Experience With A Software Defined Machine Architecture WRL 91 10
WRL-91-10 WRL-91-10
User Manual: WRL-91-10
Open the PDF directly: View PDF ![]() .
.
Page Count: 49
A U G U S T 1 9 9 1
WRL
Research Report 91/10
Experience
with a
Software-Defined
Machine
Architecture
David W. Wall
d i gi t a l
Western Research Laboratory 250 University Avenue Palo Alto, California 94301 USA
The Western Research Laboratory (WRL) is a computer systems research group that
was founded by Digital Equipment Corporation in 1982. Our focus is computer science
research relevant to the design and application of high performance scientific computers.
We test our ideas by designing, building, and using real systems. The systems we build
are research prototypes; they are not intended to become products.
There two other research laboratories located in Palo Alto, the Network Systems
Laboratory (NSL) and the Systems Research Center (SRC). Other Digital research groups
are located in Paris (PRL) and in Cambridge, Massachusetts (CRL).
Our research is directed towards mainstream high-performance computer systems. Our
prototypes are intended to foreshadow the future computing environments used by many
Digital customers. The long-term goal of WRL is to aid and accelerate the development
of high-performance uni- and multi-processors. The research projects within WRL will
address various aspects of high-performance computing.
We believe that significant advances in computer systems do not come from any single
technological advance. Technologies, both hardware and software, do not all advance at
the same pace. System design is the art of composing systems which use each level of
technology in an appropriate balance. A major advance in overall system performance
will require reexamination of all aspects of the system.
We do work in the design, fabrication and packaging of hardware; language processing
and scaling issues in system software design; and the exploration of new applications
areas that are opening up with the advent of higher performance systems. Researchers at
WRL cooperate closely and move freely among the various levels of system design. This
allows us to explore a wide range of tradeoffs to meet system goals.
We publish the results of our work in a variety of journals, conferences, research
reports, and technical notes. This document is a research report. Research reports are
normally accounts of completed research and may include material from earlier technical
notes. We use technical notes for rapid distribution of technical material; usually this
represents research in progress.
Research reports and technical notes may be ordered from us. You may mail your
order to:
Technical Report Distribution
DEC Western Research Laboratory, WRL-2
250 University Avenue
Palo Alto, California 94301 USA
Reports and notes may also be ordered by electronic mail. Use one of the following
addresses:
Digital E-net: DECWRL::WRL-TECHREPORTS
Internet: WRL-Techreports@decwrl.dec.com
UUCP: decwrl!wrl-techreports
To obtain more details on ordering by electronic mail, send a message to one of these
addresses with the word ‘‘help’’ in the Subject line; you will receive detailed instruc-
tions.
Experience with a
Software-Defined Machine Architecture
David W. Wall
August, 1991
d i gi t a l
Western Research Laboratory 250 University Avenue Palo Alto, California 94301 USA
Abstract
We built a system in which the compiler back end and the linker work
together to present an abstract machine at a considerably higher level than
the actual machine. The intermediate language translated by the back end is
the target language of all high-level compilers and is also the only assembly
language generally available. This lets us do intermodule register allocation,
which would be harder if some of the code in the program had come from a
traditional assembler, out of sight of the optimizer. We do intermodule
register allocation and pipeline instruction scheduling at link time, using in-
formation gathered by the compiler back end. The mechanism for analyzing
and modifying the program at link time was also useful in a wide array of
instrumentation tools.
i

1. Introduction
When our lab built its experimental RISC workstation, the Titan, we defined a high-level
assembly language as the official interface to the machine. This high-level assembly language,
called Mahler, represents a compromise between a traditional assembly language and a com-
piler intermediate language. It is the target language for all high-level language compilers, and
it is also the only assembly language available for general use. For this reason we say that the
Titan/Mahler combination is a machine with a software-defined architecture: hardware with a
software face.
We had two reasons for this approach. First, programming a RISC machine in a true
assembly language can be quite unpleasant. We expected this to be especially true for us,
because the Titan’s instruction set is reduced even further than most RISC machines that pre-
ceded or followed it [1,5,16,24,26,31,33], and moreover we expected the architecture to change
somewhat from generation to generation. Second, we wanted to do very global optimization,
including intermodule promotion of variables to registers. Traditional assemblers can interfere
with this by allowing actions that the optimizer does not know about; this forces the optimizer
to make conservative assumptions.
Mahler is not intended to be a machine-independent intermediate language, an idea going
back thirty years or more [37]. Its structure is intentionally quite close to that of the Titan
family, and it is more appropriate to think of it as a high-level assembly language. To put it
another way, Mahler provides the same sort of clean interface for the Titan that a CISC archi-
tecture provides for its microcode engine. Within the envelope of this interface, the assembler
and linker can safely perform optimizations that require knowledge of the entire program.
This paper describes our experience with Mahler. Section 2 briefly contrasts the Titan
hardware with the Mahler interface. Section 3, the bulk of the paper, describes the implemen-
tation of the Mahler assembler and linker, and describes the optimization and instrumentation
capabilities of the system. Section 4 contains quantitative measurements of the effectiveness of
Mahler’s link-time optimizations.
2. Titan and Mahler
The Titan [29] is an experimental, high-performance, 32-bit scientific workstation
developed at Digital Equipment’s Western Research Lab (WRL). It is the first of a family of
machines that we have designed. There have already been two different versions of Titan itself
and a substantially different CMOS machine we nevertheless call the MicroTitan [23]. These
machines are generally similar in that each is a pipelined load-store architecture with a large
register set and a floating-point coprocessor. They are substantially different in the size of the
register set, the details of the pipeline, and the interface and capabilities of the coprocessor.
Both the Titan and the MicroTitan are load-store architectures. Memory is accessed only
through simple load and store instructions with a base register and a 16-bit displacement.
Early versions of some of this material appeared in Proceedings of the SIGPLAN ’86 Symposium on Compiler Construction (1986) [40], Second
International Symposium on Architectural Support for Programming Languages and Operating Systems (1987) [44], and Proceedings of the
SIGPLAN ’88 Conference on Programming Language Design and Implementation (1988) [41].
1
EXPERIENCE WITH A SOFTWARE-DEFINED MACHINE ARCHITECTURE
Other operations like addition and subtraction are three-register instructions that cannot access
memory. Branches and jumps are delayed [31]: the transfer of control does not occur immedi-
ately after the branch instruction, but rather one instruction later than that. The instruction exe-
cuted after a branch is said to occupy the branch slot. Filling the branch slot with a useful
instruction rather than a no-op is desirable.
The CPU pipeline can stall for one cycle at a memory reference, depending on the instruc-
tion that preceded it, or for tens of cycles at a coprocessor operation if it tries to fetch a copro-
cessor result that is not ready yet. These stalls are implemented by the hardware and do not
require explicit no-ops. Nevertheless, we would like to avoid these wasted cycles by schedul-
ing other instructions to fill them whenever possible.
Mahler is the intermediate language used by all of the front-end compilers implemented
for the Titan. It has a uniform infix syntax for operations performed on addresses, signed
integers, unsigned integers, single-precision reals, and double-precision reals. These operations
are performed on constants or named variables. A variable may be either local to a procedure
or global. Some variables are user variables from the source program, while others are tem-
porary variables generated by the front-end compiler. Branches in Mahler are not delayed.
There is no explicit concept of a register in Mahler; it is as if there are unboundedly many
registers available, each corresponding to a named scalar variable. Procedures are explicitly
declared and explicitly called, as in a high-level language.
Thus Mahler hides several machine-level aspects of the Titan: the registers, the pipeline,
the delayed branches, and the asynchronous coprocessor. Nevertheless we want to treat the
Mahler interface as the official machine description, and as the only available assembly
language. The Mahler implementation therefore needs to use these resources well, so that per-
formance is not degraded and Mahler’s clients do not wish that they had direct control over
them.
We accomplish this by taking advantage of the fact that Mahler is the official machine
description. This means that it has complete control over an entire program, regardless of what
high-level languages it is written in, and regardless even of whether ‘‘assembly language’’ sub-
routines are included. The Mahler implementation uses this complete control to perform
several code improvements at link time, when the entire program is available for analysis.
3. The Mahler implementation
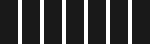
Figure 1 shows an overview of our language system. The Mahler implementation con-
sists of the Mahler assembler and an extended linker. A high-level language compiler or a
human writes source files in the Mahler language. The assembler reads the Mahler source files
and produces object modules. These object files can be linked in the usual manner to form an
executable program, or they can be improved at link time by invoking an intermodule register
allocator and an instruction scheduler. They can also be instrumented at link time in various
ways. The assembler extensively annotates the object modules with information that enables
these link-time transformations to be done quickly and correctly.
2
Modula-2 C Pascal
Fortran Scheme
Mahler source files
Annotated object files
Executable file
Mahler
assembler
Mahler
linker
Human
assembly
programmer
Local optimization
Code annotation
Intra-proc variable coloring
Per-procedure use estimates
Variable promotion
Pipeline scheduling
Code rewriting
Program-wide use estimates
EXPERIENCE WITH A SOFTWARE-DEFINED MACHINE ARCHITECTURE
Figure 1. The Mahler implementation.
3.1. The Mahler assembler
Code selection on a RISC is easy because there are few choices. Since Mahler is at a
higher level than the hardware, it is both possible and desirable to do a number of classical
optimizations. Some are global optimizations based on data-flow analysis, but most are local
optimizations like local strength reduction. On the Titan, for example, multiplication by an
integer constant can be profitably replaced by the sum or difference of as many as four shifts.*
The Mahler assembler starts by parsing the Mahler source file and producing an internal
form that represents each basic block as a directed acyclic graph (DAG). All of the local
optimization is then performed on this DAG structure. Within each basic block, the DAGs for
common subexpressions, including multiple uses of the same variable value, are merged when
possible.
After DAG optimization, the assembler traverses the DAG, generating code for each node
in turn. It allocates temporary registers from a small set of eight reserved for expression
evaluation. This number of temporaries is large enough that most basic blocks do not have to
spill these registers to memory, but small enough to leave as many registers as possible for
global allocation.
In general, the assembler generates simple fast code whose performance will be tolerable
even without link-time improvement. It makes no attempt to keep variables in registers, except
locally within a basic block. For the most part, it does not try to avoid pipeline stalls, and it
generates a no-op after each branch. The exceptions to this occur only inside ‘‘idioms,’’ single
operations in Mahler that require sequences of several instructions at the machine level. One
example of an idiom is procedure call; another is variable left shift, which is carried out as an
indexed jump into a table of thirty-two constant left shifts. These idioms are somewhat like a
*Since constants between 1 and 170 can all be handled this way, this eliminates all the multiplications in many
programs. Bernstein [7] explored this technique more generally.
3
EXPERIENCE WITH A SOFTWARE-DEFINED MACHINE ARCHITECTURE
set of standard macros, and we tailored their expansions to do useful work during pipeline
delays and branch slots whenever we could.
Part of the assembler’s job is to collect and record information to help the link-time regis-
ter allocator and pipeline scheduler. It builds a table of the variables and procedures that are
defined or referenced in the module, and includes this table in the object file. It also annotates
the code heavily with a kind of generalized relocation information, which the register allocator
uses to remove loads and stores of variables that it promotes to registers. Finally, it flags cer-
tain code sequences in idioms as unchangeable so the pipeline scheduler will know not to harm
them.
In addition, the assembler optionally does a dataflow analysis on each procedure to deter-
mine whether two locals of the same procedure are ever simultaneously live. If they aren’t, the
link-time register allocator can decide to keep them in the same register.
When the assembler has finished with all of the source files, the resulting object modules
can be linked in the usual manner. Alternatively, the linker can also be requested to perform
register allocation and instruction scheduling based on the information the assembler has
included with each object module.
3.2. The Mahler linker
The interesting part of the Mahler implementation is the linker. The Mahler linker is a
standard linker, augmented with a variety of code transformation options. These transforma-
tions include optimizations like inter-module register allocation and pipeline instruction
scheduling. They also include various kinds of high-level and low-level instrumentation.
The code transformation system is invoked by the linker proper, but is essentially
independent of it. The linker reads into memory the modules to be linked, from object files or
from libraries, and passes each in turn to the module rewriter. Depending on the requested
transformation, the module rewriter changes the module in memory and returns it to the linker
proper. The changed module has the same format as a module read from a file, so several
independent transformations can be done in succession. After all the transformations, the
linker combines the resulting object modules into a single executable image, which it writes to
an executable file.
Some transformations are easy and do not depend on much context; others are harder and
require knowledge of the program structure, sometimes even at the source level. This kind of
information is collected by the assembler and passed in the object module to the linker, which
can then combine the information from all of the modules if needed. The assembler includes
this information routinely, so it will be present no matter what transformations we ask the
linker to do.
Transformations require us to insert, delete, or change individual instructions. Inserting
and deleting is the hard part, because this causes the addresses of code and data locations to
change. To correct for this, we must do two things: compute a mapping from old addresses to
new ones, and find each place in the program where an address is used and identify the address
referenced there.
4
EXPERIENCE WITH A SOFTWARE-DEFINED MACHINE ARCHITECTURE
Computing the mapping is straightforward because we know where we are inserting or
deleting instructions. We simply keep track of how much insertion and deletion has been done
at each point in the program. We must be careful, however, to identify code inserted between
two instructions as either after the first instruction or before the second. The destination of a
branch to some instruction should be changed to point to new code inserted before that instruc-
tion, but not to new code inserted after its predecessor. The computation of the correct map-
ping of this instruction’s address must distinguish between these two similar-looking inser-
tions.
Finding the places where addresses are used also turns out to be relatively easy. Each
object module contains a loader symbol table and relocation tables that mark the places where
unresolved addresses are used. An unresolved address may be one that depends on an
imported symbol whose value is not yet known, or may be one that is known relative to the
current module but that will change when the module is linked with other modules. In either
case it must be resolved during normal linking, and the relocation tables tell the linker what
kind of address it is. This same information also lets the module rewriter correct the value, if
only by leaving the relocation entry in place so that the linker will correct it.
Other addresses are not marked for relocation, because they are position-relative addresses
and will not change when the module is linked with others. These are all manifest in the
instruction format itself, as in the case of a PC-relative branch instruction. If instructions are
inserted between a branch and its destination, we increase the magnitude of the branch’s dis-
placement.
Inserting and deleting instructions can have an effect on span-dependent branches. We
believed that this would not be a problem, and it never was; our span-dependent branches were
used only within a procedure, and no procedure was ever too big. Handling span-dependent
branches is well-understood, however, and incorporating a classical algorithm [38] would not
be hard.
We are translating individual object modules into new object modules, so we must also
translate the loader symbol table and relocation tables. Addresses in the symbol table are
tagged with types that tell us how to correct them. Addresses in the relocation tables are a bit
different, since they identify specific code or data words, rather than locations; even if we
insert a new instruction, the relocation entry should apply to the same instruction as before!
We therefore do not translate these addresses by looking them up in our mapping; instead we
build the new relocation table as we build the new segment, appending an entry whenever we
append the associated instruction.
In summary, the algorithm for modifying an object module is as follows. Based on the
transformation requested, the linker determines the changes to be made, possibly using infor-
mation left by the assembler. In one pass over the module it makes the individual changes.
