User And Programmers Guide To The Neutron Ray Tracing Package McStas Manual
User Manual:
Open the PDF directly: View PDF ![]() .
.
Page Count: 130 [warning: Documents this large are best viewed by clicking the View PDF Link!]
- Preface and acknowledgments
- Introduction to McStas
- Monte Carlo Techniques and simulation strategy
- Running McStas
- Installation and updates
- Brief introduction to the graphical user interface
- Running the instrument compiler
- Running the simulations
- Using simulation front-ends
- The graphical user interface (mcgui)
- Running simulations on the commandline (mcrun)
- Graphical display of simulations (mcdisplay)
- Plotting the results of a simulation (mcplot)
- Plotting resolution functions (mcresplot)
- Creating and viewing the library, component/instrument help and Manuals (mcdoc)
- Translating McStas components for Vitess (mcstas2vitess)
- Translating and merging McStas results files (all text formats)
- Data formats - Analyzing and visualizing the simulation results
- Using computer Grids and Clusters
- The McStas kernel and meta-language
- Links to other computing codes
- The component library: Abstract
- Instrument examples
- Random numbers in McStas
- Libraries and constants
- The McStas terminology
- Bibliography
- Index and keywords
Physics Physics Department,
Technical University of Denmark
2800 Kongens Lyngby, Denmark
User and Programmers Guide to the
Neutron Ray-Tracing Package McStas,
version 2.5
P. Willendrup, E. Farhi, E. Knudsen, U. Filges, K. Lefmann, J. Stein
December 12th, 2018
The software package McStas is a tool for carrying out Monte Carlo ray-tracing sim-
ulations of neutron scattering instruments with high complexity and precision. The
simulations can compute all aspects of the performance of instruments and can thus
be used to optimize the use of existing equipment, design new instrumentation, and
carry out virtual experiments for e.g. training, experimental planning or data analysis.
McStas is based on a unique design where an automatic compilation process translates
high-level textual instrument descriptions into efficient ISO-C code. This design makes
it simple to set up typical simulations and also gives essentially unlimited freedom to
handle more unusual cases.
This report constitutes the reference manual for McStas, and, together with the man-
ual for the McStas components, it contains documentation of most aspects of the pro-
gram. It covers the various ways to compile and run simulations, a description of the
meta-language used to define simulations, and some example simulations performed with
the program.
This report documents McStas version 2.5, released December 12th, 2018
The authors are:
Peter Kjær Willendrup <pkwi@fysik.dtu.dk>
Physics Department, Technical University of Denmark, Kongens Lyngby,
Denmark
Emmanuel Farhi <farhi@ill.fr>
Institut Laue-Langevin, Grenoble, France
Erik Knudsen <erkn@fysik.dtu.dk>
Physics Department, Technical University of Denmark, Kongens Lyngby,
Denmark
Jakob Garde <jaga@fysik.dtu.dk>
Physics Department, Technical University of Denmark, Kongens Lyngby,
Denmark
Kim Lefmann <lefmann@fys.ku.dk>
Niels Bohr Institute, University of Copenhagen, Denmark
Jonas Stein <Jonas.Stein@uni-koeln.de>
Institute of Physics II, University of Cologne, Germany
as well as authors who left the project:
Peter Christiansen <pchristi@hep.lu.se>
Materials Research Department, Risø National Laboratory, Roskilde, Den-
mark
Present address: University of Lund, Lund, Sweden
Klaus Lieutenant <klaus.lieutenant@helmholtz-berlin.de>
Institut Laue-Langevin, Grenoble, France
Present address: Helmotlz Zentrum Berlin, Germany
Kristian Nielsen <kristian-nielsen@mail.tele.dk>
Materials Research Department, Risø National Laboratory, Roskilde, Den-
mark
Presently associated with: MySQL AB, Sweden
ISBN 978–87–550–3679–6
ISSN 0106–2840
Physics Department ·DTU ·2018
Contents
Preface and acknowledgments 9
1. Introduction to McStas 11
1.1. Development of Monte Carlo neutron simulation . . . . . . . . . . . . . . 11
1.2. Scientificbackground.............................. 12
1.2.1. The goals of McStas . . . . . . . . . . . . . . . . . . . . . . . . . . 14
1.3. ThedesignofMcStas ............................. 14
1.4. Overview .................................... 16
2. Monte Carlo Techniques and simulation strategy 18
2.1. Neutron spectrometer simulations . . . . . . . . . . . . . . . . . . . . . . . 18
2.1.1. Monte Carlo ray tracing simulations . . . . . . . . . . . . . . . . . 18
2.2. Theneutronweight............................... 19
2.2.1. Statistical errors of non-integer counts . . . . . . . . . . . . . . . . 19
2.3. Weight factor transformations during a Monte Carlo choice . . . . . . . . 20
2.3.1. Direction focusing . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
2.4. Adaptive and Stratified sampling . . . . . . . . . . . . . . . . . . . . . . . 21
2.5. Accuracy of Monte Carlo simulations . . . . . . . . . . . . . . . . . . . . . 22
3. Running McStas 24
3.1. Installation and updates . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
3.1.1. Important note for Windows users . . . . . . . . . . . . . . . . . . 24
3.1.2. New releases of McStas . . . . . . . . . . . . . . . . . . . . . . . . 26
3.2. Brief introduction to the graphical user interface . . . . . . . . . . . . . . 26
3.3. Running the instrument compiler . . . . . . . . . . . . . . . . . . . . . . . 28
3.3.1. Code generation options . . . . . . . . . . . . . . . . . . . . . . . . 29
3.3.2. Specifying the location of files . . . . . . . . . . . . . . . . . . . . . 30
3.3.3. Embedding the generated simulations in other programs . . . . . . 30
3.3.4. Running the C compiler . . . . . . . . . . . . . . . . . . . . . . . . 31
3.4. Running the simulations . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
3.4.1. Choosing an output data file format . . . . . . . . . . . . . . . . . 33
3.4.2. Basic import and plot of results . . . . . . . . . . . . . . . . . . . . 34
3.4.3. Interacting with a running simulation . . . . . . . . . . . . . . . . 34
3.4.4. Optimizing simulation speed . . . . . . . . . . . . . . . . . . . . . 38
3.4.5. Optimizing instrument parameters . . . . . . . . . . . . . . . . . . 38
3.5. Using simulation front-ends . . . . . . . . . . . . . . . . . . . . . . . . . . 40
3.5.1. The graphical user interface (mcgui) . . . . . . . . . . . . . . . . . 40
5

3.5.2. Running simulations on the commandline (mcrun) . . . . . . . . . 46
3.5.3. Graphical display of simulations (mcdisplay) . . . . . . . . . . . . 48
3.5.4. Plotting the results of a simulation (mcplot) . . . . . . . . . . . . . 50
3.5.5. Plotting resolution functions (mcresplot) . . . . . . . . . . . . . . . 51
3.5.6. Creating and viewing the library, component/instrument help and
Manuals(mcdoc)............................ 52
3.5.7. Translating McStas components for Vitess (mcstas2vitess) . . . . . 53
3.5.8. Translating and merging McStas results files (all text formats) . . 53
3.6. Data formats - Analyzing and visualizing the simulation results . . . . . . 54
3.6.1. McStas and PGPLOT format . . . . . . . . . . . . . . . . . . . . . 54
3.6.2. NeXusformat.............................. 55
3.7. Using computer Grids and Clusters . . . . . . . . . . . . . . . . . . . . . . 56
3.7.1. Distribute mcrun simulations on grids, multi-cores and clusters
(SSHgrid) ............................... 56
3.7.2. Parallel computing (MPI) . . . . . . . . . . . . . . . . . . . . . . . 58
3.7.3. McRun script with MPI support (mpich) . . . . . . . . . . . . . . 59
3.7.4. McStas/MPI Performance . . . . . . . . . . . . . . . . . . . . . . . 60
3.7.5. MPI and Grid Bugs and limitations . . . . . . . . . . . . . . . . . 61
4. The McStas kernel and meta-language 62
4.1. Notational conventions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
4.2. Syntactical conventions . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
4.3. Writing instrument definitions . . . . . . . . . . . . . . . . . . . . . . . . . 66
4.3.1. The instrument definition head . . . . . . . . . . . . . . . . . . . . 66
4.3.2. The DEPENDENCY line.......................... 67
4.3.3. The DECLARE section.......................... 67
4.3.4. The INITIALIZE section........................ 68
4.3.5. The NEXUS extension.......................... 68
4.3.6. The TRACE section ........................... 68
4.3.7. The SAVE section............................ 70
4.3.8. The FINALLY section.......................... 70
4.3.9. The end of the instrument definition . . . . . . . . . . . . . . . . . 71
4.3.10. Code for the instrument vanadium example.instr ......... 71
4.4. Writing instrument definitions - complex arrangements and syntax . . . . 71
4.4.1. Embedding instruments in instruments TRACE . . . . . . . . . . 71
4.4.2. Groups and component extensions - GROUP - EXTEND . . . . . 72
4.4.3. Duplication of component instances - COPY . . . . . . . . . . . . 73
4.4.4. Conditional components - WHEN . . . . . . . . . . . . . . . . . . 74
4.4.5. Component loops and non sequential propagation - JUMP . . . . . 75
4.4.6. Enhancing statistics reaching components - SPLIT . . . . . . . . . 77
4.5. Writing component definitions . . . . . . . . . . . . . . . . . . . . . . . . . 77
4.5.1. The component definition header . . . . . . . . . . . . . . . . . . . 78
4.5.2. The DEPENDENCY line.......................... 79
4.5.3. The DECLARE section.......................... 80
6

4.5.4. The SHARE section ........................... 80
4.5.5. The INITIALIZE section........................ 81
4.5.6. The TRACE section ........................... 81
4.5.7. The SAVE section............................ 82
4.5.8. The FINALLY section.......................... 84
4.5.9. The MCDISPLAY section ........................ 85
4.5.10. The end of the component definition . . . . . . . . . . . . . . . . . 86
4.5.11. A component example: Slit . . . . . . . . . . . . . . . . . . . . . . 86
4.6. Extending component definitions . . . . . . . . . . . . . . . . . . . . . . . 87
4.6.1. Extending from the instrument definition . . . . . . . . . . . . . . 87
4.6.2. Component heritage and duplication . . . . . . . . . . . . . . . . . 87
4.7. McDoc, the McStas library documentation tool . . . . . . . . . . . . . . . 88
4.7.1. Documentation generators mcdoc and mcgui . . . . . . . . . . . . 88
4.7.2. The format of the comments in the library source code . . . . . . . 88
5. Links to other computing codes 90
5.1. McStasandMANTID ............................. 90
5.1.1. System requirements . . . . . . . . . . . . . . . . . . . . . . . . . . 90
5.1.2. Requirements for the instrument file . . . . . . . . . . . . . . . . . 90
5.1.3. Compiling and running your simulation for Mantid output . . . . . 91
5.1.4. Looking at instrument output in Mantid . . . . . . . . . . . . . . . 92
5.2. McStasandMCNP(X)............................. 93
6. The component library: Abstract 94
6.1. A short overview of the McStas component library . . . . . . . . . . . . . 94
7. Instrument examples 101
7.1. A quick tour of instrument examples . . . . . . . . . . . . . . . . . . . . . 101
7.1.1. Neutron site: Brookhaven . . . . . . . . . . . . . . . . . . . . . . . 101
7.1.2. Neutron site: Tools . . . . . . . . . . . . . . . . . . . . . . . . . . . 101
7.1.3. Neutron site: ILL . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101
7.1.4. Neutron site: tests . . . . . . . . . . . . . . . . . . . . . . . . . . . 102
7.1.5. Neutron site: ISIS . . . . . . . . . . . . . . . . . . . . . . . . . . . 102
7.1.6. Neutron site: Risø . . . . . . . . . . . . . . . . . . . . . . . . . . . 102
7.1.7. Neutronsite:PSI............................102
7.1.8. Neutron site: Tutorial . . . . . . . . . . . . . . . . . . . . . . . . . 102
7.1.9. Neutron site: ESS . . . . . . . . . . . . . . . . . . . . . . . . . . . 102
7.2. A test instrument for the component V sample . . . . . . . . . . . . . . . 102
7.2.1. Scattering from the V-sample test instrument . . . . . . . . . . . . 103
7.3. The triple axis spectrometer TAS1 . . . . . . . . . . . . . . . . . . . . . . 103
7.3.1. Simulated and measured resolution of TAS1 . . . . . . . . . . . . . 105
7.4. The time-of-flight spectrometer PRISMA . . . . . . . . . . . . . . . . . . 108
7.4.1. Simple spectra from the PRISMA instrument . . . . . . . . . . . . 109
7

A. Random numbers in McStas 110
A.1. Transformation of random numbers . . . . . . . . . . . . . . . . . . . . . . 110
A.2.Randomgenerator ...............................111
B. Libraries and constants 112
B.1. Run-time calls and functions (mcstas-r)...................112
B.1.1. Neutron propagation . . . . . . . . . . . . . . . . . . . . . . . . . . 112
B.1.2. Coordinate and component variable retrieval . . . . . . . . . . . . 113
B.1.3. Coordinate transformations . . . . . . . . . . . . . . . . . . . . . . 115
B.1.4. Mathematical routines . . . . . . . . . . . . . . . . . . . . . . . . . 115
B.1.5. Output from detectors . . . . . . . . . . . . . . . . . . . . . . . . . 116
B.1.6. Ray-geometry intersections . . . . . . . . . . . . . . . . . . . . . . 116
B.1.7. Randomnumbers............................116
B.2. Reading a data file into a vector/matrix (Table input, read table-lib) . 117
B.3.MonitornDLibrary ..............................120
B.4. Adaptive importance sampling Library . . . . . . . . . . . . . . . . . . . . 120
B.5. Vitess import/export Library . . . . . . . . . . . . . . . . . . . . . . . . . 120
B.6. Constants for unit conversion etc. . . . . . . . . . . . . . . . . . . . . . . . 120
C. The McStas terminology 122
Bibliography 123
Index and keywords 125
8

Preface and acknowledgments
This document contains information on the Monte Carlo neutron ray-tracing program
McStas version 2.5, building on the initial release in October 1998 of version 1.0 as
presented in Ref. [LN99] and further developed though version 2.0 as presented in Ref.
[Wil+14]. The reader of this document is supposed to have some knowledge of neutron
scattering, whereas only little knowledge about simulation techniques is required. In a
few places, we also assume familiarity with the use of the C programming language and
UNIX/Linux.
If you don’t want to read this manual in full, go directly to the brief introduction in
chapter 3.2.
It is a pleasure to thank Prof. Kurt N. Clausen, PSI, for his continuous support to
this project and for having initiated McStas in the first place. Essential support has also
been given by Prof. Robert McGreevy, ISIS. We have also benefited from discussions
with many other people in the neutron scattering community, too numerous to mention
here.
In case of errors, questions, or suggestions, do not hesitate to contact the authors
at mcstas-support@mcstas.org or consult the McStas home page [Mcs]. A special
bug/request reporting service is available [Git].
If you appreciate this software, please subscribe to the mcstas-users@mcstas.org
email list, send us a smiley message, and contribute to the package. We also encourage
you to refer to this software when publishing results, with the following citations:
•P. Willendrup, E. Farhi, E. Knudsen, U. Filges and K. Lefmann, Journal of Neutron
Research, 17 (2014) 35.
•K. Lefmann and K. Nielsen, Neutron News 10/3, 20, (1999).
•P. Willendrup, E. Farhi and K. Lefmann, Physica B, 350 (2004) 735.
McStas 2.5 contributors
Several people outside the core developer team have been contributing to McStas 2.5:
•Thanks to Jonas Stein from Uni Cologne for helping us modernize the T
E
X docu-
mentation
•Thanks to Esben Klinkby and Troels Sch¨onfeldt from DTU Nutech for helping
Peter W with modernizing the ESS moderator.comp
•Thanks to R. Heenan for contributing the ISIS ISIS SANS2d instrument
9
•Thanks to Klaus Habicht and Markos Skoulatos, HZB for contributing the HZB FLEX
instrument
•Thanks to Morten Sales, HZB for contributing the SEMSANS instrument
•Thanks to Henrich Frielinghaus, FZJ for contributing the SANS benchmark2.comp
component and the related FZJ BenchmarkSfin2 test instrument
•Thanks to Esko Oksanen, ESS for contributing .lau reflection lists for the macro-
molecular structures Rubedoxin and Perdeuterated pyrophosphatase
Thank you guys! This is what McStas is all about!
Third party software included (only those distributed with) McStas are:
•Strawberry Perl (Windows system only)
•perl Math::Amoeba from John A.R. Williams J.A.R.Williams@aston.ac.uk.
•perl Tk::Codetext from Hans Jeuken haje@toneel.demon.nl.
•PGPLOT from Tim Pearson tjp@astro.caltech.edu (Windows and Mac OS X
systems only).
•perl-PGPLOT from Karl Glazebrook karl@astro.swin.edu.au (Windows and
Mac OS X systems only).
•PDL (Perl Data Language) from http://pdl.perl.org (Windows and Mac OS
X systems only).
•NXSLib from Mirko Boin boin@helmholtz-berlin.de
The McStas project has been supported by the European Union through“XENNI /
Cool Neutrons” (FP4), “SCANS” (FP5), “nmi3/MCNSI” (FP6), “‘nmi3-ii/E-learning”
and “nmi3-ii/MCNSI7” (FP7) [Nmi; Mcn]. McStas was supported directly from the
construction project for the ISIS second target station (TS2/EU), see [Ts2]. Currently
McStas is supported through the Danish involvement in the Data Management and
Software Center, a subdivision of the European Spallation Source (ESS), see [Ess] and
the European Union through “SINE2020/WP3 e-elarning” and and “SINE2020/WP8
e-Tools” (Horizon2020). the home pages [Sin].
10
1. Introduction to McStas
Efficient design and optimization of neutron spectrometers are formidable challenges,
which are efficiently treated by Monte Carlo simulation techniques. When McStas ver-
sion 1.0 was released in October 1998, except for the NISP/MCLib program [Nis], no
existing package offered a general framework for the neutron scattering community to
tackle the problems currently faced at reactor and spallation sources. The McStas project
was designed to provide such a framework.
McStas is a fast and versatile software tool for neutron ray-tracing simulations. It is
based on a meta-language specially designed for neutron simulation. Specifications are
written in this language by users and automatically translated into efficient simulation
codes in ISO-C. The present version supports both continuous and pulsed source instru-
ments, and includes a library of standard components with in total around 130 compo-
nents. These enable to simulate all kinds of neutron scattering instruments (diffractome-
ters, spectrometers, reflectometers, small-angle, back-scattering,...) for both continuous
and pulsed sources.
The core McStas package is written in ISO-C, with various tools based on Perl and
Python and is freely available for download from the McStas website [Mcs]. The package
is actively being developed and supported by DTU Physics, Institut Laue Langevin
(ILL), Paul Scherrer Institute and the Niels Bohr Institute (NBI). The system is well
tested and is supplied with several examples and with an extensive documentation.
Besides this manual, a separate component manual exists.
The release at hand McStas 2.5 is a major upgrade from the last release, mainly
because of our switch to the use of a Python user interface layer. (The perl-based layer
is still available, but we recommend and encourage use of the new Python layer, since
this is where our efforts will go from this point.)
Porting your existing personal instrument files and components should be trivial, but if
you experience problems feel free to contact mcstas-users@mcstas.org or the authors.
1.1. Development of Monte Carlo neutron simulation
The very early implementations of the method for neutron instruments used home-made
computer programs (see e.g. papers by J.R.D. Copley, D.F.R. Mildner, J.M. Carpenter,
J. Cook), more general packages have been designed, providing models for most parts of
the simulations. These present existing packages are: NISP [See+00], ResTrax [SK97],
McStas [Wil+14; LN99; WFL04; Wil+14; Mcs], Vitess [Wec+00; Vit], IDEAS [LW02]
and IB (Instrument Builder) [Ibw]. Supplementing the Monte Carlo based methods,
various analytic phase-space simulation methods exist, including Neutron Acceptance
11
Diagram Shading (NADS) [Nad]. Their usage usually covers all types of neutron spec-
trometers, most of the time through a user-friendly graphical interface, without requiring
programming skills.
The neutron ray-tracing Monte-Carlo method has been used widely for e.g. guide stud-
ies [Cop93; Far+02; Sch+04], instrument optimization and design [ZLa04; Lie05]. Most
of the time, the conclusions and general behavior of such studies may be obtained using
the classical analytic approaches, but accurate estimates for the flux, the resolutions,
and generally the optimum parameter set, benefit advantageously from MC methods.
Recently, the concept of virtual experiments, i.e. full simulations of a complete neutron
experiment, has been suggested as a major asset for neutron ray-tracing simulations. The
goal is that simulations should be of benefit to not only instrument builders, but also to
users for training, experiment planning, diagnostics, and data analysis.
In the late 90’ies at Risø National Laboratory, simulation tools were urgently needed,
not only to better utilize existing instruments (e.g. RITA-1 and RITA-2 [Mas+95;
Cla+98; Lef+00]), but also to plan completely new instruments for new sources (e.g.
the Spallation Neutron Source, SNS [Sns] and the planned European Spallation Source,
ESS [Ess]). Writing programs in C or FORTRAN for each of the different cases involves
a huge effort, with debugging presenting particularly difficult problems. A higher level
tool specially designed for simulating neutron instruments was needed. As there was
no existing simulation software that would fulfill our needs, the McStas project was
initiated. In addition, the ILL required an efficient and general simulation package in
order to achieve renewal of its instruments and guides. A significant contribution to both
the component library and the McStas kernel itself was early performed at the ILL and
included in the package. ILL later became a part of the core McStas team. Similarly,
the PSI has applied McStas extensively for instrument design and upgrades, provided
important component additions and contributed several systematic comparative studies
of the European instrument Monte Carlo codes. Hence, PSI has also become a part of
the core McStas team. Since year 2001 Risø was no longer a neutron source, and the
authors from that site have moved on to positions at University of Copenhagen (NBI)
and Technical University of Denmark (DTU Physics), hence these two partners have
joined the core McStas team. Finally, trough general emphasis on use of McStas as a
tool for simulating the ESS instruments and virtual data, plus the partial secondment of
one DTU-based McStas author, the ESS Data Management and Software Centre (ESS
DMSC) is now contributing to the projecte.
1.2. Scientific background
What makes scientists happy? Probably collect good quality data, pushing the instru-
ments to their limits, and fit that data to physical models. Among available measure-
ment techniques, neutron scattering provides a large variety of spectrometers to probe
structure and dynamics of all kinds of materials.
Neutron scattering instruments are built as a series of neutron optics elements. Each
of these elements modifies the beam characteristics (e.g. divergence, wavelength spread,
12
spatial and time distributions) in a way which, for simple neutron beam configurations,
may be modeled with analytic methods. This is valid for individual elements such
as guides [MLS63; Mil90], choppers [Low60; Cop03], Fermi choppers [FMM47; Pet05],
velocity selectors [Cla+66], monochromators [Fre83; Sea97; SST02; Ali04], and detectors
[Rad74; Pes+89; Man+04]. In the case of a limited number of optical elements, the so-
called acceptance diagram theory [Mil90; Cop93; Cus03] may be used, within which the
neutron beam distributions are considered to be homogeneous, triangular or Gaussian.
However, real neutron instruments are constituted of a large number of optical elements,
and this brings additional complexity by introducing strong correlations between neutron
beam parameters like divergence and position - which is the basis of the acceptance
diagram method - but also wavelength and time. The usual analytic methods, such as
phase-space theory, then reach their limit of validity in the description of the resulting
effects.
In order to cope with this difficulty, Monte Carlo (MC) methods (for a general review,
see Ref. [Jam80]) may be applied to the simulation of neutron instruments. The use of
probability is common place in the description of microscopic physical processes. Inte-
grating these events (absorption, scattering, reflection, ...) over the neutron trajectories
results in an estimation of measurable quantities characterizing the neutron instrument.
Moreover, using variance reduction (importance sampling) where possible, reduces the
computation time and gives better accuracy.
Early implementations of the MC method for neutron instruments used home-made
computer programs (see [Cop+86; MPC77]) but, more recently, general packages have
been designed, providing models for most optical components of neutron spectrometers.
The most widely-used packages are NISP [See+00], ResTrax [SK97], McStas [Wil+14;
LN99; Mcs], Vitess [Wec+00], and IDEAS [LW02], which allow a wide range of neutron
scattering instruments to be simulated.
The neutron ray-tracing Monte Carlo method has been used widely for guide studies
[Cop93; Far+02; Sch+04], instrument optimization and design [ZLa04; Lie05]. Most of
the time, the conclusions and general behavior of such studies may be obtained using the
classical analytic approaches, but accurate estimates for the flux, resolution and generally
the optimum parameter set, benefit considerably from MC methods, see Chapter 2.
Neutron instrument resolution (in qand E) and flux are often limitations in the
experiments. This then motivates instrument responsibles to improve the resolution, flux
and overall efficiency at the spectrometer positions, and even to design new machines.
Using both analytic and numerical methods, optimal configurations may be found.
But achieving a satisfactory experiment on the best neutron spectrometer is not all.
Once collected, the data analysis process raises some questions concerning the signal:
what is the background signal? What proportion of coherent and incoherent scattering
has been measured? Is possible to identify clearly the purely elastic (structure) contri-
bution from the quasi-elastic and inelastic one (dynamics)? What are the contributions
from the sample geometry, the container, the sample environment, and generally the
instrument itself? And last but not least, how does multiple scattering affect the signal?
Most of the time, the physicist will elude these questions using rough approximations,
or applying analytic corrections [Cop+86]. Monte-Carlo techniques also provide means
13
to evaluate some of these quantities.
Technicalities of Monte-Carlo simulation techniques are explained in detail in Chap-
ter 2.
1.2.1. The goals of McStas
Initially, the McStas project had four main objectives that determined its design.
Correctness. It is essential to minimize the potential for bugs in computer simulations.
If a word processing program contains bugs, it will produce bad-looking output or may
even crash. This is a nuisance, but at least you know that something is wrong. However,
if a simulation contains bugs it produces wrong results, and unless the results are far off,
you may not know about it! Complex simulations involve hundreds or even thousands of
lines of formulae, making debugging a major issue. Thus the system should be designed
from the start to help minimize the potential for bugs to be introduced in the first place,
and provide good tools for testing to maximize the chances of finding existing bugs.
Flexibility. When you commit yourself to using a tool for an important project, you need
to know if the tool will satisfy not only your present, but also your future requirements.
The tool must not have fundamental limitations that restrict its potential usage. Thus
the McStas systems needs to be flexible enough to simulate different kinds of instruments
as well as many different kind of optical components, and it must also be extensible so
that future, as yet unforeseen, needs can be satisfied.
Power. “Simple things should be simple; complex things should be possible”. New ideas
should be easy to try out, and the time from thought to action should be as short as
possible. If you are faced with the prospect of programming for two weeks before getting
any results on a new idea, you will most likely drop it. Ideally, if you have a good idea
at lunch time, the simulation should be running in the afternoon.
Efficiency. Monte Carlo simulations are computationally intensive, hardware capacities
are finite (albeit impressive), and humans are impatient. Thus the system must assist in
producing simulations that run as fast as possible, without placing unreasonable burdens
on the user in order to achieve this.
1.3. The design of McStas
In order to meet these ambitious goals, it was decided that McStas should be based on
its own meta-language (also known as domain-specific language), specially designed for
simulating neutron scattering instruments. Simulations are written in this language by
the user, and the McStas compiler automatically translates them into efficient simulation
programs written in ISO-C.
14
In realizing the design of McStas, the task was separated into four conceptual layers,
listed below and also detailed in Figure 3.1
1. Graphical user interface and scripting layer, presentation of the calculations, graph-
ical or otherwise. (aka. the tool layer).
2. Modeling of the overall instrument geometry, mainly consisting of the type and
position of the individual components.
3. Modeling the physical processes of neutron scattering, i.e. the calculation of the
fate of a neutron that passes through the individual components of the instrument
(absorption, scattering at a particular angle, etc.)
4. Accurate calculation, using Monte Carlo techniques, of instrument properties such
as resolution function from the result of ray-tracing of a large number of neutrons.
This includes estimating the accuracy of the calculation.
If you don’t want to read this manual in full, go directly to the brief introduction in
chapter 3.2.
Though obviously interrelated, these four layers can be treated independently, and
this is reflected in the overall system architecture of McStas. The user will in many
situations be interested in knowing the details only in some of the layers. For example,
one user may merely look at some results prepared by others, without worrying about
the details of the calculation. Another user may simulate a new instrument without
having to reinvent the code for simulating the individual components in the instrument.
A third user may write an intricate simulation of a complex component, e.g. a detailed
description of a rotating velocity selector, and expect other users to easily benefit from
his/her work, and so on. McStas attempts to make it possible to work at any combination
of layers in isolation by separating the layers as much as possible in the design of the
system and in the meta-language in which simulations are written.
The usage of a special meta-language and an automatic compiler has several advan-
tages over writing a big monolithic program or a set of library functions in C, FORTRAN,
or another general-purpose programming language. The meta-language is more power-
ful; specifications are much simpler to write and easier to read when the syntax of the
specification language reflects the problem domain. For example, the geometry of in-
struments would be much more complex if it were specified in C code with static arrays
and pointers. The compiler can also take care of the low-level details of interfacing the
various parts of the specification with the underlying C implementation language and
each other. This way, users do not need to know about McStas internals to write new
component or instrument definitions, and even if those internals change in later versions
of McStas, existing definitions can be used without modification.
The McStas system also utilizes the meta-language to let the McStas compiler generate
as much code as possible automatically, letting the compiler handle some of the things
that would otherwise be the task of the user/programmer. Correctness is improved by
having a well-tested compiler generate code that would otherwise need to be specially
written and debugged by the user for every instrument or component. Efficiency is also
15
improved by letting the compiler optimize the generated code in ways that would be
time-consuming or difficult for humans to do. Furthermore, the compiler can generate
several different simulations from the same specification, for example to optimize the
simulations in different ways, to generate a simulation that graphically displays neutron
trajectories, and possibly other things in the future that were not even considered when
the original instrument specification was written.
The design of McStas makes it well suited for doing “what if. . . ” types of simulations.
Once an instrument has been defined, questions such as “what if a slit was inserted”,
“what if a focusing monochromator was used instead of a flat one”, “what if the sample
was offset 2 mm from the center of the axis” and so on are easy to answer. Within minutes
the instrument definition can be modified and a new simulation program generated. It
also makes it simple to debug new components. A test instrument definition may be
written containing a neutron source, the component to be tested, and whatever monitors
are useful, and the component can be thoroughly tested before being used in a complex
simulation with many different components.
The McStas system is based on ISO-C, making it both efficient and portable. The
meta-language allows the user to embed arbitrary C code in the specifications. Flexibility
is thus ensured since the full power of the C language is available if needed.
1.4. Overview
The McStas system documentation consists of the following major parts:
•The complete listing of changes related to the version McStas 2.5 is available
in CHANGES document of the relevant download folder at http://download.
mcstas.org/. Bugs are reported and traced using the McStas GitHub issue sys-
tem[Git]. We will not present here an extensive list of corrections, and we let the
reader refer to this bug reporting service for details. Only important changes are
indicated in the CHANGES document.
•Chapter 2 concerns Monte Carlo techniques and simulation strategies in general
•Chapter 3 includes a brief introduction to the McStas system (section 3.2) as well a
section (3.3) on running the compiler to produce simulations. Section 3.4 explains
how to run the generated simulations. Running McStas on parallel computers
require special attention and is discussed in section 3.7. A number of front-end
programs are used to run the simulations and to aid in the data collection and
analysis of the results. These user interfaces are described in section 3.5.
•The McStas meta-language is described in chapter 4. This chapter also describes
a set of library functions and definitions that aid in the writing of simulations. See
appendix B for more details.
•The McStas component library contains a collection of well-tested, as well as
user contributed, beam components that can be used in simulations. The Mc-
Stas component library is documented in a separate manual and on the McStas
16
web-page [Mcs], but a short overview of these components is given in chapter 6 of
the Manual.
As of this release of McStas support for simulating neutron polarization is strongly
improved, e.g. by allowing nested magnetic fields, tabulated magnetic fields in numerical
input files and by close to “full” support of polarization in all components. As this is
the first stable release with these new features, functionality is likely to change. To
reflect this, the documentation is still only available in the appendix of the Component
manual. A list of library calls that may be used in component definitions appears in
appendix B, and an explanation of the McStas terminology can be found in appendix C
of the Manual..
17

