Guide To Host/Network Co Processor Communications Using Silicon Labs Thread And Connect AN844 Ashv3 Host Uart I Interface
an844-ashv3-host-uart-iInterface-guide
an844-ashv3-host-uart-iInterface-guide
an844-ashv3-host-uart-iInterface-guide
User Manual:
Open the PDF directly: View PDF ![]() .
.
Page Count: 8
silabs.com | Smart. Connected. Energy-friendly Rev. 0.6
AN844: Guide to Host/Network Co-Processor
Communications Using Silicon Labs Thread
and Connect
This document describes how to set up and test UART
communication between a host and NCP (Network Co-Processor)
using ASHv3-UART, and how to load NCP. It assumes that you
have a Raspberry Pi, USB cable (for UART communication), and
a development board. It applies to Silicon Labs Thread stack
version 1.0 or later, and Silicon Labs Connect stack version 1.2 or
later, provided as part of the Flex SDK.
KEY FEATURES
• Hardware configuration information.
• Building and using the ASHv3-UART test
application
• Building and using the standard UART
host application
• Building and using a host bootloader ap-
plication

Guide to Host/Network Co-Processor Communications Using Silicon Labs Thread and Connect -- AN844
Introduction
silabs.com | Smart. Connected. Energy-friendly Rev. 0.6 | 1
1 Introduction
A Network Co-Processor (NCP) runs the Silicon Labs Thread or Connect stack and is controlled by the host processor through ASHv3-
UART commands. The NCP must be a chip in the Ember® EM35x family or Wireless Gecko (EFR32™) portfolio. The host is a Linux
device such as a Raspberry Pi. ASHv3 is the third revision of the Asynchronous Serial Host (ASH). It is a reliable and efficient UART
communication protocol that is used to facilitate NCP and Host communication. ASHv3 operates on the same level as the UART and
interfaces directly with it.
This document assumes that the NCP platform is loaded with an application image. Both stacks come with NCP UART examples (one
with hardware and one with software flow control) that can be compiled and loaded onto the NCP platform. The NCP platform should also
be loaded with a correctly-configured serial bootloader (serial-uart-bootloader). For Silicon Labs Thread, *.hex images contain both a
bootloader and application. *.ebl and *.s37 images contain just an application; a bootloader must be loaded separately when using these
images. For Connect, building an example in Studio generates both types of images: Bootloader+application and application alone.
See AN961: Bringing up Custom Nodes for the Mighty Gecko and Flex Gecko Families, and AN710: Bringing Up Custom Devices for the
EM35x, to learn how to configure a serial bootloader on an EFR32 and EM35x, respectively.
The Linux host can be loaded with the ASHv3-UART test application (ash-v3-test-app) or, for Silicon Labs Thread, with ip-driver-app and
a host application, referred to in these instructions as [host-app]. When ip-driver-app is loaded, you can also load the host bootloading
application (bootload-ncp-uart-app).
This application note describes the following:
• Hardware configuration information.
• Building and using the ASHv3-UART test application
• Building and using the standard UART host application
• Building and using a host bootloader application
For additional information on using Simplicity Studio and building Thread or Connect applications, see QSG113: Getting Started with
Silicon Labs Thread, or QSG138: Getting Started with the Silicon Labs Flex SDK for the Wireless Gecko (EFR32™) Portfolio. For addi-
tional information on ASHv3, see UG115: ASHv3 Protocol Reference.