As it does this, it builds a mapping from old addresses to new, in each case relative to the
beginning of the module under consideration. On a second pass it corrects the addresses that
appear in the changed code. During this second pass it also produces a new version of the
code’s relocation table. It then goes on to correct the addresses that appear in the data segment
and in the loader symbol table. The result is a new version of the object module. This new
5

EXPERIENCE WITH A SOFTWARE-DEFINED MACHINE ARCHITECTURE
object module can then be linked with others just as if it had been read from an object file, or
can be passed in turn to another transformation for further modification.
The Mahler linker can perform many different transformations in this way. Perhaps the
most interesting is the intermodule register allocation, to which we turn next.
3.3. Intermodule register allocation
A good way to use a lot of registers is to promote variables: allocate registers for them to
live in for long periods of time. Chaitin et al. [9,10] and Chow [11] pioneered a technique that
combines this with ordinary local register allocation. A key idea is that the same register can
be used for many different variables if this causes no conflicts. The compiler starts by doing a
liveness dataflow analysis. It then builds a conflict graph in which an edge appears between
two variables if they are ever live at the same time. Two variables that are never live at the
same time can be promoted to the same register. It follows that a coloring of this graph is
equivalent to a register allocation for the variables. (A coloring of a graph is an assignment of
‘‘colors,’’ one per vertex, subject to the constraint that adjacent vertices must be different
colors. A minimal coloring is one with the fewest possible colors. Good linear-time coloring
heuristics exist, even though the problem of finding a minimal coloring is NP-complete.)
Applying this technique across procedure boundaries requires some form of inter-
procedural dataflow analysis. This in turn requires a more complete picture of the program
than is usually available to a compiler in an environment of separately compiled modules. We
might approach this problem by compiling all the modules in one monolithic compilation.
More recently, some compilers have maintained persistent program databases [34], triggering
recompilation of modules when new information shows this to be necessary. In either case, it
is awkward to include library routines in the process, since users don’t want to worry about
what library modules are included.
Our solution is to wait until link time to select the variables to promote. We can pick the
globals and locals to promote using program-wide safety and payoff information. We can keep
an important global in the same register across all procedures. And when one procedure calls
another, we can keep the locals of the two procedures in different registers. Spills and reloads
around calls are not necessary.
Simply postponing the coloring technique until link time is impractical, however. If we
wait until link time and then do a dataflow analysis, conflict graph construction, graph color-
ing, and final code generation, we will be doing the bulk of the back end’s work at link time.
Rebuilding a program after a change will take almost as long as if we used monolithic compi-
lation. Moreover, algorithms for dataflow analysis and conflict graph construction require
slightly more than linear time. The cost may be acceptable if we apply the algorithms repeat-
edly to a lot of smaller modules or procedures, but we have found it too expensive to apply
them to an entire program.
The call-return structure of most programs gives us an easy way to conservatively approx-
imate the interprocedural liveness information. Our link-time register allocator assumes that a
local variable is live for exactly as long as its procedure is active.*The assembler generates
*We can optionally refine this assumption with an intra-procedural coloring done by the Mahler assembler. See
section 3.3.7.
6
EXPERIENCE WITH A SOFTWARE-DEFINED MACHINE ARCHITECTURE
code assuming that variables live in memory, loading them into temporary registers as needed
within a basic block. Along with the object code, it produces extra information about the uses
of variables and procedures throughout the code. If invoked, the intermodule register allocator
picks the variables to promote and uses this extra information to transform each module
accordingly.
Generating code that is correct as it stands but that can be easily modified later is attrac-
tive for three reasons. First, it means that the promotion of variables is entirely optional. If
the expense of global register allocation is unwarranted, we can omit it. Second, it means we
are not forced somehow to allocate registers for all the variables in the program. If we manage
to keep the most frequently used variables in registers, we can keep the rest of them in
memory and the results are still correct. Finally, it keeps us honest as designers of the system.
Once we postpone anything until link time, the temptation is great to postpone everything, so
that we can know what the other modules look like. The requirement that we generate work-
ing code at compile time assures that we will not succumb to that temptation.
To make the global promotion of variables optional, the assembler sets aside some regis-
ters as expression temporaries. These temporaries will not be available for link-time allocation
to promoted variables. This is contrary to the philosophy of Chaitin et al., who included
expression temporaries in the conflict graph, and introduced spills and reloads in order to
reduce the complexity of the conflict graph to the point where it was colorable using the
number of registers available. This meant that global register allocation was an integral part of
code generation and could never be omitted.
3.3.1. Annotated object code
The assembler’s main contribution to link-time register allocation is to explain the code it
produces, by annotating it with register allocation actions.
action explanation
REMOVE.vdelete the instruction
OP1.vreplace operand 1 by the register allocated to v
OP2.vreplace operand 2 by the register allocated to v
RESULT.vreplace the result register by the register allocated to v
LOAD.vreplace ‘‘temp := load v’’ by ‘‘temp := reg v’’
STORE.vreplace ‘‘store v:= temp’’ by ‘‘reg v:= temp’’
KEEP.vdo not delete the instruction, overriding any REMOVE
Figure 2. Register allocation actions invoked if vis
promoted to a register.
These actions tell the linker how to change the code if it decides to promote some of the vari-
ables to registers. Typically the linker removes loads and stores of a promoted variable, and
modifies each instruction that uses the loaded or stored value so that it references the newly
allocated register instead of the original temporary. Occasionally the structure of a basic block
forces variations of this. The annotations discussed in this paper appear in Figure 2. Each
action is qualified by its variable name, and will be ignored if that variable is not promoted.
7
EXPERIENCE WITH A SOFTWARE-DEFINED MACHINE ARCHITECTURE
The simplest case is when any of the loads or stores can be removed. For example, the
assignment ‘‘x:= y+z’’ would lead to annotated code like this:
instruction actions
r1 := load yREMOVE.y
r2 := load zREMOVE.z
r3 := r1 + r2 OP1.yOP2.zRESULT.x
store x:= r3 REMOVE.x
(In this example, registers r1, r2, and r3 are temporaries managed by the assembler.) For
instance, if we decide to keep yin a register, we will delete the load of yand change the addi-
tion instruction so that its first operand is the register allocated for yinstead of the temporary
register. The three examples below show the rewritten code that results from various link-time
selections of register variables.
register y register x,y register x,y,z
r2 := load zr2 := load zx:= y+z
r3 := y+r2 x:= y+r2
store x:= r3
If a value will not be available in the variable for as long as it is needed, the linker must
replace the load by a register move rather than deleting it altogether. Figure 3 shows the two
possible cases. In the first case, the variable xis not changed until after the last use of its ori-
ginal value; in the second case, xis reassigned before we are through. This could happen
because of local optimizations like copy propagation, and means we must keep the value in the
temporary and accordingly must replace the load by a register move.
instruction actions instruction actions
r1 := load xREMOVE.xr1 := load xLOAD.x
... := r1 + ... OP1.x... := r1 + ...
... := r1 - ... OP1.xstore x:= ...
store x:= ... ... := r1 - ...
Figure 3. Register actions if value is always available in x(left)
and if xgets a new value before the old value is dead (right).
A similar analysis applies in the case of a store. When a value is computed and immedi-
ately stored to a promoted variable, we can find subsequent uses of that value in that variable
if we make no new assignment to the variable before the last use of the value.
A simple assignment like ‘‘x:= y’’ is a special case, because the analysis sketched above
would cause both the load and the store to be marked for removal if both xand yare promoted
to registers, which is clearly wrong. Instead, we use the KEEP action:
instruction actions
r1 := load yREMOVE.yRESULT.x
store x:= r1 STORE.xREMOVE.xKEEP.yOP1.y
8

EXPERIENCE WITH A SOFTWARE-DEFINED MACHINE ARCHITECTURE
The KEEP.yaction overrides the REMOVE.xaction if both xand yare promoted. We end up
with a single instruction if we promote either or both.
This three-part analysis of loads, stores, and simple assignments lets us correctly annotate
the code we generate. We begin with a forward and backward pass over the basic block. This
step marks each operation in the basic block with the variable or variables, if any, in which its
result will always be available. This is followed by the generation of the annotated code.
Appendix 1 sketches these algorithms. Some generated instructions may be given redundant
annotations, such as two different OP1 actions. This just means that the value is available in
two different variables, and either can be used. We don’t know in advance which variables
will be promoted, so this redundancy can be helpful.
By analyzing the basic block this carefully, the assembler is essentially planning the code
needed for any possible combination of promoted variables. The rest of the work is done by
the linker, which chooses which variables to promote, and uses the assembler’s annotations to
rewrite the code based on that choice.
3.3.2. Register allocation and module rewriting
The first thing the register allocator must do is decide which variables to promote. To
help it, the assembler collects use information about each module it translates, and records this
information in the object file. This information includes a list of the procedures appearing in
the module and a list of the procedures each calls. It also includes an estimate of how many
times each procedure uses each variable. The assembler computes this estimate for each pro-
cedure by counting the static number of times the reference is made, with references inside
loops, no matter how deeply nested, counting as 10. This is a coarse estimate, but it seemed to
work better than, for instance, multiplying by 10 for each surrounding loop.
The register allocator in the linker collects the use information for all the modules being
linked, and then builds a call graph for the program. If there are no recursive or indirect calls,
then this call graph is a directed acyclic graph (DAG). Recursive and indirect calls require
special handling, which we will describe shortly.
The allocator then estimates the dynamic number of references of each variable, by multi-
plying each of the assembler’s per-procedure estimates by the static number of places the pro-
cedure is called. (In effect, we are estimating that each procedure is called exactly once from
each call site. We tried getting a better estimate by traversing the call graph and multiplying
estimated counts, so that if P calls Q ten times and Q calls R ten times, we estimate 100 calls
for R. Since the assembler’s estimates are only rough guesses, this tended to give wildly
wrong counts, some even overflowing a 32-bit integer. The current more conservative scheme
works better.)
The idea behind our allocation of registers to local variables is simple. If two variables
are local to different procedures, and these procedures are never simultaneously active, then the
two variables are never simultaneously live. These two locals can therefore be grouped
together and kept in the same register.*We do this grouping by traversing the call DAG in
*Michael L. Powell is responsible for this insight, for which I am most grateful.
9
A
B C
D E
pr0 pr1 pr2 pr3 pr4 pr5 pr6 pr7 pr8 pr9 pr10 . . .
B
D
E
A
C
pseudo-registers available
total number of registers needed
EXPERIENCE WITH A SOFTWARE-DEFINED MACHINE ARCHITECTURE
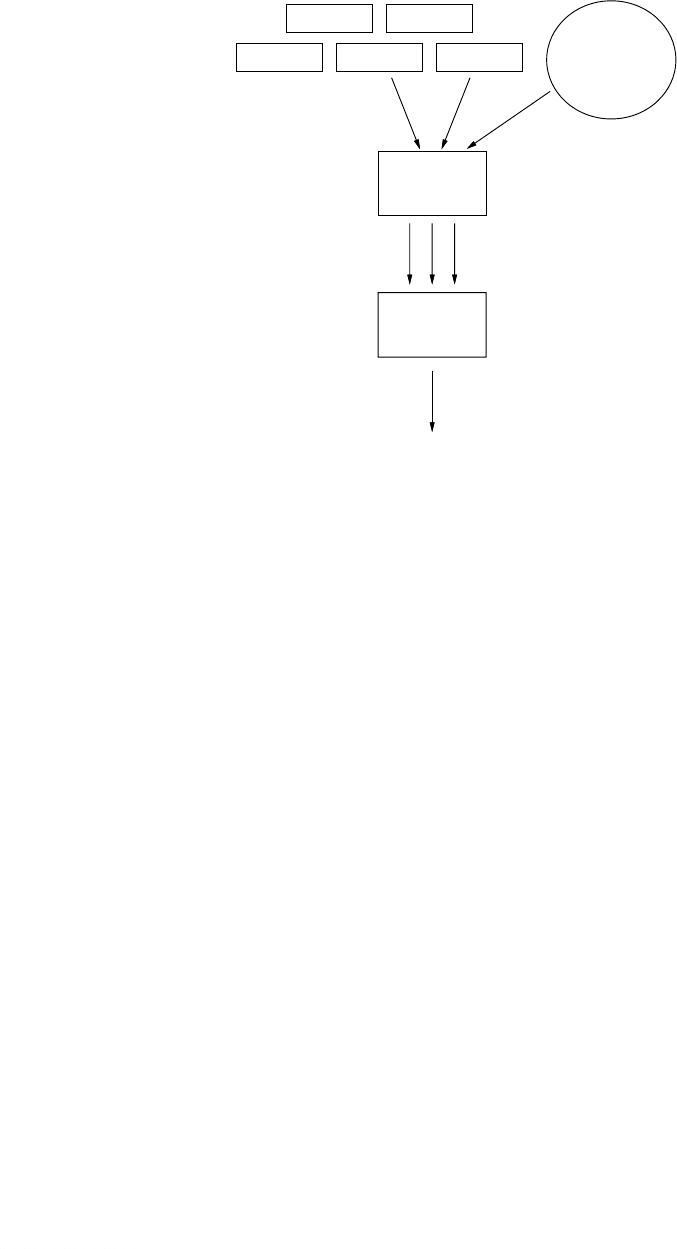
Figure 4. A sample call DAG, with arrows showing calls in the
program, and the allocation of pseudo-registers
to locals of the procedures.
reverse depth-first search order [4]. We start by allocating pseudo-registers to the locals of
each leaf procedure, beginning with pseudo-register 0. We then allocate pseudo-registers to the
locals of other procedures, beginning immediately after those used by its children. Figure 4
shows an example call DAG and the associated allocation of pseudo-registers to the pro-
cedures’ locals. The algorithm*is given in Figure 5.
for each proc p in reverse depth-first search order do:
– – First find the largest pseudo-register allocated in a
– – previous iteration to the children of this procedure.
– – Leaves have no children.
childPseudos := 0
for each child q of p in the call DAG do:
childPseudos := max (childPseudos, pseudos[q])
– – Now allocate pseudo-registers to p’s locals, starting
– – where its children left off
pseudos[p] := childPseudos
for each local v of p do:
allocate pseudo-register number "pseudos[p]" to v
pseudos[p] := pseudos[p] + 1
Figure 5. Assigning locals to pseudo-registers.
*My thanks to Richard Beigel for this elegant algorithm.
10

EXPERIENCE WITH A SOFTWARE-DEFINED MACHINE ARCHITECTURE
The register allocator then creates a pseudo-register for each individual global scalar. It
gives each pseudo-register a reference frequency that is the sum of the frequencies of its vari-
ables, and sorts the pseudo-registers by frequency. Finally, it allocates an actual register to
each of the most frequently used pseudo-registers.
A variable whose address is taken anywhere in the program is not eligible for promotion.
This is an extremely conservative decision and might be relaxed by using dataflow analysis and
type information to determine the places where the address might be used.
When we have decided which variables to keep in registers, we know which register
actions to apply to the code of each module. Applying these actions is easy since each one is
independent of context; the assembler did the hard work when it generated the actions in the
first place.
