Print Preview C:\TEMP\Apdf_2541_3068\home\AppData\Local\PTC\Arbortext\Editor\.aptcache\ae3849j0/tf38450r Signal Processing Toolbox User's Guide
User Manual:
Open the PDF directly: View PDF ![]() .
.
Page Count: 527 [warning: Documents this large are best viewed by clicking the View PDF Link!]
- toc
- Filtering, Linear Systems and Transforms Overview
- Filter Design and Implementation
- Filter Requirements and Specification
- IIR Filter Design
- FIR Filter Design
- Special Topics in IIR Filter Design
- Filtering Data With Signal Processing Toolbox Software
- Selected Bibliography
- Designing a Filter in Fdesign — Process Overview
- Designing a Filter in the Filterbuilder GUI
- FDATool: A Filter Design and Analysis GUI
- Overview
- Using FDATool
- Choosing a Response Type
- Choosing a Filter Design Method
- Setting the Filter Design Specifications
- Computing the Filter Coefficients
- Analyzing the Filter
- Editing the Filter Using the Pole/Zero Editor
- Converting the Filter Structure
- Exporting a Filter Design
- Generating a C Header File
- Generating MATLAB Code
- Managing Filters in the Current Session
- Saving and Opening Filter Design Sessions
- Importing a Filter Design
- Statistical Signal Processing
- Special Topics
- SPTool: A Signal Processing GUI Suite
- SPTool: An Interactive Signal Processing Environment
- Opening SPTool
- Getting Context-Sensitive Help
- Signal Browser
- FDATool
- Filter Visualization Tool
- Spectrum Viewer
- Filtering and Analysis of Noise
- Exporting Signals, Filters, and Spectra
- Accessing Filter Parameters
- Importing Filters and Spectra
- Loading Variables from the Disk
- Saving and Loading Sessions
- Selecting Signals, Filters, and Spectra
- Editing Signals, Filters, or Spectra
- Making Signal Measurements with Markers
- Setting Preferences
- Using the Filter Designer
- Code Generation from MATLAB Support in Signal Processing Toolbo
- Convolution and Correlation
- Multirate Signal Processing
- Spectral Analysis
- Linear Prediction
- Transforms
- Signal Generation
- Signal Measurement
- Technical Conventions
- Index
- tables

Signal Processing Toolbox™
User’s Guide
R2012b

How to Contact MathWorks
www.mathworks.com Web
comp.soft-sys.matlab Newsgroup
www.mathworks.com/contact_TS.html Technical Support
suggest@mathworks.com Product enhancement suggestions
bugs@mathworks.com Bug reports
doc@mathworks.com Documentation error reports
service@mathworks.com Order status, license renewals, passcodes
info@mathworks.com Sales, pricing, and general information
508-647-7000 (Phone)
508-647-7001 (Fax)
The MathWorks, Inc.
3 Apple Hill Drive
Natick, MA 01760-2098
For contact information about worldwide offices, see the MathWorks Web site.
Signal Processing Toolbox™ User’s Guide
© COPYRIGHT 1988–2012 by The MathWorks, Inc.
The software described in this document is furnished under a license agreement. The software may be used
or copied only under the terms of the license agreement. No part of this manual may be photocopied or
reproduced in any form without prior written consent from The MathWorks, Inc.
FEDERAL ACQUISITION: This provision applies to all acquisitions of the Program and Documentation
by, for, or through the federal government of the United States. By accepting delivery of the Program
or Documentation, the government hereby agrees that this software or documentation qualifies as
commercial computer software or commercial computer software documentation as such terms are used
or defined in FAR 12.212, DFARS Part 227.72, and DFARS 252.227-7014. Accordingly, the terms and
conditions of this Agreement and only those rights specified in this Agreement, shall pertain to and govern
theuse,modification,reproduction,release,performance,display,anddisclosureoftheProgramand
Documentation by the federal government (or other entity acquiring for or through the federal government)
and shall supersede any conflicting contractual terms or conditions. If this License fails to meet the
government’s needs or is inconsistent in any respect with federal procurement law, the government agrees
to return the Program and Documentation, unused, to The MathWorks, Inc.
Trademarks
MATLAB and Simulink are registered trademarks of The MathWorks, Inc. See
www.mathworks.com/trademarks for a list of additional trademarks. Other product or brand
names may be trademarks or registered trademarks of their respective holders.
Patents
MathWorks products are protected by one or more U.S. patents. Please see
www.mathworks.com/patents for more information.
Revision History
1988 First printing New
November 1997 Second printing Revised
January 1998 Third printing Revised
September 2000 Fourth printing Revised for Version 5.0 (Release 12)
July 2002 Fifth printing Revised for Version 6.0 (Release 13)
December 2002 Online only Revised for Version 6.1 (Release 13+)
June 2004 Online only Revised for Version 6.2 (Release 14)
October 2004 Online only Revised for Version 6.2.1 (Release 14SP1)
March 2005 Online only Revised for Version 6.2.1 (Release 14SP2)
September 2005 Online only Revised for Version 6.4 (Release 14SP3)
March 2006 Sixth printing Revised for Version 6.5 (Release 2006a)
September 2006 Online only Revised for Version 6.6 (Release 2006b)
March 2007 Online only Revised for Version 6.7 (Release 2007a)
September 2007 Online only Revised for Version 6.8 (Release 2007b)
March 2008 Online only Revised for Version 6.9 (Release 2008a)
October 2008 Online only Revised for Version 6.10 (Release 2008b)
March 2009 Online only Revised for Version 6.11 (Release 2009a)
September 2009 Online only Revised for Version 6.12 (Release 2009b)
March 2010 Online only Revised for Version 6.13 (Release 2010a)
September 2010 Online only Revised for Version 6.14 (Release 2010b)
April 2011 Online only Revised for Version 6.15 (Release 2011a)
September 2011 Online only Revised for Version 6.16 (Release 2011b)
March 2012 Online only Revised for Version 6.17 (Release 2012a)
September 2012 Online only Revised for Version 6.18 (Release 2012b)
Contents
Filtering, Linear Systems and Transforms
Overview
1
Filter Implementation and Analysis ................. 1-2
Filtering Overview ................................ 1-2
Convolution and Filtering ........................... 1-2
Filters and Transfer Functions ...................... 1-3
Filtering with the filter Function ..................... 1-4
The filter Function ................................ 1-6
Other Functions for Filtering ....................... 1-8
Multirate Filter Bank Implementation ................ 1-8
Anti-Causal, Zero-Phase Filter Implementation ......... 1-9
Frequency Domain Filter Implementation ............. 1-10
Impulse Response ................................. 1-12
Frequency Response ............................... 1-14
DigitalDomain ................................... 1-14
Analog Domain ................................... 1-16
Magnitude and Phase .............................. 1-17
Delay ........................................... 1-18
Zero-Pole Analysis ................................. 1-21
Linear System Models .............................. 1-23
Available Models .................................. 1-23
Discrete-Time System Models ....................... 1-23
Continuous-Time System Models ..................... 1-31
Linear System Transformations ..................... 1-32
Discrete Fourier Transform ........................ 1-34
v

Filter Design and Implementation
2
Filter Requirements and Specification .............. 2-2
IIR Filter Design .................................. 2-4
IIR vs. FIR Filters ................................. 2-4
Classical IIR Filters ............................... 2-4
Other IIR Filters .................................. 2-5
IIR Filter Method Summary ......................... 2-5
Classical IIR Filter Design Using Analog Prototyping .... 2-6
Comparison of Classical IIR Filter Types .............. 2-9
FIR Filter Design .................................. 2-17
FIR vs. IIR Filters ................................. 2-17
FIR Filter Summary ............................... 2-18
Linear Phase Filters ............................... 2-18
Windowing Method ................................ 2-20
Multiband FIR Filter Design with Transition Bands ..... 2-24
Constrained Least Squares FIR Filter Design .......... 2-31
Arbitrary-Response Filter Design .................... 2-37
Special Topics in IIR Filter Design .................. 2-43
Classic IIR Filter Design ........................... 2-43
Analog Prototype Design ........................... 2-44
Frequency Transformation .......................... 2-44
Filter Discretization ............................... 2-46
Filtering Data With Signal Processing Toolbox
Software ........................................ 2-52
Lowpass FIR Filter — Window Method ................ 2-52
Bandpass Filters — Minimum-Order FIR and IIR
Systems ....................................... 2-56
Zero-Phase Filtering ............................... 2-65
Selected Bibliography .............................. 2-71
vi Contents

Designing a Filter in Fdesign — Process
Overview
3
Process Flow Diagram and Filter Design
Methodology .................................... 3-2
Exploring the Process Flow Diagram .................. 3-2
Selecting a Response ............................... 3-4
Selecting a Specification ............................ 3-4
Selecting an Algorithm ............................. 3-6
Customizing the Algorithm ......................... 3-8
Designing the Filter ............................... 3-8
Design Analysis ................................... 3-9
RealizeorApplytheFiltertoInputData .............. 3-10
Designing a Filter in the Filterbuilder GUI
4
Filterbuilder Design Process ....................... 4-2
Introduction to Filterbuilder ........................ 4-2
Design a Filter Using Filterbuilder ................... 4-2
Select a Response ................................. 4-3
Select a Specification .............................. 4-5
Select an Algorithm ................................ 4-5
Customize the Algorithm ........................... 4-6
Analyze the Design ................................ 4-8
RealizeorApplytheFiltertoInputData .............. 4-8
Designing a FIR Filter Using filterbuilder ........... 4-10
FIR Filter Design ................................. 4-10
FDATool: A Filter Design and Analysis GUI
5
Overview ......................................... 5-2
vii

FDATool ......................................... 5-2
Filter Design Methods ............................. 5-2
Using the Filter Design and Analysis Tool ............. 5-4
Analyzing Filter Responses ......................... 5-4
Filter Design and Analysis Tool Panels ................ 5-4
Getting Help ..................................... 5-5
Using FDATool .................................... 5-6
Choosing a Response Type .......................... 5-7
Choosing a Filter Design Method ..................... 5-8
Setting the Filter Design Specifications ............... 5-8
Computing the Filter Coefficients .................... 5-12
Analyzing the Filter ............................... 5-13
Editing the Filter Using the Pole/Zero Editor ........... 5-19
Converting the Filter Structure ...................... 5-23
Exporting a Filter Design ........................... 5-26
Generating a C Header File ......................... 5-32
Generating MATLAB Code .......................... 5-34
Managing Filters in the Current Session .............. 5-35
Saving and Opening Filter Design Sessions ............ 5-38
Importing a Filter Design .......................... 5-39
Import Filter Panel ................................ 5-39
Filter Structures .................................. 5-40
Statistical Signal Processing
6
Correlation and Covariance ........................ 6-2
Background Information ............................ 6-2
Using xcorr and xcov Functions ...................... 6-3
Bias and Normalization ............................ 6-3
Multiple Channels ................................. 6-4
Spectral Analysis .................................. 6-5
Background Information ............................ 6-5
Spectral Estimation Method ......................... 6-7
Nonparametric Methods ............................ 6-9
Parametric Methods ............................... 6-32
viii Contents

Selected Bibliography .............................. 6-46
Special Topics
7
Windows .......................................... 7-2
Why Use Windows? ................................ 7-2
Available Window Functions ........................ 7-2
Graphical User Interface Tools ...................... 7-3
Basic Shapes ..................................... 7-3
Generalized Cosine Windows ........................ 7-6
Kaiser Window ................................... 7-8
Chebyshev Window ................................ 7-12
Parametric Modeling .............................. 7-13
What is Parametric Modeling ........................ 7-13
Available Parametric Modeling Functions ............. 7-13
Time-Domain Based Modeling ....................... 7-14
Frequency-Domain Based Modeling .................. 7-18
Resampling ....................................... 7-21
Available Resampling Functions ..................... 7-21
resample Function ................................. 7-21
decimate and interp Functions ....................... 7-23
upfirdn Function .................................. 7-23
spline Function ................................... 7-23
Cepstrum Analysis ................................. 7-24
What Is a Cepstrum? .............................. 7-24
Inverse Complex Cepstrum ......................... 7-27
FFT-Based Time-Frequency Analysis ................ 7-28
Median Filtering .................................. 7-29
Communications Applications ...................... 7-30
Modulation ....................................... 7-30
Demodulation .................................... 7-31
ix

Voltage Controlled Oscillator ........................ 7-34
Deconvolution ..................................... 7-35
Specialized Transforms ............................ 7-36
Chirp z-Transform ................................. 7-36
Discrete Cosine Transform .......................... 7-37
Hilbert Transform ................................. 7-40
Walsh–Hadamard Transform ........................ 7-41
Selected Bibliography .............................. 7-47
SPTool: A Signal Processing GUI Suite
8
SPTool: An Interactive Signal Processing
Environment .................................... 8-2
SPTool Overview .................................. 8-2
SPTool Data Structures ............................ 8-3
Opening SPTool ................................... 8-4
Getting Context-Sensitive Help ..................... 8-6
Signal Browser .................................... 8-7
Overview of the Signal Browser ...................... 8-7
Opening the Signal Browser ......................... 8-7
FDATool .......................................... 8-10
Filter Visualization Tool ........................... 8-11
Connection between FVTool and SPTool ............... 8-11
Opening the Filter Visualization Tool ................. 8-11
Analysis Parameters ............................... 8-12
Spectrum Viewer .................................. 8-13
xContents
Spectrum Viewer Overview ......................... 8-13
Opening the Spectrum Viewer ....................... 8-13
Filtering and Analysis of Noise ..................... 8-16
Overview ........................................ 8-16
Importing a Signal into SPTool ...................... 8-16
Designing a Filter ................................. 8-18
Applying a Filter to a Signal ........................ 8-20
Analyzing a Signal ................................ 8-22
Spectral Analysis in the Spectrum Viewer ............. 8-24
Exporting Signals, Filters, and Spectra .............. 8-27
Opening the Export Dialog Box ...................... 8-27
Exporting a Filter to the MATLAB Workspace .......... 8-28
Accessing Filter Parameters ........................ 8-29
Accessing Filter Parameters in a Saved Filter .......... 8-29
Accessing Parameters in a Saved Spectrum ............ 8-30
Importing Filters and Spectra ...................... 8-32
Similarities to Other Procedures ..................... 8-32
Importing Filters .................................. 8-32
Importing Spectra ................................. 8-34
Loading Variables from the Disk .................... 8-36
Saving and Loading Sessions ....................... 8-37
SPTool Sessions ................................... 8-37
Filter Formats .................................... 8-37
Selecting Signals, Filters, and Spectra ............... 8-39
Editing Signals, Filters, or Spectra .................. 8-40
Making Signal Measurements with Markers ......... 8-41
Setting Preferences ................................ 8-43
Overview of Setting Preferences ..................... 8-43
Summary of Settable Preferences .................... 8-44
xi

Setting the Filter Design Tool ....................... 8-45
Using the Filter Designer ........................... 8-47
Filter Designer ................................... 8-47
Filter Types ...................................... 8-47
FIR Filter Methods ................................ 8-48
IIR Filter Methods ................................ 8-48
Pole/Zero Editor ................................... 8-48
Spectral Overlay Feature ........................... 8-48
Opening the Filter Designer ......................... 8-48
Accessing Filter Parameters in a Saved Filter .......... 8-50
Designing a Filter with the Pole/Zero Editor ........... 8-53
Positioning Poles and Zeros ......................... 8-54
Redesigning a Filter Using the Magnitude Plot ......... 8-56
Code Generation from MATLAB Support in
Signal Processing Toolbox
9
Supported Functions .............................. 9-2
Specifying Inputs in Code Generation from MATLAB
................................................. 9-7
Defining Input Size and Type ........................ 9-7
Inputs must be Constants ........................... 9-8
Code Generation Examples ......................... 9-11
Apply Window to Input Signal ....................... 9-11
Apply Lowpass Filter to Input Signal ................. 9-13
Cross Correlate or Autocorrelate Input Data ........... 9-14
freqz With No Output Arguments ................... 9-15
Zero Phase Filtering ............................... 9-16
xii Contents
Convolution and Correlation
10
Linear and Circular Convolution ................... 10-2
Confidence Intervals for Sample Autocorrelation ..... 10-5
Residual Analysis with Autocorrelation ............. 10-9
Autocorrelation of Moving Average Process .......... 10-19
Cross-correlation of Two Moving Average Processes .. 10-21
Cross-correlation of Delayed Signal in Noise ......... 10-23
Cross-correlation of Phase-Lagged Sine Wave ........ 10-26
Multirate Signal Processing
11
Downsampling — Signal Phases .................... 11-2
Downsampling — Aliasing .......................... 11-6
Filtering Before Downsampling ..................... 11-12
Upsampling — Imaging Artifacts .................... 11-14
Filtering After Upsampling — Interpolation ......... 11-16
Changing Signal Sampling Rate ..................... 11-18
xiii

Spectral Analysis
12
Power Spectral Density Estimates Using FFT ........ 12-2
Bias and Variability in the Periodogram ............. 12-10
Cross Spectrum and Magnitude-Squared Coherence .. 12-20
Amplitude Estimation and Zero Padding ............ 12-24
Significance Testing for Periodic Component ........ 12-27
Frequency Estimation by Subspace Methods ......... 12-29
Frequency-Domain Linear Regression ............... 12-32
Linear Prediction
13
Prediction Polynomial ............................. 13-2
Formant Estimation with LPC Coefficients .......... 13-5
AR Order Selection with Partial Autocorrelation
Sequence ....................................... 13-9
Transforms
14
Complex Cepstrum — Fundamental Frequency
Estimation ..................................... 14-2
xiv Contents
Analytic Signal for Cosine .......................... 14-6
Envelope Extraction Using The Analytic Signal ...... 14-9
Signal Generation
15
Display Time-Domain Data in Signal Browser ........ 15-2
Import and Display Signals ......................... 15-3
Configure the Signal Browser Properties .............. 15-6
Modify the Signal Browser Display ................... 15-9
Inspect Your Data (Scaling the Axes and Zooming) ...... 15-11
Signal Measurement
16
RMS Value of Periodic Waveforms .................. 16-2
Slew Rate of Triangular Waveform .................. 16-5
Duty Cycle of Rectangular Pulse Waveform .......... 16-9
Estimate State for Digital Clock ..................... 16-12
CalculateSettlingTimewithSignalBrowser ......... 16-16
Find Peak Amplitudes in Signal Browser ............ 16-20
xv

1
Filtering, Linear Systems
and Transforms Overview
•“Filter Implementation and Analysis” on page 1-2
•“The filter Function” on page 1-6
•“Other Functions for Filtering” on page 1-8
•“Impulse Response” on page 1-12
•“Frequency Response” on page 1-14
•“Zero-Pole Analysis” on page 1-21
•“Linear System Models” on page 1-23
•“Discrete Fourier Transform” on page 1-34
1Filtering, Linear Systems and Transforms Overview
Filter Implementation and Analysis
In this section...
“Filtering Overview” on page 1-2
“Convolution and Filtering” on page 1-2
“Filters and Transfer Functions” on page 1-3
“Filtering with the filter Function” on page 1-4
Filtering Overview
This section describes how to filter discrete signals using the MATLAB®
filter function and other Signal Processing Toolbox™ functions. It also
discusses how to use the toolbox functions to analyze filter characteristics,
including impulse response, magnitude and phase response, group delay,
and zero-pole locations.
Convolution and Filtering
The mathematical foundation of filtering is convolution. The MATLAB conv
function performs standard one-dimensional convolution, convolving one
vector with another:
conv([1 1 1],[1 1 1])
ans =
12321
Note Convolve rectangular matrices for two-dimensional signal processing
using the conv2 function.
A digital filter’s output y(k)isrelatedtoitsinputx(k) by convolution with its
impulse response h(k).
yk hlxk l
l
() ()( )=−
=−∞
∞
∑
1-2

Filter Implementation and Analysis
If a digital filter’s impulse response h(k) is finite in length, and the input x(k)
is also of finite length, you can implement the filter using conv.Storex(k)ina
vector x,h(k)inavectorh, and convolve the two:
x = randn(5,1); % A random vector of length 5
h = [1 1 1 1]/4; % Length 4 averaging filter
y = conv(h,x);
The length of the output is the sum of the finite-length input vectors minus 1.
Filters and Transfer Functions
In general, the z-transform Y(z) of a discrete-time filter’s output y(n)isrelated
to the z-transform X(z)oftheinputby
Yz HzXz bbz bnz
aaz a
n
() () () () () ... ( )
() () ...
==
++++
+++
−−
−
12 1
12
1
1(() ()
mz
Xz
m
+−
1
where H(z)isthefilter’stransfer function. Here, the constants b(i)anda(i)are
the filter coefficients and the order of the filter is the maximum of nand m.
Note The filter coefficients start with subscript 1, rather than 0. This reflects
the standard indexing scheme used for MATLAB vectors.
MATLAB filter functions store the coefficients in two vectors, one for the
numerator and one for the denominator. By convention, it uses row vectors
forfiltercoefficients.
Filter Coefficients and Filter Names
Many standard names for filters reflect the number of aand bcoefficients
present:
•When n=0(thatis,bis a scalar), the filter is an Infinite Impulse Response
(IIR), all-pole, recursive, or autoregressive (AR) filter.
•When m=0(thatis,ais a scalar), the filter is a Finite Impulse Response
(FIR), all-zero, nonrecursive, or moving-average (MA) filter.
1-3

1Filtering, Linear Systems and Transforms Overview
•If both nand mare greater than zero, the filter is an IIR, pole-zero,
recursive, or autoregressive moving-average (ARMA) filter.
The acronyms AR, MA, and ARMA are usually applied to filters associated
with filtered stochastic processes.
Filtering with the filter Function
It is simple to work back to a difference equation from the z-transform relation
shown earlier. Assume that a(1) = 1. Move the denominator to the left-hand
side and take the inverse z-transform.
yk a yk am yk m b xk b xk bn() ()( ) ( )( ) ()() ()( ) (+ − +…+ + − = + − +…+ +21 1 1 21 1))( )xk n−
In terms of current and past inputs, and past outputs, y(k)is
yk a ykb xk b xk bn xk n am() ()( )() () () ( ) ( ) ( ) (=+−+…++−− …−+−−121 1 121 ))( )yk m−
This is the standard time-domain representation of a digital filter, computed
starting with y(1) and assuming a causal system with zero initial conditions.
This representation’s progression is
ybx
ybxbxay
ybx
() () ()
() ()() ()() ()()
() ()()
111
2122121
313
=
=+−
=+bbx bx ay ay()() ()() ()() ()()22 31 22 31+− −
=
A filter in this form is easy to implement with the filter function. For
example, a simple single-pole filter (lowpass) is
B = 1; % Numerator
A = [1 -0.9]; % Denominator
where the vectors Band Arepresent the coefficients of a filter in transfer
function form. Note that the Acoefficient vectors are written as if the output
and input terms are separated in the difference equation. For the example,
the previous coefficient vectors represent a linear constant-coefficient
difference equation of
1-4

Filter Implementation and Analysis
yn yn xn() . ( ) ()−−=09 1
Changing the sign of the A(2) coefficient, results in the difference equation
yn yn xn() . ( ) ()+−=09 1
The previous coefficients are represented as:
B = 1; %Numerator
A = [1 0.9]; %Denominator
and results in a highpass filter.
Toapplythisfiltertoyourdata,use
y = filter(B,A,x);
filter gives you as many output samples as there are input samples, that
is, the length of yis the same as the length of x.Ifthefirstelementofa
is not 1, filter divides the coefficients by a(1) before implementing the
difference equation.
1-5
1Filtering, Linear Systems and Transforms Overview
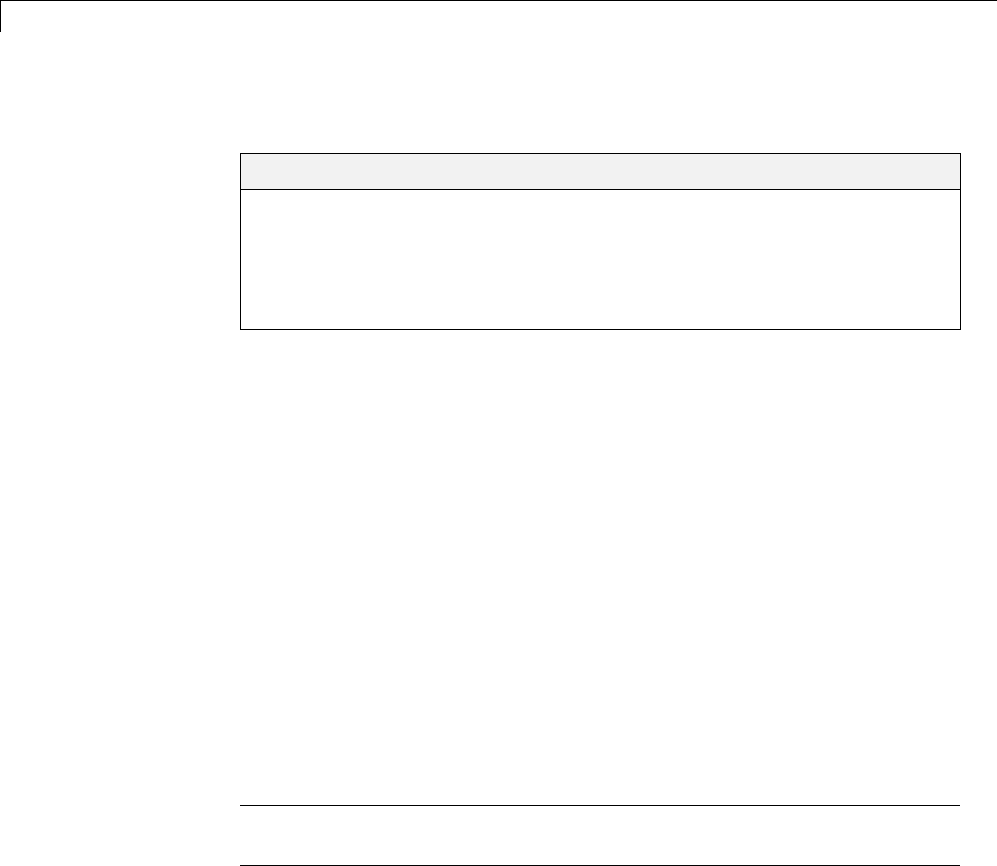
The filter Function
filter is implemented as the transposed direct-form II structure, where n-1
is the filter order. This is a canonical form that has the minimum number of
delay elements.
At sample m,filter computes the difference equations
ym b xm z m
zm b xm zm a ym
zn
() ()() ( )
() ()() ( ) ()()
=+−
=+−−
=
−
11
212
1
12
221
1
111() ( )() ( ) ( )()
() ()() ()
mbn xmz m an ym
zmbnxman
n
n
=− + −−−
=−
−
−yym()
In its most basic form, filter initializes the delay outputs zi(1), i= 1, ..., n-1
to 0. This is equivalent to assuming both past inputs and outputs are zero.
Set the initial delay outputs using a fourth input parameter to filter,or
access the final delay outputs using a second output parameter:
[y,zf] = filter(b,a,x,zi)
Access to initial and final conditions is useful for filtering data in sections,
especially if memory limitations are a consideration. Suppose you have
collected data in two segments of 5000 points each:
x1 = randn(5000,1); % Generate two random data sequences.
x2 = randn(5000,1);
Perhaps the first sequence, x1, corresponds to the first 10 minutes of data
and the second, x2, to an additional 10 minutes. The whole sequence is
1-6

The filter Function
x=[x1;x2]. If there is not sufficient memory to hold the combined sequence,
filter the subsequences x1 and x2 one at a time. To ensure continuity of
the filtered sequences, use the final conditions from x1 as initial conditions
to filter x2:
[y1,zf] = filter(b,a,x1);
y2 = filter(b,a,x2,zf);
The filtic function generates initial conditions for filter.filtic computes
the delay vector to make the behavior of the filter reflect past inputs and
outputs that you specify. To obtain the same output delay values zf as above
using filtic,use
zf = filtic(b,a,flipud(y1),flipud(x1));
This can be useful when filtering short data sequences, as appropriate initial
conditions help reduce transient startup effects.
1-7
1Filtering, Linear Systems and Transforms Overview
Other Functions for Filtering
In this section...
“Multirate Filter Bank Implementation” on page 1-8
“Anti-Causal, Zero-Phase Filter Implementation” on page 1-9
“Frequency Domain Filter Implementation” on page 1-10
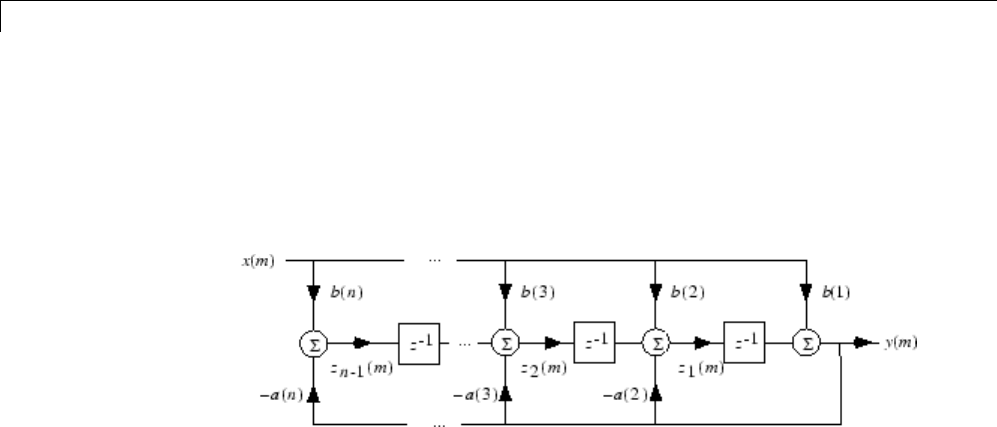
Multirate Filter Bank Implementation
The upfirdn function alters the sampling rate of a signal by an integer ratio
P/Q. It computes the result of a cascade of three systems that performs the
following tasks:
•Upsampling (zero insertion) by integer factor p
•FilteringbyFIRfilterh
•Downsampling by integer factor q
For example, to change the sample rate of a signal from 44.1 kHz to 48 kHz,
we first find the smallest integer conversion ratio p/q.Set
d = gcd(48000,44100);
p = 48000/d;
q = 44100/d;
In this example, p=160 and q=147. Sample rate conversion is then
accomplished by typing
y = upfirdn(x,h,p,q)
This cascade of operations is implemented in an efficient manner using
polyphase filtering techniques, and it is a central concept of multirate
filtering. Note that the quality of the resampling result relies on the quality of
the FIR filter h.
1-8
Other Functions for Filtering
Filter banks may be implemented using upfirdn by allowing the filter h
to be a matrix, with one FIR filter per column. A signal vector is passed
independently through each FIR filter, resulting in a matrix of output signals.
Other functions that perform multirate filtering (with fixed filter) include
resample,interp,anddecimate.
Anti-Causal, Zero-Phase Filter Implementation
In the case of FIR filters, it is possible to design linear phase filters that,
when applied to data (using filter or conv), simply delay the output by a
fixed number of samples. For IIR filters, however, the phase distortion is
usually highly nonlinear. The filtfilt function uses the information in the
signal at points before and after the current point, in essence “looking into the
future,” to eliminate phase distortion.
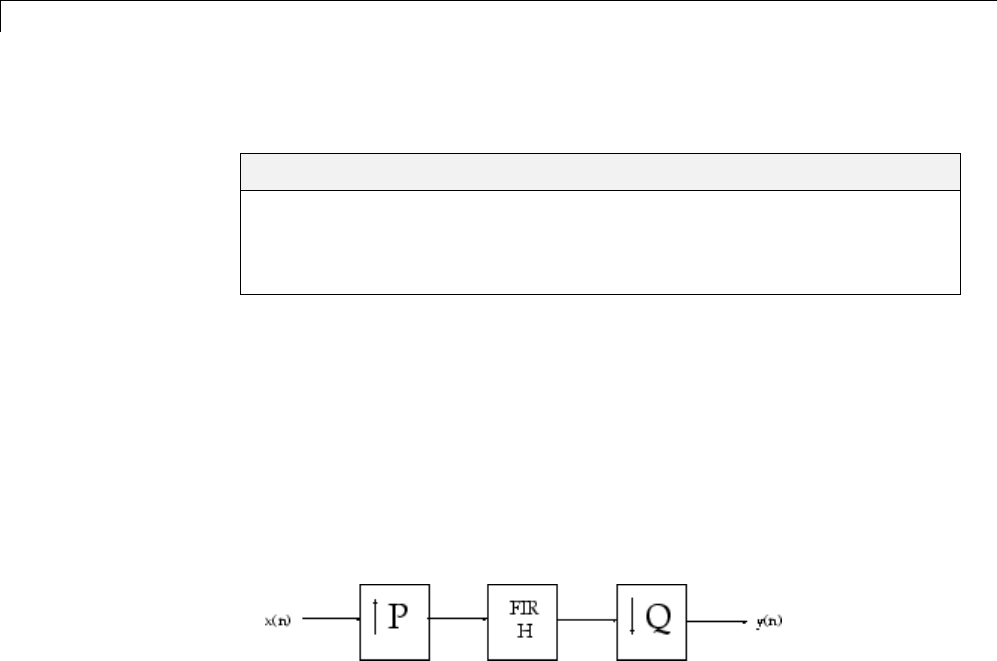
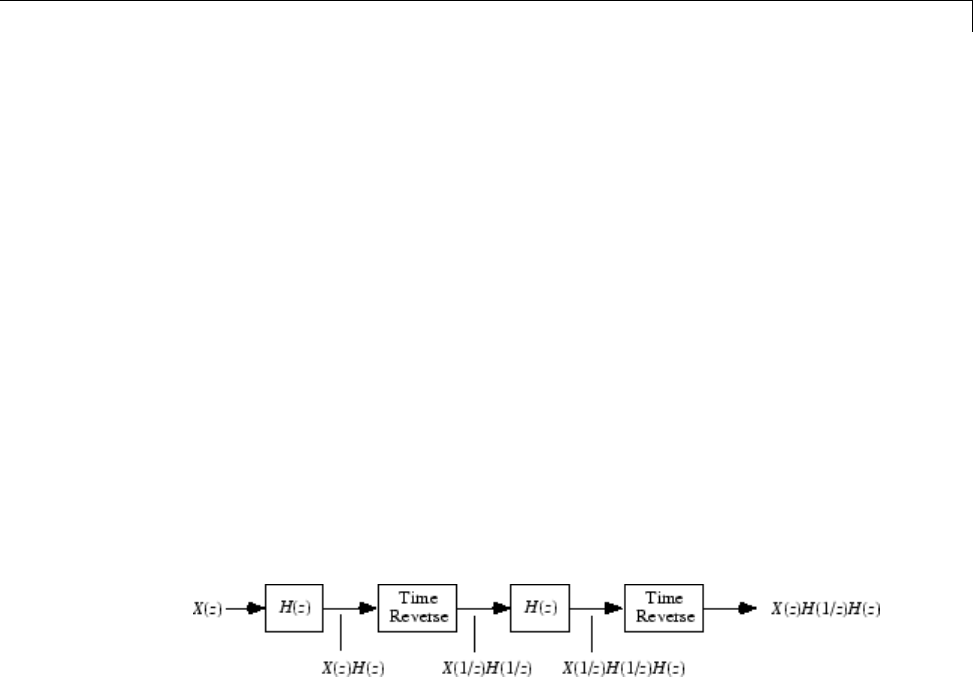
To see how filtfilt does this, recall that if the z-transform of a real
sequence x(n)isX(z), the z-transform of the time reversed sequence x(n)is
X(1/z). Consider the processing scheme.
Image of Anti Causal Zero Phase Filter
When |z|=1,thatisz=ejω, the output reduces to X(ejω)|H(ejω)|2.Given
all the samples of the sequence x(n), a doubly filtered version of xthat has
zero-phase distortion is possible.
For example, a 1-second duration signal sampled at 100 Hz, composed of two
sinusoidal components at 3 Hz and 40 Hz, is
fs = 100;
t = 0:1/fs:1;
x = sin(2*pi*t*3)+.25*sin(2*pi*t*40);
Now create a 10-point averaging FIR filter, and filter xusing both filter
and filtfilt for comparison:
1-9

1Filtering, Linear Systems and Transforms Overview
b = ones(1,10)/10; % 10 point averaging filter
y = filtfilt(b,1,x); % Noncausal filtering
yy = filter(b,1,x); % Normal filtering
plot(t,x,t,y,'--',t,yy,':')
Both filtered versions eliminate the 40 Hz sinusoid evident in the original,
solid line. The plot also shows how filter and filtfilt differ; the dashed
(filtfilt) line is in phase with the original 3 Hz sinusoid, while the dotted
(filter) line is delayed by about five samples. Also, the amplitude of the
dashed line is smaller due to the magnitude squared effects of filtfilt.
filtfilt reduces filter startup transients by carefully choosing initial
conditions, and by prepending onto the input sequence a short, reflected piece
of the input sequence. For best results, make sure the sequence you are
filtering has length at least three times the filter order and tapers to zero on
both edges.
Frequency Domain Filter Implementation
Dualitybetweenthetimedomainandthefrequencydomainmakesitpossible
to perform any operation in either domain. Usually one domain or the other is
more convenient for a particular operation, but you can always accomplish
a given operation in either domain.
1-10

Other Functions for Filtering
To implement general IIR filtering in the frequency domain, multiply the
discrete Fourier transform (DFT) of the input sequence with the quotient of
the DFT of the filter:
n = length(x);
y = ifft(fft(x).*fft(b,n)./fft(a,n));
This computes results that are identical to filter, but with different startup
transients (edge effects). For long sequences, this computation is very
inefficient because of the large zero-padded FFT operations on the filter
coefficients, and because the FFT algorithm becomes less efficient as the
number of points nincreases.
For FIR filters, however, it is possible to break longer sequences into shorter,
computationally efficient FFT lengths. The function
y = fftfilt(b,x)
uses the overlap add method to filter a long sequence with multiple
medium-length FFTs. Its output is equivalent to filter(b,1,x).
1-11
1Filtering, Linear Systems and Transforms Overview
Impulse Response
The impulse response of a digital filter is the output arising from the unit
impulse sequence defined as
()nn
n
==
≠
⎧
⎨
⎩
10
00
You can generate an impulse sequence a number of ways; one straightforward
way is
imp = [1; zeros(49,1)];
The impulse response of the simple filter b=1and a=[1 -0.9] is
h = filter(b,a,imp);
Asimplew
ay to display the impulse response is with the Filter Visualization
Tool (fvtool):
fvtool(b,a)
Then click the Impulse Response button on the toolbar or select
Analysis > Impulse Response. This plot shows the exponential decay
h(n) =0.9n ofthesinglepolesystem:
1-12

Impulse Response
1-13
1Filtering, Linear Systems and Transforms Overview
Frequency Response
In this section...
“Digital Domain” on page 1-14
“Analog Domain” on page 1-16
“Magnitude and Phase” on page 1-17
“Delay” on page 1-18
Digital Domain
freqz uses an FFT-based algorithm to calculate the z-transform frequency
response of a digital filter. Specifically, the statement
[h,w] = freqz(b,a,p)
returns the p-point complex frequency response, H(ejω), of the digital filter.
He bbe bne
aae am
jw jw jwn
jw
() ( ) ( ) ... ( )
() () ... (
=++++
++++
−−
−
12 1
12 11)ejwm−
In its simplest form, freqz accepts the filter coefficient vectors band a,andan
integer pspecifying the number of points at which to calculate the frequency
response. freqz returns the complex frequency response in vector h,andthe
actual frequency points in vector win rad/s.
freqz can accept other parameters, such as a sampling frequency or a
vector of arbitrary frequency points. The example below finds the 256-point
frequency response for a 12th-order Chebyshev Type I filter. The call to freqz
specifies a sampling frequency fs of 1000 Hz:
[b,a] = cheby1(12,0.5,200/500);
[h,f] = freqz(b,a,256,1000);
Because the parameter list includes a sampling frequency, freqz returns a
vector fthat contains the 256 frequency points between 0 and fs/2 used in
the frequency response calculation.
1-14
Frequency Response
Note This toolbox uses the convention that unit frequency is the Nyquist
frequency, defined as half the sampling frequency. The cutoff frequency
parameter for all basic filter design functions is normalized by the Nyquist
frequency. For a system with a 1000 Hz sampling frequency, for example,
300 Hz is 300/500 = 0.6. To convert normalized frequency to angular frequency
around the unit circle, multiply by π. To convert normalized frequency back
to hertz, multiply by half the sample frequency.
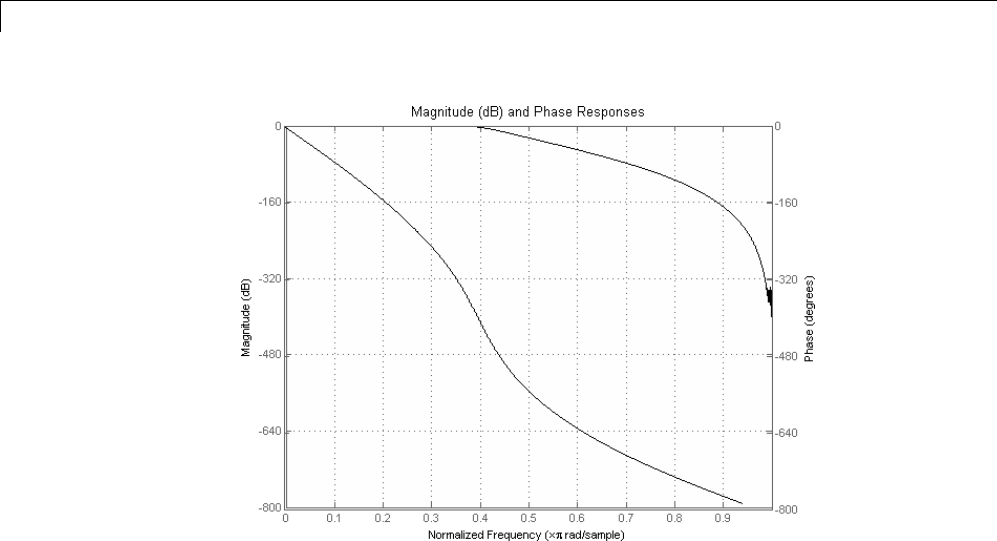
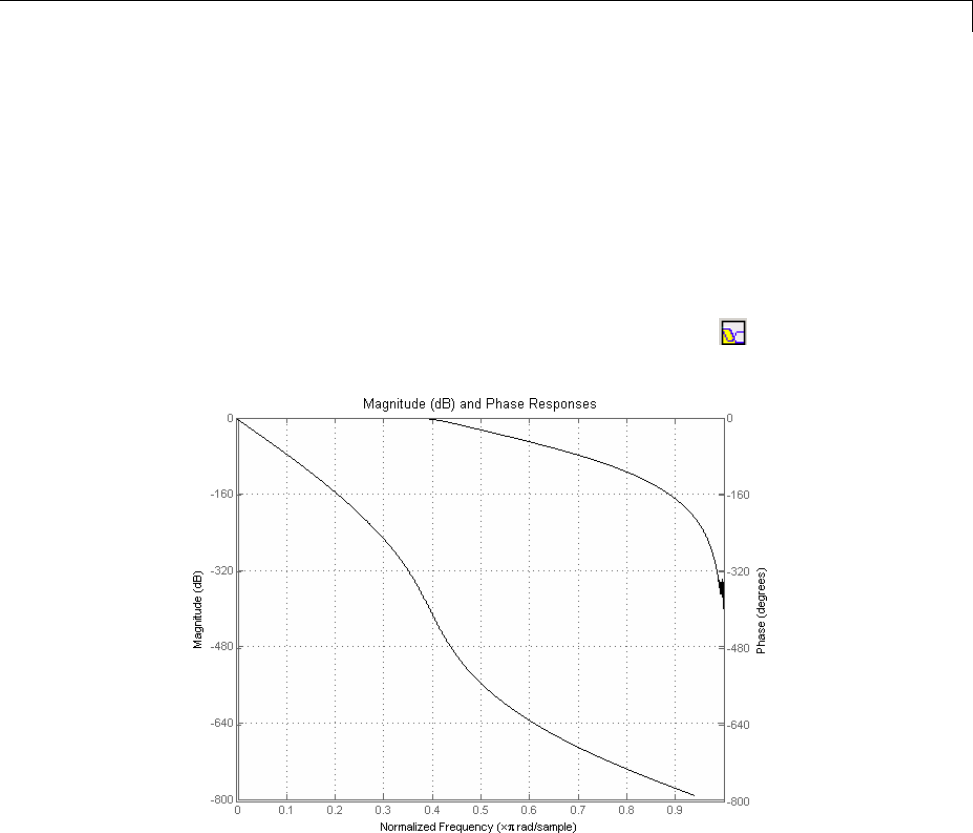
If you call freqz with no output arguments, it plots both magnitude
versus frequency and phase versus frequency. For example, a ninth-order
Butterworth lowpass filter with a cutoff frequency of 400 Hz, based on a 2000
Hz sampling frequency, is
[b,a] = butter(9,400/1000);
To calculate the 256-point complex frequency response for this filter, and plot
the magnitude and phase with freqz,use
freqz(b,a,256,2000)
or to display the magnitude and phase responses in fvtool, which provides
additional analysis tools, use
fvtool(b,a)
and click the Magnitude and Phase Response button on the toolbar or
select Analysis > Magnitude and Phase Response.
1-15
1Filtering, Linear Systems and Transforms Overview
freqz can also accept a vector of arbitrary frequency points for use in the
frequency response calculation. For example,
w = linspace(0,pi);
h = freqz(b,a,w);
calculates the complex frequency response at the frequency points in wfor the
filter defined by vectors band a. The frequency points can range from 0 to
2π. To specify a frequency vector that ranges from zero to your sampling
frequency, include both the frequency vector and the sampling frequency
value in the parameter list.
Analog Domain
freqs evaluates frequency response for an analog filter defined by two input
coefficient vectors, band a. Its operation is similar to that of freqz;youcan
specify a number of frequency points to use, supply a vector of arbitrary
frequency points, and plot the magnitude and phase response of the filter.
1-16
Frequency Response
Magnitude and Phase
MATLAB functions are available to extract magnitude and phase from a
frequency response vector h. The function abs returns the magnitude of the
response; anglereturns the phase angle in radians. To extract the magnitude
and phase of a Butterworth filter:
[b,a] = butter(9,400/1000);
fvtool(b,a)
and click the Magnitude and Phase Response button on the toolbar or
select Analysis > Magnitude and Phase Response to display the plot.
The unwrap function is also useful in frequency analysis. unwrap unwraps
the phase to make it continuous across 360º phase discontinuities by adding
multiples of ±360°, as needed. To see how unwrap is useful, design a
25th-order lowpass FIR filter:
h = fir1(25,0.4);
Obtain the filter’s frequency response with freqz, and plot the phase in
degrees:
1-17
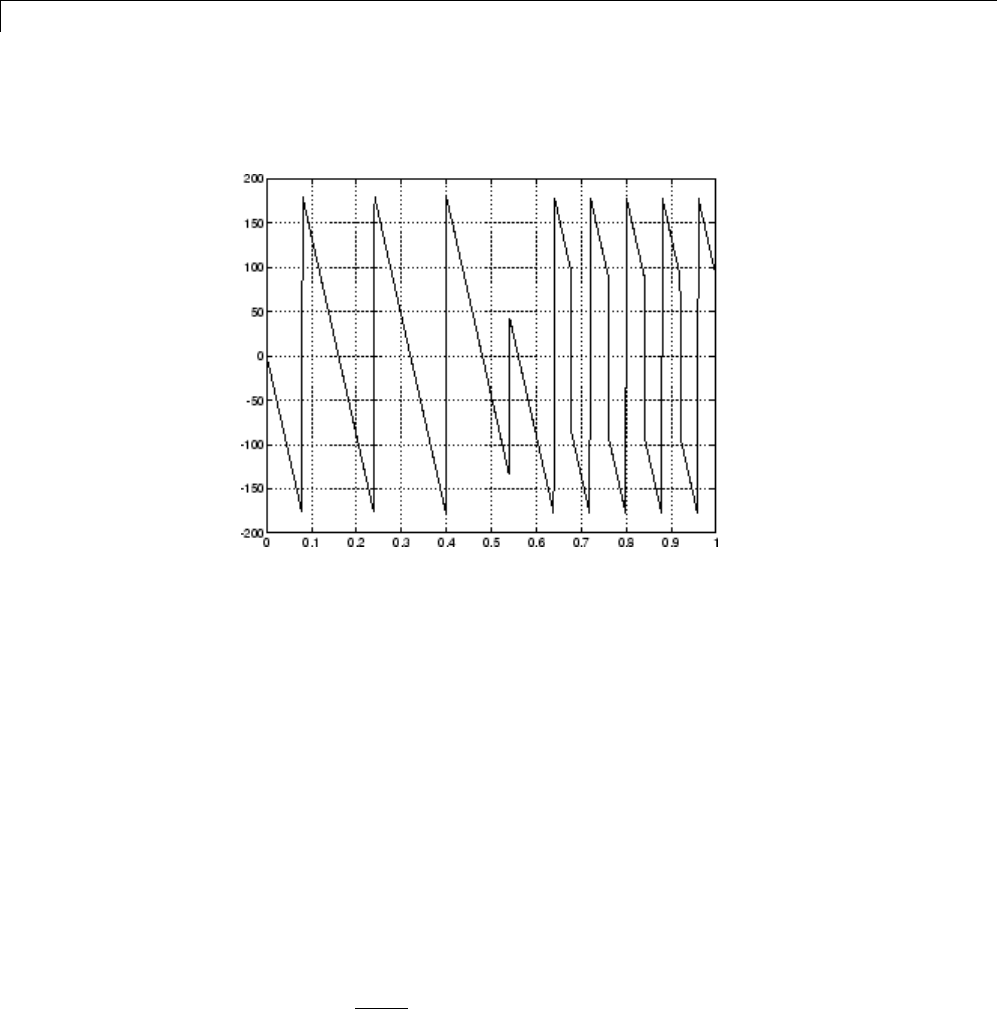
1Filtering, Linear Systems and Transforms Overview
[H,f] = freqz(h,1,512,2);
plot(f,angle(H)*180/pi); grid
It is difficult to distinguish the 360° jumps (an artifact of the arctangent
function inside angle) from the 180° jumps that signify zeros in the frequency
response.
unwrap eliminates the 360° jumps:
plot(f,unwrap(angle(H))*180/pi);
or you can use phasez to see the unwrapped phase.
Delay
The group delay ofafilterisameasureoftheaveragetimedelayofthefilter
as a function of frequency. It is defined as the negative first derivative of a
filter’s phase response. If the complex frequency response of a filter is H(ejω),
then the group delay is
g
d
d
() ()
=−
1-18
Frequency Response
where θ(ω) is the phase, or argument of H(ejω). Compute group delay with
[gd,w] = grpdelay(b,a,n)
which returns the n-point group delay, ,τg(ω) of the digital filter specified by
band a, evaluated at the frequencies in vector w.
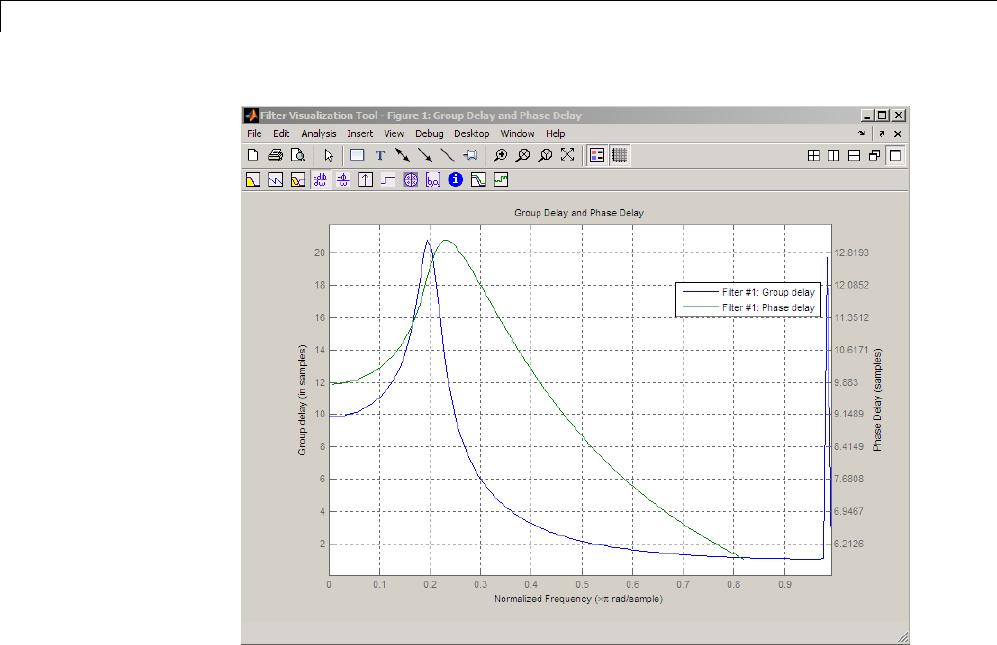
The phase delay of a filter is the negative of phase divided by frequency:
p() ()
=−
To plot both the group and phase delays of a system on the same FVTool
graph, type
[b,a] = butter(10,200/1000);
hFVT = fvtool(b,a,'Analysis','grpdelay');
set(hFVT,'NumberofPoints',128,'OverlayedAnalysis','phasedelay');
legend(hFVT)
1-19
1Filtering, Linear Systems and Transforms Overview
1-20
Zero-Pole Analysis
Zero-Pole Analysis
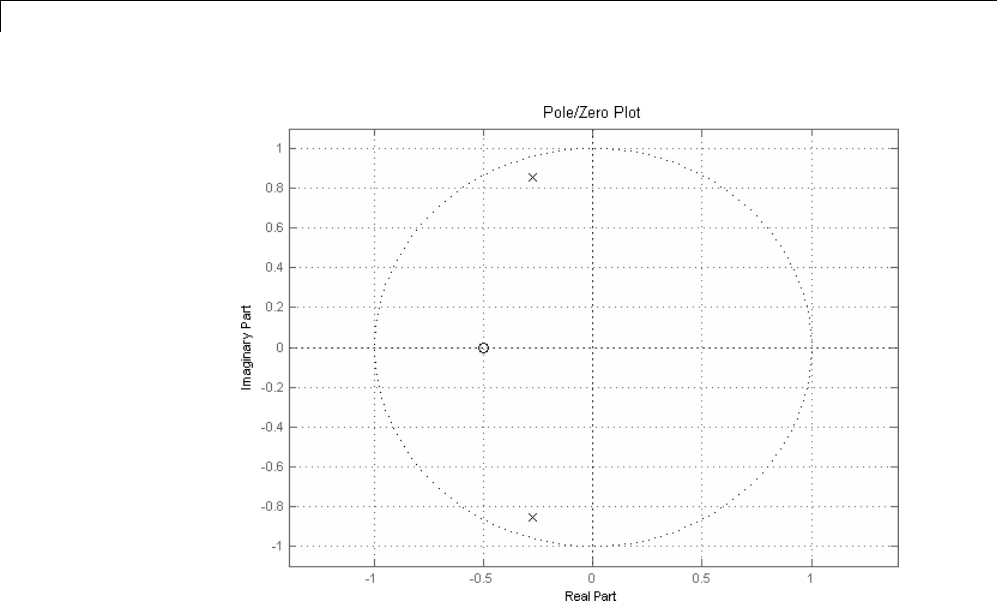
The zplane function plots poles and zeros of alinearsystem. Forexample,
a simple filter with a zero at -1/2 and a complex pole pair at 0.9e–j2π(0.3) and
0.9ej2π(0.3) is
zer = -0.5;
pol = 0.9*exp(j*2*pi*[-0.3 0.3]');
To view the pole-zero plot for this filter you can use
zplane(zer,pol)
or, for access to additional tools, use fvtool. First convert the poles and zeros
to transfer function form, then call fvtool,
[b,a] = zp2tf(zer,pol,1);
fvtool(b,a)
and click the Pole/Zero Plot toolbar button on the toolbar or select
Analysis > Pole/Zero Plot to see the plot.
1-21
1Filtering, Linear Systems and Transforms Overview
For a system in zero-pole form, supply column vector arguments zand pto
zplane:
zplane(z,p)
For a system in transfer function form, supply row vectors band aas
arguments to zplane:
zplane(b,a)
In this case zplane finds the roots of band ausing the roots function and
plots the resulting zeros and poles.
See “Linear System Models” on page 1-23 for details on zero-pole and transfer
function representation of systems.
1-22
Linear System Models
Linear System Models
In this section...
“Available Models” on page 1-23
“Discrete-Time System Models” on page 1-23
“Continuous-Time System Models” on page 1-31
“Linear System Transformations” on page 1-32
Available Models
Several Signal Processing Toolbox models are provided for representing linear
time-invariant systems. This flexibility lets you choose the representational
scheme that best suits your application and, within the bounds of numeric
stability, convert freely to and from most other models. This section provides
a brief overview of supported linear system models and describes how to work
with these models in the MATLAB technical computing environment.
Discrete-Time System Models
The discrete-time system models are representational schemes for digital
filters. The MATLAB technical computing environment supports several
discrete-time system models, which are described in the following sections:
•“Transfer Function” on page 1-23
•“Zero-Pole-Gain” on page 1-24
•“State-Space” on page 1-25
•“Partial Fraction Expansion (Residue Form)” on page 1-26
•“Second-Order Sections (SOS)” on page 1-27
•“Lattice Structure” on page 1-28
•“Convolution Matrix” on page 1-30
Transfer Function
The transfer function is a basic z-domain representation of a digital filter,
expressing the filter as a ratio of two polynomials. It is the principal
1-23

1Filtering, Linear Systems and Transforms Overview
discrete-time model for this toolbox. The transfer function model description
for the z-transform of a digital filter’s difference equation is
Yz bbz bnz
aaz amz
Xz
n
m
() () () ( )
() () ( ) ()=++…++
++…++
−−
−−
12 1
12 1
1
1
Here, the constants b(i)anda(i) are the filter coefficients, and the order of the
filter is the maximum of nand m. In the MATLAB environment, you store
these coefficients in two vectors (row vectors by convention), one row vector
for the numerator and one for the denominator. See “Filters and Transfer
Functions” on page 1-3 for more details on the transfer function form.
Zero-Pole-Gain
The factored or zero-pole-gain form of a transfer function is
Hz qz
pz kzq zq zqn
zp zp
() ()
()
( ( ))( ( ))...( ( ))
( ( ))( ( ))
==
−− −
−−
12
12
....( ( ))zpn−
By convention, polynomial coefficients are stored in row vectors and
polynomial roots in column vectors. In zero-pole-gain form, therefore, the
zero and pole locations for the numerator and denominator of a transfer
function reside in column vectors. The factored transfer function gain kis a
MATLAB scalar.
The poly and roots functions convert between polynomial and zero-pole-gain
representations. For example, a simple IIR filter is
b=[234];
a=[1331];
The zeros and poles of this filter are
q = roots(b)
p = roots(a)
% Gain factor
k = b(1)/a(1)
Returning to the original polynomials,
1-24
Linear System Models
bb = k*poly(q)
aa = poly(p)
Note that band ain this case represent the transfer function:
Hz zz
zzz
zz
zzz
()=++
+++
=++
+++
−−
−−−
23 4
13 3
234
331
12
123
2
32
For b=[2 3 4],theroots function misses the zero for zequal to 0. In fact, it
misses poles and zeros for zequal to 0 whenever the input transfer function
has more poles than zeros, or vice versa. This is acceptable in most cases. To
circumvent the problem, however, simplyappendzerostomakethevectors
the same length before using the roots function; for example, b=[b 0].
State-Space
It is always possible to represent a digital filter, or a system of difference
equations, as a set of first-order difference equations. In matrix or state-space
form, you can write the equations as
xn Axn Bun
yn Cxn Dun
( ) () ()
() () ()
+= +
=+
1
where uis the input, xis the state vector, and yis the output. For
single-channel systems, Ais an m-by-mmatrix where mis the order of the filter,
Bis a column vector, Cis a row vector, and Dis a scalar. State-space notation
is especially convenient for multichannel systems where input uand output y
become vectors, and B,C,andDbecome matrices.
State-space representation extends easily to the MATLAB environment.A,B,
C,andDare rectangular arrays; MATLAB functions treat them as individual
variables.
Taking the z-transform of the state-space equations and combining them
shows the equivalence of state-space and transfer function forms:
Yz HzUz Hz CzI A B D() () () () ( )==−+
−
, where 1
1-25
1Filtering, Linear Systems and Transforms Overview
Don’t be concerned if you are not familiar with the state-space representation
of linear systems. Some of the filter design algorithms use state-space
form internally but do not require any knowledge of state-space concepts
to use them successfully. If your applications use state-space based signal
processing extensively, however, see the Control System Toolbox™ product
for a comprehensive library of state-space tools.
Partial Fraction Expansion (Residue Form)
Each transfer function also has a corresponding partial fraction expansion or
residue form representation, given by
bz
az
r
pz
rn
pnz
kkz
()
()
()
() ... ()
() ( ) ( ) ...=−++
−++ ++
−−
−
1
11 1 12
11
1kkm n z mn
()
()
−+ −−
1
provided H(z) has no repeated poles. Here, nis the degree of the denominator
polynomial of the rational transfer function b(z)/a(z). If ris a pole of
multiplicity sr,thenH(z)hastermsoftheform:
rj
pjz
rj
pjz
rj s
pjz
r
sr
()
()
()
(())
... ()
(())1
1
1
1
1
112 1
−++
−++−
−
−− −
The Signal Processing Toolbox residuez function in converts transfer
functions to and from the partial fraction expansion form. The “z”ontheend
of residuez stands for z-domain, or discrete domain. residuez returns the
poles in a column vector p, the residues corresponding to the poles in a column
vector r, and any improper part of the original transfer function in a row
vector k.residuez determines that two poles are the same if the magnitude of
their difference is smaller than 0.1 percent of either of the poles’ magnitudes.
Partial fraction expansion arises in signal processing as one method of finding
the inverse z-transform of a transfer function. For example, the partial
fraction expansion of
Hz z
zz
()=−+
++
−
−−
48
16 8
1
12
is
1-26

Linear System Models
b = [-4 8];
a=[168];
[r,p,k] = residuez(b,a)
which corresponds to
Hz
zz
()=−
+++
−−
12
14
8
12
11
To find the inverse z-transform of H(z), find the sum of the inverse
z-transforms of the two addends of H(z), giving the causal impulse response:
hn n
nn
() ( ) ( ) ,,,=− − + − = …12 4 8 2 0 1 2
To verify this in the MATLAB environment, type
imp=[10000];
resptf = filter(b,a,imp)
respres = filter(r(1),[1 -p(1)],imp)+...
filter(r(2),[1 -p(2)],imp)
Second-Order Sections (SOS)
Any transfer function H(z) has a second-order sections representation
Hz H z bbzbz
aazaz
k
k
Lkk k
kk k
k
L
() ()==
++
++
=
−−
−−
=
∏∏
1
01
122
01
122
1
where Lis the number of second-order sections that describe the system.
The MATLAB environment represents the second-order section form of a
discrete-time system as an L-by-6 array sos. Each row of sos contains a
single second-order section, where the row elements are the three numerator
and three denominator coefficients that describe the second-order section.
1-27

1Filtering, Linear Systems and Transforms Overview
sos
bbbaaa
bbbaaa
bb
LL
=
01 11 21 01 11 21
02 12 22 02 12 22
01
......
......
bbaaa
LLLL2012
⎛
⎝
⎜
⎜
⎜
⎜
⎜
⎜
⎞
⎠
⎟
⎟
⎟
⎟
⎟
⎟
There are many ways to represent a filter in second-order section form.
Through careful pairing of the pole and zero pairs, ordering of the sections
in the cascade, and multiplicative scaling of the sections, it is possible to
reduce quantization noise gain and avoid overflow in some fixed-point filter
implementations. The functions zp2sos and ss2sos, described in “Linear
System Transformations” on page 1-32, perform pole-zero pairing, section
scaling, and section ordering.
Note AllSignalProcessingToolboxsecond-order section transformations
apply only to digital filters.
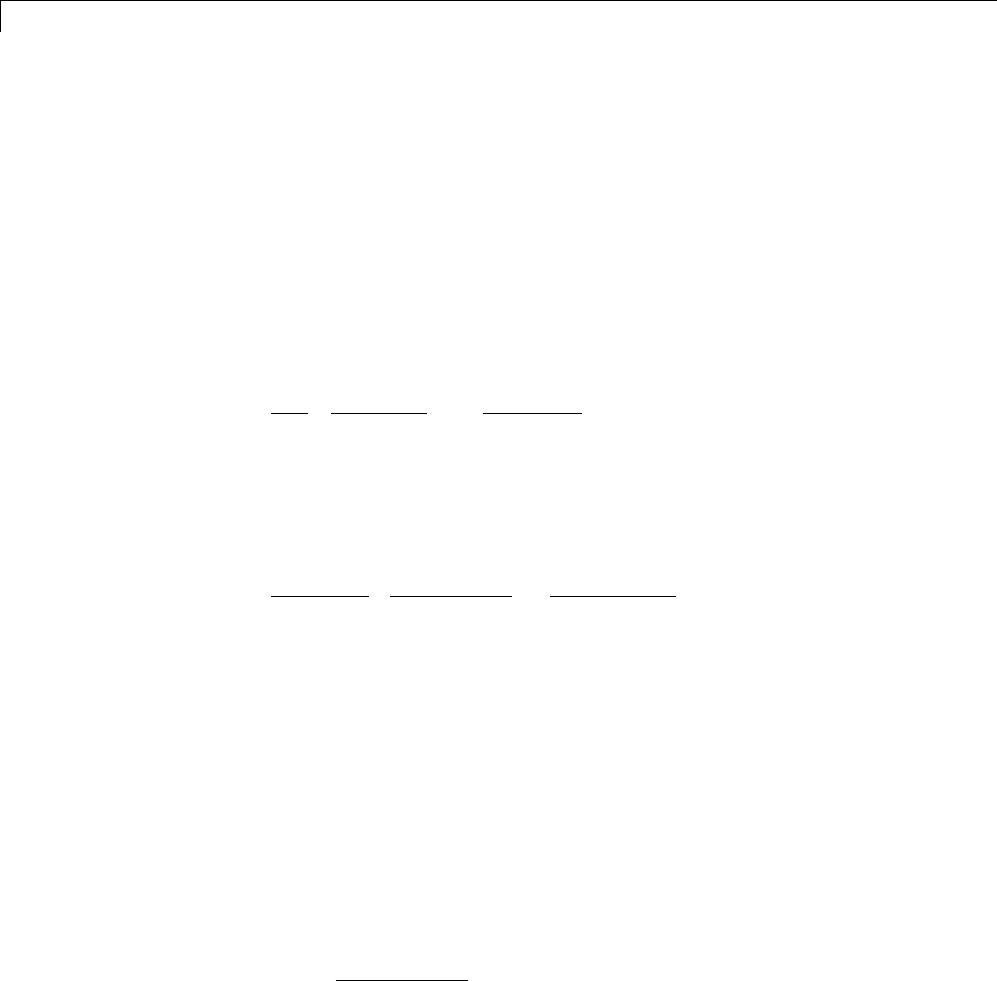
Lattice Structure
For a discrete Nth order all-pole or all-zero filter described by the polynomial
coefficients a(n),n=1,2,...,N+1, there are Ncorresponding lattice structure
coefficients k(n),n=1,2,...,N. The parameters k(n) are also called the
reflection coefficients of the filter. Given these reflection coefficients, you can
implement a discrete filter as shown below.
1-28
Linear System Models
FIRandIIRLatticeFilterstructurediagrams
For a general pole-zero IIR filter described by polynomial coefficients a
and b, there are both lattice coefficients k(n) for the denominator aand
ladder coefficients v(n) for the numerator b. The lattice/ladder filter may be
implemented as
Diagram of lattice/ladder filter
The toolbox function tf2latc accepts an FIR or IIR filter in polynomial form
and returns the corresponding reflection coefficients. An example FIR filter
in polynomial form is
b = [1.0000 0.6149 0.9899 0.0000 0.0031 -0.0082];
1-29

1Filtering, Linear Systems and Transforms Overview
This filter’s lattice (reflection coefficient) representation is
k = tf2latc(b)
For IIR filters, the magnitude of the reflection coefficients provides an easy
stability check. If all the reflection coefficients corresponding to a polynomial
have magnitude less than 1, all of that polynomial’s roots are inside the unit
circle. For example, consider an IIR filter with numerator polynomial bfrom
above and denominator polynomial:
a = [1 1/2 1/3];
The filter’s lattice representation is
[k,v] = tf2latc(b,a);
Because abs(k) <1for all reflection coefficients in k, the filter is stable.
The function latc2tf calculates the polynomial coefficients for a filter from
its lattice (reflection) coefficients. Given the reflection coefficient vector
k(above), the corresponding polynomial form is
b = latc2tf(k);
The lattice or lattice/ladder coefficients can be used to implement the filter
using the function latcfilt.
Convolution Matrix
In signal processing, convolving two vectors or matrices is equivalent to
filtering one of the input operands by the other. This relationship permits the
representation of a digital filter as a convolution matrix.
Given any vector, the toolbox function convmtx generates a matrix whose
inner product with another vector is equivalent to the convolution of the two
vectors. The generated matrix represents a digital filter that you can apply to
any vector of appropriate length; the inner dimension of the operands must
agreetocomputetheinnerproduct.
The convolution matrix for a vector b, representing the numerator coefficients
for a digital filter, is
1-30

Linear System Models
b = [1 2 3]; x = randn(3,1);
C = convmtx(b',3);
Two equivalent ways to convolve bwith xare as follows.
y1 = C*x;
y2 = conv(b,x);
Continuous-Time System Models
The continuous-time system models are representational schemes for analog
filters. Many of the discrete-time system models described earlier are also
appropriate for the representation of continuous-time systems:
•State-space form
•Partial fraction expansion
•Transfer function
•Zero-pole-gain form
It is possible to represent any system of linear time-invariant differential
equations as a set of first-order differential equations. In matrix or state-space
form, you can express the equations as
xAxBu
yCxDu
=+
=+
where uis a vector of nu inputs, xis an nx-element state vector, and yis a
vector of ny outputs. In the MATLAB environment, A,B,C,andDare stored in
separate rectangular arrays.
An equivalent representation of the state-space system is the Laplace
transform transfer function description
Ys HsUs() () ()=
where
1-31
1Filtering, Linear Systems and Transforms Overview
Hs CsI A B D() ( )=− +
−1
For single-input, single-output systems, this form is given by
Hs bs
as
bs bs bn
as as a
nn
mm
() ()
()
() () ( )
() () (
== ++…++
++…+
−
−
12 1
12
1
1mm +1)
Given the coefficients of a Laplace transform transfer function, residue
determines the partial fraction expansion of the system. See the description
of residue for details.
The factored zero-pole-gain form is
Hs zs
ps ksz sz szn
sp sp
() ()
()
( ( ))( ( )) ( ( ))
( ( ))( ( )) (
==−−…−
−−…
12
12
sspm−())
Asinthediscrete-timecase,theMATLABenvironmentstorespolynomial
coefficients in row vectors in descending powers of s.Itstorespolynomial
roots, or zeros and poles, in column vectors.
Linear System Transformations
A number of Signal Processing Toolbox functions are provided to convert
between the various linear system models.. You can use the following chart to
find an appropriate transfer function: find the row of the model to convert
from on the left side of the chart and the column of the model to convert to on
the top of the chart and read the function name(s) at the intersection of the
row and column. Note that some cells of this table are empty.
Transfer
Function
State-
Space
Zero-
Pole-
Gain
Partial
Fraction
Lattice
Filter
Second-
Order
Sections
Convolution
Matrix
Transfer
Function
tf2ss tf2zp
roots
residuez tf2latc none convmtx
State-Space ss2tf ss2zp none none ss2sos none
1-32
Linear System Models
Transfer
Function
State-
Space
Zero-
Pole-
Gain
Partial
Fraction
Lattice
Filter
Second-
Order
Sections
Convolution
Matrix
Zero-Pole-
Gain
zp2tf
poly
zp2ss none none zp2sos none
Partial
Fraction
residuez none none none none none
Lattice
Filter
latc2tf none none none none none
SOS sos2tf sos2ss sos2zp none none none
Note Converting from one filter structure or model to another may produce
a result with different characteristics than the original. This is due to the
computer’s finite-precision arithmetic and the variations in the conversion’s
round-off computations.
Many of the toolbox filter design functions use these functions internally.
For example, the zp2ss function converts the poles and zeros of an analog
prototype into the state-space form required for creation of a Butterworth,
Chebyshev, or elliptic filter. Once in state-space form, the filter design
function performs any required frequency transformation, that is, it
transforms the initial lowpass design into a bandpass, highpass, or bandstop
filter, or a lowpass filter with the desired cutoff frequency.
Note AllSignalProcessingToolboxsecond-order section transformations
apply only to digital filters.
1-33
1Filtering, Linear Systems and Transforms Overview
Discrete Fourier Transform
The discrete Fourier transform, or DFT, is the primary tool of digital signal
processing. The foundation of Signal Processing Toolbox product is the fast
Fourier transform (FFT), a method for computing the DFT with reduced
execution time. Many of the toolbox functions (including z-domain frequency
response, spectrum and cepstrum analysis, and some filter design and
implementation functions) incorporate the FFT.
The MATLAB environment provides the functions fft and ifft to compute
the discrete Fourier transform and its inverse, respectively. For the input
sequence xand its transformed version X(the discrete-time Fourier transform
at equally spaced frequencies around the unit circle), the two functions
implement the relationships
Xk xn W
n
Nkn
N
() (),+= +
=
−
∑
11
0
1
and
xn NXk W
k
N
Nkn
() .()
111
0
1
In these equations, the series subscripts begin with 1 instead of 0 because of
the MATLAB vector indexing scheme, and
We
NjN
=−2
/.
Note TheMATLABconventionistouseanegativejfor the fft function.
This is an engineering convention; physics and pure mathematics typically
use a positive j.
fft, with a single input argument x, computes the DFT of the input vector
or matrix. If xis a vector, fft computes the DFT of the vector; if xis a
rectangular array, fft computes the DFT of each array column.
1-34
Discrete Fourier Transform
For example, create a time vector and signal:
t = (0:1/100:10-1/100); % Time vector
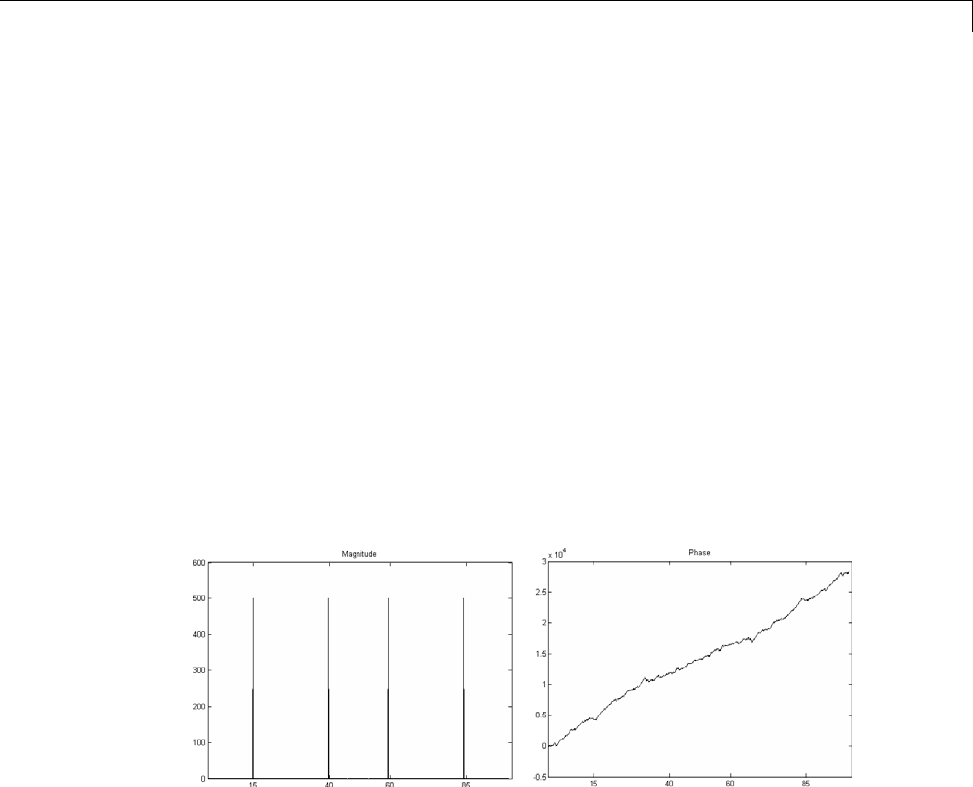
x = sin(2*pi*15*t) + sin(2*pi*40*t); % Signal
The DFT of the signal, and the magnitude and phase of the transformed
sequence, are then
y = fft(x); % Compute DFT of x
m = abs(y); p = unwrap(angle(y)); % Magnitude and phase
To plot the magnitude and phase, type the following commands:
f = (0:length(y)-1)*99/length(y); % Frequency vector
plot(f,m); title('Magnitude');
set(gca,'XTick',[15 40 60 85]);
figure; plot(f,p*180/pi); title('Phase');
set(gca,'XTick',[15 40 60 85]);
Aseco
nd argument to fft specifies a number of points nfor the transform,
representing DFT length:
y = fft(x,n);
In this case, fft pads the input sequence with zeros if it is shorter than n,or
truncates the sequence if it is longer than n.Ifnisnotspecified,itdefaults
to the length of the input sequence. Execution time for fft depends on the
length, n, of the DFT it performs; see the fft for details about the algorithm.
1-35
1Filtering, Linear Systems and Transforms Overview
Note The resulting FFT amplitude is A*n/2, where A is the original amplitude
and n is the number of FFT points. This is true only if the number of FFT
points is greater than or equal to the number of data samples. If the number
of FFT points is less, the FFT amplitude is lower than the original amplitude
by the above amount.
The inverse discrete Fourier transform function ifft also accepts an input
sequence and, optionally, the number of desired points for the transform. Try
the example below; the original sequence xand the reconstructed sequence
are identical (within rounding error).
t = (0:1/255:1);
x = sin(2*pi*120*t);
y = real(ifft(fft(x)));
This toolbox also includes functions for the two-dimensional FFT and its
inverse, fft2 and ifft2. These functions are useful for two-dimensional
signal or image processing. The goertzel function, which is another
algorithm to compute the DFT, also is included in the toolbox. This function is
efficient for computing the DFTofaportionofalongsignal.
It is sometimes convenient to rearrange the output of the fft or fft2 function
so the zero frequency component is at the center of the sequence. The
MATLAB function fftshift moves the zero frequency component to the
center of a vector or matrix.
1-36
2
Filter Design and
Implementation
•“Filter Requirements and Specification” on page 2-2
•“IIR Filter Design” on page 2-4
•“FIR Filter Design” on page 2-17
•“Special Topics in IIR Filter Design” on page 2-43
•“Filtering Data With Signal Processing Toolbox Software” on page 2-52
•“Selected Bibliography” on page 2-71

2Filter Design and Implementation
Filter Requirements and Specification
Filter design is the process of creating the filter coefficients to meet specific
filtering requirements. Filter implementation involves choosing and applying
a particular filter structure to those coefficients. Only after both design and
implementation have been performed can data be filtered. The following
chapter describes filter design and implementation in Signal Processing
Toolbox software.
The goal of filter design is to perform frequency dependent alteration of a data
sequence. A possible requirement might be to remove noise above 200 Hz from
a data sequence sampled at 1000 Hz. A more rigorous specification might call
for a specific amount of passband ripple, stopband attenuation, or transition
width. A very precise specification could ask to achieve the performance goals
with the minimum filter order, or it could call for an arbitrary magnitude
shape, or it might require an FIR filter. Filter design methods differ primarily
in how performance is specified.
To design a filter, the Signal Processing Toolbox software offers two
approaches: object-oriented and non-object oriented. The object-oriented
approach first constructs a filter specification object, fdesign,andthen
invokes an appropriate design method. To illustrate the object-oriented
approach, design and implement a 5–th order lowpass Butterworth filter with
a 3–dB frequency of 200 Hz. Assume a sampling frequency of 1 kHz. Apply
thefiltertoinputdata.
Fs=1000; %Sampling Frequency
time = 0:(1/Fs):1; %time vector
% Data vector
x = cos(2*pi*60*time)+sin(2*pi*120*time)+randn(size(time));
d=fdesign.lowpass('N,F3dB',5,200,Fs); %lowpass filter specification object
% Invoke Butterworth design method
Hd=design(d,'butter');
y=filter(Hd,x);
The non-object oriented approach implements the filter using a function such
as butter and firpm. All of the non-object oriented filter design functions
operate with normalized frequencies. Convert frequency specifications in
Hz to normalized frequency to use these functions. The Signal Processing
Toolbox software defines normalized frequency to be in the closed interval
2-2

Filter Requirements and Specification
[0,1] with 1 denoting πradians/sample. For example, to specify a normalized
frequency of π/2 radians/sample, enter 0.5.
To convert from Hz to normalized frequency, multiply the frequency in Hz by
two and divide by the sampling frequency. To design a 5–th order lowpass
Butterworth filter with a 3–dB frequency of 200 Hz using the non-object
oriented approach, use butter:
Wn = (2*200)/1000; %Convert 3-dB frequency
% to normalized frequency: 0.4*pi rad/sample
[B,A] = butter(5,Wn,'low');
y = filter(B,A,x);
2-3
2Filter Design and Implementation
IIR Filter Design
In this section...
“IIR vs. FIR Filters” on page 2-4
“Classical IIR Filters” on page 2-4
“Other IIR Filters” on page 2-5
“IIR Filter Method Summary” on page 2-5
“Classical IIR Filter Design Using Analog Prototyping” on page 2-6
“Comparison of Classical IIR Filter Types” on page 2-9
IIRvs. FIRFilters
TheprimaryadvantageofIIRfiltersoverFIRfiltersisthattheytypically
meet a given set of specifications with a much lower filter order than a
corresponding FIR filter. Although IIR filters have nonlinear phase, data
processing within MATLAB software is commonly performed “offline,” that
is, the entire data sequence is available prior to filtering. This allows for a
noncausal, zero-phase filtering approach (via the filtfilt function), which
eliminates the nonlinear phase distortion of an IIR filter.
Classical IIR Filters
The classical IIR filters, Butterworth, Chebyshev Types I and II, elliptic, and
Bessel, all approximate the ideal “brick wall” filter in different ways.
This toolbox provides functions to create all these types of classical IIR filters
in both the analog and digital domains (except Bessel, for which only the
analog case is supported), and in lowpass, highpass, bandpass, and bandstop
configurations. For most filter types, you can also find the lowest filter
order that fits a given filter specification in terms of passband and stopband
attenuation, and transition width(s).
2-4
IIR Filter Design
Other IIR Filters
The direct filter design function yulewalk finds a filter with magnitude
response approximating a desired function. This is one way to create a
multiband bandpass filter.
You can also use the parametric modeling or system identification functions
to design IIR filters. These functions are discussed in “Parametric Modeling”
on page 7-13.
The generalized Butterworth design function maxflat is discussed in the
section “Generalized Butterworth Filter Design” on page 2-15.
IIR Filter Method Summary
The following table summarizes the various filter methods in the toolbox and
lists the functionsavailabletoimplementthesemethods.
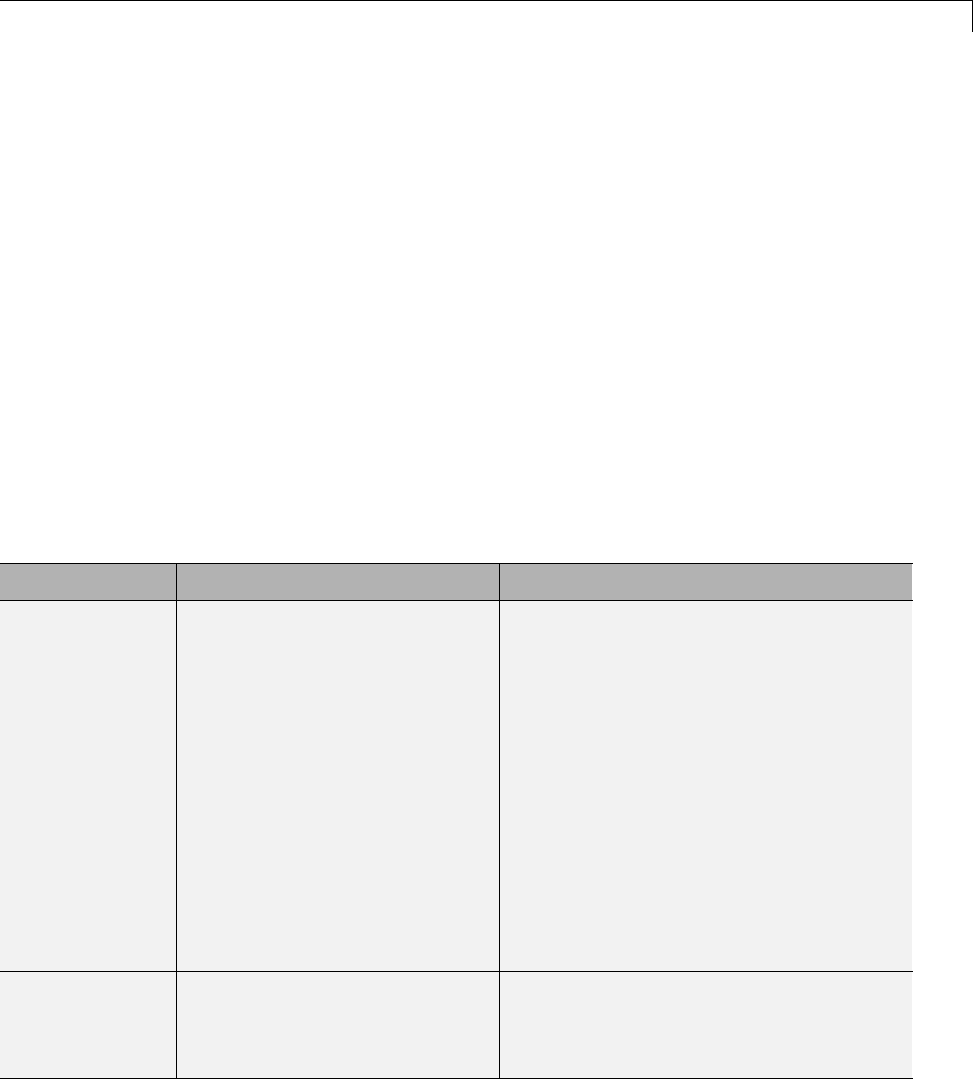
Toolbox Filters Methods and Available Functions
Filter Method Description Filter Functions
Analog
Prototyping
Using the poles and zeros of a
classical lowpass prototype
filter in the continuous
(Laplace) domain, obtain a
digital filter through frequency
transformation and filter
discretization.
Complete design functions:
besself,butter,cheby1,cheby2,ellip
Order estimation functions:
buttord,cheb1ord,cheb2ord,ellipord
Lowpass analog prototype functions:
besselap,buttap,cheb1ap,cheb2ap,
ellipap
Frequency transformation functions:
lp2bp,lp2bs,lp2hp,lp2lp
Filter discretization functions:
bilinear,impinvar
Direct Design Design digital filter directly
in the discrete time-domain
by approximating a piecewise
linear magnitude response.
yulewalk
2-5

2Filter Design and Implementation
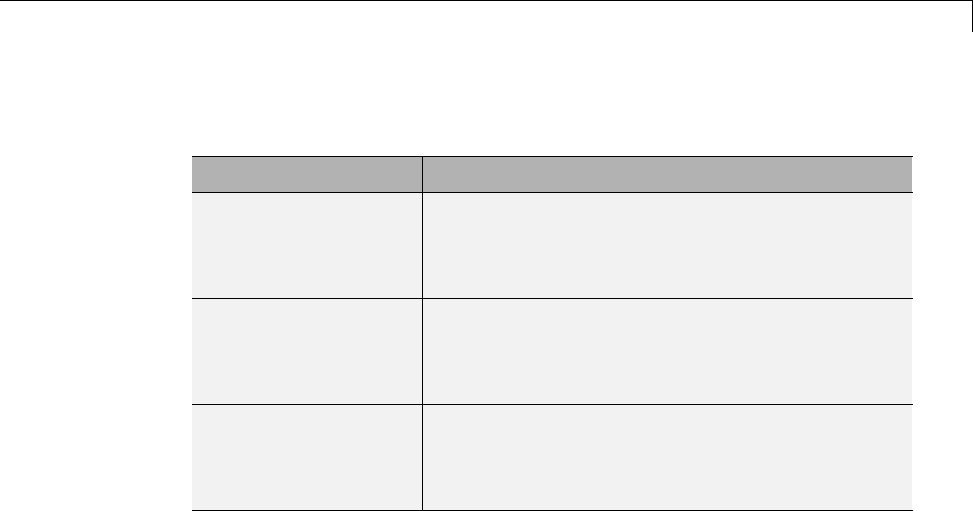
Toolbox Filters Methods and Available Functions (Continued)
Filter Method Description Filter Functions
Generalized
Butterworth
Design
Design lowpass Butterworth
filters with more zeros than
poles.
maxflat
Parametric
Modeling
Find a digital filter that
approximates a prescribed time
or frequency domain response.
(See System Identification
Toolbox™ documentation for
an extensive collection of
parametric modeling tools.)
Time-domain modeling functions:
lpc,prony,stmcb
Frequency-domain modeling functions:
invfreqs,invfreqz
Classical IIR Filter Design Using Analog Prototyping
The principal IIR digital filter design technique this toolbox provides is based
on the conversion of classical lowpass analog filters to their digital equivalents.
The following sections describe how to design filters and summarize the
characteristics of the supported filter types. See “Special Topics in IIR Filter
Design” on page 2-43 for detailed steps on the filter design process.
Complete Classical IIR Filter Design
You can easily create a filter of any order with a lowpass, highpass, bandpass,
or bandstop configuration using the filter design functions.
Filter Design Functions
Filter Type Design Function
Bessel (analog only) [b,a] = besself(n,Wn,options)
[z,p,k] = besself(n,Wn,options)
[A,B,C,D] = besself(n,Wn,options)
Butterworth [b,a] = butter(n,Wn,options)
[z,p,k] = butter(n,Wn,options)
[A,B,C,D] = butter(n,Wn,options)
2-6
IIR Filter Design
Filter Design Functions (Continued)
Filter Type Design Function
Chebyshev Type I [b,a] = cheby1(n,Rp,Wn,options)
[z,p,k] = cheby1(n,Rp,Wn,options)
[A,B,C,D] = cheby1(n,Rp,Wn,options)
Chebyshev Type II [b,a] = cheby2(n,Rs,Wn,options)
[z,p,k] = cheby2(n,Rs,Wn,options)
[A,B,C,D] = cheby2(n,Rs,Wn,options)
Elliptic [b,a] = ellip(n,Rp,Rs,Wn,options)
[z,p,k] = ellip(n,Rp,Rs,Wn,options)
[A,B,C,D] = ellip(n,Rp,Rs,Wn,options)
By default, each of these functions returns a lowpass filter; you need only
specify the desired cutoff frequency Wn in normalized frequency (Nyquist
frequency =1 Hz). For a highpass filter, append the string 'high' to the
function’s parameter list. For a bandpass or bandstop filter, specify Wn as a
two-element vector containing the passband edge frequencies, appending the
string 'stop' for the bandstop configuration.
Herearesomeexampledigitalfilters:
[b,a] = butter(5,0.4); % Lowpass Butterworth
[b,a] = cheby1(4,1,[0.4 0.7]); % Bandpass Chebyshev Type I
[b,a] = cheby2(6,60,0.8,'high'); % Highpass Chebyshev Type II
[b,a] = ellip(3,1,60,[0.4 0.7],'stop'); % Bandstop elliptic
To design an analog filter, perhaps for simulation, use a trailing 's' and
specify cutoff frequencies in rad/s:
[b,a] = butter(5,.4,'s'); % Analog Butterworth filter
All filter design functions return a filter in the transfer function,
zero-pole-gain, or state-space linear system model representation, depending
on how many output arguments are present. In general, you should avoid
2-7
2Filter Design and Implementation
using the transfer function form because numerical problems caused by
roundoff errors can occur. Instead, use the zero-pole-gain form which you can
convert to a second-order section (SOS) form using zp2sos and then use the
SOS form with dfilt to analyze or implement your filter.
Note All classical IIR lowpass filters are ill-conditioned for extremely low
cutoff frequencies. Therefore, instead of designing a lowpass IIR filter with
a very narrow passband, it can be better to design a wider passband and
decimate the input signal.
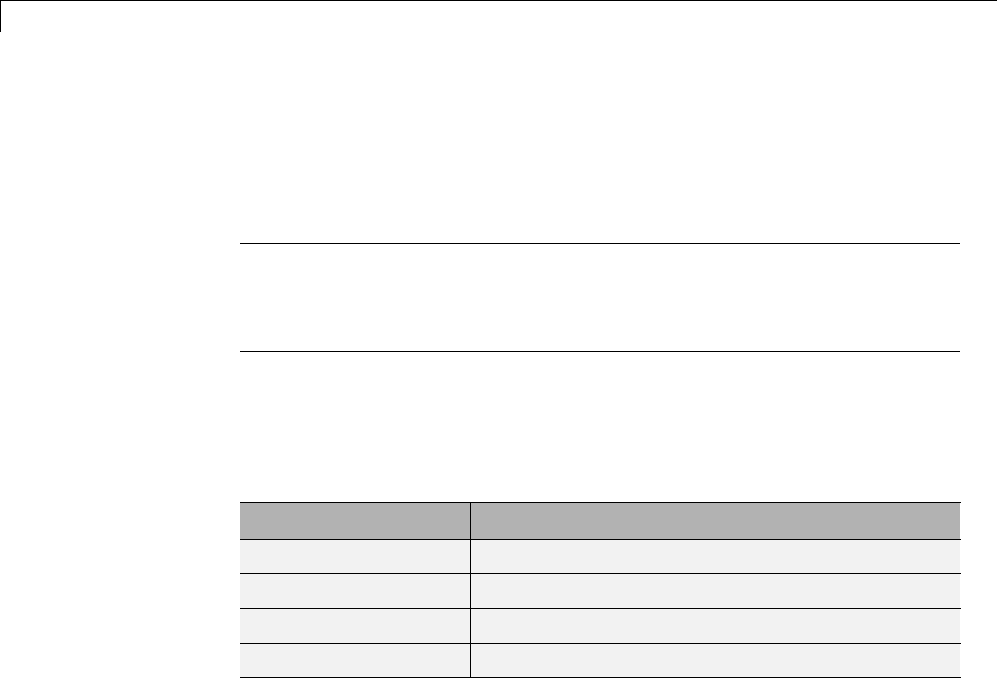
Designing IIR Filters to Frequency Domain Specifications
This toolbox provides order selection functions that calculate the minimum
filter order that meets a given set of requirements.
Filter Type Order Estimation Function
Butterworth [n,Wn] = buttord(Wp,Ws,Rp,Rs)
Chebyshev Type I [n,Wn] = cheb1ord(Wp, Ws, Rp, Rs)
Chebyshev Type II [n,Wn] = cheb2ord(Wp, Ws, Rp, Rs)
Elliptic [n,Wn] = ellipord(Wp, Ws, Rp, Rs)
These are useful in conjunction with the filter design functions. Suppose you
want a bandpass filter with a passband from 1000 to 2000 Hz, stopbands
starting 500 Hz away on either side, a 10 kHz sampling frequency, at most
1 dB of passband ripple, and at least 60 dB of stopband attenuation. You can
meet these specifications by using the butter function as follows.
[n,Wn] = buttord([1000 2000]/5000,[500 2500]/5000,1,60)
n=
12
Wn =
0.1951 0.4080
[b,a] = butter(n,Wn);
An elliptic filter that meets the same requirements is given by
2-8
IIR Filter Design
[n,Wn] = ellipord([1000 2000]/5000,[500 2500]/5000,1,60)
n=
5
Wn =
0.2000 0.4000
[b,a] = ellip(n,1,60,Wn);
These functions also work with the other standard band configurations, as
well as for analog filters.
Comparison of Classical IIR Filter Types
The toolbox provides five different types of classical IIR filters, each optimal
in some way. This section shows the basic analog prototype form for each and
summarizes major characteristics.
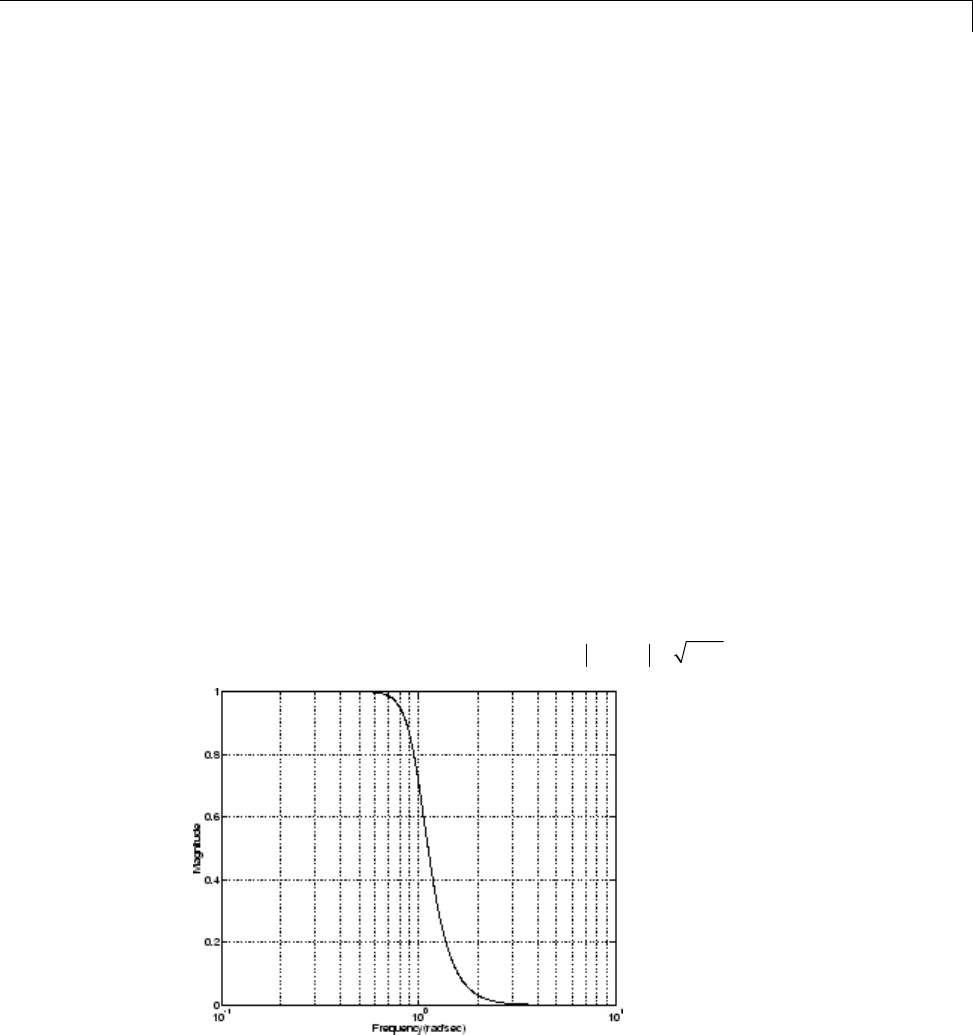
Butterworth Filter
The Butterworth filter provides the best Taylor Series approximation to the
ideal lowpass filter response at analog frequencies Ω=0andΩ=∞;forany
order N, the magnitude squared response has 2N–1 zero derivatives at these
locations (maximally flat at Ω=0andΩ=∞). Response is monotonic overall,
decreasing smoothly from Ω=0toΩ=∞.Hj() /Ω=12
at Ω=1.
2-9
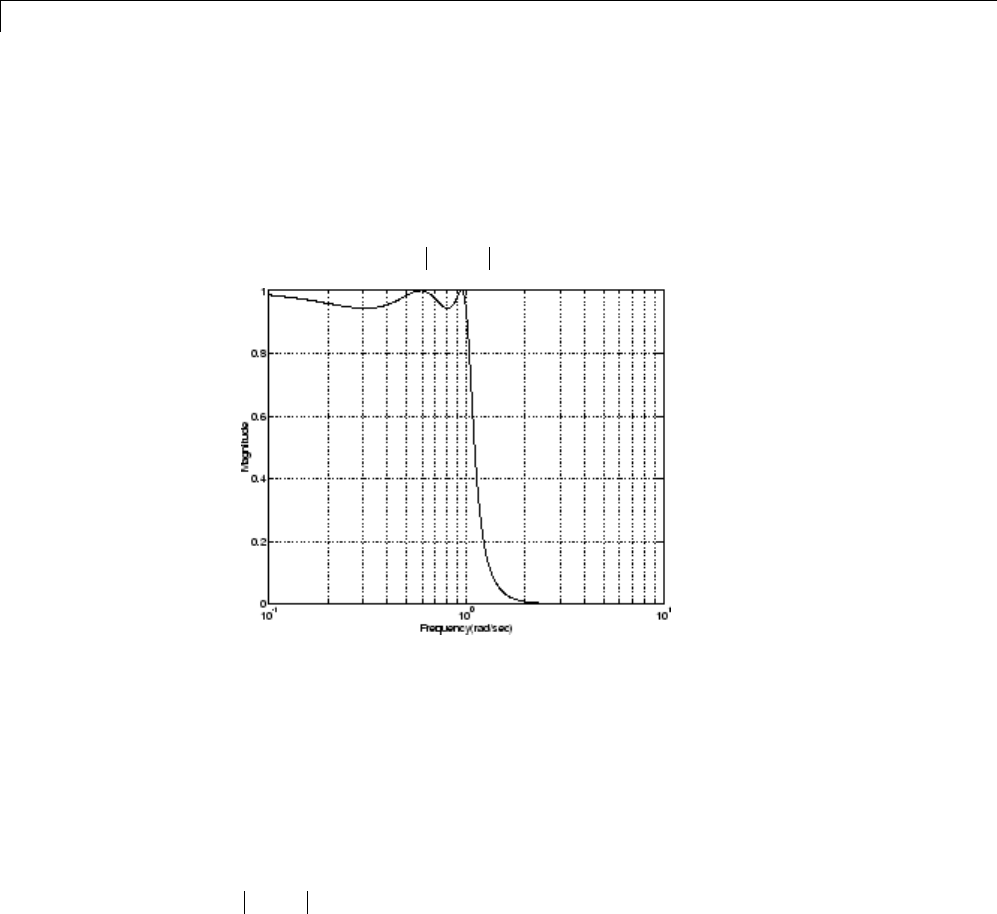
2Filter Design and Implementation
Chebyshev Type I Filter
The Chebyshev Type I filter minimizes the absolute difference between the
ideal and actual frequency response over the entire passband by incorporating
an equal ripple of Rp dB in the passband. Stopband response is maximally
flat. The transition from passband to stopband is more rapid than for the
Butterworth filter. Hj Rp
() /
Ω= −
10 20 at Ω=1.
Chebyshev Type II Filter
The Chebyshev Type II filter minimizes the absolute difference between the
ideal and actual frequency response over the entire stopband by incorporating
an equal ripple of Rs dB in the stopband. Passband response is maximally flat.
The stopband does not approach zero as quickly as the type I filter (and
does not approach zero at all for even-valued filter order n). The absence
of ripple in the passband, however, is often an important advantage.
Hj Rs
() /
Ω= −
10 20 at Ω=1.
2-10
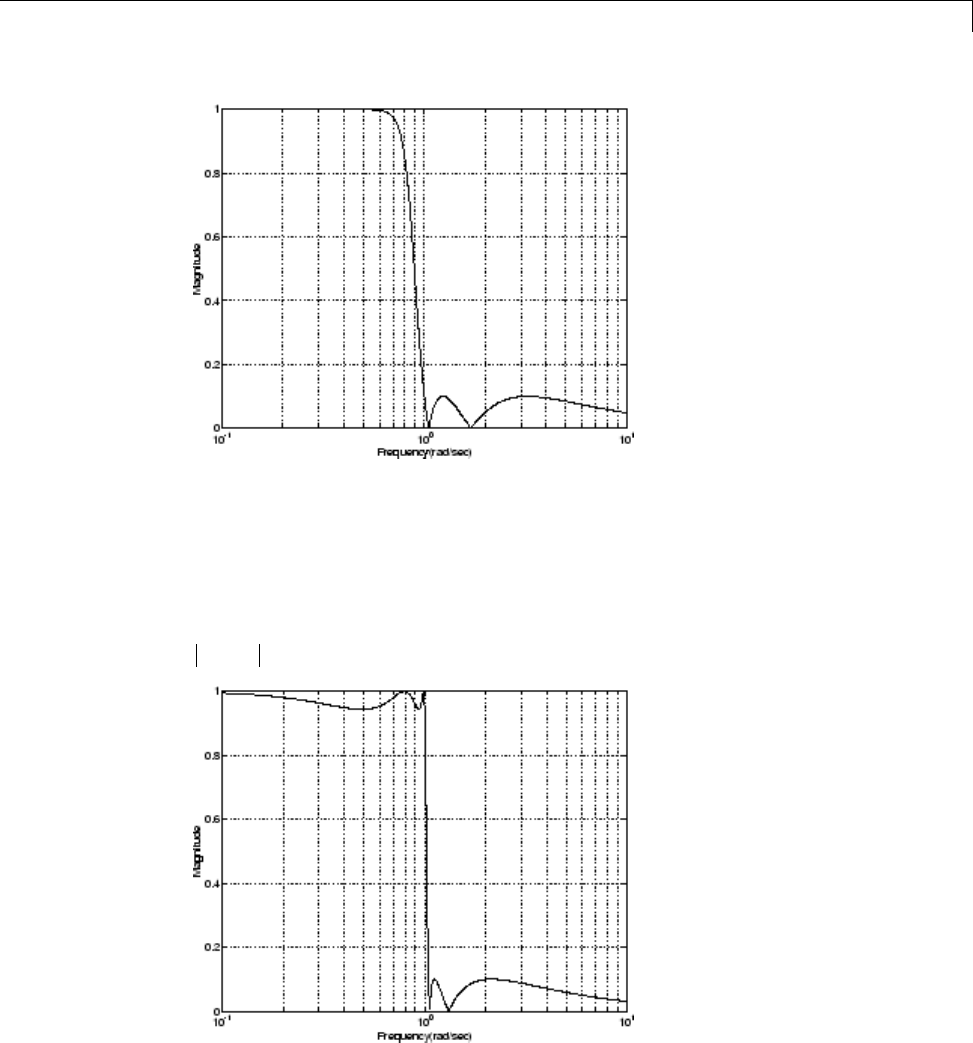
IIR Filter Design
Elliptic Filter
Elliptic filters are equiripple in both the passband and stopband. They
generally meet filter requirements with the lowest order of any supported
filter type. Given a filter order n, passband ripple Rp in decibels, and
stopband ripple Rs in decibels, elliptic filters minimize transition width.
Hj Rp
() /
Ω= −
10 20 at Ω=1.
2-11
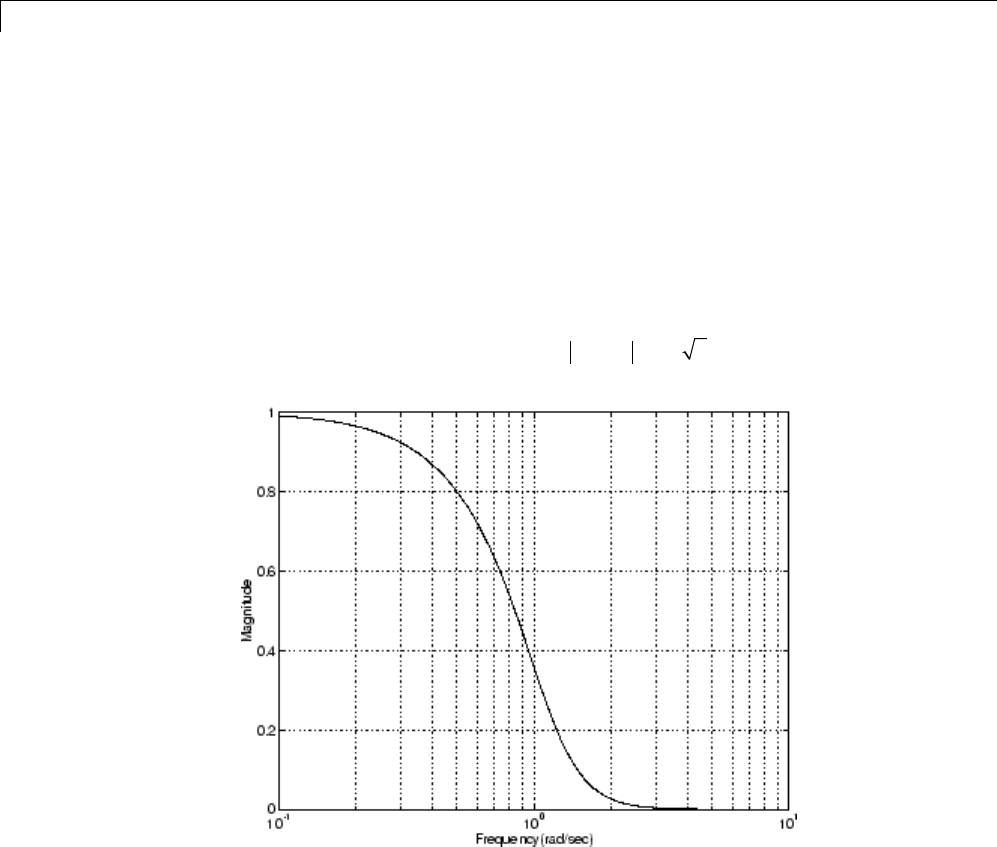
2Filter Design and Implementation
Bessel Filter
Analog Bessel lowpass filters have maximally flat group delay at zero
frequency and retain nearly constant group delay across the entire passband.
Filtered signals therefore maintain their waveshapes in the passband
frequency range. Frequency mapped and digital Bessel filters, however, do
not have this maximally flat property; this toolbox supports only the analog
case for the complete Bessel filter design function.
Bessel filters generally require a higherfilterorderthanotherfiltersfor
satisfactory stopband attenuation. Hj() /Ω<12
at Ω= 1 and decreases as
filter order nincreases.
2-12
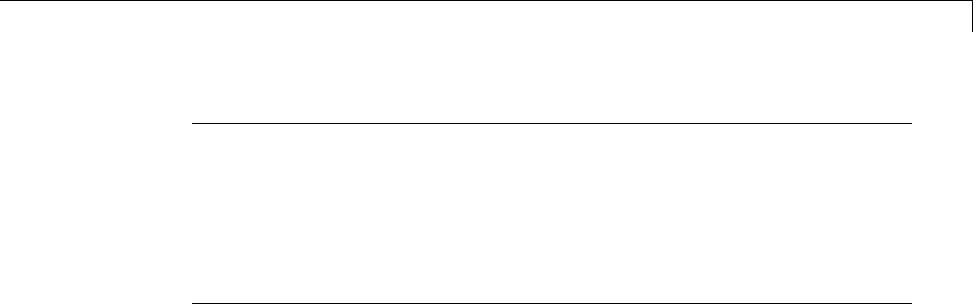
IIR Filter Design
Note The lowpass filters shown above were created with the analog prototype
functions besselap,buttap,cheb1ap,cheb2ap,andellipap. These functions
find the zeros, poles, and gain of an order nanalog filter of the appropriate
type with cutoff frequency of 1 rad/s. Thecompletefilterdesignfunctions
(besself,butter,cheby1,cheby2,andellip) call the prototyping functions
as a first step in the design process. See “Special Topics in IIR Filter Design”
on page 2-43 for details.
To create similar plots, use n=5and, as needed, Rp =0.5 and Rs =20.For
example, to create the elliptic filter plot:
[z,p,k] = ellipap(5,0.5,20);
w = logspace(-1,1,1000);
h = freqs(k*poly(z),poly(p),w);
semilogx(w,abs(h)), grid
Direct IIR Filter Design
This toolbox uses the term direct methods to describe techniques for IIR
design that find a filter based on specifications in the discrete domain. Unlike
the analog prototyping method, direct design methods are not constrained
to the standard lowpass, highpass, bandpass, or bandstop configurations.
Rather, these functions design filters with an arbitrary, perhaps multiband,
frequency response. This section discusses the yulewalk function, which
is intended specifically for filter design; “Parametric Modeling” on page
7-13 discusses other methods that may also be considered direct, such as
Prony’s method, Linear Prediction, the Steiglitz-McBride method, and inverse
frequency design.
The yulewalk function designs recursive IIR digital filters by fitting a
specified frequency response. yulewalk’s name reflects its method for
finding the filter’s denominator coefficients: it finds the inverse FFT of
the ideal desired magnitude-squared response and solves the modified
Yule-Walker equations using the resulting autocorrelation function samples.
The statement
[b,a] = yulewalk(n,f,m)
2-13
2Filter Design and Implementation
returns row vectors band acontaining the n+1 numerator and denominator
coefficients of the order nIIR filter whose frequency-magnitude characteristics
approximate those given in vectors fand m.fis a vector of frequency points
ranging from 0 to 1, where 1 represents the Nyquist frequency. mis a vector
containing the desired magnitude response at the points in f.fand m
can describe any piecewise linear shape magnitude response, including a
multiband response. The FIR counterpart of this function is fir2,whichalso
designs a filter based on an arbitrary piecewise linear magnitude response.
See “FIR Filter Design” on page 2-17 for details.
Note that yulewalk does not accept phase information, and no statements are
made about the optimality of the resulting filter.
Design a multiband filter with yulewalk, and plot the desired and actual
frequency response:
m=[0011001100];
f = [0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 1];
[b,a] = yulewalk(10,f,m);
[h,w] = freqz(b,a,128)
plot(f,m,w/pi,abs(h))
2-14
IIR Filter Design
Generalized Butterworth Filter Design
The toolbox function maxflat enables you to design generalized Butterworth
filters, that is, Butterworth filters with differing numbers of zeros and poles.
This is desirable in some implementations where poles are more expensive
computationally than zeros. maxflat is just like the butter function, except
that it you can specify two orders (one for the numerator and one for the
denominator) instead of just one. These filters are maximally flat.This
means that the resulting filter is optimal for any numerator and denominator
orders, with the maximum number of derivatives at 0 and the Nyquist
frequency ω=πboth set to 0.
For example, when the two orders are the same, maxflat is the same as
butter:
[b,a] = maxflat(3,3,0.25)
b=
0.0317 0.0951 0.0951 0.0317
a=
1.0000 -1.4590 0.9104 -0.1978
[b,a] = butter(3,0.25)
b=
0.0317 0.0951 0.0951 0.0317
a=
1.0000 -1.4590 0.9104 -0.1978
However, maxflat is more versatile because it allows you to design a filter
with more zeros than poles:
[b,a] = maxflat(3,1,0.25)
b=
0.0950 0.2849 0.2849 0.0950
a=
1.0000 -0.2402
The third input to maxflat is the half-power frequency, a frequency between
0 and 1 with a desired magnitude response of 12/.
You can also design linear phase filters that have the maximally flat property
using the 'sym' option:
2-15

FIR Filter Design
FIR Filter Design
In this section...
“FIR vs. IIR Filters” on page 2-17
“FIR Filter Summary” on page 2-18
“Linear Phase Filters” on page 2-18
“Windowing Method” on page 2-20
“Multiband FIR Filter Design with Transition Bands” on page 2-24
“Constrained Least Squares FIR Filter Design” on page 2-31
“Arbitrary-Response Filter Design” on page 2-37
FIRvs. IIRFilters
Digital filters with finite-duration impulse response (all-zero, or FIR filters)
have both advantages and disadvantages compared to infinite-duration
impulseresponse(IIR)filters.
FIR filters have the following primary advantages:
•They can have exactly linear phase.
•They are always stable.
•The design methods are generally linear.
•They can be realized efficiently in hardware.
•The filter startup transients have finite duration.
The primary disadvantage of FIR filters is that they often require a much
higher filter order than IIR filters to achieve a given level of performance.
Correspondingly, the delay of these filters is often much greater than for an
equal performance IIR filter.
2-17

