I.MX Linux® Reference Manual Linux
i.MX_Linux_Reference_Manual
User Manual:
Open the PDF directly: View PDF ![]() .
.
Page Count: 377 [warning: Documents this large are best viewed by clicking the View PDF Link!]
- Chapter 1: About this Book
- Chapter 2: Introduction
- Chapter 3: Machine Specific Layer (MSL)
- Chapter 4: Smart Direct Memory Access (SDMA) API
- Chapter 5: AHB-to-APBH Bridge with DMA (APBH-Bridge-DMA)
- Chapter 6: Image Processing Unit (IPU) Drivers
- Chapter 7: MIPI DSI Driver
- Chapter 8: LVDS Display Bridge(LDB) Driver
- Chapter 9: Video for Linux Two (V4L2) Driver
- Chapter 10: Electrophoretic Display Controller (EPDC) Frame Buffer Driver
- Chapter 11: Pixel Pipeline (PxP) DMA-ENGINE Driver
- Chapter 12: ELCDIF Frame Buffer Driver
- Chapter 13: Graphics Processing Unit (GPU)
- Chapter 14: Direct FB
- Chapter 15: Wayland
- Chapter 16: On-Chip High Definition Multimedia Interface (HDMI) Driver
- Chapter 17: External High-Definition Multimedia Interface (HDMI) for i.MX 6SoloLite
- Chapter 18: X Windows Acceleration
- Chapter 19: Video Processing Unit (VPU) Driver
- Chapter 20: OmniVision Camera Driver
- Chapter 21: MIPI CSI2 Driver
- Chapter 22: Low-level Power Management (PM) Driver
- Chapter 23: PF100 Regulator Driver
- Chapter 24: CPU Frequency Scaling (CPUFREQ) Driver
- Chapter 25: Dynamic Bus Frequency Driver
- Chapter 26: Thermal Driver
- Chapter 27: Anatop Regulator Driver
- Chapter 28: SNVS Real Time Clock (SRTC) Driver
- Chapter 29: Advanced Linux Sound Architecture (ALSA) System on a Chip (ASoC) Sound Driver
- Chapter 30: Advanced Linux Sound Architecture (ALSA) System on a Chip (ASoC) Sound Driver for i.MX 6SoloLite
- Chapter 31: Asynchronous Sample Rate Converter (ASRC) Driver
- Chapter 32: The Sony/Philips Digital Interface (S/PDIF) Driver
- Chapter 33: SPI NOR Flash Memory Technology Device (MTD) Driver
- Chapter 34: MMC/SD/SDIO Host Driver
- Chapter 35: NAND GPMI Flash Driver
- Chapter 36: SATA Driver
- Chapter 37: Inter-IC (I2C) Driver
- Chapter 38: Enhanced Configurable Serial Peripheral Interface (ECSPI) Driver
- Chapter 39: FlexCAN Driver
- Chapter 40: Media Local Bus Driver
- Chapter 41: CHIPIDEA USB Driver
- Chapter 42: i.MX 6 PCI Express Root Complex Driver
- Chapter 43: EIM NOR Driver
- Chapter 44: Quad Serial Peripheral Interface (QuadSPI) Driver
- Chapter 45: Fast Ethernet Controller (FEC) Driver
- Chapter 46: ENET IEEE-1588 Driver
- Chapter 47: Universal Asynchronous Receiver/Transmitter (UART) Driver
- Chapter 48: AR6003 WiFi
- Chapter 49: Pulse-Width Modulator (PWM) Driver
- Chapter 50: Watchdog (WDOG) Driver
- Chapter 51: OProfile
- Chapter 52: CAAM (Cryptographic Acceleration and Assurance Module)
- CAAM Device Driver Overview
- Configuration and Job Execution Level
- Control/Configuration Driver
- Job Ring Driver
- API Interface Level
- Driver Configuration
- Limitations
- Limitations in the Existing Implementation Overview
- Initialize Keystore Management Interface
- Detect Available Secure Memory Storage Units
- Establish Keystore in Detected Unit
- Release Keystore
- Allocate a Slot from the Keystore
- Load Data into a Keystore Slot
- Demo Image Update
- Decapsulate Data in the Keystore
- Read Data From a Keystore Slot
- Release a Slot back to the Keystore
- CAAM/SNVS - Security Violation Handling Interface Overview
- Operation
- Configuration Interface
- Install a Handler
- Remove an Installed Driver
- Driver Configuration CAAM/SNVS
- Chapter 53: Remote Processor Messaging (RPMsg)
- Chapter 54: Display Content Integrity Checker (DCIC)
- Chapter 55: ADC Driver
- Chapter 56: Video Analog-to-Digital Converter (VADC)

i.MX Linux® Reference Manual
Document Number: IMXLXRM
Rev. L3.14.38_6ul-ga, 09/2015

i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
2 Freescale Semiconductor, Inc.

Contents
Section number Title Page
Chapter 1
About this Book
1.1 Audience....................................................................................................................................................................... 27
1.1.1 Conventions................................................................................................................................................... 27
1.1.2 Definitions, Acronyms, and Abbreviations....................................................................................................27
Chapter 2
Introduction
2.1 Overview.......................................................................................................................................................................31
2.1.1 Software Base................................................................................................................................................ 31
2.1.2 Features.......................................................................................................................................................... 31
Chapter 3
Machine Specific Layer (MSL)
3.1 Introduction...................................................................................................................................................................37
3.2 Interrupts (Operation)................................................................................................................................................... 37
3.2.1 Interrupt Hardware Operation........................................................................................................................38
3.2.2 Interrupt Software Operation......................................................................................................................... 38
3.2.3 Interrupt Features........................................................................................................................................... 38
3.2.4 Interrupt Source Code Structure.................................................................................................................... 39
3.2.5 Interrupt Programming Interface................................................................................................................... 39
3.3 Timer.............................................................................................................................................................................40
3.3.1 Timer Software Operation............................................................................................................................. 40
3.3.2 Timer Features............................................................................................................................................... 40
3.3.3 Timer Source Code Structure.........................................................................................................................41
3.3.4 Timer Programming Interface........................................................................................................................41
3.4 Memory Map................................................................................................................................................................ 41
3.4.1 Memory Map Hardware Operation................................................................................................................41
3.4.2 Memory Map Software Operation................................................................................................................. 41
3.4.3 Memory Map Features...................................................................................................................................41
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 3

Section number Title Page
3.4.4 Memory Map Source Code Structure............................................................................................................ 42
3.5 IOMUX.........................................................................................................................................................................42
3.5.1 IOMUX Hardware Operation........................................................................................................................ 43
3.5.2 IOMUX Software Operation..........................................................................................................................43
3.5.3 IOMUX Features............................................................................................................................................43
3.5.4 IOMUX Source Code Structure.....................................................................................................................44
3.5.5 IOMUX Programming Interface....................................................................................................................44
3.5.6 IOMUX Control Through GPIO Module...................................................................................................... 44
3.5.6.1 GPIO Hardware Operation...........................................................................................................45
3.5.6.1.1 Muxing Control...........................................................................................................45
3.5.6.1.2 PULLUP Control........................................................................................................ 45
3.5.6.2 GPIO Software Operation (general)............................................................................................ 45
3.5.6.3 GPIO Implementation..................................................................................................................45
3.6 General Purpose Input/Output(GPIO).......................................................................................................................... 46
3.6.1 GPIO Software Operation..............................................................................................................................46
3.6.1.1 API for GPIO............................................................................................................................... 46
3.6.2 GPIO Features................................................................................................................................................47
3.6.3 GPIO Module Source Code Structure............................................................................................................47
3.6.4 GPIO Programming Interface 2..................................................................................................................... 47
Chapter 4
Smart Direct Memory Access (SDMA) API
4.1 Overview.......................................................................................................................................................................49
4.1.1 Hardware Operation.......................................................................................................................................49
4.1.2 Software Operation........................................................................................................................................ 49
4.1.3 Source Code Structure................................................................................................................................... 50
4.1.4 Programming Interface.................................................................................................................................. 51
4.1.5 Usage Example.............................................................................................................................................. 51
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
4 Freescale Semiconductor, Inc.

Section number Title Page
Chapter 5
AHB-to-APBH Bridge with DMA (APBH-Bridge-DMA)
5.1 Overview.......................................................................................................................................................................53
5.1.1 Hardware Operation.......................................................................................................................................53
5.1.2 Software Operation........................................................................................................................................ 54
5.1.3 Source Code Structure................................................................................................................................... 54
5.1.4 Menu Configuration Options......................................................................................................................... 55
5.1.5 Programming Interface.................................................................................................................................. 55
5.1.6 Usage Example.............................................................................................................................................. 55
Chapter 6
Image Processing Unit (IPU) Drivers
6.1 Introduction...................................................................................................................................................................57
6.1.1 Hardware Operation.......................................................................................................................................58
6.2 Software Operation....................................................................................................................................................... 59
6.2.1 IPU Frame Buffer Drivers Overview.............................................................................................................60
6.2.1.1 IPU Frame Buffer Hardware Operation.......................................................................................61
6.2.1.2 IPU Frame Buffer Software Operation........................................................................................ 61
6.2.1.3 Synchronous Frame Buffer Driver...............................................................................................62
6.2.2 IPU Backlight Driver..................................................................................................................................... 63
6.2.3 IPU Device Driver......................................................................................................................................... 63
6.3 Source Code Structure ................................................................................................................................................. 64
6.3.1 Menu Configuration Options......................................................................................................................... 65
6.4 Unit Test........................................................................................................................................................................69
6.4.1 Framebuffer Tests.......................................................................................................................................... 69
6.4.2 Video4Linux API test.................................................................................................................................... 69
6.4.3 IPU Device Unit test...................................................................................................................................... 71
Chapter 7
MIPI DSI Driver
7.1 Introduction...................................................................................................................................................................75
7.1.1 MIPI DSI IP Driver Overview.......................................................................................................................75
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 5

Section number Title Page
7.1.2 MIPI DSI Display Panel Driver Overview.................................................................................................... 76
7.1.3 Hardware Operation.......................................................................................................................................76
7.2 Software Operation....................................................................................................................................................... 76
7.2.1 MIPI DSI IP Driver Software Operation....................................................................................................... 76
7.2.2 MIPI DSI Display Panel Driver Software Operation.....................................................................................77
7.3 Driver Features..............................................................................................................................................................77
7.3.1 Source Code Structure................................................................................................................................... 78
7.3.2 Menu Configuration Options......................................................................................................................... 78
7.3.3 Programming Interface.................................................................................................................................. 78
Chapter 8
LVDS Display Bridge(LDB) Driver
8.1 Introduction...................................................................................................................................................................79
8.1.1 Hardware Operation.......................................................................................................................................79
8.1.2 Software Operation........................................................................................................................................ 79
8.1.3 Source Code Structure................................................................................................................................... 80
8.1.4 Menu Configuration Options......................................................................................................................... 80
Chapter 9
Video for Linux Two (V4L2) Driver
9.1 Introduction...................................................................................................................................................................81
9.2 V4L2 Capture Device................................................................................................................................................... 82
9.2.1 V4L2 Capture IOCTLs.................................................................................................................................. 82
9.2.2 Use of the V4L2 Capture APIs...................................................................................................................... 84
9.3 V4L2 Output Device.....................................................................................................................................................85
9.3.1 V4L2 Output IOCTLs....................................................................................................................................85
9.3.2 Use of the V4L2 Output APIs........................................................................................................................86
9.4 Source Code Structure ................................................................................................................................................. 86
9.4.1 Menu Configuration Options......................................................................................................................... 87
9.4.2 V4L2 Programming Interface........................................................................................................................ 87
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
6 Freescale Semiconductor, Inc.

Section number Title Page
Chapter 10
Electrophoretic Display Controller (EPDC) Frame Buffer Driver
10.1 Introduction...................................................................................................................................................................89
10.2 Hardware Operation......................................................................................................................................................90
10.3 Software Operation....................................................................................................................................................... 90
10.3.1 EPDC Frame Buffer Driver Overview...........................................................................................................90
10.3.2 EPDC Frame Buffer Driver Extensions.........................................................................................................91
10.3.3 EPDC Panel Configuration............................................................................................................................ 91
10.3.3.1 Boot Command Line Parameters................................................................................................. 92
10.3.4 EPDC Waveform Loading.............................................................................................................................92
10.3.4.1 Using a Default Waveform File...................................................................................................93
10.3.4.2 Using a Custom Waveform File...................................................................................................93
10.3.5 EPDC Panel Initialization.............................................................................................................................. 94
10.3.6 Grayscale Framebuffer Selection...................................................................................................................95
10.3.7 Enabling an EPDC Splash Screen..................................................................................................................95
10.4 Source Code Structure ................................................................................................................................................. 96
10.5 Menu Configuration Options........................................................................................................................................96
10.6 Programming Interface................................................................................................................................................. 97
10.6.1 IOCTLs/Functions......................................................................................................................................... 97
10.6.2 Structures and Defines................................................................................................................................... 100
Chapter 11
Pixel Pipeline (PxP) DMA-ENGINE Driver
11.1 Introduction...................................................................................................................................................................103
11.2 Hardware Operation......................................................................................................................................................103
11.3 Software Operation....................................................................................................................................................... 103
11.3.1 Key Data Structs............................................................................................................................................ 103
11.3.2 Channel Management.................................................................................................................................... 104
11.3.3 Descriptor Management.................................................................................................................................105
11.3.4 Completion Notification................................................................................................................................ 105
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 7

Section number Title Page
11.3.5 Limitations..................................................................................................................................................... 105
11.4 Menu Configuration Options........................................................................................................................................105
11.5 Source Code Structure.................................................................................................................................................. 106
Chapter 12
ELCDIF Frame Buffer Driver
12.1 Introduction...................................................................................................................................................................107
12.2 Hardware Operation......................................................................................................................................................107
12.3 Software Operation....................................................................................................................................................... 107
12.4 Menu Configuration Options........................................................................................................................................108
12.5 Source Code Structure.................................................................................................................................................. 108
Chapter 13
Graphics Processing Unit (GPU)
13.1 Introduction...................................................................................................................................................................109
13.1.1 Driver Features...............................................................................................................................................109
13.1.1.1 Hardware Operation.....................................................................................................................110
13.1.1.2 Software Operation...................................................................................................................... 110
13.1.1.3 Source Code Structure ................................................................................................................ 111
13.1.1.4 Library Structure .........................................................................................................................111
13.1.1.5 API References............................................................................................................................ 112
13.1.1.6 Menu Configuration Options....................................................................................................... 113
Chapter 14
Direct FB
14.1 Introduction...................................................................................................................................................................115
14.1.1 Hardware Operation.......................................................................................................................................115
14.2 Software Operation....................................................................................................................................................... 115
14.2.1 DirectFB Acceleration Architecture.............................................................................................................. 116
14.2.2 DirectFB Accelerator Setup ..........................................................................................................................117
14.2.3 i.MX DirectFB Driver Details....................................................................................................................... 118
14.2.4 The gal_config File for i.MX DirectFB Driver..............................................................................................119
14.3 DirectFB EGL...............................................................................................................................................................120
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
8 Freescale Semiconductor, Inc.

Section number Title Page
14.4 Setup DirectFB Acceleration........................................................................................................................................ 120
Chapter 15
Wayland
15.1 Introduction...................................................................................................................................................................123
15.2 Hardware Operation......................................................................................................................................................123
15.3 Software Operation....................................................................................................................................................... 123
15.4 Yocto Build Instructions...............................................................................................................................................123
15.5 Customizing Weston.....................................................................................................................................................124
15.5.1 Multi display supported in Weston................................................................................................................ 124
15.5.2 Multi buffer supported in Weston..................................................................................................................124
15.6 Running Weston............................................................................................................................................................125
Chapter 16
On-Chip High Definition Multimedia Interface (HDMI) Driver
16.1 Introduction...................................................................................................................................................................127
16.1.1 Hardware Operation.......................................................................................................................................127
16.2 Software Operation....................................................................................................................................................... 129
16.2.1 Core................................................................................................................................................................129
16.2.2 Video..............................................................................................................................................................130
16.2.3 Display Device Registration and Initialization.............................................................................................. 131
16.2.4 Hotplug Handling and Video Mode Changes................................................................................................132
16.2.5 Audio..............................................................................................................................................................132
16.2.6 CEC................................................................................................................................................................134
16.3 Source Code Structure.................................................................................................................................................. 134
16.3.1 Linux Menu Configuration Options...............................................................................................................136
16.4 Unit Test........................................................................................................................................................................137
16.4.1 Video..............................................................................................................................................................137
16.4.2 Audio..............................................................................................................................................................138
16.4.3 CEC................................................................................................................................................................138
16.4.4 HDCP.............................................................................................................................................................138
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 9

Section number Title Page
Chapter 17
External High-Definition Multimedia Interface (HDMI) for i.MX 6SoloLite
17.1 Introduction...................................................................................................................................................................141
17.2 Software Operation....................................................................................................................................................... 141
17.2.1 Hotplug Handling and Video Mode Changes................................................................................................141
17.3 Source Code Structure.................................................................................................................................................. 142
17.3.1 Linux Menu Configuration Options...............................................................................................................143
17.4 Unit Test........................................................................................................................................................................143
17.4.1 Video..............................................................................................................................................................143
17.4.2 Audio..............................................................................................................................................................144
Chapter 18
X Windows Acceleration
18.1 Introduction...................................................................................................................................................................145
18.2 Hardware Operation......................................................................................................................................................145
18.3 Software Operation....................................................................................................................................................... 145
18.3.1 X-Windows Acceleration Architecture..........................................................................................................146
18.3.2 i.MX 6 Driver for X-Windows System..........................................................................................................147
18.3.3 i.MX 6 Direct Rendering Infrastructure (DRI) for X-Windows System....................................................... 149
18.3.4 EGL- X Library..............................................................................................................................................150
18.3.5 xorg.conf for i.MX 6......................................................................................................................................151
18.3.6 Setup X-Windows System Acceleration on Yocto........................................................................................153
18.3.7 Setup X Window System Acceleration .........................................................................................................154
18.3.8 Troubleshooting ............................................................................................................................................ 154
Chapter 19
Video Processing Unit (VPU) Driver
19.1 Hardware Operation......................................................................................................................................................157
19.1.1 Software Operation........................................................................................................................................ 158
19.1.2 Source Code Structure................................................................................................................................... 159
19.1.3 Menu Configuration Options......................................................................................................................... 160
19.1.4 Programming Interface.................................................................................................................................. 161
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
10 Freescale Semiconductor, Inc.

Section number Title Page
19.1.5 Defining an Application.................................................................................................................................162
Chapter 20
OmniVision Camera Driver
20.1 OV5640 Using MIPI CSI-2 interface........................................................................................................................... 163
20.1.1 Hardware Operation.......................................................................................................................................163
20.1.2 Software Operation........................................................................................................................................ 164
20.1.3 Source Code Structure................................................................................................................................... 164
20.1.4 Linux Menu Configuration Options...............................................................................................................164
20.2 OV5642 Using parallel interface.................................................................................................................................. 165
20.2.1 Hardware Operation.......................................................................................................................................165
20.2.2 Software Operation........................................................................................................................................ 165
20.2.3 Source Code Structure................................................................................................................................... 166
20.2.4 Linux Menu Configuration Options...............................................................................................................166
Chapter 21
MIPI CSI2 Driver
21.1 Introduction...................................................................................................................................................................169
21.1.1 MIPI CSI2 Driver Overview..........................................................................................................................169
21.1.2 Hardware Operation.......................................................................................................................................170
21.2 Software Operation....................................................................................................................................................... 170
21.2.1 MIPI CSI2 Driver Initialize Operation.......................................................................................................... 170
21.2.2 MIPI CSI2 Common API Operation..............................................................................................................171
21.3 Driver Features..............................................................................................................................................................171
21.3.1 Source Code Structure................................................................................................................................... 172
21.3.2 Menu Configuration Options......................................................................................................................... 172
21.3.3 Programming Interface.................................................................................................................................. 172
21.3.4 Interrupt Requirements.................................................................................................................................. 173
Chapter 22
Low-level Power Management (PM) Driver
22.1 Hardware Operation......................................................................................................................................................175
22.1.1 Software Operation........................................................................................................................................ 175
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 11

Section number Title Page
22.1.2 Source Code Structure................................................................................................................................... 176
22.1.3 Menu Configuration Options......................................................................................................................... 177
22.1.4 Programming Interface.................................................................................................................................. 177
22.1.5 Unit Test.........................................................................................................................................................177
Chapter 23
PF100 Regulator Driver
23.1 Introduction...................................................................................................................................................................179
23.2 Hardware Operation......................................................................................................................................................179
23.2.1 Driver Features...............................................................................................................................................180
23.3 Software Operation....................................................................................................................................................... 180
23.3.1 Regulator APIs...............................................................................................................................................180
23.4 Driver Architecture....................................................................................................................................................... 181
23.4.1 Driver Interface Details..................................................................................................................................183
23.4.2 Source Code Structure................................................................................................................................... 183
23.4.3 Menu Configuration Options......................................................................................................................... 184
Chapter 24
CPU Frequency Scaling (CPUFREQ) Driver
24.1 Introduction...................................................................................................................................................................185
24.1.1 Software Operation........................................................................................................................................ 185
24.1.2 Source Code Structure................................................................................................................................... 186
24.2 Menu Configuration Options........................................................................................................................................187
24.2.1 Board Configuration Options.........................................................................................................................187
Chapter 25
Dynamic Bus Frequency Driver
25.1 Introduction...................................................................................................................................................................189
25.1.1 Operation........................................................................................................................................................189
25.1.2 Software Operation........................................................................................................................................ 189
25.1.3 Source Code Structure................................................................................................................................... 190
25.2 Menu Configuration Options........................................................................................................................................190
25.2.1 Board Configuration Options.........................................................................................................................190
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
12 Freescale Semiconductor, Inc.

Section number Title Page
Chapter 26
Thermal Driver
26.1 Introduction...................................................................................................................................................................193
26.1.1 Thermal Driver Overview..............................................................................................................................193
26.2 Hardware Operation......................................................................................................................................................193
26.2.1 Thermal Driver Software Operation.............................................................................................................. 194
26.3 Driver Features..............................................................................................................................................................194
26.3.1 Source Code Structure................................................................................................................................... 194
26.3.2 Menu Configuration Options......................................................................................................................... 194
26.3.3 Programming Interface.................................................................................................................................. 195
26.4 Unit Test........................................................................................................................................................................195
Chapter 27
Anatop Regulator Driver
27.1 Introduction...................................................................................................................................................................197
27.1.1 Hardware Operation.......................................................................................................................................197
27.2 Driver Features..............................................................................................................................................................197
27.2.1 Software Operation........................................................................................................................................ 198
27.2.2 Regulator APIs...............................................................................................................................................198
27.2.3 Driver Interface Details..................................................................................................................................199
27.2.4 Source Code Structure................................................................................................................................... 199
27.2.5 Menu Configuration Options......................................................................................................................... 199
Chapter 28
SNVS Real Time Clock (SRTC) Driver
28.1 Introduction...................................................................................................................................................................201
28.1.1 Hardware Operation.......................................................................................................................................201
28.2 Software Operation....................................................................................................................................................... 201
28.2.1 IOCTL............................................................................................................................................................201
28.2.2 Keep Alive in the Power Off State.................................................................................................................202
28.3 Driver Features..............................................................................................................................................................202
28.3.1 Source Code Structure................................................................................................................................... 203
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 13

Section number Title Page
28.3.2 Menu Configuration Options......................................................................................................................... 203
Chapter 29
Advanced Linux Sound Architecture (ALSA) System on a Chip (ASoC) Sound Driver
29.1 ALSA Sound Driver Introduction.................................................................................................................................205
29.2 SoC Sound Card ...........................................................................................................................................................208
29.2.1 Stereo CODEC Features................................................................................................................................ 208
29.2.2 7.1 Audio Codec Features..............................................................................................................................209
29.2.3 AM/FM Codec Features.................................................................................................................................209
29.2.4 Sound Card Information.................................................................................................................................209
29.3 Hardware Operation......................................................................................................................................................210
29.3.1 Stereo Audio CODEC....................................................................................................................................210
29.3.2 7.1 Audio Codec............................................................................................................................................ 211
29.3.3 AM/FM Codec............................................................................................................................................... 211
29.4 Software Operation....................................................................................................................................................... 211
29.4.1 ASoC Driver Source Architecture................................................................................................................. 212
29.4.2 Sound Card Registration................................................................................................................................ 213
29.4.3 Device Open...................................................................................................................................................214
29.4.4 Devicetree Binding........................................................................................................................................ 214
29.4.5 Menu Configuration Options......................................................................................................................... 214
29.5 Unit Test........................................................................................................................................................................215
29.5.1 Stereo CODEC Unit Test...............................................................................................................................215
29.5.2 7.1 Audio Codec Unit Test............................................................................................................................ 216
29.5.3 AM/FM Codec Unit Test............................................................................................................................... 217
Chapter 30
Advanced Linux Sound Architecture (ALSA) System on a Chip (ASoC) Sound Driver for i.MX 6SoloLite
30.1 ALSA Sound Driver Introduction.................................................................................................................................219
30.2 SoC Sound Card ...........................................................................................................................................................222
30.2.1 Stereo CODEC Features................................................................................................................................ 222
30.2.2 AM/FM Codec Features.................................................................................................................................222
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
14 Freescale Semiconductor, Inc.

Section number Title Page
30.2.3 Sound Card Information.................................................................................................................................223
30.3 Hardware Operation......................................................................................................................................................223
30.3.1 Stereo Audio CODEC....................................................................................................................................223
30.3.2 7.1 Audio Codec............................................................................................................................................ 224
30.3.3 AM/FM Codec............................................................................................................................................... 224
30.4 Software Operation....................................................................................................................................................... 225
30.4.1 ASoC Driver Source Architecture................................................................................................................. 225
30.4.2 Sound Card Registration................................................................................................................................ 225
30.4.3 Device Open...................................................................................................................................................226
30.4.4 Platform Data................................................................................................................................................. 226
30.4.5 Menu Configuration Options......................................................................................................................... 226
Chapter 31
Asynchronous Sample Rate Converter (ASRC) Driver
31.1 Introduction...................................................................................................................................................................229
31.1.1 Hardware Operation.......................................................................................................................................229
31.2 Software Operation....................................................................................................................................................... 230
31.2.1 Sequence for Memory to ASRC to Memory................................................................................................. 231
31.2.2 Sequence for Memory to ASRC to Peripheral...............................................................................................231
31.3 Source Code Structure.................................................................................................................................................. 232
31.3.1 Linux Menu Configuration Options...............................................................................................................232
31.4 Devicetree Binding....................................................................................................................................................... 232
31.4.1 Programming Interface (Exported API and IOCTLs)....................................................................................233
Chapter 32
The Sony/Philips Digital Interface (S/PDIF) Driver
32.1 Introduction...................................................................................................................................................................235
32.1.1 S/PDIF Overview...........................................................................................................................................235
32.1.2 Hardware Overview....................................................................................................................................... 236
32.1.3 Software Overview........................................................................................................................................ 237
32.1.4 The ASoC layer..............................................................................................................................................237
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 15

Section number Title Page
32.2 S/PDIF Tx Driver..........................................................................................................................................................237
32.2.1 Driver Design.................................................................................................................................................238
32.2.2 Provided User Interface................................................................................................................................. 238
32.3 S/PDIF Rx Driver......................................................................................................................................................... 239
32.3.1 Driver Design.................................................................................................................................................240
32.3.2 Provided User Interface................................................................................................................................. 240
32.4 Source Code Structure ................................................................................................................................................. 242
32.5 Menu Configuration Options........................................................................................................................................243
32.6 Device Tree Bindings................................................................................................................................................... 243
32.7 Interrupts and Exceptions............................................................................................................................................. 243
32.8 Unit Test Preparation.................................................................................................................................................... 244
32.8.1 Tx test step..................................................................................................................................................... 244
32.8.2 Rx test step.....................................................................................................................................................244
Chapter 33
SPI NOR Flash Memory Technology Device (MTD) Driver
33.1 Introduction...................................................................................................................................................................245
33.1.1 Hardware Operation.......................................................................................................................................245
33.1.2 Software Operation........................................................................................................................................ 246
33.1.3 Driver Features...............................................................................................................................................246
33.1.4 Source Code Structure................................................................................................................................... 246
33.1.5 Menu Configuration Options......................................................................................................................... 247
Chapter 34
MMC/SD/SDIO Host Driver
34.1 Introduction...................................................................................................................................................................249
34.1.1 Hardware Operation.......................................................................................................................................249
34.1.2 Software Operation........................................................................................................................................ 250
34.2 Driver Features..............................................................................................................................................................252
34.2.1 Source Code Structure................................................................................................................................... 252
34.2.2 Menu Configuration Options......................................................................................................................... 252
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
16 Freescale Semiconductor, Inc.

Section number Title Page
34.2.3 Devicetree Binding........................................................................................................................................ 253
34.2.4 Programming Interface.................................................................................................................................. 254
34.2.5 Loadable Module Operations.........................................................................................................................254
Chapter 35
NAND GPMI Flash Driver
35.1 Introduction...................................................................................................................................................................257
35.1.1 Hardware Operation.......................................................................................................................................257
35.2 Software Operation....................................................................................................................................................... 257
35.2.1 Basic Operations: Read/Write........................................................................................................................258
35.2.2 Error Correction............................................................................................................................................. 258
35.2.3 Boot Control Block Management.................................................................................................................. 258
35.2.4 Bad Block Handling.......................................................................................................................................259
35.3 Source Code Structure.................................................................................................................................................. 259
35.3.1 Menu Configuration Options......................................................................................................................... 259
Chapter 36
SATA Driver
36.1 Hardware Operation......................................................................................................................................................261
36.1.1 Software Operation........................................................................................................................................ 261
36.1.2 Source Code Structure Configuration............................................................................................................261
36.1.3 Linux Menu Configuration Options...............................................................................................................262
36.1.4 Board Configuration Options.........................................................................................................................262
36.2 Programming Interface................................................................................................................................................. 262
36.2.1 Usage Example2............................................................................................................................................ 262
36.2.2 Usage Example.............................................................................................................................................. 263
Chapter 37
Inter-IC (I2C) Driver
37.1 Introduction...................................................................................................................................................................265
37.1.1 I2C Bus Driver Overview.............................................................................................................................. 265
37.1.2 I2C Device Driver Overview......................................................................................................................... 266
37.1.3 Hardware Operation.......................................................................................................................................266
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 17

Section number Title Page
37.2 Software Operation....................................................................................................................................................... 266
37.2.1 I2C Bus Driver Software Operation...............................................................................................................266
37.2.2 I2C Device Driver Software Operation......................................................................................................... 267
37.3 Driver Features..............................................................................................................................................................267
37.3.1 Source Code Structure................................................................................................................................... 267
37.3.2 Menu Configuration Options......................................................................................................................... 268
37.3.3 Programming Interface.................................................................................................................................. 268
37.3.4 Interrupt Requirements.................................................................................................................................. 268
Chapter 38
Enhanced Configurable Serial Peripheral Interface (ECSPI) Driver
38.1 Introduction...................................................................................................................................................................269
38.1.1 Hardware Operation.......................................................................................................................................269
38.2 Software Operation....................................................................................................................................................... 269
38.2.1 SPI Sub-System in Linux OS.........................................................................................................................270
38.2.2 Software Limitations......................................................................................................................................271
38.2.3 Standard Operations.......................................................................................................................................271
38.2.4 ECSPI Synchronous Operation......................................................................................................................272
38.3 Driver Features..............................................................................................................................................................274
38.3.1 Source Code Structure................................................................................................................................... 274
38.3.2 Menu Configuration Options......................................................................................................................... 274
38.3.3 Programming Interface.................................................................................................................................. 275
38.3.4 Interrupt Requirements.................................................................................................................................. 275
Chapter 39
FlexCAN Driver
39.1 Driver Overview........................................................................................................................................................... 277
39.1.1 Hardware Operation.......................................................................................................................................277
39.1.2 Software Operation........................................................................................................................................ 277
39.1.3 Source Code Structure................................................................................................................................... 278
39.1.4 Linux Menu Configuration Options...............................................................................................................278
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
18 Freescale Semiconductor, Inc.

Section number Title Page
Chapter 40
Media Local Bus Driver
40.1 Introduction...................................................................................................................................................................281
40.1.1 MLB Device Module..................................................................................................................................... 281
40.1.2 Supported Features.........................................................................................................................................282
40.1.3 MLB Driver Overview...................................................................................................................................283
40.2 MLB Driver.................................................................................................................................................................. 283
40.2.1 MLB Driver Architecture...............................................................................................................................283
40.2.2 Software Operation........................................................................................................................................ 285
40.3 Driver Files................................................................................................................................................................... 286
40.4 Menu Configuration Options........................................................................................................................................286
Chapter 41
CHIPIDEA USB Driver
41.1 Introduction...................................................................................................................................................................287
41.1.1 Architectural Overview..................................................................................................................................287
41.2 Hardware Operation......................................................................................................................................................288
41.2.1 Software Operation........................................................................................................................................ 288
41.2.2 Source Code Structure................................................................................................................................... 289
41.2.3 Menu Configuration Options......................................................................................................................... 289
41.2.4 USB Wakeup Usage.......................................................................................................................................290
41.2.5 How to Close the USB Child Device Power..................................................................................................290
41.2.6 Changing the Controller Operation Mode..................................................................................................... 290
41.2.7 Loadable Module Support..............................................................................................................................290
41.2.8 USB Charger Detection................................................................................................................................. 291
41.2.9 USB OTG HNP and SRP Support................................................................................................................. 291
41.2.10 Embeded Host Certification...........................................................................................................................293
41.2.10.1 Adding TPL-Support Property.....................................................................................................293
41.2.10.2 VBUS Control..............................................................................................................................293
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 19

Section number Title Page
Chapter 42
i.MX 6 PCI Express Root Complex Driver
42.1 Introduction...................................................................................................................................................................295
42.1.1 PCIe................................................................................................................................................................295
42.1.2 Terminology and Conventions.......................................................................................................................295
42.1.3 PCIe Topology on i.MX.................................................................................................................................297
42.1.4 Features.......................................................................................................................................................... 299
42.2 Linux OS PCI Subsystem and RC driver......................................................................................................................299
42.2.1 RC Driver Source Files..................................................................................................................................300
42.2.2 Kernel Configurations....................................................................................................................................300
42.3 System Resource: Memory Layout...............................................................................................................................300
42.3.1 System Resource: Interrupt lines................................................................................................................... 302
42.4 Using PCIe Endpoint and Running Tests..................................................................................................................... 302
42.4.1 Ensuring PCIe System Initialization..............................................................................................................304
42.4.2 Tests............................................................................................................................................................... 304
42.4.3 Known issues................................................................................................................................................. 305
Chapter 43
EIM NOR Driver
43.1 Introduction...................................................................................................................................................................307
43.2 Hardware Operation......................................................................................................................................................307
43.3 Software Operation....................................................................................................................................................... 307
43.4 Source Code..................................................................................................................................................................307
43.5 Enabling the WEIM NOR.............................................................................................................................................307
Chapter 44
Quad Serial Peripheral Interface (QuadSPI) Driver
44.1 Introduction...................................................................................................................................................................309
44.2 Hardware Operation......................................................................................................................................................309
44.3 Software Operation....................................................................................................................................................... 310
44.4 Driver Features..............................................................................................................................................................311
44.5 Source Code Structure.................................................................................................................................................. 311
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
20 Freescale Semiconductor, Inc.

Section number Title Page
44.6 Menu Configuration Options........................................................................................................................................311
Chapter 45
Fast Ethernet Controller (FEC) Driver
45.1 Introduction...................................................................................................................................................................313
45.2 Hardware Operation......................................................................................................................................................313
45.2.1 Software Operation........................................................................................................................................ 316
45.2.2 Source Code Structure................................................................................................................................... 316
45.2.3 Menu Configuration Options......................................................................................................................... 316
45.3 Programming Interface................................................................................................................................................. 317
45.3.1 Device-Specific Defines................................................................................................................................ 317
45.3.2 Getting a MAC Address.................................................................................................................................318
Chapter 46
ENET IEEE-1588 Driver
46.1 Hardware Operation......................................................................................................................................................319
46.1.1 Transmit Timestamping................................................................................................................................. 320
46.1.2 Receive Timestamping...................................................................................................................................320
46.2 Software Operation....................................................................................................................................................... 320
46.2.1 Source Code Structure................................................................................................................................... 321
46.2.2 Linux Menu Configuration Options...............................................................................................................321
46.3 Programming Interface................................................................................................................................................. 321
46.4 1588 Stack Support.......................................................................................................................................................321
46.4.1 1588 Stack Introduction.................................................................................................................................321
46.4.2 Linuxptp Stack Features.................................................................................................................................322
46.4.3 How to Use the Stacks in Linux OS.............................................................................................................. 322
Chapter 47
Universal Asynchronous Receiver/Transmitter (UART) Driver
47.1 Introduction...................................................................................................................................................................323
47.2 Hardware Operation......................................................................................................................................................324
47.2.1 Software Operation........................................................................................................................................ 324
47.2.2 Driver Features...............................................................................................................................................325
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 21

Section number Title Page
47.2.3 Source Code Structure................................................................................................................................... 325
47.3 Configuration................................................................................................................................................................325
47.3.1 Configuration Options....................................................................................................................................326
47.3.2 Source Code Configuration Options..............................................................................................................326
47.3.3 Chip Configuration Options...........................................................................................................................326
47.3.4 Board Configuration Options.........................................................................................................................326
47.4 Programming Interface................................................................................................................................................. 326
47.4.1 Interrupt Requirements.................................................................................................................................. 326
Chapter 48
AR6003 WiFi
48.1 Hardware Operation......................................................................................................................................................327
48.1.1 Software Operation........................................................................................................................................ 327
48.1.2 Driver features................................................................................................................................................327
48.1.3 Source Code Structure................................................................................................................................... 328
48.1.4 Linux Menu Configuration Options...............................................................................................................328
48.2 How to Install the AR6003 Driver................................................................................................................................328
Chapter 49
Pulse-Width Modulator (PWM) Driver
49.1 Introduction...................................................................................................................................................................329
49.1.1 Hardware Operation.......................................................................................................................................329
49.1.2 Clocks.............................................................................................................................................................330
49.1.3 Software Operation........................................................................................................................................ 331
49.1.4 Driver Features...............................................................................................................................................331
49.1.5 Source Code Structure................................................................................................................................... 331
49.1.6 Menu Configuration Options......................................................................................................................... 332
Chapter 50
Watchdog (WDOG) Driver
50.1 Introduction...................................................................................................................................................................333
50.1.1 Hardware Operation.......................................................................................................................................333
50.1.2 Software Operation........................................................................................................................................ 333
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
22 Freescale Semiconductor, Inc.

Section number Title Page
50.2 Generic WDOG Driver.................................................................................................................................................333
50.2.1 Driver Features...............................................................................................................................................334
50.2.2 Menu Configuration Options......................................................................................................................... 334
50.2.3 Source Code Structure................................................................................................................................... 334
50.2.4 Programming Interface.................................................................................................................................. 335
Chapter 51
OProfile
51.1 Introduction...................................................................................................................................................................337
51.1.1 Overview........................................................................................................................................................337
51.1.2 Features.......................................................................................................................................................... 337
51.1.3 Hardware Operation.......................................................................................................................................338
51.2 Software Operation....................................................................................................................................................... 338
51.2.1 Architecture-specific Components.................................................................................................................338
51.2.2 oprofilefs Pseudo Filesystem......................................................................................................................... 339
51.2.3 Generic Kernel Driver....................................................................................................................................339
51.2.4 OProfile Daemon........................................................................................................................................... 339
51.2.5 Post Profiling Tools....................................................................................................................................... 340
51.3 Requirements................................................................................................................................................................ 340
51.3.1 Source Code Structure................................................................................................................................... 340
51.3.2 Menu Configuration Options......................................................................................................................... 340
51.3.3 Programming Interface.................................................................................................................................. 341
51.3.4 Interrupt Requirements.................................................................................................................................. 341
51.3.5 Example Software Configuration...................................................................................................................341
Chapter 52
CAAM (Cryptographic Acceleration and Assurance Module)
52.1 CAAM Device Driver Overview..................................................................................................................................343
52.2 Configuration and Job Execution Level....................................................................................................................... 343
52.3 Control/Configuration Driver....................................................................................................................................... 344
52.4 Job Ring Driver.............................................................................................................................................................344
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 23

Section number Title Page
52.5 API Interface Level.......................................................................................................................................................345
52.6 Driver Configuration.....................................................................................................................................................348
52.7 Limitations....................................................................................................................................................................349
52.8 Limitations in the Existing Implementation Overview.................................................................................................350
52.9 Initialize Keystore Management Interface....................................................................................................................350
52.10 Detect Available Secure Memory Storage Units..........................................................................................................351
52.11 Establish Keystore in Detected Unit.............................................................................................................................351
52.12 Release Keystore...........................................................................................................................................................352
52.13 Allocate a Slot from the Keystore.................................................................................................................................352
52.14 Load Data into a Keystore Slot.....................................................................................................................................352
52.15 Demo Image Update..................................................................................................................................................... 353
52.16 Decapsulate Data in the Keystore.................................................................................................................................354
52.17 Read Data From a Keystore Slot.................................................................................................................................. 354
52.18 Release a Slot back to the Keystore..............................................................................................................................355
52.19 CAAM/SNVS - Security Violation Handling Interface Overview...............................................................................357
52.20 Operation.......................................................................................................................................................................357
52.21 Configuration Interface.................................................................................................................................................358
52.22 Install a Handler............................................................................................................................................................358
52.23 Remove an Installed Driver.......................................................................................................................................... 358
52.24 Driver Configuration CAAM/SNVS............................................................................................................................ 359
Chapter 53
Remote Processor Messaging (RPMsg)
53.1 Introduction...................................................................................................................................................................361
53.2 Features.........................................................................................................................................................................362
53.3 Source Codes................................................................................................................................................................ 363
53.4 Kernel Configurations...................................................................................................................................................363
Chapter 54
Display Content Integrity Checker (DCIC)
54.1 Introduction...................................................................................................................................................................365
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
24 Freescale Semiconductor, Inc.

Section number Title Page
54.2 Hardware Operation......................................................................................................................................................365
54.3 Software Operation....................................................................................................................................................... 365
54.3.1 Source Code Structure................................................................................................................................... 365
54.3.2 Menu Configuration Options......................................................................................................................... 366
54.3.3 DTS Configuration.........................................................................................................................................366
54.4 Programming Interface................................................................................................................................................. 366
54.4.1 IOCTLs Functions..........................................................................................................................................366
54.4.2 Structures....................................................................................................................................................... 366
54.5 Unit Test........................................................................................................................................................................367
54.5.1 Source Code................................................................................................................................................... 367
54.5.2 DCIC CRC Calculation Functions.................................................................................................................367
54.5.3 sample............................................................................................................................................................ 367
Chapter 55
ADC Driver
55.1 ADC Introduction......................................................................................................................................................... 369
55.2 ADC External Signals...................................................................................................................................................369
55.3 ADC Driver Overview..................................................................................................................................................370
55.3.1 ADC Driver File.............................................................................................................................................370
55.3.2 Menu Configuration Options......................................................................................................................... 370
55.3.3 Programming Interface.................................................................................................................................. 370
Chapter 56
Video Analog-to-Digital Converter (VADC)
56.1 Introduction...................................................................................................................................................................373
56.2 Hardware Operation......................................................................................................................................................373
56.3 Software Operation....................................................................................................................................................... 374
56.3.1 Source Code Structure................................................................................................................................... 374
56.3.2 Menu Configuration Options......................................................................................................................... 374
56.3.3 DTS Configuration ........................................................................................................................................374
56.4 Unit Test........................................................................................................................................................................375
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 25

i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
26 Freescale Semiconductor, Inc.
Chapter 1
About this Book
1.1 Audience
This document is targeted to individuals who will port the i.MX Linux® OS Board
Support Package (BSP) to customer-specific products.
The audience is expected to have a working knowledge of the Linux OS 3.0 kernel
internals, driver models, and i.MX processors.
1.1.1 Conventions
This document uses the following notational conventions:
• Courier monospaced type indicate commands, command parameters, code examples,
and file and directory names.
•Italic type indicates replaceable command or function parameters.
•Bold type indicates function names.
•<Yocto_BuildDir> stands for <Yocto build directory>/tmp/work/<machine-poky-linux-gnueabi>
1.1.2 Definitions, Acronyms, and Abbreviations
The following table defines the acronyms and abbreviations used in this document.
Definitions and Acronyms
Term Definition
ADC Asynchronous Display Controller
address
translation
Address conversion from virtual domain to physical domain
API Application Programming Interface
Table continues on the next page...
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 27
Term Definition
ARM®Advanced RISC Machines processor architecture
AUDMUX Digital audio MUX-provides a programmable interconnection for voice, audio, and synchronous data routing
between host serial interfaces and peripheral serial interfaces
BCD Binary Coded Decimal
bus A path between several devices through data lines
bus load The percentage of time a bus is busy
CODEC Coder/decoder or compression/decompression algorithm-used to encode and decode (or compress and
decompress) various types of data
CPU Central Processing Unit-generic term used to describe a processing core
CRC Cyclic Redundancy Check-Bit error protection method for data communication
CSI Camera Sensor Interface
DFS Dynamic Frequency Scaling
DMA Direct Memory Access-an independent block that can initiate memory-to-memory data transfers
DPM Dynamic Power Management
DRAM Dynamic Random Access Memory
DVFS Dynamic Voltage Frequency Scaling
EMI External Memory Interface-controls all IC external memory accesses (read/write/erase/program) from all the
masters in the system
Endian Refers to byte ordering of data in memory. Little endian means that the least significant byte of the data is
stored in a lower address than the most significant byte. In big endian, the order of the bytes is reversed
EPIT Enhanced Periodic Interrupt Timer-a 32-bit set and forget timer capable of providing precise interrupts at
regular intervals with minimal processor intervention
FCS Frame Checker Sequence
FIFO First In First Out
FIPS Federal Information Processing Standards-United States Government technical standards published by the
National Institute of Standards and Technology (NIST). NIST develops FIPS when there are compelling
Federal government requirements such as for security and interoperability but no acceptable industry
standards
FIPS-140 Security requirements for cryptographic modules-Federal Information Processing Standard 140-2(FIPS 140-2)
is a standard that describes US Federal government requirements that IT products should meet for Sensitive,
but Unclassified (SBU) use
Flash A non-volatile storage device similar to EEPROM, where erasing can be done only in blocks or the entire chip.
Flash path Path within ROM bootstrap pointing to an executable Flash application
Flush Procedure to reach cache coherency. Refers to removing a data line from cache. This process includes
cleaning the line, invalidating its VBR and resetting the tag valid indicator. The flush is triggered by a software
command
GPIO General Purpose Input/Output
hash Hash values are produced to access secure data. A hash value (or simply hash), also called a message
digest, is a number generated from a string of text. The hash is substantially smaller than the text itself, and is
generated by a formula in such a way that it is extremely unlikely that some other text produces the same hash
value.
I/O Input/Output
ICE In-Circuit Emulation
IP Intellectual Property
Table continues on the next page...
Audience
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
28 Freescale Semiconductor, Inc.
Term Definition
IPU Image Processing Unit -supports video and graphics processing functions and provides an interface to video/
still image sensors and displays
IrDA Infrared Data Association-a nonprofit organization whose goal is to develop globally adopted specifications for
infrared wireless communication
ISR Interrupt Service Routine
JTAG JTAG (IEEE Standard 1149.1) A standard specifying how to control and monitor the pins of compliant devices
on a printed circuit board
Kill Abort a memory access
KPP KeyPad Port-16-bit peripheral used as a keypad matrix interface or as general purpose input/output (I/O)
line Refers to a unit of information in the cache that is associated with a tag
LRU Least Recently Used-a policy for line replacement in the cache
MMU Memory Management Unit-a component responsible for memory protection and address translation
MPEG Moving Picture Experts Group-an ISO committee that generates standards for digital video compression and
audio. It is also the name of the algorithms used to compress moving pictures and video
MPEG
standards
Several standards of compression for moving pictures and video:
• MPEG-1 is optimized for CD-ROM and is the basis for MP3
• MPEG-2 is defined for broadcast video in applications such as digital television set-top boxes and DVD
• MPEG-3 was merged into MPEG-2
• MPEG-4 is a standard for low-bandwidth video telephony and multimedia on the World-Wide Web
MQSPI Multiple Queue Serial Peripheral Interface-used to perform serial programming operations necessary to
configure radio subsystems and selected peripherals
MSHC Memory Stick Host Controller
NAND Flash Flash ROM technology-NAND Flash architecture is one of two flash technologies (the other being NOR) used
in memory cards such as the Compact Flash cards. NAND is best suited to flash devices requiring high
capacity data storage. NAND flash devices offer storage space up to 512-Mbyte and offers faster erase, write,
and read capabilities over NOR architecture
NOR Flash See NAND Flash
PCMCIA Personal Computer Memory Card International Association-a multi-company organization that has developed
a standard for small, credit card-sized devices, called PC Cards. There are three types of PCMCIA cards that
have the same rectangular size (85.6 by 54 millimeters), but different widths
physical
address
The address by which the memory in the system is physically accessed
PLL Phase Locked Loop-an electronic circuit controlling an oscillator so that it maintains a constant phase angle (a
lock) on the frequency of an input, or reference, signal
RAM Random Access Memory
RAM path Path within ROM bootstrap leading to the downloading and the execution of a RAM application
RGB The RGB color model is based on the additive model in which Red, Green, and Blue light are combined to
create other colors. The abbreviation RGB comes from the three primary colors in additive light models
RGBA RGBA color space stands for Red Green Blue Alpha. The alpha channel is the transparency channel, and is
unique to this color space. RGBA, like RGB, is an additive color space, so the more of a color placed, the
lighter the picture gets. PNG is the best known image format that uses the RGBA color space
RNGA Random Number Generator Accelerator-a security hardware module that produces 32-bit pseudo random
numbers as part of the security module
ROM Read Only Memory
ROM
bootstrap
Internal boot code encompassing the main boot flow as well as exception vectors
Table continues on the next page...
Chapter 1 About this Book
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 29
Term Definition
RTIC Real-Time Integrity Checker-a security hardware module
SCC SeCurity Controller-a security hardware module
SDMA Smart Direct Memory Access
SDRAM Synchronous Dynamic Random Access Memory
SoC System on a Chip
SPBA Shared Peripheral Bus Arbiter-a three-to-one IP-Bus arbiter, with a resource-locking mechanism
SPI Serial Peripheral Interface-a full-duplex synchronous serial interface for connecting low-/medium-bandwidth
external devices using four wires. SPI devices communicate using a master/slave relationship over two data
lines and two control lines: Also see SS, SCLK, MISO, and MOSI
SRAM Static Random Access Memory
SSI Synchronous-Serial Interface-standardized interface for serial data transfer
TBD To Be Determined
UART Universal Asynchronous Receiver/Transmitter-asynchronous serial communication to external devices
UID Unique ID-a field in the processor and CSF identifying a device or group of devices
USB Universal Serial Bus-an external bus standard that supports high-speed data transfers. The USB 1.1
specification supports data transfer rates of up to 12 Mb/s and USB 2.0 has a maximum transfer rate of 480
Mbps. A single USB port can be used to connect up to 127 peripheral devices, such as mice, modems, and
keyboards. USB also supports Plug-and-Play installation and hot plugging
USBOTG USB On The Go-an extension of the USB 2.0 specification for connecting peripheral devices to each other.
USBOTG devices, also known as dual-role peripherals, can act as limited hosts or peripherals themselves
depending on how the cables are connected to the devices, and they also can connect to a host PC
word A group of bits comprising 32-bits
Audience
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
30 Freescale Semiconductor, Inc.

Chapter 2
Introduction
2.1 Overview
The i.MX family Linux Board Support Package (BSP) supports the Linux Operating
System (OS) on the following processors:
i.MX 6Dual/6Quad/6Solo/6DualLite/6SoloLite/6SoloX/6UltaLite/7Dual applications
processor
The purpose of this software package is to support Linux OS on the i.MX 6Dual/6Quad/
6Solo/6DualLite/6SoloLite/6UltaLite/7Dual family of Integrated Circuits (ICs) and their
associated platforms. It provides the necessary software to interface the standard open-
source Linux kernel to the i.MX hardware. The goal is to enable Freescale customers to
rapidly build products based on i.MX devices that use the Linux OS.
The BSP is not a platform or product reference implementation. It does not contain all of
the product-specific drivers, hardware-independent software stacks, Graphical User
Interface (GUI) components, Java Virtual Machine (JVM), and applications required for
a product. Some of these are made available in their original open-source form as part of
the base kernel.
The BSP is not intended to be used for silicon verification. While it can play a role in
this, the BSP functionality and the tests run on the BSP do not have sufficient coverage to
replace traditional silicon verification test suites.
2.1.1 Software Base
The i.MX BSP is based on version 3.14.38 of the Linux kernel from the official Linux
kernel website (www.kernel.org ). It is enhanced with the features provided by Freescale.
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 31
2.1.2 Features
Table below describes the features supported by the Linux BSP for specific platforms.
Table 2-1. Linux BSP Supported Features
Feature Description Chapter Source Applicable
Platform
Machine-Specific Layer
MSL Machine-Specific Layer (MSL) supports interrupts,
Timer, Memory Map, GPIO/IOMUX, SPBA, SDMA.
• Interrupts GIC: The Linux kernel contains
common ARM GIC interrupts handling code.
• Timer (GPT): The General Purpose Timer (GPT)
is set up to generate an interrupt as programmed
to provide OS ticks. Linux OS facilitates timer use
through various functions for timing delays,
measurement, events, alarms, high resolution
timer features, and so on. Linux OS defines the
MSL timer API required for the OS-tick timer and
does not expose it beyond the kernel tick
implementation.
• GPIO/EDIO/IOMUX: The GPIO and EDIO
components in the MSL provide an abstraction
layer between the various drivers and the
configuration and utilization of the system,
including GPIO, IOMUX, and external board I/O.
The IO software module is board-specific, and
resides in the MSL layer as a self-contained set
of files. I/O configuration changes are centralized
in the GPIO module so that changes are not
required in the various drivers.
• SPBA: The Shared Peripheral Bus Arbiter
(SPBA) provides an arbitration mechanism
among multiple masters to allow access to the
shared peripherals. The SPBA implementation
under MSL defines the API to allow different
masters to take or release ownership of a shared
peripheral.
Machine-Specific Layer (MSL) All
SDMA API The Smart Direct Memory Access (SDMA) API driver
controls the SDMA hardware. It provides an API to
other drivers for transferring data between MCU, DSP
and peripherals. . The SDMA controller is responsible
for transferring data between the MCU memory space,
peripherals, and the DSP memory space. The SDMA
API allows other drivers to initialize the scripts, pass
parameters and control their execution. SDMA is based
on a microRISC engine that runs channel-specific
scripts.
Smart Direct Memory Access
(SDMA) API
All
DMAC Both AHB-to-APBH and AHB-to-APBX DMA support
configurable DMA descript chain.
AHB-to-APBH Bridge with DMA
(APBH-Bridge-DMA)
All
Low-level PM
Drivers
The low-level power management driver is responsible
for implementing hardware-specific operations to meet
power requirements and also to conserve power on the
Low-level Power Management
(PM) Driver
All
Table continues on the next page...
Overview
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
32 Freescale Semiconductor, Inc.
Table 2-1. Linux BSP Supported Features (continued)
Feature Description Chapter Source Applicable
Platform
development platforms. Driver implementations are
often different for different platforms. It is used by the
DPM layer.
CPU Frequency
Scaling
The CPU frequency scaling device driver allows the
clock speed of the CPUs to be changed on the fly.
CPU Frequency Scaling
(CPUFREQ) Driver
All
Dynamic Bus
Frequency Driver
In order to improve power consumption, the Bus
Frequency driver dynamically manages the various
system frequencies.
Dynamic Bus Frequency Driver All
Multimedia Drivers
LCD The LCD interface driver supports the Samsung
LMS430xx 4.3" WQVGA LCD panel.
ELCDIF Frame Buffer Driver i.MX
6SoloLite,
i.MX
6UltraLite,
i.MX 7Dual
EPDC The Electrophoretic Display Controller (EPDC) is a
direct-drive active matrix EPD controller designed to
drive E Ink EPD panels supporting a wide variety of
TFT backplanes.
Electrophoretic Display Controller
(EPDC) Frame Buffer
i.MX
6DualLite,
i.MX 6Solo,
i.MX
6SoloLite,
i.MX 7Dual
PxP The Pixel Pipeline (PxP) DMA-ENGINE driver provides
a unique API, which are implemented as a DMA engine
client that smooths over the details of different
hardware offload engine implementations.
PXP DMA-ENGINE Driver i.MX
6DualLite,
i.MX 6Solo,
i.MX
6SoloLite,
i.MX
6UltraLite,
i.MX 7Dual
IPU The Image Processing Unit (IPU) is designed to
support video and graphics processing functions and to
interface with video/still image sensors and displays.
The IPU driver is a self-contained driver module in the
Linux kernel. It contains a custom kernel-level API to
manipulate logical channels. A logical channel
represents a complete IPU processing flow. The IPU
driver includes a frame buffer driver, a V4L2 device
driver, and low-level IPU drivers.
Image Processing Unit (IPU)
Drivers
i.MX 6Quad,
i.MX 6Dual,
i.MX
6DualLite,
i.MX 6Solo,
i.MX
6UltraLite,
i.MX 7Dual
HDMI This driver provides the support HDMI module HDMI Driver All
V4L2 Output The Video for Linux 2 (V4L2) output driver uses the IPU
post-processing functions for video output. The driver
implements the standard V4L2 API for output devices.
Video for Linux Two (V4L2) Driver All
V4L2 Capture The Video for Linux 2 (V4L2) capture device includes
two interfaces: the capture interface and the overlay
interface. The capture interface records the video
stream. The overlay interface displays the preview
video.
Video for Linux Two (V4L2) Driver All
Table continues on the next page...
Chapter 2 Introduction
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 33
Table 2-1. Linux BSP Supported Features (continued)
Feature Description Chapter Source Applicable
Platform
VPU The Video Processing Unit (VPU) is a multi-standard
video decoder and encoder that can perform decoding
and encoding of various video formats.
Video Processing Unit (VPU)
Driver
i.MX 6Quad,
i.MX 6Dual,
i.MX
6DualLite,
i.MX 6Solo
Sound Drivers
ALSA Sound The Advanced Linux Sound Architecture (ALSA) is a
sound driver that provides ALSA and OSS compatible
applications with the means to perform audio playback
and recording functions. ALSA has a user-space
component called ALSAlib that can extend the features
of audio hardware by emulating the same in software
(user space), such as resampling, software mixing,
snooping, and so on. The ASoC Sound driver supports
stereo CODEC playback and capture through SSI.
ALSA Sound Driver All
S/PDIF The S/PDIF driver is designed under the Linux ALSA
subsystem. It implements one playback device for Tx
and one capture device for Rx.
The Sony/Philips Digital Interface
(S/PDIF) Driver
All
Memory Drivers
SPI NOR MTD The SPI NOR MTD driver provides the support to the
Atmel data Flash using the SPI interface.
SPI NOR Flash Memory
Technology Device (MTD) Driver
All
NAND MTD The NAND MTD driver interfaces with the integrated
NAND controller. It can support various file systems,
such as UBIFS, CRAMFS and JFFS2UBI and
UBIFSCRAMFS and JFFS2. The driver implementation
supports the lowest level operations on the external
NAND Flash chip, such as block read, block write and
block erase as the NAND Flash technology only
supports block access. Because blocks in a NAND
Flash are not guaranteed to be good, the NAND MTD
driver is also able to detect bad blocks and feed that
information to the upper layer to handle bad block
management.
NAND GPMI Flash Driver i.MX 6Quad,
i.MX 6Dual,
i.MX
6DualLite,
i.MX 6Solo,
i.MX
6UltraLite,
i.MX 7Dual
SATA The SATA AHCI driver is based on the LIBATA layer of
the block device infrastructure of the Linux kernel
SATA Driver i.MX 6Quad,
i.MX 6Dual
Input Device Drivers
Networking Drivers
ENET The ENET Driver performs the full set of IEEE 802.3/
Ethernet CSMA/CD media access control and channel
interface functions. The FEC requires an external
interface adaptor and transceiver function to complete
the interface to the Ethernet media. It supports half or
full-duplex operation on 10M\100M\1G related Ethernet
networks.
Fast Ethernet Controller (FEC)
Driver
All
Bus Drivers
I2C The I2C bus driver is a low-level interface that is used
to interface with the I2C bus. This driver is invoked by
the I2C chip driver; it is not exposed to the user space.
The standard Linux kernel contains a core I2C module
Inter-IC (I2C) Driver All
Table continues on the next page...
Overview
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
34 Freescale Semiconductor, Inc.
Table 2-1. Linux BSP Supported Features (continued)
Feature Description Chapter Source Applicable
Platform
that is used by the chip driver to access the bus driver
to transfer data over the I2C bus. This bus driver
supports:
• Compatibility with the I2C bus standard
• Bit rates up to 400 Kbps
• Standard I2C master mode
• Power management features by suspending and
resuming I2C.
CSPI The low-level Enhanced Configurable Serial Peripheral
Interface (ECSPI) driver interfaces a custom, kernel-
space API to both ECSPI modules. It supports the
following features:
• Interrupt-driven transmit/receive of SPI frames
• Multi-client management
• Priority management between clients
• SPI device configuration per client
Enhanced Configurable Serial
Peripheral Interface (ECSPI) Driver
All
MMC/SD/SDIO -
uSDHC
The MMC/SD/SDIO Host driver implements the
standard Linux driver interface to eSDHC.
MMC/SD/SDIO Host Driver All
UART Drivers
MXC UART The Universal Asynchronous Receiver/Transmitter
(UART) driver interfaces the Linux serial driver API to
all of the UART ports. A kernel configuration parameter
gives the user the ability to choose the UART driver
and also to choose whether the UART should be used
as the system console.
Universal Asynchronous Receiver/
Transmitter (UART) Driver
All
General Drivers
USB The USB driver implements a standard Linux driver
interface to the ARC USB-OTG controller.
CHIPIDEA USB Driver All
FlexCAN The FlexCAN driver is designed as a network device
driver. It provides the interfaces to send and receive
CAN messages. The CAN protocol was primarily
designed to be used as a vehicle serial data bus,
meeting the specific requirements of this field: real-time
processing, reliable operation in the EMI environment
of a vehicle, cost-effectiveness and required bandwidth.
FlexCAN Driver i.MX 6Quad,
i.MX 6Dual,
i.MX
6DualLite,
i.MX 6Solo
ASRC The Asynchronous Sample Rate Converter (ASRC)
driver provides the interfaces to access the
asynchronous sample rate converter module.
Asynchronous Sample Rate
Converter (ASRC) Driver
i.MX 6Quad,
i.MX 6Dual,
i.MX
6DualLite,
i.MX 6Solo
WatchDog The Watchdog Timer module protects against system
failures by providing an escape from unexpected hang
or infinite loop situations or programming errors. This
WDOG implements the following features:
• Generates a reset signal if it is enabled but not
serviced within a predefined time-out value
• Does not generate a reset signal if it is serviced
within a predefined time-out value
Watchdog (WDOG) Driver All
Table continues on the next page...
Chapter 2 Introduction
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 35

Table 2-1. Linux BSP Supported Features (continued)
Feature Description Chapter Source Applicable
Platform
MXC PWM driver The MXC PWM driver provides the interfaces to access
MXC PWM signals
Pulse-Width Modulator (PWM)
Driver
All
Thermal Driver Thermal driver is a necessary driver for monitoring and
protecting the SoC. The thermal driver will monitor the
SoC's temperature in a certain frequency. It defines
three trip points: critical, hot, and active.
Thermal Driver All
OProfile OProfile is a system-wide profiler for Linux systems,
capable of profiling all running code at low overhead.
OProfile All
Overview
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
36 Freescale Semiconductor, Inc.

Chapter 3
Machine Specific Layer (MSL)
3.1 Introduction
The Machine Specific Layer (MSL) provides the Linux kernel with the machine-
dependent components found here.
• Interrupts including GPIO and EDIO (only on certain platforms)
• Timer
• Memory map
• General Purpose Input/Output (GPIO) including IOMUX on certain platforms
• Shared Peripheral Bus Arbiter (SPBA)
• Smart Direct Memory Access (SDMA)
These modules are normally available in the following directory:
<Yocto_BuildDir>/linux/arch/arm/mach-imx for the i.MX 6 platform
The MSL layer contains not only the modules common to all the boards using the same
processor, such as the interrupts and timer, but it also contains modules specific to each
board, such as the memory map. The following sections describe the basic hardware and
software operation and the software interfaces for MSL modules. First, the common
modules, such as Interrupts and Timer are discussed. Next, the board-specific modules,
such as Memory Map and General Purpose Input/Output (GPIO) (including IOMUX on
some platforms) are detailed. Because of the complexity of the SDMA module, its design
is explained in SDMA relevant chapter.
Each of the following sections contains an overview of the hardware operation. For more
information, see the corresponding device documentation.
3.2 Interrupts (Operation)
This section describes the hardware and software operation of interrupts on the device.
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 37

3.2.1 Interrupt Hardware Operation
The Interrupt Controller controls and prioritizes a maximum of 128 internal and external
interrupt sources.
Each source can be enabled or disabled by configuring the Interrupt Enable Register or
using the Interrupt Enable/Disable Number Registers. When an interrupt source is
enabled and the corresponding interrupt source is asserted, the Interrupt Controller asserts
a normal or a fast interrupt request depending on the associated Interrupt Type Register
setting.
Interrupt Controller registers can only be accessed in supervisor mode. The Interrupt
Controller interrupt requests are prioritized in the following order: fast interrupts and
normal interrupts in order of highest priority level, then highest source number with the
same priority. There are sixteen normal interrupt levels for all interrupt sources, with
level zero being the lowest priority. The interrupt levels are configurable through eight
normal interrupt priority level registers. Those registers, along with the Normal Interrupt
Mask Register, support software-controlled priority levels for normal interrupts and
priority masking.
3.2.2 Interrupt Software Operation
For ARM architecture-based processors, normal interrupt and fast interrupt are two
different exception types. The exception vector addresses can be configured to start at
low address (0x0) or high address (0xFFFF0000).
The Linux OS implementation running on ARM architecture chooses the high vector
address model.
The following file has a description of the ARM interrupt architecture.
<Yocto_BuildDir>/linux/Documentation/arm/Interrupts
The software provides a processor-specific interrupt structure with callback functions
defined in the irqchip structure and exports one initialization function, which is called
during system startup.
Interrupts (Operation)
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
38 Freescale Semiconductor, Inc.
3.2.3 Interrupt Features
The interrupt implementation supports the following features:
• Interrupt Controller interrupt disable and enable
• Functions required by the Linux interrupt architecture as defined in the standard
ARM interrupt source code (mainly the <Yocto_BuildDir>/linux/arch/arm/kernel/
irq.c file)
3.2.4 Interrupt Source Code Structure
The interrupt module is implemented in the following file (located in the directory
<Yocto_BuildDir>/linux/arch/arm/plat-mxc):
irq.c (If CONFIG_MXC_TZIC is not selected)
tzic.c (If CONFIG_MXC_TZIC is selected)
gic.c (If CONFIG_ARM_GIC is selected)
There are also two header files (located in the include directory specified at the beginning
of this chapter):
hardware.h
irqs.h
Table below lists the source files for interrupts.
Table 3-1. Interrupt Files
File Description
hardware.h Register descriptions
irqs.h Declarations for number of interrupts supported
gic.c Actual interrupt functions for GIC modules
3.2.5 Interrupt Programming Interface
The machine-specific interrupt implementation exports a single function.
This function initializes the Interrupt Controller hardware and registers functions for
interrupt enable and disable from each interrupt source.
This is done with the global structure irq_desc of type struct irqdesc. After the
initialization, the interrupt can be used by the drivers through the request_irq() function to
register device-specific interrupt handlers.
Chapter 3 Machine Specific Layer (MSL)
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 39

In addition to the native interrupt lines supported from the Interrupt Controller, the
number of interrupts is also expanded to support GPIO interrupt and (on some platforms)
EDIO interrupts. This allows drivers to use the standard interrupt interface supported by
ARM device running Linux OS, such as the request_irq() and free_irq() functions.
3.3 Timer
The Linux kernel relies on the underlying hardware to provide support for both the
system timer (which generates periodic interrupts) and the dynamic timers (to schedule
events).
After the system timer interrupt occurs, it does the following:
• Updates the system uptime
• Updates the time of day
• Reschedules a new process if the current process has exhausted its time slice
• Runs any dynamic timers that have expired
• Updates resource usage and processor time statistics
The timer hardware on most i.MX platforms consists of either Enhanced Periodic
Interrupt Timer (EPIT) or general purpose timer (GPT) or both. GPT is configured to
generate a periodic interrupt at a certain interval (every 10 ms) and is used by the Linux
kernel.
3.3.1 Timer Software Operation
The timer software implementation provides an initialization function that initializes the
GPT with the proper clock source, interrupt mode and interrupt interval.
The timer then registers its interrupt service routine and starts timing. The interrupt
service routine is required to service the OS for the purposes mentioned in Timer.
Another function provides the time elapsed as the last timer interrupt.
3.3.2 Timer Features
The timer implementation supports the following features:
• Functions required by Linux OS to provide the system timer and dynamic timers.
• Generates an interrupt every 10 ms.
Timer
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
40 Freescale Semiconductor, Inc.

3.3.3 Timer Source Code Structure
The timer module is implemented in the arch/arm/mach-imx/time.c file.
3.3.4 Timer Programming Interface
The timer module utilizes four hardware timers, to implement clock source and clock
event objects.
This is done with the clocksource_mxc structure of struct clocksource type and
clockevent_mxc structure of struct clockevent_device type. Both structures provide
routines required for reading current timer values and scheduling the next timer event.
The module implements a timer interrupt routine that services the Linux OS with timer
events for the purposes mentioned in the beginning of this chapter.
3.4 Memory Map
A predefined virtual-to-physical memory map table is required for the device drivers to
access to the device registers since the Linux kernel is running under the virtual address
space with the Memory Management Unit (MMU) enabled.
3.4.1 Memory Map Hardware Operation
The MMU, as part of the ARM core, provides the virtual to physical address mapping
defined by the page table. For more information, see the ARM Technical Reference
Manual (TRM) from ARM Limited.
3.4.2 Memory Map Software Operation
A table mapping the virtual memory to physical memory is implemented for i.MX
platforms as defined in the <Yocto_BuildDir>/arch/arm/mach-imx/pm-imx*.cfile.
Chapter 3 Machine Specific Layer (MSL)
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 41
3.4.3 Memory Map Features
The Memory Map implementation programs the Memory Map module to creates the
physical to virtual memory map for all the I/O modules.
3.4.4 Memory Map Source Code Structure
The Memory Map module implementation is in pm-imx*.c under the platform-specific
MSL directory. The hardware.h header file is used to provide macros for all the I/O
module physical and virtual base addresses and physical to virtual mapping macros. All
of the memory map source code is in the in the following file:
<Yocto_BuildDir>/arch/arm/mach-imx/pm-imx*.c
Table below lists the source file for the memory map.
Table 3-2. Memory Map Files
File Description
mx6.h, mx7.h Header files for the I/O module physical addresses
hardware.h Memory map definition file
3.5 IOMUX
The limited number of pins of highly integrated processors can have multiple purposes.
The IOMUX module controls a pin usage so that the same pin can be configured for
different purposes and can be used by different modules.
This is a common way to reduce the pin count while meeting the requirements from
various customers. Platforms that do not have the IOMUX hardware module can do pin
muxing through the GPIO module.
The IOMUX module provides the multiplexing control so that each pin may be
configured either as a functional pin or as a GPIO pin. A functional pin can be subdivided
into either a primary function or alternate functions. The pin operation is controlled by a
specific hardware module. A GPIO pin, is controlled by the user through software with
further configuration through the GPIO module. For example, the TXD1 pin might have
the following functions:
• TXD1-internal UART1 Transmit Data. This is the primary function of this pin.
• UART2 DTR-alternate mode 3
IOMUX
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
42 Freescale Semiconductor, Inc.