3.3.3. Initialization
A global variable may be declared with an initial value. This value is preset in memory
before the program begins to execute, so no instruction is responsible for assigning the value to
the variable. If we promote such a variable, we must somehow get that initial value from the
original memory location into the register. The assembler identifies these globals in the use
information it puts in the object file. The startup routine that sets up the program environment
before invoking the user main program includes a special register action, called INIT, that is
unconditionally performed as part of register allocation. This action inserts instructions to load
the initial value of each initialized global that gets promoted to register.
A local variable declared with an initial value does not present this problem. The front-
end compiler generates ordinary Mahler statements to assign the variable’s initial value at the
beginning of the procedure. The Mahler assembler then annotates this code just like code for
explicit user statements.
A parameter is more like a global than like a local. The assembler assumes that parame-
ters are passed on the stack, so the argument value is already in the parameter location when
we enter the procedure. If a parameter is promoted, the module rewriter must insert code at
the beginning of the procedure to load that value into the register.*
3.3.4. Indirect and recursive calls
Our algorithm for assigning pseudo-registers to variables depends on building a directed
acyclic graph to describe the static call structure of the entire program. Indirect calls don’t
appear on the DAG at all, and recursive calls make the graph cyclic. Something must be
added to handle these kinds of calls.
One solution to the problem of indirect calls is to represent an indirect call by direct calls
to each possible destination procedure. We could do this naively, by listing every procedure
that is ever assigned to a procedure variable. We could also do it more carefully, by using type
*In fact, we can do better, by having the caller put the argument value directly into the parameter register. We
discuss this in section 3.3.5.
11

EXPERIENCE WITH A SOFTWARE-DEFINED MACHINE ARCHITECTURE
information and flow analysis to narrow down the possible candidates. The naive approach
seems a bad idea, but the careful approach might well be appropriate for an object-oriented
program with a preponderance of indirect calls.
Our solution is different. We don’t record indirect calls in the call graph, and we insert a
non-trivial spill and reload around an indirect call. In this approach an indirect call archives
all of the apparently active locals. When we arrive at the called procedure we can then behave
as if we had performed a normal call visible in the call DAG. The set of active locals consists
of each local whose procedure is on any path in the call DAG from the root to the calling pro-
cedure.
We chose our solution because it seemed likely that few of our applications would make
heavy use of indirect calls; it was also easier. This seems not to have hurt us: a program
whose author [30] describes it as ‘‘object-oriented’’ seems to benefit as much as the others.
We should note that our solution works only because we allow indirect calls only to top-
level procedures. Suppose that P and Q are both nested in R and both refer to R’s locals, and
suppose that P calls Q indirectly. Then archiving R’s locals around the call is wrong because
Q might legally change one of them.
For many years we thought recursion could be handled analogously to indirect calls. In
an early report [40], we described a system that did so. We removed recursion from the call
graph by building a depth-first spanning tree [4] and discarding the back edges. This gave us
an acyclic graph on which we could perform our usual algorithm. At the call corresponding to
the discarded back edge, we added a spill and reload for a possibly large set of variables. To
determine the set of variables spilled, we examined the call DAG to find the procedures
appearing on each path from the called procedure to the calling procedure. The locals of these
procedures were spilled. On the assumption that the back-edge call really is recursive, these
are the only locals that might be recursively re-instantiated.
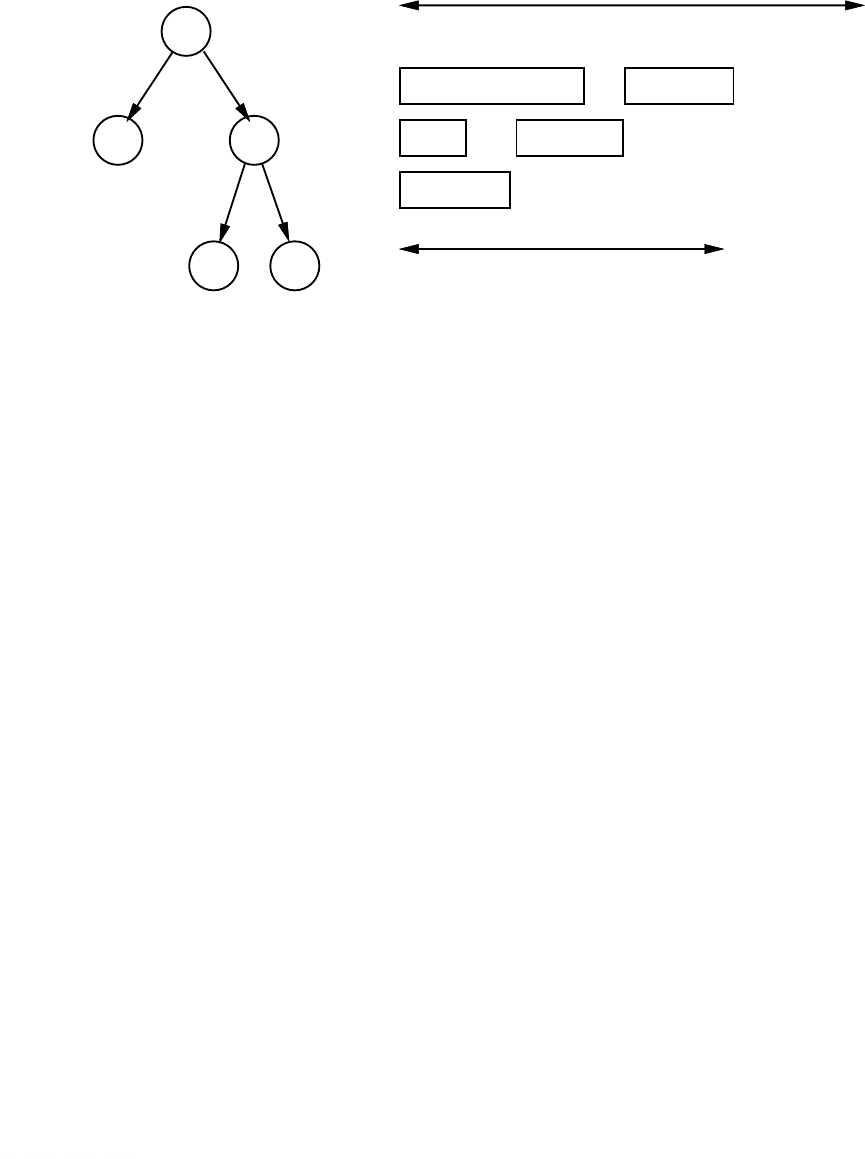
Unfortunately, this isn’t always correct. Figure 6 shows one of two possible depth-first-
search DAGs for a counter-example program with five procedures. The solid lines are calls in
the DAG; the dashed line from Q to P is a call not in the DAG. Procedure R has locals in r1
and r2, and procedure Q has a local in r1. This means that procedure P can keep a local in r3
(but not r2, because P’s child R uses it). Procedure T, on the other hand, is allowed to keep a
local in r2, because T’s only child is Q. The recursive call from Q to P will archive all locals
of both P and Q, namely r1 and r3 but not r2. Unfortunately, the series of calls shown as a
dotted line leads to an error. Both T and R feel entitled to use r2, but r2 was not archived by
the backward call to P. Thus the value in T’s local can be damaged by R.
It was not hard to fix this problem. The better way to remove cycles from a directed
graph is to partition the graph into its strongly-connected components*and then replace each
component by a single node. Then we apply the bottom-up algorithm as before, with one
*Nodes aand bare in the same strongly-connected component of a directed graph if there is a (possibly empty)
path from ato band a (possibly empty) path from bto a. Thus a strongly-connected component of a call graph
is either a maximal group of procedures that can form a recursive cycle, or a single procedure that can never be in
a recursive cycle [3].
12
main
r4
P
r3
T
r2
R
r1,r2
Q
r1
EXPERIENCE WITH A SOFTWARE-DEFINED MACHINE ARCHITECTURE
Figure 6. A depth-first-search call-DAG (solid) with a recursive
call (dashed). The call chain shown (dotted) reveals
a bug in our original algorithm for saving registers.
difference. When we reach a node representing an entire recursive cycle, we must pick
pseudo-registers for all locals of all procedures in the cycle. We can use the same pseudo-
register for locals of two different procedures in the cycle, but we must insert a spill and reload
on each path between them. Our system does this simply by treating each procedure in the
recursive component independently; it inserts spills and restores around any call between
strongly-connected procedures. If recursion were more common, it might be worth concentrat-
ing the spills and reloads at the less frequent calls.
3.3.5. Fast argument passing
The scheme we have described so far deals with argument passing in a simple-minded
way. We evaluate each argument and place it on the stack, in the memory location associated
with the parameter that we are about to create. If the called procedure has a promoted parame-
ter, it loads the argument from the stack into that register. It would be better if the calling pro-
cedure could put the argument directly into the parameter register to begin with.
We use the same idea here that we used in expression evaluation. The assembler gen-
erates code to evaluate the argument and store it on the stack. It flags this code with the usual
RESULT, STORE, and REMOVE actions. These actions are not qualified by the name of the
parameter, however, but rather by its position in the parameter list of the called procedure. (It
cannot refer to the parameter by name because it generates the action at assembly time, when
the called procedure may not be visible.) At link time, the module rewriter checks whether
that parameter was promoted. If it was, the positional qualification is converted into a normal
variable qualification.
We discussed the promotion of parameters to registers in section 3.3.3. In that scheme,
the caller put each argument value on the stack. If we promote the parameter, we insert into
the procedure entry code a load of the argument value into the parameter register. Now we
13

EXPERIENCE WITH A SOFTWARE-DEFINED MACHINE ARCHITECTURE
must not do these loads, since the caller has already put the arguments directly into the
parameter registers, and the value on the stack is garbage. Unfortunately, a caller still cannot
do this if the call is indirect, because the identity of the called procedure is unknown. So we
leave the inserted loads in place, and instead modify direct calls so that each enters the pro-
cedure after the point where we have inserted the loads.
3.3.6. Profiling
We do not keep all of the variables in registers, but only those that seem to be referenced
frequently. As a result, the quality of the frequency estimates is important, especially in large
programs. Instead of relying on estimates, we can use previously gathered execution-time
profiles. Two kinds of profile are useful — a variable-use profile and a procedure-call profile.
Avariable-use profile tells how many times each variable is loaded or stored. We can
use these counts directly in place of the variable-use estimates that drive the selection of vari-
ables to promote. We built the variable-use profiler using the code modification facility in the
Mahler linker. We will describe this in more detail in section 3.7.2.
The variable-use profile has the disadvantage that we may need to recompute it often for
it to be effective. If the programmer adds a new variable to a procedure that is executed very
frequently, that variable will not appear in the previously computed profile. It is therefore
unlikely to get promoted. An alternative is to use gprof [17] to get a procedure-call profile
telling us how many times each procedure was called. We can then combine these dynamic
counts with the assembler’s per-procedure estimates of variable use, which are computed every
time the module is assembled. The resulting estimates will be less precise than a true
variable-use profile, but also somewhat less sensitive to small changes in the program, and
should be considerably more precise than estimates alone.
3.3.7. Intra-procedure coloring
In grouping together local variables into pseudo-registers, we assume very conservatively
that a local variable is live whenever its procedure is active. This is a cheap way of estimating
when locals of different procedures will conflict, and it is reasonable because the lifetimes of
most procedures are short anyway. This simplification does have one important limitation: it
does not allow us to combine two non-conflicting locals of the same procedure.
Recognizing two such locals does not require interprocedure dataflow analysis, only
intra-procedure analysis and coloring. The assembler does a liveness analysis on each pro-
cedure it translates, grouping together locals that do not conflict. It does not allocate registers
to these groups, but simply reports these groups to the link-time allocator.*The only tricky part
is that the liveness analysis may allow a parameter to be combined with another local, or even
with another parameter that for some reason is initially dead. If so, the register allocator must
make sure that the live argument value gets properly loaded into the register that the two vari-
ables share.
*This analysis can be suppressed by the user, resulting in a faster compilation but producing code that is a few
percent slower [40].
14
EXPERIENCE WITH A SOFTWARE-DEFINED MACHINE ARCHITECTURE
3.3.8. Alternative allocation strategies
Register allocation works by first deciding which variables and constants we should keep
in registers and then rewriting the code to reflect this decision. These two phases are essen-
tially independent. The code rewriting works in the same manner no matter how we make the
selection of variables to promote.
This allows us, for example, to drive the selection by either frequency estimates or by a
dynamic variable-use profile. It also allows us explicitly to exclude certain classes of variables
from consideration, if we wish. In a multiprocessor system, for instance, we might wish to
force global variables to reside in memory, because they are shared between processors with
different register banks.
Another interesting notion is the distinction between cooperative allocation and selfish
allocation. Cooperative allocation is the form described earlier. In cooperative allocation, a
given procedure may not get all of its locals into registers. On the other hand, the allocation is
based on the call graph, so spills and reloads around calls are not usually necessary. In selfish
allocation, by contrast, each procedure is treated independently. It can keep all of its locals in
registers if it wishes, but it must pay for this by saving and restoring these registers at entry
and exit. In practice this means that it keeps a local in a register only if the local is used more
than twice. The allocator uses frequency estimates or a dynamic profile to make that judge-
ment.
3.3.9. Comparison with Steenkiste’s allocation method
Steenkiste [35,36] independently developed an approach similar to ours. He does not do
allocation in the linker and therefore has no need for annotations or module rewriting, but his
algorithm for allocating registers to variables is much the same. The major difference is that
Steenkiste does not use frequency information in allocating registers. Both schemes traverse
the call graph starting with the leaves, in order to combine local variables into groups. Our
scheme allocates registers to the most important of these groups. Steenkiste’s scheme allocates
registers to the groups sufficiently close to the leaves. Whenever it runs out of registers,
Steenkiste’s scheme reverts to doing saves and restores. Thus procedures near the leaves use
cooperative allocation, and procedures far from the leaves use selfish allocation. Globals do
not fit well into Steenkiste’s scheme, which can hamper performance.
3.3.10. Intermodule register allocation: Summary
The Mahler assembler prepares for intermodule register allocation by annotating the code
with register actions and providing intra-procedure estimates of scalar use frequency. The
Mahler linker combines these estimates to obtain estimates for the entire run, groups together
non-conflicting locals based on the program call graph, and allocates registers for the most
important groups. It then rewrites the code to reflect this choice, removing loads and stores
and modifying other instructions. As we will see in section 4.1, between 60% and 80% of the
references to scalars are removed in this manner.
Once register allocation is finished, we can schedule the resulting instructions for better
pipeline performance, the subject of the next section.
15

EXPERIENCE WITH A SOFTWARE-DEFINED MACHINE ARCHITECTURE
3.4. Pipeline instruction scheduling
Our second link-time optimizing transformation is the pipeline instruction scheduler, ori-
ginally written by Michael L. Powell [44]. The instruction scheduler finds the places where
cycles will be wasted. Wasted cycles can happen because of a pipeline stall in accessing
memory, a stall waiting for the coprocessor to finish, or a no-op after a branch. It then tries to
move instructions around so that these wasted cycles are filled with productive instructions.
