Manual
manual
User Manual:
Open the PDF directly: View PDF ![]() .
.
Page Count: 20

Evolutionary Multi-Objective
Optimization Platform
User Manual
Ye Tian
April 10, 2017
Thank you very much for selecting PlatEMO. The copyright of PlatEMO belongs to the BIMK Group,
and all publications using the platform should acknowledge the use of “PlatEMO” and reference the
following literature:
Ye Tian, Ran Cheng, Xingyi Zhang, and Yaochu Jin, “PlatEMO: A MATLAB
Platform for Evolutionary Multi-Objective Optimization,” 2016.
If you have any comment or suggestion to PlatEMO or the MOEAs in PlatEMO, please send it to
field910921@gmail.com (Ye Tian). If you want to add your MOEA or MOP to PlatEMO, please send
the MATLAB code and the relevant literature to field910921@gmail.com as well.
We sincerely hope this platform is helpful to your research in evolutionary multi-objective
optimization. Your support is the greatest impetus for us!
Contents
I. Introduction to PlatEMO ..................................................................................... 1
A. Evolutionary Multi-Objective Optimization ............................................. 1
B. PlatEMO ................................................................................................... 2
C. File structure of PlatEMO ......................................................................... 3
II. How to Use PlatEMO .......................................................................................... 4
A. Use PlatEMO without GUI ....................................................................... 4
B. Use PlatEMO with GUI ............................................................................ 6
III. How to Extend PlatEMO ................................................................................... 10
A. Architecture of PlatEMO ........................................................................ 10
B. Add Algorithms ....................................................................................... 11
C. Add Problems.......................................................................................... 13
D. Add Operators ......................................................................................... 15
E. Add Performance Indicators ................................................................... 17

Section I. Introduction to PlatEMO
1
I. Introduction to PlatEMO
A. Evolutionary Multi-Objective Optimization
Multi-objective optimization problems (MOPs), which involve two or more
conflicting objectives to be optimized, can be formulated as follows:
Whereis the decision vector (i.e. solution), and is
the known decision space. is the objective vector, and is the
unknown objective space.includes inequality constraints. Each element
indenotes a decision variable, andis the number of decision variables. Each
element indenotes a single-objective optimization problem, andis the number
of objectives.
Solutionis said to dominate solution (denoted by) if and only if
And solutionis said to be Pareto optimal if and only if
All the Pareto optimal solutions inconstitute the Pareto optimal set, and the objective
values of all the solutions in Pareto optimal set constitute the Pareto front.
Many metaheuristics have been verified in solving MOPs in the last two decades,
including genetic algorithm, differential evolution, particle swarm optimization,
memetic algorithm, estimation of distribution algorithm and so on, which are
collectively known as multi-objective evolutionary algorithms (MOEAs). An MOEA
usually maintains a population consisting of a set of individuals, where an individual
represents a solution together with its objective values and constraint values. The

PlatEMO User Manual
2
population is updated in each generation during the evolution, where new individuals
are generated by operators (e.g. crossover and mutation), and the population together
with new individuals is truncated by environmental selection. The goal of MOEAs is to
make the population approximate the Pareto optimal set with good convergence and
diversity.
B. PlatEMO
PlatEMO is an open source and free MATLAB-based platform for evolutionary
multi-objective optimization, which is available at http://bimk.ahu.edu.cn/index.php?
s=/Index/Software/index.html. It can be run on any operating system able to run
MATLAB®. PlatEMO provides two running modes to users: command mode and GUI
mode. In command mode, no GUI is displayed, users should set the parameters and
execute the algorithms by commands. In GUI mode, a GUI is displayed, users can set
the parameters and execute the algorithms on the GUI. In order to successfully run the
GUI mode, the version of the MATLAB® software should not be lower than R2014b.
The main features of PlatEMO are:
· It includes more than 60 existing MOEAs, most of which are representative
algorithms published in top journals after 2010.
· It includes more than 100 popular MOPs, which provide a variety of difficulties
for testing the MOEAs.
· It includes a lot of operators for different encodings, which can be combined
with all the MOEAs.
· It includes many performance indicators for numerically assessing the
performance of MOEAs.
· It is easy to be used that uses need not establish any project or write any code to
run PlatEMO, but just invoke the interface function main().
· It provides a powerful experimental module in the GUI, which can help users
perform experiments on multiple MOEAs and MOPs, and obtain the statistical
results in the format of Excel or LaTeX directly.