• LCDC_CLS-alternate mode 4
• GPIO4[22]-alternate mode 5
• SLCDC_DATA[8]-alternate mode 6
If the hardware modes are chosen at the system integration level, this pin is dedicated
only to that purpose and cannot be changed by software. Otherwise, the IOMUX module
needs to be configured to serve a particular purpose that is dictated by the system (board)
design. If the pin is connected to an external UART transceiver and therefore to be used
as the UART data transmit signal, it should be configured as the primary function. If the
pin is connected to an external Ethernet controller for interrupting the ARM core, then it
should be configured as GPIO input pin with interrupt enabled. Again, be aware that the
software does not have control over what function a pin should have. The software only
configures pin usage according to the system design.
3.5.1 IOMUX Hardware Operation
The following discussion applies only to those processors that have an IOMUX hardware
module.
The IOMUX controller registers are briefly described in this section.
For detailed information, see the pin multiplexing section of the IC Reference Manual.
• SW_MUX_CTL-Selects the primary or alternate function of a pin. Also enables
loopback mode when applicable.
• SW_SELECT_INPUT-Controls pin input path. This register is only required when
multiple pads drive the same internal port.
• SW_PAD_CTL-Control pad slew rate, driver strength, pull-up/down resistance, and
so on.
3.5.2 IOMUX Software Operation
The IOMUX software implementation provides an API to set up pin functionality and
pad features.
3.5.3 IOMUX Features
The IOMUX implementation programs the IOMUX module to configure the pins that are
supported by the hardware.
Chapter 3 Machine Specific Layer (MSL)
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 43
3.5.4 IOMUX Source Code Structure
Table below lists the source files for the IOMUX module. The files are in the following
directories:
• <Yocto_BuildDir>/drivers/pinctrl/pinctrl-imx.c
• <Yocto_BuildDir>/drivers/pinctrl/pinctrl-imx6sl.c
• <Yocto_BuildDir>/drivers/pinctrl/pinctrl-imx6q.c
• <Yocto_BuildDir>/drivers/pinctrl/pinctrl-imx6sx.c
• <Yocto_BuildDir>/drivers/pinctrl/pinctrl-imx6ul.c
• <Yocto_BuildDir>/drivers/pinctrl/pinctrl-imx7d.c
Table 3-3. IOMUX Files
File Description
pinctrl-imx.c i.MX pinctrl core driver
pinctrl-im6sl.c i.MX 6SoloLite pinctrl driver
pinctrl-imx6q.c i.MX 6Quad/DualLite pinctrl driver
pinctrl-imx6sx.c i.MX 6SoloX pinctrl driver
pinctrl-imx6ul.c i.MX 6UltraLite pinctrl driver
pinctrl-imx7d.c i.MX 7Dual pinctrl driver
3.5.5 IOMUX Programming Interface
See pinctrl binding documents:
• imx-pinctrl.txt in Documentation/devicetree/bindings/pinctrl/fsl
• imx6sl-pinctrl.txt in Documentation/devicetree/bindings/pinctrl/fsl
3.5.6 IOMUX Control Through GPIO Module
For a multi-purpose pin, the GPIO controller provides the multiplexing control so that
each pin may be configured either as a functional pin, or a GPIO pin.
The operation of the functional pin, which can be subdivided into either major function or
one alternate function, is controlled by a specific hardware module. If it is configured as a
GPIO pin, the pin is controlled by the user through software with further configuration
through the GPIO module. In addition, there are some special configurations for a GPIO
pin (such as output based A_IN, B_IN, C_IN or DATA register, but input based A_OUT
or B_OUT).
IOMUX
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
44 Freescale Semiconductor, Inc.

The following discussion applies to those platforms that control the muxing of a pin
through the general purpose input/output (GPIO) module.
If the hardware modes are chosen at the system integration level, this pin is dedicated
only to that purpose which cannot be changed by software. Otherwise, the GPIO module
needs to be configured properly to serve a particular purpose that is dictated with the
system (board) design. If this pin is connected to an external UART transceiver, it should
be configured as the primary function or if this pin is connected to an external Ethernet
controller for interrupting the core, then it should be configured as GPIO input pin with
interrupt enabled. The software does not have control over what function a pin should
have. The software only configures a pin for that usage according to the system design.
3.5.6.1 GPIO Hardware Operation
The GPIO controller module is divided into MUX control and PULLUP control sub
modules. The following sections briefly describe the hardware operation. For detailed
information, refer to the relevant device documentation.
3.5.6.1.1 Muxing Control
The GPIO In Use Registers control a multiplexer in the GPIO module.
The settings in these registers choose if a pin is utilized for a peripheral function or for its
GPIO function. One 32-bit general purpose register is dedicated to each GPIO port.
These registers may be used for software control of IOMUX block of the GPIO.
3.5.6.1.2 PULLUP Control
The GPIO module has a PULLUP control register (PUEN) for each GPIO port to control
every pin of that port.
3.5.6.2 GPIO Software Operation (general)
The GPIO software implementation provides an API to setup pin functionality and pad
features.
3.5.6.3 GPIO Implementation
The GPIO implementation programs the GPIO module to configure the pins that are
supported by the hardware.
Chapter 3 Machine Specific Layer (MSL)
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 45

3.6 General Purpose Input/Output(GPIO)
The GPIO module provides general-purpose pins that can be configured as either inputs
or outputs.
When configured as an output, the pin state (high or low) can be controlled by writing to
an internal register. When configured as an input, the pin input state can be read from an
internal register.
3.6.1 GPIO Software Operation
The general purpose input/output (GPIO) module provides an API to configure the i.MX
processor external pins and a central place to control the GPIO interrupts.
The GPIO utility functions should be called to configure a pin instead of directly
accessing the GPIO registers. The GPIO interrupt implementation contains functions,
such as the interrupt service routine (ISR) registration/un-registration and ISR
dispatching once an interrupt occurs. All driver-specific GPIO setup functions should be
made during device initialization in the MSL layer to provide better portability and
maintainability. This GPIO interrupt is initialized automatically during the system
startup.
If a pin is configured as GPIO by the IOMUX, the state of the pin should also be set since
it is not initialized by a dedicated hardware module. Setting the pad pull-up, pull-down,
slew rate and so on, with the pad control function may be required as well.
3.6.1.1 API for GPIO
API for GPIO lists the features supported by the GPIO implementation.
The GPIO implementation supports the following features:
• An API for registering an interrupt service routine to a GPIO interrupt. This is made
possible as the number of interrupts defined by NR_IRQS is expanded to
accommodate all the possible GPIO pins that are capable of generating interrupts.
• Functions to request and free an IOMUX pin. If a pin is used as GPIO, another set of
request/free function calls are provided. The user should check the return value of the
request calls to see if the pin has already been reserved before modifying the pin
state. The free function calls should be made when the pin is not needed. See the API
document for more details.
General Purpose Input/Output(GPIO)
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
46 Freescale Semiconductor, Inc.
• Aligned parameter passing for both IOMUX and GPIO function calls. In this
implementation the same enumeration for iomux_pins is used for both IOMUX and
GPIO calls and the user does not have to figure out in which bit position a pin is
located in the GPIO module.
• Minimal changes required for the public drivers such as Ethernet and UART drivers
as no special GPIO function call is needed for registering an interrupt.
3.6.2 GPIO Features
This GPIO implementation supports the following features:
• Implements the functions for accessing the GPIO hardware modules
• Provides a way to control GPIO signal direction and GPIO interrupts
3.6.3 GPIO Module Source Code Structure
All of the GPIO module source code is in the GPIO framework, in the following files,
located in the directories indicated at the beginning of this chapter:
Table 3-4. GPIO Files
File Description
drivers/gpio/gpio-mxc.c Function implementation
3.6.4 GPIO Programming Interface 2
For more information, see the Documentation/gpio.txt under Linux source code directory
for the programming interface.
Chapter 3 Machine Specific Layer (MSL)
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 47

General Purpose Input/Output(GPIO)
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
48 Freescale Semiconductor, Inc.

Chapter 4
Smart Direct Memory Access (SDMA) API
4.1 Overview
The Smart Direct Memory Access (SDMA) API driver controls the SDMA hardware.
It provides an API to other drivers for transferring data between MCU memory space and
the peripherals. It supports the following features:
• Loading channel scripts from the MCU memory space into SDMA internal RAM
• Loading context parameters of the scripts
• Loading buffer descriptor parameters of the scripts
• Controlling execution of the scripts
• Callback mechanism at the end of script execution
4.1.1 Hardware Operation
The SDMA controller is responsible for transferring data between the MCU memory
space and peripherals and includes the following features:
• Multi-channel DMA supporting up to 32 time-division multiplexed DMA channels.
• Powered by a 16-bit Instruction-Set micro-RISC engine.
• Each channel executes specific script.
• Very fast context-switching with two-level priority based preemptive multi-tasking.
• 4 Kbytes ROM containing startup scripts (that is, boot code) and other common
utilities that can be referenced by RAM-located scripts.
• 8 Kbyte RAM area is divided into a processor context area and a code space area
used to store channel scripts that are downloaded from the system memory.
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 49
4.1.2 Software Operation
The driver provides an API for other drivers to control SDMA channels. SDMA channels
run dedicated scripts according to peripheral and transfer types. The SDMA API driver is
responsible for loading the scripts into SDMA memory, initializing the channel
descriptors, and controlling the buffer descriptors and SDMA registers.
The table below provides a list of drivers that use SDMA and the number of SDMA
physical channels used by each driver. A driver can specify the SDMA channel number
that it wishes to use, static channel allocation, or can have the SDMA driver provide a
free SDMA channel for the driver to use, dynamic channel allocation. For dynamic
channel allocation, the list of SDMA channels is scanned from channel 32 to channel 1.
Upon finding a free channel, that channel is allocated for the requested DMA transfers.
Table 4-1. SDMA Channel Usage
Driver Name Number of
SDMA Channels
SDMA Channel Used
SDMA CMD 1 Static Channel allocation-uses SDMA channels 0
SSI 2 per device Dynamic channel allocation
UART 2 per device Dynamic channel allocation
SPDIF 2 per device Dynamic channel allocation
ESAI 2 per device Dynamic channel allocation
4.1.3 Source Code Structure
The dmaengine.h (header file for SDMA API) is available in the directory linux/include/
linux
The table below shows the source files available in the directory / <Yocto_BuildDir>/
linux/drivers/dma
Table 4-2. SDMA API Source Files
File Description
dmaengine.c SDMA management routine
imx-sdma.c SDMA implement driver
The table below shows the image files available in the directory / <Yocto_BuildDir>/
linux/firmware/imx/sdma
Overview
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
50 Freescale Semiconductor, Inc.

Table 4-3. SDMA Script Files
File Description
sdma-mx6q-to1.bin.ihex SDMA RAM scripts
4.1.4 Programming Interface
The module implements standard DMA API. Refer to the API documents, which are
included in the Linux documentation package, for more information on the functions
implemented in the driver. For additional information, you can refer to the ESAI driver.
4.1.5 Usage Example
Refer to one of the drivers, such as SPDIF driver, UART driver or SSI driver, that uses
the SDMA API driver for a usage example.
Chapter 4 Smart Direct Memory Access (SDMA) API
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 51

Overview
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
52 Freescale Semiconductor, Inc.

Chapter 5
AHB-to-APBH Bridge with DMA (APBH-Bridge-DMA)
5.1 Overview
The AHB-to-APBH bridge provides the processor with an inexpensive peripheral
attachment bus running on the AHB's HCLK.
(The H in APBH denotes that the APBH is synchronous to HCLK.)
The AHB-to-APBH bridge includes the AHB-to-APB PIO bridge for a memory-mapped
I/O to the APB devices, as well as a central DMA facility for devices on this bus and a
vectored interrupt controller for the ARM core. Each one of the APB peripherals,
including the vectored interrupt controller, is documented in their own chapters elsewhere
in this document.
There is no separate DMA bus for these devices. Contention between the DMA's use of
the APBH bus and the AHB-to-APB bridge functions' use of the APBH is mediated by an
internal arbitration logic. For contention between these two units, the DMA is favored
and the AHB slave will report "not ready" through its HREADY output until the bridge
transfer can complete. The arbiter tracks repeated lockouts and inverts the priority,
guaranteeing the ARM platform every fourth transfer on the APB
5.1.1 Hardware Operation
The SDMA controller is responsible for transferring data between the MCU memory
space and peripherals and includes the following features.
• Multi-channel DMA supporting up to 32 time-division multiplexed DMA channels
• Powered by a 16-bit Instruction-Set micro-RISC engine
• Each channel executes specific script
• Very fast context-switching with two-level priority based preemptive multi-tasking
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 53
• 4 Kbytes ROM containing startup scripts (that is, boot code) and other common
utilities that can be referenced by RAM-located scripts
• 8 Kbyte RAM area is divided into a processor context area and a code space area
used to store channel scripts that are downloaded from the system memory.
5.1.2 Software Operation
The DMA supports sixteen channels of DMA services, as shown in the following table.
The shared DMA resource allows each independent channel to follow a simple chained
command list. Command chains are built up using the general structure.
Table 5-1. APBH DMA Channel Assignments
APBH DMA CHANNEL # USAGE
0 GPMI0
1 GPMI1
2 GPMI2
3 GPMI3
4 GPMI4
5 GPMI5
6 GPMI6
7 GPMI7
8 EMPTY
9 EMPTY
10 EMPTY
11 EMPTY
12 EMPTY
13 EMPTY
14 EMPTY
15 EMPTY
5.1.3 Source Code Structure
The table below shows the source files available in the directory, drivers/dma/
Table 5-2. APBH DMA Source Files
File Description
mxs-dma.c APBH DMA implement driver
Overview
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
54 Freescale Semiconductor, Inc.

5.1.4 Menu Configuration Options
The following Linux kernel configuration option is provided for this module:
• MXS_DMA -This is the configuration option for the APBH DMA driver. In
menuconfig, this option is available under:
• Device Drivers > DMA Engine support > MXS DMA support.
5.1.5 Programming Interface
The module implements standard DMA API. Refer to the API documents, which are
located in the Linux documentation package, for more information on the functions
implemented in the driver such as GPMI NAND driver.
5.1.6 Usage Example
Refer to one of the drivers, such as GPMI NAND driver, that uses the APBH DMA
driver for a usage example.
Chapter 5 AHB-to-APBH Bridge with DMA (APBH-Bridge-DMA)
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 55

Overview
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
56 Freescale Semiconductor, Inc.

Chapter 6
Image Processing Unit (IPU) Drivers
6.1 Introduction
The image processing unit (IPU) is designed to support video and graphics processing
functions and to interface with video and still image sensors and displays. The IPU driver
provides a kernel-level API to manipulate logical channels. A logical channel represents
a complete IPU processing flow. For example, a complete IPU processing flow (logical
channel) might consist of reading a YUV buffer from memory, performing post-
processing, and writing an RGB buffer to memory. A logical channel maps one to three
IDMA channels and maps to either zero or one IC tasks. A logical channel can have one
input, one output, and one secondary input IDMA channel. The IPU API consists of a set
of common functions for all channels. Its functions are to initialize channels, set up
buffers, enable and disable channels, link channels for auto frame synchronization, and
set up interrupts.
Typical logical channels include:
• CSI direct to memory
• CSI to viewfinder pre-processing to memory
• Memory to viewfinder pre-processing to memory
• Memory to viewfinder rotation to memory
• Previous field channel of memory to video deinterlacing and viewfinder pre-
processing to memory
• Current field channel of memory to video deinterlacing and viewfinder pre-
processing to memory
• Next field channel of memory to video deinterlacing and viewfinder pre-processing
to memory
• CSI to encoder pre-processing to memory
• Memory to encoder pre-processing to memory
• Memory to encoder rotation to memory
• Memory to post-processing rotation to memory
• Memory to synchronous frame buffer background
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 57

• Memory to synchronous frame buffer foreground
• Memory to synchronous frame buffer DC
• Memory to synchronous frame buffer mask
The IPU API has some additional functions that are not common across all channels, and
are specific to an IPU sub-module. The types of functions for the IPU sub-modules are as
follows:
• Synchronous frame buffer functions
• Panel interface initialization
• Set foreground positions
• Set local/global alpha and color key
• Set gamma
• CSI functions
• Sensor interface initialization
• Set sensor clock
• Set capture size
• Enable or disable prefetching linear frames by using PRE/PRG
• Enable or disable resolving tiled frames by using PRE/PRG
The higher level drivers are responsible for memory allocation, chaining of channels, and
providing user-level API.
Introduction
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
58 Freescale Semiconductor, Inc.

6.1.1 Hardware Operation
The detailed hardware operation of the IPU is discussed in the Applications Processor
Reference Manual. The following figure shows the IPU hardware modules.
Figure 6-1. IPUv3EX/IPUv3H IPU Module Overview
6.2 Software Operation
The IPU driver is a self-contained driver module in the Linux kernel.
It consists of a custom kernel-level API for the following blocks:
• Synchronous frame buffer driver
• Display Interface (DI)
• Display Processor (DP)
• Image DMA Controller (IDMAC)
• CMOS Sensor Interface (CSI)
• Image Converter (IC)
• Prefetch/Resolve Engine/Gasket (PRE/PRG)
Figure below shows the interaction between the different graphics/video drivers and the
IPU.
Chapter 6 Image Processing Unit (IPU) Drivers
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 59
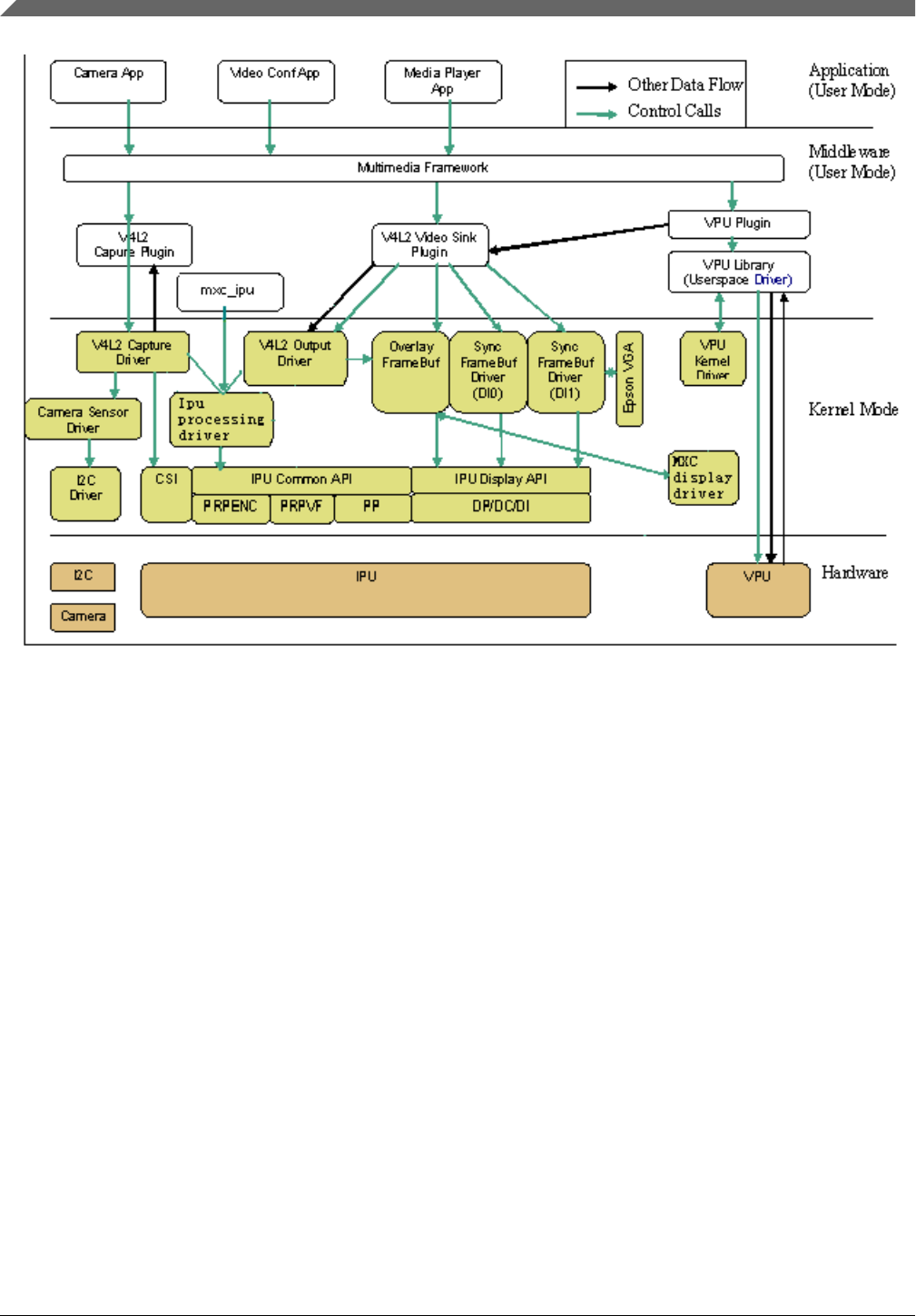
Figure 6-2. Graphics/Video Drivers Software Interaction for IPUv3
The IPU drivers are sub-divided as follows:
• Device drivers-include the frame buffer driver for the synchronous frame buffer, the
frame buffer driver for the displays, V4L2 capture drivers for IPU pre-processing, the
V4L2 output driver for IPU post-processing, and the ipu processing driver which
provide system interface to user space or V4L2 drivers. The frame buffer device
drivers are available in the <Yocto_BuildDir>/linux/drivers/video/mxc directory of
the Linux kernel. The V4L2 device drivers are available in the <Yocto_BuildDir>/
linux/drivers/media/video directory of the Linux kernel.
• MXC display driver is introduced as a simple framework to manage interaction
between IPU and display device drivers (e.g., LCD, LVDS, HDMI, MIPI, etc.)
• Low-level library routines-interface to the IPU hardware registers. They take input
from the high-level device drivers and communicate with the IPU hardware. The
low-level libraries are available in the directory of the Linux kernel.
Software Operation
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
60 Freescale Semiconductor, Inc.

6.2.1 IPU Frame Buffer Drivers Overview
The frame buffer device provides an abstraction for the graphics hardware. It represents
the frame buffer video hardware, and allows application software to access the graphics
hardware through a well-defined interface, so that the software is not required to know
anything about the low-level hardware registers.
The driver is enabled by selecting the frame buffer option under the graphics parameters
in the kernel configuration. To supplement the frame buffer driver, the kernel builder
may also include support for fonts and a startup logo. This device depends on the virtual
terminal (VT) console to switch from serial to graphics mode. The device is accessed
through special device nodes, located in the /dev directory, as /dev/fb*. fb0 is generally
the primary frame buffer.
Other than the physical memory allocation and LCD panel configuration, the common
kernel video API is utilized for setting colors, palette registration, image blitting, and
memory mapping. The IPU reads the raw pixel data from the frame buffer memory and
sends it to the panel for display.
6.2.1.1 IPU Frame Buffer Hardware Operation
The frame buffer interacts with the IPU hardware driver module.
6.2.1.2 IPU Frame Buffer Software Operation
A frame buffer device is a memory device, such as /dev/mem, and it has features similar
to a memory device. Users can read it, write to it, seek to some location in it, and mmap()
it (the main use). The difference is that the memory that appears in the special file is not
the whole memory, but the frame buffer of some video hardware.
/dev/fb* also interacts with several IOCTLs, which allows users to query and set
information about the hardware. The color map is also handled through IOCTLs. For
more information on what IOCTLs exist and which data structures they use, see
<Yocto_BuildDir>/linux/include/linux/fb.h. The following are a few of the IOCTLs
functions:
• Request general information about the hardware, such as name, organization of the
screen memory (planes, packed pixels, and so on), and address and length of the
screen memory.
• Request and change variable information about the hardware, such as visible and
virtual geometry, depth, color map format, timing, and so on. The driver suggests
Chapter 6 Image Processing Unit (IPU) Drivers
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 61

values to meet the hardware capabilities (the hardware returns EINVAL if that is not
possible) if this information is changed.
• Get and set parts of the color map. Communication is 16 bits-per-pixel (values for
red, green, blue, transparency) to support all existing hardware. The driver does all
the calculations required to apply the options to the hardware (round to fewer bits,
possibly discard transparency value).
The hardware abstraction makes the implementation of application programs easier and
more portable. The only thing that must be built into the application programs is the
screen organization (bitplanes or chunky pixels, and so on), because it works on the
frame buffer image data directly.
The MXC frame buffer driver ( ) interacts closely with the generic Linux frame buffer
driver ( <Yocto_BuildDir>/linux/drivers/video/fbmem.c).
6.2.1.3 Synchronous Frame Buffer Driver
The synchronous frame buffer screen driver implements a Linux standard frame buffer
driver API for synchronous LCD panels or those without memory. The synchronous
frame buffer screen driver is the top level kernel video driver that interacts with kernel
and user level applications. This is enabled by selecting the Synchronous Panel Frame
buffer option under the graphics support device drivers in the kernel configuration. To
supplement the frame buffer driver, the kernel builder may also include support for fonts
and a startup logo. This depends on the VT console for switching from serial to graphics
mode.
Except for physical memory allocation and LCD panel configuration, the common kernel
video API is utilized for setting colors, palette registration, image blitting and memory
mapping. The IPU reads the raw pixel data from the frame buffer memory and sends it to
the panel for display.
The frame buffer driver supports different panels as a kernel configuration option.
Support for new panels can be added by defining new values for a structure of panel
settings.
The frame buffer interacts with the IPU driver using custom APIs that allow:
• Initialization of panel interface settings
• Initialization of IPU channel settings for LCD refresh
• Changing the frame buffer address for double buffering support
The following features are supported:
• Configurable screen resolution
Software Operation
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
62 Freescale Semiconductor, Inc.

• Configurable RGB 16, 24 or 32 bits per pixel frame buffer
• Configurable panel interface signal timings and polarities
• Palette/color conversion management
• Power management
• LCD power off/on
• Enable/disable PRE/PRG features
User applications utilize the generic video API (the standard Linux frame buffer driver
API) to perform functions with the frame buffer. These include the following:
• Obtaining screen information, such as the resolution or scan length
• Allocating user space memory using mmap for performing direct blitting operations
A second frame buffer driver supports a second video/graphics plane.
6.2.2 IPU Backlight Driver
The IPU backlight driver implements IPU PWM backlight control for panels. It exports a
sys control file under /sys/class/backlight/pwm-backlight.0/brightness to user space. The
default backlight intensity value is 128.
6.2.3 IPU Device Driver
IPU (processing) device driver provide image processing features: resizing/rotation/CSC/
combination/deinterlacing based on IC/IRT modules in IPUv3.
The IPU device driver is task based, user just need prepare task setting, queue task, then
block wait task finish. The driver now support blocking method only, non-block method
will be added in the future. The task structures are like below:
struct ipu_task {
struct ipu_input input;
struct ipu_output output;
bool overlay_en;
struct ipu_overlay overlay;
#define IPU_TASK_PRIORITY_NORMAL 0
#define IPU_TASK_PRIORITY_HIGH 1
u8 priority;
#define IPU_TASK_ID_ANY 0
#define IPU_TASK_ID_VF 1
#define IPU_TASK_ID_PP 2
#define IPU_TASK_ID_MAX 3
u8 task_id;
int timeout;
};
Chapter 6 Image Processing Unit (IPU) Drivers
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 63

struct ipu_input {
u32 width;
u32 height;
u32 format;
struct ipu_crop crop;
dma_addr_t paddr;
struct ipu_deinterlace deinterlace;
dma_addr_t paddr_n; /*valid when deinterlace enable*/
};
struct ipu_overlay {
u32 width;
u32 height;
u32 format;
struct ipu_crop crop;
struct ipu_alpha alpha;
struct ipu_colorkey colorkey;
dma_addr_t
paddr;
};
struct ipu_output
{
u32 width;
u32 height;
u32 format;
u8 rotate;
struct ipu_crop crop;
dma_addr_t paddr;
};
To prepare task, user just needs to fill task.input, task.overlay(if need combine) and
task.output parameters, then queue task either by:
int ipu_queue_task(struct ipu_task *task);
if from kernel level (V4L2 driver for example), or by IPU_QUEUE_TASK ioctl
under /dev/mxc_ipu if from application level.
6.3 Source Code Structure
Table 6-1 lists the source files associated with the IPU, Sensor, V4L2, and Panel drivers.
These files are available in the following directories:
Yocto_BuildDir/linux/drivers/mxc/ipu3
Yocto_BuildDir/linux/drivers/video/mxc
Yocto_BuildDir/linux/drivers/media/platform/mxc
Yocto_BuildDir/linux/drivers/video/backlight
Source Code Structure
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
64 Freescale Semiconductor, Inc.
Table 6-1. IPU Driver Files
File Description
ipu_common.c IPU common library functions
ipu_ic.c IPU IC base driver
ipu_device.c IPU driver device interface and fops functions
ipu_capture.c IPU CSI capture base driver
ipu_disp.c IPU display functions
ipu_calc_stripes_sizes.c Multi-stripes method functions for ipu_device.c
pre.c Prefetch/Resolve the engine driver
prg.c Prefetch/Resolve the Gasket driver
mxc_ipuv3_fb.c Driver for synchronous frame buffer
mxc_lcdif.c Display Driver for CLAA-WVGA and SEIKO-WVGA LCD support
mxc_hdmi.c Display Driver for HDMI interface
ldb.c Driver for synchronous frame buffer for on chip LVDS
mxc_dispdrv.c Display Driver framework for synchronous frame buffer
mxc_edid.c Driver for EDID
vdoa.c VDOA post-processing driver, used by ipu_device.c
Table 6-2 lists the global header files associated with the IPU and Panel drivers. These
files are available in the following directories:
Yocto_BuildDir/linux/drivers/mxc/ipu3/
Yocto_BuildDir/linux/include/linux/
Yocto_BuildDir/linux/drivers/media/platform/mxc/
Table 6-2. IPU Global Header Files
File Description
ipu_param_mem.h Helper functions for IPU parameter memory access
ipu_prv.h Header file for Pre-processing drivers
ipu_regs.h IPU register definitions
pre-regs.h Prefetch/Resolve Engine register definitions
prg-regs.h Prefetch/Resolve Gasket register definitions
vdoa.h Header file for VDOA drivers
mxc_dispdrv.h Header file for display driver
mxcfb.h Header file for the synchronous framebuffer driver
ipu.h Header file for IPU basic driver
6.3.1 Menu Configuration Options
The following Linux kernel configuration options are provided for the IPU module.
Chapter 6 Image Processing Unit (IPU) Drivers
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 65

To get to these options use the command bitbake linux-imx -c menuconfig in the Yocto
build directory. On the screen displayed, select Configure the kernel and exit. When the
next screen appears select the options to configure.
• CONFIG_MXC_IPU_V3 - Includes support for the Image Processing Unit. In
menuconfig, this option is available under:
Device Drivers > MXC support drivers > Image Processing Unit Driver
By default, this option is Y for all architectures.
If ARCH_MXC is true, CONFIG_MXC_IPU_V3 will be set.
• CONFIG_MXC_IPU_V3_PRG - This enables support for the IPUv3 prefetch gasket
engine to support double buffer handshake control bewteen IPUv3 and prefetch
engine (PRE), snoop the AXI interface for display refresh requests to memory, and
modify the request address to fetch the double buffered row of blocks in OCRAM.
Device Drivers > MXC support drivers > i.MX IPUv3 prefetch gasket engine
This option depends on CONFIG_MXC_IPU_V3 and
CONFIG_MXC_IPU_V3_PRE.
• CONFIG_MXC_IPU_V3_PRE - This enables support for the IPUv3 prefetch engine
to improve the system memory performance. The engine has the capability to resolve
framebuffers in tile pixel format to linear.
Device Drivers > MXC support drivers > i.MX IPUv3 prefetch engine
This option depends on CONFIG_MXC_IPU_V3. Enabling this option selects
CONFIG_MXC_IPU_V3_PRG.
• CONFIG_MXC_CAMERA_OV5640_MIPI - Option for both the OV 5640 mipi
sensor driver and the use case driver. This option is dependent on the
VIDEO_MXC_CAPTURE option. In menuconfig, this option is available under:
Device Drivers > Multimedia support > V4L platform devices > MXC Video For
Linux Video Capture > MXC Camera/V4L2 PRP Features support > OmniVision
5640 Camera support using mipi
• CONFIG_MXC_CAMERA_OV5640 - Option for both the OV5640 sensor driver
and the use case driver. This option is dependent on the VIDEO_MXC_CAPTURE
option. In menuconfig, this option is available under:
Device Drivers > Multimedia platform > V4L platform devices > MXC Video For
Linux Video Capture > MXC Camera/V4L2 PRP Features support > OmniVision
ov5640 camera support
Source Code Structure
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
66 Freescale Semiconductor, Inc.

Only one sensor should be installed at a time.
• CONFIG_MXC_IPU_PRP_VF_SDC - Option for the IPU (here the > symbols
illustrates data flow direction between HW blocks):
CSI > IC > MEM MEM > IC (PRP VF) > MEM
Use case driver for dumb sensor or
CSI > IC(PRP VF) > MEM
for smart sensors. In menuconfig, this option is available under:
Multimedia devices > Video capture adapters > MXC Video For Linux Camera >
MXC Camera/V4L2 PRP Features support > Pre-Processor VF SDC library
By default, this option is M for all.
• CONFIG_MXC_IPU_PRP_ENC - Option for the IPU:
Use case driver for dumb sensors
CSI > IC > MEM MEM > IC (PRP ENC) > MEM
or for smart sensors
CSI > IC(PRP ENC) > MEM.
In menuconfig, this option is available under:
Device Drivers > Multimedia Devices > Video capture adapters > MXC Video For
Linux Camera > MXC Camera/V4L2 PRP Features support > Pre-processor Encoder
library
By default, this option is set to M for all.
• CONFIG_VIDEO_MXC_CAMERA - This is configuration option for V4L2 capture
Driver. This option is dependent on the following expression:
VIDEO_DEV && MXC_IPU && MXC_IPU_PRP_VF_SDC &&
MXC_IPU_PRP_ENC
In menuconfig, this option is available under:
Device Drivers > Multimedia devices > Video capture adapters > MXC Video For
Linux Camera
By default, this option is M for all.
Chapter 6 Image Processing Unit (IPU) Drivers
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 67

• CONFIG_VIDEO_MXC_OUTPUT - This is configuration option for V4L2 output
Driver. This option is dependent on VIDEO_DEV && MXC_IPU option. In
menuconfig, this option is available under:
Device Drivers > Multimedia devices > Video capture adapters > MXC Video for
Linux Video Output
By default, this option is Y for all.
• CONFIG_FB - This is the configuration option to include frame buffer support in the
Linux kernel. In menuconfig, this option is available under:
Device Drivers > Graphics support > Support for frame buffer devices
By default, this option is Y for all architectures.
• CONFIG_FB_MXC - This is the configuration option for the MXC Frame buffer
driver. This option is dependent on the CONFIG_FB option. In menuconfig, this
option is available under:
Device Drivers > Graphics support > MXC Framebuffer support
By default, this option is Y for all architectures.
• CONFIG_FB_MXC_SYNC_PANEL - This is the configuration option that chooses
the synchronous panel framebuffer. This option is dependent on the
CONFIG_FB_MXC option. In menuconfig, this option is available under:
Device Drivers > Graphics support > MXC Framebuffer support > Synchronous
Panel Framebuffer
By default this option is Y for all architectures.
• CONFIG_FB_MXC_LDB - This configuration option selects the LVDS module on
i.MX 6 chip. This option is dependent on CONFIG_FB_MXC_SYNC_PANEL and
CONFIG_MXC_IPUV3 || FB_MXS options. In menuconfig, this option is available
under:
Device Drivers > Graphics support > MXC Framebuffer support > Synchronous
Panel Framebuffer > MXC LDB
• CONFIG_FB_MXC_SII9022 - This configuration option selects the SII9022 HDMI
chip. This option is dependent on CONFIG_FB_MXC_SYNC_PANEL option. In
menuconfig, this option is available under:
Device Drivers > Graphics support > MXC Framebuffer support > Synchronous
Panel Framebuffer > Si Image SII9022 DVI/HDMI Interface Chip
Source Code Structure
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
68 Freescale Semiconductor, Inc.

6.4 Unit Test
NOTE
In order to execute the tests properly, make sure you have the
util-linux package selected and load the following modules:
insmod ipu_prp_enc.ko
insmod ipu_bg_overlay_sdc.ko
insmod ipu_fg_overlay_sdc.ko
insmod ipu_csi_enc.ko
insmod ov5640_camera.ko
insmod mxc_v4l2_capture.ko
6.4.1 Framebuffer Tests
There is a test application named mxc_fb_test.c under the <Yocto_BuildDir>/imx-
test-"version"/test/mxc_fb_test directory.
Execute the fb test as follows:
./mxc_fb_test.out
The result should be Exiting PASS. The test includes fb0(background) and
fb1(foreground) devices open, framebuffer parameters configure, global alpha blending,
fb pan display test and gamma test.
Redirect an image directly to the framebuffer device as follows:
# cat image.bin > /dev/fb0
6.4.2 Video4Linux API test
There are test applications named mxc_v4l2_test.c and mxc_v4l2_output.c under the
<Yocto_BuildDir>/imx-test-"version"/test/mxc_v4l2_test directory.
Before running the v4l2 capture test application, you should be able see that the /dev/v4l/
video0 has been created.
Test ID: FSL-UT-V4L2-capture-0010
# mxc_v4l2_capture.out -iw 640 -ih 480 -m 0 -r 0 -c 50 -fr 30 test.yuv
Capture the camera and store the 50 frames of YUV420 (VGA size)to a file called
test.yuv and set the frame rate to 30 fps. Look at mxc_v4l2_capture.out -help to see
usage.
Chapter 6 Image Processing Unit (IPU) Drivers
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 69
Test ID: FSL-UT-V4L2-overlay-sdc-0010
# mxc_v4l2_overlay.out -iw 640 -ih 480 -it 0 -il 0 -ow 160 -oh 160 -ot 20 -ol 20 -r
0 -t 50 -d 0 -fg -fr 30
Direct preview the camera to SDC foreground, and set frame rate to 30 fps, window
of
interest is 640 X 480 with starting offset(0,0), the preview size is 160 X 160 with
starting offset (20,20). mxc_v4l2_overlay.out -help to see the usage.
Test ID: FSL-UT-V4L2-overlay-sdc-0020
# mxc_v4l2_overlay.out -iw 640 -ih 480 -it 0 -il 0 -ow 160 -oh 160 -ot 20 -ol 20 -r
4 -t 50 -d 0 -fr 30
Direct preview(90 degree rotation) the camera to SDC background, and set frame rate
to 30 fps.
Test ID: FSL-UT-V4L2-overlay-adc-0010
# mxc_v4l2_overlay.out -iw 640 -ih 480 -it 0 -il 0 -ow 120 -oh 120 -ot 40 -ol 40 -r
0 -t 50 -d 1 -fg -fr 30
Direct preview the camera to foreground, and set frame rate to 30 fps.
Test ID: FSL-UT-V4L2-overlay-adc-0020
# mxc_v4l2_overlay.out -iw 640 -ih 480 -it 0 -il 0 -ow 120 -oh 120 -ot 40 -ol 40 -r
4 -t 50 -d 1 -fg -fr 30
Direct preview(90 degree rotation) the camera to foreground, and set frame rate to
30
fps.
Test ID: FSL-UT-V4L2-output-0010
# mxc_v4l2_output.out -iw 640 -ih 480 -ow 1024 -oh 768 -r 0 -fr 60 test.yuv
Read the YUV420 stream file on test.yuv created by the mxc_v4l2_capture test as run
in test FSL-UT-V4L2-capture-0010. Apply color space conversion and resize, then
display on the framebuffer.
NOTE
The PRP channels require the stride line to be a multiple of 8,
for example with no rotation, the width needs to be 8 bit
aligned; and with 90 degree rotation, the height needs to be 8
Unit Test
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
70 Freescale Semiconductor, Inc.

bit aligned. Downsizing cannot exceed 8:1. For example, for a
VGA sensor, the smallest downsize is 80 X 60.
6.4.3 IPU Device Unit test
There is a test application named mxc_ipudev_test.c under the <Yocto_BuildDir>/imx-
test-"version"/test/mxc_ipudev_test directory.
Before running the IPU device test application, you should be able see that the /dev/
mxc_ipu has been created.
Run test like:
./mxc_ipudev_test.out -C config_file raw_data_file
./mxc_ipudev_test.out -command_line_options raw_data_file
See <Yocto_BuildDir>/imx-test-"version"/test/ipudev_config_file for configure file
instruction.
Below is a simple test source code of IPU device overlay which use alpha(global/local)
blending to combine two layers:
NOTE: the overlay width and height must be same as output's. For example, the input is
240x320, output is 1024x768 which using rotation 90 degree, the overlay must be same
as output, said, 1024x768.
static unsigned int fmt_to_bpp(unsigned int pixelformat)
{
unsigned int bpp;
switch (pixelformat) {
case IPU_PIX_FMT_RGB565:
/*interleaved 422*/
case IPU_PIX_FMT_YUYV:
case IPU_PIX_FMT_UYVY:
/*non-interleaved 422*/
case IPU_PIX_FMT_YUV422P:
case IPU_PIX_FMT_YVU422P:
bpp = 16;
break;
case IPU_PIX_FMT_BGR24:
case IPU_PIX_FMT_RGB24:
case IPU_PIX_FMT_YUV444:
bpp = 24;
break;
case IPU_PIX_FMT_BGR32:
case IPU_PIX_FMT_BGRA32:
case IPU_PIX_FMT_RGB32:
case IPU_PIX_FMT_RGBA32:
case IPU_PIX_FMT_ABGR32:
bpp = 32;
break;
/*non-interleaved 420*/
case IPU_PIX_FMT_YUV420P:
case IPU_PIX_FMT_YVU420P:
Chapter 6 Image Processing Unit (IPU) Drivers
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 71

case IPU_PIX_FMT_YUV420P2:
case IPU_PIX_FMT_NV12:
bpp = 12;
break;
default:
bpp = 8;
break;
}
return bpp;
}
static void dump_ipu_task(struct ipu_task *t)
{
printf("====== ipu task ======\n");
printf("input:\n");
printf("\twidth: %d\n", t->input.width);
printf("\theight: %d\n", t->input.height);
printf("\tcrop.w = %d\n", t->input.crop.w);
printf("\tcrop.h = %d\n", t->input.crop.h);
printf("\tcrop.pos.x = %d\n", t->input.crop.pos.x);
printf("\tcrop.pos.y = %d\n", t->input.crop.pos.y);
printf("output:\n");
printf("\twidth: %d\n", t->output.width);
printf("\theight: %d\n", t->output.height);
printf("\tcrop.w = %d\n", t->output.crop.w);
printf("\tcrop.h = %d\n", t->output.crop.h);
printf("\tcrop.pos.x = %d\n", t->output.crop.pos.x);
printf("\tcrop.pos.y = %d\n", t->output.crop.pos.y);
if (t->overlay_en) {
printf("overlay:\n");
printf("\twidth: %d\n", t->overlay.width);
printf("\theight: %d\n", t->overlay.height);
printf("\tcrop.w = %d\n", t->overlay.crop.w);
printf("\tcrop.h = %d\n", t->overlay.crop.h);
printf("\tcrop.pos.x = %d\n", t->overlay.crop.pos.x);
printf("\tcrop.pos.y = %d\n", t->overlay.crop.pos.y);
}
}
int main(int argc, char *argv[])
{
int fd, fd_fb, isize, ovsize, alpsize, cnt = 50;
int blank, ret;
FILE * file_in = NULL;
struct ipu_task task;
struct fb_var_screeninfo fb_var;
struct fb_fix_screeninfo fb_fix;
void *inbuf, *ovbuf, *alpbuf, *vdibuf;
fd = open("/dev/mxc_ipu", O_RDWR, 0);
fd_fb = open("/dev/fb1", O_RDWR, 0);
file_in = fopen(argv[argc-1], "rb");
memset(&task, 0, sizeof(task));
/* input setting */
task.input.width = 320;
task.input.height = 240;
task.input.crop.pos.x = 0;
task.input.crop.pos.y = 0;
task.input.crop.w = 0;
task.input.crop.h = 0;
task.input.format = IPU_PIX_FMT_YUV420P;
isize = task.input.paddr =
task.input.width * task.input.height
* fmt_to_bpp(task.input.format)/8;
Unit Test
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
72 Freescale Semiconductor, Inc.

ioctl(fd, IPU_ALLOC, &task.input.paddr);
inbuf = mmap(0, isize, PROT_READ | PROT_WRITE,
MAP_SHARED, fd, task.input.paddr);
/*overlay setting */
task.overlay_en = 1;
task.overlay.width = 1024;
task.overlay.height = 768;
task.overlay.crop.pos.x = 0;
task.overlay.crop.pos.y = 0;
task.overlay.crop.w = 0;
task.overlay.crop.h = 0;
task.overlay.format = IPU_PIX_FMT_RGB24;
#ifdef GLOBAL_ALP
task.overlay.alpha.mode = IPU_ALPHA_MODE_GLOBAL;
task.overlay.alpha.gvalue = 255;
task.overlay.colorkey.enable = 1;
task.overlay.colorkey.value = 0x555555;
#else
task.overlay.alpha.mode = IPU_ALPHA_MODE_LOCAL;
alpsize = task.overlay.alpha.loc_alp_paddr =
task.overlay.width * task.overlay.height;
ioctl(fd, IPU_ALLOC, &task.overlay.alpha.loc_alp_paddr);
alpbuf = mmap(0, alpsize, PROT_READ | PROT_WRITE,
MAP_SHARED, fd, task.overlay.alpha.loc_alp_paddr);
memset(alpbuf, 0x00, alpsize/4);
memset(alpbuf+alpsize/4, 0x55, alpsize/4);
memset(alpbuf+alpsize/2, 0x80, alpsize/4);
memset(alpbuf+alpsize*3/4, 0xff, alpsize/4);
#endif
ovsize = task.overlay.paddr =
task.overlay.width * task.overlay.height
* fmt_to_bpp(task.overlay.format)/8;
ioctl(fd, IPU_ALLOC, &task.overlay.paddr);
ovbuf = mmap(0, ovsize, PROT_READ | PROT_WRITE,
MAP_SHARED, fd, task.overlay.paddr);
#ifdef GLOBAL_ALP
memset(ovbuf, 0x55, ovsize/4);
memset(ovbuf+ovsize/4, 0xff, ovsize/4);
memset(ovbuf+ovsize/2, 0x55, ovsize/4);
memset(ovbuf+ovsize*3/4, 0x00, ovsize/4);
#else
memset(ovbuf, 0x55, ovsize);
#endif
#endif
/* output setting*/
task.output.width = 1024;
task.output.height = 768;
task.output.crop.pos.x = 0;
task.output.crop.pos.y = 0;
task.output.crop.w = 0;
task.output.crop.h = 0;
task.output.format = IPU_PIX_FMT_RGB565;
task.output.rotate = IPU_ROTATE_NONE;
ioctl(fd_fb, FBIOGET_VSCREENINFO, &fb_var);
fb_var.xres = task.output.width;
fb_var.xres_virtual = fb_var.xres;
fb_var.yres = task.output.height;
fb_var.yres_virtual = fb_var.yres * 3;
fb_var.activate |= FB_ACTIVATE_FORCE;
fb_var.nonstd = task.output.format;
fb_var.bits_per_pixel = fmt_to_bpp(task.output.format);
ioctl(fd_fb, FBIOPUT_VSCREENINFO, &fb_var);
ioctl(fd_fb, FBIOGET_VSCREENINFO, &fb_var);
ioctl(fd_fb, FBIOGET_FSCREENINFO, &fb_fix);
task.output.paddr = fb_fix.smem_start;
blank = FB_BLANK_UNBLANK;
Chapter 6 Image Processing Unit (IPU) Drivers
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 73

ioctl(fd_fb, FBIOBLANK, blank);
task.priority = IPU_TASK_PRIORITY_NORMAL;
task.task_id = IPU_TASK_ID_ANY;
task.timeout = 1000;
again:
ret = ioctl(fd, IPU_CHECK_TASK, &task);
if (ret != IPU_CHECK_OK) {
if (ret > IPU_CHECK_ERR_MIN) {
if (ret == IPU_CHECK_ERR_SPLIT_INPUTW_OVER) {
task.input.crop.w -= 8;
goto again;
}
if (ret == IPU_CHECK_ERR_SPLIT_INPUTH_OVER) {
task.input.crop.h -= 8;
goto again;
}
if (ret == IPU_CHECK_ERR_SPLIT_OUTPUTW_OVER) {
task.output.crop.w -= 8;
goto again;
}
if (ret == IPU_CHECK_ERR_SPLIT_OUTPUTH_OVER) {
task.output.crop.h -= 8;
goto again;
}
ret = -1;
return ret;
}
}
dump_ipu_task(&task);
while (--cnt > 0) {
fread(inbuf, 1, isize, file_in);
ioctl(fd, IPU_QUEUE_TASK, &task);
}
munmap(ovbuf, ovsize);
ioctl(fd, IPU_FREE, task.input.paddr);
ioctl(fd, IPU_FREE, task.overlay.paddr);
close(fd);
close(fd_fb);
fclose(file_in);
}
Unit Test
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
74 Freescale Semiconductor, Inc.

Chapter 7
MIPI DSI Driver
7.1 Introduction
The MIPI DSI driver for Linux OS is based on the IPU framebuffer driver.
This driver has two parts:
• MIPI DSI IP driver-low level interface used to communicate with MIPI device
controller on the display panel
• MIPI DSI display panel driver provides an interface to configure the display panel
through MIPI DSI
7.1.1 MIPI DSI IP Driver Overview
The MIPI DSI IP driver is registered through IPU framebuffer driver interface and it is
not exposed to the user space.
The driver enables the platform-related regulators and clocks. It requests OS related
system resources and registers framebuffer event notifier for blank/unblank operation.
Next, the driver initializes MIPI D-PHY and configures the MIPI DSI IP according to the
MIPI DSI display panel. MIPI DSI driver supports the following features:
• Compatibility with MIPI Alliance Specification for DSI, Version1.01.00
• Compatibility with MIPI Alliance Specification for D-PHY, Version 1.00.00
• Supports up to 2 D-PHY data lanes
• Bidirectional Communication and Escape Mode Support through Data Lane 0
• Programmable display resolutions, from 160x120(QQVGA) to 1024x768(XVGA)
• Video Mode Pixel Formats, 16bpp(565RGB),18bpp(666RGB)packed,
18bpp(666RGB)loosely, 24bpp(888RGB).
• Supports the transmission of all generic commands
• Supports ECC and checksum capabilities
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 75

• End-of-Transmission Packet(EoTp) support
• Supports ultra low power mode
7.1.2 MIPI DSI Display Panel Driver Overview
The MIPI DSI display panel driver implements MIPI DSI display panel related
configuration.
It uses the APIs provided by the MIPI DSI IP driver to read/write the display module
registers. Usually, there is a MIPI DSI slave controller integrated on the display panel.
After power on reset, the MIPI DSI display panel needs to be configured through
standard MIPI DCS command or MIPI DSI Generic command according to the
manufacturer's specification.
7.1.3 Hardware Operation
The MIPI DSI module provides a high-speed serial interface between a host processor
and a display module.
It has higher performance, lower power, less EMI and fewer pins compared with legacy
parallel bus. It is designed to be compatible with the standard MIPI DSI protocol. MIPI
DSI is built on exisiting MIPI DPI-2, MIPI DBI-2 and MIPI DCS standards. It sends
pixels or commands to the peripheral and reads back status or pixel information from the
peripheral. MIPI DSI serializes all pixels data, commands and events, and contains two
basic modes: command mode and video mode. It uses command mode to read/write
register and memory to the display controller while reading display module status
information. On the other hand, it uses video mode to transmit a real-time pixel streams
from host to peripheral in high-speed mode. It also generates an interrupt when error
occurs.
7.2 Software Operation
The MIPI DSI driver for Linux OS has two parts: MIPI DSI IP driver and MIPI DSI
display panel driver.
Software Operation
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
76 Freescale Semiconductor, Inc.

7.2.1 MIPI DSI IP Driver Software Operation
The MIPI DSI IP driver has a private structure called mipi_dsi_info. The IPU instance to
which the MIPI DSI IP is attached is described in field int ipu_id while the DI instance
inside IPU is described in the field int disp_id.
During startup, the MIPI DSI IP driver is registered with the IPU framebuffer driver
through the field struct mxc_dispdrv_entry when the driver is loaded. It also registers a
framebuffer event notifier with framebuffer core to perform the display panel blank/
unblank operation. The field struct fb_videomode *mode and struct mipi_lcd_config
*lcd_config are received from the display panel callback. The MIPI DSI IP needs this
infomation to configure the MIPI DSI hardware registers.
After initializing the MIPI DSI IP controller and the display module, the MIPI DSI IP
gets the pixel streams from IPU through DPI-2 interface and serializes pixel data and
video event through high-speed data links for display. When there is an framebuffer
blank/unblank event, the registered notifier will be called to enter/leave low power mode.
The MIPI DSI IP driver provides 3 APIs for MIPI DSI display panel driver to configure
display module.
7.2.2 MIPI DSI Display Panel Driver Software Operation
The MIPI DSI Display Panel driver enables a particular display panel through MIPI DSI
interface. The driver should provide struct fb_videomode configuration and struct
mipi_lcd_config data: some MIPI DSI parameters for the display panel such as maximum
D-PHY clock, numbers of data lanes and DPI-2 pixel format. Finally, the display driver
needs to setup display panel initialize routine by calling the APIs provided by MIPI DSI
IP drivers.
7.3 Driver Features
The MIPI DSI driver supports the following features:
• MIPI DSI communication protocol
• MIPI DSI command mode and video mode
• MIPI DCS command operation
NOTE
The MIPI DSI driver does not support the DBI-2 mode, since
the DBI-2 and DPI-2 cannot be enabled at the same time on this
controller.
Chapter 7 MIPI DSI Driver
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 77
7.3.1 Source Code Structure
Table below shows the MIPI DSI driver source files available in the directory:
<Yocto_BuildDir>/linux/drivers/video/mxc.
Table 7-1. MIPI DSI Driver Files
File Description
mipi_dsi.c MIPI DSI IP driver source file
mipi_dsi.h MIPI DSI IP driver header file
mxcfb_hx8369_wvga.c MIPI DSI Display Panel driver source file
7.3.2 Menu Configuration Options
The following Linux kernel configuration option is provided for this module. To get to
this option, use the bitbake linux-imx -c menuconfigcommand. On the screen displayed,
select Configure the Kernel and exit. When the next screen appears, select the following
options to enable this module:
Device Drivers > Graphics support > MXC Framebuffer support > Synchronous Panel
Framebuffer > MXC MIPI_DSI
7.3.3 Programming Interface
The MIPI DSI Display Panel driver can use the API interface to read and write the
registers of the display panel device connected to MIPI DSI link.
For more information, see <Yocto_BuildDir>/linux/driver/video/mxc/mipi_dsi.h.
Driver Features
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
78 Freescale Semiconductor, Inc.

Chapter 8
LVDS Display Bridge(LDB) Driver
8.1 Introduction
This section describes the LVDS Display Bridge(LDB) driver which controls LDB
module to connect with external display devices with LVDS interface.
8.1.1 Hardware Operation
The purpose of the LDB is to support flow of synchronous RGB data from IPU or LCDIF
to external display devices through LVDS interface.
This support covers all aspects of these activities:
1. Connectivity to relevant devices - Displays with LVDS receivers.
2. Arranging data as required by the external display receiver and by LVDS display
standards.
3. Synchronization and control capabilities.
For detailed information about LDB, see the LDB chapter of the following documents:
•i.MX 6Dual/6Quad Applications Processor Reference Manual (IMX6DQRM)
•i.MX 6Solo/6DualLite Applications Processor Reference Manual (IMX6SDLRM)
•i.MX 6SoloLite Applications Processor Reference Manual (IMX6SLRM)
•i.MX 6SoloX Applications Processor Reference Manual (IMX6SXRM)
•i.MX 7Dual Applications Processor Reference Manual (IMX7DRM)
8.1.2 Software Operation
LDB driver is functional if the driver is built-in.
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 79

When LDB device is probed properly, the driver will configure LDB reference resistor
mode and LDB regulator by using platform data information. LDB driver probe function
will also try to match video modes for external display devices to LVDS interface. The
display signal polarities control bits of LDB are set according to the matched video
modes. LVDS channel mapping mode and bit mapping mode of LDB are set according to
the LDB device tree node set by the user. LDB is fully enabled in probe function if the
driver identifies a display device with LVDS interface as the primary display device.
The steps the driver takes to enable a LVDS channel are:
1. Set ldb_di_clk's parent clk and the parent clk's rate.
2. Set ldb_di_clk's rate.
3. Enable both ldb_di_clk and its parent clk.
4. Set the LDB in a proper mode including display signals' polarities, LVDS channel
mapping mode, bit mapping mode, and reference resistor mode.
5. Enable related LVDS channels.
See <Yocto_BuildDir>/linux/drivers/video/mxc/ldb.c for more information.
8.1.3 Source Code Structure
The source code is available in the following location:
<Yocto_BuildDir>/linux/drivers/video/mxc/ldb.c
8.1.4 Menu Configuration Options
The following Linux kernel configuration options are provided for this module.
To get to these options, use the bitbake linux-imx -c menuconfig command. On the screen
displayed, select Configure the Kernel and exit. When the next screen appears, select
the following options as build-in status to enable this module:
Device Drivers -> Graphics support -> MXC Framebufer support ->
Synchronous Panel Framebuffer -> MXC LDB
Introduction
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
80 Freescale Semiconductor, Inc.

Chapter 9
Video for Linux Two (V4L2) Driver
9.1 Introduction
The Video for Linux Two (V4L2) drivers are plug-ins to the V4L2 framework that enable
support for camera and preprocessing functions, as well as video and post-processing
functions.
The V4L2 camera driver implements support for all camera related functions. The V4l2
capture device takes incoming video images, either from a camera or a stream, and
manipulates them. The output device takes video and manipulates it, then sends it to a
display or similar device. The V4L2 Linux standard API specification is available at
v4l2spec.bytesex.org/spec
The features supported by the V4L2 driver are as follows:
• Direct preview and output to SDC foreground overlay plane (with synchronized to
LCD refresh)
• Direct preview to graphics frame buffer (without synchronized to LCD refresh)
• Color keying or alpha blending of frame buffer and overlay planes
• Streaming (queued) capture from IPU encoding channel
• Direct (raw Bayer) still capture (sensor dependent)
• Programmable pixel format, size, frame rate for preview and capture
• Programmable rotation and flipping using custom API
• RGB 16-bit, 24-bit, and 32-bit preview formats
• Raw Bayer (still only, sensor dependent), RGB 16, 24, and 32-bit, YUV 4:2:0 and
4:2:2 planar, YUV 4:2:2 interleaved, and JPEG formats for capture
• Control of sensor properties including exposure, white-balance, brightness, contrast,
and so on
• Plug-in of different sensor drivers
• Link post-processing resize and CSC, rotation, and display IPU channels
• Streaming (queued) input buffer
• Double buffering of overlay and intermediate (rotation) buffers
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 81

• Configurable 3+ buffering of input buffers
• Programmable input and output pixel format and size
• Programmable scaling and frame rate
• RGB 16, 24, and 32-bit, YUV 4:2:0 and 4:2:2 planar, and YUV 4:2:2 interleaved
input formats
• TV output
The driver implements the standard V4L2 API for capture, output, and overlay devices.
The command modprobe mxc_v4l2_capture must be run before using these functions.
9.2 V4L2 Capture Device
The V4L2 capture device includes two interfaces:
• Capture interface-uses IPU pre-processing ENC channels to record the YCrCb video
stream
• Overlay interface-uses the IPU device driver to display the preview video to the SDC
foreground and background panel.
V4L2 capture support can be selected during kernel configuration. The driver includes
two layers. The top layer is the common Video for Linux driver, which contains chain
buffer management, stream API and other ioctl interfaces. The files for this device are
located in <Yocto_BuildDir>/linux/drivers/media/video/mxc/capture/.
The V4L2 capture device driver is in the mxc_v4l2_capture.c file. The low level overlay
driver is in the ipu_fg_overlay_sdc.c, ipu_bg_overlay_sdc.c
This code (ipu_prp_enc.c) interfaces with the IPU ENC hardware, and ipu_still.c
interfaces with the IPU CSI hardware. Sensor frame rate control is handled by
VIDIOC_S_PARM ioctl. Before the frame rate is set, the sensor turns on the AE and
AWB turn on. The frame rate may change depending on light sensor samples.
Drivers for specific cameras can be found in <Yocto_BuildDir>/linux/drivers/media/
video/mxc/capture/
9.2.1 V4L2 Capture IOCTLs
Currently, the memory map stream API is supported. Supported V4L2 IOCTLs include
the following:
• VIDIOC_QUERYCAP
• VIDIOC_G_FMT
V4L2 Capture Device
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
82 Freescale Semiconductor, Inc.

• VIDIOC_S_FMT
• VIDIOC_REQBUFS
• VIDIOC_QUERYBUF
• VIDIOC_QBUF
• VIDIOC_DQBUF
• VIDIOC_STREAMON
• VIDIOC_STREAMOFF
• VIDIOC_OVERLAY
• VIDIOC_G_FBUF
• VIDIOC_S_FBUF
• VIDIOC_G_CTRL
• VIDIOC_S_CTRL
• VIDIOC_CROPCAP
• VIDIOC_G_CROP
• VIDIOC_S_CROP
• VIDIOC_S_PARM
• VIDIOC_G_PARM
• VIDIOC_ENUMSTD
• VIDIOC_G_STD
• VIDIOC_S_STD
• VIDIOC_ENUMOUTPUT
• VIDIOC_G_OUTPUT
• VIDIOC_S_OUTPUT
V4L2 control code has been extended to provide support for rotation. The ID is
V4L2_CID_PRIVATE_BASE. Supported values include:
• 0-Normal operation
• 1-Vertical flip
• 2-Horizontal flip
• 3-180° rotation
• 4-90° rotation clockwise
• 5-90° rotation clockwise and vertical flip
• 6-90° rotation clockwise and horizontal flip
• 7-90° rotation counter-clockwise
Figure below shows a block diagram of V4L2 Capture API interaction.
Chapter 9 Video for Linux Two (V4L2) Driver
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 83
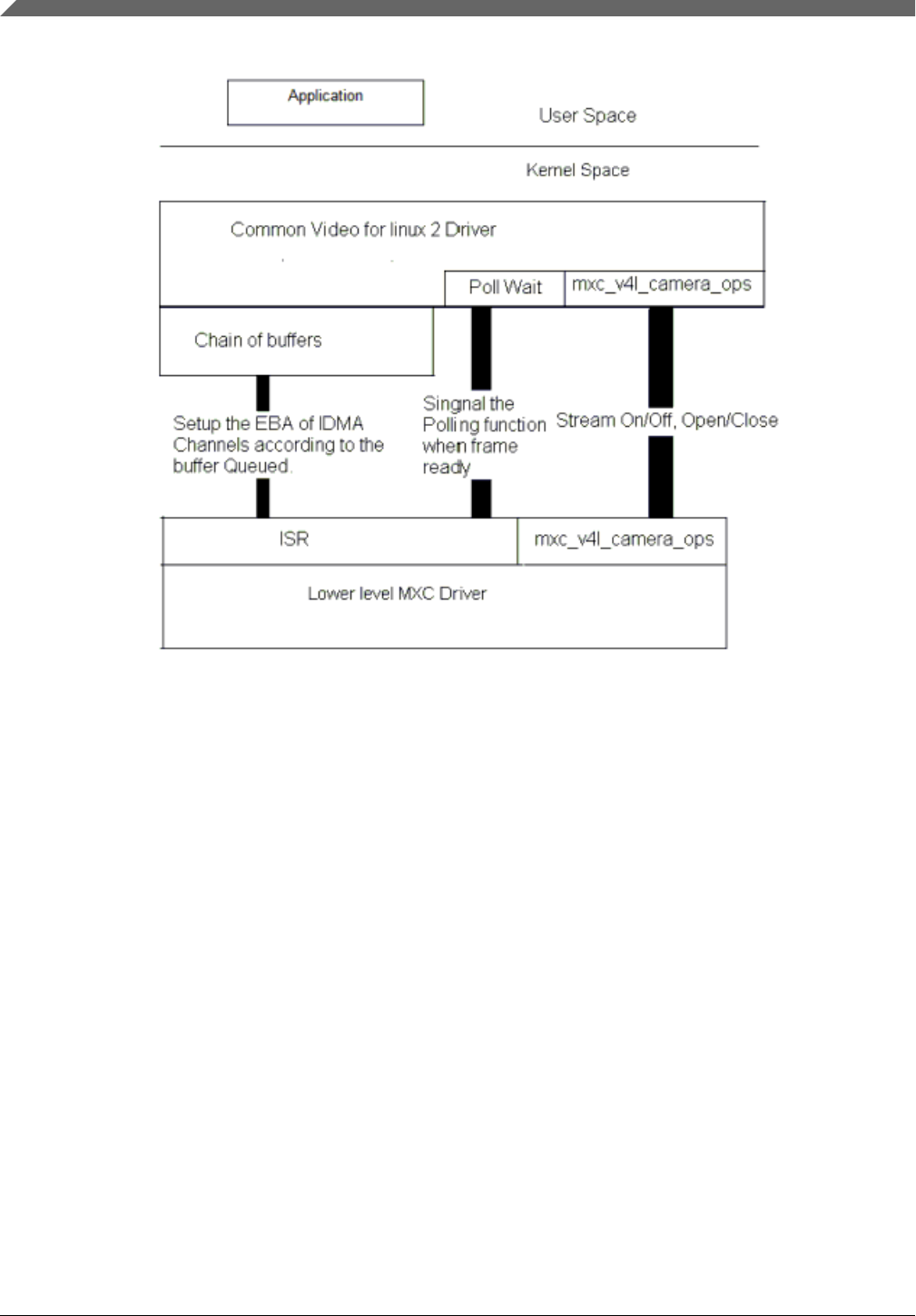
Figure 9-1. Video4Linux2 Capture API Interaction
9.2.2 Use of the V4L2 Capture APIs
This section describes a sample V4L2 capture process. The application completes the
following steps:
1. Sets the capture pixel format and size by IOCTL VIDIOC_S_FMT.
2. Sets the control information by IOCTL VIDIOC_S_CTRL for rotation usage.
3. Requests a buffer using IOCTL VIDIOC_REQBUFS. The common V4L2 driver
creates a chain of buffers (currently the maximum number of frames is 3).
4. Memory maps the buffer to its user space.
5. Queues buffers using the IOCTL command VIDIOC_QBUF.
6. Starts the stream using the IOCTL VIDIOC_STREAMON. This IOCTL enables the
IPU tasks and the IDMA channels. When the processing is completed for a frame,
the driver switches to the buffer that is queued for the next frame. The driver also
signals the semaphore to indicate that a buffer is ready.
7. Takes the buffer from the queue using the IOCTL VIDIOC_DQBUF. This IOCTL
blocks until it has been signaled by the ISR driver.
V4L2 Capture Device
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
84 Freescale Semiconductor, Inc.
8. Stores the buffer to a YCrCb file.
9. Replaces the buffer in the queue of the V4L2 driver by executing VIDIOC_QBUF
again.
For the V4L2 still image capture process, the application completes the following steps:
1. Sets the capture pixel format and size by executing the IOCTL VIDIOC_S_FMT.
2. Reads one frame still image with YUV422.
FOr the V4L2 overlay support use case, the application completes the following steps:
1. Sets the overlay window by IOCTL VIDIOC_S_FMT.
2. Turns on overlay task by IOCTL VIDIOC_OVERLAY.
3. Turns off overlay task by IOCTL VIDIOC_OVERLAY.
9.3 V4L2 Output Device
The V4L2 output driver uses the IPU post-processing functions for video output.
The driver implements the standard V4L2 API for output devices. V4L2 output device
support can be selected during kernel configuration. The driver is available at
<Yocto_BuildDir>/linux/drivers/media/video/mxc/output/mxc_vout.c.
9.3.1 V4L2 Output IOCTLs
Currently, the memory map stream API is supported. Supported V4L2 IOCTLs include
the following:
• VIDIOC_QUERYCAP
• VIDIOC_REQBUFS
• VIDIOC_G_FMT
• VIDIOC_S_FMT
• VIDIOC_QUERYBUF
• VIDIOC_QBUF
• VIDIOC_DQBUF
• VIDIOC_STREAMON
• VIDIOC_STREAMOFF
• VIDIOC_G_CTRL
• VIDIOC_S_CTRL
• VIDIOC_CROPCAP
Chapter 9 Video for Linux Two (V4L2) Driver
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 85

• VIDIOC_G_CROP
• VIDIOC_S_CROP
• VIDIOC_ENUM_FMT
The V4L2 control code has been extended to provide support for de-interlace motion. For
this use, the ID is V4L2_CID_MXC_MOTION. Supported values include the following:
• 0-Medium motion
• 1-Low motion
• 2-High motion
9.3.2 Use of the V4L2 Output APIs
This section describes a sample V4L2 output process that uses the V4L2 output APIs.
The application completes the following steps:
1. Sets the input pixel format and size using IOCTL VIDIOC_S_FMT.
2. Sets the control information using IOCTL VIDIOC_S_CTRL, for rotation, de-
interlace motion(if need).
3. Sets the output information using IOCTL VIDIOC_S_CROP.
4. Requests a buffer using IOCTL VIDIOC_REQBUFS. The common V4L2 driver
creates a chain of buffers (not allocated yet)
5. Memory maps the buffer to its user space.
6. Executes the IOCTL VIDIOC_QUERYBUF to query buffers.
7. Passes the data that requires post-processing to the buffer.
8. Queues the buffer using the IOCTL command VIDIOC_QBUF.
9. Executes the IOCTL VIDIOC_DQBUF to dequeue buffers.
10. Starts the stream by executing IOCTL VIDIOC_STREAMON.
11. Stop the stream by excuting IOCTL VIDIOC_STREAMOFF
9.4 Source Code Structure
Table below lists the source and header files associated with the V4L2 drivers.
These files are available in the following directory:
<Yocto_BuildDir>/linux/drivers/media/video/mxc
Source Code Structure
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
86 Freescale Semiconductor, Inc.
Table 9-1. V2L2 Driver Files
File Description
capture/mxc_v4l2_capture.c V4L2 capture device driver
output/mxc_vout.c V4L2 output device driver
capture/mxc_v4l2_capture.h Header file for V4L2 capture device driver
capture/ipu_prp_enc.c Pre-processing encoder driver
capture/ipu_prp_vf_adc.c Pre-processing view finder (asynchronous) driver
capture/ipu_prp_vf_sdc.c Pre-processing view finder (synchronous foreground) driver
capture/ipu_prp_vf_sdc_bg.c Pre-processing view finder (synchronous background) driver
capture/ipu_fg_overlay_sdc.c synchronous forground driver
capture/ipu_bg_overlay_sdc.c synchronous background driver
capture/ipu_still.c Pre-processing still image capture driver
Drivers for specific cameras can be found in <Yocto_BuildDir>/linux/drivers/media/
video/mxc/capture/
Drivers for specific output can be found in <Yocto_BuildDir>/linux/drivers/media/
video/mxc/output/
9.4.1 Menu Configuration Options
The Linux kernel configuration options are provided in the chapter on the IPU module.
See Menu Configuration Options.
9.4.2 V4L2 Programming Interface
For more information, see the V4L2 Specification and the API Documents for the
programming interface.
The API Specification is available at LINUX MEDIA INFRASTRUCTURE API.
Chapter 9 Video for Linux Two (V4L2) Driver
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 87

Source Code Structure
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
88 Freescale Semiconductor, Inc.