2Filter Design and Implementation
FIR Filter Summary
FIR Filters
Filter Design
Method Description Filter Functions
Windowing Apply window to truncated inverse
Fourier transform of desired “brick
wall” filter
fir1,fir2,
kaiserord
Multiband
with Transition
Bands
Equiripple or least squares approach
over sub-bands of the frequency range
firls,firpm,
firpmord
Constrained
Least Squares
Minimize squared integral error over
entire frequency range subject to
maximum error constraints
fircls,fircls1
Arbitrary
Response
Arbitrary responses, including
nonlinear phase and complex filters
cfirpm
Raised Cosine Lowpass response with smooth,
sinusoidal transition
firrcos
Linear Phase Filters
Except for cfirpm, all of the FIR filter design functions design linear phase
filters only. The filter coefficients, or “taps,” of such filters obey either an even
or odd symmetry relation. Depending on this symmetry, and on whether the
ordernof the filter is even or odd, a linear phase filter (stored in length n+1
vector b) has certain inherent restrictions on its frequency response.
2-18
FIR Filter Design
Linear
Phase
Filter Type
Filter
Order Symmetry of Coefficients
Response
H(f), f =0
Response
H(f), f =1
(Nyquist)
Type I Even even:
bk bn k k n( ) ( ), ,...,=+− = +211
No
restriction
No
restriction
Type II Odd even:
bk bn k k n( ) ( ), ,...,=+− = +211
No
restriction
H(1) =0
Type III Even odd:
bk bn k k n( ) ( ), ,...,=− + − = +211
H(0) =0H(1) =0
Type IV Odd odd:
bk bn k k n( ) ( ), ,...,=− + − = +211
H(0) =0No
restriction
The phase delay and group delay of linear phase FIR filters are equal and
constant over the frequency band. For an order nlinear phase FIR filter, the
group delay is n/2, and the filtered signal is simply delayed by n/2 time steps
(and the magnitude of its Fourier transform is scaled by the filter’s magnitude
response). This property preserves the wave shape of signals in the passband;
that is, there is no phase distortion.
The functions fir1,fir2,firls,firpm,fircls,fircls1,andfirrcos all
design type I and II linear phase FIR filters by default. Both firls and
firpm design type III and IV linear phase FIR filters given a 'hilbert' or
'differentiator' flag. cfirpm can design any type of linear phase filter,
and nonlinear phase filters as well.
Note Because the frequency response of a type II filter is zero at the Nyquist
frequency (“high” frequency), fir1 does not design type II highpass and
bandstop filters. For odd-valued nin these cases, fir1 adds 1 to the order
and returns a type I filter.
2-19
2Filter Design and Implementation
Windowing Method
Consider the ideal, or “brick wall,” digital lowpass filter with a cutoff
frequency of ω0rad/s. This filter has magnitude 1 at all frequencies with
magnitude less than ω0, and magnitude 0 at frequencies with magnitude
between ω0and π. Its impulse response sequence h(n)is
hn H e d e d n
n
jn jn
() ( ) sin( )
===
−−
∫∫
1
2
1
20
00
πωω
πωω
π
π
πωω
ω
ω
This filter is not implementable since its impulse response is infinite and
noncausal. To create a finite-duration impulse response, truncate it by
applying a window. By retaining the central section of impulse response in
this truncation, you obtain a linear phase FIR filter. For example, a length 51
filter with a lowpass cutoff frequency ω0of 0.4 πrad/s is
b = 0.4*sinc(0.4*(-25:25));
The window applied here is a simple rectangular window. By Parseval’s
theorem, this is the length 51 filter thatbestapproximatestheideallowpass
filter, in the integrated least squares sense. The following command displays
the filter’s frequency response in FVTool:
fvtool(b,1)
2-20
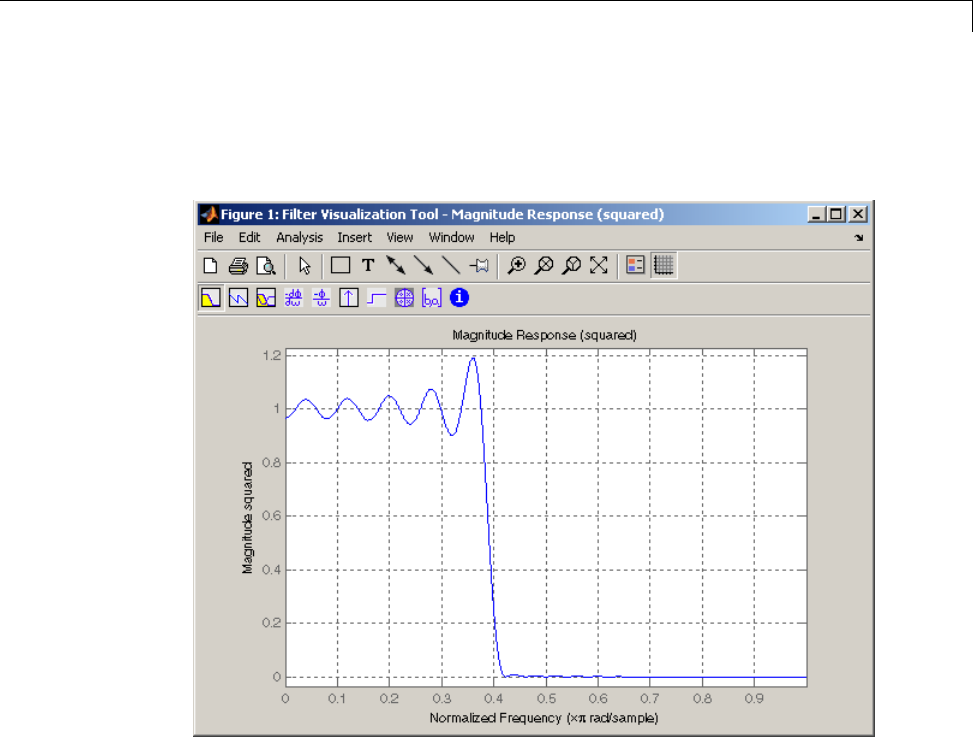
FIR Filter Design
Note that the y-axis shown in the figure below is in Magnitude Squared.
You can set this by right-clicking on the axis label and selecting Magnitude
Squared from the menu.
Ringing and ripples occur in the response, especially near the band edge.
This “Gibbs effect” does not vanish as the filter length increases, but a
nonrectangular window reduces its magnitude. Multiplication by a window in
the time domain causes a convolution or smoothing in the frequency domain.
Apply a length 51 Hamming window to the filter and display the result using
FVTool:
b = 0.4*sinc(0.4*(-25:25));
b = b.*hamming(51)';
fvtool(b,1)
2-21
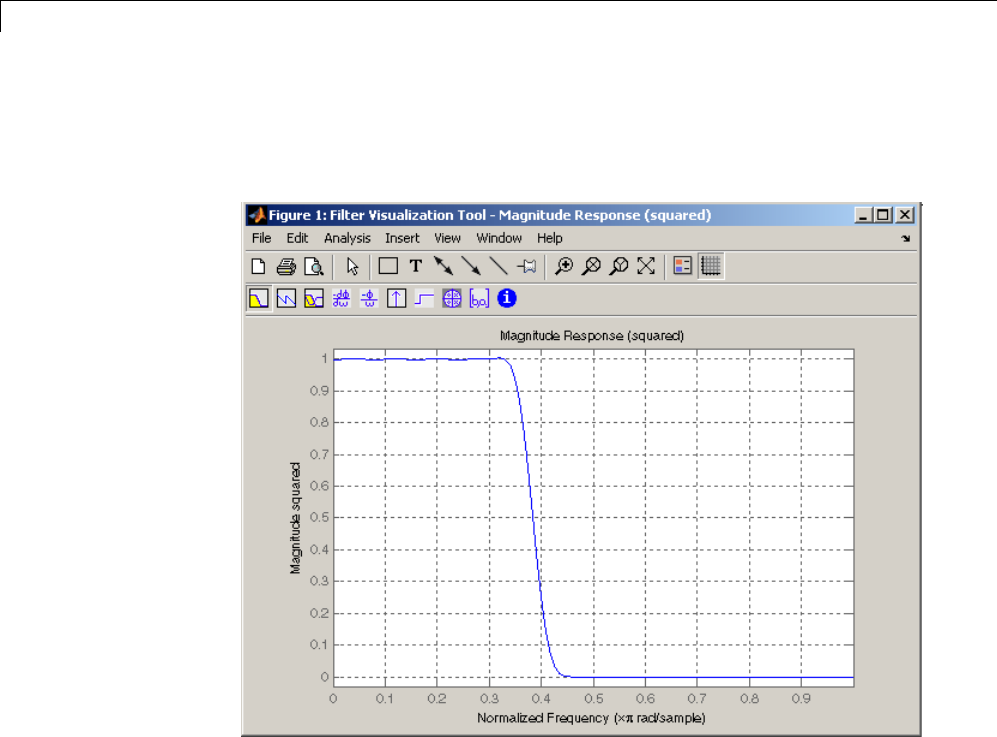
2Filter Design and Implementation
Note that the y-axis shown in the figure below is in Magnitude Squared.
You can set this by right-clicking on the axis label and selecting Magnitude
Squared from the menu.
Using a Hamming window greatly reduces the ringing. This improvement is
at the expense of transition width (the windowed version takes longer to ramp
from passband to stopband) and optimality (the windowed version does not
minimize the integrated squared error).
The functions fir1 and fir2 are based on this windowing process. Given a
filter order and description of an ideal desired filter, these functions return a
windowed inverse Fourier transform of that ideal filter. Both use a Hamming
window by default, but they accept any window function. See “Windows” on
page 7-2 for an overview of windows and their properties.
2-22

FIR Filter Design
Standard Band FIR Filter Design: fir1
fir1 implements the classical method of windowed linear phase FIR
digital filter design. It resembles the IIR filter design functions in that it
is formulated to design filters in standard band configurations: lowpass,
bandpass, highpass, and bandstop.
The statements
n = 50;
Wn = 0.4;
b = fir1(n,Wn);
create row vector bcontaining the coefficients of the order n
Hamming-windowed filter. This is a lowpass, linear phase FIR filter with
cutoff frequency Wn.Wn is a number between 0 and 1, where 1 corresponds to
the Nyquist frequency, half the sampling frequency. (Unlike other methods,
here Wn corresponds to the 6 dB point.) For a highpass filter, simply append
the string 'high' to the function’s parameter list. For a bandpass or bandstop
filter, specify Wn as a two-element vector containing the passband edge
frequencies; append the string 'stop' for the bandstop configuration.
b = fir1(n,Wn,window) uses the window specified in column vector window
for the design. The vector window must be n+1 elements long. If you do not
specify a window, fir1 applies a Hamming window.
Kaiser Window Order Estimation. The kaiserord function estimates the
filter order, cutoff frequency, and Kaiser window beta parameter needed to
meet a given set of specifications. Given a vector of frequency band edges and
a corresponding vector of magnitudes, as well as maximum allowable ripple,
kaiserord returns appropriate input parameters for the fir1 function.
Multiband FIR Filter Design: fir2
The fir2 function also designs windowed FIR filters, but with an arbitrarily
shaped piecewise linear frequency response. This is in contrast to fir1,which
only designs filters in standard lowpass, highpass, bandpass, and bandstop
configurations.
The commands
2-23

2Filter Design and Implementation
n = 50;
f=[0.4.51];
m=[1 1 00];
b = fir2(n,f,m);
return row vector bcontaining the n+1 coefficients of the order nFIR filter
whose frequency-magnitude characteristics match those given by vectors f
and m.fis a vector of frequency points ranging from 0 to 1, where 1 represents
the Nyquist frequency. mis a vector containing the desired magnitude
response at the points specified in f. (The IIR counterpart of this function
is yulewalk, which also designs filters based on arbitrary piecewise linear
magnitude responses. See “IIR Filter Design” on page 2-4 for details.)
Multiband FIR Filter Design with Transition Bands
The firls and firpm functions provide a more general means of specifying
the ideal desired filter than the fir1 and fir2 functions. These functions
design Hilbert transformers, differentiators, and other filters with odd
symmetric coefficients (type III and type IV linear phase). They also let you
include transition or “don’t care” regions in which the error is not minimized,
and perform band dependent weighting of the minimization.
The firls function is an extension of the fir1 and fir2 functions in that
it minimizes the integral of the square of the error between the desired
frequency response and the actual frequency response.
The firpm function implements the Parks-McClellan algorithm, which uses
the Remez exchange algorithm and Chebyshev approximation theory to design
filters with optimal fits between the desired and actual frequency responses.
The filters are optimal in the sense that they minimize the maximum error
between the desired frequency response and the actual frequency response;
they are sometimes called minimax filters. Filters designed in this way
exhibit an equiripple behavior in their frequency response, and hence are also
known as equiripple filters. The Parks-McClellan FIR filter design algorithm
is perhaps the most popular and widely used FIR filter design methodology.
The syntax for firls and firpm isthesame;theonlydifferenceistheir
minimization schemes. The next example shows how filters designed with
firls and firpm reflect these different schemes.
2-24

FIR Filter Design
Basic Configurations
The default mode of operation of firls and firpm is to design type I or type
II linear phase filters, depending on whether the order you desire is even or
odd, respectively. A lowpass example with approximate amplitude 1 from 0 to
0.4 Hz, and approximate amplitude 0 from 0.5 to 1.0 Hz is
n = 20; % Filter order
f = [0 0.4 0.5 1]; % Frequency band edges
a = [1 1 0 0]; % Desired amplitudes
b = firpm(n,f,a);
From 0.4 to 0.5 Hz, firpm performs no error minimization; this is a transition
band or “don’t care” region. A transition band minimizes the error more in
thebandsthatyoudocareabout,attheexpenseofaslowertransitionrate.
In this way, these types of filters have an inherent trade-off similar to FIR
design by windowing.
Tocompareleastsquarestoequiripplefilterdesign,usefirls to create
a similar filter. Type
bb = firls(n,f,a);
and compare their frequency responses using FVTool:
fvtool(b,1,bb,1)
2-25
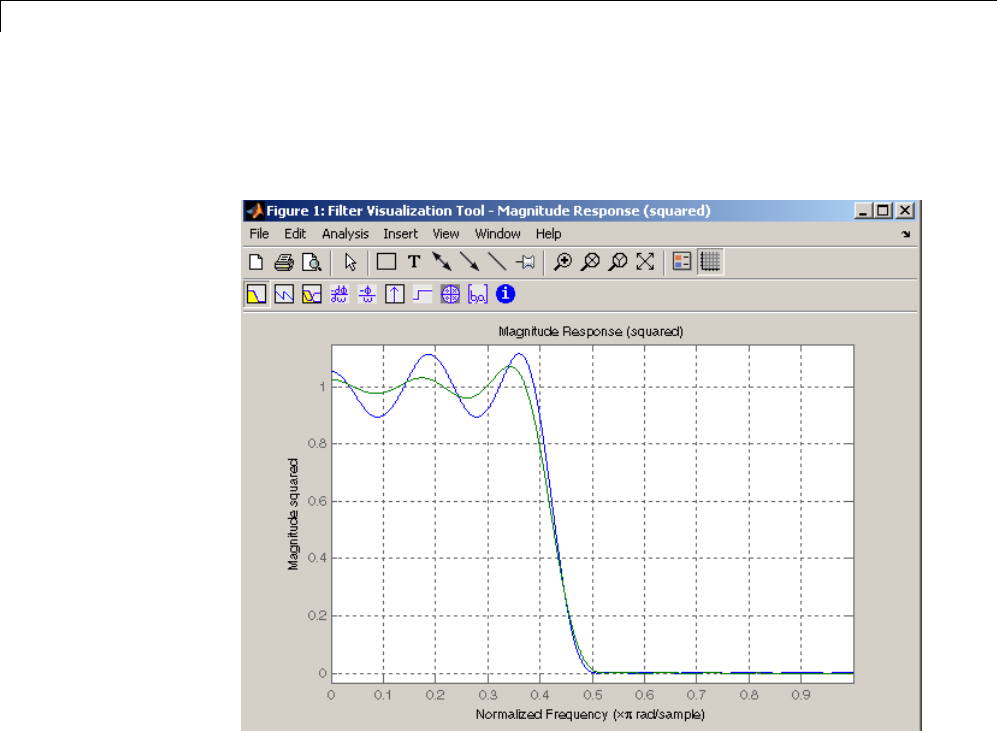
2Filter Design and Implementation
Note that the y-axis shown in the figure below is in Magnitude Squared.
You can set this by right-clicking on the axis label and selecting Magnitude
Squared from the menu.
The filter designed with firpm exhibits equiripple behavior. Also note that
the firls filter has a better response over most of the passband and stopband,
but at the band edges (f=0.4 and f=0.5),theresponseisfurtherawayfrom
the ideal than the firpm filter. This shows that the firpm filter’s maximum
error over the passband and stopband is smaller and, in fact, it is the smallest
possible for this band edge configuration and filter length.
Think of frequency bands as lines over short frequency intervals. firpm and
firls use this scheme to represent any piecewise linear desired function with
any transition bands. firls and firpm design lowpass, highpass, bandpass,
and bandstop filters; a bandpass example is
f = [0 0.3 0.4 0.7 0.8 1]; % Band edges in pairs
2-26

FIR Filter Design
a = [0 0 1 1 0 0]; % Bandpass filter amplitude
Technically, these fand avectors define five bands:
•Two stopbands, from 0.0 to 0.3 and from 0.8 to 1.0
•A passband from 0.4 to 0.7
•Two transition bands, from 0.3 to 0.4 and from 0.7 to 0.8
Example highpass and bandstop filters are
f = [0 0.7 0.8 1]; % Band edges in pairs
a = [0 0 1 1]; % Highpass filter amplitude
f = [0 0.3 0.4 0.5 0.8 1]; % Band edges in pairs
a = [1 1 0 0 1 1]; % Bandstop filter amplitude
An example multiband bandpass filter is
f = [0 0.1 0.15 0.25 0.3 0.4 0.45 0.55 0.6 0.7 0.75 0.85 0.9 1];
a=[11001100110011];
Another possibility is a filter that has as a transition region the line
connecting the passband with the stopband; this can help control “runaway”
magnitude response in wide transition regions:
f = [0 0.4 0.42 0.48 0.5 1];
a = [1 1 0.8 0.2 0 0]; % Passband, linear transition,
% stopband
The Weight Vector
Both firls and firpm allow you to place more or less emphasis on minimizing
the error in certain frequency bands relative to others. To do this, specify a
weight vector following the frequencyandamplitudevectors. Anexample
lowpass equiripple filter with 10 times less ripple in the stopband than the
passband is
n = 20; % Filter order
f = [0 0.4 0.5 1]; % Frequency band edges
a = [1 1 0 0]; % Desired amplitudes
2-27

2Filter Design and Implementation
w = [1 10]; % Weight vector
b = firpm(n,f,a,w);
A legal weight vector is always half the length of the fand avectors; there
must be exactly one weight per band.
Anti-Symmetric Filters / Hilbert Transformers
When called with a trailing 'h' or 'Hilbert' option, firpm and firls design
FIR filters with odd symmetry, that is, type III (for even order) or type IV
(for odd order) linear phase filters. An ideal Hilbert transformer has this
anti-symmetry property and an amplitude of 1 across the entire frequency
range. Try the following approximate Hilbert transformers and plot them
using FVTool:
b = firpm(21,[0.05 1],[1 1],'h'); % Highpass Hilbert
bb = firpm(20,[0.05 0.95],[1 1],'h'); % Bandpass Hilbert
fvtool(b,1,bb,1)
2-28
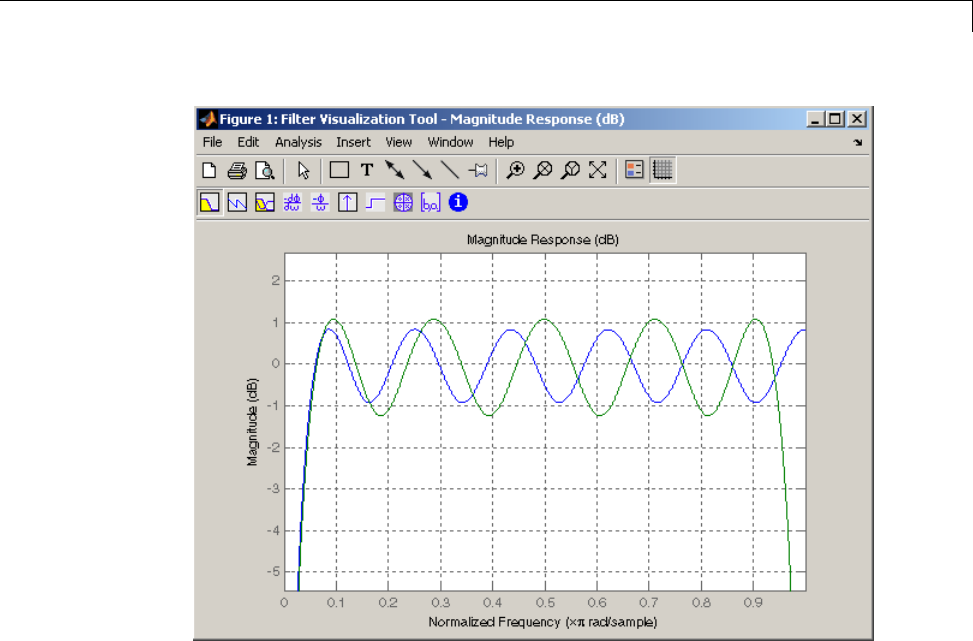
FIR Filter Design
You can find the delayed Hilbert transform of a signal xby passing it through
these filters.
fs = 1000; % Sampling frequency
t = (0:1/fs:2)'; % Two second time vector
x = sin(2*pi*300*t); % 300 Hz sine wave example signal
xh = filter(bb,1,x); % Hilbert transform of x
The analytic signal corresponding to xis the complex signal that has xas its
real part and the Hilbert transform of xas its imaginary part. For this FIR
method (an alternative to the hilbert function), you must delay xby half the
filter order to create the analytic signal:
xd = [zeros(10,1); x(1:length(x)-10)]; % Delay 10 samples
xa = xd + j*xh; % Analytic signal
2-29

2Filter Design and Implementation
This method does not work directly for filters of odd order, which require a
noninteger delay. In this case, the hilbert function, described in “Specialized
Transforms” on page 7-36, estimates the analytic signal. Alternatively, use
the resample function to delay the signal by a noninteger number of samples.
Differentiators
Differentiation of a signal in the time domain is equivalent to multiplication
of the signal’s Fourier transform by an imaginary ramp function. That is, to
differentiate a signal, pass it through a filter that has a response H(ω)=jω.
Approximate the ideal differentiator (with a delay) using firpm or firls with
a'd' or 'differentiator' option:
b = firpm(21,[0 1],[0 pi],'d');
For a type III filter, the differentiation band should stop short of the Nyquist
frequency, and the amplitude vector must reflect that change to ensure the
correct slope:
bb = firpm(20,[0 0.9],[0 0.9*pi],'d');
In the 'd' mode, firpm weights the error by 1/ωin nonzero amplitude bands
to minimize the maximum relative error. firls weights the error by (1/ω)2in
nonzero amplitude bands in the 'd' mode.
2-30
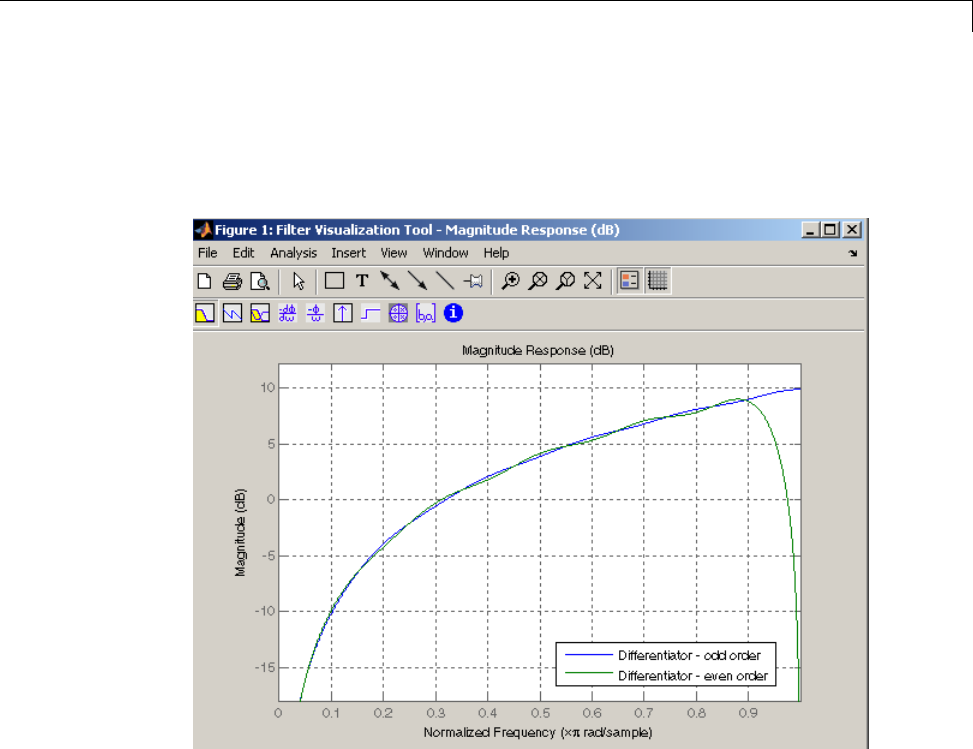
FIR Filter Design
The following plots show the magnitude responses for the differentiators
above.
fvtool(b,1,bb,1)
Constrained Least Squares FIR Filter Design
The Constrained Least Squares (CLS) FIR filter design functions implement
a technique that enables you to design FIR filters without explicitly defining
the transition bands for the magnitude response. The ability to omit the
specification of transition bands is useful in several situations. For example,
it may not be clear where a rigidly defined transition band should appear if
noise and signal information appear together in the same frequency band.
Similarly, it may make sense to omit the specification of transition bands if
they appear only to control the results of Gibbs phenomena that appear in
the filter’s response. See Selesnick, Lang, and Burrus [2] for discussion of
this method.
2-31

2Filter Design and Implementation
Instead of defining passbands, stopbands, and transition regions, the CLS
method accepts a cutoff frequency (for the highpass, lowpass, bandpass, or
bandstop cases), or passband and stopband edges (for multiband cases), for
the desired response. In this way, the CLS method defines transition regions
implicitly, rather than explicitly.
The key feature of the CLS method is that it enables you to define upper
and lower thresholds that contain the maximum allowable ripple in the
magnitude response. Given this constraint, the technique applies the least
square error minimization technique over the frequency range of the filter’s
response, instead of over specific bands. The error minimization includes
any areas of discontinuity in the ideal, “brick wall” response. An additional
benefit is that the technique enables you to specify arbitrarily small peaks
resulting from Gibbs’ phenomena.
There are two toolbox functions that implement this design technique.
Description Function
Constrained least square multiband FIR filter design fircls
Constrained least square filter design for lowpass and
highpass linear phase filters
fircls1
For details on the calling syntax for these functions, see their reference
descriptions in the Function Reference.
Basic Lowpass and Highpass CLS Filter Design
The most basic of the CLS design functions, fircls1, uses this technique to
design lowpass and highpass FIR filters. As an example, consider designing a
filter with order 61 impulse response and cutoff frequency of 0.3 (normalized).
Further, define the upper and lower bounds that constrain the design process
as:
•Maximum passband deviation from 1 (passband ripple) of 0.02.
•Maximum stopband deviation from 0 (stopband ripple) of 0.008.
2-32
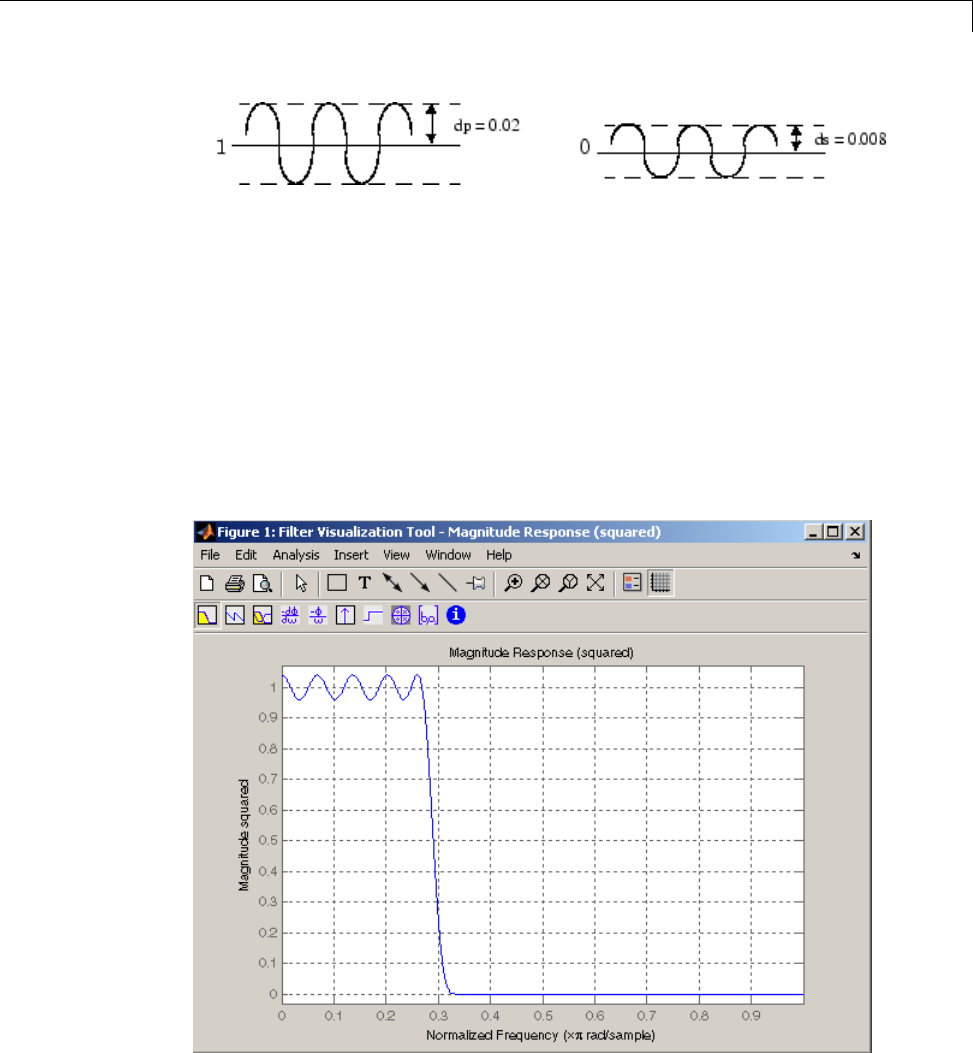
FIR Filter Design
To approach this design problem using fircls1, use the following commands:
n = 61;
wo = 0.3;
dp = 0.02;
ds = 0.008;
h = fircls1(n,wo,dp,ds);
fvtool(h,1)
Note that the y-axisshownbelowisinMagnitude Squared. You can set
this by right-clicking on the axis label and selecting Magnitude Squared
from the menu.
2-33

2Filter Design and Implementation
Multiband CLS Filter Design
fircls uses the same technique to design FIR filters with a desired piecewise
constant magnitude response. In this case, you can specify a vector of band
edges and a corresponding vector of band amplitudes. In addition, you can
specify the maximum amount of ripple for each band.
For example, assume the specifications for a filter call for:
•From 0 to 0.3 (normalized): amplitude 0, upper bound 0.005, lower
bound –0.005
•From 0.3 to 0.5: amplitude 0.5, upper bound 0.51, lower bound 0.49
•From 0.5 to 0.7: amplitude 0, upper bound 0.03, lower bound –0.03
•From 0.7 to 0.9: amplitude 1, upper bound 1.02, lower bound 0.98
•From 0.9 to 1: amplitude 0, upper bound 0.05, lower bound –0.05
Design a CLS filter with impulse response order 129 that meets these
specifications:
n = 129;
f = [0 0.3 0.5 0.7 0.9 1];
a = [0 0.5 0 1 0];
up = [0.005 0.51 0.03 1.02 0.05];
lo = [-0.005 0.49 -0.03 0.98 -0.05];
h = fircls(n,f,a,up,lo);
fvtool(h,1)
2-34
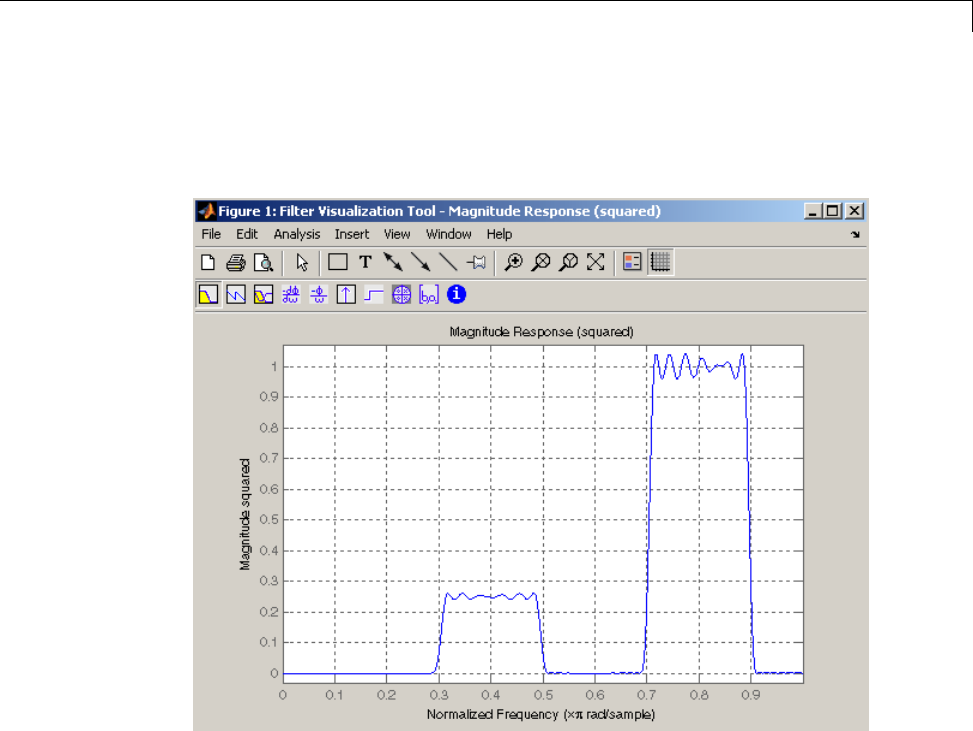
FIR Filter Design
Note that the y-axisshownbelowisinMagnitude Squared. You can set
this by right-clicking on the axis label and selecting Magnitude Squared
from the menu.
Weighted CLS Filter Design
Weighted CLS filter design lets you design lowpass or highpass FIR filters
with relative weighting of the error minimization in each band. The fircls1
function enables you to specify the passband and stopband edges for the least
squares weighting function, as well as a constant kthat specifies the ratio of
the stopband to passband weighting.
Forexample,considerspecificationsthatcallforanFIRfilterwithimpulse
response order of 55 and cutoff frequency of 0.3 (normalized). Also assume
maximum allowable passband ripple of 0.02 and maximum allowable
stopband ripple of 0.004. In addition, add weighting requirements:
2-35

2Filter Design and Implementation
•Passband edge for the weight function of 0.28 (normalized)
•Stopband edge for the weight function of 0.32
•Weight error minimization 10 times as much in the stopband as in the
passband
To approach this using fircls1,type
n = 55;
wo = 0.3;
dp = 0.02;
ds = 0.004;
wp = 0.28;
ws = 0.32;
k = 10;
h = fircls1(n,wo,dp,ds,wp,ws,k);
fvtool(h,1)
2-36
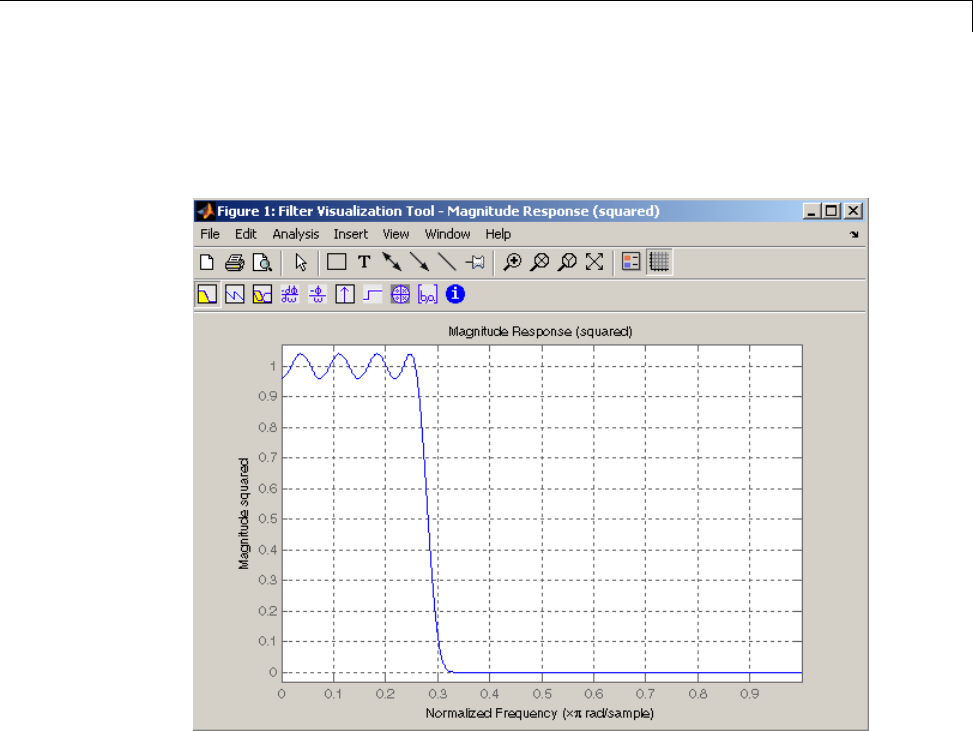
FIR Filter Design
Note that the y-axisshownbelowisinMagnitude Squared. You can set
this by right-clicking on the axis label and selecting Magnitude Squared
from the menu.
Arbitrary-Response Filter Design
The cfirpm filter design function provides a tool for designing FIR filters
with arbitrary complex responses. It differs from the other filter design
functions in how the frequency response of the filter is specified: it accepts the
name of a function which returns the filter response calculated over a grid of
frequencies. This capability makes cfirpm a highly versatile and powerful
technique for filter design.
This design technique may be used to produce nonlinear-phase FIR filters,
asymmetric frequency-response filters (with complex coefficients), or more
symmetric filters with custom frequency responses.
2-37
2Filter Design and Implementation
The design algorithm optimizes the Chebyshev (or minimax) error using
an extended Remez-exchange algorithm for an initial estimate. If this
exchange method fails to obtain the optimal filter, the algorithm switches
to an ascent-descent algorithm that takes over to finish the convergence to
the optimal solution.
Multiband Filter Design
Consider a multiband filter with the following special frequency-domain
characteristics.
Band Amplitude
Optimization
Weighting
[–1 –0.5] [5 1] 1
[–0.4 +0.3] [2 2] 10
[+0.4 +0.8] [2 1] 5
A linear-phase multiband filter may be designed using the predefined
frequency-response function multiband,asfollows:
b = cfirpm(38, [-1 -0.5 -0.4 0.3 0.4 0.8], ...
{'multiband', [5 1 2 2 2 1]}, [1 10 5]);
For the specific case of a multiband filter, we can use a shorthand filter design
notation similar to the syntax for firpm:
b = cfirpm(38,[-1 -0.5 -0.4 0.3 0.4 0.8], ...
[5 1 2 2 2 1], [1 10 5]);
As with firpm, a vector of band edges is passed to cfirpm. This vector defines
the frequency bands over which optimization is performed; note that there are
two transition bands, from –0.5 to –0.4 and from 0.3 to 0.4.
In either case, the frequency response is obtained and plotted using linear
scale in FVTool:
fvtool(b,1)
2-38
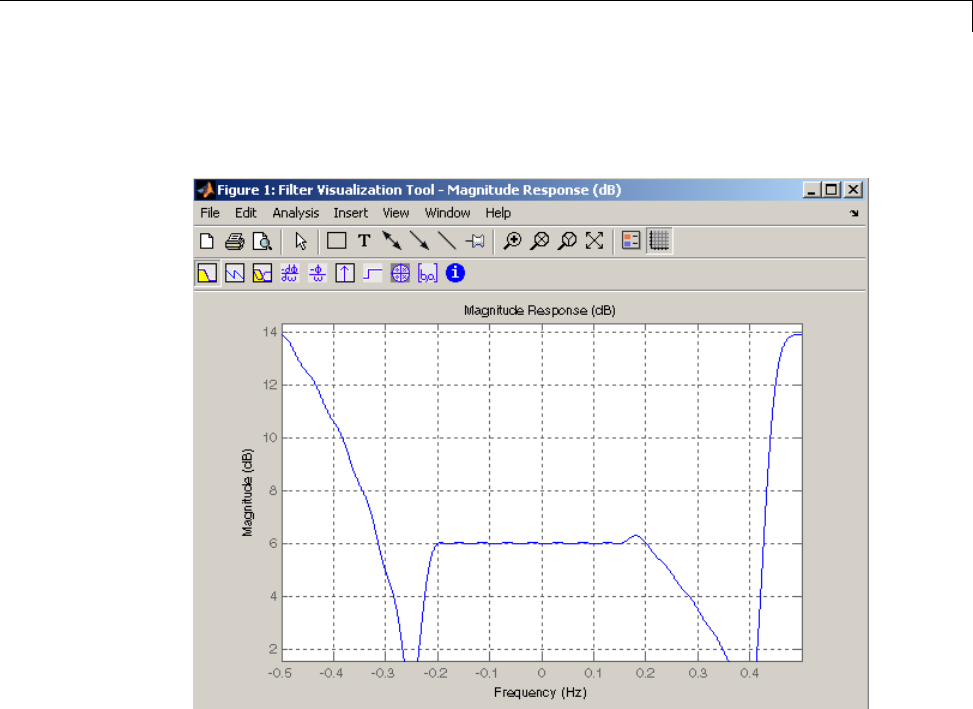
FIR Filter Design
Note that the range of data shown below is (-Fs/2,Fs/2). You can set this
range by changing the x-axis units to Frequency (Fs = 1 Hz).
2-39

2Filter Design and Implementation
The filter response for this multiband filter is complex, which is expected
because of the asymmetry in the frequency domain. The impulse response,
which you can select from the FVTool toolbar, is shown below.
Filter Design with Reduced Delay
Consider the design of a 62-tap lowpass filter with a half-Nyquist cutoff. If
we specify a negative offset value to the lowpass filter design function, the
group delay offset for the design is significantly less than that obtained for a
standard linear-phase design. This filter design may be computed as follows:
b = cfirpm(61,[0 0.5 0.55 1],{'lowpass',-16});
The resulting magnitude response is
fvtool(b,1)
2-40
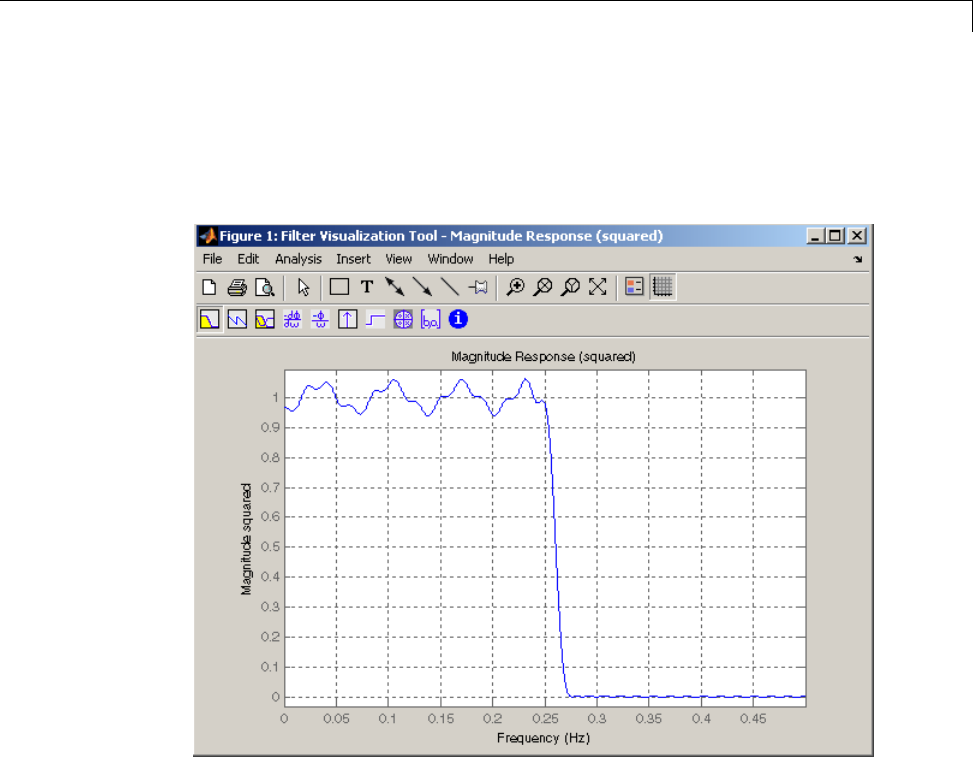
FIR Filter Design
Note that the range of data in this plot is (-Fs/2,Fs/2),whichyoucanset
changing the x-axis units to Frequency.They-axisisinMagnitudeSquared,
which you can set by right-clicking on the axis label and selecting Magnitude
Squared from the menu.
2-41
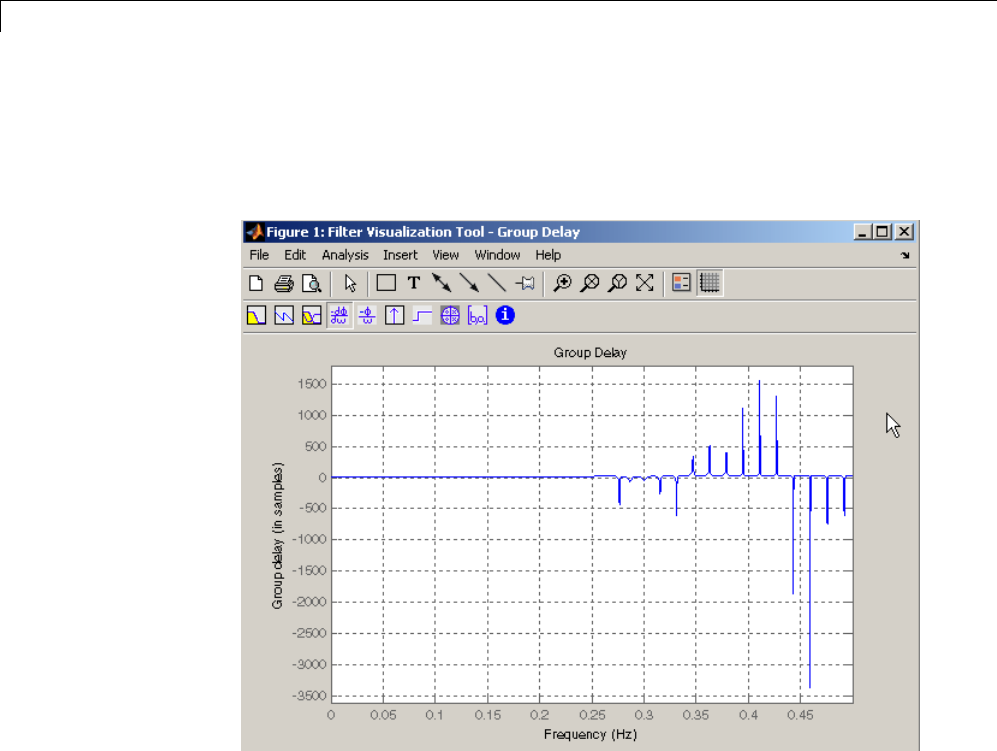
2Filter Design and Implementation
The group delay of the filter reveals that the offset has been reduced from
N/2 to N/2-16 (i.e., from 30.5 to 14.5). Now, however, the group delay is no
longer flat in the passband region. To create this plot, click the Group Delay
button on the toolbar.
If we compare this nonlinear-phase filter to a linear-phase filter that has
exactly 14.5 samples of group delay, the resulting filter is of order 2*14.5, or
29. Using b = cfirpm(29,[0 0.5 0.55 1],'lowpass'), the passband and
stopband ripple is much greater for the order 29 filter. These comparisons
can assist you in deciding which filter is more appropriate for a specific
application.
2-42
Special Topics in IIR Filter Design
Special Topics in IIR Filter Design
In this section...
“Classic IIR Filter Design” on page 2-43
“Analog Prototype Design” on page 2-44
“Frequency Transformation” on page 2-44
“Filter Discretization” on page 2-46
Classic IIR Filter Design
The classic IIR filter design technique includes the following steps.
1Find an analog lowpass filter with cutoff frequency of 1 and translate this
prototype filter to the desired band configuration
2Transform the filter to the digital domain.
3Discretize the filter.
The toolbox provides functions for each of these steps.
Design Task Available functions
Analog lowpass
prototype
buttap,cheb1ap,besselap,ellipap,cheb2ap
Frequency
transformation
lp2lp,lp2hp,lp2bp,lp2bs
Discretization bilinear,impinvar
Alternatively, the butter,cheby1,cheb2ord,ellip,andbesself functions
perform all steps of the filter design and the buttord,cheb1ord,cheb2ord,
and ellipord functions provide minimum order computation for IIR filters.
These functions are sufficient for many design problems, and the lower level
functions are generally not needed. But if you do have an application where
you need to transform the band edges of an analog filter, or discretize a
rational transfer function, this section describes the tools with which to do so.
2-43
2Filter Design and Implementation
Analog PrototypeDesign
This toolbox provides a number of functions to create lowpass analog
prototype filters with cutoff frequency of 1, the first step in the classical
approach to IIR filter design.
The table below summarizes the analog prototype design functions for each
supported filter type; plots for each type are shown in “IIR Filter Design”
on page 2-4.
Filter Type Analog Prototype Function
Bessel [z,p,k] = besselap(n)
Butterworth [z,p,k] = buttap(n)
Chebyshev Type I [z,p,k] = cheb1ap(n,Rp)
Chebyshev Type II [z,p,k] = cheb2ap(n,Rs)
Elliptic [z,p,k] = ellipap(n,Rp,Rs)
Frequency Transformation
The second step in the analog prototyping design technique is the frequency
transformation of a lowpass prototype. The toolbox provides a set of functions
to transform analog lowpass prototypes (with cutoff frequency of 1 rad/s)
into bandpass, highpass, bandstop, and lowpass filters of the desired cutoff
frequency.
Frequency
Transformation Transformation Function
Lowpass to lowpass
′=ss/
ω
0
[numt,dent] = lp2lp (num,den,Wo)
[At,Bt,Ct,Dt] =lp2lp (A,B,C,D,Wo)
Lowpass to highpass
′=ss
ω
0
[numt,dent] = lp2hp (num,den,Wo)
[At,Bt,Ct,Dt] =lp2hp (A,B,C,D,Wo)
2-44
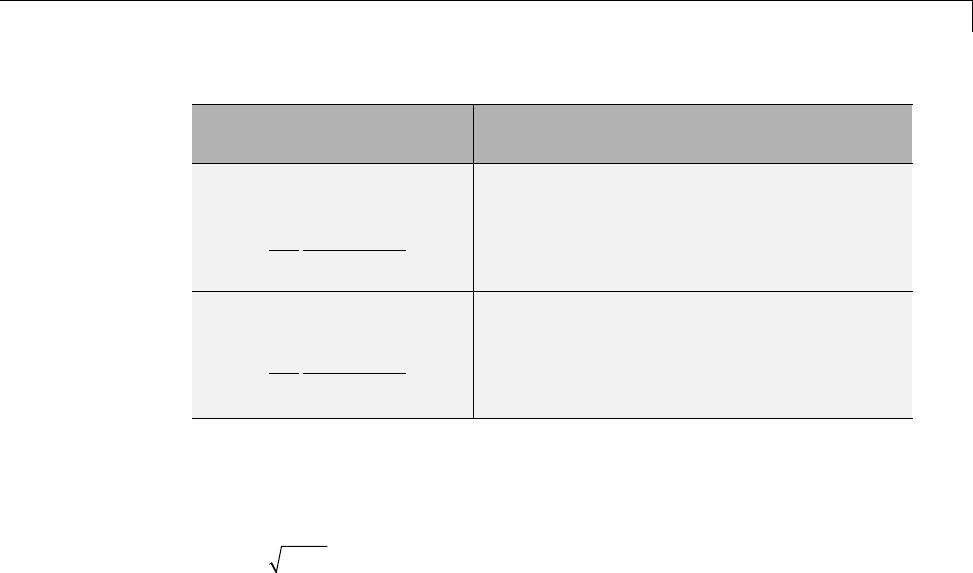
Special Topics in IIR Filter Design
Frequency
Transformation Transformation Function
Lowpass to bandpass
′=+
sB
s
s
ωω
ω
ω
00
2
0
1(/ )
/
[numt,dent] = lp2bp (num,den,Wo,Bw)
[At,Bt,Ct,Dt] =lp2bp (A,B,C,D,Wo,Bw)
Lowpass to bandstop
′=+
sBs
s
ω
ω
ω
ω
0
0
021
/
(/ )
[numt,dent] = lp2bs (num,den,Wo,Bw)
[At,Bt,Ct,Dt] =lp2bs( A,B,C,D,Wo,Bw)
As shown, all of the frequency transformation functions can accept two linear
system models: transfer function and state-space form. For the bandpass
and bandstop cases
ωωω
012
=
and
B
ω
ωω
=−
21
where ω1is the lower band edge and ω2is the upper band edge.
The frequency transformation functions perform frequency variable
substitution. In the case of lp2bp and lp2bs, this is a second-order
substitution, so the output filter is twice the order of the input. For lp2lp and
lp2hp, the output filter is the same order as the input.
To begin designing an order 10 bandpass Chebyshev Type I filter with a value
of 3 dB for passband ripple, enter
[z,p,k] = cheb1ap(10,3);
Outputs z,p,andkcontain the zeros, poles, and gain of a lowpass analog
filter with cutoff frequency Ωcequal to 1 rad/s. Use the lp2bp function to
transform this lowpass prototype to a bandpass analog filter with band edges
2-45
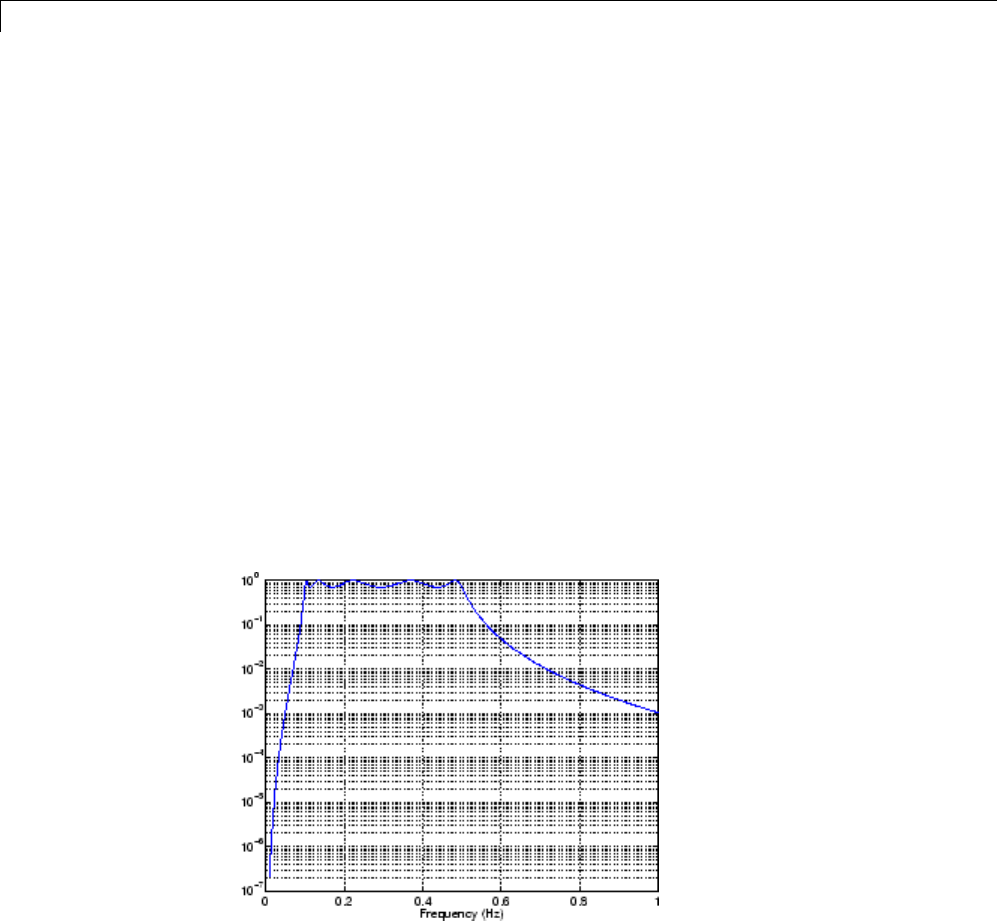
2Filter Design and Implementation
Ω1=π/5 and Ω2=π. First, convert the filter to state-space form so the lp2bp
function can accept it:
[A,B,C,D] = zp2ss(z,p,k); % Convert to state-space form.
Now, find the bandwidth and center frequency, and call lp2bp:
u1 = 0.1*2*pi; u2 = 0.5*2*pi; % In radians per second
Bw = u2-u1;
Wo = sqrt(u1*u2);
[At,Bt,Ct,Dt] = lp2bp(A,B,C,D,Wo,Bw);
Finally, calculate the frequency response and plot its magnitude:
[b,a] = ss2tf(At,Bt,Ct,Dt); % Convert to TF form
w = linspace(0.01,1,500)*2*pi; % Generate frequency vector
h = freqs(b,a,w); % Compute frequency response
semilogy(w/2/pi,abs(h)), grid % Plot log magnitude vs. freq
xlabel('Frequency (Hz)');
Filter Discretization
Thethirdstepintheanalogprototyping technique is the transformation of
thefiltertothediscrete-timedomain. The toolbox provides two methods for
this: the impulse invariant and bilinear transformations. The filter design
2-46
Special Topics in IIR Filter Design
functions butter,cheby1,cheby2,andellip use the bilinear transformation
for discretization in this step.
Analog
to Digital
Transformation Transformation Function
Impulse
invariance
[numd,dend] = impinvar (num,den,fs)
Bilinear
transform
[zd,pd,kd] = bilinear (z,p,k,fs,Fp)
[numd,dend] = bilinear (num,den,fs,Fp)
[Ad,Bd,Cd,Dd] = bilinear (At,Bt,Ct,Dt,fs,Fp)
Impulse Invariance
The toolbox function impinvar creates a digital filter whose impulse response
is the samples of the continuous impulse response of an analog filter. This
function works only on filters in transfer function form. For best results, the
analog filter should have negligible frequency content above half the sampling
frequency, because such high frequency content is aliased into lower bands
upon sampling. Impulse invariance works for some lowpass and bandpass
filters, but is not appropriate for highpass and bandstop filters.
Design a Chebyshev Type I filter and plot its frequency and phase response
using FVTool:
[bz,az] = impinvar(b,a,2);
fvtool(bz,az)
Click the Magnitude and Phase Response toolbar button.
2-47
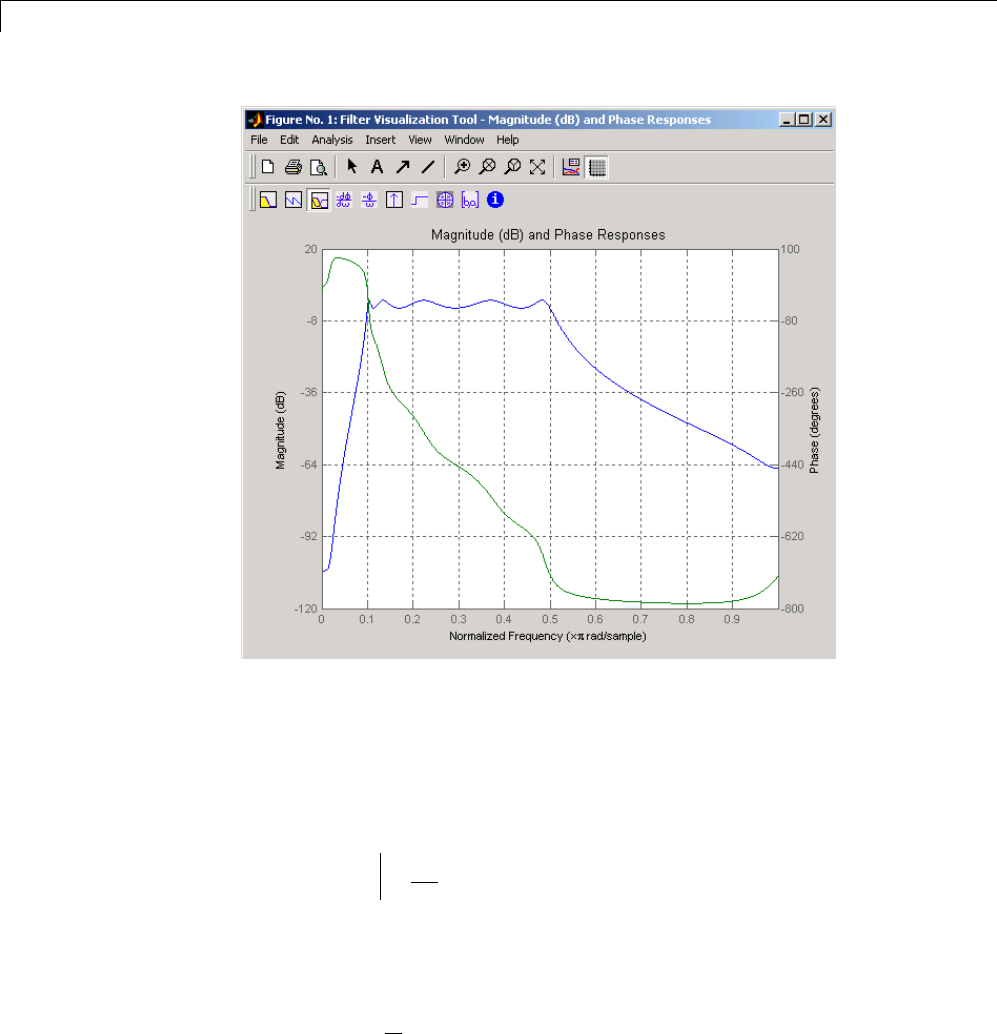
2Filter Design and Implementation
Impulse invariance retains the cutoff frequencies of 0.1 Hz and 0.5 Hz.
Bilinear Transformation
The bilinear transformation is a nonlinear mapping of the continuous domain
to the discrete domain; it maps the s-plane into the z-plane by
Hz Hs sk
z
z
() ()==−
+
1
1
Bilinear transformation maps the jΩ-axis of the continuous domain to the
unit circle of the discrete domain according to
ω
=⎛
⎝
⎜⎞
⎠
⎟
−
21
tan Ω
k
2-48
Special Topics in IIR Filter Design
The toolbox function bilinear implements this operation, where the
frequency warping constant kis equal to twice the sampling frequency (2*fs)
by default, and equal to 2ππfff
pps
tan
()
if you give bilinear a trailing
argument that represents a “match” frequency Fp. If a match frequency Fp
(in hertz) is present, bilinear maps the frequency Ω=2πfp(in rad/s) to the
same frequency in the discrete domain, normalized to the sampling rate:
ω=2πfp/fs(in rad/sample).
The bilinear function can perform this transformation on three different
linear system representations: zero-pole-gain, transfer function, and
state-space form. Try calling bilinear with the state-space matrices that
describe the Chebyshev Type I filter from the previous section, using a
sampling frequency of 2 Hz, and retaining the lower band edge of 0.1 Hz:
[Ad,Bd,Cd,Dd] = bilinear(At,Bt,Ct,Dt,2,0.1);
The frequency response of the resulting digital filter is
[bz,az] = ss2tf(Ad,Bd,Cd,Dd); % Convert to TF
fvtool(bz,az)
2-49
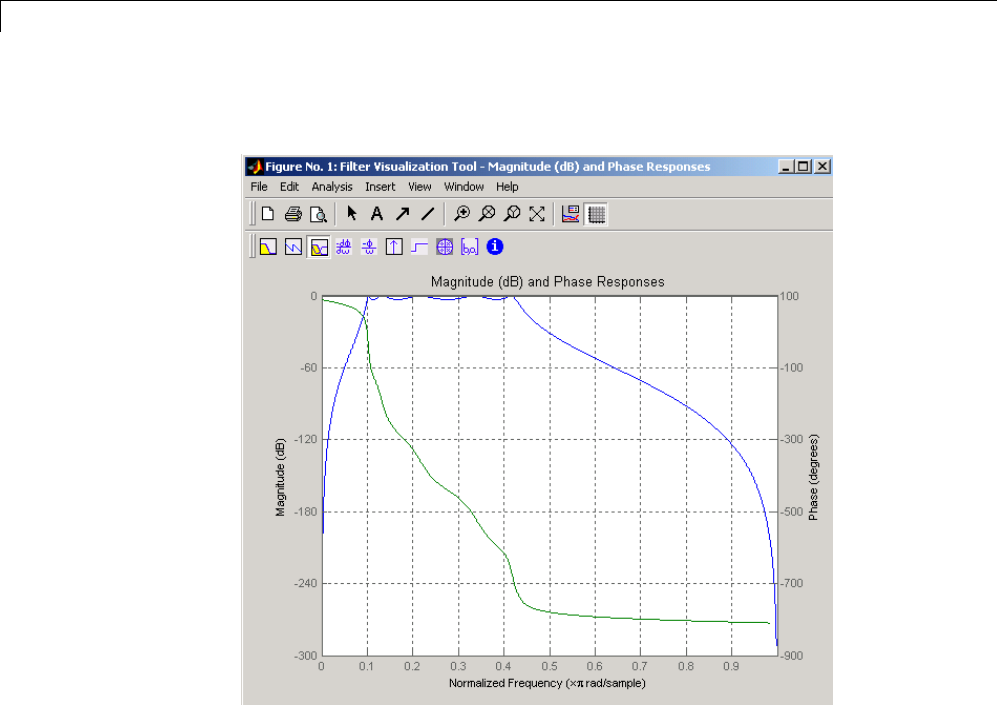
2Filter Design and Implementation
Click the Magnitude and Phase Response toolbar button.
The lower band edge is at 0.1 Hz as expected. Notice, however, that the
upper band edge is slightly less than 0.5 Hz, although in the analog domain
it was exactly 0.5 Hz. This illustrates the nonlinear nature of the bilinear
transformation. To counteract this nonlinearity, it is necessary to create
analog domain filters with “prewarped” band edges, which map to the correct
locations upon bilinear transformation. Here the prewarped frequencies u1
and u2 generate Bw and Wo for the lp2bp function:
fs = 2; % Sampling frequency (hertz)
u1 = 2*fs*tan(0.1*(2*pi/fs)/2); % Lower band edge (rad/s)
u2 = 2*fs*tan(0.5*(2*pi/fs)/2); % Upper band edge (rad/s)
Bw = u2 - u1; % Bandwidth
Wo = sqrt(u1*u2); % Center frequency
[At,Bt,Ct,Dt] = lp2bp(A,B,C,D,Wo,Bw);
2-50

Special Topics in IIR Filter Design
A digital bandpass filter with correct band edges 0.1 and 0.5 times the
Nyquist frequency is
[Ad,Bd,Cd,Dd] = bilinear(At,Bt,Ct,Dt,fs);
The example bandpass filters from the last two sections could also be created
in one statement using the complete IIR design function cheby1.Forinstance,
an analog version of the example Chebyshev filter is
[b,a] = cheby1(5,3,[0.1 0.5]*2*pi,'s');
Note that the band edges are in rad/s for analog filters, whereas for the digital
case, frequency is normalized:
[bz,az] = cheby1(5,3,[0.1 0.5]);
All of the complete design functions call bilinear internally. They prewarp
the band edges as needed to obtain the correct digital filter.
2-51
2Filter Design and Implementation
Filtering Data With Signal Processing Toolbox Software
In this section...
“Lowpass FIR Filter — Window Method” on page 2-52
“Bandpass Filters — Minimum-Order FIR and IIR Systems” on page 2-56
“Zero-Phase Filtering” on page 2-65
Lowpass FIR Filter — Window Method
These examples show you how to design and implement an FIR filter using
the command line functions: fir1 and fdesign.lowpass, and the interactive
tool fdatool.
To filter the input signal, these examples use the filter command. The
examples in “Zero-Phase Filtering” on page 2-65 show you how to implement
zero-phase filtering with filtfilt.
Createasignaltouseintheexamples. Thesignalisa100-Hzsinewavein
additive N(0,1/4) white Gaussian noise. Set the random number generator to
the default state for reproducible results.
rng default;
Fs = 1000;
t = linspace(0,1,Fs);
x = cos(2*pi*100*t)+0.5*randn(size(t));
The filter design is an FIR lowpass filter with order equal to 20 and a cutoff
frequency of 150 Hz. Use a Kasier window with length one sample greater
than the filter order and β=3. See kaiser fordetailsontheKaiserwindow.
Use fir1 to design the filter. fir1 requires normalized frequencies in the
interval [0,1], where 1 is (1)πradians/sample. To use fir1,youmustconvert
all frequency specifications to normalized frequencies.
Design the filter and view the filter’s magnitude response.
fc = 150;
Wn = (2/Fs)*fc;
2-52
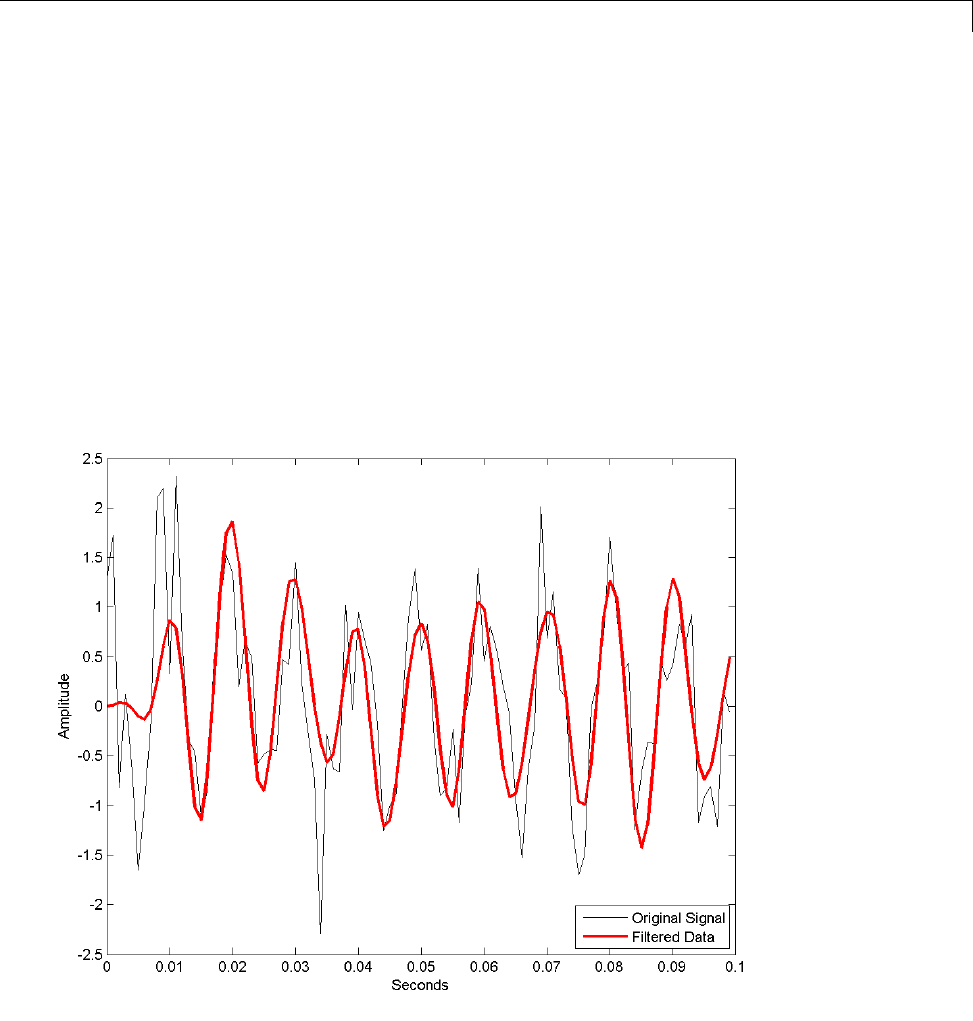
Filtering Data With Signal Processing Toolbox™ Software
b = fir1(20,Wn,'low',kaiser(21,3));
fvtool(b,1,'Fs',Fs);
Apply the filter to the signal and plot the result for the first ten periods of
the 100-Hz sinusoid.
y = filter(b,1,x);
plot(t(1:100),x(1:100),'k');
hold on;
plot(t(1:100),y(1:100),'r','linewidth',2);
legend('Original Signal','Filtered Data','Location','SouthEast');
xlabel('Seconds'); ylabel('Amplitude');
Designthesamefilterusingfdesign.lowpass.
2-53

2Filter Design and Implementation
Set the filter specifications using the 'N,Fc' specification string. With
fdesign.lowpass, you can specify your filter design in Hz.
Fs = 1000;
d = fdesign.lowpass('N,Fc',20,150,Fs);
Hd = design(d,'window','Window',kaiser(21,3));
Filter the data and plot the result.
y1 = filter(Hd,x);
plot(t(1:100),x(1:100),'k');
hold on;
plot(t(1:100),y1(1:100),'r','linewidth',2);
legend('Original Signal','Filtered Data','Location','SouthEast');
xlabel('Seconds'); ylabel('Amplitude');
Design and implement a lowpass FIR filter using the window method with
the interactive tool fdatool.
Start FDATool by entering
fdatool
at the command line.
Set the Response Type to Lowpass.SettheDesign Method to FIR and
select the Window method.
Under Filter Order,selectSpecify order. Set the order to 20.
Under Frequency Specifications.SetUnits to Hz,Fs: to 1000, and Fc: to
150.
2-54
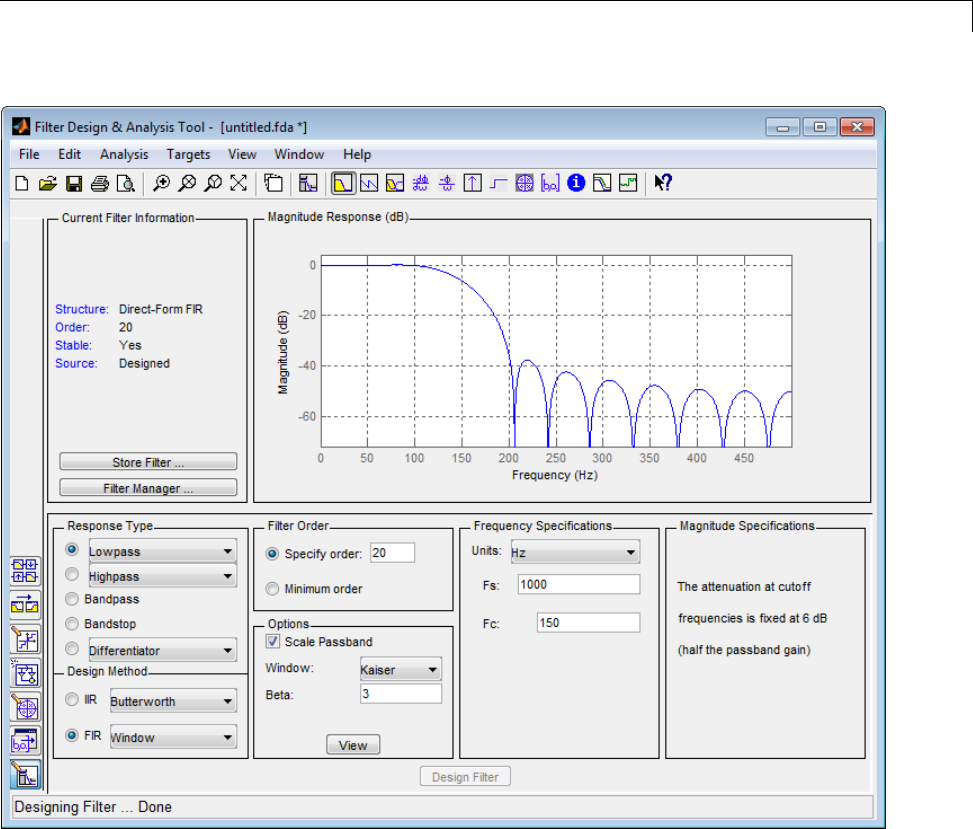
Filtering Data With Signal Processing Toolbox™ Software
Click Design Filter.
Select File —>Export... to export your FIR filter to the MATLAB workspace
as coefficients or a filter object. In this example, export the filter as an object.
Specify the variable name as Hd1.
2-55
2Filter Design and Implementation
Click Export.
Filter the input signal in the command window with the exported filter object.
Plot the result for the first ten periods of the 100-Hz sinusoid.
y2 = filter(Hd1,x);
plot(t(1:100),x(1:100),'k');
hold on;
plot(t(1:100),y1(1:100),'r','linewidth',2);
legend('Original Signal','Filtered Data','Location','SouthEast');
xlabel('Seconds'); ylabel('Amplitude');
Select File —> Generate MATLAB Code to generate a MATLAB function
to create a filter object using your specifications.
You can also use the interactive tool filterbuilder to design your filter.
Bandpass Filters — Minimum-Order FIR and IIR
Systems
This example shows you how to design a bandpass filter and filter data with
minimum-order FIR equiripple and IIR Butterworth filters. The example uses
fdesign.bandpass and the interactive tool fdatool.
You can model many real-world signals as a superposition of oscillating
components, a low-frequency trend, and additive noise. For example,
2-56

Filtering Data With Signal Processing Toolbox™ Software
economic data often contain oscillations, which represent cycles superimposed
on a slowly varying upward or downward trend. In addition, there is an
additive noise component, which is a combination of measurement error and
the inherent random fluctuations in the process.
In these examples, assume you sample some process every day for 1 year.
Assume the process has oscillations on approximately one-week and
one-month scales. In addition, there is a low-frequency upward trend in the
data and additive N(0,1/4) white Gaussian noise.
Create the signal as a superposition of two sine waves with frequencies of 1/7
and 1/30 cycles/day. Add a low-frequency increasing trend term and N(0,1/4)
white Gaussian noise. Set the random number generator to the default state
for reproducible results. The data is sampled at 1 sample/day. Plot the
resulting signal and the power spectral density (PSD) estimate.
rng default;
Fs =1;
n = 1:365;
x = cos(2*pi*(1/7)*n)+cos(2*pi*(1/30)*n-pi/4);
trend = 3*sin(2*pi*(1/1480)*n);
y = x+trend+0.5*randn(size(n));
subplot(211);
plot(n,y); xlabel('Days'); set(gca,'xlim',[1 365]);
grid on;
subplot(212);
psdest = psd(spectrum.periodogram,y,'Fs',Fs);
plot(psdest.Frequencies,10*log10(psdest.Data));
xlabel('Cycles/day'); ylabel('dB'); grid on;
2-57
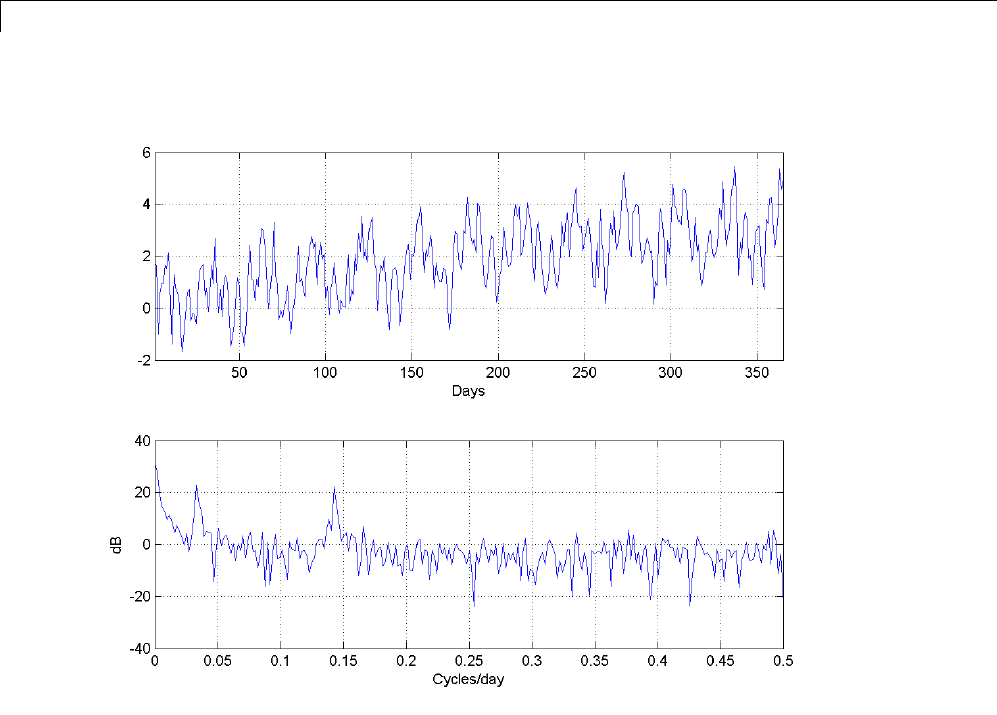
2Filter Design and Implementation
The low-frequency trend appears in the power spectral density estimate
as increased low-frequency power. The low-frequency power appears
approximately 10 dB above the oscillation at 1/30 cycles/day. Use this
information in the specifications for the filter stopbands.
Design minimum-order FIR equiripple and IIR Butterworth filters with the
following specifications: passband from [1/40,1/4] cycles/day and stopbands
from [0,1/60] and [1/4,1/2] cycles/day. Set both stopband attenuations to 10 dB
and the passband ripple tolerance to 1 dB.
d = fdesign.bandpass('Fst1,Fp1,Fp2,Fst2,Ast1,Ap,Ast2',...
1/60,1/40,1/4,1/2,10,1,10,1);
Hd1 = design(d,'equiripple');
Hd2 = design(d,'butter');
2-58
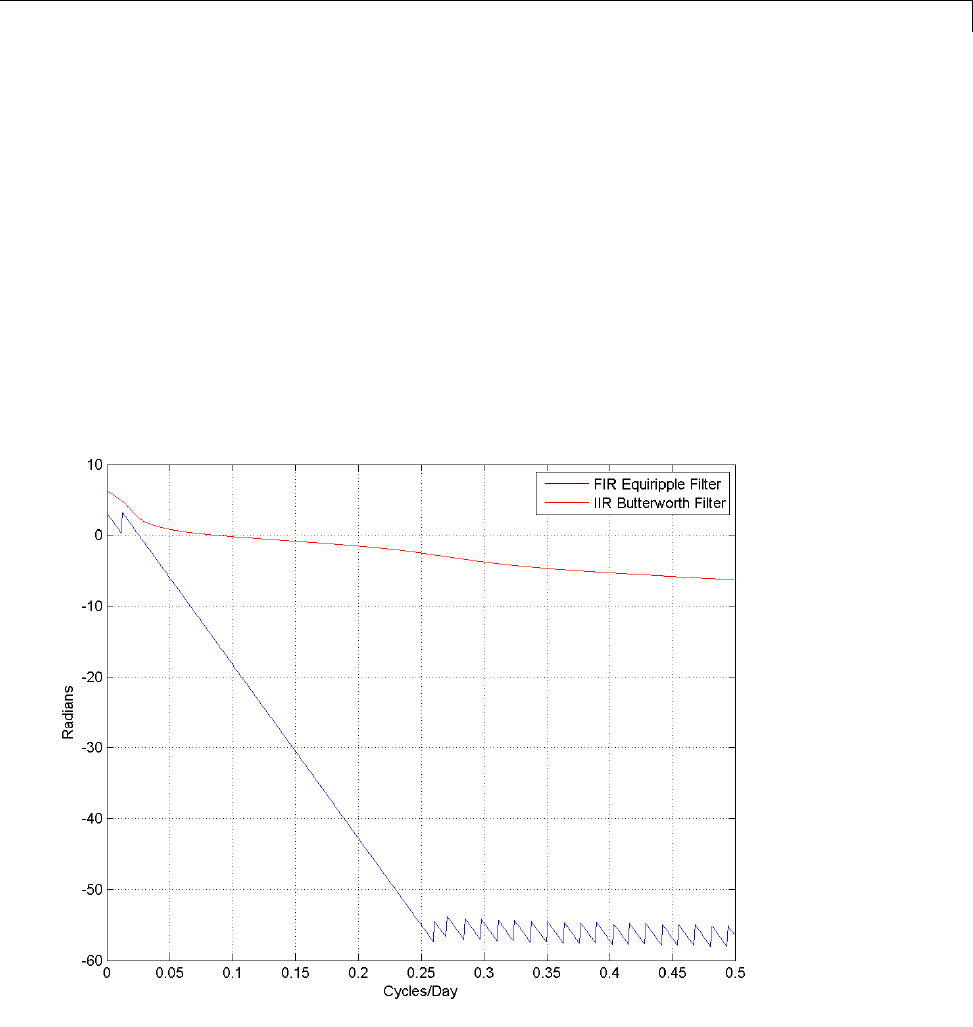
Filtering Data With Signal Processing Toolbox™ Software
Compare the order of the FIR and IIR filters and the unwrapped phase
responses.
fprintf('The order of the FIR filter is %d\n',length(Hd1.Numerator)-1);
[b,a] = sos2tf(Hd2.sosMatrix,Hd2.ScaleValues);
fprintf('The order of the IIR filter is %d\n',length(max(b,a))-1);
[phifir,w] = phasez(Hd1,[],1);
[phiiir,w] = phasez(Hd2,[],1);
plot(w,unwrap(phifir),'b'); hold on;
plot(w,unwrap(phiiir),'r'); grid on;
xlabel('Cycles/Day'); ylabel('Radians');
legend('FIR Equiripple Filter','IIR Butterworth Filter');
2-59

2Filter Design and Implementation
The IIR filter has a much lower order that the FIR filter. However, the FIR
filter has a linear phase response over the passband, while the IIR filter does
not. The FIR filter delays all frequencies in the filter passband equally, while
the IIR filter does not.
Additionally, the rate of change of the phase per unit of frequency is greater
in the FIR filter than in the IIR filter.
Design a lowpass FIR equiripple filter for comparison. The lowpass filter
specifications are: passband [0,1/4] cycles/day, stopband attenuation equal to
10 dB, and the passband ripple tolerance set to 1 dB.
dlow = fdesign.lowpass('Fp,Fst,Ap,Ast',1/4,1/2,1,10,1);
Hdlow = design(dlow,'equiripple');
Filter the data with the bandpass and lowpass filters.
yfir = filter(Hd1,y);
yiir = filter(Hd2,y);
ylow = filter(Hdlow,y);
Plot the PSD estimate of the bandpass IIR filter output. You can replace
yiir with yfir in the following code to view the PSD estimate of the FIR
bandpass filter output.
psdest = psd(spectrum.periodogram,yiir,'Fs',Fs);
plot(psdest.Frequencies,10*log10(psdest.Data));
xlabel('Cycles/day'); ylabel('dB'); grid on;
2-60
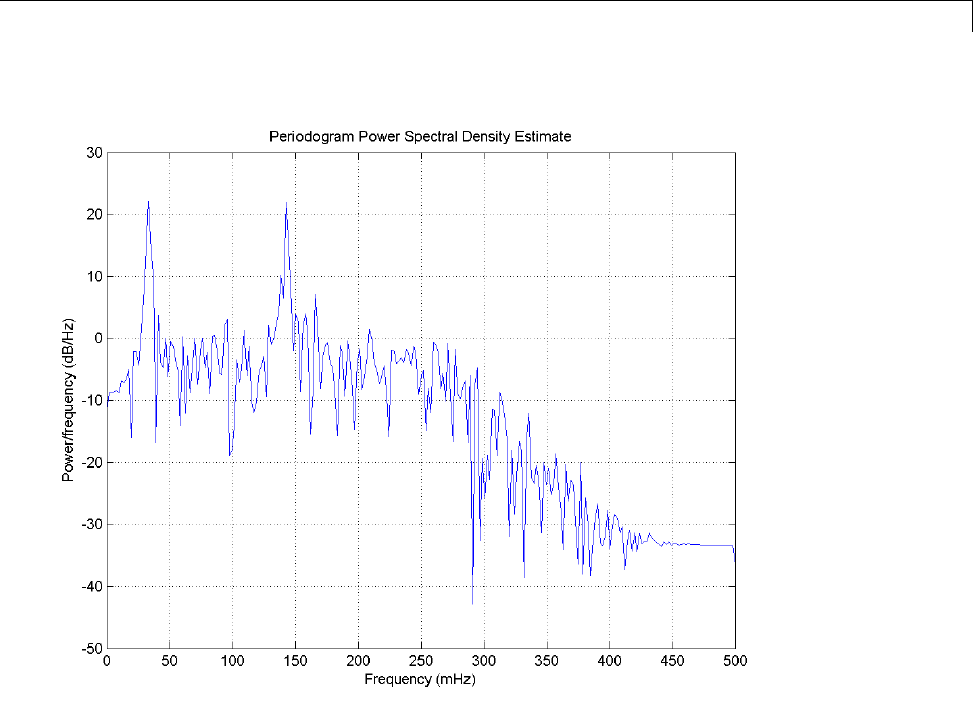
Filtering Data With Signal Processing Toolbox™ Software
The PSD estimate shows the bandpass filter attenuates the low-frequency
trend and high-frequency noise.
Plot the first 120 days of FIR and IIR filter output.
plot(n(1:120),yfir(1:120),'b');
hold on;
plot(n(1:120),yiir(1:120),'r');
xlabel('Days'); axis([1 120 -2.8 2.8]);
legend('FIR bandpass filter output','IIR bandpass filter output',...
'Location','SouthEast');
2-61
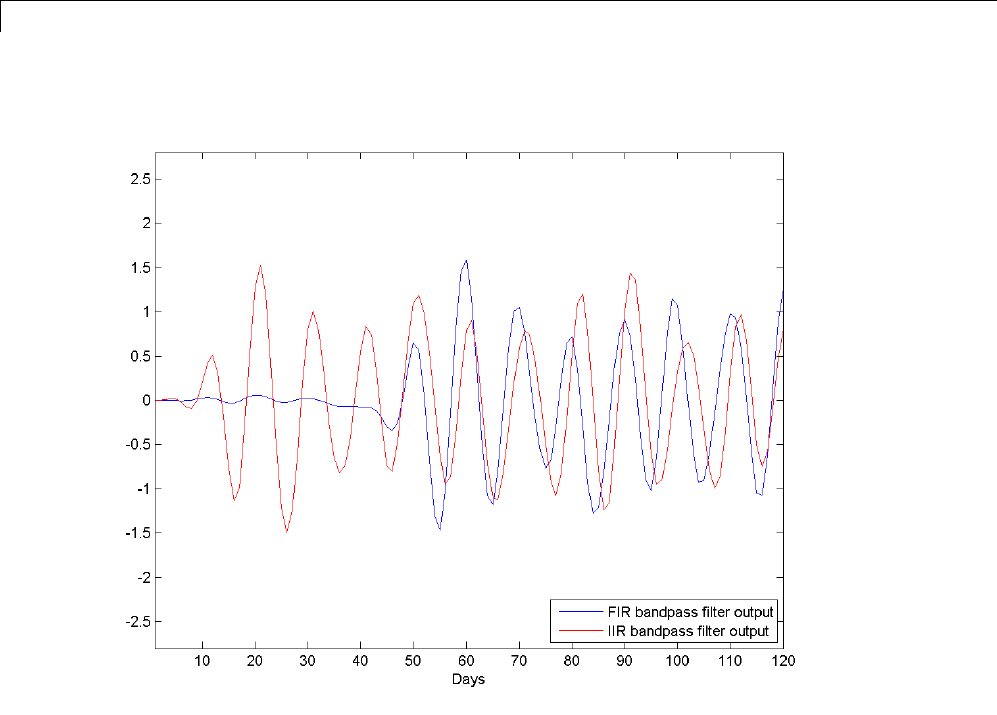
2Filter Design and Implementation
The increased phase delay in the FIR filter is evident in the filter output.
Plot the lowpass FIR filter output superimposed on the superposition of the
7-day and 30-day cycles for comparison.
plot(n,x,'k');
hold on;
plot(n,ylow,'r'); set(gca,'xlim',[1 365]);
legend('7-day and 30-day cycles','FIR lowpass filter output',...
'Location','NorthWest');
xlabel('Days');
2-62
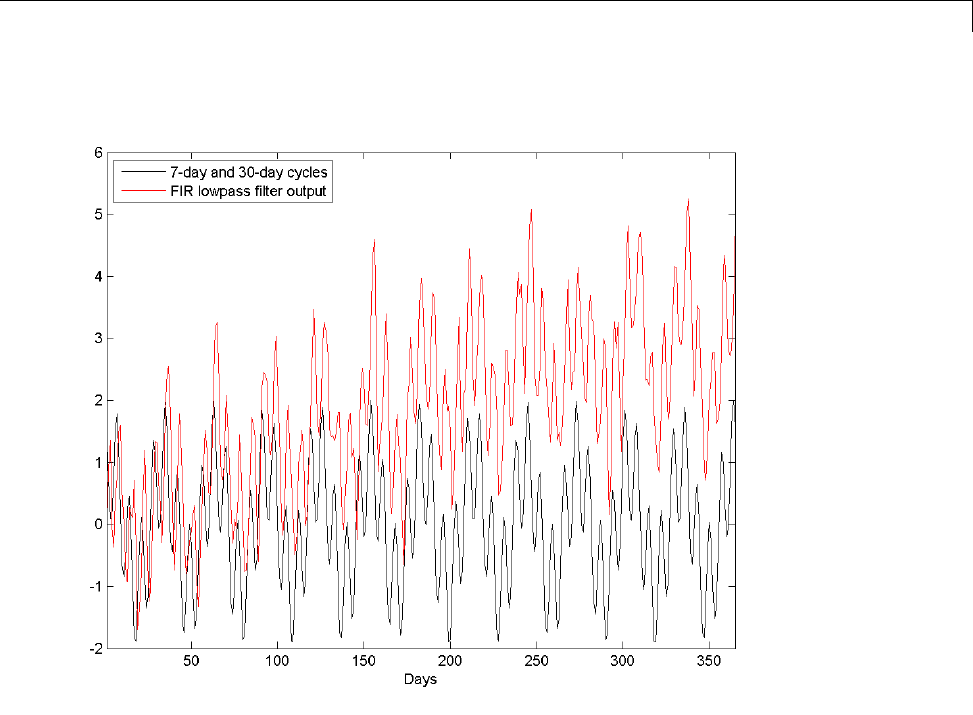
Filtering Data With Signal Processing Toolbox™ Software
You can see in the preceding plot that the low-frequency trend is evident in
the lowpass filter output. While the lowpass filter preserves the 7-day and
30-day cycles, the bandpass filters perform better in this example because the
bandpass filters also remove the low-frequency trend.
Design and implement the bandpass Butterworth (IIR) filter with the
interactive tool fdatool.
Start FDATool by entering
fdatool
at the command line.
2-63
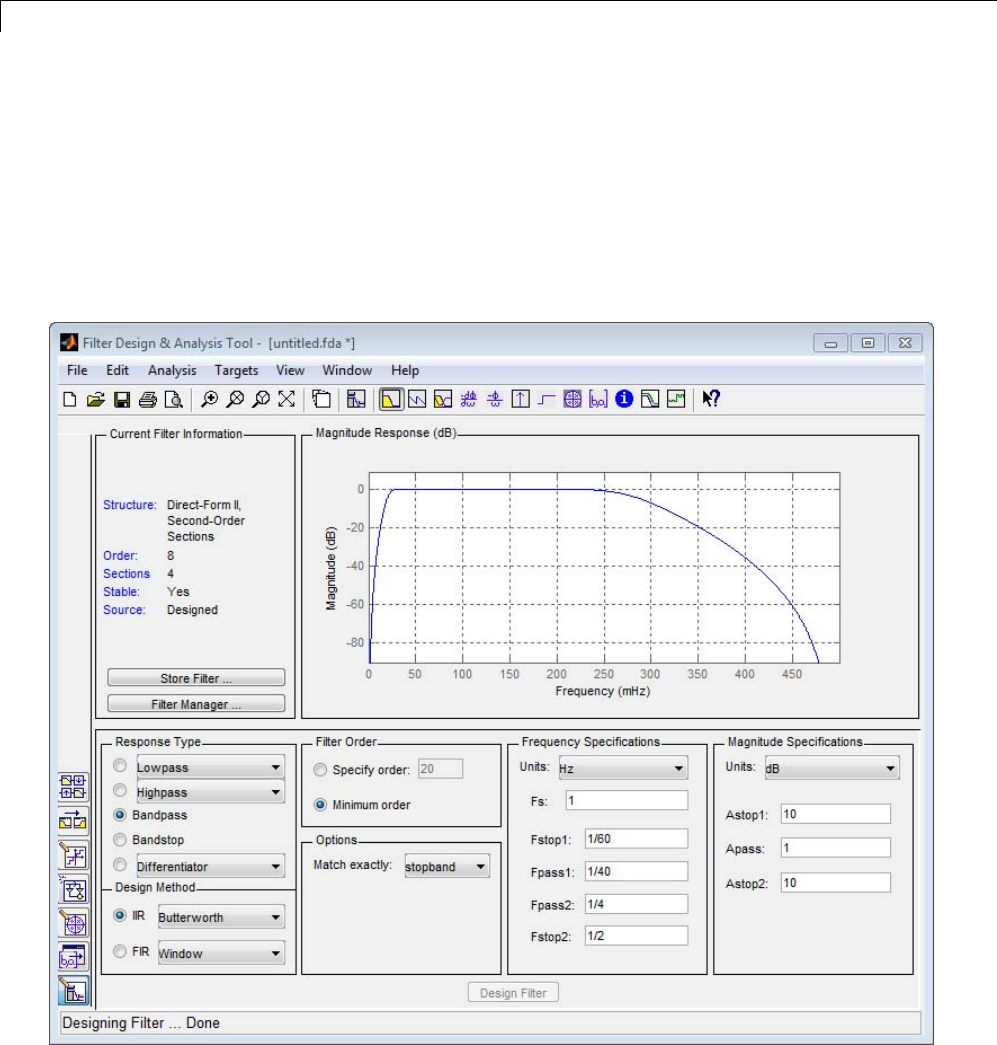
2Filter Design and Implementation
Set the Response Type to Bandpass.SettheDesign Method to IIR and
select the Butterworth design.
Under Filter Order, select Minimum order.
Under Frequency Specifications.SetUnits to Hz,Fs: to 1 , Fstop1: to
1/60, Fpass1: to 1/40, Fpass2: to 1/4, and Fstop2: to 1/2. Under Magnitude
Specifications,setAstop1: and Astop2: to 10 and Apass: to 1.
2-64
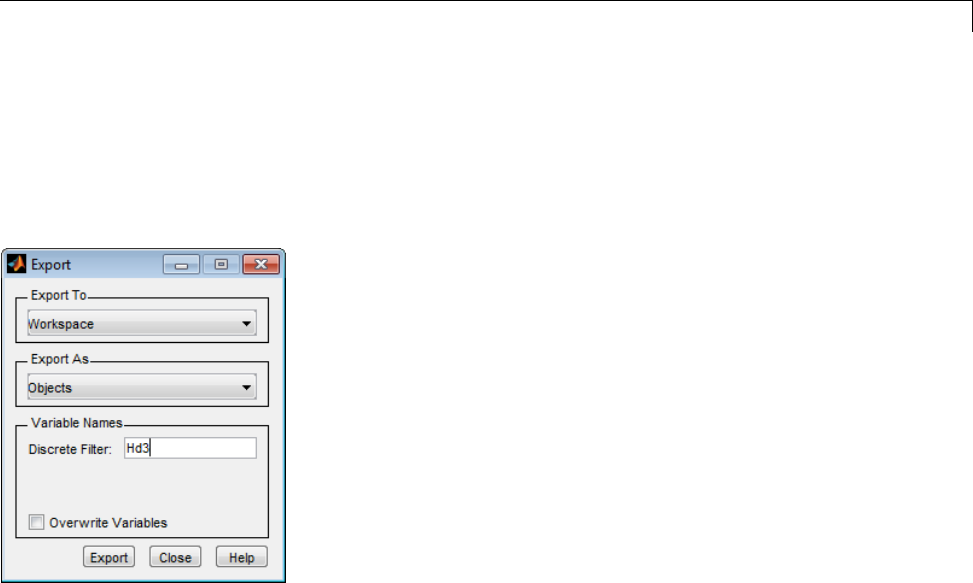
Filtering Data With Signal Processing Toolbox™ Software
Click Design Filter.
Select File —> Export... to export your IIR filter to the MATLAB workspace
as coefficients or a filter object. In this example, export the filter as an object.
Specify the variable name as Hd3.
Click Export.
Filter the input signal in the command window with the exported filter object.
yfilt = filter(Hd3,x);
SelectFile —> Generate MATLAB Code to generate a MATLAB function
to create a filter object using your specifications.
You can also use the interactive tool filterbuilder to design your filter.
Zero-Phase Filtering
These examples show you how to perform zero-phase filtering. The signal and
filters are described in “Lowpass FIR Filter — Window Method” on page 2-52
and “Bandpass Filters — Minimum-Order FIR and IIR Systems” on page 2-56.
2-65

2Filter Design and Implementation
Repeat the signal generation and lowpass filter design with fir1 and
fdesign.lowpass. You do not have to execute the following code if you
already have these variables in your workspace.
rng default;
Fs = 1000;
t = linspace(0,1,Fs);
x = cos(2*pi*100*t)+0.5*randn(size(t));
% Using fir1
fc = 150;
Wn = (2/Fs)*fc;
b = fir1(20,Wn,'low',kaiser(21,3));
% Using fdesign.lowpass
d = fdesign.lowpass('N,Fc',20,150,Fs);
Hd = design(d,'window','Window',kaiser(21,3));
Filter the data using filter. Plot the first 100 points of the filter output
along with a superimposed sinusoid with the same amplitude and initial
phase as the input signal.
yout = filter(Hd,x);
xin = cos(2*pi*100*t);
plot(t(1:100),xin(1:100),'k');
hold on; grid on;
plot(t(1:100),yout(1:100),'r','linewidth',2);
xlabel('Seconds'); ylabel('Amplitude');
legend('Input Sine Wave','Filtered Data',...
'Location','NorthEast');
2-66
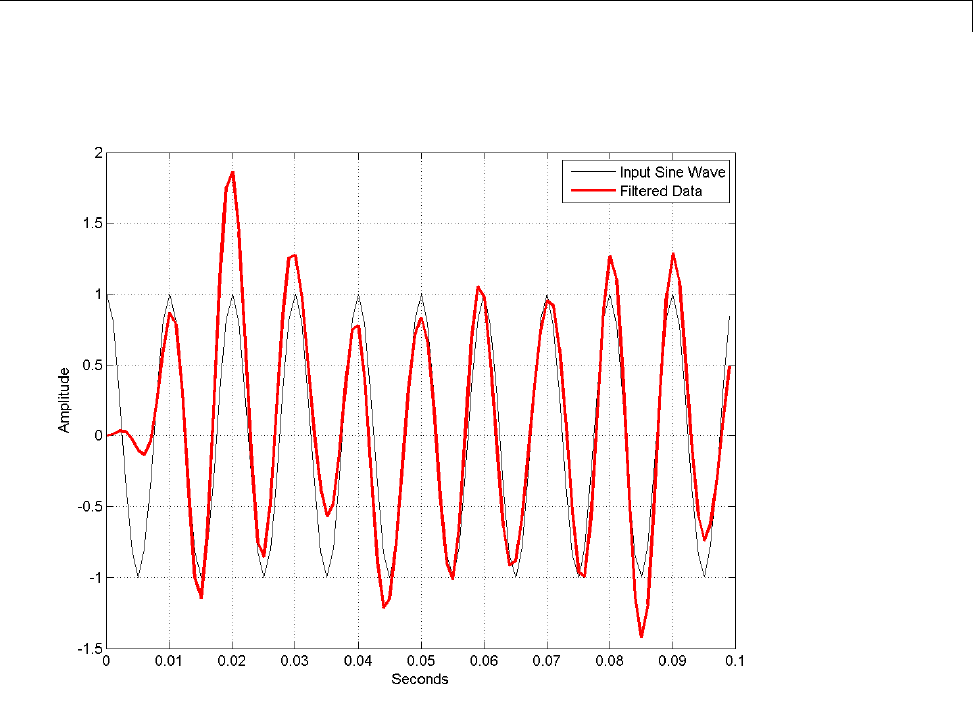
Filtering Data With Signal Processing Toolbox™ Software
Looking at the initial 0.01 seconds of the filtered data, you see that the output
is delayed with respect to the input. The delay appears to be approximately
0.01 seconds, which is almost 1/2 thelengthoftheFIRfilterinsamples
(10*0.001).
This delay is due to the filter’s phase response. The FIR filter in these
examples is a type I linear-phase filter. The group delay of the filter is 10
samples.
Plot the group delay using fvtool.
fvtool(Hd,'analysis','grpdelay');
2-67

2Filter Design and Implementation
In many applications, phase distortion is acceptable. This is particularly true
when phase response is linear. In other applications, it is desirable to have
a filter with a zero-phase response. A zero-phase response is not technically
possibly in a noncausal filter. However, you can implement zero-phase
filtering using a causal filter with filtfilt.filtfilt does not accept filter
objects as input arguments, but you can still use filter objects with filtfilt
by extracting the filter coefficients from the object.
Filter the input signal using the coefficients in the filter object. Plot the
responses to compare the filter outputs obtained with filter and filtfilt.
yzp = filtfilt(Hd.Numerator,1,x);
% or yzp = filtfilt(b,1,x);
plot(t(1:100),xin(1:100),'k');
hold on;
plot(t(1:100),yout(1:100),'r','linewidth',2);
plot(t(1:100),yzp(1:100),'b','linewidth',2);
xlabel('Seconds'); ylabel('Amplitude');
legend('100-Hz Sine Wave','Filtered Signal','Zero-phase Filtering',...
'Location','NorthEast');
2-68
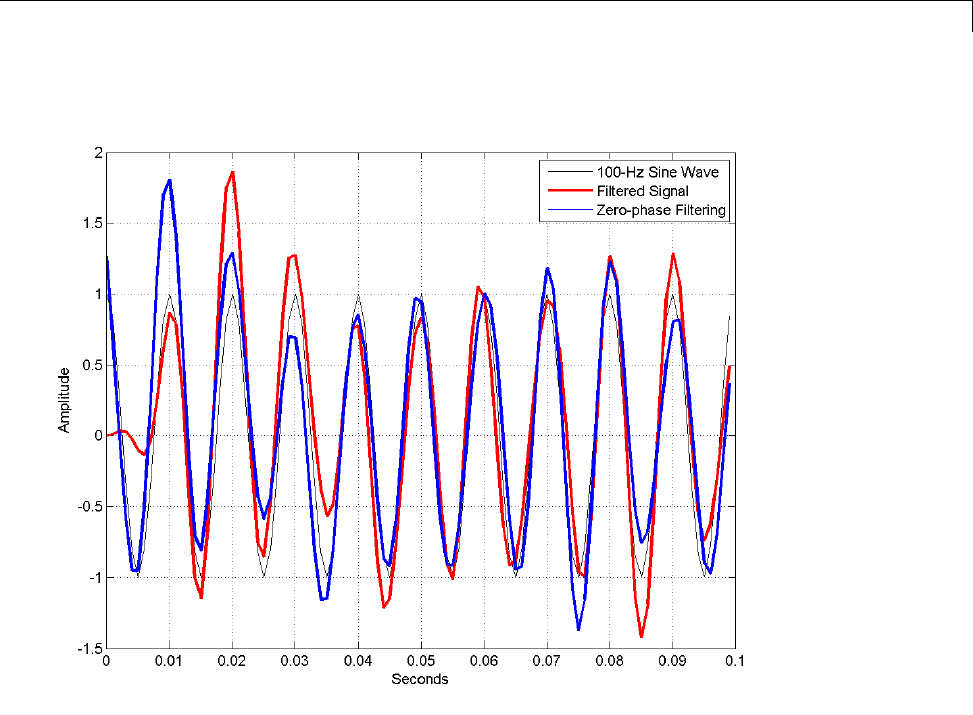
Filtering Data With Signal Processing Toolbox™ Software
In the preceding figure, you can see that the output of filtfilt does not
exhibit the delay due to the phase response of the FIR filter.
The IIR bandpass filter designed in “Bandpass Filters — Minimum-Order
FIR and IIR Systems” on page 2-56 is a biquad filter. Stated equivalently,
the IIR filter is in the form of cascaded second-order sections. To implement
zero-phase filtering with a discrete-time biquad filter, you must input the
matrix of second-order sections and the gain values for each of those sections
into filtfilt.
Zero phase filter the data in “Bandpass Filters — Minimum-Order FIR and
IIR Systems” on page 2-56 with the IIR bandpass filter. For convenience, the
2-69

2Filter Design and Implementation
code to generate the signal and filter is repeated. You do not have to execute
this code if you already have these variables in your workspace.
Generate the data.
rng default;
Fs =1;
n = 1:365;
x = cos(2*pi*(1/7)*n)+cos(2*pi*(1/30)*n-pi/4);
trend = 3*sin(2*pi*(1/1480)*n);
y = x+trend+0.5*randn(size(n));
Specify and design the filter.
d = fdesign.bandpass('Fst1,Fp1,Fp2,Fst2,Ast1,Ap,Ast2',...
1/60,1/40,1/4,1/2,10,1,10,1);
Hd2 = design(d,'butter');
Use filtfilt to zero-phase filter the input. Input the matrix of second-order
sections and gain (scale) values along with your signal.
yzpiir = filtfilt(Hd2.sosMatrix,Hd2.ScaleValues,y);
2-70

Selected Bibliography
Selected Bibliography
[1] Karam, L.J., and J.H. McClellan. “Complex Chebyshev Approximation for
FIR Filter Design.” IEEE Trans. on Circuits and Systems II. March 1995.
[2] Selesnick, I.W., and C.S. Burrus. “Generalized Digital Butterworth
Filter Design.” Proceedings of the IEEE Int. Conf. Acoust., Speech, Signal
Processing. Vol. 3 (May 1996).
[3] Selesnick, I.W., M. Lang, and C.S. Burrus. “Constrained Least Square
Design of FIR Filters without Specified Transition Bands.” Proceedings of
the IEEE Int. Conf. Acoust., Speech, Signal Processing. Vol. 2 (May 1995).
Pgs. 1260-1263.
2-71

2Filter Design and Implementation
2-72
3
Designing a Filter in
Fdesign — Process
Overview

3Designing a Filter in Fdesign — Process Overview
Process Flow Diagram and Filter Design Methodology
In this section...
“Exploring the Process Flow Diagram” on page 3-2
“Selecting a Response” on page 3-4
“Selecting a Specification” on page 3-4
“Selecting an Algorithm” on page 3-6
“Customizing the Algorithm” on page 3-8
“Designing the Filter” on page 3-8
“Design Analysis” on page 3-9
“Realize or Apply the Filter to Input Data” on page 3-10
Note You must minimally have the Signal Processing Toolbox installed
to use fdesign and design. Some of the features described below may
be unavailable if your installation does not additionally include the DSP
System Toolbox™ license. The DSP System Toolbox significantly expands the
functionality available for the specification, design, and analysis of filters.
You can verify the presence of both toolboxes by typing ver at the command
prompt.
Exploring the Process Flow Diagram
The process flow diagram shown in the following figure lists the steps and
shows the order of the filter design process.
3-2
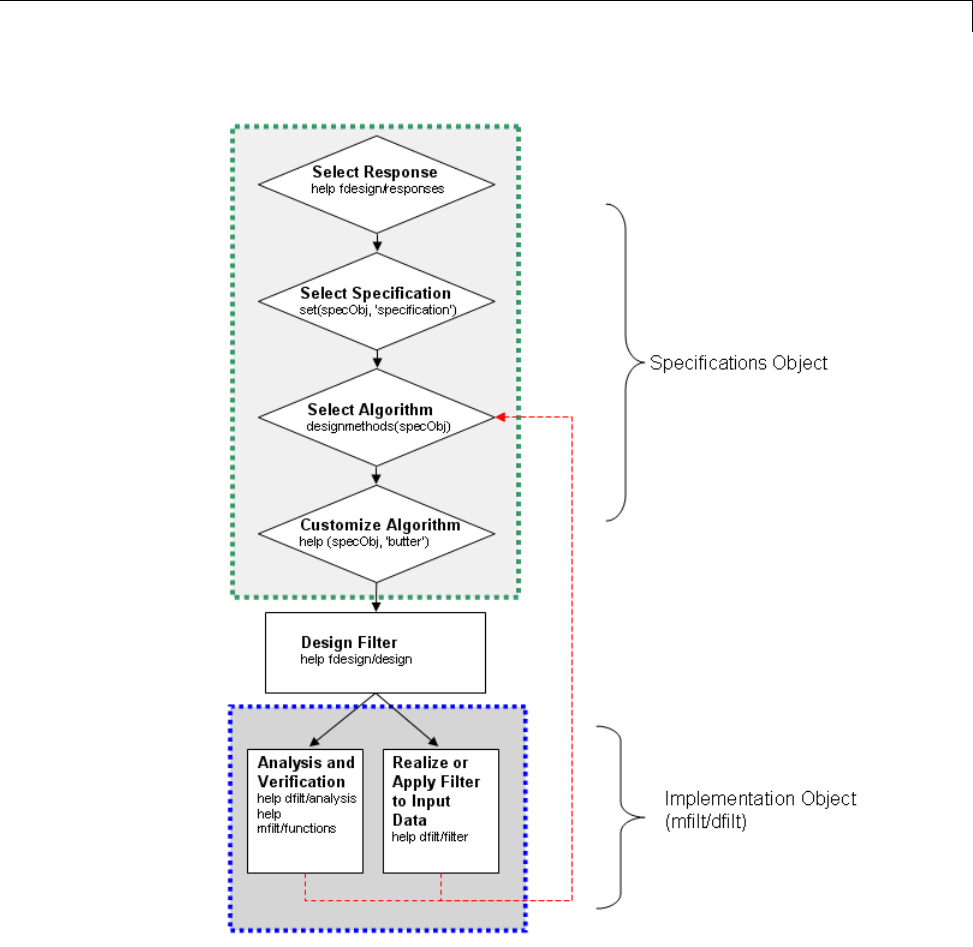
Process Flow Diagram and Filter Design Methodology
The first four steps of the filter design process relate to the filter Specifications
Object, while the last two steps involve the filter Implementation Object. Both
of these objects are discussed in more detail in the following sections. Step 5
- the design of the filter, is the transition step from the filter Specifications
Object to the Implementation object. The analysis and verification step is
3-3
3Designing a Filter in Fdesign — Process Overview
completely optional. It provides methods for the filter designer to ensure that
the filter complies with all design criteria. Depending on the results of this
verification, you can loop back to steps 3 and 4, to either choose a different
algorithm, or to customize the current one. You may also wish to go back to
steps 3 or 4 after you filter the input data with the designed filter (step 7),
andfindthatyouwishtotweakthe filter or change it further.
The diagram shows the help command for each step. Enter the help line at the
MATLAB command prompt to receive instructions and further documentation
links for the particular step. Not all of the steps have to be executed explicitly.
For example, you could go from step 1 directly to step 5, and the interim three
steps are done for you by the software.
The following are the details for each of the steps shown above.
Selecting a Response
If you type:
help fdesign/responses
at the MATLAB command prompt, you see a list of all available filter
responses. The responses marked with an asterisk require the DSP System
Toolbox.
You must select a response to initiate the filter. In this example, a bandpass
filter Specifications Object is created by typing the following:
d = fdesign.bandpass
Selecting a Specification
Aspecification is an array of design parameters for a given filter. The
specification is a property of the Specifications Object.
Note A specification is not the same as the Specifications Object. A
Specifications Object contains a specification as one of its properties.
3-4

Process Flow Diagram and Filter Design Methodology
When you select a filter response, there are a number of different
specifications available. Each one contains a different combination of design
parameters. After you create a filter Specifications Object, you can query the
available specifications for that response. Specifications marked with an
asterisk require the DSP System Toolbox.
>> d = fdesign.bandpass; % step 1 - choose the response
>> set (d, 'specification')
ans =
'Fst1,Fp1,Fp2,Fst2,Ast1,Ap,Ast2'
'N,F3dB1,F3dB2'
'N,F3dB1,F3dB2,Ap'
'N,F3dB1,F3dB2,Ast'
'N,F3dB1,F3dB2,Ast1,Ap,Ast2'
'N,F3dB1,F3dB2,BWp'
'N,F3dB1,F3dB2,BWst'
'N,Fc1,Fc2'
'N,Fp1,Fp2,Ap'
'N,Fp1,Fp2,Ast1,Ap,Ast2'
'N,Fst1,Fp1,Fp2,Fst2'
'N,Fst1,Fp1,Fp2,Fst2,Ap'
'N,Fst1,Fst2,Ast'
'Nb,Na,Fst1,Fp1,Fp2,Fst2'
>> d=fdesign.arbmag;
>> set(d,'specification')
ans =
'N,F,A'
'N,B,F,A'
The set command can be used to select one of theavailablespecificationsas
follows:
>> d = fdesign.lowpass; % step 1
>> % step 2: get a list of available specifications
>> set (d, 'specification')
3-5

3Designing a Filter in Fdesign — Process Overview
ans =
'Fp,Fst,Ap,Ast'
'N,F3dB'
'N,F3dB,Ap'
'N,F3dB,Ap,Ast'
'N,F3dB,Ast'
'N,F3dB,Fst'
'N,Fc'
'N,Fc,Ap,Ast'
'N,Fp,Ap'
'N,Fp,Ap,Ast'
'N,Fp,F3dB'
'N,Fp,Fst'
'N,Fp,Fst,Ap'
'N,Fp,Fst,Ast'
'N,Fst,Ap,Ast'
'N,Fst,Ast'
'Nb,Na,Fp,Fst'
>> %step 2: set the required specification
>> set (d, 'specification', 'N,Fc')
If you do not perform this step explicitly, fdesign returns the default
specification for the response you chose in “Select a Response” on page 4-3, and
provides default values for all design parameters included in the specification.
Selecting an Algorithm
The availability of algorithms depends the chosen filter response, the design
parameters, and the availability of the DSP System Toolbox. In other words,
for the same lowpass filter, changing the specification string also changes the
available algorithms. In the following example, for a lowpass filter and a
specification of 'N, Fc', only one algorithm is available—window.
>> %step 2: set the required specification
>> set (d, 'specification', 'N,Fc')
>> designmethods (d) %step3: get available algorithms
3-6

Process Flow Diagram and Filter Design Methodology
Design Methods for class fdesign.lowpass (N,Fc):
window
However, for a specification of 'Fp,Fst,Ap,Ast',anumberofalgorithmsare
available. If the user has only the Signal Processing Toolbox installed, the
following algorithms are available:
>>set (d, 'specification', 'Fp,Fst,Ap,Ast')
>>designmethods(d)
Design Methods for class fdesign.lowpass (Fp,Fst,Ap,Ast):
butter
cheby1
cheby2
ellip
equiripple
kaiserwin
If the user additionally has the DSP System Toolbox installed, the number of
available algorithms for this response and specification string increases:
>>set(d,'specification','Fp,Fst,Ap,Ast')
>>designmethods(d)
Design Methods for class fdesign.lowpass (Fp,Fst,Ap,Ast):
butter
cheby1
cheby2
ellip
equiripple
ifir
kaiserwin
3-7

3Designing a Filter in Fdesign — Process Overview
multistage
The user chooses a particular algorithm and implements the filter with the
design function.
>>Hd=design(d,'butter');
The preceding code actually creates the filter, where Hd is the filter
Implementation Object. This concept is discussed further in the next step.
If you do not perform this step explicitly, design automatically selects the
optimum algorithm for the chosen response and specification.
Customizing the Algorithm
The customization options available for any given algorithm depend not only
on the algorithm itself, selected in “Selecting an Algorithm” on page 3-6,
but also on the specification selected in “Selecting a Specification” on page
3-4. To explore all the available options, type the following at the MATLAB
command prompt:
help (d, 'algorithm-name')
where dis the Filter Specification Object, and algorithm-name isthenameof
the algorithm in single quotes, such as 'butter' or 'cheby1'.
The application of these customization options takes place while “Designing
the Filter” on page 3-8, because these options are the properties of the filter
Implementation Object, not the Specification Object.
If you do not perform this step explicitly, the optimum algorithm structure is
selected.
Designing the Filter
This next task introduces a new object, the Filter Object, or dfilt. To create
a filter, use the design command:
>> % design filter w/o specifying the algorithm
>> Hd = design(d);
3-8

Process Flow Diagram and Filter Design Methodology
where Hd is the Filter Object and dis the Specifications Object. This code
creates a filter without specifying the algorithm. When the algorithm is not
specified, the software selects the best available one.
Toapplythealgorithmchosenin“SelectinganAlgorithm”onpage3-6,use
the same design command, but specify the Butterworth algorithm as follows:
>> Hd = design(d, 'butter');
where Hd is the new Filter Object, and dis the Specifications Object.
To obtain help and see all the available options, type:
>> help fdesign/design
This help command describes not only the options for the design command
itself, but also options that pertain to the method or the algorithm. If you
are customizing the algorithm, you apply these options in this step. In the
following example, you design a bandpass filter, and then modify the filter
structure:
>> Hd = design(d, 'butter', 'filterstructure', 'df2sos')
f=
FilterStructure: 'Direct-Form II, Second-Order Sections'
Arithmetic: 'double'
sosMatrix: [7x6 double]
ScaleValues: [8x1 double]
PersistentMemory: false
The filter design step, just like the first task of choosing a response, must be
performed explicitly. A Filter Object is created only when design is called.
Design Analysis
After the filter is designed you may wish to analyze it to determine if the filter
satisfies the design criteria. Filter analysis is broken into three main sections:
•Frequency domain analysis — Includes the magnitude response, group
delay, and pole-zero plots.
3-9