Because these productive instructions would otherwise require cycles of their own, the program
gets faster.
The instruction scheduler works in two phases. First, it reorders each basic block
independently, trying to fill stalls and branch slots from within the same basic block. Then it
makes a final pass looking for branch slots that have not been filled. It tries to fill each
unfilled slot with a useful or potentially useful instruction from the next block to be executed.
3.4.1. Scheduling a basic block
We say that two instructions conflict if they cannot be exchanged even when they are
adjacent. This is true only if one of them modifies a register or memory location that the other
instruction also uses or modifies. Usually it is impossible to tell if two memory references are
to the same location, so we must assume the worst and suppose that they are. The one excep-
tion is when the two references use the same base register and different displacements. These
two references do not conflict even though an intervening instruction might change the value of
the base register, because the intervening instruction will conflict with both memory references
and the order of the three will be preserved.
The scheduler starts by computing the earliest time at which each instruction can be exe-
cuted relative to the beginning of its basic block. This earliest time is determined by looking
for conflicts with all preceding instructions. In the same way, the scheduler computes the
latest time at which each instruction can be executed, relative to the end of the block, by look-
ing for conflicts with instructions that follow it. The instructions in the block (except for the
final branch, if present, and its branch slot) are then sorted according to latest start time. Ties
are broken according to the earliest start time.
Next, another pass looks for instructions that stall because of an interaction with the pre-
vious instruction. The scheduler delays such an instruction by pushing it later in the instruc-
tion sequence. This instruction can be pushed past any instruction whose earliest allowed time
precedes this instruction’s.
At this point, the scheduler has filled as many of the memory stalls and coprocessor stalls
in the basic block as it can.*If the block ends with an empty branch slot, the scheduler looks at
the instruction that has been sorted to the position before the branch. If this instruction can be
performed later than the branch itself, then it can be moved into the branch slot to replace the
no-op there.
*The problem of finding an optimal schedule is unfortunately NP-complete, but more aggressive heuristics than
ours have been explored [20].
16
EXPERIENCE WITH A SOFTWARE-DEFINED MACHINE ARCHITECTURE
3.4.2. Filling slots with future instructions
When the scheduler reorganizes a basic block, it may fill the branch slot with an instruc-
tion from earlier in the basic block. When it has reorganized all of the blocks, however, some
branch slots may still be unfilled. The possibility remains of looking in the block that will be
executed after a branch, and moving an instruction from there into the branch slot. A final
pass over the object code tries to do this, by looking at the destination of each such branch.
If a branch jumps to an unconditional branch, we can sometimes change the first branch
so it bypasses the second, by jumping directly to the same place. The only problem is that the
second branch’s delay slot may contain an instruction that must be executed. If the first branch
is unconditional, we can guarantee that this instruction gets executed anyway by copying it into
the slot of the first branch. We cannot bypass the second branch if both have non-empty
branch slots, or if both are conditional.
If an unconditional branch jumps to a nonbranch, we copy the nonbranch target into the
branch slot. Then we change the branch so that it jumps to the instruction after the nonbranch.
This also works if the destination is a conditional branch, because of the way delayed branches
work.
The most interesting case is when a conditional branch jumps to a nonbranch. We may
be able to fill the slot speculatively, either with an instruction from the block at the branch des-
tination or with one from the block that we get to by falling through the branch. This is safe
only if the instruction is harmless even when we end up in the wrong block; it is profitable
whenever we end up in the right one.
Looking at one of the two blocks, we can pick a candidate instruction from among those
instructions whose earliest time is 0; these can be executed first and so could just as well be
executed in the preceding branch slot. A candidate instruction from one block is safe if the
register it modifies is dead at the beginning of the other block. Dataflow analysis would give
us precise information about this, but we can do pretty well just by looking to see if the other
block sets that register without using it first.
If we pick the instruction from the fall-through block, we must delete it from that block.
Otherwise it will be executed twice: once in the branch slot and once in the block that follows.
We therefore consider using the fall-through block only if it cannot be branched to from else-
where in the program.
If we pick the instruction from the destination block, we move it to the beginning of that
block, copy it into the branch slot, and increment the destination of the branch so that it skips
over the original. This leaves the destination block intact in case there is another branch to it.
We are not allowed to do this a second time to fill some other branch slot, however, so we
mark the instruction in the destination block as immovable.
In Figure 7(a), the only safe candidates are the loads into r1. It is worth noting that they
make each other safe: moving either one into the branch slot is safe because the other one
shows us that r1 is dead at the start of its block. The loads into r2 or r3 cannot be guaranteed
safe, and the arithmetic operations and stores cannot even be candidates because their start
times are greater than zero. Figures 7(b) and 7(c) show what happens if we select each of the
two safe candidates.
17
EXPERIENCE WITH A SOFTWARE-DEFINED MACHINE ARCHITECTURE
(a) original code (b) fill from (c) fill from
destination fall-through
if r4 = 0 goto L1 if r4 = 0 goto L1+1 if r4 = 0 goto L1
no-op r1 := load v r1 := load x
r1 := load x r1 := load x
r2 := load y r2 := load y r2 := load y
r1 := r1 + r2 r1 := r1 + r2 r1 := r1 + r2
goto L2 goto L2 goto L2
store z := r1 store z := r1 store z := r1
L1: r3 := load u L1: r1 := load v L1: r3 := load u
r1 := load v r3 := load u r1 := load v
r3:=r3-r1 r3:=r3-r1 r3:=r3-r1
store z := r3 store z := r3 store z := r3
L2: L2: L2:
Figure 7. Filling a conditional branch slot with
instructions from each possible successor block.
If the branch is a backward branch, it is probably a loop and will therefore most likely be
taken. We therefore prefer to use the destination block rather than the fall-through block. But
a speculatively executed instruction in a branch slot is no worse than a no-op; looking in both
blocks seems sensible.
3.5. Cooperation between assembler and linker
We have already seen that the assembler provides information that the register allocator
uses to select register variables and rewrite the code. We have also seen that the assembler
marks tricky idioms so that the scheduler will not hurt them. There are other forms of
cooperation as well.
One important example is our decision to do scheduling after global register allocation.
The instruction scheduler never crosses module boundaries and might therefore be part of the
assembler rather than the linker. Doing scheduling before register allocation doesn’t make
much sense, however, because register allocation causes profound changes in the structure of a
basic block. To begin with, register allocation removes many loads and stores, which are com-
mon sources of stalls. There would be little point in reorganizing the code to avoid a load stall
if the load itself later disappears. Furthermore, by using more of the registers, register alloca-
tion can remove irrelevant conflicts between instructions. If the sequence
r1 := load x
r1 := r1 + 1
store x := r1
appears in the middle of a block, other unrelated uses of r1 cannot be moved past it in either
direction. If xis promoted, however, the increment of xno longer uses r1, and other
18
EXPERIENCE WITH A SOFTWARE-DEFINED MACHINE ARCHITECTURE
instructions become more mobile.
The assembler helps the scheduler by allocating the dedicated temporary registers in
round-robin order. When we are finished using r1, we will usually not allocate it for a new
purpose until several instructions later. Thus even a block without many promoted variables
will tend to have more mobile instructions than it would if it used the same one or two tem-
poraries over and over.
This round-robin allocation of temporary registers might hamper the effectiveness of the
inter-block phase of scheduling, because it makes it harder to be sure that a particular register
is dead at the beginning of the block. The assembler alleviates this somewhat by starting the
cycle over again each time a new basic block begins. Thus the first temporary register to be
assigned by a block is more likely to be r1 than any other, so it is more likely that the two
blocks will both have such assignments. In that case either one could be moved into the
branch slot.
3.6. Loopholes
Sometimes you really do need precise control over the machine. You might need to write
absolutely the best possible version of a library routine that will be executed millions of times,
like input/output conversion. Or you might need to write a routine that is responsible for
directly maintaining part of the machine state, like an interrupt handler. Mahler has two
mechanisms for getting this kind of fine control over the machine: builtin procedures, and
startup procedures.
The Mahler assembler recognizes the names of a small set of builtin procedures. The
name of the builtin procedure is a Mahler keyword and cannot be redefined by the user. When
the assembly language contains a call to a builtin procedure, the Mahler assembler translates it
to inline code instead of calling code. Builtin procedures are used to implement operations that
cannot be expressed (or expressed efficiently enough) in normal Mahler. A call to a builtin
procedure looks just like a normal call, so it can be made from a high-level language as well as
from a Mahler routine.
We have tried to design Mahler builtins with semantics that are as clean and high-level as
practical. They should satisfy the user, but they should also let Mahler know what is happen-
ing so that its analysis will not be impaired. Thus we have shied away, for example, from
builtins that simply let the user examine or change a specific register. Instead, we have tried to
find out what problem the user was really trying to solve, so we could design a builtin to suit.
Dangerous lower-level builtins are occasionally useful to let the user decide what is really
needed. Nonetheless, they are used rarely; we have always tried to replace them with more
meaningful builtins when we understand the problem better.
For example, Mahler has builtin procedures to spill and reload big pieces of the register
state for use in interrupt handling. It has builtin procedures to access certain extended-
precision arithmetic instructions, for use by the input/output conversion routines. These rou-
tines would likely have to be changed for a new generation of Titan, and perhaps it would be
better to make the entire conversion routine be builtin. Even the C library routines of setjmp,
longjmp, and alloca are Mahler builtins, because Mahler must know when these things happen
19
EXPERIENCE WITH A SOFTWARE-DEFINED MACHINE ARCHITECTURE
if it is to optimize data references safely.
Adding a new builtin procedure to Mahler is straightforward, but it must be done by the
Mahler implementor: the user cannot specify arbitrary machine-level code. We have found this
mechanism adequate. Machine-level control of the registers and pipeline is handled adequately
by the Mahler system itself, and machine-level instruction selection is for the most part expres-
sible in the Mahler language — where it is necessary at all. The Titan is a simple machine,
and most of its user operations are directly accessible from a high-level language.
The other Mahler loophole mechanism is the startup procedure. A startup procedure has
no name and is never called by another routine. To give this routine control some piece of
magic is needed, either by hardware intervention (for operating system bootstrap code) or by
operating system activity (for user code that begins a program execution). A startup procedure
has no local variables and must ensure that a valid data environment exists before it can call a
normal procedure or reference a global variable; the startup procedure can invoke builtins to do
these setup tasks inline.
These two extensions were enough to avoid the use of any lower-level assembly language,
even in the operating system. A UNIX operating system was experimentally ported to the
Titan using only high-level languages and Mahler. Even the less pure port now in use includes
only 1000 instructions of ‘‘true’’ assembly code, for bootstrapping and interrupt handling.
This code is not reachable by normal means, and the normal procedures that it calls are
declared outside as procedure variables, so no change to Mahler’s analysis is necessary.
3.7. Instrumentation
Mahler produces all of the code in any program. It also makes extensive changes to the
code at link time. This makes it easy for the linker to insert instrumentation code of various
kinds. We have taken advantage of this for a variety of different applications, both high-level
and low-level, and both special-purpose and general-purpose [42].
A similar facility is provided by the pixie tool developed by Earl Killian at MIPS Com-
puter Systems [28]. Pixie was developed independently from our system but the possible
modifications overlap with ours; its approach is in some ways similar to ours. The pixie sys-
tem works by transforming a fully-linked executable instead of by transforming object files
being linked. Thus it transforms the code after linking instead of before. This has two conse-
quences. On one hand, their system is easier to use than ours. One must know only the name
of the executable, rather than how to link its components. On the other hand, our approach is
easier to implement. An isolated object file, prior to linking, contains the relocation table and
loader symbol table, which make the transformation easier. Lacking this information, pixie
must postpone much address translation until the modified program is executed, because it can-
not reliably distinguish text addresses from data values at transformation time [25]. This intro-
duces runtime overhead that makes pixie an unsuitable vehicle for optimization, though it has
been used for several of the instrumentation purposes that Mahler has.
20
EXPERIENCE WITH A SOFTWARE-DEFINED MACHINE ARCHITECTURE
3.7.1. Instruction-level instrumentation
Our first instrumentation tool was an instruction-level profiler. We create a set of global
counters in the instrumented program, one for each kind of event we want to count. We then
insert code to increment the associated counter wherever that event appears. If we insert an
increment wherever a load appears, for example, running the program will count the loads per-
formed. This lets us count occurrences of different kinds of instructions or recognizable
multi-instruction idioms like byte load or procedure call.
We can also count pipeline stalls that occur completely within a single basic block, by
examining each block and inserting an increment for the right amount. This requires only the
same analysis that the scheduler itself must do. Because stalls sometimes occur across a block
boundary, we also create some global state variables. When we see a block with an operation
whose latency extends past the end of the block, we insert code to set the state variable, and
when we see a block with an instruction that could be delayed because of the state, we insert
code to check the state variable and conditionally increment the stall counter.
Instruction-level instrumentation provides us with statistics that one often acquires only
by instruction-level simulation. Inserting the instrumentation at link time is expensive, but it is
an order of magnitude cheaper than inserting it at compile time. Executing the instrumented
program is expensive, too: the instrumentation can slow the program by an order of magnitude.
But simulating the program instead would be slower by two to four orders of magnitude. For
this kind of application, link-time instrumentation seems to be the best approach.
3.7.2. Profiling
The gprof [17] profiler is a useful tool for performance debugging of applications. The
normal way to use it is to recompile all of your source modules with the compiler option –pg,
and then link the new object modules with standard libraries that have themselves previously
been compiled with the same option. Running the resulting instrumented program produces a
file of profile data.
The only effect of compiling with –pg is to insert a lot of calls to a special routine named
mcount, which is responsible for keeping track of who calls whom. These calls are inserted at
the beginning of each procedure, and it’s easy to make the Mahler linker do that itself.
The advantages are considerable. Relinking is one or two orders of magnitude faster than
recompiling all modules, and we no longer need to maintain the instrumented versions of
libraries. Profiling is now much more attractive.
Just as we can insert profile code at the beginning of each procedure, we can insert code
to count the executions of each individual basic block. The linker allocates a long vector of
counts, one for each basic block in the program. The inserted code for a block increments the
count associated with that block.
Our main use of the basic block execution counts is the construction of a variable-use
profile. In section 3.7.2 we observed that the register allocation can be improved by using
actual variable reference counts rather than compile-time estimates. To build the variable-use
profile, we combine the basic block counts with static information produced by the register
allocator. This static information tells, for each basic block, how many variable references it
21
EXPERIENCE WITH A SOFTWARE-DEFINED MACHINE ARCHITECTURE
contains, and which variables they are. This is easy to determine: each variable reference
counted is a load or store marked for removal if the variable is promoted. Combining these
per-block statistics with the dynamic block counts gives us a dynamic profile of variable use.
3.7.3. Register management strategies
In 1988, we reported the results of a study comparing register allocation techniques and
hardware register windows [41]. Some machines [23,24,29,33] treat the register set as a flat
space and rely on the language system to promote the variables. Other machines [1,5,16,31]
include hardware to divide the register set into a circular buffer of windows. When a procedure
is called, the tail of the buffer is advanced in order to allocate a new window of registers,
which the procedure can use for its locals.
