matrix[5,7] m;
...
row_vector[3] rv;
rv = m[4, 3:5]; // result is 1 x 3
...
vector[4] v;
v = m[2:5, 3]; // result is 3 x 1
...
matrix[3, 4] m2;
m2 = m[1:3, 2:5]; // result is 3 x 4
The key is realizing that any position with a multiple index or bounded index remains
in play in the result, whereas any dimension with a single index is replaced with 1 in
the resulting dimensions. Then the type of the result can be read off of the resulting
dimensionality as indicated in the comments above.
Matrices with One Multiple Index
If matrices receive a single multiple index, the result is a matrix. So if mis a matrix, so
is m[2:4]. In contrast, supplying a single index, m[3], produces a row vector result.
That is, m[3] produces the same result as m[3, ] or m[3, 1:cols(m)].
Arrays of Vectors or Matrices
With arrays of matrices, vectors, and row vectors, the basic access rules remain ex-
actly the same: single indexes reduce dimensionality and multiple indexes redirect
indexes. For example, consider the following example.
matrix[3, 4] m[5, 7];
...
matrix[3, 4] a[2];
a = m[1, 2:3]; // knock off first array dimension
a = m[3:4, 5]; // knock off second array dimension
In both assignments, the multiple index knocks off an array dimension, but it’s dif-
ferent in both cases. In the first case, a[i] == m[1, i + 1], whereas in the second
case, a[i] == m[i + 2, 5].
Continuing the previous example, consider the following.
334
...
vector[2] b;
b = a[1, 3, 2:3, 2];
Here, the two array dimensions are reduced as is the column dimension of the matrix,
leaving only a row dimension index, hence the result is a vector. In this case, b[j]
== a[1, 3, 1 + j, 2].
This last example illustrates an important point: if there is a lower-bounded index,
such as 2:3, with lower bound 2, then the lower bound minus one is added to the
index, as seen in the 1+jexpression above.
Continuing further, consider continuing with the following.
...
row_vector[3] c[2];
c = a[4:5, 3, 1, 2: ];
Here, the first array dimension is reduced, leaving a single array dimension, and the
row index of the matrix is reduced, leaving a row vector. For indexing, the values are
given by c[i, j] == a[i + 3, 3, 1, j + 1]
27.5. Matrices with Parameters and Constants
Suppose you have a 3x3matrix and know that two entries are zero but the others are
parameters. Such a situation arises in missing data situations and in problems with
fixed structural parameters.
Suppose a 3×3matrix is known to be zero at indexes [1,2]and [1,3]. The indexes
for parameters are included in a “melted” data-frame or database format.
transformed data {
int<lower=1, upper=3> idxs[7,
= { {1, 1},
{2, 1}, {2, 2}, {2, 3},
{3, 1}, {3, 2}, {3, 3} };
...
The seven remaining parameters are declared as a vector.
parameters {
vector[7] A_raw;
...
Then the full matrix Ais constructed in the model block as a local variable.
335
model {
matrix[3, 3] A;
for (i in 1:7)
A[idxs[i, 1], idxs[i, 2]] = A_raw[i];
A[1, 2] = 0;
A[1, 3] = 0;
...
This may seem like overkill in this setting, but in more general settings, the matrix
size, vector size, and the idxs array will be too large to code directly. Similar tech-
niques can be used to build up matrices with ad-hoc constraints, such as a handful of
entries known to be positive.
336
28. Optimizing Stan Code for Efficiency
This chapter provides a grab bag of techniques for optimizing Stan code, including
vectorization, sufficient statistics, and conjugacy. At a coarse level, efficiency involves
both the amount of time required for a computation and the amount of memory
required. For practical applied statistical modeling, we are mainly concerned with
reducing wall time (how long a program takes as measured by a clock on the wall)
and keeping memory requirements within available bounds.
28.1. What is Efficiency?
The standard algorithm analyses in computer science measure efficiency asymptoti-
cally as a function of problem size (such as data, number of parameters, etc.) and
typically do not consider constant additive factors like startup times or multiplica-
tive factors like speed of operations. In practice, the constant factors are important;
if run time can be cut in half or more, that’s a huge gain. This chapter focuses on both
the constant factors involved in efficiency (such as using built-in matrix operations
as opposed to naive loops) and on asymptotic efficiency factors (such as using linear
algorithms instead of quadratic algorithms in loops).
28.2. Efficiency for Probabilistic Models and Algorithms
Stan programs express models which are intrinsically statistical in nature. The al-
gorithms applied to these models may or may not themselves be probabilistic. For
example, given an initial value for parameters (which may itself be given determinis-
tically or generated randomly), Stan’s optimization algorithm (L-BFGS) for penalized
maximum likelihood estimation is purely deterministic. Stan’s sampling algorithms
are based on Markov chain Monte Carlo algorithms, which are probabilistic by nature
at every step. Stan’s variational inference algorithm (ADVI) is probabilistic despite
being an optimization algorithm; the randomization lies in a nested Monte Carlo cal-
culation for an expected gradient.
With probabilistic algorithms, there will be variation in run times (and maybe
memory usage) based on the randomization involved. For example, by starting too
far out in the tail, iterative algorithms underneath the hood, such as the solvers for
ordinary differential equations, may take different numbers of steps. Ideally this
variation will be limited; when there is a lot of variation it can be a sign that there is a
problem with the model’s parameterization in a Stan program or with initialization.
A well-behaved Stan program will have low variance between runs with differ-
ent random initializations and differently seeded random number generators. But
sometimes an algorithm can get stuck in one part of the posterior, typically due to
337

high curvature. Such sticking almost always indicates the need to reparameterize the
model. Just throwing away Markov chains with apparently poor behavior (slow, or
stuck) can lead to bias in posterior estimates. This problem with getting stuck can
often be overcome by lowering the initial step size to avoid getting stuck during adap-
tation and increasing the target acceptance rate in order to target a lower step size.
This is because smaller step sizes allow Stan’s gradient-based algorithms to better
follow the curvature in the density or penalized maximum likelihood being fit.
28.3. Statistical vs. Computational Efficiency
There is a difference between pure computational efficiency and statistical efficiency
for Stan programs fit with sampling-based algorithms. Computational efficiency mea-
sures the amount of time or memory required for a given step in a calculation, such
as an evaluation of a log posterior or penalized likelihood.
Statistical efficiency typically involves requiring fewer steps in algorithms by mak-
ing the statistical formulation of a model better behaved. The typical way to do this
is by applying a change of variables (i.e., reparameterization) so that sampling algo-
rithms mix better or optimization algorithms require less adaptation.
28.4. Model Conditioning and Curvature
Because Stan’s algorithms (other than Riemannian Hamiltonian Monte Carlo) rely on
step-based gradient-based approximations of the density (or penalized maximum
likelihood) being fitted, posterior curvature not captured by this first-order approx-
imation plays a central role in determining the statistical efficiency of Stan’s algo-
rithms.
A second-order approximation to curvature is provided by the Hessian, the matrix
of second derivatives of the log density log p(θ) with respect to the parameter vector
θ, defined as
H(θ) = ∇∇ log p(θ|y),
so that
Hi,j (θ) =∂2log p(θ|y)
∂θi∂θj
.
For pure penalized maximum likelihood problems, the posterior log density
log p(θ|y) is replaced by the penalized likelihood function L(θ) =log p(y|θ) −λ(θ).
Condition Number and Adaptation
A good gauge of how difficult a problem the curvature presents is given by the condi-
tion number of the Hessian matrix H, which is the ratio of the largest to the smallest
338
eigenvalue of H(assuming the Hessian is positive definite). This essentially measures
the difference between the flattest direction of movement and the most curved. Typ-
ically, the step size of a gradient-based algorithm is bounded by the most sharply
curved direction. With better conditioned log densities or penalized likelihood func-
tions, it is easier for Stan’s adaptation, especially the diagonal adaptations that are
used as defaults.
Unit Scales without Correlation
Ideally, all parameters should be programmed so that they have unit scale and so
that posterior correlation is reduced; together, these properties mean that there is no
rotation or scaling required for optimal performance of Stan’s algorithms. For Hamil-
tonian Monte Carlo, this implies a unit mass matrix, which requires no adaptation as
it is where the algorithm initializes. Riemannian Hamiltonian Monte Carlo performs
this conditioning on the fly at every step, but such conditioning is very expensive
computationally.
Varying Curvature
In all but very simple models (such as multivariate normals), the Hessian will vary as
θvaries. As an example, see the illustration of Neal’s funnel example in Figure 28.1.
The more the curvature varies, the harder it is for all of the algorithms with fixed
adaptation parameters (that is, everything but Riemannian Hamiltonian Monte Carlo)
to find adaptations that cover the entire density well. Many of the variable transforms
proposed are aimed at improving the conditioning of the Hessian and/or making it
more consistent across the relevant portions of the density (or penalized maximum
likelihood function) being fit.
For all of Stan’s algorithms, the curvature along the path from the initial values
of the parameters to the solution is relevant. For penalized maximum likelihood and
variational inference, the solution of the iterative algorithm will be a single point, so
this is all that matters. For sampling, the relevant “solution” is the typical set, which is
the posterior volume where almost all draws from the posterior lies; thus, the typical
set contains almost all of the posterior probability mass.
With sampling, the curvature may vary dramatically between the points on the
path from the initialization point to the typical set and within the typical set. This is
why adaptation needs to run long enough to visit enough points in the typical set to
get a good first-order estimate of the curvature within the typical set. If adaptation is
not run long enough, sampling within the typical set after adaptation will not be effi-
cient. We generally recommend at least one hundred iterations after the typical set is
reached (and the first effective draw is ready to be realized). Whether adaptation has
339
run long enough can be measured by comparing the adaptation parameters derived
from a set of diffuse initial parameter values.
Reparameterizing with a Change of Variables
Improving statistical efficiency is achieved by reparameterizing the model so that the
same result may be calculated using a density or penalized maximum likelihood that
is better conditioned. Again, see the example of reparameterizing Neal’s funnel in
Figure 28.1 for an example, and also the examples in Chapter 22.
One has to be careful in using change-of-variables reparameterizations when using
maximum likelihood estimation, because they can change the result if the Jacobian
term is inadvertently included in the revised likelihood model.
28.5. Well-Specified Models
Model misspecification, which roughly speaking means using a model that doesn’t
match the data, can be a major source of slow code. This can be seen in cases where
simulated data according to the model runs robustly and efficiently, whereas the real
data for which it was intended runs slowly or may even have convergence and mixing
issues. While some of the techniques recommended in the remaining sections of
this chapter may mitigate the problem somewhat, the best remedy is a better model
specification.
Somewhat counterintuitively, more complicated models often run faster than sim-
pler models. One common pattern is with a group of parameters with a wide fixed
prior such as normal(0, 1000)). This can fit slowly due to the mismatch between
prior and posterior (the prior has support for values in the hundreds or even thou-
sands, whereas the posterior may be concentrated near zero). In such cases, replacing
the fixed prior with a hierarchical prior such as normal(mu, sigma), where mu and
sigma are new parameters, with their own hyperpriors.
28.6. Reparameterization
Stan’s sampler can be slow in sampling from distributions with difficult posterior
geometries. One way to speed up such models is through reparameterization. In
some cases, reparameterization can dramatically increase effective sample size for
the same number of iterations or even make programs that would not converge well
behaved.
340
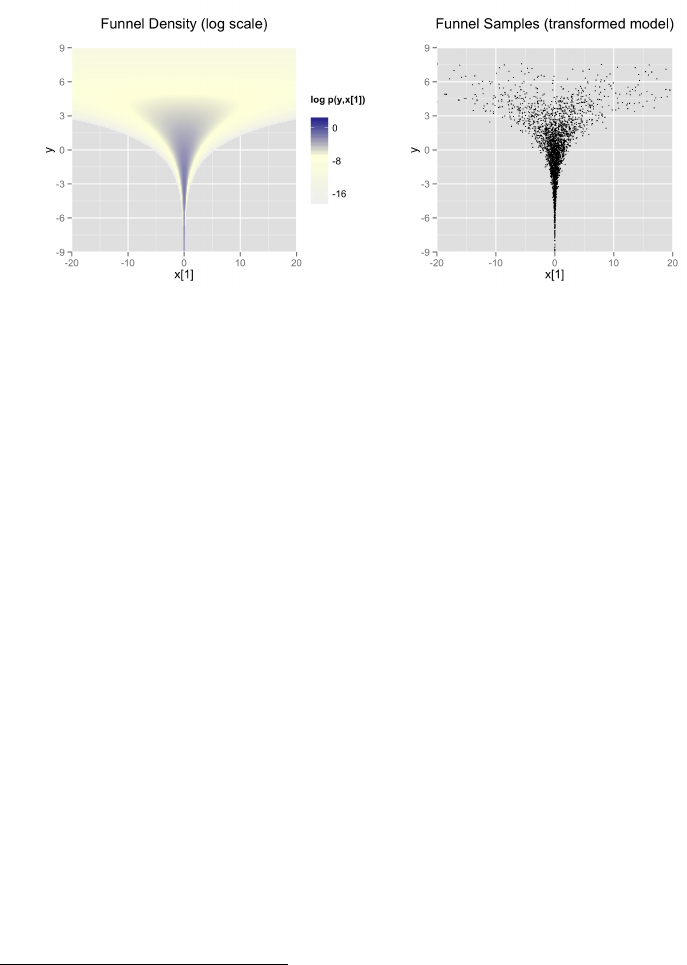
Figure 28.1: Neal’s Funnel. (Left) The marginal density of Neal’s funnel for the upper-level
variable yand one lower-level variable x1(see the text for the formula). The blue region has log
density greater than -8, the yellow region density greater than -16, and the gray background
a density less than -16. (Right) 4000 draws from a run of Stan’s sampler with default settings.
Both plots are restricted to the shown window of x1and yvalues; some draws fell outside of
the displayed area as would be expected given the density. The samples are consistent with the
marginal density p(y) =Normal(y|0,3), which has mean 0 and standard deviation 3.
Example: Neal’s Funnel
In this section, we discuss a general transform from a centered to a non-centered
parameterization Papaspiliopoulos et al. (2007).1This reparameterization is helpful
when there is not much data, because it separates the hierarchical parameters and
lower-level parameters in the prior.
(Neal,2003) defines a distribution that exemplifies the difficulties of sampling
from some hierarchical models. Neal’s example is fairly extreme, but can be trivially
reparameterized in such a way as to make sampling straightforward.
Neal’s example has support for y∈Rand x∈R9with density
p(y, x) =Normal(y|0,3)×
9
Y
n=1
Normal(xn|0,exp(y/2)).
The probability contours are shaped like ten-dimensional funnels. The funnel’s neck
is particularly sharp because of the exponential function applied to y. A plot of the
log marginal density of yand the first dimension x1is shown in Figure 28.1.
The funnel can be implemented directly in Stan as follows.
parameters {
real y;
1This parameterization came to be known on our mailing lists as the “Matt trick” after Matt Hoffman,
who independently came up with it while fitting hierarchical models in Stan.
341
vector[9] x;
}
model {
y ~ normal(0, 3);
x ~ normal(0, exp(y/2));
}
When the model is expressed this way, Stan has trouble sampling from the neck of
the funnel, where yis small and thus xis constrained to be near 0. This is due to the
fact that the density’s scale changes with y, so that a step size that works well in the
body will be too large for the neck and a step size that works in the neck will be very
inefficient in the body.
In this particular instance, because the analytic form of the density from which
samples are drawn is known, the model can be converted to the following more effi-
cient form.
parameters {
real y_raw;
vector[9] x_raw;
}
transformed parameters {
real y;
vector[9] x;
y = 3.0 *y_raw;
x = exp(y/2) *x_raw;
}
model {
y_raw ~ normal(0, 1); // implies y ~ normal(0, 3)
x_raw ~ normal(0, 1); // implies x ~ normal(0, exp(y/2))
}
In this second model, the parameters x_raw and y_raw are sampled as independent
unit normals, which is easy for Stan. These are then transformed into samples from
the funnel. In this case, the same transform may be used to define Monte Carlo
samples directly based on independent unit normal samples; Markov chain Monte
Carlo methods are not necessary. If such a reparameterization were used in Stan code,
it is useful to provide a comment indicating what the distribution for the parameter
implies for the distribution of the transformed parameter.
342

Reparameterizing the Cauchy
Sampling from heavy tailed distributions such as the Cauchy is difficult for Hamilto-
nian Monte Carlo, which operates within a Euclidean geometry.2The practical prob-
lem is that tail of the Cauchy requires a relatively large step size compared to the
trunk. With a small step size, the No-U-Turn sampler requires many steps when
starting in the tail of the distribution; with a large step size, there will be too much
rejection in the central portion of the distribution. This problem may be mitigated by
defining the Cauchy-distributed variable as the transform of a uniformly distributed
variable using the Cauchy inverse cumulative distribution function.
Suppose a random variable of interest Xhas a Cauchy distribution with location
µand scale τ, so that X∼Cauchy(µ, τ). The variable Xhas a cumulative distribution
function FX:R→(0,1)defined by
FX(x) =1
πarctan x−µ
τ+1
2.
The inverse of the cumulative distribution function, F−1
X:(0,1)→R, is thus
F−1
X(y) =µ+τtan πy−1
2.
Thus if the random variable Yhas a unit uniform distribution, Y∼Uniform(0,1),
then F−1
X(Y ) has a Cauchy distribution with location µand scale τ, i.e., F−1
X(Y ) ∼
Cauchy(µ, τ).
Consider a Stan program involving a Cauchy-distributed parameter beta.
parameters {
real beta;
...
}
model {
beta ~ cauchy(mu, tau);
...
}
This declaration of beta as a parameter may be replaced with a transformed param-
eter beta defined in terms of a uniform-distributed parameter beta_unif.
parameters {
real<lower=-pi()/2, upper=pi()/2> beta_unif;
...
2Riemannian Manifold Hamiltonian Monte Carlo (RMHMC) overcomes this difficulty by simulating the
Hamiltonian dynamics in a space with a position-dependent metric; see (Girolami and Calderhead,2011)
and (Betancourt,2012).
343

}
transformed parameters {
real beta;
beta = mu + tau *tan(beta_unif); // beta ~ cauchy(mu, tau)
}
model {
beta_unif ~ uniform(-pi()/2, pi()/2); // not necessary
...
}
It is more convenient in Stan to transform a uniform variable on (−π/2, π/2)than
one on (0,1). The Cauchy location and scale parameters, mu and tau, may be defined
as data or may themselves be parameters. The variable beta could also be defined as
a local variable if it does not need to be included in the sampler’s output.
The uniform distribution on beta_unif is defined explicitly in the model block,
but it could be safely removed from the program without changing sampling behavior.
This is because log Uniform(βunif| − π/2, π/2)= −log πis a constant and Stan only
needs the total log probability up to an additive constant. Stan will spend some time
checking that that beta_unif is between -pi()/2 and pi()/2, but this condition is
guaranteed by the constraints in the declaration of beta_unif.
Reparameterizing a Student-t Distribution
One thing that sometimes works when you’re having trouble with the heavy-tailedness
of Student-t distributions is to use the gamma-mixture representation, which says
that you can generate a Student-t distributed variable β,
β∼Student-t(ν, 0,1),
by first generating a gamma-distributed precision (inverse variance) τaccording to
τ∼Gamma(ν/2, ν/2),
and then generating βfrom the normal distribution,
β∼Normal(0, τ−1
2).
Because τis precision, τ−1
2is the scale (standard deviation), which is the parameteri-
zation used by Stan.
The marginal distribution of βwhen you integrate out τis Student-t(ν, 0,1), i.e.,
Student-t(β|ν, 0,1). =Z∞
0
Normal(β|0,1/τ−1
2)×Gamma(τ|ν/2, ν/2) dτ.
344

To go one step further, instead of defining a βdrawn from a normal with precision
τ, define αto be drawn from a unit normal,
α∼Normal(0,1)
and rescale by defining
β=α τ−1
2.
Now suppose µ=βx is the product of βwith a regression predictor x. Then the
reparameterization µ=ατ−1
2xhas the same distribution, but in the original, direct
parameterization, βhas (potentially) heavy tails, whereas in the second, neither τnor
αhave heavy tails.
To translate into Stan notation, this reparameterization replaces
parameters {
real<lower=0> nu;
real beta;
...
model {
beta ~ student_t(nu, 0, 1);
...
with
parameters {
real<lower=0> nu;
real<lower=0> tau;
real alpha;
...
transformed parameters {
real beta;
beta = alpha / sqrt(tau);
...
model {
real half_nu;
half_nu = 0.5 *nu;
tau ~ gamma(half_nu, half_nu);
alpha ~ normal(0, 1);
...
Although set to 0here, in most cases, the lower bound for the degrees of freedom
parameter nu can be set to 1or higher; when nu is 1, the result is a Cauchy distribution
with very fat tails and as nu approaches infinity, the Student-t distribution approaches
a normal distribution. Thus the parameter nu characterizes the heaviness of the tails
of the model.
345
Hierarchical Models and the Non-Centered Parameterization
Unfortunately, the usual situation in applied Bayesian modeling involves complex
geometries and interactions that are not known analytically. Nevertheless, reparame-
terization can still be very effective for separating parameters.
Centered parameterization
For example, a vectorized hierarchical model might draw a vector of coefficients β
with definitions as follows. The so-called centered parameterization is as follows.
parameters {
real mu_beta;
real<lower=0> sigma_beta;
vector[K] beta;
...
model {
beta ~ normal(mu_beta, sigma_beta);
...
Although not shown, a full model will have priors on both mu_beta and sigma_beta
along with data modeled based on these coefficients. For instance, a standard binary
logistic regression with data matrix xand binary outcome vector ywould include a
likelihood statement such as form y ~ bernoulli_logit(x *beta), leading to an
analytically intractable posterior.
A hierarchical model such as the above will suffer from the same kind of ineffi-
ciencies as Neal’s funnel, because the values of beta,mu_beta and sigma_beta are
highly correlated in the posterior. The extremity of the correlation depends on the
amount of data, with Neal’s funnel being the extreme with no data. In these cases,
the non-centered parameterization, discussed in the next section, is preferable; when
there is a lot of data, the centered parameterization is more efficient. See Betancourt
and Girolami (2013) for more information on the effects of centering in hierarchical
models fit with Hamiltonian Monte Carlo.
Non-Centered Parameterization
Sometimes the group-level effects do not constrain the hierarchical distribution
tightly. Examples arise when there is not many groups, or when the inter-group vari-
ation is high. In such cases, hierarchical models can be made much more efficient by
shifting the data’s correlation with the parameters to the hyperparameters. Similar
to the funnel example, this will be much more efficient in terms of effective sample
size when there is not much data (see (Betancourt and Girolami,2013)), and in more
extreme cases will be necessary to achieve convergence.
346
parameters {
vector[K] beta_raw;
...
transformed parameters {
vector[K] beta;
// implies: beta ~ normal(mu_beta, sigma_beta)
beta = mu_beta + sigma_beta *beta_raw;
model {
beta_raw ~ normal(0, 1);
...
Any priors defined for mu_beta and sigma_beta remain as defined in the original
model.
Reparameterization of hierarchical models is not limited to the normal distribu-
tion, although the normal distribution is the best candidate for doing so. In general,
any distribution of parameters in the location-scale family is a good candidate for
reparameterization. Let β=l+sα where lis a location parameter and sis a scale
parameter. Note that lneed not be the mean, sneed not be the standard deviation,
and neither the mean nor the standard deviation need to exist. If αand βare from
the same distributional family but αhas location zero and unit scale, while βhas
location land scale s, then that distribution is a location-scale distribution. Thus, if
αwere a parameter and βwere a transformed parameter, then a prior distribution
from the location-scale family on αwith location zero and unit scale implies a prior
distribution on βwith location land scale s. Doing so would reduce the dependence
between α,l, and s.
There are several univariate distributions in the location-scale family, such as the
Student t distribution, including its special cases of the Cauchy distribution (with one
degree of freedom) and the normal distribution (with infinite degrees of freedom). As
shown above, if αis distributed standard normal, then βis distributed normal with
mean µ=land standard deviation σ=s. The logistic, the double exponential, the
generalized extreme value distributions, and the stable distribution are also in the
location-scale family.
Also, if zis distributed standard normal, then z2is distributed chi-squared with
one degree of freedom. By summing the squares of Kindependent standard normal
variates, one can obtain a single variate that is distributed chi-squared with Kdegrees
of freedom. However, for large K, the computational gains of this reparameterization
may be overwhelmed by the computational cost of specifying Kprimitive parameters
just to obtain one transformed parameter to use in a model.
347
Multivariate Reparameterizations
The benefits of reparameterization are not limited to univariate distributions. A pa-
rameter with a multivariate normal prior distribution is also an excellent candidate
for reparameterization. Suppose you intend the prior for βto be multivariate normal
with mean vector µand covariance matrix Σ. Such a belief is reflected by the following
code.
data {
int<lower=2> K;
vector[K] mu;
cov_matrix[K] Sigma;
...
parameters {
vector[K] beta;
...
model {
beta ~ multi_normal(mu, Sigma);
...
In this case mu and Sigma are fixed data, but they could be unknown parameters, in
which case their priors would be unaffected by a reparameterization of beta.
If αhas the same dimensions as βbut the elements of αare independently and
identically distributed standard normal such that β=µ+Lα, where LL>=Σ, then β
is distributed multivariate normal with mean vector µand covariance matrix Σ. One
choice for Lis the Cholesky factor of Σ. Thus, the model above could be reparame-
terized as follows.
data {
int<lower=2> K;
vector[K] mu;
cov_matrix[K] Sigma;
...
transformed data {
matrix[K, K] L;
L = cholesky_decompose(Sigma);
}
parameters {
vector[K] alpha;
...
transformed parameters {
vector[K] beta;
beta = mu + L *alpha;
}
model {
348
alpha ~ normal(0, 1);
// implies: beta ~ multi_normal(mu, Sigma)
...
This reparameterization is more efficient for two reasons. First, it reduces depen-
dence among the elements of alpha and second, it avoids the need to invert Sigma
every time multi_normal is evaluated.
The Cholesky factor is also useful when a covariance matrix is decomposed into a
correlation matrix that is multiplied from both sides by a diagonal matrix of standard
deviations, where either the standard deviations or the correlations are unknown pa-
rameters. The Cholesky factor of the covariance matrix is equal to the product of
a diagonal matrix of standard deviations and the Cholesky factor of the correlation
matrix. Furthermore, the product of a diagonal matrix of standard deviations and a
vector is equal to the elementwise product between the standard deviations and that
vector. Thus, if for example the correlation matrix Tau were fixed data but the vector
of standard deviations sigma were unknown parameters, then a reparameterization
of beta in terms of alpha could be implemented as follows.
data {
int<lower=2> K;
vector[K] mu;
corr_matrix[K] Tau;
...
transformed data {
matrix[K, K] L;
L = cholesky_decompose(Tau);
}
parameters {
vector[K] alpha;
vector<lower=0>[K] sigma;
...
transformed parameters {
vector[K] beta;
// This equals mu + diag_matrix(sigma) *L*alpha;
beta = mu + sigma .*(L *alpha);
}
model {
sigma ~ cauchy(0, 5);
alpha ~ normal(0, 1);
// implies: beta ~ multi_normal(mu,
// diag_matrix(sigma) *L*L' *diag_matrix(sigma)))
...
This reparameterization of a multivariate normal distribution in terms of standard
349
normal variates can be extended to other multivariate distributions that can be con-
ceptualized as contaminations of the multivariate normal, such as the multivariate
Student t and the skew multivariate normal distribution.
A Wishart distribution can also be reparameterized in terms of standard normal
variates and chi-squared variates. Let Lbe the Cholesky factor of a K×Kpositive
definite scale matrix Sand let νbe the degrees of freedom. If
A=
√c10··· 0
z21 √c2
....
.
.
.
.
.......0
zK1··· zK(K−1)√cK
,
where each ciis distributed chi-squared with ν−i+1degrees of freedom and each
zij is distributed standard normal, then W=LAA>L>is distributed Wishart with
scale matrix S=LL>and degrees of freedom ν. Such a reparameterization can be
implemented by the following Stan code:
data {
int<lower=1> N;
int<lower=1> K;
int<lower=K+2> nu
matrix[K, K] L; // Cholesky factor of scale matrix
vector[K] mu;
matrix[N, K] y;
...
parameters {
vector<lower=0>[K] c;
vector[0.5 *K*(K - 1)] z;
...
model {
matrix[K, K] A;
int count = 1;
for (j in 1:(K-1)) {
for (i in (j+1):K) {
A[i, j] = z[count];
count += 1;
}
for (i in 1:(j - 1)) {
A[i, j] = 0.0;
}
A[j, j] = sqrt(c[j]);
}
for (i in 1:(K-1))
350
A[i, K] = 0;
A[K, K] = sqrt(c[K]);
for (i in 1:K)
c[i] ~ chi_square(nu - i + 1);
z ~ normal(0, 1);
// implies: L *A*A' *L' ~ wishart(nu, L *L')
y ~ multi_normal_cholesky(mu, L *A);
...
This reparameterization is more efficient for three reasons. First, it reduces de-
pendence among the elements of zand second, it avoids the need to invert the
covariance matrix, Wevery time wishart is evaluated. Third, if Wis to be used
with a multivariate normal distribution, you can pass LA to the more efficient
multi_normal_cholesky function, rather than passing Wto multi_normal.
If Wis distributed Wishart with scale matrix Sand degrees of freedom ν, then
W−1is distributed inverse Wishart with inverse scale matrix S−1and degrees of free-
dom ν. Thus, the previous result can be used to reparameterize the inverse Wishart
distribution. Since W=L∗A∗A>∗L>,W−1=L>−1A>−1A−1L−1, where all four in-
verses exist, but L−1>=L>−1and A−1>=A>−1. We can slightly modify the above Stan
code for this case:
data {
int<lower=1> K;
int<lower=K+2> nu
matrix[K, K] L; // Cholesky factor of scale matrix
...
transformed data {
matrix[K, K] eye;
matrix[K, K] L_inv;
for (j in 1:K) {
for (i in 1:K) {
eye[i, j] = 0.0;
}
eye[j, j] = 1.0;
}
L_inv = mdivide_left_tri_low(L, eye);
}
parameters {
vector<lower=0>[K] c;
vector[0.5 *K*(K - 1)] z;
...
model {
351

matrix[K, K] A;
matrix[K, K] A_inv_L_inv;
int count;
count = 1;
for (j in 1:(K-1)) {
for (i in (j+1):K) {
A[i, j] = z[count];
count += 1;
}
for (i in 1:(j - 1)) {
A[i, j] = 0.0;
}
A[j, j] = sqrt(c[j]);
}
for (i in 1:(K-1))
A[i, K] = 0;
A[K, K] = sqrt(c[K]);
A_inv_L_inv = mdivide_left_tri_low(A, L_inv);
for (i in 1:K)
c[i] ~ chi_square(nu - i + 1);
z ~ normal(0, 1); // implies: crossprod(A_inv_L_inv) ~
// inv_wishart(nu, L_inv' *L_inv)
...
Another candidate for reparameterization is the Dirichlet distribution with all K
shape parameters equal. Zyczkowski and Sommers (2001) shows that if θiis equal to
the sum of βindependent squared standard normal variates and ρi=θi
Pθi, then the
K-vector ρis distributed Dirichlet with all shape parameters equal to β
2. In particular,
if β=2, then ρis uniformly distributed on the unit simplex. Thus, we can make ρbe
a transformed parameter to reduce dependence, as in:
data {
int<lower=1> beta;
...
parameters {
vector[beta] z[K];
...
transformed parameters {
simplex[K] rho;
for (k in 1:K)
rho[k] = dot_self(z[k]); // sum-of-squares
rho = rho / sum(rho);
352

}
model {
for (k in 1:K)
z[k] ~ normal(0, 1);
// implies: rho ~ dirichlet(0.5 *beta *ones)
...
28.7. Vectorization
Gradient Bottleneck
Stan spends the vast majority of its time computing the gradient of the log proba-
bility function, making gradients the obvious target for optimization. Stan’s gradient
calculations with algorithmic differentiation require a template expression to be allo-
cated3and constructed for each subexpression of a Stan program involving parame-
ters or transformed parameters. This section defines optimization strategies based
on vectorizing these subexpressions to reduce the work done during algorithmic dif-
ferentiation.
Vectorizing Summations
Because of the gradient bottleneck described in the previous section, it is more ef-
ficient to collect a sequence of summands into a vector or array and then apply the
sum() operation than it is to continually increment a variable by assignment and
addition. For example, consider the following code snippet, where foo() is some
operation that depends on n.
for (n in 1:N)
total += foo(n,...);
This code has to create intermediate representations for each of the Nsummands.
A faster alternative is to copy the values into a vector, then apply the sum() oper-
ator, as in the following refactoring.
{
vector[N] summands;
for (n in 1:N)
summands[n] = foo(n,...);
total = sum(summands);
}
3Stan uses its own arena-based allocation, so allocation and deallocation are faster than with a raw call
to new.
353
Syntactically, the replacement is a statement block delineated by curly brackets ({,}),
starting with the definition of the local variable summands.
Even though it involves extra work to allocate the summands vector and copy N
values into it, the savings in differentiation more than make up for it. Perhaps sur-
prisingly, it will also use substantially less memory overall than incrementing total
within the loop.
Vectorization through Matrix Operations
The following program directly encodes a linear regression with fixed unit noise using
a two-dimensional array xof predictors, an array yof outcomes, and an array beta
of regression coefficients.
data {
int<lower=1> K;
int<lower=1> N;
real x[K, N];
real y[N];
}
parameters {
real beta[K];
}
model {
for (n in 1:N) {
real gamma = 0;
for (k in 1:K)
gamma += x[n, k] *beta[k];
y[n] ~ normal(gamma, 1);
}
}
The following model computes the same log probability function as the previous
model, even supporting the same input files for data and initialization.
data {
int<lower=1> K;
int<lower=1> N;
vector[K] x[N];
real y[N];
}
parameters {
vector[K] beta;
}
model {
354

for (n in 1:N)
y[n] ~ normal(dot_product(x[n], beta), 1);
}
Although it produces equivalent results, the dot product should not be replaced with
a transpose and multiply, as in
y[n] ~ normal(x[n]' *beta, 1);
The relative inefficiency of the transpose and multiply approach is that the transpo-
sition operator allocates a new vector into which the result of the transposition is
copied. This consumes both time and memory4. The inefficiency of transposition
could itself be mitigated somewhat by reordering the product and pulling the trans-
position out of the loop, as follows.
...
transformed parameters {
row_vector[K] beta_t;
beta_t = beta';
}
model {
for (n in 1:N)
y[n] ~ normal(beta_t *x[n], 1);
}
The problem with transposition could be completely solved by directly encoding the
xas a row vector, as in the following example.
data {
...
row_vector[K] x[N];
...
}
parameters {
vector[K] beta;
}
model {
for (n in 1:N)
y[n] ~ normal(x[n] *beta, 1);
}
4Future versions of Stan may remove this inefficiency by more fully exploiting expression templates
inside the Eigen C++ matrix library. This will require enhancing Eigen to deal with mixed-type arguments,
such as the type double used for constants and the algorithmic differentiation type stan::math::var
used for variables.
355
Declaring the data as a matrix and then computing all the predictors at once using
matrix multiplication is more efficient still, as in the example discussed in the next
section.
Having said all this, the most efficient way to code this model is with direct matrix
multiplication, as in
data {
matrix[N, K] x;
vector[N] y;
}
parameters {
vector[K] beta;
}
model {
y ~ normal(x *beta, 1);
In general, encapsulated single operations that do the work of loops will be more
efficient in their encapsulated forms. Rather than performing a sequence of row-
vector/vector multipliations, it is better to encapsulate it as a single matrix/vector
multiplication.
Vectorized Probability Functions
The final and most efficient version replaces the loops and transformed parameters
by using the vectorized form of the normal probability function, as in the following
example.
data {
int<lower=1> K;
int<lower=1> N;
matrix[N, K] x;
vector[N] y;
}
parameters {
vector[K] beta;
}
model {
y ~ normal(x *beta, 1);
}
The variables are all declared as either matrix or vector types. The result of the
matrix-vector multiplication x*beta in the model block is a vector of the same
length as y.
356
The probability function documentation in Part VII indicates which of Stan’s prob-
ability functions support vectorization; see Section 49.8.1 for more information. Vec-
torized probability functions accept either vector or scalar inputs for all arguments,
with the only restriction being that all vector arguments are the same dimensionality.
In the example above, yis a vector of size N,x*beta is a vector of size N, and 1is
a scalar.
Reshaping Data for Vectorization
Sometimes data does not arrive in a shape that is ideal for vectorization, but can be
put into such shape with some munging (either inside Stan’s transformed data block
or outside).
John Hall provided a simple example on the Stan users group. Simplifying nota-
tion a bit, the original model had a sampling statement in a loop, as follows.
for (n in 1:N)
y[n] ~ normal(mu[ii[n]], sigma);
The brute force vectorization would build up a mean vector and then vectorize all at
once.
{
vector[N] mu_ii;
for (n in 1:N)
mu_ii[n] = mu[ii[n]];
y ~ normal(mu_ii, sigma);
If there aren’t many levels (values ii[n] can take), then it behooves us to reorganize
the data by group in a case like this. Rather than having a single observation vector
y, there are K of them. And because Stan doesn’t support ragged arrays, it means K
declarations. For instance, with 5 levels, we have
y_1 ~ normal(mu[1], sigma);
...
y_5 ~ normal(mu[5], sigma);
This way, both the mu and sigma parameters are shared. Which way works out to be
more efficient will depend on the shape of the data; if the sizes are very small, the
simple vectorization may be faster, but for moderate to large sized groups, the full
expansion should be faster.
28.8. Exploiting Sufficient Statistics
In some cases, models can be recoded to exploit sufficient statistics in estimation.
This can lead to large efficiency gains compared to an expanded model. For example,
357
consider the following Bernoulli sampling model.
data {
int<lower=0> N;
int<lower=0, upper=1> y[N];
real<lower=0> alpha;
real<lower=0> beta;
}
parameters {
real<lower=0, upper=1> theta;
}
model {
theta ~ beta(alpha, beta);
for (n in 1:N)
y[n] ~ bernoulli(theta);
}
In this model, the sum of positive outcomes in yis a sufficient statistic for the chance
of success theta. The model may be recoded using the binomial distribution as
follows.
theta ~ beta(alpha, beta);
sum(y) ~ binomial(N, theta);
Because truth is represented as one and falsehood as zero, the sum sum(y) of a
binary vector yis equal to the number of positive outcomes out of a total of Ntrials.
This can be generalized to other discrete cases (one wouldn’t expect continuous
observations to be duplicated if they are random). Suppose there are only Kpos-
sible discrete outcomes, z1, . . . , zK, but there are Nobservations, where Nis much
larger than K. If fkis the frequency of outcome zk, then the entire likelihood with
distribution foo can be coded as follows.
for (k in 1:K)
target += f[k] *foo_lpmf(z[k] | ...);
where the ellipses are the parameters of the log probability mass function for dis-
tribution foo (there’s no distribution called “foo”; this is just a placeholder for any
discrete distribution name).
The resulting program looks like a “weighted” regression, but here the weights
f[k] are counts and thus sufficient statistics for the pmf and simply amount to an al-
ternative, more efficient coding of the same likelihood. For efficiency, the frequencies
f[k] should be counted once in the transformed data block and stored.
358
28.9. Aggregating Common Subexpressions
If an expression is calculated once, the value should be saved and reused wherever
possible. That is, rather than using exp(theta) in multiple places, declare a local
variable to store its value and reuse the local variable.
Another case that may not be so obvious is with two multilevel parameters, say
a[ii[n]] + b[jj[n]]. If aand bare small (i.e., do not have many levels), then a
table a_b of their sums can be created, with
matrix[size(a), size(b)] a_b;
for (i in 1:size(a))
for (j in 1:size(b))
a_b[i, j] = a[i] + b[j];
Then the sum can be replaced with a_b[ii[n], jj[n]].
28.10. Exploiting Conjugacy
Continuing the model from the previous section, the conjugacy of the beta prior and
binomial sampling distribution allow the model to be further optimized to the follow-
ing equivalent form.
theta ~ beta(alpha + sum(y), beta + N - sum(y));
To make the model even more efficient, a transformed data variable defined to be
sum(y) could be used in the place of sum(y).
28.11. Standardizing Predictors and Outputs
Stan programs will run faster if the input is standardized to have a zero sample mean
and unit sample variance. This section illustrates the principle with a simple linear
regression.
Suppose that y=(y1, . . . , yN)is a sequence of Noutcomes and x=(x1, . . . , xN)a
parallel sequence of Npredictors. A simple linear regression involving an intercept
coefficient αand slope coefficient βcan be expressed as
yn=α+βxn+n,
where
n∼Normal(0, σ ).
If either vector xor yhas very large or very small values or if the sample mean
of the values is far away from 0 (on the scale of the values), then it can be more
359
efficient to standardize the outputs ynand predictors xn. The data is first centered
by subtracting the sample mean, and then scaled by dividing by the sample deviation.
Thus a data point uis standardized with respect to a vector yby the function zy,
defined by
zy(u) =u−¯
y
sd(y)
where the sample mean of yis
¯
y=1
N
N
X
n=1
yn,
and the sample standard deviation of yis
sd(y) =
1
N
N
X
n=1
(yn−¯
y)2
1/2
.
The inverse transform is defined by reversing the two normalization steps, first
rescaling by the same deviation and relocating by the sample mean,
z−1
y(v) =sd(y)v +¯
y.
To standardize a regression problem, the predictors and outcomes are standard-
ized. This changes the scale of the variables, and hence changes the scale of the
priors. Consider the following initial model.
data {
int<lower=0> N;
vector[N] y;
vector[N] x;
}
parameters {
real alpha;
real beta;
real<lower=0> sigma;
}
model {
// priors
alpha ~ normal(0, 10);
beta ~ normal(0, 10);
sigma ~ cauchy(0, 5);
// likelihood
for (n in 1:N)
y[n] ~ normal(alpha + beta *x[n], sigma);
}
360
The data block for the standardized model is identical. The standardized predic-
tors and outputs are defined in the transformed data block.
data {
int<lower=0> N;
vector[N] y;
vector[N] x;
}
transformed data {
vector[N] x_std;
vector[N] y_std;
x_std = (x - mean(x)) / sd(x);
y_std = (y - mean(y)) / sd(y);
}
parameters {
real alpha_std;
real beta_std;
real<lower=0> sigma_std;
}
model {
alpha_std ~ normal(0, 10);
beta_std ~ normal(0, 10);
sigma_std ~ cauchy(0, 5);
for (n in 1:N)
y_std[n] ~ normal(alpha_std + beta_std *x_std[n],
sigma_std);
}
The parameters are renamed to indicate that they aren’t the “natural” parameters,
but the model is otherwise identical. In particular, the fairly diffuse priors on the
coefficients and error scale are the same. These could have been transformed as well,
but here they are left as is, because the scales make sense as very diffuse priors for
standardized data; the priors could be made more informative. For instance, because
the outputs yhave been standardized, the error σshould not be greater than 1,
because that’s the scale of the noise for predictors α=β=0.
The original regression
yn=α+βxn+n
has been transformed to a regression on the standardized variables,
zy(yn)=α0+β0zx(xn)+0
n.
361
The original parameters can be recovered with a little algebra,
yn=z−1
y(zy(yn))
=z−1
yα0+β0zx(xn)+0
n
=z−1
yα0+β0xn−¯
x
sd(x) +0
n
=sd(y) α0+β0xn−¯
x
sd(x) +0
n+¯
y
=sd(y) α0−β0¯
x
sd(x) +¯
y+β0sd(y)
sd(x) xn+sd(y)0
n,
from which the original scale parameter values can be read off,
α=sd(y) α0−β0¯
x
sd(x) +¯
y;β=β0sd(y)
sd(x) ;σ=sd(y)σ 0.
These recovered parameter values on the original scales can be calculated within Stan
using a generated quantities block following the model block,
generated quantities {
real alpha;
real beta;
real<lower=0> sigma;
alpha = sd(y) *(alpha_std - beta_std *mean(x) / sd(x))
+ mean(y);
beta = beta_std *sd(y) / sd(x);
sigma = sd(y) *sigma_std;
}
Of course, it is inefficient to compute all of the means and standard deviations every
iteration; for more efficiency, these can be calculated once and stored as transformed
data. Furthermore, the model sampling statement can be easily vectorized, for in-
stance, in the transformed model, to
y_std ~ normal(alpha_std + beta_std *x_std, sigma_std);
362
Part V
Inference
363
29. Bayesian Data Analysis
Gelman et al. (2013) provide the following characterization of Bayesian data analysis.
By Bayesian data analysis, we mean practical methods for making infer-
ences from data using probability models for quantities we observe and
about which we wish to learn.
They go on to describe how Bayesian statistics differs from frequentist approaches.
The essential characteristic of Bayesian methods is their explicit use of
probability for quantifying uncertainty in inferences based on statistical
analysis.
Because they view probability as the limit of relative frequencies of observations,
strict frequentists forbid probability statements about parameters. Parameters are
considered fixed, not random.
Bayesians also treat parameters as fixed but unknown. But unlike frequentists,
they make use of both prior distributions over parameters and posterior distributions
over parameters. These prior and posterior probabilities and posterior predictive
probabilities are intended to characterize knowledge about the parameters and future
observables. Posterior distributions form the basis of Bayesian inference, as described
below.
29.1. Bayesian Modeling
(Gelman et al.,2013) break applied Bayesian modeling into the following three steps.
1. Set up a full probability model for all observable and unobservable quantities.
This model should be consistent with existing knowledge of the data being
modeled and how it was collected.
2. Calculate the posterior probability of unknown quantities conditioned on ob-
served quantities. The unknowns may include unobservable quantities such as
parameters and potentially observable quantities such as predictions for future
observations.
3. Evaluate the model fit to the data. This includes evaluating the implications of
the posterior.
Typically, this cycle will be repeated until a sufficient fit is achieved in the third step.
Stan automates the calculations involved in the second and third steps.
364
29.2. Bayesian Inference
Basic Quantities
The mechanics of Bayesian inference follow directly from Bayes’s rule. To fix nota-
tion, let yrepresent observed quantities such as data and let θrepresent unknown
quantities such as parameters and future observations. Both yand θwill be mod-
eled as random. Let xrepresent known, but unmodeled quantities such as constants,
hyperparameters, and predictors.
Probability Functions
The probability function p(y, θ) is the joint probability function of the data yand
parameters θ. The constants and predictors xare implicitly understood as being part
of the conditioning. The conditional probability function p(y|θ) of the data ygiven
parameters θand constants xis called the sampling probability function; it is also
called the likelihood function when viewed as a function of θfor fixed yand x.
The probability function p(θ) over the parameters given the constants xis called
the prior because it characterizes the probability of the parameters before any data is
observed. The conditional probability function p(θ|y) is called the posterior because
it characterizes the probability of parameters given observed data yand constants x.
Bayes’s Rule
The technical apparatus of Bayesian inference hinges on the following chain of equa-
tions, known in various forms as Bayes’s rule (where again, the constants xare im-
plicit).
p(θ|y) =p(θ, y)
p(y) [definition of conditional probability]
=p(y|θ) p(θ)
p(y) [chain rule]
=p(y|θ) p(θ)
RΘp(y, θ) dθ [law of total probability]
=p(y|θ) p(θ)
RΘp(y|θ) p(θ) dθ [chain rule]
∝p(y|θ) p(θ) [yis fixed]
Bayes’s rule “inverts” the probability of the posterior p(θ|y), expressing it solely in
terms of the likelihood p(y|θ) and prior p(θ) (again, with constants and predictors
365
ximplicit). The last step is important for Stan, which only requires probability func-
tions to be characterized up to a constant multiplier.
Predictive Inference
The uncertainty in the estimation of parameters θfrom the data y(given the model)
is characterized by the posterior p(θ|y). The posterior is thus crucial for Bayesian
predictive inference.
If ˜
yis taken to represent new, perhaps as yet unknown, observations, along with
corresponding constants and predictors ˜
x, then the posterior predictive probability
function is given by
p(˜
y|y) =ZΘ
p(˜
y|θ) p(θ|y) dθ.
Here, both the original constants and predictors xand the new constants and pre-
dictors ˜
xare implicit. Like the posterior itself, predictive inference is characterized
probabilistically. Rather than using a point estimate of the parameters θ, predictions
are made based on averaging the predictions over a range of θweighted by the pos-
terior probability p(θ|y) of θgiven data y(and constants x).
The posterior may also be used to estimate event probabilities. For instance, the
probability that a parameter θkis greater than zero is characterized probabilistically
by
Pr[θk>0]=ZΘ
I(θk>0) p(θ|y) dθ.
The indicator function, I(φ), evaluates to one if the proposition φis true and evalu-
ates to zero otherwise.
Comparisons involving future observables may be carried out in the same way.
For example, the probability that ˜
yn>˜
yn0can be characterized using the posterior
predictive probability function as
Pr[˜
yn>˜
yn0]=ZΘZY
I(˜
yn>˜
yn0) p(˜
y|θ)p(θ|y) d ˜
y dθ.
Posterior Predictive Checking
After the parameters are fit to data, they can be used to simulate a new data set by
running the model inferences in the forward direction. These replicated data sets can
then be compared to the original data either visually or statistically to assess model
fit (Gelman et al.,2013, Chapter 6).
In Stan, posterior simulations can be generated in two ways. The first approach is
to treat the predicted variables as parameters and then define their distributions in
the model block. The second approach, which also works for discrete variables, is to
366
generate replicated data using random-number generators in the generated quantities
block.
367