Section I. Introduction to PlatEMO
3
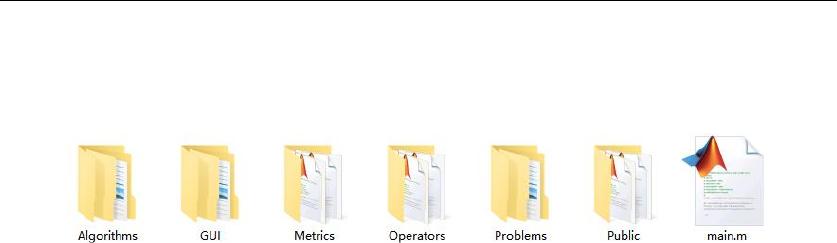
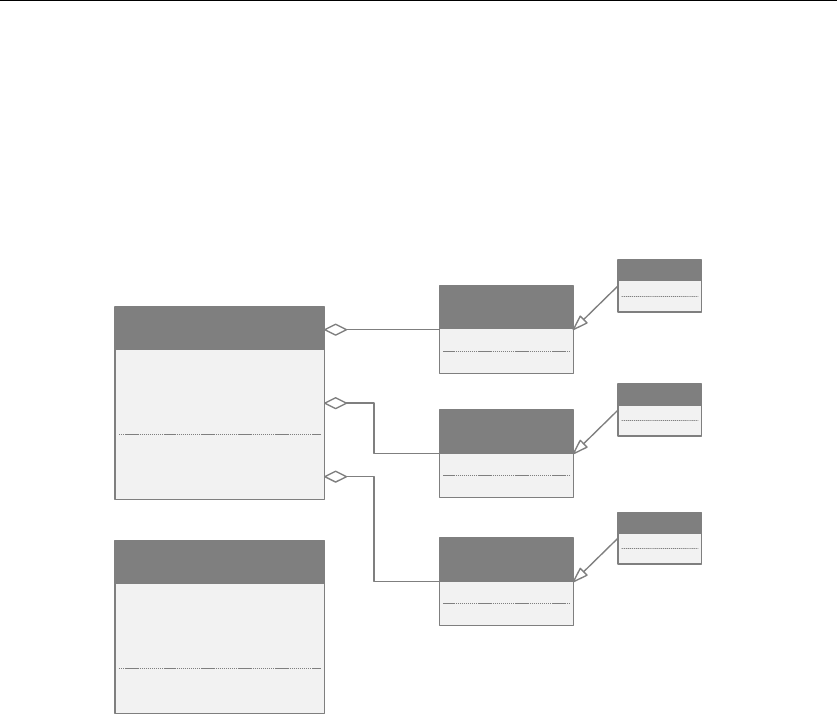
C. File structure of PlatEMO
Fig. 1 The file structure of PlatEMO
As shown in Fig. 1, there are six folders and one .m file in the root directory of
PlatEMO, the functions of which are given in the following.
· main.m. The only interface of PlatEMO, invoke this function to run the platform.
· Algorithms. For storing the source codes of all the MOEAs.
· GUI. For storing the codes to establish the GUI of PlatEMO, which need not be
read or modified by users.
· Metrics. For storing the source codes of all the performance indicators.
· Operators. For storing the source codes of all the operators.
· Problems. For storing the source codes of all the MOPs.
· Public. For storing some public classes and functions.
All the files in these folders are .m files, each of which represents one MATLAB
function or MATLAB class with detailed comments. All the files are open source except
for the ones in the folder GUI.
PlatEMO User Manual
4
II. How to Use PlatEMO
A. Use PlatEMO without GUI
Users can run the command mode of PlatEMO by invoking the interface function
main() with input parameters. While if main() is invoked without any input parameter,
the GUI mode will be run. All the acceptable parameters for main() are listed in Table
1. Note that users need not assign all the parameters since each of them has a default
value.
Table 1 The acceptable parameters for main()
Parameter Name
Data Type
Default Value
Description
-algorithm
function handle
@NSGAII
MOEA function
-problem
function handle
@DTLZ2
MOP function
-operator
function handle
@EAreal
Operator function
-N
positive integer
100
Population size
-M
positive integer
3
Number of objectives
-D
positive integer
12
Number of variables
-evaluation
positive integer
10000
Number of evaluations
-mode
1, 2 or 3
1
Run mode
-run
positive integer
1
Run No.
-outputFcn
function handle
@GLOBAL.show
Function invoked after each
generation
-X_parameter
cell
N/A
Parameters for function X
· -algorithm. The function handle of the MOEA to be executed.
· -problem. The function handle of the MOP to be solved by the MOEA.
· -operator. The function handle of the operator to be used in the MOEA. Note
that some MOEAs specify the operator by themselves (e.g. MOPSO.m), hence
this parameter is invalid for these MOEAs.
· -N. The size of the population generated by the MOEA after termination. Note
that the population size is fixed to some special values in some MOEAs (e.g.
MOEAD.m), hence the actual size of the population generated by these MOEAs
may not exactly equal to this parameter.

Section II. How to Use PlatEMO
5
· -M. The number of objectives of the MOP. Note that the number of objectives
is constant in unscalable MOPs (e.g. ZDT1.m), hence this parameter is invalid
for these MOPs.
· -D. The number of decision variables of the MOP. Note that the number of
decision variables is constant or fixed to some integers in some MOPs (e.g.
ZDT5.m), hence the actual number of decision variables may not exactly equal
to this parameter.
· -evaluation. The maximum number of fitness evaluations.
· -mode. If this parameter is set to 1, a figure showing the result will be displayed
after termination. And if this parameter is set to 2, the result will be saved to a
file after termination and no figure will be displayed, where the filename is
Data\algorithm\algorithm_problem_M_run.mat with algorithm, problem, M,
and run denoting the MOEA name, the MOP name, the number of objectives,
and the run number, respectively. If this parameter is set to 3, the result will be
neither displayed nor saved, instead, the operation acting on the result is
determined by the function outputFcn.
· -run. The run number. If users want to record multiple results for the same
parameters of algorithm, problem and M, modify this parameter in each run so
that the filenames of the results are different.
· -outputFcn. The function invoked after each generation. In particular, when
mode is set to 1, this parameter will be forced to @GLOBAL.show, which can
display the result after termination; when mode is set to 2, this parameter will
be forced to @GLOBAL.save, which can save the result after termination.
· -X_parameter. For setting the specific parameters in each MOEA, MOP or
operator. For example, the algorithm LMEA.m has three parameters nSel, nPer
and nCor, using main(…, ’-LMEA_parameter’, {5,50,5}, …) to set the values
of the three parameters to 5, 50 and 5, respectively. If the command is
main(…, ’-LMEA_parameter’, {[],50}, …), the first parameter nSel and the
third parameter nCor will equal to their default values. Note that the parameter
values should be put in a cell array like {5,50,5}, but not an array like [5,50,5].
The specific parameters for each MOEA, MOP and operator can be found in the
comments in the head of the corresponding function.