2. Monte Carlo Techniques and simulation
strategy
This chapter explains the simulation strategy and the Monte Carlo techniques used
in McStas. We first explain the concept of the neutron weight factor, and discuss the
statistical errors in dealing with sums of neutron weights. Secondly, we give an expression
for how the weight factor transforms under a Monte Carlo choice and specialize this to the
concept of direction focusing. Finally, we present a way of generating random numbers
with arbitrary distributions. More details are available in the Appendix concerning
random numbers.
2.1. Neutron spectrometer simulations
2.1.1. Monte Carlo ray tracing simulations
The behavior of a neutron scattering instrument can in principle be described by a
complex integral over all relevant parameters, like initial neutron energy and divergence,
scattering vector and position in the sample, etc. However, in most relevant cases, these
integrals are not solvable analytically, and we hence turn to Monte Carlo methods. The
neutron ray-tracing Monte Carlo method has been used widely for guide studies [Cop93;
Far+02; Sch+04], instrument optimization and design [ZLa04; Lie05]. Most of the time,
the conclusions and general behavior of such studies may be obtained using the classical
analytic approaches, but accurate estimates for the flux, resolution and generally the
optimum parameter set, benefit considerably from MC methods.
Mathematically, the Monte-Carlo method is an application of the law of large numbers
[Jam80; GRR92]. Let f(u) be a finite continuous integrable function of parameter u
for which an integral estimate is desirable. The discrete statistical mean value of f
(computed as a series) in the uniformly sampled interval a<u<bconverges to the
mathematical mean value of fover the same interval.
lim
n→∞
1
n
n
X
i=1,a≤ui≤b
f(ui) = 1
b−aZb
a
f(u)du (2.1)
In the case were the uivalues are regularly sampled, we come to the well known
midpoint integration rule. In the case were the uivalues are randomly (but uniformly)
sampled, this is the Monte-Carlo integration technique. As random generators are not
perfect, we rather talk about quasi-Monte-Carlo technique. We encourage the reader to
consult James [Jam80] for a detailed review on the Monte-Carlo method.
18

2.2. The neutron weight
A totally realistic semi-classical simulation will require that each neutron is at any time
either present or lost. In many instruments, only a very small fraction of the initial
neutrons will ever be detected, and simulations of this kind will therefore waste much
time in dealing with neutrons that never hit the relevant detector or monitor.
An important way of speeding up calculations is to introduce a neutron ”weight factor”
for each simulated neutron ray and to adjust this weight according to the path of the ray.
If e.g. the reflectivity of a certain optical component is 10%, and only reflected neutrons
ray are considered later in the simulations, the neutron weight will be multiplied by 0.10
when passing this component, but every neutron is allowed to reflect in the component.
In contrast, the totally realistic simulation of the component would require in average
ten incoming neutrons for each reflected one.
Let the initial neutron weight be p0and let us denote the weight multiplication factor
in the j’th component by πj. The resulting weight factor for the neutron ray after
passage of the ncomponents in the instrument becomes the product of all contributions
p=pn=p0
n
Y
j=1
πj.(2.2)
Each adjustment factor should be 0 < πj<1, except in special circumstances, so that
total flux can only decrease through the simulation, see section 2.3. For convenience,
the value of pis updated (within each component) during the simulation.
Simulation by weight adjustment is performed whenever possible. This includes
•Transmission through filters and windows.
•Transmission through Soller blade collimators and velocity selectors (in the ap-
proximation which does not take each blade into account).
•Reflection from monochromator (and analyzer) crystals with finite reflectivity and
mosaicity.
•Reflection from guide walls.
•Passage of a continuous beam through a chopper.
•Scattering from all types of samples.
2.2.1. Statistical errors of non-integer counts
In a typical simulation, the result will consist of a count of neutrons histories (”rays”)
with different weights. The sum of these weights is an estimate of the mean number of
neutrons hitting the monitor (or detector) per second in a “real” experiment. One may
write the counting result as
I=X
i
pi=Np, (2.3)
19
where Nis the number of rays hitting the detector and the horizontal bar denotes
averaging. By performing the weight transformations, the (statistical) mean value of
Iis unchanged. However, Nwill in general be enhanced, and this will improve the
accuracy of the simulation.
To give an estimate of the statistical error, we proceed as follows: Let us first for
simplicity assume that all the counted neutron weights are almost equal, pi≈p, and
that we observe a large number of neutrons, N≥10. Then Nalmost follows a normal
distribution with the uncertainty σ(N) = √N1. Hence, the statistical uncertainty of
the observed intensity becomes
σ(I) = √Np =I/√N, (2.4)
as is used in real neutron experiments (where p≡1). For a better approximation we
return to Eq. (2.3). Allowing variations in both Nand p, we calculate the variance of
the resulting intensity, assuming that the two variables are statistically independent:
σ2(I) = σ2(N)p2+N2σ2(p).(2.5)
Assuming as before that Nfollows a normal distribution, we reach σ2(N)p2=Np2.
Further, assuming that the individual weights, pi, follow a Gaussian distribution (which
in some cases is far from the truth) we have N2σ2(p) = σ2(Pipi) = Nσ2(pi) and reach
σ2(I) = Np2+σ2(pi).(2.6)
The statistical variance of the pi’s is estimated by σ2(pi)≈(Pip2
i−Np2)/(N−1). The
resulting variance then reads
σ2(I) = N
N−1 X
i
p2
i−p2!.(2.7)
For almost any positive value of N, this is very well approximated by the simple expres-
sion
σ2(I)≈X
i
p2
i.(2.8)
As a consistency check, we note that for all piequal, this reduces to eq. (2.4)
In order to compute the intensities and uncertainties, the monitor/detector compo-
nents in McStas will keep track of N=Pip0
i, I =Pip1
i, and M2=Pip2
i.
2.3. Weight factor transformations during a Monte Carlo
choice
When a Monte Carlo choice must be performed, e.g. when the initial energy and direction
of the neutron ray is decided at the source, it is important to adjust the neutron weight
1This is not correct in a situation where the detector counts a large fraction of the neutron rays in the
simulation, but we will neglect that for now.
20