3Designing a Filter in Fdesign — Process Overview
•Time domain analysis — Includes impulse and step response
•Implementation analysis — Includes quantization noise and cost
To display help for analysis of a discrete-time filter, type:
>> help dfilt/analysis
To display help for analysis of a multirate filter, type:
>> help mfilt/functions
To display help for analysis of a farrow filter, type:
>> help farrow/functions
To analyze your filter, you must explicitly perform this step.
Realize or Apply the Filter to Input Data
After the filter is designed and optimized, it can be used to filter actual input
data. The basic filter command takes input data x, filters it through the Filter
Object, and produces output y:
>> y = filter (FilterObj, x)
This step is never automatically performed for you. To filter your data, you
must explicitly execute this step. To understand how the filtering commands
work, type:
>> help dfilt/filter
Note If you have Simulink®, you have the option of exporting this filter
to a Simulink block using the realizemdl command. To get help on this
command, type:
>> help realizemdl
3-10
4Designing a Filter in the Filterbuilder GUI
Filterbuilder Design Process
In this section...
“Introduction to Filterbuilder” on page 4-2
“Design a Filter Using Filterbuilder” on page 4-2
“Select a Response” on page 4-3
“Select a Specification” on page 4-5
“Select an Algorithm” on page 4-5
“Customize the Algorithm” on page 4-6
“Analyze the Design” on page 4-8
“Realize or Apply the Filter to Input Data” on page 4-8
Introduction to Filterbuilder
The filterbuilder function provides a graphical interface to the fdesign
object-object oriented filter design paradigm and is intended to reduce
development time during the filter design process. filterbuilder uses a
specification-centered approach to find the best algorithm for the desired
response.
Note filterbuilder requires the Signal Processing Toolbox. The
functionality of filterbuilder is greatly expanded by the DSP System
Toolbox. Many of the features described or displayed below are only available
if the DSP System Toolbox is installed. You may verify your installation by
typing ver at the command prompt.
Design a Filter Using Filterbuilder
The basic workflow in using filterbuilder is to choose the constraints and
specifications of the filter, and to use those as a starting point in the design.
Postponing the choice of algorithm for the filter allows the best design method
to be determined automatically, based upon the desired performance criteria.
The following are the details of each of the steps for designing a filter with
filterbuilder.
4-2
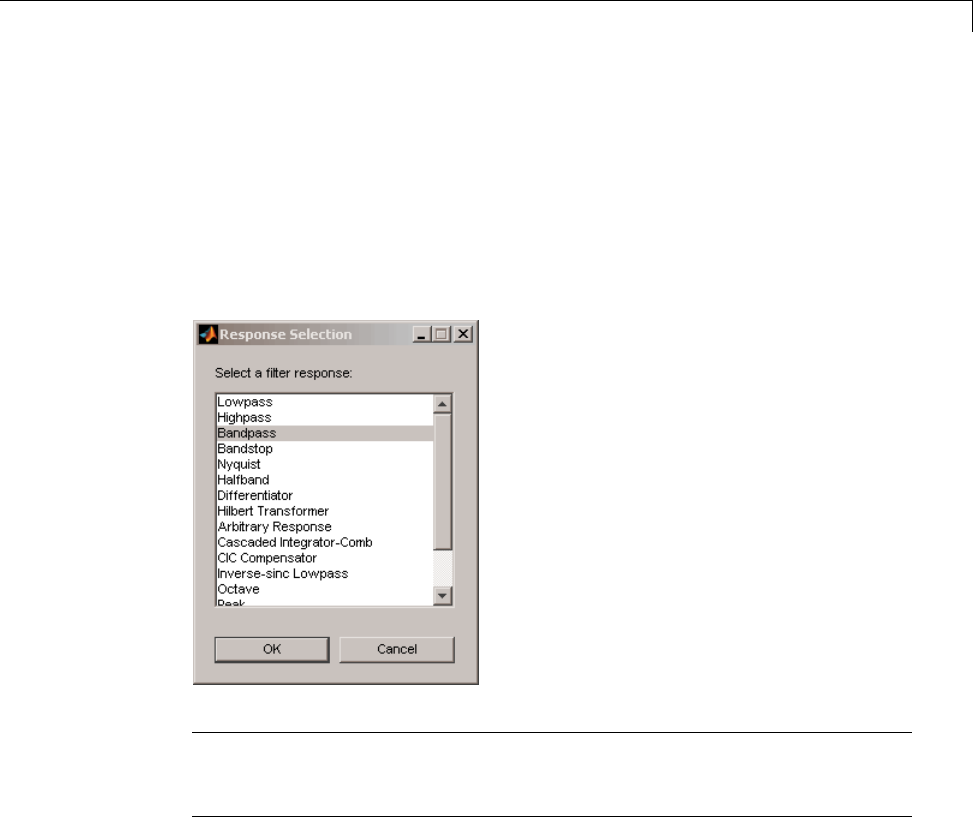
Filterbuilder Design Process
Select a Response
Whenyouopenthefilterbuilder tool by typing:
filterbuilder
at the MATLAB command prompt, the Response Selection dialog box
appears, listing all possible filter responses available in DSP System Toolbox
software.
Note This step cannot be skipped because it is not automatically completed
for you by the software. You must select a response to initiate the filter design
process.
After you choose a response, say bandpass, you start the design of the
Specifications Object, and the Bandpass Design dialog box appears.
This dialog box contains a Main pane, a Data Types pane and a Code
Generation pane. The specifications of your filter are generally set in the
Main pane of the dialog box.
The Data Types pane provides settings for precision and data types, and the
Code Generation pane contains options for various implementations of
the completed filter design.
4-3
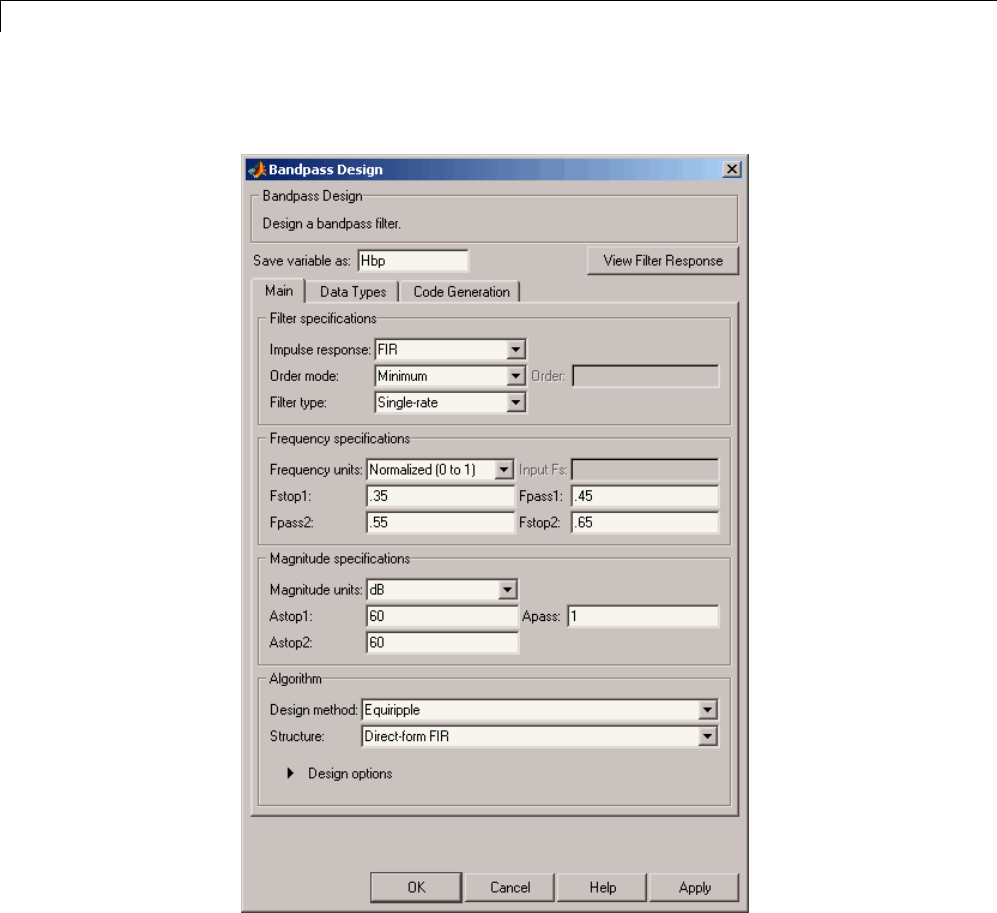
4Designing a Filter in the Filterbuilder GUI
For the initial design of your filter, you will mostly use the Main pane.
The Bandpass Design dialog box contains all the parameters you need to
determine the specifications of a bandpass filter. The parameters listed in
the Main pane depend upon the type of filter you are designing. However,
nomatterwhattypeoffilteryouhavechosenintheResponse Selection
4-4
Filterbuilder Design Process
dialog box, the filter design dialog box contains the Main,Data Types,and
Code Generation panes.
Select a Specification
To choose the specification for the bandpass filter, you can begin by selecting
an Impulse Response,Order Mode,andFilter Type in the Filter
Specifications frame of the Main Pane. You can further specify the
response of your filter by setting frequency and magnitude specifications in
the appropriate frames on the Main Pane.
Note Frequency,Magnitude,andAlgorithm specifications are
interdependent and may change based upon your Filter Specifications
selections. When choosing specifications for your filter, select your Filter
Specifications first and work your way down the dialog box- this approach
ensures that the best settings for dependent specifications display as available
in the dialog box.
Select an Algorithm
The algorithms available for your filter depend upon the filter response and
design parameters you have selected in the previous steps. For example, in the
case of a bandpass filter, if the impulse response selected is IIR and the Order
Mode field is set toMinimum, the design methods available are Butterworth,
Chebyshev type I or II, or Elliptic,whereasiftheOrder Mode field is set
to Specify, the design method available is IIR least p-norm.
4-5
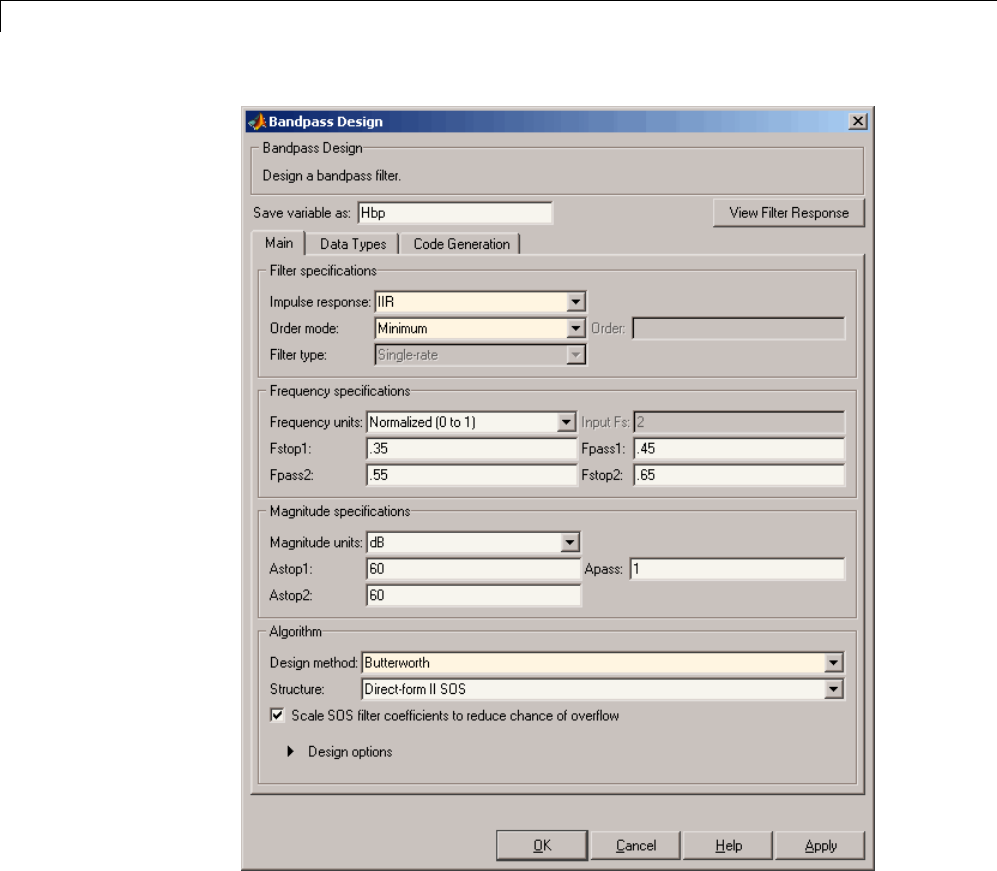
4Designing a Filter in the Filterbuilder GUI
Customize the Algorithm
By expanding the Design options section of the Algorithm frame, you
can further customize the algorithm specified. The options available will
depend upon the algorithm and settings that have already been selected in
the dialog box. In the case of a bandpass IIR filter using the Butterworth
4-6
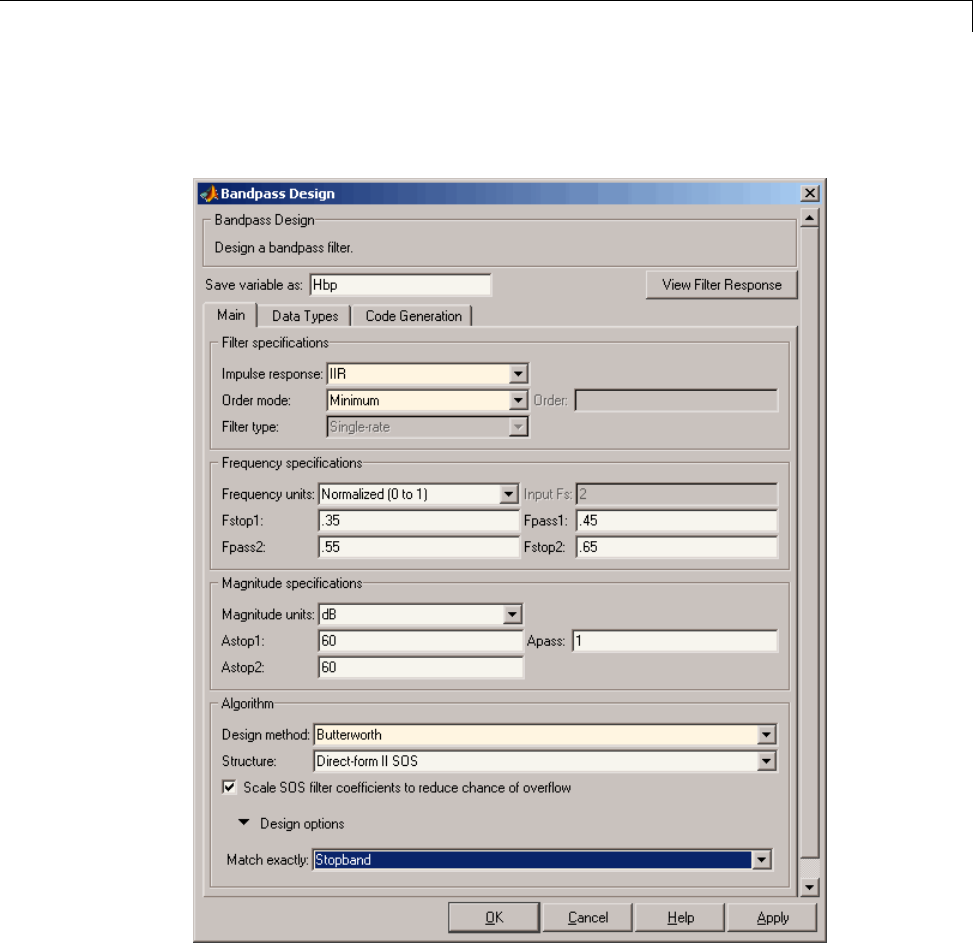
Filterbuilder Design Process
method, design options such as Match Exactly are available, as shown in
the following figure.
4-7
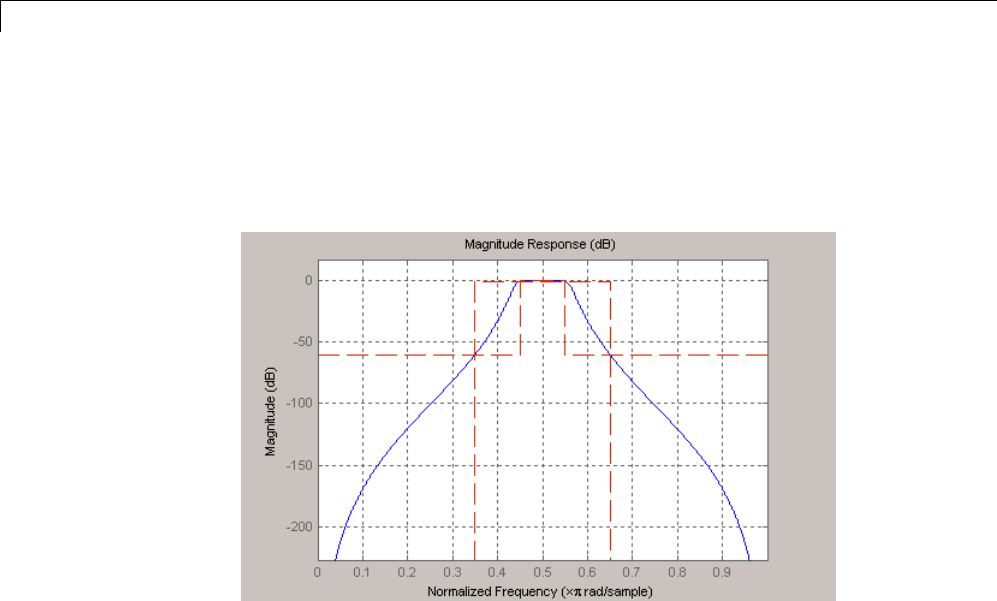
4Designing a Filter in the Filterbuilder GUI
Analyze the Design
To analyze the filter response, click on the View Filter Response button. The
Filter Visualization Tool opens displaying the magnitude plot of the filter
response.
Realize or Apply the Filter to Input Data
When you have achieved the desired filter response through design iterations
and analysis using the Filter Visualization Tool, apply the filter to the
input data. Again, this step is never automatically performed for you by the
software. Tofilteryourdata,youmust explicitly execute this step. In the
Filter Visualization Tool, click OK and DSP System Toolbox software
creates the filter object with the name specified in the Save variable as field
and exports it to the MATLAB workspace.
The filter is then ready to be used to filter actual input data. The basic filter
command takes input data x, filters it through the Filter Object, and produces
output y:
>> y = filter (FilterObj, x)
To understand how the filtering commands work, type:
>> help dfilt/filter
4-8
Filterbuilder Design Process
Tip If you have Simulink, you have the option of exporting this filter to
a Simulink block using the realizemdl command. To get help on this
command, type:
>> help realizemdl
4-9
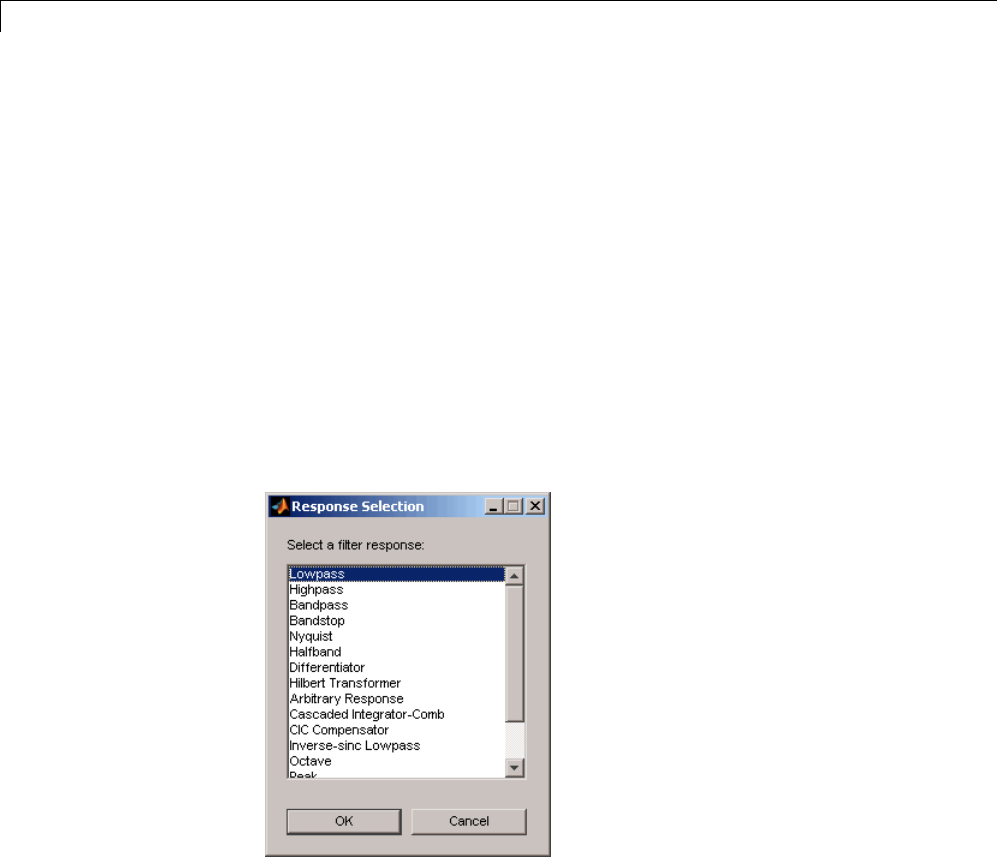
4Designing a Filter in the Filterbuilder GUI
Designing a FIR Filter Using filterbuilder
FIR Filter Design
Example – Using Filterbuilder to Design a Finite Impulse Response
(FIR) Filter
To design a lowpass FIR filter using filterbuilder:
1Open the Filterbuilder GUI by typing the following at the MATLAB prompt:
filterbuilder
The Response Selection dialog box appears. In this dialog box, you can
select from a list of filter response types. Select Lowpass in the list box.
2Hit the OK button. The Lowpass Design dialog box opens. Here you
can specify the writable parameters of the Lowpass filter object. The
components of the Main frame of this dialog box are described in the
section titled Lowpass Filter Design Dialog Box — Main Pane.Inthedialog
box, make the following changes:
•Enter a Fpass value of 0.55.
•Enter a Fstop value of 0.65.
4-10
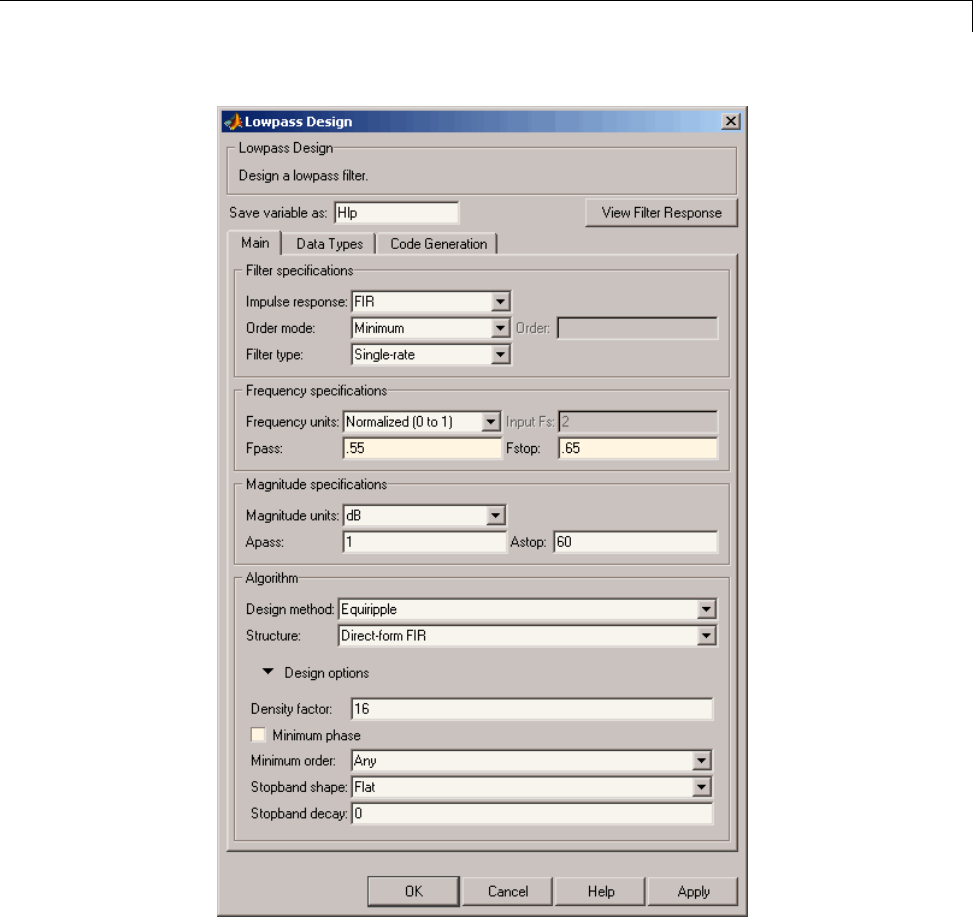
Designing a FIR Filter Using filterbuilder
3Click Apply, and the following message appears at the MATLAB prompt:
The variable 'Hlp' has been exported to the command window.
4-11
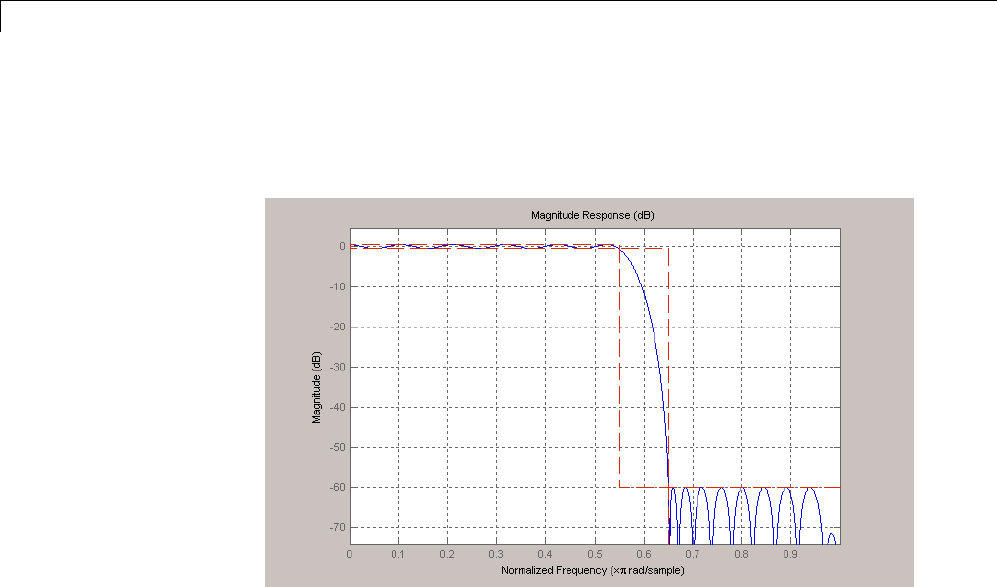
4Designing a Filter in the Filterbuilder GUI
4To check your design, click View Filter Response.TheFilter
Visualization tool appears, showing a plot of the magnitude response of
the filter.
You can change the design and click Apply,followedbyView Filter
Response, as many times as needed until your design specifications are
met.
4-12

5FDATool: A Filter Design and Analysis GUI
Overview
In this section...
“FDATool” on page 5-2
“Filter Design Methods” on page 5-2
“Using the Filter Design and Analysis Tool” on page 5-4
“Analyzing Filter Responses” on page 5-4
“Filter Design and Analysis Tool Panels” on page 5-4
“Getting Help” on page 5-5
FDATool
The Filter Design and Analysis Tool (FDATool) is a user interface for
designing and analyzing filters quickly. FDATool enables you to design digital
FIR or IIR filters by setting filter specifications, by importing filters from
your MATLAB workspace, or by adding, moving or deleting poles and zeros.
FDATool also provides tools for analyzing filters, such as magnitude and
phaseresponseandpole-zeroplots.
Filter Design Methods
FDATool gives you access to the following Signal Processing Toolbox filter
design methods.
Design Method Function
Butterworth butter
Chebyshev Type I cheby1
Chebyshev Type II cheby2
Elliptic ellip
Maximally Flat maxflat
Equiripple firpm
Least-squares firls
5-2
Overview
Design Method Function
Constrained least-squares fircls
Complex equiripple cfirpm
Window fir1
When using the window method in FDATool, all Signal Processing Toolbox
window functions are available, and you can specify a user-defined window by
entering its function name and input parameter.
Advanced Filter Design Methods
The following advanced filter design methods are available if you have DSP
System Toolbox software.
Design Method Function
Constrained equiripple FIR firceqrip
Constrained-band equiripple FIR fircband
Generalized remez FIR firgr
Equripple halfband FIR firhalfband
Least P-norm optimal FIR firlpnorm
Equiripple Nyquist FIR firnyquist
Interpolated FIR ifir
IIR comb notching or peaking iircomb
Allpass filter (given group delay) iirgrpdelay
Least P-norm optimal IIR iirlpnorm
Constrained least P-norm IIR iirlpnormc
Second-order IIR notch iirnotch
Second-order IIR peaking (resonator) iirpeak
5-3

5FDATool: A Filter Design and Analysis GUI
Using the Filter Design and Analysis Tool
There are different ways that you can design filters using the Filter Design
and Analysis Tool. For example:
•You can first choose a response type, such as bandpass, and then choose
from the available FIR or IIR filter design methods.
•You can specify the filter by its type alone, along with certain frequency-
or time-domain specifications such as passband frequencies and stopband
frequencies. The filter you design is then computed using the default filter
design method and filter order.
Analyzing Filter Responses
Once you have designed your filter, you can display the filter coefficients
and detailed filter information, export the coefficients to the MATLAB
workspace, and create a C header file containing the coefficients, and analyze
different filter responses in FDATool or in a separate Filter Visualization Tool
(fvtool). The following filter responses are available:
•Magnituderesponse(
freqz)
•Phase response (phasez)
•Group delay (grpdelay)
•Phase delay (phasedelay)
•Impulseresponse(
impz)
•Step response (stepz)
•Pole-zero plots (zplane)
•Zero-phaseresponse(
zerophase)
Filter Design and Analysis Tool Panels
The Filter Design and Analysis Tool has sidebar buttons that display
particular panels in the lower half of the tool. The panels are
•Design Filter. See “Choosing a Filter Design Method” on page 5-8 for more
information. You use this panel to
-Design filters from scratch.
5-4
Overview
-Modify existing filters designed in FDATool.
-Analyze filters.
•Import filter. You use this panel to
-Import previously saved filters or filter coefficients that you have stored
in the MATLAB workspace.
-Analyze imported filters.
•Pole/Zero Editor. See “Editing the Filter Using the Pole/Zero Editor” on
page 5-19. You use this panel to add, delete, and move poles and zeros
in your filter design.
If you also have DSP System Toolbox product installed, additional panels
are available:
•Set quantization parameters — Use this panel to quantize double-precision
filters that you design in FDATool, quantize double-precision filters that
you import into FDATool, and analyze quantized filters.
•Transform filter — Use this panel to change a filter from one response
type to another.
•Multirate filter design — Use this panel to create a multirate filter
from your existing FIR design, create CIC filters, and linear and hold
interpolators.
If you have Simulink installed, this panel is available:
•Realize Model — Use this panel to create a Simulink block containing the
filter structure.
Getting Help
At any time, you can right-click or click the What’s this? button, ,toget
informationonthedifferentpartsofthetool. YoucanalsousetheHelp
menu to see complete Help information.
5-5
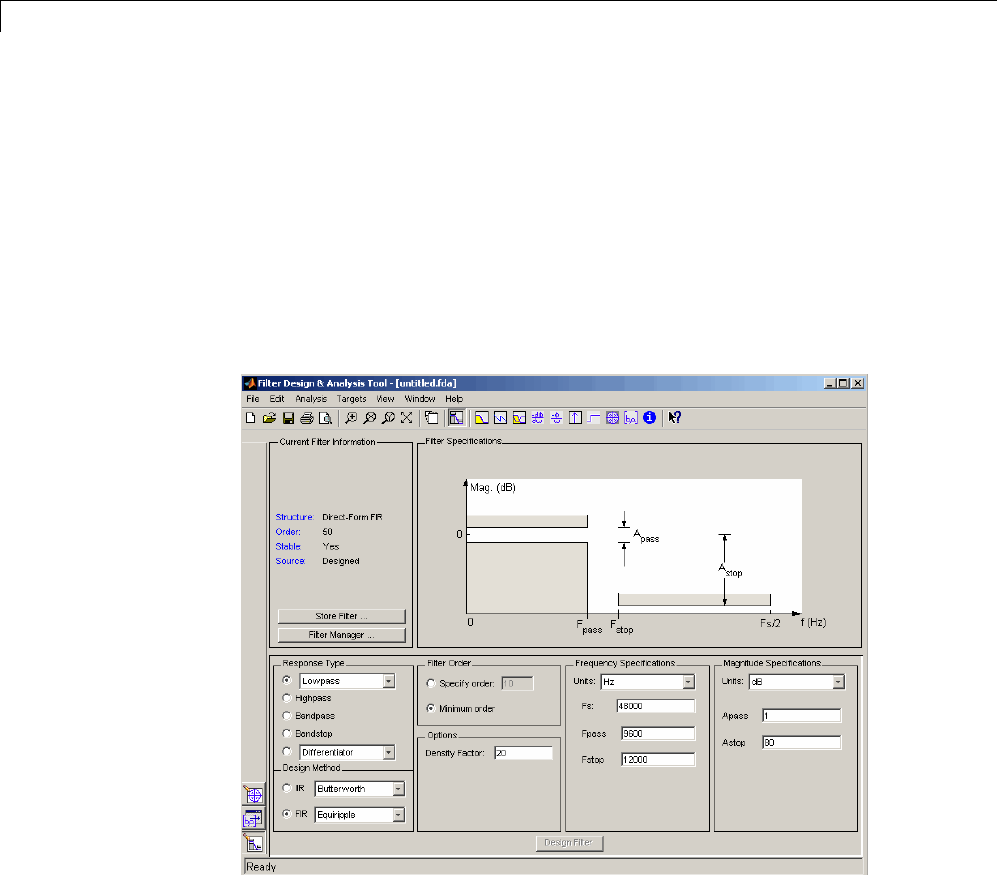
5FDATool: A Filter Design and Analysis GUI
Using FDATool
To open FDATool, type
fdatool
at the MATLAB command prompt.
The Filter Design and Analysis Tool opens with the Design Filter panel
displayed.
Note that when you open FDATool, Design Filter is not enabled. You must
make a change to the default filter design in order to enable Design Filter.
This is true each time you want to change the filter design. Changes to
radio button items or drop down menu items such as those under Response
Type or Filter Order enable Design Filter immediately. Changes to
specifications in text boxes such as Fs,Fpass,andFstop require you to click
outside the text box to enable Design Filter.
5-6
Using FDATool
Choosing a Response Type
You can choose from several response types:
•Lowpass
•Raised cosine
•Highpass
•Bandpass
•Bandstop
•Differentiator
•Multiband
•Hilbert transformer
•Arbitrary magnitude
Additional response types are available if you have DSP System Toolbox
software installed.
To design a bandpass filter, select the radio button next to Bandpass in
the Response Type region of the GUI.
Note Not all filter design methods are available for all response types. Once
you choose your response type, this may restrict the filter design methods
available to you. Filter design methods that are not available for a selected
response type are removed from the Design Method region of the GUI.
5-7
5FDATool: A Filter Design and Analysis GUI
Choosing a Filter Design Method
You can use the default filter design method for the response type that you’ve
selected, or you can select a filter design method from the available FIR and
IIR methods listed in the GUI.
To select the Remez algorithm to compute FIR filter coefficients, select the
FIR radio button and choose Equiripple from the list of methods.
Setting the Filter Design Specifications
•“Viewing Filter Specifications” on page 5-8
•“Filter Order” on page 5-9
•“Options” on page 5-9
•“Bandpass Filter Frequency Specifications” on page 5-10
•“Bandpass Filter Magnitude Specifications” on page 5-12
Viewing Filter Specifications
The filter design specifications that you can set vary according to response
type and design method. The display region illustrates filter specifications
when you select Analysis > Filter Specifications or when you click the
Filter Specifications toolbar button.
You can also view the filter specifications on the Magnitude plot of a designed
filter by selecting View > Specification Mask.
5-8
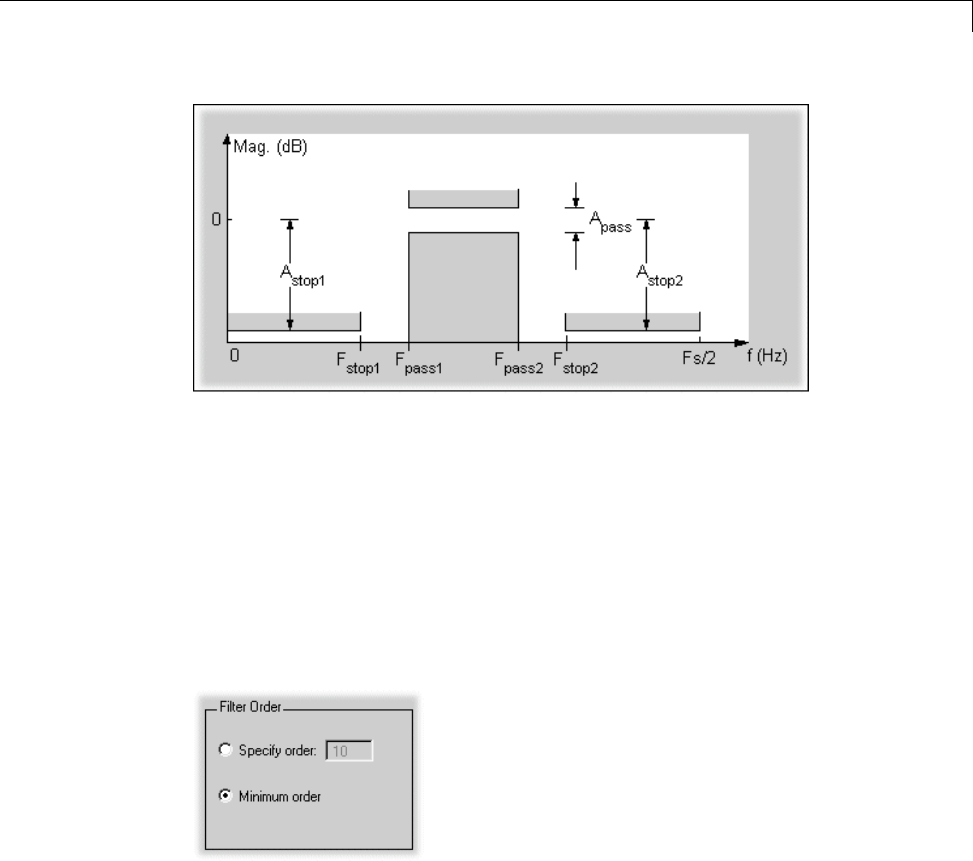
Using FDATool
Filter Order
You have two mutually exclusive options for determining the filter order
when you design an equiripple filter:
•Specify order: You enter the filter order in a text box.
•Minimum order: The filter design method determines the minimum
order filter.
Select the Minimum order radio button for this example.
Note that filter order specification options depend on the filter design method
you choose. Some filter methods may not have both options available.
Options
The available options depend on the selected filter design method. Only
the FIR Equiripple and FIR Window design methods have settable options.
5-9
5FDATool: A Filter Design and Analysis GUI
For FIR Equiripple, the option is a Density Factor.Seefirpm for more
information. For FIR Window the options are Scale Passband,Window
selection, and for the following windows, a settable parameter:
Window Parameter
Chebyshev (chebwin) Sidelobe attenuation
Gaussian (gausswin)Alpha
Kaiser (kaiser)Beta
Taylor (taylorwin)NbarandSidelobelevel
Tukey (tukeywin)Alpha
User Defined Function Name, Parameter
You can view the window in the Window Visualization Tool (wvtool)by
clicking the View button.
For this example, set the Density factor to 16.
Bandpass Filter Frequency Specifications
For a bandpass filter, you can set
•Units of frequency:
-Hz
-kHz
-MHz
-Normalized (0 to 1)
5-10
Using FDATool
•Sampling frequency
•Passband frequencies
•Stopband frequencies
You specify the passband with two frequencies. The first frequency
determines the lower edge of the passband, and the second frequency
determines the upper edge of the passband.
Similarly, you specify the stopband with two frequencies. The first frequency
determines the upper edge of the first stopband, and the second frequency
determines the lower edge of the second stopband.
For this example:
•Keep the units in Hz (default).
•Set the sampling frequency (Fs)to2000 Hz.
•Set the end of the first stopband (Fstop1)to200 Hz.
•Set the beginning of the passband (Fpass1)to300 Hz.
•Set the end of the passband (Fpass2)to700 Hz.
•Set the beginning of the second stopband (Fstop2)to800 Hz.
5-11
5FDATool: A Filter Design and Analysis GUI
Bandpass Filter Magnitude Specifications
For a bandpass filter, you can specify the following magnitude response
characteristics:
•Units for the magnitude response (dB or linear)
•Passband ripple
•Stopband attenuation
For this example:
•Keep Units in dB (default).
•Set the passband ripple (Apass)to0.1 dB.
•Set the stopband attenuation for both stopbands (Astop1,Astop2)to75
dB.
Computing the Filter Coefficients
Now that you’ve specified the filter design, click the Design Filter button to
compute the filter coefficients.
Notice that the Design Filter button is disabled once you’ve computed the
coefficients for your filter design. This button is enabled again once you make
any changes to the filter specifications.
5-12

Using FDATool
Analyzing the Filter
•“Displaying Filter Responses” on page 5-13
•“Using Data Tips” on page 5-15
•“Drawing Spectral Masks” on page 5-16
•“Changing the Sampling Frequency” on page 5-17
•“Displaying the Response in FVTool” on page 5-18
Displaying Filter Responses
You can view the following filter response characteristics in the display region
or in a separate window.
•Magnitude response
•Phase response
•Magnitude and Phase responses
•Group delay response
•Phase delay response
•Impulse response
•Step response
•Pole-zero plot
•Zero-phase response — available from the y-axis context menu in a
MagnitudeorMagnitudeandPhaseresponseplot.
If you have DSP System Toolbox product installed, two other analyses are
available:magnituderesponseestimateandround-offnoisepower.Thesetwo
analyses are the only ones that use filter internals.
For descriptions of the above responses and their associated toolbar buttons
and other FDATool toolbar buttons, see fvtool.
You can display two responses in the same plot by selecting
Analysis > Overlay Analysis and selecting an available response. A second
5-13
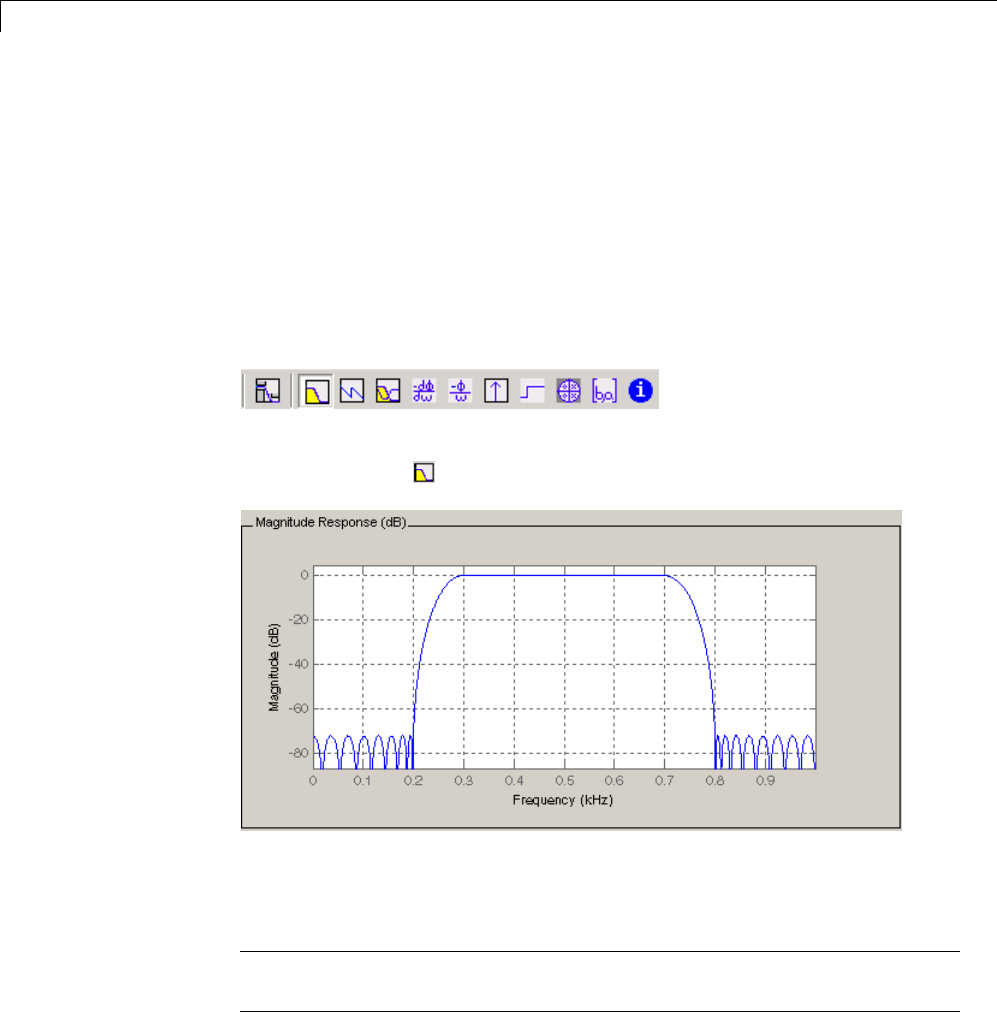
5FDATool: A Filter Design and Analysis GUI
y-axis is added to the right side of theresponseplot. (Notethatnotall
responses can be overlaid on each other.)
You can also display the filter coefficients and detailed filter information in
this region.
For all the analysis methods, except zero-phase response, you can access
them from the Analysis menu, the Analysis Parameters dialog box from the
context menu, or by using the toolbar buttons. For zero-phase, right-click the
y-axis of the plot and select Zero-phase from the context menu.
For example, to look at the filter’s magnitude response, select the Magnitude
Response button on the toolbar.
You can also overlay the filter specifications on the Magnitude plot by
selecting View > Specification Mask.
Note You can use specification masks in FVTool only if FVTool was launched
from FDATool.
5-14
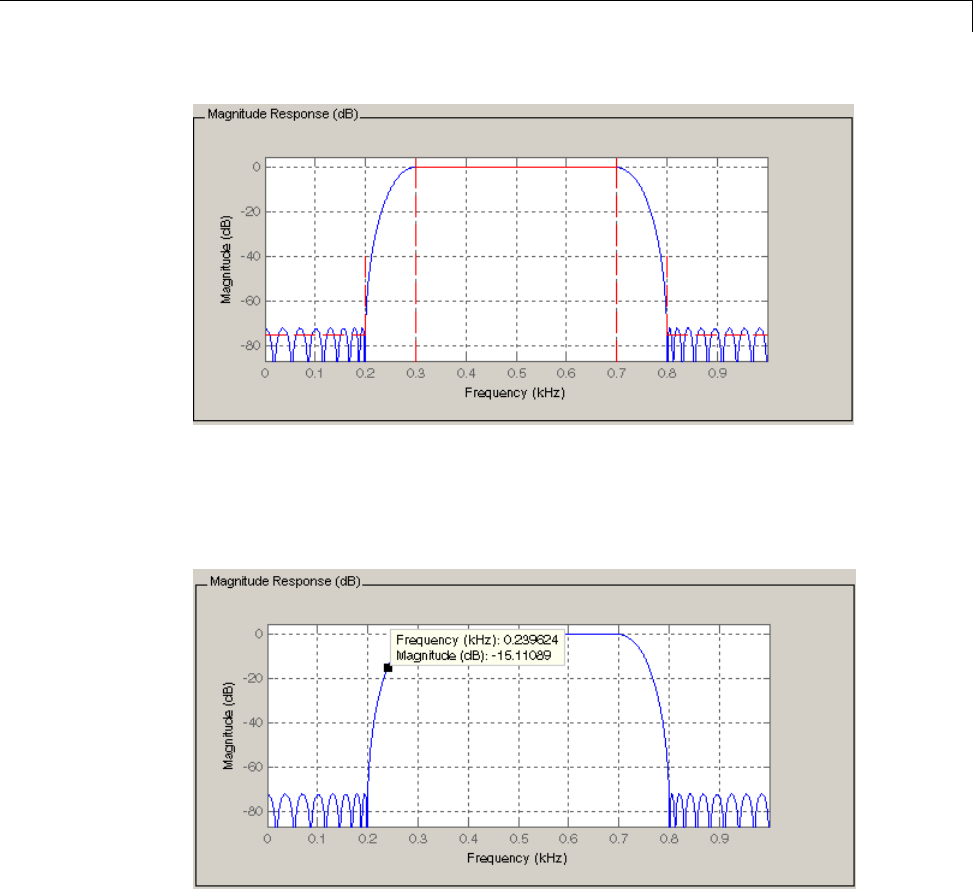
Using FDATool
Using Data Tips
You can click the response to add plot data tips that display information
about particular points on the response.
For information on using data tips, see “Data Cursor — Displaying Data
Values Interactively” in the MATLAB documentation.
5-15
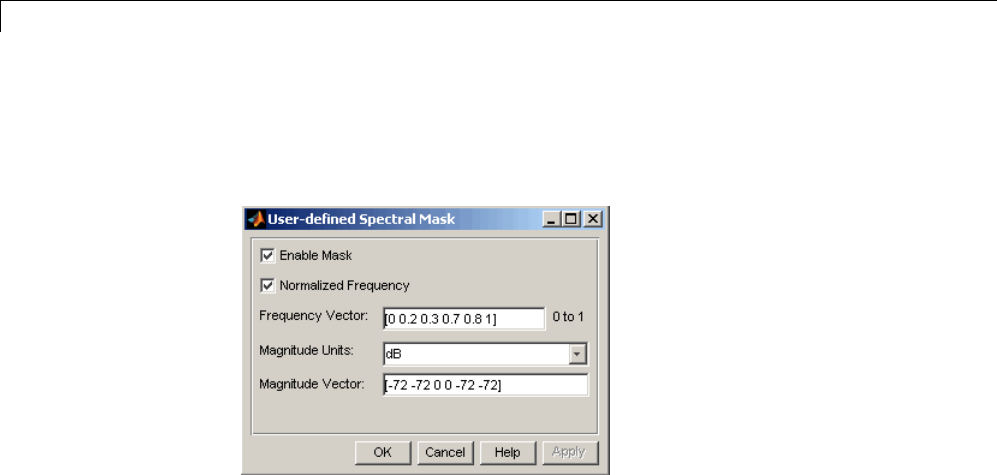
5FDATool: A Filter Design and Analysis GUI
Drawing Spectral Masks
To add spectral masks or rejection area lines to your magnitude plot, click
View > User-defined Spectral Mask.
The mask is defined by a frequency vector and a magnitude vector. These
vectors must be the same length.
•Enable Mask — Select to turn on the mask display.
•Normalized Frequency — Select to normalize the frequency between 0
and 1 across the displayed frequency range.
•Frequency Vector —Enteravectorofx-axis frequency values.
•Magnitude Units — Select the desired magnitude units. These units
should match the units used in the magnitude plot.
•Magnitude Vector — Enter a vector of y-axis magnitude values.
The magnitude response below shows a spectral mask.
5-16
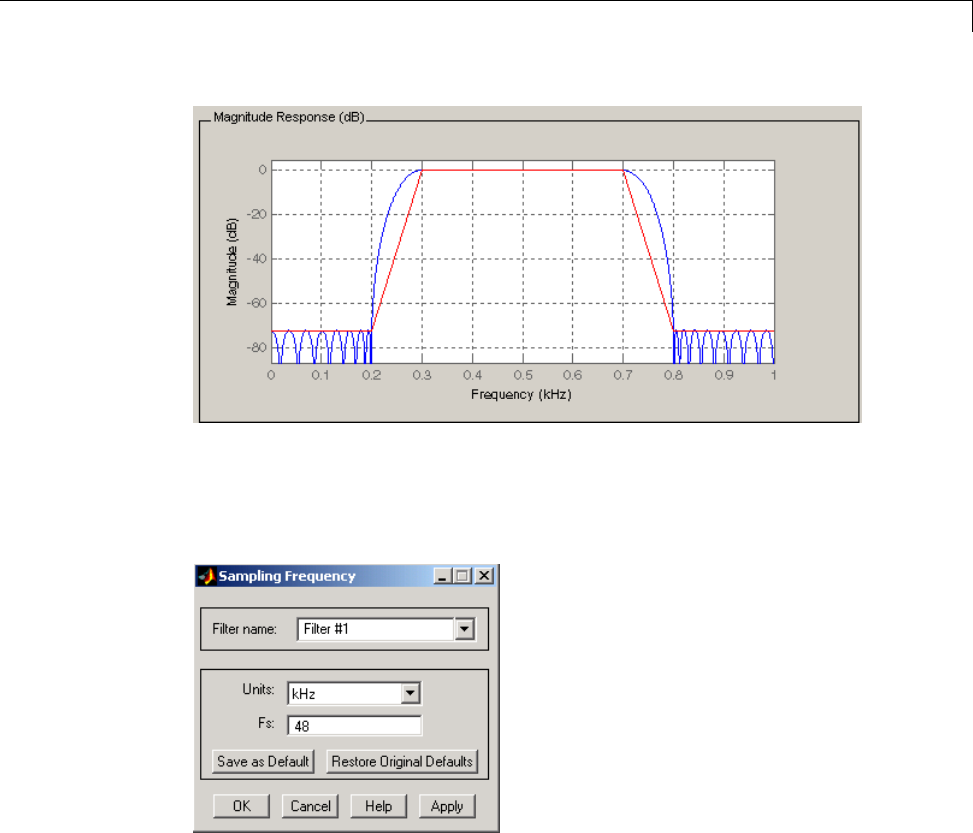
Using FDATool
Changing the Sampling Frequency
To change the sampling frequency of your filter, right-click any filter response
plot and select Sampling Frequency from the context menu.
To change the filter name, type the new name in Filter name.(In
fvtool,
if youhavemultiplefilters,selectthedesired filter and then enter the new
name.)
To change the sampling frequency, selectthedesiredunitfromUnits and
enter the sampling frequency in Fs. (Foreachfilterinfvtool, you can specify
adi
fferent sampling frequency or you can apply the sampling frequency to all
filters.)
5-17

5FDATool: A Filter Design and Analysis GUI
To save the displayed parameters as the default values to use when FDATool
or FVTool is opened, click Save as Default.
To restore the default values, click Restore Original Defaults.
Displaying the Response in FVTool
To display the filter response characteristics in a separate window, select
View > Filter Visualization Tool (available if any analysis, except the
filter specifications, is in the display region) or click the Full View Analysis
button:
This launches the Filter Visualization Tool (fvtool).
Note If Filter Specifications are shown in the display region, clicking the
Full View Analysis toolbar button launches a MATLAB figure window
instead of FVTool. The associated menu item is Print to figure,whichis
enabled only if the filter specifications are displayed.
You can use this tool to annotate your design, view other filter characteristics,
and print your filter response. You can link FDATool and FVTool so that
changes made in FDATool are immediately reflected in FVTool. See fvtool
for more information.
5-18
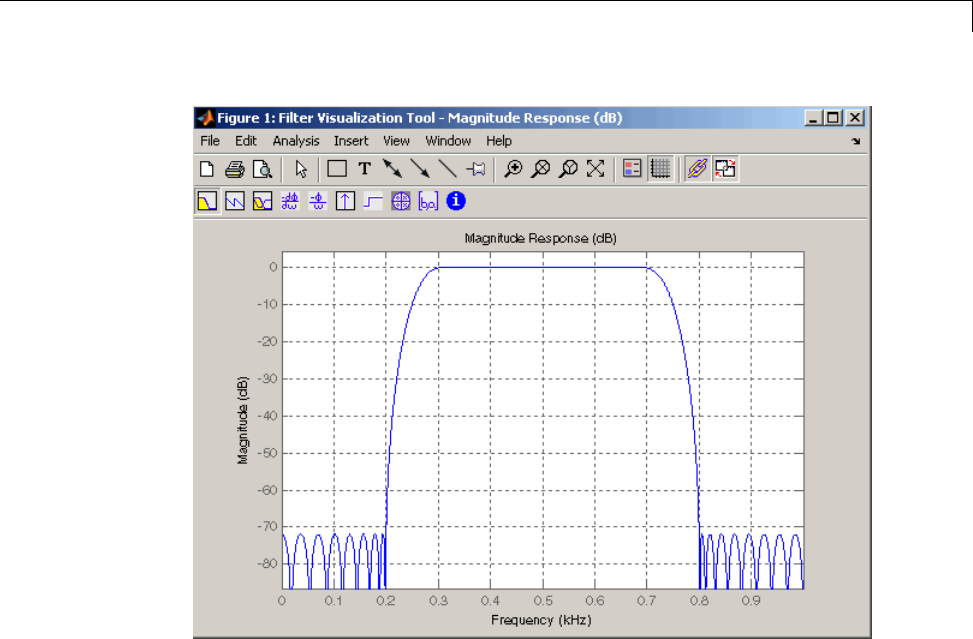
Using FDATool
Editing the Filter Using the Pole/Zero Editor
•“Displaying the Pole-Zero Plot” on page 5-19
•“Changing the Pole-Zero Plot” on page 5-20
Displaying the Pole-Zero Plot
You can edit a designed or imported filter’s coefficients by moving, deleting, or
adding poles and/or zeros using the Pole/Zero Editor panel.
5-19
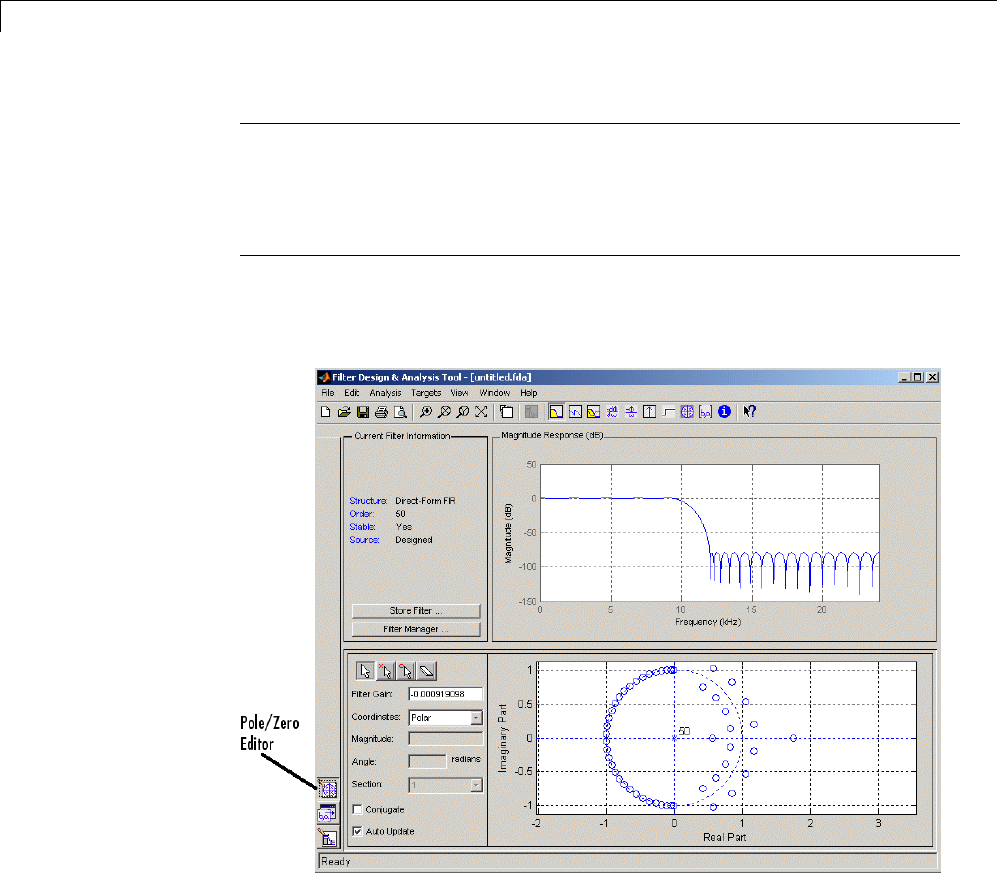
5FDATool: A Filter Design and Analysis GUI
Note You cannot generate MATLAB code (File > Generate MATLAB
code) if your filter was designed or edited with the Pole/Zero Editor.
You cannot move quantized poles and zeros. You can only move the reference
poles and zeros.
Click the Pole/Zero Editor button in the sidebar or select Edit > Pole/Zero
Editor to display this panel.
Poles are shown using x symbols and zeros are shown using o symbols.
Changing the Pole-Zero Plot
Plot mode buttons are located to the left of the pole/zero plot. Select one of the
buttons to change the mode of the pole/zero plot. The Pole/Zero Editor has
5-20
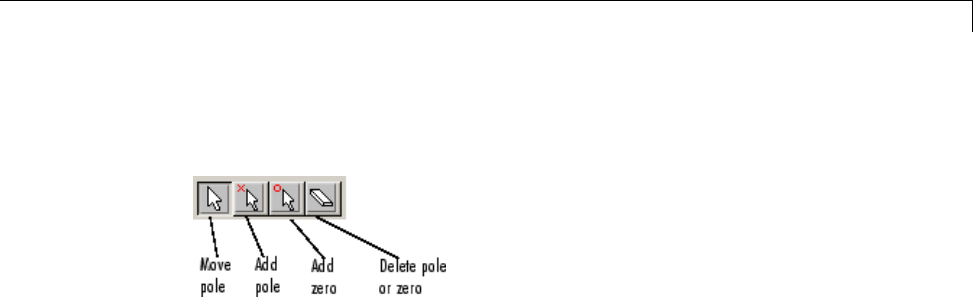
Using FDATool
these buttons from left to right: move pole, add pole, add zero, and delete
pole or zero.
The following plot parameters and controls are located to the left of the
pole/zero plot and below the plot mode buttons.
•Filter gain — factor to compensate for the filter’s pole(s) and zero(s) gains
•Coordinates — units (Polar or Rectangular)oftheselectedpoleorzero
•Magnitude — if polar coordinates is selected, magnitude of the selected
pole or zero
•Angle — if polar coordinates is selected, angle of selected pole(s) or zero(s)
•Real — if rectangular coordinates is selected, real component of selected
pole(s) or zero(s)
•Imaginary — if rectangular coordinates is selected, imaginary component
of selected pole or zero
•Section — for multisection filters, number of the current section
•Conjugate — creates a corresponding conjugate pole or zero or
automatically selects the conjugate pole or zero if it already exists.
•Auto update — immediately updates the displayed magnitude response
when poles or zeros are added, moved, or deleted.
The Edit > Pole/Zero Editor has items for selecting multiple poles/zeros,
for inverting and mirroring poles/zeros, and for deleting, scaling and rotating
poles/zeros.
5-21
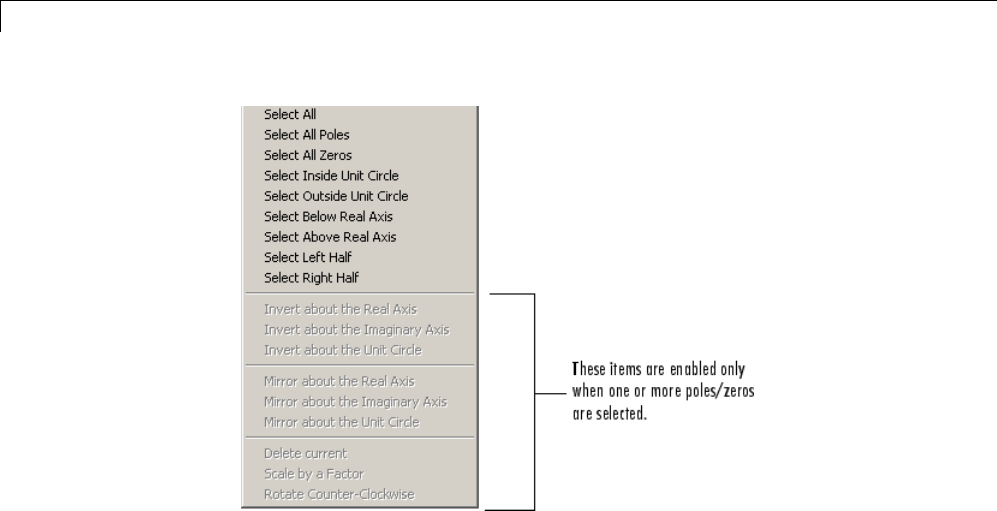
5FDATool: A Filter Design and Analysis GUI
Moving one of the zeros on the vertical axis produces the following result:
5-22
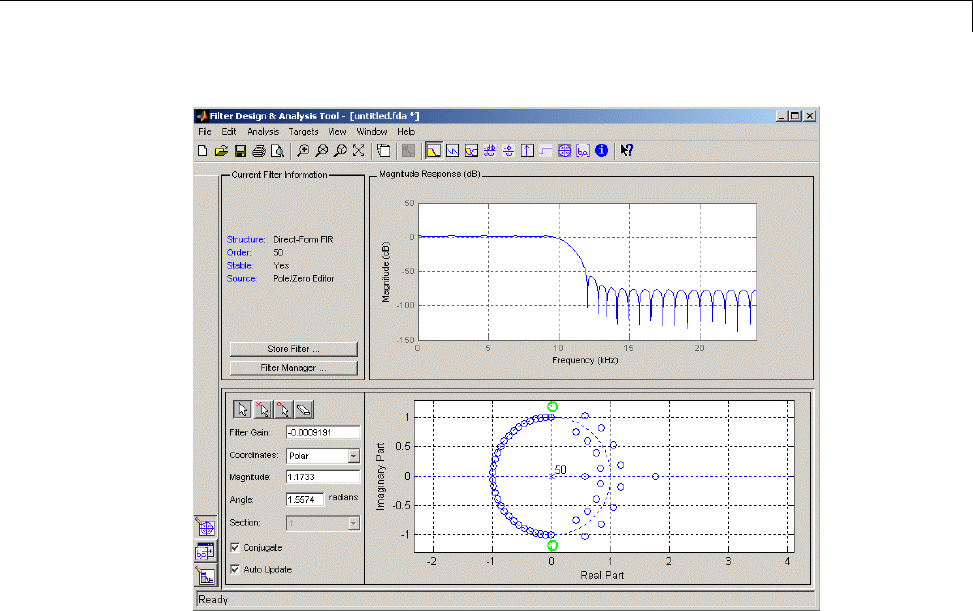
Using FDATool
•The selected zero pair is shown in green.
•When you select one of the zeros from a conjugate pair, the Conjugate check
box and the conjugate are automatically selected.
•The Magnitude Response plot updates immediately because Auto update
is active.
Converting the Filter Structure
•“Converting to a New Structure” on page 5-23
•“Converting to Second-Order Sections” on page 5-25
Converting to a New Structure
You can use Edit > Convert Structure to convert the current filter to a new
structure. All filters can be converted to the following representations:
5-23
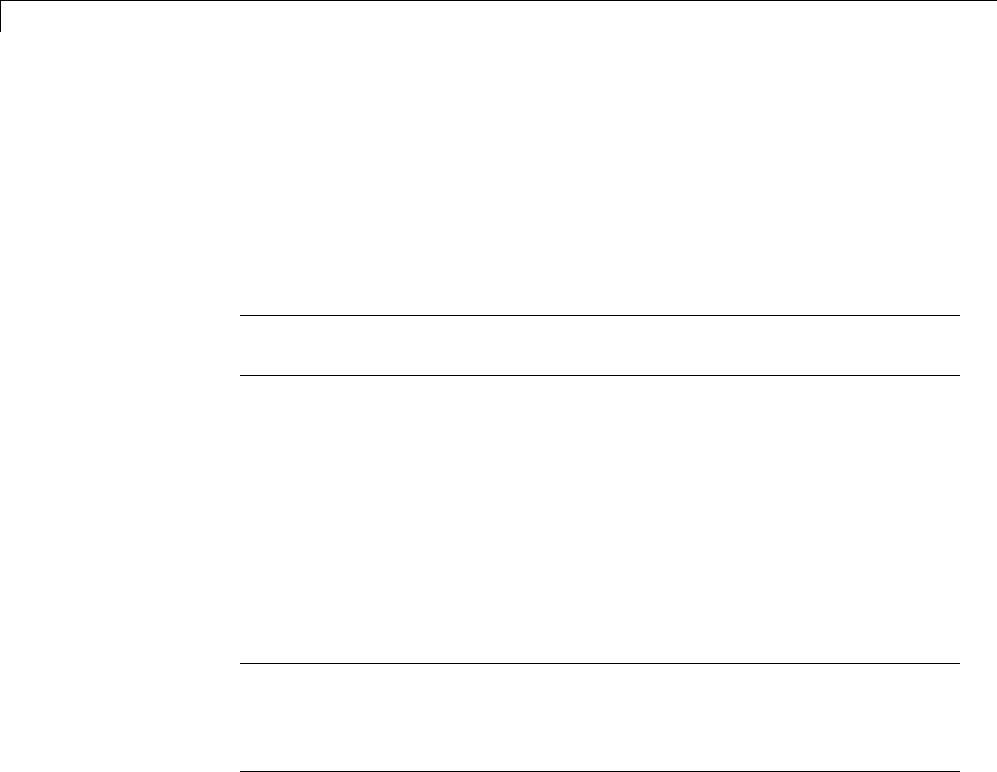
5FDATool: A Filter Design and Analysis GUI
•Direct-form I
•Direct-form II
•Direct-form I transposed
•Direct-form II transposed
•Lattice ARMA
Note If you have DSP System Toolbox product installed, you will see
additional structures in the Convert structure dialog box.
In addition, the following conversions are available for particular classes
of filters:
•Minimum phase FIR filters can be converted to Lattice minimum phase
•Maximum phase FIR filters can be converted to Lattice maximum phase
•Allpass filters can be converted to Lattice allpass
•IIR filters can be converted to Lattice ARMA
Note Converting from one filter structure to another may produce a result
with different characteristics than the original. This is due to the computer’s
finite-precision arithmetic and the variations in the conversion’s roundoff
computations.
For example:
•Select Edit > Convert Structure to open the Convert structure dialog box.
•Select Direct-form I in the list of filter structures.
5-24
Using FDATool
Converting to Second-Order Sections
You can use Edit > Convert to Second-Order Sections to store the
converted filter structure as a collection of second-order sections rather than
as a monolithic higher-order structure.
Note The following options are also used for Edit > Reorder and Scale
Scale Second-Order Sections,whichyouusetomodifyanSOSfilter
structure.
The following Scale options are available when converting a direct-form II
structure only:
•None (default)
•L-2 (L2norm)
•L-infinity (L∞norm)
The Direction (Up or Down) determines the ordering of the second-order
sections. The optimal ordering changes depending on the Scale option
selected.
For example:
5-25
5FDATool: A Filter Design and Analysis GUI
•Select Edit > Convert to Second-Order Sections to open the Convert to
SOS dialog box.
•Select L-infinity from the Scale menu for L∞norm scaling.
•Leave Up as the Direction option.
Note To convert from second-order sections back to a single section, use
Edit > Convert to Single Section.
Exporting a Filter Design
•“Exporting Coefficients or Objects to the Workspace” on page 5-26
•“Exporting Coefficients to an ASCII File” on page 5-27
•“Exporting Coefficients or Objects to a MAT-File” on page 5-28
•“Exporting to SPTool” on page 5-29
•“Exporting to a Simulink Model” on page 5-29
•“Other Ways to Export a Filter” on page 5-32
Exporting Coefficients or Objects to the Workspace
You can save the filter either as filter coefficients variables or as a dfilt or
mfilt filter object variable. (Note that you must have DSP System Toolbox
product installed to save as an mfilt.) TosavethefiltertotheMATLAB
workspace:
1Select File > Export. The Export dialog box appears.
2Select Workspace from the Export To menu.
3Select Coefficients from the Export As menu to save the filter
coefficients or select Objects to save the filter in a filter object.
4For coefficients, assign variable names using the Numerator (for FIR
filters) or Numerator and Denominator (for IIR filters), or SOS Matrix
and Scale Values (for IIR filters in second-order section form) text boxes
in the Variable Names region.
5-26
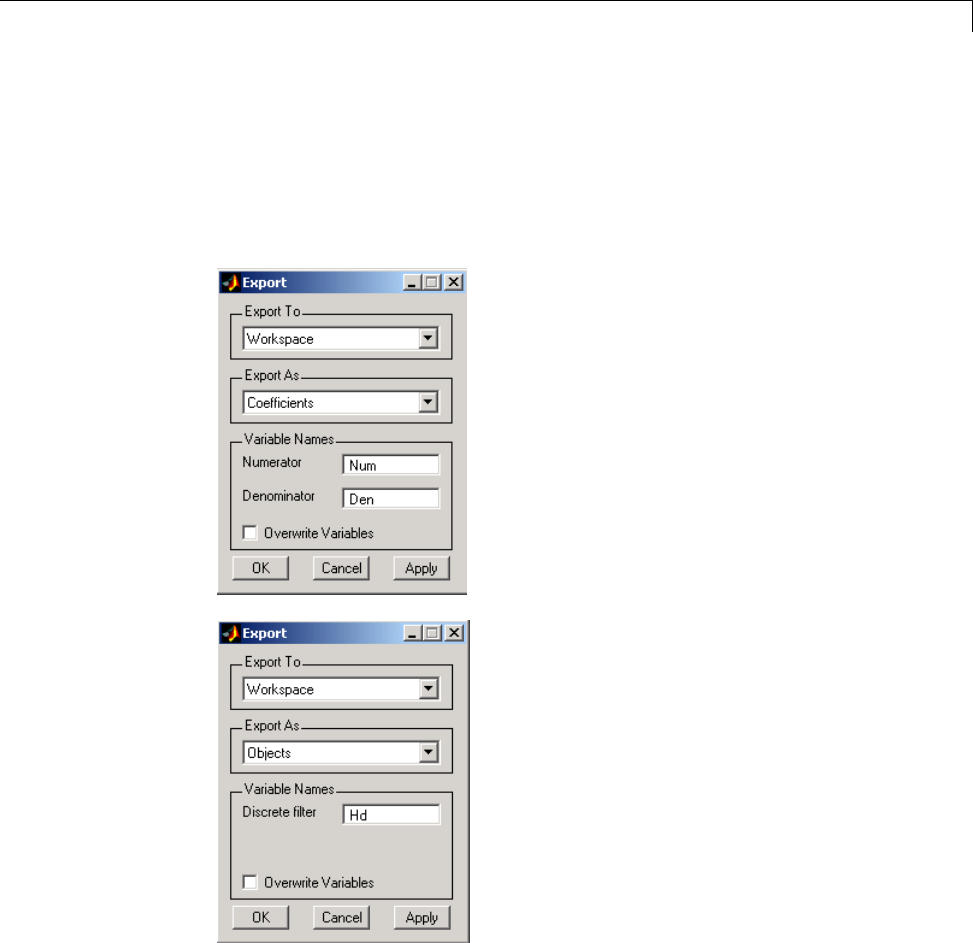
Using FDATool
For objects, assign the variable name in the Discrete Filter (or
Quantized Filter) text box. If you have variables with the same names
in your workspace and you want to overwrite them, select the Overwrite
Variables check box.
5Click the Export button.
Exporting Coefficients to an ASCII File
To save filter coefficients to a text file,
5-27

5FDATool: A Filter Design and Analysis GUI
1Select File > Export. The Export dialog box appears.
2Select Coefficients File (ASCII) from the Export To menu.
3Click the Export button. The Export Filter Coefficients to .FCF File dialog
box appears.
4Choose or enter a filename and click the Save button.
The coefficients are saved in the text file that you specified, and the MATLAB
Editor opens to display the file. The textfilealsocontainscommentswiththe
MATLAB version number, the Signal Processing Toolbox version number,
and filter information.
Exporting Coefficients or Objects to a MAT-File
To save filter coefficients or a filter object as variables in a MAT-file:
1Select File > Export. The Export dialog box appears.
2Select MAT-file from the Export To menu.
3Select Coefficients from the Export As menu to save the filter
coefficients or select Objects to save the filter in a filter object.
4For coefficients, assign variable names using the Numerator (for FIR
filters) or Numerator and Denominator (for IIR filters), or SOS Matrix
and Scale Values (for IIR filters in second-order section form) text boxes
in the Variable Names region.
For objects, assign the variable name in the Discrete Filter (or
Quantized Filter) text box. If you have variables with the same names
in your workspace and you want to overwrite them, select the Overwrite
Variables check box.
5Click the Export button. The Export to a MAT-File dialog box appears.
6Choose or enter a filename and click the Save button.
5-28
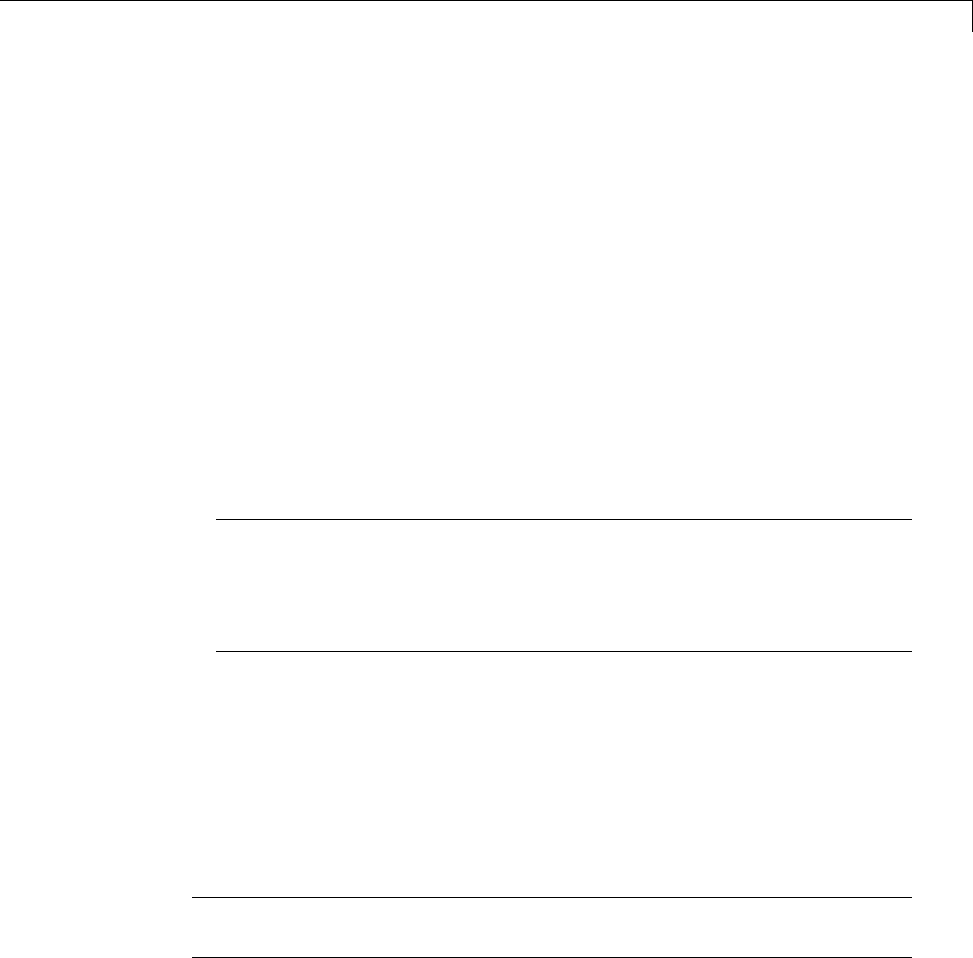
Using FDATool
Exporting to SPTool
You may want to use your designed filter in SPTool to do signal processing
and analysis.
1Select File > Export. The Export dialog box appears.
2Select SPTool from the Export To menu.
3AssignthevariablenameintheDiscrete Filter (or Quantized Filter)
text box. If you have variables with the same names in your workspace and
you want to overwrite them, select the Overwrite Variables check box.
4Click the Export button.
SPTool opens and the current FDATool filter appears in the Filter area list
as the specified variable name followed by (Imported).
Note If you are using the DSP System Toolbox software and export a
quantized filter, only the values of its quantized coefficients are exported.
The reference coefficients are not exported. SPTool does not restrict the
coefficient values, so if you edit them in SPTool by moving poles or zeros,
thefilterwillnolongerbeinquantizedform.
Exporting to a Simulink Model
If you have the Simulink product installed, you can export a Simulink block of
your filter design and insert it into a new or existing Simulink model.
You can export a filter designed using any filter design method available
in FDATool.
Note If you have the DSP System Toolbox and Fixed-Point Toolbox™
installed, you can export a CIC filter to a Simulink model.
1After designing your filter, click the Realize Model sidebar button or select
File > Export to Simulink Model. The Realize Model panel is displayed.
5-29
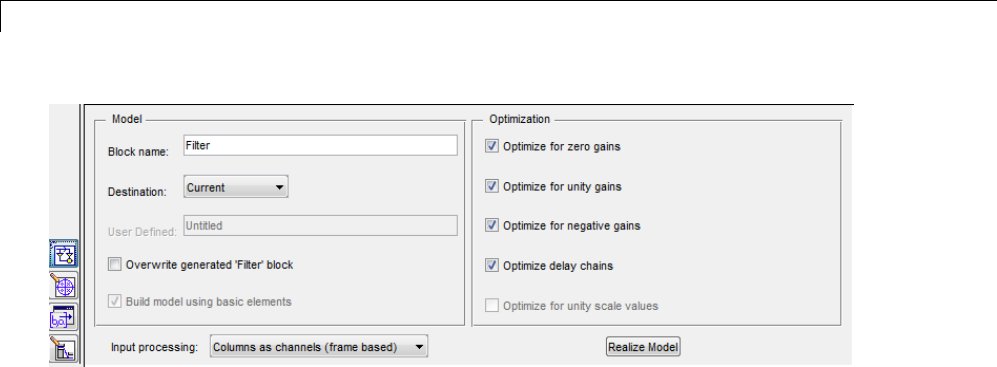
5FDATool: A Filter Design and Analysis GUI
2Specify the name to use for your block in Block name.
3To insert the block into the current (most recently selected) Simulink
model, set the Destination to Current. Toinsettheblockintoanew
model, select New. To insert the block into a user-defined subsystem, select
User defined.
4If you want to overwrite a block previously created from this panel, check
Overwrite generated ‘Filter’ block.
5If you select the Build model using basic elements check box, your filter
is created as a subsystem block, which uses separate sub-elements. In this
mode, the following optimization(s) are available:
•Optimize for zero gains — Removes zero-valued gain paths from
the filter structure.
•Optimize for unity gains — Substitutes a wire (short circuit) for
gains equal to 1 in the filter structure.
•Optimize for negative gains — Substitutes a wire (short circuit) for
gains equal to -1 and changes corresponding additions to subtractions in
the filter structure.
•Optimize delay chains — Substitutes delay chains composed of nunit
delays with a single delay of n.
•Optimize for unity scale values — Removes multiplications for
scale values equal to 1 from the filter structure.
The following illustration shows the effects of some of the optimizations:
5-30
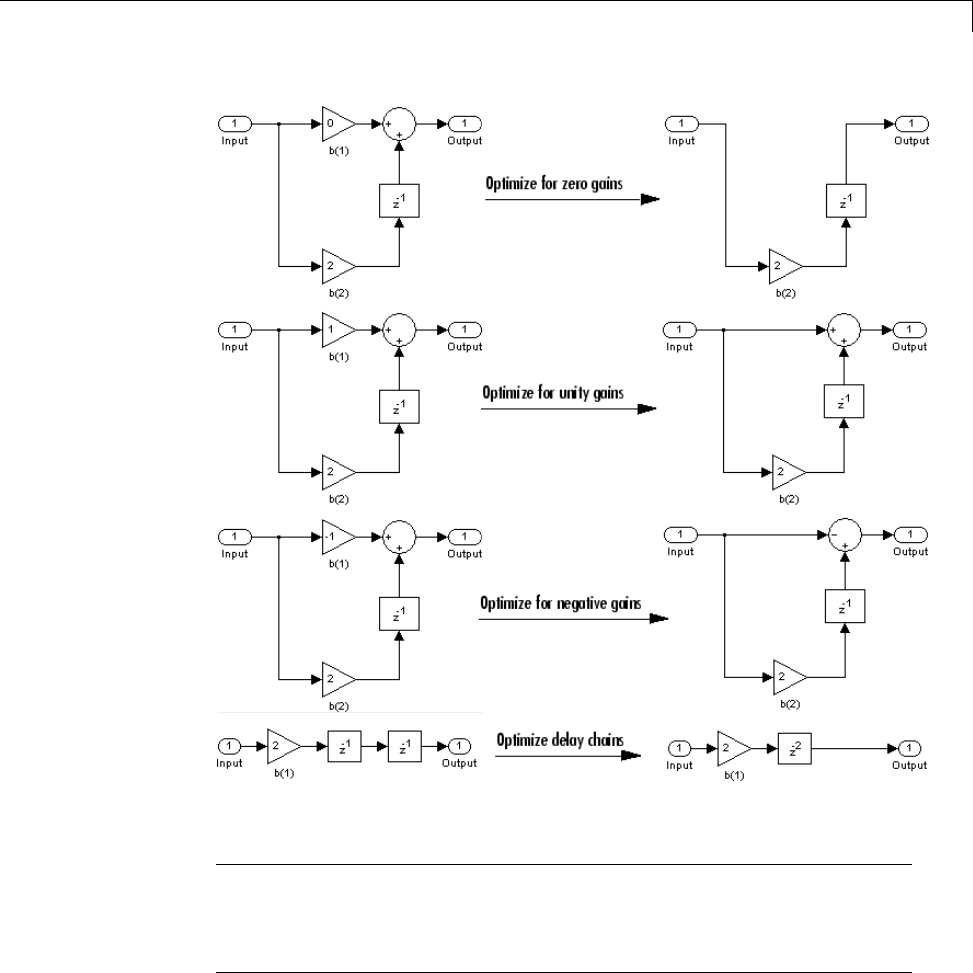
Using FDATool
Optimization Effects
Note The Build model using basic elements check box is enabled
only when you have a DSP System Toolbox license and your filter can be
designed using a Digital Filter block. For more information, see the Filter
Realization Wizard topic in the DSP System Toolbox documentation.
6Set the Input processing parameter to specify whether the generated
filter performs sample- or frame-based processing on the input. Depending
5-31

5FDATool: A Filter Design and Analysis GUI
on the type of filter you design, one or both of the following options may
be available:
•Columns as channels (frame based) — When you select this option,
the block treats each column of the input as a separate channel.
•Elements as channels (sample based) —Whenyouselectthis
option, the block treats each element of the input as a separate channel.
7Click the Realize Model button to create the filter block. When the Build
model using basic elements check box is selected, FDATool implements
the filter as a subsystem block using Sum, Gain, and Delay blocks.
If you double-click the Simulink Filter block, the filter structure is displayed.
Other Ways to Export a Filter
You can also send your filter to a C header file or generate MATLAB code to
construct your filter from the command line. For detailed instructions, see
the following sections:
•“Generating a C Header File” on page 5-32
•“Generating MATLAB Code” on page 5-34
Generating a C Header File
You may want to include filter information in an external C program. To
create a C header file with variables that contain filter parameter data,
follow this procedure:
1Select Targets > Generate C Header. The Generate C Header dialog
box appears.
5-32
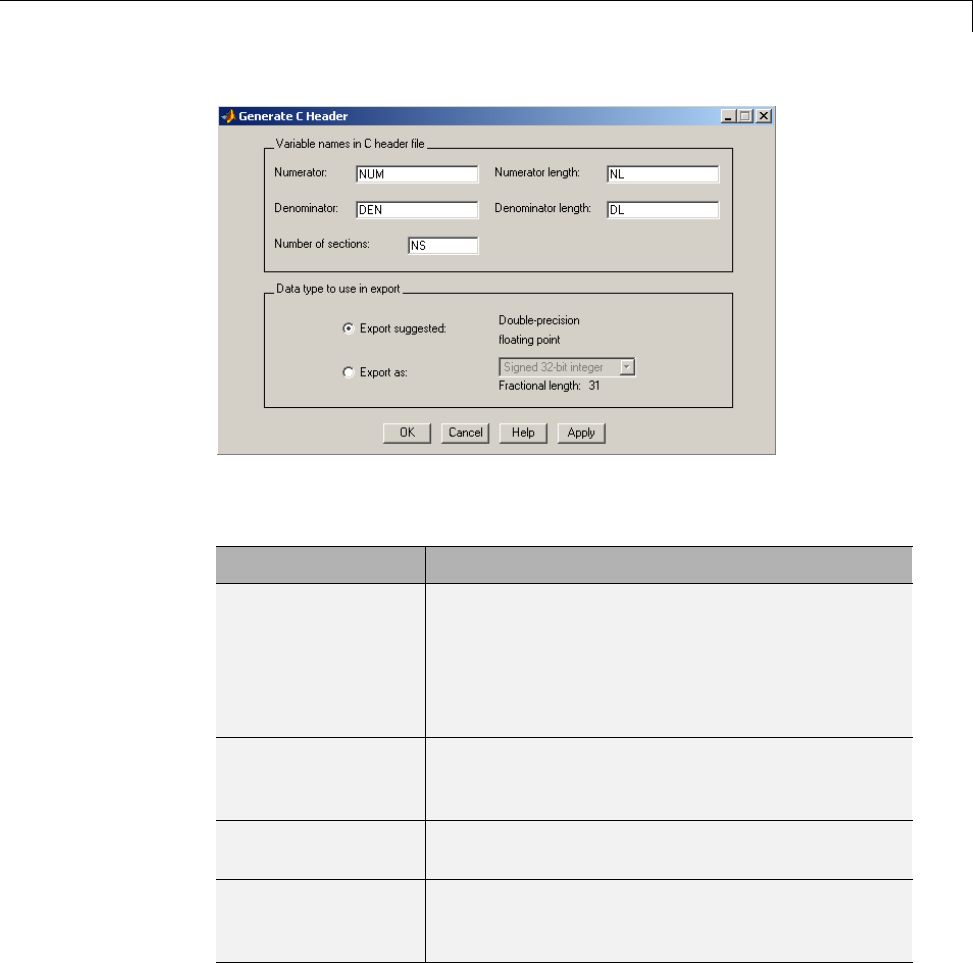
Using FDATool
2EnterthevariablenamestobeusedintheCheaderfile. Theparticular
filter structure determines the variables that are created in the file
Filter Structure Variable Parameter
Direct-form I
Direct-form II
Direct-form I
transposed
Direct-form II
transposed
Numerator, Numerator length*, Denominator,
Denominator length*, and Number of sections
(inactive if filter has only one section)
Lattice ARMA Lattice coeffs, Lattice coeffs length*, Ladder
coeffs, Ladder coeffs length*, Number of sections
(inactive if filter has only one section)
Lattice MA Lattice coeffs, Lattice coeffs length*, and Number
of sections (inactive if filter has only one section)
Direct-form FIR
Direct-form FIR
transposed
Numerator, Numerator length*, and Number of
sections (inactive if filter has only one section)
*length variables contain the total number of coefficients of that type.
5-33
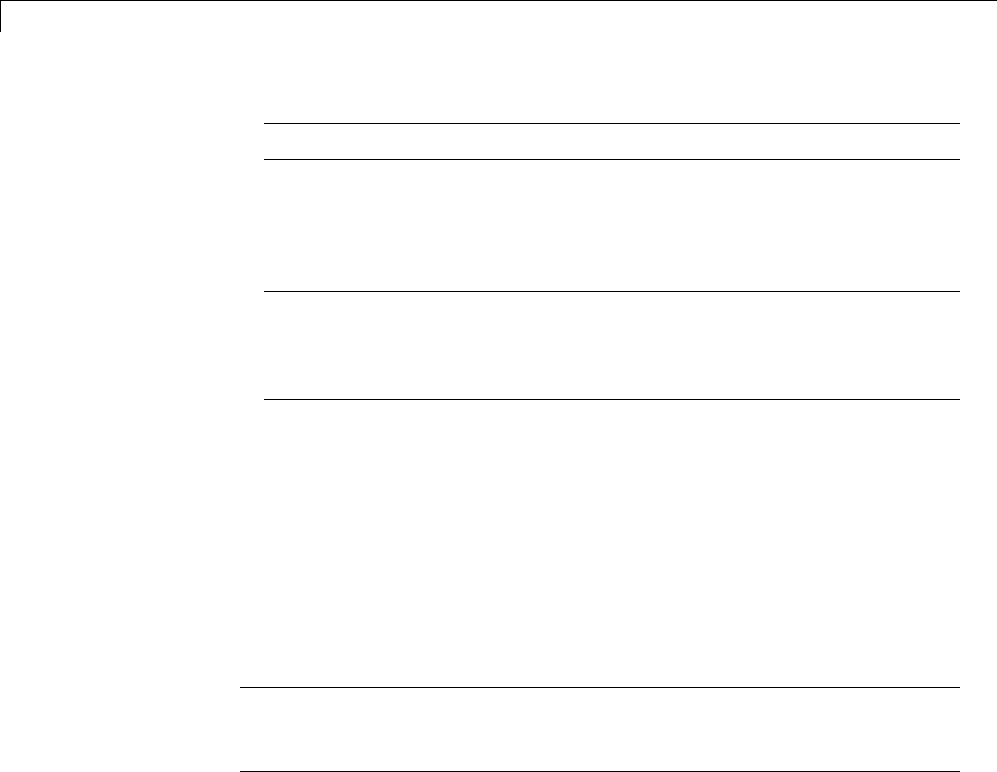
5FDATool: A Filter Design and Analysis GUI
Note Variable names cannot be C language reserved words, such as “for.”
3Select Export Suggested to use the suggested data type or select Export
As and select the desired data type from the pull-down.
Note If you do not have DSP System Toolbox software installed, selecting
any data type other than double-precision floating point results in a filter
that does not exactly match the one you designed in the FDATool. This is
due to rounding and truncating differences.
4Click OK tosavethefileandclosethedialogboxorclickApply to save the
file, but leave the dialog box open for additional C header file definitions.
Generating MATLAB Code
You can generate MATLAB code that constructs the filter you designed
in FDATool from the command line. Select File > Generate MATLAB
Code > Filter Design Function and specify the filename in the Generate
MATLAB code dialog box.
Note You cannot generate MATLAB code (File > Generate MATLAB
Code > Filter Design Function) if your filter was designed or edited with
the Pole/Zero Editor.
The following is generated MATLAB code for the default lowpass filter in
FDATool.
function Hd = ExFilter
%EXFILTER Returns a discrete-time filter object.
%
% MATLAB Code
% Generated by MATLAB(R) 7.11 and the Signal Processing Toolbox 6.14.
%
% Generated on: 17-Feb-2010 14:15:37
5-34

Using FDATool
%
% Equiripple Lowpass filter designed using the FIRPM function.
% All frequency values are in Hz.
Fs = 48000; % Sampling Frequency
Fpass = 9600; % Passband Frequency
Fstop = 12000; % Stopband Frequency
Dpass = 0.057501127785; % Passband Ripple
Dstop = 0.0001; % Stopband Attenuation
dens = 20; % Density Factor
% Calculate the order from the parameters using FIRPMORD.
[N, Fo, Ao, W] = firpmord([Fpass, Fstop]/(Fs/2), [1 0], [Dpass, Dstop]);
% Calculate the coefficients using the FIRPM function.
b = firpm(N, Fo, Ao, W, {dens});
Hd = dfilt.dffir(b);
% [EOF]
Managing Filters in the Current Session
You can store filters designed in the current FDATool session for cascading
together, exporting to FVTool or for recalling later in the same or future
FDATool sessions.
You store and access saved filters with the Store filter and Filter Manager
buttons, respectively, in the Current Filter Information pane.
5-35
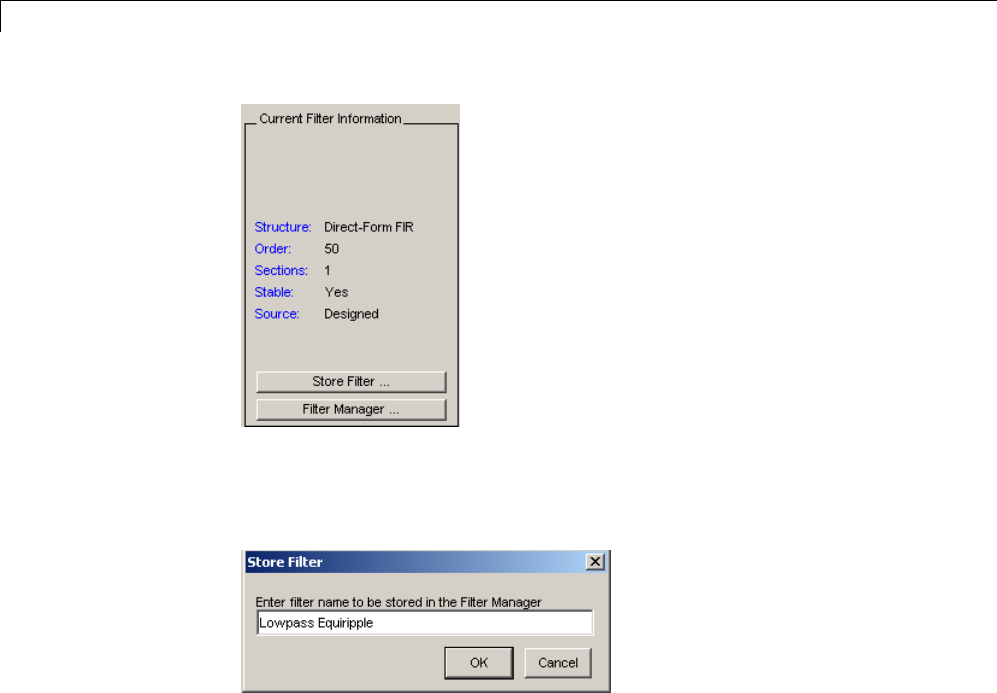
5FDATool: A Filter Design and Analysis GUI
Store Filter — Displays the Store Filter dialog box in which you specify the
filter name to use when storing the filter in the Filter Manager. The default
nameisthetypeofthefilter.
Filter Manager — Opens the Filter Manager.
5-36
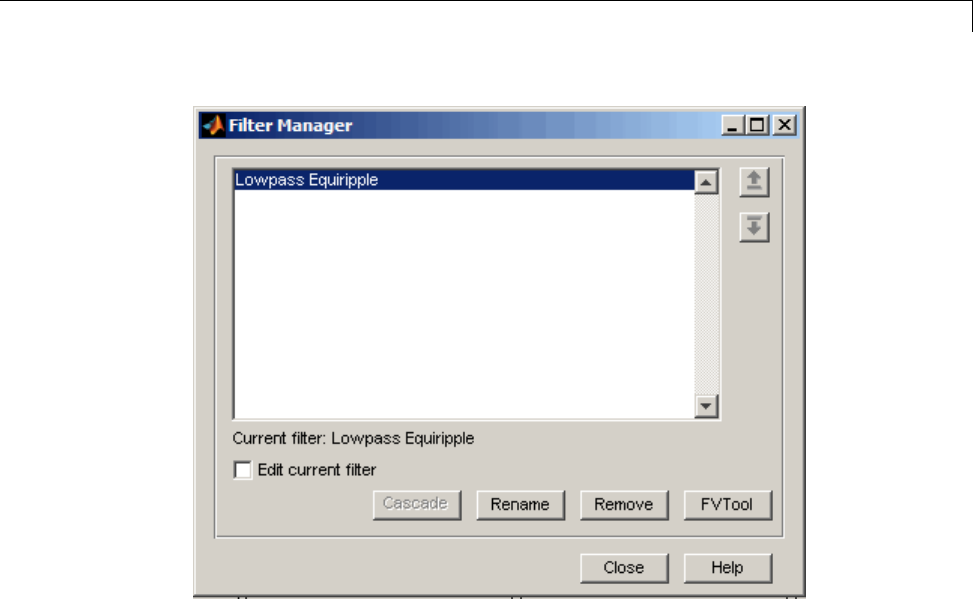
Using FDATool
The current filter is listed below the listbox. To change the current filter,
highlight the desired filter. If you select Edit current filter, FDATool
displays the currently selected filter specifications. If you make any changes
to the specifications, the stored filter is updated immediately.
To cascade two or more filters, highlight the desired filters and press
Cascade. A new cascaded filter is added to the Filter Manager.
To change the name of a stored filter, press Rename. The Rename filter
dialog box is displayed.
To remove a stored filter from the Filter Manager, press Delete.
To export one or more filters to FVTool, highlight the filter(s) and press
FVTool.
5-37
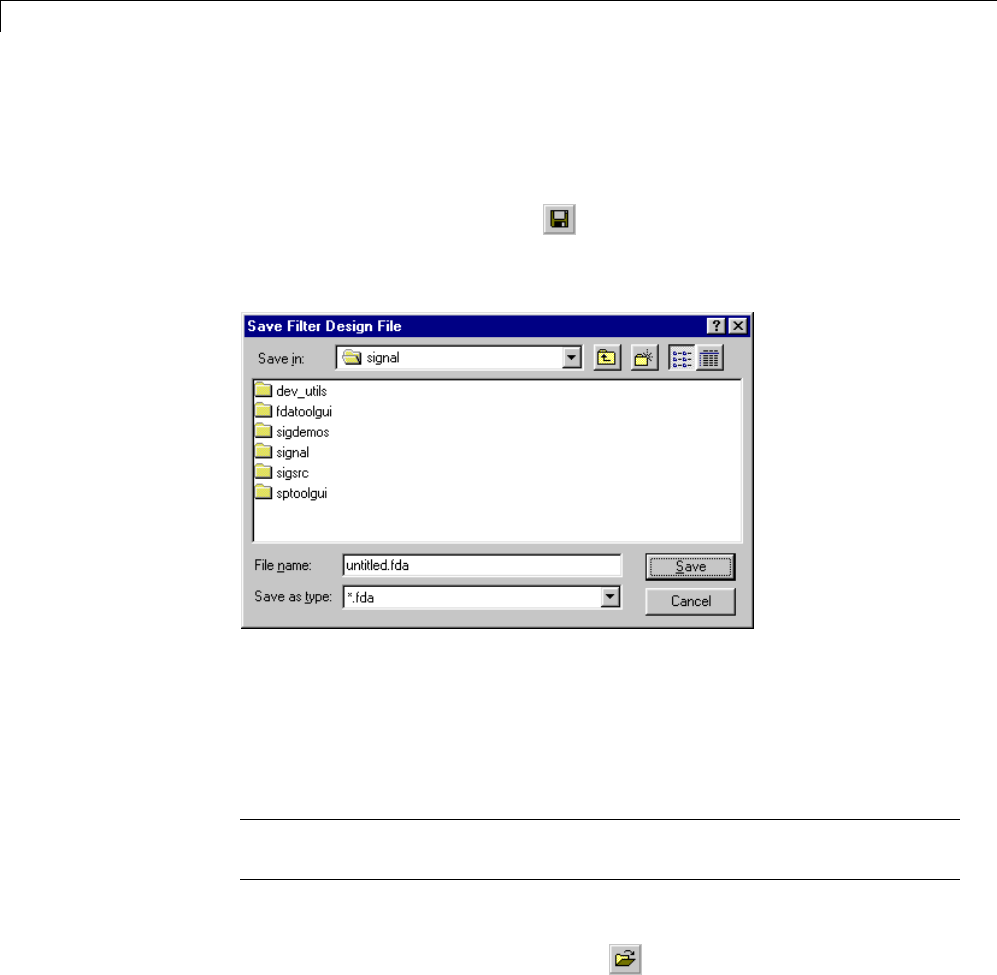
5FDATool: A Filter Design and Analysis GUI
Saving and Opening Filter Design Sessions
You can save your filter design session as a MAT-file and return to the same
session another time.
Select the Save session button to save your session as a MAT-file.
The first time you save a session, a Save Filter Design File browser opens,
prompting you for a session name.
For example, save this design session as TestFilter.fda in your current
working directory by typing TestFilter in the File name field.
The .fda extension is added automatically to all filter design sessions you
save.
Note You can also use the File > Save session and File > Save session
as to save a session.
You can load existing sessions into the Filter Design and Analysis Tool
by selecting the Open session button, or File > Open session .A
Load Filter Design File browser opens that allows you to select from your
previously saved filter design sessions.
5-38
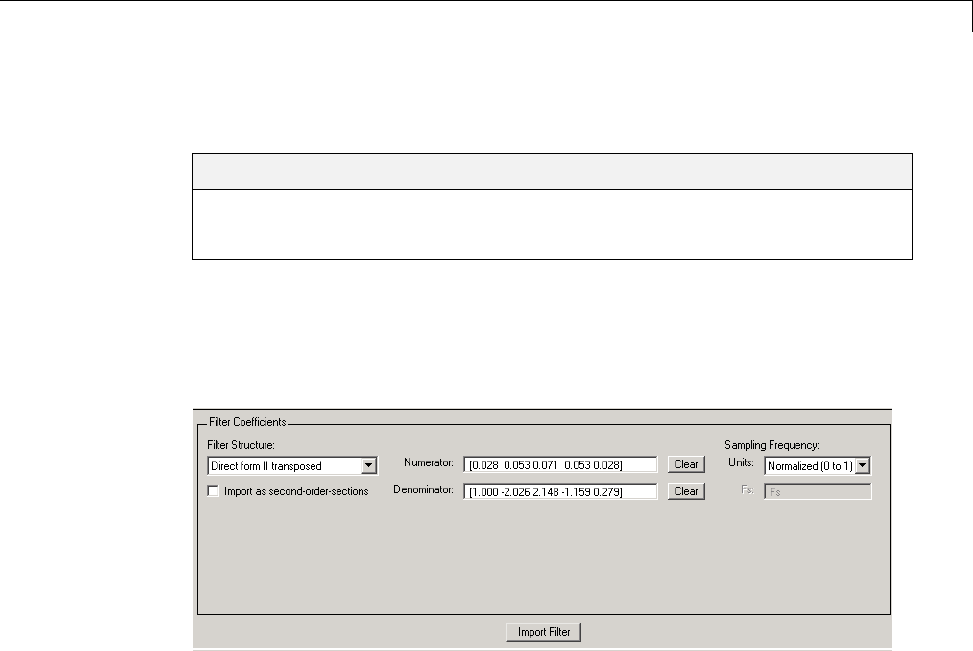
Importing a Filter Design
Importing a Filter Design
In this section...
“Import Filter Panel” on page 5-39
“Filter Structures” on page 5-40
Import Filter Panel
The Import Filter panel allows you to import a filter. You can access this
region by clicking the Import Filter buttoninthesidebar.
The imported filter can be in any of the representations listed in the Filter
Structure pull-downmenu.Youcanimportafilter as second-order sections
by selecting the check box.
Specify the filter coefficients in Numerator and Denominator,either
by entering them explicitly or by referring to variables in the MATLAB
workspace.
Select the frequency units from the following options in the Units menu, and
for any frequency unit other than Normalized, specify the value or MATLAB
workspace variable of the sampling frequency in the Fs field.
To import the filter, click the Import Filter button. The display region is
automatically updated when the new filter has been imported.
You can edit the imported filter using the Pole/Zero Editor panel.
5-39

5FDATool: A Filter Design and Analysis GUI
Filter Structures
The available filter structures are:
•Direct Form, which includes direct-form I, direct-form II, direct-form I
transposed, direct-form II transposed, and direct-form FIR
•Lattice, which includes lattice allpass, lattice MA min phase, lattice MA
max phase, and lattice ARMA
•Discrete–time Filter (dfilt object)
The structurethatyouchoosedeterminesthetypeofcoefficientsthatyou
need to specify in the text fields to the right.
Direct-form
For direct-form I, direct-form II, direct-form I transposed, and direct-form II
transposed, specify the filter by its transfer function representation
Hz bbzbz bmz
aazaZ
m
() () () () ( )
() () ()
12 3 1
12 3
12
13
aan z n
()
1
•The Numerator field specifies a variable name or value for the numerator
coefficient vector b, which contains m+1 coefficients in descending powers
of z.
•The Denominator field specifies a variable name or value for the
denominator coefficient vector a, which contains n+1 coefficients in
descending powers of z. For FIR filters, the Denominator is 1.
Filters in transfer function form can be produced by all of the Signal
Processing Toolbox filter design functions (such as fir1,fir2,firpm,butter,
yulewalk). See “Transfer Function” on page 1-23 for more information.
Importing as second-order sections. For all direct-form structures,
except direct-form FIR, you can import the filter in its second-order section
representation:
5-40

Importing a Filter Design
Hz G bbzbz
aazaz
kk k
kk k
k
L
()
01
122
01
122
1
The Gain fieldspecifiesavariablenameoravalueforthegainG,andthe
SOS Matrix fieldspecifiesavariablenameoravaluefortheL-by-6 SOS
matrix
SOS
bbb aa
bbb aa
bbb
LLL
01 11 21 11 22
02 12 22 12 22
012
1
1
1
······
······
aaa
LL12
whose rows contain the numerator and denominator coefficients bik and aik
of the second-order sections of H(z).
Filters in second-order section form can be produced by functions such as
tf2sos,zp2sos,ss2sos,andsosfilt. See “Second-Order Sections (SOS)”
on page 1-27 for more information.
Lattice
For lattice allpass, lattice minimum and maximum phase, and lattice ARMA
filters, specify the filter by its lattice representation:
•For lattice allpass, the Lattice coeff field specifies the lattice (reflection)
coefficients, k(1) to k(N),whereNis the filter order.
•For lattice MA (minimum or maximum phase), the Lattice coeff field
specifies the lattice (reflection) coefficients, k(1) to k(N),whereNis the
filter order.
•For lattice ARMA, the Lattice coeff field specifies the lattice (reflection)
coefficients, k(1) to k(N),andtheLadder coeff field specifies the ladder
coefficients, v(1) to v(N+1),whereNis the filter order.
Filters in lattice form can be produced by tf2latc. See “Lattice Structure”
on page 1-28 for more information.
5-41

5FDATool: A Filter Design and Analysis GUI
Discrete-time Filter (dfilt object)
For Discrete-time filter, specify the name of the dfilt object. See dfilt for
more information.
Multirate Filter (mfilt object)
For Multirate filter, specify the name of the mfilt object. See mfilt in the
DSP System Toolbox product for more information.
5-42
6Statistical Signal Processing
Correlation and Covariance
In this section...
“Background Information” on page 6-2
“Using xcorr and xcov Functions” on page 6-3
“Bias and Normalization” on page 6-3
“Multiple Channels” on page 6-4
Background Information
The cross-correlation sequence for two wide-sense stationary random process,
x(n) and y(n) is:
Rm Exnmyn
xy () {( ) ()}
*
=+
where *denotes the complex conjugate and the expectation is over the
ensemble of realizations that constitute the random processes.
Note that cross-correlation is not commutative, but a Hermitian (conjugate)
symmetry property holds such that:
Rm R m
xy yx
() ( )
*
=−
The cross-covariance between x(n) and y(n) is:
Cm Exnm yn Rm
xy x y xy x y
() {(( ) )(() )} ()
**
=+− −= −
For zero-mean wide-sense stationary random processes, the cross-correlation
and cross-covariance are equivalent.
In practice, you must estimate these sequences, because it is possible to
access only a finite segment of the infinite-length random processes. Further,
it is often necessary to estimate ensemble moments based on time averages
because only a single realization of the random processes are available.
A common estimate based on Nsamples of xnand ynis the deterministic
cross-correlation sequence (also called the time-ambiguity function)
6-2

Correlation and Covariance
ˆ() ()()
ˆ()
*
*
Rm
xn my n m
Rm m
xy n
Nm
xy
=+≥
−<
⎧
⎨
⎪
⎪
⎩
⎪
⎪
=
−−
∑
0
1
0
0
where we assume for this discussion that xnand ynare indexed from 0 to
N-1, and ˆ()Rm
xy from -(N-1) to N-1.
Using xcorr and xcov Functions
The functions xcorr and xcov estimate the cross-correlation and
cross-covariance sequences of random processes. They also handle
autocorrelation and autocovariance as special cases. The xcorr function
evaluates the sum shown above with an efficient FFT-based algorithm, given
inputs xnand ynstored in length Nvectors xand y. Its operation is equivalent
to convolution with one of the two subsequences reversed in time.
For example:
x=[11111]';
y=x;
xyc = xcorr(x,y)
Notice that the resulting sequence length is one less than twice the length
of the input sequence. Thus, the Nth element is the correlation at lag 0.
Also notice the triangular pulse of the output that results when convolving
twosquarepulses.
The xcov function estimates autocovariance and cross-covariance sequences.
This function has the same options and evaluates the same sum as xcorr,but
first removes the means of xand y.
Bias and Normalization
An estimate of a quantity is biased if its expected value is not equal to the
quantity it estimates. The expected value of the output of xcorr is
ER m N m R m
xy xy
{()}(||)()=−
6-3

6Statistical Signal Processing
xcorr provides the unbiased estimate, dividing by N-|m|, when you specify
an 'unbiased' flag after the input sequences.
xcorr(x,y,'unbiased')
Although this estimate is unbiased, the end points (near -(N-1) and N-1) suffer
fromlargevariancebecausexcorr computes them using only a few data
points. A possible trade-off is to simply divide by Nusing the 'biased' flag:
xcorr(x,y,'biased')
With this scheme, only the sample of the correlation at zero lag (the Nth
output element) is unbiased. This estimate is often more desirable than the
unbiased one because it avoids random large variations at the end points
of the correlation sequence.
xcorr provides one other normalization scheme. The syntax
xcorr(x,y,'coeff')
divides the output by norm(x)*norm(y) so that, for autocorrelations, the
sample at zero lag is 1.
Multiple Channels
For a multichannel signal, xcorr and xcov estimate the autocorrelation and
cross-correlation and covariance sequences for all of the channels at once. If S
is an M-by-Nsignal matrix representing Nchannels in its columns, xcorr(S)
returns a (2M-1)-by-N2matrix with the autocorrelations and cross-correlations
of the channels of Sin its N2columns. If Sis a three-channel signal
S = [s1 s2 s3]
then the result of xcorr(S) is organized as
R = [Rs1s1 Rs1s2 Rs1s3 Rs2s1 Rs2s2 Rs2s3 Rs3s1 Rs3s2 Rs3s3]
Two related functions, cov and corrcoef, are available in the standard
MATLAB environment. They estimate covariance and normalized covariance
respectively between the different channels at lag 0 and arrange them in
a square matrix.
6-4

Spectral Analysis
Spectral Analysis
In this section...
“Background Information” on page 6-5
“Spectral Estimation Method” on page 6-7
“Nonparametric Methods” on page 6-9
“Parametric Methods” on page 6-32
Background Information
The goal of spectral estimation is to describe the distribution (over frequency)
of the power contained in a signal, based on a finite set of data. Estimation of
power spectra is useful in a variety of applications, including the detection
of signals buried in wideband noise.
The power spectral density (PSD)ofastationaryrandomprocessxnis
mathematically related to the autocorrelation sequence by the discrete-time
Fourier transform. In terms of normalized frequency, this is given by
PRme
xx xx
jm
m
() ( )ωπ
ω
=−
=−∞
∞
∑
1
2
This can be written as a function of physical frequency f(e.g., in hertz) by
using the relation ω=2πf/fs,wherefsis the sampling frequency.
Pf fRme
xx
s
xx jmff
m
s
() ( ) /
=−
=−∞
∞
∑
12π
The correlation sequence can be derivedfromthePSDbyuseoftheinverse
discrete-time Fourier transform:
Rm P e d Pfe df
xx xx jm xx jmf
f
f
f
s
s
s
() () () /
/
/
==
−−
∫∫
ωω
ω
π
ππ2
2
2
6-5

6Statistical Signal Processing
The average power of the sequence xnovertheentireNyquistintervalis
represented by
RPdPfdf
xx xx xx
f
f
s
s
() () ()
/
/
0
2
2
==
−− ∫∫ ωω
π
π
The average power of a signal over a particular frequency band [ω1,ω2],
0≤ω1≤ω2≤π, can be found by integrating the PSD over that band:
PPdPd
xx xx[,] () ()
12 1
2
2
1
==
∫∫
−
−
You can see from the above expression that Pxx(ω) represents the power
content of a signal in an infinitesimal frequency band, which is why it is called
the power spectral density.
The units of the PSD are power (e.g., watts) per unit of frequency. In the case
of Pxx(ω), this is watts/radian/sample or simply watts/radian. In the case
of Pxx(f), the units are watts/hertz. Integration of the PSD with respect to
frequency yields units of watts, as expected for the average power .
For real–valued signals, the PSD is symmetric about DC, and thus Pxx(ω)for
0≤ω≤π is sufficient to completely characterize the PSD. However, to obtain the
average power over the entire Nyquist interval, it is necessary to introduce
the concept of the one-sided PSD.
The one-sided PSD is given by
PPxx
onesided () ()
=−≤ <
≤≤
⎧
⎨
⎩
00
20
The average power of a signal over the frequency band, [ω1,ω2]with
0≤ω1≤ω2≤π, can be computed using the one-sided PSD as
PPd
[,] ()
12 1
2
=∫onesided
6-6

Spectral Analysis
Spectral Estimation Method
The various methods of spectrum estimation available in the toolbox are
categorized as follows:
•Nonparametric methods
•Parametric methods
•Subspace methods
Nonparametric methods are those in which the PSD is estimated directly
from the signal itself. The simplest such method is the periodogram.Other
nonparametric techniques such as Welch’s method [8], the multitaper method
(MTM)reduc
e the variance of the periodogram.
Parametric methods are those in which the PSD is estimated from a signal
that is assumed to be output of a linear system driven by white noise.
Examples are the Yule-Walker autoregressive (AR)method and the Burg
method.T
hese methods estimate the PSD by first estimating the parameters
(coefficients) of the linear system that hypothetically generates the signal.
They tend to produce better results than classical nonparametric methods
when the data length of the available signal is relatively short. Parametric
methods also produce smoother estimates of the PSD than nonparametric
methods, but are subject to error from model misspecification.
Subspace methods,alsoknownashigh-resolution methods or super-resolution
methods, generate frequency component estimates for a signal based on an
eigenanalysis or eigendecomposition of the autocorrelation matrix. Examples
are themultiple signal classification (MUSIC)method or the eigenvector (EV)
method. These methods are best suited for line spectra — that is, spectra of
sinusoidal signals — and are effective in the detection of sinusoids buried
in noise, especially when the signal to noise ratios are low. The subspace
methods do not yield true PSD estimates: they do not preserve process power
between the time and frequency domains, and the autocorrelation sequence
cannot be recovered by taking the inverse Fourier transform of the frequency
estimate.
All three categories of methods are listed in the table below with the
corresponding toolbox function and spectrum object names. More information
about each function is on the corresponding function reference page.
6-7