Chapter 10
Electrophoretic Display Controller (EPDC) Frame
Buffer Driver
10.1 Introduction
The Electrophoretic Display Controller (EPDC) is a direct-drive active matrix EPD
controller designed to drive E Ink EPD panels supporting a wide variety of TFT
backplanes. The EPDC framebuffer driver acts as a standard Linux frame buffer device
while also supporting a set of custom API extensions, accessible from user space (via
IOCTL) or another kernel module (via direct function call) in order to provide the user
with access to EPD-specific functionality. The EPDC driver is abstracted from any
specific E Ink® panel type, providing flexibility to work with a range of E Ink panel types
and specifications.
The EPDC driver supports the following features:
• Support for EPDC driver as a loadable or built-in module.
• Support for RGB565 and Y8 frame buffer formats.
• Support for full and partial EPD screen updates.
• Support for up to 256 panel-specific waveform modes.
• Support for automatic optimal waveform selection for a given update.
• Support for synchronization by waiting for a specific update request to complete.
• Support for screen updates from an alternate (overlay) buffer.
• Support for automated collision handling.
• Support for 64 simultaneous update regions.
• Support for pixel inversion in a Y8 frame buffer format.
• Support for 90, 180, and 270 degree HW-accelerated frame buffer rotation.
• Support for panning (y-direction only).
• Support for automated full and partial screen updates through the Linux
fb_deferred_io mechanism.
• Support for three EPDC driver display update schemes: Snapshot, Queue, and Queue
and Merge.
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 89

• Support for setting the ambient temperature through either a one-time designated API
call or on a per-update basis.
• Support for user control of the delay between completing all updates and powering
down the EPDC.
10.2 Hardware Operation
For the detailed hardware operation of the EPDC, see the following documents:
•i.MX 6Solo/6DualLite Applications Processor Reference Manual (IMX6SDLRM)
•i.MX 6SoloLite Applications Processor Reference Manual (IMX6SLRM)
10.3 Software Operation
The EPDC frame buffer driver is a self-contained driver module in the Linux kernel. It
consists of a standard frame buffer device API coupled with a custom EPD-specific API
extension, accessible through the IOCTL interface. This combined functionality provides
the user with a robust and familiar display interface while offering full control over the
contents and update mode of the E Ink display.
This section covers the software operation of the EPDC driver, both through the standard
frame buffer device architecture, and through the custom E Ink API extensions.
Additionally, panel intialization and framebuffer formats are discussed.
10.3.1 EPDC Frame Buffer Driver Overview
The frame buffer device provides an abstraction for the graphics hardware. It represents
the frame buffer video hardware and allows application software to access the graphics
hardware through a well-defined interface, so that the software is not required to know
anything about the low-level hardware registers. The EPDC driver supports this model
with one key caveat: the contents of the frame buffer are not automatically updated to the
E Ink display. Instead, a custom API function call is required to trigger an update to the E
Ink display. The details of this process are explained in the EPDC Frame Buffer Driver
Extensions.
The frame buffer driver is enabled by selecting the frame buffer option under the graphics
parameters in the kernel configuration. To supplement the frame buffer driver, the kernel
builder may also include support for fonts and a startup logo. The frame buffer device
Hardware Operation
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
90 Freescale Semiconductor, Inc.

depends on the virtual terminal (VT) console to switch from serial to graphics mode. The
device is accessed through special device nodes, located in the /dev directory, as /dev/fb*.
fb0 is generally the primary frame buffer.
A frame buffer device is a memory device, such as /dev/mem, and it has features similar
to a memory device. Users can read it, write to it, seek to some location in it, and mmap()
it (the main use). The difference is that the memory that appears in the special file is not
the whole memory, but the frame buffer of some video hardware.
The EPDC frame buffer driver ( drivers/video/mxc/mxc_epdc_fb.c) interacts closely with
the generic Linux frame buffer driver (drivers/video/fbmem.c).
For additional details on the frame buffer device, see documentation in the Linux kernel
found in Documentation/fb/framebuffer.txt.
10.3.2 EPDC Frame Buffer Driver Extensions
E Ink display technology, in conjunction with the EPDC, has several features that
distinguish it from standard LCD-based frame buffer devices. These differences
introduce the need for API extensions to the frame buffer interface. The EPDC refreshes
the E Ink display asynchronously and supports partial screen updates. Therefore, the
EPDC requires notification from the user when the frame buffer contents have been
modified and which region needs updating. Another unique characteristic of EPDC
updates to the E Ink display is the long screen update latencies (between 300-980ms),
which introduces the need for a mechanism to allow the user to wait for a given screen
update to complete.
The custom API extensions to the frame buffer device are accessible both from user
space applications and from within kernel space. The standard device IOCTL interface
provides access to the custom API for user space applications. The IOCTL extensions,
along with relevant data structures and definitions, can be found in include/linux/
mxcfb.h. A full description of these IOCTLs can be found in the Programming Interface
section Programming Interface.
For kernel mode access to the custom API extensions, the IOCTL interface should be
bypassed in favor of direct access to the underlying functions. These functions are
included in include/linux/mxcfb_epdc_kernel.h, and are documented in the Programming
Interface section Programming Interface.
Chapter 10 Electrophoretic Display Controller (EPDC) Frame Buffer Driver
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 91

10.3.3 EPDC Panel Configuration
The EPDC driver is designed to flexibly support E Ink panels with a variety of panel
resolutions, timing parameters, and waveform modes. The EPDC driver is kept panel-
agnostic through the use of an EPDC panel mode structure, imx_epdc_fb_mode, which
can be found in include/linux/mxcfb_epdc.h.
struct imx_epdc_fb_mode {
struct fb_videomode *vmode;
int vscan_holdoff;
int sdoed_width;
int sdoed_delay;
int sdoez_width;
int sdoez_delay;
int gdclk_hp_offs;
int gdsp_offs;
int gdoe_offs;
int gdclk_offs;
int num_ce;
};
The imx_epdc_fb_mode structure consists of an fb_videomode structure and a set of EPD
timing parameters. The fb_videomode structure defines the panel resolution and the basic
timing parameters (pixel clock frequency, hsync and vsync margins) and the additional
timing parameters in imx_epdc_fb_mode define EPD-specific timing parameters, such as
the source and gate driver timings. For details on how to configure E Ink panel timing
parameters, see the EPDC programming model section in the i.MX 6SoloLite
Applications Processor Reference Manual (IMX6SLRM).
In addition to the EPDC panel mode data, functions may be passed to the EPDC driver to
define how to handle the EPDC pins when the EPDC driver is enabled or disabled. These
functions should disable the EPDC pins for purposes of power savings.
10.3.3.1 Boot Command Line Parameters
Additional configuration for the EPDC driver is provided through boot command line
parameters. The format of the command line option is as follows:
epdc video=mxcepdcfb:[panel_name],bpp=16
The EPDC driver parses these options and tries to match panel_name to the name of
video mode specified in the imx_epdc_fb_mode panel mode structure. If no match is
found, then the first panel mode provided in the platform data is used by the EPDC
driver. The bpp setting from this command line sets the initial bits per pixel setting for
the frame buffer. A setting of 16 selects RGB565 pixel format, while a setting of 8 selects
8-bit grayscale (Y8) format.
Software Operation
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
92 Freescale Semiconductor, Inc.

10.3.4 EPDC Waveform Loading
The EPDC driver requires a waveform file for proper operation. This waveform file
contains the waveform information needed to generate the waveforms that drive updates
to the E Ink panel. A pointer to the waveform file data is programmed into the EPDC
before the first update is performed.
There are two options for selecting a waveform file:
1. Select one of the default waveform files included in this BSP and built into the
kernel.
2. Use a new waveform file that is specific to the E Ink panel being used.
The waveform file is loaded by the EPDC driver using the Linux firmware APIs.
10.3.4.1 Using a Default Waveform File
The quickest and easiest way to get started using an E Ink panel and the EPDC driver is
to use one of the default waveform files provided in the Linux BSP. This should enable
updates to several different types of E Ink panel without a panel-specific waveform file.
The drawback is that optimal quality should not be expected. Typically, using a non-
panel-specific waveform file for an E Ink panel results in more ghosting artifacts and
overall poorer color quality.
The following default waveform files included in the BSP reside in firmware/imx/:
• epdc_E60_V110.fw - Default waveform for the 6.0 inch V110 E Ink panel.
• epdc_E60_V220.fw - Default waveform for the 6.0 inch V220 E Ink panel (supports
animation mode updates).
• epdc_E97_V110.fw - Default waveform for the 9.7 inch V110 E Ink panel.
• epdc_E060SCM.fw - Default waveform for the 6.0 inch Pearl E Ink panel (supports
animation mode updates).
The EPDC driver attempts to load a waveform file with the name "imx/
epdc_[panel_name].fw", where panel_name refers to the string specified in the
fb_videomode name field. This panel_name information should be provided to the EPDC
driver through the kernel command line parameters described in the preceding chapter.
For example, to load the epdc_E060SCM.fw default firmware file for a Pearl panel, set
the EPDC kernel command line paratmeter to the following:
video=mxcepdcfb:E060SCM,bpp=16
Chapter 10 Electrophoretic Display Controller (EPDC) Frame Buffer Driver
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 93

10.3.4.2 Using a Custom Waveform File
To ensure the optimal E Ink display quality, use a waveform file specific to E Ink panel
being used. The raw waveform file type (.wbf) requires conversion to a format that can
be understood and read by the EPDC. This conversion script is not included as part of the
BSP. Therefore, contact Freescale to acquire this conversion script.
Once the waveform conversion script has been run on the raw waveform file, the
converted waveform file should be renamed so that the EPDC driver can find it and load
it. The driver is going to search for a waveform file with the name "imx/
epdc_[panel_name].fw", where panel_name refers to the string specified in the
fb_videomode name field. For example, if the panel is named "E60_ABCD", then the
converted waveform file should be named epdc_E60_ABCD.fw.
The firmware script firmware.sh (lib/udev/firmware in the Linux root file system)
contains the search path used to locate the firmware file. The default search path for
firmware files is /lib/firmware;/usr/local/lib/firmware. A custom search path can be
specified by modifying firmware.sh. Create an imx directory in one of these paths and
add your new epdc_[panel_name].fw file there.
NOTE
If the EPDC driver is searching for a firmware waveform file
that matches the names of one of the default waveform files
(see preceding chapter), it will choose the default firmware files
that are built into the BSP over any firmware file that has been
added in the firmware search path. Thus, if you leave the BSP
so that it builds those default firmware files into the OS image,
be sure to use a panel name other than those associated with the
default firmware files, since those default waveform files will
be preferred and selected over a new waveform file placed in
the firmware search path.
10.3.5 EPDC Panel Initialization
The framebuffer driver will not typically (see note below for exceptions) go through any
hardware initialization steps when the framebuffer driver module is loaded. Instead, a
subsequent user mode call must be made to request that the driver initialize itself for a
specific EPD panel. To initialize the EPDC hardware and E Ink panel, an
FBIOPUT_VSCREENINFO ioctl call must be made, with the xres and yres fields of the
fb_var_screeninfo parameter set to match the X and Y resolution of a supported E Ink
panel type. To ensure that the EPDC driver receives the initialization request, the activate
field of the fb_var_screeninfo parameter should be set to FB_ACTIVATE_FORCE.
Software Operation
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
94 Freescale Semiconductor, Inc.

NOTE
The exception is when the FB Console driver is included in the
kernel. When the EPDC driver registers the framebuffer device,
the FB Console driver will subsequently make an
FBIOPUT_VSCREENINFO ioctl call. This will in turn
initialize the EPDC panel.
10.3.6 Grayscale Framebuffer Selection
The EPDC framebuffer driver supports the use of 8-bit grayscale (Y8) and 8-bit inverted
grayscale (Y8 inverted) pixel formats for the framebuffer (in addition to the more
common RGB565 pixel format). In order to configure the framebuffer format as 8-bit
grayscale, the application would call the FBIOPUT_VSCREENINFO framebuffer ioctl.
This ioctl takes an fb_var_screeninfo pointer as a parameter. This parameter specifies the
attributes of the framebuffer and allows the application to request changes to the
framebuffer format. There are two key members of the fb_var_screeninfo parameter that
must be set in order to request a change to 8-bit grayscale format: bits_per_pixel and
grayscale. bits_per_pixel must be set to 8 and grayscale must be set to one of the 2 valid
grayscale format values: GRAYSCALE_8BIT or GRAYSCALE_8BIT_INVERTED.
The following code snippet demonstrates a request to change the framebuffer to use the
Y8 pixel format:
fb_screen_info screen_info;
screen_info.bits_per_pixel = 8;
screen_info.grayscale = GRAYSCALE_8BIT;
retval = ioctl(fd_fb0, FBIOPUT_VSCREENINFO, &screen_info);
10.3.7 Enabling an EPDC Splash Screen
By default, the EPDC support in U-Boot is disabled, and therefore splash screen support
is also disabled. To enable splash screen support, edit the configuration file /include/
configs/mx6sl_evk.h/include/configs/mx6dl_arm2.h and enable the following defines:
#define CONFIG_SPLASH_SCREEN
#define CONFIG_MXC_EPDC
Once this change has been made, rebuild the U-Boot image and flash it to your SD card.
Then perform the following steps to flash a waveform file to an SD card where U-Boot
can find it:
1. Identify the EPDC waveform file from the Linux kernel firmware directory that is
the best match for the panel you are using. For the DC2/DC3 boards, that would be
the waveform file /firmware/imx/epdc_E060SCM.fw.ihex.
Chapter 10 Electrophoretic Display Controller (EPDC) Frame Buffer Driver
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 95
2. Convert the ihex firmware file to a stripped-down binary using the script
ihex2bin.py. Contact Freescale to acquire this script.
python ihex2bin.py -i epdc_E060SCM.fw.ihex -o epdc_E060SCM_splash.bin
3. Write the firmware file to the SD card at the FAT partition.
cp epdc_E060SCM.bin [FAT partition on SD card]
10.4 Source Code Structure
Table below lists the source files associated with the EPDC driver. These files are
available in the following directory:
drivers/video/mxc
Table 10-1. EPDC Driver Files
File Description
mxc_epdc_v2_fb.c The EPDC V2 frame buffer driver.
epdc_v2_regs.h Register definitions for the EPDC V2 module.
Table below lists the global header files associated with the EPDC driver. These files are
available in the following directory:
include/linux/
Table 10-2. EPDC Global Header Files
File Description
mxcfb.h Header file for the MXC framebuffer drivers
mxcfb_epdc.h Header file for direct kernel access to the EPDC API extension
10.5 Menu Configuration Options
The following Linux kernel configuration options are provided for the EPDC module:
• CONFIG_MXC_EINK_PANEL includes support for the Electrophoretic Display
Controller. In menuconfig, this option is available under:
• Device Drivers > Graphics Support > E Ink Panel Framebuffer
• CONFIG_MXC_EINK_AUTO_UPDATE_MODE enables support for auto-update
mode, which provides automated EPD updates through the deferred I/O framebuffer
Source Code Structure
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
96 Freescale Semiconductor, Inc.

driver. This option is dependent on the MXC_EINK_PANEL option. In menuconfig,
this option is available under:
• Device Drivers > Graphics Support > E Ink Auto-update Mode Support
NOTE
This option only enables the use of auto-update mode.
Turning on auto-update mode requires an additional
IOCTL call using the
MXCFB_SET_AUTO_UPDATE_MODE IOCTL.
• CONFIG_FB to include frame buffer support in the Linux kernel. In menuconfig,
this option is available under:
• Device Drivers > Graphics support > Support for frame buffer devices
• By default, this option is Y for all architectures.
• CONFIG_FB_MXC is a configuration option for the MXC Frame buffer driver. This
option is dependent on the CONFIG_FB option. In menuconfig, this option is
available under:
• Device Drivers > Graphics support > MXC Framebuffer support
• By default, this option is Y for all architectures.
• CONFIG_MXC_PXP_V2 enables support for the PxP. The PxP is required by the
EPDC driver for processing (color space conversion, rotation, auto-waveform
selection) framebuffer update regions. This option must be selected for the EPDC
framebuffer driver to operate correctly. In menuconfig, this option is available under:
• Device Drivers > DMA Engine support > MXC PxP support
10.6 Programming Interface
10.6.1 IOCTLs/Functions
The EPDC Frame Buffer is accessible from user space and from kernel space. A single
set of functions describes the EPDC Frame Buffer driver extension. There are, however,
two modes for accessing these functions. For user space access the IOCTL interface
should be used. For kernel space access the functions should be called directly. For each
function below both the IOCTL code and the corresponding kernel function is listed.
MXCFB_SET_WAVEFORM_MODES / mxc_epdc_fb_set_waveform_modes()
Description:
Defines a mapping for common waveform modes.
Parameters:
Chapter 10 Electrophoretic Display Controller (EPDC) Frame Buffer Driver
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 97
mxcfb_waveform_modes *modes
Pointer to a structure containing the waveform mode values for common waveform
modes. These values must be configured in order for automatic waveform mode selection
to function properly.
MXCFB_SET_TEMPERATURE / mxc_epdc_fb_set_temperature
Description:
Set the temperature to be used by the EPDC driver in subsequent panel updates.
Parameters:
int32_t temperature
Temperature value, in degrees Celsius. Note that this temperature setting may be
overridden by setting the temperature value parameter to anything other than
TEMP_USE_AMBIENT when using the MXCFB_SEND_UPDATE ioctl.
MXCFB_SET_AUTO_UPDATE_MODE / mxc_epdc_fb_set_auto_update
Description:
Select between automatic and region update mode.
Parameters:
__u32 mode
In region update mode, updates must be submitted via the MXCFB_SEND_UPDATE
IOCTL.
In automatic mode, updates are generated automatically by the driver by detecting pages
in frame buffer memory region that have been modified.
MXCFB_SET_UPDATE_SCHEME / mxc_epdc_fb_set_upd_scheme
Description:
Select a scheme that dictates how the flow of updates within the driver.
Parameters:
__u32 scheme
Select of the following updates schemes:
UPDATE_SCHEME_SNAPSHOT - In the Snapshot update scheme, the contents of the
framebuffer are immediately processed and stored in a driver-internal memory buffer. By
the time the call to MXCFB_SEND_UPDATE has completed, the framebuffer region is
Programming Interface
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
98 Freescale Semiconductor, Inc.

free and can be modified without affecting the integrity of the last update. If the update
frame submission is delayed due to other pending updates, the original buffer contents
will be displayed when the update is finally submitted to the EPDC hardware. If the
update results in a collision, the original update contents will be resubmitted when the
collision has cleared.
UPDATE_SCHEME_QUEUE - The Queue update scheme uses a work queue to
aynchronously handle the processing and submission of all updates. When an update is
submitted via MXCFB_SEND_UPDATE, the update is added to the queue and then
processed in order as EPDC hardware resources become available. As a result, the
framebuffer contents processed and updated are not guaranteed to reflect what was
present in the framebuffer when the update was sent to the driver.
UPDATE_SCHEME_QUEUE_AND_MERGE - The Queue and Merge scheme uses the
queueing concept from the Queue scheme, but adds a merging step. This means that,
before an update is processed in the work queue, it is first compared with other pending
updates. If any update matches the mode and flags of the current update and also overlaps
the update region of the current update, then that update will be merged with the current
update. After attempting to merge all pending updates, the final merged update will be
processed and submitted.
MXCFB_SEND_UPDATE / mxc_epdc_fb_send_update
Description:
Request a region of the frame buffer be updated to the display.
Parameters:
mxcfb_update_data *upd_data
Pointer to a structure defining the region of the frame buffer, waveform mode, and
collision mode for the current update. This structure also includes a flags field to select
from one of the following update options:
EPDC_FLAG_ENABLE_INVERSION - Enables inversion of all pixels in the update
region.
EPDC_FLAG_FORCE_MONOCHROME - Enables full black/white posterization of all
pixels in the update region.
EPDC_FLAG_USE_ALT_BUFFER - Enables updating from an alternate (non-
framebuffer) memory buffer.
If enabled, the final upd_data parameter includes detailed configuration information for
the alternate memory buffer.
Chapter 10 Electrophoretic Display Controller (EPDC) Frame Buffer Driver
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 99

MXCFB_WAIT_FOR_UPDATE_COMPLETE /
mxc_epdc_fb_wait_update_complete
Description:
Block and wait for a previous update request to complete.
Parameters:
mxfb_update_marker_data marker_data
The update_marker value used to identify a particular update (passed as a parameter in
MXCFB_SEND_UPDATE IOCTL call) should be re-used here to wait for the update to
complete. If the update was a collision test update, the collision_test variable will return
the result indicating whether a collision occurred.
MXCFB_SET_PWRDOWN_DELAY / mxc_epdc_fb_set_pwrdown_delay
Description:
Set the delay between the completion of all updates in the driver and when the driver
should power down the EPDC and the E Ink display power supplies.
Parameters:
int32_t delay
Input delay value in milliseconds. To disable EPDC power down altogether, use
FB_POWERDOWN_DISABLE (defined below).
MXCFB_GET_PWRDOWN_DELAY / mxc_epdc_fb_get_pwrdown_delay
Description:
Retrieve the driver's current power down delay value.
Parameters:
int32_t delay
Output delay value in milliseconds.
10.6.2 Structures and Defines
#define GRAYSCALE_8BIT 0x1
#define GRAYSCALE_8BIT_INVERTED 0x2
#define AUTO_UPDATE_MODE_REGION_MODE 0
#define AUTO_UPDATE_MODE_AUTOMATIC_MODE 1
Programming Interface
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
100 Freescale Semiconductor, Inc.

#define UPDATE_SCHEME_SNAPSHOT 0
#define UPDATE_SCHEME_QUEUE 1
#define UPDATE_SCHEME_QUEUE_AND_MERGE 2
#define UPDATE_MODE_PARTIAL 0x0
#define UPDATE_MODE_FULL 0x1
#define WAVEFORM_MODE_AUTO 257
#define TEMP_USE_AMBIENT 0x1000
#define EPDC_FLAG_ENABLE_INVERSION 0x01
#define EPDC_FLAG_FORCE_MONOCHROME 0x02
#define EPDC_FLAG_USE_ALT_BUFFER 0x100
#define EPDC_FLAG_TEST_COLLISION 0x200
#define FB_POWERDOWN_DISABLE -1
struct mxcfb_rect {
__u32 left; /* Starting X coordinate for update region */
__u32 top; /* Starting Y coordinate for update region */
__u32 width; /* Width of update region */
__u32 height; /* Height of update region */
};
struct mxcfb_waveform_modes {
int mode_init; /* INIT waveform mode */
int mode_du; /* DU waveform mode */
int mode_gc4; /* GC4 waveform mode */
int mode_gc8; /* GC8 waveform mode */
int mode_gc16; /* GC16 waveform mode */
int mode_gc32; /* GC32 waveform mode */
};
struct mxcfb_alt_buffer_data {
__u32 phys_addr; /* physical address of alternate image buffer */
__u32 width; /* width of entire buffer */
__u32 height; /* height of entire buffer */
struct mxcfb_rect alt_update_region; /* region within buffer to update */
};
struct mxcfb_update_data {
struct mxcfb_rect update_region; /* Rectangular update region bounds */
__u32 waveform_mode; /* Waveform mode for update */
__u32 update_mode; /* Update mode selection (partial/full) */
__u32 update_marker; /* Marker used when waiting for completion */
int temp; /* Temperature in Celsius */
uint flags; /* Select options for the current update */
struct mxcfb_alt_buffer_data alt_buffer_data; /* Alternate buffer data */
};
struct mxcfb_update_marker_data { __u32 update_marker; __u32 collision_test; };
Chapter 10 Electrophoretic Display Controller (EPDC) Frame Buffer Driver
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 101

Programming Interface
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
102 Freescale Semiconductor, Inc.

Chapter 11
Pixel Pipeline (PxP) DMA-ENGINE Driver
11.1 Introduction
The Pixel Pipeline (PxP) DMA-ENGINE driver provides a unique API, which are
implemented as a dmaengine client that smooths over the details of different hardware
offload engine implementations. Typically, the users of PxP DMA-ENGINE driver
include EPDC driver, V4L2 Output driver, and the PxP user-space library.
11.2 Hardware Operation
The PxP driver uses PxP registers to interact with the hardware. For detailed hardware
operations, see the following documents:
•i.MX 6Solo/6DualLite Applications Processor Reference Manual (IMX6SDLRM)
•i.MX 6SoloLite Applications Processor Reference Manual (IMX6SLRM)
•i.MX 6SoloX Applications Processor Reference Manual (IMX6SXRM)
•i.MX 7Dual Applications Processor Reference Manual (IMX7DRM)
•i.MX 6UltraLite Applications Processor Reference Manual (IMX6ULRM)
11.3 Software Operation
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 103

11.3.1 Key Data Structs
The PxP DMA Engine driver implementation depends on the DMA Engine Framework.
There are three important structs in the DMA Engine Framework which are extended by
the PxP driver: struct dma_device, struct dma_chan, struct dma_async_tx_descriptor. The
PxP driver implements several callback functions which are called by the DMA Engine
Framework (or DMA slave) when a DMA slave (client) interacts with the DMA Engine.
The PxP driver implements the following callback functions in struct dma_device:
device_alloc_chan_resources /* allocate resources and descriptors */
device_free_chan_resources /* release DMA channel's resources */
device_tx_status /* poll for transaction completion */
device_issue_pending /* push pending transactions to hardware */
and,
device_prep_slave_sg /* prepares a slave DMA operation */
device_control /* manipulate all pending operations on a channel, returns zero or error
code */
The first four functions are used by the DMA Engine Framework, the last two are used
by the DMA slave (DMA client). Notably, device_issue_pending is used to trigger the
start of a PxP operation.
The PxP DMA driver also implements the interface tx_submit in struct
dma_async_tx_descriptor, which is used to prepare the descriptor(s) which will be
executed by the engine. When tasks are received in pxp_tx_submit, they are not
configured and executed immediately. Rather, they are added to a task queue and the
function call is allowed to return immediately.
11.3.2 Channel Management
Although ePxP does not have multiple channels in hardware, the virtual channels are
supported in the driver; this provides flexibility in the multiple instance/client design. At
any time, a user can call dma_request_channel() to get a free channel, and then configure
this channel with several descriptors (a descriptor is required for each input plane and for
the output plane). When the PxP is no longer being used, the channel should be released
by calling dma_release_channel(). Detailed elements of channel management are
handled by the driver and are transparent to the client.
Software Operation
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
104 Freescale Semiconductor, Inc.

11.3.3 Descriptor Management
The DMA Engine processes the task based on the descriptor. One DMA channel is
usually associated with several descriptors. Descriptors are recycled resources, under
control of the offload engine driver, to be reused as operations complete. The extended
TX descriptor packet (pxp_tx_desc), allows the user to pass PxP configuration
information to the driver. This includes everything that the PxP needs to execute a
processing task.
11.3.4 Completion Notification
There are two ways for an application to receive notification that a PxP operation has
completed.
• Call dma_wait_for_async_tx(). This call causes the CPU to spin while it polls for the
completion of the operation.
• Specify a completion callback.
The latter method is recommended. After the PxP operation completes, the PxP output
buffer data can be retrieved.
For general information for DMA Engine Framework, see Documentation/dmaengine.txt
in the Linux kernel source tree.
11.3.5 Limitations
• The driver currently does not support scatterlist objects in the way they are
traditionally used. Instead of using the scatterlist parameter object to provide a chain
of memory sources and destinations, the driver currently uses it to provide the input
and output buffers (and overlay buffers, if needed) for one transfer.
• The PxP driver may not properly execute a series of transfers that is queued in rapid
sequence. It is recommended to wait for each transfer to complete before submitting
a new one.
11.4 Menu Configuration Options
The following Linux kernel configuration option is provided for this module:
Device Drivers --->
Chapter 11 Pixel Pipeline (PxP) DMA-ENGINE Driver
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 105

DMA Engine support --->
[*] MXC PxP support
[*] MXC PxP Client Device
11.5 Source Code Structure
The PxP driver source code is located in drivers/dma/ and include/linux/.
Source Code Structure
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
106 Freescale Semiconductor, Inc.

Chapter 12
ELCDIF Frame Buffer Driver
12.1 Introduction
The ELCDIF frame buffer driver is designed using the Linux kernel frame buffer driver
framework. It implements the platform driver for a frame buffer device. The
implementation uses the ELCDIF API for generic LCD low-level operations. The
ELCDIF API is also defined in the ELCDIF frame buffer driver to realize low level
hardware control. Only DOTCLK mode of the ELCDIF API is tested, so theoretically the
ELCDIF frame buffer driver can work with a sync LCD panel driver to support a frame
buffer device. The sync LCD driver is organized in a flexible and extensible manner and
is abstracted from any specific sync LCD panel support. To support another sync LCD
panel, the user can write a sync LCD driver by referring to the existing one.
12.2 Hardware Operation
For detailed hardware operations, see the following documents:
•i.MX 6Solo/6DualLite Applications Processor Reference Manual (IMX6SDLRM)
•i.MX 6SoloLite Applications Processor Reference Manual (IMX6SLRM)
•i.MX 6SoloX Applications Processor Reference Manual (IMX6SXRM)
•i.MX 7Dual Applications Processor Reference Manual (IMX7DRM)
12.3 Software Operation
A frame buffer device is a memory device similar to /dev/mem and it has the same
features. It can be read from, written to, or some location in it can be sought and maped
using mmap(). The difference is that the memory that appears is not the whole memory,
but only the frame buffer of the video hardware. The device is accessed through special
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 107

device nodes, usually located in the /dev directory, /dev/fb*. /dev/fb* also has several
IOCTLs which act on it and through which information about the hardware can be
queried and set. The color map handling operates through IOCTLs as well. See linux/fb.h
for more information on which IOCTLs there are and which data structures they use.
The frame buffer driver implementation for i.MX 6 is abstracted from the actual
hardware. The default panel driver is picked up by video mode defined in platform data
or passed in with 'video=mxc_elcdif_fb:resolution, bpp=bits_per_pixel' kernel bootup
command during probing, where resolution should be in the common frame buffer video
mode pattern and bits_per_pixel should be the frame buffer's color depth.
12.4 Menu Configuration Options
The following Linux kernel configurations are provided for this module:
• CONFIG_FB_MXS [=Y|N|M] Configuration option to compile support for the MXC
ELCDIF frame buffer driver into the kernel.
12.5 Source Code Structure
The frame buffer driver source code is in drivers/video/mxc/mxsfb.c.
Menu Configuration Options
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
108 Freescale Semiconductor, Inc.
Chapter 13
Graphics Processing Unit (GPU)
13.1 Introduction
The Graphics Processing Unit (GPU) is a graphics accelerator targeting embedded 2D/3D
graphics applications.
The 3D graphics processing unit (GPU3D) is an embedded engine that accelerates user
level graphics Application Programming Interface (APIs) such as OpenGL ES 1.1,
OpenGL ES 2.0, and OpenGL ES 3.0 and OpenCL 1.1EP. The 2D graphics processing
unit (GPU2D) is an embedded 2D graphics accelerator targeting graphical user interfaces
(GUI) rendering boost. The VG graphics processing unit (GPUVG) is an embedded
vector graphic accelerator for supporting the OpenVG 1.1 graphics API and feature set.
The GPU driver kernel module source is in kernel source tree, but the libs are delivered
as binary only.
Graphics Processing Unit Hardware Applicable Platform
3D Vivante GC2000 6Quad/6Dual
3D Vivante GC880 6DualLite/6Solo
3D/2D Vivante GC400T 6SoloX
2D Vivante GC320 6Quad/6Dual/6DualLite/6Solo/6SoloLite
Vector Vivante GC355 6Quad/6Dual/6SoloLite
NOTE
GC400T does not support OpenGL ES 3.0.
GC880/GC400T does not support OpenCL 1.1EP, and only
GC2000 supports it.
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 109

13.1.1 Driver Features
The GPU driver enables this board to provide the following software and hardware
support:
• EGL (EGL is an interface between Khronos rendering APIs such as OpenGL ES or
OpenVG and the underlying native platform window system) 1.4 API defined by
Khronos Group.
• OpenGL ES (OpenGL® ES is a royalty-free, cross-platform API for full-function 2D
and 3D graphics on embedded systems) 1.1 API defined by Khronos Group.
• OpenGL ES 2.0 API defined by Khronos Group.
• OpenGL ES 3.0 API defined by Khronos Group.
• OpenVG (OpenVG is a royalty-free, cross-platform API that provides a low-level
hardware acceleration interface for vector graphics libraries such as Flash and SVG)
1.1 API defined by Khronos Group.
• OpenCL (OpenCL is the first open, royalty-free standard for cross-platform, parallel
programming of modern processors.) 1.1 EP API defined by Khronos Group.
• OpenGL 2.1 API defined by Khronos Group.
• Automatic 3D core slowing down, when hot notification from thermal driver is
active, 3D core will run at 1/64 clock.
13.1.1.1 Hardware Operation
For detailed hardware operations, seee the GPU chapters in the following documents:
•i.MX 6Dual/6Quad Applications Processor Reference Manual (IMX6DQRM)
•i.MX 6Solo/6DualLite Applications Processor Reference Manual (IMX6SDLRM)
•i.MX 6SoloLite Applications Processor Reference Manual (IMX6SLRM)
•i.MX 6SoloX Applications Processor Reference Manual (IMX6SXRM)
13.1.1.2 Software Operation
The GPU driver is divided into two layers. The first layer is running in kernel mode and
acts as the base driver for the whole stack . This layer provides the essential hardware
access, device management, memory management, command queue management,
context management and power management. The second layer is running in user mode,
implementing the stack logic and providing the following APIs to the upper layer
applications:
• OpenGL ES 1.1, 2.0, and 3.0 API
Introduction
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
110 Freescale Semiconductor, Inc.
• EGL 1.4 API
• OpenVG 1.1 API
• OpenCL 1.1 EP API
13.1.1.3 Source Code Structure
Table below lists GPU driver kernel module source structure:
<Yocto_BuildDir>/linux/drivers/mxc/gpu-viv
Table 13-1. GPU Driver Files
File Description
Kconfig Kbuild config Kernel configure file and makefile
hal/kernel/arch Hardware-specific driver code for GC2000, GC880, GC400T, and
GC320
hal/kernel/archvg Hardware-specific driver code for GC355
hal/kernel Kernel mode HAL driver
hal/os/linux/kernel OS layer HAL driver
NOTE
If you replace the whole content in this directory, the GPU
kernel driver can be upgraded.
13.1.1.4 Library Structure
Table below lists GPU driver user mode library structure:
<ROOTFS>/usr/lib
Table 13-2. GPU Library Files
File Description
libCLC.so OpenCL frontend compiler library
libEGL.so** EGL1.4 library
libGAL.so GAL user mode driver
libGLES_CL.so OpenGL ES 1.1 common lite library
(without EGL API, no float point support API)
libGL.so** OpenGL 2.1 common library
libGLES_CM.so OpenGL ES 1.1 common library
(without EGL API, include float point support API)
Table continues on the next page...
Chapter 13 Graphics Processing Unit (GPU)
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 111
Table 13-2. GPU Library Files (continued)
File Description
libGLESv1_CL.so** OpenGL ES 1.1 common lite library
(with EGL API, no float point support API)
libGLESv1_CM.so** OpenGL ES 1.1 common library
(with EGL API, include float point support API)
libGLESv2.so** OpenGL ES 2.0/3.0 library
libGLSLC.so OpenGL ES shader language compiler library
libVSC.so OpenGL frontend compiler library
libVivanteOpenCL.so Vivante
libOpenCL.so OpenCL ICD wrapper library
libOpenVG.so* OpenVG 1.1 library
libVDK.so VDK wrapper library.
libVIVANTE.so Vivante user mode driver.
directfb-1.6-0/gfxdrivers/libdirectfb_gal.so DirectFB 2D acceleration library.
dri/vivante_dri.so DRI library for OpenGL2.1.
xorg/modules/drivers/vivante_drv.so EXA library for X11 acceleration.
libwayland-viv.so Wayland server side library for Vivante's EGL driver
libgc_wayland_protocol.so Vivante Wayland Protocol Extension Library
**SONAME is used for libEGL.so, libGLESv2.so, libGLESv1_CM.so,
libGLESv1_CL.so, libGL.so.
*For libOpenVG.so, there are two libraries for OpenVG feature. libOpenVG_3D.so is
gc2000/gc880/gc400t based OpenVG library. libOpenVG_355.so is gc355 based
OpenVG library. For X11 system, the default openVG library is linked to
libOpenVG_3D.so. For framebuffer, directFB, and Wayland systems, the default
openVG library is linked to libOpenVG355.so. for i.MX 6Dual/Quad, i.MX 6Dual, i.MX
6SoloLite and linked to libOpenVG_3D.so for i.MX 6DualLite, i.MX 6SoloX, i.MX
6Solo. gc355 based OpenVG library needs to be used. This can be done by using the
following sequence of commands:
cd <ROOTFS>/usr/lib
sudo ln -s libOpenVG_355.so libOpenVG.so
13.1.1.5 API References
Refer to the following web sites for detailed specifications:
• OpenGL ES 1.1, 2.0, and 3.0 API: www.khronos.org/opengles/
• OpenCL 1.1 EP www.khronos.org/opencl/
Introduction
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
112 Freescale Semiconductor, Inc.

• EGL 1.4 API: www.khronos.org/egl/
• OpenVG 1.1 API: www.khronos.org/openvg/
13.1.1.6 Menu Configuration Options
The following Linux kernel configurations are provided for GPU driver:
• CONFIG_MXC_GPU_VIV is a configuration option for GPU driver. In the
menuconfig this option is available under Device Drivers > MXC support drivers >
MXC Vivante GPU support > MXC Vivante GPU support.
To get to the GPU library package in Yocto, use the command bitbake linux-imx -c
menuconfig. On the screen displayed, select Configure the kernel and select "Device
Drivers" > "MXC support drivers" > "MXC Vivante GPU support" > "MXC Vivante
GPU support"and exit. When the next screen appears select the following options to
enable the GPU driver:
• Package list > gpu-viv-bin-mx6q
• This package provides proprietary binary libraries, and test code built from the GPU
for framebuffer
Chapter 13 Graphics Processing Unit (GPU)
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 113

Introduction
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
114 Freescale Semiconductor, Inc.

Chapter 14
Direct FB
14.1 Introduction
DirectFB is a thin library that provides hardware graphics acceleration, input device
handling and abstraction, integrated windowing system with support for translucent
windows and multiple display layers, not only on top of the Linux Frame Buffer Device.
It is a complete hardware abstraction layer with software fallbacks for every graphics
operation that is not supported by the underlying hardware. DirectFB adds graphical
power to embedded systems and sets a new standard for graphics under Linux OS.
14.1.1 Hardware Operation
DirectFB acceleration utilizes the Vivante GPU.
The process is discussed in the Driver Features. Acceleration is also dependent on the
frame buffer memory.
14.2 Software Operation
DirectFB version which is currently supported is DirectFB-1.6.3. for Yocto.
Subsequent versions have not been tested and are not officially supported.
Since DirectFB is a thin Graphics library, it is lightweight and has a small footprint
optimized for embedded devices, it is not a client/server model like X11.
It provides a hardware abstraction layer for hardware graphics acceleration: -Anything
that is not supported by hardware and still supported by software, but utilizes hardware
where possible
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 115
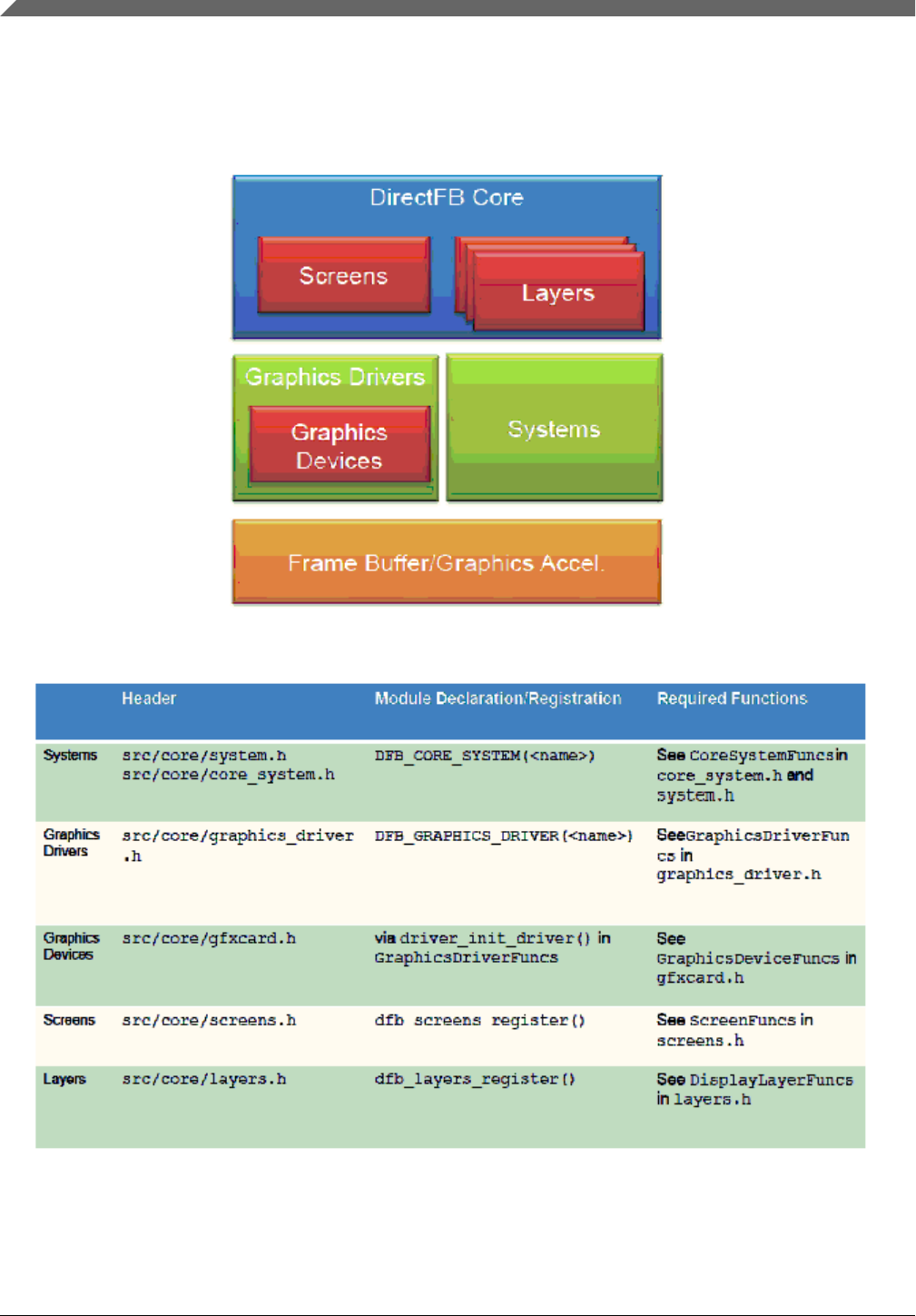
14.2.1 DirectFB Acceleration Architecture
Figure 14-1. Figure 1
Figure 14-2. Figure 2
Systems provides frame buffer and hardware management, access to the resources
Software Operation
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
116 Freescale Semiconductor, Inc.

14.2.2 DirectFB Accelerator Setup
The Vivante DirectFB Accelerator provides an interface layer between our HAL and the
DirectFB-supplied drivers. The relationship between applications and the DirectFB driver
modules flows as follows: DirectFB App -> calls the DirectFB.org driver-->which calls
the Vivante gfx DirectFB Accelerator libdirectfb_gal.so -> which calls libGAL.so ->
which provides access to HW. The Vivante gfx driver may be built along with the other
Linux modules as in the preceeding section, or it may be built by itself. This section
illustrates some additional options specific to DFB driver creation to provide additional
reference information.
Prerequisites
Prepare system
Boot up the i.MX 6 processor with the BSP and install gpu-viv –bin-<BSP
Version>.tar.gz to the rootfs. The gpu-viv –bin-<BSP Version>.tar.gz comes up with
prebuilt libdirectfb_gal.so and will be installed to $ROOTFS/usr/lib/directfb-<version>/
gfxdrivers.
Additional configuration
Set the additional values needed for DirectFB graphics in the local configuration file
~/.directfbrc:
# directfbrc begin
system=fbdev
mode=640x480 # display size (change to fit your needs)
desktop-buffer-mode=frontonly # if no double buffering in framebuffer
driver
depth=16
pixelformat=RGB16
#no-hardware # disable hardware acceleration
#no-software # disable software fallbacks
# directfbrc end
Customize Primitive Acceleration
By default, the Vivante gfx driver will use GCCORE GPU hardware to accelerate
DirectFB features: draw (lines and rectangles), fill (triangles and rectangles), blit, and
stretch blit. The user may change the behavior of the gfx driver by providing a
configuration file that takes precedence over the default settings when the driver is
initialized. The environment variable $GAL_CONFIG_FILE must then be defined by the
user to point to the configuration file containing the new settings. If the environment
variable is not set or if the indicated file is missing, then default driver settings will be
used. For your reference, Vivante provides an example gfx configuration file in the
Chapter 14 Direct FB
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 117

software release package: <PROJECTS_DIR>/driver/gfx/gc_dfb_config The full matrix
of DirectFB functions and available flags is shown here. The flag "none" means the
default mode is used for the given operation. If no flag is specified, then “none” is used.
fillrectangle=none,xor,blend
drawrectangle=none,xor,blend
drawline=none,xor,blend
filltriangle=none,xor,blend
blit=none,xor,alphachannel,coloralpha,colorize,src_colorkey,dst_colorkey,rotate180
stretchblit=
none,xor,alphachannel,coloralpha,colorize,src_colorkey,dst_colorkey,rotate180
A specified configuration file has higher priority than the default
configuration matrix, which is:
fillrectangle=none,xor,blend
filltriangle=none,xor,blend
blit=none,xor,alphachannel,coloralpha,src_colorkey,rotate180
stretchblit=none,xor,alphachannel,coloralpha,src_colorkey,rotate180
As an example, let us assume that the user wants to accelerate only the alpha blending
and rotate180 features of blit. We also assume that there is a user-defined gal_config file
at ~/config_files/my_gal_config.
Step 1. Edit “my_gal_config” and add the line: blit=alphachannel,rotate180
Step 2. Define the GAL_CONFIG_FILE environment variable:
export GAL_CONFIG_FILE=~/config_files/mygc_dfb_config
The result is that the “alphachannel” and “rotate180” blit features will be GPU-
accelerated, and that all other features will be sent to the CPU for processing.
14.2.3 i.MX DirectFB Driver Details
The following list summarizes the types of operations that are accelerated for DirectFB
• Rectangle filling/drawing
• Triangle filling/drawing
• Line drawing
• Flat shaded triangles
• Simple blitting
• Stretched blitting
• Textured triangles (perspective correct)
• Blending with an alphachannel (per pixel alpha)
• Blending with an alpha factor (alpha modulation)
• Nine source and destination blend functions
• Porter/Duff rules are supported
• Premultiplied alpha supported
• Colorized blitting (color modulation)
Software Operation
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
118 Freescale Semiconductor, Inc.

• Source color keying
• Destination color keying
Management
DirectFB has its own resource management for video memory. Resources like display
layers or input devices can be locked for exclusive access, e.g., for full screen games.
DirectFB provides abstraction for the different graphics targets like display layers,
windows and any general purpose surfaces. The programming effort for switching from
windowed to fullscreen and back is minimized to setting the desired cooperative level.
DirectFB Modules
The API and structure of DirectFB is designed to provide an easy way of implementing
the following parts:
• Graphics acceleration
• Input devices (currently keyboard, serial and PS/2 mice, joysticks)
• Image Provider (currently PNG, GIF and JPEG)
• Video Provider (currently Video4Linux, AVI (using avifile), MPEG1/2 (using
libmpeg3))
• Font Provider (currently DirectFB bitmap font, TrueType via FreeType 2)
14.2.4 The gal_config File for i.MX DirectFB Driver
This is the configuration file for Vivante GFX plug-in driver. You can use this file to
control which primitive is accelerated with specific features.
For example, if you want to accelerate blit with alpha blending and rotate180 features,
add the following line in the file.
blit=alphachannel,coloralpha,rotate180
Then blit with other features (including xor and src_colorkey etc.) are not accelerated by
HW. Even blit without any features is not accelerated also.
"none" in the feature list means the rendering primitive without any features.
Following is the full matrix of the primitives and features.
drawline=none,xor,blend
drawrectangle=none,xor,blend
fillrectangle=none,xor,blend
filltriangle=none,xor,blend
Chapter 14 Direct FB
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 119

blit=none,xor,alphachannel,coloralpha,src_colorkey,rotate180
stretchblit=none,xor,alphachannel,coloralpha,src_colorkey,rotate180
To use the configuration file, set environment variable GAL_CONFIG_FILE pointing to
this file, for example, for bash user.
export GAL_CONFIG_FILE=/home/gfx/gal_config
If you don't set the environment variable, a default configuration matrix is used. The
default configuration matrix is listed below.
fillrectangle=none,xor,blend
filltriangle=none,xor,blend
filltriangle=none,xor,blend
blit=none,xor,alphachannel,coloralpha,src_colorkey,rotate180
stretchblit=none,xor,alphachannel,coloralpha,src_colorkey,rotate180
Configuration file has higher priority.
14.3 DirectFB EGL
It is possible to use EGL in DirectFB for OpenGL and OpenVG apps
For DirectFB EGL to work you need to increase the size of FBDEV
This is achieved by increasing the size in memory of /dev/fb0
That can be done by using fbset
The typical size to of the fb is the same as the one used for triple buffer
fbset -fb /dev/fb0 -g Xsize Ysize Xsize 3*Ysize BPP
for the hanstar lvds panel:
fbset -fb /dev/fb0 -g 1024 768 1024 2304 32
For more info on fbset check the fbset man pages
14.4 Setup DirectFB Acceleration
Perform the following actions in order to set up DirectFB Acceleration:
DirectFB EGL
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
120 Freescale Semiconductor, Inc.

1. Prepare a Yocto build directory and follow the setup instructions in the Freescale
Yocto Project User's Guide (IMXLXYOCTOUG) for DirectFB.
2. Setup Yocto for DirectFB in build directory source fsl-setup-release.sh -b build-dfb -
e dfb. This step adds non-x11 features for the build in build-dfb/conf/local.conf.
3. Build using $ bitbake fsl-image-dfb
To run the DFB examples run “/usr/bin/df_dok” and it will perform a series of
benchmarks and show the results, however, be aware that they require assets such as jpgs,
pngs, fonts, etc. (found in the DirectFB-examples tar file, see the DirectFB-
examples-1.6.0.tat.gz README for more details)
Chapter 14 Direct FB
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 121

Setup DirectFB Acceleration
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
122 Freescale Semiconductor, Inc.

Chapter 15
Wayland
15.1 Introduction
Wayland is a protocol for a compositor to talk to its clients as well as a C library
implementation of that protocol. The compositor can be a standalone display server
running on Linux kernel modesetting and evdev input devices, an X application, or a
Wayland client itself. The clients can be traditional applications, X servers or other
display servers.
Part of the Wayland project is also the Weston reference implementation of a Wayland
compositor. The Weston compositor is a minimal and fast compositor and is suitable for
many embedded and mobile use cases.
This chapter describes how to enable Wayland/Weston support on an i.MX 6 series
device.
15.2 Hardware Operation
i.MX 6SoloLite only supports GAL2D acceleration, and other SOCs in i.MX 6 series
support EGL3D and GAL2D acceleration.
15.3 Software Operation
This release is based on the Wayland 1.6.0 version and Weston 1.6.0 version.
15.4 Yocto Build Instructions
The instructions for Yocto build are as follows:
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 123
1. Prepare a Yocto build directory and follow the setup instructions in the Freescale
Yocto Project User's Guide (IMXLXYOCTOUG) for Wayland.
2. Set up Yocto for Wayland in the build directory:
$ source fsl-setup-release.sh -b build-wayland -e wayland
3. Build an image.
$ bitbake fsl-image-weston
15.5 Customizing Weston
The FSL-Weston includes two compositors. One is the EGL3D compositor, which is
accelerated by the GC2000 3D core. The other is GAL2D compositor accelerated by the
GC320 2D core.
Weston options can be updated in the file “/etc/init.d/weston”.
Table 15-1. Common options for Weston
Weston option Description
tty default to current tty.
device "/dev/fb0", default frame buffer , Multi display supported in
Gal2D compositor.
use-gl EGL accelerated, defaults to be “1”.
use-gal2d GAL2D accelerated, defaults to be “0”.
idle-time Idle time in seconds.
15.5.1 Multi display supported in Weston
Multi display was supported in Gal2D compositor only. Add these options to start
Weston:
weston --tty=1 --device=/dev/fb0,/dev/fb2 --use-gal2d=1 &
15.5.2 Multi buffer supported in Weston
The Weston server supports both single buffering and multi buffering. In single
buffering, the damage area is rendered to the offscreen surface and blits to front
buffer.The offscreen surface is used to avoid flickering. By default, the Weston server
starts with single buffering.
Customizing Weston
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
124 Freescale Semiconductor, Inc.

In multi buffering, instead of rendering to offscreen, the damage area is rendered to back
buffer and does the flip, but the frame rate will be restricted to the display rate. A
maximum of three buffers are supported.
Before starting the Weston server, export FB_MULTI_BUFFER to control the number of
buffers to be used.
Environment variables for single buffering:
export FB_MULTI_BUFFER=1
Environment variables for double buffering:
export FB_MULTI_BUFFER=2
15.6 Running Weston
Perform the following operations to run Weston:
1. Boot the i.MX 6 series device.
2. To run clients, the second button in the top bar will run weston-terminal, from which
you can run clients. There are a few demo clients available in the Weston build
directory, but they are all pretty simple and mostly for testing specific features in the
Wayland protocol:
• 'weston-terminal' is a simple terminal emulator, not very compliant, but works
well enough for bash.
• 'weston-flower' draws a flower on the screen, testing the frame protocol.
• 'weston-smoke' tests SHM buffer sharing.
• 'weston-image' loads the image files passed on the command line and shows
them.
Chapter 15 Wayland
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 125

Running Weston
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
126 Freescale Semiconductor, Inc.

Chapter 16
On-Chip High Definition Multimedia Interface (HDMI)
Driver
16.1 Introduction
The High Definition Multimedia Interface (HDMI) driver supports the on-chip
DesignWare HDMI hardware module, which provides the capability to transfer
uncompressed video, audio, and data using a single cable.
The HDMI driver is divided into four sub-components: A video display device driver that
integrates with the Linux Frame Buffer API, an audio driver that integrates with the
ALSA/SoC sub-system, a CEC driver, and a multi-function device (MFD) driver which
manages the shared software and hardware resources of the HDMI driver.
The HDMI driver supports the following features:
• Integration with the MXC Display Device framework (for managing display device
connections with the IPU(s))
• HDMI video output up to 1080p60 resolution
• Support for reading EDID information from an HDMI sink device
• Hotplug detection
• Support CEC
• Automated clock management to minimize power consumption
• Support for system suspend/resume
• HDMI audio playback (2, 4, 6, or 8 channels, 16bit, for sample rates 32KHz to
192KHz)
• IEC audio header information exposed through ALSA using ‘iecset’ utility
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 127
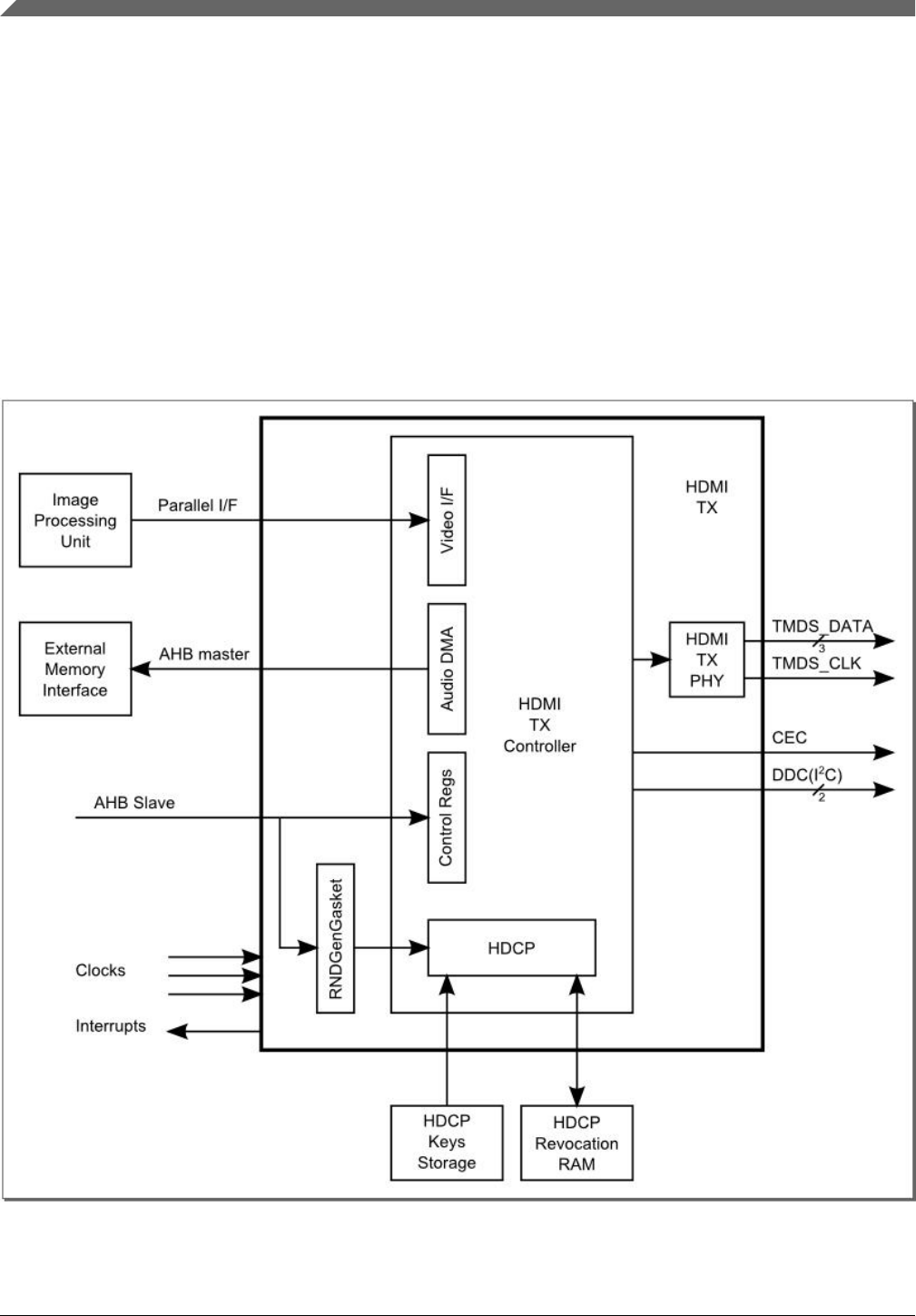
16.1.1 Hardware Operation
The HDMI module receives video data from the Image Processing Unit (IPU), audio data
from the external memory interface, and control data from the CPU, as shown in the
figure below.
Output data is transmitted via three Transition-Minimized Differential Signaling (TMDS)
channels to an HDMI sink device external to the SoC. Additionally, the HDMI carries a
VESA Data Display Channel (DDC). The DDC is an I2C interface which allows the
HDMI source to query the HDMI sink for Extended Display Identification Data (EDID).
A CEC channel provides optional high-level control functions between the source and
sink device.
Figure 16-1. HDMI HW Integration
Introduction
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
128 Freescale Semiconductor, Inc.
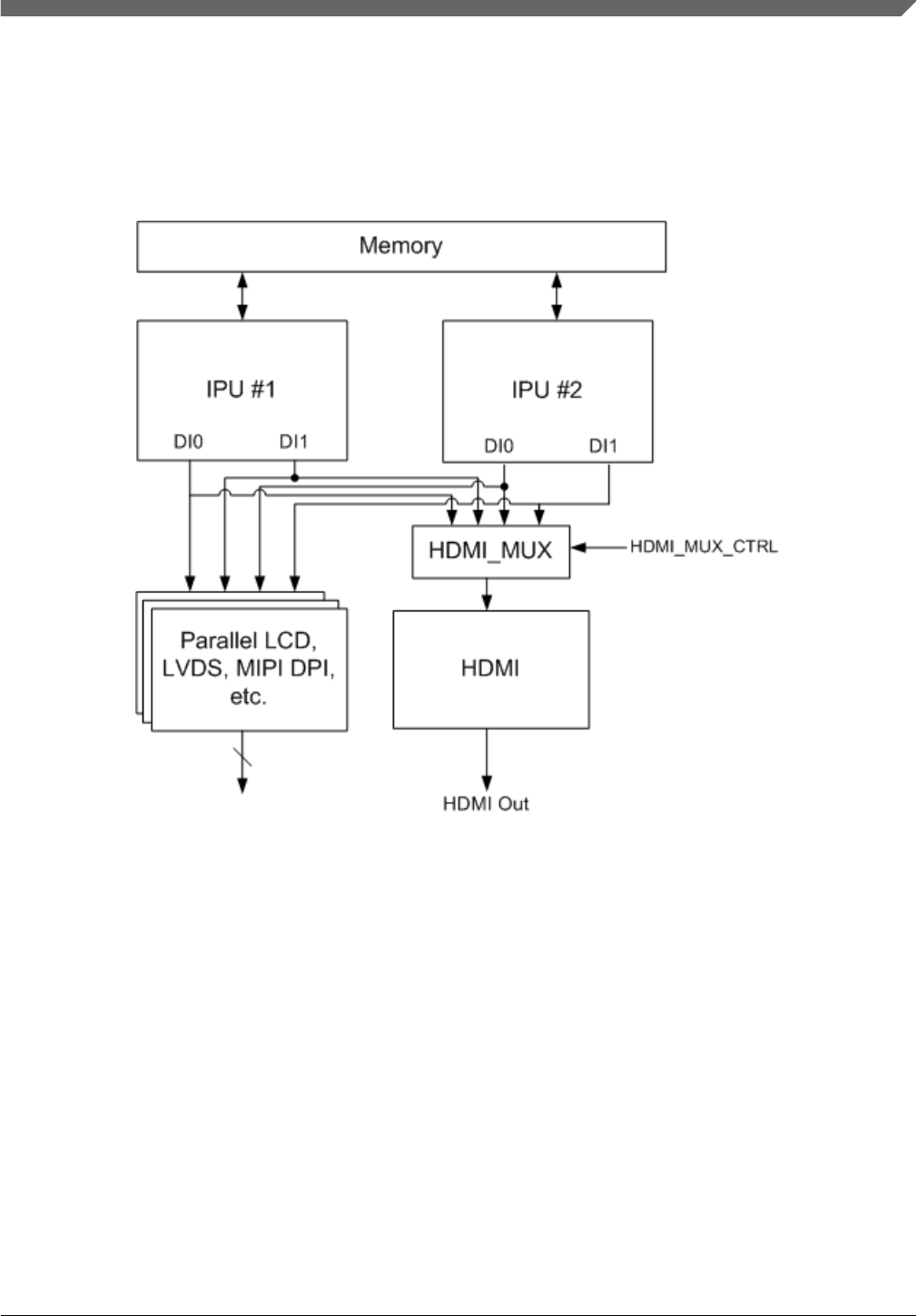
The video input to the HDMI is configurable and may come from either of the two IPU
modules in the i.MX 6 serials and from either of the two Display Interface (DI) ports of
the IPU, DI0 or DI1. This configuration is controlled through the IOMUX module using
the HDMI_MUX_CTRL register field. See the figure below for an illustration of this
interconnection.
Figure 16-2. IPU-HDMI Hardware Interconnection
16.2 Software Operation
The HDMI driver is divided into sub-components based on its two primary purposes:
providing video and audio to an HDMI sink device.
The video display driver component and audio driver component require an additional
core driver component to manage common HDMI resources, including the HDMI
registers, clocks, and IRQ.
Chapter 16 On-Chip High Definition Multimedia Interface (HDMI) Driver
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 129

16.2.1 Core
The HDMI core driver manages resources that must be shared between the HDMI audio
and video drivers. The HDMI audio and video drivers depend on the HDMI core driver,
and the HDMI core driver should always be loaded and initialized before audio and
video. The core driver serves the following functions:
• Map the HDMI register region and provide APIs for reading and writing to HDMI
registers
• Perform one-time initialization of key HDMI registers
• Initialize the HDMI IRQ and provide shared APIs for enabling and disabling the IRQ
• Provide a means for sharing information between the audio and video drivers (e.g.,
the HDMI pixel clock)
• Provide a means for synchronization between HDMI video and HDMI audio while
blank/unbalnk, plug in/plug out events happen. HDMI audio can't start work while
HDMI cable is in the state of plug out or HDMI is in state of blank. Every time
HDMI audio starts a playback, HDMI audio driver should register its PCM into core
driver and unregister PCM when the playback is finished. Once HDMI video blank
or cable plug out event happens, core driver would pause HDMI audio DMA
controller if its PCM is registered. When HDMI is unblanked or cable plug in event
happens, core driver would firstly check if the cable is in the state of plug in, the
video state is unblank and the PCM is registered. If items listed above are all yes,
core driver would restart HDMI audio DMA.
16.2.2 Video
The following diagram illustrates both the interconnection between the various HDMI
sub-drivers and the interconnection between the HDMI video driver and the Linux Frame
Buffer subsystem.
Software Operation
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
130 Freescale Semiconductor, Inc.

Figure 16-3. HDMI Video SW Architecture
The i.MX 6Dual/6Quad/6Solo/6DualLite/6SoloLite supports many different types of
display output devices (e.g., LVDS, LCD, HDMI, and MIPI displays) connected to and
driven by the IPU modules. The MXC Display Driver API provides a system for
registering display devices and configuring how they should be connected to each of the
IPU DIs. The HDMI driver registers itself as a display device using this API in order to
receive the correct video input from the IPU.
16.2.3 Display Device Registration and Initialization
The following sequence of software activities occurs in the OS boot flow to connect the
HDMI display device to the IPU FB driver through the MXC Display Driver system:
1. During the HDMI video driver initialization, mxc_dispdrv_register() is called to
register the HDMI module as a display device and to set the mxc_hdmi_disp_init()
function as the display device init callback.
Chapter 16 On-Chip High Definition Multimedia Interface (HDMI) Driver
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 131

2. When the IPU FB driver is initialized, mxc_dispdrv_init() is called. This results in an
init call to all registered display devices.
3. The mxc_hdmi_disp_init() callback is executed. The HDMI driver receives a structure
from the IPU FB driver containing frame buffer information (fbi). The HDMI driver
also provides return information about which IPU and DI to select and the preferred
output format for video data from the IPU. The HDMI driver registers itself to
receive notifications of FB driver events. Finally, the HDMI driver can complete its
initialization by configuring the HDMI to receive a hotplug interrupt.
NOTE
All display device drivers must be initialized before the IPU FB
driver, in order for all display devices to be registered as MXC
Display Driver devices before the IPU FB driver can initialize
them.
16.2.4 Hotplug Handling and Video Mode Changes
Once the connection between the IPU and the HDMI has been established through the
MXC Display Driver interface, the HDMI video driver waits for a hotplug interrupt,
indicating that a valid HDMI sink device is connected and ready to receive HDMI video
data. Subsequent communications between the HDMI and IPU FB are conducted through
the Linux Frame Buffer APIs. The following list demonstrates the software flow to
recognize an HDMI sink device and configure the IPU FB driver to drive video output to
it:
1. The HDMI video driver receives a hotplug interrupt and reads the EDID from the
HDMI sink device, constructing a list of video modes from the retrieved EDID
information. Using either the video mode string from the Linux kernel command line
(for the initial connection) or the most recent video mode (for a later HDMI cable
connection), the HDMI driver selects a video mode from the mode list that is the
closest match.
2. The HDMI video driver calls fb_set_var() to change the video mode in the IPU FB
driver. The IPU FB driver completes its reconfiguration for the new mode.
3. As a result of calling fb_set_var(), an FB notification is sent back to the HDMI driver
indicating that an FB_EVENT_MODE_CHANGE has occurred. The HDMI driver
configures the HDMI hardware for the new video mode..
4. In the final step, the HDMI module is enabled to generate output to the HDMI sink
device.
Software Operation
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
132 Freescale Semiconductor, Inc.