so that the combined effect of neutron weight change and Monte Carlo probability of
making this particular choice equals the actual physical properties we like to model.
Let us follow up on the simple example of transmission. The probability of trans-
mitting the real neutron is P, but we make the Monte Carlo choice of transmitting the
neutron ray each time: fMC = 1. This must be reflected on the choice of weight mul-
tiplier πj=P. Of course, one could simulate without weight factor transformation, in
our notation written as fMC =P, πj= 1. To generalize, weight factor transformations
are given by the master equation
fMCπj=P. (2.9)
This probability rule is general, and holds also if, e.g., it is decided to transmit only
half of the rays (fMC = 0.5). An important different example is elastic scattering from a
powder sample, where the Monte-Carlo choices are the particular powder line to scatter
from, the scattering position within the sample and the final neutron direction within the
Debye-Scherrer cone. This weight transformation is much more complex than described
above, but still boils down to obeying the master transformation rule 2.9.
2.3.1. Direction focusing
An important application of weight transformation is direction focusing. Assume that
the sample scatters the neutron rays in many directions. In general, only neutron rays
in some of these directions will stand any chance of being detected. These directions
we call the interesting directions. The idea in focusing is to avoid wasting computation
time on neutrons scattered in the other directions. This trick is an instance of what in
Monte Carlo terminology is known as importance sampling.
If e.g. a sample scatters isotropically over the whole 4πsolid angle, and all interesting
directions are known to be contained within a certain solid angle interval ∆Ω, only these
solid angles are used for the Monte Carlo choice of scattering direction. This implies
fMC(∆Ω) = 1. However, if the physical events are distributed uniformly over the unit
sphere, we would have P(∆Ω) = ∆Ω/(4π), according to Eq. (2.9). One thus ensures
that the mean simulated intensity is unchanged during a ”correct” direction focusing,
while a too narrow focusing will result in a lower (i.e. wrong) intensity, since we cut
neutrons rays that should have reached the final detector.
2.4. Adaptive and Stratified sampling
Another strategy to improve sampling in simulations is adaptive importance sampling
(also called variance reduction technique), where McStas during the simulations will de-
termine the most interesting directions and gradually change the focusing according to
that. Implementation of this idea is found in the Source adapt and Source Optimizer
components.
An other class of efficiency improvement technique is the so-called stratified sampling.
It consists in partitioning the event distributions in representative sub-spaces, which are
then all sampled individually. The advantage is that we are then sure that each sub-space
21
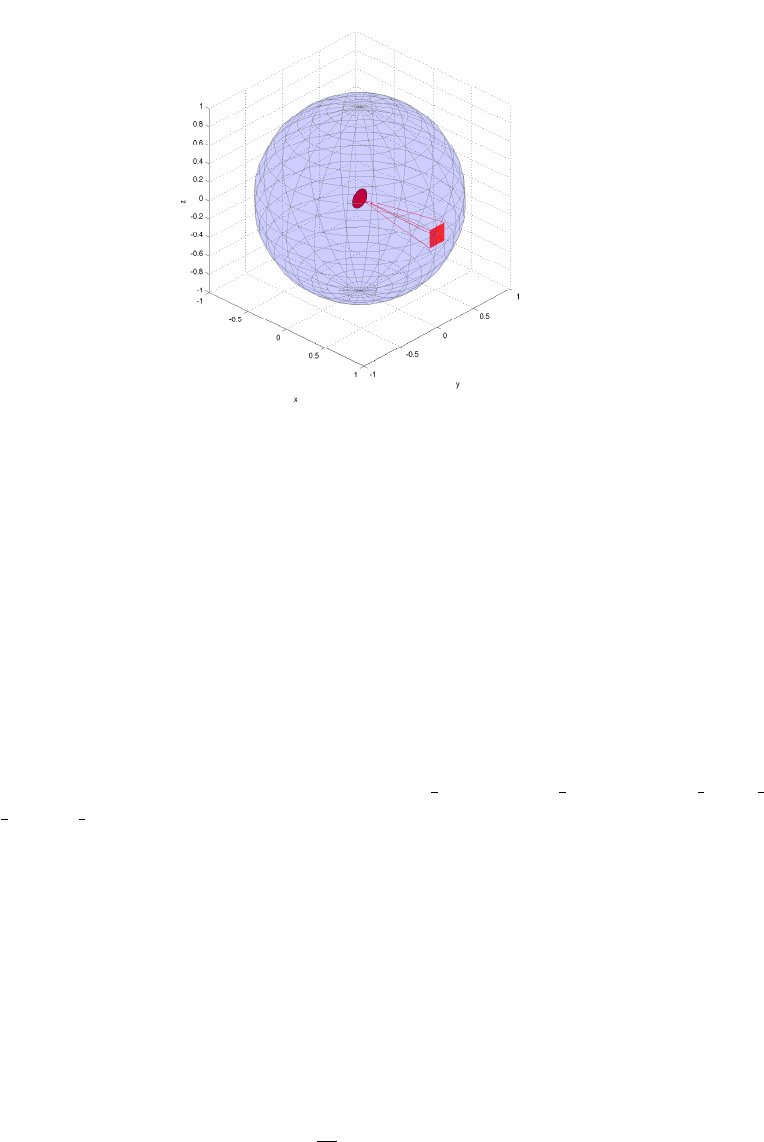
Figure 2.1.: Illustration of the effect of direction focusing in McStas. Weights of neutrons
emitted into a certain solid angle are scaled down by the full unit sphere
area.
is well represented in the final integrals. This means that instead of shooting Nevents,
we define Dpartitions and shoot r=N/D events in each partition. In conjunction
with adaptive sampling, we may define partitions so that they represent ’interesting’
distributions, e.g. from events scattered on a monochromator or a sample. The sum of
partitions should equal the total space integrated by the Monte Carlo method, and each
partition must be sampled randomly.
In the case of McStas, an ad-hoc implementation of adaptive stratified is used when re-
peating events, such as in the Virtual sources (Virtual input, Vitess input, Virtual mcnp input,
Virtual tripoli4 input) and when using the SPLIT keyword in the TRACE section on
instrument descriptions. We emphasize here that the number of repetitions rshould
not exceed the dimensionality of the Monte Carlo integration space (which is d= 10
for neutron events) and the dimensionality of the partition spaces, i.e. the number of
random generators following the stratified sampling location in the instrument.
2.5. Accuracy of Monte Carlo simulations
When running a Monte Carlo, the meaningful quantities are obtained by integrating
random events into a single value (e.g. flux), or onto an histogram grid. The theory
[Jam80] shows that the accuracy of these estimates is a function of the space dimension
dand the number of events N. For large numbers N, the central limit theorem provides
an estimate of the relative error as 1/√N. However, the exact expression depends on
the random distributions.
22
Records Accuracy
10310 %
1042.5 %
1051 %
1060.25 %
1070.05 %
Table 2.1.: Accuracy estimate as a function of the number of statistical events used to
estimate an integral with McStas.
McStas uses a space with d= 10 parameters to describe neutrons (position, velocity,
spin, time). We show in Table 2.1 a rough estimate of the accuracy on integrals as a
function of the number of records reaching the integration point. This stands both for
integrated flux, as well as for histogram bins - for which the number of events per bin
should be used for N.
23
3. Running McStas
This chapter describes usage of the McStas simulation package. In case of problems
regarding installation or usage, the McStas mailing list [Mcs] or the authors should be
contacted.
Performing a simulation using McStas can be divided into the following steps/elements
•The structure of McStas is illustrated in Figure 3.1.
•To use McStas, an instrument definition file describing the instrument to be simu-
lated must be written. Alternatively, an example instrument file can be obtained
from the examples/ directory in the distribution or from another source.
•The input files (instrument and component files) are written in the McStas meta-
language and are edited either by using your favorite editor or by using the built-in
editor of the graphical user interface (mcgui).
•Next, the McStas compiler mcstas is invoked to translate the instrument and
component files into a C program. The program mcstas itself is written in C,
using the parser flex and the compiler compiler bison.
•The resulting C program can then be compiled with a C compiler and run in
combination with various front-end programs for example to present the intensity
at the detector as a motor position is varied.
•The output data may be analyzed and visualized in the same way as regular ex-
periments by using the data handling and visualization tools in McStas based on
Perl/Python in combination with chaco,matplotlib, Matlab, GNUPlot or PG-
PLOT. Further data output formats including NeXus are available, see section
3.6.
3.1. Installation and updates
For installation notes, see the web site [Mcs]. In case of problems, write the support
mailing list, or contact the authors.
3.1.1. Important note for Windows users
It is a known problem that some of the McStas tools do not support filenames / direc-
tories with spaces. We are working on a more general approach to this problem, which
24
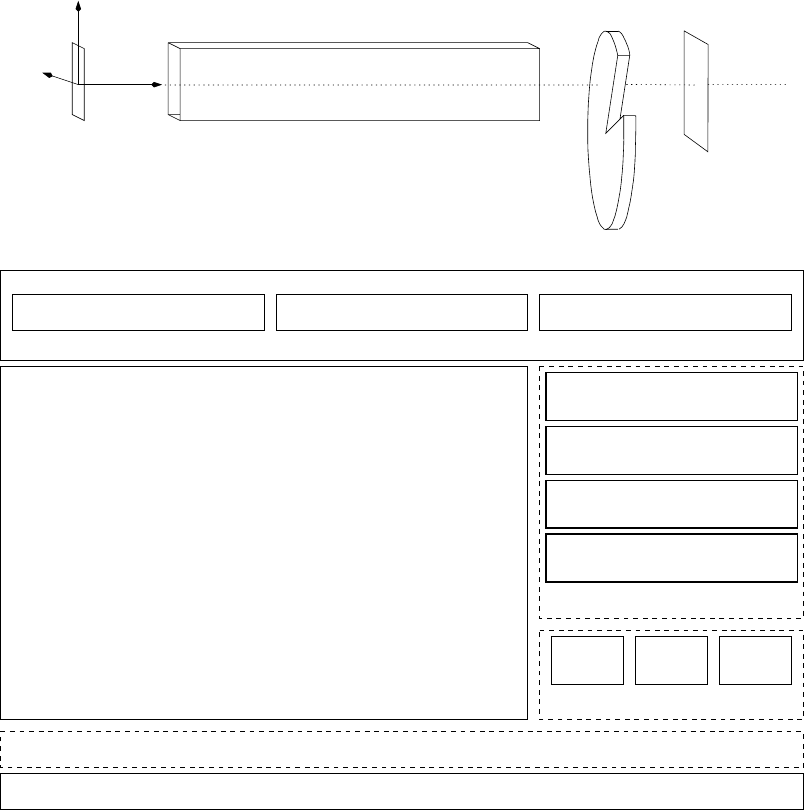
Chopper
Guide.comp ccode
Source.comp ccode
DiskChopper.comp ccode
TOF_monitor.comp ccode
mcgui, graphical user interface mcplot, visualize histogram outp. mcdisplay, visualize instrument
mcgui is used to assemble an instrument file, which is taken over by the McStas system
The "tool layer" consists of programs manipulated by the McStas user:
COMPONENT A
COMPONENT B
COMPONENT C
COMPONENT D
Source Guide
TOF_monitor
INSTRUMENT
DEFINE INSTRUMENT Example(Param1=1, string Param2="two", ...)
COMPONENT A = Source(Parameters...)
AT (0, 0, 0) ABSOLUTE
COMPONENT B = Guide(Parameters...)
AT (0, 0, 1) RELATIVE A
COMPONENT C = DiskChopper(Parameters...)
AT (0, 0, 1) RELATIVE B
AT (0, 0, Param1) RELATIVE PREVIOUS
COMPONENT D = TOF_monitor(Parameters, filename="Tof.dat")
Random
numbers
I/O Physical
consts.
Component library
"Kernel and runtime ccode"
"Instrument file"
The simulation executable produces data output which can be visualized using the mcplot and mcdisplay tools
The McStas system generates an "ISO C file" and an executable from instrument file and ccodes
Figure 3.1.: An illustration of the structure of McStas.
25
will hopefully be solved in a further release. We recommend to use ActiveState Perl
5.10. (Note that as of McStas 1.10, all needed support tools for Windows are bundled
with McStas in a single installer file.)
3.1.2. New releases of McStas
Releases of new versions of a software package can today be carried out more or less
continuously. However, users do not update their software on a daily basis, and as a
compromise we have adopted the following policy of McStas.
•The versions 2.5.x will possibly contain bug fixes and minor new functionality. A
new manual will, however, not be released and the modifications are documented
on the McStas web-page. The extensions of the forthcoming version 2.5.x are also
listed on the web, and new versions may be released quite frequently when it is
requested by the user community.
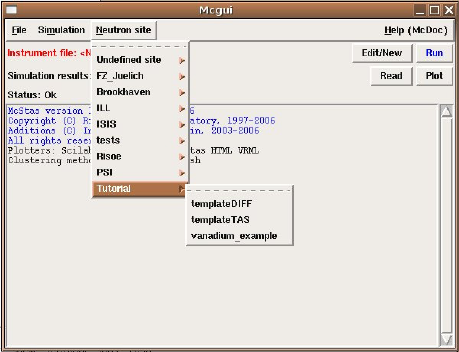
3.2. Brief introduction to the graphical user interface
This section gives an ultra-brief overview of how to use McStas once it has been prop-
erly installed. It is intended for those who do not read manuals if they can avoid
it. For details on the different steps, see the following sections. This section uses the
Samples_vanadium.instr file supplied in the examples/ directory of the McStas dis-
tribution.
To start the graphical user interface of McStas, run the mcgui command which will
open a window with a number of menus, see figure 3.2. To load an instrument,
Figure 3.2.: The graphical user interface mcgui.
select “Tutorial” from the “Neutron site” menu and open the file Samples_vanadium.
26
Next, check that the current plotting backend setting (select “Choose backend” from
the “Simulation” menu) corresponds to your system setup.
•by editing the tools/perl/mcstas_config.perl setup file of your installation
•by setting the MCSTAS_FORMAT environment variable.
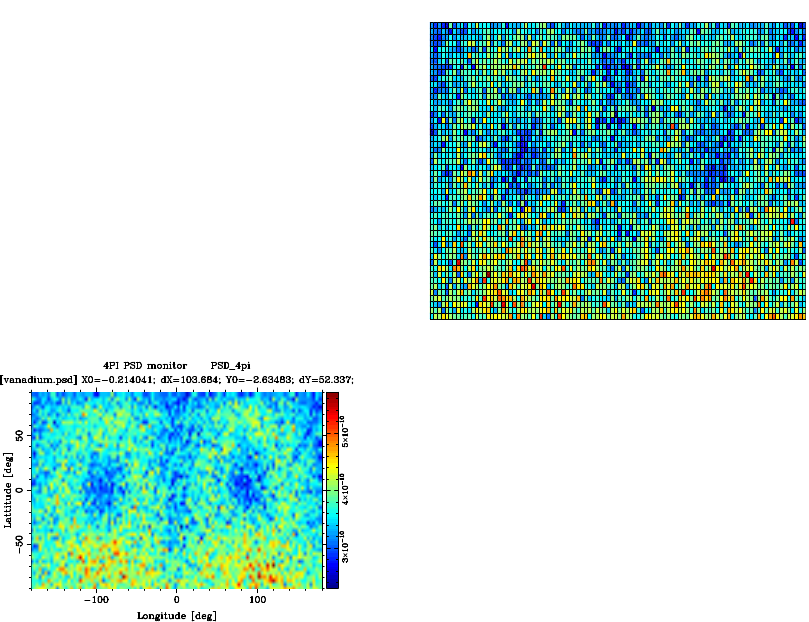
Next, select “Run simulation” from the “Simulation” menu. The McStas compiler
mcstas will translate the definition into an executable program. Then mcgui will pop
up a dialog window. Type a value for the “ROT” parameter (e.g. 90), check the “Plot
results” option, and select “Start”. The simulation will run, and when it finishes after
a while the results will be plotted in a window. Depending on your chosen plotting
backend, the presented graphics will resemble one of those shown in figure 3.3. When
−150 −100 −50 0 50 100 150
−80
−60
−40
−20
0
20
40
60
80
[vanadiumpsd] vanadium.psd: 4PI PSD monitor
Longitude [deg]
Lattitude [deg]
Figure 3.3.: Output from mcplot with PGPLOT and Matlab backends
using the Matlab backend, full 3D view of plots and different display possibilities are
available. Use the attached McStas window menus to control these. Features are quite
self explanatory. For other options, execute mcplot --help (mcplot.pl --help on
windows) to get help.
27
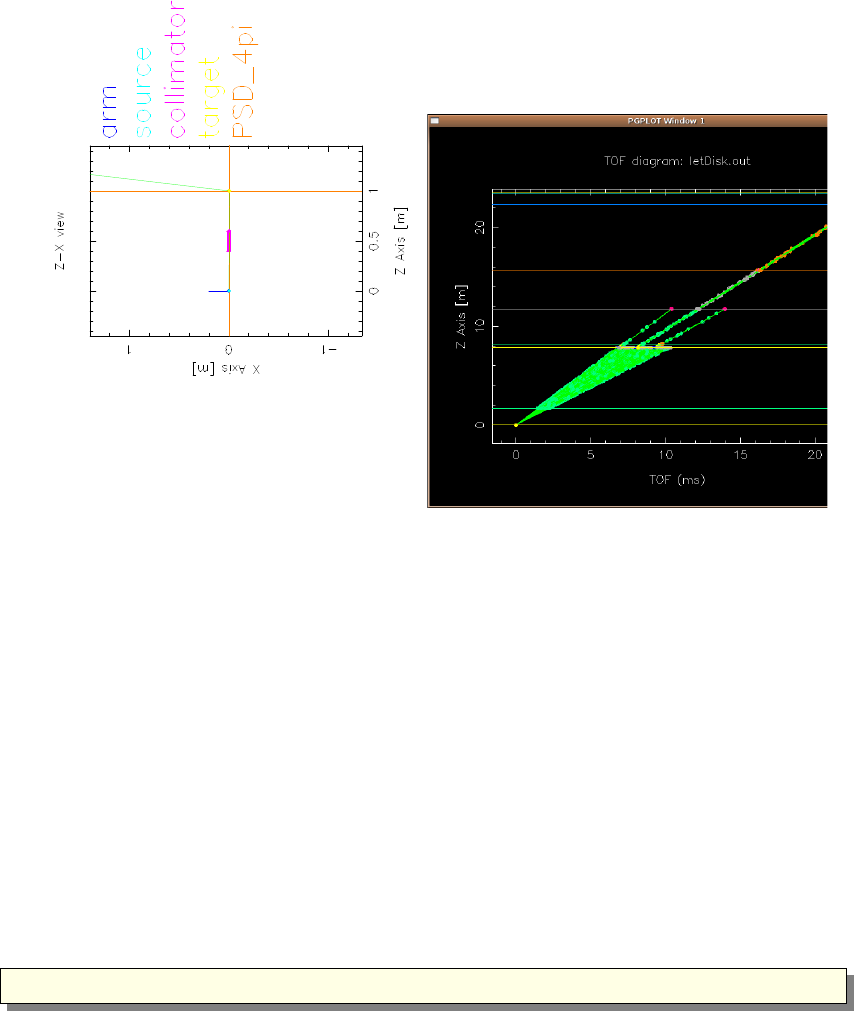
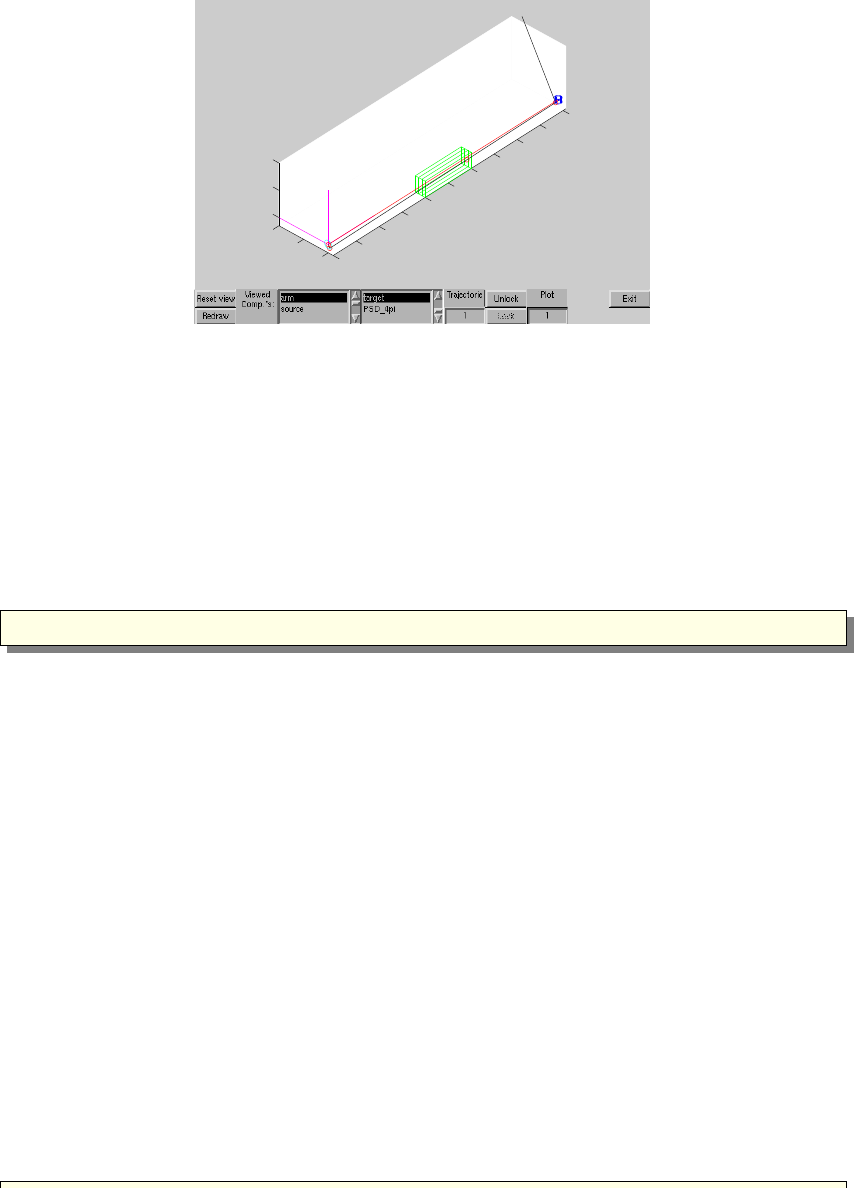
To visualize or debug the simulation graphically, repeat the steps but check the “Trace”
option instead of the “Simulate” option. A window will pop up showing a sketch of the
instrument. Depending on your chosen plotting backend, the presented graphics will
resemble one of those shown in figures 3.4-3.5.
Figure 3.4.: Left: Output from mcdisplay with PGPLOT backend. The left mouse
button starts a new neutron ray, the middle button zooms, and the right
button resets the zoom. The Q key quits the program. Right: The new
PGPLOT time-of-flight option. See section 3.5.3 for details.
For a slightly longer gentle introduction to McStas, see the McStas tutorial (available
from [Mcs]), and as of version 2.5 built into the mcgui help menu. For more technical
details, read on from section 3.3
3.3. Running the instrument compiler
This section describes how to run the McStas compiler mcstas manually. Often, it
will be more convenient to use the front-end program mcgui (section 3.5.1) or mcrun
(section 3.5.2), which run the compilation and the simulations automatically.
Upon a command of the form
1 mcstas name . i n s t r
28
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0
0.1
0.2
0
0.1
0.2
z/[m]
/home/fys/pkwi/Beta0/mcstas−1.7−Beta0/examples/vanadium_example
x/[m]
y/[m]
Figure 3.5.: Output from mcdisplay with Matlab backend. Display can be adjusted
using the window buttons.
the compiler mcstas will read the instrument definition name.instr, written in the
McStas meta-language, and translate it into a Monte Carlo simulation program in the
programming language C. The output is by default written to a file in the current
directory with the same name as the instrument file, but with extension .c rather than
.instr. This can be overridden using the -o option as follows:
1 mcstas −o code . c name . i n s t r
which gives the output in the file code.c. A single dash ‘-’ may be used for both input
and output filename to represent standard input and standard output, respectively.
3.3.1. Code generation options
By default, the code generated by mcstas is ISO-C with some extensions (currently the
only extension is the creation of new directories, which is not possible in pure ISO-C).
The use of extensions may be disabled with the -p or --portable option. With this
option, the output is strictly ISO-C compliant, at the cost of some slight reduction in
capabilities.
The -t or --trace option puts special “trace” code in the output. This code makes it
possible to get a complete trace of the path of every neutron ray through the instrument,
as well as the position and orientation of every component. This option is mainly used
with the mcdisplay front-end as described in section 3.5.3.
The code generation options can also be controlled by using preprocessor macros in the
C compiler, without the need to re-run mcstas. If the preprocessor macro MC_PORTABLE
is defined, the same result is obtained as with the --portable option. The effect of
the --trace option may be obtained by defining the MC_TRACE_ENABLED macro. Most
Unix-like C compilers allow preprocessor macros to be defined using the -D option, e.g.
29
1 cc −DMC TRACE ENABLED −DMC PORTABLE . . .
Finally, the --verbose option will list the components and libraries being included in
the instrument.
3.3.2. Specifying the location of files
The McStas compiler mcstas needs to be able to find various files during compilation,
some explicitly requested by the user (such as component definitions and files referenced
by %include), and some used internally to generate the simulation executable. McStas
looks for these files in three places: first in the current directory, then in a list of
directories given by the user, and finally in a special McStas directory. Usually, the user
will not need to worry about this as mcstas will automatically find the required files.
But if users build their own component library in a separate directory or if mcstas is
installed in an unusual way, it will be necessary to tell the compiler where to look for
the files.
The location of the special McStas directory is set when mcstas is compiled. It defaults
to /usr/share/mcstas/version on Debian and derivatives, to /usr/local/mcstas/
version on RedHat and derivatives and on other Unix-like systems, including Mac
OS X, where it is a link to the actual location /Applications/McStas-version.app/
Contents/Resources/mcstas/version, and C:\mcstas-version\lib on Windows sys-
tems, but it can be changed to something else, see the installation instructions for details.
The location can be overridden by setting the environment variable MCSTAS:
1 se t en v MCSTAS /home/ j oe / mcstas
for csh/tcsh users, or
1export MCSTAS=/home/ j o e / mc sta s
for bash/Bourne shell users. Windows users should define MCSTAS from the menu
’Start/Settings/Control Panel/System/Advanced/Environment Variables’ by creating
MCSTAS with the value C:\mcstas\lib
To make mcstas search additional directories for component definitions and include
files, use the -I switch:
1 mcstas −I /home/ j o e / components −I /home/ j o e / n eu tr on / i n c l u d e name . i n s t r
Multiple -I options can be given, as shown.
3.3.3. Embedding the generated simulations in other programs
By default, mcstas will generate a stand-alone C program, which is what is needed in
most cases. However, for advanced usage, such as embedding the generated simulation
in another program or even including two or more simulations in the same program, a
stand-alone program is not appropriate. For such usage, mcstas provides the following
options:
30

•--no-main This option makes mcstas omit the main() function in the generated
simulation program. The user must then arrange for the function mcstas_main()
to be called in some way.
•--no-runtime Normally, the generated simulation program contains all the run-
time C code necessary for declaring functions, variables, etc. used during the
simulation. This option makes mcstas omit the run-time code from the generated
simulation program, and the user must then explicitly link with the file mcstas-r.c
as well as other shared libraries from the McStas distribution.
Users that need these options are encouraged to contact the authors for further help.
3.3.4. Running the C compiler
After the source code for the simulation program has been generated with mcstas, it
must be compiled with the C compiler to produce an executable. Since the generated
C code obeys the ISO-C standard, it should be easy to compile it using any ISO-C (or
C++) compiler. E.g. a typical Unix-style command would be
1 cc −O−o name . out name . c −lm
The McStas team recommends these compiler alternatives for the Intel (and AMD)
hardware architectures:
Agcc which is a very portable, open source, ISO-C compatible c compiler, available
for most platforms. For Linux it is usually part of your distribution, for Windows
the McStas distribution package includes a version of gcc (in the Dev-CPP sub-
package), and for Mac OS X gcc is part of the Xcode tools package available on
the installation medium.
Bicc or the Intel c compiler is available for Linux, Mac OS and Windows systems
and is a commercial software product. Generally, simulations run with the Intel
compiler are a factor of 2 faster than the identical simulation run using gcc. To
use icc with McStas on Linux or Mac OS X, set the environment variables
–MCSTAS_CC=icc
–MCSTAS_CFLAGS="-g -O2 -wd177,266,1011,181"
To use icc with MPI on Unix system (see Section 3.7) installations, it seems
that editing the mpicc shell script and setting the CC variable to ”icc” is the
only requirement! On Windows, the Intel c compiler is ’icl’, not ’icc’ and has a
dependency for Microsoft Visual C++. If you have both these softwares available,
running McStas with the Intel compiler should be possible (currently untested by
the McStas developer team).
The -O option typically enables the optimization phase of the compiler, which can
make quite a difference in speed of mcstas-generated simulations. The -o name.out
31
sets the name of the generated executable. The -lm options is needed on many systems
to link in the math runtime library (like the cos() and sin() functions).
Monte Carlo simulations are computationally intensive, and it is often desirable to have
them run as fast as possible. Some success can be obtained by adjusting the compiler
optimization options. Here are some example platform and compiler combinations that
have been found to perform well (up-to-date information will be available on the McStas
WWW home page [Mcs]):
•Intel x86 (“PC”) with Linux and GCC, using options gcc -O3.
•Intel x86 with Linux and EGCS (GCC derivate) using options egcc -O6.
•Intel x86 with Linux and PGCC (pentium-optimized GCC derivate), using options
gcc -O6 -mstack-align-double.
•HPPA machines running HPUX with the optional ISO-C compiler, using the op-
tions -Aa +Oall -Wl,-a,archive (the -Aa option is necessary to enable the ISO-C
standard).
•SGI machines running Irix with the options -Ofast -o32 -w
Optimization flags will typically result in a speed improvement by a factor about 3, but
the compilation of the instrument may be 5 times slower.
A warning is in place here: it is tempting to spend far more time fiddling with compiler
options and benchmarking than is actually saved in computation times. Even worse,
compiler optimizations are notoriously buggy; the options given above for PGCC on
Linux and the ISO-C compiler for HPUX have been known to generate incorrect code
in some compiler versions. mcstas actually puts an effort into making the task of the
C compiler easier, by in-lining code and using variables in an efficient way. As a result,
McStas simulations generally run quite fast, often fast enough that further optimizations
are not worthwhile. Also, optimizations are highly time and memory consuming during
compilation, and thus may fail when dealing with large instrument descriptions (e.g.
more that 100 elements). The compilation process is simplified when using components
of the library making use of shared libraries (see SHARE keyword in chapter 4). Refer to
section 3.4.4 for other optimization methods.
3.4. Running the simulations
Once the simulation program has been generated by the McStas compiler mcstas and an
executable has been obtained with the C compiler, the simulation can be run in various
ways.
Simple McStas options
In this section, the most common simulation parameters are discussed. For a full list,
please consult tables 3.1, 3.2.
The simplest way is to run it directly from the command line or shell:
32
1 . / name . out
Note the leading “.”, which is needed if the current directory is not in the path searched
by the shell. When used in this way, the simulation will prompt for the values of any
instrument parameters such as angular settings, and then run the simulation. Default
instrument parameter values (see section 4.3), if any, will be indicated and entered
when hitting the Return key. This way of running McStas will only give data for one
instrument setting which is normally sufficient for e.g., time-of-flight, SANS or powder
instruments, but not for e.g. continuous-beam reflectometers or triple-axis spectrometers
where a scan over various instrument settings is required. Often the simulation will be
run using one of several available front-ends, as described in the next section. These
front-ends help manage output from the potentially many detectors in the instruments,
as well as running the simulation for each data point in a scan.
The generated simulations accept a number of options and arguments. The full list
can be obtained using the --help option:
1 . / name . out −−h e l p
The values of instrument parameters may be specified as arguments using the syntax
name=val. For example
1 . / Samples vanadium . out ROT=90
The number of neutron histories to simulate may be set using the --ncount or -n
option, for example --ncount=2e5. The initial seed for the random number generator is
by default chosen based on the current time so that it is different for each run. However,
for debugging purposes it is sometimes convenient to use the same seed for several runs,
so that the same sequence of random numbers is used each time. To achieve this, the
random seed may be set using the --seed or -s option.
By default, McStas simulations write their results into several data files in the current
directory, overwriting any previous files stored there. The --dir=dir or -ddir option
causes the files to be placed instead in a newly created directory dir (to prevent over-
writing previous results an error message is given if the directory already exists). Al-
ternatively, all output may be written to a single file file using the --file=file or -ffile
option (which should probably be avoided when saving in binary format, see below). If
the file is given as NULL, the file name is automatically built from the instrument name
and a time stamp. The default file name is mcstas followed by appropriate extension.
The complete list of options and arguments accepted by McStas simulations appears
in Tables 3.1 and 3.2.
3.4.1. Choosing an output data file format
Data files contain header lines with information about the simulation from which they
originate. In case the data must be analyzed with programs that cannot read files with
such headers, they may be turned off using the --data-only or -a option.
33
The format of the output files from McStas simulations is described in more detail
in section 3.6. It may be chosen either with --format=FORMAT for each simulation or
globally by setting the MCSTAS FORMAT environment variable. The available format
list is obtained using the name.out --help option. McStas can presently generate the
McStas/PGPLOT and the NeXus format.
It is also possible to create and read Vitess,MCNP/PTRAC and Tripoli4/batch neu-
tron event files using components
•Vitess_input and Vitess_output
•Virtual_tripoli4_input and Virtual_tripoli4_output
•Virtual_mcnp_input and Virtual_mcnp_output
Additionally, adding the raw keyword to the FORMAT will produce raw [N, p, p2] data
sets instead of [N, p, σ] (see Section 2.2.1). The former representation is fully additive,
and thus enables to add results from separate simulations (e.g. when using a computer
Grid - which is automated in the mcformat tool). Other acceptable format modifiers are
transpose to transpose data matrices and append to concatenate data to existing files.
3.4.2. Basic import and plot of results
The previous example will result in a mcstas.sim file, that may be read directly from
Matlab (using the sim file function)
1 matlab>s=mcstas ;
2 matlab>s=mc sta s ( ’ p l o t ’ )
The first line returns the simulation data as a single structure variable, whereas the
second one will additionally plot each detector separately. This also equivalently stands
for IDL
1 i d l >s=mcs tas ( )
2 i d l >s=m cst as (/ p l o t )
See section 3.5.4 for another way of plotting simulation results using the mcplot front-
end.
When choosing the HTML format, the simulation results are saved as a web page,
whereas the monitor data files are saved as VRML files, displayed within the web page.
3.4.3. Interacting with a running simulation
Once the simulation has started, it is possible, under Unix, Linux and Mac OS X systems,
to interact with the on-going simulation. This feature is not available when using MPI
parallelization.
McStas attaches a signal handler to the simulation process. In order to send a signal
to the process, the process-id pid must be known. Users may look at their running
34

