Theory Manual
User Manual:
Open the PDF directly: View PDF ![]() .
.
Page Count: 59
- List of Abbreviations
- VTOL sizing: Overview
- Drag models
- Rotor and Wing Performance Models
- Weight models
- Cantilever beam dynamics
HYDRA: Rotorcraft Conceptual Sizing
Authors
Ananth Sridharan
Bharath Govindarajan
This is the user manual for the rotorcraft conceptual sizing analysis HYDRA -HYbrid
Design and Rotorcraft Analysis, developed and evolved over several years at the Uni-
versity of Maryland, with inspiration drawn from the AHS Student Design Com-
petition challenges. This manual contains a description of the theory and various
operations performed by the sizing code for both conventional and novel Vertical-
Lift platforms. The key features of HYDRA are flexibility,speed and reliance on
only open-source tools. With the majority of the code written in an interpreted
language, i.e., Python, modules can be prototyped and added quickly. Subsequently
select parts of the code can be ported to Fortran or C(i.e., compiled languages) and
wrapped for execution sppeed. Using a combination of OpenMP,MPI and algorithmic
acceleration, up to 2000 designs can be generated per second on a desktop worksta-
tion. The use of Pythonenables powerful built-in text parsing abilities, resulting in
more intuitive interfaces.
Another advantage of HYDRA is the ability to set up input decks and call higher
fidelity models (BEMT, FEA for airframe and wings) and the comprehensive anal-
ysis PRASADUM, and through the comprehensive analysis, the Maryland Free Wake
(MFW). These higher-fidelity tools are integrated into the sizing loop to provide ac-
curate estimates of rotor performance and component weights, and may be invoked
as required.
Contents
List of Abbreviations iii
1 VTOL sizing: Overview 1
1.1 The nature of VTOL sizing . . . . . . . . . . . . . . . . . . . . . . . 2
1.1.1 Iterative convergence . . . . . . . . . . . . . . . . . . . . . . . 3
1.1.2 Constrained optimziation . . . . . . . . . . . . . . . . . . . . . 10
2 Drag models 11
2.1 Fuselage and empennage drag . . . . . . . . . . . . . . . . . . . . . . 11
2.2 Edgewise rotor hub drag . . . . . . . . . . . . . . . . . . . . . . . . . 12
2.3 Spinnerdrag................................ 12
2.4 Momentum drag for engine air intakes . . . . . . . . . . . . . . . . . 12
2.5 Landinggeardrag............................. 13
2.6 Coolingdrag................................ 14
2.7 Mast fairing drag for coaxial rotors . . . . . . . . . . . . . . . . . . . 14
2.8 Protrusiondrag.............................. 14
3 Rotor and Wing Performance Models 14
3.1 Rotor performance model . . . . . . . . . . . . . . . . . . . . . . . . 14
3.1.1 MomentumTheory........................ 15
3.1.2 Blade Element Momentum Theory (BEMT) . . . . . . . . . . 15
3.2 Wing performance model . . . . . . . . . . . . . . . . . . . . . . . . . 18
4 Weight models 19
4.1 Engines, fuel and batteries . . . . . . . . . . . . . . . . . . . . . . . . 19
4.1.1 Engines .............................. 19
4.1.2 Fuel, tank and fuel handling systems . . . . . . . . . . . . . . 21
4.1.3 Batterymodels .......................... 23
4.1.4 Electric motor weights . . . . . . . . . . . . . . . . . . . . . . 25
4.2 Electric Transmissions . . . . . . . . . . . . . . . . . . . . . . . . . . 25
4.3 Wireweights ............................... 27
4.4 Physics based model for rotor blades . . . . . . . . . . . . . . . . . . 28
4.4.1 Skinsizing............................. 29
4.4.2 Leading edge weight . . . . . . . . . . . . . . . . . . . . . . . 29
4.4.3 Spar caps and shear web sizing . . . . . . . . . . . . . . . . . 30
4.4.4 Root fitting sizing . . . . . . . . . . . . . . . . . . . . . . . . . 34
4.4.5 Torsion frequency check . . . . . . . . . . . . . . . . . . . . . 34
4.5 Flightcontrols............................... 35
4.5.1 Rotorcontrols........................... 35
4.5.2 Fixed wing controls . . . . . . . . . . . . . . . . . . . . . . . . 36
4.5.3 Tiltactuators........................... 36
4.6 Motormountmass ............................ 36
ii
4.7 Wingweightmodel............................ 38
4.7.1 AFDD wing weight model . . . . . . . . . . . . . . . . . . . . 38
4.7.2 Frequency tuning: bending loads . . . . . . . . . . . . . . . . 38
4.7.3 Hover: shear loads . . . . . . . . . . . . . . . . . . . . . . . . 39
4.8 Airframe Weight Model . . . . . . . . . . . . . . . . . . . . . . . . . . 40
4.8.1 Statistical weight model . . . . . . . . . . . . . . . . . . . . . 40
4.8.2 Component build-up model . . . . . . . . . . . . . . . . . . . 41
4.8.3 Physics-based weight model: load-bearing airframe components 42
4.9 Weightmargin .............................. 46
4.10Fixedweightgroups ........................... 46
4.11 Comparison of weights vs. NDARC . . . . . . . . . . . . . . . . . . . 47
A Cantilever beam dynamics 49
A.1 Potentialenergy.............................. 51
A.2 Kineticenergy............................... 52
A.3 Frequencytuning ............................. 53
A.4 Validation ................................. 54
A.4.1 Case 1: cantilever beam . . . . . . . . . . . . . . . . . . . . . 54
A.4.2 Case 2: distributed non-structural mass . . . . . . . . . . . . . 56
A.4.3 Case 3: half-wing with lumped masses . . . . . . . . . . . . . 56
iii
1 VTOL sizing: Overview
The objective of rotorcraft sizing is to obtain a consistent combination of
weights and performance for the various components in a VTOL platform. The
interdependent nature of the design of various parts (e.g., engine, rotors, transmis-
sion, fuselage) necessitates methods that capture these dependencies to the required
accuracy; otherwise components might be over-designed and heavier/bulkier than
required (performance penalty) or under-designed, requiring a costly sequence of
redesign operations for all parts in the detailed design phase.
Sizing for vertical-lift aircraft is not a new field; the fundamental methods
have been adapted from fixed-wing sizing and augmented with VTOL-specific com-
ponents, and refined over several decades. A notable example of a VTOL sizing
algorithm is the method of Prof. Marat Tishchenko (MIL design bureau) and Dr.
V.T. Nagaraj; this combination of component sizing laws and the iterative sizing
sequence is one of the cornerstones of HYDRA.
Recent work by Dr. Wayne Johnson at NASA Ames produced several it-
erations of a continuously updated NASA code called NDARC. This code can size
conventional and unconventional VTOL platforms, as well as a range of fixed-wing
aircraft. Additionally, each major helicopter manufacturer has built up a database
of manufactured part weights and performance, and have developed their respective
in-house sizing tools. These sizing tools were originally developed for single main
rotor helicopters powered by gas turbine engines, and have been gradually adapted
1

to include eVTOLs (electric Vertical TakeOff and Landing platforms) and configu-
rations with hybrid powerplants featuring Distributed Electric Propulsion (DEP).
1.1 The nature of VTOL sizing
Table 1: Conceptual sizing: drivers for group mass
Group name Mass depends on
Fixed wing Aspect ratio, wing loading →take-off mass
Rotors Radius, solidity, RPM, torque, thrust →take-off mass
Empennage Tail loading, pitch/yaw stability and control authority
Propeller Vehicle drag →take-off mass
Fuselage Dimensions, take-off mass
Landing gear Take-off mass
Flight controls Blade geometry, wing area, wing loading →take-off mass
Deicing Wing area, rotor blade area →take-off mass
Battery C-rating, specific energy, rotor power →take-off mass
Motor Maximum torque/power →take-off mass
Avionics Fixed mass group
Power wire Layout of rotors and motor power limits →take-off mass
Signal wire Layout of controls and sensors
2
To illustrate the interdependent nature of sizing laws for various components,
consider the dominant drivers for the weights of various vehicle components in an
eVTOL, shown in Table 1. The list of dependencies is illustrative and not exhaus-
tive, but sufficient to highlight the key point: determination of take-off mass
requires solving for several cyclic dependencies, i.e., the total take-off mass
depends on itself. Two well-known methods have been successfully used to solve
this class of problems with simultaneous nonlinear equations:
1. Iterative convergence
2. Optimization with compatibility constraints
The implementations of both approaches in HYDRA are detailed in the following
sections.
1.1.1 Iterative convergence
Iterative convergence is a popular technique that is used to solve several classes
of problems. It has been successfully applied to nonlinear algebraic equations in
several variables, where analytical solutions are unavailable. The overall approach
is shown in Fig. 1. Four primary types of models are required for conceptual sizing:
1. Weight
2. Performance
3. Sizing and geometry
4. Energy storage
3
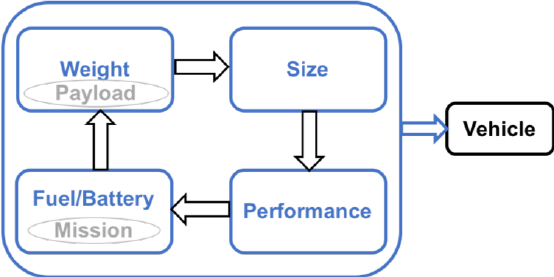
Figure 1: Iterative sizing: the classical approach
Typically, low-fidelity models are used to represent each group for conceptual
sizing, because fine-grained resolution of each component is not possible at this
stage due to the unavailability of design details. For VTOL sizing in particular,
sizing operations can be executed in a particular sequence to obtain answers rapidly
with fewer sizing iterations. One such sequence is shown in Fig. 2.
Each block shown in Fig. 2 consists of further sub-modules that are assembled
together in the implementation. The key inputs for sizing are the three green blocks
that feed information to the sizing of the vehicle: aircraft layout,mission profile
and model calibration data.
The aircraft layout is perhaps the most significant assumption required to
initiate sizing. Figure 3 shows a few candidate eVTOL configurations, with different
permutations and combinations of rotor and wing technologies, as shown in Fig. 4.
In HYDRA, the constituent rotor and wing technologies are defined as primitive types.
Based on user inputs, these technology combinations are superimposed in HYDRA to
obtain the appropriate configuration.
4
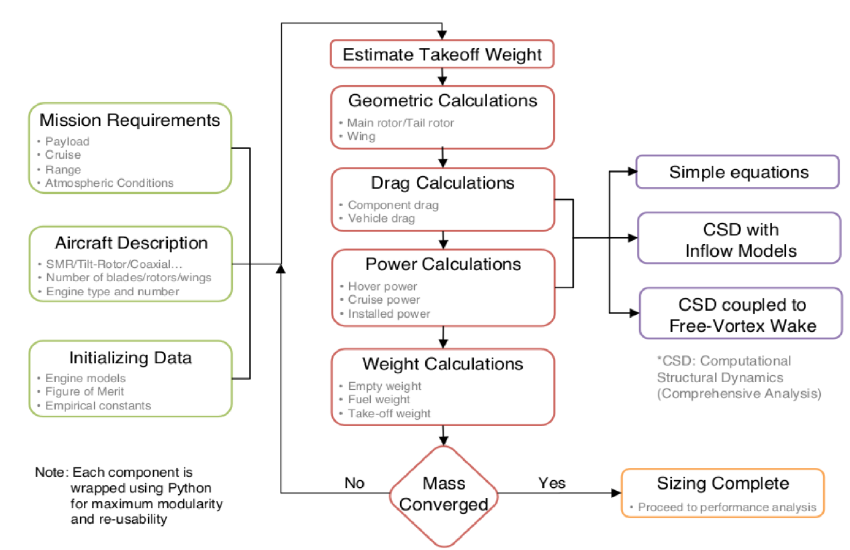
Figure 2: Iterative sizing: detailed breakdown of operations
5

