G PROMS Optimisation Guide
User Manual:
Open the PDF directly: View PDF ![]() .
.
Page Count: 50
- Optimisation Guide
- Table of Contents
- Chapter 1. Overview
- Chapter 2. Dynamic Optimisation in gPROMS
- Introduction
- What is dynamic optimisation?
- What is the mathematical problem?
- What is a "solution'' of a dynamic optimisation problem?
- Specifying dynamic optimisation problems in gPROMS
- Point Optimisation
- Running optimisation problems in gPROMS
- Results of the optimisation run
- Other features
- Standard solvers for optimisation
- Dynamic Optimisation Example
- Project tree ReactorOpt.gPJ
- Variable Type entities in ReactorOpt.gPJ
- Text contained within the Reactor Model entity
- BatchReaction Model entity
- Text contained within the OPTIMISE_REACTOR Process entity
- Optimisation entity (OPTIMISE_REACTOR)
- Sample optimisation report file (OPTIMISE_REACTOR.out)
- Sample gPROMS schedule file (OPTIMISE_REACTOR.SCHEDULE)
- Sample point file (OPTIMISE_REACTOR.point)
- Simulating the optimal solution within a Process
- Interpretation of screen output

Optimisation Guide
Release v3.5
June 2012

Optimisation Guide
Release v3.5
June 2012
Copyright © 1997-2012 Process Systems Enterprise Limited
Process Systems Enterprise Limited
6th Floor East
26-28 Hammersmith Grove
London W6 7HA
United Kingdom
Tel: +44 20 85630888
Fax: +44 20 85630999
WWW: http://www.psenterprise.com
Trademarks
gPROMS is a registered trademark of Process Systems Enterprise Limited ("PSE"). All other
registered and pending trademarks mentioned in this material are considered the sole property
of their respective owners. All rights reserved.
Legal notice
No part of this material may be copied, distributed, published, retransmitted or modified in any
way without the prior written consent of PSE. This document is the property of PSE, and must
not be reproduced in any manner without prior written permission.
Disclaimer
gPROMS provides an environment for modelling the behaviour of complex systems. While
gPROMS provides valuable insights into the behaviour of the system being modelled, this is
not a substitute for understanding the real system and any dangers that it may present. Except as
otherwise provided, all warranties, representations, terms and conditions express and implied
(including implied warranties of satisfactory quality and fitness for a particular purpose) are
expressly excluded to the fullest extent permitted by law. gPROMS provides a framework
for applications which may be used for supervising a process control system and initiating
operations automatically. gPROMS is not intended for environments which require fail-safe
characteristics from the supervisor system. PSE specifically disclaims any express or implied
warranty of fitness for environments requiring a fail-safe supervisor. Nothing in this disclaimer
shall limit PSE's liability for death or personal injury caused by its negligence.
Acknowledgements
ModelBuilder uses the following third party free-software packages. The distribution and use
of these libraries is governed by their respective licenses which can be found in full in the
distribution. Where required, the source code will made available upon request. Please contact
support.gPROMS@psenterprise.com in such a case.
Many thanks to the developers of these great products!
Table 1. Third party free-software packages
Software/Copyright Website License
ANTLR http://www.antlr2.org/ Public Domain
Batik http://xmlgraphics.apache.org/batik/ Apache v2.0
Copyright © 1999-2007 The Apache Software Foundation.
BLAS http://www.netlib.org/blas BSD Style
Copyright © 1992-2009 The University of Tennessee.
Boost http://www.boost.org/ Boost
Copyright © 1999-2007 The Apache Software Foundation.
Castor http://www.castor.org/ Apache v2.0
Copyright © 2004-2005 Werner Guttmann
Commons CLI http://commons.apache.org/cli/ Apache v2.0
Copyright © 2002-2004 The Apache Software Foundation.
Commons Collections http://commons.apache.org/collections/ Apache v2.0
Copyright © 2002-2004 The Apache Software Foundation.
Commons Lang http://commons.apache.org/lang/ Apache v2.0
Copyright © 1999-2008 The Apache Software Foundation.
Commons Logging http://commons.apache.org/logging/ Apache v1.1
Copyright © 1999-2001 The Apache Software Foundation.
Crypto++ (AES/Rijndael
and SHA-256) http://www.cryptopp.com/ Public Domain
Copyright © 1995-2009 Wei Dai and contributors.
Fast MD5 http://www.twmacinta.com/myjava/
fast_md5.php LGPL v2.1
Copyright © 2002-2005 Timothy W Macinta.
HQP http://hqp.sourceforge.net/ LGPL v2
Copyright © 1994-2002 Ruediger Franke.
Jakarta Regexp http://jakarta.apache.org/regexp/ Apache v1.1
Copyright © 1999-2002 The Apache Software Foundation.
JavaHelp http://javahelp.java.net/ GPL v2 with
classpath exception
Copyright © 2011, Oracle and/or its affiliates.
JXButtonPanel http://swinghelper.dev.java.net/ LGPL v2.1 (or
later)
Copyright © 2011, Oracle and/or its affiliates.
LAPACK http://www.netlib.org/lapack/ BSD Style
libodbc++ http://libodbcxx.sourceforge.net/ LGPL v2
Software/Copyright Website License
Copyright © 1999-2000 Manush Dodunekov <manush@stendahls.net>
Copyright © 1994-2008 Free Software Foundation, Inc.
lp_solve http://lpsolve.sourceforge.net/ LGPL v2.1
Copyright © 1998-2001 by the University of Florida.
Copyright © 1991, 2009 Free Software Foundation, Inc.
MiGLayout http://www.miglayout.com/ BSD
Copyright © 2007 MiG InfoCom AB.
Netbeans http://www.netbeans.org/ SPL
Copyright © 1997-2007 Sun Microsystems, Inc.
omniORB http://omniorb.sourceforge.net/ LGPL v2
Copyright © 1996-2001 AT&T Laboratories Cambridge.
Copyright © 1997-2006 Free Software Foundation, Inc.
TimingFramework http://timingframework.dev.java.net/ BSD
Copyright © 1997-2008 Sun Microsystems, Inc.
VecMath http://vecmath.dev.java.net/ GPL v2 with
classpath exception
Copyright © 1997-2008 Sun Microsystems, Inc.
Wizard Framework http://wizard-framework.dev.java.net/ LGPL
Copyright © 2004-2005 Andrew Pietsch.
Xalan http://xml.apache.org/xalan-j/ Apache v2.0
Copyright © 1999-2006 The Apache Software Foundation.
Xerces-C http://xerces.apache.org/xerces-c/ Apache v2.0
Copyright © 1994-2008 The Apache Software Foundation.
Xerces-J http://xerces.apache.org/xerces2-j/ Apache v2.0
Copyright © 1999-2005 The Apache Software Foundation.
This product includes software developed by the Apache Software Foundation, http://
www.apache.org/.
gPROMS also uses the following third party commercial packages:
•FLEXnet Publisher software licensing management from Acresso Software Inc., http://
www.acresso.com/.
•JClass DesktopViews by Quest Software, Inc., http://www.quest.com/jclass-desktopviews/.
•JGraph by JGraph Ltd., http://www.jgraph.com/.

v
Table of Contents
1. Overview .................................................................................................................................. 1
2. Dynamic Optimisation in gPROMS .............................................................................................. 2
Introduction .......................................................................................................................... 2
What is dynamic optimisation? ................................................................................................ 2
What is the mathematical problem? .......................................................................................... 3
The process model ......................................................................................................... 3
The initial conditions ..................................................................................................... 3
The objective function .................................................................................................... 4
Bounds on the optimisation decision variables .................................................................... 4
Other constraint types .................................................................................................... 5
What is a "solution'' of a dynamic optimisation problem? ............................................................. 6
Classes of control variable profile .................................................................................... 6
Control variable profiles in gPROMS ................................................................................ 8
Specifying dynamic optimisation problems in gPROMS ............................................................... 9
Process entities for optimisation ....................................................................................... 9
The Optimisation entity ................................................................................................ 10
Point Optimisation ............................................................................................................... 13
Specification of point Optimisation Entities ...................................................................... 13
Specification of steady-state optimisation problems ............................................................ 14
Running optimisation problems in gPROMS ............................................................................. 17
Results of the optimisation run ............................................................................................... 18
The comprehensive optimisation report file ...................................................................... 18
The optimisation report file ........................................................................................... 19
The SCHEDULE file and the Saved Variable Set .............................................................. 19
The point file .............................................................................................................. 20
Other features ...................................................................................................................... 20
Standard solvers for optimisation ............................................................................................ 21
The CVP_SS solver ..................................................................................................... 23
The OAERAP solver .................................................................................................... 23
The SRQPD solver ....................................................................................................... 26
The CVP_MS solver .................................................................................................... 29
Dynamic Optimisation Example ............................................................................................. 32
Project tree ReactorOpt.gPJ ........................................................................................... 33
Variable Type entities in ReactorOpt.gPJ ......................................................................... 33
Text contained within the Reactor Model entity ................................................................ 33
BatchReaction Model entity ........................................................................................... 35
Text contained within the OPTIMISE_REACTOR Process entity ......................................... 35
Optimisation entity (OPTIMISE_REACTOR) ................................................................... 36
Sample optimisation report file (OPTIMISE_REACTOR.out) .............................................. 36
Sample gPROMS schedule file (OPTIMISE_REACTOR.SCHEDULE) ................................. 38
Sample point file (OPTIMISE_REACTOR.point) .............................................................. 39
Simulating the optimal solution within a Process ............................................................... 39
Interpretation of screen output ........................................................................................ 41

vi
List of Figures
2.1. Batch Reactor ......................................................................................................................... 2
2.2. Different types of control variable profile .................................................................................... 7
2.3. Different types of control variable profile .................................................................................... 8
2.4. Selecting a Saved Variable Set for use in a steady-state optimisation ............................................... 16
2.5. Executing an optimisation run via the Activities menu. ................................................................. 17
2.6. Executing an optimisation run via the Optimisation button. ........................................................... 18
2.7. Comprehensive optimisation report. .......................................................................................... 19
2.8. Single-shooting algorithm ........................................................................................................ 21
2.9. Multiple-shooting algorithm ..................................................................................................... 22
2.10. Project tree for the dynamic optimisation example. .................................................................... 33
2.11. Variable Type entities in the ReactorOpt project. ....................................................................... 33
2.12. BatchReaction Model entity for the dynamic optimisation example. .............................................. 35
2.13. Optimisation entity for the dynamic optimisation example. .......................................................... 36

vii
List of Tables
1. Third party free-software packages ............................................................................................... 3
2.1. Mathematical statement of the dynamic optimisation problem ......................................................... 6
2.2. Syntax of a gPROMS Optimisation entity .................................................................................. 10
2.3. Alternative syntax for Interiorpoint constraints ............................................................................ 12