For example, use the following command to run KnEA on DTLZ2 with a population
size of 200 and 10 objectives, and the final result will be displayed:
1. main(- @KnEA, - @DTLZ2, - 200, - 10);
PlatEMO User Manual
6
Use the following command to run RVEA on UF8 with DE operator for 10 times, the
parameters in DE.m, i.e. CR, F, proM and disM, are set to 1, 0.6, 1 and 10, respectively,
and the final results will be saved:
1. for r = 1 : 10
2. -algorithm, @RVEA, - @UF8, - 2, - r,
3. - {1,0.6,1,10});
4. end
B. Use PlatEMO with GUI
Users can run the GUI mode of PlatEMO by the following command:
1. main();
Then two modules can be seen on the GUI, i.e. the test module and the experimental
module. The test module is used to execute one MOEA on an MOP each time, and the
result will be displayed in a figure. The experimental module is used to execute multiple
MOEAs on several MOPs at the same time, and the statistical results will be listed in a
table and saved to files.
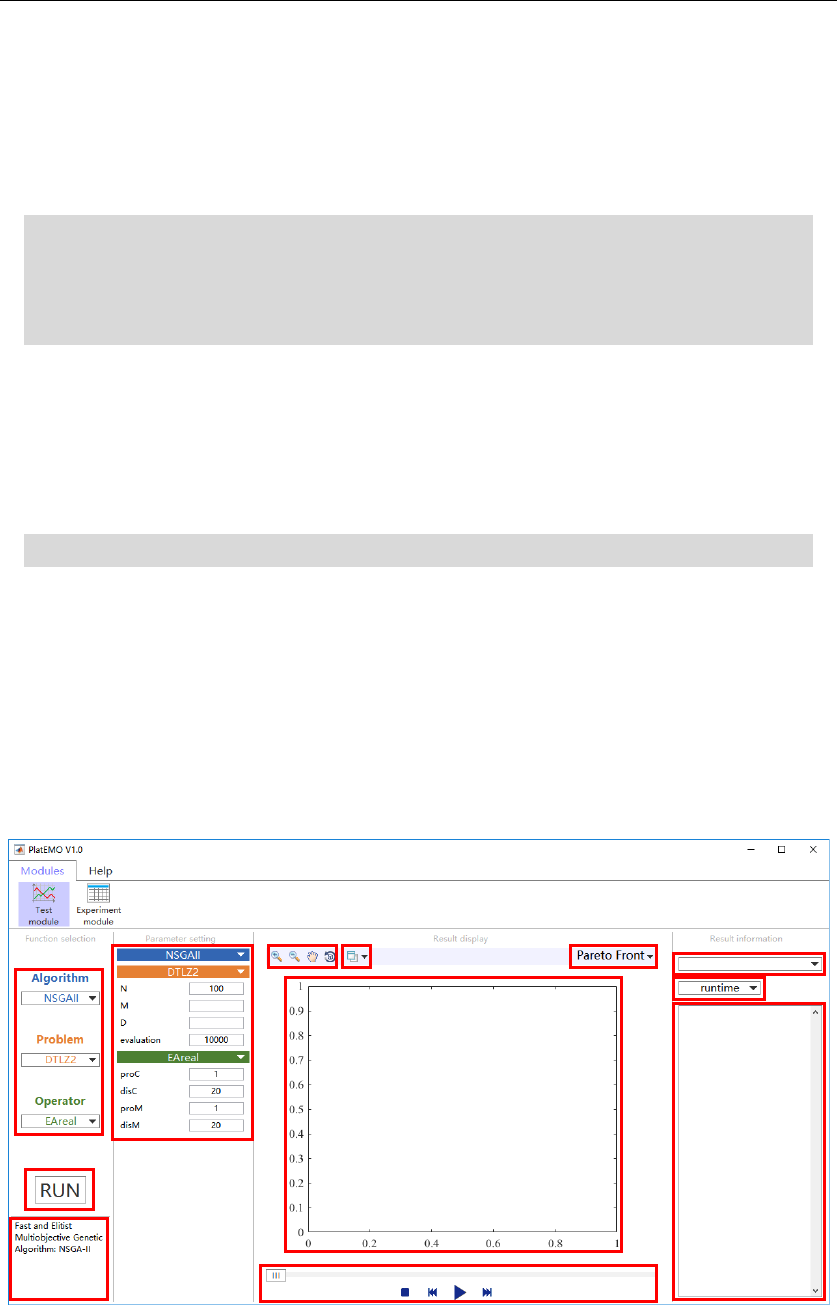
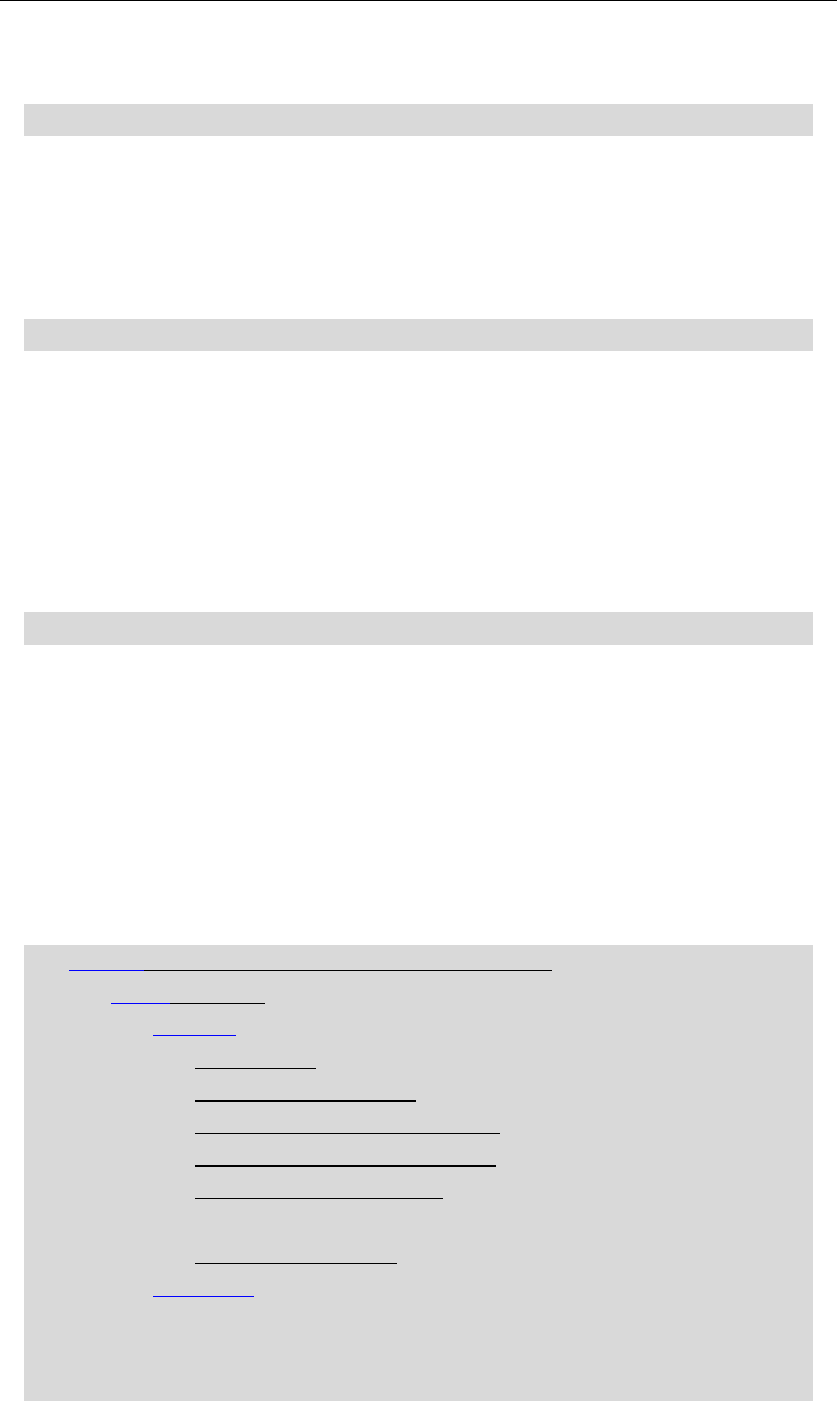
Fig. 2 The interface of the test module
The interface of the test module of PlatEMO is shown in Fig. 2. The functions of the
A
B
C
D
E
I
F
G
H
J
K
L

Section II. How to Use PlatEMO
7
controls in each region are:
· Region A. Select the MOEA, MOP and operator to be executed. Note that some
MOEAs specify the operator by themselves (e.g. MOPSO.m), hence the
operator cannot be selected by users when selecting these MOEAs.
· Region B. Set the parameters of the selected MOEA, MOP and operator. The
value of each parameter should be a scalar. Note that here the common