Figure 3: Variety in electric VTOL aircraft
6
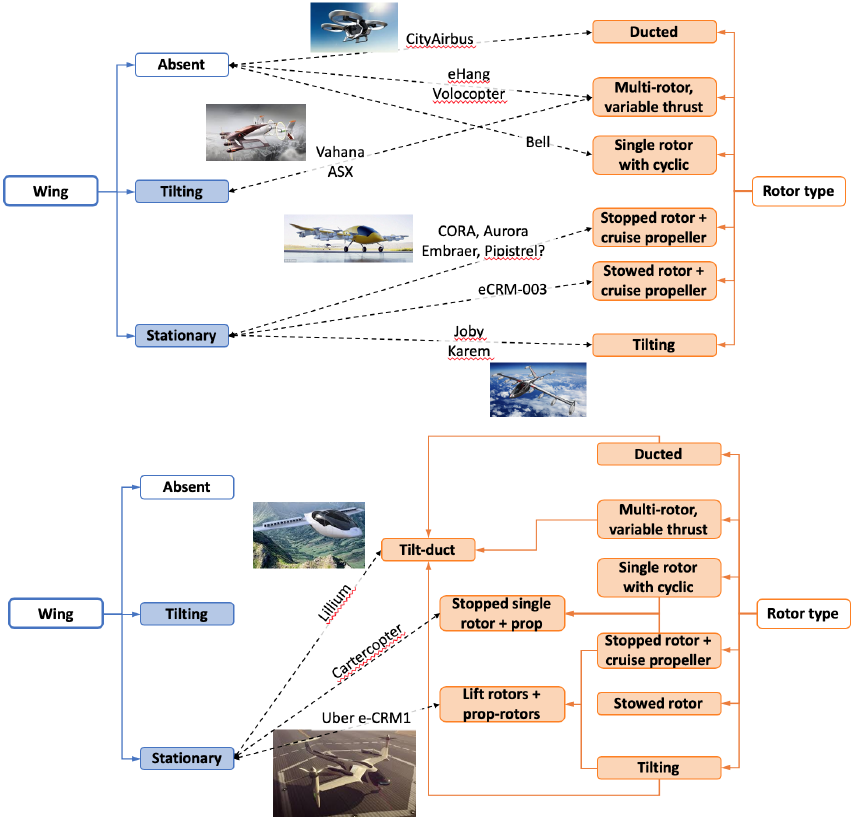
Figure 4: Assembling eVTOLs from rotor and wing technologies
7
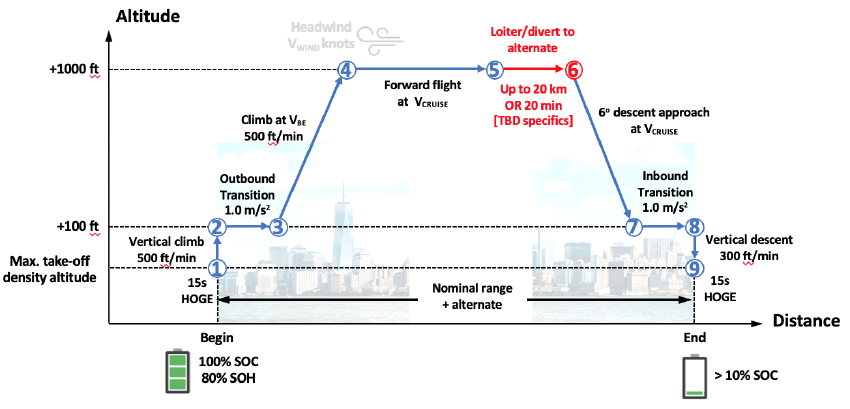
Figure 5: An example mission profile
The mission profile is specified as a sequence of hover and cruise segments.
Cruise segments are defined through a specified airspeed and distance/time, while
hover segments are defined through duration. Climb and descent segments are
defined as cruise segments with different start and end altitudes. An example mission
profile is shown in Fig. 5.
Finally, the model calibration data refers to calibration constants for para-
metric models of rotor performance, turboshaft engine performance, electric motors,
fuselage drag vs. weight curve fits, and several other assumptions. Typically, up
to 30 constants are required to calibrate different low-fidelity models accurately,
defined in the defaults.yaml input file. In HYDRA, several parametric models have
been systematically replaced with higher-fidelity counterparts and so lift the specific
assumptions made to arrive at those constants.
Accelerated convergence
8
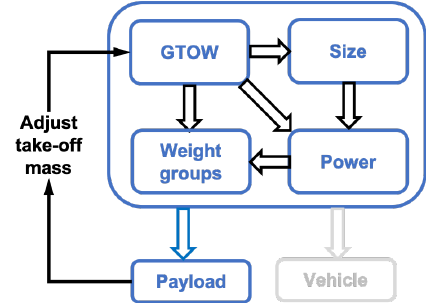
Figure 6: Accelerated convergence for iterative sizing
The implementation of iterative sizing shown in Fig. 1 requires several iterations (up
to 30) to converge take-off mass to the required tolerance. An alternate approach
is implemented in HYDRA, resulting in significantly faster convergence for no loss in
accuracy. This accelerated convergence technique is shown in Fig. 6.
In this method, the “inner loop” is executed in fixed take-off mass mode, and
the constituent weight groups are evaluated. Finally, the remaining mass (take-off
mass minus empty weight, minus energy storage) is assigned to payload mass, i.e.,
mpay =M−mempty −mbattery −mfuel (1)
Here, Mrepresents the take-off mass. Usually, mission profiles are specified
together with the target payload mtarget. However, the “inner loop” described above
runs once to calculate the payload mass mpay for a given take-off mass M. Therefore,
the take-off mass needs to be continuously adjusted to ensure that the “calculated”
payload matches the target payload. One update scheme for the take-off mass (used
9

in HYDRA) is
Mi+1 =Mi−dM
dmpay
(mpay −mtarget)(2)
The slope dM
dmpay is initially set to 3.0, and subsequently updated based on a finite-
difference approximation as iterations proceed. This method usually converges in 3
– 5 updates for take-off mass (vs. 30 iterations for the baseline technique), resulting
in 5 – 6 times faster convergence for no reduction in accuracy.
1.1.2 Constrained optimziation
The other technique that lends itself to VTOL conceptual sizing is constrained
optimization. The primary advantage of this technique is that it allows for simulta-
neous minimization of a cost function (e.g. vehicle operating cost) while satisfying
compatibility constraints (e.g., payload matching and landing footprint). If only
sizing is required, the design variables are fed as prescribed inputs and compatibil-
ity constraints are specified as nonlinear algebraic constraints. The take-off weight
is provided as a design variable and the payload is calculated as an output. The
condition that the calculated payload (mpay) be at least the target mission payload
(mtarget) is enforced as a nonlinear inequality constraint.
In HYDRA, two different optimizers are used for constrained minimization of
the vehicle hourly operating cost: gradient-based optimization, and differential evo-
lution. The constraints are landing footprint (based on wing span and fuselage
length) and payload matching. For concentual sizing, gradient-based optimiza-
tion requires an accurate initial condition to ensure that global minima (and not
local minima) are identified at the end of optimization. In HYDRA, the gradient-
10
based optimizer is initialized from several starting conditions, each of which are
obtained from a parametric sweep over the available high-level design variables. For
differential evolution, compatibility constraints are implemented indirectly as a
“death penalty” - an analog of exterior penalty functions. The cost function is in-
creased by a large number (1e6) for designs that violate any of the user-specified
constraints. Additionally, HYDRA is programmed to automatically add and remove
design variables based on the number of rotor and wing groups in the vehicle.
The optimizer in HYDRA is invoked after basic sizing over a limited parametric
sweep is carried out. Both optimization techniques - gradient based and differ-
ential evolution - are used to minimize vehicle operating costs, and the resulting
optimized designs are checked for uniqueness. These unique designs (obtained from
optimization with different starting conditions) are ranked by operating cost, weight,
battery/fuel or rated power based on a user-selected criterion. Further details are
provided in the appropriate section later on in the documentation.
2 Drag models
2.1 Fuselage and empennage drag
The fuselage is modeled as a slender body of revolution with its length set by
user inputs, and an equivalent diameter based on body width and height (also set by
the user). The procedure to calculate skin friction drag and base drag are identical
to those documented in NASA CR-3083: Rotary-Wing Aerodynamics: Volume II
11
by C.N. Keys. Similiarly, the approach for estimating the drag of horizontal and
vertical tail surfaces, as documented in NASA CR-3083, is implemented in HYDRA.
2.2 Edgewise rotor hub drag
The flat-plate area of each edgewise rotor hub is estimated based on a modified
procedure outlined in NASA CR-3083, as follows:
fhub = 1.2R2(0.0006 + 0.00222Nb)(3)
2.3 Spinner drag
The spinner is assumed to be a rotating body with a hemispherical nose and
blunt base. As shown in Fig. 7, the drag coefficient of such a shape is 0.2 (refer-
enced to cross-sectional area πd2/4), for a length-to-diameter ratio of 2.5. For the
calculations presented in this paper, a drag coefficient of 0.36 is assumed, to account
for additional blockage from the airframe, vertical fins and interference effects. The
radius of the spinner is 15% of the rotor radius.
2.4 Momentum drag for engine air intakes
For turboshaft engines operating at cruise speeds above 160 knots, the addi-
tional momentum drag is 0.3 ft2per intake.
12
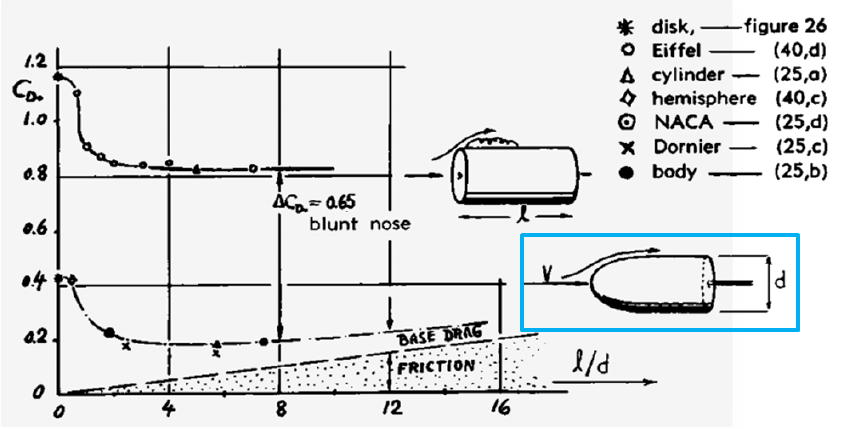
Figure 7: Spinner nose cone:drag coefficient, from Fluid Dynamic Drag, Hoerner
2.5 Landing gear drag
The drag of landing gear is modeled with a parametric representation (obtained
from NASA CR-3083) as follows:
logefLG =y0+mloge(0.001W)(4)
Here, fLG is in square feet, and Wis in lbs. The constants y0and mare set
based on the type of landing gear.
1. Retracted gear:fLG = 0
2. Wheeled gear:y0= 0.5755. The slope m= 0.443 for W ≥1000 lb, and zero
for W ≤1000 lb.
3. Skid gear:y0=-0.11626. The slope m= 0.4979 for W ≥1000 lb, and zero
for W ≤1000 lb.
13
2.6 Cooling drag
The cooling systems required to regulate engine temperatures creates addi-
tional drag, which is estimated using a parametric model given in NASA CR-3083.
fcool(ft2) = 10−4Pins(hp)(5)
2.7 Mast fairing drag for coaxial rotors
The fairing for the exposed length of the rotor shaft between the upper and
lower rotors of a coaxial system incurs an additional drag penalty, given by
fmast(ft2) = 0.0322R2(6)
2.8 Protrusion drag
The drag of protrusions is modeled as an additional 10% of the accumulated
parasitic drag of all wetted surfaces.
3 Rotor and Wing Performance Models
3.1 Rotor performance model
Two performance models are used to calculate rotor power required in hover
and axial flight. The first model is based on momentum theory, and the second
model is based on blade element momentum theory.
14