1
Chapter 1. Overview
gPROMS can be used to optimise the steady-state and/or the dynamic behaviour of a continuous or batch process.
Both plant design and operational optimisation can be carried out. The form of the objective function and the
constraints can be quite general. Moreover, the optimisation decision variables can be either functions of time
("controls") or time-invariant quantities.
2
Chapter 2. Dynamic Optimisation in
gPROMS
Introduction
This chapter describes how gPROMS can be used to perform (dynamic) optimisation calculations.
• A dynamic optimisation problem is described using a small example. We use this example throughout this guide
to illustrate the dynamic optimisation facilities provided by gPROMS.
• A dynamic optimisation problem is described mathematically.
• A definition of what constitutes a solution to the dynamic optimisation problem is given.
• A description of how to specify dynamic optimisation problems in gPROMS is given.
• A description of how to specify point (including steady-state) optimisation problems in gPROMS is given.
• A description of how optimisation problems are executed in gPROMS is given.
• An explanation of the contents of the various output files that are generated is given.
• A discussion of various other features of the optimisation capabilities of gPROMS is made.
The optimisation capabilities in gPROMS have evolved significantly in recent versions of the software.
Some basic familiarity with the gPROMS language and concepts is assumed.
What is dynamic optimisation?
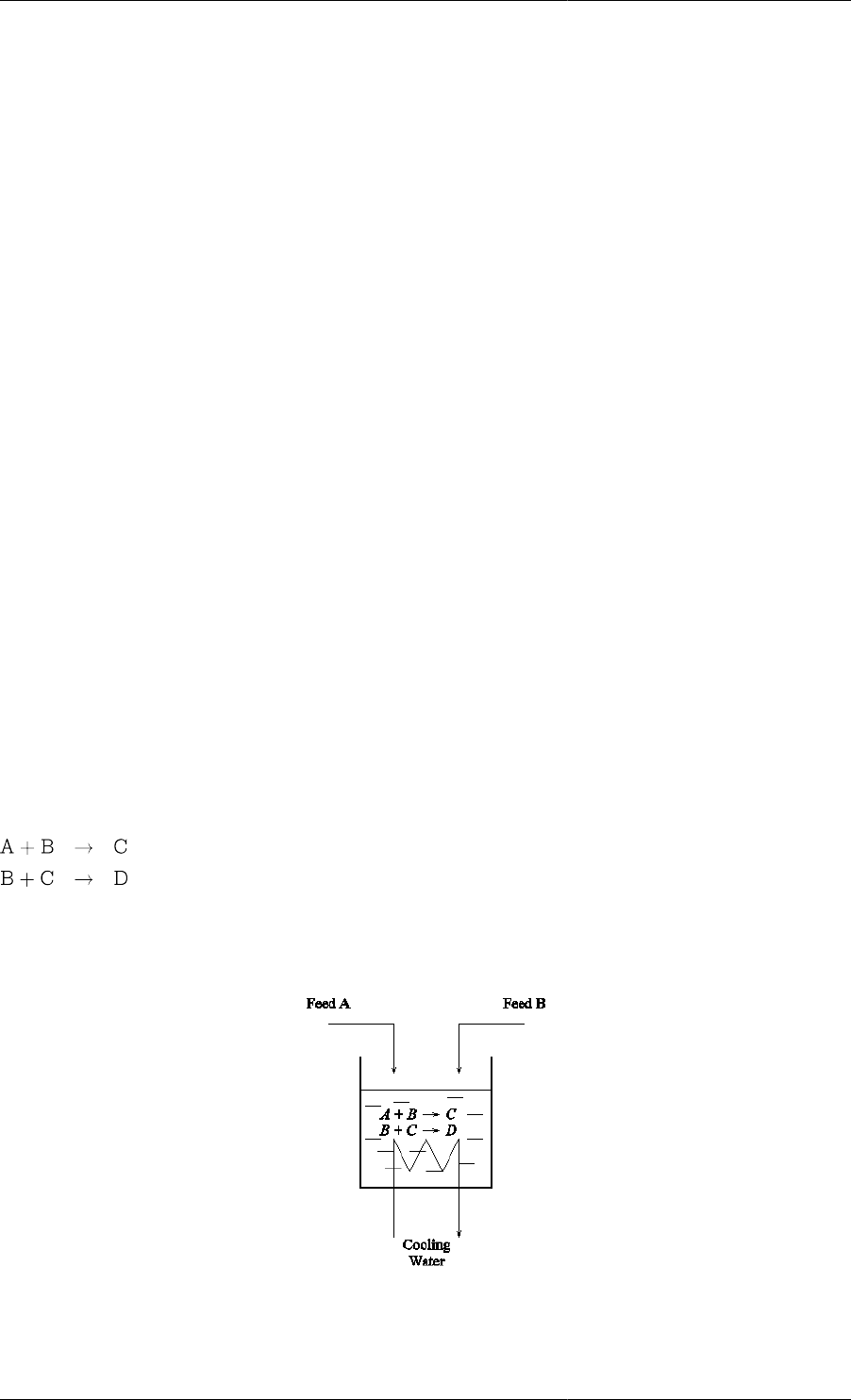
In order to introduce the various elements of the definition of the problem of dynamic optimisation, we consider
the semi-batch reactor shown in the figure below. Two exothermic reactions are taking place:
where A and B are the raw materials, C the desirable product, and D the unwanted by-product.
Figure 2.1. Batch Reactor
The reactor receives two independent inputs of pure A and B, and is cooled with cooling water circulating through
a coil. Starting with an empty reactor, we are free to vary the in-flows of A and B, as well as the cooling water
flowrate.
Dynamic Optimisation in gPROMS
3
For a given reactor design, our operational objective may be to determine the duration of the operation, and the time
variation of the various material and energy flowrates over this duration, so as to maximise the final concentration
of C. Of course, equipment design and resource availability usually impose certain limits within which our control
manipulations must be maintained---for instance, there is an upper limit on the available flowrate of cooling water.
In general, the design of processes operating in the transient domain also leads to problems that are similar to
operational optimisation problems, but may have additional degrees of freedom. For instance, we may wish to
determine the optimal geometry of the reactor in addition to the optimal way of operating it over time.
Because of the transient nature of the underlying process, both the operational and design problems considered
above are applications of dynamic optimisation1
and serve to introduce some of the important features of this problem in its most basic form. Some other
complications that often arise in practical applications will be introduced later.
What is the mathematical problem?
In this section we provide a mathematical statement of the class of dynamic optimisation problems solved by
gPROMS.
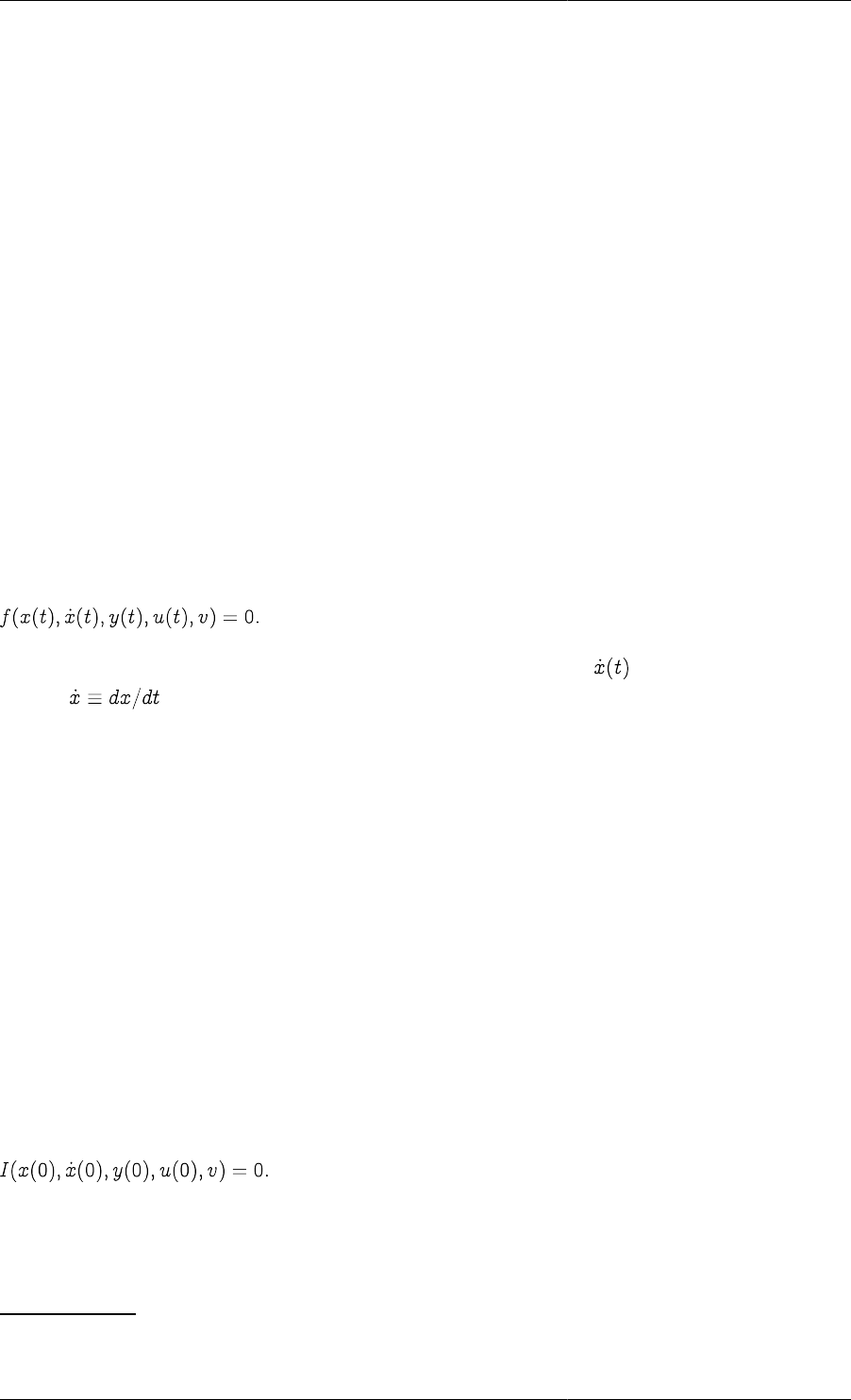
The process model
We consider processes described by mixed differential and algebraic equations of the form:
Here x(t) and y(t) are the differential and algebraic variables in the model while are the time derivatives of the
x(t) (i.e., ). u(t) are the control variables and v the time invariant parameters to be determined by the
optimisation. In the context of the batch reactor example considered earlier, the differential variables will typically
correspond to fundamental conserved quantities (such as molar component holdups and internal energy), while y
will include various quantities related to them (e.g. component molar concentrations and temperature). The input
flowrates of A, B and cooling water are the control variables u while, in the design case, the volume of the reactor
acts as a time invariant parameter v.
Note
For simplicity, the mathematical description in this document assumes that the system behaviour is
defined in terms of ordinary(with respect to time) differential and algebraic equations. However, the
optimisation capabilities of gPROMS are equally applicable to mixed lumped and distributed systems
described by general integral, partial differential and algebraic equations in time and one or more space
dimensions.
The initial conditions
In general, gPROMS assumes that the initial t=0 condition of the system is described in terms of a set of general
non-linear relations of the form:
It is important to note that, once we fix the time variation of the controls, u(t) and the values of any time
invariant parameters, v, the modelling equations together with the initial conditions completely determine the
transient response of the system. In practice, we could determine this response by performing a gPROMS dynamic
simulation.
1Often, the term "optimal control'' is also used, especially for problems that involve control variables but no time-invariant parameters (see
also: What is the mathematical model?).
Dynamic Optimisation in gPROMS
4
The objective function
Dynamic optimisation in gPROMS seeks to determine
• the time horizon, tf,
• the values of the time invariant parameters, v, and
•the time variation of the control variables, u(t), over the entire time horizon ,
so as to minimise (or maximise) the final value of a single variable z. This can be written mathematically as:
Here the objective function variable, z is one of either the differential variables x or the algebraic variables y.
In the context of the batch reactor example, tf would be the duration of the batch reaction while z would be the
concentration of component C (either a differential or an algebraic variable, depending on the model used).
The above form of the objective function is not as restrictive as might appear at first. In particular, it is worth
noting that:
• Maximisation can be carried out as well as minimisation.
•If we wish to optimise a function of several variables instead of a single
variable, we can simply add an extra algebraic equation to the model:
The additional computational cost incurred because of this model extension is usually negligible.
•If we wish to minimise or maximise the integral of a function over the entire time horizon,
we can simply add the differential equation:
together with the initial condition:
We can easily verify that this is equivalent to:
Again, very little additional computational cost is incurred in doing this.
• Minimising the time horizon itself can be achieved by adding the equation:
together with the initial condition above.
Bounds on the optimisation decision variables
In practice, the time horizon tf will often be subject to certain lower and upper bounds:
Dynamic Optimisation in gPROMS
5
In some cases, tf will, in fact, be fixed at a given value, . This can be achieved simply by setting
.
As we have already seen in the batch reactor example, it is likely that the control variables and time invariant
parameters will also be subject to lower and upper bounds:
Other constraint types
End-point constraints
In some applications, it is necessary to impose certain conditions that the system must satisfy at the end of the
operation. These are called end-point constraints. For instance, in the batch reactor example, we may require:
• the final amount of material in the reactor to be at certain prescribed value;
and also
• the final temperature to lie within given limits.
In the first case, we have an equality end-point constraint of the type:
where w is one of the system variables (x or y). In the second case, we have an inequality end-point constraint:
Interior-point constraints
We can also have constraints that hold at one or more distinct times tI during the time horizon (e.g. at the middle
of the horizon). These are called interior-point constraints. These may be represented mathematically as:
where w is a system variable, and tl is a given time.
We note that both interior and end-point constraints are special cases of point constraints. However, for
convenience, gPROMS treats them separately. It also treats any constraints that have to be satisfied at the initial
time t=0 as interior-point constraints
Path constraints
We may also have certain constraints that must be satisfied at all times during the system operation. If these path
constraints are equalities, then often they can simply be added to the system model effectively converting one of
the control variables u(t) into an algebraic variable y. More often, they are inequalities of the form:
For instance, in our batch reactor example, we may require that the temperature never exceed a certain value so
as to avoid some unwanted side-reactions that are not explicitly considered by our model.
Dynamic Optimisation in gPROMS
6
Although we have assumed in equations representing end-point, interior-point and path constraints that the various
constraints are imposed on a single variable w, this is not really restrictive. If we wanted to constrain a function
of several variables, we could simply define a new variable w through an additional equation:
and then impose the required constraints on w.
What is a "solution'' of a dynamic
optimisation problem?
Let us start by summarising the mathematical statement of the dynamic optimisation problem as defined in: What
is the mathematical model?:
Table 2.1. Mathematical statement of the dynamic optimisation problem
Objective function subject to
Process model
Initial conditions
Time horizon bounds
Control variable bounds
Time invariant parameter bounds
End-point constraints
Interior-point constraints
Path constraints
Clearly, a "solution'' to this problem comprises three key elements:
• The value of the time horizon, tf.
• The values of the time invariant parameters, v.
• The variation of the control variables u(t) over the time horizon from t = 0 to t = tf.
As has already been mentioned, if these are specified, we can solve the model equations to determine how the
system behaves over the time horizon of interest, obtaining values of x(t) and y(t) for all . We can then
evaluate the objective function, and also check whether the various end-point and path constraints are satisfied.
Normally, there will be more than one combination of tf, v and u(t) that satisfies the bounds and the constraints---
and this, of course, is what gives rise to the optimisation problem. The latter aims to find the combination that
produces the best value of the objective function while satisfying all the constraints.
Classes of control variable profile
For the above dynamic optimisation problem to be well defined, we need to be rather more specific regarding the
type of the variation of the control variables over time that we are willing to consider. For instance, we could have:
Dynamic Optimisation in gPROMS
7
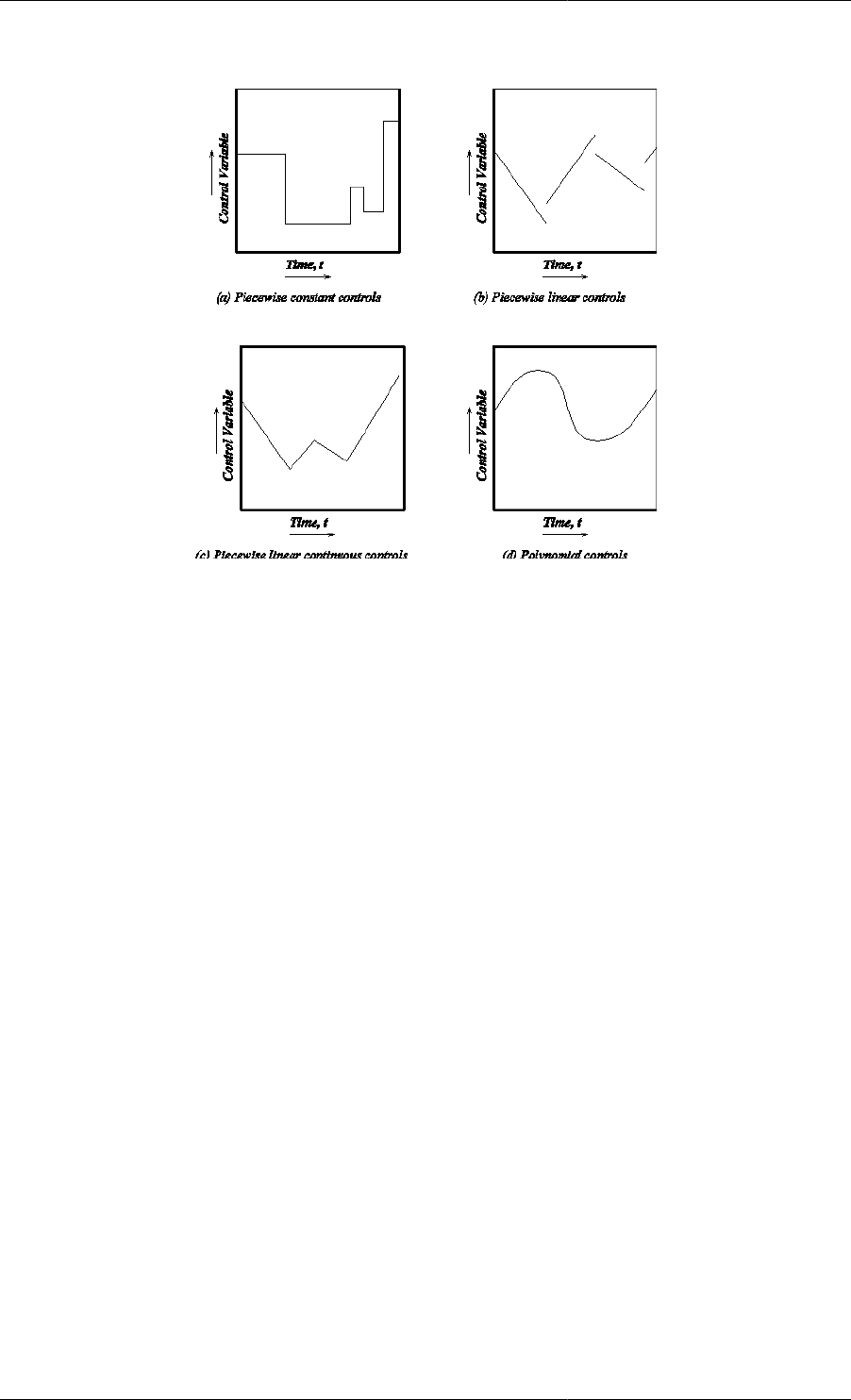
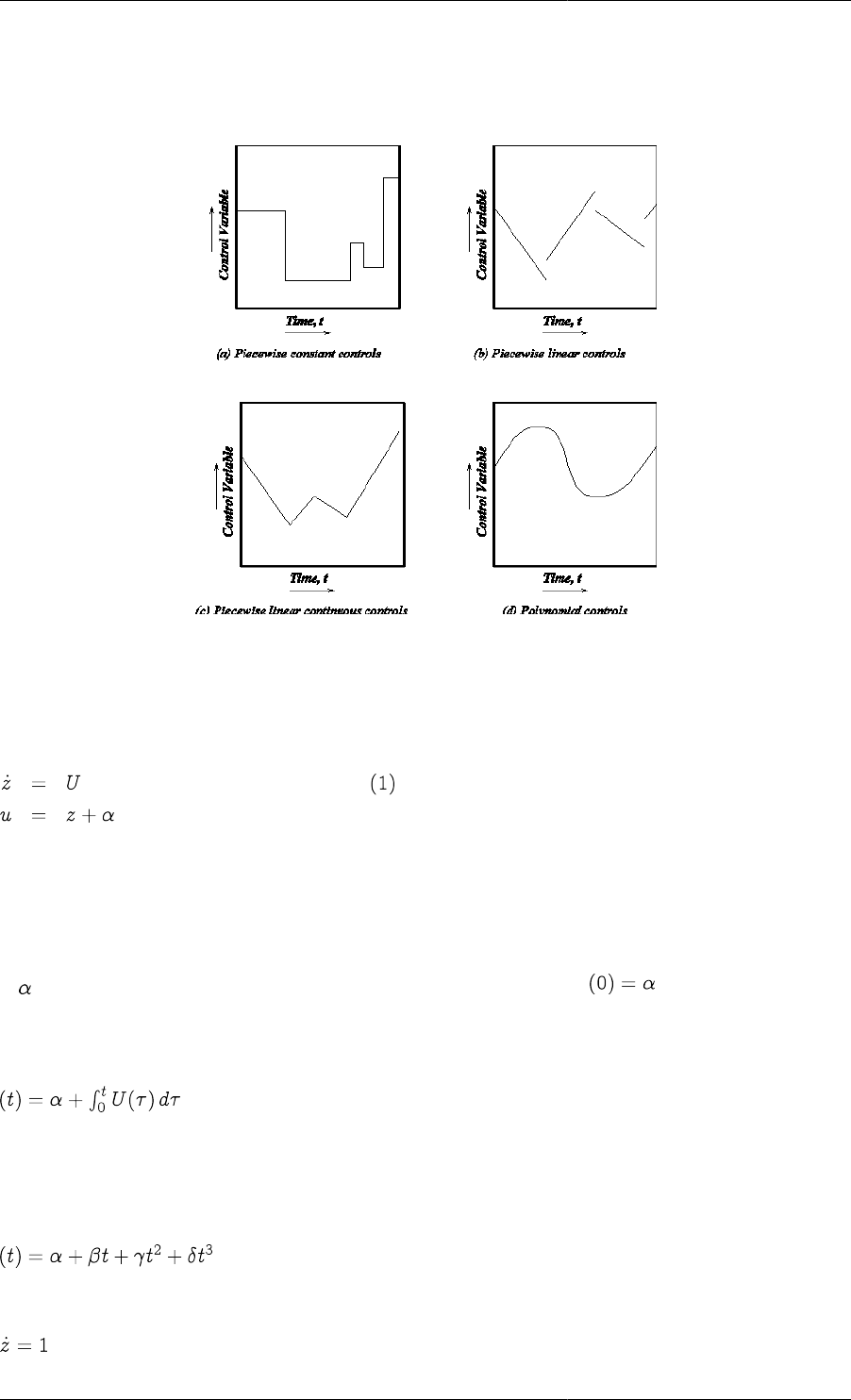
Figure 2.2. Different types of control variable profile
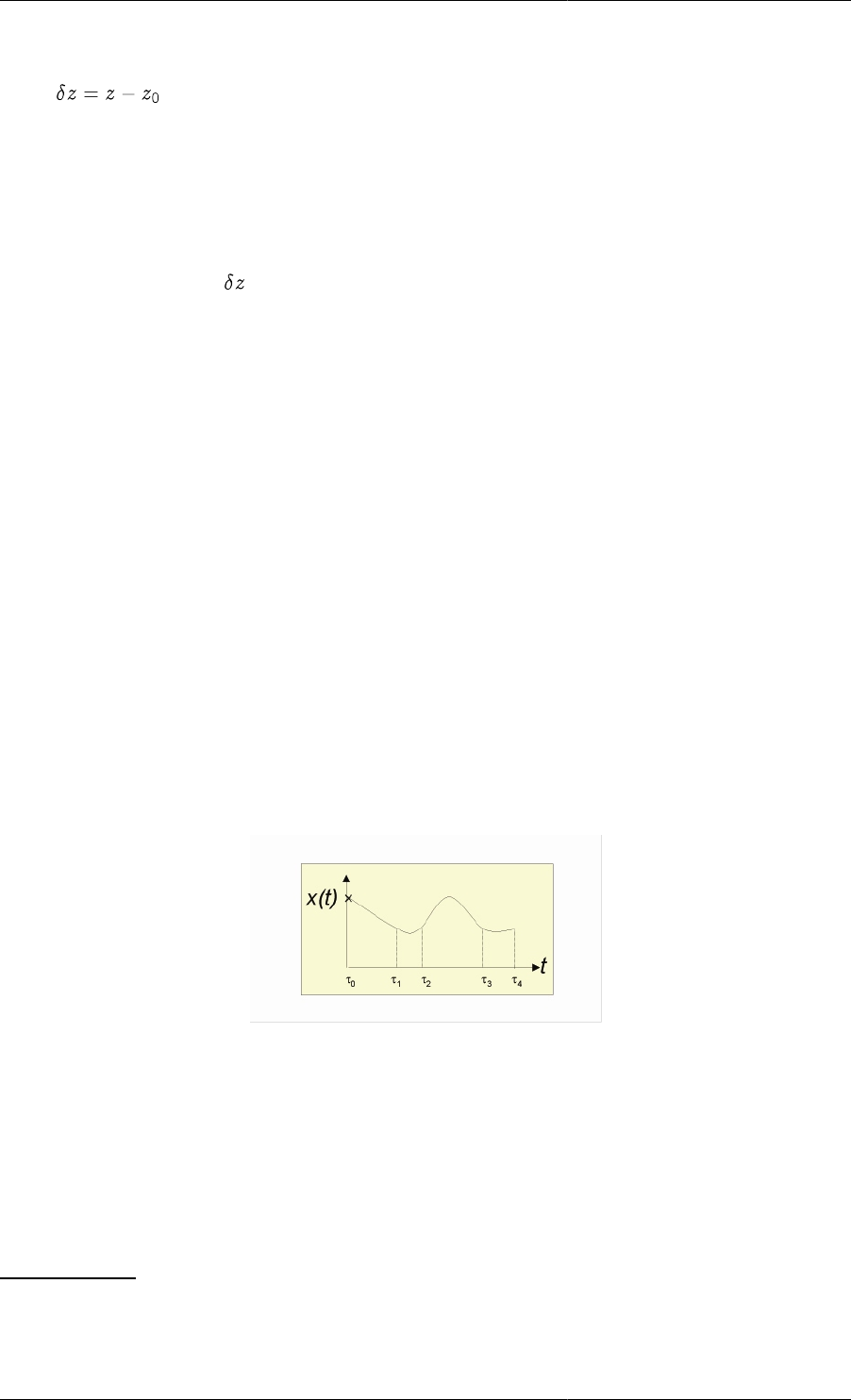
• Piecewise-constant controls---these remain constant at a certain value over a certain part of the time horizon
before jumping discretely to a different value over the next interval: see subfigure (a) above.
• Piecewise-linear controls---these take a certain linear time variation over a certain part of the time horizon before
jumping discretely to a different linear variation over the next interval: see subfigure (b) above.
• Piecewise-linear continuous controls---these are similar to the piecewise-linear controls described above, with
the additional requirement that their values be continuous at the interval boundaries: see subfigure (c) above.
• Controls that vary smoothly over time---perhaps as polynomials of a given degree: see subfigure (d) above.
It is important to appreciate that, in most cases, the choice of the form of the control variables is an engineering
rather than a mathematical issue: it very much depends on the capabilities of the actual control system (automatic
or manual!) that we will eventually use to implement these controls on the real plant. For instance, piecewise-
constant controls may often be preferable to other types as they are much easier to implement.
Dynamic Optimisation in gPROMS
8
Control variable profiles in gPROMS
Figure 2.3. Different types of control variable profile
The dynamic optimisation facilities in gPROMS support piecewise-constant and piecewise-linear controls of the
types shown in subfigures (a) and (b) respectively. These are by far the most commonly encountered in practical
applications. However, if necessary, it is relatively straightforward to introduce several other types of control. For
instance, a piecewise-linear continuous control of the type shown in subfigure (c) can be defined by adding the
equations:
where:
•z is a new differential variable with initial condition z(0)=0;
•U is a new piecewise-constant control variable (cf. subfigure (a)) to be determined by the optimisation;
• is a new time invariant parameter representing the initial value of u (i.e. ), to be determined by the
optimisation.
We note that this is equivalent to:
which expresses the fact that the time gradient of a piecewise-linear continuous control is a piecewise-constant
function of time.
Also a cubic polynomial control variation of the form:
can be introduced by adding the following to the model equations:

Dynamic Optimisation in gPROMS
9
Together with the initial condition z(0)=0, this equation effectively defines z as time.
By virtue of this equation, the variable u becomes one of the algebraic variables y to be determined by solving
the model equations.
The actual control variation is determined by the values of , , and which should now be treated as time
invariant parameters v.
Specifying dynamic optimisation problems in
gPROMS
Most of the information needed for specifying dynamic optimisation problems in gPROMS will be present in the
various entities used for dynamic simulation of the process. Some additional information will have to be specified
in separate entities.
We consider each of these sources of information in turn.
Process entities for optimisation
Just like a dynamic simulation experiment, a dynamic optimisation problem in gPROMS is defined in a Process
entity. In fact, there is no difference in syntax between a simulation and an optimisation Process. Thus, the latter
specifies most of the information required for defining mathematically the optimisation problem to be solved:
• The Unit specification, together with parameter Setting, effectively determine the set of model equations f(.)=0.
• The Assign specifications mark certain system variables as fixed for the purposes of dynamic simulation. As
far as optimisation is concerned, some of these variables will be either controls or time invariant parameters
(see also: Optimisation Entity).
• The Initial specifications provide the initial conditions I(.)=0.
• An optional Preset specification may be used to override the default initial guesses and bounds for any system
variable. In particular, the bounds on the controls and time invariant parameters to be used for the purposes of the
dynamic optimisation are either those specified here or the default values specified in the Variable Type entities.
• There are two standard mathematical solvers available in gPROMS for solving dynamic optimisation problems.
The first (default) implements a control vector parameterisation algorithm based via single-shooting. This can
be specified in the Solutionparameters section of a Process entity through the syntax:
SOLUTIONPARAMETERS
DOSolver := "CVP_SS" ;
The second solver is an implementation of control vector parameterisation via multiple-shooting. This is
specified in the Solutionparameters using:
SOLUTIONPARAMETERS
DOSolver := "CVP_MS" ;
In general, CVP_MS is more suited than CVP_SS for solving dynamic optimisation problems with relatively
few differential variables but a large number of control variables and/or control intervals. A detailed description
of the two solvers and the various parameters that can be used for configuring their precise behaviour is given
in: standard solvers for optimisation.
• Any Schedule specification in the Process is ignored for the purposes of dynamic optimisation. This also means
that any Intrinsic Tasks2 used by your Models will not be executed.
2See the section "Defining Tasks" in the Model Developer Guide

Dynamic Optimisation in gPROMS
10
Experience indicates that most of the effort in defining a dynamic optimisation problem is, in fact, incurred in
the construction of a robust model of your process. This will probably be exactly the same model as that used
for dynamic simulations within gPROMS. However, it is worth investing some effort in ensuring that it behaves
properly for the entire range of possible values of the control variables and time invariant parameters. In particular,
you should check that the differential and algebraic variables x and y remain within any specified bounds even
for extreme values of u and v.
The various Variable Type, Model and Process entities for the batch reactor example in this chapter are shown
within a project called "ReactorOpt.gPJ'' (see the dynamic optimisation example).
The Optimisation entity
The complete specification of a dynamic optimisation problem requires some additional information which is not
provided in the gPROMS Process entity. This includes information on the time horizon and the objective function,
the form of the control variable profiles, and any end-point and path constraints that have to be imposed on the
process.
All of the above information has to be specified in a separate entity which appears under the Optimisations entry
in the gPROMS project tree. In order to create such an entity:
1. Pull-down the Entity menu from the top pane in gPROMS ModelBuilder.
2. Click on New Entity. A dialog box will appear.
3. Choose Optimisation for the Entity type and fill in the Name field. The name of the Optimisation entity must
be the name of the relevant Process entity in the gPROMS project.
The structure of the Optimisation entity is shown in the table below, with keywords having their first letter
capitalised. Most of the information presented is adequately explained by the comments in the second column.
However, it is worth clarifying some points regarding the selection of control variables and time invariant
parameters, and also the specification of interior-point constraints and path constraints.
An example of such an entity is shown in the dynamic optimisation example for the batch reactor.
Note
• To omit any lower bound from the optimisation, specify it as -1E30.
• To omit any upper bound from the optimisation, specify it as 1E30.
Table 2.2. Syntax of a gPROMS Optimisation entity
Specification Comments
#Lines starting with hash (#)
symbols are treated as comments
PROCESS {name of Process} name of Process must correspond to the name
of one of the Processes in the Project. This
specification allows one to have more several
Optimisation entities in a gPROMS Project all
referring to the same Process: e.g. to perform different
optimisation experiments on the same system.
OPTIMISATION_TYPE
{optimisation type}
The optimisation type can be one of the following
values: POINT, STEADY_STATE and DYNAMIC
Optional—If omitted, dynamic or point
optimisation will be used, depending on
whether or not a horizon is specified.
HORIZON
{IV} : {LB} : {UB}
Time horizon specification
Dynamic Optimisation in gPROMS
11
Specification Comments
Initial guess for tf followed by
and (cf. constraint in: Bounds on
the optimisation decision variables).
INTERVALS
{number of intervals}
{IV} : {LB} : {UB}
...
{IV} : {LB} : {UB}
Intervals in control variable profiles.
There follows one line per interval.
Initial guess, lower bound and upper
bound for the length of each interval.
PIECEWISE_CONSTANT
{variable name}
{initial profile specification}
Specification of a piecewise-constant control variable.
Its full gPROMS path name.
Optional—see also: control variables
and time invariant parameters.
PIECEWISE_LINEAR
{variable name}
{initial profile specification}
Specification of a piecewise-linear control variable.
Its full gPROMS path name.
Optional—see also: control variables
and time invariant parameters.
TIME_INVARIANT
{variable name}
{initial value specification}
Specification of a time-invariant parameter.
Its full gPROMS path name.
Optional—see also: control variables
and time invariant parameters.
ENDPOINT_EQUALITY
{variable name}
{value}
Specification of a variable on which an
equality end-point constraint is to be imposed.
Its full gPROMS path name.
The value in the constraint in: end-point constraints.
ENDPOINT_INEQUALITY
{variable name}
{LB} : {UB}
Specification of a variable on which an
inequality end-point constraint is to be imposed.
Its full gPROMS path name.
The values and in the
constraint in: end-point constraints.
INTERIORPOINT
{variable name}
{LB} : {UB}
Specification of a variable on which an
interior-point constraint is to be imposed.
Its full gPROMS path name.
The values and in the
constraint in: interior-point constraints.
Note: an alternate syntax for specifying varying
interior-point constraints will be presented later.
MAXIMISE or MINIMISE

Dynamic Optimisation in gPROMS
12
Specification Comments
{variable name) The objective function variable z
(see objective function equation)
Specifications of control variables and time-invariant parameters
All of the variables specified as PIECEWISE_CONSTANT, PIECEWISE_LINEAR and TIME_INVARIANT
must be Assigned in the gPROMS Process entity. Any variables that are Assigned in the Process entity but are not
included here will retain the value(s) which are assigned to them: these may be constants or functions of TIME.
Effectively, these variables are removed from the optimisation problem.
By default, the initial control-variable profiles are taken to be constant (at the Assigned value) throughout the
time horizon. Similarly, the initial guesses for time-invariant parameters are also taken to be the corresponding
Assigned values. In both cases, if the Assigned value is a function of TIME, then the initial value of this will be
used. Also the upper and lower bounds are taken, by default, to be the values specified in Variable Type entities
or in the Preset section of the Process entity (see also: Process entities for optimisation).
The defaults for initial control-variable profiles may be overridden by an INITIAL_PROFILE specification of the
following type:
INITIAL_PROFILE
{InitialValue} : {LowerBound} : {UpperBound}
...
{InitialValue} : {LowerBound} : {UpperBound}
where InitialValue, LowerBound and UpperBound are real constants. For piecewise-constant controls, one such
line must be included for each of the time intervals specified in Intervals earlier in the file, with each specification
referring to the value of the control over the corresponding interval. For piecewise-linear controls, there must be
two such lines for each interval, corresponding to the value of the control at the beginning and at the end of the
interval respectively.
The default initial guesses for time-invariant parameters may be overridden by an INITIAL_VALUE specification
of the type:
INITIAL_VALUE
{InitialValue} : {LowerBound} : {UpperBound}
where InitialValue, LowerBound and UpperBound are real constants.
Interior-point constraints
The INTERIORPOINT specifications force the named variable to lie within the specified lower and upper bounds
at a set of discrete times, namely the time-interval boundaries3The most frequent use of such specifications is as
an approximate way of enforcing path constraints—the latter are not handled directly by gPROMS.
In some applications, it can be useful to specify different bounds at each of the time-interval boundaries—for
example, a batch reaction procedure might require the temperature to lie in a narrower range in the final stages of
reaction than in the earlier stages. This can be achieved in gPROMS through the use of an alternative syntax for
the INTERIORPOINT segment of the input file as shown in the table below.
Table 2.3. Alternative syntax for Interiorpoint constraints
Specification Comments
INTERIORPOINT Specification of a variable on which an
interior-point constraint is to be imposed.
3This includes the initial point but not the final one. An ENDPOINT_INEQUALITY specification should be used to enforce a final-time
constraint, if necessary.
Dynamic Optimisation in gPROMS
13
Specification Comments
{variable name} Its full gPROMS path name.
VARYING
{lower bound} : {upper bound}
...
{lower bound} : {upper bound}
Keyword to indicate distinct
bounds at each interval boundary
Bounds at start of first interval.
Bounds at start of last interval.
Inequality path constraints
It is worth noting that enforcing a path constraint at the interval boundaries does not automatically guarantee that
the constraints are not violated within the intervals. For many applications, this is not a major problem as path
constraints tend to be "soft'' and minor violations can be tolerated. However, if this is not the case, a more stringent
way of enforcing the constraint is to define a violation variable z within the relevant Model entity in the gPROMS
project through the equation:
with initial condition,
and then impose the additional end-point equality constraint:
It can be verified that this end-point equality constraint can be satisfied if and only if the original path constraint
is satisfied. In many cases, it is still worthwhile retaining the Interiorpoint constraints on w as this often leads to
improved numerical performance. It may also be better to relax the end-point equality constraint to an inequality
constraint:
where is a small positive tolerance. An implementation of path constraints is shown for the batch reactor
example in the Reactor Model entity, the Initial section of the OPTIMISE_REACTOR Process entity, and the
OPTIMISE_REACTOR Optimisation entity.
Point Optimisation
By default, gPROMS treats optimisation problems as dynamic ones, optimising the behaviour of a system over
a finite non-negative time horizon. However, in some cases, it is desired to optimise a system at a single time
point—performing a so-called "point" optimisation. From the mathematical point of view, this is equivalent to
solving a purely algebraic problem in which a generally nonlinear objective function is maximised or minimised
subject to generally nonlinear constraints by manipulating a set of optimisation decision variables that may be
either continuous or discrete.
Specification of point Optimisation Entities
The specification of a point optimisation problem in gPROMS is achieved simply by omitting the HORIZON part
of the corresponding Optimisation Entity. One can also use the following language to specify a point optimisation:
OPTIMISATION_TYPE
POINT