16.2.5 Audio
The HDMI Tx audio driver uses the ALSA SoC framework, so it is broken into several
files, as is listed in Table 16-4. Most of the code is in the platform DMA driver
(sound/soc/imx/imx-hdmi-dma.c). The machine driver (sound/soc/fsl/imx-hdmi.c) exists
to allocate the SoC audio device and link all the SoC components together. The DAI
driver (sound/soc/fsl/fsl-hdmi-dai.c) mostly exists because SoC wants there to be a DAI
driver; it gets the platform data, but doesn’t do anything else.
The HDMI codec driver does most of the initialization of the HDMI audio sampler. Note
that the HDMI Tx block only implements the AHB DMA audio and not the other audio
interfaces (SSI, S/PDIF, etc.). The other main function of the HDMI codec driver is to set
up a struct of the IEC header information which needs to go into the audio stream. This
struct is hooked into the ALSA layer, so the IEC settings will be accessible in userspace
using the ‘iecset’ utility.
The platform DMA driver handles the HDMI Tx block’s DMA engine. Note that HDMI
audio uses the HDMI block’s DMA as well as SDMA. SDMA is used to help implement
the multi-buffer mechanism. The HDMI Tx block does not automatically merge the IEC
audio header information into the audio stream, so the platform DMA driver does this in
its hdmi_dma_copy()(for no memory map use) or hdmi_dma_mmap_copy()(for memory
map mode use) function before the DMA sends the buffers out. Also note that, due to
IEC audio header adding operation, it is possible that user space application is not able to
get enough CPU periods to feed data into HDMI audio driver in time, especially when
system loading is high. In this situation, some spark noise would be heard. In different
audio framework(ALSA LIB, or PULSE AUDIO), different log about this noise may be
printed. For example, in ALSA LIB, logs like "underrung!!! at least * ms is lost" are
printed.
HDMI audio playback depends on HDMI pixel clock. So while in the state of HDMI
blank and cable plug out, HDMI audio would be stopped or can't be played. See detailed
information in software_operation_core.
Also note that, because HDMI audio driver need to add IEC header, driver need to know
how many data has application already write into HDMI audio driver. If application is
not able to tell how many data is wrote (for example, DMIX plugin in ALSA LIB),
HDMI audio driver is not able to work properly. There would be no sound heard.
The HDMI audio support features below:
• Playback sample rate
• 32k, 44.1k, 48k, 88.2k, 96k, 176.4k, 192k
• capability of HDMI sink
• Playback Channels:
Chapter 16 On-Chip High Definition Multimedia Interface (HDMI) Driver
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 133
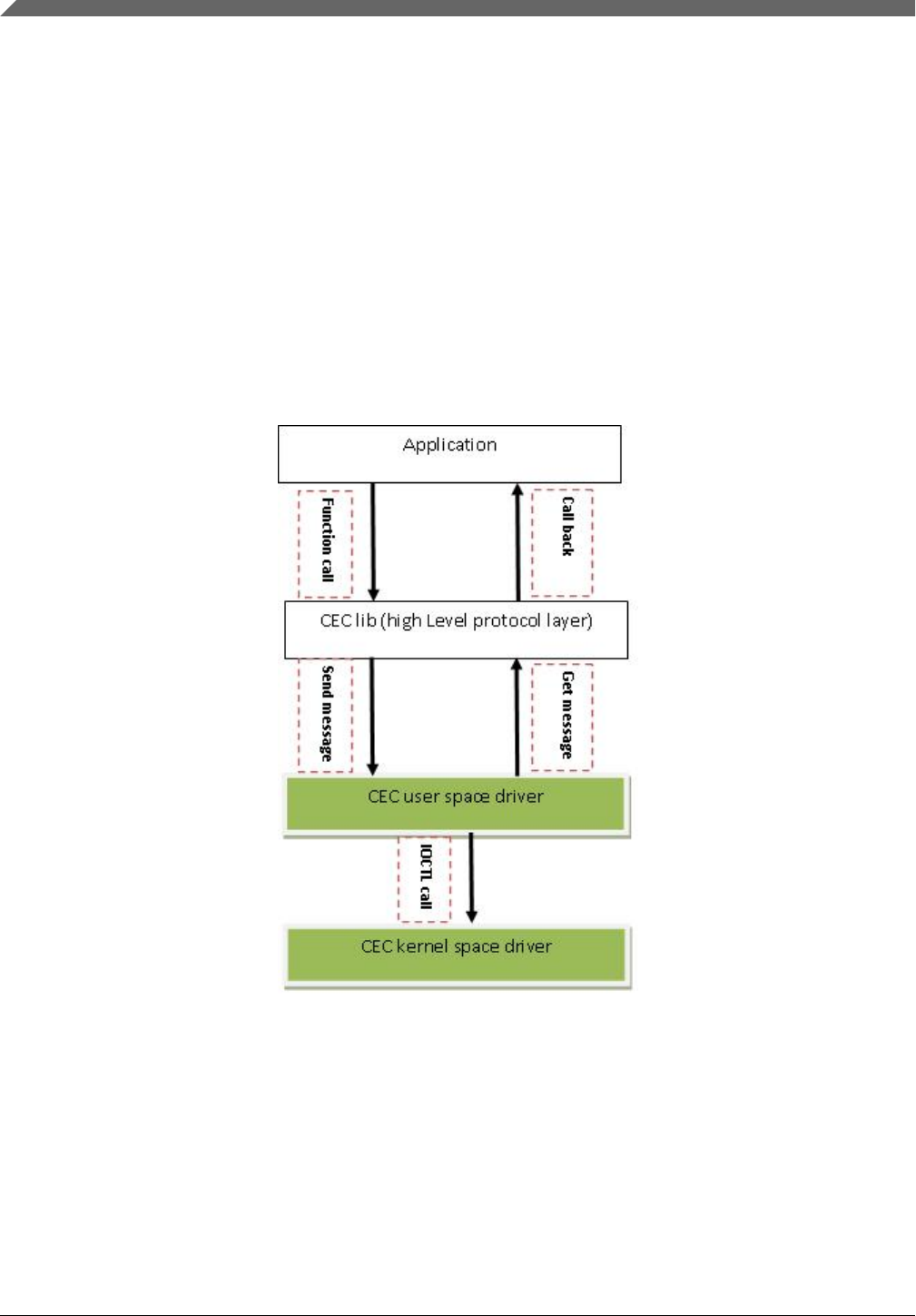
• 2, 4, 6, 8
• capability of HDMI sink
• Playback audio formats:
• SNDRV_PCM_FMTBIT_S16_LE
16.2.6 CEC
HDMI CEC is a protocol that provides high-level control functions between all of the
various audiovisual products is a user’s environment. The HDMI CEC driver implements
software part of HDMI CEC low Level protocol. It includes getting Logical address,
CEC message sending and receiving, error handle, message re-transmitting, and etc.
Figure 16-4. HDMI CEC SW Architecture
16.3 Source Code Structure
The bulk of the source code for the HDMI driver is divided amongst the three software
components that comprise the driver: the HDMI core driver, the HDMI display driver,
and the HDMI audio driver.
Source Code Structure
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
134 Freescale Semiconductor, Inc.
Additional platform-specific source code files provide the code for declaring and
registering these HDMI drivers.
The source code for the HDMI core driver is available in the <Yocto_BuildDir>/linux/
drivers/mfd/ directory.
Table 16-1. HDMI Core Driver File List
File Description
mxc-hdmi-core.c HDMI core driver implemention
A public header for the HDMI core driver is available in the <Yocto_BuildDir>/linux/
include/linux/mfd/ directory.
Table 16-2. HDMI Core Display Driver Public Header File List
File Description
mxc-hdmi-core.h HDMI core driver header file
The source code for the HDMI display driver is available in the driver/video/mxc
directory.
Table 16-3. HDMI Display Driver File List
File Description
mxc_hdmi.c HDMI display driver implemention
The source code for the HDMI audio driver is available in the <Yocto_BuildDir>/linux/
drivers and sound/soc/ directory. Although the HDMI is one hardware block, the audio
driver is divided into four c files corresponding to the ALSA SoC layers:
Table 16-4. HDMI Audio Driver File List
File Description
fsl/fsl_hdmi.c HDMI Audio SoC DAI driver implementation
fsl/imx-hdmi-dma.c HDMI Audio SoC platform DMA driver implementation
fsl/imx-hdmi.c HDMI Audio SoC machine driver implementation
The source code for the HDMI CEC driver is available in the <Yocto_BuildDir>/linux/
drivers/mxc/ directory.
Table 16-5. HDMI CEC Driver File List
File Description
drivers/mxc/hdmi-cec.c HDMI CEC driver implemention
Chapter 16 On-Chip High Definition Multimedia Interface (HDMI) Driver
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 135
The source code for the HDMI lib is available in the <Yocto_BuildDir>/imx-lib/hdmi-
cec/ directory.
Table 16-6. HDMI CEC lib File List
File Description
hdmi-cec/mxc_hdmi-cec.c HDMI CEC lib implemention
hdmi-cec/hdmi-cec.h HDMI CEC lib header file
hdmi-cec/android.mk HDMI CEC lib make file
The following platform-level source code files provide structures and functions for
registering the HDMI drivers. These files can be found in the <Yocto_BuildDir>/linux/
arch/arm/plat-mxc/ directory.
Table 16-7. HDMI Platform File List
File Description
devices/platform-mxc-hdmi-core.c HDMI core driver platform device code
devices/platform-mxc_hdmi.c HDMI display driver platform device code
devices/platform-imx-hdmi-soc.c HDMI audio driver platform device code
devices/platform-imx-hdmi-soc-dai.c HDMI audio driver platform device code
include/mach/mxc_hdmi.h HDMI register defines
16.3.1 Linux Menu Configuration Options
There are three main Linux kernel configuration options used to select and include HDMI
driver functionality in the Linux OS image.
The CONFIG_FB_MXC_HDMI option provides support for the HDMI video driver, and
can be selected in menuconfig at the following menu location:
Device Drivers > Graphics support > MXC HDMI driver support
HDMI video support is dependent on support for the Synchronous Panel Framebuffer and
also on the inclusion of IPUv3 support.
The CONFIG_SND_SOC_IMX_HDMI option provides support for HDMI audio through
the ALSA/SoC subsystem, and can be found in menuconfig at the following location:
Device Drivers > Sound card support > Advanced Linux Sound Architecture > ALSA for
SoC audio support > SoC Audio support for IMX - HDMI
Source Code Structure
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
136 Freescale Semiconductor, Inc.

Selecting either of the previous two configuration options will cause the MXC HDMI
Core configuration option, CONFIG_MFD_MXC_HDMI, to be selected. This option can
also be found in the menuconfig here:
Device Drivers > Multifunction device drivers > MXC HDMI Core
The CONFIG_MXC_HDMI_CEC option provides support for the HDMI CEC driver,
and can be selected in menuconfig at the following menu location:
Device Drivers > MXC support drivers > MXC HDMI CEC (Consumer Electronic
Control) support
16.4 Unit Test
The HDMI video and audio drivers each have their own set of tests.
The HDMI video driver does not lend itself well to automated testing, so a number of
manual tests are required to verify the correct functionality. For audio driver testing, the
aplay audio file player and iecset utility provide confirmation of the the driver's proper
integration into the ALSA framework. The following two section look at unit testing for
both the HDMI audio and video drivers.
16.4.1 Video
The following set of manual tests can be used to verify the proper operation of the HDMI
video driver:
1. Linux kernel command line-based tests: The initial mode used to display HDMI
video can be specified through the Linux kernel command line boot parameters. Try
several different valid display resolutions through the kernel parameters, re-booting
the system each time and verifying that the desired resolution is displayed on the
connected HDMI display.
2. Hotplug testing: Connect and disconnect the HDMI cable several times, from either
the end attached to the i.MX board, or the end attached to the HDMI sink device.
Each time the cable is reconnected, the driver should re-determine the appropriate
video mode, based on the modes read via EDID from the HDMI sink, and display
that mode on the sink device.
3. HDMI output device testing: Test by dynamically switching the HDMI sink device.
The HDMI driver should be able to detect the valid video modes for each different
HDMI sink device and provide video to that display that is closest to the most recent
video mode configured in the HDMI driver.
Chapter 16 On-Chip High Definition Multimedia Interface (HDMI) Driver
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 137

16.4.2 Audio
The following sequence of tests can verify the correct operation of the HDMI audio
driver:
1. Ensure that an HDMI cable is connected between the i.MX board and the HDMI sink
device, and that the HDMI video image is being properly displayed on the device.
2. Use 'aplay -l' (that's a single dash and a lower-case L) to list out the audio playback
cards and determine which the card number is. This is different on our various
boards.
3. For example, if the HDMI ends up being card 2, use this command line to play out a
pcm audio file "file.wav":
$ aplay -Dplughw:2,0 file.wav
4. Use 'iecset' to list out the IEC information about the device. You will need to specify
card number like:
$ iecset -c2
NOTE
Note that HDMI audio is dependent on a reasonable pixel clock
rate being established. If this is not the case, error messages
indicating “pixel clock not supported” will appear. This is
because there is no clock regenerator cts value that could be
calculated for the current pixel clock.
16.4.3 CEC
The following test can be used to simple verify HDMI CEC function:
$ /unit_test/mxc_cec_test
Bootup device and connect HDMI sink to board, then run the above command, the HDMI
CEC will send Poweroff command to HDMI sink.
16.4.4 HDCP
The following test can be used to verify the HDMI HDCP function. You need to make
sure that the HDMI HDCP function is supported by the i.MX 6 part.
Use HDCP, specifically DTB imx6q-sabresd-hdcp.dtb, and boot up the SABRE-SD
board.
Unit Test
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
138 Freescale Semiconductor, Inc.

Run the following commands:
$ /unit_tests/mxc_hdcp_app.out &
$ echo 1 > /sys/devices/soc0/soc.X/20e0000.hdmi_video/hdcp_enable
If the HDCP function is not support by the i.MX 6 part or TV, the screen displays the
RED picture.
Chapter 16 On-Chip High Definition Multimedia Interface (HDMI) Driver
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 139

Unit Test
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
140 Freescale Semiconductor, Inc.
Chapter 17
External High-Definition Multimedia Interface (HDMI)
for i.MX 6SoloLite
17.1 Introduction
The High Definition Multimedia Interface (HDMI) driver supports the external SiI9022
HDMI hardware module, which provides the capability to transfer uncompressed video,
audio, and data using a single cable.
The HDMI driver is divided into two sub-components: a video display device driver that
integrates with the Linux Frame Buffer API and an S/PDIF audio driver that transfers S/
PDIF audio data to SiI9022 HDMI hardware module.
The HDMI driver is only for demo application and supports the following features:
• HDMI video output supports 1080p60 and 720p60 resolutions.
• Support for reading EDID information from an HDMI sink device for video.
• Hotplug detection
• HDMI audio playback (2 channels, 16/24 bit, 44.1 KHz sample rate)
17.2 Software Operation
The HDMI driver is divided into sub-components based on its two primary purposes:
providing video and audio to an HDMI sink device.
The audio output depends on video display.
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 141
17.2.1 Hotplug Handling and Video Mode Changes
Once the connection between the ELCDIF and the HDMI has been established through
the MXC Display Driver interface, the HDMI video driver waits for a hotplug interrupt
indicating that a valid HDMI sink device is connected and ready to receive HDMI video
data. Subsequent communications between the HDMI and LECDIF FB are conducted
through the Linux Frame Buffer APIs. The following list demonstrates the software flow
to recognize a HDMI sink device and configure the ELCDIF FB driver to drive video
output:
1. The HDMI video driver receives a hotplug interrupt and reads the EDID from the
HDMI sink device constructing a list of video modes from the retrieved EDID
information. Using either the video mode string from the Linux kernel command line
(for the initial connection) or the most recent video mode (for a later HDMI cable
connection), the HDMI driver selects a video mode from the mode list that is the
closest match.
2. The HDMI video driver calls fb_set_var() to change the video mode in the ELCDIF
FB driver. The ELCDIF FB driver completes its reconfiguration for the new mode.
3. As a result of calling fb_set_var(), a FB notification is sent back to the HDMI driver
indicating that an FB_EVENT_MODE_CHANGE has occurred. The HDMI driver
configures the HDMI hardware for the new video mode.
4. Finally, the HDMI module is enabled to generate output to the HDMI sink device.
17.3 Source Code Structure
The bulk of the source code for the HDMI driver is divided amongst the three software
components that comprise the driver: the HDMI display driver, and the HDMI audio
driver.
The source code for the HDMI display driver is available in the <Yocto_BuildDir>/rpm/
BUILD/linux/drivers/video/mxc directory.
Table 17-1. HDMI Display Driver File List
File Description
mxcfb_sii902x_elcdif.c HDMI display driver implementation.
The source code for the HDMI audio driver is available in the <Yocto_BuildDir>/rpm/
BUILD/linux/drivers and sound/soc/ director. HDMI Audio data source comes from S/
PDIF TX.
Source Code Structure
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
142 Freescale Semiconductor, Inc.
Table 17-2. HDMI Audio Driver File List
File Description
sound/codecs/mxc_spdif.c S/PDIF Audio SoC CODEC driver implementation.
sound/soc/imx/imx-spdif.c S/PDIF Audio SoC Machine driver implementation.
sound/soc/imx/imx-spdif-dai.c S/PDIF Audio SoC DAI driver implementation.
sound/soc/imx/imx-pcm-dma-mx2.c S/PDIF Audio SoC platform layer driver implementation.
17.3.1 Linux Menu Configuration Options
There are two main Linux kernel configuration options used to select and include HDMI
driver functionality in the Linux OS image.
The CONFIG_FB_MXC_SII902X_ELCDIFI option provides support for the Sii902x
HDMI video driver and can be selected in menuconfig at the following menu location:
• Device Drivers > Graphics support > MXC Framebuffer support.
HDMI video support is dependent on MXC ELCDIF Framebuffer.
The CONFIG_SND_MXC_SPDIF option provides support for the HDMI Audio driver
and can be selected in menuconfig at the following menu location:
• Device Drivers > Sound card support > Advanced Linux Sound Architecture >
ALSA for SoC audio support > SoC Audio for Freescale i.MX CPUs > SoC Audio
support for IMX - S/PDIF
17.4 Unit Test
The HDMI video and audio drivers each have their own set of tests.
The preparation for HDMI test:
• Insert the HDMI daughter card into J13 on the i.MX 6SoloLite EVK board.
• Insert the HDMI cable into the HDMI slots of both HDMI daughter board and the
HDMI sink device.
• Power on the HDMI sink device.
Chapter 17 External High-Definition Multimedia Interface (HDMI) for i.MX 6SoloLite
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 143

17.4.1 Video
The following set of manual tests can be used to verify the proper operation of the HDMI
video driver:
1. Hotplug testing: Connect and disconnect the HDMI cable several times, from either
the end attached to the i.MX board, or the end attached to the HDMI sink device.
Each time the cable is reconnected, the driver should re-determine the appropriate
video mode based on the modes read via EDID from the HDMI sink and display that
mode on the sink device.
2. HDMI output device testing: Test by dynamically switching the HDMI sink device.
The HDMI driver should be able to detect the valid video modes for each different
HDMI sink device and provide video to that display that is closest to the most recent
video mode configured in the HDMI driver.
17.4.2 Audio
The following sequence of tests verifies the correct operation of the HDMI audio driver:
1. Ensure that an HDMI cable is connected between the HDMI daughter board and the
HDMI sink device, and that the HDMI video image is being properly displayed on
the device.
2. Use this command line to play out a pcm audio file "file.wav" to HDMI sink device:
$ aplay -Dplughw:1,0 file.wav
Unit Test
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
144 Freescale Semiconductor, Inc.

Chapter 18
X Windows Acceleration
18.1 Introduction
X-Windows System (aka X11 or X) is a portable, client-server based, graphics display
system.
X-Windows system can run with a default frame buffer driver which handles all drawing
operations to the main display. Since there is a 2D GPU (graphics processing unit)
available, then some drawing operations can be accelerated. High level X operations may
get decomposed into low level drawing operations which are accelerated for X-Windows
System.
18.2 Hardware Operation
X-Windows System acceleration on i.MX 6 utilizes the Vivante GC320 2D GPU.
Acceleration is also dependent on the frame buffer memory.
18.3 Software Operation
X-Windows acceleration is supported for X.org X Server version 1.11.x and later
versions supporting the EXA interface version 2.5.
The following list summarizes the types of operations that are accelerated for X11. All
operations involve frame buffer memory which may be on screen or off screen:
• Solid fill of a rectangle.
• Upload image in system memory into video memory.
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 145
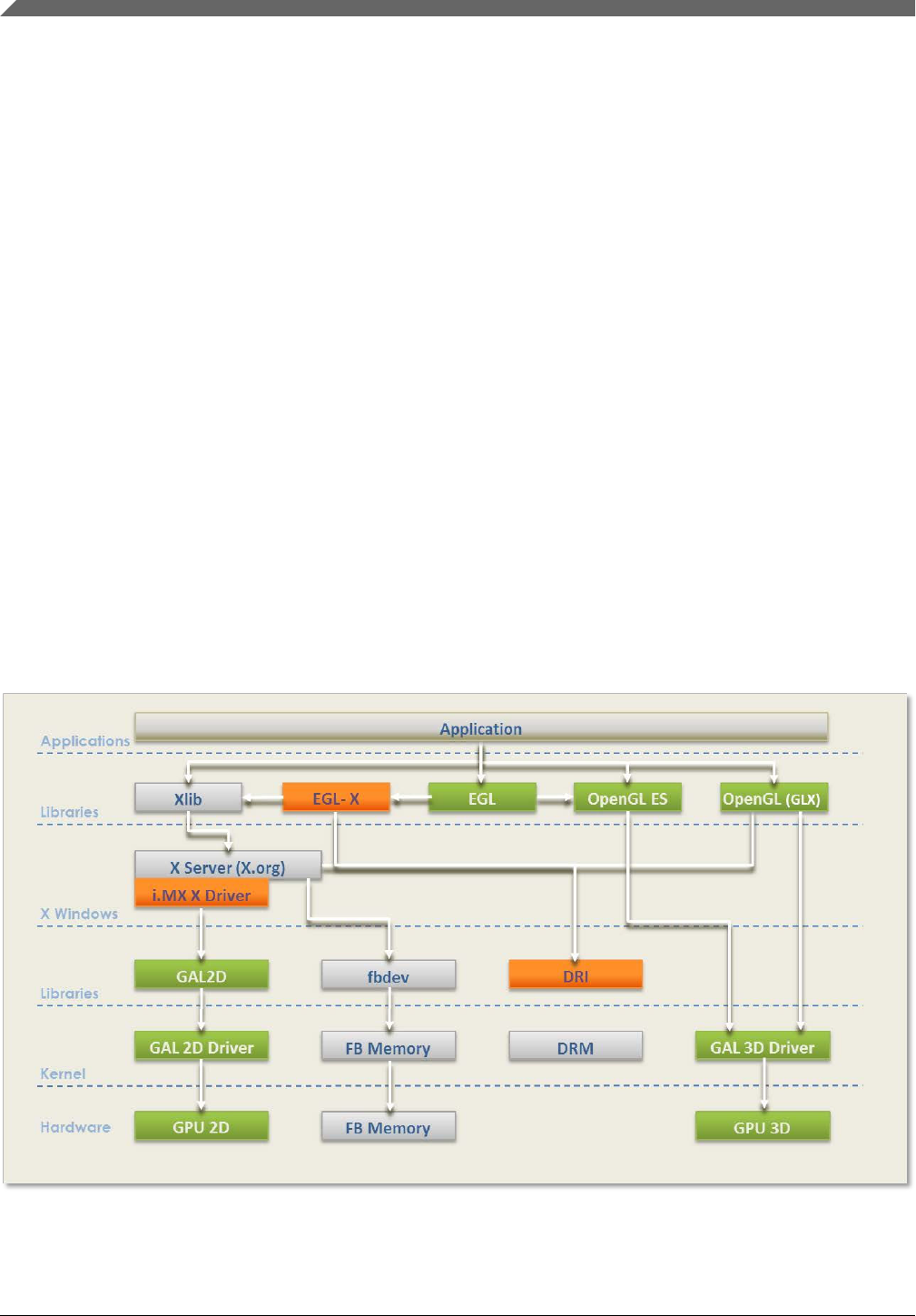
• Copy of a rectangle with same pixel format with possible source-target rectangle
overlap.
• Copy of a rectangle supporting most XRender compositing operations with these
options:
• Pixel format conversion.
• Repeating pattern source.
• Porter-Duff blending of source with target.
• Source alpha masking.
The following list includes additional features supported as part of the X-Windows
acceleration:
• Allocation of X pixmaps directly in frame buffer memory.
• EGL swap buffers where the EGL window surface is an X-window.
• X-window can be composited into an X pixmap which can be used directly as any
EGL surface.
18.3.1 X-Windows Acceleration Architecture
The following block diagram shows the components that are involved in the acceleration
of X-Windows System:
Figure 18-1. X Driver Architecture
Software Operation
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
146 Freescale Semiconductor, Inc.

The components shown in green are those provided as part of the Vivante 2D/3D GPU
driver support which includes OpenGL/ES and EGL, though some i.MX 6 processors,
such as i.MX 6SoloLite do not contain 3D HW module. The components shown in light
gray are the standard components in the X-Windows System without acceleration. The
components shown in orange are those added to support X-Windows System acceleration
and briefly described here.
The i.MX X Driver library module (vivante-drv.so) is loaded by the X server and
contains the high level implementation of the X-Windows acceleration interface for i.MX
platforms containing the GC320 2D GPU core. The entire linearly contiguous frame
buffer memory in /dev/fb0 is used for allocating pixmaps for X both on screen and off
screen. The driver supports a custom X extension which allows X clients to query the
GPU address of any X pixmap stored in frame buffer memory.
The libGAL.so library module (libGAL.so) contains the register level programming
interface to the GC320 GPU module. This includes the storing of register programming
commands into packets which can be streamed to the device. The functions in the
libGAL.so library are called by the i.MX X Driver code.
The EGL-X library module (libEGL.so) contains the X-Windows implementation of the
low level EGL platform-specific support functions. This allows X-window and X pixmap
objects to be used as EGL window and pixmap surfaces. The EGL-X library uses Xlib
function calls in its implementation along with the i.MX X Driver module's X extension
for querying the GPU address of X pixmaps stored in frame buffer memory.
18.3.2 i.MX 6 Driver for X-Windows System
The i.MX X Driver, referred to as vivante-drv.so, implements the EXA interface of the X
server in providing acceleration.
The Vivante X Driver, referred to as vivante-drv.so, implements the EXA interface of the
X server to provide acceleration.
The following list describes details particular to this implementation:
• The implementation builds upon the source from the fbdev frame buffer driver for X
so that it can be the fallback when the acceleration is disabled.
• The implementation is based on X server EXA version 2.5.0.
• The EXA solid fill operation is accelerated, except for source/target drawables
containing less than 300x300 pixels in which case fallback is to software rendering.
• The EXA copy operation is accelerated, except for source/target drawables
containing less than 400x120 pixels in which case fallback is to software rendering.
Chapter 18 X Windows Acceleration
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 147

• EXA putimage (upload into video memory) is accelerated, except for source
drawables containing less than 400x400 pixels in which case fallback is to software
rendering.For EXA solid fill and copy operations, only solid plane masks and only
GXcopy raster-op operations are accelerated.
• For EXA copy operation, the raster-op operations (GXandInverted, GXnor,
GXorReverse, GXorInverted, and GXnand) are not accelerated.
• EXA composite allows for many options and combinations of source/mask/target for
rendering.
• Most of the (commonly used) EXA composite operations are accelerated.
The following types of EXA composite operations are accelerated:
• Composite operations for source/target drawables containing at least 640 pixels. If
less than 640 pixels, the composite path falls to software.
• Simple source composite operations are used when source/target drawables contain
more than 200x200 pixels (operations with mask not supported).
• Constant source (with or without alpha mask) composite with target.
• Repeating pattern source (with or without alpha mask) composite with target.
• Only these blending functions: SOURCE, OVER, IN, IN-REVERSE, OUT-
REVERSE, and ADD (some of these are needed to support component-alpha
blending which is accelerate).
• In general, the following types of (less commonly used) EXA composite operations
are not accelerated:
• Transformed (that is, scaled, rotated) sources and masks
• Gradient sources
• Alpha masks with repeating patterns
The implementation handles all pixmap allocation for X through the EXA callback
interface. A first attempt is made to allocate the memory where it can be accessed by a
physical GPU address. This attempt can fail if there is insufficient GPU accessible
memory remaining, but it can also fail when the bits per pixel being requested for the
pixmap is less than eight (8). If the attempt to allocate from the GPU accessible memory
fails, then the memory is allocated from the system. If the pixmap memory is allocated
from the system, then this pixmap cannot be involved in a GPU accelerated option. The
number of pitch bytes used to access the pixmap memory may be different depending on
whether it was allocated from GPU accessible memory or from the system. Once the
memory for an X pixmap has been allocated, whether it is from GPU accessible memory
or from the system, the pixmap is locked and can never migrate to the other type of
memory. Pixmap migration from GPU accessible memory to system memory is not
necessary since a system virtual address is always available for GPU accessible memory.
Pixmap migration from system memory to GPU accessible memory is not currently
implemented, but would only help in situations where there was insufficient GPU
accessible memory at initial allocation but more memory becomes available (through de-
Software Operation
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
148 Freescale Semiconductor, Inc.

allocation) at a later time. The GPU accessible memory pitch (horizontal) alignment for
Vivante 2D GPUs is 8 pixels. Because the memory can be allocated from GPU accessible
memory, these pixels could be used in EGL for OpenGL/ES drawing operations. All of
the memory allocated for /dev/fb0 is made available to an internal linear offscreen
memory manager based on the one used in EXA. The portion of this memory beyond the
screen memory is available for allocation of X pixmap, where this memory area is GPU
accessible. The amount of memory allocated to /dev/fb0 needs to be several MB more
than the amount needed for the screen. The actual amount needed depends on the number
of X-Windows and pixmaps used, the possible usage of X pixmaps as textures, and
whether X-Windows are using the XComposite extension. An X extension, i.e., VIVEXT
shown in Fig. 1, is provided so that X clients can query the physical GPU address
associated with an X pixmap, if that X pixmap was allocated in the GPU accessible
memory.
18.3.3 i.MX 6 Direct Rendering Infrastructure (DRI) for X-
Windows System
The Direct Rendering Infrastructure, also known as the DRI, is a framework for allowing
direct access to graphics hardware under the X Window System in a safe and efficient
manner. It includes changes to the X server, to several client libraries, and to the kernel
(DRM, Direct Rendering Manager). The most important activity for the DRI is to create
fast OpenGL and OpenGL ES implementations that render to framebuffer memory
directly. Without DRI, the OpenGL driver has to depend on X server for final rendering
(indirect rendering), which degrades the overall performance significantly.
The components of Vivante’s DRI OpenGL implementation include:
• The Direct Rendering Manager (DRM) is a kernel module that provides APIs to
userland to synchronize access to hardware and to manage different classes of video
memory buffers. Vivante’s DRI implementation uses selected DRM APIs for
opening/closing DRI device, and locking/unlocking FB. Most other buffer
management and DMA management functions are handled by Vivante’s specific
kernel module: galcore.ko.
• The EXA driver is a DRI-enabled DDX 2D driver which initializes the DRM when X
server starts. As all X Window pixmap buffers are allocated by the EXA driver from
GPU memory, the GPU can render directly into these buffers if the buffer
information is passed from the X server process to the X client processes (GL or
GLES applications) properly.
• The Vivante-specific X extension “vivext” passes buffer information from X server
to X clients. This Vivante X extension includes the following three interfaces:
Chapter 18 X Windows Acceleration
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 149

• DrawableFlush, which enables X clients to notify X server to flush the GPU
cache for a drawable surface.
• DrawableInfo, which enables X clients to query the drawable information
(position, size, physical address, stride, cliplist, etc.) from the X server.
• PixmapPhysAddr, which enables X clients to query the physical address and
stride of a pixmap buffer from X server.
The integration of GL/GLES application windows with Ubuntu Unity2D desktop is
achieved by following steps:
• GL/GLES applications render a frame into the pixmap buffers that are allocated in
the EXA driver.
• In the SwapBuffers implementation, the driver notifies X server that the pixmap
buffer region is damaged through Xdamage and Xfixes APIs.
• Then the X server will present the latest pixmap buffer to the Unity2D desktop while
maintaining the proper window overlap characteristics relative to the other windows
on the desktop.
On a compositing X desktop, such as Ubuntu Unity 2D, GLES/GL applications always
render into the full rectangular back buffer of a window. There is no window clipping
required. So the Vivante DRI implementation can take advantage of the GPU’s resolve
function and render into the window back buffer directly.
On a legacy X window desktop, such as Gnome, Xwin, etc., GLES/GL applications have
to render onto the frame buffer surface directly. Thus, the DRI driver uses the
DrawableInfo interface in the VIVEXT extension to obtain the cliplist of the window,
then copies the sub-regions of the render target to the frame buffer according to the
cliplist. This will ensure that the GLES/GL windows overlap with other windows on the
desktop properly. However, the copying of the render target sub-regions to the frame
buffer has to be done by the CPU as the sub-regions’ starting address and alignment may
not meet GPU copy requirements.
The Vivante DRI implementation can detect the type of X window manager (compositing
desktop manager or legacy desktop manager) at run-time, and use appropriate DRI
rendering paths for GLES/GL applications.
18.3.4 EGL- X Library
The EGL-X library implements the low level EGL interface when used in X Window
System. The following list describes details particular to this implementation:
• The eglDisplay native display type is “Display*” in X.
Software Operation
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
150 Freescale Semiconductor, Inc.

• The eglWindowSurfacenative window surface type is “Window” in X.
• The eglPixmapSurface native pixmap surface type is “Pixmap” in X.
When an eglWindowSurface is created, the back buffers used for double-buffering can
have different representations from the window surface (based on the selected
eglConfig). An attempt is made to create each back buffer using the representation which
provides the most efficient blit of the back buffer contents to the window surface when
eglSwapBuffers is called.
The back buffer is allocated by creating an X pixmap of the necessary size. Use the X
extension for the Vivante X Driver module to query the physical frame buffer address for
this X pixmap if it was allocated in the offscreen frame buffer memory.
18.3.5 xorg.conf for i.MX 6
The /etc/X11/xorg.conf file must be properly configured to use the i.MX 6 X Driver.
The /etc/X11/xorg.conf file must be properly configured to use the Vivante X Driver.
This configuration appears in a “Device” section of the file which contains some required
entries and some entries that are optional. The following example shows a preferred
configuration for using the Vivante X Driver:
Section "ServerLayout"
Identifier "Default Layout"
Screen "Default Screen"
EndSection
Section "Module"
Load "dbe"
Load "extmod"
Load "freetype"
Load "glx"
Load "dri"
EndSection
Section "InputDevice"
Identifier "Generic Keyboard"
Driver "kbd"
Option "XkbLayout" "us"
Option "XkbModel" "pc105"
Option "XkbRules" "xorg"
EndSection
Section "InputDevice"
Identifier "Configured Mouse"
Driver "mouse"
Option "CorePointer"
EndSection
Section "Device"
Identifier "Your Accelerated Framebuffer Device"
Driver "vivante"
Option "fbdev" "/dev/fb0"
Option "vivante_fbdev" "/dev/fb0"
Chapter 18 X Windows Acceleration
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 151

Option "HWcursor" "false"
EndSection
Section "Monitor"
Identifier "Configured Monitor"
EndSection
Section "Screen"
Identifier "Default Screen"
Monitor "Configured Monitor"
Device "Your Accelerated Framebuffer Device"
DefaultDepth 24
EndSection
Section "DRI"
Mode 0666
EndSection
Mandatory Strings
Some important entries recognized by the Vivante X Driver are described as follows.
Device Identifier and Screen Device String
The mandatory Identifier entry in the Device section specifies the unique name to
associate with this graphics device.
Section "Device"
Identifier "Your Accelerated Framebuffer Device"
The following entry ties a specific graphics device to a screen. The Device Identifier
string must match the Device string in a Screensection of the xorg.conf file. For example:
Section "Screen"
Identifier "Default Screen"
<other entries>
Device "Your Accelerated Framebuffer Device"
<other entries>
EndSection
Device Driver String
The mandatory Driver entry specifies the name of the loadable Vivante X driver.
Driver "vivante"
Device fbdevPath Strings
The mandatory entries fbdev and vivante_dev specify the path for the frame buffer device
to use.
Section "Device"
Identifier "Your Accelerated Framebuffer Device"
Driver "vivante"
Option "fbdev" "/dev/fb0"
Option "vivante_fbdev" "/dev/fb0"
<other entries>
EndSection
Software Operation
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
152 Freescale Semiconductor, Inc.

18.3.6 Setup X-Windows System Acceleration on Yocto
Prerequisites:
• xserver-xorg-video-imx-viv-<BSP Version>.tar.gz, which is Vivante EXA plugin
source code based on GPU driver 4.6.9p12
• xserver-xorg, which should be the Xorg 1.11.x or above
• drm-update-arm.patch, which is a patch with adding the ARM lock implementation
for libdrm xf86drm.h. Note that the original xh86drm.h header file from libdrm does
not have lock for supporting ARM architecture. This patch is located in
$YOCTO_BUILDER/sources/meta-fsl-bsp-release/imx/meta-fsl-arm/recipes-
graphics/drm/libdrm/mx6, and shown below: drm-update-arm.patch:
+#elif defined(__arm__)
+ #undef DRM_DEV_MODE
+ #define DRM_DEV_MODE (S_IRUSR|S_IWUSR|S_IRGRP|S_IWGRP|S_IROTH|S_IWOTH)
+
+ #define DRM_CAS(lock,old,new,__ret) \
+ do { \
+ __asm__ __volatile__ ( \
+ "1: ldrex %0, [%1]\n" \
+ " teq %0, %2\n" \
+ " strexeq %0, %3, [%1]\n" \
+ : "r" (__ret) \
+ : "r" (lock), "r" (old), "r" (new) \
+ : "cc","memory"); \
+ } while (0)
+
#endif /* architecture */
#endif /* __GNUC__ >= 2 */
Build and install instructions:
• Install the prerequisites modules or patches in the appropriate locations and with
right recipes in Yocto environment.
• Build XServer with correct drm header file (xf86drm.h). The purpose is to create
correct dri module
• Build GPU EXA module with the command ‘bitbake xf86-video-imxfb-vivante’.
vivante_drv.so will be generated with successful build, and then install it together
with xorg and libdri library in target board rootfs in /usr/lib/xorg/modules/
• Install the pre-Yocto-built gpu-viv binary which is built based on gpu-viv version
4.6.9p12 in target board rootfs. For accelerating X11, the X11 backend is required
• Now ready to run the X11 applications in target board.
NOTE
x11 applications hangs if the ARM core version xf86drm.h is
not used
Chapter 18 X Windows Acceleration
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 153

18.3.7 Setup X Window System Acceleration
• Install any packages appropriate for your platform.
• Verify that the device file /dev/galcore is present.
• Verify that the file /etc/X11/xorg.conf contains the correct entries as described in the
previous section.
• Assuming the above steps have been performed, do the following to verify that X
Window System acceleration is indeed operating.
• Examine the log file /var/log/Xorg.0.log and confirm that the following lines are
present.
[ 41.752] (II) Loading /usr/lib/xorg/modules/drivers/vivante_drv.so
[ 41.752] (II) VIVANTE(0): using default device
[ 41.752] (II) VIVANTE(0): Creating default Display subsection in Screen
section "Default Screen" for depth/fbbpp 24/32
[ 41.752] (**) VIVANTE(0): Depth 24, (--) framebufferbpp 32
[ 41.752] (==) VIVANTE(0): RGB weight 888
[ 41.752] (==) VIVANTE(0): Default visual is TrueColor
[ 41.753] (==) VIVANTE(0): Using gamma correction (1.0, 1.0, 1.0)
[ 41.753] (II) VIVANTE(0): hardware: DISP3 BG (video memory: 8100kB)
[ 41.753] (II) VIVANTE(0): checking modes against framebuffer device...
[ 41.753] (II) VIVANTE(0): checking modes against monitor...
[ 41.753] (--) VIVANTE(0): Virtual size is 1920x1080 (pitch 1920)
[ 41.753] (**) VIVANTE(0): Built-in mode "current": 148.5 MHz, 67.5 kHz,
60.0 Hz
[ 41.753] (II) VIVANTE(0): Modeline "current"x0.0 148.50 1920 2008 2052
2200 1080 1084 1089 1125 +hsync +
vsync -csync (67.5 kHz)
[ 41.753] (==) VIVANTE(0): DPI set to (96, 96)
[ 41.753] (II) Loading sub module "fb"
[ 41.753] (II) LoadModule: "fb"
[ 41.754] (II) Loading /usr/lib/xorg/modules/libfb.so
[ 41.755] (II) Module fb: vendor="X.Org Foundation"
[ 41.755] compiled for 1.10.4, module version = 1.0.0
[ 41.755] ABI class: X.Org ANSI C Emulation, version 0.4
[ 41.755] (II) Loading sub module "exa"
[ 41.755] (II) LoadModule: "exa"
[ 41.756] (II) Loading /usr/lib/xorg/modules/libexa.so
[ 41.756] (II) Module exa: vendor="X.Org Foundation"
[ 41.756] compiled for 1.10.4, module version = 2.5.0
[ 41.756] ABI class: X.Org Video Driver, version 10.0
[ 41.756] (--) Depth 24 pixmap format is 32 bpp
[ 41.797] (II) VIVANTE(0): FB Start = 0x33142000 FB Base = 0x33142000 FB
Offset = (nil)
[ 41.797] (II) VIVANTE(0): test Initializing EXA
[ 41.798] (II) EXA(0): Driver allocated offscreenpixmaps
[ 41.798] (II) EXA(0): Driver registered support for the following
operations:
[ 41.798] (II) Solid
[ 41.798] (II) Copy
[ 41.798] (II) Composite (RENDER acceleration)
[ 41.798] (II) UploadToScreen
[ 42.075] (==) VIVANTE(0): Backing store disabled
[ 42.084] (==) VIVANTE(0): DPMS enabled
Software Operation
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
154 Freescale Semiconductor, Inc.

18.3.8 Troubleshooting
1. Framebuffer devices can be specified by environment variable. This is especially
useful when there are multiple framebuffer devices.
export FB_FRAMEBUFFER_0=/dev/fb2
2. If the above does not resolve the issue:
• If DRM booted up properly, check the /var/log/X11.n log file (n will represent
instance number) for more information.
• If DRM did not boot properly, check your kernel mode driver installation. (See
sections 6.4.2 and 6.4.3 above).
3. Window is created, but nothing is drawn
• If you run an OpenGL application and find a window was created, but nothing
was drawn, try to export the ${__GL_DEV_FB} environment variable:
export __GL_DEV_FB=$FB_FRAMEBUFFER_0.
4. Cannot open Display message
• If you have a message similar to “Cannot open Display,” use the following
command to check whether X is running at :0 or at :1 instance, use:
$ ps –ef|grep X
• Then depending on the returned instance number, add the following environment
variable
export DISPLAY=:n
• then run again.
5. UART terminal cannot run GPU application with lightdm
• Use ssh terminal instead.
6. EXA build script failure
• Check the log file and make sure your system time is set correctly.
7. Invalid MIT-MAGIC-COOKIE-1 Key error message
• Some GPU applications are not permitted to run using root. Use an alternate
account instead.
8. Segment fault occurs while running GPU application
• Check the attribute for dev/galcore should be updated to 666.
• To update this attribute automatically on system boot,
• Locate and edit file /etc/udev/rules.d/<bsp-specific.rules>.
• Add: “KERNEL==”galcore”,MODE=”0666””
• Lastly, make sure your kernel and GPU drivers are matched.
9. Check whether Compiz is running
• If your host or target has issues after installing the OpenGL Development
Packages in Table 6, above, check whether or not compiz is running with the
following command:
$ ps –ef|grep compiz
Chapter 18 X Windows Acceleration
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 155
• If compiz is running, then Ubuntu is using Unity3D by default. To set the default
window manager to Unity2D:
• Locate and edit file /var/lib/AccountsService/users/<username>.
• Change ubuntu to ubunto-2d.
Software Operation
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
156 Freescale Semiconductor, Inc.

Chapter 19
Video Processing Unit (VPU) Driver
19.1 Hardware Operation
The VPU hardware performs all of the codec computation and most of the bitstream
parsing/packeting.
Therefore, the software takes advantage of less control and effort to implement a complex
and efficient multimedia codec system.
The VPU hardware data flow is shown in the MPEG4 decoder example in Figure below.
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 157
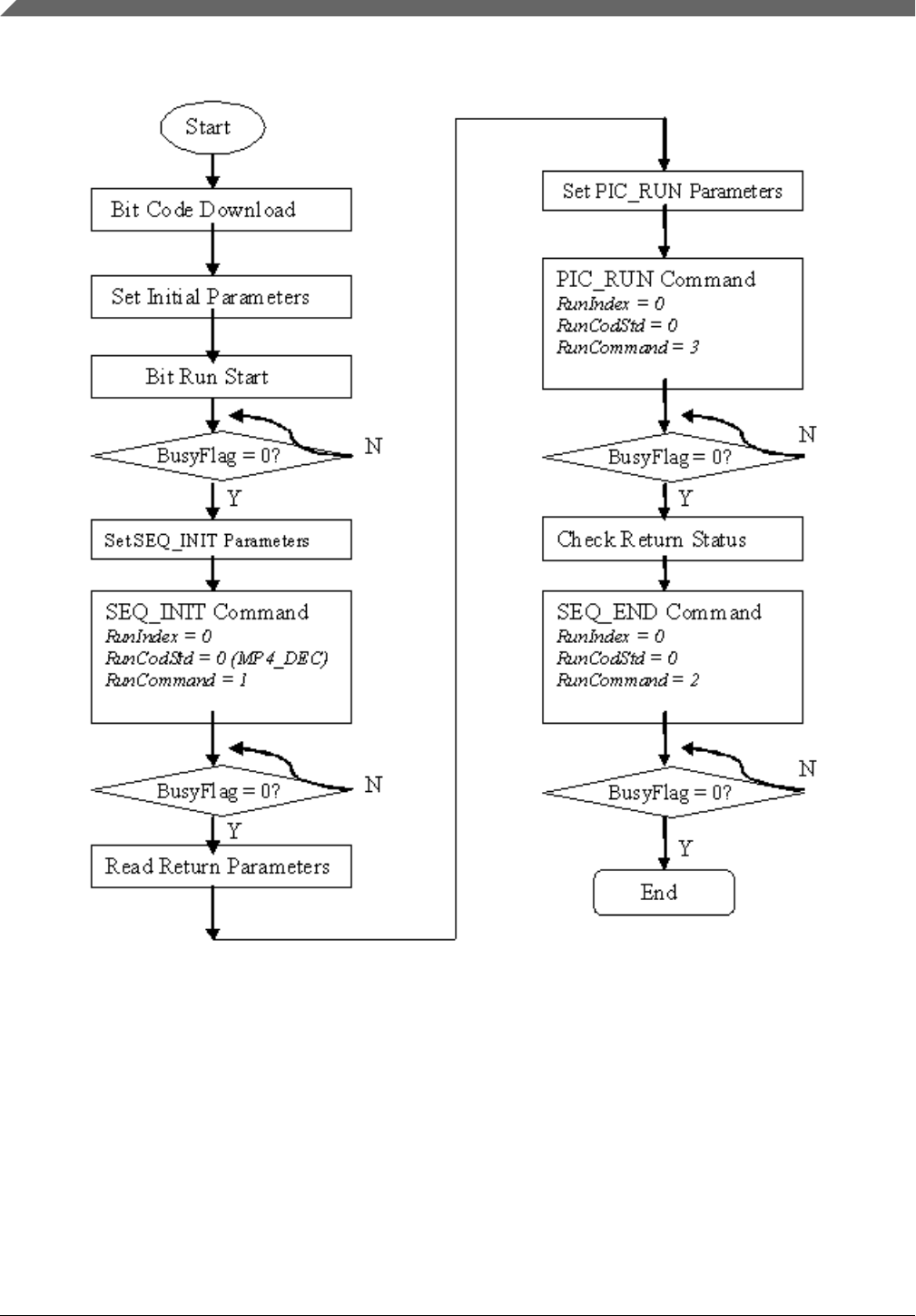
Figure 19-1. VPU Hardware Data Flow
19.1.1 Software Operation
The VPU software can be divided into two parts: the kernel driver and the user-space
library as well as the application in user space. The kernel driver takes responsibility for
system control and reserving resources (memory/IRQ). It provides an IOCTL interface
Hardware Operation
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
158 Freescale Semiconductor, Inc.
for the application layer in user-space as a path to access system resources. The
application in user-space calls related IOCTLs and codec library functions to implement a
complex codec system.
The VPU kernel driver includes the following functions:
• Module initialization which initializes the module with the device-specific structure
• Device initialization which initializes the VPU clock and hardware and request the
IRQ
• Interrupt servicing routine which supports events that one frame has been finished
• File operation routine which provides the following interfaces to user space:
• File open
• File release
• File synchronization
• File IOCTL to provide interface for memory allocating and releasing
• Memory map for register and memory accessing in user space
• Device Shutdown-Shutdowns the VPU clock and hardware, and release the IRQ
The VPU user space driver has the following functions:
• Codec lib
• Downloads executable bitcode for hardware
• Initializes codec system
• Sets codec system configuration
• Controls codec system by command
• Reports codec status and result
• System I/O operation
• Requests and frees memory
• Maps and unmaps memory/register to user space
• Device management
19.1.2 Source Code Structure
Table below lists the kernel space source files available in the following directories:
<Yocto_BuildDir>/linux/arch/arm/plat-mxc/include/mach/
<Yocto_BuildDir>/linux/drivers/mxc/vpu/
Chapter 19 Video Processing Unit (VPU) Driver
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 159
Table 19-1. VPU Driver Files
File Description
mxc_vpu.h Header file defining IOCTLs and memory structures
mxc_vpu.c Device management and file operation interface implementation
Table below lists the user-space library source files available in the <Yocto_BuildDir>/
imx-lib-11.11.00/vpu directory:
Table 19-2. VPU Library Files
File Description
vpu_io.c Interfaces with the kernel driver for opening the VPU device and allocating memory
vpu_io.h Header file for IOCTLs
vpu_lib.c Core codec implementation in user space
vpu_lib.h Header file of the codec
vpu_reg.h Register definition of VPU
vpu_util.c File implementing common utilities used by the codec
vpu_util.h Header file
Table below lists the firmware files available in the following directories:
<Yocto_BuildDir>/firmware-imx-11.11.00/lib/firmware/vpu/ directory
Table 19-3. VPU firmware Files
File Description
vpu_fw_xxx.bin VPU firmware
NOTE
To get the to files in Table 19-2, run the command: bitbake
linux-imx -c menuconfig prep -p imx-lib in the console
19.1.3 Menu Configuration Options
To get to the VPU driver, use the command bitbake linux-imx -c menuconfig. On the
screen displayed, select Configure the kernel and exit. When the next screen appears
select the following options to enable the VPU driver:
Hardware Operation
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
160 Freescale Semiconductor, Inc.

• CONFIG_MXC_VPU-Provided for the VPU driver. In menuconfig, this option is
available under
• Device Drivers > MXC support drivers > MXC VPU (Video Processing Unit)
support
19.1.4 Programming Interface
There is only a user-space programming interface for the VPU module. A user in the
application layer cannot access the kernel driver interface directly. The VPU library
accesses the kernel driver interface for users.
The codec library APIs are listed below:
RetCode vpu_Init(void *);
void vpu_UnInit(void);
RetCode vpu_GetVersionInfo(vpu_versioninfo * verinfo);
RetCode vpu_EncOpen(EncHandle* pHandle, EncOpenParam* pop);
RetCode vpu_EncClose(EncHandle encHandle);
RetCode vpu_EncGetInitialInfo(EncHandle encHandle, EncInitialInfo* initialInfo);
RetCode vpu_EncRegisterFrameBuffer(EncHandle handle, FrameBuffer * bufArray,
int num, int frameBufStride, int
sourceBufStride,
PhysicalAddress subSampBaseA,
PhysicalAddress subSampBaseB,
ExtBufCfg *scratchBuf);
RetCode vpu_EncGetBitstreamBuffer(EncHandle handle, PhysicalAddress* prdPrt,
PhysicalAddress* pwrPtr, Uint32*
size);
RetCode vpu_EncUpdateBitstreamBuffer(EncHandle handle, Uint32 size);
RetCode vpu_EncStartOneFrame(EncHandle encHandle, EncParam* pParam);
RetCode vpu_EncGetOutputInfo(EncHandle encHandle, EncOutputInfo* info);
RetCode vpu_EncGiveCommand (EncHandle pHandle, CodecCommand cmd, void* pParam);
RetCode vpu_DecOpen(DecHandle* pHandle, DecOpenParam* pop);
RetCode vpu_DecClose(DecHandle decHandle);
RetCode vpu_DecGetBitstreamBuffer(DecHandle pHandle, PhysicalAddress* pRdptr,
PhysicalAddress* pWrptr, Uint32* size);
RetCode vpu_DecUpdateBitstreamBuffer(DecHandle decHandle, Uint32 size);
RetCode vpu_DecSetEscSeqInit(DecHandle pHandle, int escape);
RetCode vpu_DecGetInitialInfo(DecHandle decHandle, DecInitialInfo* info);
RetCode vpu_DecRegisterFrameBuffer(DecHandle decHandle, FrameBuffer* pBuffer, int num,
int stride, DecBufInfo* pBufInfo);
RetCode vpu_DecStartOneFrame(DecHandle handle, DecParam* param);
RetCode vpu_DecGetOutputInfo(DecHandle decHandle, DecOutputInfo* info);
RetCode vpu_DecBitBufferFlush(DecHandle handle);
RetCode vpu_DecClrDispFlag(DecHandle handle, int index);
RetCode vpu_DecGiveCommand(DecHandle pHandle, CodecCommand cmd, void* pParam);
int vpu_IsBusy(void);
int vpu_WaitForInt(int timeout_in_ms);
RetCode vpu_SWReset(DecHandle handle, int index);
System I/O operations are listed below:
int IOGetPhyMem(vpu_mem_desc* buff);
int IOFreePhyMem(vpu_mem_desc* buff);
int IOGetVirtMem (vpu_mem_desc* buff);
int IOFreeVirtMem(vpu_mem_desc* buff);
Chapter 19 Video Processing Unit (VPU) Driver
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 161

19.1.5 Defining an Application
The most important definition for an application is the codec memory descriptor. It is
used for request, free, mmap and munmap memory as follows:
typedef struct vpu_mem_desc
{
int size; /*request memory size*/
unsigned long phy_addr; /*physical memory get from system*/
unsigned long cpu_addr; /*address for system usage while freeing,
user doesn't need
to handle or use it*/
unsigned long virt_uaddr; /*virtual user space address*/
} vpu_mem_desc;
See the i.MX 6 VPU Application Programming Interface Linux® Reference Manual for
how to use API in the application (document IMXVPUAPI).
Hardware Operation
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
162 Freescale Semiconductor, Inc.

Chapter 20
OmniVision Camera Driver
20.1 OV5640 Using MIPI CSI-2 interface
This is an introduction for ov5640 camera driver which using MIPI CSI-2 interface.
20.1.1 Hardware Operation
The OV5640 is a small camera sensor and lens module with low power consumption.
The camera driver is located under the Linux V4L2 architecture. and it implements the
V4L2 capture interfaces. Applications cannot use the camera driver directly. Instead, the
applications use the V4L2 capture driver to open and close the camera for preview and
image capture, controlling the camera, getting images from camera, and starting the
camera preview.
The OV5640 uses the serial camera control bus (SCCB) interface to control the sensor
operation. It works as an I2C client, V4L2 driver uses I2C bus to control camera
operation.
OV5640 supports two transfer mode: parallel interface and MIPI interface.
When using MIPI mode, OV5640 connects to i.MX AP chip by MIPI CSI-2 interface.
MIPI receives the sensor data and transfers them to IPU CSI.
See the OV5640 datasheet to get more information on the sensor.
For more information on MIPI CSI-2 and IPU CSI, see the following documents:
•i.MX 6Dual/6Quad Applications Processor Reference Manual (IMX6DQRM)
•i.MX 6Solo/6DualLite Applications Processor Reference Manual (IMX6SDLRM)
•i.MX 6SoloLite Applications Processor Reference Manual (IMX6SLRM)
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 163
•i.MX 6SoloX Applications Processor Reference Manual (IMX6SXRM)
•i.MX 7Dual Applications Processor Reference Manual (IMX7DRM)
20.1.2 Software Operation
The camera driver implements the V4L2 capture interface and applications and uses the
V4L2 capture interface to operate the camera.
The supported operations of V4L2 capture are:
• Capture stream mode
The supported picture formats are:
• YUV422P
• UYVY
• YUV420
The supported picture sizes are:
• QVGA
• VGA
• 720P
• 1080P
20.1.3 Source Code Structure
Table below shows the camera driver source files available in the directory.
<Yocto_BuildDir>/linux/drivers/media/video/mxc/capture.
Table 20-1. Camera Driver Files
File Description
ov5640_mipi.c Camera driver implementation for ov5640 using MIPI CSI-2 interface
20.1.4 Linux Menu Configuration Options
The following Linux kernel configuration option is provided for this module.
OV5640 Using MIPI CSI-2 interface
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
164 Freescale Semiconductor, Inc.

To get to this option, use the bitbake linux-imx -c menuconfigcommand. On the screen
displayed, select Configure the Kernel and exit. When the next screen appears, select
the following option to enable this module:
• Device Drivers > Multimedia devices > Video capture adapters > MXC Video For
Linux Camera > MXC Camera/V4L2 PRP Features support > OmniVision ov5640
camera support using mipi.
20.2 OV5642 Using parallel interface
This is an introduction for ov5642 camera driver which using parallel interface.
20.2.1 Hardware Operation
The OV5642 is a small camera sensor and lens module with low power consumption.
The camera driver is located under the Linux V4L2 architecture. and it implements the
V4L2 capture interfaces. Applications cannot use the camera driver directly. Instead, the
applications use the V4L2 capture driver to open and close the camera for preview and
image capture, controlling the camera, getting images from camera, and starting the
camera preview.
The OV5642 uses the serial camera control bus (SCCB) interface to control the sensor
operation. It works as an I2C client, V4L2 driver uses I2C bus to control camera
operation.
OV5642 supports only parallel interface.
See the OV5642 datasheet to get more information on the sensor.
For more information on IPU CSI, see the following documents:
•i.MX 6Dual/6Quad Applications Processor Reference Manual (IMX6DQRM)
•i.MX 6Solo/6DualLite Applications Processor Reference Manual (IMX6SDLRM)
•i.MX 6SoloLite Applications Processor Reference Manual (IMX6SLRM)
•i.MX 6SoloX Applications Processor Reference Manual (IMX6SXRM)
•i.MX 7Dual Applications Processor Reference Manual (IMX7DRM)
Chapter 20 OmniVision Camera Driver
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 165
20.2.2 Software Operation
The camera driver implements the V4L2 capture interface and applications and uses the
V4L2 capture interface to operate the camera.
The supported operations of V4L2 capture are:
• Capture stream mode
• Capture still mode
The supported picture formats are:
• YUV422P
• UYVY
• YUV420
The supported picture sizes are:
• QVGA
• VGA
• 720P
• 1080P
• QSXGA
20.2.3 Source Code Structure
Table below shows the camera driver source files available in the directory.
<Yocto_BuildDir>/linux/drivers/media/video/mxc/capture.
Table 20-2. Camera Driver Files
File Description
ov5642.c Camera driver implementation for ov5642 using parallel interface
20.2.4 Linux Menu Configuration Options
The following Linux kernel configuration option is provided for this module.
To get to this option, use the bitbake linux-imx -c menuconfigcommand. On the screen
displayed, select Configure the Kernel and exit. When the next screen appears, select
the following option to enable this module:
OV5642 Using parallel interface
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
166 Freescale Semiconductor, Inc.

• Device Drivers > Multimedia devices > Video capture adapters > MXC Video For
Linux Camera > MXC Camera/V4L2 PRP Features support > OmniVision ov5642
camera support.
Chapter 20 OmniVision Camera Driver
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 167

OV5642 Using parallel interface
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
168 Freescale Semiconductor, Inc.

Chapter 21
MIPI CSI2 Driver
21.1 Introduction
MIPI CSI-2 for i.MX 6 is MIPI-Camera Serial Interface Host Controller. It is a high
performance serial interconnect bus for mobile application which connects camera
sensors to the host system. The CSI-2 Host Controller is a digital core that implements all
protocol functions defined in the MIPI CSI-2 Specification. In doing so, it provides an
interface between the system and the MIPI D-PHY and allows communication with MIPI
CSI-2-compliant Camera Sensor.
The MIPI CSI2 driver is used to manage the MIPI D-PHY and lets it co-work with MIPI
sensor and IPU CSI. MIPI CSI2 driver implements functions as follows:
• MIPI CSI-2 low-level interface for managing the mipi D-PHY register and clock
• MIPI CSI-2 common API for communication between MIPI sensor and MIPI D-
PHY
By calling MIPI common APIs, MIPI sensor can set certain information about sensor
(such as datatype, lanes number, etc.) to MIPI CSI2 driver to configure D-PHY. In order
for the IPU CSI module driver to have the correct configuration, receive appropriate data,
and process it correctly, it is necessary for it to receive information about sensor (such as
datatype, virtual channel, IPU ID, CSI ID, etc.) from the MIPI CSI2 driver.
21.1.1 MIPI CSI2 Driver Overview
MIPI CSI2 driver is invoked only by the MIPI sensor driver and IPU CSI module and is
not exposed to the user space.
MIPI CSI2 driver supports the following features:
• Support 1~4 lanes
• Support IPU(0,1) and CSI(0,1) select
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 169

• Support virtual channel select(0~3)
• Support date type includes:
• RGB formats: RGB888, RGB666, RGB565, RGB555, RGB444
• YUV formats: YUV422 8bit, YUV422 10bit, YUV420 8bit, YUV420 10bit
• RAW data: RAW6, RAW7, RAW8, RAW10, RAW12, RAW14
21.1.2 Hardware Operation
There are four blocks in the MIPI CSI-2 D-PHY: PHY adaptation layer, packet analyzer,
image date interface, and register bank.
Functions and operations are listed as follows:
• PHY Adaptation Layer is responsible for managing the D-PHY interface including
PHY error handling;
• Packet Analyzer is responsible for data lane merging if required, together with
header decoding, error detection and correction, frame size error detection and CRC
error detection;
• Image Date Interface separates CSI-2 packet header information and reorders data
according to memory storage format. It also generates timing accurate video
synchronization signals. Several error detections are also performed at frame-level
and line-level;
• Register Bank is accessible through a standard AMBA-APB slave interface and
provides access to the CSI-2 Host Controller register for configuration and control.
There is also a fully programmable interrupt generator to inform the system upon
certain events;
21.2 Software Operation
MIPI CSI2 driver for Linux OS has two parts: MIPI CSI2 driver initialize operation
which initializes mipi_csi2_info struct, and MIPI CSI2 common APIs which exports
APIs for CSI module driver and MIPI sensor driver.
Software Operation
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
170 Freescale Semiconductor, Inc.

21.2.1 MIPI CSI2 Driver Initialize Operation
MIPI CSI driver first initializes mipi_csi2_info struct, some key information about mipi
sensor will be initialized, such as connected IPU ID, CSI ID, the virtual channel and date
type. Then, the driver initializes D-PHY clock and pixel clock (pixel clock is used for
MIPI D-PHY to transfer data to IPU CSI). After these operations, MIPI CSI csi2 driver
waits for sensor connection.
21.2.2 MIPI CSI2 Common API Operation
MIPI CSI2 driver exports many APIs to manage MIPI D-PHY.
The following is the introduction for all APIs:
• mipi_csi2_get_info: get the mipi_csi_info
• mipi_csi2_enable: enable MIPI CSI interface
• mipi_csi2_disable: disable MIPI CSI interface
• mipi_csi2_get_status: get MIPI CSI interface disable/enable status
• mipi_csi2_get_bind_ipu: get the IPU ID which MIPI CSI will connect
• mipi_csi2_get_bind_csi: get the CSI ID which MIPI CSI will connect
• mipi_csi2_get_virtual_channel: get the virtual channel number by which MIPI sensor
transfers data to MIPI D-PHY
• mipi_csi2_set_lanes: set the lanes number by which MIPI sensor transfers data to
MIPI D-PHY
• mipi_csi2_set datatype: set the MIPI sensor data type
• mipi_csi2_get_datatype: get the MIPI sensor data type; This function is called by
CSI module to set the CSI register
• mipi_csi2_dphy_status: get the MIPI D-PHY status
• mipi_csi2_get_error1: get the MIPI error1 register information
• mipi_csi2_get_error2: get the MIPI error2 register informaiton
• mipi_csi2_pixelclk_enable: enable the pixel clock
• mipi_csi2_pixelclk_disable: disable the pixel clock
• mipi_csi2_reset: reset the MIPI D-PHY for data receiving and transferring
21.3 Driver Features
MIPI CSI2 driver supports the following features:
• Support 1~4 lanes
• Support IPU(0,1) and CSI(0,1) select
Chapter 21 MIPI CSI2 Driver
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 171
• Support virtual channel select(0~3)
• Support date type includes:
• RGB formats: RGB888, RGB666, RGB565, RGB555, RGB444
• YUV formats: YUV422 8bit, YUV422 10bit, YUV420 8bit, YUV420 10bit
• RAW data: RAW6, RAW7, RAW8, RAW10, RAW12, RAW14
21.3.1 Source Code Structure
Table below shows the MIPI CSI2 driver source files available in the directory.
<Yocto_BuildDir>/linux/drivers/mxc/mipi.
Table 21-1. MIPI CSI2 Driver Files
File Description
mxc_mipi_csi2.c MIPI CSI driver source file
21.3.2 Menu Configuration Options
The following Linux kernel configuration option is provided for this module.
To get to this option, use the bitbake linux-imx -c menuconfigcommand. On the screen
displayed, select Configure the Kernel and exit. When the next screen appears, select
the following options to enable this module:
Device Drivers > MXC support drivers > MXC MIPI Support > MIPI CSI2 support.
21.3.3 Programming Interface
MIPI CSI2 Common APIs can only be called by mipi sensor driver and IPU CSI module
driver.
Before calling the API, in system initialization stage, use mipi_csi2_platform_data struct
and imx6q_add_mipi_csi2 function to add a MIPI CSI2 driver.
For mipi sensor driver, the initialization steps are:
• get MIPI info by calling mipi_csi2_get_info()
• enable MIPI CSI interface by calling mipi_csi2_enable()
• set the lanes by calling mipi_csi2_set_lanes()
• reset the MIPI D-PHY by calling mipi_csi2_reset()
• configure MIPI sensor
Driver Features
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
172 Freescale Semiconductor, Inc.

• wait for MIPI D-PHY to receive the sensor clock and data until clock and data are
stable by calling mipi_csi2_dphy_status() and mipi_csi2_get_error1()
• when uninstall the sensor driver, disable MIPI CSI interface by calling
mipi_csi2_disable()
For sample code which explains how mipi sensor uses mipi APIs, reference ov5640_mipi
driver source code.
For IPU CSI module driver, the call steps are:
• get MIPI info by calling mipi_csi2_get_info()
• get IPU id and CSI id to assure configuration of the correct CSI module by calling
mipi_csi2_get_bind_ipu() and mipi_csi2_get_bind_csi()
• get datatype and virtual channel from MIPI CSI driver and configure the CSI module
by calling mipi_csi2_get_datatype() and mipi_csi2_get_virtual_channel()
• perform other configure operation for CSI module and enable CSI
• enable the pixel clock to transfer data from MIPI D-PHY to IPU CSI by calling
mipi_csi2_pixelclk_enable()
• when all tasks are done, disable CSI module first, then disable mipi pixel clock by
calling mipi_csi2_pixelclk_disable()
For sample code which explains how the CSI module driver uses MIPI APIs, reference
IPU CSI module driver source code.
21.3.4 Interrupt Requirements
No interrupt is needed for MIPI CSI driver.
Chapter 21 MIPI CSI2 Driver
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 173

Driver Features
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
174 Freescale Semiconductor, Inc.
Chapter 22
Low-level Power Management (PM) Driver
22.1 Hardware Operation
Information found here describes the low-level Power Management (PM) driver which
controls the low-power modes.
The i.MX 6 supports four low power modes: RUN, WAIT, STOP, and DORMANT.
Table below lists the detailed clock information for the different low power modes.
Table 22-1. Low Power Modes
Mode Core Modules PLL CKIH/FPM CKIL
RUN Active Active, Idle or Disable On On On
WAIT Disable Active, Idle or Disable On On On
STOP Disable Disable Off On On
DORMANT Power off Disable Off Off On
For the detailed information about lower power modes, see the following documents:
•i.MX 6Dual/6Quad Applications Processor Reference Manual (IMX6DQRM)
•i.MX 6Solo/6DualLite Applications Processor Reference Manual (IMX6SDLRM)
•i.MX 6SoloLite Applications Processor Reference Manual (IMX6SLRM)
•i.MX 6SoloX Applications Processor Reference Manual (IMX6SXRM)
•i.MX 7Dual Applications Processor Reference Manual (IMX7DRM)
•i.MX 6UltraLite Applications Processor Reference Manual (IMX6ULRM)
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 175

22.1.1 Software Operation
The i.MX 6 PM driver maps the low-power modes to the kernel power management
states as listed below:
• Standby-maps to STOP mode which offers significant power saving, as all blocks in
the system are put into a low-power state, except for ARM core, which is still
powered on, and memory is placed in self-refresh mode to retain its contents.
• Mem (suspend to RAM)which maps to DORMANT mode which offers most
significant power saving as all blocks in the system are put into a low-power state,
except for memory, which is placed in self-refresh mode to retain its contents
• System idle which maps to WAIT mode
• If ARM® Cortex®-M4 processor is alive together with ARM® Cortex®-A9 processor
before the kernel enters standby/mem mode, and if ARM Cortex-M4 processor is not
in its low power idle mode, ARM Cortex-A9 processor will trigger SOC to enter
WAIT mode instead of STOP mode to make sure that ARM Cortex-M4 processor
can continue running.
The i.MX 6 PM driver performs the following steps to enter and exit low power mode:
1. Allow the Cortex-A9 platform to issue a deep sleep mode request.
2. If STOP or DORMANT mode:
• Program CCM CLPCR register to set low power control register.
• If DORMANT mode, request switching off CPU power when pdn_req is
asserted.
• Request switching off embedded memory peripheral power when pdn_req is
asserted.
• Program GPC mask register to unmask wakeup interrupts.
3. Call cpu_do_idle to execute WFI pending instructions for wait mode.
4. Execute imx6_suspend in IRAM.
5. If in DORMANT mode, save ARM context, change the drive strength of MMDC
PADs as "low" to minimize the power leakage in DDR PADs. Execute WFI pending
instructions for stop mode.
6. Generate a wakeup interrupt and exit low power mode. If DORMANT mode, restore
ARM core and DDR drive strength.
In DORMANT mode, the i.MX 6 can assert the VSTBY signal to the PMIC and request a
voltage change. The U-Boot or Machine Specific Layer (MSL) usually sets the standby
voltage in STOP mode according to i.MX 6 data sheet.
22.1.2 Source Code Structure
Table below shows the PM driver source files. These files are available in:
Hardware Operation
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
176 Freescale Semiconductor, Inc.
<Yocto_BuildDir>/arch/arm/mach-imx/
Table 22-2. PM Driver Files
File Description
pm-imx6.c Supports suspend operation
suspend-imx6.S Assembly file for CPU suspend
22.1.3 Menu Configuration Options
The following Linux kernel configuration options are provided for this module. To get to
these options, use the bitbake linux-imx -c menuconfigcommand. On the screen
displayed, select Configure the Kernel and exit. When the next screen appears, select
the following options to enable this module:
• CONFIG_PM builds support for power management. In menuconfig, this option is
available under:
• Power management options > Power Management support
• By default, this option is Y.
• CONFIG_SUSPEND builds support for suspend. In menuconfig, this option is
available under:
• Power management options > Suspend to RAM and standby
22.1.4 Programming Interface
The imx6_set_lpm API in the system.c function is provided for low-power modes. This
implements all the steps required to put the system into WAIT and STOP modes.
22.1.5 Unit Test
To enter different system level low power modes:
echo mem > /sys/power/state
echo standby > /sys/power/state
To wake up system from low power modes, enable the wakeup source first, such as USB
device, debug UART, or RTC, which can be used as a wakeup source. Below is the
example of UART wakeup:
echo enabled > /sys/bus/platform/drivers/imx-uart/'xxxxxxx'.serial/tty/ttymxc'y'/power/
Chapter 22 Low-level Power Management (PM) Driver
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 177

wakeup;
Here 'xxxxxxx' is the physical base address of your debugging UART. For example, for
UART1, it is 2020000. 'y' is your debugging UART index.
To test this mode automatically, refer to our script in /unit_tests/suspend_random_auto.sh
or /unit_tests/suspend_quick_auto.sh.
For FreeRTOS running with Linux OS together, press "s" on the FreeRTOS console to
start the test. FreeRTOS will enter or exit its low power idle mode in a random period.
Hardware Operation
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
178 Freescale Semiconductor, Inc.

Chapter 23
PF100 Regulator Driver
23.1 Introduction
PF100 is a PMIC chip which is specified by i.MX 6.
PF200/PF3000 is baed on PF100 with little change, since they share the same PF100
driver. PF100 regulator driver provides the low-level control of the power supply
regulators, selection of voltage levels, and enabling/disabling of regulators. This device
driver makes use of the PF100 regulator driver to access the PF100 hardware control
registers. PF100 regulator driver is based on regulator core driver and it is attached to
kernel I2C bus.
23.2 Hardware Operation
PF100 provides reference and supply voltages for the application processor and
peripheral devices.
Four buck (step down) converters (up to 6 independent output) and one boost (step up)
converter are included. The buck converters provide the power supply to processor cores
and to other low voltage circuits such as memory. Dynamic voltage scaling is provided to
allow controlled supply rail adjustments for the processor cores and/or other circuitry.
Linear regulators are directly supplied from the battery or from the switchers and include
supplies for I/O and peripherals, audio, camera, BT, WLAN, and so on. Naming
conventions are suggestive of typical or possible use case applications, but the switchers
and regulators may be utilized for other system power requirements within the guidelines
of specified capabilities.
The only power on event of PF100 is PWRON is high, and the only power off event of
PF100 is PWRON is low. PMIC_ON_REQ pin of i.MX 6, which is controlled by SNVS
block of i.MX 6, will connect with PWRON pin of PF100 to control PF100 on/off, so
that system can power off.
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 179
23.2.1 Driver Features
PF100 regulator driver is based on regulator core driver. It provides the following
services for regulator control of the PMIC component:
• Switch ON/OFF all voltage regulators.
• Set the value for all voltage regulators.
• Get the current value for all voltage regulators.
23.3 Software Operation
PF100 regulator client driver performs operations by reconfiguring the PMIC hardware
control registers.
Some of the PMIC power management operations depend on the system design and
configuration. For example, if the system is powered by a power source other than the
PMIC, then turning off or adjusting the PMIC voltage regulators has no effect.
Conversely, if the system is powered by the PMIC, then any changes that use the power
management driver and the regulator client driver can affect the operation or stability of
the entire system.
23.3.1 Regulator APIs
The regulator power architecture is designed to provide a generic interface to voltage and
current regulators within the Linux kernel.
It is intended to provide voltage and current control to client or consumer drivers and to
provide status information to user space applications through a sysfs interface. The
intention is to allow systems to dynamically control regulator output to save power and
prolong battery life. This applies to both voltage regulators (where voltage output is
controllable) and current sinks (where current output is controllable).
For more details, visit opensource.wolfsonmicro.com/node/15
Under this framework, most power operations can be done by the following unified API
calls:
•regulator_get is an unified API call to lookup and obtain a reference to a regulator:
struct regulator *regulator_get(struct device *dev, const char *id);
•regulator_put is an unified API call to free the regulator source:
Software Operation
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
180 Freescale Semiconductor, Inc.

void regulator_put(struct regulator *regulator, struct device *dev);
•regulator_enable is an unified API call to enable regulator output:
int regulator_enable(struct regulator *regulator);
•regulator_disable is an unified API call to disable regulator output:
int regulator_disable(struct regulator *regulator);
•regulator_is_enabled is the regulator output enabled:
int regulator_is_enabled(struct regulator *regulator);
•regulator_set_voltage is an unified API call to set regulator output voltage:
int regulator_set_voltage(struct regulator *regulator, int uV);
•regulator_get_voltage is an unified API call to get regulator output voltage:
int regulator_get_voltage(struct regulator *regulator);
You can find more APIs and details in the regulator core source code inside the Linux
kernel at: <Yocto_BuildDir>/linux/drivers/regulator/core.c.
Chapter 23 PF100 Regulator Driver
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 181
23.4 Driver Architecture
Figure below shows the basic architecture of the PF100 regulator driver.
Regulator core driver
PF100 regulator driver
PF100 core driver(MFD)
I2C or SPI driver
Device drivers
PF100 driver
Figure 23-1. PF100 Regulator Driver Architecture
Driver Architecture
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
182 Freescale Semiconductor, Inc.
23.4.1 Driver Interface Details
Access to PFUZE100 regulator is provided through the API of the regulator core driver.
PFUZE100 regulator driver provides the following regulator controls:
• 4 buck switch regulators on normal mode (up to 6 independent rails): SW1AB,
SW1C, SW2, SW3A, SW3B, and SW4.
• Buck switch can be programmed to a state of standby with specific register
(PFUZE100_SWxSTANDBY) in advance.
• 6 Linear Regulators: VGEN1, VGEN2, VGEN3, VGEN4, VGEN5, and VGEN6.
• 1 LDO/Switch supply for VSNVS support on i.MX processors.
• 1 Low current, high accuracy, voltage reference for DDR Memory reference voltage.
• 1 Boost regulator with USB OTG support.
• Most power rails from PFUZE100 have been programmed properly according to the
hardware design. Therefore, you can't find the kernel using PFUZE100 regulators.
PFUZE100 regulator driver has implemented these regulators so that customers can
use it freely if default PFUZE100 value can't meet their hardware design.
23.4.2 Source Code Structure
The PFUZE100 regulator driver is located in the regulator device driver directory:
<Yocto_BuildDir>/linux/drivers/regulator
Table 23-1. PFUZE100 core Driver Files
File Description
drivers/regulator/
pfuze100-regulator.c
Implementation of the PFUZE100 regulator client driver.
There is no board file related to pmic. Some code moves to U-Boot, such as standby
voltage setting. Some code is implemented by DTS file. See pfuze100 device node in
arch/arm/boot/dts/imx6qdl-sabresd.dtsi and arch/arm/boot/dts/imx6qdl-sabreauto.dtsi
There is no board file related to pmic. Some code moves to U-Boot, such as standby
voltage setting. Some code is implemented by DTS file. See pfuze100 device node in
arch/arm/boot/dts/imx6qdl-sabresd.dtsi and arch/arm/boot/dts/imx6qdl-sabreauto.dtsi
Chapter 23 PF100 Regulator Driver
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 183

There is no board file related to pmic. Some code moves to U-Boot, such as standby
voltage setting. Some code is implemented by DTS file. See pfuze100 device node in
arch/arm/boot/dts/imx6qdl-sabresd.dtsi and arch/arm/boot/dts/imx6qdl-sabreauto.dtsi
23.4.3 Menu Configuration Options
The following are menu configuration options:
1. To get to the PMIC power configuration, use the command:
bitbake linux-imx -c menuconfig
2. On the configuration screen select Configure Kernel, exit, and when the next screen
appears, choose the following:
3. Device Drivers > Voltage and Current regulator support > Support regulators on
Freescale PF100 PMIC.
Driver Architecture
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
184 Freescale Semiconductor, Inc.