-s seed
--seed=seed
Set the initial seed for the random number generator. This
may be useful for testing to make each run use the same ran-
dom number sequence.
-n count
--ncount=count
Set the number of neutron histories to simulate. The default
is 1,000,000. (1e6)
-d dir
--dir=dir
Create a new directory dir and put all data files in that di-
rectory.
-h
--help
Show a short help message with the options accepted, avail-
able formats and the names of the parameters of the instru-
ment.
-i
--info
Show extensive information on the simulation and the instru-
ment definition it was generated from.
-t
--trace
Makes the simulation output the state of every neutron as it
passes through every component. Requires that the -t (or
--trace) option is also given to the McStas compiler mcstas
when the simulation is generated.
--no-output-files Disables the writing of data files (output to the terminal, such
as detector intensities, will still be written).
-g
--gravitation
Toggles the gravitation (approximation) handling for the
whole neutron propagation within the instrument. May pro-
duce wrong results if the used components do no comply with
this option.
--format=FORMAT Sets the file format for result simulation and data files.
-N STEPS Divide simulation into STEPS, varying parameters within
given ranges ’min,max’.
param =value
min,max
Set the value of an instrument parameter, rather than hav-
ing to prompt for each one. Scans ranges are specified as
’min,max’.
Table 3.1.: Options accepted by McStas simulations. For options specific to MPI and
parallel computing, see section 3.7.
35
-f file
--file=file
Write all data into a single file file. Avoid when using
binary formats.
--format data=FORMAT Sets the file format for result data files from monitors.
This enables to have simulation files in one format
(e.g. HTML), and monitor files in an other format
(e.g. VRML).
--mpi=NB CPU Distributes the simulation over NB CPU node (re-
quires MPI to be installed). Speedup has been
demonstrated to be linear in number of nodes when
the simulation task is --ncount is sufficiently large.
--multi=NB CPU
--grid=NB CPU
Distributes the simulation over NB CPU node (re-
quires SSH to be installed). Speedup has been
demonstrated to be linear in number of nodes when
the simulation task is --ncount is sufficiently large.
--machines=MACHINES Specify a list of distant machines/nodes to be used
for MPI and grid clustering. Default is to use local
SMP cluster.
--optim Run in optimization mode to find best parameters
in order to maximize all monitor integral values.
Parameters to be varied are given just like scans
(min,max).
--optim=COMP Same as --optim but for specified monitors. This
option may be used more than once.
--optim-prec=ACCURACY Sets accuracy criteria to end parameter optimization
(default is 10−3).
--test Run McStas self test.
-c
--force-compile
Force to recompile the instrument.
Table 3.2.: Additional options accepted by McStas simulations.
36
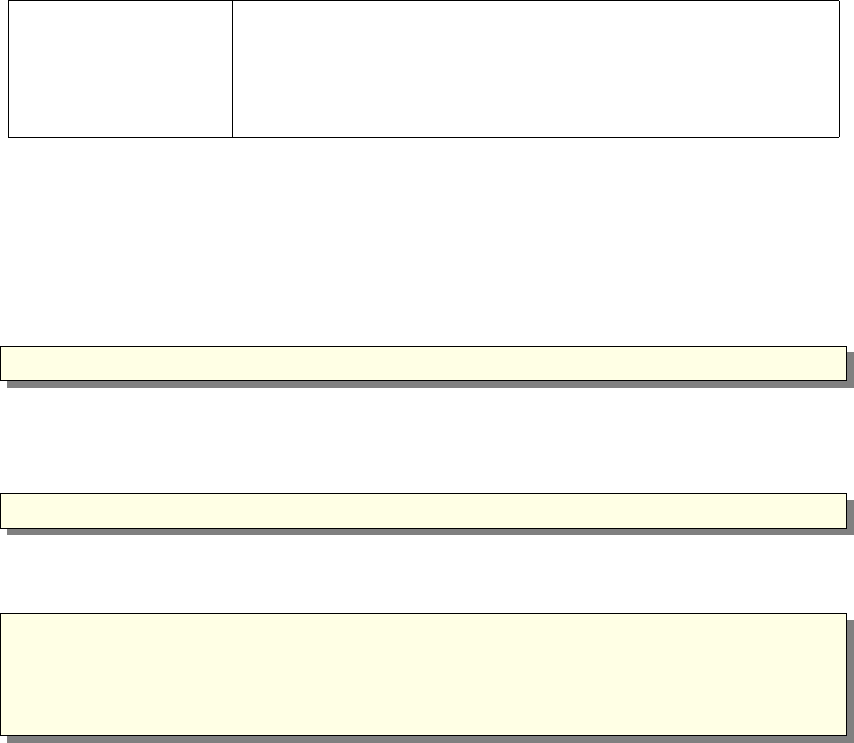
USR1 Request information (status)
USR2, HUP Request information and performs an intermediate saving of
all monitors (status and save). This triggers the execution of
all SAVE sections (see chapter 4).
INT, TERM Save and exit before end (status)
Table 3.3.: Signals supported by McStas simulations.
processes with the Unix ’ps’ command, or alternatively process managers like ’top’ and
’gtop’. If a file.out simulation obtained from McStas is running, the process status
command should output a line resembling
1<use r >13277 7140 99 2 3: 52 p ts /2 0 0 : 0 0 : 1 3 f i l e . ou t
where user is your Unix login. The pid is there ’13277’.
Once known, it is possible to send one of the signals listed in Table 3.3 using the ’kill’
unix command (or the functionalities of your process manager), e.g.
1k i l l −USR2 13277
This will result in a message showing status (here 33 % achieved), as well as the
position in the instrument of the current neutron.
1#McStas : [ p id 1 3 2 77 ] S i g n a l 12 d e t e c t e d SIGUSR2 ( Save s i m u l a t i o n )
2#Si m u l ati o n : f i l e ( f i l e . i n s t r )
3#B re a kp o in t : MyDete ctor ( T rac e ) 3 3 . 3 7 % ( 3 3 36 5 4 . 0 / 1 0 0 0 0 0 0 . 0 )
4#Date : Wed May 7 0 0 : 0 0 : 5 2 2003
5#McStas : Savi ng data and resume s i m u l a t i o n ( continue )
followed by the list of detector outputs (integrated counts and files). Finally, sending a
kill 13277 (which is equivalent to kill -TERM 13277) will end the simulation before
the initial ’ncount’ preset.
A typical usage example would be, for instance, to save data during a simulation, plot
or analyze it, and decide to interrupt the simulation earlier if the desired statistics has
been achieved. This may be done automatically using the Progress_bar component.
Whenever simulation data is generated before end (or the simulation is interrupted),
the ’ratio’ field of the monitored data will provide the level of achievement of the com-
putation (for instance ’3.33e+05/1e+06’). Intensities are then usually to be scaled ac-
cordingly by the user.
Additionally, any system error will result in similar messages, giving indication about
the occurrence of the error (component and section). Whenever possible, the simulation
will try to save the data before ending. Most errors appear when using a newly written
component, in the INITIALIZE,TRACE or FINALLY sections. Memory errors usually
show up when C pointers have not been allocated/unallocated before usage, whereas
mathematical errors are found when, for instance, dividing by zero.
37

3.4.4. Optimizing simulation speed
There are various ways to speed up simulations
•Optimize the compilation of the instrument, as explained in section 3.3.4.
•Execute the simulation in parallel on a computer grid or a cluster (with MPI or
ssh grid ) as explained in section 3.7.
•Divide simulation into parts using a file for saving or generating neutron events.
In this way, a guide may be simulated only once, saving the neutron events at the
guide exit as a file, which is being read quickly by the second simulation part. Use
the Virtual input and Virtual output components for this technique.
•Use source optimizers like the components Source adapt or Source Optimizer.
Such component may sometimes not be very efficient, when no neutron importance
sampling can be achieved, or may even sometimes alter the simulation results. Be
careful and always check results with a (shorter) non-optimized computation.
•Complex components usually take into account additional small effects in a simula-
tion, but are much longer to execute. Thus, simple components should be preferred
whenever possible, at least in the beginning of a simulation project.
•The SPLIT keyword may artificially repeat events reaching specified positions in
the instrument. This is very efficient, but requires to cast random numbers in the
course of the remaining propagation (e.g. at samples, crystals, ...). See section
4.4.6 for details.
A general comment about optimization is that it should be used cautiously, checking
that the results are not significantly affected.
3.4.5. Optimizing instrument parameters
Often, the user may wish to optimize the parameters of a simulation, i.e. the best
geometry of a given component, for example the optimal curvature of a monochromator.
The choice of the optimization routine, of the simulation quality value to optimize,
the initial parameter guess and the simulation length all have a large influence on the
results. The user is advised to be cautious when interpreting the optimization results.
Using iFit for optimization
One of the authors of McStas has developed a very flexible and general data analysis
and fitting package called iFit [EF14; Ifi] based on Matlab. Matlab itself is not required,
as a stand-alone distributable binary of iFit exists.
iFit contains wrapper functionality for compiling and running McStas simulations as
object functions, and allows to select many different optimizers, including swarms and
other non-gradient methods. Please see the iFit documentation for more information.
Our experience is that iFit together with McStas is a more robust optimization solution
than the McStas built-in Simplex solution.
38
Using the Simplex method
The McStas package comes with a Simplex optimization method to find best instrument
parameters in order to maximize all or some specified monitor integrated values. It uses
the Downhill Simplex Method in Multidimensions [NM65; Pre+02] which is a geometric
optimization method somewhat similar to genetic algorithms. It is not as fast as the
gradient method, but is much more robust. It is well suited for problems with up to about
10-20 parameters to optimize. Higher dimensionalities are not guarantied to converge
to a meaningful solution.
When using mcrun (section 3.5.2), the optimization mode is set by using the --optim
option or a list of monitors to maximize with as many --optim=COMP as required. The
optimization accuracy criterion may be changed with the --optim-prec=accuracy op-
tion.
From mcgui (section 3.5.1), one should choose the ’Optimization’ execution mode
(instead of the Simulation or Trace mode). Then specify the instrument parameters
to optimize by indicating their variation range param=min,max (e.g. Lambda=1,4) just
like parameter scans. Optionally, the starting guess value might be given with the
syntax param=min,guess,max. The optimization accuracy criterion is controlled using
the ’Precision’ entry box in the configuration options (See Figure 3.6). Finally, run the
simulation. The optimum set of parameters is then printed at the end of the simulation
process. You may ask to maximize only given monitors (instead of all) by selecting their
component names in the lower lists in the Run Dialog (up to 3).
If you would like to maximize the flux at a given monitor, with some divergence con-
strains, you should for instance simply add a divergence collimator before the monitor.
Alternatively, write a new component that produce the required ’figure-of-merit’.
The optimization search interval constrains the evolution of parameters. It should be
chosen carefully. In particular it is safer for it to indeed contain a high signal domain,
and be preferably symmetric with respect to that maximum.
Using custom optimization routines
The user should write a function script or a program that
•inputs the simulation parameters, which are usually numerical values such as T T
in the prisma2 instrument from the examples directory of the package.
•builds a command line from these parameters.
•executes that command, and waits until the end of the computation.
•reads the relevant data from the monitors.
•outputs a simulation quality measurement from this data, usually the integrated
counts or some peak width.
For instance, for the prisma2 instrument we could write a function for Matlab (see
section 3.6 for details about the Matlab data format) in order to study the effects of the
T T parameter:
39
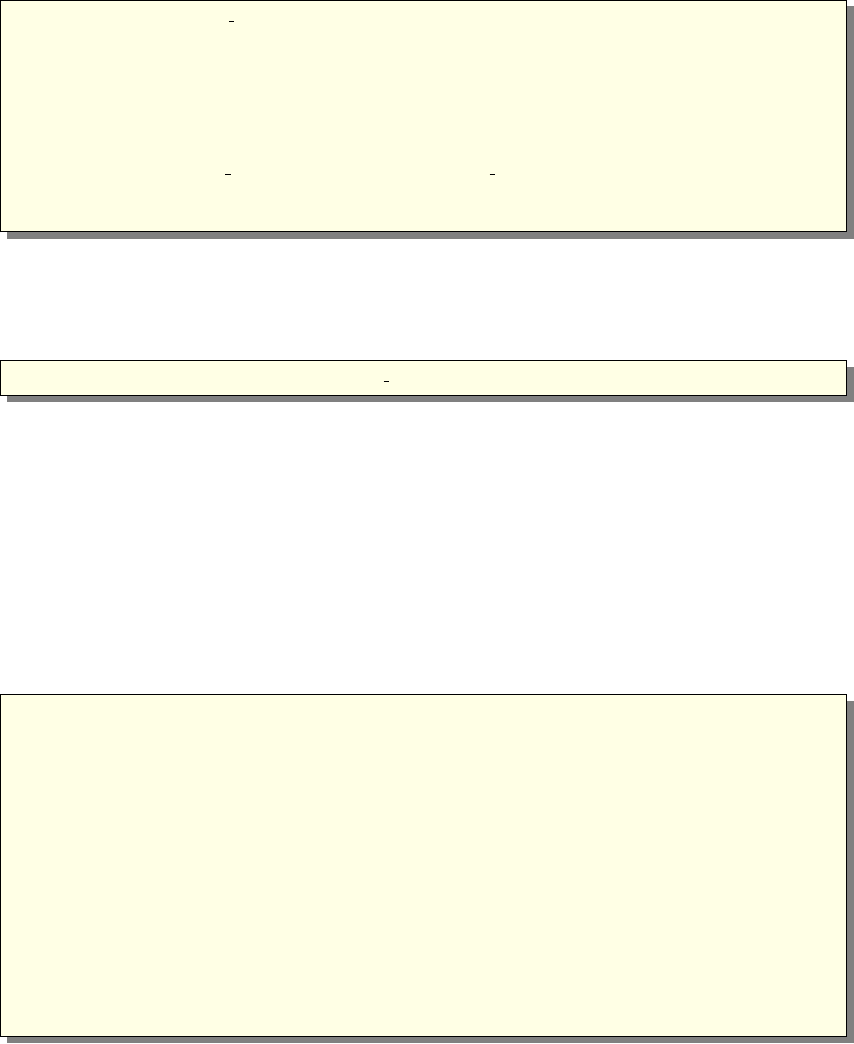
1 fu nc ti on y = i n s t r v a l u e ( p)
2 TT = p ( 1 ) ; % p may be a v e c t o r / mat ri x c o n t a i n i n g many p aram eter s
3 syscmd = [ ’ mcrun prisma2 . i n s t r −n1 e5 TT= ’ num2str (TT) . . .
4 ’ PHA=22 PHA1=−3 PHA2=−2 PHA3=−1 PHA4=0 PHA5=1 ’ . . .
5 ’ PHA6=2 PHA7=3 TTA=44 −−format=”Matlab b i n a r y ” ’ ] ;
6 system ( syscmd ) ; path ( path ) % e xe c u te s i m u la t io n , and reha s h f i l e s
7 s = m cst as ; % g e t t he s i m u l a t i o n data , and the monitor data
8 s = s . prism a2 . m mcstas . d e t e c t o r . p r i s m a 2 t o f . s i g n a l ;
9 e v a l ( s ) ; % we could a l s o use the ’ s t a t i s t i c s ’ f i e l d
10 y = −Mean ; % ’ v alu e ’ o f t he s i m u l a t i o n
Then a numerical optimization should be available, such as those provided with Mat-
lab, IDL, and Perl-PDL high level languages. In this example, we may wish to maximize
the instr_value function value. The fminsearch function of Matlab is a minimization
method (that’s why we have a minus sign for yvalue), and:
1 matlab>TT = f m in sear c h ( ’ i n s t r v a l u e ’ , −25)
will determine the best value of TT, starting from -25 estimate, in order to minimize
function instr_value, and thus maximize the mean detector counts.
3.5. Using simulation front-ends
McStas includes a number of front-end programs that extend the functionality of the
simulations. A front-end program is an interface between the user and the simulations,
running the simulations and presenting the output in various ways to the user.
The list of available McStas front-end programs may be obtained from the mcdoc --tools
command:
1 McStas Tools
2 mcstas Main instrument c o m pi l e r
3 mcrun I ns tr um ent b u i l d and e x e c u t i o n u t i l i t y
4 mcgui Graphical User I n t e r f a c e i n s t r u m e n t b u i ld e r
5 mcdoc Component l i b r a r y d ocum ent at ion g e n e r a t o r / v i e we r
6 mcplot Sim u l at io n r e s u l t view e r
7 mcdis play Inst rumen t geometry v i e w er
8 m cres p lo t Inst rumen t r e s o l u t i o n f u n ct io n v i e we r
9 m c s t a s 2 v i t e s s McStas t o V i t e s s component t r a n s l a t i o n u t i l i t y
10 mcformat Con version t o o l for t e x t f i l e s and MPI/ g r i d s
11 mcformatgui GUI for mcformat
12 mcdaemon Ins trumen t r e s u l t s on−l i n e p l o t t i n g
13 When used with t he −h f l ag , a l l t o o l s d i s p l a y a s p e c i f i c help .
14 SEE ALSO : mcstas , mcdoc , mcplot , mcrun , mcgui , m cr espl ot , m c s t a s 2 v i t e s s
15 DOC: P l e a s e v i s i t h tt p : //www. mcstas . o rg
3.5.1. The graphical user interface (mcgui)
The front-end mcgui provides a graphical user interface that interfaces the various parts
of the McStas package. It may be started with the single command
40

1 mcgui
The mcgui (mcgui.pl on Windows) program may optionally be given the name of the
instrument file to use.
Dependencies: To run the mcgui front-end, the programs Perl and Perl/Tk must be
properly installed on the system. Additionally, to use the McStas/PGPLOT back-end
the software packages PGPLOT, PgPerl, and PDL are required. It may be necessary to
set the PGPLOT_DIR and PGPLOT_DEV environment variable; consult the documentation
for PGPLOT on the local system in case of difficulty.
The menus
When the front-end is started the main window is opened (see figure 3.2). This window
displays the output from compiling and running simulations, and contains a few menus
and buttons for easy navigation. The main purpose of the front-end is to edit and
compile instrument definitions, run the simulations, and visualize the results.
The File menu has the following features:
File/Open instrument selects the name of an instrument file to be used.
File/Edit current opens a simple editor window with McStas syntax highlighting for
editing the current instrument definition. This function is also available from the
Edit button to the right of the name of the instrument definition in the main
window.
File/Spawn editor This starts the editor defined in the environment variable VISUAL or
EDITOR on the current instrument file. It is also possible to start an external editor
manually; in any case mcgui will recompile instrument definitions as necessary
based on the modification dates of the files on the disk.
File/Compile instrument forces a recompile of the instrument definition, regardless of
file dates. This is for example useful to pick up changes in component definitions,
which the front-end will not notice automatically. This might also be required
when choosing MPI and NeXus options.
File/Save log file saves the text in the window showing output of compilations and
simulations into a file.
File/Clear output erases all text in the window showing output of compilations and
simulations.
File/Preferences Opens the choose backend dialog shown in figure 3.6. Several settings
can be chosen here:
•Selection of the desired (PGPLOT—Matlab—HTML/VRML) output format
and possibility to save ’binary files’ when applicable (improved disk I/O).
41
•One- or three-pane view of your instrument in trace mode when using PG-
PLOT.
•Clustering option (None—MPI—ssh)
•Choice of editor to use when editing instrument files.
•Automatic quotation of strings when inserting in the built-in editor.
•Possibility to not optimize when compiling the generated c-code. This is
very handy when setting up an instrument model, which requires regular
compilations.
•Adjustment of final precision when doing parameter optimization.
To save the chosen settings for your next McStas run, use Save Configuration in
the File menu.
File/Save configuration saves user settings from Configuration options and Run dia-
logue to disk.
File/Quit exits the graphical user interface front-end.
The Simulation menu has the following features:
Simulation/Read old simulation prompts for the name of a file from a previous run
of a McStas simulation (usually called mcstas.sim). The file will be read and
any detector data plotted using the mcplot front-end. The parameters used in
the simulation will also be made the defaults for the next simulation run. This
function is also available using the “Read” button to the right of the name of the
current simulation data.
Simulation/Run simulation opens the run dialog window, explained further below.
Simulation/Plot results plots (using mcplot) the results of the last simulation run or
spawns a load dialogue to load a set of results.
The Neutron Site menu contains a list of template/example instruments as found in
the McStas library, sorted by neutron site. When selecting one of these, a local copy
of the instrument description is transferred to the active directory (so that users have
modification rights) and loaded. One may then view its source (Edit) and use it directly
for simulations/trace (3D View).
The Tools menu gathers minor tools.
Tools/Plot current/other results Plot current simulation results and other results.
Tools/Online plotting of results installs a DSA key to be used for ssh clustering and
MPI (see Section 3.7).
42