Dynamic Optimisation in gPROMS
14
It is worth noting that point Optimisation Entities:
• may contain TIME_INVARIANT controls as well as ENDPOINT_INEQUALITY and
ENDPOINT_EQUALITY constraints; such constraints are interpreted as simple algebraic constraints to be
satisfied by the optimal solution;
• must not contain time-varying controls PIECEWISE_CONSTANT or PIECEWISE_LINEAR ones or
constraints, or specifications of control Intervals, all of which are meaningless in this context.
Moreover,
• the value of the global TIME variable used in any Assignments in the corresponding Process Entity is taken
to be zero;
• any Initial conditions specified in corresponding Process Entity are taken as additional equality constraints to
be satisfied by the optimisation.
Note that, for the purposes of point optimisation, any time derivative terms of the form $x, that may occur in
gPROMS Model Entities, are treated as distinct to the variables x.
Specification of steady-state optimisation problems
A steady-state optimisation problem is a special case of a point optimisation one. As such, its specification must
obey all the rules outlined in: point optimisation entities.
If the underlying model is a dynamic one (i.e. its Model Entities contain one or more time derivative terms of
the form $x) , then the initial-condition of the system must be specified as STEADY_STATE in the Initial section
of the Process Entity.
It may be considerably easier to initialise complex models from a given set of initial conditions and to integrate
until steady state is obtained (rather than initialising using the STEADY_STATE initial condition). In these cases,
a special type of optimisation can be performed by using the SSOptTR solver and specifying:
OPTIMISATION_TYPE
STEADY_STATE
in the Optimisation entity (and omitting the HORIZON and INTERVALS sections).
The SSOptTR solver is selected in one of two ways, depending on the type of problem being solved:
• Continuous variables only
• use the Solution Parameters tab to specify the value of the MINLPSolver Parameter to be SSOptTR; or
• specify the following in the SOLUTIONPARAMETERS section of the Process
DOSolver := "CVP_SS" [
"MINLPSolver" := "SSOptTR"
]
• Mixed integer optimisation
• use the Solution Parameters tab to specify the value of the MINLPSolver Parameter to be OAERAP and the
value of its NLPSolver Parameter to be SSOptTR; or
• specify the following in the SOLUTIONPARAMETERS section of the Process
DOSolver := "CVP_SS" [
"MINLPSolver" := "OAERAP" [
"NLPSolver" := "SSOptTR"
]
]

Dynamic Optimisation in gPROMS
15
Finally, the time horizon needs to be specified. A simulation experiment can be performed to identify how long is
required for steady state to be established. This value is then specified using the TimeRelaxationHorizon Solution
Parameter for SSOptTR. This can be done using the Solution Parameters tab or by specifying the following in
gPROMS language (for a continuous problem):
SOLUTIONPARAMETERS
DOSolver := "CVP_SS" [
"MINLPSolver" := "SSOptTR" [
"TimeRelaxationHorizon" := 20000.0
]
]
The default value is 20000, but can be anything from 10-20 to 1020 depending on the problem.
The SSOptTR solver takes advantage of nature of the steady-state optimisation problem to increase the
performance of the optimisation relative to a full dynamic optimisation. One of the largest computation overheads
associated with dynamic optimisation is the integration of the sensitivity equations, which provide the optimiser
with the gradients of the constraints and objective function with respect to the decision variables. For steady-state
optimisations, SSOptTR need not perform these expensive sensitivity integrations until the steady-state solution
has been found, thus significantly reducing the computational effort.
Another feature of the steady-state optimisation problem that can be exploited relates to reinitialisation. In a
dynamic optimisation problem, the system needs to be reinitialised for every minor optimisation iteration (where
the decision variables are optimised along a fixed search direction) and this means reinitialising using the initial
conditions and performing a full sensitivity integration each time. The SSOptTR solver can simply use the steady-
state solution from the last minor iteration to reinitialise the problem and then perform the sensitivity evaluation,
thus avoiding the more complex initialisation and sensitivity integration. This behaviour can be controlled using
the following Solution Parameter:
"MINLPSolver" := "SSOptTR" [
"TimeRelaxationInitialConditions" := "MAJOR"
]
The three possible values are
•INITIAL: all reinitialisations are performed using the initial conditions and initial values (PRESET) specified
in the Process;
•MAJOR (default): reinitialisations are performed using the solution of the last successful major iteration as the
initial guess (each major iteration determines a new search direction for the decision variables);
•MINOR: reinitialisations are performed using the solution of the last successful minor iteration as the initial
guess.
Although the reinitialisation strategies outlined above can significantly reduce the solution time of steady-state
optimisation problems, there may be cases where the integration to obtain steady-state during the initial iteration
is difficult and time consuming. This behaviour can occur if there are Selector Variables in the Model and these
switch many times during the integration from the initial condition to the steady state. In such cases, the expensive
initial integration can be bypassed by using Saved Variable Sets to specify the steady-state solution, thus further
reducing the solution time. A Saved Variables Set can be specified for use in the optimisation by including the
following command:
RESTORE "Filename"
where Filename is the name of a Saved Variable Set. It is also possible to specify more than one Saved Variable
Set: this can be done by including several RESTORE commands and/or by providing a list of Saved Variable Sets
to a single RESTORE command. For example:
RESTORE "Filename1", "Filename2", "Filename3"
The Saved Variable Sets may also be specified using a ComboBox in the Optimisation entity. This will contain all
of the Saved Variable Sets in the Project and one can select one of them for use in the steady-state optimisation.
Dynamic Optimisation in gPROMS
16
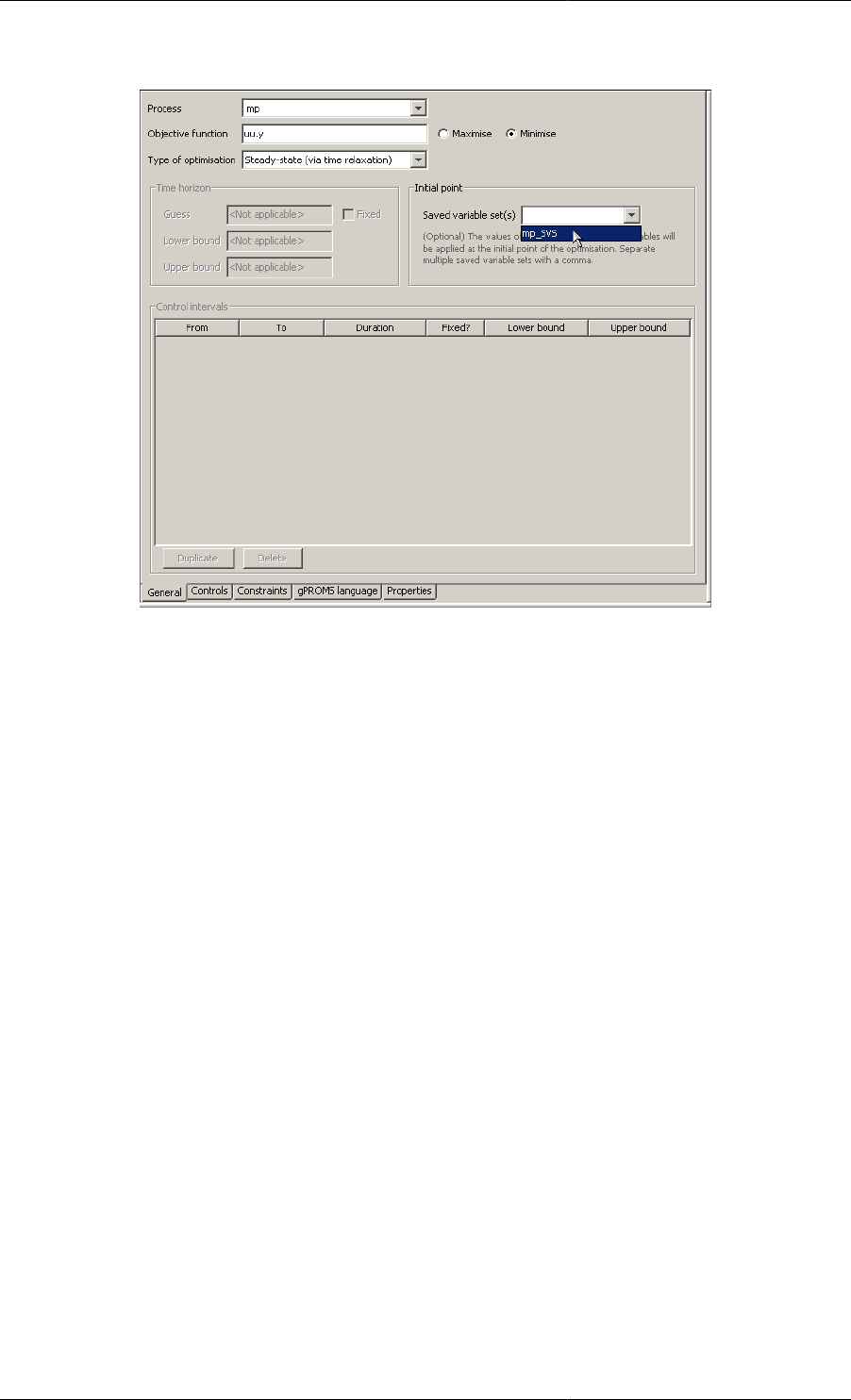
Figure 2.4. Selecting a Saved Variable Set for use in a steady-state optimisation
The Saved Variable Set can be selected by using the mouse or by typing in the name in the ComboBox (where
CTRL+space may be used to autocomplete the selection).
During initial iteration, the SSOptTR solver will first initialise the system using the initial conditions specified in
the Process. Once complete, the RESTORE will be performed: all differential and Selector Variables in the system
that are present in the SavedVariableSet will be restored and the system reinitialised. This will be used as the initial
point of the time trajectory used for the steady-state optimisation. When performing mixed integer optimisation,
this procedure is applied only to the initial relaxed NLP problem.
To summarise, there are two ways to perform a steady-state optimisation:
• If the model solves quickly and is robust using the STEADY_STATE initial condition, then
• perform a Point optimisation by specifying
OPTIMISATION_TYPE
POINT
in the Optimisation entity, omitting the HORIZON and INTERVALS sections and do not use the SSOptTR
solver;
• otherwise,
• perform a Steady-State optimisation by specifying
OPTIMISATION_TYPE
STEADY_STATE
in the Optimisation entity, omitting the HORIZON and INTERVALS sections and using the SSOptTR solver.
Specify the horizon required for steady state to be reached using the TimeRelaxationHorizon Solution
Parameter of the SSOptTR solver.
Dynamic Optimisation in gPROMS
17
Running optimisation problems in gPROMS
As explained in: specifying dynamic optimisation problems, before an optimisation problem can be executed, it
must be specified completely in a gPROMS project that contains:
• one or more Model entities;
• a Process entity named, for example, ppp; and
• an Optimisation entity named ppp.
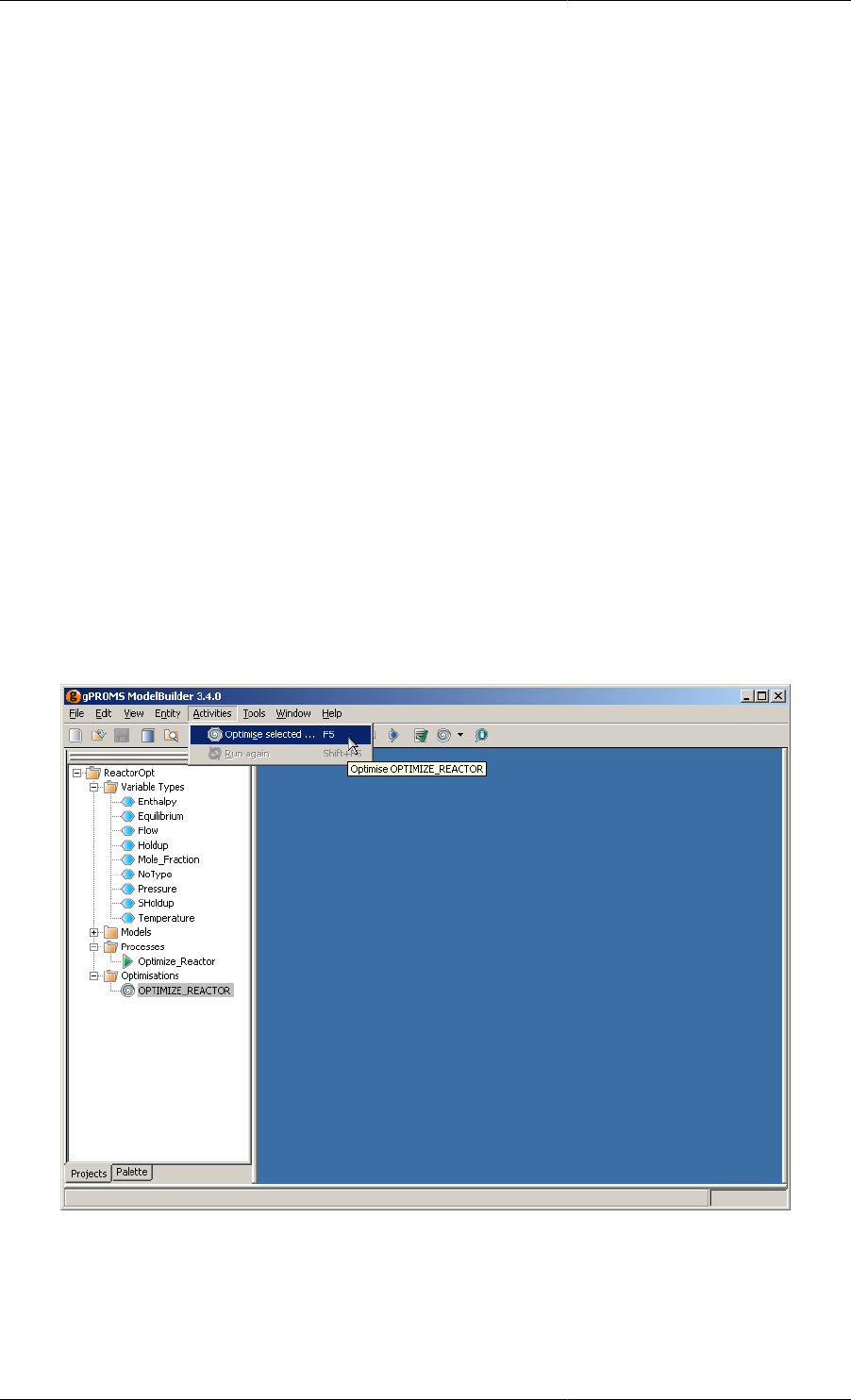
In order to run the optimisation problem:
1. Select the Optimisation entity in the gPROMS project tree.
2. Either:
a. pull down the Activities menu from the top toolbar and select Optimise;
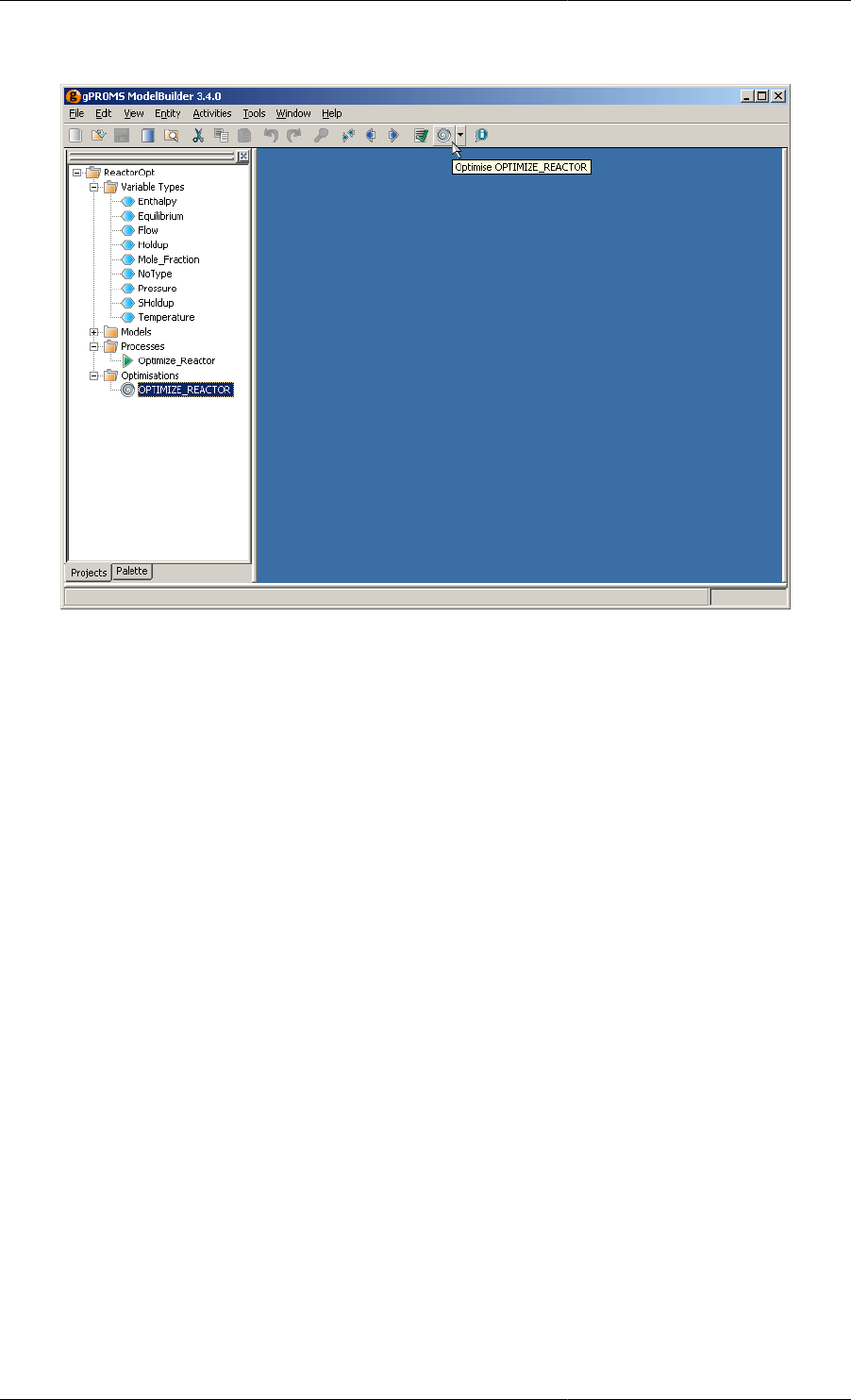
b. left click on the optimise button on the toolbar below.
3. If there are any syntactical, cross-referencing mistakes etc. these will be detected. Otherwise, the gRMS and
execution windows are opened by gPROMS, the optimisation run starts and output is directed to the screen
of the execution window.
Figure 2.5. Executing an optimisation run via the Activities menu.
Dynamic Optimisation in gPROMS
18
Figure 2.6. Executing an optimisation run via the Optimisation button.
Results of the optimisation run
The execution of an optimisation run will generate five files in the Results folder of the Case:
•PPP
•PPP.out
•PPP.SCHEDULE
•PPP_SVS
•PPP.point
where PPP is the name (in capitals) of the optimisation entity that has been executed to produce these results (cf.
running optimisation problems).
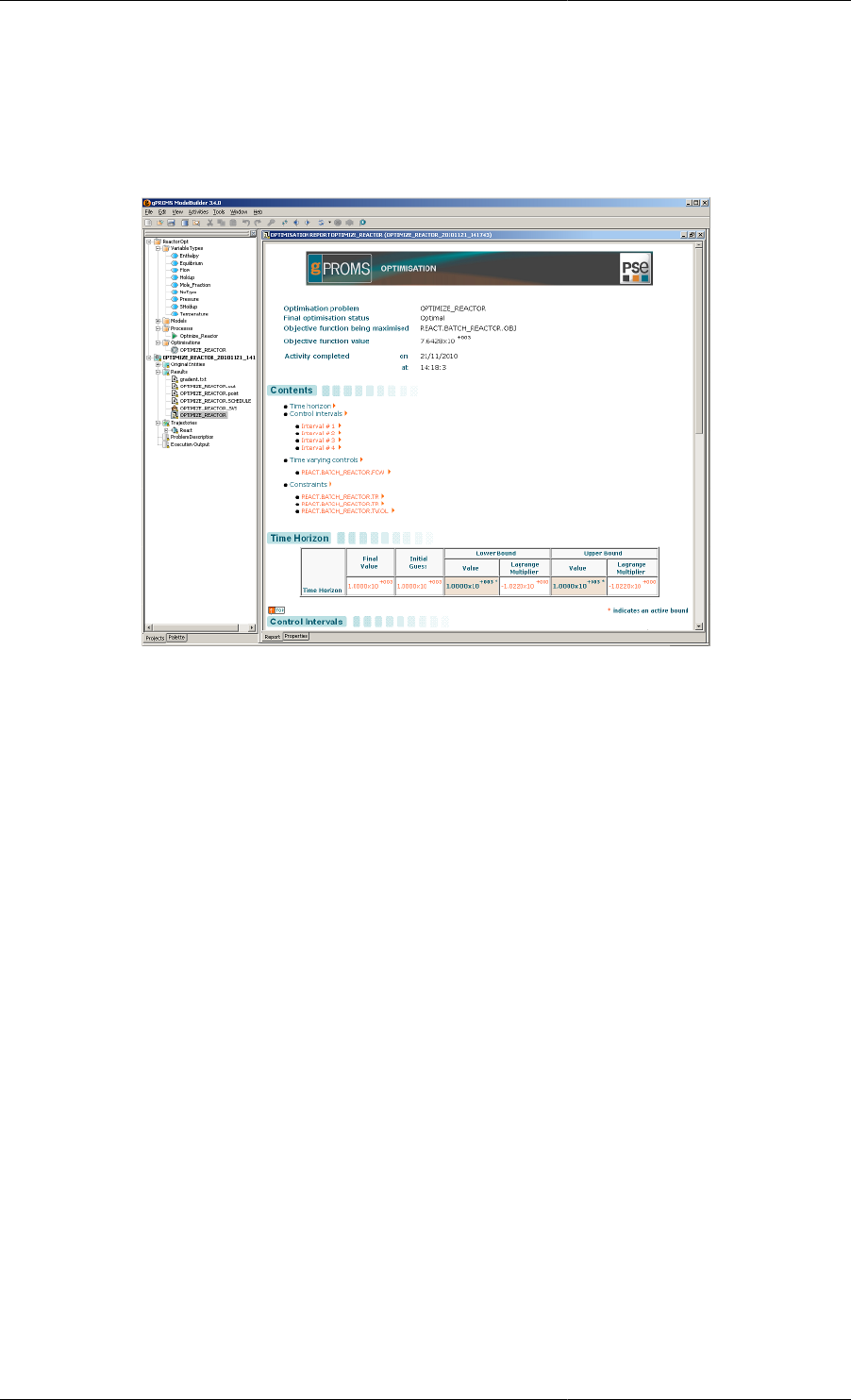
The comprehensive optimisation report file
Double-clicking on the report entry, PPP, in the Case tree causes a report window to appear in the main window,
see the figure below. The report, presented in HTML format, includes:
• a table of contents that allows quick access to the information listed below via "hyperlinks";
• general information such as the date and time of the execution of the activity, its final status and the value of
the objective function;
• information on the various optimisation decision variables (time horizon, control interval durations, and time-
invariant and time-varying controls), including the values of:
• the initial guess used,
• the final value obtained,
Dynamic Optimisation in gPROMS
19
• the lower and upper bounds,
• the Lagrange multipliers corresponding to the above bounds.
All active bounds are automatically highlighted.
Figure 2.7. Comprehensive optimisation report.
The optimisation report file
The PPP.out file contains a summary report on the optimisation run in a simple text format, including:
• the outcome of the optimisation run;
• the final value of the objective function;
• the final value of the time horizon and the lengths of the time intervals;
• the final values of the time-invariant parameters, and the control-variable profiles; the latter are specified in
terms of a single value per interval for piecewise-constant controls, and a pair of values for piecewise-linear
controls (as usual, corresponding to the value of the control at the start and end of each interval); and
• the values of variables on which end-point and/or interior-point constraints where specified, at the corresponding
final and/or interior-points.
The file also contains computational statistics on the performance of the numerical method.
A sample PPP.out file is listed in the dynamic optimisation example at the end of this guide.
The SCHEDULE file and the Saved Variable Set
The PPP.Schedule presents the most recent optimisation solution point in the form of a gPROMS Schedule. A
sample PPP.SCHEDULE file is listed in the dynamic optimisation example at the end of this guide.
The Schedule file can be used to reproduce the detailed results of the optimisation by carrying out a simulation
activity within gPROMS. This provides you access to the full facilities of the gPROMS Results Management.
Once the final solution of an optimisation problem is obtained, gPROMS creates a Saved Variable Set from the
initialisation of this point. The Saved Variable Set is called PPP_SVS and is used in the SCHEDULE to restore
the exact conditions at the final point.