3.1.1 Momentum Theory
For momentum theory-based predictions, rotor power is calculated based on
assumed aerodynamic efficiency factors in hover and cruise. Imperial units (foot,
pounds of force and horsepower) are assumed for these expressions. In hover, rotor
power is given by
Phover(hp) = T1.5
R
550√2ρA FM (7)
Here, Tis the thrust required in hover from each rotor, and is calculated assuming
the segment weight is equally divided between all rotors. A vertical download factor
(configuration-dependent) is included in the estimation of rotor thrust. The rotor
disk area is A(ft2), ρis the ambient air density (slug/ft3) and FM is the rotor figure
of merit in hover.
In cruise, the power required by each rotor when operating in axial flight is
Pcruise(hp) = D
NR
V∞
550ηp
(8)
Here, Dis the total vehicle drag in lbs when operating at a forward flight
speed of V∞ft/s, which is overcome by each of the NRrotors operating at a propeller
efficiency of ηp.
3.1.2 Blade Element Momentum Theory (BEMT)
Certain configurations like the tilt-rotor or tilt-wing fly such that the rotors
operate predominantly in axial flight. Therefore, the Blade Element Momentum
Theory (BEMT) is used as a higher-fidelity replacement for momentum theory-based
predictions. Though BEMT can resolve finer details like angle of attack variations
15
along the span, it requires detailed inputs, namely airfoil tables and distribution
of blade chord and twist along the span. These details are populated as described
below.
The rotor is assumed to be constructed from multiple user-specified airfoils.
The lift and drag characteristics for each airfoil may be Reynolds-tabulated or mach-
tabulated. Several combinations of blade chord and twist distribution are generated
assuming linear taper and bilinear twist. The design variables for blade geometry
are:
1. Blade taper ratio (1:1, 2:1 and 3:1)
2. Blade bilinear twist junction (30% – 70% span)
3. Twist at bilinear junction (-5 deg to -20 deg)
4. Twist at tip (-5 deg to -35 deg)
The rotor RPM in cruise (specified as a fraction of hover RPM) is added as a siz-
ing variable. The BEMT analysis calculates the rotor power required for a given
thrust, for all mission segments, exploring a parameter space of 360 designs (com-
binations of blade twist and taper distribution). The rotor geometry for minimum
energy consumption over the mission is identified from the parametric sweep, and
the aerodynamic efficiencies (figure of merit F M in hover and propeller efficiency
ηpin cruise) are calculated for each mission segment.
Minimizing the energy required at the rotor ensures reduced fuel consumption,
but not necessarily a good overall design. A cruise-dominated mission results in a
16
prop-rotor with a potentially degraded hover figure of merit while achieving good
aerodynamic cruise efficiency. Therefore, installed power (and therefore, engine and
transmission weights) may increase, resulting in a lower payload fraction. To prevent
unchecked increases in powerplant weights, another condition is introduced in the
BEMT analysis: designs are considered “valid" if the hover figure of merit is greater
than a user-specified threshold (e.g., 0.72), and only these valid designs are ranked
to determine the “best” rotor efficiencies.
When BEMT is included in the sizing iterations, sizing proceeds in 3 steps:
1. Perform sizing with momentum theory and assumed efficiency factors in hover
and cruise (F M=0.75, ηp=0.82)
2. If the design satisfies all constraints, perform BEMT analysis to calculate aero-
dynamic efficiencies for each segment based on thrust requirements; extract
hover or cruise efficiencies (FM, ηp).
3. Perform sizing with momentum theory, using the calculated rotor aerodynamic
efficiencies obtained in Step 2.
Figure 8 shows the comparison of thrust and power obtained from BEMT
predictions with airfoil tables vs. sub-scale experiments for a variable-pitch and
variable-RPM sub-scale prop-rotor. Good predictions were obtained at various
cruise speeds ranging from 3 m/s to 15 m/s. For these cases, BEMT was found
to be sufficient for accurate performance predictions.
17
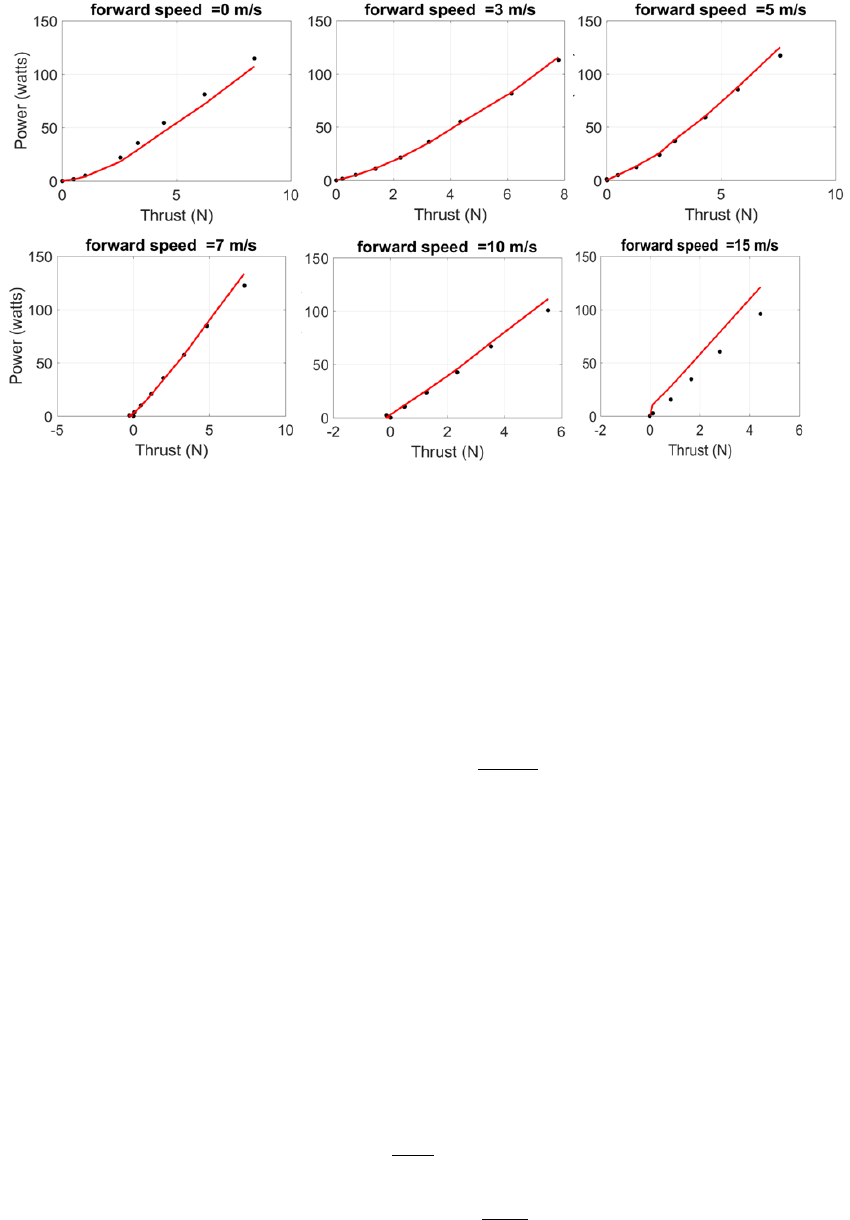
Figure 8: Comparison of BEMT predictions to experiments
3.2 Wing performance model
The drag coefficient of a fixed wing is given by
CD=CDo +1
πAReC2
L(9)
The lift coefficient CLand aspect ratio AR are sizing design variables. The profile
drag coefficient CDo is an assumed value, usually 0.014 (including protrusions and
interference). The Oswald efficiency eis calculated as
e= (Q+P πAR)−1
P= 0.38 ×0.02
Q=1.01
s
s= 1 −2dfus
bwing 2
The parameters are dfus = equivalent fuselage diameter, and bwing = wing span.
18
4 Weight models
There are three main contributors to vehicle take-off mass:
1. Energy storage - battery and/or fuel weight. This component may be
traded-off against payload for mission flexibility, depending on available vol-
ume.
2. Empty weight - this weight group represents the airframe, wings, rotors, en-
gines, transmission, motors, seats, avionics and other non-removable systems.
3. Payload - usually specified with the mission definition.
4.1 Engines, fuel and batteries
Though engines strictly belong in the empty weight category, the calculation
of fuel weights are inextricably linked to the evaluation of engine performance and
engine weights. Therefore, engine models are described in this section.
4.1.1 Engines
HYDRA has built-in models for fuel-burning engines of two types: gas turbine
engines, and reciprocating engines (piston engines and aero-diesel engines).
Turboshaft engines
Based on statistical data for various production engines, a trend line was fitted
with good accuracy (R2= 0.92) for the variation of engine weight Wengine (lb) with
19