parameters N, M, D and evaluation are regarded as the parameters of MOPs. A
parameter will equal to its default value if the value assigned by users is empty.
· Region C. Execute the algorithm according to the current configuration.
· Region D. Show the introduction of the parameter in Region B which the cursor
is moving over.
· Region E. Show the current population during the optimization.
· Region F. Zoom in, zoom out, pan or rotate the axis in Region E.
· Region G. Open the axis in Region E in a new standard MATLAB figure, thus
more operations can be acted on the axis, e.g. saving the axis.
· Region H. Select the data to be displayed in the axis in Region E, including the
Pareto front of the population, the Pareto set of the population, the true Pareto
front of the MOP, and the evolutionary trajectory of any performance indicator.
· Region I. Control the optimization procedure, e.g. start, pause, stop, backward
and forward.
· Region J. Select one of the historical results to be displayed.
· Region K. Show the value of any performance indicator of the final population
of the result.
· Region L. Show the detailed information of the result.
After open the text module, users should first select the MOEA, MOP and operator
to be executed in Region A, and set their parameters in Region B, then press the button
in Region C to execute the algorithm. The real-time population will be displayed in the
axis in Region E, and users can use the buttons in Region I to control the optimization
procedure. After the algorithm has been terminated, all the historical results can be
redisplayed by selecting the popup menu in Region J.