Chapter 24
CPU Frequency Scaling (CPUFREQ) Driver
24.1 Introduction
The CPU frequency scaling device driver allows the clock speed of the CPU to be
changed on the fly. Once the CPU frequency is changed, the voltage VDDCORE,
VDDSOC and VDDPU are changed to the voltage value defined in device tree scripts
(DTS). This method can reduce power consumption (thus saving battery power),
because the CPU uses less power as the clock speed is reduced.
24.1.1 Software Operation
The CPUFREQ device driver is designed to change the CPU frequency and voltage on
the fly.
If the frequency is not defined in DTS, the CPUFREQ driver changes the CPU frequency
to the nearest higher frequency in the array. The frequencies are manipulated using the
clock framework API, while the voltage is set using the regulators API. The CPU
frequencies in the array are based on the boot CPU frequency. Interactive CPU frequency
governor is used which cannot be changed manually. To change CPU frequency
manually, the userspace CPU frequency governor can be used.By default, the
conservative CPU frequency governor is used.
Refer to the API document for more information on the functions implemented in the
driver.
To view what values the CPU frequency can be changed to in KHz (The values in the
first column are the frequency values) use this command:
cat /sys/devices/system/cpu/cpu0/cpufreq/stats/time_in_state
To change the CPU frequency to a value that is given by using the command above (for
example, to 792 MHz) use this command:
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 185
echo 792000 > /sys/devices/system/cpu/cpu0/cpufreq/scaling_setspeed
The frequency 792000 is in KHz, which is 792 MHz.
The maximum frequency can be checked using this command:
cat /sys/devices/system/cpu/cpu0/cpufreq/scaling_max_freq
Use the following command to view the current CPU frequency in KHz:
cat /sys/devices/system/cpu/cpu0/cpufreq/cpuinfo_cur_freq
Use the following command to view available governors:
cat /sys/devices/system/cpu/cpu0/cpufreq/scaling_available_governors
Use the following command to change to interactive CPU frequency governor:
echo interactive > /sys/devices/system/cpu/cpu0/cpufreq/scaling_governor
24.1.2 Source Code Structure
Table below shows the source files and headers available in the following directory:
drivers/cpufreq/
Table 24-1. CPUFREQ Driver Files
File Description
imx6q-cpufreq.c/ imx7-cpufreq.c CPUFREQ functions
For CPU frequency working point settings, see:
• arch/arm/boot/dts/imx6q.dtsi for i.MX 6Quad
• arch/arm/boot/dts/imx6dl.dtsi for i.MX 6DualLite
• arch/arm/boot/dts/imx6sl.dtsi for i.MX 6SoloLite
• arch/arm/boot/dts/imx6sx.dtsi for i.MX 6SoloX
• arch/arm/boot/dts/imx6ul.dtsi for i.MX 6UltraLite
• arch/arm/boot/dts/imx7d.dtsi for i.MX 7Dual
Introduction
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
186 Freescale Semiconductor, Inc.

24.2 Menu Configuration Options
The following Linux kernel configuration is provided for this module:
• CONFIG_CPU_FREQ; In menuconfig, this option is located under:
• CPU Power Management > CPU Frequency scaling
• The following options can be selected:
• CPU Frequency scaling
• CPU frequency translation statistics
• Default CPU frequency governor (conservative)(interactive)
• Performance governor
• Powersave governor
• Userspace governor for userspace frequency scaling
• Interactive CPU frequency policy governor
• Conservative CPU frequency governor
• CPU frequency driver for i.MX CPUs
24.2.1 Board Configuration Options
There are no board configuration options for the CPUFREQ device driver.
Chapter 24 CPU Frequency Scaling (CPUFREQ) Driver
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 187

Menu Configuration Options
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
188 Freescale Semiconductor, Inc.

Chapter 25
Dynamic Bus Frequency Driver
25.1 Introduction
In order to improve power consumption, the Bus Frequency driver dynamically manages
the various system frequencies.
The frequency changes are transparent to the higher layers and require no intervention
from the drivers or middleware. Depending on activity of the peripheral devices and CPU
loading, the bus frequency driver varies the DDR frequency between 24 MHz and its
maximum frequency. Similarly the AHB frequency is varied between 24 MHz and 132
MHz.
25.1.1 Operation
The Bus Frequency driver is part of the power management module in the Linux BSP.
The main purpose of this driver is to scale the various operating frequency of the system
clocks (like AHB, DDR, AXI etc.) based on peripheral activity and CPU loading.
25.1.2 Software Operation
The bus frequency depends on the request and release of device drivers for its operation.
Drivers will call bus frequency APIs to request or release the bus setpoint they want. The
bus frequency will set the system frequency to highest frequency setpoint based on the
peripherals that are currently requesting.
If ARM Cortex-M4 processor is alive with ARM Cortex-A9 processor together, ARM
Cortex-M4 processor will also request/release bus frequency high setpoint for its
operation. This means that ARM Cortex-A9 processor treats ARM Cortex-M4 processor
as one of its high-speed devices.
The following setpoints are defined for all i.MX 6 platforms:
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 189
1. High Frequency Setpoint: AHB is at 132 MHz, AXI is at 264 Mhz and DDR is at the
maximum frequency. This mode is used when most peripehrals that need higher
frequency for good performance are active. For example, video playback and
graphics processing.
2. Audio Playback setpoints: AHB is at 25 MHz, AXI is at 50 MHz and DDR is at 50
MHz for i.MX 6Quad/6DualLite/6SoloX and 100 MHz for i.MX 6SoloLite. This
mode is used in audio playback mode.
3. Low Frequency setpoint: AHB is at 24 MHz, AXI is at 24 MHz and DDR is at 24
MHz. This mode is used when the system is idle waiting for user input (display is
off).
To Enable the bus frequency driver use the following command:
echo 1 > /sys/bus/platform/drivers/imx6_busfreq/busfreq.13/enable
To Disable the bus frequency driver use the following command:
echo 0 > /sys/bus/platform/drivers/imx6_busfreq/busfreq.13/enable
25.1.3 Source Code Structure
Table below lists the source files and headers available in the following directory:
arch/arm/mach-imx
Table 25-1. BusFrequency Driver Files
File Description
busfreq-imx.c Bus Frequency functions
busfreq_ddr3.c, busfreq_lpddr2.c,
ddr3_freq_imx6.S,
lpddr2_freq_imx6.S,
ddr3_freq_imx6sx.S,
ddr3_freq_imx6sx.S,
ddr3_freq_imx7d.S
DDR frequency change functions
25.2 Menu Configuration Options
There are no menu configuration options for this driver. The Bus Frequency drivers is
included and enabled by default.
Menu Configuration Options
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
190 Freescale Semiconductor, Inc.

25.2.1 Board Configuration Options
There are no board configuration options for the Linux BusFreq device driver.
Chapter 25 Dynamic Bus Frequency Driver
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 191

Menu Configuration Options
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
192 Freescale Semiconductor, Inc.

Chapter 26
Thermal Driver
26.1 Introduction
Thermal driver is a necessary driver for monitoring and protecting the SoC. The thermal
driver will monitor the SoC temperature in a certain frequency.
It defines two trip points: critical and passive. Cooling device will take actions to protect
the SoC according to the different trip points that SoC has reached:
• When reaching critical point, cooling device will shut down the system.
• When reaching passive point, cooling device will lower CPU frequency and notify
GPU to run at a lower frequency.
• When the temperature drops to 10 °C below passive point, cooling device will
release all the cooling actions.
Thermal driver has two parts:
• Thermal zone defines trip points and monitors the SoC's temperature.
• Cooling device takes the actions according to the different trip points.
26.1.1 Thermal Driver Overview
The thermal driver implements the SoC temperature monitor function and protection. It
creates a sys file interface of /sys/class/thermal/thermal_zone0/ for user. Internally, the
thermal driver will monitor the SoC temperature and do necessary protection according to
the different trip points that SoC's temperature reaches.
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 193
26.2 Hardware Operation
The thermal driver uses internal thermal sensor to monitor the SoC temperature. The
cooling device uses the CPU frequency to protect the SoC.
All the related modules are in SoC.
26.2.1 Thermal Driver Software Operation
The thermal driver registers a thermal zone and a cooling device. A
structure,thermal_zone_device_ops, describes the necessary interface that the thermal
framework needs. The framework will call the related thermal zone interface to monitor
the SoC temperature and do the cooling protection.
26.3 Driver Features
The thermal driver supports the features found here.
• Thermal monitors the SoC temperature.
• Cooling device protects the SoC when the temperature reaches passive or critical
points.
26.3.1 Source Code Structure
Table below shows the driver source files available in the directory:
<Yocto_BuildDir>/linux/drivers/thermal
Table 26-1. Thermal Driver Files
File Description
imx_thermal.c, device_cooling.c thermal zone driver source file
26.3.2 Menu Configuration Options
The following Linux kernel configuration option is provided for this module. To get to
this option, use the bitbake linux-imx -c menuconfigcommand. On the screen displayed,
select Configure the Kernel and exit. When the next screen appears, select the following
options to enable this module:
Driver Features
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
194 Freescale Semiconductor, Inc.

Device Drivers Generic Thermal sysfs driver > Temperature sensor driver for Freescale
i.MX SoCs.
26.3.3 Programming Interface
The thermal driver can be accessed via /sys/bus/platform/drivers/imx_thermal/.
26.4 Unit Test
Modify the trip point's temperature through /sys/class/thermal/thermal_zone0/
trip_point_x_temp. Here 'x' can be 0 and 1, indicating critical and passive trip point, the
value of trip points should be critical > passive. Then run some program to make SoC in
heavy loading, when the SoC temperature reach the trip points, the thermal driver will
take action to do some protections according to each trip point's mechanism. Restore the
trip point's temperature, when SoC temperature drop to 10 °C below passive, thermal
driver will remove all the protections.
Chapter 26 Thermal Driver
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 195

Unit Test
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
196 Freescale Semiconductor, Inc.

Chapter 27
Anatop Regulator Driver
27.1 Introduction
The Anatop regulator driver provides the low-level control of the power supply
regulators, and selection of voltage levels.
This device driver makes use of the regulator core driver to access the Anatop hardware
control registers.
27.1.1 Hardware Operation
The Power Management Unit on the die is built to simplify the external power interface
and allow the die to be configured in a power appropriate manner. The power system
consists of the input power sources and their characteristics, the integrated power
transforming and controlling elements, and the final load interconnection and
requirements.
Utilizing 7 LDO regulators, the number of external supplies is greatly reduced. If the
backup coin and USB inputs are neglected, then the number of external supplies is
reduced to two. Missing from this external supply total are the necessary external
supplies to power the desired memory interface. This will change depending on the type
of external memory selected. Other supplies might also be necessary to supply the
voltage to the different I/O power segments if their I/O voltage needs to be different than
what is provided above.
Some internal regulator can be bypassed , so that external pmic can supply these power
directly to decrease power numer. such as VDD_SOC, VDD_ARM
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 197

27.2 Driver Features
The Anatop regulator driver is based on regulator core driver. A list of services provided
for regulator control can be found here.
• Switch ON/OFF all voltage regulators.
• Set the value for all voltage regulators.
• Get the current value for all voltage regulators.
27.2.1 Software Operation
The Anatop regulator client driver performs operations by reconfiguring the Anatop
hardware control registers. This is done by calling regulator core APIs with the required
register settings.
27.2.2 Regulator APIs
The regulator power architecture is designed to provide a generic interface to voltage and
current regulators within the Linux kernel. It is intended to provide voltage and current
control to client or consumer drivers and also provide status information to user space
applications through a sysfs interface. The intention is to allow systems to dynamically
control regulator output to save power and prolong battery life. This applies to both
voltage regulators (where voltage output is controllable) and current sinks (where current
output is controllable).
For more details visit opensource.wolfsonmicro.com/node/15
Under this framework, most power operations can be done by the following unified API
calls:
•regulator_get used to lookup and obtain a reference to a regulator:
•struct regulator *regulator_get(struct device *dev, const char *id);
•regulator_put used to free the regulator source:
•void regulator_put(struct regulator *regulator, struct device *dev);
•regulator_enable used to enable regulator output:
•int regulator_enable(struct regulator *regulator);
•regulator_disable used to disable regulator output:
•int regulator_disable(struct regulator *regulator);
•regulator_is_enabled is the regulator output enabled:
•int regulator_is_enabled(struct regulator *regulator);
•regulator_set_voltage used to set regulator output voltage:
Driver Features
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
198 Freescale Semiconductor, Inc.
•int regulator_set_voltage(struct regulator *regulator, int uV);
•regulator_get_voltage used to get regulator output voltage:
•int regulator_get_voltage(struct regulator *regulator);
For more APIs and details in the regulator core source code inside the Linux kernel see:
<Yocto_BuildDir>/linux/drivers/regulator/core.c.
27.2.3 Driver Interface Details
Access to the Anatop regulator is provided through the API of the regulator core driver.
The Anatop regulator driver provides the following regulator controls:
• Seven LDO regulators
• All of the regulator functions are handled by setting the appropriate Anatop hardware
register values. This is done by calling the regulator core APIs to access the Anatop
hardware registers.
27.2.4 Source Code Structure
The Anatop regulator driver is located in the regulator device driver directory:
<Yocto_BuildDir>/linux/drivers/regulator
Table 27-1. Anatop Power Management Driver Files
File Description
core.c Linux kernel interface for regulators.
anatop-regulator.c Implementation of the Anatop regulator client driver
The Anatop regulators are registered in each SoC-specific dts file. For example, on the
i.MX 6Quad/6DualLite/6Solo, the DTS file is arch/arm/boot/dts/imx6qdl.dtsi.
27.2.5 Menu Configuration Options
To get to the Anatop regulator configuration, use the commandbitbake linux-imx -c
menuconfig. On the configuration screen select Configure Kernel, exit, and when the
next screen appears, choose. The following Linux kernel configurations are provided for
the Anatop Regulator driver:
Chapter 27 Anatop Regulator Driver
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 199

• Device Drivers > Voltage and Current regulator support > Anatop Regulator
Support.
• System Type > Freescale MXC Implementations > Internal LDO in i.MX 6Quad/
i.MX 6DualLite bypass.
Driver Features
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
200 Freescale Semiconductor, Inc.

Chapter 28
SNVS Real Time Clock (SRTC) Driver
28.1 Introduction
The SNVS Real Time Clock (SRTC) module is used to keep the time and date. It
provides a certifiable time to the user and can raise an alarm if tampering with counters is
detected. The SRTC is composed of two sub-modules: Low power domain (LP) and High
power domain (HP). The SRTC driver only supports the LP domain with low security
mode.
28.1.1 Hardware Operation
The SRTC is a real time clock with enhanced security capabilities.
It provides an accurate, constant time, regardless of the main system power state and
without the need to use an external on-board time source, such as an external RTC. The
SRTC can wake up the system when a pre-set alarm is reached.
28.2 Software Operation
The following sections describe the software operation of the SRTC driver.
28.2.1 IOCTL
The SRTC driver complies with the Linux RTC driver model. See the Linux
documentation in <Yocto_BuildDir>/linux/Documentation/rtc.txt for information on the
RTC API.
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 201

Besides the initialization function, the SRTC driver provides IOCTL functions to set up
the RTC timers and alarm functions. The following RTC IOCTLs are implemented by the
SRTC driver:
• RTC_RD_TIME
• RTC_SET_TIME
• RTC_AIE_ON
• RTC_AIE_OFF
• RTC_ALM_READ
• RTC_ALM_SET
The driver information can be access by the proc file system. For example:
root@freescale /unit_tests$ cat /proc/driver/rtc
rtc_time : 12:48:29
rtc_date : 2009-08-07
alrm_time : 14:41:16
alrm_date : 1970-01-13
alarm_IRQ : no
alrm_pending : no
24hr : yes
28.2.2 Keep Alive in the Power Off State
To preserve the time when the device is in the power off state, the SRTC clock source
should be set to CKIL and the voltage input, NVCC_SRTC_POW, should remain active.
Usually these signals are connected to the PMIC and software can configure the PMIC
registers to enable the SRTC clock source and power supply.
Ordinarily, when the main battery is removed and the device is in power off state, a coin-
cell battery is used as a backup power supply. To avoid SRTC time loss, the voltage of
the coin-cell battery should be sufficient to power the SRTC. If the coin-cell battery is
chargeable, it is recommend to automatically enable the coin-cell charger so that the
SRTC is properly powered.
28.3 Driver Features
The SRTC driver includes the following features:
• Implements all the functions required by Linux OS to provide the real time clock and
alarm interrupt
• Reserves time in power off state
• Alarm wakes up the system from low power modes
Driver Features
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
202 Freescale Semiconductor, Inc.
28.3.1 Source Code Structure
The RTC module is implemented in the following directory:
<Yocto_BuildDir>/linux/drivers/rtc
Table below shows the RTC module files.
Table 28-1. RTC Driver Files
File Description
rtc-snvs.c SNVS RTC driver implementation file
The source file for the SRTC specifies the SRTC function implementations.
28.3.2 Menu Configuration Options
To get to the SRTC driver, use the command bitbake linux-imx -c menuconfig. On the
screen displayed, select Configure the kernel and exit. When the next screen appears
select the following options to enable the SRTC driver:
• Device Drivers > Real Time Clock > Freescale SNVS Real Time Clock
Chapter 28 SNVS Real Time Clock (SRTC) Driver
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 203

Driver Features
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
204 Freescale Semiconductor, Inc.

Chapter 29
Advanced Linux Sound Architecture (ALSA) System
on a Chip (ASoC) Sound Driver
29.1 ALSA Sound Driver Introduction
The Advanced Linux Sound Architecture (ALSA), now the most popular architecture in
Linux system, provides audio and MIDI functionality to the Linux operating system.
ALSA has the following significant features:
• Efficient support for all types of audio interfaces, from consumer sound cards to
professional multichannel audio interfaces.
• Fully modularized sound drivers.
• SMP and thread-safe design.
• User space library (alsa-lib) to simplify application programming and provide higher
level functionality.
• Support for the older Open Sound System (OSS) API, providing binary compatibility
for most OSS programs
ALSA System on Chip (ASoC) layer is designed for SoC audio. The overall project goal
of the ASoC layer provides better ALSA support for embedded system on chip
processors and portable audio CODECs.
The ASoC layer also provides the following features:
• CODEC independence. Allows reuse of CODEC drivers on other platforms and
machines.
• Easy I2S/PCM audio interface setup between CODEC and SoC. Each SoC interface
and CODEC registers its audio interface capabilities with the core.
• Dynamic Audio Power Management (DAPM). DAPM is an ASoC technology
designed to minimize audio subsystem power consumption no matter what audio-use
case is active. DAPM guarantees the lowest audio power state at all times and is
completely transparent to user space audio components. DAPM is ideal for mobile
devices or devices with complex audio requirements.
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 205

• Pop and click reduction. Pops and clicks can be reduced by powering the CODEC
up/down in the correct sequence (including using digital mute). ASoC signals the
CODEC when to change power states.
• Machine-specific controls. Allow machines to add controls to the sound card, for
example, volume control for speaker amp.
ALSA Sound Driver Introduction
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
206 Freescale Semiconductor, Inc.
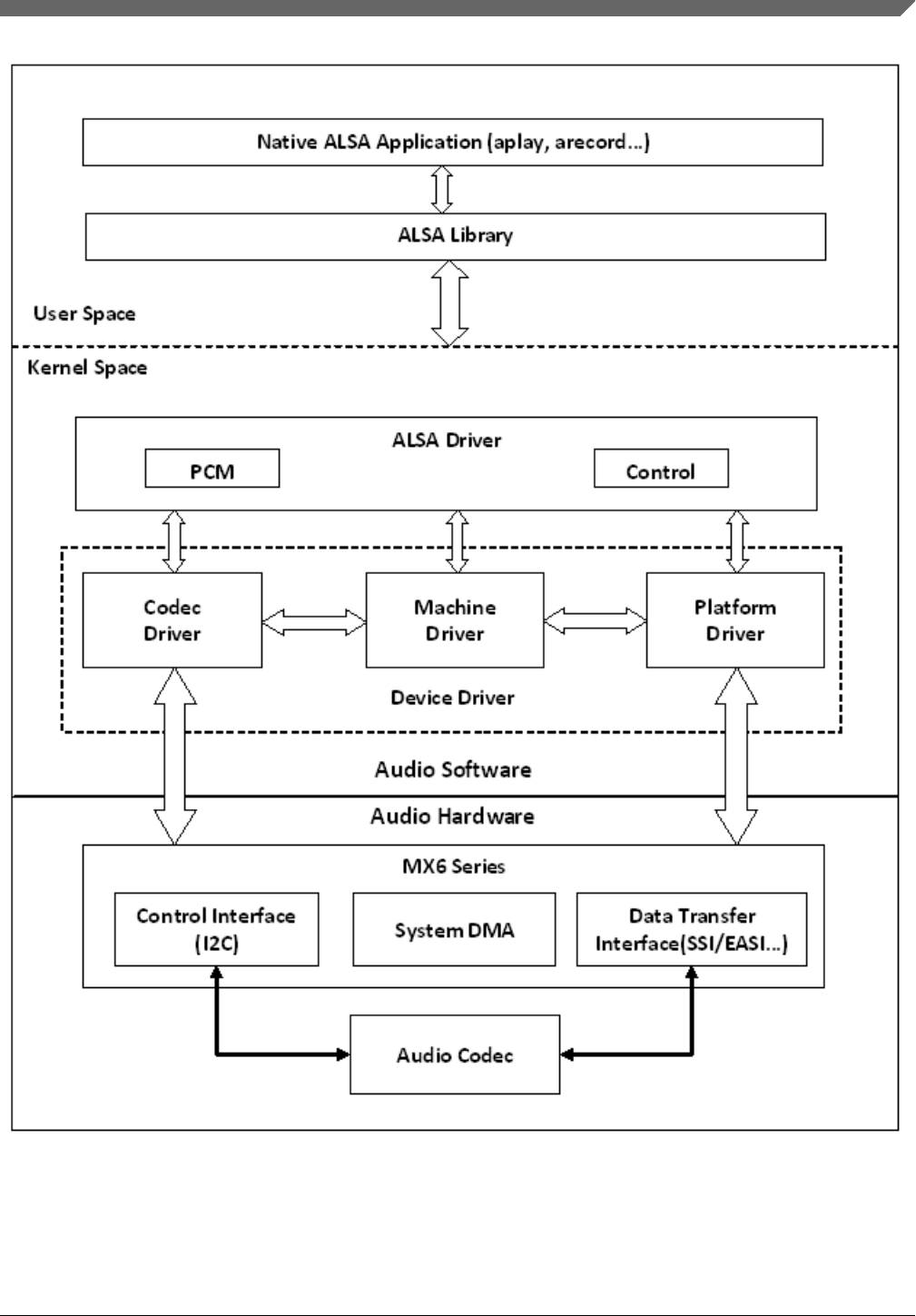
Figure 29-1. ALSA SoC Software Architecture
ASoC basically splits an embedded audio system into 3 components:
Chapter 29 Advanced Linux Sound Architecture (ALSA) System on a Chip (ASoC) Sound Driver
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 207

• Machine driver-handles any machine-specific controls and audio events, such as
turning on an external amp at the beginning of playback.
• Platform driver-contains the audio DMA engine and audio interface drivers (for
example, I2S, AC97, PCM) for that platform.
• CODEC driver-platform independent and contains audio controls, audio interface
capabilities, the CODEC DAPM definition, and CODEC I/O functions.
More detailed information about ASoC can be found in the Linux kernel documentation
in the Linux OS source tree at linux/Documentation/sound/alsa/soc and at www.alsa-
project.org/main/index.php/ASoC.
29.2 SoC Sound Card
Currently, the stereo CODEC (wm8962), 7.1 CODEC (cs42888), and AM/FM CODEC
(si4763) drivers are implemented using ASoC architecture.
These sound card drivers are built in independently. The stereo sound card supports
stereo playback and capture. The 7.1 sound card supports up to eight channels of audio
playback. While enabling ASRC, 7.1 sound card only supports 2 or 6 channels audio
playback. The AM/FM sound card supports radio PCM capture.
NOTE
The 7.1 CODEC is only supported on the i.MX 6Quad and
i.MX 6Solo SABRE Auto platform.
The AM/FM CODEC is only supported on the i.MX 6Quad and
i.MX 6Solo SABRE Auto platform.
29.2.1 Stereo CODEC Features
The stereo CODEC supports the following features:
• Sample rates for playback and capture are 8 KHz, 32 KHz, 44.1 KHz, 48 KHz, and
96 KHz
• Channels:
• Playback: supports two channels.
• Capture: supports two channels.
• Audio formats:
• Playback:
• SNDRV_PCM_FMTBIT_S16_LE
SoC Sound Card
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
208 Freescale Semiconductor, Inc.

• SNDRV_PCM_FMTBIT_S20_3LE
• SNDRV_PCM_FMTBIT_S24_LE
• Capture:
• SNDRV_PCM_FMTBIT_S16_LE
• SNDRV_PCM_FMTBIT_S20_3LE
• SNDRV_PCM_FMTBIT_S24_LE
29.2.2 7.1 Audio Codec Features
• Sample rates for playback and record:
• 48 KHz, 96 KHz, 192 KHz
• Playback: 5.512 k, 8 k, 11.025 k, 16 k, 22 k, 32 k, 44.1 k, 48 k, 64 k, 88.2 k, 96
k, 176.4 k, 192 k (ASRC enabled)
• Channels:
• Playback: 2, 4, 6, 8 channels
• Playback(ASRC enabled): 2, 6 channels
• Capture: 2, 4 channels
• Audio formats:
• Playback:
• SNDRV_PCM_FMTBIT_S16_LE
• SNDRV_PCM_FMTBIT_S20_3LE
• SNDRV_PCM_FMTBIT_S24_LE
• Playback(ASRC enabled):
• SNDRV_PCM_FMTBIT_S16_LE
• SNDRV_PCM_FMTBIT_S24_LE
• Capture:
• SNDRV_PCM_FMTBIT_S16_LE
• SNDRV_PCM_FMTBIT_S20_3LE
• SNDRV_PCM_FMTBIT_S24_LE
29.2.3 AM/FM Codec Features
• Supported sample rate for Capture: 48 KHz
• Supported channels:
• Capture: supports two channels.
• Supported audio formats:
• Capture: SNDRV_PCM_FMTBIT_S16_LE
Chapter 29 Advanced Linux Sound Architecture (ALSA) System on a Chip (ASoC) Sound Driver
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 209

29.2.4 Sound Card Information
The registered sound card information can be listed as follows using the commands aplay
-l and arecord -l. For example, the stereo sound card is registered as card 0.
root@freescale /$ aplay -l
**** List of PLAYBACK Hardware Devices ****
card 0: wm8962audio [wm8962-audio], device 0: HiFi wm8962-0 []
Subdevices: 1/1
Subdevice #0: subdevice #0
29.3 Hardware Operation
The following sections describe the hardware operation of the ASoC driver.
29.3.1 Stereo Audio CODEC
The stereo audio CODEC is controlled by the I2C interface. The audio data is transferred
from the user data buffer to/from the SSI FIFO through the DMA channel. The DMA
channel is selected according to the audio sample bits. AUDMUX is used to set up the
path between the SSI port and the output port which connects with the CODEC. The
CODEC works in master mode and provides the BCLK and LRCLK. The BCLK and
LRCLK can be configured according to the audio sample rate.
The WM8962 ASoC CODEC driver exports the audio record/playback/mixer APIs
according to the ASoC architecture.
The CODEC driver is generic and hardware independent code that configures the
CODEC to provide audio capture and playback. It does not contain code that is specific
to the target platform or machine. The CODEC driver handles:
• CODEC DAI and PCM configuration
• CODEC control I/O-using I2C
• Mixers and audio controls
• CODEC audio operations
• DAC Digital mute control
The WM8962 CODEC is registered as an I2C client when the module initializes. The
APIs are exported to the upper layer by the structure snd_soc_dai_ops .
Headphone insertion/removal can be detected through a GPIO interrupt signal.
SSI dual FIFO features are enabled by default.
Hardware Operation
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
210 Freescale Semiconductor, Inc.

29.3.2 7.1 Audio Codec
The 7.1 audio codec includes 8-channel DAC and 4-channel ADC, which are controlled
by the I2C interface. The audio data is transferred from the user data buffer to the ESAI
fifo, through a DMA channel. The DMA channel is selected according to audio sample
bits. The codec works in slave mode as the esai provides the BCLK and LRCLK. The
BCLK and LRCLK can be configured according to the audio sample rate. The ESAI
supports up to eight audio output ports. While enabling ASRC, 7.1 audio codec supports
2 or 6 channel playback through ASRC. On the i.MX 6 Sabre ARD board, a cs42888
codec with 4 audio in port is used, each port receive two channels of data in the I2S
format(network mode), providing 8-channel of playback functionality. This codec also
has 2 audio output port connected with ESAI, providing 4-channel of recording
functionality.
The codec driver is generic and hardware independent code that configures the codec to
provide audio capture and playback. It does not contain code that is specific to the target
platform or machine. The codec driver handles:
• Codec DAI and PCM configuration
• Codec control I/O-using I2C
• Mixers and audio controls
• Codec audio operations
• DAI Digital mute control
The CS42888 codec is registered as an I2C client when the module initializes. The APIs
are exported to the upper layer by the structure snd_soc_dai_ops.
29.3.3 AM/FM Codec
The AM/FM codec is a virtual codec, it only has a PCM interface connected to the Tuner
device. The audio data is transferred from the user data buffer to or from the SSI FIFO
through the DMA channel. The DMA channel is selected according to the audio sample
bits. AUDMUX is used to set up the path between the SSI port and the output port which
connects with the codec. The codec works in master mode as it provides the BCLK and
LRCLK. The BCLK and LRCLK can be configured according to the audio sample rate.
29.4 Software Operation
The following sections describe the software operation of the ASoC driver.
Chapter 29 Advanced Linux Sound Architecture (ALSA) System on a Chip (ASoC) Sound Driver
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 211
29.4.1 ASoC Driver Source Architecture
File imx-pcm-dma.c is shared by the stereo ALSA SoC driver, the 7.1 ALSA SoC driver
and other CODEC driver. This file is responsible for preallocating DMA buffers and
managing DMA channels.
The stereo CODEC is connected to the CPU through the SSI interface. fsl_ssi.c registers
the CPU DAI driver for the stereo ALSA SoC and configures the on-chip SSI interface.
wm8962.c registers the stereo CODEC and hifi DAI drivers. The direct hardware
operations on the stereo codec are in wm8962.c. imx-wm8962.c is the machine layer
code which creates the driver device and registers the stereo sound card.
The multi-channel codec is connected to the CPU through the ESAI interface. fsl_esai.c
registers the CPU DAI driver for the stereo ALSA SoC and configures the on-chip ESAI
interface. cs42888.c registers the multi-channel CODEC and hifi DAI drivers. The direct
hardware operations on the multi-channel CODEC are in cs42888.c. imx-cs42888.c is the
machine layer code which creates the driver device and registers the stereo sound card.
The AM/FM CODEC is connected to the CPU through the SSI interface. fsl_ssi.c
registers the CPU DAI driver for the stereo ALSA SoC and configures the on-chip SSI
interface. si476x.c registers the Tuner CODEC and Tuner DAI drivers. The direct
hardware operations on the CODEC are in si476x.c. imx-si476x.c is the machine layer
code which creates the driver device and registers the sound card.
Table below shows the stereo codec SoC driver source files. These files are under the
<Yocto_BuildDir>/linux/sound/soc directory.
Table 29-1. Stereo Codec SoC Driver Files
File Description
fsl/imx-wm8962.c Machine layer for stereo CODEC ALSA SoC (CODEC as I2S Master)
fsl/imx-pcm-dma.c Platform layer for stereo CODEC ALSA SoC
fsl/imx-pcm.h Header file for PCM driver and AUDMUX register definitions
fsl/fsl_ssi.c SSI CPU DAI driver for stereo CODEC ALSA SoC
fsl/fsl_ssi.h Header file for SSI CPU DAI driver and SSI register definitions
codecs/wm8962.c CODEC layer for stereo CODEC ALSA SoC
codecs/wm8962.h Header file for stereo CODEC driver
Table below lists the AM/FM codec SoC driver source files. These files are under the
<Yocto_BuildDir>/linux/sound/soc directory.
Software Operation
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
212 Freescale Semiconductor, Inc.

Table 29-2. AM/FM Codec SoC Driver Source Files
File Description
fsl/imx-si476x.c Machine layer for stereo CODEC ALSA SoC (CODEC as I2S Slave)
fsl/imx-pcm-dma.c Platform layer for stereo CODEC ALSA SoC
fsl/imx-pcm.h Header file for pcm driver and AUDMUX register definitions
fsl/fsl_ssi.c SSI CPU DAI driver for stereo CODEC ALSA SoC
fsl/fsl_ssi.h Header file for SSI CPU DAI driver and SSI register definitions
codecs/si476x.c Codec layer for stereo CODEC ALSA SoC
fsl/fsl_sai.c SAI CPU DAI driver for stereo CODEC ALSA SoC
fsl/fsl_ssi.h Header file for the SAI CPU DAI driver and SAI register definitions
Table below shows the multiple-channel ADC SoC driver source files. These files are
also under the <Yocto_BuildDir>/linux/sound/soc directory.
Table 29-3. CS42888 ASoC Driver Source File
File Description
fsl/imx-cs42888.c Machine layer for mutliple-channel CODEC ALSA SoC
fsl/imx-pcm-dma.c Platform layer for mutliple-channel CODEC ALSA SoC
fsl/imx-pcm.h Header file for pcm driver
fsl/fsl_esai.c ESAI CPU DAI driver for mutliple-channel CODEC ALSA SoC
fsl/fsl_esai.h Header file for ESAI CPU DAI driver
codecs/cs42xx8.c CODEC layer for mutliple-channel codec ALSA SoC
codecs/cs42xx8.h Header file for mutliple-channel CODEC driver
fsl/fsl_asrc.c CPU DAI driver of ASRC P2P
fsl/fsl_asrc.h Header file for CPU DAI driver of ASRC P2P
fsl/fsl_asrc_pcm.c Platform layer for ASRC P2P
29.4.2 Sound Card Registration
The codecs have the same registration sequence:
1. The codec driver registers the codec driver, DAI driver, and their operation
functions.
2. The platform driver registers the PCM driver, CPU DAI driver and their operation
functions, pre allocates buffers for PCM components and sets playback and capture
operations as applicable.
3. The machine layer creates the DAI link between codec and CPU registers the sound
card and PCM devices.
Chapter 29 Advanced Linux Sound Architecture (ALSA) System on a Chip (ASoC) Sound Driver
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 213

29.4.3 Device Open
The ALSA driver performs the following functions:
• Allocates a free substream for the operation to be performed.
• Opens the low level hardware device.
• Assigns the hardware capabilities to ALSA runtime information (the runtime
structure contains all the hardware, DMA, and software capabilities of an opened
substream).
• Configures DMA read or write channel for operation.
• Configures CPU DAI and CODEC DAI interface.
• Configures CODEC hardware.
• Triggers the transfer.
After triggering for the first time, the subsequent DMA read/write operations are
configured by the DMA callback.
29.4.4 Devicetree Binding
See the following documents:
• Documentation/devicetree/bindings/powerpc/fsl/ssi.txt
• Documentation/devicetree/bindings/sound/fsl-sai.txt
• Documentation/devicetree/bindings/sound/fsl-easi.txt
• Documentation/devicetree/bindings/sound/fsl-asrc-p2p.txt
• Documentation/devicetree/bindings/sound/wm8962.txt
• Documentation/devicetree/bindings/sound/cs42xx8.txt
• Documentation/devicetree/bindings/sound/imx-audmux.txt
• Documentation/devicetree/bindings/sound/imx-audio-wm8962.txt
• Documentation/devicetree/bindings/sound/imx-audio-cs42888.txt
• Documentation/devicetree/bindings/sound/imx-audio-si476x.txt
29.4.5 Menu Configuration Options
The following Linux kernel configuration options are provided for this module.
• SoC Audio supports for wm8962 CODEC. In menuconfig, this option is available:
-> Device Drivers
-> Sound card support
-> Advanced Linux Sound Architecture
Software Operation
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
214 Freescale Semiconductor, Inc.

-> ALSA for SoC audio support
-> SoC Audio for Freescale i.MX CPUs
-> SoC Audio support for i.MX boards with wm8962
• SoC Audio supports for i.MX cs42888. In menuconfig, this option is available:
-> Device Drivers
-> Sound card support
-> Advanced Linux Sound Architecture
-> ALSA for SoC audio support
-> SoC Audio for Freescale i.MX CPUs
-> SoC Audio support for i.MX boards with cs42888
• SoC Audio supports for AM/FM. In menuconfig, this option is available:
-> Device Drivers
-> Sound card support
-> Advanced Linux Sound Architecture
-> ALSA for SoC audio support
-> SoC Audio for Freescale i.MX CPUs
-> SoC Audio support for i.MX boards with si476x
29.5 Unit Test
This section descrbes how to use the ALSA driver.
29.5.1 Stereo CODEC Unit Test
Stereo CODEC driver supports playback and record features. There are a default volume,
and you may adjust volume by alsamixer command.
Playback feature may be tested by the following command:
• aplay [-Dplughw:0,0] audio.wav
Record feature supports analog micphone and digital micphone. The default is digital
micphone if analog micphone isn't plug-in.
Because analog micphone is connected to IN3R port of WM8962 CODEC, the following
amixer commands are needed to input into command line for enabling analog micphone.
• amixer sset 'MIXINR IN3R' on
• amixer sset 'INPGAR IN3R' on
Record feature may be tested by the following command:
• arecord [-Dplughw:0,0] -r 44100 -f S16_LE -c 2 -d 5 record.wav
Chapter 29 Advanced Linux Sound Architecture (ALSA) System on a Chip (ASoC) Sound Driver
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 215

More usage for aplay/arecord/amixer may be gotten by the following commands.
• aplay --h
• arecord --h
• amixer --h
29.5.2 7.1 Audio Codec Unit Test
The 7.1 Audio codec driver support multi-channel playback and record feature. The
codec has a default volume, and you can adjust volume by alsamixer command.
Playback feature can be tested by following command:
• aplay [-Dplughw:0,0] audio.wav
While enabling ASRC, the 7.1 audio codec should use the device 1 for playback. The
codec has a default volume, and you can adjust volume by alsamixer command.
• aplay [-Dplughw:0,1] audio.wav
Record feature supports line in and mic in simultaneously. While on i.MX 6 Sabre ARD
board, LINE-IN (L/R) use AIN1/AIN2, MICS1/MICS2 use AIN3/AIN4. By default, 2-ch
record uses AIN1/AIN2, 4-ch record uses AIN1/AIN2/AIN3/AIN4 together.
Record feature can be tested by following command:
• arecord [-Dplughw:0,0] -r 48000 -f S16_LE -c 2 -d 5 record.wav
Note:The default ALSA config file, asound.conf located under /etc/, only supports stereo
playback and record, which means, if you want to test 4,6,8-ch playback or 4-ch
recording, using aplay audio.wav or arecord -c 4 audio.wav(without -Dplughw), you will
have to make slight changes to the configure file as following:
• a) make sure playback pcm use dmix_48000 and capture pcm use dsnoop_48000
under pcm.asymed{};
• b) add "channels x" to the end of struct pcm.dmix_48000{} if you want to playback
x-ch wav file(x is greater than 2);
• c) add "channels x" to the end of struct pcm.!dsnoop_48000{} if you want to record
to x-ch wav(x is greater than 2);
If plug plughw is used to make a playback or record, examples as below,
• aplay -Dplughw:0,0 audio.wav or
• arecord -Dplughw:0,0 -c 4 -r 48000 -f S16_LE record.wav
You are not required to change asound.conf because this configure file is not used here.
Unit Test
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
216 Freescale Semiconductor, Inc.
More usage for aplay/arecord/amixer may be gotten by the following commands.
• aplay --h
• arecord --h
• amixer --h
29.5.3 AM/FM Codec Unit Test
This test turns on the AM/FM radio tuner (SI476x). It also sets and gets the current
station.
NOTE: An underrun error may occur sometimes.
This underrun behaviour is normal, since the test connects the AM/FM output to the
audio codec by a simple pipe.
There is not sync method between them. Upper layers (such as gstreamer plugins) should
take care of this sync.
Input the following command in command line to start unit test:
• ./mxc_tuner_test.sh
The following infomation will be output to console window
Welcome to radio menu.
1. Turn on the radio
2. Get current frequency
3. Set current frequency
4. Turn off the radio
9. Exit.
• To turn on the radio select option 1
• To get the current frequency select option 2
• To set the desire frecuency select option 3 <enter> set the frequency <9740>
• To turn off the radio select option 4
• To Exit select option 9
Chapter 29 Advanced Linux Sound Architecture (ALSA) System on a Chip (ASoC) Sound Driver
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 217

Unit Test
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
218 Freescale Semiconductor, Inc.
Chapter 30
Advanced Linux Sound Architecture (ALSA) System
on a Chip (ASoC) Sound Driver for i.MX 6SoloLite
30.1 ALSA Sound Driver Introduction
The Advanced Linux Sound Architecture (ALSA), now the most popular architecture in
Linux system, provides audio and MIDI functionality to the Linux operating system.
ALSA has the following significant features:
• Efficient support for all types of audio interfaces, from consumer sound cards to
professional multichannel audio interfaces.
• Fully modularized sound drivers.
• SMP and thread-safe design.
• User space library (alsa-lib) to simplify application programming and provide higher
level functionality.
• Support for the older Open Sound System (OSS) API, providing binary compatibility
for most OSS programs
ALSA System on Chip (ASoC) layer is designed for SoC audio. The overall project goal
of the ASoC layer provides better ALSA support for embedded system on chip
processors and portable audio CODECs.
The ASoC layer also provides the following features:
• CODEC independence. Allows reuse of CODEC drivers on other platforms and
machines.
• Easy I2S/PCM audio interface setup between CODEC and SoC. Each SoC interface
and CODEC registers its audio interface capabilities with the core.
• Dynamic Audio Power Management (DAPM). DAPM is an ASoC technology
designed to minimize audio subsystem power consumption no matter what audio-use
case is active. DAPM guarantees the lowest audio power state at all times and is
completely transparent to user space audio components. DAPM is ideal for mobile
devices or devices with complex audio requirements.
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 219

• Pop and click reduction. Pops and clicks can be reduced by powering the CODEC
up/down in the correct sequence (including using digital mute). ASoC signals the
CODEC when to change power states.
• Machine-specific controls. Allow machines to add controls to the sound card, for
example, volume control for speaker amp.
ALSA Sound Driver Introduction
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
220 Freescale Semiconductor, Inc.
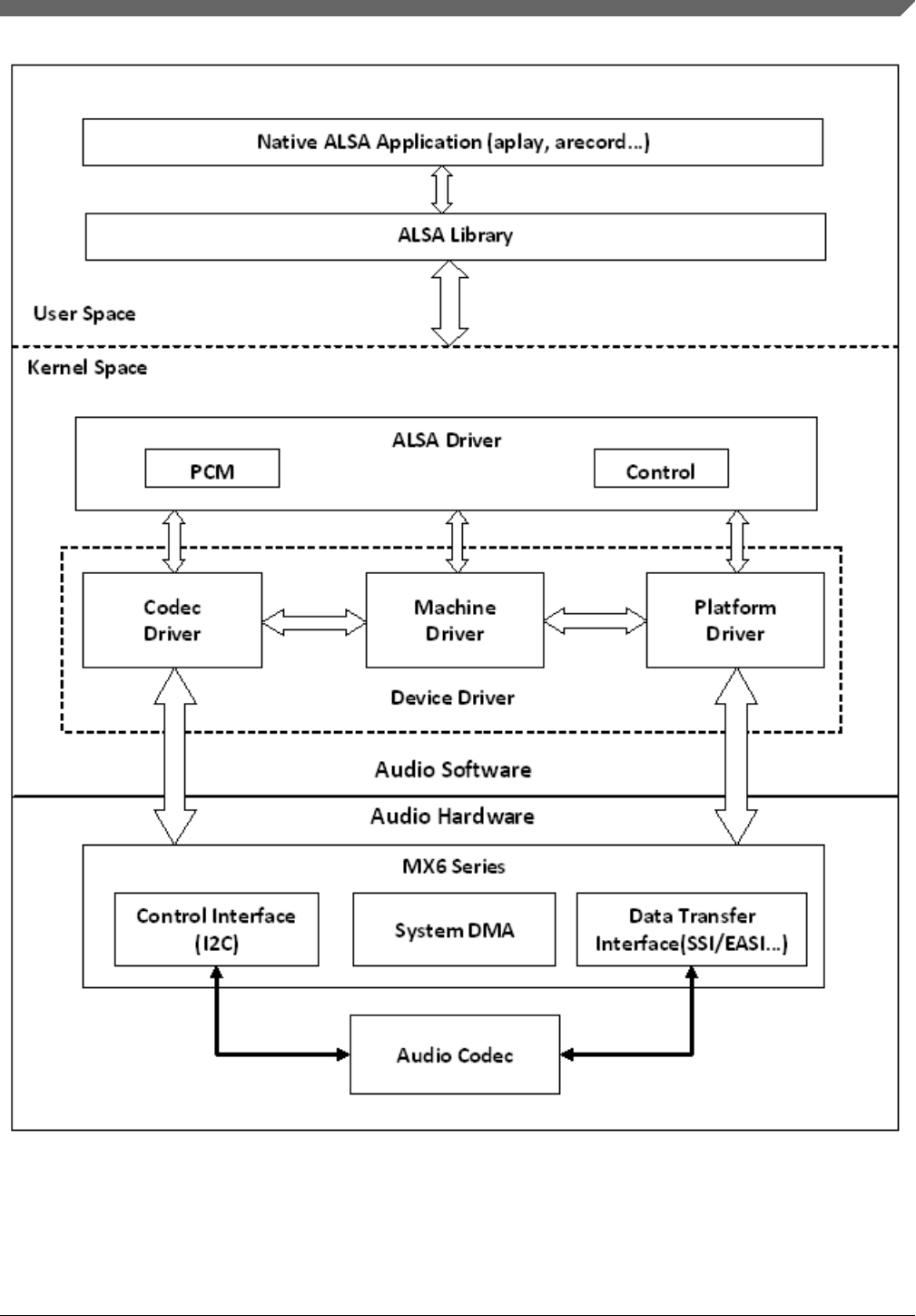
Figure 30-1. ALSA SoC Software Architecture
ASoC basically splits an embedded audio system into 3 components:
Chapter 30 Advanced Linux Sound Architecture (ALSA) System on a Chip (ASoC) Sound Driver for i.MX 6SoloLite
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 221

• Machine driver-handles any machine-specific controls and audio events, such as
turning on an external amp at the beginning of playback.
• Platform driver-contains the audio DMA engine and audio interface drivers (for
example, I2S, AC97, PCM) for that platform.
• CODEC driver-platform independent and contains audio controls, audio interface
capabilities, the CODEC DAPM definition, and CODEC I/O functions.
More detailed information about ASoC can be found in the Linux kernel documentation
in the Linux OS source tree at linux/Documentation/sound/alsa/soc and at www.alsa-
project.org/main/index.php/ASoC.
30.2 SoC Sound Card
Currently, the stereo CODEC (wm8962) is implemented by using SoC architecture on
i.MX 6SoloLite.
30.2.1 Stereo CODEC Features
The stereo CODEC supports the following features:
• Sample rates for playback and capture are 8KHz, 32 KHz, 44.1 KHz, 48 KHz, and 96
KHz
• Channels:
• Playback: supports two channels.
• Capture: supports two channels.
• Audio formats:
• Playback:
• SNDRV_PCM_FMTBIT_S16_LE
• SNDRV_PCM_FMTBIT_S20_3LE
• SNDRV_PCM_FMTBIT_S24_LE
• Capture:
• SNDRV_PCM_FMTBIT_S16_LE
• SNDRV_PCM_FMTBIT_S20_3LE
• SNDRV_PCM_FMTBIT_S24_LE
30.2.2 AM/FM Codec Features
• Supported sample rate for Capture: 48 KHz
• Supported channels:
SoC Sound Card
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
222 Freescale Semiconductor, Inc.
• Capture: supports two channels.
• Supported audio formats:
• Capture: SNDRV_PCM_FMTBIT_S16_LE
30.2.3 Sound Card Information
The registered sound card information can be listed as follows using the commands aplay
-l and arecord -l. For example, the stereo sound card is registered as card 0.
root@freescale /$ aplay -l
**** List of PLAYBACK Hardware Devices ****
card 0: wm8962audio [wm8962-audio], device 0: HiFi wm8962-0 []
Subdevices: 1/1
Subdevice #0: subdevice #0
30.3 Hardware Operation
The following sections describe the hardware operation of the ASoC driver.
30.3.1 Stereo Audio CODEC
The stereo audio CODEC is controlled by the I2C interface. The audio data is transferred
from the user data buffer to/from the SSI FIFO through the DMA channel. The DMA
channel is selected according to the audio sample bits. AUDMUX is used to set up the
path between the SSI port and the output port which connects with the CODEC. The
CODEC works in master mode and provides the BCLK and LRCLK. The BCLK and
LRCLK can be configured according to the audio sample rate.
The WM8962 ASoC CODEC driver exports the audio record/playback/mixer APIs
according to the ASoC architecture.
The CODEC driver is generic and hardware independent code that configures the
CODEC to provide audio capture and playback. It does not contain code that is specific
to the target platform or machine. The CODEC driver handles:
• CODEC DAI and PCM configuration
• CODEC control I/O-using I2C
• Mixers and audio controls
• CODEC audio operations
• DAC Digital mute control
Chapter 30 Advanced Linux Sound Architecture (ALSA) System on a Chip (ASoC) Sound Driver for i.MX 6SoloLite
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 223

The WM8962 CODEC is registered as an I2C client when the module initializes. The
APIs are exported to the upper layer by the structure snd_soc_dai_ops .
Headphone insertion/removal can be detected through a GPIO interrupt signal.
SSI dual FIFO features are enabled by default.
30.3.2 7.1 Audio Codec
The 7.1 audio codec includes 8-channel DAC and 4-channel ADC, which are controlled
by the I2C interface. The audio data is transferred from the user data buffer to the ESAI
fifo, through a DMA channel. The DMA channel is selected according to audio sample
bits. The codec works in slave mode as the esai provides the BCLK and LRCLK. The
BCLK and LRCLK can be configured according to the audio sample rate. The ESAI
supports up to eight audio output ports. While enabling ASRC, 7.1 audio codec supports
2 or 6 channel playback through ASRC. On the i.MX 6 Sabre ARD board, a cs42888
codec with 4 audio in port is used, each port receive two channels of data in the I2S
format(network mode), providing 8-channel of playback functionality. This codec also
has 2 audio output port connected with ESAI, providing 4-channel of recording
functionality.
The codec driver is generic and hardware independent code that configures the codec to
provide audio capture and playback. It does not contain code that is specific to the target
platform or machine. The codec driver handles:
• Codec DAI and PCM configuration
• Codec control I/O-using I2C
• Mixers and audio controls
• Codec audio operations
• DAI Digital mute control
The CS42888 codec is registered as an I2C client when the module initializes. The APIs
are exported to the upper layer by the structure snd_soc_dai_ops.
30.3.3 AM/FM Codec
The AM/FM codec is a virtual codec, it only has a PCM interface connected to the Tuner
device. The audio data is transferred from the user data buffer to or from the SSI FIFO
through the DMA channel. The DMA channel is selected according to the audio sample
bits. AUDMUX is used to set up the path between the SSI port and the output port which
connects with the codec. The codec works in master mode as it provides the BCLK and
LRCLK. The BCLK and LRCLK can be configured according to the audio sample rate.
Hardware Operation
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
224 Freescale Semiconductor, Inc.
30.4 Software Operation
The following sections describe the software operation of the ASoC driver.
30.4.1 ASoC Driver Source Architecture
File imx-pcm-dma.c is shared by the stereo ALSA SoC driver, the 7.1 ALSA SoC driver
and other CODEC driver. This file is responsible for preallocating DMA buffers and
managing DMA channels.
The stereo CODEC is connected to the CPU through the SSI interface. fsl_ssi.c registers
the CPU DAI driver for the stereo ALSA SoC and configures the on-chip SSI interface.
wm8962.c registers the stereo CODEC and hifi DAI drivers. The direct hardware
operations on the stereo codec are in wm8962.c. imx-wm8962.c is the machine layer
code which creates the driver device and registers the stereo sound card.
Table below shows the stereo CODEC SoC driver source files. These files are under the
<YoctoBuildDir>/linux/sound/soc directory.
Table 30-1. Stereo Codec SoC Driver Files
File Description
fsl/imx-wm8962.c Machine layer for stereo CODEC ALSA SoC
fsl/imx-pcm-dma.c Platform layer for stereo CODEC ALSA SoC
fsl/imx-pcm.h Header file for PCM driver and AUDMUX register definitions
fsl/fsl_ssi.c SSI CPU DAI driver for stereo CODEC ALSA SoC
fsl/fsl_ssi.h Header file for SSI CPU DAI driver and SSI register definitions
codecs/wm8962.c CODEC layer for stereo CODEC ALSA SoC
codecs/wm8962.h Header file for stereo CODEC driver
30.4.2 Sound Card Registration
The CODECs have the same registration sequence:
1. The CODEC driver registers the CODEC driver, DAI driver, and their operation
functions.
Chapter 30 Advanced Linux Sound Architecture (ALSA) System on a Chip (ASoC) Sound Driver for i.MX 6SoloLite
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 225

2. The platform driver registers the PCM driver, CPU DAI driver and their operation
functions, pre allocates buffers for PCM components and sets playback and capture
operations as applicable.
3. The machine layer creates the DAI link between CODEC and CPU registers the
sound card and PCM devices.
30.4.3 Device Open
The ALSA driver performs the following functions:
• Allocates a free substream for the operation to be performed.
• Opens the low level hardware device.
• Assigns the hardware capabilities to ALSA runtime information (the runtime
structure contains all the hardware, DMA, and software capabilities of an opened
substream).
• Configures DMA read or write channel for operation.
• Configures CPU DAI and CODEC DAI interface.
• Configures CODEC hardware.
• Triggers the transfer.
After triggering for the first time, the subsequent DMA read/write operations are
configured by the DMA callback.
30.4.4 Platform Data
See the following documents:
• Documentation/devicetree/bindings/powerpc/fsl/ssi.txt
• Documentation/devicetree/bindings/sound/wm8962.txt
• Documentation/devicetree/bindings/sound/imx-audmux.txt
• Documentation/devicetree/bindings/sound/imx-audio-wm8962.txt
30.4.5 Menu Configuration Options
The following Linux kernel configuration options are provided for this module.
• SoC Audio supports for wm8962 CODEC. In menuconfig, this option is available:
-> Device Drivers
-> Sound card support
-> Advanced Linux Sound Architecture
-> ALSA for SoC audio support
Software Operation
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
226 Freescale Semiconductor, Inc.

-> SoC Audio for Freescale i.MX CPUs
-> SoC Audio support for i.MX boards with wm8962
Chapter 30 Advanced Linux Sound Architecture (ALSA) System on a Chip (ASoC) Sound Driver for i.MX 6SoloLite
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 227

Software Operation
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
228 Freescale Semiconductor, Inc.
Chapter 31
Asynchronous Sample Rate Converter (ASRC)
Driver
31.1 Introduction
The Asynchronous Sample Rate Converter (ASRC) converts the sampling rate of a signal
to a signal of different sampling rate. The ASRC supports concurrent sample rate
conversion of up to 10 channels. The sample rate conversion of each channel is
associated to a pair of incoming and outgoing sampling rates. The ASRC supports up to
three sampling rate pairs simultaneously.
31.1.1 Hardware Operation
ASRC includes the following features:
• Supports ratio (Fsin/Fsout) range between 1/24 to 8.
• Designed for rate conversion between 44.1 KHz, 32 KHz, 48 KHz, and 96 KHz.
• Other input sampling rates in the range of 8 KHz to 100 KHz are also supported, but
with less performance (see IC spec for more details).
• Other output sampling rates in the range of 30 KHz to 100 KHz are also supported,
but with less performance.
• Automatic accommodation to slow variations in the incoming and outgoing sampling
rates.
• Tolerant to sample clock jitter.
• Designed mainly for real-time streaming audio usage. Can be used for non-realtime
streaming audio usage when the input sampling clocks are not available.
• In any usage case, the output sampling clocks must be activated.
• In case of real-time streaming audio, both input and output clocks need to be
available and activated.
• In case of non-realtime streaming audio, the input sampling rate clocks can be
avoided by setting ideal-ratio values into ASRC interface registers.
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 229
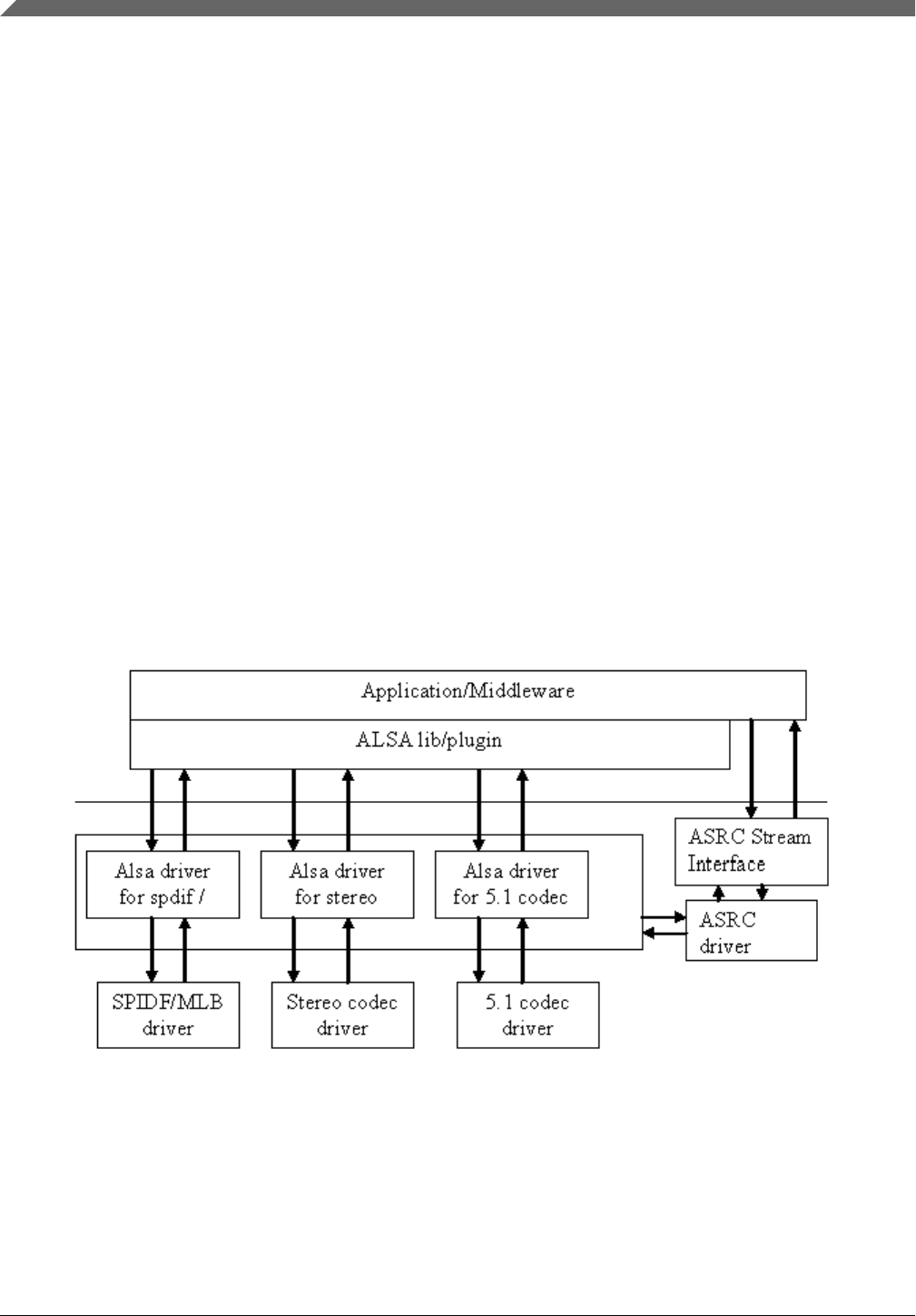
The ASRC supports polling, interrupt and DMA modes, but only DMA mode is used in
the platform for better performance. The ASRC supports following DMA channels:
• Peripheral to peripheral, for example: ASRC to ESAI
• Memory to peripheral, for example: memory to ASRC
• Peripheral to memory, for example: ASRC to memory
For more information, see the chapter on ASRC in the Multimedia Applications
Processor documentation.
31.2 Software Operation
As an assistant component in the audio system, the ASRC driver implementation depends
on the use cases in the platform.
Currently ASRC is used in following two scenarios.
• Memory > ASRC > Memory, ASRC is controlled by user application or ALSA plug-
in.
• Memory > ASRC > peripheral, ASRC is controlled directly by other ALSA driver.
Figure 31-1. Audio Driver Interactions
As illustrated in figure above, the ASRC stream interface provides the interface for the
user space. The ASRC registers itself under /dev/mxc_asrc and creates proc file /proc/
driver/asrc when the module is inserted. proc is used to track the channel number for each
Software Operation
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
230 Freescale Semiconductor, Inc.

pair. If all the pairs are not used, users can adjust the channel number through the proc
file. The total channels number should equal ten, or else the adjusted value cannot be
saved properly.
Now 7.1 audio codec driver support calling ASRC driver for memroy > ASRC >
perripheral(ESAI TX). All input audio file is convert into board defined sampling rate(for
example, 48khz). This use case only supports 2 or 6 channel playback. To call this use
case, user show follow steps below:
• call `aplay -l | grep ASRC` to get the card number and device number of playback
PCM. The device name is CS42888_ASRC. For example, the card number is 0,
device number is 1.
• play audio file with the card0device1 device. For example, aplay -Dplughw:0,1
$AUDIO_FILE.
31.2.1 Sequence for Memory to ASRC to Memory
• Open /dev/mxc_asrc device
• Request ASRC pair - ASRC_REQ_PAIR
• Configure ASRC pair - ASRC_CONIFG_PAIR
• Start ASRC - ASRC_START_CONV
• Write the raw audio data (to be converted) into the user maintained input buffer. Fill
asrc_convert_buffer struct with input/output buffer length and address. Driver would
copy output data to user maintained output buffer address according to the output
buffer size. Repeat this step until all data is converted. -ASRC_CONVERT
• Stop ASRC conversion - ASRC_STOP_CONV
• Release ASRC pair - ASRC_RELEASE_PAIR
• Close /dev/mxc_asrc device
31.2.2 Sequence for Memory to ASRC to Peripheral
Memory to ASRC to peripheral audio path is involved in 7.1 audio codec driver. In 7.1
audio sound card, a new device with the name "cs42888audio [cs42888-audio], device 1:
HiFi-ASRC-FE (*)" is specified for playback and capture with ASRC. The steps below
show the flow of calling ASRC to memroy to peripheral:
• The sound device(PCM) has been registered and start to enable the DMA channel in
ALSA driver
• Request ASRC pair - asrc_req_pair
• Configure ASRC pair - asrc_config_pair
Chapter 31 Asynchronous Sample Rate Converter (ASRC) Driver
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 231
• Enable the DMA channel from Memory to ASRC and from ASRC to Memory
• Start DMA channel and start ASRC conversion - asrc_start_conv
• When audio data playback complete, stop DMA channel and ASRC - asrc_stop_conv
• Release ASRC pair - asrc_release_pair
31.3 Source Code Structure
Table below lists the source files available in the devices directory.
<Yocto_BuildDir>/linux/drivers/mxc/asrc
<Yocto_BuildDir>/linux/include/linux/
<Yocto_BuildDir>/linux/sound/soc/fsl/
<Yocto_BuildDir>/linux/sound/soc/codec/
Table 31-1. ASRC Source File List
File Description
mxc_asrc.c ASRC driver implementation codes including stream interface
mxc_asrc.h ASRC register definitions and export function declarations
imx-cs42888.c memory to ASRC to ESAI TX implementation in 7.1 audio codec machine driver.
imx-pcm-dma.c memroy to ASRC to ESAI TX implementation in 7.1 audio codec platform driver.
fsl_esai.c memroy to ASRC to ESAI TX implementation in 7.1 audio codec cpu driver.
cs42xx8 memory to ASRC to ESAI TX implementation in 7.1 audio codec codec driver.
fsl_asrc.c ALSA CPU DAI driver of ASRC P2P
fsl_asrc.h Header file for ALSA CPU DAI driver of ASRC P2P
fsl_asrc_pcm.c ALSA Platform layer for ASRC P2P
31.3.1 Linux Menu Configuration Options
The menu configuration options are as follows:
Device Drivers
-> MXC support drivers
-> MXC Asynchronous Sample Rate Converter support
-> ASRC support
Now ASRC driver can only be configured build-in module.
Source Code Structure
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
232 Freescale Semiconductor, Inc.

31.4 Devicetree Binding
The functions of device tree bindings for ASRC M2M are as follows:
• compatible: Compatible list, must contain "fsl,imx6q-asrc".
• reg: Offset and length of the register set for the device.
• interrupts: Contains the asrc interrupt.
• clocks: Contains an entry for each entry in clock-names.
• clock-names: Must contain "mem", "ipg", "asrck", and "dma". (Generally, "dma" is
used for SPBA clock.)
• dmas: Generic dma devicetree binding as described in Documentation/devicetree/
bindings/dma/dma.txt.
• dma-names: Six dmas have to be defined, "txa", "rxa", "txb", "rxb", "txc", "rxc".
• fsl,clk-map-version: the mapping relationship in different SOC is different. This
version number can be used to indicate clock map information.
• fsl,clk-channel-bits: indicates the channel bit information.
The functions of device tree bindings for ASRC P2P are as follows:
• compatible: Compatible list, must contain "fsl,imx6q-asrc-p2p".
• fsl,p2p-rate: A valid sample rate for Back-End (I2S) playback and record.
• fsl,p2p-width: A valid sample width for Back-End (I2S) playback and record.
• fsl,asrc-dma-rx-events: Contains three SDMA event numbers for ASRC Rx.
• fsl,asrc-dma-tx-events: Contains three SDMA event numbers for ASRC Tx.
31.4.1 Programming Interface (Exported API and IOCTLs)
The ASRC Exported API allows the ALSA driver to use ASRC services.
The ASRC IOCTLs below are used for user space applications:
ASRC_REQ_PAIR:
Apply a pair from ASRC driver. Once a pair is allocated, ASRC core clock is enabled.
ASRC_CONFIG_PAIR:
Configure ASRC pair allocated. User is responsible for providing parameters defined in
struct asrc_config. Items in asrc_config is listed below:
• pair: ASRC pair allocated by the IOCTL(ASRC_REQ_PAIR).
• channel_num: channel number.
• buffer_num: buffer number need for input and output buffer use.The input/output
buffers are allocated inside ASRC driver. User is responsible for remap it into user
space.
Chapter 31 Asynchronous Sample Rate Converter (ASRC) Driver
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 233

• dma_buffer_size: buffer size for input and output buffers. The buffer size should be
in the unit of page size. Usually, 4k bytes is used.
• input_sample_rate: input sampling rate. Input sample rate should be in 5.512k, 8k,
11.025k, 16k, 22k, 32k, 44.1k, 48k, 64k, 88.2k 96k, 176.4k, 192k.
• output_sample_rate: output sampling rate. Output sampling rate should be in 32k,
44.1k, 48k, 64k, 88.2k, 96k, 176.4k 192k.
• input_word_width: word width of input audio data. The input data word width can be
16 bit or 24 bit.
• output_word_width: word width of output audio data. The output data word width
can be 16 bit or 24 bit.
• inclk: the input clock source can be ESAI RX clock, SSI1 RX clock, SSI2 RX clock,
SPDIF RX clock, MLB_clock, ESAI TX clock, SSI1 TX clock, SSI2 TX clock,
SPDIF TX clock, ASRCLK1 clock, NONE. If using clock except NONE, user
should make sure that the clock is available.
• outclk: the output clock source is the same as the input clock source.
ASRC_CONVERT:
Convert the input data into output data according to the parameters set by
ASRC_CONFIG_PAIR. Driver would copy input_buffer_length bytes data from the
input_buffer_vaddr for convert. After convert, driver fill the output_buffer_length
according to data number generated by ASRC and copy output_buffer_length to
output_buffer_vaddr. However, before calling ASRC_CONVERT, User is responsible
for filling the output_buffer_length according to the ratio of input sample rate and output
sample rate. If the generated buffer size is larger than user filled output_buffer_size,
driver would only copy user filled output_buffer_size to output_buffer_vaddr. If the
generated buffer size is smaller than user filled output_buffer_size(the difference should
be less than 64 bytes.), calling ASRC_CONVERT would fail.
• input_buffer_vaddr: virtual address of input buffer.
• output_buffer_vaddr: virtual address of output buffer.
• input_buffer_length: length of input buffer(bytes).
• output_buffer_length: length of output buffer(bytes).
ASRC_START_CONV:
Start ASRC pair convert.
ASRC_STOP_CONV:
Stop ASRC pair convert.
ASRC_STATUS:
Query ASRC pair status.
Devicetree Binding
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
234 Freescale Semiconductor, Inc.