30. Markov Chain Monte Carlo Sampling
Stan uses Markov chain Monte Carlo (MCMC) techniques to generate samples from
the posterior distribution for inference.
30.1. Monte Carlo Sampling
Monte Carlo methods were developed to numerically approximate integrals that are
not tractable analytically but for which evaluation of the function being integrated is
tractable (Metropolis and Ulam,1949).
For example, the mean µof a probability density p(θ) is defined by the integral
µ=ZΘ
θ×p(θ) dθ.
For even a moderately complex Bayesian model, the posterior density p(θ|y) leads to
an integral that is impossible to evaluate analytically. The posterior also depends on
the constants and predictors x, but from here, they will just be elided and taken as
given.
Now suppose it is possible to draw independent samples from p(θ) and let
θ(1), θ(2), . . . , θ(N) be Nsuch samples. A Monte Carlo estimate ˆ
µof the mean µof
p(θ) is given by the sample average,
ˆ
µ=1
N
N
X
n=1
θ(n).
If the probability function p(θ) has a finite mean and variance, the law of large
numbers ensures the Monte Carlo estimate converges to the correct value as the num-
ber of samples increases,
lim
N→∞ ˆ
µ=µ.
Assuming finite mean and variance, estimation error is governed by the central limit
theorem, so that estimation error decreases as the square root of N,
|µ−ˆ
µ| ∝ 1
√N.
Therefore, estimating a mean to an extra decimal place of accuracy requires one hun-
dred times more samples; adding two decimal places means ten thousand times as
many samples. This makes Monte Carlo methods more useful for rough estimates to
within a few decimal places than highly precise estimates. In practical applications,
there is no point estimating a quantity beyond the uncertainty of the data sample on
which it is based, so this lack of many decimal places of accuracy is rarely a problem
in practice for statistical models.
368
30.2. Markov Chain Monte Carlo Sampling
Markov chain Monte Carlo (MCMC) methods were developed for situations in which it
is not straightforward to draw independent samples (Metropolis et al.,1953).
A Markov chain is a sequence of random variables θ(1), θ(2), . . . where each variable
is conditionally independent of all other variables given the value of the previous
value. Thus if θ=θ(1), θ(2), . . . , θ(N), then
p(θ) =p(θ(1))
N
Y
n=2
p(θ(n)|θ(n−1)).
Stan uses Hamiltonian Monte Carlo to generate a next state in a manner described in
Chapter 34.
The Markov chains Stan and other MCMC samplers generate are ergodic in the
sense required by the Markov chain central limit theorem, meaning roughly that there
is a reasonable chance of reaching one value of θfrom another. The Markov chains are
also stationary, meaning that the transition probabilities do not change at different
positions in the chain, so that for n, n0≥0, the probability function p(θ(n+1)|θ(n))
is the same as p(θ(n0+1)|θ(n0))(following the convention of overloading random and
bound variables and picking out a probability function by its arguments).
Stationary Markov chains have an equilibrium distribution on states in which each
has the same marginal probability function, so that p(θ(n))is the same probability
function as p(θ(n+1)). In Stan, this equilibrium distribution p(θ(n))is the probability
function p(θ) being sampled, typically a Bayesian posterior density.
Using MCMC methods introduces two difficulties that are not faced by indepen-
dent sample Monte Carlo methods. The first problem is determining when a randomly
initialized Markov chain has converged to its equilibrium distribution. The second
problem is that the draws from a Markov chain are correlated, and thus the central
limit theorem’s bound on estimation error no longer applies. These problems are
addressed in the next two sections.
30.3. Initialization and Convergence Monitoring
A Markov chain generates samples from the target distribution only after it has con-
verged to equilibrium. Unfortunately, this is only guaranteed in the limit in theory.
In practice, diagnostics must be applied to monitor whether the Markov chain(s) have
converged.
369
Potential Scale Reduction
One way to monitor whether a chain has converged to the equilibrium distribution is
to compare its behavior to other randomly initialized chains. This is the motivation
for the Gelman and Rubin (1992) potential scale reduction statistic, ˆ
R. The ˆ
Rstatis-
tic measures the ratio of the average variance of samples within each chain to the
variance of the pooled samples across chains; if all chains are at equilibrium, these
will be the same and ˆ
Rwill be one. If the chains have not converged to a common
distribution, the ˆ
Rstatistic will be greater than one.
Gelman and Rubin’s recommendation is that the independent Markov chains be
initialized with diffuse starting values for the parameters and sampled until all values
for ˆ
Rare below 1.1. Stan allows users to specify initial values for parameters and it
is also able to draw diffuse random initializations itself.
The ˆ
Rstatistic is defined for a set of MMarkov chains, θm, each of which has N
samples θ(n)
m. The between-sample variance estimate is
B=N
M−1
M
X
m=1
(¯
θ(•)
m−¯
θ(•)
•)2,
where
¯
θ(•)
m=1
N
N
X
n=1
θ(n)
mand ¯
θ(•)
•=1
M
M
X
m=1
¯
θ(•)
m.
The within-sample variance is
W=1
M
M
X
m=1
s2
m,
where
s2
m=1
N−1
N
X
n=1
(θ(n)
m−¯
θ(•)
m)2.
The variance estimator is
d
var+(θ|y) =N−1
NW+1
NB.
Finally, the potential scale reduction statistic is defined by
ˆ
R=sd
var+(θ|y)
W.
Generalized ˆ
Rfor Ragged Chains
Now suppose that each chain may have a different number of samples. Let Nmbe the
number of samples in chain m. Now the formula for the within-chain mean for chain
370
muses the size of the chain, Nm,
¯
θ(•)
m=1
Nm
N
X
n=1
θ(m)
n,
as does the within-chain variance estimate,
s2
m=1
Nm−1
Nm
X
n=1
(θ(n)
m−¯
θ(•)
m)2.
The terms that average over chains, such as ¯
θ(•)
•,B, and W, have the same definition as
before to ensure that each chain has the same effect on the estimate. If the averages
were weighted by size, a single long chain would dominate the statistics and defeat
the purpose of monitoring convergence with multiple chains.
Because it contains the term N, the estimate Å
var+must be generalized. By ex-
panding the first term,
N−1
NW=N−1
N
1
M
M
X
m=1
1
N−1
N
X
n=1
(θ(n)
m−¯
θ(•)
m)2=1
M
M
X
m=1
1
N
N
X
n=1
(θ(n)
m−¯
θ(•)
m)2,
and the second term,
1
NB=1
M−1
M
X
m=1
(¯
θ(•)
m−¯
θ(•)
•)2.
the variance estimator naturally generalizes to
d
var+(θ|y) =1
M
M
X
m=1
1
Nm
Nm
X
n=1
(θ(n)
m−¯
θ(•)
m)2+1
M−1
M
X
m=1
(¯
θ(•)
m−¯
θ(•)
•)2.
If the chains are all the same length, this definition is equivalent to the one in the last
section. This generalized variance estimator and the within-chains variance estimates
may be plugged directly into the formula for ˆ
Rfrom the previous section.
Split ˆ
Rfor Detecting Non-Stationarity
Before calculating the potential-scale-reduction statistic ˆ
R, each chain may be split
into two halves. This provides an additional means to detect non-stationarity in the
chains. If one chain involves gradually increasing values and one involves gradually
decreasing values, they have not mixed well, but they can have ˆ
Rvalues near unity.
In this case, splitting each chain into two parts leads to ˆ
Rvalues substantially greater
than 1 because the first half of each chain has not mixed with the second half.
371
Convergence is Global
A question that often arises is whether it is acceptable to monitor convergence of only
a subset of the parameters or generated quantities. The short answer is “no,” but this
is elaborated further in this section.
For example, consider the value lp__, which is the log posterior density (up to
a constant) It is a mistake to declare convergence in any practical sense if lp__ has
not converged, because different chains are really in different parts of the space. Yet
measuring convergence for lp__ is particularly tricky, as noted below.
Asymptotics and transience vs. equilibrium
Markov chain convergence is a global property in the sense that it does not depend
on the choice of function of the parameters that is monitored. There is no hard cut-
off between pre-convergence “transience” and post-convergence “equilibrium.” What
happens is that as the number of states in the chain approaches infinity, the distribu-
tion of possible states in the chain approaches the target distribution and in that limit
the expected value of the Monte Carlo estimator of any integrable function converges
to the true expectation. There is nothing like warmup here, because in the limit, the
effects of initial state are completely washed out.
Multivariate convergence of functions
The ˆ
Rstatistic considers the composition of a Markov chain and a function, and if
the Markov chain has converged then each Markov chain and function composition
will have converged. Multivariate functions converge when all of their margins have
converged by the Cramer-Wold theorem.
The transformation from unconstrained space to constrained space is just another
function, so does not effect convergence.
Different functions may have different autocorrelations, but if the Markov chain
has equilibrated then all Markov chain plus function compositions should be consis-
tent with convergence. Formally, any function that appears inconsistent is of concern
and although it would be unreasonable to test every function, lp__ and other mea-
sured quantities should at least be consistent.
The obvious difference in lp__ is that it tends to vary quickly with position and is
consequently susceptible to outliers.
Finite numbers of states
The question is what happens for finite numbers of states? If we can prove a strong
geometric ergodicity property (which depends on the sampler and the target distribu-
tion), then one can show that there exists a finite time after which the chain forgets
372
its initial state with a large probability. This is both the autocorrelation time and the
warmup time. But even if you can show it exists and is finite (which is nigh impossi-
ble) you can’t compute an actual value analytically.
So what we do in practice is hope that the finite number of draws is large enough
for the expectations to be reasonably accurate. Removing warmup iterations im-
proves the accuracy of the expectations but there is no guarantee that removing any
finite number of samples will be enough.
Why inconsistent ˆ
R?
There are two things to worry about here.
Firstly, as noted above, for any finite number of draws, there will always be some
residual effect of the initial state, which typically manifests as some small (or large
if the autocorrelation time is huge) probability of having a large outlier. Functions
robust to such outliers (say, quantiles) will appear more stable and have better ˆ
R.
Functions vulnerable to such outliers may show fragility.
Secondly, use of the ˆ
Rstatistic makes very strong assumptions. In particular, it
assumes that the functions being considered are Gaussian or it only uses the first
two moments and assumes some kind of independence. The point is that strong
assumptions are made that do not always hold. In particular, the distribution for
the log posterior density (lp__) almost never looks Gaussian, instead it features long
tails that can lead to large ˆ
Reven in the large Nlimit. Tweaks to ˆ
R, such as using
quantiles in place of raw values, have the flavor of making the samples of interest
more Gaussian and hence the ˆ
Rstatistic more accurate.
Final words on convergence monitoring
“Convergence” is a global property and holds for all integrable functions at once, but
employing the ˆ
Rstatistic requires additional assumptions and thus may not work for
all functions equally well.
Note that if you just compare the expectations between chains then we can rely on
the Markov chain asymptotics for Gaussian distributions and can apply the standard
tests.
30.4. Effective Sample Size
The second technical difficulty posed by MCMC methods is that the samples will typ-
ically be autocorrelated within a chain. This increases the uncertainty of the estima-
tion of posterior quantities of interest, such as means, variances or quantiles.
A nice introductory reference for analyzing MCMC results in general and effec-
tive sample size in particular is (Geyer,2011). The particular calculations used by
373
Stan follow those for split- ˆ
R, which involve both cross-chain (mean) and within-chain
calculations (autocorrelation); they were introduced in this manual and explained in
more detail in (Gelman et al.,2013).
Definition of Effective Sample Size
The amount by which autocorrelation within the chains increases uncertainty in esti-
mates can be measured by effective sample size (ess). Given independent samples, the
central limit theorem bounds uncertainty in estimates based on the number of sam-
ples N. Given dependent samples, the number of independent samples is replaced
with the effective sample size Neff, which is the number of independent samples with
the same estimation power as the Nautocorrelated samples. For example, estimation
error is proportional to 1/pNeff rather than 1/√N.
The effective sample size of a sequence is defined in terms of the autocorrelations
within the sequence at different lags. The autocorrelation ρtat lag t≥0for a chain
with joint probability function p(θ) with mean µand variance σ2is defined to be
ρt=1
σ2ZΘ
(θ(n) −µ)(θ(n+t) −µ) p(θ) dθ.
This is just the correlation between the two chains offset by tpositions. Because
we know θ(n) and θ(n+t) have the same marginal distribution in an MCMC setting,
multiplying the two difference terms and reducing yields
ρt=1
σ2ZΘ
θ(n) θ(n+t) p(θ) dθ.
The effective sample size of Nsamples generated by a process with autocorrela-
tions ρtis defined by
Neff =N
P∞
t=−∞ ρt=N
1+2P∞
t=1ρt
.
Estimation of Effective Sample Size
In practice, the probability function in question cannot be tractably integrated and
thus the autocorrelation cannot be calculated, nor the effective sample size. Instead,
these quantities must be estimated from the samples themselves. The rest of this sec-
tion describes a variogram-based estimator for autocorrelations, and hence effective
sample size, based on multiple chains. For simplicity, each chain θmwill be assumed
to be of length N.
One way to estimate the effective sample size is based on the variograms Vtat
lag t∈ {0,1. . .}. The variograms are defined as follows for (univariate) samples θ(n)
m,
374
where m∈ {1, . . . , M}is the chain, and Nmis the number of samples in chain m.
Vt=1
M
M
X
m=1
1
Nm−t
Nm
X
n=t+1θ(n)
m−θ(n−t)
m2
.
The variogram along with the multi-chain variance estimate d
var+introduced in the
previous section can be used to estimate the autocorrelation at lag tas
ˆ
ρt=1−Vt
2d
var+.
If the chains have not converged, the variance estimator d
var+will overestimate vari-
ance, leading to an overestimate of autocorrelation and an underestimate effective
sample size.
Because of the noise in the correlation estimates ˆ
ρtas tincreases, typically only
the initial estimates of ˆ
ρtwhere ˆ
ρt>0will be used. Setting T0to be the first lag such
that ρT0+1<0,
T0=arg min
tˆ
ρt+1<0,
the effective sample size estimator is defined as
ˆ
Neff =1
2
MN
1+PT0
t=1ˆ
ρt
.
Exact autocorrelations can happen only on odd lags (Geyer,2011). By summing over
pairs, the paired autocorrelation is guaranteed to be positive modulo estimator noise.
This is the motivation behind the many termination criterion of Geyer (2011). Stan
does not (yet) do the paired expectations because NUTS almost by construction avoids
the negative autocorrelation regime. Thus terminating at the first negative autocorre-
lation is a reasonable approximation for stopping when the noise in the autocorrela-
tion estimator dominates.
Stan carries out the autocorrelation computations for all lags simultaneously us-
ing Eigen’s fast Fourier transform (FFT) package with appropriate padding; see (Geyer,
2011) for more detail on using FFT for autocorrelation calculations.
Thinning Samples
In the typical situation, the autocorrelation, ρt, decreases as the lag, t, increases.
When this happens, thinning the samples will reduce the autocorrelation. For in-
stance, consider generating one thousand samples in one of the following two ways.
1. Generate 1000 samples after convergence and save all of them.
2. Generate 10,000 samples after convergence and save every tenth sample.
375
Even though both produce one thousand samples, the second approach with thinning
will produce more effective samples. That’s because the autocorrelation ρtfor the
thinned sequence is equivalent to ρ10tin the unthinned samples, so the sum of the
autocorrelations will be lower and thus the effective sample size higher.
On the other hand, if memory and data storage are no object, saving all ten thou-
sand samples will have a higher effective sample size than thinning to one thousand
samples.
376

31. Penalized Maximum Likelihood Point Esti-
mation
This chapter defines the workhorses of non-Bayesian estimation, maximum likelihood
and penalized maximum likelihood, and relates them to Bayesian point estimation
based on posterior means, medians, and modes. Such estimates are called “point
estimates” because they are composed of a single value for the model parameters θ
rather than a posterior distribution.
Stan’s optimizer can be used to implement (penalized) maximum likelihood esti-
mation for any likelihood function and penalty function that can be coded in Stan’s
modeling language. Stan’s optimizer can also be used for point estimation in Bayesian
settings based on posterior modes. Stan’s Markov chain Monte Carlo samplers can be
used to implement point inference in Bayesian models based on posterior means or
medians.
31.1. Maximum Likelihood Estimation
Given a likelihood function p(y|θ) and a fixed data vector y, the maximum likelihood
estimate (MLE) is the parameter vector ˆ
θthat maximizes the likelihood, i.e.,
ˆ
θ=argmaxθp(y|θ).
It is usually more convenient to work on the log scale. An equivalent1formulation of
the MLE is
ˆ
θ=argmaxθlog p(y|θ).
Existence of Maximum Likelihood Estimates
Because not all functions have unique maximum values, maximum likelihood esti-
mates are not guaranteed to exist. As discussed in Chapter 25, this situation can
arise when
• there is more than one point that maximizes the likelihood function,
• the likelihood function is unbounded, or
• the likelihood function is bounded by an asymptote that is never reached for
legal parameter values.
1The equivalence follows from the fact that densities are positive and the log function is strictly mono-
tonic, i.e., p(y|θ) ≥0and for all a, b > 0, log a > log bif and only if a > b.
377

These problems persist with the penalized maximum likelihood estimates discussed
in the next section, and Bayesian posterior modes as discussed in the following sec-
tion.
Example: Linear Regression
Consider an ordinary linear regression problem with an N-dimensional vector of ob-
servations y, an (N ×K)-dimensional data matrix xof predictors, a K-dimensional
parameter vector βof regression coefficients, and a real-valued noise scale σ > 0,
with log likelihood function
log p(y|β, x) =
N
X
n=1
log Normal(yn|xnβ, σ ).
The maximum likelihood estimate for θ=(β, σ ) is just
(ˆ
β, ˆ
σ ) =argmaxβ,σ log p(y|β, σ , x) =
N
X
n=1
log Normal(yn|xnβ, σ ).
Squared Error
A little algebra on the log likelihood function shows that the marginal maximum
likelihood estimate ˆ
θ=(ˆ
β, ˆ
σ ) can be equivalently formulated for ˆ
βin terms of least
squares. That is, ˆ
βis the value for the coefficient vector that minimizes the sum of
squared prediction errors,
ˆ
β=argminβ
N
X
n=1
(yn−xnβ)2=argminβ(y −xβ)>(y −xβ).
The residual error for data item nis the difference between the actual value and
predicted value, yn−xnˆ
β. The maximum likelihood estimate for the noise scale, ˆ
σis
just the square root of the average squared residual,
ˆ
σ2=1
N
N
X
n=1yn−xnˆ
β2
=1
N(y −xˆ
β)>(y −xˆ
β).
Minimizing Squared Error in Stan
The squared error approach to linear regression can be directly coded in Stan with
the following model.
378
data {
int<lower=0> N;
int<lower=1> K;
vector[N] y;
matrix[N,K] x;
}
parameters {
vector[K] beta;
}
transformed parameters {
real<lower=0> squared_error;
squared_error = dot_self(y - x *beta);
}
model {
target += -squared_error;
}
generated quantities {
real<lower=0> sigma_squared;
sigma_squared = squared_error / N;
}
Running Stan’s optimizer on this model produces the MLE for the linear regression
by directly minimizing the sum of squared errors and using that to define the noise
scale as a generated quantity.
By replacing Nwith N-1 in the denominator of the definition of sigma_squared,
the more commonly supplied unbiased estimate of σ2can be calculated; see Sec-
tion 31.3 for a definition of estimation bias and a discussion of estimating variance.
31.2. Penalized Maximum Likelihood Estimation
There is nothing special about a likelihood function as far as the ability to perform
optimization is concerned. It is common among non-Bayesian statisticians to add
so-called “penalty” functions to log likelihoods and optimize the new function. The
penalized maximum likelihood estimator for a log likelihood function log p(y|θ) and
penalty function r(θ) is defined to be
ˆ
θ=argmaxθlog p(y|θ) −r(θ).
The penalty function r(θ) is negated in the maximization so that the estimate ˆ
θ
balances maximizing the log likelihood and minimizing the penalty. Penalization is
sometimes called “regularization.”
379
Examples
Ridge Regression
Ridge regression (Hoerl and Kennard,1970) is based on penalizing the Euclidean
length of the coefficient vector β. The ridge penalty function is
r(β) =λ
K
X
k=1
β2
k=λ β>β,
where λis a constant tuning parameter that determines the magnitude of the penalty.
Therefore, the penalized maximum likelihood estimate for ridge regression is just
(ˆ
β, ˆ
σ ) =argmaxβ,σ
N
X
n=1
log Normal(yn|xnβ, σ ) −λ
K
X
k=1
β2
k
The ridge penalty is sometimes called L2 regularization or shrinkage, because of its
relation to the L2 norm.
Like the basic MLE for linear regression, the ridge regression estimate for the
coefficients βcan also be formulated in terms of least squares,
ˆ
β=argminβ
N
X
n=1
(yn−xnβ)2+
K
X
k=1
β2
k=argminβ(y −xβ)>(y −xβ) +λβ>β.
The effect of adding the ridge penalty function is that the ridge regression esti-
mate for βis a vector of shorter length, or in other words, ˆ
βis shrunk. The ridge
estimate does not necessarily have a smaller absolute βkfor each k, nor does the
coefficient vector necessarily point in the same direction as the maximum likelihood
estimate.
In Stan, adding the ridge penalty involves adding its magnitude as a data variable
and the penalty itself to the model block,
data {
// ...
real<lower=0> lambda;
}
// ...
model {
// ...
target += - lambda *dot_self(beta);
}
The noise term calculation remains the same.
380

The Lasso
The lasso (Tibshirani,1996) is an alternative to ridge regression that applies a penalty
based on the sum of the absolute coefficients, rather than the sum of their squares,
r(β) =λ
K
X
k=1|βk|.
The lasso is also called L1 shrinkage due to its relation to the L1 norm, which is also
known as taxicab distance or Manhattan distance.
Because the derivative of the penalty does not depend on the value of the βk,
d
dβk
λ
K
X
k=1|βk| = signum(βk),
it has the effect of shrinking parameters all the way to 0 in maximum likelihood esti-
mates. Thus it can be used for variable selection as well as just shrinkage.2The lasso
can be implemented in Stan just as easily as ridge regression, with the magnitude
declared as data and the penalty added to the model block,
data {
// ...
real<lower=0> lambda;
}
// ...
model {
// ...
for (k in 1:K)
target += - lambda *fabs(beta[k]);
}
The Elastic Net
The naive elastic net (Zou and Hastie,2005) involves a weighted average of ridge and
lasso penalties, with a penalty function
r(β) =λ1
K
X
k=1|βk| + λ2
K
X
k=1
β2
k.
The naive elastic net combines properties of both ridge regression and the lasso,
providing both identification and variable selection.
The naive elastic net can be implemented directly in Stan by combining implemen-
tations of ridge regression and the lasso, as
2In practice, Stan’s gradient-based optimizers are not guaranteed to produce exact zero values; see
Langford et al. (2009) for a discussion of getting exactly zero values with gradient descent.
381
data {
real<lower=0> lambda1;
real<lower=0> lambda2;
// ...
}
// ...
model {
// ...
for (k in 1:K)
target += -lambda1 *fabs(beta[k]);
target += -lambda2 *dot_self(beta);
}
Note that the signs are negative in the program because r(β) is a penalty function.
The elastic net (Zou and Hastie,2005) involves adjusting the final estimate for β
based on the fit ˆ
βproduced by the naive elastic net. The elastic net estimate is
ˆ
β=(1+λ2)β∗
where β∗is the naive elastic net estimate.
To implement the elastic net in Stan, the data, parameter, and model blocks are
the same as for the naive elastic net. In addition, the elastic net estimate is calculated
in the generated quantities block.
generated quantities {
vector[K] beta_elastic_net;
// ...
beta_elastic_net = (1 + lambda2) *beta;
}
The error scale also needs to be calculated in the generated quantities block based on
the elastic net coefficients beta_elastic_net.
Other Penalized Regressions
It is also common to use penalty functions that bias the coefficient estimates toward
values other than 0, as in the estimators of James and Stein (1961). Penalty func-
tions can also be used to bias estimates toward population means; see (Efron and
Morris,1975;Efron,2012). This latter approach is similar to the hierarchical models
commonly employed in Bayesian statistics.
31.3. Estimation Error, Bias, and Variance
An estimate ˆ
θdepends on the particular data yand either the log likelihood function,
log p(y|θ), penalized log likelihood function log p(y|θ)−r(θ), or log probability func-
382

tion log p(y, θ) =log p(y, θ) +log p(θ). In this section, the notation ˆ
θis overloaded
to indicate the estimator, which is an implicit function of the data and (penalized)
likelihood or probability function.
Estimation Error
For a particular observed data set ygenerated according to true parameters θ, the
estimation error is the difference between the estimated value and true value of the
parameter,
err(ˆ
θ) =ˆ
θ−θ.
Estimation Bias
For a particular true parameter value θand a likelihood function p(y|θ), the expected
estimation error averaged over possible data sets yaccording to their density under
the likelihood is
Ep(y|θ)[ˆ
θ] =Zargmaxθ0p(y|θ0)p(y|θ)dy.
An estimator’s bias is the expected estimation error,
Ep(y|θ)[ˆ
θ−θ] =Ep(y|θ)[ˆ
θ] −θ
The bias is a multivariate quantity with the same dimensions as θ. An estimator is
unbiased if its expected estimation error is zero and biased otherwise.
Example: Estimating a Normal Distribution
Suppose a data set of observations ynfor n∈1:Ndrawn from a normal distribu-
tion. This presupposes a model yn∼Normal(µ, σ ), where both µand σ > 0are
parameters. The log likelihood is just
log p(y|µ, σ ) =
N
X
n=1
log Normal(yn|µ, σ ).
The maximum likelihood estimator for µis just the sample mean, i.e., the average of
the samples,
ˆ
µ=1
N
N
X
n=1
yn.
The maximum likelihood estimate for the mean is unbiased.
383
The maximum likelihood estimator for the variance σ2is the average of the
squared difference from the mean,
ˆ
σ2=1
N
N
X
n=1
(yn−ˆ
µ)2.
The maximum likelihood for the variance is biased on the low side, i.e.,
Ep(y|µ,σ )[ˆ
σ2] < σ .
The reason for this bias is that the maximum likelihood estimate is based on the
difference from the estimated mean ˆ
µ. Plugging in the actual mean can lead to larger
sum of squared differences; if µ≠ˆ
µ, then
1
N
N
X
n=1
(yn−µ)2>1
N
N
X
n=1
(yn−ˆ
µ)2.
An alternative estimate for the variance is the sample variance, which is defined
by
ˆ
µ=1
N−1
N
X
n=1
(yn−ˆ
µ)2.
This value is larger than the maximum likelihood estimate by a factor of N/(N −1).
Estimation Variance
The variance of component kof an estimator ˆ
θis computed like any other variance,
as the expected squared difference from its expectation,
varp(y|θ)[ ˆ
θk]=Ep(y|θ)[ ( ˆ
θk−Ep(y|θ)[ˆ
θk])2].
The full K×Kcovariance matrix for the estimator is thus defined, as usual, by
covarp(y|θ)[ˆ
θ] =Ep(y|θ)[ ( ˆ
θ−E[ˆ
θ]) (ˆ
θ−E[ˆ
θ])>].
Continuing the example of estimating the mean and variance of a normal distribu-
tion based on sample data, the maximum likelihood estimator (i.e., the sample mean)
is the unbiased estimator for the mean µwith the lowest variance; the Gauss-Markov
theorem establishes this result in some generality for least-squares estimation, or
equivalently, maximum likelihood estimation under an assumption of normal noise;
see (Hastie et al.,2009, Section 3.2.2).
384
32. Bayesian Point Estimation
There are three common approaches to Bayesian point estimation based on the
posterior p(θ|y) of parameters θgiven observed data y: the mode (maximum), the
mean, and the median.
32.1. Posterior Mode Estimation
This section covers estimates based on the parameters θthat maximize the posterior
density, and the next sections continue with discussions of the mean and median.
An estimate based on a model’s posterior mode can be defined by
ˆ
θ=argmaxθp(θ|y).
When it exists, ˆ
θmaximizes the posterior density of the parameters given the data.
The posterior mode is sometimes called the “maximum a posteriori” (MAP) estimate.
As discussed in Chapter 25 and Section 31.1, a unique posterior mode might not
exist—there may be no value that maximizes the posterior mode or there may be
more than one. In these cases, the posterior mode estimate is undefined. Stan’s
optimizer, like most optimizers, will have problems in these situations. It may also
return a locally maximal value that is not the global maximum.
In cases where there is a posterior mode, it will correspond to a penalized max-
imum likelihood estimate with a penalty function equal to the negation of the log
prior. This is because Bayes’s rule,
p(θ|y) =p(y|θ) p(θ)
p(y) ,
ensures that
argmaxθp(θ|y) =argmaxθ
p(y|θ) p(θ)
p(y)
=argmaxθp(y|θ) p(θ),
and the positiveness of densities and the strict monotonicity of log ensure that
argmaxθp(y|θ) p(θ) =argmaxθlog p(y|θ) +log p(θ).
In the case where the prior (proper or improper) is uniform, the posterior mode is
equivalent to the maximum likelihood estimate.
For most commonly used penalty functions, there are probabilistic equivalents.
For example, the ridge penalty function corresponds to a normal prior on coefficients
and the lasso to a Laplace prior. The reverse is always true—a negative prior can
always be treated as a penalty function.
385
32.2. Posterior Mean Estimation
A standard Bayesian approach to point estimation is to use the posterior mean (as-
suming it exists), defined by
ˆ
θ=Zθ p(θ|y) dθ.
The posterior mean is often called the Bayesian estimator, because it’s the estimator
that minimizes the expected square error of the estimate.
An estimate of the posterior mean for each parameter is returned by Stan’s inter-
faces; see the RStan, CmdStan, and PyStan user’s guides for details on the interfaces
and data formats.
Posterior means exist in many situations where posterior modes do not exist. For
example, in the Beta(0.1,0.1)case, there is no posterior mode, but posterior mean is
well defined with value 0.5.
A situation where posterior means fail to exist but posterior modes do exist is
with a posterior with a Cauchy distribution Cauchy(µ, τ). The posterior mode is µ,
but the integral expressing the posterior mean diverges. Such diffuse priors rarely
arise in practical modeling applications; even with a Cauchy Cauchy prior for some
parameters, data will provide enough constraints that the posterior is better behaved
and means exist.
Sometimes when posterior means exist, they are not meaningful, as in the case
of a multimodal posterior arising from a mixture model or in the case of a uniform
distribution on a closed interval.
32.3. Posterior Median Estimation
The posterior median (i.e., 50th percentile or 0.5 quantile) is another popular point
estimate reported for Bayesian models. The posterior median minimizes the expected
absolute error of estimates. These estimates are returned in the various Stan inter-
faces; see the RStan, PyStan and CmdStan user’s guides for more information on
format.
Although posterior medians may fail to be meaningful, they often exist even where
posterior means do not, as in the Cauchy distribution.
386
33. Variational Inference
Stan implements an automatic variational inference algorithm that leverages the
transformations from Chapter 35.
Classical variational inference algorithms are difficult to derive. We must first
define the family of approximating densities, and then calculate model-specific quan-
tities relative to that family to solve the variational optimization problem. Both steps
require expert knowledge. The resulting algorithm is tied to both the model and the
chosen approximation.
We begin by briefly describing the classical variational inference framework. For
a thorough exposition, please refer to Jordan et al. (1999); Wainwright and Jordan
(2008); for a textbook presentation, please see Bishop (2006). We follow with a high-
level description of Automatic Differentiation Variational Inference (ADVI). For more
details, see (Kucukelbir et al.,2015).
33.1. Classical Variational Inference
Variational inference approximates the posterior p(θ |y) with a simple, parameter-
ized distribution q(θ |φ). It matches the approximation to the true posterior by
minimizing the Kullback-Leibler (KL) divergence,
φ∗=arg min
φ
KL q(θ |φ) kp(θ |y).
Typically the KL divergence lacks an analytic, closed-form solution. Instead we maxi-
mize a proxy to the KL divergence, the evidence lower bound (ELBO)
L(φ) =Eq(θ)log p(y, θ)−Eq(θ)log q(θ |φ).
The first term is an expectation of the log joint density under the approximation, and
the second is the entropy of the variational density. Maximizing the ELBO minimizes
the KL divergence (Jordan et al.,1999;Bishop,2006).
33.2. Automatic Variational Inference
ADVI maximizes the ELBO in the real-coordinate space. Stan transforms the parame-
ters from (potentially) constrained domains to the real-coordinate space. We denote
the combined transformation as T:θ→ζ, with the ζvariables living in RK. The
variational objective (ELBO) becomes
L(φ) =Eq(ζ |φ)log p(y, T −1(ζ)) +log
det JT−1(ζ)
−Eq(ζ |φ)log q(ζ |φ).
387
Since the ζvariables live in the real-coordinate space, we can choose a fixed family
for the variational distribution. We choose a fully-factorized Gaussian,
q(ζ |φ) =Normal ζ|µ, σ =
K
Y
k=1
Normal ζk|µk, σk,
where the vector φ=(µ1,··· , µK, σ1,··· , σK)concatenates the mean and standard
deviation of each Gaussian factor. This reflects the “mean-field” assumption in clas-
sical variational inference algorithms; we will refer to this particular decomposition
as the meanfield option.
The transformation Tmaps the support of the parameters to the real coordinate
space. Thus, its inverse T−1maps back to the support of the latent variables. This
implicitly defines the variational approximation in the original latent variable space
as
Normal (T (θ) |µ, σ )
det JT(θ)
.
This is, in general, not a Gaussian distribution. This choice may call to mind the
Laplace approximation technique, where a second-order Taylor expansion around
the maximum-a-posteriori estimate gives a Gaussian approximation to the posterior.
However, they are not the same (Kucukelbir et al.,2015).
The variational objective (ELBO) that we maximize is,
L(φ) =Eq(ζ |φ)log p(y, T −1(ζ)) +log
det JT−1(ζ)
+
K
X
k=1
log σk,
where we plug in the analytic form for the Gaussian entropy and drop all terms that
do not depend on φ. We discuss how we perform the maximization in Chapter 37.
388
Part VI
Algorithms & Implementations
389
34. Hamiltonian Monte Carlo Sampling
This part of the manual details the algorithm implementations used by Stan and how
to configure them. This chapter presents the Hamiltonian Monte Carlo (HMC) algo-
rithm and its adaptive variant the no-U-turn sampler (NUTS) along with details of
their implementation and configuration in Stan; the next two chapters present Stan’s
optimizers and diagnostics.
34.1. Hamiltonian Monte Carlo
Hamiltonian Monte Carlo (HMC) is a Markov chain Monte Carlo (MCMC) method that
uses the derivatives of the density function being sampled to generate efficient tran-
sitions spanning the posterior (see, e.g., (Betancourt and Girolami,2013;Neal,2011)
for more details). It uses an approximate Hamiltonian dynamics simulation based on
numerical integration which is then corrected by performing a Metropolis acceptance
step.
This section translates the presentation of HMC by Betancourt and Girolami (2013)
into the notation of Gelman et al. (2013).
Target Density
The goal of sampling is to draw from a density p(θ) for parameters θ. This is typically
a Bayesian posterior p(θ|y) given data y, and in particular, a Bayesian posterior coded
as a Stan program.
Auxiliary Momentum Variable
HMC introduces auxiliary momentum variables ρand draws from a joint density
p(ρ, θ) =p(ρ|θ)p(θ).
In most applications of HMC, including Stan, the auxiliary density is a multivariate
normal that does not depend on the parameters θ,
ρ∼MultiNormal(0,Σ).
The covariance matrix Σacts as a Euclidean metric to rotate and scale the target
distribution; see (Betancourt and Stein,2011) for details of the geometry.
In Stan, this matrix may be set to the identity matrix (i.e., unit diagonal) or es-
timated from warmup samples and optionally restricted to a diagonal matrix. The
inverse Σ−1is known as the mass matrix, and will be a unit, diagonal, or dense if Σis.
390
The Hamiltonian
The joint density p(ρ, θ) defines a Hamiltonian
H(ρ, θ) = −log p(ρ, θ)
= −log p(ρ|θ) −log p(θ).
=T (ρ|θ) +V (θ),
where the term
T (ρ|θ) = −log p(ρ|θ)
is called the “kinetic energy” and the term
V (θ) = −log p(θ)
is called the “potential energy.” The potential energy is specified by the Stan program
through its definition of a log density.
Generating Transitions
Starting from the current value of the parameters θ, a transition to a new state is
generated in two stages before being subjected to a Metropolis accept step.
First, a value for the momentum is drawn independently of the current parameter
values,
ρ∼MultiNormal(0,Σ).
Thus momentum does not persist across iterations.
Next, the joint system (θ, ρ) made up of the current parameter values θand new
momentum ρis evolved via Hamilton’s equations,
dθ
dt = +∂H
∂ρ = +∂T
∂ρ
dρ
dt = −∂H
∂θ = −∂T
∂θ −∂V
∂θ .
With the momentum density being independent of the target density, i.e., p(ρ|θ) =
p(ρ), the first term in the momentum time derivative, ∂T /∂θ is zero, yielding the pair
time derivatives
dθ
dt = +∂T
∂ρ
dρ
dt = −∂V
∂θ .
391

Leapfrog Integrator
The last section leaves a two-state differential equation to solve. Stan, like most other
HMC implementations, uses the leapfrog integrator, which is a numerical integration
algorithm that’s specifically adapted to provide stable results for Hamiltonian sys-
tems of equations.
Like most numerical integrators, the leapfrog algorithm takes discrete steps of
some small time interval . The leapfrog algorithm begins by drawing a fresh momen-
tum term independently of the parameter values θor previous momentum value.
ρ∼MultiNormal(0,Σ).
It then alternates half-step updates of the momentum and full-step updates of the
position.
ρ←ρ−
2
∂V
∂θ
θ←θ+Σρ
ρ←ρ−
2
∂V
∂θ .
By applying Lleapfrog steps, a total of L time is simulated. The resulting state at the
end of the simulation (Lrepetitions of the above three steps) will be denoted (ρ∗, θ∗).
The leapfrog integrator’s error is on the order of 3per step and 2globally,
where is the time interval (also known as the step size); Leimkuhler and Reich
(2004) provide a detailed analysis of numerical integration for Hamiltonian systems,
including a derivation of the error bound for the leapfrog integrator.
Metropolis Accept Step
If the leapfrog integrator were perfect numerically, there would no need to do any
more randomization per transition than generating a random momentum vector. In-
stead, what is done in practice to account for numerical errors during integration is
to apply a Metropolis acceptance step, where the probability of keeping the proposal
(ρ∗, θ∗)generated by transitioning from (ρ, θ) is
min1,expH(ρ, θ) −H(ρ∗, θ∗).
If the proposal is not accepted, the previous parameter value is returned for the next
draw and used to initialize the next iteration.
392

Algorithm Summary
The Hamiltonian Monte Carlo algorithm starts at a specified initial set of parameters
θ; in Stan, this value is either user-specified or generated randomly. Then, for a given
number of iterations, a new momentum vector is sampled and the current value of
the parameter θis updated using the leapfrog integrator with discretization time
and number of steps Laccording to the Hamiltonian dynamics. Then a Metropolis
acceptance step is applied, and a decision is made whether to update to the new state
(θ∗, ρ∗)or keep the existing state.
34.2. HMC Algorithm Parameters
The Hamiltonian Monte Carlo algorithm has three parameters which must be set,
• discretization time ,
• mass matrix Σ−1, and
• number of steps taken L.
In practice, sampling efficiency, both in terms of iteration speed and iterations per
effective sample, is highly sensitive to these three tuning parameters (Neal,2011;
Hoffman and Gelman,2014).
If is too large, the leapfrog integrator will be inaccurate and too many proposals
will be rejected. If is too small, too many small steps will be taken by the leapfrog
integrator leading to long simulation times per interval. Thus the goal is to balance
the acceptance rate between these extremes.
If Lis too small, the trajectory traced out in each iteration will be too short and
sampling will devolve to a random walk. If Lis too large, the algorithm will do too
much work on each iteration.
If the mass matrix Σis poorly suited to the covariance of the posterior, the step
size will have to be decreased to maintain arithmetic precision while at the same
time, the number of steps Lis increased in order to maintain simulation time to
ensure statistical efficiency.
Integration Time
The actual integration time is L , a function of number of steps. Some interfaces to
Stan set an approximate integration time tand the discretization interval (step size)
. In these cases, the number of steps will be rounded down as
L=t
.
and the actual integration time will still be L .
393
I II II II II II III
-
Iteration
Figure 34.1: Adaptation during warmup occurs in three stages: an initial fast adaptation in-
terval (I), a series of expanding slow adaptation intervals (II), and a final fast adaptation interval
(III). For HMC, both the fast and slow intervals are used for adapting the step size, while the slow
intervals are used for learning the (co)variance necessitated by the metric. Iteration numbering
starts at 1 on the left side of the figure and increases to the right.
Automatic Parameter Tuning
Stan is able to automatically optimize to match an acceptance-rate target, able to
estimate Σbased on warmup sample iterations, and able to dynamically adapt Lon
the fly during sampling (and during warmup) using the no-U-turn sampling (NUTS)
algorithm (Hoffman and Gelman,2014).
When adaptation is engaged (it may be turned off by fixing a step size and mass
matrix), the warmup period is split into three stages, as illustrated in Figure 34.1,
with two fast intervals surrounding a series of growing slow intervals. Here fast and
slow refer to parameters that adapt using local and global information, respectively;
the Hamiltonian Monte Carlo samplers, for example, define the step size as a fast pa-
rameter and the (co)variance as a slow parameter. The size of the the initial and final
fast intervals and the initial size of the slow interval are all customizable, although
user-specified values may be modified slightly in order to ensure alignment with the
warmup period.
The motivation behind this partitioning of the warmup period is to allow for more
robust adaptation. The stages are as follows.
I. In the initial fast interval the chain is allowed to converge towards the typical
set,1with only parameters that can learn from local information adapted.
II. After this initial stage parameters that require global information, for exam-
ple (co)variances, are estimated in a series of expanding, memoryless windows;
often fast parameters will be adapted here as well.
1The typical set is a concept borrowed from information theory and refers to the neighborhood (or
neighborhoods in multimodal models) of substantial posterior probability mass through which the Markov
chain will travel in equilibrium.
394
III. Lastly, the fast parameters are allowed to adapt to the final update of the slow
parameters.
These intervals may be controlled through the following configuration parame-
ters, all of which must be positive integers:
parameter description default
initial buffer width of initial fast adaptation interval 75
term buffer width of final fast adaptation interval 50
window initial width of slow adaptation interval 25
Discretization-Interval Adaptation Parameters
Stan’s HMC algorithms utilize dual averaging (Nesterov,2009) to optimize the step
size.2This warmup optimization procedure is extremely flexible and for complete-
ness, Stan exposes each tuning option for dual averaging, using the notation of Hoff-
man and Gelman (2014). In practice, the efficacy of the optimization is sensitive
to the value of these parameters, but we do not recommend changing the defaults
without experience with the dual-averaging algorithm. For more information, see the
discussion of dual averaging in (Hoffman and Gelman,2011,2014).
The full set of dual-averaging parameters are
parameter description constraint default
δtarget Metropolis acceptance rate δ∈[0,1]0.80
γadaptation regularization scale γ > 00.05
κadaptation relaxation exponent κ > 00.75
t0adaptation iteration offset t0>010
By setting the target acceptance parameter δto a value closer to 1 (its value must be
strictly less than 1 and its default value is 0.8), adaptation will be forced to use smaller
step sizes. This can improve sampling efficiency (effective samples per iteration) at
the cost of increased iteration times. Raising the value of δwill also allow some
models that would otherwise get stuck to overcome their blockages.
Step-Size Jitter
All implementations of HMC use numerical integrators requiring a step size (equiv-
alently, discretization time interval). Stan allows the step size to be adapted or set
explicitly. Stan also allows the step size to be “jittered” randomly during sampling
to avoid any poor interactions with a fixed step size and regions of high curvature.
2This optimization of step size during adaptation of the sampler should not be confused with running
Stan’s optimization method.
395
The jitter is a proportion that may be added or subtracted, so the maximum amount
of jitter is 1, which will cause step sizes to be selected in the range of 0 to twice the
adapted step size. The default value is 0, producing no jitter.
Small step sizes can get HMC samplers unstuck that would otherwise get stuck
with higher step sizes. The downside is that jittering below the adapted value will in-
crease the number of leapfrog steps required and thus slow down iterations, whereas
jittering above the adapted value can cause premature rejection due to simulation er-
ror in the Hamiltonian dynamics calculation. See (Neal,2011) for further discussion
of step-size jittering.
Euclidean Metric
All HMC implementations in Stan utilize quadratic kinetic energy functions which are
specified up to the choice of a symmetric, positive-definite matrix known as a mass
matrix or, more formally, a metric (Betancourt and Stein,2011).
If the metric is constant then the resulting implementation is known as Euclidean
HMC. Stan allows for three Euclidean HMC implementations,
• a unit metric (diagonal matrix of ones),
• a diagonal metric (diagonal matrix with positive diagonal entries), and
• a dense metric (a dense, symmetric positive definite matrix)
The user may configure the form of the metric.
If the mass matrix is specified to be diagonal, then regularized variances are es-
timated based on the iterations in each slow-stage block (labeled II in Figure 34.1).
Each of these estimates is based only on the iterations in that block. This allows early
estimates to be used to help guide warmup and then be forgotten later so that they
do not influence the final covariance estimate.
If the mass matrix is specified to be dense, then regularized covariance estimates
will be carried out, regularizing the estimate to a diagonal matrix, which is itself
regularized toward a unit matrix.
Variances or covariances are estimated using Welford accumulators to avoid a loss
of precision over many floating point operations.
Warmup Times and Estimating the Mass Matrix
The mass matrix can compensate for linear (i.e. global) correlations in the posterior
which can dramatically improve the performance of HMC in some problems. This
requires knowing the global correlations.
In complex models, the global correlations are usually difficult, if not impossible,
to derivate analytically; for example, nonlinear model components convolve the scales
396

of the data, so standardizing the data does not always help. Therefore, Stan estimates
these correlations online with an adaptive warmup. In models with strong nonlinear
(i.e. local) correlations this learning can be slow, even with regularization. This is
ultimately why warmup in Stan often needs to be so long, and why a sufficiently long
warmup can yield such substantial performance improvements.
Nonlinearity
The mass matrix compensates for only linear (equivalently global or position-
independent) correlations in the posterior. The hierarchical parameterizations, on
the other hand, affect some of the nasty nonlinear (equivalently local or position-
dependent) correlations common in hierarchical models.3
One of the biggest difficulties with dense mass matrices is the estimation of the
mass matrix itself which introduces a bit of a chicken-and-egg scenario; in order to
estimate an appropriate mass matrix for sampling, convergence is required, and in
order to converge, an appropriate mass matrix is required.
Dense vs. Diagonal Mass Matrices
Statistical models for which sampling is problematic are not typically dominated by
linear correlations for which a dense mass matrix can adjust. Rather, they are gov-
erned by more complex nonlinear correlations that are best tackled with better pa-
rameterizations or more advanced algorithms, such as Riemannian HMC.
Warmup Times and Curvature
MCMC convergence time is roughly equivalent to the autocorrelation time. Because
HMC (and NUTS) chains tend to be lowly autocorrelated they also tend to converge
quite rapidly.
This only applies when there is uniformity of curvature across the posterior, an
assumption which is violated in many complex models. Quite often, the tails have
large curvature while the bulk of the posterior mass is relatively well-behaved; in
other words, warmup is slow not because the actual convergence time is slow but
rather because the cost of an HMC iteration is more expensive out in the tails.
Poor behavior in the tails is the kind of pathology that can be uncovered by run-
ning only a few warmup iterations. By looking at the acceptance probabilities and
step sizes of the first few iterations provides an idea of how bad the problem is and
whether it must be addressed with modeling efforts such as tighter priors or repa-
rameterizations.
3Only in Riemannian HMC does the metric, which can be thought of as a position-dependent mass
matrix, start compensating for nonlinear correlations.
397

NUTS and its Configuration
The no-U-turn sampler (NUTS) automatically selects an appropriate number of
leapfrog steps in each iteration in order to allow the proposals to traverse the pos-
terior without doing unnecessary work. The motivation is to maximize the expected
squared jump distance (see, e.g., (Roberts et al.,1997)) at each step and avoid the
random-walk behavior that arises in random-walk Metropolis or Gibbs samplers when
there is correlation in the posterior. For a precise definition of the NUTS algorithm
and a proof of detailed balance, see (Hoffman and Gelman,2011,2014).
NUTS generates a proposal by starting at an initial position determined by the
parameters drawn in the last iteration. It then generates an independent unit-normal
random momentum vector. It then evolves the initial system both forwards and back-
wards in time to form a balanced binary tree. At each iteration of the NUTS algorithm
the tree depth is increased by one, doubling the number of leapfrog steps and effec-
tively doubles the computation time. The algorithm terminates in one of two ways,
either
• the NUTS criterion (i.e., a U-turn in Euclidean space on a subtree) is satisfied for
a new subtree or the completed tree, or
• the depth of the completed tree hits the maximum depth allowed.
Rather than using a standard Metropolis step, the final parameter value is selected via
multinomial sampling with a bias toward the second half of the steps in the trajectory
(Betancourt,2016b).4
Configuring the no-U-turn sample involves putting a cap on the depth of the trees
that it evaluates during each iteration. This is controlled through a maximum depth
parameter. The number of leapfrog steps taken is then bounded by 2 to the power of
the maximum depth minus 1.
Both the tree depth and the actual number of leapfrog steps computed are re-
ported along with the parameters in the output as treedepth__ and n_leapfrog__,
respectively. Because the final subtree may only be partially constructed, these two
will always satisfy
2treedepth−1−1< Nleapfrog ≤2treedepth −1.
Tree depth is an important diagnostic tool for NUTS. For example, a tree depth of
zero occurs when the first leapfrog step is immediately rejected and the initial state
returned, indicating extreme curvature and poorly-chosen step size (at least relative
to the current position). On the other hand, a tree depth equal to the maximum depth
indicates that NUTS is taking many leapfrog steps and being terminated prematurely
4Stan previously used slice sampling along the trajectory, following the original NUTS paper of Hoffman
and Gelman (2014).
398
to avoid excessively long execution time. Taking very many steps may be a sign of
poor adaptation, may be due to targeting a very high acceptance rate, or may simply
indicate a difficult posterior from which to sample. In the latter case, reparameter-
ization may help with efficiency. But in the rare cases where the model is correctly
specified and a large number of steps is necessary, the maximum depth should be
increased to ensure that that the NUTS tree can grow as large as necessary.
Sampling without Parameters
In some situations, such as pure forward data simulation in a directed graphical
model (e.g., where you can work down generatively from known hyperpriors to sim-
ulate parameters and data), there is no need to declare any parameters in Stan, the
model block will be empty, and all output quantities will be produced in the generated
quantities block. For example, to generate a sequence of Ndraws from a binomial
with trials Kand chance of success θ, the following program suffices.
data {
real<lower=0,upper=1> theta;
int<lower=0> K;
int<lower=0> N;
}
model {
}
generated quantities {
int<lower=0,upper=K> y[N];
for (n in 1:N)
y[n] = binomial_rng(K, theta);
}
This program includes an empty model block because every Stan program must have
a model block, even if it’s empty. For this model, the sampler must be configured to
use the fixed-parameters setting because there are no parameters. Without parameter
sampling there is no need for adaptation and the number of warmup iterations should
be set to zero.
Most models that are written to be sampled without parameters will not declare
any parameters, instead putting anything parameter-like in the data block. Neverthe-
less, it is possible to include parameters for fixed-parameters sampling and initialize
them in any of the usual ways (randomly, fixed to zero on the unconstrained scale,
or with user-specified values). For example, theta in the example above could be
declared as a parameter and initialized as a parameter.
399
34.3. General Configuration Options
Stan’s interfaces provide a number of configuration options that are shared among
the MCMC algorithms (this chapter), the optimization algorithms (Chapter 36), and
the diagnostics (Chapter 38).
Random Number Generator
The random-number generator’s behavior is fully determined by the unsigned seed
(positive integer) it is started with. If a seed is not specified, or a seed of 0 or less
is specified, the system time is used to generate a seed. The seed is recorded and
included with Stan’s output regardless of whether it was specified or generated ran-
domly from the system time.
Stan also allows a chain identifier to be specified, which is useful when running
multiple Markov chains for sampling. The chain identifier is used to advance the
random number generator a very large number of random variates so that two chains
with different identifiers draw from non-overlapping subsequences of the random-
number sequence determined by the seed. When running multiple chains from a
single command, Stan’s interfaces will manage the chain identifiers.
Replication
Together, the seed and chain identifier determine the behavior of the underlying ran-
dom number generator. See Chapter 67 for a list of requirements for replication.
Initialization
The initial parameter values for Stan’s algorithms (MCMC, optimization, or diagnostic)
may be either specified by the user or generated randomly. If user-specified values
are provided, all parameters must be given initial values or Stan will abort with an
error message.
User-Defined Initialization
If the user specifies initial values, they must satisfy the constraints declared in the
model (i.e., they are on the constrained scale).
System Constant Zero Initialization
It is also possible to provide an initialization of 0, which causes all variables to be
initialized with zero values on the unconstrained scale. The transforms are arranged
in such a way that zero initialization provides reasonable variable initializations for
400

most parameters, such as 0 for unconstrained parameters, 1 for parameters con-
strained to be positive, 0.5 for variables to constrained to lie between 0 and 1, a
symmetric (uniform) vector for simplexes, unit matrices for both correlation and co-
variance matrices, and so on. See Chapter 35 for full details of the transformations.
System Random Initialization
Random initialization by default initializes the parameter values with values drawn at
random from a Uniform(−2,2)distribution. Alternatively, a value other than 2 may
be specified for the absolute bounds. These values are on the unconstrained scale,
and are inverse transformed back to satisfy the constraints declared for parameters.
See Chapter 35 for a complete description of the transforms used.
Because zero is chosen to be a reasonable default initial value for most parame-
ters, the interval around zero provides a fairly diffuse starting point. For instance,
unconstrained variables are initialized randomly in (−2,2), variables constrained to
be positive are initialized roughly in (0.14,7.4), variables constrained to fall between
0 and 1 are initialized with values roughly in (0.12,0.88).
34.4. Divergent Transitions
The Hamiltonian Monte Carlo algorithms (HMC and NUTS) simulate the trajectory of
a fictitious particle representing parameter values when subject to a potential en-
ergy field, the value of which at a point is the negative log posterior density (up to
a constant that does not depend on location). Random momentum is imparted in-
dependently in each direction, by drawing from a standard normal distribution. The
Hamiltonian is defined to be the sum of the potential energy and kinetic energy of the
system. The key feature of the Hamiltonian is that it is conserved along the trajectory
the particle moves.
In Stan, we use the leapfrog algorithm to simulate the path of a particle along the
trajectory defined by the initial random momentum and the potential energy field.
This is done by alternating updates of the position based on the momentum and the
momentum based on the position. The momentum updates involve the potential en-
ergy and are applied along the gradient. This is essentially a stepwise (discretized)
first-order approximation of the trajectory. Leimkuhler and Reich (2004) provide de-
tails and error analysis for the leapfrog algorithm.
A divergence arises when the simulated Hamiltonian trajectory departs from the
true trajectory as measured by departure of the Hamiltonian value from its initial
value. When this divergence is too high,5the simulation has gone off the rails and
5The current default threshold is a factor of 103, whereas when the leapfrog integrator is working
properly, the divergences will be around 10−7or so and do not compound due to the symplectic nature of
401

cannot be trusted. The positions along the simulated trajectory after the Hamiltonian
diverges will never be selected as the next draw of the MCMC algorithm, potentially
reducing Hamiltonian Monte Carlo to a simple random walk and biasing estimates by
not being able to thoroughly explore the posterior distribution. Betancourt (2016a)
provides details of the theory, computation, and practical implications of divergent
transitions in Hamiltonian Monte Carlo.
The Stan interfaces report divergences as warnings and provide ways to access
which iterations encountered divergences. ShinyStan provides visualizations that
highlight the starting point of divergent transitions to diagnose where the divergences
arise in parameter space. A common location is in the neck of the funnel in a centered
parameterization (as in the funnel example discussed in Section 28.6).
If the posterior is highly curved, very small step sizes are required for this
gradient-based simulation of the Hamiltonian to be accurate. When the step size
is too large (relative to the curvature), the simulation diverges from the true Hamil-
tonian. This definition is imprecise in the same way that stiffness for a differential
equation is imprecise; both are defined by the way they cause traditional stepwise
algorithms to diverge from where they should be.
The primary cause of divergent transitions in Euclidean HMC (other than bugs in
the code) is highly varying posterior curvature, for which small step sizes are too
inefficient in some regions and diverge in other regions. If the step size is too small,
the sampler becomes inefficient and halts before making a U-turn (hits the maximum
tree depth in NUTS); if the step size is too large, the Hamiltonian simulation diverges.
Diagnosing and Eliminating Divergences
In some cases, simply lowering the initial step size and increasing the target accep-
tance rate will keep the step size small enough that sampling can proceed. In other
cases, a reparameterization is required so that the posterior curvature is more man-
ageable; see the funnel example in Section 28.6 for an example. Before reparame-
terization, it may be helpful to plot the posterior draws, highlighting the divergent
transitions to see where they arise. This is marked as a divergent transition in the in-
terfaces; for example, ShinyStan and RStan have special plotting facilities to highlight
where divergent transitions arise.
the leapfrog integrator.
402