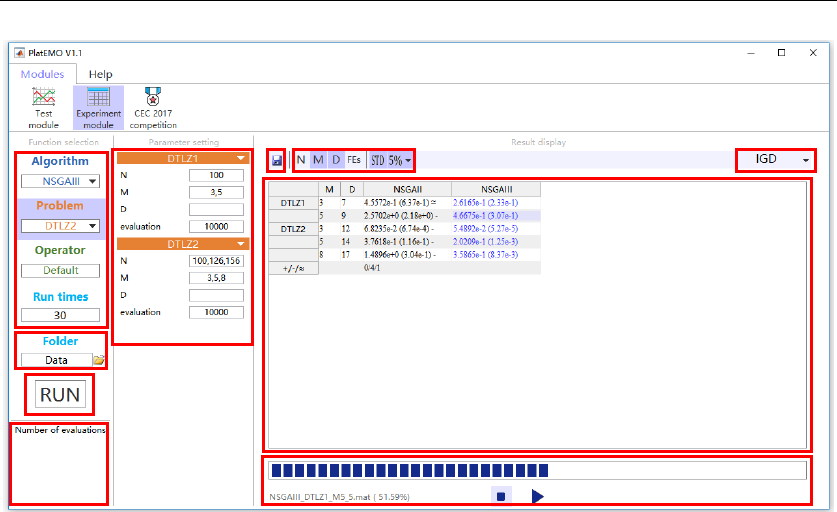
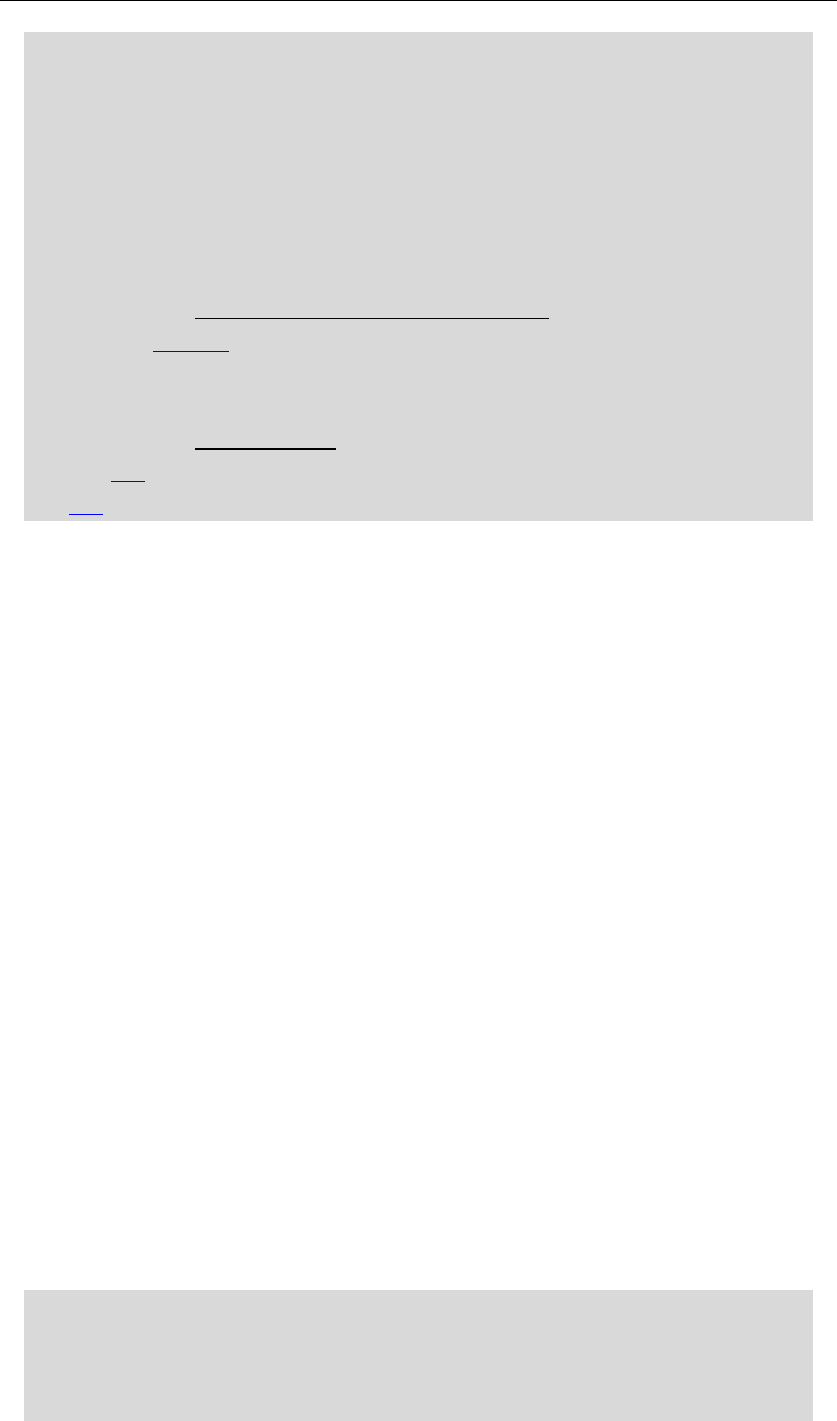
The interface of the experimental module of PlatEMO is shown in Fig. 3. The
functions of the controls in each region are:
PlatEMO User Manual
8
Fig. 3 The interface of the experimental module
· Region A. Select the MOEAs and MOPs to be executed and specify the run
times. Note that multiple MOEAs and MOPs can be selected here, but the
operators cannot be selected since only the default operators can be used.
· Region B. Set the folder for saving the results. Uses can also open an existing
configuration file so that all the MOEAs and MOPs to be executed and their
parameter values can be automatically set. The configuration file Setting.mat
will be automatically created in the specified folder when starting to execute the
experiment.
· Region C. Set the parameters of the selected MOEAs, MOPs and operators.
Note that the value of each parameter in the MOPs can be a vector, thus the
MOEAs can be executed on the same MOP with different settings at the same
time. Note that the length of the vector should be 0, 1 or the same to the number
of distinct values of parameter M.
· Region D. Execute the experiment according to the current configuration.
· Region E. Show the introduction of the parameter in Region B which the cursor
is moving over.
· Region F. Show the statistical results of the experiment.
· Region G. Specify the type of data to be shown in the table in Region F.
· Region H. Save the table in Region F in the format of Excel or LaTeX.
· Region I. Select the data to be shown in the table in Region F, including the
values of any performance indicator of the final populations of the results.
A
C
D
E
F
J
G
H
I
B

Section II. How to Use PlatEMO
9
· Region J. Control the optimization procedure.
After opening the experimental module, users should first select the MOEAs and
MOPs to be executed in Region A and set their parameters in Region C, or load existing
configuration by pressing the button in Region B, then press the button in Region D to
execute the experiment. The statistical results will be displayed in the table in Region
F, and users can use the buttons in Region J to control the optimization procedure. After
the experiment has been terminated, the data shown in the table in Region F can be
saved in the format of Excel or LaTeX by pressing the button in Region H.
PlatEMO User Manual
10
III. How to Extend PlatEMO
A. Architecture of PlatEMO
GLOBAL
-algorithm
-problem
-operator
... ...
+Initialization()
+Variation()
... ...