Dynamic Optimisation in gPROMS
20
In order to do this:
1. Paste the contents of the Schedule file into the relevant Process entity of your gPROMS project.
2. Copy the generated Saved Variable Set from the result Case into the gPROMS project.
A optimal Process entity that contains these changes is shown for the batch reactor example. It is useful for you
to compare it with the original Process entity and the Schedule results file.
Note
The contents of the Schedule file does not always represent an optimal or even a feasible solution to the
problem: if the optimisation run is interrupted by the user, or ends without finding a satisfactory solution,
the file will simply show the point last considered by gPROMS. Only if a comment at the top of the file
states the following:
# Final Optimisation Status : Optimal Solution Found
should the results be relied upon as a (locally) optimal solution.
The point file
The PPP.point file is generated at every iteration of the optimisation calculation. It contains the same information
as the Schedule file, but in the format of an Optimisation entity (except that constraints are not reproduced). This
is useful if there is a need to restart an optimisation after a system crash or other catastrophic event, or, following
a successful solution, to provide a good 'initial guess' for a slightly altered optimisation problem.
A sample PPP.point file is listed in the dynamic optimisation example at the end of this guide.
Other features
The following apply to the current version of gPROMS:
• The initial conditions specified in the Process entity must be:
• equations of the form:
VariableName = Value ;
where VariableName is the full gPROMS pathname of a differential or algebraic variable, and Value is a
numerical value;
• or equations of the form:
$VariableName = Value ;
• or the steady-state specification:
INITIAL
STEADY_STATE
• Many applications involve the optimisation of the initial values of some of the system variables. For instance,
it may be that you want to determine the optimal initial amount of catalyst to be charged to a batch reactor. This
kind of requirement can easily be accommodated as follows:
• In the Model entity containing the variable, z, whose initial value is to be optimised, introduce:
• an additional variable,z0, of the same type as z;
•an additional variable, , of type NoType;
Dynamic Optimisation in gPROMS
21
• the additional equation:
• In the Process entity,
• assign z0 to a default value:
ASSIGN
Z0 := 1.0 ;
•set the initial value of to zero:
INITIAL
\DeltaZ = 0.0 ;
• In the Optimisation entity, declare z0 as a time-invariant parameter, specifying an initial guess and lower and
upper bounds for it.
Standard solvers for optimisation
There are two standard mathematical solvers for optimisation in gPROMS, namely CVP_SS and CVP_MS.
CVP_SS can solve optimisation problems with both discrete and continuous decision variables ("mixed integer
optimisation"). Both steady-state and dynamic problems are supported. CVP_MS can solve dynamic optimisation
problems with continuous decision variables.
For dynamic optimisation problems, both CVP_SS and CVP_MS are based on a control vector parameterisation
(CVP) approach which assumes that the time-varying control variables are piecewise-constant (or piecewise-
linear) functions of time over a specified number of control intervals. The precise values of the controls over
each interval, as well as the duration of the latter, are generally determined by the optimisation algorithm4. As
the number of control variables is usually a small fraction of the total number of variables in the problem, the
optimisation algorithm has to deal only with a relatively small number of decisions, which makes the CVP
approach applicable to large problems.
Figure 2.8. Single-shooting algorithm
The CVP_SS solver implements a "single-shooting'' dynamic optimisation algorithm. This involves the following
steps (see the figure above):
1. the optimiser chooses the duration of each control interval, and the values of the control variables over it;
2. starting from the initial point at time t=0 (shown as a cross on the vertical axis in the figure, the dynamic system
model is solved over the entire time horizon to determine the time-variation of all variables x(t) in the system;
3. the above information is used to determine the values of5:
4In addition, as explained earlier in this guide, many dynamic optimisation problems involve time-invariant parameters that also have to be
chosen by the optimiser.
5In practice, the solution of the model also needs to determine the values of the partial derivatives (sensitivities) of the objective function and
constraints with respect to all the quantities specified by the optimiser.

Dynamic Optimisation in gPROMS
22
• the objective function to be optimised;
• any constraints that have to be satisfied by the optimisation;
4. based on the above, the optimiser revises the choices it made at the first step, and the procedure is repeated
until convergence to the optimum is achieved.
The term "single-shooting'' arises from the second step in the above algorithm which involves a single integration
of the dynamic model over the entire horizon.
Figure 2.9. Multiple-shooting algorithm
The CVP_MS solver implements a "multiple-shooting'' dynamic optimisation algorithm with the following steps
(see the figure above):
1. the optimiser chooses the duration of each control interval, the values of the control variables over it, and,
additionally, the values of the differential variables x(t) at the start of each control interval other than the first
one (shown as solid circles in the figure);
2. for each control interval, starting from the initial point that is either known (for the first interval) or is chosen
by the optimiser (for all subsequent intervals), the dynamic system model is solved over this control interval
to determine the time-variation of all variables x(t) in the system;
3. the above information is used to determine the values of:
• the objective function to be optimised;
• any constraints that have to be satisfied by the optimisation;
• the discrepancies between the computed values of the variables x(t) at the end of each interval and the
corresponding values chosen by the optimiser at the start of the next interval;
4. based on the above, the optimiser revises the choices it made at the first step, and repeats the above procedure
until it obtains a point that:
• optimises the objective function;
• satisfies all constraints;
• ensures that all differential variables x(t) are continuous at the control interval boundaries.
The "multiple-shooting'' term reflects the fact that each control interval is treated independently at the second step
above.
Both solvers, by default, employ the DASOLV code (details in the Model Developer Guide) for the solution of
the underlying DAE problem and the computation of its sensitivities. In principle, this can be replaced by a third-
party solver with similar capabilities.
The choice between the CVP_SS and CVP_MS solvers for any dynamic optimisation problem depends primarily
on the number of optimisation decision parameters that the algorithm has to deal with in computing the sensitivities
of the model variables. In principle:

Dynamic Optimisation in gPROMS
23
• CVP_MS should normally be preferred for problems with many time-varying control variables and/or many
control intervals, but with relatively few differential ("state'') variables;
• CVP_SS should normally be preferred for large problems (potentially involving several hundreds or thousands
of differential ("state'') variables) but with relatively few time-varying control variables and control intervals.
In practice, some experimentation may be required to determine the better algorithm for any particular application.
The DOsolver solution parameter may be used to change and/or configure the solver used for optimisation
activities. If this parameter is not specified, then the CVP_SS solver is used, with the default configuration. See
also: CVP_SS solver.
The CVP_SS solver
CVP_SS can solve steady-state and dynamic optimisation problems with both continuous and discrete optimisation
decision variables. The algorithmic parameters used by CVP_SS along with their default values are shown below.
This is followed by a detailed description of each parameter.
"CVP_SS" [ "DASolver" := "DASOLV";
"MINLPSolver" := "OAERAP"];
DASolver - A quoted string specifying a differential-algebraic equation solver.
• The solver to be used for integrations of the model equations and their sensitivity equations at each iteration of
the optimisation. This can be either the standard DASOLV solver or a third-party differential-algebraic equation
solver (see the gPROMS System Programmer Guide). The default is DASOLV.
This parameter can be followed by further specifications aimed at configuring the particular solver by setting
values to its own algorithmic parameters (see also: specifying solver-type algorithmic parameters in the Model
Developer Guide).
MINLPSolver - A quoted string specifying a mixed integer optimisation solver.
• The solver to be used for mixed integer optimisation problems. This can be either the standard OAERAP
solver or a third-party mixed integer optimisation solver (see the gPROMS System Programmer Guide).
For optimisation problems that do not involve any discrete decision variables, this can be any CAPE-OPEN
compliant solver that is capable of solving NLPs but not MINLPs, e.g. the standard NLP solver SRQPD. The
default is OAERAP.
This parameter can be followed by further specifications aimed at configuring the particular solver by setting
values to its own algorithmic parameters (see also: specifying solver-type algorithmic parameters in the Model
Developer Guide).
The OAERAP solver
The OAERAP solver employs an outer approximation (OA) algorithm for the solution of the MINLP. As outlined
in the algorithm below, this involves solving a sequence of simpler optimisation problems, including nonlinear
programs (NLPs) at steps 1 and 3 and mixed integer linear programs (MILPs) at step 2. The OAERAP code has
been designed so that it can make direct use of any CAPE-OPEN compliant NLP and MILP solvers (see the
gPROMS System Programmer Guide) without the need for any additional interfacing or modification.
Outline of the OAERAP algorithm for the solution of a MINLP problem (minimisation case)
Given initial guesses for all optimisation decision variables, both discrete (y) and continuous (x):
Step 0: Initialisation
•Set the objective function of the best solution that is currently available, .
•Set the objective function of the best solution that may be obtained, .
Dynamic Optimisation in gPROMS
24
Step 1: Solve fully relaxed problem
• Solve a continuous optimisation problem (NLP) treating all discrete variables as continuous (i.e. allow them to
take any value between their lower and upper bounds) to determine optimal values of the optimisation
decision variables and of the objective function, .
• If above problem is infeasible, terminate: original problem is infeasible as posed.
• If all discrete optimisation decision variables have discrete values at the solution of the above problem, then
terminate: optimal solution of original problem is with an objective function value of .
Step 2: Solve master problem
• Construct a mixed integer linear programming (MILP) problem which:
• involves appropriate linearisations of the objective function and the constraints carried out at the solutions
of all continuous optimisation problems solved so far,
• excludes all combinations of discrete variable values that have been considered at step 2 so far.
• Solve the above MILP problem to determine optimal values of both the continuous and discrete variables
, and the corresponding value of the objective function .
•If the above problem is infeasible or if , then terminate: there are no more
combinations of discrete variables that can be usefully considered.
•If , then original problem was infeasible.
•Otherwise, the optimal solution is with a corresponding objective function value of .
• The MILP provides an improved bound on the best solution that may be obtained; therefore, update
.
Step 3: Solve primal optimisation problem
• Fix all discrete optimisation decision variables to their current values.
• Solve continuous optimisation problem (NLP) to determine:
•optimal value of objective function, ;
•optimal values of continuous optimisation decision variables, .
•If the above NLP is feasible and , then an improved solution to the original problem has been
found; record its details by setting .
Step 4: Iterate
•Set the next set of values of the discrete optimisation decision variables to be considered .
• Repeat from step 2.
The OAERAP solver also includes an equality relaxation (ER) scheme for handling equality constraints. It should
be emphasised that, in the case of optimisation problems defined in gPROMS, this relaxation is applied only to
any ENDPOINT_EQUALITY constraints that may appear in the Optimisation Entity.
The algorithm described above is guaranteed to obtain the globally optimal solution to the optimisation problem
posed only if the latter is convex. This is unlikely to be the case in many problems of engineering interest.