Chapter 32
The Sony/Philips Digital Interface (S/PDIF) Driver
32.1 Introduction
The Sony/Philips Digital Interface (S/PDIF) audio module is a stereo transceiver that
allows the processor to receive and transmit digital audio. The S/PDIF transceiver allows
the handling of both S/PDIF channel status (CS) and User (U) data. The frequency
measurement block allows the S/PDIF RX section to derive the receive clock from the
incoming S/PDIF stream.
32.1.1 S/PDIF Overview
Figure below shows the block diagram of the S/PDIF interface.
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 235

Figure 32-1. S/PDIF Transceiver Data Interface Block Diagram
32.1.2 Hardware Overview
The S/PDIF is composed of two parts:
• The S/PDIF receiver extracts the audio data from each S/PDIF frame and places the
data in the S/PDIF Rx left and right FIFOs. The Channel Status and User Bits are
also extracted from each frame and placed in the corresponding registers. The S/
PDIF receiver provides a bypass option for direct transfer of the S/PDIF input signal
to the S/PDIF transmitter.
• For the S/PDIF transmitter, the audio data is provided by the processor through the
SPDIFTxLeft and SPDIFTxRight registers. The Channel Status bits are provided
through the corresponding registers. The S/PDIF transmitter generates a S/PDIF
output bitstream in the biphase mark format (IEC958), which consists of audio data,
channel status and user bits.
Introduction
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
236 Freescale Semiconductor, Inc.

In the S/PDIF transmitter, the IEC958 biphase bit stream is generated on both edges of
the S/PDIF Transmit clock. The S/PDIF Transmit clock is generated by the S/PDIF
internal clock dividers and the sources are from outside of the S/PDIF block. The S/PDIF
receiver can recover the S/PDIF Rx clock from the S/PDIF stream. Figure 32-1 shows the
clock structure of the S/PDIF transceiver.
32.1.3 Software Overview
The S/PDIF driver is designed under ALSA System on Chip (ASoC) layer. The ASoC
driver for S/PDIF provides one playback device for Tx and one capture device for Rx.
The playback output audio format can be linear PCM data or compressed data with 16-
bit, 20-bit, and 24-bit audio. The allowed sampling bit rates are 44.1, 48 or 32 KHz. The
capture input audio format can be linear PCM data or compressed 24-bit data and the
allowed sampling bit rates are from 16 to 96 KHz. The driver provides the same interface
for PCM and compressed data transmission.
32.1.4 The ASoC layer
The ASoC layer divides audio drivers for embedded platforms into separate layers that
can be reused. ASoC divides an audio driver into a codec driver, a machine layer, a DAI
(digital audio interface) layer, and a platform layer. The Linux kernel documentation has
some concise description of these layers in linux/Documentation/sound/alsa/soc. In the
case of the S/PDIF driver, we are able to reuse the platform layer (imx-pcm-dma-mx2.c)
that is used by the ssi stereo codec driver.
32.2 S/PDIF Tx Driver
The S/PDIF Tx driver supports the following features.
• 32, 44.1 and 48 KHz sample rates.
• Signed 16 and 24-bit little Endian sample format. Due to S/PDIF SDMA feature, the
24-bit output sample file must have 32-bits in each channel per frame. Only the 24
LSBs are valid.
• In the ALSA subsystem, the supported format is defined as S16_LE and S24_LE.
• Stereo playback.
• Information query through iecset or amixer.
Chapter 32 The Sony/Philips Digital Interface (S/PDIF) Driver
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 237

• The device ID can be determined by using the 'aplay -l' utility to list out the playback
audio devices.
For example:
root@freescale ~$ aplay -l
**** List of PLAYBACK Hardware Devices ****
card 0: imxspdif [imx-spdif], device 0: S/PDIF PCM Playback dit-hifi-0 []
Subdevices: 1/1
Subdevice #0: subdevice #0
•NOTE
The number at the beginning of the IMX_SPDIF line is the
card ID. The string in the square brackets is the card name.
• The ALSA utility provides a common method for user spaces to operate and use
ALSA drivers
#aplay -Dplughw:0,0 audio.wav
NOTE
The -D parameter of aplay indicates the PCM device with
card ID and PCM device ID: hw:[card id],[pcm device id]
The "iecset" utility provides a common method to set or dump the IEC958 status bits.
#iecset -c 0
32.2.1 Driver Design
Before S/PDIF playback, the configuration, interrupt, clock and channel registers are
initialized. During S/PDIF playback, the channel status bits are fixed. The DMA and
interrupts are enabled. S/PDIF has 16 TX sample FIFOs on Left and Right channel
respectively. When both FIFOs are empty, an empty interrupt is generated if the empty
interrupt is enabled. If no data are refilled in the 20.8 μs (1/48000), an underrun interrupt
is generated. Overrun is avoided if only 16 sample FIFOs are filled for each channel
every time. If auto re-synchronization is enabled, the hardware checks if the left and right
FIFO are in sync, and if not, it sets the filling pointer of the right FIFO to be equal to the
filling pointer of the left FIFO and an interrupt is generated.
S/PDIF Tx Driver
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
238 Freescale Semiconductor, Inc.

32.2.2 Provided User Interface
The S/PDIF transmitter driver provides one ALSA mixer sound control interface to the
user besides the common PCM operations interface. It provides the interface for the user
to write S/PDIF channel status codes into the driver so they can be sent in the S/PDIF
stream. The input parameter of this interface is the IEC958 digital audio structure shown
below, and only status member is used:
struct snd_aes_iec958 {
unsigned char status[24]; /* AES/IEC958 channel status bits */
unsigned char subcode[147]; /* AES/IEC958 subcode bits */
unsigned char pad; /* nothing */
unsigned char dig_subframe[4]; /* AES/IEC958 subframe bits */
};
32.3 S/PDIF Rx Driver
The S/PDIF Rx driver supports the following features:
• 16, 32, 44.1, 48, 64 and 96 KHz receiving sample rate
• Signed 24-bit little endian sample format. Due to S/PDIF SDMA feature, each
channel bit length in PCM recorded frame is 32 bits, and only the 24 LSBs are valid
In ALSA subsystem, the supported format is defined as S24_LE.
• Stereo record.
• The device ID can be determined by using the 'arecord -l' to list out record devices.
For example:
root@freescale ~$ arecord -l
**** List of CAPTURE Hardware Devices ****
card 0: cs42888audio [cs42888-audio], device 0: HiFi CS42888-0 []
Subdevices: 1/1
Subdevice #0: subdevice #0
card 1: imxspdif [imx-spdif], device 0: S/PDIF PCM Capture dir-hifi-0 []
Subdevices: 1/1
Subdevice #0: subdevice #0
• The ALSA utility provides a common method for user spaces to operate and use
ALSA drivers.
#arecord -Dplughw:1,0" -c 2 -r 44100 -f S24_LE record.wav
Chapter 32 The Sony/Philips Digital Interface (S/PDIF) Driver
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 239

NOTE
The -D parameter of the arecord indicates the PCM device
with card ID and PCM device ID: hw:[card id],[pcm device
id]
The "iecset" utility provides a common method to set or dump the IEC958 status bits.
#iecset -c 1
32.3.1 Driver Design
Before the driver can read a data frame from the S/PDIF receiver FIFO, it must wait for
the internal DPLL to be locked. Using the high-speed system clock, the internal DPLL
can extract the bit clock (advanced pulse) from the input bit stream. When this internal
DPLL is locked, the LOCK bit of PhaseConfig Register is set and the driver configures
the interrupt, clock and SDMA channel. After that, the driver can receive audio data,
channel status, user bits and valid bits concurrently.
For channel status reception, a total of 48 channel status bits are received in two registers.
The driver reads them out when a user application makes a request.
For user bits reception, there are two modes for User Channel reception: CD and non-CD.
The mode is determined by the USyncMode (bit 1 of CDText_Control register). User can
call the sound control interface to set the mode (see Table 32-1), but no matter what the
mode is, the driver handles the user bits in the same way. For the S/PDIF Rx, the
hardware block copies the Q bits from the user bits to the QChannel registers and puts the
user bits in UChannel registers. The driver allocates two queue buffers for both U bits
and Q bits. The U bits queue buffer is 96x2 bytes in size, the Q bits queue buffer is 12x2
bytes in size, and queue buffers are filled in the U/Q Full, Err and Sync interrupt
handlers. This means that the user can get the previous ready U/Q bits while S/PDIF
driver is reading new U/Q bits.
For valid bit reception, S/PDIF Rx hardware block triggers an interrupt and set interrupt
status upon reception. A sound control interface is provided for the user to get the status
of this valid bit.
32.3.2 Provided User Interface
The S/PDIF Rx driver provides interfaces for user application as shown in table below.
S/PDIF Rx Driver
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
240 Freescale Semiconductor, Inc.
Table 32-1. S/PDIF Rx Driver Interfaces
Interface Type Mode1Parameter Comment
Common PCM PCM - - PCM open/close
prepare/trigger
hw_params/sw_params
Rx Sample
Rate
Sound
Control2r Integer
Range: [16000, 96000]
Get sample rate. It is not accurate due to DPLL
frequency measure module. So the user
application must do a correction to the get
value.
USyncMode Sound
Control
rw Boolean
Value: 0 or 1
Set 1 for CD mode
Set 0 for non-CD mode
Channel Status Sound
Control
r struct snd_aes_iec958
Only status [6] array member is used
-
User bit Sound
Control
r Byte array
96 bytes for U bits
12 bytes for Q bits
-
No good V bit Sound
Control
r Boolean
Value: 0 or 1
An interrupt is associated with the valid flag.
(interrupt 16 - SPDIFValNoGood). This interrupt
is set every time a frame is seen on the SPDIF
interface with the valid bit set to invalid.
1. The mode column shows the interface attribute: r (read) or w (write)
2. The sound control type of interface is called by the snd_ctl_xxx() alsa-lib function
The user application can follow the program flow from Figure 32-2 to use the S/PDIF Rx
driver. First, the application opens the S/PDIF Rx PCM device, waits for the DPLL to
lock the input bit stream, and gets the input sample rate. If the USyncMode needs to be
set, set it before reading the U/Q bits. Next, set the hardware parameters, including
channel number, format and capture sample rate which is obtained from the driver. Then,
call prepare and trigger to startup S/PDIF Rx stream read. Finally, call the read function
to get the data. During the reading process, applications can read the U/Q bits and
channel status from the driver and valid the no good bit.
Chapter 32 The Sony/Philips Digital Interface (S/PDIF) Driver
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 241
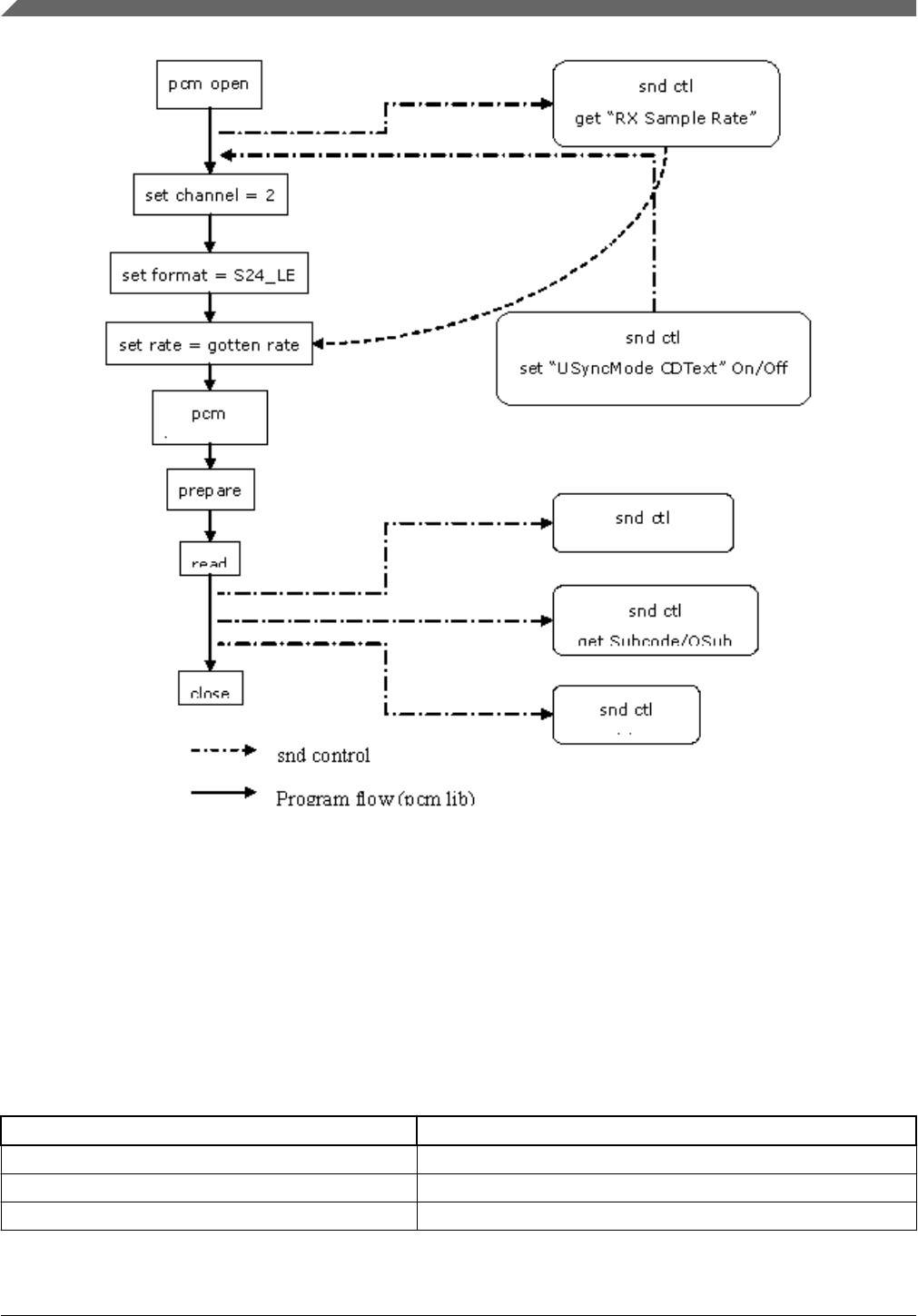
Figure 32-2. S/PDIF Rx Application Program Flow
32.4 Source Code Structure
Table below lists the source files for the driver.
These files are under the <Yocto_BuildDir>/linux/ directory.
Table 32-2. S/PDIF Driver Files
File Description
sound/soc/codecs/spdif_transmitter.c S/PDIF ALSA SOC playback codec driver
sound/soc/codecs/spdif_receiver.c S/PDIF ALSA SOC record codec driver
sound/soc/fsl/imx-spdif.c S/PDIF ALSA SOC machine layer
Table continues on the next page...
Source Code Structure
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
242 Freescale Semiconductor, Inc.
Table 32-2. S/PDIF Driver Files (continued)
File Description
sound/soc/fsl/fsl_spdif.c S/PDIF ALSA SOC DAI layer
sound/soc/fsl/imx-pcm-dma.c ALSA SOC platform layer
sound/soc/fsl/imx-pcm.h ALSA SOC platform layer header
32.5 Menu Configuration Options
The following Linux kernel configurations are provided for this module:
To get to these options, use the bitbake linux-imx -c menuconfig command. Select
Configure the Kernel on the screen displayed and exit. When the next screen appears,
select the following options to enable this module:
• CONFIG_SND_IMX_SPDIF - Configuration option for the S/PDIF driver. In the
menuconfig, this option is available:
-> Device Drivers
-> Sound card support
-> Advanced Linux Sound Architecture
-> ALSA for SoC audio support
-> SoC Audio for Freescale i.MX CPUs
-> SoC Audio support for i.MX boards with S/PDIF
32.6 Device Tree Bindings
Please refer to the following documents:
• Documentation/devicetree/bindings/sound/fsl,spdif.txt
• Documentation/devicetree/bindings/sound/imx-audio-spdif.txt
32.7 Interrupts and Exceptions
S/PDIF Tx/Rx hardware block has many interrupts to indicate the success, exception and
event.
The driver handles the following interrupts:
• DPLL Lock and Loss Lock-Saves the DPLL lock status; this is used when getting the
Rx sample rate
Chapter 32 The Sony/Philips Digital Interface (S/PDIF) Driver
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 243

• U/Q Channel Full and overrun/underrun-Puts the U/Q channel register data into
queue buffer, and update the queue buffer write pointer
• U/Q Channel Sync-Saves the ID of the buffer whose U/Q data is ready for read out
• U/Q Channel Error-Resets the U/Q queue buffer
32.8 Unit Test Preparation
In order to prepare to run a unit test, perform the following actions:
• Setup M-Audio Transit USB sound card by installing M-Audio Transit driver on
your PC.
• Install WaveLab tools on your PC.
32.8.1 Tx test step
• Plug optical line into [line|optical] port of M-Audio transit.
NOTE
Make sure the [optical out] port of M-Audio transit has no
output (red light off) after plugging the optical line.
• Startup WaveLab, press record button on toolbar, setup the record file name, sample
rate, channel number, then do record.
• Meanwhile, on board use following command to play one wave file:
#aplay -D hw:[card id],[pcm id] audioXXkYYS.wav
• After aplay finishing, stop recording in WaveLab.
• Play the recorded wav file in wavelab to check.
32.8.2 Rx test step
• Plug optical line into [optical port] of M-Audio transit
• Startup WaveLab, open a test wav file: audioXXkYYS.wav to play in loop
• Meanwhile, on board use following command to record one wave file. After finish
recording, you may playback the record wav file on other audio card on board or PC
#arecord -D hw:[card id],[pcm id] -c 2 -d 20 -r [sample rate in Hz] -f S24_LE record.wav
NOTE
The sample rate argument in the arecord command must be
consistent with wav file playing on WaveLab.
Unit Test Preparation
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
244 Freescale Semiconductor, Inc.

Chapter 33
SPI NOR Flash Memory Technology Device (MTD)
Driver
33.1 Introduction
The SPI NOR Flash Memory Technology Device (MTD) driver provides the support to
the data Flash though the SPI interface.
By default, the SPI NOR Flash MTD driver creates static MTD partitions to support data
Flash.
33.1.1 Hardware Operation
On some boards, the SPI NOR - AT45DB321D is equipped, while on some boards
M25P32 is equipped. Check the SPI NOR type on the boards and then configure it
properly.
The AT45DB321D is a 2.7 V, serial-interface sequential access Flash memory. The
AT45DB321D serial interface is SPI compatible for frequencies up to 66 MHz. The
memory is organized as 8,192 pages of 512 bytes or 528 bytes. The AT45DB321D also
contains two SRAM buffers of 512/528 bytes each which allow receiving of data while a
page in the main memory is being reprogrammed, as well as writing a continuous data
stream.
The M25P32 is a 32 Mbit (4M x 8) Serial Flash memory, with advanced write protection
mechanisms, accessed by a high-speed SPI-compatible bus up to 75 MHz. The memory
is organized as 64 sectors, each containing 256 pages. Each page is 256 bytes wide. Thus,
the whole memory can be viewed as consisting of 16384 pages, or 4,194,304 bytes. The
memory can be programmed 1 to 256 bytes at a time using the Page Program instruction.
The whole memory can be erased using the Bulk Erase instruction, or a sector at a time,
using the Sector Erase instruction.
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 245
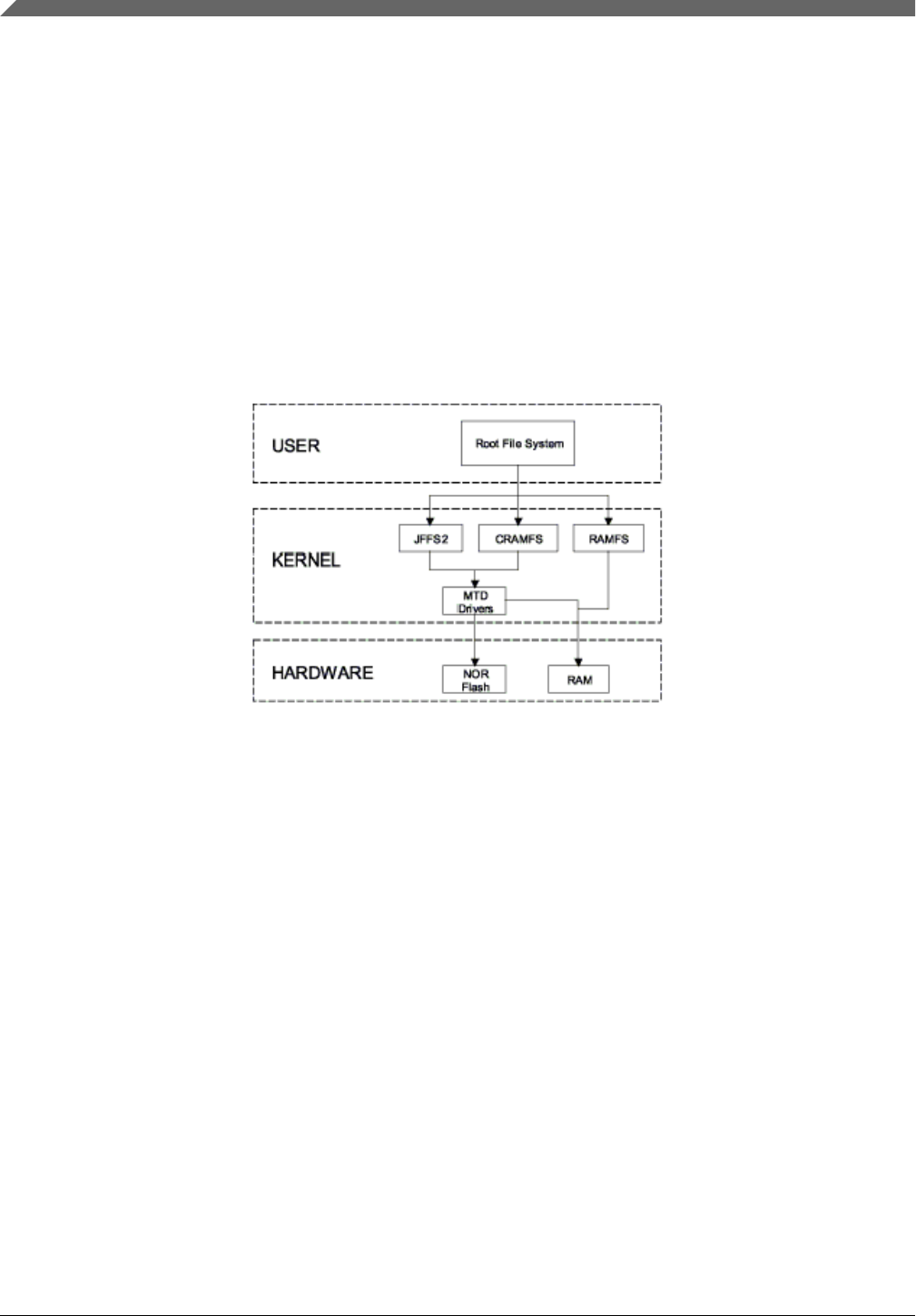
Unlike conventional Flash memories that are accessed randomly, these two SPI NOR
access data sequentially. They operate from a single 2.7-3.6 V power supply for program
and read operations. They are enabled through a chip select pin and accessed through a
three-wire interface: Serial Input, Serial Output, and Serial Clock.
33.1.2 Software Operation
In a Flash-based embedded Linux system, a number of Linux technologies work together
to implement a file system. Figure below illustrates the relationships between some of the
standard components.
Figure 33-1. Components of a Flash-Based File System
The MTD subsystem for Linux OS is a generic interface to memory devices, such as
Flash and RAM, providing simple read, write, and erase access to physical memory
devices. Devices called mtdblock devices can be mounted by JFFS, JFFS2 and CRAMFS
file systems. The SPI NOR MTD driver is based on the MTD data Flash driver in the
kernel by adding SPI access. In the initialization phase, the SPI NOR MTD driver detects
a data Flash by reading the JEDEC ID. Then the driver adds the MTD device. The SPI
NOR MTD driver also provides the interfaces to read, write, and erase NOR Flash.
33.1.3 Driver Features
This NOR MTD implementation supports the following features:
• Provides necessary information for the upper layer MTD driver
Introduction
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
246 Freescale Semiconductor, Inc.
33.1.4 Source Code Structure
The SPI NOR MTD driver is implemented in the following directory:
drivers/mtd/devices/
Table below shows the driver files:
Table 33-1. SPI NOR MTD Driver Files
File Description
m25p80.c Source file
33.1.5 Menu Configuration Options
To get to the SPI NOR MTD driver, use the command bitbake linux-imx -c menuconfig.
On the screen displayed, select Configure the kernel and exit. When the next screen
appears select the following options to enable the SPI NOR MTD driver accordingly:
• CONFIG_MTD_M25P80: This config enables access to most modern SPI flash
chips, used for program and data storage.
• Device Drivers > Memory Technology Device (MTD) support >Self-contained MTD
device drivers > Support most SPI Flash chips (AT26DF, M25P, W25X, ...)
Chapter 33 SPI NOR Flash Memory Technology Device (MTD) Driver
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 247

Introduction
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
248 Freescale Semiconductor, Inc.

Chapter 34
MMC/SD/SDIO Host Driver
34.1 Introduction
The MultiMediaCard (MMC)/ Secure Digital (SD)/ Secure Digital Input Output (SDIO)
Host driver implements a standard Linux driver interface to the ultra MMC/SD host
controller (uSDHC) .
The host driver is part of the Linux kernel MMC framework.
The MMC driver has the following features:
• 1-bit or 4-bit operation for SD3.0 and SDIO 2.0 cards (so far we support SDIO v2.0
(AR6003 is verified)).
• Supports card insertion and removal detections.
• Supports the standard MMC commands.
• PIO and DMA data transfers.
• Supports power management.
• Supports 1/4/8-bit operations for MMC cards.
• For i.MX 6, USDHC supports eMMC4.4 SDR and DDR modes.
• For i.MX 7Dual, USDHC supports eMMC5.0, which includes HS400 and HS200.
• Supports SD3.0 SDR50 and SDR104 modes.
34.1.1 Hardware Operation
The MMC communication is based on an advanced 11-pin serial bus designed to operate
in a low voltage range. The uSDHC module supports MMC along with SD memory and
I/O functions. The uSDHC controls the MMC, SD memory, and I/O cards by sending
commands to cards and performing data accesses to and from the cards. The SD memory
card system defines two alternative communication protocols: SD and SPI. The uSDHC
only supports the SD bus protocol.
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 249

The uSDHC command transfer type and uSDHC command argument registers allow a
command to be issued to the card. The uSDHC command, system control, and protocol
control registers allow the users to specify the format of the data and response and to
control the read wait cycle.
There are four 32-bit registers used to store the response from the card in the uSDHC.
The uSDHC reads these four registers to get the command response directly. The uSDHC
uses a fully configurable 128x32-bit FIFO for read and write. The buffer is used as
temporary storage for data being transferred between the host system and the card, and
vice versa. The uSDHC data buffer access register bits hold 32-bit data upon a read or
write transfer.
For receiving data, the steps are as follows:
1. The uSDHC controller generates a DMA request when there are more words
received in the buffer than the amount set in the RD_WML register
2. Upon receiving this request, DMA engine starts transferring data from the uSDHC
FIFO to system memory by reading the data buffer access register.
For transmitting data, the steps are as follows:
1. The uSDHC controller generates a DMA request whenever the amount of the buffer
space exceeds the value set in the WR_WML register.
2. Upon receiving this request, the DMA engine starts moving data from the system
memory to the uSDHC FIFO by writing to the Data Buffer Access Register for a
number of pre-defined bytes.
The read-only uSDHC Present State and Interrupt Status Registers provide uSDHC
operations status, application FIFO status, error conditions, and interrupt status.
When certain events occur, the module has the ability to generate interrupts as well as set
the corresponding Status Register bits. The uSDHC interrupt status enable and signal-
enable registers allow the user to control if these interrupts occur.
34.1.2 Software Operation
The Linux OS contains an MMC bus driver which implements the MMC bus protocols.
The MMC block driver handles the file system read/write calls and uses the low level
MMC host controller interface driver to send the commands to the uSDHC.
The MMC driver is responsible for implementing standard entry points for init, exit,
request, and set_ios. The driver implements the following functions:
Introduction
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
250 Freescale Semiconductor, Inc.

• The init function esdhc_pltfm_init() initializes the platform hardware and set platform
dependant flags or values to sdhci_host structure.
• The exit function esdhc_pltfm_exit() deinitializes the platform hardware and frees the
memory allocated.
• The function esdhc_pltfm_get_max_clock() gets the maximum SD bus clock frequency
supported by the platform.
• The function esdhc_pltfm_get_min_clock() gets the minimum SD bus clock frequency
supported by the platform.
•esdhc_pltfm_get_ro() gets the card read only status.
•esdhc_execute_tuning() handles the preparation for tuning. It's only used for SD3.0
UHS-I mode.
•esdhc_set_clock() handles the clock change request.
Figure below shows how the MMC-related drivers are layered.
Figure 34-1. MMC Drivers Layering
Chapter 34 MMC/SD/SDIO Host Driver
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 251
34.2 Driver Features
The MMC driver supports the following features:
• Supports multiple uSDHC modules.
• Provides all the entry points to interface with the Linux MMC core driver.
• MMC and SD cards.
• SDIO cards.
• SD3.0 cards.
• Recognizes data transfer errors such as command time outs and CRC errors.
• Power management.
• It supports to be built as loadable or builtin module
34.2.1 Source Code Structure
Table below shows the uSDHC source files available in the kernel source directory:
drivers/mmc/host/.
Table 34-1. uSDHC Driver Files MMC/SD Driver Files
File Description
sdhci.c sdhci standard stack code
sdhci-pltfm.c sdhci platform layer
sdhci-esdhc-imx.c uSDHC driver
sdhci-esdhc.h uSDHC driver header file
34.2.2 Menu Configuration Options
The following Linux kernel configuration options are provided for this module.
• CONFIG_MMC builds support for the MMC bus protocol. In menuconfig, this
option is available under:
• Device Drivers > MMC/SD/SDIO Card support
• By default, this option is Y.
• CONFIG_MMC_BLOCK builds support for MMC block device driver which can be
used to mount the file system. In menuconfig, this option is available under:
• Device Drivers > MMC/SD Card Support > MMC block device driver
• By default, this option is Y.
Driver Features
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
252 Freescale Semiconductor, Inc.

• CONFIG_MMC_SDHCI_ESDHC_IMX is used for the i.MX USDHC ports. In
menuconfig, this option is found under:
• Device Drivers > MMC/SD Card Support > Secure Digital Host Controller
Interface support > SDHCI support on the platform specific bus > SDHCI
platform support for the Freescale eSDHC i.MX controller
To compile SDHCI driver as a loadable module, several options should be selected
as indicated below:
• CONFIG_MMC_SDHCI=m, it can be found at Device Drivers > MMC/SD Card
Support > Secure Digital Host Controller Interface support
• CONFIG_MMC_SDHCI_PLTFM=m, it can be found at Device Drivers >
MMC/SD Card Support > Secure Digital Host Controller Interface support >
SDHCI support on the platform specific bus.
• CONFIG_MMC_SDHCI_ESDHC_IMX=y, it can be found at Device Drivers >
MMC/SD Card Support > Secure Digital Host Controller Interface support >
SDHCI support on the platform specific bus > SDHCI platform support for the
Freescale eSDHC i.MX controller
To compile SDHCI driver as a builttin module, several options should be selected as
indicated below:
• CONFIG_MMC_SDHCI=y, it can be found at Device Drivers > MMC/SD Card
Support > Secure Digital Host Controller Interface support
• CONFIG_MMC_SDHCI_PLTFM=y, it can be found at Device Drivers >
MMC/SD Card Support > Secure Digital Host Controller Interface support >
SDHCI support on the platform specific bus.
• CONFIG_MMC_SDHCI_ESDHC_IMX=y, it can be found at Device Drivers >
MMC/SD Card Support > Secure Digital Host Controller Interface support >
SDHCI support on the platform specific bus > SDHCI platform support for the
Freescale eSDHC i.MX controller
• CONFIG_MMC_UNSAFE_RESUME is used for embedded systems which use a
MMC/SD/SDIO card for rootfs. In menuconfig, this option is found under:
• Device drivers > MMC/SD/SDIO Card Support > Assume MMC/SD cards are
non-removable.
34.2.3 Devicetree Binding
Required properties:
• compatible : Should be "fsl,<chip>-esdhc"
• reg : Should contain eSDHC registers location and
• interrupts : Should contain eSDHC interrupt
Optional properties:
Chapter 34 MMC/SD/SDIO Host Driver
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 253

• non-removable : Indicate the card is wired to host permanently
• fsl,cd-internal : Indicate to use controller internal card detection
• fsl,wp-internal : Indicate to use controller internal write protection
• cd-gpios : Specify GPIOs for card detection
• wp-gpios : Specify GPIOs for write protection
• fsl,delay-line : Specify delay line value for emmc ddr mode
Example:usdhc@02194000 { /* uSDHC2 */
compatible = "fsl,imx6q-usdhc";
reg = <0x02194000 0x4000>;
interrupts = <0 23 0x04>;
clocks = <&clks 164>, <&clks 164>, <&clks 164>;
clock-names = "ipg", "ahb", "per";
pinctrl-names = "default";
pinctrl-0 = <&pinctrl_usdhc2_1>;
cd-gpios = <&gpio2 2 0>;
wp-gpios = <&gpio2 3 0>;
bus-width = <8>;
no-1-8-v;
keep-power-in-suspend;
enable-sdio-wakeup;
status = "okay";
};
Reference:
• Documentation/devicetree/bindings/mmc/fsl-imx-esdhc.txt
• arch/arm/boot/dts/imx6*.dtsi
34.2.4 Programming Interface
This driver implements the functions required by the MMC bus protocol to interface with
the i.MX uSDHC module.
See the Linux document generated from build: make htmldocs.
34.2.5 Loadable Module Operations
The SDHCI driver can be built as loadable or builtin module.
1. How to build SDHCI driver as loadable module.
• CONFIG_MMC_SDHCI=m, it can be found at Device Drivers > MMC/SD Card
Support > Secure Digital Host Controller Interface support
Driver Features
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
254 Freescale Semiconductor, Inc.

• CONFIG_MMC_SDHCI_PLTFM=m, it can be found at Device Drivers >
MMC/SD Card Support > Secure Digital Host Controller Interface support >
SDHCI support on the platform specific bus.
• CONFIG_MMC_SDHCI_ESDHC_IMX=y, it can be found at Device Drivers >
MMC/SD Card Support > Secure Digital Host Controller Interface support >
SDHCI support on the platform specific bus > SDHCI platform support for the
Freescale eSDHC i.MX controller
2. How to load and unload SDHCI module.
Due to dependency, load or unload the module following the module sequence
shown below.
run the following commands to load module:
• load modules via insmod command, assuming the files of sdhci.ko and sdhci-
platform.ko exist in current directory.
$> insmod sdhci.ko
$> insmod sdhci-platform.ko
• load modules via modprobe command, make sure the files of sdhci.ko and sdhci-
platform.ko exist in corresponding kernel module lib directory.
$> modprobe sdhci.ko
$> modprobe sdhci-platform.ko
run the following commands to unload module.:
• unload modules via insmod command.
$> rmsmod sdhci-platform
$> rmsmod sdhci
• unload modules via modprobe command.
$> modprobe -r sdhci-platform
$> modprobe -r sdhci
Chapter 34 MMC/SD/SDIO Host Driver
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 255

Driver Features
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
256 Freescale Semiconductor, Inc.

Chapter 35
NAND GPMI Flash Driver
35.1 Introduction
The NAND Flash Memory Technology Devices (MTD) driver is used in the Generic-
Purpose Media Interface (GPMI) controller on the i.MX 6 serials.
Only the hardware-specific layer has to be implemented for the NAND MTD driver to
operate.
The rest of the functionality such as Flash read/write/erase is automatically handled by
the generic layer provided by the Linux MTD subsystem for NAND devices.
35.1.1 Hardware Operation
NAND Flash is a nonvolatile storage device used for embedded systems.
It does not support random accesses of memory as in the case of RAM or NOR Flash.
Reading or writing to NAND Flash must be done through the GPMI. NAND Flash is a
sequential access device appropriate for mass storage applications. Code stored on
NAND Flash cannot be executed from there. Code must be loaded into RAM memory
and executed from there. The i.MX 6 contains a hardware error-correcting block.
35.2 Software Operation
MTDs in Linux covers all memory devices such as RAM, ROM, and different kinds of
NOR/NAND Flashes.
The MTD subsystem provides uniform access to all such devices. Above the MTD
devices there could be either MTD block device emulation with a Flash file system
(JFFS2) or a UBI layer. The UBI layer in turn, can have either UBIFS above the volumes
or a Flash Translation Layer (FTL) with a regular file system (FAT, Ext2/3) above it. The
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 257

hardware-specific driver interfaces with the GPMI module on the i.MX 6. It implements
the lowest level operations such as read, write and erase. If enabled, it also provides
information about partitions on the NAND device-this information has to be provided by
platform code.
The NAND driver is the point where read/write errors can be recovered if possible.
Hardware error correction is performed by BCH blocks and is driven by NAND drivers
code.
Detailed information about NAND driver interfaces can be found at www.linux-
mtd.infradead.org
35.2.1 Basic Operations: Read/Write
The NAND driver exports the following callbacks:
gpmi_ecc_read_page (with ECC)
gpmi_ecc_write_page (with ECC)
gpmi_read_byte (without ECC)
gpmi_read_buf (without ECC)
gpmi_write_buf (without ECC)
gpmi_ecc_read_oob (with ECC)
gpmi_ecc_write_oob (with ECC)
These functions read the requested amount of data, with or without error correction. In
the case of read, the gpmi_read_page() function is called, which creates the DMA chain,
submits it to execute, and waits for completion. The write case is a bit more complex: the
data to be written is mapped and flushed out by calling gpmi_send_page().
35.2.2 Error Correction
When reading or writing data to Flash, some bits can be flipped. This is normal behavior,
and NAND drivers utilize various error correcting schemes to correct this. It could be
resolved with software or hardware error correction. The GPMI driver uses only a
hardware correction scheme with the help of an hardware accelerator-BCH.
For BCH, the page laylout of 2K page is (2k + 64), the page layout of 4K page is (4k +
218) the page layout of 8K page is (8K + 448).
Software Operation
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
258 Freescale Semiconductor, Inc.

35.2.3 Boot Control Block Management
During startup, the NAND driver scans the first block for the presence of a NAND
Control Block (NCB). Its presence is detected by magic signatures. When a signature is
found, the boot block candidate is checked for errors using Hamming code. If errors are
found, they are fixed, if possible. If the NCB is found, it is parsed to retrieve timings for
the NAND chip.
All boot control blocks are created when formatting the medium using the user space
application kobs-ng .
35.2.4 Bad Block Handling
When the driver begins, by default, it builds the bad block table. It is possible to
determine if a block is bad, dynamically, but to improve performance it is done at boot
time. The badness of the erase block is determined by checking a pattern in the beginning
of the spare area on each page of the block. However, if the chip uses hardware error
correction, the bad marks falls into the ECC bytes area. Therefore, if hardware error
correction is used, the bad block mark should be moved.
35.3 Source Code Structure
The NAND driver is located in the drivers/mtd/nand/ directory.
The following files are included in the NAND driver:
bch-regs.h
gpmi-lib.c
gpmi-nand.c
gpmi-nand.h
gpmi-regs.h
Makefile
35.3.1 Menu Configuration Options
To enable the NAND driver, the following options must be set:
• CONFIG_IMX_HAVE_PLATFORM_GPMI_NAND= [Y]
• CONFIG_MTD_NAND_GPMI_NAND= [Y | M]
In addition, these MTD options must be enabled:
• CONFIG_MTD_NAND = [y | m]
Chapter 35 NAND GPMI Flash Driver
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 259

• CONFIG_MTD = y
• CONFIG_MTD_PARTITIONS = y
• CONFIG_MTD_CHAR = y
• CONFIG_MTD_BLOCK = y
In addition, these UBI options must be enabled:
• CONFIG_MTD_UBI=y
• CONFIG_MTD_UBI_WL_THRESHOLD=4096
• CONFIG_MTD_UBI_BEB_RESERVE=1
• CONFIG_UBIFS_FS=y
• CONFIG_UBIFS_FS_LZO=y
• CONFIG_UBIFS_FS_ZLIB=y
Source Code Structure
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
260 Freescale Semiconductor, Inc.

Chapter 36
SATA Driver
36.1 Hardware Operation
The detailed hardware operation of SATA is detailed in the Synopsys DesignWare Cores
SATA AHCI documentation, named SATA_Data_Book.pdf.
36.1.1 Software Operation
The details about the libata APIs, see the libATA Developer's Guide named libata.pdf
pulished by Jeff Gazik.
The SATA AHCI driver is based on the LIBATA layer of the block device infrastructure
of the Linux kernel . Freescale-integrated AHCI linux driver combined the standard
AHCI drivers handle the details of the integrated Freescale SATA AHCI controller, while
the LIBATA layer understands and executes the SATA protocols. The SATA device,
such as a hard disk, is exposed to the application in user space by the /dev/sda* interface.
Filesystems are built upon the block device. The AHCI specified integrated DMA engine,
which assists the SATA controller hardware in the DMA transfer modes.
36.1.2 Source Code Structure Configuration
The source codes of freescale's AHCI SATA driver is located in the following folder:
<kernel_dir>/driver/ata/ahci_imx.c
The standard AHCI and AHCI platform drivers are used to do the actual SATA
operations.
The source codes of the standard AHCI and AHCI platform drivers are located in drivers/
ata/ folder, named as ahci.c and ahci-platform.c.
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 261

36.1.3 Linux Menu Configuration Options
The following Linux kernel configurations are provided for SATA driver:
Symbol: AHCI_IMX
[=y]
Type :
tristate
Prompt: Freescale i.MX AHCI SATA
support
Location:
-> Device
Drivers
-> Serial ATA and Parallel ATA drivers (ATA
[=y])
-> Platform AHCI SATA support (SATA_AHCI_PLATFORM
[=y])
In busybox, enable "fdisk" under "Linux System Utilities".
36.1.4 Board Configuration Options
With the power off, install the SATA cable and hard drive.
36.2 Programming Interface
The application interface to the SATA driver is the standard POSIX device interface (for
example: open, close, read, write, and ioctl) on /dev/sda*.
36.2.1 Usage Example2
NOTE
There may be a known error message when few kinds of SATA
disks are initialized, such as:
ata1.00: serial number mismatch '090311PB0300QKG3TB1A' !
= ''
ata1.00: revalidation failed (errno=-19)
Programming Interface
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
262 Freescale Semiconductor, Inc.

pls ignore that.
1. After building the kernel and the SATA AHCI driver and deploying, boot the target,
and log in as root.
2. Make sure that the AHCI and AHCI paltform drivers are built in kernel or loaded
into kernel.
You should see messages similar to the following:
ahci: SSS flag set, parallel bus scan disabled
ahci ahci: AHCI 0001.0300 32 slots 1 ports 3 Gbps 0x1 impl platform mode
ahci ahci: flags: ncq sntf stag pm led clo only pmp pio slum part ccc apst
scsi0 : ahci_platform
ata1: SATA max UDMA/133 mmio [mem 0x02200000-0x02203fff] port 0x100 irq 71
ata1: SATA link up 3.0 Gbps (SStatus 123 SControl 300)
ata1.00: ATA-8: SAMSUNG HM100UI, 2AM10001, max UDMA/133
ata1.00: 1953525168 sectors, multi 0: LBA48 NCQ (depth 31/32)
ata1.00: configured for UDMA/133
scsi 0:0:0:0: Direct-Access ATA SAMSUNG HM100UI 2AM1 PQ: 0 ANSI: 5
sd 0:0:0:0: [sda] 1953525168 512-byte logical blocks: (1.00 TB/931 GiB)
sd 0:0:0:0: [sda] 4096-byte physical blocks
sd 0:0:0:0: [sda] Write Protect is off
sd 0:0:0:0: [sda] Write cache: enabled, read cache: enabled, doesn't support
DPO or FUA
sda: sda1
sd 0:0:0:0: [sda] Attached SCSI disk
You may use standard Linux utilities to partition and create a file system on the drive (for
example: fdisk and mke2fs) to be mounted and used by applications.
The device nodes for the drive and its partitions appears under /dev/sda*. For example, to
check basic kernel settings for the drive, execute hdparm /dev/sda.
36.2.2 Usage Example
Create Partitons
The following command can be used to find out the capacities of the hard disk. If the
hard disk is pre-formatted, this command shows the size of the hard disk, partitions, and
filesystem type:
$fdisk -l /dev/sda
If the hard disk is not formatted, create the partitions on the hard disk using the following
command:
$fdisk /dev/sda
After the partition, the created files resemble /dev/sda[1-4].
Chapter 36 SATA Driver
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 263

Block Read/Write Test: The command, dd, is used for for reading/writing blocks. Note
this command can corrupt the partitions and filesystem on Hard disk.
To clear the first 5 KB of the card, do the following:
$dd if=/dev/zero of=/dev/sda1 bs=1024 count=5
The response should be as follows:
5+0 records in
5+0 records out
To write a file content to the card enter the following text, substituting the name of the
file to be written for file_name, do the following:
$dd if=file_name of=/dev/sda1
To read 1KB of data from the card enter the following text, substituting the name of the
file to be written for output_file, do the following:
$dd if=/dev/sda1 of=output_file bs=1024 count=1
Files System Tests
Format the hard disk partitons using mkfs.vfat or mkfs.ext2, depending on the filesystem:
$mkfs.ext2 /dev/sda1
$mkfs.vfat /dev/sda1
Mount the file system as follows:
$mkdir /mnt/sda1
$mount -t ext2 /dev/sda1 /mnt/sda1
After mounting, file/directory, operations can be performed in /mnt/sda1.
Unmount the filesystem as follows:
$umount /mnt/sda1
Programming Interface
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
264 Freescale Semiconductor, Inc.

Chapter 37
Inter-IC (I2C) Driver
37.1 Introduction
I2C is a two-wire, bidirectional serial bus that provides a simple, efficient method of data
exchange, minimizing the interconnection between devices.
The I2C driver for Linux OS has two parts:
• I2C bus driver-low level interface that is used to talk to the I2C bus
• I2C chip driver-acts as an interface between other device drivers and the I2C bus
driver
37.1.1 I2C Bus Driver Overview
The I2C bus driver is invoked only by the I2C chip driver and is not exposed to the user
space.
The standard Linux kernel contains a core I2C module that is used by the chip driver to
access the I2C bus driver to transfer data over the I2C bus. The chip driver uses a
standard kernel space API that is provided in the Linux kernel to access the core I2C
module. The standard I2C kernel functions are documented in the files available under
Documentation/i2c in the kernel source tree. This bus driver supports the following
features:
• Compatible with the I2C bus standard
• Bit rates up to 400 Kbps
• Starts and stops signal generation/detection
• Acknowledge bit generation/detection
• Interrupt-driven, byte-by-byte data transfer
• Standard I2C master mode
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 265

37.1.2 I2C Device Driver Overview
The I2C device driver implements all the Linux I2C data structures that are required to
communicate with the I2C bus driver. It exposes a custom kernel space API to the other
device drivers to transfer data to the device that is connected to the I2C bus. Internally,
these API functions use the standard I2C kernel space API to call the I2C core module.
The I2C core module looks up the I2C bus driver and calls the appropriate function in the
I2C bus driver to transfer data. This driver provides the following functions to other
device drivers:
• Read function to read the device registers
• Write function to write to the device registers
The camera driver uses the APIs provided by this driver to interact with the camera.
37.1.3 Hardware Operation
The I2C module provides the functionality of a standard I2C master and slave.
It is designed to be compatible with the standard Philips I2C bus protocol. The module
supports up to 64 different clock frequencies that can be programmed by setting a value
to the Frequency Divider Register (IFDR). It also generates an interrupt when one of the
following occurs:
• One byte transfer is completed
• Address is received that matches its own specific address in slave-receive mode
• Arbitration is lost
37.2 Software Operation
The I2C driver for Linux OS has two parts: an I2C bus driver and an I2C chip driver.
Software Operation
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
266 Freescale Semiconductor, Inc.

37.2.1 I2C Bus Driver Software Operation
The I2C bus driver is described by a structure called i2c_adapter. The most important
field in this structure is struct i2c_algorithm *algo. This field is a pointer to the
i2c_algorithm structure that describes how data is transferred over the I2C bus. The
algorithm structure contains a pointer to a function that is called whenever the I2C chip
driver wants to communicate with an I2C device.
During startup, the I2C bus adapter is registered with the I2C core when the driver is
loaded. Certain architectures have more than one I2C module. If so, the driver registers
separate i2c_adapter structures for each I2C module with the I2C core. These adapters are
unregistered (removed) when the driver is unloaded.
After transmitting each packet, the I2C bus driver waits for an interrupt indicating the end
of a data transmission before transmitting the next byte. It times out and returns an error
if the transfer complete signal is not received. Because the I2C bus driver uses wait
queues for its operation, other device drivers should be careful not to call the I2C API
methods from an interrupt mode.
37.2.2 I2C Device Driver Software Operation
The I2C driver controls an individual I2C device on the I2C bus. A structure, i2c_driver,
describes the I2C chip driver. The fields of interest in this structure are flags and
attach_adapter. The flags field is set to a value I2C_DF_NOTIFY so that the chip driver
can be notified of any new I2C devices, after the driver is loaded. When the I2C bus
driver is loaded, this driver stores the i2c_adapter structure associated with this bus driver
so that it can use the appropriate methods to transfer data.
37.3 Driver Features
The I2C driver supports the following features:
• I2C communication protocol
• I2C master mode of operation
NOTE
The I2C driver does not support the I2C slave mode of
operation.
Chapter 37 Inter-IC (I2C) Driver
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 267
37.3.1 Source Code Structure
Table below shows the I2C bus driver source files available in the directory:
<Yocto_BuildDir>/drivers/i2c/busses.
Table 37-1. I2C Bus Driver Files
File Description
i2c-imx.c I2C bus driver source file
37.3.2 Menu Configuration Options
Configure the kernel option to enable the module by menuconfig:
Device Drivers > I2C support > I2C Hardware Bus support > IMX I2C interface.
37.3.3 Programming Interface
The I2C device driver can use the standard SMBus interface to read and write the
registers of the device connected to the I2C bus.
For more information, see include/linux/i2c.h .
37.3.4 Interrupt Requirements
The I2C module generates many kinds of interrupts.
The highest interrupt rate is associated with the transfer complete interrupt as shown in
table below.
Table 37-2. I2C Interrupt Requirements
Parameter Equation Typical Best Case
Rate Transfer Bit Rate/8 12,500/sec 50,000/sec
Latency 8/Transfer Bit Rate 80 us 20 us
The typical value of the transfer bit-rate is 100 Kbps. The best case values are based on a
baud rate of 400 Kbps (the maximum supported by the I2C interface).
Driver Features
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
268 Freescale Semiconductor, Inc.

Chapter 38
Enhanced Configurable Serial Peripheral Interface
(ECSPI) Driver
38.1 Introduction
The ECSPI driver implements a standard Linux driver interface to the ECSPI controllers.
It supports the following features:
• Interrupt-driven transmit/receive of bytes
• Multiple master controller interface
• Multiple slaves select
• Multi-client requests
38.1.1 Hardware Operation
ECSPI is used for fast data communication with fewer software interrupts than
conventional serial communications.
Each ECSPI is equipped with a data FIFO and is a master/slave configurable serial
peripheral interface module, allowing the processor to interface with external SPI master
or slave devices.
The primary features of the ECSPI includes:
• Master/slave-configurable
• Four chip select signals to support multiple peripherals
• Up to 32-bit programmable data transfer
• 64 x 32-bit FIFO for both transmit and receive data
• Configurable polarity and phase of the Chip Select (SS) and SPI Clock (SCLK)
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 269
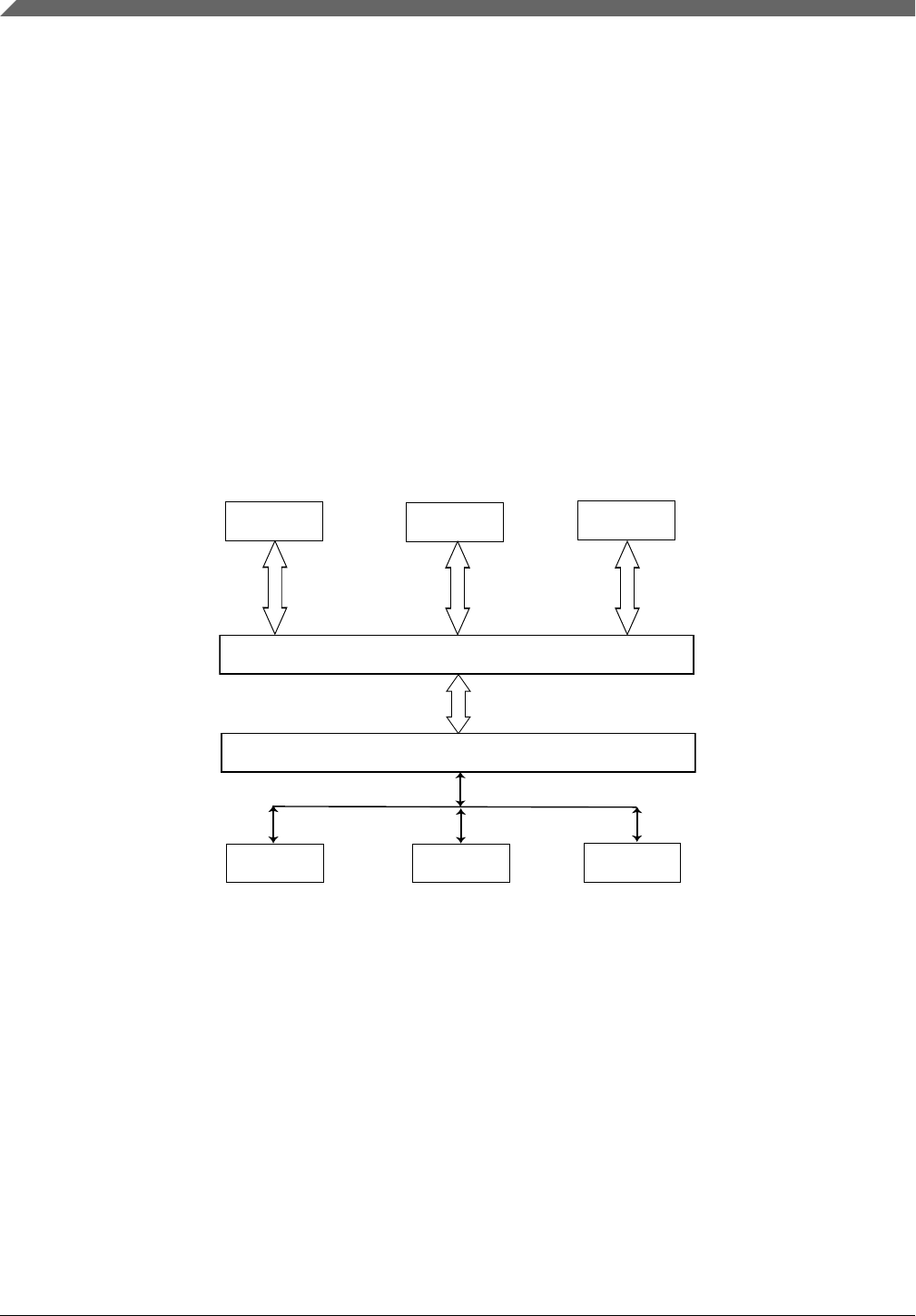
38.2 Software Operation
The following sections describe the ECSPI software operation.
38.2.1 SPI Sub-System in Linux OS
The ECSPI driver layer is located between the client layer (SPI-NOR Flash are examples
of clients) and the hardware access layer. Figure below shows the block diagram for SPI
subsystem in Linux OS.
The SPI requests go into I/O queues. Requests for a given SPI device are executed in
FIFO order and they complete asynchronously through completion callbacks. There are
also some simple synchronous wrappers for those calls including the ones for common
transaction types such as writing a command and then reading its response.
SPI-NOR
mtd driver Client #2 driver .... Client #3 driver
SPI Subsystem
ECSPI Hardware
SPI-NOR Flash Client #2 Client #3
....
Figure 38-1. SPI Subsystem
All SPI clients must have a protocol driver associated with them and they all must be
sharing the same controller driver. Only the controller driver can interact with the
underlying SPI hardware module. Figure below shows how the different SPI drivers are
layered in the SPI subsystem.
Software Operation
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
270 Freescale Semiconductor, Inc.
SPI client Driver
SPI Core Driver
ECSPI Controller Driver
ECSPI Controller
SPI Slave
(SPI-NOR Flash)
Client Driver Interface
Controller Driver Interace
FSL ECSPI driver
(spi_imx.c)
SPI Bus Interface
Electrical Interface
SPI slave driver
SPI core driver
ECSPI host
controller driver
SPI slave device
Figure 38-2. Layering of SPI Drivers in SPI Subsystem
38.2.2 Software Limitations
The ECSPI driver limitations are as follows:
• Does not currently have SPI slave logic implementation
• Does not support a single client connected to multiple masters
• Does not currently implement the user space interface with the help of the device
node entry but supports sysfs interface
38.2.3 Standard Operations
The ECSPI driver is responsible for implementing standard entry points for init, exit, chip
select, and transfer. The driver implements the following functions:
• Init function spi_imx_init() registers the device_driver structure.
• Probe function spi_imx_probe() performs initialization and registration of the SPI
device-specific structure with SPI core driver. The driver probes for memory and
IRQ resources. Configures the IOMUX to enable ECSPI I/O pins, requests for IRQ
and resets the hardware.
• Chip select function spi_imx_chipselect() configures the hardware ECSPI for the
current SPI device. Sets the word size, transfer mode, data rate for this device.
• SPI transfer function spi_imx_transfer() handles data transfers operations.
• SPI setup function spi_imx_setup() initializes the current SPI device.
• SPI driver ISR spi_imx_isr() is called when the data transfer operation is completed
and an interrupt is generated.
Chapter 38 Enhanced Configurable Serial Peripheral Interface (ECSPI) Driver
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 271

38.2.4 ECSPI Synchronous Operation
Figure below shows how the ECSPI provides synchronous read/write operations.
Software Operation
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
272 Freescale Semiconductor, Inc.
Client Driver SPI Core
Driver
SPI Controller
Driver ECSPI
Hardware
spi_read/write
spi transfer
spi_enable_rx_intr
spi_load_TxFifo
spi_init_exchange
Rx_Data_Ready_intr
spi_getRxData
callback after
transfer completionreturn
Figure 38-3. ECSPI Synchronous Operation
Chapter 38 Enhanced Configurable Serial Peripheral Interface (ECSPI) Driver
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 273
38.3 Driver Features
The ECSPI module supports the following features:
• Implements each of the functions required by a ECSPI module to interface to Linux
OS
• Multiple SPI master controllers
• Multi-client synchronous requests
38.3.1 Source Code Structure
Table below shows the source files available in the devices directory:
<Yocto_BuildDir>/linux/drivers/spi/
Table 38-1. CSPI Driver Files
File Description
spi_imx.c SPI Master Controller driver
38.3.2 Menu Configuration Options
To get to the Linux kernel configuration options provided for this module, use the bitbake
linux-imx -c menuconfigcommand.
On the screen displayed, select Configure the Kernel and exit. When the next screen
appears, select the following options to enable this module:
• CONFIG_SPI build support for the SPI core. In menuconfig, this option is available
under:
• Device Drivers > SPI Support.
• CONFIG_BITBANG is the Library code that is automatically selected by drivers
that need it. SPI_IMX selects it. In menuconfig, this option is available under:
• Device Drivers > SPI Support > Utilities for Bitbanging SPI masters.
• CONFIG_SPI_IMX implements the SPI master mode for ECSPI. In menuconfig, this
option is available under:
• Device Drivers > SPI Support > Freescale i.MX SPI controllers.
Driver Features
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
274 Freescale Semiconductor, Inc.
38.3.3 Programming Interface
This driver implements all the functions that are required by the SPI core to interface
with the ECSPI hardware.
For more information, see the Linux document generated from build: make htmldocs.
38.3.4 Interrupt Requirements
The SPI interface generates interrupts.
ECSPI interrupt requirements are listed in table below.
Table 38-2. ECSPI Interrupt Requirements
Parameter Equation Typical Worst Case
BaudRate/ Transfer Length (BaudRate/(TransferLength)) * (1/Rxtl) 31250 1500000
The typical values are based on a baud rate of 1 Mbps with a receiver trigger level (Rxtl)
of 1 and a 32-bit transfer length. The worst-case is based on a baud rate of 12 Mbps (max
supported by the SPI interface) with a 8-bits transfer length.
Chapter 38 Enhanced Configurable Serial Peripheral Interface (ECSPI) Driver
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 275

Driver Features
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
276 Freescale Semiconductor, Inc.

Chapter 39
FlexCAN Driver
39.1 Driver Overview
FlexCAN is a communication controller implementing the CAN protocol according to
the CAN 2.0B protocol specification.
The CAN protocol was primarily designed to be used as a vehicle serial data bus meeting
the specific requirements of this field such as real-time processing, reliable operation in
the EMI environment of a vehicle, cost-effectiveness, and required bandwidth. The
standard and extended message frames are supported. The maximum message buffer is
64. The driver is a network device driver of PF_CAN protocol family.
For detailed information, see lwn.net/Articles/253425 or Documentation/networking/
can.txt in Linux source directory.
39.1.1 Hardware Operation
For the information on hardware operations, see the following documents:
•i.MX 6Dual/6Quad Applications Processor Reference Manual (IMX6DQRM)
•i.MX 6Solo/6DualLite Applications Processor Reference Manual (IMX6SDLRM)
•i.MX 6SoloLite Applications Processor Reference Manual (IMX6SLRM)
•i.MX 6SoloX Applications Processor Reference Manual (IMX6SXRM)
•i.MX 7Dual Applications Processor Reference Manual (IMX7DRM)
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 277

39.1.2 Software Operation
The CAN driver is a network device driver. For the common information on software
operation, refer to the documents in the kernel source directory Documentation/
networking/can.txt.
The CAN network device driver interface.
The CAN network device driver interface provides a generic interface to setup, configure
and monitor CAN network devices. The user can then configure the CAN device, like
setting the bit-timing parameters, via the netlink interface using the program "ip" from
the "IPROUTE2" utility suite.
Starting and stopping the CAN network device.
A CAN network device is started or stopped as usual with the command "ifconfig canX
up/down" or "ip link set canX up/down". Be aware that you *must* define proper bit-
timing parameters for real CAN devices before you can start it to avoid error-prone
default settings:
• ip link set canX up type can bitrate 125000
The iproute2 tool also provides some other configuration capbilities for can bus such as
bit-timing setting. For details, see kernel doc: Documentation/networking/can.txt
39.1.3 Source Code Structure
Table below shows the driver source file available in the directory, /linux/drivers/net/can/
Table 39-1. FlexCAN Driver Files
File Description
flexcan.c FlexCAN driver
39.1.4 Linux Menu Configuration Options
The following Linux kernel configuration options are provided for this module.
• CONFIG_CAN - Build support for PF_CAN protocol family. In menuconfig, this
option is available under
Networking > CAN bus subsystem support.
• CONFIG_CAN_RAW - Build support for Raw CAN protocol. In menuconfig, this
option is available under
Driver Overview
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
278 Freescale Semiconductor, Inc.

Networking > CAN bus subsystem support > Raw CAN Protocol (raw access with
CAN-ID filtering).
• CONFIG_CAN_BCM - Build support for Broadcast Manager CAN protocol. In
menuconfig, this option is available under
Networking > CAN bus subsystem support > Broadcast Manager CAN Protocol
(with content filtering).
• CONFIG_CAN_VCAN - Build support for Virtual Local CAN interface (also in
Ethernet interface). In menuconfig, this option is available under
Networking > CAN bus subsystem support > CAN Device Driver > Virtual Local
CAN Interface (vcan).
• CONFIG_CAN_DEBUG_DEVICES - Build support to produce debug messages to
the system log to the driver. In menuconfig, this option is available under
Networking > CAN bus subsystem support > CAN Device Driver > CAN devices
debugging messages.
• CONFIG_CAN_FLEXCAN - Build support for FlexCAN device driver. In
menuconfig, this option is available under
Networking > CAN bus subsystem support > CAN Device Driver > Freescale
FlexCAN.
Chapter 39 FlexCAN Driver
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 279

Driver Overview
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
280 Freescale Semiconductor, Inc.

Chapter 40
Media Local Bus Driver
40.1 Introduction
MediaLB is an on-PCB or inter-chip communication bus specifically designed to
standardize a common hardware interface and software API library.
This standardization allows an application or multiple applications to access the MOST
Network data or to communicate with other applications with minimum effort. MediaLB
supports all the MOST Network data transport methods: synchronous stream data,
asynchronous packet data, and control message data. MediaLB also supports an
isochronous data transport method. For detailed information about the MediaLB, see the
Media Local Bus Specification.
40.1.1 MLB Device Module
The MediaLB module implements the Physical Layer and Link Layer of the MediaLB
specification, interfacing the i.MX to the MediaLB controller.
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 281
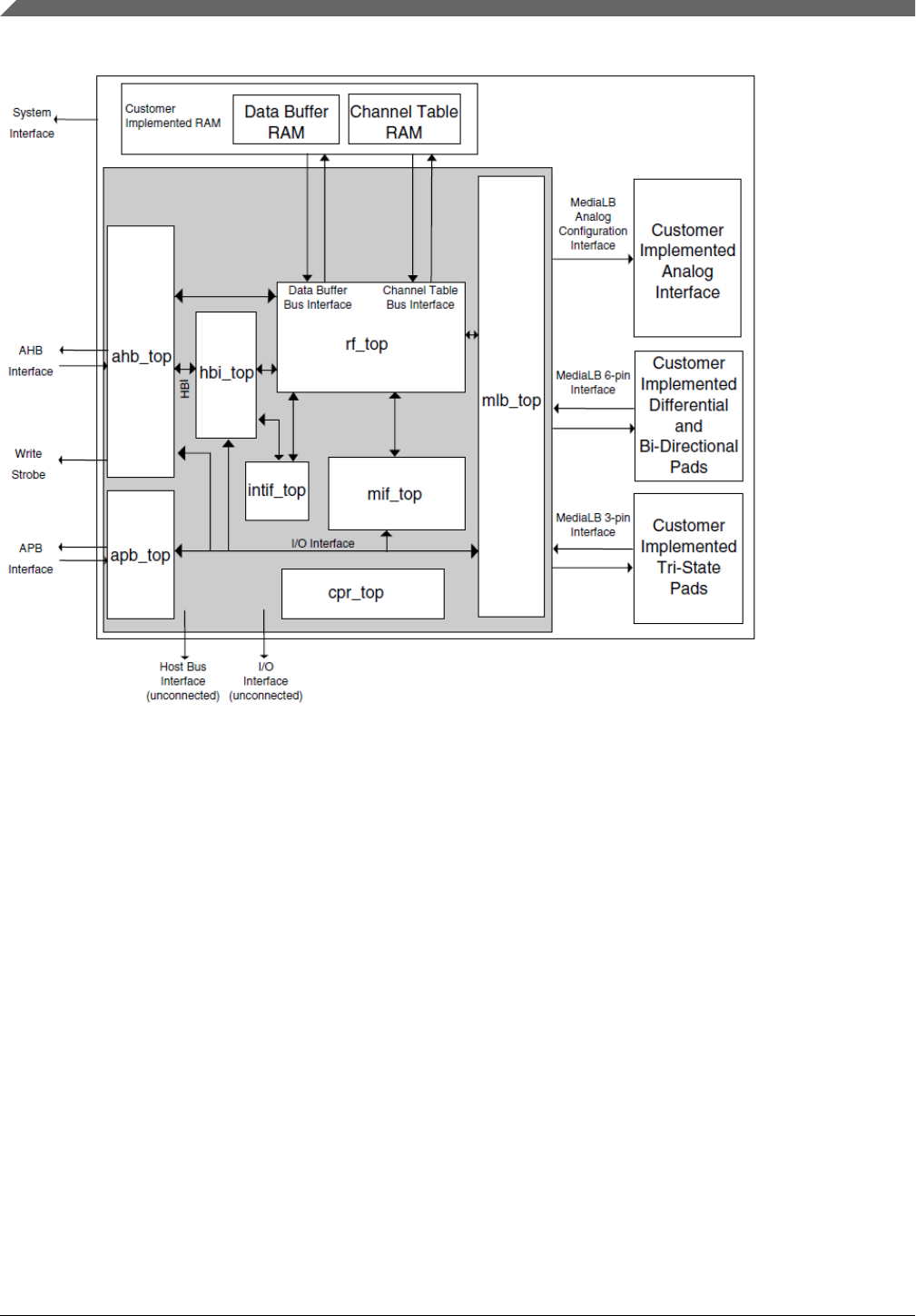
Figure 40-1. MLB Device Top-Level Block Diagram
The MLB implements the 3-pin MediaLB mode and can run at speeds up to 1024Fs. It
does not implement MediaLB controller functionality. All MediaLB devices support a set
of physical channels for sending data over the MediaLB. Each physical channel is 4 bytes
in length (quadlet) and grouped into logical channels with one or more physical channels
allocated to each logical channel. These logical channels can be any combination of
channel type (synchronous, asynchronous, control, or isochronous) and direction
(transmit or receive).
The MLB provides support for up to 64 logical channels and up to 64 physical channels.
Each logical channel is referenced using an unique channel address and represents a
unidirectional data path between a MediaLB device transmitting the data and the
MediaLB device(s) receiving the data.
40.1.2 Supported Features
• Synchronous, asynchronous, control and isochronous channel.
Introduction
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
282 Freescale Semiconductor, Inc.