Algorithm
Problem
Operator
NSGA-II
DTLZ1
DE
INDIVIDUAL
-dec
-obj
-con
-add
+Individual()
... ...
1 1
1
1
1
1
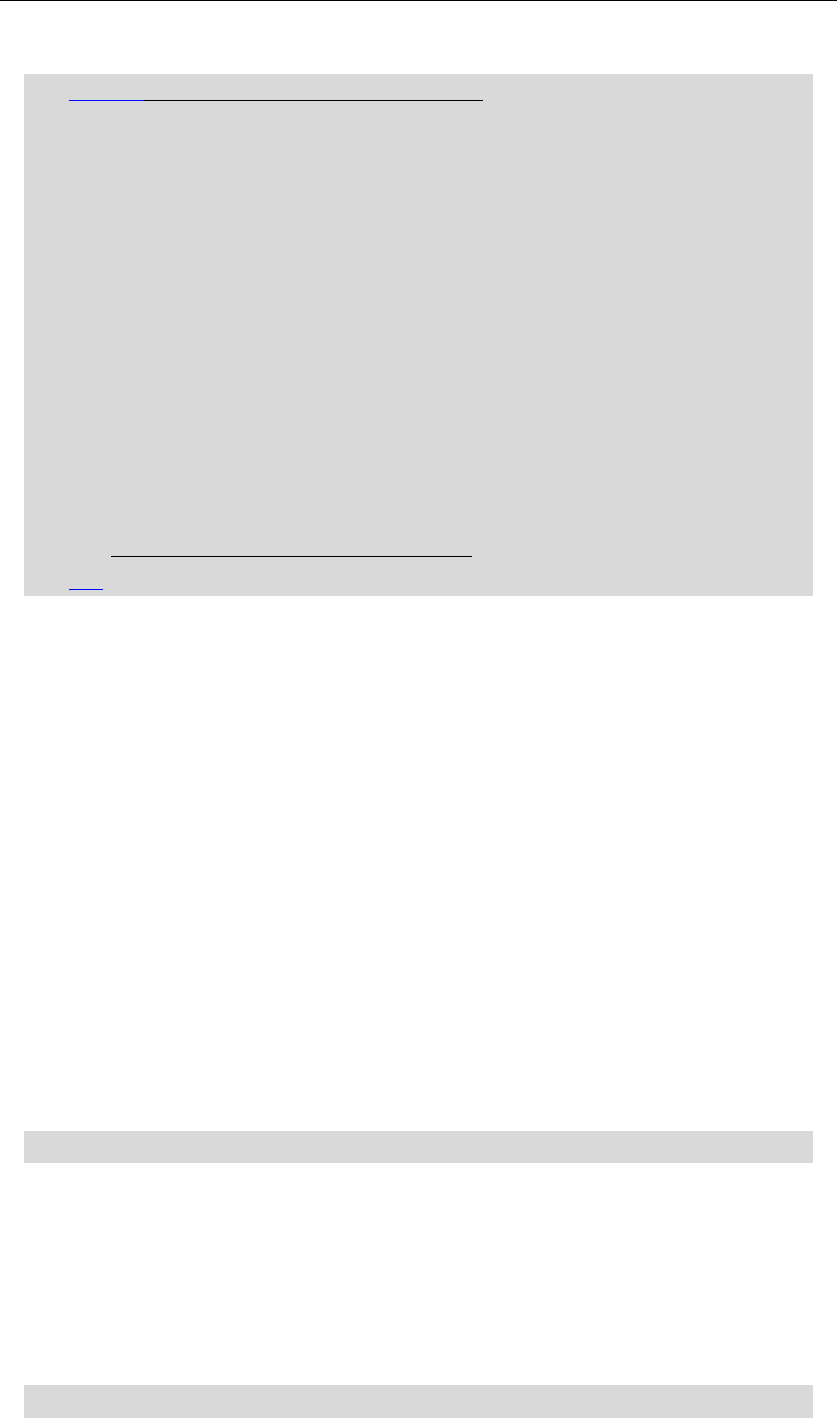
Fig. 4 Architecture of PlatEMO
The architecture of PlatEMO is shown in Fig. 4, where there are only two classes in
the implementation of PlatEMO, i.e. GLOBAL and INDIVIDUAL. Note that each
algorithm, problem and operator is just a function, but not an object.
GLOBAL represents the configuration of the current run, the source code and the
detailed comments of which can be found in Public\GLOBAL.m. During each execution,
one GLOBAL object is maintained to store all the parameter setting and the result data,
including the function handles of the executed MOEA, MOP and operator, the
population size, the number of objectives, the number of decision variables, the
maximum number of fitness evaluations, the number of evaluated fitness, and so on.
GLOBAL also provides some methods which can be invoked by the MOEAs, for
instance, GLOBAL.Initialization() can generate a randomly initial population, and
GLOBAL.Variation() can generate a set of offsprings according to specified parents.
INDIVIDUAL represents one individual, the source code and the detailed comments
of which can be found in Public\INDIVIDUAL.m. An INDIVIDUAL object stores the
decision variables dec, the objective values obj, the constraint values con, and the
additional property values add of one individual. The values of dec and add are assigned

Section III. How to Extend PlatEMO
11
when invoking the constructor, then the values of obj and con are calculated
automatically. Each of the above properties is a row vector, and use P.decs, P.objs,
P.cons or P.adds can obtain a matrix of the decision variables, objective values,
constraint values or additional property values of an array of INDIVIDUAL objects P,
respectively, where each row of the matrix denotes one individual and each column
denotes one dimension of the values. When the number of instantiated INDIVIDUAL
objects exceeds the maximum number of fitness evaluations, the algorithm will be
forced to be terminated.