Dynamic Optimisation in gPROMS
25
An augmented penalty (AP) strategy is employed in order to increase the probability of a global solution being
obtained.
The algorithmic parameters used by OAERAP along with their default values are shown below. This is followed
by a detailed description of each parameter.
"OAERAP" ["MILPSolver" := "LPSOLVE",
"NLPSolver" := "SRQPD",
"MaxIterations" := 10000,
"NLPSubProblemInitialGuesses" := "MILPMasterProblem",
"OptimisationTolerance" := 1.0E-4,
"OutputLevel" := 0]
MILPSolver - A quoted string specifying a mixed integer linear programming solver.
• Specifies a CAPE-OPEN compliant solver to be used for the solution of the mixed integer linear programming
(MILP) problems at step 2 of the algorithm described above.
NLPSolver - A quoted string specifying a nonlinear programming solver.
• Specifies a CAPE-OPEN compliant solver to be used for the solution of the nonlinear programming (NLP)
problems at steps 1 and 3 of the algorithm described above.
MaxIterations - An integer in the range [1, 100000].
• The maximum number of iterations involving step 2-4 of the algorithm described above. This is essentially the
maximum number of distinct alternatives to be considered by the algorithm
NLPSubProblemInitialGuesses - either "MILPMasterProblem" or "FullyRelaxedNLP"
• Determines the source of initial guesses for the NLP Primal Optimisation.
The OAERAP algorithm employs two methods of obtaining initial guesses for the NLP Primal Problems (step
3 above).
The first is to use the solution of the fully-relaxed problem (step 1) as initial guesses for the solution of the
primal problem (step 3) at each iteration. To use this method, specify "NLPSubProblemInitialGuesses" :=
"FullyRelaxedNLP".
An alternative approach is to use the solution of the MILP master problem, at the current iteration, to
provide the initial guesses for the NLP primal problem. This is the default method, specified by setting
"NLPSubProblemInitialGuesses" := "MILPMasterProblem".
The method that will be most effective will depend on the problem being solved. One advantage of obtaining
initial guesses from the MILP master problem is that because the discrete variables in the NLP problem will
be set to the values in the solution of the MILP, the values of the continuous variables will be consistent with
the discrete ones and so should provide a good initial guess for the NLP problem. A common example of this
behaviour is process synthesis problems, where binary variables can be used to represent the existance of a
process in a flowsheet. If the solution of an MILP implies that a unit does not exist, then the MILP of step 2 will
force some related continuous variables (e.g. the flows through these units) to be zero and these are, of course,
excellent initial guesses for the NLP problem (by contrast, these might not be zero in the solution of the fully-
relaxed NLP). However, if the problem is highly non-linear, then the solution of the linearised equations in the
MILP may not be such a good initial guess for the NLP. In these cases, it may be better to use the solution of
the relaxed NLP as the initial guess for each NLP primal problem.
OptimisationTolerance - A real number in the range [0.0, 1.0].
• The optimisation tolerance used in the termination criterion at step 2 of the algorithm described above.
OutputLevel - An integer in the range [-1, 0].
• The amount of information generated by the solver. The following table indicates the lowest level at which
different types of information are produced:
Dynamic Optimisation in gPROMS
26
-1 (None)
0 Solution of fully relaxed point,
solution of master problem,
solution of primal optimisation problem,
final solution
The SRQPD solver
The SRQPD solver employs a sequential quadratic programming (SQP) method for the solution of the nonlinear
programming (NLP) problem. The algorithmic parameters used by SRQPD along with their default values are
shown below. This is followed by a detailed description of each parameter.
"SRQPD" [
"ConvergenceCriterion" := "ImprovedEstimateBased",
"HandleDiscreteVariables" := FALSE,
"InitialHessian" := 0,
"InitialLineSearchStepLength" := 1.0,
"MaxFun" := 10000,
"MaximumLineSearchSteps" := 20,
"MaxLineSearchStepLength" := 1.0,
"MinimumLineSearchStepLength" := 1.0E-5,
"NoImprovementTolerance" := 1.0E-12,
"OptimisationTolerance" := 0.0010,
"OutputLevel" := 0,
"Scaling" := 0
]
ConvergenceCriterion - Either "ImprovedEstimateBased" or "OptimalityBased"; default
"ImprovedEstimateBased".
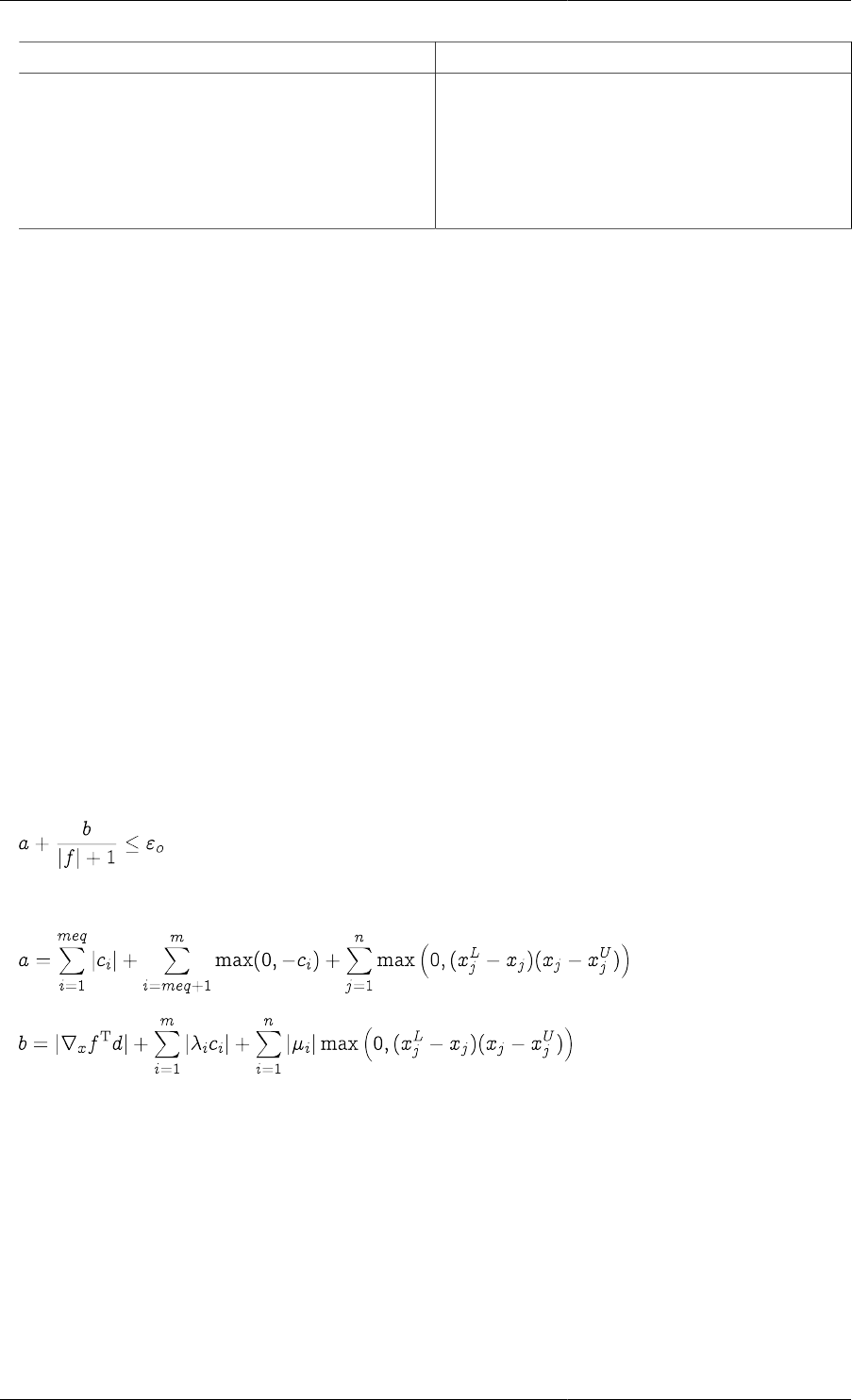
• The "ImprovedEstimateBased" convergence criterion is:
where:
;
;
#o is the optimisation tolerance given by the Solution Parameter OptimisationTolerance;
f is the objective function;
c is the constraint vector (right-hand side);
meq is the number of equality constraints;
m is the total number of constraints;
n is the size of the variable vector x (i.e. the number of variables);

Dynamic Optimisation in gPROMS
27
and are the lower and upper bounds of variable xj;
d is the vector of corrections to x (i.e. the change in x during the current step);
is the Lagrange multiplier that corresponds to the equality constraint imposed on variable xj;
is the Lagrange multiplier that corresponds to the bound constraints imposed on variable xj.
• The "OptimalityBased" convergence criterion uses two tolerances: #o, specified by the OptimisationTolerance
Solution Parameter and #i, specified by NoImprovement Tolerance. Given the following definitions:
;
, where k is the current iteration number;
, where dxj is the step calculated for xj in the latest line-search step;
;
;
is the Lagrange
function,
the Lagrange multipliers for the equality and inequality constraints
hi(x) and and the Lagrange multipliers for the upper and lower bound constraints;
the following tests are applied:
At the end of each major iteration: If , then terminate due to optimality;
Else if and , then terminate due to no-
improvement in the objective function.
At the end of each line-search step: If #2b ≤ #i and #1 ≤ #o, then terminate due to no-improvement in the
optimisation variables;
Else if #2b ≤ #i, then terminate due to failure to find a feasible point
within the non-improvement tolerance.
HandleDiscreteVariables - TRUE or FALSE; default FALSE.
• This parameter determines whether the solver handles mixed-integer non-linear optimisation problems by
transforming discrete controls into continuous ones.
InitialHessian - An integer in the range [0, 2]; default 0.
• By default, the initial hessian matrix is assumed to be the identity matrix (InitialHessian := 0).
• At present no other options are available but may be introduced in the future.
Dynamic Optimisation in gPROMS
28
InitialLineSearchStepLength - A real number in the range [10-10, 1.0]; default 1.0.
• The length of the line search step for the first optimisation iteration. An initial line search step length less than
1 is recommended when the initial approximation of the Hessian (i.e. identity matrix) is very different to the
actual values in the Hessian. This could result in a very large initial step and therefore several line search trials
before the optimiser finds a better point.
MaxFun - An integer in the range [0, 100000]; default 10000.
• The maximum number of optimiser function evaluations (i.e. solutions of the underlying steady-state or dynamic
model) to perform before halting the solution process (if no optimum has been found by that point).
MaximumLineSearchSteps - An integer in the range [1, 100]; default 20.
• The maximum number of line search steps in one optimisation iteration.
MaxLineSearchStepLength - A real number in the range [10-10, 1.0]; default 1.
• The maximum length of a line search step.
MinimumLineSearchStepLength - A real number in the range [10-10, 1.0]; default 10-5.
• The minimum length of a line search step.
NoImprovementTolerance - A real number in the range [10-20, 1.0]; default 10-12.
• The solution tolerance for non-improving objective function or optimisation variables. Only used when
ConvergenceCriterion := "OptimalityBased" (see above).
OptimisationTolerance - A real number in the range [10-20, 1.0]; default 0.001.
• The solution tolerance for the optimisation. Convergence is deemed to occur when a linear combination of the
gradients of the Lagrangian function on one hand, and the violation of the constraints on the other, drops below
this tolerance. The convergence criterion used is specified by the ConvergenceCriterion parameter described
above.
OutputLevel - An integer in the range [-1, 4]; default 0.
• The amount of information generated by the solver. The following table indicates the lowest level at which
different types of information are produced:
-1 (None)
0 Failed integrations and initialisations, optimisation
failure,
summary information from the SRQPD nonlinear
programming code,
final solution point and constraint values,
best available point after failure
1 Values of optimisation decision variables, objective
function and constraints in each major optimisation
iteration
2 Start and end times of each interval of integration,
optimisation decision variables and objective function
at each line search trial
3 Derivatives of objective function and constraints
Scaling - An integer in the range [0, 3]; default 0.
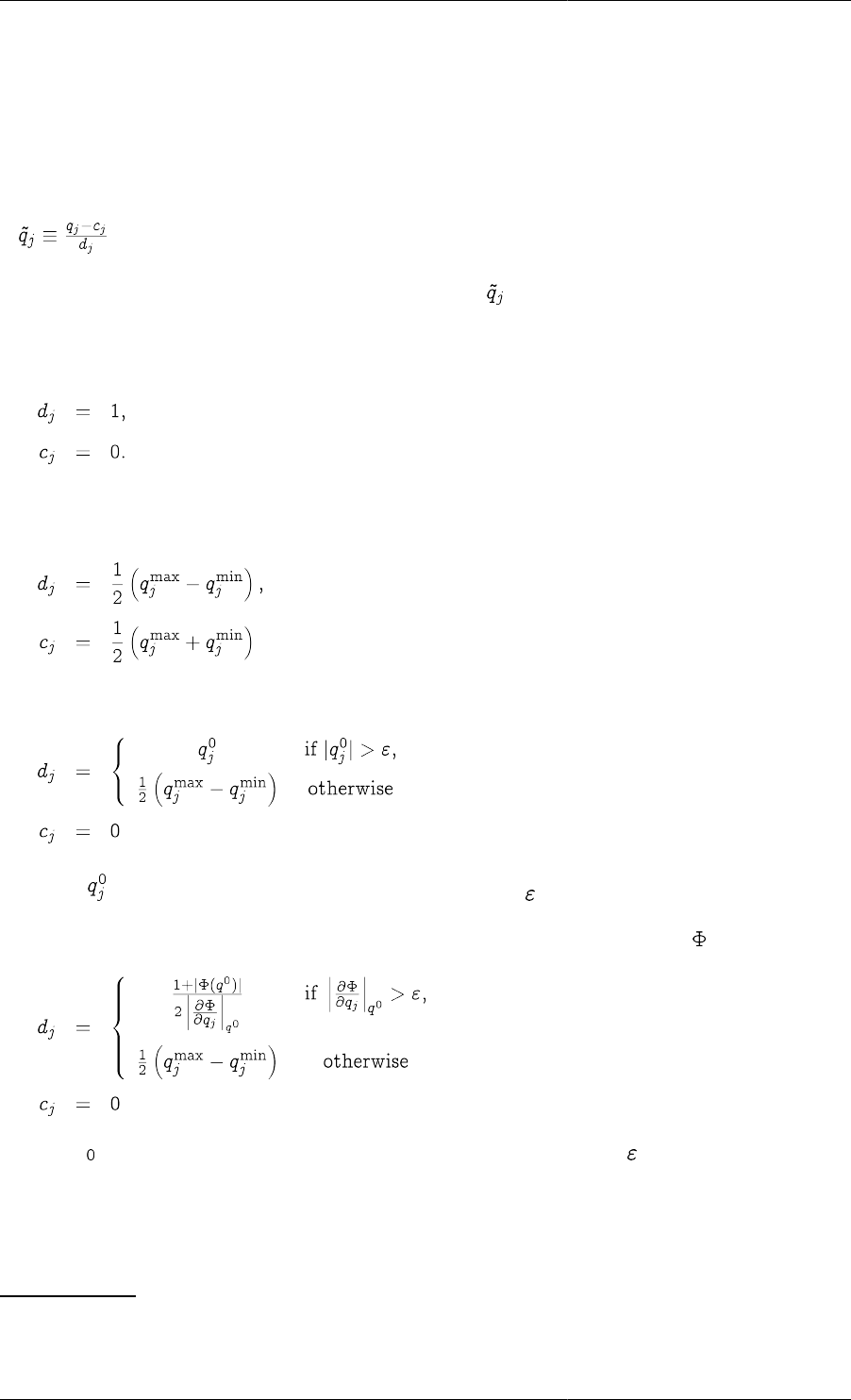
Dynamic Optimisation in gPROMS
29
• The form of scaling to be applied to the optimisation decision variables, including control variables, time-
invariant parameters, the length of the time horizon and the lengths of individual control intervals. These
decision variables may vary significantly in magnitude, which may adversely affect the performance of the
optimisation algorithms. Consequently, appropriate scaling of the optimisation decision variables is strongly
recommended6
The scaling performed is of the general mathematical form:
where qj is the jth original optimisation decision variable and is the corresponding scaled decision variable.
The constants cj and dj are determined automatically depending on the value of Scaling, as described below:
•Scaling = 0: No scaling (default).
•Scaling = 1: Scaling according to the ranges of the optimisation decision variables so that the scaled variables
vary between -1 and 1.
•Scaling = 2: Scaling according to the initial guesses of the optimisation variables.
where is the initial guess for the jth optimisation variable and is a small constant (currently set at 10-8).
•Scaling = 3: Scaling according to the value and the gradients of the objective function at the initial guess.
where is the vector of initial guesses of the optimisation decision variables and is a small constant (currently
set at 10-8).
The CVP_MS solver
The algorithmic parameters used by CVP_MS along with their default values are shown below. This is followed
by a detailed description of each parameter7
6A useful indication as to whether scaling is necessary is the condition number estimate that is printed out at each iteration of the optimisation
calculation. It is recommended that scaling be undertaken for problems with condition numbers exceeding 1010.
7For full details, please consult the information at http://www.systemtechnik.tu-ilmenau.de/fg_opt/omuses/omuses.html
Dynamic Optimisation in gPROMS
30
"CVP_MS" [ "OutputLevel" := 0;
"MaxFun" := 10000;
"SQPMinAlpha" := 1E-10;
"SQPHeLa" := "BFGS";
"SQPHeLaEps" := 1E-10;
"SQPHeLaScale" := TRUE;
"SQPHeLaEigenCtrl" := TRUE;
"SQPMaxIters" := 500;
"SQPMaxInfIters" := 10;
"SQPWatchdogStart" := 10;
"SQPWatchdogCredit" := 0;
"SQPWatchdogLogging" := FALSE;
"SQPSolver" := "Powell";
"SQPQPSolver" := "Franke";
"QPEps" := 1E-10;
"QPMatSolver" := "RedSpBKP";
"QPMaxIters" := 250;
"OptTol" := 1E-3;
"InfDefault" := 1E10;
"NumSen" := FALSE;
"SetBounds" := FALSE;
"NeedLagrangeMultipliers" := FALSE;
"DASolver" := "DASOLV"];
OutputLevel - An integer in the range [0, 4].
• The amount of information generated by the solver. The following table indicates the lowest level at which
different types of information are produced:
0 Failed integrations and initialisations, optimisation
failure,
summary information from the HQP nonlinear
programming code,
final solution point and constraint values,
best available point after failure
1 Values of optimisation decision variables, objective
function and constraints in each major optimisation
iteration
2 For each multiple-shooting interval in each major
optimisation iteration:
the values of the optimisation decision variables,
the values and derivatives of the matching conditions,
the constraints and the objective function.
MaxFun - An integer in the range [0, 100000].
• The maximum number of optimiser function evaluations (i.e. solutions of the underlying dynamic model) to
perform before halting the solution process (if no optimum has been found by that point).
SQPMinAlpha - A real number in the range [0, 105].
• Lower limit for the step length in the line search of the sequential quadratic programming (SQP) sub-solver.
SQPHeLa - A quoted string.