installed power Pins (hp). The fitted engine weight model is given by
Wengine (lb) = 7.3874 P0.552
ins (10)
Another fit is shown in Fig. 9, in SI units with engines manufactured over the last
fifty years.
The variation of engine Specific Fuel Consumption (SFC) at peak efficiency
with installed power is
sfcbase (lb/hp-hr) = 1.549 P−0.161
ins (11)
Engines operating at sub-optimal conditions (i.e. at power settings lower than design
power output) suffer from higher specific fuel consumption. This effect is modeled
using a power law as
sfc =sfcbase Preq
Pins −0.256
(12)
Here, Preq is the power output required from the engine to produce a thrust T
during a mission segment. Finally, the variation of available power (relative to
installed power) with ambient temperature and pressure is given by
Pavail =Pins [1 −KT(θ−1)] [1 + KD(δ−1)] (13)
The terms θand δare ratios of ambient temperature and ambient pressure to their
corresponding values at mean sea level (ISA). The constants KTand KDare ob-
tained from curve fits of detailed engine performance curves.
Piston engines
The treatment of piston engine weights is similar to that followed for turboshaft
engines. The variation of engine weight with installed power is given by
20
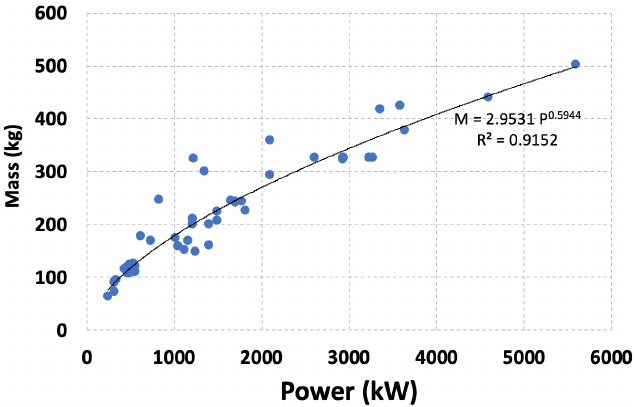
Figure 9: Statistics: turboshaft engine mass vs. installed power
Wengine (lb)=2.367 Pins (hp)0.916 35 ≤Pins (hp) ≤1000 (14)
Another fit is shown in Fig. 10, in SI units with a larger sample size, including less
efficient engines. The variation of engine SFC at its peak efficiency is
sfcbase (lb/hp-hr) = 0.42,Pins (hp) ≤4
= 0.594 −0.0046 Pins (hp),4≤Pins ≤56
= 0.52 Pins (hp)−0.0972,56 ≤Pins ≤1000
4.1.2 Fuel, tank and fuel handling systems
After calculating the engine power required, the mission profile (flight segment
duration) is used with engine power requirement and SFC estimates to calculate the
fuel weight as
mfuel =ΣNSEG
i=1 sfc(i)Peng(i) + munusable (15)
21
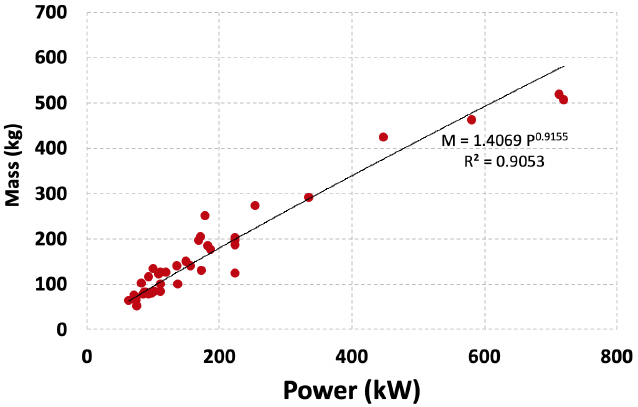
Figure 10: Statistics: reciprocating engine mass vs. installed power
An average density of 6.7 lb/gal is used for both turbine engine fuel and aviation
gasoline. The fuel tank and plumbing mass is estimated from fuel volume using
AFDD models as
Wtank = 0.4341 V0.7717
tank N0.5897
tank fcw f1.9491
bt (16)
The terms used in the equations are
Vtank is the tank volume in U.S. gallons (1 gal = 3.7.8 liters)
Ntank is the number of internal tanks
fcw is the crashworthiness mark-up factor, usually 1.31
fbt is the ballistic survivability mark-up factor (1.2 for military, 1.0 for civilian)
The weight of plumbing systems used for regulating fuel flow from tanks to
engines is modeled as follows:
k0plumb =max(0.022M, 120)
22
k1plumb = 0.025k0
Wplumb =k0plumb +k1plumb(0.01 ∗Ntank + 0.06 ∗Nengine)˙
V0.866
˙
Vis the peak fuel flow rate to the powerplant in lb/hr and the plumbing system
weight is in pounds. Mis the take-off mass in kg - the mixing of units and con-
ventions is a result of AFDD models being specified in FPS units, while HYDRA is
implemented in SI units.
For small-scale powerplants, the trendlines predict an over-estimate of fuel
handling system weight. To handle these special cases, a maximum limiter is placed
on the fuel system weights, with the limit set to 50% of fuel weight.
4.1.3 Battery models
Battery weights are accurately represented using a very simple statistical
model. Figure 11 shows the variation of battery weight with rated energy capacity
for commercially available small-scale batteries, where each data point represents a
manufactured unit. Arguably, a battery density of 158 W-hr/kg is quite low and
improvements can be made; this “conservative” design is typical of commercially
available battery packs including the safety casing.
For full-scale platforms used in commercial operations, several conservative
assumptions are used to incorporate various margins in sizing the battery.
1. The minimum depth of discharge is 7.5% of total energy capacity
2. The maximum state of charge near end of life for the battery is 80%, i.e., after
cycling, the usable battery capacity is at most 80% of the rated energy. Thus,
23
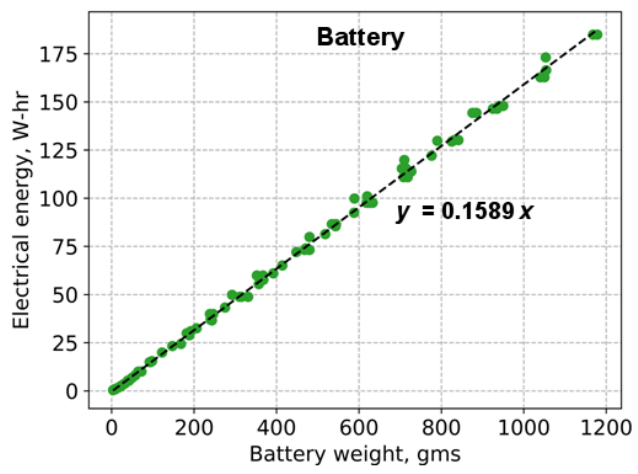
Figure 11: Small-scale batteries: weight statistics
the effective usable energy for battery sizing is 72.5% of the rated capacity.
3. The average discharge efficiency of the battery reduces by 4% for every unit
increase in average C-rating.
4. A specific energy of 240 Wh/kg is used to estimate the mass of the cells.
5. A pack integration factor of 0.75 (defined as battery mass to cell mass) is used
to estimate the weight of battery management systems and casing.
6. A curve fit of temperature rise vs. C-rating (obtained from experimental
data) is used to track the rise of cell temperature over the mission duration. A
maximum limit of of 70oC is used to iteratively add cells until thermal limits
are satisfied.
24
4.1.4 Electric motor weights
Though electric motor weights are strictly driven by peak torque requirements,
the data correlation between weight and peak rated power is also very good as shown
in Fig. 12. For small-scale motors, the speed controller is sized based on the current
drawn by the system assuming a 12 Volt source. The masses of several large-scale
motors with controllers are plotted against rated power in Fig. 13. Motor + speed
controller efficiencies range from 85% to 92% depending on the design point and
operating RPM range. Motor and speed controller weights are estimated as
Wmotor(lb) = 0.74 P P ≤13.4hp
WESC (lb) = 1.047 P P ≤13.4hp
Wmotor +WESC (lb) = 1.489 P0.783 13.4hp <P≤350 hp
4.2 Electric Transmissions
Generators for electric transmissions are sized in a manner identical to electric
drive motors. The components of an electric transmission are shown in Fig. 14.
The advantage of this hybrid system is that a mechanical transmission is not
required for power transmission to the rotors; further the hybrid system can serve
as a long-range drop-in upgrade for short-range battery-powered variants. The dis-
advantage of a turboshaft-electric hybrid system is that each additional component
introduces additional points of failure. Adding redundancy and fail-safe architec-
tures can incur a significant empty weight penalty.
25
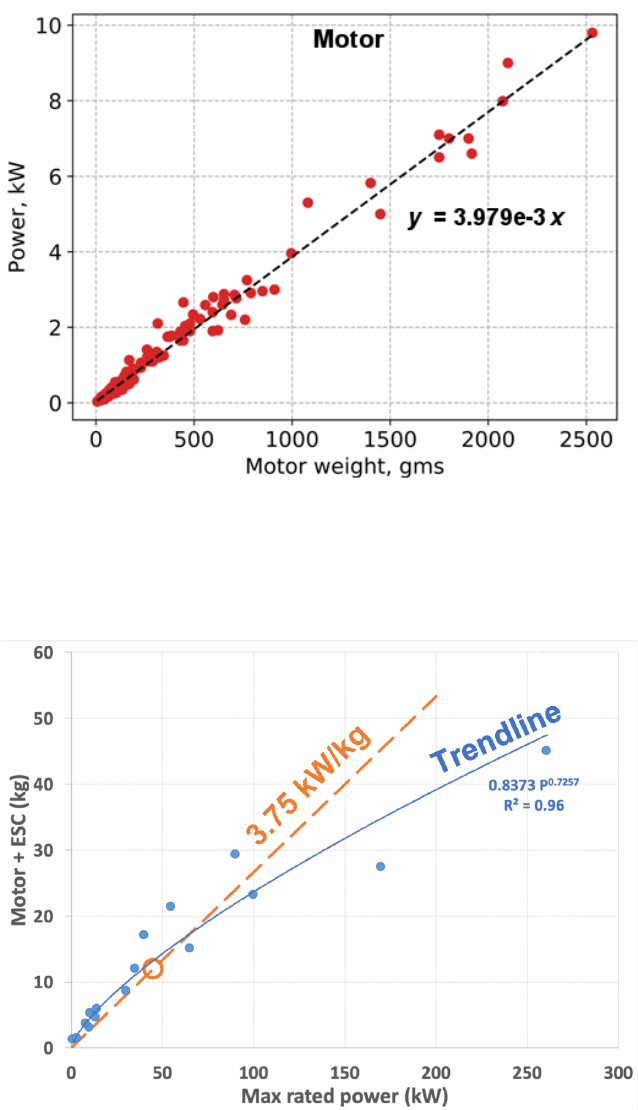
Figure 12: Statistics: weight of small BLDC motors
Figure 13: Statistics: large-scale DC motor + controller mass vs. installed power.
Manufacturing technology in 2018 can achieve 3.75 kW/kg of power density.
26
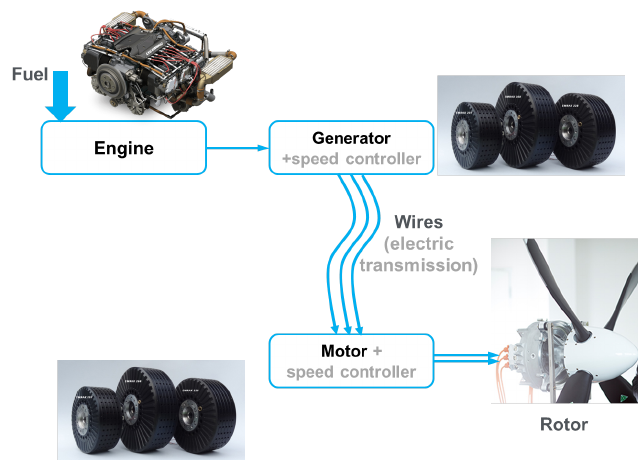
Figure 14: Turbine-generator hybrid powerplant for electric motor. 98% wire trans-
mission efficiency, 92% generator efficiency
4.3 Wire weights
Two types of wires are considered in the sizing analysis: power cables and signal
wires. The weights of electrical power cables are estimated from the vehicle rotor
layout using a wire mass per unit length per unit power of 0.0057 kg/kW/m. Signal
wires are calculated using a linear mass density of 0.17 kg/m and a knowledge of
the rotor layout, together with an estimate of channel counts. Based on user inputs,
doubly/triply redundant power cables and signal wires are automatically added to
the appropriate weight groups for estimating vehicle empty mass.
At full-scale, a key driver of vehicle weight is the rotor design parameter set
(tip speed, solidity, disk loading/radius, first rotating flap frequency). One such em-
27