Without promotions, we would need to perform some number M0of loads and stores to
access scalar variables and constants. Promoting some of these to registers reduces this
number to M1. (In either case, of course, we would need loads and stores to access array or
pointer structures. These are not included in M0or M1.) Unfortunately, any scheme for pro-
motion also requires that we add some number Sof new loads and stores to spill and reload
promoted variables. With register allocation, the new loads and stores are needed when one
makes procedure calls that would otherwise harm registers in use. This might be all procedure
calls or, in our scheme, only recursive and indirect calls. With register windows, the new
loads and stores are needed when one runs out of buffers after a long series of calls or returns.
When this happens, an exception occurs that is handled by spilling or reloading windows.
Although these loads and stores do not appear in the user program, it seems only fair to charge
for them.
We can take both effects into account by computing a miss ratio (M1+S)/M0. The miss
ratio is a measure of how thoroughly we were able to remove loads and stores associated with
scalars. If the miss ratio is zero, we have managed to keep all variables and constants in regis-
ters, and did not need to perform any spills and reloads. If the miss ratio is more than unity,
then the spills and reloads slowed the program down more than keeping things in registers
speeded it up. The miss ratio is a property of the dynamic behavior of a program. A particular
load or store instruction may be counted many times, or no times, depending on how often
control passes through it.
We used our automatic instrumentation to compute the miss ratio for a variety of
hardware and software promotion schemes. This usually required more than simply instru-
menting the executed code. For register allocation, we inserted code to count not the loads and
stores that were actually executed, but those that would have been executed with a given allo-
cation scheme and a given number of registers. We similarly counted the times we passed a
place where a load or store would have been removed. For hardware windows, the saves and
restores depend on the history of recent calls and returns and on how deep the call chain is.
We inserted instrumentation code to keep track of this and to simulate the state of the circular
window buffer. This let us count hypothetical saves and restores at the times when a machine
with windows would actually overflow or underflow. Some of the results will be sketched in
section 4.1.
22
EXPERIENCE WITH A SOFTWARE-DEFINED MACHINE ARCHITECTURE
3.7.4. Address traces
An address trace is the sequence of instruction or data addresses referenced by a program
during the course of its execution. Such a trace is useful in simulating the performance of
different cache configurations. Previous techniques for acquiring address traces fall into two
general categories. One is to physically monitor the address bus, using either a hardware mon-
itor [13] or extra microcode [2], and log the addresses seen. This approach can slow execution
by an order of magnitude, and in any case is not suitable for modern RISC machines, which
are integrated on a single chip and have no microcode. The other approach is simulation. We
can build an instruction-level machine simulator that also logs the memory references made by
the simulated program. Unfortunately, simulation is very slow: simulating a program typically
takes two to four orders of magnitude longer than executing it. With the advent of machines
with very large caches, we must use very long address traces to get realistic and useful results.
Simulation is too slow to do this easily.
Our approach is to use link-time code modification to instrument the code. Wherever a
data memory reference appears, the linker inserts a very short, stylized subroutine call to a rou-
tine that logs the reference in a large buffer. The same thing is done at the beginning of each
basic block, to record instruction references. Borg [8] provided this facility with operating sys-
tem kernel support that lets the trace buffer be shared by several multiprogrammed processes
and even the kernel itself. Each time the buffer fills up, a special untraced process is resumed
to consume it, either dumping it to an output device or, more usefully, incrementally continu-
ing a parameterized cache simulation.
23

EXPERIENCE WITH A SOFTWARE-DEFINED MACHINE ARCHITECTURE
4. Performance of register and pipeline management
How well does Mahler do at managing the registers and pipeline? By instrumenting the
Mahler implementation and the code it produces, we were able to produce some answers to
this question.
We performed the measurements described in this section using five artificial benchmarks
and ten real programs in use at WRL. These fifteen programs are summarized in Figure 8.
Sed, egrep, troff, yacc, rsim, and mx are written in C, and the Boyer benchmark is written in
Scheme, a dialect of Lisp; the rest are written in Modula-2.
lines vars procs remarks
Livermore 268 347 20 Livermore loops
Whetstones 462 413 37 Floating-point
Linpack 814 397 31 Linear algebra [14]
Stanford 1019 565 65 Hennessy’s suite [18]
Boyer 600 1702 98 Lisp theorem-proving [15]
sed 1751 259 31 Stream editor
egrep 844 241 28 File search
troff 7577 947 175 Text formatter
yacc 1856 689 73 Compiler-compiler
metronome 4287 1240 157 Timing verifier
rsim 3003 911 133 Logic simulator [39]
grr 5883 1833 243 Printed circuit board router
eco 2721 1008 150 Recursive tree comparison
ccom 10142 2193 333 C compiler front end
mx 26449 2869 354 Mouse-based editor [30]
Figure 8. The fifteen test programs.
4.1. Performance of intermodule register allocation
The aim of intermodule register allocation is to promote important variables and constants
to registers, so as to avoid memory references. The miss ratio, defined in section 3.7.3, is a
measure of how effective we are at this. We used automatic instrumentation to compute the
miss ratio of our register allocation technique assuming a range of possible register set sizes.
Figure 9 shows the miss ratios for each of the fifteen test programs, plotted as a function
of the number of registers available for global register allocation. The left-hand graph shows
the effects of register allocation based only on the compile-time estimates of variable use fre-
quency. The right-hand graph shows the effects based on an actual variable-frequency profile
for the same run. In this graph, six of the test programs had miss ratios very close to zero;
these are labelled with numbers rather than names. These graphs extend beyond the actual
limits of the Titan, in which 52 registers are available for global register allocation. The dotted
curve is the arithmetic mean of the miss ratios for all fifteen programs.
24
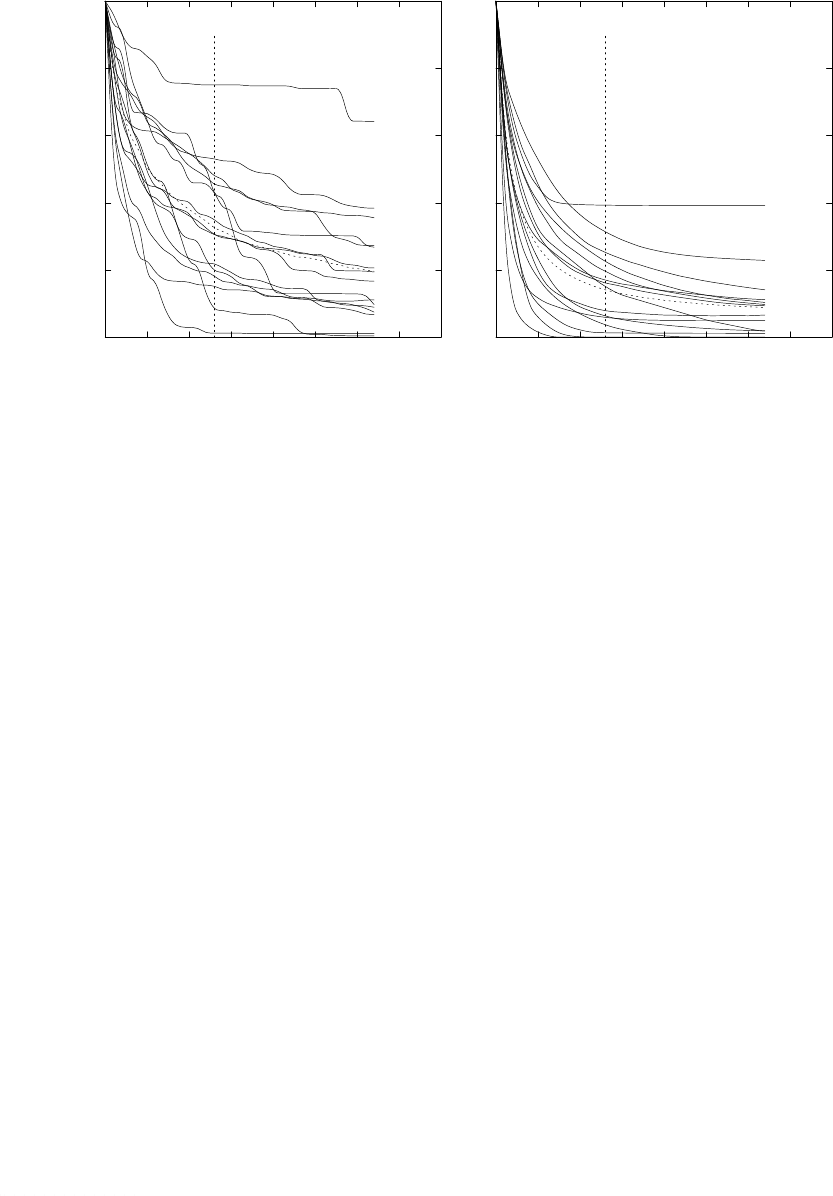
0 16020 40 60 80 100 120 140
number of registers
0
1
0.2
0.4
0.6
0.8
miss ratio
Titan
livermore
whet
linpak
stan
boyer
sedd
egrep
troff
mx
yacc
ccom
met
rsim
grr
eco
0 16020 40 60 80 100 120 140
number of registers
0
1
0.2
0.4
0.6
0.8
Titan KEY:
1 = yacc
2 = whet
3 = sed
4 = livermore
5 = egrep
6 = linpak
4
26
stan
boyer
35
troff
mx
1
ccom
met
rsim
grr eco
EXPERIENCE WITH A SOFTWARE-DEFINED MACHINE ARCHITECTURE
Figure 9. Miss ratio as a function of registers allocated, for
allocation using estimates (left) or dynamic profile (right).
There is considerable variation across the test suite, but it is not obviously correlated with
the size of the program. The mx program is the largest, and moreover is written [30] in
‘‘object-oriented’’ style with frequent use of procedure variables, but it nevertheless does con-
siderably better than average. Even with relatively few registers, most programs can make half
or more of their scalar references from registers. On the Titan the average is around two-
thirds.
Use of a profile not only improves the curves, it also smooths them: each time a new
register is available, the allocator makes the best choice of what to do with it. Each profile
used here was for identical inputs to the program in question, so the curves on the right
represent the best possible behavior.*Unsurprisingly, the profile makes the biggest difference
when few registers are available.
As discussed in section 3.7.3, we computed the miss ratio curves for several register
management techniques. Figure 10 shows the average miss ratio for each scheme, as a func-
tion of number of registers used. The left-hand graph shows the average for the five artificial
benchmarks, and the right-hand graph shows it for the ten real programs. We examined six
different schemes. Each scheme was tested twice, basing its decisions first on compile-time
variable-frequency estimates, and then on an actual variable-frequency profile. The labels on
Figure 10’s curves are defined below; a ‘‘P’’ indicates that the scheme used a dynamic
variable-use profile rather than estimates.
Link-time allocation (L, LP) is our technique, described in section 3.3.†It starts by keeping all
scalars in memory except within a basic block, but improves this at link time based on inter-
module analysis. It builds a complete call graph and an estimate of how often each scalar is
*This is optimistic, but perhaps not grossly so [43].
†The miss ratios for each benchmark under schemes L and LP were shown in Figure 9.
25
EXPERIENCE WITH A SOFTWARE-DEFINED MACHINE ARCHITECTURE
used. Locals are combined into non-conflicting groups based on the call graph, and the most
frequently used globals and groups of locals are promoted to registers. Little-used scalars con-
tinue to live in memory, and are brought into temporary registers whenever they are needed.
Compile-time allocation (C, CP) keeps each procedure’s locals in registers but saves and
restores those registers on entry and exit so that this procedure does not interfere with others.
Globals are not kept in registers, as this requires interprocedure analysis to be safe and
effective.
Steenkiste allocation (S, SP) is an improvement of compile-time allocation. Steenkiste alloca-
tion starts with a compile-time allocation, in which each procedure uses essentially the same
set of registers. Then it builds a complete call graph, and locals of procedures near the leaves
are renamed to different registers so that saves and restores are not needed. The decision of
which locals to rename is determined by the structure of the call graph and not by use fre-
quency. Globals are not kept in registers.
Hybrid allocation (H, HP) is a combination of our link-time allocation and Steenkiste alloca-
tion. It starts with a compile-time allocation with saves and restores in each procedure. A
second phase then tries to use the remaining registers to rename locals so as to remove saves
and restores, or to hold globals. This second phase is based on the estimated savings as well
as on the structure of the call graph. As with both our link-time allocation and Steenkiste allo-
cation, using the call graph allows the same register to be used for several non-conflicting
locals.
Fixed-sized windows (W, WP) assumes that the register set is divided into overlapping
hardware windows in a circular buffer. The buffer shifts at each call, allowing eight new regis-
ters to be used. When a long chain of calls or returns causes the buffer to overflow or
underflow, exactly eight registers are saved or restored to make room for the required window.
Although these saves and restores are done by trap code, we assume that the trap has abso-
lutely no overhead, and charge only for the loads and stores that occur. This is optimistic; real
window machines have a significant trap overhead, and try to minimize it by saving and restor-
ing several windows at a time. In that case, more may be saved or restored than is necessary.
Variable-sized windows (V, VP) assumes that the register set is used as a circular buffer of
variable-sized windows. At each call, the buffer shifts for the number of registers the pro-
cedure needs for its locals. When the buffer overflows or underflows, exactly enough registers
are saved or restored to make room for the required window. Again, we assume that the win-
dow traps have no overhead, and we therefore charge only for the loads and stores.
In Figure 10, if we look only at the five artificial benchmarks, we might conclude that the
link-time schemes L and H were clear winners over the others. The results of the ten real pro-
grams suggest that the advantage is not so dramatic. Compile-time allocation, Steenkiste allo-
cation, and windows have smaller average miss ratios for the real programs than they do for
the artificial benchmarks. This merely shows that artificial benchmarks are unrealistic.
Modern allocation techniques aim to exploit the locality of procedures. Unfortunately,
artificial benchmarks often have unrealistically small procedures and an unrealistically high
ratio of global references to local references.
26
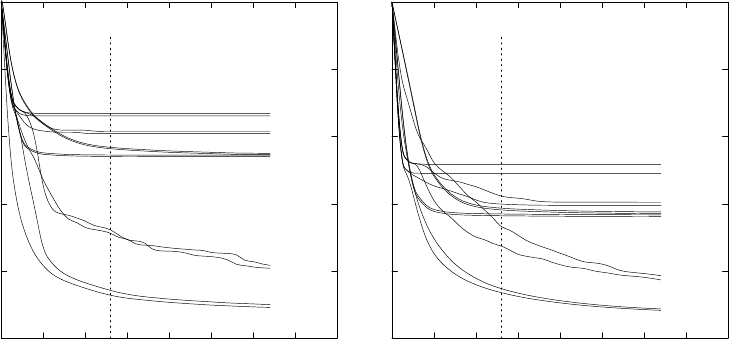
0 16020 40 60 80 100 120 140
number of registers
0
1
0.2
0.4
0.6
0.8
miss ratio
Titan
CCP
SSP
L
LP
H
HP
VVP
WWP
0 16020 40 60 80 100 120 140
number of registers
0
1
0.2
0.4
0.6
0.8
Titan
CCP
SSP
L
LP
H
HP
VVP
WWP
EXPERIENCE WITH A SOFTWARE-DEFINED MACHINE ARCHITECTURE
Figure 10. Miss ratio as a function of registers allocated,
for each register management scheme, averaged over
the five artificial benchmarks (left) or the ten
real programs (right).