Dynamic Optimisation in gPROMS
31
• The method to be used for constructing the approximation of the Hessian matrix of the Lagrangian. Permitted
values are:
• "BFGS": partitioned BFGS update with Powell's damping
• "DScale": numerical approximation with a diagonal matrix
SQPHeLaEps - A real number in the range [0, 105].
• parameter used in SQP algorithm, see the Omuses document.
SQPHeLaScale - A boolean value.
• Use "DScale'' approach to initialise Hessian rather than setting it to the identity matrix.
SQPHeLaEigenCtrl - A boolean value.
• Control of positive definite Hessian blocks based on eigenvalues (only used with the BFGS method).
SQPMaxIters - An integer in the range [0, 100000].
• Total number of SQP iterations allowed.
SQPMaxInfIters - An integer in the range [0, 100000].
• Number of infeasible SQP iterations (i.e. points where the integration fails) allowed before failure.
SQPWatchdogStart - An integer in the range [0, 100000].
• Iteration at which to start watchdog algorithm if using "Powell" algorithm (see SQPSolver parameter below).
SQPWatchdogCredit - An integer in the range [0, 100000].
• Number of "bad'' iterations until backtracking and regular step are performed (0 means disable watchdog).
SQPWatchdogLogging - A boolean value.
• Specifies whether watchdog log output should be produced.
SQPSolver - A quoted string.
• The type of sequential quadratic programming (SQP) algorithm to be used for the optimisation. Permitted
values:
• "Powell"
• "Schittkowski"
SQPQPSolver - A quoted string.
• The type of quadratic programming (QP) solver to be used at each iteration of the optimisation. Permitted values
are:
• "Franke"
• "Mehrotra"
QPEps - A real number in the range [0, 105].
• The tolerance to which the quadratic programming sub-problems are to be solved.

Dynamic Optimisation in gPROMS
32
QPMatSolver - A quoted string.
• The matrix solver to use for the solution of the quadratic programming sub-problems in the optimisation.
Permitted values are (refer to Omuses document for details):
• "SpBKP"
• "RedSpBKP"
• "SpSC"
• "LQDOCP"
QPMaxIters - An integer in the range [0, 100000].
• Maximum number of QP iterations to attempt.
OptTol - A real number in the range [0.0, 1.0].
• The solution tolerance for the optimisation.
InfDefault - A real number in the range [0, 1035].
•Upper and lower bounds greater than this value in magnitude are treated as (as appropriate).
NumSen - A boolean value.
• Specifies whether sensitivities should be calculated numerically -- i.e. by repeated "normal'' integrations with
perturbed values -- rather than 'analytically', i.e. with a special sensitivity integration. Not recommended except
perhaps for large problems with very few parameters per interval.
DASolver - A quoted string specifying a differential-algebraic equation solver.
• The solver to be used for integrations of the model equations and their sensitivity equations at each stage and
each iteration of the optimisation. This can be either the standard DASOLV solver or a third-party differential-
algebraic equation solver (see the gPROMS System Programmer Guide). The default is DASOLV.
This parameter can be followed by further specifications aimed at configuring the particular solver by setting
values to its own algorithmic parameters (see also: specifying solver-type algorithmic parameters in the Model
Developer Guide).
Dynamic Optimisation Example
Here, an example of a dynamic optimisation is given using a batch-reactor Model.
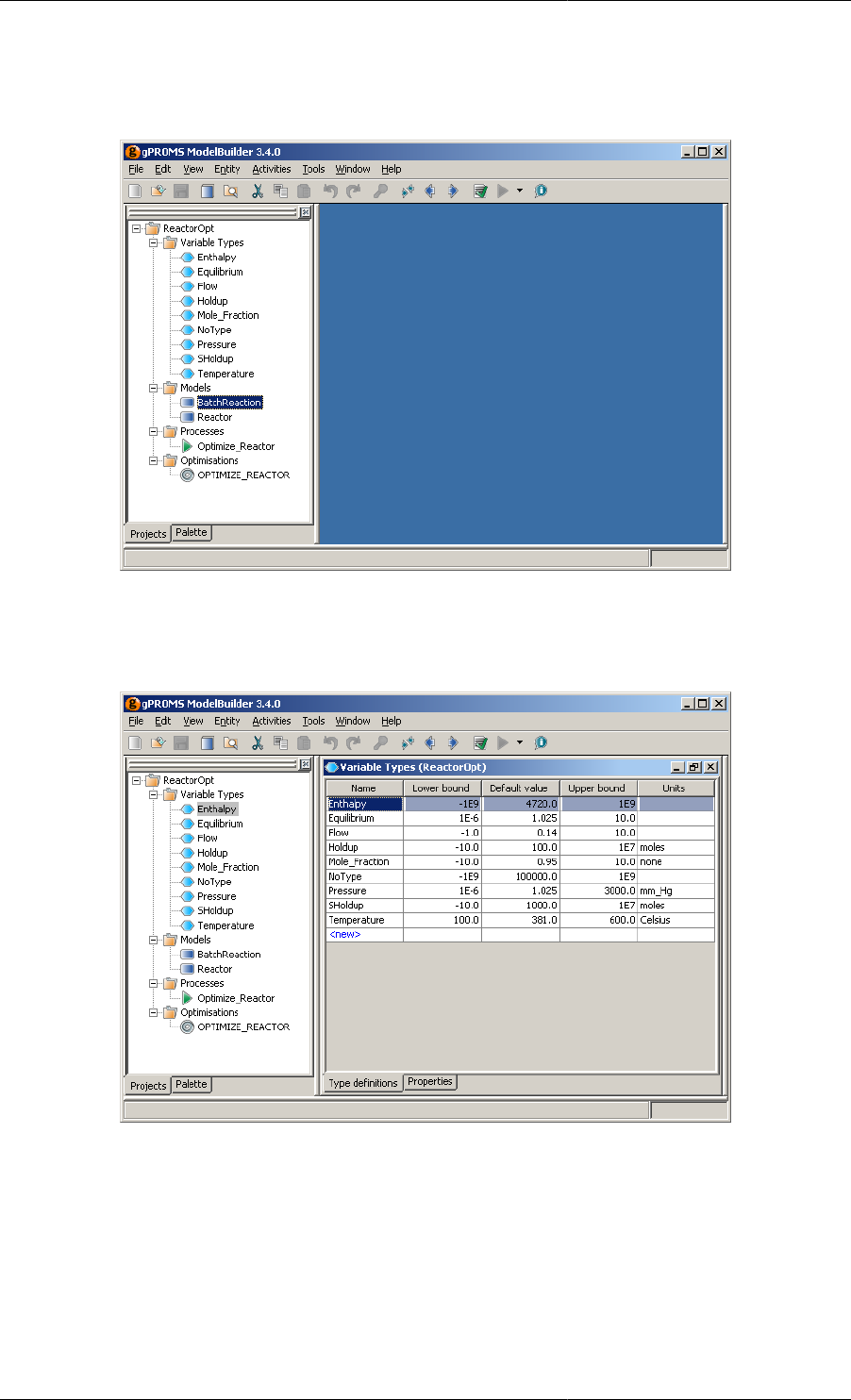
Dynamic Optimisation in gPROMS
33
Project tree ReactorOpt.gPJ
Figure 2.10. Project tree for the dynamic optimisation example.
Variable Type entities in ReactorOpt.gPJ
Figure 2.11. Variable Type entities in the ReactorOpt project.
Text contained within the Reactor Model entity
#---------------------------------------------------------------
# Model of an externally cooled batch reactor: A + B -> C + D
#
# The reactor model takes into account mass and energy balances.
#---------------------------------------------------------------
PARAMETER
NoComp AS INTEGER