Guide to Host/Network Co-Processor Communications Using Silicon Labs Thread and Connect -- AN844
Hardware Configuration
silabs.com | Smart. Connected. Energy-friendly Rev. 0.6 | 2
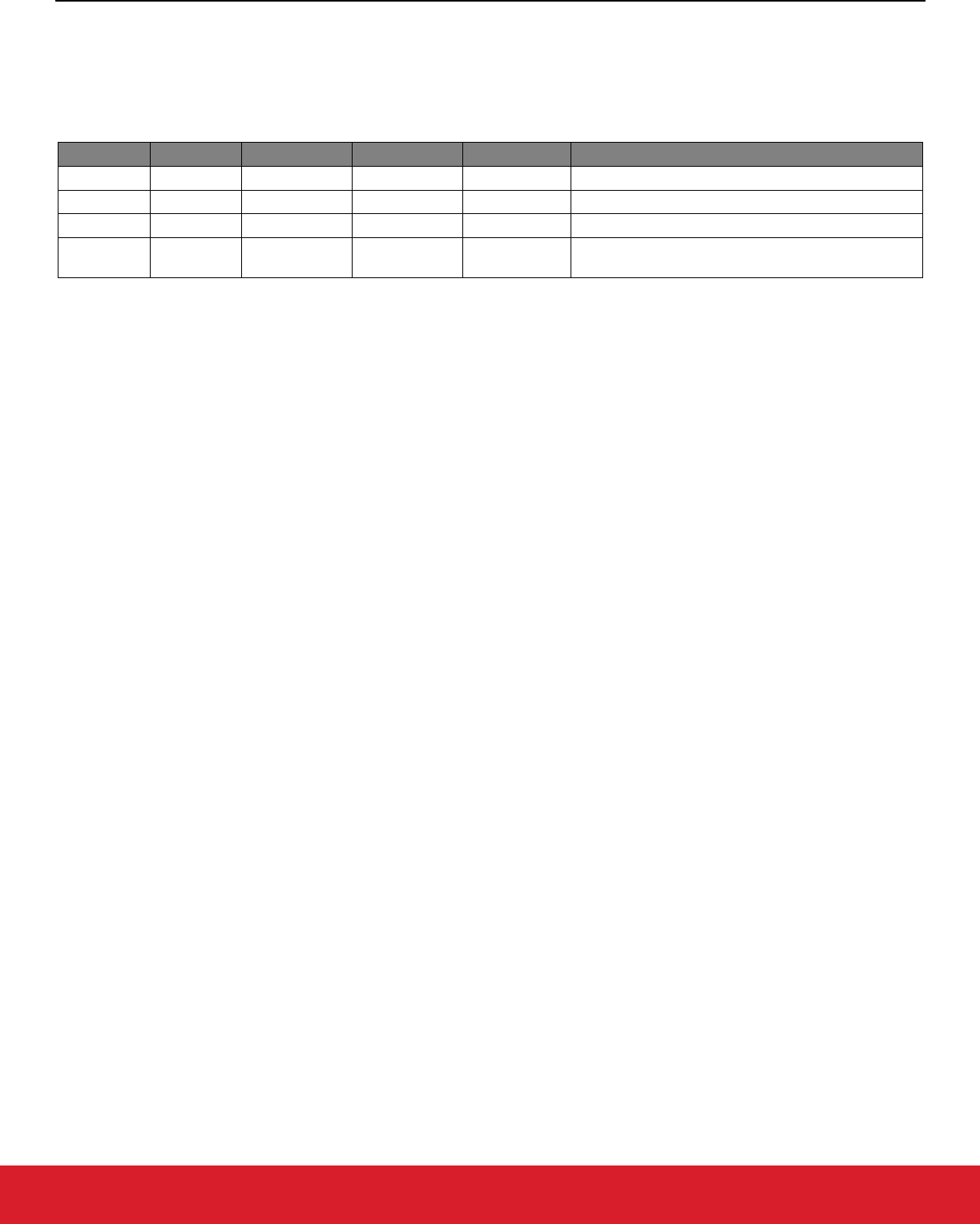
2 Hardware Configuration
For UART NCP, Silicon Labs uses USART0 directed to the same pins that are used for the virtual COM port, as shown in the following
table.
Table 1. EFR32 and EM35x Pin Configurations
Function
EFR32 Pin
EM35x Pin
Peripheral
Location
Description
TX PA0 PB1 USART0_TX 0 Data output from NCP
RX PA1 PB2 USART0_RX 0 Data input to NCP
CTS* PA2 PB3 (N/A)* (N/A)* Clear to send hardware flow control input to NCP
RTS* PA3 PB4 (N/A)* (N/A)* Request to send hardware flow control output from
NCP
*CTS and RTS are software enabled
For UART NCP implementations on EFR32-based development kits, these pins are also on the WSTK expansion header. Only UART
TX and UART RX are labeled (12 and 14), but CTS and RTS can be found at 3 and 5 respectively.
If you are using an EM35x UART NCP over a USB-to-serial connection (J5 on the EM35x Breakout Board), set the jumpers on the NCP
breakout board to connect the four serial port signals (TX, RX, CTS, RTS) to USB and disconnect them from the ISA3. Access to these
signals using direct TTL serial connections or the DB9 port is also possible. Refer to TS6: EM35x Breakout Board Technical Specification,
specifically the section entitled “Serial Communication for EM35xx SC1 UART”, for further information about configuring the EM35x
Breakout Board to access the UART signals.