B. Add Algorithms
An MOEA function is represented by an .m file in PlatEMO, which should be put in
the folder Algorithms. For example, the source code of NSGAII.m is
1. function NSGAII(Global)
2. Population = Global.Initialization();
3. FrontNo = NDSort(Population.objs, inf);
4. CrowdDis = CrowdingDistance(Population.objs, FrontNo);
5. while Global.NotTermination(Population)
6. MatingPool = TournamentSelection(2, Global.N, FrontNo, -CrowdDis);
7. Offspring = Global.Variation(Population(MatingPool));
8.
9. EnvironmentalSelection([Population, Offspring], Global.N);
10. end
11. end
Note that the common codes for all the MOEAs are underlined. To begin with, an
MOEA function has one input parameter denoting the GLOBAL object and none output
parameter. Then an initial population Population is generated (line 2), and the non-
dominated front number and the crowding distance of each individual are calculated
(line 3-4). In each generation, Global.NotTermination() is invoked to check whether the
number of evaluated fitness exceeds the maximum number of fitness evaluation, and
Population is passed to the function to be the final output (line 5). Afterwards, the
mating pool selection, generating offsprings, and environmental selection are
performed in sequence (line 6-9).
As shown in the code of NSGA-II, one MOEA should perform three operations at
least: obtaining an initial population via Global.Initialization(), checking the

PlatEMO User Manual
12
optimization state and passing Population via Global.NotTermination(), and generating
offsprings via Global.Variation(). Besides, the function CrowdingDistance() and
EnvironmentalSelection() are specific to NSGA-II, and NDSort() and
TournamentSelection() are public functions stored in the folder Public.
For decomposition based MOEAs, a set of reference points should be generated
before the optimization. For example in MOEAD.m, it uses the following command to
generate the reference points:
1. [W, Global.N] = UniformPoint(Global.N, Global.M);
Where UniformPoint() is a public function in the folder Public for generating about
Global.N uniformly distributed points with Global.M objectives on the unit hyperplane.
W is the set of reference points, and the population size Global.N is reset to the same to
the number of reference points in W.
The comments in the head of the MOEA functions (as well as MOP, operator and
performance indicator functions) should be written in a specified form such that it can
be identified by PlatEMO. For example in MOEADDE.m, the comments in the head of
the function are
1. function MOEADDE(Global)
2. % <algorithm> <H-N>
3. % Multiobjective Optimization Problems With Complicated Pareto Sets, MOEA/D
4. % and NSGA-II
5. % delta --- 0.9 --- The probability of choosing parents locally
6. % nr --- 2 --- Maximum number of solutions replaced by each offspring
7. % operator --- DE
Line 2 gives two labels of the function, the first label <algorithm> indicates that this is
an MOEA function (it is <problem>, <operator> and <metric> for MOP, operator and
performance indicator function, respectively), and the second label <H-N> can be an
arbitrary string. Line 3-4 give the title of the relevant literature. Line 5-6 define the
parameters for MOEA/D-DE, where the name of the parameter is located on the first
column of each line, the default value of the parameter is located on the second column,
and the introduction to the parameter is located on the third column; the columns are
divided by --- . Line 7 specifies the operator for MOEA/D-DE, where this line is
optional.
MOEA/D-DE then receives the parameter setting from users by the following
Section III. How to Extend PlatEMO
13
command:
1. [delta, nr] = Global.ParameterSet(0.9, 2);
The detailed introduction to Global.ParameterSet() can be found in Public\GLOBAL.m.
An MOEA may use its specified operator to generate offsprings, for example in
MOEADDE.m, the following command is used to generate offsprings by DE.m:
1. Offspring = Global.Variation(Population(MatingPool), 1, @DE);
The detailed introduction to Global.Variation() can be found in Public\GLOBAL.m.
Note that the number of evaluated fitness will be increased once this function is invoked.
For surrogate-assisted MOEAs, the following command can be used to generate new
decision variables according to the decision variables of parents, while no
INDIVIDUAL object will be instantiated:
1. OffDec = Global.VariationDec(Population(MatingPool).decs);
The detailed introduction to Global.VariationDec() can be found in Public\GLOBAL.m.
C. Add Problems
An MOP function is represented by an .m file in PlatEMO, which should be put in
the folder Problems. For example, the source code of DTLZ2.m is
1. function varargout = DTLZ2(Operation, Global, input)
2. switch Operation
3.
4. Global.M = 3;
5. Global.D = Global.M + 9;
6. Global.lower = zeros(1, Global.D);
7. Global.upper = ones(1, Global.D);
8. Global.operator = @EAreal;
9. PopDec = rand(input, Global.D);
10. varargout = {PopDec};
11.
12. PopDec = input;
13. M = Global.M;
14. PopObj = zeros(size(PopDec, 1), M);
PlatEMO User Manual
14
15. g = sum((PopDec(:, M:end)-0.5).^2, 2);
16. for m = 1 : M
17. PopObj(:, m) = (1+g).*prod(cos(PopDec(:, 1:M-m)*pi/2), 2);
18. if m > 1
19. PopObj(:, m) = PopObj(:, m).*sin(PopDec(:, M-m+1)*pi/2);
20. end
21. end
22. PopCon = [];
23. varargout = {PopDec, PopObj, PopCon};
24. c
25. f = UniformPoint(input, Global.M);
26. f = f./repmat(sqrt(sum(f.^2, 2)), 1, Global.M);
27. varargout = {f};
28. end
29. end
Note that the common codes for all the MOPs are underlined. To begin with, an MOP
function has three input parameters and one output parameter, where Operation denotes
the operation to be done, Global denotes the GLOBAL object, and input and varargout
may have one of the three meanings when Operation is set to different values. To be
specific, if Operation is set to ‘init’, the MOP function will assign the default values of
Global.M, Global.D, Global.lower, Global.upper and Global.operator (line 4-8), and
return the decision variable matrix of a random population with size input (line 9-10).