35. Transformations of Constrained Variables
To avoid having to deal with constraints while simulating the Hamiltonian dynamics
during sampling, every (multivariate) parameter in a Stan model is transformed to an
unconstrained variable behind the scenes by the model compiler. The transform is
based on the constraints, if any, in the parameter’s definition. Scalars or the scalar
values in vectors, row vectors or matrices may be constrained with lower and/or up-
per bounds. Vectors may alternatively be constrained to be ordered, positive ordered,
or simplexes. Matrices may be constrained to be correlation matrices or covariance
matrices. This chapter provides a definition of the transforms used for each type of
variable.
Stan converts models to C++ classes which define probability functions with sup-
port on all of RK, where Kis the number of unconstrained parameters needed to
define the constrained parameters defined in the program. The C++ classes also in-
clude code to transform the parameters from unconstrained to constrained and apply
the appropriate Jacobians.
35.1. Changes of Variables
The support of a random variable Xwith density pX(x) is that subset of values for
which it has non-zero density,
supp(X) = {x|pX(x) > 0}.
If fis a total function defined on the support of X, then Y=f (X) is a new random
variable. This section shows how to compute the probability density function of Y
for well-behaved transforms f. The rest of the chapter details the transforms used by
Stan.
Univariate Changes of Variables
Suppose Xis one dimensional and f: supp(X) →Ris a one-to-one, monotonic func-
tion with a differentiable inverse f−1. Then the density of Yis given by
pY(y) =pX(f −1(y))
d
dy f−1(y)
.
The absolute derivative of the inverse transform measures how the scale of the trans-
formed variable changes with respect to the underlying variable.
403
Multivariate Changes of Variables
The multivariate generalization of an absolute derivative is a Jacobian, or more fully
the absolute value of the determinant of the Jacobian matrix of the transform. The
Jacobian matrix measures the change of each output variable relative to every input
variable and the absolute determinant uses that to determine the differential change
in volume at a given point in the parameter space.
Suppose Xis a K-dimensional random variable with probability density function
pX(x). A new random variable Y=f (X) may be defined by transforming Xwith
a suitably well-behaved function f. It suffices for what follows to note that if fis
one-to-one and its inverse f−1has a well-defined Jacobian, then the density of Yis
pY(y) =pX(f −1(y))
det Jf−1(y)
,
where det is the matrix determinant operation and Jf−1(y) is the Jacobian matrix of
f−1evaluated at y. Taking x=f−1(y), the Jacobian matrix is defined by
Jf−1(y) =
∂x1
∂y1··· ∂x1
∂yK
.
.
..
.
..
.
.
∂xK
∂y1··· ∂xK
∂yK
.
If the Jacobian matrix is triangular, the determinant reduces to the product of the
diagonal entries,
det Jf−1(y) =
K
Y
k=1
∂xk
∂yk
.
Triangular matrices naturally arise in situations where the variables are ordered, for
instance by dimension, and each variable’s transformed value depends on the pre-
vious variable’s transformed values. Diagonal matrices, a simple form of triangular
matrix, arise if each transformed variable only depends on a single untransformed
variable.
35.2. Lower Bounded Scalar
Stan uses a logarithmic transform for lower and upper bounds.
Lower Bound Transform
If a variable Xis declared to have lower bound a, it is transformed to an unbounded
variable Y, where
Y=log(X −a).
404

Lower Bound Inverse Transform
The inverse of the lower-bound transform maps an unbounded variable Yto a variable
Xthat is bounded below by aby
X=exp(Y ) +a.
Absolute Derivative of the Lower Bound Inverse Transform
The absolute derivative of the inverse transform is
d
dy exp(y) +a
=exp(y).
Therefore, given the density pXof X, the density of Yis
pY(y) =pXexp(y) +a·exp(y).
35.3. Upper Bounded Scalar
Stan uses a negated logarithmic transform for upper bounds.
Upper Bound Transform
If a variable Xis declared to have an upper bound b, it is transformed to the un-
bounded variable Yby
Y=log(b −X).
Upper Bound Inverse Transform
The inverse of the upper bound transform converts the unbounded variable Yto the
variable Xbounded above by bthrough
X=b−exp(Y ).
Absolute Derivative of the Upper Bound Inverse Transform
The absolute derivative of the inverse of the upper bound transform is
d
dy b−exp(y)
=exp(y).
Therefore, the density of the unconstrained variable Yis defined in terms of the
density of the variable Xwith an upper bound of bby
pY(y) =pXb−exp(y)·exp(y).
405
35.4. Lower and Upper Bounded Scalar
For lower and upper-bounded variables, Stan uses a scaled and translated log-odds
transform.
Log Odds and the Logistic Sigmoid
The log-odds function is defined for u∈(0,1)by
logit(u) =log u
1−u.
The inverse of the log odds function is the logistic sigmoid, defined for v∈(−∞,∞)
by
logit−1(v) =1
1+exp(−v) .
The derivative of the logistic sigmoid is
d
dy logit−1(y) =logit−1(y) ·1−logit−1(y).
Lower and Upper Bounds Transform
For variables constrained to be in the open interval (a, b), Stan uses a scaled and
translated log-odds transform. If variable Xis declared to have lower bound aand
upper bound b, then it is transformed to a new variable Y, where
Y=logit X−a
b−a.
Lower and Upper Bounds Inverse Transform
The inverse of this transform is
X=a+(b −a) ·logit−1(Y ).
Absolute Derivative of the Lower and Upper Bounds Inverse Transform
The absolute derivative of the inverse transform is given by
d
dy a+(b −a) ·logit−1(y)
=(b −a) ·logit−1(y) ·1−logit−1(y).
Therefore, the density of the transformed variable Yis
pY(y) =pXa+(b −a) ·logit−1(y)·(b −a) ·logit−1(y) ·1−logit−1(y).
406
Despite the apparent complexity of this expression, most of the terms are repeated
and thus only need to be evaluated once. Most importantly, logit−1(y) only needs to
be evaluated once, so there is only one call to exp(−y).
35.5. Ordered Vector
For some modeling tasks, a vector-valued random variable Xis required with sup-
port on ordered sequences. One example is the set of cut points in ordered logistic
regression (see Section 9.8).
In constraint terms, an ordered K-vector x∈RKsatisfies
xk< xk+1
for k∈ {1, . . . , K −1}.
Ordered Transform
Stan’s transform follows the constraint directly. It maps an increasing vector x∈RK
to an unconstrained vector y∈RKby setting
yk=
x1if k=1,and
log (xk−xk−1)if 1< k ≤K.
Ordered Inverse Transform
The inverse transform for an unconstrained y∈RKto an ordered sequence x∈RK
is defined by the recursion
xk=
y1if k=1,and
xk−1+exp(yk)if 1< k ≤K.
xkcan also be expressed iteratively as
xk=y1+
k
X
k0=2
exp(yk0).
Absolute Jacobian Determinant of the Ordered Inverse Transform
The Jacobian of the inverse transform f−1is lower triangular, with diagonal elements
for 1≤k≤Kof
Jk,k =
1if k=1,and
exp(yk)if 1< k ≤K.
407

Because Jis triangular, the absolute Jacobian determinant is
|det J| =
K
Y
k=1
Jk,k
=
K
Y
k=2
exp(yk).
Putting this all together, if pXis the density of X, then the transformed variable Y
has density pYgiven by
pY(y) =pX(f −1(y))
K
Y
k=2
exp(yk).
35.6. Unit Simplex
Variables constrained to the unit simplex show up in multivariate discrete models
as both parameters (categorical and multinomial) and as variates generated by their
priors (Dirichlet and multivariate logistic).
The unit K-simplex is the set of points x∈RKsuch that for 1≤k≤K,
xk>0,
and K
X
k=1
xk=1.
An alternative definition is to take the convex closure of the vertices. For instance, in
2-dimensions, the simplex vertices are the extreme values (0,1), and (1,0)and the
unit 2-simplex is the line connecting these two points; values such as (0.3,0.7)and
(0.99,0.01)lie on the line. In 3-dimensions, the basis is (0,0,1),(0,1,0)and (1,0,0)
and the unit 3-simplex is the boundary and interior of the triangle with these vertices.
Points in the 3-simplex include (0.5,0.5,0),(0.2,0.7,0.1)and all other triplets of non-
negative values summing to 1.
As these examples illustrate, the simplex always picks out a subspace of K−1
dimensions from RK. Therefore a point xin the K-simplex is fully determined by its
first K−1elements x1, x2, . . . , xK−1, with
xK=1−
K−1
X
k=1
xk.
Unit Simplex Inverse Transform
Stan’s unit simplex inverse transform may be understood using the following stick-
breaking metaphor.1
1For an alternative derivation of the same transform using hyperspherical coordinates, see (Betancourt,
2010).
408
Take a stick of unit length (i.e., length 1). Break a piece off and label it
as x1, and set it aside. Next, break a piece off what’s left, label it x2, and
set it aside. Continue doing this until you have broken off K−1pieces
labeled (x1, . . . , xK−1). Label what’s left of the original stick xK. The vector
x=(x1, . . . , xK)is obviously a unit simplex because each piece has non-
negative length and the sum of their lengths is 1.
This full inverse mapping requires the breaks to be represented as the fraction in
(0,1)of the original stick that is broken off. These break ratios are themselves derived
from unconstrained values in (−∞,∞)using the inverse logit transform as described
above for unidimensional variables with lower and upper bounds.
More formally, an intermediate vector z∈RK−1, whose coordinates zkrepresent
the proportion of the stick broken off in step k, is defined elementwise for 1≤k < K
by
zk=logit−1yk+log 1
K−k.
The logit term log 1
K−k(i.e., logit 1
K−k+1) in the above definition adjusts the trans-
form so that a zero vector yis mapped to the simplex x=(1/K, . . . , 1/K). For in-
stance, if y1=0, then z1=1/K; if y2=0, then z2=1/(K −1); and if yK−1=0, then
zK−1=1/2.
The break proportions zare applied to determine the stick sizes and resulting
value of xkfor 1≤k<Kby
xk=
1−
k−1
X
k0=1
xk0
zk.
The summation term represents the length of the original stick left at stage k. This is
multiplied by the break proportion zkto yield xk. Only K−1unconstrained parame-
ters are required, with the last dimension’s value xKset to the length of the remaining
piece of the original stick,
xK=1−
K−1
X
k=1
xk.
Absolute Jacobian Determinant of the Unit-Simplex Inverse Transform
The Jacobian Jof the inverse transform f−1is lower-triangular, with diagonal entries
Jk,k =∂xk
∂yk=∂xk
∂zk
∂zk
∂yk
,
where ∂zk
∂yk=∂
∂yk
logit−1yk+log 1
K−k=zk(1−zk),
409

and
∂xk
∂zk=
1−
k−1
X
k0=1
xk0
.
This definition is recursive, defining xkin terms of x1, . . . , xk−1.
Because the Jacobian Jof f−1is lower triangular and positive, its absolute deter-
minant reduces to
|det J| =
K−1
Y
k=1
Jk,k =
K−1
Y
k=1
zk(1−zk)
1−
k−1
X
k0=1
xk0
.
Thus the transformed variable Y=f (X) has a density given by
pY(y) =pX(f −1(y))
K−1
Y
k=1
zk(1−zk)
1−
k−1
X
k0=1
xk0
.
Even though it is expressed in terms of intermediate values zk, this expression still
looks more complex than it is. The exponential function need only be evaluated once
for each unconstrained parameter yk; everything else is just basic arithmetic that can
be computed incrementally along with the transform.
Unit Simplex Transform
The transform Y=f (X) can be derived by reversing the stages of the inverse trans-
form. Working backwards, given the break proportions z,yis defined elementwise
by
yk=logit(zk)−log 1
K−k.
The break proportions zkare defined to be the ratio of xkto the length of stick left
after the first k−1pieces have been broken off,
zk=xk
1−Pk−1
k0=1xk0
.
35.7. Unit Vector
An n-dimensional vector x∈Rnis said to be a unit vector if it has unit Euclidean
length, so that
kxk = √x>x=qx2
1+x2
2+ ··· + x2
n=1.
410

Unit Vector Inverse Transform
Stan divides an unconstrained vector y∈Rnby its norm, kyk = py>y, to obtain a
unit vector x,
x=y
kyk.
To generate a unit vector, Stan generates points at random in Rnwith independent
unit normal distributions, which are then standardized by dividing by their Euclidean
length. Marsaglia (1972) showed this generates points uniformly at random on Sn−1.
That is, if we draw yn∼Normal(0,1)for n∈1:n, then x=y
kykhas a uniform distribu-
tion over Sn−1. This allows us to use an n-dimensional basis for Sn−1that preserves
local neighborhoods in that points that are close to each other in Rnmap to points
near each other in Sn−1. The mapping is not perfectly distance preserving, because
there are points arbitrarily far away from each other in Rnthat map to identical points
in Sn−1.
Warning: undefined at zero!
The above mapping from Rnto Snis not defined at zero. While this point outcome
has measure zero during sampling, and may thus be ignored, it is the default initial-
ization point and thus unit vector parameters cannot be initialized at zero. A simple
workaround is to initialize from a very small interval around zero, which is an option
built into all of the Stan interfaces.
Absolute Jacobian Determinant of the Unit Vector Inverse Transform
The Jacobian matrix relating the input vector yto the output vector xis singular
because x>x=1for any non-zero input vector y. Thus, there technically is no unique
transformation from xto y. To circumvent this issue, let r=py>yso that y=rx. The
transformation from (r, x−n)to yis well-defined but ris arbitrary, so we set r=1.
In this case, the determinant of the Jacobian is proportional to −1
2y>y, which is the
kernel of a standard multivariate normal distribution with nindependent dimensions.
35.8. Correlation Matrices
AK×Kcorrelation matrix xmust be is a symmetric, so that
xk,k0=xk0,k
for all k, k0∈ {1, . . . , K}, it must have a unit diagonal, so that
xk,k =1
411

for all k∈ {1, . . . , K}, and it must be positive definite, so that for every non-zero
K-vector a,
a>xa > 0.
To deal with this rather complicated constraint, Stan implements the transform of
Lewandowski et al. (2009). The number of free parameters required to specify a K×K
correlation matrix is K
2.
Correlation Matrix Inverse Transform
It is easiest to specify the inverse, going from its K
2parameter basis to a correlation
matrix. The basis will actually be broken down into two steps. To start, suppose y
is a vector containing K
2unconstrained values. These are first transformed via the
bijective function tanh : R→(0,1)
tanh x=exp(2x) −1
exp(2x) +1.
Then, define a K×Kmatrix z, the upper triangular values of which are filled by row
with the transformed values. For example, in the 4×4case, there are 4
2values
arranged as
z=
0tanh y1tanh y2tanh y4
0 0 tanh y3tanh y5
0 0 0 tanh y6
0 0 0 0
.
Lewandowski et al. show how to bijectively map the array zto a correlation matrix
x. The entry zi,j for i < j is interpreted as the canonical partial correlation (CPC)
between iand j, which is the correlation between i’s residuals and j’s residuals when
both iand jare regressed on all variables i0such that i0< i. In the case of i=1, there
are no earlier variables, so z1,j is just the Pearson correlation between iand j.
In Stan, the LKJ transform is reformulated in terms of a Cholesky factor wof the
final correlation matrix, defined for 1≤i, j ≤Kby
wi,j =
0if i > j,
1if 1=i=j,
Qi−1
i0=11−z2
i0, j 1/2
if 1< i =j,
zi,j if 1=i < j, and
zi,j Qi−1
i0=11−z2
i0, j 1/2
if 1< i < j.
412

This does not require as much computation per matrix entry as it may appear; calcu-
lating the rows in terms of earlier rows yields the more manageable expression
wi,j =
0if i > j,
1if 1=i=j,
zi,j if 1=i < j, and
zi,j wi−1,j 1−z2
i−1,j 1/2
if 1< i ≤j.
Given the upper-triangular Cholesky factor w, the final correlation matrix is
x=w>w.
Lewandowski et al. show that the determinant of the correlation matrix can be
defined in terms of the canonical partial correlations as
det x=
K−1
Y
i=1
K
Y
j=i+1
(1−z2
i,j )=Y
1≤i<j≤K
(1−z2
i,j ),
Absolute Jacobian Determinant of the Correlation Matrix Inverse Transform
From the inverse of equation 11 in Lewandowski et al. (2009), the absolute Jacobian
determinant is v
u
u
u
t
K−1
Y
i=1
K
Y
j=i+11−z2
i,j K−i−1
×
K−1
Y
i=1
K
Y
j=i+1
∂tanh zi,j
∂yi,j
Correlation Matrix Transform
The correlation transform is defined by reversing the steps of the inverse transform
defined in the previous section.
Starting with a correlation matrix x, the first step is to find the unique upper
triangular wsuch that x=ww >. Because xis positive definite, this can be done by
applying the Cholesky decomposition,
w=chol(x).
The next step from the Cholesky factor wback to the array zof CPCs is simplified
by the ordering of the elements in the definition of w, which when inverted yields
zi,j =
0if i≤j,
wi,j if 1=i < j, and
wi,j Qi−1
i0=11−z2
i0,j −2
if 1< i < j.
413

The final stage of the transform reverses the hyperbolic tangent transform, which is
defined by
tanh−1v=1
2log 1+v
1−v.
The inverse hyperbolic tangent function, tanh−1, is also called the Fisher transforma-
tion.
35.9. Covariance Matrices
AK×Kmatrix is a covariance matrix if it is symmetric and positive definite (see the
previous section for definitions). It requires K+K
2free parameters to specify a K×K
covariance matrix.
Covariance Matrix Transform
Stan’s covariance transform is based on a Cholesky decomposition composed with a
log transform of the positive-constrained diagonal elements.2
If xis a covariance matrix (i.e., a symmetric, positive definite matrix), then there
is a unique lower-triangular matrix z=chol(x) with positive diagonal entries, called
a Cholesky factor, such that
x=z z>.
The off-diagonal entries of the Cholesky factor zare unconstrained, but the diagonal
entries zk,k must be positive for 1≤k≤K.
To complete the transform, the diagonal is log-transformed to produce a fully
unconstrained lower-triangular matrix ydefined by
ym,n =
0if m < n,
log zm,m if m=n, and
zm,n if m > n.
2An alternative to the transform in this section, which can be coded directly in Stan, is to parameterize a
covariance matrix as a scaled correlation matrix. An arbitrary K×Kcovariance matrix Σcan be expressed
in terms of a K-vector σand correlation matrix Ωas
Σ=diag(σ ) ×Ω×diag(σ ),
so that each entry is just a deviation-scaled correlation,
Σm,n =σm×σn×Ωm,n .
414
Covariance Matrix Inverse Transform
The inverse transform reverses the two steps of the transform. Given an uncon-
strained lower-triangular K×Kmatrix y, the first step is to recover the intermediate
matrix zby reversing the log transform,
zm,n =
0if m < n,
exp(ym,m)if m=n, and
ym,n if m > n.
The covariance matrix xis recovered from its Cholesky factor zby taking
x=z z>.
Absolute Jacobian Determinant of the Covariance Matrix Inverse Transform
The Jacobian is the product of the Jacobians of the exponential transform from the
unconstrained lower-triangular matrix yto matrix zwith positive diagonals and the
product transform from the Cholesky factor zto x.
The transform from unconstrained yto Cholesky factor zhas a diagonal Jacobian
matrix, the absolute determinant of which is thus
K
Y
k=1
∂
∂yk,k
exp(yk,k)=
K
Y
k=1
exp(yk,k)=
K
Y
k=1
zk,k.
The Jacobian matrix of the second transform from the Cholesky factor zto the
covariance matrix xis also triangular, with diagonal entries corresponding to pairs
(m, n) with m≥n, defined by
∂
∂zm,n z z>m,n =∂
∂zm,n
K
X
k=1
zm,k zn,k
=
2zn,n if m=nand
zn,n if m > n.
The absolute Jacobian determinant of the second transform is thus
2K
K
Y
m=1
m
Y
n=1
zn,n =
K
Y
n=1
K
Y
m=n
zn,n =2K
K
Y
k=1
zK−k+1
k,k .
Finally, the full absolute Jacobian determinant of the inverse of the covariance matrix
transform from the unconstrained lower-triangular yto a symmetric, positive defi-
nite matrix xis the product of the Jacobian determinants of the exponentiation and
product transforms,
K
Y
k=1
zk,k
2K
K
Y
k=1
zK−k+1
k,k
=2K
K
Y
k=1
zK−k+2
k,k .
415
Let f−1be the inverse transform from a K+K
2-vector yto the K×Kcovariance
matrix x. A density function pX(x) defined on K×Kcovariance matrices is trans-
formed to the density pY(y) over K+K
2vectors yby
pY(y) =pX(f −1(y)) 2K
K
Y
k=1
zK−k+2
k,k .
35.10. Cholesky Factors of Covariance Matrices
An M×Mcovariance matrix Σcan be Cholesky factored to a lower triangular matrix
Lsuch that L L>=Σ. If Σis positive definite, then Lwill be M×M. If Σis only positive
semi-definite, then Lwill be M×N, with N < M.
A matrix is a Cholesky factor for a covariance matrix if and only if it is lower
triangular, the diagonal entries are positive, and M≥N. A matrix satisfying these
conditions ensures that L L>is positive semi-definite if M > N and positive definite if
M=N.
A Cholesky factor of a covariance matrix requires N+N
2+(M −N)N uncon-
strained parameters.
Cholesky Factor of Covariance Matrix Transform
Stan’s Cholesky factor transform only requires the first step of the covariance matrix
transform, namely log transforming the positive diagonal elements. Suppose xis an
M×NCholesky factor. The above-diagonal entries are zero, the diagonal entries are
positive, and the below-diagonal entries are unconstrained. The transform required
is thus
ym,n =
0if m < n,
log xm,m if m=n, and
xm,n if m > n.
Cholesky Factor of Covariance Matrix Inverse Transform
The inverse transform need only invert the logarithm with an exponentiation. If yis
the unconstrained matrix representation, then the elements of the constrained matrix
xis defined by
xm,n =
0if m < n,
exp(ym,m)if m=n, and
ym,n if m > n.
416

Absolute Jacobian Determinant of Cholesky Factor Inverse Transform
The transform has a diagonal Jacobian matrix, the absolute determinant of which is
N
Y
n=1
∂
∂yn,n
exp(yn,n)=
N
Y
n=1
exp(yn,n)=
N
Y
n=1
xn,n.
Let x=f−1(y) be the inverse transform from a N+N
2+(M −N)N vector to an
M×NCholesky factor for a covariance matrix xdefined in the previous section. A
density function pX(x) defined on M×NCholesky factors of covariance matrices is
transformed to the density pY(y) over N+N
2+(M −N)N vectors yby
pY(y) =pX(f −1(y))
N
Y
N=1
xn,n.
35.11. Cholesky Factors of Correlation Matrices
AK×Kcorrelation matrix Ωis positive definite and has a unit diagonal. Because it
is positive definite, it can be Cholesky factored to a K×Klower-triangular matrix L
with positive diagonal elements such that Ω=L L>. Because the correlation matrix
has a unit diagonal,
Ωk,k =LkL>
k=1,
each row vector Lkof the Cholesky factor is of unit length. The length and positivity
constraint allow the diagonal elements of Lto be calculated from the off-diagonal
elements, so that a Cholesky factor for a K×Kcorrelation matrix requires only K
2
unconstrained parameters.
Cholesky Factor of Correlation Matrix Inverse Transform
It is easiest to start with the inverse transform from the K
2unconstrained param-
eters yto the K×Klower-triangular Cholesky factor x. The inverse transform is
based on the hyperbolic tangent function, tanh, which satisfies tanh(x) ∈(−1,1).
Here it will function like an inverse logit with a sign to pick out the direction of an
underlying canonical partial correlation (see Section 35.8 for more information on the
relation between canonical partial correlations and the Cholesky factors of correlation
matrices).
Suppose yis a vector of K
2unconstrained values. Let zbe a lower-triangular
matrix with zero diagonal and below diagonal entries filled by row. For example, in
417
the 3×3case,
z=
0 0 0
tanh y10 0
tanh y2tanh y30
The matrix z, with entries in the range (−1,1), is then transformed to the Cholesky
factor x, by taking3
xi,j =
0if i < j [above diagonal]
q1−Pj0<j x2
i,j0if i=j[on diagonal]
zi,j q1−Pj0<j x2
i,j0if i > j [below diagonal]
In the 3×3case, this yields
x=
1 0 0
z2,1q1−x2
2,10
z3,1z3,2q1−x2
3,1q1−(x2
3,1+x2
3,2)
,
where the zi,j ∈(−1,1)are the tanh-transformed y.
The approach is a signed stick-breaking process on the quadratic (Euclidean
length) scale. Starting from length 1 at j=1, each below-diagonal entry xi,j is de-
termined by the (signed) fraction zi,j of the remaining length for the row that it con-
sumes. The diagonal entries xi,i get any leftover length from earlier entries in their
row. The above-diagonal entries are zero.
Cholesky Factor of Correlation Matrix Transform
Suppose xis a K×KCholesky factor for some correlation matrix. The first step of
the transform reconstructs the intermediate values zfrom x,
zi,j =xi,j
q1−Pj0<j x2
i,j0
.
The mapping from the resulting zto yinverts tanh,
y=tanh−1z=1
2log(1+z) −log(1−z).
3For convenience, a summation with no terms, such as Pj0<1xi,j0, is defined to be 0. This implies
x1,1=1and that xi,1=zi,1for i > 1.
418
Absolute Jacobian Determinant of Inverse Transform
The Jacobian of the full transform is the product of the Jacobians of its component
transforms.
First, for the inverse transform z=tanh y, the derivative is
d
dy tanh y=1
(cosh y)2.
Second, for the inverse transform of zto x, the resulting Jacobian matrix Jis of
dimension K
2×K
2, with indexes (i, j) for (i > j). The Jacobian matrix is lower
triangular, so that its determinant is the product of its diagonal entries, of which
there is one for each (i, j) pair,
|det J| = Y
i>j
d
dzi,j
xi,j
,
where d
dzi,j
xi,j =s1−X
j0<j
x2
i,j0.
So the combined density for unconstrained yis
pY(y) =pX(f −1(y)) Y
n<(K
2)
1
(cosh y)2Y
i>j
1−X
j0<j
x2
i,j0
1/2
,
where x=f−1(y) is used for notational convenience. The log Jacobian determinant
of the complete inverse transform x=f−1(y) is given by
log |det J|=−2X
n≤(K
2)
log cosh y+1
2X
i>j
log
1−X
j0<j
x2
i,j0
.
419
36. Optimization Algorithms
Stan provides optimization algorithms which find modes of the density specified by
a Stan program. Such modes may be used as parameter estimates or as the basis
of approximations to a Bayesian posterior; see Chapter 31 for background on point
estimation.
Stan provides three different optimizers, a Newton optimizer, and two related
quasi-Newton algorithms, BFGS and L-BFGS; see (Nocedal and Wright,2006) for thor-
ough description and analysis of all of these algorithms. The L-BFGS algorithm is the
default optimizer. Newton’s method is the least efficient of the three, but has the
advantage of setting its own stepsize.
36.1. General Configuration
All of the optimizers are iterative and allow the maximum number of iterations to be
specified; the default maximum number of iterations is 2000.
All of the optimizers are able to stream intermediate output reporting on their
progress. Whether or not to save the intermediate iterations and stream progress is
configurable.
36.2. BFGS and L-BFGS Configuration
Convergence Monitoring
Convergence monitoring in (L-)BFGS is controlled by a number of tolerance values,
any one of which being satisfied causes the algorithm to terminate with a solution.
Any of the convergence tests can be disabled by setting its corresponding tolerance
parameter to zero. The tests for convergence are as follows.
Parameter Convergence
The parameters θiin iteration iare considered to have converged with respect to
tolerance tol_param if
||θi−θi−1|| <tol_param.
Density Convergence
The (unnormalized) log density log p(θi|y) for the parameters θiin iteration igiven
data yis considered to have converged with respect to tolerance tol_obj if
log p(θi|y) −log p(θi−1|y)
<tol_obj.
420
The log density is considered to have converged to within relative tolerance
tol_rel_obj if
log p(θi|y) −log p(θi−1|y)
max
log p(θi|y)
,
log p(θi−1|y)
,1.0<tol_rel_obj ∗.
Gradient Convergence
The gradient is considered to have converged to 0 relative to a specified tolerance
tol_grad if
||gi|| <tol_grad,
where ∇θis the gradient operator with respect to θand gi= ∇θlog p(θi|y) is the
gradient at iteration i.
The gradient is considered to have converged to 0 relative to a specified relative
tolerance tol_rel_grad if
gT
iˆ
H−1
igi
max
log p(θi|y)
,1.0<tol_rel_grad ∗,
where ˆ
Hiis the estimate of the Hessian at iteration i,|u|is the absolute value (L1
norm) of u,||u|| is the vector length (L2 norm) of u, and ≈2e−16 is machine
precision.
Initial Step Size
The initial step size parameter αfor BFGS-style optimizers may be specified. If the
first iteration takes a long time (and requires a lot of function evaluations) initialize
αto be the roughly equal to the αused in that first iteration. The default value is
intentionally small, 0.001, which is reasonable for many problems but might be too
large or too small depending on the objective function and initialization. Being too
big or too small just means that the first iteration will take longer (i.e., require more
gradient evaluations) before the line search finds a good step length. It’s not a critical
parameter, but for optimizing the same model multiple times (as you tweak things or
with different data), being able to tune αcan save some real time.
L-BFGS History Size
L-BFGS has a command-line argument which controls the size of the history it uses
to approximate the Hessian. The value should be less than the dimensionality of
the parameter space and, in general, relatively small values (5–10) are sufficient; the
default value is 5.
421
If L-BFGS performs poorly but BFGS performs well, consider increasing the history
size. Increasing history size will increase the memory usage, although this is unlikely
to be an issue for typical Stan models.
36.3. General Configuration Options
The general configuration options for optimization are the same as those for MCMC;
see Section 34.3 for details.
36.4. Writing Models for Optimization
Constrained vs. Unconstrained Parameters
For constrained optimization problems, for instance, with a standard deviation pa-
rameter σconstrained so that σ > 0, it can be much more efficient to declare a
parameter sigma with no constraints. This allows the optimizer to easily get close to
0 without having to tend toward −∞ on the log σscale.
The Jacobian adjustment is not an issue for posterior modes, because Stan turns
off the built-in Jacobian adjustments for optimization.
With unconstrained parameterizations of parameters with constrained support, it
is important to provide a custom initialization that is within the support. For example,
declaring a vector
vector[M] sigma;
and using the default random initialization which is Uniform(−2,2)on the uncon-
strained scale, means that there is only a 2−Mchance that the initialization will be
within support.
For any given optimization problem, it is probably worthwhile trying the program
both ways, with and without the constraint, to see which one is more efficient.
422
37. Variational Inference
Stan implements an automatic variational inference algorithm, called Automatic Dif-
ferentiation Variational Inference (ADVI) (Kucukelbir et al.,2015). In this chapter, we
describe the specifics of how ADVI maximizes the variational objective. For a high-
level description, please see Chapter 33.
37.1. Stochastic Gradient Ascent
ADVI optimizes the ELBO in the real-coordinate space using stochastic gradient as-
cent. We obtain noisy (yet unbiased) gradients of the variational objective using auto-
matic differentiation and Monte Carlo integration. The algorithm ascends these gra-
dients using an adaptive stepsize sequence. We evaluate the ELBO also using Monte
Carlo integration and measure convergence similar to the relative tolerance scheme
in Stan’s optimization feature.
Monte Carlo Approximation of the ELBO
ADVI uses Monte Carlo integration to approximate the variational objective func-
tion, the ELBO. The number of samples used to approximate the ELBO is denoted
by elbo_samples. We recommend a default value of 100, as we only evaluate the
ELBO every eval_elbo iterations, which also defaults to 100.
Monte Carlo Approximation of the Gradients
ADVI uses Monte Carlo integration to approximate the gradients of the ELBO. The
number of samples used to approximate the gradients is denoted by grad_samples.
We recommend a default value of 1, as this is the most efficient. It also a very noisy
estimate of the gradient, but stochastic gradient ascent is capable of following such
gradients.
Adaptive Stepsize Sequence
ADVI uses a finite-memory version of adaGrad (Duchi et al.,2011). This has a single
parameter that we expose, denoted eta. We now have a warmup adaptation phase
that selects a good value for eta. The procedure does a heuristic search over eta
values that span 5 orders of magnitude.
423
Assessing Convergence
ADVI tracks the progression of the ELBO through the stochastic optimization. Specifi-
cally, ADVI heuristically determines a rolling window over which it computes the aver-
age and the median change of the ELBO. Should either number fall below a threshold,
denoted by tol_rel_obj, we consider the algorithm to have converged. The change
in ELBO is calculated the same way as in Stan’s optimization module.
424

38. Diagnostic Mode
Stan’s diagnostic mode runs a Stan program with data, initializing parameters either
randomly or with user-specified initial values, and then evaluates the log probability
and its gradients. The gradients computed by the Stan program are compared to
values calculated by finite differences.
Diagnostic mode may be configured with two parameters.
parameter description constraints default
finite difference size > 01e–6
error error threshold for matching error >01e–6
If the difference between the Stan program’s gradient value and that calculated by
finite difference is higher than the specified threshold, the argument will be flagged.
38.1. Output
Diagnostic mode prints the log posterior density (up to a proportion) calculated by
the Stan program for the specified initial values. For each parameter, it prints the
gradient at the initial parameter values calculated by Stan’s program and by finite
differences over Stan’s program for the log probability.
Unconstrained Scale
The output is for the variable values and their gradients are on the unconstrained
scale, which means each variable is a vector of size corresponding to the number of
unconstrained variables required to define it. For example, an N×Ncorrelation ma-
trix, requires N
2unconstrained parameters. The transformations from constrained
to unconstrained parameters are based on the constraints in the parameter declara-
tions and described in detail in Chapter 35.
Includes Jacobian
The log density includes the Jacobian adjustment implied by the constraints declared
on variables; see Chapter 35 for full details. The Jacobian adjustment will be turned
off if optimization is used in practice, but there is as of yet no way to turn it off in
diagnostic mode.
38.2. Configuration Options
The general configuration options for diagnostics are the same as those for MCMC;
see Section 34.3 for details. Initial values may be specified, or they may be drawn at
425
random. Setting the random number generator will only have an effect if a random
initialization is specified.
38.3. Speed Warning and Data Trimming
Due to the application of finite differences, the computation time grows linearly with
the number of parameters. This can be require a very long time, especially in models
with latent parameters that grow with the data size. It can be helpful to diagnose a
model with smaller data sizes in such cases.
426
Part VII
Built-In Functions
427
39. Void Functions
Stan does not technically support functions that do not return values. It does
support two types of statements that look like functions, one for incrementing log
probabilities and one for printing. Documentation on these functions is included
here for completeness. The special keyword void is used for the return type of void
functions.
39.1. Print
The print statement is unique among Stan’s syntactic constructs in two ways. First,
it is the only function-like construct that allows a variable number of arguments.
Second, it is the only function-like construct to accept string literals (e.g., "hello
world") as arguments.
Printing has no effect on the model’s log probability function. Its sole purpose is
the side effect (i.e., an effect not represented in a return value) of arguments being
printed to whatever the standard output stream is connected to (e.g., the terminal in
command-line Stan or the R console in RStan).
void print(T1 x1,..., TN xN)
Print the values denoted by the arguments x1 through xN on the standard
output stream. There are no spaces between items in the print, but a line feed
(LF; Unicode U+000A; C++ literal ’\n’) is inserted at the end of the printed line.
The types T1 through TN can be any of Stan’s built-in numerical types or double
quoted strings of ASCII characters.
The full behavior of the print statement with examples is documented in Section 5.9.
428
40. Integer-Valued Basic Functions
This chapter describes Stan’s built-in function that take various types of arguments
and return results of type integer.
40.1. Integer-Valued Arithmetic Operators
Stan’s arithmetic is based on standard double-precision C++ integer and floating-point
arithmetic. If the arguments to an arithmetic operator are both integers, as in 2+2,
integer arithmetic is used. If one argument is an integer and the other a floating-point
value, as in 2.0 + 2 and 2 + 2.0, then the integer is promoted to a floating point
value and floating-point arithmetic is used.
Integer arithmetic behaves slightly differently than floating point arithmetic. The
first difference is how overflow is treated. If the sum or product of two integers over-
flows the maximum integer representable, the result is an undesirable wraparound
behavior at the bit level. If the integers were first promoted to real numbers, they
would not overflow a floating-point representation. There are no extra checks in Stan
to flag overflows, so it is up to the user to make sure it does not occur.
Secondly, because the set of integers is not closed under division and there is no
special infinite value for integers, integer division implicitly rounds the result. If both
arguments are positive, the result is rounded down. For example, 1/2evaluates to
0 and 5/3evaluates to 1.
If one of the integer arguments to division is negative, the latest C++ specification
(C++11), requires rounding toward zero. This would have -1 / 2 evaluate to 0 and
-7 / 2 evaluate to 3. Before the C++11 specification, the behavior was platform de-
pendent, allowing rounding up or down. All compilers recent enough to be able to
deal with Stan’s templating should follow the C++11 specification, but it may be worth
testing if you are not sure and plan to use integer division with negative values.
Unlike floating point division, where 1.0 / 0.0 produces the special positive in-
finite value, integer division by zero, as in 1/0, has undefined behavior in the C++
standard. For example, the clang++ compiler on Mac OS X returns 3764, whereas the
g++ compiler throws an exception and aborts the program with a warning. As with
overflow, it is up to the user to make sure integer divide-by-zero does not occur.
Binary Infix Operators
Operators are described using the C++ syntax. For instance, the binary operator of
addition, written X+Y, would have the Stan signature int operator+(int,int)
indicating it takes two real arguments and returns a real value.
429
int operator+(int x, int y)
The sum of the addends xand y
operator+(x, y) =(x +y)
int operator-(int x, int y)
The difference between the minuend xand subtrahend y
operator-(x, y) =(x −y)
int operator*(int x, int y)
The product of the factors xand y
operator*(x, y) =(x ×y)
int operator/(int x, int y)
The integer quotient of the dividend xand divisor y
operator/(x, y) = bx/yc
int operator%(int x, int y)
xmodulo y, which is the remainder after dividing xby y,
operator%(x, y) =xmod y=x−y∗ bx/yc
Unary Prefix Operators
int operator-(int x)
The negation of the subtrahend x
operator-(x) = −x
int operator+(int x)
This is a no-op.
operator+(x) =x
430
40.2. Absolute Functions
Rabs(T x)
Returns the (elementwise) absolute value of x,
abs(x) = |x|
for any argument type T; see Section 41.1 for details including return type R.
int int_step(int x)
int int_step(real x)
Returns the integer step, or Heaviside, function of x.
int_step(x) =
0if x≤0
1if x > 0
See the warning in Section 41.7 about the dangers of step functions applied to any-
thing other than data.
40.3. Bound Functions
int min(int x, int y)
Returns the minimum of xand y.
min(x, y) =
xif x < y
yotherwise
int max(int x, int y)
Returns the maximum of xand y.
max(x, y) =
xif x>y
yotherwise
431
41. Real-Valued Basic Functions
This chapter describes built-in functions that take zero or more real or integer argu-
ments and return real values.
41.1. Vectorization of Real-Valued Functions
Although listed in this chapter, many of Stan’s built-in functions are vectorized so
that they may be applied to any argument type. The vectorized form of these func-
tions is not any faster than writing an explicit loop that iterates over the elements
applying the function—it’s just easier to read and write and less error prone.
Unary Function Vectorization
Many of Stan’s unary functions can be applied to any argument type. For example,
the exponential function, exp, can be applied to real arguments or arrays of real
arguments. Other than for integer arguments, the result type is the same as the argu-
ment type, including dimensionality and size. Integer arguments are first promoted
to real values, but the result will still have the same dimensionality and size as the
argument.
Real and real array arguments
When applied to a simple real value, the result is a real value. When applied to arrays,
vectorized functions like exp() are defined elementwise. For example,
// declare some variables for arguments
real x0;
real x1[5];
real x2[4, 7];
...
// declare some variables for results
real y0;
real y1[5];
real y2[4, 7];
...
// calculate and assign results
y0 = exp(x0);
y1 = exp(x1);
y2 = exp(x2);
When exp is applied to an array, it applies elementwise. For example, the statement
above,
432
y2 = exp(x2);
produces the same result for y2 as the explicit loop
for (i in 1:4)
for (j in 1:7)
y2[i, j] = exp(x2[i, j]);
Vector and matrix arguments
Vectorized functions also apply elementwise to vectors and matrices. For example,
vector[5] xv;
row_vector[7] xrv;
matrix[10, 20] xm;
...
vector[5] yv;
row_vector[7] yrv;
matrix[10, 20] ym;
yv = exp(xv);
yrv = exp(xrv);
ym = exp(xm);
Arrays of vectors and matrices work the same way. For example,
matrix[17, 93] u[12];
...
matrix[17, 93] z[12];
...
z = exp(u);
After this has been executed, z[i, j, k] will be equal to exp(u[i, j, k]).
Integer and integer array arguments
Integer arguments are promoted to real values in vectorized unary functions. Thus if
nis of type int,exp(n) is of type real. Arrays work the same way, so that if n2 is
a one dimensional array of integers, then exp(n2) will be a one-dimensional array of
reals with the same number of elements as n2. For example,
int n1[23];
...
real z1[23];
...
z1 = exp(n1);
433
It would be illegal to try to assign exp(n1) to an array of integers; the return type is
a real array.
41.2. Mathematical Constants
Constants are represented as functions with no arguments and must be called as
such. For instance, the mathematical constant πmust be written in a Stan program
as pi().
real pi()
π, the ratio of a circle’s circumference to its diameter
real e()
e, the base of the natural logarithm
real sqrt2()
The square root of 2
real log2()
The natural logarithm of 2
real log10()
The natural logarithm of 10
41.3. Special Values
real not_a_number()
Not-a-number, a special non-finite real value returned to signal an error
real positive_infinity()
Positive infinity, a special non-finite real value larger than all finite numbers
real negative_infinity()
Negative infinity, a special non-finite real value smaller than all finite numbers
real machine_precision()
The smallest number xsuch that (x +1)≠1in floating-point arithmetic on the
current hardware platform
434

41.4. Log Probability Function
The basic purpose of a Stan program is to compute a log probability function and
its derivatives. The log probability function in a Stan model outputs the log density
on the unconstrained scale. A log probability accumulator starts at zero and is then
incremented in various ways by a Stan program. The variables are first transformed
from unconstrained to constrained, and the log Jacobian determinant added to the
log probability accumulator. Then the model block is executed on the constrained pa-
rameters, with each sampling statement (~) and log probability increment statement
(increment_log_prob) adding to the accumulator. At the end of the model block
execution, the value of the log probability accumulator is the log probability value
returned by the Stan program.
Stan provides a special built-in function target() that takes no arguments and
returns the current value of the log probability accumulator.1
This function is primarily useful for debugging purposes, where for instance, it
may be used with a print statement to display the log probability accumulator at
various stages of execution to see where it becomes ill defined.
real target()
Returns the current value of the log probability accumulator.
real get_lp()
Returns the current value of the log probability accumulator; deprecated: —
use target() instead).
Both target and the deprecated get_lp act like other functions ending in _lp,
meaning that they may only may only be used in the model block.
41.5. Logical Functions
Like C++, BUGS, and R, Stan uses 0 to encode false, and 1 to encode true. Stan sup-
ports the usual boolean comparison operations and boolean operators. These all
have the same syntax and precedence as in C++; for the full list of operators and
precedences, see Figure 4.1.
Comparison Operators
All comparison operators return boolean values, either 0 or 1. Each operator has
two signatures, one for integer comparisons and one for floating-point comparisons.
1This function used to be called get_lp(), but that name has been deprecated; using it will print a
warning. The function get_lp() will be removed in a future release.
435
Comparing an integer and real value is carried out by first promoting the integer
value.
int operator<(int x, int y)
int operator<(real x, real y)
Returns 1 if xis less than yand 0 otherwise.
operator<(x, y) =
1if x<y
0otherwise
int operator<=(int x, int y)
int operator<=(real x, real y)
Returns 1 if xis less than or equal yand 0 otherwise.
operator<=(x, y) =
1if x≤y
0otherwise
int operator>(int x, int y)
int operator>(real x, real y)
Returns 1 if xis greater than yand 0 otherwise.
operator> =
1if x>y
0otherwise
int operator>=(int x, int y)
int operator>=(real x, real y)
Returns 1 if xis greater than or equal to yand 0 otherwise.
operator>= =
1if x≥y
0otherwise
int operator==(int x, int y)
int operator==(real x, real y)
Returns 1 if xis equal to yand 0 otherwise.
operator==(x, y) =
1if x=y
0otherwise
436
int operator!=(int x, int y)
int operator!=(real x, real y)
Returns 1 if xis not equal to yand 0 otherwise.
operator!=(x, y) =
1if x≠y
0otherwise
Boolean Operators
Boolean operators return either 0 for false or 1 for true. Inputs may be any
real or integer values, with non-zero values being treated as true and zero val-
ues treated as false. These operators have the usual precedences, with negation
(not) binding the most tightly, conjunction the next and disjunction the weakest;
all of the operators bind more tightly than the comparisons. Thus an expression
such as !a && b is interpreted as (!a) && b, and a<b||c>=d&&e!=fas
(a < b) || (((c >= d) && (e != f))).
int operator!(int x)
int operator!(real x)
Returns 1 if xis zero and 0 otherwise.
operator!(x) =
0if x≠0
1if x=0
int operator&&(int x, int y)
int operator&&(real x, real y)
Returns 1 if xis unequal to 0 and yis unequal to 0.
operator&&(x, y) =
1if x≠0and y≠0
0otherwise
int operator||(int x, int y)
int operator||(real x, real y)
Returns 1 if xis unequal to 0 or yis unequal to 0.
operator||(x, y) =
1if x≠0or y≠0
0otherwise
437
Boolean Operator Short Circuiting
Like in C++, the boolean operators && and || and are implemented to short circuit
directly to a return value after evaluating the first argument if it is sufficient to re-
solve the result. In evaluating a || b, if aevaluates to a value other than zero, the
expression returns the value 1 without evaluating the expression b. Similarly, evalu-
ating a && b first evaluates a, and if the result is zero, returns 0 without evaluating
b.
Logical Functions
The logical functions introduce conditional behavior functionally and are primarily
provided for compatibility with BUGS and JAGS.
real step(real x)
Returns 1 if xis positive and 0 otherwise.
step(x) =
1if x > 0
0otherwise
The step function is often used in BUGS to perform conditional operations. For in-
stance, step(a - b) evaluates to 1 if ais greater than band evaluates to 0 otherwise.
step is a step-like functions; see the warning in Section 41.7 applied to expressions
dependent on parameters.
int is_inf(real x)
Returns 1if xis infinite (positive or negative) and 0otherwise.
int is_nan(real x)
Returns 1if xis NaN and 0otherwise.
Care must be taken because both of these indicator functions are step-like and thus
can cause discontinuities in gradients when applied to parameters; see Section 41.7
for details.
41.6. Real-Valued Arithmetic Operators
The arithmetic operators are presented using C++ notation. For instance
operator+(x,y) refers to the binary addition operator and operator-(x) to the
unary negation operator. In Stan programs, these are written using the usual infix
and prefix notations as x+yand -x, respectively.
438

Binary Infix Operators
real operator+(real x, real y)
Returns the sum of xand y.
(x +y) =operator+(x, y) =x+y
real operator-(real x, real y)
Returns the difference between xand y.
(x −y) =operator-(x, y) =x−y
real operator*(real x, real y)
Returns the product of xand y.
(x ∗y) =operator*(x, y) =xy
real operator/(real x, real y)
Returns the quotient of xand y.
(x/y) =operator/(x, y) =x
y
real operator^(real x, real y)
Return xraised to the power of y.
(x^y) =operator^(x, y) =xy
Unary Prefix Operators
real operator-(real x)
Returns the negation of the subtrahend x.
operator-(x) =(−x)
439
real operator+(real x)
Returns the value of x.
operator+(x) =x
41.7. Step-like Functions
Warning: These functions can seriously hinder sampling and optimization efficiency
for gradient-based methods (e.g., NUTS, HMC, BFGS) if applied to parameters (includ-
ing transformed parameters and local variables in the transformed parameters or
model block). The problem is that they break gradients due to discontinuities coupled
with zero gradients elsewhere. They do not hinder sampling when used in the data,
transformed data, or generated quantities blocks.
Absolute Value Functions
Rfabs(T x)
Returns the (elementwise) absolute value of x,
abs(x) = |x|
See the warning at start of Section 41.7 for application to parameters. for any
argument type T; see Section 41.1 for details including return type R.
real abs(real x)
Returns the absolute value of x, defined by
abs(x) = |x|
See the warning at start of Section 41.7 for application to parameters.
int abs(int x)
Returns the absolute value of x, defined by
abs(x) = |x|
real fdim(real x, real y)
Returns the positive difference between xand y, which is x-yif xis greater
than yand 0 otherwise; see warning at start of Section 41.7.
fdim(x, y) =
x−yif x≥y
0otherwise
440