Figure 15: Blade cross-section
pirical parameter is the flap natural frequency. In the legacy approach for estimating
rotor blade weight, the designer had to prescribe this parameter to perform sizing.
However, underlying data for the flap frequency is restricted to articulated and hin-
geless rotors, and plentiful data is not available for stiffer rotors (νβ≥1.08/rev). For
small-scale VTOL with very stiff rotor systems (νβ≥1.4/rev), extrapolation of the
trend line beyond the range of available data for νβmay yield erroneous estimates
for rotor blade weight. For eVTOLs, a physics-based approach is implemented and
used in HYDRA.
4.4 Physics based model for rotor blades
A schematic of the rotor airfoil is shown in Fig. 15. The cross-section consists
of two categories of materials: non-structural masses, and load-bearing components.
The non-structural masses are:
1. Paint: 0.15 mm thickness, density 1800 kg/cu.m, applied on surface
2. Glue: 0.25 mm thickness, density 1800 kg/cu.m, applied on skin, shear webs
3. Core: density of 52 kg/cu.m, encompasses cross-section area of 0.49 t
cc
4. Leading edge protection: 1.14mm thickness, density 8900 kg/cu.m, from lead-
28
ing edge to 25% chord on upper and lower surfaces.
Here, t
cis the airfoil thickness-to-chord ratio, usually 0.1 to 0.12 and cis the blade
airfoil chord. For the paint and glue, the chordwise location of the component center
of gravity is 0.5c. For the leading edge protection strip and core, the component
chordwise center of gravity locations are 12.5% chord and 57% chord, respectively.
4.4.1 Skin sizing
The skin is sized to withstand a total torsion moment equivalent to an airfoil
cm=0.2 at the maximum rated rotor speed. The total root pitching moment in hover
is
Mx=1
6ρV 2
TIPc2cmR
The skin thickness is given by
tskin =nMx
2Acsτskin
Here, Acs is the cross-section area of the airfoil, and τskin is the maximum allowable
shear stress in the skin. The factor naccounts for additional overload and safety
factors to account for for contingency conditions and fatigue margins.
4.4.2 Leading edge weight
The section chordwise center of gravity for the non-structural components
(paint, leading edge protection and core) along with the skin is obtained from the
respective weights and component centroid locations. If this center of gravity is
29

behind the blade quarter-chord, a leading edge weight is added to avoid torsional
divergence and flutter for the blade.
The CG of the non-structural components and skin is given by
x1
c=mLEP0.125 + mskin0.5 + mcore0.57 + mpaint0.5 + mglue0.5
mLEP +mskin +mcore +mpaint +mglue
If x1
cis greater than 0.25, then a leading edge mass is added, equal to
mLE = (mLEP +mskin +mcore +mpaint +mglue)4x1
c−1
4.4.3 Spar caps and shear web sizing
The spar is placed so that the neutral axis and CG both lie at quarter-chord.
A NACA-0012 section is used to estimate The elements that support shear and
bending moment due to lift and drag and bending loads are the spar webs (shear
and lag bending moment) and spar caps (flap bending moment and tension due to
the centrifugal load).
The limit load for eVTOL rotor blades is determined from the trim thrust
required under OMI (One Motor Inoperative) conditions. For the “conventional”
tilt-wing configuration (6 rotors on main wing, 2 rotors on horizontal tail) and the
tandem tilt-wing configuration (4 rotors each on canard and wing), the maximum
thrust scaling factor is approximately 150% the hover thrust. With rotor radius
R, rotor speed Ωand peak torque at the blade root Qbdetermined from the rotor
geometry, the vertical force on the blade is obtained by dividing the maximum
expected thrust level by the total number of blades as
Fz=W
NRNb
nz(17)
30

Figure 16: Blade spanwise segment
The terms nzis a load factor that can incorporate safety margins, dynamic over-
shoot/landing and fatigue factors for blade loads. The lift distribution along the
span is assumed to be quadratic (a structurally conservative loading profile - the
optimum hovering rotor features a linear spanwise lift distribution, discounting tip
loss effects). The blade is assumed to constructed with a pre-cone angle βpto alle-
viate root bending moments, and then subdivided into N= 5 equal span segments.
One such segment is shown in Fig. 16.
The dominant loads on the outboard end of the segment, that are carried by
the spar caps, are the centrifugal force (from all segments outboard of the present
one) and a flap bending moment due to (i) distributed lift on segments outboard of
the present one, and (ii) a combination of pre-cone and centrifugal load on segments
outboard of the present one. The blade spanwise segments are successively sized
starting from the tip segment and ending in the root segment. A schematic of the
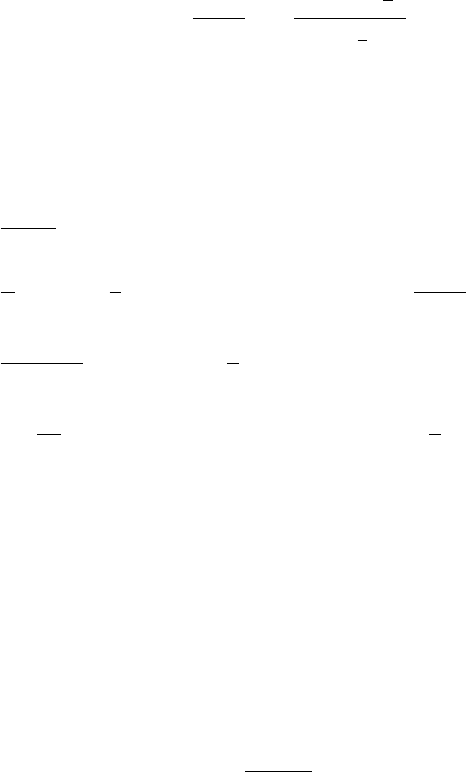
rotor blade segment and cross-section is shown in Fig. 17.
The total centrifugal load and flap bending moment at the inboard end of the
31
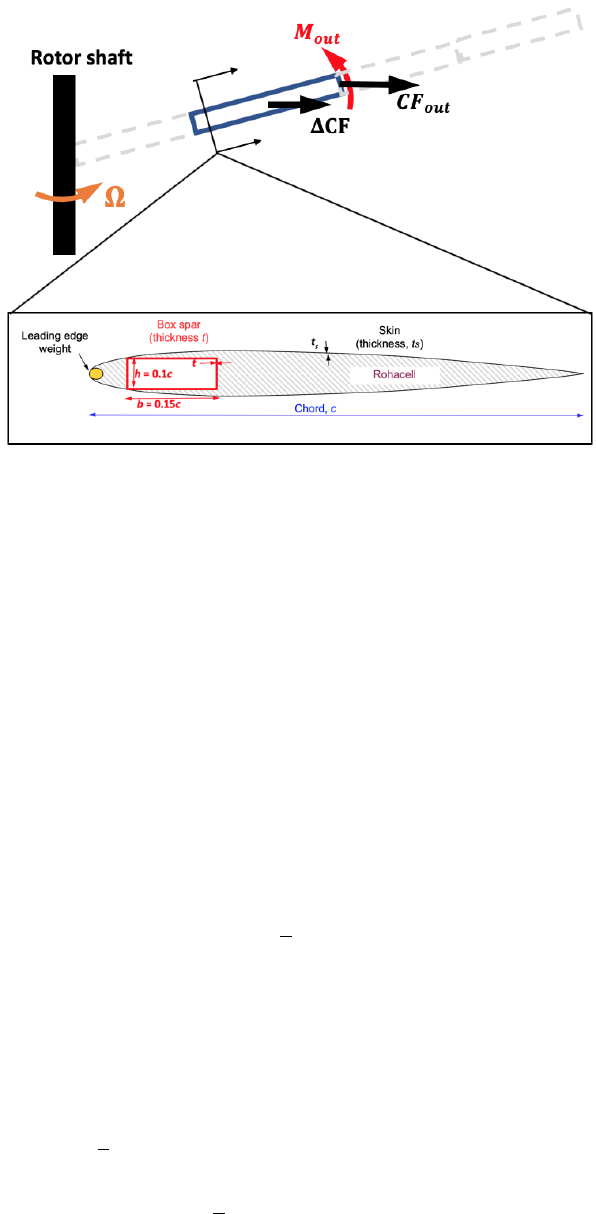
Figure 17: Rotor blade segment sizing: schematic
segment is
CF (xin) = CF (xout) + ∆CF (18)
M(xin) = M(xout) + ∆M(19)
The flap bending moment distribution due to lift, along the non-dimensional span
coordinate x(0 at root, 1 at tip) is
Mlift(x) = 1
4FzR(x4−4x+ 3) (20)
The additional centrifugal load and flap bending moment due to loads on the present
segment are
∆CF =1
2(ms+mns)V2
TIP (x)out2−x2
in)
∆M=−(CFout +1
2∆CF )∆Rβp+Mlift(xin)−Mlift(xout)
The spar mass per unit span is ms)and the non-structural mass per unit span is
32
mns. The maximum axial stress in the spar caps at the inboard end of the present
segment is
σxx(xin) = CF
Aspar
+M(xin)h
2
2bt h
22
The term Aspar is the area of the spar, given by 2(b+h)t. The individual
expressions can be rearranged to solve for the spar cap thickness t, as
t=RHS
LHS
LHS =1
nσmax +1
2V2
TIP(x2
out −x2
in)ρspar ∆Rβp
b+h
bh −1
RHS =1
2(b+h)CF (xout) + 1
2mnsV2
TIP(x2
out −x2
in)+Mlift(xin)
+1
bh M(xout)−∆RβpCF (xout) + 1
2∆CF
This formulation avoids iterative convergence inner loops for the rotor blade
structure during sizing, improving computational efficiency.
After sizing the spar, the shear webs thickness is determined from the vertical
bending load at the inboard end, given by
tweb = max 1.5nVz
hσskin
, tweb
Here, Vzis the vertical shear due to blade lift integrated from the inboard end of
the segment (x=xin) to the blade tip (x=1). After sizing one spanwise segment,
the total axial load and flap bending moment at the inboard end of the segment
are calculated using Eqns. 18,19 respectively. The loads at the inboard end of the
present segment are then assigned as tip loads for the next segment, and the process
is repeated for all segments in succession.
33
4.4.4 Root fitting sizing
The root fitting for the blade is assumed to extend from the shaft (x=0) to
10% of the blade span (x=0.1), and is made of 7075 Aluminum. The density is 2800
kg/cu.m, and a limiting axial stress of 20 MPa is used based on a fatigue life of 108
cycles. The construction of the root fitting is shown in Fig. 18.
The tube radius is assumed to be equal to 4×the airfoil thickness, and the
thickness tRoot is evaluated to ensure that the maximum tensile stress in the ma-
terial does not exceed the limiting stress (20 MPa). The tube thickness is solved
analytically, using a formulation similar to the approach used for spar sizing. The
expression for tube thickness is
tRoot =RHS
LHS
RHS =CF (x= 0.1)
2πrRootσlimit
+Mlift(x= 0.1) −MCF(x= 0.1)
3πr2
Rootσlimit
LHS = 1 −ρ
2σlimit
Ω2(0.1R)
The root fitting thickness is set to the larger of minimum gauge tmin or the calculated
thickness above, whichever is larger.
4.4.5 Torsion frequency check
The skin thickness is used to calculate the first elastic torsion frequency for the
rotating blade and ensure that it is above 3.3/rev at the hover RPM. If the torsion
frequency is too low, then additional skin thickness is added until this requirement
is satisfied, preserving the same spar design.
34