Figure 3.6.: The “configuration options” dialog in mcgui.
Tools/Dataset convert/merge Opens a GUI to the mcformat tool, in order to convert
datasets to other formats, merge scattered dataset (e.g. from successive or grid
simulations), and assemble scan sets. This tool does not handle raw event files.
Tools/Shortcut keys displays the shortcut keys used for running and editing instru-
ments.
Tools/Install DSA key installs a DSA key to be used for ssh clustering and MPI (see
Section 3.7).
The Histogrammer In addition to these tools, the Neutron site/Tools/Histogrammer.instr
example instrument may read McStas, Vitess, MCNP and Tripoli event files in or-
der to generate histograms of any type.
The Help menu has the following features, through use of mcdoc and a web browser. To
customize the used web browser, set the BROWSER environment variable. If BROWSER is
not set, mcgui uses netscape/mozilla/firefox on Unix/Linux and the default browser
on Windows.
Help/McStas User manual calls mcdoc --manual, brings up the local pdf version of
this manual, using a web browser.
Help/McStas Component manual calls mcdoc --comp, brings up the local pdf version
of the component manual, using a web browser.
Help/Component library index displays the component documentation using the com-
ponent index.html index file.
Help/McStas web page calls mcdoc --web, brings up the McStas website in a web
browser.
43
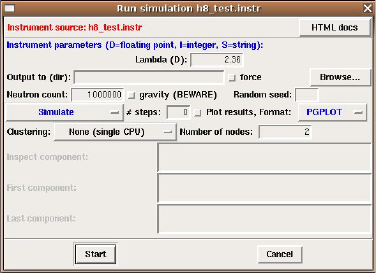
Help/Tutorial opens the McStas tutorial for a quick start.
Help/Current instrument info generates a description web-page of the current edited
instrument.
Help/Test McStas installation launches a self test procedure to check that the McStas
package is installed properly, generates accurate results, and may use the plotter
to display the results.
Help/Generate component index (re-)generates locally the component index.html.
The run dialog
Figure 3.7.: The run dialog in mcgui.
The run dialog is used to run simulations. It allows the entry of instrument parameters
as well as the specifications of options for running the simulation (see section 3.4 for
details). It also allows to run the mcdisplay (section 3.5.3) and mcplot (section 3.5.4)
front-ends together with the simulation.
The meaning of the different fields is as follows:
Run:Instrument parameters allows the setting of the values for the input parameters
of the instrument. The type of each instrument parameter is given in parenthe-
sis after each name. Floating point numbers are denoted by (D) (for the C type
“double”), (I) denotes integer parameters, and (S) denotes strings. For parameter
scans and optimizations, enter the minimum and maximum values to scan/opti-
mize, separated by a comma, e.g. 1,10 and do not forget to set the # Scanpoints
to more than 1.
Run:Output to allows the entry of a directory for storage of the resulting data files in
(like the --dir option). If no name is given, the results are stored in the current
directory, to be overwritten by the next simulation.
Run:Force Forces McStas to overwrite existing data files
44

Neutron count sets the number of neutron rays to simulate (the --ncount option).
Run:Gravity Activates gravitation handling. Not all components full support the use
of gravitation, but all transport in “free space” using the PROP DT, PROP Z0
etc. macros will include propagation with gravity. Only local, internal component
propagation without the PROP routines will be gravity-less. As a conclusion it
is considered safe and to high precision correct to apply the gravitation setting if
one takes care to use the Guide gravity component and other gravity-supporting
guide types in combination with non-gravity components that are “small” in size,
i.e. samples, lenses, etc.
Run:Random seed/Set seed to selects between using a random seed (different in each
simulation) for the random number generator, or using a fixed seed (to reproduce
results for debugging).
Run:Simulate/Trace (3D)/Optimize selects between several modes of running the sim-
ulation:
•Simulate: perform a normal simulation or a scan when #steps is set to non-
zero value
•Trace (3D view): View the instrument in 3D tracing individual neutrons
through the instrument
•Optimize: find the optimum value of the simulation parameters in the given
ranges (see section 3.4.5).
•Backgrounding (bg): Simulate or Optimize in the background.
Run:# steps / # optim sets the number of simulation to run when performing a pa-
rameter scan or the number of iterations to perform in optimization mode.
Run:Plot results – if checked, the mcplot front-end will be run after the simulation has
finished, and the plot dialog will appear (see below).
Run:Format quick selection of output format. Binary mode may be checked from the
“Simulation/Configuration options” dialog box.
Run:Clustering method selects the mechanism to be used for running on grids and
clusters. See section 3.7 on parallel computing for more informations.
Run:Number of nodes sets the number of nodes to use for MPI/ssh clustering.
Run:Inspect component (Trace mode) will trace only neutron trajectories that reach a
given component (e.g. sample or detector).
Run:First component (Trace mode) seletcs the first component to plot (default is first)
in order to define a region of interest.
Run:Last component (Trace mode) seletcs the last component to plot (default is first)
in order to define a region of interest.
45
Run:Maximize monitor (Optimization mode) seletcs up to three monitors which inte-
gral value should be maximized, varying instrument parameters. If no monitor is
selected, the sum of all monitors is optimized.
Run:Start runs the simulation.
Run:Cancel aborts the dialog.
Most of the settings on the run dialog can be saved for your next McStas run using ’Save
configuration’ in the File menu.
Before running the simulation, the instrument definition is automatically compiled if
it is newer than the generated C file (or if the C file is newer than the executable). The
executable is assumed to have a .out suffix in the filename. NB: If components are
changed, automatic compilation is not performed. Instead, use the File/Compile menu
item in mcgui.
The editor window
The editor window provides a simple editor for creating and modifying instrument defini-
tions. Apart from the usual editor functions, the “Insert” menu provides some functions
that aid in the construction of the instrument definitions:
Editor Insert/Instrument template inserts the text for a simple instrument skeleton in
the editor window.
Editor Insert/Component. . . opens up a dialog window with a list of all the components
available for use in McStas. Selecting a component will display a description.
Double-clicking will open up a dialog window allowing the entry of the values of
all the parameters for the component (figure 3.8). See section 4.3 for details of the
meaning of the different fields.
The dialog will also pick up those of the users own components that are present
in the current directory when mcgui is started. See section 4.7 for how to write
components to integrate well with this facility.
Editor Insert/Type These menu entries give quick access to the entry dialog for the
various component types available, i.e. Sources, Optics, Samples, Monitors, Misc,
Contrib and Obsolete.
3.5.2. Running simulations on the commandline (mcrun)
The mcrun front-end (mcrun.pl on Windows) provides a convenient command-line inter-
face for running simulations with the same automatic compilation features available in
the mcgui front-end. It also provides a facility for running a series of simulations while
varying an input parameter.
The command
46
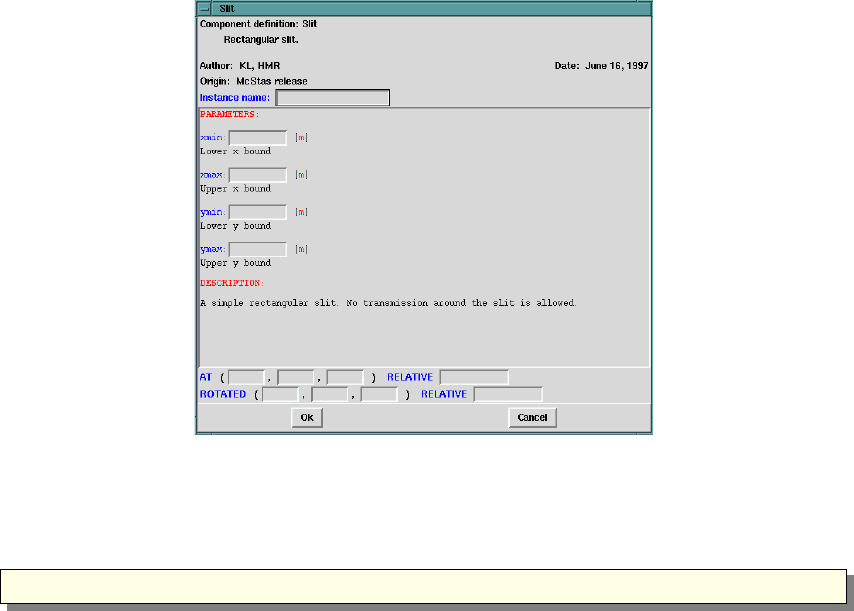
Figure 3.8.: Component parameter entry dialog.
1 mcrun sim a r g s . . .
will compile the instrument definition sim.instr (if necessary) into an executable
simulation sim.out. It will then run sim.out, passing the argument list args
The possible arguments are the same as those accepted by the simulations themselves
as described in section 3.4, with the following extensions:
•The -c or --force-compile option may be used to force the recompilation of the
instrument definition, regardless of file dates. This may be needed in case any
component definitions are changed (in which case mcrun does not automatically
recompile), or if a new version of McStas has been installed.
•The -p file or --param=file option may be used to specify a file containing
assignment of values to the input parameters of the instrument definition. The
file should consist of specifications of the form name =value separated by spaces
or line breaks. Multiple -p options may be given together with direct parameter
specifications on the command line. If a parameter is assigned multiple times, later
assignments override previous ones.
•The -N count or --numpoints=count option may be used to perform a series of
count simulations while varying one or more parameters within specified intervals.
Such a series of simulations is called a scan. To specify an interval for a parameter
X, it should be assigned two values separated by a comma. For example, the
command
47
1 mcrun sim . i n s t r −N4 X=2,8 Y=1
would run the simulation defined in sim.instr four times, with Xhaving the
values 2, 4, 6, and 8, respectively.
After running the simulation, the results will be written to the file mcstas.dat by
default. This file contains one line for each simulation run giving the values of the
scanned input variables along with the integrated intensity and estimated error in
all monitors. Additionally, a file mcstas.m (when using Matlab format) is written
that can be read by the mcplot front-end to plot the results on the screen or in a
Postscript file, see section 3.5.4.
•When performing a scan, the -f file and --file=file options make mcrun write
the output to the files file .dat and file .sim instead of the default names.
•When performing a scan, the -d dir and --dir=dir options make mcrun put
all output in a newly created directory dir. Additionally, the directory will have
subdirectories 1,2,3,. . . containing all data files output from the different simula-
tions. When the -d option is not used, no data files are written from the individual
simulations (in order to save disk space).
•The mcrun --test command will test your McStas installation, accuracy and
plotter.
The -h option will list valid options. The mcrun front-end requires a working instal-
lation of Perl to run.
3.5.3. Graphical display of simulations (mcdisplay)
The front-end mcdisplay (mcdisplay.pl on Windows) is a graphical visualization tool,
very useful for debugging. It presents a schematic drawing of the instrument definition,
showing the position of the components and the paths of the simulated neutrons through
the instrument. It is thus very useful for debugging a simulation, for example to spot
components in the wrong position or to find out where neutrons are getting lost. (See
figures 3.4-3.5.)
To use the mcdisplay front-end with a simulation, run it as follows:
1 m c di s pl a y s im a r g s . . .
where sim is the name of either the instrument source sim.instr or the simulation
program sim.out generated by mcstas, and args . . . are the normal command line
arguments for the simulation, as explained above. The -h option will list valid options.
The drawing back-end program may be selected among PGPLOT, VRML, and Matlab
using the -pPLOTTER option. For instance, calling
1 mcdisplay −−pMatlab . / Samples vanadium . out ROT=90+
48

will output graphics using Matlab. The mcdisplay front-end can also be run from the
mcgui front-end. Examples of plotter appearence for mcdisplay is shown in figures
3.4-3.5.
McStas/PGPLOT back-end This will view the instrument from above. A multi-
display that shows the instrument from three directions simultaneously can be shown
using the --multi option:
1 mcdisplay −−m u lt i sim . o ut a r g s . . .
Click the left mouse button in the graphics window or hit the space key to see the
display of successive neutron trajectories. The ‘P’ key saves a postscript file containing
the current display that can be sent to the printer to obtain a hardcopy; the ‘C’ key
produces color postscript. To stop the simulation prematurely, type ‘Q’ or use control-C
as normal in the window in which mcdisplay was started.
To see details in the instrument, it is possible to zoom in on a part of the instrument
using the middle mouse button (or the ‘Z’ key on systems with a one- or two-button
mouse). The right mouse button (or the ‘X’ key) resets the zoom. Note that after
zooming, the aspect ratio of the plot may have changed, and thus the angles as seen on
the display may not match the actual angles.
Another way to see details while maintaining an overview of the instrument is to
use the --zoom=factor option. This magnifies the display of each component along the
selected axis only, e.g. a Soller collimator is magnified perpendicular to the neutron
beam but not along it. This option may produce rather strange visual effects as the
neutron passes between components with different coordinate magnifications, but it is
occasionally useful.
When debugging, it is often the case that one is interested only in neutrons that reach
a particular component in the instrument. For example, if there is a problem with the
sample one may prefer not to see the neutrons that are absorbed in the monochromator
shielding. For these cases, the --inspect=comp option is useful. With this option, only
neutrons that reach the component named comp are shown in the graphics display.
As of McStas 1.10, the PGPLOT version has a special mode for time of flight ap-
plications. Using the new commandline options --TOF/-T and --tmax=TMAX, chopper
acceptance diagrams can be generated from the statistical information from the simu-
lated neutron rays. As the use in non-interactive, please use with a limited number of
neutron rays (-n/--ncount). For export of graphics, combine with e.g. --gif.
The mcdisplay front-end will then require the Perl, the PGPLOT, and the PGPerl
packages to be installed. It may be necessary to set the PGPLOT_DIR and PGPLOT_DEV
environment variable; consult the documentation for PGPLOT on the local system in
case of difficulty.
Matlab and back-end A 3D view of the instrument, and various operations (zoom,
export, print, trace neutrons, . . . ) is available from dedicated Graphical User Interfaces.
The --inspect option may be used (see previous paragraph), as well as the --first
and --last options to specify a region of interest.
49

The mcdisplay front-end will then require the Perl, and Matlab to be installed.
VRML/OpenGL back-ends When using the -pVRML option, the instrument is shown
in Virtual Reality (using OpenGL). You may then walk aside instrument, or go inside
elements following neutron trajectories. As all neutron trajectories are stored into a
VRML file, you better limit the number of stored trajectories below 1000, otherwise file
size and processing time becomes significant. The --inspect option is not available in
VRML format display.
3.5.4. Plotting the results of a simulation (mcplot)
The front-end mcplot (mcplot.pl on Windows) is a program that produces plots of all the
monitors in a simulation, and it is thus useful to get a quick overview of the simulation
results.
In the simplest case, the front-end is run simply by typing
1 mcplot
This will plot any simulation data stored in the current directory, which is where simu-
lations store their results by default. If the --dir or --file options have been used (see
section 3.4), the name of the file or directory should be passed to mcplot, e.g. “mcplot
dir ” or “mcplot file ”. It is also possible to plot one single text (not binary) data file
from a given monitor, passing its name to mcplot.
The drawing back-end program may be selected among PGPLOT, Matlab, and Gnu-
plot using either the -pPLOTTER option (e.g. mcplot -pMatlab file) or using the
current MCSTAS_FORMAT environment variable.
Except for the NeXus format, all other plotters read the legacy McStas/PGPLOT
text based data format.
The mcformat utility will convert any McStas result into an other data format (see
section 3.5.8), but restricting to text data sets. In this case, we recommend to generate
data sets using PGPLOT/McStas format, and translate into any other format using
mcformat.
The mcplot front-end can also be run from the mcgui front-end.
The initial display shows plots for each detector in the simulation. Examples of plotter
appearence for mcplot is shown in figures 3.4-3.3.
McStas/PGPLOT back-end Clicking the left mouse button on a plot produces a full-
window version of that plot. The ‘P’ key saves a postscript file containing the current
plot that can be sent to the printer to obtain a hardcopy; the ‘C’ key produces color
postscript. The ‘Q’ key quits the program (or CTRL-C in the controlling terminal may
be used as normal).
To use the mcplot front-end with PGPLOT, the programs Perl, PGPLOT, PgPerl,
and PDL must all be properly installed on the system. It may be necessary to set
the PGPLOT_DIR and PGPLOT_DEV environment variable; consult the documentation for
PGPLOT on the local system in case of difficulty.
50
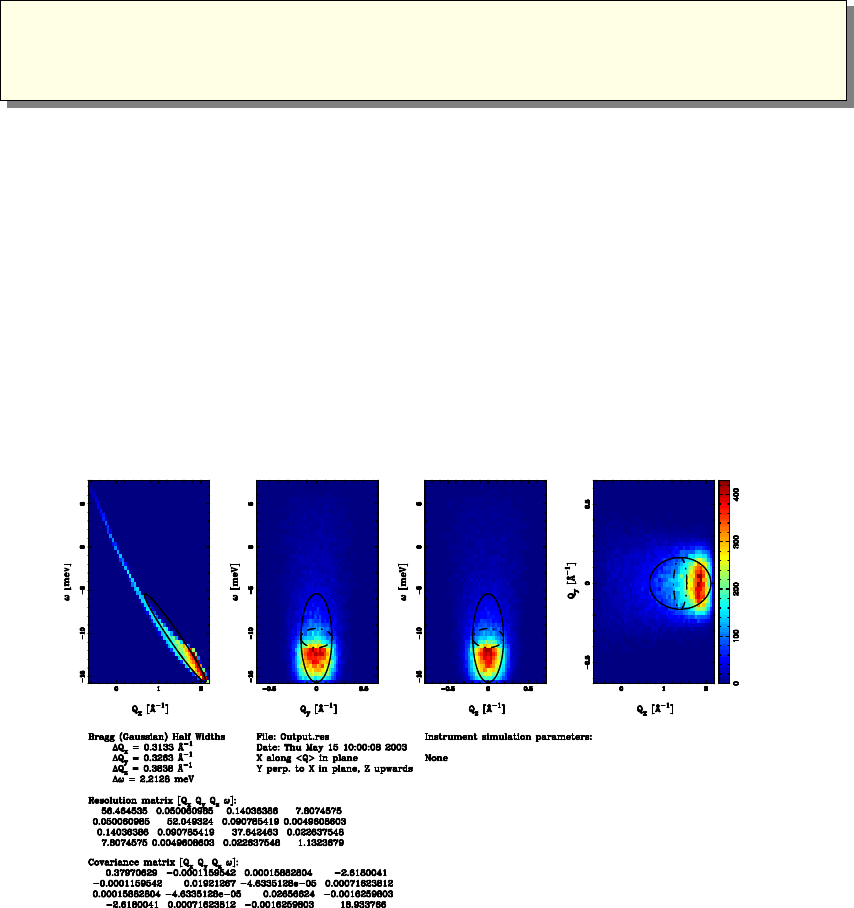
Matlab back-end A dedicated McStas/Mcplot Dialog or menu attached to the plotting
window is available, and provides many operations (duplication, export, colormaps, . . . ).
The corresponding ’mcplot’ Matlab function may be called from these language prompt
with the same method as in section 3.4, e.g:
1 matlab>s=mcplot ;
2 matlab>help mcplot
3 matlab>s=mcplot ( ’ mcstas .m’ ) ;
4 matlab>mcplot ( s ) ;
A full parameter scan simulation result, or simply one of its scan steps may be dis-
played using the ’Scan step’ menu item. When the +nw option is specified, a separate
Matlab window will appear (instead of being launched in the current terminal). This
will then enable Java support under Matlab, resulting in additional menus and tools.
On the other hand, the -nw option will force Matlab to run in the current terminal,
which is usually faster.
To use the mcplot front-end, the programs Perl, and Matlab are required.
3.5.5. Plotting resolution functions (mcresplot)
Figure 3.9.: Output from mcresplot with PGPLOT backend. Use P, C and G keys to
write hardcopy files.
51
The mcresplot front-end is used to plot the resolution function, particularly for triple-
axis spectrometers, as calculated by the Res sample component or TOF res sample for
time-of-flight instruments. It requires to have a Res monitor component further in the
instrument description (at the detector position). This front-end has been included in
the release since it may be useful despite its somewhat rough user interface.
The mcresplot front-end is launched with the command
1 mc r e sp l o t o u t f i l e
Here, outfile is the name of a file output from a simulation using the Res monitor com-
ponent.
This front-end currently only works with the PGPLOT plotter, but port for Matlab
may be written in the future.
The front-end will open a window displaying projections of the 4-dimensional resolu-
tion function R(Q, ω), measured at a particular choice of Qand ω, see the component
manual. The covariance matrix of the resolution function, the resolution along each pro-
jection axis and the resulting resolution matrix are also shown, as well as the instrument
name and parameters used for the simulation.
To use the mcresplot front-end, the programs Perl, PGPLOT, PgPerl, and PDL must
all be properly installed on the system.
3.5.6. Creating and viewing the library, component/instrument help and
Manuals (mcdoc)
McStas provides an easy way to generate automatically an HTML help page about a
given component or instrument, or the whole McStas library.
1 mcdoc
2 mcdoc {comp |instr}
3 mcdoc −−tools
The first example generates an index.html catalog file using the available components and
instruments (both locally, and in the McStas library). The library catalog of components
is opened using the BROWSER environment variable (e.g. netscape, konqueror, nautilus,
MSIE, mozilla, . . . ). If the BROWSER is not defined, the help is displayed as text in the
current terminal. This latter output may be forced with the -t or --text option.
Alternatively, if a component or instrument comp is specified as in the second example,
it will be searched within the library, and an HTML help will be created for all available
components matching comp.
The last example will list the name and description of all McStas tools.
Additionally, the options --web,--manual and --comp will open the McStas web
site page, the User Manual (this document) and the Component Manual, all requiring
BROWSER to be defined. Finally, the --help option will display the command help, as
usual.
See section 4.7 for more details about the McDoc usage and header format. To use
the mcdoc front-end, the program Perl should be available.
52
3.5.7. Translating McStas components for Vitess (mcstas2vitess)
Any McStas component may be translated for usage with Vitess (starting from Vitess
version 2.3). The syntax is simply
1 m c s t a s 2 v i t e s s Compo . comp
This will create a Vitess module of the given component.
Let us assume the component Compo shall be translated. The tool first creates a small
instrument called McStas_Compo.instr consisting of
1. component Vitess input
2. component Compo
3. component Vitess output
This file is parsed to generate the C file McStas_Compo.c. The last step is to compile
the C-file and build the executable Vitess module McStas_compo. For both steps McStas
is used as for any other instrument. McStas_compo has to be moved to the directory
’MODULES’ that contains all VITESS executables.
Additionally, a file McStas_compo.tcl is created that contains (most of) what is
needed to get a GUI window in VITESS. To obtain that, the content of this file has to
added into ’vitess.tcl’. To make it accessible within the given GUI structure of VITESS,
it is necessary to add the name ’compo’ - NO capital letters ! - to one of the folders in
’proc makeModuleSets’ (beginning of ’vitess.tcl’).
The component Virtual input transfers all neutron parameters to the McStas defini-
tion of the co-ordinate system and the units used. (Of course Virtual output transfers it
back.) This means that ’Compo’ works with the McStas definition of co-ordinate system
and units, while it is used as a VITESS module. Be careful with axis labeling.
The original parameters of the component and its position have to be given. The
origin of this shift is the center of the end of the previous module, (as it is always the
case in VITESS).
It is important to notice that, as VITESS uses the standard output stream (stdout)
to send neutron events, all information printed to screen must use the error stream
stderr, so that all printf(...) and fprintf(stdout, ...) occurrences should be
changed manually into fprintf(stderr, ...).
To use the mcstas2vitess front-end, the program Perl should be available.
3.5.8. Translating and merging McStas results files (all text formats)
If you have been running a McStas simulation with a given text format output, but
finally plan to look at the results with an other plotter (e.g. you ran a simulation with
PGPLOT output and want to view it using Matlab), you may use
1 mcformat {file |dir} −d t a r g e t d i r −−format=TARGET FORMAT
53

to translate files into format TARGET FORMAT (e.g. NeXus). When given a directory,
the translation works recursively. The conversion works only for text files.
The --merge option may be used to merge similar files, e.g. obtained from grid
systems, just as if a longer run was achieved.
The --scan option may be used to reconstruct the scan data from a set of directo-
ries which vary by instrument parameters. For instance, you ran a scan, but finally
realized you should have prolonged it. Then simply simulate the missing bits, and ap-
ply mcformat -d scan_data --format=PGPLOT --scan step0 .. stepN. The result-
ing scan data is compatible with mcplot only when generating PGPLOT/McStas format.
You may conjugate this option with the --merge in order to add/merge similar data
sets before re-building the scan.
The data files are analyzed by searching keywords inside data files (e.g. ’Source’ for
the source instrument description file). If some file names or component names match
these keywords (e.g. using a file ’Source.psd’), the extracted metadata information may
be wrong, even though the data itself will be correct.
3.6. Data formats - Analyzing and visualizing the simulation
results
To analyze simulation results, one uses the same tools as for analyzing experimental
data, i.e. programs such as Matlab, NumPy, IDL. The output files from simulations are
usually simple text files containing headers and data blocks. If data blocks are empty
they may be accessed referring to an external file indicated in the header.
Each data file contains information about the simulation, the instrument, the param-
eters used, and of course the signal, the estimated error on the signal, and the number
of events used in each bin. Additionally, all data files indicate their first moment (mean
value) and second moment (half width) in the ’statistics’ field.
The available data formats are the legacy McStas (McCode) format, and the HD-
F/NeXus binary when the needed libraries are installed.
In order for the user to choose the data format, we recommend to set it using the
--format=FORMAT or alternatively via the MCSTAS FORMAT environment variable,
which will also make the front-end programs able to import and plot data and instrument
consistently (see Section 3.4).
Note that the neutron event counts in detectors are typically not very meaningful
except as a way to measure the performance of the simulation. Use the simulated
intensity instead whenever analyzing simulation data.
3.6.1. McStas and PGPLOT format
The McStas original format, which is equivalent to the PGPLOT format, is simply
columns of ASCII text that most programs should be able to read.
One-dimensional histogram monitors (time-of-flight, energy) write one line for each
histogram bin. Each line contains a number identifying the bin (i.e. the time-of-flight)
54
followed by three numbers: the simulated intensity, an estimate of the statistical error
as explained in section 2.2.1, and the number of neutron events for this bin.
Two-dimensional histogram monitors (position sensitive detectors) output Mlines of
Nnumbers representing neutron intensities, where Mand Nare the number of bins in
the two dimensions. The two-dimensional monitors also store the error estimates and
event counts as additional matrices.
Single-point monitors output the neutron intensity, the estimated error, and the neu-
tron event count as numbers on the terminal. (The results from a series of simulations
may be combined in a data file using the mcrun front-end as explained in section 3.5.2).
When using one- and two-dimensional monitors, the integrated intensities are written
to terminal as for the single-point monitor type, supplementing file output of the full
one- or two-dimensional intensity distribution. Both one- and two-dimensional monitor
output by default start with a header of comment lines, all beginning with the ‘#’
character. This header gives such information as the name of the instrument used
in the simulation, the values of any instrument parameters, the name of the monitor
component for this data file, etc. The headers may be disabled using the --data-only
option in case the file must be read by a program that cannot handle the headers.
In addition to the files written for each one- and two-dimensional monitor component,
another file (by default named mcstas.sim) is also created. This file is in a special Mc-
Stas ASCII format. It contains all available information about the instrument definition
used for the simulation, the parameters and options used to run the simulation, and the
monitor components present in the instrument. It is read by the mcplot front-end (see
section 3.5.4). This file stores the results from single monitors, but by default contains
only pointers (in the form of file names) to data for one- and two-dimensional monitors.
By storing data in separate files, reading the data with programs that do not know the
special McStas file format is simplified. The --file option may be used to store all data
inside the mcstas.sim file instead of in separate files.
3.6.2. NeXus format
The NeXus format [Nex] is a platform independent HDF binary data file. To have
McStas use it
1. the HDF and NeXus libraries must have been installed (libNeXus and headers)
2. the compilation of instruments must be done with the -DUSE_NEXUS -lNeXus flag
(see Section 4.3.5). This is automated with the mcrun tool (Section 3.5.2).
All results are saved in a single file, containing ’groups’ of data. To view such files,
install and use HDFView (or alternatively HDFExplorer). This Java viewer can show
content of all detectors, including metadata (attributes). Basic detector images may also
be generated.
55