Bounds Functions
real fmin(real x, real y)
Returns the minimum of xand y; see warning at start of Section 41.7.
fmin(x, y) =
xif x≤y
yotherwise
real fmax(real x, real y)
Returns the maximum of xand y; see warning at start of Section 41.7.
fmax(x, y) =
xif x≥y
yotherwise
Arithmetic Functions
real fmod(real x, real y)
Returns the real value remainder after dividing xby y; see warning at start of
Section 41.7.
fmod(x, y) =x−$x
y%y
The operator bucis the floor operation; see below.
Rounding Functions
Warning: Rounding functions convert real values to integers. Because the output is
an integer, any gradient information resulting from functions applied to the integer is
not passed to the real value it was derived from. With MCMC sampling using HMC or
NUTS, the MCMC acceptance procedure will correct for any error due to poor gradient
calculations, but the result is likely to be reduced acceptance probabilities and less
efficient sampling.
The rounding functions cannot be used as indices to arrays because they return
real values. Stan may introduce integer-valued versions of these in the future, but as
of now, there is no good workaround.
Rfloor(T x)
Returns the (elementwise) floor of x, which is the largest integer less than or
equal to x, converted to a real value; see warning at start of Section 41.7,
floor(x) = bxc
441

for any argument type T; see Section 41.1 for details including return type R.
Rceil(T x)
Returns the (elementwise) ceiling of x, which is the smallest integer greater than
or equal to x, converted to a real value; see warning at start of Section 41.7,
ceil(x) = dxe
for any argument type T; see Section 41.1 for details including return type R.
Rround(T x)
Returns the (elementwise) nearest integer to x, converted to a real value; see
warning at start of Section 41.7,
round(x) =
dxeif x− bxc ≥ 0.5
bxcotherwise
for any argument type T; see Section 41.1 for details including return type R.
Rtrunc(T x)
Returns the (elementwise) integer nearest to but no larger in magnitude than x,
converted to a double value; see warning at start of Section 41.7,
trunc(x) = bxc
Note that this function is redundant with floor. for any argument type T; see
Section 41.1 for details including return type R.
41.8. Power and Logarithm Functions
Rsqrt(T x)
Returns the (elementwise) square root of x,
sqrt(x) =
√xif x≥0
NaN otherwise
for any argument type T; see Section 41.1 for details including return type R.
Rcbrt(T x)
Returns the (elementwise) cube root of x,
cbrt(x) =3
√x
for any argument type T; see Section 41.1 for details including return type R.
442
Rsquare(T x)
Returns the (elementwise) square of x,
square(x) =x2
for any argument type T; see Section 41.1 for details including return type R.
Rexp(T x)
Returns the (elementwise) natural exponential of x,
exp(x) =exp(x) =ex
for any argument type T; see Section 41.1 for details including return type R.
Rexp2(T x)
Returns the (elementwise) base-2 exponential of x,
exp2(x) =2x
for any argument type T; see Section 41.1 for details including return type R.
Rlog(T x)
Returns the (elementwise) natural logarithm of x,
log(x) =log x=
loge(x) if x≥0
NaN otherwise
for any argument type T; see Section 41.1 for details including return type R.
Rlog2(T x)
Returns the (elementwise) base-2 logarithm of x,
log2(x) =
log2(x) if x≥0
NaN otherwise
for any argument type T; see Section 41.1 for details including return type R.
Rlog10(T x)
Returns the (elementwise) base-10 logarithm of x,
log10(x) =
log10(x) if x≥0
NaN otherwise
for any argument type T; see Section 41.1 for details including return type R.
443

real pow(real x, real y)
Returns xraised to the power of y.
pow(x, y) =xy
Rinv(T x)
Returns the (elementwise) inverse of x,
inv(x) =1
x
for any argument type T; see Section 41.1 for details including return type R.
Rinv_sqrt(T x)
Returns the (elementwise) inverse of the square root of x,
inv_sqrt(x) =
1
√xif x≥0
NaN otherwise
for any argument type T; see Section 41.1 for details including return type R.
Rinv_square(T x)
Returns the (elementwise) inverse of the square of x,
inv_square(x) =1
x2
for any argument type T; see Section 41.1 for details including return type R.
41.9. Trigonometric Functions
real hypot(real x, real y)
Returns the length of the hypotenuse of a right triangle with sides of length x
and y.
hypot(x, y) =
px2+y2if x, y ≥0
NaN otherwise
Rcos(T x)
Returns the (elementwise) cosine of the angle x(in radians),
cos(x) =cos(x)
for any argument type T; see Section 41.1 for details including return type R.
444

Rsin(T x)
Returns the (elementwise) sine of the angle x(in radians),
sin(x) =sin(x)
for any argument type T; see Section 41.1 for details including return type R.
Rtan(T x)
Returns the (elementwise) tangent of the angle x(in radians),
tan(x) =tan(x)
for any argument type T; see Section 41.1 for details including return type R.
Racos(T x)
Returns the (elementwise) principal arc (inverse) cosine (in radians) of x,
acos(x) =
arccos(x) if −1≤x≤1
NaN otherwise
for any argument type T; see Section 41.1 for details including return type R.
Rasin(T x)
Returns the (elementwise) principal arc (inverse) sine (in radians) of x,
asin(x) =
arcsin(x) if −1≤x≤1
NaN otherwise
for any argument type T; see Section 41.1 for details including return type R.
Ratan(T x)
Returns the (elementwise) principal arc (inverse) tangent (in radians) of x,
atan(x) =arctan(x)
for any argument type T; see Section 41.1 for details including return type R.
real atan2(real x, real y)
Returns the principal arc (inverse) tangent (in radians) of xdivided by y.
atan2(x, y) =arctan x
y!
445
41.10. Hyperbolic Trigonometric Functions
Rcosh(T x)
Returns the (elementwise) hyperbolic cosine of x(in radians),
cosh(x) =cosh(x)
for any argument type T; see Section 41.1 for details including return type R.
Rsinh(T x)
Returns the (elementwise) hyperbolic sine of x(in radians),
sinh(x) =sinh(x)
for any argument type T; see Section 41.1 for details including return type R.
Rtanh(T x)
Returns the (elementwise) hyperbolic tangent of x(in radians),
tanh(x) =tanh(x)
for any argument type T; see Section 41.1 for details including return type R.
Racosh(T x)
Returns the (elementwise) inverse hyperbolic cosine (in radians),
acosh(x) =
cosh−1(x) if x≥1
NaN otherwise
for any argument type T; see Section 41.1 for details including return type R.
Rasinh(T x)
Returns the (elementwise) inverse hyperbolic cosine (in radians),
asinh(x) =sinh−1(x)
for any argument type T; see Section 41.1 for details including return type R.
Ratanh(T x)
Returns the (elementwise) inverse hyperbolic tangent (in radians) of x,
atanh(x) =
tanh−1(x) if −1≤x≤1
NaN otherwise
for any argument type T; see Section 41.1 for details including return type R.
446

41.11. Link Functions
The following functions are commonly used as link functions in generalized linear
models (see Section 9.5). The function Φis also commonly used as a link function
(see Section 41.12).
Rlogit(T x)
Returns the (elementwise) log odds, or logit, function applied to x,
logit(x) =
log x
1−xif 0≤x≤1
NaN otherwise
for any argument type T; see Section 41.1 for details including return type R.
Rinv_logit(T x)
Returns the (elementwise) logistic sigmoid function applied to x,
inv_logit(x) =1
1+exp(−x)
for any argument type T; see Section 41.1 for details including return type R.
Rinv_cloglog(T x)
Returns the (elementwise) inverse of the complementary log-log function
applied to x,
inv_cloglog(x) =1−exp−exp(x)
for any argument type T; see Section 41.1 for details including return type R.
41.12. Probability-Related Functions
Normal Cumulative Distribution Functions
The error function erf is related to the unit normal cumulative distribution function
Φby scaling. See Section 54.1 for the general normal cumulative distribution function
(and its complement).
Rerf(T x)
Returns the (elementwise) error function, also known as the Gauss error
function, of x,
erf(x) =2
√πZx
0
e−t2dt
for any argument type T; see Section 41.1 for details including return type R.
447

Rerfc(T x)
Returns the (elementwise) complementary error function of x,
erfc(x) =2
√πZ∞
x
e−t2dt
for any argument type T; see Section 41.1 for details including return type R.
RPhi(T x)
Returns the (elementwise) unit normal cumulative distribution function of x,
Phi(x) =1
√2πZx
0
e−t2/2dt
for any argument type T; see Section 41.1 for details including return type R.
Rinv_Phi(T x)
Returns the (elementwise) standard normal inverse cumulative distribution
function of p, otherwise known as the quantile function,
Phi(inv_Phi(p)) =p
for any argument type T; see Section 41.1 for details including return type R.
RPhi_approx(T x)
Returns the (elementwise) fast approximation of the unit (may replace Phi for
probit regression with maximum absolute error of 0.00014, see (Bowling et al.,
2009) for details),
Phi_approx(x) =logit−1(0.07056 x3+1.5976 x)
for any argument type T; see Section 41.1 for details including return type R.
Other Probability-Related Functions
real binary_log_loss(int y, real y_hat)
Returns the log loss function for for predicting ˆ
y∈[0,1]for boolean outcome
y∈ {0,1}.
binary_log_loss(y, ˆ
y) =
−log ˆ
yif y=0
−log(1−ˆ
y) otherwise
448

real owens_t(real h, real a)
Returns the Owen’s T function for the probability of the event X > h and
0< Y < aX where Xand Yare independent standard normal random variables.
owens_t(h, a) =1
2πZa
0
exp(−1
2h2(1+x2))
1+x2dx
41.13. Combinatorial Functions
real inc_beta(real alpha, real beta, real x)
Returns the incomplete beta function up to xapplied to alpha and beta. See
Section F.2 for a definition.
real lbeta(real alpha, real beta)
Returns the natural logarithm of the beta function applied to alpha and beta.
The beta function, B(α, β), computes the normalizing constant for the beta
distribution, and is defined for α > 0and β > 0.
lbeta(α, β) =log Γ(a) +log Γ(b) −log Γ(a +b)
See Section F.1 for definition of B(α, β).
Rtgamma(T x)
Returns the (elementwise) gamma function applied to x. The gamma function
is the generalization of the factorial function to continuous variables, defined
so that Γ(n +1)=n!. See Section F.3 for a full definition of Γ(x). The function
is defined for positive numbers and non-integral negative numbers„
tgamma(x) =
Γ(x) if x6∈ {. . . , −3,−2,−1,0}
error otherwise
See Section F.3 for a definition of Γ(x). for any argument type T; see Sec-
tion 41.1 for details including return type R.
Rlgamma(T x)
Returns the (elementwise) natural logarithm of the gamma function applied to
x„
lgamma(x) =
log Γ(x) if x6∈ {. . . , −3,−2,−1,0}
error otherwise
for any argument type T; see Section 41.1 for details including return type R.
449
Rdigamma(T x)
Returns the (elementwise) digamma function applied to x. The digamma
function is the derivative of the natural logarithm of the Gamma function. The
function is defined for positive numbers and non-integral negative numbers,
digamma(x) =
Γ0(x)
Γ(x) if x6∈ {. . . , −3,−2,−1,0}
error otherwise
See Section F.3 for definition of Γ(x). for any argument type T; see Section 41.1
for details including return type R.
Rtrigamma(T x)
Returns the (elementwise) trigamma function applied to x. The trigamma
function is the second derivative of the natural logarithm of the Gamma
function,
trigamma(x) =
P∞
n=0
1
(x+n)2if x6∈ {. . . , −3,−2,−1,0}
error otherwise
for any argument type T; see Section 41.1 for details including return type R.
real lmgamma(int n, real x)
Returns the natural logarithm of the multivariate gamma function Γnwith n
dimensions applied to x.
lmgamma(n, x) =
n(n−1)
4log π+Pn
j=1log Γx+1−j
2if x6∈ {. . . , −3,−2,−1,0}
error otherwise
real gamma_p(real a, real z)
Returns the normalized lower incomplete gamma function of aand zdefined
for positive aand nonnegative z.
gamma_p(a, z) =
1
Γ(a) Rz
0ta−1e−tdt if a > 0, z ≥0
error otherwise
real gamma_q(real a, real z)
450

Returns the normalized upper incomplete gamma function of aand zdefined
for positive aand nonnegative z.
gamma_q(a, z) =
1
Γ(a) R∞
zta−1e−tdt if a > 0, z ≥0
error otherwise
real binomial_coefficient_log(real x, real y)
Warning: This function is deprecated and should be replaced with lchoose.
Returns the natural logarithm of the binomial coefficient of xand y. For non-
negative integer inputs, the binomial coefficient function is written as x
yand
pronounced “xchoose y.” This function generalizes to real numbers using the
gamma function.
For 0≤y≤x,
binomial_coefficient_log(x, y) =log Γ(x+1)−log Γ(y +1)−log Γ(x−y+1).
int choose(int x, int y)
Returns the binomial coefficient of xand y. For non-negative integer inputs,
the binomial coefficient function is written as x
yand pronounced “xchoose
y.” In its the antilog of the lchoose function but returns an integer rather than
a real number with no non-zero decimal places.
For 0≤y≤x, the binomial coefficient function can be defined via the factorial
function
choose(x, y) =x!
(y!) (x −y)!.
real bessel_first_kind(int v, real x)
Returns the Bessel function of the first kind with order vapplied to x.
bessel_first_kind(v, x) =Jv(x),
where
Jv(x) =1
2xv∞
X
k=0−1
4x2k
k!Γ(v +k+1)
451
real bessel_second_kind(int v, real x)
Returns the Bessel function of the second kind with order vapplied to x
defined for positive xand v.
For x, v > 0,
bessel_second_kind(v, x) =
Yv(x) if x > 0
error otherwise
where
Yv(x) =Jv(x) cos(vπ ) −J−v(x)
sin(vπ )
real modified_bessel_first_kind(int v, real z)
Returns the modified Bessel function of the first kind with order vapplied to z
defined for all zand v.
modified_bessel_first_kind(v, z) =Iv(z)
where
Iv(z) =1
2zv∞
X
k=01
4z2k
k!Γ(v +k+1)
real modified_bessel_second_kind(int v, real z)
Returns the modified Bessel function of the second kind with order vapplied
to zdefined for positive zand v.
modified_bessel_second_kind(v, z) =
Kv(z) if z > 0
error if z≤0
where
Kv(z) =π
2·I−v(z) −Iv(z)
sin(vπ )
real falling_factorial(real x, real n)
Returns the falling factorial of xwith power ndefined for positive xand real n.
falling_factorial(x, n) =
(x)nif x > 0
error if x≤0
452

where
(x)n=Γ(x +1)
Γ(x −n+1)
real lchoose(real x, real y)
Returns the natural logarithm of the generalized binomial coefficient of xand
y. For non-negative integer inputs, the binomial coefficient function is written
as x
yand pronounced “xchoose y.” This function generalizes to real numbers
using the gamma function.
For 0≤y≤x,
binomial_coefficient_log(x, y) =log Γ(x+1)−log Γ(y +1)−log Γ(x−y+1).
real log_falling_factorial(real x, real n)
Returns the log of the falling factorial of xwith power ndefined for positive x
and real n.
log_falling_factorial(x, n) =
log(x)nif x > 0
error if x≤0
real rising_factorial(real x, real n)
Returns the rising factorial of xwith power ndefined for positive xand real n.
rising_factorial(x, n) =
x(n) if x > 0
error if x≤0
where
x(n) =Γ(x +n)
Γ(x)
real log_rising_factorial(real x, real n)
Returns the log of the rising factorial of xwith power ndefined for positive x
and real n.
log_rising_factorial(x, n) =
log x(n) if x > 0
error if x≤0
453
41.14. Composed Functions
The functions in this section are equivalent in theory to combinations of other func-
tions. In practice, they are implemented to be more efficient and more numerically
stable than defining them directly using more basic Stan functions.
Rexpm1(T x)
Returns the (elementwise) natural exponential of xminus 1,
expm1(x) =ex−1
for any argument type T; see Section 41.1 for details including return type R.
real fma(real x, real y, real z)
Returns zplus the result of xmultiplied by y.
fma(x, y, z) =(x ×y) +z
real multiply_log(real x, real y)
Warning: This function is deprecated and should be replaced with lmultiply.
Returns the product of xand the natural logarithm of y.
multiply_log(x, y) =
0if x=y=0
xlog yif x, y ≠0
NaN otherwise
real lmultiply(real x, real y)
Returns the product of xand the natural logarithm of y.
lmultiply(x, y) =
0if x=y=0
xlog yif x, y ≠0
NaN otherwise
Rlog1p(T x)
Returns the (elementwise) natural logarithm of 1 plus x,
log1p(x) =
log(1+x) if x≥ −1
NaN otherwise
for any argument type T; see Section 41.1 for details including return type R.
454
Rlog1m(T x)
Returns the (elementwise) natural logarithm of 1 minus x,
log1m(x) =
log(1−x) if x≤1
NaN otherwise
for any argument type T; see Section 41.1 for details including return type R.
Rlog1p_exp(T x)
Returns the (elementwise) natural logarithm of one plus the natural exponenti-
ation of x,
log1p_exp(x) =log(1+exp(x))
for any argument type T; see Section 41.1 for details including return type R.
Rlog1m_exp(T x)
Returns the (elementwise) logarithm of one minus the natural exponentiation
of x,
log1m_exp(x) =
log(1−exp(x)) if x < 0
NaN if x≥0
for any argument type T; see Section 41.1 for details including return type R.
real log_diff_exp(real x, real y)
Returns the natural logarithm of the difference of the natural exponentiation
of xand the natural exponentiation of y.
log_diff_exp(x, y) =
log(exp(x) −exp(y)) if x > y
NaN otherwise
real log_mix(real theta, real lp1, real lp2)
Returns the log mixture of the log densities lp1 and lp2 with mixing proportion
theta, defined by
log_mix(θ, λ1, λ2)=logθexp(λ1)+(1−θ) exp(λ2)
=log_sum_explog(θ) +λ1,log(1−θ) +λ2.
real log_sum_exp(real x, real y)
455
Returns the natural logarithm of the sum of the natural exponentiation of x
and the natural exponentiation of y.
log_sum_exp(x, y) =log(exp(x) +exp(y))
Rlog_inv_logit(T x)
Returns the (elementwise) natural logarithm of the inverse logit function of x,
log_inv_logit(x) =log logit−1(x)
See Section 41.11 for a definition of inverse logit. for any argument type T; see
Section 41.1 for details including return type R.
Rlog1m_inv_logit(T x)
Returns the (elementwise) natural logarithm of 1 minus the inverse logit
function of x,
log1m_inv_logit(x) =log(1−logit−1(x))
See Section 41.11 for a definition of inverse logit. for any argument type T; see
Section 41.1 for details including return type R.
456
42. Array Operations
42.1. Reductions
The following operations take arrays as input and produce single output values. The
boundary values for size 0 arrays are the unit with respect to the combination opera-
tion (min, max, sum, or product).
Minimum and Maximum
real min(real x[])
The minimum value in x, or +∞ if xis size 0.
int min(int x[])
The minimum value in x, or error if xis size 0.
real max(real x[])
The maximum value in x, or −∞ if xis size 0.
int max(int x[])
The maximum value in x, or error if xis size 0.
Sum, Product, and Log Sum of Exp
int sum(int x[])
The sum of the elements in x, defined for xof size Nby
sum(x) =
PN
n=1xnifN > 0
0ifN=0
real sum(real x[])
The sum of the elements in x; see definition above.
real prod(real x[])
The product of the elements in x, or 1 if xis size 0.
real prod(int x[])
457
The product of the elements in x,
product(x) =
QN
n=1xnifN > 0
1ifN=0
real log_sum_exp(real x[])
The natural logarithm of the sum of the exponentials of the elements in x, or
−∞ if the array is empty.
Sample Mean, Variance, and Standard Deviation
The sample mean, variance, and standard deviation are calculated in the usual way.
For i.i.d. draws from a distribution of finite mean, the sample mean is an unbiased
estimate of the mean of the distribution. Similarly, for i.i.d. draws from a distribution
of finite variance, the sample variance is an unbiased estimate of the variance.1The
sample deviation is defined as the square root of the sample deviation, but is not
unbiased.
real mean(real x[])
The sample mean of the elements in x. For an array xof size N > 0,
mean(x) =¯
x=1
N
N
X
n=1
xn.
It is an error to the call the mean function with an array of size 0.
real variance(real x[])
The sample variance of the elements in x. For N > 0,
variance(x) =
1
N−1PN
n=1(xn−¯
x)2if N > 1
0if N=1
It is an error to call the variance function with an array of size 0.
real sd(real x[])
The sample standard deviation of elements in x.
sd(x) =
pvariance(x) if N > 1
0if N=0
It is an error to call the sd function with an array of size 0.
1Dividing by Nrather than (N −1)produces a maximum likelihood estimate of variance, which is biased
to underestimate variance.
458

Euclidean Distance and Squared Distance
real distance(vector x, vector y)
The Euclidean distance between xand y, defined by
distance(x, y) =qPN
n=1(xn−yn)2
where Nis the size of xand y. It is an error to call distance with arguments of
unequal size.
real distance(vector x, row_vector y)
The Euclidean distance between xand y
real distance(row_vector x, vector y)
The Euclidean distance between xand y
real distance(row_vector x, row_vector y)
The Euclidean distance between xand y
real squared_distance(vector x, vector y)
The squared Euclidean distance between xand y, defined by
squared_distance(x, y) =distance(x, y)2=PN
n=1(xn−yn)2,
where Nis the size of xand y. It is an error to call squared_distance with
arguments of unequal size.
real squared_distance(vector x, row_vector y[])
The squared Euclidean distance between xand y
real squared_distance(row_vector x, vector y[])
The squared Euclidean distance between xand y
real squared_distance(row_vector x, row_vector y[])
The Euclidean distance between xand y
42.2. Array Size and Dimension Function
The size of an array or matrix can be obtained using the dims() function. The dims()
function is defined to take an argument consisting of any variable with up to 8 array
dimensions (and up to 2 additional matrix dimensions) and returns an array of inte-
gers with the dimensions. For example, if two variables are declared as follows,
459
real x[7,8,9];
matrix[8,9] y[7];
then calling dims(x) or dims(y) returns an integer array of size 3 containing the
elements 7, 8, and 9 in that order.
The size() function extracts the number of elements in an array. This is just the
top-level elements, so if the array is declared as
real a[M,N];
the size of ais M.
The function num_elements, on the other hand, measures all of the elements, so
that the array aabove has M×Nelements.
The specialized functions rows() and cols() should be used to extract the di-
mensions of vectors and matrices.
int[] dims(T x)
Returns an integer array containing the dimensions of x; the type of the
argument Tcan be any Stan type with up to 8 array dimensions.
int num_elements(T[] x)
Returns the total number of elements in the array xincluding all elements in
contained arrays, vectors, and matrices. Tcan be any array type. For example,
if xis of type real[4,3] then num_elements(x) is 12, and if yis declared as
matrix[3,4] y[5], then size(y) evaluates to 60.
int size(T[] x)
Returns the number of elements in the array x; the type of the array Tcan be
any type, but the size is just the size of the top level array, not the total number
of elements contained. For example, if xis of type real[4,3] then size(x) is
4.
42.3. Array Broadcasting
The following operations create arrays by repeating elements to fill an array of a
specified size. These operations work for all input types T, including reals, integers,
vectors, row vectors, matrices, or arrays.
T[] rep_array(T x, int n)
Return the narray with every entry assigned to x.
T[ , ] rep_array(T x, int m, int n)
Return the mby narray with every entry assigned to x.
460
T[ , , ] rep_array(T x, int k, int m, int n)
Return the kby mby narray with every entry assigned to x.
For example, rep_array(1.0,5) produces a real array (type real[]) of size 5 with
all values set to 1.0. On the other hand, rep_array(1,5) produces an integer array
(type int[]) of size 5 with all values set to 1. This distinction is important because
it is not possible to assign an integer array to a real array. For example, the following
example contrasts legal with illegal array creation and assignment
real y[5];
int x[5];
x = rep_array(1,5); // ok
y = rep_array(1.0,5); // ok
x = rep_array(1.0,5); // illegal
y = rep_array(1,5); // illegal
x = y; // illegal
y = x; // illegal
If the value being repeated vis a vector (i.e., Tis vector), then rep_array(v,27)
is a size 27 array consisting of 27 copies of the vector v.
vector[5] v;
vector[5] a[3];
// ...
a = rep_array(v,3); // fill a with copies of v
a[2,4] = 9.0; // v[4], a[1,4], a[2,4] unchanged
If the type Tof xis itself an array type, then the result will be an array with one,
two, or three added dimensions, depending on which of the rep_array functions is
called. For instance, consider the following legal code snippet.
real a[5,6];
real b[3,4,5,6];
// ...
b = rep_array(a,3,4); // make (3 x 4) copies of a
b[1,1,1,1] = 27.9; // a[1,1] unchanged
After the assignment to b, the value for b[j,k,m,n] is equal to a[m,n] where it is
defined, for jin 1:3,kin 1:4,min 1:5, and nin 1:6.
461
42.4. Sorting functions
Sorting can be used to sort values or the indices of those values in either ascending
or descending order. For example, if vis declared as a real array of size 3, with values
v=(1,−10.3,20.987),
then the various sort routines produce
sort_asc(v) =(−10.3,1,20.987)
sort_desc(v) =(20.987,1,−10.3)
sort_indices_asc(v) =(2,1,3)
sort_indices_desc(v) =(3,1,2)
real[] sort_asc(real[] v)
Sort the elements of vin ascending order
int[] sort_asc(int[] v)
Sort the elements of vin ascending order
real[] sort_desc(real[] v)
Sort the elements of vin descending order
int[] sort_desc(int[] v)
Sort the elements of vin descending order
int[] sort_indices_asc(real[] v)
Return an array of indices between 1 and the size of v, sorted to index vin
ascending order.
int[] sort_indices_asc(int[] v)
Return an array of indices between 1 and the size of v, sorted to index vin
ascending order.
int[] sort_indices_desc(real[] v)
Return an array of indices between 1 and the size of v, sorted to index vin
descending order.
int[] sort_indices_desc(int[] v)
Return an array of indices between 1 and the size of v, sorted to index vin
descending order.
462
int rank(real[] v, int s)
Number of components of vless than v[s]
int rank(int[] v, int s)
Number of components of vless than v[s]
463
43. Matrix Operations
43.1. Integer-Valued Matrix Size Functions
int num_elements(vector x)
The total number of elements in the vector x(same as function rows)
int num_elements(row_vector x)
The total number of elements in the vector x(same as function cols)
int num_elements(matrix x)
The total number of elements in the matrix x. For example, if xis a 5×3
matrix, then num_elements(x) is 15
int rows(vector x)
The number of rows in the vector x
int rows(row_vector x)
The number of rows in the row vector x, namely 1
int rows(matrix x)
The number of rows in the matrix x
int cols(vector x)
The number of columns in the vector x, namely 1
int cols(row_vector x)
The number of columns in the row vector x
int cols(matrix x)
The number of columns in the matrix x
43.2. Matrix Arithmetic Operators
Stan supports the basic matrix operations using infix, prefix and postfix operations.
This section lists the operations supported by Stan along with their argument and
result types.
464
Negation Prefix Operators
vector operator-(vector x)
The negation of the vector x.
row_vector operator-(row_vector x)
The negation of the row vector x.
matrix operator-(matrix x)
The negation of the matrix x.
Infix Matrix Operators
vector operator+(vector x, vector y)
The sum of the vectors xand y.
row_vector operator+(row_vector x, row_vector y)
The sum of the row vectors xand y.
matrix operator+(matrix x, matrix y)
The sum of the matrices xand y
vector operator-(vector x, vector y)
The difference between the vectors xand y.
row_vector operator-(row_vector x, row_vector y)
The difference between the row vectors xand y
matrix operator-(matrix x, matrix y)
The difference between the matrices xand y
vector operator*(real x, vector y)
The product of the scalar xand vector y
row_vector operator*(real x, row_vector y)
The product of the scalar xand the row vector y
matrix operator*(real x, matrix y)
The product of the scalar xand the matrix y
vector operator*(vector x, real y)
The product of the scalar yand vector x
465
matrix operator*(vector x, row_vector y)
The product of the vector xand row vector y
row_vector operator*(row_vector x, real y)
The product of the scalar yand row vector x
real operator*(row_vector x, vector y)
The product of the row vector xand vector y
row_vector operator*(row_vector x, matrix y)
The product of the row vector xand matrix y
matrix operator*(matrix x, real y)
The product of the scalar yand matrix x
vector operator*(matrix x, vector y)
The product of the matrix xand vector y
matrix operator*(matrix x, matrix y)
The product of the matrices xand y
Broadcast Infix Operators
vector operator+(vector x, real y)
The result of adding yto every entry in the vector x
vector operator+(real x, vector y)
The result of adding xto every entry in the vector y
row_vector operator+(row_vector x, real y)
The result of adding yto every entry in the row vector x
row_vector operator+(real x, row_vector y)
The result of adding xto every entry in the row vector y
matrix operator+(matrix x, real y)
The result of adding yto every entry in the matrix x
matrix operator+(real x, matrix y)
The result of adding xto every entry in the matrix y
vector operator-(vector x, real y)
The result of subtracting yfrom every entry in the vector x
466
vector operator-(real x, vector y)
The result of adding xto every entry in the negation of the vector y
row_vector operator-(row_vector x, real y)
The result of subtracting yfrom every entry in the row vector x
row_vector operator-(real x, row_vector y)
The result of adding xto every entry in the negation of the row vector y
matrix operator-(matrix x, real y)
The result of subtracting yfrom every entry in the matrix x
matrix operator-(real x, matrix y)
The result of adding xto every entry in negation of the matrix y
vector operator/(vector x, real y)
The result of dividing each entry in the vector xby y
row_vector operator/(row_vector x, real y)
The result of dividing each entry in the row vector xby y
matrix operator/(matrix x, real y)
The result of dividing each entry in the matrix xby y
Elementwise Arithmetic Operations
vector operator.*(vector x, vector y)
The elementwise product of yand x
row_vector operator.*(row_vector x, row_vector y)
The elementwise product of yand x
matrix operator.*(matrix x, matrix y)
The elementwise product of yand x
vector operator./(vector x, vector y)
The elementwise quotient of yand x
vector operator./(vector x, real y)
The elementwise quotient of yand x
467
vector operator./(real x, vector y)
The elementwise quotient of yand x
row_vector operator./(row_vector x, row_vector y)
The elementwise quotient of yand x
row_vector operator./(row_vector x, real y)
The elementwise quotient of yand x
row_vector operator./(real x, row_vector y)
The elementwise quotient of yand x
matrix operator./(matrix x, matrix y)
The elementwise quotient of yand x
matrix operator./(matrix x, real y)
The elementwise quotient of yand x
matrix operator./(real x, matrix y)
The elementwise quotient of yand x
43.3. Transposition Operator
Matrix transposition is represented using a postfix operator.
matrix operator’(matrix x)
The transpose of the matrix x, written as x’
row_vector operator’(vector x)
The transpose of the vector x, written as x’
vector operator’(row_vector x)
The transpose of the row vector x, written as x’
43.4. Elementwise Functions
Elementwise functions apply a function to each element of a vector or matrix, return-
ing a result of the same shape as the argument. There are many functions that are
vectorized in addition to the ad hoc cases listed in this section; see Section 41.1 for
the general cases.
468
43.5. Dot Products and Specialized Products
real dot_product(vector x, vector y)
The dot product of xand y
real dot_product(vector x, row_vector y)
The dot product of xand y
real dot_product(row_vector x, vector y)
The dot product of xand y
real dot_product(row_vector x, row_vector y)
The dot product of xand y
row_vector columns_dot_product(vector x, vector y)
The dot product of the columns of xand y
row_vector columns_dot_product(row_vector x, row_vector y)
The dot product of the columns of xand y
row_vector columns_dot_product(matrix x, matrix y)
The dot product of the columns of xand y
vector rows_dot_product(vector x, vector y)
The dot product of the rows of xand y
vector rows_dot_product(row_vector x, row_vector y)
The dot product of the rows of xand y
vector rows_dot_product(matrix x, matrix y)
The dot product of the rows of xand y
real dot_self(vector x)
The dot product of the vector xwith itself
real dot_self(row_vector x)
The dot product of the row vector xwith itself
row_vector columns_dot_self(vector x)
The dot product of the columns of xwith themselves
row_vector columns_dot_self(row_vector x)
The dot product of the columns of xwith themselves
469
row_vector columns_dot_self(matrix x)
The dot product of the columns of xwith themselves
vector rows_dot_self(vector x)
The dot product of the rows of xwith themselves
vector rows_dot_self(row_vector x)
The dot product of the rows of xwith themselves
vector rows_dot_self(matrix x)
The dot product of the rows of xwith themselves
Specialized Products
matrix tcrossprod(matrix x)
The product of xpostmultiplied by its own transpose, similar to the
tcrossprod(x) function in R. The result is a symmetric matrix x x>.
matrix crossprod(matrix x)
The product of xpremultiplied by its own transpose, similar to the crossprod(x)
function in R. The result is a symmetric matrix x>x.
The following functions all provide shorthand forms for common expressions,
which are also much more efficient.
matrix quad_form(matrix A, matrix B)
The quadratic form, i.e., B’ *A*B.
real quad_form(matrix A, vector B)
The quadratic form, i.e., B’ *A*B.
matrix quad_form_diag(matrix m, vector v)
The quadratic form using the column vector vas a diagonal matrix, i.e.,
diag_matrix(v)*m*diag_matrix(v).
matrix quad_form_diag(matrix m, row_vector rv)
The quadratic form using the row vector rv as a diagonal matrix, i.e.,
diag_matrix(rv)*m*diag_matrix(rv).
matrix quad_form_sym(matrix A, matrix B)
Similarly to quad_form, gives B’ *A*B, but additionally checks if A is
symmetric and ensures that the result is also symmetric.
470
real quad_form_sym(matrix A, vector B)
Similarly to quad_form, gives B’ *A*B, but additionally checks if A is
symmetric and ensures that the result is also symmetric.
real trace_quad_form(matrix A, matrix B)
The trace of the quadratic form, i.e., trace(B’ *A*B).
real trace_gen_quad_form(matrix D,matrix A, matrix B)
The trace of a generalized quadratic form, i.e., trace(D *B’ *A*B).
matrix multiply_lower_tri_self_transpose(matrix x)
The product of the lower triangular portion of x(including the diagonal) times
its own transpose; that is, if Lis a matrix of the same dimensions as xwith
L(m,n) equal to x(m,n) for n≤mand L(m,n) equal to 0 if n>m, the result
is the symmetric matrix L L>. This is a specialization of tcrossprod(x) for
lower-triangular matrices. The input matrix does not need to be square.
matrix diag_pre_multiply(vector v, matrix m)
Return the product of the diagonal matrix formed from the vector vand the
matrix m, i.e., diag_matrix(v)*m.
matrix diag_pre_multiply(row_vector rv, matrix m)
Return the product of the diagonal matrix formed from the vector rv and the
matrix m, i.e., diag_matrix(rv)*m.
matrix diag_post_multiply(matrix m, vector v)
Return the product of the matrix mand the diagonal matrix formed from the
vector v, i.e., m*diag_matrix(v).
matrix diag_post_multiply(matrix m, row_vector rv)
Return the product of the matrix mand the diagonal matrix formed from the
the row vector rv, i.e., m*diag_matrix(rv).
43.6. Reductions
Log Sum of Exponents
real log_sum_exp(vector x)
The natural logarithm of the sum of the exponentials of the elements in x
real log_sum_exp(row_vector x)
The natural logarithm of the sum of the exponentials of the elements in x
471
real log_sum_exp(matrix x)
The natural logarithm of the sum of the exponentials of the elements in x
Minimum and Maximum
real min(vector x)
The minimum value in x, or +∞ if xis empty
real min(row_vector x)
The minimum value in x, or +∞ if xis empty
real min(matrix x)
The minimum value in x, or +∞ if xis empty
real max(vector x)
The maximum value in x, or −∞ if xis empty
real max(row_vector x)
The maximum value in x, or −∞ if xis empty
real max(matrix x)
The maximum value in x, or −∞ if xis empty
Sums and Products
real sum(vector x)
The sum of the values in x, or 0 if xis empty
real sum(row_vector x)
The sum of the values in x, or 0 if xis empty
real sum(matrix x)
The sum of the values in x, or 0 if xis empty
real prod(vector x)
The product of the values in x, or 1 if xis empty
real prod(row_vector x)
The product of the values in x, or 1 if xis empty
real prod(matrix x)
The product of the values in x, or 1 if xis empty
472
Sample Moments
Full definitions are provided for sample moments in Section 42.1.
real mean(vector x)
The sample mean of the values in x; see Section 42.1 for details.
real mean(row_vector x)
The sample mean of the values in x; see Section 42.1 for details.
real mean(matrix x)
The sample mean of the values in x; see Section 42.1 for details.
real variance(vector x)
The sample variance of the values in x; see Section 42.1 for details.
real variance(row_vector x)
The sample variance of the values in x; see Section 42.1 for details.
real variance(matrix x)
The sample variance of the values in x; see Section 42.1 for details.
real sd(vector x)
The sample standard deviation of the values in x; see Section 42.1 for details.
real sd(row_vector x)
The sample standard deviation of the values in x; see Section 42.1 for details.
real sd(matrix x)
The sample standard deviation of the values in x; see Section 42.1 for details.
43.7. Broadcast Functions
The following broadcast functions allow vectors, row vectors and matrices to be cre-
ated by copying a single element into all of their cells. Matrices may also be created
by stacking copies of row vectors vertically or stacking copies of column vectors hor-
izontally.
vector rep_vector(real x, int m)
Return the size m(column) vector consisting of copies of x.
473
row_vector rep_row_vector(real x, int n)
Return the size nrow vector consisting of copies of x.
matrix rep_matrix(real x, int m, int n)
Return the mby nmatrix consisting of copies of x.
matrix rep_matrix(vector v, int n)
Return the mby nmatrix consisting of ncopies of the (column) vector vof size
m.
matrix rep_matrix(row_vector rv, int m)
Return the mby nmatrix consisting of mcopies of the row vector rv of size n.
Unlike the situation with array broadcasting (see Section 42.3), where there is a
distinction between integer and real arguments, the following two statements pro-
duce the same result for vector broadcasting; row vector and matrix broadcasting
behave similarly.
vector[3] x;
x = rep_vector(1, 3);
x = rep_vector(1.0, 3);
There are no integer vector or matrix types, so integer values are automatically pro-
moted.
43.8. Diagonal Matrix Functions
vector diagonal(matrix x)
The diagonal of the matrix x
matrix diag_matrix(vector x)
The diagonal matrix with diagonal x
Although the diag_matrix function is available, it is unlikely to ever show up in
an efficient Stan program. For example, rather than converting a diagonal to a full
matrix for use as a covariance matrix,
y ~ multi_normal(mu, diag_matrix(square(sigma)));
it is much more efficient to just use a univariate normal, which produces the same
density,
y ~ normal(mu, sigma);
474
Rather than writing m*diag_matrix(v) where mis a matrix and vis a vector, it
is much more efficient to write diag_post_multiply(m, v) (and similarly for pre-
multiplication). By the same token, it is better to use quad_form_diag(m, v) rather
than quad_form(m, diag_matrix(v)).
43.9. Slicing and Blocking Functions
Stan provides several functions for generating slices or blocks or diagonal entries for
matrices.
Columns and Rows
vector col(matrix x, int n)
The n-th column of matrix x
row_vector row(matrix x, int m)
The m-th row of matrix x
The row function is special in that it may be used as an lvalue in an assignment
statement; for more information on assignment, see Section 5.1. The row function is
also special in that the indexing notation x[m] is just an alternative way of writing
row(x,m). The col function may not be used as an lvalue, nor is there an indexing
based shorthand for it.
Block Operations
Matrix Slicing Operations
Block operations may be used to extract a sub-block of a matrix.
matrix block(matrix x, int i, int j, int n_rows, int n_cols)
Return the submatrix of xthat starts at row iand column jand extends
n_rows rows and n_cols columns.
The sub-row and sub-column operations may be used to extract a slice of row or
column from a matrix
vector sub_col(matrix x, int i, int j, int n_rows)
Return the sub-column of xthat starts at row iand column jand extends
n_rows rows and 1 column.
row_vector sub_row(matrix x, int i, int j, int n_cols)
Return the sub-row of xthat starts at row iand column jand extends 1 row
and n_cols columns.
475
Vector and Array Slicing Operations
The head operation extracts the first nelements of a vector and the tail operation the
last. The segment operation extracts an arbitrary subvector.
vector head(vector v, int n)
Return the vector consisting of the first nelements of v.
row_vector head(row_vector rv, int n)
Return the row vector consisting of the first nelements of rv.
T[] head(T[] sv, int n)
Return the array consisting of the first nelements of sv; applies to up to
three-dimensional arrays containing any type of elements T.
vector tail(vector v, int n)
Return the vector consisting of the last nelements of v.
row_vector tail(row_vector rv, int n)
Return the row vector consisting of the last nelements of rv.
T[] tail(T[] sv, int n)
Return the array consisting of the last nelements of sv; applies to up to
three-dimensional arrays containing any type of elements T.
vector segment(vector v, int i, int n)
Return the vector consisting of the nelements of vstarting at i; i.e., elements
ithrough through i+n- 1.
row_vector segment(row_vector rv, int i, int n)
Return the row vector consisting of the nelements of rv starting at i; i.e.,
elements ithrough through i+n- 1.
T[] segment(T[] sv, int i, int n)
Return the array consisting of the nelements of sv starting at i; i.e., elements i
through through i+n- 1. Applies to up to three-dimensional arrays containing
any type of elements T.
43.10. Matrix Concatenation
Stan’s matrix concatenation operations append_col and append_row are like the op-
erations cbind and rbind in R.
476
Horizontal concatenation
matrix append_col(matrix x, matrix y)
Combine matrices xand yby columns. The matrices must have the same
number of rows.
matrix append_col(matrix x, vector y)
Combine matrix xand vector yby columns. The matrix and the vector must
have the same number of rows.
matrix append_col(vector x, matrix y)
Combine vector xand matrix yby columns. The vector and the matrix must
have the same number of rows.
matrix append_col(vector x, vector y)
Combine vectors xand yby columns. The vectors must have the same number
of rows.
row_vector append_col(row_vector x, row_vector y)
Combine row vectors xand yof any size into another row vector.
row_vector append_col(real x, row_vector y)
Append xto the front of y, returning another row vector.
row_vector append_col(row_vector x, real y)
Append yto the end of x, returning another row vector.
Vertical concatenation
matrix append_row(matrix x, matrix y)
Combine matrices xand yby rows. The matrices must have the same number
of columns.
matrix append_row(matrix x, row_vector y)
Combine matrix xand row vector yby rows. The matrix and the row vector
must have the same number of columns.
matrix append_row(row_vector x, matrix y)
Combine row vector xand matrix yby rows. The row vector and the matrix
must have the same number of columns.
477
matrix append_row(row_vector x, row_vector y)
Combine row vectors xand yby row. The row vectors must have the same
number of columns.
vector append_row(vector x, vector y)
Concatenate vectors xand yof any size into another vector.
vector append_row(real x, vector y)
Append xto the top of y, returning another vector.
vector append_row(vector x, real y)
Append yto the bottom of x, returning another vector.
43.11. Special Matrix Functions
Softmax
The softmax function1maps y∈RKto the K-simplex by
softmax(y) =exp(y)
PK
k=1exp(yk),
where exp(y) is the componentwise exponentiation of y. Softmax is usually calcu-
lated on the log scale,
log softmax(y) =y−log
K
X
k=1
exp(yk)
=y−log_sum_exp(y).
where the vector yminus the scalar log_sum_exp(y) subtracts the scalar from each
component of y.
Stan provides the following functions for softmax and its log.
vector softmax(vector x)
The softmax of x
vector log_softmax(vector x)
The natural logarithm of the softmax of x
1The softmax function is so called because in the limit as yn→ ∞ with ymfor m≠nheld constant,
the result tends toward the “one-hot” vector θwith θn=1and θm=0for m≠n, thus providing a “soft”
version of the maximum function.
478

Cumulative Sums
The cumulative sum of a sequence x1, . . . , xNis the sequence y1, . . . , yN, where
yn=
n
X
m=1
xm.
real[] cumulative_sum(real[] x)
The cumulative sum of x
vector cumulative_sum(vector v)
The cumulative sum of v
row_vector cumulative_sum(row_vector rv)
The cumulative sum of rv
43.12. Covariance Functions
Exponentiated quadratic covariance function
The exponentiated quadratic kernel defines the covariance between f (xi)and f (xj)
where f:RD, R as a function of the squared Euclidian distance between xi∈RD
and xj∈RD:
cov(f (xi), f (xj)) =k(xi, xj)=α2exp
−1
2ρ2
D
X
d=1
(xi,d −xj,d )2
with αand ρconstrained to be positive.
There are two variants of the exponentiated quadratic covariance function in Stan.
One builds a covariance matrix, K∈RN×Nfor x1, . . . , xN, where Ki,j =k(xi, xj), which
is necessarily symmetric and positive semidefinite by construction. There is a second
variant of the exponentiated quadratic covariance function that builds a K∈RN×M
covariance matrix for x1, . . . , xNand x0
1, . . . , x0
M, where xi∈RDand x0
i∈RDand Ki,j =
k(xi, x0
j).
matrix cov_exp_quad(row_vectors x, real alpha, real rho)
The covariance matrix with an exponentiated quadratic kernel of x.
matrix cov_exp_quad(vectors x, real alpha, real rho)
The covariance matrix with an exponentiated quadratic kernel of x.
matrix cov_exp_quad(real[] x, real alpha, real rho)
The covariance matrix with an exponentiated quadratic kernel of x.
479
matrix cov_exp_quad(row_vectors x1, row_vectors x2,
real alpha, real rho)
The covariance matrix with an exponentiated quadratic kernel of x1 and x2.
matrix cov_exp_quad(vectors x1, vectors x2,
real alpha, real rho)
The covariance matrix with an exponentiated quadratic kernel of x1 and x2.
matrix cov_exp_quad(real[] x1, real[] x2,
real alpha, real rho)
The covariance matrix with an exponentiated quadratic kernel of x1 and x2.
43.13. Linear Algebra Functions and Solvers
Matrix Division Operators and Functions
In general, it is much more efficient and also more arithmetically stable to use ma-
trix division than to multiply by an inverse. There are specialized forms for lower
triangular matrices and for symmetric, positive-definite matrices.
Matrix division operators
row_vector operator/(row_vector b, matrix A)
The right division of bby A; equivalently b*inverse(A)
matrix operator/(matrix B, matrix A)
The right division of Bby A; equivalently B*inverse(A)
vector operator\(matrix A, vector b)
The left division of bby A; equivalently inverse(A)*b
matrix operator\(matrix A, matrix B)
The left division of Bby A; equivalently inverse(A)*B
Lower-triangular matrix division functions
There are four division functions which use lower triangular views of a matrix. The
lower triangular view of a matrix tri(A) is used in the definitions and defined by
tri(A)[m, n] =
A[m, n] if m≥n, and
0otherwise.
When a lower triangular view of a matrix is used, the elements above the diagonal are
ignored.
480
vector mdivide_left_tri_low(matrix A, vector b)
The left division of bby a lower-triangular view of A; algebraically equivalent to
the less efficient and stable form inverse(tri(A)) *b, where tri(A)is the
lower-triangular portion of Awith the above-diagonal entries set to zero.
matrix mdivide_left_tri_low(matrix A, matrix B)
The left division of Bby a triangular view of A; algebraically equivalent to the
less efficient and stable form inverse(tri(A)) *B, where tri(A)is the
lower-triangular portion of Awith the above-diagonal entries set to zero.
row_vector mdivide_right_tri_low(row_vector b, matrix A)
The right division of bby a triangular view of A; algebraically equivalent to
the less efficient and stable form b*inverse(tri(A)), where tri(A)is the
lower-triangular portion of Awith the above-diagonal entries set to zero.
matrix mdivide_right_tri_low(matrix B, matrix A)
The right division of Bby a triangular view of A; algebraically equivalent to
the less efficient and stable form B*inverse(tri(A)), where tri(A)is the
lower-triangular portion of Awith the above-diagonal entries set to zero.
Symmetric positive-definite matrix division functions
There are four division functions which are specialized for efficiency and stability for
symmetric positive-definite matrix dividends. If the matrix dividend argument is not
symmetric and positive definite, these will reject and print warnings.
matrix mdivide_left_spd(matrix A, vector b)
The left division of bby the symmetric, positive-definite matrix A; algebraically
equivalent to the less efficient and stable form inverse(A)*b.
vector mdivide_left_spd(matrix A, matrix B)
The left division of Bby the symmetric, positive-definite matrix A; algebraically
equivalent to the less efficient and stable form inverse(A)*B.
row_vector mdivide_right_spd(row_vector b, matrix A)
The right division of bby the symmetric, positive-definite matrix A; algebraically
equivalent to the less efficient and stable form b*inverse(A).
matrix mdivide_right_spd(matrix B, matrix A)
The right division of Bby the symmetric, positive-definite matrix A; algebraically
equivalent to the less efficient and stable form B*inverse(A).
481