For most of our range of study, variable-sized windows don’t do noticeably better than
fixed-sized windows. On the Titan, with 52 registers available, windows and link-time alloca-
tion do about equally well. The variable-window curve flattens out almost immediately, sug-
gesting that windows would have the biggest advantage over allocation when only a few regis-
ters are available. We should remember, though, that the miss ratio for windows does not
include the overhead of the trap for window overflow or underflow. Its apparent advantage for
small register sets may be spurious.
A profile had little effect on schemes not designed to exploit a profile, like Steenkiste’s
scheme. Nevertheless, a profile was occasionally of use even to these schemes. It revealed
variables that were never used at all and that therefore did not need a register.
Having implemented both Steenkiste’s scheme and our own, the hybrid scheme was an
easy generalization. It turns out to be reasonably successful. It combines the best of
Steenkiste’s scheme (complete coverage of locals, at the smaller expense of saves and restores)
with the best of our link-time scheme (inclusion of globals and use of frequency information).
Although it has little to recommend it over our normal scheme when applied to the artificial
benchmarks, its performance on the real programs is good. It stays consistently ahead of our
scheme, and takes an early lead that makes it suitable even when relatively few registers are
available, giving it a clear advantage over both its parents.
When we first made the comparison, the hybrid scheme did several percent worse than
our original scheme. The reason was interesting. In our standard libraries, several routines
make calls through procedure variables, even when it is not necessary. The exit routine is one
such, as are all routines that set up arguments for system calls. In either Steenkiste allocation
or the hybrid scheme, these routines, along with any routines above them in the call graph, are
rendered ineligible for renaming of local registers. This is overkill, however. We never return
27

EXPERIENCE WITH A SOFTWARE-DEFINED MACHINE ARCHITECTURE
from the exit routine, and so it would be safe to rename locals above it on the call graph.
Similarly, the routine that performs a system-call trap is short and stylized, and poses no threat
to renamed registers above it. The designers of a system using this sort of register allocation
would probably tune their libraries so that they did not unnecessarily handicap the allocator.
Alternatively, they might build in knowledge of these exceptions so that the allocator could
work around them. The latter would be more dangerous but might be easier. We assume that
the problem would be addressed in some manner, and wanted only to get realistic measure-
ments of the Steenkiste and hybrid schemes. We therefore adopted the latter approach.
The link-time allocation schemes (L and H) are clear winners asymptotically, though it
must be admitted that without a profile other schemes work better with small register sets. As
future machines exhibit higher levels of integration and more instruction-level parallelism, we
are likely to see an increase in the size of register sets. This will make the advantages of link-
time allocation schemes even more important.
The better performance of the link-time schemes comes from two advantages over the
other schemes. First, the link-time analysis makes it safe to include globals without risk of
aliasing errors. Second, the use of variable-frequency estimates (or profiles) lets them use their
registers preferentially for important variables. By including this kind of interprocedural and
intermodule analysis, we could improve the window schemes enough to give them comparable
miss ratios [41]. Still, if we are willing to do the intermodule analysis, it is unclear why we
should want the windows.
4.2. Performance of pipeline instruction scheduling
Our other link-time optimization is pipeline scheduling. The Titan CPU can waste cycles
because of a pipeline stall or an unfilled branch slot. The scheduler hides these CPU-wasted
cycles by moving other instructions into them, in an intra-block phase followed by a modest
inter-block phase, as described in section 3.4. Because the inter-block phase fills branch slots
speculatively from the likely successor block, we must be careful how we count CPU-wasted
cycles. A branch slot filled with an instruction from the destination block, for example, is use-
ful whenever the branch is actually taken, and is wasted only when the branch is not taken; the
reverse is true if we fill the slot from the fall-through block.
We used Mahler’s instruction-level instrumentation to count useful and wasted cycles in
unscheduled code, in code with only intra-block scheduling, and in code with full scheduling.*
The results are shown in Figure 11. CPU-wasted cycles in unscheduled code made up between
20 and 60 percent of all cycles. We normalized the CPU-wasted cycles for each benchmark so
that the wasted cycles for unscheduled code is unity; thus the fraction removed is zero. In the
left-hand graph, global register allocation was done; in the right-hand graph it was not. The
dotted curves are the arithmetic means over all 15 programs.
In most cases the second phase of scheduling was less effective than the first, because the
second phase is trying only to fill branch slots. Two of the programs, however, improved pro-
portionally more in the second phase than in the first. The spread of improvements was about
*This does not count wasted cycles due to effects outside the processor, such as cache misses or page faults.
28
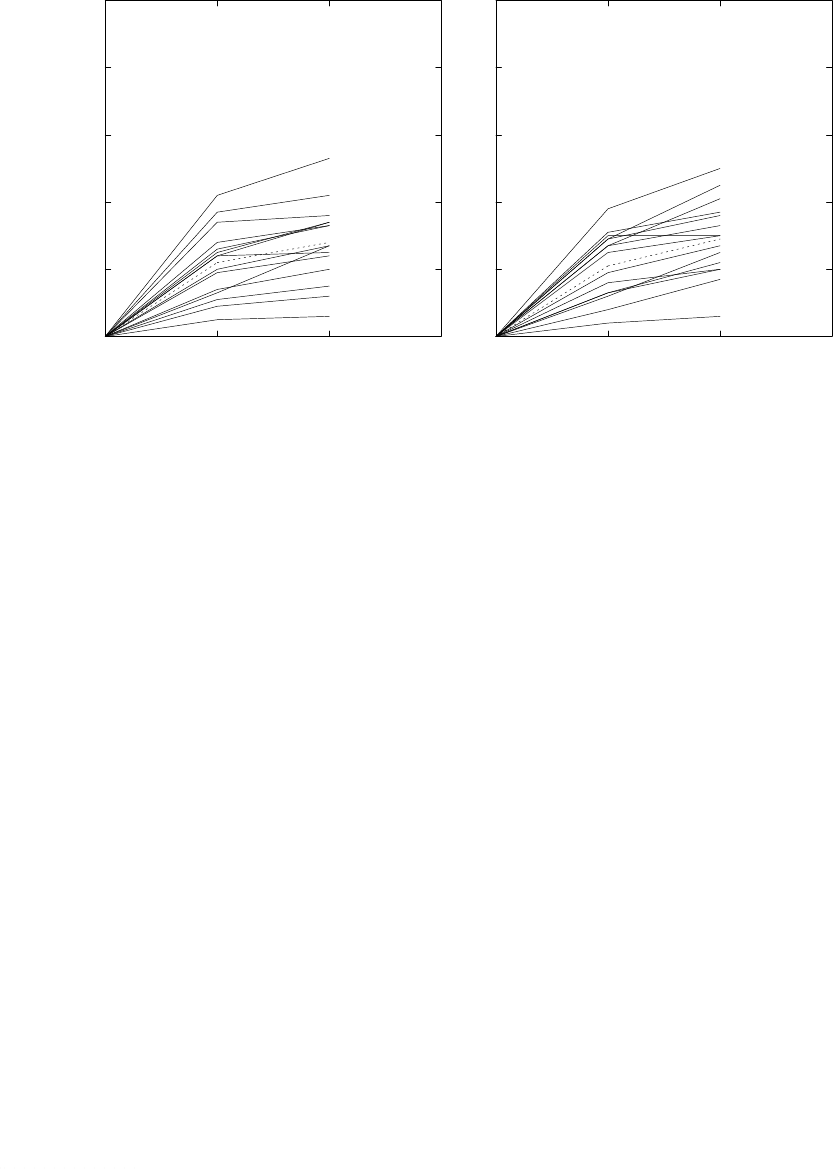
no
sched intra-
block full
sched
0
1
0.2
0.4
0.6
0.8
fraction of CPU-wasted cycles removed
livermore
whet
linpak
stan
boyer
sedd
egrep
troff
mxyacc
ccom
met
rsim
grr
eco
no
sched intra-
block full
sched
0
1
0.2
0.4
0.6
0.8
livermore
whet
linpakstan
boyer
sedd
egrep
troff
mx
yacc
ccom
met
rsim
grr
eco
EXPERIENCE WITH A SOFTWARE-DEFINED MACHINE ARCHITECTURE
Figure 11. Fraction of all CPU-wasted cycles that are
removed by different scheduling intensities, with
global register allocation (left) and without (right).
the same with and without register allocation. On the average, scheduling removed about one
fourth of the CPU-wasted cycles.
Also of interest is how well the scheduler can fill branch slots with useful instructions.
As before, we must consider how often a branch slot is usefully executed rather than how often
it contains an instruction other than a no-op. The results are summarized in Figure 12, which
shows how often various kinds of branch slots contained useful instructions when executed,
averaged over all the test programs.*
The certainty of an unconditional jump allows us to fill the slot almost all the time. In
fact, the only exceptions are certain branches whose destinations are unknown, as when we are
jumping into a table.
Because a backward conditional branch is likely to be a loop, we try to fill its slot from
the destination block in preference to the fall-through block. The result is that the slot after a
backward conditional branch is likely to be usefully filled around two-thirds of the time.
Figure 12 shows that global register allocation has little effect on either intra-block
scheduling or inter-block filling of unconditional branch slots. Unfortunately, it does
significantly reduce our ability to speculatively fill the slot of a conditional branch in the inter-
block phase.
This is because register allocation broadens the set of registers referenced. In code
without register allocation, the first instruction of a block is likely to be a load of some vari-
able into the first temporary register. It is likely that any pair of possible successor blocks will
*The fraction of useful branch slots is not zero even without scheduling, because the Mahler assembler fills in a
few branch slots itself, within idioms (see section 3.1).
29
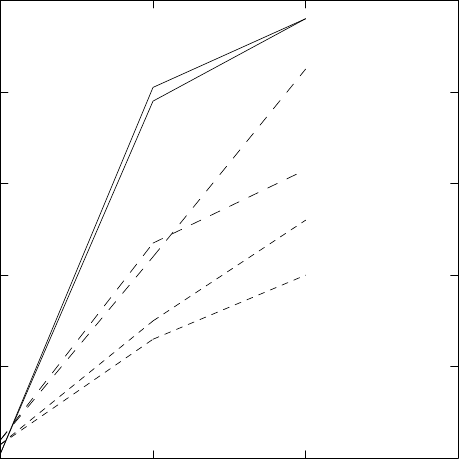
no
sched intra-
block full
sched
0
1
0.2
0.4
0.6
0.8
useful fraction of branch slots
cond forward,
no reg alloc
cond forward,
reg alloc
cond backward,
no reg alloc
cond backward,
reg alloc
uncond, no reg alloc
uncond, reg alloc
EXPERIENCE WITH A SOFTWARE-DEFINED MACHINE ARCHITECTURE
Figure 12. Fraction of branch slots that are useful for three
kinds of branches, with and without register allocation.
both start with such a load instruction. In that case, the scheduler will know that either one
can safely be moved into the preceding branch slot. After register allocation, however, these
loads are likely to be absent; the first instruction is probably an operation using the register
allocated for the variable that was loaded in the original code. The variables used by the two
successor blocks will not necessarily be the same. The scheduler will therefore have more
trouble guaranteeing that a candidate instruction will be harmless if control goes the other way.
Although register allocation degrades the filling of forward branches and backward
branches by comparable proportions on the average, there is an interesting asymmetry between
the two. Figure 13 shows the effect of register allocation on the fraction of usefully filled
branch slots after scheduling. The left-hand graph shows forward conditional branches, and the
right-hand graph shows backward conditional branches. Each graph shows the fraction of slots
that are useful in each of the fifteen test programs, first when register allocation is not done and
then when it is done. The range of fractions without register allocation is about the same in
either case. The effect of register allocation on the two cases is quite different, however.
Register allocation degraded the filling of forward branch slots by degrading most of the pro-
grams about the same amount. In contrast, it degraded the filling of backward branch slots by
spreading out the distribution. Some programs had many backward branch slots filled, with or
without register allocation. Others did much worse under register allocation. The variation
does not seem to be related to differences in the relative abundance of forward and backward
branches. Why this asymmetry exists is still unclear.
30
reg alloc
off reg alloc
on
0
1
0.2
0.4
0.6
0.8
useful fraction of branch slots
livermore
whet
linpak
stan
boyer
sedd
egrep
troff
mx
yacc
ccom
met
rsim
grr
eco
reg alloc
off reg alloc
on
0
1
0.2
0.4
0.6
0.8
livermore
whet
linpak
stan
boyer
sedd
egrep
troff
mx
yacc
ccom met
rsim
grr
eco
EXPERIENCE WITH A SOFTWARE-DEFINED MACHINE ARCHITECTURE
Figure 13. Effect of register allocation on the dynamic fraction of
useful branch slots after scheduling, for forward conditional
branches (left) and backward conditional branches (right).
5. A retrospective assessment
Performing optimizations at link time is not free. The register actions increase the size of
an object file, typically by a factor of 2. Register allocation by itself slows down the link step
by a factor of 1.5 to 3. Asking for both register allocation and scheduling slows it down by a
factor of 2 to 4. We had hoped it would be less than this; slowdowns of 2 to 4 are enough to
keep some people from using link-time optimizations routinely. Because our register alloca-
tion exploits intermodule information, an alternative would be to require complete recompila-
tion, so that the intermodule information can be collected. A complete recompilation takes
anywhere from 5 to 50 times as long as a non-optimizing link, not including recompiling the
relevant library modules. An optimizing link is clearly preferable.
Whether people at WRL are willing to accept the slowdown of optimizing at link time
depends on how fast our programs run after optimization. Figure 14 shows the runtimes of the
fifteen test programs for various combinations of register allocation and scheduling, relative to
the runtimes when neither was done. Even without profiling, the average payoff in using both
is a 25% improvement in speed.
What would we do differently? Our biggest mistake, despite our attempts to avoid it, was
that we pushed too much into the linker. The Mahler assembler should have done intra-
procedure promotion of variables, inserting saves and restores that the link-time allocator
would remove. This would have led directly to the hybrid scheme described in section 4.1,
making the link-time part of the algorithm both more effective and faster. With fewer memory
references making it past the assembler, we might even have been able to do pipeline schedul-
ing in the assembler rather than the linker.
We were also disappointed in the low appeal of the profile-driven allocation. Even
though using profile-driven allocation made programs 10% to 15% faster than using normal
31
0 71 2 3 4 5 6
0
1
0.2
0.4
0.6
0.8
normalized execution time
(all)
whet-ccom
boyer
troff-rsim-mx-liv-eco
stan
yacc-met-grr
egrep
sed
linp
boyer
whet
ccom
met
sed-rsim-linp
troff
liv
eco
grr
mx
stan
yacc
egrep
whet-boyer
ccom
rsim
troff-sed-met
eco
linp-grr
mx
liv
stan
yacc
egrep
whet
ccom
linp-boyer
rsim
met
liv
eco
troff-grr
sed
mx
stan
yacc
egrep
whet
ccom
rsim-boyer
met-linp
eco
grr
troff
sed-mx
liv
stan
yacc
egrep
reg alloc: - o f f - from estimates from profile
sched: off on off on off on
EXPERIENCE WITH A SOFTWARE-DEFINED MACHINE ARCHITECTURE
Figure 14. Execution times for various optimization combinations,
normalized to the case of no link-time optimization.