6Statistical Signal Processing
See “Parametric Modeling” on page 7-13 for details about lpc and other
parametric estimation functions.
Spectral Estimation Methods/Functions
Method Description Functions
Periodogram Power spectral density
estimate
spectrum.periodogram,
periodogram
Welch Averaged periodograms
of overlapped, windowed
signal sections
spectrum.welch,pwelch,
cpsd,tfestimate,
mscohere
Multitaper Spectral estimate from
combination of multiple
orthogonal windows (or
“tapers”)
spectrum.mtm,pmtm
Yule-Walker AR Autoregressive (AR)
spectral estimate of
a time-series from its
estimated autocorrelation
function
spectrum.yulear,
pyulear
Burg Autoregressive (AR)
spectral estimation
of a time-series by
minimization of linear
prediction errors
spectrum.burg,pburg
Covariance Autoregressive (AR)
spectral estimation
of a time-series by
minimization of the
forward prediction errors
spectrum.cov,pcov
Modified
Covariance
Autoregressive (AR)
spectral estimation
of a time-series by
minimization of the
forward and backward
prediction errors
spectrum.mcov,pmcov
6-8
Spectral Analysis
Spectral Estimation Methods/Functions (Continued)
Method Description Functions
MUSIC Multiple signal
classification
spectrum.music,pmusic
Eigenvector Pseudospectrum estimate spectrum.eigenvector,
peig
Nonparametric Methods
The following sections discuss the periodogram, modified periodogram, Welch,
and multitaper methods of nonparametric estimation, along with the related
CPSD function, transfer function estimate, and coherence function.
Periodogram
Ingeneralterms,onewayofestimatingthePSDofaprocessistosimplyfind
the discrete-time Fourier transform of the samples of the process (usually
done on a grid with an FFT) and appropriately scale the magnitude squared
of the result. This estimate is called the periodogram.
The periodogram estimate of the PSD of a length-L signal xL[n]is
PLF
fxne
xx
s
L
n
LjfnF
s
() | () |
/
=
=
−−
∑
1
0
122
where Fsis the sampling frequency.
In practice, the actual computation of Pxx(f) can be performed only at a
finite number of frequency points, and usually employs an FFT. Most
implementations of the periodogram method compute the N-point PSD
estimate at the frequencies
fkF
NkN
ks
==…−01 1,, ,
6-9
6Statistical Signal Processing
In some cases, the computation of the periodogram via an FFT algorithm is
more efficient if the number of frequencies is a power of two. Therefore it
is not uncommon to pad the input signal with zeros to extend its length to
a power of two.
As an example of the periodogram, consider the following 1001-element
signal xn, which consists of two sinusoids plus noise:
fs = 1000; % Sampling frequency
t = (0:fs)/fs; % One second worth of samples
A = [1 2]; % Sinusoid amplitudes (row vector)
f = [150;140]; % Sinusoid frequencies (column vector)
xn = A*sin(2*pi*f*t) + 0.1*randn(size(t));
Note The three last lines illustrate a convenient and general way to express
the sum of sinusoids.
Together they are equivalent to xn = sin(2*pi*150*t) +
2*sin(2*pi*140*t) + 0.1*randn(size(t));
The periodogram estimate of the PSD can be computed by creating a
periodogram object. In this case, the data vector is multiplied by a Hamming
window.
Hs = spectrum.periodogram('Hamming');
6-10
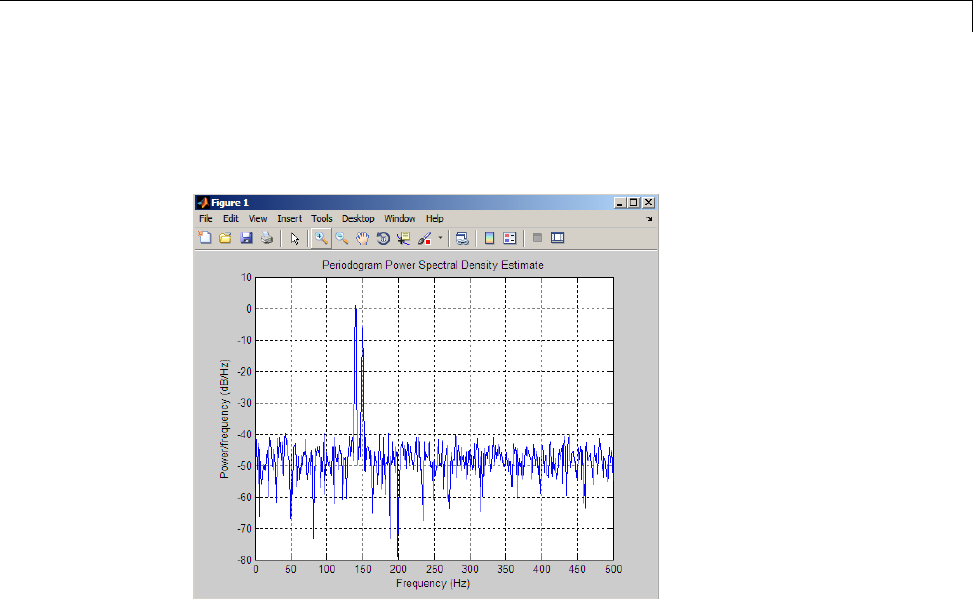
Spectral Analysis
and a plot of the PSD estimate can be displayed with the psd method:
psd(Hs,xn,'Fs',fs,'NFFT',1024,'SpectrumType','onesided')
The average power can be computed by approximating the integral with the
following sum:
Hdsp2= psd(Hs,xn,'Fs',fs,'NFFT',1024,'SpectrumType','twosided');
Pow = avgpower(Hdsp2)
You can also compute the average power from the one-sided PSD estimate:
Hdsp3= psd(Hs,xn,'Fs',fs,'NFFT',1024,'SpectrumType','onesided');
Pow = avgpower(Hdsp3)
Algorithm. Spectrum.periodogram computes and scales the output of the
FFT to produce the power vs. frequency plot as follows. For a detailed
example, see “Power Spectral Density Estimates Using FFT” on page 12-2.
1For rapid and efficient processing, make the input signal length (nfft)
equal to a power of 2 by padding it with zeros.
6-11

6Statistical Signal Processing
2If the input signal is real-valued, the magnitude of the resulting FFT is
symmetric with respect to zero frequency (DC). For an even-length FFT,
only the first (1+nfft/2) points are unique. Determine the number of
unique values and keep only those unique points.
3Take the squared magnitudes of the unique FFT values. Scale the squared
magnitudes (except for DC) by 2Fs/N, where Nis the length of signal prior
to any zero padding. Scale the DC value by Fs/N.
4Create a frequency vector from the number of unique points, the nfft and
the sampling frequency.
5Plot the resulting magnitude squared FFT vs. the frequency.
Performance of the Periodogram
The following sections discuss the performance of the periodogram with
regard to the issues of leakage, resolution, bias, and variance.
Spectral Leakage. Consider the PSD of a finite-length (length L)signal
xL[n], as discussed in the “Periodogram” on page 6-9 section. It is frequently
useful to interpret xL[n] as the result of multiplying an infinite signal, x[n], by
a finite-length rectangular window, wR[n]:
xn xnwn
LR
[] [] [].=
Because multiplication in the time domain corresponds to convolution in the
frequency domain, the expected value of the periodogram in the frequency
domain is:
EP f Fs
Lf f Fs
LffFs
xx Fs
Fs
{()} sin ( ( ) / )
sin ( ( ) / )
/
/
=−′
−′
−
∫
12
2
2
2
PPfdf
xx () ,
′′
showing that the expected value of the periodogram is the convolution of the
true PSD with the square of the Dirichlet kernel.
The effect of the convolution is best understood for sinusoidal data. Suppose
that x[n]iscomposedofasumofMcomplex sinusoids:
6-12

Spectral Analysis
xn A e
k
k
Njn
k
()=
=
∑
1
Its spectrum is
XA
k
k
N
k
() ( )
=−
=
∑
1
which for a finite-length sequence becomes
XAWd
k
k
N
kR
() ( ( )) ( )
=−−
−=
∫∑
1
==\=
\
The preceding equation is equal to:
XAW
k
k
N
Rk
() ( )
=−
=
∑
1
So in the spectrum of the finite-length signal, the Dirac deltas have been
replaced by terms of the form WR(ω-ωk), which corresponds to the frequency
response of a rectangular window centered on the frequency ωk.
6-13
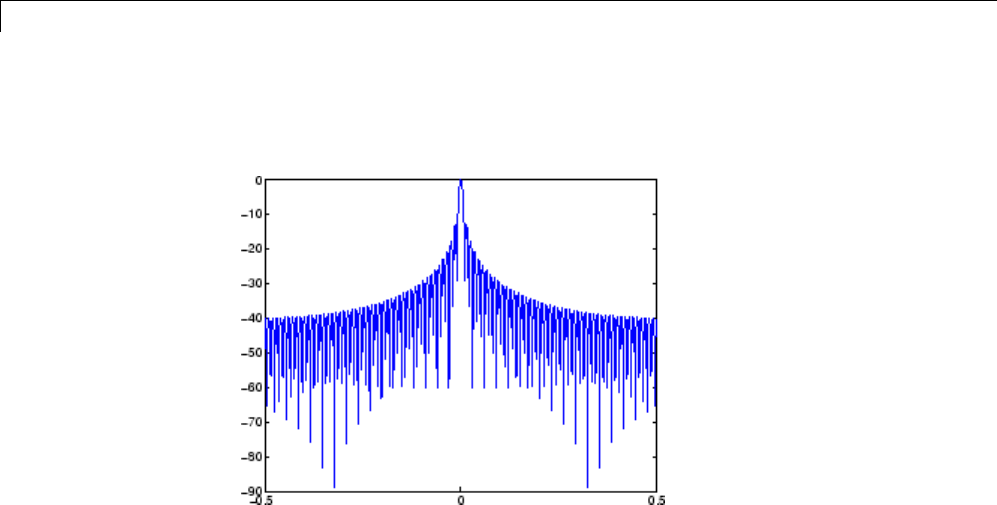
6Statistical Signal Processing
The frequency response of a rectangular window has the shape of a sinc
signal, as shown below.
The plot displays a main lobe and several side lobes, the largest of which is
approximately 13.5 dB below the mainlobe peak. These lobes account for
the effect known as spectral leakage. While the infinite-length signal has its
power concentrated exactly at the discrete frequency points fk, the windowed
(or truncated) signal has a continuum of power “leaked” around the discrete
frequency points fk.
Because the frequency response of a short rectangular window is a much
poorer approximation to the Dirac delta function than that of a longer
window, spectral leakage is especially evident when data records are short.
Consider the following sequence of 100 samples:
fs = 1000; % Sampling frequency
t = (0:fs/10)/fs; % One-tenth second worth of samples
A = [1 2]; % Sinusoid amplitudes
f = [150;140]; % Sinusoid frequencies
xn = A*sin(2*pi*f*t) + 0.1*randn(size(t));
Hs = spectrum.periodogram;
psd(Hs,xn,'Fs',fs,'NFFT',1024)
6-14
Spectral Analysis
It is important to note that the effect of spectral leakage is contingent solely
on the length of the data record. It is not a consequence of the fact that the
periodogram is computed at a finite number of frequency samples.
Resolution. Resolution refers to the ability to discriminate spectral features,
and is a key concept on the analysis of spectral estimator performance.
In order to resolve two sinusoids that are relatively close together in
frequency, it is necessary for the difference between the two frequencies to
be greater than the width of the mainlobe of the leaked spectra for either
one of these sinusoids. The mainlobe width is defined to be the width of the
mainlobe at the point where the power is half the peak mainlobe power (i.e.,
3 dB width). This width is approximately equal to fs/L.
In other words, for two sinusoids of frequencies f1and f2, the resolvability
condition requires that
()ff Fs
L
21
−>
6-15
6Statistical Signal Processing
In the example above, where two sinusoids are separated by only 10 Hz, the
data record must be greater than 100 samples to allow resolution of two
distinct sinusoids by a periodogram.
Consider a case where this criterion is not met, as for the sequence of 67
samples below:
fs = 1000; % Sampling frequency
t = (0:fs/15)./fs; % 67 samples
A = [1 2]; % Sinusoid amplitudes
f = [150;140]; % Sinusoid frequencies
xn = A*sin(2*pi*f*t) + 0.1*randn(size(t));
Hs=spectrum.periodogram;
psd(Hs,xn,'Fs',fs,'NFFT',1024)
The above discussion about resolution did not consider the effects of noise
since the signal-to-noise ratio (SNR) has been relatively high thus far. When
the SNR is low, true spectral features are much harder to distinguish, and
6-16
Spectral Analysis
noise artifacts appear in spectral estimates based on the periodogram. The
example below illustrates this:
fs = 1000; % Sampling frequency
t = (0:fs/10)./fs; % One-tenth second worth of samples
A = [1 2]; % Sinusoid amplitudes
f = [150;140]; % Sinusoid frequencies
xn = A*sin(2*pi*f*t) + 2*randn(size(t));
Hs=spectrum.periodogram;
psd(Hs,xn,'Fs',fs,'NFFT',1024)
Bias of the Periodogram. The periodogram is a biased estimator of the
PSD. Its expected value was previously shown to be:
EP f Fs
Lf f Fs
LffFs
xx Fs
Fs
{()} sin ( ( ) / )
sin ( ( ) / )
/
/
=−′
−′
−
∫
12
2
2
2
PPfdf
xx () ,
′′
6-17

6Statistical Signal Processing
The periodogram is asymptotically unbiased, which is evident from the earlier
observation that as the data record length tends to infinity, the frequency
response of the rectangular window more closely approximates the Dirac
delta function. However, in some cases the periodogram is a poor estimator
of the PSD even when the data record is long. This is due to the variance of
the periodogram, as explained below.
Variance of the Periodogram. Thevarianceoftheperiodogramcanbe
shown to be:
Var Fs
or
(()) () /
() /
Pf Pf f
Pf f fFs
xx xx
xx
=<<
==
⎧
⎨
⎪
⎩
⎪
2
2
02
20 2
whichindicatesthatthevariancedoesnottendtozeroasthedatalengthL
tends to infinity. In statistical terms, the periodogram is not a consistent
estimator of the PSD. Nevertheless, theperiodogramcanbeausefultoolfor
spectral estimation in situations where the SNR is high, and especially if
the data record is long.
The Modified Periodogram
The modified periodogram windows the time-domain signal prior to computing
the DFT in order to smooth the edges of the signal. This has the effect of
reducing the height of the sidelobes or spectral leakage. This phenomenon
gives rise to the interpretation of sidelobesasspuriousfrequenciesintroduced
into the signal by the abrupt truncation that occurs when a rectangular
window is used. For nonrectangular windows, the end points of the truncated
signal are attenuated smoothly, and hence the spurious frequencies
introduced are much less severe. On the other hand, nonrectangular windows
also broaden the mainlobe, which results in a reduction of resolution.
spectrum.periodogram allows you to compute a modified periodogram by
specifyingthewindowtobeusedonthedata.Forexample,compareadefault
rectangular window and a Hamming window:
fs = 1000; % Sampling frequency
t = (0:fs/10)./fs; % One-tenth second worth of samples
A = [1 2]; % Sinusoid amplitudes
6-18
Spectral Analysis
f = [150;140]; % Sinusoid frequencies
xn = A*sin(2*pi*f*t) + 0.1*randn(size(t));
Hrect = spectrum.periodogram;
psd(Hrect,xn,'Fs',fs,'NFFT',1024);
6-19

6Statistical Signal Processing
Hhamm = spectrum.periodogram('Hamming');
psd(Hhamm,xn,'Fs',fs,'NFFT',1024);
You can verify that although the sidelobes are much less evident in the
Hamming-windowed periodogram, the two main peaks are wider. In fact,
the 3 dB width of the mainlobe corresponding to a Hamming window
is approximately twice that of a rectangular window. Hence, for a fixed
data length, the PSD resolution attainable with a Hamming window is
approximately half that attainable with a rectangular window. The competing
interests of mainlobe width and sidelobe height can be resolved to some extent
by using variable windows such as the Kaiser window.
Nonrectangular windowing affects the average power of a signal because
some of the time samples are attenuated when multiplied by the window.
To compensate for this, spectrum.periodogram and spectrum.welch
normalize the window to have an average power of unity. This ensures that
the measured average power is generally independent of window choice. If
the frequency components are not well resolved by the PSD estimators, the
window choice does affect the average power.
6-20
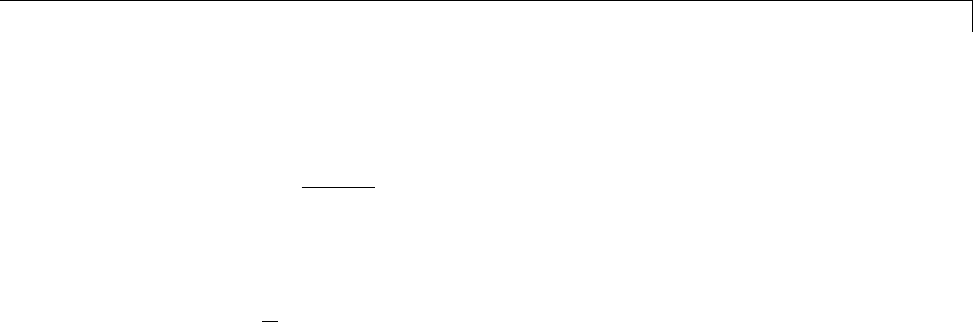
Spectral Analysis
The modified periodogram estimate of the PSD is
ˆ() |()|
Pf Xf
FsLU
xx =2
where Uis the window normalization constant.
ULwn
n
N
=
=
−
∑
1
0
12
|( )| .
For large values of L,Utends to become independent of window length.
The addition of Uas a normalization constant ensures that the modified
periodogram is asymptotically unbiased.
Welch’s Method
An improved estimator of the PSD is the one proposed by Welch [8]. The
method consists of dividing the time series data into (possibly overlapping)
segments, computing a modified periodogram of each segment, and then
averaging the PSD estimates. The result is Welch’s PSD estimate. Welch’s
method is implemented in the toolbox by the spectrum.welch object or
pwelch function
The averaging of modified periodograms tends to decrease the variance of the
estimate relative to a single periodogram estimate of the entire data record.
Although overlap between segments introduces redundant information, this
effect is diminished by the use of a nonrectangular window, which reduces
the importance or weight given to the end samples of segments (the samples
that overlap).
However, as mentioned above, the combined use of short data records and
nonrectangular windows results in reduced resolution of the estimator. In
summary, there is a trade-off between variance reduction and resolution.
One can manipulate the parameters in Welch’s method to obtain improved
estimates relative to the periodogram, especially when the SNR is low. This is
illustrated in the following example.
Consider an original signal consisting of 301 samples:
6-21
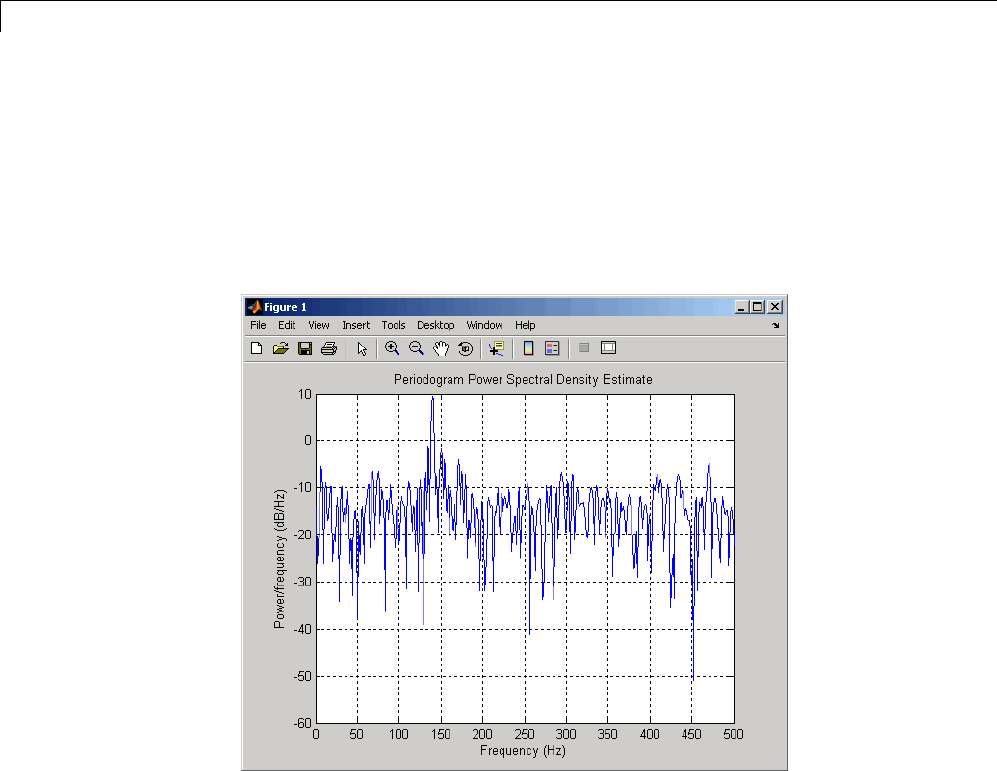
6Statistical Signal Processing
fs = 1000; % Sampling frequency
t = (0:0.3*fs)./fs; % 301 samples
A = [2 8]; % Sinusoid amplitudes (row vector)
f = [150;140]; % Sinusoid frequencies (column vector)
xn = A*sin(2*pi*f*t) + 5*randn(size(t));
Hs = spectrum.periodogram('rectangular');
psd(Hs,xn,'Fs',fs,'NFFT',1024);
We can obtain Welch’s spectral estimate for 3 segments with 50% overlap with
Hs = spectrum.welch('rectangular',150,50);
psd(Hs,xn,'Fs',fs,'NFFT',512);
6-22
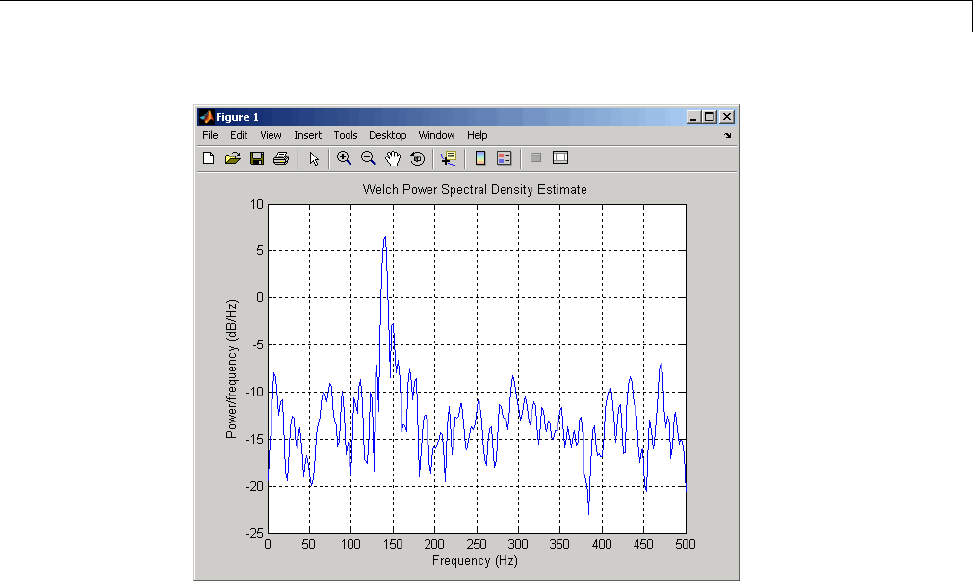
Spectral Analysis
In the periodogram above, noise and the leakage make one of the sinusoids
essentially indistinguishable from the artificial peaks. In contrast, although
the PSD produced by Welch’s method has wider peaks, you can still
distinguish the two sinusoids, which stand out from the “noise floor.”
However, if we try to reduce the variance further, the loss of resolution causes
one of the sinusoids to be lost altogether:
6-23
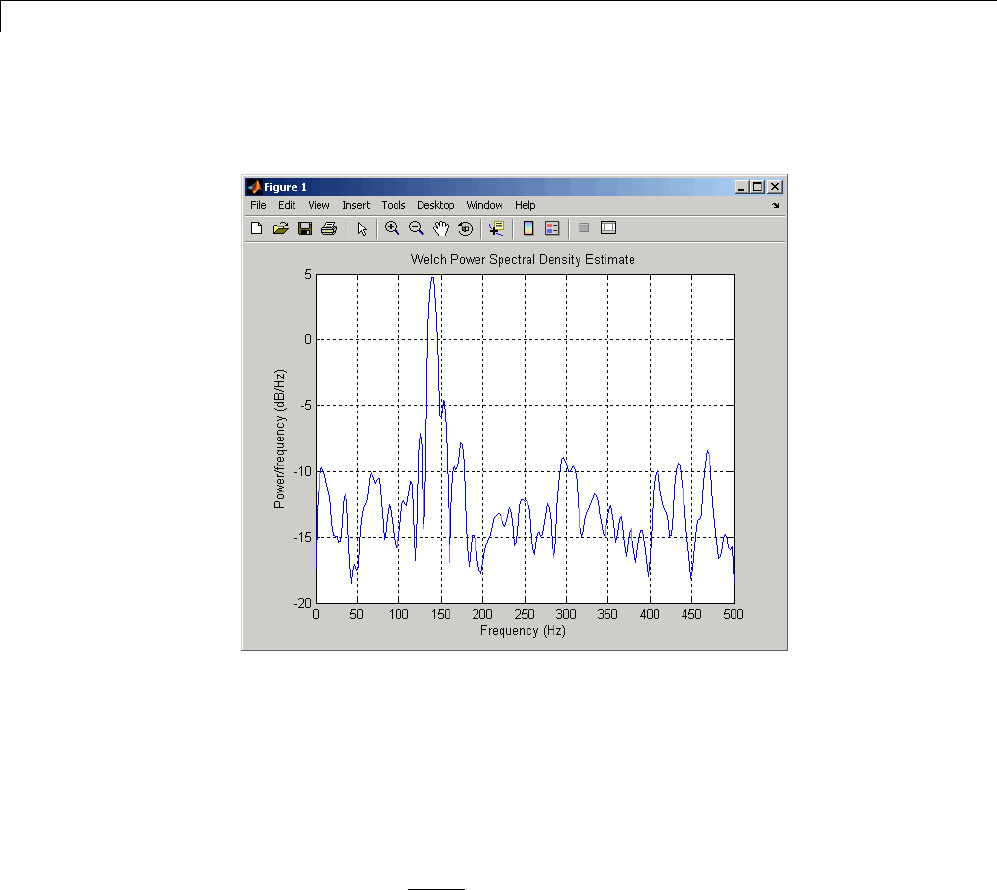
6Statistical Signal Processing
Hs = spectrum.welch('rectangular',100,75);
psd(Hs,xn,'Fs',fs,'NFFT',512);
For a more detailed discussion of Welch’s method of PSD estimation, see
Kay [2] and Welch [8].
Bias and Normalization in Welch’s Method
Welch’s method yields a biased estimator of the PSD. The expected value of
the PSDestimateis:
EP f FsLU Wf f P f df
Fs
F
xx
{()} |()|()
/
/
Welch =−
′′′
−
∫
1
2
22
where Lis the length of the data segments, Uisthesamenormalization
constant present in the definition of the modified periodogram, and W(f) is the
Fourier transform of the window function. As is the case for all periodograms,
Welch’s estimator is asymptotically unbiased. For a fixed length data record,
6-24

Spectral Analysis
the bias of Welch’s estimate is larger than that of the periodogram because
the length of the segments is less than the length of the entire data sample.
The variance of Welch’s estimator is difficult to compute because it depends
on both the window used and the amount of overlap between segments.
Basically,thevarianceisinverselyproportional to the number of segments
whose modified periodograms are being averaged.
Multitaper Method
The periodogram can be interpreted as filtering a length Lsignal, xL[n],
through a filter bank (a set of filters in parallel) of LFIR bandpass filters.
The 3 dB bandwidth of each of these bandpass filters can be shown to be
approximately equal to fs/L. The magnitude response of each one of these
bandpass filters resembles that of the rectangular window discussed in
“Spectral Leakage” on page 6-12. The periodogram can thus be viewed as
a computation of the power of each filtered signal (i.e., the output of each
bandpass filter) that uses just one sample of each filtered signal and assumes
that the PSD of xL[n] is constant over the bandwidth of each bandpass filter.
As the length of the signal increases, the bandwidth of each bandpass filter
decreases, making it a more selective filter, and improving the approximation
of constant PSD over the bandwidth of the filter. This provides another
interpretation of why the PSD estimate of the periodogram improves as the
length of the signal increases. However, there are two factors apparent from
this standpoint that compromise the accuracy of the periodogram estimate.
First, the rectangular window yields a poor bandpass filter. Second, the
computation of the power at the output of each bandpass filter relies on a
single sample of the output signal, producing a very crude approximation.
Welch’s method can be given a similar interpretation in terms of a filter bank.
In Welch’s implementation, several samples are used to compute the output
power, resulting in reduced variance of the estimate. On the other hand,
the bandwidth of each bandpass filter is larger than that corresponding to
the periodogram method, which results in a loss of resolution. The filter
bank model thus provides a new interpretation of the compromise between
variance and resolution.
Thompson’s multitaper method (MTM)buildsontheseresultstoprovidean
improved PSD estimate. Instead of using bandpass filters that are essentially
6-25

6Statistical Signal Processing
rectangular windows (as in the periodogram method), the MTM method uses
a bank of optimal bandpass filters to compute the estimate. These optimal
FIR filters are derived from a set of sequences known as discrete prolate
spheroidal sequences (DPSSs, also known as Slepian sequences).
In addition, the MTM method provides a time-bandwidth parameter with
which to balance the variance and resolution. This parameter is given by the
time-bandwidth product, NW and it is directly related to the number of tapers
used to compute the spectrum. There are always 2*NW-1 tapers used to form
the estimate. This means that, as NW increases, there are more estimates of
the power spectrum, and the variance of the estimate decreases. However, the
bandwidth of each taper is also proportional to NW,soasNW increases, each
estimate exhibits more spectral leakage (i.e., wider peaks) and the overall
spectral estimate is more biased. For each data set, there is usually a value
for NW that allows an optimal trade-off between bias and variance.
The Signal Processing Toolbox function that implements the MTM method is
pmtm and the object that implements it is spectrum.mtm.Use spectrum.mtm
to compute the PSD of xn from the previous examples:
fs = 1000; % Sampling frequency
t = (0:fs)/fs; % One second worth of samples
A = [1 2]; % Sinusoid amplitudes
f = [150;140]; % Sinusoid frequencies
xn = A*sin(2*pi*f*t) + 0.1*randn(size(t));
Hs1 = spectrum.mtm(4,'adapt');
psd(Hs1,xn,'Fs',fs,'NFFT',1024)
6-26
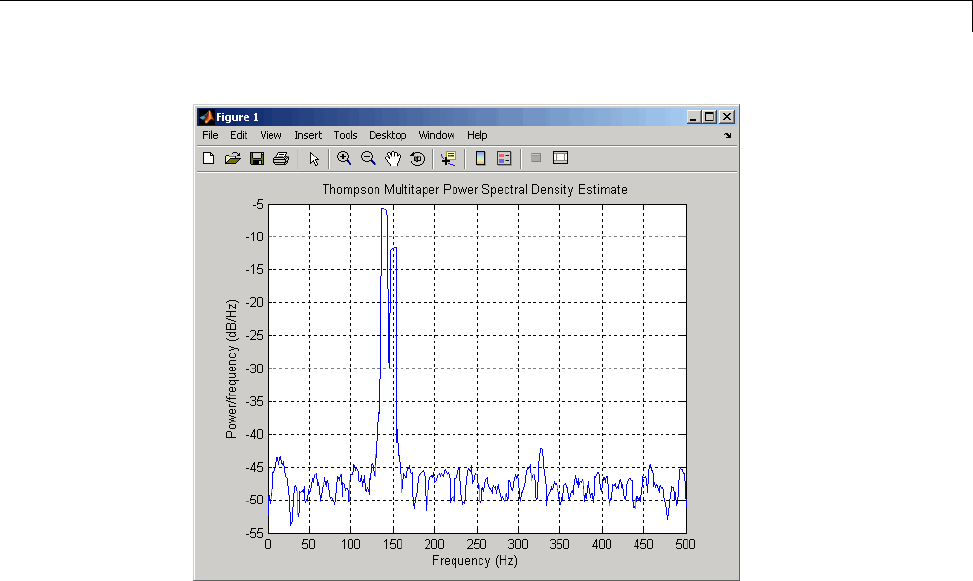
Spectral Analysis
By lowering the time-bandwidth product, you can increase the resolution at
the expense of larger variance:
6-27
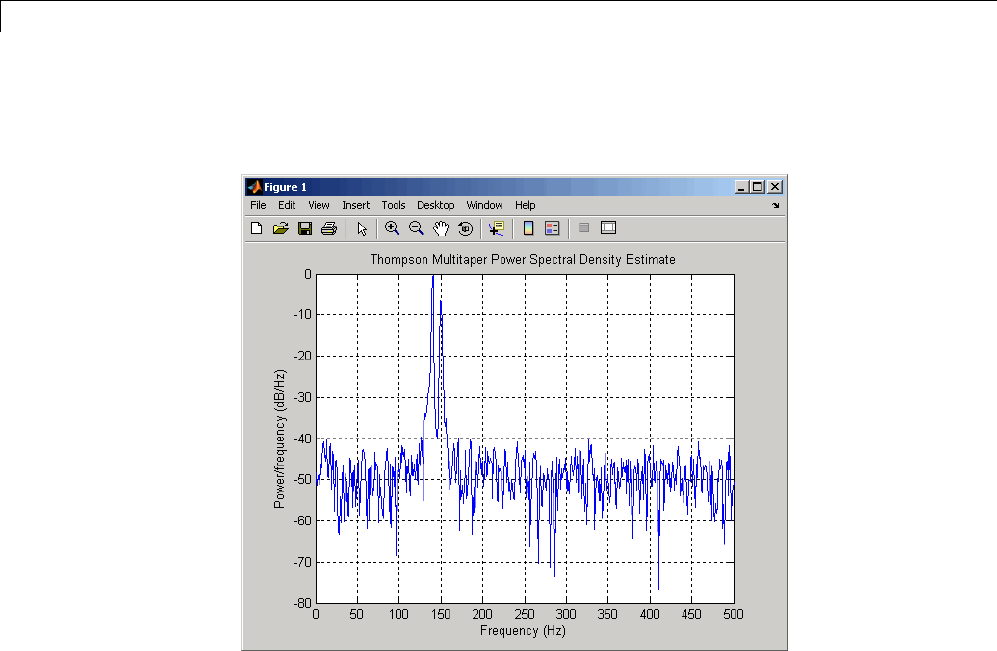
6Statistical Signal Processing
Hs2 = spectrum.mtm(3/2,'adapt');
psd(Hs2,xn,'Fs',fs,'NFFT',1024)
Note that the average power is conserved in both cases:
Hs1p = psd(Hs1,xn,'Fs',fs,'NFFT',1024);
Pow1 = avgpower(Hs1p)
Hs2p = psd(Hs2,xn,'Fs',fs,'NFFT',1024);
Pow2 = avgpower(Hs2p)
This method is more computationally expensive than Welch’s method due to
the cost of computing the discrete prolate spheroidal sequences. For long data
series (10,000 points or more), it is useful to compute the DPSSs once and
save them in a MAT-file. dpsssave,dpssload,dpssdir,anddpssclear are
provided to keep a database of saved DPSSs in the MAT-file dpss.mat.
6-28

Spectral Analysis
Cross-Spectral Density Function
The PSD is a special case of the cross spectral density (CPSD) function,
defined between two signals xnand ynas
PRme
xy xy jm
m
() ( )ωπ
ω
=−
=−∞
∞
∑
1
2
Asisthecaseforthecorrelationandcovariancesequences,thetoolbox
estimates the PSD and CPSD because signal lengths are finite.
To estimate the cross-spectral density of two equal length signals xand y
using Welch’s method, the cpsd function forms the periodogram as the product
of the FFT of xand the conjugate of the FFT of y. Unlike the real-valued PSD,
the CPSD is a complex function. cpsd handles the sectioning and windowing
of xand yin the same way as the pwelch function:
Sxy = cpsd(x,y,nwin,noverlap,nfft,fs)
Transfer Function Estimate
One application of Welch’s method is nonparametric system identification.
Assume that His a linear, time invariant system, and x(n)andy(n)arethe
input to and output of H, respectively. Then the power spectrum of x(n)is
related to the CPSD of x(n)andy(n)by
PHP
yx xx
() () ()ωωω=
An estimate of the transfer function between x(n)andy(n)is
HP
P
yx
xx
() ()
()
ωω
ω
=
This method estimates both magnitude and phase information. The
tfestimate function uses Welch’s method to compute the CPSD and power
spectrum, and then forms their quotient for the transfer function estimate.
Use tfestimate the same way that you use the cpsd function.
6-29
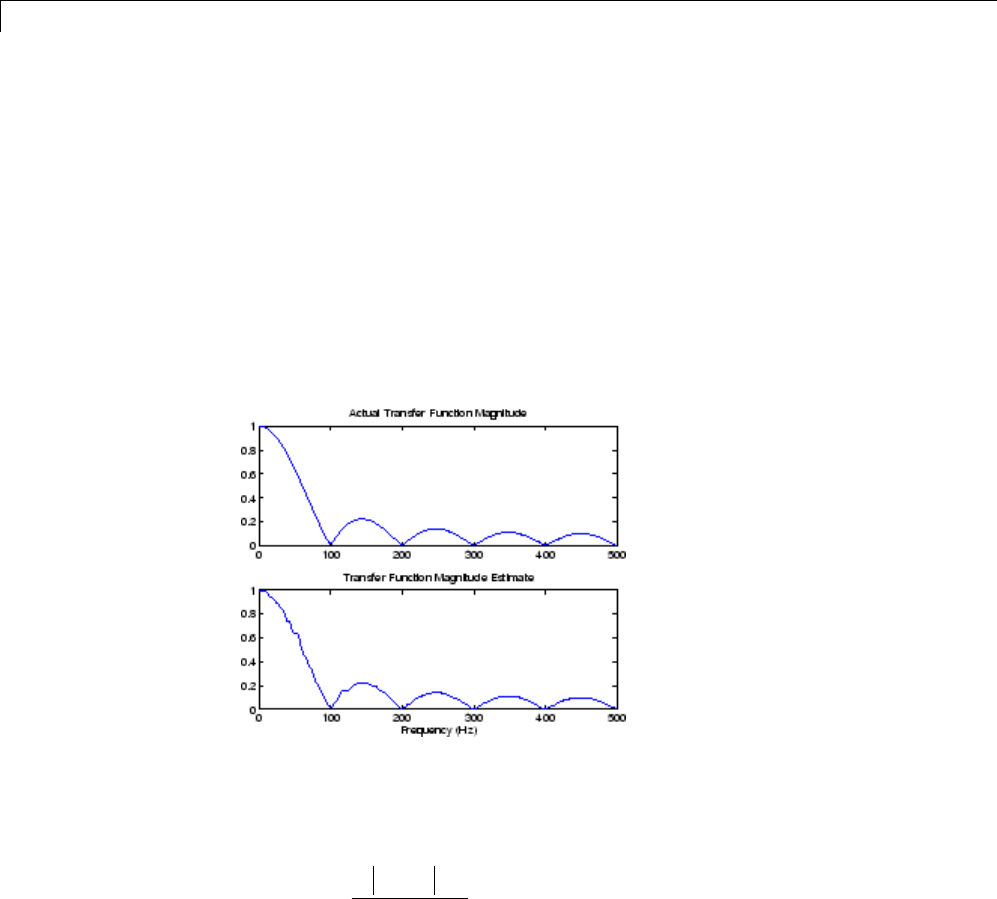
6Statistical Signal Processing
Filter the signal xn with an FIR filter, then plot the actual magnitude
response and the estimated response:
h = ones(1,10)/10; % Moving-average filter
yn = filter(h,1,xn);
[HEST,f] = tfestimate(xn,yn,256,128,256,fs);
H = freqz(h,1,f,fs);
subplot(2,1,1); plot(f,abs(H));
title('Actual Transfer Function Magnitude');
subplot(2,1,2); plot(f,abs(HEST));
title('Transfer Function Magnitude Estimate');
xlabel('Frequency (Hz)');
Coherence Function
The magnitude-squared coherence between two signals x(n)andy(n)is
CP
PP
xy
xy
xx yy
() ()
() ()
ωω
ωω
=
2
This quotient is a real number between 0 and 1 that measures the correlation
between x(n)andy(n) at the frequency ω.
6-30
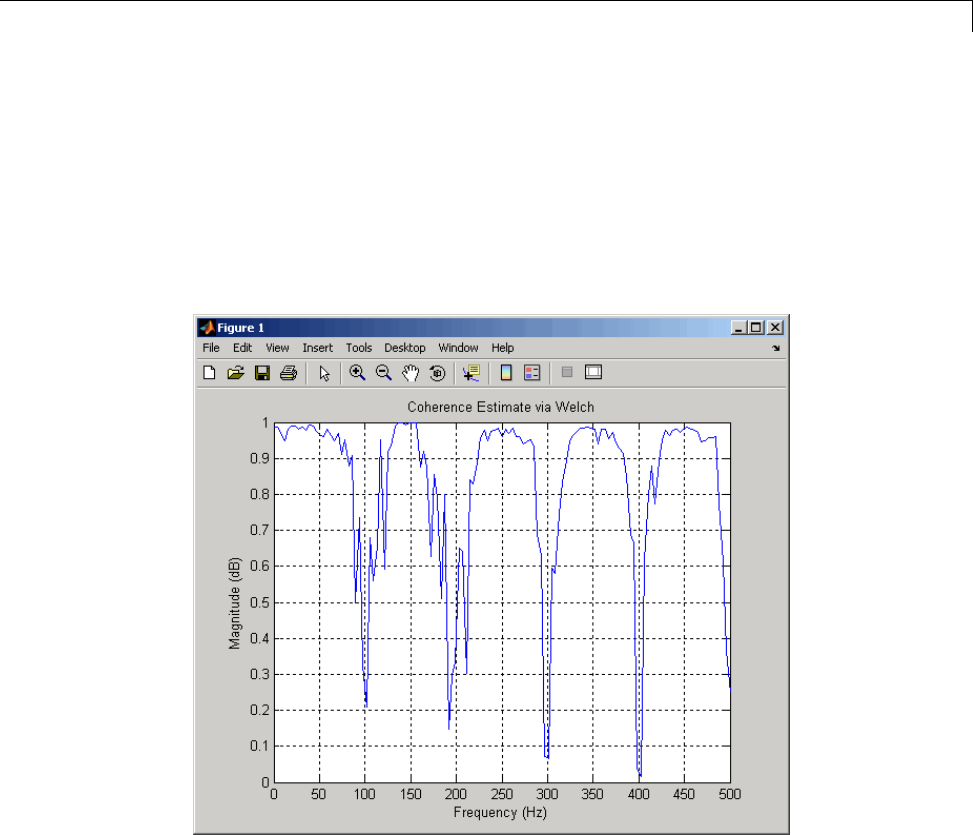
Spectral Analysis
The mscohere function takes sequences xand y, computes their power spectra
and CPSD, and returns the quotient of the magnitude squared of the CPSD
and the product of the power spectra. Its options and operation are similar to
the cpsd and tfestimate functions.
The coherence function of xn and the filter output yn versus frequency is
mscohere(xn,yn,256,128,256,fs)
If the input sequence length nfft,windowlengthwindow, and the number of
overlapping data points in a window numoverlap, are such that mscohere
operates on only a single record, the function returns all ones. This is because
the coherence function for linearly dependent data is one.
6-31

6Statistical Signal Processing
Parametric Methods
Parametric methods can yield higher resolutions than nonparametric methods
in cases when the signal length is short. These methods use a different
approach to spectral estimation; instead of trying to estimate the PSD directly
from the data, they model the data as the output of a linear system driven
by white noise, and then attempt to estimate the parameters of that linear
system.
The most commonly used linear system model is the all-pole model,afilter
with all of its zeroes at the origin in the z-plane. The output of such a filter for
white noise input is an autoregressive (AR) process. For this reason, these
methods are sometimes referred to as AR methods of spectral estimation.
The AR methods tend to adequately describe spectra of data that is “peaky,”
that is, data whose PSD is large at certain frequencies. The data in many
practical applications (such as speech) tends to have “peaky spectra” so that
AR models are often useful. In addition, the AR models lead to a system of
linear equations which is relatively simple to solve.
Signal Processing Toolbox AR methods for spectral estimation include:
•Yule-Walker AR method (autocorrelation method)
•Burg method
•Covariance method
•Modified covariance method
All AR methods yield a PSD estimate given by
ˆ()
|ˆ() |
/
Pf Fs ake
p
p
k
pjkfFs
=
−
=
−
∑
1
1
1
22
The different AR methods estimate the parameters slightly differently,
yielding different PSD estimates. The following table provides a summary
of the different AR methods.
6-32
Spectral Analysis
AR Methods
Burg Covariance
Modified
Covariance Yule-Walker
Does not apply
window to data
Does not apply
window to data
Does not apply
window to data
Applies window
to data
Characteristics
Minimizes
the forward
and backward
prediction errors
in the least
squares sense,
with the AR
coefficients
constrained to
satisfy the L-D
recursion
Minimizes
the forward
prediction error
in the least
squares sense
Minimizes
the forward
and backward
prediction errors
in the least
squares sense
Minimizes
the forward
prediction error
in the least
squares sense
(also called
“Autocorrelation
method”)
High resolution
for short data
records
Better resolution
than Y-W
for short
data records
(more accurate
estimates)
High resolution
for short data
records
Performs as well
as other methods
for large data
records
Able to extract
frequencies from
data consisting
of p or more pure
sinusoids
Advantages
Always produces
a stable model
Able to extract
frequencies from
data consisting
of p or more pure
sinusoids
Does not
suffer spectral
line-splitting
Always produces
a stable model
6-33
6Statistical Signal Processing
AR Methods (Continued)
Burg Covariance
Modified
Covariance Yule-Walker
Peak locations
highly dependent
on initial phase
May produce
unstable models
May produce
unstable models
Performs
relatively poorly
for short data
records
May suffer
spectral
line-splitting
for sinusoids in
noise, or when
order is very
large
Peak locations
slightly
dependent on
initial phase
Frequency bias
for estimates of
sinusoids in noise
Disadvantages
Frequency bias
for estimates of
sinusoids in noise
Frequency bias
for estimates of
sinusoids in noise
Minor frequency
bias for estimates
of sinusoids in
noise
Conditions for
Nonsingularity
Order must be
less than or equal
to half the input
frame size
Order must be
less than or equal
to 2/3 the input
frame size
Because of
the biased
estimate, the
autocorrelation
matrix is
guaranteed to
positive-definite,
hence
nonsingular
Yule-Walker AR Method
The Yule-Walker AR method of spectral estimation computes the AR
parameters by solving the following linear system, which give the Yule-Walker
equations in matrix form:
6-34

Spectral Analysis
rr rp
rr rp
rp rp r
() () ( )
() () ( )
()() ()
**
*
01 1
10 2
12 0
…−
…−
−−…
⎛
⎝
⎜
⎜
⎜
⎜
⎞
⎠
⎟⎟
⎟
⎟
⎟…
⎛
⎝
⎜
⎜
⎜
⎜
⎞
⎠
⎟
⎟
⎟
⎟
=…
⎛
⎝
⎜
⎜
⎜
⎜
⎞
⎠
⎟
⎟
⎟
⎟
a
a
ap
r
r
rp
()
()
()
()
()
()
1
2
1
2
In practice, the biased estimate of the autocorrelation is used for the unknown
true autocorrelation.The Yule-Walker AR method produces the same results
as a maximum entropy estimator. For more information, see page 155 of item
[2] in the “Selected Bibliography” on page 6-46.
The use of a biased estimate of the autocorrelation function ensures that
the autocorrelation matrix above is positive definite. Hence, the matrix is
invertible and a solution is guaranteed to exist. Moreover, the AR parameters
thus computed always result in a stable all-pole model. The Yule-Walker
equations can be solved efficiently via Levinson’s algorithm, which takes
advantage of the Hermitian Toeplitz structure of the autocorrelation matrix.
The toolbox object spectrum.yulear and function pyulear implement the
Yule-Walker AR method.
For example, compare the spectrum of a speech signal using Welch’s method
and the Yule-Walker AR method:
load mtlb
Hwelch = spectrum.welch('hamming',256,50);
psd(Hwelch,mtlb,'Fs',Fs,'NFFT',1024)
6-35
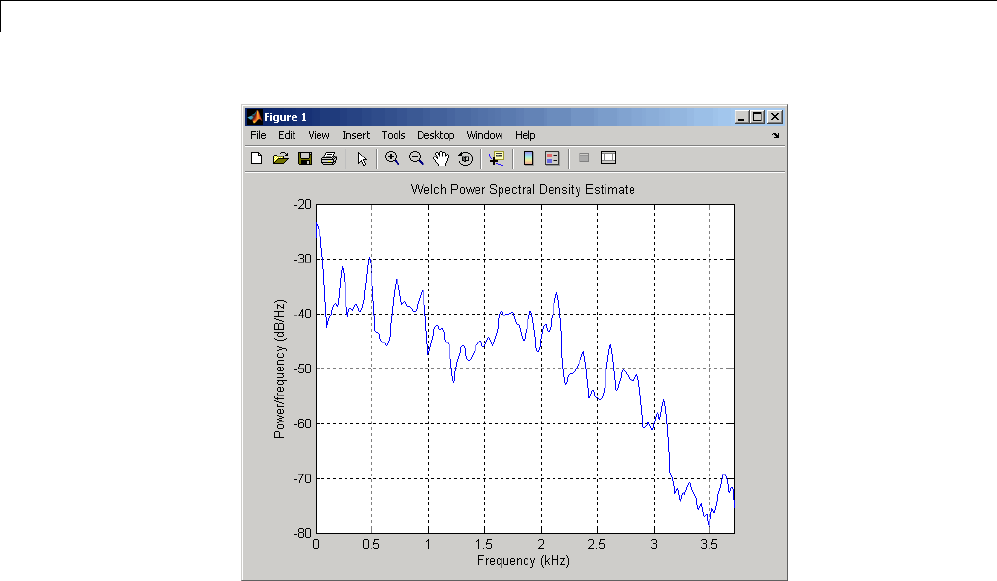
6Statistical Signal Processing
6-36

Spectral Analysis
Hyulear = spectrum.yulear(14);
psd(Hyulear,mtlb,'Fs',Fs,'NFFT',1024)
The Yule-Walker AR spectrum is smoother than the periodogram because of
the simple underlying all-pole model.
Burg Method
The Burg method for AR spectral estimation is based on minimizing the
forward and backward prediction errors while satisfying the Levinson-Durbin
recursion (see Marple [3], Chapter 7, and Proakis [6], Section 12.3.3). In
contrast to other AR estimation methods, the Burg method avoids calculating
the autocorrelation function, and instead estimates the reflection coefficients
directly.
The primary advantages of the Burg method are resolving closely spaced
sinusoids in signals with low noise levels, and estimating short data records,
in which case the AR power spectral density estimates are very close to the
6-37
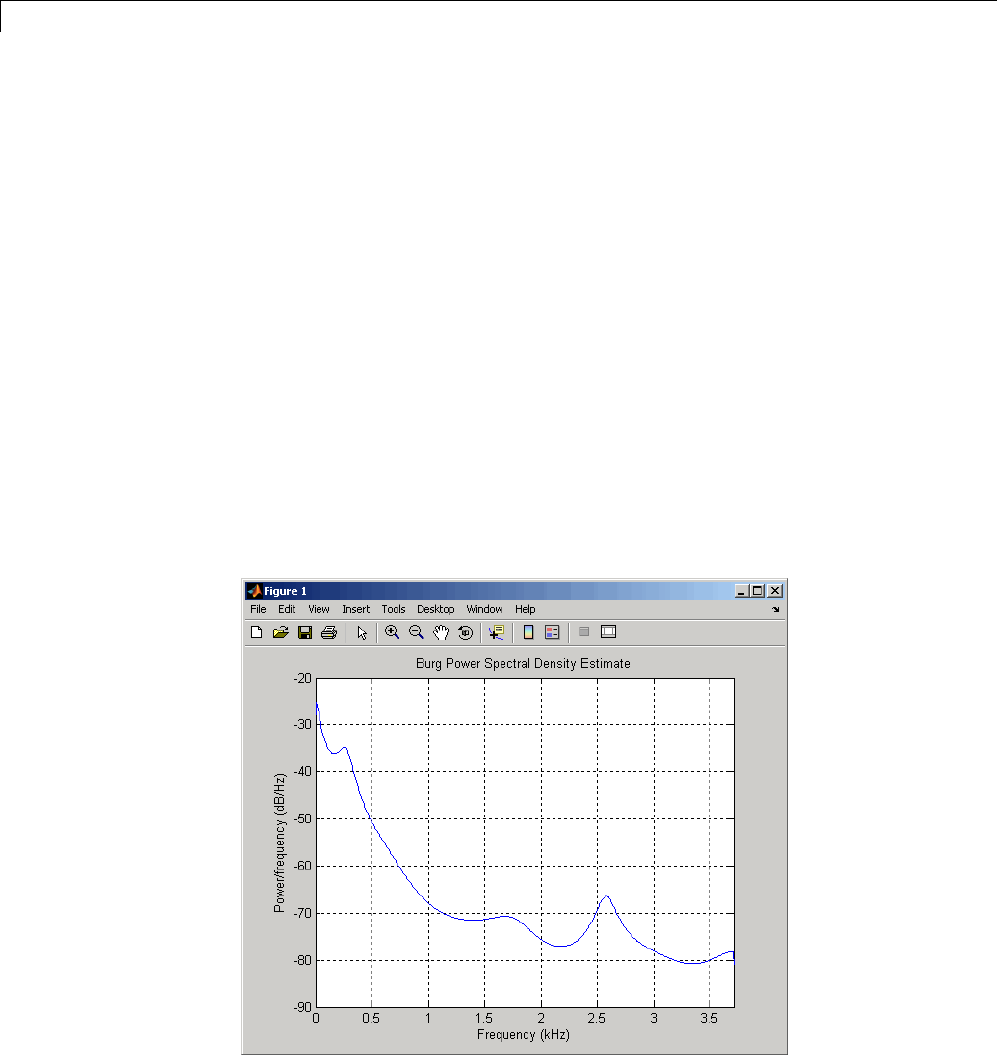
6Statistical Signal Processing
true values. In addition, the Burg method ensures a stable AR model and
is computationally efficient.
The accuracy of the Burg method is lower for high-order models, long data
records, and high signal-to-noise ratios (which can cause line splitting,
or the generation of extraneous peaks in the spectrum estimate). The
spectral density estimate computed by the Burg method is also susceptible
to frequency shifts (relative to the true frequency) resulting from the initial
phase of noisy sinusoidal signals. This effect is magnified when analyzing
short data sequences.
The toolbox object spectrum.burg and function pburg implement the Burg
method. Compare the spectrum of the speech signal generated by both the
Burg method and the Yule-Walker AR method. They are very similar for
large signal lengths:
load mtlb
Hburg = spectrum.burg(14); % 14th order model
psd(Hburg,mtlb(1:512),'Fs',Fs,'NFFT',1024)
6-38
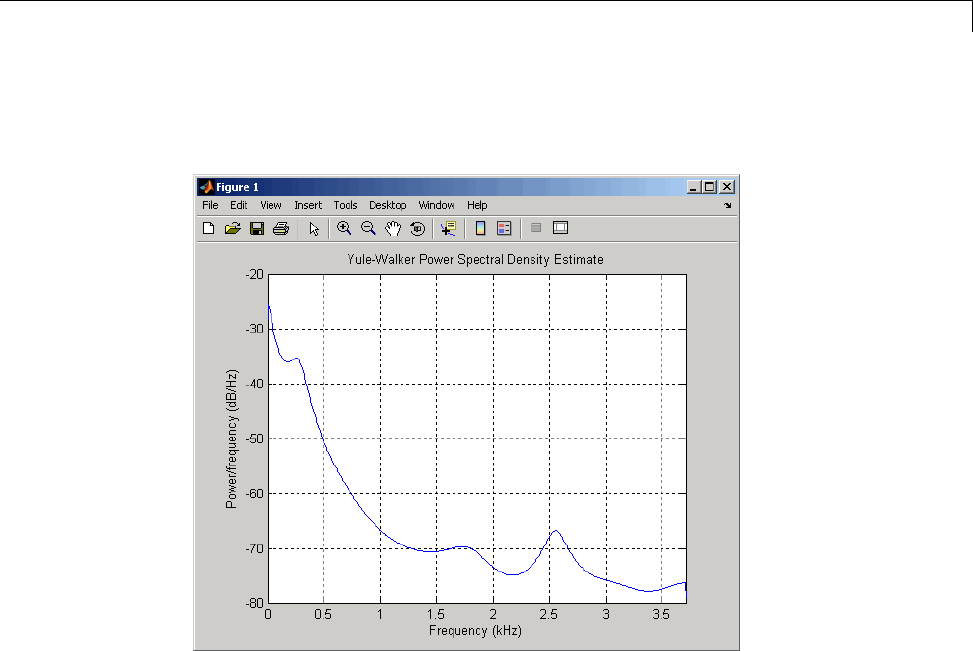
Spectral Analysis
Hyulear = spectrum.yulear(14); % 14th order model
psd(Hyulear,mtlb(1:512),'Fs',Fs,'NFFT',1024)
Compare the spectrum of a noisy signal computed using the Burg method
and the Welch method:
fs = 1000; % Sampling frequency
t = (0:fs)/fs; % One second worth of samples
A = [1 2]; % Sinusoid amplitudes
f = [150;140]; % Sinusoid frequencies
xn = A*sin(2*pi*f*t) + 0.1*randn(size(t));
Hwelch = spectrum.welch('hamming',256,50);
psd(Hwelch,xn,'Fs',fs,'NFFT',1024)
6-39
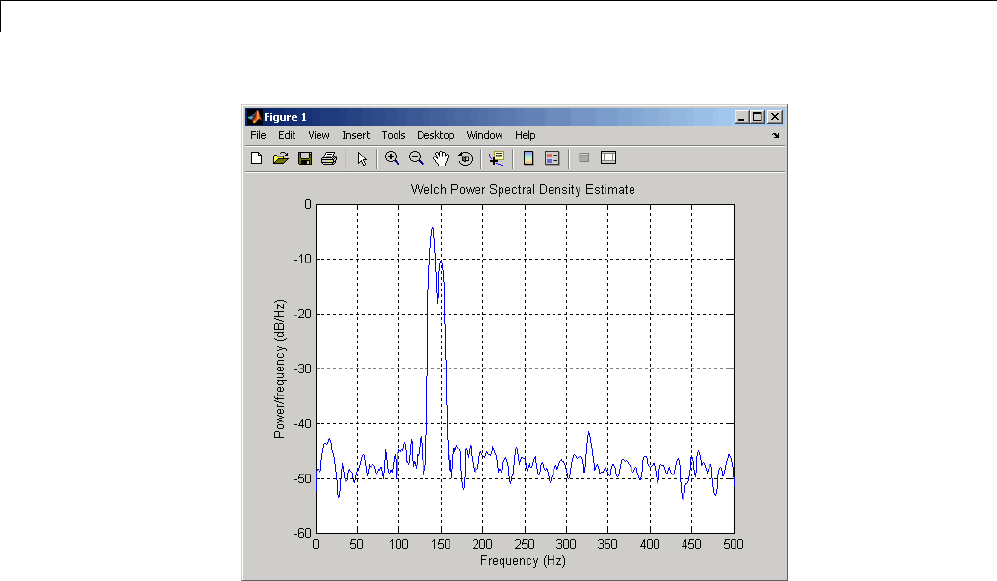
6Statistical Signal Processing
6-40
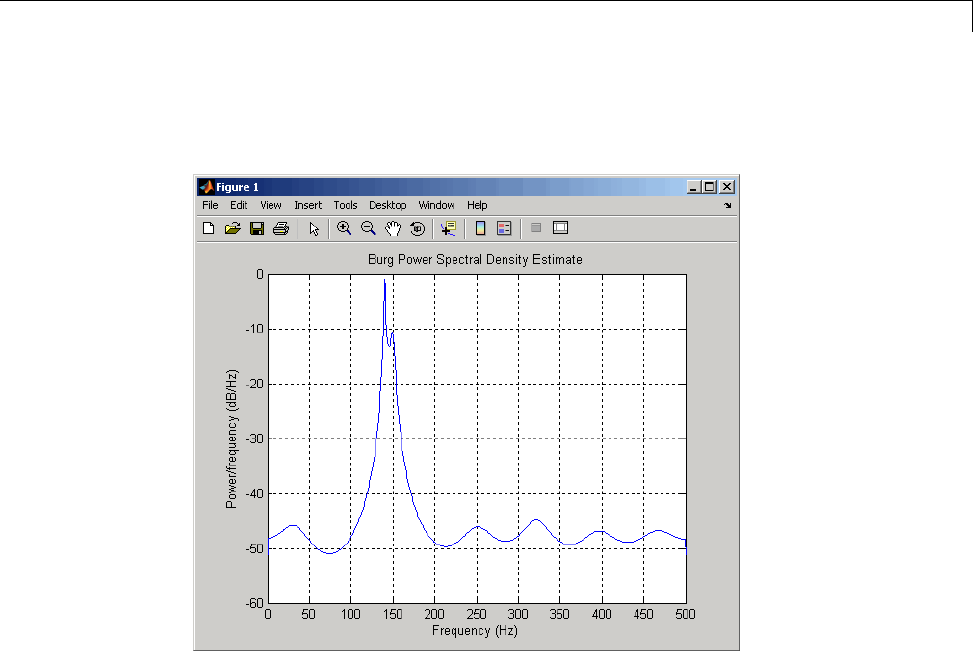
Spectral Analysis
Hburg = spectrum.burg(14);
psd(Hburg,xn,'Fs',fs,'NFFT',1024)
Note that, as the model order for the Burg method is reduced, a frequency
shift due to the initial phase of the sinusoids will become apparent.
Covariance and Modified Covariance Methods
The covariance method for AR spectral estimation is based on minimizing
the forward prediction error. The modified covariance method is based on
minimizing the forward and backward prediction errors. The toolbox object
spectrum.cov and function pcov, and object spectrum.mcov and function
pmcovimplement the respective methods.
Compare the spectrum of the speech signal generated by both the covariance
method and the modified covariance method. They are nearly identical, even
for a short signal length:
6-41
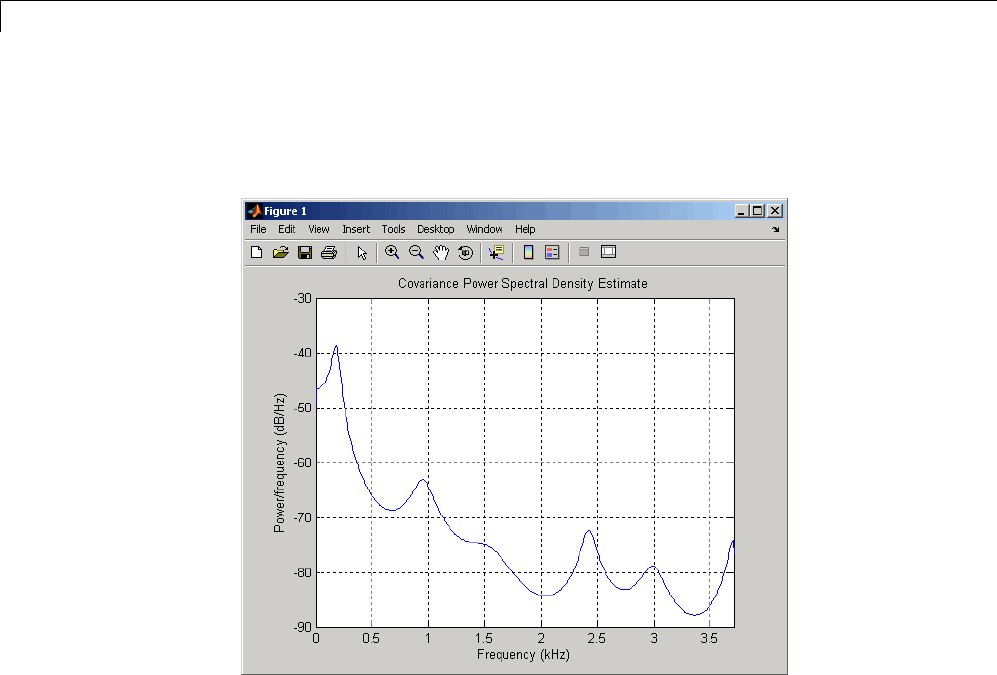
6Statistical Signal Processing
load mtlb
Hcov = spectrum.cov(14); % 14th order model
psd(Hcov,mtlb(1:64),'Fs',Fs,'NFFT',1024)
Hmcov = spectrum.mcov(14); % 14th order model
psd(Hmcov,mtlb(1:64),'Fs',Fs,'NFFT',1024)
6-42
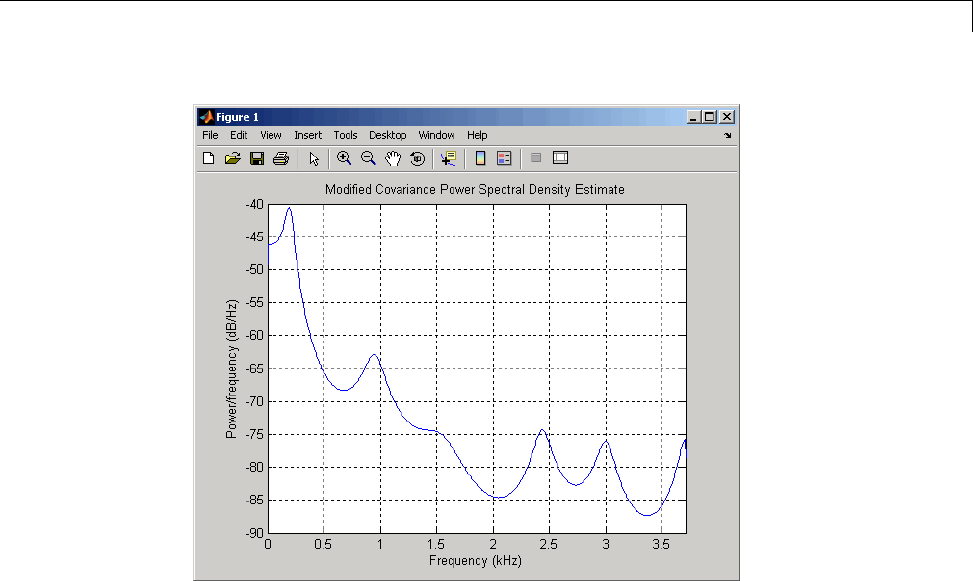
Spectral Analysis
MUSIC and Eigenvector Analysis Methods
The spectrum.music object and pmusic function, and spectrum.eigenvector
object and peig function provide two related spectral analysis methods:
•spectrum.music and pmusic provide the multiple signal classification
(MUSIC) method developed by Schmidt
•spectrum.eigenvector and peig provides the eigenvector (EV) method
developed by Johnson
See Marple [3] (pgs. 373-378) for a summary of these methods.
Both of these methods are frequency estimator techniques based on
eigenanalysis of the autocorrelation matrix. This type of spectral analysis
categorizes the information in a correlation or data matrix, assigning
information to either a signal subspace or a noise subspace.
6-43

6Statistical Signal Processing
Eigenanalysis Overview
Consider a number of complex sinusoids embedded in white noise. You can
write the autocorrelation matrix Rfor this system as the sum of the signal
autocorrelation matrix (S) and the noise autocorrelation matrix (W):
R = S + W. There is a close relationship between the eigenvectors of the signal
autocorrelation matrix and the signal and noise subspaces. The eigenvectors
vof Sspan the same signal subspace as the signal vectors. If the system
contains Mcomplex sinusoids and the order of the autocorrelation matrix is p,
eigenvectors vM+1 through vp+1 span the noise subspace of the autocorrelation
matrix.
Frequency Estimator Functions. To generate their frequency estimates,
eigenanalysis methods calculate functions of the vectors in the signal and
noise subspaces. Both the MUSIC and EV techniques choose a function that
goes to infinity (denominator goes to zero) at one of the sinusoidal frequencies
in the input signal. Using digital technology, the resulting estimate has sharp
peaks at the frequencies of interest; this means that there might not be
infinity values in the vectors.
The MUSIC estimate is given by the formula
ˆ
|( ) |
()P
ef v
f
kp
MHk
MUSIC =
=+
∑
1
1
2
wherethev_karetheeigenvectorsofthenoisesubspaceande(f)isavector
of complex sinusoids.
ef e e e
jf jf jM T
() [ ]
()
=…
−
12421
vrepresents the eigenvectors of the input signal’s correlation matrix; vkis
the kth eigenvector. His the conjugate transpose operator. The eigenvectors
used in the sum correspond to the smallest eigenvalues and span the noise
subspace (pis the size of the signal subspace).
The expression e(f)Hvkis equivalent to a Fourier transform (the vector
e(f) consists of complex exponentials). This form is useful for numeric
6-44
Spectral Analysis
computation because the FFT can be computed for each vkand then the
squared magnitudes can be summed.
The EV method weights the summation by the eigenvalues of the correlation
matrix:
ˆ
|()|
()P
efv
fk
kp
MHk
EV =
=+
∑
-
1
2
The pmusic and peig functions in this toolbox interpret their first input
either as a signal matrix or as a correlation matrix (if the 'corr' input flag is
set). In the former case, the singular value decomposition of the signal matrix
is used to determine the signal and noise subspaces. In the latter case, the
eigenvalue decomposition of the correlation matrix is used to determine the
signal and noise subspaces.
6-45

6Statistical Signal Processing
Selected Bibliography
[1] Hayes, M.H. Statistical Digital Signal Processing and Modeling.New
York: John Wiley & Sons, 1996.
[2] Kay, S.M. Modern Spectral Estimation. Englewood Cliffs, NJ: Prentice
Hall, 1988.
[3] Marple, S.L. Digital Spectral Analysis. Englewood Cliffs, NJ: Prentice
Hall, 1987.
[4] Orfanidis, S.J. Introduction to Signal Processing. Upper Saddle River, NJ:
Prentice Hall, 1996.
[5] Percival, D.B., and A.T. Walden. Spectral Analysis for Physical
Applications: Multitaper and Conventional Univariate Techniques.
Cambridge: Cambridge University Press, 1993.
[6] Proakis, J.G., and D.G. Manolakis. Digital Signal Processing: Principles,
Algorithms, and Applications. Englewood Cliffs, NJ: Prentice Hall, 1996.
[7] Stoica, P., and R. Moses. Introduction to Spectral Analysis. Upper Saddle
River, NJ: Prentice Hall, 1997.
[8] Welch, P.D. “The Use of Fast Fourier Transform for the Estimation of
Power Spectra: A Method Based on Time Averaging Over Short, Modified
Periodograms.” IEEE Trans. Audio Electroacoust.Vol.AU-15(June1967).
Pgs. 70-73.
6-46
7
Special Topics
•“Windows” on page 7-2
•“Parametric Modeling” on page 7-13
•“Resampling” on page 7-21
•“Cepstrum Analysis” on page 7-24
•“FFT-Based Time-Frequency Analysis” on page 7-28
•“Median Filtering” on page 7-29
•“Communications Applications” on page 7-30
•“Deconvolution” on page 7-35
•“Specialized Transforms” on page 7-36
•“Selected Bibliography” on page 7-47
7Special Topics
Windows
In this section...
“Why Use Windows?” on page 7-2
“Available Window Functions” on page 7-2
“Graphical User Interface Tools” on page 7-3
“Basic Shapes” on page 7-3
“Generalized Cosine Windows” on page 7-6
“Kaiser Window” on page 7-8
“Chebyshev Window” on page 7-12
Why Use Windows?
In both digital filter design and spectral estimation, the choice of a windowing
function can play an important role in determining the quality of overall
results. The main role of the window is to damp out the effects of the Gibbs
phenomenon that results from truncation of an infinite series.
Available Window Functions
Window Function
Bartlett-Hann window barthannwin
Bartlett window bartlett
Blackman window blackman
Blackman-Harris window blackmanharris
Bohman window bohmanwin
Chebyshev window chebwin
Flat Top window flattopwin
Gaussian window gausswin
Hamming window hamming
7-2
Windows
Window Function
Hann window hann
Kaiser window kaiser
Nuttall’s Blackman-Harris window nuttallwin
Parzen (de la Valle-Poussin) window parzenwin
Rectangular window rectwin
Tapered cosine window tukeywin
Triangular window triang
Graphical User Interface Tools
Two graphical user interface tools are provided for working with windows in
the Signal Processing Toolbox product:
•Window Design and Analysis Tool (wintool)
•Window Visualization Tool (wvtool)
Refer to the reference pages for these tools for detailed information.
Basic Shapes
The basic window is the rectangular window, a vector of ones of the
appropriate length. A rectangular window of length 50 is
n = 50;
w = rectwin(n);
This toolbox stores windows in column vectors by convention, so an equivalent
expression is
w = ones(50,1);
To use the Window Design and Analysis Tool to create this window, type
wintool
7-3
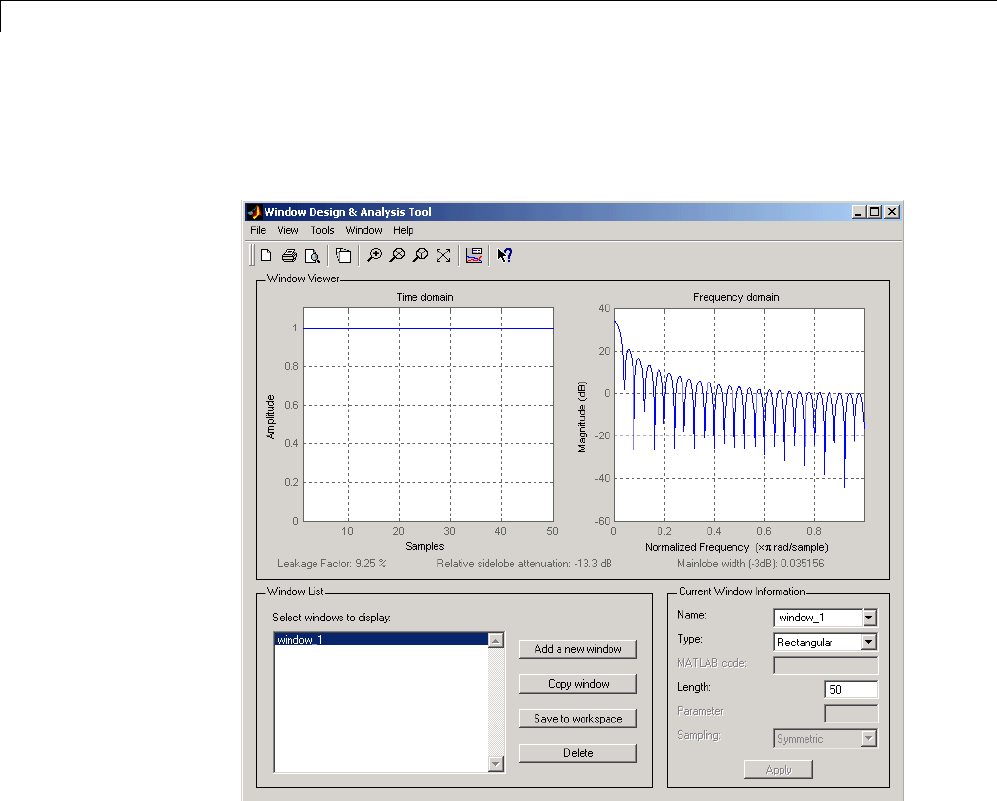
7Special Topics
wintool opens with a default Hamming window. In the Current Window
Information panel, set Type = Rectangular and Length = 50 and then
press Apply.
The Bartlett (or triangular) window is the convolution of two rectangular
windows. The functions bartlett and triang compute similar triangular
windows, with three important differences. The bartlett function always
returns a window with two zeros on the ends of the sequence, so that for n
odd, the center section of bartlett(n+2) is equivalent to triang(n):
Bartlett = bartlett(7);
isequal(Bartlett(2:end-1),triang(5))
% Returns a 1
7-4
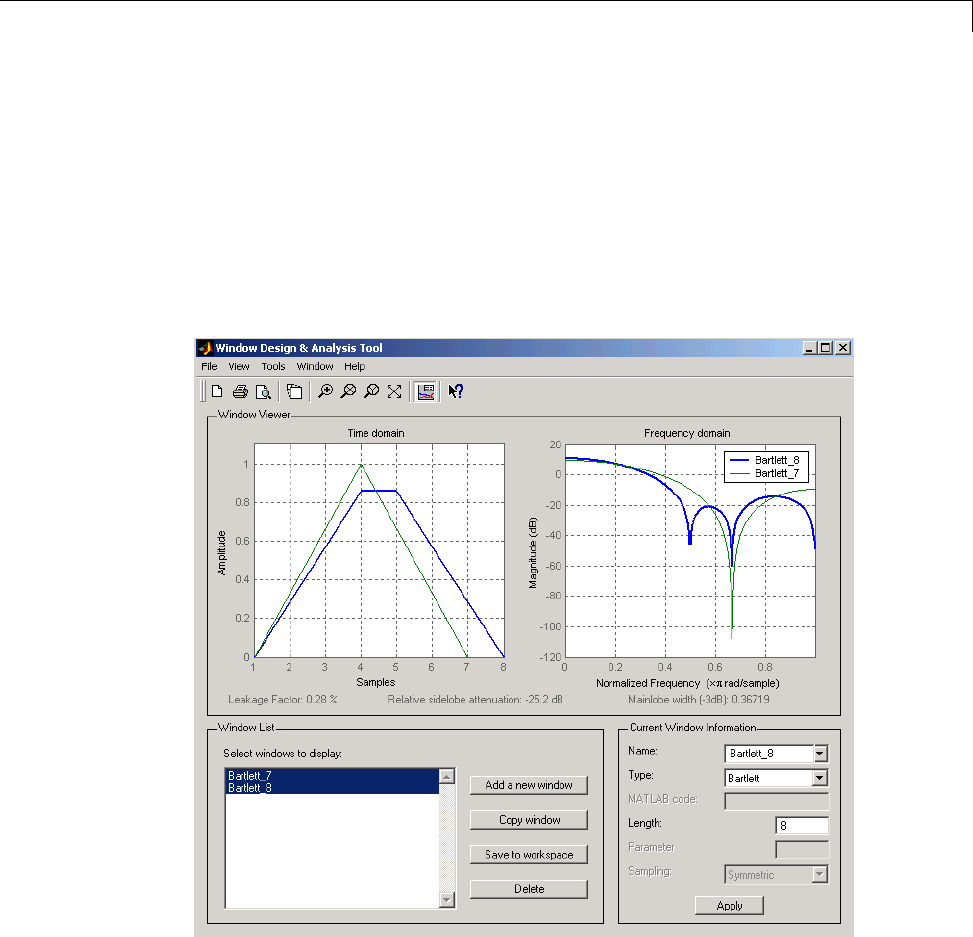
Windows
For neven, bartlett is still the convolution of two rectangular sequences.
There is no standard definition for the triangular window for neven; the
slopes of the line segments of the triang result are slightly steeper than
those of bartlett in this case:
w = bartlett(8);
[w(2:7) triang(6)]
You can see the difference between odd and even Bartlett windows in WinTool.
The final difference between the Bartlett and triangular windows is evident in
the Fourier transforms of these functions. The Fourier transform of a Bartlett
window is negative for neven. The Fourier transform of a triangular window,
however, is always nonnegative.
7-5
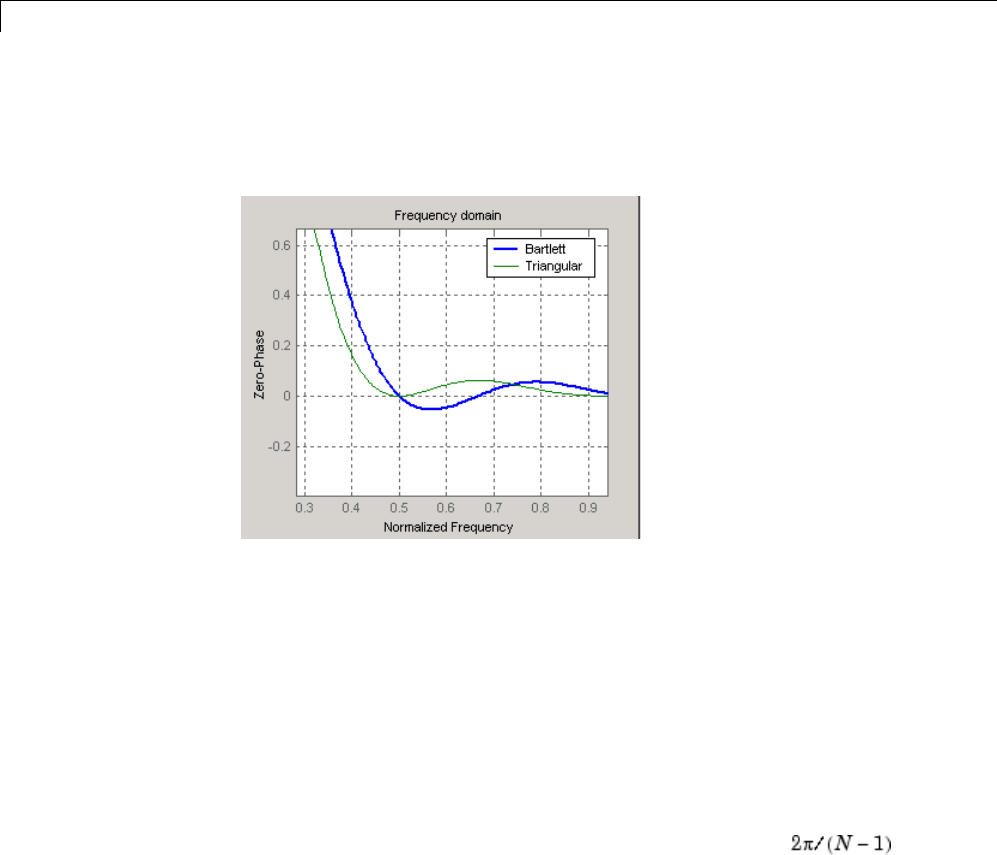
7Special Topics
The following figure, which is a zoomed version of the Frequency domain plot
of 8-point Bartlett and Triangular windows with the y-axis set to Zerophase,
illustrates this difference.
This difference can be important when choosing a window for some
spectral estimation techniques, such as the Blackman-Tukey method.
Blackman-Tukey forms the spectral estimate by calculating the Fourier
transform of the autocorrelation sequence. The resulting estimate might be
negative at some frequencies if the window’s Fourier transform is negative
(see Kay [1], pg. 80).
Generalized Cosine Windows
Blackman, flat top, Hamming, Hann, and rectangular windows are all special
cases of the generalized cosine window. These windows are combinations of
sinusoidal sequences with frequencies that are multiples of ,where
Nis the window length. One special case is the Blackman window:
N = 128;
A = 0.42; B = 0.5; C = 0.08;
ind = (0:N-1)'*2*pi/(N-1);
w = A - B*cos(ind) + C*cos(2*ind);
Changing the values of the constants A,B,andCin the previous expression
generates different generalized cosine windows like the Hamming and Hann
7-6
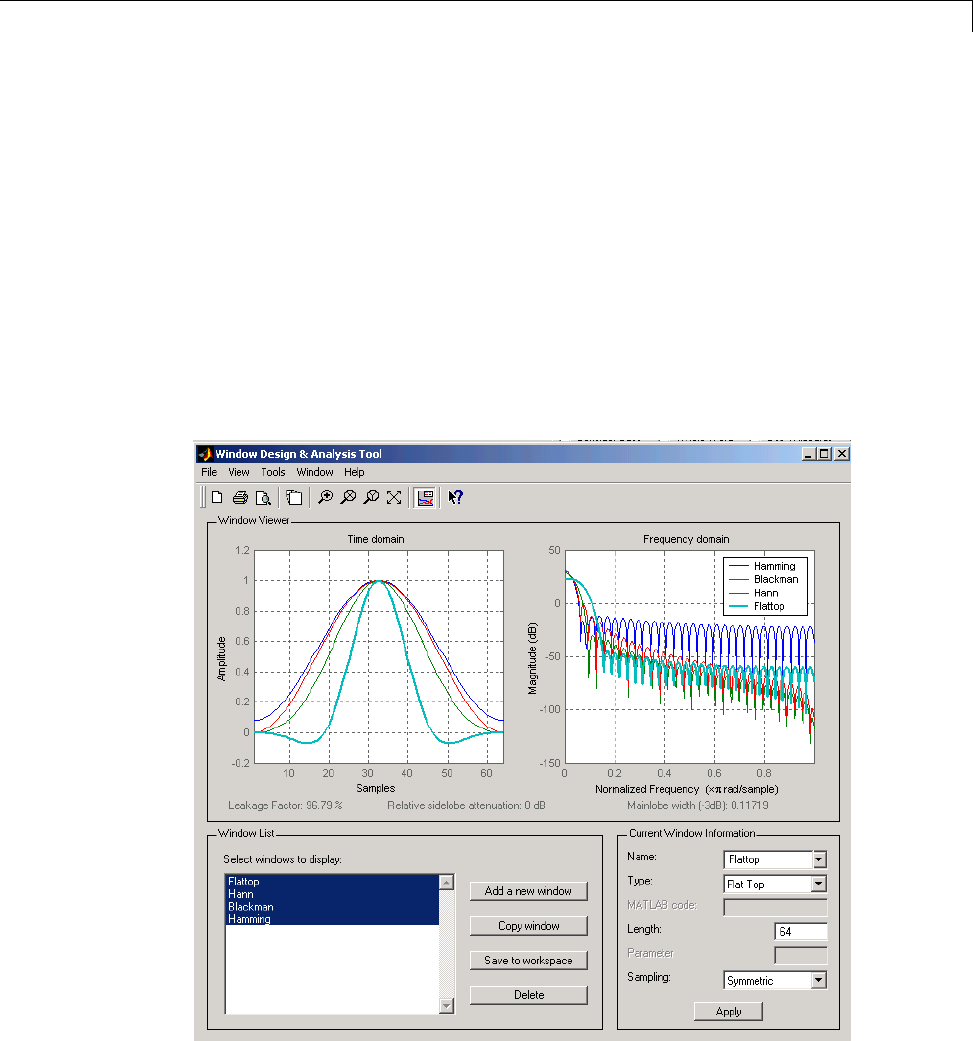
Windows
windows. Adding additional cosine terms of higher frequency generates the
flat top window. The concept behind these windows is that by summing
the individual terms to form the window, the low frequency peaks in the
frequency domain combine in such a way as to decrease sidelobe height. This
has the side effect of increasing the mainlobe width.
The Hamming and Hann windows are two-term generalized cosine windows,
given by A=0.54,B=0.46 for the Hamming and A=0.5,B=0.5 for the Hann.
Note that the definition of the generalized cosine window shown in the earlier
MATLAB code yields zeros at samples 1 and nfor A=0.5 and B=0.5.
This WinTool compares Blackman, Hamming, Hann, and Flat Top windows.
7-7
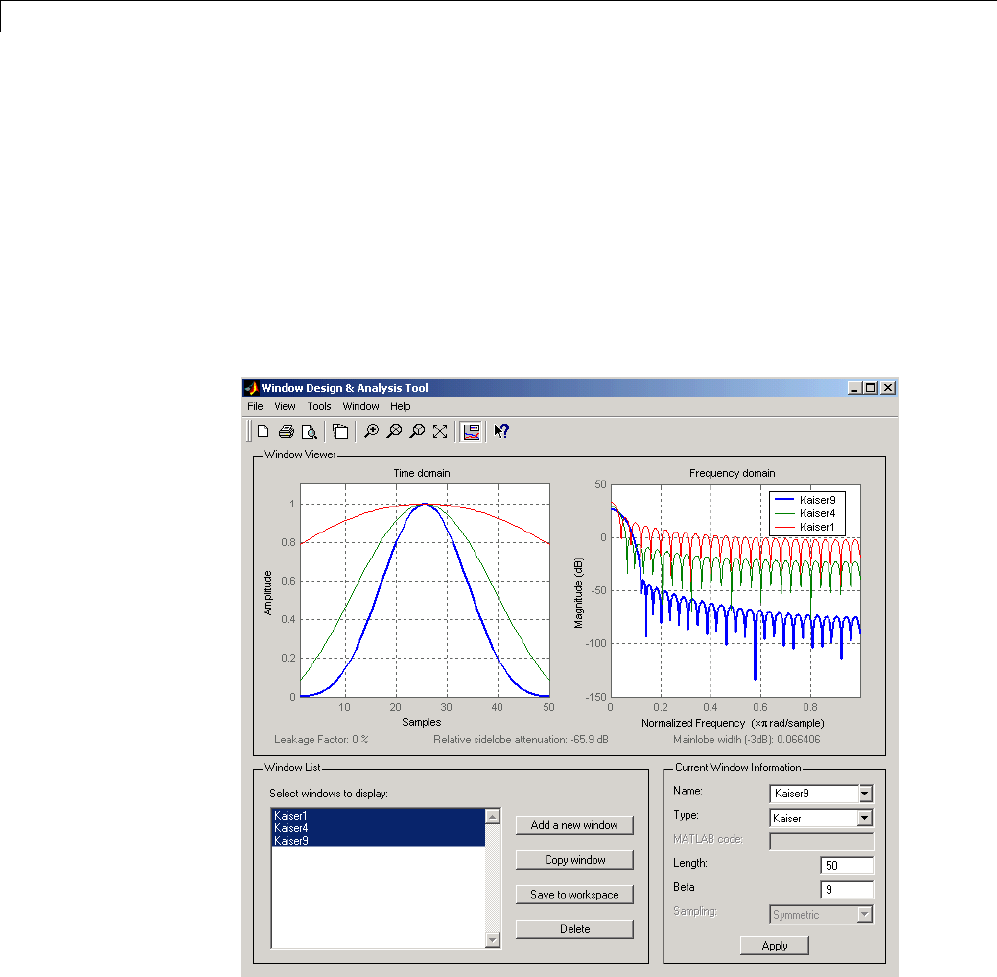
7Special Topics
Kaiser Window
The Kaiser windowis an approximation to the prolate-spheroidal window, for
which the ratio of the mainlobe energy to the sidelobe energy is maximized.
For a Kaiser window of a particular length, the parameter βcontrols the
sidelobe height. For a given β, the sidelobe height is fixed with respect to
window length.Thestatementkaiser(n,beta) computes a length nKaiser
window with parameter beta.
Examples of Kaiser windows with length 50 and beta parameters of 1, 4, and
9areshowninthis wintool example.
To create these Kaiser windows using the MATLAB command line,
n=50;
7-8
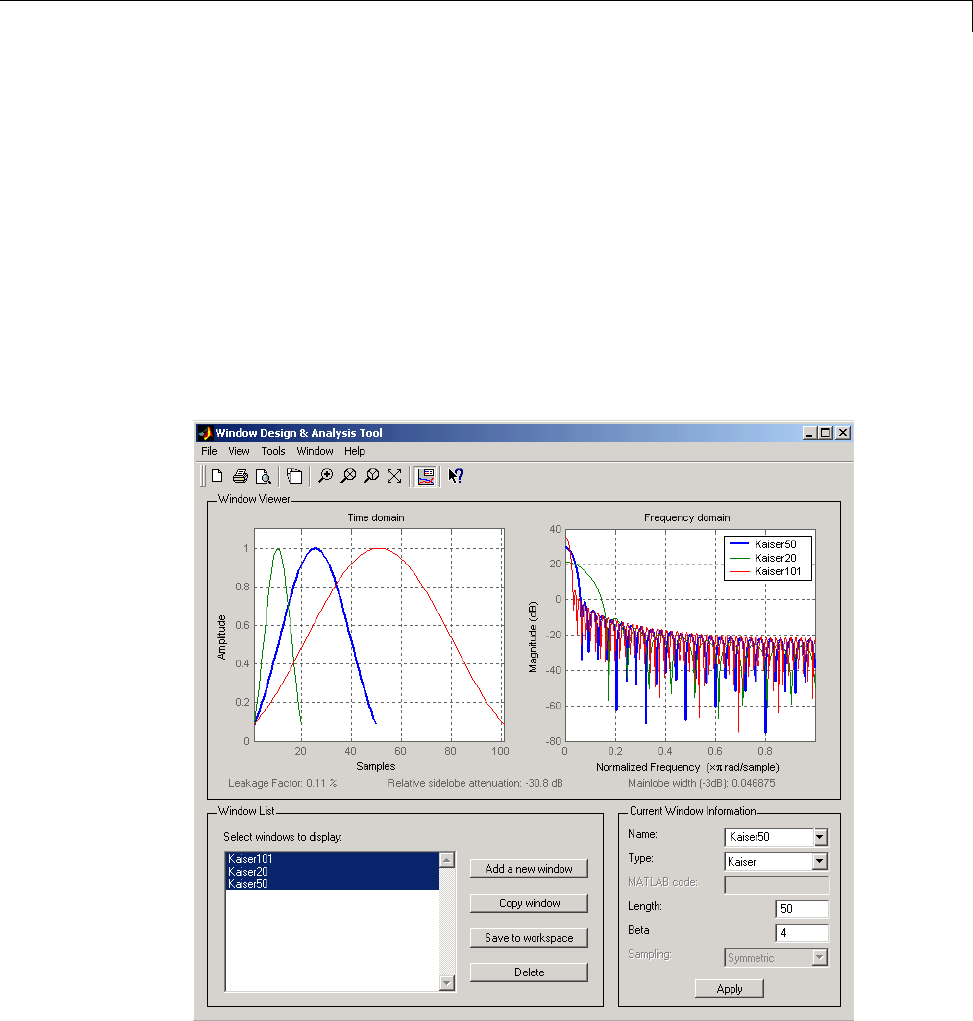
Windows
w1 = kaiser(n,1);
w2 = kaiser(n,4);
w3 = kaiser(n,9);
[W1,f] = freqz(w1/sum(w1),1,512,2);
[W2,f] = freqz(w2/sum(w2),1,512,2);
[W3,f] = freqz(w3/sum(w3),1,512,2);
plot(f,20*log10(abs([W1 W2 W3]))); grid;
legend('beta = 1','beta = 4','beta = 9',3)
As βincreases, the sidelobe height decreases and the mainlobe width
increases. This wintool shows how the sidelobeheightstaysthesamefora
fixed βparameter as the length is varied.
To create these Kaiser windows using the MATLAB command line:
7-9
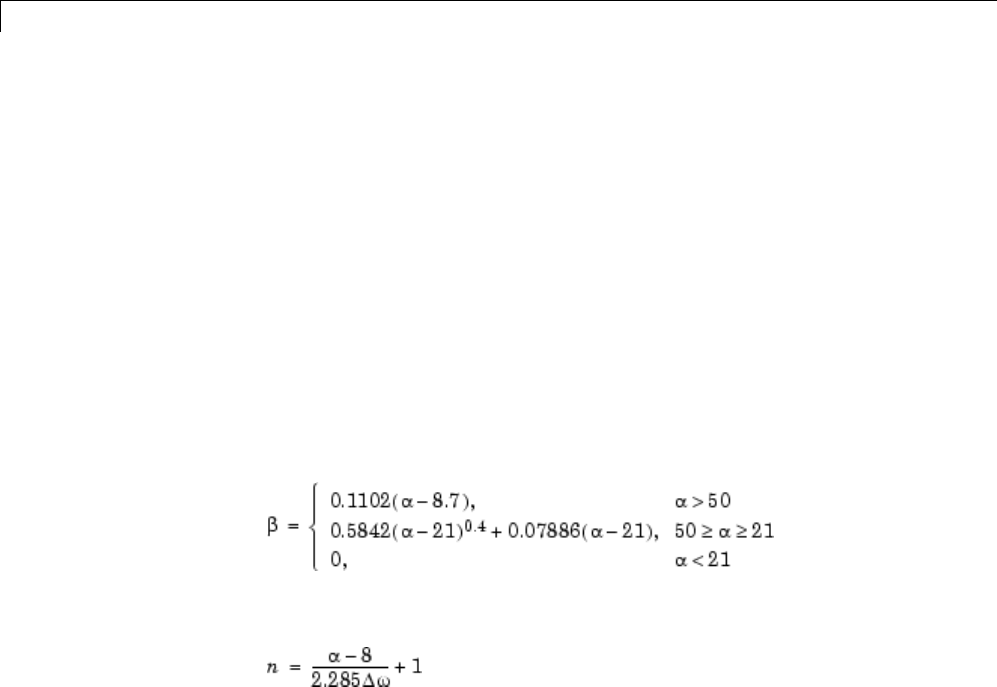
7Special Topics
w1 = kaiser(50,4);
w2 = kaiser(20,4);
w3 = kaiser(101,4);
[W1,f] = freqz(w1/sum(w1),1,512,2);
[W2,f] = freqz(w2/sum(w2),1,512,2);
[W3,f] = freqz(w3/sum(w3),1,512,2);
plot(f,20*log10(abs([W1 W2 W3]))); grid;
legend('length = 50','length = 20','length = 101')
Kaiser Windows in FIR Design
TherearetwodesignformulasthatcanhelpyoudesignFIRfilterstomeet
a set of filter specifications using a Kaiser window. To achieve a sidelobe
height of -αdB, the beta parameter is
For a transition width of Δω rad/s, use the length
Filters designed using these heuristics will meet the specifications
approximately, but you should verify this. To design a lowpass filter with
cutoff frequency 0.5πrad/s, transition width 0.2πrad/s, and 40 dB of
attenuation in the stopband, try
[n,wn,beta] = kaiserord([0.4 0.6]*pi,[1 0],[0.01 0.01],2*pi);
h = fir1(n,wn,kaiser(n+1,beta),'noscale');
The kaiserord function estimates the filter order, cutoff frequency, and
Kaiser window beta parameter needed to meet a given set of frequency
domain specifications.
7-10
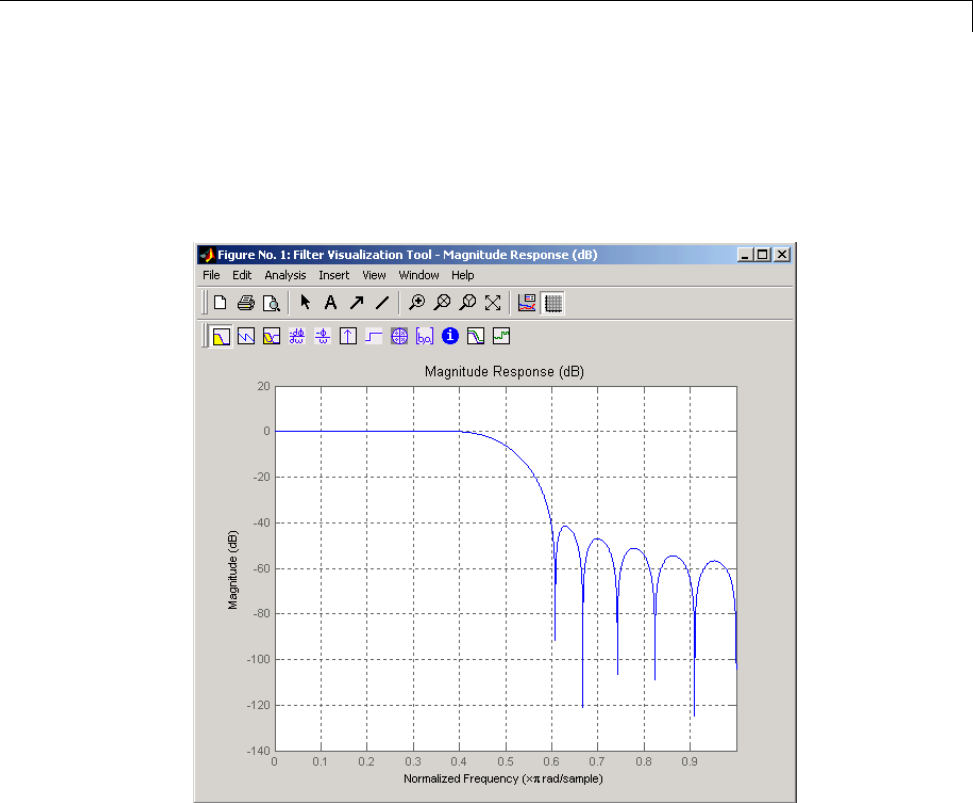
Windows
Therippleinthepassbandisroughlythesameastherippleinthestopband.
As you can see from the frequency response, this filter nearly meets the
specifications:
fvtool(h,1);
7-11

7Special Topics
Chebyshev Window
The Chebyshev window minimizes the mainlobe width, given a particular
sidelobe height. It is characterized by an equiripple behavior, that is, its
sidelobes all have the same height.
As shown in the Time Domain plot, the Chebyshev window has large spikes
at its outer samples.
For a detailed discussion of the characteristics and applications of the various
window types, see Oppenheim and Schafer [3], pgs. 444-462, and Parks and
Burrus [4], pgs. 71-73.
7-12
Parametric Modeling
Parametric Modeling
In this section...
“What is Parametric Modeling” on page 7-13
“Available Parametric Modeling Functions” on page 7-13
“Time-Domain Based Modeling” on page 7-14
“Frequency-Domain Based Modeling” on page 7-18
What is Parametric Modeling
Parametric modeling techniques find the parameters for a mathematical
model describing a signal, system, or process. These techniques use known
information about the system to determine the model. Applications for
parametric modeling include speech and music synthesis, data compression,
high-resolution spectral estimation, communications, manufacturing, and
simulation.
Available Parametric Modeling Functions
The toolbox parametric modeling functions operate with the rational transfer
function model. Given appropriate information about an unknown system
(impulse or frequency response data, or input and output sequences), these
functions find the coefficients of a linear system that models the system.
One important application of the parametric modeling functions is in the
design of filters that have a prescribed time or frequency response.
Here is a summary of the parametric modeling functions in this toolbox.
7-13
7Special Topics
Domain Functions Description
arburg Generate all-pole filter coefficients that
model an input data sequence using the
Levinson-Durbin algorithm.
arcov Generate all-pole filter coefficients
that model an input data sequence by
minimizing the forward prediction error.
armcov Generate all-pole filter coefficients
that model an input data sequence by
minimizing the forward and backward
prediction errors.
aryule Generate all-pole filter coefficients that
model an input data sequence using an
estimate of the autocorrelation function.
lpc,levinson Linear Predictive Coding. Generate
all-pole recursive filter whose impulse
response matches a given sequence.
prony Generate IIR filter whose impulse
response matches a given sequence.
Time
stmcb Find IIR filter whose output, given a
specified input sequence, matches a given
output sequence.
Frequency invfreqz,
invfreqs
Generate digital or analog filter
coefficients given complex frequency
response data.
Time-Domain Based Modeling
The lpc,prony,andstmcb functions find the coefficients of a digital rational
transfer function that approximates a given time-domain impulse response.
The algorithms differ in complexity and accuracy of the resulting model.
Linear Prediction
Linear prediction modeling assumes that each output sample of a signal,
x(k), is a linear combination of the past noutputs (that is, it can be linearly
7-14
Parametric Modeling
predicted from these outputs), and that the coefficients are constant from
sample to sample:
An nth-order all-pole model of a signal xis
a = lpc(x,n)
To illustrate lpc, create a sample signal that is the impulse response of an
all-pole filter with additive white noise:
x = impz(1,[1 0.1 0.1 0.1 0.1],10) + randn(10,1)/10;
The coefficients for a fourth-order all-pole filter that models the system are
a = lpc(x,4)
lpc first calls xcorr to find a biased estimate of the correlation function of x,
and then uses the Levinson-Durbin recursion, implemented in the levinson
function, to find the model coefficients a. The Levinson-Durbin recursion is a
fast algorithm for solving a system of symmetric Toeplitz linear equations.
lpc’s entire algorithm for n=4is
r = xcorr(x);
r(1:length(x)-1) = []; % Remove corr. at negative lags
a = levinson(r,4)
You could form the linear prediction coefficients with other assumptions by
passing a different correlation estimate to levinson, such as the biased
correlation estimate:
r = xcorr(x,'biased');
r(1:length(x)-1) = []; % Remove corr. at negative lags
a = levinson(r,4)
7-15

7Special Topics
Prony’s Method (ARMA Modeling)
The prony function models a signal using a specified number of poles and
zeros. Given a sequence xand numerator and denominator orders nand m,
respectively, the statement
[b,a] = prony(x,n,m)
finds the numerator and denominator coefficients of an IIR filter whose
impulse response approximates the sequence x.
The prony function implements the method described in [4] Parks and Burrus
(pgs. 226-228). This method uses a variation of the covariance method of AR
modeling to find the denominator coefficients a, and then finds the numerator
coefficients bfor which the resulting filter’s impulse response matches exactly
the first n+1samples of x. The filter is not necessarily stable, but it can
potentially recover the coefficients exactly if the data sequence is truly an
autoregressive moving-average (ARMA) process of the correct order.
Note The functions prony and stmcb (described next) are more accurately
described as ARX models in system identification terminology. ARMA
modeling assumes noise only at the inputs, while ARX assumes an external
input. prony and stmcb know the input signal: it is an impulse for prony
and is arbitrary for stmcb.
A model for the test sequence x(from the earlier lpc example) using a
third-order IIR filter is
[b,a] = prony(x,3,3)
The impz command shows how well this filter’s impulse response matches
the original sequence:
format long
[x impz(b,a,10)]
Notice that the first four samples match exactly. For an example of exact
recovery, recover the coefficients of a Butterworth filter from its impulse
response:
7-16

Parametric Modeling
[b,a] = butter(4,.2);
h = impz(b,a,26);
[bb,aa] = prony(h,4,4);
Try this example; you’ll see that bb and aa match the original filter coefficients
to within a tolerance of 10-13.
Steiglitz-McBride Method (ARMA Modeling)
The stmcb function determines the coefficients for the system b(z)/a(z)given
an approximate impulse response x, as well as the desired number of zeros
and poles. This function identifies an unknown system based on both input
and output sequences that describe the system’s behavior, or just the impulse
response of the system. In its default mode, stmcb works like prony.
[b,a] = stmcb(x,3,3)
stmcb also finds systems that match given input and output sequences:
y = filter(1,[1 1],x); % Create an output signal.
[b,a] = stmcb(y,x,0,1)
In this example, stmcb correctly identifies the system used to create yfrom x.
The Steiglitz-McBride method is a fast iterative algorithm that solves for
the numerator and denominator coefficients simultaneously in an attempt
to minimize the signal error between the filter output and the given output
signal. This algorithm usually converges rapidly, but might not converge
if the model order is too large. As for prony,stmcb’s resulting filter is not
necessarily stable due to its exact modeling approach.
stmcb provides control over several important algorithmic parameters; modify
these parameters if you are having trouble modeling the data. To change the
number of iterations from the default of five and provide an initial estimate
for the denominator coefficients:
n = 10; % Number of iterations
a = lpc(x,3); % Initial estimates for denominator
[b,a] = stmcb(x,3,3,n,a);
7-17

7Special Topics
The function uses an all-pole model created with prony as an initial estimate
when you do not provide one of your own.
To compare the functions lpc,prony,andstmcb, compute the signal error
in each case:
a1 = lpc(x,3);
[b2,a2] = prony(x,3,3);
[b3,a3] = stmcb(x,3,3);
[x-impz(1,a1,10) x-impz(b2,a2,10) x-impz(b3,a3,10)]
In comparing modeling capabilities for a given order IIR model, the last result
shows that for this example, stmcb performs best, followed by prony,then
lpc. This relative performance is typical of the modeling functions.
Frequency-Domain Based Modeling
The invfreqs and invfreqz functions implement the inverse operations of
freqs and freqz; they find an analog or digital transfer function of a specified
order that matches a given complex frequency response. Though the following
examples demonstrate invfreqz, the discussion also applies to invfreqs.
To recover the original filter coefficients from the frequency response of a
simple digital filter:
[b,a] = butter(4,0.4) % Design Butterworth lowpass
[h,w] = freqz(b,a,64); % Compute frequency response
[b4,a4] = invfreqz(h,w,4,4) % Model: n = 4, m = 4
The vector of frequencies whas the units in rad/sample, and the frequencies
need not be equally spaced. invfreqz finds a filter of any order to fit the
frequency data; a third-order example is
[b4,a4] = invfreqz(h,w,3,3) % Find third-order IIR
Both invfreqs and invfreqz design filters with real coefficients; for a data
pointatpositivefrequencyf, the functions fit the frequency response at both
fand -f.
7-18
Parametric Modeling
By default invfreqz uses an equation error method to identify the best model
from the data. This finds band ain
by creating a system of linear equations and solving them with the MATLAB
\operator. Here A(w(k)) and B(w(k)) are the Fourier transforms of the
polynomials aand brespectively at the frequency w(k), and nis the number
of frequency points (the length of hand w). wt(k) weights the error relative
to the error at different frequencies. The syntax
invfreqz(h,w,n,m,wt)
includes a weighting vector. In this mode, the filter resulting from invfreqz
is not guaranteed to be stable.
invfreqz provides a superior (“output-error”) algorithm that solves the direct
problem of minimizing the weighted sum of the squared error between the
actual frequency response points and the desired response
To use this algorithm, specify a parameter for the iteration count after the
weight vector parameter:
wt = ones(size(w)); % Create unity weighting vector
[b30,a30] = invfreqz(h,w,3,3,wt,30) % 30 iterations
The resulting filter is always stable.
Graphically compare the results of the first and second algorithms to the
original Butterworth filter with FVTool (and select the Magnitude and Phase
Responses):
fvtool(b,a,b4,a4,b30,a30)
7-19
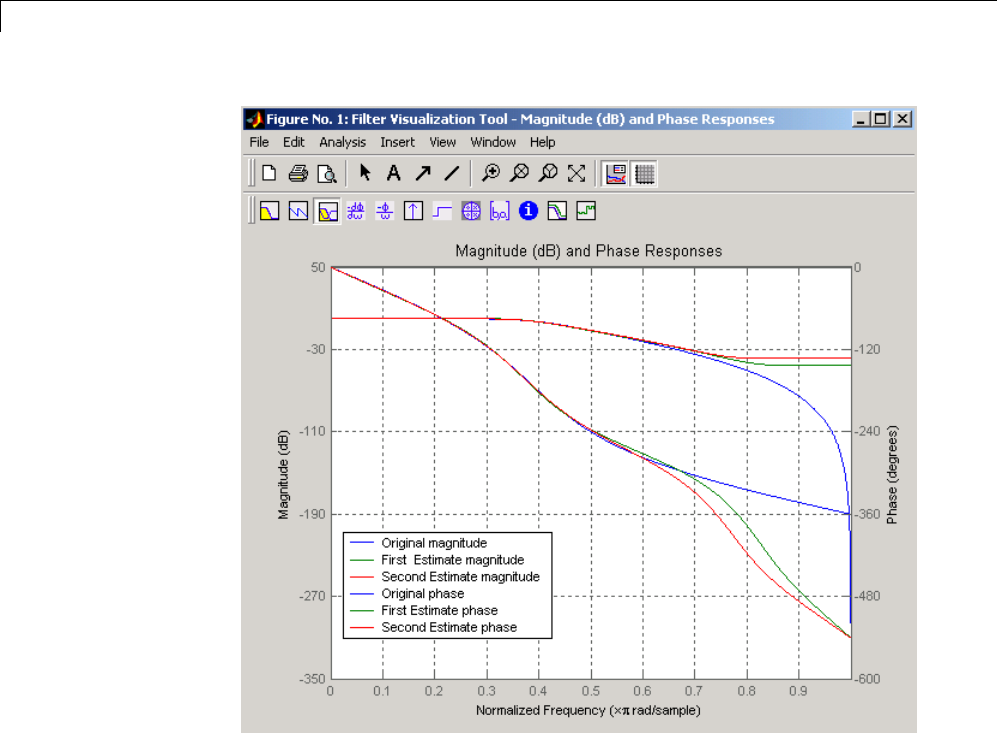
7Special Topics
To verify the superiority of the fit numerically, type
sum(abs(h-freqz(b4,a4,w)).^2) % Total error, algorithm 1
sum(abs(h-freqz(b30,a30,w)).^2) % Total error, algorithm 2
7-20
Resampling
Resampling
In this section...
“Available Resampling Functions” on page 7-21
“resample Function” on page 7-21
“decimate and interp Functions” on page 7-23
“upfirdn Function” on page 7-23
“spline Function” on page 7-23
Available Resampling Functions
The toolbox provides a number of functions that resample a signal at a higher
or lower rate.
OperationFunction
Apply FIRfilterwith
resampling
upfirdn
Cubic spline interpolation spline
Decimation decimate
Interpolation interp
Other 1-D interpolation interp1
Resample at new rate resample
resample Function
The resample function changes the sampling rate for a sequence to any rate
that is a ratio of two integers. The basic syntax for resample is
y= resample(x,p,q)
where the function resamples the sequence xat p/q times the original
sampling rate. The length of the result yis p/q times the length of x.
7-21

7Special Topics
One resampling application is the conversion of digitized audio signals from
onesamplingratetoanother,suchasfrom48kHz(thedigitalaudiotape
standard) to 44.1 kHz (the compact disc standard).
The example file contains a length 4001 vector of speech sampled at 7418 Hz:
clear
load mtlb
whos
Name Size Bytes Class
Fs 1x1 8 double array
mtlb 4001x1 32008 double array
Grand total is 4002 elements using 32016 bytes
Fs
Fs =
7418
To play this speech signal on a workstation that can only play sound at
8192 Hz, use the rat function to find integers pand qthat yield the correct
resampling factor:
[p,q] = rat(8192/Fs,0.0001)
p=
127
q=
115
Since p/q*Fs = 8192.05 Hz, the tolerance of 0.0001 is acceptable; to
resample the signal at very close to 8192 Hz:
y = resample(mtlb,p,q);
resample applies a lowpass filter to the input sequence to prevent aliasing
during resampling. It designs this filter using the firls function with a
Kaiser window. The syntax
resample(x,p,q,l,beta)
7-22

Resampling
controls the filter’s length and the beta parameter of the Kaiser window.
Alternatively, use the function intfilt to design an interpolation filter b
and use it with
resample(x,p,q,b)
decimate and interp Functions
The decimate and interp functions do the same thing as resample with p=1
and q=1, respectively. These functions provide different anti-alias filtering
options, and they incur a slight signal delay due to filtering. The interp
function is significantly less efficient than the resample function with q=1.
upfirdn Function
The toolbox also contains a function, upfirdn,thatappliesanFIRfiltertoan
input sequence and outputs the filtered sequence at a sample rate different
than its original. See “Multirate Filter Bank Implementation” on page 1-8.
spline Function
The standard MATLAB environment contains a function, spline,thatworks
with irregularly spaced data. The MATLAB function interp1 performs
interpolation, or table lookup, using various methods including linear and
cubic interpolation.
7-23
7Special Topics
Cepstrum Analysis
In this section...
“What Is a Cepstrum?” on page 7-24
“Inverse Complex Cepstrum” on page 7-27
What Is a Cepstrum?
Cepstrum analysis is a nonlinear signal processing technique with a variety
of applications in areas such as speech and image processing.
The complex cepstrum for a sequence xis calculated by finding the complex
natural logarithm of the Fourier transform of x, then the inverse Fourier
transform of the resulting sequence.
The toolbox function cceps performs this operation, estimating the complex
cepstrum for an input sequence. It returns a real sequence the same size
as the input sequence:
xhat = cceps(x)
For sequences that have roots on the unit circle, cepstrum analysis has
numerical problems. See Oppenheim and Schafer [2] for information.
The complex cepstrum transformation is central to the theory and application
of homomorphic systems, that is, systems that obey certain general rules
of superposition. See Oppenheim and Schafer [3] for a discussion of the
complex cepstrum and homomorphic transformations, with details on speech
processing applications.
Try using cceps in an echo detection application. First, create a 45 Hz sine
wave sampled at 100 Hz:
t = 0:0.01:1.27;
s1 = sin(2*pi*45*t);
7-24
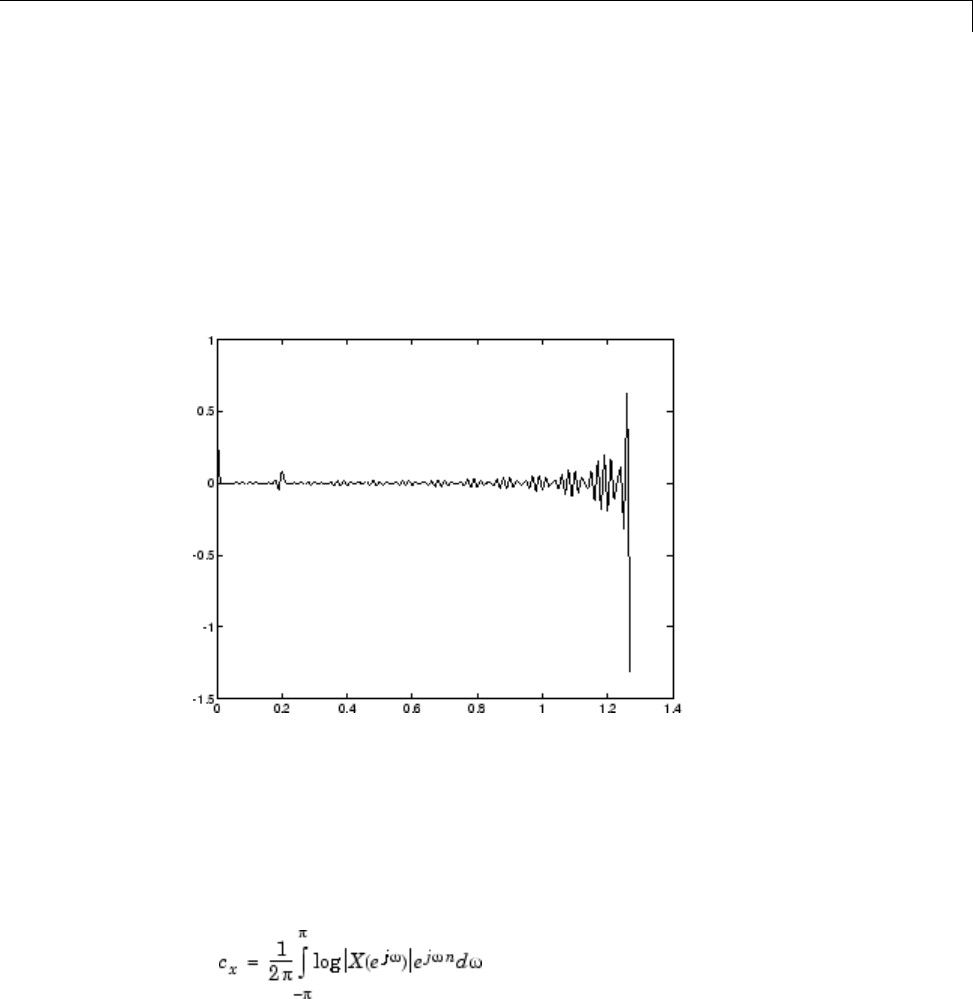
Cepstrum Analysis
Add an echo of the signal, with half the amplitude, 0.2 seconds after the
beginning of the signal.
s2 = s1 + 0.5*[zeros(1,20) s1(1:108)];
The complex cepstrum of this new signal is
c = cceps(s2);
plot(t,c)
Note that the complex cepstrum shows a peak at 0.2 seconds, indicating the
echo.
The real cepstrum of a signal x, sometimes called simply the cepstrum, is
calculated by determining the natural logarithm of magnitude of the Fourier
transform of x, then obtaining the inverse Fourier transform of the resulting
sequence.
7-25
7Special Topics
The toolbox function rceps performs this operation, returning the real
cepstrum for a sequence x. The returned sequence is a real-valued vector the
same size as the input vector:
y = rceps(x)
By definition, you cannot reconstruct the original sequence from its real
cepstrum transformation, as the real cepstrum is based only on the magnitude
of the Fourier transform for the sequence (see Oppenheim and Schafer [3]).
The rceps function also returns a unique minimum-phase sequence that
has the same real cepstrum as x. To obtain both the real cepstrum and the
minimum phase reconstruction for a sequence, use
[y,ym] = rceps(x)
where yis the real cepstrum and ym is the minimum phase reconstruction
of x. The following example shows that one output of rceps is a unique
minimum-phase sequence with the same real cepstrum as x.
y = [4 1 5]; % Non-minimum phase sequence
[xhat,yhat] = rceps(y);
xhat2= rceps(yhat);
[xhat' xhat2']
ans =
1.6225 1.6225
0.3400 0.3400
0.3400 0.3400
Summary of Cepstrum Functions
The Signal Processing Toolbox product provides three functions for cepstrum
analysis:
Operation Function
Complex cepstrum cceps
Inverse complex cepstrum icceps
Real cepstrum rceps
7-26