Figure 18: Blade root fitting
4.5 Flight controls
Two categories of actuators are modeled: fixed-wing, and rotary-wing.
4.5.1 Rotor controls
Unlike large rotorcraft, some eVTOLs feature low-bandwidth collective actu-
ators and no cyclic or swashplate. In such designs, the collective pitch (e.g., for
prop-rotors) is usually scheduled with airspeed, and RPM is used for feedback con-
trol. Sizing laws for these collective actuators are therefore markedly different from
those used for full-scale helicopter controls. The rotor hub mass and collective pitch
actuator masses scale with tip speed VTIP (and blade chord cfor the actuator) as
Mhub (kg) = 4.84 VTIP
171 2c
0.082(21)
Mact (kg) = 1.47 VTIP
171 2c
0.082(22)
The tip speed VTIP is in m/s and mean blade chord cis in meters.
35
4.5.2 Fixed wing controls
Fixed wing flap and actuator weights are obtained from the AFDD model as
Wflaps (lb) = 0.01735W0.644S0.41
wing (23)
For this model, the weights are in lbs, including the take-off weight W. The term
Swing is the total plan-form area of all fixed wings, and the actuator weights Wflaps
includes all actuators on all fixed wings.
4.5.3 Tilt actuators
For tilt-rotors and tilt-wing configurations, the masses of tilt actuators are
estimated as the larger of 15.5% of wing mass, and 3.61% of the total mass being
tilted by that actuator. For tilt-wings, both metrics are applicable; for tilt-rotors,
the tilt actuator weight is set to 10% of the masses being tilted.
Mtilt−wing = max(0.155Mwing,0.0361Mtilt)(24)
Mtilt−rotor = 0.10(Mhub +Mact +Mblades +Mmotor)(25)
4.6 Motor mount mass
The motor mount structure refers to the overhang beam connecting the motor
and rotor hub, to a wing (or fuselage). For the Vahana tilt-wing configuration, the
motor mount structure is the overhang beam used to offset the rotor hub ahead of the
wing leading edge, as shown in Fig. 19. The motor mount is modeled as a cantilever
beam of length Lwith a tip mass equal to the mass of the rotor hub, blades and
36
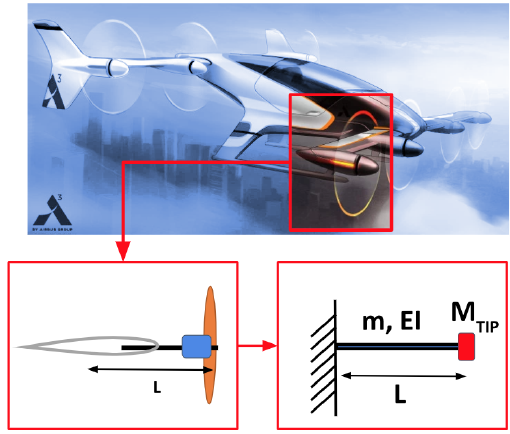
Figure 19: Motor mount model
motor. This structure is sized by a natural frequency requirement, i.e., the first
cantilever bending mode for this beam with a tip mass must be sufficiently
large so that the structural dynamics do not interact with flight dynamics (0 - 4
Hz). For eVTOLs, a target first bending frequency of 8.5 – 10 Hz is used to size the
motor mount beam. The overhang length is set to the sum of wing three-quarter
chord and one rotor radius.
For configurations such as CityAirbus (quad-ducted-coaxial rotors) with no
fixed wings, the rotors are mounted directly on the fuselage using support arms.
The support arms are treated as “motor mounts”, and the beam length is set to
120% rotor radius. Appendix A provides an analytical solution for sizing a cantilever
beam with several lumped non-structural masses, distributed structural and non-
structural masses based on a target frequency.
37
4.7 Wing weight model
Three models are available to estimate the weight of a fixed wing:
4.7.1 AFDD wing weight model
The weight of a fixed wing is estimated as
Wwing = 5.6641Lw
1000 0.847 n0.4
zS0.21
wingAR0.5
t
c0.0936
The wing weight is in lbs, Lwis the wing design lift in lbs, nzis the design ultimate
load factor, Swing is the wing plan-form area in sq. ft, AR is the wing aspect ratio
and t
cis the wing thickness to chord ratio.
4.7.2 Frequency tuning: bending loads
The wing spar is idealized as a cantilever beam with lumped non-structural
masses (rotor blades, hub and collective actuator assembly and motor), distributed
non-structural masses (skin, ribs) and a hollow circular spar. A schematic of one
half-wing is shown in Fig. 20.
The wing taper ratio λ=cTIP
cROOT is a design parameter with a default value of
0.75. A tapered wing shifts the non-structural skin mass inboard while strengthening
the root, resulting in increased first bending frequency for the same mass. The skin
thickness is set to include three layers of carbn fiber (45/0/45), resulting in an areal
mass density of ≈4.9 kg/sq.m. During sizing, the rotor assembly mass and motor
mass are used to calculate the wing spar thickness required to achieve a target first
bending frequency using the Rayleigh-Ritz approximation detailed in Appendix A.
38

Figure 20: Wing structure: layout
To decouple wing structural dynamics from vehicle flight dynamics, a target first
bending frequency of at least 4 Hz is desirable (for a take off mass of 2000 kg).
Larger aircraft feature progressively relaxed natural frequency constraints, because
the flight dynamic frequencies are lower for larger vehicles with correspondingly
larger moments inertia.
4.7.3 Hover: shear loads
After determining the spar thickness based on natural frequency requirements,
the wing structure is analyzed with static loads in hover with the tapered beam.
Rotor thrusts are applied at the motor mount locations and the static bending
stresses and shear stresses are calculated at five points between nodes (nodes are
located at the root and motor mount locations). A load factor of 3.8 and safety
margin of 1.5 are applied to ensure that the spar can support the loads in hover.
This hover loading condition is more limiting than cruise flight with the same load
39

factors and safety factors, because the bending moments due to distributed lift are
lower than the corresponding bending moments in hover. The shear loading is used
to estimate the number of ±45 deg layers of carbon fiber, while the bending loads
are supported by layers of uniaxial carbon fiber.
4.8 Airframe Weight Model
4.8.1 Statistical weight model
The AFDD82 fuselage weight model for helicopter is given by
wfuselage =wbasic +wpress +wcw (26)
where wbasic is the basic weight of the fuselage, wpress is the weight from any pressur-
ization constraints (set to none for the sample mission in this work) and wcw is the
weight addition for crashworthiness, which is assumed to be 6% of the basic weight
as per AFDD standards. The basic weight is given by
wbasic = 5.896framp WGTOW
1000 0.4908
n0.1323
zS0.2544
body l0.61 (27)
where framp is the factor for a retractable ramp, nzis the load factor, Sbody is the wet-
ted area of the fuselage (sq. ft) and lis the length of the fuselage (feet). While these
terms can be defined for full-scale helicopters/tiltrotor, their definitions become in-
creasingly challenging to interpret in the context of unconventional configurations
such as an eVTOL, with very different load paths compared to helicopters.
40

4.8.2 Component build-up model
Another approach to estimate fuselage mass is to consider the constituent
components in the airframe, and estimate the weight of each part based on the
design limit loads carried by that part. These parts are
1. Skin: using fuselage dimensions and an assumed uniform skin thickness, the
skin mass is calculated using the wetted area of the skin. This wetted area is
estimated as
Swet = 4π(lfhf)1.6+ (bflf)1.6+ (bfhf)1.6
31
1.6
(28)
The skin consists of paint, core, glue and carbon fiber. The mass of the fuselage
skin is therefore
Mskin = (ρcarbontcarbon +ρgluetglue +ρcoretcore +ρpainttpaint)(29)
2. Canopy: When a canopy is included, the wetted area of the canopy is assumed
to be 8% of the fuselage wetted area, and the canopy mass is calculated as
mcanopy =ρcanopytcanopyScanopy (30)
3. Bulkhead: 4 bulkheads (elliptical cross-sections) are placed along the length
of the fuselage. Bulkhead mass is calculated assuming no cut-outs, as
mbulkhead = 4 πbh
4tbulkheadρcarbon (31)
4. Keel beam: The keel beam mass is estimated based on strength requirements,
and sized to carry the following loads: (1) bending moment due to tail lift at
41
a load factor of 3.8 and safety factor of 1.5 (2) torsion moment in the airframe
due to differential wing lift of 25% vehicle weight, and a moment arm of half-
span; and finally (3) Combined vertical and lateral shear load during a 3.5 nz
landing.
4.8.3 Physics-based weight model: load-bearing airframe components
A physics-based model is used to estimate the weights of load-bearing compo-
nents that transmit rotor hub forces and wing lift and drag to the vehicle center of
mass. The airframe is subdivided into 3-D beam elements, each with bending, axial
and torsion degrees of freedom. Rotor hub loads and wing lift/drag are modeled
as point loads at the motor points, and distributed uniformly over the wing span,
respectively. The external loads corresponding to each mission phase are applied
on the structure, (rotor thrust, torque, wing lift and wing drag) and the resulting
stresses and deflections are calculated and stored at all the nodes. Subsequently,
the cross-section dimensions of the beams are iteratively resized to ensure; (i) Min-
imum factor of safety of 1.5 (based on Von-Mises stress) at a load factor of 3.5,
(ii) A maximum deflection of 10% for any node (relative to its distance from the
vehicle center). The cross-sections of all beam elements are assumed to be hollow
circles with wall thickness equal to 15% outer radius. The only design parameter
for a beam element is the outer radius of the cross-section. Beam cross-section radii
for all elements are updated iteratively until the 3 design criteria are satisfied, and
the weight of the airframe members is calculated using material density and final
dimensions. The finite element analysis iterations are performed within the sizing
42

