I.MX Graphics User’s Guide User's
User Manual:
Open the PDF directly: View PDF ![]() .
.
Page Count: 170 [warning: Documents this large are best viewed by clicking the View PDF Link!]
- Chapter 1 Introduction
- Chapter 2 i.MX G2D API
- Chapter 3 i.MX EGL and OGL Extension Support
- Chapter 4 i.MX Framebuffer API
- Chapter 5 OpenCL
- 5.1 Overview
- 5.2 Vivante OpenCL implementation
- 5.3 Optimization for OpenCL embedded profile
- 5.3.1 Using preferred multiple of work-group size
- 5.3.2 Using multiple work-groups of reduced size
- 5.3.3 Packing work-item data
- 5.3.4 Improving locality
- 5.3.5 Minimizing use of 1 KB local memory
- 5.3.6 Using 16 byte memory Read/Write size
- 5.3.7 Useing _RTZ rounding mode
- 5.3.8 Using native functions
- 5.3.9 Using buffers instead of images
- 5.4 OpenCL Debug messages
- Chapter 6 OpenVX Introduction
- Chapter 7 Vulkan
- Chapter 8 Multiple GPUs and Virtualization
- Chapter 9 G2D compositor on Weston
- Chapter 10 XServer Video Driver
- Chapter 11 Advanced GPU Configuration
- Chapter 12 Vivante Software Tool Kit
- 12.1 Vivante Tool Kit overview
- 12.2 vEmulator
- 12.2.1 Supported operating systems and graphics hardware
- 12.2.2 vEmulator components
- 12.2.3 vEmulator for OpenCL
- 12.2.4 Supported extensions
- 12.2.5 vEmulator environment variable setup
- 12.2.6 Sample code overview
- 12.2.7 Building and running the code examples
- 12.2.8 OpenGL ES 1.1 examples
- 12.2.8.1 Tutorial1: rotating three-color triangle
- 12.2.8.2 Tutorial2: rotating six-color cube
- 12.2.8.3 Tutorial3: rotating multi-textured cube
- 12.2.8.4 Tutorial4: lighting and fog
- 12.2.8.5 Tutorial5: blending and bit-mapped fonts
- 12.2.8.6 Tutorial6: particles using point sprites
- 12.2.8.7 Tutorial7: vertex buffer objects
- 12.2.9 OpenGL ES 2.0 examples
- 12.3 vShader
- 12.4 vCompiler
- 12.5 vTexture
- 12.6 vProfiler and vAnalyzer
- 12.6.1 Fundamentals of performance optimization
- 12.6.2 vProfiler setup for the Linux OS
- 12.6.3 vProfiler setup for the Android platform
- 12.6.4 vProfiler setup for the QNX OS
- 12.6.5 vProfiler collecting performance data
- 12.6.6 vAnalyzer viewing and analyzing a run-time profile
- 12.6.7 vAnalyzer charts
- 12.6.8 vAnalyzer viewers
- 12.7 Debug and performance counters
- Chapter 13 GPU Tools
- Chapter 14 GPU Memory Introduction
- Chapter 15 Application Programming Recommendations
- 15.1 Understand the system configuration and target application
- 15.2 Optimize off chip data transfer such as accessing off-chip DDR memory/mobile DDR memory
- 15.3 Avoid W-Clipping issue in the Application Program
- 15.4 Avoid GPU hang and data corruption when use occlusion query
- 15.5 Avoid random cache or memory accesses
- 15.6 Optimize your use of system memory
- 15.7 Target a fixed frame rate that is visibly smooth
- 15.8 Minimize GL state changes
- 15.9 Batch primitives to minimize the number of draw calls
- 15.10 Perform calculations per vertex instead of per fragment/pixel
- 15.11 Enable early-Z, hierarchical-Z and back face culling
- 15.12 Use branching carefully
- 15.13 Do not use static or stack data as vertex data - use VBOs instead
- 15.14 Use dynamic VBO if data is changing frame by frame
- 15.15 Tessellate your data so that Hierarchical Z (HZ) can do its job
- 15.16 Use dynamic textures as a texture cache (texture atlas)
- 15.17 If you use many small triangle strips, stitch them together
- 15.18 Specify EGL configuration attributes precisely
- 15.19 Use aligned texture/render buffers
- 15.20 Disable MSAA rendering unless high quality is needed
- 15.21 Avoid partial clears
- 15.22 Avoid mask operations
- 15.23 Use MIPMAP textures
- 15.24 Use compressed textures if constricted by RAM/ROM budget
- 15.25 Draw objects from near to far if possible
- 15.26 Avoid indexed triangle strips.
- 15.27 Vertex attribute stride should not be larger than 256 bytes
- 15.28 Avoid binding buffers to mixed index/vertex array
- 15.29 Avoid using CPU to update texture/buffer contexts during render
- 15.30 Avoid frequent context switching
- 15.31 Optimize resources within a shader
- 15.32 Avoid using glScissor Clear for small regions
- 15.33 Use PRE to accelerate data transfer
- 15.34 i.MX 8QuadMax dual-GPU performance
- Chapter 16 Demo Framework
- 16.1 Summaries
- 16.2 Introduction
- 16.3 Design overview
- 16.4 High level overview
- 16.5 Demo application details
- 16.6 Helper Class Overview
- 16.7 Android SDK+NDK on Windows OS build guide
- 16.8 Ubuntu build guide
- 16.9 Windows OS build guide
- 16.10 Yocto build guide
- 16.11 FslContentSync.py notes
- 16.12 Roadmap – Upcoming features
- 16.13 Known limitations
- Chapter 17 Environment Variables Summary

NXP Semiconductors Document Number: IMXGRAPHICUG
Rev. 0, 02/2018
i.MX Graphics User’s Guide

i.MX Graphics User’s Guide, Rev. 0, 02/2018
2 NXP Semiconductors
Contents
Chapter 1 Introduction ............................................................................................................................................. 6
Chapter 2 i.MX G2D API ............................................................................................................................................ 6
2.1 Overview ...................................................................................................................................................... 6
2.2 Enumerations and structures ....................................................................................................................... 6
2.3 G2D function descriptions .......................................................................................................................... 10
2.4 Support of new operating system in G2D .................................................................................................. 16
2.5 Sample code for G2D API usage ................................................................................................................. 16
2.6 Feature list on multiple platforms.............................................................................................................. 19
Chapter 3 i.MX EGL and OGL Extension Support .................................................................................................... 20
3.1 Introduction ............................................................................................................................................... 20
3.2 EGL extension support ............................................................................................................................... 20
3.3 OpenGL ES extension support .................................................................................................................... 23
3.4 Extension GL_VIV_direct_texture .............................................................................................................. 29
3.5 Extension GL_VIV_texture_border_clamp ................................................................................................. 32
Chapter 4 i.MX Framebuffer API ............................................................................................................................ 35
4.1 Overview .................................................................................................................................................... 35
4.2 API data types and environment variables ................................................................................................ 35
4.3 API description and syntax ......................................................................................................................... 37
Chapter 5 OpenCL ................................................................................................................................................... 44
5.1 Overview .................................................................................................................................................... 44
5.2 Vivante OpenCL implementation ............................................................................................................... 51
5.3 Optimization for OpenCL embedded profile .............................................................................................. 53
5.4 OpenCL Debug messages ........................................................................................................................... 56
Chapter 6 OpenVX Introduction ............................................................................................................................. 57
6.1 Overview .................................................................................................................................................... 57
6.2 Designing framework of OpenVX ............................................................................................................... 57
6.3 OpenVX extension implementation ........................................................................................................... 59
6.4 OpenCL functions compatible with Vivante vision..................................................................................... 62
Chapter 7 Vulkan .................................................................................................................................................... 65
7.1 OverView .................................................................................................................................................... 65
7.2 Vivante Extension Support for Vulkan ....................................................................................................... 65
Chapter 8 Multiple GPUs and Virtualization........................................................................................................... 67
8.1 Overview .................................................................................................................................................... 67
8.2 Multi-GPU configurations .......................................................................................................................... 67
8.3 GPU affinity configuration .......................................................................................................................... 67

i.MX Graphics User’s Guide, Rev. 0, 02/2018
3 NXP Semiconductors
8.4 OpenCL on multi-GPU device ..................................................................................................................... 67
8.5 GPU virtualization configuration ................................................................................................................ 68
Chapter 9 G2D compositor on Weston .................................................................................................................. 69
9.1 Overview .................................................................................................................................................... 69
9.2 Enabe G2D compositor .............................................................................................................................. 69
Chapter 10 XServer Video Driver ......................................................................................................................... 70
10.1 EXA driver ................................................................................................................................................... 70
10.2 XRandR ....................................................................................................................................................... 71
Chapter 11 Advanced GPU Configuration ............................................................................................................ 82
11.1 GPU Scaling Governor ................................................................................................................................ 82
11.2 GPU Device Cooling .................................................................................................................................... 82
Chapter 12 Vivante Software Tool Kit .................................................................................................................. 82
12.1 Vivante Tool Kit overview .......................................................................................................................... 82
12.2 vEmulator ................................................................................................................................................... 84
12.3 vShader ...................................................................................................................................................... 95
12.4 vCompiler ................................................................................................................................................. 103
12.5 vTexture ................................................................................................................................................... 107
12.6 vProfiler and vAnalyzer ............................................................................................................................ 111
12.7 Debug and performance counters ........................................................................................................... 125
Chapter 13 GPU Tools ........................................................................................................................................ 127
13.1 gpuinfo tool .............................................................................................................................................. 127
13.2 gmem_info tool ........................................................................................................................................ 129
13.3 Apitrace user guide .................................................................................................................................. 130
Chapter 14 GPU Memory Introduction .............................................................................................................. 135
14.1 GPU memory overview ............................................................................................................................ 135
14.2 GPU memory pools .................................................................................................................................. 135
14.3 GPU memory allocators ........................................................................................................................... 135
14.4 GPU reserved memory ............................................................................................................................. 136
14.5 GPU memory base address ...................................................................................................................... 136
Chapter 15 Application Programming Recommendations ................................................................................. 138
15.1 Understand the system configuration and target application ................................................................. 138
15.2 Optimize off chip data transfer such as accessing off-chip DDR memory/mobile DDR memory ............ 138
15.3 Avoid W-Clipping issue in the Application Program ................................................................................. 138
15.4 Avoid GPU hang and data corruption when use occlusion query ............................................................ 139
15.5 Avoid random cache or memory accesses ............................................................................................... 139
15.6 Optimize your use of system memory ..................................................................................................... 139

i.MX Graphics User’s Guide, Rev. 0, 02/2018
4 NXP Semiconductors
15.7 Target a fixed frame rate that is visibly smooth....................................................................................... 139
15.8 Minimize GL state changes ...................................................................................................................... 140
15.9 Batch primitives to minimize the number of draw calls .......................................................................... 140
15.10 Perform calculations per vertex instead of per fragment/pixel .......................................................... 140
15.11 Enable early-Z, hierarchical-Z and back face culling ............................................................................ 140
15.12 Use branching carefully ....................................................................................................................... 141
15.13 Do not use static or stack data as vertex data - use VBOs instead ...................................................... 141
15.14 Use dynamic VBO if data is changing frame by frame ......................................................................... 141
15.15 Tessellate your data so that Hierarchical Z (HZ) can do its job ............................................................ 142
15.16 Use dynamic textures as a texture cache (texture atlas) ..................................................................... 142
15.17 If you use many small triangle strips, stitch them together ................................................................ 142
15.18 Specify EGL configuration attributes precisely .................................................................................... 142
15.19 Use aligned texture/render buffers ..................................................................................................... 142
15.20 Disable MSAA rendering unless high quality is needed ....................................................................... 143
15.21 Avoid partial clears .............................................................................................................................. 143
15.22 Avoid mask operations ........................................................................................................................ 143
15.23 Use MIPMAP textures .......................................................................................................................... 143
15.24 Use compressed textures if constricted by RAM/ROM budget ........................................................... 143
15.25 Draw objects from near to far if possible ............................................................................................ 143
15.26 Avoid indexed triangle strips. .............................................................................................................. 143
15.27 Vertex attribute stride should not be larger than 256 bytes ............................................................... 144
15.28 Avoid binding buffers to mixed index/vertex array ............................................................................. 144
15.29 Avoid using CPU to update texture/buffer contexts during render .................................................... 144
15.30 Avoid frequent context switching ........................................................................................................ 144
15.31 Optimize resources within a shader .................................................................................................... 144
15.32 Avoid using glScissor Clear for small regions ....................................................................................... 144
15.33 Use PRE to accelerate data transfer .................................................................................................... 144
15.34 i.MX 8QuadMax dual-GPU performance ............................................................................................. 145
Chapter 16 Demo Framework ............................................................................................................................ 146
16.1 Summaries................................................................................................................................................ 146
16.2 Introduction ............................................................................................................................................. 146
16.3 Design overview ....................................................................................................................................... 147
16.4 High level overview .................................................................................................................................. 147
16.5 Demo application details ......................................................................................................................... 148
16.6 Helper Class Overview .............................................................................................................................. 152
16.7 Android SDK+NDK on Windows OS build guide ....................................................................................... 157

i.MX Graphics User’s Guide, Rev. 0, 02/2018
5 NXP Semiconductors
16.8 Ubuntu build guide .................................................................................................................................. 158
16.9 Windows OS build guide .......................................................................................................................... 160
16.10 Yocto build guide ................................................................................................................................. 162
16.11 FslContentSync.py notes ...................................................................................................................... 166
16.12 Roadmap – Upcoming features ........................................................................................................... 166
16.13 Known limitations ................................................................................................................................ 167
Chapter 17 Environment Variables Summary .................................................................................................... 168
17.1 Environment variable for drivers and HAL ............................................................................................... 168
17.2 Environment variable for compiler .......................................................................................................... 169
i.MX Graphics User’s Guide, Rev. 0, 02/2018
6 NXP Semiconductors
Chapter 1 Introduction
The purpose of this document is to provide information on graphic APIs and driver support. Each chapter describes
a specific set of APIs or driver integration as well as specific hardware acceleration customization. The target
audiences for this document are developers writing graphics applications or video drivers.
Chapter 2 i.MX G2D API
2.1 Overview
The G2D Application Programming Interface (API) is designed to be easy to understand and to use the 2D Bit blit
(BLT) function. It allows the user to implement the customized applications with simple interfaces. It is hardware
and platform independent for i.MX 2D Graphics.
G2D API supports the following features but is not limited to these:
• Simple BLT operation from source to destination
• Alpha blending for source and destination with Porter-Duff rules
• High-performance memory copy from source to destination
• Up-scaling and down-scaling from source to destination
• 90/180/270 degree rotation from source to destination
• Horizontal and vertical flip from source to destination
• Enhanced visual quality with dither for pixel precision-loss
• High performance memory clear for destination
• Pixel-level cropping for source surface
• Global alpha blending for source only
• Asynchronous mode and sync
• Contiguous memory allocator
• Support VG engine
The G2D API document includes a detailed interface description and sample code for reference.
The API is designed with C-Style coding and can be used in both C and C++ applications.
G2D API supports the following features but is not limited to these:
• Multi source blit
2.2 Enumerations and structures
This chapter describes all enumeration and structure definitions in G2D.
2.2.1 g2d_format enumeration
This enumeration describes the pixel format for source and destination.
Table 1. g2d_format enumeration
Name
Numeric
Description
G2D_RGB565
0
RGB565 pixel format
G2D_RGBA8888
1
32 bit-RGBA pixel format
G2D_RGBX8888
2
32 bit-RGBX without alpha blending
G2D_BGRA8888
3
32 bit-BGRA pixel format
G2D_BGRX8888
4
32 bit-BGRX without alpha blending
i.MX Graphics User’s Guide, Rev. 0, 02/2018
7 NXP Semiconductors
G2D_BGR565
5
16 bit-BGR565 pixel format
G2D_ARGBA8888
6
32 bit-ARGB pixel format
G2D_ABGR8888
7
32 bit-ABGR pixel format
G2D_XRGB8888
8
32 bit-XRGB without alpha
G2D_XBGR8888
9
32 bit-XBGR without alpha
G2D_RGB888
10
24 bit-RGB
G2D_NV12
20
Y plane followed by interleaved U/V plane
G2D_I420
21
Y, U, V are within separate planes
G2D_YV12
22
Y, V, U are within separate planes
G2D_NV21
23
Y plane followed by interleaved V/U plane
G2D_YUYV
24
Interleaved Y/U/Y/V plane
G2D_YVYU
25
Interleaved Y/V/Y/U plane
G2D_UYVY
26
Interleaved U/Y/V/Y plane
G2D_VYUY
27
Interleaved V/Y/U/Y plane
G2D_NV16
28
Y plane followed by interleaved U/V plane
G2D_NV61
29
Y plane followed by interleaved V/U plane
2.2.2 g2d_blend_func enumeration
This enumeration describes the blend factor for source and destination.
Table 2. g2d_blend_func enumeration
Name
Numeric
Description
G2D_ZERO
0
Blend factor with 0
G2D_ONE
1
Blend factor with 1
G2D_SRC_ALPHA
2
Blend factor with source alpha
G2D_ONE_MINUS_SRC_ALPHA
3
Blend factor with 1 - source alpha
G2D_DST_ALPHA
4
Blend factor with destination alpha
G2D_ONE_MINUS_DST_ALPHA
5
Blend factor with 1 - destination alpha
G2D_PRE_MULTIPLIED_ALPHA
0 x 10
Extensive blend as pre-multiplied alpha
G2D_DEMULTIPLY_OUT_ALPHA
0 x 20
Extensive blend as demultiply out alpha
2.2.3 g2d_cap_mode enumeration
This enumeration describes the alternative capability in 2D BLT.
Table 3. g2d_cap_mode enumeration
Name
Numeric
Description
G2D_BLEND
0
Enable alpha blend in 2D BLT
G2D_DITHER
1
Enable dither in 2D BLT
G2D_GLOBAL_ALPHA
2
Enable global alpha in blend
Note: G2D_GLOBAL_ALPHA is only valid when G2D_BLEND is enabled.
i.MX Graphics User’s Guide, Rev. 0, 02/2018
8 NXP Semiconductors
2.2.4 g2d_rotation enumeration
This enumeration describes the rotation mode in 2D BLT.
Table 4. g2d_rotation enumeration
Name
Numeric
Description
G2D_ROTATION_0
0
No rotation
G2D_ROTATION_90
1
Rotation with 90 degree
G2D_ROTATION_180
2
Rotation with 180 degree
G2D_ROTATION_270
3
Rotation with 270 degree
G2D_FLIP_H
4
Horizontal flip
G2D_FLIP_V
5
Vertical flip
2.2.5 g2d_cache_mode enumeration
This enumeration describes the cache operation mode.
Table 5. g2d_cache_mode enumeration
Name
Numeric
Description
G2D_CACHE_CLEAN
0
Clean the cacheable buffer
G2D_CACHE_FLUSH
1
Clean and invalidate cacheable buffer
G2D_GLOBAL_INVALIDATE
2
Invalidate the cacheable buffer
2.2.6 g2d_hardware_type enumeration
This enumeration describes the supported hardware type.
Table 6. g2d_hardware_type enumeration
Name
Numeric
Description
G2D_HARDWARE_2D
0
2D hardware type by default
G2D_HARDWARE_VG
1
VG hardware type
2.2.7 g2d_surface structure
This structure describes the surface with operation attributes.
Table 7. g2d_surface structure
g2d_surface Members
Type
Description
format
g2d_format
Pixel format of surface buffer
planes[3]
Int
Physical addresses of surface buffer
left
Int
Left offset in blit rectangle
top
Int
Top offset in blit rectangle
right
Int
Right offset in blit rectangle
i.MX Graphics User’s Guide, Rev. 0, 02/2018
9 NXP Semiconductors
bottom
Int
Left offset in blit rectangle
stride
Int
RGB/Y stride of surface buffer
width
Int
Surface width in pixel unit
height
Int
Surface height in pixel unit
blendfunc
g2d_blend_func
Alpha blend mode
global_alpha
Int
Global alpha value 0~255
clrcolor
Int
Clear color is 32bit RGBA
rot
g2d_rotation
Rotation mode
Notes:
• RGB and YUV formats can be set in source surface, but only RGB format can be set in destination surface.
• RGB pixel buffer only uses planes [0], buffer address is with 16bytes alignment on i.MX
6Quad/Dual/DualLite/Solo/SoloLite, 1 pixel alignment on i.MX 6QuadPlus.
• NV12: Y in planes [0], UV in planes [1], with 64bytes alignment,
• I420: Y in planes [0], U in planes [1], U in planes [2], with 64 bytes alignment
• The cropped region in source surface is specified with left, top, right and bottom parameters.
• RGB stride alignment is 16bytes on i.MX 6Quad/Dual/DualLite/Solo/SoloLite, 1 pixel on i.MX 6QuadPlus,
both for source and destination surface.
• NV12 stride alignment is 8bytes for source surface, UV stride = Y stride,
• I420 stride alignment is 8bytes for source surface, U stride=V stride = ½ Y stride.
• G2D_ROTATION_0/G2D_FLIP_H/G2D_FLIP_V shall be set in source surface, and the clockwise rotation
degree shall be set in destination surface.
• Application should calculate the rotated position and set it for destination surface.
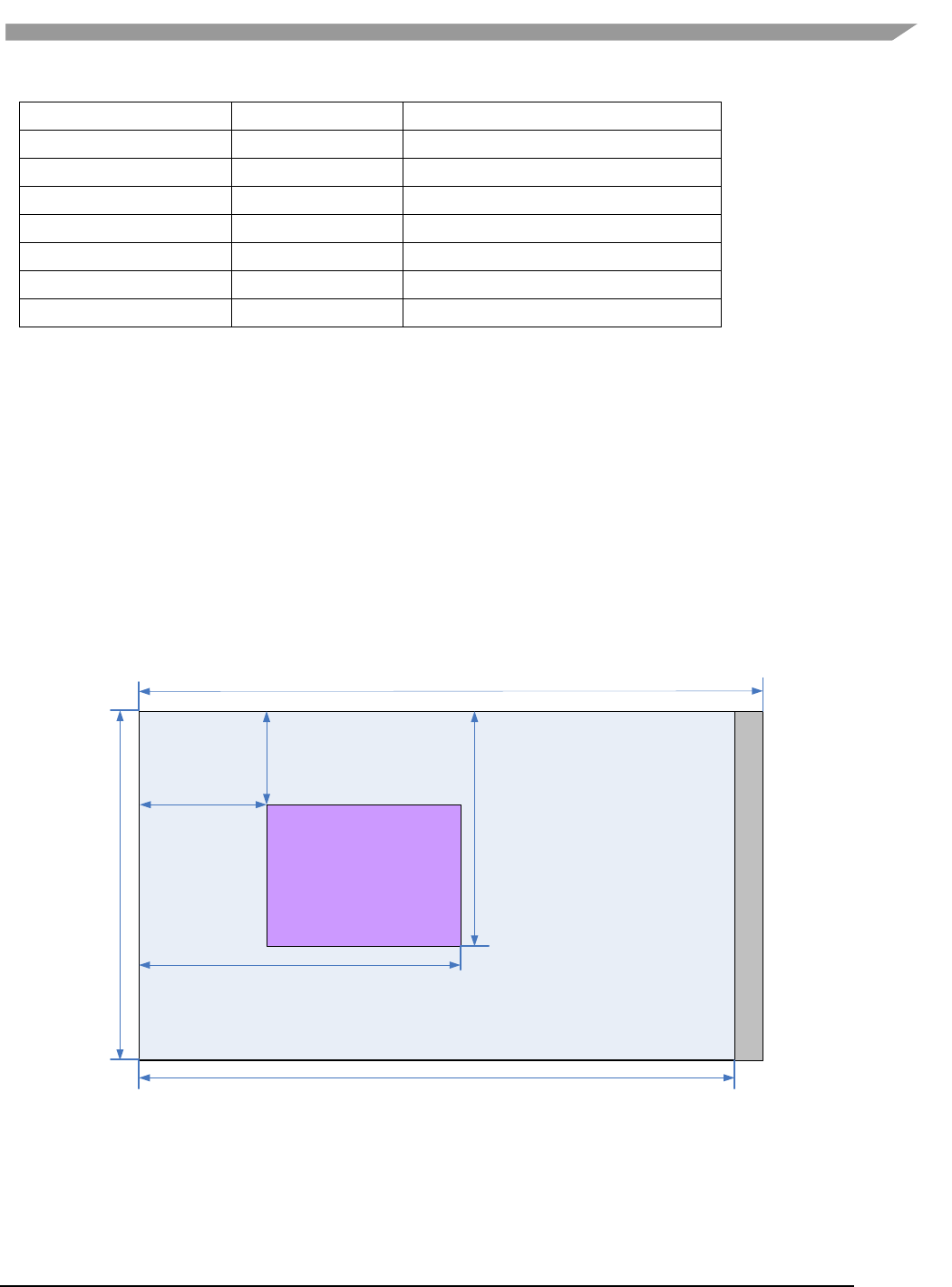
• The geometry definition of surface structure is described as follows.
stride
left
top
bottom
right
width
Planes
height
Figure 1 g2d_surface structure
2.2.8 g2d_buf structure
This structure describes the buffer used as G2D interfaces.
i.MX Graphics User’s Guide, Rev. 0, 02/2018
10 NXP Semiconductors
Table 8. g2d_buf structure
g2d_buf Members
Type
Description
buf_handle
void *
The handle associated with buffer
buf_vaddr
void *
Virtual address of the buffer
buf_paddr
int
Physical address of the buffer
buf_size
int
The actual size of the buffer
2.2.9 g2d_surface_pair structure
This structure binds one source g2d_surface and one destination g2d_surface as a pair. When doing multi-source
blit, they are one-to-one correspondent.
Table 9. g2d_surface_pair structure
g2d_surface_pair Members
Type
Description
s
g2d_surface
Source g2d_surface
d
g2d_surface
Destination g2d_surface
2.2.10 g2d_feature enumeration
This enumeration describes the features in G2D BLT.
Table 10. g2d_feature enumeration
Name
Numeric
Description
G2D_SCALING
0
Scaling
G2D_ROTATION
1
Rotation
G2D_SRC_YUV
2
Source YUV format
G2D_DST_YUV
3
Destination YUV format
G2D_MULTI_SOURCE_BLT
4
Multisource blit
2.3 G2D function descriptions
2.3.1 g2d_open
Description:
Open a G2D device and return a handle.
Syntax:
int g2d_open (void **handle);
Parameters:
handle Pointer to receive G2D device handle
Returns:
Success with 0, fail with -1

i.MX Graphics User’s Guide, Rev. 0, 02/2018
11 NXP Semiconductors
2.3.2 g2d_close
Description:
Close G2D device with the handle.
Syntax:
int g2d_close (void *handle);
Parameters:
handle G2D device handle
Returns:
Success with 0, fail with -1
2.3.3 g2d_make_current
Description:
Set the specific hardware type for current context, and the default is G2D_HARDWARE_2D.
Syntax:
int g2d_make_current (void *handle, enum g2d_hardware_type type);
Parameters:
handle G2D device handle
type G2D hardware type
Returns:
Success with 0, fail with -1
2.3.4 g2d_clear
Description:
Clear a specific area.
Syntax:
int g2d_clear (void *handle, struct g2d_surface *area);
Parameters:
handle G2D device handle
area The area to be cleared
Returns:
Success with 0, fail with -1
2.3.5 g2d_blit
Description:
G2D blit from source to destination with alternative operation (Blend, Dither, etc.).
Syntax:

i.MX Graphics User’s Guide, Rev. 0, 02/2018
12 NXP Semiconductors
int g2d_blit (void *handle, struct g2d_surface *src, struct g2d_surface *dst);
Parameters:
handle G2D device handle
src source surface
dst destination surface
Returns:
Success with 0, fail with -1
2.3.6 g2d_copy
Description:
G2D copy with specified size.
Syntax:
int g2d_copy (void *handle, struct g2d_buf *d, struct g2d_buf* s, int size);
Parameters:
handle G2D device handle
d destination buffer
s source buffer
size copy bytes
Limitations:
If the destination buffer is cacheable, it must be invalidated before g2d_copy
due to the alignment limitation of G2D driver.
Returns:
Success with 0, fail with -1
2.3.7 g2d_query_cap
Description:
Query the alternative capability enablement.
Syntax:
int g2d_query_cap (void *handle, enum g2d_cap_mode cap, int *enable);
Parameters:
handle G2D device handle
cap G2D capability to query
enable Pointer to receive G2D capability enablement
Returns: Success with 0, fail with -1
2.3.8 g2d_enable
Description:

i.MX Graphics User’s Guide, Rev. 0, 02/2018
13 NXP Semiconductors
Enable G2D capability with the specific mode.
Syntax:
int g2d_enable (void *handle, enum g2d_cap_mode cap);
Parameters:
handle G2D device handle
cap G2D capability to enable
Returns:
Success with 0, fail with -1
2.3.9 g2d_disable
Description:
Enable G2D capability with the specific mode.
Syntax:
int g2d_disable (void *handle, enum g2d_cap_mode cap);
Parameters:
handle G2D device handle
cap G2D capability to disable
Returns:
Success with 0, fail with -1
2.3.10 g2d_cache_op
Description:
Perform cache operations for the cacheable buffer allocated through the G2D driver.
Syntax:
int g2d_cache_op (struct g2d_buf *buf, enum g2d_cache_mode op);
Parameters:
buf the buffer to be handled with cache operations
op cache operation type
Returns:
Success with 0, fail with -1
2.3.11 g2d_alloc
Description:
Allocate a buffer through G2D device
Syntax:
struct g2d_buf *g2d_alloc (int size, int cacheable);

i.MX Graphics User’s Guide, Rev. 0, 02/2018
14 NXP Semiconductors
Parameters:
size allocated bytes
cacheable 0, non-cacheable, 1, cacheable attribute defined by system
Returns:
Success with valid G2D buffer pointer, fail with 0
2.3.12 g2d_free
Description:
Free the buffer through G2D device.
Syntax:
int g2d_free (struct g2d_buf *buf);
Parameters:
buf G2D buffer to free
Returns:
Success with 0, fail with -1
2.3.13 g2d_flush
Description:
Flush G2D command and return without completing pipeline.
Syntax:
int g2d_flush (void *handle);
Parameters:
handle G2D device handle
Returns:
Success with 0, fail with -1
2.3.14 g2d_finish
Description:
Flush G2D command and then return when pipeline is finished.
Syntax:
int g2d_finish (void *handle);
Parameters:
handle G2D device handle
Returns:
Success with 0, fail with -1

i.MX Graphics User’s Guide, Rev. 0, 02/2018
15 NXP Semiconductors
2.3.15 g2d_multi_blit
Description:
Blit multiple sources to one destination.
Syntax:
int g2d_multi_blit (void *handle, struct g2d_surface_pair *sp[], int layers);
Parameters:
handle G2D device handle
sp array in which elements point to g2d_surface_pair
layers number of the source layers that need to be blited
Returns:
Success with 0, fail with -1
Note:
There are some restrictions for this API that we should be aware of.
• This API only works on the i.MX 6DualPlus/QuadPlus platform.
• The maximum number of the source layers that can be blited one time is 8.
• Although g2d_surface_pair binds one source g2d_surface and one destination g2d_surface as a pair, it
only supports one destination surface. The relationship between the source and destination is many to
one, but each source surface can be set separately and differently, and its dimension, stride, rotation, and
format can differ with that of the destination surface.
• The rotation of the destination surface is set to 0 degree by defaut, and cannot be changed.
• The key restriction is that the destination rectangle cannot be set, which means that the destination
rectangle must be the same as the source rectangle. Therefore, if the source rectangle is set to (l, t, r, b),
the destination rectangle should also be set to (l, t, r, b) by hardware. In the chapter on multi source blit
(2.4.4), as it makes no sense to set the destination rectangles, we just set all of them to (0, 0, width,
height) for future extension.
2.3.16 g2d_query_hardware
Description:
Query whether 2D and VG hardware are available in the current G2D.
Syntax:
int g2d_query_hardware (void *handle, enum g2d_hardware_type type, int *available);
Parameters:
handle G2D device handle
type G2D hardware type
available Pointer to receive G2D hardware type availability
Returns:
Success with 0, fail with -1
2.3.17 g2d_query_feature
Description:
Query if the features are available in G2D BLT.
Syntax:
int g2d_query_feature (void *handle, enum g2d_feature feature, int *available);
Parameters:
handle G2D device handle

i.MX Graphics User’s Guide, Rev. 0, 02/2018
16 NXP Semiconductors
feature G2D feature in g2d_blit
available Pointer to receive G2D feature availability
Returns:
Success with 0, fail with -1
2.4 Support of new operating system in G2D
G2D code is independent on operating system (OS) except of buffer allocation. Allocating the memory for buffer is
made by mechanism that is offered by each OS differently. The code for allocation is located in [G2D repository
copy]/source/os/[OS name]. Therefore, supporting new OS includes the following steps:
1. Create a new folder in [G2D repository copy]/source/os/ with the name of the new OS and update
implementation in the included source code according to the new OS allocation mechanism.
2. When creating new makefiles for the OS, include the files from the new folder.
3. The test named overlay_test contains the OS dependent code. For supporting the new OS in this test,
create new folder in [G2D repository copy]/test/overlay_test/os and update the code according to the
new OS mechanism for display initialization. Also update makefiles to include code from the new folder.
2.5 Sample code for G2D API usage
This chapter provides the brief prototype code with G2D API.
2.5.1 Color space conversion from YUV to RGB
g2d_open(&handle);
src.planes[0] = buf_y;
src.planes[1] = buf_u;
src.planes[2] = buf_v;
src.left = crop.left;
src.top = crop.top;
src.right = crop.right;
src.bottom = crop.bottom;
src.stride = y_stride;
src.width = y_width;
src.height = y_height;
src.rot = G2D_ROTATION_0;
src.format = G2D_I420;
dst.planes[0] = buf_rgba;
dst.left = 0;
dst.top = 0;
dst.right = disp_width;
dst.bottom = disp_height;
dst.stride = disp_width;
dst.width = disp_width;
dst.height = disp_height;
dst.rot = G2D_ROTATION_0;
dst.format = G2D_RGBA8888;

i.MX Graphics User’s Guide, Rev. 0, 02/2018
17 NXP Semiconductors
g2d_blit(handle, &src, &dst);
g2d_finish(handle);
g2d_close(handle);
2.5.2 Alpha blend in source over mode
g2d_open(&handle);
src.planes[0] = src_buf;
src.left = 0;
src.top = 0;
src.right = test_width;
src.bottom = test_height;
src.stride = test_width;
src.width = test_width;
src.height = test_height;
src.rot = G2D_ROTATION_0;
src.format = G2D_RGBA8888;
src.blendfunc = G2D_ONE;
dst.planes[0] = dst_buf;
dst.left = 0;
dst.top = 0;
dst.right = test_width;
dst.bottom = test_height;
dst.stride = test_width;
dst.width = test_width;
dst.height = test_height;
dst.format = G2D_RGBA8888;
dst.rot = G2D_ROTATION_0;
dst.blendfunc = G2D_ONE_MINUS_SRC_ALPHA;
g2d_enable(handle,G2D_BLEND);
g2d_blit(handle, &src, &dst);
g2d_finish(handle);
g2d_disable(handle,G2D_BLEND);
g2d_close(handle);
2.5.3 Source cropping and destination rotation
g2d_open(&handle);
src.planes[0] = src_buf;
src.left = crop.left;
src.top = crop.left;
src.right = crop.right;

i.MX Graphics User’s Guide, Rev. 0, 02/2018
18 NXP Semiconductors
src.bottom = crop.bottom;
src.stride = src_stride;
src.width = src_width;
src.height = src_height;
src.format = G2D_RGBA8888;
src.rot = G2D_ROTATION_0;//G2D_FLIP_H or G2D_FLIP_V
dst.planes[0] = dst_buf;
dst.left = 0;
dst.top = 0;
dst.right = dst_width;
dst.bottom = dst_height;
dst.stride = dst_width;
dst.width = dst_width;
dst.height = dst_height;
dst.format = G2D_RGBA8888;
dst.rot = G2D_ROTATION_90;
g2d_blit(handle, &src, &dst);
g2d_finish(handle);
g2d_close(handle);
2.5.4 Multi source blit
const int layers = 8;
struct g2d_buf *d_buf;
struct g2d_buf *mul_s_buf[layers];
struct g2d_surface_pair *sp[layers];
g2d_open(&handle)
for(n = 0; n < layers; n++) {
sp[n] = (struct g2d_surface_pair *)malloc(sizeof(struct g2d_surface_pair));
}
d_buf = g2d_alloc(test_width * test_height * 4, 0);
for(n = 0; n < layers; n++) {
mul_s_buf[n] = g2d_alloc(test_width * test_height * 4, 0);
}
for(n = 0; n < layers; n++) {
sp[n]->s.left = img_info_ptr[n]->img_left;
sp[n]->s.top = img_info_ptr[n]->img_top;
sp[n]->s.right = img_info_ptr[n]->img_right;
sp[n]->s.bottom = img_info_ptr[n]->img_bottom;
sp[n]->s.stride = img_info_ptr[n]->img_width;
sp[n]->s.width = img_info_ptr[n]->img_width;
sp[n]->s.height = img_info_ptr[n]->img_height;
i.MX Graphics User’s Guide, Rev. 0, 02/2018
19 NXP Semiconductors
sp[n]->s.rot = img_info_ptr[n]->img_rot;
sp[n]->s.format = img_info_ptr[n]->img_format;
sp[n]->s.planes[0] = mul_s_buf[n]->buf_paddr;
}
sp[0]->d.left = 0;
sp[0]->d.top = 0;
sp[0]->d.right = test_width;
sp[0]->d.bottom = test_height;
sp[0]->d.stride = test_width;
sp[0]->d.width = test_width;
sp[0]->d.height = test_height;
sp[0]->d.format = G2D_RGBA8888;
sp[0]->d.rot = G2D_ROTATION_0;
sp[0]->d.planes[0] = d_buf->buf_paddr;
for(n = 1; n < layers; n++) {
sp[n]->d = sp[0]->d;
}
g2d_multi_blit(handle, sp, layers);
g2d_finish(handle);
for(n = 0; n < layers; n++)
g2d_free(mul_s_buf[n]);
g2d_free(d_buf);
g2d_close(handle);
2.6 Feature list on multiple platforms
This user guide is for multiple platforms, such as i.MX 6 and i.MX 8, and the hardwares for the G2D implementation
are different on those platforms, so some G2D features are also different.
For example, the G2D_YVYU and G2D_VYUY formats are not supported on the i.MX8, and the g2d_multi_blit
function only works on the i.MX 6DualPlus/QuadPlus. Therefore, we list those differences in the following feature
table.
Table 11. Feature list on multiple platforms
Feature
i.MX 6
i.MX 7
i.MX 8
Solo/Dual/Quad
DualPlus/QuadPlus
ULP1
QuadMax
G2D_YVYU
Yes
Yes
Yes
No
G2D_VYUY
Yes
Yes
Yes
No
G2D_HARDWARE_VG
Yes
Yes
Yes
No
G2D_MULTI_SOURCE_BLT
No
Yes
Yes
No
g2d_cache_op
Yes
Yes
Yes
No
i.MX Graphics User’s Guide, Rev. 0, 02/2018
20 NXP Semiconductors
Chapter 3 i.MX EGL and OGL Extension Support
3.1 Introduction
The following tables list the level of support for EGL and OES extensions available with i.MX hardware and
software. Support levels are current as of the date of the document and subject to change.
Two tables are provided. The first table lists the EGL interface extensions. The second table lists extensions for
OpenGL ES 1.1, OpenGL ES 2.0, and OpenGL ES 3.0.
Key:
Extension Name and Number: Each listed extension is derived from the relevant khronos.org webpage list and
includes the extension number as well as a hyperlink to the khronos description of the extension.
Yes: Support is currently available.
No: Support is not available. (Reasons for lack of support may vary: the extension may be proprietary or obsolete,
or not applicable to the specified OES version.)
N/A: Support is not provided as the extension is not applicable in this and subsequent versions of the specification.
3.2 EGL extension support
The following table includes the list of all current EGL Extensions and indicates their support level.
(list from www.khronos.org/registry/egl/ as of 1/24/2013)
Table 12. EGL extension support
EGL Extension Number, Name and hyperlink
Supported
1. EGL_KHR_config_attribs
2. EGL_KHR_lock_surface
YES
3. EGL_KHR_image
YES
4. EGL_KHR_vg_parent_image
5. EGL_KHR_gl_texture_2D_image
EGL_KHR_gl_texture_cubemap_image
EGL_KHR_gl_texture_3D_image
EGL_KHR_gl_renderbuffer_image
YES
YES
no
YES
6. EGL_KHR_reusable_sync
YES
8. EGL_KHR_image_base
YES
9. EGL_KHR_image_pixmap
YES
10. EGL_IMG_context_priority
16. EGL_KHR_lock_surface2
17. EGL_NV_coverage_sample
18. EGL_NV_depth_nonlinear
19. EGL_NV_sync
20. EGL_KHR_fence_sync
YES
24. EGL_HI_clientpixmap
25. EGL_HI_colorformats
26. EGL_MESA_drm_image
27. EGL_NV_post_sub_buffer
28. EGL_ANGLE_query_surface_pointer
i.MX Graphics User’s Guide, Rev. 0, 02/2018
21 NXP Semiconductors
29. EGL_ANGLE_surface_d3d_texture_2d_share_handle
30. EGL_NV_coverage_sample_resolve
31. EGL_NV_system_time
32. EGL_KHR_stream
33. EGL_KHR_stream_consumer_gltexture
34. EGL_KHR_stream_producer_eglsurface
35. EGL_KHR_stream_producer_aldatalocator
36. EGL_KHR_stream_fifo
37. EGL_EXT_create_context_robustness
YES
38. EGL_ANGLE_d3d_share_handle_client_buffer
39. EGL_KHR_create_context
YES
40. EGL_KHR_surfaceless_context
41. EGL_KHR_stream_cross_process_fd
42. EGL_EXT_multiview_window
43. EGL_KHR_wait_sync
44. EGL_NV_post_convert_rounding
45. EGL_NV_native_query
46. EGL_NV_3dvision_surface
47. EGL_ANDROID_framebuffer_target
48. EGL_ANDROID_blob_cache
49. EGL_ANDROID_image_native_buffer
YES
50. EGL_ANDROID_native_fence_sync
YES
51. EGL_ANDROID_recordable
52. EGL_EXT_buffer_age
YES
53. EGL_EXT_image_dma_buf_import
YES
54. EGL_ARM_pixmap_multisample_discard
55. EGL_EXT_swap_buffers_with_damage
56. EGL_NV_stream_sync
57. EGL_EXT_platform_base
58. EGL_EXT_client_extensions
59. EGL_EXT_platform_x11
60. EGL_KHR_cl_event
61. EGL_KHR_get_all_proc_addresses
EGL_KHR_client_get_all_proc_addresses
62. EGL_MESA_platform_gbm
63. EGL_EXT_platform_wayland
64. EGL_KHR_lock_surface3
65. EGL_KHR_cl_event2
66. EGL_KHR_gl_colorspace
67. EGL_EXT_protected_surface
YES
68. EGL_KHR_platform_android
69. EGL_KHR_platform_gbm
70. EGL_KHR_platform_wayland
YES
71. EGL_KHR_platform_x11
72. EGL_EXT_device_base
73. EGL_EXT_platform_device
74. EGL_NV_device_cuda
i.MX Graphics User’s Guide, Rev. 0, 02/2018
22 NXP Semiconductors
75. EGL_NV_cuda_event
76. EGL_TIZEN_image_native_buffer
77. EGL_TIZEN_image_native_surface
78. EGL_EXT_output_base
79. EGL_EXT_device_drm
EGL_EXT_output_drm
80. EGL_EXT_device_openwf
EGL_EXT_output_openwf
81. EGL_EXT_stream_consumer_egloutput
83. EGL_KHR_partial_update
84. EGL_KHR_swap_buffers_with_damage
85. EGL_ANGLE_window_fixed_size
86. EGL_EXT_yuv_surface
87. EGL_MESA_image_dma_buf_export
88. EGL_EXT_device_enumeration
89. EGL_EXT_device_query
90. EGL_ANGLE_device_d3d
91. EGL_KHR_create_context_no_error
92. EGL_KHR_debug
93. EGL_NV_stream_metadata
94. EGL_NV_stream_consumer_gltexture_yuv
95. EGL_IMG_image_plane_attribs
96. EGL_KHR_mutable_render_buffer
97. EGL_EXT_protected_content
98. EGL_ANDROID_presentation_time
99. EGL_ANDROID_create_native_client_buffer
100. EGL_ANDROID_front_buffer_auto_refresh
101. EGL_KHR_no_config_context
102. EGL_KHR_context_flush_control
103. EGL_ARM_implicit_external_sync
104. EGL_MESA_platform_surfaceless
105. EGL_EXT_image_dma_buf_import_modifiers
106. EGL_EXT_pixel_format_float
107. EGL_EXT_gl_colorspace_bt2020_linear
EGL_EXT_gl_colorspace_bt2020_pq
108. EGL_EXT_gl_colorspace_scrgb_linear
109. EGL_EXT_surface_SMPTE2086_metadata
110. EGL_NV_stream_fifo_next
111. EGL_NV_stream_fifo_synchronous
112. EGL_NV_stream_reset
113. EGL_NV_stream_frame_limits
114. EGL_NV_stream_remote
EGL_NV_stream_cross_object
EGL_NV_stream_cross_display
EGL_NV_stream_cross_process
EGL_NV_stream_cross_partition
EGL_NV_stream_cross_system
i.MX Graphics User’s Guide, Rev. 0, 02/2018
23 NXP Semiconductors
3.3 OpenGL ES extension support
The following table includes the list of all current OpenGL ES Extensions and indicates their support level.
(list from www.khronos.org/registry/gles/ as of 9/27/2012)
Table 13. OpenGL ES extension support
Extension Number, Name and hyperlink
ES1.1
ES2.0/3.0/3.1/3.2
1. GL_OES_blend_equation_separate
YES
na
2. GL_OES_blend_func_separate
YES
na
3. GL_OES_blend_subtract
YES
na
4. GL_OES_byte_coordinates
YES
na
5. GL_OES_compressed_ETC1_RGB8_texture
YES
YES
6. GL_OES_compressed_paletted_texture
YES
YES
7. GL_OES_draw_texture
YES
na
8. GL_OES_extended_matrix_palette
YES
9. GL_OES_fixed_point
YES
10. GL_OES_framebuffer_object
YES
na
11. GL_OES_matrix_get
YES
na
12. GL_OES_matrix_palette
YES
na
14. GL_OES_point_size_array
YES
15. GL_OES_point_sprite
YES
16. GL_OES_query_matrix
YES
na
17. GL_OES_read_format
YES
18. GL_OES_single_precision
YES
19. GL_OES_stencil_wrap
YES
20. GL_OES_texture_cube_map
YES
na
21. GL_OES_texture_env_crossbar
22. GL_OES_texture_mirrored_repeat
YES
na
23. GL_OES_EGL_image
YES
YES
24. GL_OES_depth24
YES
YES
25. GL_OES_depth32
YES
26. GL_OES_element_index_uint
YES
YES
27. GL_OES_fbo_render_mipmap
YES
YES
28. GL_OES_fragment_precision_high
YES
29. GL_OES_mapbuffer
YES
YES
30. GL_OES_rgb8_rgba8
YES
YES
31. GL_OES_stencil1
32. GL_OES_stencil4
33. GL_OES_stencil8
YES
na
115. EGL_NV_stream_socket
EGL_NV_stream_socket_unix
EGL_NV_stream_socket_inet
EGL_ANDROID_get_render_buffer
YES
EGL_ANDROID_swap_rectangle
YES
EGL_WL_bind_wayland_display
YES
i.MX Graphics User’s Guide, Rev. 0, 02/2018
24 NXP Semiconductors
Extension Number, Name and hyperlink
ES1.1
ES2.0/3.0/3.1/3.2
34. GL_OES_texture_3D
35. GL_OES_texture_float_linear
no
GL_OES_texture_half_float_linear
CORE
36. GL_OES_texture_float
CORE
GL_OES_texture_half_float
CORE
37. GL_OES_texture_npot
YES
YES
38. GL_OES_vertex_half_float
YES
YES
39. GL_AMD_compressed_3DC_texture
40. GL_AMD_compressed_ATC_texture
41. GL_EXT_texture_filter_anisotropic
CORE
CORE
42. GL_EXT_texture_type_2_10_10_10_REV
CORE
43. GL_OES_depth_texture
YES
44. GL_OES_packed_depth_stencil
YES
YES
45. GL_OES_standard_derivatives
YES
46. GL_OES_vertex_type_10_10_10_2
CORE
47. GL_OES_get_program_binary
YES
48. GL_AMD_program_binary_Z400
49. GL_EXT_texture_compression_dxt1
YES
50. GL_AMD_performance_monitor
51. GL_EXT_texture_format_BGRA8888
YES
YES
52. GL_NV_fence
53. GL_IMG_read_format
54. GL_IMG_texture_compression_pvrtc
55. GL_QCOM_driver_control
56. GL_QCOM_performance_monitor_global_mode
57. GL_IMG_user_clip_plane
58. GL_IMG_texture_env_enhanced_fixed_function
59. GL_APPLE_texture_2D_limited_npot
60. GL_EXT_texture_lod_bias
YES
N/A
61. GL_QCOM_writeonly_rendering
62. GL_QCOM_extended_get
63. GL_QCOM_extended_get2
64. GL_EXT_discard_framebuffer
YES
65. GL_EXT_blend_minmax
YES
YES
66. GL_EXT_read_format_bgra
YES
YES
67. GL_IMG_program_binary
68. GL_IMG_shader_binary
69. GL_EXT_multi_draw_arrays
YES
YES
GL_SUN_multi_draw_arrays
no
no
70. GL_QCOM_tiled_rendering
71. GL_OES_vertex_array_object
YES
72. GL_NV_coverage_sample
73. GL_NV_depth_nonlinear
74. GL_IMG_multisampled_render_to_texture
75. GL_OES_EGL_sync
YES
YES
76. GL_APPLE_rgb_422
i.MX Graphics User’s Guide, Rev. 0, 02/2018
25 NXP Semiconductors
Extension Number, Name and hyperlink
ES1.1
ES2.0/3.0/3.1/3.2
77. GL_EXT_shader_texture_lod
78. GL_APPLE_framebuffer_multisample
79. GL_APPLE_texture_format_BGRA8888
80. GL_APPLE_texture_max_level
81. GL_ARM_mali_shader_binary
82. GL_ARM_rgba8
83. GL_ANGLE_framebuffer_blit
84. GL_ANGLE_framebuffer_multisample
85. GL_VIV_shader_binary
86. GL_EXT_frag_depth
YES
87. GL_OES_EGL_image_external
YES
YES
88. GL_DMP_shader_binary
89. GL_QCOM_alpha_test
90. GL_EXT_unpack_subimage
N/A
91. GL_NV_draw_buffers
92. GL_NV_fbo_color_attachments
93. GL_NV_read_buffer
94. GL_NV_read_depth_stencil
95. GL_NV_texture_compression_s3tc_update
96. GL_NV_texture_npot_2D_mipmap
97. GL_EXT_color_buffer_half_float
CORE
98. GL_EXT_debug_label
99. GL_EXT_debug_marker
100. GL_EXT_occlusion_query_boolean
101. GL_EXT_separate_shader_objects
102. GL_EXT_shadow_samplers
103. GL_EXT_texture_rg
YES
104. GL_NV_EGL_stream_consumer_external
105. GL_EXT_sRGB
106. GL_EXT_multisampled_render_to_texture
YES
107. GL_EXT_robustness
YES
108. GL_EXT_texture_storage
109. GL_ANGLE_instanced_arrays
110. GL_ANGLE_pack_reverse_row_order
111. GL_ANGLE_texture_compression_dxt3
GL_ANGLE_texture_compression_dxt5
112. GL_ANGLE_texture_usage
113. GL_ANGLE_translated_shader_source
114. GL_FJ_shader_binary_GCCSO
115. GL_OES_required_internalformat
YES
116. GL_OES_surfaceless_context
YES
117. GL_KHR_texture_compression_astc_hdr
GL_KHR_texture_compression_astc_ldr
YES
118. GL_KHR_debug
YES
119. GL_QCOM_binning_control
120. GL_ARM_mali_program_binary
i.MX Graphics User’s Guide, Rev. 0, 02/2018
26 NXP Semiconductors
Extension Number, Name and hyperlink
ES1.1
ES2.0/3.0/3.1/3.2
121. GL_EXT_map_buffer_range
122. GL_EXT_shader_framebuffer_fetch
CORE
123. GL_APPLE_copy_texture_levels
124. GL_APPLE_sync
125. GL_EXT_multiview_draw_buffers
126. GL_NV_draw_texture
127. GL_NV_packed_float
128. GL_NV_texture_compression_s3tc
129. GL_NV_3dvision_settings
130. GL_NV_texture_compression_latc
131. GL_NV_platform_binary
132. GL_NV_pack_subimage
133. GL_NV_texture_array
134. GL_NV_pixel_buffer_object
135. GL_NV_bgr
136. GL_OES_depth_texture_cube_map
YES
137. GL_EXT_color_buffer_float
CORE
138. GL_ANGLE_depth_texture
139. GL_ANGLE_program_binary
140. GL_IMG_texture_compression_pvrtc2
141. GL_NV_draw_instanced
142. GL_NV_framebuffer_blit
143. GL_NV_framebuffer_multisample
144. GL_NV_generate_mipmap_sRGB
145. GL_NV_instanced_arrays
146. GL_NV_shadow_samplers_array
147. GL_NV_shadow_samplers_cube
148. GL_NV_sRGB_formats
149. GL_NV_texture_border_clamp
150. GL_EXT_disjoint_timer_query
151. GL_EXT_draw_buffers
152. GL_EXT_texture_sRGB_decode
YES
153. GL_EXT_sRGB_write_control
154. GL_EXT_texture_compression_s3tc
YES
155. GL_EXT_pvrtc_sRGB
156. GL_EXT_instanced_arrays
157. GL_EXT_draw_instanced
158. GL_NV_copy_buffer
159. GL_NV_explicit_attrib_location
160. GL_NV_non_square_matrices
161. GL_EXT_shader_integer_mix
162. GL_OES_texture_compression_astc
163. GL_NV_blend_equation_advanced
GL_NV_blend_equation_advanced_coherent
164. GL_INTEL_performance_query
165. GL_ARM_shader_framebuffer_fetch
i.MX Graphics User’s Guide, Rev. 0, 02/2018
27 NXP Semiconductors
Extension Number, Name and hyperlink
ES1.1
ES2.0/3.0/3.1/3.2
166. GL_ARM_shader_framebuffer_fetch_depth_stencil
167. GL_EXT_shader_pixel_local_storage
168. GL_KHR_blend_equation_advanced
CORE
GL_KHR_blend_equation_advanced_coherent
169. GL_OES_sample_shading
CORE
170. GL_OES_sample_variables
CORE
171. GL_OES_shader_image_atomic
CORE
172. GL_OES_shader_multisample_interpolation
CORE
173. GL_OES_texture_stencil8
CORE
174. GL_OES_texture_storage_multisample_2d_array
CORE
175. GL_EXT_copy_image
CORE
176. GL_EXT_draw_buffers_indexed
CORE
177. GL_EXT_geometry_shader
CORE
GL_EXT_geometry_point_size
CORE
178. GL_EXT_gpu_shader5
CORE
179. GL_EXT_shader_implicit_conversions
CORE
180. GL_EXT_shader_io_blocks
CORE
181. GL_EXT_tessellation_shader
CORE
GL_EXT_tessellation_point_size
CORE
182. GL_EXT_texture_border_clamp
CORE
183. GL_EXT_texture_buffer
CORE
184. GL_EXT_texture_cube_map_array
CORE
185. GL_EXT_texture_view
186. GL_EXT_primitive_bounding_box
CORE
187. GL_ANDROID_extension_pack_es31a
CORE
188. GL_EXT_compressed_ETC1_RGB8_sub_texture
189. GL_KHR_robust_buffer_access_behavior
YES
190. GL_KHR_robustness
YES
191. GL_KHR_context_flush_control
192. GL_DMP_program_binary
193. GL_APPLE_clip_distance
194. GL_APPLE_color_buffer_packed_float
195. GL_APPLE_texture_packed_float
196. GL_NV_internalformat_sample_query
197. GL_NV_bindless_texture
198. GL_NV_conditional_render
199. GL_NV_path_rendering
200. GL_NV_image_formats
201. GL_NV_shader_noperspective_interpolation
202. GL_NV_viewport_array
203. GL_EXT_base_instance
204. GL_EXT_draw_elements_base_vertex
CORE
205. GL_EXT_multi_draw_indirect
CORE
206. GL_EXT_render_snorm
207. GL_EXT_texture_norm16
208. GL_OES_copy_image
CORE
i.MX Graphics User’s Guide, Rev. 0, 02/2018
28 NXP Semiconductors
Extension Number, Name and hyperlink
ES1.1
ES2.0/3.0/3.1/3.2
209. GL_OES_draw_buffers_indexed
CORE
210. GL_OES_geometry_shader
CORE
211. GL_OES_gpu_shader5
CORE
212. GL_OES_primitive_bounding_box
CORE
213. GL_OES_shader_io_blocks
CORE
214. GL_OES_tessellation_shader
CORE
215. GL_OES_texture_border_clamp
CORE
216. GL_OES_texture_buffer
CORE
217. GL_OES_texture_cube_map_array
CORE
218. GL_OES_texture_view
219. GL_OES_draw_elements_base_vertex
CORE
220. GL_OES_copy_image
CORE
221. GL_EXT_texture_sRGB_R8
222. GL_EXT_yuv_target
223. GL_EXT_texture_sRGB_RG8
224. GL_EXT_float_blend
225. GL_EXT_post_depth_coverage
226. GL_EXT_raster_multisample
227. GL_EXT_texture_filter_minmax
228. GL_NV_conservative_raster
229. GL_NV_fragment_coverage_to_color
230. GL_NV_fragment_shader_interlock
231. GL_NV_framebuffer_mixed_samples
232. GL_NV_fill_rectangle
233. GL_NV_geometry_shader_passthrough
234. GL_NV_path_rendering_shared_edge
235. GL_NV_sample_locations
236. GL_NV_sample_mask_override_coverage
237. GL_NV_viewport_array2
238. GL_NV_polygon_mode
239. GL_EXT_buffer_storage
240. GL_EXT_sparse_texture
241. GL_OVR_multiview
242. GL_OVR_multiview2
243. GL_KHR_no_error
246. GL_INTEL_framebuffer_CMAA
247. GL_EXT_blend_func_extended
248. GL_EXT_multisample_compatibility
249. GL_KHR_texture_compression_astc_sliced_3d
250. GL_OVR_multiview_multisampled_render_to_texture
251. GL_IMG_texture_filter_cubic
251. GL_IMG_texture_filter_cubic
252. GL_EXT_polygon_offset_clamp
253. GL_EXT_shader_pixel_local_storage2
254. GL_EXT_shader_group_vote
255. GL_IMG_framebuffer_downsample
i.MX Graphics User’s Guide, Rev. 0, 02/2018
29 NXP Semiconductors
Extension Number, Name and hyperlink
ES1.1
ES2.0/3.0/3.1/3.2
256. GL_EXT_protected_textures
CORE
257. GL_EXT_clip_cull_distance
258. GL_NV_viewport_swizzle
259. GL_EXT_sparse_texture2
260. GL_NV_gpu_shader5
261. GL_NV_shader_atomic_fp16_vector
262. GL_NV_conservative_raster_pre_snap_triangles
263. GL_EXT_window_rectangles
264. GL_EXT_shader_non_constant_global_initializers
265. GL_INTEL_conservative_rasterization
266. GL_NVX_blend_equation_advanced_multi_draw_buffers
267. GL_OES_viewport_array
268. GL_EXT_conservative_depth
269. GL_EXT_clear_texture
270. GL_IMG_bindless_texture
271. GL_NV_texture_barrier
GL_VIV_direct_texture
YES
YES
3.4 Extension GL_VIV_direct_texture
Name
VIV_direct_texture
Name strings
GL_VIV_direct_texture
IPStatus
Contact NXP Semiconductor regarding any intellectual property questions associated with this extension.
Status
Implemented: July, 2011
Version
Last modified: 29 July, 2011
Revision: 2
Number
Unassigned
Dependencies
OpenGL ES 1.1 is required. OpenGL ES 2.0 support is available.
Overview
Create a texture with direct access support. This is useful when an application desires to use the same texture over and over
while frequently updating its content. It could also be used for mapping live video to a texture. A video decoder could write its
result directly to the texture and then the texture could be directly rendered onto a 3D shape. glTexDirectVIVMap is similar
i.MX Graphics User’s Guide, Rev. 0, 02/2018
30 NXP Semiconductors
to glTexDirectVIV. The only difference is that it has two inputs, “Logical” and “Physical,” which support mapping a user
space memory or a physical address into the texture surface.
New Procedures and Functions
glTexDirectVIV
Syntax:
GL_API void GL_APIENTRY
glTexDirectVIV (
GLenum Target,
GLsizei Width,
GLsizei Height,
GLenum Format,
GLvoid ** Pixels
);
Parameters
Target
Target texture. Must be GL_TEXTURE_2D.
Width
Height
Size of LOD 0. Width must be 16 pixel aligned. The width and
height of LOD 0 of the texture is specified by the Width and Height
parameters. The driver may auto-generate the rest of LODs if the
hardware supports high quality scaling (for non-power of 2
textures) and LOD generation. If the hardware does not support
high quality scaling and LOD generation, the texture remains a
single-LOD texture.
Format
Choose the format of the pixel data from the following formats:
GL_VIV_YV12, GL_VIV_NV12, GL_VIV_NV21, GL_VIV_YUY2,
GL_VIV_UYVY, GL_RGBA, and GL_BGRA_EXT.
• If the format is GL_VIV_YV12, glTexDirectVIV creates a planar
YV12 4:2:0 texture and the format of the Pixels array is as
follows: Yplane, Vplane, Uplane.
• If the format is GL_VIV_NV12, glTexDirectVIV creates a planar
NV12 4:2:0 texture and the format of the Pixels array is as
follows: Yplane, UVplane.
• If the format is GL_VIV_NV21, glTexDirectVIV creates a planar
NV21 4:2:0 texture and the format of the Pixels array is as
follows: Yplane, VUplane.
• If the format is GL_VIV_YUY2 or GL_VIV_UYVY, glTexDirectVIV
creates a packed 4:2:2 texture and the Pixels array contains
only one pointer to the packed YUV texture.
• If Format is GL_RGBA, glTexDirectVIV creates a pixel array
with four GL_UNSIGNED_BYTE components: the first byte for
red pixels, the second byte for green pixels, the third byte for
blue, and the fourth byte for alpha.
• If Format is GL_BGRA_EXT, glTexDirectVIV creates a pixel
array with four GL_UNSIGNED_BYTE components: the first
byte for blue pixels, the second byte for green pixels, the third
byte for red, and the fourth byte for alpha.