Cepstrum Analysis
Inverse Complex Cepstrum
To invert the complex cepstrum, use the icceps function. Inversion is
complicated by the fact that the cceps function performs a data dependent
phase modification so that the unwrapped phase of its input is continuous at
zero frequency. The phase modification is equivalent to an integer delay. This
delay term is returned by cceps if you ask for a second output. For example:
x = 1:10;
[xhat,delay] = cceps(x)
xhat =
Columns 1 through 4
2.2428 -0.0420 -0.0210 0.0045
Columns 5 through 8
0.0366 0.0788 0.1386 0.2327
Columns 9 through 10
0.4114 0.9249
delay =
1
To invert the complex cepstrum, use icceps with the original delay parameter:
icc = icceps(xhat,2)
ans =
Columns 1 through 4
2.0000 3.0000 4.0000 5.0000
Columns 5 through 8
6.0000 7.0000 8.0000 9.0000
Columns 9 through 10
10.0000 1.0000
Asshownintheaboveexample,with any modification of the complex
cepstrum, the original delay term may no longer be valid. You will not be able
to invert the complex cepstrum exactly.
7-27
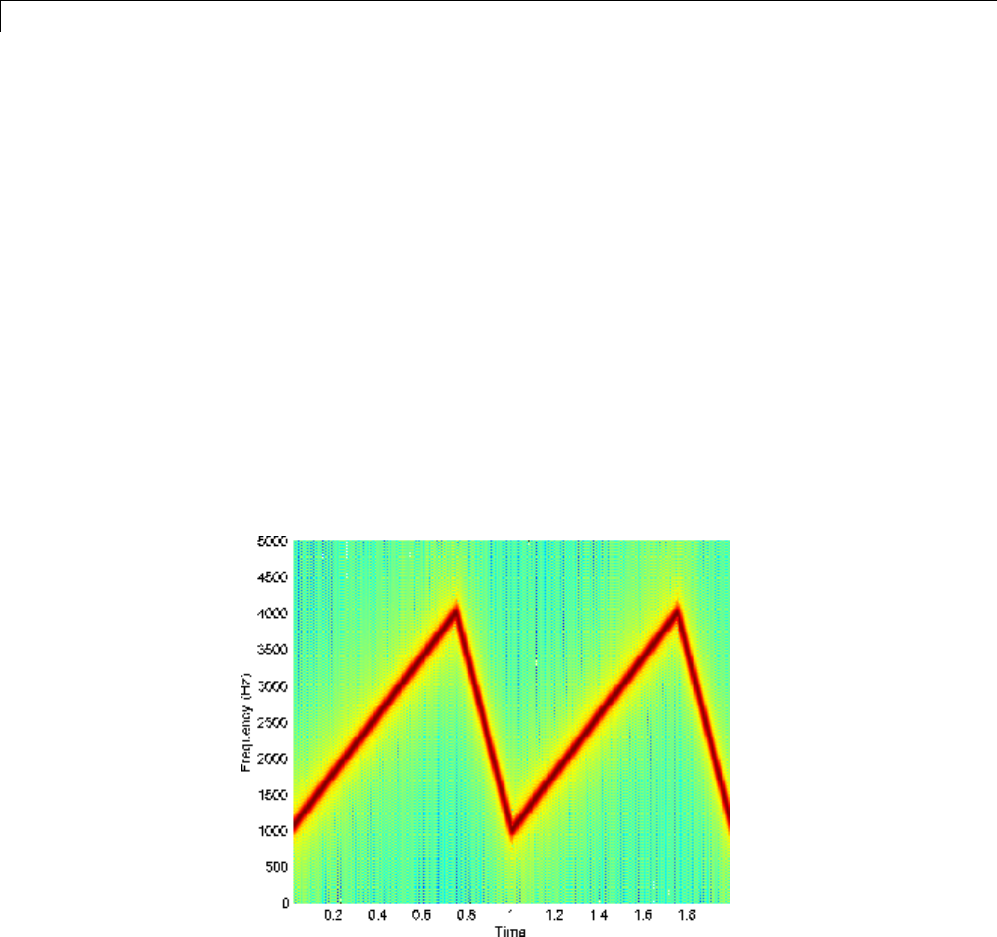
7Special Topics
FFT-Based Time-Frequency Analysis
The Signal Processing Toolbox product provides a function, spectrogram,
that returns the time-dependent Fourier transform for a sequence, or displays
this information as a spectrogram. The time-dependent Fourier transform is
the discrete-time Fourier transform for a sequence, computed using a sliding
window. This form of the Fourier transform, also known as the short-time
Fourier transform (STFT), has numerous applications in speech, sonar, and
radar processing. The spectrogram of a sequence is the magnitude of the
time-dependent Fourier transform versus time.
To display the spectrogramofalinearFMsignal:
fs = 10000;
t = 0:1/fs:2;
x = vco(sawtooth(2*pi*t,.75),[0.1 0.4]*fs,fs);
spectrogram(x,kaiser(256,5),220,512,fs,'yaxis')
7-28

Median Filtering
Median Filtering
The function medfilt1 implements one-dimensional median filtering, a
nonlinear technique that applies a sliding window to a sequence. The median
filter replaces the center value in the window with the median value of all the
points within the window [5]. In computing this median, medfilt1 assumes
zeros beyond the input points.
When the number of elements nin the window is even, medfilt1 sorts the
numbers, then takes the average of the n/2 and n/2 +1elements.
Twosimpleexampleswithfourth-and third-order median filters are
medfilt1([4 3 5 2 8 9 1],4)
ans =
1.500 3.500 3.500 4.000 6.500 5.000 4.500
medfilt1([4 3 5 2 8 9 1],3)
ans =
3435881
See the medfilt2 function in the Image Processing Toolbox™ for information
on two-dimensional median filtering.
7-29
7Special Topics
Communications Applications
In this section...
“Modulation” on page 7-30
“Demodulation” on page 7-31
“Voltage Controlled Oscillator” on page 7-34
Modulation
Modulation varies the amplitude, phase, or frequency of a carrier signal with
reference to a message signal.The
modulate function modulates a message
signal with a specified modulation method.
The basic syntax for the modulate function is
y = modulate(x,fc,fs,'method',opt)
where:
•xis the message signal.
•fc is the carrier frequency.
•fs is the sampling frequency.
•method is a flag for the desired modulation method.
•opt is any additional argument that the method requires. (Not all
modulation methods require an option argument.)
The table below summarizes the modulation methods provided; see the
documentation for modulate,demod,andvco for complete details on each.
Method Description
amdsb-sc or am Amplitude modulation, double sideband, suppressed
carrier
amdsb-tc Amplitude modulation, double sideband, transmitted
carrier
7-30
Communications Applications
Method Description
amssb Amplitude modulation, single sideband
fm Frequency modulation
pm Phase modulation
ppm Pulse position modulation
pwm Pulse width modulation
qam Quadrature amplitude modulation
If the input xis an array rather than a vector, modulate modulates each
column of the array.
To obtain the time vector that modulate uses to compute the modulated
signal, specify a second output parameter:
[y,t] = modulate(x,fc,fs,'method',opt)
Demodulation
The demod function performs demodulation, that is, it obtains the original
message signal from the modulated signal:
The syntax for demod is
x = demod(y,fc,fs,'method',opt)
demod uses any of the methods shown for modulate, but the syntax for
quadrature amplitude demodulation requires two output parameters:
[X1,X2] = demod(y,fc,fs,'qam')
If the input yis an array, demod demodulates all columns.
Try modulating and demodulating a signal. A 50 Hz sine wave sampled at
1000 Hz is
t = (0:1/1000:2);
x = sin(2*pi*50*t);
7-31
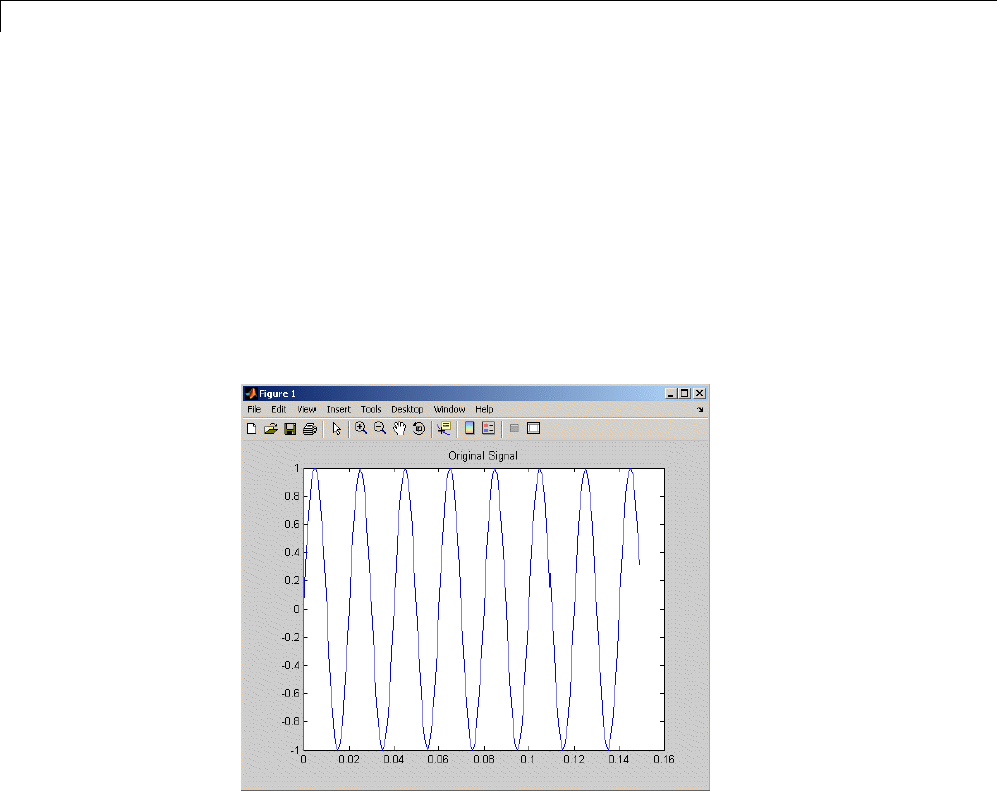
7Special Topics
With a carrier frequency of 200 Hz, the modulated and demodulated versions
of this signal are
y = modulate(x,200,1000,'am');
z = demod(y,200,1000,'am');
To plot portions of the original, modulated, and demodulated signal:
figure; plot(t(1:150),x(1:150)); title('Original Signal');
figure; plot(t(1:150),y(1:150)); title('Modulated Signal');
figure; plot(t(1:150),z(1:150)); title('Demodulated Signal');
Original Signal
7-32
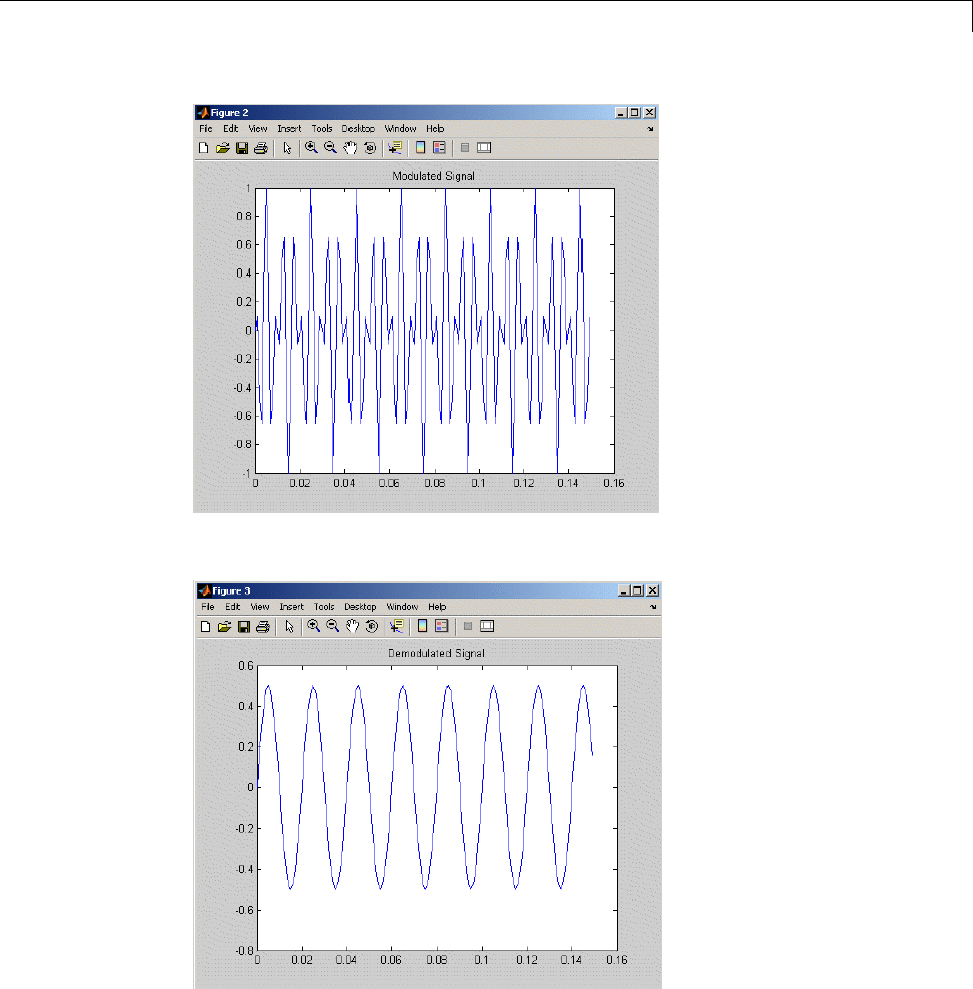
Communications Applications
Modulated Signal
Demodulated Signal
7-33
7Special Topics
Note The demodulated signal is attenuated because demodulation includes
two steps: multiplication and lowpass filtering. The multiplication produces a
component with frequency centered at 0 Hz and a component with frequency
at twice the carrier frequency. The filtering removes the higher frequency
component of the signal, producing the attenuated result.
Voltage Controlled Oscillator
The voltage controlled oscillator function vco creates a signal that oscillates
at a frequency determined by the input vector. The basic syntax for vco is
y = vco(x,fc,fs)
where fc is the carrier frequency and fs is the sampling frequency.
To scale the frequency modulation range, use
y = vco(x,[Fmin Fmax],fs)
In this case, vco scales the frequency modulation range so values of xon the
interval [-1 1] map to oscillations of frequency on [Fmin Fmax].
If the input xis an array, vco produces an array whose columns oscillate
according to the columns of x.
See “FFT-Based Time-Frequency Analysis” on page 7-28 for an example using
the vco function.
7-34

Deconvolution
Deconvolution
Deconvolution, or polynomial division, is the inverse operation of convolution.
Deconvolution is useful in recovering the input to a known filter, given the
filtered output. This method is very sensitive to noise in the coefficients,
however, so use caution in applying it.
The syntax for deconv is
[q,r] = deconv(b,a)
where bis the polynomial dividend, ais the divisor, qis the quotient, and r
is the remainder.
To try deconv, first convolve two simple vectors aand b.
a=[123];
b=[456];
c = conv(a,b)
c=
413282718
Now use deconv to deconvolve bfrom c:
[q,r] = deconv(c,a)
q=
456
r=
00000
7-35
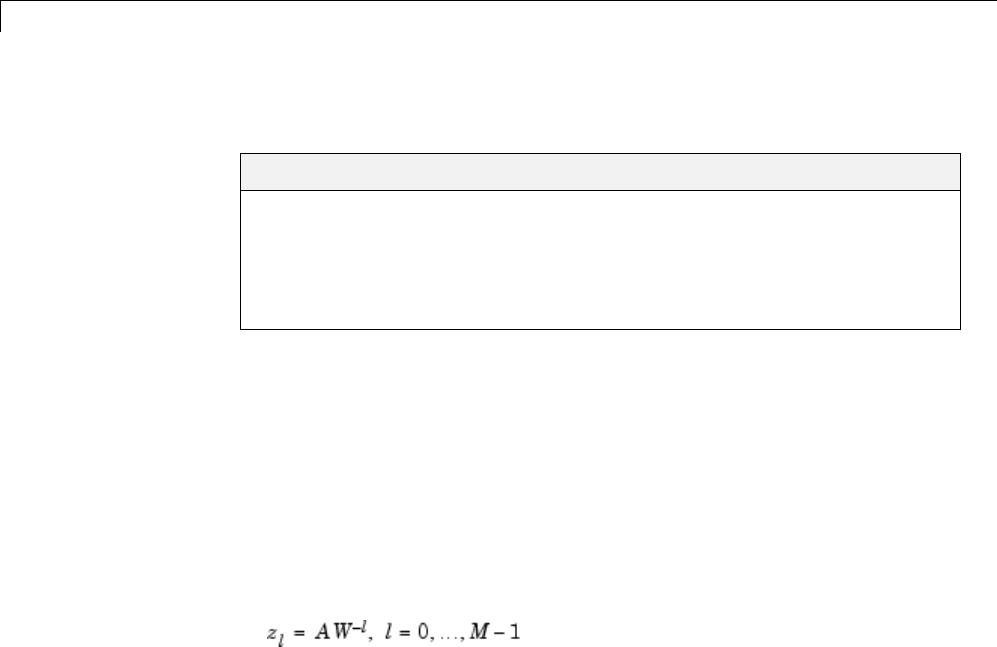
7Special Topics
Specialized Transforms
In this section...
“Chirp z-Transform” on page 7-36
“Discrete Cosine Transform” on page 7-37
“Hilbert Transform” on page 7-40
“Walsh–Hadamard Transform” on page 7-41
Chirp z-Transform
The chirp z-transform (CZT), useful in evaluating the z-transform along
contours other than the unit circle. The chirp z-transform is also more efficient
than the DFT algorithm for the computation of prime-length transforms,
and it is useful in computing a subset of the DFT for a sequence. The chirp
z-transform, or CZT, computes the z-transform along spiral contours in the
z-plane for an input sequence. Unlike the DFT, the CZT is not constrained to
operate along the unit circle, but can evaluate the z-transform along contours
described by
where Ais the complex starting point, Wis a complex scalar describing the
complex ratio between points on the contour, and Mis the length of the
transform.
Onepossiblespiralis
A = 0.8*exp(j*pi/6);
W = 0.995*exp(-j*pi*.05);
M = 91;
z = A*(W.^(-(0:M-1)));
zplane([],z.')
7-36
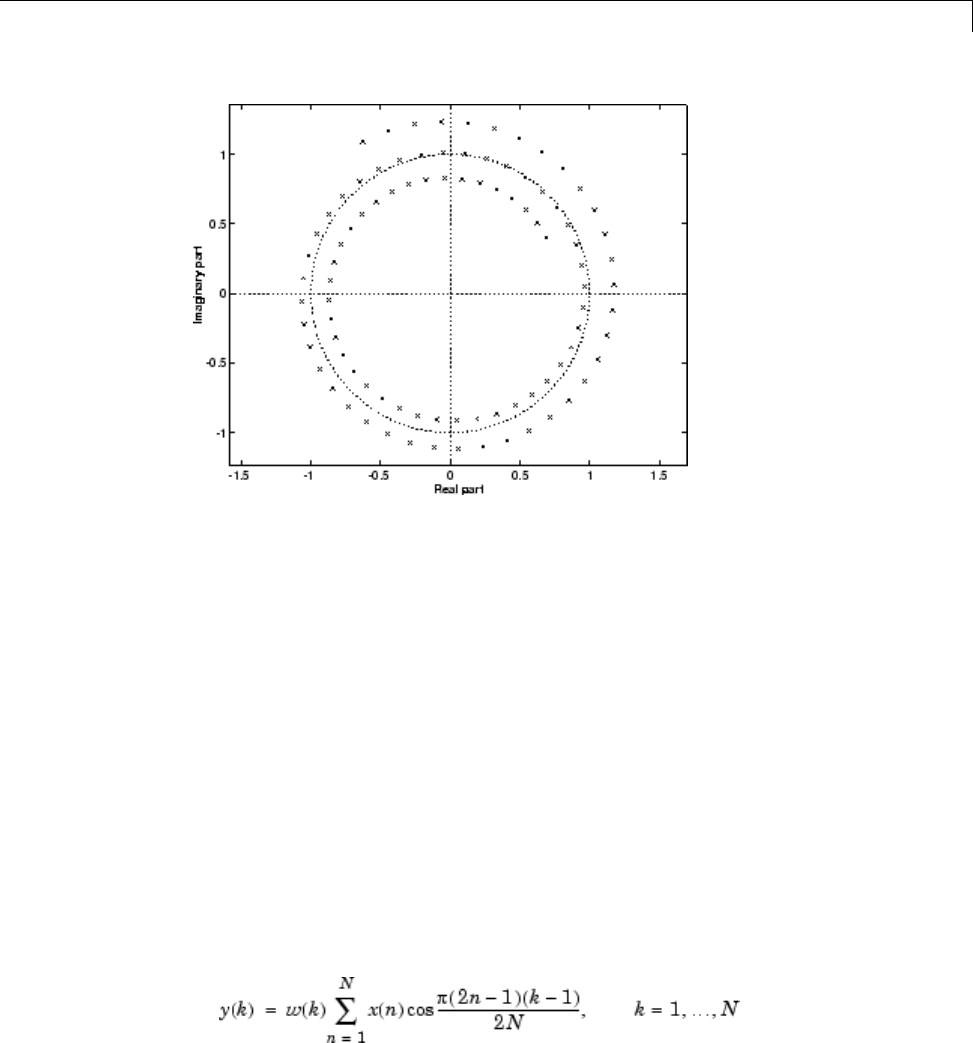
Specialized Transforms
czt(x,M,W,A)computesthez-transform of xon these points.
An interesting and useful spiral set is mevenly spaced samples around the
unit circle, parameterized by A=1and W = exp(-j*pi/M).Thez-transform
on this contour is simply the DFT, obtained by
y = czt(x)
czt may be faster than the fft function for computing the DFT of sequences
with certain odd lengths, particularly long prime-length sequences.
Discrete Cosine Transform
The discrete cosine transform (DCT), closely related to the DFT. The DCT’s
energy compaction properties are useful for applications like signal coding.
The toolbox function dct computes the unitary discrete cosine transform,
or DCT, for an input vector or matrix. Mathematically, the unitary DCT of
an input sequence xis
7-37

7Special Topics
where
The DCT is closely related to the discrete Fourier transform; the DFT is
actually one step in the computation of the DCT for a sequence. The DCT,
however, has better energy compaction properties, with just a few of the
transform coefficients representing the majority of the energy in the sequence.
The energy compaction properties of the DCT make it useful in applications
such as data communications.
The function idct computes the inverse DCT for an input sequence,
reconstructing a signal from a complete or partial set of DCT coefficients. The
inverse discrete cosine transform is
where
Because of the energy compaction mentioned above, it is possible to
reconstruct a signal from only a fraction of its DCT coefficients. For example,
generate a 25 Hz sinusoidal sequence, sampled at 1000 Hz:
t = (0:1/999:1);
x = sin(2*pi*25*t);
7-38
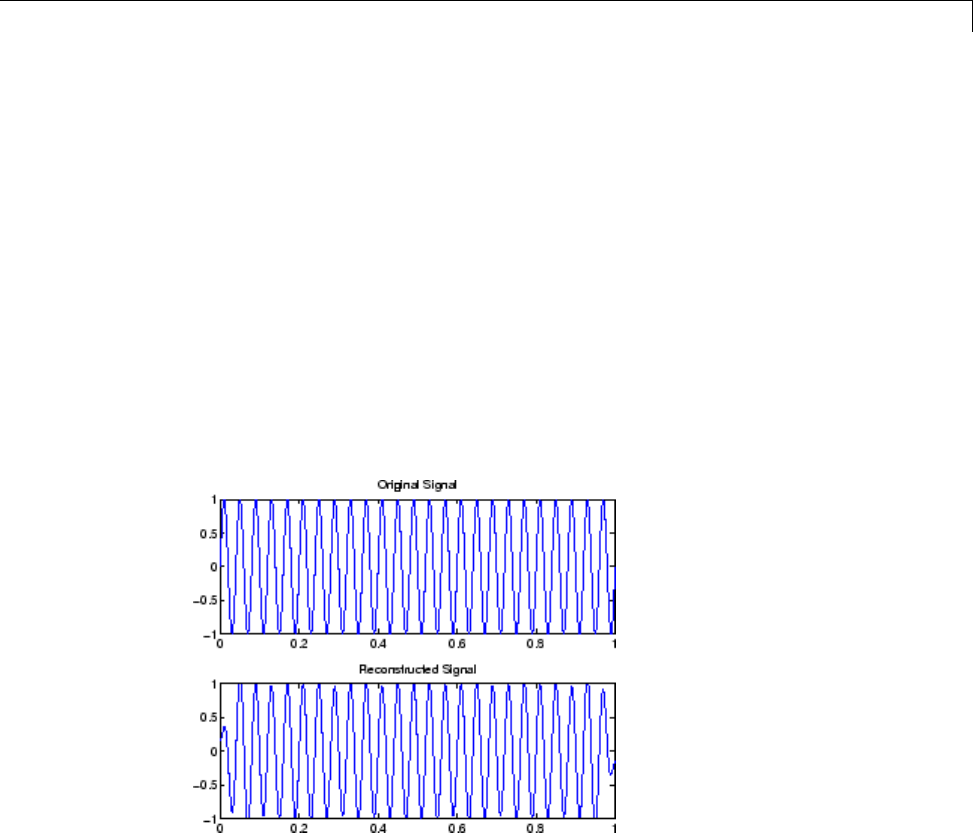
Specialized Transforms
Compute the DCT of this sequence and reconstruct the signal using only
those components with value greater than 0.1 (64 of the original 1000 DCT
coefficients):
y = dct(x) % Compute DCT
y2 = find(abs(y) < 0.9); % Use 17 coefficients
y(y2) = zeros(size(y2)); % Zero out points < 0.9
z = idct(y); % Reconstruct signal w/inverse DCT
Plot the original and reconstructed sequences:
subplot(2,1,1); plot(t,x);
title('Original Signal')
subplot(2,1,2); plot(t,z), axis([0 1 -1 1])
title('Reconstructed Signal')
One measure of the accuracy of the reconstruction is
norm(x-z)/norm(x)
that is, the norm of the difference between the original and reconstructed
signals, divided by the norm of the original signal. In this case, the
relative error of reconstruction is 0.1443. The reconstructed signal retains
approximately 85% of the energy in the original signal.
7-39

7Special Topics
Hilbert Transform
The Hilbert transform facilitates the formation of the analytic signal. The
analytic signal is useful in the area of communications, particularly in
bandpass signal processing. The toolbox function hilbert computes the
Hilbert transform for a real input sequence xand returns a complex result of
thesamelength
y = hilbert(x)
where the real part of yis the original real data and the imaginary part
is the actual Hilbert transform. yis sometimes called the analytic signal,
in reference to the continuous-time analytic signal. A key property of the
discrete-time analytic signal is that its z-transform is 0 on the lower half of
the unit circle. Many applications of the analytic signal are related to this
property; for example, the analytic signal is useful in avoiding aliasing effects
for bandpass sampling operations. The magnitude of the analytic signal is the
complex envelope of the original signal.
The Hilbert transform is related to the actual data by a 90° phase shift; sines
become cosines and vice versa. To plot a portion of data (solid line) and its
Hilbert transform (dotted line):
t = (0:1/1023:1);
x = sin(2*pi*60*t);
y = hilbert(x);
plot(t(1:50),real(y(1:50))), hold on
plot(t(1:50),imag(y(1:50)),':');
axis([0 0.05 -1.1 2]);
legend('Real Part','Imaginary Part','location','northeast');
7-40
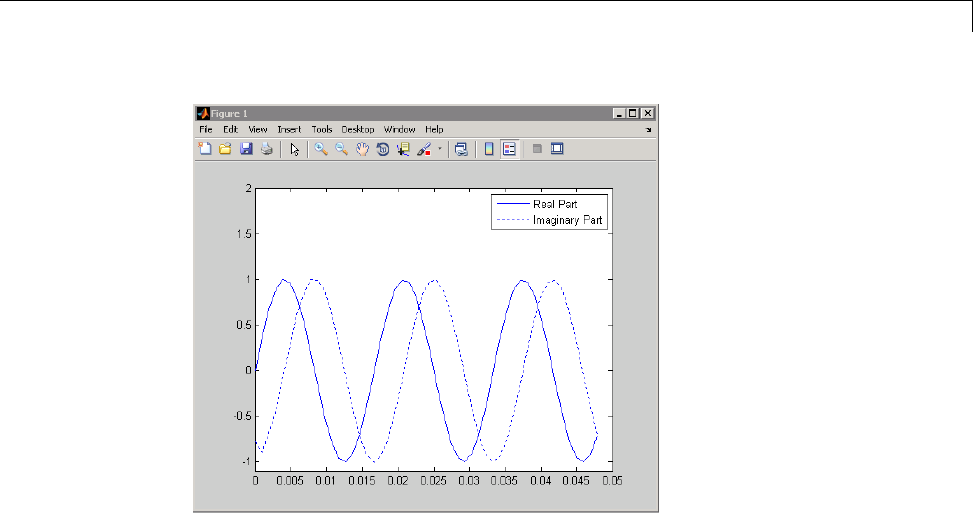
Specialized Transforms
The analytic signal is useful in calculating instantaneous attributes of a time
series, the attributes of the series at any point in time. The instantaneous
amplitude of the input sequence is the amplitude of the analytic signal. The
instantaneous phase angle of the input sequence is the (unwrapped) angle of
the analytic signal; the instantaneous frequency is the time rate of change
of the instantaneous phase angle. You can calculate the instantaneous
frequency using the MATLAB function, diff.
Walsh–Hadamard Transform
The Walsh–Hadamard transform is a non-sinusoidal, orthogonal
transformation technique that decomposes a signal into a set of basis
functions. These basis functions are Walsh functions, which are rectangular
or square waves with values of +1 or –1. Walsh–Hadamard transforms
arealsoknownasHadamard(seethehadamard function in the MATLAB
software), Walsh, or Walsh-Fourier transforms.
The first eight Walsh functions have these values:
7-41
7Special Topics
Index Walsh Function Values
011111111
1 1111-1-1-1-1
21 1 -1 -1 -1 -1 1 1
31 1 -1 -1 1 1 -1 -1
4 1 -1 -1 1 1 -1 -1 1
51-1-11-111-1
61-11-1-11-11
71-11-11-11-1
The Walsh–Hadamard transform returns sequency values. Sequency is a
more generalized notion of frequency and is defined as one half of the average
number of zero-crossings per unit time interval. Each Walsh function has a
unique sequency value. You can use the returned sequency values to estimate
the signal frequencies in the original signal.
Three different ordering schemes are used to store Walsh functions: sequency,
Hadamard, and dyadic. Sequency ordering, which is used in signal processing
applications, has the Walsh functions in the order shown in the table above.
Hadamard ordering, which is used in controls applications, arranges them
as 0, 4, 6, 2, 3, 7, 5, 1. Dyadic or gray code ordering, which is used in
mathematics, arranges them as 0, 1, 3, 2, 6, 7, 5, 4.
The Walsh–Hadamard transform is used in a number of applications, such
as image processing, speech processing, filtering, and power spectrum
analysis. It is very useful for reducing bandwidth storage requirements and
spread-spectrum analysis. Like the FFT, the Walsh–Hadamard transform has
a fast version, the fast Walsh–Hadamard transform (fwht). Compared to the
FFT, the FWHT requires less storage space and is faster to calculate because
it uses only real additions and subtractions, while the FFT requires complex
values. The FWHT is able to represent signals with sharp discontinuities
more accurately using fewer coefficients than the FFT. Both the FWHT and
the inverse FWHT (ifwht) are symmetric and thus, use identical calculation
processes. The FWHT and IFWHT for a signal x(t) of length N are defined as:
7-42

Specialized Transforms
yNxWAL ni
xyWALni
ni
i
N
in
i
N
=
()
=
=
−
=
−
∑
∑
1
0
1
0
1
,
(,)
where i= 0,1,..., N-1 and WAL(n,i) are Walsh functions. Similar to the
Cooley-Tukey algorithm for the FFT, the Nelements are decomposed into two
sets of N/2 elements, which are then combined using a butterfly structure to
form the FWHT. For images, where the input is typically a 2–D signal, the
FWHT coefficients are calculated by first evaluating across the rows and
then evaluating down the columns.
For the following simple signal, the resulting FWHT shows that xwas created
using Walsh functions with sequency values of 0, 1, 3, and 6, which are the
non-zero indices of the transformed x. The inverse FWHT recreates the
original signal.
x=[422002-20]
y = fwht(x)
y
11010010
x1 = ifwht(y)
x1
422002-20
Using Walsh-Hadamard Transform for Spectral Analysis and
Compression of ECG Signals
The following example uses an electrocardiogram (ECG) signal to illustrate
working with the Walsh-Hadamard transform. ECG signals typically are
very large and need to be stored for analysis and retrieval at a future time.
Walsh-Hadamard transforms are particularly well-suited to this application
because they provide compression and thus, require less storage space, plus
they also provide rapid signal reconstruction.
Start with an ECG signal. For this example, we replicate it to create a longer
signal and insert some additional random noise. Then, transform the signal
7-43

7Special Topics
using the fast Walsh-Hadamard transform and plot the original signal and
the transformed signal.
xe = ecg(512); % Single ecg wave
xr = repmat(xe,1,8); % Replicate it to create more data
x = xr + 0.1.*randn(1,length(xr)); % Add noise
% Fast Walsh-Hadamard transform. Use default values
% for the number of points to use for the transform and
% for the ordering - sequency -- why???
y = fwht(x);
figure('color','white');
subplot(2,1,1);
plot(x); % Plot original noisy signal
xlabel('Sample index');
ylabel('Amplitude');
title('ECG Signal');
subplot(2,1,2);
plot(abs(y)) % Plot magnitude of transformed signal
xlabel('Sequency index');
ylabel('Magnitude');
title('WHT Coefficients');
7-44
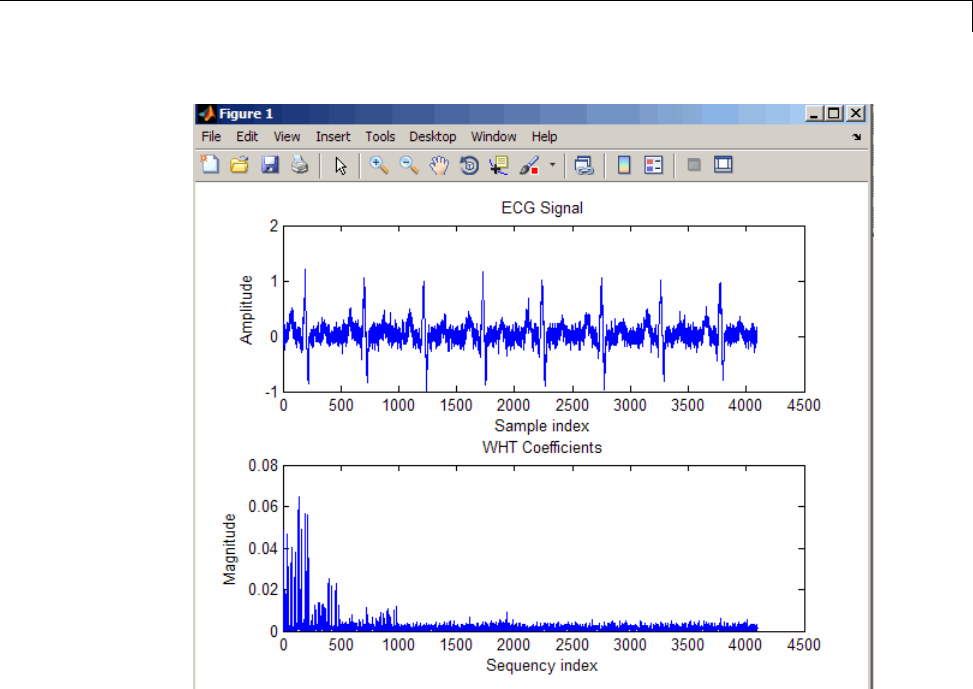
Specialized Transforms
The plot shows that most of the signal energy is in the lower sequency values
below approximately 1100. We will store only the first 1024 coefficients
and see if the signal can be accurately reconstructed from only these stored
coefficients.
y(1025:length(x)) = 0; % Zeroing out the higher coefficients
xHat = ifwht(y); % Signal reconstruction using inverse WHT
figure('color','white');
plot(x);
hold on
plot(xHat,'r');
xlabel('Sample index');
ylabel('ECG signal amplitude');
legend('Original Signal','Reconstructed Signal');
7-45
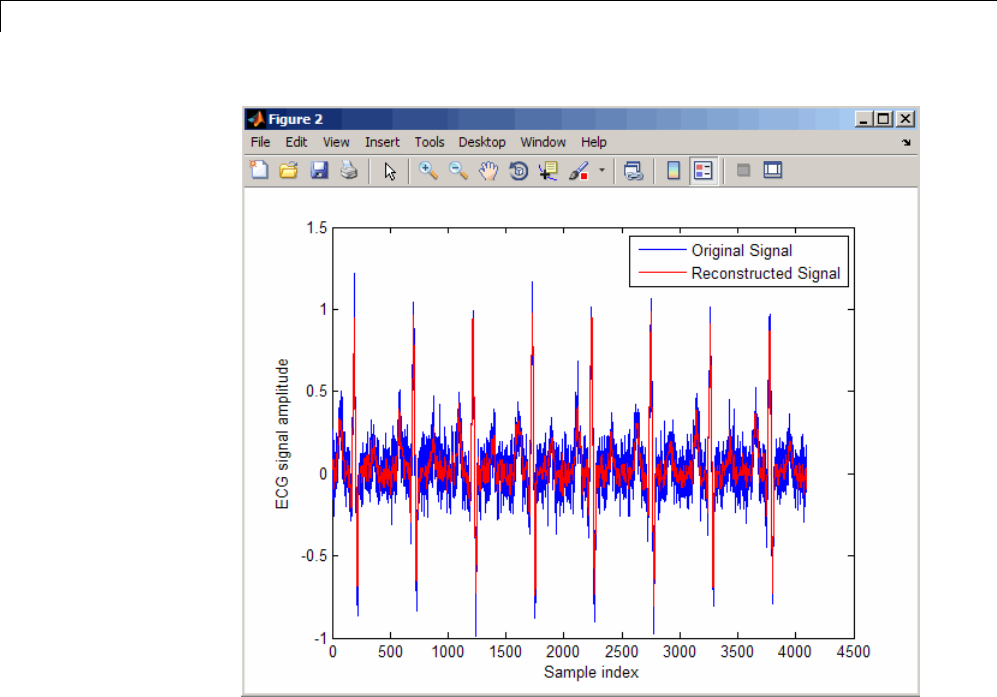
7Special Topics
The reproduced signal is very close to the original signal.
To reconstruct the original signal, we stored only the first 1024 coefficients and
the ECG signal length. This represents a compression ratio of approximately
4:1. Storing more coefficients is a tradeoff between increased resolution and
increased noise, while storing fewer coefficients may cause loss of peaks.
req = [length(x) y(1:1024)];
whos x req
Name Size Bytes Class Attributes
req 1x1025 8200 double
x 1x4096 32768 double
7-46

Selected Bibliography
Selected Bibliography
[1] Kay, S.M. Modern Spectral Estimation. Englewood Cliffs, NJ: Prentice
Hall, 1988.
[2] Oppenheim, A.V., and R.W. Schafer. Discrete-Time Signal Processing.
Englewood Cliffs, NJ: Prentice Hall, 1989.
[3] Oppenheim, A.V., and R.W. Schafer. Discrete-Time Signal Processing.
Englewood Cliffs, NJ: Prentice Hall, 1975, Section 10.5.3.
[4] Parks, T.W., and C.S. Burrus. Digital Filter Design. New York: John
Wiley & Sons, 1987.
[5] Pratt,W.K. Digital Image Processing. New York: John Wiley & Sons, 1991.
7-47

7Special Topics
7-48
8
SPTool: A Signal Processing
GUI Suite
•“SPTool: An Interactive Signal Processing Environment” on page 8-2
•“Opening SPTool” on page 8-4
•“Getting Context-Sensitive Help” on page 8-6
•“Signal Browser” on page 8-7
•“FDATool” on page 8-10
•“Filter Visualization Tool” on page 8-11
•“Spectrum Viewer” on page 8-13
•“Filtering and Analysis of Noise” on page 8-16
•“Exporting Signals, Filters, and Spectra” on page 8-27
•“Accessing Filter Parameters” on page 8-29
•“Importing Filters and Spectra” on page 8-32
•“Loading Variables from the Disk” on page 8-36
•“Saving and Loading Sessions” on page 8-37
•“Selecting Signals, Filters, and Spectra” on page 8-39
•“Editing Signals, Filters, or Spectra” on page 8-40
•“Making Signal Measurements with Markers” on page 8-41
•“Setting Preferences” on page 8-43
•“Using the Filter Designer” on page 8-47
8SPTool: A Signal Processing GUI Suite
SPTool: An Interactive Signal Processing Environment
In this section...
“SPTool Overview” on page 8-2
“SPTool Data Structures” on page 8-3
SPTool Overview
SPTool is an interactive GUI for digital signal processing used to
•Analyze signals
•Design filters
•Analyze (view) filters
•Filter signals
•Analyze signal spectra
You can accomplish these tasks using four GUIs that you access from within
SPTool:
•The “Signal Browser” on page 8-7 is for analyzing signals. You can also
play signals using your computer’s audio hardware.
•fdatool is available for designing or editing FIR and IIR digital filters.
Most Signal Processing Toolbox filter design methods available at the
command line are also available in FDATool. Additionally, you can use
FDATool to design a filter by using the“Pole/ZeroEditor”onpage8-48to
graphically place poles and zeros on the z-plane.
•The “Filter Visualization Tool” on page 8-11 (FVTool) is for analyzing filter
characteristics.
•The “Spectrum Viewer” on page 8-13 is for spectral analysis. You can use
Signal Processing Toolbox spectral estimation methods to estimate the
power spectral density of a signal.
8-2

SPTool: An Interactive Signal Processing Environment
SPTool Data Structures
You can use SPTool to analyze signals, filters, or spectra that you create at
the MATLAB command line.
You can bring signals, filters, or spectra from the MATLAB workspace into the
SPTool workspace using File > Import. For more information, see “Importing
Filters and Spectra” on page 8-32. Signals, filters, or spectra that you create
in (or import into) the SPTool workspace exist as MATLAB structures. See
the MATLAB documentation for more information on MATLAB structures.
When you use File > Export to save signals, filters, and spectra that you
create or modify in SPTool, these are also saved as MATLAB structures. For
more information on exporting, see “Exporting Signals, Filters, and Spectra”
on page 8-27.
8-3
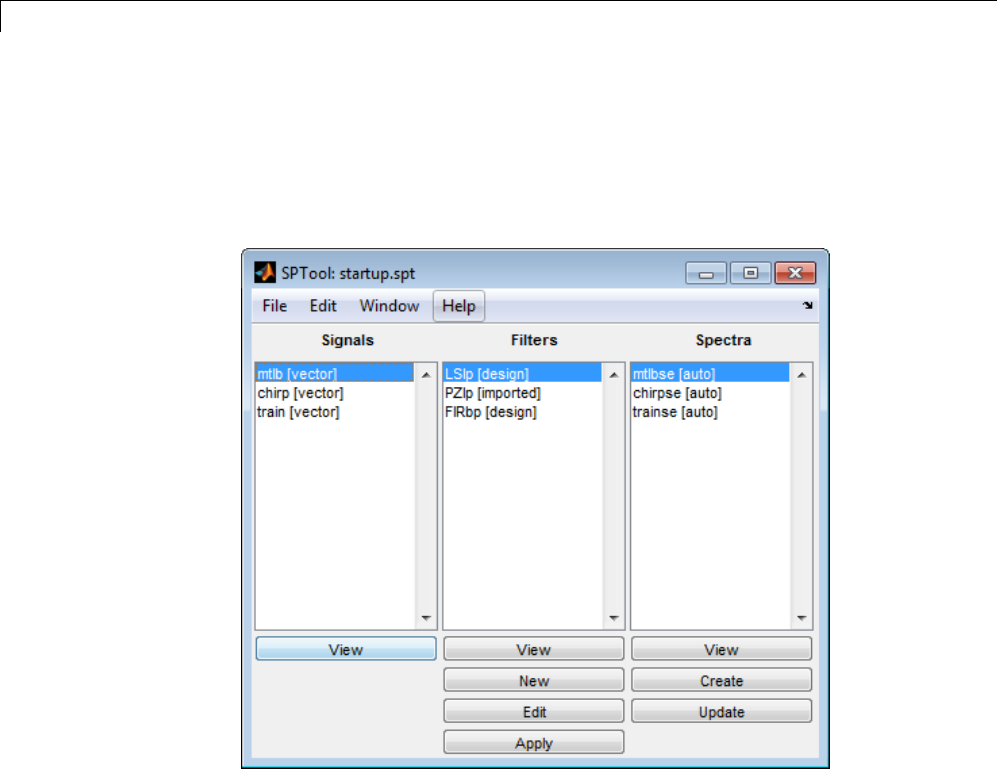
8SPTool: A Signal Processing GUI Suite
Opening SPTool
To open SPTool, type
sptool
When you first open SPTool, it contains a collection of default signals, filters,
and spectra. To specify your own preferences for what signals, filters, and
spectra to see when SPTool opens see “Setting Preferences” on page 8-43.
You can access these three GUIs from SPTool by selecting a signal, filter, or
spectrum and clicking the appropriate View button:
•Signal Browser
•Filter Visualization Tool
•Spectrum Viewer
8-4

Opening SPTool
You can access FDATool by clicking New to create a new filter or Edit to edit
a selected filter. Clicking Apply applies a selected filter to a selected signal.
Create opens the Spectrum Viewer and creates the power spectral density
of the selected signal. Update opens the Spectrum Viewer for the selected
spectrum.
8-5
8SPTool: A Signal Processing GUI Suite
Getting Context-Sensitive Help
To find information on a particular feature or setting of the “Signal Browser”
on page 8-7:
•In any Measurements panel, right-click anywhere on the panel and select
What’s this?.
•In any dialog box where you see the icon in the lower left corner,
right-click on any parameter and select What’s this?.
To find information on a particular region of “FDATool” on page 8-10 or
“Spectrum Viewer” on page 8-13:
1Click What’s this? .
2Click on the region of the GUI you want information on.
You can also use Help > What’s This? to launch context-sensitive help.
8-6
Signal Browser
Signal Browser
In this section...
“Overview of the Signal Browser” on page 8-7
“Opening the Signal Browser” on page 8-7
Overview of the Signal Browser
You can use the Signal Browser to display and analyze signals listed in the
Signals list box in SPTool.
Using the Signal Browser, you can:
•Analyze and compare vector or array (matrix) signals.
•Zoom in on portions of signal data.
•Measure a variety of characteristics of signal data.
•Comparemultiplesignals.
•Play portions of signal data on audio hardware.
•Print signal plots.
Opening the Signal Browser
To open the Signal Browser from SPTool:
1Select one or more signals in the Signals list in SPTool.
2Click View under the Signals list.
8-7
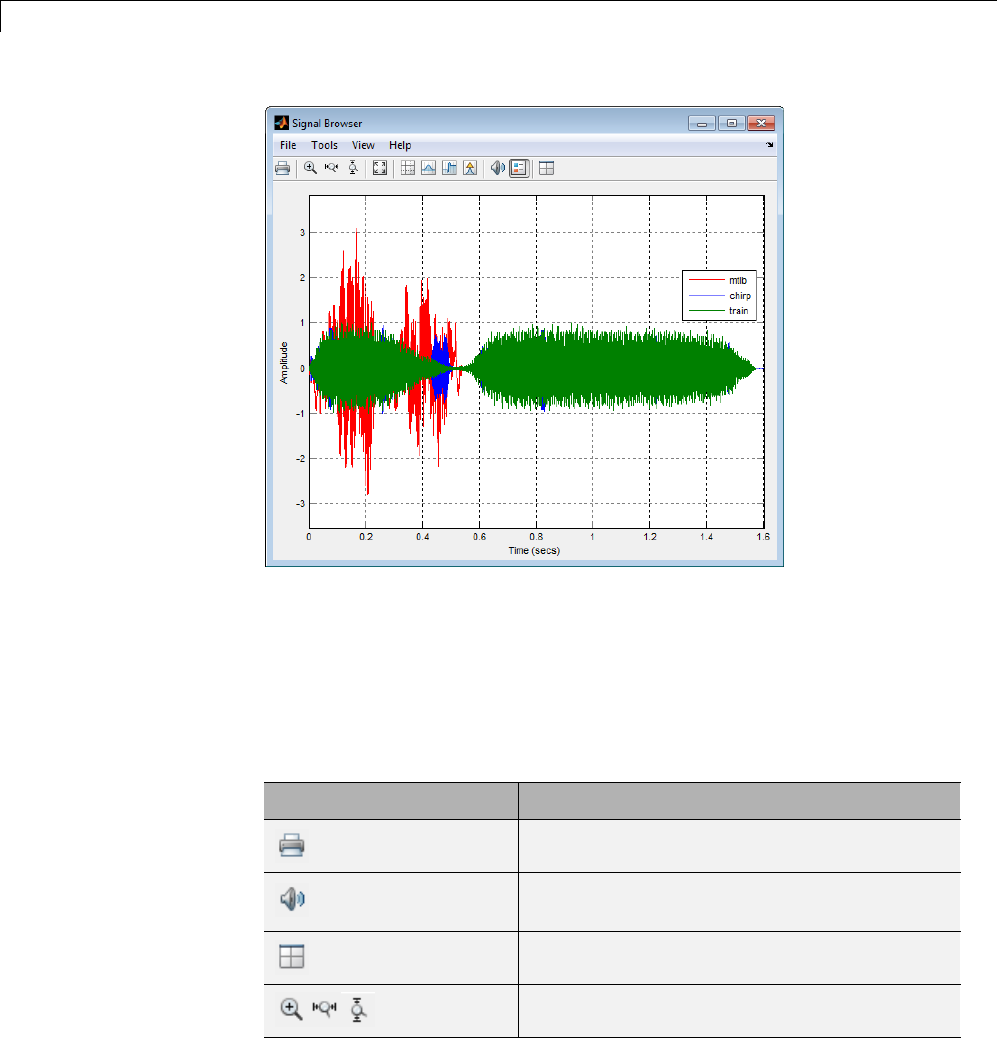
8SPTool: A Signal Processing GUI Suite
The Signal Browser has the following components:
•A display region for analyzing signals
•A panels section on the right side of the scope window, which shows
statistics and information about your signals
•A toolbar with buttons for convenient access to frequently used functions
Icon Description
Print the current scope window.
Play an audio signal. The function soundsc is
used to play the signal.
Show multiple displays of signals.
Zoom the signal in and out.
8-8
Signal Browser
Icon Description
Scale the axes.
Toggle the legends on and off.
Toggle the Cursor Measurements panel. This
panel allows you to see screen cursors and get
measurements of time and amplitude values
at the cursors.
Toggle the Signal Statistics, Bilevel
Measurements, and Peak Finder panels,
which display various measurements about
the selected signal.
For more information on the Signal Browser, see the sptool function
reference page.
8-9
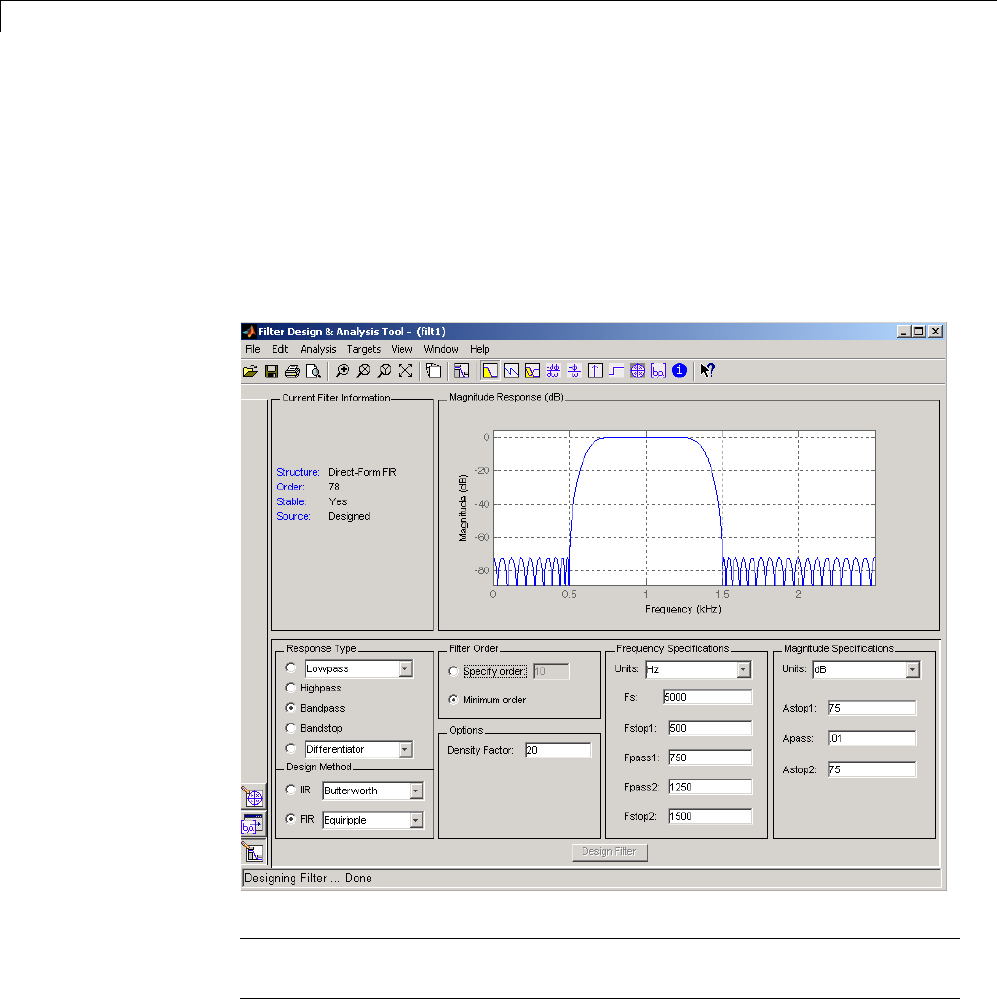
8SPTool: A Signal Processing GUI Suite
FDATool
You can use the Filter Design and Analysis Tool (fdatool)todesignand
edit filters.
To open FDATool from SPTool, click New under the Filters list to create a
new filter or select one of the filters in the Filters list in SPTool and click
Edit to edit that filter.
Note When you open FDATool from SPTool, a reduced version of FDATool
that is compatible with SPTool opens.
8-10
Filter Visualization Tool
Filter Visualization Tool
In this section...
“Connection between FVTool and SPTool” on page 8-11
“Opening the Filter Visualization Tool” on page 8-11
“Analysis Parameters” on page 8-12
Connection between FVTool and SPTool
You can use the Filter Visualization Tool to analyze response characteristics
of the selected filter(s). See fvtool for detailed information about FVTool.
If you start FVTool by clicking the SPTool Filter View button, that FVTool is
linked to SPTool. Any changes made in SPTool to the filter are immediately
reflected in FVTool. The FVTool title bar includes "SPTool" to indicate the
link.
If you start an FVTool by clicking the New button or by selecting File > New
from within FVTool, that FVTool is a standalone version and is not linked to
SPTool.
Note Every time you click the Filter View button a new, linked FVTool
starts. This allows you to view multiple analyses simultaneously.
Opening the Filter Visualization Tool
YouopenFVToolfromSPToolasfollows.
1Select one or more filters in the Filters list in SPTool.
2Click the View button under the Filters list.
When you first open FVTool, it displays the selected filter’s magnitude plot.
8-11
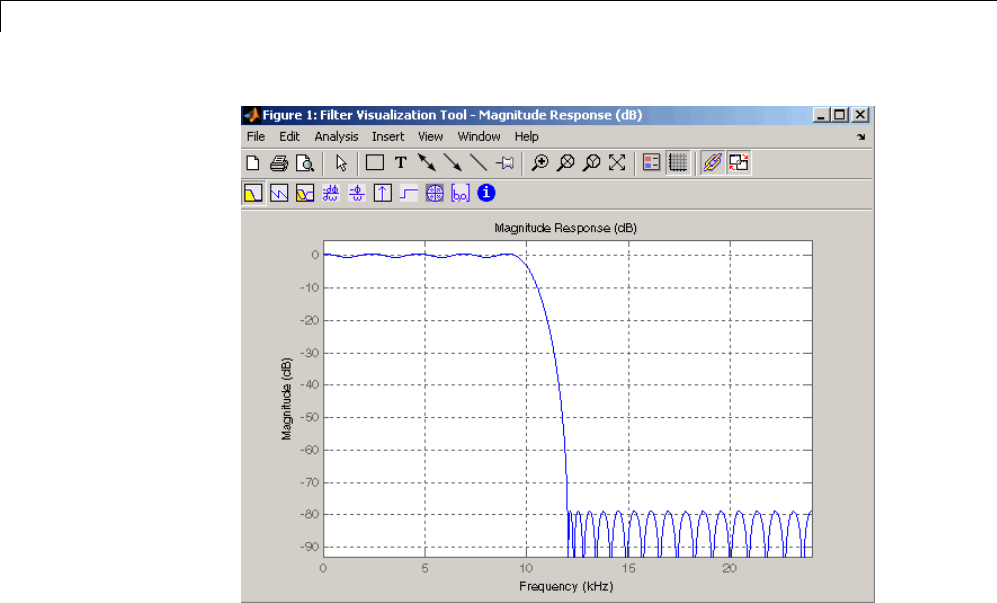
8SPTool: A Signal Processing GUI Suite
Analysis Parameters
In the plot area of any filter response plot, right-click and select Analysis
Parameters to display details about the displayed plot. See “Analysis
Parameters” in the FDATool online help for more information.
You can change any parameter in a linked FVTool, except the sampling
frequency. You can only change the sampling frequency using the SPTool
Edit > Sampling Frequency or the SPTool Filters Edit button.
8-12
Spectrum Viewer
Spectrum Viewer
In this section...
“Spectrum Viewer Overview” on page 8-13
“Opening the Spectrum Viewer” on page 8-13
Spectrum Viewer Overview
You can use the Spectrum Viewer for estimating and analyzing a signal’s
power spectral density (PSD). You can use the PSD estimates to understand a
signal’s frequency content.
The Spectrum Viewer provides the following functionality.
•Analyze and compare spectral density plots.
•Use different spectral estimation methods to create spectra:
-Burg (pburg)
-Covariance (pcov)
-FFT (fft)
-Modified covariance (pmcov)
-MTM (multitaper method) (pmtm)
-MUSIC (pmusic)
-Welch (pwelch)
-Yule-Walker AR (pyulear)
•Modify power spectral density parameters such as FFT length, window
type, and sample frequency.
•Print spectral plots.
Opening the Spectrum Viewer
To open the Spectrum Viewer and create a PSD estimate from SPTool:
1Select a signal from the Signal list box in SPTool.
8-13
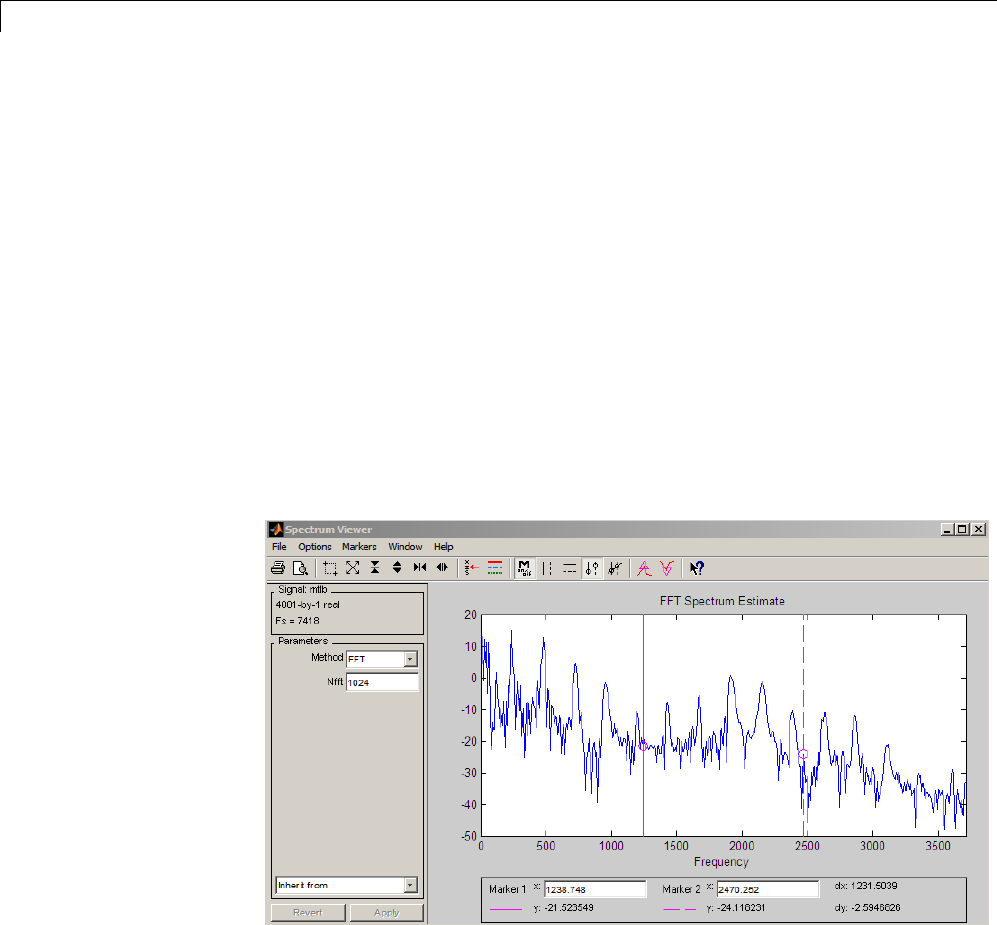
8SPTool: A Signal Processing GUI Suite
2Click Create in the Spectra list.
3Click Apply in the Spectrum Viewer.
To open the Spectrum Viewer with a PSD estimate already listed in SPTool:
1Select a PSD estimate from the Spectra list box in SPTool.
2Click View in the Spectra list.
For example:
1Select mtlb in the default Signals list in SPTool.
2Click Create in SPTool to open the Spectrum Viewer.
3Click Apply in the Spectrum Viewer to plot the spectrum.
The Spectrum Viewer has the following components:
•A signal identification region that provides information about the signal
whose power spectral density estimate is displayed
8-14
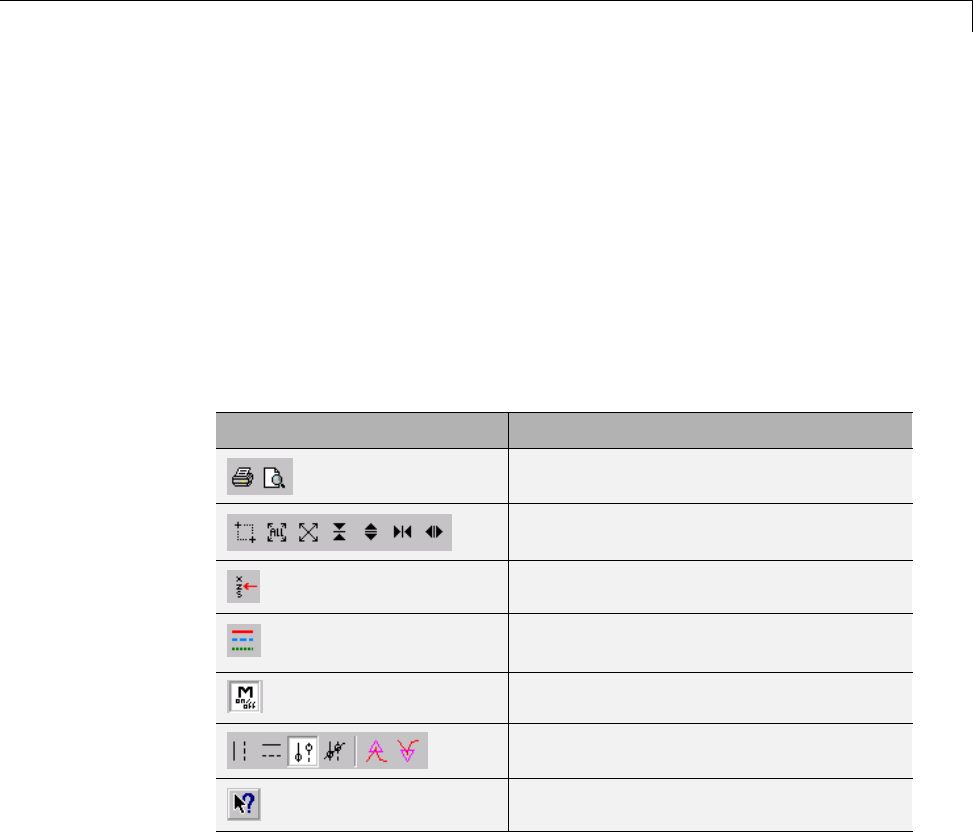
Spectrum Viewer
•A Parameters region for modifying the PSD parameters
•A display region for analyzing spectra and an Options menu for modifying
display characteristics
•Spectrum management controls
-Inherit from menu to inherit PSD specifications from another PSD
object listed in the menu
-Revert button to revert to the named PSD’s original specifications
-Apply button for creating or updating PSD estimates
•A toolbar with buttons for convenient access to frequently used functions
Icon Description
Print and print preview
Zoom the signal in and out
Select one of several loaded signals
Set the display color and line style of a
signal
Toggle the markers on and off
Set marker types
Turn on the What’s This help
8-15
8SPTool: A Signal Processing GUI Suite
Filtering and Analysis of Noise
In this section...
“Overview” on page 8-16
“Importing a Signal into SPTool” on page 8-16
“Designing a Filter” on page 8-18
“Applying a Filter to a Signal” on page 8-20
“Analyzing a Signal” on page 8-22
“Spectral Analysis in the Spectrum Viewer” on page 8-24
Overview
The following sections provide an example of using the GUI-based interactive
tools to:
•Design and implement an FIR bandpass digital filter
•Apply the filter to a noisy signal
•Analyze signals and their spectra
The steps include:
1“Importing a Signal into SPTool” on page 8-16
2Designing a bandpass filter using FDATool
3Applyingthefiltertotheoriginalnoisesignaltocreateabandlimited
noise signal
4Comparing the time domain information of the original and filtered signals
using the Signal Browser
5Comparing the spectra of both signals using the Spectrum Viewer
Importing a Signal into SPTool
To import a signal into SPTool from the workspace or disk, the signal must
be either:
8-16
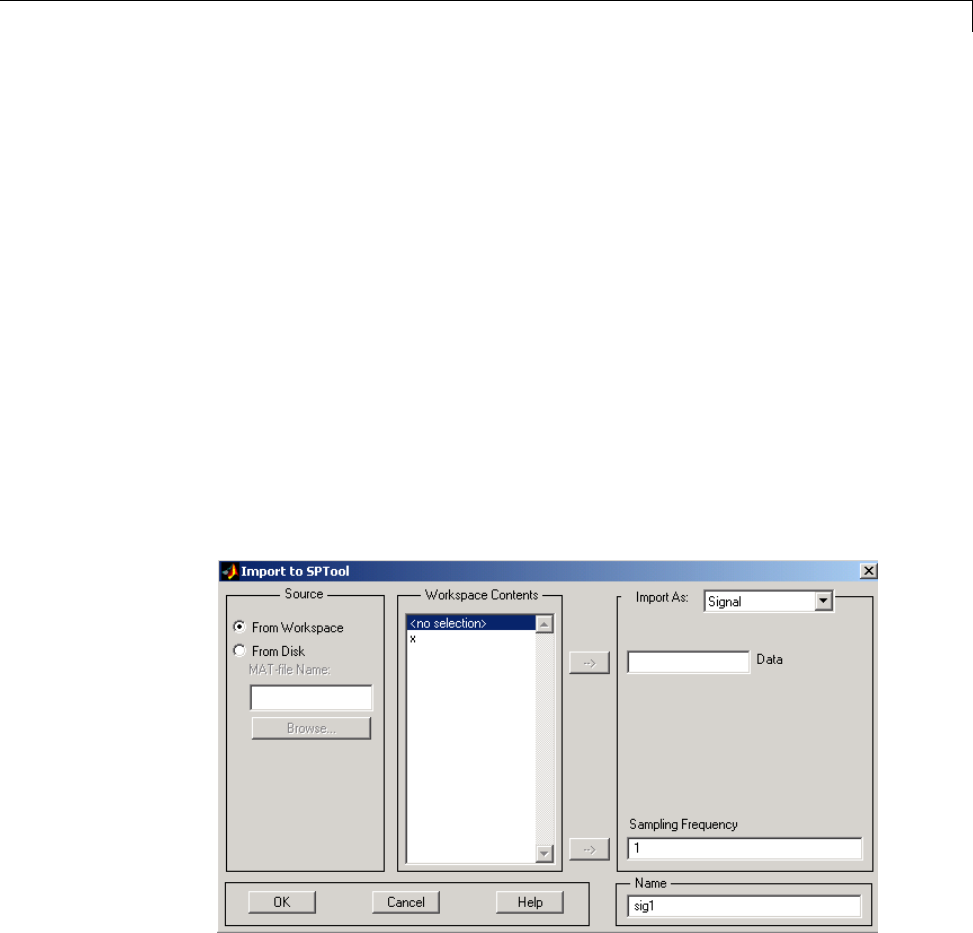
Filtering and Analysis of Noise
•A special MATLAB signal structure, such as that saved from a previous
SPTool session
•A signal created as a variable (vector or matrix) in the MATLAB workspace
For this example, create a new signal at the command line and then import it
as a structure into SPTool:
1Create a random signal in the MATLAB workspace by typing
x = randn(5000,1);
2If SPTool is not already open, open SPTool by typing
sptool
The SPTool window is displayed.
3Select File > Import. The Import to SPTool dialog opens.
The variable xis displayed in the Workspace Contents list. (If it is not,
select the From Workspace radio button todisplaythecontentsofthe
workspace.)
4Select the signal and import it into the Data field:
8-17
8SPTool: A Signal Processing GUI Suite
aSelect the signal variable xin the Workspace Contents list.
bMake sure that Signal is selected in the Import As pull-down menu.
cClick on the arrow to the left of the Data field or type xin the Data field.
dType 5000 in the Sampling Frequency field.
eName the signal by typing noise in the Name field.
fClick OK.
The signal noise[vector] appears and is selected in SPTool’s Signals list.
Note YoucanimportfiltersandspectraintoSPToolinmuchthesameway
as you import signals. See “Importing Filters and Spectra” on page 8-32 for
specific details.
You can also import signals from MAT-files on your disk, rather than from
the workspace. See “Loading Variables from the Disk” on page 8-36 for more
information.
Type help sptool for information about importing from the command line.
Designing a Filter
You can import an existing filter into SPTool, or you can design and edit
a new filter using FDATool.
In this example, you
1Open a default filter in FDATool.
2Specify an equiripple bandpass FIR filter.
Opening FDATool
To open FDATool, click New in SPTool. FDATool opens with a default filter
named filt1.
8-18

Filtering and Analysis of Noise
Specifying the Bandpass Filter
Design an equiripple bandpass FIR filter with the following characteristics:
•Sampling frequency of 5000 Hz
•Stopband frequency ranges of [0 500] Hz and [1500 2500] Hz
•Passband frequency range of [750 1250] Hz
•Ripple in the passband of 0.01 dB
•Stopband attenuation of 75 dB
To modify the filter in FDATool to meet these specifications, you need to
1Select Bandpass from the Response Type list.
2Verify that FIR Equiripple is selected as the Design Method.
3Verify that Minimum order is selected as the Filter Order and that the
Density Factor is set to 20.
4Under Frequency Specifications, set the sampling frequency (Fs)and
the passband (Fpass1,Fpass2) and stopband (Fstop1,Fstop2)edges:
Units Hz
Fs 5000
Fstop1 500
Fpass1 750
Fpass2 1250
Fstop2 1500
5Under Magnitude Specifications, set the stopband attenuation (Astop1,
Astop2) and the maximum passband ripple (Apass):
8-19
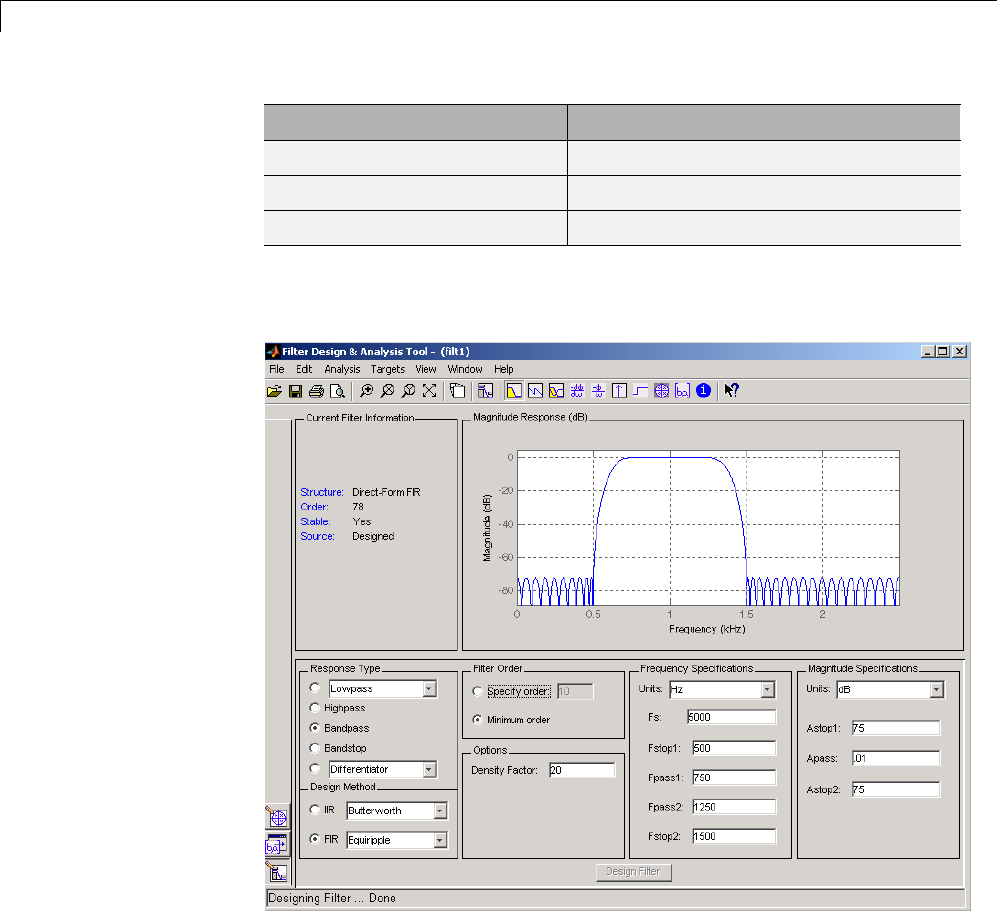
8SPTool: A Signal Processing GUI Suite
Units dB
Astop1 75
Apass 0.01
Astop2 75
6Click Design Filter to design the new filter. When the new filter is
designed, the magnitude response of the filter is displayed.
The resulting filter is an order-78 bandpass equiripple filter.
Applying a Filter to a Signal
When you apply a filter to a signal, you create a new signal in SPTool
representing the filtered signal.
8-20
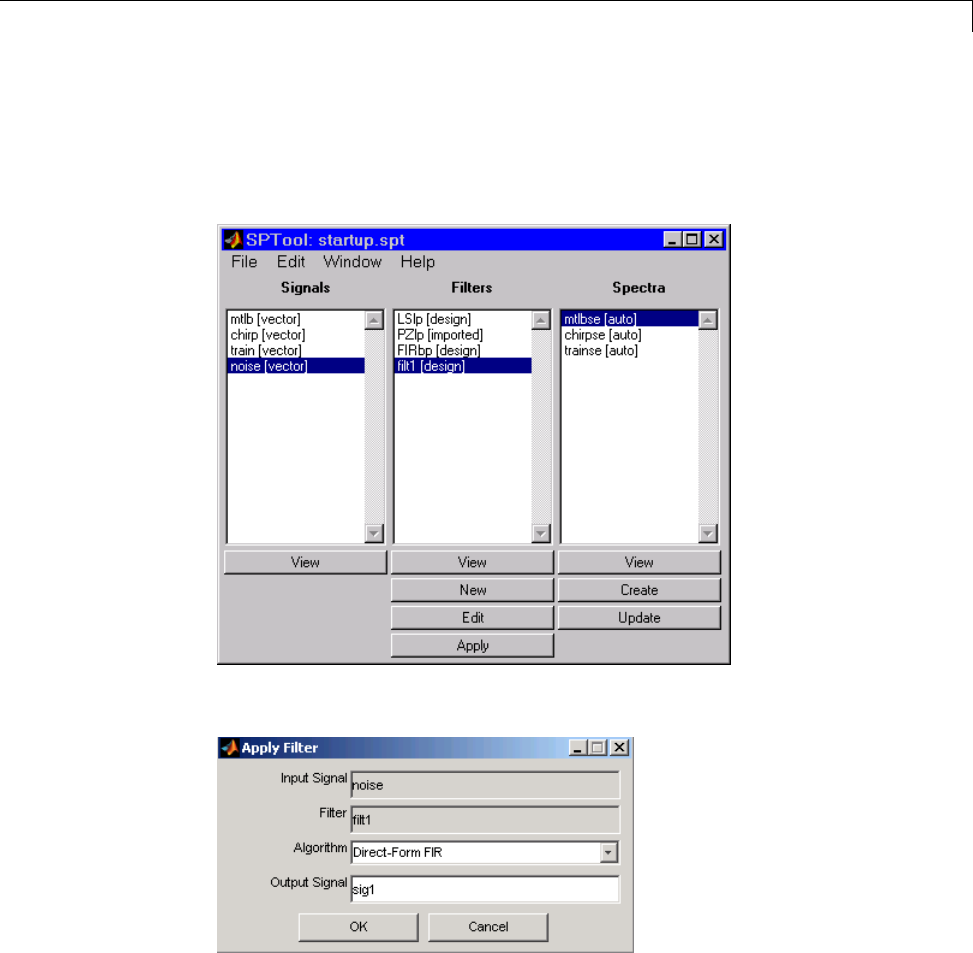
Filtering and Analysis of Noise
To apply the filter filt1 you just created to the signal noise,
1In SPTool, select the signal noise[vector] from the Signals list and select
the filter (named filt1[design])fromtheFilters list.
2Click Apply under the Filters list.
3Leave the Algorithm as Direct-Form FIR.
8-21
8SPTool: A Signal Processing GUI Suite
Note You can apply one of two filtering algorithms to FIR filters. The
default algorithm is specific to the filter structure, which is shown in the
FDATool Current Filter Info frame. Alternately for FIR filters, FFT based
FIR (fftfilt) uses the algorithm described in fftfilt.
For IIR filters, the alternate algorithm is a zero-phase IIR that uses the
algorithm described in filtfilt.
4Enter blnoise as the Output Signal name.
5Click OK to close the Apply Filter dialog box.
The filter is applied to the selected signal, and the filtered signal
blnoise[vector] is listed in the Signals list in SPTool.
Analyzing a Signal
You can analyze and print signals using the Signal Browser. You can also
play the signals if your computer has audio output capabilities.
For example, compare the signal noise to the filtered signal blnoise:
1Shift+click on the noise and blnoise signals in the Signals list of SPTool
to select both signals.
2Click View under the Signals list.
The Signal Browser is activated, and both signals are displayed in the
display region. (The names of both signals are shown above the display
region.) Initially, the original noise signal covers up the bandlimited
blnoise signal.
3Push the selection button on the toolbar to select the blnoise signal.
The display area is updated. Now you can see the blnoise signal
superimposed on top of the noise signal. The signals are displayed in
different colors in both the display region and the panner. You can change
the color of the selected signal using the Line Properties buttononthe
toolbar, .
8-22
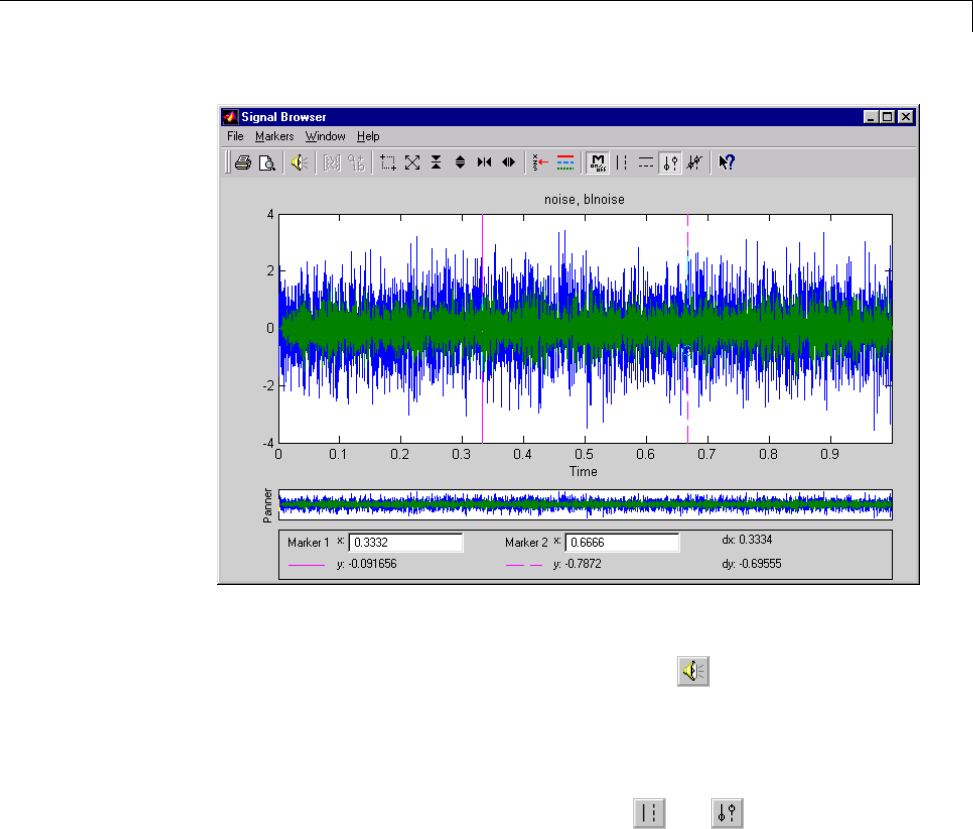
Filtering and Analysis of Noise
Playing a Signal
When you click Play in the Signal Browser toolbar, , the active signal is
played on the computer’s audio hardware:
1To hear a portion of the active (selected) signal
aUse the vertical markers to select a portion of the signal you want to
play. Vertical markers are enabled by the and buttons.
bClick Play.
2To hear the other signal
aSelect the signal as in step above. You can also select the signal directly
in the display region.
bClick Play again.
8-23
8SPTool: A Signal Processing GUI Suite
Printing a Signal
You can print from the Signal Browser using the Print button, .
You can use the line display buttons to maximize the visual contrast between
the signals by setting the line color for noise to gray and the line color for
blnoisetowhite. Dothisbeforeprintingtwosignalstogether.
Note You can follow the same rules to print spectra, but you can’t print filter
responses directly from SPTool.
Use the Signal Browser region in the Preferences dialog box in SPTool to
suppress printing of both the panner and the marker settings.
To print both signals, click Print in the Signal Browser toolbar.
Spectral Analysis in the Spectrum Viewer
You can analyze the frequency content of a signal using the Spectrum Viewer,
which estimates and displays a signal’s power spectral density.
For example, to analyze and compare the spectra of noise and blnoise:
1Create a power spectral density (PSD) object, spect1, that is associated
with the signal noise, and a second PSD object, spect2, that is associated
with the signal blnoise.
2Open the Spectrum Viewer to analyze both of these spectra.
3Print both spectra.
CreatingaPSDObjectFromaSignal
1Click on SPTool, or select Window > SPTool in any active open GUI.
SPTool is now the active window.
2Select the noise[vector] signal in the Signals list of SPTool.
8-24

Filtering and Analysis of Noise
3Click Create in the Spectra list.
The Spectrum Viewer is activated, and a PSD (spect1) corresponding to
the noise signal is created in the Spectra list. The PSD is not computed
or displayed yet.
4Click Apply in the Spectrum Viewer to compute and display the PSD
estimate spect1 using the default parameters.
The PSD of the noise signal is displayed in the display region. The
identifying information for the PSD’s associated signal (noise)isdisplayed
above the Parameters region.
The PSD estimate spect1 is within 2 or 3 dB of 0, so the noise has a fairly
"flat" power spectral density.
5Follow steps 1 through 4 for the bandlimited noise signal blnoise to create a
second PSD estimate spect2.
The PSD estimate spect2 is flat between 750 and 1250 Hz and has 75 dB
less power in the stopband regions of filt1.
Opening the Spectrum Viewer with Two Spectra
1Reactivate SPTool again, as in step 1 above.
2Shift+click on spect1 and spect2 in the Spectra list to select them both.
3Click View in the Spectra list to reactivate the Spectrum Viewer and
display both spectra together.
8-25
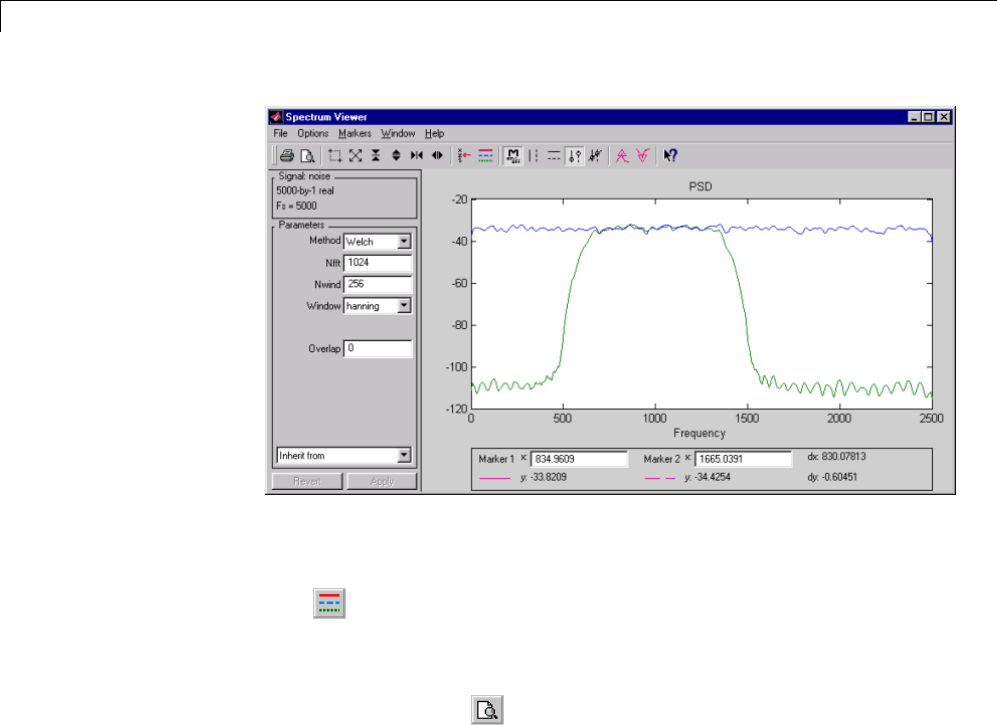
8SPTool: A Signal Processing GUI Suite
Printing the Spectra
Before printing the two spectra together, use the color and line style selection
button, ,todifferentiatethetwoplotsbylinestyle,ratherthanbycolor.
To print both spectra:
1Click Print Preview in the toolbar on the Spectrum Viewer.
2From the Spectrum Viewer Print Preview window, drag the legend out of
the display region so that it doesn’t obscure part of the plot.
3Click Print in the Spectrum Viewer Print Preview window.
8-26

Exporting Signals, Filters, and Spectra
Exporting Signals, Filters, and Spectra
In this section...
“Opening the Export Dialog Box” on page 8-27
“Exporting a Filter to the MATLAB Workspace” on page 8-28
Opening the Export Dialog Box
To save the filter filt1 you just created in this example, open the Export
dialog box with filt1 preselected:
1Select filt1 in the SPTool Filters list.
2Select File > Export.
The Export dialog box opens with filt1 preselected.
8-27

8SPTool: A Signal Processing GUI Suite
Exporting a Filter to the MATLAB Workspace
To export the filter filt1 to the MATLAB workspace:
1Select filt1 from the Export List and deselect all other items using
Ctrl+click.
2Click Export to Workspace.
8-28
Accessing Filter Parameters
Accessing Filter Parameters
In this section...
“Accessing Filter Parameters in a Saved Filter” on page 8-29
“Accessing Parameters in a Saved Spectrum” on page 8-30
Accessing Filter Parameters in a Saved Filter
The MATLAB structures created by SPTool have several associated fields,
many of which are also MATLAB structures. See the MATLAB documentation
for general information about MATLAB structures.
For example, after exporting a filter filt1 to the MATLAB workspace, type
filt1
to display the fields of the MATLAB filter structure. The tf field of the
structure contains information that describes the filter.
The tf Field: Accessing Filter Coefficients
The tf field is a structure containing the transfer function representation of
the filter. Use this field to obtain the filter coefficients;
•filt1.tf.num contains the numerator coefficients.
•filt1.tf.den contains the denominator coefficients.
The vectors contained in these structures represent polynomials in descending
powers of z. The numerator and denominator polynomials are used to specify
the transfer function
Hz Bz
Az
bbz bnbz
aaz ana
m
() ()
()
() () ( )
() () (
==
++++
+++
−−
−
12 1
12
1
1
++ −
1)zn
where:
•bis a vector containing the coefficients from the tf.num field.
8-29
8SPTool: A Signal Processing GUI Suite
•ais a vector containing the coefficients from the tf.den field.
•mis the numerator order.
•nis the denominator order.
You can change the filter representation from the default transfer function to
another form by using the tf2ss or tf2zp functions.
Note The FDAspecs field of your filter contains internal information about
FDATool and should not be changed.
Accessing Parameters in a Saved Spectrum
The following structure fields describe the spectra saved by SPTool.
Field Description
PThe spectral power vector.
fThe spectral frequency vector.
confid A structure containing the confidence intervals data
•The confid.level field contains the chosen
confidence level.
•The confid.Pc field contains the spectral power
data for the confidence intervals.
•The confid.enable field contains a 1if confidence
levelsareenabledforthepowerspectraldensity.
signalLabel Thenameofthesignalfromwhichthepower
spectral density was generated.
Fs The associated signal’s sample rate.
You can access the information in these fields as you do with every MATLAB
structure.
For example, if you export an SPTool PSD estimate spect1 to the workspace,
type
8-30

Accessing Filter Parameters
spect1.P
to obtain the vector of associated power values.
8-31
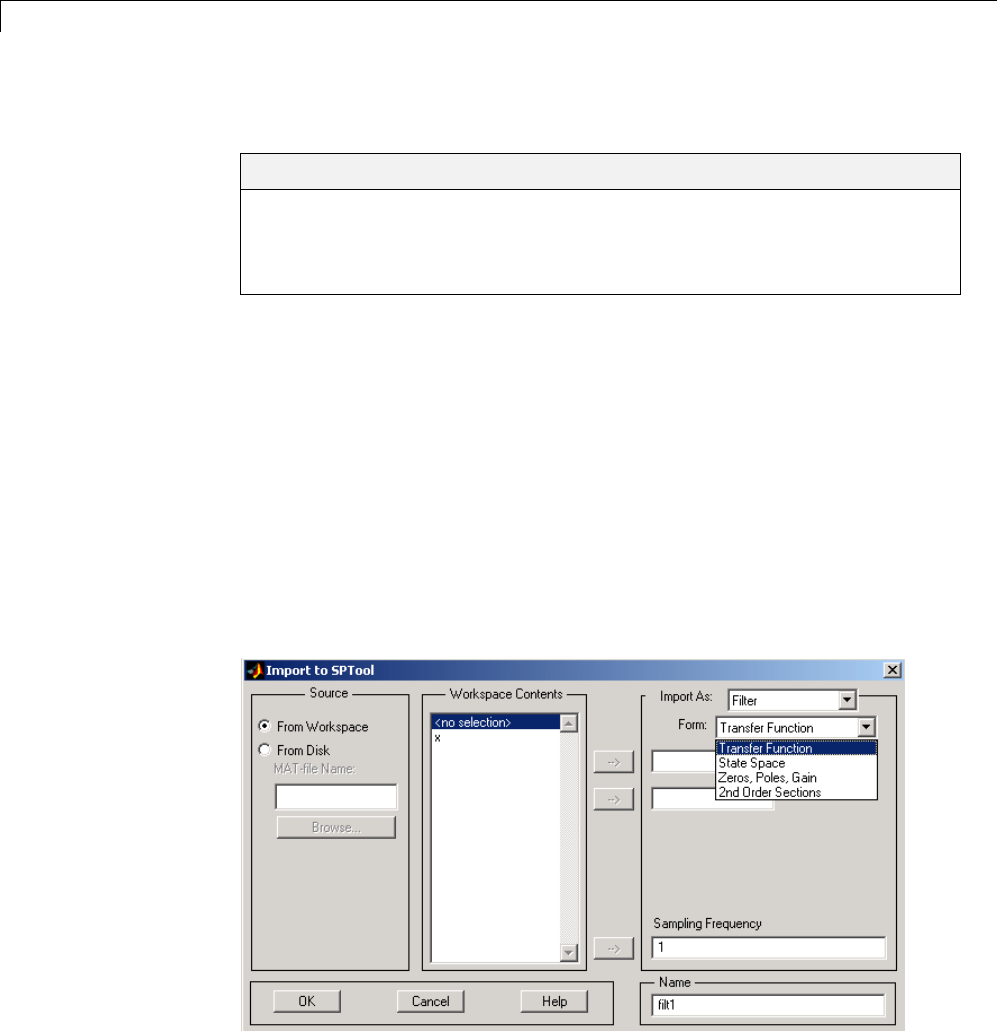
8SPTool: A Signal Processing GUI Suite
Importing Filters and Spectra
In this section...
“Similarities to Other Procedures” on page 8-32
“Importing Filters” on page 8-32
“Importing Spectra” on page 8-34
Similarities to Other Procedures
The procedures are very similar to those explained in
•“Importing a Signal into SPTool” on page 8-16 for loading variables from
the workspace
•“Loading Variables from the Disk” on page 8-36 for loading variables from
your disk
Importing Filters
When you import filters, first select the appropriate filter form from the Form
list. SPTool does not currently support the import of filter objects.
8-32

Importing Filters and Spectra
Foreveryfilteryouspecifyavariablenameoravalueforthefilter’ssampling
frequency in the Sampling Frequency field. Each filter form requires
different variables.
Transfer Function
For Transfer Function, you specify the filter by its transfer function
representation:
Hz Bz
Az
bbz bmz
aaz an
m
() ()
()
() () ( )
() () (
==
++++
++++
−−
−
12 1
12 1
1
1
))zn−
•The Numerator field specifies a variable name or value for the numerator
coefficient vector b, which contains m+1 coefficients in descending powers
of z.
•The Denominator field specifies a variable name or value for the
denominator coefficient vector a, which contains n+1 coefficients in
descending powers of z.
State Space
For State Space, you specify the filter by its state-space representation:
xAxBu
yCxDu
=+
=+
The A-Matrix,B-Matrix,C-Matrix,andD-Matrix fields specifyavariable
name or a value for each matrix in this system.
Zeros, Poles, Gain
For Zeros, Poles, Gain, you specify the filter by its zero-pole-gain
representation:
Hz Zz
Pz kzz zz zzm
zp zp
() ()
()
( ( ))( ( )) ( ( ))
( ( ))( ( )) (
==
−− −
−−
12
12
zzpn−())
8-33

8SPTool: A Signal Processing GUI Suite
•The Zeros field specifies a variable name or value for the zeros vector z,
which contains the locations of mzeros.
•The Poles field specifies a variable name or value for the zeros vector p,
which contains the locations of npoles.
•The Gain field specifies a variable name or value for the gain k.
Second Order Sections
For 2nd Order Sections you specify the filter by its second-order section
representation:
Hz H z bbzbz
az az
kkk k
kk
k
L
k
L
() ()==
++
++
−−
−−
== ∏∏ 01
122
1122
11 1
The SOS Matrix field specifies a variable name or a value for the L-by-6
SOS matrix
sos
bbb aa
bbb aa
bbb aa
LLL L L
=
01 11 21 11 21
02 12 22 12 22
012 1 2
1
1
1
⎡⎡
⎣
⎢
⎢
⎢
⎢
⎤
⎦
⎥
⎥
⎥
⎥
whose rows contain the numerator and denominator coefficients bik and aik
of the second-order sections of H(z).
Note If you import a filter that was not created in SPTool, you can only edit
that filter using the Pole/Zero Editor.
Importing Spectra
When you import a power spectral density (PSD), you specify:
•A variable name or a value for the PSD vector in the PSD field
•AvariablenameoravalueforthefrequencyvectorintheFreq. Vector
field
8-34
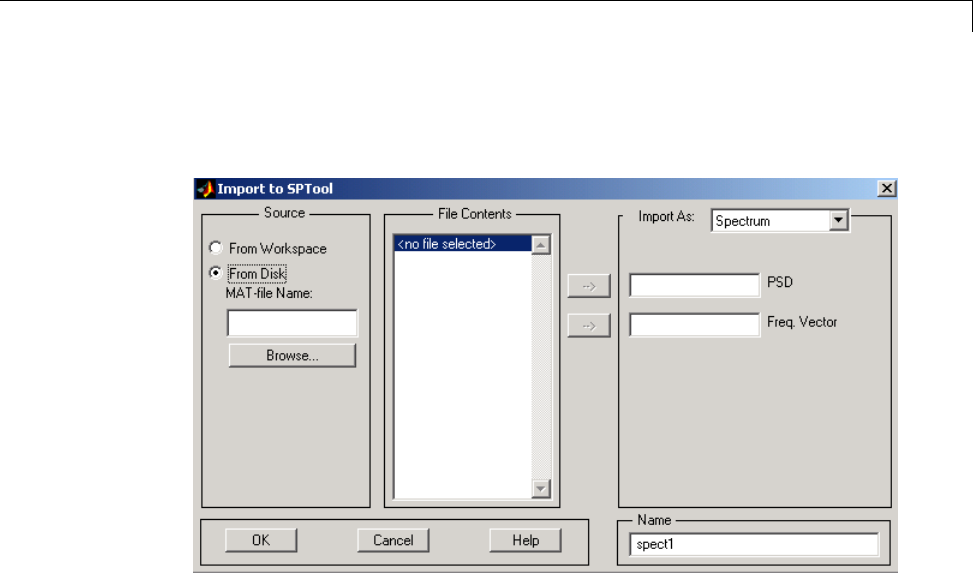
Importing Filters and Spectra
The PSD values in the PSD vector correspond to the frequencies contained in
the Freq. Vector vector; the two vectors must have the same length.
8-35

8SPTool: A Signal Processing GUI Suite
Loading Variables from the Disk
To import variables representing signals, filters, or spectra from a MAT-file
on your disk;
1Select the From Disk radio button and do either of the following:
•TypethenameofthefileyouwanttoimportintotheMAT-file Name
field and press either the Tab or the Enter key on your keyboard.
•Select Browse, and then find and select the file you want to import
using Select > File to Open.ClickOK to close that dialog.
In either case, all variables in the MAT-file you selected are displayed
in the File Contents list.
2Select the variables to be imported into SPTool.
You can now import one or more variables from the File Contents list into
SPTool,aslongasthesevariablesare scalars, vectors, or matrices.
8-36

Saving and Loading Sessions
Saving and Loading Sessions
In this section...
“SPTool Sessions” on page 8-37
“Filter Formats” on page 8-37
SPTool Sessions
When you start SPTool, the default startup.spt session is loaded. To save
your work in the startup SPTool session, use File > Save Session or to
specify a session name, use File > Save Session As.
To recall a previously saved session, use File > Open Session.
Filter Formats
When you start SPTool or open a session, the current filter design format
preference is compared to the filter formats in the session. See “Setting
Preferences” on page 8-43.
•If the formats match, the session opens.
•If the filter preference is FDATool, but the session contains Filter Designer
filters, this warning displays:
8-37

8SPTool: A Signal Processing GUI Suite
Click Convert to convert the filters to FDATool format. Click Don’t Use
FDATool to leave the filters in Filter Designer format and change the
preference to Use Filter Designer.
•If the filter preference is Use Filter Designer, but the session contains
FDATool filters, this warning displays:
Click Yes to remove the current filters. Click No to leave the filters in
FDATool.
8-38

Selecting Signals, Filters, and Spectra
Selecting Signals, Filters, and Spectra
All signals, filters, or spectra listed in SPTool exist as special MATLAB
structures. You can bring data representing signals, filters, or spectra into
SPTool from the MATLAB workspace. In general, you can select one or
several items in a given list box. An item is selected when it is highlighted.
The Signals list shows all vector and array signals in the current SPTool
session.
The Filters list shows all designed and imported filters in the current SPTool
session.
The Spectra list shows all spectra in the current SPTool session.
You can select a single data object in a list, a range of data objects in a list,
or multiple separate data objects in a list. You can also have data objects
simultaneously selected in different lists:
•To select a single item, click it. All other items in that list box become
deselected.
•To add or remove a range of items, Shift+click on the items at the top and
bottom of the section of the list that you want to add. You can also drag
your mouse pointer to select these items.
•To add a single data object to a selection or remove a single data object
from a multiple selection, Ctrl+click on the object.
8-39

8SPTool: A Signal Processing GUI Suite
Editing Signals, Filters, or Spectra
You can edit selected items in SPTool by
1Selecting the names of the signals, filters, or spectra you want to edit.
2Selecting the appropriate Edit menu item:
•Duplicate to copy an item in an SPTool list
•Clear to delete an item in an SPTool list
•Name to rename an item in an SPTool list
•Sampling Frequency to modify the sampling frequency associated
with either a signal (and its associated spectra) or filter in an SPTool list
The pull-downmenunexttoeachmenuitemshowsthenamesofall
selected items.
You can also edit the following signal characteristics by right-clicking in the
display region of the Signal Browser, the Filter Visualization Tool, or the
Spectrum Viewer:
•The signal name
•The sampling frequency
•The line style properties
Note If you modify the sampling frequency associated with a signal’s
spectrum using the right-click menu on the Spectrum Viewer display region,
the sampling frequency of the associated signal is automatically updated.
8-40
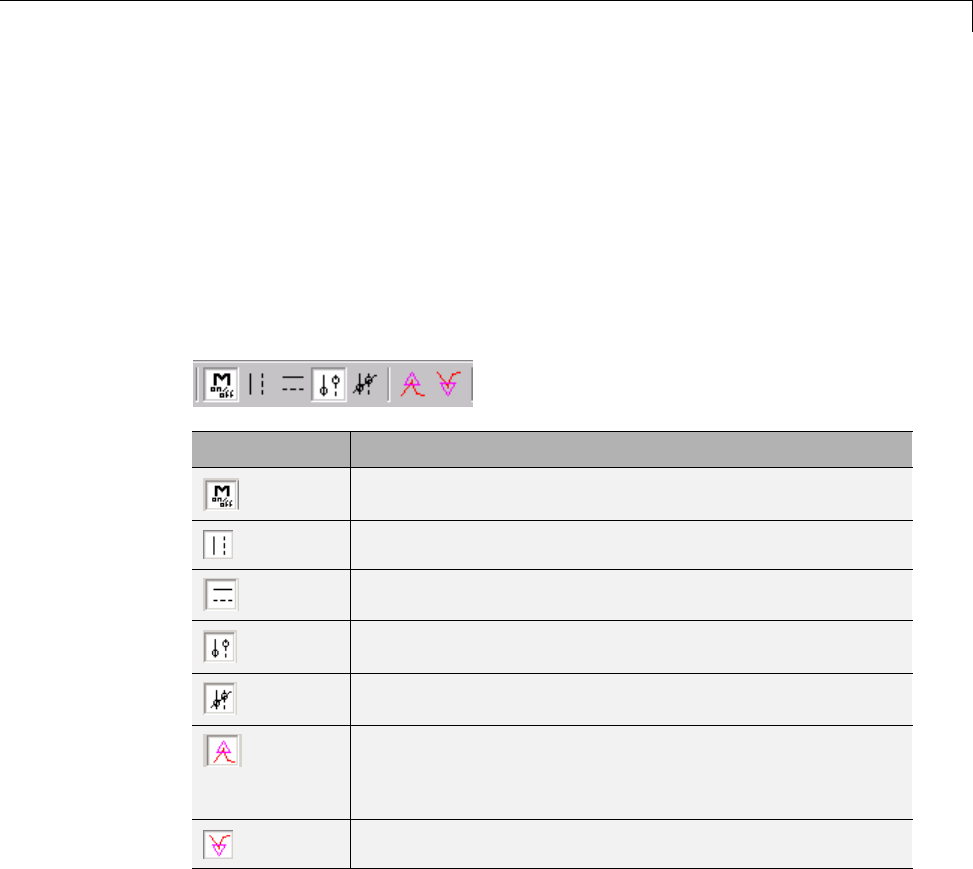
Making Signal Measurements with Markers
Making Signal Measurements with Markers
You can use the markers on the Signal Browser or the Spectrum Viewer to
make measurements on either of the following:
•A signal in the Signal Browser
•A power spectral density plotted in the Spectrum Viewer
The following marker buttons are included
Icon Description
Toggle markers on/off
Vertical markers
Horizontal markers
Vertical markers with tracking
Vertical markers with tracking and slope
Display peaks (local maxima)
You can find peaks in a signal from the command line
with findpeaks
Display valleys (local minima)
To make a measurement:
1Select a line to measure (or play, if you are in the Signal Browser).
2Select one of the marker buttons to applyamarkertothedisplayedsignal.
8-41

8SPTool: A Signal Processing GUI Suite
3Position a marker in the main display area by grabbing it with your mouse
and dragging:
aSelect a marker setting. If you choose the Vertical,Track,orSlope
buttons, you can drag a marker to the right or left. If you choose the
Horizontal button, you can drag a marker up or down.
bMove the mouse over the marker (1 or 2) that you want to drag.
The hand cursor with the marker number inside it is displayed when
your mouse passes over a marker.
cDrag the marker to where you want it on the signal
As you drag a marker, the bottom of the Signal Browser shows the current
position of both markers. Depending on which marker setting you select,
some or all of the following fields are displayed — x1,y1,x2,y2,dx,dy,
m. These fields are also displayed when you print from the Signal Browser,
unless you suppress them.
You can also position a marker by typing its x1 and x2 or y1 and y2 values
in the region at the bottom.
8-42
Setting Preferences
Setting Preferences
In this section...
“Overview of Setting Preferences” on page 8-43
“Summary of Settable Preferences” on page 8-44
“Setting the Filter Design Tool” on page 8-45
Overview of Setting Preferences
Use File > Preferences to customize displays and certain parameters for
SPTool and its four component GUIs. If you change any preferences, a dialog
box displays when you close SPTool askingifyouwanttosavethosechanges.
If you click Yes, the new settings are saved on disk and are used when you
restart SPTool from the MATLAB workspace.
Note You can set MATLAB preferences that affect the Filter Visualization
Tool only from within FVTool by selecting File > Preferences. You can set
FVTool-specific preferences using Analysis > Analysis Parameters.
8-43
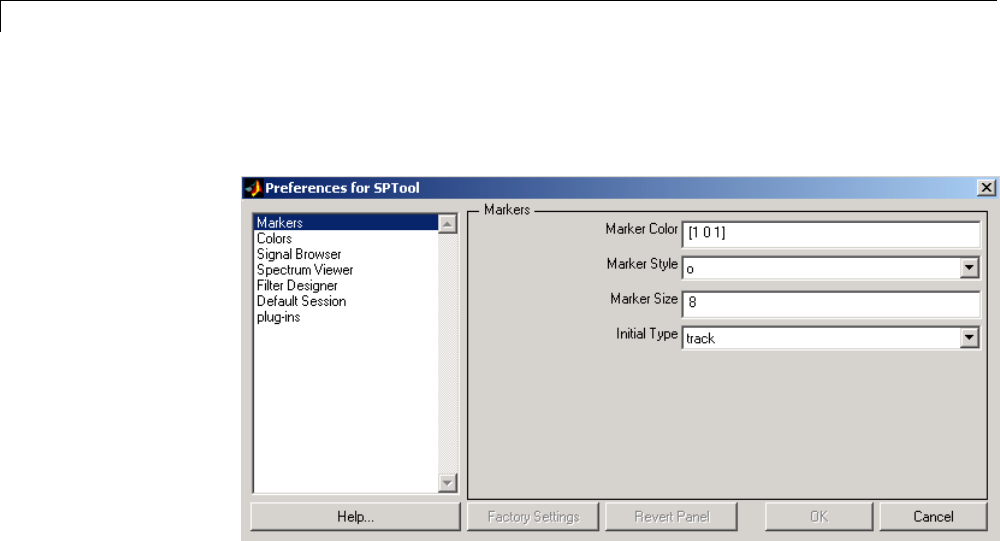
8SPTool: A Signal Processing GUI Suite
When you first select Preferences, the Preferences dialog box opens with
Markers selected by default.
Change any marker settings, if desired. To change settings for another
category, click its name in the category list to display its settings. Most
of the fields are self-explanatory. Details of the Filter Design options are
described below.
Summary of Settable Preferences
In the Preferences regions, you can
•Select colors and markers for all displays.
•Select colors and line styles for displayed signals.
•Configure labels, and enable/disable markers, panner, and zoom in the
Signal Browser.
•Configure display parameters, and enable/disable markers and zoom in
the Spectrum Viewer.
•Select whether to use the default FDATool or the Filter Designer to design
filters. FDATool is the recommended designer.
•Enable/disable use of a default session file.
8-44
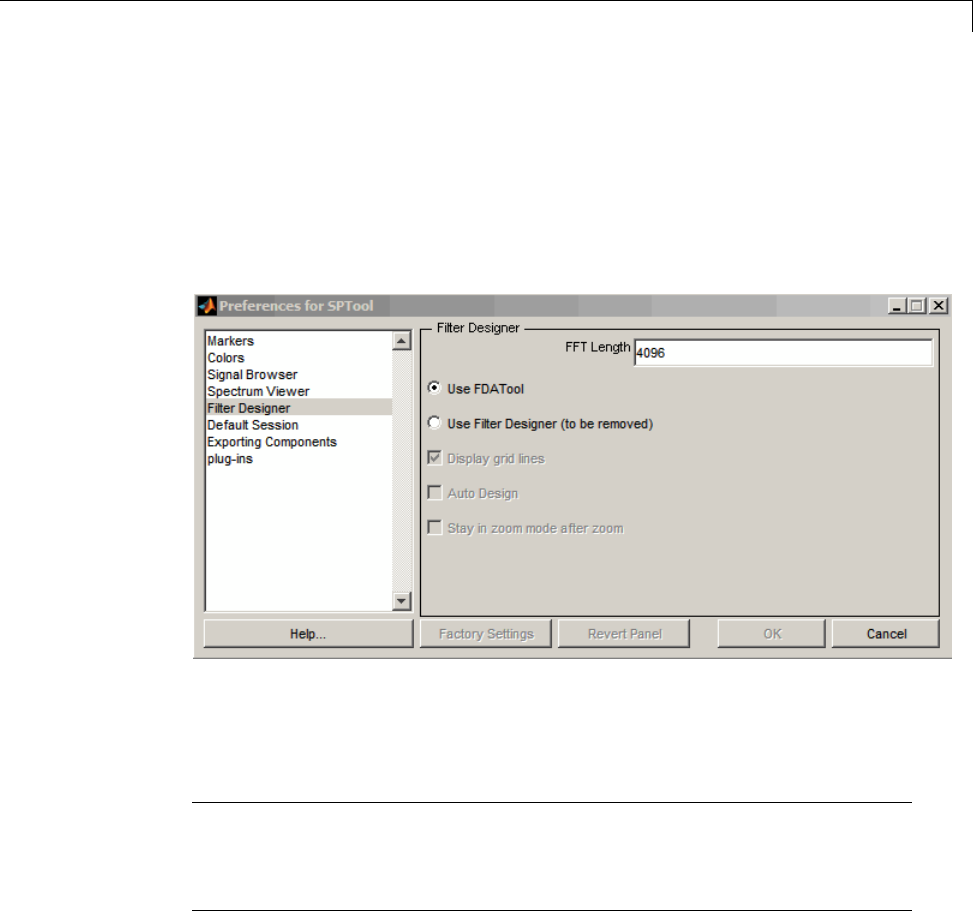
Setting Preferences
•Export filters for use with Control System Toolbox software.
•Enable/disable search for plug-ins at startup.
Setting the Filter Design Tool
The Filter Designer options include radio buttons to select the filter design
tool.
FDATool is the default and recommended tool. You can use Filter Designer,
but Filter Designer will be removed in a future release. You cannot change
this preference if either FDATool or the Filter Designer is open.
Note Filters in any one SPTool session must be in the same format — either
FDATool format or Filter Designer format. You can convert filters from the
Filter Designer format to FDATool format, but you cannot convert FDATool
filters to Filter Designer format.
If you change the preference from Use FDATool to Use Filter Designer,
a warning message appears. The warning message informs you that filters
created with FDATool are not compatible with Filter Designer and that Filter
Designer will be removed in the future.
8-45
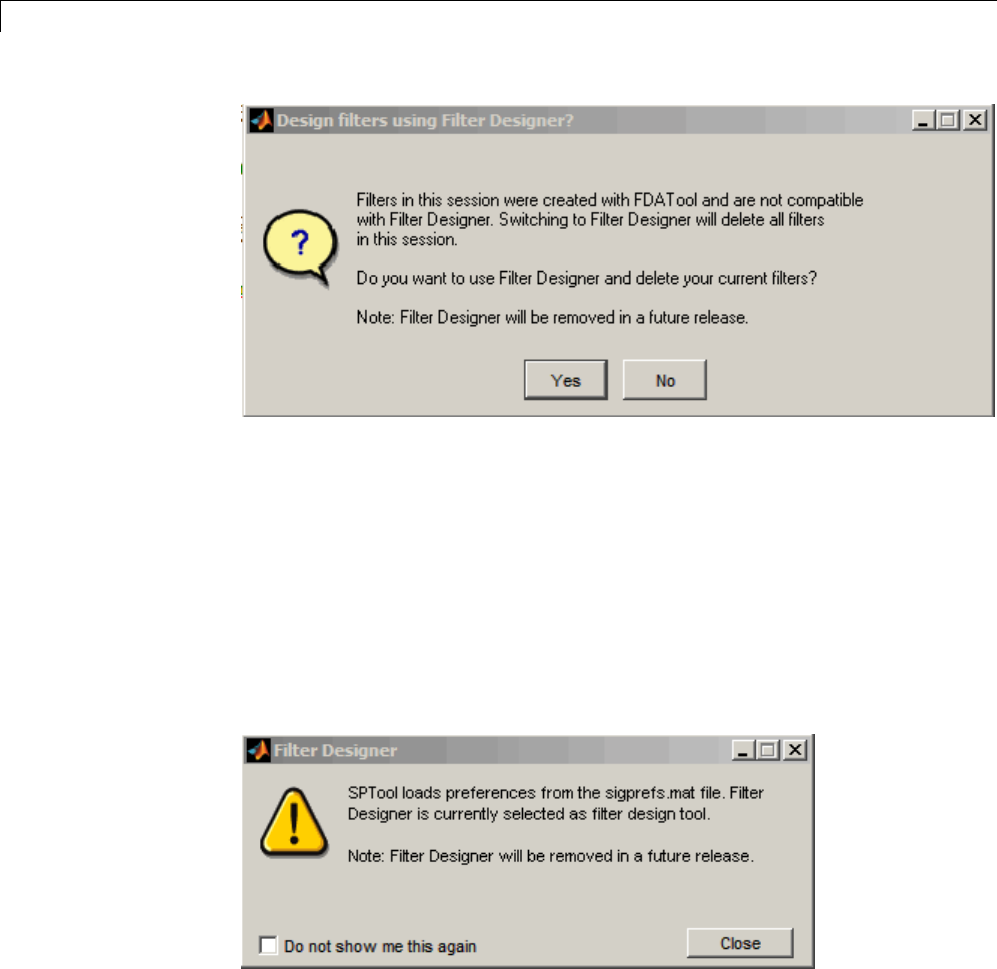
8SPTool: A Signal Processing GUI Suite
See “Saving and Loading Sessions” on page 8-37 for more information.
When you change the preference from Use Filter Designer to Use FDATool,
a confirmation message appears indicating that switching will convert your
filters to FDATool format. See “Saving and Loading Sessions” on page 8-37
for information on this message.
Changes to Filter Designer format are saved only if you save the session.
Exiting the session prompts you to save changes to the sigprefs.mat and
startup.spt files. Starting SPTool with Filter Designer specified as the filter
design tool results in the warning:
The warning appears each time SPTool initializes unless you opt to not show
the warning.
8-46
Using the Filter Designer
Using the Filter Designer
In this section...
“Filter Designer” on page 8-47
“Filter Types” on page 8-47
“FIR Filter Methods” on page 8-48
“IIR Filter Methods” on page 8-48
“Pole/Zero Editor” on page 8-48
“Spectral Overlay Feature” on page 8-48
“Opening the Filter Designer” on page 8-48
“Accessing Filter Parameters in a Saved Filter” on page 8-50
“Designing a Filter with the Pole/Zero Editor” on page 8-53
“Positioning Poles and Zeros” on page 8-54
“Redesigning a Filter Using the Magnitude Plot” on page 8-56
Filter Designer
“FDATool” on page 8-10 is the recommended filter design tool. Filter Designer
will be removed in a future release. The following information is provided for
users that choose to use Filter Designer while they transition to FDATool.
Filter Designer, provides an interactive graphical environment for the design
of digital IIR and FIR filters based on specifications that you enter on a
magnitude or pole-zero plot.
Filter Types
You can design filters of the following types using the Filter Designer:
•Bandpass
•Lowpass
•Bandstop
•Highpass
8-47