If Operation is set to ‘value’, the parameter input will denote the decision variable
matrix of a population, and the objective values PopObj and constraint values PopCon
of the population are calculated (line 14-22), note that here PopCon is set to empty
since DTLZ2 does not have any constraint. Then the matrices of decision variables,
objective values and constraint values of the population are returned (line 23). If
Operation is set to ‘PF’, input uniformly distributed reference points will be sampled
on the true Pareto front of the MOP and returned (line 25-27). Note that if the true
Pareto front of the MOP is unknown, the MOP should also return a nadir point for the
calculation of hypervolume (e.g. MOKP.m).
The number of objectives and decision variables may be fixed to some special values
in some MOPs. For example in ZDT5.m, these two values are assigned by
1. Global.M = 2;
2. Global.M = 2;
3. Global.D = 80;
4. Global.D = ceil(max(Global.D-30,1)/5)*5 + 30;

Section III. How to Extend PlatEMO
15
In line 1, the function sets the default value of Global.M to 2; if Global.M has already
been assigned by users, this line of code will be invalid. In line 2, the function sets the
value of Global.M to 2 again, then Global.M will equal to 2 no matter whether users
have assigned it. Analogously, line 3 sets the default value of Global.D to 80, and line
4 forces the value of Global.D to be a multiple of 5 after being subtracted by 30.
It is worth to note that a decision variable is illegal in three cases. First, for continuous
MOPs, it may be greater than the upper bound Global.upper or less than the lower
bound Global.lower, in this case it will be set to the boundary value by INDIVIDUAL
class, so MOP functions need not handle this case. Second, for combinational MOPs, it
may be an illegal character, in this case it should be modified and returned by the MOP
function when calculating the objective values and constraint values (e.g. MOKP.m).
Thirdly, it may not fulfill the constraints (a positive constraint value indicates that this
constraint is not fulfilled), while in this case it will not be modified.
An MOP function can receive parameter setting similar to MOEA functions, for
example in WFG1.m, the following command is used to receive parameter setting from
user:
1. K = Global.ParameterSet(Global.M-1);
While in some combinatorial MOP functions, the parameter is a random matrix and
should be identical in different runs, therefore such parameters should be randomly
generated and then saved to files. For example in MOKP.m, the following command is
used to set such parameters:
1. [P, W] = Global.ParameterFile(springf(-M%d-, M, D)
2. randi([10, 100], M, D), randi([10, 100], M, D));
To be specific, if the specified data file does not exist, the two parameters will be set to
the random matrices, and the matrices will be saved to the specified data file; while if
the file exists, the two parameters will be set to the matrices saved in the file. The
detailed introduction to Global.ParameterFile() can be found in Public\GLOBAL.m.
D. Add Operators
An operator function is represented by an .m file in PlatEMO, which should be put
in the folder Operators. For example, the source code of EAbinary.m is
PlatEMO User Manual
16
1. function Offspring = EAbinary(Global, Parent)
2. Parent = Parent(min(1:ceil(end/2)*2, end));
3. parentDec = Parent.decs;
4. [N,D] = size(parentDec);
5. Parent1Dec = parentDec(1:N/2, :);
6. Parent2Dec = parentDec(N/2+1:end, :);
7. k = repmata(1:D, N/2, 1) > repmat(randi(D, N/2, 1), 1, D);
8. Offspring1Dec = Parent1Dec;
9. Offspring2Dec = Parent2Dec;
10. Offspring1Dec(k) = Parent2Dec(k);
11. Offspring2Dec(k) = Parent1Dec(k);
12. OffspringDec = [Offspring1Dec; Offspring2Dec];
13. site = rand(N, D) < 1/D;
14. OffspringDec(site) = ~OffspringDec(site);
15. Offspring = INDIVIDUAL(OffspringDec);
16. end
Note that the common codes for all the operators are underlined. To begin with, an
operator function has two input parameters and one output parameter, where Global
denotes the GLOBAL object, Parent denotes the parent population, and Offspring
denotes the new population generated based on Parent. Since the number of parents for
crossover should be a multiple of two, the operator function first makes the number of
parents be an even (line 2). Then, it calculates the decision variables of the offsprings
according to the decision variables of the parents, where the single-point crossover and
bitwise mutation are performed in line 7-12 and line 13-14, respectively. Finally, the
objects of the offsprings are generated by INDIVIDUAL class and returned (line 15).
In particular, an individual may have additional property in some operators. For
example in PSO.m, it uses the following command to obtain the values of the speed
property of all the parents:
1. Speed = Parent.adds(zeros(N, D));
Where the input parameter zeros(N, D) is the matrix of default values for the speed
property of all the parents, that is, set the speed property of a parent to the default value
if it does not include this property. Then, the function uses the following command to
assign the speed property of offsprings:
1. Offspring = INDIVIDUAL(NewDec, NewSpeed);
Section III. How to Extend PlatEMO
17
Where NewDec is the matrix of decision variables of all the offsprings, and NewSpeed
is the matrix of speed property of all the offsprings. Note that an individual can have
more than one additional properties, while the operator functions need not specify the
name of each additional property, because the name of an additional property is
automatically set to the same to the name of the operator function.
E. Add Performance Indicators
A performance indicator function is represented by an .m file in PlatEMO, which
should be put in the folder Metrics. For example, the source code of IGD.m is
1. function score = IGD(PopObj, PF)
2. score = mean(min(pdist2(PF, PopObj), [], 2);
3. end
Note that the common codes for all the performance indicators are underlined. To begin
with, a performance indicator function has two input parameters and one output
parameter, where PopObj denotes the matrix of objective values of the population, PF
denotes the set of reference points sampled on the true Pareto front of the MOP, and
score denotes the scalar performance indicator value. Then, the performance indicator
value of the population is calculated according to the reference points and returned (line
2).