Connect the Linux host, and make sure that it recognizes the USB connection, if using USB-to-serial interfacing to the UART NCP.
The device entry for the newly connected USB or UART device can vary by operating system but will typically have the form of /dev/tty<ex-
tension>, for example: /dev/ttyUSB0 (EM35x) or /dev/ttyACM0 (EFR32). Instructions later in this document reference these device for-
mats.
Guide to Host/Network Co-Processor Communications Using Silicon Labs Thread and Connect -- AN844
Testing the Interface
silabs.com | Smart. Connected. Energy-friendly Rev. 0.6 | 3
3 Testing the Interface
Two applications are needed for testing: NCP image and ash-v3-test-app.
3.1 ash-v3-test-app
ash-v3-test-app runs on your host and provides tests to verify that your ASHv3-UART implementation is working. This test program is
much simpler than a full-fledged sample application. As a result, it can more efficiently pinpoint ASHv3-UART interface problems.
ash-v3-test-app has two modes of execution—interactive and non-interactive. In interactive mode, the application is operated by an
interactive console. In non-interactive mode, the application is operated by command-line arguments. By default, ash-v3-test-app runs in
interactive mode. Invoking ash-v3-test-app with the arguments --test-echo, --test-bootstrap or --test-xon-xoff
forces it to run in non-interactive mode. (See the Testing section for a detailed explanation of these arguments.)
Note: ash-v3-test-app does not enable any wireless functionality because its purpose is to validate proper operation of the ASHv3
interface between the host and the NCP.
3.2 ash-v3-test-app Command Line Options
ash-v3-test-app takes the following arguments:
--uart <uart_file>: Specify the UART file descriptor, (see section Hardware Configuration for examples for your chip type).
This option is required.
--test-echo <echo_string>: Run an echo test. For more information, see section Echo Testing.
--test-bootstrap: Run a bootstrap test. For more information, see section Bootstrap Testing.
--test-xon-xoff: Run an XON/XOFF test. For more information, see section XON/XOFF Testing.
--verbose: Display all TX’d and RX’d ASHv3 packets.
3.3 Testing
ash-v3-test-app provides tests to verify that your ASHv3-UART implementation is working properly. It verifies that an ASHv3 handshake
can be performed and it also provides an ‘echo’ command. To build the application, execute the following command in the base release
directory (building from a directory other than this is not guaranteed to work):
make –f <path_to_ash_v3_test_app>/ash-v3-test-app.mak
Before executing ash-v3-test-app, identify your TTY driver device for your USB or UART serial connection to the NCP. See sec-
tion Hardware Configuration for TTY driver device examples for your chip type.
3.3.1 Bootstrap Testing
The bootstrap test verifies that ASHv3 can perform an initial handshake between the host and NCP. Invoke ash-v3-test-app with the -u
and --test-bootstrap arguments as follows:
sudo <path_to_compiled_app>/ash-v3-test-app -u /dev/ttyUSB0 --test-bootstrap
The application displays ‘ASHv3 is up’ when ASHv3 successfully performs an initialization handshake. If a handshake cannot be per-
formed, the application displays ‘Failure’.
3.3.2 Echo Testing
The echo test sends a string from the host to the NCP, and the NCP then sends the string back to the host. The host verifies that the
received string matches what was sent. Invoke ash-v3-test-app with the –u and--test-echo arguments as follows:
sudo <path_to_compiled_app>/ash-v3-test-app -u /dev/ttyUSB0 --test-echo “this is my string”
Guide to Host/Network Co-Processor Communications Using Silicon Labs Thread and Connect -- AN844
Testing the Interface
silabs.com | Smart. Connected. Energy-friendly Rev. 0.6 | 4
If the application receives a correctly formatted string back from the NCP, it displays ‘Success’. Otherwise it displays ‘Failure’.
3.3.3 XON/XOFF (Software Flow Control) Testing
The NCP implements XON/XOFF as follows:
• The NCP tells the host to stop sending it data by sending an XOFF.
• The NCP sends a series of XONs when it can accept serial data again.
Note: The NCP UART Software and Hardware Flow Control examples differ only in that the global defines described below are in-
cluded in the Software Flow Control example.