i.MX Graphics User’s Guide, Rev. 0, 02/2018
31 NXP Semiconductors
Pixels
Stores the memory pointer created by the driver.
Output
If the function succeeds, it returns a pointer, or, for some YUV formats, it returns a set of pointers that
directly point to the texture. The pointer(s) are returned in the user-allocated array pointed to by the Pixels
parameter.
GlTexDirectVIVMap
Syntax:
GL_API void GL_APIENTRY
glTexDirectVIVMap (
Glenum Target,
Glsizei Width,
Glsizei Height,
Glenum Format,
Glvoid ** Logical,
const Gluint * Physical
);
Parameters
Target
Target texture. Must be GL_TEXTURE_2D.
Width
Height
Size of LOD 0. Width must be 16 pixel aligned. See glTexDirectVIV.
Format
Same as glTexDirectVIV Format.
Logical
Pointer to the logical address of the application-defined texture
buffer. Logical address must be 64 bit (8 byte) aligned.
Physical
Pointer to the physical address of the application-defined buffer to
the texture, or ~0 if no physical address has been provided.
GlTexDirectInvalidateVIV
Syntax:
GL_API void GL_APIENTRY
glTexDirectInvalidateVIV (
Glenum Target
);
Parameters
Target
Target texture. Must be GL_TEXTURE_2D.
New Tokens
GL_VIV_YV12
0x8FC0
GL_VIV_NV12
0x8FC1
GL_VIV_YUY2
0x8FC2

i.MX Graphics User’s Guide, Rev. 0, 02/2018
32 NXP Semiconductors
GL_VIV_UYVY
0x8FC3
GL_VIV_NV21
0x8FC4
Error codes
GL_INVALID_ENUM
Target is not GL_TEXTURE_2D, or format is not a valid format.
GL_INVALID_VALUE
Width or Height parameter is less than 1.
GL_OUT_OF_MEMORY
A memory allocation error occurred.
GL_INVALID_OPERATION
Specified format is not supported by the hardware, or
no texture is bound to the active texture unit, or
some other error occurs during the call.
Example 1.
First, call glTexDirectVIV to get a pointer.
Second, copy the texture data to this memory address.
Then, call glTexDirectInvalidateVIV to apply the texture before drawing something with that texture.
… …
glTexDirectVIV(GL_TEXUTURE_2D, 512, 512, GL_VIV_YV12, &texels);
… …
GlTexDirectInvalidateVIV(GL_TEXTURE_2D);
…
glDrawArrays(…);
…
Example 2.
First, call glTexDirectVIVMap to map Logical and Physical address to the texture.
Second, modify Logical and Physical data.
Then, call glTexDirectInvalidateVIV to apply the texture before drawing something with that texture.
… …
char *Logical = (char*) malloc (sizeof(char)*size);
Gluint physical = ~0U;
glTexDirectVIVMap(GL_TEXUTURE_2D, 512, 512, GL_VIV_YV12,
(void**)&Logical, &
32
hysical);
… …
GlTexDirectInvalidateVIV(GL_TEXTURE_2D);
…
glDrawArrays(…);
Issues
None
3.5 Extension GL_VIV_texture_border_clamp
Name
VIV_texture_border_clamp

i.MX Graphics User’s Guide, Rev. 0, 02/2018
33 NXP Semiconductors
Name Strings
GL_VIV_texture_border_clamp
Status
Implemented September 2012.
Version
Last modified: 27 September 2012
Vivante revision: 1
Number
Unassigned
Dependencies
This extension is implemented for use with OpenGL ES 1.1 and OpenGL ES 2.0.
This extension is based on OpenGL ARB Extension #13: GL_ARB_texture_border_clamp:
www.opengl.org/registry/specs/ARB/texture_border_clamp.txt. See also vendor extension GL_SGIS_texture_border_clamp:
www.opengl.org/registry/specs/SGIS/texture_border_clamp.txt.
Overview
This extension was adapted from the OpenGL extension for use with OpenGL ES implementations. The OpenGL ARB Extension
13 description applies here as well:
“The base OpenGL provides clamping such that the texture coordinates are limited to exactly the range
[0,1]. When a texture coordinate is clamped using this algorithm, the texture sampling filter straddles the
edge of the texture image, taking 1/2 its sample values from within the texture image, and the other 1/2
from the texture border. It is sometimes desirable for a texture to be clamped to the border color, rather
than to an average of the border and edge colors.
This extension defines an additional texture clamping algorithm. CLAMP_TO_BORDER_[VIV] clamps texture
coordinates at all mipmap levels such that NEAREST and LINEAR filters return only the color of the border
texels.”
The color returned is derived only from border texels and cannot be configured.
Issues
None
New Tokens
Accepted by the <param> parameter of TexParameteri and TexParameterf, and by the <params> parameter of
TexParameteriv and TexParameterfv, when their <pname> parameter is TEXTURE_WRAP_S, TEXTURE_WRAP_T, or
TEXTURE_WRAP_R:
CLAMP_TO_BORDER_VIV
0x812D
Errors
None.
New State
Only the type information changes for these parameters.

i.MX Graphics User’s Guide, Rev. 0, 02/2018
34 NXP Semiconductors
See OES 2.0 Specification Section 3.7.4, page 75-76, Table 3.10, “Texture parameters and their values.”
i.MX Graphics User’s Guide, Rev. 0, 02/2018
35 NXP Semiconductors
Chapter 4 i.MX Framebuffer API
4.1 Overview
The graphics software includes i.MX Framebuffer (FB) API which enables users to easily create and port their
graphics applications by using a framebuffer device without the need to expend additional effort handling
platform-related tasks. i.MX Framebuffer API focuses on providing mechanisms for controlling display, window,
and pixmap render surfaces.
The EGL Native Platform Graphics Interface provides mechanisms for creating rendering surfaces onto which client
APIs can draw, creating graphics contexts for client APIs, and synchronizing drawing by client APIs as well as native
platform rendering APIs. This enables seamless rendering using Khronos APIs such as OpenGL ES and OpenVG for
high-performance, accelerated, mixed-mode 2D, and 3D rendering. For further information on EGL, see
www.khronos.org/registry/egl. The API described in this document is compatible with EGL version 1.4 of the
specification.
The following platforms are supported:
• Linux® OS/X11
• Android™ platform
• Windows® Embedded Compact OS
• QNX®
4.2 API data types and environment variables
4.2.1 Data types
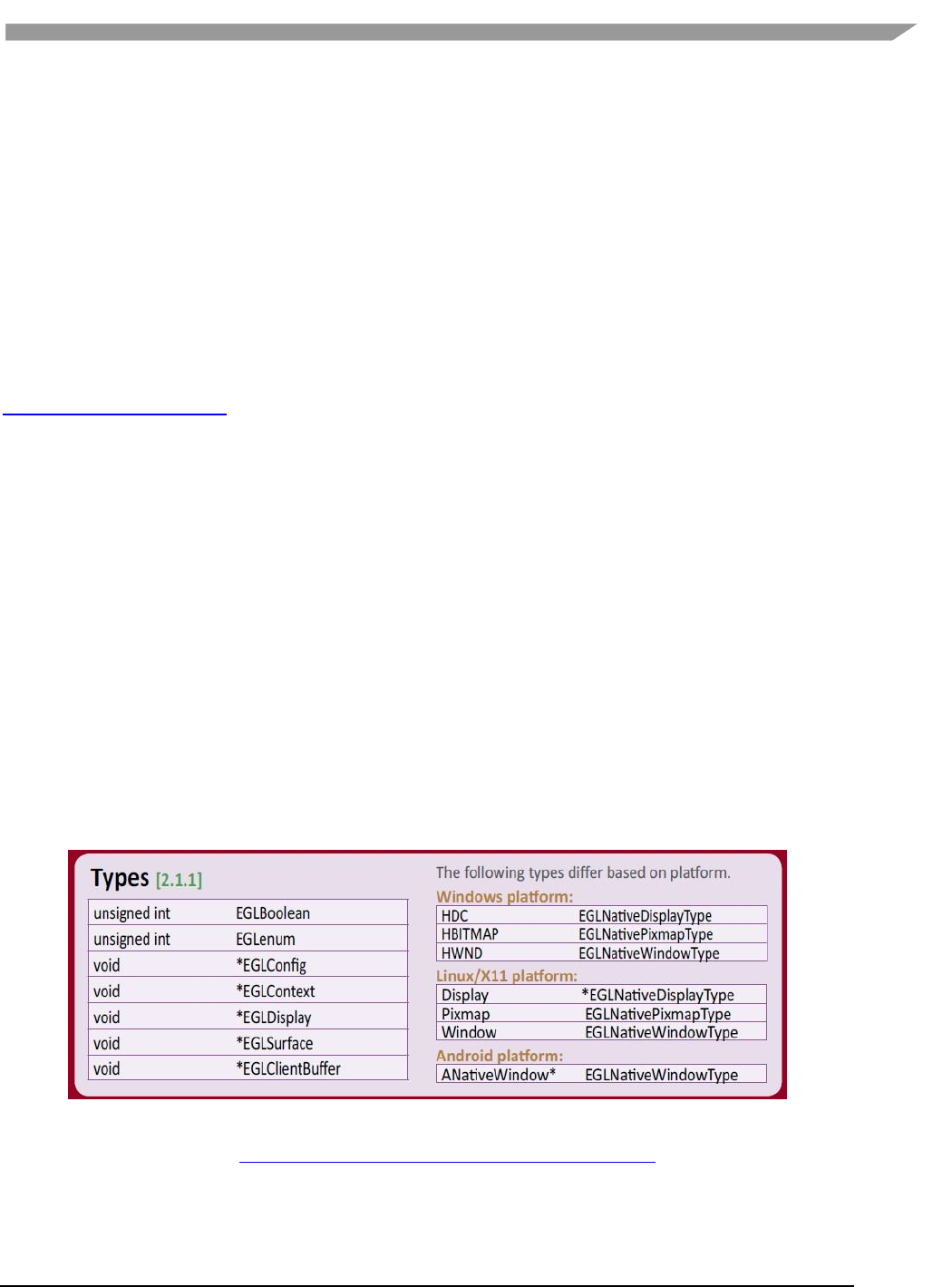
The GPU software provides platform independent member definitions for the following EGL types:
typedef struct _FBDisplay * EGLNativeDisplayType;
typedef struct _FBWindow * EGLNativeWindowType;
typedef struct _FBPixmap * EGLNativePixmapType;
Figure 2 Types as listed on EGL 1.4 API Quick Reference Card
(from www.khronos.org/files/egl-1-4-quick-reference-card.pdf)
i.MX Graphics User’s Guide, Rev. 0, 02/2018
36 NXP Semiconductors
4.2.2 Environment variables
Table 14. i.MX FB API environment variables
Environment Variables
Description
FB_MULTI_BUFFER
To use multiple-buffer rendering, set the environment variable
FB_MULTI_BUFFER to an unsigned integer value, which indicates the
number of buffers required. The maximum is 8.
Recommended values: 4.
The FB_MULTI_BUFFER variable can be set to any positive integer value.
• If set to 1, the multiple-buffer function is not enabled, and the VSYNC
is also disabled, so there may be tearing on screen, but it is good for
benchmark test.
• If set to 2 or 3, VSYNC is enabled and there are double or trible frame
buffer. Because of the hardware limitation of current IPU, there may
be tearing on screen.
• If set to 4 or more, VSYNC is enabled and no screen tearing appears.
• If set to a value more than 8, the driver uses 8 as the buffer count.
FB_FRAMEBUFFER_0,
FB_FRAMEBUFFER_1,
FB_FRAMEBUFFER_2,
FB_FRAMEBUFFER_n
To open a specified framebuffer device, set the environment variable
FB_FRAMEBUFFER_n to a proper value (for example,
FB_FRAMEBUFFER_0 = /dev/fb0).
Allowed values for n: any positive integer.
Note: If there are no environment variables set, the driver tries to use the
default framebuffer devices (fb0 for index 0, fb1 for index 1, fb2 for index
2, fb3 for index 3, and so on).
FB_IGNORE_DISPLAY_SIZE
When set to a positive integer and a window’s initial size request is
greater than the display size, the window size is not reduced to fit within
the display. Global.
Allowed values: any positive integer.
Note: The drivers read the value from this environment variable as a
Boolean to check if the user wants to ignore the display size when creating
a window.
• If the variable is set to value, 0, or this environment variable is not
set, when creating window, the driver uses display size to cut down
the size of the window to ensure that the entire window area is
inside the display screen.
• If the user sets this variable to 1, or any positive integer value, then
the window area can be partly or entirely outside of the display
screen area (see the image below in which the ignore display size is
equal to 1).
GPU_VIV_DISABLE_CLEAR_FB
It turns off zero fill memory, so the content of FBDEV buffer is not cleared.
FB_LEGACY
If the board support drm-fb, the gpu will render though drm by default. If
the user wants to render to framebuffer directly instead of through drm,
window
Display

i.MX Graphics User’s Guide, Rev. 0, 02/2018
37 NXP Semiconductors
sets this variable to 1.
Below are some usage syntax examples for environment variables:
To create a window with its size different from the display size, use the environment variable
FB_IGNORE_DISPLAY_SIZE. Example usage syntax:
export FB_IGNORE_DISPLAY_SIZE=1
To let the driver use multiple buffers to do swap work, use the environment variable FB_MULTI_BUFFER. Example
usage syntax:
export FB_MULTI_BUFFER=2
To specify the display device, use the environment variable FB_FRAMEBUFFER_n, where n = any positive integer.
Example usage syntax:
export FB_FRAMEBUFFER_0=/dev/fb0
export FB_FRAMEBUFFER_1=/dev/fb1
export FB_FRAMEBUFFER_2=/dev/fb2
export FB_FRAMEBUFFER_3=/dev/fb3
4.3 API description and syntax
fbGetDisplay
Description:
This function is used to get the default display of the framebuffer device.
To open the framebuffer device, set an environment variable FB_FRAMEBUFFER_n to the framebuffer location.
Syntax:
EGLNativeDisplayType
fbGetDisplay (
void * context
);
Parameters:
context Pointer to the native display instance.
Return Values:
The function returns a pointer to the EGL native display instance if successful; otherwise, it returns a NULL pointer.
fbGetDisplayByIndex
Description:
This function is used to get a specified display within a multiple framebuffer environment by providing an index
number.

i.MX Graphics User’s Guide, Rev. 0, 02/2018
38 NXP Semiconductors
To use multiple buffers when rendering, set the environment variable FB_MULTI_BUFFER to an unsigned integer
value, which indicates the number of buffers. Maximum is 3.
To open a specific Framebuffer device, set environment variables to their proper values (e.g., set
FB_FRAMEBUFFER_0 = /dev/fb0). If there are no environment variables set, the driver tries to use the default fb
devices (fb0 for index 0, fb1 for index 1, fb2 for index 2, fb3 for index 3, and so on).
Syntax:
EGLNativeDisplayType
fbGetDisplayByIndex (
int DisplayIndex
);
Parameters:
DisplayIndex An integer value where the integer is associated with one of the following environment
variables for framebuffer devices:
FB_FRAMEBUFFER_0
FB_FRAMEBUFFER_1
FB_FRAMEBUFFER_2
FB_FRAMEBUFFER_n
Return Value:
The function returns a pointer to the EGL native display instance if successful; otherwise, it returns a NULL pointer.
fbGetDisplayGeometry
Description:
This function is used to get display width and height information.
Syntax:
void
fbGetDisplayGeometry (
EGLNativeDisplayType Display,
int * Width,
int * Height
);
Parameters:
Display [in] Pointer to EGL native display instance created by fbGetDisplay.
Width [out] Pointer that receives the width of the display.
Height [out] Pointer that receives the height of the display.
fbGetDisplayInfo
Description:
This function is used to get display information.
Syntax:
void
fbGetDisplayInfo (
EGLNativeDisplayType Display,

i.MX Graphics User’s Guide, Rev. 0, 02/2018
39 NXP Semiconductors
int * Width,
int * Height,
unsigned long * Physical,
int * Stride,
int * BitsPerPixel
);
Parameters:
Display [in] A pointer to the EGL native display instance created by fbGetDisplay.
Width [out] A pointer to the location that contains the width of the display.
Height [out] A pointer to the location that contains the height of the display.
Physical [out] A pointer to the location that contains the physical start address of the display.
Stride [out] A pointer to the location that contains the stride of the display.
BitsPerPixel [out] A pointer to the location that contains the pixel depth of the display.
fbDestroyDisplay
Description:
This function is used to destroy a display.
Syntax:
void
fbDestroyDisplay (
EGLNativeDisplayType Display
);
Parameters:
Display [in] Pointer to EGL native display instance created by fbGetDisplay.
fbCreateWindow
Description:
This function is used to create a window for the framebuffer platform with the specified position and size. If
width/height is 0, it uses the display width/height as its value.
Note: When either window X + width or the Y + height is larger than the display’s width or height respectively, the
API reduces the window size to force the whole window inside the display screen limits. To avoid reducing the
window size in this scenario, users can set a value of “1” to the environment variable FB_IGNORE_DISPLAY_SIZE.
Syntax:
EGLNativeWindowType
fbCreateWindow (
EGLNativeDisplayType Display,
int X,
int Y,
int Width,
int Height

i.MX Graphics User’s Guide, Rev. 0, 02/2018
40 NXP Semiconductors
);
Parameters:
Display [in] Pointer to EGL native display instance created by fbGetDisplay.
X [in] Specifies the initial horizontal position of the window.
Y [in] Specifies the initial vertical position of the window.
Width [in] Specifies the width of the window.
Height [in] Specifies the height of the window in device units.
Return Value:
The function returns a pointer to the EGL native window instance if successful; otherwise, it returns a NULL
pointer.
fbGetWindowGeometry
Description:
This function is used to get window position and size information.
Syntax:
void
fbGetWindowGeometry (
EGLNativeWindowType Window,
int * X,
int * Y,
int * Width,
int * Height
);
Parameters:
Window [in] Pointer to EGL native window instance created by fbCreateWindow.
X [out] Pointer that receives the horizontal position value of the window.
Y [out] Pointer that receives the vertical position value of the window.
Width [out] Pointer that receives the width value of the window.
Height [out] Pointer that receives the height value of the window.
fbGetWindowInfo
Description:
This function is used to get window position and size and address information.
Syntax:
void
fbGetWindowInfo (
EGLNativeWindowType Window,
int * X,
int * Y,
int * Width,
int * Height
int * BitsPerPixel,

i.MX Graphics User’s Guide, Rev. 0, 02/2018
41 NXP Semiconductors
unsigned int * Offset
);
Parameters:
Window [in] A pointer to the EGL native window instance created by fbCreateWindow.
X [out] A pointer to the location that contains the horizontal position value of the window.
Y [out] A pointer to the location that contains the vertical position value of the window.
Width [out] A pointer to the location that contains the width of the window.
Height [out] A pointer to the location that contains the height of the window.
BitsPerPixel [out] A pointer to the location that contains the pixel depth of the window.
Offset [out] A pointer to the location that contains the offset of the window.
fbDestroyWindow
Description:
This function is used to destroy a window.
Syntax:
void
fbDestroyWindow (
EGLNativeWindowType Window
);
Parameters:
Window [in] Pointer to EGL native window instance created by fbCreateWindow.
fbCreatePixmap
Description:
This function is used to create a pixmap of a specific size on the specified framebuffer device. If either the width or
height is 0, the function fails to create a pixmap and return NULL.
Syntax:
EGLNativePixmapType
fbCreatePixmap (
EGLNativeDisplayType Display,
int Width,
int Height
);
Parameters:
Display [in] Pointer to the EGL native display instance created by fbGetDisplay.
Width [in] Specifies the width of the pixmap.
Height [in] Specifies the height of the pixmap.
Return Value:
The function returns a pointer to the EGL native pixmap instance if successful; otherwise, it returns a NULL pointer.

i.MX Graphics User’s Guide, Rev. 0, 02/2018
42 NXP Semiconductors
fbCreatePixmapWithBpp
Description:
This function is used to create a pixmap of a specific size and bit depth on the specified framebuffer device. If
either the width or height is 0, the function fails to create a pixmap and return NULL.
Syntax:
EGLNativePixmapType
fbCreatePixmapWithBpp (
EGLNativeDisplayType Display,
int Width,
int Height
int BitsPerPixel
);
Parameters:
Display [in]A pointer to the EGL native display instance created by fbGetDisplay.
Width [in] Specifies the width of the pixmap.
Height [in] Specifies the height of the pixmap.
BitsPerPixel [in] Specifies the bit depth of the pixmap.
Return Value:
The function returns a pointer to the EGL native pixmap instance if successful; otherwise, it returns a NULL pointer.
fbGetPixmapGeometry
Description:
This function is used to get pixmap size information.
Syntax:
void
fbGetPixmapGeometry (
EGLNativePixmapType Pixmap,
int * Width,
int * Height
);
Parameters:
Pixmap [in] Pointer to the EGL native pixmap instance created by fbCreatePixmap.
Width [out] Pointer that receives a width value for pixmap.
Height [out] Pointer that receives a height value for pixmap.
fbGetPixmapInfo
Description:
This function is used to get pixmap size and depth information.
Syntax:
void

i.MX Graphics User’s Guide, Rev. 0, 02/2018
43 NXP Semiconductors
fbGetPixmapInfo (
EGLNativePixmapType Pixmap,
int * Width,
int * Height
int * BitsPerPixel
int * Stride,
void ** Bits
);
Parameters:
Pixmap [in] A pointer to the EGL native pixmap instance created by fbCreatePixmap.
Width [out] A pointer to the location that contains a width value for pixmap.
Height [out] A pointer to the location that contains a height value for pixmap.
BitsPerPixel [out] A pointer to the location that contains the pixel depth of the pixmap.
Stride [out] A pointer to the location that contains the stride of the pixmap.
Bits [out] A pointer to the location that contains the bit address of the pixmap.
fbDestroyPixmap
Description:
This function is used to destroy a pixmap.
Syntax:
void
fbDestroyPixmap (
EGLNativePixmapType Pixmap
);
Parameters:
Pixmap [in] Pointer to the EGL native pixmap instance created by fbCreatePixmap.

i.MX Graphics User’s Guide, Rev. 0, 02/2018
44 NXP Semiconductors
Chapter 5 OpenCL
5.1 Overview
5.1.1 General description
OpenCL (Open Computing Language) is an open industry standard application programming interface (API) used to
program multiple devices including GPUs, CPUs, as well as other devices organized as part of a single
computational platform. The OpenCL standard targets a wide range of devices from mobile phones, tablets, PCs,
and consumer electronic (CE) devices, all the way to embedded applications such as automotive and image
processing functions. The API takes advantage of all resources in a platform to fully utilize all compute capability
and to efficiently process the growing complexity of incoming data streams from multiple I/O (input/output)
sources. I/O streams can be camera inputs, images, scientific or mathematical data, and any other form of complex
data that can make use of data or task parallelism.
OpenCL uses parallel execution SIMD (single instruction, multiple data) engines found in GPUs to enhance data
computational density by performing massively parallel data processing on multiple data items, across multiple
compute engines. Each compute unit has its own arithmetic logic units (ALUs), including pipelined floating point
(FP), integer (INT) units and a special function unit (SFU) that can perform computations as well as transcendental
operations. The parallel computations and associated series of operations are called a kernel, and the GPU cores
can execute a kernel on thousands of work-items in parallel at any given time.
At a high level, OpenCL provides both a programming language and a framework to enable parallel programming.
OpenCL includes APIs, libraries and a runtime system to assist and support software development. With OpenCL, it
is possible to write general purpose programs that can execute directly on GPUs, without needing to know
graphics architecture details or using 3D graphics APIs like OpenGL or DirectX. OpenCL also provides a low-level
Hardware Abstraction Layer (HAL) as well as a framework that exposes many details of the underlying hardware
layer and thus allows the programmer to take full advantage of the hardware.
For more details on all the capabilities of OpenCL, see the following specifications from the Khronos Group:
• OpenCL 1.2 Specification
www.khronos.org/registry/cl/specs/opencl-1.2.pdf
• OpenCL 1.2 C++ Bindings Specification
www.khronos.org/registry/cl/specs/opencl-cplusplus-1.2.pdf
5.1.2 OpenCL framework
The OpenCL framework has two principal parts, similar to OpenGL, the host C API and the device C-based language
runtime. The host in OpenCL terminology corresponds to the client in OpenGL and the device corresponds to the
server. Device programs are called kernels. Execution of an OpenCL program is preceded by a series of API calls
that configure the system and GPGPU for execution.
OpenCL abstracts today's heterogeneous architectures using a hierarchical platform model. A host coordinates the
execution and data transfers on, to and from one or several compute devices. Compute devices are comprised of
compute units and each such unit contains an array of processing elements.
5.1.2.1 OpenCL execution model: kernels and work elements
The OpenCL execution model is defined by how the kernels are executed. When a kernel is submitted for
execution by the host, an index space is defined. An instance of the kernel executes for each point in this index
space. This kernel instance is called a work-item. Work-items are identified by their position in the index space

i.MX Graphics User’s Guide, Rev. 0, 02/2018
45 NXP Semiconductors
that provides the global ID for the work-item. Each work-item executes the same code but the specific pathway
through the code and the data operated upon varies by work-item.
Work-items are organized into work-groups. Work-groups provide a broader decomposition of the index space.
Work-groups are each assigned a unique work-group ID with the same dimensionality as the index space used for
the work-items. Work-items are assigned a unique local ID within a work-group so that a single work-item can be
uniquely identified by its global ID or by a combination of its local ID and work-group ID. The work-items in a given
work-group execute concurrently on the same compute device.
The index space supported in OpenCL is called an NDRange. An NDRange is an N-dimensional index space, where N
is one (1), two (2) or three (3). An NDRange is defined by an integer array of length N specifying the extent of the
index space in each dimension starting at an offset index F (zero by default). Each work-item’s global ID and local
ID are N-dimensional tuples. The global ID components are values in the range from F, to F plus the number of
elements in that dimension minus one.
Work-groups are assigned IDs using a similar approach to that used for work-item global IDs. An array of length N
defines the number of work-groups in each dimension. Work-items are assigned to a work-group and given a local
ID with components in the range from zero to the size of the work-group in that dimension minus one. Hence, the
combination of a work-group ID and the local-ID within a work-group uniquely defines a work-item. Each work-
item is identifiable in two ways; in terms of a global index, unique through the whole kernel index space, and in
terms of a local index, unique within a work group.
5.1.2.2 OpenCL command queues
OpenCL provides both task and data parallelism. Data movements are coordinated via command queues which
provide a general means of specifying inter-task relationships and task execution orders that obey the
dependencies in the computation. OpenCL may execute several tasks in parallel, if they are not order dependent.
Tasks are composed of data-parallel kernels which, similarly to shaders, apply a single function to a range of
elements in parallel. Only restricted synchronization and communication is allowed during kernel execution.
OpenCL kernels execute over a 1, 2 or 3 dimensional index space. All work-items execute the same program
(kernel) but their execution may diverge, with branching dependent on the data or their index. For details
regarding how many work groups are allowed within an index space see “Using clEnqueueNDRangeKernel”.
A kernel or a memory operation is first enqueued onto a command queue. Kernels are executed asynchronously
and the host application execution may proceed right after the enqueue operation. The application may opt to
wait for an operation to complete and an operation (kernel or memory) may be marked with a list of events that
must occur before it executes.
Events are kernel completion and memory operations. OpenCL traverses the dependence graph between the
kernels and memory transfers in a queue and ensures the correct execution order. Multiple command queues may
be constructed, further enhancing parallelism control across platforms and multiple compute devices.
• Command-queue barriers are used to control the commands within the command queue. The
command-queue barrier indicates which commands must be finished before proceeding. This allows
for out-of-order command processing. The command queue barrier ensures that all previously
enqueued commands finish execution before any following commands begin execution.
i.MX Graphics User’s Guide, Rev. 0, 02/2018
46 NXP Semiconductors
Figure 3 Command queue barrier
The work-group barrier built-in function provides control of the work-item flow within work-groups. All work-items
must execute the barrier construct before any can continue execution beyond the barrier.
5.1.2.3 OpenCL memory model
The OpenCL memory model is divided into four different types of memory domains. These are:
• Global Memory. Each compute device has global memory space which can reside off-chip in system
memory (DRAM) or inside the chip at the L1 or temporary register level. Global memory is accessible to
all work-items executing in a context, as well as to the host (read, write, and map commands).
• Constant Memory is also global memory, but it is read-only. Constant memory can be placed in any
level of memory that the application programmer decides, making it an implementation dependent
decision. This is the region for host-allocated and host-initialized objects that are not changed during
kernel execution.
• Local Memory. Each compute unit has local memory which resides very near the processing elements.
Access to local memory is very fast and the size of local memory is much smaller than global memory,
making it a scarce resource that needs to be controlled for optimal communication of work-items inside
a work-group. Local memory is specific to a work-group, and is accessible only by work-items belonging
to that work group.
• Private Memory. Each processing element has another level of memory called private memory, which is
only accessible to a single work-item. Private memory is specific to a work-item and is not visible to
other work-items.
During run-time, each processing element is assigned a set of on-chip registers that are used for data storage of
intermediate data. Data that cannot be stored in registers spills over to global memory which can be very costly in
i.MX Graphics User’s Guide, Rev. 0, 02/2018
47 NXP Semiconductors
terms of performance and constant data movement to/from temporary registers. Software may emulate local and
private memory using global memory. System Memory is often loaded to L1 cache, Temporary or Local Storage
Registers and the GPGPU reads from those locations. At every level of the application program, the programmer
must be aware of the size and hierarchy of storage elements.
Table 15. Vivante memory structures mapped to Khronos OpenCL memory types
Khronos OpenCL Memory
Model Name
Vivante GPGPU OpenCL Memory
Structures Utilized
Definition
Private Memory
Registers, System Memory
Accessible only to an individual work-item; not visible
to any other work-items
Local Memory
Local Storage Registers, System
Memory
Accessible to all work-items within a specific work-
group; accessible only by work-items belonging to
that work-group
Global Memory
System Memory
Accessible to all-work-items executing in a context, as
well as to the host (read, write, and map commands).
Constant Memory
Constant Registers, System
Memory
Read only global memory region for host-allocated
and initialized objects that are not changed during
kernel execution
Host (CPU) Memory
Host Memory
Region for a kernel application’s program data and
structures
The OpenCL concurrent-read /concurrent-write (CRCW) memory model has so-called relaxed consistency which
means that different work-items may see a different view of global memory as the computation proceeds. Within
individual work-items reads and writes to all memory spaces are ordered. Synchronization between work-items in
a work-group is necessary to ensure consistency. No mechanism for synchronization between work-groups is
provided. Such a model assures parallel scalability by requiring explicit synchronization and communication.
For the highest throughput and computational speed, kernels should use high-speed on-chip memories and
registers as much as possible. Instruction control flow and memory operations, including data gathering /
scattering and direct memory access (DMA) should be automatically reorganized / re-ordered depending on data
dependencies detected by the optimized compiler. The Vivante OpenCL compiler automatically maps
dependencies and re-orders instructions for the best performance.
5.1.2.4 Host to GPGPU compute device data transfers
The application running on the host uses the OpenCL API to create memory objects in global memory, and to
enqueue memory commands that operate on these memory objects. The host and OpenCL device memory models
are, for the most part, independent of each other. This is by necessity as the host is defined outside of OpenCL.
They do, however, at times need to interact. This interaction occurs in one of two ways: by explicitly copying data
from the host to the GPU compute device memory, or implicitly, by mapping and unmapping regions of a memory
object.
• Explicit using clEnqueueReadBuffer and clEnqueueWriteBuffer (clEnqueueReadImage,
clEnqueueWriteImage.)
To copy data explicitly, the host enqueues commands to transfer data between the memory object and
host memory. These memory transfer commands may be blocking or non-blocking. The OpenCL function
call for a blocking memory transfer returns once the associated memory resources on the host can be

i.MX Graphics User’s Guide, Rev. 0, 02/2018
48 NXP Semiconductors
safely reused. For a non-blocking memory transfer, the OpenCL function call returns as soon as the
command is enqueued regardless of whether host memory is safe to use.
• Implicit using clEnqueueMapBuffer and clEnqueueUnMapMemObject.
The mapping/unmapping method of interaction between the host and OpenCL memory objects allows
the host to map a region from the memory object into its address space. The memory map command may
be blocking or non-blocking. Once a region from the memory object has been mapped, the host can read
or write to this region. The host unmaps the region when accesses (reads and/or writes) to this mapped
region by the host are complete.
The OpenCL specification does not explicitly state where each memory space will be mapped to on
individual implementations. This provides great freedom for vendors on the one hand and some
uncertainty for programmers on the other. Fortunately, kernels may be compiled just-in-time and
possible differences may be tackled during run-time.
When using these interfaces, it is important to consider the amount of copying involved to/from system
memory and the various levels within the compute device(s). There is a two-copy process: between host
and AXI (or SoC internal bus), and between AXI (or SoC internal bus) and the Vivante GPGPU compute
device. Double copying lowers overall system memory bandwidth and lowers performance. Because of
variations in system architecture (both internal and external/memory), there is sometimes a large
performance delta between the system or calculated GFLOPS and the kernel or GPGPU GFLOPS. GPGPU
GFLOPS are based on the theoretical computational capability of the ALUs within the GPGPU, assuming
the system architecture can deliver full data to the GPGPU. OpenCL APIs for buffers and images aid in
avoiding double copy by allowing the mapping of host memory to device memory. With proper memory
transfer management and the use of host/CPU memory remapped to the GPGPU memory space, copying
between host memory and GPGPU memory can be skipped so data transfer becomes a one-copy process.
The trade-off is that the programmer needs to be mindful of page boundaries and memory alignment
issues.
5.1.3 OpenCL profiles
In addition to Full Profile, the OpenCL specification also includes an Embedded Profile, which relaxes the OpenCL
compliance requirements for mobile and embedded devices. The main commons and differences between OpenCL
1.1/1.2 EP (Embedded Profile) and FP (Full Profile) come down to:
Commons:
• Both EP and FP significantly offload the CPU of parallel, multi-threaded tasks.
• For both EP and FP double precision and half-precision floating point are optional.
Difference:
• Full Profile is for highly complex, accurate, and real time computations, while Embedded Profile is a
small subset targeting smaller devices (handheld, mobile, embedded) that perform GPGPU/OpenCL
processing with relaxed data type and precision requirements (image processing, augmented reality,
gesture recognition, and more).
• 64-bit integers are required for FP and optional for EP.
• EP requires either RTZ or RTE. FP requires both.
• Computational precision (units in the last place; i.e., ULP) requirements in EP are relaxed.
• Atomic instruction support is not required in EP.
• 3D Image support is not required in EP.
i.MX Graphics User’s Guide, Rev. 0, 02/2018
49 NXP Semiconductors
• Minimum requirements for constant buffer size, object allocation size, constant argument counts and
local memory sizes are scaled down in EP.
• And more (in general EP is a scaled down version of FP).
• Die size and power increase with FP because of the higher requirements, features and memory sizes.
5.1.4 Vivante OpenCL embedded compatible IP
As of the date of this document, select Vivante GPGPU cores are compatible with OpenCL Embedded Profile
version 1.1. Hardware capability deltas include:
Table 16. Vivante OpenCL embedded profile hardware
Hardware and revision
GC2000
Feature
5.1.0.rc8a
Compute Devices (GPGPU cores)
1
Compute Units per device (Shader cores)
4
Processing Elements per compute unit
4
Profile
Embedded
Preferred work-group/thread group size
16
Max count global work-items each dim
64K
Max count of work-items each dim per work-group
1K
Local Storage Registers On-chip
64
Instruction Memory
512
Texture Samplers
8 PS + 4 VS
Texture Samplers available to OCL
(HW, unlimited via SW)
4
L1 Cache Size
4 KB
L1 Cache Banks
1
L1 Cache Sets/Bank
4
L1 Cache Ways/Set
16
L1 Cache Line Size
64B
L1 Cache MC ports
1
5.1.5 Vivante OpenCL full profile hardware model
As of the date of this document, select Vivante GPGPU cores are compatible with OpenCL Full Profile version 1.2.
Hardware capability deltas are subject to change and includes:
Table 17. Vivante OpenCL full profile hardware
Hardware and revision
GC2000+
GC7000XSVX
GC7000L
i.MX SOC
i.MX 6QuadPlus, i.MX 6DualPlus
i.MX 8QuadMax
i.MX 8 MQuad
Compute Devices (GPGPU
cores)
1
1
1
Compute Units per device
(Shader cores)
4
8
1
i.MX Graphics User’s Guide, Rev. 0, 02/2018
50 NXP Semiconductors
Processing Elements per
compute unit
4
32
16
Profile
Full-Lite*
Full
Full
Preferred work-group/ thread
group size
16
32
8
Max count global work-items
each dim
(if 3D only 1 dim can be up to
4G, the others 64K)
4 G/64 K
4 G/64 K
4 G/64 K
Max count of work-items each
dim per work-group
1 K
1 K
1K
Local Storage Registers On-chip
0
2048 (32 K)
16K
Instruction Memory
I$:512/1 M
I$:512/1 M
I$:512/1 M
Texture Samplers
32
32
32
Texture Samplers available to
OCL
32
32
32
L1 Cache Size
4 KB
64 KB
16K
L1 Cache Banks
2
4
2
L1 Cache Sets/Bank
2
8
8
L1 Cache Ways/Set
16
16
8
L1 Cache Line Size
64 B
64 B
64B
L1 Cache MC ports per GPGPU
core
2
2
2
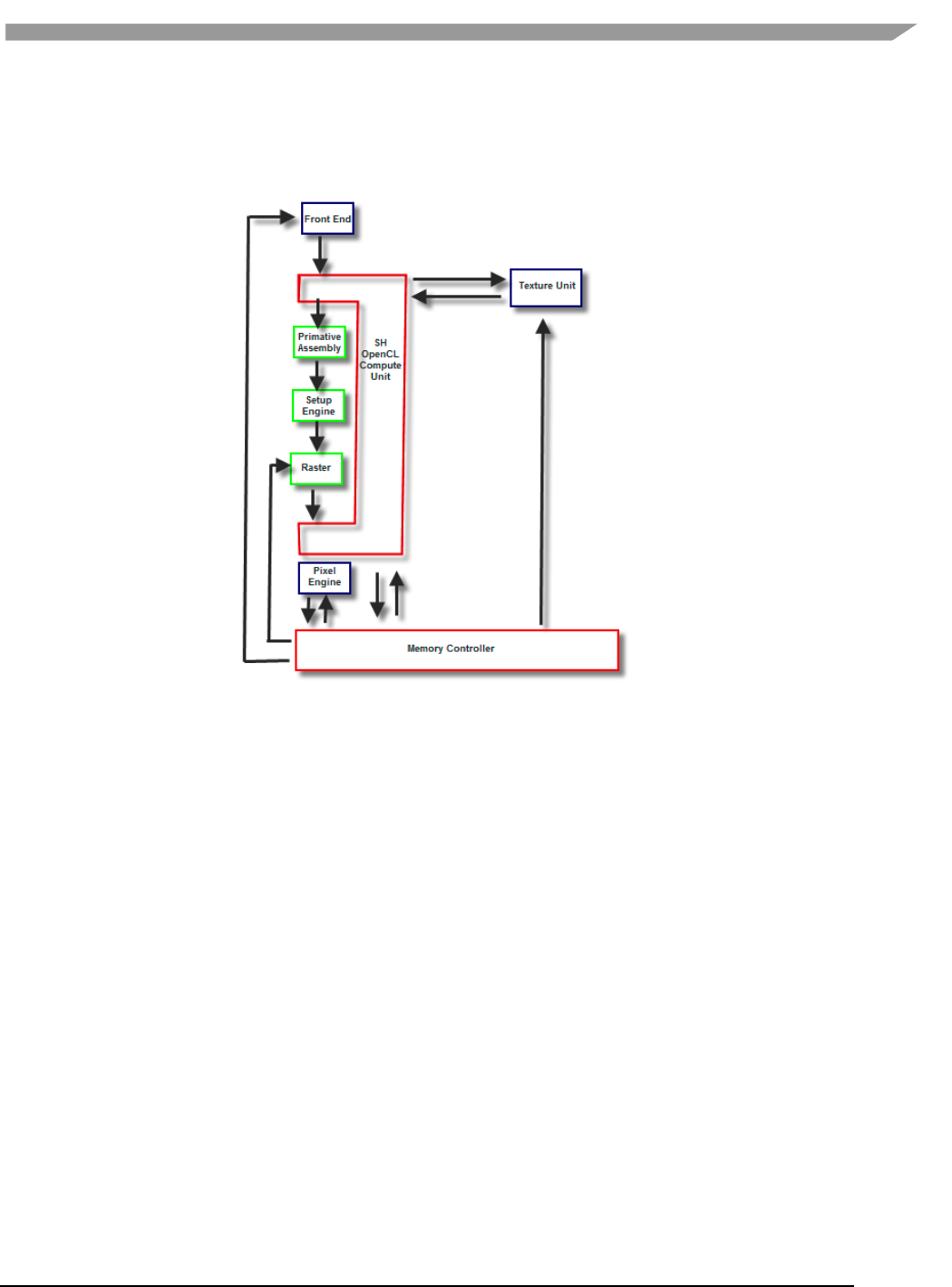
i.MX Graphics User’s Guide, Rev. 0, 02/2018
51 NXP Semiconductors
5.2 Vivante OpenCL implementation
5.2.1 OpenCL pipeline
Figure 4 Vivante OpenCL data pipeline for an OpenCL compute device
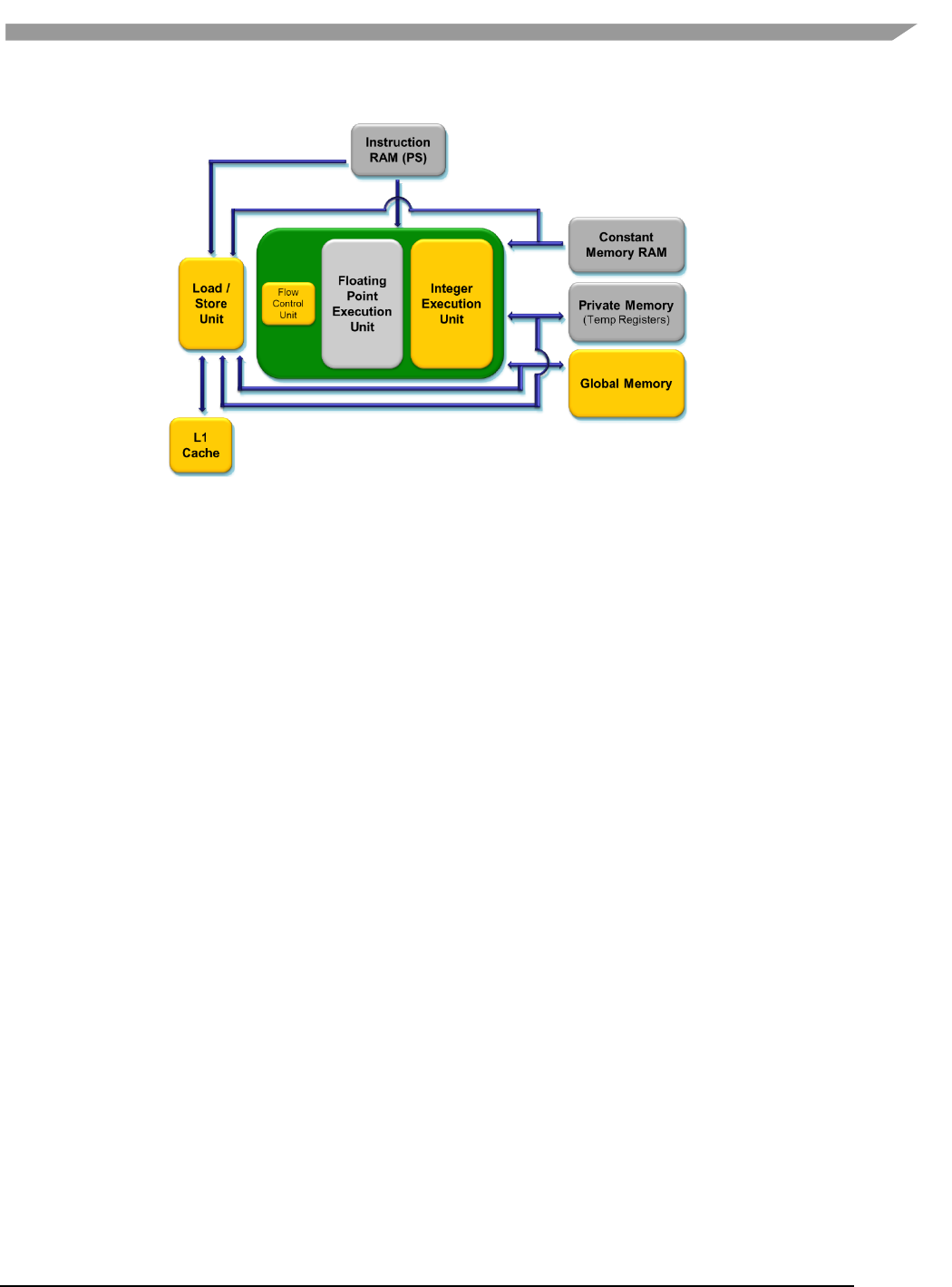
i.MX Graphics User’s Guide, Rev. 0, 02/2018
52 NXP Semiconductors
Figure 5 Vivante OpenCL compute device showing memory scheme
5.2.2 Front end
The front end passes the instructions and constant data as State Loads to the OpenCL Compute Unit (Shader)
block. State Loads program instructions and constant data and work groups initiate execution on the instructions
and the constants loaded.
5.2.3 The OpenCL compute unit
All OpenCL executions occur in this block and all work-groups in a compute unit should belong to the same kernel.
Threads from a work-group are grouped into internal “Thread-groups”. All the threads in a thread-group execute in
parallel. Barrier instruction is supported to enforce synchronization within a work-group.
The compute unit contains Local Memory and the L1 Cache and is where the Load/Store instruction to access
global memory originates. The compute unit can accommodate multiple work-groups (based on the temporary
register and local memory usage) simultaneously.
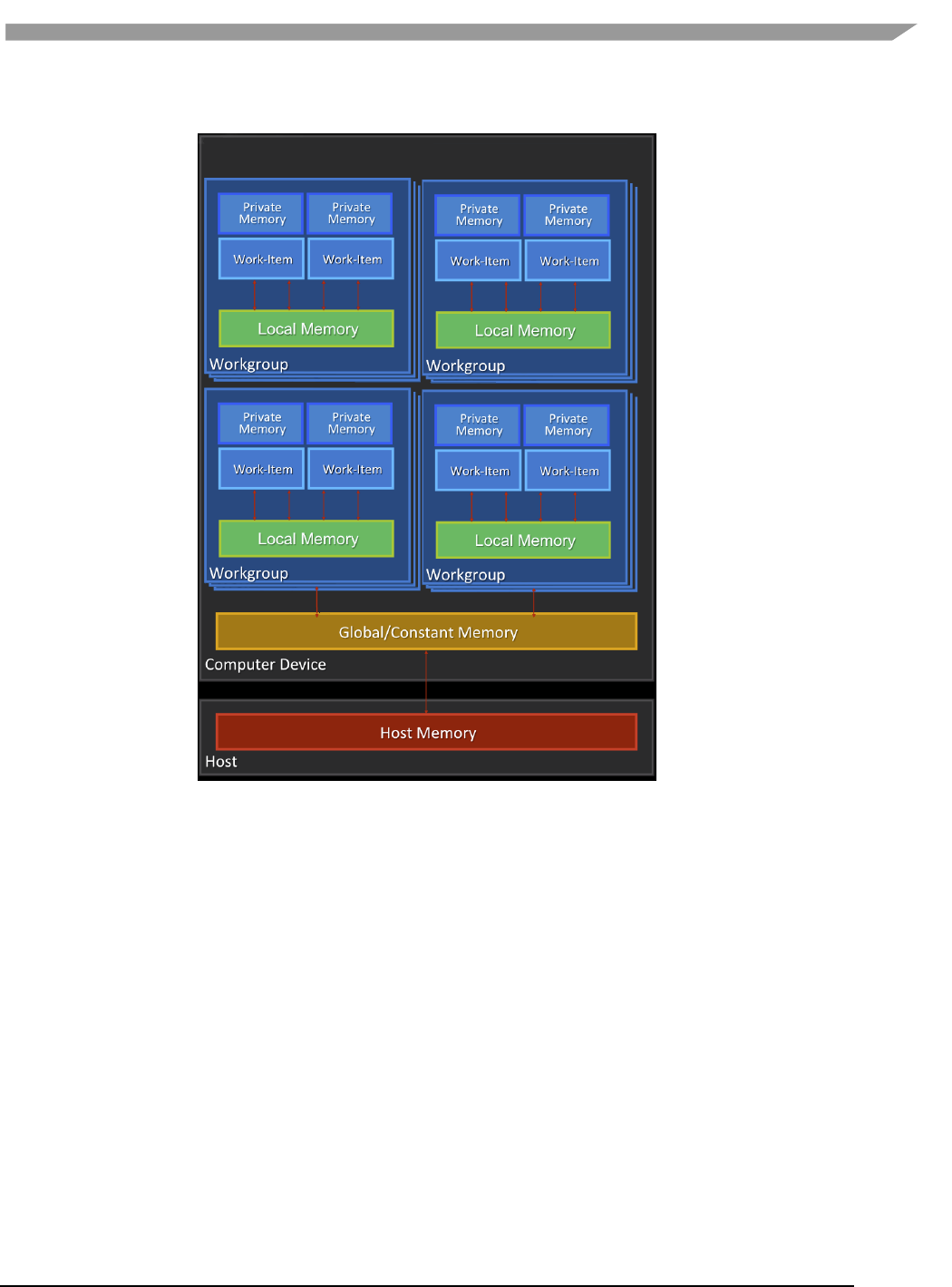
i.MX Graphics User’s Guide, Rev. 0, 02/2018
53 NXP Semiconductors
5.2.4 Memory hierarchy
Figure 6 OpenCL memory hierarchy
5.3 Optimization for OpenCL embedded profile
OpenCL EP (Embedded Profile) is basically a scaled down version of OpenCL FP(Full Profile) and thus may require
extra optimization. The guidelines below help with the optimization of Vivante OpenCL Embedded Profile GPGPU
cores.
When optimizing code on Vivante hardware, it is important to remember a few key points to get the best
performance from the hardware:
• Take advantage of algorithm and data parallelism
• Choose the correct execution configuration (more details below)
• Overlap memory transfer from different levels of the OpenCL memory hierarchy with simultaneous
thread execution
• Maximize memory bandwidth and minimize data transfers (large transfers are more beneficial than many
smaller transfers because of the impact of latency)
• Maximize instruction throughput and minimize instruction count