8SPTool: A Signal Processing GUI Suite
FIR Filter Methods
You can use the following filter methods to design FIR filters:
•Equiripple
•Least squares
•Window
IIR Filter Methods
You can use the following filter methods to design IIR filters:
•Butterworth
•Chebyshev Type I
•Chebyshev Type II
•Elliptic
Pole/ZeroEditor
You can use the Pole/Zero Editor to design arbitrary FIR and IIR filters by
placing and moving poles and zeros on the complex z-plane.
Spectral Overlay Feature
You can also superimpose spectra on a filter’s magnitude response to see if
the filtering requirements are met.
Opening the Filter Designer
Open the Filter Designer from SPTool by either:
•Clicking New in the Filters list in SPTool
•Selecting a filter you want to edit from the Filters list in SPTool, and
then clicking Edit
8-48
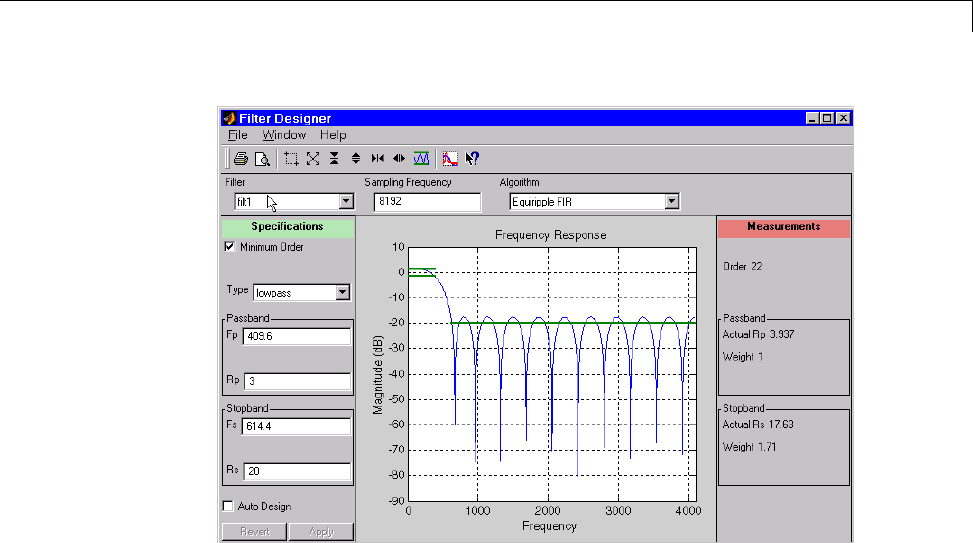
Using the Filter Designer
The Filter Designer has the following components:
•Apull-downFilter menu for selecting a filter from the list in SPTool
•ASampling Frequency text box
•Apull-downAlgorithm menu for selecting a filter design method or a
pole-zero plot display
•A Specifications area for viewing or modifying a filter’s design parameters
or pole-zero locations
•A plot display region for graphically adjusting filter magnitude responses
or the pole-zero locations
•A Measurements area for viewing the response characteristics and stability
of the current filter
•A toolbar with the following buttons
8-49
8SPTool: A Signal Processing GUI Suite
Icon Description
Print and print preview
Zoom in and out
Passband view
Overlay spectrum
Turn on the What’s This help
Accessing Filter Parameters in a Saved Filter
The MATLAB structures created by SPTool have several associated fields,
many of which are also MATLAB structures. See the MATLAB documentation
for general information about MATLAB structures.
For example, after exporting a filter filt1 to the MATLAB workspace, type
filt1
to display the fields of the MATLAB filter structure. The tf, Fs,andspecs
fields of the structure contain the information that describes the filter.
The tf Field: Accessing Filter Coefficients
The tf field is a structure containing the transfer function representation of
the filter. Use this field to obtain the filter coefficients;
•filt1.tf.num contains the numerator coefficients.
•filt1.tf.den contains the denominator coefficients.
The vectors contained in these structures represent polynomials in descending
powers of z. The numerator and denominator polynomials are used to specify
the transfer function
8-50
Using the Filter Designer
Hz Bz
Az
bbz bnbz
aaz ana
m
() ()
()
() () ( )
() () (
==
++++
+++
−−
−
12 1
12
1
1
++ −
1)zn
where:
•bis a vector containing the coefficients from the tf.num field.
•ais a vector containing the coefficients from the tf.den field.
•mis the numerator order.
•nis the denominator order.
You can change the filter representation from the default transfer function to
another form by using the tf2ss or tf2zp functions.
The Fs Field: Accessing Filter Sample Frequency
The Fs field contains the sampling frequency of the filter in hertz.
The specs Field: Accessing other Filter Parameters
The specs field is a structure containing parameters that you specified
for the filter design. The first field, specs.currentModule,containsa
string representing the most recent design method selected from the Filter
Designer’s Algorithm list before you exported the filter. The possible
contents of the currentModule field and the corresponding design methods
are shown below.
Contents of the currentModule
field Design Method
fdbutter Butterworth IIR
fdcheby1 Chebyshev Type I IIR
fdcheby2 Chebyshev Type II IIR
fdellip Elliptic IIR
fdfirls Least Squares FIR
fdkaiser Kaiser Window FIR
fdremez Equiripple FIR
8-51

8SPTool: A Signal Processing GUI Suite
Following the specs.currentModule field, there may be up to seven
additional fields, with labels such as specs.fdremez,specs.fdfirls,etc.
The design specifications for the most recently exported filter are contained
in the field whose label matches the currentModule string. For example, if
the specs structure is
filt1.specs
ans
currentModule: 'fdremez'
fdremez: [1x1 struct]
the filter specifications are contained in the fdremez field, which is itself
adatastructure.
The specifications include the parameter values from the Specifications region
of the Filter Designer, such as band edges and filter order. For example, the
filter above has the following specifications stored in filt1.specs.fdremez:
filt1.specs.fdremez
ans =
setOrderFlag: 0
type: 3
f: [0 0.2000 0.3000 0.5000 0.6000 1]
m: [6x1 double]
Rp: 0.0100
Rs: 75
wt: [3.2371 1 3.2371]
order: 78
Because certain filter parameters are unique to a particular design, this
structure has a different set of fields for each filter design.
The table below describes the possible fields associated with the filter design
specification field (the specs field) that can appear in the exported structure.
8-52
Using the Filter Designer
Parameter Description
Beta Kaiser window βparameter.
fContains a vector of band-edge frequencies, normalized
so that 1 Hz corresponds to half the sample frequency.
Fpass Passband cutoff frequencies. Scalar for lowpass and
highpass designs, two-element vector for bandpass and
bandstop designs.
Fstop Stopband cutoff frequencies. Scalar for lowpass and
highpass designs, two-element vector for bandpass and
bandstop designs.
mTheresponsemagnitudescorresponding to the band-edge
frequencies in f.
order Filter order.
Rp Passband ripple (dB)
Rs Stopband attenuation (dB)
setOrderFlag Contains 1if the filter order was specified manually (i.e.,
the Minimum Order box in the Specifications region
was not selected). Contains 0if the filter order was
computed automatically.
type Contains 1for lowpass, 2for highpass, 3for bandpass, or
4for bandstop.
w3db -3 dB frequency for Butterworth IIR designs.
wind Vector of Kaiser window coefficients.
Wn Cutoff frequency for the Kaiser window FIR filter when
setOrderFlag = 1.
wt Vector of weights, one weight per frequency band.
Designing a Filter with the Pole/Zero Editor
To design a filter transfer function using the Filter Designer Pole/Zero Editor:
1Select the Pole/Zero Editor option from the Algorithm list to open the
Pole/Zero Editor in the Filter Designer display.
8-53
8SPTool: A Signal Processing GUI Suite
2EnterthedesiredfiltergainintheGain edit box.
3Select a pole or zero (or conjugate pair) by selecting one of the (pole) or
(zero) symbols on the plot.
4Choose the coordinates to work in by specifying Polar or Rectangular
from the Coordinates list.
5Specify the new location(s) of the selected pole, zero, or conjugate pair by
typing values into the Mag and Angle fields (for angular coordinates) or X
and Y(for rectangular coordinates) fields. Alternatively, position the poles
and zeros by dragging the and symbols.
6Use the Conjugate pair check box to create a conjugate pair from a lone
pole or zero, or to break a conjugate pair into two individual poles or zeros.
Design a new filter or edit an existing filter in the same way.
Note Keep the Filter Visualization Tool (FVTool) open while designing a
filter with the Pole/Zero Editor. Any changes that you make to the filter
transfer function in the Pole/Zero Editor are then simultaneously reflected in
theresponseplotsofFVTool.
Positioning Poles and Zeros
You can use your mouse to move poles and zeros around the pole/zero plot
and modify your filter design.
Icon Description
Enable moving poles or zeros by dragging on the plot
Add pole
8-54
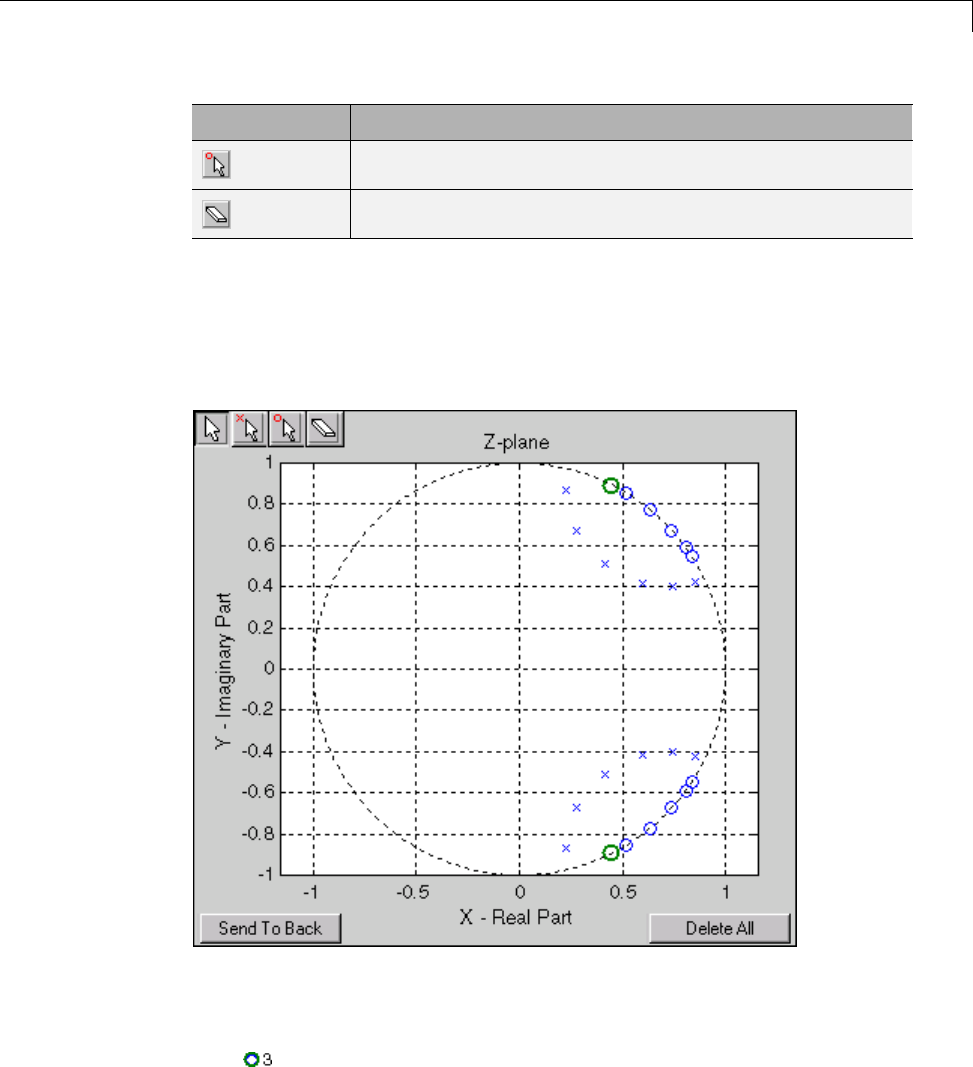
Using the Filter Designer
Icon Description
Add zero
Erase poles or zeros
You can move both members of a conjugate pair simultaneously by
manipulating just one of the poles or zeros.
To ungroup conjugates, select the desired pair and clear Conjugate pair in
the Specifications region on the Filter Designer.
When you place two or more poles (or two or more zeros) directly on top of each
other, a number is displayed next to the symbols (on the left for poles, and on
the right for zeros) indicating the number of poles or zeros at that location
(e.g., for three zeros). This number makes it easy to keep track of all the
8-55

8SPTool: A Signal Processing GUI Suite
poles and zeros in the plot area, even when several are superimposed on each
other and are not visually differentiable. Note, however, that this number
does not indicate the multiplicity of the poles or zeros to which it is attached.
To detect whether or not a set of poles or zeros are truly multiples, use the
zoom tools to magnify the region around the poles or zeros in question.
Because numerical limitations usually prevent any set of poles or zeros from
sharing exactly thesamevalue,atahighenoughzoomleveleventruly
multiple poles or zeros appear distinct from each other.
A common way to assess whether a particular group of poles or zeros contains
multiples is by comparing the mutual proximity of the group members against
a selected threshold value. As an example, the residuez function defines a
pole or zero as being a multiple of another pole or zero if the absolute distance
separating them is less than 0.1% of the larger pole or zero’s magnitude.
Redesigning a Filter Using the Magnitude Plot
After designing a filter in the Filter Designer, you can redesign it by dragging
the specification lines on the magnitude plot. Use the specification lines to
change passband ripple, stopband attenuation, and edge frequencies.
In the following example, create a Chebyshev filter and modify it by dragging
the specification lines:
1Select Chebyshev Type I IIR from the Algorithm menu.
2Select highpass from the Type menu.
3Type 2000 in the Sampling Frequency field.
4Set the following parameters:
•Fp =800
•Fs =700
•Rp =2.5
•Rs =35
5Select Minimum Order so the Filter Designer can calculate the lowest
filter order that produces the desired characteristics.
8-56
Using the Filter Designer
6Click Apply to compute the filter and update the response plot.
7Position the cursor over the horizontal filter specification line for the
stopband. This is the first (leftmost) horizontal specification line you see.
The cursor changes to the up/down drag indicator.
8DragthelineuntiltheRs (stopband attenuation) field reads 100.
Note The Order value in the Measurements region changes because a
higher filter order is needed to meet the new specifications.
8-57

8SPTool: A Signal Processing GUI Suite
8-58
9Code Generation from MATLAB®Support in Signal Processing Toolbox™
Supported Functions
Code generation from MATLAB is a restricted subset of the MATLAB
language that provides optimizations for:
•Generating efficient, production-quality C/C++ code and MEX files for
deployment in desktop and embedded applications. For embedded targets,
the subset restricts MATLAB semantics to meet the memory and data type
requirements of the target environments.
Depending on which feature you wish to use, there are additional required
products. For a comprehensive list, see “Installing Prerequisite Products” in
the Embedded Coder®documentation.
Code generation from MATLAB supports Signal Processing Toolbox functions
listed in the table. You must have the DSP System Toolbox software installed
to use this feature. To generate C code, you must have the MATLAB Coder™
software. If you have the Fixed-Point Toolbox, you can use fiaccel to
generate MEX code for fixed-point applications.
To follow the examples in this documentation:
•To generate C/C++ code and MEX files with codegen, install the MATLAB
Coder software, the Signal Processing Toolbox, the DSP System Toolbox,
and a C compiler. For the Windows®platform, MATLAB supplies a default
Ccompiler. Runmex -setup at the MATLAB command prompt to set up
the C compiler.
•Change to a folder where you have write permission.
Note Many Signal Processing Toolbox functions require constant inputs in
generated code. To specify a constant input for codegen,usecoder.Constant.
9-2
Supported Functions
Function Remarks/Limitations
barthannwin Window length must be a constant. Expressions or variables are
allowed if their values do not change.
bartlett Window length must be a constant. Expressions or variables are
allowed if their values do not change.
besselap Filter order must be a constant. Expressions or variables are allowed if
their values do not change.
bitrevorder —
blackman Window length must be a constant. Expressions or variables are
allowed if their values do not change.
blackmanharris Window length must be a constant. Expressions or variables are
allowed if their values do not change.
bohmanwin Window length must be a constant. Expressions or variables are
allowed if their values do not change.
buttap Filter order must be a constant. Expressions or variables are allowed if
their values do not change.
butter Filter coefficients must be constants. Expressions or variables are
allowed if their values do not change.
buttord All inputs must be constants. Expressions or variables are allowed if
their values do not change.
cfirpm All inputs must be constants. Expressions or variables are allowed if
their values do not change.
cheb1ap All inputs must be constants. Expressions or variables are allowed if
their values do not change.
cheb2ap All inputs must be constants. Expressions or variables are allowed if
their values do not change.
cheb1ord All inputs must be constants. Expressions or variables are allowed if
their values do not change.
cheb2ord All inputs must be constants. Expressions or variables are allowed if
their values do not change.
chebwin All inputs must be constants. Expressions or variables are allowed if
their values do not change.
9-3
9Code Generation from MATLAB®Support in Signal Processing Toolbox™
Function Remarks/Limitations
cheby1 All Inputs must be constants. Expressions or variables are allowed if
their values do not change.
cheby2 All inputs must be constants. Expressions or variables are allowed if
their values do not change.
dct Length of transform dimension must be a power of two. If specified, the
pad or truncation value must be constant. Expressions or variables are
allowed if their values do not change.
downsample —
dpss All inputs must be constants. Expressions or variables are allowed if
their values do not change.
ellip Inputs must be constant. Expressions or variables are allowed if their
values do not change.
ellipap All inputs must be constants. Expressions or variables are allowed if
their values do not change.
ellipord All inputs must be constants. Expressions or variables are allowed if
their values do not change.
filtfilt Filter coefficients must be constants. Expressions or variables are
allowed if their values do not change.
fir1 All inputs must be constants. Expressions or variables are allowed if
their values do not change.
fir2 All inputs must be constants. Expressions or variables are allowed if
their values do not change.
fircls All inputs must be constants. Expressions or variables are allowed if
their values do not change.
fircls1 All inputs must be constants. Expressions or variables are allowed if
their values do not change.
firls All inputs must be constants. Expressions or variables are allowed if
their values do not change.
firpm All inputs must be constants. Expressions or variables are allowed if
their values do not change.
9-4
Supported Functions
Function Remarks/Limitations
firpmord All inputs must be constants. Expressions or variables are allowed if
their values do not change.
firrcos All inputs must be constants. Expressions or variables are allowed if
their values do not change.
flattopwin All inputs must be constants. Expressions or variables are allowed if
their values do not change.
freqz freqz with no output arguments produces a plot only when the function
call terminates in a semicolon. See “freqz With No Output Arguments”
on page 9-15.
gaussfir All inputs must be constant. Expressions or variables are allowed if
their values do not change.
gausswin All inputs must be constant. Expressions or variables are allowed if
their values do not change.
hamming All inputs must be constant. Expressions or variables are allowed if
their values do not change.
hann All inputs must be constant. Expressions or variables are allowed if
their values do not change.
idct Length of transform dimension must be a power of two. If specified, the
pad or truncation value must be constant. Expressions or variables are
allowed if their values do not change.
intfilt All inputs must be constant. Expressions or variables are allowed if
their values do not change.
kaiser All inputs must be constant. Expressions or variables are allowed if
their values do not change.
kaiserord —
levinson If specified, the order of recursion must be a constant. Expressions or
variables are allowed if their values do not change.
maxflat All inputs must be constant. Expressions or variables are allowed if
their values do not change.
nuttallwin All inputs must be constant. Expressions or variables are allowed if
their values do not change.
9-5
9Code Generation from MATLAB®Support in Signal Processing Toolbox™
Function Remarks/Limitations
parzenwin All inputs must be constant. Expressions or variables are allowed if
their values do not change.
rectwin All inputs must be constant. Expressions or variables are allowed if
their values do not change.
resample The upsampling and downsampling factors must be specified as
constants. Expressions or variables are allowed if their values do not
change.
sgolay All inputs must be constant. Expressions or variables are allowed if
their values do not change.
sosfilt —
taylorwin All inputs must be constant. Expressions or variables are allowed if
their values do not change.
triang All inputs must be constant. Expressions or variables are allowed if
their values do not change.
tukeywin All inputs must be constant. Expressions or variables are allowed if
their values do not change.
upfirdn •Filter coefficients, upsampling factor, and downsampling factor must
be constants. Expressions or variables are allowed if their values
do not change.
•Variable-size inputs are not supported.
upsample Either declare input nas constant, or use the assert function in the
calling function to set upper bounds for n. For example,
assert(n<10)
xcorr —
yulewalk If specified, the order of recursion must be a constant. Expressions or
variables are allowed if their values do not change.
9-6
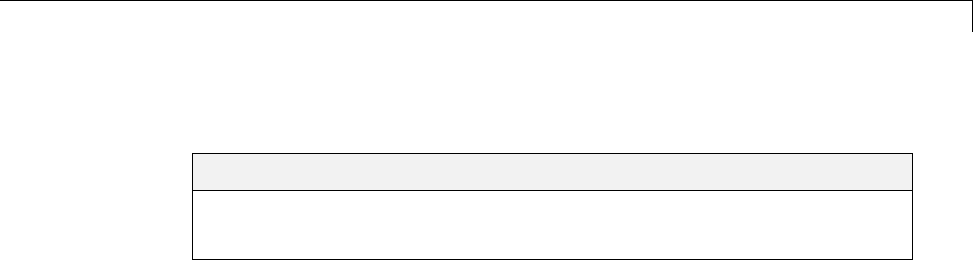
Specifying Inputs in Code Generation from MATLAB®
Specifying Inputs in Code Generation from MATLAB
In this section...
“Defining Input Size and Type” on page 9-7
“Inputs must be Constants” on page 9-8
Defining Input Size and Type
When you use Signal Processing Toolbox functions for code generation, you
must define the size and type of the function inputs. One way to do this is
with the -args compilation option. The size and type of inputs must be
defined because C is a statically typed language. . To illustrate the need to
define input size and type, consider the simplest call to xcorr requiring two
input arguments. The following demonstrates the differences in the use of
xcorr in MATLAB and in Code Generation from MATLAB.
Cross correlate two white noise vectors in MATLAB:
x = randn(512,1); %real valued white noise
y = randn(512,1); %real valued white noise
[C,lags] = xcorr(x,y);
x_circ = randn(256,1)+1j*randn(256,1); %circular white noise
y_circ = randn(256,1)+1j*randn(256,1); %circular white noise
[C1,lags1] = xcorr(x_circ,y_circ);
xcorr does not require any information about the size and type of the
input arguments. xcorr obtains this information at runtime. Contrast this
behavior with a MEX-file created with codegen.Createthefilemyxcorr.m in
a folder where you have read and write permission. Ensure that this folder
is in the MATLAB search path. Copy and paste the following two lines of
code into myxcorr.m and save the file. The compiler tag %#codegen must
be included in the file.
function [C,Lags]=myxcorr(x,y) %#codegen
[C,Lags]=xcorr(x,y);
Enter the following command at the MATLAB command prompt:
codegen myxcorr -args {zeros(512,1),zeros(512,1)} -o myxcorr
9-7

9Code Generation from MATLAB®Support in Signal Processing Toolbox™
Run the MEX-file:
x = randn(512,1); %real valued white noise
y = randn(512,1); %real valued white noise
[C,Lags] = myxcorr(x,y);
Define two new inputs x1 and y1 by transposing xand y.
x1 = x'; %x1 is 1x512
y1 = y'; %y1 is 1x512
Attempt to rerun the MEX-file with the tranposed inputs.
[C,Lags] = myxcorr(x1,y1); %Errors
The preceding program errors with the message ??? MATLAB expression
'x' is not of the correct size: expected [512x1] found [1x512]..
The error results because the inputs are specified to be 512x1 real-valued
column vectors at compilation. For complex-valued inputs, you must specify
that the input is complex valued. For example:
codegen myxcorr -o ComplexXcorr ...
-args {complex(zeros(512,1)),complex(zeros(512,1))}
Run the MEX-file at the MATLAB command prompt with complex-valued
inputs of the correct size:
x_circ = randn(512,1)+1j*randn(512,1); %circular white noise
y_circ = randn(512,1)+1j*randn(512,1); %circular white noise
[C,Lags] = ComplexXcorr(x_circ,y_circ);
Attempting to run ComplexXcorr with real valued inputs results in the error:
??? MATLAB expression 'x' is not of the correct complexness.
Inputs must be Constants
For a number of supported Signal Processing Toolbox functions, the inputs
or a subset of the inputs must be specified as constants at compilation
time. Functions with this behavior are noted in the right column of the
table “Supported Functions” on page 9-2. Use coder.Type with the -args
compilation option, or enter the constants directly in the source code.
9-8

Specifying Inputs in Code Generation from MATLAB®
Specifying inputs as constants at compilation time results in significant
advantages in the speed and efficiency of the generated code. For example,
storing filter coefficients or window function values as vectors in the C source
code improves performance by avoiding costly computation at runtime.
Because a primary purpose of Code Generation from MATLAB is to generate
optimized C code for desktop and embeddedsystems,emphasisisplacedon
providing the user with computational savings at runtime whenever possible.
To illustrate the constant input requirement with butter, create the file
myLowpassFilter.m inafolderwhereyouhavereadandwritepermission.
Ensure that this folder is in the MATLAB search path. Copy and paste the
following lines of code into myLowpassFilter.m and save the file.
function output = myLowpassFilter(input,N,Wn) %#codegen
[B,A] = butter(N,Wn,'low');
output = filter(B,A,input);
If you have the MATLAB Coder software, enter the following command at the
MATLAB command prompt:
codegen myLowpassFilter -o myLowpassFilter ...
-args {zeros(512,1), coder.newtype('constant',5),coder.newtype('constant',
0
Once the program compiles successfully, the following message appears in the
command window: Code generation successful: View report.
Click on View report.ClickontheC code tab on the top left and open the
target source file myLowpassFilter.c.
Note that the numerator and denominator filter coefficients are included in
the source code.
static real_T dv0[6] = { 5.9795780369978346E-5, 0.00029897890184989173,
static real_T dv1[6] = { 1.0, -3.9845431196123373, 6.4348670902758709, .
Run the MEX-file without entering the constants:
output = myLowpassFilter(randn(512,1));
If you attempt to run the MEX-file by inputting the constants, you receive
the error ??? Error using ==> myLowpassFilter 1 input required for
entry-point 'myLowpassFilter'..
9-9

9Code Generation from MATLAB®Support in Signal Processing Toolbox™
You may also enter the constants in the MATLAB source code directly. Edit
the myLowPassFilter.m file and replace the MATLAB code with the lines:
function output = myLowpassFilter(input) %#codegen
[B,A] = butter(5,0.1,'low');
output = filter(B,A,input);
Enter the following command at the MATLAB command prompt:
codegen myLowpassFilter -args {zeros(512,1)} -o myLowpassFilter
Run the MEX-file by entering the following at the MATLAB command prompt:
output = myLowpassFilter(randn(512,1));
See “Apply Window to Input Signal” on page 9-11 ,“Apply Lowpass Filter
to Input Signal” on page 9-13, and “Zero Phase Filtering” on page 9-16 for
additional examples of the constant input requirement.
9-10
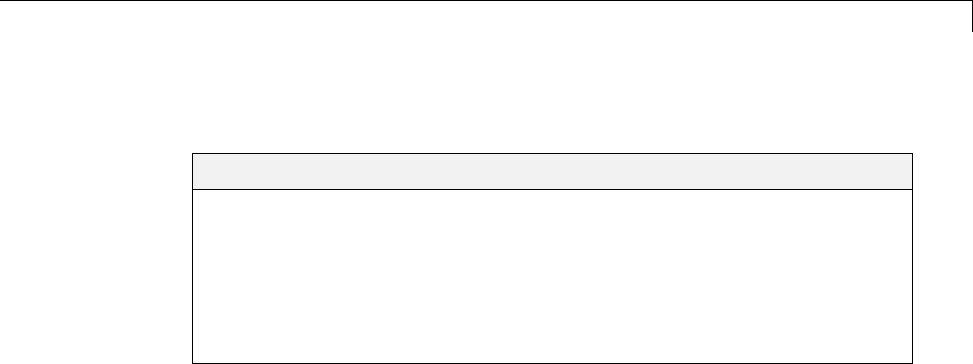
Code Generation Examples
Code Generation Examples
In this section...
“Apply Window to Input Signal” on page 9-11
“Apply Lowpass Filter to Input Signal” on page 9-13
“Cross Correlate or Autocorrelate Input Data” on page 9-14
“freqz With No Output Arguments” on page 9-15
“Zero Phase Filtering” on page 9-16
Apply Window to Input Signal
In this example, apply a Hamming window to an input data vector of size
512x1.
Create a file called window_data.m by typing
>>edit window_data
at the MATLAB command prompt.
Copy and paste the code provided into the editor and save the file.
function output_data=window_data(input_data,N) %#codegen
Win=hamming(N);
output_data=input_data.*Win;
Use codegen to generate a MEX–file window_data.m.
codegen window_data -args {zeros(512,1),coder.newtype('constant',512)} -o
w
The -args option defines the input specifications for the MEX –file.
input_data is a 512x1 real valued vector. Because the input to hamming
must be a constant, coder.newtype is used to specify the window length. In
a conventional MATLAB program, you can read the input data length at
runtime and construct a Hamming window of the corresponding length.
Alternatively, edit the code for window_data.m as follows:
9-11
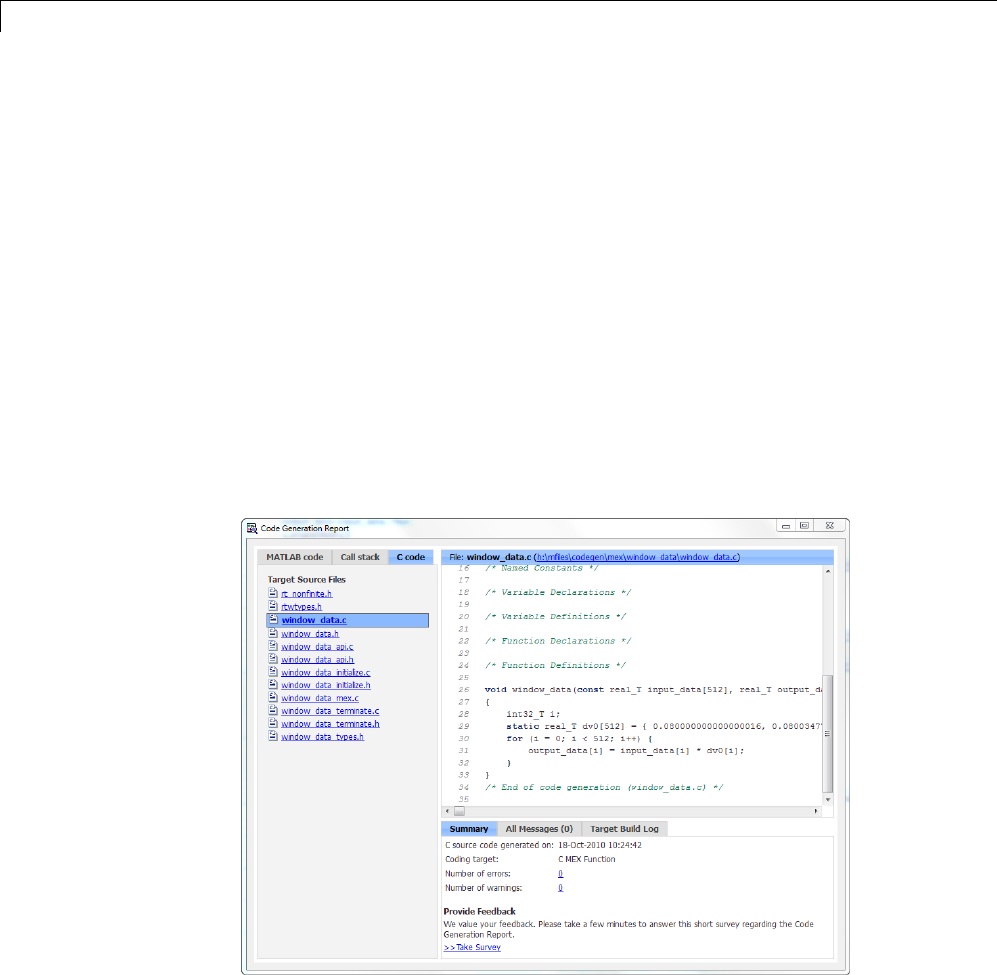
9Code Generation from MATLAB®Support in Signal Processing Toolbox™
function output_data=window_data(input_data) %#codegen
Win=hamming(512);
output_data=input_data.*Win;
The preceding code specifies the length of the Hamming window in the
source code as opposed to using coder.newtype.Usecodegen to generate a
MEX–file and C code:
codegen window_data -args {zeros(512,1)} -o window_data -report
The -report flag generates a compilation report. If the codegen operation is
successful, you obtain: Code generation successful: View report.
Click on View report to view the Code Generation Report.
Select the C-code tab and select window_data.c as the Target Source File.
Note from the location bar that the C source code is in the
codegen/mex/<FUNCTION_NAME> folder. Running codegen creates this folder
9-12

Code Generation Examples
and places the C source code, C header files, and MEX files in the folder. Each
function that you create produces a codegen/mex/<FUNCTION_NAME> folder.
Scroll through the C code to see that the values of the Hamming window are
included directly in the C source code.
Run the MEX-file on a white noise input:
% Window white noise input
output_data=window_data(randn(512,1));
Apply Lowpass Filter to Input Signal
Assuming a sampling frequency of 20 kHz, create a 4–th order Butterworth
filter with a 3–dB frequency of 2.5 kHz. Use the Butterworth filter to lowpass
filter a 10000x1 input data vector.
Create a file called ButterFilt.m. Copy and paste the following code into
the file.
function output_data=ButterFilt(input_data) %#codegen
[b,a]=butter(4,0.25);
output_data=filter(b,a,input_data);
Run the codegen command to obtain the C source code ButterFilt.c and
MEX file:
codegen ButterFilt -args {zeros(10000,1)} -o ButterFilt -report
The C source code includes the five numerator and denominator coefficients
of the 4–th order Butterworth filter as constants.
static real_T dv0[5] = { 0.010209480791203124, 0.040837923164812495, 0.061
2
static real_T dv1[5] = { 1.0, -1.9684277869385174, 1.7358607092088851, -0.
7
Apply the filter using the MEX-file:
Fs=20000;
%Create 10000x1 input signal
t=0:(1/Fs):0.5-(1/Fs);
input_data=(cos(2*pi*1000*t)+sin(2*pi*500*t)+0.2*randn(size(t)))';
%Filter data
9-13

9Code Generation from MATLAB®Support in Signal Processing Toolbox™
output_data=ButterFilt(input_data);
Cross Correlate or Autocorrelate Input Data
Estimate the cross correlation or autocorrelation of two real-valued input
vectors to lag 50. Output the estimate at the nonnegative lags.
Create a file called myxcorr.m. Copy and paste the following code into the file:
function [C,Lags]=myxcorr(x,y) %#codegen
[c,lags]=xcorr(x,y,50,'coeff');
C=c(51:end);
Lags=lags(51:end);
Run the codegen command at the MATLAB command prompt:
codegen myxcorr -args {zeros(512,1), zeros(512,1)} -o myxcorr -report
Use the MEX-file to compute and plot the autocorrelation of a white noise
input:
rng(0,'twister')
%White noise input
input_data=randn(512,1);
%Compute autocorrelation with MEX-file
[C,Lags]=myxcorr(input_data,input_data);
% Plot the result
stem(Lags,C); axis([-0.5 51 -1.1 1.1])
xlabel('Lags'); ylabel('Autocorrelation Function');
9-14
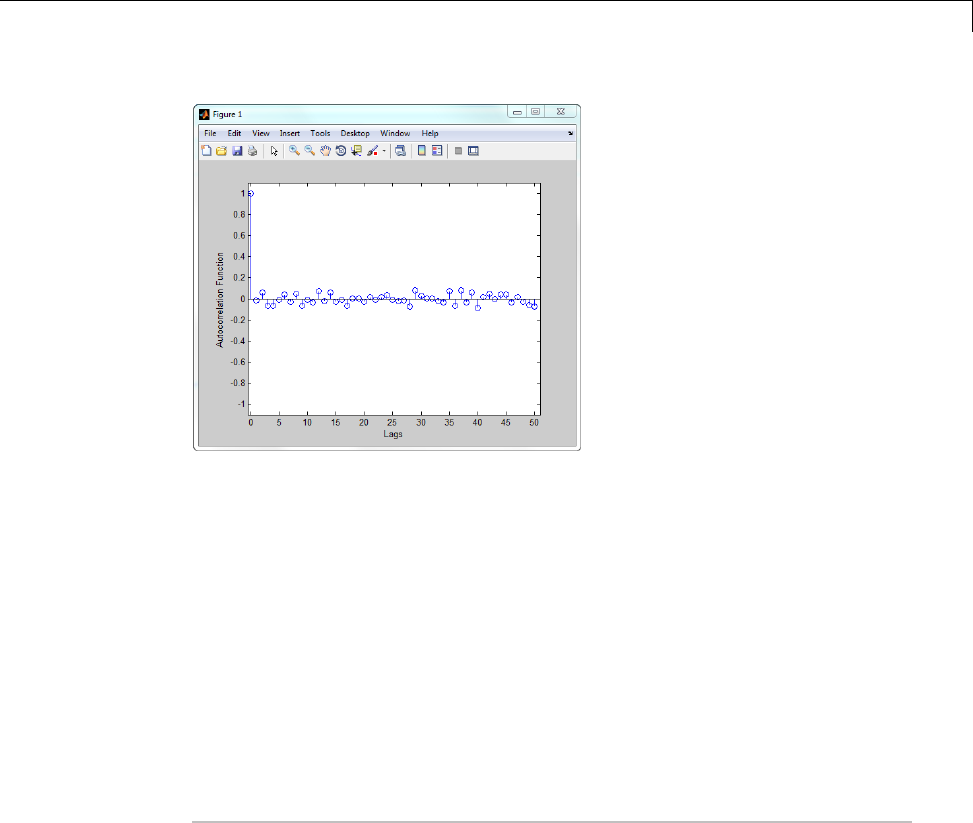
Code Generation Examples
freqz With No Output Arguments
In Code Generation from MATLAB, freqz with no output arguments behaves
differently than in the standard MATLAB language. In standard MATLAB,
freqz with no output arguments produces a plot of the magnitude and phase
response of the input filter. The plot is produced regardless of whether the
call to freqz terminates in a semicolon or not. No frequency response or
phase vectors are returned.
freqz with no output arguments and no terminating semicolon:
B = [0.05 0.9 0.05]; %Numerator coefficients
freqz(B,1) %no semicolon. Plot is produced
freqzwith no output arguments and terminating in a semicolon:
B = [0.05 0.9 0.05]; %Numerator coefficients
freqz(B,1); %semicolon. Plot is produced
The behavior shown in the preceding examples differs from the expected
behavior of a MEX-file using freqz with code generation support. To
illustrate this difference create a program called myfreqz.m.
9-15

9Code Generation from MATLAB®Support in Signal Processing Toolbox™
Copy and paste the following code into the file:
function myfreqz(B,A) %#codegen
freqz(B,A)
Run the following command at the MATLAB command prompt:
codegen myfreqz -args {zeros(1,3), zeros(1,1)} -o myfreqz
Calling the MEX-file writes a 512x1 complex-valued vector to the workspace
and displays the output. The vector is the frequency response. No plot is
produced.
myfreqz([0.05 0.9 0.05],1);
Change the code in myfreqz.m by adding a terminating semicolon:
function myfreqz(B,A) %#codegen
freqz(B,A);
Run the following command at the MATLAB command prompt:
codegen myfreqz -args {zeros(1,3), zeros(1,1)} -o myfreqz
Calling the MEX-file produces a plot of the magnitude and phase response of
the filter. The output of the complex-valued frequency response is suppressed.
myfreqz([0.05 0.9 0.05],1);
Zero Phase Filtering
Design a lowpass Butterworth filter with a 1 kHz 3–dB frequency to
implement zero phase filtering on data with a sampling frequency of 20 kHz.
[B,A] = butter(20,0.314,'low');
Create the program myZerophaseFilt.m.
function output = myZerophaseFilt(input) %#codegen
B=1e-3 *[
0.0000
0.0001
0.0010
0.0060
9-16

Code Generation Examples
0.0254
0.0814
0.2035
0.4071
0.6615
0.8820
0.9702
0.8820
0.6615
0.4071
0.2035
0.0814
0.0254
0.0060
0.0010
0.0001
0.0000];
A=[1.0000
-7.4340
28.2476
-71.6333
134.6222
-197.9575
235.1628
-230.2286
188.0901
-129.1746
74.8284
-36.5623
15.0197
-5.1525
1.4599
-0.3361
0.0613
-0.0085
0.0009
-0.0001
0.0000];
output = filtfilt(B,A,input);
9-17
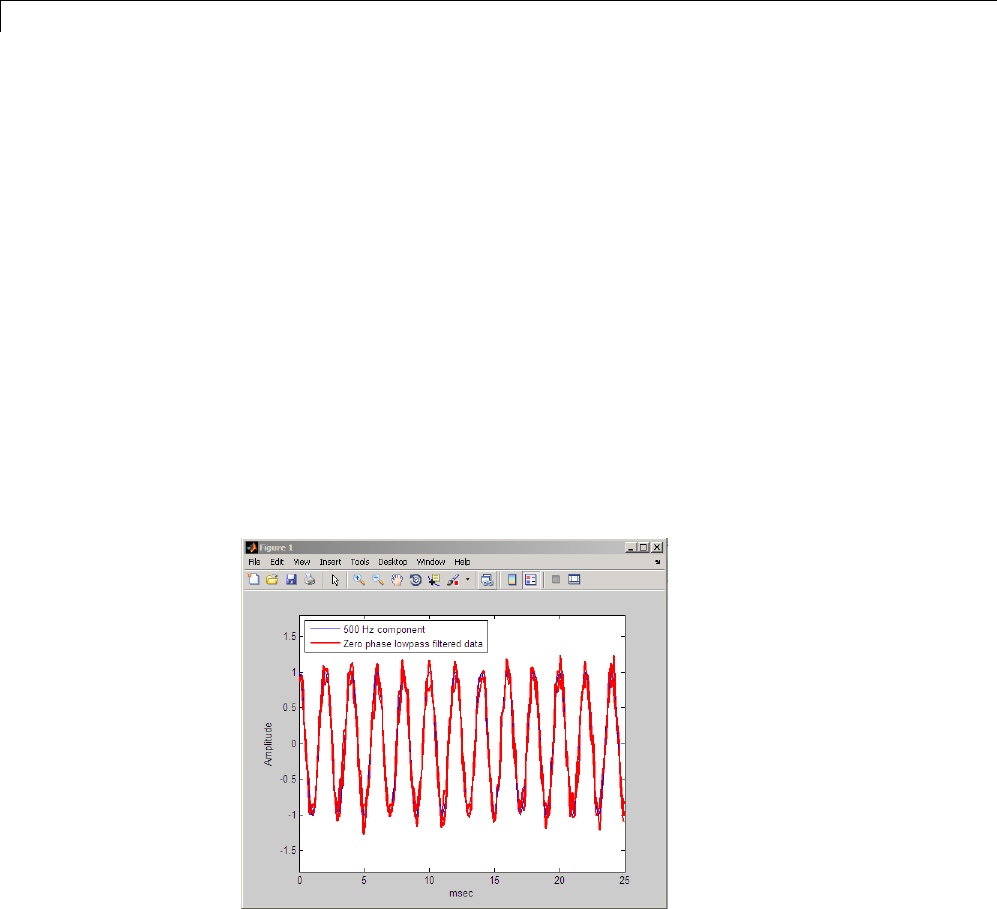
9Code Generation from MATLAB®Support in Signal Processing Toolbox™
Run the following command at the MATLAB command prompt:
codegen myZerophaseFilt -args {zeros(1,20001)} -o myZerophaseFilt
Filter input data with myZerophaseFilt:
Fs = 20000;
t = 0:(1/Fs):1;
Comp500Hz = cos(2*pi*500*t);
Signal = Comp500Hz+sin(2*pi*4000*t)+0.2*randn(size(t));
FilteredData = myZerophaseFilt(Signal);
plot(t(1:500).*1000,Comp500Hz(1:500));
xlabel('msec'); ylabel('Amplitude');
axis([0 25 -1.8 1.8]); hold on;
plot(t(1:500).*1000,FilteredData(1:500),'r','linewidth',2);
legend('500 Hz component','Zero phase lowpass filtered data',...
'Location','NorthWest');
9-18

10
Convolution and
Correlation
•“LinearandCircularConvolution”onpage10-2
•“Confidence Intervals for Sample Autocorrelation” on page 10-5
•“Residual Analysis with Autocorrelation” on page 10-9
•“Autocorrelation of Moving Average Process” on page 10-19
•“Cross-correlation of Two Moving Average Processes” on page 10-21
•“Cross-correlation of Delayed Signal in Noise” on page 10-23
•“Cross-correlation of Phase-Lagged Sine Wave” on page 10-26

10 Convolution and Correlation
Linear and Circular Convolution
This example shows how to establish an equivalence between linear and
circular convolution.
Linear and circular convolution are fundamentally different operations.
However, there are conditions under which linear and circular convolution
are equivalent. Establishing this equivalence has important implications. For
two vectors, xand y, the circular convolution is equal to the inverse discrete
Fourier transform (DFT) of the product of the vectors’ DFTs. Knowing the
conditions under which linear and circular convolution are equivalent allows
you to use the DFT to efficiently compute linear convolutions.
The linear convolution of an N-point vector, x, and a L-point vector, y,has
length N+L-1.
For the circular convolution of xand yto be equivalent, you must pad the
vectors with zeros to length at least N+L-1 before you take the DFT. After you
invert the product of the DFTs, retain only the first N+L-1 elements.
Create two vectors, xand y, and compute the linear convolution of the two
vectors.
x = [2 1 2 1];
y=[123];
clin = conv(x,y);
The output has length 4+3–1.
Pad both vectors with zeros to length 4+3–1. Obtain the DFT of both vectors,
multiply the DFTs, and obtain the inverse DFT of the product.
xpad = [x zeros(1,6-length(x))];
ypad = [y zeros(1,6-length(y))];
ccirc = ifft(fft(xpad).*fft(ypad));
The circular convolution of the zero-padded vectors, xpad and ypad,is
equivalent to the linear convolution of xand y. You retain all the elements of
ccirc because the output has length 4+3–1.
10-2
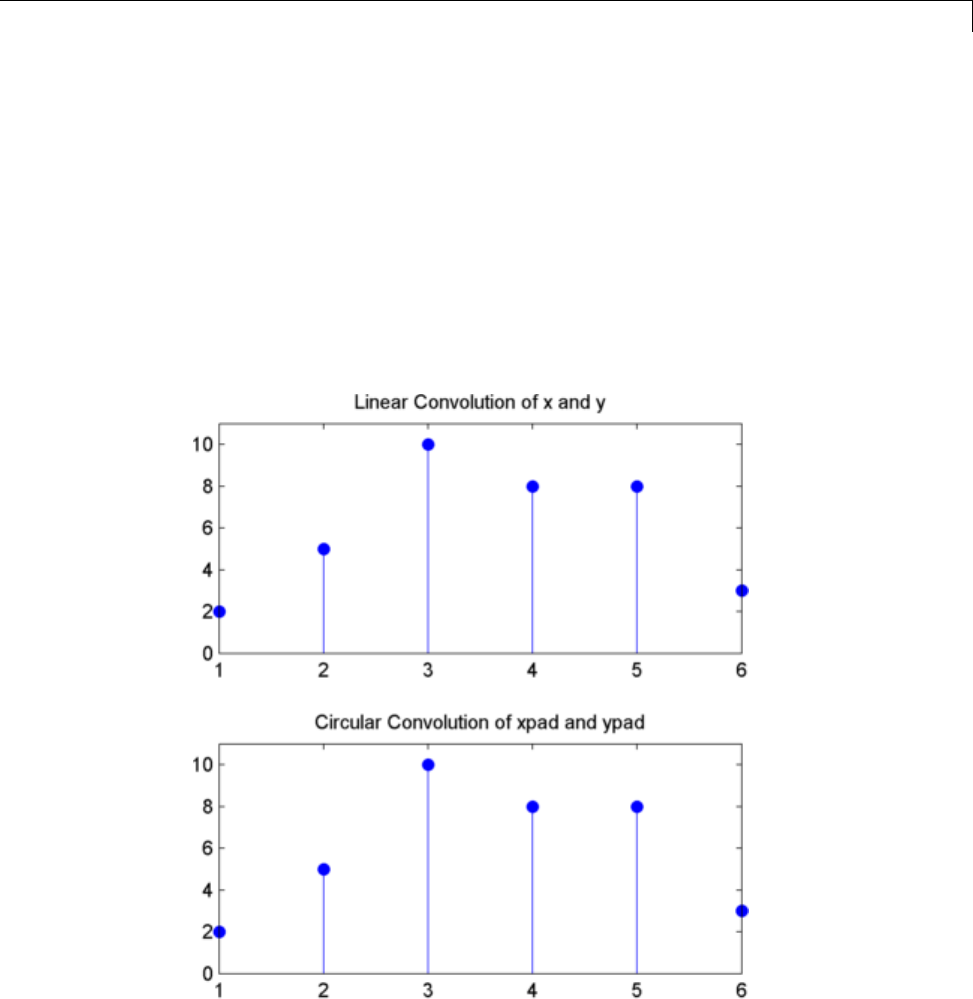
Linear and Circular Convolution
Plot the output of linear convolution and the inverse of the DFT product to
show the equivalence.
subplot(211)
stem(clin,'markerfacecolor',[0 0 1]);
title('Linear Convolution of x and y');
set(gca,'ylim',[0 11]);
subplot(212)
stem(ccirc,'markerfacecolor',[0 0 1]);
set(gca,'ylim',[0 11]);
title('Circular Convolution of xpad and ypad');
10-3

10 Convolution and Correlation
Pad the vectors to length 12 and obtain the circular convolution using the
inverse DFT of the product of the DFTs. Retain only the first 4+3–1 elements
to produce an equivalent result to linear convolution.
N = length(x)+length(y)-1;
xpad = [x zeros(1,12-length(x))];
ypad = [y zeros(1,12-length(y))];
ccirc = ifft(fft(xpad).*fft(ypad));
ccirc = ccirc(1:N);
The Signal Processing Toolbox software has a function, cconv, that returns
the circular convolution of two vectors. You can obtain the linear convolution
of xand yusing circular convolution with the following code.
ccirc2 = cconv(x,y,6);
cconv internallyusesthesameDFT-based procedure illustrated in the
previous example.
10-4

Confidence Intervals for Sample Autocorrelation
Confidence Intervals for Sample Autocorrelation
This example shows how to construct confidence intervals for the sample
autocorrelation of a white noise process. Having confidence intervals for a
white noise process is important, because many time series procedures aim to
whiten, or decorrelate a random process. To determine the effectiveness of the
whitening procedure, you examine the autocorrelation.
If x(n) is a white noise process, the sample normalized autocorrelation is
approximately normally distributed with mean zero and variance 1/N, where
N is the length of the input vector. In other words, the sample normalized
autocorrelation values follow a N(0,1/N) distribution.
You can form an approximate confidence interval using the mean plus
or minus the appropriate α-level critical value on the standard normal
distribution times the standard deviation. For a symmetric distribution like
the Gaussian (normal), this interval takes the form
z/2
where μis the mean, σis the standard deviation, and zα/2 is the value such
that the interval contains (1–α)% of the probability.
For the N(0,1) distribution, zα/2 = 1.96 gives a 95% probability interval.
10-5
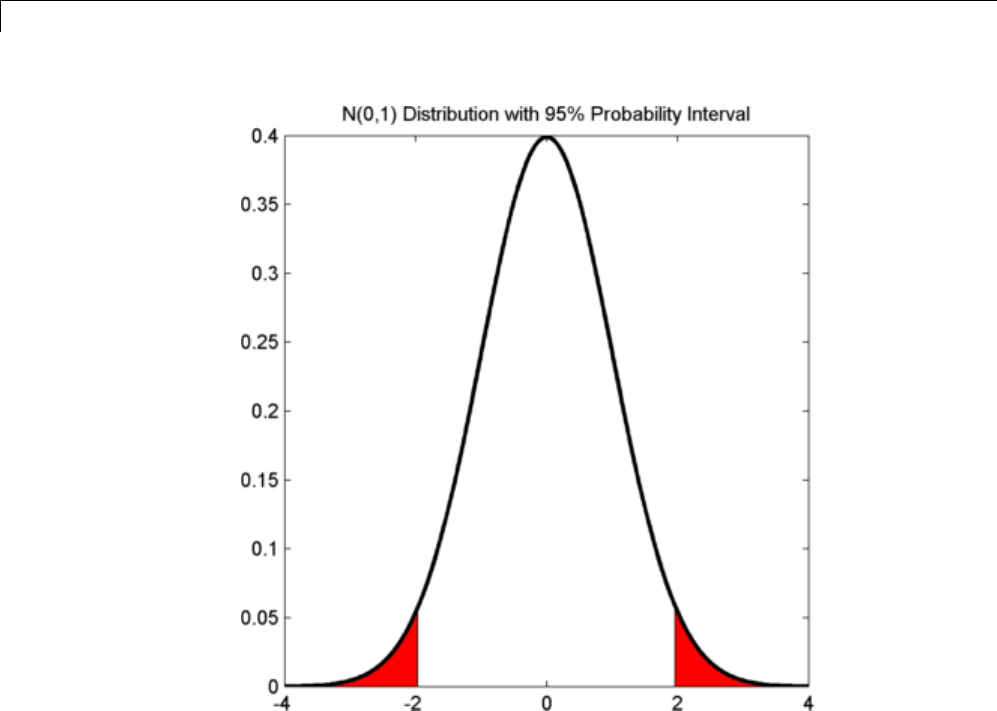
10 Convolution and Correlation
Create a realization of a white noise process 1,000 samples in length. Compute
the sample autocorrelation to lag 20. Plot the sample autocorrelation along
with the approximate 95%-confidence intervals for a white noise process.
Create the white noise random vector. Set the random number generator to
the default settings for reproducible results. Obtain the normalized sampled
autocorrelation to lag 20.
rng default;
x = randn(1e3,1);
[xc,lags] = xcorr(x,20,'coeff');
Create the lower and upper 95% confidence bounds for the N(0,1/N)
distribution. For a 95%-confidence interval, the critical value is 1.96. The
10-6
Confidence Intervals for Sample Autocorrelation
standard deviation is the square root of 1/N, where N is the length of the
input vector.
Theconfidenceintervalis
0196
1000
.
lconf = -1.96/sqrt(length(x));
upconf = 1.96/sqrt(length(x));
Plot the sample autocorrelation along with the 95%-confidence interval.
stem(lags,xc,'markerfacecolor',[0 0 1]);
set(gca,'ylim',[lconf-0.03 1.05]);
hold on;
line(lags,lconf*ones(size(lags)),'color','r','linewidth',2);
line(lags,upconf*ones(size(lags)),'color','r','linewidth',2);
title('Sample Autocorrelation with 95% Confidence Intervals');
10-7
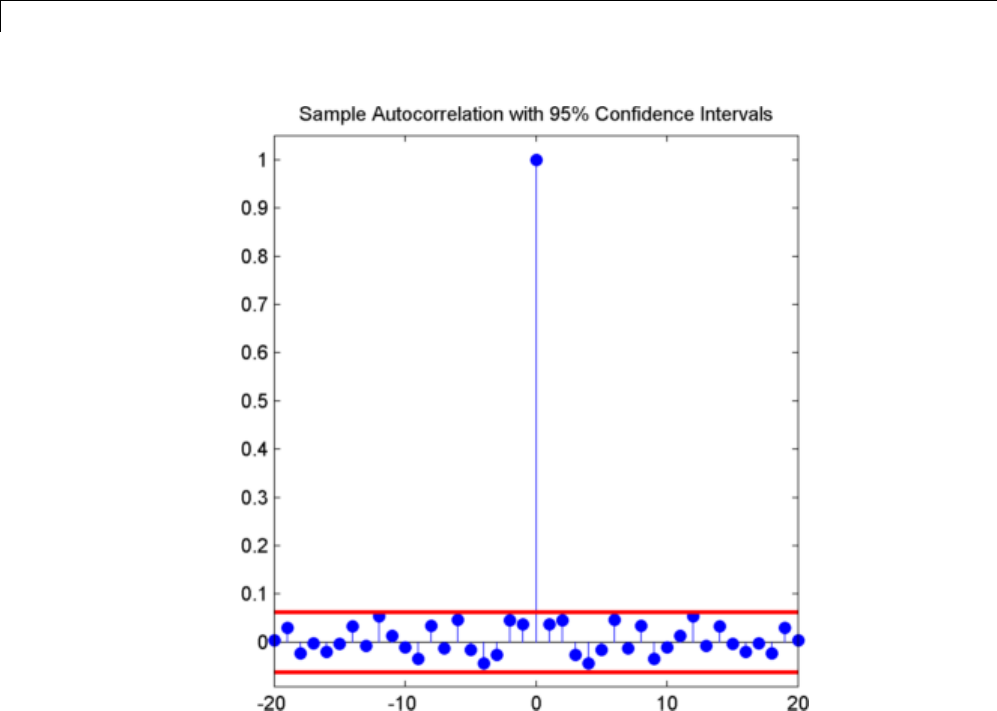
10 Convolution and Correlation
You see in the above figure that the only autocorrelation value outside of the
95%-confidence interval occurs at lag 0 as expected for a white noise process.
Based on this result, you can conclude that the data are a realization of a
white noise process.
10-8

Residual Analysis with Autocorrelation
Residual Analysis with Autocorrelation
This example shows you how to use autocorrelation with a confidence interval
to analyze the residuals of a least-squares fit to noisy data. The residuals are
the differences between the fitted model and the data. In a signal+white
noise model, if you have a good fit for the signal, the residuals should be
whitenoise.Theexample“ConfidenceIntervals for Sample Autocorrelation”
on page 10-5 demonstrates the basic technique for forming a confidence
interval for the sample autocorrelation. This example extends the technique
illustrated in that example.
Create a noisy data set consisting of a 1st order polynomial (straight line)
in additive white Gaussian noise. The additive noise is a sequence of
uncorrelated random variables following a N(0,1) distribution. This means
that all the random variables have mean zero and unit variance. Set the
random number generator to the default settings for reproducible results.
x = -3:0.01:3;
rng default
y = 2*x+randn(size(x));
plot(x,y)
10-9
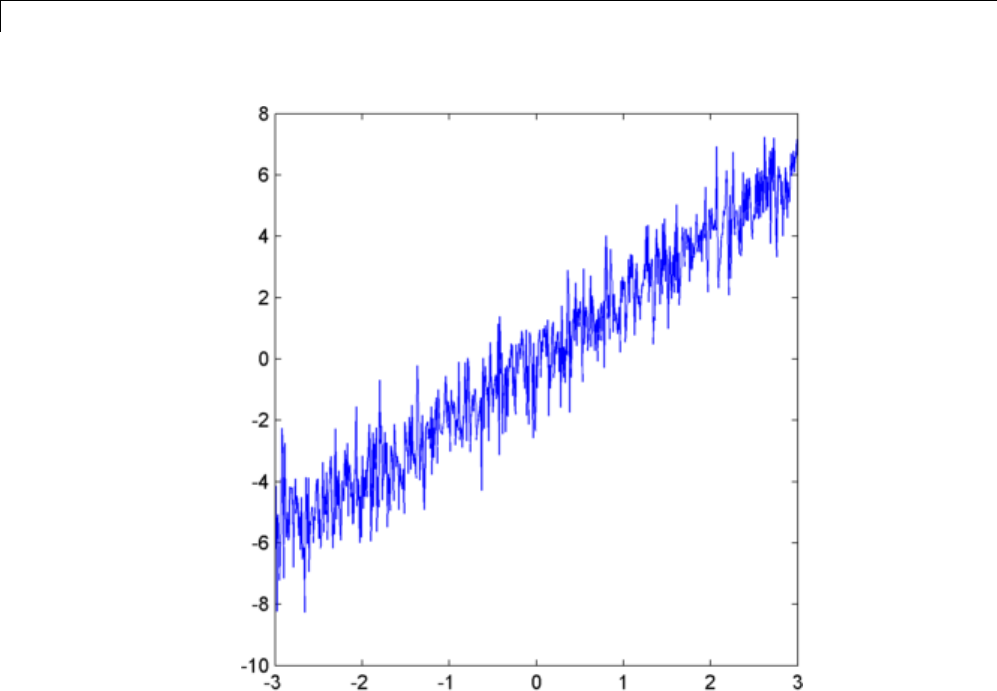
10 Convolution and Correlation
Use polyfit to find the least-squares line for the noisy data. Plot the original
data along with the least-squares fit.
coeffs = polyfit(x,y,1);
yfit = coeffs(2)+coeffs(1)*x;
plot(x,y); hold on;
plot(x,yfit,'r','linewidth',2)
10-10
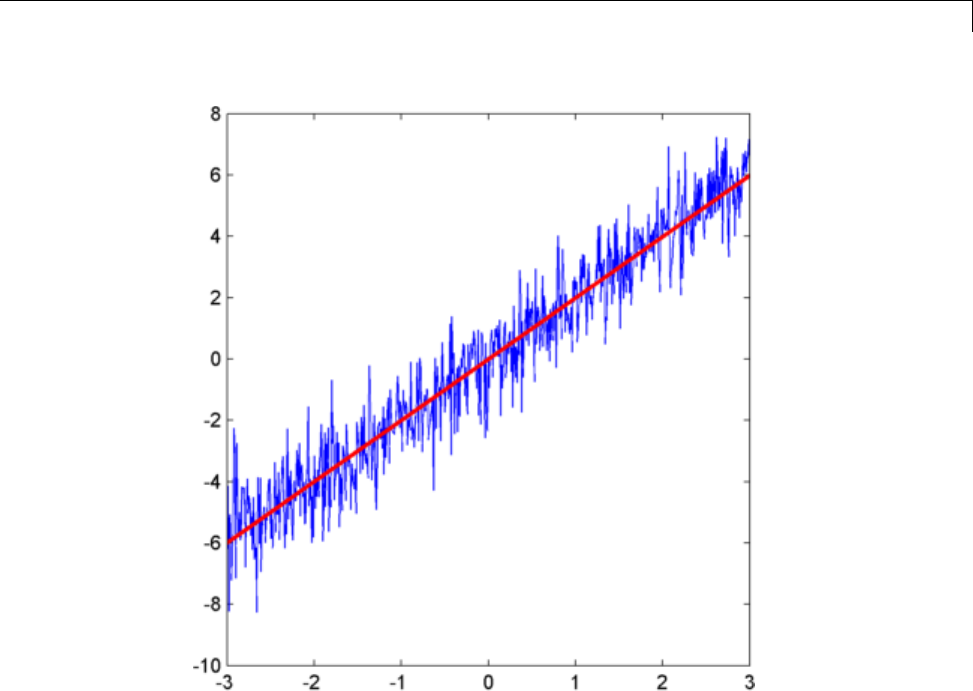
Residual Analysis with Autocorrelation
Find the residuals. Obtain the autocorrelation sequence of the residuals to
lag 50.
residuals = y-yfit;
[xc,lags] = xcorr(residuals,50,'coeff');
When you inspect the autocorrelation sequence, you want to determine
whether or not there is evidence of autocorrelation. In other words, you
want to determine whether the sample autocorrelation sequence looks like
the autocorrelation sequence of white noise. If the autocorrelation sequence
of the residuals looks like the autocorrelation of a white noise process, you
are confident that none of the signal has escaped your fit and ended up in
the residuals. In this example, use a 99%-confidence interval. To construct
the confidence interval, you need to know the distribution of the sample
autocorrelation values. This is described in “Confidence Intervals for Sample
10-11

10 Convolution and Correlation
Autocorrelation” on page 10-5. You also need to find the critical values on the
appropriate distribution between which lie 0.99 of the probability. Because
the distribution in this case is Gaussian, you can use complementary inverse
error function, erfcinv. The relationship between this function and the
inverse of the Gaussian cumulative distribution function is described on the
reference page for erfcinv.
Find the critical value for the 99%-confidence interval.
conf99 = sqrt(2)*erfcinv(2*.01/2)
Ue the critical value to construct the lower and upper confidence bounds.
lconf = -conf99/sqrt(length(x));
upconf = conf99/sqrt(length(x));
Plot the autocorrelation sequence along with the 99%-confidence intervals.
stem(lags,xc,'markerfacecolor',[0 0 1]);
set(gca,'ylim',[lconf-0.03 1.05]);
hold on;
line(lags,lconf*ones(size(lags)),'color','r','linewidth',2);
line(lags,upconf*ones(size(lags)),'color','r','linewidth',2);
title('Sample Autocorrelation with 99% Confidence Intervals');
10-12
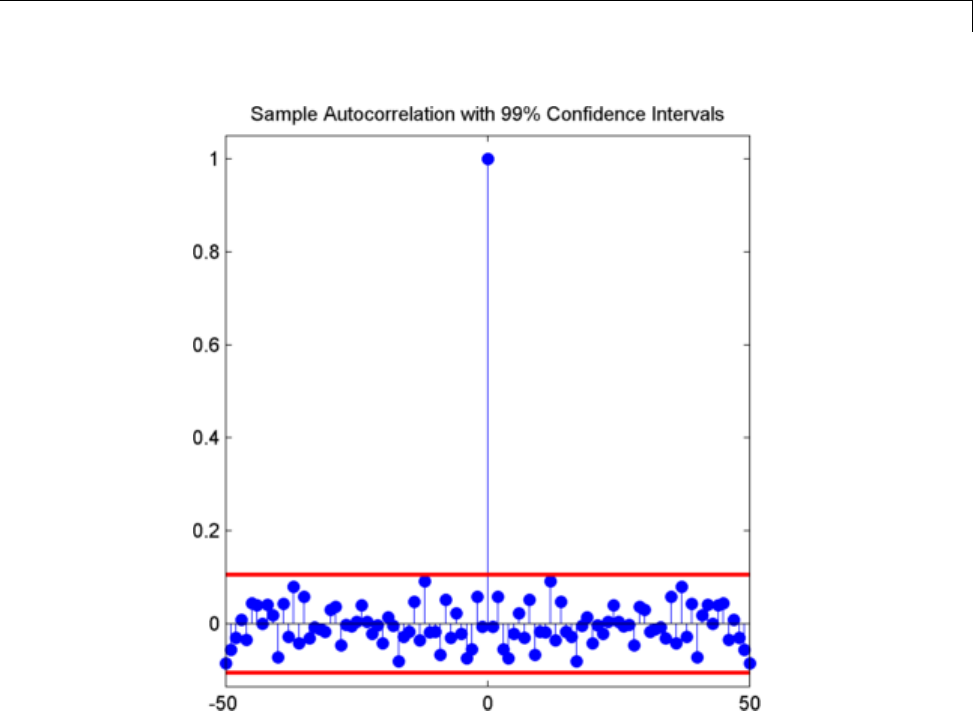
Residual Analysis with Autocorrelation
Except at zero lag, the sample autocorrelation values lie within the
99%-confidence bounds for the autocorrelation of a white noise sequence.
From this, you can conclude that the residuals are white noise. More
specifically, you cannot reject that the residuals are a realization of a white
noise process.
Create a signal consisting of a sine wave plus noise. The data are sampled
at 1 kHz. The frequency of the sine wave is 100 Hz. Set the random number
generator to the default settings for reproducible results.
Fs = 1000;
t = 0:1/Fs:1-1/Fs;
rng default
x = cos(2*pi*100*t)+randn(size(t));
10-13

10 Convolution and Correlation
Use the discrete Fourier transform (DFT) to obtain the least-squares fit to
thesinewaveat100Hz. Theleast-squaresestimateoftheamplitudeis2/N
times the DFT coefficient corresponding to 100 Hz, where N is the length
of the signal. The real part is the ampltiude of a cosine at 100 Hz and the
imaginary part is the amplitude of a sine at 100 Hz. The least-squares fit is
the sum of the cosine and sine with the correct amplitude. In this example,
DFT bin 101 corresponds to 100 Hz.
xdft = fft(x);
ampest = 2/length(x)*xdft(101);
xfit = real(ampest)*cos(2*pi*100*t)+imag(ampest)*sin(2*pi*100*t);
plot(t,x,'r-.','linewidth',2); hold on;
plot(t,xfit,'b','linewidth',2);
axis([0 0.30 -4 4]);
xlabel('Seconds'); ylabel('Amplitude');
10-14
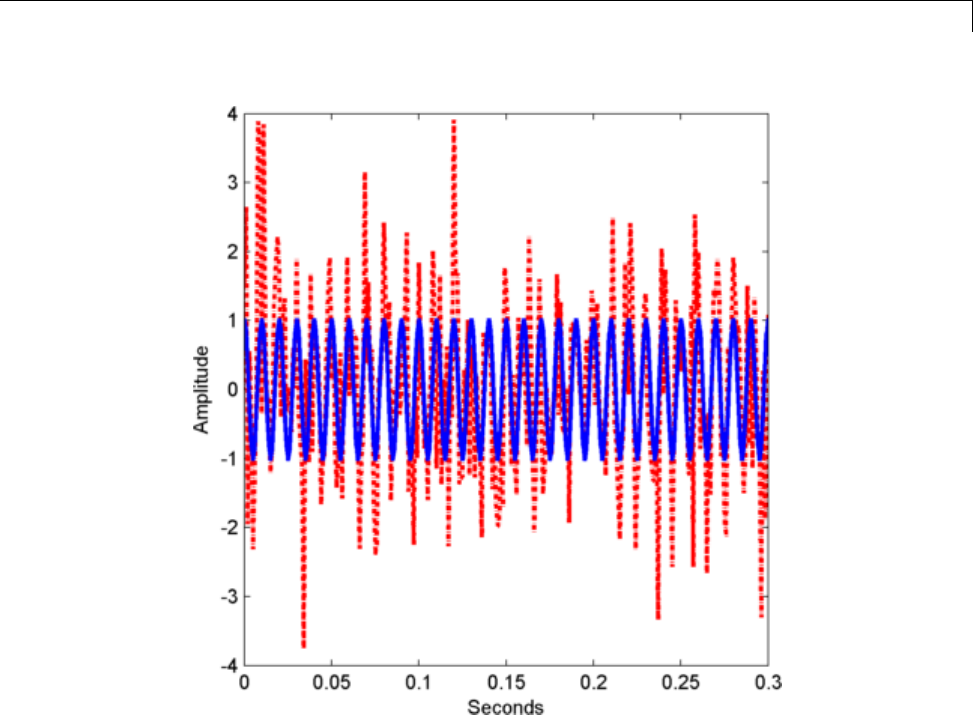
Residual Analysis with Autocorrelation
Find the residuals and determine the sample autocorrelation sequence to
lag 50.
residuals = x-xfit;
[xc,lags] = xcorr(residuals,50,'coeff');
Plot the autocorrelation sequence with the 99%-confidence intervals.
stem(lags,xc,'markerfacecolor',[0 0 1]);
set(gca,'ylim',[lconf-0.03 1.05]);
hold on;
line(lags,lconf*ones(size(lags)),'color','r','linewidth',2);
line(lags,upconf*ones(size(lags)),'color','r','linewidth',2);
title('Sample Autocorrelation with 99% Confidence Intervals');
10-15
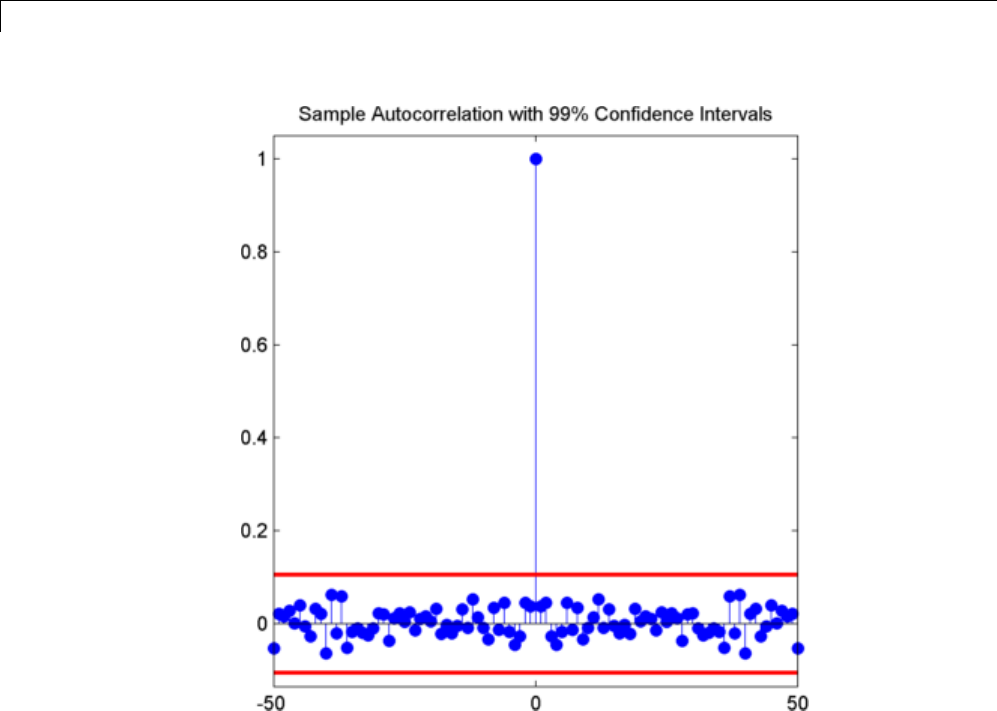
10 Convolution and Correlation
Again, you see that except at zero lag, the sample autocorrelation values lie
within the 99%-confidence bounds for the autocorrelation of a white noise
sequence. From this, you can conclude that the residuals are white noise.
More specifically, you cannot reject that the residuals are a realization of a
white noise process.
Finally, add another sine wave with a frequency of 200 Hz and an amplitude
of 3/4. Fit only the sine wave at 100 Hz and find the sample autocorrelation
of the residuals.
x = x+3/4*sin(2*pi*200*t);
xdft = fft(x);
ampest = 2/length(x)*xdft(101);
xfit = real(ampest)*cos(2*pi*100*t)+imag(ampest)*sin(2*pi*100*t);
10-16
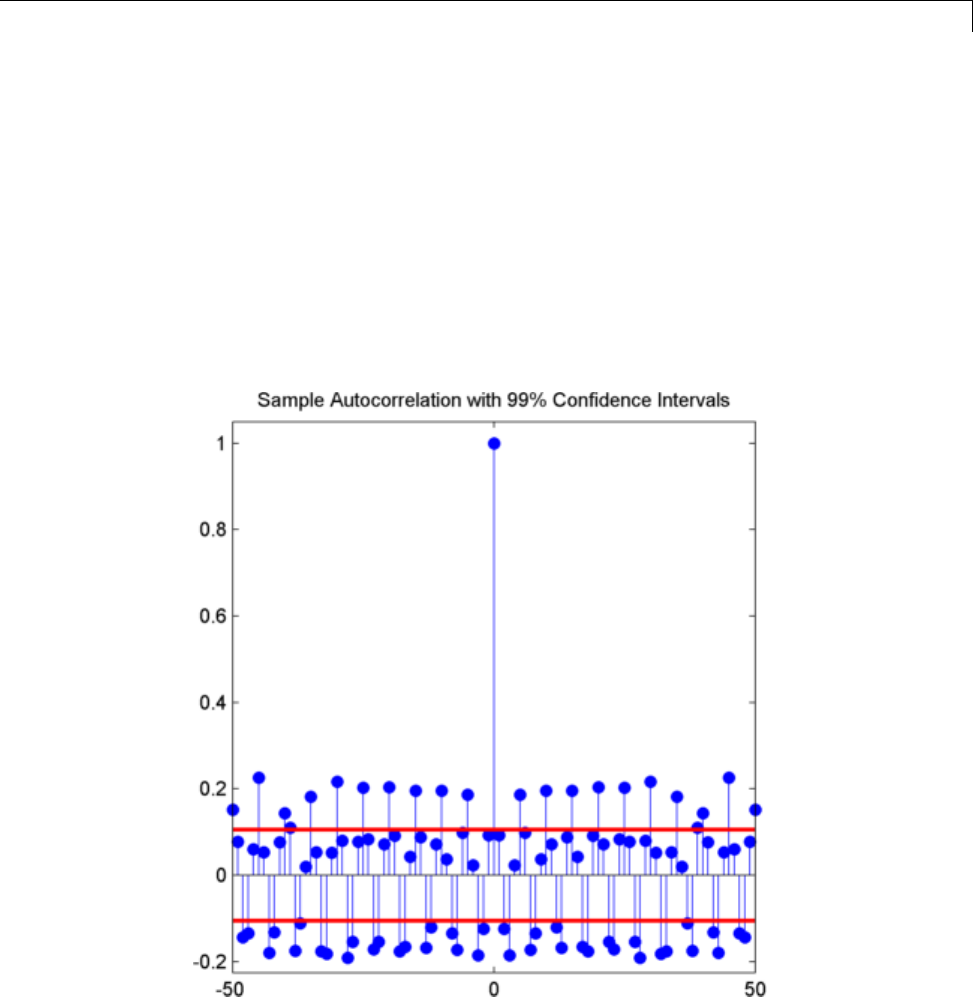
Residual Analysis with Autocorrelation
residuals = x-xfit;
[xc,lags] = xcorr(residuals,50,'coeff');
Plot the sample autocorrelation alongwiththe99%-confidence intervals.
stem(lags,xc,'markerfacecolor',[0 0 1]);
set(gca,'ylim',[lconf-0.12 1.05]);
hold on;
line(lags,lconf*ones(size(lags)),'color','r','linewidth',2);
line(lags,upconf*ones(size(lags)),'color','r','linewidth',2);
title('Sample Autocorrelation with 99% Confidence Intervals');
In this case, the autocorrelation values clearly exceed the 99%-confidence
bounds for a white noise autocorrelation at many lags. Here you can reject the
10-17

10 Convolution and Correlation
hypothesis that the residuals are a white noise sequence. The implication is
that the model has not accounted for all the signal and therefore the residuals
consist of signal+noise.
10-18

Autocorrelation of Moving Average Process
Autocorrelation of Moving Average Process
This example shows how filtering a white noise process introduces
autocorrelation. The example also shows how the sample autocorrelation
sequence does not agree perfectly with the known theoretical autocorrelation
sequence. However, the sample autocorrelation sequence accurately
represents the general form of the theoretical autocorrelation.
Simulate a realization of an N(0,1) white noise process. Filter the process
with a 3-point moving average (MA) filter. Plot the sample autocorrelation
along with the known theoretical autocorrelation for comparison.
Create the impulse response for the 3-point MA filter. Filter an N(0,1) white
noise with the filter. Set the random number generator to the default settings
for reproducible results.
h = 1/3*ones(3,1);
rng default;
x = randn(100,1);
y = filter(h,1,x);
Obtain the biased sample autocorrelation out to 20 lags. Plot the sample
autocorrelation along with the theoretical autocorrelation.
[xc,lags] = xcorr(y,20,'biased');
stem(lags,xc,'markerfacecolor',[0 0 1]);
Xc = zeros(size(xc));
Xc([19 23]) = 1/9*var(x);
Xc([20 22]) = 2/9*var(x);
Xc(21) = 3/9*var(x);
hold on;
stem(lags,Xc,'color',[1 0 0],'marker','none','linewidth',2);
legend('Sample Autocorrelation','Theoretical Autocorrelation',...
'Location','NorthEast');
10-19
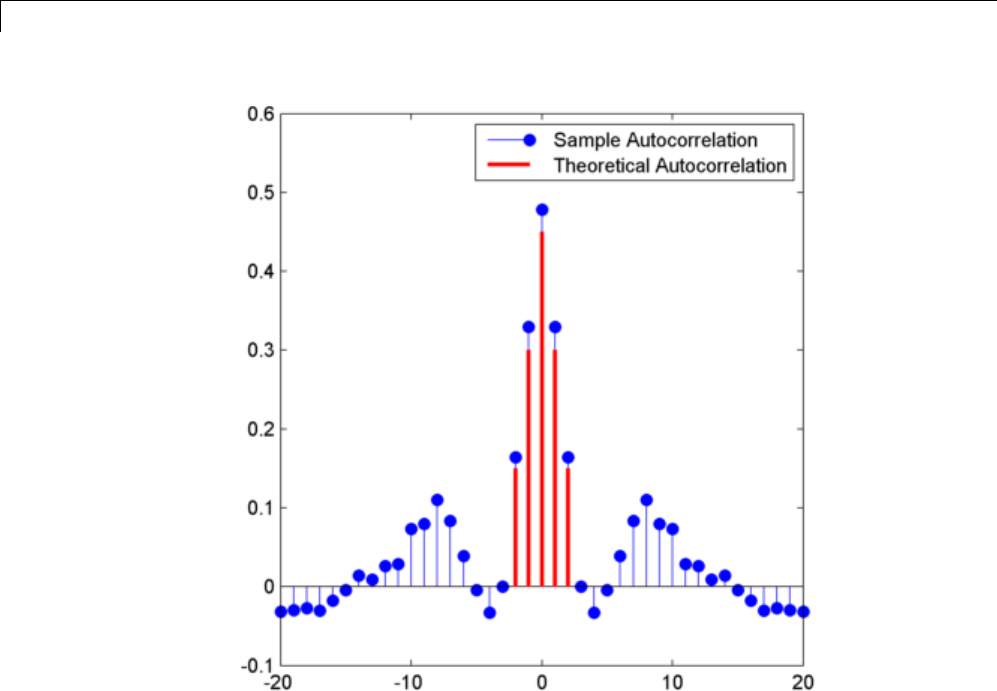
10 Convolution and Correlation
The theoretical autocorrelation is zero outside of lags [-2,2], while the sample
autocorrelation is not. However, the magnitudes (absolute values) of the
sample autocorrelation decay quickly to zero outside of lags [-2,2].
The sample autocorrelation sequence is not in perfect agreement with the
theoretical autocorrelation, but captures that the filter has introduced
significant autocorrelation only over lags [-2,2].
10-20

Cross-correlation of Two Moving Average Processes
Cross-correlation of Two Moving Average Processes
This example shows how to find and plot the cross-correlation sequence
between two moving average processes. The example compares the sample
cross-correlation with the theoretical cross-correlation.
Filter an N(0,1) white noise input with two different moving average filters.
Plot the sample and theoretical cross-correlation sequences.
Create an N(0,1) white noise sequence. Set the random number generator
to the default settings for reproducible results. Create two moving average
filters. One filter has impulse response δ(n)+δ(n-1). The other filter has
impulse response, δ(n)-δ(n-1).
rng default;
w = randn(100,1);
x = filter([1 1],1,w);
y = filter([1 -1],1,w);
Obtain the sample cross-correlation sequence up to lag 20. Plot the sample
cross-correlation along with the theoretical cross-correlation.
[xc,lags] = xcorr(x,y,20,'biased');
stem(lags,xc,'markerfacecolor',[0 0 1]);
Xc = zeros(size(xc));
Xc(20) = -1;
Xc(22) = 1;
hold on;
stem(lags,Xc,'color',[1 0 0],'marker','none','linewidth',2);
legend('Sample Cross-correlation','Theoretical Cross-correlation',...
'Location','NorthWest')
10-21

10 Convolution and Correlation
The theoretical cross-correlation is -1 at lag -1, 1 at lag 1, and zero at all other
lags. The sample cross-correlation sequence approximates the theoretical
cross-correlation.
As expected, there is not perfect agreement between the theoretical
cross-correlation and sample cross-correlation. The sample cross-correlation
does accurately represent both the sign and magnitude of the theoretical
cross-correlation sequence values at lag -1 and lag 1.
10-22

Cross-correlation of Delayed Signal in Noise
Cross-correlation of Delayed Signal in Noise
This example shows how to use the cross-correlation sequence to detect the
time delay in a noise-corrupted sequence. The output sequence is a delayed
version of the input sequence with additive white Gaussian noise.
Create two sequences. One sequence is a delayed version of the other. The
delay is 3 samples. Add an N(0,0.32) white noise sequence to the delayed
signal. Use the sample cross-correlation sequence to detect the lag.
Create and plot the signals. Set the random number generator to the default
settings for reproducible results.
rng default;
x = triang(20);
y = [zeros(3,1); x]+0.3*randn(length(x)+3,1);
subplot(211)
stem(x,'markerfacecolor',[0 0 1]); axis([0 22 -1 2]);
subplot(212)
stem(y,'markerfacecolor',[0 0 1]); axis([0 22 -1 2]);
10-23
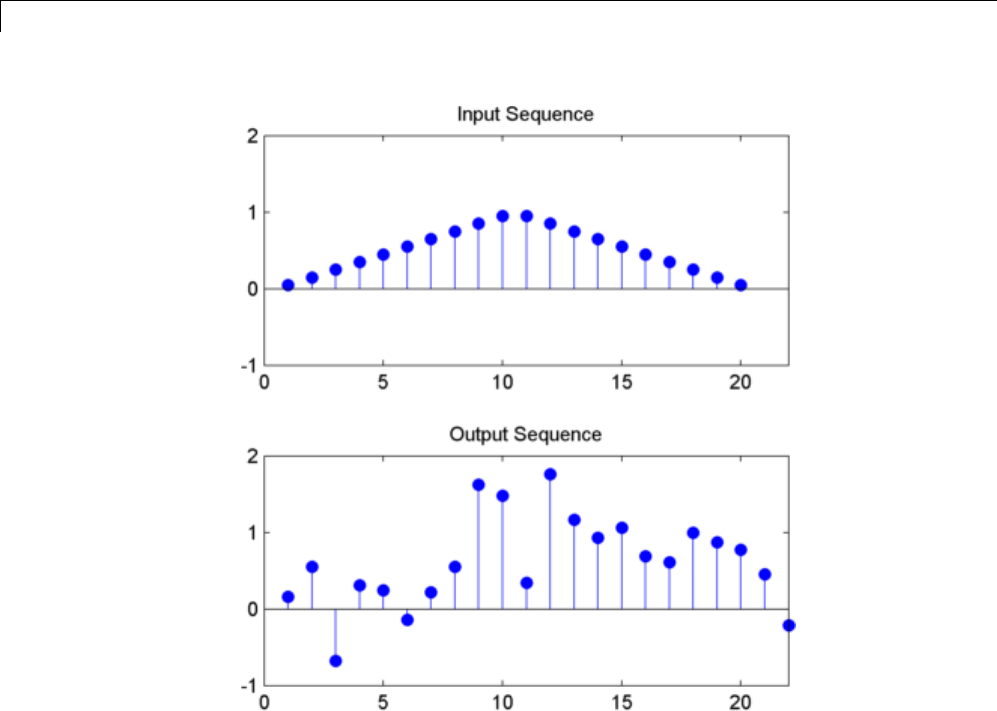
10 Convolution and Correlation
Obtain the sample cross-correlation sequence and use the maximum absolute
valuetoestimatethelag. Plotthesample cross-correlation sequence.
[xc,lags] = xcorr(y,x);
[~,I] = max(abs(xc));
fprintf('Maximum cross correlation sequence value occurs at lag %d\n',lags(
figure;
stem(lags,xc,'markerfacecolor',[0 0 1]);
10-24
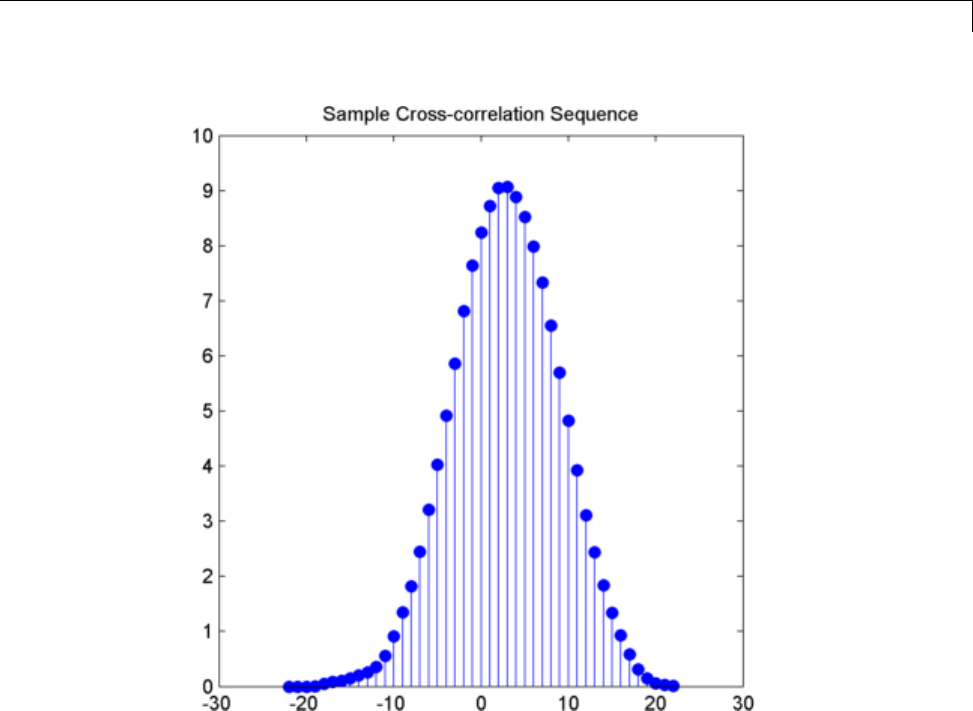
Cross-correlation of Delayed Signal in Noise
The maximum cross correlation sequence value occurs at lag 3 as expected.
10-25

10 Convolution and Correlation
Cross-correlation of Phase-Lagged Sine Wave
This example shows how to use the cross-correlation sequence to estimate the
phase lag between two sine waves. The theoretical cross-correlation sequence
of two sine waves at the same frequency also oscillates at that frequency.
Because the sample cross-correlation sequence uses fewer and fewer samples
at larger lags, the sample cross-correlation sequence also oscillates at the
same frequency, but the amplitude decays as the lag increases.
Use the cross-correlation sequence to detect the phase lag between two sine
waves with a frequency of 2π/10 radians/sample. One sine wave lags the
other in phase by πradians.
Create two sine waves with frequencies of 2π/10 radians/sample. The starting
phase of one sine wave is 0, while the starting phase of the other sine wave is
-πradians. Add N(0,0.252) white noise to the sine wave with the phase lag
of πradians. Set the random number generator to the default settings for
reproducible results.
t = 0:99;
rng default;
x = cos(2*pi*1/10*t);
y = cos(2*pi*1/10*t-pi)+0.25*randn(size(t));
Obtain the sample cross-correlation sequence for two periods of the sine wave
(10 samples). Plot the cross-correlation sequence and mark the known lag
between the two sine waves (5 samples).
[xc,lags] = xcorr(y,x,20,'coeff');
stem(lags(21:end),xc(21:end),'markerfacecolor',[0 0 1]);
set(gca,'xtick',0:5:20);
hold on;
plot([5 5],[-1 1],'r','linewidth',2);
10-26
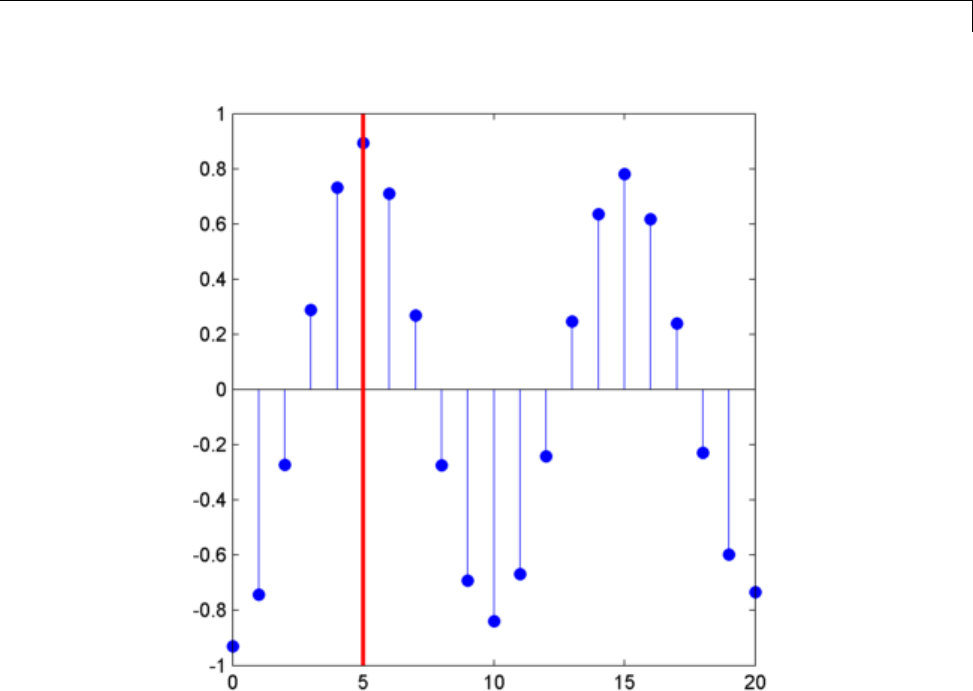
Cross-correlation of Phase-Lagged Sine Wave
You see that the cross-correlation sequence peaks at lag 5 as expected and
oscillates with a period of 10 samples.
10-27

10 Convolution and Correlation
10-28

11
Multirate Signal Processing
•“Downsampling — Signal Phases” on page 11-2
•“Downsampling — Aliasing” on page 11-6
•“Filtering Before Downsampling” on page 11-12
•“Upsampling — Imaging Artifacts” on page 11-14
•“Filtering After Upsampling — Interpolation” on page 11-16
•“Changing Signal Sampling Rate” on page 11-18

11 Multirate Signal Processing
Downsampling — Signal Phases
These examples show how to use downsample to obtain the phases of a signal.
Downsampling a signal by M can produce M unique phases. For example, if
youhaveadiscrete-timesignal,x, with x(0) x(1) x(2) x(3),...., the M phases
of xare x(nM+λ)withλ=0,1,...M-1.
The M signals are referred to as the polyphase components of x.
Create a white noise vector and obtain the 3 polyphase components associated
with downsampling by 3.
Reset the random number generator to the default settings to produce a
repeatable result. Generate a white noise random vector and obtain the 3
polyphase components associated with downsampling by 3.
rng default;
x = randn(36,1);
x0 = downsample(x,3,0);
x1 = downsample(x,3,1);
x2 = downsample(x,3,2);
The polyphase components have length equal to 1/3 the original signal.
Upsample the polyphase components by 3 using upsample .
y0 = upsample(x0,3,0);
y1 = upsample(x1,3,1);
y2 = upsample(x2,3,2);
Plot the result.
subplot(411)
stem(x,'marker','none');
set(gca,'ylim',[-4 4]); title('Original Signal');
subplot(412)
stem(y0,'marker','none'); ylabel('Phase 0');
set(gca,'ylim',[-4 4]);
subplot(413)
stem(y1,'marker','none'); ylabel('Phase 1');
set(gca,'ylim',[-4 4]);
11-2

Downsampling — Signal Phases
subplot(414)
stem(y2,'marker','none'); ylabel('Phase 2');
set(gca,'ylim',[-4 4]);
If you sum the upsampled polyphase components you obtain the original
signal.
Create a discrete-time sinusoid and obtain the 2 polyphase components
associated with downsampling by 2.
Createadiscrete-timesinewavewithanangularfrequencyofπ/4
radians/sample. AddaDCoffsetof2tothesinewavetohelpwith
visualization of the polyphase components. Downsample the sine wave by 2 to
obtain the even and odd polyphase components.
n = 0:127;
11-3

11 Multirate Signal Processing
x = 2+cos(pi/4*n);
x0 = downsample(x,2,0);
x1 = downsample(x,2,1);
Upsample the two polyphase components.
y0 = upsample(x0,2,0);
y1 = upsample(x1,2,1);
Plot the upsampled polyphase components along with the original signal
for comparison.
subplot(311)
stem(x,'marker','none');
set(gca,'ylim',[0.5 3.5]); title('Original Signal');
subplot(312)
stem(y0,'marker','none'); ylabel('Phase 0');
set(gca,'ylim',[0.5 3.5]);
subplot(313)
stem(y1,'marker','none'); ylabel('Phase 1');
set(gca,'ylim',[0.5 3.5]);
11-4
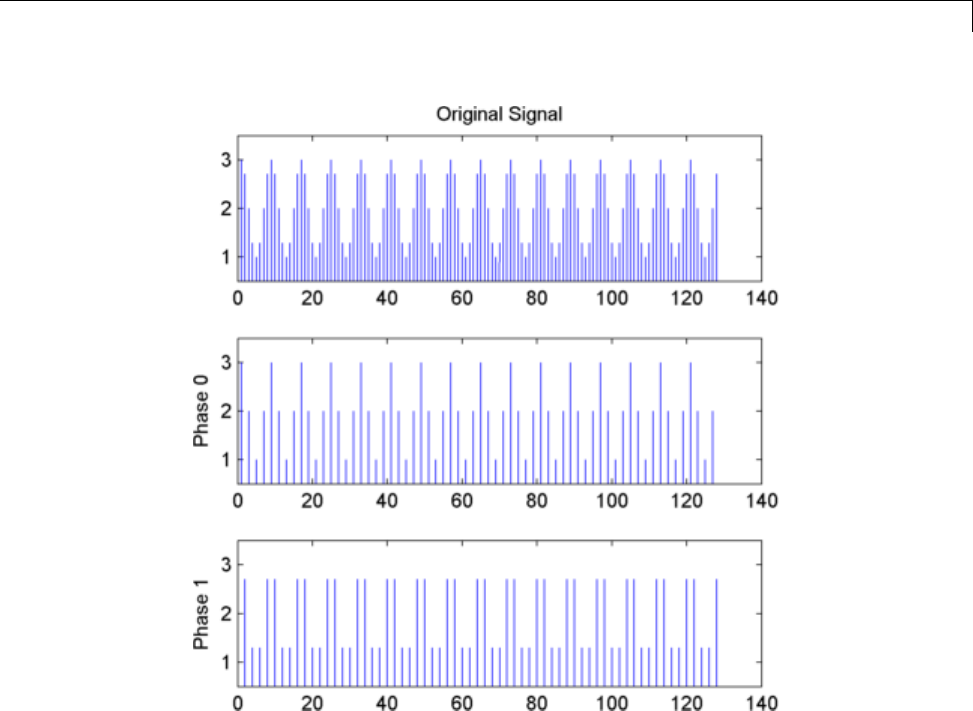
Downsampling — Signal Phases
If you sum the two upsampled polyphase components (Phase 0 and Phase
1), you obtain the original sine wave.
11-5

11 Multirate Signal Processing
Downsampling — Aliasing
These examples show how downsampling can introduce aliasing. If a
discrete-time signal’s baseband spectral support is not limited to an interval
of width 2π/M radians, downsampling by M results in aliasing. Aliasing is
the distortion that occurs when overlapping copies of the signal’s spectrum
are added together. The more the signal’s baseband spectral support exceeds
2π/M radians, the more severe the aliasing.
Demonstrate aliasing in a signal downsampled by two. The signal’s baseband
spectral support exceeds πradians in width.
Create a signal with baseband spectral support equal to 3π/2 radians. Use
fir2 to design the signal. Plot the signal’s spectrum.
F = [0 0.2500 0.5000 0.7500 1.0000];
A = [1.00 0.6667 0.3333 0 0];
Order = 511;
B1 = fir2(Order,F,A);
[Hx,W] = freqz(B1,1,8192,'whole');
Hx = [Hx(4098:end) ; Hx(1:4097)];
omega = -pi+(2*pi/8192):(2*pi)/8192:pi;
plot(omega,abs(Hx));
set(gca,'xlim',[-pi pi]);
set(gca,'xtick',[-pi -pi/2 0 pi/2 pi]);
grid on;
title('Magnitude Spectrum');
xlabel('Radians/Sample'); ylabel('Magnitude');
You see that the signal’s baseband spectral support exceeds [-π/2, π/2].
Downsample the signal by a factor of 2 and plot the downsampled signal’s
spectrum with the spectrum of the original signal.
y = downsample(B1,2,0);
[Hy,W] = freqz(y,1,8192,'whole');
Hy = [Hy(4098:end) ; Hy(1:4097)];
hold on;
plot(omega,abs(Hy),'r','linewidth',2);
set(gca,'xlim',[-pi pi]);
11-6
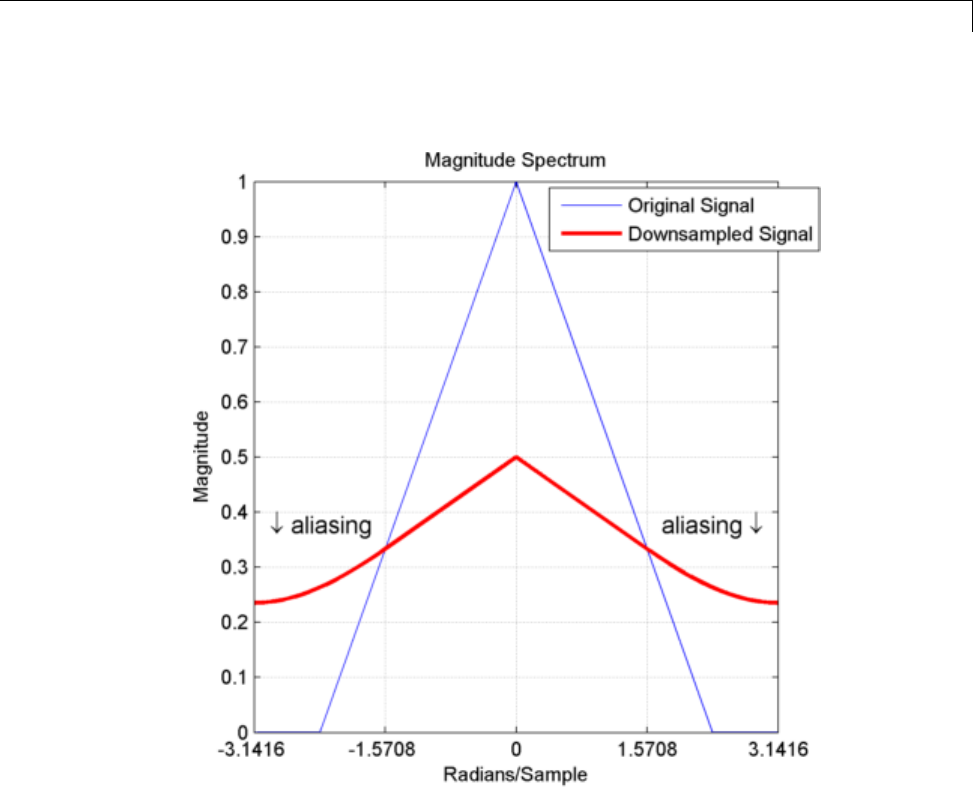
Downsampling — Aliasing
legend('Original Signal','Downsampled Signal');
In addition to an amplitude scaling of the spectrum, the superposition of
overlapping spectral replicas causes distortion of the original spectrum for
|ω|>π/2.
Increase the baseband spectral support of the signal to [-7π/8, 7π/8] and
downsample the signal by 2. Plot the original spectrum along with the
spectrum of the downsampled signal.
F = [0 0.2500 0.5000 0.7500 7/8 1.0000];
A = [1.00 0.7143 0.4286 0.1429 0 0];
Order = 511;
11-7

11 Multirate Signal Processing
B2 = fir2(Order,F,A);
[Hx,W] = freqz(B2,1,8192,'whole');
Hx = [Hx(4098:end) ; Hx(1:4097)];
omega = -pi+(2*pi/8192):(2*pi)/8192:pi;
plot(omega,abs(Hx));
set(gca,'xlim',[-pi pi]);
y = downsample(B2,2,0);
[Hy,W] = freqz(y,1,8192,'whole');
Hy = [Hy(4098:end) ; Hy(1:4097)];
plot(omega,abs(Hx));
hold on;
plot(omega,abs(Hy),'r','linewidth',2);
set(gca,'xlim',[-pi pi]);
grid on;
legend('Original Signal','Downsampled Signal');
xlabel('Radians/Sample'); ylabel('Magnitude');
11-8
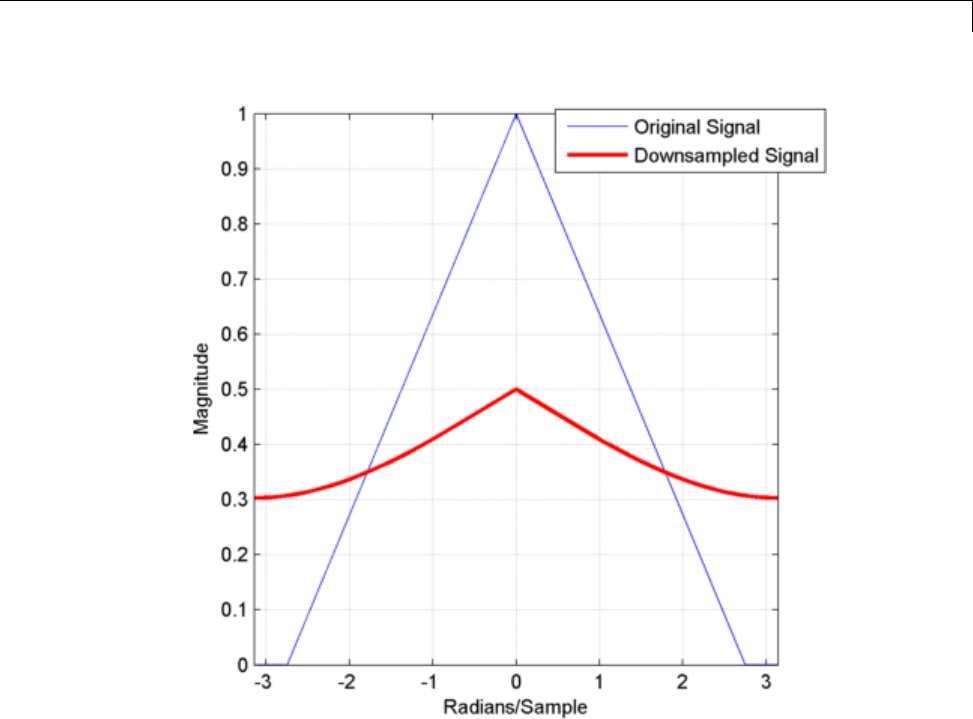
Downsampling — Aliasing
The increased spectral width results in more pronounced aliasing in the
spectrum of the downsampled signal because more signal energy is outside
[-π/2, π/2].
Finally, construct a signal with baseband spectral support limited to [-π/2,
π/2]. Downsample the signal by a factor of 2 and plot the spectrum of the
original and downsampled signals. The downsampled signal is full band, but
the shape of the spectrum is preserved because the spectral copies do not
overlap. There is no aliasing.
F=[
0 0.250 0.500 0.7500 1];
A=[
1.0000 0.5000 0 0 0];
Order = 511;
11-9

11 Multirate Signal Processing
B3 = fir2(Order,F,A);
[Hx,W] = freqz(B3,1,8192,'whole');
Hx = [Hx(4098:end) ; Hx(1:4097)];
omega = -pi+(2*pi/8192):(2*pi)/8192:pi;
plot(omega,abs(Hx));
set(gca,'xlim',[-pi pi]);
y = downsample(B3,2,0);
[Hy,W] = freqz(y,1,8192,'whole');
Hy = [Hy(4098:end) ; Hy(1:4097)];
plot(omega,abs(Hx));
hold on;
plot(omega,abs(Hy),'r','linewidth',2);
set(gca,'xlim',[-pi pi]);
grid on;
legend('Original Signal','Downsampled Signal');
xlabel('Radians/Sample'); ylabel('Magnitude');
11-10
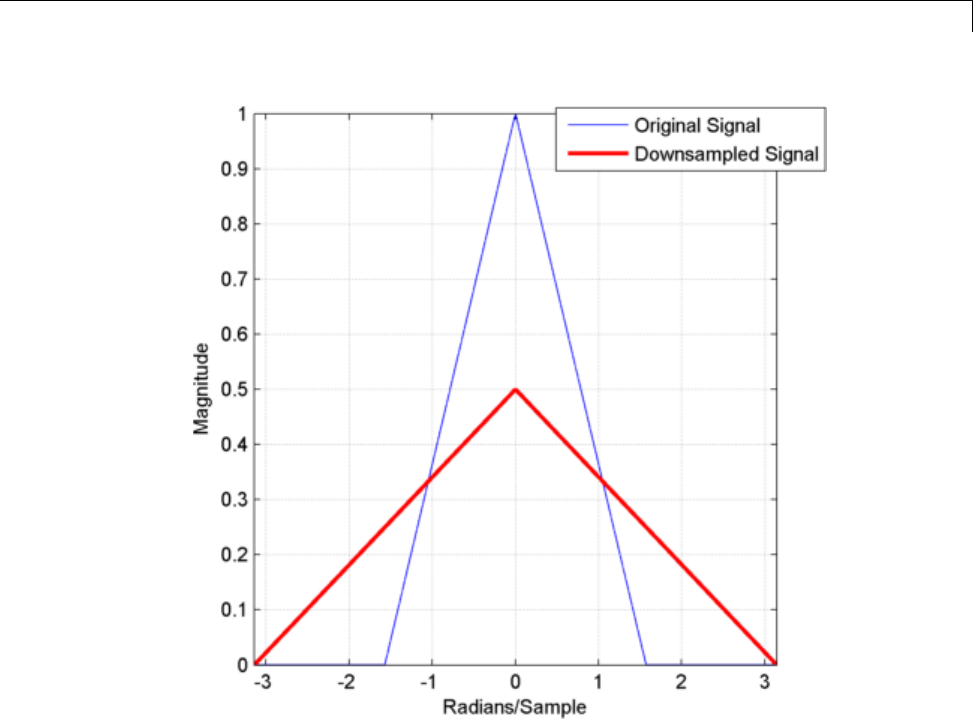
Downsampling — Aliasing
You see in the preceding figure that the shape of the spectrum is preserved.
The spectrum of the downsampled signal is a stretched and scaled version of
the original signal’s spectrum, but there is no aliasing.
11-11

11 Multirate Signal Processing
Filtering Before Downsampling
This example shows how to filter before downsampling to mitigate the
distortion caused by aliasing. You can use decimate or resample to filter
and downsample with one function. Alternatively, you can lowpass filter
your data and then use downsample.
Create a signal with baseband spectral support greater than πradians. Use
decimate to filter the signal with a 10-th order Chebyshev type I lowpass
filter prior to downsampling.
Create the signal and plot the magnitude spectrum.
F = [0 0.2500 0.5000 0.7500 1.0000];
A = [1.00 0.6667 0.3333 0 0];
Order = 511;
B = fir2(Order,F,A);
[Hx,W] = freqz(B,1,8192,'whole');
Hx = [Hx(4098:end) ; Hx(1:4097)];
omega = -pi+(2*pi/8192):(2*pi)/8192:pi;
plot(omega,abs(Hx));
set(gca,'xlim',[-pi pi]);
set(gca,'xtick',[-pi -3*pi/4 -pi/2 0 pi/2 3*pi/4 pi]);
grid on;
title('Magnitude Spectrum');
xlabel('Radians/Sample'); ylabel('Magnitude');
Filter the signal with a 10-th order type I Chebyshev lowpass filter and
downsample by 2. Plot the magnitude spectra of the original signal along with
the filtered and downsampled signal.
y = decimate(B,2,10);
[Hy,W] = freqz(y,1,8192,'whole');
Hy = [Hy(4098:end) ; Hy(1:4097)];
plot(omega,abs(Hx));
hold on;
plot(omega,abs(Hy),'r','linewidth',2);
set(gca,'xlim',[-pi pi]);
grid on;
legend('Original Signal','Downsampled Signal');
11-12
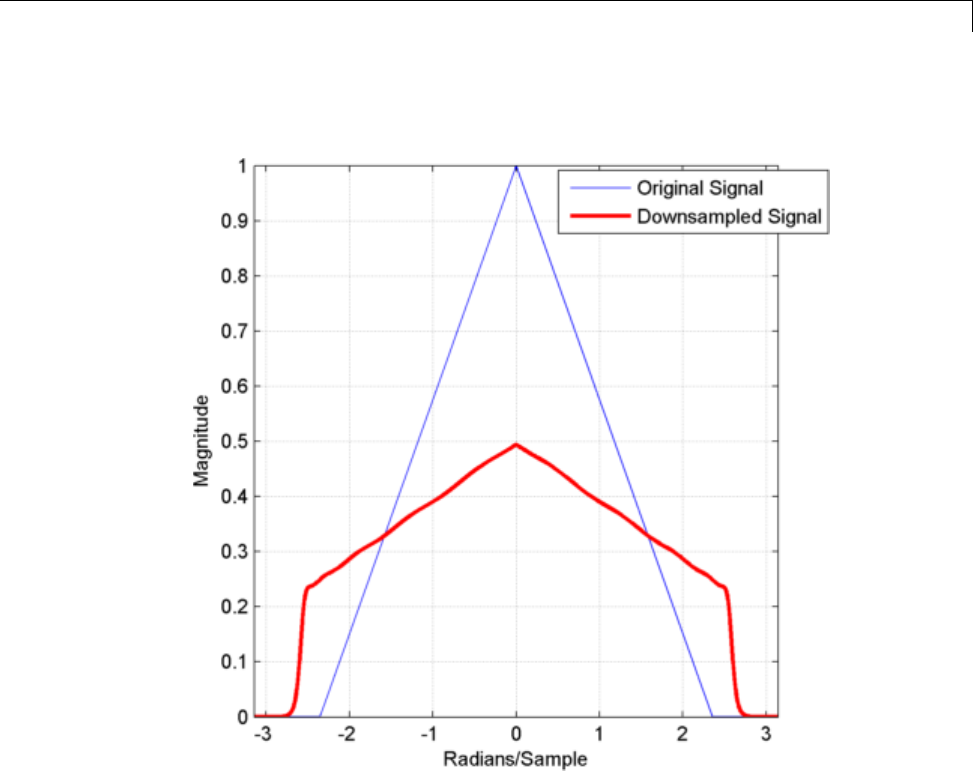
Filtering Before Downsampling
xlabel('Radians/Sample'); ylabel('Magnitude');
The lowpass filter reduces the amount of aliasing distortion outside the
interval [-π/2, π/2].
11-13

11 Multirate Signal Processing
Upsampling — Imaging Artifacts
Thisexampleshowshowtoupsampleasignalandhowupsamplingcan
result in images. Upsampling a signal contracts the spectrum. For example,
upsampling a signal by 2 results in a contraction of the spectrum by a factor
of 2.
Because the spectrum of a discrete-time signal is 2π-periodic, contraction can
cause replicas of the spectrum normally outside of the baseband to appear
inside the interval [-π,π].
Create a signal with baseband spectral support from [-π/2, π/2]. Upsample the
signal by a factor of 2 and demonstrate that upsampling results in images of
the spectrum in [-ππ].
Create a discrete-time signal whose baseband spectral support is [-π/2, π/2].
Plot the magnitude spectrum.
F = [0 0.250 0.500 0.7500 1];
A = [1.0000 0.5000 0 0 0];
Order = 511;
B = fir2(Order,F,A);
[Hx,W] = freqz(B,1,8192,'whole');
Hx = [Hx(4098:end) ; Hx(1:4097)];
omega = -pi+(2*pi/8192):(2*pi)/8192:pi;
plot(omega,abs(Hx));
Upsample the signal by 2. Plot the spectrum of the upsampled signal.
y = upsample(B,2);
[Hy,W] = freqz(y,1,8192,'whole');
Hy = [Hy(4098:end) ; Hy(1:4097)];
plot(omega,abs(Hx));
hold on;
plot(omega,abs(Hy),'r','linewidth',2);
set(gca,'xlim',[-pi pi]);
legend('Original Signal','Upsampled Signal');
xlabel('Radians/Sample'); ylabel('Magnitude');
11-14
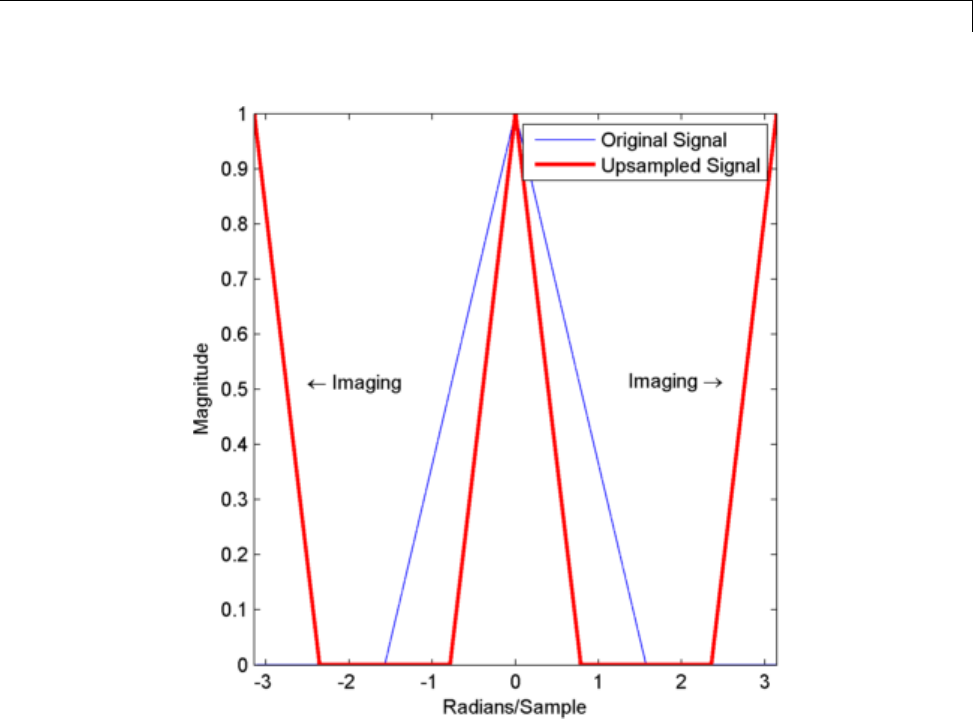
Upsampling — Imaging Artifacts
You can see in the preceding figure that the contraction of the spectrum has
drawn subsequent periods of the spectrum into the interval [-π,π].
11-15

11 Multirate Signal Processing
Filtering After Upsampling — Interpolation
This example shows how to upsample a signal and apply a lowpass
interpolation filter with interp.UpsamplingbyLinserts Lzeros between
every element of the original signal. The example in “Upsampling — Imaging
Artifacts” on page 11-14 shows that upsampling can create imaging artifacts.
Lowpass filtering following upsampling can remove these imaging artifacts.
In the time domain, lowpass filtering interpolates the zeros inserted by
upsampling.
Create a signal with baseband spectral support from [-π/2, π/2]. Upsample
the signal by a factor of 2 and use a lowpass filter to remove the images
resulting fromupsampling.
Create a discrete-time signal whose baseband spectral support is [-π/2 π/2].
Plot the magnitude spectrum.
F = [0 0.250 0.500 0.7500 1];
A = [1.0000 0.5000 0 0 0];
Order = 511;
B = fir2(Order,F,A);
[Hx,W] = freqz(B,1,8192,'whole');
Hx = [Hx(4098:end) ; Hx(1:4097)];
omega = -pi+(2*pi/8192):(2*pi)/8192:pi;
plot(omega,abs(Hx));
set(gca,'xlim',[-pi pi]);
xlabel('Radians/Sample'); ylabel('Magnitude');
Upsample the signal and apply a lowpass filter to remove the imaging
artifacts. Plot the magnitude spectrum.
y = interp(B,2);
[Hy,W] = freqz(y,1,8192,'whole');
Hy = [Hy(4098:end) ; Hy(1:4097)];
hold on;
plot(omega,abs(Hy),'r','linewidth',2);
legend('Original Signal','Upsampled Signal');
11-16
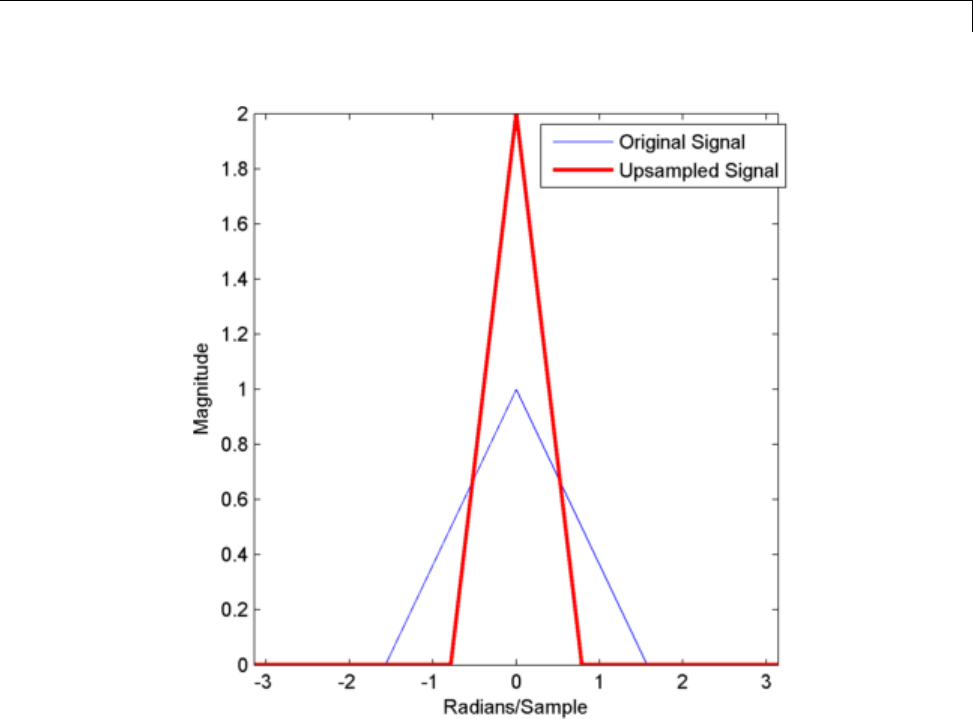
Filtering After Upsampling — Interpolation
Upsampling still contracts the spectrum, but the imaging artifacts are
removed by the lowpass filter.
11-17