Figure 21: Quad-rotor biplane tail-sitter: layout to finite element representation
loop. The parameterization for a quad-rotor layout is shown in Fig. 21.
Integration of FEA into sizing: workflow
The overall process is depicted in a flowchart shown in Fig. 22 and proceeds as
follows
1. Initialize: A geometric layout of the airframe is chosen, and beam elements
are defined. The present work assumes the beam cross section to be simple
shapes such as a hollow cylinder or a solid square.
2. Inner FEA loop: Point forces and moments are applied to the structure
43
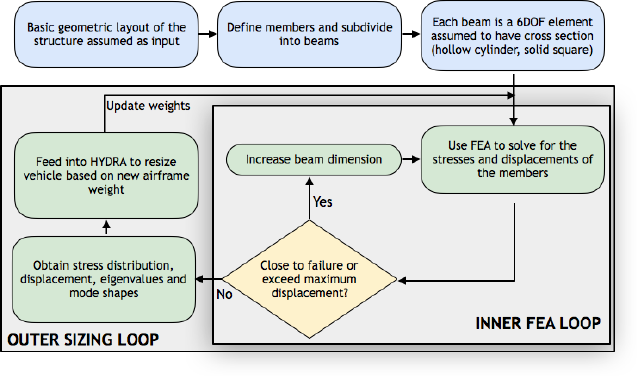
Figure 22: Workflow for including physics-based airframe weight model in sizing
based on rotor and wing loads, such as rotor thrust, rotor torque and wing lift.
The von-Mises stress (σVM), the corresponding factor of safety and deflection
of the various nodes are computed as
σVM = [(σxx −σyy)2+ (σyy −σzz)2(32)
+ (σzz −σxx)2+ 6(σ2
yz +σ2
xy +σ2
xz)]1/2
where σij are components of the stress tensor and the factor-of-safety (FOS)
is
FOS = min(σV M )i/σyield ∀i∈N(33)
where Nis the total number of beam elements.
3. Update cross-section dimensions: The mathematical constraints im-
posed for convergence are
|FOStar −∆FOS| ≤ min(FOS) (34)
44
where FOStar is the target FOS, set to 1.5 and ∆FOS is the allowable band,
set to 0.1. The axial and bending deflections of each node are normalized by
the distance of the node from the vehicle center of gravity. These normalized
deflections must not exceed a pre-determined fraction (0.08) to ensure struc-
tural rigidity. Depending on the type of condition encountered, two types of
cross-section updates are calculated:
(a) The beam cross-section is scaled up by the term (FOS/FOStar)1/3) if the
factor of safety is not sufficiently large. The cube root in the expression
stems from the fact that stress is inversely proportional to cross-section
dimension under static load.
(b) If the deflection of any one node is too large, the dimensions of all cross-
sections are increased by 10%. Increasing the sizes of all the member
cross-sections is required because adding stiffness to the root end of a
longer beam may be more effective than stiffening an outboard member
(in the present workflow, no apriori assumptions are made about the
load path, and so to guarantee deflections are restricted, all members are
stiffened).
The larger of the two calculated dimensions for each structural member is
provided to the FEA for the next iteration. The stresses and deflections are
recalculated, and members resized until the structure achieves the required
factor of safety and deflection limits.
The airframe weight is computed by multiplying the total volume of all the
45
beam elements with the material density (Aluminum, 2,700 kg/m3or carbon,
1650 kg/m3). This converged airframe weight from static finite element analy-
sis replaces the fuselage weight from the AFDD empty weight formulae in the
iterative sizing process.
The structural analysis used in in sizing the airframe structure also provides esti-
mates of the natural frequencies and the mode-shapes. This information can be used
in advanced stages of design to ensure sufficient separation between the airframe,
blade natural frequencies and operating RPM range of the rotor(s).
4.9 Weight margin
A weight margin is included in the analysis to admit additional expansion of
component performance (and therefore weight) at later stages of design. Therefore,
10% of the vehicle empty weight is allocated for a weight margin.
4.10 Fixed weight groups
Fixed empty weight groups consist of mission-specific components and do not
scale with vehicle dimensions or system performance during sizing. These fixed
weight groups are
1. Carpets, cabin trim and noise insulation
2. Avionics, sensors and flight computers
3. Airconditioning and heaters
46
4. Seats
5. Low voltage battery, anti-collision lights, air data systems
6. High voltage bus and power distributors
4.11 Comparison of weights vs. NDARC
To validate the convergence technique, individual weight models and perfor-
mance models in HYDRA, the vehicle weight breakdown was obtained for a single
main rotor helicopter with gas turbine engines and a mechanical transmission, and
compared to values obtained from NDARC (a NASA sizing code). Table 2 shows
that less than 1% error is obtained for most groups, while fuel is slight over-predicted
by 2.8%.
47
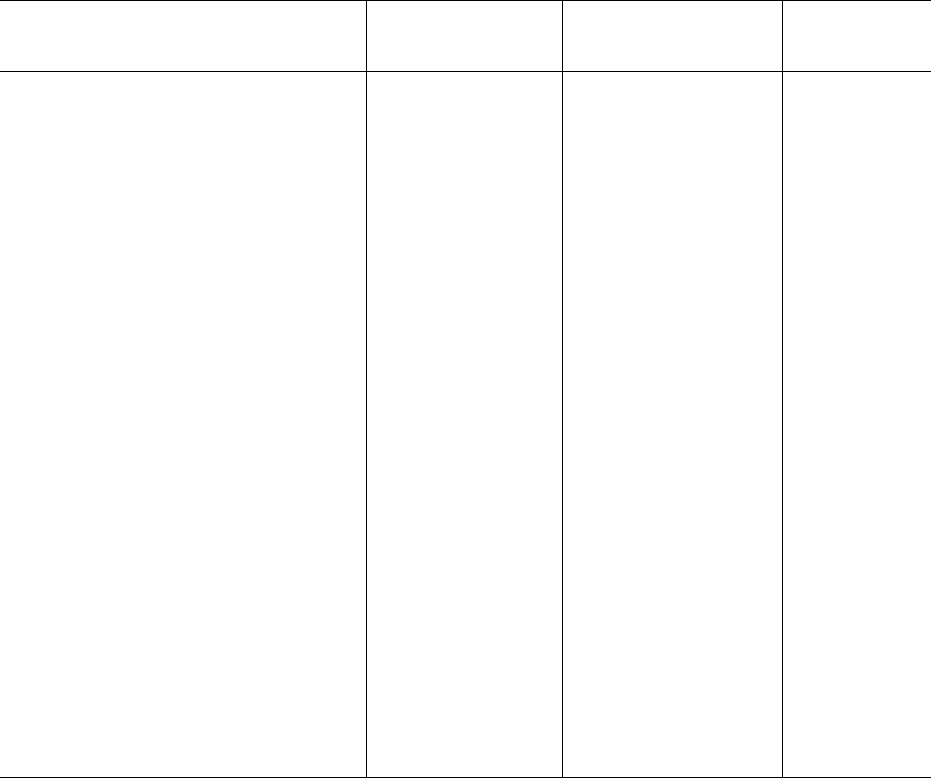
Table 2: Helicopter weight breakdown: HYDRA vs. NDARC
Group weight (lb) HYDRA prediction NDARC prediction % difference
Gross weight 14230 14243 0.1%
Payload 2500 2500 –
Fuel 1702 1752 2.9%
Empty weight 9252 9267 0.16%
Engine + accessories 1038 1024 1.3%
Transmission 1316 1292 -1.82%
Fuel system (pump, tank) 508 505 -0.6%
Airframe 1304 1301 -0.2%
Alighting gear 461 463 0.4%
Rotor system 1098 1100 0.2%
Empennage 184 179 2.7%
Flt. control, deicing + hydraulics 1013 1013 –
48

A Cantilever beam dynamics
Consider an eVTOL wing with multiple electric motors and rotors mounted
along the spar, shown in Fig. 23. The wing structure is idealized as a cantilever
beam with non-structural lumped masses placed along the span, shown in Fig. 24.
Figure 23: Rotor layout for an example eVTOL wing
Figure 24: Idealization of eVTOL wing structure
To expand the generality of the analysis, consider a tapered circular spar
running along the length of the wing. The cross-section of the spar is shown in
49

Figure 25: Linearly tapered circular spar
Fig. 25. The tube thickness is equal to t, and is uniform along the spar length. The
radius of the circular cross-section varies from r1at the root of the beam to r2at
the tip. The mass per unit span and bending stiffness of the spar is given by
m(x) = 2πρr(x)t
EIyy(x) = Eπr(x)3t
The first bending natural frequency is estimated using a Rayleigh-Ritz approx-
imation, with a mode shape set by the static deflection of the cantilever due to a
tip-load, i.e.,
w00(x) = P(L−x)(35)
Integrate twice along the span and apply the cantilever boundary condition to obtain
the deflected bending slope as
w0(x) = P
Eπt a2
r(x)2+a1
r(x)+a0(36)
50
The constants are
a2=−L
2r0−r1
2r02
a1=−1
r02
a0=L
2r0r2
1−1
2r02r1
Integrate the bending slope along the span to obtain the deflected mode shape as
w(x) = P
Eπt b0+b1x+bm
r(x)+blloger(x)(37)
The constants are
b0=−a2
r1r0−a1
r0loge(r1)
b1=a0
bm=−a2
r0
bl=a1
r0
A.1 Potential energy
The maximum potential energy is given by
U=1
2ZL
0
P2(L−x)2
EIyy(x)dx
Substitute for the bending stiffness to obtain
U=1
2
P2
Eπt[A+B+C](λ)
The term λis the spar taper ratio, given by
λ=r2
r1
(38)
51
The sum A+B+Cis well-represented by a cubic polynomial in λas
A+B+C≈(1.6261 −0.4826λ+ 2.1197λ2−0.5957λ3)1
K3
The constant Kis the inverse of the spar aspect ratio, given by
K=2( t
c)
ARwing
(39)
Here, t
cis the wing thickness to chord ratio, and ARwing is the wing aspect ratio.
A.2 Kinetic energy
The maximum kinetic energy of the beam has contributions from three types
of masses:
1. Structural masses: This term deals with the kinetic energy of the spar
structure. This contribution to kinetic energy is
KEs=ZL
0
1
22πr(x)tρ w(x)2ω2
ndx =P2
E2πtρω2
n(RHS)
The term RHS is a function of the taper ratio λ, length Land spar taper ratio
inverse Konly. Further, the dependence on wing taper λcan be approximated
using a cubic polynomial in λ. Thus, the kinetic energy coefficient RHS is
approximated as
RHS ≈L2
K5(0.04823 + 0.269λ+ 0.15178λ2+ 0.36917λ3)
2. Non-structural distributed masses: This term deals with the kinetic en-
ergy due to the skin and other components (e.g., wires) that do not contribute
52