EFR32 NCP
• The EFR32 NCP will respond similarly to XON/XOFF bytes from the host
• The thresholds for sending XON/XOFF can be independently configured in software. When the number of free bytes in the receive
buffer is less than or equal to COM_USART0_RXSTOP (default=17), the NCP sends an XOFF byte. When the number of free bytes
is equal to or greater than COM_USART0_RXSTART (default=21), the NCP sends an XON byte. XON/XOFF flow control is enabled
in the application when it is compiled with the global #defines:
EMBER_APPLICATION_SUPPORTS_SOFTWARE_FLOW_CONTROL
EMBER_SERIAL1_XONXOFF
EM3x NCP
• The EM3X NCP ignores any XON or XOFF bytes sent by the host.
• The EM3X NCP sends an XOFF when its receive buffer fills up to a threshold. It sends a series of five XONs, with 100 milliseconds
between each, when the buffer drains down to a second lower threshold. The NCP also sends the same sequence of XONs after it
is reset. These additional XONs prevent the UART from hanging if an XON is lost or corrupted by noise, or if another byte sent by
the NCP is corrupted into an XOFF. XON/XOFF flow control is enabled in the application when it is compiled with this global #define:
EMBER_APPLICATION_SUPPORTS_SOFTWARE_FLOW_CONTROL
The XON/XOFF test verifies that the NCP sends XONs when either of its RX buffers is full, and sends a series of XONs after it services
its RX buffers. Invoke ash-v3-test-app with the –u and --test-xon-xoff arguments as follows:
sudo <path_to_compiled_app>/ash-v3-test-app -u /dev/ttyUSB0 --test-xon-xoff
The application displays ‘Passed’ upon success, and displays an error upon failure.
3.4 Debugging
If the steps in the Testing section fail, try these debugging tips:
• Some problems can be debugged by viewing the ASH frames that are sent between the host and NCP. To do this, invoke ash-v3-
test-app with the --verbose argument:
sudo <path_to_compiled_app>/ash-v3-test-app -u /dev/ttyUSB0 --verbose
• Verify that a tty device exists in /dev, such as /dev/ttyUSB0. It might have a different name, such as /dev/ttyUSB1.
• If ash-v3-test-app is completely unable to communicate with the NCP, attach a logic analyzer to the UART TX and RX lines, and verify
that traffic is being sent.

Guide to Host/Network Co-Processor Communications Using Silicon Labs Thread and Connect -- AN844
ip-driver-app (Thread Only)
silabs.com | Smart. Connected. Energy-friendly Rev. 0.6 | 5
4 ip-driver-app (Thread Only)
ip-driver-app is an application that connects Silicon Labs Thread host applications with NCP devices. It connects the Linux networking
stack with the Thread wireless mesh, and enables seamless communication between them.
Execute the following command in the base release directory to build the application:
make –f app/ip-ncp/ip-driver-app.mak
An example to start ip-driver-app and a host, when the NCP is an EM35x:
sudo ./build/ip-driver-app/ip-driver-app -u /dev/ttyUSB0 -t tun0 -m 4901 &
sudo [host-app] -m 4901
where
-u: Specifies the USB device (see section Hardware Configuration for examples)
-t: Specifies the tun0 virtual network interface.
-m: Specifies the port for the host app management plane (4901)
All options are required.
Troubleshooting:
• If ip-driver-app reports "connect failed: Connection refused", check whether an instance of ip-driver-app is already running. If so, kill
the process.
• Check ip-driver-app.log for clues.
Guide to Host/Network Co-Processor Communications Using Silicon Labs Thread and Connect -- AN844
bootload-ncp-uart-app
silabs.com | Smart. Connected. Energy-friendly Rev. 0.6 | 6
5 bootload-ncp-uart-app
This application provides the platform-specific means to bootload an NCP over UART. It transfers a file to the NCP via the xmodem
protocol, then reboots the NCP. The bootload application assumes that the serial standalone bootloader is already running on the NCP.
With Silicon Labs Thread, it can be co-resident with the ip-driver-app, but that process will terminate when the bootloader launches. The
process is not required and must not be running when bootloading.