11 Multirate Signal Processing
Changing Signal Sampling Rate
This example shows you how to change the sampling rate of a signal. Two
examples are presented here. One example changes the sampling rate of a
sinusoidal input from 44.1 kHz to 48 kHz. This workflow is common to audio
processing. The sampling rate used on compact discs is 44.1 kHz, while the
sampling rate used on digital audio tape is 48 kHz. The other example changes
the sampling rate of a recorded speech sample from 7418 Hz to 8192 Hz.
Create an input signal consisting of a sum of sine waves sampled at 44.1 kHz.
The sine waves have frequencies of 2, 4, and 8 kHz.
Fs = 44.1e3;
t = 0:1/Fs:1-(1/Fs);
x = cos(2*pi*2000*t)+1/2*sin(2*pi*4000*(t-pi/4))+1/4*cos(2*pi*8000*t);
To change the sampling rate from 44.1 to 48 kHz, you have to determine a
rational number (ratio of integers), P/Q, such that P/Qtimes the original
sampling rate, 44100, is equal to 48000 within some specified tolerance.
To determine these factors, use rat. Input the ratio of the new sampling rate,
48000, to the original sampling rate, 44100.
[P,Q] = rat(48e3/Fs);
abs(P/Q*Fs-48000)
You see that P/Q*Fs only differs from the desired sampling rate, 48000, on
the order of 10-12.
Use the numerator and denominator factors obtained with rat as inputs to
resample to output a waveform sampled at 48 kHz.
xnew = resample(x,P,Q);
If your computer can play audio, you can play the two waveforms. Set the
volume to a comfortable level before you play the signals. Execute the play
commands separately so that you can hear the signal with the two different
sampling rates.
P44_1 = audioplayer(x,44100);
P48 = audioplayer(xnew,48000);
11-18

Changing Signal Sampling Rate
play(P44_1)
play(P48)
Change the sampling rate of a speech sample from 7418 Hz to 8192. The
speech signal is a recording of a speaker saying “MATLAB”.
Load the speech sample.
load mtlb
Loading the file mtlb.mat brings the speech signal, mtlb,andthesampling
rate, Fs, into the MATLAB workspace.
Determine a rational approximation to the ratio of the new sample rate, 8192,
to the original sample rate. Use rat to determine the approximation.
[P,Q] = rat(8192/Fs);
Resample the speech sample at the new sampling rate.
mtlb_new = resample(mtlb,P,Q);
If your computer has audio output capability, you can play the two waveforms
at their respective sampling rates for comparison. Set the volume on your
computer to a comfortable listening level before playing the sounds. Execute
the play commands separately to compare the speech samples at the different
sampling rates.
Pmtlb = audioplayer(mtlb,Fs);
Pmtlb_new = audioplayer(mtlb_new,8192);
play(Pmtlb)
play(Pmtlb_new)
11-19

11 Multirate Signal Processing
11-20

12
Spectral Analysis
•“Power Spectral Density Estimates Using FFT” on page 12-2
•“Bias and Variability in the Periodogram” on page 12-10
•“Cross Spectrum and Magnitude-Squared Coherence” on page 12-20
•“Amplitude Estimation and Zero Padding” on page 12-24
•“Significance Testing for Periodic Component” on page 12-27
•“Frequency Estimation by Subspace Methods” on page 12-29
•“Frequency-Domain Linear Regression” on page 12-32

12 Spectral Analysis
Power Spectral Density Estimates Using FFT
These examples show how to obtain nonparametric power spectral density
(PSD) estimates equivalent to the periodogram using fft. The examples
show you how to properly scale the output of fft for even-length inputs, for
normalized frequency and hertz, and for one- and two-sided PSD estimates.
Obtain the periodogram for an even-length signal sampled at 1 kHz using
both fft and periodogram. Compare the results.
Create a signal consisting of a 100-Hz sine wave in N(0,1) additive noise. The
sampling frequency is 1 kHz. The signal length is 1000 samples. Use the
default settings of the random number generator for reproducible results.
rng default;
Fs = 1000;
t = linspace(0,1,1000);
x = cos(2*pi*100*t)+randn(size(t));
Obtain the periodogram using fft. The signal is real-valued and has even
length. Because the signal is real-valued, you only need power estimates for
thepositiveornegativefrequencies. In order to conserve the total power,
multiply all frequencies that occur inbothsets—thepositiveandnegative
frequencies — by a factor of 2. Zero frequency (DC) and the Nyquist frequency
do not occur twice. Plot the result.
N = length(x);
xdft = fft(x);
xdft = xdft(1:N/2+1);
psdx = (1/(Fs*N)).*abs(xdft).^2;
psdx(2:end-1) = 2*psdx(2:end-1);
freq = 0:Fs/length(x):Fs/2;
plot(freq,10*log10(psdx)); grid on;
title('Periodogram Using FFT');
xlabel('Frequency (Hz)'); ylabel('Power/Frequency (dB/Hz)');
12-2
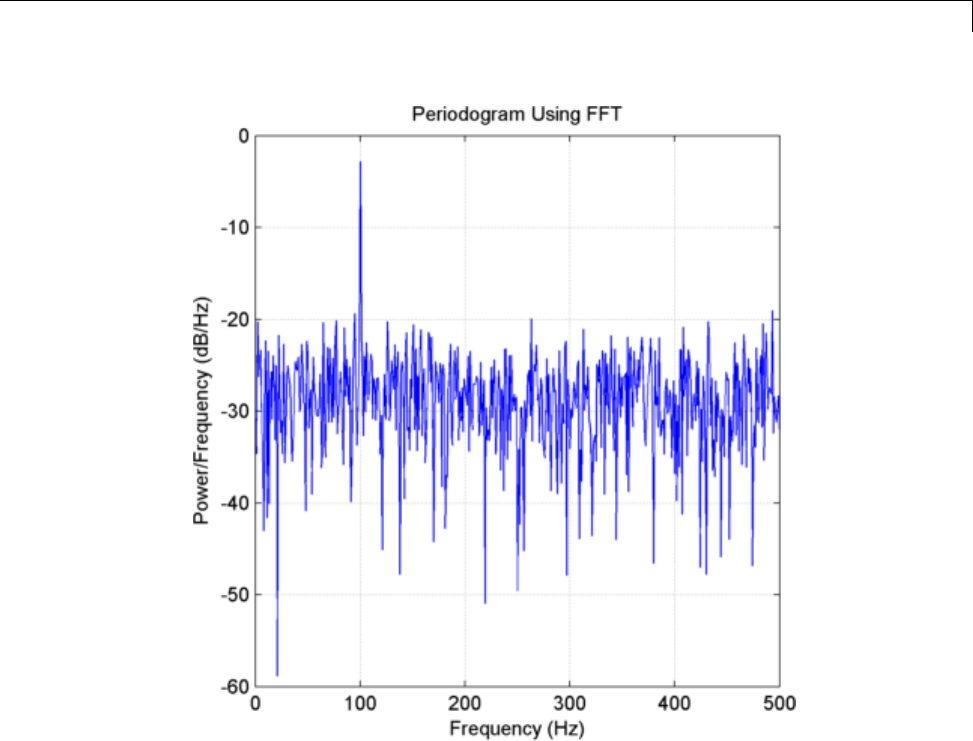
Power Spectral Density Estimates Using FFT
Compute and plot the periodogram using periodogram. Show that the 2
results are identical.
figure;
[psdestx,Fxx] = periodogram(x,rectwin(length(x)),length(x),Fs);
plot(Fxx,10*log10(psdestx)); grid on;
xlabel('Hz'); ylabel('Power/Frequency (dB/Hz)');
title('Periodogram Power Spectral Density Estimate');
max(psdx'-psdestx)
12-3
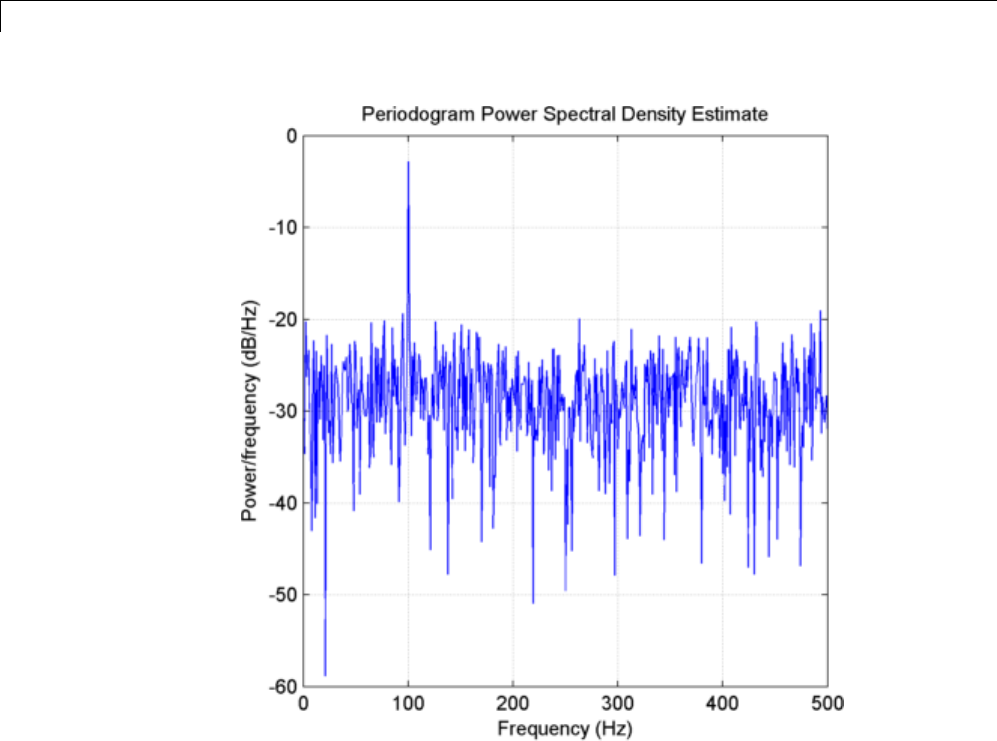
12 Spectral Analysis
Use fft to produce a periodogram for an input using normalized frequency.
Create a signal consisting of a sine wave in N(0,1) additive noise. The sine
wave has an angular frequency of π/4 radians/sample. Use the default
settings of the random number generator for reproducible results.
rng default;
n = 0:999;
x = cos(pi/4*n)+randn(size(n));
Obtain the periodogram using fft. The signal is real-valued and has even
length. Because the signal is real-valued, you only need power estimates for
thepositiveornegativefrequencies. In order to conserve the total power,
12-4

Power Spectral Density Estimates Using FFT
multiply all frequencies that occur inbothsets—thepositiveandnegative
frequencies — by a factor of 2. Zero frequency (DC) and the Nyquist frequency
do not occur twice. Plot the result.
N = length(x);
xdft = fft(x);
xdft = xdft(1:N/2+1);
psdx = (1/(2*pi*N)).*abs(xdft).^2;
psdx(2:end-1) = 2*psdx(2:end-1);
freq = 0:(2*pi)/N:pi;
plot(freq./pi,10*log10(psdx)); grid on;
title('Periodogram Using FFT');
xlabel('Normalized Frequency');
ylabel('Power/Frequency (dB/rad/sample)');
12-5
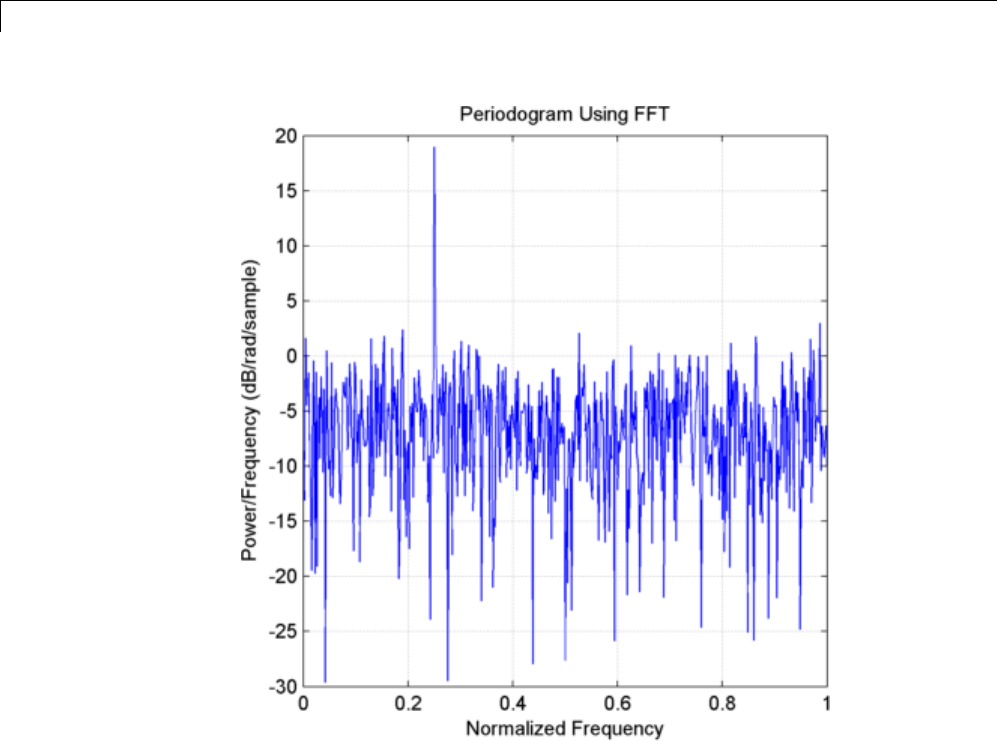
12 Spectral Analysis
Compute and plot the periodogram using periodogram. Show that the 2
results are identical.
figure;
[psdestx,Fxx] = periodogram(x,rectwin(length(x)),length(x));
plot(Fxx./pi,10*log10(psdestx));
xlabel('Hz'); ylabel('Power/Frequency (dB/Hz)');
title('Periodogram Power Spectral Density Estimate');
xlabel('Normalized Frequency'); grid on;
ylabel('Power/Frequency (dB/rad/sample)');
max(psdx'-psdestx)
12-6
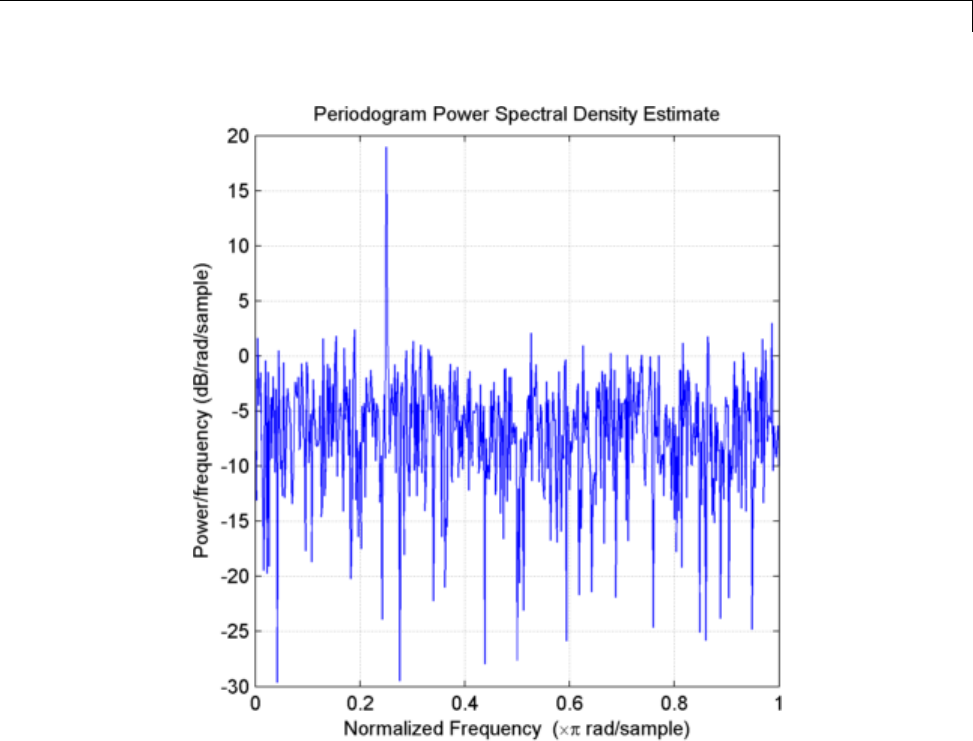
Power Spectral Density Estimates Using FFT
Use fft to produce a periodogram for a complex-valued input with normalized
frequency.
Create the complex-valued signal. The signal is a complex exponential with an
angular frequency of π/4 radians/sample in complex-valued N(0,1) noise. Set
the random number generator to the default settings for reproducible results.
rng default;
n = 0:999;
x = exp(1j*pi/4*n)+1/sqrt(2)*randn(size(n))+1j*1/sqrt(2)*randn(size(n));
Use fft to obtain the periodogram. Because the input is complex-valued,
obtain the periodogram from (-π,π] radians/sample. Plot the result.
12-7
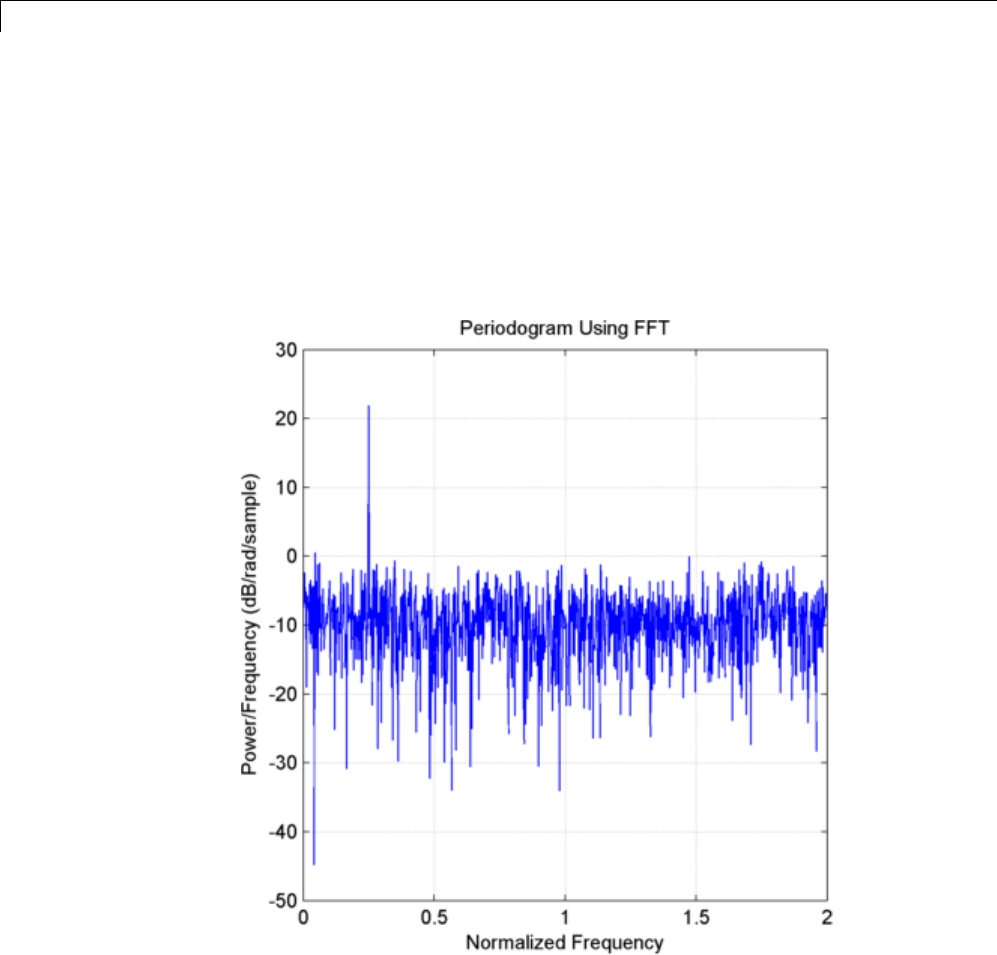
12 Spectral Analysis
N = length(x);
xdft = fft(x);
psdx = (1/(2*pi*N)).*abs(xdft).^2;
freq = 0:(2*pi)/N:2*pi-(2*pi)/N;
plot(freq./pi,10*log10(psdx)); grid on;
title('Periodogram Using FFT');
xlabel('Normalized Frequency');
ylabel('Power/Frequency (dB/rad/sample)');
Use periodogram to obtain and plot the periodogram. Compare the PSD
estimates.
[psdestx,Fxx] = periodogram(x,rectwin(length(x)),length(x),'twosided');
12-8
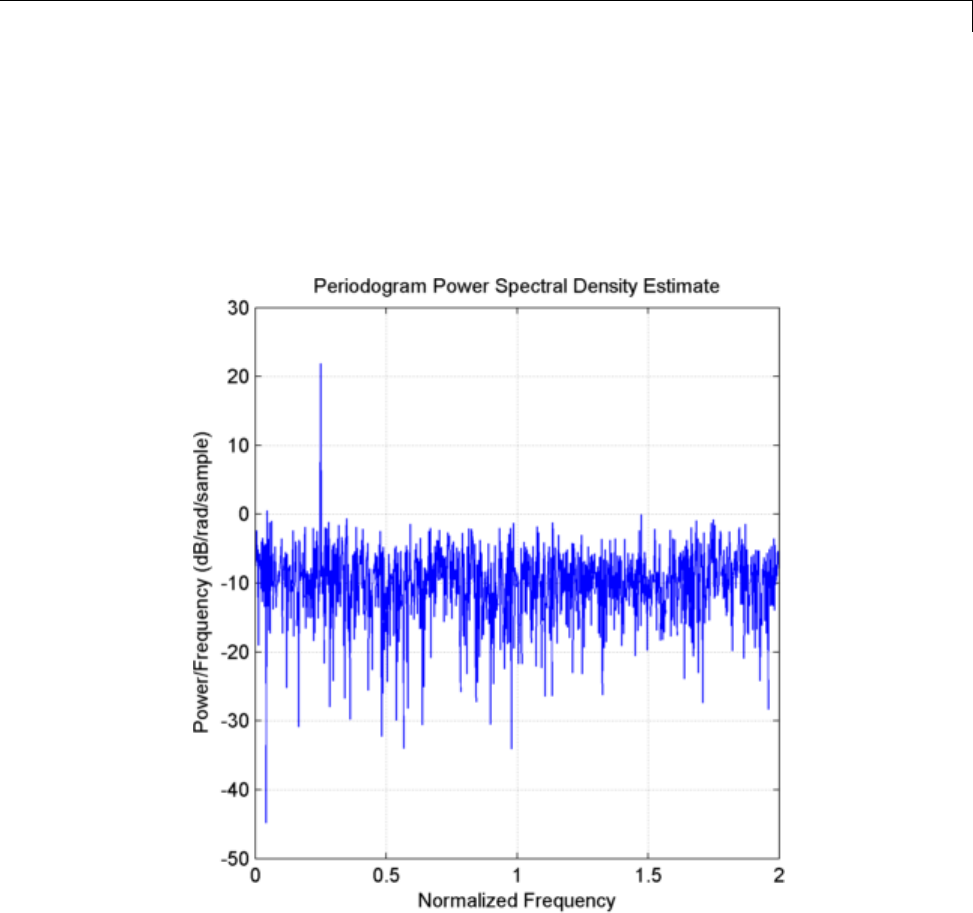
Power Spectral Density Estimates Using FFT
figure;
plot(Fxx./pi,10*log10(psdestx));
grid on; xlabel('Normalized Frequency');
ylabel('Power/Frequency (dB/rad/sample)');
title('Periodogram Power Spectral Density Estimate');
max(psdx'-psdestx)
12-9

12 Spectral Analysis
Bias and Variability in the Periodogram
These examples show how to reduce bias and variability in the periodogram.
Using a window can reduce the bias in the periodogram and using windows
with averaging can reduce variability.
The periodogram suffers from two well-known problems, bias and
inconsistency. Bias is introduced by the convolution of the true spectral
density with Fejer’s kernel. The periodogram is not a consistent estimator of
the true spectral density because the variance of the periodogram does not
decay to zero regardless of the sample size.
The periodogram also exhibits a high degree of variability because of the small
number of degrees of freedom. The periodogram estimates at the Fourier
frequencies are chi-square random variables with two degrees of freedom
except at zero and Nyquist, which only exhibit one degree of freedom.
Bias in the periodogram can be mitigated by tapering,orwindowingthe
time series before computing the PSD estimate. Inconsistency is addressed
by using Welch’s overlapped segment averaging approach, or a multitaper
estimate.
Use wide-sense stationary autoregressive processes (AR) processes to show
the effects of bias and variability in the periodogram. AR processes present a
convenient model because their PSDs have closed-form expressions. Create
an AR(2) model of the following form:
yn yn yn n() . ( ) . ( ) (),075 1 05 2
where ε(n) is a zero mean white noise sequence with some specified variance.
In this example, assume the variance and the sampling period to be 1.
To simulate the preceding AR(2) process, create an all-pole (IIR) filter. View
the filter’s magnitude response.
B2 = 1;
A2 = [1 -0.75 0.5];
fvtool(B2,A2);
12-10
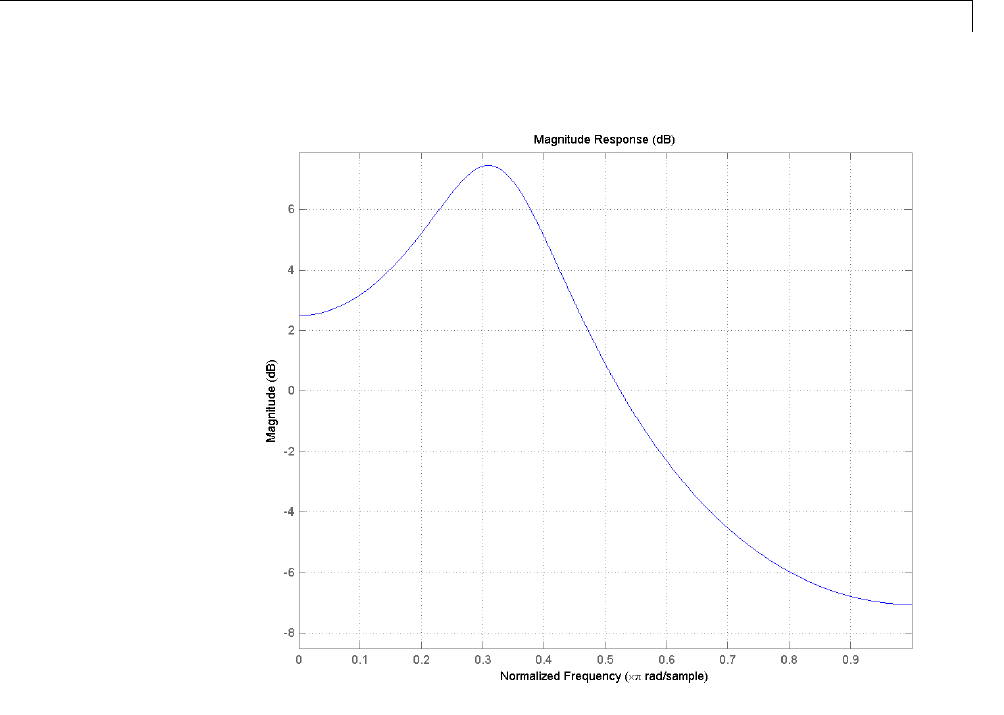
Bias and Variability in the Periodogram
Thisprocessisbandpass. ThedynamicrangeofthePSDisapproximately
14.5 dB, you can determine this with the following code.
[H2,W2] = freqz(B2,A2,1e3,1);
max(20*log10(abs(H2)))-min(20*log10(abs(H2)))
By examining the placement of the poles, you see that this AR(2) process is
stable. The two poles are inside the unit circle.
fvtool(B2,A2,'analysis','polezero');
12-11
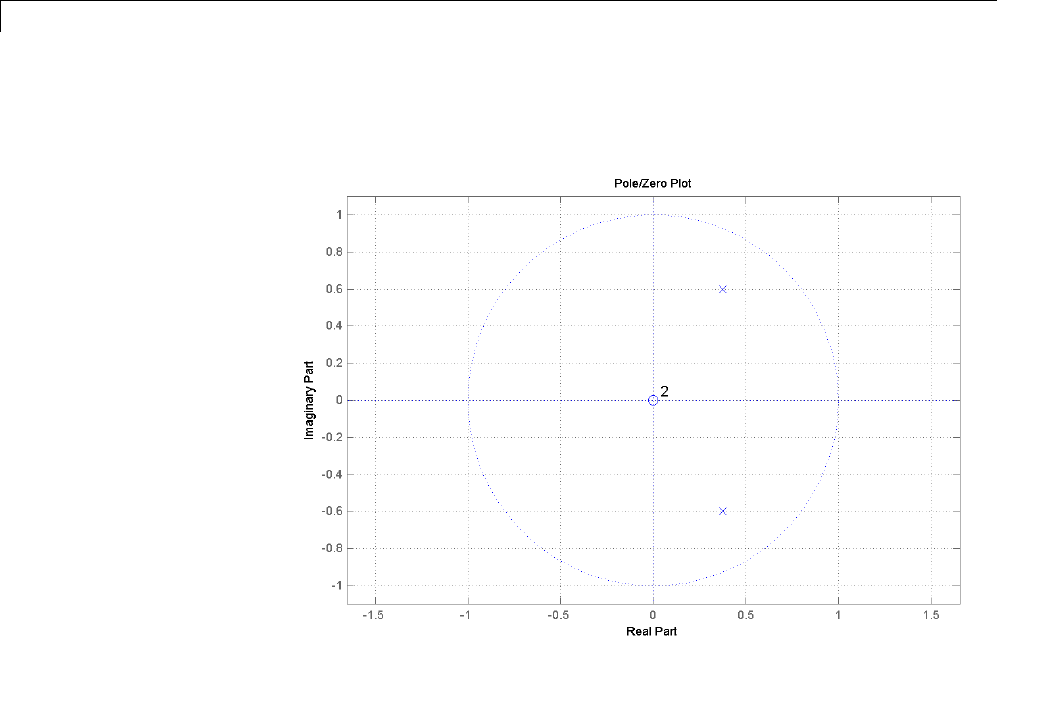
12 Spectral Analysis
Create an AR(4) process described by the following equation:
yn yn yn yn yn().().().().()2 7607 1 3 8106 2 2 6535 3 0 9238 4
(()n
UsethefollowingcodetoviewthemagnituderesponseofthisIIRsystem.
B4 = 1;
A4 = [1 -2.7607 3.8106 -2.6535 0.9238];
fvtool(B4,A4);
12-12
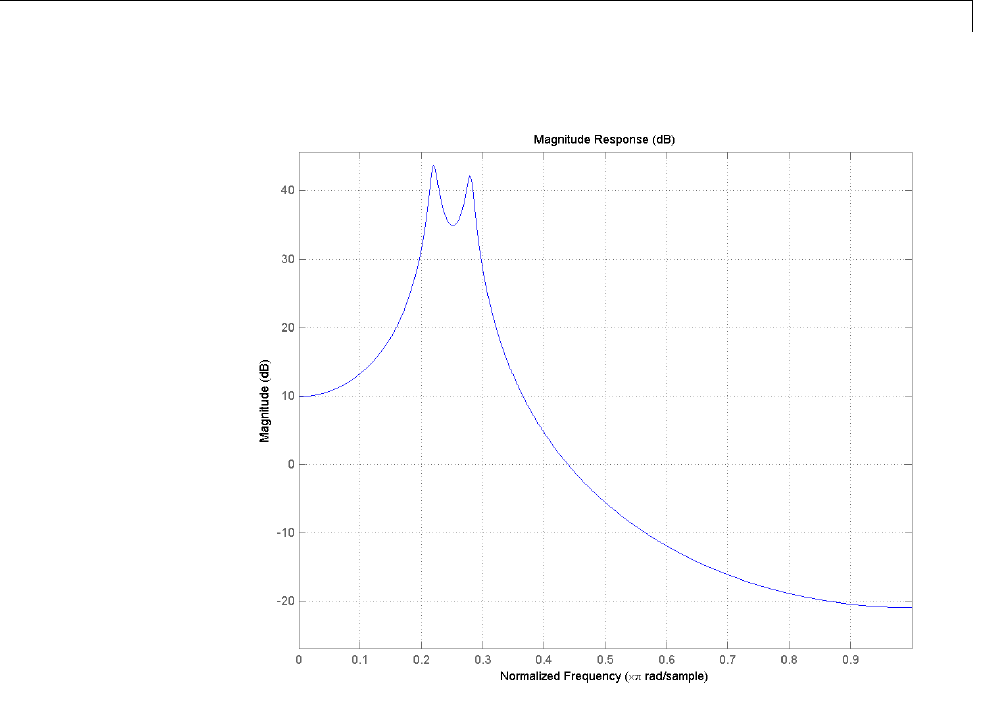
Bias and Variability in the Periodogram
Examining the placement of the poles, you can see this AR(4) process is also
stable. The four poles are inside the unit circle.
fvtool(B4,A4,'analysis','polezero');
12-13
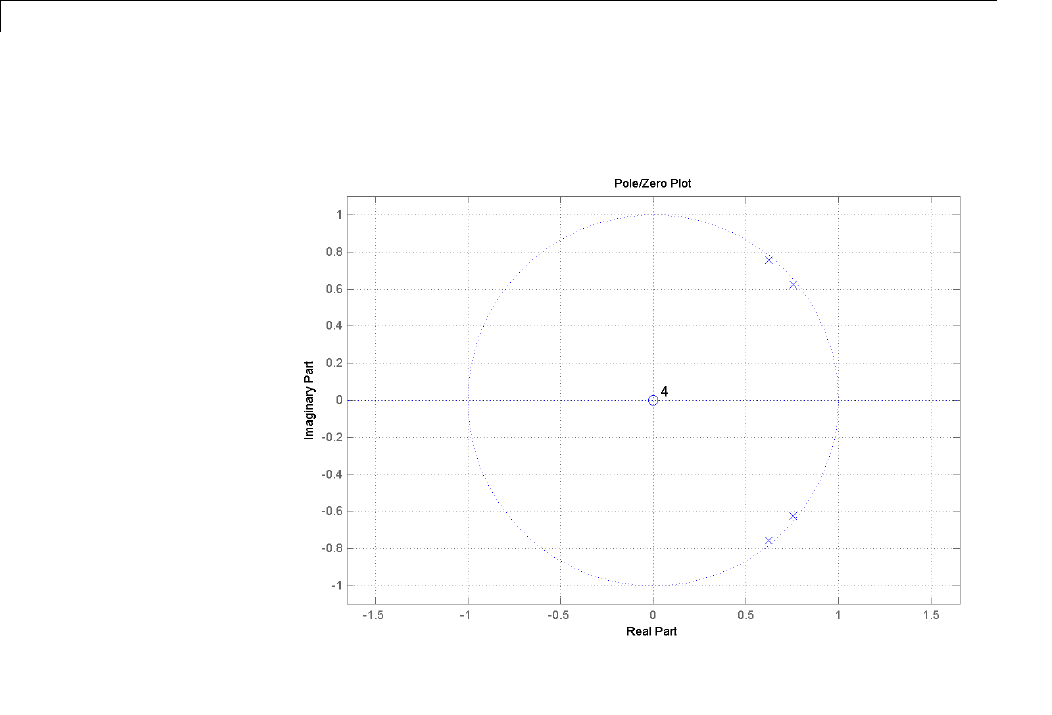
12 Spectral Analysis
The dynamic range of this PSD is approximately 65 dB, much larger than
the AR(2) model.
[H4,W4] = freqz(B4,A4,1e3,1);
max(20*log10(abs(H4)))-min(20*log10(abs(H4)))
To simulate realizations from these AR(p) processes, use randn and filter.
Set the random number generator to the default settings to produce
repeatable results. Plot the realizations.
rng default;
x = randn(1e3,1);
y2 = filter(B2,A2,x);
y4 = filter(B4,A4,x);
12-14
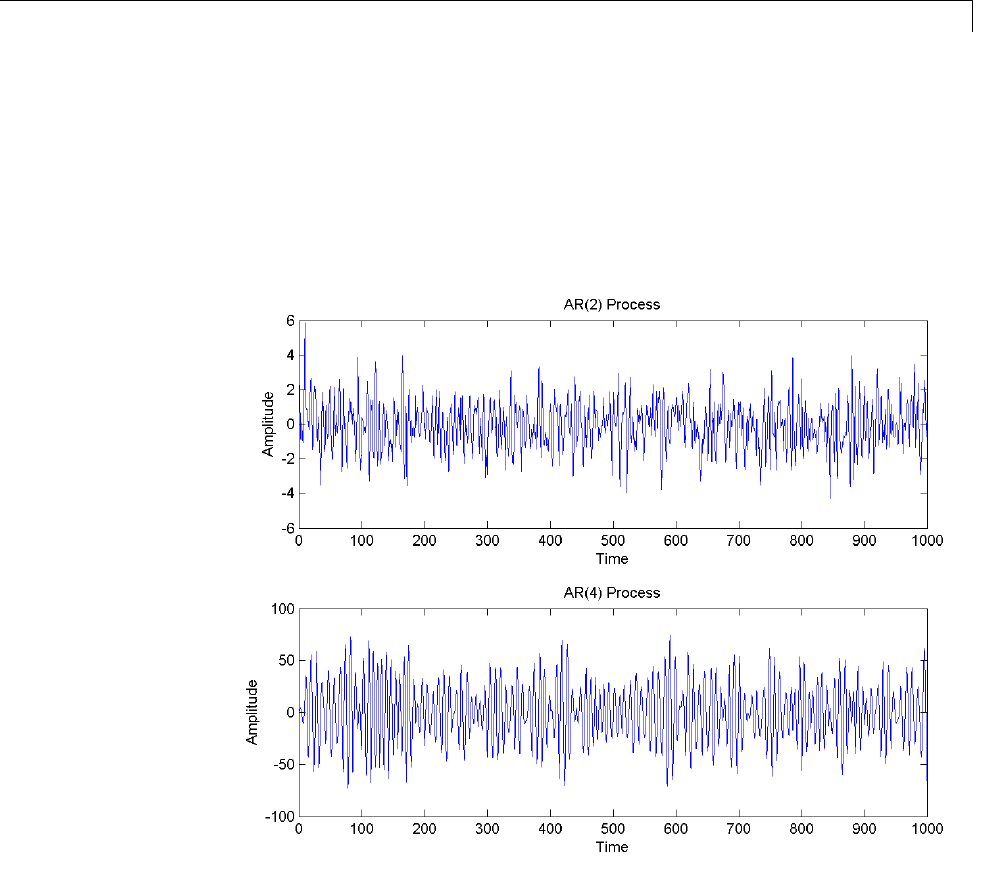
Bias and Variability in the Periodogram
subplot(211)
plot(y2); title('AR(2) Process');
xlabel('Time'); ylabel('Amplitude');
subplot(212);
plot(y4); title('AR(4) Process');
xlabel('Time'); ylabel('Amplitude');
Compute the periodograms of the AR(2) and AR(4) realizations. Plot the
result and compare the periodogram against the true PSD.
Fs = 1;
NFFT = length(y2);
[psdAR2,Fxx] = periodogram(y2,rectwin(length(y2)),length(y2),1);
psdAR4 = periodogram(y4,rectwin(length(y2)),length(y2),1);
12-15
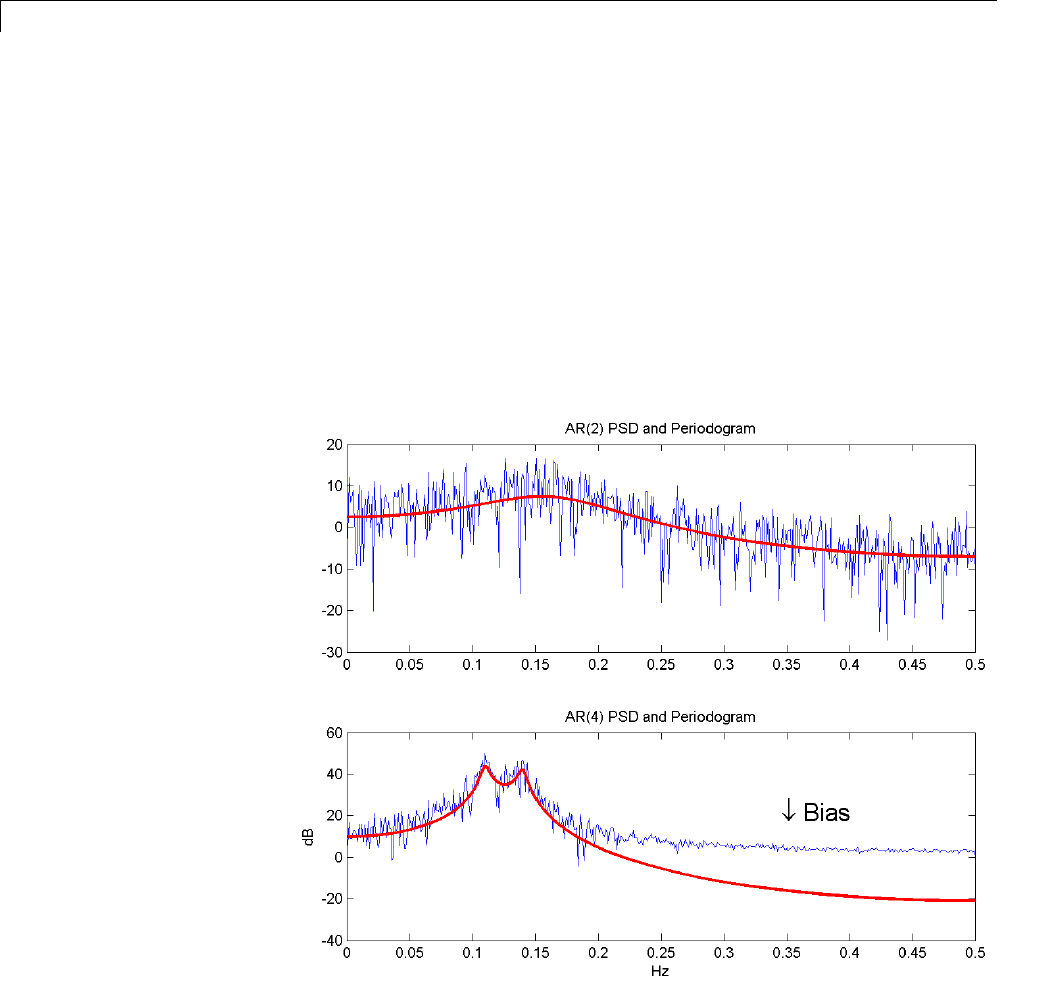
12 Spectral Analysis
subplot(211)
plot(Fxx,10*log10(psdAR2));
hold on;
plot(W2,20*log10(abs(H2)),'r','linewidth',2);
title('AR(2) PSD and Periodogram');
subplot(212)
plot(Fxx,10*log10(psdAR4));
hold on;
plot(W4,20*log10(abs(H4)),'r','linewidth',2);
xlabel('Hz'); ylabel('dB');
title('AR(4) PSD and Periodogram');
12-16

Bias and Variability in the Periodogram
InthecaseoftheAR(2)process,theperiodogram estimate follows the shape
of the true PSD but exhibits considerable variability. This is due to the
low degrees of freedom. The pronounced negative deflections (in dB) in the
periodogram are explained by taking the log of a chi-square random variable
with two degrees of freedom.
InthecaseoftheAR(4)process,theperiodogramfollowstheshapeofthetrue
PSD at low frequencies but deviates from the PSD in the high frequencies.
This is the effect of the convolution with Fejer’s kernel. The large dynamic
range of the AR(4) process compared to the AR(2) process is what makes
thebiasmorepronounced.
Mitigate the bias demonstrated in the AR(4) process by using a taper,
or window. In this example, use a Hamming window to taper the AR(4)
realization before obtaining the periodogram.
[psdAR4H,Fxx] = periodogram(y4,hamming(length(y4)),NFFT,Fs);
plot(Fxx,10*log10(psdAR4H));
hold on;
plot(W4,20*log10(abs(H4)),'r','linewidth',2);
xlabel('Hz'); ylabel('dB');
title('AR(4) PSD and Periodogram with Hamming Window');
legend('Periodogram with Hamming Window','AR(4) PSD',...
'Location','NorthEast');
12-17
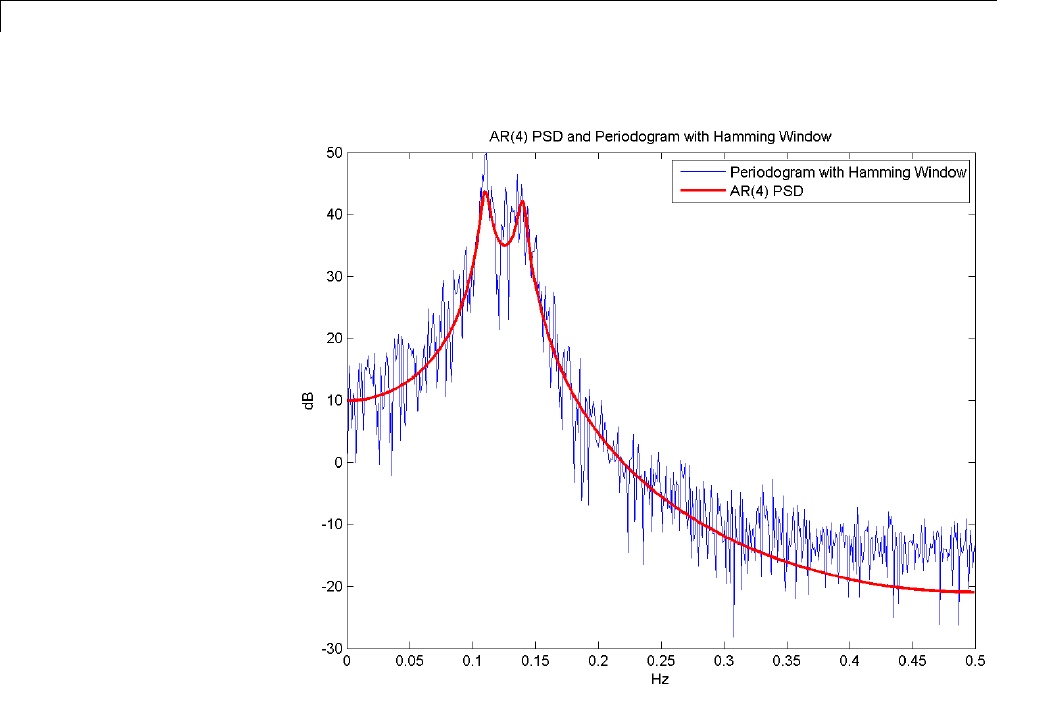
12 Spectral Analysis
Note that the periodogram estimate nowfollowsthetrueAR(4)PSDoverthe
entire [0,Nyquist] frequency range. The periodogram estimates still only have
two degrees of freedom so the use of a window does not reduce the variability
of periodogram, but it does address bias.
In nonparametric spectral estimation, two methods for increasing the degrees
of freedom and reducing the variability of the periodogram are Welch’s
overlapped segment averaging and multitaper spectral estimation.
Obtain a multitaper estimate of the AR(4) time series using a time half
bandwidthproductof3.5. Plottheresult.
NW = 3.5;
[psdmtm,Fxx] = pmtm(y4,NW,NFFT,Fs);
12-18
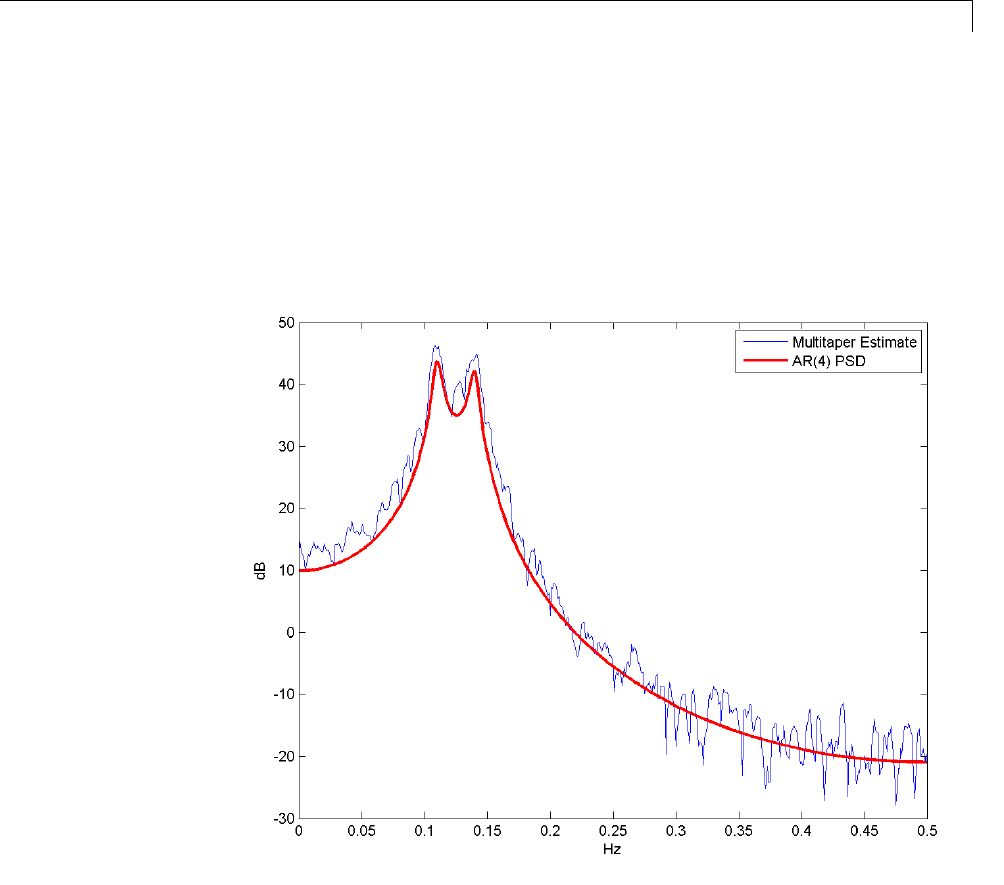
Bias and Variability in the Periodogram
plot(Fxx,10*log10(psdmtm));
hold on;
plot(W4,20*log10(abs(H4)),'r','linewidth',2);
xlabel('Hz'); ylabel('dB');
legend('Multitaper Estimate','AR(4) PSD', ...
'Location','NorthEast');
The multitaper method produces a PSD estimate with significantly less
variability than the periodogram. Because the multitaper method also uses
windows, you see that the bias of the periodogram is also addressed.
12-19

12 Spectral Analysis
Cross Spectrum and Magnitude-Squared Coherence
This example shows how to use the cross spectrum to obtain the phase lag
between sinusoidal components in a bivariate time series. The example
also uses the magnitude-squared coherence (MSC) to identify significant
frequency-domain correlation atthesinewavefrequencies.
Create the bivariate time series. The individual series consist of two sine
waves with frequencies of 100 and 200 Hz in additive white Gaussian noise.
The sine waves in the x-series both have amplitudes equal to 1. The 100-Hz
sine wave in the y-series has amplitude 0.5 and the 200-Hz sine wave in the
y-series has amplitude 0.35. The sine waves in the y-series are phase-lagged
by π/4 radians (100 Hz) and π/2 radians (200 Hz). You can think of y-series as
the noise-corrupted output of a linear system with input x. In the following
code, set the random number generator to the default settings for reproducible
results.
Fs = 1000;
t = 0:1/Fs:1-1/Fs;
rng default;
x = cos(2*pi*100*t)+sin(2*pi*200*t)+0.5*randn(size(t));
y = 0.5*cos(2*pi*100*t-pi/4)+0.35*sin(2*pi*200*t-pi/2)+0.5*randn(size(t));
Obtain the magnitude-squared coherence (MSC) for the bivariate time
series. The magnitude-squared coherence enables you to identify significant
frequency-domain correlation between the two time series. Phase estimates
in the cross spectrum are only useful where significant frequency-domain
correlation exists.
To prevent obtaining a magnitude-squared coherence estimate, which is
identically 1 for all frequencies, you must use an averaged MSC estimator.
Both Welch’s overlapped segment averaging (WOSA) and mulitaper
techniques are appropriate. mscohere implements a WOSA estimator.
Set the window length to 100 samples. This window length contains 10
periods of the 100-Hz sine wave and 20 periods of the 200-Hz sine wave.
Use an overlap of 80 samples with the default Hamming window. Plot the
magnitude-squared coherence.
[Pxy,F] = mscohere(x,y,hamming(100),80,100,Fs);
12-20
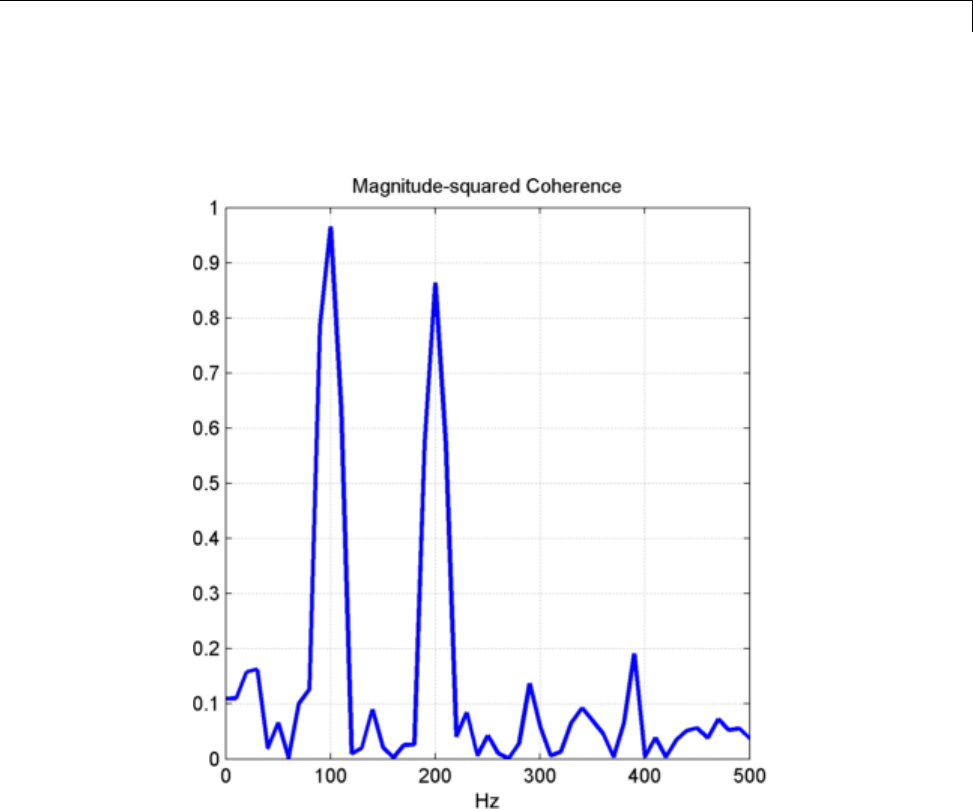
Cross Spectrum and Magnitude-Squared Coherence
plot(F,Pxy,'linewidth',2); title('Magnitude-squared Coherence');
xlabel('Hz'); grid on;
You see that the magnitude-squared coherence is greater than 0.8 at 100
and 200 Hz.
Obtain the cross spectrum of xand yusing cpsd. Use the same parameters
to obtain the cross spectrum that you used in the MSC estimate. Plot the
phase of the cross spectrum and indicate the frequencies with significant
coherencebetweenthetwotimes. Marktheknownphaselagsbetweenthe
sinusoidal components.
[Cxy,F] = cpsd(x,y,hamming(100),80,100,Fs);
12-21
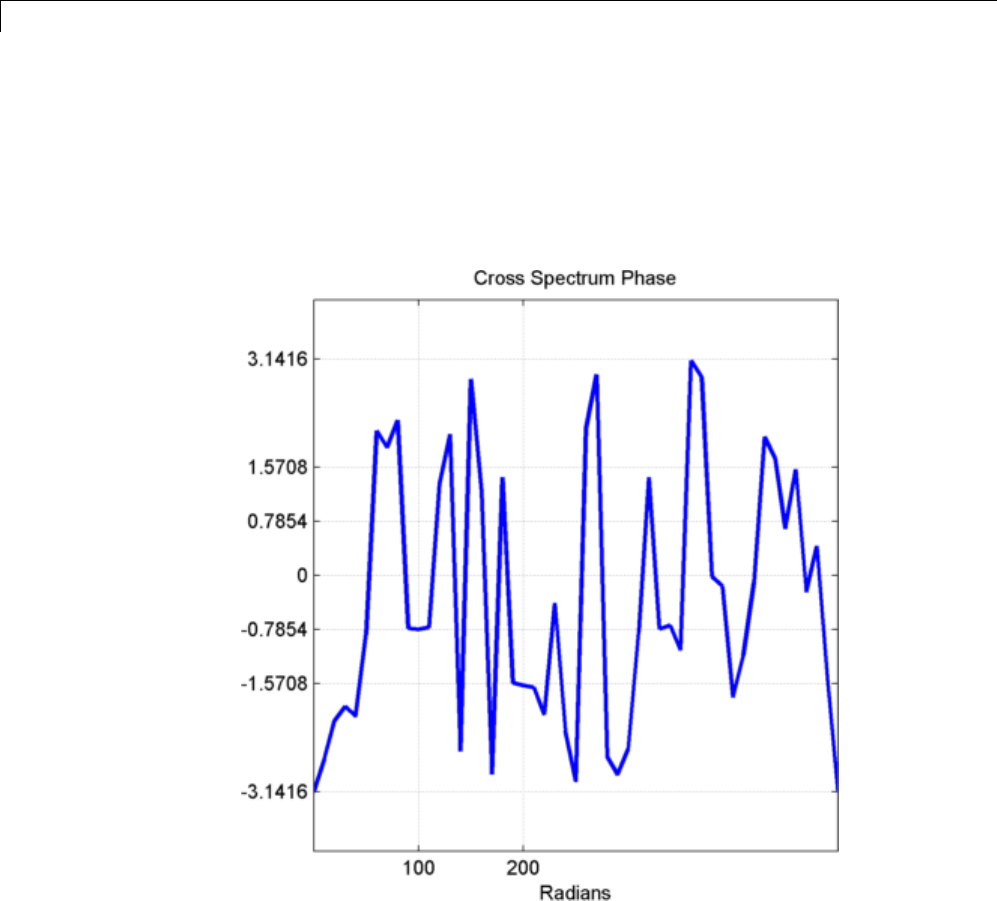
12 Spectral Analysis
figure;
plot(F,-angle(Cxy),'linewidth',2); title('Cross Spectrum Phase');
xlabel('Radians');
set(gca,'xtick',[100 200]);
set(gca,'ytick',[-pi -pi/2 -pi/4 0 pi/4 pi/2 pi]);
grid on;
You see that at 100 Hz and 200 Hz, the phase lags estimated from the cross
spectrumareclosetothetruevalues.
In this example, the cross spectrum estimates are spaced at 1000/100= 10 Hz.
You can return the phase estimates at those frequency bins. Keep in mind
that the first frequency bin corresponds to 0 Hz, or DC.
12-22

Cross Spectrum and Magnitude-Squared Coherence
phi100 = - angle(Cxy(11));
phi200 = - angle(Cxy(21));
You see that phi100 and phi200 are close to –π/4 and –π/2.
12-23

12 Spectral Analysis
Amplitude Estimation and Zero Padding
Thisexampleshowstheeffectoffrequency resolution on amplitude
estimation. Frequencies in the discrete Fourier transform (DFT) are spaced
at intervals of Fs/N where Fs is the sampling frequency and N is the length
of the input time series. Attempting to estimate the amplitude of a sinusoid
with a frequency that does not correspond to a DFT bin canresultinan
inaccurate estimate. Therefore, zero padding the data before you obtain the
DFT can often help to improve the amplitude estimate.
Create a signal consisting of two sine waves. The two sine waves have
frequencies of 100 and 202.5 Hz. The sampling frequency is 1000 Hz and
thesignalis1000samplesinlength.
Fs = 1e3;
t = 0:0.001:1-0.001;
x = cos(2*pi*100*t)+sin(2*pi*202.5*t);
Obtain the DFT of the signal. The DFT bins are spaced at 1 Hz. Accordingly,
the 100-Hz sine wave corresponds to a DFT bin, but the 202.5-Hz sine wave
does not.
Because the signal is real-valued, use only the positive frequencies from the
DFT to estimate the amplitude. Scale the DFT by the length of the input
signal and multiply all frequencies except 0 and the Nyquist by 2.
Plot the result with the known amplitudes for comparison.
freqres = Fs/length(x);
xdft = fft(x);
xdft = xdft(1:length(x)/2+1);
xdft = 1/length(x).*xdft;
xdft(2:end-1) = 2*xdft(2:end-1);
freq = 0:Fs/length(x):Fs/2;
plot(freq,abs(xdft));
xlabel('Hz'); ylabel('Amplitude');
h = line(freq,ones(length(x)/2+1,1));
set(h,'color',[1 0 0],'linewidth',2);
12-24

Amplitude Estimation and Zero Padding
The amplitude estimate at 100 Hz is accurate because that frequency
corresponds to a DFT bin. However, the amplitude estimate at 202.5 Hz is not
accurate because that frequency does not correspond to a DFT bin.
You can interpolate the DFT by zero padding. While zero padding does not
improve the frequency resolution of the DFT, zero padding can allow you to
obtain more accurate amplitude estimates of resolvable signal components.
Pad the DFT out to length 2000. With this length, the spacing between DFT
bins is Fs/2000=0.5 Hz. In this case, the energy from the 202.5-Hz sine wave
falls directly in a DFT bin. Using zero padding out to 2000 samples, obtain
the DFT and plot the amplitude estimates.
xdft = fft(x,2000);
12-25
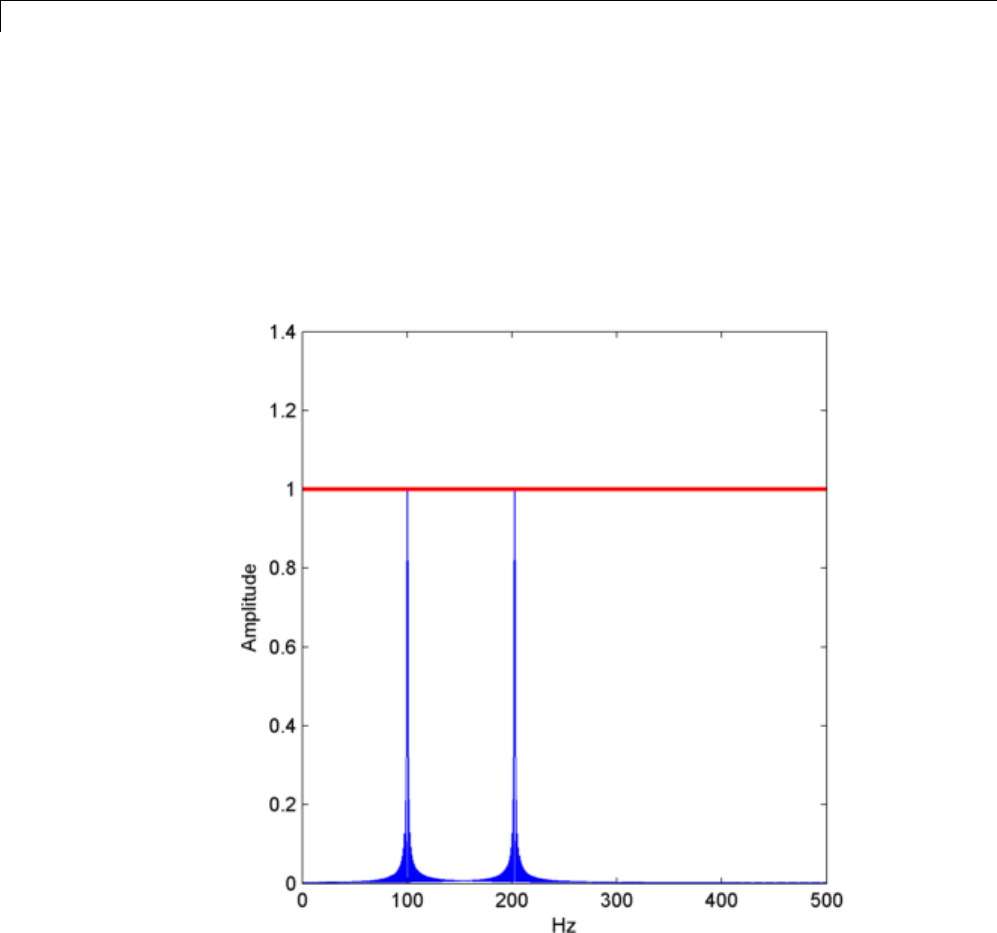
12 Spectral Analysis
xdft = xdft(1:length(xdft)/2+1);
xdft = 1/length(x).*xdft;
xdft(2:end-1) = 2*xdft(2:end-1);
freq = 0:Fs/(2*length(x)):Fs/2;
plot(freq,abs(xdft));
xlabel('Hz'); ylabel('Amplitude');
h = line(freq,ones(2*length(x)/2+1,1));
set(h,'color',[1 0 0],'linewidth',2);
The use of zero padding enables you to estimate the amplitudes of both
frequencies correctly.
12-26

Significance Testing for Periodic Component
Significance Testing for Periodic Component
This example shows you how to assess the significance of a sinusoidal
component in white noise using Fisher’s g–statistic. Fisher’s g–statistic is
the ratio of the largest periodogram value to the sum of all the periodogram
values over 1/2 of the frequency interval, (0,Fs/2). A detailed description of
the g–statistic and exact distribution can be found in [1] and [2].
Create a signal consisting of a 100-Hz sine wave in white Gaussian noise
with zero mean and variance 1. The amplitude of the sine wave is 0.25. The
sampling rate is 1 kHz. Set the random number generator to the default
settings for reproducible results.
Fs = 1e3;
t = 0:0.001:1-0.001;
rng default;
x = 0.25*cos(2*pi*100*t)+randn(size(t));
Obtain the periodogram of the signal using periodogram.Exclude0and
the Nyquist frequency (Fs/2) .
[Pxx,F] = periodogram(x,rectwin(length(x)),length(x),Fs);
Pxx = Pxx(2:length(x)/2);
Find the maximum value of the periodogram. Fisher’s g–statistic is the ratio
of the maximum perioodgram value to the sum of all periodogram values.
[maxval,index] = max(Pxx);
fisher_g = Pxx(index)/sum(Pxx);
The maximum periodogram value occurs at 100 Hz, which you can verify
by finding the frequency corresponding to the index of the maximum
periodogram value.
F = F(2:end-1);
F(index)
Use the distributional results detailed in [1] and [2] to determine the
significance level, pval,ofFisher’sg–statistic. The following MATLAB code
implements equation 6 on page 7 in [2].
N = length(Pxx);
12-27

12 Spectral Analysis
upper = floor(1/fisher_g);
for nn = 1:3
I(nn) = ...
(-1)^(nn-1)*nchoosek(N,nn)*(1-nn*fisher_g)^(N-1);
end
pval = sum(I);
The p-value is less than 0.00001, which indicates a significant periodic
component at 100 Hz. The interpretation of Fisher’s g–statistic is complicated
by the presence of other periodicities. See [1] for a modification when multiple
periodicities may be present.
References
[1] Percival, D.B. and Walden, A.T. Spectral Analysis for Physical
Applications, Cambridge University Press, 1993, p. 491.
[2] Wichert, S., Fokianos, K., and Strimmer, K. “Identifying periodically
expressed transcripts in microarray time series data”, Bioinformatics, 20,
5-20, 2004.
12-28

Frequency Estimation by Subspace Methods
Frequency Estimation by Subspace Methods
This example shows you how to resolve closely-spaced sine waves using
subspace methods. Subspace methods assume a harmonic model consisting of
a sum of sine waves, possibly complex, in additive noise. In a complex-valued
harmonic model, the noise is also complex-valued.
Create a complex-valued signal 24 samples in length. The signal consists of
two complex exponentials (sine waves) with frequencies of 0.50 and 0.52 hertz
and additive complex white Gaussian noise. The noise has zero mean and
variance 0.22. In a complex white noise, both the real and imaginary parts
have variance equal to 1/2 the overall variance.
n = 0:23;
rng default
x = exp(1j*2*pi*0.5*n)+exp(1j*2*pi*0.52*n)+ ...
0.2/sqrt(2)*(randn(size(n))+1j*randn(size(n)));
Using periodogram,attempttoresolvethetwosinewaves.
periodogram(x,rectwin(length(x)),128,1);
12-29
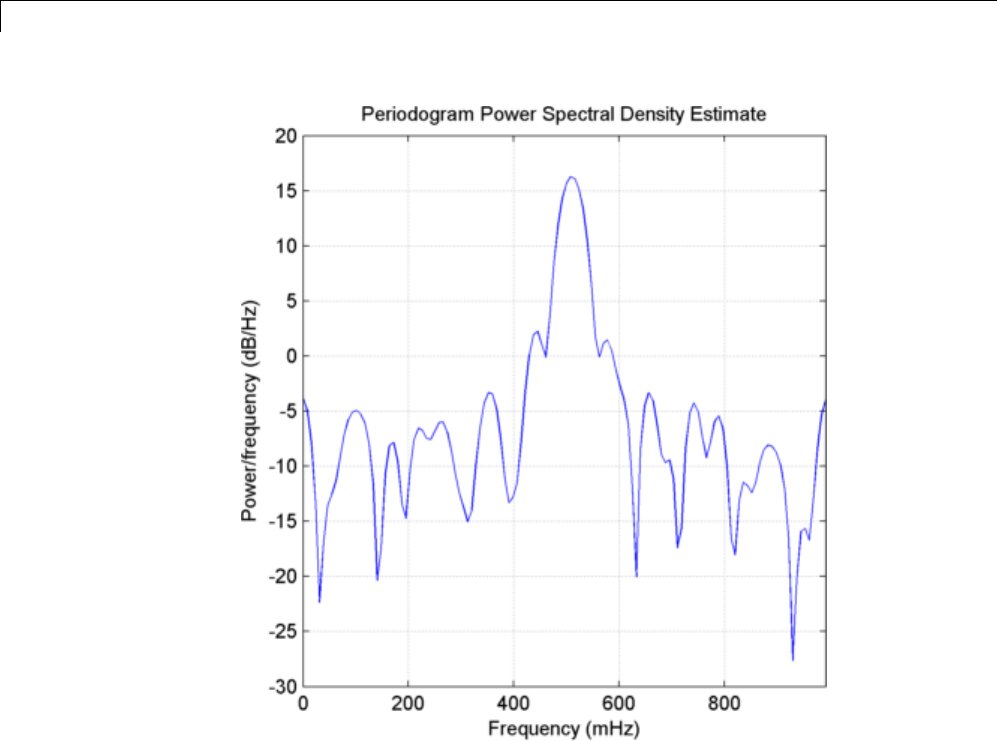
12 Spectral Analysis
The periodogram shows a broad peak near 1/2 Hz. You cannot resolve the two
separate sine waves because the frequency resolution of the periodogram is
1/N, where N is the length of the signal. In this case, 1/N is greater than the
separation of the two sine waves. Zero padding does not help to resolve two
separate peaks.
Use a subspace method to resolve the two closely-spaced peaks. In this
example, use the root-MUSIC method. Estimate the autocorrelation matrix
and input the autocorrelation matrix into pmusic. Specify a model with 2
sinusoidal components. Plot the result.
[X,R] = corrmtx(x,14,'mod');
12-30
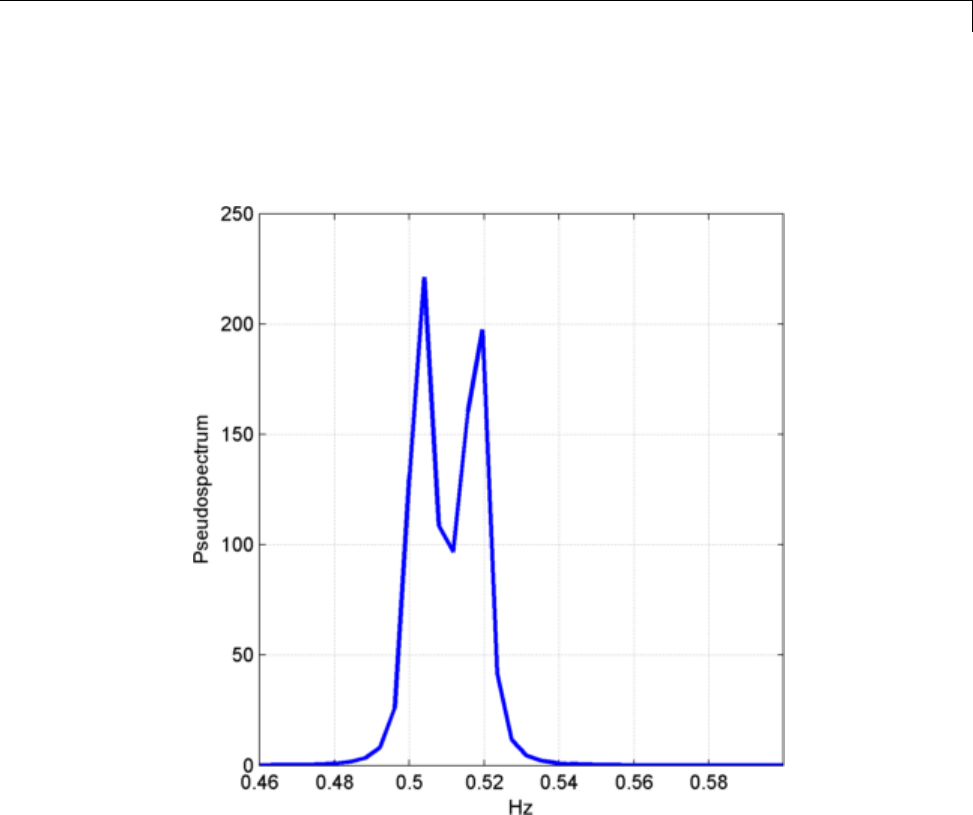
Frequency Estimation by Subspace Methods
[S,F] = pmusic(R,2,[],1,'corr');
plot(F,S,'linewidth',2); set(gca,'xlim',[0.46 0.60]);
grid on; xlabel('Hz'); ylabel('Pseudospectrum');
The root MUSIC method is able to separate the two peaks at 0.5 and 0.52
Hz. However, subspace methods do not produce power estimates like power
spectral density estimates. Subspace methods are most useful for frequency
identification and can be sensitive to model-order misspecification.
12-31

12 Spectral Analysis
Frequency-Domain Linear Regression
This example shows how to use the discrete Fourier transform to construct a
linear regression model for a time series. The time series used in this example
is the monthly number of accidental deaths in the U.S. from 1973 to 1979.
The data are published in [1]. The original source is the U.S. National Safety
Council.
Enter the data. Copy the exdata matrix into the MATLAB workspace.
exdata = [
9007 7750 8162 7717 7792 7836
8106 6981 7306 7461 6957 6892
8928 8038 8124 7776 7726 7791
9137 8422 7870 7925 8106 8129
10017 8714 9387 8634 8890 9115
10826 9512 9556 8945 9299 9434
11317 10120 10093 10078 10625 10484
10744 9823 9620 9179 9302 9827
9713 8743 8285 8037 8314 9110
9938 9129 8433 8488 8850 9070
9161 8710 8160 7874 8265 8633
8927 8680 8034 8647 8796 9240];
exdata is a 12-by-6 matrix. Each column of exdata contains 12 months of
data. The first row of each column contains the number of U.S. accidental
deaths for January of the corresponding year. The last row of each
column contains the number of U.S. accidental deaths for December of the
corresponding year.
Reshape the data matrix into a 72-by-1 time series and plot the data for the
years 1973 to 1978.
ts = reshape(exdata,72,1);
years = linspace(1973,1979,72);
plot(years,ts,'bo-','markerfacecolor',[0 0 1]); xlabel('Year');
ylabel('Number of Accidental Deaths'); grid on;
12-32

Frequency-Domain Linear Regression
A visual inspection of the data indicates that number of accidental deaths
varies in a periodic manner. The period of the oscillation appears to be
roughly 1 year (12 months). The periodic nature of the data suggests that
an appropriate model may be
Xn A B n
k
k
kn
Nkkn
N
() cos( ) sin( ) ()
22
where μis the overall mean, N is the length of the time series, and ε(n)
is a white noise sequence of independent and identically-distributed (iid)
Gaussian random variables with zero mean and some variance. The additive
noise term accounts for the randomness inherent in the data. The parameters
12-33

12 Spectral Analysis
of the model are the overall mean and the amplitudes of the cosines and sines.
The model is linear in the parameters.
To construct a linear regression model in the time domain, you have to specify
which frequencies to use for the cosines and sines, form the design matrix,
and solve the normal equations in order to obtain the least-squares estimates
of the model parameters. In this case, it is easier to use the discrete Fourier
transform to detect the periodicities, retain only a subset of the Fourier
coefficients, and invert the transform to obtain the fitted time series.
Perform a spectral analysis of the data to reveal which frequencies contribute
significantly to the variability in the data. Because the overall mean of the
signal is approximately 9,000 and is proportional to the Fourier transform at
0 frequency, subtract the mean prior to the spectral analysis. This reduces the
large magnitude Fourier coefficient at 0 frequency and makes any significant
oscillations easier to detect. The frequencies in the Fourier transform are
spaced at an interval that is the reciprocal of the time series length, 1/72.
Sampling the data monthly, the highest frequency in the spectral analysis is
1 cycle/2 months. In this case, it is convenient to look at the spectral analysis
in terms of cycles/year so scale the frequencies accordingly for visualization.
tsdft = fft(ts-mean(ts));
freq = 0:1/72:1/2;
plot(freq.*12,abs(tsdft(1:length(ts)/2+1)),'bo-','markerfacecolor',[0 0 1]
xlabel('Cycles/Year'); ylabel('Magnitude');
set(gca,'xtick', [1/6 1 2 3 4 5 6])
12-34
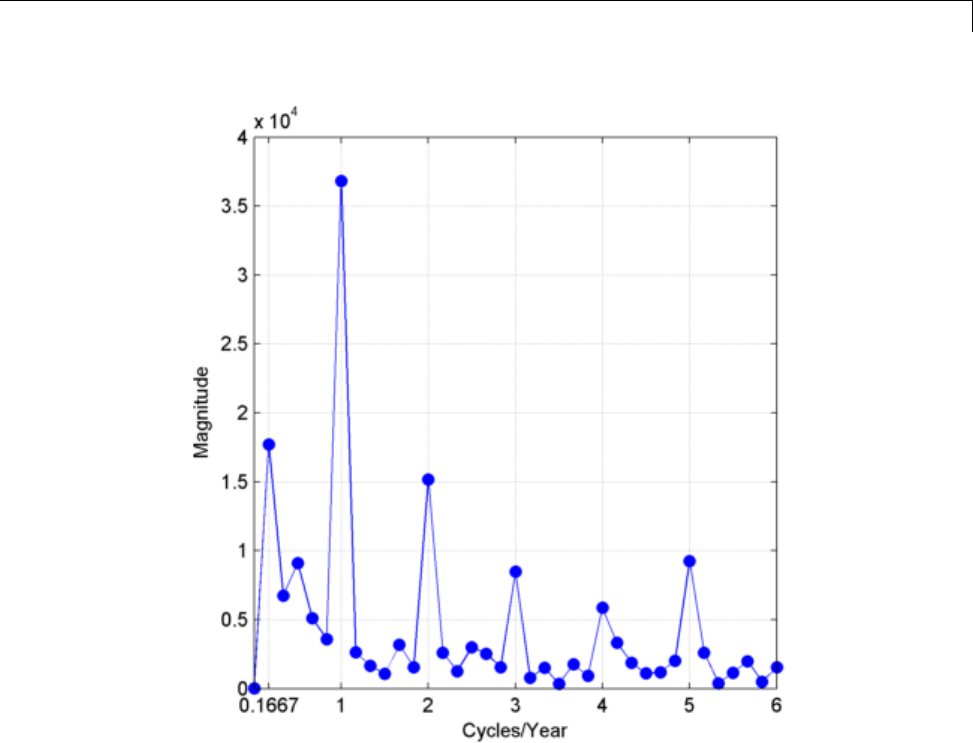
Frequency-Domain Linear Regression
Based on the magnitudes, the frequency of 1 cycle/12 months is the most
significant oscillation in the data. The magnitude at 1 cycle/12 months is
more than twice as large as any other magnitude. However, the spectral
analysis reveals that there are also other periodic components in the data.
For example, there appears to be periodic components at harmonics (integer
multiples) of 1 cycle/12 months. There also appears to be a periodic component
with a period of 1 cycle/72 months.
Based on the spectral analysis of the data, fit a simple linear regression
model using a cosine and sine term with a frequency of the most signficant
component: 1 cycle/year (1 cycle/12 months).
12-35

12 Spectral Analysis
Determine the frequency bin in the discrete Fourier transform that
corresponds to 1 cycle/12 months. Because the frequencies are spaced at 1/72
and the first bin corresponds to 0 frequency, the correct bin is 72/12+1. This
is the frequency bin of the positive frequency. You must also include the
frequency bin corresponding to the negative frequency: –1 cycle/12 months.
With MATLAB indexing, the frequency bin of the negative frequency is
72–72/12+3.
Create a 72-by-1 vector of zeros. Fill the appropriate elements of the vector
with the Fourier coefficients corresponding to a positive and negative
frequency of 1 cycle/12 months. Invert the Fourier transform and add the
overall mean to obtain a fit to the accidental death data.
N=72;
freqbin = N/12+1;
freqbins = [freqbin N-freqbin+2];
tsfit = zeros(72,1);
tsfit(freqbins) = tsdft(freqbins);
tsfit = ifft(tsfit,'symmetric');
mu = mean(ts);
tsfit = mu+tsfit;
Plot the original data along with the fitted series using two Fourier
coefficients.
plot(years,ts,'bo-','markerfacecolor',[0 0 1]); xlabel('Year');
ylabel('Number of Accidental Deaths'); grid on;
hold on;
plot(years,tsfit,'r','linewidth',2);
legend('Data','Fitted Model');
12-36
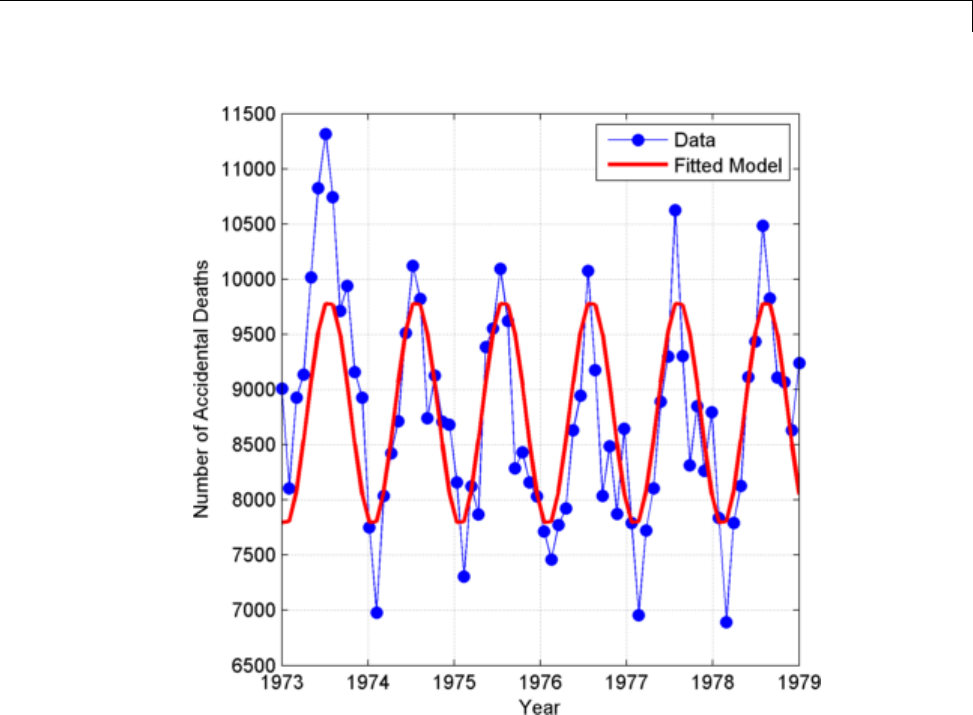
Frequency-Domain Linear Regression
The fitted model appears to capture the general periodic nature of the data
and supports the initial conclusion that data oscillate with a cycle of 1 year.
To assess how adequately the single frequency of 1 cycle/12 months accounts
for the observed time series, form the residuals. If the residuals resemble
a white noise sequence, the simple linear model with one frequency has
adequately modeled the time series.
To assess the residuals, use the autocorrelation sequence with 95%-confidence
intervals for a white noise. See “Confidence Intervals for Sample
Autocorrelation” on page 10-5 for a detailed example on how to form the
95%-confidence intervals.
resid = ts-tsfit;
12-37
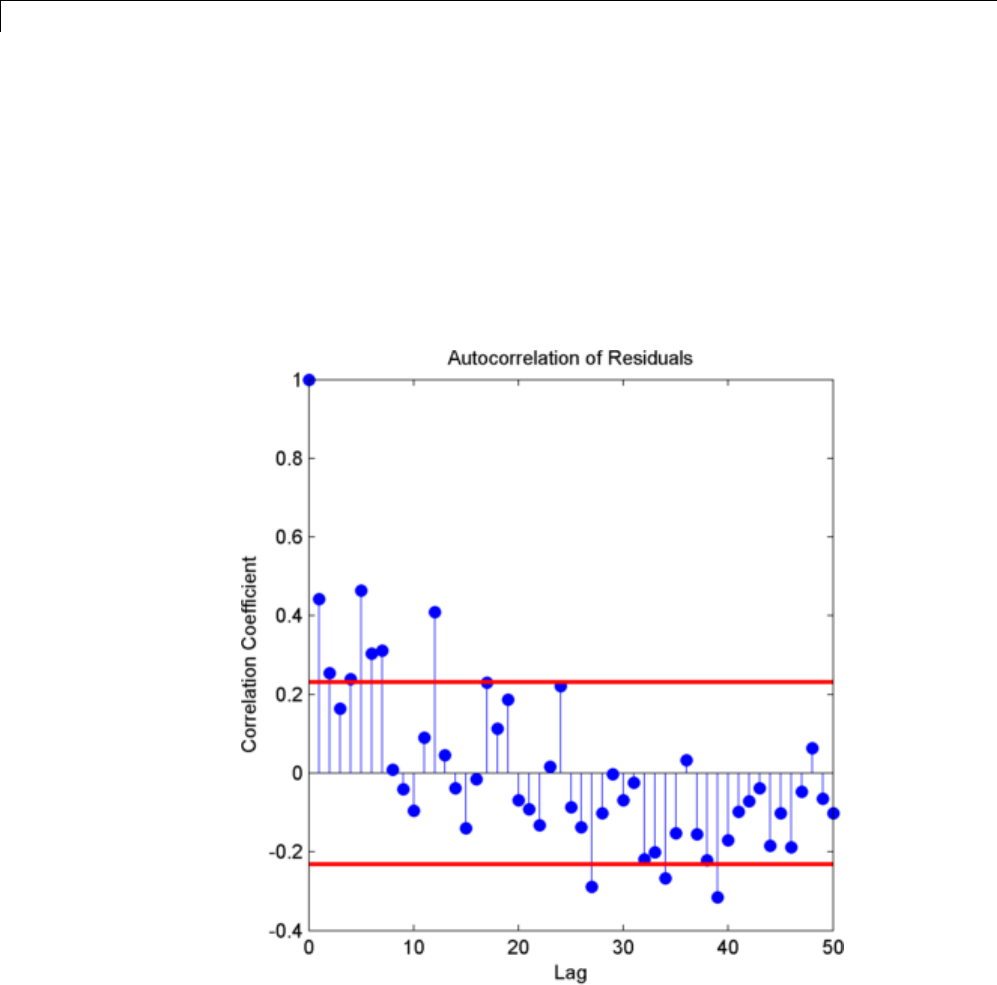
12 Spectral Analysis
[xc,lags] = xcorr(resid,50,'coeff');
stem(lags(51:end),xc(51:end),'markerfacecolor',[0 0 1]);
hold on;
lconf = -1.96*ones(51,1)/sqrt(72);
uconf = 1.96*ones(51,1)/sqrt(72);
plot(lags(51:end),lconf,'r','linewidth',2);
plot(lags(51:end),uconf,'r','linewidth',2);
xlabel('Lag'); ylabel('Correlation Coefficient');
title('Autocorrelation of Residuals');
The autocorrelation values fall outside the 95% confidence bounds at a
number of lags. It does not appear that the residuals are white noise. The
12-38

Frequency-Domain Linear Regression
conclusion is that the simple linear model with one sinusoidal component
does not account for all the oscillations in the number of accidental deaths.
This is expected because the spectral analysis revealed additional periodic
components in addition to the dominant oscillation. Creating a model that
incorporates additional periodic terms indicated by the spectral analysis will
improve the fit and whiten the residuals.
Fit a model which consists of the three largest Fourier coefficient magnitudes.
Because you have to retain the Fourier coefficients corresponding to both
negative and positive frequencies, retain the largest 6 indices.
tsfit2dft = zeros(72,1);
[Y,I] = sort(abs(tsdft),'descend');
indices = I(1:6);
tsfit2dft(indices) = tsdft(indices);
Demonstrate that preserving only 6 of the 72 Fourier coefficients (3
frequencies) retains most of the signal’s energy. First, demonstrate that
retaining all the Fourier coefficients yields energy equivalence between the
original signal and the Fourier transform.
norm(1/sqrt(72)*tsdft,2)/norm(ts-mean(ts),2)
The ratio is 1. Now, examine the energy ratio where only 3 frequencies are
retained.
norm(1/sqrt(72)*tsfit2dft,2)/norm(ts-mean(ts),2)
Almost 90% of the energy is retained. Equivalently, 90% of the variance of the
time series is accounted for by 3 frequency components.
Form an estimate of the data based on 3 frequency components. Compare the
original data, the model with one frequency, and the model with 3 frequencies.
tsfit2 = mu+ifft(tsfit2dft,'symmetric');
plot(years,ts,'bo-','markerfacecolor',[0 0 1]); xlabel('Year');
ylabel('Number of Accidental Deaths'); grid on;
hold on;
plot(years,tsfit,'r','linewidth',2);
plot(years,tsfit2,'k','linewidth',2);
legend('Data','1 Frequency','3 Frequencies');
12-39
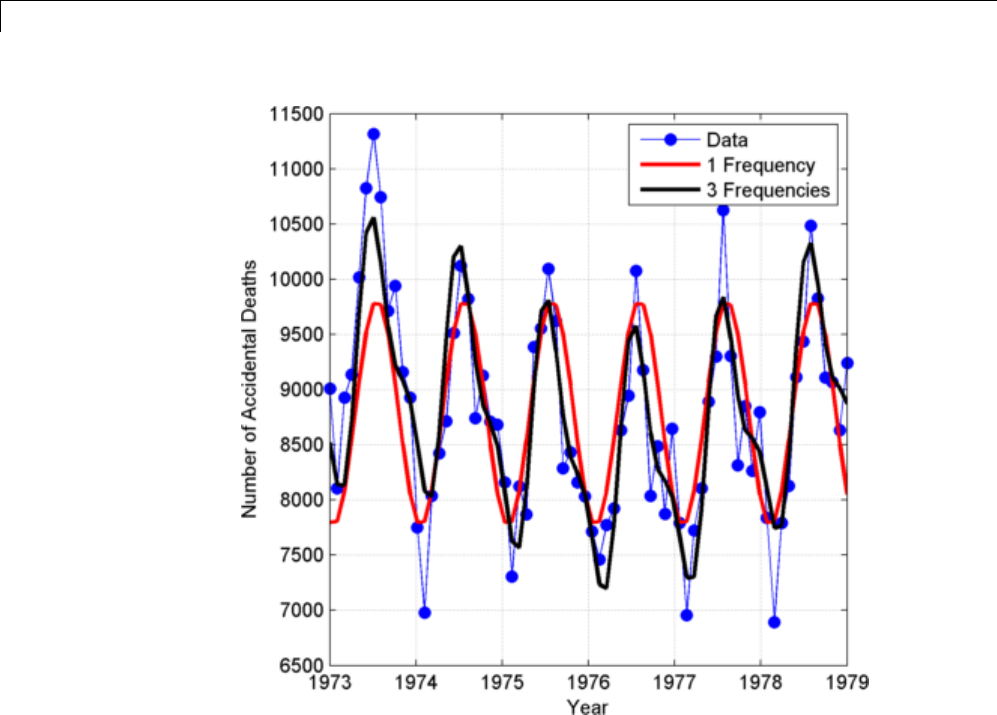
12 Spectral Analysis
Using 3 frequencies has improved the fit to the original signal. You can see
this by examining the autocorrelation of the residuals from the 3-frequency
model.
resid = ts-tsfit2;
[xc,lags] = xcorr(resid,50,'coeff');
stem(lags(51:end),xc(51:end),'markerfacecolor',[0 0 1]);
hold on;
lconf = -1.96*ones(51,1)/sqrt(72);
uconf = 1.96*ones(51,1)/sqrt(72);
plot(lags(51:end),lconf,'r','linewidth',2);
plot(lags(51:end),uconf,'r','linewidth',2);
xlabel('Lag'); ylabel('Correlation Coefficient');
title('Autocorrelation of Residuals');
12-40
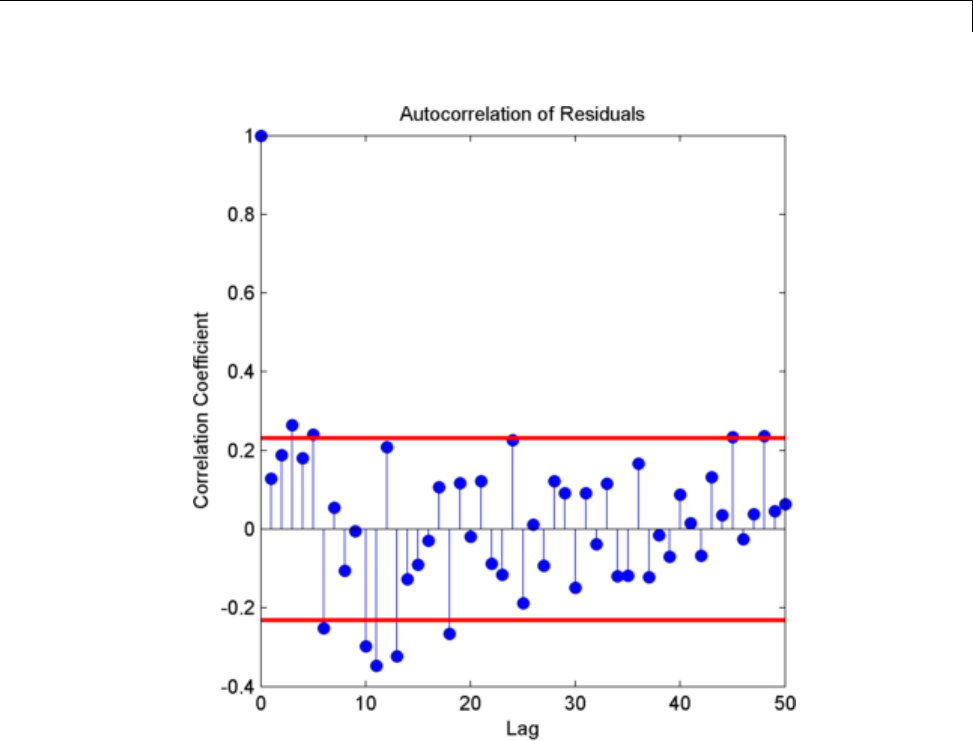
Frequency-Domain Linear Regression
Using 3 frequencies has resulted in residuals that more closely approximate a
white noise process.
Demonstrate that the parameter values obtained from the Fourier
transform are equivalent to a time-domain linear regression model. Find
the least-squares estimates for the overall mean, the cosine amplitudes,
and the sine amplitudes for the 3 frequencies by forming the design matrix
and solving the normal equations. Compare the fitted time series with that
obtained from the Fourier transform.
X = ones(72,7);
X(:,2) = cos(2*pi/72*(0:71))';
12-41

12 Spectral Analysis
X(:,3) = sin(2*pi/72*(0:71))';
X(:,4) = cos(2*pi*6/72*(0:71))';
X(:,5) = sin(2*pi*6/72*(0:71))';
X(:,6) = cos(2*pi*12/72*(0:71))';
X(:,7) = sin(2*pi*12/72*(0:71))';
beta = X\ts;
tsfit_lm = X*beta;
max(abs(tsfit_lm-tsfit2))
The two methods yield identical results. The maximum absolute value of the
difference between the two waveforms is on the order of 10-12.Inthiscase,
the frequency-domain approach was easier than the equivalent time-domain
approach. You naturally use a spectral analysis to visually inspect which
oscillations are present in the data. From that step, it is simple to use the
Fourier coefficients to construct a model for the signal consisting of a sum
cosines and sines.
For more details on spectral analysis in time series and the equivalence with
time-domain regression see [2].
While spectral analysis can answer which periodic components contribute
significantly to the variability of the data, it does not explain why those
components are present. If you examine these data closely, you see that the
minimum values in the 12-month cycle tend to occur in February, while
the maximum values occur in July. A plausible explanation for these data
is that people are naturally more active in summer than in the winter.
Unfortunately, as a result of this increased activity, there is an increased
probability of the occurrence of fatal accidents.
References
[1] Brockwell, P.J and Davis, R.A. Time Series: Theory and Methods,
Springer, 2006.
[2] Shumway, R.H. and Stoffer, D.S. Time Series Analysis and Its Applications
with R Examples, Springer, 2006.
12-42

13 Linear Prediction
Prediction Polynomial
This example shows how to obtain the prediction polynomial from an
autocorrelation sequence. The examplealsoshowsthattheresulting
prediction polynomial has an inverse that produces a stable all-pole filter.
You can use the all-pole filter to filter a wide-sense stationary white noise
sequence to produce a wide-sense stationary autoregressive process.
Create an autocorrelation sequence defined by
rk k
kk
() ( / ) ( / ) ,,
|| ||
24 5 2 27 10 3 0 1 2
k = 0:2;
rk = (24/5)*2.^(-k)-(27/10)*3.^(-k);
Use ac2poly to obtain the prediction polynomial of order 2.
A = ac2poly(rk);
The prediction polynomial of order 2 is
Az z z() / /
156 16
12
Examine the pole-zero plot of the FIR filter to see that the zeros are inside
the unit circle.
zplane(A,1)
13-2
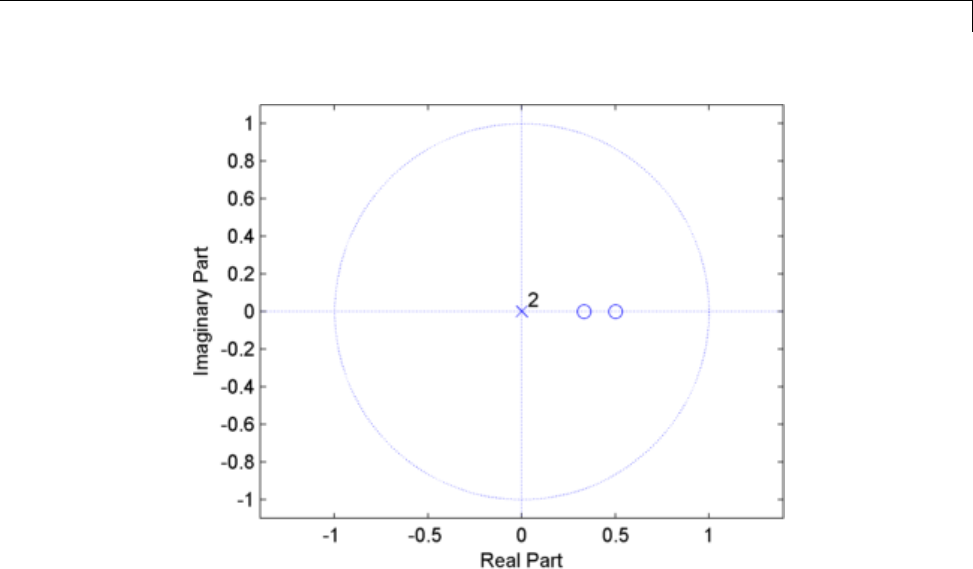
Prediction Polynomial
The inverse all-pole filter is stable with poles inside the unit circle.
zplane(1,A)
13-3
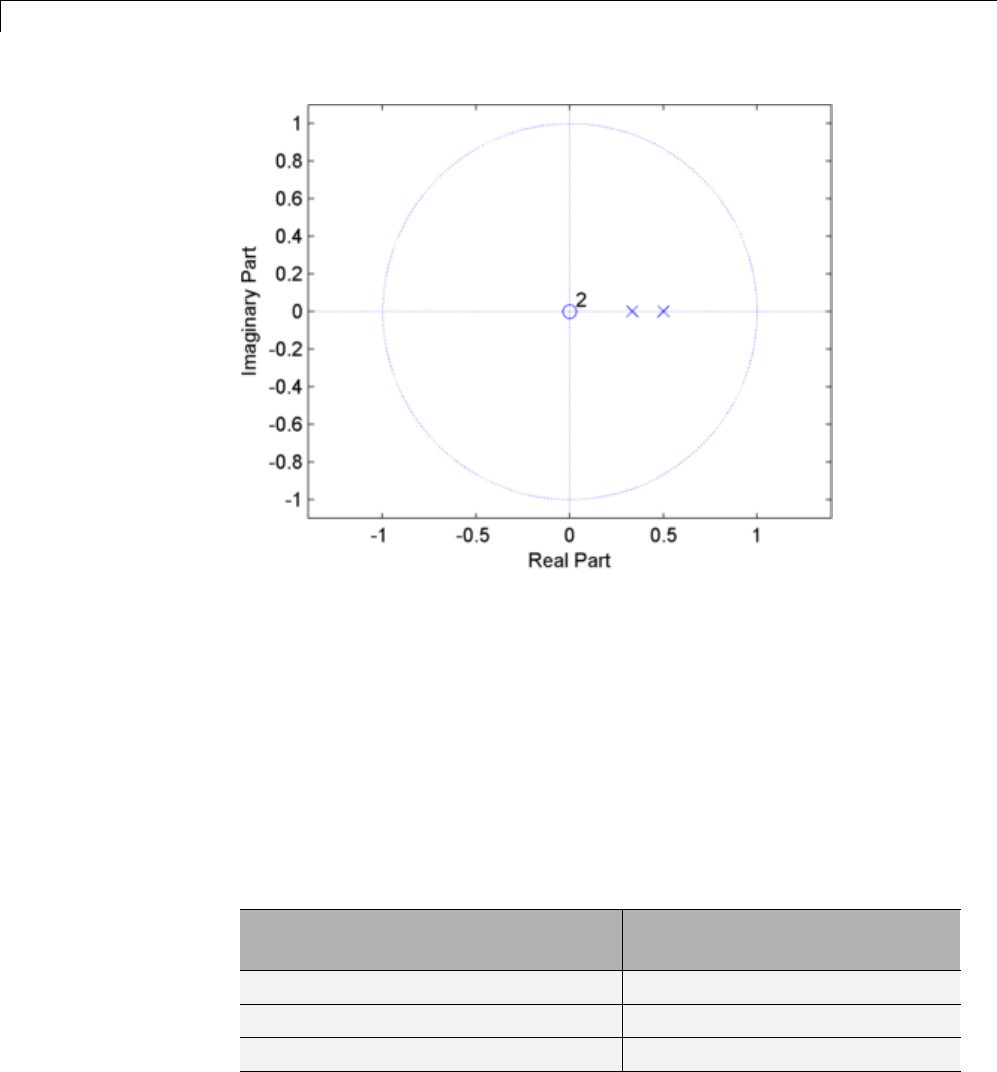
13 Linear Prediction
Use the all-pole filter to produce a realization of a wide-sense stationary AR(2)
process from a white noise sequence. Set the random number generator to the
default settings for reproducible results.
rng default;
x = randn(1000,1);
y = filter(1,A,x);
Compute the sample autocorrelation of the AR(2) realization and show that
the sample autocorrelation is close to the true autocorrelation.
[xc,lags] = xcorr(y,2,'biased');
[xc(3:end) rk']
Estimated Autocorrelation
Sequence Values
True Autocorrelation Sequence
Values
2.24 2.1
1.64 1.5
0.99 0.90
13-4

Formant Estimation with LPC Coefficients
Formant Estimation with LPC Coefficients
This example shows you how to estimate vowel formant frequencies using
linear predictive coding (LPC). The formant frequencies are obtained by
finding the roots of the prediction polynomial.
The example “Complex Cepstrum — Fundamental Frequency Estimation ” on
page 14-2 uses the same speech signal to estimate the fundamental frequency.
Note This example uses the speech sample mtlb.mat, which is part of
Signal Processing Toolbox. The speech is lowpass-filtered. Because of the
low sampling frequency, this speech sample is not optimal for this example.
The low sampling frequency limits the order of the autoregressive model you
can fit to the data. In spite of this limitation, the example illustrates the
technique for using LPC coefficients to determine vowel formants.
Load the speech signal. The recording is a woman saying “MATLAB”. The
sampling frequency is 7418 Hz.
load mtlb;
The MAT file contains the speech waveform, mtlb,andthesampling
frequency, Fs.
Use the spectrogram to identify a voiced segment for analysis.
segmentlen = 100;
noverlap = 90;
NFFT = 128;
[y,f,t,p] = spectrogram(mtlb,segmentlen,noverlap,NFFT,Fs);
surf(t,f,10*log10(abs(p)),'EdgeColor','none');
axis xy; axis tight; colormap(jet); view(0,90);
xlabel('Time');
ylabel('Frequency (Hz)');
13-5
13 Linear Prediction
Extract the segment from 0.1 to 0.25 seconds for analysis. The extracted
segment corresponds roughly to the first vowel, /ae/, in “MATLAB”.
dt = 1/Fs;
I0 = round(0.1/dt);
Iend = round(0.25/dt);
x = mtlb(I0:Iend);
Two common preprocessing steps applied to speech waveforms before linear
predictive coding are windowing and pre-emphasis (highpass) filtering.
Window the speech segment using a Hamming window.
x1 = x.*hamming(length(x));
13-6

Formant Estimation with LPC Coefficients
Apply a pre-emphasis filter. The pre-emphasis filter is a highpass all-pole
(AR(1)) filter.
preemph = [1 0.63];
x1 = filter(1,preemph,x1);
Obtain the linear prediction coefficients. To specify the model order, use the
general rule that the order is two times the expected number of formants
plus 2. In the frequency range, [0,Fs/2], you expect 3 formants. Therefore,
set the model order equal to 8. Find the roots of the prediction polynomial
returned by lpc.
A = lpc(x1,8);
rts = roots(A);
Because the LPC coefficients are real-valued, the roots occur in complex
conjugate pairs. Retain only the roots with one sign for the imaginary part
and determine the angles corresponding to the roots.
rts = rts(imag(rts)>=0);
angz = atan2(imag(rts),real(rts));
Convert the angular frequencies in radians/sample represented by the angles
to hertz and calculate the bandwidths of the formants [1].
The bandwidths of the formants are represented by the distance of the
prediction polynomial zeros from the unit circle.
[frqs,indices] = sort(angz.*(Fs/(2*pi)));
bw = -1/2*(Fs/(2*pi))*log(abs(rts(indices)));
Use the criteria that formant frequencies should be greater than 90 Hz with
bandwidths less than 400 Hz to determine the formants [2].
nn = 1;
for kk = 1:length(frqs)
if (frqs(kk) > 90 && bw(kk) <400)
formants(nn) = frqs(kk);
nn = nn+1;
end
end
formants
13-7

13 Linear Prediction
The first three formants are 869.70, 2026.49, and 2737.95 Hz.
References
[1] Snell. R. “Formant location from LPC analysis data”, IEEE®Transactions
on Speech and Audio Processing, 1(2), pp. 129–134, 1993.
[2] Loizou, P. “COLEA: a MATLAB software tool for speech analysis”.
13-8

AR Order Selection with Partial Autocorrelation Sequence
AR Order Selection with Partial Autocorrelation Sequence
This example shows how to assess the order of an autoregressive model using
the partial autocorrelation sequence. For a moving average process, you
can use the autocorrelation sequence to assess the order. However, for an
autoregressive (AR) or autoregressive moving average (ARMA) process, the
autocorrelation sequence does not help in order selection.
For these processes, you can use the partial autocorrelation sequence to
help with model order selection. For a stationary time series with values
X(1),X(2),X(3),...,X(k+1), the partial autocorrelation sequence at lag kis the
correlation between X(1) and X(k+1) after regressing X(1) and X(k+1) on the
intervening observations X(2),X(3),X(4),...,X(k).
Consider the AR(2) process defined by
Xn Xn Xn n() . ( ) . ( ) () 15 1 075 2
where
ε
(n) is an N(0,1) Gaussian white noise process. The following example
•simulates a realization of the AR(2) process
•graphically explores the correlation between lagged values of the time series
•examines the sample autocorrelation sequence of the time series
•fits an AR(15) model to the time series by solving the Yule-Walker
equations (aryule)
•uses the reflection coefficients returned by aryule to compute the partial
autocorrelation sequence
•examines the partial autocorrelation sequence to select the model order
Simulate a time series 1,000 samples in length from the AR(2) process defined
by the difference equation. Set the random number generator to the default
settings for reproducible results.
A = [1 1.5 0.75];
rng default
x = filter(1,A,randn(1000,1));
View the frequency response of the AR(2) process.
13-9
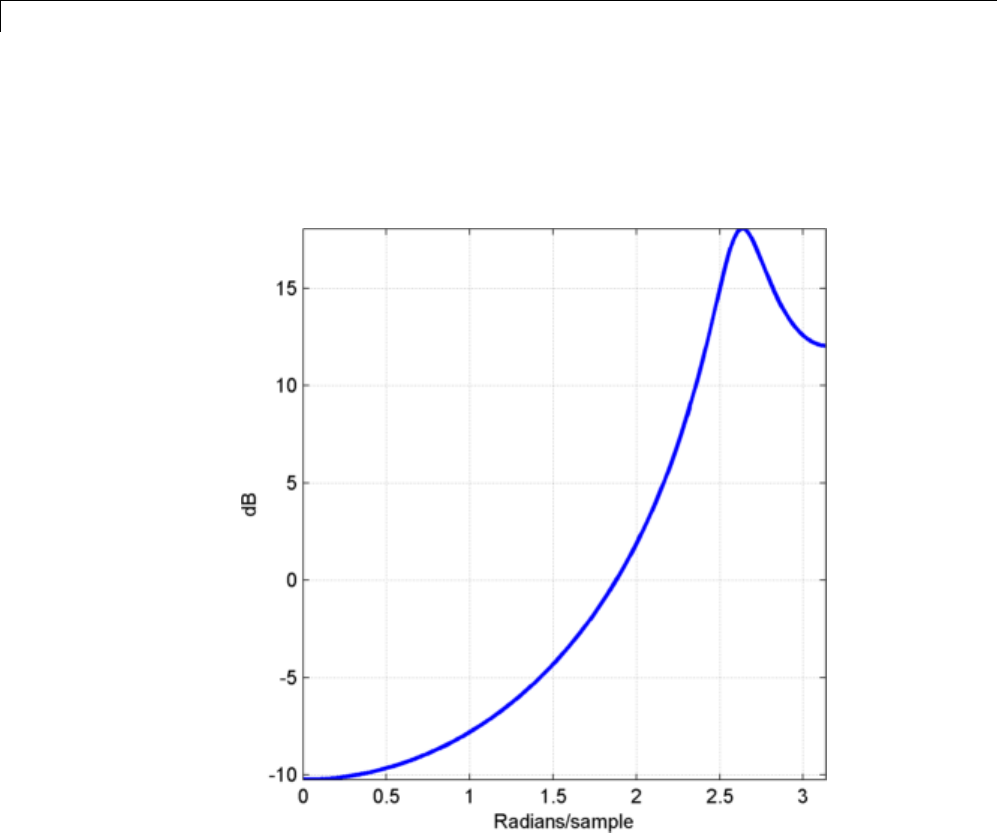
13 Linear Prediction
[H,W] = freqz(1,A);
plot(W,20*log10(abs(H)),'linewidth',2); grid on;
axis tight;
xlabel('Radians/sample'); ylabel('dB');
The AR(2) process acts like a highpass filter in this case.
Graphically examine the correlation in xby producing scatter plots of X(1)
vs X(n) for n=2,3,4,5.
x12 = x(1:end-1);
x21 = x(2:end);
x13 = x(1:end-2);
x31 = x(3:end);
13-10

AR Order Selection with Partial Autocorrelation Sequence
x14 = x(1:end-3);
x41 = x(4:end);
x15 = x(1:end-4);
x51 = x(5:end);
subplot(2,2,1)
plot(x12,x21,'b*');
xlabel('X_1'); ylabel('X_2');
subplot(2,2,2)
plot(x13,x31,'b*');
xlabel('X_1'); ylabel('X_3');
subplot(2,2,3)
plot(x14,x41,'b*');
xlabel('X_1'); ylabel('X_4');
subplot(2,2,4)
plot(x15,x51,'b*');
xlabel('X_1'); ylabel('X_5');
13-11
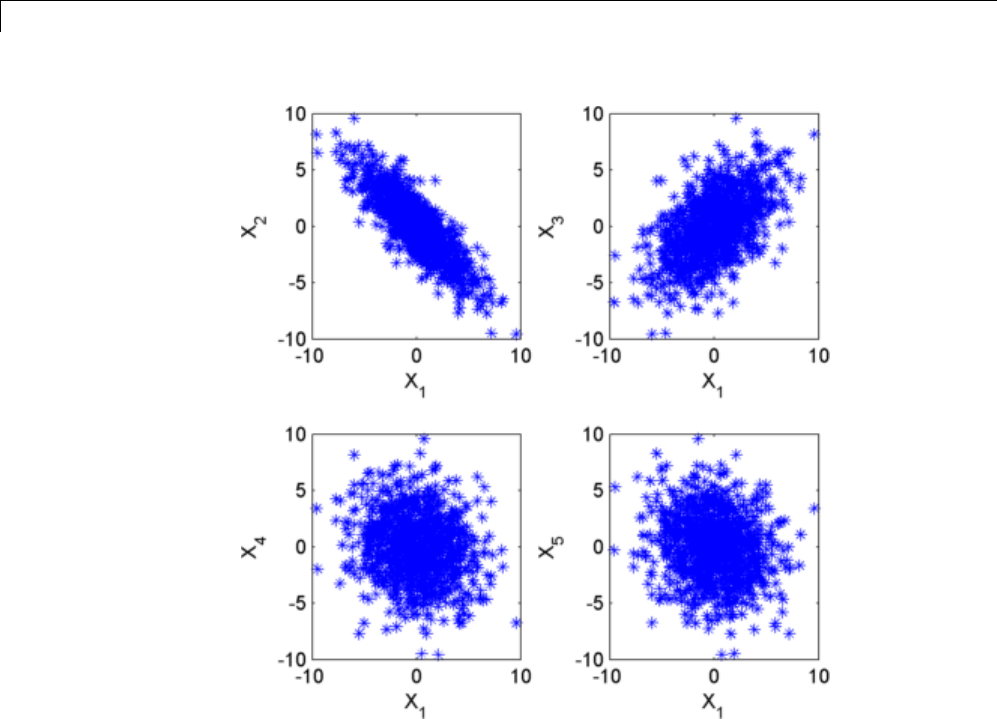
13 Linear Prediction
In the scatter plot, you see there is a linear relationship between X(1),X(2)
and X(1),X(3), but not between X(1) and X(4) or X(5).
The points in the top row scatter plots fall approximately on a line with a
negative slope in the top left panel and positive slope in the top right panel.
The scatter plots in the bottom two panels do not show any apparent linear
relationship.
The negative correlation between X(1) and X(2) and positive correlation
between X(1) and X(3) are explained by the fact that the AR(2) process in this
example acts like a highpass filter.
Find the sample autocorrelation sequence out to lag 50 and plot the result.
13-12
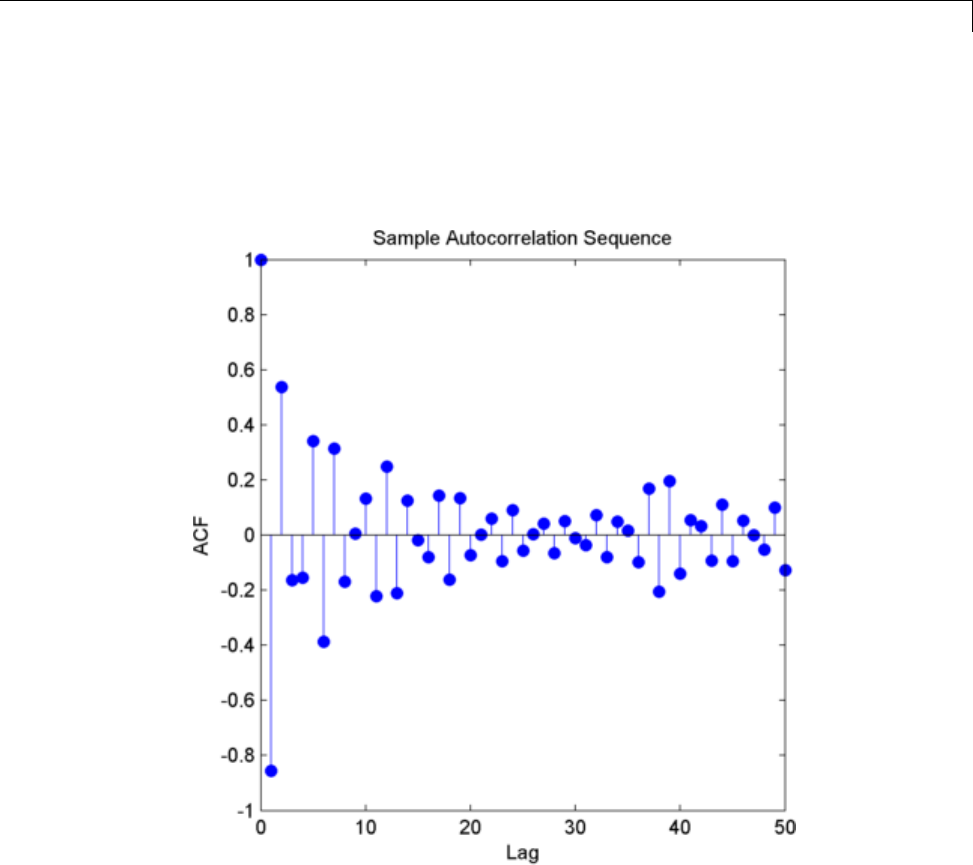
AR Order Selection with Partial Autocorrelation Sequence
[xc,lags] = xcorr(x,50,'coeff');
stem(lags(51:end),xc(51:end),'markerfacecolor',[0 0 1])
xlabel('Lag'); ylabel('ACF');
title('Sample Autocorrelation Sequence');
The sample autocorrelation sequence shows a negative value at lag 1 and
positive value at lag 2. Based on the scatter plot, this is the expected result.
However, you cannot determine from the sample autocorrelation sequence
what order is appropriate for the AR model.
Fit an AR(15) model using aryule. Return the reflection coefficients. The
negative of the reflection coefficients is the partial autocorrelation sequence.
13-13