Dynamic Optimisation in gPROMS
34
a,b,rho AS ARRAY (NoComp) OF REAL
nu AS ARRAY (NoComp) OF REAL
Ai,E,R,DH AS REAL
Tref AS REAL
VARIABLE
N,C,h AS ARRAY (NoComp) OF NoType
HR,Rate,V AS NoType
QcR,TR,K,Fcw AS NoType
Uacc,Tviol AS NoType
Obj AS NoType
EQUATION
# Component material balance
$N = V * Rate * nu ;
# Definition of reaction rate
Rate = K * C(1)* C(2) ;
# Rate constant
K = Ai * exp( - E / (R *TR) ) ;
# Energy balance
$HR = ( V * Rate * ( -DH ) ) - QcR ;
# Cooling load as a function of cooling water flowrate
QcR = 4200* 40 *Fcw ;
# Cumulative cooling water consumption
$Uacc= Fcw ;
# Definition of total enthalpy content of reactor
HR = sigma(N * h ) ;
# Pure component specific enthalpies
h = ( a * (TR - Tref ) + ( b * ( TR^2 - Tref^2 ) / 2 ) ) ;
# Relate molar concentrations C to component holdups N
V * C = N ;
# Volumetric holdup in reactor
V = sigma( N / rho ) ;
# Path constraint
$Tviol = MAX(TR - 450,0)^2 ;
# Objective to be maximised: value of product (3) - cooling water
Obj = 2*N(3) - Uacc ;
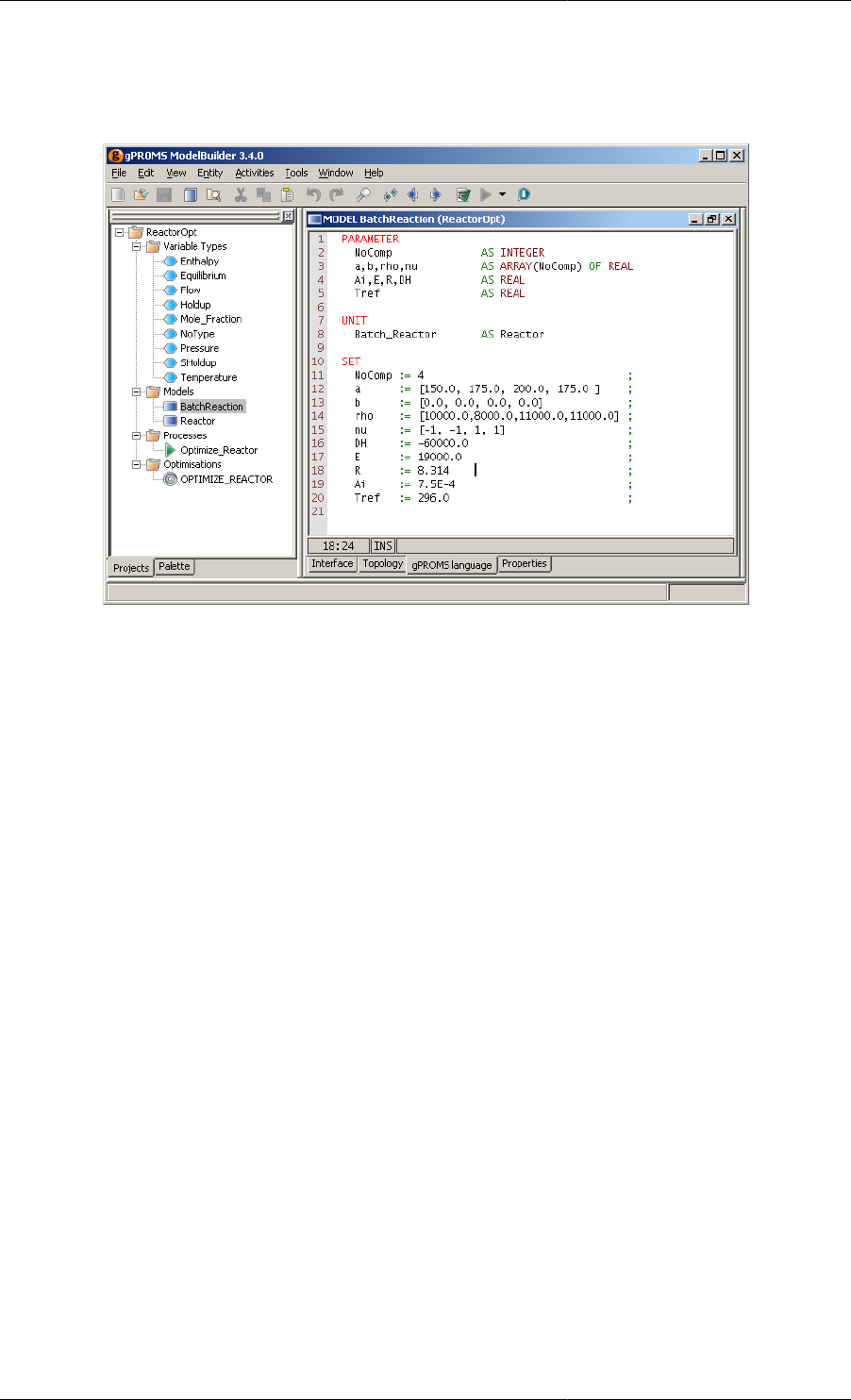
Dynamic Optimisation in gPROMS
35
BatchReaction Model entity
Figure 2.12. BatchReaction Model entity for the dynamic optimisation example.
Text contained within the OPTIMISE_REACTOR
Process entity
UNIT
React AS BatchReaction
ASSIGN
# This will be overridden in the Optimisation entity
WITHIN React.Batch_Reactor DO
FcW := 0.0 ;
END
PRESET
REACT.BATCH_REACTOR.RATE := 7.28422E+00 ;
REACT.BATCH_REACTOR.HR := 6.50000E+06 ;
REACT.BATCH_REACTOR.C(1) := 4.44444E+03 ;
REACT.BATCH_REACTOR.C(2) := 4.44444E+03 ;
REACT.BATCH_REACTOR.C(3) := 0.00000E+00 ;
REACT.BATCH_REACTOR.C(4) := 0.00000E+00 ;
REACT.BATCH_REACTOR.OBJ := 0.00000E+00 ;
REACT.BATCH_REACTOR.H(1) := 6.00000E+02 ;
REACT.BATCH_REACTOR.H(2) := 7.00000E+02 ;
REACT.BATCH_REACTOR.H(3) := 8.00000E+02 ;
REACT.BATCH_REACTOR.H(4) := 7.00000E+02 ;
REACT.BATCH_REACTOR.FCW := 0.00000E+00 ;
REACT.BATCH_REACTOR.K := 3.68763E-07 ;
REACT.BATCH_REACTOR.QCR := 0.00000E+00 ;
REACT.BATCH_REACTOR.V := 1.12500E+00 ;
INITIAL
WITHIN React.Batch_Reactor DO
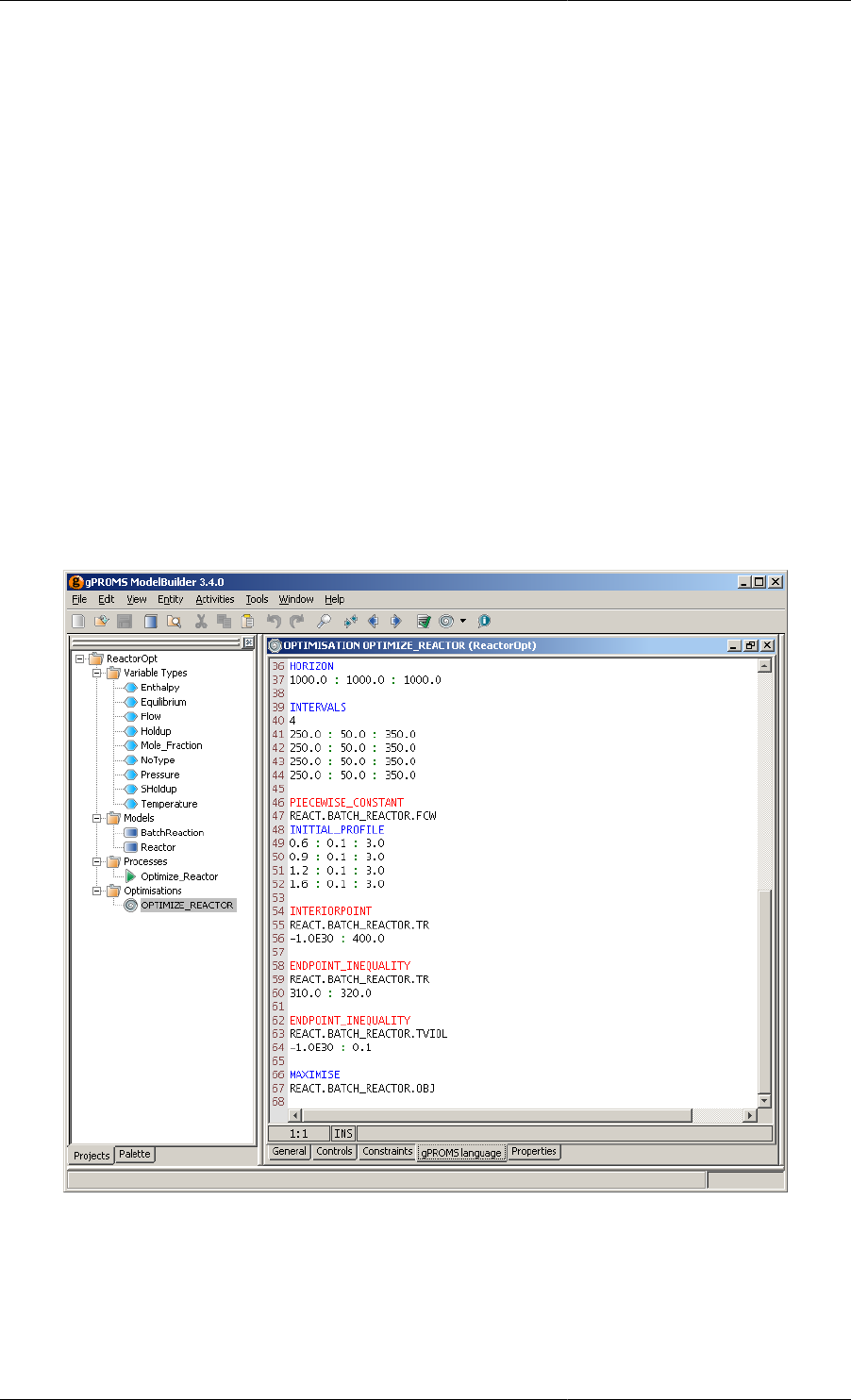
Dynamic Optimisation in gPROMS
36
N(1) = 5000.0 ;
N(2) = 5000.0 ;
N(3) = 0.0 ;
N(4) = 0.0 ;
TR = 300.0 ;
Uacc = 0.0 ;
Tviol = 0.0 ;
END
SOLUTIONPARAMETERS
ABSOLUTEACCURACY := 1.0E-6 ;
REPORTINGINTERVAL := 100 ;
SCHEDULE
# This will be ignored by the dynamic optimisation
SEQUENCE
CONTINUE FOR 2000
END
Optimisation entity (OPTIMISE_REACTOR)
Figure 2.13. Optimisation entity for the dynamic optimisation example.
Sample optimisation report file
(OPTIMISE_REACTOR.out)

Dynamic Optimisation in gPROMS
37
gPROMS Dynamic Optimisation
gPROMS Process : OPTIMIZE_REACTOR
Final Optimisation Status : Optimal Solution Found
Objective Function Being Maximised: 7642.78
Current Values of Optimisation Decision Variables
([*] denotes an active bound)
Decision Variable Type Value Lower Bound Upper Bound
Time horizon 1000 1000[*] 1000[*]
Control Interval # 1 249.718 50 350
Control Interval # 2 159.781 50 350
Control Interval # 3 288.055 50 350
Control Interval # 4 302.446 50 350
1. REACT.BATCH_REACTOR.FCW (piecewise constant)
Control
Interval Type Value Lower Bound Upper Bound
# 1 Continuous 0.1 0.1[*] 3
# 2 Continuous 1.84372 0.1 3
# 3 Continuous 0.554775 0.1 3
# 4 Continuous 3 0.1 3[*]
Current Values of Constrained Variables
([*] denotes violation of constraint)
Constrained Variable Type Time Value Lower Bound Upper Bound
REACT.BATCH_REACTOR.TR Interior 0 300 -1E+030 400
REACT.BATCH_REACTOR.TR Interior 249.718 394.578 -1E+030 400
REACT.BATCH_REACTOR.TR Interior 409.499 397.018 -1E+030 400
REACT.BATCH_REACTOR.TR Interior 697.554 398.378 -1E+030 400
REACT.BATCH_REACTOR.TR Endpoint 1000 320 310 320[*]
REACT.BATCH_REACTOR.TVIOL Endpoint 1000 0.100812 -1E+030 0.1[*]
Computational Statistics
Total CPU Time : 6.84375 seconds
CVP_SS Optimiser Statistics
CPU Time : 0.015625 seconds (0.228311 % of total time)
Number of MINLP Iterations : 0
Number of NLP Iterations : 61
Number of NLP Line Search Steps : 72
DASOLV Integrator Statistics
CPU Time : 5.23438 seconds (76.484018 % of total time)
CPU Time Spent on State Integration Only : 1.9375 seconds (37.014925 % of DASOLV time)
16292 steps, 30038 residuals : 0.546875 seconds
4140 Jacobians : 0.109375 seconds

Dynamic Optimisation in gPROMS
38
CPU Time Spent on Sensitivity Integration Only : 3.29688 seconds (62.985075 % of DASOLV time)
13674 steps, 37422 residuals : 0.328125 seconds
17198 Jacobians : 0.5 seconds
Mean (Sensitivity+State)/(State) CPU Ratio : 2.70161
Sample gPROMS schedule file
(OPTIMISE_REACTOR.SCHEDULE)
#
# Schedule generated by gOPT for process OPTIMIZE_REACTOR
#
# Final Optimisation Status : Optimal Solution Found
# Objective Function Being Maximised: 7642.78
#
SCHEDULE
SEQUENCE
PARALLEL
RESTORE "OPTIMIZE_REACTOR_SVS" ;
RESET
REACT.BATCH_REACTOR.FCW := 0.1;
END
END
CONTINUE FOR 249.718
RESET
REACT.BATCH_REACTOR.FCW := 1.84372;
END
CONTINUE FOR 159.781
RESET
REACT.BATCH_REACTOR.FCW := 0.554775;
END
CONTINUE FOR 288.055
RESET
REACT.BATCH_REACTOR.FCW := 3;
END
CONTINUE FOR 302.446

Dynamic Optimisation in gPROMS
39
END
Sample point file (OPTIMISE_REACTOR.point)
# .gOPT segment generated by gOPT for process OPTIMIZE_REACTOR
# at final solution.
HORIZON
1000 : 1000 : 1000
INTERVALS
4
249.718 : 50 : 350
159.781 : 50 : 350
288.055 : 50 : 350
302.446 : 50 : 350
PIECEWISE_CONSTANT
REACT.BATCH_REACTOR.FCW
INITIAL_PROFILE
0.1 : 0.1 : 3
1.84372 : 0.1 : 3
0.554775 : 0.1 : 3
3 : 0.1 : 3
Simulating the optimal solution within a Process
UNIT
React AS BatchReaction
ASSIGN
{ This was the previous ASSIGN section
# This will be overridden in the Optimisation entity
WITHIN React.Batch_Reactor DO
FcW := 0.0 ;
END
}
# This is the new one using the first RESET statement
# from the SCHEDULE file
REACT.BATCH_REACTOR.FCW:= 1.00000E-01;
PRESET
REACT.BATCH_REACTOR.RATE := 7.28422E+00 ;
REACT.BATCH_REACTOR.HR := 6.50000E+06 ;
REACT.BATCH_REACTOR.C(1) := 4.44444E+03 ;
REACT.BATCH_REACTOR.C(2) := 4.44444E+03 ;
REACT.BATCH_REACTOR.C(3) := 0.00000E+00 ;
REACT.BATCH_REACTOR.C(4) := 0.00000E+00 ;
REACT.BATCH_REACTOR.OBJ := 0.00000E+00 ;
REACT.BATCH_REACTOR.H(1) := 6.00000E+02 ;
REACT.BATCH_REACTOR.H(2) := 7.00000E+02 ;
REACT.BATCH_REACTOR.H(3) := 8.00000E+02 ;
REACT.BATCH_REACTOR.H(4) := 7.00000E+02 ;

Dynamic Optimisation in gPROMS
40
REACT.BATCH_REACTOR.FCW := 0.00000E+00 ;
REACT.BATCH_REACTOR.K := 3.68763E-07 ;
REACT.BATCH_REACTOR.QCR := 0.00000E+00 ;
REACT.BATCH_REACTOR.V := 1.12500E+00 ;
INITIAL
WITHIN React.Batch_Reactor DO
N(1) = 5000.0 ;
N(2) = 5000.0 ;
N(3) = 0.0 ;
N(4) = 0.0 ;
TR = 300.0 ;
Uacc = 0.0 ;
Tviol = 0.0 ;
END
SOLUTIONPARAMETERS
ABSOLUTEACCURACY := 1.0E-6 ;
REPORTINGINTERVAL := 100 ;
{ This is the previous SCHEDULE
SCHEDULE
# This will be ignored by the dynamic optimisation
SEQUENCE
CONTINUE FOR 2000
END
}
# This is the new one taken from the SCHEDULE results file
# Final Optimisation Status : Optimal Solution Found
# Objective Function Being Maximised: 7642.78
#
SCHEDULE
SEQUENCE
PARALLEL
RESTORE "OPTIMIZE_REACTOR_SVS" ;
RESET
REACT.BATCH_REACTOR.FCW := 0.1;
END
END
CONTINUE FOR 249.718
RESET
REACT.BATCH_REACTOR.FCW := 1.84372;
END
CONTINUE FOR 159.781

Dynamic Optimisation in gPROMS
41
RESET
REACT.BATCH_REACTOR.FCW := 0.554775;
END
CONTINUE FOR 288.055
RESET
REACT.BATCH_REACTOR.FCW := 3;
END
CONTINUE FOR 302.446
END
Interpretation of screen output
The purpose here is to explain the detailed meaning of the screen output produced by gPROMS during
optimisation, which can be of value in determining whether the problem is unsatisfactorily posed, for example.
This output is essentially of four kinds. We will review these together with a brief explanation of each. The
examples below refer to when the single-shooting algorithm CVP_SS is chosen. This output is very similar to that
when the multiple-shooting algorithm CVP_MS is invoked.
1. Display of the solution point
This is indicated by a line of the type:
After 73 cycles, the solution point is:
A report is then given of values of:
• the time invariant parameters,
• the time interval lengths and control values,
for the current solution point.
Note that the SCHEDULE and point files are updated at the same time that these values are written to the screen.
2. Output from the integration
During optimisation, gPROMS repeatedly carries out integrations for a different choices of time invariant
parameters and controls. This computation, similar to the execution of a conventional gPROMS simulation,
will produce some output if the method parameter IPRINT is not set to zero. This may be of use if there are
problems with these integrations.
3. Report on constraint residuals
Following a successful simulation, gPROMS outputs both the objective function value and a report on the status
of the constraints. The latter are marked with [*] if they are violated (for equality constraints, a violation is
indicated if the actual value differs from the desired one by more than one millionth of its magnitude).
4. Optimiser reports
Following a gradient evaluation, the optimiser will produce a report of this type:

Dynamic Optimisation in gPROMS
42
No. of No. of Step Objective Current Constraint
Iterations Functions Length Function Accuracy Violations
18 63 1.587E-03 -7.473E+03 8.493E-02 5.684E-14
These values have the following meanings:
• No. of Iterations: this refers to the number of full optimiser iterations, i.e. the number of gradient evaluations
used to determine new search directions.
• No. of Functions: the total number of simulations carried out so far. Since the optimiser works by selecting a
search direction and then carrying out a line search along that direction, it generally evaluates the objective
function considerably more often than it evaluates its gradient.
• Step Length: this provides a measure of how much the optimiser is altering the optimisation decision variables
between simulations.
• Objective Function: the present objective function value, negated if a maximisation is in progress.
• Current Accuracy: this shows how close the optimiser considers the current point is to optimality. When
this value falls below 10-4 (or the value supplied with the ACC keyword in the PARAMETERS entity), the
optimisation will report that the solution has been found, and terminate (after its output integration).
• Constraint Violations a measure of the total constraint violation of the current point --- zero (or very small)
if the point is feasible.
Finally, here is an example of one iteration's output for the problem OPTIMISE_REACTOR. Again, a wide screen
format is needed.
Optimisation Iteration 10
---------------------------
Values and gradients of objective function and constraints to be evaluated
at the following point:
Time Horizon: 1.00000E+03
Current Control Profiles
Duration Control 1
Interval 1 3.50000E+02 3.83448E-01
Interval 2 3.26555E+02 1.48681E+00
Interval 3 1.23949E+02 1.99611E+00
Interval 4 1.99496E+02 3.00000E+00
Control 1 = REACT.BATCH_REACTOR.FCW
Objective function and constraint residuals:
Objective Function to be Maximised: 7.48409E+03
Constraint Residuals: ([*] denotes violation)
Variable Type Lower Bound Upper Bound Current Value Time
-------- -------- ----------- ----------- ----------- -----------
REACT.BATCH_REACTOR.TR Endpoint 3.10000E+02 3.20000E+02 3.11559E+02 1.00000E+03
REACT.BATCH_REACTOR.TVIOL Endpoint N/A 1.00000E-01 0.00000E+00 1.00000E+03
No. of No. of Step Objective Current Constraint

Dynamic Optimisation in gPROMS
43
Iterations Functions Length Function Accuracy Violations
9 27 3.490E-03 -7.484E+03 8.236E-02 5.684E-14
Searching Along Optimisation Step..... ( 28)
After 37 cycles, the solution point is:
Time Horizon: 1.00000E+03
Current Control Profiles
Duration Control 1
Interval 1 3.50000E+02 1.00000E-01
Interval 2 5.00000E+01 1.35623E+00
Interval 3 2.50000E+02 3.00000E+00
Interval 4 3.50000E+02 3.00000E+00
Control 1 = REACT.BATCH_REACTOR.FCW
About to perform a function evaluation.