Matrix Exponential
The exponential of the matrix Ais formally defined by the convergent power series:
eA=∞
X
n=0
An
n!
matrix matrix_exp(matrix A)
The matrix exponential of A
Linear Algebra Functions
Trace
real trace(matrix A)
The trace of A, or 0 if Ais empty; Ais not required to be diagonal
Determinants
real determinant(matrix A)
The determinant of A
real log_determinant(matrix A)
The log of the absolute value of the determinant of A
Inverses
It is almost never a good idea to use matrix inverses directly because they are both
inefficient and arithmetically unstable compared to the alternatives. Rather than in-
verting a matrix mand post-multiplying by a vector or matrix a, as in inv(m) *a, it
is better to code this using matrix division, as in m\a. The pre-multiplication case
is similar, with b*inv(m) being more efficiently coded as as a/m. There are also
useful special cases for triangular and symmetric, positive-definite matrices that use
more efficient solvers.
matrix inverse(matrix A)
The inverse of A
matrix inverse_spd(matrix A)
The inverse of Awhere A is symmetric, positive definite. This version is faster
and more arithmetically stable when the input is symmetric and positive
definite.
482
Eigendecomposition
vector eigenvalues_sym(matrix A)
The vector of eigenvalues of a symmetric matrix Ain ascending order
matrix eigenvectors_sym(matrix A)
The matrix with the (column) eigenvectors of symmetric matrix Ain the same
order as returned by the function eigenvalues_sym
Because multiplying an eigenvector by −1results in an eigenvector, eigenvectors re-
turned by a decomposition are only identified up to a sign change. In order to com-
pare the eigenvectors produced by Stan’s eigendecomposition to others, signs may
need to be normalized in some way, such as by fixing the sign of a component, or
doing comparisons allowing a multiplication by −1.
The condition number of a symmetric matrix is defined to be the ratio of the
largest eigenvalue to the smallest eigenvalue. Large condition numbers lead to dif-
ficulty in numerical algorithms such as computing inverses, and thus known as “ill
conditioned.” The ratio can even be infinite in the case of singular matrices (i.e., those
with eigenvalues of 0).
QR Decomposition
matrix qr_Q(matrix A)
The orthogonal matrix in the fat QR decomposition of A, which implies that the
resulting matrix is square with the same number of rows as A
matrix qr_R(matrix A)
The upper trapezoidal matrix in the fat QR decomposition of A, which implies
that the resulting matrix has the same dimensions as A
Multiplying a column of an orthogonal matrix by −1still results in an orthogonal ma-
trix, and you can multiply the corresponding row of the upper trapezoidal matrix by
−1without changing the product. Thus, Stan adopts the normalization that the diag-
onal elements of the upper trapezoidal matrix are strictly positive and the columns
of the orthogonal matrix are reflected if necessary. The input matrix Aneed not be
square but must have at least as many rows as it has columns. Also, this QR decom-
position algorithm does not utilize pivoting and thus is fast but may be numerically
unstable.
Cholesky Decomposition
Every symmetric, positive-definite matrix (such as a correlation or covariance ma-
trix) has a Cholesky decomposition. If Σis a symmetric, positive-definite matrix, its
483
Cholesky decomposition is the lower-triangular vector Lsuch that
Σ=L L>.
matrix cholesky_decompose(matrix A)
The lower-triangular Cholesky factor of the symmetric positive-definite matrix
A
Singular Value Decomposition
Stan only provides functions for the singular values, not for the singular vectors in-
volved in a singular value decomposition (SVD).
vector singular_values(matrix A)
The singular values of Ain descending order
43.14. Sort Functions
See Section 42.4 for examples of how the functions work.
vector sort_asc(vector v)
Sort the elements of vin ascending order
row_vector sort_asc(row_vector v)
Sort the elements of vin ascending order
vector sort_desc(vector v)
Sort the elements of vin descending order
row_vector sort_desc(row_vector v)
Sort the elements of vin descending order
int[] sort_indices_asc(vector v)
Return an array of indices between 1 and the size of v, sorted to index vin
ascending order.
int[] sort_indices_asc(row_vector v)
Return an array of indices between 1 and the size of v, sorted to index vin
ascending order.
int[] sort_indices_desc(vector v)
Return an array of indices between 1 and the size of v, sorted to index vin
descending order.
484
int[] sort_indices_desc(row_vector v)
Return an array of indices between 1 and the size of v, sorted to index vin
descending order.
int rank(vector v, int s)
Number of components of vless than v[s]
int rank(row_vector v, int s)
Number of components of vless than v[s]
485
44. Sparse Matrix Operations
For sparse matrices, for which many elements are zero, it is more efficient to use
specialized representations to save memory and speed up matrix arithmetic (includ-
ing derivative calculations). Given Stan’s implementation, there is substantial space
(memory) savings by using sparse matrices. Because of the ease of optimizing dense
matrix operations, speed improvements only arise at 90% or even greater sparsity;
below that level, dense matrices are faster but use more memory.
Because of this speedup and space savings, it may even be useful to read in a
dense matrix and convert it to a sparse matrix before multiplying it by a vector. This
chapter covers a very specific form of sparsity consisting of a sparse matrix multiplied
by a dense vector; for more general coding strategies for sparse data structures within
Stan, see Chapter 16.
44.1. Compressed Row Storage
Sparse matrices are represented in Stan using compressed row storage (CSR). For
example, the matrix
A=
19 27 0 0
0000
0 0 0 52
81 0 95 33
is translated into a vector of the non-zero real values, read by row from the matrix A,
w(A) =h19 27 52 81 95 33i>
,
an array of integer column indices for the values,
v(A) =h124134i,
and an array of integer indices indicating where in w(A) a given row’s values start,
u(A) =h13347i,
with a padded value at the end to guarantee that
u(A)[n +1]−u(A)[n]
is the number of non-zero elements in row nof the matrix (here 2,0,1, and 3). Note
that because the second row has no non-zero elements both the second and third
elements of u(A) correspond to the third element of w (A), which is 52. The values
(w(A), v(A), u(A)) are sufficient to reconstruct A.
486
The values are structured so that there is a real value and integer column index
for each non-zero entry in the array, plus one integer for each row of the matrix,
plus one for padding. There is also underlying storage for internal container pointers
and sizes. The total memory usage is roughly 12K+Mbytes plus a small constant
overhead, which is often considerably fewer bytes than the M×Nrequired to store
a dense matrix. Even more importantly, zero values do not introduce derivatives
under multiplication or addition, so many storage and evaluation steps are saved
when sparse matrices are multiplied.
44.2. Conversion Functions
Conversion functions between dense and sparse matrices are provided.
Dense to Sparse Conversion
Converting a dense matrix mto a sparse representation produces a vector wand two
integer arrays, uand v.
vector csr_extract_w(matrix a)
Return non-zero values in matrix a; see Section 44.1.
int[] csr_extract_v(matrix a)
Return column indices for values in csr_extract_w(a); see Section 44.1.
int[] csr_extract_u(matrix a)
Return array of row starting indices for entries in csr_extract_w(a)followed
by the size of csr_extract_w(a)plus one; see Section 44.1.
Sparse to Dense Conversion
To convert a sparse matrix representation to a dense matrix, there is a single function.
matrix csr_to_dense_matrix(int m, int n, vector w, int[] v, int[]
u)Return dense m×nmatrix with non-zero matrix entries w, column indices v,
and row starting indices u; the vector wand arrays vand umust all be the same
size, and the arrays vand umust have index values bounded by mand n. See
Section 44.1 for more details.
487
44.3. Sparse Matrix Arithmetic
Sparse Matrix Multiplication
The only supported operation is the multiplication of a sparse matrix Aand a dense
vector bto produce a dense vector A b. Multiplying a dense row vector band a sparse
matrix Acan be coded using transposition as
b A =(A>b>)>,
but care must be taken to represent A>rather than Aas a sparse matrix.
vector csr_matrix_times_vector(int m, int n, vector w,
int[] v, int[] u, vector b)
Multiply the m×nmatrix represented by values w, column indices v, and row
start indices uby the vector b; see Section 44.1.
488
45. Mixed Operations
These functions perform conversions between Stan containers matrix, vector, row
vector and arrays.
matrix to_matrix(matrix m)
Return the matrix mitself.
matrix to_matrix(vector v)
Convert the column vector vto a size(v)by 1 matrix.
matrix to_matrix(row_vector v)
Convert the row vector vto a 1 by size(v)matrix.
matrix to_matrix(matrix m, int m, int n)
Convert a matrix mto a matrix with mrows and ncolumns filled in column-major
order.
matrix to_matrix(vector v, int m, int n)
Convert a vector vto a matrix with mrows and ncolumns filled in column-major
order.
matrix to_matrix(row_vector v, int m, int n)
Convert a row_vector ato a matrix with mrows and ncolumns filled in
column-major order.
matrix to_matrix(matrix m, int m, int n, int col_major)
Convert a matrix mto a matrix with mrows and ncolumns filled in row-major
order if col_major equals 0 (otherwise, they get filled in column-major order).
matrix to_matrix(vector v, int m, int n, int col_major)
Convert a vector vto a matrix with mrows and ncolumns filled in row-major
order if col_major equals 0 (otherwise, they get filled in column-major order).
matrix to_matrix(row_vector v, int m, int n, int col_major)
Convert a row_vector ato a matrix with mrows and ncolumns filled in row-
major order if col_major equals 0 (otherwise, they get filled in column-major
order).
matrix to_matrix(real[] a, int m, int n)
Convert a one-dimensional array ato a matrix with mrows and ncolumns filled
in column-major order.
489
matrix to_matrix(int[] a, int m, int n)
Convert a one-dimensional array ato a matrix with mrows and ncolumns filled
in column-major order.
matrix to_matrix(real[] a, int m, int n, int col_major)
Convert a one-dimensional array ato a matrix with mrows and ncolumns
filled in row-major order if col_major equals 0 (otherwise, they get filled in
column-major order).
matrix to_matrix(int[] a, int m, int n, int col_major)
Convert a one-dimensional array ato a matrix with mrows and ncolumns
filled in row-major order if col_major equals 0 (otherwise, they get filled in
column-major order).
matrix to_matrix(real[,] a)
Convert the two dimensional array ato a matrix with the same dimensions and
indexing order.
matrix to_matrix(int[,] a)
Convert the two dimensional array ato a matrix with the same dimensions and
indexing order. If any of the dimensions of aare zero, the result will be a 0×0
matrix.
vector to_vector(matrix m)
Convert the matrix mto a column vector in column-major order.
vector to_vector(vector v)
Return the column vector vitself.
vector to_vector(row_vector v)
Convert the row vector vto a column vector.
vector to_vector(real[] a)
Convert the one-dimensional array ato a column vector.
vector to_vector(int[] a)
Convert the one-dimensional integer array ato a column vector.
row_vector to_row_vector(matrix m)
Convert the matrix mto a row vector in column-major order.
row_vector to_row_vector(vector v)
Convert the column vector vto a row vector.
490
row_vector to_row_vector(row_vector v)
Return the row vector vitself.
row_vector to_row_vector(real[] a)
Convert the one-dimensional array ato a row vector.
row_vector to_row_vector(int[] a)
Convert the one-dimensional array ato a row vector.
real[,] to_array_2d(matrix m)
Convert the matrix mto a two dimensional array with the same dimensions and
indexing order.
real[] to_array_1d(vector v)
Convert the column vector vto a one-dimensional array.
real[] to_array_1d(row_vector v)
Convert the row vector vto a one-dimensional array.
real[] to_array_1d(matrix m)
Convert the matrix mto a one-dimensional array in column-major order.
real[] to_array_1d(real[...] a)
Convert the array a(of any dimension up to 10) to a one-dimensional array in
row-major order.
int[] to_array_1d(int[...] a)
Convert the array a(of any dimension up to 10) to a one-dimensional array in
row-major order.
491
46. Compound Arithmetic and Assignment
The compound arithmetic and assignment operations are coded directly as state-
ments, as described in Section 5.1.3. They allow statements of the form
x=xopy;
with the compound form
x op= y;
The signatures of the supported compound arithmetic and assignment operations are
as follows.
46.1. Compound Addition and Assignment
void operator+=(int x, int y)
x+= y is equivalent to x=x+y.
void operator+=(real x, real y)
x+= y is equivalent to x=x+y.
void operator+=(vector x, real y)
x+= y is equivalent to x=x+y.
void operator+=(row_vector x, real y)
x+= y is equivalent to x=x+y.
void operator+=(matrix x, real y)
x+= y is equivalent to x=x+y.
void operator+=(vector x, vector y)
x+= y is equivalent to x=x+y.
void operator+=(row_vector x, row_vector y)
x+= y is equivalent to x=x+y.
void operator+=(matrix x, matrix y)
x+= y is equivalent to x=x+y.
492
46.2. Compound Subtraction and Assignment
void operator-=(int x, int y)
x-= y is equivalent to x=x-y.
void operator-=(real x, real y)
x-= y is equivalent to x=x-y.
void operator-=(vector x, real y)
x-= y is equivalent to x=x-y.
void operator-=(row_vector x, real y)
x-= y is equivalent to x=x-y.
void operator-=(matrix x, real y)
x-= y is equivalent to x=x-y.
void operator-=(vector x, vector y)
x-= y is equivalent to x=x-y.
void operator-=(row_vector x, row_vector y)
x-= y is equivalent to x=x-y.
void operator-=(matrix x, matrix y)
x-= y is equivalent to x=x-y.
46.3. Compound Multiplication and Assignment
void operator*=(int x, int y)
x*= y is equivalent to x=x*y.
void operator*=(real x, real y)
x*= y is equivalent to x=x*y.
void operator*=(vector x, real y)
x*= y is equivalent to x=x*y.
void operator*=(row_vector x, real y)
x*= y is equivalent to x=x*y.
void operator*=(matrix x, real y)
x*= y is equivalent to x=x*y.
493
void operator*=(row_vector x, matrix y)
x*= y is equivalent to x=x*y.
void operator*=(matrix x, matrix y)
x*= y is equivalent to x=x*y.
46.4. Compound Division and Assignment
void operator/=(int x, int y)
x/= y is equivalent to x=x/y.
void operator/=(real x, real y)
x/= y is equivalent to x=x/y.
void operator/=(vector x, real y)
x/= y is equivalent to x=x/y.
void operator/=(row_vector x, real y)
x/= y is equivalent to x=x/y.
void operator/=(matrix x, real y)
x/= y is equivalent to x=x/y.
46.5. Compound Elementwise Multiplication and Assignment
void operator.*=(vector x, vector y)
x.*= y is equivalent to x=x.*y.
void operator.*=(row_vector x, row_vector y)
x.*= y is equivalent to x=x.*y.
void operator.*=(matrix x, matrix y)
x.*= y is equivalent to x=x.*y.
46.6. Compound Elementwise Division and Assignment
void operator./=(vector x, vector y)
x./= y is equivalent to x=x./ y.
void operator./=(row_vector x, row_vector y)
x./= y is equivalent to x=x./ y.
494
void operator./=(matrix x, matrix y)
x./= y is equivalent to x=x./ y.
void operator./=(vector x, real y)
x./= y is equivalent to x=x./ y.
void operator./=(row_vector x, real y)
x./= y is equivalent to x=x./ y.
void operator./=(matrix x, real y)
x./= y is equivalent to x=x./ y.
495
47. Algebraic Equation Solver
Stan provides a built-in algebraic equation solver. Although it looks like other
function applications, the algebraic solver is special in two ways.
First, the algebraic solver is a higher-order function, i.e. it takes another function
as one of its arguments. The only other functions in Stan which share this feature are
the ordinary differential equation solvers (see section 48). Ordinary Stan functions do
not allow functions as arguments.
Second, some of the arguments of the algebraic solvers are restricted to data only
expressions. These expressions must not contain variables other than those declared
in the data or transformed data blocks. Ordinary Stan functions place no restriction
on the origin of variables in their argument expressions.
47.1. Specifying an Algebraic Equation as a Function
An algebraic system is specified as an ordinary function in Stan within the function
block. The algebraic system function must have this signature:
vector algebra_system(vector y, vector theta,
real[] x_r, int[] x_i)
The algebraic system function should return the value of the algebraic function which
goes to 0, when we plug in the solution to the algebraic system.
The argument of this function are:
•y, the unknowns we wish to solve for
•theta, parameter values used to evaluate the algebraic system
•x_r, data values used to evaluate the algebraic system
•x_i, integer data used to evaluate the algebraic system
The algebraic system function separates parameter values, theta, from data val-
ues, x_r, for efficiency in computing the gradients of the algebraic system.
47.2. Call to the Algebraic Solver
vector algebra_solver(function algebra_system,
vector y_guess,
vector theta, real[] x_r, int[] x_i)
Solves the algebraic system, given an initial guess, using the Powell hybrid
algorithm.
496
vector algebra_solver(function algebra_system,
vector y_guess,
vector theta, real[] x_r, int[] x_i,
real rel_tol, real f_tol, int max_steps)
Solves the algebraic system, given an initial guess, using the Powell hybrid
algorithm with additional control parameters for the solver.
Arguments to the Algebraic Solver
The arguments to the algebraic solver are as follows:
1. algebra_system: function literal referring to a function specifying the system
of algebraic equations with signature described in Section 47.1:
(vector, vector, real[], int[]):vector
The arguments represent (1) unknowns, (2) parameters, (3) real data, and (4)
integer data, and the return value contains the value of the algebraic function,
which goes to 0 when we plug in the solution to the algebraic system,
2. y_guess: initia guess for the solution, type vector,
3. theta: parameters, type vector,
4. x_r: real data, type real[], data only, and
5. x_i: parameters, type int[], data only.
For more fine-grained control of the algebraic solver, these parameters can also
be provided:
6. rel_tol: relative tolerance for the algebraic solver, type real, data only,
7. function_tol: function tolerance for the algebraic solver, type real, data only,
8. max_num_steps: maximum number of steps to take in the algebraic solver, type
int, data only.
Return Value
The return value for the algebraic solver is an object of type vector, with values
which, when plugged in as ymake the algebraic function go to 0.
497
Sizes and Parallel Arrays
Certain sizes have to be consistent. The initial guess, return value of the solver, and
return value of the algebraic function must all be the same size.
The parameters, real data, and integer data will be passed from the solver directly
to the system function.
Algorithmic Details
The algebraic solver uses the Powell hybrid method (Powell,1970). The Stan code
builds on the implementation of the hybrid solver in the unsupported module for
nonlinear optimization problems of the Eigen library (Guennebaud et al.,2010). This
solver is in turn based on the algorithm developed for the package MINPACK-1 (Jorge
J. More,1980).
The Jacobian of the solution with respect to auxiliary parameters is computed
using the implicit function theorem. Intermediate Jacobians (of the the algebraic
function’s output with respect to the unknowns yand with respect to the auxiliary
parameters theta) are computed using Stan’s automatic differentiation.
Example
An example of Stan code with a system definition and solver call is shown in Chap-
ter 20.
498
48. Ordinary Differential Equation Solvers
Stan provides built-in ordinary differential equation (ODE) solvers. Although they
look like function applications, the ODE solvers are special in two ways.
First, the first argument to each of the solvers is a function specifying the ODE
system as an argument, like PKBugs (Lunn et al.,1999). Ordinary Stan functions do
not allow functions as arguments.
Second, some of the arguments to the ODE solvers are restricted to data only
expressions. These expressions must not contain variables other than those declared
in the data or transformed data blocks. Ordinary Stan functions place no restriction
on the origin of variables in their argument expressions.
48.1. Specifying an Ordinary Differential Equation as a Function
A system of ODEs is specified as an ordinary function in Stan within the functions
block. The ODE system function must have this function signature:
real[] ode(real time, real[] state, real[] theta,
real[] x_r, int[] x_i)
The ODE system function should return the derivative of the state with respect to
time at the time provided. The length of the returned real array must match the
length of the state input into the function.
The arguments to this function are:
•time, the time to evaluate the ODE system
•state, the state of the ODE system at the time specified
•theta, parameter values used to evaluate the ODE system
•x_r, data values used to evaluate the ODE system
•x_i, integer data values used to evaluate the ODE system.
The ODE system function separates parameter values, theta, from data values, x_r,
for efficiency in computing the gradients of the ODE.
48.2. Non-Stiff Solver
real[ , ] integrate_ode_rk45(function ode, real[] initial_state,
real initial_time, real[] times,
real[] theta, real[] x_r, int[] x_i)
499
Solves the ODE system for the times provided using the Runge Kutta Dopri
algorithm with the implementation from Boost.
real[ , ] integrate_ode_rk45(function ode, real[] initial_state,
real initial_time, real[] times,
real[] theta, real[] x_r, int[] x_i,
real rel_tol, real abs_tol, int max_num_steps)
Solves the ODE system for the times provided using the Runge Kutta Do-
pri algorithm with the implementation from Boost with additional control
parameters for the solver.
real[ , ] integrate_ode(function ode, real[] initial_state,
real initial_time, real[] times,
real[] theta, real[] x_r, int[] x_i)
Deprecated. Solves the ODE system for the times provided with a non-stiff
solver. This calls the Runge Kutta Dopri algorithm.
48.3. Stiff Solver
real[] integrate_ode_bdf(function ode, real[] initial_state,
real initial_time, real[] times,
real[] theta, real[] x_r, int[] x_i)
Solves the ODE system for the times provided using the backward differentia-
tion formula (BDF) method with the implementation from CVODES.
real[] integrate_ode_bdf(function ode, real[] initial_state,
real initial_time, real[] times,
real[] theta, real[] x_r, int[] x_i,
real rel_tol, real abs_tol, int max_num_steps)
Solves the ODE system for the times provided using the backward differen-
tiation formula (BDF) method with the implementation from CVODES with
additional control parameters for the CVODES solver.
Arguments to the ODE Solvers
The arguments to the ODE solvers are as follows:
1. ode: function literal referring to a function specifying the system of differential
equations with signature described in Section 48.1:
(real,real[],real[],real[],int[]):real[]
500
The arguments represent (1) time, (2) system state, (3) parameters, (4) real data,
and (5) integer data, and the return value contains the derivatives with respect
to time of the state,
2. initial_state: initial state, type real[],
3. initial_time: initial time, type int or real, data only,
4. times: solution times, type real[], data only,
5. theta: parameters, type real[],
6. x_r: real data, type real[], data only, and
7. x_i: integer data, type int[], data only.
For more fine-grained control of the ODE solvers, these parameters can also be
provided:
8. rel_tol: relative tolerance for the ODE solver, type real, data only,
9. abs_tol: absolute tolerance for the ODE solver, type real, data only, and
10. max_num_steps: maximum number of steps to take in the ODE solver, type
int, data only.
Return Values
The return value for the ODE solvers is an array of type real[,], with values consist-
ing of solutions at the specified times.
Sizes and Parallel Arrays
The sizes must match, and in particular, the following groups are of the same size:
• state variables passed into the system function, derivatives returned by the
system function, initial state passed into the solver, and rows of the return
value of the solver,
• solution times and number of rows of the return value of the solver,
• parameters, real data and integer data passed to the solver will be passed to the
system function
Example
An example of a complete Stan program with a system definition and solver call is
shown for data simulation in Figure 21.3 and estimation in Figure 21.4.
501
Part VIII
Discrete Distributions
502
49. Conventions for Probability Functions
Functions associated with distributions are set up to follow the same naming con-
ventions for both built-in distributions and for user-defined distributions.
49.1. Suffix Marks Type of Function
The suffix is determined by the type of function according to the following table.
function outcome suffix
log probability mass function discrete _lpmf
log probability density function continuous _lpdf
log cumulative distribution function any _lcdf
log complementary cumulative distribution function any _lccdf
random number generator any _rng
For example, normal_lpdf is the log of the normal probability density function (pdf)
and bernoulli_lpmf is the log of the bernoulli probability mass function (pmf). The
log of the corresponding cumulative distribution functions (cdf) use the same suffix,
normal_lcdf and bernoulli_lcdf.
49.2. Argument Order and the Vertical Bar
Each probability function has a specific outcome value and a number of parameters.
Following conditional probability notation, probability density and mass functions
use a vertical bar to separate the outcome from the parameters of the distribution. For
example, normal_lpdf(y | mu, sigma) returns the value of mathematical formula
logNormal(y |µ, σ ). Cumulative distribution functions separate the outcome from
the parameters in the same way (e.g., normal_lcdf(y_low | mu, sigma)
49.3. Sampling Notation
The notation
y ~ normal(mu, sigma);
provides the same (proportional) contribution to the model log density as the explicit
target density increment,
target += normal_lpdf(y | mu, sigma);
503
In both cases, the effect is to add terms to the target log density. The only difference is
that the example with the sampling (~) notation drops all additive constants in the log
density; the constants are not necessary for any of Stan’s sampling, approximation,
or optimization algorithms.
49.4. Finite Inputs
All of the distribution functions are configured to throw exceptions (effectively reject-
ing samples or optimization steps) when they are supplied with non-finite arguments.
The two cases of non-finite arguments are the infinite values and not-a-number value;
see Section 3.2 for more information on floating-point values.
49.5. Boundary Conditions
Many distributions are defined with support or constraints on parameters forming an
open interval. For example, the normal density function accepts a scale parameter
σ > 0. If σ=0, the probability function will throw an exception.
This is true even for (complementary) cumulative distribution functions, which
will throw exceptions when given input that is out of the support.
49.6. Pseudorandom Number Generators
For most of the probability functions, there is a matching pseudorandom number
generator (PRNG) with the suffix _rng. For example, the function normal_rng(real,
real) accepts two real arguments, an unconstrained location µand positive scale
σ > 0, and returns an unconstrained pseudorandom value drawn from Normal(µ, σ ).
Generated Quantities Only
Unlike regular functions, the PRNG functions may only be used in the generated quan-
tities block.
Not Vectorized
Unlike the probability functions, the PRNG functions are not vectorized.
504
49.7. Cumulative Distribution Functions
For most of the univariate probability functions, there is a corresponding cumulative
distribution function, log cumulative distribution function, and log complementary
cumulative distribution function.
For a univariate random variable Ywith probability function pY(y |θ), the cumu-
lative distribution function (CDF) FYis defined by
FY(y) =Pr[Y < y] =Zy
−∞
p(y |θ) dθ.
The complementary cumulative distribution function (CCDF) is defined as
Pr[Y ≥y] =1−FY(y).
The reason to use CCDFs instead of CDFs in floating-point arithmetic is that it is
possible to represent numbers very close to 0 (the closest you can get is roughly
10−300), but not numbers very close to 1 (the closest you can get is roughly 1−10−15).
In Stan, there is a cumulative distribution function for each probability function.
For instance, normal_cdf(y, mu, sigma) is defined by
Zy
0
Normal(y |µ, σ ) dy.
There are also log forms of the CDF and CCDF for most univariate distributions. For
example, normal_lcdf(y | mu, sigma) is defined by
log Zy
0
Normal(y |µ, σ ) dy
and normal_lccdf(y | mu, sigma) is defined by
log 1−Zy
0
Normal(y |µ, σ ) dy.
49.8. Vectorization
Stan’s univariate log probability functions, including the log density functions, log
mass functions, log CDFs, and log CCDFs, all support vectorized function application,
with results defined to be the sum of the elementwise application of the function.
In all cases, matrix operations are at least as fast and usually faster than loops and
vectorized log probability functions are faster than their equivalent form defined with
loops. This isn’t because loops are slow in Stan, but because more efficient automatic
differentiation can be used. The efficiency comes from the fact that a vectorized
505
log probably function only introduces one new node into the expression graph, thus
reducing the number of virtual function calls required to compute gradients in C++,
as well as from allowing caching of repeated computations.
Stan also overloads the multivariate normal distribution, including the Cholesky-
factor form, allowing arrays of row vectors or vectors for the variate and location
parameter. This is a huge savings in speed because the work required to solve the
linear system for the covariance matrix is only done once.
Stan also overloads some scalar functions, such as log and exp, to apply to vec-
tors (arrays) and return vectors (arrays). These vectorizations are defined elementwise
and unlike the probability functions, provide only minimal efficiency speedups over
repeated application and assignment in a loop.
Vectorized Function Signatures
Vectorized Scalar Arguments
The normal probability function is specified with the signature
normal_lpdf(reals | reals, reals);
The pseudo-type reals is used to indicate that an argument position may be vec-
torized. Argument positions declared as reals may be filled with a real, a one-
dimensional array, a vector, or a row-vector. If there is more than one array or vector
argument, their types can be anything but their size must match. For instance, it is
legal to use normal_lpdf(row_vector | vector, real) as long as the vector and
row vector have the same size.
Vectorized Vector and Row Vector Arguments
The multivariate normal distribution accepting vector or array of vector arguments is
written as
multi_normal_lpdf(vectors | vectors, matrix);
These arguments may be row vectors, column vectors, or arrays of row vectors or
column vectors.
Vectorized Integer Arguments
The pseudo-type ints is used for vectorized integer arguments. Where it appears
either an integer or array of integers may be used.
506
Evaluating Vectorized Functions
The result of a vectorized log probability function is equivalent to the sum of the eval-
uations on each element. Any non-vector argument, namely real or int, is repeated.
For instance, if yis a vector of size N,mu is a vector of size N, and sigma is a scalar,
then
ll = normal_lpdf(y | mu, sigma);
is just a more efficient way to write
ll = 0;
for (n in 1:N)
ll = ll + normal_lpdf(y[n] | mu[n], sigma);
With the same arguments, the vectorized sampling statement
y ~ normal(mu, sigma);
has the same effect on the total log probability as
for (n in 1:N)
y[n] ~ normal(mu[n], sigma);
507
50. Binary Distributions
Binary probability distributions have support on {0,1}, where 1 represents the value
true and 0 the value false.
50.1. Bernoulli Distribution
Probability Mass Function
If θ∈[0,1], then for y∈ {0,1},
Bernoulli(y|θ) =(θif y=1,and
1−θif y=0.
Sampling Statement
y~bernoulli(theta);
Increment log probability with bernoulli_lpmf(y|theta), dropping con-
stant additive terms; Section 5.3 explains sampling statements.
Stan Functions
real bernoulli_lpmf(ints y| reals theta)
The log Bernoulli probability mass of ygiven chance of success theta
real bernoulli_cdf(ints y, reals theta)
The Bernoulli cumulative distribution function of ygiven chance of success
theta
real bernoulli_lcdf(ints y| reals theta)
The log of the Bernoulli cumulative distribution function of ygiven chance of
success theta
real bernoulli_lccdf(ints y| reals theta)
The log of the Bernoulli complementary cumulative distribution function of y
given chance of success theta
int bernoulli_rng(real theta)
Generate a Bernoulli variate with chance of success theta; may only be used in
generated quantities block
508
50.2. Bernoulli Distribution, Logit Parameterization
Stan also supplies a direct parameterization in terms of a logit-transformed chance-
of-success parameter. This parameterization is more numerically stable if the chance-
of-success parameter is on the logit scale, as with the linear predictor in a logistic
regression.
Probability Mass Function
If α∈R, then for c∈ {0,1},
BernoulliLogit(c|α) =Bernoulli(c|logit−1(α)) =(logit−1(α) if y=1,and
1−logit−1(α) if y=0.
Sampling Statement
y~bernoulli_logit(alpha);
Increment log probability with bernoulli_logit_lpmf(y|alpha), drop-
ping constant additive terms; Section 5.3 explains sampling statements.
Stan Functions
real bernoulli_logit_lpmf(ints y| reals alpha)
The log Bernoulli probability mass of ygiven chance of success
inv_logit(alpha)
int bernoulli_logit_rng(real alpha)
Generate a Bernoulli variate with chance of success logit−1(α); may only be
used in generated quantities block
509

51. Bounded Discrete Distributions
Bounded discrete probability functions have support on {0, . . . , N}for some upper
bound N.
51.1. Binomial Distribution
Probability Mass Function
Suppose N∈Nand θ∈[0,1], and n∈ {0, . . . , N}.
Binomial(n|N, θ) = N
n!θn(1−θ)N−n.
Log Probability Mass Function
log Binomial(n|N, θ) =log Γ(N +1)−log Γ(n +1)−log Γ(N −n+1)
+nlog θ+(N −n) log(1−θ),
Gradient of Log Probability Mass Function
∂
∂θ log Binomial(n|N, θ) =n
θ−N−n
1−θ
Sampling Statement
n~binomial(N, theta);
Increment log probability with binomial_lpmf(n|N, theta), dropping con-
stant additive terms; Section 5.3 explains sampling statements.
Stan Functions
real binomial_lpmf(ints n| ints N, reals theta)
The log binomial probability mass of nsuccesses in Ntrials given chance of
success theta
real binomial_cdf(ints n, ints N, reals theta)
The binomial cumulative distribution function of nsuccesses in Ntrials given
chance of success theta
510

real binomial_lcdf(ints n| ints N, reals theta)
The log of the binomial cumulative distribution function of nsuccesses in N
trials given chance of success theta
real binomial_lccdf(ints n| ints N, reals theta)
The log of the binomial complementary cumulative distribution function of n
successes in Ntrials given chance of success theta
int binomial_rng(int N, real theta)
Generate a binomial variate with Ntrials and chance of success theta; may
only be used in generated quantities block
51.2. Binomial Distribution, Logit Parameterization
Stan also provides a version of the binomial probability mass function distribution
with the chance of success parameterized on the unconstrained logistic scale.
Probability Mass Function
Suppose N∈N,α∈R, and n∈ {0, . . . , N}.
BinomialLogit(n|N, α) =Binomial(n|N, logit−1(α))
= N
n!logit−1(α)n1−logit−1(α)N−n.
Log Probability Mass Function
log BinomialLogit(n|N, α) =log Γ(N +1)−log Γ(n +1)−log Γ(N −n+1)
+nlog logit−1(α) +(N −n) log 1−logit−1(α),
Gradient of Log Probability Mass Function
∂
∂α log BinomialLogit(n|N, α) =n
logit−1(−α) −N−n
logit−1(α)
511
Sampling Statement
n~binomial_logit(N, alpha);
Increment log probability with binomial_logit_lpmf(n|N, alpha), drop-
ping constant additive terms; Section 5.3 explains sampling statements.
Stan Functions
real binomial_logit_lpmf(ints n| ints N, reals alpha)
The log binomial probability mass of nsuccesses in Ntrials given logit-scaled
chance of success alpha
51.3. Beta-Binomial Distribution
Probability Mass Function
If N∈N,α∈R+, and β∈R+, then for n∈ {0, . . . , N},
BetaBinomial(n|N, α, β) = N
n!B(n +α, N −n+β)
B(α, β) ,
where the beta function B(u, v) is defined for u∈R+and v∈R+by
B(u, v) =Γ(u) Γ(v)
Γ(u +v) .
Sampling Statement
n~beta_binomial(N, alpha, beta);
Increment log probability with beta_binomial_lpmf(n|N, alpha, beta),
dropping constant additive terms; Section 5.3 explains sampling statements.
Stan Functions
real beta_binomial_lpmf(ints n| ints N, reals alpha, reals beta)
The log beta-binomial probability mass of nsuccesses in Ntrials given prior
success count (plus one) of alpha and prior failure count (plus one) of beta
real beta_binomial_cdf(ints n, ints N, reals alpha, reals beta)
The beta-binomial cumulative distribution function of nsuccesses in Ntrials
given prior success count (plus one) of alpha and prior failure count (plus one)
of beta
512

real beta_binomial_lcdf(ints n| ints N, reals alpha, reals beta)
The log of the beta-binomial cumulative distribution function of nsuccesses in
Ntrials given prior success count (plus one) of alpha and prior failure count
(plus one) of beta
real beta_binomial_lccdf(ints n| ints N, reals alpha, reals beta)
The log of the beta-binomial complementary cumulative distribution function
of nsuccesses in Ntrials given prior success count (plus one) of alpha and
prior failure count (plus one) of beta
int beta_binomial_rng(int N, real alpha, real beta)
Generate a beta-binomial variate with Ntrials, prior success count (plus one)
of alpha, and prior failure count (plus one) of beta; may only be used in
generated quantities block
51.4. Hypergeometric Distribution
Probability Mass Function
If a∈N,b∈N, and N∈ {0, . . . , a +b}, then for n∈ {max(0, N −b), . . . , min(a, N)},
Hypergeometric(n|N, a, b) =a
n b
N−n
a+b
N.
Sampling Statement
n~hypergeometric(N, a, b);
Increment log probability with hypergeometric_lpmf(n|N, a, b), drop-
ping constant additive terms; Section 5.3 explains sampling statements.
Stan Functions
real hypergeometric_lpmf(int n| int N, int a, int b)
The log hypergeometric probability mass of nsuccesses in Ntrials given total
success count of aand total failure count of b
int hypergeometric_rng(int N, real a, real b)
Generate a hypergeometric variate with Ntrials, total success count of a, and
total failure count of b; may only be used in generated quantities block
513
51.5. Categorical Distribution
Probability Mass Functions
If N∈N,N > 0, and if θ∈RNforms an N-simplex (i.e., has nonnegative entries
summing to one), then for y∈ {1, . . . , N},
Categorical(y|θ) =θy.
In addition, Stan provides a log-odds scaled categorical distribution,
CategoricalLogit(y|β) =Categorical(y|softmax(β)).
See Section 43.11 for the definition of the softmax function.
Sampling Statement
y~categorical(theta);
Increment log probability with categorical_lpmf(y|theta), dropping con-
stant additive terms; Section 5.3 explains sampling statements.
Sampling Statement
y~categorical_logit(beta);
Increment log probability with categorical_logit_lpmf(y|beta), drop-
ping constant additive terms; Section 5.3 explains sampling statements.
Stan Functions
All of the categorical distributions are vectorized so that the outcome ycan be a
single integer (type int) or an array of integers (type int[]).
real categorical_lpmf(ints y| vector theta)
The log categorical probability mass function with outcome(s) yin 1:Ngiven
N-vector of outcome probabilities theta. The parameter theta must have
non-negative entries that sum to one, but it need not be a variable declared as
a simplex.
real categorical_logit_lpmf(ints y| vector beta)
The log categorical probability mass function with outcome(s) yin 1:Ngiven
log-odds of outcomes beta.
514
int categorical_rng(vector theta)
Generate a categorical variate with N-simplex distribution parameter theta;
may only be used in generated quantities block
int categorical_logit_rng(vector beta)
Generate a categorical variate with outcome in range 1:Nfrom log-odds vector
beta; may only be used in generated quantities block
51.6. Ordered Logistic Distribution
Probability Mass Function
If K∈Nwith K > 2,c∈RK−1such that ck< ck+1for k∈ {1, . . . , K −2}, and η∈R,
then for k∈ {1, . . . , K},
OrderedLogistic(k|η, c) =
1−logit−1(η −c1)if k=1,
logit−1(η −ck−1)−logit−1(η −ck)if 1< k < K, and
logit−1(η −cK−1)−0if k=K.
The k=Kcase is written with the redundant subtraction of zero to illustrate the
parallelism of the cases; the k=1and k=Kedge cases can be subsumed into
the general definition by setting c0= −∞ and cK= +∞ with logit−1(−∞)=0and
logit−1(∞)=1.
Sampling Statement
k~ordered_logistic(eta, c);
Increment log probability with ordered_logistic_lpmf(k|eta, c), drop-
ping constant additive terms; Section 5.3 explains sampling statements.
Stan Functions
real ordered_logistic_lpmf(int k| real eta, vector c)
The log ordered logistic probability mass of kgiven linear predictor eta and
cutpoints c.
int ordered_logistic_rng(real eta, vector c)
Generate an ordered logistic variate with linear predictor eta and cutpoints c;
may only be used in generated quantities block
515
52. Unbounded Discrete Distributions
The unbounded discrete distributions have support over the natural numbers (i.e.,
the non-negative integers).
52.1. Negative Binomial Distribution
For the negative binomial distribution Stan uses the parameterization described in
Gelman et al. (2013). For alternative parameterizations, see Section 52.2.
Probability Mass Function
If α∈R+and β∈R+, then for y∈N,
NegBinomial(y|α, β) = y+α−1
α−1! β
β+1!α 1
β+1!y
.
The mean and variance of a random variable y∼NegBinomial(α, β) are given by
E[y] =α
βand Var[Y ] =α
β2(β +1).
Sampling Statement
n~neg_binomial(alpha, beta);
Increment log probability with neg_binomial_lpmf(n|alpha, beta), drop-
ping constant additive terms; Section 5.3 explains sampling statements.
Stan Functions
real neg_binomial_lpmf(ints n| reals alpha, reals beta)
The log negative binomial probability mass of ngiven shape alpha and inverse
scale beta
real neg_binomial_cdf(ints n, reals alpha, reals beta)
The negative binomial cumulative distribution function of ngiven shape alpha
and inverse scale beta
real neg_binomial_lcdf(ints n| reals alpha, reals beta)
The log of the negative binomial cumulative distribution function of ngiven
shape alpha and inverse scale beta
516
real neg_binomial_lccdf(ints n| reals alpha, reals beta)
The log of the negative binomial complementary cumulative distribution
function of ngiven shape alpha and inverse scale beta
int neg_binomial_rng(real alpha, real beta)
Generate a negative binomial variate with shape alpha and inverse scale beta;
may only be used in generated quantities block. alpha /beta must be less
than 229
52.2. Negative Binomial Distribution (alternative parameterization)
Stan also provides an alternative parameterization of the negative binomial distribu-
tion directly using a mean (i.e., location) parameter and a parameter that controls
overdispersion relative to the square of the mean. Section 52.3, below, provides a
second alternative parameterization directly in terms of the log mean.
Probability Mass Function
The first parameterization is for µ∈R+and φ∈R+, which for y∈Nis defined as
NegBinomial2(y |µ, φ) = y+φ−1
y! µ
µ+φ!y φ
µ+φ!φ
.
The mean and variance of a random variable y∼NegBinomial2(y|µ, φ) are
E[Y ] =µand Var[Y ] =µ+µ2
φ.
Recall that Poisson(µ) has variance µ, so µ2/φ > 0is the additional variance of the
negative binomial above that of the Poisson with mean µ. So the inverse of parameter
φcontrols the overdispersion, scaled by the square of the mean, µ2.
Sampling Statement
y~neg_binomial_2(mu, phi);
Increment log probability with neg_binomial_2_lpmf(y|mu, phi), drop-
ping constant additive terms; Section 5.3 explains sampling statements.
Stan Functions
real neg_binomial_2_lpmf(ints y| reals mu, reals phi)
The negative binomial probability mass of ngiven location mu and precision
phi.
517
real neg_binomial_2_cdf(ints n, reals mu, reals phi)
The negative binomial cumulative distribution function of ngiven location mu
and precision phi.
real neg_binomial_2_lcdf(ints n| reals mu, reals phi)
The log of the negative binomial cumulative distribution function of ngiven
location mu and precision phi.
real neg_binomial_2_lccdf(ints n| reals mu, reals phi)
The log of the negative binomial complementary cumulative distribution
function of ngiven location mu and precision phi.
int neg_binomial_2_rng(real mu, real phi)
Generate a negative binomial variate with location mu and precision phi; may
only be used in generated quantities block. mu must be less than 229.
52.3. Negative Binomial Distribution (log alternative parameteriza-
tion)
Related to the parameterization in Section 52.2, the following parameterization uses
a log mean parameter η=log(µ), defined for η∈R,φ∈R+, so that for y∈N,
NegBinomial2Log(y |η, φ) =NegBinomial2(y|exp(η), φ).
This alternative may be used for sampling, as a function, and for random number
generation, but as of yet, there are no CDFs implemented for it.
Sampling Statement
y~neg_binomial_2_log(eta, phi);
Increment log probability with neg_binomial_2_log_lpmf(y|eta, phi),
dropping constant additive terms; Section 5.3 explains sampling statements.
52.4. Stan Functions
real neg_binomial_2_log_lpmf(ints y| reals eta, reals phi)
The log negative binomial probability mass of ngiven log-location eta and
inverse overdispersion control phi. This is especially useful for log-linear
negative binomial regressions.
518

int neg_binomial_2_log_rng(real eta, real phi)
Generate a negative binomial variate with log-location eta and inverse overdis-
persion control phi; may only be used in generated quantities block. eta must
be less than 29 log 2.
52.5. Poisson Distribution
Probability Mass Function
If λ∈R+, then for n∈N,
Poisson(n|λ) =1
n!λnexp(−λ).
Sampling Statement
n~poisson(lambda);
Increment log probability with poisson_lpmf(n|lambda), dropping con-
stant additive terms; Section 5.3 explains sampling statements.
Stan Functions
real poisson_lpmf(ints n| reals lambda)
The log Poisson probability mass of ngiven rate lambda
real poisson_cdf(ints n, reals lambda)
The Poisson cumulative distribution function of ngiven rate lambda
real poisson_lcdf(ints n| reals lambda)
The log of the Poisson cumulative distribution function of ngiven rate lambda
real poisson_lccdf(ints n| reals lambda)
The log of the Poisson complementary cumulative distribution function of n
given rate lambda
int poisson_rng(real lambda)
Generate a Poisson variate with rate lambda; may only be used in generated
quantities block. lambda must be less than 230.
519

52.6. Poisson Distribution, Log Parameterization
Stan also provides a parameterization of the Poisson using the log rate α=log λas
a parameter. This is useful for log-linear Poisson regressions so that the predictor
does not need to be exponentiated and passed into the standard Poisson probability
function.
Probability Mass Function
If α∈R, then for n∈N,
PoissonLog(n|α) =1
n!exp nα −exp(α).
Sampling Statement
n~poisson_log(alpha);
Increment log probability with poisson_log_lpmf(n|alpha), dropping con-
stant additive terms; Section 5.3 explains sampling statements.
Stan Functions
real poisson_log_lpmf(ints n| reals alpha)
The log Poisson probability mass of ngiven log rate alpha
int poisson_log_rng(real alpha)
Generate a Poisson variate with log rate alpha; may only be used in generated
quantities block. alpha must be less than 30 log 2
520

53. Multivariate Discrete Distributions
The multivariate discrete distributions are over multiple integer values, which are
expressed in Stan as arrays.
53.1. Multinomial Distribution
Probability Mass Function
If K∈N,N∈N, and θ∈K-simplex, then for y∈NKsuch that PK
k=1yk=N,
Multinomial(y|θ) = N
y1, . . . , yK!K
Y
k=1
θyk
k,
where the multinomial coefficient is defined by
N
y1, . . . , yk!=N!
QK
k=1yk!.
Sampling Statement
y~multinomial(theta);
Increment log probability with multinomial_lpmf(y|theta), dropping con-
stant additive terms; Section 5.3 explains sampling statements.
Stan Functions
real multinomial_lpmf(int[] y| vector theta)
The log multinomial probability mass function with outcome array yof size K
given the K-simplex distribution parameter theta and (implicit) total count N
= sum(y)
int[] multinomial_rng(vector theta, int N)
Generate a multinomial variate with simplex distribution parameter theta and
total count N; may only be used in generated quantities block
521
Part IX
Continuous Distributions
522
54. Unbounded Continuous Distributions
The unbounded univariate continuous probability distributions have support on all
real numbers.
54.1. Normal Distribution
Probability Density Function
If µ∈Rand σ∈R+, then for y∈R,
Normal(y|µ, σ ) =1
√2π σ exp −1
2y−µ
σ2!.
Sampling Statement
y~normal(mu, sigma);
Increment log probability with normal_lpdf(y|mu, sigma), dropping con-
stant additive terms; Section 5.3 explains sampling statements.
Stan Functions
real normal_lpdf(reals y| reals mu, reals sigma)
The log of the normal density of ygiven location mu and scale sigma
real normal_cdf(reals y, reals mu, reals sigma)
The cumulative normal distribution of ygiven location mu and scale sigma;
normal_cdf will underflow to 0 for y−µ
σbelow -37.5 and overflow to 1 for y−µ
σ
above 8.25; the function Phi_approx is more robust in the tails, but must be
scaled and translated for anything other than a unit normal.
real normal_lcdf(reals y| reals mu, reals sigma)
The log of the cumulative normal distribution of ygiven location mu and scale
sigma; normal_lcdf will underflow to −∞ for y−µ
σbelow -37.5 and overflow to 0
for y−µ
σabove 8.25; see above for discussion of Phi_approx as an alternative.
real normal_lccdf(reals y| reals mu, reals sigma)
The log of the complementary cumulative normal distribution of ygiven
location mu and scale sigma; normal_lccdf will overflow to 0 for y−µ
σbelow
-37.5 and underflow to −∞ for y−µ
σabove 8.25; see above for discussion of
Phi_approx as an alternative.
523

real normal_rng(real mu, real sigma)
Generate a normal variate with location mu and scale sigma; may only be used
in generated quantities block
54.2. Exponentially Modified Normal Distribution
Probability Density Function
If µ∈R,σ∈R+, and λ∈R+, then for y∈R,
ExpModNormal(y|µ, σ , λ) =λ
2exp λ
22µ+λσ 2−2yerfc µ+λσ 2−y
√2σ!.
Sampling Statement
y~exp_mod_normal(mu, sigma, lambda);
Increment log probability with exp_mod_normal_lpdf(y|mu, sigma,
lambda), dropping constant additive terms; Section 5.3 explains sampling state-
ments.
Stan Functions
real exp_mod_normal_lpdf(reals y| reals mu, reals sigma,
reals lambda)
The log of the exponentially modified normal density of ygiven location mu,
scale sigma, and shape lambda
real exp_mod_normal_cdf(reals y, reals mu, reals sigma,
reals lambda)
The exponentially modified normal cumulative distribution function of ygiven
location mu, scale sigma, and shape lambda
real exp_mod_normal_lcdf(reals y| reals mu, reals sigma,
reals lambda)
The log of the exponentially modified normal cumulative distribution function
of ygiven location mu, scale sigma, and shape lambda
real exp_mod_normal_lccdf(reals y| reals mu, reals sigma,
reals lambda)
The log of the exponentially modified normal complementary cumulative
distribution function of ygiven location mu, scale sigma, and shape lambda
524

real exp_mod_normal_rng(real mu, real sigma, real lambda)
Generate a exponentially modified normal variate with location mu, scale sigma,
and shape lambda; may only be used in generated quantities block
54.3. Skew Normal Distribution
Probability Density Function
If ξ∈R,ω∈R+, and α∈R, then for y∈R,
SkewNormal(y |ξ, ω, α) =1
ω√2πexp −1
2y−ξ
ω2!1+erf αy−ξ
ω√2.
Sampling Statement
y~skew_normal(xi, omega, alpha);
Increment log probability with skew_normal_lpdf(y|xi, omega, alpha),
dropping constant additive terms; Section 5.3 explains sampling statements.
Stan Functions
real skew_normal_lpdf(reals y| reals xi, reals omega, reals alpha)
The log of the skew normal density of ygiven location xi, scale omega, and
shape alpha
real skew_normal_cdf(reals y, reals xi, reals omega, reals alpha)
The skew normal distribution function of ygiven location xi, scale omega, and
shape alpha
real skew_normal_lcdf(reals y| reals xi, reals omega,
reals alpha)
The log of the skew normal cumulative distribution function of ygiven location
xi, scale omega, and shape alpha
real skew_normal_lccdf(reals y| reals xi, reals omega,
reals alpha)
The log of the skew normal complementary cumulative distribution function
of ygiven location xi, scale omega, and shape alpha
real skew_normal_rng(real xi, real omega, real alpha)
Generate a skew normal variate with location xi, scale omega, and shape alpha;
may only be used in generated quantities block
525

54.4. Student-tDistribution
Probability Density Function
If ν∈R+,µ∈R, and σ∈R+, then for y∈R,
StudentT(y|ν, µ, σ ) =Γ((ν +1)/2)
Γ(ν/2)
1
√νπ σ 1+1
νy−µ
σ2!−(ν+1)/2
.
Sampling Statement
y~student_t(nu, mu, sigma);
Increment log probability with student_t_lpdf(y|nu, mu, sigma), drop-
ping constant additive terms; Section 5.3 explains sampling statements.
Stan Functions
real student_t_lpdf(reals y| reals nu, reals mu, reals sigma)
The log of the Student-tdensity of ygiven degrees of freedom nu, location mu,
and scale sigma
real student_t_cdf(reals y, reals nu, reals mu, reals sigma)
The Student-tcumulative distribution function of ygiven degrees of freedom
nu, location mu, and scale sigma
real student_t_lcdf(reals y| reals nu, reals mu, reals sigma)
The log of the Student-tcumulative distribution function of ygiven degrees of
freedom nu, location mu, and scale sigma
real student_t_lccdf(reals y| reals nu, reals mu, reals sigma)
The log of the Student-tcomplementary cumulative distribution function of y
given degrees of freedom nu, location mu, and scale sigma
real student_t_rng(real nu, real mu, real sigma)
Generate a Student-tvariate with degrees of freedom nu, location mu, and scale
sigma; may only be used in generated quantities block
526

54.5. Cauchy Distribution
Probability Density Function
If µ∈Rand σ∈R+, then for y∈R,
Cauchy(y|µ, σ ) =1
πσ
1
1+((y −µ)/σ )2.
Sampling Statement
y~cauchy(mu, sigma);
Increment log probability with cauchy_lpdf(y|mu, sigma), dropping con-
stant additive terms; Section 5.3 explains sampling statements.
Stan Functions
real cauchy_lpdf(reals y| reals mu, reals sigma)
The log of the Cauchy density of ygiven location mu and scale sigma
real cauchy_cdf(reals y, reals mu, reals sigma)
The Cauchy cumulative distribution function of ygiven location mu and scale
sigma
real cauchy_lcdf(reals y| reals mu, reals sigma)
The log of the Cauchy cumulative distribution function of ygiven location mu
and scale sigma
real cauchy_lccdf(reals y| reals mu, reals sigma)
The log of the Cauchy complementary cumulative distribution function of y
given location mu and scale sigma
real cauchy_rng(real mu, real sigma)
Generate a Cauchy variate with location mu and scale sigma; may only be used
in generated quantities block
54.6. Double Exponential (Laplace) Distribution
Probability Density Function
If µ∈Rand σ∈R+, then for y∈R,
DoubleExponential(y|µ, σ ) =1
2σexp −|y−µ|
σ.
527

Note that the double exponential distribution is parameterized in terms of the scale,
in contrast to the exponential distribution (see Section 55.5), which is parameterized
in terms of inverse scale.
The double-exponential distribution can be defined as a compound exponential-
normal distribution. Specifically, if
α∼Exponential 1
λ
and
β∼Normal(µ, α),
then
β∼DoubleExponential(µ, λ).
This may be used to code a non-centered parameterization by taking
βraw ∼Normal(0,1)
and defining
β=µ+α βraw.
Sampling Statement
y~double_exponential(mu, sigma);
Increment log probability with double_exponential_lpdf(y|mu, sigma),
dropping constant additive terms; Section 5.3 explains sampling statements.
Stan Functions
real double_exponential_lpdf(reals y| reals mu, reals sigma)
The log of the double exponential density of ygiven location mu and scale
sigma
real double_exponential_cdf(reals y, reals mu, reals sigma)
The double exponential cumulative distribution function of ygiven location mu
and scale sigma
real double_exponential_lcdf(reals y| reals mu, reals sigma)
The log of the double exponential cumulative distribution function of ygiven
location mu and scale sigma
real double_exponential_lccdf(reals y| reals mu, reals sigma)
The log of the double exponential complementary cumulative distribution
function of ygiven location mu and scale sigma
528

real double_exponential_rng(real mu, real sigma)
Generate a double exponential variate with location mu and scale sigma; may
only be used in generated quantities block
54.7. Logistic Distribution
Probability Density Function
If µ∈Rand σ∈R+, then for y∈R,
Logistic(y|µ, σ ) =1
σexp−y−µ
σ 1+exp−y−µ
σ−2
.
Sampling Statement
y~logistic(mu, sigma);
Increment log probability with logistic_lpdf(y|mu, sigma), dropping
constant additive terms; Section 5.3 explains sampling statements.
Stan Functions
real logistic_lpdf(reals y| reals mu, reals sigma)
The log of the logistic density of ygiven location mu and scale sigma
real logistic_cdf(reals y, reals mu, reals sigma)
The logistic cumulative distribution function of ygiven location mu and scale
sigma
real logistic_lcdf(reals y| reals mu, reals sigma)
The log of the logistic cumulative distribution function of ygiven location mu
and scale sigma
real logistic_lccdf(reals y| reals mu, reals sigma)
The log of the logistic complementary cumulative distribution function of y
given location mu and scale sigma
real logistic_rng(real mu, real sigma)
Generate a logistic variate with location mu and scale sigma; may only be used
in generated quantities block
529

54.8. Gumbel Distribution
Probability Density Function
If µ∈Rand β∈R+, then for y∈R,
Gumbel(y|µ, β) =1
βexp −y−µ
β−exp −y−µ
β!!.
Sampling Statement
y~gumbel(mu, beta);
Increment log probability with gumbel_lpdf(y|mu, beta), dropping con-
stant additive terms; Section 5.3 explains sampling statements.
Stan Functions
real gumbel_lpdf(reals y| reals mu, reals beta)
The log of the gumbel density of ygiven location mu and scale beta
real gumbel_cdf(reals y, reals mu, reals beta)
The gumbel cumulative distribution function of ygiven location mu and scale
beta
real gumbel_lcdf(reals y| reals mu, reals beta)
The log of the gumbel cumulative distribution function of ygiven location mu
and scale beta
real gumbel_lccdf(reals y| reals mu, reals beta)
The log of the gumbel complementary cumulative distribution function of y
given location mu and scale beta
real gumbel_rng(real mu, real beta)
Generate a gumbel variate with location mu and scale beta; may only be used in
generated quantities block
530

55. Positive Continuous Distributions
The positive continuous probability functions have support on the positive real num-
bers.
55.1. Lognormal Distribution
Probability Density Function
If µ∈Rand σ∈R+, then for y∈R+,
LogNormal(y|µ, σ ) =1
√2π σ
1
yexp −1
2log y−µ
σ2!.
Sampling Statement
y~lognormal(mu, sigma);
Increment log probability with lognormal_lpdf(y|mu, sigma), dropping
constant additive terms; Section 5.3 explains sampling statements.
Stan Functions
real lognormal_lpdf(reals y| reals mu, reals sigma)
The log of the lognormal density of ygiven location mu and scale sigma
real lognormal_cdf(reals y, reals mu, reals sigma)
The cumulative lognormal distribution function of ygiven location mu and
scale sigma
real lognormal_lcdf(reals y| reals mu, reals sigma)
The log of the lognormal cumulative distribution function of ygiven location
mu and scale sigma
real lognormal_lccdf(reals y| reals mu, reals sigma)
The log of the lognormal complementary cumulative distribution function of y
given location mu and scale sigma
real lognormal_rng(real mu, real beta)
Generate a lognormal variate with location mu and scale sigma; may only be
used in generated quantities block
531