i.MX Graphics User’s Guide, Rev. 0, 02/2018
54 NXP Semiconductors
5.3.1 Using preferred multiple of work-group size
The work-group size should be a multiple of the thread group size, otherwise some threads remain idle and the
application does not fully utilize all the compute resources. For example, if the work-group size is 8 and the Vivante
core supports 16, only half the compute resources are used. For example, in some early Vivante GPGPU revisions,
the work-group size limit is 192 and the thread group size is 16. See the Overview section on OpenCL Compatible IP
for IP-specific capabilities.
5.3.2 Using multiple work-groups of reduced size
Multiple work groups need to be set to reduce synchronization penalties. To prevent stalls at barriers, it is
recommended to have at least four (4) work-groups to keep the cores busy or as long as the number of work-
groups is greater than or equal to two (2). One work-group is very inefficient; four or more is preferred and helps
avoid latency.
5.3.3 Packing work-item data
It is important to pack data to extract the optimal performance from the SIMD ALU hardware and align the data
into a format supported by the hardware. Efficient use of the Vivante GPGPU core requires that the kernel
contains enough parallelism to fill all four vector units. Work-items in the same thread group have the same
program counter and execute the same instruction for each cycle. Whenever possible, pack together work-items
that follow the same direction (e.g., on branches) since the granularity is very close and there may be less
divergence and higher performance. If each work-item handles less than or equal to 8 bytes, it is better to combine
two or more work-items into one to improve utilization of the SIMD ALU.
5.3.4 Improving locality
If the input data is an array-of-structs, and each work-item needs to access only a small part of the struct across
many array elements at different stages, it may be better to convert and use a struct-of-arrays or several different
arrays as input to improve data locality and avoid cache thrashing.
If each work-item needs to process a row of data without sharing any data with other work-items, it is better to
check if the algorithm can be converted to make each work-item process a column of data so that data accessed by
adjacent work-items can share the same cache lines.
5.3.5 Minimizing use of 1 KB local memory
The OpenCL Embedded Profile specification defines the minimum requirement for local memory to be 1KB to pass
conformance testing. Based on algorithm analysis and profiling different image and computer vision algorithms,
we found that a 1KB local memory size was too small to benefit those algorithms. In most instances, those
algorithms actually slowed down when using 1KB local memory. To increase performance, we recommend not
using local memory since it is more efficient to transfer larger chunks of data from system memory to keep the
OpenCL pipeline full.
Note: if local memory type is CL_GLOBAL, the local memory is emulated using global memory, and the
performance is the same as global memory. There is extra overhead on data copy from global to local, which slows
down the performance.
5.3.6 Using 16 byte memory Read/Write size
When accessing memory, it is important to minimize the read/write count and to ensure L1 cache utilization is high
to reduce outstanding read/write requests. Since the internal GPGPU read-write-request queue has a limit, if the
queue and L1 cache are filled, then the GPGPU remains idle.

i.MX Graphics User’s Guide, Rev. 0, 02/2018
55 NXP Semiconductors
5.3.7 Useing _RTZ rounding mode
Wherever possible, use _RTZ (round to zero) since it is natively supported in hardware with one instruction.
Support for _RTE (round to nearest even) is optional in OpenCL EP and is only supported in Vivante GPGPU EP
hardware from 2013. This function is handled in software for EP cores if necessary.
5.3.8 Using native functions
5.3.8.1 Using native_function() for increased performance
There are two types of runtime math libraries available to developers. Native_function() and regular function().
• Function(): slower, computationally expensive, higher instruction count, and greater accuracy
• Native_function(): faster, computationally inexpensive, lower instruction count (sometimes reduced to
one instruction), and lower accuracy.
• If accuracy is not important but speed/performance is, use native math functions that map directly to the
Vivante GPGPU hardware.
For image processing computations that do not require high accuracy, use native instructions to significantly lower
the instruction count and speed up performance. Based on actual analysis and performance profiling with the
Vivante GPGPU, we found that using native_function() instructions such as sin, cos, etc., reduces the instruction
count from many instructions to one or two instructions. Use of native functions also sped performance by 3x-10x.
5.3.8.2 Using native_divide and native_reciprocal for faster floating point calculations
There are two use cases for floating point division which a user can select:
• Normal use of the division operator ( / ) in OpenCL has high precision and covers all corner use cases. This
operator generates more instructions and runs slower.
• Native Divide: this use case uses the built-in function native_divide or native_reciprocal, which uses what
the hardware supports. The Vivante OpenCL compiler generates one or two instructions for each native_divide or
native_reciprocal instruction. If there are no corner use cases in applications, such as NaN, INF, or (2^127) /
(2^127), it is better to use native_divide since it is faster.
5.3.8.3 Using compile option for native functions
Both the function() and native_function() methods are supported in the Vivante GPGPUs, so it is up to the
developer to use whichever method makes sense for their application. If the OpenCL program uses the standard
division operator and a developer wants to use native_divide or native_reciprocal without modifying their
program, the Vivante OpenCL compiler has a simple option “-cl-fast-relaxed-math” that uses native built-in
functions during compilation.
5.3.9 Using buffers instead of images
For the following image functions, it is better to use buffers instead of images.
• read_image{f/i/ui/h}
• write_image{f/i/ui/h}
Write_image* functions are implemented by software; it is better to use buffers to reduce the additional overhead
involved in checking for size, format, etc. Since a few formats are not supported by Vivante GPGPU hardware,
some built-in read_image() functions are implemented in software. The software implementation uses more
instructions with many steps of “condition” checking. To improve performance, we recommend using buffers since
it reduces instruction count.

i.MX Graphics User’s Guide, Rev. 0, 02/2018
56 NXP Semiconductors
5.4 OpenCL Debug messages
When writing OpenCL applications, it is important to check the code returned by the API. Since the return codes
specified in the OpenCL specification may not be descriptive enough to isolate where the problem is located, the
Vivante OpenCL driver provides an environment variable, VIV_DEBUG to help debug problems. When VIV_DEBUG
is set to -MSG_LEVEL:ERROR, the Vivante OpenCL driver prints onscreen error messages as well as return the error
code to the caller.
The following error code descriptions and suggested workarounds are provided.
5.4.1 OCL-007005: (clCreateKernel) cannot link kernel
One of the following “Not Enough” messages usually precedes this message. Issuer indicates the real reason for
the problem which may be:
Not Enough Register Memory (constant or temp)
Not Enough Instruction Memory
5.4.2 Not enough register memory
Local variables, including arrays, are implemented using temp registers. If an array is larger than then number of
available temp registers, a link-time failure occurs.
WORKAROUNDS:
1. If the array size is more than 64, use an array address to force the compiler to use private memory instead
of temp registers.
2. If there are many variables, use variable addresses to force the compiler to use private memory to reduce
register usage.
Note that there is performance degradation when using private memory instead of registers. It is better to change
the algorithm to use a smaller array or less variables.
5.4.3 Not enough instruction memory
WORKAROUNDS:
1. Replace sin/cos/tan/divide/powr/exp/exp2/exp10/log/log2/log10/sqrt/rsqrt/recip with
native_sin/native_divide, etc.
2. Convert unrolled-loops back to loops.
3. Use buffer instead of image for write, and for reads which are not linear-filtered.
4. If the program is just too long, it should be split into two or more programs with intermediate data saved
from one program to next.
5.4.4 GlobalWorkSize over hardware limit
WORKAROUND:
1. Split one clEnqueueNDRangeKernel into several instances. Change the kernel source to compute real
global/local/group ID using offset as a parameter.
2. Convert one dimension to two dimensions, or two dimensions to three. For example, one dimension of
1M work-items can be converted to a GlobalWorkSize of 64K x16 work-items. The kernel function needs
modification to reflect the change of dimension.
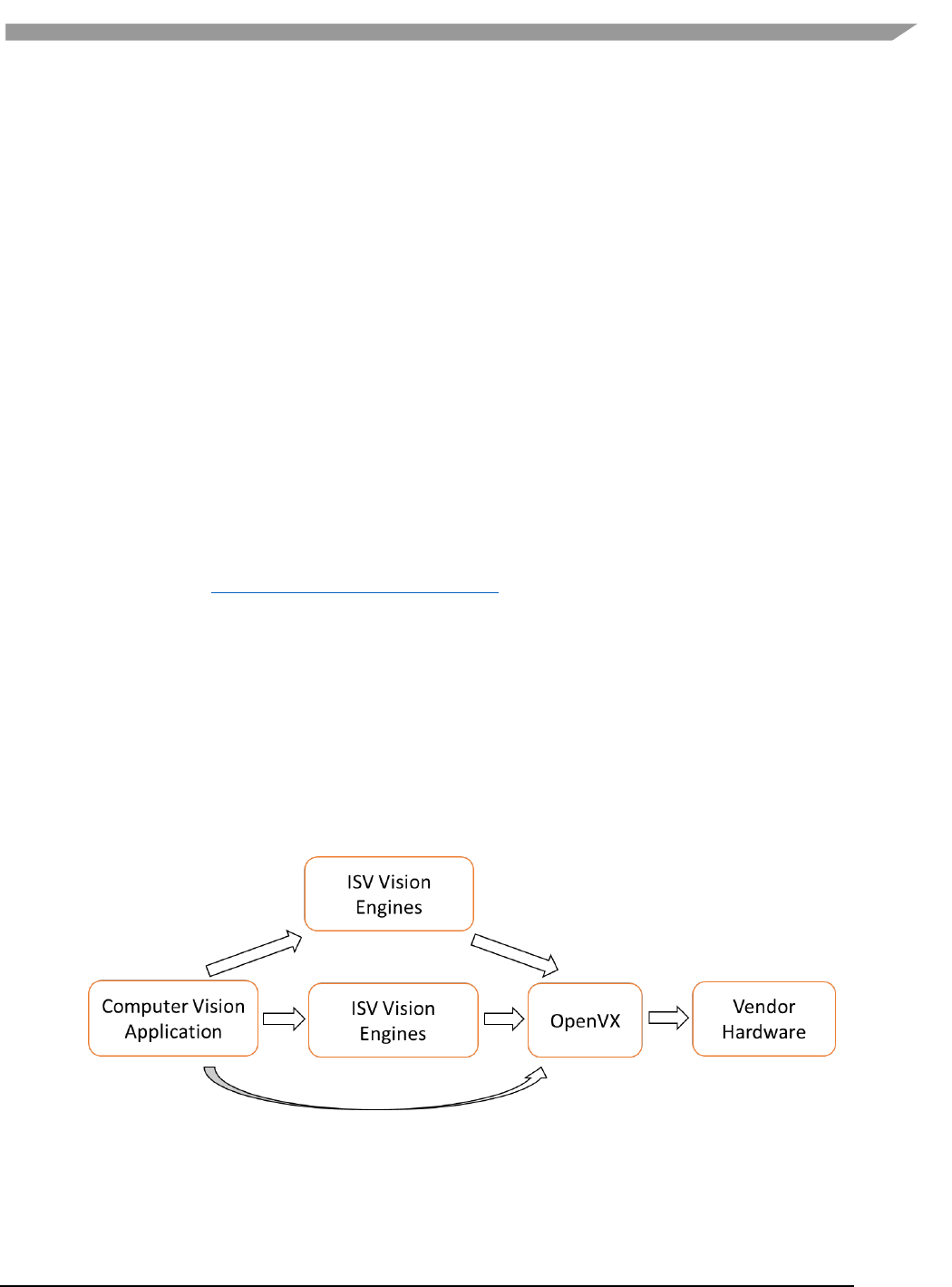
i.MX Graphics User’s Guide, Rev. 0, 02/2018
57 NXP Semiconductors
Chapter 6 OpenVX Introduction
6.1 Overview
OpenVX is a low-level programming framework domain to enable software developers to efficiently access
computer vision hardware acceleration with both functional and performance portability. OpenVX has been
designed to support modern hardware architectures, such as mobile and embedded SoCs as well as desktop
systems. Many of these systems are parallel and heterogeneous: containing multiple processor types including
multi-core CPUs, DSP subsystems, GPUs, dedicated vision computing fabrics as well as hardwired functionality.
Additionally, vision system memory hierarchies can often be complex, distributed, and not fully coherent. OpenVX
is designed to maximize functional and performance portability across these diverse hardware platforms, providing
a computer vision framework that efficiently addresses current and future hardware architectures with minimal
impact on applications.
OpenVX defines a C Application Programming Interface (API) for building, verifying, and coordinating graph
execution, as well as for accessing memory objects. The graph abstraction enables OpenVX implementers to
optimize the execution of the graph for the underlying acceleration architecture.
OpenVX also defines the vxu utility library, which exposes each OpenVX predefined function as a directly callable C
function, without the need for first creating a graph. Applications built using the vxu library do not benefit from the
optimizations enabled by graphs; however, the vxu library can be useful as the simplest way to use OpenVX and as
first step in porting existing vision applications.
For more details of programming with OpenVX, see the following specification from Khronos Group,
OpenVX 1.0.1 specification (https://www.khronos.org/registry/vx ).
6.2 Designing framework of OpenVX
6.2.1 Software landscape
OpenVX (OVX) is intended to be used either directly by applications or as the acceleration layer for higher-level
vision frameworks, engines or platform APIs. Vivante software includes VX (Vision Imaging Accelleration) control
mechanisms for hardware accelerated vision imaging, therefy allowing the user to implement customized
applications and drivers using the Vivante–specific Vivante VX API (Application Programming Interface). This API
provides programmable user kernel extensions for OpenCL 1.2 and provides additional Vision functionality to
supplement those currently available with OpenVX 1.0.1 open standard from the Khronos group.
Figure 7 OVX usage overview
6.2.2 Object-oriented behaviors
OpenVX objects are both strongly typed at compile-time for safety critical applications and are strongly typed at

i.MX Graphics User’s Guide, Rev. 0, 02/2018
58 NXP Semiconductors
run-time for dynamic applications.
The objects of OVX framework are:
• Context, The OpenVX context is the object domain for all OpenVX objects.
• Kernel, A Kernel in OpenVX is the abstract representation of a computer vision function, such as a “Sobel
Gradient” or “Lucas Kanade Feature Tracking”.
• Parameter, an abstract input, output, or bidirectional data object passed to a computer vision function.
• Node, A node is an instance of a kernel that will be paired with a specific set of references (the parameters).
• Graph, A set of nodes connected in a directed (only goes one-way) acyclic (does not loop back) fashion.
OpenVX Data Objects:
• Array, An opaque array object that could be an array of primitive data types or an array of structures.
• Convolution, An opaque object that contains MxN matrix of vx_int16 values. Also contains a scaling factor
for normalization.
• Delay, An opaque object that contains a manually controlled, temporally-delayed list of objects.
• Distribution, An opaque object that contains a frequency distribution (e.g., a histogram).
• Image, An opaque image object that may be some format in vx_df_image_e.
• LUT, An opaque lookup table object used with vxTableLookupNode and vxuTableLookup
• Matrix, An opaque object that contains MxN matrix of some scalar values.
• Pyramid, An opaque object that contains multiple levels of scaled vx_image objects.
• Remap, An opaque object that contains the map of source points to destination points used to transform
images.
• Scalar, An opaque object that contains a single primitive data type.
• Threshold, An opaque object that contains the thresholding configuration.
Error objects of OVX:
Error objects are specialized objects that may be returned from other object creator functions when serious
platform issue occur (i.e., out of memory or out of handles). These can be checked at the time of creation of these
objects, but checking also may be put-off until usage in other APIs or verification time, in which case, the
implementation must return appropriate errors to indicate that an invalid object type was used.
6.2.3 Graphs concepts
The graph is the central computation concept of OpenVX. The purpose of using graphs to express the Computer
Vision problem is to allow for the possibility of any implementation to maximize its optimization potential because
all the operations of the graph and its dependencies are known ahead of time, before the graph is processed.
Graphs are composed of one or more nodes that are added to the graph through node creation functions. Graphs
in OpenVX must be created ahead of processing time and verified by the implementation, after which they can be
processed as many times as needed.
There are several nodes in a graph, which are responsible for independent computation. One node can be linked to
another by data dependencies.
6.2.4 User kernels
OpenVX allows users to define new functions that can be excuted as Nodes from inside Graph or are Graph
internal. Users will benefit from this mode,
• Exploiting
• Allow componentized functions to be reused elsewhere in OpenVX
• Formalize strict verification requirements (i.e., Contract Programming).
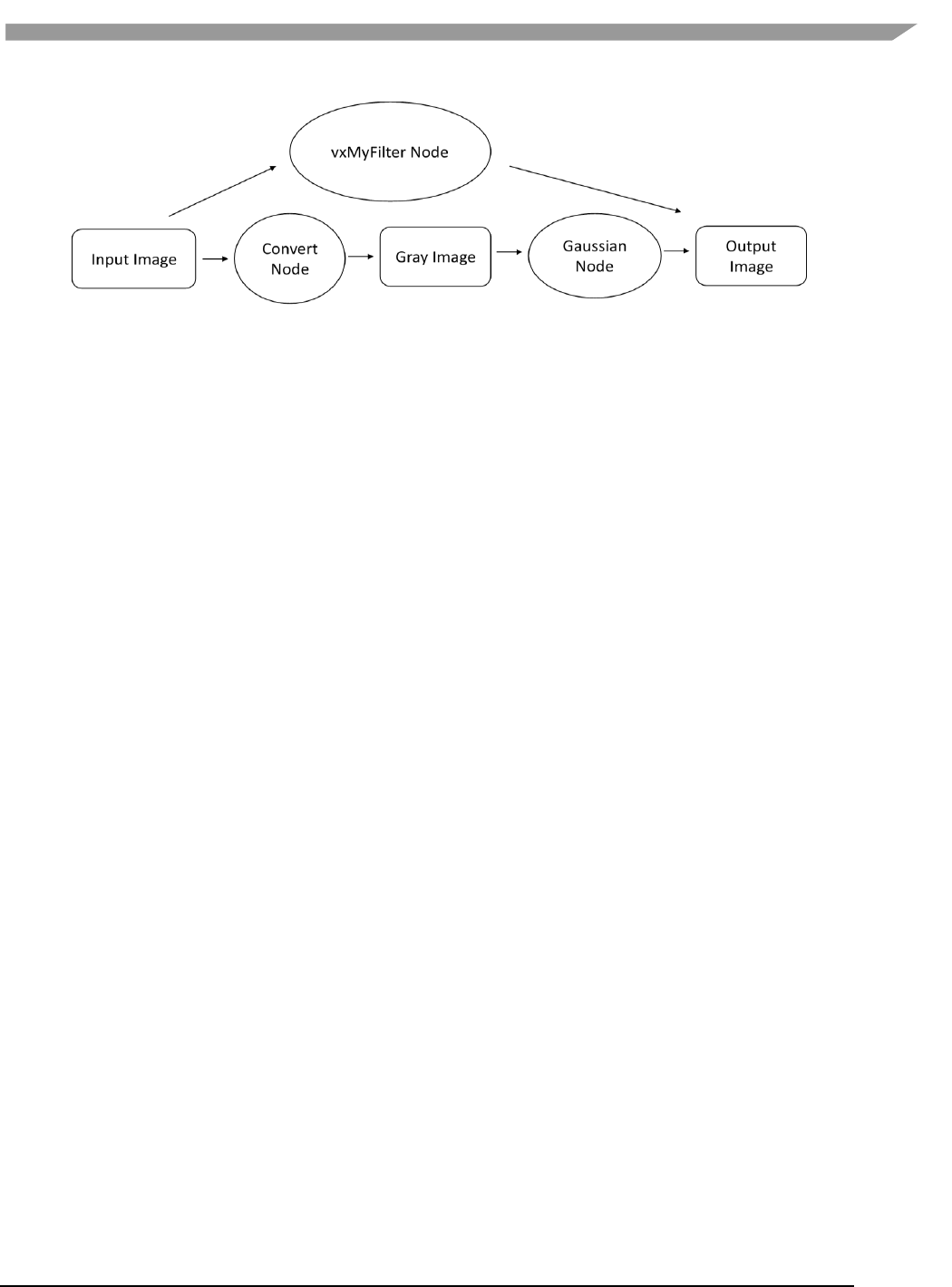
i.MX Graphics User’s Guide, Rev. 0, 02/2018
59 NXP Semiconductors
Figure 8 Graph and user kernel usage
6.3 OpenVX extension implementation
VeriSilicon’s VX Extensions for Vision Imaging provide additional functionality for Vision Image processing beyond
the functions provided through the Khronos Group OpenVX API version 1.0.1. These enhancements take
advantage of the enhanced Vision capabilities available in VeriSilicon’s Vision-capable hardware. VeriSilicon
software provides a set of extensions which interface with OpenCL 1.2 and support higher level C language
programming of VeriSilicon’s custom EVIS (Enhanced Vision Instruction Set).
The VeriSilicon VX extension and enhancements includes three major components:
• An API level interface to the EVIS (Enhanced Vision Instruction Set),
• Extended C language features for Vision Processing,
• Supported for a subset of Vision-compatible OpenCL built-in functions.
6.3.1 Hardware requirements
Initial VeriSilicon cores with Vision Imaging hardware capabilities include:
• GC7000XSVX (available in i.MX 8QuadMax)
6.3.2 EVIS instruction interface
Vivante’s Vision Imaging capable IP have an Enhanced Vision Instruction Set (EVIS), which enhances the ability of
the GPU or VIP (Vision Image Processor) to process complex vision operations. A single EVIS instruction can do a
task which may require tens or even hundreds of normal ISA instructions to finish.
Table 18 shows the instructions supported as Intrinsic calls.
6.3.3 Extended language features
Vivante’s OpenVX C programming Language corresponds closely to the OpenCL C programming language.
• Vivante’s C language extensions for OpenVX C share many language facilities with OpenCL C 1.2.
However, it can be considered a subset of OpenCL C 1.2, as it does not include OCL features which are
useless for OpenVX and other Vision Imaging applications.
• Vivante’s OpenVX C includes specific language facilities like Vision built-ins and data types specific for
OpenVX.
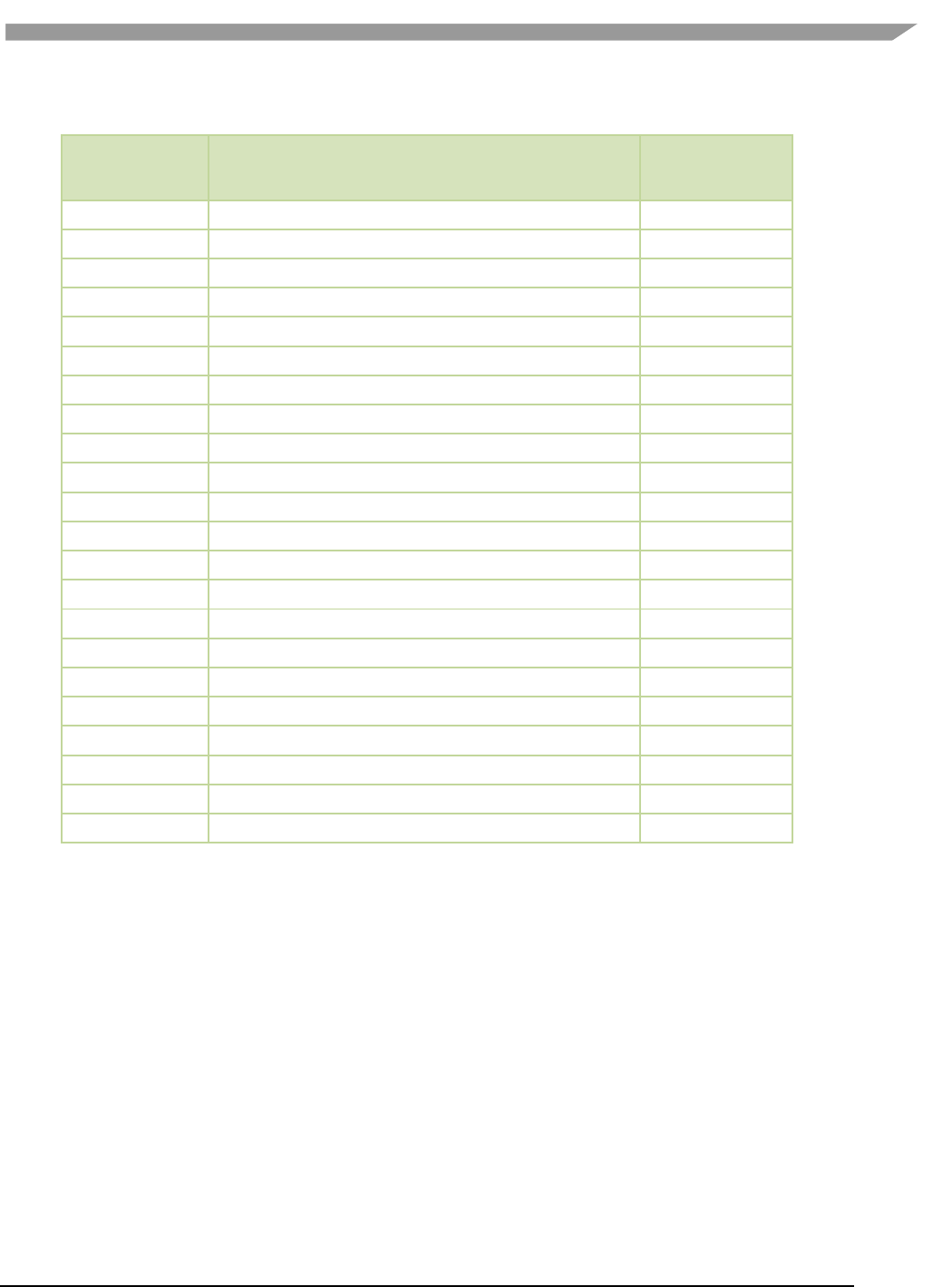
i.MX Graphics User’s Guide, Rev. 0, 02/2018
60 NXP Semiconductors
Table 18. OPCODE EVIS instructions supported as intrinsic calls
EVIS OP_CODE
Description
Supported by
Vivante VX
ABS_DIFF
Absolute difference between two values
Y
IADD
Adds two or three integer values
Y
IACC_SQ
Squares a value and adds it to an accumulator
Y
LERP
Linear interpolation between two values
Y
FILTER
Performs a filter on a 3x3 block
Y
MAG_PHASE
Computes magnitude and phase of 2 packed data values
Y
MUL_SHIFT
Multiples two 8-or 16-bit integers and shifts
Y
DP16X1
1 Dot Product from 2 16 component values
Y
DP8X2
2 Dot Products from 2 8 component values
Y
DP4X4
4 Dot Products from 2 4 component values
Y
DP2X8
8 Dot Products from 2 2 component values
Y
CLAMP
Clamps up to 16 values to a max or min value
Y
BI_LINEAR
Computes a bi0linear interpolation of 4 pixel values
Y
SELECT_ADD
Adds a pixel value or increments a counter inside bins
Y
ATOMIC_ADD
Adds a valid atomically to an address
Y
BIT_EXTRACT
Extracts up to 8 bitfields from a packed stream
Y
BIT_REPLACE
Replaces up to 8 bitfields from a packed stream
Y
DP32X1
1 Dot Product from 2 32 component values
Y
DP16X2
2 Dot Products from 2 16 component values
Y
DP8X4
4 Dot Products from 2 8 component values
Y
DP4X8
8 Dot Products from 2 4 component values
Y
DP2X16
16 Dot Products from 2 2 component values
Y
6.3.4 Packed types
Vivante’s OpenCL compiler implements OpenCL C signed and unsigned char and short types in an unpacked
format, such that a normal char4 occupies 128 bits (4 32-bit registers). This is undesirable for Vision applications,
where packed data is the “natural” layout for almost all operations. To fully utilize the computing power of EVIS
instructions, Vivante VX includes additional packed types, which can be identified by their vxc_ prefix.
/* packed char2/4/8/16 */
typedef _viv_char2_packed vxc_char2;
typedef _viv_char4_packed vxc_char4;
typedef _viv_char8_packed vxc_char8;
typedef _viv_char16_packed vxc_char16;
/* packed uchar2/4/8/16 */
typedef _viv_uchar2_packed vxc_uchar2;
typedef _viv_uchar4_packed vxc_uchar4;
typedef _viv_uchar8_packed vxc_uchar8;
typedef _viv_uchar16_packed vxc_uchar16;
/* packed short2/4/8 */
typedef _viv_short2_packed vxc_short2;
typedef _viv_short4_packed vxc_short4;
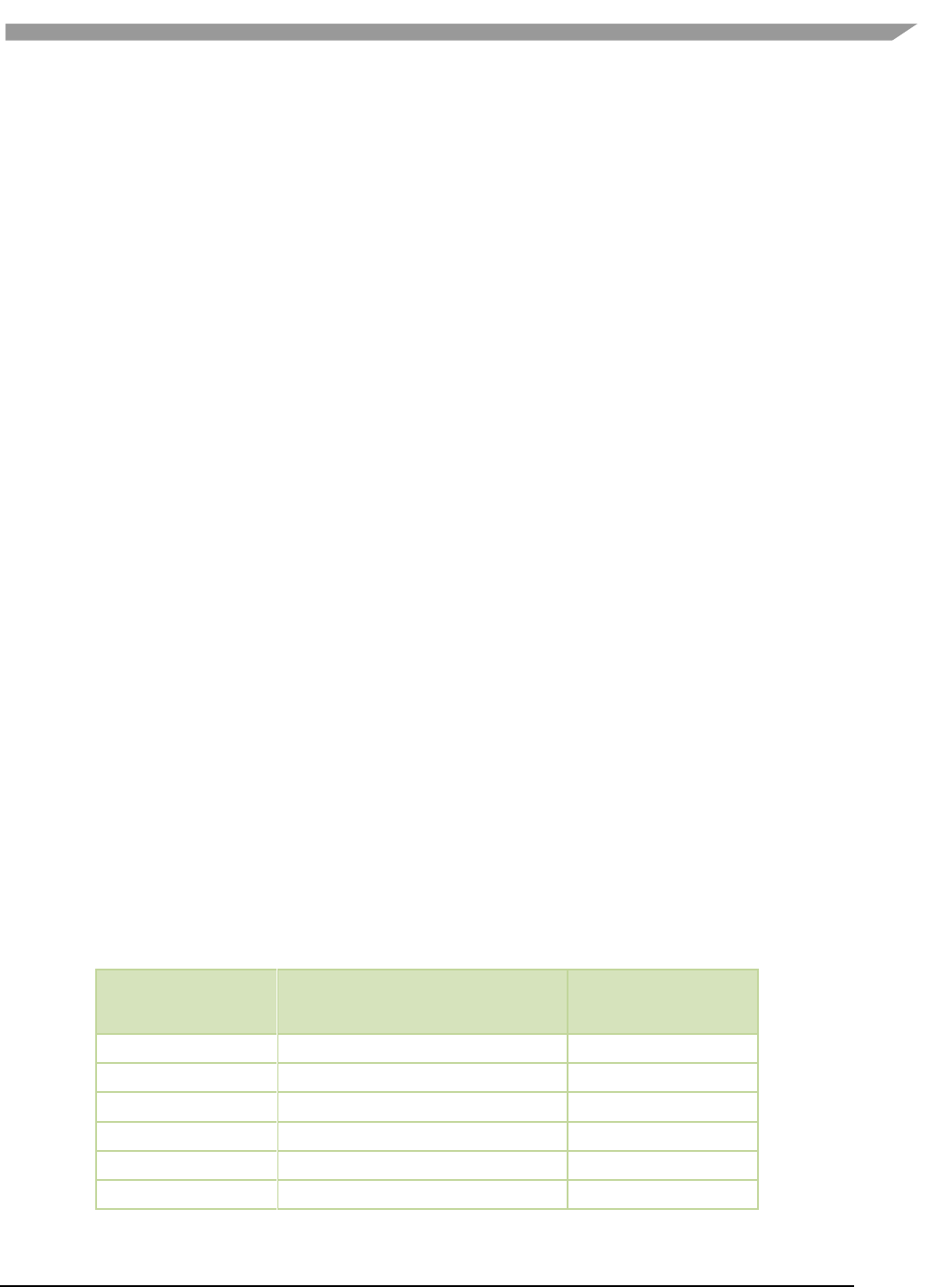
i.MX Graphics User’s Guide, Rev. 0, 02/2018
61 NXP Semiconductors
typedef _viv_short8_packed vxc_short8;
/* packed ushort2/4/8 */
typedef _viv_ushort2_packed vxc_ushort2;
typedef _viv_ushort4_packed vxc_ushort4;
typedef _viv_ushort8_packed vxc_ushort8;
6.3.5 Initializing constants on load
Constant data in OpenCL requires compile-time initialization. There is also a need to initialize the data when the
kernel is loaded/run, so that the application can control the behavior of a program by changing its constants at
load-time. The VeriSilicon VX extended keyword _viv_uniform can be used to define load-time initialization
constant data,
_viv_uniform vxc_512bits u512;
An application using VeriSilicon VX needs to set the proper values for _viv_uniform before the kernel program is
run.
6.3.6 Inline assembly
A packed type cannot be used as an unpacked type in expressions or built-in functions. The programmer needs to
convert packed type data to unpacked type data in order to perform these operations. The conversion negatively
impacts performance in terms of both instruction count and register usage, so it is desirable to perform operations
directly on packed data whenever possible. The Vivante Vision compiler accepts inline assembly for a wide range of
operations to speed up packed data calculations.
For example, to add two packed char16 data, the programmer can use following inline assembly:
vxc_uchar16 a, b, c;
vxc_short8 b;
_viv_uniform vxc_512bits u512;
...
_viv_asm(ADD, c, a, b); /* c = a + b; */
where the syntax of inline assembly is:
_viv_asm(
OP_CODE,
dest,
source0,
source1
);
Table 19 lists the standard shader instructions that operate on packed data and are supported through inline
assembly, keyword _viv_asm.
Table 19. OPCODES IR instructions supported by inline assembly
IR OP_CODE Instruction
Description
Supported by Vivante VX
ABS
Absolute value
Y
ADD
Add
Y
ADD_SAT
Integer add with saturation
Y
AND_BITWISE
Bitwise AND
Y
BIT_REVERSAL
Integer bit-wise reversal
ES31
BITEXTRACT
Extract Bits from src to dest
ES31
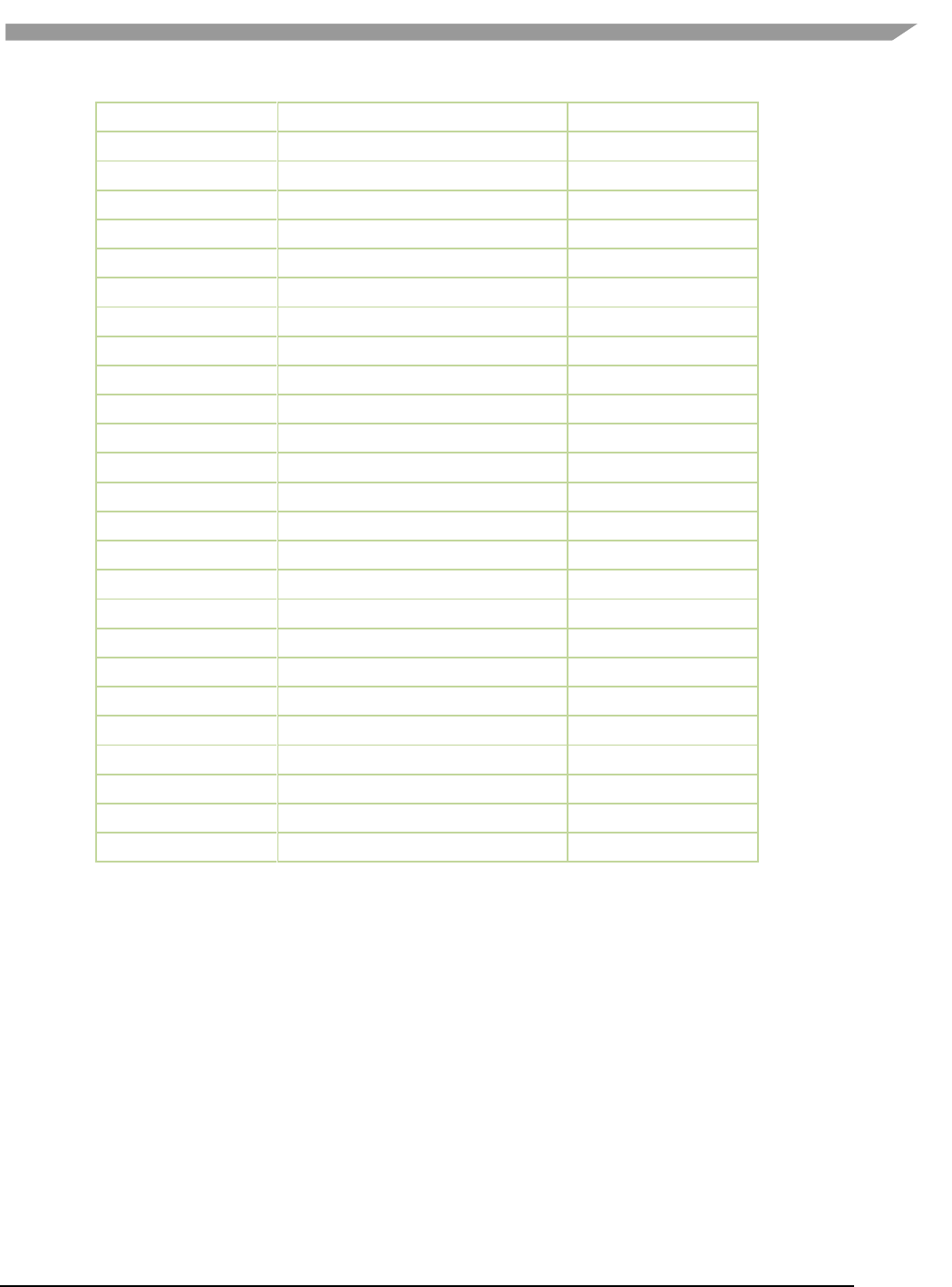
i.MX Graphics User’s Guide, Rev. 0, 02/2018
62 NXP Semiconductors
BITINSERT
Bit replacement
ES31
BITSEL
Bitwise Select
Y
BYTE_REVERSAL
Integer byte-wise reversal
ES31
CLAMP0MAX
clamp0max dest, value, max
Y
CMP
Compare each component
Y
CONV
Convert
Y
DIV
Divide
Y
FINDLSB
Find least significant bit
ES31
FINDMSB
Find most significant bit
ES31
LEADZERO
Detect Leading Zero
Y
LSHIFT
Left Shifter
Y
MADSAT
Integer multiple and add with saturation
Y
MOD
Modulus
Y
MOV
Move
Y
MUL
Multiply
Y
MULHI
Integer only
Y
MULSAT
Integer multiply with saturation
Y
NEG
neg(a) is similar to (0 - (a))
Y
NOT_BITWISE
Bitwise NOT
Y
OR_BITWISE
Bitwise OR
Y
POPCOUNT
Population Count
ES31/OCL1.2
ROTATE
Rotate
Y
RSHIFT
Right Shifter
Y
SUB
Substract
Y
SUBSAT
Integer subtraction with saturation
Y
XOR_BITWISE
Bitwise XOR
Y
*ES31 = Supported by VivanteVX, but may not be needed for Vision processing
6.4 OpenCL functions compatible with Vivante vision
Vivante’s VX extensions for Vision Image processing support most of the OpenCL 1.2 built-in functions for normal
OCL data types. Packed types are not supported in these built-in functions.
For image read/write functions, only sample-less 1D/1D array/2D image read/write functions are supported.
6.4.1 Read_Imagef,i,ui
/* OCL image builtins can be used in VX kernel */
float4 read_imagef (image2d_t image, int2 coord);
int4 read_imagei (image2d_t image, int2 coord);
uint4 read_imageui (image2d_t image, int2 coord);
float4 read_imagef (image1d_t image, int coord);
int4 read_imagei (image1d_t image, int coord);

i.MX Graphics User’s Guide, Rev. 0, 02/2018
63 NXP Semiconductors
uint4 read_imageui (image1d_t image, int coord);
float4 read_imagef (image1d_array_t image, int2 coord);
int4 read_imagei (image1d_array_t image, int2 coord);
uint4 read_imageui (image1d_array_t image, int2 coord);
6.4.2 Write_Imagef,i,ui
void write_imagef (image2d_t image, int2 coord, float4 color);
void write_imagei (image2d_t image, int2 coord, int4 color);
void write_imageui (image2d_t image, int2 coord, uint4 color);
void write_imagef (image1d_t image, int coord, float4 color);
void write_imagei (image1d_t image, int coord, int4 color);
void write_imageui (image1d_t image, int coord, uint4 color);
void write_imagef (image1d_array_t image, int2 coord, float4 color);
void write_imagei (image1d_array_t image, int2 coord, int4 color);
void write_imageui (image1d_array_t image, int2 coord, uint4 color)
6.4.3 Query Image Dimensions
int2 get_image_dim (image2d_t image);
size_t get_image_array_size(image1d_array_t image);
/* Built-in Image Query Functions */
int get_image_width (image1d_t image);
int get_image_width (image2d_t image);
int get_image_width (image1d_array_t image);
int get_image_height (image2d_t image);
6.4.4 Channel Data Types Supported
/* Return the channel data type. Valid values are:
* CLK_SNORM_INT8
* CLK_SNORM_INT16
* CLK_UNORM_INT8
* CLK_UNORM_INT16
* CLK_UNORM_SHORT_565
* CLK_UNORM_SHORT_555
* CLK_UNORM_SHORT_101010
* CLK_SIGNED_INT8
* CLK_SIGNED_INT16
* CLK_SIGNED_INT32
* CLK_UNSIGNED_INT8
* CLK_UNSIGNED_INT16
* CLK_UNSIGNED_INT32
* CLK_HALF_FLOAT
* CLK_FLOAT
*/
int get_image_channel_data_type (image1d_t image);
int get_image_channel_data_type (image2d_t image);
int get_image_channel_data_type (image1d_array_t image);
6.4.5 Image Channel Orders Supported
/* Return the image channel order. Valid values are:

i.MX Graphics User’s Guide, Rev. 0, 02/2018
64 NXP Semiconductors
* CLK_A
* CLK_R
* CLK_Rx
* CLK_RG
* CLK_RGx
* CLK_RA
* CLK_RGB
* CLK_RGBx
* CLK_RGBA
* CLK_ARGB
* CLK_BGRA
* CLK_INTENSITY
* CLK_LUMINANCE
*/
int get_image_channel_order (image1d_t image);
int get_image_channel_order (image2d_t image);
int get_image_channel_order (image1d_array_t image);
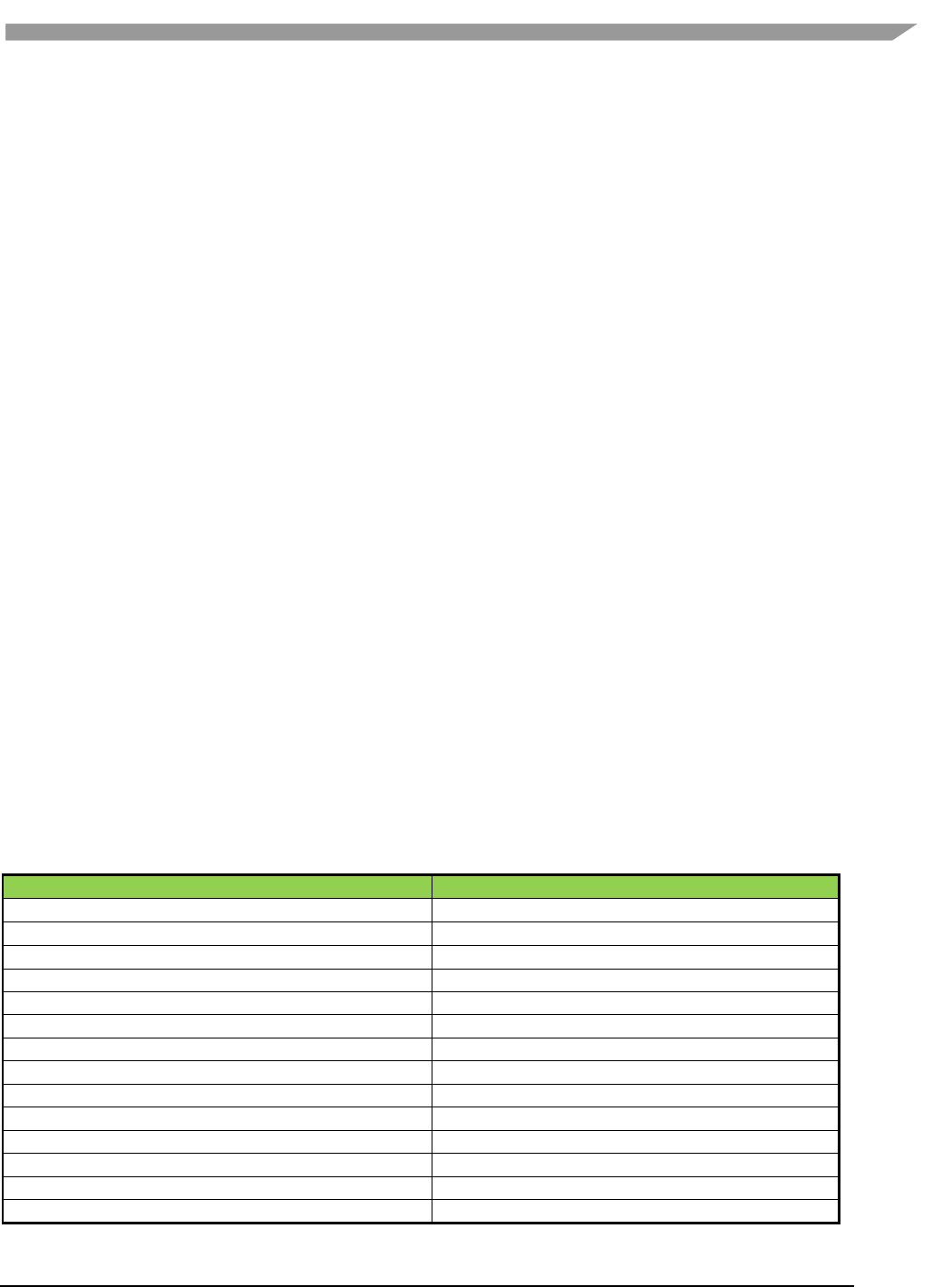
i.MX Graphics User’s Guide, Rev. 0, 02/2018
65 NXP Semiconductors
Chapter 7 Vulkan
7.1 OverView
Vulkan is a new generation graphics and compute API that provides high-efficiency, cross-platform access to
modern GPUs used in a wide variety of devices from PCs and consoles to mobile phones and embedded platforms.
Vulkan defines as an API (Application Programming Interface) for graphics and compute hardware. The API consists
of many commands that allow a programmer to specify shader programs, compute kernels, objects, and
operations involved in producing high-quality graphical images, specifically color images of three-dimensional
objects.
To the programmer, Vulkan is a set of commands that allow the specification of shader programs or shaders,
kernels, data used by kernels or shaders, and state controlling aspects of Vulkan outside the scope of shaders.
Typically, the data represents geometry in two or three dimensions and texture images, while the shaders and
kernels control the processing of the data, rasterization of the geometry, and the lighting and shading of fragments
generated by rasterization, resulting in the rendering of geometry into the framebuffer.
A typical Vulkan program begins with platform-specific calls to open a window or otherwise prepare a display
device onto which the program will draw. Then, calls are made to open queues to which command buffers are
submitted. The command buffers contain lists of commands which will be executed by the underlying hardware.
The application can also allocate device memory, associate resources with memory and refer to these resources
from within command buffers. Drawing commands cause application-defined shader programs to be invoked,
which can then consume the data in the resources and use them to produce graphical images. To display the
resulting images, further platform-specific commands are made to transfer the resulting image to a display device
or window.
For more details of programming with Vulkan, refer to the following specification from Khronos Group.
https://www.khronos.org/registry/vulkan/
7.2 Vivante Extension Support for Vulkan
The following table includes a list of all current Vulkan extensions and indicates their support level in Vivante
software.
(list from https://www.khronos.org/registry/vulkan/ as of 5/24/2017)
Note: This list does not include unsupported vendor specific extensions.
Table 20. Vulkan extension
Vulkan Extension Name
SW 6.2.x for Vulkan 1.0
VK_KHR_android_surface
YES
VK_KHR_descriptor_update_template
VK_KHR_display
YES
VK_KHR_display_swapchain
YES
VK_KHR_get_physical_device_properties2
VK_KHR_get_surface_capabilities2
VK_KHR_incremental_present
VK_KHR_maintenance1
VK_KHR_mir_surface
VK_KHR_push_descriptor
VK_KHR_sampler_mirror_clamp_to_edge
VK_KHR_shader_draw_parameters
VK_KHR_shared_presentable_image
VK_KHR_surface
YES
i.MX Graphics User’s Guide, Rev. 0, 02/2018
66 NXP Semiconductors
VK_KHR_swapchain
YES
VK_KHR_wayland_surface
YES
Vulkan Extension Name
SW 6.2.x for Vulkan 1.0
VK_KHR_win32_surface
YES
VK_KHR_xcb_surface
VK_KHR_xlib_surface
EXT Extensions (Multivendor)
VK_EXT_acquire_xlib_display
VK_EXT_debug_marker
VK_EXT_debug_report
YES
VK_KHR_get_surface_capabilities2
VK_KHR_incremental_present
VK_KHR_maintenance1
VK_EXT_direct_mode_display
VK_EXT_discard_rectangles
VK_EXT_display_control
VK_EXT_display_surface_counter
VK_EXT_hdr_metadata
VK_EXT_shader_subgroup_ballot
VK_EXT_shader_subgroup_vote
VK_EXT_swapchain_colorspace
VK_EXT_validation_flags
GOOGLE Extensions (Google, Inc.)
VK_GOOGLE_display_timing
KHX Extensions (full vendor description unavailable)
VK_KHX_device_group
VK_KHX_device_group_creation
VK_KHX_external_memory
VK_KHX_external_memory_capabilities
VK_KHX_external_memory_fd
VK_KHX_external_memory_win32
VK_KHX_external_semaphore
VK_KHX_external_semaphore_capabilities
VK_KHX_external_semaphore_fd
VK_KHX_external_semaphore_win32
VK_KHX_multiview
VK_KHX_win32_keyed_mutex

i.MX Graphics User’s Guide, Rev. 0, 02/2018
67 NXP Semiconductors
Chapter 8 Multiple GPUs and Virtualization
8.1 Overview
Vivante multi-GPU implementations provide a variety of capabilities which can be managed through hardware
and software controls. This chapter intends to summarize the software controls used for Vivante multi-GPU IP
implementations.
Multi-GPU feature can be enabled with dual GC7000XSVX on i.MX 8QuadMax and the derived devices.
8.2 Multi-GPU configurations
Vivante Multi-GPU IP may be configured into one of the following behavior model through SW:
Combined Mode where two (or more) GPU cores in the multi-GPU design behave in concert. Driver presents
multi-GPU to SW application as a single logical GPU. The multiple GPUs work in the same virtual address space
and share the same MMU page table. The multiple GPUs fetch and excute a shared Command Buffer.
Independent Mode where each GPU in the multi-GPU design performs independently. The multiple GPUs work
in different virtual address spaces but share the same MMU page table. Each GPU core fetches and excutes its
own Command Buffer. This enables different SW applications to run simultaneously on different GPU cores.
Note, OpenCL API allows application to handle the multi-GPU Independent Mode directly, as each GPU core in a
multi-GPU design represents an independent OpenCL Compute Device. OpenCL driver does not support the
multi-GPU combined mode.
8.3 GPU affinity configuration
In the multi-GPU Independent Mode, application can specify to run on a specific GPU among the multiple GPUs
through an environment variable VIV_MGPU_AFFINITY. Once an application’s GPU affinity is specified, the
application will only run on the specified GPU and will not migrate to other GPUs even if those GPUs are idle.
VIV_MGPU_AFFINITY is the environment variable to control the application GPU affinity on multi-GPU platform.
The client drivers will assume they are using a standalone GPU through a gcoHARDWARE object no matter how
this variable is set. The possible values for the environment variable VIV_MGPU_AFFINITY include:
Not defined or
Defined as "0" gcoHARDWARE objects work in gcvMULTI_GPU_COMBINED mode (default)
"1:0" gcoHARDWARE objects work in gcvMULTI_GPU_INDEPENDENT mode and GPU0 is used
"1:1" gcoHARDWARE objects work in gcvMULTI_GPU_INDEPENDENT mode and GPU1 is used
On a single GPU device, setting VIV_MGPU_AFFINITY to 0 or 1 does not make any difference as all application
processes/threads are bound to GPU0. But the application will fail the GPU context initialization if
VIV_MGPU_AFFINITY is set to "1:1" (driver reports error).
8.4 OpenCL on multi-GPU device
OpenCL driver works in multi-GPU Independent Mode only. In this configuration, multiple GPUs in the device
operate as individual OpenCL Compute Devices. The OpenCL application is responsible to assign and dispatch the
compute tasks to each GPU (Compute Device).
The following OpenCL APIs return the list of compute devices available on a platform, and the device
information.
cl_int clGetDeviceIDs (cl_platform_id platform, cl_device_type device_type, cl_uint num_entries,
cl_device_id *devices, cl_uint *num_devices)
cl_int clGetDeviceInfo (cl_device_id device, cl_device_info param_name, size_t param_value_size,
void *param_value, size_t *param_value_size_ret)
i.MX Graphics User’s Guide, Rev. 0, 02/2018
68 NXP Semiconductors
8.5 GPU virtualization configuration
Multi-GPU also can be used on different OS systems as independent mode separately, this can be configured by
overriding the irq availability n DTS entry for different OS implementation, in arch/arm64/boot/dts/freescale/fsl-
imx8qmxxx.dts.
Guest OS 1 (GPU0 only)
&gpu_3d1 {
status = "disable";
};
Guest OS 2 (GPU1 only)
&gpu_3d0 {
status = "disable";
};

i.MX Graphics User’s Guide, Rev. 0, 02/2018
69 NXP Semiconductors
Chapter 9 G2D compositor on Weston
9.1 Overview
Wayland is intended as a simpler replacement for X, easier to develop and maintain. GNOME and KDE are
expected to be ported to it.
Wayland is a protocol for a compositor to talk to its clients as well as a C library implementation of that protocol.
The compositor can be a standalone display server running on Linux kernel modesetting and evdev input devices,
an X application, or a wayland client itself. The clients can be traditional applications, X servers (rootless or
fullscreen) or other display servers.
Part of the Wayland project is also the Weston reference implementation of a Wayland compositor. Weston can
run as an X client or under Linux KMS and ships with a few demo clients. The Weston compositor is a minimal and
fast compositor and is suitable for many embedded and mobile use cases.
This chapter describes how to enable Weston accelerated by G2D APIS. G2D compositor can increase system
bandwidth utilization, so the performance was better than GL compositor in the complex environment, but it still
doesn’t support display rotation and EXT_RESOLVE feature.
9.2 Enabe G2D compositor
9.2.1 Open the file: /etc/default/Weston in the Release image.
# cat /etc/default/weston
#!/bin/sh
OPTARGS="--xwayland"
9.2.2 Add the parameters in the OPTARGS, and disable EXT_RESOLVE feature in compositor.
OPTARGS="—xwayland –use-g2d=1"
GPU_VIV_EXT_RESOLVE=0
9.2.3 Restart Weston by this command:
# systemctl restart weston
9.2.4 Disable EXT_RESOLVE feature before running the client application.
# export GPU_VIV_EXT_RESOLVE=0
# Weston-simple-egl
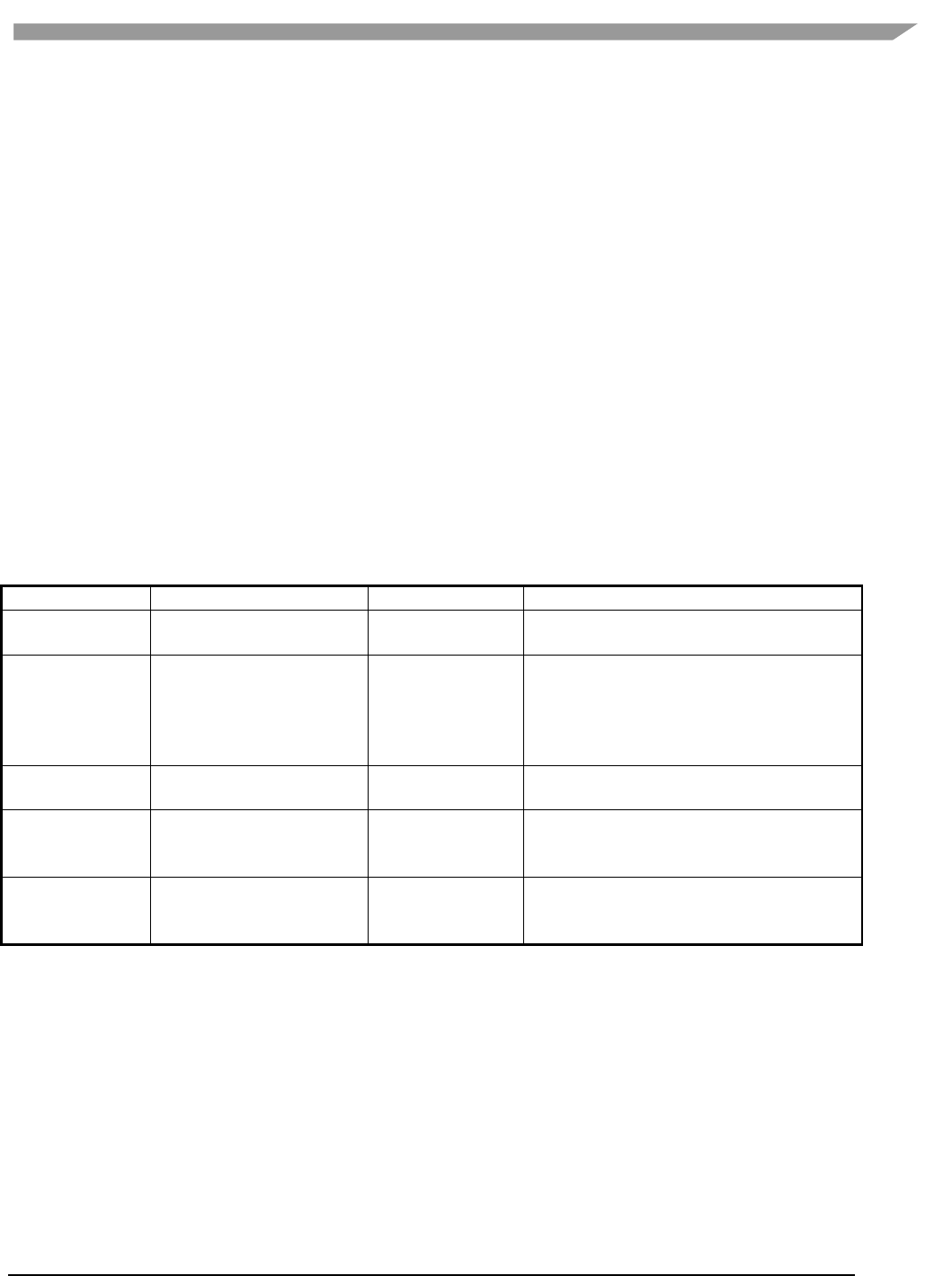
i.MX Graphics User’s Guide, Rev. 0, 02/2018
70 NXP Semiconductors
Chapter 10 XServer Video Driver
10.1 EXA driver
XServer video driver is designed to help XServer to render desktop onto a screen. It manages the display driver,
and provides rendering acceleration and other display features, such as rotation and multiple display methods. The
video driver implements XServer EXcellent Architecture (EXA).
10.1.1 EXA driver options
These options are used in the configuration file /etc/X11/xorg.conf:
Section "Device"
Identifier "i.MX Accelerated Framebuffer Device"
Driver "vivante"
Option "fbdev" "/dev/fb1"
Option "vivante_fbdev" "/dev/fb1"
Option "SyncDraw" "false"
EndSection
Table 21. EXA driver options
Option
Meaning
Default Value
Comment
ShadowFB
Whether to enable the
shadow frame buffer (FB).
False
Deprecated technology. It rotates the FB. If
it is enabled, acceleration is disabled.
Rotate
Rotation of FB.
<null>
Deprecated technology. It can be CW/CCW/
UD. If it is set to one of these values,
Shadow FB is automatically enabled.
Rotation cannot change after XServer is
started.
NoAccel
Disables EXA acceleration.
False
If it is set to True, the EXA functions are not
accelerated by the GPU.
VivCacheMem
Pixmap created by GPU is
generally cacheable.
True
Normal Pixmaps are created cacheable.
Special Pixmaps used for EGL are still non-
cacheable.
SyncDraw
Wait for the GPU to
complete for every single
drawing.
False
This affects the performance if it is set to
True.
10.1.2 24 bpp pixmap
The GPU can only accelerate a 16 bpp or 32 bpp pixmap. For a 24 bpp screen, a 32 bpp buffer is actually reserved.
10.1.3 Shared pixmap extension
The Shared Pixmap Extension (SHM) pixmap will be described in next release.
i.MX Graphics User’s Guide, Rev. 0, 02/2018
71 NXP Semiconductors
10.1.4 How to disable XRandR
For an embedded device that does not support XRandR (for which the memory can be reduced), set
“gEnableXRandR” to False in vivante_fbdev_driver.c.
10.1.5 Cursor
Hardware IPU does not provide a hardware cursor.
10.1.6 DRI
DRI is designed to accelerate OpenGL rendering. It enables the GPU direct render to the on-screen buffer. Due to
the lack of hard cursor support, and because often the window location is not well aligned, the GPU cannot render
to screen directly. Therefore, DRI is not fully used.
DRI is supported in this video driver. DRI2 or DRI3 is not supported.
10.1.7 Tearing
XServer (and early Microsoft Windows OS) does not support double buffering for the screen. There is a copy from
off-screen buffer to target on-screen area (or direct rendering to on-screen). The operation cannot be completed
in the blank time of the display, and the IPU cannot provide an ideal VSYNC signal. Therefore, there is tearing.
To remove tearing, a GLES compositor is needed. This tearing free feature will be described in next release.
10.2 XRandR
This video driver supports XRandR.
The X Resize, Rotate and Reflect Extension (RandR) is an X Window System extension, which allows clients to
dynamically resize, rotate, and reflect the root window of a screen (en.wikipedia.org/wiki/Xrandr).
10.2.1 Useful commands
If the display supports multiple resolution types, use the following commands for a query:
root@imx6qsabresd:~# export DISPLAY=:0.0
root@imx6qsabresd:~# xrandr
Screen 0: minimum 240 x 240, current 1920 x 1080, maximum 8192 x 8192
DISP3 BG connected 1920x1080+0+0 (normal left inverted right x axis y axis) 0mm x 0mm
S:1920x1080p-50 50.0*
S:1920x1080p-60 60.0
S:1280x720p-50 50.0
S:1280x720p-60 60.0
S:720x576p-50 50.0
S:720x480p-60 59.9
V:640x480p-60 60.0
S:640x480p-60 59.9
If using the console serial port for the command line interface, the DISPLAY environment variable is not configured
by default and the xrandr command fails. The solution is to set the DISPLAY environment variable. (Reference: see
manpage for X)
root@imx6qsabresd:~# xrandr
Can't open display
root@imx6qsabresd:~# echo $DISPLAY
i.MX Graphics User’s Guide, Rev. 0, 02/2018
72 NXP Semiconductors
root@imx6qsabresd:~# export DISPLAY=:0.0
root@imx6qsabresd:~# xrandr
Screen 0: minimum 240 x 240, current 1024 x 768, maximum 8192 x 8192
DISP4 BG - DI1 connected 1024x768+0+0 (normal left inverted right x axis y axis) 0mm x
0mm
U:1024x768p-60 60.0*+
• Change the resolution:
root@imx6qsabresd:~# xrandr -s 1920x1080
Figure 9 Changing the resolution

i.MX Graphics User’s Guide, Rev. 0, 02/2018
73 NXP Semiconductors
• Rotate the screen:
root@imx6qsabresd:~# xrandr -o left:
Figure 10 Rotating the screen
i.MX Graphics User’s Guide, Rev. 0, 02/2018
74 NXP Semiconductors
root@imx6qsabresd:~# xrandr -o right:
Figure 11 Rotating the screen

i.MX Graphics User’s Guide, Rev. 0, 02/2018
75 NXP Semiconductors
root@imx6qsabresd:~# xrandr -o inverted:
Figure 12 Rotating the screen

i.MX Graphics User’s Guide, Rev. 0, 02/2018
76 NXP Semiconductors
• Reflect the screen:
root@imx6qsabresd:~# xrandr -x
Figure 13 Reflecting the screen

i.MX Graphics User’s Guide, Rev. 0, 02/2018
77 NXP Semiconductors
root@imx6qsabresd:~# xrandr -y
Figure 14 Reflecting the screen

i.MX Graphics User’s Guide, Rev. 0, 02/2018
78 NXP Semiconductors
• Restore to normal state:
root@imx6qsabresd:~# xrandr -o normal:
Figure 15 Restoring to normal state
10.2.2 Rendering the desktop on overlay
/dev/fb1 is the overlay device on the same screen as /dev/fb0; and /dev/fb3 is the overlay of /dev/fb2. Use
xorg.conf to specify fb1 or fb3:
Section "Device"
Identifier "i.MX Accelerated Framebuffer Device"
Driver "vivante"
Option "fbdev" "/dev/fb1"
Option "vivante_fbdev" "/dev/fb1"
EndSection
After rebooting the system, the desktop is rendered on the overlay:
i.MX Graphics User’s Guide, Rev. 0, 02/2018
79 NXP Semiconductors
Figure 16 Rendering the desktop on overlay
If the size is too small (240x240), XRandR can be used to define a new mode.
1. Get the output name:
root@imx6qsabresd:~# xrandr
Screen 0: minimum 240 x 240, current 240 x 320, maximum 8192 x 8192
DISP4 FG connected 240x320+0+0 (normal left inverted right x axis y axis) 0mm x 0mm
U:240x320p-60 60.0*
2. Define a new mode:
root@imx6qsabresd:~# xrandr --newmode "640x480R" 23.50 640 688 720 800 480 483 487 494 +hsync -
vsync
3. Add the newly created mode:
root@imx6qsabresd:~# xrandr --addmode "DISP4 FG" 640x480R
4. Check the modes:
root@imx6qsabresd:~# xrandr
Screen 0: minimum 240 x 240, current 240 x 320, maximum 8192 x 8192
DISP4 FG connected 240x320+0+0 (normal left inverted right x axis y axis) 0mm x 0mm
U:240x320p-60 60.0*
640x480R 59.5

i.MX Graphics User’s Guide, Rev. 0, 02/2018
80 NXP Semiconductors
5. Switch to a new mode:
root@imx6qsabresd:~# xrandr -s 640x480
Figure 17 Switching to a new mode
Note:
• The overlay size cannot exceed the display size. For example, if LVDS is 1024x768, the overlay size cannot
be larger than this.
• Timings for overlay are meaningless, but wrong timings may damage the display, so be careful when
creating a new display mode for the display.
• If fb3 is used, fb2 must be enabled. Otherwise, fb3 is invisible.
10.2.3 Process of selecting the HDMI default resolution
The process of selecting the HDMI default resolution is as follows:
1. Set the user preferred mode (must be within the initial size).
2. Set the display preferred mode (must be within the initial size).
3. Check the aspect (if not found, use 4:3. Find the biggest resolution within the initial size for the aspect
ratio).
4. Check the first mode.
Initial size: initial FB virtual size or configured maximum size.
To specify the user preferred mode, add the option “PreferredMode” or “modes”.

i.MX Graphics User’s Guide, Rev. 0, 02/2018
81 NXP Semiconductors
10.2.4 Performance
The performance is decreased during screen rotation or mirroring.
10.2.5 Memory consumption
The video driver supports a maximum of 1920x1080@32bpp. To support rotation, a shadow buffer is reserved, so
the total memory consumption is 16 MB (1920x1080x4x2).

i.MX Graphics User’s Guide, Rev. 0, 02/2018
82 NXP Semiconductors
Chapter 11 Advanced GPU Configuration
11.1 GPU Scaling Governor
i.MX 8QuadMax GPU DVFS design supports different running modes: overdrive, nominal, and underdrive.
Nominal is the default, the overdrive is supposed to be performance/benchmark mode, and underdrive mode is
expected as energy saving mode.
Try to switch among the 3 modes, just using command line after boot without recompile the gpu driver.
$ echo "overdrive" > /sys/bus/platform/drivers/galcore/gpu_mode
$ echo "nominal" > /sys/bus/platform/drivers/galcore/gpu_mode
$ echo "underdrive" > /sys/bus/platform/drivers/galcore/gpu_mode
Try to check which mode is running on now, using command line as below:
$ cat /sys/bus/platform/drivers/galcore/gpu_mode
11.2 GPU Device Cooling
i.MX device support the thermal driver, which could signal the overheat event to GPU driver, once GPU driver
receive the event, it can enable GPU DFS feature to reduce GPU frequency as N/64 of the original designated clock.
The default N factor is 1 in the original BSP release, the end-user can reconfigure it through below command:
echo N >/sys/bus/platform/drivers/galcore/gpu3DMinClock
The user also can check the existing config as below
cat /sys/bus/platform/drivers/galcore/gpu3DMinClock
Chapter 12 Vivante Software Tool Kit
This chapter contains copyright material disclosed with permission of Vivante Corporation.
12.1 Vivante Tool Kit overview
The Vivante Tool Kit (VTK) is a set of applications designed to be used by graphics application developers to rapidly
develop and port graphics applications either stand alone, or as part of an IDE targeting a system-on-chip (SoC)
platform containing an embedded GPU.
12.1.1 VTK component overview
The VTK includes a graphics and OpenCL emulator (vEmulator) to enable embedded graphics and compute
application development on a PC platform, a driver and hardware performance profiling utility (vProfiler), and a
visual analyzer (vAnalyzer) for graphing the performance metrics. Also provided are pre-processing utilities for
stand-alone development of optimized shader programs (vShader) and for compiling shader code (vCompiler) into
binary executables targeting Vivante accelerated hardware platforms. An image transfer utility (vTexture) provides
compression and decompression options.
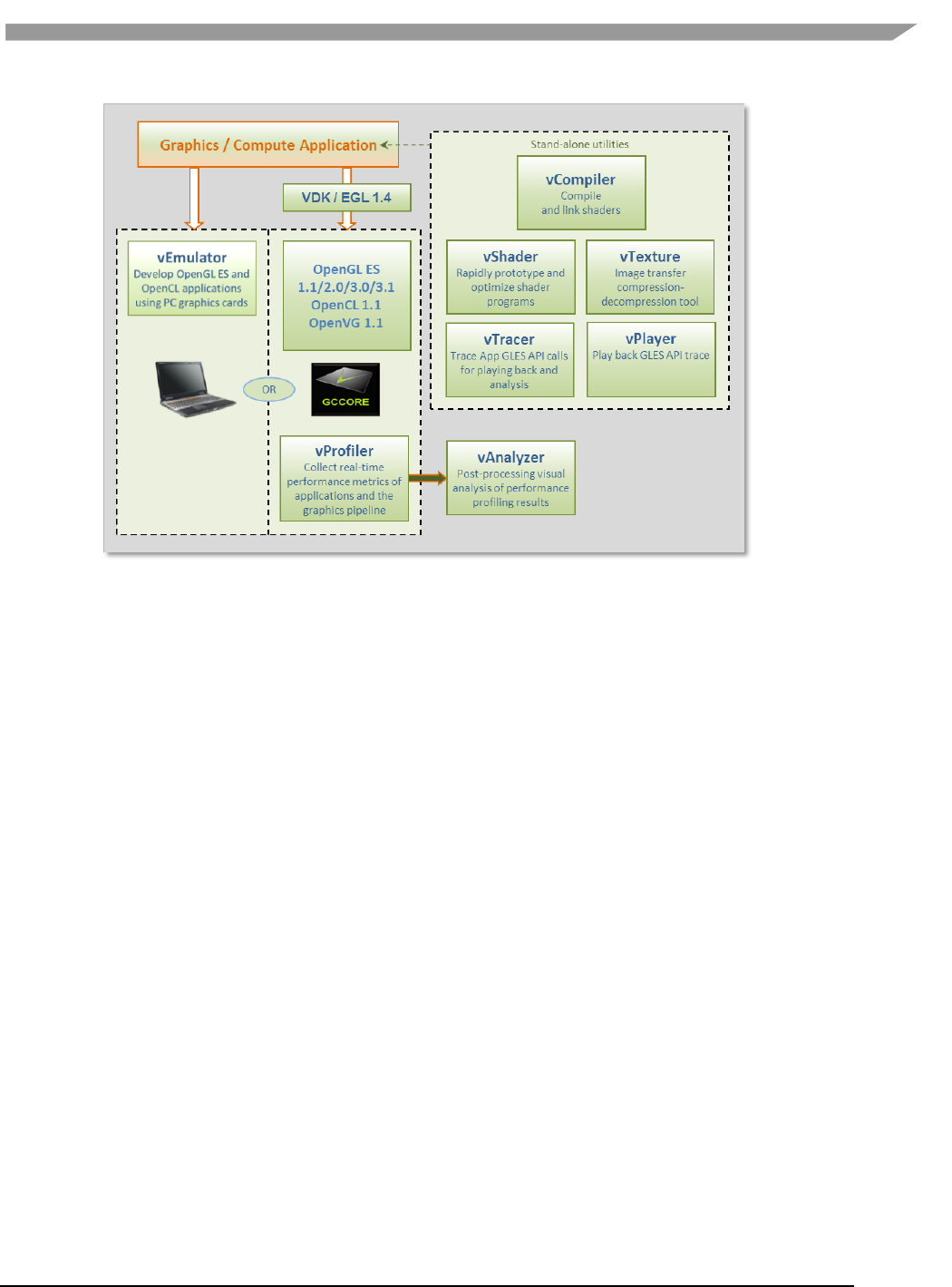
i.MX Graphics User’s Guide, Rev. 0, 02/2018
83 NXP Semiconductors
Figure 18 Vivante Tool Kit vTools components
12.1.2 VTK operating system requirements
Most VTK vTools applications are designed to run on Microsoft Windows operating systems. The following systems
are compatible with current releases of vTools:
• Microsoft Windows® XP Professional, with Service Pack 2 or later
• Microsoft Windows® Vista with Service Pack 2 or later
• Microsoft Windows® 7 Professional
Some components, such as the vProfiler, are run on other platforms. See the individual vTools component detail
description.
12.1.3 VTK installation
The vProfiler tool is not included in the VTK. This tool can be built by setting a build command option when making
the Vivante Graphics Drivers.
The VTK package contains a vtools folder. Inside this folder are six .zip packages which can be individually
extracted. As an example, for a WinRAR system, right-click and select Extract Here. A folder is created with the
same name as the .zip file.
• vAnalyze.zip
• vCompiler.zip
• vEmulator.zip
• vShader.zip
• vTexture.zip
• vTracer.zip
Each vTools extracted folder contains a SETUP.exe and a vToolName.msi file. The tool can be installed
independently by running the SETUP.exe located in the tool folder. Typical licensing and folder placement
options may appear as part of the installation prompts.

i.MX Graphics User’s Guide, Rev. 0, 02/2018
84 NXP Semiconductors
vAnalyzer and vShader have a Windows GUI. vEmulator is a library. vCompiler and vTexture are utilities run from
the command line.
NOTES:
• The default installation location for the VTK is usually a folder named something like C:\Program
Files\Vivante\vToolName, where vToolName is the name of the tool being installed. Some systems may install to a
Program Files (x86) folder.
• Windows OS navigation instructions such as Control Panel navigation vary with the different Windows operating
systems.
• Administrator rights may be required to install the tool.
• When installing an updated version, use Windows OS Add/Remove programs to remove the installed version of
the tool, before installing the update version.
12.1.4 Software release compatibility
• SW release 5.0.11.p7 - VTK v1.6.2.p1
• SW release 5.1.1 - VTK v1.6.3
• SW release 5.0.11_p6 - VTK v1.6.2
• SW release 5.0.11_p5 - VTK v1.6.1
• SW release 5.0.11_p4 - VTK v1.6.0
• SW release 5.0.11_p3 - VTK v1.5.9 and v1.5.8
• SW release 5.0.11_p2 - VTK v1.5.7
• SW release 4.6.9.p13, 5.0.9 and 5.0.9.1 - VTK v1.5.3
• SW release 4.6.9.p13 and 5.0.7 - VTK v1.5
• SW release 4.6.9.p9 - VTK v1.4.2
• SW release 4.6.9 - VTK v1.4
12.2 vEmulator
Vivante’s vEmulator duplicates the graphics and compute functionality of the Khronos APIs—namely, OpenGL ES
3.0, 2.0, 1.1 and OpenCL 1.1—in a desktop PC environment. This enables developers to write and test applications
for Vivante embedded GPU cores prior to their availability, using the graphics cards on Windows® XP or Windows®
Vista or Windows® 7 PC platforms.
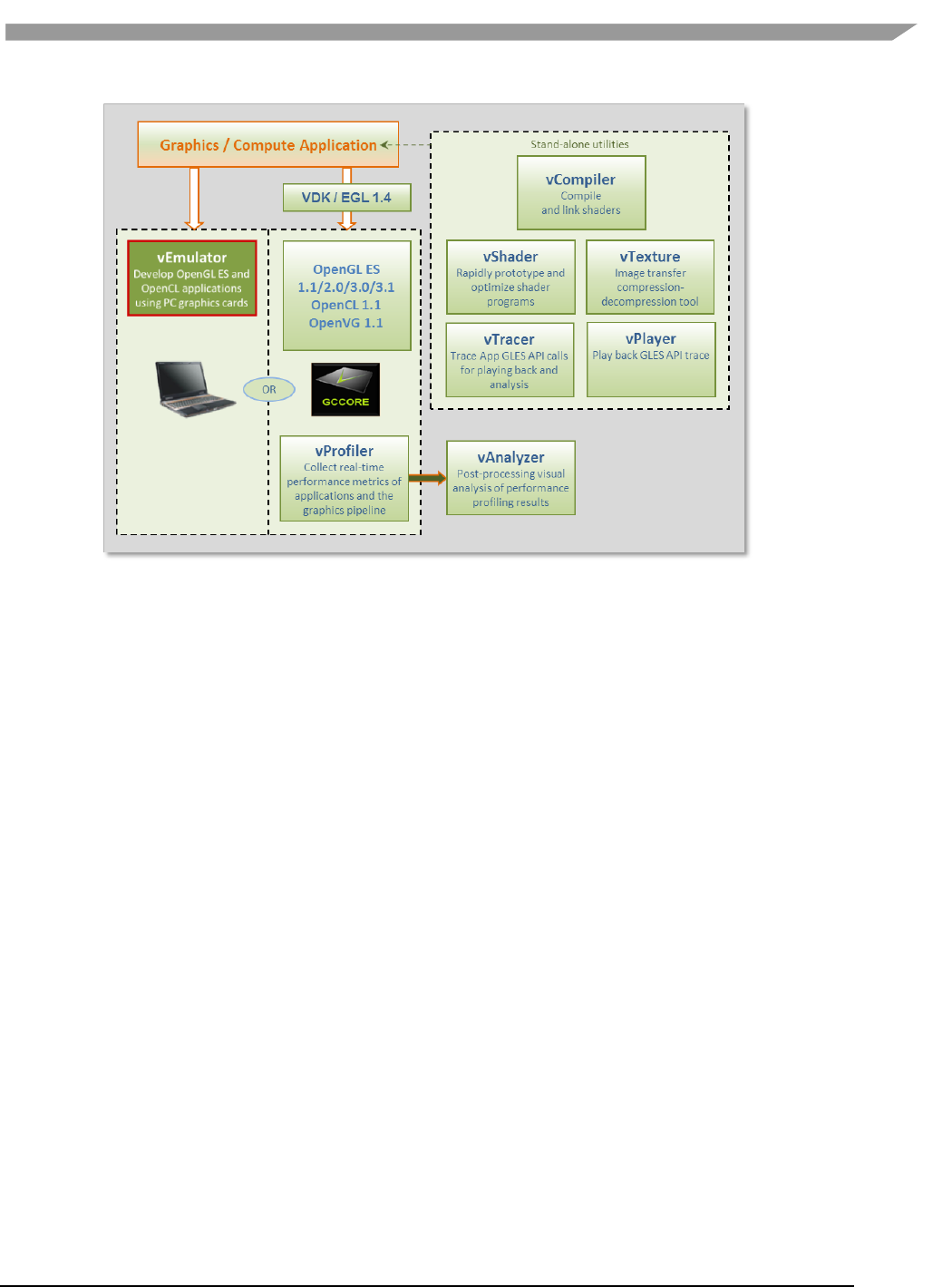
i.MX Graphics User’s Guide, Rev. 0, 02/2018
85 NXP Semiconductors
Figure 19 vEmulator embedded graphics emulator
vEmulator is not an application, but rather a set of libraries that convert Khronos mobile API function calls into
OpenGL desktop or OpenCL function calls. These libraries can be accessed directly by the graphics / compute
application.
12.2.1 Supported operating systems and graphics hardware
vEmulator libraries are available for Microsoft Windows XP, Windows Vista and Windows 7 operating systems:
• Microsoft Windows XP Professional, with Service Pack 2 or later
• Microsoft Windows Vista with Service Pack 2 or later
• Microsoft Windows 7 Professional
vEmulator has been tested on popular graphics cards, including:
• NVIDIA GeForce GTX 200 series with driver version 182.05 or later
• NVIDIA GeForce 9000 and 8000 series with driver version 182.05 or later
• NVIDIA GeForce 8400 GSwithForceWare driver version 176.44 or later
• ATI Radeon HD 3000 and 4000 series with driver version Catalyst 9.1 or later
vEmulator for OpenGL ES 3 has been tested on the nVidia GeForce GT430 card with driver version 310.90.
Additional graphics cards to be added as testing is confirmed.
12.2.1.1 Specifying platform mode for Windows OS
vEmulator supports both 32-bit and 64-bit operation on the same host (from VTK 1.61). The installation uses the
following locations for vEmulator files on Windows platforms:
• C:\Program Files\vivante\vEmulator\x86 (for 32-bit emulation)
• C:\Program Files\vivante\vEmulator\x64 (for 64-bit emulation)
• Start Menu location: All Programs\Vivante\vEmulator\x86 (for 32-bit)
• Start Menu location: All Programs\Vivante\vEmulator\x64 (for 64-bit)
i.MX Graphics User’s Guide, Rev. 0, 02/2018
86 NXP Semiconductors
To run samples for 32-bit emulation in the x86 folder, select the platform option Win32 from the dropdown list
box in the toolbar area:
Figure 20 Selecting Win32
To run samples for 64-bit emulation in the x64 folder, select the platform option x64 from the dropdown list box in
the toolbar area:
Figure 21 Selecting x64
12.2.2 vEmulator components
vEmulator libraries are packaged with the Vivante VTK installer. Once installed, the libraries resides in a folder
vEmulator in the VTK installation path, which can be specified by the user at time of installation. The default
location of the Vivante VTK is:
C:\Program Files\Vivante
The vEmulator folder contains everything that is needed for emulation. The vEmulator directory structure and its
files are described in the following table.
Table 22. vEmulator Directory Contents
vEmulator
subdirectory
Filename
Description
bin
libEGL.dll
Dynamic library for invoking EGL at runtime
libGLESv1_CM.dll
Dynamic library for OpenGL ES 1.1 emulation
libGLESv2x.dll
Dynamic library for OpenGL ES 2.0 emulation
libGLESv3.dll
Dynamic library for OpenGL ES 3.0 emulation
libOpenCL.dll
Dynamic library for OpenCL 1.1 emulation
libVEmulatorVDK.dll
Dynamic library for vEmulator VDK functions
inc
gc_vdk.h
Vivante VDK declarations
gc_vdk_types.h
Vivante VDK type declarations
inc/EGL
gc_sdk.h
Vivante SDK declarations and definitions
egl.h
EGL declarations
eglext.h
EGL extension declarations
eglplatform.h
Platform-specific EGL declarations
eglrename.h
Rename for building static link driver
eglunname.h
For mixed usage of ES11, ES20
inc/GLES
eglvivante.h
Vivante EGL declarations
egl.h
EGL declarations
gl.h
OpenGL 1.1 declarations
glext.h
OpenGL1.1 extension declarations
i.MX Graphics User’s Guide, Rev. 0, 02/2018
87 NXP Semiconductors
glplatform.h
Platform-specific OpenGL 1.1 declarations
glrename.h
Rename for building static link driver
inc/GLES2
glunname.h
For mixed usage of ES11, ES20
gl2.h
OpenGL 2.0 declarations
gl2ext.h
OpenGL 2.0 extension declarations
gl2platform.h
Platform-specific OpenGL 2.0 declarations
gl2rename.h
Rename for building static link driver
inc/GLES3
gl2unname.h
Unified name definitions
gl3.h
OpenGL 3.0 declarations
gl3ext.h
OpenGL 3.0 extension declarations
gl3platform.h
Platform-specific OpenGL 3.0 declarations
inc/hal
inc/KHR
gc_hal_eglplatform_type.h
Vivante HAL Platform-specific struct declarations
khrplatform.h
Platform-specific Khronos declarations
lib
samples/es11, /es20
libEGL.lib
Static library for linking EGL functions
libGLESv1_CM.lib
Static library for linking OpenGL ES 1.1 functions
libGLESv2x.lib
Static library for linking OpenGL ES 2.0 functions
libGLESv3x.lib
Static library for linking OpenGL ES 3.0 functions
libVEmulatorVDK.lib
Static library for linking vEmulator VDK functions
tutorials.sln
Microsoft Visual Studio® project solution file for
samples
samples/es11/tutoria
lN
-- Varies with N --
Sample OpenGL ES 1.1 applications
samples/es20/tutoria
lN
-- Varies with N --
Sample OpenGL ES 2.0 applications
bin
libEGL.dll
Dynamic library for invoking EGL at runtime
12.2.3 vEmulator for OpenCL
If vEmulator includes support for OpenCL, additional files may be present. For OpenCL emulation using vEmulator
on the PC, see the OpenCL emulator readme file (OCL_Readme.txt) in the vEmulator folder for additional
installation instruction.
Note: An additional environment variable CL_ON_GC2100 needs to be set for simulation for GC2100. The value
can be any characters, as long as it is not null. This variable does not need to be set for other OCL cores.
Table 23. vEmulator Files for OpenCL 1.1
vEmulator subdirectory
Filename
Description
OCL_Readme.txt
Readme file for OpenCL 1.1
bin
libOpenCL.dll
Dynamic library for invoking OCL at runtime
inc/CL
cl.h
OpenCL 1.1 core API header file
cl.hpp
OpenCL 1.1 C++ binding header file
cl_d3d10.h
OpenCL 1.1KhronosOCL/Direct3D extensions header file
cl_ext.h
OpenCL 1.1 extensions header file
cl_gl.h
OpenCL 1.1Khronos OCL/OpenGL extensions header file
cl_gl_ext.h
OpenCL 1.1Vivante OCL/OpenGL extensions header file
cl_platform.h
Platform-specific OCL declarations
opencl.h
Vivante HAL version
lib
libOpenCL.lib
Dynamic library for linking OpenCL functions
i.MX Graphics User’s Guide, Rev. 0, 02/2018
88 NXP Semiconductors
samples/cl11
cl_sample.cpp
Sample OpenCL 1.1 source code
samples/cl11
cl_sample.sln
Sample OpenCL 1.1 Visual Studio solution file
samples/cl11
cl_sample.vcproj
Sample OpenCL 1.1 Visual Studio solution project file
samples/cl11
square.cl
Sample OpenCL 1.1 kernel file
12.2.4 Supported extensions
See Section “EGL and OES Extensions Support” for a list of supported and custom extensions available for EGL and
OpenGL ES.
Software extensions have not been added to vEmulator for OpenGL ES 2.0. vEmulator relies on the extensions
available with the installed version of native OpenGL.
12.2.5 vEmulator environment variable setup
There are two steps to running an OpenGL ES or OpenCL application with vEmulator:
Step 1. Link to the vEmulator *.lib static libraries at build time when creating an application executable
image.
Step 2. Provide a path to the vEmulator *.dll dynamic libraries during run-time.
These steps require a one-time setup in which the location of the vEmulator libraries is added to the Microsoft
Windows system environment variable named “Path.” In our example, the following string would be added to the
system “Path” variable: C:\Program Files\vivante\vEmulator\lib.
To add vEmulator DLL files to the Windows XP system path:
a. Click Start then click Control Panel then double-click System
• Vista: then click Advanced system settings from the Tasks list in the upper-leftcorner of the
window.
• Windows 7: in the System and Security window, click System, then on the left menu column
click Advanced system settings.
b. Select the Advanced tab, then click on the Environment Variables… button.
• An Environment Variables dialogue box is displayed, with two panes for variables.
c. Select Path, and then click on the Edit… button.
d. In the Variable value: field type the following environment variables in the order they should be
found. For instance:
C:\Program Files\vivante\vEmulator\lib;<current path>
Note: The system parses a path string in left-to-right order when looking for a file. Whatever it finds
first is what is used.
e. If the Vivante Core is GC2100, an additional variable CL_ON_GC2100 should be set to any non-null
value.
f. Click OK.
• Click OK to close the Environment Variables dialogue window.
• Click OK to close the System Properties dialogue window.

i.MX Graphics User’s Guide, Rev. 0, 02/2018
89 NXP Semiconductors
• Close the Control Panel > System window.
12.2.6 Sample code overview
In the discussions that follow about the various sample programs included with the vEmulator distribution, we
assume that vEmulator has been installed in the default location within the vivante/VTK folder:
C:\Program Files\vivante\vEmulator
Relative to this path:
• run-time dlls are located at …\bin
• include-files are found at …\inc
• library files are located at …\lib\<API>
• examples are located at …\samples\<API>\tutorial*
where API is one of: es11or es20
The code examples are distributed with working *.exe executable images so that the VTK user can see how the
results should look.
They are presented in a tutorial fashion, progressing from simpler programs to more complex as the tutorial
number increases.
12.2.7 Building and running the code examples
The steps to build and run are identical for all code examples, regardless of the API (es11 or es20). There are two
general guidelines to keep in mind.
1. A Visual Studio project has environment variables that allow the specification of additional paths to “include”
and “library” files when a source module from that project is being built. The Visual Studio projects that are
part of the vEmulator distribution package are configured out-of-the-box for building all of the sample code
executables, relative to the location where vEmulator is installed. Specifically the additional paths are set as
“$(SolutionDir)..\..\inc” and “$(SolutionDir)..\..\lib”.
If \samples is moved, or if the VTK user begins with the provided projects as templates for developing
applications in a directory that is not directly under the \vEmulator installation, then the project path
variables must be adjusted accordingly. For example:
To access these path variables for tutorial1, first launch the tutorials.sln
• Right-click on tutorial1, then select Properties (at the bottom of the pop-up menu)
• Under “Configuration Properties” > “C/C++” > “General”, edit the Additional Include Directories
entry
o For example, change ..\..\..\inc to C:\Program Files\vivante\vEmulator\inc
• Under “Configuration Properties” >“Linker” > “General”, edit the Additional Library
Directories entry
o For example, change ..\..\..\lib to C:\Program Files\vivante\vEmulator\lib
2. Make sure that the system environment variable PATH contains a path to the vEmulator DLL files. (See above
section on vEmulatorEnvironment Variable Setup, above.) Remember that the path is order-dependent;
i.MX Graphics User’s Guide, Rev. 0, 02/2018
90 NXP Semiconductors
whatever the system finds first is used. If there is more than one DLL with the same name, ensure that the
path to the desired one is listed first in the PATH string.
12.2.8 OpenGL ES 1.1 examples
12.2.8.1 Tutorial1: rotating three-color triangle
Renders a cube centered at the origin with a different color on each face. Flat shading is used. The cube rotates
about the vertical axis. The default projection is ORTHO, which can be toggled between ORTHO and PERSPECTIVE
by left-clicking in the display window with the mouse or pressing Enter.
Figure 22 Rotating three-color triangle
12.2.8.2 Tutorial2: rotating six-color cube
Renders a cube centered at the origin with a different color on each face. Flat shading is used. The cube rotates
about the vertical axis. The default projection is ORTHO, which can be toggled between ORTHO and PERSPECTIVE
by left-clicking in the display window with the mouse or pressing Enter.
Figure 23 Rotating six-color cube
12.2.8.3 Tutorial3: rotating multi-textured cube
This example takes the cube of the previous example with PERSPECTIVE projection, loads two textures from file
and combines them using GL_ADD blending mode, and applies the resulting texture to the cube faces.
i.MX Graphics User’s Guide, Rev. 0, 02/2018
91 NXP Semiconductors
Figure 24 Rotating multi-textured cube
12.2.8.4 Tutorial4: lighting and fog
What appears to be a torus, a cone, and an oblate spheroid orbiting about the center of a plane is actually a single
mesh being lit by a single rotating, diffuse light source. Green fog is added to the scene by left-clicking on the
display window with the mouse or pressing Enter.
Figure 25 Lighting and fog
12.2.8.5 Tutorial5: blending and bit-mapped fonts
This example makes use of alpha blending to animate sprites across the display, and it also instructs how to create
a bit-mapped font from a texture. Jumbled letters iteratively print and move across the display as they unscramble
into a text message.
i.MX Graphics User’s Guide, Rev. 0, 02/2018
92 NXP Semiconductors
Figure 26 Blending and bit-mapped fonts
12.2.8.6 Tutorial6: particles using point sprites
This example reuses the bit-mapped font technique from the previous tutorial, but it adds a particle generator to
simulate and animate particles being emitted from the textured plane. All computation is performed in fixed-point
arithmetic.
Figure 27 Particles using point sprites
12.2.8.7 Tutorial7: vertex buffer objects
Using Vertex Buffer Objects (VBO) can substantially increase performance by reducing the bandwidth required to
transmit geometry data. Information such vertex, normal vector, color, and so on is sent once to locate device
video memory and then bound and used as needed, rather than being read from system memory every time. This
example illustrates how to create and use vertex buffer objects.
i.MX Graphics User’s Guide, Rev. 0, 02/2018
93 NXP Semiconductors
Figure 28 Vertex buffer objects
12.2.9 OpenGL ES 2.0 examples
12.2.9.1 Tutorial1: rotating three-color triangle
A single triangle is rendered with a different color at each vertex, Gouraud shading for blending, rotational
animation in the final display. This is the same example as es11/tutorial1, only implemented in OpenGL ES 2.0.
Figure 29 Rotating three-color triangle
12.2.9.2 Tutorial2: rotating six-color cube
Renders a cube centered at the origin with a different color on each face, and rotates it about the vertical axis.
Similar to the es11/tutorial2 example, the default projection is ORTHO. But there is no toggle for PERSPECTIVE.
i.MX Graphics User’s Guide, Rev. 0, 02/2018
94 NXP Semiconductors
Figure 30 Rotating six-color cube
12.2.9.3 Tutorial3: rotating reflecting ball
A ball made of a mirroring material and centered at the origin spins about its Y-axis and reflects the scene
surrounding it.
Note: if the program cannot be executed and print “GL error” in the console, remove the line “return” before the
line of “DeleteCubeTexture(cubeTexData);”
Figure 31 Rotating reflecting ball
12.2.9.4 Tutorial4: rotating refracting ball
This example is the same as the previous one, except that the ball is made of clear glass which refracts the
surrounding environment.
Note: if the program cannot be executed and print “GL error” in the console, remove the line “return” before the
line of “DeleteCubeTexture(cubeTexData);”
i.MX Graphics User’s Guide, Rev. 0, 02/2018
95 NXP Semiconductors
Figure 32 Rotating refracting ball
12.3 vShader
vShader is a complete off-line environment for editing, previewing, analyzing, and optimizing shader programs.
Figure 33 vShader shader editor
vShader allows users to:
• Map any texture onto shaders
• Import user-defined meshes
• Bind mesh attributes to shaders
• Set uniforms in shaders
• View shader compiler output for optimization hints
• Predict hardware performance