• Up to 64 logical channels and 64 physical channels running at a maximum speed of
1024Fs
• Transmission of commands and data and reception of receive status when
functioning as the transmitting device associated with a logical channel address
• Reception of commands and data and transmission as receive status responses when
functioning as the receiving device associated with a logical channel address
• MediaLB lock detection
• System channel command handling
• 256Fs, 512Fs and 1024Fs frame rates.
• Asynchronous, control, synchronous, and isochronous channel types.
• The following configurations to MLB device module:
• Frame rate
• Device address
• Channel address
• MLB channel exception get interface. All the channel exceptions are sent and
handled by the application.
40.1.3 MLB Driver Overview
The MLB driver is designed as a common Linux OS character driver. It implements one
asynchronous and one control channel device with Ping-Pong buffering operation mode.
The supported frame rates are 256, 512, and 1024Fs. The MLB driver uses common read/
write interfaces to receive/send packets and uses the ioctl interface to configure the MLB
device module.
40.2 MLB Driver
Functionality of the MLB driver is described in supported features, MLB driver
architecture, and software operation.
40.2.1 MLB Driver Architecture
The MLB driver is a common Linux character driver and the architecture is shown in
figure below.
Chapter 40 Media Local Bus Driver
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 283
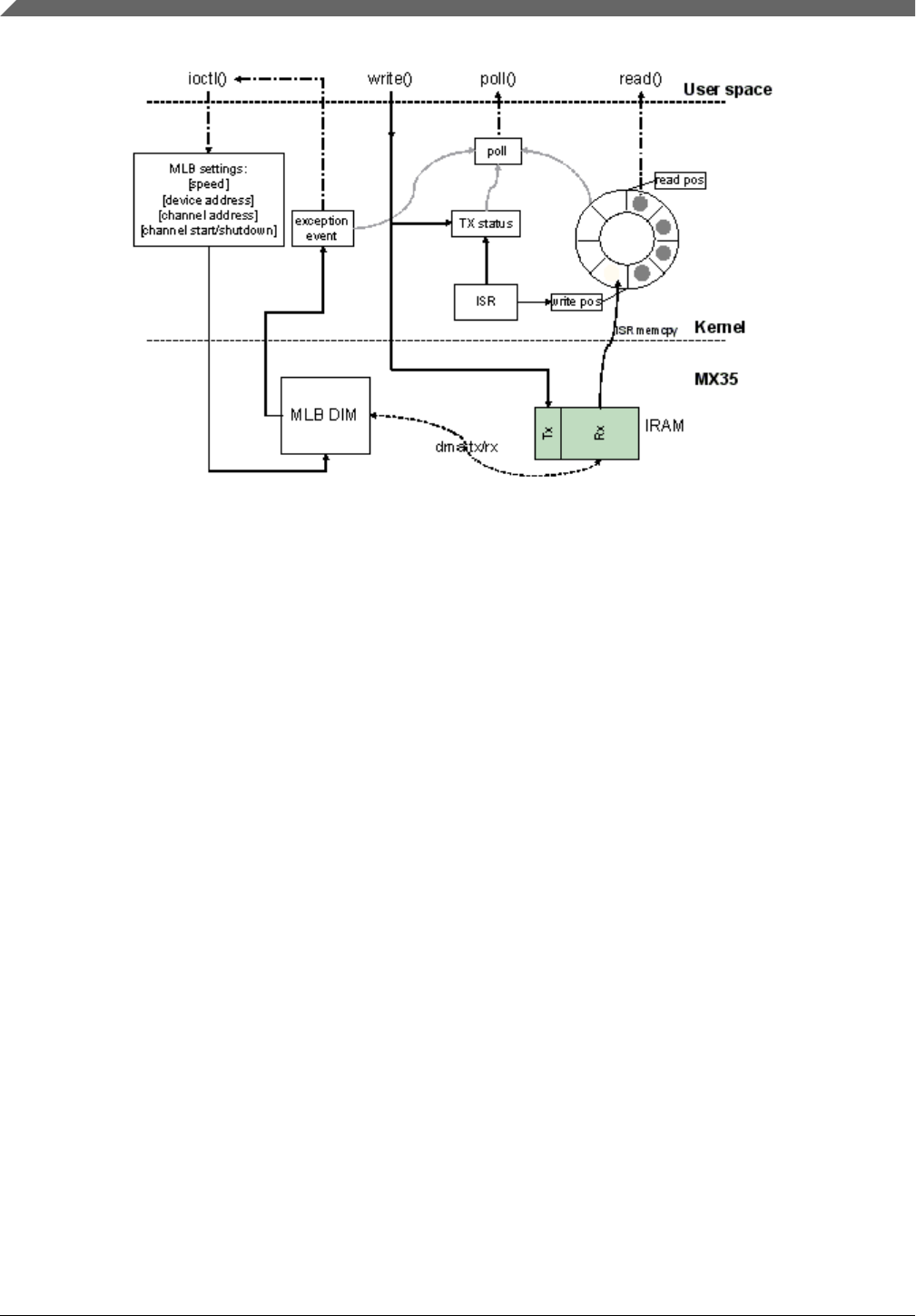
Figure 40-2. MLB Driver Architecture Diagram
The MLB driver creates four minor devices. These four devices support control Tx/Rx
channel, asynchronous Tx/Rx channel, synchronous Tx/Rx channel, and isochronous
Tx/Rx channel. Their device files are /dev/ctrl, /dev/async, /dev/sync, and /dev/isoc. Each
minor device has the same interfaces, and handle both Tx and Rx operation. The
following description is for both control and asynchronous device.
The driver uses IRAM as MLB device module Tx/Rx buffer. All the data transmission
and reception between module and IRAM is handled by the MLB module DMA. The
driver is responsible for configuring the buffer start and end pointer for the MLB module.
For reception, the driver uses a ring buffer to buffer the received packet for read. When a
packet arrives, the MLB module puts the received packet into the IRAM Rx buffer, and
notifies the driver by interrupt. The driver then copy the packet from the IRAM to one
ring buffer node indicated by the write position, and updates the write position with the
next empty node. Finally the packet reader application is notified, and it gets one packet
from the node indicated by the read position of ring buffer. After the read completed, it
updates the read position with the next available buffer node. There is no received packet
in the ring buffer when the read and write position is the same.
For transmission, the driver writes the packet given by the writer application into the
IRAM Tx buffer, updates the Tx status and sets MLB device module Tx buffer pointer to
start transmission. After transmission completes, the driver is notified by interrupt and
updates the Tx status to accept the next packet from the application.
MLB Driver
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
284 Freescale Semiconductor, Inc.

The driver supports NON BLOCK I/O. User applications can poll to check if there are
packets or exception events to read, and also they can check if a packet can be sent or not.
If there are exception events, the application can call ioctl to get the event. The ioctl also
provides the interface to configure the frame rate, device address and channel address.
40.2.2 Software Operation
The MLB driver provides a common interface to application.
• Packet read/write-BLOCK and NONBLOCK Packet I/O modes are supported. Only
one packet can be read or written at once. The minimum read length must be greater
or equal to the received packet length, meanwhile the write length must be shorter
than 1024Bytes.
• Polling-The MLB driver provide polling interface which polls for three status,
application can use select to get current I/O status:
• Packet available for read (ready to read)
• Driver is ready to send next packet (ready to write)
• Exception event comes (ready to read)
• ioctl-MLB driver provides the following ioctl:
MLB_SET_FPS
Argument type: unsigned int
Set frame rate, the argument must be 256, 512 or 1024.
MLB_GET_VER
Argument type: unsigned long
Get MLB device module version, which is 0x02000202 by default on the i.MX35.
MLB_SET_DEVADDR
Argument type: unsigned char
Set MLB device address, which is used by the system channel MlbScan command.
MLB_CHAN_SETADDR
Argument type: unsigned int
Set the corresponding channel address [8:1] bits. This ioctl combines both tx and rx
channel address, the argument format is: tx_ca[8:1] << 16 | rx_ca[8:1]
MLB_CHAN_STARTUP
Startup the corresponding type of channel for transmit and reception.
MLB_CHAN_SHUTDOWN
Chapter 40 Media Local Bus Driver
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 285
Shutdown the corresponding type of channel.
MLB_CHAN_GETEVENT
Argument type: unsigned long
Get exception event from MLB device module, the event is defined as a set of
enumeration:
MLB_EVT_TX_PROTO_ERR_CUR
MLB_EVT_TX_BRK_DETECT_CUR
MLB_EVT_RX_PROTO_ERR_CUR
MLB_EVT_RX_BRK_DETECT_CUR
40.3 Driver Files
Table below lists the source file associated with the MLB driver that are found in the
directory drivers/mxc/mlb/.
Table 40-1. MLB Driver Source File List
File Description
mxc_mlb150.c Source file for MLB driver
include/linux/mxc_mlb.h Include file for MLB driver
40.4 Menu Configuration Options
To get to the MediaLB configuration, use the command bitbake linux-imx -c menuconfig.
On the screen, select Configure Kernel, exit, and a new screen appears. This option is
available under:
• Device Drivers > MXC support drivers > MXC Media Local Bus Driver > MLB
support.
Driver Files
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
286 Freescale Semiconductor, Inc.

Chapter 41
CHIPIDEA USB Driver
41.1 Introduction
The universal serial bus (USB) driver implements a standard Linux driver interface to the
CHIPIDEA USB-HS OTG controller.
The USB provides a universal link that can be used across a wide range of PC-to-
peripheral interconnects. It supports plug-and-play, port expansion, and any new USB
peripheral that uses the same type of port.
The CHIPIDEA USB controller is Enhanced Host Controller Interface (EHCI)-
compliant. This USB driver has the following features:
• high-speed OTG core supported
• high-speed Host Only core(Host1), high-speed, full speed, and low devices are
supported.
• high-speed Inter-Chip core(Host2 & Host3)
• high-speed Host Only core(OTG2), high-speed, full speed, and low devices are
supported. An USB2Pci bridge is connected to OTG2 by default. Therefore, User
may not be able to connect other USB devices on this port.
• high-speed Inter-Chip core(Host2)
• Host mode-Supports HID (Human Interface Devices), MSC (Mass Storage Class)
• Peripheral mode-Supports MSC, and CDC (Communication Devices Class) drivers
which include ethernet and serial support
• Embedded DMA controller
41.1.1 Architectural Overview
The USB host system is composed of a number of hardware and software layers.
Figure below shows a conceptual block diagram of the building block layers in a host
system that support USB 2.0.
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 287
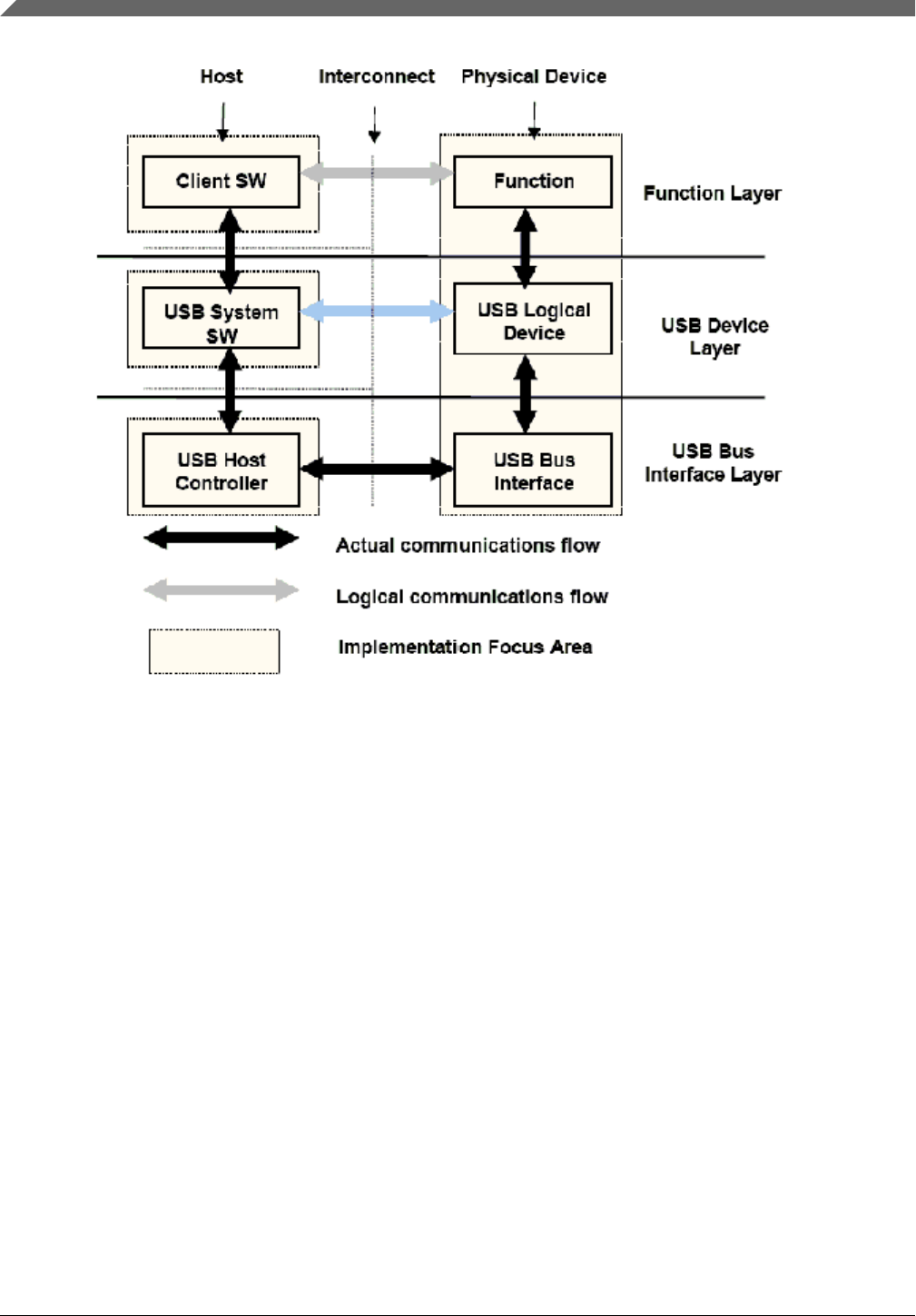
Figure 41-1. USB Block Diagram
41.2 Hardware Operation
For information on hardware operations, refer to the EHCI spec.ehci-r10.pdf.
The spec is available at Enhanced Host Controller Interface for USB 2.0: Specification
41.2.1 Software Operation
The Linux OS contains a USB driver, which implements the USB protocols. For the USB
host, it only implements the hardware specified initialization functions. For the USB
peripheral, it implements the gadget framework. For OTG, ID dynamic switch host/
device modes are supported. In addition, the OTG HNP and SRP functions are already
supported. Currently, the runtime suspend for USB is supported, that is to say when the
USB is not in use (both for host and peripheral mode), the USB will enter low power
mode.
Hardware Operation
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
288 Freescale Semiconductor, Inc.
41.2.2 Source Code Structure
Table below shows the source files available in the source directory, $KERNEL/
drivers/usb/
Table 41-1. USB Driver Files
File Description
chipidea/core.c Chipidea IP core driver
chipidea/udc.c Chipidea peripheral driver
chipidea/host.c Chipidea host driver
chipidea/otg.c Chipidea OTG driver
chipidea/otg_fsm.c Chipidea OTG HNP and SRP driver
chipidea/ci_hdrc_imx.c i.MX glue layer
chipidea/usbmisc_imx.c i.MX SoC abstract layer
phy/phy-mxs-usb.c i.MX 6 USB physical driver
41.2.3 Menu Configuration Options
1. CONFIG_USB-Build Support for Host-side USB
2. CONFIG_USB_EHCI_HCD EHCI HCD (USB 2.0) support
Default y
3. CONFIG_USB_CHIPIDEA- ChipIdea high-speed Dual Role Controller
Default y
4. CONFIG_USB_CHIPIDEA_UDC - ChipIdea device controller
Default y
5. CONFIG_USB_CHIPIDEA_HOST - ChipIdea host controller
Default y
6. CONFIG_USB_GADGET - USB Gadget Support
Default y
7. CONFIG_USB_MXS_PHY - Freescale MXS USB PHY support
Default y
Chapter 41 CHIPIDEA USB Driver
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 289

41.2.4 USB Wakeup Usage
The following example is for the OTG port and the first EHCI device.
Controller wakeup setting, after the following settings, the vbus and ID will be wakeup
source.
echo enabled > /sys/bus/platform/devices/20c9000.usbphy/power/wakeup
echo enabled > /sys/bus/platform/devices/2184000.usb/power/wakeup
echo enabled > /sys/bus/platform/devices/ci_hdrc.0/power/wakeup
EHCI wakeup setting, after the following settings, the host will have wakeup ability, such
as remote wakeup and connect/disconnect wakeup
echo enabled > /sys/bus/usb/devices/usb1/power/wakeup
echo enabled > /sys/bus/usb/devices/1-1/power/wakeup
NOTE
When the OTG mode switches from the host to the device, it
will delete the EHCI wakeup, and the user needs to set it again
before the system suspending.
41.2.5 How to Close the USB Child Device Power
The following code string outlines how to close the USB child device power:
echo auto > /sys/bus/usb/devices/1-1/power/control
echo auto > /sys/bus/usb/devices/1-1.1/power/control (If there is a hub at USB device)
41.2.6 Changing the Controller Operation Mode
To change the default settings, the use can modify the DTS file as follows:
dr_mode = "host" /* Set controller as gadget-only mode */
dr_mode = "peripheral" /* Set controller as host-only mode */
dr_mode = "otg" /* Set controller as otg mode */
41.2.7 Loadable Module Support
The kernel configuration is as follows:
Hardware Operation
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
290 Freescale Semiconductor, Inc.

Device Drivers --->
[*] USB support --->
<M> EHCI HCD (USB 2.0) support
<M> ChipIdea Highspeed Dual Role Controller
[*] USB Physical Layer drivers --->
<M> Freescale MXS USB PHY support
<M> USB Gadget Support --->
The modprobe utility will automatically load the modules which have dependency among
all modules.
The loading command is as follows:
modprobe phy_mxs_usb
modprobe ci_hdrc_imx
The unloading command is as follows:
modprobe -r ci_hdrc_imx
modprobe -r phy_mxs_usb
41.2.8 USB Charger Detection
i.MX SoC has USB charger detection ability, but it has no charging ability. The user can
use the /sys entry to know the USB charger type, charging current, and whether the
charger exists (see below three entries).
cat /sys/class/power_supply/imx6_usb_charger/type
cat /sys/class/power_supply/imx6_usb_charger/current_max
cat /sys/class/power_supply/imx6_usb_charger/present
Currently, the i.MX 6 Sabre-SD board does not support the USB charger detection
function. i.MX 6 Sabre-Auto and i.MX 6SoloLite EVK support the function.
41.2.9 USB OTG HNP and SRP Support
i.MX SoC and the driver can support OTG HNP (Host Negotiation Protocol) and SRP
(Session Request Protocol) according to "On-The-Go and Embedded Host Supplement to
the USB Revision 2.0 Specification July 27, 2012, Revision 2.0, Version 1.1a", which is
not enabled by default. To enable this, add OTG related DTS properties in DTS as
follows:
otg-rev = <0x0200>;
adp-disable;
Chapter 41 CHIPIDEA USB Driver
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 291

All the required drivers should be built-in kernel, including the gadget driver. For
example, if you want to enable mass storage as gadget driver:
Choose ‘Y’ at Kernel Configuration:
Device Drivers --->
[*] USB support --->
<*> USB Gadget Support --->
<*> USB Gadget Drivers (Mass Storage Gadget) --->
Add some module parameters for g_mass_storage at U-Boot bootargs.
g_mass_storage.removable=1
g_mass_storage.idVendor=0x15a2
g_mass_storage.idProduct=0x7b
g_mass_storage.iSerialNumber=123456abcdef
g_mass_storage.luns=1
Add the back file for g_mass_storage after the system boots up:
echo "/dev/mmcblk3p1" > /sys/bus/platform/devices/2184000.usb/ci_hdrc.0/gadget/lun0/
file
NOTE
Yocto rootfs has some limitations. The back file assignment
will not be effected if the mass storage gadget has already been
recognized. The Windows® OS 7 and Ubuntu do not have this
issue. To solve this limitation:
• Do not connect the USB cable before back file assignment.
• Disconnect and reconnect the USB cable between devices
A and B.
The HNP and SRP have been verified with two i.MX 6 reference boards. For details on
how to demo it, see the document in the Linux kernel source:
.Documentation/usb/chipidea.txt
NOTE
For all i.MX 6 series, if you want to support OTG SRP on one
OTG port (e.g., usbotg1), the VBUS of another port with
internal PHY (for usbotg2 or host1) should be provided at all
times.
This can be achieved by keeping the second port vbus always
on, but for freescale i.MX 6UltraLite EVK board, the vbus
control GPIO is multiplexed with other module, so it cannot be
done by this work around. OTG SRP cannot be supported, and
you need change the hardware design on this point to make one
of the internal USB PHY power supplies active.
Hardware Operation
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
292 Freescale Semiconductor, Inc.

41.2.10 Embeded Host Certification
41.2.10.1 Adding TPL-Support Property
To pass embeded host USB certification, "tpl-support" should be added in DTS to enable
Targeted Peripheral List (TPL). For example, to enable TPL on the Host port of i.MX
6UltraLite EVK board (imx6ul-14x14-evk.dts):
&usbotg2 {
dr_mode = "host";
disable-over-current;
tpl-support;
status = "okay";
};
41.2.10.2 VBUS Control
The VBUS should be kept off until the Linux USB host function is ready. For example,
on the i.MX 6UltraLite EVK board, because the pin is multiplexed with the touch
function, you need to rework the board to make the GPIO (GPIO1_IO02) selected for
VBUScontrol.
Disable the touch function in its DTS file (imx6ul-14x14-evk.dts) as follows:
&tsc {
pinctrl-names = "default";
pinctrl-0 = <&pinctrl_tsc>;
xnur-gpio = <&gpio1 3 0>;
measure_delay_time = <0xffff>;
pre_charge_time = <0xfff>;
status = "disabled";
};
Add VBUS GPIO pinctrl and its regulator node:
pinctrl_usb_otg2: usbotg2grp {
fsl,pins = <
MX6UL_PAD_GPIO1_IO02__GPIO1_IO02 0xb0
>;
};
reg_usb_otg2_vbus: regulator@2 {
compatible = "regulator-fixed";
reg = <2>;
pinctrl-names = "default";
pinctrl-0 = <&pinctrl_usb_otg2>;
regulator-name = "usb_otg2_vbus";
regulator-min-microvolt = <5000000>;
regulator-max-microvolt = <5000000>;
gpio = <&gpio1 2 GPIO_ACTIVE_HIGH>;
enable-active-high;
};
&usbotg2 {
Chapter 41 CHIPIDEA USB Driver
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 293
vbus-supply = <®_usb_otg2_vbus>;
dr_mode = "host";
disable-over-current;
tpl-support;
status = "okay";
};
Hardware Operation
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
294 Freescale Semiconductor, Inc.

Chapter 42
i.MX 6 PCI Express Root Complex Driver
42.1 Introduction
PCI Express hardware module, contained in i.MX SoC, can either be configured to act as
a Root Complex or a PCIe Endpoint.
This document is used to describe the PCI Express Root Complex implementation on
i.MX SoC families.
It also describes the drivers needed to be configured and operated on i.MX PCI Express
device as Root Complex.
42.1.1 PCIe
PCI Express (PCIe) is Third Generation I/O Interconnect, targeting low cost, high
volume, multi-platform interconnection usages. It has the concepts with earlier PCI and
PCI-X and offers backwards compatibility for existing PCI software with following
differences:
• PCIe is a point-to-point interconnect
• Serial link between devices
• Packet based communication
• Scalable performance via aggregated Lanes from X1 to X16
• Need PCIe switch to have connection between more than two PCIe devices
42.1.2 Terminology and Conventions
Following terminologies and conventions are used in this document:
• Bridge
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 295

A Function that virtually or actually connects a PCI/PCI-X segment or PCI Express
Port with an internal component interconnect or with another PCI/PCI-X bus
segment or PCI Express Port.
• Downstream
• 1. The relative position of an interconnect/System Element (Port/component)
that is farther from the Root Complex. The Ports on a Switch that are not the
Upstream Port are Downstream Ports. All Ports on a Root Complex are
Downstream Ports. The Downstream component on a Link is the component
farther from the Root Complex.
• 2. A direction of information flow where the information is flowing away from
the Root Complex.
• Endpoint
One of several defined System Elements. A Function that has a Type 00h
Configuration Space header.
• Host
The entity comprising of one (or more) Central Processing Unit(s) (CPU) and
resources, such as Memory (RAM) that can be shared across multiple PCIe nodes
connected through a Root Complex.
• Lane
A set of differential signal pairs, one pair for transmission and one pair for reception.
• Link
The collection of two Ports and their interconnecting Lanes. A Link is a dual simplex
communications path between two components.
• PCIe Fabric
A topology comprised of various PCI Express nodes, also referred as devices. A
device in the fabric can be Root Complex, Endpoint, PCIe-PCI/PCI-X Bridge or a
Switch.
• Port
• 1. Logically, an interface between a component and a PCI Express Link.
• 2. Physically, a group of Transmitters and Receivers located on the same chip
that define a Link.
• Root Complex
RC A defined System Element that includes a Host Bridge, zero or more Root
Complex Integrated Endpoints, zero or more Root Complex Event Collectors, and
one or more Root Ports
Introduction
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
296 Freescale Semiconductor, Inc.

• Root Port
A PCI Express Port on a Root Complex that maps a portion of the Hierarchy through
an associated virtual PCI-PCI Bridge.
• Upstream
• 1. The relative position of an interconnect/System Element (Port/component)
that is closer to the Root Complex. The Port on a Switch that is closest
topologically to the Root Complex is the Upstream Port. The Port on a
component that contains only Endpoint or Bridge Functions is an Upstream Port.
The Upstream component on a Link is the component closer to the Root
Complex.
Any element of the fabric which is relatively closer towards RC is treated as 'Upstream'.
All PCIe Endpoint ports (including termination points for bridges) and Switch ports,
which are closer to RC are called Upstream Ports on that device. A Upstream Flow is the
communication moving towards RC.
42.1.3 PCIe Topology on i.MX
There is one PCIe port on the i.MX. Up to now, only the RC mode is enabled in the
Linux BSP.
The following figure describes the diagram of the PCIe RC port on i.MX.
Chapter 42 i.MX 6 PCI Express Root Complex Driver
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 297
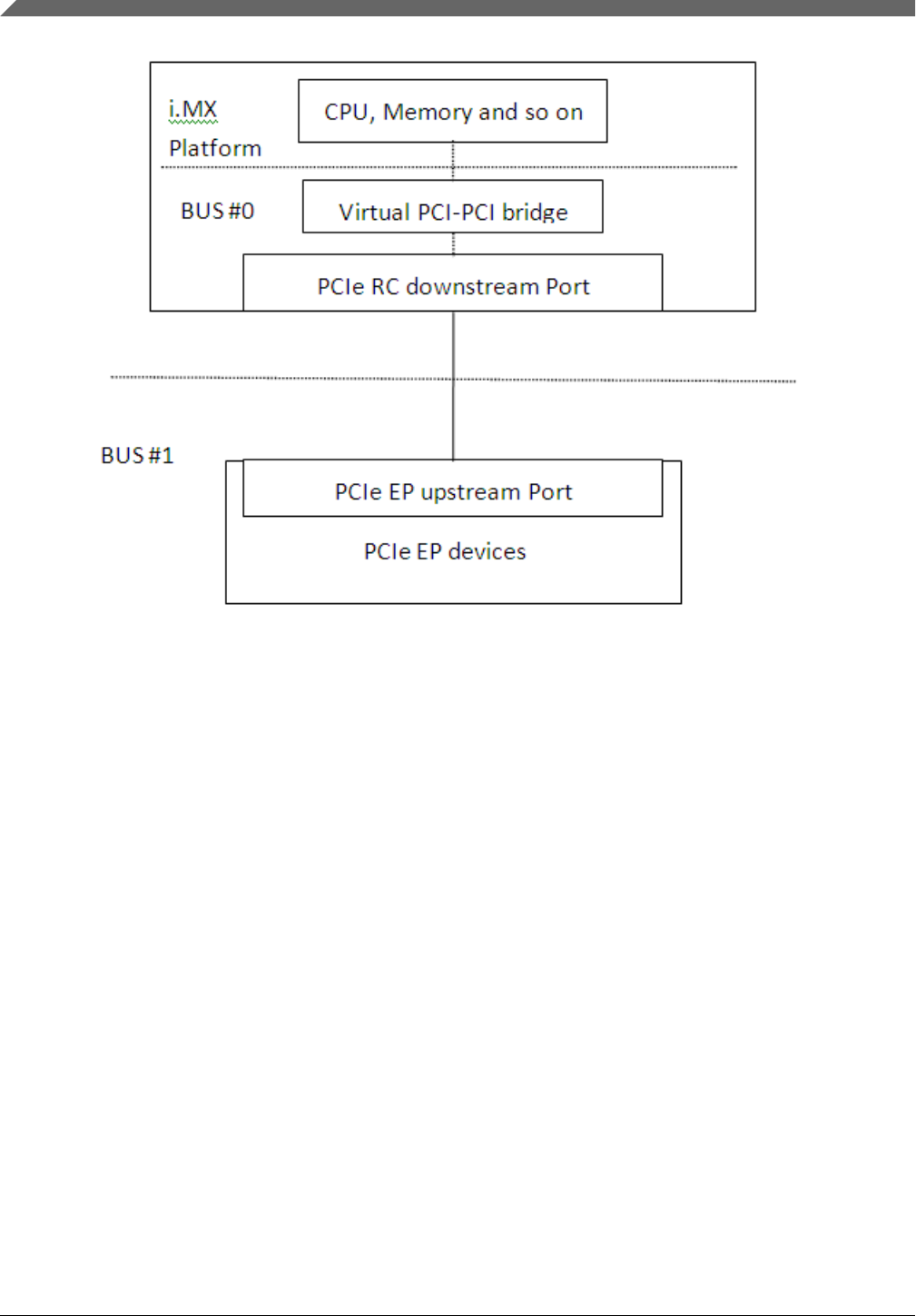
Figure 42-1. diagram of the PCIe RC port on i.MX
PCI Enumeration Mapping
Since PCI Express is point to point topology, to maintain compatibility with legacy PCI
Bus - Device notion used for Software Enumeration, we introduce following concepts
which allow identifying various nodes and their internals (e.g., PCIe Switches) in terms
of PCI devices/functions:
• Host Bridge: A bridge, integrated into RC to have PCI compatible connection to
Host. The PCI side of this bridge is Bus #0 always. This means, the device on this
bus will be the host itself.
• Virtual PCI-PCI Bridge: Each PCI Express port which is part of RC or a Switch is
treated as a virtual PCI-PCI bridge. This means each port has a primary and
secondary PCI bus and the downstream is mapped into the remote configuration
space.
• Root port associated virtual bridge has Bus #0 on the primary side with secondary
bus on the downstream.
• Each PCIe Switch is viewed as collection of as many virtual PCI-PCI bridges as
number of downstream ports, connected to a virtual PCI bus which is actually
secondary bus of another PCI-PCI bridge forming the upstream port of the switch.
• The upstream port of each EP can either be part of the secondary bus segment of
virtual PCI-PCI Bridge representing downstream port of a switch or of the root port.
Introduction
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
298 Freescale Semiconductor, Inc.

42.1.4 Features
Listed below are the various features supported by i.MX as a PCI Express Root Complex
driver.
• Express Base Specification Revision 2.0-compliant.
• Gen2 operation with x1 link supporting 5 GT/s raw transfer rate in single direction.
• Support Legacy Interrupts (INTx) and MSI.
• Max_Payload_Size size (128 bytes).
• It fits into Linux PCI Bus framework to provide PCI compatible software
enumeration support
• In addition, it provides interface to Endpoint Drivers to access the respective devices
detected downstream.
• The same interface can be used by the PCI Express Port Bus Driver framework in
Linux OS to handle AER, ASP etc.
• Interrupt handling facility for EP drivers either as Legacy Interrupts (INTx).
• Access to EP I/O BARs through generic I/O accessories in Linux PCI subsystem.
• Seamless handling of PCIe errors.
42.2 Linux OS PCI Subsystem and RC driver
In Linux OS, the PCI implementation can roughly be divided into following main
components: PCI BIOS architecture-specific Linux OS implementation, Host Controller
(RC) Module, and Core.
• PCI BIOS Architecture-specific Linux OS implementation to kick off PCI bus
initialization. It interfaces with PCI Host Controller code as well as the PCI Core to
perform bus enumeration and allocation of resources such as memory and interrupts.
The successful completion of BIOS execution assures that all the PCI devices in the
system are assigned parts of available PCI resources and their respective drivers
(referred as Slave Drivers). PCI can take control of them using the facilities provided
by PCI Core. It is possible to skip resource allocation (if they were assigned before
Linux OS was booted, for example PC scenario).
• Host Controller (RC) Module handles hardware (SoC + Board) specific initialization
and configuration and it invokes PCI BIOS. It should provide callback functions for
BIOS as well as PCI Core, which will be called during PCI system initialization and
accessing PCI bus for configuration cycles. It provides resources information for
available memory/IO space, INTx interrupt lines, MSI. It should also facilitate IO
Chapter 42 i.MX 6 PCI Express Root Complex Driver
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 299

space access (as supported) through in _x_ () out _x_ () You may need to provide
indirect memory access (if supported by h/w) through read _x_ () write _x_ ()
• Core creates and initializes the data structure tree for bus devices as well as bridges
in the system, handles bus/device numberings, creates device entries and proc/sysfs
information, provides services for BIOS and slave drivers and provides hot plug
support (optional/as supported by h/w). It targets (EP) driver interface query and
initializes corresponding devices found during enumeration. It also provides MSI
interrupt handling framework and PCI express port bus support. It provides Hot-Plug
support (if supported), advanced error reporting support, power management event
support, and virtual Channel support to run on PCI express ports (if supported).
42.2.1 RC Driver Source Files
The driver files are present at the following path relative to extracted kernel source
directory.
drivers/pci/host/pci-imx6.c
42.2.2 Kernel Configurations
Root Complex is not supported by the default kernel configurations on i.MX boards.
To set the default configuration, execute the following command as follows:
make CROSS_COMPILE=arm-none-linux-gnueabi-ARCH=arm imx_v7_defconfig
Configure the Root Complex to be built in:
#
# Bus support
#
CONFIG_PCI=y
CONFIG_PCI_DOMAINS=y
CONFIG_PCI_SYSCALL=y
CONFIG_PCI_MSI=y
#
# PCI host controller drivers
#
CONFIG_PCIE_DW=y
CONFIG_PCI_IMX6=y
NOTE
PCI Express support can't be built as a module.
System Resource: Memory Layout
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
300 Freescale Semiconductor, Inc.
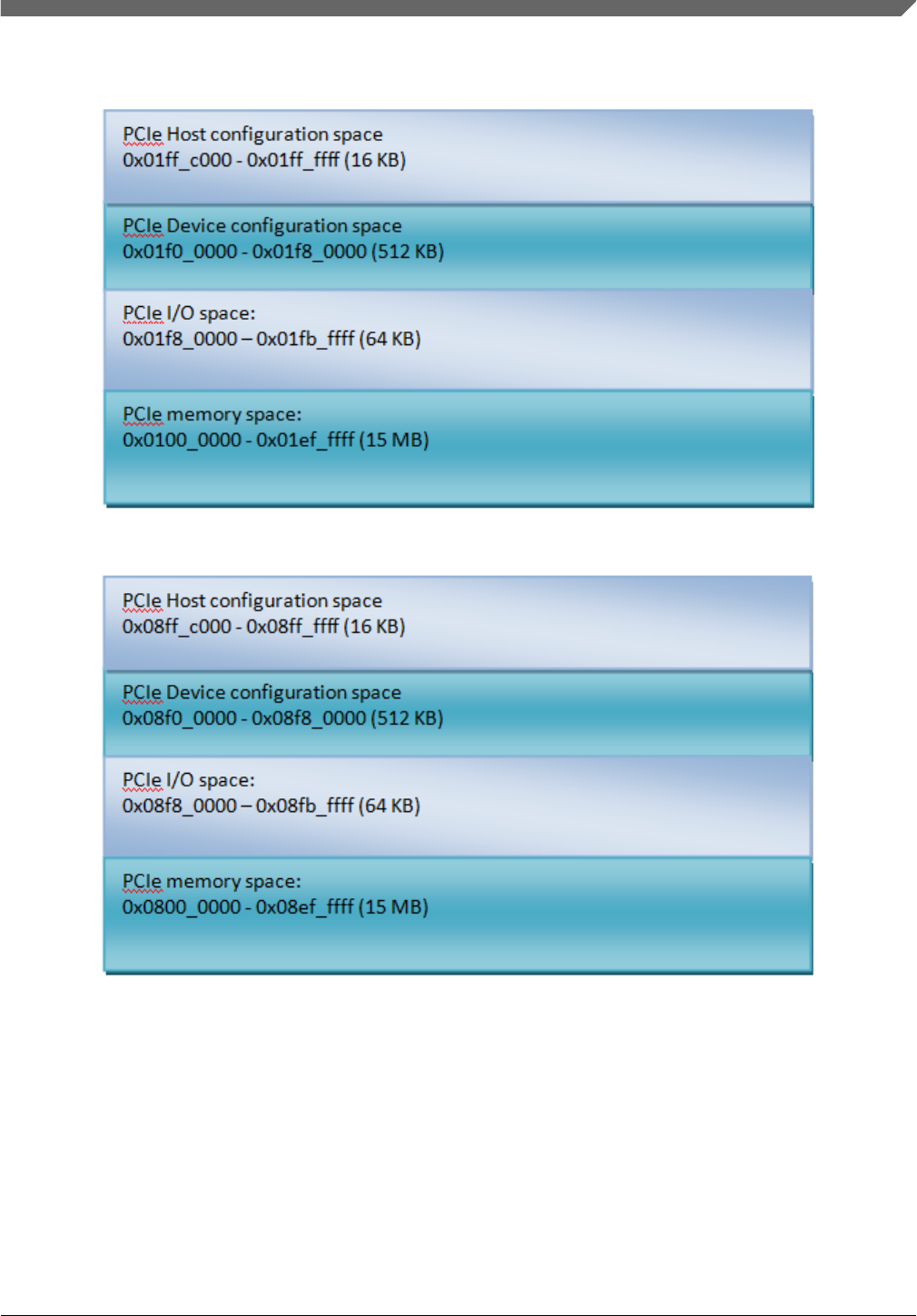
42.3 System Resource: Memory Layout
Figure 42-2. Memory Layout (i.MX 6Quad/6DualLite/6Solo)
Figure 42-3. Memory Layout (i.MX 6SoloX)
Chapter 42 i.MX 6 PCI Express Root Complex Driver
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 301
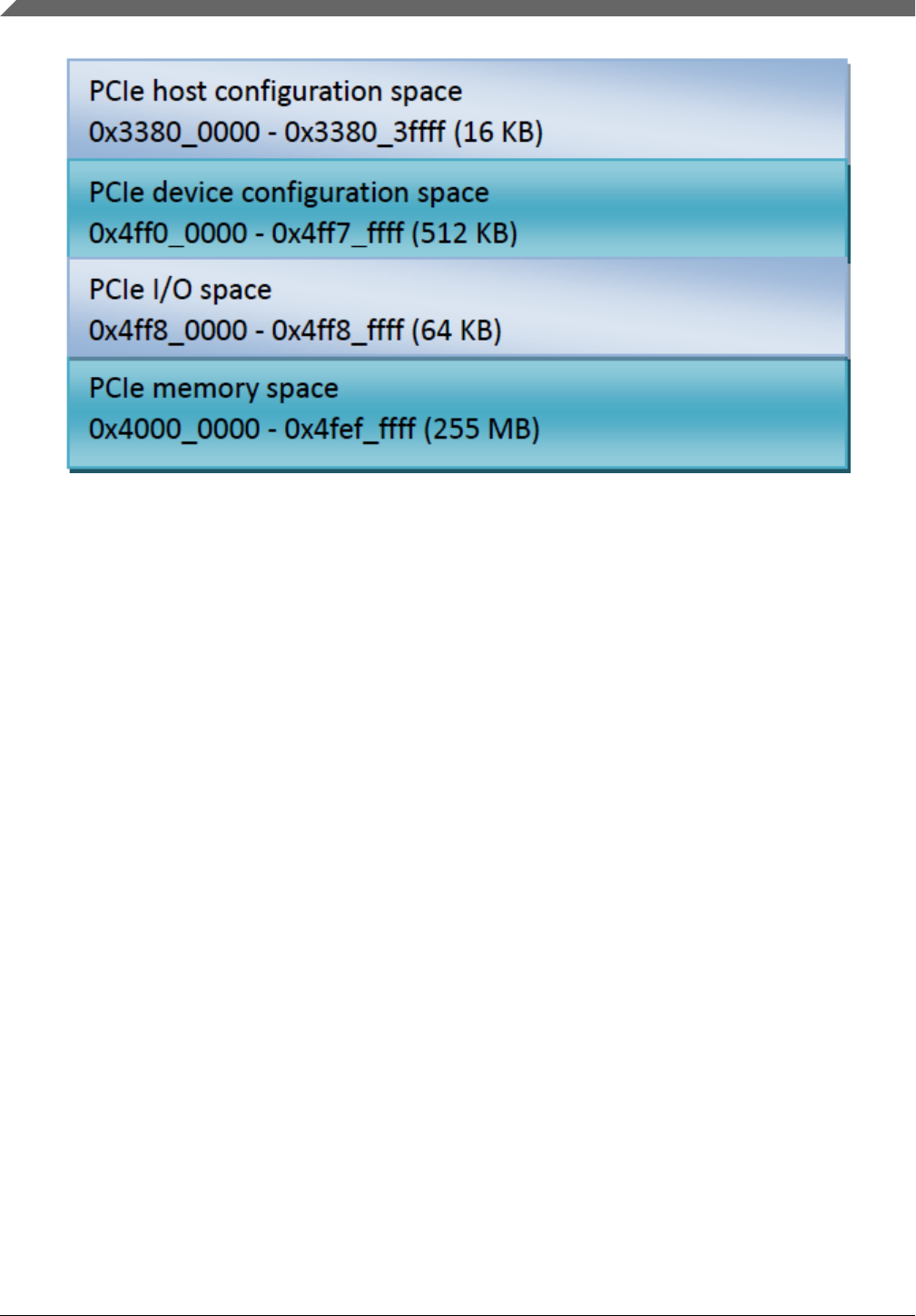
Figure 42-4. Memory Layout (i.MX 7Dual)
• IO and memory spaces are two address spaces used by the devices to communicate
with their device driver running in the Linux kernel on CPU.
• The upper 16Kbytes PCIe host configuration space.
• This memory segment is used to map the configuration space of PCIe RC. SW
can access PCIe RC core configuration space through the DBI interface.
• PCIe device configuration space.
• Used to map the configuration spaces of PCIe EP devices that are inserted to the
RC downstream port.
42.3.1 System Resource: Interrupt lines
i.MX Root Complex driver uses interrupt line 152 for MSI INT on i.MX 6 platforms, and
154 for MSI INT on i.MX 7Dual platforms.
42.4 Using PCIe Endpoint and Running Tests
Perform the following steps to use PCIe endpoint and run test:
Configure the driver according to PCIe Endpoint device.
Run "make menuconfig" after run "make ARCH=arm imx_v7_defconfig".
Freescale i.MX6 PCIe controller
Using PCIe Endpoint and Running Tests
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
302 Freescale Semiconductor, Inc.

-> Bus support
-> PCI host controller drivers
Implement the following configurations according to the PCIe EP devices:
• PCIe to USB card driver
Symbol: USB_XHCI_HCD [=y]
Type : tristate
Prompt: xHCI HCD (USB 3.0) support (EXPERIMENTAL)
Defined at drivers/usb/host/Kconfig:20
Depends on: USB_SUPPORT [=y] && USB [=y] && PCI [=y] && EXPERIMENTAL [=y]
Location:
-> Device Drivers
-> USB support (USB_SUPPORT [=y])
• Intel CT gigabit network card driver
Symbol: E1000E
[=y]
Type :
tristate
Prompt: Intel(R) PRO/1000 PCI-Express Gigabit Ethernet
support
Location:
-> Device
Drivers
-> Network device support (NETDEVICES
[=y])
-> Ethernet driver support (ETHERNET
[=y])
-> Intel devices (NET_VENDOR_INTEL [=y])
• Intel iwl4965 or iwl6300 card driver
Symbol: IWL4965
[=y]
Type :
tristate
Prompt: Intel Wireless Wi-Fi 4965AGN
(iwl4965)
Location:
-> Device
Drivers
-> Network device support (NETDEVICES
[=y])
-> Wireless LAN (WLAN [=y])
To enable the Wi-Fi driver, we need to enable one of the two options: IWL4965 or
IWLAGN. Choose one, but not both.
Chapter 42 i.MX 6 PCI Express Root Complex Driver
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 303

CONFIG_IWLAGN:
Select to build the driver supporting the:
Intel Wireless WiFi Link Next-Gen AGN
This option enables support with the following hardware:
Intel Wireless WiFi Link 6250AGN Adapter
Intel 6000 Series Wi-Fi Adapters (6200AGN and 6300AGN)
Intel WiFi Link 1000BGN
Intel Wireless WiFi 5150AGN
Intel Wireless WiFi 5100AGN, 5300AGN, and 5350AGN
Intel 6005 Series Wi-Fi Adapters
Intel 6030 Series Wi-Fi Adapters
Intel Wireless WiFi Link 6150BGN 2 Adapter
Intel 100 Series Wi-Fi Adapters (100BGN and 130BGN)
Intel 2000 Series Wi-Fi Adapters
• Wi-Fi firmware configurations:
In order to install the mandatory required firmware by Intel IWL Wi-Fi devices, see the
following link for guidance intellinuxwireless.org/?n=Info
42.4.1 Ensuring PCIe System Initialization
Run 'lspci' after login the consol. There should be the following similar message if the
PCIe link is established.
root@freescale ~$ lspci
00:00.0 PCI bridge: Unknown device 16c3:abcd (rev 01)
01:00.0 Network controller: Intel Corporation Unknown device 4237
42.4.2 Tests
Run different tests according the different PCIe EP devices.
• Intel Iwl6300 mini-PCIe x1 WIFI card
• Iperf, netperf
• Overnight different packet ping
• Intel CT gigabit standard PCIe X1 network card
• NFS mount/data IO through NFS
• Iperf, netperf
• Overnight different packet ping
• PCIe to USB3.0 standard PCIe X1 card
• General tests
• * Block storage device, recognization,
Using PCIe Endpoint and Running Tests
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
304 Freescale Semiconductor, Inc.

• * Partition creation, format and so on.
• * Hundreds MB data read/write by copy command
• Stress tests
•./iozone -a -n 2000m -g 2000m -i 0 -i 1 -f /mnt/src/iozone.tmpfile -Rb ./iozone
42.4.3 Known issues
• Connect an external WIFI antenna to enlarge the WIFI signal strength if the WIFI
card tests can't work well.
Chapter 42 i.MX 6 PCI Express Root Complex Driver
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 305

Using PCIe Endpoint and Running Tests
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
306 Freescale Semiconductor, Inc.

Chapter 43
EIM NOR Driver
43.1 Introduction
The Wireless External Interface Module (WEIM) NOR driver supports the Parallel NOR
flash.
43.2 Hardware Operation
By default, there is a parallel NOR in the i.MX 6Quad/6Dual SABRE-AI boards. The
parallel NOR has more pins than the SPI NOR. On some boards, the
M29W256GL7AN6E is equipped. Refer to the datasheet for details on the parallel NOR.
43.3 Software Operation
Similar to the SPI NOR, the parallel NOR uses the MTD subsystem. Because the parallel
NOR is very small, you may only use the jffs2 but cannot use the UBIFS for it.
43.4 Source Code
To set the proper timing only for the parallel NOR, refer to mx6q_setup_weimcs() in
arch/arm/mach-mx6/board-mx6q_sabreauto.c.
43.5 Enabling the WEIM NOR
Add weim-nor to the kernel command line to enable the WEIM NOR. The WEIM NOR
has pin conflict with some other modules, such as the SPI.
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 307

Enabling the WEIM NOR
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
308 Freescale Semiconductor, Inc.

Chapter 44
Quad Serial Peripheral Interface (QuadSPI) Driver
44.1 Introduction
The Quad Serial Peripheral Interface (QuadSPI) block acts as an interface to one single or
two external serial flash devices, each with up to four bidirectional data lines.
It supports the following features:
• Flexible sequence engine to support various flash vendor devices.
• Single, dual, quad and octal mode of operation.
• DDR/DTR mode wherein the data is generated on every edge of the serial flash
clock.
• Support for flash data strobe signal for data sampling in DDR and SDR mode.
• DMA support to read RX Buffer data via AMBA AHB bus (64-bit width interface)
or IP registers space (32-bit access).
44.2 Hardware Operation
On some boards, the Quad SPI NOR - N25Q256A is equipped, while on some other
boards S25FL128S is equipped. Check the Quad SPI NOR type on the boards and then
configure it properly.
The N25Q256A is a high-performance multiple input/output serial Flash memory device.
The innovative, high-performance, dual and quad input/output instructions enable double
or quadruple the transfer bandwidth for READ and PROGRAM operations.The memory
is organized as 512 (64KB) main sectors and can be erased 64KB sectors at a time. The
device features 3-byte or 4-byte address modes to access memory beyond 128Mb. When
4-byte address mode is enabled, all commands requiring an address must be entered and
exited with a 4-byte address mode command: ENTER 4-BYTE ADDRESS MODE
command and EXIT 4-BYTE ADDRESS MODE command. The 4-byte address mode
can also be enabled through the nonvolatile configuration register. The memory can be
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 309
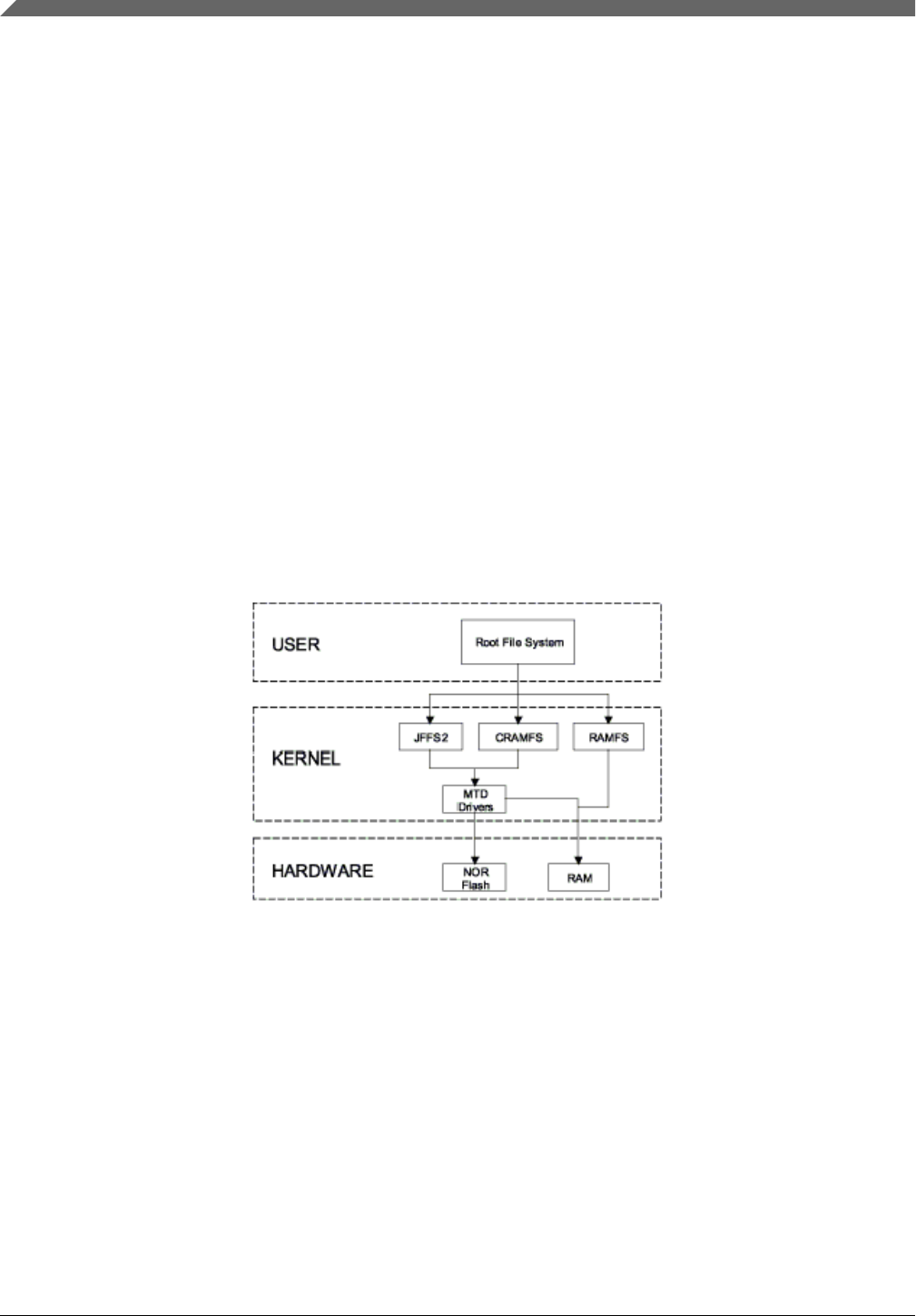
operated with three different protocols:Extended SPI (standard SPI protocol upgraded
with dual and quad operations), Dual I/O SPI and Quad I/O SPI. Each protocol contains
unique commands to perform READ operations in DTR mode. This enables high data
throughput while running at lower clock frequencies.
The S25FL128S device is flash non-volatile memory product. It connects to a host
system via a Serial Peripheral Interface (SPI). Traditional SPI single bit serial input and
output (SIngle I/O or SIO) is supported as well as optional two bit (Dual I/O or DIO) and
four bit (Quad I/O or QIO) serial commands. It also adds support for Double Data Rate
(DDR) read commands for SIO, DIO, and QIO that transfer address and read data on
both edges of the clock.
44.3 Software Operation
In a Flash-based embedded Linux system, a number of Linux technologies work together
to implement a file system. Figure below illustrates the relationships between some of the
standard components.
Figure 44-1. Components of a Flash-Based File System
The MTD subsystem for Linux is a generic interface to memory devices, such as Flash
and RAM, providing simple read, write, and erase access to physical memory devices.
Devices called mtdblock devices can be mounted by JFFS, JFFS2 and CRAMFS file
systems. The Quad SPI NOR MTD driver is based on the MTD data Flash driver in the
kernel by adding SPI access. In the initialization phase, the Quad SPI NOR MTD driver
detects a data Flash by reading the JEDEC ID. Then the driver adds the MTD device. The
SPI NOR MTD driver also provides the interfaces to read, write, and erase NOR Flash.
Software Operation
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
310 Freescale Semiconductor, Inc.
44.4 Driver Features
This Quad NOR driver implementation supports the following feature:
• Provides necessary information for the upper-layer MTD driver.
44.5 Source Code Structure
The Quad SPI NOR driver is implemented in the following directory:
drivers/mtd/spi-nor/
Table below shows the driver file:
Table 44-1. SPI NOR MTD Driver File
File Description
spi-nor.c Source file, spi-nor framework
fsl-quadspi.c Source file, FSL Quad SPI Driver
44.6 Menu Configuration Options
To enable the Quad SPI driver, the following options must be set:
• CONFIG_MTD_SPI_NOR_BASE: This is the framework for the SPI NOR which
can be used by the SPI device drivers and the SPI-NOR device driver.
• CONFIG_SPI_FSL_QUADSPI: This enables support for the Quad SPI controller in
master mode.
Chapter 44 Quad Serial Peripheral Interface (QuadSPI) Driver
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 311

Menu Configuration Options
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
312 Freescale Semiconductor, Inc.

Chapter 45
Fast Ethernet Controller (FEC) Driver
45.1 Introduction
The Fast Ethernet Controller (FEC) driver performs the full set of IEEE 802.3/Ethernet
CSMA/CD media access control and channel interface functions.
The FEC requires an external interface adapter and transceiver function to complete the
interface to the Ethernet media. It supports half or full-duplex operation on 10 Mbps, 100
Mbpsrelated Ethernet networks.
The FEC driver supports the following features:
• Full/Half duplex operation
• Link status change detect
• Auto-negotiation (determines the network speed and full or half-duplex operation)
• Transmits features such as automatic retransmission on collision and CRC generation
• Obtaining statistics from the device such as transmit collisions
The network adapter can be accessed through the ifconfig command with interface name
ethx. The driver auto-probes the external adaptor (PHY device).
45.2 Hardware Operation
The FEC is an Ethernet controller that interfaces the system to the LAN network.
The FEC supports different standard MAC-PHY (physical) interfaces for connection to
an external Ethernet transceiver. The FEC supports the 10/100 Mbps MII, and 10/100
Mbps RMII.
A brief overview of the device functionality is provided here. For details, see the FEC
chapter of the following documents:
•i.MX 6Dual/6Quad Applications Processor Reference Manual (IMX6DQRM)
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 313
•i.MX 6Solo/6DualLite Applications Processor Reference Manual (IMX6SDLRM)
•i.MX 6SoloLite Applications Processor Reference Manual (IMX6SLRM)
•i.MX 6SoloX Applications Processor Reference Manual (IMX6SXRM)
•i.MX 7Dual Applications Processor Reference Manual (IMX7DRM)
In MII mode, there are 18 signals defined by the IEEE 802.3 standard and supported by
the EMAC. MII, RMII mode uses a subset of the 18 signals. These signals are listed in
table below.
Table 45-1. Pin Usage in MII, RMII
Direction EMAC Pin
Name
MII Usage RMII Usage RGMII Usage (not supported by i.MX
6SoloLite or i.MX 6UltraLite)
In/Out FEC_MDIO Management Data Input/Output Management Data
Input/output
Management Data Input/Output
Out FEC_MDC Management Data Clock General output Management Data Clock
Out FEC_TXD[0] Data out, bit 0 Data out, bit 0 Data out, bit 0
Out FEC_TXD[1] Data out, bit 1 Data out, bit 1 Data out, bit 1
Out FEC_TXD[2] Data out, bit 2 Not Used Data out, bit 2
Out FEC_TXD[3] Data out, bit 3 Not Used Data out, bit 3
Out FEC_TX_EN Transmit Enable Transmit Enable Transmit Enable
Out FEC_TX_ER Transmit Error Not Used Not Used
In FEC_CRS Carrier Sense Not Used Not Used
In FEC_COL Collision Not Used Not Used
In FEC_TX_CLK Transmit Clock Not Used Synchronous clock reference (REF_CLK,
can connect from PHY)
In FEC_RX_ER Receive Error Receive Error Not Used
In FEC_RX_CLK Receive Clock Not Used Synchronous clock reference (REF_CLK,
can connect from PHY)
In FEC_RX_DV Receive Data Valid Receive Data Valid
and generate CRS
RXDV XOR RXERR on the falling edge
of FEC_RX_CLK.
In FEC_RXD[0] Data in, bit 0 Data in, bit 0 Data in, bit 0
In FEC_RXD[1] Data in, bit 1 Data in, bit 1 Data in, bit 1
In FEC_RXD[2] Data in, bit 2 Not Used Data in, bit 2
In FEC_RXD[3] Data in, bit 3 Not Used Data in, bit 3
The MII management interface consists of two pins, FEC_MDIO, and FEC_MDC. The
FEC hardware operation can be divided in the parts listed below. For details, see the
Applications Processor Reference Manuals.
• Transmission-The Ethernet transmitter is designed to work with almost no
intervention from software. Once ECR[ETHER_EN] is asserted and data appears in
the transmit FIFO, the Ethernet MAC is able to transmit onto the network. When the
Hardware Operation
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
314 Freescale Semiconductor, Inc.

transmit FIFO fills to the watermark (defined by the TFWR), the MAC transmit logic
asserts FEC_TX_EN and starts transmitting the preamble (PA) sequence, the start
frame delimiter (SFD), and then the frame information from the FIFO. However, the
controller defers the transmission if the network is busy (FEC_CRS asserts).
• Before transmitting, the controller waits for carrier sense to become inactive, then
determines if carrier sense stays inactive for 60 bit times. If the transmission begins
after waiting an additional 36 bit times (96 bit times after carrier sense originally
became inactive), both buffer (TXB) and frame (TXF) interrupts may be generated as
determined by the settings in the EIMR.
• Reception-The FEC receiver is designed to work with almost no intervention from
the host and can perform address recognition, CRC checking, short frame checking,
and maximum frame length checking. When the driver enables the FEC receiver by
asserting ECR[ETHER_EN], it immediately starts processing receive frames. When
FEC_RX_DV asserts, the receiver checks for a valid PA/SFD header. If the PA/SFD
is valid, it is stripped and the frame is processed by the receiver. If a valid PA/SFD is
not found, the frame is ignored. In MII mode, the receiver checks for at least one
byte matching the SFD. Zero or more PA bytes may occur, but if a 00 bit sequence is
detected prior to the SFD byte, the frame is ignored.
• After the first six bytes of the frame have been received, the FEC performs address
recognition on the frame. During reception, the Ethernet controller checks for various
error conditions and once the entire frame is written into the FIFO, a 32-bit frame
status word is written into the FIFO. This status word contains the M, BC, MC, LG,
NO, CR, OV, and TR status bits, and the frame length. Receive Buffer (RXB) and
Frame Interrupts (RXF) may be generated if enabled by the EIMR register. When the
receive frame is complete, the FEC sets the L bit in the RxBD, writes the other frame
status bits into the RxBD, and clears the E bit. The Ethernet controller next generates
a maskable interrupt (RXF bit in EIR, maskable by RXF bit in EIMR), indicating that
a frame has been received and is in memory. The Ethernet controller then waits for a
new frame.
• Interrupt management-When an event occurs that sets a bit in the EIR, an interrupt is
generated if the corresponding bit in the interrupt mask register (EIMR) is also set.
The bit in the EIR is cleared if a one is written to that bit position; writing zero has
no effect. This register is cleared upon hardware reset. These interrupts can be
divided into operational interrupts, transceiver/network error interrupts, and internal
error interrupts. Interrupts which may occur in normal operation are GRA, TXF,
TXB, RXF, RXB. Interrupts resulting from errors/problems detected in the network
or transceiver are HBERR, BABR, BABT, LC, and RL. Interrupts resulting from
internal errors are HBERR and UN. Some of the error interrupts are independently
Chapter 45 Fast Ethernet Controller (FEC) Driver
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 315
counted in the MIB block counters. Software may choose to mask off these interrupts
as these errors are visible to network management through the MIB counters.
• PHY management-phylib was used to manage all the FEC phy related operation such
as phy discovery, link status, and state machine.MDIO bus will be created in FEC
driver and registered into the system. See Documentation/networking/phy.txt under
the Linux OS source directory for more information.
45.2.1 Software Operation
The FEC driver supports the following functions:
• Module initialization-Initializes the module with the device-specific structure
• Rx/Tx transmition
• Interrupt servicing routine
• PHY management
• FEC management such init/start/stop
• i.MX 6 FEC module use little-endian format
45.2.2 Source Code Structure
Table below shows the source files.
They are available in the
drivers/net/ethernet/freescale/ directory.
Table 45-2. FEC Driver Files
File Description
fec.h Header file defining registers
fec_main.c Linux driver for Ethernet LAN controller
For more information about the generic Linux driver, see the drivers/net/ethernet/
freescale/fec_main.c source file.
45.2.3 Menu Configuration Options
Configure the kernel to provide for this module:
• CONFIG_FEC is provided for this module. This option is available under:
Hardware Operation
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
316 Freescale Semiconductor, Inc.

• Device Drivers > Network device support > Ethernet (10, 100 or 1000 Mbit) >
FEC Ethernet controller.
• To mount NFS-rootfs through FEC, disable the other Network config in the
menuconfig if need.
45.3 Programming Interface
Table 45-2 lists the source files for the FEC driver.
The following section shows the modifications that were required to the original Ethernet
driver source for porting it to the i.MX device.
45.3.1 Device-Specific Defines
Device-specific defines are added to the header file (fec.h) and they provide common
board configuration options.
fec.h defines the struct for the register access and the struct for the buffer descriptor. For
example,
/*
* Define the buffer descriptor structure.
*/
struct bufdesc {
unsigned short cbd_datlen; /* Data length */
unsigned short cbd_sc; /* Control and status info */
unsigned long cbd_bufaddr; /* Buffer address */
};
struct bufdesc_ex {
struct bufdesc desc;
unsigned long cbd_esc;
unsigned long cbd_prot;
unsigned long cbd_bdu;
unsigned long ts;
unsigned short res0[4];
};
/*
* Define the register access structure.
*/
#define FEC_IEVENT 0x004 /* Interrupt event reg */
#define FEC_IMASK 0x008 /* Interrupt mask reg */
#define FEC_R_DES_ACTIVE 0x010 /* Receive descriptor reg */
#define FEC_X_DES_ACTIVE 0x014 /* Transmit descriptor reg */
#define FEC_ECNTRL 0x024 /* Ethernet control reg */
#define FEC_MII_DATA 0x040 /* MII manage frame reg */
#define FEC_MII_SPEED 0x044 /* MII speed control reg */
#define FEC_MIB_CTRLSTAT 0x064 /* MIB control/status reg */
#define FEC_R_CNTRL 0x084 /* Receive control reg */
#define FEC_X_CNTRL 0x0c4 /* Transmit Control reg */
#define FEC_ADDR_LOW 0x0e4 /* Low 32bits MAC address */
#define FEC_ADDR_HIGH 0x0e8 /* High 16bits MAC address */
#define FEC_OPD 0x0ec /* Opcode + Pause duration */
Chapter 45 Fast Ethernet Controller (FEC) Driver
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 317

#define FEC_HASH_TABLE_HIGH 0x118 /* High 32bits hash table */
#define FEC_HASH_TABLE_LOW 0x11c /* Low 32bits hash table */
#define FEC_GRP_HASH_TABLE_HIGH 0x120 /* High 32bits hash table */
#define FEC_GRP_HASH_TABLE_LOW 0x124 /* Low 32bits hash table */
#define FEC_X_WMRK 0x144 /* FIFO transmit water mark */
#define FEC_R_BOUND 0x14c /* FIFO receive bound reg */
#define FEC_R_FSTART 0x150 /* FIFO receive start reg */
#define FEC_R_DES_START 0x180 /* Receive descriptor ring */
#define FEC_X_DES_START 0x184 /* Transmit descriptor ring */
#define FEC_R_BUFF_SIZE 0x188 /* Maximum receive buff size */
#define FEC_MIIGSK_CFGR 0x300 /* MIIGSK config register */
#define FEC_MIIGSK_ENR 0x308 /* MIIGSK enable register */
45.3.2 Getting a MAC Address
The MAC address can be set through the kernel command line, kernel device tree DTS
file, OCOTP, or MAC registers set by bootloader, such as U-Boot. The FEC driver uses it
to configure the MAC address for the network device. In general, use kernel command
line in a form of fec.macaddr=0x00,0x04,0x9f,0x01,0x30,0xe0 to set the MAC address.
Due to certain pin conflicts (FEC RMII mode needs to use GPIO_16 or RGMII_TX_CTL
pin as reference clock input/output channel), the one of the both pins cannot connect to
branch lines for other modules use because the branch lines have serious influence on
clock.
Programming Interface
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
318 Freescale Semiconductor, Inc.
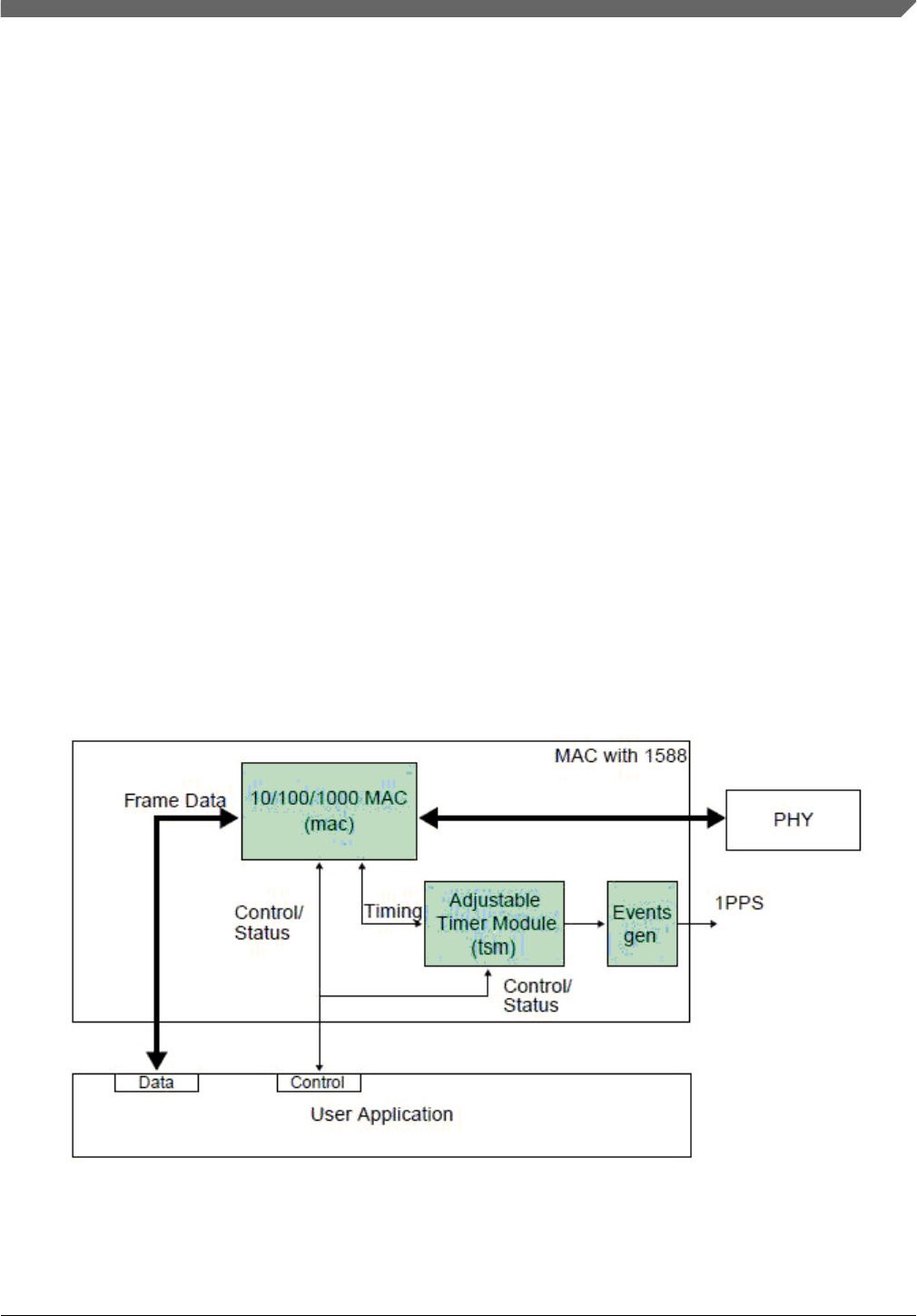
Chapter 46
ENET IEEE-1588 Driver
46.1 Hardware Operation
ENET IEEE-1588 driver performs a set of functions that enabling precise
synchronization of clocks in network communication.
The driver requires a protocol stack to complete IEEE-1588 full protocol. It complies
with the IXXAT stack interfaces.
To allow for IEEE 1588 or similar time synchronization protocol implementations, the
ENET MAC is combined with a time-stamping module to support precise time stamping
of incoming and outgoing frames. 1588 Support is enabled when the register bit
ENA_1588 is set to '1'.
Figure 46-1. IEEE 1588 Functions Overview
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 319

46.1.1 Transmit Timestamping
On transmit, only 1588 event frames need to be time-stamped. The Client application (for
example, the MAC driver) should detect 1588 event frames and set the signal
ff_tx_ts_frm together with the frame.
For every transmitted frame, the MAC returns the captured timestamp on tx_ts (31:0)
with the frame sequence number (tx_ts_id(3:0)) and the transmit status. The transmit
status bit tx_ts_stat (5) indicates that the application had the ff_tx_ts_frm signal asserted
for the frame.
If ff_tx_ts_frm is set to '1', the MAC additionally memorizes the timestamp for the frame
in the register TS_TIMESTAMP. The interrupt bit EIR (TS_AVAIL) is set to indicate
that a new timestamp is available.
Software would implement a handshaking procedure by setting the ff_tx_ts_frm signal
when it transmits the frame it needs a timestamp for and then waits on the EIR
(TS_AVAIL) interrupt bit to know when the timestamp is available. It then can read the
timestamp from the TS_TIMESTAMP register. This is done for all event frames; other
frames do not use the ff_tx_ts_frm indicator and hence do not interfere with the
timestamp capture.
46.1.2 Receive Timestamping
When a frame is received, the MAC latches the value of the timer when the frame SFD
field is detected and provides the captured timestamp on ff_rx_ts(31:0). This is done for
all received frames.
The DMA controller has to ensure that it transfers the timestamp provided for the frame
into the corresponding field within the receive descriptor for software access.
46.2 Software Operation
The 1588 Driver has the functions listed below:
• Module initialization-Initializes the module with the device-specific structure, and
registers a character driver.
• Interrupt servicing routine-Supports events, such as TS_AVAIL, TS_TIMER. The
driver shares interrupt servicing routine with FEC driver.
Software Operation
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
320 Freescale Semiconductor, Inc.
46.2.1 Source Code Structure
Table below lists the source files available in the drivers/net/ethernet/freescale/ directory.
Table 46-1. ENET 1588 File List
File Description
fec.h Header file defining registers
fec_ptp.c Linux driver for ENET 1588 timer
For more information about the generic Linux driver, see the drivers/net/ethernet/
freescale/fec_ptp.c source file.
46.2.2 Linux Menu Configuration Options
By default, ENET 1588 is enabled.
46.3 Programming Interface
The 1588 driver complies with the Linuxptp protocol stack interface.
Stack-specific defines are added to the header file (fec.h).
46.4 1588 Stack Support
The 1588 driver supports Linuxptp protocol stack.
46.4.1 1588 Stack Introduction
This release supports the following type of the 1588 Stack:
• Linuxptp stack
This software is an implementation of the Precision Time Protocol (PTP) according
to IEEE standard 1588 for Linux OS. The dual design goals are to provide a robust
implementation of the standard and to use the most relevant and modern Application
Chapter 46 ENET IEEE-1588 Driver
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 321

Programming Interfaces (API) offered by the Linux OS kernel. Supporting legacy
APIs and other platforms is not a goal. The software is copyrighted by the authors
and is licensed under the GNU General Public License.
The software development is hosted at Source Forge: sourceforge.net/projects/linuxptp/
46.4.2 Linuxptp Stack Features
Linuxptp support the following features:
• Ordinary/Boundary Clock
• Best master clock algorithm
• Transport over UDP/IPv4, UDP/IPv6, and IEEE 802.3
• Transparent clock (E2E/P2P)
• Slave only
• Supporting IEEE 802.1AS-2011 in the role of end station
46.4.3 How to Use the Stacks in Linux OS
In Linux OS, run 1588 stack binary with the following commands.
Linuxptp:
Transport on UDP IPV4 with E2E delay mechanism: ptp4l -A -4 -H -m -i eth0
Transport on UDP IPV4 with P2P delay mechanism: ptp4l -P -A -4 -H -m -i eth0
Transport on UDP IPV6 with E2E delay mechanism: ptp4l -A -6 -H -m -i eth0
Transport on UDP IPV6 with P2P delay mechanism: ptp4l -P -A -6 -H -m -i eth0
Transport on IEEE 802.3 with E2E delay mechanism: ptp4l -A -2 -H -m -i eth0
Transport on IEEE 802.3 with P2P delay mechanism: ptp4l -P -A -2 -H -m -i eth0
1588 Stack Support
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
322 Freescale Semiconductor, Inc.
Chapter 47
Universal Asynchronous Receiver/Transmitter
(UART) Driver
47.1 Introduction
The low-level UART driver interfaces the Linux serial driver API to all the UART ports.
It has the following features:
• Interrupt-driven and SDMA-driven transmit/receive of characters
• Standard Linux baud rates up to 4 Mbps
• Transmit and receive characters with 7-bit and 8-bit character lengths
• Transmits one or two stop bits
• Supports TIOCMGET IOCTL to read the modem control lines. Only supports the
constants TIOCM_CTS and TIOCM_CAR, plus TIOCM_RI in DTE mode only
• Supports TIOCMSET IOCTL to set the modem control lines. Supports the constants
TIOCM_RTS and TIOCM_DTR only
• Odd and even parity
• XON/XOFF software flow control. Serial communication using software flow
control is reliable when communication speeds are not too high and the probability of
buffer overruns is minimal
• CTS/RTS hardware flow control-both interrupt-driven software-controlled hardware
flow and hardware-driven hardware-controlled flow
• Send and receive break characters through the standard Linux serial API
• Recognizes frame and parity errors
• Ability to ignore characters with break, parity and frame errors
• Get and set UART port information through the TIOCGSSERIAL and
TIOCSSERIAL TTY IOCTL. Some programs like setserial and dip use this feature
to make sure that the baud rate was set properly and to get general information on the
device. The UART type should be set to 52 as defined in the serial_core.h header
file.
• Serial IrDA
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 323

• Power management feature by suspending and resuming the UART ports
• Standard TTY layer IOCTL calls
All the UART ports can be accessed from the device files /dev/ttymxc0 to /dev/ttymxc1.
Autobaud detection is not supported.
47.2 Hardware Operation
See the i.MX VPU Application Programming Interface Linux Reference Manual
(IMXVPUAPI) to determine the number of UART modules available in the device.
Each UART hardware port is capable of standard RS-232 serial communication and has
support for IrDA 1.0.
Each UART contains a 32-byte transmitter FIFO and a 32-half-word deep receiver FIFO.
Each UART also supports a variety of maskable interrupts when the data level in each
FIFO reaches a programmed threshold level and when there is a change in state in the
modem signals. Each UART can be programmed to be in DCE or DTE mode.
47.2.1 Software Operation
The Linux OS contains a core UART driver that manages many of the serial operations
that are common across UART drivers for various platforms.
The low-level UART driver is responsible for supplying information such as the UART
port information and a set of control functions to the core UART driver. These functions
are implemented as a low-level interface between the Linux OS and the UART hardware.
They cannot be called from other drivers or from a user application. The control
functions used to control the hardware are passed to the core driver through a structure
called uart_ops, and the port information is passed through a structure called uart_port.
The low level driver is also responsible for handling the various interrupts for the UART
ports, and providing console support if necessary.
Each UART can be configured to use DMA for the data transfer by enabling the DMA
channel in the DTS file.
The driver requests two DMA channels for the UARTs that need DMA transfer. On a
receive transaction, the driver copies the data from the DMA receive buffer to the TTY
Flip Buffer.
Hardware Operation
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
324 Freescale Semiconductor, Inc.