13 Linear Prediction
[arcoefs,E,K] = aryule(x,15);
Plot the partial autocorrelation sequence along with the large-sample 95%
confidence intervals. If the data are generated by an autoregressive process
of order p, the values of the sample partial autocorrelation sequence for lags
greater than pfollow a N(0,1/N) distribution where N is the length of the
time series. The example “Confidence Intervals for Sample Autocorrelation”
on page 10-5 shows you how to form the 95% confidence intervals for the
N(0,1/N) distributions.
pacf = -K;
lag = 1:15;
stem(lag,pacf,'markerfacecolor',[0 0 1]);
xlabel('Lag'); ylabel('Partial Autocorrelation');
set(gca,'xtick',1:1:15)
lconf = -1.96/sqrt(1000)*ones(length(lag),1);
uconf = 1.96/sqrt(1000)*ones(length(lag),1);
hold on;
line(lag,lconf,'color',[1 0 0]);
line(lag,uconf,'color',[1 0 0]);
13-14
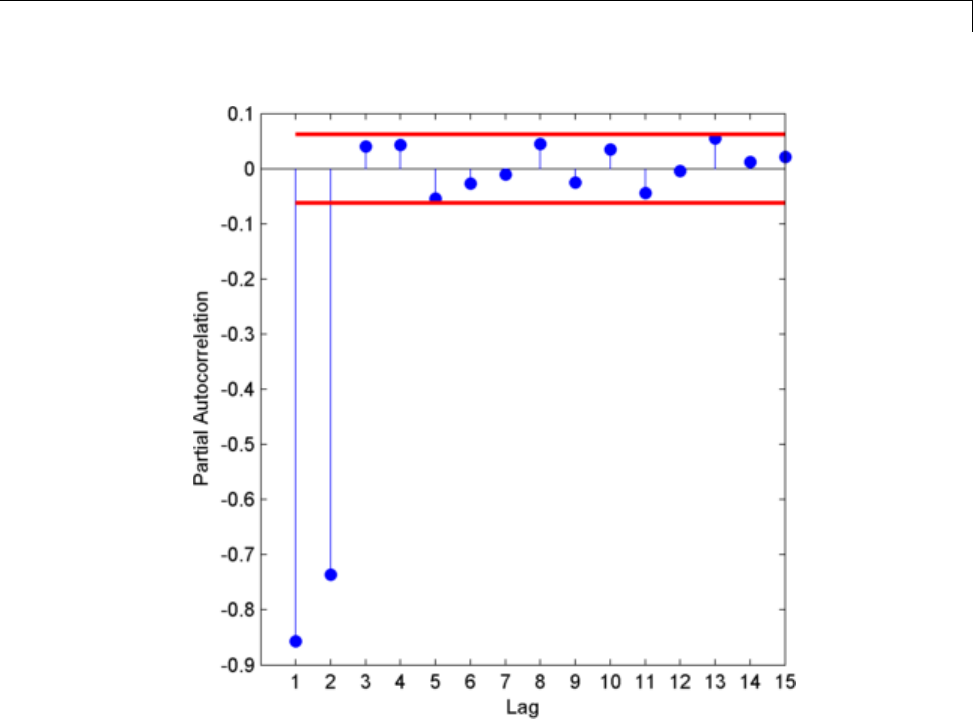
AR Order Selection with Partial Autocorrelation Sequence
The only values of the partial autocorrelation sequence outside the 95%
confidence bounds occur at lags 1 and 2. This indicates that the correct
modelorderfortheARprocessis2.Inthisexample,yougeneratedthetime
series to simulate an AR(2) process, so the partial autocorrelation sequence
only confirms the result. In practice, you have only the observed time series
without any a priori information about model order. In a realistic scenario,
the partial autocorrelation is an important tool for appropriate model order
selection in stationary autoregressive time series.
13-15

13 Linear Prediction
13-16

14 Transforms
Complex Cepstrum — Fundamental Frequency Estimation
This example shows you how to estimate a speaker’s fundamental frequency
using the complex cepstrum. The example also estimates the fundamental
frequency using a zero-crossing method and compares the results.
Load the speech signal. The recording is a woman saying “MATLAB”. The
sampling frequency is 7418 Hz.
load mtlb;
The preceding code loads the speech waveform, mtlb,andthesampling
frequency, Fs, in the MATLAB workspace.
Use the spectrogram to identify a voiced segment for analysis.
segmentlen = 100;
noverlap = 90;
NFFT = 128;
[y,f,t,p] = spectrogram(mtlb,segmentlen,noverlap,NFFT,Fs);
surf(t,f,10*log10(abs(p)),'EdgeColor','none');
axis xy; axis tight; colormap(jet); view(0,90);
xlabel('Time');
ylabel('Frequency (Hz)');
14-2
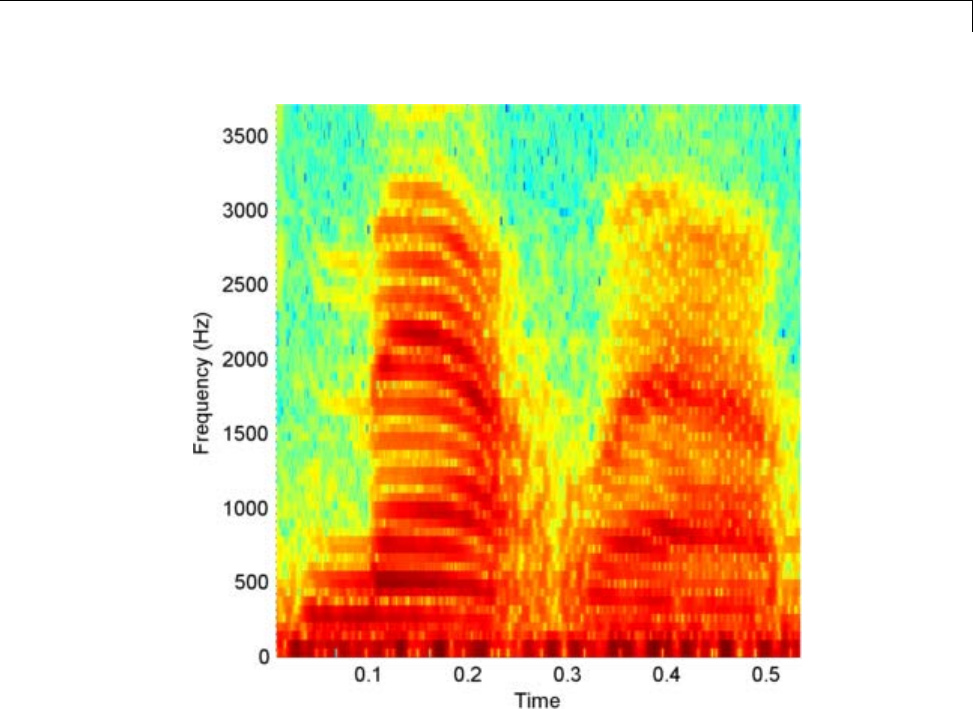
Complex Cepstrum — Fundamental Frequency Estimation
Extract the segment from 0.1 to 0.25 seconds for analysis. The extracted
segment corresponds roughly to the first vowel, /ae/, in “MATLAB”.
dt = 1/Fs;
I0 = round(0.1/dt);
Iend = round(0.25/dt);
x = mtlb(I0:Iend);
Obtain the complex cepstrum.
c = cceps(x);
Plot the cepstrum for times ranging from 2 to 10 msec corresponding to a
frequency range of approximately 100 to 500 Hz. Identify the peak in the
14-3
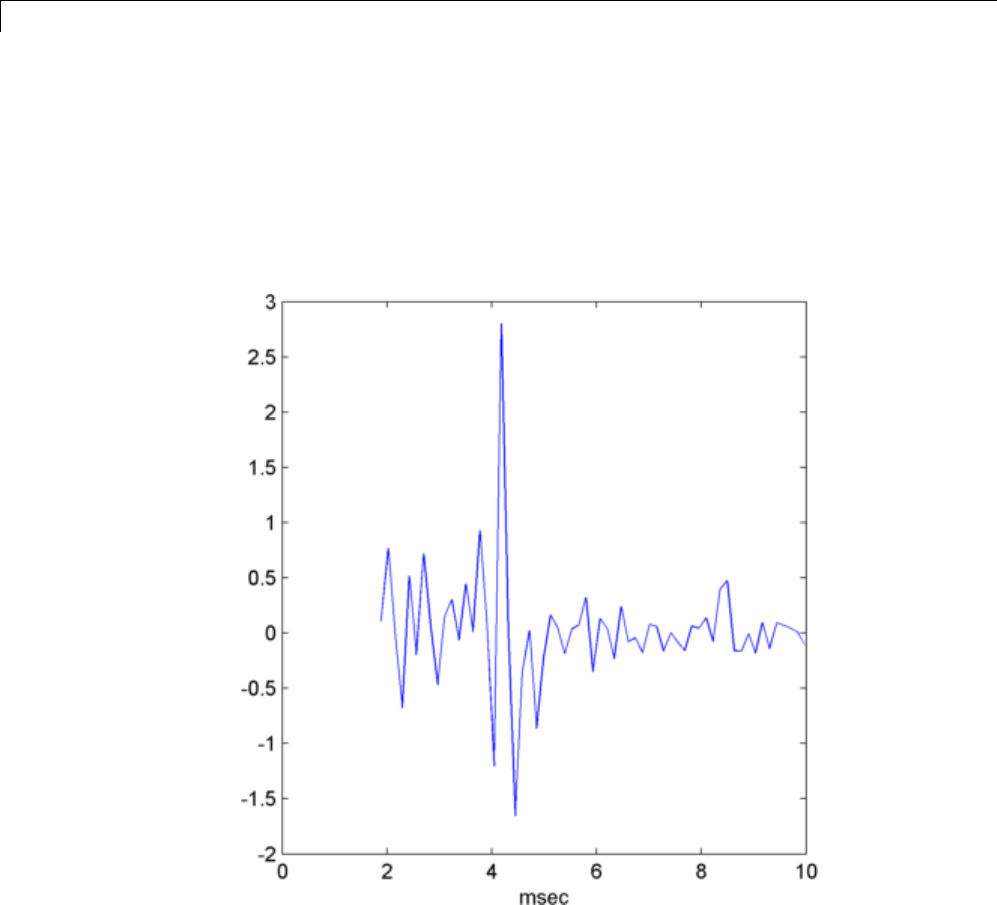
14 Transforms
cepstrum and find the frequency corresponding to the peak. Use the peak as
the estimate of the fundamental frequency.
t = 0:dt:length(x)-dt;
plot(t(15:75).*1e3,c(15:75)); xlabel('msec');
[~,I] = max(c(15:55));
fprintf('Complex cepstrum F0 estimate is %3.2f Hz.\n', 1/(t(I+15)));
Use a zero-crossing detector on a lowpass-filtered and rectified form of the
vowel to estimate the fundamental frequency.
[b0,a0]=butter(2,325/(Fs/2));
xin = abs(x);
xin=filter(b0,a0,xin);
14-4

Complex Cepstrum — Fundamental Frequency Estimation
xin = xin-mean(xin);
x2=zeros(length(xin),1);
x2(1:length(x)-1)=xin(2:length(x));
zc=length(find((xin>0 & x2<0) | (xin<0 & x2>0)));
F0=0.5*Fs*zc/length(x);
fprintf('Zero-crossing F0 estimate is %3.2f Hz.\n',F0);
The estimate of the fundamental frequency obtained with the complex
cepstrum is 231.81 Hz and the estimate with the zero-crossing detector is
233.27 Hz.
14-5

14 Transforms
Analytic Signal for Cosine
This example shows that the imaginary part of the analytic signal
corresponding to a cosine is a sine with the same frequency. If the cosine has
a nonzero mean (DC shift), the real part of the analytic signal is the original
cosine with the same mean, but the imaginary part has zero mean.
Create a cosine with a frequency of 100 Hz. The sampling frequency is 10
kHz. Add a DC offset of 2.5 to the cosine.
t = 0:1e-4:1;
x = 2.5+cos(2*pi*100*t);
Use hilbert to obtain the analytic signal. The real part is equal to the
original signal. The imaginary part is the Hilbert transform of the original
signal. Plot the real and imaginary parts for comparison.
y = hilbert(x);
plot(t,real(y),'b','linewidth',2);
hold on;
plot(t,imag(y),'r','linewidth',2);
set(gca,'xlim',[0 0.1]); grid on;
xlabel('Seconds');
14-6
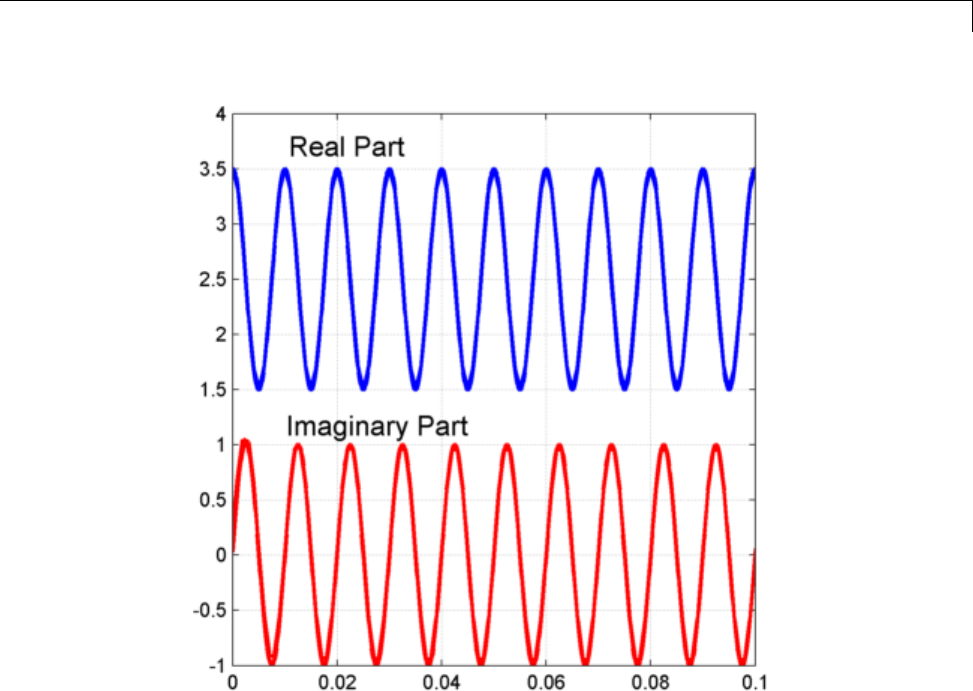
Analytic Signal for Cosine
You see that the imaginary part is a sine with the same frequency as the
cosine real part. However, the imaginary part has a mean of zero, while the
real part has a mean of 2.5.
The original signal is
xt cos t() . ( )2 5 2 1000
The resulting analytic signal is
zt e jt
() . ()
25 2 1000
Plot 10 periods of the complex-valued analytic signal.
14-7
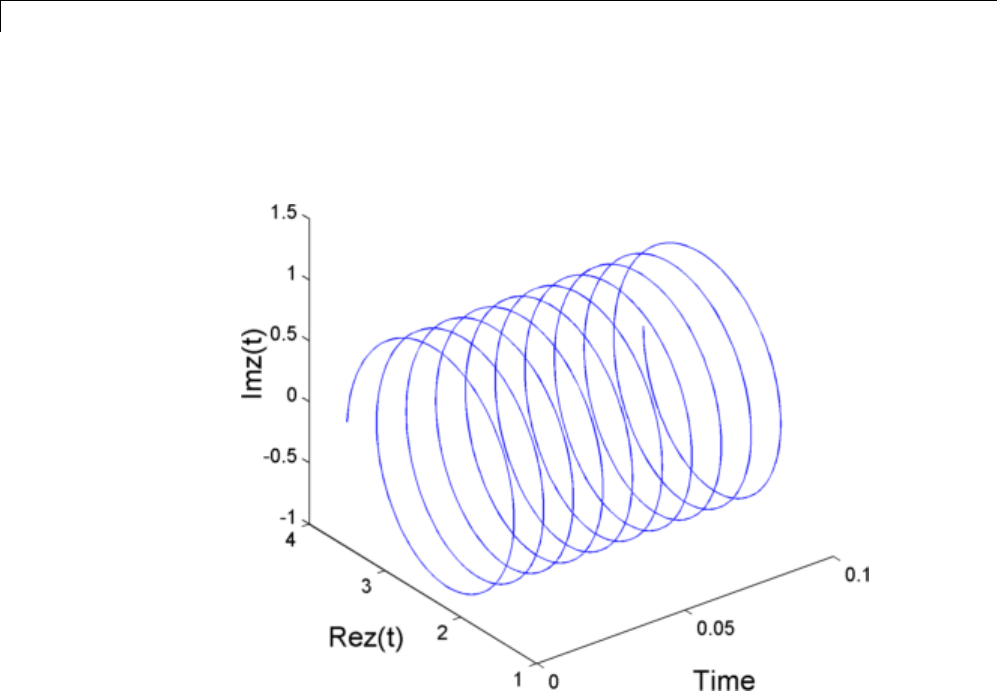
14 Transforms
plot3(t(1:1e3),real(y(1:1e3)),imag(y(1:1e3)));
xlabel('Time','fontsize',14); ylabel('Re{z(t)}','fontsize',14);
zlabel('Im{z(t)}','fontsize',14);
14-8
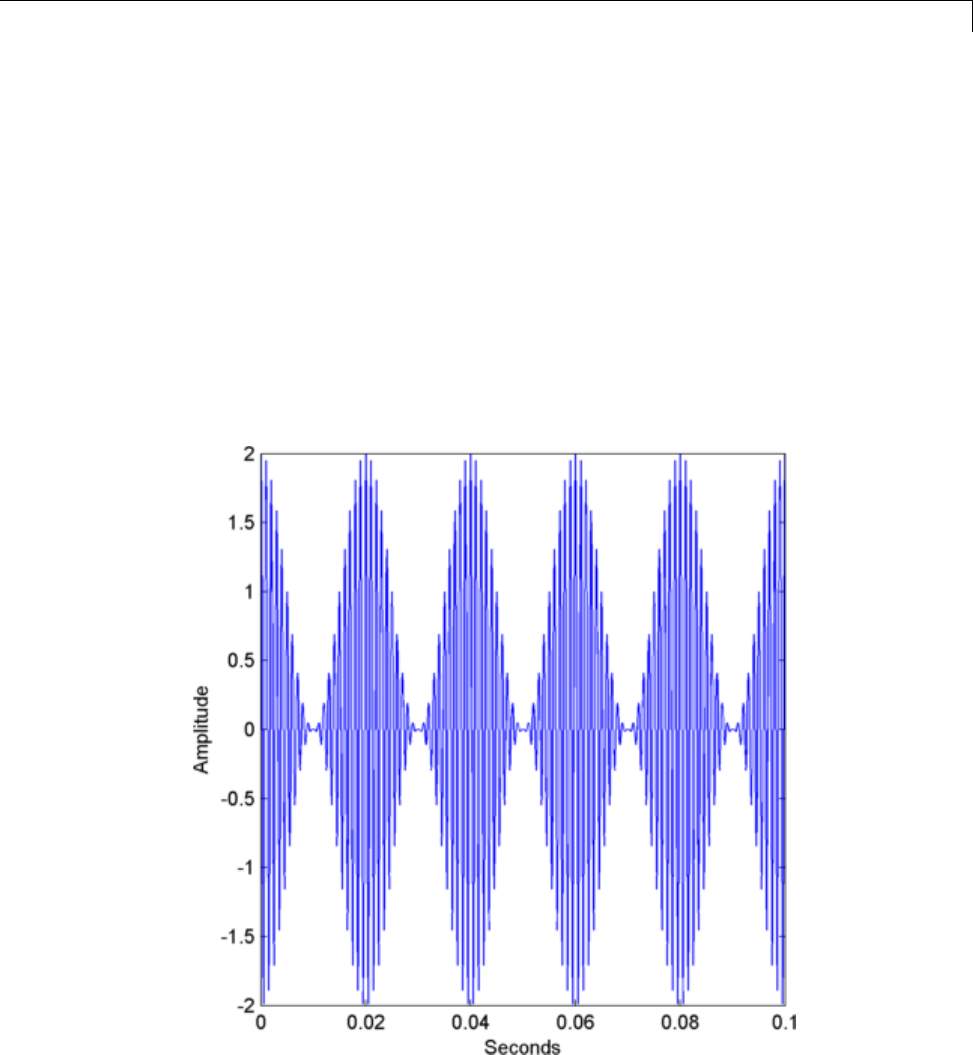
Envelope Extraction Using The Analytic Signal
Envelope Extraction Using The Analytic Signal
This example shows how to extract the signal envelope using the analytic
signal.
Create a double sideband amplitude-modulated signal. The carrier frequency
is 1 kHz. The modulation frequency is 50 Hz. The modulation depth is 100%.
The sampling frequency is 10 kHz.
t = 0:1e-4:1;
x = [1+cos(2*pi*50*t)].*cos(2*pi*1000*t);
plot(t,x); set(gca,'xlim',[0 0.1]);
xlabel('Seconds'); ylabel('Amplitude');
14-9
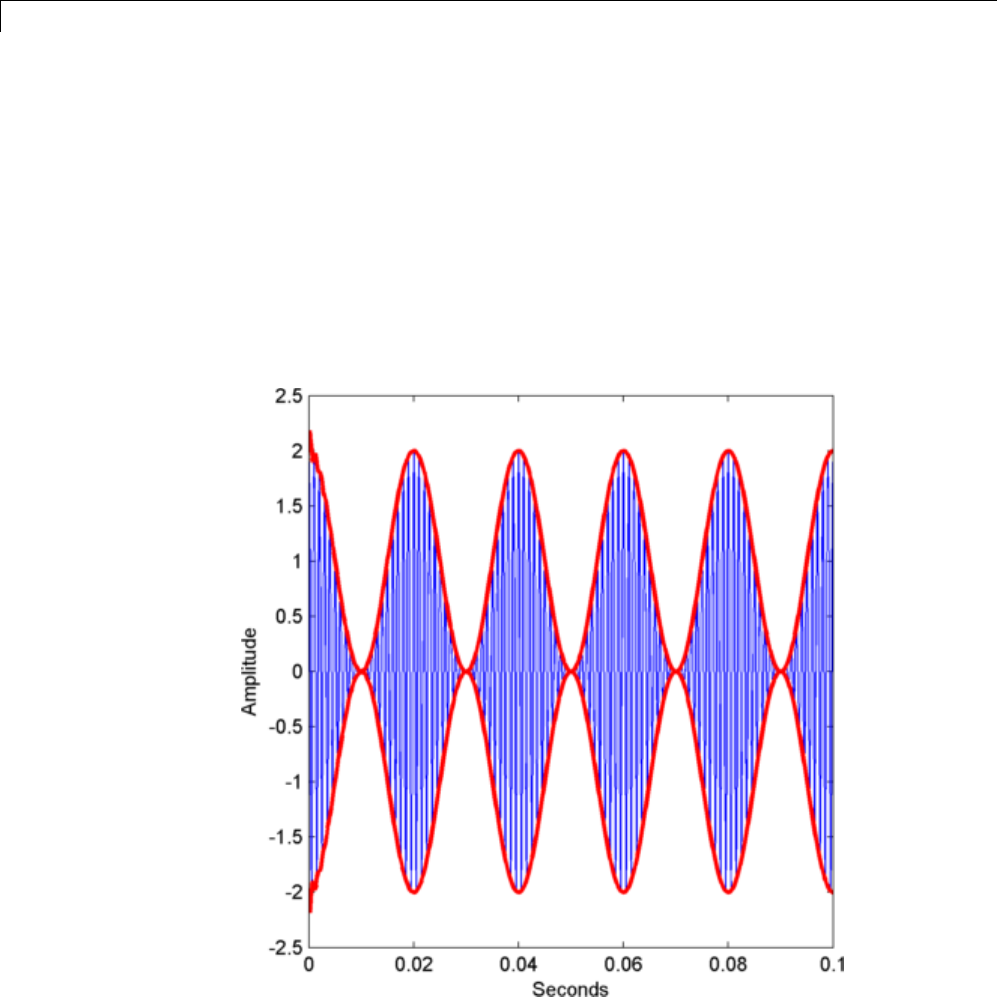
14 Transforms
Obtain the analytic signal. Extract the envelope, which is the magnitude
(modulus) of the analytic signal. Plot the envelope along with the original
signal.
y = hilbert(x);
env = abs(y);
plot(t,x); hold on;
plot(t,abs(y),'r','linewidth',2);
plot(t,-abs(y),'r','linewidth',2);
set(gca,'xlim',[0 0.1]);
xlabel('Seconds'); ylabel('Amplitude');
The magnitude of the analytic signal captures the slowly varying features of
the signal, while the phase contains the high frequency information.
14-10

15
Signal Generation
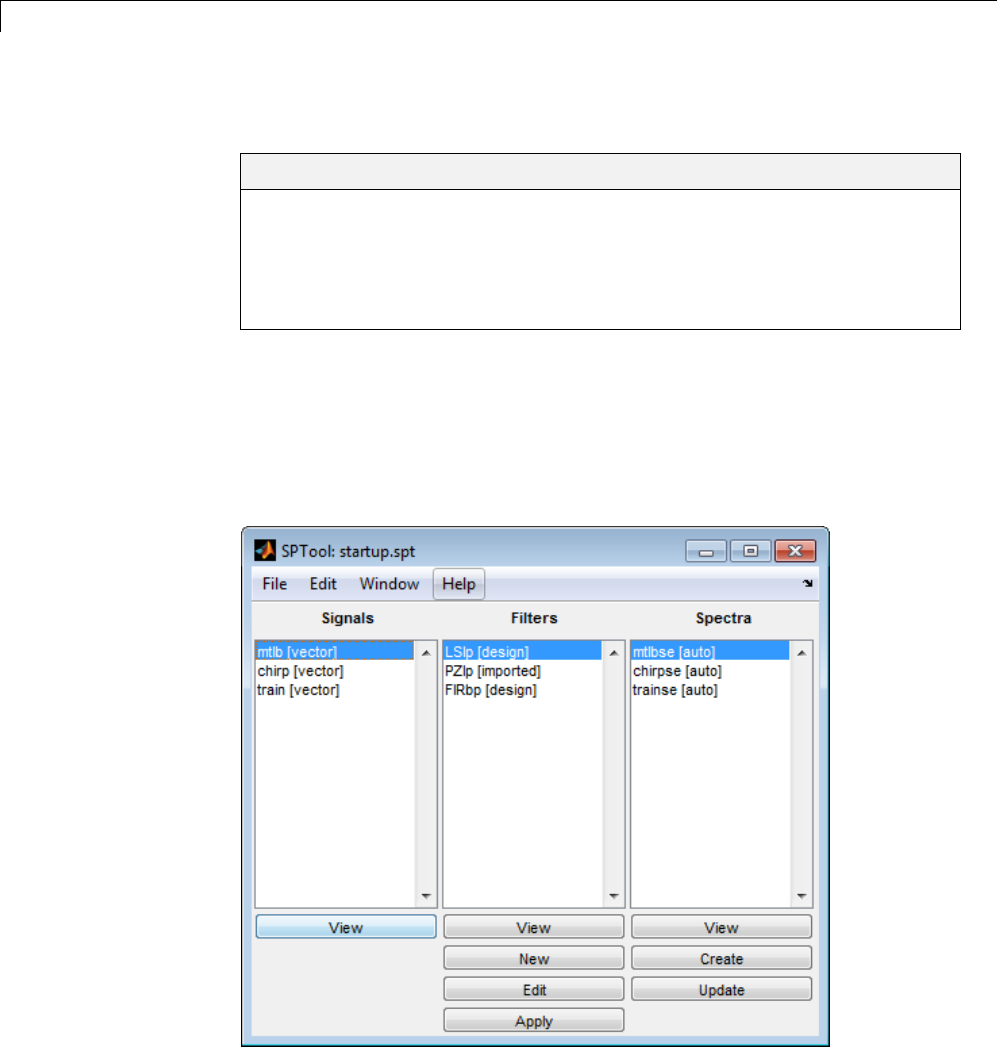
15 Signal Generation
Display Time-Domain Data in Signal Browser
In this section...
“Import and Display Signals” on page 15-3
“Configure the Signal Browser Properties” on page 15-6
“Modify the Signal Browser Display” on page 15-9
“Inspect Your Data (Scaling the Axes and Zooming)” on page 15-11
ThisexampleshowshowtouseandconfiguretheSPToolSignalBrowserto
display time-domain signals. First, open SPTool by typing
sptool
at the MATLAB command line. SPTool opens.
15-2
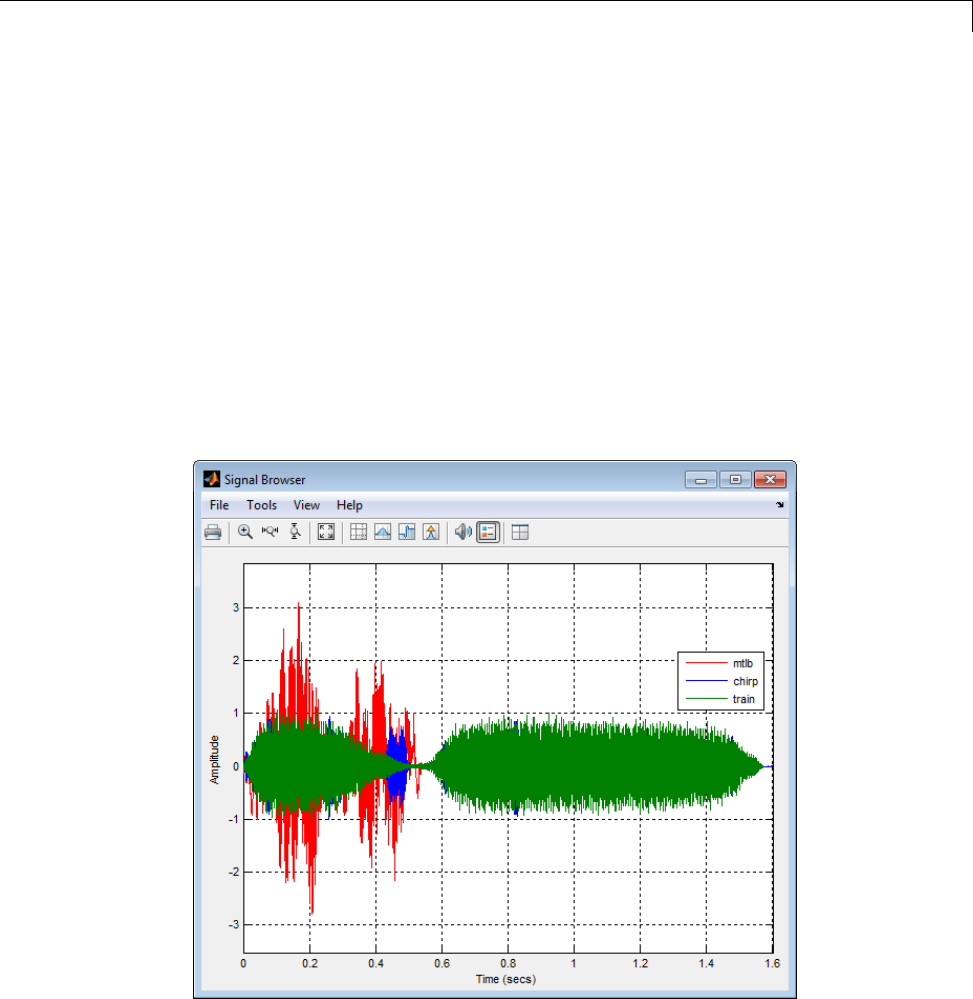
Display Time-Domain Data in Signal Browser
Import and Display Signals
Displaying Multiple Signals
You can display multiple signals in the Signal Browser by selecting more than
one entry in the SPTool Signals list. In the Signals list, first select mtlb
[vector].Nex
t, press the Ctrl key, and select chirp [vector].Finally,
click the View button. The Signal Browser opens, displaying both signals.
Any signals that you select in SPTool are now visible in the Signal Browser.
You can also select multiple entries using the Shift key. In the SPTool
Signals list, first select mtlb [vector]. Next, press the Shift key, and select
train [vector]. The Signal Browser automatically updates to display all
three signals, as shown in the following figure.
15-3
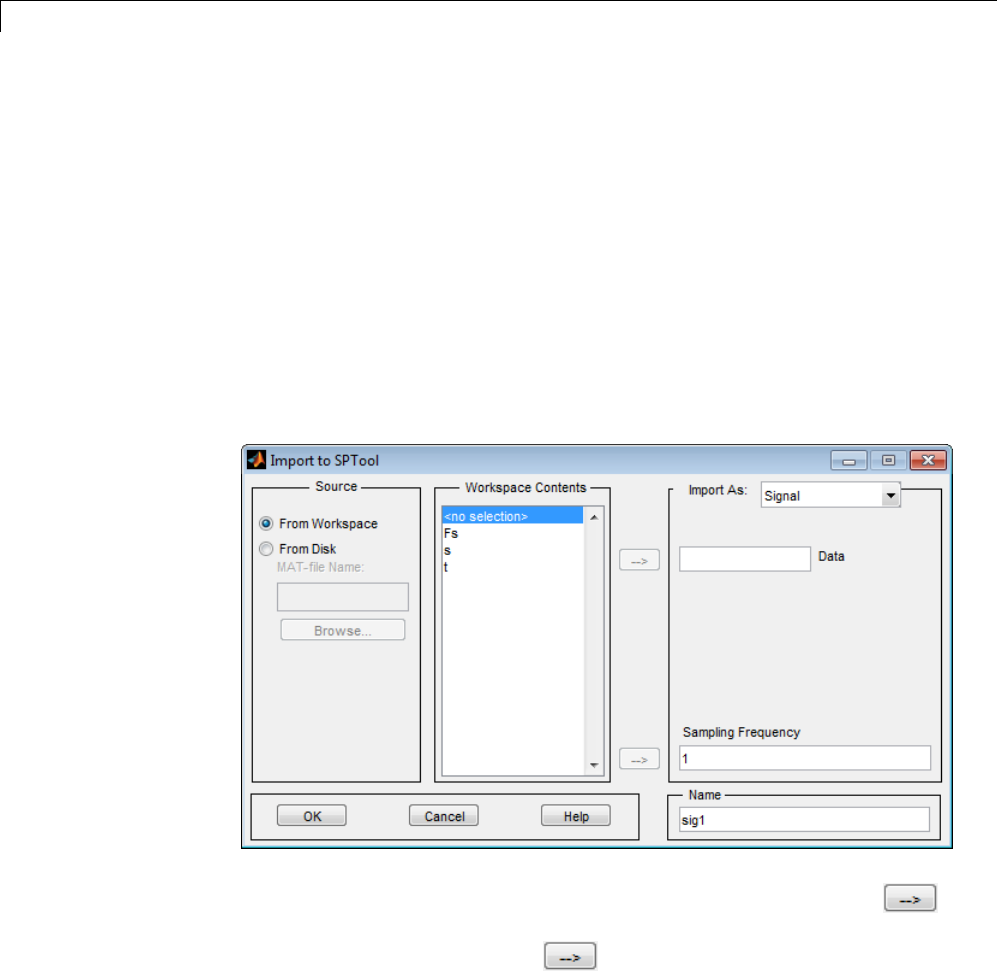
15 Signal Generation
Importing New Signals
Using SPTool, you can import signals from variables in the MATLAB
workspace. First, create a 3-second signal, sampled at 10 kHz, that is the
sum of two sine waves. At the MATLAB command line, enter the following
commands:
Fs = 1e4;
t = 0:1/Fs:3;
s = sum(sin(2*pi*[350;440]*t));
To import the signal from these variables, in the SPTool menu, select
File > Import. Alternatively, you can press the Ctrl+I keyboard shortcut.
TheImporttoSPTooldialogboxopens.
From the Workspace Contents list, select s. Click the right arrow ( )
button to the left of the Data box. Next, from the Workspace Contents list,
select Fs. Click the right arrow ( ) button to the left of the Sampling
Frequency box. You can assign the signal a name in the Name box, but since
you will rename the signal later in this example, leave it as sig1 for now.
15-4
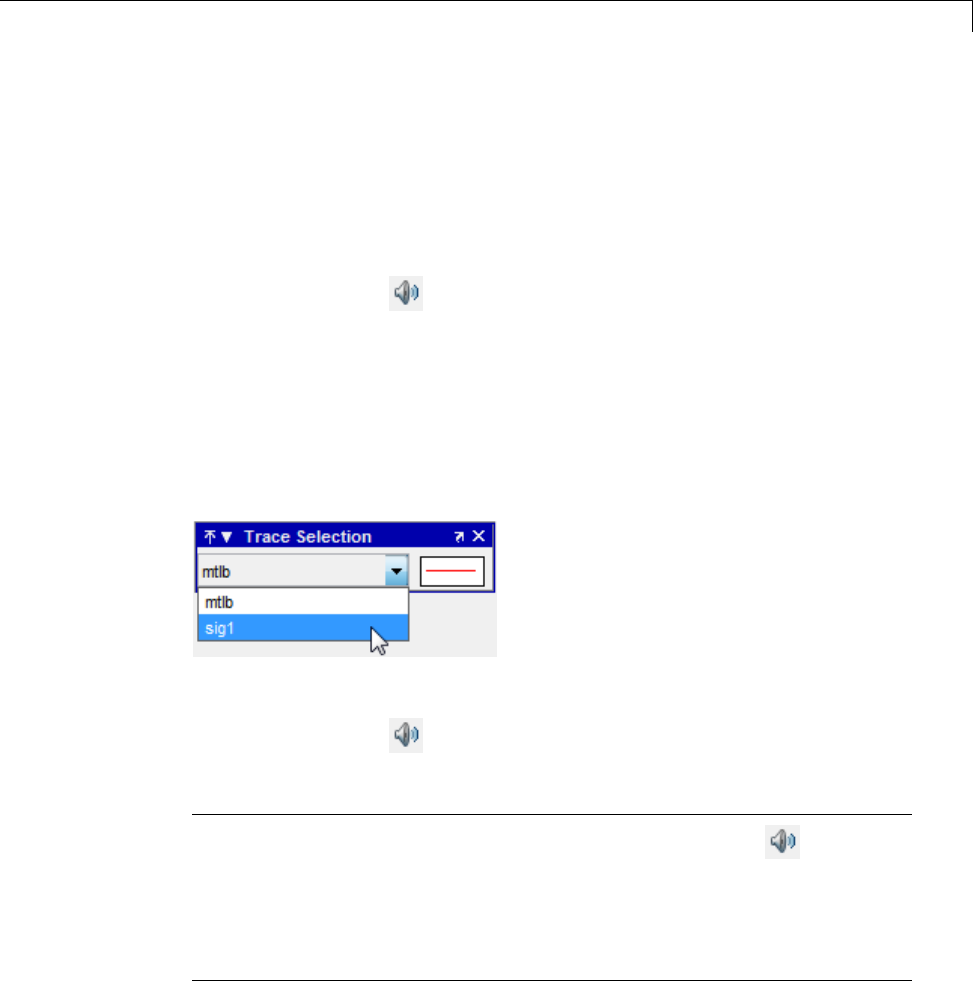
Display Time-Domain Data in Signal Browser
Click OK. The SPTool Signals list now contains a signal named sig1
[vector].
Selecting a Signal and Playing Audio
In the SPTool Signals list, select sig1 [vector], and click the View button.
The Signal Browser reappears in front. To play audio for the signal, click the
Play selected signal ( ) button. Signal Browser sends the audio signal to
the speaker. For more information, see sound in the MATLAB documentation.
If you have multiple signals selected in SPTool, you can use the Trace
Selection panel to choose which signal to make active. In the SPTool
Signals list, press the Ctrl key, and select mtlb [vector].TheSignal
Browser now displays two signals. In the Signal Browser menu, select
Tools > Measurements > Trace Selection.TheTrace Selection panel
appears as showninthefollowingfigure.
In the Trace Selection panel drop-down list, select sig1. Then, click the
Play selected signal ( ) button. Signal Browser sends the audio signal to
the speaker.
Note To hear audio when you click the Play selected signal ( ) button,
your computer sound card must be able to support the sample rate of the
signal. In this example, the sample rate of the signal, sig1 [vector],is10
kHz. If your sound card supports this or a greater sample rate, such as 44.1
kHz, then you can hear the audio on your speaker. For more information, see
sound in the MATLAB documentation.
15-5
15 Signal Generation
Change Signal Names from the Legend
When multiple signals are displayed, Signal Browser shows a legend by
default. To turn off the legend, click the Show all legends ( ) button. Click
the button again to turn the legend back on. You can modify the names of the
signal directly in the legend. To do so, when the legend is visible, click and
drag it to any location on the display.
You can change the name of any signal directly within the legend. In the
legend, double-click the signal name sig1. A cursor appears, indicating that
you can now change this name. Highlight the text, and type Dial Tone.The
legend now shows Dial Tone asthenameofthatsignal. IntheSPTool
Signals list, the last item is now also named Dial Tone.
Configure the Signal Browser Properties
First, configure the appearance of the Signal Browser window. In the SPTool
Signals list, first select mtlb [vector]. Next, press the Shift key, and select
train [vector]. The Signal Browser automatically updates to display all
three signals.
Multiple Displays
You can display multiple signals on different displays in the Signal Browser
window. In the SPTool Signals list, first ensure all three signals are selected.
In the Signal Browser toolbar, click the Layout ( ) button. Select row 3,
column 1, as shown in the following figure.
15-6
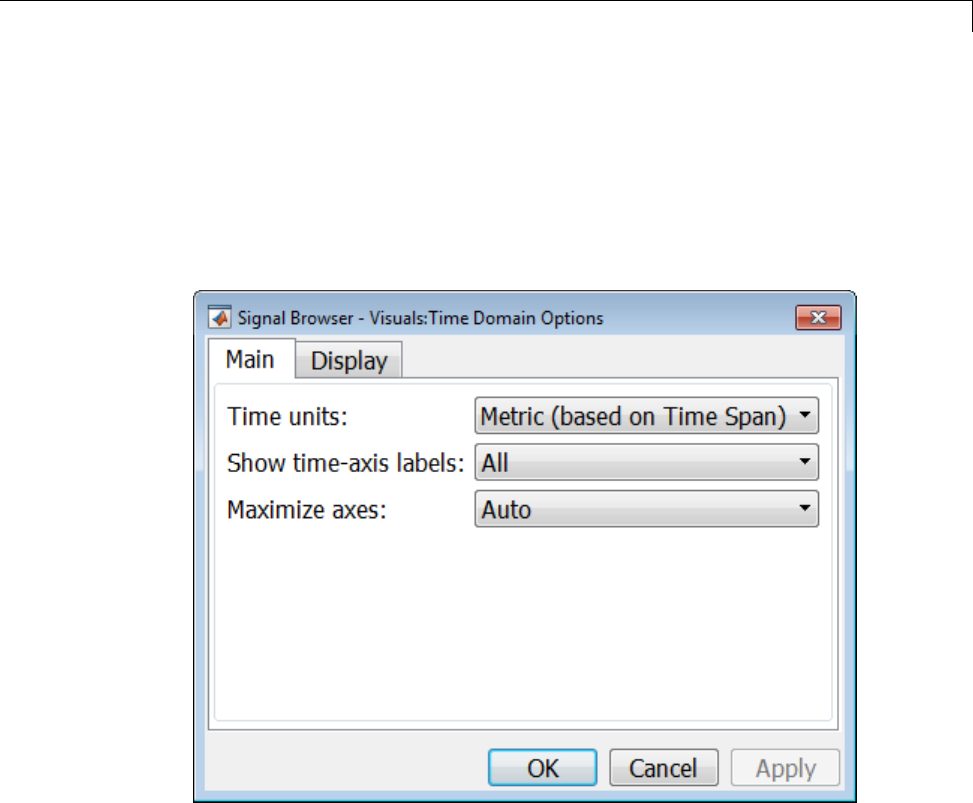
Display Time-Domain Data in Signal Browser
After you make this selection, the Signal Browser is separated into three
displays.
Configure Appearance
In the Signal Browser menu, select View > Properties. The Visuals:Time
Domain Options dialog box opens, as shown in the following figure.
In the Visuals:Time Domain Options dialog box, click the Main tab. Choose
the appropriate parameter settings for the Main tab, as shown in the
following table.
15-7
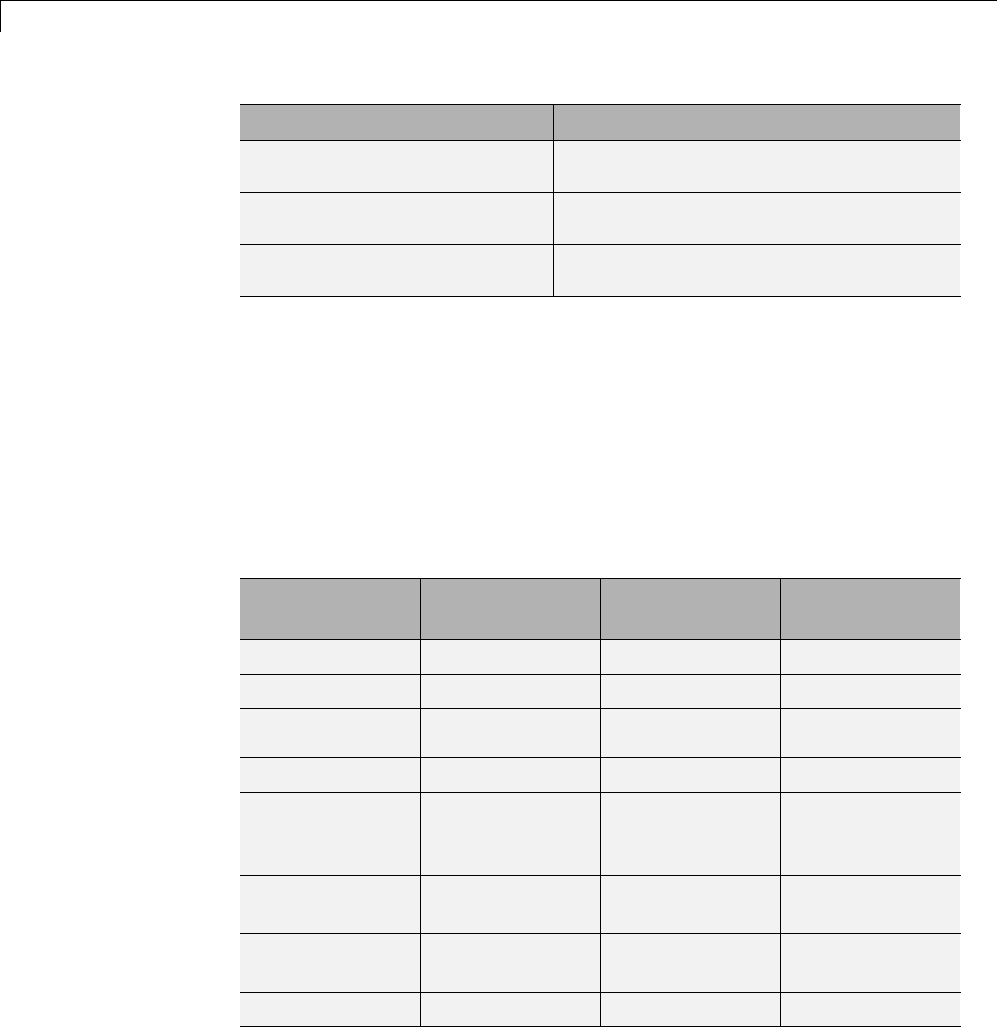
15 Signal Generation
Parameter Setting
Time units Metric (based on Time Span)
Show time-axis labels Bottom Displays Only
Maximize axes On
When you change the Maximize axes parameter to On, the axes are expanded
to fill the entire display. To conserve space, titles and axis labels are not
shownineachdisplay. ClickApply.
Set Display Properties
In the Visuals:Time Domain Options dialog box, click the Display tab. You
can change the value of the Select display parametertomakedifferent
settings for each display. Set the parameters to the values shown in the
following table.
Parameter Display 1
Setting
Display 2
Setting
Display 3
Setting
Select display 123
Title mtlb chirp train
Show legend Selected Selected Selected
Show grid Selected Selected Selected
Plot signal(s)
as magnitude
and phase
Cleared Cleared Cleared
Minimum
Y-limit
-2.5 -1 -1.5
Maximum
Y-limit
2.5 1 1.5
Y-axis label Amplitude Amplitude Amplitude
15-8
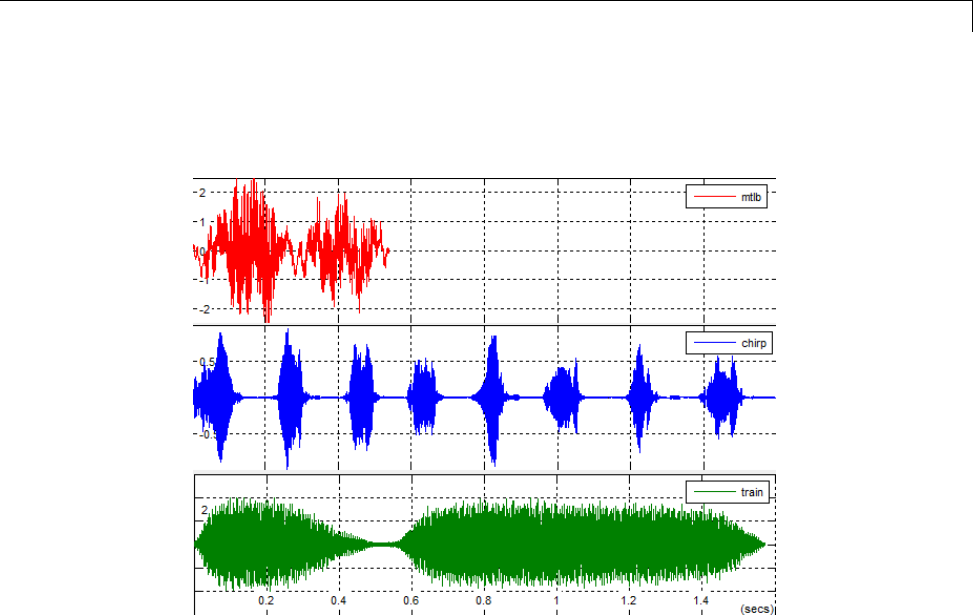
Display Time-Domain Data in Signal Browser
Click OK to save your changes and close the Visuals:Time Domain Options
dialog box. The Signal Browser appears as shown in the following figure.
Modify the Signal Browser Display
UsetheStyledialogboxtomodifytheappearanceoftheaxesandthelinesfor
each of the selected signals in SPTool. In the Signal Browser menu, select
View > Style. The Style dialog box opens, as shown in the following figure.
15-9
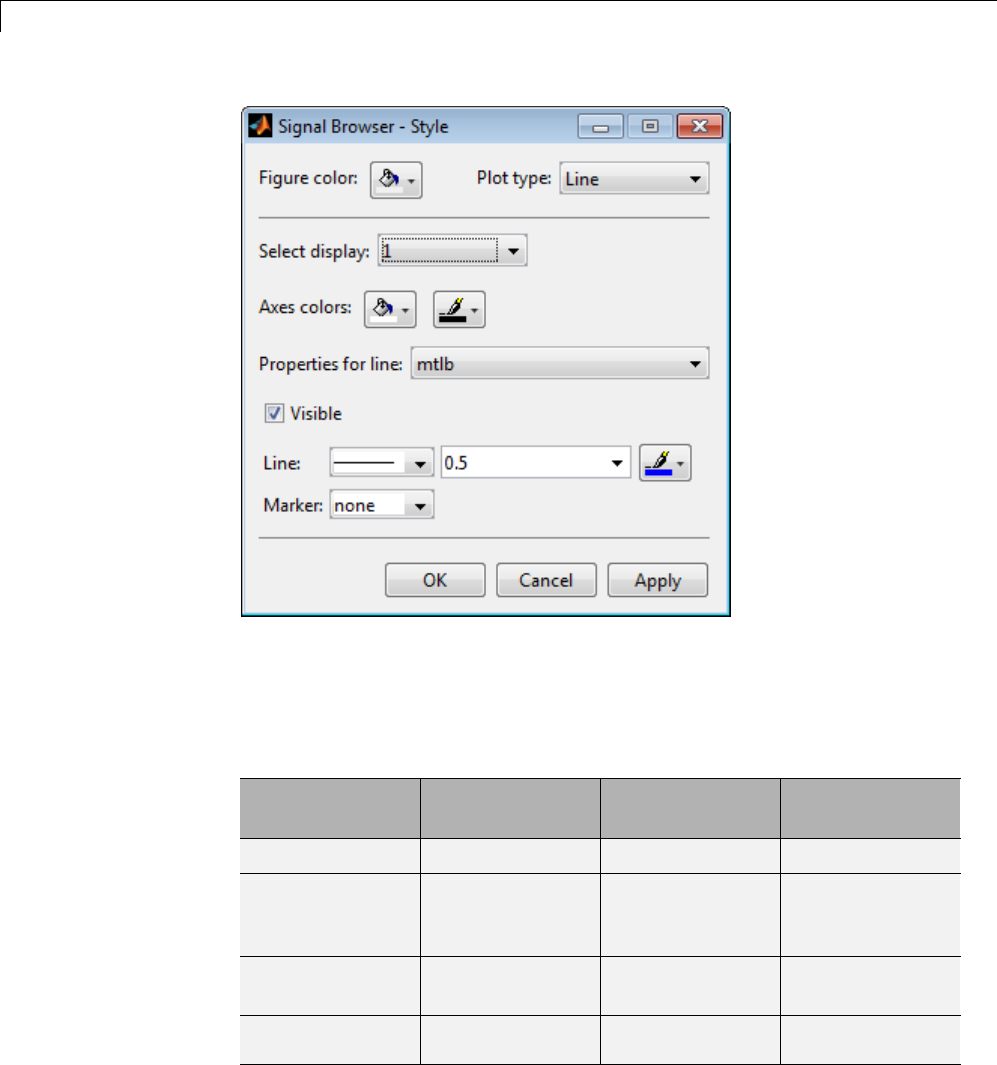
15 Signal Generation
Modify Axes Colors and Line Properties
You can change the value of the Select display parametertomakedifferent
settings for each display. Set the parameters to the values shown in the
following table.
Parameter Display 1
Setting
Display 2
Setting
Display 3
Setting
Select display 123
Axes
background
color
Black Black Black
Ticks, labels,
and grid colors
White White White
Line color Yellow Cyan Magenta
15-10
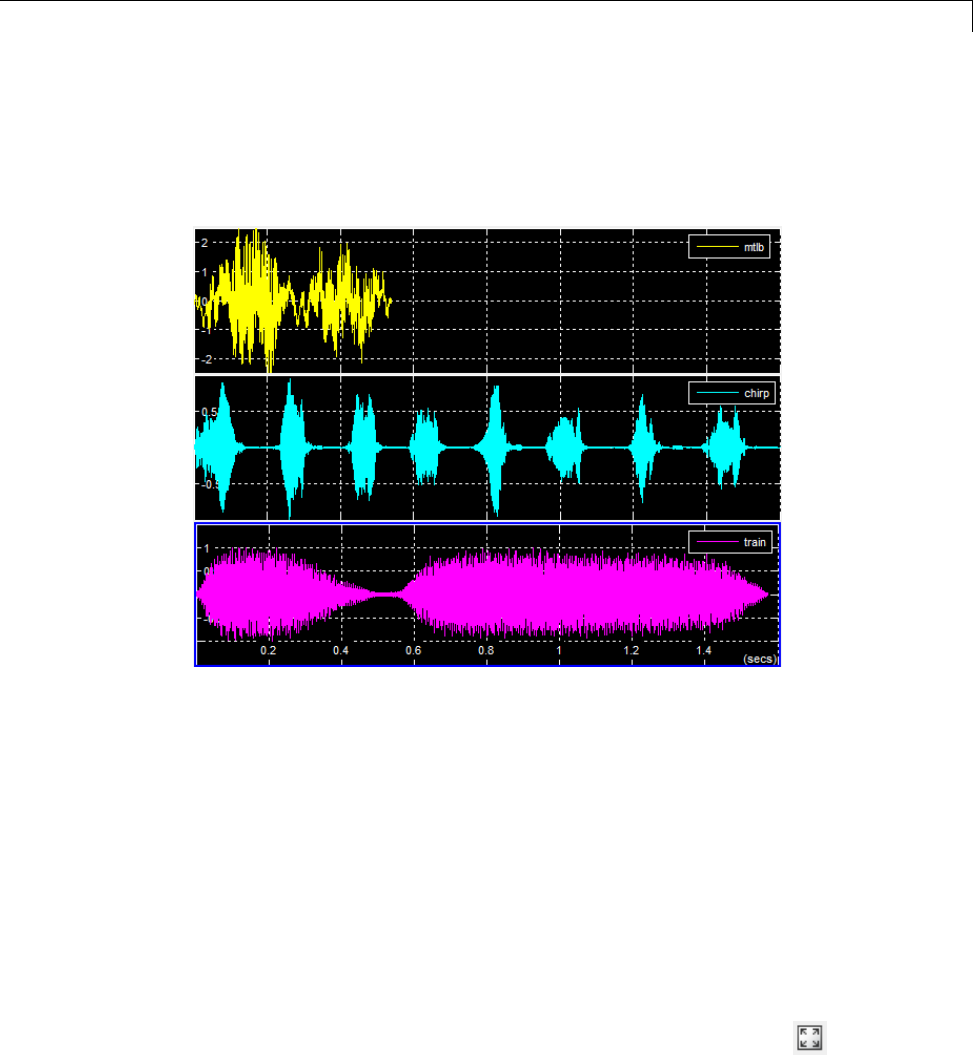
Display Time-Domain Data in Signal Browser
These settings enable the Signal Browser to display line colors in the same
manner as the Simulink Scope block. Click OK to save your changes and
close the Style dialog box. The Signal Browser now appears as shown in the
following figure.
Show and Hide Toolbar
To hide the toolbar, from the Signal Browser menu, select View > Toolbar.
Doing so removes the toolbar from the Signal Browser window and also
removes the check mark beside the Toolbar option in the View menu. You
can choose to show the toolbar again at any time by selecting View > Toolbar.
Inspect Your Data (Scaling the Axes and Zooming)
So far, you have manually set the y-axis limits. Use one of the following
options to let Signal Browser scale the axes:
•From the Signal Browser menu, select Tools > Scale Axes Limits.
•From the Signal Browser toolbar, click the Scale Axes Limits ( ) button.
15-11
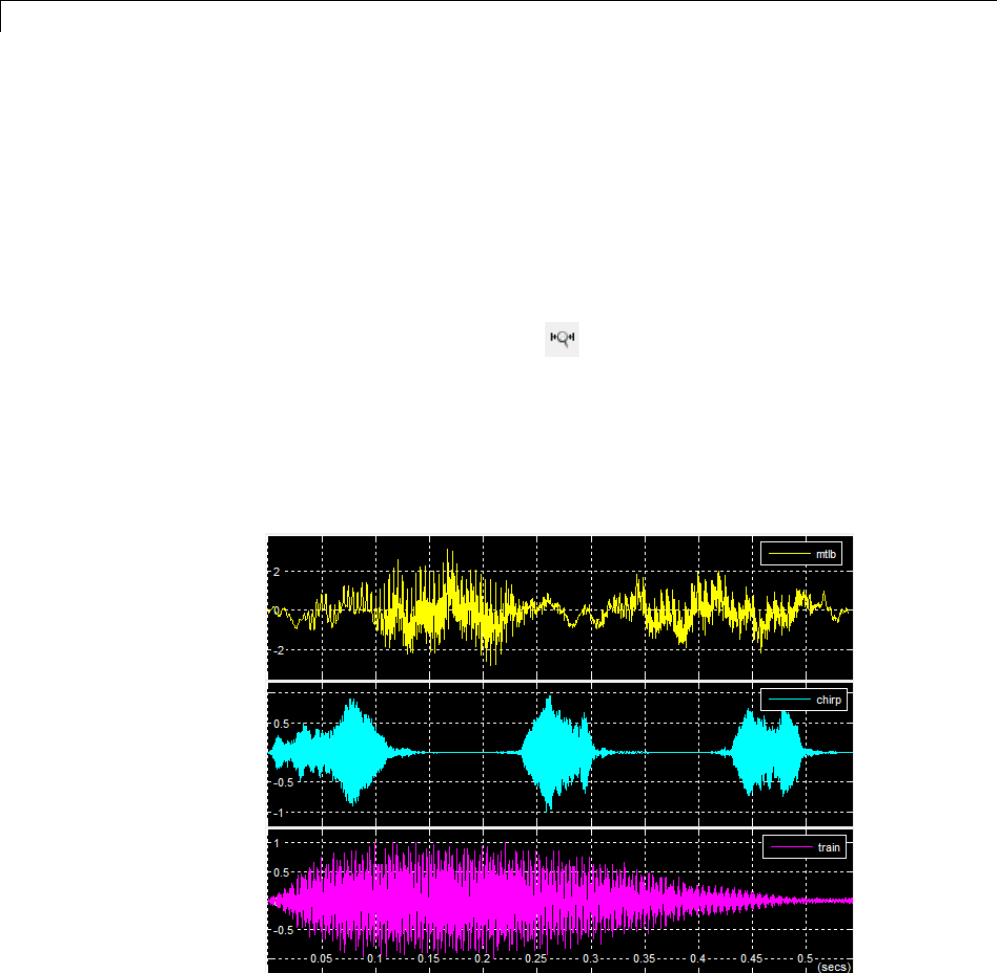
15 Signal Generation
•With the Signal Browser as your active window, press Ctrl + A.
Use the Zoom Tools
The zoom tools allow you to zoom in simultaneously in the directions of both
the x-andy-axes , or in either direction individually. For example, to zoom in
on the signal between 0 and 0.5 seconds, you can use the Zoom X option.
•To activate the Zoom X tool, select Tools > Zoom X,orpressthe
corresponding toolbar button ( ). The Signal Browser indicates that the
Zoom X tool is active by indenting the toolbar button and placing a check
mark next to the Tools > Zoom X menu option.
•Next, zoom in on the region between 0 and 0.5 seconds. In the Signal
Browser window, click on the 0-second mark and drag to the 0.5-second
mark. All three displays reflect this new x-axis setting, as shown in the
following figure.
•To zoom out of the Signal Browser window, right-click inside the window,
andselectZoom Out. Alternatively, you can return to the original view
15-12

Display Time-Domain Data in Signal Browser
of your signal by right-clicking inside the Signal Browser window and
selecting Reset to Original View.
15-13

15 Signal Generation
15-14

16
Signal Measurement
•“RMS Value of Periodic Waveforms” on page 16-2
•“Slew Rate of Triangular Waveform” on page 16-5
•“Duty Cycle of Rectangular Pulse Waveform” on page 16-9
•“Estimate State for Digital Clock” on page 16-12
•“Calculate Settling Time with Signal Browser” on page 16-16
•“Find Peak Amplitudes in Signal Browser” on page 16-20
16 Signal Measurement
RMS Value of Periodic Waveforms
Thisexampleshowsyouhowtofindtherootmeansquare(RMS)valueof
a sine wave, a square wave, and a rectangular pulse train using rms.The
waveforms in this example are discrete-time versions of their continuous-time
counterparts. The following table gives the RMS values of a continuous-time
sine wave, square wave, and rectangular pulse with duty cycle, D.
Waveform RMS Value
Sine wave with amplitude A A/sqrt(2)
Square wave with values of A and –A A
Rectangular pulse with duty cycle D
and amplitude (on value) A
A*sqrt(D)
Create a discrete-time sine wave. Compute the RMS value and show that it is
a good approximation to the theoretical value for a continuous-time sine wave.
Create a sine wave with a frequency of π/4 radians/sample. The length of the
sine wave is 16 samples, which equals two periods of the sine wave.
n = 0:15;
x = cos(pi/4*n);
Compute the RMS value of the sine wave.
rmsval = rms(x)
The RMS value is equal to 0.7071 as expected.
Create a periodic square wave with a period of 0.1 seconds. The square wave
values oscillate between –2 and 2
t = 0:0.01:1;
x = 2*square(2*pi*10*t);
stem(t,x,'markerfacecolor',[0 0 1]); axis([0 1 -2.5 2.5]);
16-2
RMS Value of Periodic Waveforms
Find the RMS value.
rmsval = rms(x)
The RMS value agrees with the theoretical value of 2.
Create a rectangular pulse train sampled at 1 kHz with the following
parameters: the pulse is on, or equal to 1, for 0.025 seconds and off, or equal
to 0, for 0.075 seconds in each 0.1 second interval. This means the pulse
period is 0.1 seconds and the pulse is on for 1/4 of that interval. This is
referred to as the duty cycle. See “Duty Cycle of Rectangular Pulse Waveform”
on page 16-9 for a more detailed example of duty cycle. Use pulstran to
create the rectangular pulse train.
t = 0:0.001:(10*0.1);
16-3
16 Signal Measurement
pulsewidth = 0.025;
pulseperiods = [0:10]*0.1;
x = pulstran(t,pulseperiods,@rectpuls,pulsewidth);
plot(t,x); axis([0 1 -0.5 1.5]);
xlabel('Seconds'); ylabel('Amplitude');
Find the RMS value and compare it to the RMS of a continuous-time
rectangular pulse waveform with duty cycle 1/4 and peak amplitude 1.
rmsval = rms(x)
thrms = sqrt(1/4)
The observed RMS value and the RMS value for a continuous-time
rectangular pulse waveform are in good agreement.
16-4

Slew Rate of Triangular Waveform
Slew Rate of Triangular Waveform
This example shows you how to use the slew rate as an estimate of the rising
and falling slopes of a triangular waveform.
Create three triangular waveforms. One waveform has rising-falling slopes
of +/- 2, one waveform has rising-falling slopes of +/- 1/2, and one waveform
has a rising slope of +2 and a falling slope of -1/2. Use slewrate to find the
slopes of the waveforms.
Create a triangular waveform with rising-falling slopes of +/- 2. Set the
sampling interval to 0.01 seconds, which corresponds to a sampling frequency
of 100 hertz.
t = 0:0.01:1;
x = 2*t;
x = [x fliplr(x)];
tnew = [t t+1.01];
plot(tnew,x); xlabel('Time');
ylabel('Amplitude');
16-5
16 Signal Measurement
Calculate the slew rate for the triangular waveform. Input the sampling
frequency (100 Hz) to obtain the correct positive and negative slope values.
s = slewrate(x,100)
Create a triangular waveform with slopes of +/- 1/2. Set the sampling interval
to 0.01 seconds, which corresponds to a sampling frequency of 100 hertz.
t = 0:0.01:1;
x = 1/2*t;
x = [x fliplr(x)];
tnew = [t t+1.01];
plot(tnew,x); xlabel('Time');
ylabel('Amplitude');
16-6
Slew Rate of Triangular Waveform
Calculate the slew rate for the triangular waveform. Input the sampling
frequency (100 Hz) to obtain the correct positive and negative slope values.
s = slewrate(x,100)
Create a triangular waveform with a rising slope of +2 and a falling slope
of -1/2. Set the sampling increment to 0.01 seconds, which corresponds to
a sampling frequency of 100 hertz.
t = 0:0.01:1;
x = 2*t;
t1 = 1:0.01:5;
x1 = -1/2*(t1-1)+2;
y=[xx1];
16-7
16 Signal Measurement
tnew=[tt1];
plot(tnew,y); xlabel('Time');
ylabel('Amplitude');
Determine the slew rate.
s = slewrate(y,100)
The first element of sis the rising slope and the second element is the falling
slope.
16-8

Duty Cycle of Rectangular Pulse Waveform
Duty Cycle of Rectangular Pulse Waveform
This example shows you how to create a rectangular pulse waveform and
measure the duty cycle. You can think of a rectangular pulse waveform as
asequenceofon and off states. One pulse period is the total duration of an
on and off state. The pulse width is the duration of the on state. The duty
cycle is the ratio of the pulse width to the pulse period. The duty cycle for a
rectangular pulse describes the fraction of time that the pulse is on in one
pulse period.
Create a rectangular pulse sampled at 1 gigahertz. The pulse is on, or equal
to 1, for a duration of 1 microsecond. The pulse if off, or equal to 0, for a
duration of 3 microseconds. The pulse period is 4 microseconds. Measure the
duty cycle of the waveform.
Set the sampling frequency equal to 1 gigahertz. Create a vector of times long
enough to accomodate 10 pulses. Define the pulse width to be 1 microsecond.
Space the pulses at intervals of 4 microseconds, which determines the pulse
period. Use pulstran to generate the pulse train and plot the result.
Fs = 1e9;
t = 0:1/Fs:(10*4e-6);
pulsewidth = 1e-6;
pulseperiods = [0:10]*4e-6;
x = pulstran(t,pulseperiods,@rectpuls,pulsewidth);
plot(t.*1e6,x); axis([0 40 -0.5 1.5]);
xlabel('\mus'); ylabel('Amplitude');
16-9
16 Signal Measurement
Determine the duty cycle using dutycycle. Input both the pulse waveform
and the sampling frequency to output the duty cycle. dutycycle outputs a
duty cycle value for each detected pulse.
D = dutycycle(x,Fs)
In this example, the duty cycle for each of the 10 detected pulses is identical
and equal to 0.25. This is the expected duty cycle because the pulse is on
for 1 microsecond and off for 3 microseconds in each 4 microsecond period.
Therefore, the pulse is on for 1/4 of each period. Expressed as a percentage,
this is equal to a duty cycle of 25%.
Calling dutycycle with no output arguments produces a plot with all the
detected pulse widths marked.
16-10

Duty Cycle of Rectangular Pulse Waveform
dutycycle(x,Fs);
Using the same sampling rate and pulse period, vary the pulse on time (pulse
width) from 1 to 3 microseconds in a loop and calculate the duty cycle. Plot
the pulse waveforms and display the duty cycle value in the plot title for each
step through the loop. You see the duty cycle increase from 0.25 (1/4) to 0.75
(3/4) as the pulse width increases.
pulsewidths = 1e-6:1e-6:3e-6;
for nn = 1:length(pulsewidths)
x = pulstran(t,pulseperiods,@rectpuls,pulsewidths(nn));
plot(t.*1e6,x); axis([0 40 -0.5 1.5]);
xlabel('\mus'); ylabel('Amplitude');
D = dutycycle(x,Fs);
title(['Duty cycle is ' num2str(mean(D)) ]);
pause(1);
end
16-11

16 Signal Measurement
Estimate State for Digital Clock
This example shows you how to estimate the high and low state levels for
digital clock data. In contrast to analog voltage signals, signals in digital
circuits have only two states: HIGH and LOW. Information is conveyed by the
pattern of high and low state levels.
Load clockex.mat into the MATLAB workspace. clockex.mat contains a 2.3
volt digital clock waveform sampled at 4 megahertz. Load the clock data
into the variable, x, and the vector of sampling times in the variable, t.Plot
the data.
load('clockex.mat','x','t')
stem(t,x,'markerfacecolor',[0 0 1]); xlabel('Seconds'); ylabel('Volts');
16-12

Estimate State for Digital Clock
Determinethehighandlowstatelevelsfortheclockdatausingstatelevels.
levels = statelevels(x)
The low-state level estimate is 0.0027 volts and the high-state level estimate
is 2.3068volts. Thisistheexpectedresult for the 2.3 volt clock data, where
the noise-free low-state level is 0 volts, and the noise-free high-state level
is 2.3volts.
Use the estimated state levels to convert the voltages into a sequence of 0s and
1s. The sequence of 0s and 1s is a binary waveform representation of the two
states. To make the assignment, use the following decision rule. Assign any
16-13

16 Signal Measurement
voltage within a 3%-tolerance region of the low-state level the value 0, and
any voltage within a 3%-tolerance region of the high-state level the value 1.
Determine the 3%-tolerance region around the low-state level.
lowtol = [levels(1)-3/100*(levels(2)-levels(1)) ...
levels(1)+3/100*(levels(2)-levels(1))];
Determine the 3%-tolerance region around the high-state level.
hightol = [levels(2)-3/100*(levels(2)-levels(1)) ...
levels(2)+3/100*(levels(2)-levels(1))];
Use logical indexing to determine the voltages within a 3%-tolerance region
of the low-state level and the voltages within a 3%-tolerance region of the
high-state level. Assign the value 0 to the voltages within the tolerance region
of the low-state level and 1 to the voltages within the tolerance region of
thehigh-statelevel. Plottheresult.
y = zeros(size(x));
y(x>= lowtol(1) & x<= lowtol(2)) = 0;
y(x>= hightol(1) & x<= hightol(2)) = 1;
subplot(211)
stem(t,x,'markerfacecolor',[0 0 1]); ylabel('Volts');
subplot(212)
stem(t,y,'markerfacecolor',[0 0 1]); ylabel('{0,1}'); xlabel('Seconds');
set(gca,'ytick',[0 1])
16-14
Estimate State for Digital Clock
The decision rule has assigned all the voltages to the correct state.
16-15
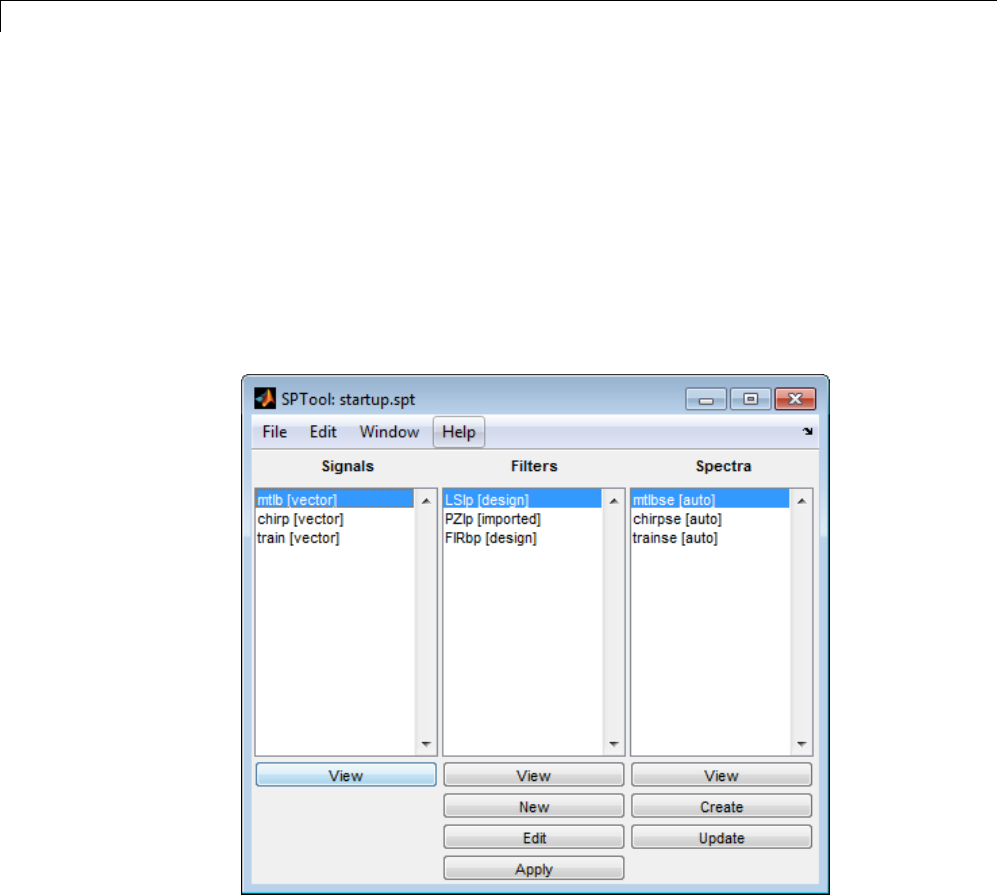
16 Signal Measurement
Calculate Settling Time with Signal Browser
This example demonstrates how you can use the SPTool Signal Browser to
find the settling time of a clock signal in the Bilevel Measurements panel.
First, open SPTool by typing
sptool
at the MATLAB command line. SPTool opens.
In this example, you import a clock signal from the MAT-file named
clockex.mat. In the SPTool menu, select File > Import. Alternatively, you
can press the Ctrl+I keyboard shortcut. The Import to SPTool dialog box
opens.
1Under Source,clickFrom Disk.
16-16
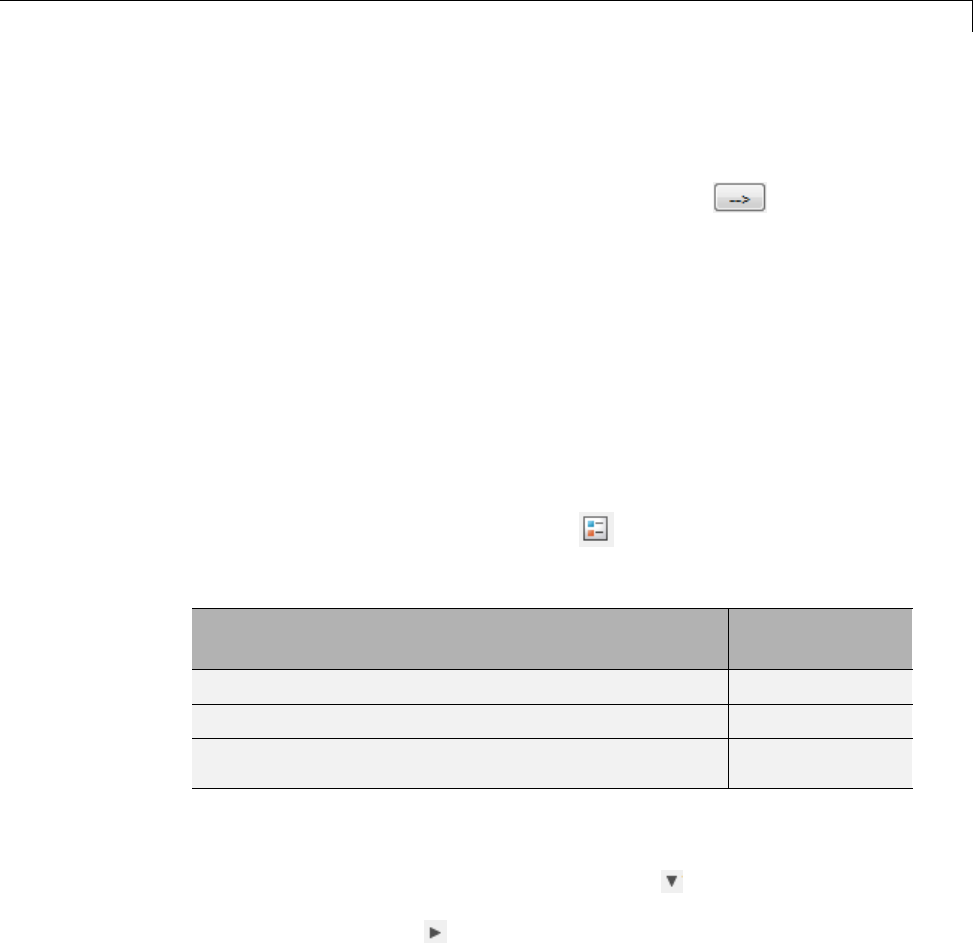
Calculate Settling Time with Signal Browser
2In the MAT-file box, type clockex,andpressEnter. The variables x
and tappear under File Contents.
3Under File Contents,clickx. Click the right arrow ( ) button to the
left of the Data box.
4In the Sampling Frequency box, type 4000000.
5In the Name box, type Clock.
6Click OK. The SPTool Signals list now contains a signal named Clock
[vector].
7In SPTool, in the Signals list, select Clock [vector],andclicktheView
button. The Signal Browser appears and displays the clock signal.
Because you selected only one signal, the legend is not needed. Turn off the
legend by clicking the Show All Legends ( ) button. Then, use the Style
dialog box to modify the appearance of the axes and the lines for the signal.
In the Signal Browser menu, select View > Style.
Parameter Display 1
Setting
Axes background color Black
Ticks, labels, and grid colors Dark Gray
Line color Yellow
To show the Bilevel Measurements panel, in the Signal Browser menu,
select Tools > Measurements > Bilevel Measurements.Tocollapsethe
Transitions pane,clickthepanecollapsebutton( )nexttothatlabel. To
expand the Settings pane and the Overshoots / Undershoots pane, click
the pane expand button ( ) next to each label. The Signal Browser appears
as shown in the following figure.
16-17
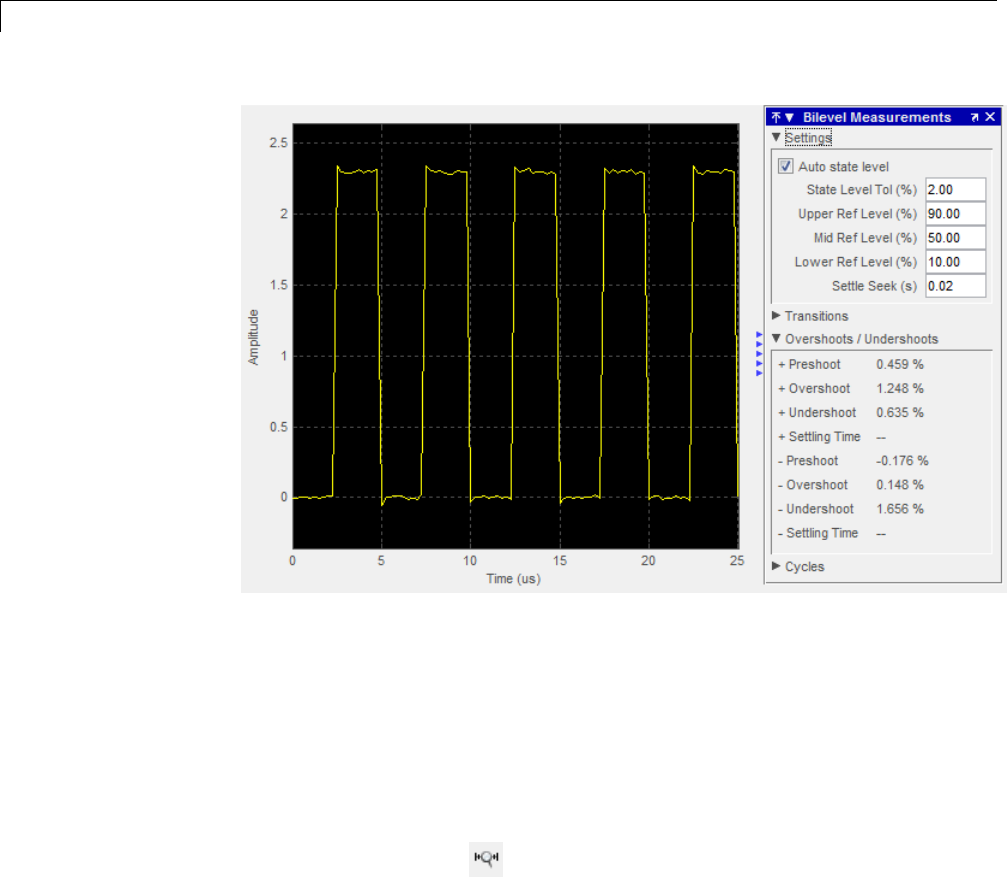
16 Signal Measurement
The value for the rising edge Settling Time parameter does not appear in the
Overshoots / Undershoots pane because the Settle Seek parameter is too
large. The Settle Seek value is longer than the entire simulation duration.
Enter a value for settle seek of 2e-6,andpressEnter.SignalBrowsernow
displays a rising edge settling time value of 118.392 ns.
This settling time value displayed is actually the statistical average of the
settling times for all five rising edges. To display the settling time for only one
rising edge, you can zoom in on that transition. In the Signal Browser toolbar,
click the Zoom X button ( ). Click the display near a value of 2 microseconds
on thetime-axis. Drag to the right, and release near a value of 4 microseconds
on thetime-axis. Signal Browser updates the rising edge Settling Time
value to reflect the new time window, as shown in the following figure.
16-18
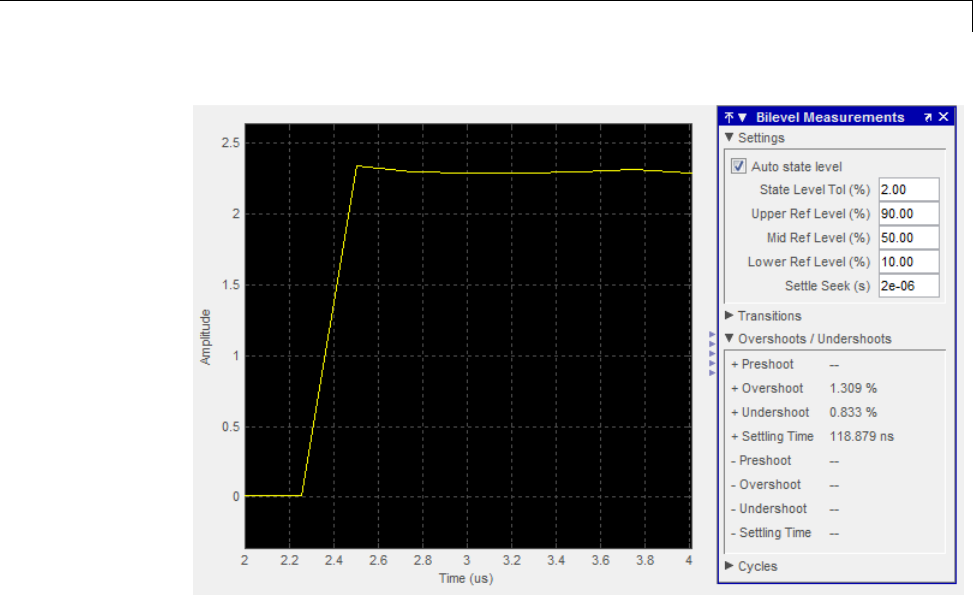
Calculate Settling Time with Signal Browser
16-19
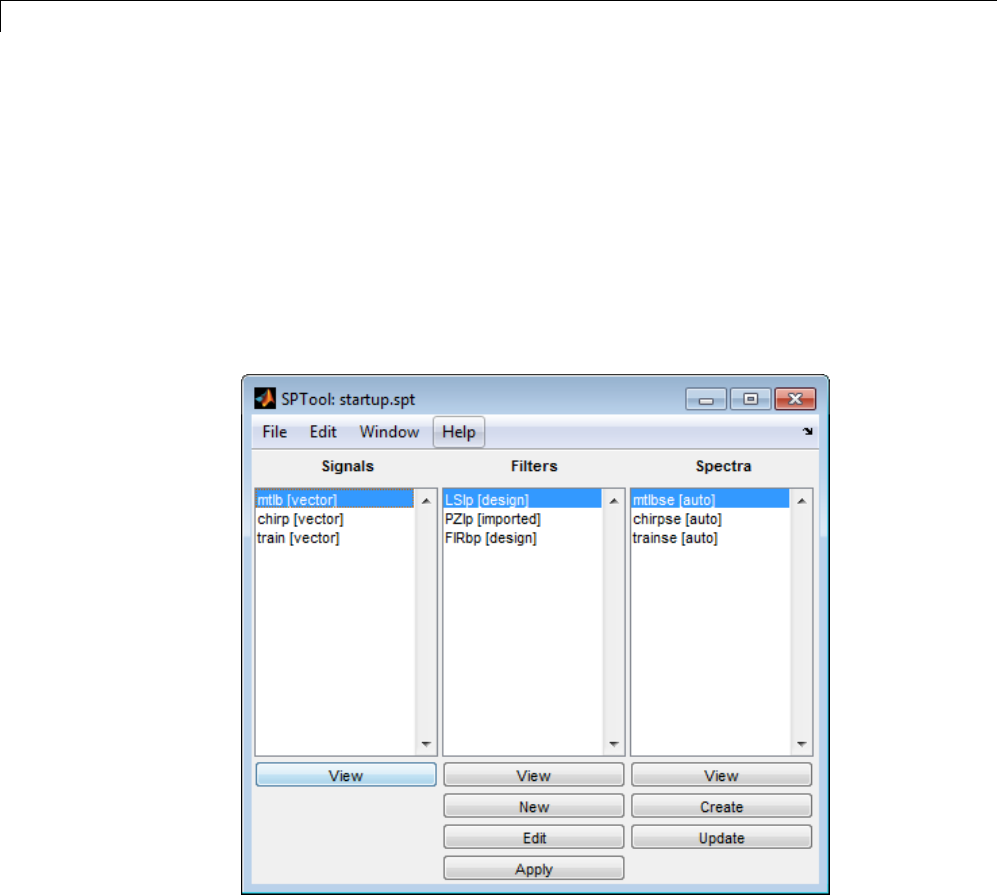
16 Signal Measurement
Find Peak Amplitudes in Signal Browser
The following example demonstrates how you can use the Peak Finder panel
to find heart rate, given an electrocardiogram (ECG) signal.
First, open SPTool by typing
sptool
at the MATLAB command line. SPTool opens.
Using SPTool, you can import signals from variables in the MATLAB
workspace. First, create an electrocardiogram (ECG) signal, sampled at 4
kHz, and apply the Savitzky-Golay filter. At the MATLAB command line,
enter the following commands:
x1 = 3.5*ecg(2700).';
16-20
Find Peak Amplitudes in Signal Browser
y1 = sgolayfilt(kron(ones(1,13),x1),0,21);
n = (1:30000)';
del = round(2700*rand(1));
mhb = y1(n + del);
ts = 0.00025;
Fs = 1/ts;
For more information about the Savitzky-Golay filter, see the sgolayfilt
function reference page or run the sgolaydemo example.
To import the signal from these variables, in the SPTool menu, select
File > Import. Alternatively, you can press the Ctrl+I keyboard shortcut.
The Import to SPTool dialog box appears.
1Under Workspace Contents,clickmhb. Click the right arrow ( )
button to the left of the Data box.
2Under Workspace Contents,clickFs. Click the right arrow ( )
button to the left of the Sampling Frequency box.
3In the Name box, type ECG.
4Click OK. The SPTool Signals list now contains a signal named ECG
[vector].
5In SPTool, in the Signals list, select ECG [vector], and click the View
button. The Signal Browser opens and displays the ECG signal.
Because you only selected one signal, the legend is not needed. Turn off the
legend by clicking the Show All Legends ( ) button. Then, use the Style
dialog box to modify the appearance of the axes and the lines for the signal.
In the Signal Browser menu, select View > Style.
16-21
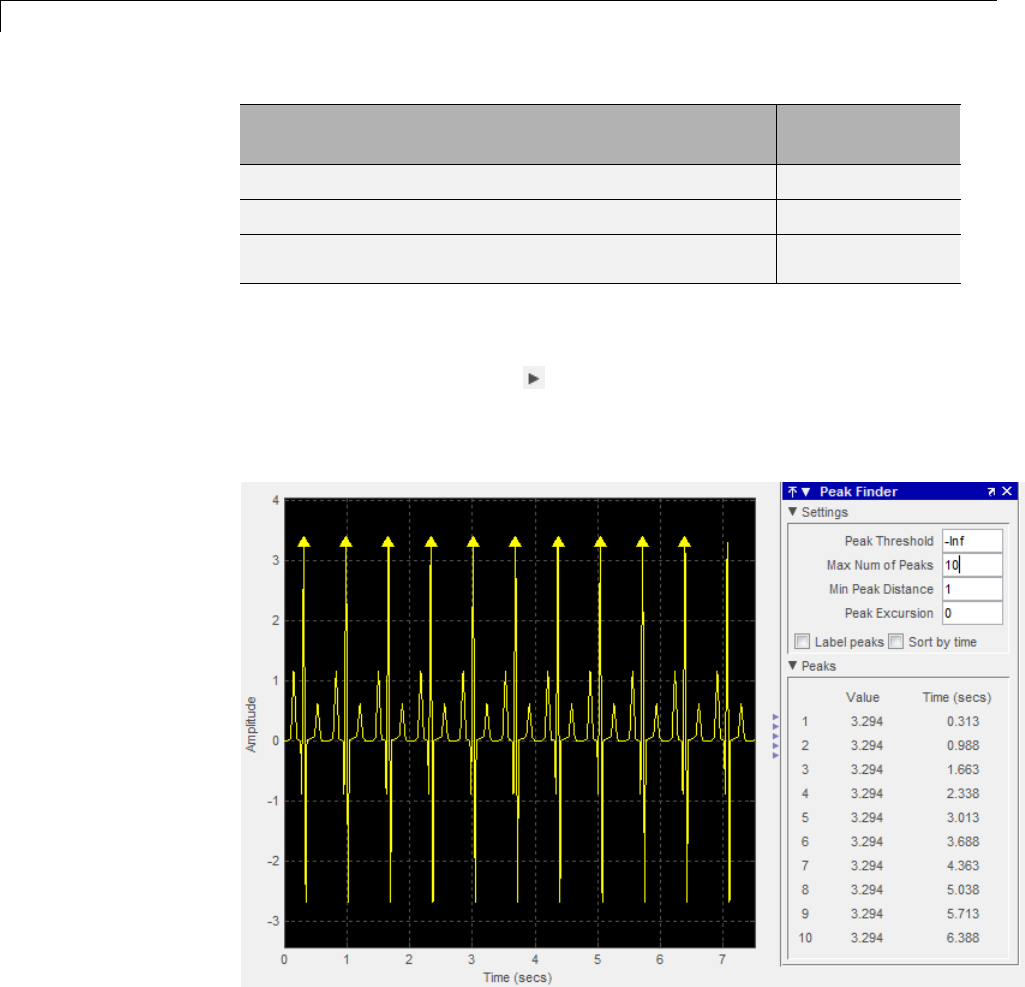
16 Signal Measurement
Parameter Display 1
Setting
Axes background color Black
Ticks, labels, and grid colors Dark Gray
Line color Yellow
To show the Peak Finder panel, in the Signal Browser menu, select
Tools > Measurements > Peak Finder.ToexpandtheSettings pane,
click the pane expand button ( )nexttothatlabel. IntheMax Num of
Peaks box, type 10 and press the Enter key. Signal Browser now displays in
the Peaks pane a list of 10 peak amplitude values, and the times at which
they occur, as shown in the following figure.
16-22

Find Peak Amplitudes in Signal Browser
As you can see from the list of peak values, there is a constant time difference
of 0.675 seconds between each heartbeat. Therefore, the heart rate detected
by the ECG signal is given by the following equation.
60
0 675
88 89
sec
min
.sec .min ()
beat
beats bpm
16-23

16 Signal Measurement
16-24
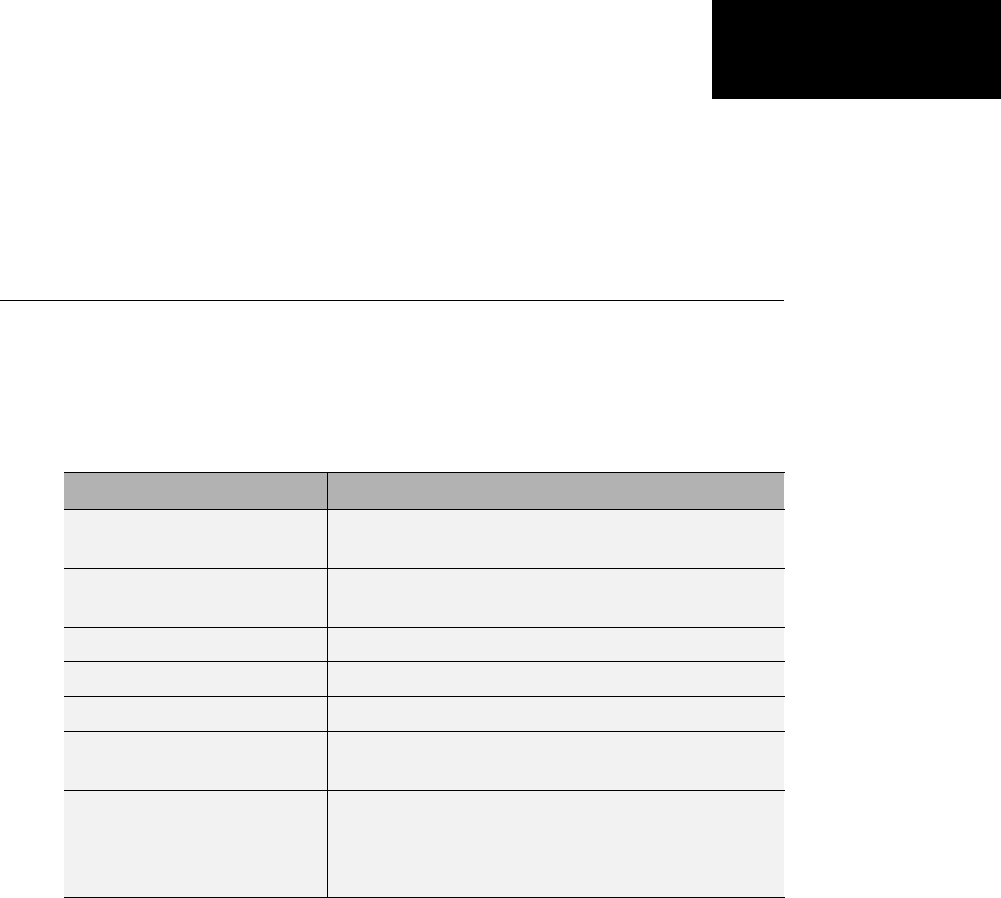
A
Technical Conventions
This manual and all Signal Processing Toolbox functions use the following
technical notations.
Term or Symbol Description
Nyquist frequency One-half the sampling frequency. Some toolbox
functions normalize this value to 1.
x(1) The first element of a data sequence or filter,
corresponding to zero lag.
Ωor w Analog frequency in radians per second.
ωor w Digital frequency in radians per sample.
fDigital frequency in hertz.
[x,y)Theintervalfromxto y,includingxbut not
including y.
... Ellipses in the argument list for a given
syntax on a function reference page indicate
all possible argument lists for that function
appearing prior to the given syntax are valid.

ATechnical Conventions
A-2
Index
IndexA
aliasing
impulse invariance 2-47
preventing 7-22
reducing 7-40
all-pole filters.SeeIIR filters
all-zero filters.SeeFIR filters
AM.Seeamplitude modulation
analog filters 2-9 2-44
Bessel comparison 2-12
bilinear transformation 2-48
Butterworth comparison 2-9
Chebyshev Type I comparison 2-10
Chebyshev Type II comparison 2-10
design 2-7
discretization 2-46
frequency response example 2-13
impulse invariance 2-47
models 1-31
plotting 2-13
See also IIR filters
analog frequency A-1
anti-symmetric filters 2-28
AR models.Seeautoregressive (AR) models
ARMA filters 1-4
coefficients 1-4
Prony’s method 7-16
Steiglitz-McBride method 7-17
See also IIR filters
ARX models 7-16
autocorrelation
estimation 6-4
multiple channel filters 6-4
variance 6-4
autocovariance
multiple channels 6-4
autoregressive (AR) models 1-3
coefficients 1-3
See also IIR filters
autoregressive moving-average (ARMA) filters.
See ARMA filters
B
band edges
prewarping 2-50
bandpass filters
Chebyshev Type I example 2-45
design 2-7
FIR 2-23
impulse invariance 2-47
bandwidth 2-46
barthannwin Bartlett Hann window function
comparison 7-2
bartlett window function
comparison 7-2
Bessel filters
characteristics 2-12
bias 6-3
linear prediction 7-15
power spectral density 6-17
variance trade-off 6-4
Welch 6-24
bilinear transformations
characteristics 2-48
prewarping example 2-50
blackman window function
comparison 7-2
blackmanharris window function
comparison 7-2
bohmanwin window function
comparison 7-2
boxcar windows.Seerectangular windows
brackets A-1
Burg method
characteristics 6-37
example 6-38
spectral estimation 6-7
Welch’s method comparison 6-39
Index-1

Index
Butterworth filters
characteristics 2-9
comparison 2-9
generalized 2-15
C
C header files 5-32
canonical forms 1-6
carrier frequencies 7-30
cascades 1-28
center frequency 2-46
cepstrum 7-24
chebwin Chebyshev window function
comparison 7-2
Chebyshev Type I filters
characteristics 2-10
example 2-45
Chebyshev Type II filters
characteristics 2-10
order estimation 2-8
chirp z-transforms
characteristics 7-36
CIC filters
exporting from FDATool to Simulink 5-29
coefficients
accessing filter 8-29
filter 1-3
lattice 1-28
coherence
definition 6-31
linearly dependent data 6-31
colors
sptool GUI 8-44
communications 7-30
applications 7-30
modeling 7-13
See also modulation, demodulation, voltage
controlled oscillation
compaction
discrete cosine transform 7-39
complex envelope.SeeHilbert transforms
context-sensitive help 8-6
continuous-time filters.Seeanalog filters
conversions
errors 5-24
functions (table) 1-32
convolution
cross-correlation 6-3
filtering 1-2
matrix 1-30
correlation 6-2
bias 6-3
linear prediction 7-15
See also autocorrelation, cross-correlation
cosine windows 7-6
covariance 6-2
definition 6-8
methods 6-41
See also autocovariance, cross-covariance,
modified covariance method
cross power spectral density
definition 6-29
cross spectral density 6-29
definition 6-29
See also power spectral density, spectral
estimation
cross-correlation
discussion 6-2
cross-covariance
comparison to cross-correlation 6-2
multiple channels 6-4
czt 7-36
See also chirp z-transforms
D
data
tips 5-15
DC component suppression 1-36
Index-2

Index
deconvolution 7-35
default session
sptool GUI 8-44
delays
group 1-18
noninteger 2-30
phase 1-19
signals 2-29
demodulation
example 7-31
design methods 3-6
customize 3-8
dft.Seediscrete Fourier transforms
difference equations 1-24
differentiators
definition 2-30
digital audio tape standards 7-22
digital filters 1-2
anti-causal 1-9
cascade 1-28
coefficients 1-3
comparison to IIR 2-17
convolution 1-3
convolution matrices 1-30
design 2-2
FIR design 2-17
fixed-point implementation 1-28
frequency response 1-14
group delay description 1-18
IIR design 2-4
implementation with filter 1-3
impulse response definition 1-12
initial conditions 1-6
lattice/ladder structures 1-28
models 1-23
order 1-3
phase delay definition 1-19
poles 1-24
second-order sections 1-28
specifications 2-8
state-space 1-25
time-domain representation 1-4
transfer functions representation 1-3
transients 1-11
transposed direct-form II structures 1-6
types 1-3
zero-phase implementation 1-9
zero-pole analysis 1-21
zeros 1-24
See also FIR filters, IIR filters
digital frequency A-1
discrete cosine transforms
definition 7-38
energy compaction property 7-39
example 7-39
reconstruct signals 7-39
discrete Fourier transforms 1-11
algorithms 1-35
definition 1-34
eigenvector equivalent 6-44
goertzel 1-36
IIR filter implementation 1-11
inverse two-dimensional 1-36
magnitude 1-35
phase 1-35
power spectrum estimation 6-9
signal length dependencies 1-35
spectral analysis 6-5
time-dependent 7-28
two-dimensional 1-36
See also fast Fourier transforms
discrete prolate spheroidal sequences.Seedpss
function
discretization
bilinear transformations 2-48
filters 2-46
impulse invariance 2-47
dpss function
example 6-28
Index-3

Index
E
echo detection 7-24
edge effects 1-11
eigenanalysis 6-44
eigenvector method 6-7
definition 6-43
spectral estimation 6-7
See also multiple signal classification method
elliptic filters
definition 2-11
equiripple 2-24
Chebyshev Type I filters 2-10
Chebyshev Type II filters 2-10
Chebyshev windows 7-12
elliptic filters 2-11
error minimization 2-24
weighted frequency bands 2-27
estimation 6-7 6-29
cross spectral density 6-29
See also parametric modeling
export
filter 5-26
F
fast Fourier transforms 1-34
example 1-35
frequency response 1-14
implementation 1-11
output 1-36
fdatool
exporting to Simulink 5-29
fdatool GUI
computing coefficients 5-12
design methods 5-8
exporting filters 5-26
filter architecture 5-23
filter design specification 5-8
filter implementation 5-23
filter order specification 5-9
filter responses 5-13
filters structure 5-23
frequency response specification 5-10
importing 5-39
MATLAB code 5-34
opening 5-6
response type 5-7
saving coefficients 5-26
second analysis 5-13
sessions 5-38
FFT.Seefast Fourier transforms
filter algorithm 3-6
choosing 3-6
Filter block 5-29
filter data 3-10
filter design 5-2
customize algorithm 3-8
filter analysis 3-9
Filter Object 3-8
flow chart
flow diagram 3-2
process 3-2
specification 3-4
Specifications Object 3-4
sptool Filter Designer GUI 8-47
See also fdatool GUI
filter design parameters 3-4
Filter Designer GUI.Seefdatool GUI
filter function
description 1-6
filter response 3-4
Filter Viewer
open 8-11
printing 8-24
filters 1-5
analog 2-9
anti-causal 1-9
anti-symmetric 2-28
Butterworth (generalized) 2-15
Cheaderfile 5-32
Index-4

Index
coefficients 1-3
coefficients in sptool GUI 8-29
convolution 1-2
design 2-6
discretization 2-46
equiripple 2-24
export 5-26
filter and filtfilt functions
comparison 1-9
filter function 1-4
FIR design 2-24
FIR single band 2-23
frequency domain 1-10
frequency transformations 2-44
importing to sptool GUI 8-32
initial conditions using filter function 1-6
lattice/ladder 1-28
linear phase 2-18
linear prediction 7-14
linear system models 1-24
median filtering 7-29
minimax 2-24
order 1-3
phase distortion removal 1-9
phase modulation 7-27
pole-zero editor 5-19
sampling frequency 5-17
saving 5-35
second-order sections 1-28
specifications 2-8
sptool GUI Filter Designer 8-47
types 1-3
zero-phase implementation 1-9
See also fdatool GUI, FIR filters, IIR
filters, digital filters, analog
filters
filtfilt function
filter function comparison 1-9
FIR filters 2-17
arbitrary response 2-37
constrained least square 2-31
differentiators 2-30
equiripple 2-24
example 8-16
frequency domain 1-11
Hilbert transformers 2-28
IIR filter comparison 2-17
implementation 1-6
Kaiser windows 7-10
lattice/ladder 1-28
least square and equiripple comparison 2-25
least square multiband 2-34
least square weighted 2-35
linear phase 2-18
multiband 2-24
multiband example 2-23
reduced delay response 2-40
resample 1-8
sptool GUI Filter Designer 8-47
standard band 2-23
windowing method 2-20
fir1 function
example 2-22
firls function
differentiators 2-30
firpm comparison 2-25
weight vectors 2-27
firpm function
differentiators 2-30
example 2-25
firls comparison 2-25
Hilbert transformers 2-28
weight vectors 2-27
firpmord function
example 2-18
FM.Seefrequency modulation
frequency
analog A-1
angular 2-2
center 2-46
Index-5

Index
cutoff 2-44
digital A-1
estimation 6-43
normalization 2-2
Nyquist A-1
vectors 2-27
frequency domain
duality with time-domain 1-10
filters 1-10
FIR filtering 1-10
transformation functions 2-44
frequency domain based modeling.See
parametric modeling
frequency response 1-14
Bessel filters 2-12
Butterworth filters 2-9
Chebyshev Type I filters 2-10
Chebyshev Type II filters 2-10
elliptic filters 2-11
error minimization 2-24
evaluating 1-14
example 1-15
Kaiser window 7-9
linear phase 2-18
magnitude 1-17
monotonic 2-9
multiband 2-13
phase 1-17
plotting 1-15
sampling frequency 1-14
freqz function
sampling frequencies 1-14
From Disk radio button 8-36
G
generalized Butterworth filters 2-15
generalized cosine windows 7-6
generalized filters 2-6
Gibbs effect 2-21
reduced by window 7-2
group delay 1-18
comparison to phase delay 2-19
example 1-19
passband 2-12
grpdelay function
example 1-19
H
Hadamard transform 7-41
See also Walsh transform
hamming window function
comparison to boxcar 6-18
comparison to Hann 7-6
example 2-21
hann window function
comparison to Hamming 7-6
highpass filters
FIR example 2-23
hilbert transform function
analytic signals 2-29
description 7-40
example 2-29
homomorphic systems 7-24
I
icceps function
example 7-27
idct function
example 7-38
ideal lowpass filters 2-20
See also lowpass filters
ifft function
example 1-36
ifft2 function
example 1-36
IIR filters 2-5
analog prototype 2-7
Index-6

Index
Bessel 2-12
Butterworth 2-9
Chebyshev Type I 2-10
Chebyshev Type II 2-10
comparison 2-9
comparison to FIR 2-4
design 2-4
elliptic 2-11
Filter Designer GUI 8-47
frequency domain implementation 1-10
frequency response 2-14
generalized Butterworth 2-15
lattice/ladder 1-28
maximally flat 2-15
multiband 2-14
order estimation 2-8
plotting responses 2-13
specifications 2-8
Yule-Walker example 2-13
zero-phase implementation 1-9
See also direct design
image processing 1-36
Import dialog box
sptool from disk 8-36
sptool from workspace 8-17
impulse invariance
example 2-47
impulse response 1-12
ideal 2-20
impulse invariance 2-47
indexing 1-3
initial conditions
example 1-6
using filtfilt function 1-10
instantaneous attributes 7-41
interval notation A-1
inverse cepstrum, complex 7-27
inverse discrete cosine transforms
accuracy of signal reconstruction 7-39
inverse discrete Fourier transforms 1-34
example 1-34
two-dimensional 1-36
invfreqs function
example 7-18
invfreqz function
example 7-18
K
kaiser window function
discussion 7-8
example 6-20
FIR filters 7-10
L
ladder filters.Seelattice/ladder filters
Laplace transforms 1-31
latc2tf function
example 1-30
latcfilt function
example 1-10
lattice/ladder filters 1-28
implementation 1-29
latcfilt function 1-30
levinson function
example 7-15
parametric modeling 7-15
line
drawing in FDATool 5-16
line style 8-44
linear models.Seemodels
linear phase filters 2-18
linear prediction
modeling 7-14
linear system transformations.Seeconversions
lowpass filters
FIR 2-23
ideal 2-20
impulse invariance 2-47
Index-7

Index
impulse response 2-20
lp2bp function
example 2-45
lpc.Seeprony function, linear prediction
M
magnitude
Fourier transforms 1-35
frequency response extraction 1-17
plots 8-56
transfer functions 6-29
MAT-files
dpss.mat 6-28
sptool GUI 8-36
MATLAB code
generating in FDATool 5-34
matrices
convolution 1-30
matrix forms.Seestate-space forms
maxflat function
discussion 2-15
maximally flat filters.Seemaxflat function
maximum entropy estimate 6-35
medfilt1 function
example 7-29
minimax method 2-24
FIR filters 2-24
See also Parks-McClellan algorithm
models 1-23
bilinear transformations 2-49
transformations 2-49
modified covariance method 6-41
modulate function
definition 7-30
example 7-31
time vector 7-31
modulation 7-30
moving-average (MA) filters 1-3
See also FIR filters
MTM.Seemultitaper method
multiband filters
FIR 2-23
IIR 2-13
multiple signal classification method (MUSIC)
discussion 6-7
example 6-43
multiplicity of zeros and poles 8-55
multirate filters 1-8
multitaper method (MTM) 6-25
MUSIC algorithm.Seemultiple signal
classification method
N
nonrecursive filters.SeeFIR filters
normalization 6-3
modified periodogram 6-18
periodogram bias 6-17
Welch’s power spectral density 6-24
Nyquist frequency A-1
O
order
estimation 2-8
overlap-add method
FIR filter implementation 1-11
P
p-model.Seeparametric modeling
Panner check box 8-44
parametric modeling 7-13
applications 7-13
frequency domain based 7-18
linear predictive coding 7-14
Steiglitz-McBride method 7-17
summary 2-6
techniques 7-13
time-domain based 7-14
Index-8

Index
parentheses A-1
partial fraction expansion 1-31
residue 1-26
passband
Chebyshev Type I 2-10
equiripple 2-11
group delay 2-12
pburg function
example 6-38
pcov function
example 6-41
periodogram function
discussion 6-9
phase
delay 1-19
distortion 1-9
Fourier transforms 1-35
frequency response 1-17
linear delay 2-19
transfer functions 6-29
unwrapping 1-17
plots
analog filters 2-13
coherence function 6-31
complex cepstrum 7-25
DFT 1-35
frequency response 1-15
group delay 1-19
magnitude 8-56
magnitude and phase 1-17
phase 1-17
phase delays 1-19
transfer functions 6-30
zero-pole 1-21
plug-ins 8-45
pmcov function
example 6-41
pole-zero editor 5-19
pole-zero filters.SeeIIR filters
poly function
example 1-24
polynomials
division 7-35
roots 1-24
polyphase filtering techniques 1-8
power spectral density 6-5
Burg estimation example 6-37
covariance estimation example 6-41
multitaper estimation example 6-25
MUSIC estimation example 6-43
periodogram bias 6-17
periodogram normalization 6-17
plots 8-13
sptool GUI 8-34
units 6-6
Welch’s bias 6-24
Welch’s estimation bias 6-24
Welch’s estimation example 6-21
Welch’s normalization 6-24
Yule-Walker estimation example 6-34
prediction filters 7-14
Preferences menu item 8-43
Print dialog box 8-26
print to figure 5-18
prolate-spheroidal windows 7-8
prony function
example 7-16
Prony’s method.See
prony function
pulse position modulation 7-31
pyulear function
Burg comparison 6-38
example 6-35
R
radar applications 7-28
range notation A-1
rceps function
example 7-26
realize data 3-10
Index-9

Index
rectangular windows 7-3
rectwin function
example 7-3
recursive filters.SeeIIR filters
references
special topics 7-47
statistical signal processing 6-46
reflection coefficients 1-29
definition 1-28
rejection area 5-16
resample function
example 7-21
resampling.Seedecimation, interpolation
residue forms.Seepartial fraction expansion
roots
polynomials 1-24
rulers
sptool GUI 8-44
running average 7-16
S
sampling frequency 5-17
FIR filters 1-8
freqz function 1-16
irregularly spaced data 7-23
range 1-16
resampling discussion 7-21
spacing 1-16
using upfirdn function 1-8
saved filters 5-35
saving data
Spectrum Viewer 8-30
second-order sections 1-27
conversion to in fdatool 5-25
matrices 1-27
sptool GUI 8-34
Signal Browser 8-7
axis labels 8-44
markers preferences 8-44
overview 8-7
Panner preferences 8-44
printing 8-24
signals, measuring 8-41
zooming, preferences 8-44
signals 2-29
analytic 7-40
applications 7-40
array 8-7
auto- and cross-correlation 6-4
carrier 7-30
DCT coefficients reconstruction 7-39
differentiators 2-30
measurements 8-41
properties 7-40
Simulink
exporting from FDATool 5-29
Slepian sequences
See discrete prolate spheroidal sequences
6-28
sonar applications 7-28
spectral analysis 6-5
cross spectral density 6-29
power spectral density 6-5
PSD 6-5
Spectrum Viewer 8-13
See also spectral estimation
spectral density 6-5
measurements 8-41
plots 8-13
Spectrum Viewer 8-13
units 6-6
See also cross spectral density; power
spectral density
spectral estimation 6-9
Burg method example 6-37
Welch’s method bias 6-24
Welch’s method discussion 6-21
Welch’s method example 6-7
Yule-Walker AR method example 6-35
Index-10

Index
spectrogram
definition 7-28
spectrogram function
example 7-28
spectrum
mask 5-16
Spectrum Viewer 8-13
activating 8-13
axis parameters 8-44
markers, preferences 8-44
measurements 8-41
opening 8-13
overview 8-13
printing 8-26
rulers 8-41
spectra structures 8-30
spectral density plots 8-13
windows 8-14
zooming 8-44
spectrum.mtm function
example 6-26
speech processing
parametric modeling 7-13
resampling 7-22
spline function 7-23
sptool GUI
colors, customizing 8-44
context-sensitive help 8-6
customizing 8-43
data objects 8-39
data structures 8-3
editing 8-40
example 8-16
exporting data 8-27
filter coefficients 8-50
filter design 8-18
filter importing 8-32
filter parameters 8-29
filter saving 8-28
filter transfer functions 8-29
filtering 8-20
filters 8-32
help 8-6
Import dialog 8-17
importing filters and spectra 8-32
importing signals 8-16
items, selecting 8-39
line style 8-44
MAT-files 8-36
MATLAB workspace 8-3
multiselection of items 8-39
operation 8-3
preferences 8-43
printing 8-26
rulers 8-41
sample frequency 8-51
saving 8-27
second-order section forms 8-34
signal analysis 8-22
signal measurement 8-41
signal playing 8-23
sound 8-23
spectra analysis 8-24
spectra import 8-34
spectral densities import 8-32
spectral densities plot 8-34
Spectrum Viewer 8-24
state-space forms 8-33
transfer functions 8-33
tutorial 8-2
workspace 8-3
zero-pole-gain forms 8-33
standards, digital audio tape 7-22
startup transients 1-10
state-space forms 1-25
continuous time 1-31
scalar 1-25
sptool GUI 8-33
statistical operations 6-2
Index-11

Index
See also autocorrelation sequences;
cross-correlation sequences; cross-covariance
Steiglitz-McBride method
example 7-17
stmcb function
example 7-17
stopband
Chebyshev Type II 2-10
elliptic 2-11
structures
conversion 5-24
conversion round off 1-33
lattice/ladder 1-28
transposed direct-form II 1-6
system identification 7-16
T
tapers (PSD estimates) 6-25
taps 2-18
tf2latc function
example 1-29
tfestimate function
example 6-29
time series attributes 7-41
time-domain based modeling.Seeparametric
modeling
transfer functions 1-3
coefficients 8-29
discrete time models 1-24
factoring 1-24
filter coefficients 8-50
partial fractions 1-26
sptool GUI 8-33
Welch’s estimation 6-29
zero-pole-gain forms 1-24
transformations
bilinear 2-48
frequency 2-44
models 1-32
transforms 7-36
chirp z-transforms (CZT) discussion 7-36
discrete Fourier 1-34
Hadamard 7-41
Hilbert discussion 7-40
inverse discrete cosine discussion 7-38
Walsh 7-41
transients 1-11
transition band 2-25
transposed direct-form II structure 1-6
triang triangle window function
Bartlett comparison 7-4
two-dimensional operations 1-36
U
units of power spectral density (PSD) 6-6
unwrap function
example 1-17
upfirdn function
example 1-8
resampling 7-23
V
variables
load from disk 8-36
variance 6-4
vco
example 7-34
vectors
frequency 2-27
indexing 1-3
voltage controlled oscillators
example 7-34
W
Walsh transform 7-41
Welch’s method 6-21
AR Yule-Walker comparison 6-35
Index-12

Index
bias and normalization 6-24
Burg comparison 6-39
MTM comparison 6-28
nonparametric system identification 6-29
power spectral density estimation 6-29
windows
Bartlett comparison 7-4
Blackman comparison 7-6
boxcar 2-20
Chebyshev overview 7-12
cosine 7-6
filters 2-20
finite impulse response filters 2-20
fir1 function 2-23
Hamming discussion 7-6
Hamming rectangular example 6-18
Hamming ringing example 2-21
Hann example 7-6
Kaiser discussion 7-8
Kaiser example 6-20
multiband FIR filters 2-23
prolate-spheroidal 7-8
rectangular example 2-20
shapes 7-3
single band FIR filters 2-23
spectral leakage 6-12
Workspace Contents list 8-17
Y
Yule-Walker AR method
description 6-34
example 6-38
Welch’s method comparison 6-35
yulewalk function
example 2-14
Z
z-transforms
chirp z 7-36
definition 1-24
discrete Fourier transforms 1-34
equation 1-3
zero frequency component, centering 1-36
zero-pole
multiplicity 8-55
plots 1-21
transfer functions 1-24
zero-pole-gain 1-24
zero-pole-gain forms 1-31
sptool GUI 8-33
zoom
sptool GUI 8-44
Index-13