i.MX Graphics User’s Guide, Rev. 0, 02/2018
96 NXP Semiconductors
12.3.1 vShader components
By default, the vShader executable installs in the following location within the Vivante Toolkit directories:
C:\Program Files\Vivante\vShade.
The vShader package includes samples of shader programs, a number of standard meshes (sphere, cube, tea pot,
pyramid, etc.) and a text editor. These extra features help programmers get a quick start on creating their shader
programs.
By combining vertex shaders and fragment shaders into a single shader program, an application can produce a
shader effect. A project can make use of many shader effects, which can share vertex and fragment shaders,
mixing and matching to achieve the desired results.
The scope of this guide is to cover the vShader user interface. The tutorials provided with the vShader package are
there to help the reader learn about shaders, if needed.
12.3.2 Getting started with vShader
Once the vShader utility is launched by clicking on a shortcut or directly on the executable vShader.exe projects
can be created, developed and saved. Project files have an extension .vsp.
12.3.2.1 Creating a new project
To create a new project, locate the main menu bar: Select File then New Project…
Depending on the current project status, one of three things happen:
1. If this is the first time vShader is launched, there is no project already open and selecting “File > New
Project…” has no effect.
2. If there have been no changes to the current project since the last save, then the current project closes and a
new and empty project is opened.
3. If the current project has been modified, then a dialog box appears to ask to save the changes. Choosing Yes
commits the changes to the current project, which is then closed, and a new, empty project is opened.
12.3.2.2 Opening an existing project
To open an existing project, locate the main menu bar:
To open an existing project, locate the main menu bar:
1. Select File then Open Project…
2. Double-click on the desired project from the list that pops up, or single-click on the project name and click OK.
The project loads into vShader and appear in the state it is last saved.
12.3.2.3 Saving a project
To save a project, locate the main menu bar:
1. Select File then Save Project…
2. In the resulting dialog box indicate where to save the project, then click OK.
12.3.3 vShaderNavigation
The vShader application runs on the Windows XP, Windows Vista and Windows 7 platforms and is driven from a
graphical user interface as shown in the figure below.
Main components of the GUI include:
• on upper portion of window: a Menu Bar, Menu Icons,
• on left: Preview pane, Project Explorer pane
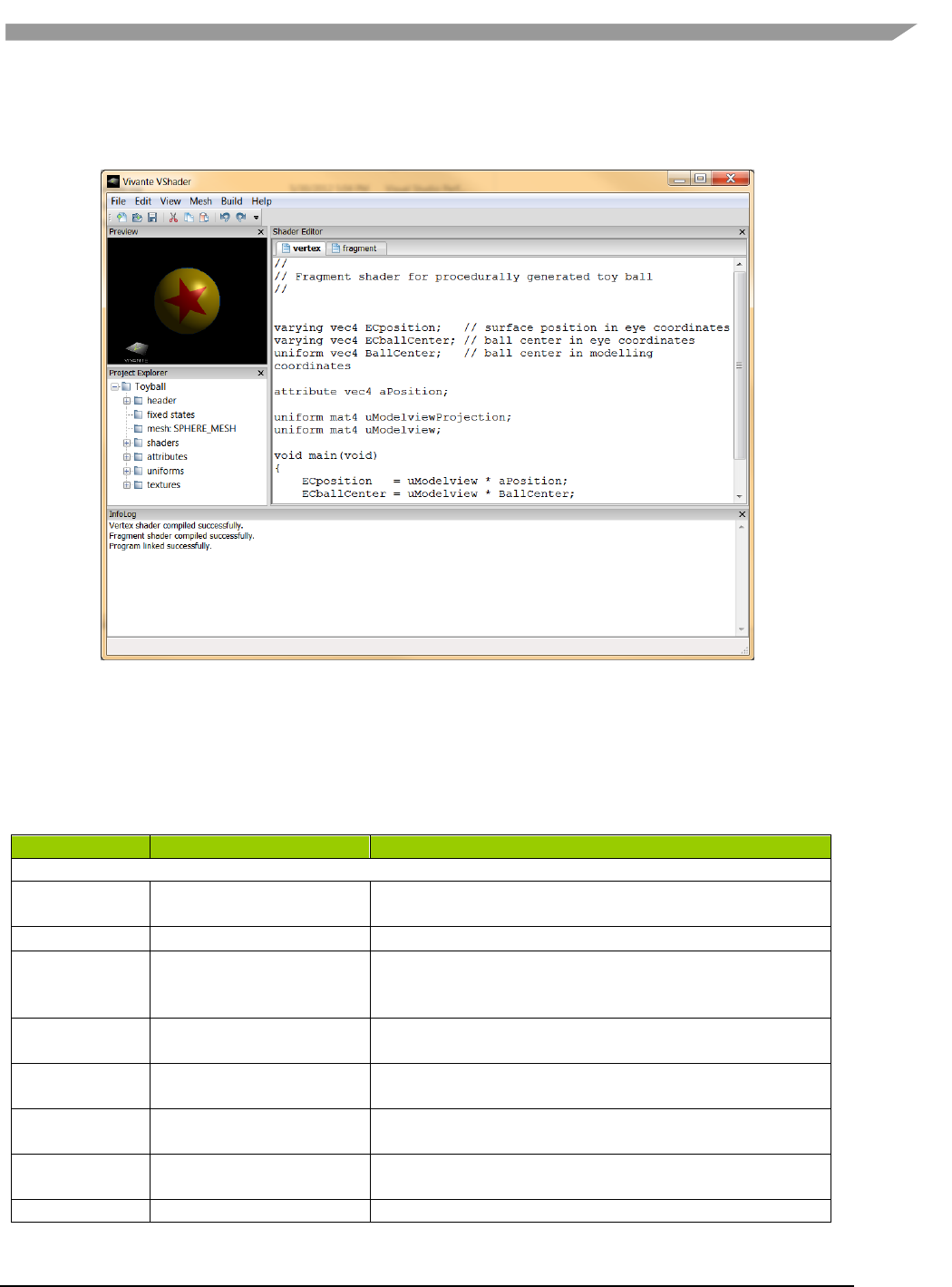
i.MX Graphics User’s Guide, Rev. 0, 02/2018
97 NXP Semiconductors
• on right: Shader Editor pane
• on lower portion of window: InfoLog pane.
Figure 34 vShader GUI main window
12.3.3.1 vShader menu bar
The main window opens when a user launches vShader. The main menu bar contains drop-down menus for File,
Edit, View, Mesh, Build, and Help.
Table 24. vShader menu commands
Menu Name
Menu Command
Description
File
New Project…
Create a new project file; if a project is currently open, then
the user is prompted to choose whether to save it first.
Open Project…
Browse for and load a .vsp VShader project.
Save Project…
Save the current project; if this is the first time saving this
project, then the user is prompted to choose where to save
it.
Load Vertex…
Browse for and load a vertex shader from an existing text
file.
Load Fragment…
Browse for and load a fragment shader from an existing
text file.
Save VertexShader As…
Prompts for filename and location to save the active vertex
shader.
Save FragmentShader As…
Prompts for filename and location to save the active
fragment shader.
Exit
Close all open files and exit VShader.
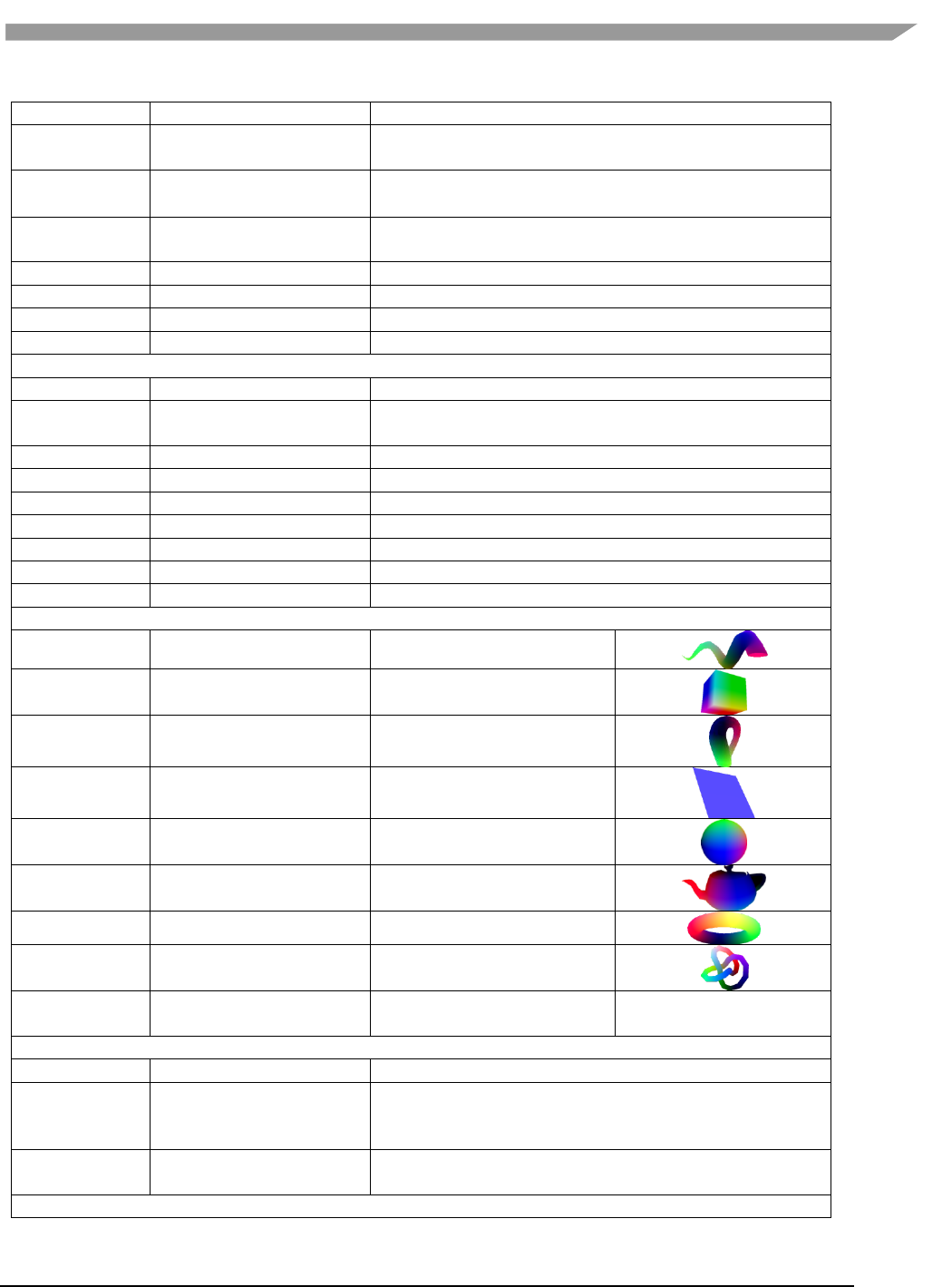
i.MX Graphics User’s Guide, Rev. 0, 02/2018
98 NXP Semiconductors
Edit
Undo [Ctrl-z]
Revert to a previous edit state (Note: Undo is only 1-level
deep)
Redo [Ctrl-y]
Re-apply the last “undone” edit command (Note: Redo is
only 1-level deep)
Cut [Ctrl-x]
Delete the selected item(s) and save a copy in the paste
buffer
Copy [Ctrl-c]
Save a copy of the selected item(s) item in the paste buffer
Paste [Ctrl-v]
Insert the contents of the paste buffer
Delete [Del or Bkspc]
Remove the selected item(s)
Select All [Ctrl-a]
Highlight all items in the current view
View
Reset Preview
Reset Preview window.
Snapshot
Save current preview image to bitmap bmp file. A dialog
box is displayed to let user choose where to save the bmp.
Perspective
Use perspective projection in the Shader Preview pane
Ortho
Use orthographic projection in the Shader Preview pane
Tool Bar
Show or hide toolbar icons
Preview Window
Show or hide Preview window
Project Explorer
Show or hide Project Explorer window
Shader Editor
Show or hide Shader Editor window
InfoLog
Show or hide InfoLog window
Mesh
Conic
Looks like a spiral horn.
Cube
A 3D cube.
Klein
The Klein bottle.
Plane
A 2D square.
Sphere
A ball.
Teapot
The Utah teapot.
Torus
Looks like a donut.
Trefoil
A trefoil knot.
Custom Mesh…
Browse for and open a 3DS
mesh file.
Build
Compile
Compile the active shader.
Link
Link the vertex and fragment shaders into a shader
program, and apply it to the mesh showing in the Shader
Preview window pane.
Clear InfoLog
Remove all text currently showing in the InfoLog window
pane.
Help

i.MX Graphics User’s Guide, Rev. 0, 02/2018
99 NXP Semiconductors
About
Information about the version of VShader being used.
12.3.3.2 vShader Window OS panes
There are four window panes in the vShader GUI: Preview, Project Explorer, Shader Editor, and InfoLog. Each pane
can be resized by left-mouse-dragging the pane edge. A pane can be hidden by clicking the X in the upper-right
corner of the pane, or by un-checking the box next to its name in the View pull-down of the main menu. Restoring
a hidden window pane is done by checking the appropriate box in the View pull-down menu.
Individual panes in the vShader application can be resized, relocated or converted to detached windows, as in the
example to the right.
Note: Changes made to pane arrangement are not restored on application or project relaunch.
Figure 35 vShader moveable panes
12.3.3.2.1 Preview
The shader Preview pane shows the current effect of the shaders on the chosen mesh geometry. A different mesh
may be chosen either via the Mesh pull-down menu in the menu bar near the top of the vShader main window or
by right-mouse clicking in the Preview pane.
When using the right-click method, the user also can choose between perspective and orthographic views of the
mesh, can reset the view orientation to the default, or can save the current view in the Preview window as a
bitmap file by selecting Snapshot.
The object in the Preview window can be rotated, translated, and scaled. Rotation is controlled by left-mouse-
drag; translation is done by holding the Ctrl key plus left-mouse-drag; scaling the image is seen by holding the Alt
key while applying left-mouse-drag.
When shader variables are changed, the shader preview updates automatically. When shader programs are
changed they must be recompiled and relinked by the user, through the Build menu. The Preview display is
automatically updated to reflect the new Build.
12.3.3.3 Project explorer
The Project Explorer displays all of the project resources in a familiar tree structure. The root of the tree is the
project name, and the branches and leaves classify the resources. Folders can be expanded by clicking on the plus
sign next to them, and they can be collapsed by choosing the minus sign. By right-mouse clicking on any resource
name, the user can view and usually edit that resource.
12.3.3.3.1 Shader editor
i.MX Graphics User’s Guide, Rev. 0, 02/2018
100 NXP Semiconductors
The Shader Editor is a work area for entering and modifying shader programs. There are two tabs: one for vertex
shader, and one for fragment shader. Changes made to a shader must be compiled and linked in order for their
effect to appear in the Shader Preview.
Compiling can be done by selecting Build then Compile from the main menu bar. Likewise, linking and applying the
shaders is performed by choosing Build then Link.
12.3.3.3.2 Info log
The Info Log window pane receives diagnostic messages from the compiler and linker, so that the user can see if
the current shaders have built without errors. This pane can be cleared of text by selecting the Build then Clear
InfoLog entry in the main menu.
12.3.4 vShader project resources
Project resources are accessible from the Project Explorer pane. Click on the item and an Editor pop-up dialog box
appears where the user can enter alternate values. Resources include: header, fixed states, mesh, shaders,
attributes, uniforms, and textures.
12.3.4.1 Header
Some project identifying information, namely version, author, and company. Expand the folder to see the settings,
or right-click (or double-click) the folder to edit them.
Figure 36 Header editor
12.3.4.2 Fixed states
The Fixed State Editor is a list of OpenGL ES 2.0 fixed states settings, such as depth test enable/disable, etc. It
allows the user to set all fixed states manually. Right-click or double click to display an edit dialog.
i.MX Graphics User’s Guide, Rev. 0, 02/2018
101 NXP Semiconductors
Figure 37 Fixed states
12.3.4.3 Mesh
This resource shows the name of the mesh which is currently being displayed in the Preview pane. It does not have
a pop-up window. Right-click on the mesh name to select a different mesh can be selected from the resulting pull-
down menu.
12.3.4.4 Shaders
Left-click on the plus sign next to the “shaders” folder to reveal the two sub nodes in this section, which are vertex
and fragment. Double-click (or right-click and then choose Active) on either shader to bring it forward in the
Shader Editor for editing.
12.3.4.5 Attributes
The Attribute Editor dialog displays all attributes bound to the current project. It allows the user to add new
attributes, and edit or remove existing attributes. Right-click Attributes to add a new one. Click on the plus sign to
expand the attributes list, and then double-click to edit a particular attribute. Also, by right-clicking on an attribute,
the user can edit or remove that attribute or add a new one. Up to 12 attributes are allowed.
i.MX Graphics User’s Guide, Rev. 0, 02/2018
102 NXP Semiconductors
Figure 38 Attributes
12.3.4.6 Uniforms
This displays all uniforms bound to the current project. Right click on Uniforms to add a new one, or expand the list
and double-click on a given uniform to bring up the Uniform Editor dialog. When a uniform is right-clicked, the user
can add new uniforms, or edit or remove existing uniforms. Up to 160 uniforms are allowed.
Figure 39 Uniforms
12.3.4.7 Textures
The Texture Editor dialog allows the user to select a texture for each of up to 8 texture units. The effect of applying
each texture is shown immediately in the Shader Preview pane.
The texture selection option list is created from the texture files located in the “textures” subfolder of the project.
The list can be expanded by adding textures to the textures folder, formatted as bitmap files.
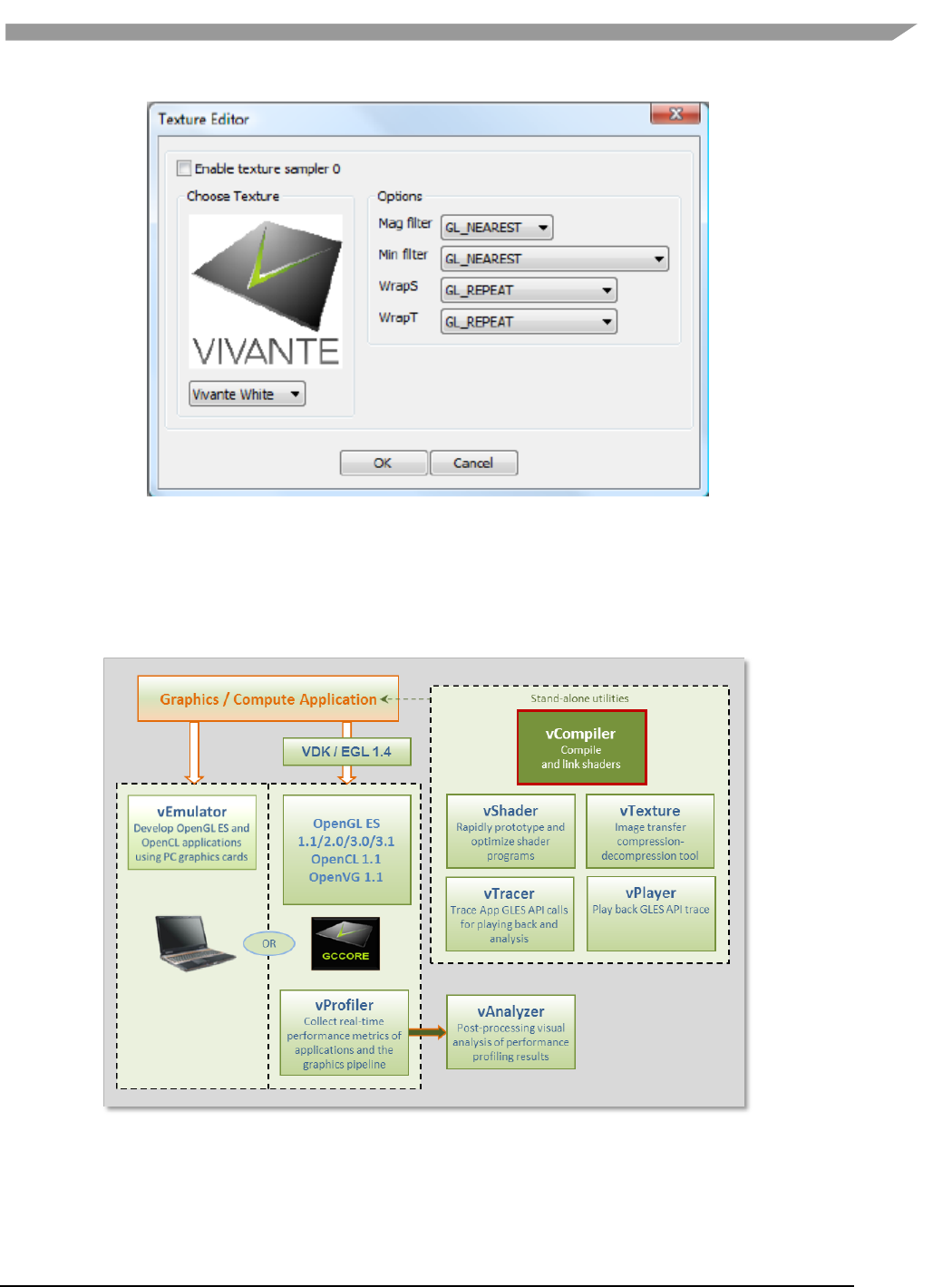
i.MX Graphics User’s Guide, Rev. 0, 02/2018
103 NXP Semiconductors
Figure 40 Textures
12.4 vCompiler
vCompiler is an off-line compiler and linker for translating vertex and fragment shaders written in OpenGL ES
Shading Language (ESSL) into binary executables targeting Vivante accelerated hardware platforms. vCompiler is
driven by a simple command-line interface.
Figure 41 vCompiler compiler/linker

i.MX Graphics User’s Guide, Rev. 0, 02/2018
104 NXP Semiconductors
12.4.1 vCompiler command line syntax
12.4.1.1 Syntax:
Optional inputs are indicated by italic font.
vCompiler [-c] [-h] [-l] [-On] [-v] [-x <shaderType>] [-o <outputFileName>]
<shaderInputFileName> <shaderInputFileName_2>
12.4.1.2 Input parameters (required):
shaderInputFileName
shader input file name, which must contain one of the following
file extensions:
vert
vertex shader source file
frag
fragment shader source file
vgcSL
previously compiled vertex shader input/output
file
pgcSL
previously compiled pixel shader input/output file
12.4.1.3 Input parameters (optional):
shaderInputFileName_2 up to two shader files can be specified. The second shader file is
optional but must have one of the file extensions described above for
shader InputFileName. If the first shader is a vertex shader, this
second shader should be a fragment shader; conversely if the first
shader is a fragment shader, the second should be a pixel shader.
Note: pre-compiled and compiled shaders may be mixed, as long as
one is a vertex shader and the other a fragment shader.
-c Compile each vertex .vert file into a vgcSL file and/or fragment shader
.frag file into a pgcSL only, with no merged result file of type .gcPGM.
If the –c option is not specified:
a)When only one shader is specified, that shader is compiled into a
.[v/p]gcSL file.
b) When two shaders are specified, one is assumed to be a vertex
shader and the other a fragment shader. Each shader can be
either a previously compiled .vgcSL or .pgcSL. file or a .vert or .frag
still to be compiled. The two are merged into a .gcPGM file after
successful compilation.
-f <gpuConfigurationFile> Specifies a configuration file (from VTK 1.6.2). If –f is not specified, the
file viv_gpu.config in the vCompiler working directory is used as
the default configuration file. Example syntax:
vCompiler –f viv_gpu_880.config foo.vert bar.frag
Note: vCompiler does not work correctly if the GPU
configuration file cannot be found or contains incorrect
content. See Section on vCompiler Core-specific configuration
for .config file content organization.
-h Shows a help message on all the command options.

i.MX Graphics User’s Guide, Rev. 0, 02/2018
105 NXP Semiconductors
-l Create a log file. The log file name is created by taking the first input
file name, then replacing its file extension with “.log”. If the input file
name does not have a file extension, .log is appended, e.g.,
myvert.vert => myvert.log
inputfrag => inputfrag.log
-o <outputFileName> Specify the output file name. If the path is other than the current
directory, it must also be specified. Any extension can be specified. If
the extension is not specified, the following are
outputFileName supported default types:
vgcSL compiled vertex shader output file, usually compiled
from a .vert input source file (default result for single
file compile)
pgcSL compiled pixel shader output file, usually compiled
from a .frag source input file.
gcPGM compiled file merging vertex shader and
fragment/pixel shader into a single output file
-On Optimization level. Default is –O1:
-O0 Disable optimizations
-O1- -O9 Indicates on which level optimization should be done.
The default is level 1. Note: Optimization is actually
implemented in the compiler, not vCompiler.
-s Deprecated from 5.0.11_p5; instead, use file viv_gpu.config in the
vCompiler work directory contains GPU core-specific configuration
detail.
-v Verbose; prints compiler version and diagnostic messages to STDOUT.
-x<shaderType> Explicitly specifies the type of shader instead of relying on the file
extension. This option applies to all following input files until the next
-x option.
ShaderType: supported values for Shader type include:
vert vertex shader source file
frag fragment shader source file
vgcSL compiled vertex shader input/output file
pgcSL compiled pixel shader input/output file
-x none revert back to recognizing shader type according to the file name
extension.
12.4.1.4 vCompiler output
Output files are placed in the current directory, unless another directory is specified with the –o option. The files
can be of the three types described above under outputFileName value of the –o option.

i.MX Graphics User’s Guide, Rev. 0, 02/2018
106 NXP Semiconductors
12.4.1.5 vCompiler syntax examples
vCompiler foo.vert
produces foo.vgcSL
vCompiler bar.frag
produces bar.pgcSL
vCompiler foo.vert bar.frag
produces foo.gcPGM
vCompiler -v -l -O1 foo.vert bar.frag
produces foo.gcPMG and foo.log
vCompiler -v -l -O1 -o foo_bar foo.vert bar.frag
produces foo_bar.gcPGM and foo_bar.log
12.4.2 vCompiler core-specific configuration
To ensure the shader binaries generated by vCompiler work correctly and optimally on the specified GPU, specify
the GPU before starting to run vCompiler.
There are two or more configuration files (available in VTK 1.6.1) in the vCompiler installation directory. For
example:
viv_gpu.config configuration file for GC2000-5108a (default)
viv_gpu_880.config configuration file for GC880-5106
To change the GPU configuration, rename the GPU file to viv_gpu.config. For example, on a Linux OS platform,
use the following commands:
mv viv_gpu.config viv_gpu_2100.config
mv viv_gpu_880.config viv_gpu.config
Keep in mind that the content of these files should not be modified, and the viv_gpu.config file must be in the
vCompiler work directory. If customization is required, note that the format for the file contents is fixed and only
the value for each parameter may be changed.
Here is the default viv_gpu.config file:
chipModel = 0x2000;
chipRevision = 0x5108;
chipFeatures = 0xE0296CAD;
chipMinorFeatures = 0xC9799EFF;
chipMinorFeatures1 = 0x2EFBF2D9;
chipMinorFeatures2 = 0x00000000;
chipMinorFeatures3 = 0x00000000;
chipMinorFeatures4 = 0x00000000;
chipMinorFeatures5 = 0x00000000;
chipMinorFeatures6 = 0x00000000;
pixelPipes = 2;
streamCount = 8;
registerMax = 64;
threadCount = 1024;
shaderCoreCount = 4;
vertexCacheSize = 16;
vertexOutputBufferSize = 512;
instructionCount = 512;
numConstants = 168;
bufferSize = 0;
varyingsCount = 11;
superTileMode = 1;
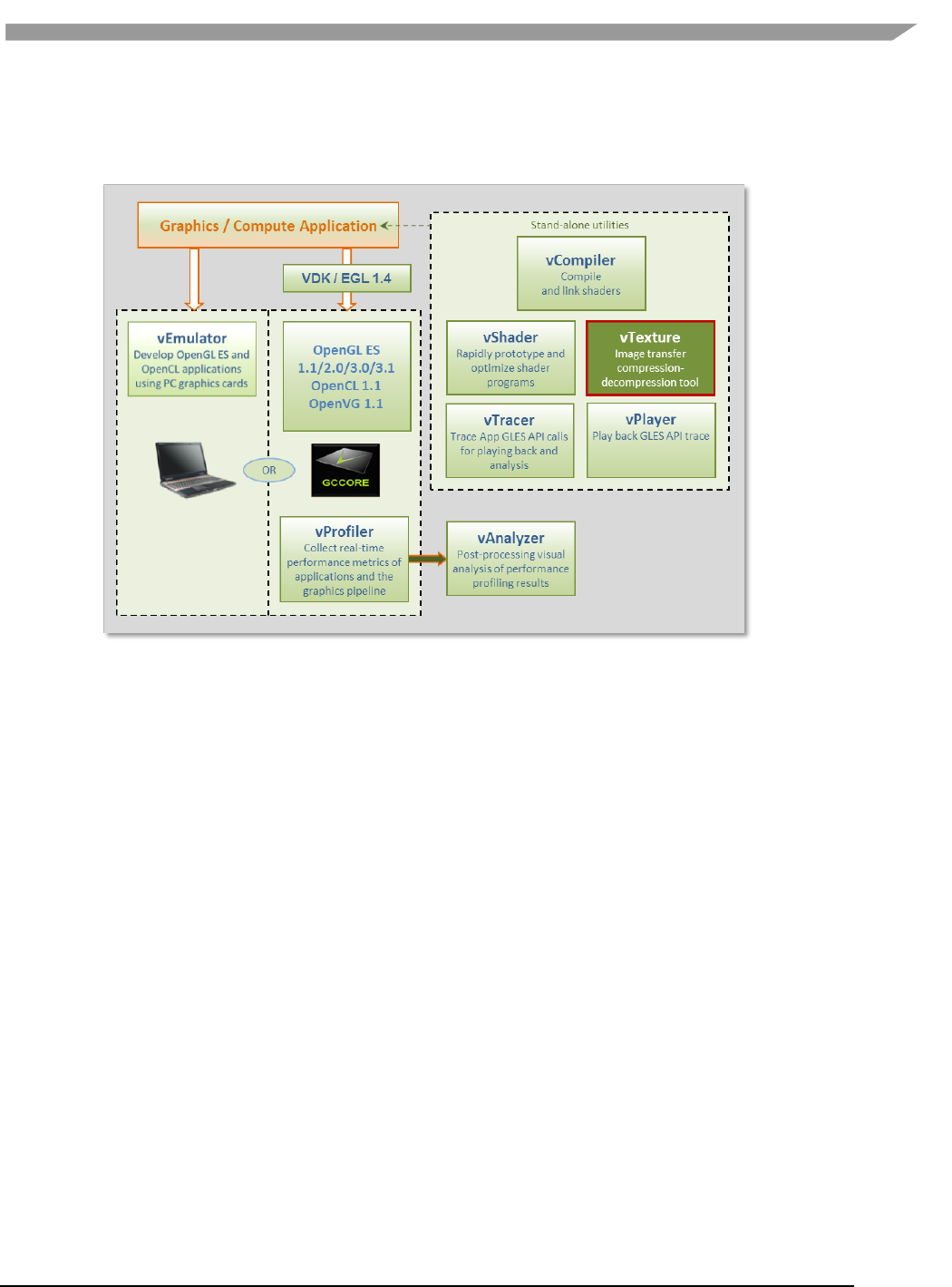
i.MX Graphics User’s Guide, Rev. 0, 02/2018
107 NXP Semiconductors
12.5 vTexture
The Vivante vTexture tool is a command line tool which provides compression and decompression functions to
help developers transfer image formats.
Figure 42 vTexture Image Transfer Tool
12.5.1 Formats
12.5.1.1 Supported formats
The vTexture tool supports:
• compression of uncompressed TGA format files to any of the following formats:
o DXT1
o DXT3
o DXT5
o ETC1
o ETC2
• decompression to uncompressed TGA format of the following compressed format file types:
o DXT1
o DXT3
o DXT5
o ETC1
o ETC2
The compressed DXTn format image file is stored as a DDS file, and the ETCn format image is stored as a PKM or
KTX file.
The TGA format either the RGBA or RGB color model and ETCn format provides an image following the RGB color
model RGB888. Note that compressing a TGA image of RGBA format to an ETCn format results in a loss of alpha
values.
i.MX Graphics User’s Guide, Rev. 0, 02/2018
108 NXP Semiconductors
12.5.1.2 Supported formats for tile and de-tile conversions
vTexture supports conversions between linear textures and the tile configurations supported in Vivante hardware:
• Linear no tiling
• Tile 4x4 tile
• Supertile 64x64 tile
The following two tile configurations are supported by some hardware, but not routinely utilized in Vivante
software:
• Multi-tile A split-tile (possible, but rarely used).
• Multi-supertile A split or multi-supertile surface can occur with GC2000 and above, where,
each pixel engine of the multi-pipe renders into a different render buffer and
each render buffer is supertiled.
Formats supported for tile format conversions include the following:
• source data
o BMP
o TGA
• output data
o BMP
o raw data of a specified type. Supported formats are: RGBA8888 BGRA8888 RGB888
BGR888 RGB565 BGR565 ARGB1555
12.5.1.3 vTexture output formats
Output from the compress option:
• DXTn format image file is stored as a DDS file,
• ETC1 and ETC2 format images is stored as a PKM or KTM file.
Output from the decompress option:
• all supported formats are decompressed to an uncompressed TGA file.
Output from tile / de-tile options:
• BMP if –r not specified
• RAW if –r specified.
12.5.1.4 vTexture RAW output file format definition
The Vivante vTexture Tools RAW file is a Vivante-defined file. The file extension is .RAW.
The format consists of the following:
Table 25. Vivante RAW file header and pixel data definition
Vivante RAW File Header
and Pixel Data Definition
Size
16 bytes
Data type
Detail
Width in pixels
4 bytes
INT
Number of pixels
Height in pixels
4 bytes
INT
Number of pixels
Pixel format
4 bytes
INT
Integer value of numeric for a
supported format, as defined in
gceSURF_FORMAT enumeration:
Supported Format
Numeric
ARGB_1555
208
RGB_565
209
BGR_888
210
i.MX Graphics User’s Guide, Rev. 0, 02/2018
109 NXP Semiconductors
BGRX_8888
211
BGRA_8888
212
BGR_565
302
RGB_888
303
RGBX_8888
305
RGBA_8888
306
These value can also be found in
samples(Named TiledTexture).
Tile format
1 byte
BOOL
bit 0: tile
bit 1 supertile
bit 5: flag for multi-
other bits reserved
Supertile format
1 byte
INT
Integer value:
0 = supertile layout mode 0
1 = supertile layout mode 1
2 = supertile layout mode 2
Reserved
2 bytes
not used
12.5.2 Set vTexture environment variable
The following table summarizes the only environment variable that vTexture currently expects.
Table 26. vTexture Environment Variables
Environment Variable
Description
PATH
set PATH=%PATH%;"C:\Program Files\Vivante\vTexture\"
12.5.3 Command line syntax
Open a Command prompt.
Navigate to the folder which contains the vTexture files (for example, C:\Program Files (x86)\Vivante\vTexture).
Launch the vTexture or vTextureTools application using the command line syntax described below.
12.5.4 Syntax
The usage of the command line tool is as follows for compression/decompression:
vTextureTools -c TYPE [-s SPEED] –src FILE [–dest FILE]
or
vTextureTools -d TYPE –src FILE [–dest FILE]
The usage of the command line tool is as follows for tiling/de-tiling:
vTextureTools -t|-st [-2 [–r|--raw=FORMAT] –m LAYOUT] –src FILE [–dest FILE]
or
vTextureTools -dt -t|-st [-2 [–r|--raw=FORMAT] –m LAYOUT] –src FILE [–dest FILE]
12.5.4.1 General Parameters
General parameters:
-h
show help
-src [FILE]
source file - input image path and filename.
Note:
for option –c compress, the application expects an input filename with a .TGA
extension;
for –d decompression the application expects .DDS, .KTX or .PKM ;