significantly to bending stiffness. The kinetic energy term is
KENS =ZL
0
1
2mNS(x)w(x)2ω2
ndx
The non-structural mass due to wing skin is given by
mNS(x) = 2MNS
A(t
c)r(x)
The term MNS
Ais the non-structural mass per unit plan-form area of the skin.
Define an intermediate quantity βgiven by
β=MNS
A(t
c)
The expression for kinetic energy of non-structural masses simplifies to
KENS =βP2ω2
n
E2π2t2RHS
3. Non-structural lumped mass: This term refers to the kinetic energy of
the electric motor/speed controller unit, rotor hubs and rotor blades. These
discrete lumped masses are mounted along the wing spar, and the kinetic
energy of these masses is given by
KElump =ΣNM
i
1
2Miw(xi)2=P2ω2
n
E2π2t2∆RHS
The coefficient ∆RHS is
∆RHS =ΣNM
i
Mi
2b0+b1xi+blloger(xi) + bm
r(xi)2
A.3 Frequency tuning
The goal is to determine the spar mass by setting a target first natural fre-
quency ωnfor the cantilever beam with distributed and lumped non-structural
53
masses. Equating the maximum total kinetic energy and maximum potential energy
for the first bending mode, we obtain
1
2
P2
E2πt LHS =ω2
nP2
E2t(RHS) + P2
E2π2t2β(RHS) + P2
E2π2t2∆RHS(40)
Solve for spar thickness as
t=Eπ
2ω2
n
LHS −ρπRHS−1
[β(RHS) + ∆RHS]
The total spar mass is therefore
Mspar =πρ t(1 + λ)r1(41)
For validation of the Rayleigh-Ritz solution, several cases were evaluated with
and without lumped non-structural masses.
A.4 Validation
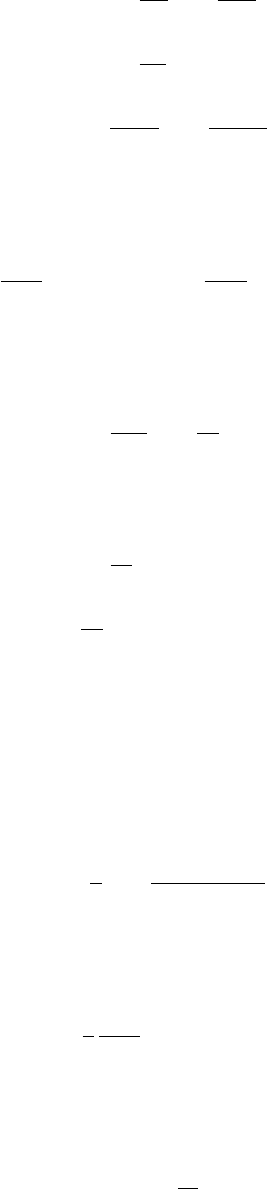
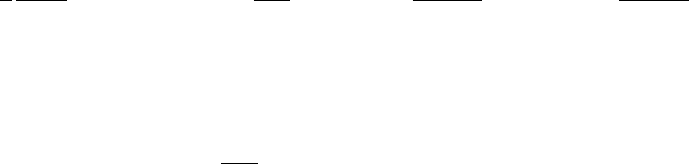
A.4.1 Case 1: cantilever beam
Consider a cantilever beam with a hollow circular cross-section of constant wall
thickness, and the cross-section radius is linearly tapered from root to tip, with a
taper ratio of λvarying from 0.5 to 1.2. The beam length is 2.9 m, mean tube radius
is 0.1411 m. The first bending natural frequency predictions from the Rayleigh-Ritz
approximation are compared against a beam Finite Element Method analysis. These
two frequencies are plotted in Fig. 26. The Rayleigh-Ritz approximation exhibits
about 2% over-prediction, but otherwise captures the trends accurately. In this
example, no non-structural masses were considered.
54
(a) Natural frequency vs. taper ratio (b) Rayleigh-Ritz vs. FEM
Figure 26: Natural frequency: Rayleigh-Ritz vs. FEM predicted natural frequencies
for a tapered cantilever beam
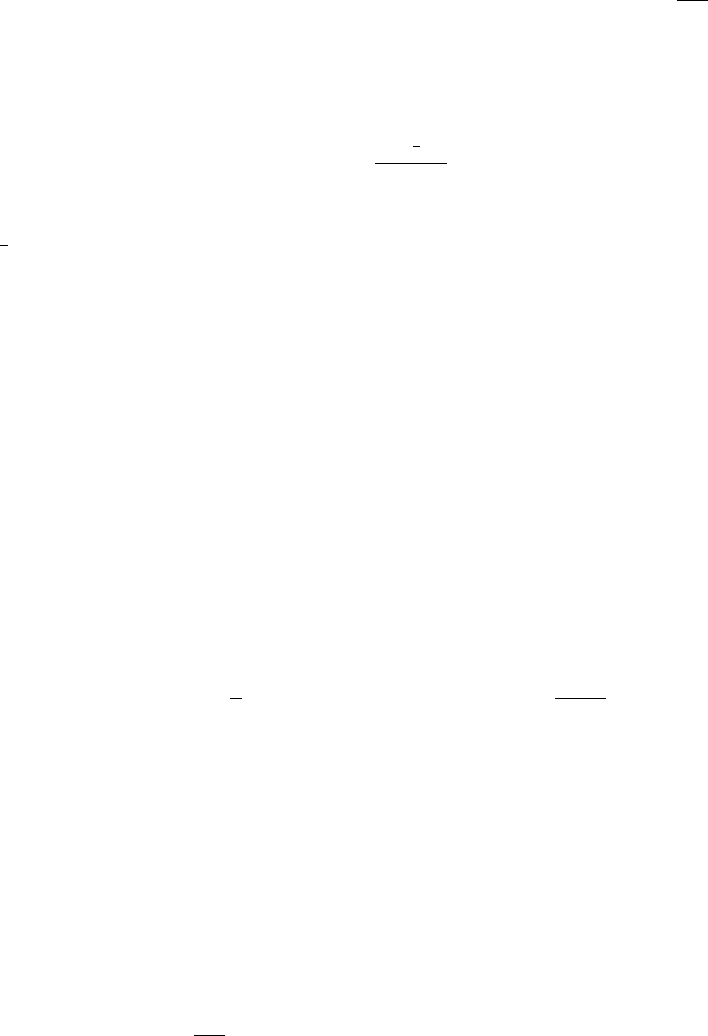
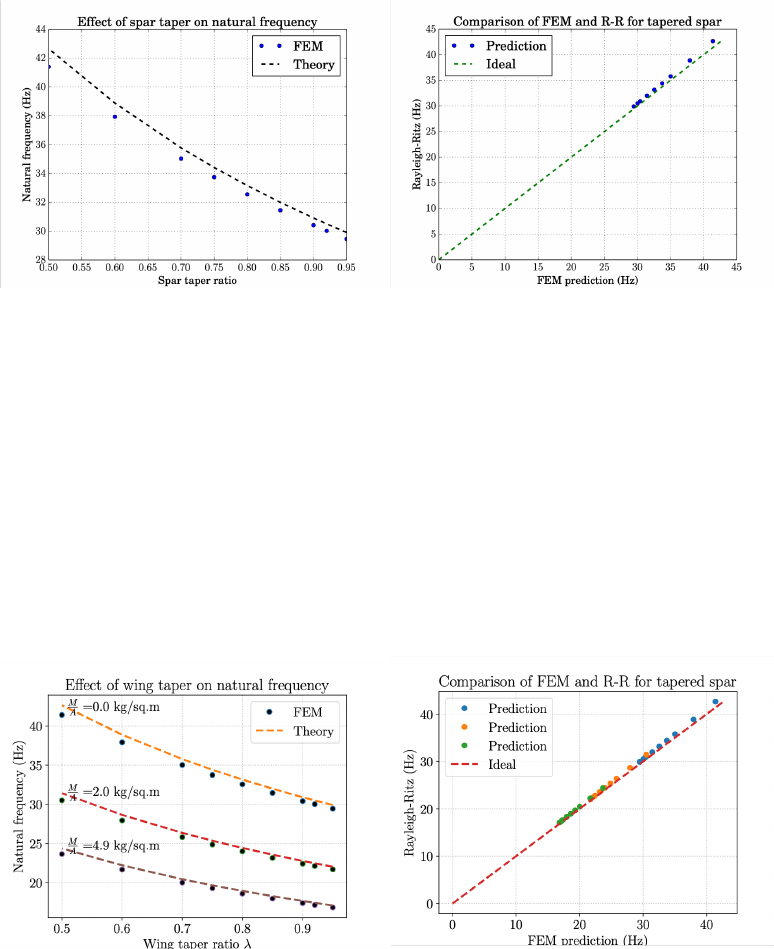
(a) Natural frequency vs. taper ratio (b) Rayleigh-Ritz vs. FEM
Figure 27: Natural frequency: Rayleigh-Ritz vs. FEM for a tapered cantilever beam
with distributed non-structural masses
55
(a) Layout of eVTOL wing (b) Rayleigh-Ritz vs. FEM
Figure 28: Natural frequency: Rayleigh-Ritz vs. FEM for an example eVTOL wing
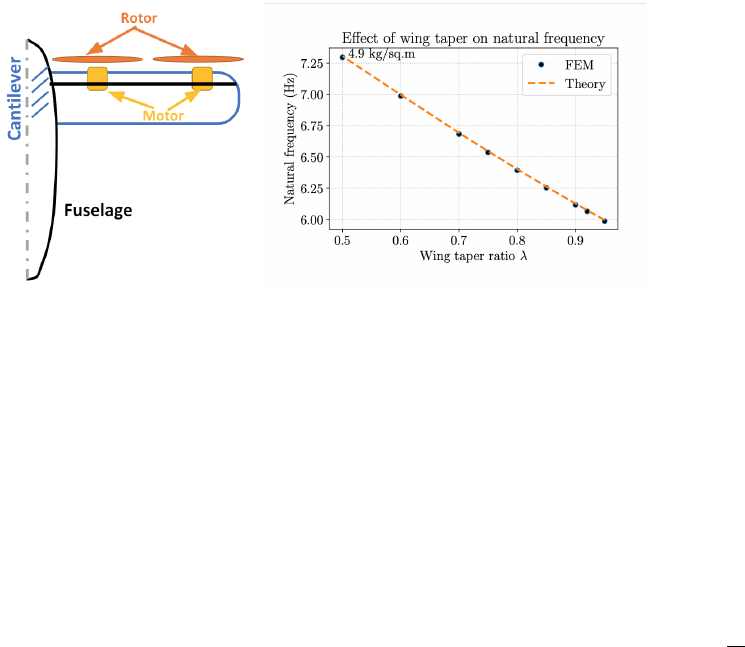
A.4.2 Case 2: distributed non-structural mass
This case is representative of an aircraft half-wing with skin, and no lumped
masses. The non-structural masses are represented as a mass per unit area, i.e., M
A
kg/m2. Three different values of the non-structural mass per unit wing area were
evaluated: 0, 2.0 and 4.9 kg/m2. The resulting natural frequencies were calculated
from both Rayleigh-Ritz and FEM, and are plotted in Fig. 27. Excellent agreement
is obtained.
A.4.3 Case 3: half-wing with lumped masses
This case is representative of an eVTOL wing. The dimensions of the beam
are the same as in the previous examples, and the distributed skin mass per unit
area is 4.9 kg/m2. Two lumped masses (21.3 kg, 27 kg) are placed along the beam
at 0.5Land L, respectively. The wing layout and natural frequencies are shown in
Fig. 28.
56