55.2. Chi-Square Distribution
Probability Density Function
If ν∈R+, then for y∈R+,
ChiSquare(y|ν) =2−ν/2
Γ(ν/2)yν/2−1exp−1
2y.
Sampling Statement
y~chi_square(nu);
Increment log probability with chi_square_lpdf(y|nu), dropping constant
additive terms; Section 5.3 explains sampling statements.
Stan Functions
real chi_square_lpdf(reals y| reals nu)
The log of the Chi-square density of ygiven degrees of freedom nu
real chi_square_cdf(reals y, reals nu)
The Chi-square cumulative distribution function of ygiven degrees of freedom
nu
real chi_square_lcdf(reals y| reals nu)
The log of the Chi-square cumulative distribution function of ygiven degrees
of freedom nu
real chi_square_lccdf(reals y| reals nu)
The log of the complementary Chi-square cumulative distribution function of y
given degrees of freedom nu
real chi_square_rng(real nu)
Generate a Chi-square variate with degrees of freedom nu; may only be used in
generated quantities block
55.3. Inverse Chi-Square Distribution
Probability Density Function
If ν∈R+, then for y∈R+,
InvChiSquare(y |ν) =2−ν/2
Γ(ν/2)y−ν/2−1exp −1
2
1
y!.
532

Sampling Statement
y~inv_chi_square(nu);
Increment log probability with inv_chi_square_lpdf(y|nu), dropping con-
stant additive terms; Section 5.3 explains sampling statements.
Stan Functions
real inv_chi_square_lpdf(reals y| reals nu)
The log of the inverse Chi-square density of ygiven degrees of freedom nu
real inv_chi_square_cdf(reals y, reals nu)
The inverse Chi-squared cumulative distribution function of ygiven degrees of
freedom nu
real inv_chi_square_lcdf(reals y| reals nu)
The log of the inverse Chi-squared cumulative distribution function of ygiven
degrees of freedom nu
real inv_chi_square_lccdf(reals y| reals nu)
The log of the inverse Chi-squared complementary cumulative distribution
function of ygiven degrees of freedom nu
real inv_chi_square_rng(real nu)
Generate an inverse Chi-squared variate with degrees of freedom nu; may only
be used in generated quantities block
55.4. Scaled Inverse Chi-Square Distribution
Probability Density Function
If ν∈R+and σ∈R+, then for y∈R+,
ScaledInvChiSquare(y|ν, σ ) =(ν/2)ν/2
Γ(ν/2)σνy−(ν/2+1)exp −1
2ν σ 21
y!.
Sampling Statement
y~scaled_inv_chi_square(nu, sigma);
Increment log probability with scaled_inv_chi_square_lpdf(y|nu,
sigma), dropping constant additive terms; Section 5.3 explains sampling state-
ments.
533
Stan Functions
real scaled_inv_chi_square_lpdf(reals y| reals nu, reals sigma)
The log of the scaled inverse Chi-square density of ygiven degrees of freedom
nu and scale sigma
real scaled_inv_chi_square_cdf(reals y, reals nu, reals sigma)
The scaled inverse Chi-square cumulative distribution function of ygiven
degrees of freedom nu and scale sigma
real scaled_inv_chi_square_lcdf(reals y| reals nu, reals sigma)
The log of the scaled inverse Chi-square cumulative distribution function of y
given degrees of freedom nu and scale sigma
real scaled_inv_chi_square_lccdf(reals y| reals nu, reals sigma)
The log of the scaled inverse Chi-square complementary cumulative distribu-
tion function of ygiven degrees of freedom nu and scale sigma
real scaled_inv_chi_square_rng(real nu, real sigma)
Generate a scaled inverse Chi-squared variate with degrees of freedom nu and
scale sigma; may only be used in generated quantities block
55.5. Exponential Distribution
Probability Density Function
If β∈R+, then for y∈R+,
Exponential(y|β) =βexp(−β y).
Sampling Statement
y~exponential(beta);
Increment log probability with exponential_lpdf(y|beta), dropping con-
stant additive terms; Section 5.3 explains sampling statements.
Stan Functions
real exponential_lpdf(reals y| reals beta)
The log of the exponential density of ygiven inverse scale beta
534

real exponential_cdf(reals y, reals beta)
The exponential cumulative distribution function of ygiven inverse scale beta
real exponential_lcdf(reals y| reals beta)
The log of the exponential cumulative distribution function of ygiven inverse
scale beta
real exponential_lccdf(reals y| reals beta)
The log of the exponential complementary cumulative distribution function of
ygiven inverse scale beta
real exponential_rng(real beta)
Generate an exponential variate with inverse scale beta; may only be used in
generated quantities block
55.6. Gamma Distribution
Probability Density Function
If α∈R+and β∈R+, then for y∈R+,
Gamma(y|α, β) =βα
Γ(α) yα−1exp(−β y).
Sampling Statement
y~gamma(alpha, beta);
Increment log probability with gamma_lpdf(y|alpha, beta), dropping con-
stant additive terms; Section 5.3 explains sampling statements.
Stan Functions
real gamma_lpdf(reals y| reals alpha, reals beta)
The log of the gamma density of ygiven shape alpha and inverse scale beta
real gamma_cdf(reals y, reals alpha, reals beta)
The cumulative gamma distribution function of ygiven shape alpha and
inverse scale beta
real gamma_lcdf(reals y| reals alpha, reals beta)
The log of the cumulative gamma distribution function of ygiven shape alpha
and inverse scale beta
535

real gamma_lccdf(reals y| reals alpha, reals beta)
The log of the complementary cumulative gamma distribution function of y
given shape alpha and inverse scale beta
real gamma_rng(real alpha, real beta)
Generate a gamma variate with shape alpha and inverse scale beta; may only
be used in generated quantities block
55.7. Inverse Gamma Distribution
Probability Density Function
If α∈R+and β∈R+, then for y∈R+,
InvGamma(y|α, β) =βα
Γ(α) y−(α+1)exp −β1
y!.
Sampling Statement
y~inv_gamma(alpha, beta);
Increment log probability with inv_gamma_lpdf(y|alpha, beta), drop-
ping constant additive terms; Section 5.3 explains sampling statements.
Stan Functions
real inv_gamma_lpdf(reals y| reals alpha, reals beta)
The log of the inverse gamma density of ygiven shape alpha and scale beta
real inv_gamma_cdf(reals y, reals alpha, reals beta)
The inverse gamma cumulative distribution function of ygiven shape alpha
and scale beta
real inv_gamma_lcdf(reals y| reals alpha, reals beta)
The log of the inverse gamma cumulative distribution function of ygiven shape
alpha and scale beta
real inv_gamma_lccdf(reals y| reals alpha, reals beta)
The log of the inverse gamma complementary cumulative distribution function
of ygiven shape alpha and scale beta
real inv_gamma_rng(real alpha, real beta)
Generate an inverse gamma variate with shape alpha and scale beta; may only
be used in generated quantities block
536

55.8. Weibull Distribution
Probability Density Function
If α∈R+and σ∈R+, then for y∈[0,∞),
Weibull(y|α, σ ) =α
σy
σα−1
exp−y
σα.
Note that if Y∝Weibull(α, σ ), then Y−1∝Frechet(α, σ −1).
Sampling Statement
y~weibull(alpha, sigma);
Increment log probability with weibull_lpdf(y|alpha, sigma), dropping
constant additive terms; Section 5.3 explains sampling statements.
Stan Functions
real weibull_lpdf(reals y| reals alpha, reals sigma)
The log of the Weibull density of ygiven shape alpha and scale sigma
real weibull_cdf(reals y, reals alpha, reals sigma)
The Weibull cumulative distribution function of ygiven shape alpha and scale
sigma
real weibull_lcdf(reals y| reals alpha, reals sigma)
The log of the Weibull cumulative distribution function of ygiven shape alpha
and scale sigma
real weibull_lccdf(reals y| reals alpha, reals sigma)
The log of the Weibull complementary cumulative distribution function of y
given shape alpha and scale sigma
real weibull_rng(real alpha, real sigma)
Generate a weibull variate with shape alpha and scale sigma; may only be used
in generated quantities block
537

55.9. Fréchet Distribution
Probability Density Function
If α∈R+and σ∈R+, then for y∈R+,
Frechet(y|α, σ ) =α
σy
σ−α−1
exp −y
σ−α!.
Note that if Y∝Frechet(α, σ ), then Y−1∝Weibull(α, σ −1).
Sampling Statement
y~frechet(alpha, sigma);
Increment log probability with frechet_lpdf(y|alpha, sigma), dropping
constant additive terms; Section 5.3 explains sampling statements.
Stan Functions
real frechet_lpdf(reals y| reals alpha, reals sigma)
The log of the Fréchet density of ygiven shape alpha and scale sigma
real frechet_cdf(reals y, reals alpha, reals sigma)
The Fréchet cumulative distribution function of ygiven shape alpha and scale
sigma
real frechet_lcdf(reals y| reals alpha, reals sigma)
The log of the Fréchet cumulative distribution function of ygiven shape alpha
and scale sigma
real frechet_lccdf(reals y| reals alpha, reals sigma)
The log of the Fréchet complementary cumulative distribution function of y
given shape alpha and scale sigma
real frechet_rng(real alpha, real sigma)
Generate an Fréchet variate with shape alpha and scale sigma; may only be
used in generated quantities block
538

56. Non-negative Continuous Distributions
The non-negative continuous probability functions have support on the non-negative
real numbers.
56.1. Rayleigh Distribution
Probability Density Function
If σ∈R+, then for y∈[0,∞),
Rayleigh(y|σ ) =y
σ2exp(−y2/2σ2).
Sampling Statement
y~rayleigh(sigma);
Increment log probability with rayleigh_lpdf(y|sigma), dropping con-
stant additive terms; Section 5.3 explains sampling statements.
Stan Functions
real rayleigh_lpdf(reals y| reals sigma)
The log of the Rayleigh density of ygiven scale sigma
real rayleigh_cdf(real y, real sigma)
The Rayleigh cumulative distribution of ygiven scale sigma
real rayleigh_lcdf(real y| real sigma)
The log of the Rayleigh cumulative distribution of ygiven scale sigma
real rayleigh_lccdf(real y| real sigma)
The log of the Rayleigh complementary cumulative distribution of ygiven scale
sigma
real rayleigh_rng(real sigma)
Generate a Rayleigh variate with scale sigma; may only be used in generated
quantities block
539

56.2. Wiener Diffusion Model Distributions
Probability Density Function
If α∈R+,τ∈R+,β∈[0,1]and δ∈R, then for y∈(0, τ),
Wiener(y|α, τ, β, δ) =α
(y −τ)3/2exp −δαβ −δ2(y −τ)
2!∞
X
k=−∞
(2k+β)φ 2k+αβ
√y−τ!
where φ(x) denotes the standard normal density function (Blurton et al.,2012).
Sampling Statement
y~wiener(alpha, tau, beta, delta);
Increment log probability with wiener_lpdf(y|alpha, tau, beta,
delta), dropping constant additive terms; Section 5.3 explains sampling
statements.
Stan Functions
real wiener_lpdf(reals y| reals alpha, reals tau, reals beta,
reals delta)
The log of the Wiener first passage time density of ygiven boundary separation
alpha, non-decision time tau, a-priori bias beta and drift rate delta
Boundaries
Stan returns the first passage time of the accumulation process over the upper bound-
ary only. Therefore, one needs to calculate:
wiener(y|α, τ, 1−β, −δ).
To get the result for the lower boundary. For more details, see the appendix of
Vandekerckhove and Wabersich (2014).
540

57. Positive Lower-Bounded Probabilities
The positive lower-bounded probabilities have support on real values above some
positive minimum value.
57.1. Pareto Distribution
Probability Density Function
If ymin ∈R+and α∈R+, then for y∈R+with y≥ymin,
Pareto(y|ymin, α) =α yα
min
yα+1.
Sampling Statement
y~pareto(y_min, alpha);
Increment log probability with pareto_lpdf(y|y_min, alpha), dropping
constant additive terms; Section 5.3 explains sampling statements.
Stan Functions
real pareto_lpdf(reals y| reals y_min, reals alpha)
The log of the Pareto density of ygiven positive minimum value y_min and
shape alpha
real pareto_cdf(reals y, reals y_min, reals alpha)
The Pareto cumulative distribution function of ygiven positive minimum value
y_min and shape alpha
real pareto_lcdf(reals y| reals y_min, reals alpha)
The log of the Pareto cumulative distribution function of ygiven positive
minimum value y_min and shape alpha
real pareto_lccdf(reals y| reals y_min, reals alpha)
The log of the Pareto complementary cumulative distribution function of y
given positive minimum value y_min and shape alpha
real pareto_rng(real y_min, real alpha)
Generate a Pareto variate with positive minimum value y_min and shape alpha;
may only be used in generated quantities block
541

57.2. Pareto Type 2 Distribution
Probability Density Function
If µ∈R,λ∈R+, and α∈R+, then for y≥µ,
Pareto_Type_2(y|µ, λ, α) =α
λ1+y−µ
λ−(α+1)
.
Note that the Lomax distribution is a Pareto Type 2 distribution with µ=0.
Sampling Statement
y~pareto_type_2(mu, lambda, alpha);
Increment log probability with pareto_type_2_lpdf(y|mu, lambda,
alpha), dropping constant additive terms; Section 5.3 explains sampling state-
ments.
Stan Functions
real pareto_type_2_lpdf(reals y| reals mu, reals lambda,
reals alpha)
The log of the Pareto Type 2 density of ygiven location mu, scale lambda, and
shape alpha
real pareto_type_2_cdf(reals y, reals mu, reals lambda,
reals alpha)
The Pareto Type 2 cumulative distribution function of ygiven location mu, scale
lambda, and shape alpha
real pareto_type_2_lcdf(reals y| reals mu, reals lambda,
reals alpha)
The log of the Pareto Type 2 cumulative distribution function of ygiven
location mu, scale lambda, and shape alpha
real pareto_type_2_lccdf(reals y| reals mu, reals lambda,
reals alpha)
The log of the Pareto Type 2 complementary cumulative distribution function
of ygiven location mu, scale lambda, and shape alpha
real pareto_type_2_rng(real mu, real lambda, real alpha)
Generate a Pareto Type 2 variate with location mu, scale lambda, and shape
alpha; may only be used in generated quantities block
542

58. Continuous Distributions on [0, 1]
The continuous distributions with outcomes in the interval [0,1]are used to charac-
terized bounded quantities, including probabilities.
58.1. Beta Distribution
Probability Density Function
If α∈R+and β∈R+, then for θ∈(0,1),
Beta(θ|α, β) =1
B(α, β) θα−1(1−θ)β−1,
where the beta function B() is as defined in Section 41.13.
Warning: If θ=0or θ=1, then the probability is 0 and the log probability is −∞.
Similarly, the distribution requires strictly positive parameters, α, β > 0.
Sampling Statement
theta ~beta(alpha, beta);
Increment log probability with beta_lpdf(theta |alpha, beta), dropping
constant additive terms; Section 5.3 explains sampling statements.
Stan Functions
real beta_lpdf(reals theta | reals alpha, reals beta)
The log of the beta density of theta in [0,1]given positive prior successes
(plus one) alpha and prior failures (plus one) beta
real beta_cdf(reals theta, reals alpha, reals beta)
The beta cumulative distribution function of theta in [0,1]given positive
prior successes (plus one) alpha and prior failures (plus one) beta
real beta_lcdf(reals theta | reals alpha, reals beta)
The log of the beta cumulative distribution function of theta in [0,1]given
positive prior successes (plus one) alpha and prior failures (plus one) beta
real beta_lccdf(reals theta | reals alpha, reals beta)
The log of the beta complementary cumulative distribution function of theta
in [0,1]given positive prior successes (plus one) alpha and prior failures (plus
one) beta
543
real beta_rng(real alpha, real beta)
Generate a beta variate with positive prior successes (plus one) alpha and prior
failures (plus one) beta; may only be used in generated quantities block
544

59. Circular Distributions
Circular distributions are defined for finite values yin any interval of length 2π.
59.1. Von Mises Distribution
Probability Density Function
If µ∈Rand κ∈R+, then for y∈R,
VonMises(y|µ, κ) =exp(κ cos(y −µ))
2πI0(κ) .
In order for this density to properly normalize, ymust be restricted to some interval
(c, c +2π) of length 2π, because
Zc+2π
c
VonMises(y|µ, κ)dy =1.
Similarly, if µis a parameter, it will typically be restricted to the same range as y.
A von Mises distribution with its 2πinterval of support centered around its loca-
tion µwill have a single mode at µ; for example, restricting yto (−π , π) and taking
µ=0leads to a single local optimum at the model µ. If the location µis not in the
center of the support, the density is circularly translated and there will be a second lo-
cal maximum at the boundary furthest from the mode. Ideally, the parameterization
and support will be set up so that the bulk of the probability mass is in a continuous
interval around the mean µ.
Sampling Statement
y~von_mises(mu, kappa);
Increment log probability with von_mises_lpdf(y|mu, kappa), dropping
constant additive terms; Section 5.3 explains sampling statements.
Stan Functions
real von_mises_lpdf(reals y| reals mu, reals kappa)
The log of the von mises density of ygiven location mu and scale kappa
real von_mises_rng(reals mu, reals kappa)
Generate a Von Mises variate with location mu and scale kappa (i.e. returns
values in the interval [(µ mod 2π) −π, (µ mod 2π ) +π]); may only be used
in generated quantities block
545

Numerical Stability
Evaluating the Von Mises distribution for κ > 100 is numerically unstable in the
current implementation. Nathanael I. Lichti suggested the following workaround on
the Stan users group, based on the fact that as κ→ ∞,
VonMises(y|µ, κ) →Normal(µ, p1/κ).
The workaround is to replace y ~ von_mises(mu,kappa) with
if (kappa < 100)
y ~ von_mises(mu, kappa);
else
y ~ normal(mu, sqrt(1 / kappa));
546

60. Bounded Continuous Probabilities
The bounded continuous probabilities have support on a finite interval of real num-
bers.
60.1. Uniform Distribution
Probability Density Function
If α∈Rand β∈(α, ∞), then for y∈[α, β],
Uniform(y|α, β) =1
β−α.
Sampling Statement
y~uniform(alpha, beta);
Increment log probability with uniform_lpdf(y|alpha, beta), dropping
constant additive terms; Section 5.3 explains sampling statements.
Stan Functions
real uniform_lpdf(reals y| reals alpha, reals beta)
The log of the uniform density of ygiven lower bound alpha and upper bound
beta
real uniform_cdf(reals y, reals alpha, reals beta)
The uniform cumulative distribution function of ygiven lower bound alpha
and upper bound beta
real uniform_lcdf(reals y| reals alpha, reals beta)
The log of the uniform cumulative distribution function of ygiven lower bound
alpha and upper bound beta
real uniform_lccdf(reals y| reals alpha, reals beta)
The log of the uniform complementary cumulative distribution function of y
given lower bound alpha and upper bound beta
real uniform_rng(real alpha, real beta)
Generate a uniform variate with lower bound alpha and upper bound beta;
may only be used in generated quantities block
547

61. Distributions over Unbounded Vectors
The unbounded vector probability distributions have support on all of RKfor some
fixed K.
61.1. Multivariate Normal Distribution
Probability Density Function
If K∈N,µ∈RK, and Σ∈RK×Kis symmetric and positive definite, then for y∈RK,
MultiNormal(y|µ, Σ)=1
(2π)K/2
1
p|Σ|exp−1
2(y −µ)>Σ−1(y −µ),
where |Σ|is the absolute determinant of Σ.
Sampling Statement
y~multi_normal(mu, Sigma);
Increment log probability with multi_normal_lpdf(y|mu, Sigma), drop-
ping constant additive terms; Section 5.3 explains sampling statements.
Stan Functions
The multivariate normal probability function is overloaded to allow the variate vector
yand location vector µto be vectors or row vectors (or to mix the two types). The
density function is also vectorized, so it allows arrays of row vectors or vectors as
arguments; see Section 49.8.1 for a description of vectorization.
real multi_normal_lpdf(vectors y| vectors mu, matrix Sigma)
The log of the multivariate normal density of vector(s) ygiven location vector(s)
mu and covariance matrix Sigma
real multi_normal_lpdf(vectors y| row_vectors mu, matrix Sigma)
The log of the multivariate normal density of vector(s) ygiven location row
vector(s) mu and covariance matrix Sigma
real multi_normal_lpdf(row_vectors y| vectors mu, matrix Sigma)
The log of the multivariate normal density of row vector(s) ygiven location
vector(s) mu and covariance matrix Sigma
548
real multi_normal_lpdf(row_vectors y| row_vectors mu, matrix
Sigma)
The log of the multivariate normal density of row vector(s) ygiven location row
vector(s) mu and covariance matrix Sigma
Although there is a direct multi-normal RNG function, if more than one result is
required, it’s much more efficient to Cholesky factor the covariance matrix and call
multi_normal_cholesky_rng; see Section 61.3.
vector multi_normal_rng(vector mu, matrix Sigma)
Generate a multivariate normal variate with location mu and covariance matrix
Sigma; may only be used in generated quantities block
61.2. Multivariate Normal Distribution, Precision Parameterization
Probability Density Function
If K∈N,µ∈RK, and Ω∈RK×Kis symmetric and positive definite, then for y∈RK,
MultiNormalPrecision(y|µ, Ω)=MultiNormal(y|µ, Σ−1)
Sampling Statement
y~multi_normal_prec(mu, Omega);
Increment log probability with multi_normal_prec_lpdf(y|mu, Omega),
dropping constant additive terms; Section 5.3 explains sampling statements.
Stan Functions
real multi_normal_prec_lpdf(vectors y| vectors mu,
matrix Omega)
The log of the multivariate normal density of vector(s) ygiven location vector(s)
mu and positive definite precision matrix Omega
real multi_normal_prec_lpdf(vectors y| row_vectors mu,
matrix Omega)
The log of the multivariate normal density of vector(s) ygiven location row
vector(s) mu and positive definite precision matrix Omega
real multi_normal_prec_lpdf(row_vectors y| vectors mu,
matrix Omega)
The log of the multivariate normal density of row vector(s) ygiven location
vector(s) mu and positive definite precision matrix Omega
549
real multi_normal_prec_lpdf(row_vectors y| row_vectors mu,
matrix Omega)
The log of the multivariate normal density of row vector(s) ygiven location row
vector(s) mu and positive definite precision matrix Omega
61.3. Multivariate Normal Distribution, Cholesky Parameterization
Probability Density Function
If K∈N,µ∈RK, and L∈RK×Kis lower triangular and such that LL>is positive
definite, then for y∈RK,
MultiNormalCholesky(y|µ, L) =MultiNormal(y|µ, LL>).
If Lis lower triangular and LLtop is a K×Kpositive definite matrix, then Lk,k must be
strictly positive for k∈1:K. If an Lis provided that is not the Cholesky factor of a
positive-definite matrix, the probability functions will raise errors.
Sampling Statement
y~multi_normal_cholesky(mu, L);
Increment log probability with multi_normal_cholesky_lpdf(y|mu, L),
dropping constant additive terms; Section 5.3 explains sampling statements.
Stan Functions
real multi_normal_cholesky_lpdf(vectors y| vectors mu,
matrix L)
The log of the multivariate normal density of vector(s) ygiven location vector(s)
mu and lower-triangular Cholesky factor of the covariance matrix L
real multi_normal_cholesky_lpdf(vectors y| row_vectors mu,
matrix L)
The log of the multivariate normal density of vector(s) ygiven location row
vector(s) mu and lower-triangular Cholesky factor of the covariance matrix L
real multi_normal_cholesky_lpdf(row_vectors y| vectors mu,
matrix L)
The log of the multivariate normal density of row vector(s) ygiven location
vector(s) mu and lower-triangular Cholesky factor of the covariance matrix L
real multi_normal_cholesky_lpdf(row_vectors y| row_vectors mu,
matrix L)
550
The log of the multivariate normal density of row vector(s) ygiven location row
vector(s) mu and lower-triangular Cholesky factor of the covariance matrix L
vector multi_normal_cholesky_rng(vector mu, matrix L)
Generate a multivariate normal variate with location mu and lower-triangular
Cholesky factor of the covariance matrix L; may only be used in generated
quantities block
61.4. Multivariate Gaussian Process Distribution
Probability Density Function
If K, N ∈N,Σ∈RN×Nis symmetric, positive definite kernel matrix and w∈RKis a
vector of positive inverse scales, then for y∈RK×N,
MultiGP(y|Σ, w) =
K
Y
i=1
MultiNormal(yi|0, w−1
iΣ),
where yiis the ith row of y. This is used to efficiently handle Gaussian Processes with
multi-variate outputs where only the output dimensions share a kernel function but
vary based on their scale. Note that this function does not take into account the mean
prediction.
Sampling Statement
y~multi_gp(Sigma, w);
Increment log probability with multi_gp_lpdf(y|Sigma, w), dropping con-
stant additive terms; Section 5.3 explains sampling statements.
Stan Functions
real multi_gp_lpdf(matrix y| matrix Sigma, vector w)
The log of the multivariate GP density of matrix ygiven kernel matrix Sigma
and inverses scales w
61.5. Multivariate Gaussian Process Distribution, Cholesky parame-
terization
Probability Density Function
If K, N ∈N,L∈RN×Nis lower triangular and such that LL>is positive definite kernel
matrix (implying Ln,n >0for n∈1:N), and w∈RKis a vector of positive inverse
551

scales, then for y∈RK×N,
MultiGPCholesky(y |L, w) =
K
Y
i=1
MultiNormal(yi|0, w−1
iLL>),
where yiis the ith row of y. This is used to efficiently handle Gaussian Processes with
multi-variate outputs where only the output dimensions share a kernel function but
vary based on their scale. If the model allows parameterization in terms of Cholesky
factor of the kernel matrix, this distribution is also more efficient than MultiGP().
Note that this function does not take into account the mean prediction.
Sampling Statement
y~multi_gp_cholesky(L, w);
Increment log probability with multi_gp_cholesky_lpdf(y|L, w), drop-
ping constant additive terms; Section 5.3 explains sampling statements.
Stan Functions
real multi_gp_cholesky_lpdf(matrix y| matrix L, vector w)
The log of the multivariate GP density of matrix ygiven lower-triangular
Cholesky factor of the kernel matrix Land inverses scales w
61.6. Multivariate Student-tDistribution
Probability Density Function
If K∈N,ν∈R+,µ∈RK, and Σ∈RK×Kis symmetric and positive definite, then for
y∈RK,
MultiStudentT(y|ν, µ, Σ)
=1
πK/2
1
νK/2
Γ((ν +K)/2)
Γ(ν/2)
1
p|Σ|1+1
ν(y −µ)>Σ−1(y −µ)−(ν+K)/2
.
Sampling Statement
y~multi_student_t(nu, mu, Sigma);
Increment log probability with multi_student_t_lpdf(y|nu, mu,
Sigma), dropping constant additive terms; Section 5.3 explains sampling
statements.
552
Stan Functions
real multi_student_t_lpdf(vectors y| real nu, vectors mu,
matrix Sigma)
The log of the multivariate Student-tdensity of vector(s) ygiven degrees of
freedom nu, location vector(s) mu, and scale matrix Sigma
real multi_student_t_lpdf(vectors y| real nu, row_vectors mu,
matrix Sigma)
The log of the multivariate Student-tdensity of vector(s) ygiven degrees of
freedom nu, location row vector(s) mu, and scale matrix Sigma
real multi_student_t_lpdf(row_vectors y| real nu, vectors mu,
matrix Sigma)
The log of the multivariate Student-tdensity of row vector(s) ygiven degrees
of freedom nu, location vector(s) mu, and scale matrix Sigma
real multi_student_t_lpdf(row_vectors y| real nu, row_vectors mu,
matrix Sigma)
The log of the multivariate Student-tdensity of row vector(s) ygiven degrees
of freedom nu, location row vector(s) mu, and scale matrix Sigma
vector multi_student_t_rng(real nu, vector mu, matrix Sigma)
Generate a multivariate Student-tvariate with degrees of freedom nu, location
mu, and scale matrix Sigma; may only be used in generated quantities block
61.7. Gaussian Dynamic Linear Models
A Gaussian Dynamic Linear model is defined as follows, For t∈1, . . . , T ,
yt∼N(F0θt, V )
θt∼N(Gθt−1, W )
θ0∼N(m0, C0)
where yis n×Tmatrix where rows are variables and columns are observations. These
functions calculate the log-likelihood of the observations marginalizing over the la-
tent states (p(y|F, G, V, W , m0, C0)). This log-likelihood is a system that is calculated
using the Kalman Filter. If Vis diagonal, then a more efficient algorithm which se-
quentially processes observations and avoids a matrix inversions can be used (Durbin
and Koopman,2001, Sec 6.4).
553
Sampling Statement
y~gaussian_dlm_obs(F, G, V, W, m0, C0);
Increment log probability with gaussian_dlm_obs_lpdf(y|F, G, V, W,
m0, C0), dropping constant additive terms; Section 5.3 explains sampling state-
ments.
Stan Functions
The following two functions differ in the type of their V, the first taking a full ob-
servation covariance matrix Vand the second a vector Vrepresenting the diagonal of
the observation covariance matrix. The sampling statement defined in the previous
section works with either type of observation V.
real gaussian_dlm_obs_lpdf(matrix y| matrix F, matrix G, matrix V,
matrix W, vector m0, matrix C0)
The log of the density of the Gaussian Dynamic Linear model with observation
matrix yin which rows are variables and columns are observations, design
matrix F, transition matrix G, observation covariance matrix V, system covari-
ance matrix W, and the initial state is distributed normal with mean m0 and
covariance C0.
real gaussian_dlm_obs_lpdf(matrix y| matrix F, matrix G, vector V,
matrix W, vector m0, matrix C0)
The log of the density of the Gaussian Dynamic Linear model with observation
matrix yin which rows are variables and columns are observations, design
matrix F, transition matrix G, observation covariance matrix with diagonal V,
system covariance matrix W, and the initial state is distributed normal with
mean m0 and covariance C0.
554

62. Simplex Distributions
The simplex probabilities have support on the unit K-simplex for a specified K. A K-
dimensional vector θis a unit K-simplex if θk≥0for k∈ {1, . . . , K}and PK
k=1θk=1.
62.1. Dirichlet Distribution
Probability Density Function
If K∈Nand α∈(R+)K, then for θ∈K-simplex,
Dirichlet(θ|α) =
ΓPK
k=1αk
QK
k=1Γ(αk)
K
Y
k=1
θαk−1
k.
Warning: If any of the components of θsatisfies θi=0or θi=1, then the prob-
ability is 0 and the log probability is −∞. Similarly, the distribution requires strictly
positive parameters, with αi>0for each i.
Sampling Statement
theta ~dirichlet(alpha);
Increment log probability with dirichlet_lpdf(theta |alpha), dropping
constant additive terms; Section 5.3 explains sampling statements.
Stan Functions
real dirichlet_lpdf(vector theta | vector alpha)
The log of the Dirichlet density for simplex theta given prior counts (plus one)
alpha
vector dirichlet_rng(vector alpha)
Generate a Dirichlet variate with prior counts (plus one) alpha; may only be
used in generated quantities block
555

63. Correlation Matrix Distributions
The correlation matrix distributions have support on the (Cholesky factors of) corre-
lation matrices. A Cholesky factor Lfor a K×Kcorrelation matrix Σof dimension
Khas rows of unit length so that the diagonal of LL>is the unit K-vector. Even
though models are usually conceptualized in terms of correlation matrices, it is bet-
ter to operationalize them in terms of their Cholesky factors. If you are interested in
the posterior distribution of the correlations, you can recover them in the generated
quantities block via
generated quantities {
corr_matrix[K] Sigma;
Sigma = multiply_lower_tri_self_transpose(L);
}
63.1. LKJ Correlation Distribution
Probability Density Function
For η > 0, if Σa positive-definite, symmetric matrix with unit diagonal (i.e., a correla-
tion matrix), then
LkjCorr(Σ|η) ∝det (Σ)(η−1).
The expectation is the identity matrix for any positive value of the shape parameter η,
which can be interpreted like the shape parameter of a symmetric beta distribution:
• if η=1, then the density is uniform over correlation matrices of order K;
• if η > 1, the identity matrix is the modal correlation matrix, with a sharper peak
in the density at the identity matrix for larger η; and
• for 0<η<1, the density has a trough at the identity matrix.
• if ηwere an unknown parameter, the Jeffreys prior is proportional to
r2PK−1
k=1ψ1η+K−k−1
2−2ψ1(2η+K−k−1), where ψ1() is the trigamma
function
See (Lewandowski et al.,2009) for definitions. However, it is much better computa-
tionally to work directly with the Cholesky factor of Σ, so this distribution should
never be explicitly used in practice.
556

Sampling Statement
y~lkj_corr(eta);
Increment log probability with lkj_corr_lpdf(y|eta), dropping constant
additive terms; Section 5.3 explains sampling statements.
Stan Functions
real lkj_corr_lpdf(matrix y| real eta)
The log of the LKJ density for the correlation matrix ygiven nonnegative shape
eta. The only reason to use this density function is if you want the code to run
slower and consume more memory with more risk of numerical errors. Use its
Cholesky factor as described in the next section.
matrix lkj_corr_rng(int K, real eta)
Generate a LKJ random correlation matrix of order Kwith shape eta; may only
be used in generated quantities block
63.2. Cholesky LKJ Correlation Distribution
Stan provides an implicit parameterization of the LKJ correlation matrix density in
terms of its Cholesky factor, which you should use rather than the explicit parameter-
ization in the previous section. For example, if Lis a Cholesky factor of a correlation
matrix, then
L ~ lkj_corr_cholesky(2.0);
# implies L *L' ~ lkj_corr(2.0);
Because Stan requires models to have support on all valid constrained parameters, L
will almost always 1be a parameter declared with the type of a Cholesky factor for a
correlation matrix; for example,
parameters {
cholesky_factor_corr[K] L;
# rather than corr_matrix[K] Sigma;
// ...
1It is possible to build up a valid Lwithin Stan, but that would then require Jacobian adjustments to
imply the intended posterior.
557
Probability Density Function
For η > 0, if Lis a K×Klower-triangular Cholesky factor of a symmetric positive-
definite matrix with unit diagonal (i.e., a correlation matrix), then
LkjCholesky(L|η) ∝ |J|det(LL>)(η−1)=
K
Y
k=2
LK−k+2η−2
kk .
See the previous section for details on interpreting the shape parameter η. Note that
even if η=1, it is still essential to evaluate the density function because the density
of Lis not constant, regardless of the value of η, even though the density of LL>is
constant iff η=1.
A lower triangular Lis a Cholesky factor for a correlation matrix if and only if
Lk,k >0for k∈1:Kand each row Lkhas unit Euclidean length.
Sampling Statement
L~lkj_corr_cholesky(eta);
Increment log probability with lkj_corr_cholesky_lpdf(L|eta), drop-
ping constant additive terms; Section 5.3 explains sampling statements.
Stan Functions
real lkj_corr_cholesky_lpdf(matrix L| real eta)
The log of the LKJ density for the lower-triangular Cholesky factor Lof a
correlation matrix given shape eta.
matrix lkj_corr_cholesky_rng(int K, real eta)
Generate a random Cholesky factor of a correlation matrix of order Kthat is
distributed LKJ with shape eta; may only be used in generated quantities block
558
64. Covariance Matrix Distributions
The covariance matrix distributions have support on symmetric, positive-definite K×
Kmatrices.
64.1. Wishart Distribution
Probability Density Function
If K∈N,ν∈(K −1,∞), and S∈RK×Kis symmetric and positive definite, then for
symmetric and positive-definite W∈RK×K,
Wishart(W |ν, S) =1
2νK/2
1
ΓKν
2|S|−ν/2|W|(ν−K−1)/2exp−1
2tr S−1W,
where tr() is the matrix trace function, and ΓK() is the multivariate Gamma function,
ΓK(x) =1
πK(K−1)/4
K
Y
k=1
Γx+1−k
2.
Sampling Statement
W~wishart(nu, Sigma);
Increment log probability with wishart_lpdf(W|nu, Sigma), dropping con-
stant additive terms; Section 5.3 explains sampling statements.
Stan Functions
real wishart_lpdf(matrix W| real nu, matrix Sigma)
The log of the Wishart density for symmetric and positive-definite matrix W
given degrees of freedom nu and symmetric and positive-definite scale matrix
Sigma
matrix wishart_rng(real nu, matrix Sigma)
Generate a Wishart variate with degrees of freedom nu and symmetric and
positive-definite scale matrix Sigma; may only be used in generated quantities
block
559

64.2. Inverse Wishart Distribution
Probability Density Function
If K∈N,ν∈(K −1,∞), and S∈RK×Kis symmetric and positive definite, then for
symmetric and positive-definite W∈RK×K,
InvWishart(W |ν, S) =1
2νK/2
1
ΓKν
2|S|ν/2|W|−(ν+K+1)/2exp−1
2tr(SW −1).
Sampling Statement
W~inv_wishart(nu, Sigma);
Increment log probability with inv_wishart_lpdf(W|nu, Sigma), drop-
ping constant additive terms; Section 5.3 explains sampling statements.
Stan Functions
real inv_wishart_lpdf(matrix W| real nu, matrix Sigma)
The log of the inverse Wishart density for symmetric and positive-definite
matrix Wgiven degrees of freedom nu and symmetric and positive-definite scale
matrix Sigma
matrix inv_wishart_rng(real nu, matrix Sigma)
Generate an inverse Wishart variate with degrees of freedom nu and symmetric
and positive-definite scale matrix Sigma; may only be used in generated
quantities block
560
Part X
Software Development
561

65. Model Building as Software Development
Developing a statistical model in Stan means writing a Stan program and is thus a
kind of software development process. Developing software is hard. Very hard. So
many things can go wrong because there are so many moving parts and combinations
of parts.
Software development practices are designed to mitigate the problems caused by
the inherent complexity of writing computer programs. Unfortunately, many method-
ologies veer off into dogma, bean counting, or both. A couple we can recommend that
provide solid, practical advice for developers are (Hunt and Thomas,1999) and (Mc-
Connell,2004). This section tries to summarize some of their advice.
65.1. Use Version Control
Version control software, such as Subversion or Git, should be in place before starting
to code.1It may seem like a big investment to learn version control, but it’s well
worth it to be able to type a single command to revert to a previously working version
or to get the difference between the current version and an old version. It’s even
better when you need to share work with others, even on a paper—work can be done
independently and then automatically merged. See Chapter 66 for information on
how Stan itself is developed.
65.2. Make it Reproducible
Rather than entering commands on the command-line when running models (or en-
tering commands directly into an interactive programming language like R or Python),
try writing scripts to run the data through the models and produce whatever poste-
rior analysis you need. Scripts can be written for the shell, R, or Python. Whatever
language a script is in, it should be self contained and not depend on global variables
having been set, other data being read in, etc.
See Chapter 67 for complete information on reproducibility in Stan and its inter-
faces.
Scripts are Good Documentation
It may seem like overkill if running the project is only a single line of code, but the
script provides not only a way to run the code, but also a form of concrete documen-
1Stan started using Subversion (SVN), then switched to the much more feature-rich Git package. Git
does everything SVN does and a whole lot more. The price is a steeper learning curve. For individual or
very-small-team development, SVN is just fine.
562

tation for what is run.
Randomization and Saving Seeds
Randomness defeats reproducibility. MCMC methods are conceptually randomized.
Stan’s samplers involve random initializations as well as randomization during each
iteration (e.g., Hamiltonian Monte Carlo generates a random momentum in each iter-
ation).
Computers are deterministic. There is no real randomness, just pseudo-random
number generators. These operate by generating a sequence of random numbers
based on a “seed.” Stan (and other languages like R) can use time-based methods to
generate a seed based on the time and date, or seeds can be provided to Stan (or R)
in the form of integers. Stan writes out the seed used to generate the data as well as
the version number of the Stan software so that results can be reproduced at a later
date.2
65.3. Make it Readable
Treating programs and scripts like other forms of writing for an audience provides
an important perspective on how the code will be used. Not only might others want
to read a program or model, the developer will want to read it later. One of the mo-
tivations of Stan’s design was to make models self-documenting in terms of variable
usage (e.g., data versus parameter), types (e.g., covariance matrix vs. unconstrained
matrix) and sizes.
A large part of readability is consistency. Particularly in naming and layout. Not
only of programs themselves, but the directories and files in which they’re stored.
Readability of code is not just about comments (see Section Section 65.8 for com-
menting recommendations and syntax in Stan).
It is surprising how often the solution to a debugging or design problem occurs
when trying to explain enough about the problem to someone else to get help. This
can be on a mailing list, but it works best person-to-person. Finding the solution
to your own problem when explaining it to someone else happens so frequently in
software development that the listener is called a “rubber ducky,” because they only
have to nod along.3
2This also requires fixing compilers and hardware, because floating-point arithmetic does not have an
absolutely fixed behavior across operating systems, hardware configurations, or compilers.
3Research has shown an actual rubber ducky won’t work. For some reason, the rubber ducky must
actually be capable of understanding the explanation.
563
65.4. Explore the Data
Although this should go without saying, don’t just fit data blindly. Look at the data
you actually have to understand its properties. If you’re doing a logistic regression,
is it separable? If you’re building a multilevel model, do the basic outcomes vary by
level? If you’re fitting a linear regression, see whether such a model makes sense by
scatterplotting xvs. y.
65.5. Design Top-Down, Code Bottom-Up
Software projects are almost always designed top-down from one or more intended
use cases. Good software coding, on the other hand, is typically done bottom-up.
The motivation for top-down design is obvious. The motivation for bottom-up
development is that it is much easier to develop software using components that have
been thoroughly tested. Although Stan has no built-in support for either modularity
or testing, many of the same principles apply.
The way the developers of Stan themselves build models is to start as simply as
possibly, then build up. This is true even if we have a complicated model in mind as
the end goal, and even if we have a very good idea of the model we eventually want to
fit. Rather than building a hierarchical model with multiple interactions, covariance
priors, or other complicated structure, start simple. Build just a simple regression
with fixed (and fairly tight) priors. Then add interactions or additional levels. One at
a time. Make sure that these do the right thing. Then expand.
65.6. Fit Simulated Data
One of the best ways to make sure your model is doing the right thing computationally
is to generate simulated (i.e., “fake”) data with known parameter values, then see if
the model can recover these parameters from the data. If not, there is very little hope
that it will do the right thing with data from the wild.
There are fancier ways to do this, where you can do things like run χ2tests on
marginal statistics or follow the paradigm introduced in (Cook et al.,2006), which
involves interval tests.
564

65.7. Debug by Print
Although Stan does not have a stepwise debugger or any unit testing framework in
place, it does support the time-honored tradition of debug-by-printf.4
Stan supports print statements with one or more string or expression arguments.
Because Stan is an imperative language, variables can have different values at dif-
ferent points in the execution of a program. Print statements can be invaluable for
debugging, especially for a language like Stan with no stepwise debugger.
For instance, to print the value of variables yand z, use the following statement.
print("y=", y, " z=", z);
This print statement prints the string “y=” followed by the value of y, followed by the
string “ z=” (with the leading space), followed by the value of the variable z.
Each print statement is followed by a new line. The specific ASCII character(s)
generated to create a new line are platform specific.
Arbitrary expressions can be used. For example, the statement
print("1+1=", 1+1);
will print “1 + 1 = 2” followed by a new line.
Print statements may be used anywhere other statements may be used, but their
behavior in terms of frequency depends on how often the block they are in is eval-
uated. See Section 5.9 for more information on the syntax and evaluation of print
statements.
65.8. Comments
Code Never Lies
The machine does what the code says, not what the documentation says. Documen-
tation, on the other hand, might not match the code. Code documentation easily rots
as the code evolves if the documentation is not well maintained.
Thus it is always preferable to write readable code as opposed to documenting un-
readable code. Every time you write a piece of documentation, ask yourself if there’s
a way to write the code in such a way as to make the documentation unnecessary.
Comment Styles in Stan
Stan supports C++-style comments; see Section 2.3 for full details. The recommended
style is to use line-based comments for short comments on the code or to comment
4The “f” is not a typo — it’s a historical artifact of the name of the printf function used for formatted
printing in C.
565
out one or more lines of code. Bracketed comments are then reserved for long doc-
umentation comments. The reason for this convention is that bracketed comments
cannot be wrapped inside of bracketed comments.
What Not to Comment
When commenting code, it is usually safe to assume that you are writing the com-
ments for other programmers who understand the basics of the programming lan-
guage in use. In other words, don’t comment the obvious. For instance, there is no
need to have comments such as the following, which add nothing to the code.
y ~ normal(0, 1); // y has a unit normal distribution
A Jacobian adjustment for a hand-coded transform might be worth commenting, as
in the following example.
exp(y) ~ normal(0, 1);
// adjust for change of vars: y = log | d/dy exp(y) |
target += y;
It’s an art form to empathize with a future code reader and decide what they will or
won’t know (or remember) about statistics and Stan.
What to Comment
It can help to document variable declarations if variables are given generic names like
N,mu, and sigma. For example, some data variable declarations in an item-response
model might be usefully commented as follows.
int<lower=1> N; // number of observations
int<lower=1> I; // number of students
int<lower=1> J; // number of test questions
The alternative is to use longer names that do not require comments.
int<lower=1> n_obs;
int<lower=1> n_students;
int<lower=1> n_questions;
Both styles are reasonable and which one to adopt is mostly a matter of taste (mostly
because sometimes models come with their own naming conventions which should
be followed so as not to confuse readers of the code familiar with the statistical
conventions).
Some code authors like big blocks of comments at the top explaining the purpose
of the model, who wrote it, copyright and licensing information, and so on. The
following bracketed comment is an example of a conventional style for large comment
blocks.
566
/*
*Item-Response Theory PL3 Model
*-----------------------------------------------------
*Copyright: Joe Schmoe <joe@schmoe.com>
*Date: 19 September 2012
*License: GPLv3
*/
data {
// ...
The use of leading asterisks helps readers understand the scope of the comment. The
problem with including dates or other volatile information in comments is that they
can easily get out of synch with the reality of the code. A misleading comment or one
that is wrong is worse than no comment at all!
567

66. Software Development Lifecycle
This chapter describes the software development lifecycle (SDLC) for Stan, RStan,
CmdStan, and PyStan. The layout and content very closely follow the R regulatory
compliance and validation document (R Project,2014, Section 6).
66.1. Operational Overview
The development, release, and maintenance of Stan is a collaborative process involv-
ing the Stan development team. The team covers multiple statistical and computa-
tional disciplines and its members are based at both academic institutions and indus-
trial labs.
Communication among team members takes place in several venues. Most discus-
sions take place openly on the Stan developers group, often initiated by discussions
in the Stan users group.1The users and developers groups are archived and may be
read by anyone at any time. Communication that’s not suitable for the public, such
as grant funding, is carried out on a private group restricted to the core Stan develop-
ers. Further issue-specific discussion takes place concurrently with development and
source control.2Bigger design issues and discussions that should be preserved take
place on the project Wiki.3
The developers host a weekly videoconference during which project issues are
discussed and prioritized.4The developers also meet informally at their places of
employment (e.g., Columbia University) or at conferences and workshops when mul-
tiple team members are in attendance. The developers also host meetups for the
public in locations including London and New York.5
The Stan project employs standard software development, code review, and test-
ing methodologies, as described on the project Wiki pages and later in this chapter.
Stan’s C++ library and the CmdStan interface are released under the terms of the
new (3 clause) BSD license, with two dependent libraries (Boost and Eigen), released
under compatible libraries. The R interface RStan and Python interface PyStan are
released under the GPLv3 license. All of the code is hosted on public version control
repositories and may be reviewed at any time by all members of the Stan commu-
nity. This allows continuous feedback for both coding standards, functionality, and
1The groups are hosted by Google Groups, with information on reading and posting available from
http://mc-stan.org/groups.html.
2The issue tracker for feature requests and bug reports is hosted by GitHub. Full information on reading
and making issue requests is available from http://mc-stan.org/issues.html.
3The Wiki is hosted by GitHub; see https://github.com/stan-dev/stan/wiki.
4The weekly meetings are hosted on Google+. They are not recorded or stored.
5These meetings are organized through http://meetups.com. For example, meetings in New York are
organized through http://www.meetup.com/Stan-Users-NYC/.
568
statistical accuracy.
The size of the Stan community is difficult to estimate reliably because there are
no sales transactions and Stan’s version control distribution system (GitHub) does
not provide download statistics. There are over 950 users subscribed to the users
group, and a conservative estimate would put the number of users in the thousands.
This substantial user base provides the means to do continuous reviews of real-world
performance in real settings. Unlike proprietary software only available in binary
form, Stan’s open-source code base allows users to provide feedback at the code
level.
66.2. Source Code Management
The source code for Stan’s C++ library, CmdStan, PyStan, and RStan is managed in sep-
arate version-control libraries based on Git (Chacon and Straub,2014) and hosted by
GitHub under the GitHub organization stan-dev (https://github.com/stan-dev).
Push access (i.e., the ability to write to the repository) is restricted to core developers
and very closely managed. At the same time, any user may provide (and many users
have provided) pull requests with patches for the system (which are treated as any
other pull request and fully tested and code reviewed). Because of Git’s distributed
nature, everyone who clones a repository produces a full backup of the system and
all past versions.
The basic Git process for branching, releasing, hotfixing, and merging follows
standard Git procedure (Driessen,2010). A diagram outlining the process is presented
in Figure 66.1. The key idea is that the master branch is always at the latest release,
with older commits tagged for previous releases.
The development branch always represents the current state of development.
Feature and bugfix branches branch from the development branch. Before being
merged back into the development branch, they must be wrapped in a pull request
for GitHub, which supplies differences with current code and a forum for code re-
view and comment on the issue. All branches must have appropriate unit tests
and documentation as part of their pull request before they will be merged (see
https://github.com/stan-dev/stan/wiki/Pull-Request-Template for the pull
request template which all requests must follow). Each pull request must provide a
summary of the change, a detailed description of the intended effect (often coupled
with pointers to one or more issues on the issue tracker and one or more Wiki pages),
a description of how the change was tested and its effects can be verified, a descrip-
tion of any side effects, a description of any user-facing documentation changes, and
suggestions for reviewers.
Taken together, the testing, code review, and merge process ensures that the de-
velopment branch is always in a releasable state.
569
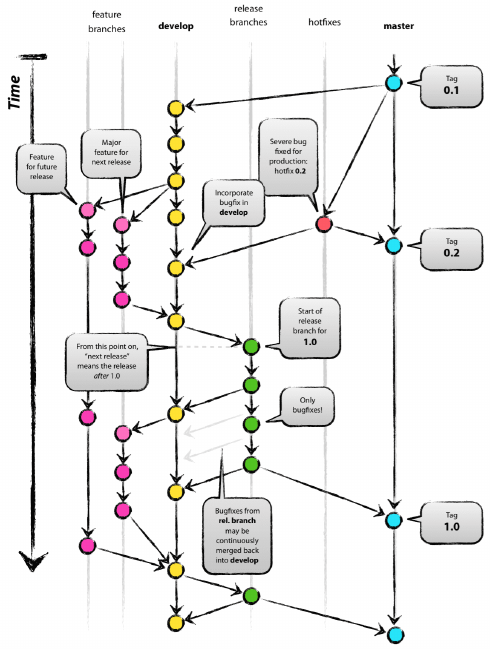
Figure 66.1: Git branching process for master and development branches. New features and
ordinary (not hot) bugfixes are developed in branches from and merged back into the develop-
ment branch. These are then collected into releases and merged with the master branch, which
tracks the releases. Hotfix branches are like feature or ordinary bugfix branches, but branch
from master and merge back into master. Image courtesy of (Driessen,2010).
570