While using DMA to transmit, the driver copies the data from the UART transmit buffer
to the DMA transmit buffer and sends this buffer to the DMA system. For more
information, see the Linux documentation on the serial driver in the kernel source tree.
The low-level driver supports both interrupt-driven software-controlled hardware flow
control and hardware-driven hardware flow control. The hardware flow control method
can be configured using the options provided in the header file. The user has the
capability to de-assert the CTS line using the available IOCTL calls. If the user wishes to
assert the CTS line, then control is transferred back to the receiver, as long as the driver
has been configured to use hardware-driven hardware flow control.
47.2.2 Driver Features
The UART driver supports the following features:
• Baud rates up to 4 Mbps
• Recognizes frame and parity errors only in interrupt-driven mode; does not recognize
these errors in DMA-driven mode
• Sends, receives, and appropriately handles break characters
• Recognizes the modem control signals
• Ignores characters with frame, parity, and break errors if requested to do so
• Implements support for software and hardware flow control (software-controlled and
hardware-controlled)
• Get and set the UART port information; certain flow control count information is not
available in hardware-driven hardware flow control mode
• Implements support for Serial IrDA
• Power management
• Interrupt-driven and DMA-driven data transfer
47.2.3 Source Code Structure
Table below shows the UART driver source files that are available in the directory:
<Yocto_BuildDir>/linux/drivers/tty/serial.
Table 47-1. UART Driver Files
File Description
imx.c Low level driver
Chapter 47 Universal Asynchronous Receiver/Transmitter (UART) Driver
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 325

47.3 Configuration
This section discusses configuration options associated with Linux OS, chip
configuration options, and board configuration options.
47.3.1 Configuration Options
The UART driver is enabled by default.
47.3.2 Source Code Configuration Options
This section details the chip configuration options and board configuration options.
47.3.3 Chip Configuration Options
47.3.4 Board Configuration Options
For the i.MX 6Quad/6DualLite/6SoloLite/6SoloX, the board-specific configuration
options for the driver are set in:
arch/arm/boot/dts/imx6*.dts
arch/arm/boot/dts/imx6*.dts
47.4 Programming Interface
The UART driver implements all the methods required by the Linux serial API to
interface with the UART port.
The driver implements and provides a set of control methods to the Linux core UART
driver. For more information about the methods implemented in the driver, see the API
document.
47.4.1 Interrupt Requirements
The UART driver interface generates only one interrupt.
The status is used to determine which kinds of interrupt occurs, such as RX or TX.
Programming Interface
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
326 Freescale Semiconductor, Inc.

Chapter 48
AR6003 WiFi
48.1 Hardware Operation
The officially supported WiFi chip with FSL BSP is AR6003 from Atheros.
The Atheros AR6003 is a single chip, small form factor IEEE 802.11 a/b/g/n MAC/
baseband/ radio optimized for low-power mobile applications.
48.1.1 Software Operation
FSL BSP uses the open source ath6kl driver from kernel 3.14.38 for AR6003.
48.1.2 Driver features
AR6003 is a single stream, SDIO based 802.11 chipset from Atheros optimized for
mobile and embedded devices. ath6kl is a cfg80211 driver for AR6003 and supports both
the station and AP mode of operation.
Station mode supports 802.11 a/b/g/n with HT20 on 2.4/5GHz and HT40 only on 5GHz.
Some of the other features include WPA/WPA2,WPS, WMM, WMM-PS, and BT
coexistence. AP mode can be operated only in b/g mode with support for a subset of
features mentioned above.
The driver supports cfg80211 but comes with its own set of wext ioctls which have
historically supported some of our customers with features like BT 3.0 and AP mode of
operation.
For further details, refer to wireless.kernel.org/en/users/Drivers/ath6kl
The driver requires firmware that runs on the chip's network processor. The majority of it
is stored in ROM. The binaries that are downloaded and executed from RAM are as
follows:
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 327

1) Patch against the code in ROM for bug fixes and feature enhancements.
2) Code to copy the data from the OTP region of the memory into RAM.
3) Calibration file carrying board-specific data.
The above files need to be present in the directory '/lib/firmware/ath6k/AR6003/hw2.0/'
for the driver to initialize the chip upon enumeration. The files can be downloaded from
the link specified at the following location wireless.kernel.org/en/users/Drivers/ath6kl
48.1.3 Source Code Structure
The AR6003 driver source files are available in the kernel source directory: drivers/net/
wireless/ath/ath6kl/.
48.1.4 Linux Menu Configuration Options
The following Linux kernel configuration option is provided for this module:
CONFIG_ATH6KL
CONFIG_ATH6KL_SDIO
48.2 How to Install the AR6003 Driver
Ensure to connect the Silex SX-SDCAN WiFi card (which is based on AR6003) to the
SD card slot on your board, and type the following command:
modprobe ath6kl_sdio
Then, wlan0 link should become ready automatically.
How to Install the AR6003 Driver
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
328 Freescale Semiconductor, Inc.

Chapter 49
Pulse-Width Modulator (PWM) Driver
49.1 Introduction
The pulse-width modulator (PWM) has a 16-bit counter and is optimized to generate
sound from stored sample audio images and generate tones.
The PWM has 16-bit resolution and uses a 4x16 data FIFO to generate sound. The
software module is composed of a Linux driver that allows privileged users to control the
backlight by the appropriate duty cycle of the PWM Output (PWMO) signal.
49.1.1 Hardware Operation
Figure below shows the PWM block diagram.
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 329
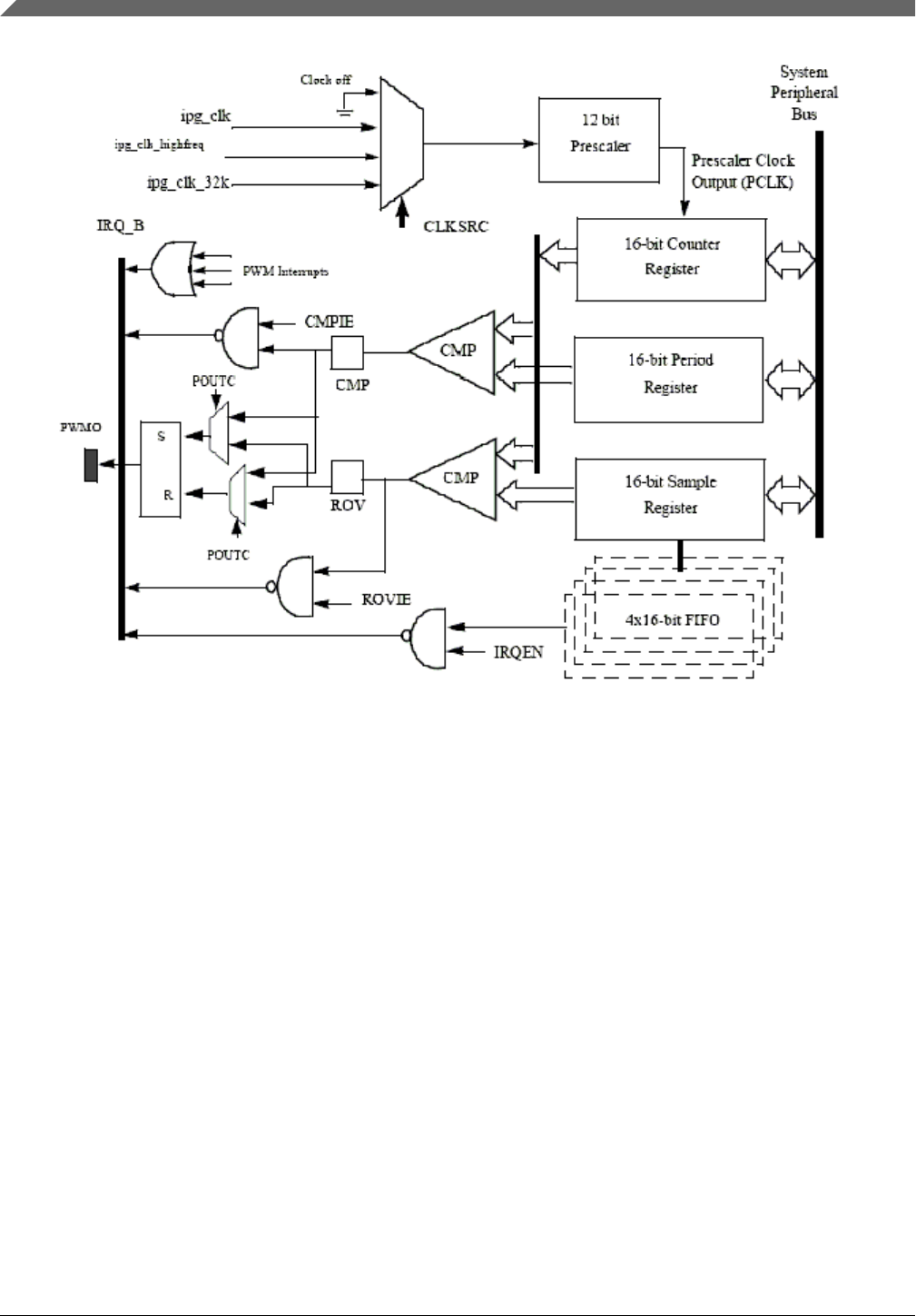
Figure 49-1. PWM Block Diagram
The PWM follows IP Bus protocol for interfacing with the processor core. It does not
interface with any other modules inside the device except for the clock and reset inputs
from the Clock Control Module (CCM) and interrupt signals to the processor interrupt
handler. The PWM includes a single external output signal, PMWO. The PWM includes
the following internal signals:
• Three clock inputs
• Four interrupt lines
• One hardware reset line
• Four low power and debug mode signals
• Four scan signals
• Standard IP slave bus signals
49.1.2 Clocks
The clock that feeds the prescaler can be selected from:
Introduction
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
330 Freescale Semiconductor, Inc.
• High frequency clock-provided by the CCM. The PWM can be run from this clock in
low power mode.
• Low reference clock-32 KHz low reference clock provided by the CCM. The PWM
can be run from this clock in the low power mode.
• Global functional clock-for normal operations. In low power modes this clock can be
switched off.
The clock input source is determined by the CLKSRC field of the PWM control register.
The CLKSRC value should only be changed when the PWM is disabled.
49.1.3 Software Operation
The PWM device driver reduces the amount of power sent to a load by varying the width
of a series of pulses to the power source. One common and effective use of the PWM is
controlling the backlight of a QVGA panel with a variable duty cycle.
Table below provides a summary of the interface functions in source code.
Table 49-1. PWM Driver Summary
Function Description
struct pwm_device *pwm_request(int pwm_id, const char *label) Request a PWM device
void pwm_free(struct pwm_device *pwm) Free a PWM device
int pwm_config(struct pwm_device *pwm, int duty_ns, int period_ns) Change a PWM device configuration
int pwm_enable(struct pwm_device *pwm) Start a PWM output toggling
int pwm_disable(struct pwm_device *pwm) Stop a PWM output toggling
The function pwm_config() includes most of the configuration tasks for the PWM
module, including the clock source option, and period and duty cycle of the PWM output
signal. It is recommended to select the peripheral clock of the PWM module, rather than
the local functional clock, as the local functional clock can change.
49.1.4 Driver Features
The PWM driver includes the following software and hardware support:
• Duty cycle modulation
• Varying output intervals
• Two power management modes-full on and full of
Chapter 49 Pulse-Width Modulator (PWM) Driver
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 331
49.1.5 Source Code Structure
Table below lists the source files and headers available in the following directories:
<Yocto_BuildDir>/linux/arch/arm/plat-mxc/pwm.c
<Yocto_BuildDir>/linux/include/linux/pwm.h
Table 49-2. PWM Driver Files
File Description
pwm.h Functions declaration
pwm.c Functions definition
49.1.6 Menu Configuration Options
To get to the PWM driver, use the command bitbake linux-imx -c menuconfig. On the
screen displayed, select Configure the kernel and exit. When the next screen appears
select the following option to enable the PWM driver:
• System Type > Enable PWM driver
• Select the following option to enable the Backlight driver:
Device Drivers > Graphics support > Backlight & LCD device support > Generic
PWM based Backlight Driver
Introduction
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
332 Freescale Semiconductor, Inc.
Chapter 50
Watchdog (WDOG) Driver
50.1 Introduction
The Watchdog Timer module protects against system failures by providing an escape
from unexpected hang or infinite loop situations or programming errors.
Some platforms may have two WDOG modules with one of them having interrupt
capability.
50.1.1 Hardware Operation
Once the WDOG timer is activated, it must be serviced by software on a periodic basis.
If servicing does not take place in time, the WDOG times out. Upon a time-out, the
WDOG either asserts the wdog_b signal or a wdog_rst_b system reset signal, depending
on software configuration. The watchdog module cannot be deactivated once it is
activated.
50.1.2 Software Operation
The Linux OS has a standard WDOG interface that allows support of a WDOG driver for
a specific platform.
WDOG can be suspended/resumed in STOP/DOZE and WAIT modes independently.
Since some bits of the WGOD registers are only one-time programmable after booting,
ensure these registers are written correctly.
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 333
50.2 Generic WDOG Driver
The generic WGOD driver is implemented in the <Yocto_BuildDir>/linux/drivers/
watchdog/imx2_wdt.c file.
It provides functions for various IOCTLs and read/write calls from the user level program
to control the WDOG.
50.2.1 Driver Features
This WDOG implementation includes the following features:
• Generates the reset signal if it is enabled but not serviced within a predefined timeout
value (defined in milliseconds in one of the WDOG source files)
• Does not generate the reset signal if it is serviced within a predefined timeout value
• Provides IOCTL/read/write required by the standard WDOG subsystem
50.2.2 Menu Configuration Options
To get to the Linux kernel configuration option provided for this module, use the bitbake
linux-imx -c menuconfigcommand. On the screen displayed, select Configure the
Kernel and exit. When the next screen appears, select the following option to enable this
module:
• CONFIG_IMX2_WDT-Enables Watchdog timer module. This option is available
under Device Drivers > Watchdog Timer Support > IMX2+ Watchdog.
50.2.3 Source Code Structure
Table below shows the source files for WDOG drivers that are in the following directory:
<Yocto_BuildDir>/linux/drivers/watchdog.
Table 50-1. WDOG Driver Files
File Description
imx2_wdt.c WDOG function implementations
Watchdog system reset function is located under <Yocto_BuildDir>/linux/arch/arm/plat-
mxc/system.c
Generic WDOG Driver
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
334 Freescale Semiconductor, Inc.

50.2.4 Programming Interface
The following IOCTLs are supported in the WDOG driver:
• WDIOC_GETSUPPORT
• WDIOC_GETSTATUS
• WDIOC_GETBOOTSTATUS
• WDIOC_KEEPALIVE
• WDIOC_SETTIMEOUT
• WDIOC_GETTIMEOUT
For detailed descriptions about these IOCTLs, see <Yocto_BuildDir>/linux/
Documentation/watchdog.
Chapter 50 Watchdog (WDOG) Driver
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 335

Generic WDOG Driver
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
336 Freescale Semiconductor, Inc.

Chapter 51
OProfile
51.1 Introduction
OProfile is a system-wide profiler for Linux systems, capable of profiling all running
code at low overhead.
OProfile is released under the GNU GPL. It consists of a kernel driver, a daemon for
collecting sample data, and several post-profiling tools for turning data into information.
51.1.1 Overview
OProfile leverages the hardware performance counters of the CPU to enable profiling of
a wide variety of interesting statistics, which can also be used for basic time-spent
profiling.
All code is profiled: hardware and software interrupt handlers, kernel modules, the
kernel, shared libraries, and applications.
51.1.2 Features
OProfile has the following features.
• Unobtrusive-No special recompilations or wrapper libraries are necessary. Even
debug symbols (-g option to gcc) are not necessary unless users want to produce
annotated source. No kernel patch is needed; just insert the module.
• System-wide profiling-All code running on the system is profiled, enabling analysis
of system performance.
• Performance counter support-Enables collection of various low-level data and
association for particular sections of code.
• Call-graph support-With an 2.6 kernel, OProfile can provide gprof-style call-graph
profiling data.
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 337
• Low overhead-OProfile has a typical overhead of 1-8% depending on the sampling
frequency and workload.
• Post-profile analysis-Profile data can be produced on the function-level or
instruction-level detail. Source trees, annotated with profile information, can be
created. A hit list of applications and functions that utilize the most CPU time across
the whole system can be produced.
• System support-Works with almost any 2.2, 2.4 and 2.6 kernels, and works on based
platforms.
51.1.3 Hardware Operation
OProfile is a statistical continuous profiler.
In other words, profiles are generated by regularly sampling the current registers on each
CPU (from an interrupt handler, the saved PC value at the time of interrupt is stored), and
converting that runtime PC value into something meaningful to the programmer.
OProfile achieves this by taking the stream of sampled PC values, along with the detail of
which task was running at the time of the interrupt, and converting the values into a file
offset against a particular binary file. Each PC value is thus converted into a tuple (group
or set) of binary-image offset. The userspace tools can use this data to reconstruct where
the code came from, including the particular assembly instructions, symbol, and source
line (through the binary debug information if present).
Regularly sampling the PC value like this approximates what actually was executed and
how often and, more often than not, this statistical approximation is good enough to
reflect reality. In common operation, the time between each sample interrupt is regulated
by a fixed number of clock cycles. This implies that the results reflect where the CPU is
spending the most time. This is a very useful information source for performance
analysis.
The ARM CPU provides hardware performance counters capable of measuring these
events at the hardware level. Typically, these counters increment once per each event and
generate an interrupt on reaching some pre-defined number of events. OProfile can use
these interrupts to generate samples and the profile results are a statistical approximation
of which code caused how many instances of the given event.
51.2 Software Operation
Software Operation
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
338 Freescale Semiconductor, Inc.

51.2.1 Architecture-specific Components
OProfile supports the hardware performance counters available on a particular
architecture. Code for managing the details of setting up and managing these counters can
be located in the kernel source tree in the relevant <Yocto_BuildDir>/linux/arch/arm/
oprofile directory. The architecture-specific implementation operates through filling in
the oprofile_operations structure at initialization. This provides a set of operations, such
as setup(), start(), stop(), and so on, that manage the hardware-specific details the
performance counter registers.
The other important facility available to the architecture code is oprofile_add_sample().
This is where a particular sample taken at interrupt time is fed into the generic OProfile
driver code.
51.2.2 oprofilefs Pseudo Filesystem
OProfile implements a pseudo-filesystem known as oprofilefs, which is mounted from
userspace at /dev/oprofile. This consists of small files for reporting and receiving
configuration from userspace, as well as the actual character device that the OProfile
userspace receives samples from. At setup() time, the architecture-specific code may add
further configuration files related to the details of the performance counters. The
filesystem also contains a stats directory with a number of useful counters for various
OProfile events.
51.2.3 Generic Kernel Driver
The generic kernel driver resides in <Yocto_BuildDir>/linux/drivers/oprofile/, and forms
the core of how OProfile operates in the kernel. The generic kernel driver takes samples
delivered from the architecture-specific code (through oprofile_add_sample()), and
buffers this data (in a transformed configuration) until releasing the data to the userspace
daemon through the /dev/oprofile/buffer character device.
51.2.4 OProfile Daemon
The OProfile userspace daemon takes the raw data provided by the kernel and writes it to
the disk. It takes the single data stream from the kernel and logs sample data against a
number of sample files (available in /var/lib/oprofile/samples/current/). For the benefit of
Chapter 51 OProfile
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 339
the separate functionality, the names and paths of these sample files are changed to
reflect where the samples were from. This can include thread IDs, the binary file path, the
event type used, and more.
After this final step from interrupt to disk file, the data is now persistent (that is, changes
in the running of the system do not invalidate stored data). This enables the post-profiling
tools to run on this data at any time (assuming the original binary files are still available
and unchanged).
51.2.5 Post Profiling Tools
The collected data must be presented to the user in a useful form. This is the job of the
post-profiling tools. In general, they collate a subset of the available sample files, load
and process each one correlated against the relevant binary file, and produce user
readable information.
51.3 Requirements
OProfile has the following requirements.
• Add Oprofile support with Cortex-A7 Event Monitor
51.3.1 Source Code Structure
Oprofile platform-specific source files are available in the directory:
<Yocto_BuildDir>/linux/arch/arm/oprofile/
Table 51-1. OProfile Source Files
File Description
op_arm_model.h Header File with the register and bit definitions
common.c Source file with the implementation required for all platforms
The generic kernel driver for Oprofile is located under <Yocto_BuildDir>/linux/drivers/
oprofile/
Requirements
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
340 Freescale Semiconductor, Inc.

51.3.2 Menu Configuration Options
The following Linux kernel configurations are provided for this module.
To get to the Oprofile configuration, use the command bitbake linux-imx -c menuconfig.
On the screen, first go to Package list and select Oprofile. Then return to the first screen
and, select Configure Kernel, then exit, and a new screen appears.
• CONFIG_OPROFILE-configuration option for the oprofile driver. In the
menuconfig this option is available under
• General Setup > Profiling support (EXPERIMENTAL) > OProfile system profiling
(EXPERIMENTAL)
51.3.3 Programming Interface
This driver implements all the methods required to configure and control PMU and L2
cache EVTMON counters.
More information, see the Linux document generated from build: make htmldocs.
51.3.4 Interrupt Requirements
The number of interrupts generated with respect to the OProfile driver are numerous. The
latency requirements are not needed.
The rate at which interrupts are generated depends on the event.
51.3.5 Example Software Configuration
The following steps show and example of how to configure the OProfile:
1. Use the command bitbake linux-imx -c menuconfig. On the screen, first, go to
Package list and select Oprofile.
2. Then, return to the first screen and select Configure Kernel, follow the instruction
from Menu Configuration Options, to enable Oprofile in the kernel space.
3. Save the configuration and start to build.
4. Copy Oprofile binaries to target rootfs. Copy vmlinux to /boot directory and run
Oprofile
root@ubuntu:/boot# opcontrol --separate=kernel --vmlinux=/boot/vmlinux
root@ubuntu:/boot# opcontrol --reset
Signalling daemon... done
root@ubuntu:/boot# opcontrol --setup --event=CPU_CYCLES:100000
Chapter 51 OProfile
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 341

root@ubuntu:/boot# opcontrol --start
Profiler running.
root@ubuntu:/boot# opcontrol --dump
root@ubuntu:/boot# opreport
Overflow stats not available
CPU: ARM V7 PMNC, speed 0 MHz (estimated)
Counted CPU_CYCLES events (Number of CPU cycles) with a unit mask of 0x00 (No un
it mask) count 100000
CPU_CYCLES:100000|
samples| %|
------------------
4 22.2222 grep
CPU_CYCLES:100000|
samples| %|
------------------
4 100.000 libc-2.9.so
2 11.1111 cat
CPU_CYCLES:100000|
samples| %|
------------------
1 50.0000 ld-2.9.so
1 50.0000 libc-2.9.so
...
root@ubuntu:/boot# opcontrol --stop
Stopping profiling.
Requirements
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
342 Freescale Semiconductor, Inc.

Chapter 52
CAAM (Cryptographic Acceleration and Assurance
Module)
52.1 CAAM Device Driver Overview
This section discusses implementation specifics of the kernel driver components
supporting CAAM (Cryptographic Acceleration and Assurance Module) within the Linux
kernel.
CAAM's base driver packaging can be categorized on two distinct levels:
• Configuration and Job Execution Level
• API Interface Level
Configuration and Job Execution Level consists of:
• a control and configuration module which maps the main register page and writes
global or system required configuration information.
• a module that feeds jobs through job rings, and reports status.
API Interface Level consists of:
• An interface to the Sctterlist Crypto API supporting asynchronous single-pass
authentication-encryption operations, and common blockciphers - caamalg.
• An interface to the Scatterlist Crypto API supporting asynchronous hashes - caamhash.
• An interface to the hwrng API supporting use of the Random Number Generator -
caamrng.
52.2 Configuration and Job Execution Level
This section has two parts:
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 343

• Control/Configuration Driver
• Job Ring Driver
52.3 Control/Configuration Driver
The control and configuration driver is responsible for initializing and setting up the
master register page, initializing early-on feature initialization, providing limited debug
and monitoring capability, and generally ensuring that all other dependent driver
subsystems can connect to a correctly-configured device.
Step by step, it performs the following actions at startup:
• Allocates a private storage block for this level.
• Maps a virtual address to the full CAAM register page.
• Maps a virtual address for the SNVS register page.
• Maps a virtual (cache coherent) address for Secure Memory.
• Registers the security violation interrupt.
• Selects the correct DMA address size for the platform, and sets DMA address masks
to match.
• Identifies other pertinent interrupt connections
• Initializes all job ring instances
• If the system configuration includes a DPAA Queue Interface, that interface has
frame-pop enabled.
NOTE
i.MX 6 configurations do not contain this logic.
• If the instance contains a TRNG, it's oscillator/entropy configuration is set and then
"kickstarted".
• Configuration information is sent to the system console to indicate that the driver is
alive, and what configuration it has assumed.
• If CONFIG_DEBUG_FS is selected in the kernel configuration, then entries are
added to enable debugfs views to useful registers in the performance monitor.
Register views are accessible under the caam/ctl directory at the debugfs root entry.
52.4 Job Ring Driver
The Job Ring driver is responsible for providing job execution service to higher-level
drivers. It takes care of overall management of both input and output rings and interrupt
service driving the output ring.
Control/Configuration Driver
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
344 Freescale Semiconductor, Inc.

One driver call is available for higher layers to use for queueing jobs to a ring for
execution:
int caam_jr_enqueue(struct device *dev, u32 *desc, void (*cbk)(struct device
*dev, u32 *desc, u32 status, void *areq), void *areq);
Arguments:
dev Pointer to the struct device associated with the job ring for use. In the current
configuration, one or more struct device entries exist in the controller's private data block,
one for each ring.
desc Pointer to a CAAM job descriptor to be executed. The driver will map the descriptor
prior to execution, and unmap it upon completion. However, since the driver can't
reasonably know anything about the data referenced by the descriptor, it is the caller's
responsibility to map/flush any of this data prior to submission, and to unmap/invalidate
data after the request completes.
cbk Pointer to a callback function that will be called when the job has completed
processing.
areq Pointer to metadata or context data associated with this request. Often, this can
contain referenced data mapping information that request postprocessing (via the
callback) can use to clean up or release resources once complete.
Callback Function Arguments:
dev Pointer to the struct device associated with the job ring for use.
desc Pointer to the original descriptor submitted for execution.
status Completion status received back from the CAAM DECO that executed the request.
Nonzero only if an error occurred. Strings describing each error are enumerated in
error.c.
areq Metadata/context pointer passed to the original request.
Returns:
• Zero on successful job submission
• -EBUSY if the input ring was full
• -EIO if driver could not map the job descriptor
Chapter 52 CAAM (Cryptographic Acceleration and Assurance Module)
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 345
52.5 API Interface Level
CAAM module provides a connection through the Scatterlist Crypto API both for
common symmetric blockciphers, and for single-pass authentication-encryption services.
This table lists all installed authentication-encryption algorithms by their common name,
driver name, and purpose. Note that certain platforms, such as i.MX 6, contain a low-
power MDHA accelerator, which cannot support SHA384 or SHA512.
Name Driver Name Purpose
authenc(hmac(md5),cbc(aes)) authenc-hmac-md5-cbc-aes-caam Single-pass authentication/encryption
using MD5 and AES-CBC
authenc(hmac(sha1),cbc(aes)) authenc-hmac-sha1-cbc-aes-caam Single-pass authentication/encryption
using SHA1 and AES-CBC
authenc(hmac(sha224),cbc(aes)) authenc-hmac-sha224-cbc-aes-caam Single-pass authentication/encryption
using SHA224 and AES-CBC
authenc(hmac(sha256),cbc(aes)) authenc-hmac-sha256-cbc-aes-caam Single-pass authentication/
encryptionusing SHA256 and AES-CBC
authenc(hmac(sha384),cbc(aes)) authenc-hmac-sha384-cbc-aes-caam Single-pass authentication/encryption
using SHA384 and AES-CBC
authenc(hmac(sha512),cbc(aes)) authenc-hmac-sha512-cbc-aes-caam Single-pass authentication/encryption
using SHA512 and AES-CBC
authenc(hmac(md5),cbc(des3_ede)) authenc-hmac-md5-cbcdes3_ede-caam Single-pass authentication/encryption
using MD5 and Triple-DES-CBC
authenc(hmac(sha1),cbc(des3_ede)) authenc-hmac-sha1-cbc-des3_ede-
caam
Single-pass authentication/encryption
using SHA1 and Triple-DES-CBC
authenc(hmac(sha224),cbc(des3_ede)) authenc-hmac-sha224-cbc-des3_ede-
caam
Single-pass authentication/encryption
using SHA224 and Triple-DES-CBC
authenc(hmac(sha256),cbc(des3_ede)) authenc-hmac-sha256-cbc-des3_ede-
caam
Single-pass authentication/encryption
using SHA256 and Triple-DES-CBC
authenc(hmac(sha384),cbc(des3_ede)) authenc-hmac-sha384-cbc-des3_ede-
caam
Single-pass authentication/encryption
using SHA384 and Triple-DES-CBC
authenc(hmac(sha512),cbc(des3_ede)) authenc-hmac-sha512-cbc-des3_ede-
caam
Single-pass authentication/encryption
using SHA512 and Triple-DES-CBC
authenc(hmac(md5),cbc(des)) authenc-hmac-md5-cbc-des-caam Single-pass authentication/encryption
using MD5 and Single-DES-CBC
authenc(hmac(sha1),cbc(des)) authenc-hmac-sha1-cbc-des-caam Single-pass authentication/encryption
using SHA1 and Single-DES-CBC
authenc(hmac(sha224),cbc(des)) authenc-hmac-sha224-cbc-des-caam Single-pass authentication/encryption
using SHA224 and Single-DES-CBC
authenc(hmac(sha256),cbc(des)) authenc-hmac-sha256-cbc-des-caam Single-pass authentication/encryption
using SHA256 and Single-DES-CBC
authenc(hmac(sha384),cbc(des)) authenc-hmac-sha384-cbc-des-caam Single-pass authentication/encryption
using SHA384 and Single-DES-CBC
authenc(hmac(sha512),cbc(des)) authenc-hmac-sha512-cbc-des-caam Single-pass authentication/encryption
using SHA512 and Single-DES-CBC
This table lists all installed symmetric key blockcipher algorithms by their common
name, driver name, and purpose.
API Interface Level
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
346 Freescale Semiconductor, Inc.
Name Driver Name Purpose
cbc(aes) cbc-aes-caam AES with a CBC mode wrapper
cbc(des3_ede) cbc-3des-caam Triple DES with a CBC mode wrapper
cbc(des) cbc-des-caam Single DES with a CBC mode wrapper
ecb(aes) ecb-aes-caam AES with a ECB mode wrapper
ecb(des3_ede) ecb-3des-caam Triples DES with a ECB mode wrapper
ecb(des) ecb-des-caam Single DES with a ECB mode wrapper
ecb(arc4) ecb-arc4-caam ARC4 with a ECB mode wrapper
ctr(aes) ctr-aes-caam AES with a CTR mode wrapper
Use of these services through the API is exemplified in the common conformance/
performance testing module in the kernel's crypto subsystem, known as tcrypt, visible in
the kernel source tree at crypto/tcrypt.c.
The caamhashmodule provides a connection through the Scatterlist Crypto API both for
common asynchronous hashes.
This table lists all installed asynchronous hashes by their common name, driver name,
and purpose. Note that certain platforms, such as i.MX 6, contain a low-power MDHA
accelerator, which cannot support SHA384 or SHA512.
Name Driver Name Purpose
sha1 sha1-caam SHA1-160 Hash Computation
sha224 sha224-caam SHA224 Hash Computation
sha256 sha256-caam SHA256 Hash Computation
sha384 sha384-caam SHA384 Hash Computation
sha512 sha512-caam SHA512 Hash Computation
md5 md5-caam MD5 Hash Computation
hmac(sha1) hmac-sha1-caam SHA1-160 Hash-based Message
Authentication Code
hmac(sha224) hmac-sha224-caam SHA224 Hash-based Message
Authentication Code
hmac(sha256) hmac-sha256-caam SHA256 Hash-based Message
Authentication Code
hmac(sha384) hmac-sha384-caam SHA384 Hash-based Message
Authentication Code
hmac(sha512) hmac-sha512-caam SHA512 Hash-based Message
Authentication Code
hmac(md5) hmac-md5-caam MD5 Hash-based Message
Authentication Code
Use of these services through the API is exemplified in the common conformance/
performance testing module in the kernel's crypto subsystem, known as tcrypt, visible in
the kernel source tree at crypto/tcrypt.c.
Chapter 52 CAAM (Cryptographic Acceleration and Assurance Module)
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 347

The caamrng module installs a mechanism to use CAAM's random number generator to
feed random data into a pair of buffers that can be accessed through /dev/hw_random.
/dev/hw_random is commonly used to feed the kernel's own entropy pool, which can be used
internally, as an entropy source for other random data "devices".
For more information regarding support for this service, see rng-tools available in
sourceforge.net/projects/gkernel/files/rng-tools.
52.6 Driver Configuration
Configuration of the driver is controlled by the following kernel confguration parameters
(found under Cryptographic API -> Hardware Crypto Devices):
CRYPTO_DEV_FSL_CAAM
Enables building the base controller driver and the job ring backend.
CRYPTO_DEV_FSL_CAAM_RINGSIZE
Selects the size (e.g., the maximum number of entries) of job rings. This is selectable as a
power of 2 in the range of 2-9, allowing selection of a ring depth ranging from 4 to 512
entries.
The default selection is 9, resulting in a ring depth of 512 job entries.
CRYPTO_DEV_FSL_CAAM_INTC
Enables the use of the hardware's interrupt coalescing feature, which can reduce the
amount of interrupt overhead the system incurs during periods of high utilization.
Leaving this disabled forces a single interrupt for each job completion, simplifying
operation, but increasing overhead.
CRYPTO_DEV_FSL_CAAM_INTC_COUNT_THLD
If coalescing is enabled, selects the number of job completions allowed to queue before
an interrupt is raised. This is selectable within the range of 1 to 255. Selecting 1
effectively defeats the coalescing feature. Any selection of a size greater than the job ring
size forces a situation where the interrupt times out before ever raising an interrupt.
The default selection is 255.
CRYPTO_DEV_FSL_CAAM_INTC_TIME_THLD
Driver Configuration
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
348 Freescale Semiconductor, Inc.

If coalescing is enables, selects the count of bus clocks (divided by 64) before a
coalescing timeout where, if the count threshold has not been met, an interrupt is raised at
the end of the time period. The selection range is an integer from 1 to 65535.
The default selection is 2048.
CRYPTO_DEV_FSL_CAAM_CRYPTO_API
Enables Scatterlist Crypto API support for asynchronous blockciphers and for single-pass
autentication-encryption operations through the API using CAAM hardware for
acceleration.
CRYPTO_DEV_FSL_CAAM_AHASH_API
Enables Scatterlist Crypto API support for asynchronous hashing through the API using
CAAM hardware for acceleration.
CRYPTO_DEV_FSL_CAAM_RNG_API
Enables use of the CAAM Random Number generator through the hwrng API. This can
be used to generate random data to feed an entropy pool for the kernels pseudo-random
number generator.
CRYPTO_DEV_FSL_CAAM_RNG_TEST
Enables a captive test to ensure that the CAAM RNG driver is operating and buffering
random data.
52.7 Limitations
• Components of the driver do not currently build and run as modules. This may be
rectified in a future version.
• Interdependencies exist between the controller and job ring backends, therefore they
all must run in the same system partition. Future versions of the driver may separate
out the job ring back-end as a standalone module that can run independently (and
support independent API and SM instances) in its own system partition.
• The full CAAM register page is mapped by the controller driver, and derived
pointers to selected subsystems are calculated and passed to higher-layer driver
components. Partition-independent configurations will have to map their own
subsystem pointers instead.
• Upstream variants of this driver support only Power architecture. This ARM
architecture-specific port is not upstreamed at this time, although portions may be
upstreamed at some point.
Chapter 52 CAAM (Cryptographic Acceleration and Assurance Module)
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 349

• TRNG kickstart may need to be moved to the bootloader in a future release, so that
the RNG can be used earlier.
• The Job Ring driver has a registration and de-registration functions that are not
currently necessary (and may be rewritten in future editions to provide for shutdown
notifications to higher layers.
• The full CAAM function is exclusive with the Mega/Fast mix off feature in DSM. If
CAAM is enabled, the Mega/Fast mix off feature needs to be disabled, and the user
should "echo enabled > /sys/bus/platform/devices/2100000.aips-bus/2100000.caam/
2101000.jr0/power/wakeup" after the kernel boots up, and then Mega/Fast mix will
keep the power on in DSM.
52.8 Limitations in the Existing Implementation Overview
This chapter describes a prototype of a Keystore Management Interface intended to
provide access to CAAM Secure Memory.
Secure memory provides a controlled and access-protected area where critical system
security parameters can be stored and processed in a running system without bus-level
exposure of clear secrets. Secrets can be imported into and exported from secure
memory, but never exported from secure memory in their cleartext form. Instead, secrets
may be exported from secure memory in a covered form, using keys never visible to the
outside.
This driver, with it's kernel-level API, exposes a basic interface to allow kernel-level
services access to secure memory functionality. It is split into two pieces:
• Keystore Initialization and Maintenance Interfaces
• Keystore Access Interface
The initialization and maintenance services exist to initialize and define the instance of a
keystore interface. Likewise, the access interface allows kernel-level services to use the
API for management of security parameters.
52.9 Initialize Keystore Management Interface
Installs a set of pointers to functions that implement an underlying physical interface to
the keystore subsystem.
In the present release, a default (and hidden) suite of functions implement this interface.
Future implementations of this API may provide for the installation of an alternate
interface. If this occurs, an alternate to this call can be provided.
Limitations in the Existing Implementation Overview
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
350 Freescale Semiconductor, Inc.

void sm_init_keystore(struct device *dev);
Arguments:
dev points to a struct device established to manage resources for the secure memory
subsystem.
52.10 Detect Available Secure Memory Storage Units
Returns the number of available units ("pages") that can be accessed by the local instance
of this driver. Intended for use as a resource probe.
u32 sm_detect_keystore_units(struct device *dev);
Arguments:
dev Points to a struct device established to manage resources for the secure memory
subsystem.
Returns: Number of detected units available for use, 0 through n - 1 may be used with
subsequent calls to all other API functions.
52.11 Establish Keystore in Detected Unit
Sets up an allocation table in a detected unit that can be used for the storage of keys (or
other secrets). The unit will be divided into a series of fixed-size slots, each one of which
is marked available in the allocation table. The size of each slot is a build-time selectable
parameter.
No calls to the keystore access interface can occur until sm_establish_keystore() has been
called.
sm_establish_keystore() should follow a call to sm_detect_keystore_units().
int sm_establish_keystore(struct device *dev, u32 unit);
Arguments:
dev Points to a struct device established to manage resources for the secure memory
subsystem.
unit One of the units detected with a call to sm_detect_keystore_units().
Returns:
Chapter 52 CAAM (Cryptographic Acceleration and Assurance Module)
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 351

• Zero on successful return
• -EINVAL if the keystore subsystem was not initialized
• -ENOSPC if no memory was available for the allocation table and associated context
data.
52.12 Release Keystore
Releases all resources used by this keystore unit. No further calls to the keystore access
interface can be made.
void sm_release_keystore(struct device *dev, u32 unit);
Arguments:
dev Points to a struct device established to manage resources for the secure memory
subsystem.
unit One of the units detected with a call to sm_detect_keystore_units().
52.13 Allocate a Slot from the Keystore
Allocate a slot from the keystore for use in all other subsequent operations by the
keystore access interface.
int sm_keystore_slot_alloc(struct device *dev, u32 unit, u32 size, u32*slot);
Arguments:
dev Points to a struct device established to manage resources for the secure memory
subsystem.
unit One of the units detected with a call to sm_detect_keystore_units().
size Desired size of data for storage in the allocated slot.
slot Pointer to the variable to receive the allocated slot number, once known.
Returns:
• Zero for successful completion.
• -EKEYREJECTED if the requested size exceeds the selected slot size.
Release Keystore
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
352 Freescale Semiconductor, Inc.
52.14 Load Data into a Keystore Slot
Load data into an allocated keystore slot so that other operations (such as encapsulation)
can be carried out upon it.
int sm_keystore_slot_load(struct device *dev, u32 unit, u32 slot, constu8 *key_data, u32
key_length);
Arguments:
dev Points to a struct device established to manage resources for the secure memory
subsystem.
unit One of the units detected with a call to sm_detect_keystore_units().
key_length Length (in bytes) of information to write to the slot.
key_data Pointer to buffer with the data to be loaded. Must be a contiguous buffer.
Returns:
• Zero for successful completion.
• -EFBIG if the requested size exceeds that which the slot can hold.
52.15 Demo Image Update
Encapsulate data written into a keystore slot as a Secure Memory Blob.
int sm_keystore_slot_encapsulate(struct device *dev, u32 unit, u32
inslot, u32 outslot, u16 secretlen, u8 *keymod, u16 keymodlen);
Arguments:
dev Points to a struct device established to manage resources for the secure memory
subsystem.
unit One of the units detected with a call to sm_detect_keystore_units().
inslot Slot holding the input secret, loaded into that slot by sm_keystore_slot_load().
Note that the slot containing this secret should be overwritten or deallocated as soon as
practical, since it contains cleartext at this point.
outslot Allocated slot to hold the encapsulated output as a Secure Memory Blob.
secretlen Length of the secret to be encapsulated, not including any blob storage overhead
(blob key, MAC, etc.).
Chapter 52 CAAM (Cryptographic Acceleration and Assurance Module)
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 353

keymod Key modifier component to be used for encapsulation. The key modifier allows an
extra secret to be used in the encapsulation process. The same modifier will also be
required for decapsulation.
keymodlen Lenth of key modifier in bytes.
Returns:
• Zero on success
• CAAM job status if a failure occurs
52.16 Decapsulate Data in the Keystore
Decapsulate data in the keystore into a Black Key Blob for use in other cryptographic
operations. A Black Key Blob allows a key to be used "covered" in main memory
without exposing it as cleartext.
int sm_keystore_slot_decapsulate(struct device *dev, u32 unit, u32
inslot, u32 outslot, u16 secretlen, u8 *keymod, u16 keymodlen);
Arguments:
dev Points to a struct device established to manage resourcesfor the secure memory
subsystem.
unit One of the units detected with a call to sm_detect_keystore_units().
inslot Slot holding the input data, processed by a prior call to
sm_keystore_slot_encapsulate(), and containing a Secure Memory Blob.
outslot Allocated slot to hold the decapsulated output data in the form of a Black Key
Blob.
secretlen Length of the secret to be decapsulated, without any blob storage overhead.
keymod Key modified component specified at the time of encapsulation.
keymodlen Lenth of key modifier in bytes.
Returns:
• Zero on success
• CAAM job status if a failure occurs
Decapsulate Data in the Keystore
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
354 Freescale Semiconductor, Inc.

52.17 Read Data From a Keystore Slot
Extract data from a keystore slot back to a user buffer. Normally to be used after some
other operation (e.g., decapsulation) occurs.
int sm_keystore_slot_read(struct device *dev, u32 unit, u32 slot, u32
key_length, u8 *key_data);
Arguments:
dev Points to a struct device established to manage resources for the secure memory
subsystem.
unit One of the units detected with a call to sm_detect_keystore_units().
slot Allocated slot to read from.
key_length Length (in bytes) of information to read from the slot.
key_data Pointer to buffer to hold the extracted data. Must be a contiguous buffer.
Returns:
• Zero for successful completion.
• -EFBIG if the requested size exceeds that which the slot can hold.
52.18 Release a Slot back to the Keystore
Release a keystore slot back to the available pool. Information in the store is wiped clean
before the deallocation occurs.
int sm_keystore_slot_dealloc(struct device *dev, u32 unit, u32 slot);
Arguments:
dev Points to a struct device established to manage resources for the secure memory
subsystem.
unit One of the units detected with a call to sm_detect_keystore_units().
slot Number of the allocated slot to be released back to the store.
Returns:
• Zero for successful completion.
• -EINVAL if an unallocated slot is specified.
Chapter 52 CAAM (Cryptographic Acceleration and Assurance Module)
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 355

Configuration of the Secure Memory Driver / Keystore API is dependent on the
following kernel configuration parameters:
CRYPTO_DEV_FSL_CAAM_SM
Turns on the secure memory driver in the kernel build.
CRYPTO_DEV_FSL_CAAM_SM_SLOTSIZE
Configures the size of a secure memory "slot".
Each secure memory unit is block of internal memory, the size of which is
implementation dependent. This block can be subdivided into a number of logical "slots"
of a size which can be selected by this value. The size of these slots needs to be set to a
value that can hold the largest secret size intended, plus the overhead of blob parameters
(blob key and MAC, typically no more than 48 bytes).
The values are selectable as powers of 2, limited to a range of 32 to 512 bytes. The
default value is 7, for a size of 128 bytes.
CRYPTO_DEV_FSL_CAAM_SM_TEST
Enables operation of a captive test / example module that shows how one might use the
API, while verifying its functionality. The test module works along this flow:
• Creates a number of known clear keys (3 sizes).
• Allocated secure memory slots.
• Inserts those keys into secure memory slots and encapsulates.
• Decapsulates those keys into black keys.
• Enrcrypts DES, AES128, and AES256 plaintext with black keys. Since this uses
symmetric ciphers, same-key encryption/decryption results will be equivalent.
• Decrypts enciphered buffers with equivalent clear keys.
• Compares decrypted results with original ciphertext and compares. If they match, the
test reports OK for each key case tested.
Normal output is reported at the console as follows:
platform caam_sm.0: caam_sm_test: 8-byte key test match OK platform
caam_sm.0: caam_sm_test: 16-byte key test match OK platform caam_sm.0:
caam_sm_test: 32-byte key test match OK
• The secure memory driver is not implemented as a kernel module at this point in
time.
• Implementation is presently limited to kernel-mode operations.
Release a Slot back to the Keystore
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
356 Freescale Semiconductor, Inc.

• One instance is possible at the present time. In the future, when job rings can run
independently in different system partitions, a multiple instance secure memory
driver should be considered.
• All storage requests are limited to the storage size of a single slot (which is of a
build-time configurable length). It may be possible to allow a secret to span multiple
slots so long as those slots can be allocated contiguously.
• Slot size is fixed across all pages/partitions.
• Encapsulation/Decapsulation interfaces could allow for authentication to be
specified; the underlying interface does not request it.
• Encapsulation/Decapsulation interfaces return a job status; this status should be
translated into a meaningful error from errno.h
52.19 CAAM/SNVS - Security Violation Handling Interface
Overview
This chapter describes a prototype of a driver component and control interface for SNVS
Security Violations. It provides a means of installing, managing, and executing
application defined handlers meant to process security violation events as a response to
their occurrence in a system.
SNVS allows for the continuous monitoring of a number of possible attack vectors in a
running system. If the occurrence of one of these attach vectors is sensed, (e.g., a Security
Violation has been detected), SNVS can, along with erasing critical security parameters
and transitioning to a failure state. generate an interrupt indicating that the violation has
occurred. This interrupt can dispatch an application-defined routine to take cleanup action
as a consequence of the violation, such that an orderly shutdown of security services
might occur.
Therefore, the purpose of this interface is to allow system-level services to install
handlers for these types of events. This allows the system designer to select how he wants
to respond to specific security violation causes using a simple function call written to his
system-specific requirements.
52.20 Operation
For existing platforms, 6 security violation interrupt causes are possible within SNVS. 5
of these violation causes are normally wired for use, and these causes are defined as:
• SECVIO_CAUSE_CAAM_VIOLATION - Violation detected inside CAAM/SNVS
• SECVIO_CAUSE JTAG_ALARM - JTAG activity detected
Chapter 52 CAAM (Cryptographic Acceleration and Assurance Module)
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 357

• SECVIO_CAUSE_WATCHDOG - Watchdog expiration
• SECVIO_CAUSE_EXTERNAL_BOOT - External bootload activity
• SECVIO_CAUSE_TAMPER_DETECT - Tamper detection logic triggered
Each of these causes can be associated with an application-defined handler through the
API provided with this driver. If no handler is specified, then a default handler will be
called. This handler does no more than to identify the interrupt cause to the system
console.
52.21 Configuration Interface
The following interface can be used to define or remove application-defined violation
handlers from the driver's dispatch table.
52.22 Install a Handler
int caam_secvio_install_handler(struct device *dev, enum secvio_cause
cause, void (*handler)(struct device *dev, u32 cause, void *ext), u8
*cause_description, void *ext);
Arguments:
dev Points to SNVS-owning device.
cause Interrupt source cause from the above list of enumerated causes.
handler Application-defined handler, gets called with dev, source cause, and locally-
defined handler argument
cause_description Points to a string to override the default cause name, this can be used as
an alternate for error messages and such. If left NULL, the default description string is
used. ext pointer to any extra data needed by the handler.
Returns:
• Zero on success.
• -EINVAL if an argument was invalid or unusable.
Configuration Interface
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
358 Freescale Semiconductor, Inc.

52.23 Remove an Installed Driver
int caam_secvio_remove_handler(struct device *dev, enum secvio_cause
cause);
Arguments:
dev Points to SNVS-owning device.
cause Interrupt source cause.
Returns:
• Zero on success.
• -EINVAL if an argument was invalid or unusable.
52.24 Driver Configuration CAAM/SNVS
CRYPTO_DEV_FSL_CAAM_SECVIO
Enables inclusion of Security Violation driver and configuration interface as part of the
build configuration. Note that the driver is not buildable as a module in its present form.
Chapter 52 CAAM (Cryptographic Acceleration and Assurance Module)
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 359

Driver Configuration CAAM/SNVS
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
360 Freescale Semiconductor, Inc.

Chapter 53
Remote Processor Messaging (RPMsg)
53.1 Introduction
With the newest multi-core architecture designed by using the ARM Cortex®-A series
processors and the ARM Cortex®-M series processors, industrial applications can
achieve greater power efficiency for a reduced carbon footprint. This reduces power
consumption without performance deterioration.
A homogeneous SoC would traditionally run a single operating system (OS) that controls
all the memory. The OS or a hypervisor would handle task management among available
cores to maximize system utilization. Such a system is called Symmetric Multi-
Processing (SMP).
As explained previously, a heterogeneous multi-core chip where different processing
cores running different instruction sets and different OSs. Each processing core handles a
specific task as required. Such a system is called Asymmetric Multiprocessing (AMP).
To understand the distinction between the SMP and AMP systems, it is possible for a
homogeneous multi-core SoC to be an AMP system but a heterogeneous multi-core SoC
cannot be an SMP system.
A multi-core architecture brings new challenges to the system design, because the
software must be rewritten to distribute tasks across the available cores. In addition, all
the peripheral resources need to be properly allocated to avoid resource contention and
achieve efficient sharing of the data spaces between the cores. A multi-core SoC also
needs mechanisms for reliable communication and synchronization among tasks running
on different processing cores.
RPMsg is a virtio-based messaging bus it allows kernel drivers to communicate with
remote processors available on the system. In turn, drivers could then expose appropriate
user space interfaces if needed. Every RPMsg device is a communication channel with a
remote processor (so the RPMsg devices are called channels). Channels are identified by
a textual name and have a local ("source") RPMsg address, and remote ("destination")
RPMsg address.
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 361
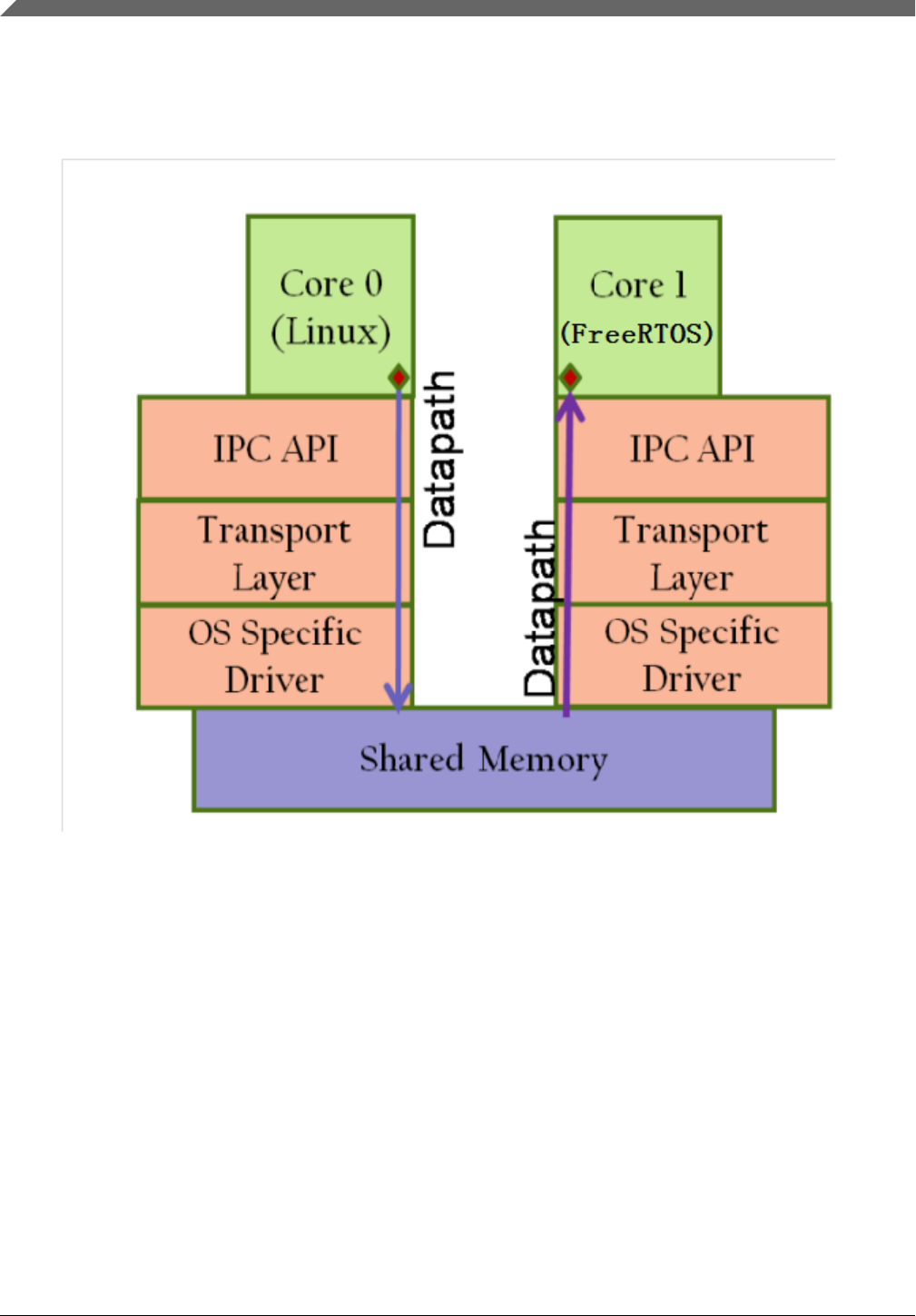
As shown in the following figure, the messages pass between endpoints through
bidirectional connection-less communication channels.
Figure 53-1. New multi-core, multi-OS architecture
53.2 Features
• Designed for low-latency and low overhead operation, and complaint with the Linux
RPMsg framework.
• Optimized for embedded environments with constrained CPU and memory
resources.
• Implementation by using shared memory without data translation or message
headers.
• Application communication by using a client-server methodology.
• Dynamic allocation of the RPMsg channels.
Features
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
362 Freescale Semiconductor, Inc.

53.3 Source Codes
• Common codes:
drivers/rpmsg/virtio_rpmsg_bus.c
• i.MX platform-related codes:
arch/arm/mach-imx/imx_rpmsg.c
• i.MX RPMsg pingpong tests:
drivers/rpmsg/imx_rpmsg_pingpong.c
• i.MX RPMsg TTY driver
drivers/rpmsg/imx_rpmsg_tty.c
53.4 Kernel Configurations
For RPMSG pingpong test
Symbol: IMX_RPMSG_PINGPONG [=m]
Type : tristate
Prompt: IMX RPMSG pingpong driver
Location:
-> Device Drivers
-> Rpmsg drivers
-> RPMSG bus driver (RPMSG [=y])
For RPMSG TTY driver
Symbol: IMX_RPMSG_TTY [=m]
Type : tristate
Prompt: IMX RPMSG tty driver
Location:
-> Device Drivers
-> Rpmsg drivers
-> RPMSG bus driver (RPMSG [=y])
Chapter 53 Remote Processor Messaging (RPMsg)
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 363

Kernel Configurations
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
364 Freescale Semiconductor, Inc.

Chapter 54
Display Content Integrity Checker (DCIC)
54.1 Introduction
The goal of the DCIC is to verify that a safety-critical information sent to a display is not
corrupted.
54.2 Hardware Operation
The DCIC has the following features:
• Pixel clock up to 148.5 MHz
• Configurable polarity of Display Interface control signals
• 24-bit pixel data bus
• Up to 16 rectangular ROIs with a configurable location and size
• Independent CRC32 signature calculation for each ROI
• External controller mismatch indication signal
54.3 Software Operation
54.3.1 Source Code Structure
Table below shows the driver source files available in the directory: <Yocto_BuildDir>/
linux/drivers/video/mxc/.
Table 54-1. DCIC Driver Files
File Description
mxc_dcic.c DCIC driver source code
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 365
54.3.2 Menu Configuration Options
The following Linux kernel configuration options are provided for this module. To get to
these options, use the bitbake linux-imx -c menuconfig command. On the screen
displayed, select Configure the Kernel and exit. When the next screen appears, select the
following options as build-in status to enable this module:
Device Drivers -> Graphics support -> MXC DCIC
54.3.3 DTS Configuration
dcic_id = <0>; /* DCIC device index 0-dcic1, i-dcic2 */
dcic_mux = "dcic-lcdif1"; /* DCIC input select */
Table 54-2. DCIC Input Select
Module i.MX 6SoloX i.MX 6Dual/6Quad
DCIC1 dcic_lvds
dcic_lcdif1
dcic-ipu0-di1
dcic-lvds0
dcic-lvds1
dcic-hdmi
DCIC2 dcic_lvds
dcic_lcdif2
dcic-ipu0-di0/dcic-ipu1-di0
dcic-lvds0
dcic-lvds1
dcic-mipi_dpi
54.4 Programming Interface
54.4.1 IOCTLs Functions
The DCIC driver supports the following IOCTLs:
• DCIC_IOC_CONFIG_DCIC: Configures the DCIC input CLK, VSYNC, HSYNC,
and data signal polarity.
• DCIC_IOC_CONFIG_ROI: Configures the ROI block size and reference signature.
• DCIC_IOC_GET_RESULT: Gets the result of the ROI calculated signature.
Programming Interface
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
366 Freescale Semiconductor, Inc.

54.4.2 Structures
struct roi_params {
unsigned int roi_n; /* ROI index */
unsigned int ref_sig; /* Reference CRC32 */
unsigned int start_y; /* start vertical lines of ROI */
unsigned int start_x; /* start horizon lines of ROI */
unsigned int end_y; /* end vertical lines of ROI */
unsigned int end_x; /* end horizon lines of ROI */
char freeze; /* state of ROI */
};
54.5 Unit Test
54.5.1 Source Code
The DCIC unit test is a sample for how to use DCIC to check the display content. The
source located at:
<Yocto_BuildDir>/linux –test/test/mxc_dcic_test
In this unit test, there are three ROIs allocated.
NOTE
All ROIs block cannot overlay with each other.
54.5.2 DCIC CRC Calculation Functions
There are four functions in this unit test to calculate reference signature.
crc32_calc_18of24bit() /* CRC calculate 18 bit of 24 */
crc32_calc_24bit() /* CRC calculate 24 */
crc32_calc_24of16bit() /* CRC calculate 24 bit of 16 */
crc32_calc_18of16bit() /* CRC calculate 18 bit of 16 */
DCIC calculates CRC according to the display bus width, but the display bus width does
not always align with bytes per pixel (bpp), and the four functions above can cover
different display bus widths and bpps.
54.5.3 sample
The pixel bpp in the frame buffer is 24, but the display bus width is 18. Therefore, the
unit test should run with the parameter “–bw 18” as follows:
./mxc_dcic_test.out -bw 18 -dev 1
Chapter 54 Display Content Integrity Checker (DCIC)
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 367

Unit Test
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
368 Freescale Semiconductor, Inc.

Chapter 55
ADC Driver
55.1 ADC Introduction
The features of the ADC-Digital are as follows:
• Two 12-bit ADCs
• Linear successive approximation algorithm with up to 12-bit resolution with 10/11
bit accuracy
• Up to 1MS/s sampling rate
• Up to 8 single-ended external analog inputs
• Single or continuous conversion (automatic return to idle after single conversion)
• Output Modes: (in right-justified unsigned format)
• 12-bit
• 10-bit
• 8-bit
• Configurable sample time and conversion speed/power
• Conversion complete and hardware average complete flag and interrupt
• Input clock selectable from up to four sources
• Asynchronous clock source for lower noise operation with option to output the clock
• Selectable asynchronous hardware conversion trigger with hardware channel select
• Selectable voltage reference, Internal, External, or Alternate
• Operation in low power modes for lower noise operation
• Hardware average function
• Self-calibration mode
55.2 ADC External Signals
• ADC_VREFH: Voltage reference high
• ADC_VREHL: Voltage reference low
• ADC1_IN0: Analog channel 1 input 0
• ADC1_IN1: Analog channel 1 input 1
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 369

• ADC1_IN2: Analog channel 1 input 2
• ADC1_IN3: Analog channel 1 input 3
• ADC2_IN0: Analog channel 2 input 0
• ADC2_IN1: Analog channel 2 input 1
• ADC2_IN2: Analog channel 2 input 2
• ADC2_IN3: Analog channel 2 input 3
The ADC pin settings should be done in the ADCx_PCTL register. No other extra
IOMUX settings are required.
55.3 ADC Driver Overview
The ADC driver is developed under the Linux IIO (Industrial I/O) driver frame. The
ADC driver only provides the basic functions. The following features are supported:
• Four external inputs for each ADC controller channel
• 12 bit ADC
• Single conversion
• Hardware average
• Low power mode of ADC
• Sample rate changes in the available sample rate group
55.3.1 ADC Driver File
The ADC driver file is <Yocto_BuildDir>/linux/drivers/iio/adc/vf610_adc.c for i.MX
6UltraLite and i.MX6SoloX, <Yocto_BuildDir>/linux/drivers/iio/adc/ad2802a.c for i.MX
7Dual.
55.3.2 Menu Configuration Options
Configure the kernel option to enable the module by menuconfig:
Device Drivers > Industrial I/O support > Analog to digital converters > 2802A ADC
driver
Device Drivers > Industrial I/O support> Analog to digital converters > Freescale vf610
ADC driver
ADC Driver Overview
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
370 Freescale Semiconductor, Inc.
55.3.3 Programming Interface
Linux IIO provides some system interface to get the raw ADC data from the related
input. Users can also set the sample rate in the available sample rate group. The ADC
controllers system interface is located:
/sys/devices/soc0/soc.1/2200000.aips-bus/2280000.adc/iio:device0:
/sys/devices/soc0/soc.1/2200000.aips-bus/2284000.adc/iio:device1:
The following table lists the software interfaces.
Table 55-1. Software Interfaces
Software interface Description
in_voltage0_raw~ in_voltage3_raw cat in_voltage0_raw to get raw ADC data
sampling_frequency_available cat sampling_frequency_available to get available sample
rate group
in_voltage_sampling_frequency cat in_voltage_sampling_frequency to show current
sample rate
echo value > in_voltage_sampling_frequency to set the
sample rate
Chapter 55 ADC Driver
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 371

ADC Driver Overview
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
372 Freescale Semiconductor, Inc.

Chapter 56
Video Analog-to-Digital Converter (VADC)
56.1 Introduction
The video analog-to-digital converter (VADC) consists of an analog video front end
(AFE), and a digital video decoder. The AFE accepts NTSC or PAL input from a device,
such as an analog camera.
The two parts are configured in the VADC driver. The video decoder outputs the
YUV444-formatted data.
56.2 Hardware Operation
The Video ADC has the following features:
• Internal voltage and current reference generator
• 10-bit resolution (9.5 bit ENOB at 66.5 Msps)
• 4 analog inputs, with all inputs available for CVBS
• Programmable anti-aliasing filter, gain, and clamp
The video decoder has the following features:
• NTSC/PAL decoder
• Direct data path (no complex resampling)
• Automatic standards detection
• 2D adaptive comb filter
• Datapath/clocking architecture encompasses a time base corrector for VCR signals
• Luma passband is flat to > 6MHz
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 373
56.3 Software Operation
The VADC driver is located under the Linux V4L2 architecture and it implements the
V4L2 capture interfaces. Applications cannot use the camera driver directly. Instead, the
applications use the V4L2 capture driver to open and close the camera for image capture.
The V4L2 capture supports the following operation:
• Capture stream mode
The following picture format is supported:
• YUV444
The following picture sizes are supported:
• PAL
• NTSC
56.3.1 Source Code Structure
Table below shows the driver source files available in the directory: <Yocto_BuildDir>/
linux/drivers/media/platform/mxc/capture
Table 56-1. VADC Driver Files
File Description
mxc_vadc.c VADC driver source code
56.3.2 Menu Configuration Options
The following Linux kernel configuration option is provided for this module. To get to
this option, use the bitbake linux-imx -c menuconfig command. On the screen displayed,
select Configure the Kernel and exit. When the next screen appears, select the following
option to enable this module:
Device Drivers > Multimedia devices > Video capture adapters > MXC Video For Linux
Camera > MXC Camera/V4L2 PRP Features support > MXC VADC support
Software Operation
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
374 Freescale Semiconductor, Inc.

56.3.3 DTS Configuration
VADC analog inputs can choose [0-3]. CSI1 or CSI2 can be used to capture the VADC
data. They can be configured in the DTS file.
For example:
vadc_in = <0>; /* VADC input select */
csi_id = <1>; /* CSI select */
The VADC input selected to vin1 and CSI2 is used to capture the VADC data.
56.4 Unit Test
Before running the unit test, make sure that the following modules are loaded:
• insmod fsl_csi.ko
• insmod mxc_vadc_tvin.ko
• insmod csi_v4l2_capture.ko
Run the unit test:
/unit_tests/csi_v4l2_tvin.out -d /dev/video<x>
Chapter 56 Video Analog-to-Digital Converter (VADC)
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
Freescale Semiconductor, Inc. 375

Unit Test
i.MX Linux® Reference Manual, Rev. L3.14.38_6ul-ga, 09/2015
376 Freescale Semiconductor, Inc.

Document Number: IMXLXRM
Rev. L3.14.38_6ul-ga
09/2015
Information in this document is provided solely to enable system and software
implementers to use Freescale products. There are no express or implied copyright
licenses granted hereunder to design or fabricate any integrated circuits based on the
information in this document.
Freescale reserves the right to make changes without further notice to any products
herein. Freescale makes no warranty, representation, or guarantee regarding the
suitability of its products for any particular purpose, nor does Freescale assume any
liability arising out of the application or use of any product or circuit, and specifically
disclaims any and all liability, including without limitation consequential or incidental
damages. “Typical” parameters that may be provided in Freescale data sheets and/or
specifications can and do vary in different applications, and actual performance may
vary over time. All operating parameters, including “typicals,” must be validated for
each customer application by customer’s technical experts. Freescale does not convey
any license under its patent rights nor the rights of others. Freescale sells products
pursuant to standard terms and conditions of sale, which can be found at the following
address: freescale.com/SalesTermsandConditions.
How to Reach Us:
Home Page:
freescale.com
Web Support:
freescale.com/support
Freescale and the Freescale logo are trademarks of Freescale Semiconductor, Inc.,
Reg. U.S. Pat. & Tm. Off. All other product or service names are the property of their
respective owners. ARM, ARM Powered, and Cortex are registered trademarks of
ARM Limited (or its subsidiaries) in the EU and/or elsewhere. All rights reserved.
© 2015 Freescale Semiconductor, Inc.