32
EXPERIENCE WITH A SOFTWARE-DEFINED MACHINE ARCHITECTURE
link-time allocation, few people went to the trouble. In retrospect, this is not terribly surpris-
ing. The programs that one wants to squeeze the last bit of performance from are usually the
programs that run a long time, which means they are not programs one wants to run as part of
the build step. Perhaps if a profile had offered 50% or 90% improvement this would be
different, but our experience may serve as a warning to those exploring profile-driven optimi-
zation.
We did not attempt to make the debugger understand link-time optimized programs. This
was due mainly to a lack of people. Register allocation should not have been a significant
problem since a variable is either promoted for its entire lifetime or it is not promoted at all.
Pipeline scheduling can rearrange instructions enough to make statement-oriented breakpoints
difficult, but there is now a fairly well-understood tradeoff between code motion and debugging
[19]. It is interesting to note that we had merely to relink if we wanted to convert between an
optimized program and a debuggable one. This is considerably more convenient than if we
had had to recompile; if the inconvenience had been greater than it was, we might have taken
the trouble to make the debugger smarter.
Our greatest success was the technique of link-time code modification. By itself, register
allocation at link time may be overkill; very global optimization by monolithic compilation of
source files or of intermediate-code files [12,21,36,45] or perhaps by reference to persistent
program data bases [34] could still turn out to be a better tradeoff. But our machinery for code
modification led us to develop a wide variety of tools for performance analysis at the source
and machine levels. Most of these tools actually require very little of the machinery we imple-
mented, but their advantage is profound. It has transformed gprof from something we use a
few times a year into something we use a few times a month or week.
Late modification of the compiled program, though not a new idea, is getting an increas-
ing amount of attention. It is a handy stage to reorder procedures or basic blocks to improve
cache performance [27,32], because only when the code is in our hands do we know how big
basic blocks and procedures really are. Benitez and Davidson [6] describe an optimizing linker
that does fairly general peephole optimizations. Johnson [22] discusses an elegant approach
called postloading: code modification occurs after linking and is completely separate from the
linker, but the linker always retains in the executable file enough information for the postloader
to understand the uses of addresses and the like.
Finally, we are also pleased with our use of Mahler as the ‘‘software-defined architec-
ture’’ for the Titan. Three related but different machines have been designed under the Mahler
umbrella, with few changes needed in the front-end compilers. The implementation of Mahler
was good enough that users interested in performance were not heard to wish that they could
get at the underlying machine. The main benefit of the ‘‘RISC philosophy’’ is the ability to
make sensible tradeoffs between hardware and software. A software-defined architecture like
Mahler allows us to make these tradeoffs flexibly and without causing turmoil in the higher
levels of the environment.
33
EXPERIENCE WITH A SOFTWARE-DEFINED MACHINE ARCHITECTURE
History and acknowledgements
In 1982, Forest Baskett founded Digital Equipment’s Western Research Lab. Its initial
project was the development of the Titan, a high-performance scientific workstation intended to
exploit the advantages of simplified architecture and hardware-software tradeoffs. Baskett and
Michael L. Powell were interested in doing very global allocation before I joined the lab, and
provided many prods and insights. Powell implemented our first pipeline scheduler, and the
associated instruction-level instrumentation. David Goldberg invented the first version of the
Mahler language and a global register allocator that worked at compile time, as well as the
name ‘‘Mahler.’’ Loretta Guarino Reid provided a linker that worked on Titans, and contri-
buted to the interface between the linker proper and the code modification facilities. Richard
Beigel did a prototype study of register allocation during his summer with us, suggesting that
allocation based on the call graph would be effective. Many thanks must also go to Jud Leo-
nard, Gene McDaniel, Jeff Prisner, and Neil Wilhelm, for first advocating and then tolerating
Mahler’s extreme approach toward hiding the underlying machine.
In more recent years, newcomers have contributed to the applications in performance
measurement. Anita Borg took the hack that enabled address tracing and incorporated it into a
system that allows traces of multiprogram sets and even of kernel activity. Scott Nettles and
Jeff Mogul spurred the implementation of link-time gprof.
Joel Bartlett, Patrick Boyle, Mary Jo Doherty, Alan Eustace, Norm Jouppi, Jeff Mogul,
and John Ousterhout were unyieldingly critical of drafts of this paper, forcing me to strengthen
it considerably. My thanks to them.
Finally, I must thank all of WRL’s varying population over the years, for helping to build
a stimulating environment in which strange ideas and real systems turn out to be the same
thing.
Appendix 1. Generation of annotated code.
We assume that a basic block is represented as a sequence of commands of three kinds.
Aleaf command says to obtain the value of a particular variable. An assign command says to
assign the value of a particular previous command to a particular variable. An operate com-
mand says to perform a particular operation on the results of two previous commands and
make the new result available to later commands.
There are links from an operate or assign command to the commands it uses, and a link
from a leaf or assign command to the symbol table entry for the variable it uses. Commands
also have the following fields, which we will fill as we perform the algorithm:
index : cardinal; – – index in basic block
firstUse : link to Command; – – link to first command using c
lastUse : link to Command; – – link to last command using c
assigned : link to Variable; – – where c gets assigned, if available
inLeaf : boolean; – – c is leaf and will be avail in leaf var
34
EXPERIENCE WITH A SOFTWARE-DEFINED MACHINE ARCHITECTURE
We also need Variables to have a field
nextAssn : cardinal; – – index of command that next assigns to v
that we use for bookkeeping while we decorate the commands.
The first step is to find out if each value will be available, either in a leaf variable or as
the result of an assignment, for as long as we need it. This is done with a forward pass over
the basic block, followed by a backward pass. The forward pass is as follows:
index := 0
for each command c do
c.index := index
index := index + 1
c.assigned := nil
c.inLeaf := false
c.firstUse := nobody
for each command c2 that is an operand of c do
if c2.firstUse = nobody then
c2.firstUse := c
c2.lastUse := c
if c is ‘‘leaf v’’ or ‘‘v := rhs’’ then
v.nextAssn := MAXINT
and the backward pass is as follows:
for each command c, in reverse order do
if c is ‘‘v := rhs’’ then
if (rhs.firstUse = c)
and (v.nextAssn >= rhs.lastUse.index) then
rhs.assigned := v
v.nextAssn := c.index
elseif c is ‘‘leaf v’’ then
if v.nextAssn >= c.lastUse.index then
c.inLeaf := true
Then we can generate annotated code. The main algorithm for this is on the next page.
35
EXPERIENCE WITH A SOFTWARE-DEFINED MACHINE ARCHITECTURE
procedure GenCode ( )
for each command c do
if c = ‘‘leaf v’’ then
Generate an instruction to load v into a temporary register
FlagLeaf (c, v)
elseif c = ‘‘v := rhs’’ then
Generate an instruction to store rhs from its temp reg into v
FlagAssn (c, v, rhs)
FlagOp (1, rhs, expr)
else – – c is an operation
Generate one or more instructions to perform the operation.
Call FlagOp(n,opnd,c) for any insts that use the value of opnd
as the n-th operand, where opnd is some operand of c
Call FlagResult(c) for any instructions that produce the result
of this operation
This algorithm uses the following four subsidiary algorithms to annotate individual instruc-
tions:
procedure FlagLeaf (c : Expr; v : Symbol)
if c.inLeaf and c.assigned=x then REMOVE.v RESULT.x
elseif c.inLeaf then REMOVE.v
else LOAD.v
procedure FlagAssn (c : Expr; v : Symbol; rhs : Expr)
if rhs.firstUse ≠cthen STORE.v
elseif rhs.assigned = nobody then STORE.v
elseif rhs=‘‘leaf x’’ and rhs.inLeaf then STORE.v REMOVE.v KEEP.x
elseif rhs=‘‘leaf x’’ then STORE.v
else REMOVE.v
procedure FlagResult (c : Expr)
if c.assigned = x then RESULT.x
procedure FlagOp (n : cardinal; opnd, c : Expr)
if n=1 then op := OP1 else op := OP2
if opnd=‘‘leaf v’’ and opnd.inLeaf then op.v
if opnd.assigned=x and opnd.firstUse≠cthen op.x
36
EXPERIENCE WITH A SOFTWARE-DEFINED MACHINE ARCHITECTURE
References
[1] Advanced Micro Devices. Am29000 Streamlined Instruction Processor User’s Manual
(1987). Advanced Micro Devices, Inc., 901 Thompson Place, P. O. Box 3453, Sun-
nyvale, CA 94088.
[2] Anant Agarwal, Richard L. Sites, Mark Horowitz. ATUM: A new technique for captur-
ing address traces using microcode. Proceedings of the 13th Annual Symposium on
Computer Architecture, pp. 119-127. Published as Computer Architecture News 14 (2),
June 1986.
[3] Alfred V. Aho, John E. Hopcroft, and Jeffrey D. Ullman. The Design and Analysis of
Computer Algorithms, pp. 189-195. Addison-Wesley, 1974.
[4] Alfred V. Aho, Ravi Sethi, and Jeffrey D. Ullman. Compilers: Principles, Techniques,
and Tools, pp. 660-664. Addison-Wesley, 1986.
[5] Russell R. Atkinson and Edward M. McCreight. The Dragon processor. Proceedings
of the Second International Conference on Architectural Support for Programming
Languages and Operating Systems, pp. 65-69. Published as Computer Architecture
News 15 (5), Operating Systems Review 21 (4), SIGPLAN Notices 22 (10), October
1987.
[6] Manuel E. Benitez and Jack W. Davidson. A portable global optimizer and linker.
Proceedings of the SIGPLAN ’88 Conference on Programming Language Design and
Implementation, pp. 329-338. Published as SIGPLAN Notices 23 (7), July 1988.
[7] Robert Bernstein. Multiplication by integer constants. Software — Practice and
Experience 16 (7), pp. 641-652, July 1986.
[8] Anita Borg, R. E. Kessler, Georgia Lazana, and David W. Wall. Long address traces
from RISC machines: Generation and analysis. Seventeenth Annual International Sym-
posium on Computer Architecture, pp. 270-279, May 1990. A more detailed version is
available as WRL Research Report 89/14, September 1989.
[9] G. J. Chaitin. Register allocation & spilling via graph coloring. Proceedings of the
SIGPLAN ’82 Symposium on Compiler Construction, pp. 98-105. Published as SIG-
PLAN Notices 17 (6), June 1982.
[10] Gregory J. Chaitin, Marc A. Auslander, Ashok K. Chandra, John Cocke, Martin E.
Hopkins, and Peter W. Markstein. Register allocation via coloring. Computer
Languages 6, pp. 47-57, 1981.
[11] Frederick C. Chow. A Portable Machine-Independent Global Optimizer — Design and
Measurements. PhD dissertation, Stanford University. Available as Computer Systems
Laboratory Technical Note 83-254. Stanford University, December 1983.
[12] Fred C. Chow. Minimizing register usage penalty at procedure calls. Proceedings of
the SIGPLAN ’88 Conference on Programming Language Design and Implementation,
pp. 85-94. Published as SIGPLAN Notices 23 (7), July 1988.
[13] Douglas W. Clark. Cache performance in the VAX-11/780. ACM Transactions on
Computer Systems 1 (1), pp. 24-37, February 1983.
37
EXPERIENCE WITH A SOFTWARE-DEFINED MACHINE ARCHITECTURE
[14] Jack J. Dongarra. Performance of various computers using standard linear equations
software in a Fortran environment. Computer Architecture News 11 (5), pp. 22-27,
December 1983.
[15] Richard P. Gabriel. Performance and Evaluation of Lisp Systems, pp. 116-135. The
MIT Press, 1985.
[16] Robert B. Garner, et al. The Scalable Processor Architecture (SPARC). Digest of
Papers: Compcon 88, pp. 278-283, March 1988.
[17] Susan L. Graham, Peter B. Kessler, and Marshall K. McKusick. gprof: a call graph
execution profiler. Proceedings of the SIGPLAN ’82 Symposium on Compiler Con-
struction, pp. 120-126. Published as SIGPLAN Notices 17 (6), June 1982.
[18] John Hennessy. Stanford benchmark suite. Personal communication.
[19] John Hennessy. Symbolic debugging of optimized code. ACM Transactions on Pro-
gramming Languages and Systems 4 (3), pp. 323-344, July 1982.
[20] John Hennessy and Thomas Gross. Postpass code optimization of pipeline constraints.
ACM Transactions on Programming Languages and Systems 5 (3), pp. 422-448, July
1983.
[21] Mark I. Himelstein, Fred C. Chow, and Kevin Enderby. Cross-module optimizations:
Its implementation and benefits. Proceedings of the Summer 1987 USENIX Conference,
pp. 347-356, June 1987.
[22] S. C. Johnson. Postloading for fun and profit. Proceedings of the Winter ’90 USENIX
Conference, pp. 325-330, January 1990.
[23] Norman P. Jouppi and Jeffrey Y.-F. Tang. A 20 MIPS sustained 32 bit CMOS
microprocessor with high ratio of sustained to peak performance. IEEE Journal of
Solid-State Circuits 24 (5), pp. 1348-1359, October 1989.
[24] Gerry Kane. MIPS R2000 Risc Architecture. Prentice Hall, 1987.
[25] Earl A. Killian. Personal communication.
[26] Ruby B. Lee. Precision Architecture. IEEE Computer 22 (1), pp. 78-89, January 1989.
[27] Scott McFarling. Program optimization for instruction caches. Third International
Symposium on Architectural Support for Programming Languages and Operating Sys-
tems, pp. 183-191, April 1989. Published as Computer Architecture News 17 (2),
Operating Systems Review 23 (special issue), SIGPLAN Notices 24 (special issue).
[28] MIPS Computer Systems. RISCompiler and C Programmer’s Guide. MIPS Computer
Systems, Inc., 930 Arques Ave., Sunnyvale, California 94086. 1989.
[29] Michael J. K. Nielsen. Titan system manual. WRL Research Report 86/1, September
1986.
[30] John Ousterhout. Personal communication.
[31] David A. Patterson. Reduced instruction set computers. Communications of the ACM
28 (1), pp. 8-21, January 1985.
38
EXPERIENCE WITH A SOFTWARE-DEFINED MACHINE ARCHITECTURE
[32] Karl Pettis and Robert C. Hansen. Profile guided code positioning. Proceedings of the
SIGPLAN ’90 Conference on Programming Language Design and Implementation, pp.
16-27. Published as SIGPLAN Notices 25 (6), June 1990.
[33] George Radin. The 801 minicomputer. Proceedings of the Symposium on Architec-
tural Support for Programming Languages and Operating Systems, pp. 39-47. Pub-
lished as SIGARCH Computer Architecture News 10 (2), March 1982, and as SIGPLAN
Notices 17 (4), April 1982.
[34] Vatsa Santhanam and Daryl Odnert. Register allocation across procedure and module
boundaries. Proceedings of the SIGPLAN ’90 Conference on Programming Language
Design and Implementation, pp. 28-39. Published as SIGPLAN Notices 25 (6), June
1990.