Git itself provides extensive log facilities for comparing changes made in any given
commit (which has a unique ID under Git) with any other commit, including the cur-
rent development or master branch. GitHub provides further graphical facilities for
commentary and graphical differences.
For each release, the Git logs are scanned and a set of user-facing release notes
provided summarizing the changes. The full set of changes, including differences
with previous versions, is available through Git. These logs are complete back to
the first version of Stan, which was originally managed under the Subversion version
control system.
More information on the mechanics of the process are available from on the Wiki
page https://github.com/stan-dev/stan/wiki/Developer-Process.
66.3. Testing and Validation
Unit Testing
Stan C++, CmdStan, PyStan, and RStan are all extensively unit tested. The core C++
code and CmdStan code is tested directly in C++ using the Google test framework
Google (2011). PyStan is tested using the Python unit testing framework unittest6
(formerly called “PyTest”). RStan is tested using the RUnit package.7
The point of unit testing is to test the program at the application programmer
interface (API) level, not the end-to-end functional level.
The tests are run automatically when pull requests are created through a contin-
uous integration process. PyStan uses the Travis continuous integration framework;8
Stan C++ and CmdStan use Jenkins.9The continuous integration servers provide de-
tailed reports of the various tests they run and whether they succeeded or failed. If
they failed, console output is available pointing to the failed tests. The continuous
integration servers also provide graphs and charts summarizing ongoing and past
testing behavior.
Stan and its interfaces’ unit tests are all distributed with the system software
and may be run by users on their specific platform with their specific compilers and
configurations to provide support for the reliability of a particular installation of Stan.
As with any statistical software, users need to be careful to consider the appropri-
ateness of the statistical model, the ability to fit it with existing data, and its suitability
to its intended application.
The entire source repository is available to users. A snapshot at any given release
(or commit within a branch) may be downloaded as an archive (zip file) or may be
6See https://docs.python.org/3/library/unittest.html.
7See http://cran.r-project.org/web/packages/RUnit/index.html.
8See https://travis-ci.org for more on Travis.
9See http://jenkins-ci.org for more on Jenkins.
571

cloned for development under Git. Cloning in Git provides a complete copy of all
version history, including every commit to every branch since the beginning of the
project.
User feedback is accommodated through three channels. First, and most formally,
there is an issue tracker for each of Stan C++, CmdStan, RStan and PyStan, which
allows users to submit formal bug reports or make feature requests. Any user bug
report is reviewed by the development team, assessed for validity and reproducibility,
and assigned to a specific developer for a particular release target. A second route
for reporting bugs is our users group; bugs reported to the user group by users are
then submitted to the issue tracker by the developers and then put through the usual
process. A third method of bug reporting is informal e-mail or comments; like the
user group reports, these are channeled through the issue tracker by the developers
before being tackled.
Continuous integration is run on a combination of Windows, Mac OS X, and Linux
platforms. All core Stan C++ code is tested on Windows, Mac OS, and Linux before
release.
Functional Testing
In addition to unit testing at the individual function level, Stan undergoes rigorous
end-to-end testing of its model fitting functionality. Models with known answers
are evaluated for both speed and accuracy. Models without analytic solutions are
evaluated in terms of MCMC error.
66.4. Release Cycles
At various stages, typically when major new functionality has been added or a serious
bug has been fixed, the development branch is declared ready for release by the Stan
development team. At this point, the branch is tested one last time on all platforms
before being merged with the master branch. Releases are managed through GitHub
releases mechanism.10 Each release further bundles the manual and provides both a
zipped and tar-gzipped archive of the release.
Stan is released exclusively as source code, so nothing needs to be done with
respect to binary release management or compatibility. The source is tested so that
it can be used under Windows, Mac OS X, and Linux.
Instructions for installing Stan C++, CmdStan, RStan, and PyStan are managed
separately and distributed with the associated product.
10For example, releases for Stan C++ are available on https://github.com/stan-dev/stan/releases.
572
66.5. Versioning and Release Compatibility
Stan version numbers follow the standard semantic version numbering pattern in
which version numbers are of the form Major.Minor.Patch; for example version
2.9.1 is major release 2, minor release 9, and patch release 1. Semantic versioning
signals important information about features and compatibiltiy for the Stan language
and how it is used. It does not provide information about underlying implementation;
changes in implementation do not affect version numbering in and of itself.
See Appendix Efor a list of currently deprecated features and instructions on how
to upgrade them.
Major Version and Backward Compatiblity
A change in a library breaks backward compatibility if a program that worked in the
previous version no longer works the same way in the current version. For backward-
compatibility breaking changes, the major version number is incremented. When the
major version is updated, the minor version reverts to 0. Because breaking backward
compatibility is such a disturbance for users, there are very few major releases.
Minor Version and Forward Compatibility
A change in a library introduces a new feature if a program that works in the current
version will not work in a previous version; that is, it breaks forward compatibility.
When a version introduces a new feature without breaking backward compatibility, its
minor version number is incremented. Whenever the minor version is incremented,
the patch level reverts to 0. Most Stan releases increment the minor version.
Bug Fixes and Patch Releases
If a release does not add new functionality or break backward compatibility, only its
patch version is incremented. Patch releases of Stan are made when an important
bug is fixed before any new work is done. Because Stan keeps its development branch
clean, pending patches are easily rolled into minor releases.
66.6. Deprecating and Removing Features
Before a user-facing feature is removed from software, it is polite to deprecate it in
order to maintain backward compatibility and provide suggestions for upgrading. Ap-
pendix Eprovides a description of all of the deprecated features that are still available
in Stan and how to replace them with up-to-date features.
573
Eventually, deprecated features will be removed (aka retired). As explained in Sec-
tion 66.5, removing deprecated features requires a major version number increment.
Stan 3.0.0 will retire most if not all of the currently deprecated features.
66.7. Availability of Current and Historical Archive Versions
Current and older versions of Stan C++, CmdStan, RStan, and PyStan are available
through the GitHub pages for the corresponding repository. Official releases are bun-
dled as archives and available through GitHub’s releases (e.g., https://github.com/
stan-dev/stan/releases for Stan C++).
Any intermediate commit is also available through GitHub in one of two ways.
First, all of Stan (or CmdStan, RStan, or PyStan) may be downloaded by cloning the
repository, at which point a user has a complete record of the entire project’s commits
and branches. After first cloning a repository, it may be kept up to date using Git’s
pull command (available from the command-line or platform-specific graphical user
interfaces). An alternative delivery mechanism is as a zip archive of a snapshot of the
system.
66.8. Maintenance, Support, and Retirement
Stan support extends only to the most current release. Specifically, patches are not
backported to older versions.
Early fixes of bugs are available to users in the form of updated development
branches. Snapshots of the entire code base at every commit, including development
patches and official releases, are available from GitHub. Git itself may be used to
download a complete clone of the entire source code history at any time.
There is extensive documentation in the form of manuals available for the
Stan language and algorithms (http://mc-stan.org/manual.html), as well as
each of the interfaces, CmdStan (http://mc-stan.org/cmdstan.html), PyStan
(http://mc-stan.org/pystan.html), and RStan (http://mc-stan.org/cmdstan.
html). There is also an extensive suite of example models (http://mc-stan.org/
documentation) which may be used directly or modified by users. There is also a
fairly extensive set of Wiki pages geared toward developers (https://github.com/
stan-dev/stan/wiki).
Issue trackers for reporting bugs and requesting features are available
online for Stan C++ (https://github.com/stan-dev/stan/issues), CmdStan
(https://github.com/stan-dev/cmdstan/issues), RStan (https://github.com/
stan-dev/rstan/issues), and PyStan (https://github.com/stan-dev/pystan/
issues).
574
There is Stan users group and also a group for Stan developers that can be ac-
cessed online, in daily news digest form, or as an e-mail list (see http://mc-stan.
org/groups.html). The users group is where users can request support for instal-
lation issues, modeling issues, or performance/accuracy issues. These lists all come
with built-in search facilities through their host, Google Groups.
A number of books provide introductions to Stan, including Bayesian Data Anal-
ysis, 3rd Edition (Gelman et al.,2013) and Doing Bayesian Data Analysis, 2nd Edition
(Kruschke,2014). All of the examples from two other books have been translated to
Stan, Bayesian Cognitive Modeling: A Practical Course (Lee and Wagenmakers,2013),
The BUGS Book (Lunn et al.,2012), and Data Analysis Using Regression and Multilevel-
Hierarchical Models (Gelman and Hill,2007).
The major.minor.0 releases are maintained through patch releases major.minor.n
releases. At each new major.minor.0 release, prior versions are retired from support.
All efforts are focused on the current release. No further development or bug fixes are
made available for earlier versions. The earlier versions can still be accessed through
version control.
66.9. Qualified Personnel
The members of the Stan development team are drawn from multiple computational,
scientific, and statistical disciplines across academic, not-for-profit, and industrial
laboratories.
Most of Stan’s developers have Ph.D. degrees, some have Master’s degrees, and
some are currently enrolled as undergraduate or graduate students. All of the devel-
opers with advanced degrees have published extensively in peer reviewed journals.
Several have written books on statistics and/or computing. Many members of the core
development team were well known internationally outside of their contributions to
Stan. The group overall is widely acknowledged as leading experts in statistical com-
puting, software development, and applied statistics.
The managers of the development process have extensive industrial programming
experience and have designed or contributed to other software systems that are still
in production.
Institutions at which the members of the Stan development team hold appoint-
ments as of Stan release 2.17.0 include Columbia University, Adobe Creative Tech-
nologies Lab, University of Warwick, University of Toronto (Scarborough), Dartmouth
College, University of Washington, Lucidworks, CNRS (Paris), St. George’s, University
of London, University of Massachussetts (Amherst), Aalto University, and Novartis
Pharma.
575
66.10. Physical and Logical Security
The Stan project maintains its integration servers for Stan C++ and CmdStan on site at
Columbia University. The integration servers for Stan C++ and CmdStan are password
protected and run on isolated, standalone machines used only as integration servers.
The network is maintained by Columbia University’s Information Technology (CUIT)
group.
The integration server for PyStan is hosted by the Travis open-source continuous
integration project, and is password protected on an account basis.
The version control system is hosted by GitHub (http://github.com). Due to
Git’s distributed nature, each developer maintains a complete record of the entire
project’s commit history. Everything is openly available, but privileges to modify the
existing branches is restricted to the core developers. Any change to the code base is
easily reversed through Git.
The archived releases as well as clones of the full repositories are also managed
through GitHub.
Stan’s web pages are served by Pair, Inc. (http://pair.com) and are password
protected. The web pages are purely informational and nothing is distributed through
the web page.
Individual contributors work on their own personal computers or on compute
clusters at Columbia or elsewhere.
66.11. Disaster Recovery
The entire history of the Stan C++, CmdStan, RStan, and PyStan repositories is main-
tained on the GitHub servers as well as on each developer’s individual copy of the
repository. Specifically, each repository can be reconstituted from any of the core
developers’ machines.
576
67. Reproducibility
Floating point operations on modern computers are notoriously difficult to replicate
because the fundamental arithmetic operations, right down to the IEEE 754 encoding
level, are not fully specified. The primary problem is that the precision of operations
varies across different hardware platforms and software implementations.
Stan is designed to allow full reproducibility. However, this is only possible up to
the external constraints imposed by floating point arithmetic.
Stan results will only be exactly reproducible if all of the following components
are identical :
• Stan version
• Stan interface (RStan, PyStan, CmdStan) and version, plus version of interface
language (R, Python, shell)
• versions of included libraries (Boost and Eigen)
• operating system version
• computer hardware including CPU, motherboard and memory
• C++ compiler, including version, compiler flags, and linked libraries
• same configuration of call to Stan, including random seed, chain ID, initializa-
tion and data
It doesn’t matter if you use a stable release version of Stan or the version with a
particular Git hash tag. The same goes for all of the interfaces, compilers, and so on.
The point is that if any of these moving parts changes in some way, floating point
results may change.
Concretely, if you compile a single Stan program using the same CmdStan code
base, but changed the optimization flag (-O3 vs. -O2 or -O0), the two programs may
not return the identical stream of results. Thus it is very hard to guarantee repro-
ducibility on externally managed hardware, like in a cluster or even a desktop man-
aged by an IT department or with automatic updates turned on.
If, however, you compiled a Stan program today using one set of flags, took the
computer away from the internet and didn’t allow it to update anything, then came
back in a decade and recompiled the Stan program in the same way, you should get
the same results.
The data needs to be the same down to the bit level. For example, if you are
running in RStan, Rcpp handles the conversion between R’s floating point numbers
and C++ doubles. If Rcpp changes the conversion process or use different types, the
results are not guaranteed to be the same down to the bit level.
577
68. Contributed Modules
Stan is an open-source project and welcomes user contributions.
In order to reduce maintenance on the main trunk of Stan development and to
allow developer-specified licenses, contributed Stan modules are not distributed as
part of Stan itself.
68.1. Contributing a Stan Module
Developers who have a Stan module to contribute should contact the Stan developers
either through one of the following.
•stan-users mailing list:
https://groups.google.com/forum/?fromgroups#!forum/stan-users
• Stan e-mail:
mc.stanislaw@gmail.com
68.2. GitHub-Hosted Modules
The stan-dev organization on GitHub hosts contributed projects on GitHub. This is
also where the Stan developers will host works in progress. The full list of contributed
projects on GitHub for stan-dev is available at the following location.
https://github.com/stan-dev
Each contributed module on stan-dev’s GitHub space comes with its own doc-
umentation, indexed by the README.md file displayed on GitHub. Each contributed
module has its own licensing the terms of which are controlled by its developers. The
license for a contributed package and its dependencies can be found in a top-level
directory licenses/.
Emacs Stan Mode
Emacs Stan mode allows syntax highlighting and automatic indentation of Stan mod-
els in the Emacs text editor.
Repository: https://github.com/stan-dev/stan-mode
License: GPLv3
Authors: Jeffrey Arnold, Daniel Lee
579

69. Stan Program Style Guide
This chapter describes the preferred style for laying out Stan models. These are not
rules of the language, but simply recommendations for laying out programs in a text
editor. Although these recommendations may seem arbitrary, they are similar to
those of many teams for many programming languages. Like rules for typesetting
text, the goal is to achieve readability without wasting white space either vertically or
horizontally.
69.1. Choose a Consistent Style
The most important point of style is consistency. Consistent coding style makes it
easier to read not only a single program, but multiple programs. So when departing
from this style guide, the number one recommendation is to do so consistently.
69.2. Line Length
Line lengths should not exceed 80 characters.1This is a typical recommendation for
many programming language style guides because it makes it easier to lay out text
edit windows side by side and to view the code on the web without wrapping, easier
to view diffs from version control, etc. About the only thing that is sacrificed is laying
out expressions on a single line.
69.3. File Extensions
The recommended file extension for Stan model files is .stan. For Stan data dump
files, the recommended extension is .R, or more informatively, .data.R.
69.4. Variable Naming
The recommended variable naming is to follow C/C++ naming conventions, in which
variables are lowercase, with the underscore character (_) used as a separator. Thus it
is preferred to use sigma_y, rather than the run together sigmay, camel-case sigmaY,
or capitalized camel-case SigmaY. Even matrix variables should be lowercased.
1Even 80 characters may be too many for rendering in print; for instance, in this manual, the number of
code characters that fit on a line is about 65.
580
The exception to the lowercasing recommendation, which also follows the C/C++
conventions, is for size constants, for which the recommended form is a single up-
percase letter. The reason for this is that it allows the loop variables to match. So
loops over the indices of an M×Nmatrix awould look as follows.
for (m in 1:M)
for (n in 1:N)
a[m,n] = ...
69.5. Local Variable Scope
Declaring local variables in the block in which they are used aids in understanding
programs because it cuts down on the amount of text scanning or memory required
to reunite the declaration and definition.
The following Stan program corresponds to a direct translation of a BUGS model,
which uses a different element of mu in each iteration.
model {
real mu[N];
for (n in 1:N) {
mu[n] = alpha *x[n] + beta;
y[n] ~ normal(mu[n],sigma);
}
}
Because variables can be reused in Stan and because they should be declared locally
for clarity, this model should be recoded as follows.
model {
for (n in 1:N) {
real mu;
mu = alpha *x[n] + beta;
y[n] ~ normal(mu,sigma);
}
}
The local variable can be eliminated altogether, as follows.
model {
for (n in 1:N)
y[n] ~ normal(alpha *x[n] + beta, sigma);
}
There is unlikely to be any measurable efficiency difference between the last two
implementations, but both should be a bit more efficient than the BUGS translation.
581
Scope of Compound Structures with Componentwise Assignment
In the case of local variables for compound structures, such as arrays, vectors, or
matrices, if they are built up component by component rather than in large chunks, it
can be more efficient to declare a local variable for the structure outside of the block
in which it is used. This allows it to be allocated once and then reused.
model {
vector[K] mu;
for (n in 1:N) {
for (k in 1:K)
mu[k] = ...;
y[n] ~ multi_normal(mu,Sigma);
}
In this case, the vector mu will be allocated outside of both loops, and used a total of
Ntimes.
69.6. Parentheses and Brackets
Optional Parentheses for Single-Statement Blocks
Single-statement blocks can be rendered in one of two ways. The fully explicit brack-
eted way is as follows.
for (n in 1:N) {
y[n] ~ normal(mu,1);
}
The following statement without brackets has the same effect.
for (n in 1:N)
y[n] ~ normal(mu,1);
Single-statement blocks can also be written on a single line, as in the following exam-
ple.
for (n in 1:N) y[n] ~ normal(mu,1);
These can be much harder to read than the first example. Only use this style if the
statement is very simple, as in this example. Unless there are many similar cases, it’s
almost always clearer to put each sampling statement on its own line.
Conditional and looping statements may also be written without brackets.
The use of for loops without brackets can be dangerous. For instance, consider
this program.
582
for (n in 1:N)
z[n] ~ normal(nu,1);
y[n] ~ normal(mu,1);
Because Stan ignores whitespace and the parser completes a statement as eagerly as
possible (just as in C++), the previous program is equivalent to the following program.
for (n in 1:N) {
z[n] ~ normal(nu,1);
}
y[n] ~ normal(mu,1);
Parentheses in Nested Operator Expressions
The preferred style for operators minimizes parentheses. This reduces clutter in
code that can actually make it harder to read expressions. For example, the expres-
sion a+b*cis preferred to the equivalent a + (b *c) or (a + (b *c)). The
operator precedences and associativities are given in Figure 4.1.
Similarly, comparison operators can usually be written with minimal bracketing,
with the form y[n] > 0 || x[n] != 0 preferred to the bracketed form (y[n] > 0)
|| (x[n] != 0).
No Open Brackets on Own Line
Vertical space is valuable as it controls how much of a program you can see. The
preferred Stan style is as shown in the previous section, not as follows.
for (n in 1:N)
{
y[n] ~ normal(mu,1);
}
This also goes for parameters blocks, transformed data blocks, which should look as
follows.
transformed parameters {
real sigma;
...
}
69.7. Conditionals
Stan supports the full C++-style conditional syntax, allowing real or integer values to
act as conditions, as follows.
583
real x;
...
if (x) {
// executes if x not equal to 0
...
}
Explicit Comparisons of Non-Boolean Conditions
The preferred form is to write the condition out explicitly for integer or real values
that are not produced as the result of a comparison or boolean operation, as follows.
if (x != 0) ...
69.8. Functions
Functions are laid out the same way as in languages such as Java and C++. For exam-
ple,
real foo(real x, real y) {
return sqrt(x *log(y));
}
The return type is flush left, the parentheses for the arguments are adjacent to the
arguments and function name, and there is a space after the comma for arguments
after the first. The open curly brace for the body is on the same line as the function
name, following the layout of loops and conditionals. The body itself is indented;
here we use two spaces. The close curly brace appears on its own line. If function
names or argument lists are long, they can be written as
matrix
function_to_do_some_hairy_algebra(matrix thingamabob,
vector doohickey2) {
...body...
}
The function starts a new line, under the type. The arguments are aligned under each
other.
Function documentation should follow the Javadoc and Doxygen styles. Here’s an
example repeated from Section 24.7.
/**
*Return a data matrix of specified size with rows
*corresponding to items and the first column filled
584
*with the value 1 to represent the intercept and the
*remaining columns randomly filled with unit-normal draws.
*
*@param N Number of rows correspond to data items
*@param K Number of predictors, counting the intercept, per
*item.
*@return Simulated predictor matrix.
*/
matrix predictors_rng(int N, int K) {
...
The open comment is /**, asterisks are aligned below the first asterisk of the open
comment, and the end comment */is also aligned on the asterisk. The tags @param
and @return are used to label function arguments (i.e., parameters) and return values.
69.9. White Space
Stan allows spaces between elements of a program. The white space characters al-
lowed in Stan programs include the space (ASCII 0x20), line feed (ASCII 0x0A), carriage
return (0x0D), and tab (0x09). Stan treats all whitespace characters interchangeably,
with any sequence of whitespace characters being syntactically equivalent to a single
space character. Nevertheless, effective use of whitespace is the key to good program
layout.
Line Breaks Between Statements and Declarations
It is dispreferred to have multiple statements or declarations on the same line, as in
the following example.
transformed parameters {
real mu_centered; real sigma;
mu = (mu_raw - mean_mu_raw); sigma = pow(tau,-2);
}
These should be broken into four separate lines.
No Tabs
Stan programs should not contain tab characters. They are legal and may be used any-
where other whitespace occurs. Using tabs to layout a program is highly unportable
because the number of spaces represented by a single tab character varies depending
on which program is doing the rendering and how it is configured.
585

Two-Character Indents
Stan has standardized on two space characters of indentation, which is the standard
convention for C/C++ code. Another sensible choice is four spaces, which is the
convention for Java and Python. Just be consistent.
Space Between if and Condition
Use a space after ifs. For instance, use if (x < y) ..., not if(x < y) ....
No Space For Function Calls
There is no space between a function name and the function it applies to. For in-
stance, use normal(0,1), not normal (0,1).
Spaces Around Operators
There should be spaces around binary operators. For instance, use y[1] = x, not
y[1]=x, use (x + y) *znot (x+y)*z.
Breaking Expressions across Lines
Sometimes expressions are too long to fit on a single line. In that case, the recom-
mended form is to break before an operator,2aligning the operator to indicate scop-
ing. For example, use the following form (though not the content; inverting matrices
is almost always a bad idea).
target += (y - mu)' *inv(Sigma) *(y - mu);
Here, the multiplication operator (*) is aligned to clearly signal the multiplicands in
the product.
For function arguments, break after a comma and line the next argument up un-
derneath as follows.
y[n] ~ normal(alpha + beta *x + gamma *y,
pow(tau,-0.5));
2This is the usual convention in both typesetting and other programming languages. Neither R nor
BUGS allows breaks before an operator because they allow newlines to signal the end of an expression or
statement.
586
Optional Spaces after Commas
Optionally use spaces after commas in function arguments for clarity. For
example, normal(alpha *x[n] + beta,sigma) can also be written as
normal(alpha *x[n] + beta, sigma).
Unix Newlines
Wherever possible, Stan programs should use a single line feed character to separate
lines. All of the Stan developers (so far, at least) work on Unix-like operating systems
and using a standard newline makes the programs easier for us to read and share.
Platform Specificity of Newlines
Newlines are signaled in Unix-like operating systems such as Linux and Mac OS X
with a single line-feed (LF) character (ASCII code point 0x0A). Newlines are signaled
in Windows using two characters, a carriage return (CR) character (ASCII code point
0x0D) followed by a line-feed (LF) character.
587
Appendices
588

A. Licensing
Stan and its two dependent libraries, Boost and Eigen, are distributed under liberal
freedom-respecting1licenses approved by the Open Source Initiative.2
In particular, the licenses for Stan and its dependent libraries have no “copyleft”
provisions requiring applications of Stan to be open source if they are redistributed.
This chapter describes the licenses for the tools that are distributed with Stan.
The next chapter explains some of the build tools that are not distributed with Stan,
but are required to build and run Stan models.
A.1. Stan’s License
Stan is distributed under the BSD 3-clause license (BSD New).
http://www.opensource.org/licenses/BSD-3-Clause
The copyright holder of each contribution is the developer or his or her assignee.3
A.2. Boost License
Stan uses the Boost library for template metaprograms, traits programs, the parser,
and various numerical libraries for special functions, probability functions, and ran-
dom number generators. Boost is distributed under the Boost Software License ver-
sion 1.0.
http://www.opensource.org/licenses/BSL-1.0
The copyright for each Boost package is held by its developers or their assignees.
A.3. Eigen License
Stan uses the Eigen library for matrix arithmetic and linear algebra. Eigen is dis-
tributed under the Mozilla Public License, version 2.
http://opensource.org/licenses/mpl-2.0
The copyright of Eigen is owned jointly by its developers or their assignees.
1The link http://www.gnu.org/philosophy/open-source-misses-the-point.html leads to a dis-
cussion about terms “open source” and “freedom respecting.”
2See http://opensource.org.
3Universities or companies often own the copyright of computer programs developed by their employ-
ees.
589
A.4. SUNDIALS License
Stan uses the SUNDIALS package for solving stiff differential equations. SUNDIALS is
distributed under the new BSD (3-clause) license.
https://opensource.org/licenses/BSD-3-Clause
The copyright of SUNDIALS is owned by Lawrence Livermore National Security.
A.5. Google Test License
Stan uses Google Test for unit testing; it is not required to compile or execute models.
Google Test is distributed under the new BSD (3-clause) license.
https://opensource.org/licenses/BSD-3-Clause
The copyright of Google Test is owned by Google, Inc.
590

B. Stan for Users of BUGS
From the outside, Stan and BUGS1are similar — they use statistically-themed
modeling languages (which are similar but with some differences; see below), they can
be called from R, running some specified number of chains to some specified length,
producing posterior simulations that can be assessed using standard convergence
diagnostics. This is not a coincidence: in designing Stan, we wanted to keep many of
the useful features of Bugs.
To start, take a look at the files of translated BUGS models at http://mc-stan.
org/. These are 40 or so models from the BUGS example volumes, all translated and
tested (to provide the same answers as BUGS) in Stan. For any particular model you
want to fit, you can look for similar structures in these examples.
B.1. Some Differences in How BUGS and Stan Work
• BUGS is interpreted; Stan is compiled in two steps, first a model is is translated
to templated C++ and then to a platform-specific executable. Stan, unlike BUGS,
allows the user to directly program in C++, but we do not describe how to
do this in this Stan manual (see the getting started with C++ section of http:
//mc-stan.org for more information on using Stan directly from C++).
• BUGS performs MCMC updating one scalar parameter at a time (with some ex-
ceptions such as JAGS’s implementation of regression and generalized linear
models and some conjugate multivariate parameters), using conditional distri-
butions (Gibbs sampling) where possible and otherwise using adaptive rejection
sampling, slice sampling, and Metropolis jumping. BUGS figures out the depen-
dence structure of the joint distribution as specified in its modeling language
and uses this information to compute only what it needs at each step. Stan
moves in the entire space of all the parameters using Hamiltonian Monte Carlo
(more precisely, the no-U-turn sampler), thus avoiding some difficulties that oc-
cur with one-dimension-at-a-time sampling in high dimensions but at the cost
of requiring the computation of the entire log density at each step.
• BUGS tunes its adaptive jumping (if necessary) during its warmup phase (tra-
ditionally referred to as "burn-in"). Stan uses its warmup phase to tune the
no-U-turn sampler (NUTS).
• The BUGS modeling language is not directly executable. Rather, BUGS parses
its model to determine the posterior density and then decides on a sampling
1Except where otherwise noted, we use “BUGS” to refer to WinBUGS, OpenBUGS, and JAGS, indiscrimi-
nately.
591
scheme. In contrast, the statements in a Stan model are directly executable:
they translate exactly into C++ code that is used to compute the log posterior
density (which in turn is used to compute the gradient).
• In BUGS, the order in which statements are written does not matter. They are
executed according to the directed graphical model so that variables are always
defined when needed. A side effect of the direct execution of Stan’s modeling
language is that statements execute in the order in which they are written. For
instance, the following Stan program, which sets mu before using it to sample y.
mu=a+b*x;
y ~ normal(mu,sigma);
It translates to the following C++ code.
mu=a+b*x;
lp += normal_log(mu,sigma);
Contrast this with the Stan program
y ~ normal(mu,sigma)
mu=a+b*x
This program is well formed, but is almost certainly a coding error, because it
attempts to use mu before it is set. It translates to the following C++ code.
lp += normal_log(mu,sigma);
mu=a+b*x;
The direct translation to the imperative language of C++ code highlights the po-
tential error of using mu in the first statement.
To trap these kinds of errors, variables are initialized to the special not-a-
number (NaN) value. If NaN is passed to a log probability function, it will raise a
domain exception, which will in turn be reported by the sampler. The sampler
will reject the sample out of hand as if it had zero probability.
• Stan uses its own C++ algorithmic differentiation packages to compute the gra-
dient of the log density (up to a proportion). Gradients are required during the
Hamiltonian dynamics simulations within the leapfrog algorithm of the Hamil-
tonian Monte Carlo and NUTS samplers. BUGS computes the log density but not
its gradient.
• Both BUGS and Stan are semi-automatic in that they run by themselves with
no outside tuning required. Nevertheless, the user needs to pick the number
592
of chains and number of iterations per chain. We usually pick 4 chains and
start with 10 iterations per chain (to make sure there are no major bugs and
to approximately check the timing), then go to 100, 1000, or more iterations
as necessary. Compared to Gibbs or Metropolis, Hamiltonian Monte Carlo can
take longer per iteration (as it typically takes many "leapfrog steps" within each
iteration), but the iterations typically have lower autocorrelation. So Stan might
work fine with 1000 iterations in an example where BUGS would require 100,000
for good mixing. We recommend monitoring potential scale reduction statistics
(ˆ
R) and the effective sample size to judge when to stop (stopping when ˆ
Rvalues
do not counter-indicate convergence and when enough effective samples have
been collected).
• WinBUGS is closed source. OpenBUGS and JAGS are both licensed under the
Gnu Public License (GPL), otherwise known as copyleft due to the restrictions it
places on derivative works. Stan is licensed under the much more liberal new
BSD license.
• Like WinBUGS, OpenBUGS and JAGS, Stan can be run directly from the command
line or through R (Python and MATLAB interfaces are in the works)
• Like OpenBUGS and JAGS, Stan can be run on Linux, Mac, and Windows plat-
forms.
B.2. Some Differences in the Modeling Languages
• The BUGS modeling language follows an R-like syntax in which line breaks are
meaningful. Stan follows the rules of C, in which line breaks are equivalent to
spaces, and each statement ends in a semicolon. For example:
y ~ normal(mu, sigma);
and
for (i in 1:n) y[i] ~ normal(mu, sigma);
Or, equivalently (recall that a line break is just another form of whitespace),
for (i in 1:n)
y[i] ~ normal(mu, sigma);
and also equivalently,
for (i in 1:n) {
y[i] ~ normal(mu, sigma);
}
593
There’s a semicolon after the model statement but not after the brackets indi-
cating the body of the for loop.
• Another C thing: In Stan, variables can have names constructed using letters,
numbers, and the underscore (_) symbol, but nothing else (and a variable name
cannot begin with a number). BUGS variables can also include the dot, or period
(.) symbol.
• In Stan, the second argument to the "normal" function is the standard devia-
tion (i.e., the scale), not the variance (as in Bayesian Data Analysis) and not the
inverse-variance (i.e., precision) (as in BUGS). Thus a normal with mean 1 and
standard deviation 2 is normal(1,2), not normal(1,4) or normal(1,0.25).
• Similarly, the second argument to the "multivariate normal" function is the co-
variance matrix and not the inverse covariance matrix (i.e., the precision matrix)
(as in BUGS). The same is true for the "multivariate student" distribution.
• The distributions have slightly different names:
BUGS Stan
dnorm normal
dbinom binomial
dpois poisson
.
.
..
.
.
• Stan, unlike BUGS, allows intermediate quantities, in the form of local variables,
to be reassigned. For example, the following is legal and meaningful (if possibly
inefficient) Stan code.
{
total = 0;
for (i in 1:n){
theta[i] ~ normal(total, sigma);
total = total + theta[i];
}
}
In BUGS, the above model would not be legal because the variable total is
defined more than once. But in Stan, the loop is executed in order, so total is
overwritten in each step.
• Stan uses explicit declarations. Variables are declared with base type integer or
real, and vectors, matrices, and arrays have specified dimensions. When vari-
ables are bounded, we give that information also. For data and transformed
594

parameters, the bounds are used for error checking. For parameters, the con-
straints are critical to sampling as they determine the geometry over which the
Hamiltonian is simulated.
Variables can be declared as data, transformed data, parameters, transformed
parameters, or generated quantities. They can also be declared as local vari-
ables within blocks. For more information, see the part of this manual devoted
to the Stan programming language and examine at the example models.
• Stan allows all sorts of tricks with vector and matrix operations which can make
Stan models more compact. For example, arguments to probability functions
may be vectorized,2allowing
for (i in 1:n)
y[i] ~ normal(mu[i], sigma[i]);
to be expressed more compactly as
y ~ normal(mu,sigma);
The vectorized form is also more efficient because Stan can unfold the compu-
tation of the chain rule during algorithmic differentiation.
• Stan also allows for arrays of vectors and matrices. For example, in a hierarchi-
cal model might have a vector of Kparameters for each of Jgroups; this can be
declared using
vector[K] theta[J];
Then theta[j] is an expression denoting a K-vector and may be used in the
code just like any other vector variable.
An alternative encoding would be with a two-dimensional array, as in
real theta[J,K];
The vector version can have some advantages, both in convenience and in com-
putational speed for some operations.
A third encoding would use a matrix:
matrix[J,K] theta;
2Most distributions have been vectorized, but currently the truncated versions may not exist and may
not be vectorized.
595
but in this case, theta[j] is a row vector, not a vector, and accessing it as a
vector is less efficient than with an array of vectors. The transposition operator,
as in theta[j]’, may be used to convert the row vector theta[j] to a (column)
vector. Column vector and row vector types are not interchangeable everywhere
in Stan; see the function signature declarations in the programming language
section of this manual.
• Stan supports general conditional statements using a standard if-else syntax.
For example, a zero-inflated (or -deflated) Poisson mixture model is defined
using the if-else syntax as described in Section 13.7.
• Stan supports general while loops using a standard syntax. While loops give
Stan full Turing equivalent computational power. They are useful for defining
iterative functions with complex termination conditions. As an illustration of
their syntax, the for-loop
model {
....
for (n in 1:N) {
... do something with n ....
}
}
may be recoded using the following while loop.
model {
int n;
...
n = 1;
while (n <= N) {
... do something with n ...
n=n+1;
}
}
B.3. Some Differences in the Statistical Models that are Allowed
• Stan does not yet support estimation of discrete parameters (discrete data is
supported). We may eventually implement a combination of Gibbs and slice
sampling for discrete parameters, but we haven’t done so yet.
• Stan has some distributions on covariance matrices that do not exist in BUGS, in-
cluding a uniform distribution over correlation matrices which may be rescaled,
596
and the priors based on C-vines defined in (Lewandowski et al.,2009). In par-
ticular, the Lewandowski et al. prior allows the correlation matrix to be shrunk
toward the unit matrix while the scales are given independent priors.
• In BUGS you need to define all variables. In Stan, if you declare but don’t define
a parameter it implicitly has a flat prior (on the scale in which the parameter is
defined). For example, if you have a parameter pdeclared as
real<lower=0,upper=1> p;
and then have no sampling statement for pin the model block, then you are
implicitly assigning a uniform [0,1]prior on p. On the other hand, if you have
a parameter theta declared with
real theta;
and have no sampling statement for theta in the model block, then you are
implicitly assigning an improper uniform prior on (−∞,∞)to theta.
• BUGS models are always proper (being constructed as a product of proper
marginal and conditional densities). Stan models can be improper. Here is
the simplest improper Stan model:
parameters {
real theta;
}
model { }
• Although parameters in Stan models may have improper priors, we do not want
improper posterior distributions, as we are trying to use these distributions for
Bayesian inference. There is no general way to check if a posterior distribution
is improper. But if all the priors are proper, the posterior will be proper also.
• As noted earlier, each statement in a Stan model is directly translated into the
C++ code for computing the log posterior. Thus, for example, the following pair
of statements is legal in a Stan model:
y ~ normal(0,1);
y ~ normal(2,3);
The second line here does not simply overwrite the first; rather, both statements
contribute to the density function that is evaluated. The above two lines have
the effect of including the product, Norm(y|0,1)×Norm(y|2,3), into the density
function.
For a perhaps more confusing example, consider the following two lines in a
Stan model:
597
x ~ normal(0.8*y, sigma);
y ~ normal(0.8*x, sigma);
At first, this might look like a joint normal distribution with a correlation of
0.8. But it is not. The above are not interpreted as conditional entities; rather,
they are factors in the joint density. Multiplying them gives, Norm(x|0.8y, σ ) ×
Norm(y|0.8x, σ ), which is what it is (you can work out the algebra) but it is not
the joint distribution where the conditionals have regressions with slope 0.8.
• With censoring and truncation, Stan uses the censored-data or truncated-data
likelihood—this is not always done in BUGS. All of the approaches to censoring
and truncation discussed in (Gelman et al.,2013) and (Gelman and Hill,2007)
may be implemented in Stan directly as written.
• Stan, like BUGS, can benefit from human intervention in the form of reparame-
terization. More on this topic to come.
B.4. Some Differences when Running from R
• Stan can be set up from within R using two lines of code. Follow the instruc-
tions for running Stan from R on http://mc-stan.org/. You don’t need to
separately download Stan and RStan. Installing RStan will automatically set up
Stan. When RStan moves to CRAN, it will get even easier.
• In practice we typically run the same Stan model repeatedly. If you pass RStan
the result of a previously fitted model the model will not need be recom-
piled. An example is given on the running Stan from R pages available from
http://mc-stan.org/.
• When you run Stan, it saves various conditions including starting values, some
control variables for the tuning and running of the no-U-turn sampler, and the
initial random seed. You can specify these values in the Stan call and thus
achieve exact replication if desired. (This can be useful for debugging.)
• When running BUGS from R, you need to send exactly the data that the model
needs. When running RStan, you can include extra data, which can be helpful
when playing around with models. For example, if you remove a variable xfrom
the model, you can keep it in the data sent from R, thus allowing you to quickly
alter the Stan model without having to also change the calling information in
your R script.
598
• As in R2WinBUGS and R2jags, after running the Stan model, you can quickly
summarize using plot() and print(). You can access the simulations them-
selves using various extractor functions, as described in the RStan documenta-
tion.
• Various information about the sampler, such as number of leapfrog steps, log
probability, and step size, is available through extractor functions. These can
be useful for understanding what is going wrong when the algorithm is slow to
converge.
B.5. The Stan Community
• Stan, like WinBUGS, OpenBUGS, and JAGS, has an active community, which
you can access via the user’s mailing list and the developer’s mailing list; see
http://mc-stan.org/ for information on subscribing and posting and to look
at archives.
599
C. Modeling Language Syntax
This chapter defines the basic syntax of the Stan modeling language using a Backus-
Naur form (BNF) grammar plus extra-grammatical constraints on function typing and
operator precedence and associativity.
C.1. BNF Grammars
Syntactic Conventions
In the following BNF grammars, literal strings are indicated in single quotes ('). Gram-
mar non-terminals are unquoted strings. A prefix question mark (?A) indicates op-
tionality of A. A postfixed Kleene star (A*) indicates zero or more occurrences of A.
The notation A%B, following the Boost Spirit parser library’s notation, is shorthand
for ?(A (B A)*), i.e., any number of A(including zero), separated by B. A postfixed,
curly-braced number indicates a fixed number of repetitions; e.g., A{6} is equivalent
to a sequence of six copies of A.
Programs
program ::= ?functions ?data ?tdata ?params ?tparams model ?generated
functions ::= 'functions' function_decls
data ::= 'data' var_decls
tdata ::= 'transformed data' var_decls_statements
params ::= 'parameters' var_decls
tparams ::= 'transformed parameters' var_decls_statements
model ::= 'model' statement
generated ::= 'generated quantities' var_decls_statements
function_decls ::= '{' function_decl*'}'
var_decls ::= '{' var_decl*'}'
var_decls_statements ::= '{' var_decl*statement*'}'
Function Declarations
function_decl ::= unsized_return_type identifier '(' unsized_types ')'
statement
unsized_return_type ::= 'void' | unsized_type
unsized_type ::= (basic_type ?unsized_dims)
unsized_types ::= unsized_type % ','
600
basic_type ::= 'int' | 'real' | 'vector' | 'row_vector' | 'matrix'
unsized_dims ::= '[' ','*']'
Variable Declarations
var_decl ::= var_type variable ?dims ?('=' expression) ';'
var_type ::= 'int' range_constraint
| 'real' range_constraint
| 'vector' range_constraint '[' expression ']'
| 'ordered' '[' expression ']'
| 'positive_ordered' '[' expression ']'
| 'simplex' '[' expression ']'
| 'unit_vector' '[' expression ']'
| 'row_vector' range_constraint '[' expression ']'
| 'matrix' range_constraint '[' expression ',' expression ']'
| 'cholesky_factor_corr' '[' expression ']'
| 'cholesky_factor_cov' '[' expression ?(',' expression) ']'
| 'corr_matrix' '[' expression ']'
| 'cov_matrix' '[' expression ']'
range_constraint ::= ?('<' range '>')
range ::= 'lower' '=' expression ',' 'upper' = expression
| 'lower' '=' expression
| 'upper' '=' expression
dims ::= '[' expressions ']'
variable ::= identifier
identifier ::= [a-zA-Z] [a-zA-Z0-9_]*
Expressions
expressions ::= expression % ','
expression ::= numeric_literal
| variable
| '{' expressions '}'
| expression `?` expression `:` expression
| expression infixOp expression
| prefixOp expression
| expression postfixOp
| expression '[' indexes ']'
601
| function_literal '(' ?expressions ')'
| function_literal '(' expression ?('|' expression % ',') ')'
| integrate_ode '(' function_literal (',' expression){6} ')'
| integrate_ode_rk45
'(' function_literal (',' expression){6|9} ')'
| integrate_ode_bdf
'(' function_literal (',' expression){6|9} ')'
| algebra_solver
'('function_literal (',' expression){4|7} ')'
| '(' expression ')'
index ::= ?(expression | expression ':' | ':' expression
| expression ':' expression)
indexes ::= index % ','
numeric_literal ::= integer_literal | real_literal
integer_literal ::= 0 | [1-9] [0-9]*
real_literal ::= integer_literal ?('.' [0-9]*) ?exp_literal
exp_literal ::= ('e' | 'E') integer_literal
function_literal ::= identifier
Statements
statement ::= atomic_statement | nested_statement
atomic_statement ::= atomic_statement_body ';'
atomic_statement_body
::= lhs assignment_op expression
| expression '~' identifier '(' expressions ')' ?truncation
| function_literal '(' expressions ')'
| 'increment_log_prob' '(' expression ')'
| 'target' '+=' expression
| 'break'
| 'continue'
| 'print' '(' (expression | string_literal)*')'
| 'reject' '(' (expression | string_literal)*')'
| 'return' expression
| ''
602
assignment_op ::= '<-' | '=' | '+=' | '-=' | '*=' | '/=' | '.*=' | '/*='
string_literal ::= '"' char*'"'
truncation ::= 'T' '[' ?expression ',' ?expression ']'
lhs ::= identifier ?('[' indexes ']')
nested_statement
::=
| 'if' '(' expression ')' statement
('else' 'if' '(' expression ')' statement)*
?('else' statement)
| 'while' '(' expression ')' statement
| 'for' '(' identifier 'in' expression ':' expression ')' statement
| '{' var_decl*statement+ '}'
C.2. Extra-Grammatical Constraints
Type Constraints
A well-formed Stan program must satisfy the type constraints imposed by functions
and distributions. For example, the binomial distribution requires an integer total
count parameter and integer variate and when truncated would require integer trun-
cation points. If these constraints are violated, the program will be rejected during
parsing with an error message indicating the location of the problem. For information
on argument types, see Part VII.
Operator Precedence and Associativity
In the Stan grammar provided in this chapter, the expression 1+2*3has two
parses. As described in Section 4.5, Stan disambiguates between the meaning 1+(2×
3)and the meaning (1+2)×3based on operator precedences and associativities.
Typing of Compound Declaration and Definition
In a compound variable declaration and definition, the type of the right-hand side
expression must be assignable to the variable being declared. The assignability con-
straint restricts compound declarations and definitions to local variables and vari-
ables declared in the transformed data, transformed parameters, and generated quan-
tities blocks.
603
Typing of Array Expressions
The types of expressions used for elements in array expressions
('{' expressions '}') must all be of the same type or a mixture of int and
real types (in which case the result is promoted to be of type real).
Forms of Numbers
Integer literals longer than one digit may not start with 0 and real literals cannot
consist of only a period or only an exponent.
Conditional Arguments
Both the conditional if-then-else statement and while-loop statement require the ex-
pression denoting the condition to be a primitive type, integer or real.
Print Arguments
The arguments to a print statement cannot be void.
Only Break and Continue in Loops
The break and continue statements may only be used within the body of a for-loop
or while-loop.
PRNG Function Locations
Functions ending in _rng may only be called in the transformed data and generated
quantities block, and within the bodies of user-defined functions with names ending
in _rng.
Probability Function Naming
A probability function literal must have one of the following suffixes: _lpdf,_lpmf,
_lcdf, or _lccdf.
Algebraic Solver Argument Types and Origins
The algebra_solver function may be used without control parameters; in this case
• its first argument refers to a function with signature
( vector, vector, real[], int[]) : vector,
604
• the remaining four arguments must be assignable to types
vector,vector,real[],int[]
respectively and
• the second, fourth, and fifth arguments must be expressions containing only
variables originating from the data or transformed data blocks.
The algebra_solver function may accept three additional arguments, which like
the second, fourth, and fifth arguments, must be expressions free of parameter ref-
erences. The final free arguments must be assignable to types
real,real,int
ODE Solver Argument Types and Origins
The integrate_ode,integrate_ode_rk45, and integrate_ode_bdf functions may
be used without control parameters; in this case
• its first argument to refer to a function with signature
(real, real[], real[], real[], int[]) : real[],
• the remaining six arguments must assignable to types
real[],real,real[],real[],real[], and int[]
respectively, and
• the third, fourth, and sixth arguments must be expressions not containing any
variables not originating in the data or transformed data blocks.
The integrate_ode_rk45 and integrate_ode_bdf functions may accept three ad-
ditional arguments, which like the third, fourth, and sixth arguments, must be expres-
sions free of parameter references. The final three arguments must be assignable to
types
real,real,int.
Indexes
Standalone expressions used as indexes must denote either an integer (int) or an
integer array (int[]). Expressions participating in range indexes (e.g., aand bin
a:b) must denote integers (int).
605
A second condition is that there not be more indexes provided than dimensions
of the underlying expression (in general) or variable (on the left side of assignments)
being indexed. A vector or row vector adds 1 to the array dimension and a matrix
adds 2. That is, the type matrix[ , , ], a three-dimensional array of matrices, has five
index positions: three for the array, one for the row of the matrix and one for the
column.
606
D. Warning and Error Messages
This appendix details the specific error messages returned by the underlying Stan
engine. The individual Stan interfaces (RStan, PyStan, CmdStan) also return error or
warning messages in some circumstances.
D.1. Warnings vs. Errors
The messages returned by Stan come in two flavors, warnings and errors. Error mes-
sages arise when a fatal problem occurs under the hood from which there is no way
to recover. Warning messages arise in circumstances from which the underlying pro-
gram can continue to operate.
An example warning message is an informational message about ill-formed input
to an underlying function, which results in a Metropolis rejection during sampling or
a reduction in step size for optimization, without causing a fatal error. An example
error message is when either sampling or optimization cannot find a region of non-
zero probability or when a program being parsed is ill formed. When an error arises,
whatever program is running cannot continue and the entire execution must halt.
D.2. Parsing and Compilation
Both warning messages and error messages may arise during parsing. If a Stan pro-
gram parses successfully, it should compile in C++ as well. If it does not compile,
there is an underlying bug in Stan’s parser and C++ code generator.
•Jacobian may be necessary. This message arises when the parser cannot verify
that the left-hand side of a sampling statement is a linear function of a pa-
rameter. If it is not a linear function of the parameters, a Jacobian adjustment
must be applied. See Chapter 22 for more information on how to adjust for the
Jacobian of a non-linear transform
D.3. Initialization
•vanishing density. This message arises when there is a problem with initializa-
tion not providing a finite log probability.
D.4. Function Evaluation
•informational message. This message shows up during sampling when there is
a rejected sample due to an underlying issue with input to an underlying func-
607
tion (including probably functions and sampling statements). This is a warning
message, not an error message. If it only appears at the beginning of warmup
in MCMC or during early iterations of optimization, it indicates that adapta-
tion has not yet found appropriate scales for the parameters and an appropri-
ate overall stepsize. This causes problem like overflow or underflow and thus
causes illegal inputs to be passed to functions. Even if this message persists
during sampling, the Metropolis acceptance step will account for the problem
and the parameter values being evaluated will be rejected. This can lead to inef-
ficiency in the best case and lack of ability to make progress in the worst case.
In cases where the message persists, it is worth investigating the arithmetic sta-
bility of the Stan program. There are several tips in this manual and in the user
group about how to rewrite problematic programs.
608
E. Deprecated Features
This appendix lists currently deprecated functionality. These deprecated features are
likely to be removed in the next major release. Section 66.6 describes the deprecation
process. The rest of this appendix lists deprecated functionality and how to upgrade
it.
E.1. Assignment with <-
Deprecated The deprecated syntax uses the operator <- for assignment, e.g.,
a <- b;
Replacement The new syntax uses the operator =for assignment, e.g.,
a = b;
E.2. increment_log_prob Statement
Deprecated The deprecated syntax for incrementing the log density accumulator by
uis
increment_log_prob(u);
If uis an expression of real type, the underlying log density accumulator is
incremented by u; if uis a container, the underlying log density is incremented
with each element.
Replacement Replace the above statement with
target += u;
E.3. lp__ Variable
Deprecated The variable lp__ is available wherever log density increment statements
are allowed (target += and ~shorthand statements).
Replacement General manipulation of lp__ is not allowed, but
lp__ <- lp__ + e;
can be replaced with
target += e;
The value of lp__ is available through the no-argument function target().
609
E.4. get_lp() Function
Deprecated The no-argument function get_lp() is deprecated.
Replacement Use the no-argument function target() instead.
E.5. _log Density and Mass Functions
Deprecated The probability function for the distribution foo will be applied to an
outcome variable yand sequence of zero or more parameters ... to produce
the expression foo_log(y, ...).
Replacement If ycan be a real value (including vectors or matrices), replace
foo_log(y, ...)
with the log probability density function notation
foo_lpdf(y | ...).
If ymust be an integer (including arrays), instead replace
foo_log(y, ...
with the log probability mass function
foo_lpmf(y | ...).
E.6. cdf_log and ccdf_log Cumulative Distribution Functions
Deprecated The log cumulative distribution and complementary cumulative distri-
bution functions for a distribution foo are currently written as foo_cdf_log
and foo_ccdf_log.
Replacement Replace foo_cdf_log(y, ...) with foo_lcdf(y | ...).
Replace foo_ccdf_log(y, ...) with foo_lccdf(y | ...).
E.7. multiply_log and binomial_coefficient_log Functions
Deprecated Currently two non-conforming functions ending in suffix _log.
Replacement Replace multiply_log(...) with lmultiply(...).
Replace binomial_coefficient_log(...) with lchoose(...).
610
E.8. User-Defined Function with _log Suffix
Deprecated A user-defined function ending in _log can be used in sampling state-
ments, with
y ~ foo(...);
having the same effect as
target += foo_log(y, ...);
Replacement Replace the _log suffix with _lpdf for density functions or _lpmf for
mass functions in the user-defined function.
E.9. lkj_cov Distribution
Deprecated The distribution lkj_cov is deprecated.
Replacement Replace lkj_cov_log(...) with an lkj_corr distribution on the cor-
relation matrix and independent lognormal distributions on the scales. That is,
replace
cov_matrix[K] Sigma;
...
Sigma ~ lkj_cov(mu, tau, eta);
with
corr_matrix[K] Omega;
vector<lower=0>[K] sigma;
...
Omega ~ lkj_corr(eta);
sigma ~ lognormal(mu, tau);
...
cov_matrix[K] Sigma;
Sigma <- quad_form_diag(Omega, sigma);
The variable Sigma may be defined as a local variable in the model block or as a
transformed parameter. An even more efficient transform would use Cholesky
factors rather than full correlation matrix types.
611
E.10. if_else Function
Deprecated The function if_else is deprecated. This function takes three argu-
ments a,b, and c, where ais an int value and band care scalars. It returns b
if ais non-zero and cotherwise.
Replacement Use the conditional operator which allows more flexibility in the types
of band cand is much more efficient in that it only evaluates whichever of
bor cis returned. See Section 4.6 for full details of the conditional operator.
Replace
x = if_else(a,b,c);
with
x=a?b:c;
E.11. #Comments
Deprecated The use of #for line-based comments is deprecated. From the first oc-
currence of #onward, the rest of the line is ignored. This happens after includes
are resolved starting with #include.
Replacement Use a pair of forward slashes, //, for line comments. See Section 2.3.
612