To launch the serial standalone bootloader, the host application must call
emberLaunchStandaloneBootloader(STANDALONE_BOOTLOADER_NORMAL_MODE)
To build the application, execute the following command in the base release directory:
For Thread:
make -f app/util/bootload/serial-bootloader/bootload-ncp-uart-app.mak
For Connect:
make –f connect/plugins/serial-bootloader/bootload-ncp-uart-app.mak
To start the application:
sudo ./build/bootload-ncp-uart-app/bootload-ncp-uart-app <image-path> <begin-offset> <length> [serial
options]
for example:
sudo ./build/bootload-ncp-uart-app/bootload-ncp-uart-app ./em3588-ncp-uart.ebl 0 0xFFFFFFFF -p
/dev/ttyUSB0
where:
<image-path> Pathname to image (required)
<begin-offset> Offset within image to begin (required)
<length> Number of bytes to send, 0xFFFFFFFF = everything to end of file (required)
[serial options] {ncp type} {options}
ncp type:
-n 0,1 0=EM2xx/EM3xx @ 115200 bps, RTS/CTS
1=EM2xx/EM3xx @ 57600 bps, XON/XOFF (if present must be the first option)
options:
-b <baud rate> 9600, 19200, 38400, 57600, 115200, etc.
-f r,x Flow control: r=RST/CTS, x=XON/XOFF
-h Display usage information
-i 0,1 Enable/disable input buffering
-o 0,1 Enable/disable output buffering
-p <port> Serial port name or number (eg, COM1, ttyS0, or 1)
-r d,r,c NCP reset method: d=DTR, r=RST frame, c=custom
-s 1,2 Stop bits
-t <trace flags> Trace B0=frames, B1=verbose frames, B2=events, B3=EZSP
-v[base-port] Enables virtual ISA support (optional).
Both serial ports are available via telnet instead of local console. RAW serial
port is available on the first port (offset 0 from base port), and CLI is
available on the second port (offset 1 from base port). By default, 4900 is the
base-port, therefore RAW access is available from port 4900, and CLI access is
available on port 4901.
NOTE: No space is allowed between '-v' and [base-port].
-x 0,1 Enable/disable data randomization

http://www.silabs.com
Silicon Laboratories Inc.
400 West Cesar Chavez
Austin, TX 78701
USA
Smart.
Connected.
Energy-Friendly.
Products
www.silabs.com/products
Quality
www.silabs.com/quality
Support and Community
community.silabs.com
Disclaimer
Silicon Labs intends to provide customers with the latest, accurate, and in-depth documentation of all peripherals and modules available for system and software implementers using or
intending to use the Silicon Labs products. Characterization data, available modules and peripherals, memory sizes and memory addresses refer to each specific device, and "Typical"
parameters provided can and do vary in different applications. Application examples described herein are for illustrative purposes only. Silicon Labs reserves the right to make changes
without further notice and limitation to product information, specifications, and descriptions herein, and does not give warranties as to the accuracy or completeness of the included
information. Silicon Labs shall have no liability for the consequences of use of the information supplied herein. This document does not imply or express copyright licenses granted
hereunder to design or fabricate any integrated circuits. The products are not designed or authorized to be used within any Life Support System without the specific written consent of
Silicon Labs. A "Life Support System" is any product or system intended to support or sustain life and/or health, which, if it fails, can be reasonably expected to result in significant
personal injury or death. Silicon Labs products are not designed or authorized for military applications. Silicon Labs products shall under no circumstances be used in weapons of mass
destruction including (but not limited to) nuclear, biological or chemical weapons, or missiles capable of delivering such weapons.
Trademark Information
Silicon Laboratories Inc.® , Silicon Laboratories®, Silicon Labs®, SiLabs® and the Silicon Labs logo®, Bluegiga®, Bluegiga Logo®, Clockbuilder®, CMEMS®, DSPLL®, EFM®,
EFM32®, EFR, Ember®, Energy Micro, Energy Micro logo and combinations thereof, "the world’s most energy friendly microcontrollers", Ember®, EZLink®, EZRadio®, EZRadioPRO®,
Gecko®, ISOmodem®, Precision32®, ProSLIC®, Simplicity Studio®, SiPHY®, Telegesis, the Telegesis Logo®, USBXpress® and others are trademarks or registered trademarks of
Silicon Labs. ARM, CORTEX, Cortex-M3 and THUMB are trademarks or registered trademarks of ARM Holdings. Keil is a registered trademark of ARM Limited. All other products or
brand names mentioned herein are trademarks of their respective holders.