3.7. Using computer Grids and Clusters
Parallelizing a computation is in general possible when dependencies between each com-
putation are not too strong. The situation of McStas is ideal since each neutron ray
can be simulated without interfering with other simulated neutron rays. Therefore each
neutron ray can be simulated independently on a set of computers.
When computing Nneutron rays with pcomputers, each computer will simulate N
p
neutrons. As a result there will be p·N
p=Nneutrons simulated. As a result, McStas
generates two kinds of data sets:
•intensity measurements, internally represented by three values (p0, p1, p2) where
p0,p1,p2are additive. Therefore the final value of p0is the sum of all local value
of p0computed on each node. The same rule applies for p1and p2. The evaluation
of the intensity errors σis performed using the final p0,p1, and p2arrays (see
Section 2.2.1).
•event lists: the merge of events is done by concatenation
McStas provides three methods in order to distribute computations on many comput-
ers.
•when using a set of nodes (grid, cluster or multi-cores), it is possible to distribute
simulations on a list of computers and multi-core machines (see section 3.7.1).
Results are automatically merged after completion. This method is very efficient,
and only requires SSH server to be installed/configured on slave machines. In
order to use an heterogeneous system, a C compiler should be optionally installed
on slave machines.
•when using an homogeneous computer cluster, each simulation (including scan
steps) may be computed in parallel using MPI. We recommend this method on
clusters (see section 3.7.2).
Last but not least, you may run simulations manually on a number of machines.
Once the distributed simulation have been completed, you may merge their results using
mcformat (see section 3.5.8) in order to obtain a set of files just as if it had been executed
on a single machine.
All of these methods can be used, when available, from mcgui.
3.7.1. Distribute mcrun simulations on grids, multi-cores and clusters (SSH
grid)
This method distributes simulations on a set of machines using ssh connections, using
a command such as mcrun --grid=4 .... Each of the scan steps is split and executed
on distant slave machines, sending the executable with scp, executing single simulations,
and then retrieving individual results on the master machine. These are then merged
using mcformat.
The mcrun script has been adapted to use transparently SSH grids. The syntax is:
56

•--grid=<number>: tells mcrun to use the grid over <number> nodes.
•--machines=<file>: defines a text file where the nodes which are to be used for
parallel computation are listed; by default, mcrun will look at $HOME/.mcstas-hosts
and MCSTAS/tools/perl/mcstas-hosts. When used on a single SMP machine
(multi-core/cpu), this option may be omitted.
•--force-compile: this option is required on heterogeneous systems. The C code
is sent to all slaves and simulation is compiled on each node before starting com-
putation. The default is to send directly the executable from the master node,
which only works on homogeneous systems. computation.
This method shows similar efficiency as MPI, but without MPI installation. It is
especially suited on multi-core machines, but may also be used on any set of distant
machines (grids), as well as clusters. For Windows master machines, we recommend the
installation of the PuTTY SSH client. The overhead is proportional to the number of
nodes and the amount of data files to transfer per simulation. It is usually larger than
the pure MPI method. We thus recommend to launch long runs on fewer nodes rather
than many short runs on many nodes.
Requirements and limitation (SSH grids)
1. A master machine with an SSH client, and McStas installation.
2. A set of machines (homogeneous or heterogeneous) with SSH servers.
3. On heterogeneous grids, a C compiler must also be installed on all slave nodes.
4. ssh access from the master node (where McStas is installed) to the slaves through
e.g. DSA keys without a password. These keys should be generated using the
command ssh-keygen. Run e.g. ssh-keygen -t dsa on master node, enter no
passphrase and add resulting .ssh/id dsa.pub to .ssh/authorized keys on all
the slave nodes. The key generation and registering mechanism may be done
automatically for the local machine from the Help menu/Install DSA key item of
mcgui.
5. The machine names listed in the file .mcstas-hosts in your home directory or
in the MCSTAS/tools/perl/mcstas-hosts on the master node, one node per line.
The --machines=<file> option enables to specify the hosts file to use. If it
does not exist, only the current machine will be used (for multi-processor/core
machines).
6. Without ssh keys, passwords will be prompted many times. To avoid this, we
recommend to use only the local machine (for multi-cores/cpu), i.e. do not use a
machine hosts file.
57