F. Mathematical Functions
This appendix provides the definition of several mathematical functions used
throughout the manual.
F.1. Beta
The beta function, B(α, β), computes the normalizing constant for the beta distribu-
tion, and is defined for a > 0and b > 0by
B(a, b) =Z1
0
ua−1(1−u)b−1du =Γ(a) Γ(b)
Γ(a +b) .
F.2. Incomplete Beta
The incomplete beta function, B(x;a, b), is defined for x∈[0,1]and a, b ≥0such
that a+b≠0by
B(x;a, b) =Zx
0
ua−1(1−u)b−1du,
where B(a, b) is the beta function defined in Section F.1. If x=1, the incomplete beta
function reduces to the beta function, B(1;a, b) =B(a, b).
The regularized incomplete beta function divides the incomplete beta function by
the beta function,
Ix(a, b) =B(x;a, b)
B(a, b) .
F.3. Gamma
The gamma function, Γ(x), is the generalization of the factorial function to continu-
ous variables, defined so that for positive integers n,
Γ(n +1)=n!
Generalizing to all positive numbers and non-integer negative numbers,
Γ(x) =Z∞
0
ux−1exp(−u) du.
613

F.4. Digamma
The digamma function Ψis the derivative of the log Γfunction,
Ψ(u) =d
du log Γ(u) =1
Γ(u)
d
du Γ(u).
614
Bibliography
Aguilar, O. and West, M. (2000). Bayesian dynamic factor models and portfolio alloca-
tion. Journal of Business & Economic Statistics, 18(3):338–357. 183
Ahnert, K. and Mulansky, M. (2011). Odeint—solving ordinary differential equations
in C++. arXiv, 1110.3397. 275
Albert, J. H. and Chib, S. (1993). Bayesian analysis of binary and polychotomous
response data. Journal of the American Statistical Association, 88:669–679. 157
Betancourt, M. (2010). Cruising the simplex: Hamiltonian Monte Carlo and the Dirich-
let distribution. arXiv, 1010.3436. 408
Betancourt, M. (2012). A general metric for Riemannian manifold Hamiltonian Monte
Carlo. arXiv, 1212.4693. 343
Betancourt, M. (2016a). Diagnosing suboptimal cotangent disintegrations in Hamilto-
nian Monte Carlo. arXiv, 1604.00695. 402
Betancourt, M. (2016b). Identifying the optimal integration time in Hamiltonian Monte
Carlo. arXiv, 1601.00225. 398
Betancourt, M. and Girolami, M. (2013). Hamiltonian Monte Carlo for hierarchical
models. arXiv, 1312.0906. 346,390
Betancourt, M. and Stein, L. C. (2011). The geometry of Hamiltonian Monte Carlo.
arXiv, 1112.4118. 390,396
Bishop, C. M. (2006). Pattern Recognition and Machine Learning. Springer New York.
387
Blei, D. M. and Lafferty, J. D. (2007). A correlated topic model of Science.The Annals
of Applied Statistics, 1(1):17–37. 243
Blei, D. M., Ng, A. Y., and Jordan, M. I. (2003). Latent Dirichlet allocation. Journal of
Machine Learning Research, 3:993–1022. 241
Blurton, S. P., Kesselmeier, M., and Gondan, M. (2012). Fast and accurate calculations
for cumulative first-passage time distributions in Wiener diffusion models. Journal
of Mathematical Psychology, 56(6):470–475. 540
Bowling, S. R., Khasawneh, M. T., Kaewkuekool, S., and Cho, B. R. (2009). A logistic
approximation to the cumulative normal distribution. Journal of Industrial Engi-
neering and Management, 2(1):114–127. 448
615
Chacon, S. and Straub, B. (2014). Pro Git. Apress, 2nd edition. 569
Chung, Y., Rabe-Hesketh, S., Dorie, V., Gelman, A., and Liu, J. (2013). A nondegen-
erate penalized likelihood estimator for variance parameters in multilevel models.
Psychometrika, 78(4):685–709. 127,142
Church, A. (1936). An unsolvable problem of elementary number theory. American
Journal of Mathematics, pages 345–363. 24
Clayton, D. G. (1992). Models for the analysis of cohort and case-control studies
with inaccurately measured exposures. In Dwyer, J. H., Feinleib, M., Lippert, P., and
Hoffmeister, H., editors, Statistical Models for Longitudinal Studies of Exposure and
Health, pages 301–331. Oxford University Press. 203,204
Cohen, S. D. and Hindmarsh, A. C. (1996). CVODE, a stiff/nonstiff ODE solver in C.
Computers in Physics, 10(2):138–143. 275,281
Cook, S. R., Gelman, A., and Rubin, D. B. (2006). Validation of software for Bayesian
models using posterior quantiles. Journal of Computational and Graphical Statistics,
15(3):675–692. 564
Corden, M. J. and Kreitzer, D. (2014). Consistency of floating-point results using
the Intel compiler or Why doesn’t my application always give the same answer?
Technical report, Intel Corporation. 578
Cormack, R. M. (1964). Estimates of survival from the sighting of marked animals.
Biometrika, 51(3/4):429–438. 218
Curtis, S. M. (2010). BUGS code for item response theory. Journal of Statistical Soft-
ware, 36(1):1–34. 142
Daumé, III, H. (2007). HBC: Hierarchical Bayes compiler. Technical report, University
of Utah. x
Dawid, A. P. and Skene, A. M. (1979). Maximum likelihood estimation of observer
error-rates using the EM algorithm. Journal of the Royal Statistical Society. Series C
(Applied Statistics), 28(1):20–28. 226,227,228,229
Dempster, A. P., Laird, N. M., and Rubin, D. B. (1977). Maximum likelihood from
incomplete data via the EM algorithm. Journal of the Royal Statistical Society. Series
B (Methodological), 39(1):1–38. 210
Dormand, J. R. and Prince, P. J. (1980). A family of embedded Runge-Kutta formulae.
Journal of Computational and Applied Mathematics, 6(1):19–26. 275
616
Driessen, V. (2010). A successful Git branching model. Online, accessed 6-January-
2015. 569,570
Duane, A., Kennedy, A., Pendleton, B., and Roweth, D. (1987). Hybrid Monte Carlo.
Physics Letters B, 195(2):216–222. 24
Duchi, J., Hazan, E., and Singer, Y. (2011). Adaptive subgradient methods for online
learning and stochastic optimization. The Journal of Machine Learning Research,
12:2121–2159. 423
Durbin, J. and Koopman, S. J. (2001). Time Series Analysis by State Space Methods.
Oxford University Press, New York. 553
Efron, B. (2012). Large-Scale Inference: Empirical Bayes Methods for Estimation, Test-
ing, and Prediction. Institute of Mathematical Statistics Monographs. Cambridge
Univesity Press. 382
Efron, B. and Morris, C. (1975). Data analysis using stein’s estimator and its general-
izations. Journal of the American Statistical Association, 70:311–319. 382
Engle, R. F. (1982). Autoregressive conditional heteroscedasticity with estimates of
variance of United Kingdom inflation. Econometrica, 50:987–1008. 164
Fonnesbeck, C., Patil, A., Huard, D., and Salvatier, J. (2013). PyMC User’s Guide. Version
2.3. 210
Fowler, M., Beck, K., Brant, J., Opdyke, W., and Roberts, D. (1999). Refactoring: Im-
proving the Design of Existing Code. Addison-Wesley. xiii
Gay, D. M. (2005). Semiautomatic differentiation for efficient gradient computations.
In Bücker, H. M., Corliss, G. F., Hovland, P., Naumann, U., and Norris, B., editors,
Automatic Differentiation: Applications, Theory, and Implementations, volume 50 of
Lecture Notes in Computational Science and Engineering, pages 147–158. Springer,
New York. x
Gelman, A. (2004). Parameterization and Bayesian modeling. Journal of the American
Statistical Association, 99:537–545. 285
Gelman, A. (2006). Prior distributions for variance parameters in hierarchical models.
Bayesian Analysis, 1(3):515–534. 127,129,131
Gelman, A., Carlin, J. B., Stern, H. S., Dunson, D. B., Vehtari, A., and Rubin, D. B. (2013).
Bayesian Data Analysis. Chapman &Hall/CRC Press, London, third edition. 69,161,
180,202,205,207,209,240,286,364,366,374,390,516,575,598
617
Gelman, A. and Hill, J. (2007). Data Analysis Using Regression and Multilevel-
Hierarchical Models. Cambridge University Press, Cambridge, United Kingdom. x,
100,142,143,144,147,231,240,575,598
Gelman, A., Jakulin, A., Pittau, M. G., and Su, Y.-S. (2008). A weakly informative de-
fault prior distribution for logistic and other regression models. Annals of Applied
Statistics, 2(4):1360–1383. 127,131
Gelman, A. and Rubin, D. B. (1992). Inference from iterative simulation using multiple
sequences. Statistical Science, 7(4):457–472. 26,370
Geyer, C. J. (2011). Introduction to Markov chain Monte Carlo. In Brooks, S., Gelman,
A., Jones, G. L., and Meng, X.-L., editors, Handbook of Markov Chain Monte Carlo,
pages 3–48. Chapman and Hall/CRC. 373,375
Giesler, G. C. (2000). MCNP software quality: Then and now. Technical Report LA-UR-
00-2532, Los Alamos National Laboratory. xviii
Girolami, M. and Calderhead, B. (2011). Riemann manifold Langevin and Hamiltonian
Monte Carlo methods. Journal of the Royal Statistical Society: Series B (Statistical
Methodology), 73(2):123–214. 343
Google (2011). Google C++ testing framework. http://code.google.com/p/
googletest/.571
Greene, W. H. (2011). Econometric Analysis. Prentice-Hall, 7th edition. 155,157
Guennebaud, G., Jacob, B., et al. (2010). Eigen v3. http://eigen.tuxfamily.org.
498
Hastie, T., Tibshirani, R., and Friedman, J. (2009). The Elements of Statistical Learning:
Data Mining, Inference, and Prediction. Springer-Verlag, New York, second edition.
384
Hastings, W. K. (1970). Monte Carlo sampling methods using Markov chains and their
applications. Biometrika, 57(1):97–109. 25
Hoerl, A. E. and Kennard, R. W. (1970). Ridge regression: biased estimation for
nonorthogonal problems. Technometrics, 12(1):55–67. 380
Hoeting, J. A., Madigan, D., Raftery, A. E., and Volinsky, C. T. (1999). Bayesian model
averaging: a tutorial. Statistical Science, 14(4):382–417. 201
Hoffman, M. D., Blei, D. M., Wang, C., and Paisley, J. (2013). Stochastic variational
inference. The Journal of Machine Learning Research, 14(1):1303–1347. 27
618
Hoffman, M. D. and Gelman, A. (2011). The no-U-turn sampler: Adaptively setting
path lengths in Hamiltonian Monte Carlo. arXiv, 1111.4246. xi,25,119,172,320,
395,398
Hoffman, M. D. and Gelman, A. (2014). The No-U-Turn Sampler: Adaptively Setting
Path Lengths in Hamiltonian Monte Carlo. Journal of Machine Learning Research,
15:1593–1623. xii,25,119,172,320,393,394,395,398
Hopcroft, J. E. and Motwani, R. (2006). Introduction to Automata Theory, Languages,
and Computation. Pearson Education, 3rd edition. 24
Hunt, A. and Thomas, D. (1999). The Pragmatic Programmer. Addison-Wesley. 562
James, W. and Stein, C. (1961). Estimation with quadratic loss. In Neyman, J., edi-
tor, Proceedings of the Fourth Berkeley Symposium on Mathematical Statistics and
Probability, volume 1, pages 361–379. University of California Press. 382
Jarrett, R. G. (1979). A note on the intervals between coal-mining disasters. Biometrika,
66(1):191–193. 210
Jolly, G. M. (1965). Explicit estimates from capture-recapture data with both death
and immigration-stochastic model. Biometrika, 52(1/2):225–247. 218
Jordan, M. I., Ghahramani, Z., Jaakkola, T. S., and Saul, L. K. (1999). An introduction
to variational methods for graphical models. Machine Learning, 37(2):183–233. 27,
387
Jorge J. More, Burton S. Garbow, K. E. H. (1980). User Guide for MINPACK-1. Argonne
National Laboratory, 9700 South Cass Avenue, Argonne, Illinois 60439. 498
Kim, S., Shephard, N., and Chib, S. (1998). Stochastic volatility: Likelihood inference
and comparison with ARCH models. Review of Economic Studies, 65:361–393. 171
Kruschke, J. (2014). Doing Bayesian Data Analysis: A Tutorial with R, JAGS, and Stan.
Academic Press, 2nd edition. 575
Kucukelbir, A., Ranganath, R., Gelman, A., and Blei, D. M. (2015). Automatic variational
inference in Stan. arXiv, 1506.03431. 28,387,388,423
Lambert, D. (1992). Zero-inflated Poisson regression, with an application to defects in
manufacturing. Technometrics, 34(1). 198
Langford, J., Li, L., and Zhang, T. (2009). Sparse online learning via truncated gradient.
Journal of Machine Learning Research, 10:777–801. 381
619
Lee, M. D. and Wagenmakers, E.-J. (2013). Bayesian Cognitive Modeling: A Practical
Course. Cambridge University Press. 575
Leimkuhler, B. and Reich, S. (2004). Simulating Hamiltonian Dynamics. Cambridge
University Press. 392,401
Lewandowski, D., Kurowicka, D., and Joe, H. (2009). Generating random correlation
matrices based on vines and extended onion method. Journal of Multivariate Anal-
ysis, 100:1989–2001. 412,413,556,597
Lincoln, F. C. (1930). Calculating waterfowl abundance on the basis of banding re-
turns. United States Department of Agriculture Circular, 118:1–4. 216
Lunn, D., Jackson, C., Best, N., Thomas, A., and Spiegelhalter, D. (2012). The BUGS
Book: A Practical Introduction to Bayesian Analysis. CRC Press/Chapman & Hall.
129,130,575
Lunn, D. J., Wakefield, J., Thomas, A., Best, N., and Spiegelhalter, D. (1999). PKBugs
User Guide. Dept. Epidemiology and Public Health, Imperial College School of
Medicine, London. 499
Marsaglia, G. (1972). Choosing a point from the surface of a sphere. The Annals of
Mathematical Statistics, 43(2):645–646. 269,411
McConnell, S. (2004). Code Complete: A Practical Handbook of Software Construction.
Microsoft Press, second edition. 562
Metropolis, N., Rosenbluth, A., Rosenbluth, M., Teller, M., and Teller, E. (1953). Equa-
tions of state calculations by fast computing machines. Journal of Chemical Physics,
21:1087–1092. 24,25,369
Metropolis, N. and Ulam, S. (1949). The Monte Carlo method. Journal of the American
Statistical Association, 44(247):335–341. xviii,368
Neal, R. (2011). MCMC using Hamiltonian dynamics. In Brooks, S., Gelman, A., Jones,
G. L., and Meng, X.-L., editors, Handbook of Markov Chain Monte Carlo, pages 116–
162. Chapman and Hall/CRC. 24,25,390,393,396
Neal, R. M. (1994). An improved acceptance procedure for the hybrid monte carlo
algorithm. Journal of Computational Physics, 111:194–203. 24
Neal, R. M. (1996a). Bayesian Learning for Neural Networks. Number 118 in Lecture
Notes in Statistics. Springer. 256
Neal, R. M. (1996b). Sampling from multimodal distributions using tempered transi-
tions. Statistics and Computing, 6(4):353–366. 316
620
Neal, R. M. (1997). Monte Carlo implementation of Gaussian process models for
Bayesian regression and classification. Technical Report 9702, University of
Toronto, Department of Statistics. 253
Neal, R. M. (2003). Slice sampling. Annals of Statistics, 31(3):705–767. 341
Nesterov, Y. (2009). Primal-dual subgradient methods for convex problems. Mathe-
matical Programming, 120(1):221–259. 25,395
Nocedal, J. and Wright, S. J. (2006). Numerical Optimization. Springer-Verlag, Berlin,
second edition. 420
Papaspiliopoulos, O., Roberts, G. O., and Sköld, M. (2007). A general framework for
the parametrization of hierarchical models. Statistical Science, 22(1):59–73. 341
Petersen, C. G. J. (1896). The yearly immigration of young plaice into the Limfjord
from the German Sea. Report of the Danish Biological Station, 6:5–84. 216
Piironen, J. and Vehtari, A. (2016). Projection predictive model selection for Gaus-
sian processes. In Machine Learning for Signal Processing (MLSP), 2016 IEEE 26th
International Workshop on. IEEE. doi:10.1109/MLSP.2016.7738829. 256
Pinheiro, J. C. and Bates, D. M. (1996). Unconstrained parameterizations for variance-
covariance matrices. Statistics and Computing, 6:289–296.
Powell, M. J. D. (1970). A hybrid method for nonlinear equations. In Rabinowitz, P.,
editor, Numerical Methods for Nonlinear Algebraic Equations. Gordon and Breach.
271,498
R Project (2014). R: Regulatory compliance and validation issues; a guidance docu-
ment for the use of R in regulated clinical trial environments. Technical report, The
R Foundation for Statistical Computing. www.r-project.org/doc/R-FDA.pdf.
568
Rasmussen, C. E. and Williams, C. K. I. (2006). Gaussian Processes for Machine Learn-
ing. MIT Press. 246,256
Richardson, S. and Gilks, W. R. (1993). A Bayesian approach to measurement error
problems in epidemiology using conditional independence models. American Jour-
nal of Epidemiology, 138(6):430–442. 203
Roberts, G., Gelman, A., and Gilks, W. R. (1997). Weak convergence and optimal scaling
of random walk Metropolis algorithms. Annals of Applied Probability, 7(1):110–120.
398
621
Rubin, D. B. (1981). Estimation in parallel randomized experiments. Journal of Edu-
cational Statistics, 6:377–401. 209
Schäling, B. (2011). The Boost C++ libraries. http://en.highscore.de/cpp/
boost/.
Schofield, M. R. (2007). Hierarchical Capture-Recapture Models. PhD thesis, Depart-
ment of of Statistics, University of Otago, Dunedin. 218,219
Seber, G. A. F. (1965). A note on the multiple-recapture census. Biometrika,
52(1/2):249–259. 218
Serban, R. and Hindmarsh, A. C. (2005). CVODES: the sensitivity-enabled ODE solver
in SUNDIALS. In ASME 2005 International Design Engineering Technical Confer-
ences and Computers and Information in Engineering Conference, pages 257–269.
American Society of Mechanical Engineers. 275,281
Smith, T. C., Spiegelhalter, D. J., and Thomas, A. (1995). Bayesian approaches
to random-effects meta-analysis: a comparative study. Statistics in Medicine,
14(24):2685–2699. 209
Swendsen, R. H. and Wang, J.-S. (1986). Replica Monte Carlo simulation of spin glasses.
Physical Review Letters, 57:2607–2609. 316
Tibshirani, R. (1996). Regression shrinkage and selection via the lasso. Journal of the
Royal Statistical Society, Series B, 58(1):267–288. 381
Tokuda, T., Goodrich, B., Van Mechelen, I., Gelman, A., and Tuerlinckx, F. (2010). Visu-
alizing distributions of covariance matrices. Technical report, Columbia University,
Department of Statistics.
Turing, A. M. (1936). On computable numbers, with an application to the Entschei-
dungsproblem. J. of Math, 58(345-363):5. 24
van Heesch, D. (2011). Doxygen: Generate documentation from source code. http:
//www.stack.nl/~dimitri/doxygen/index.html.
Vandekerckhove, J. and Wabersich, D. (2014). The RWiener package: an R package
providing distribution functions for the Wiener diffusion model. The R Journal,
6/1. 540
Wainwright, M. J. and Jordan, M. I. (2008). Graphical models, exponential families,
and variational inference. Foundations and Trends in Machine Learning, 1(1-2):1–
305. 27,387
622
Warn, D. E., Thompson, S. G., and Spiegelhalter, D. J. (2002). Bayesian random ef-
fects meta-analysis of trials with binary outcomes: methods for the absolute risk
difference and relative risk scales. Statistics in Medicine, 21:1601–1623. 207,209
Zellner, A. (1962). An efficient method of estimating seemingly unrelated regression
equations and tests for aggregation bias. Journal of the American Statistical Associ-
ation, 57:348–368. 155
Zhang, H. (2004). Inconsistent estimation and asymptotically equal interpolations
in model-based geostatistics. Journal of the American Statistical Association,
99(465):250–261. 257
Zou, H. and Hastie, T. (2005). Regularization and variable selection via the elastic net.
Journal of the Royal Statistical Society, Series B, 67(2):301–320. 381,382
Zyczkowski, K. and Sommers, H. (2001). Induced measures in the space of mixed
quantum states. Journal of Physics A: Mathematical and General, 34(35):7111. 352
623
624
Index
abs
(T x): R,431
(int x): int,440
(real x): real,440
acos
(T x): R,445
acosh
(T x): R,446
algebra_solver
(function algebra_system, vector
y_guess, vector theta, real[]
x_r, int[] x_i): vector,496
(function algebra_system, vector
y_guess, vector theta,
real[] x_r, int[] x_i, real
rel_tol, real f_tol, int
max_steps): vector,497
append_col
(matrix x, matrix y): matrix,477
(matrix x, vector y): matrix,477
(real x, row_vector y): row_vector,
477
(row_vector x, real y): row_vector,
477
(row_vector x, row_vector
y): row_vector,477
(vector x, matrix y): matrix,477
(vector x, vector y): matrix,477
append_row
(matrix x, matrix y): matrix,477
(matrix x, row_vector y): matrix,477
(real x, vector y): vector,478
(row_vector x, matrix y): matrix,477
(row_vector x, row_vector y): matrix,
478
(vector x, real y): vector,478
(vector x, vector y): vector,478
asin
(T x): R,445
asinh
(T x): R,446
atan
(T x): R,445
atan2
(real x, real y): real,445
atanh
(T x): R,446
bernoulli
sampling statement, 508
bernoulli_cdf
(ints y, reals theta): real,508
bernoulli_lccdf
(ints y| reals theta): real,508
bernoulli_lcdf
(ints y| reals theta): real,508
bernoulli_logit
sampling statement, 509
bernoulli_logit_lpmf
(ints y| reals alpha): real,509
bernoulli_logit_rng
(real alpha): int,509
bernoulli_lpmf
(ints y| reals theta): real,508
bernoulli_rng
(real theta): int,508
bessel_first_kind
(int v, real x): real,451
bessel_second_kind
(int v, real x): real,452
beta
sampling statement, 543
beta_binomial
sampling statement, 512
beta_binomial_cdf
(ints n, ints N, reals alpha, reals
beta): real,512
beta_binomial_lccdf
(ints n| ints N, reals alpha, reals
beta): real,513
beta_binomial_lcdf
(ints n| ints N, reals alpha, reals
beta): real,513
beta_binomial_lpmf
(ints n| ints N, reals alpha, reals
beta): real,512
beta_binomial_rng
(int N, real alpha, real beta): int,
513
beta_cdf
(reals theta, reals alpha, reals
beta): real,543
beta_lccdf
625
(reals theta | reals alpha, reals
beta): real,543
beta_lcdf
(reals theta | reals alpha, reals
beta): real,543
beta_lpdf
(reals theta | reals alpha, reals
beta): real,543
beta_rng
(real alpha, real beta): real,544
binary_log_loss
(int y, real y_hat): real,448
binomial
sampling statement, 510
binomial_cdf
(ints n, ints N, reals theta): real,
510
binomial_coefficient_log
(real x, real y): real,451
binomial_lccdf
(ints n| ints N, reals theta): real,
511
binomial_lcdf
(ints n| ints N, reals theta): real,
511
binomial_logit
sampling statement, 512
binomial_logit_lpmf
(ints n| ints N, reals alpha): real,
512
binomial_lpmf
(ints n| ints N, reals theta): real,
510
binomial_rng
(int N, real theta): int,511
block
(matrix x, int i, int j, int n_rows,
int n_cols): matrix,475
categorical
sampling statement, 514
categorical_logit
sampling statement, 514
categorical_logit_lpmf
(ints y| vector beta): real,514
categorical_logit_rng
(vector beta): int,515
categorical_lpmf
(ints y| vector theta): real,514
categorical_rng
(vector theta): int,515
cauchy
sampling statement, 527
cauchy_cdf
(reals y, reals mu, reals
sigma): real,527
cauchy_lccdf
(reals y| reals mu, reals
sigma): real,527
cauchy_lcdf
(reals y| reals mu, reals
sigma): real,527
cauchy_lpdf
(reals y| reals mu, reals
sigma): real,527
cauchy_rng
(real mu, real sigma): real,527
cbrt
(T x): R,442
ceil
(T x): R,442
chi_square
sampling statement, 532
chi_square_cdf
(reals y, reals nu): real,532
chi_square_lccdf
(reals y| reals nu): real,532
chi_square_lcdf
(reals y| reals nu): real,532
chi_square_lpdf
(reals y| reals nu): real,532
chi_square_rng
(real nu): real,532
cholesky_decompose
(matrix A): matrix,484
choose
(int x, int y): int,451
col
(matrix x, int n): vector,475
cols
(matrix x): int,464
(row_vector x): int,464
(vector x): int,464
columns_dot_product
(matrix x, matrix y): row_vector,469
(row_vector x, row_vector
y): row_vector,469
(vector x, vector y): row_vector,469
columns_dot_self
(matrix x): row_vector,470
(row_vector x): row_vector,469
(vector x): row_vector,469
cos
626
(T x): R,444
cosh
(T x): R,446
cov_exp_quad
(real[] x1, real[] x2 real alpha,
real rho): matrix,480
(real[] x, real alpha, real
rho): matrix,479
(row_vectors x1, row_vectors x2 real
alpha, real rho): matrix,480
(row_vectors x, real alpha, real
rho): matrix,479
(vectors x1, vectors x2 real alpha,
real rho): matrix,480
(vectors x, real alpha, real
rho): matrix,479
crossprod
(matrix x): matrix,470
csr_extract_u
(matrix a): int[],487
csr_extract_v
(matrix a): int[],487
csr_extract_w
(matrix a): vector,487
csr_matrix_times_vector
(int m, int n, vector wint[] v,
int[] u, vector b): vector,488
csr_to_dense_matrix
(int m, int n, vector w, int[] v,
int[] u): matrix,487
cumulative_sum
(real[] x): real[],479
(row_vector rv): row_vector,479
(vector v): vector,479
determinant
(matrix A): real,482
diag_matrix
(vector x): matrix,474
diag_post_multiply
(matrix m, row_vector rv): matrix,471
(matrix m, vector v): matrix,471
diag_pre_multiply
(row_vector rv, matrix m): matrix,471
(vector v, matrix m): matrix,471
diagonal
(matrix x): vector,474
digamma
(T x): R,450
dims
(T x): int[],460
dirichlet
sampling statement, 555
dirichlet_lpdf
(vector theta | vector alpha): real,
555
dirichlet_rng
(vector alpha): vector,555
distance
(row_vector x, row_vector y): real,
459
(row_vector x, vector y): real,459
(vector x, row_vector y): real,459
(vector x, vector y): real,459
dot_product
(row_vector x, row_vector y): real,
469
(row_vector x, vector y): real,469
(vector x, row_vector y): real,469
(vector x, vector y): real,469
dot_self
(row_vector x): real,469
(vector x): real,469
double_exponential
sampling statement, 528
double_exponential_cdf
(reals y, reals mu, reals
sigma): real,528
double_exponential_lccdf
(reals y| reals mu, reals
sigma): real,528
double_exponential_lcdf
(reals y| reals mu, reals
sigma): real,528
double_exponential_lpdf
(reals y| reals mu, reals
sigma): real,528
double_exponential_rng
(real mu, real sigma): real,529
e
(): real,434
eigenvalues_sym
(matrix A): vector,483
eigenvectors_sym
(matrix A): matrix,483
erf
(T x): R,447
erfc
(T x): R,448
exp
(T x): R,443
exp2
(T x): R,443
627
exp_mod_normal
sampling statement, 524
exp_mod_normal_cdf
(reals y, reals mu, reals sigma
reals lambda): real,524
exp_mod_normal_lccdf
(reals y| reals mu, reals sigma
reals lambda): real,524
exp_mod_normal_lcdf
(reals y| reals mu, reals sigma
reals lambda): real,524
exp_mod_normal_lpdf
(reals y| reals mu, reals sigma
reals lambda): real,524
exp_mod_normal_rng
(real mu, real sigma, real
lambda): real,525
expm1
(T x): R,454
exponential
sampling statement, 534
exponential_cdf
(reals y, reals beta): real,535
exponential_lccdf
(reals y| reals beta): real,535
exponential_lcdf
(reals y| reals beta): real,535
exponential_lpdf
(reals y| reals beta): real,534
exponential_rng
(real beta): real,535
fabs
(T x): R,440
falling_factorial
(real x, real n): real,453
fdim
(real x, real y): real,440
floor
(T x): R,442
fma
(real x, real y, real z): real,454
fmax
(real x, real y): real,441
fmin
(real x, real y): real,441
fmod
(real x, real y): real,441
frechet
sampling statement, 538
frechet_cdf
(reals y, reals alpha, reals
sigma): real,538
frechet_lccdf
(reals y| reals alpha, reals
sigma): real,538
frechet_lcdf
(reals y| reals alpha, reals
sigma): real,538
frechet_lpdf
(reals y| reals alpha, reals
sigma): real,538
frechet_rng
(real alpha, real sigma): real,538
gamma
sampling statement, 535
gamma_cdf
(reals y, reals alpha, reals
beta): real,535
gamma_lccdf
(reals y| reals alpha, reals
beta): real,536
gamma_lcdf
(reals y| reals alpha, reals
beta): real,535
gamma_lpdf
(reals y| reals alpha, reals
beta): real,535
gamma_p
(real a, real z): real,450
gamma_q
(real a, real z): real,451
gamma_rng
(real alpha, real beta): real,536
gaussian_dlm_obs
sampling statement, 554
gaussian_dlm_obs_lpdf
(matrix y| matrix F, matrix G,
matrix Vmatrix W, vector m0,
matrix C0): real,554
(matrix y| matrix F, matrix G,
vector Vmatrix W, vector m0,
matrix C0): real,554
get_lp
(): real,435
gumbel
sampling statement, 530
gumbel_cdf
(reals y, reals mu, reals beta): real,
530
gumbel_lccdf
628
(reals y| reals mu, reals
beta): real,530
gumbel_lcdf
(reals y| reals mu, reals
beta): real,530
gumbel_lpdf
(reals y| reals mu, reals
beta): real,530
gumbel_rng
(real mu, real beta): real,530
head
(T[] sv, int n): T[],476
(row_vector rv, int n): row_vector,
476
(vector v, int n): vector,476
hypergeometric
sampling statement, 513
hypergeometric_lpmf
(int n| int N, int a, int b): real,
513
hypergeometric_rng
(int N, real a, real b): int,513
hypot
(real x, real y): real,444
inc_beta
(real alpha, real beta, real x): real,
449
int_step
(int x): int,431
(real x): int,431
integrate_ode
(function ode, real[] initial_state,
real initial_time, real[] times,
real[] theta, real[] x_r, int[]
x_i): real[ , ],500
integrate_ode_bdf
(function ode, real[] initial_state,
real initial_time, real[] times,
real[] theta, real[] x_r, int[]
x_i): real[],500
(function ode, real[] initial_state,
real initial_time, real[] times,
real[] theta, real[] x_r, int[]
x_i, real rel_tol, real abs_tol,
int max_num_steps): real[],500
integrate_ode_rk45
(function ode, real[] initial_state,
real initial_time, real[] times,
real[] theta, real[] x_r, int[]
x_i): real[ , ],500
(function ode, real[] initial_state,
real initial_time, real[] times,
real[] theta, real[] x_r, int[]
x_i, real rel_tol, real abs_tol,
int max_num_steps): real[ , ],
500
inv
(T x): R,444
inv_Phi
(T x): R,448
inv_chi_square
sampling statement, 533
inv_chi_square_cdf
(reals y, reals nu): real,533
inv_chi_square_lccdf
(reals y| reals nu): real,533
inv_chi_square_lcdf
(reals y| reals nu): real,533
inv_chi_square_lpdf
(reals y| reals nu): real,533
inv_chi_square_rng
(real nu): real,533
inv_cloglog
(T x): R,447
inv_gamma
sampling statement, 536
inv_gamma_cdf
(reals y, reals alpha, reals
beta): real,536
inv_gamma_lccdf
(reals y| reals alpha, reals
beta): real,536
inv_gamma_lcdf
(reals y| reals alpha, reals
beta): real,536
inv_gamma_lpdf
(reals y| reals alpha, reals
beta): real,536
inv_gamma_rng
(real alpha, real beta): real,536
inv_logit
(T x): R,447
inv_sqrt
(T x): R,444
inv_square
(T x): R,444
inv_wishart
sampling statement, 560
inv_wishart_lpdf
(matrix W| real nu, matrix
Sigma): real,560
inv_wishart_rng
629
(real nu, matrix Sigma): matrix,560
inverse
(matrix A): matrix,482
inverse_spd
(matrix A): matrix,482
is_inf
(real x): int,438
is_nan
(real x): int,438
lbeta
(real alpha, real beta): real,449
lchoose
(real x, real y): real,453
lgamma
(T x): R,449
lkj_corr
sampling statement, 557
lkj_corr_cholesky
sampling statement, 558
lkj_corr_cholesky_lpdf
(matrix L| real eta): real,558
lkj_corr_cholesky_rng
(int K, real eta): matrix,558
lkj_corr_lpdf
(matrix y| real eta): real,557
lkj_corr_rng
(int K, real eta): matrix,557
lmgamma
(int n, real x): real,450
lmultiply
(real x, real y): real,454
log
(T x): R,443
log10
(): real,434
(T x): R,443
log1m
(T x): R,455
log1m_exp
(T x): R,455
log1m_inv_logit
(T x): R,456
log1p
(T x): R,454
log1p_exp
(T x): R,455
log2
(): real,434
(T x): R,443
log_determinant
(matrix A): real,482
log_diff_exp
(real x, real y): real,455
log_falling_factorial
(real x, real n): real,453
log_inv_logit
(T x): R,456
log_mix
(real theta, real lp1, real
lp2): real,456
log_rising_factorial
(real x, real n): real,453
log_softmax
(vector x): vector,478
log_sum_exp
(matrix x): real,472
(real x, real y): real,456
(real x[]): real,458
(row_vector x): real,471
(vector x): real,471
logistic
sampling statement, 529
logistic_cdf
(reals y, reals mu, reals
sigma): real,529
logistic_lccdf
(reals y| reals mu, reals
sigma): real,529
logistic_lcdf
(reals y| reals mu, reals
sigma): real,529
logistic_lpdf
(reals y| reals mu, reals
sigma): real,529
logistic_rng
(real mu, real sigma): real,529
logit
(T x): R,447
lognormal
sampling statement, 531
lognormal_cdf
(reals y, reals mu, reals
sigma): real,531
lognormal_lccdf
(reals y| reals mu, reals
sigma): real,531
lognormal_lcdf
(reals y| reals mu, reals
sigma): real,531
lognormal_lpdf
(reals y| reals mu, reals
sigma): real,531
630
lognormal_rng
(real mu, real beta): real,531
machine_precision
(): real,434
matrix_exp
(matrix A): matrix,482
max
(int x, int y): int,431
(int x[]): int,457
(matrix x): real,472
(real x[]): real,457
(row_vector x): real,472
(vector x): real,472
mdivide_left_spd
(matrix A, matrix B): vector,481
(matrix A, vector b): matrix,481
mdivide_left_tri_low
(matrix A, matrix B): matrix,481
(matrix A, vector b): vector,481
mdivide_right_spd
(matrix B, matrix A): matrix,481
(row_vector b, matrix A): row_vector,
481
mdivide_right_tri_low
(matrix B, matrix A): matrix,481
(row_vector b, matrix A): row_vector,
481
mean
(matrix x): real,473
(real x[]): real,458
(row_vector x): real,473
(vector x): real,473
min
(int x, int y): int,431
(int x[]): int,457
(matrix x): real,472
(real x[]): real,457
(row_vector x): real,472
(vector x): real,472
modified_bessel_first_kind
(int v, real z): real,452
modified_bessel_second_kind
(int v, real z): real,452
multi_gp
sampling statement, 551
multi_gp_cholesky
sampling statement, 552
multi_gp_cholesky_lpdf
(matrix y| matrix L, vector w): real,
552
multi_gp_lpdf
(matrix y| matrix Sigma, vector
w): real,551
multi_normal
sampling statement, 548
multi_normal_cholesky
sampling statement, 550
multi_normal_cholesky_lpdf
(row_vectors y| row_vectors mu
matrix L): real,551
(row_vectors y| vectors mu matrix
L): real,550
(vectors y| row_vectors mu matrix
L): real,550
(vectors y| vectors mu matrix
L): real,550
multi_normal_cholesky_rng
(vector mu, matrix L): vector,551
multi_normal_lpdf
(row_vectors y| row_vectors mu,
matrix Sigma): real,549
(row_vectors y| vectors mu, matrix
Sigma): real,548
(vectors y| row_vectors mu, matrix
Sigma): real,548
(vectors y| vectors mu, matrix
Sigma): real,548
multi_normal_prec
sampling statement, 549
multi_normal_prec_lpdf
(row_vectors y| row_vectors mu
matrix Omega): real,550
(row_vectors y| vectors mu matrix
Omega): real,549
(vectors y| row_vectors mu matrix
Omega): real,549
(vectors y| vectors mu matrix
Omega): real,549
multi_normal_rng
(vector mu, matrix Sigma): vector,549
multi_student_t
sampling statement, 552
multi_student_t_lpdf
(row_vectors y| real nu,
row_vectors mu matrix
Sigma): real,553
(row_vectors y| real nu, vectors mu
matrix Sigma): real,553
(vectors y| real nu, row_vectors mu
matrix Sigma): real,553
(vectors y| real nu, vectors mu
matrix Sigma): real,553
631
multi_student_t_rng
(real nu, vector mu, matrix
Sigma): vector,553
multinomial
sampling statement, 521
multinomial_lpmf
(int[] y| vector theta): real,521
multinomial_rng
(vector theta, int N): int[],521
multiply_log
(real x, real y): real,454
multiply_lower_tri_self_transpose
(matrix x): matrix,471
neg_binomial
sampling statement, 516
neg_binomial_2
sampling statement, 517
neg_binomial_2_cdf
(ints n, reals mu, reals phi): real,
518
neg_binomial_2_lccdf
(ints n| reals mu, reals phi): real,
518
neg_binomial_2_lcdf
(ints n| reals mu, reals phi): real,
518
neg_binomial_2_log
sampling statement, 518
neg_binomial_2_log_lpmf
(ints y| reals eta, reals phi): real,
518
neg_binomial_2_log_rng
(real eta, real phi): int,519
neg_binomial_2_lpmf
(ints y| reals mu, reals phi): real,
517
neg_binomial_2_rng
(real mu, real phi): int,518
neg_binomial_cdf
(ints n, reals alpha, reals
beta): real,516
neg_binomial_lccdf
(ints n| reals alpha, reals
beta): real,517
neg_binomial_lcdf
(ints n| reals alpha, reals
beta): real,516
neg_binomial_lpmf
(ints n| reals alpha, reals
beta): real,516
neg_binomial_rng
(real alpha, real beta): int,517
negative_infinity
(): real,434
normal
sampling statement, 523
normal_cdf
(reals y, reals mu, reals
sigma): real,523
normal_lccdf
(reals y| reals mu, reals
sigma): real,523
normal_lcdf
(reals y| reals mu, reals
sigma): real,523
normal_lpdf
(reals y| reals mu, reals
sigma): real,523
normal_rng
(real mu, real sigma): real,524
not_a_number
(): real,434
num_elements
(matrix x): int,464
(row_vector x): int,464
(vector x): int,464
(T[] x): int,460
operator!
(int x): int,437
(real x): int,437
operator!=
(int x, int y): int,437
(real x, real y): int,437
operator’
(matrix x): matrix,468
(row_vector x): vector,468
(vector x): row_vector,468
operator*
(int x, int y): int,430
(matrix x, matrix y): matrix,466
(matrix x, real y): matrix,466
(matrix x, vector y): vector,466
(real x, matrix y): matrix,465
(real x, real y): real,439
(real x, row_vector y): row_vector,
465
(real x, vector y): vector,465
(row_vector x, matrix y): row_vector,
466
(row_vector x, real y): row_vector,
466
(row_vector x, vector y): real,466
632
(vector x, real y): vector,465
(vector x, row_vector y): matrix,466
operator*=
(int x, int y): void,493
(matrix x, matrix y): void,494
(matrix x, real y): void,493
(real x, real y): void,493
(row_vector x, matrix y): void,494
(row_vector x, real y): void,493
(vector x, real y): void,493
operator+
(int x): int,430
(int x, int y): int,430
(matrix x, matrix y): matrix,465
(matrix x, real y): matrix,466
(real x): real,440
(real x, matrix y): matrix,466
(real x, real y): real,439
(real x, row_vector y): row_vector,
466
(real x, vector y): vector,466
(row_vector x, real y): row_vector,
466
(row_vector x, row_vector
y): row_vector,465
(vector x, real y): vector,466
(vector x, vector y): vector,465
operator+=
(int x, int y): void,492
(matrix x, matrix y): void,492
(matrix x, real y): void,492
(real x, real y): void,492
(row_vector x, real y): void,492
(row_vector x, row_vector y): void,
492
(vector x, real y): void,492
(vector x, vector y): void,492
operator-
(int x): int,430
(int x, int y): int,430
(matrix x): matrix,465
(matrix x, matrix y): matrix,465
(matrix x, real y): matrix,467
(real x): real,439
(real x, matrix y): matrix,467
(real x, real y): real,439
(real x, row_vector y): row_vector,
467
(real x, vector y): vector,467
(row_vector x): row_vector,465
(row_vector x, real y): row_vector,
467
(row_vector x, row_vector
y): row_vector,465
(vector x): vector,465
(vector x, real y): vector,466
(vector x, vector y): vector,465
operator-=
(int x, int y): void,493
(matrix x, matrix y): void,493
(matrix x, real y): void,493
(real x, real y): void,493
(row_vector x, real y): void,493
(row_vector x, row_vector y): void,
493
(vector x, real y): void,493
(vector x, vector y): void,493
operator.*
(matrix x, matrix y): matrix,467
(row_vector x, row_vector
y): row_vector,467
(vector x, vector y): vector,467
operator.*=
(matrix x, matrix y): void,494
(row_vector x, row_vector y): void,
494
(vector x, vector y): void,494
operator./
(matrix x, matrix y): matrix,468
(matrix x, real y): matrix,468
(real x, matrix y): matrix,468
(real x, row_vector y): row_vector,
468
(real x, vector y): vector,468
(row_vector x, real y): row_vector,
468
(row_vector x, row_vector
y): row_vector,468
(vector x, real y): vector,467
(vector x, vector y): vector,467
operator./=
(matrix x, matrix y): void,495
(matrix x, real y): void,495
(row_vector x, real y): void,495
(row_vector x, row_vector y): void,
494
(vector x, real y): void,495
(vector x, vector y): void,494
operator/
(int x, int y): int,430
(matrix B, matrix A): matrix,480
633
(matrix x, real y): matrix,467
(real x, real y): real,439
(row_vector b, matrix A): row_vector,
480
(row_vector x, real y): row_vector,
467
(vector x, real y): vector,467
operator/=
(int x, int y): void,494
(matrix x, real y): void,494
(real x, real y): void,494
(row_vector x, real y): void,494
(vector x, real y): void,494
operator<
(int x, int y): int,436
(real x, real y): int,436
operator<=
(int x, int y): int,436
(real x, real y): int,436
operator>
(int x, int y): int,436
(real x, real y): int,436
operator>=
(int x, int y): int,436
(real x, real y): int,436
operator%
(int x, int y): int,430
operator^
(real x, real y): real,439
operator\
(matrix A, matrix B): matrix,480
(matrix A, vector b): vector,480
operator==
(int x, int y): int,436
(real x, real y): int,436
operator&&
(int x, int y): int,437
(real x, real y): int,437
operator||
(int x, int y): int,437
(real x, real y): int,437
ordered_logistic
sampling statement, 515
ordered_logistic_lpmf
(int k| real eta, vector c): real,
515
ordered_logistic_rng
(real eta, vector c): int,515
owens_t
(real h, real a): real,449
pareto
sampling statement, 541
pareto_cdf
(reals y, reals y_min, reals
alpha): real,541
pareto_lccdf
(reals y| reals y_min, reals
alpha): real,541
pareto_lcdf
(reals y| reals y_min, reals
alpha): real,541
pareto_lpdf
(reals y| reals y_min, reals
alpha): real,541
pareto_rng
(real y_min, real alpha): real,541
pareto_type_2
sampling statement, 542
pareto_type_2_cdf
(reals y, reals mu, reals lambda
reals alpha): real,542
pareto_type_2_lccdf
(reals y| reals mu, reals lambda
reals alpha): real,542
pareto_type_2_lcdf
(reals y| reals mu, reals lambda
reals alpha): real,542
pareto_type_2_lpdf
(reals y| reals mu, reals lambda
reals alpha): real,542
pareto_type_2_rng
(real mu, real lambda, real
alpha): real,542
Phi
(T x): R,448
Phi_approx
(T x): R,448
pi
(): real,434
poisson
sampling statement, 519
poisson_cdf
(ints n, reals lambda): real,519
poisson_lccdf
(ints n| reals lambda): real,519
poisson_lcdf
(ints n| reals lambda): real,519
poisson_log
sampling statement, 520
poisson_log_lpmf
(ints n| reals alpha): real,520
poisson_log_rng
634
(real alpha): int,520
poisson_lpmf
(ints n| reals lambda): real,519
poisson_rng
(real lambda): int,519
positive_infinity
(): real,434
pow
(real x, real y): real,444
print
(T1 x1,..., TN xN): void,428
prod
(int x[]): real,458
(matrix x): real,472
(real x[]): real,457
(row_vector x): real,472
(vector x): real,472
qr_Q
(matrix A): matrix,483
qr_R
(matrix A): matrix,483
quad_form
(matrix A, matrix B): matrix,470
(matrix A, vector B): real,470
quad_form_diag
(matrix m, row_vector rv): matrix,470
(matrix m, vector v): matrix,470
quad_form_sym
(matrix A, matrix B): matrix,470
(matrix A, vector B): real,471
rank
(int[] v, int s): int,463
(real[] v, int s): int,463
(row_vector v, int s): int,485
(vector v, int s): int,485
rayleigh
sampling statement, 539
rayleigh_cdf
(real y, real sigma): real,539
rayleigh_lccdf
(real y| real sigma): real,539
rayleigh_lcdf
(real y| real sigma): real,539
rayleigh_lpdf
(reals y| reals sigma): real,539
rayleigh_rng
(real sigma): real,539
rep_array
(T x, int k, int m, int n): T[ , , ],
461
(T x, int m, int n): T[ , ],460
(T x, int n): T[],460
rep_matrix
(real x, int m, int n): matrix,474
(row_vector rv, int m): matrix,474
(vector v, int n): matrix,474
rep_row_vector
(real x, int n): row_vector,474
rep_vector
(real x, int m): vector,473
rising_factorial
(real x, real n): real,453
round
(T x): R,442
row
(matrix x, int m): row_vector,475
rows
(matrix x): int,464
(row_vector x): int,464
(vector x): int,464
rows_dot_product
(matrix x, matrix y): vector,469
(row_vector x, row_vector y): vector,
469
(vector x, vector y): vector,469
rows_dot_self
(matrix x): vector,470
(row_vector x): vector,470
(vector x): vector,470
scaled_inv_chi_square
sampling statement, 533
scaled_inv_chi_square_cdf
(reals y, reals nu, reals
sigma): real,534
scaled_inv_chi_square_lccdf
(reals y| reals nu, reals
sigma): real,534
scaled_inv_chi_square_lcdf
(reals y| reals nu, reals
sigma): real,534
scaled_inv_chi_square_lpdf
(reals y| reals nu, reals
sigma): real,534
scaled_inv_chi_square_rng
(real nu, real sigma): real,534
sd
(matrix x): real,473
(real x[]): real,458
(row_vector x): real,473
(vector x): real,473
segment
(T[] sv, int i, int n): T[],476
635
(row_vector rv, int i, int
n): row_vector,476
(vector v, int i, int n): vector,476
sin
(T x): R,445
singular_values
(matrix A): vector,484
sinh
(T x): R,446
size
(T[] x): int,460
skew_normal
sampling statement, 525
skew_normal_cdf
(reals y, reals xi, reals omega,
reals alpha): real,525
skew_normal_lccdf
(reals y| reals xi, reals omega
reals alpha): real,525
skew_normal_lcdf
(reals y| reals xi, reals omega
reals alpha): real,525
skew_normal_lpdf
(reals y| reals xi, reals omega,
reals alpha): real,525
skew_normal_rng
(real xi, real omega, real
alpha): real,525
softmax
(vector x): vector,478
sort_asc
(int[] v): int[],462
(real[] v): real[],462
(row_vector v): row_vector,484
(vector v): vector,484
sort_desc
(int[] v): int[],462
(real[] v): real[],462
(row_vector v): row_vector,484
(vector v): vector,484
sort_indices_asc
(int[] v): int[],462
(real[] v): int[],462
(row_vector v): int[],484
(vector v): int[],484
sort_indices_desc
(int[] v): int[],462
(real[] v): int[],462
(row_vector v): int[],485
(vector v): int[],484
sqrt
(T x): R,442
sqrt2
(): real,434
square
(T x): R,443
squared_distance
(row_vector x, row_vector y[]): real,
459
(row_vector x, vector y[]): real,459
(vector x, row_vector y[]): real,459
(vector x, vector y): real,459
step
(real x): real,438
student_t
sampling statement, 526
student_t_cdf
(reals y, reals nu, reals mu, reals
sigma): real,526
student_t_lccdf
(reals y| reals nu, reals mu, reals
sigma): real,526
student_t_lcdf
(reals y| reals nu, reals mu, reals
sigma): real,526
student_t_lpdf
(reals y| reals nu, reals mu, reals
sigma): real,526
student_t_rng
(real nu, real mu, real sigma): real,
526
sub_col
(matrix x, int i, int j, int
n_rows): vector,475
sub_row
(matrix x, int i, int j, int
n_cols): row_vector,475
sum
(int x[]): int,457
(matrix x): real,472
(real x[]): real,457
(row_vector x): real,472
(vector x): real,472
tail
(T[] sv, int n): T[],476
(row_vector rv, int n): row_vector,
476
(vector v, int n): vector,476
tan
(T x): R,445
tanh
(T x): R,446
636
target
(): real,435
tcrossprod
(matrix x): matrix,470
tgamma
(T x): R,449
to_array_1d
(int[...] a): int[],491
(matrix m): real[],491
(real[...] a): real[],491
(row_vector v): real[],491
(vector v): real[],491
to_array_2d
(matrix m): real[,],491
to_matrix
(int[,] a): matrix,490
(int[] a, int m, int n): matrix,490
(int[] a, int m, int n, int
col_major): matrix,490
(matrix m): matrix,489
(matrix m, int m, int n): matrix,489
(matrix m, int m, int n, int
col_major): matrix,489
(real[,] a): matrix,490
(real[] a, int m, int n): matrix,489
(real[] a, int m, int n, int
col_major): matrix,490
(row_vector v): matrix,489
(row_vector v, int m, int n): matrix,
489
(row_vector v, int m, int n, int
col_major): matrix,489
(vector v): matrix,489
(vector v, int m, int n): matrix,489
(vector v, int m, int n, int
col_major): matrix,489
to_row_vector
(int[] a): row_vector,491
(matrix m): row_vector,490
(real[] a): row_vector,491
(row_vector v): row_vector,491
(vector v): row_vector,490
to_vector
(int[] a): vector,490
(matrix m): vector,490
(real[] a): vector,490
(row_vector v): vector,490
(vector v): vector,490
trace
(matrix A): real,482
trace_gen_quad_form
(matrix D,matrix A, matrix B): real,
471
trace_quad_form
(matrix A, matrix B): real,471
trigamma
(T x): R,450
trunc
(T x): R,442
uniform
sampling statement, 547
uniform_cdf
(reals y, reals alpha, reals
beta): real,547
uniform_lccdf
(reals y| reals alpha, reals
beta): real,547
uniform_lcdf
(reals y| reals alpha, reals
beta): real,547
uniform_lpdf
(reals y| reals alpha, reals
beta): real,547
uniform_rng
(real alpha, real beta): real,547
variance
(matrix x): real,473
(real x[]): real,458
(row_vector x): real,473
(vector x): real,473
von_mises
sampling statement, 545
von_mises_lpdf
(reals y| reals mu, reals
kappa): real,545
von_mises_rng
(reals mu, reals kappa): real,545
weibull
sampling statement, 537
weibull_cdf
(reals y, reals alpha, reals
sigma): real,537
weibull_lccdf
(reals y| reals alpha, reals
sigma): real,537
weibull_lcdf
(reals y| reals alpha, reals
sigma): real,537
weibull_lpdf
(reals y| reals alpha, reals
sigma): real,537
weibull_rng
637