[35] Peter Steenkiste. Lisp on a Reduced-Instruction-Set Processor: Characterization and
Optimization. PhD dissertation, Stanford University. Available as Stanford Computer
Systems Laboratory Technical Report CSL-TR-87-324. March 1987.
[36] Peter A. Steenkiste and John L. Hennessy. A simple interprocedural register allocation
algorithm and its effectiveness for LISP. ACM Transactions on Programming
Languages and Systems 11 (1), pp. 1-32, January 1989.
[37] J. Strong, et al. The problem of programming communication with changing machines:
A proposed solution. Communications of the ACM 1 (8), pp. 12-18, August 1958, and
1(9), pp. 9-15, September 1958.
[38] Thomas G. Szymanski. Assembling code for machines with span-dependent instruc-
tions. Communications of the ACM 21 (4), pp. 300-308, April 1978.
[39] Christopher J. Terman. User’s Guide to NET, PRESIM, and RNL/NL. M.I.T. Labora-
tory for Computer Science, 545 Technology Square, Room 418, Cambridge, Mas-
sachusetts.
[40] David W. Wall. Global register allocation at link time. Proceedings of the SIGPLAN
’86 Symposium on Compiler Construction, pp. 264-275. Published as SIGPLAN
Notices 21 (7), July 1986. Also available as WRL Research Report 86/3.
[41] David W. Wall. Register windows vs. register allocation. Proceedings of the SIG-
PLAN ’88 Conference on Programming Language Design and Implementation, pp. 67-
78. Published as SIGPLAN Notices 23 (7), July 1988. Also available as WRL
Research Report 87/5.
[42] David W. Wall. Link-time code modification. WRL Research Report 89/17, Sep-
tember 1989.
[43] David W. Wall. Predicting program behavior using real or estimated profiles.
Proceedings of the SIGPLAN ’91 Conference on Programming Language Design and
Implementation, pp. 59-70. Published as SIGPLAN Notices 26 (6), June 1991. Also
available as WRL Technical Note TN-18.
[44] David W. Wall and Michael L. Powell. The Mahler experience: Using an intermediate
language as the machine description. Second International Symposium on Architectural
Support for Programming Languages and Operating Systems, pp. 100-104. Published
39
EXPERIENCE WITH A SOFTWARE-DEFINED MACHINE ARCHITECTURE
as Computer Architecture News 15 (5), Operating Systems Review 21 (4), SIGPLAN
Notices 22 (10), October 1987. A more detailed version is available as WRL Research
Report 87/1.
[45] William Wulf. Personal communication.
40
WRL Research Reports
‘‘Titan System Manual.’’ ‘‘MultiTitan: Four Architecture Papers.’’
Michael J. K. Nielsen. Norman P. Jouppi, Jeremy Dion, David Boggs, Mich-
WRL Research Report 86/1, September 1986. ael J. K. Nielsen.
WRL Research Report 87/8, April 1988.
‘‘Global Register Allocation at Link Time.’’
David W. Wall. ‘‘Fast Printed Circuit Board Routing.’’
WRL Research Report 86/3, October 1986. Jeremy Dion.
WRL Research Report 88/1, March 1988.
‘‘Optimal Finned Heat Sinks.’’
William R. Hamburgen. ‘‘Compacting Garbage Collection with Ambiguous
WRL Research Report 86/4, October 1986. Roots.’’
Joel F. Bartlett.
‘‘The Mahler Experience: Using an Intermediate WRL Research Report 88/2, February 1988.
Language as the Machine Description.’’
David W. Wall and Michael L. Powell. ‘‘The Experimental Literature of The Internet: An
WRL Research Report 87/1, August 1987. Annotated Bibliography.’’
Jeffrey C. Mogul.
‘‘The Packet Filter: An Efficient Mechanism for WRL Research Report 88/3, August 1988.
User-level Network Code.’’
Jeffrey C. Mogul, Richard F. Rashid, Michael ‘‘Measured Capacity of an Ethernet: Myths and
J. Accetta. Reality.’’
WRL Research Report 87/2, November 1987. David R. Boggs, Jeffrey C. Mogul, Christopher
A. Kent.
‘‘Fragmentation Considered Harmful.’’ WRL Research Report 88/4, September 1988.
Christopher A. Kent, Jeffrey C. Mogul.
WRL Research Report 87/3, December 1987. ‘‘Visa Protocols for Controlling Inter-Organizational
Datagram Flow: Extended Description.’’
‘‘Cache Coherence in Distributed Systems.’’ Deborah Estrin, Jeffrey C. Mogul, Gene Tsudik,
Christopher A. Kent. Kamaljit Anand.
WRL Research Report 87/4, December 1987. WRL Research Report 88/5, December 1988.
‘‘Register Windows vs. Register Allocation.’’ ‘‘SCHEME->C A Portable Scheme-to-C Compiler.’’
David W. Wall. Joel F. Bartlett.
WRL Research Report 87/5, December 1987. WRL Research Report 89/1, January 1989.
‘‘Editing Graphical Objects Using Procedural ‘‘Optimal Group Distribution in Carry-Skip Ad-
Representations.’’ ders.’’
Paul J. Asente. Silvio Turrini.
WRL Research Report 87/6, November 1987. WRL Research Report 89/2, February 1989.
‘‘The USENET Cookbook: an Experiment in ‘‘Precise Robotic Paste Dot Dispensing.’’
Electronic Publication.’’ William R. Hamburgen.
Brian K. Reid. WRL Research Report 89/3, February 1989.
WRL Research Report 87/7, December 1987.
41
‘‘Simple and Flexible Datagram Access Controls for ‘‘Link-Time Code Modification.’’
Unix-based Gateways.’’ David W. Wall.
Jeffrey C. Mogul. WRL Research Report 89/17, September 1989.
WRL Research Report 89/4, March 1989.
‘‘Noise Issues in the ECL Circuit Family.’’
‘‘Spritely NFS: Implementation and Performance of
Jeffrey Y.F. Tang and J. Leon Yang.
Cache-Consistency Protocols.’’
WRL Research Report 90/1, January 1990.
V. Srinivasan and Jeffrey C. Mogul.
WRL Research Report 89/5, May 1989.
‘‘Efficient Generation of Test Patterns Using
Boolean Satisfiablilty.’’
‘‘Available Instruction-Level Parallelism for Super-
Tracy Larrabee.
scalar and Superpipelined Machines.’’
WRL Research Report 90/2, February 1990.
Norman P. Jouppi and David W. Wall.
WRL Research Report 89/7, July 1989.
‘‘Two Papers on Test Pattern Generation.’’
Tracy Larrabee.
‘‘A Unified Vector/Scalar Floating-Point Architec-
WRL Research Report 90/3, March 1990.
ture.’’
Norman P. Jouppi, Jonathan Bertoni, and David
‘‘Virtual Memory vs. The File System.’’
W. Wall.
Michael N. Nelson.
WRL Research Report 89/8, July 1989.
WRL Research Report 90/4, March 1990.
‘‘Architectural and Organizational Tradeoffs in the
‘‘Efficient Use of Workstations for Passive Monitor-
Design of the MultiTitan CPU.’’
ing of Local Area Networks.’’
Norman P. Jouppi.
Jeffrey C. Mogul.
WRL Research Report 89/9, July 1989.
WRL Research Report 90/5, July 1990.
‘‘Integration and Packaging Plateaus of Processor
‘‘A One-Dimensional Thermal Model for the VAX
Performance.’’
9000 Multi Chip Units.’’
Norman P. Jouppi.
John S. Fitch.
WRL Research Report 89/10, July 1989.
WRL Research Report 90/6, July 1990.
‘‘A 20-MIPS Sustained 32-bit CMOS Microproces-
‘‘1990 DECWRL/Livermore Magic Release.’’
sor with High Ratio of Sustained to Peak Perfor-
Robert N. Mayo, Michael H. Arnold, Walter S. Scott,
mance.’’
Don Stark, Gordon T. Hamachi.
Norman P. Jouppi and Jeffrey Y. F. Tang.
WRL Research Report 90/7, September 1990.
WRL Research Report 89/11, July 1989.
‘‘Pool Boiling Enhancement Techniques for Water at
‘‘The Distribution of Instruction-Level and Machine
Low Pressure.’’
Parallelism and Its Effect on Performance.’’
Wade R. McGillis, John S. Fitch, William
Norman P. Jouppi.
R. Hamburgen, Van P. Carey.
WRL Research Report 89/13, July 1989.
WRL Research Report 90/9, December 1990.
‘‘Long Address Traces from RISC Machines:
‘‘Writing Fast X Servers for Dumb Color Frame Buf-
Generation and Analysis.’’
fers.’’
Anita Borg, R.E.Kessler, Georgia Lazana, and David
Joel McCormack.
W. Wall.
WRL Research Report 91/1, February 1991.
WRL Research Report 89/14, September 1989.
42
‘‘A Simulation Based Study of TLB Performance.’’ ‘‘Cache Write Policies and Performance.’’
J. Bradley Chen, Anita Borg, Norman P. Jouppi. Norman P. Jouppi.
WRL Research Report 91/2, November 1991. WRL Research Report 91/12, December 1991.
‘‘Analysis of Power Supply Networks in VLSI Cir-
‘‘Packaging a 150 W Bipolar ECL Microprocessor.’’
cuits.’’
William R. Hamburgen, John S. Fitch.
Don Stark.
WRL Research Report 92/1, March 1992.
WRL Research Report 91/3, April 1991.
‘‘Observing TCP Dynamics in Real Networks.’’
‘‘TurboChannel T1 Adapter.’’
Jeffrey C. Mogul.
David Boggs.
WRL Research Report 92/2, April 1992.
WRL Research Report 91/4, April 1991.
‘‘Systems for Late Code Modification.’’
‘‘Procedure Merging with Instruction Caches.’’
David W. Wall.
Scott McFarling.
WRL Research Report 92/3, May 1992.
WRL Research Report 91/5, March 1991.
‘‘Piecewise Linear Models for Switch-Level Simula-
‘‘Don’t Fidget with Widgets, Draw!.’’
tion.’’
Joel Bartlett.
Russell Kao.
WRL Research Report 91/6, May 1991.
WRL Research Report 92/5, September 1992.
‘‘Pool Boiling on Small Heat Dissipating Elements in
Water at Subatmospheric Pressure.’’
Wade R. McGillis, John S. Fitch, William ‘‘A Practical System for Intermodule Code Optimiza-
R. Hamburgen, Van P. Carey. tion at Link-Time.’’
WRL Research Report 91/7, June 1991. Amitabh Srivastava and David W. Wall.
WRL Research Report 92/6, December 1992.
‘‘Incremental, Generational Mostly-Copying Gar-
bage Collection in Uncooperative Environ- ‘‘A Smart Frame Buffer.’’
ments.’’ Joel McCormack & Bob McNamara.
G. May Yip. WRL Research Report 93/1, January 1993.
WRL Research Report 91/8, June 1991.
‘‘Recovery in Spritely NFS.’’
‘‘Interleaved Fin Thermal Connectors for Multichip Jeffrey C. Mogul.
Modules.’’ WRL Research Report 93/2, June 1993.
William R. Hamburgen.
WRL Research Report 91/9, August 1991. ‘‘Tradeoffs in Two-Level On-Chip Caching.’’
Norman P. Jouppi & Steven J.E. Wilton.
‘‘Experience with a Software-defined Machine Ar- WRL Research Report 93/3, October 1993.
chitecture.’’
David W. Wall. ‘‘Unreachable Procedures in Object-oriented
WRL Research Report 91/10, August 1991. Programing.’’
Amitabh Srivastava.
‘‘Network Locality at the Scale of Processes.’’ WRL Research Report 93/4, August 1993.
Jeffrey C. Mogul.
WRL Research Report 91/11, November 1991. ‘‘Limits of Instruction-Level Parallelism.’’
David W. Wall.
WRL Research Report 93/6, November 1993.
43
‘‘Fluoroelastomer Pressure Pad Design for
Microelectronic Applications.’’
Alberto Makino, William R. Hamburgen, John
S. Fitch.
WRL Research Report 93/7, November 1993.
WRL Technical Notes
‘‘TCP/IP PrintServer: Print Server Protocol.’’ ‘‘Predicting Program Behavior Using Real or Es-
Brian K. Reid and Christopher A. Kent. timated Profiles.’’
WRL Technical Note TN-4, September 1988. David W. Wall.
WRL Technical Note TN-18, December 1990.
‘‘TCP/IP PrintServer: Server Architecture and Im-
plementation.’’ ‘‘Cache Replacement with Dynamic Exclusion’’
Christopher A. Kent. Scott McFarling.
WRL Technical Note TN-7, November 1988. WRL Technical Note TN-22, November 1991.
‘‘Smart Code, Stupid Memory: A Fast X Server for a ‘‘Boiling Binary Mixtures at Subatmospheric Pres-
Dumb Color Frame Buffer.’’ sures’’
Joel McCormack. Wade R. McGillis, John S. Fitch, William
WRL Technical Note TN-9, September 1989. R. Hamburgen, Van P. Carey.
WRL Technical Note TN-23, January 1992.
‘‘Why Aren’t Operating Systems Getting Faster As
Fast As Hardware?’’ ‘‘A Comparison of Acoustic and Infrared Inspection
John Ousterhout. Techniques for Die Attach’’
WRL Technical Note TN-11, October 1989. John S. Fitch.
WRL Technical Note TN-24, January 1992.
‘‘Mostly-Copying Garbage Collection Picks Up
Generations and C++.’’ ‘‘TurboChannel Versatec Adapter’’
Joel F. Bartlett. David Boggs.
WRL Technical Note TN-12, October 1989. WRL Technical Note TN-26, January 1992.
‘‘The Effect of Context Switches on Cache Perfor- ‘‘A Recovery Protocol For Spritely NFS’’
mance.’’ Jeffrey C. Mogul.
Jeffrey C. Mogul and Anita Borg. WRL Technical Note TN-27, April 1992.
WRL Technical Note TN-16, December 1990.
‘‘Electrical Evaluation Of The BIPS-0 Package’’
‘‘MTOOL: A Method For Detecting Memory Bot- Patrick D. Boyle.
tlenecks.’’ WRL Technical Note TN-29, July 1992.
Aaron Goldberg and John Hennessy.
‘‘Transparent Controls for Interactive Graphics’’
WRL Technical Note TN-17, December 1990.
Joel F. Bartlett.
WRL Technical Note TN-30, July 1992.
44
‘‘Design Tools for BIPS-0’’
Jeremy Dion & Louis Monier.
WRL Technical Note TN-32, December 1992.
‘‘Link-Time Optimization of Address Calculation on
a 64-Bit Architecture’’
Amitabh Srivastava and David W. Wall.
WRL Technical Note TN-35, June 1993.
‘‘Combining Branch Predictors’’
Scott McFarling.
WRL Technical Note TN-36, June 1993.
‘‘Boolean Matching for Full-Custom ECL Gates’’
Robert N. Mayo and Herve Touati.
WRL Technical Note TN-37, June 1993.
45