7. If your simulation/instrument requires data files (Powders, Sqw, source descrip-
tion, ...), these must be copied at the same level as the instrument definition. They
are sent to all slave nodes before starting each computation. Take care to limit
as much as possible the required data file volume in order to avoid large data
transfers.
8. Interrupting or sending Signals may fail during computations. However, simulation
scans can be interrupted as soon as the on-going computation step ends.
9. With heterogeneous systems, we recommend to use the mcrun --force-compile
command rather than McGUI, which may skip the required simulation compilation
on slaves.
3.7.2. Parallel computing (MPI)
The MPI support requires that MPICH (recommended), or alternatively LAM-MPI or
OpenMPI, is installed on a set of nodes. This usually also requires properly setup ssh
connections and keys as indicated in the ssh grid system (Section 3.7.1). Some OpenMPI
implementations do not recognize multi-cores as separate nodes. In this case, you should
use MPICH, or the SSH grid.
There are 3 methods for using MPI
•Basic usage requires to compile and run the simulation by hand (mpicc, mpirun).
This should be used when running LAM-MPI.
•A much simpler way is to use mcrun -c --mpi=NB_CPU ... which will recompile
and run MPICH.
•The McGUI interface supports MPICH from within the Run Dialog.
The MPI support is especially suited on clusters. As an alternative, the SSH grid
presented above (section 3.7.1) is very flexible and requires lighter configuration.
Requirements and limitation (MPI)
To use MPI you will need
1. A master machine with an SSH client/server, and McStas installation.
2. A set of Unix machines of the same architecture (binary compatible) with SSH
servers.
3. ssh access from the master node (where McStas is installed) to the slaves through
e.g. DSA keys without a password. These keys should be generated using the
command ssh-keygen. Run e.g. ssh-keygen -t dsa on master node, enter no
passphrase and add resulting .ssh/id dsa.pub to .ssh/authorized keys on all
the slave nodes. The key generation and registering mechanism may be done
automatically for the local machine from the Help menu/Install DSA key item of
mcgui.
58
4. The machine names listed in the file .mcstas-hosts in your home directory or
in the MCSTAS/tools/perl/mcstas-hosts on the master node, one node per line.
The --machines=<file> option enables to specify the hosts file to use. If it
does not exist, only the current machine will be used (for multi-processor/core
machines).
5. Without ssh keys, passwords will be prompted many times. To avoid this, we
recommend to use only the local machine (for multi-cores/cpu), i.e. do not use a
machine hosts file.
6. Signals are not supported while simulating with MPI (since asynchronous events
cannot be easily transmitted to all nodes). This means it is not possible to cancel
an on-going computation. However, simulation scans can be interrupted as soon
as the on-going computation step ends.
7. MPI must be correctly configured: if using ssh, you have to set ssh keys to avoid
use of passwords; if using rsh, you have to set a .rhosts file. On non-local
accounts, this procedure may fail and ssh always require passwords.
MPI Basic usage
To enable parallel computation, compile mcstas-generated C code with mpicc with the
flag -DUSE_MPI and run it using the wrapper of your MPI implementation (mpirun for
mpich or lammpi) :
1# generate a C−so u rce f i l e [ sim . c ]
2 mcstas sim . i n s t r
3
4# g en er at e an e x e c u t a b l e w ith MPI s up por t [ sim . mpi ]
5 mpicc −DUSE MPI −o sim . mpi sim . c
6
7# e x e c u te w i th p a r a l l e l p r o c e s s i n g o ve r <N>computers
8# h e r e you h av e t o l i s t t h e c om put er s you want t o u se
9# i n a f i l e [ m ac hin es . l i s t ] ( u s i n g mpich i m pl e m e nt a t i on )
10 # ( r e f e r t o MPI documentatio n f o r a c om pl et e d e s c r i p t i o n )
11 mpirun −m a c h i n e f i l e machines . l i s t −n<N>\
12 . / sim . mpi <instrument parameters>
13 . . .
If you don’t want to spread the simulation, run it as usual:
1 . / sim . mpi <i n s t r u m e n t par ame ter s>
3.7.3. McRun script with MPI support (mpich)
The mcrun script has been adapted to use MPICH implementation of MPI. Two new
options have been added:
59
•--mpi=<number>: tells mcrun to use MPI, and to spread the simulation over
<number> nodes
•--machines=<file>: defines a text file where the nodes which are to be used for
parallel computation are listed; by default, mcrun will look at $HOME/.mcstas-hosts
and MCSTAS/tools/perl/mcstas-hosts. When used on a single SMP machine
(multi-core/cpu), this option may be omitted.
When available, the MPI option will show up in the mcgui Run dialog. Specify the
number of nodes required.
Suppose you have four machines named node1 to node4. A typical machine list file,
machines.list looks like :
1 node1
2 node2
3 node3
4 node4
You can then spread a simulation sim.instr using mcrun :
1 mcrun −c−−mpi=4 −−machines=machines . l i s t \
2 sim . i n s t r <i n s t r u m e n t parameters>
Warning: when using mcrun with MPI, be sure to recompile your simulation with MPI
support (see -c flag of mcrun): a simulation compiled without MPI support cannot be
used with MPI, whereas a simulation compiled with MPI support can be used without
MPI.
3.7.4. McStas/MPI Performance
Theoretically, a computation which lasts Tseconds on a single computer, should lasts
at least T
pseconds when it is distributed over pcomputers. In practice, there will be
overhead time due to the split and merge operations.
•the split is immediate: constant time cost O(1)
•the merge is at worst linear against the number of computers:
–linear time cost : O(p) when saving an event list
–logarithmic time cost: O(log p) when not saving an event list
The efficiency of McStas using MPI has been tested on large clusters, up to 500 nodes.
The computation time decreases in the same proportion as the number of nodes, showing
an ideal efficiency. However, a small overhead may appear depending on the cluster
internal network load, which may be estimated at most of about 10-20 s. This overhead
comes from the spread and the fusion of the computations. For instance, spreading a
computation implies often an rsh or and ssh session to be opened on every node. To
reach the best efficiency, the computation time should not be lower than 30 seconds, or
the overhead time may become significant compared to total time.
60
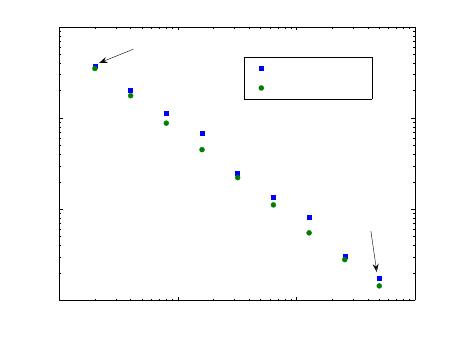
100101102103
100
101
102
103
Number of CPUs
Execution time [s]
McStas computation time using MPI
templateTOF simulation with 108 initial events
Total time
Computing time
6 min
1 sec
Figure 3.10.: McStas/MPI execution time as a function of computing nodes, with tem-
plateTOF instrument and 1e8 initial neutron events. Tests performed on
Lonestar@TACC (US Teragrid, 2008).
3.7.5. MPI and Grid Bugs and limitations
•Some header of output files might contain minor errors.
•The computation split does not take into account the speed or the load of nodes:
the overall time of a distributed computation is forced by the slowest node; for
optimal performance, the “cluster” should be homogeneous.
•Interacting with a running simulation (USR1 and USR2 signals) is disabled with
MPI.
61
4. The McStas kernel and meta-language
Instrument definitions are written in a special McStas meta-language which is translated
automatically by the compiler mcstas into a C program which is in turn compiled to
an executable that performs the simulation. The meta-language is custom-designed for
neutron scattering and serves two main purposes: (i) to specify the interaction of a
single neutron ray with a single optical component, and (ii) to build a simulation by
constructing a complete instrument from individual components.
For maximum flexibility and efficiency, the meta-language is based on C. Instrument
geometry, propagation of neutrons between the different components, parameters, data
input/output etc. is handled in the meta-language and by the compiler mcstas. Com-
plex calculations are written in C embedded in the meta-language description of the
components. However, it is possible to set up an instrument from existing components
and run a simulation without writing a single line of C code, working entirely in the
meta-language.
Apart from the meta-language, McStas also includes a number of C library functions
and definitions that are useful for neutron ray-tracing simulations. The definitions avail-
able for component developers are listed in appendix B. The list includes functions for
•Computing the intersection between a flight-path and various objects (such as
planes, cylinders, boxes and spheres)
•Functions for generating random numbers with various distributions
•Functions for reading or writing information from/to data files
•Convenient conversion factors between relevant units, etc.
The McStas meta-language was designed to be readable, with a verbose syntax and
explicit mentioning of otherwise implicit information. The recommended way to get
started with the meta-language is to start by looking at the examples supplied with
McStas, modifying them as necessary for the application at hand.
4.1. Notational conventions
Simulations generated by McStas use a semi-classical description of the neutron rays
to compute the neutron trajectory through the instrument and its interaction with the
different components. The effect of gravity is taken into account either in particular
components (e.g. Guide_gravity), or more generally when setting an execution flag
(-g) to perform gravitation computation. This latter setting is only an approximation
and may produce wrong results with some components.
62
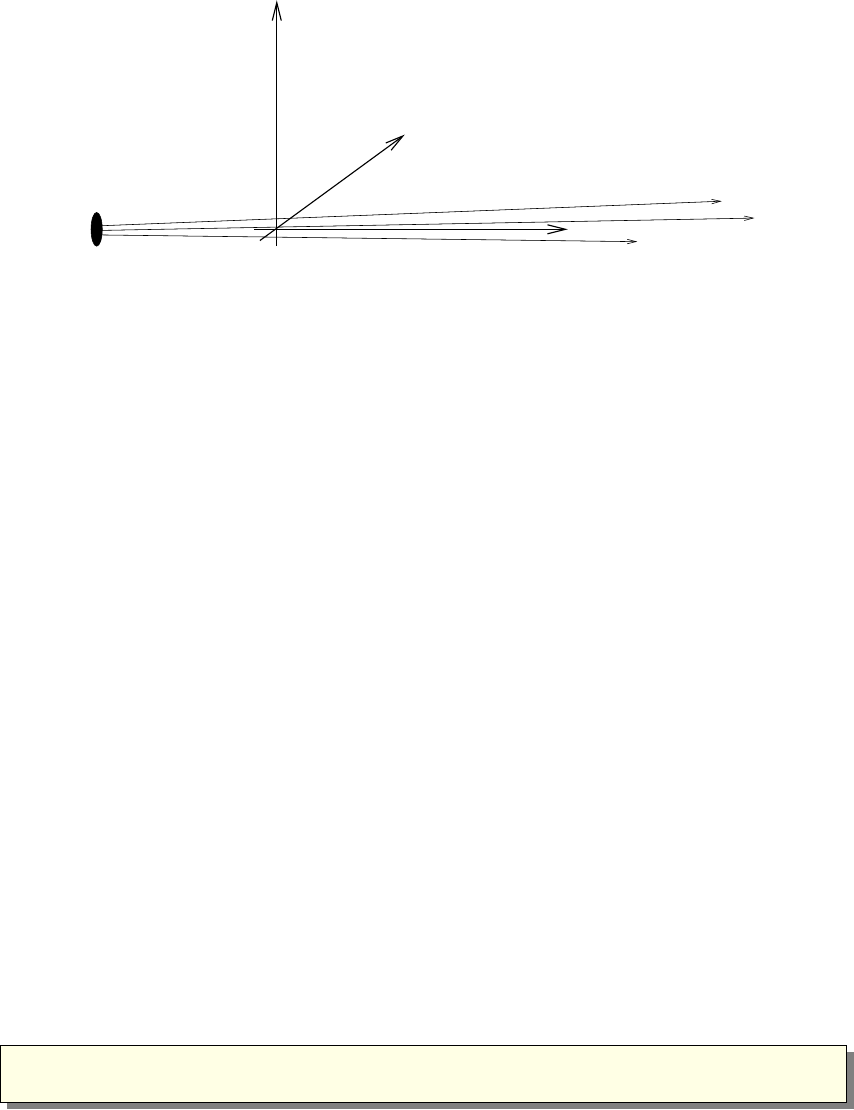
z
x
y
Figure 4.1.: conventions for the orientations of the axes in simulations.
An instrument consists of a list of components through which the neutron ray passes
one after the other. The order of components is thus significant since mcstas does not
automatically check which component is the next to interact with the neutron ray at a
given point in the simulation. Note that in case of a negative propagation time from
one component to the next, the neutron ray is by default absorbed as this is often an
indication of unphysical conditions.
The instrument is given a global, absolute coordinate system. In addition, every
component in the instrument has its own local coordinate system that can be given any
desired position and orientation (though the position and orientation must remain fixed
for the duration of a single simulation). By convention, the zaxis points in the direction
of the beam, the xaxis is perpendicular to the beam in the horizontal plane pointing left
as seen from the source, and the yaxis points upwards (see figure 4.1). Nothing in the
McStas metalanguage enforces this convention, but if every component used different
conventions the user would be faced with a severe headache! It is therefore necessary
that this convention is followed by users implementing new components.
In the instrument definitions, units of length (e.g. component positions) are given in
meters and units of angles (e.g. rotations) are given in degrees.
The state of the neutron is given by its position (x, y, z) in meters, its velocity
(vx, vy, vz) in meters per second, the time tin seconds, and the three spin parameters
(sx, sy, sz), and finally the neutron weight pdescribed in 2.
4.2. Syntactical conventions
Comments follow the C and C++ syntax
1/∗C s t y l e comment ∗/
2// C++ s t y l e comment
Keywords are not case-sensitive, for example “DEFINE”, “define”, and “dEfInE” are
all equivalent. However, by convention we always write keywords in uppercase to dis-
63
tinguish them from identifiers and C language keywords. In contrast, McStas identifiers
(names), like C identifiers and keywords, are case sensitive, another good reason to use
a consistent case convention for keywords. All McStas keywords are reserved, and thus
should not be used as C variable names. The list of these reserved keywords is shown in
table 4.1.
It is possible, and usual, to split the input instrument definition across several different
files. For example, if a component is not explicitly defined in the instrument, mcstas
will search for a file containing the component definition in the standard component
library (as well as in the current directory and any user-specified search directories, see
section 3.3.2). It is also possible to explicitly include another file using a line of the form
1 %i n c l u d e ” f i l e ”
Beware of possible confusion with the C language “#include” statement, especially
when it is used in C code embedded within the McStas meta-language. Files referenced
with “%include” are read when the instrument is translated into C by mcstas, and must
contain valid McStas meta-language input (and possibly C code). Files referenced with
“#include” are read when the C compiler generates an executable from the generated
C code, and must contain valid C.
Embedded C code is used in several instances in the McStas meta-language. Such
code is copied by mcstas into the generated simulation C program. Embedded C code
is written by putting it between the special symbols % and %, as follows:
1 %{
2// Embedded C code . . .
3 %}
The %{and %}must appear on a line by themselves (do not add comments after).
Additionally, if a “%include” statement is found within an embedded C code block,
the specified file will be included from the ’share’ directory of the standard component
library (or from the current directory and any user-specified search directories) as a C
library, just like the usual “#include”but only once. For instance, if many components
require to read data from a file, they may all ask for “%include "read_table-lib"”
without duplicating the code of this library. If the file has no extension, both .h
and .c files will be searched and included, otherwise, only the specified file will be
imported. The McStas’run-time’ shared library is included by default (equivalent to
“%include "mcstas-r"” in the DECLARE section). For an example of %include, see the
monitors/Monitor nD component. See also section 4.4 for insertion of full instruments
in instruments (instrument concatenation).
If the instrument description compilation fails, check that the keywords syntax is
correct, that no semi-colon (;) sign is missing (e.g. in C blocks and after an ABSORB
macro), and there are no name conflicts between instrument and component instances
variables.
64
Keyword Scope Meaning
ABSOLUTE I Indicates that the AT and ROTATED keywords are in the
absolute coordinate system.
AT I Indicates the position of a component in an instrument defi-
nition.
COPY I,C copy/duplicate an instance or a component definition.
DECLARE I,C Declares C internal variables.
DEFINE I,C Starts an INSTRUMENT or COMPONENT definition.
DEFINITION C Defines component parameters that are constants (#define).
DEPENDENCY C,I Indicates any library dependency required to create the in-
strument.
END I,C Ends the instrument or component definition.
SPLIT I Enhance incoming statistics by event repetition.
EXTEND I Extends a component TRACE section (plug-in).
FINALLY I,C Embeds C code to execute when simulation ends.
GROUP I Defines an exclusive group of components.
%include I,C Imports an instrument part, a component or a piece of C code
(when within embedded C).
JUMP I Iterative (loops) and conditional jumps.
INITIALIZE I,C Embeds C code to be executed when starting.
ITERATE I Defines iteration counter for JUMP.
MCDISPLAY C Embeds C code to display component geometry.
OUTPUT C Defines internal variables to be public and protected symbols
(usually all global variables and functions of DECLARE).
PARAMETERS C Defines a class of component parameter (DEFINITION, SET-
TING).
PREVIOUS C Refers to a previous component position/orientation.
RELATIVE I Indicates that the AT and ROTATED keywords are relative
to an other component.
REMOVABLE I Indicates that this component will be removed when the in-
strument is inserted into an other one using the %include
keyword.
ROTATED I Indicates the orientation of a component in an instrument
definition.
SAVE I,C Embedded C code to execute when saving data.
SETTING C Defines component parameters that are variables.
SHARE C Declares global functions and variables to be shared.
TRACE I,C Defines the instrument as a the component sequence.
WHEN I Condition for component activation and JUMP.
Table 4.1.: Reserved McStas keywords. Scope is ’I’ for instrument and ’C’ for component
definitions.
65
4.3. Writing instrument definitions
The purpose of the instrument definition is to specify a sequence of components, along
with their position and parameters, which together make up an instrument. Each com-
ponent is given its own local coordinate system, the position and orientation of which
may be specified by its translation and rotation relative to another component. An ex-
ample is given in section 4.3.10 and some additional examples of instrument definitions
can be found on the McStas web-page [Mcs] and in the example directory.
As a summary, the usual grammar for instrument descriptions is
1DEFINE INSTRUMENT name( parameters )
2DECLARE C code
3INITIALIZE C code
4TRACE components
5{FINALLY C code}
6END
4.3.1. The instrument definition head
1DEFINE INSTRUMENT name ( a 1 , a 2 , . . . )
This marks the beginning of the definition. It also gives the name of the instrument
and the list of instrument parameters. Instrument parameters describe the configuration
of the instrument, and usually correspond to setting parameters of the components, see
section 4.5. A motor position is a typical example of an instrument parameter. The
input parameters of the instrument constitute the input that the user (or possibly a
front-end program) must supply when the generated simulation is started.
By default, the parameters will be floating point numbers, and will have the C type
double (double precision floating point). The type of each parameter may optionally
be declared to be int for the C integer type or char * for the C string type. The
name string may be used as a synonym for char *, and floating point parameters
may be explicitly declared using the name double. The following example illustrates all
possibilities:
1DEFINE INSTRUMENT t e s t ( d1 , double d2 , int i , char ∗s1 , s t r i n g s 2 )
Here d1 and d2 will be floating point parameters of C type double,iwill be an integer
parameter of C type int, and s1 and s2 will be string parameters of C type char *.
The parameters of an instrument may be given default values. Parameters with default
values are called optional parameters, and need not be given an explicit value when
the instrument simulation is executed. When executed without any parameter value in
the command line (see section 3.4), the instrument asks for all parameter values, but
pressing the Return key selects the default value (if any). When used with at least one
parameter value in the command line, all non specified parameters will have their value
set to the default one (if any). A parameter is given a default value using the syntax
“param=value”. For example
66
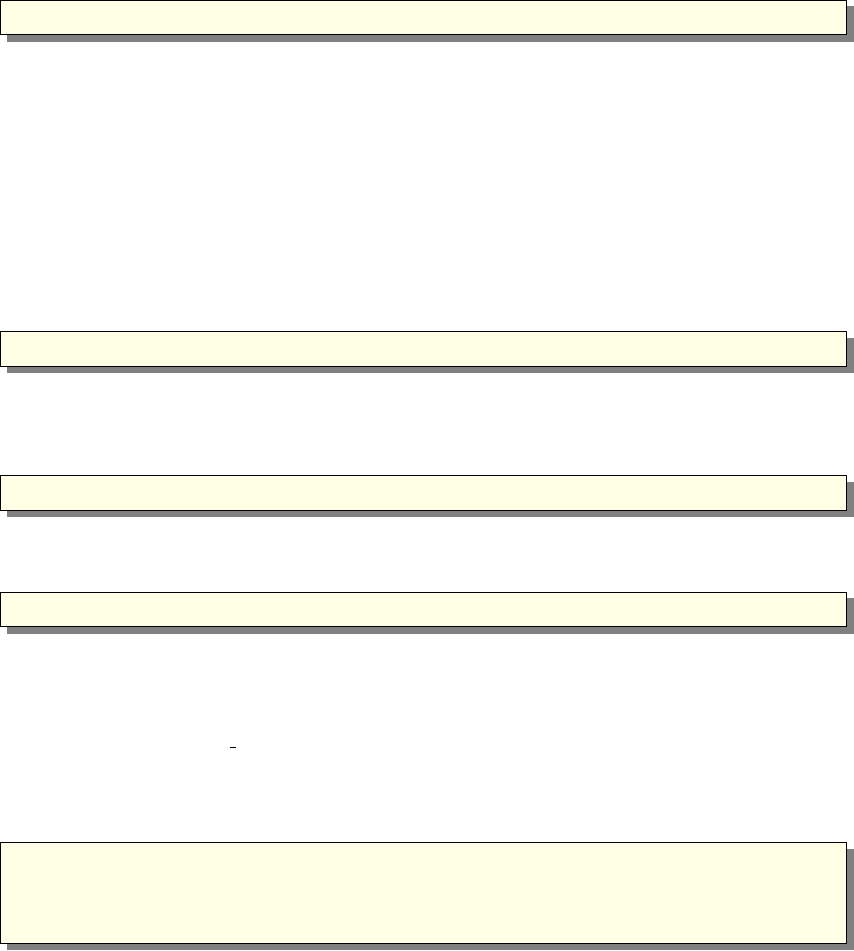
1DEFINE INSTRUMENT t e s t ( d1= 1 , s t r i n g s 2=” h e l l o ” )
Here d1 and d2 are optional parameters and if no value are given explicitly, “1” and
“hello” will be used.
Optional parameters can greatly increase the convenience for users of instruments for
which some parameters are seldom changed or of unclear signification to the user. Also,
if all instrument parameters have default values, then the simple command mcdisplay
test.instr will show the instrument view without requesting any other input, which is
usually a good starting point to study the instrument design.
4.3.2. The DEPENDENCY line
1 DEPENDENCY ”−lLIB1 −lLIB2 . . ”
If you make use of external library calls in your instrument, you may indicate the
dependency list to be used for the compilation of the instrument, as a single DEPEN-
DENCY keyword and a string argument, all on a single line such as:
1 DEPENDENCY ”−l g s l −lgslcblas”
The concatenation of all found dependencies from the instrument, but also from all used
components, will be printed to the terminal (stdout) as
1 CFLAGS=−l g s l −lgslcblas
This line is interpreted by mcrun (see section 3.5.2) and passed to the compiler. It must
be indicated just before the DECLARE section. This line is optional, and if omitted you
may need to manually link the instrument with the libraries and add the proper library
names to the MCSTAS CFLAGS or CFLAGS environment variables.
4.3.3. The DECLARE section
1DECLARE
2 %{
3// C d e c l a r a t i o n s o f g l o b a l v a r i a b l e s e tc . . . .
4 %}
This gives C declarations that may be referred to in the rest of the instrument def-
inition. A typical use is to declare global variables or small functions that are used
elsewhere in the instrument. The %include ’’file’’ keyword may be used to im-
port a specific component definition or a part of an instrument. Variables defined
here are global, and may conflict with internal McStas variables, specially symbols
like x,y,z,sx,sy,sz,vx,vy,vz,t and generally all names starting with mc should be
avoided. If you can not compile the instrument, this may be the reason. The DECLARE
section is optional.
67
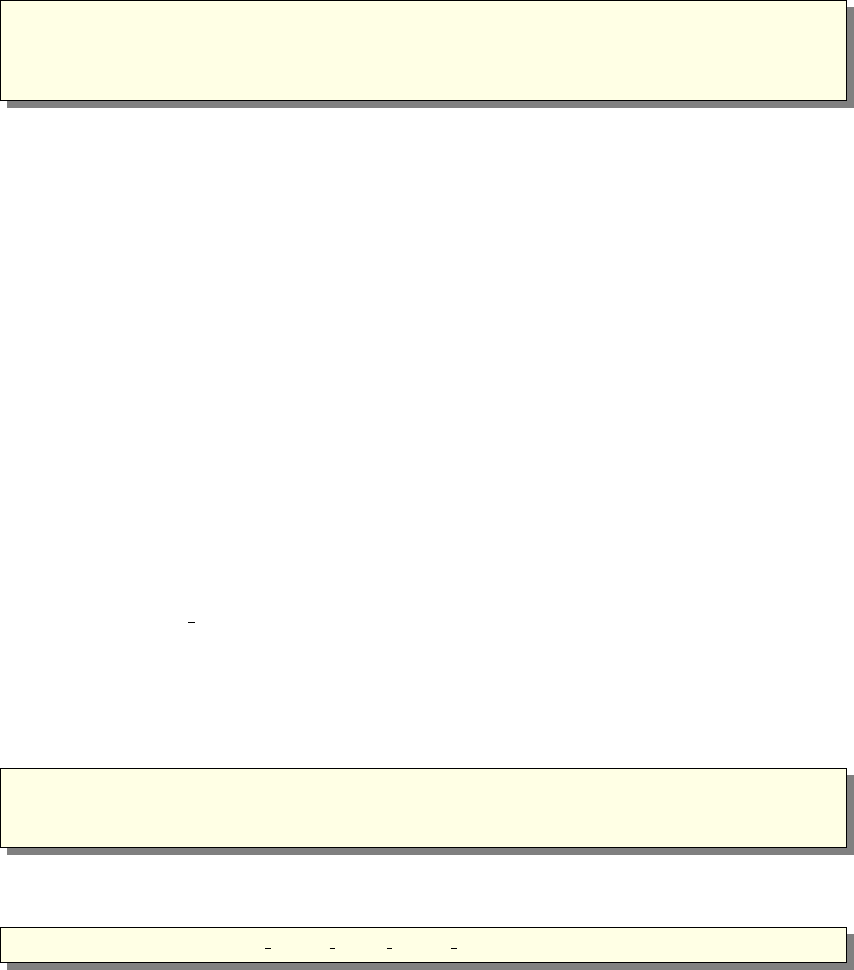
4.3.4. The INITIALIZE section
1INITIALIZE
2 %{
3// C initializations .
4 %}
This gives code that is executed when the simulation starts. This section is optional.
Instrument setting parameters may be modified in this section (e.g. doing tests or