i.MX Graphics User’s Guide, Rev. 0, 02/2018
110 NXP Semiconductors
for –t tile the application expects .BMP or .TGA;
for –dt detile the application expects .BMP or .TGA
-dest [FILE]
destination file - image path and filename.
Note: the application expects a filename with a .TGA, .DDS, .KTX or .PKM
extension for compress/uncompress or .BMP or .RAW for tile/detile.
If the -dest parameter is not set, vTexture automatically generates a name for
the newly generated file, using the source file name as the prefix appending
critical parameters and file type information.
12.5.4.2 Compression/Decompression parameters
These parameters are used for compression and decompression:
-c
compress a source image of format uncompressed TGA
[TYPE] specify the target output compression format:
-DXT1
compress image to DXT1 format (default format).
-DXT3
compress image to DXT3 format.
-DXT5
compress image to DXT5 format.
-ETC1
compress image to ETC1 format.
-ETC2
compress image to ETC2 format .
-d
decompress a source image of format specified by the value [TYPE].
The resulting file type is uncompressed TGA.
This option decompresses DXT1, DXT3, DXT5, ECT1 or ETC2 format image to TGA
format.
Note: [TYPE] supported tga. namely, we can only use -d tga
-s
compression [SPEED] mode for ETCn images:
slow
medium
fast (default)
12.5.4.3 Tile/De-Tile parameters
These parameters are used for tiling and de-tiling between linear and tiled formats:
-t
Convert linear data to tiled texture output
-st
Enable supertile format. This option is an alternate to –t. If –st and –t are
used together, -st is set.
-dt
De-tile: Convert tiled texture to linear texture output
-2
Tile/de-tile in multi- format. Tile format is multi-tiled (when used with –t) or
multi-supertiled (with –st).
-m
[LAYOUT]: layout mode for supertiled or multi-supertiled textures:
0: Legacy supertile mode (default).
1: Supertile mode when hardware has HZ.
2: Supertile mode when hardware has NEW_HZ or FAST_MSAA.
-r
Specify output data as raw pixel output instead of BMP.
Use: --raw=rgb565 to specify raw pixel [FORMAT]. Supported raw formats
(7) are:
i.MX Graphics User’s Guide, Rev. 0, 02/2018
111 NXP Semiconductors
rgba8888, bgra8888, rgb888, bgr888, rgb565, bgr565, argb1555.
12.5.4.4 vTexture syntax examples
COMPRESS:
vTextureTools -c dxt1 -src d:\myfile.tga -dest c:\compress.dds
vTextureTools -c etc2 -src d:\myfile.tga -dest c:\compress.pkm
vTextureTools -c etc2 -src d:\myfile.tga -dest c:\compress.ktx
vTextureTools -c etc1 -s slow -src d:\myfile.tga -dest c:\compress.pkm
vTextureTools -c etc2 -s slow -src d:\myfile.tga -dest c:\compress.ktx
DECOMPRESS:
vTextureTools -d etc1–srcC:/vtexin/myfile2.pkm –dest C:/vtextout/myfile2.tga
vTextureTools -d –srcC:/vtexin/myfile3.dds –dest C:/vtextout/myfile3.tga (assumes DXT1)
vTextureTools -d tga -src d:\myfile.dds -dest c:\decompress.tga
vTextureTools–dtga -src d:\myfile.ktx -dest c:\decompress.tga
TILE: LINEAR TO TILE CONVERSION:
Tile linear texture to standard tile texture
vTextureTools.exe -t -src 123.bmp
Tile linear texture to multi-tiled texture
vTextureTools.exe -t -2 -src 123.bmp
Tile linear texture to supertiled texture
vTextureTools.exe -st -src 123.bmp
Tile linear texture to multi-supertiled texture
vTextureTools.exe -2 –st-src 123.bmp
Tile linear texture to multi-supertiled texture and output rgb565
vTextureTools.exe -2 --raw=rgb565 -src 123.bmp
Tile linear texture to multi-supertiled texture with layout mode 2
vTextureTools.exe -st -2 -m 2 -src 123.bmp
DE-TILE: TILED TO LINEAR CONVERSION:
De-tile tiled texture to linear texture
vTextureTools.exe –dt -t -src 123-tiled.bmp
De-tile supertiled texture to linear texture
vTextureTools.exe -dt -st -src 123-supertiled.bmp
De-tile multi-supertiled texture to linear texture
vTextureTools.exe –dt -t -2 -src 123-tiled-multi-tiled.bmp
De-tile multi-Super-tiled texture with layout mode 2 to linear texture
vTextureTools.exe -dt -st -2 -m 2 -src 123-multi-supertiled-2.bmp
12.6 vProfiler and vAnalyzer
vProfiler is a run-time environment for collecting performance statistics of an application and the graphics pipeline.
vAnalyzer is a utility for graphically displaying the data gathered by vProfiler and aiding in visual analysis of
graphics performance. Used together, these tools can assist software developers in optimizing application
performance on Vivante enabled platforms. The GPU includes performance counters that track a variety of GPU
functions. vProfiler gathers data from these counters during runtime and can track data for a range of frames or a
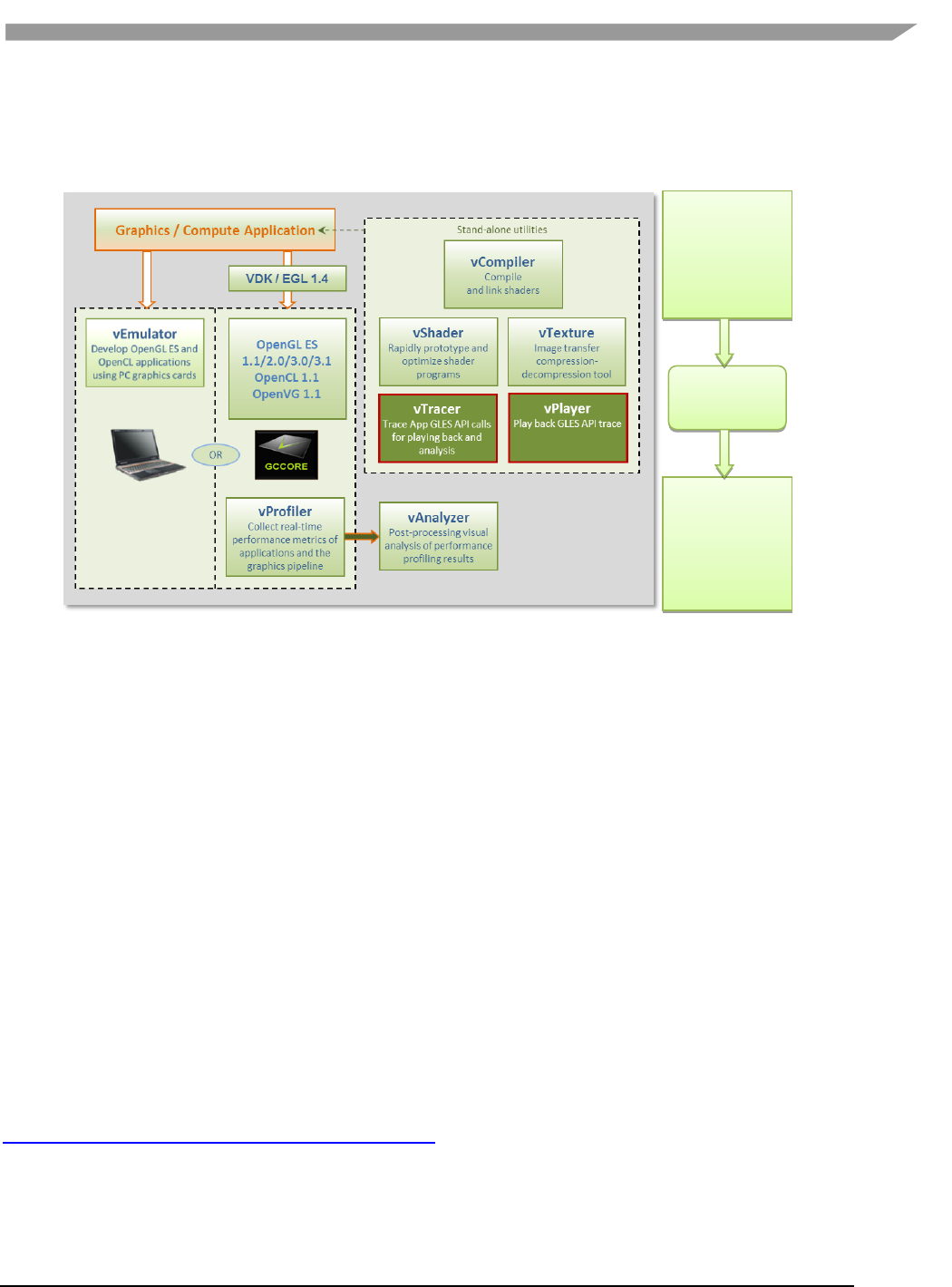
i.MX Graphics User’s Guide, Rev. 0, 02/2018
112 NXP Semiconductors
single frame from any application. Appendix A contains a partial list of the data gathered by the hardware
performance counters. Additional counters are present in the software drivers and hardware access layer.
Figure 43 vProfiler performance profiling save data for review in the vAnalyzer visual analyzer
12.6.1 Fundamentals of performance optimization
Whenever an application runs on a computer, it makes use of one or more of the available resources. These
compute resources include the CPU, the graphics processor, caches and memory, hard disks, and possibly even the
network. Viewed simplistically, it is always true that one of these resources is the limiting factor in how quickly the
application can finish its tasks. This limiting resource is the performance bottleneck. Remove this bottleneck, and
application performance should be improved. Note, however, that removing one limiting factor always promotes
something else to become the new performance bottleneck.
The goal of optimizing, or tuning, application performance is to balance the use of resources so that none of them
holds back the application more than any of the others. In practice there is no single, simple way to tune an
application. The whole system needs to be considered, including the size and speed of individual components as
well as interactions and dependencies among components.
vProfiler collects information on GPU usage and on calls to Vivante functions within the graphics pipeline. As such
it provides an excellent view into what is happening on the GCCORE graphics processor at any point in time, down
to the individual frame. When the application performance is GPU-bound, vProfiler and vAnalyzer are the right
tools to help determine why.
Note that the initial determination regarding which component of the computer system is the performance
bottleneck—CPU, GPU, memory, etc.—is the domain of system performance analyzers and is outside the scope of
the GPU tools. A list of such performance analysis tools can be found at Wikipedia:
en.wikipedia.org/wiki/List_of_performance_analysis_tools.
VAnalyze
r
Post-processing
visual analysis of
performance
profiling results
VProfiler
Collect real-time
performance
metrics of
applications and
the graphics
pipeline
vprofil
er.vpd
vProfiler
data file
i.MX Graphics User’s Guide, Rev. 0, 02/2018
113 NXP Semiconductors
12.6.2 vProfiler setup for the Linux OS
The VTK Windows OS package includes vAnalyzer for the Windows OS environment. The vProfiler tool can be
compiled for the Linux OS, as per the instructions below.
vProfiler stores software and hardware counters captured per frame in the vprofiler.vpd file. vAnalyzer reads
the .vpd file and allows the user to browse all counters, visualize application performance bottlenecks, and
measure system utilization of that application run. Presently, vProfiler does not store frame buffer images due to
excessive overhead that changes the behavior of applications.
12.6.2.1 Enable vProfiler option in kernel
When building Vivante Graphics Drivers in a Linux OS environment, the driver is built with vProfiler capability.
To activate vProfiler functionality, build the drivers per the instructions in Section “How to Build the GCCORE
Drivers for the Linux OS” in the Vivante Driver Development Guide.In Step 3 of the subsection “Run on the target
board” where insmod is used to insert the GAL kernel driver, use the command line to add the gpuProfiler=1
option, or add the option into an existing .sh script similar to the following:
#!/system/bin/sh
#
insmod /system/lib/modules/galcore.ko gpuProfiler=1 [OPTIONS]
chmod 777 /dev/graphics/*
12.6.2.2 Enable vProfiler option in U-Boot
vProfiler can also be enabled from U-Boot with kernel command parameters. Minimum Linux kernel version 3.10.y
needs to support this galcore.powerManagement=0 galcore.showArgs=1 galcore.gpuProfiler=1.
12.6.2.3 Set vProfiler environment variables
The following table summarizes the environment variables that vProfiler supports. (Note that environment
variable names for the Linux OS were changed from driver releases 4.6.9.p13 and 5.0.7 and toolkit release 1.5.)
Table 27. vProfiler Environment Variables for the Linux OS
Environment Variable
Description
VIV_PROFILE
[0] Disable vProfiler (default), [1] Enable vProfiler,[2] Control via application call, [3]
Allows control over which frames to profile with vProfiler
VP_OUTPUT
Specify the output file name of vProfiler (default is vprofiler.vpd)
VP_FRAME_NUM
When VIV_PROFILE=1, specify the number of frames dumped by vProfiler.
VP_FRAME_START
When VIV_PROFILE=3, specify the frame to start profiling with vProfiler.
VP_FRAME_END
When VIV_PROFILE=3, specify the frame to end profiling with vProfiler.
VP_SYNC_MODE
Enable [1] or disable [0] the synchronous mode of vProfiler (default is synchronous
enabled)
12.6.2.3.1 VIV_PROFILE
The environment variable VIV_PROFILE can be used to control enable /disable and set profiling modes for vProfiler.
VIV_PROFILE=0:
By default, vProfiler is disabled in the driver. If vProfiler has been enabled and to disable it,set
VIV_PROFILE equal to 0:
export VIV_PROFILE=0
i.MX Graphics User’s Guide, Rev. 0, 02/2018
114 NXP Semiconductors
VIV_PROFILE=1:
To enable vProfiler, set VIV_PROFILE to 1:
export VIV_PROFILE=1
To limit the number of frames to analyze, use the environment variable VP_FRAME_NUM. (This
option is available only when VIV_PROFILE=1.) For example, this example setting makes
vProfiler dump performance data for the first 100 frames.
export VP_FRAME_NUM=100
VIV_PROFILE=2:
Mode VIV_PROFILE=2 (available from VTK 1.5.7) provides support for
glEnable(GL_PROFILE_VIV) and glDisable(GL_PROFILE_VIV), which are used to
choose which frames are to be profiled. In this mode, vProfiler is disabled by default. It begins to
do profiling only after a glEnable(GL_PROFILE_VIV) call from the application. And it stops
profiling when glDisable(GL_PROFILE_VIV) is called. Note that the flag is only checked at every
frame end, i.e., in eglSwapBuffers. To use this mode, set VIV_PROFILE to 2:
export VIV_PROFILE=2
VIV_PROFILE=3:
Setting VIV_PROFILE to 3 (available from VTK 1.5.8) provides support for two environment
variables VP_FRAME_START and VP_FRAME_END, which are used to choose which frames are
to be profiled. In this mode, vProfiler is disabled by default. It begins to do profiling starting at
the frame number specified by VP_FRAME_START, and it ends the profiling after the frame
number specified by VP_FRAME_END. For example to use this mode, set VIV_PROFILE to 3:
export VIV_PROFILE=3
export VP_FRAME_START=10
export VP_FRAME_END=90
NOTE: The GPU profiling mode requires the GPU Power Management (PM) functions to be disabled to get the
precise profiling data. When kernel module “galcore” is inserted with gpuProfiler=1, the PM functions in the driver
are not disabled. The PM functions are disabled when VIV_PROFILE is set to 1, 2, or 3, and the application starts.
The PM functions are enabled when VIV_PROFILE is set to 0, and the application starts again.
12.6.2.3.2 VP_OUTPUT
The output file of vProfiler is vprofiler.vpd by default. To specify an alternate filename use the environment
variable VP_OUTPUT. For example,
exportVP_OUTPUT =sample.vpd
12.6.2.3.3 VP_SYNC_MODE
To get accurate values from the GPU counters, vProfiler needs to commit the GPU commands at the end of every
frame; this is so-called synchronous mode. The environment variable VP_SYNC_MODE can be used to enable or
disable synchronous mode. By default, vProfiler works in synchronous mode. The command below makes vProfiler
work in asynchronous mode.
export VP_SYNC_MODE=0
12.6.3 vProfiler setup for the Android platform
The vProfiler tool can be set up for use with the Android platform, as per the instructions below.
i.MX Graphics User’s Guide, Rev. 0, 02/2018
115 NXP Semiconductors
12.6.3.1 Enable vProfiler option in kernel
When building Vivante Graphics Drivers in an Android environment, build the drivers per the instructions in the
Vivante Driver Development Guide section entitled “How to Build the GCCORE Drivers for Android Platform.” In
Step 2 of the subsection “Run on the Target board”, use the provided install-recovery.sh script or add the
gpuProfiler=1 option into the existing .sh script similar to the following:
#!/system/bin/sh
#
insmod /system/lib/modules/galcore.ko gpuProfiler=1 [OPTIONS]
chmod 777 /dev/graphics/*
Put the install-recovery.sh file in the target Android system’s /system/etc/ folder. Continue following
the instructions in the Vivante Driver Development Guide or the readme guide in the driver source package.
Use adb push to migrate the drivers to the target system, and then reboot the target Android system.
NOTE: If using an install-recovery.sh script as described above, and cannot reboot the
Android platform successfully, there may be a problem with file access permissions.
Workaround: run adb shell. Go to /system/etc/, then run the command chmod 777
install-recovery.sh.
12.6.3.2 Setting property options for vProfiler
The following table summarizes the property options that vProfiler supports through running the commands adb
shell setprop [OPTIONS]. These options are similar to the environment variables available for the Linux OS.
Table 28. vProfiler Set Property Options for Android Platform
adb shell setprop OPTIONS
Description
setprop VIV_PROFILE 0
Run this command in adb shell to disable vProfiler in the drivers
setprop VIV_PROFILE 1
Run this command in adb shell to enable vProfiler in the drivers
setprop VIV_PROFILE 2
Run this command in adb shell to have vProfiler enable/disable
controlled in the application by glEnable(GL_PROFILE_VIV) and
glDisable(GL_PROFILE_VIV calls. (available from VTK 1.5.7)
setprop VIV_PROFILE 3
setprop VP_FRAME_START
setprop VP_FRAME_END
Run these commands in adb shell to have vProfiler start-stop at
frames specified in VP_FRAME_START and VP_FRAME_END.
(available from VTK 1.5.8)
setprop VP_PROCESS_NAME appname
Run this command in adb shell to specify the application to
profile. Change the app name as needed to profile another
application.
NOTES:
There may be different sub use case names used by an app. Be sure
to accurately specify a use case name to match the name on the
command line when using ps command.
This option is only available for the Android platform, not available
for the Linux OS.
setprop VP_OUTPUT newpath
Run this command in adb shell to specify a new location for
vProfiler output.
By default, the vpd file is created under /sdcard/. If an application
has no access to the SD card, specify another path where the
application does have write permission.
NOTE: For applications which initialize during Android system boot
i.MX Graphics User’s Guide, Rev. 0, 02/2018
116 NXP Semiconductors
startup, such as launcher, kill the process after you change to a new
path. When the application automatically restarts, then the vpd is
accessible in a desired location.
setprop VP_FRAME_NUM xxx
Run this command in adb shell to limit the number of frames to
analyze. For example, to make vProfiler dump performance data for
the first 100 frames: setprop VP_FRAME_NUM 100
NOTES:
Only use when VIV_PROFILER is set to 1.
When this option is not used, the profile file generated when running
an application for a long time can be very large. This takes up a large
amount of disk space and also makes it hard to view the data in
vAnalyzer.
setprop VP_SYNC_MODE 0
setprop VP_SYNC_MODE 1
Run this command in adb shell to enable or disable synchronous
mode. By default, vProfiler works in synchronous mode (=1). To get
accurate values from the GPU counters, vProfiler needs to commit
the GPU commands at the end of every frame; this is so-called
synchronous mode. This example command makes vProfiler work in
asynchronous mode: setpropVP_SYNC_MODE0
12.6.4 vProfiler setup for the QNX OS
The vProfiler tool can be set up to use with the QNX platform according to the instructions below.
12.6.4.1 Enable vProfiler option
When building the Vivante Graphics Drivers for QNX environment, build the driver with the vProfiler capability.
The graphics.conf file contains the configuration information for Screen and is found under the following directory:
SCREEN-DIR/usr/lib/graphics/TARGET-SPECIFIC
To activate the vProfiler functionality, add the gpu-gpuProfiler=1 option into the khronos section of the
corresponding graphics.conf file:
begin khronos
...
begin wfd device 1
...
gpu-gpuProfiler=1
...
end wfd device
...
end khronos
When the QNX Screen graphic subsystem is started, it reads this option from the config file and enables the
vProfiler function.
12.6.4.2 Setting property options for vProfiler
The following table summarizes the property options that vProfiler supports by setting environment variables.
These options are similar to the environment variables available for the Linux OS.
Table 29. vProfiler Set Property Options for Android Platform
Environment Variable
Description
export VIV_PROFILE=0
Set VIV_PROFILE to 0 to disable vProfiler in the drivers
i.MX Graphics User’s Guide, Rev. 0, 02/2018
117 NXP Semiconductors
export VIV_PROFILE=1
export VP_FRAME_NUM=100
Set VIV_PROFILE to 1 to enable vProfiler in the drivers. Optionally set
the VP_FRAME_NUM to specify the number of frames dumped by
vProfiler.
export VIV_PROFILE=2
Set VIV_PROFILE to 2 to control the vProfiler in the application by
glEnable(GL_PROFILE_VIV) and glDisable(GL_PROFILE_VIV) calls.
(available from VTK 1.5.7)
export VIV_PROFILE=3
export VP_FRAME_START=10
export VP_FRAME_END=90
Set VIV_PROFILE to 3 to have vProfiler start-stop at frames specified
in VP_FRAME_START and VP_FRAME_END. (available from VTK
1.5.8)
export VP_OUTPUT=newpath
The output file of vProfiler is vprofiler.vpd by default. To specify an
alternate filename use the environment variable VP_OUTPUT. For
example, export VP_OUTPUT=/tmp/sample.vpd. Make sure the
directory specified has correct access rights.
export VP_SYNC_MODE=0
export VP_SYNC_MODE=1
Set VP_SYNC_MODE to enable [1] or disable [0] synchronous mode.
By default, vProfiler works in synchronous mode (=1).
export VP_USE_GLFINISH=0
export VP_USE_GLFINISH=1
Set the VP_USE_GLFINISH to enable [1] or disable [0] the use of
glFinish() instead of eglSwapBuffers() as the frame delimiter (default
is disabled).
12.6.5 vProfiler collecting performance data
vProfiler is implemented by using hardware counters and a group of instrumentations inserted into drivers that are
controlled by compilation flags.
12.6.5.1 Performance counters
vProfiler counters are divided into five sets: HAL (Vivante Graphics driver), (shader) program, OpenGL and
OpenVG. The counters provide detailed per frame runtime information about the application that can help the
developer monitor and tune an application’s resource usage. The following table briefly lists the various profile
counter sets. For further information, see Appendix A at the end of this document.
Table 30. Performance Counter Types
Counter Type
Description
HALCounters
Driver memory usage
Program
Statistics of the shaders loaded in the GPU (Note: Available only for OpenGL ES 2.0 applications.)
OGLCounters
Various OpenGL (OpenGL ES 20 or 11) counters, such as API usage and primitives drawn.
OVGCounters
Various OpenVG counters, such as API usage and primitives drawn.
12.6.6 vAnalyzer viewing and analyzing a run-time profile
vAnalyzer is a GUI-based tool whose purpose is to help the user view and analyze GPU performance data that was
collected using counters during an application run. The performance data from a binary file (*.vpd) written by
vProfiler is displayed by vAnalyzer both in text lists and as line graphs. vAnalyzer features a multi-tab, multi-pane,
graphical user interface that gives the user several ways to inspect any frame in a captured animation sequence.
12.6.6.1 Loading profile files
vAnalyzer accepts a profile for input, which is a .vpd file of performance data created by the Vivante vProfiler
during a run. For example, the saved file may have a name such as sample.vpd.
A .vpd file can be selected using the File/Load Profile Data menu option.
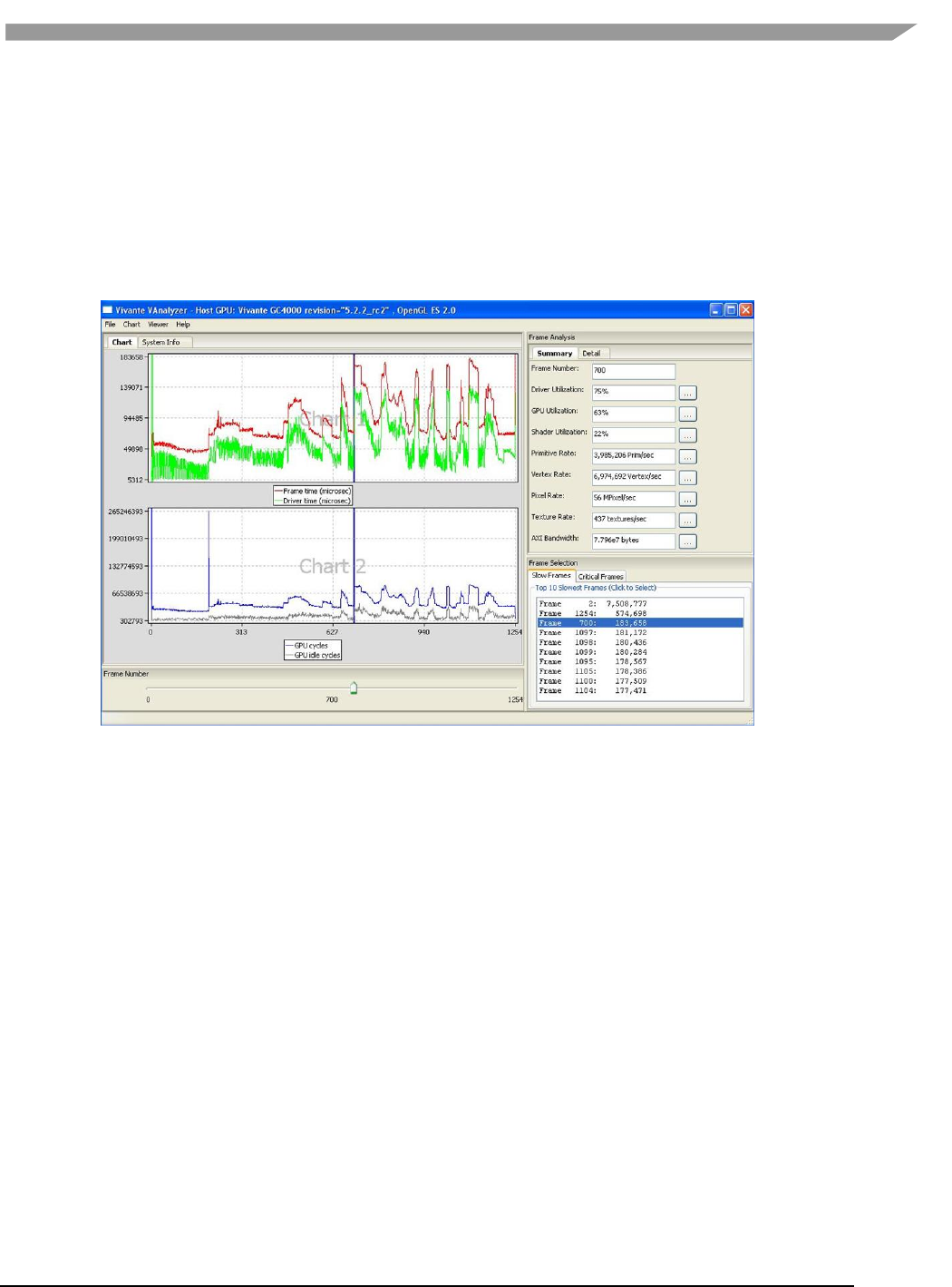
i.MX Graphics User’s Guide, Rev. 0, 02/2018
118 NXP Semiconductors
When a performance profile is loaded, vAnalyzer populates the title bar with information about the GPU and the
CPU.
The vAnalyzer screen shot below shows the vAnalyzer GUI immediately after loading a.vpd performance file, and
moving the frame number slider to frame 700. By default, the main pane of the vAnalyzer window displays the
Charts tab which provides charts for frame time, driver time and GPU idle cycles. Additional charts can be added in
the graph window by selecting from the list of variables on the right. Different combinations of counters can be
displayed in graphical and list form to illustrate resource utilization for any portion of the profiled application. A
second tab contains system information.
Figure 44 vAnalyzer GUI Main Window
12.6.6.2 vAnalyzer menu bar
The vAnalyzer main window opens when a user launches vAnalyzer. The main menu bar contains drop-down
menus for File,Chart, Viewer and Help. Menu options include the following:
File
– Load Profile Data: load a .vpd profile file
– Export Current Frame Data: dump all the counters for the frame being viewed to a .cvs file
– Exit: exit vAnalyzer
Chart
– Create chart: create a new chart
– Customize chart: add or delete counters in an existing chart
– Remove chart: delete a chart
– Export data from chart: dump the counters in a chart to a .csv file
– Save chart to png: dump the chart to a .png file
– View: zoom in, zoom out or fit the chart
Viewer
– OpenGL function call viewer: display the OpenGL function call statistics
– Program viewer: display the shader program statistics
Help
– About: gives version information for vAnalyzer
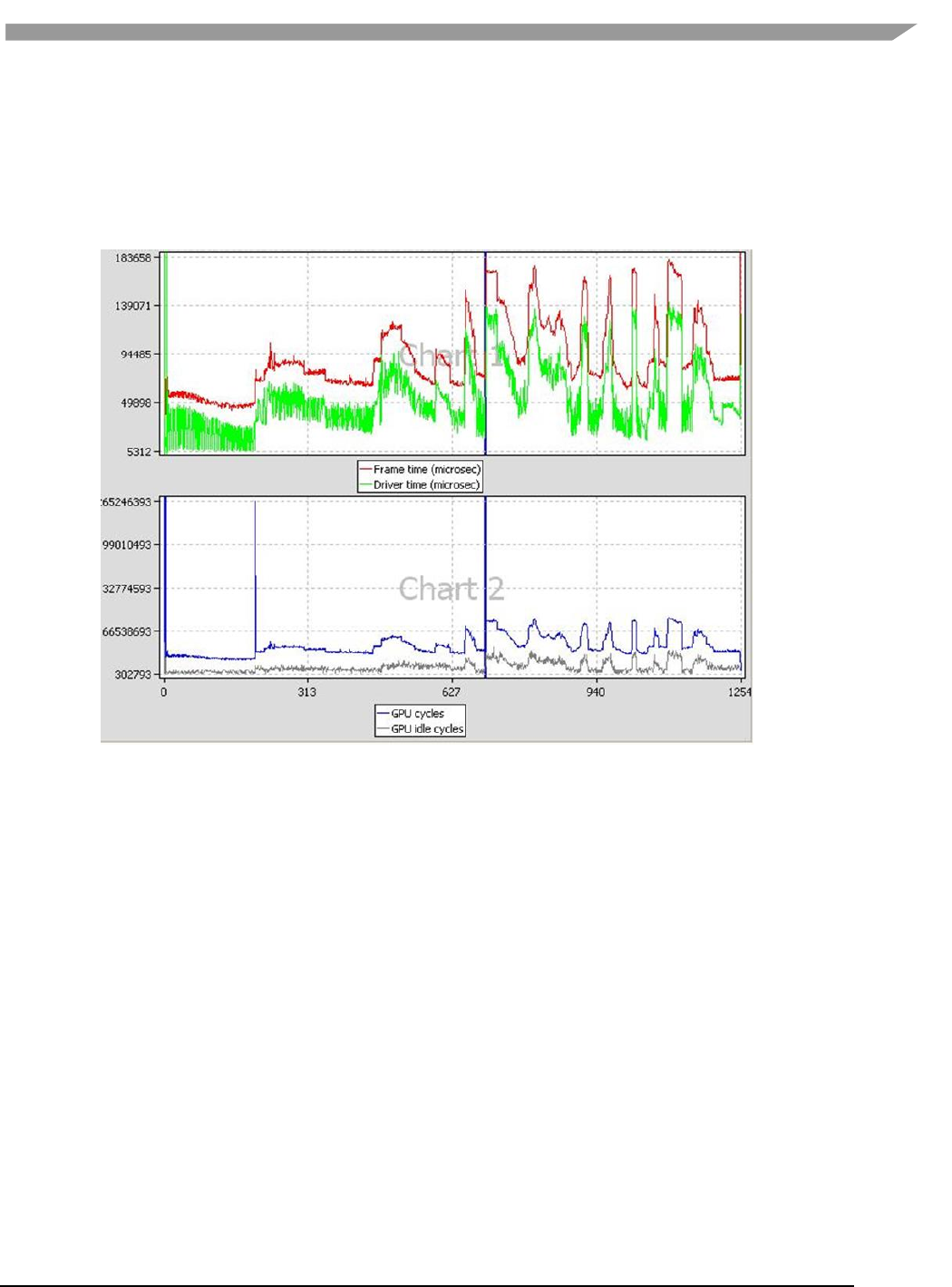
i.MX Graphics User’s Guide, Rev. 0, 02/2018
119 NXP Semiconductors
12.6.7 vAnalyzer charts
12.6.7.1 vAnalyzer upper left pane: chart tab and menu options
On the Chart tab in the vAnalyzer main window two default line graphs are displayed.
Figure 45 vAnalyzer Performance Counter Charts
12.6.7.2 Chart customization
Chart/Customize: Additional performance counters can be added to existing chart using the Customize Chart
dialog window, which can be invoked from the drop menu Chart/Customize, or from a pop-up menu, which can be
invoked by right clicking in the Chart tab area.
Create New Chart: A new chart can be added in a similar way. A single chart can display up to four (4) counters,
and the Chart pane can hold up to eight (8) charts. Thus a maximum of thirty-two (32) counters can be graphed at
the same time.
Remove Chart: Any chart can be removed from the display using the drop menu Chart/Remove Chart.
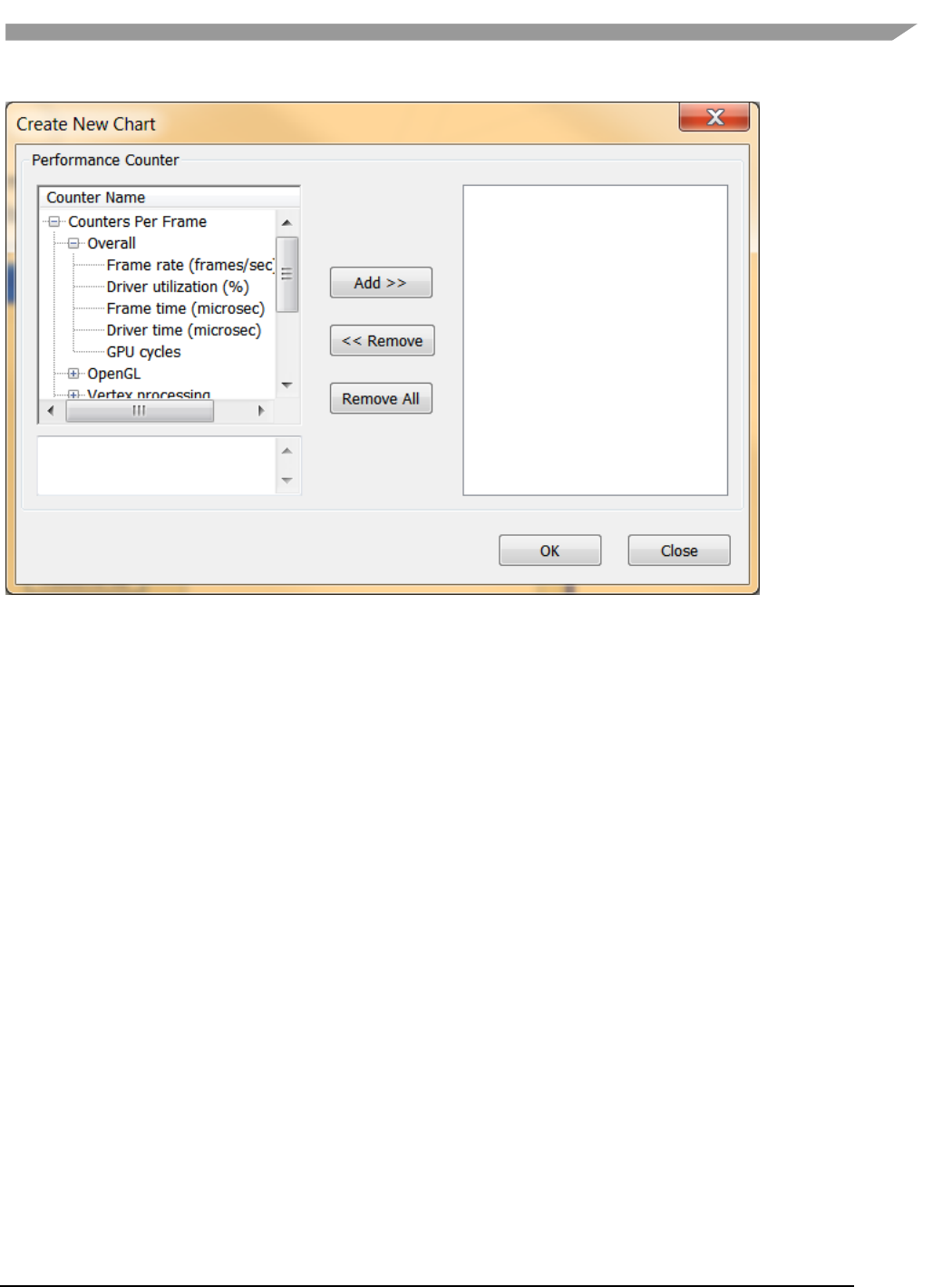
i.MX Graphics User’s Guide, Rev. 0, 02/2018
120 NXP Semiconductors
Figure 46 vAnalyzer Create New Chart Dialog
12.6.7.2.1 Chart components and navigation
Frame Marker: On the plots displayed in the chart example above there is a blue, vertical frame marker. This
marks the current frame position in the timeline.
Zoom:
Zooming in on a set of frames can be achieved in one of two ways.
• One method is to hold down the left mouse button and then sweep a selection box across a range of frame
numbers, either on a plot itself or in the common X-axis (frame numbers) in the “Chart” pane, before releasing the
mouse button. All charts in the “Chart” pane zooms in to the same range of frames.
• Alternatively, if the mouse has a scroll wheel, zoom in by rolling the wheel forward--toward the screen.
To zoom out move the scroll wheel backward.
To reset zoom to the default, which shows the entire timeline, press the escape key (ESC) on the keyboard. The
chart view changes to include all frames, from start to end.
12.6.7.2.2 Data export
The performance counters in a chart can be dumped to a .csv file by selecting from the dropdown menu Chart /
Export Data From. The .csv file can be viewed using Excel or another text viewer.
The chart can also be dumped to a .png file by selecting from the main menu Chart / Save chart to PNG.
12.6.7.3 vAnalyzer lower left pane: frame number slider bar
In the lower left pane of the vAnalyzer window, there is a Frame Number gauge in the form of a slider bar.
Numbers at each end of the bar indicate the initial frame (0) and the last frame available in the loaded sample. By
left-clicking and holding the slider, the user can change which frame is selected for analysis. When the frame
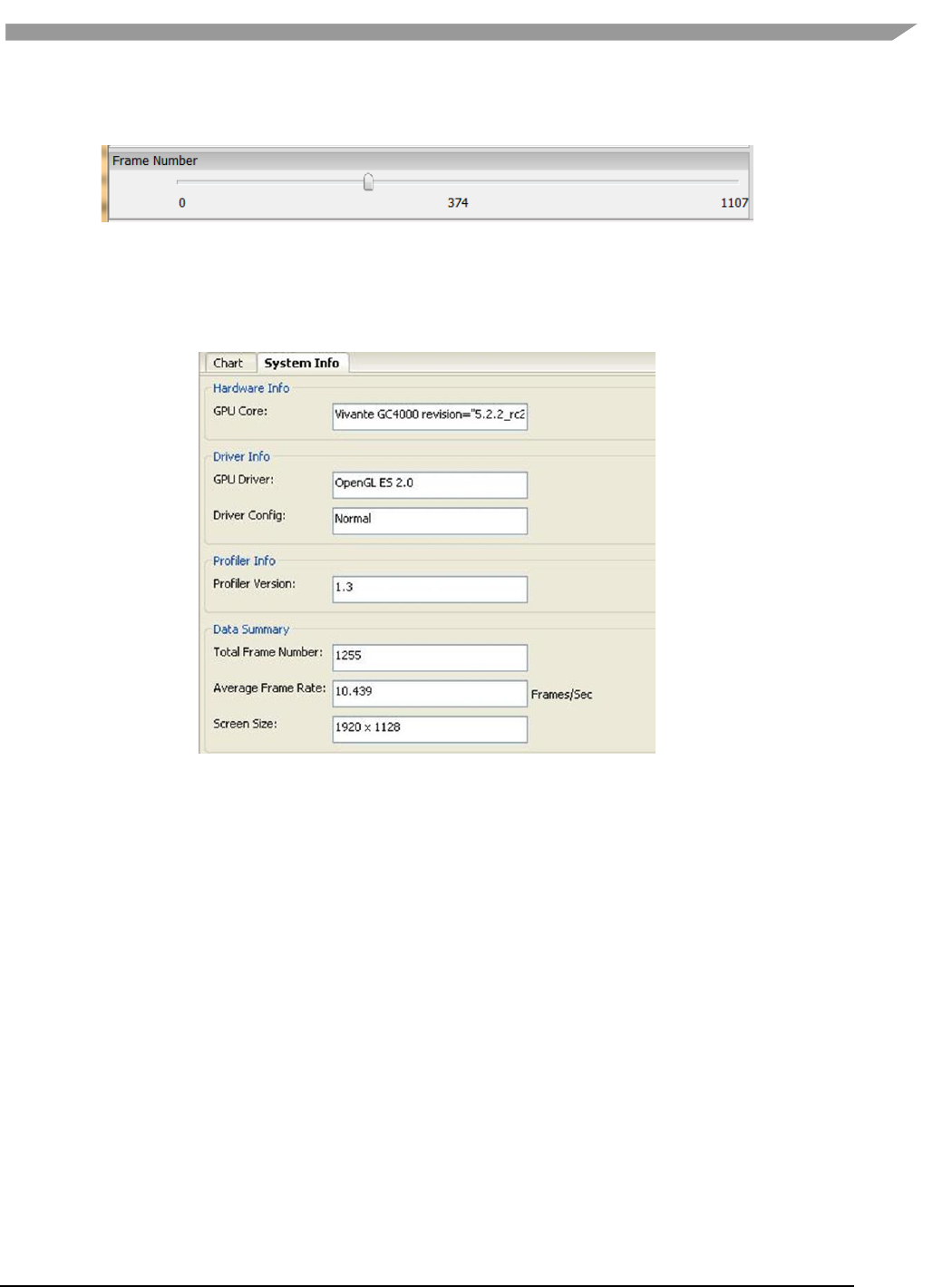
i.MX Graphics User’s Guide, Rev. 0, 02/2018
121 NXP Semiconductors
number is changed, the blue vertical line which indicates the current frame is moved, and the reported Frame
Number changes in the upper right pane Frame Analysis Summary.
Figure 47 vAnalyzer Frame Number Slider Bar
12.6.7.4 vAnalyzer left pane: System Info tab
When a .vpd profile is loaded, system information about the profiled machine populates the fields on the System
Info pane. Some information is repeated in the title bar of the main GUI for quick reference.
Figure 48 vAnalyzer System Info Tab
12.6.7.5 vAnalyzer upper right pane: Frame Analysis
A selection of performance counters for the frame being viewed are displayed on the right side of the vAnalyzer
main GUI. The user can convert this pane to a pop-up window by dragging the pane outside the application
window. Drag it back to the right pane area of the application window to reintegrate the pane.
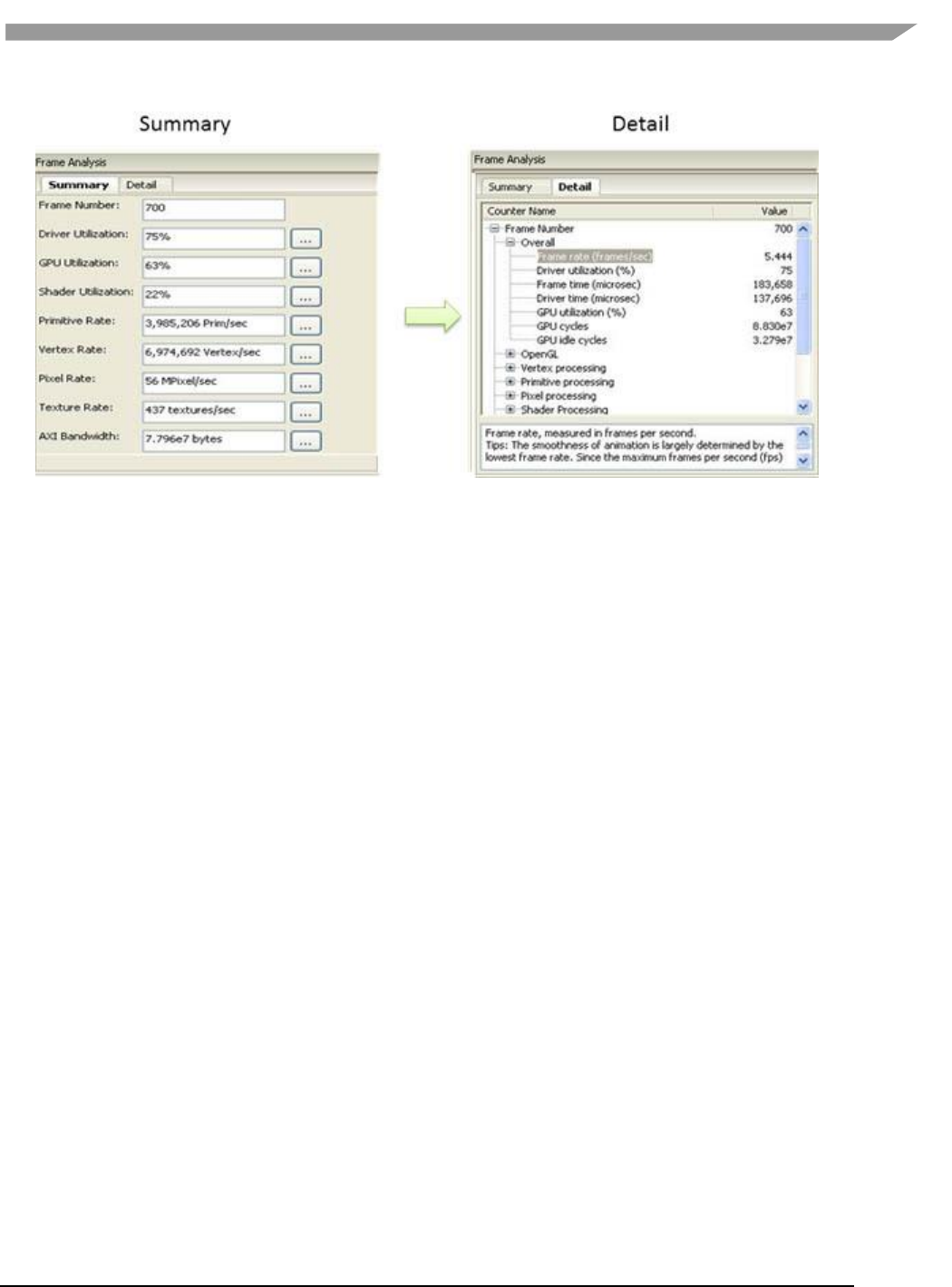
i.MX Graphics User’s Guide, Rev. 0, 02/2018
122 NXP Semiconductors
Figure 49 vAnalyzer Frame Analysis Summary and Detail Tabs
12.6.7.5.1 Summary tab
The Summary tab displays summary information for the frame being viewed.
The Selected Frame Number can be changed by entering a new frame number in the text box at the top of the list.
The user must press Enter after the input to activate the change. Then Summary values, sliders, and charts all
change to reflect the newly entered frame number.
The Summary values below frame number are not directly changeable. They change only when the frame number
is changed, either in the Summary tab, by moving the Frame Number slider, or by selecting a frame from the
Frame Selection pane. Clicking the “…” button to the right of a Summary item brings up the corresponding
counters in the Detailtab. For example, clicking the “…” button to the right ofPrimitive Rate: switches the view to
the Detail tab and expands the Primitive processingcatogory. Clicking the “…” button forDriver Utilization: brings
up the pop-p window OpenGL function call viewer.
12.6.7.5.2 Detail tab
The Detail tab reports values for overall performance evaluation, such as Frame Rate, Driver Utilization, and GPU
cycles. Additionally counter detail is accessible on this tab. The categories of available counters in the Detail
tabare: Overall, OpenGL, Vertex processing, Primitive processing, Pixel processing, Shader Processing, Texturing
and AXI Bandwidth. Appendix A lists performance as well as hardware counters.
12.6.7.6 vAnalyzer lower right pane: Frame Selection
As with the Frame Analysis pane, this pane can be dragged to display as an independent popup window.
12.6.7.6.1 Slow Frames tab
The “Slow Frames” tab lists the ten (10) slowest frames in the animation sequence, by time in ascending order
from slowest to tenth slowest.
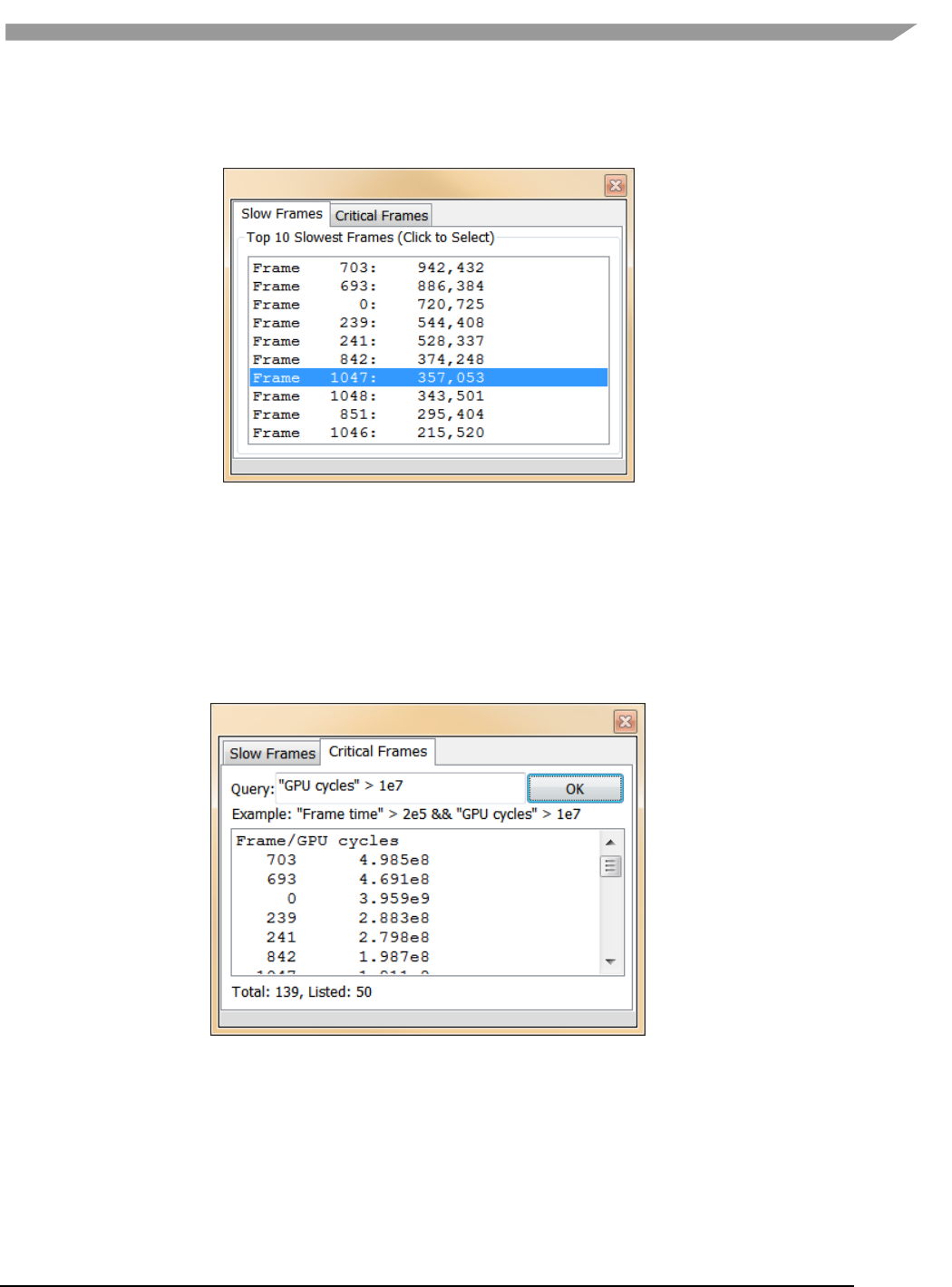
i.MX Graphics User’s Guide, Rev. 0, 02/2018
123 NXP Semiconductors
The user can left click on any entry, or can use the arrow keys to move up and down the list, and the display in
each of the other GUI panes changes to match that frame.
Figure 50 vAnalyzer Frame Selection Slow Frames Tab
12.6.7.6.2 Critical Frames tab
Select the “Critical Frames” tab to customize the criteria by which a frame is chosen for inspection. One or more of
the performance counters can be specified in building the query, which also allows for AND and OR logic.
Queries should follow a pattern such as:
“counter name” condition(‘<’,’>’,’==’) values.
Users can identify counter names from those in the Frame Analysis pane Detail tab. An example is provided just
below the Query input text box.
Figure 51 vAnalyzer Frame Selection Critical Frames Tab
12.6.8 vAnalyzer viewers
The Viewer information pop-up window can be launched by selecting Viewer/Function Call Viewer or
Viewer/Program Viewer from the Main menu. The selected Viewer appears in a pop-up window.
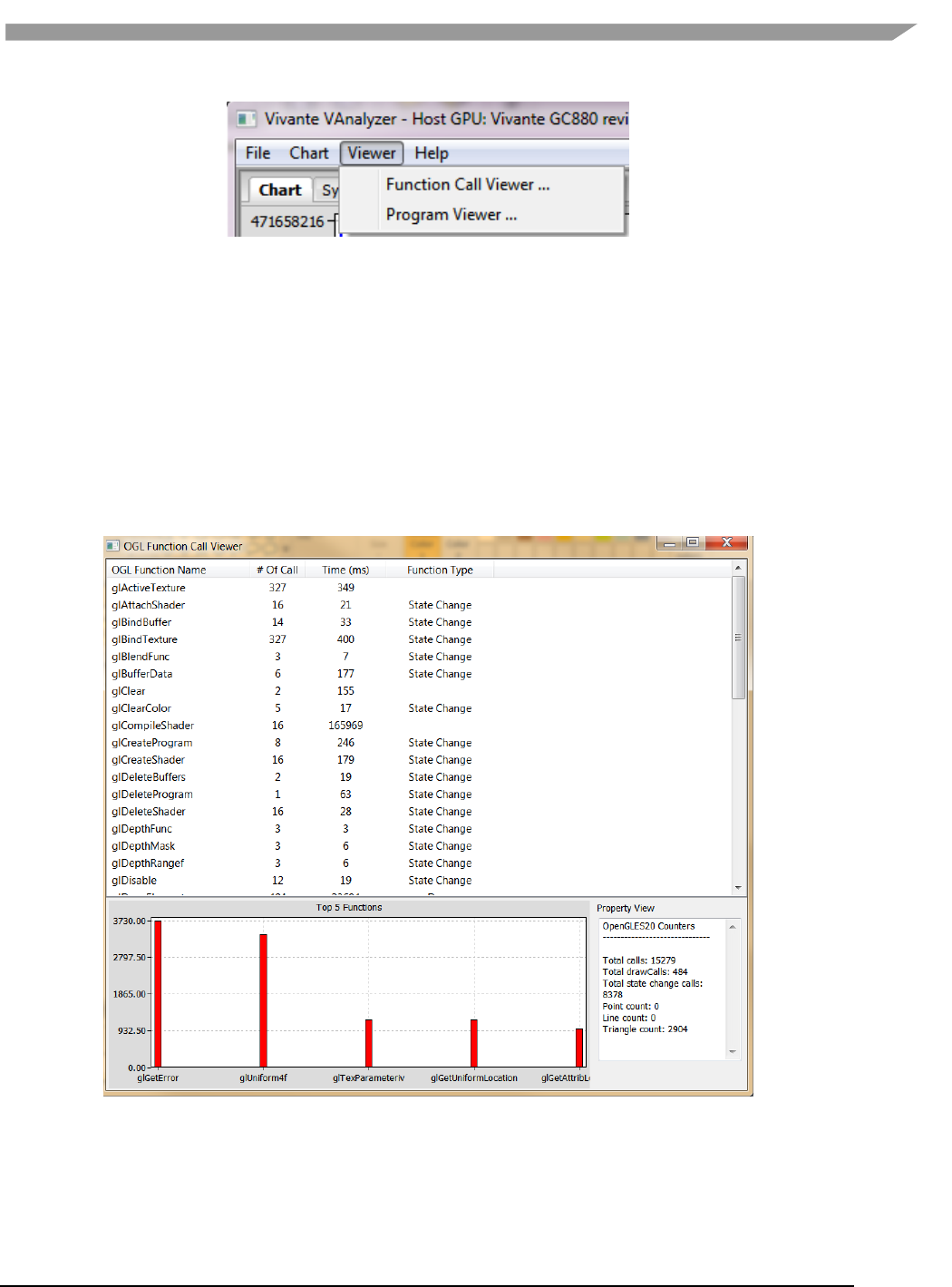
i.MX Graphics User’s Guide, Rev. 0, 02/2018
124 NXP Semiconductors
Figure 52 vAnalyzer viewers
12.6.8.1 OpenGL Function Call viewer
The OpenGL function call viewer includes three information areas.
• The OGL Function Name area contains a table which lists the available OpenGL ES functions by Function Name
and Function Type, the run time and the number of times each has been called for this frame. Functions can
be sorted by clicking in the column heading area. For example, sort the functions by call count or run time by
clicking the title bar of “# of Call” or “Time (ms)”.
• The Top 5 Functions area contains a histogram which shows the top 5 call count of the listed OpenGL
functions.
• The Property view area shows the summary when no function is selected; while it shows performance hints
for the function when one is selected.
Figure 53 vAnalyzer OpenGL function call viewer window
12.6.8.2 Program viewer
For a given Frame Number, the Program Viewer gives the statistics for shader programs: uniforms, attributes, and
the number of instructions in the shader. This is only for OpenGLES2, ES3 profile data. The description of the item
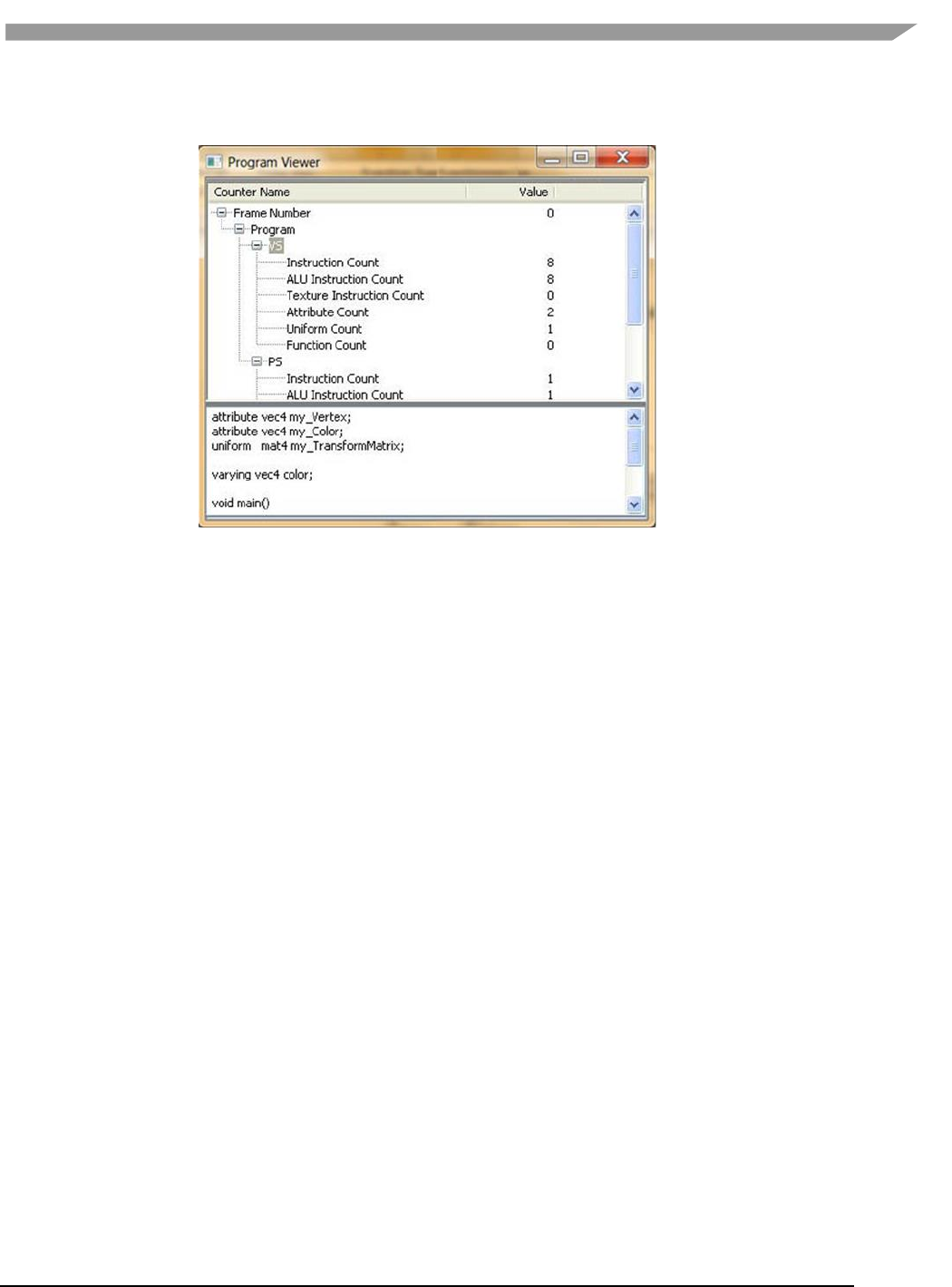
i.MX Graphics User’s Guide, Rev. 0, 02/2018
125 NXP Semiconductors
is displayed in the lower text window when selecting the item. Expand by clicking on VS or PS submenu to expand
the detail for that shader’s source code.
Figure 54 vAnalyzer Program Viewer
12.7 Debug and performance counters
Availability of some counters varies depending on core capabilities and software source tree.
12.7.1 AXI bandwidth
• Read bandwidth (byte)
• Write bandwidth (byte)
• Total bandwidth (byte)
• AXI cycles when read request stalled
• AXI cycles when write request stalled
• AXI cycles when write data stalled
12.7.2 Overall
• Frame rate (frames/sec)
• Driver utilization (%)
• Frame time (microsec)
• Driver time (microsec)
• GPU utilization (%)
• GPU cycles
• GPU idle cycles
12.7.3 OpenGL
• Total calls
• Total draw calls
• Total state change calls
• Point count
• Line count
• Triangle count

i.MX Graphics User’s Guide, Rev. 0, 02/2018
126 NXP Semiconductors
12.7.4 Pixel processing
• Valid pixel count
• % alpha test fail
• % depth&stencil test fail
• Overdraw
12.7.5 Shader processing
• VS instruction count
• VS branch instruction count
• VS texture fetch count
• Rendered vertex count
• PS instruction count
• PS branch instruction count
• PS texture fetch count
• Rendered pixel count
12.7.6 Texturing
• Total bilinear requests
• Total trilinear requests
• Total texture requests
• Total discarded texture requests
12.7.7 Vertex processing
• Input vertex count
• Vertics per batch
• Vertics per primitive
12.7.8 Vertex shader and fragment shader
(per shader, for ES20 and ES30 applications only)
• Total instruction count
• ALU instruction count
• Texture instruction count
• Function calls
• Attribute count
i.MX Graphics User’s Guide, Rev. 0, 02/2018
127 NXP Semiconductors
Chapter 13 GPU Tools
13.1 gpuinfo tool
13.1.1 Introduction
gpuinfo is a script to gather GPU runtime status through debugfs interface. It exports below information:
• GPU hardware information.
• GPU total memory usage.
• GPU memory usage of certain process or all processes (user space only).
• GPU idle percentage.
13.1.2 Usage
The script is located at Yocto rootfs /unit_tests/. There are three ways to run it.
1. Normal run to get all GPU-related processes information:
>/unit_tests/gpuinfo.sh
2. Get GPU information for certain process by clarifying the process id.
The process id (pid) can be got by command ps or top. Take the process 1035 as example.
>/unit_tests/gpuinfo.sh 1035
3. Get the GPU information for certain process by clarifying part of process name.
Take the process sample_test_fbo as an example.
>/unit_tests/gpuinfo.sh sample_test_fbo
or
>/unit_tests/gpuinfo.sh sample
or
>/unit_tests/gpuinfo.sh test
13.1.3 Sample log information
13.1.3.1 GPU hardware information
This section shows all GPU cores model name and revision information with index in the SoC.
The sample information:
GPU Info
gpu : 0
model : 2000
revision : 5108
gpu : 1
model : 320
revision : 5007
gpu : 2
model : 355
revision : 1215
i.MX Graphics User’s Guide, Rev. 0, 02/2018
128 NXP Semiconductors
13.1.3.2 Total memory information
This part shows total GPU memory information.
Table 31. Total memory information
gcvPOOL_SYSTEM:
GPU reserved system memory.
gcvPOOL_CONTIGUOUS:
contiguous memory allocated from CMA pool, low
memory zone and high memory zone.
gcvPOOL_VIRTUAL:
non-contigous memory allocated from low memory
zone and high memory zone.
NON PAGED MEMORY:
Allocated from CMA pool(mainly for command
buffer)
The sample information:
VIDEO MEMORY:
gcvPOOL_SYSTEM:
Free : 124170474 B
Used : 10047254 B
Total : 134217728 B
gcvPOOL_CONTIGUOUS:
Used : 0 B
gcvPOOL_VIRTUAL:
Used : 0 B
NON PAGED MEMORY:
Used : 0 B
Paged memory Info
low: 892928 bytes
high: 0 bytes
CMA memory info
cma: 0 bytes
13.1.3.3 Process user space GPU memory usage information
This part shows detail user space GPU memory usage per process.
Table 32. User space GPU memory usage
Index
memory for index buffer.
Vertex
memory for vertex data buffer.
Texture
memory for texture buffer.
RT
memory for render target buffer.
Depth
memory for depth buffer.
Bitmap
memory for bitmap buffer.
TS
memory for tile status buffer.
Image
memory for vg image buffer.
Mask
memory for vg mask buffer.
Scissor
memory for vg scissor buffer.
HZDepth
memory for hierarchical Z depth buffer.
i.MX Graphics User’s Guide, Rev. 0, 02/2018
129 NXP Semiconductors
The sample information:
VidMem Usage (Process 1106):
Counter: vidMem (for each surface type)
All Index Vertex Texture RT Depth Bitmap TS Image Mask Scissor
HZDepth
Current 10047254 489362 1213248 435200 3866624 3727360 0 36352 0
0 0 245760
Maximum 10047254 489362 1213248 435200 3866624 3727360 0 36352 0
0 0 245760
Total 10047254 489362 1213248 435200 3866624 3727360 0 36352 0
0 0 245760
Counter: vidMem (for each pool)All 1 2 3 4 5 6 7
8 9
Current 10047254 0 0 0 0 0 10047254 0 0
0
Maximum 10047254 0 0 0 0 0 10047254 0 0
0
Total 10047254 0 0 0 0 0 10047254 0 0
0
Counter: nonPaged
All
Current 0
Maximum 0
Total 0
Counter: contiguous
All
Current 0
Maximum 0
Total 0
Counter: mapUserMemory
All
Current 0
Maximum 0
Total 0
Counter: mapMemory
All
Current 134217728
Maximum 134217728
Total 134217728
13.1.3.4 GPU idle percentage
This part shows GPU idle percentage in past 1s.
The sample information:
>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>
Idle percentage:0.00%
>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>
13.2 gmem_info tool
• The gmem_info tool is developed to trace the overall memory utilization in classification of memory
pools.(referring to chapter 9.2)
• The available memory size is reported for the reserved pool.
• GPU idle time is reported from the last capture.
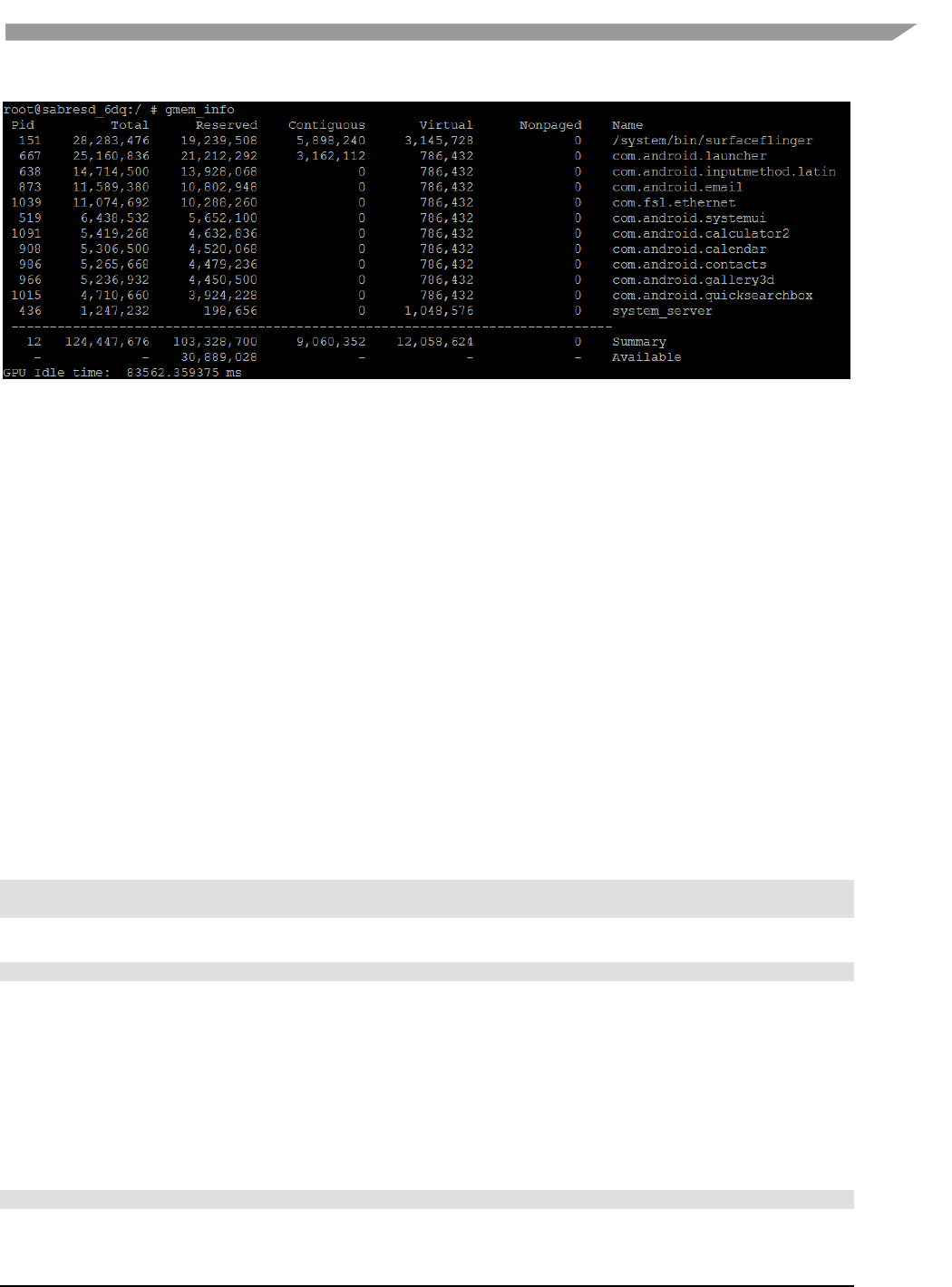
i.MX Graphics User’s Guide, Rev. 0, 02/2018
130 NXP Semiconductors
Figure 55 gmem_info tool
13.3 Apitrace user guide
13.3.1 Introduction
Apitrace is a set of tools enhanced from open source project apitrace, supported by i.MX 6, i.MX 7, and i.MX 8 with
Vivante GPU IP. This tool can dump OpenGL/GLES1.1/GLES2.0/GLES3.0 API calls and replay on a wide range of
other devices.
For more information, see apitrace.github.io/.
13.3.2 Install
13.3.2.1 Yocto
APITrace source code release part of the i.MX Yocto Project Linux BSP release. The source code have more patches
added on top of official API Trace release. The Yocto Project recipes pull the apitrace source package and install as
needed for X11, Framebuffer or Wayland backend.Yocto FB/DFB/Wayland
13.3.2.2 Android Platform
It will be preinstalled in next release. Currently have to install them by hand:
Mount release package to Android system:
mkdir /data/share; busybo mount -t nfs -o nolock <host> /data/share
cp -r apitrace/android/apitrace /data/
A convenient alternative:
adb push apitrace/android/ /data/local/tmp/
Note 1: If install to a directory other than /data/apitrace, update apitrace/bin/apitrace_dalvik.sh to use the new
path.
Note 2: Pay attention to file attributes. You need to grant access to the whole file path of eglretrace for normal
user, because Java applications are running as normal user even if it is started by root user.
13.3.2.3 PC
APITrace have set of PC tools. Prebuilt binary packages can be directly downloaded from APITrace website.
Currently supports Ubuntu 14.04 LTS, 64-bit.
sudo apt-get install libgles1-mesa libgles2-mesa libqt4-dev
i.MX Graphics User’s Guide, Rev. 0, 02/2018
131 NXP Semiconductors
13.3.3 Usage
13.3.3.1 Trace OpenGL ES1.1/2.0/3.0 application
apitrace trace --api=egl <app name and arguments>
e.g., apitrace trace --api=egl es2gears_x11
It generates trace file (.trace) under the current directory. To specify a new path, use --output=<path_name>
13.3.3.2 Trace OpenGL ES 1.1/2.0/3.0 Java application on the Android platform
On the Android platform, a GLES application can be native (e.g., frameworks/native/opengl/angeles). This type of
application can be traced as normal Linux application. Some other applications involving the Java virtual machine
cannot run in this way. A script apitrace_dalvik.sh is provided to run this type of application. This is an example to
trace com.android.settings:
sh /data/apitrace/bin/apitrace_dalvik.sh com.android.settings start
To stop tracing, run:
sh /data/apitrace/bin/apitrace_dalvik.sh com.android.settings stop
Because there is no “current” directory for a Java application, the trace file is stored to under /sdcard/
If apitrace is installed in a different directory, you need to update apitrace_dalvik.sh by hand
13.3.3.3 Trace OpenGL application
apitrace trace --api=glx <app name and arguments>
Only the X11 backend supports this feature
13.3.3.4 Replay
This utility is also called retrace. It reads in the trace file and executes OpenGL(ES) APIs one by one. Each
OpenGL(ES) API call is processed by a callback function. In that callback function, a hook can be inserted for debug
or analysis purposes.
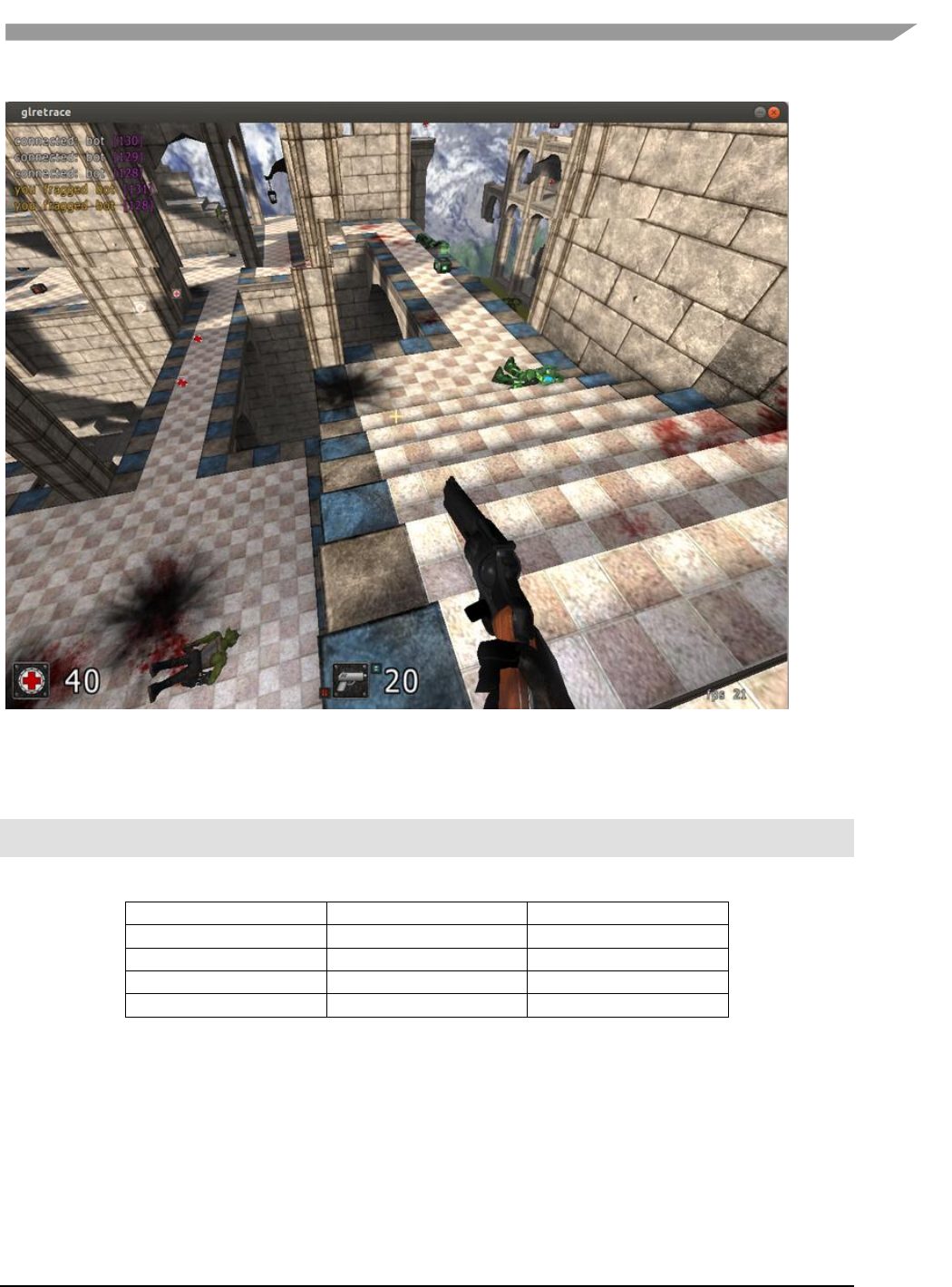
i.MX Graphics User’s Guide, Rev. 0, 02/2018
132 NXP Semiconductors
Figure 56 Replay
OpenGL ES 1.1/2.0/3.0 applications can be replayed with eglretrace; Open GL applications can be replayed with
glretrace:
eglretrace <trace file>
glretrace <trace file>
Supported platforms:
eglretrace
Glretrace
Yocto-X11
X
X
Yocto-FB/DFB/Wayland
X
Android
PC
X
X
For ES 3.0 replay, only i.MX supports this feature. It is not available on PC.
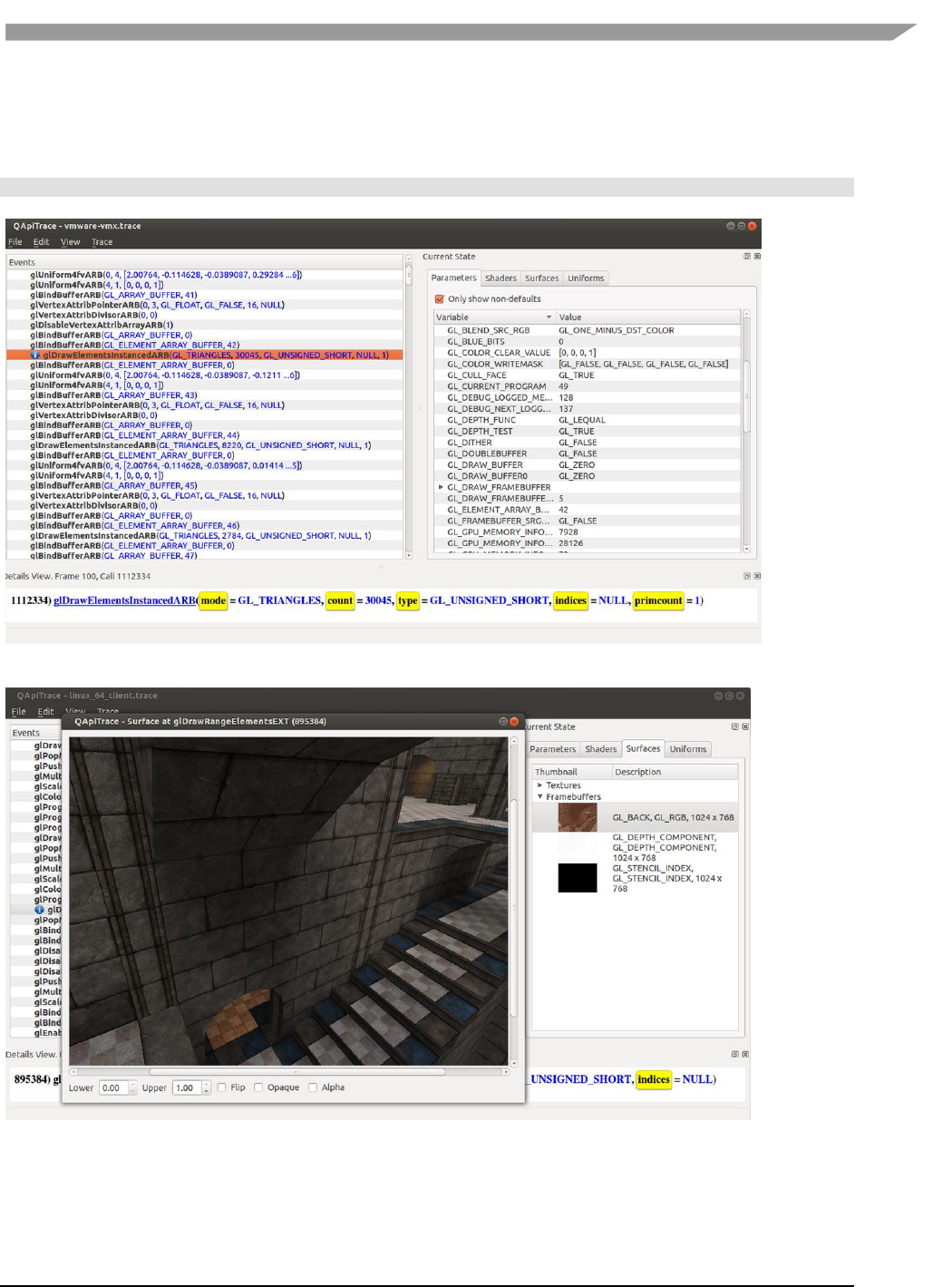
i.MX Graphics User’s Guide, Rev. 0, 02/2018
133 NXP Semiconductors
13.3.3.5 Analysis
qapitrace provides a detailed look at the trace file. It can only run on a PC. Verified on Ubuntu 14.04 LTS 64-bit. The
command is:
qapitrace <trace file name>
Figure 57 Checking state of every API call
Figure 58 Checking Framebuffer
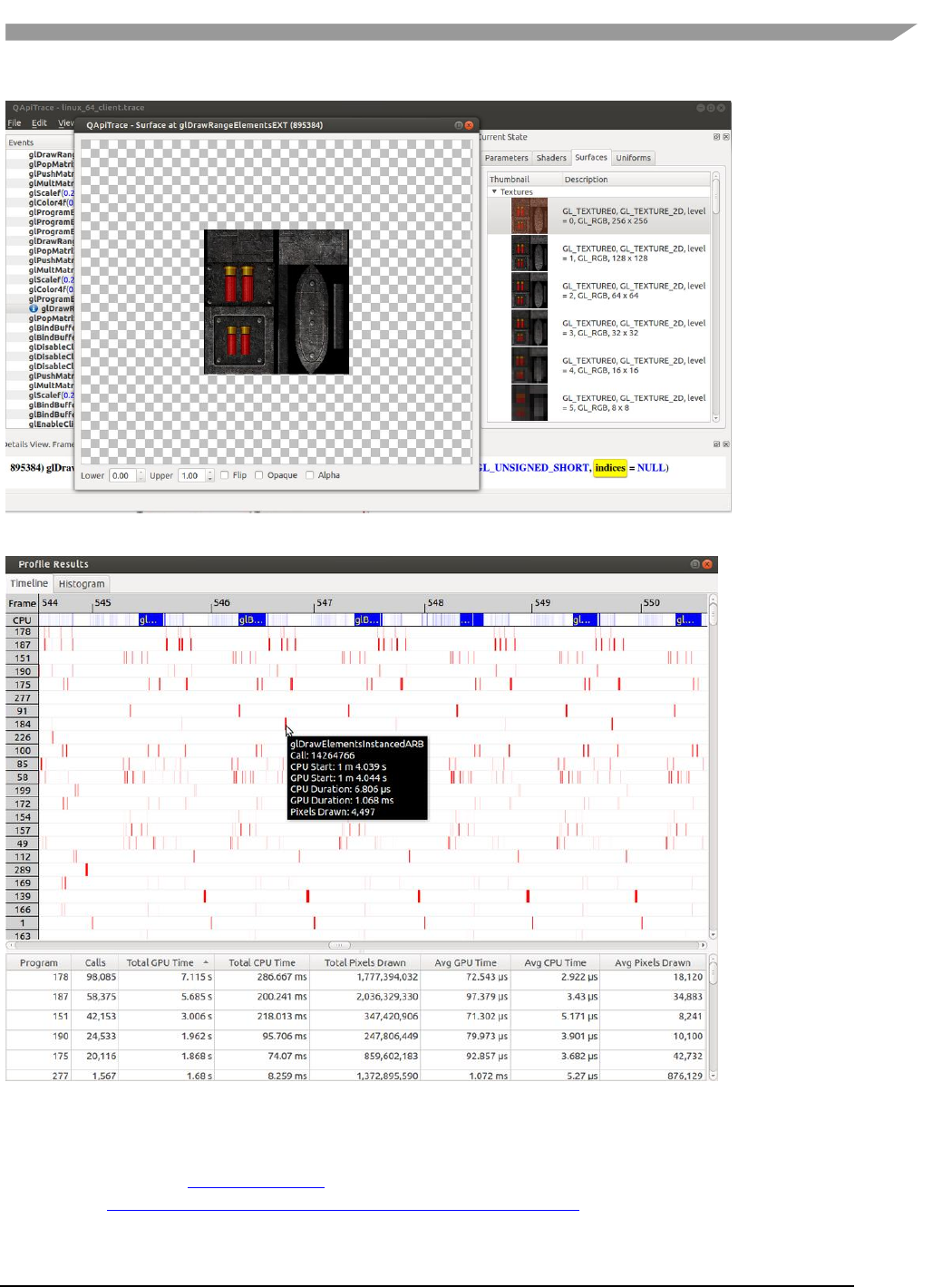

i.MX Graphics User’s Guide, Rev. 0, 02/2018
135 NXP Semiconductors
Chapter 14 GPU Memory Introduction
14.1 GPU memory overview
• OpenGL-ES
o Texture buffer
o Vertex buffer
o Index buffer
o PBuffer surface
o Color buffer
o Z/Stencil buffer
o HZ depth buffer
o Tiled status buffer
o 3D Command buffer
o 3D Context buffer
• OpenVG
o Image buffer
o Tessellation buffer
o VG command buffer
o VG context buffer
• 2D buffers
o 2D command buffer
o 2D temporary buffer
14.2 GPU memory pools
• Reserved memory
In the Linux 3.10.y kernel, the memory is reserved from CMA implemented in the GPU kernel driver, the
size can be changed through U-Boot args with “galcore.contiguoussize =xxx”
The memory allocation and lock very fast, but cannot support cacheable attribute.
• Contiguous memory
The contiguous memory is from CMA or Normal or Highmem with alloc_pages_exact.
The GPU driver tries the CMA allocator for non-cacheable request first. If CMA memory is used up, it goes
to system allocator.
The CMA allocator does not support the cacheable attribute, the system allocator supports cacheable
attribute, but the memory performance is slow with the additional cache flush operations.
• Virtual memory pool
The virtual memory is from Normal or Highmem with multiple page_alloc.
The memory support cacheable attribute, but slow with GPU MMU and cache flush.
The GPU virtual command buffer is allocated from virtual memory pool directly.
• Nonpaged memory pool
In the 5.x GPU driver, this pool is not used any more
14.3 GPU memory allocators
Two kinds of allocators are implemented in i.MX GPU kernel driver, see drivers/mxc/gpu-viv/
• The video memory allocator implementation is very complicated. The memory is from the reserved pool,
system contiguous pool (supports CMA), or system virtual pool (enables GPU MMU).
• The CMA allocator supports non-cacheable contiguous memory. It is implemented as a part of contiguous
pool. When the system requests contiguous memory, the allocator tries CMA first. If CMA is used up, it
goes to allocate the system contiguous pages.
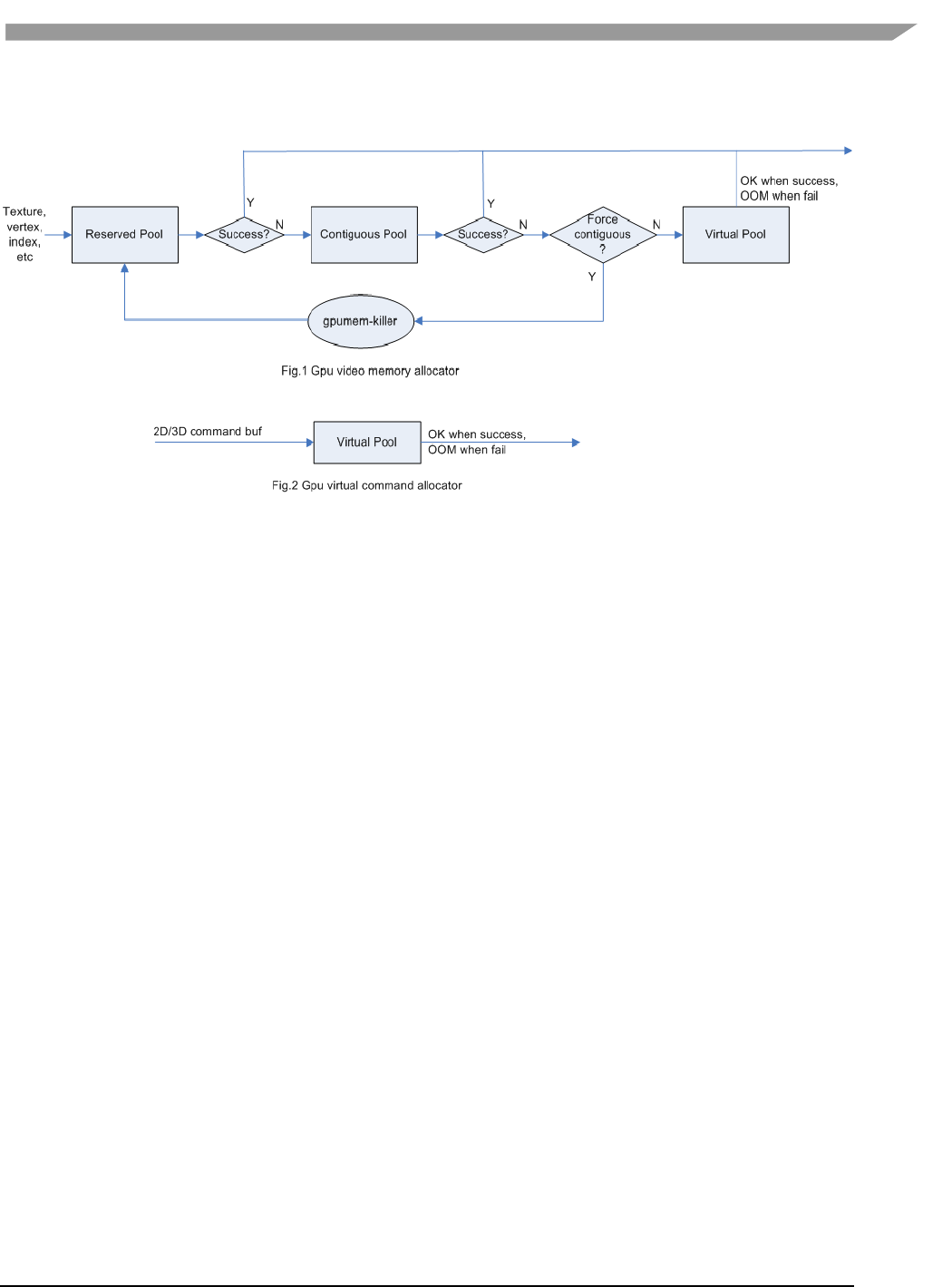
i.MX Graphics User’s Guide, Rev. 0, 02/2018
136 NXP Semiconductors
• GPU memory-killer is implemented for special requirement of force contiguous GPU memory.
Figure 61 GPU memory allocators
14.4 GPU reserved memory
• The reserved memory is managed by two dual linked lists, one is free list, and another is node list.
• When allocate the reserved memory, the free list is scanned from head to tail until a available node is
selected, it is very fast but makes more memory fragments, under test, 10~20M of 128M is not available
to use after a lot of allocate/free operations.
• When the available node is selected, it is removed from the free list, but it always keeps the dual linked
nodes to merge the conjoint available memory when freed.
• The reserved memory is mapped once when application process is attached, during 3D application
running, the memory map/un-map operations are very fast, the virtual address is just calculated with
logical base and offset.
14.5 GPU memory base address
• GPU support contiguous physical memory within (0~2G) address directly:
o GPU address = CPU Physical address – GPU BaseAddress
• GPU MMU is enabled for two kinds of memory type as below:
o Separated page memory from Virtual memory pool
o Contiguous page memory with address out of (0~2G)
• BaseAddress should be set to RAM start address to achieve the better performance by reducing GPU
MMU mapping.
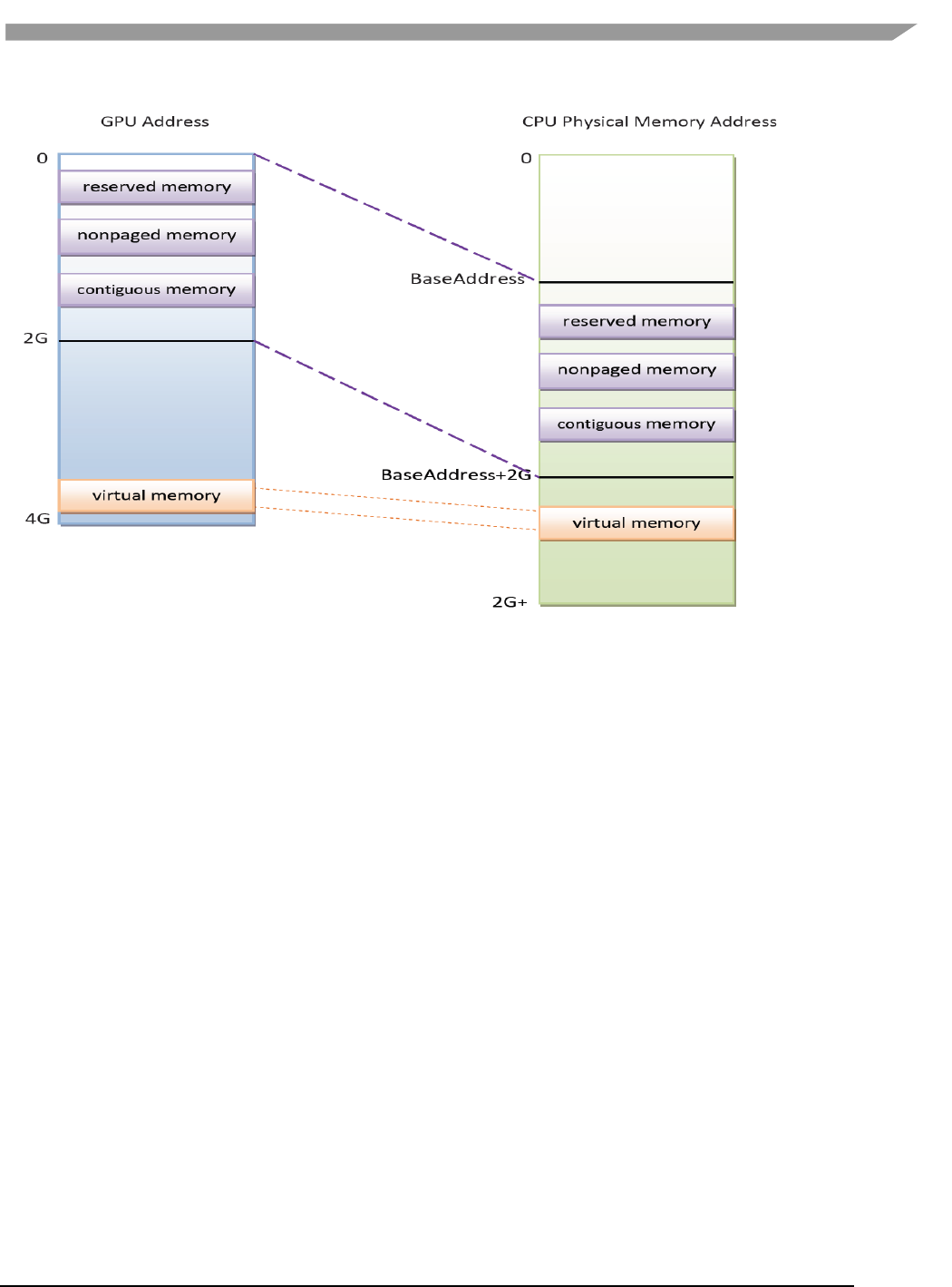
i.MX Graphics User’s Guide, Rev. 0, 02/2018
137 NXP Semiconductors
Figure 62 GPU memory base address
i.MX Graphics User’s Guide, Rev. 0, 02/2018
138 NXP Semiconductors
Chapter 15 Application Programming Recommendations
The recommendations listed below take a holistic approach centered on overall system level optimizations that
balance graphics and system resources.
15.1 Understand the system configuration and target application
Knowing details about the application and use case allows developers to correctly utilize the hardware resources in
an ideal access pattern. For example, an implementation for a 2D or 3D GUI could be rendered in a single pass
instead of multiple passes if the draw call sequence is correctly ordered. In addition, knowing the most common
graphics function calls allow developers to parallelize rendering to maximize performance.
Using Vivante and vendor-specific SoC profiling tools, you can determine bottlenecks in the GPU and CPU and
make changes as needed. For example, in a 3D game, most CPU cycles may be spent on audio processing, AI, and
physics and less on rendering or scene setup for the GPU. In this instance, the application is CPU-bound and
configurations dealing with non-graphics tasks need to be reviewed and modified. If the system is GPU-bound, the
profiler can point out where the GPU programming code bottlenecks are located and which sections to optimize to
remove restrictions.
15.2 Optimize off chip data transfer such as accessing off-chip DDR
memory/mobile DDR memory
Any data transfer off-chip takes bandwidth and resources from other functional blocks in the SoC, increases power,
and causes additional cycles of latency and delay as the GPU pipeline needs to wait for data to return from
memory. Using on-chip cache and writing the application to better take advantage of cache locality and coherency
increase performance. In addition, accessing the GPU frame buffer from the CPU (not recommended) cause the
driver to flush all queued render commands in the command buffer, slowing down performance as the GPU has to
wait since the command queue is partially empty (inefficient use of resources) and CPU-GPU synchronization is not
parallelized.
15.3 Avoid W-Clipping issue in the Application Program
The w-clipping overflow issue typically occurs with these three factors:
• Objects with very large primitives. In a 3D scene, this is usually the sky, the outer
world or a long road that expands far behind the camera and far in front of the
camera. At the same time, the object may also expand far in either the x or y
direction.
• Near-plane with a very small value. Usually this value is very close to zero. An
example would be 10-4
• Large screen resolution.
These three factors can cause the final window coordinate to overflow the 24-bit mantissa precision in
IEEE single precision floating point format.
The following are suggested ways to modify an application to avoid overflow:
1. For draw calls with very large primitives such as sky or world, set the near-plane to 0.99 as an
initial value.

i.MX Graphics User’s Guide, Rev. 0, 02/2018
139 NXP Semiconductors
2. If this removes the rendering error and the entire scene is rendered correctly, the issue can be
considered resolved.
3. If the rendering error is still there and no desired objects are being culled (or there are no
missing objects), increase the near-plane value until the rendering error disappears.
4. If the near-plane value is large (>10.0) already, the issue persists and some desired objects are
being culled, reduce the near-plane value until the desired objects appear again then go to the
next step.
5. Tessellate the large objects into smaller primitives until the rendering error disappears.
Please note that the suggested near plane adjustment can be done on a per draw call basis, and only
needs to be modified for objects with very large primitives. Some applications scale the object by reduce
the w value in vertex shader, as change w value will finally affect the near plane, this is not
recommended, a better way to scale the object is scale the x, y, z coordinate, not w.
15.4 Avoid GPU hang and data corruption when use occlusion query
Description:
On i.MX6D/Q GPU IP, both Hierarchical Depth (HZ) write and Occlusion Query (OQ) write share the same port. If HZ Fast
Clear(FC) is enabled, and OQ uses the HZ port to perform a write, the HZ FC data may become corrupted, even lead to GPU
hang unexpectedly.
Software Workaround:
A software workaround is recommended for this issue and is available from L4.9 bsp release. Because the issue occurs very
infrequently, a per-application work around is most efficient. Software will disable HZ with a per-app detection and also provide
a new environment variable control (VIV_DISABLE_HZ).
15.5 Avoid random cache or memory accesses
Cache thrashing, misses, and the need to access data in external memory causes performance hits. An example
would be random texture cache access since it is expensive when performing per-pixel texture reads if the texture
units need to access the cache randomly and go off-chip if there is a cache miss.
15.6 Optimize your use of system memory
Memory is a valuable resource that needs to be shared between the GPU (frame buffer), CPU, system, and other
applications. If you allocate too much memory for your OpenGL ES application, less memory is available for the
rest of the system, which may impact system performance. Claim enough memory as needed for your application
then deallocate it as soon as your application no longer needs it. For example, you can allocate a depth buffer only
when needed or if your application only needs partial resources, load the necessary items initially and load the rest
later.
15.7 Target a fixed frame rate that is visibly smooth
Smooth frame rate is achieved from a combination of a constant FPS and the lowest FPS (frames per second) that
is visually acceptable. There is a trade-off between power and frame rates since the graphics engine loading
increases with higher FPS. If the application is smooth at 30 FPS and no visual differences for the application are
perceived at 50 FPS, then the developer should cap the FPS at 30 since the extra 20 FPS do not make a visual

i.MX Graphics User’s Guide, Rev. 0, 02/2018
140 NXP Semiconductors
difference. The FPS limit also guarantees an achievable frame rate at all times. The savings in FPS help lower GPU
and system power consumption.
15.8 Minimize GL state changes
Setting up state values between draw calls adds significant overhead to application performance so they must be
minimized. Most of these call setups are redundant since you are saving / restoring states prior to drawing. Try to
avoid setting up multiple state calls between draw calls or setting the same values for multiple calls. Sometimes
when a specific texture is used, it is better to sort draw calls around that texture to avoid texture thrashing which
inhibits performance. Application developers should also try to group state changes.
15.9 Batch primitives to minimize the number of draw calls
When your application submits primitives to be processed by OpenGL ES, the CPU spends time preparing
commands for the GPU hardware to execute. If you batch your draw calls into fewer calls, you reduce the CPU
overhead and increase draw call efficiency. Batch processing allows a group of draw calls to be quickly executed
without any intervention from the CPU (driver or application) in a fire-and-forget method.
Some examples of batching primitives are:
• Branching in shaders may allow better batching since each branch can be grouped together for execution.
• For primitives like triangle strips, the developer can combine multiple strips that share the same state to
save successive draw calls (and state changes) into a single batch call that uses the same state (single
setup) for many triangles.
• Developers can also consolidate primitives that are drawn in close proximity to take advantage of spatial
relationships. If the batched primitives are too far apart, it is more difficult for the application to
effectively cull if they are not visible in the frame.
15.10 Perform calculations per vertex instead of per fragment/pixel
Since the number of vertices is usually much less than the number of fragments/pixels, it is cheaper to do per
vertex calculations to save processing power.
15.11 Enable early-Z, hierarchical-Z and back face culling
Hardware support of depth testing to determine if objects are in the user’s field of view are used to save workload
and processing on vertex and pixel processing. If the object is in view, then the vertices are sent down the pipeline
for processing. If the object is hidden or not viewable, the triangles are culled and not sent to the pipeline. This
improves graphics performance since computations are only spent on visible objects. If the application already
knows details about the contents and relative position of objects in the scene or screen, the developer can use that
information to automatically bound areas that never need to be touched (for example an automotive application
that has multiple layers of dials where parts of the underlying dials are occluded can have the application avoid
occluded areas from the beginning). Another optimization is to perform basic culling on the CPU since the CPU has
first-hand information about the scene details and object positions so it knows what scene data to send to the
GPU.

i.MX Graphics User’s Guide, Rev. 0, 02/2018
141 NXP Semiconductors
15.12 Use branching carefully
Static branches perform well since states are known but they tend to use many general purpose registers. An
example is a long shader that combines multiple shaders into a single, large shader that reduces state changes and
batch draw calls. Dynamic branching has non-constant overhead since it processes multiple pixels as one and
everything executes whether a branch is taken or not. In other words, dynamic branching goes through different
permutations/branches in parallel to reach the correct results. If all pixels take the same path, then performance is
good. The more pixels processed translates to higher overhead and lower performance. For dynamic branching,
smaller pixel sizes/groups are optimal for throughput. Developers need to be aware of branching in their code to
make sure excessive calculations and branches are efficient. Profiling tools can help determine if certain parts of
code are optimized or not.
15.13 Do not use static or stack data as vertex data - use VBOs instead
A vertex buffer object (VBO) is a buffer object that provides the benefits of vertex array and display list and allows
a substantial performance gain for uploading data (vertex position, color, normals, and texture coordinates) to the
GPU. VBOs create buffer objects in memory and allow the GPU to directly access memory without CPU
intervention (DMA). The memory manager can optimize buffer placement using feedback from the application.
VBOs can also handle static and dynamic data sets and are managed by the Vivante driver. The benefits of each
are:
• A vertex array reduces the number of function calls and allows redundant data to be shared
between related vertices, instead of re-sending all the data each time. Access to data can be
referenced by the array index.
• The display list allows commands to be stored for later execution and can be used repeatedly over
multiple frames without re-transmitting data, thus minimizing CPU cycles to transfer data. The
display list can also be shared by multiple OpenGL / OpenGL ES clients so they can access the same
buffer with the corresponding identifier. If you put computationally expensive operations (ex.
lighting or material calculations) inside display lists, then these computations are processed once
when the list is created and the final result can be re-used multiple times without needing to re-
calculate again.
If you combine the benefits of both by using VBO, the performance is enhanced over static or stack data sets.
15.14 Use dynamic VBO if data is changing frame by frame
Locking a static vertex buffer while the GPU is using it can create a performance penalty since the GPU needs to
finish reading the vertex data from the buffer before it can return to the calling application. Locking and rendering
from a static buffer many times per frame also prevents the GPU buffering render commands since it mush finish
commands before returning the lock pointer. Without buffered commands the GPU remains idle until the
application finishes filling the vertex buffer and issues the draw commands.
If the scene data never changes from frame to frame then a static buffer may be sufficient. With newer
applications (ex. games, maps) that have dynamic viewports where vertex data changes multiple times per frame
or frame-to-frame, then a dynamic VBO is required to ensure performance is still met. If the current buffer is being
used by the GPU when a lock is called, a pointer to a new buffer location is returned to the application to ensure
updated data is written to the new buffer. The GPU can still access the old data (current buffer) while the
application puts updated data into the new buffer. The Vivante memory management unit and driver
automatically take care of allocating, re-allocating, or destroying buffers.

i.MX Graphics User’s Guide, Rev. 0, 02/2018
142 NXP Semiconductors
You can implement dynamic VBO depending on your preference, but one recommendation is to allocate a 1 MB
dynamic VBO block and upload data to using different offsets for each dynamic buffer. If the buffer overflows you
can loop back and use location offset 0 again.
15.15 Tessellate your data so that Hierarchical Z (HZ) can do its job
We can break this into how OpenGL and OpenGL ES handle this use case.
OpenGL only renders simple convex polygons (edges only intersect at vertices with no duplicate vertices and only
two edges meet at any vertex), in addition to points, lines, and triangles. If the application requires concave
polygons (polygons with holes or intersecting edges), those polygons need to be subdivided into simple convex
polygons, which is called tessellation (subdividing a polygon mesh into a bunch of smaller meshes). Once you have
all the meshes in place our HZ hardware can automatically cull hidden polygons to efficiently process the frame,
effectively breaking the frame into smaller chunks that can be processed very fast.
OpenGL ES only renders triangles, lines, and points. The same concepts apply as in OpenGL, which is to avoid very
large polygons by breaking them down into smaller polygons where our internal GPU scheduler can distribute
them into multiple threads to fully parallelize the process and remove hidden polygons.
15.16 Use dynamic textures as a texture cache (texture atlas)
The main reason for using dynamic textures as a cache is the application developer can create one larger texture
that is subdivided into different regions (texture atlas). The application can upload data into each region and use
an application side texture atlas to access the data. Each dynamic texture and sub-region can be locked, written to,
and unlocked each frame, as needed. This method of allocating once is more efficient than using multiple smaller
textures that need to be allocated, generated, and then destroyed each time.
15.17 If you use many small triangle strips, stitch them together
It is better to combine several small, spatially related triangle strips together into a larger triangle stip to minimize
overhead and increase performance. For each triangle strip, there are overhead and start up costs that are
required by the CPU and GPU, including state loads. If there are too many small triangle strips that need to be
loaded, this impacts performance. An application developer can combine multiple triangle strips by adding a
degenerate triangle to join the strips together. The overhead to restart multiple new strips is much higher than
adding the degenerate triangle.
15.18 Specify EGL configuration attributes precisely
To obtain a 16 bit/pixel window buffer for rendering, the EGL config attributes need to be specified precisely
according to the EGL spec. Specifying inaccurate EGL attributes may result in getting a 32-bit bit/pixel window
buffer which doubles the bandwidth requirement for rendering which in turn leads to lower performance.
15.19 Use aligned texture/render buffers
The GPUs work on buffers with hardware-specific width/height alignment for better efficiency. Use the available
API to query the GPU buffer alignment and allocate the texture / render buffers to satisfy these requirements, to
avoid the cost of copies to aligned shadow memory.

i.MX Graphics User’s Guide, Rev. 0, 02/2018
143 NXP Semiconductors
15.20 Disable MSAA rendering unless high quality is needed
Although MSAA rendering can achieve higher image quality with smoother lines and triangle edges, it requires
much higher (4x, 8x) bandwidth because it has to rendering a single pixel 4x/8x times. So, if high rendering quality
is not required, MSAA should be disabled.
15.21 Avoid partial clears
Most GPUs have special hardware logic to do a fast clear of an entire buffer. So it is better to utilize the fast clear
function to clear the entire buffer then render graphics again, instead of doing a partial clear to preserve a graphics
region. If a partial clear is required by the application, make sure the clear area is aligned according to the GPU-
specific requirements. Unaligned partial clears are expensive and should be avoided.
15.22 Avoid mask operations
Do not use mask unless the mask is 0 (other than when you need a specific render quality). Clearing a surface with
mask (color /depth stencil mask) could have a performance penalty.Pixel mask operations are normally pretty
expensive on some GPUs as the mask operation has to be done on every single pixel.
15.23 Use MIPMAP textures
MIPMAP textures enable the application to sample a lower resolution texture image (1/2, 1/4, 1/8, 1/16, ... size of
the original texture image) when the triangle is rendering further away from the view point. Thus, the bandwidth
required to read the texture image is reduced which leads to better performance.
15.24 Use compressed textures if constricted by RAM/ROM budget
Compressed textures are normally only a fraction (up to 1/8) of the original texture size. Using compressed
textures reduces the storage requirements in memory and can also reduce the required texture upload bandwidth,
when using a format that is supported natively by the hardware.
Compressed textures should not be chosen, if only for the purposes of reducing the memory bandwidth required
for sampling of the texture during rendering. This is because due to a fixed read request size from the GPU, the
memory controller load is the same as for an uncompressed texture.
15.25 Draw objects from near to far if possible
Drawing objects from near to far normally has better performance because the objects in the near foreground can
block entire or partial objects in the background. Most GPUs have early Z rejection logic to reject the pixels that fail
a Z compare. The GPU can skip fragment shader computations on these rejected pixels.
15.26 Avoid indexed triangle strips.
Index triangle strips can usually maximize the vertex cache utilization as each set of vertex data can be used in two
triangles. There is however an errata in the GC2000 and GC880 GPUs which requires a SW conversion of indexed
triangle strips to triangle lists in the driver. For small strips the conversion overhead is neglible, but for large
geometries a different primitive type should be used.

i.MX Graphics User’s Guide, Rev. 0, 02/2018
144 NXP Semiconductors
15.27 Vertex attribute stride should not be larger than 256 bytes
Most Vivante GPUs provide native support for a 256 byte vertex attribute stride. If the vertex attribute stride is
larger than 256 bytes, then the driver has to copy the vertex data around. Hardware versions v55 and higher (such
as the GC7000L v55) support a 2048 byte vertex attribute stride as required in the OES3.1 spec.
15.28 Avoid binding buffers to mixed index/vertex array
Most of Vivante GPUs do not natively support mixed index/vertex arrays. So the Vivante driver must copy the
index and vertex data around to form separate vertex data streams for the GPU. Avoid mixing index and vertex
data so the driver does not have to incur a performance hit while performing this task.
15.29 Avoid using CPU to update texture/buffer contexts during render
Do not use the CPU to update texture/buffer contexts in the middle of rendering. Using the CPU to update
texture/buffer causes the rendering pipeline to flush and stall, so that CPU can safely update the buffer contents.
The pipeline flush/stall/resume causes significant performance impact.
15.30 Avoid frequent context switching
Context switch is an inherently expensive operation as many GPU states need to be reset to start a new rendering
context. Thus, frequent context switching has a negative impact on application performance.
15.31 Optimize resources within a shader
Most GPUs have optimal support for a limited amount of resources (uniforms, varying, etc.). Using resources
beyond the optimal working set causes the GPU to fetch/store resources from a lower performance memory pool
and shader performance is negatively impacted.
15.32 Avoid using glScissor Clear for small regions
glScissor Clear for small regions (less than 16x8 aligned window) fall back to CPU so the performance is not
optimal.
15.33 Use PRE to accelerate data transfer
PRE is an optimized hardware that can transform tiled format image to linear framebuffer. With PRE, GPU can
onlyoutput tiled render target and has no need to resolve it. To enable the PRE feature, set the environment
GPU_VIV_EXT_RESOLVE variable to 1; otherwise set it to 0. Its default value on the FB backend is 1, which means
PRE is enabled by default on FB.
Warning: VG use cases can only output the linear format image. It is impossible to render linear and tiled format
target to the same framebuffer at the same time. Therefor, when running 3D use cases with PRE and VG use cases
together, there is garbage on the display. Besides, when running 3D use cases with PRE, the framebuffer format is
changed from linear to tiled. It is the user’s responsibility to convert the format back after the use cases end, or the
display is abnormal when showing the FB console.

i.MX Graphics User’s Guide, Rev. 0, 02/2018
145 NXP Semiconductors
15.34 i.MX 8QuadMax dual-GPU performance
For some legacy applications with small texture/rendering size and less shader complex, dual-GPU performance
may become worse than single GPU mode, because the driver needs to take more CPU effort for dual-GPU
programming, and the driver overhead is more significant than GPU load in the hardware pipeline.
For such a kind of legacy case, the users can single-GPU to achieve better performance on the i.MX 8QuadMax.

i.MX Graphics User’s Guide, Rev. 0, 02/2018
146 NXP Semiconductors
Chapter 16 Demo Framework
16.1 Summaries
This document describes the Demo Framework, targeted at platform agnostic development of graphical demos. It
covers the goals, architecture and instructions of how to use it across platforms, examples and best practices.
16.1.1 Executive summary
• Write a demo application once.
• Run it on the Android platform, Yocto Linux OS, Ubuntu and MS Windows OS.
• Easily portable to additional platforms.
• Supports: OpenGL ES2, OpenGL ES3, with OpenVG and G2D planned for future release.
16.1.2 Technical overview
• Written in a limited subset of C++11 and uses RAII to manage resources.
• Uses a limited subset of STL to make it easier to port.
• No copyleft restrictions from GPL/LGPL licenses
• Allows for direct access to the expected API (EGL,ES2, ES3)
• Provides optional helper classes for commonly used tasks
− Matrix, Vector3, GLShader, GLTexture, etc.
• Services
− Keyboard and mouse
− Persistent data manager
− Assets management (models, textures)
• Defines a standard way for handling
− Init, shutdown and window resize.
− Program input arguments.
− Input events like keyboard, mouse and touch.
− Fixed time-step and variable time-step demo implementations.
− Logging functionality.
16.2 Introduction
The Demo Framework is a multi-platform framework that enables demos to run on various platforms without any
changes. The framework abstracts away all the boilerplate and OS-specific code of allocating surfaces, creating the
context, model loading, texture loading, shader compilation, render loop, animation ticks, benchmarking graph
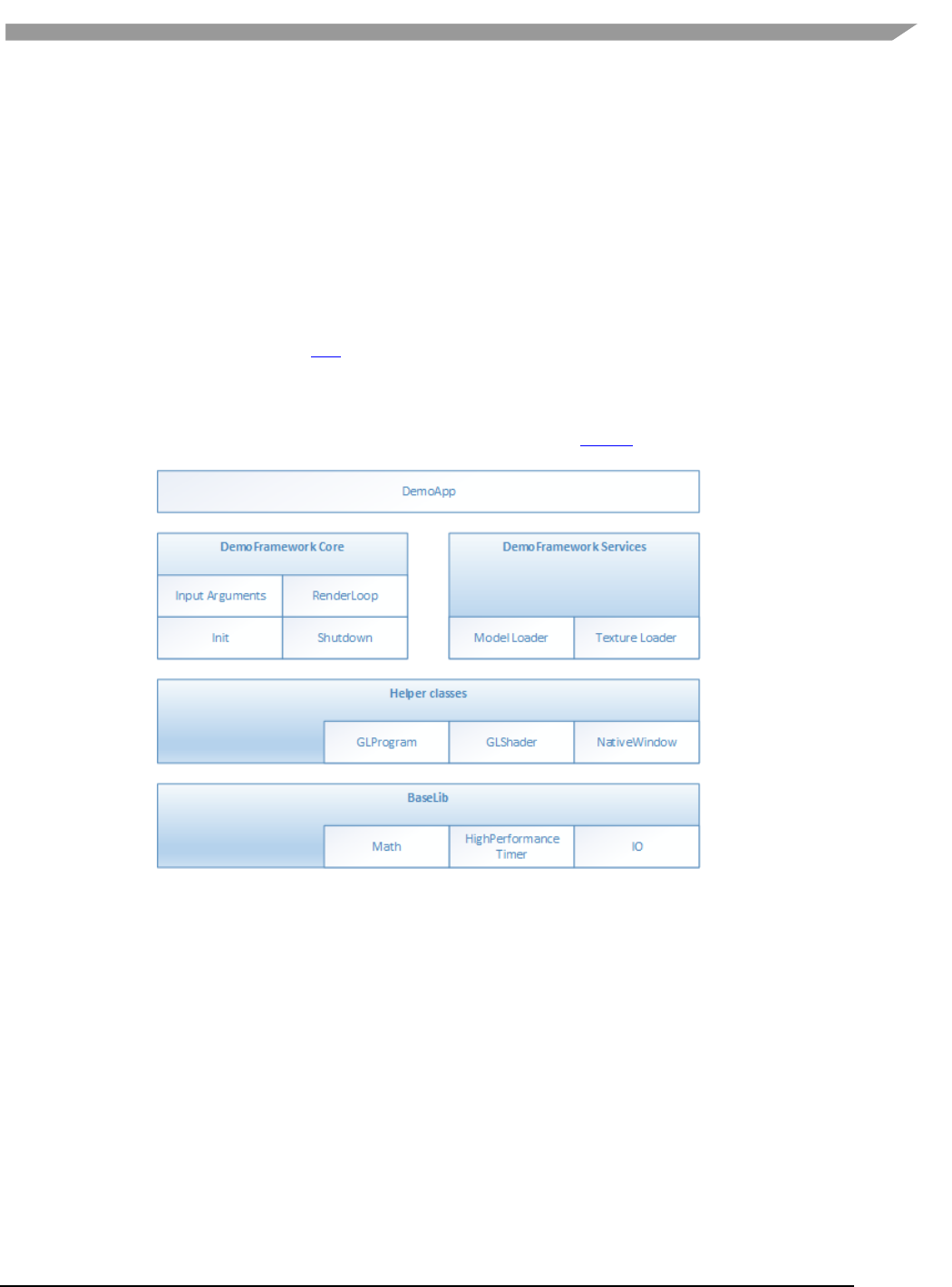
i.MX Graphics User’s Guide, Rev. 0, 02/2018
147 NXP Semiconductors
overlays etc. This allows the demo/benchmark developer to focus on writing rendering code. It also enables them
to develop demos on PC or the Android platform where the tool chain and debug facilities allows for faster
turnaround time and then take the working code and deploy without code changes to the supported platforms.
The platforms we currently support are Windows OS (for development via emulated backends), Android NDK and
Linux OS with various windowing systems. The framework allows us to provide ‘real’ comparative benchmarks
between the different OS and windowing systems we support, since we can run the exact same demo/benchmark
code on them all.
The long term plans for the framework include extending it with support for OpenVG, G2D and other relevant API.
16.3 Design overview
The framework is written in C++ and uses RAII to manage resources. The resource management code focuses on
‘ease of use’ over raw performance, since it’s mainly run on construction and destruction of the demo.
To allow the demo framework to be easily portable to new platforms its functionality is split into two parts: ‘core’
and ‘services’. The core framework depends on a limited subset of STL to make it easier to port. Framework
services come with their own set of library requirements. The model importer Assimp requires boost to be
available on the platform.
Figure 63 Design overview
Beside the demo framework core and demo framework services there is a set of helper classes for commonly used
functionality, which makes it easier to write demos for the API we support. The helper classes do not depend on
the demo framework and can be used in any program for the given API. For example for OpenGL ES, there is a
GLShader and GLProgram class which hides away the complexities of compiling the shader object and linking the
program object and since they are RAII objects, they also clean up after themselves once you are done with them.
Since our primarily supported BSPs are Linux OS-based, we decided to utilize an input argument framework that is
compatible with the standard UNIX parameter format, like the one exposed by getopt (However, we do not utilize
getopt to remain GPL free across platforms).
16.4 High level overview
The framework consists of three high level domains.
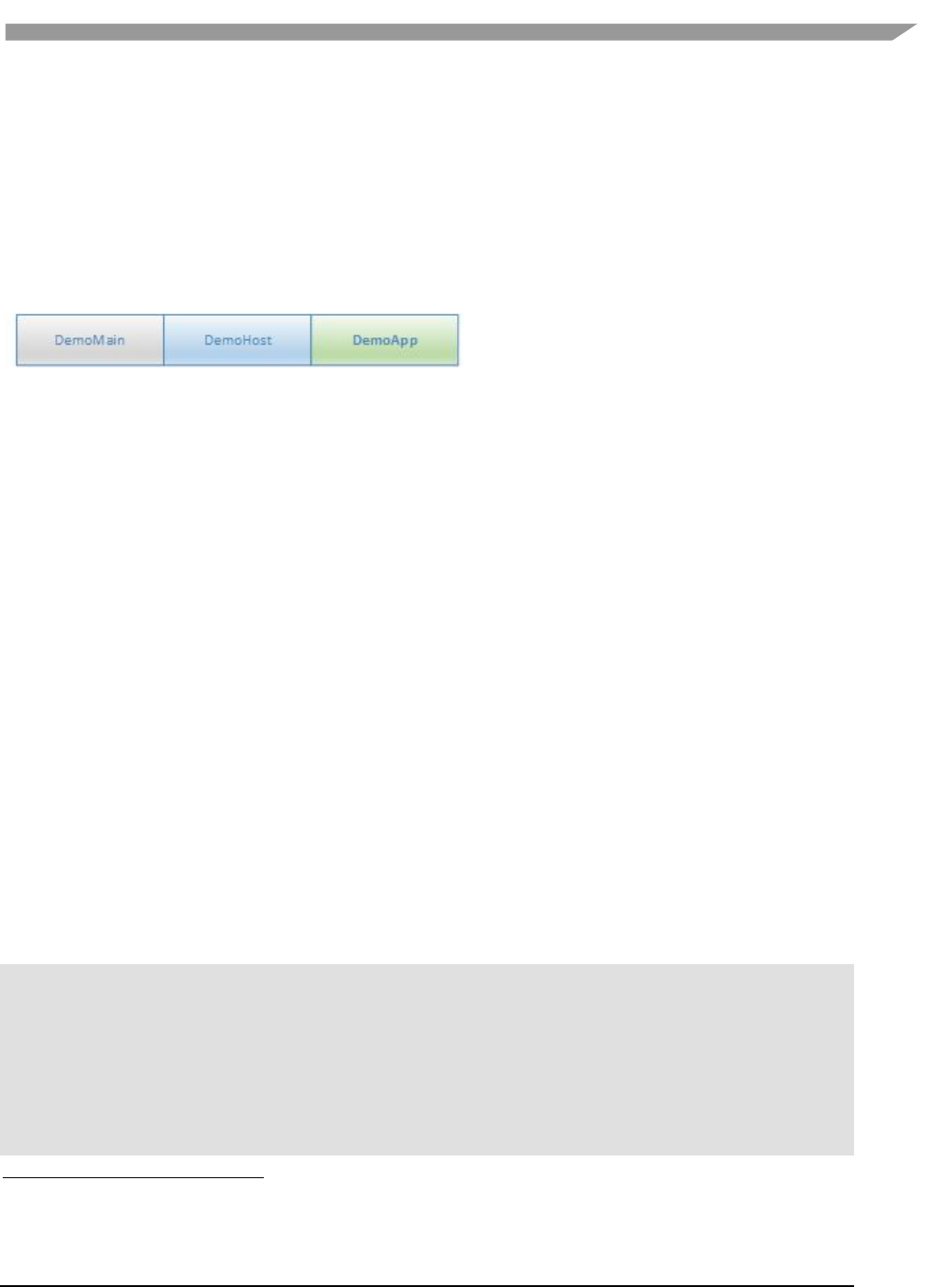
i.MX Graphics User’s Guide, Rev. 0, 02/2018
148 NXP Semiconductors
16.4.1 DemoMain
All the code that binds everything together and it is platform independent.
1. It gets the current demo setup
a. Which demo host to utilize for the demo.
b. Which demo app that needs to be run.
2. It parses the input arguments
3. It launches the demo host.
4. It logs any errors that might occur.
16.4.2 DemoHost
The demo-host is responsible for init and shutdown of the host environment and running the main loop.
The main loop utilizes the DemoAppManager to control the life of the DemoApp.
In other words, the DemoHost is the graphics API-specific code needed to initialize and shutdown a given API and
some code to run a render loop. All the API and platform independent code of the render loop resides inside the
DemoAppManager class.
The exact capabilities of a DemoHost are also platform dependent. For example, some EGL implementations
support running OpenVG and OpenGL ES, allowing a demo app to utilize both API at once. This is not something
that is supported by most Windows emulation layers.
16.4.3 DemoApp
It is a demo application written for one or more specific APIs that are supported by a specific DemoHost. The demo
is usually platform independent – the exception to the rule is if it depends on specific features that only exist on
certain platforms.
16.5 Demo application details
The following description of the demo application details uses a GLES2 demo named ‘S01_SimpleTriangle’ as
example. It lists the default methods that a demo should implement, the way it can provide customized
parameters to the windowing system and how asset management is made platform agnostic.
16.5.1 Demo method overview
This is a list of the methods that every Demo App is most likely to override
1
.
// Init
S01_SimpleTriangle(const DemoAppConfig& config)
// Shutdown
~S01_SimpleTriangle()
// OPTIONAL: Custom resize logic (if the app requested it). The default logic is to
// restart the app.
void Resized(const Point2& size)
// OPTIONAL: Fixed time step update method that is called the set number of times
// per second. The fixed time step update is often used for physics.
void FixedUpdate(const DemoTime& demoTime)
1
See DemoFramework\FslDemoApp\include\FslDemoApp\ADemoApp.hpp for a complete list.
i.MX Graphics User’s Guide, Rev. 0, 02/2018
149 NXP Semiconductors
// OPTIONAL: Variable time step update method.
void Update(const DemoTime& demoTime)
// Put the rendering calls here
void Draw()
When the constructor is invoked, the Demo Host API is already set up and is ready for use. The demo framework
uses EGL to configure things as requested by your EGL config and API version.
It is recommended that you do all your setup in the constructor.
This also means that you should never try to shut down EGL in the destructor since the framework does it at the
appropriate time. The destructor should only worry about resources that your demo app actually allocated by
itself.
16.5.1.1 Resized
The resized method is called if the screen resolution changes (if your application never changes resolution, it is
never called)
2
.
16.5.1.2 FixedUpdate
It is fixed time-step update method that is called the set number of times per second. The fixed time step update is
often used for physics
3
.
16.5.1.3 Update
It is called once before every draw call and you normally update your animation using delta time.
For example if you need to move your object 10 units horizontally per second you would do something like
m_positionX += 10 * demoTime.DeltaTime;
16.5.1.4 Draw
Should be used to render graphics.
16.5.2 Fixed or variable timestep update
Depending on what the demo is doing, the user might choose one or the other - or both. This is a complex topic
once you start to dig into it, but in general anything that needs precision and predictable/repeatable calculations,
like for example physics, often benefits from using fixed time steps. It depends on the algorithm, and it is
recommended to research fixed vs. variable, because there are lots of arguments for both. It is also worth noting
that game engines, such as Unity3D
4
support both methods.
16.5.3 Execution order of methods during a frame
The methods is called in this order
• Events (if any occurred)
5
• Resized
6
2
This version of the framework always restart the app, so this will never be called.
3
This version uses a fixed update frequency of 60 ticks per second. This will be configurable in the future.
4
unity3d.com/
5
For an example of event handling see the “DemoApps\GLES2\InputEvents” sample.
i.MX Graphics User’s Guide, Rev. 0, 02/2018
150 NXP Semiconductors
• FixedUpdate (0-N calls. The first frame always has a FixedUpdate call)
• Update
• Draw
After the draw call, a swap occurs.
16.5.4 Exit
The demo app can request an exit to occur, or it can be terminated via an external request.
In both situations one of the following things occurs.
1. If the app has been constructed and has received a FixedUpdate, then it finishes its FixedUpdate, Update,
Draw, swap sequence before its shutdown.
2. If the app requests a shutdown during construction, the application is destroyed before calling any other
method on the object (and no swap occurs).
The app can request an exit to occur by calling:
GetDemoAppControl()->RequestExit(1);
16.5.5 Dealing with screen resolution changes
Per default the app is destroyed and recreated when a resolution change occurs
7
.
It is left up to the DemoApp to save and restore demo-specific state.
16.5.6 Content loading
The framework supports loading files from the Content folder on all platforms.
Given a content folder like this:
Content/Texture1.bmp
Content/Stuff/Readme.txt
You can load the files via the IContentManager service that can be accessed by calling
std::shared_ptr<IContentManager> contentManager = GetContentManager();
You can then load files like this:
Binary file:
std::vector<uint8_t> content;
contentManager->ReadAllBytes(content, "MyData.bin");
Text file:
const std::string content = contentManager-
>ReadAllText("Stuff/Readme.txt");
Bitmap file
8
:
Bitmap bitmap;
contentManager->Read(bitmap, "Texture1.bmp", PixelFormat::RGB888);
6
In this version of the framework this is never called as the app will be recreated on screen size changes
(future versions will allow demo apps to handle resize events if they so desire)
7
Future versions will allow demo apps to handle resize events if they so desire.
8
The current framework only supports a limited subset of BMP images (24 and 32BPP). This will be
extended in a future version where we expect to have DevIL support.

i.MX Graphics User’s Guide, Rev. 0, 02/2018
151 NXP Semiconductors
If you psee control the loading yourself you can retrieve the path to the files like this:
IO::Path contentPath = contentManager->GetContentPath();
IO::Path myData = IO::Path::Combine(contentPath, "MyData.bin");
IO::Path readmePath = IO::Path::Combine(contentPath, "Stuff/Readme.txt");
IO::Path texture1Path = IO::Path::Combine(contentPath, "Texture1.bmp");
You can then open the files with any method you prefer.
Both methods works for all supported platforms.
For detailed information about how the content is handled on each platform, see the build guide appendixes.
The details of the available helper classes for a Demo Application are described in 16.6.
16.5.7 Demo registration
This is done in the S01_SimpleTriangle_Register.cpp file.
namespace
{
// Custom EGL config (overwrites the settings for the listed values.
// however an exact EGL config can be used)
static const EGLint g_eglConfigAttribs[] =
{
EGL_RED_SIZE, 5,
EGL_GREEN_SIZE, 6,
EGL_BLUE_SIZE, 5,
EGL_ALPHA_SIZE, 0,
EGL_SAMPLES, 0,
EGL_NONE
};
}
// configure the demo environment to run this demo app in a OpenGLES2 host environment
FSL_REGISTER_OPENGLES2_DEMO(S01_SimpleTriangle,DemoAppHostConfigEGL(g_eglConfigAttribs
));
Since the demo framework is controlling the main method, you need to register your application with the Demo
Host-specific macro (in this instance, the OpenGL ES2 host), for the framework to register your demo class.
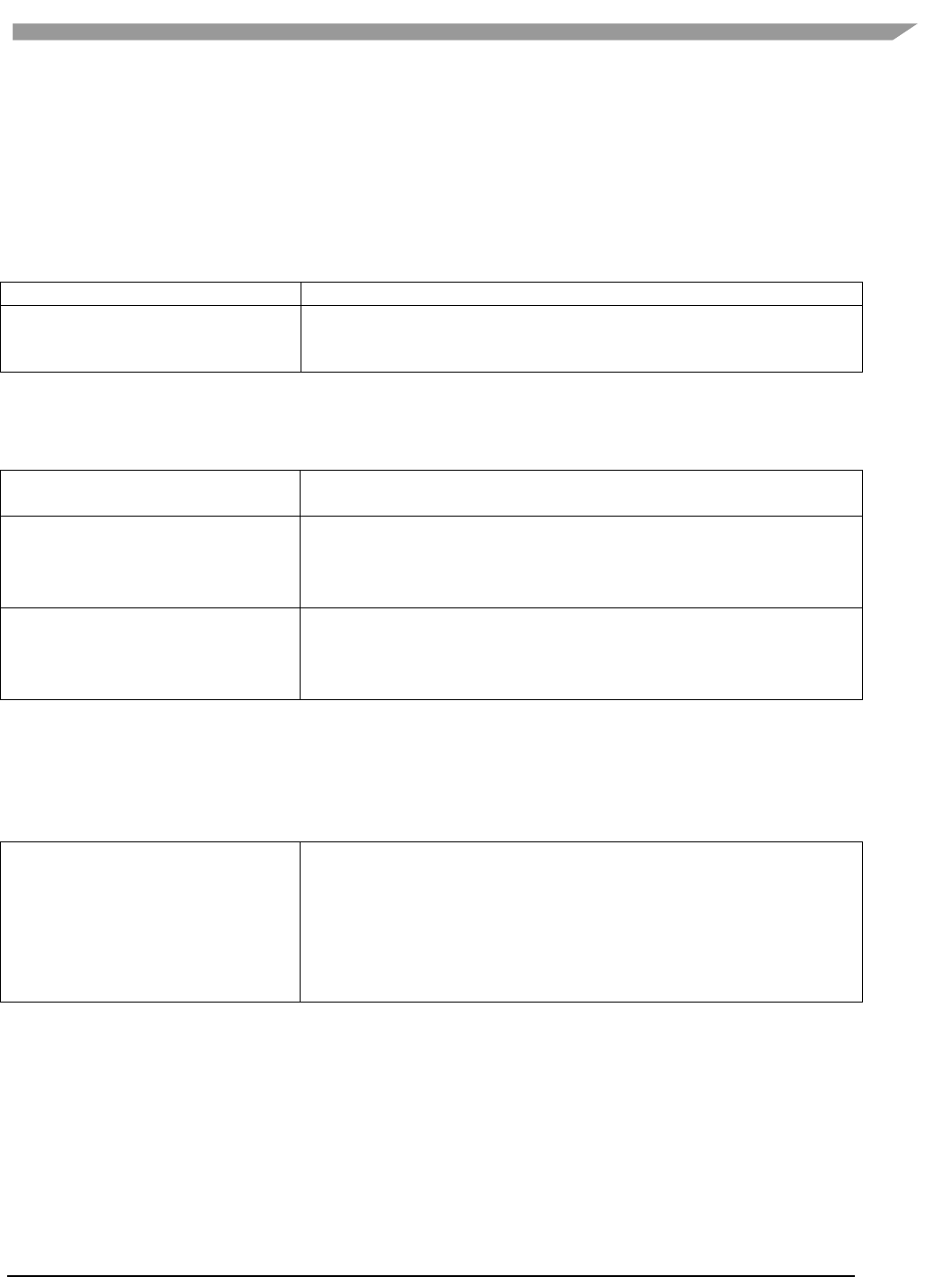
i.MX Graphics User’s Guide, Rev. 0, 02/2018
152 NXP Semiconductors
16.6 Helper Class Overview
16.6.1 FslBase
Provides basic functionality missing from C++ standard libraries.
16.6.1.1 Bits
BitsUtil
Utility methods for working with bits
ByteArrayUtil
Utility methods for reading and writing values from byte arrays in a
specific endian format. This functionality is useful when working on
platform independent load and save methods.
16.6.1.2 IO
Platform independent IO.
Directory
Helper methods for working on directories.
• GetCurrentWorkingDirectory.
File
Helper methods for working with files
• Checking if file exists.
• File length.
• Read all content from a file.
Path
A UTF8 path class and helper methods for working on it.
• Combing paths.
• Extracting directory or filename.
• Getting the full path from a relative path.
16.6.1.3 Log
Platform independent logging.
Instead of using printf or std::cout to log information it’s better to use the provided logging macros since work
across all supported platforms.
Log
Various logging macros
• FSLLOG
• FSLLOG_IF
• FSLLOG_WARNING
• FSLLOG_WARNING_IF
• FSLLOG_ERROR
• FSLLOG_ERROR_IF
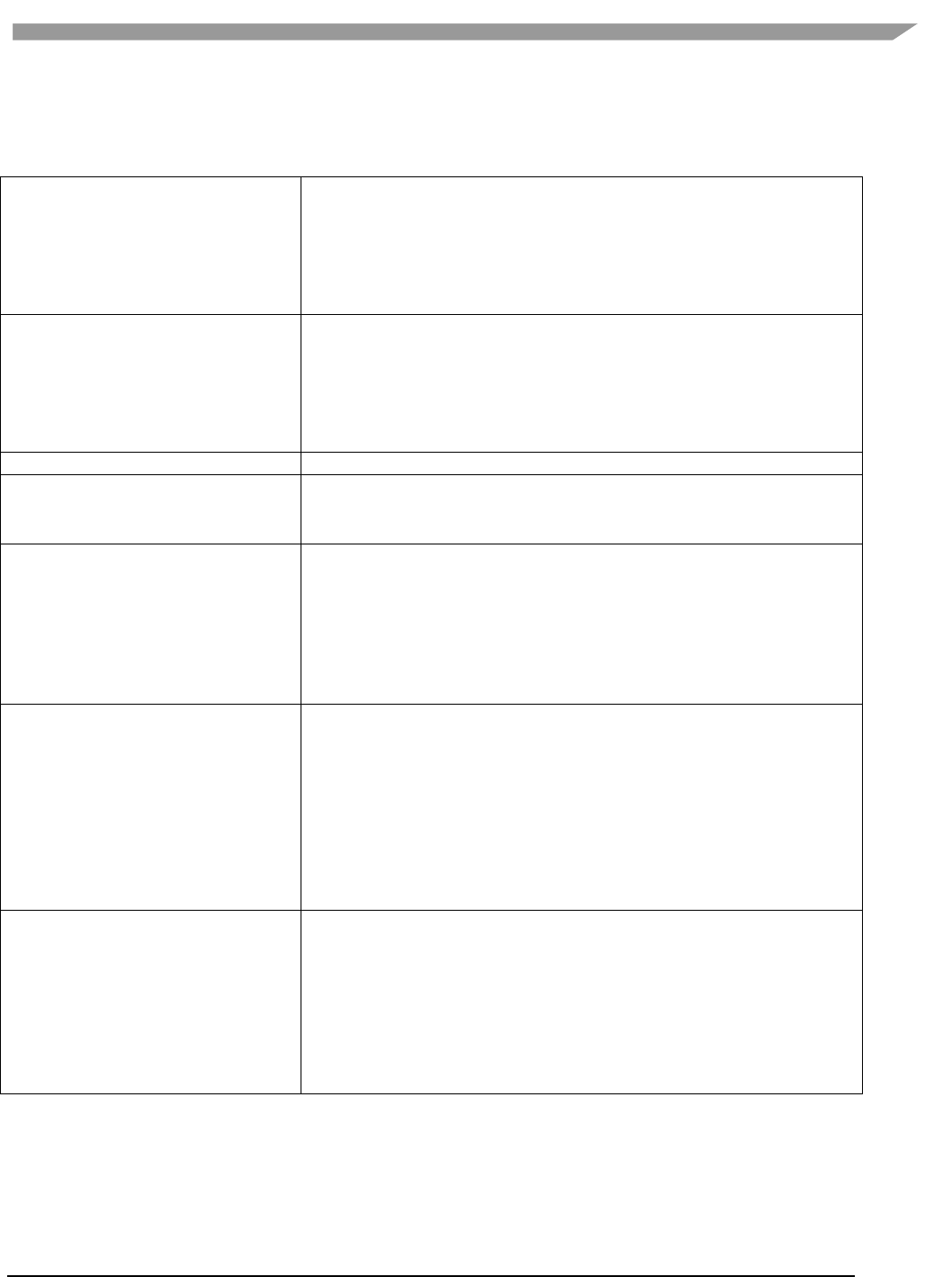
i.MX Graphics User’s Guide, Rev. 0, 02/2018
153 NXP Semiconductors
16.6.1.4 Math
Mainly focused on math functionality useful for working with graphics. It focuses on ease of use instead of raw
performance.
MathHelper
Various commonly used helper methods and constants like
• PI
• Clamping
• Lerp
• Conversions between radians and angles
• PowerOfTwo
Matrix
Matrix helper methods like
• Perspective
• Rotate
• Translate
• Scale
• Multiply
Point2
A 2D integer point.
Rectangle
A integer based rectangle with helper methods like
• Union
• Intersection
Vector2
A 2d float point with helper methods like
• Dot
• Length
• Lerp
• Min, max
• Normalize
• Reflect
Vector3
A 3d float point with helper methods like
• Cross
• Dot
• Length
• Lerp
• Min, max
• Normalize
• Reflect
• Transform by matrix
Vector4
A 4d float point with helper methods like
• Dot
• Length
• Lerp
• Min, max
• Normalize
• Reflect
• Transform by matrix
i.MX Graphics User’s Guide, Rev. 0, 02/2018
154 NXP Semiconductors
16.6.1.5 String
Various string functionality
StringParseUtil
Various utility method for converting a string to a number.
UTF8String
A UTF8 string representation.
16.6.1.6 System
HighResolutionTimer
A platform independent high resolution timer.
16.6.1.7 FslGraphics
Bitmap
A RAII class to manage bitmap data.
BitmapUtil
Contains various helper methods that work on the bitmap class.
• Horizontal flip
• Pixel format conversion
RawBitmap
Read only bitmap information.
RawBitmapEx
Writeable access to bitmap information
RawBitmapUtil
Low level helper methods that work on RawBitmaps
• Horizontal flip
• Padding clear
• Swizzle
16.6.1.8 IO
BMPUtil
A simple helper class for loading and saving BMP images.
It’s not recommended to use it directly. Instead utilize the framework for
loading images9.
See Content loading for more details.
9
A future version will also add saving to the ContentManager.
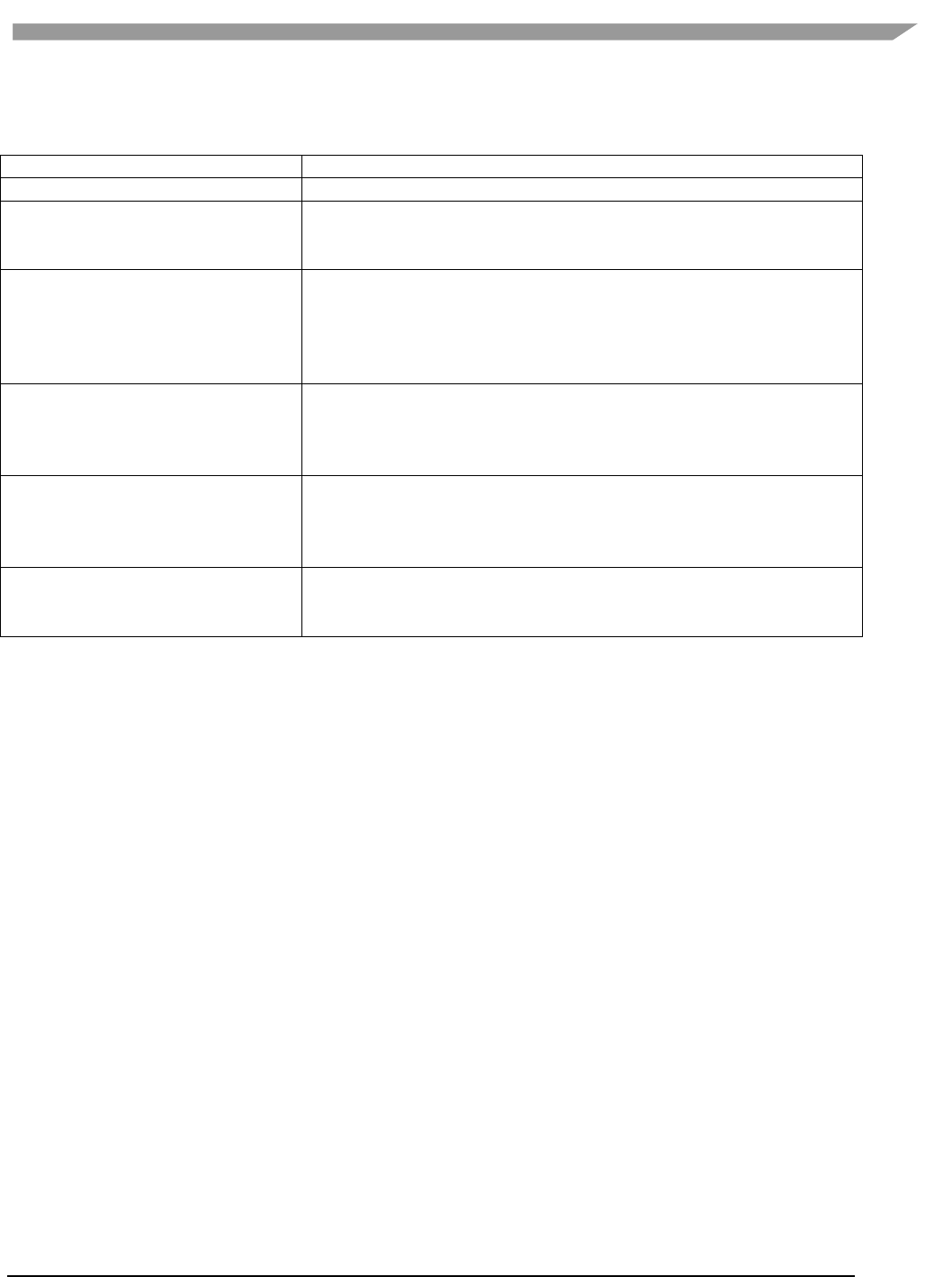
i.MX Graphics User’s Guide, Rev. 0, 02/2018
155 NXP Semiconductors
16.6.1.9 Vertices
API independent vertex helper classes.
VertexDeclaration
Defines how a vertex is constructed in an API independent way.
VertexElementEx
Defines a vertex element
VertexPositionColor
A vertex comprised of
• position
• color.
VertexPositionColorNormalTexture
A vertex comprised of
• position
• color
• normal
• texture coordinates
VertexPositionColorTexture
A vertex comprised of
• position
• color
• texture coordinates
VertexPositionNormalTexture
A vertex comprised of
• position
• normal
• texture coordinates
VertexPositionTexture
A vertex comprised of
• position
• texture coordinates
i.MX Graphics User’s Guide, Rev. 0, 02/2018
156 NXP Semiconductors
16.6.2 FslGraphicsGLES2
RAII based helper classes for common GLES2 operations.
GLCheck
Various helper macros for checking and transforming OpenGL ES errors to
exception.
GLIndexBuffer
A RAII based index buffer.
• uint8_t and uint16_t based index buffers.
• Easy creation and update.
GLProgram
A RAII based GL program encapsulation.
• Vertex and fragment shader combination.
GLShader
A RAII based GL shader encapsulation.
• Compilation and logging.
GLTexture
A RAII based GL texture encapsulation.
• Can be created from either FslGraphics RawBitmaps or Bitmaps.
• Easy content update.
• Supports both normal and cubemap textures.
GLUtil
Contains various utility methods for OpenGL ES2
• Capture screenshots
GLVertexBuffer
A RAII based vertex buffer.
• Easy creation and updating from Custom or FslGraphics.Vertices.
• Helper methods for quickly enabling/disabling Attribs
16.6.3 FslGraphicsGLES3
RAII based helper classes for common GLES3 operations.
GLES3 has the exact same helper classes as GLES2 and the following additions:
GLVertexArray
A RAII based vertex array.
• Easy creation
i.MX Graphics User’s Guide, Rev. 0, 02/2018
157 NXP Semiconductors
16.7 Android SDK+NDK on Windows OS build guide
16.7.1 Prerequisites
• JDK (32 bit)
IMPORTANT: Make sure to configure JAVA_HOME to point to the JDK directory
• Android SDK (32 bit)
After installation, run "SDK Manager.exe" and make sure everything is up to date.
IMPORTANT: Make sure to configure ANDROID_HOME to point to the Android SDK directory
IMPORTANT: Make sure that you have the Android Lollipop 5.0.0 (API 19) SDK Platform installed.
• Android NDK (32 bit)
IMPORTANT: Make sure to configure ANDROID_NDK to point to the Android NDK directory
• Ant
IMPORTANT: Make sure to configure ANT_HOME to point to the ant directory
Extra info: www.androidengineer.com/2010/06/using-ant-to-automate-building-android.html
• Python 2.7.x
o For 32bit Windows OS
o For 64bit Windows OS
16.7.2 Environment setup
1. Start a Windows OS console (cmd.exe) in the DemoFramework folder.
2. Run the 'prepare.bat' file located in the root of the framework folder to configure the necessary
environment variables and paths. Note that the prepare.bat file requires the current working directory to
be the root of your demoframework folder to function (which is also the folder it resides in).
16.7.3 Compiling and running an existing sample application
In this example we use the GLES2 S06_Texturing application.
1. Make sure that you performed the environment setup.
2. Change directory to the sample directory:
cd DemoApps\GLES2\S06_Texturing\Android
3. Build and install the app APK (See the ant notes for more details)
ant debug install
16.7.4 Creating a new GLES2 demo project named 'CoolNewDemo'
1. Make sure that you performed the environment setup.
2. Change directory to the GLES2 sample directory:
cd DemoApps/GLES2
3. Create the project template using the FslNewDemoProject.py script
FslNewDemoProject.py all -t GLES2 CoolNewDemo
4. Change directory to the newly created project folder 'CoolNewDemo'

i.MX Graphics User’s Guide, Rev. 0, 02/2018
158 NXP Semiconductors
cd CoolNewDemo
5. Generate build files for the Android platform, Ubuntu and Yocto Project (this step will be simplified soon)
FslBuildGen.py
When you add the generated build.sh to git on Windows OS, remember to set the executable bit using:
git update-index --chmod=+x build.sh
6. Change directory to the Android folder 'CoolNewDemo'
cd Android
7. Build and install the app APK
ant debug install
If you add source files to a project or change the Fsl.gen file then run the FslBuildGen.py script in the project root
folder to regenerate the various build files.
16.7.5 Notes
16.7.5.1 Content
As long as you utilize one of the methods above to load the resources, you don’t really need to know the following.
However if you experience problems it might be useful for you to know.
Under Android platform builds, we package all content using the Android 'assets' system. Since the system
requires that the asset files are located under its 'assets' folder (located at Android/assets in our samples) we
utilize a one way folder synchronization utility called 'FslContentSync.py' to ensure that all files and directories
under Content exist inside the asset folder as well. The synchronization script is automatically invoked during the
Android build process. To complicate things further the Android assets cannot normally be accessed via filenames
using standard C/C++ methods. Because of this the assets are 'unpacked' on target to either the external or
internal file system which allows us to open the files any way we like. Unfortunately this means that there is a
slight unpacking delay the first time a sample is executed.
16.7.5.2 Command line app building via Ant
developer.android.com/tools/building/building-cmdline.html
16.8 Ubuntu build guide
16.8.1 Prerequisites
• Ubuntu14.04 64 bit
• Build tools and xrand
sudo apt-get install build-essential libxrandr-dev
• Python 2.7
It should be part of the default Ubuntu14.04 install.
• A OpenGL ES 2+ emulator
o Mesa OpenGL ES 2
sudo apt-get install libgles2-mesa-dev

i.MX Graphics User’s Guide, Rev. 0, 02/2018
159 NXP Semiconductors
o ARM Mali OpenGL ES 3.0 Emulator V1.4.1 (64 bit)
wget
http://malideveloper.arm.com/downloads/tools/emulator/1.4.1/Mali_OpenGL_E
S_Emulator-1.4.1-Linux-64bit.deb
sudo dpkg -i Mali_OpenGL_ES_Emulator-1.4.1-Linux-64bit.deb
16.8.2 Environment setup
1. Start a terminal (ctrl+alt t) in the DemoFramework folder
2. Run the 'prepare.sh' file located in the root of the framework folder to configure the necessary
environment variables and paths. Note that the prepare.sh file requires the current working directory to
be the root of your demoframework folder to function (which is also the folder it resides in).
source prepare.sh
16.8.3 Compiling all samples
1. Make sure that you performed the environment setup
2. Compile everything (a good rule of thumb for '-j N' is number of cpu cores * 2)
./build.sh -j 2
16.8.4 Compiling and running an existing sample application
In this example we use the GLES2 S06_Texturing application.
1. Make sure that you performed the environment setup
2. Change directory to the sample directory:
cd DemoApps/GLES2/S06_Texturing
3. Compile the project (a good rule of thumb for '-j N' is number of cpu cores * 2)
./build.sh -j 2
16.8.5 Creating a new GLES2 demo project named 'CoolNewDemo'
1. Make sure that you performed the environment setup
2. Change directory to the GLES2 sample directory:
cd DemoApps/GLES2
3. Create the project template using the FslNewDemoProject.py script
FslNewDemoProject.py all -t GLES2 CoolNewDemo
4. Change directory to the newly created project folder 'CoolNewDemo'
cd CoolNewDemo
5. Generate build files for the Android platform, Ubuntu and Yocto Project (this step will be simplified soon)
FslBuildGen.py
chmod u+x build.sh
6. Compile the project (a good rule of thumb for '-j N' is number of cpu cores * 2)

i.MX Graphics User’s Guide, Rev. 0, 02/2018
160 NXP Semiconductors
./build.sh -j 2
If you add source files to a project or change the Fsl.gen file then run the FslBuildGen.py script in the project root
folder to regenerate the various build files.
16.8.6 NOTES:
16.8.6.1 Content
As long as you utilize one of the methods above to load the resources, you don’t really need to know the following.
However, if you experience problems it might be useful for you to know.
The ubuntu build expects the content folder to be located at "<executable directory>/content". Since the binary is
put in the sample root directory where the content folder is located, there should be no problem loading the
resources.
16.8.6.2 Manual environment setup
1. Configure your FSL_GRAPHICS_SDK to point to the downloaded sdk without the ending backslash:
export FSL_GRAPHICS_SDK=~/fsl/YourDemoFrameworkFolder
2. For easy access to the python scripts (not required for building)
PATH=$PATH:$FSL_GRAPHICS_SDK/.Config
16.8.6.3 Override platform auto-detection
To override the platform auto detection code set the following variable
export FSL_PLATFORM_NAME=Ubuntu
16.8.6.4 Executable location
The final executable is placed in the root of the demo application folder. If it is moved the content folder (if it exist)
needs to be copied to the same location.
16.9 Windows OS build guide
16.9.1 Prerequisites
• Visual Studio 2013 (community edition or better)
• Python 2.7.x
o For 32bit Windows
o For 64bit Windows
• A OpenGL ES 2+ emulator
o ARM Mali OpenGL ES 3.0 Emulator V1.4.1 (32 bit)
o Vivante OpenGL ES Emulator
To get started its recommended to utilize the ARM Mali OpenGL ES 3.0 emulator (32 bit) which this guide assumes
you are using.
16.9.2 Environment setup
1. Start a Windows OS console (cmd.exe) in the DemoFramework folder

i.MX Graphics User’s Guide, Rev. 0, 02/2018
161 NXP Semiconductors
2. Run the 'prepare.bat' file located in the root of the framework folder to configure the necessary environment
variables and paths. Note that the prepare.bat file requires the current working directory to be the root of
your demoframework folder to function (which is also the folder it resides in).
16.9.3 Compiling and running an existing sample application
In this example we use the GLES2 S06_Texturing application.
1. Make sure that you performed the environment setup
2. Change directory to the sample directory:
cd DemoApps\GLES2\S06_Texturing
3. Launch Microsoft Visual Studio using the ARM Mali Emulator:
.StartProject_Arm.bat
4. Compile and run the project (The default is to press F5)
To use the Vivante emulator, use .StartProject_Vivante.bat instead of .StartProject_Arm.bat.
16.9.4 Creating a new GLES2 demo project named 'CoolNewDemo'
1. Make sure that you performed the environment setup
2. Change directory to the GLES2 sample directory:
cd DemoApps/GLES2
3. Create the project template using the FslNewDemoProject.py script
FslNewDemoProject.py all -t GLES2 CoolNewDemo
4. Change directory to the newly created project folder 'CoolNewDemo'
cd CoolNewDemo
5. Generate build files for the Android platform, Ubuntu and Yocto Project (this step will be simplified soon)
FslBuildGen.py
When you add the generated build.sh to git on the Windows OS, remember to set the executable bit
using:
git update-index --chmod=+x build.sh
6. Launch Microsoft Visual Studio using the ARM Mali Emulator:
.StartProject_Arm.bat
7. Compile and run the project (The default is to press F5) or start creating your new demo.
If you add source files to a project or change the Fsl.gen file then run the FslBuildGen.py script in the project root
folder to regenerate the various build files.
16.9.5 Notes
16.9.5.1 Content
As long as you utilize one of the methods above to load the resources, you don’t need to know the following.
However, if you experience problems it might be useful for you to know.
The Windows OS build expects the content folder to be located at "<current working directory>/content". When
you launch the sample via the Microsoft Visual Studio project, the current working directory is equal to the sample
root directory where the content folder is located, so there should be no problem loading the resources.
16.9.5.2 Switching between emulators
The Microsoft Visual Studio projects have been configured so that emulator builds can coexist without interfering
with each other. Furthermore, the only the emulator dependent parts are rebuilt when changing emulator.
Therefore, it should be very fast to switch between emulators.
i.MX Graphics User’s Guide, Rev. 0, 02/2018
162 NXP Semiconductors
16.9.5.3 Executable location
The executable location is based on the build type release/debug and which emulator you are using, so the
executable for a demo called S06_Texturing build as debug and using the ARM emulator is located under
bin\S06_Texturing\Debug_ARM\
The content folder is located at
Content
To move them, make sure that both the S06_Texturing.exe and Content folder is moved to the same location like
this:
S06_Texturing.exe
Content
16.10 Yocto build guide
16.10.1 Prerequisites
• Python 2.7
It should be part of the default Ubuntu12.04 installation.
• A working Yocto build
For example, follow one of these:
o http://git.freescale.com/git/cgit.cgi/imx/fsl-arm-yocto-bsp.git/tree/README?h=imx-3.14.52-
1.1.0_ga
o community.nxp.com/docs/DOC-94866
• One of these:
X11 Yocto image
Example:
MACHINE=imx6qsabreauto source fsl-setup-release.sh -b build-x11 -e x11
bitbake fsl-image-gui
bitbake meta-toolchain
bbitbake meta-ide-support
Extracted rootfs
We assume your Yocto build dir is located at ~/fsl-release-bsp/build-x11 and that the rootfs is unpacked
to ~/unpacked-rootfs/build-x11 and the image is called fsl-image-gui-imx6qsabresd-
20141013154554.rootfs.tar.bz2 (you need to locate your image name)
runqemu-extract-sdk ~/fsl-release-bsp/build-
x11/tmp/deploy/images/imx6qsabresd/fsl-image-gui-imx6qsabresd-
20141013154554.rootfs.tar.bz2 ~/unpacked-rootfs/build-x11
FB Yocto image
Example:
MACHINE=imx6qsabreauto source fsl-setup-release.sh -b build-fb -e fb
bitbake fsl-image-gui
bitbake meta-toolchain
bitbake meta-ide-support
Extracted rootfs
i.MX Graphics User’s Guide, Rev. 0, 02/2018
163 NXP Semiconductors
We assume your Yocto build dir is located at ~/fsl-release-bsp/build-fb and that the rootfs is unpacked to
~/unpacked-rootfs/build-fb and the image is called fsl-image-gui-imx6qsabresd-
20141013154554.rootfs.tar.bz2 (you need to locate your image name)
runqemu-extract-sdk ~/fsl-release-bsp/build-
fb/tmp/deploy/images/imx6qsabresd/fsl-image-gui-imx6qsabresd-
20141013154554.rootfs.tar.bz2 ~/unpacked-rootfs/build-fb
Wayland Yocto image
Example:
MACHINE=imx6qsabreauto source fsl-setup-release.sh -b build-wayland -e wayland
bitbake fsl-image-gui
bitbake meta-toolchain
bitbake meta-ide-support
Extracted rootfs
We assume your Yocto build dir is located at ~/fsl-release-bsp/build-wayland and that the rootfs is
unpacked to ~/unpacked-rootfs/build-wayland and the image is called fsl-image-gui-imx6qsabresd-
20141013154554.rootfs.tar.bz2 (you need to locate your image name)
runqemu-extract-sdk ~/fsl-release-bsp/build-
wayland/tmp/deploy/images/imx6qsabresd/fsl-image-gui-imx6qsabresd-
20141013154554.rootfs.tar.bz2 ~/unpacked-rootfs/build-wayland
DirectFB Yocto image
Example:
MACHINE=imx6qsabresd source fsl-setup-release.sh -b build-dfb -e dfb
bitbake fsl-image-gui
bitbake meta-toolchain
bitbake meta-ide-support
Extracted rootfs
We assume your Yocto build dir is located at ~/fsl-release-bsp/build-dfb and that the rootfs is unpacked to
~/unpacked-rootfs/build-dfb and the image is called fsl-image-gui-imx6qsabresd-
20141013154554.rootfs.tar.bz2 (you need to locate your image name)
runqemu-extract-sdk ~/fsl-release-bsp/build-
dfb/tmp/deploy/images/imx6qsabresd/fsl-image-gui-imx6qsabresd-
20141013154554.rootfs.tar.bz2 ~/unpacked-rootfs/build-dfb

i.MX Graphics User’s Guide, Rev. 0, 02/2018
164 NXP Semiconductors
This guide assumes that you are using an X11 image.
16.10.2 Yocto project environment setup:
Prepare the Yocto project build environment:
pushd ~/fsl-release-bsp
MACHINE=imx6qsabreauto source fsl-setup-release.sh -b build-x11 -e x11
cd tmp
source environment-setup-cortexa9hf-vfp-neon-poky-linux-gnueabi
export ROOTFS=~/unpacked-rootfs/build-x11
popd
16.10.3 Demo framework environment setup
1. Make sure that you performed the Yocto project setup.
2. cd to the demoframework folder.
3. Run the 'prepare.sh' file located in the root of the framework folder to configure the necessary environment
variables and paths. Note that the prepare.sh file requires the current working directory to be the root of
your demoframework folder to function (which is also the folder it resides in).
source prepare.sh
16.10.4 Compiling all samples
1. Make sure that you performed the demo framework environment setup.
2. Compile everything (a good rule of thumb for '-j N' is number of cpu cores * 2)
./build.sh -f GNUmakefile_Yocto -j 2 EGLBackend=x11
EGLBackend can be set to either: DirectFB, FB, Wayland or X11.
16.10.5 Compiling and running an existing sample application
In this example, we use the GLES2 S06_Texturing application.
1. Make sure that you performed the demo framework environment setup.
2. Change directory to the sample directory:
cd DemoApps/GLES2/S06_Texturing
3. Compile the project (a good rule of thumb for '-j N' is number of cpu cores * 2)
./build.sh -f GNUmakefile_Yocto -j 2 EGLBackend=x11
EGLBackend can be set to either: DirectFB, FB, Wayland or X11

i.MX Graphics User’s Guide, Rev. 0, 02/2018
165 NXP Semiconductors
16.10.6 Creating a new GLES2 demo project named 'CoolNewDemo'
1. Make sure that you performed the demo framework environment setup.
2. Change directory to the GLES2 sample directory:
cd DemoApps/GLES2
3. Create the project template using the FslNewDemoProject.py script
FslNewDemoProject.py all -t GLES2 CoolNewDemo
4. Change directory to the newly created project folder 'CoolNewDemo'
cd CoolNewDemo
5. Generate build files for the Android platform, Ubuntu and Yocto Project (this step will be simplified soon)
FslBuildGen.py
chmod u+x build.sh
6. Compile the project (a good rule of thumb for '-j N' is number of cpu cores * 2)
./build.sh -f GNUmakefile_Yocto -j 2 EGLBackend=x11
EGLBackend can be set to either: DirectFB, FB, Wayland or X11
If you add source files to a project or change the Fsl.gen file then run the FslBuildGen.py script in the project root
folder to regenerate the various build files.
16.10.7 NOTES
16.10.7.1 Content
As long as you use one of the methods above to load the resources, you do not need to know the following.
However, if you experience problems, it might be useful for you to know.
The Yocto project build expects the content folder to be located at "<executable directory>/content".
16.10.7.2 Manual environment setup
Configure your FSL_GRAPHICS_SDK to point to the downloaded SDK without the ending backslash:
export FSL_GRAPHICS_SDK=~/fsl/YourDemoFrameworkFolder
For easy access to the python scripts
PATH=$PATH:$FSL_GRAPHICS_SDK/.Config
16.10.7.3 Override platform auto-detection
To override the platform auto detection code set the following variable
export FSL_PLATFORM_NAME=Yocto

i.MX Graphics User’s Guide, Rev. 0, 02/2018
166 NXP Semiconductors
16.10.7.4 Building for multiple backends
The makefiles have been configured so that the builds for all backends can coexist without interfering with each
other. Furthermore, the only backend dependent parts are rebuilt when changing backend.
Therefore, it should be very fast to switch between backends.
The demo app executables are post fixed with the backend its build for to ensure no conflicts occurs.
16.10.7.5 Executable location
The final executable is placed in the root of the demo application folder. If it is moved the content folder (if it exist)
needs to be copied to the same location.
The executables follows this naming scheme:
<DemoAppName>_<BackendName>[<TargetPostFix>]
Therefore, a debug build of S06_Texturing for the DirectFB backend is called:
S06_Texturing_DirectFB_d
A release build of S06_Texturing for the X11 backend is called:
S06_Texturing_X11
16.11 FslContentSync.py notes
• Does not copy files that start with a '.' in its file or directory name.
• Does not allow files to contain ".." in its name.
• Does not use file names that only differ by casing like this:
o Shader.txt
o shader.txt
• Due to the Android asset packer it is not recommended to use Unicode file names as they are
unsupported by the Android tool at the moment.
16.12 Roadmap – Upcoming features
16.12.1 Technical overview
• Graphics API support
− OpenVG
− G2D
• Services
− Model loader via Assimp
− Image loading via DevIL
• Implementation of standard way for handling
− Demo time stepping: pause, single step, slow motion.
− Screenshot support.
− A performance graph

i.MX Graphics User’s Guide, Rev. 0, 02/2018
167 NXP Semiconductors
16.13 Known limitations
16.13.1 General
• The Android platform, Ubuntu and Windows OS support is considered experimental for this release.
• FslBuildGen does not update the Microsoft Visual Studio® Windows projects.
16.13.2 Android platform
• The Android platform does not handle Unicode file names inside the 'content' folder. Therefore, do not
use Unicode for filenames stored in Content. The culprit is the Android assets folder which we utilize for
content files.
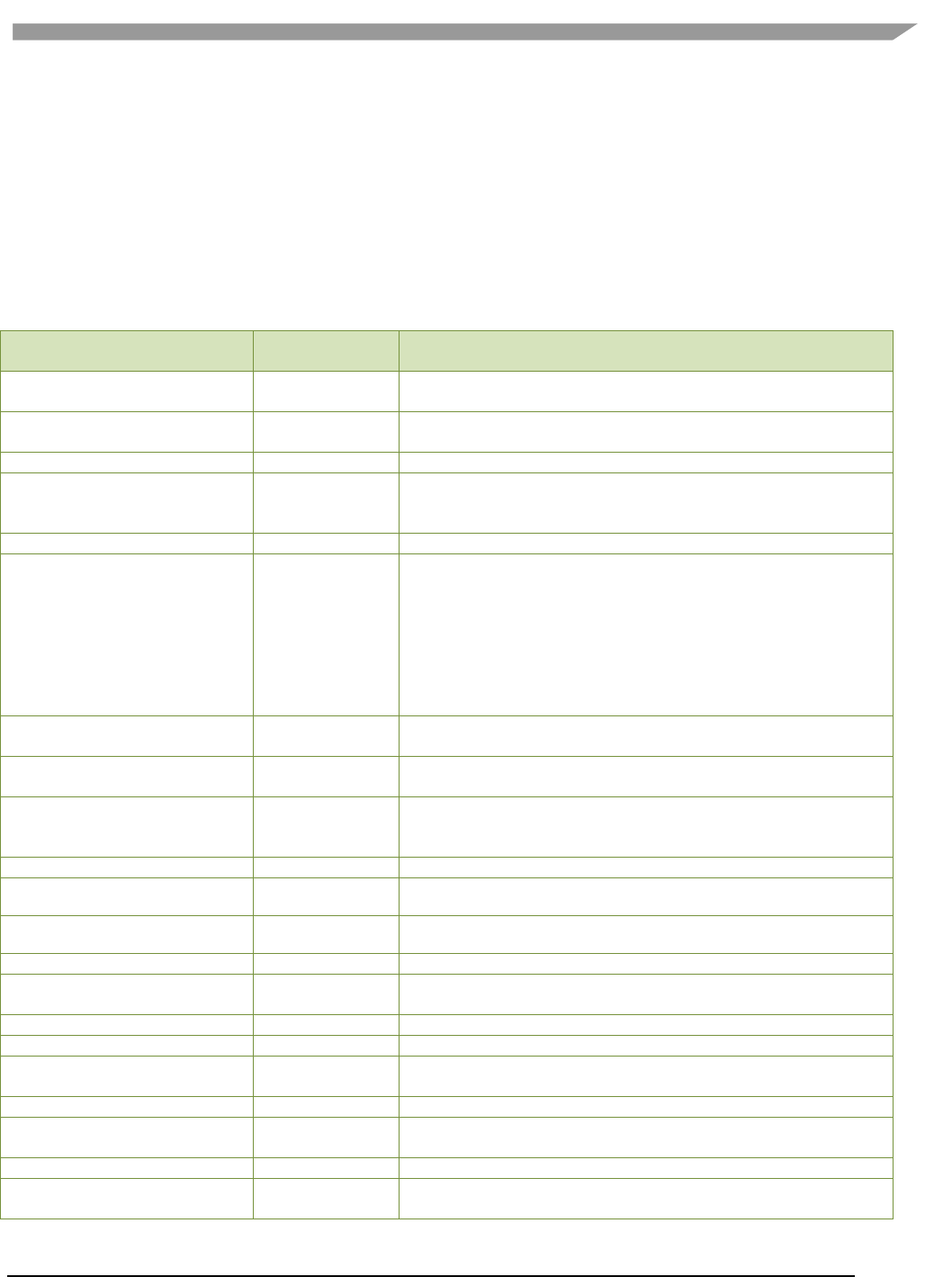
i.MX Graphics User’s Guide, Rev. 0, 02/2018
168 NXP Semiconductors
Chapter 17 Environment Variables Summary
The table below lists the environment variables (ENV) available in the GPU drivers.
The use of most environment variables remains static from driver version to driver version, but sometimes these
variables need refinements to meet new, advanced conditions not present with the ENV initially introduced.
17.1 Environment variable for drivers and HAL
Table 33. Environment variables for drivers and HAL
ENV name
Backends
suported
Note
FB_IGNORE_DISPLAY_SIZE
FB/WLD
0: Clip window to device display size.
1: Do not clip window to the device limits for width and height.
FB_MULTI_BUFFER
FB/WLD
Number of backend buffers of the framebuffer device. For WLD, define
the multibuffer number of Weston.
FB_FRAMEBUFFER_N
FB/WLD
Define the Nth framebuffer device.
FB_LEGACY
FB
If board doesn’t support drm-fb, ignore this variable.
0: GPU render through drm
1: GPU directly render to framebuffer.
VG_APITIME
FB/WLD/X11
Enable VG API function execution time print.
VIV_MGPU_AFFINITY
FB/WLD/X11
Control the multiple GPUs affinity configuration.
Possible value:
• Not defined or defined as "0"
GPUs work in GPU_COMBINED mode.
• 1:0
GPUs work in GPU_INDEPEDNENT mode, GPU0 is used.
• 1:1
GPUs work in GPU_INDEPEDNENT mode, GPU1 is used.
VIV_DEBUG
FB/WLD/X11
Define the user debug message level
(-MSG_LEVEL: ERROR/WARNING).
VIV_FBO_PREFER_MEM
FB/WLD/X11
Renderbuffer is not freed after colorbuffer detaches from FBO (GL ES
2.0)
VIV_DISABLE_HZ
FB/WLD/X11
This variable can be specifically enabled for i.mx6d/q to avoid gpu hang
with occlusion query in ES30, because of gpu hardware problem
HBN1246
GPU_VIV_EXT_RESOLVE
FB/WLD/X11
Enable the external resolve mode (1 by default for FB).
GPU_VIV_DISABLE_SUPERTIL
ED_TEXTURE
FB/WLD/X11
Disable supertiled texture (64x64 tiled texture is not used).
GPU_VIV_DISABLE_CLEAR_F
B
FB/WLD/X11
Enable clear buffer when a new Window surface is created.
GPU_VIV_WL_MULTI_BUFFER
WLD
Define the client multibuffer number.
DRI_IGNORE_DISPLAY_SIZE/
X_IGNORE_DISPLAY_SIZE
X11
0: Clip window to device display size.
1: Do not clip window to the device limits for width and height.
__GL_DEV_FB
X11
Set the path for framebuffer device like /dev/fb0.
LIBGL_ALWAYS_INDIRECT
X11
Make OGL go into indirect mode. All rendering is done by XserverSet.
LIBGL_DEBUG
X11
Print error message to stderr if LIBGL_DEBUG env var is set. Print info
message to stderr if LIBGL_DEBUG env var is set to “verbose”.
VIV_PROFILE
vProfiler
Enable profiler. Different level results generate different results.
VP_COUNTER_FILTER
vProfiler
Used to control profile different system resource like memory/CPU time
usage.
VP_FRAME_END
vProfiler
When VIV_PROFILE=3, specify the frame to end profiling with vProfiler.
VP_FRAME_NUM
vProfiler
When VIV_PROFILE=1, used to specify the number of frames dumped
by vProfiler.
i.MX Graphics User’s Guide, Rev. 0, 02/2018
169 NXP Semiconductors
VP_FRAME_START
vProfiler
When VIV_PROFILE=3, specify the frame to start profiling with vProfiler.
VP_OUTPUT
vProfiler
Specify the output file name of vProfiler (default is vprofiler.vpd).
VP_PROCESS_NAME
vProfiler
Choose profiler enable process (This option is only available for Android
platform, not available for Linux OS).
VP_SYNC_MODE
vProfiler
Enable [1] or disable [0] the synchronous mode of vProfiler (default is
synchronous enabled).
VP_USE_GLFINISH
vProfiler
Use glFinish as the frameEnd.
VIV_TRACE
vTracer
Enable tracer. Different levels could generate different logs.
17.2 Environment variable for compiler
Table 34. Environment variables for compiler
ENV NAME
Compiler
Note
VC_DUMP_SHADER_SOURCE
GLSLC/VSC
Enable dumping the shader source code.

Information in this document is provided solely to enable system and software
implementers to use NXP products. There are no express or implied copyright licenses
granted hereunder to design or fabricate any integrated circuits based on the
information in this document. NXP reserves the right to make changes without further
notice to any products herein.
NXP makes no warranty, representation, or guarantee regarding the suitability of its
products for any particular purpose, nor does NXP assume any liability arising out of
the application or use of any product or circuit, and specifically disclaims any and all
liability, including without limitation consequential or incidental damages. “Typical”
parameters that may be provided in NXP data sheets and/or specifications can and do
vary in different applications, and actual performance may vary over time. All operating
parameters, including “typicals”, must be validated for each customer application by
customerís technical experts. NXP does not convey any license under its patent rights
nor the rights of others. NXP sells products pursuant to standard terms and conditions
of sale, which can be found at the following address:
nxp.com/SalesTermsandConditions.
How to Reach Us:
Home Page:
nxp.com
Web Support:
nxp.com/support
NXP, the NXP logo, Freescale, and the Freescale logo are trademarks of NXP B.V. All
other product or service names are the property of their respective owners.
Arm, the Arm logo, and Cortex are registered trademarks of Arm Limited (or its
subsidiaries) in the EU and/or elsewhere. All rights reserved.
© 2018 NXP B.V.
Document Number: IMXGRAPHICUG
Rev. 0
02/2018