automatic settings).
4.3.5. The NEXUS extension
The NeXus format [Nex] requires to link the simulation to additional libraries (HDF
and NeXus) which must have been pre-installed. Preferably, McStas should have been
installed with the ./configure --with-nexus on Unix/Linux systems. To activate the
NeXus output, the compilation of the instrument must be done with flag -DUSE_NEXUS
-lNeXus. The resulting executable is no longer portable.
The default NeXus format is HDF5 with compression.
You may choose the name of the output file with the -f filename option from the
instrument executable or mcrun (see Sections 3.4, 3.5.2 and Table 3.2).
Then, the output format is chosen as usual with the --format=NeXus option when
launching the simulation. All output files are stored in the output filename, as well
as the instrument description itself. Other formats are still available. When run on
a distributed system (e.g. MPI), detectors are gathered, but list of events (see e.g.
component Virtual output) are stored as one data set per node.
4.3.6. The TRACE section
As a summary, the usual grammar for component instances within the instrument
TRACE section is
1COMPONENT name = comp( param e ters )
2AT (...) [RELATIVE [ r e f e r e n c e |PREVIOUS]|ABSOLUTE]
3{ROTATED {RELATIVE [ r e f e r e n c e |PREVIOUS]|ABSOLUTE} }
The TRACE keyword starts a section giving the list of components that constitute the
instrument. Components are declared like this:
1COMPONENT name = comp( p 1 = e 1 , p 2 = e 2 , . . . )
This declares a component named name that is an instance of the component definition
named comp. The parameter list gives the setting and definition parameters for the
component. The expressions e1, e2, . . . define the values of the parameters. For setting
parameters arbitrary ISO-C expressions may be used, while for definition parameters
only constant numbers, strings, names of instrument parameters, or names of C iden-
tifiers are allowed (see section 4.5.1 for details of the difference between definition and
68
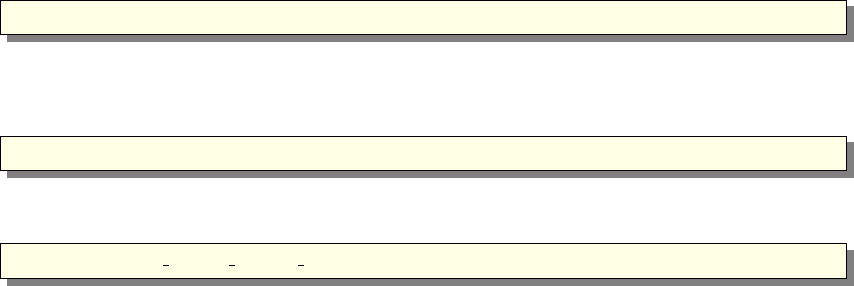
setting parameters). To assign the value of a general expression to a definition parame-
ter, it is necessary to declare a variable in the DECLARE section, assign the value to the
variable in the INITIALIZE section, and use the variable as the value for the parameter.
The McStas program takes care to rename parameters appropriately in the output so
that no conflicts occur between different component definitions or between component
and instrument definitions. It is thus possible (and usual) to use a component definition
multiple times in an instrument description.
Beware about variable type conversion when setting numerical parameter values, as
in p1=12/1000. In this example, the parameter p1 will be set to 0 as the division of
the two integers is indeed 0. To avoid that, use explicitly floating type numbers as in
p1=12.0/1000.
The compiler mcstas will automatically search for a file containing a definition of the
component if it has not been declared previously. The definition is searched for in a file
called “name.comp”. See section 3.3.2 for details on which directories are searched. This
facility is often used to refer to existing component definitions in standard component
libraries. It is also possible to write component definitions in the main file before the
instrument definitions, or to explicitly read definitions from other files using %include
(not within embedded C blocks).
The physical position of a component is specified using an AT modifier following the
component declaration:
1AT ( x , y , z ) RELATIVE name
This places the component at position (x, y, z) in the coordinate system of the previ-
ously declared component name. Placement may also be absolute (not relative to any
component) by writing
1AT ( x , y , z ) RELATIVE ABSOLUTE
Any C expression may be used for x,y, and z. The AT modifier is required. Rotation is
achieved similarly by writing
1ROTATED ( phi x , phi y , p h i z ) RELATIVE name
This will result in a coordinate system that is rotated first the angle φx(in degrees)
around the xaxis, then φyaround the yaxis, and finally φzaround the zaxis. Rotation
may also be specified using ABSOLUTE rather than RELATIVE. If no rotation is specified,
the default is (0,0,0) using the same relative or absolute specification used in the AT
modifier. We strongly recommend to apply all rotations of an instrument description
on Arm class components only, acting as goniometers, and position the optics on top of
these. This usually makes it much easier to orient pieces of the instrument, and avoid
positioning errors.
The position of a component is actually the origin of its local coordinate system.
Usually, this is used as the input window position (e.g. for guide-like components), or
the center position for cylindrical/spherical components.
The PREVIOUS keyword is a generic name to refer to the previous component in the sim-
ulation. Moreover, the PREVIOUS(n) keyword will refer to the n-th previous component,
69
starting from the current component, so that PREVIOUS is equivalent to PREVIOUS(1).
This keyword should be used after the RELATIVE keyword, but not for the first component
instance of the instrument description.
1AT ( x , y , z ) RELATIVE PREVIOUS
2ROTATED ( phi x , p hi y , p h i z ) RELATIVE PREVIOUS(2)
Invalid PREVIOUS references will be assumed to be absolute placement.
The order and position of components in the TRACE section does not allow compo-
nents to overlap, except for particular cases (see the GROUP keyword below). Indeed,
many components of the McStas library start by propagating the neutron event to the
beginning of the component itself. Anyway, when the corresponding propagation time
is found to be negative (i.e. the neutron ray is already after or aside the component,
and has thus passed the ’active’ position), the neutron event is ABSORBed, resulting in
a zero intensity and event counts after a given position. The number of such removed
neutrons is indicated at the end of the simulation. Getting such warning messages is
an indication that either some components overlap, or some neutrons are getting out-
side of the simulation, for instance this usually happens after a monochromator, as
the non-reflected beam is indeed lost. A special warning appears when no neutron ray
has reached some part of the simulation. This is usually the sign of either overlapping
components or a very low intensity.
For experienced users, we recommend as well the usage of the WHEN and EXTEND key-
words, as well as other syntax extensions presented in section 4.4 below.
4.3.7. The SAVE section
1SAVE
2 %{
3// C c ode t o e x e c u t e each t ime a t emp orary s ave i s r e q u i r e d . . .
4 %}
This gives code that will be executed when the simulation is requested to save data, for
instance when receiving a USR2 signal (on Unix systems), or using the Progress_bar
component with intermediate savings. It is also executed when the simulation ends.
This section is optional.
4.3.8. The FINALLY section
1FINALLY
2 %{
3// C c ode t o e x e c u t e a t end o f s i m u l a t i o n
4 %}
This gives code that will be executed when the simulation has ended. When existing,
the SAVE section is first executed. The FINALLY section is optional. A simulation may be
requested to end before all neutrons have been traced when receiving a TERM or INT
signal (on Unix systems), or with Control-C, causing code in FINALLY to be evaluated.
70
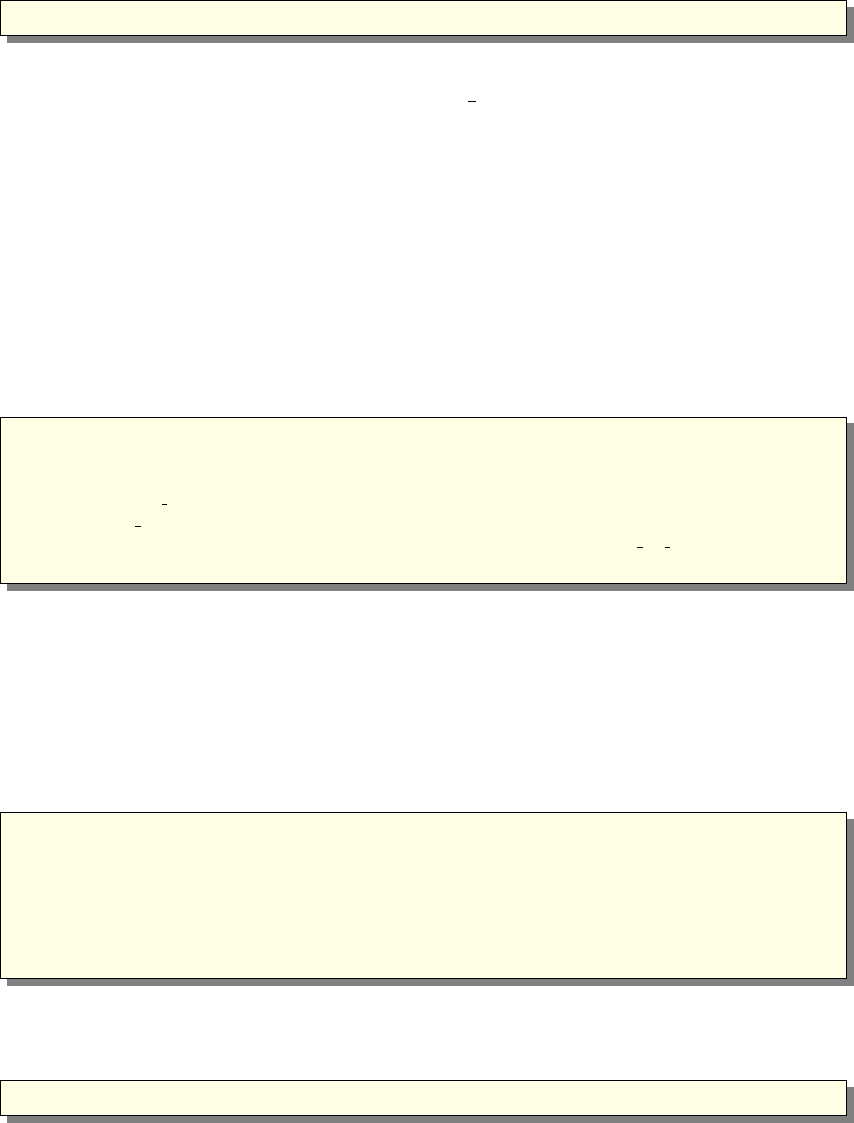
4.3.9. The end of the instrument definition
The end of the instrument definition must be explicitly marked using the keyword
1 END
4.3.10. Code for the instrument vanadium example.instr
A commented instrument definition taken from the examples directory is here shown as
an example of the use of McStas.
4.4. Writing instrument definitions - complex arrangements
and syntax
In this section, we describe some additional ways to build instruments using groups,
code extension, conditions, loops and duplication of components.
As a summary, the nearly complete grammar definition for component instances within
the instrument TRACE section is:
1{SPLIT}COMPONENT name = comp ( parame t ers ) {WHEN condition}
2AT (...) [RELATIVE [ r e f e r e n c e |PREVIOUS]|ABSOLUTE]
3{ROTATED {RELATIVE [ r e f e r e n c e |PREVIOUS]|ABSOLUTE} }
4{GROUP group name}
5{EXTEND C code}
6{JUMP [ r e f e r e n c e |PREVIOUS|MYSELF|NEXT] [ITERATE numbe r o f t i m e s |WHEN
condition ] }
4.4.1. Embedding instruments in instruments TRACE
The %include insertion mechanism may be used within the TRACE section, in order to
concatenate instruments together. This way, each DECLARE, INITIALIZE, SAVE, and
FINALLY C blocks, as well as instrument parameters from each part are concatenated.
The TRACE section is made of inserted COMPONENTS from each part. In principle,
it is then possible to write an instrument as:
1DEFINE concatenated ()
2TRACE
3
4 %i n c l u d e ” p ar t 1 . i n s t r ”
5 %i n c l u d e ” p ar t 2 . i n s t r ”
6
7END
where each inserted instrument is a valid full instrument. In order to avoid some com-
ponents to be duplicated - e.g. Sources from each part - a special syntax in the TRACE
section
1REMOVABLE COMPONENT a=...
71
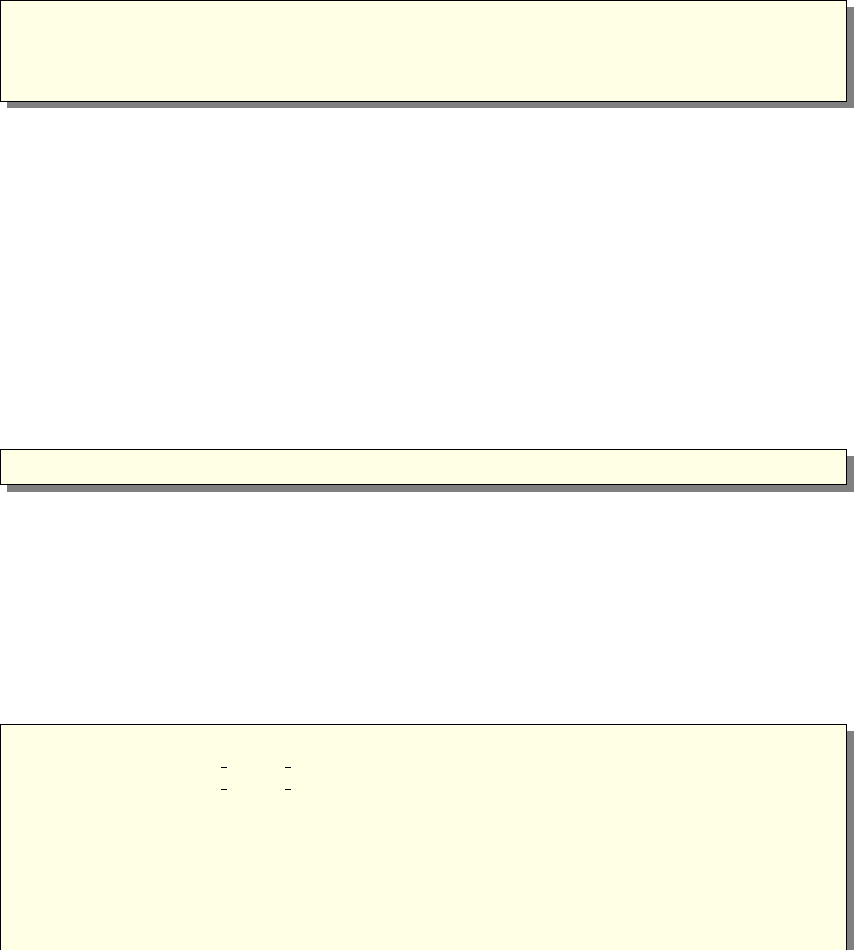
marks the component aas removable when inserted. In principle, inserted instruments
may themselves use %include.
4.4.2. Groups and component extensions - GROUP - EXTEND
It is sometimes desirable to slightly modify an existing component of the McStas library.
One would usually make a copy of the component, and extend the code of its TRACE
section. McStas provides an easy way to change the behavior of existing components in
an instrument definition without duplicating files, using the EXTEND modifier
1EXTEND
2 %{
3// C c od e e x e c u t e d a f t e r t h e component TRACE s e c t i o n . . .
4 %}
The embedded C code is appended to the component TRACE section, and all its internal
variables (as well as all the DECLARE instrument variables, except instrument parameters)
may be used. To use instrument parameters, you should copy them into global variables
in the DECLARE instrument section, and refer to these latter. This component dec-
laration modifier is of course optional. You will find numerous usage examples, and in
particular in the Sources section of the Component manual.
In some peculiar configurations it is necessary to position one or more groups of com-
ponents, nested, in parallel, or overlapping. One example is a multiple crystal monochro-
mator. One would then like the neutron ray to interact with one of the components of
the group and then continue.
In order to handle such arrangements without removing neutrons, groups are defined
by the GROUP modifier (after the AT-ROTATED positioning):
1GROUP name
to all involved component declarations. All components of the same named group are
tested one after the other, until one of them interacts (uses the SCATTER macro). The
selected component acts on the neutron ray, and the rest of the group is skipped. Such
groups are thus exclusive (only one of the elements is active).
Within a GROUP,all EXTEND sections of the group are executed. In order to discriminate
components that are active from those that are skipped, one may use the SCATTERED
flag, which is set to zero when entering each component or group, and incremented when
the neutron is SCATTERed, as in the following example
1COMPONENT name0 = comp (
2 p 1 = e 1 ,
3 p 2 = e 2 ,
4 ...)
5AT ( 0 , 0 , 0 ) ABSOLUTE
6
7COMPONENT name1 = comp . . .
8AT (...) ROTATED (...)
9
10 GROUP GroupName EXTEND
72
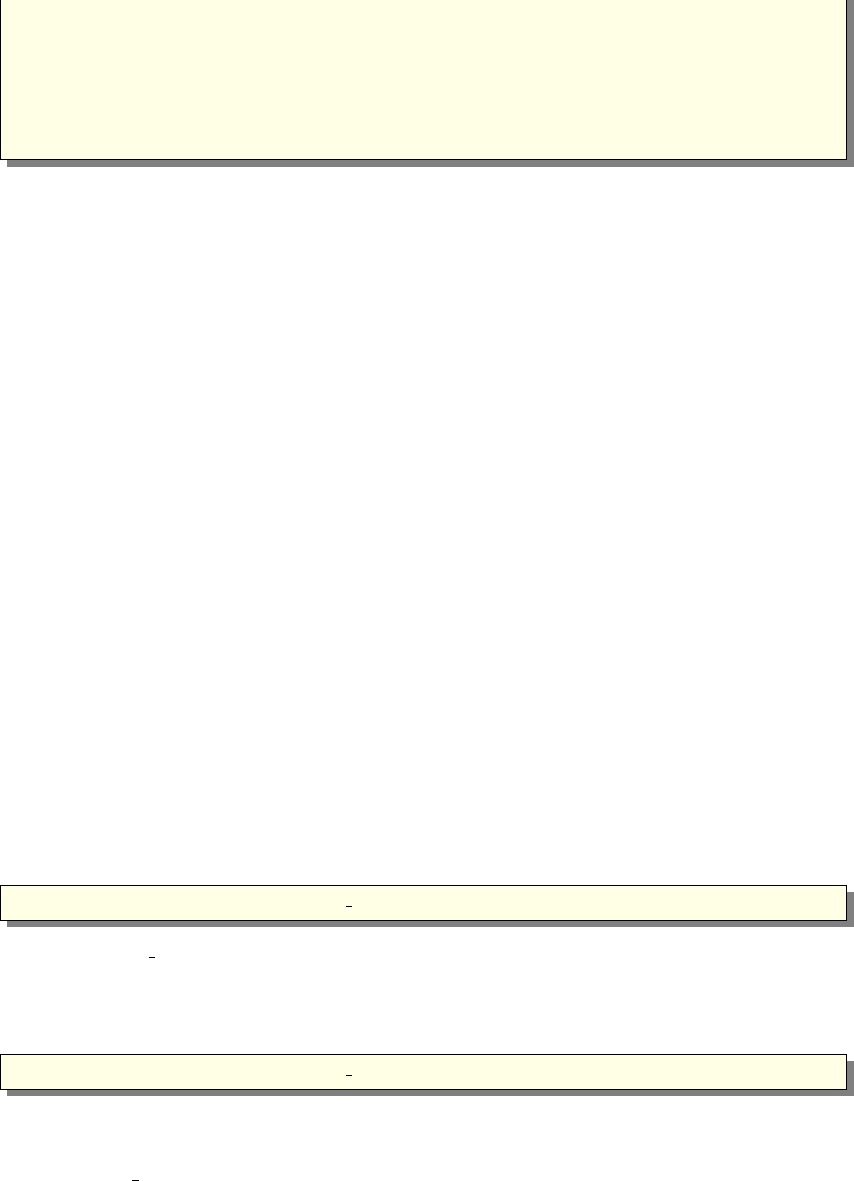
11 %{
12 i f (SCATTERED) p r i n t f ( ” I s c a t t e r ” ) ; else p r i n t f ( ” I do not s c a t t e r ” ) ;
13 %}
14
15 COMPONENT}name2 = comp . . .
16 AT (...) ROTATED (...)
17 GROUP GroupName
Components name1 and name2 are at the same position. If the first one intercepts the
neutron (and has a SCATTER within its TRACE section), the SCATTERED variable
becomes true, the code extension will result in printing ”I scatter”, and the second
component will be skipped. Thus, we recommend to make use of the SCATTER keyword
each time a component ’uses’ the neutron (scatters, detects, . . . ) within component
definitions (see section 4.5). Also, the components to be grouped should be consecutive
in the TRACE section of the instrument, and the GROUPed section should not contain
components which are not part of the group.
A usage example of the GROUP keyword can be found in the
Neutron site/ILL/ILL_H15_IN6 instrument from the mcgui, to model 3 monochroma-
tors.
Combining EXTEND, GROUP and WHEN can result in unexpected behavior. Please
read the related warning at the end of section 4.4.4.
4.4.3. Duplication of component instances - COPY
Often, one has a set of similar component instances in an instrument. These could be e.g.
a set of identical monochromator blades, or a set of detectors or guide elements. Together
with JUMPs (see below), there is a way to copy a component instance, duplicating
parameter set.
Position (AT) and rotation (ROTATED) specification must be explicitly entered in
order to avoid component overlapping, and it is futher recommended to explicitly set
any EXTEND, GROUP, JUMP and WHEN keyword to each mother or copied instance.
But BEWARE, advanced combinations of (many) keywords may introduce unexpected
behaviour.
The syntax for instance copy is
1COMPONENT name = COPY ( instance name )
where instance name is the name of a preceding component instance in the instrument.
It may be ’PREVIOUS’ as well.
If you would like to change only some of the parameters in the instance copy, you may
write, e.g.:
1COMPONENT name = COPY ( instance name ) ( par1 =0, par2 =1)
which will override the original instance parameter values. This possibility to over-
ride parameters is very useful in case of describing e.g. sample environments using
the Isotropic Sqw and PowderN components, which allow concentric geometry (first
73
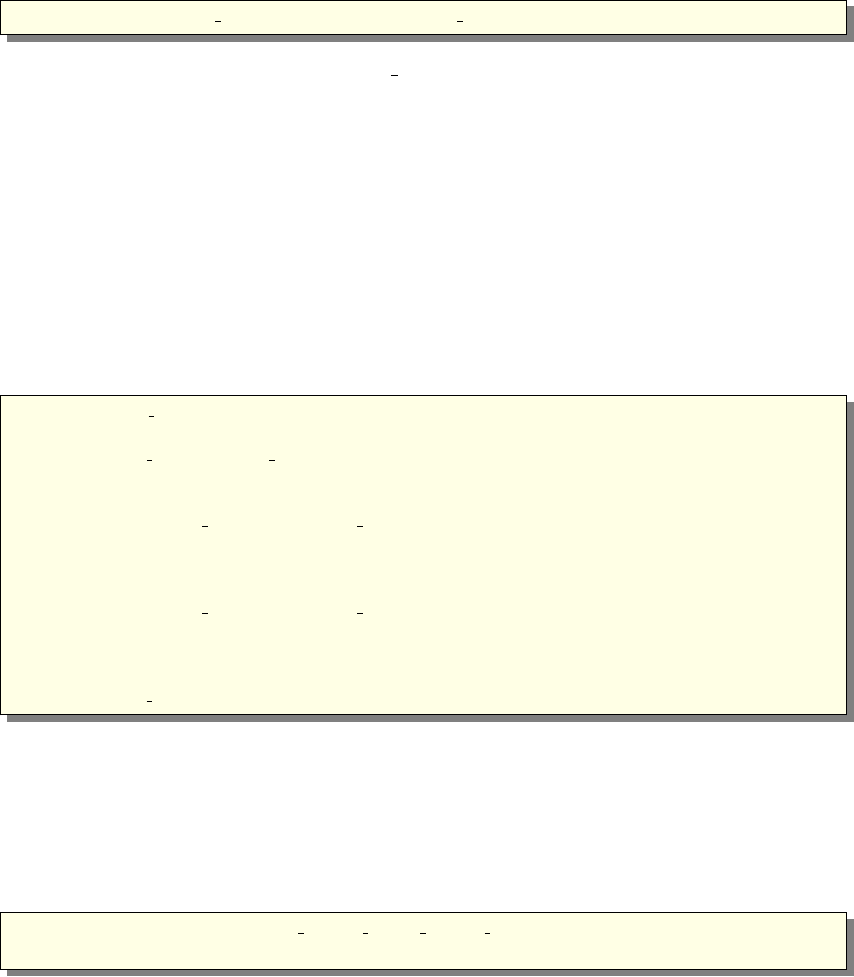
instance must have concentric = 1 and the second concentric = 0). In case EX-
TEND, GROUP, JUMP and WHEN keywords are defined for the copied instance, these
will override the settings from the copied instance.
In the case where there are many duplicated components all originating from the same
instance, there is a mechanism for automating copied instance names:
1COMPONENT COPY( root name ) = COPY( instance name )
will concatenate a unique number to root name, avoiding name conflicts. As a side effect,
referring to this component instance (for e.g. further positioning) is not straight forward
as the name is determined by mcstas and does not depend completely on the user’s
choice, even though the PREVIOUS keyword may still be used. We thus recommend to
use this naming mechanism only for components which should not be referred to in the
instrument.
This automatic naming may be used anywhere in the TRACE section of the instru-
ment, so that all components which do not need further referring may be labeled as
COPY(Origin).
As an example, we show how to build a guide made of equivalent elements. Only the
first instance of the Guide component is defined, whereas following instances are copies
of that definition. The instance name of Guide components is set automatically.
1COMPONENT CG In = Arm ( ) AT (...)
2
3COMPONENT CG 1 = G u i d e g r a v i t y ( l=L/n , m=1 , . . . )
4AT ( 0 , 0 , 0 ) RELATIVE PREVIOUS
5
6COMPONENT COPY(CG 1 ) = COPY( CG 1 )
7AT ( 0 , 0 , L/n+d ) RELATIVE PREVIOUS
8ROTATED ( 0 , ( L/n+d ) /R∗180/PI , 0) RELATIVE PREVIOUS
9
10 COMPONENT COPY(CG 1 ) = COPY( CG 1 )
11 AT ( 0 , 0 , L/n+d ) RELATIVE PREVIOUS
12 ROTATED ( 0 , ( L/n+d ) /R∗180/PI , 0) RELATIVE PREVIOUS
13 . . .
14 COMPONENT CG Out = Arm( ) AT ( 0 , 0 , L/n ) RELATIVE PREVIOUS
4.4.4. Conditional components - WHEN
One of the most useful features of the extended McStas syntax is the conditional WHEN
modifier. This optional keyword comes before the AT-ROTATED positioning. It basi-
cally enables the component only when a given condition is true (non null).
1COMPONENT name = comp ( p 1 = e 1 , p 2 = e 2 , . . . )
2WHEN condition
The condition has the same scope as the EXTEND modifier, i.e. may use component
internal variables as well as all the DECLARE instrument variables.
74
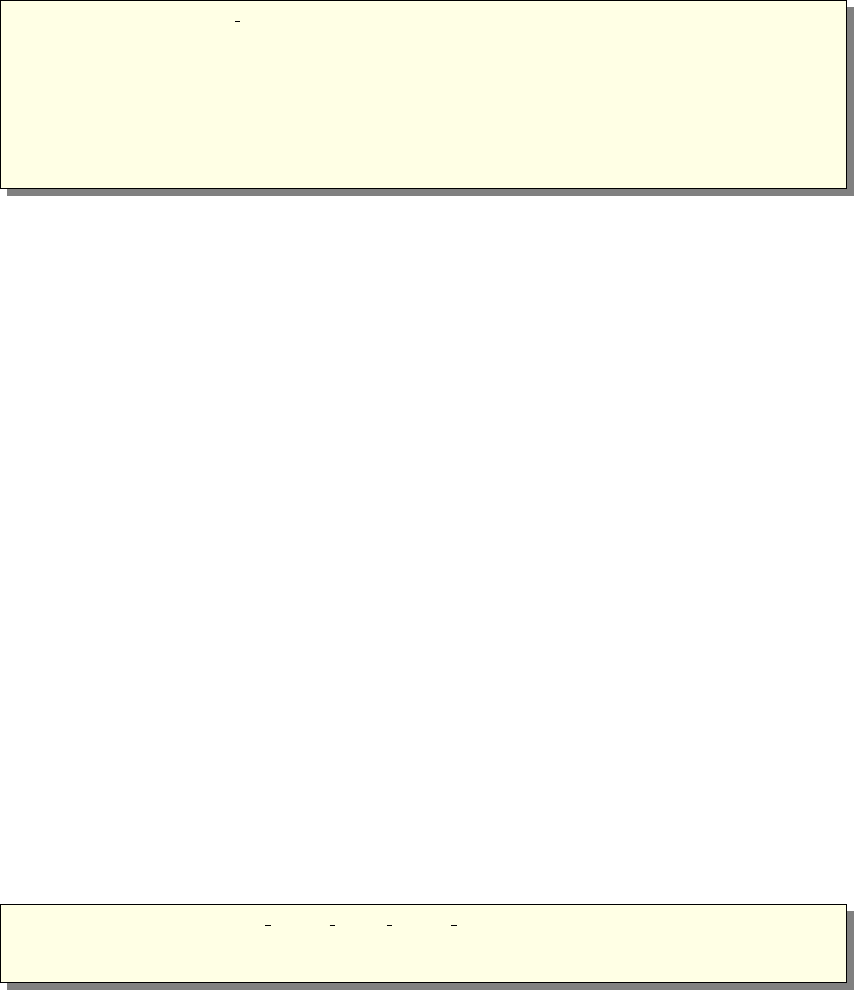
Usage examples could be to have specific monitors only sensitive to selected processes,
or to have components which are only present under given circumstances (e.g. removable
guide or radial collimator), or to select a sample among a set of choices.
In the following example, an EXTEND block sets a condition when a scattering event
is encountered, and the following monitor is then activated.
1COMPONENT Sample = V sample ( . . . ) AT . . .
2EXTEND
3 %{
4i f (SCATTERED) f l a g =1; else f l a g =0;
5 %}
6
7COMPONENT MyMon = Monitor ( . . . ) WHEN ( f l a g ==1)
8AT . . .
The WHEN keyword only applies to the TRACE section and related EXTEND blocks
of instruments/components. Other sections (INITIALIZE, SAVE, MCDISPLAY, FI-
NALLY) are executed independently of the condition. As a side effect, the 3D view of
the instrument (mcdisplay) will show all components as if all conditions were true.
Also, the WHEN keyword is a condition for GROUP. This means that when the WHEN is
false, the component instance is not active in the GROUP it belongs to.
A usage example of the WHEN keyword can be found in the
Neutron site/ILL/ILL_TOF_Env instrument from the mcgui, to monitor neutrons de-
pending on their fate.
WARNING: Combining WHEN, EXTEND and GROUP can result in unexpected
behavior, please use with caution! Let for instance a GROUP of components all have
the same WHEN condition, i.e. if the WHEN condition is false, none of the elements
SCATTER, meaning that all neutrons will be ABSORBed. As a solution to this
problem, we propose to include an EXTENDed Arm component in the GROUP, but
with the opposite WHEN condition and a SCATTER keyword in the EXTEND section.
This means that when none of the other GROUP elements are present, the Arm will be
present and SCATTER.
4.4.5. Component loops and non sequential propagation - JUMP
There are situations for which one would like to repeat a given component many times,
or under a given condition. The JUMP modifier is meant for that and should be placed
after the positioning, GROUP and EXTEND. This breaks the sequential propagation
along components in the instrument description. There may be more than one JUMP
per component instance.
The jump may depend on a condition:
1COMPONENT name = comp( p 1 = e 1 , p 2 = e 2 , . . . )
2AT (...)
3JUMP r e f e r e n c e WHEN condition
in which case the instrument TRACE will jump to the reference when condition is
true.
75
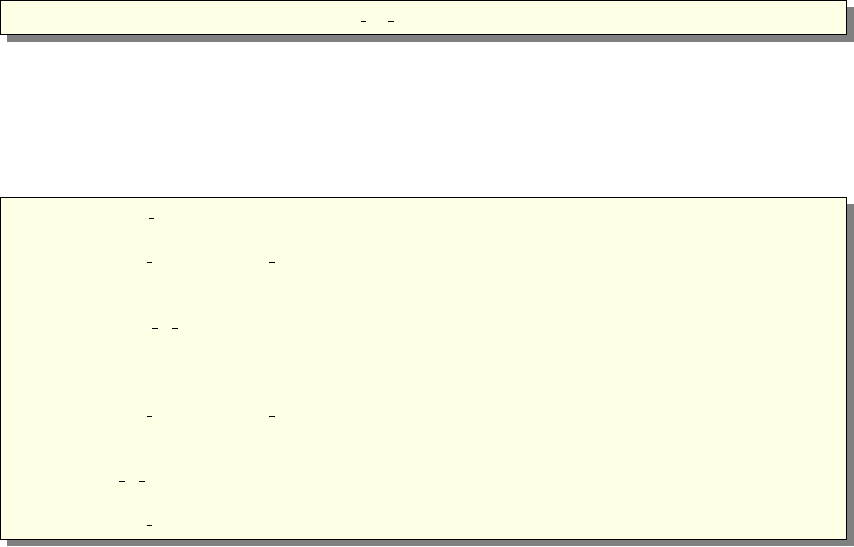
The reference may be an instance name, as well as PREVIOUS, PREVIOUS(n),
MYSELF, NEXT, and NEXT(n), where nis the index gap to the target either backward
(PREVIOUS) or forward (NEXT), so that PREVIOUS(1) is PREVIOUS and NEXT(1)
is NEXT. MYSELF means that the component will be iterated as long as the condition
is true. This may be a way to handle multiple scattering, if the component has been
designed for that.
The jump arrives directly inside the target component, in the local coordinate system
(i.e. without applying the AT and ROTATED keywords). In order to control better the
target positions, it is required that, except for looping MYSELF, the target component
type should be an Arm.
There is a more general way to iterate components, which consists in repeating the
loop for a given number of times.
1JUMP r e f e r e n c e ITERATE n u m ber of times
This method is specially suited for very long curved guides of similar components, but in
order to take into account rotation and translation between guide sections, the iterations
are performed between Arm’s.
In the following example for a curved guide made on n= 500 elements of length Lon
a curvature radius R, with gaps dbetween elements, we simply write:
1COMPONENT CG In = Arm ( ) AT (...)
2
3COMPONENT CG 1 = G u i d e g r a v i t y ( l=L/n , m=1 , . . . )
4AT ( 0 , 0 , 0 ) RELATIVE PREVIOUS
5
6COMPONENT C G 2 Po siti on = Arm ( )
7AT ( 0 , 0 , L/n+d ) RELATIVE PREVIOUS
8ROTATED ( 0 , ( L/n+d ) /R∗180/PI , 0) RELATIVE PREVIOUS
9
10 COMPONENT CG 2 = G u i d e g r a v i t y ( l=L/n , m=1 , . . . )
11 AT ( 0 , 0 , 0 ) RELATIVE PREVIOUS
12 ROTATED ( 0 , ( L/n+d ) /R∗180/PI , 0) RELATIVE PREVIOUS
13 JUMP CG 2 Position ITERATE n
14 . . .
15 COMPONENT CG Out = Arm( ) AT ( 0 , 0 , L/n ) RELATIVE PREVIOUS
Similarly to the WHEN modifier (see section 4.4.4), JUMP only applies within the TRACE
section of the instrument definition. Other sections (INITIALIZE, SAVE, MCDISPLAY,
FINALLY) are executed independently of the jump. As a side effect, the 3D view of the
instrument (mcdisplay) will show components as if there was no jump. This means that
in the following example, the very long guide 3D view only shows a single guide element.
It is not recommended to use the JUMP inside GROUPs, as the JUMP condition/counter
applies to the component instance within its group.
We would like to emphasize the potential errors originating from such jumps. Indeed,
imbricating many jumps may lead to situations were it is difficult to understand the flow
of the simulation. We thus recommend the usage of JUMPs only for experienced and
cautious users.
76
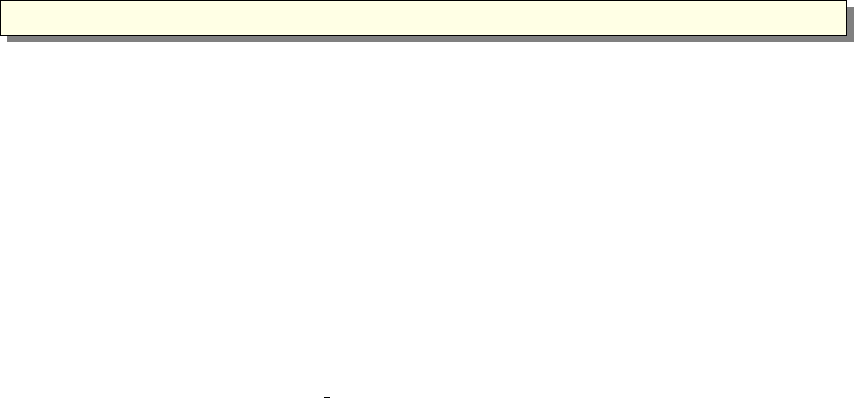
4.4.6. Enhancing statistics reaching components - SPLIT
The following method applies when the incoming neutron event distribution is considered
to be representative of the real beam, but neutrons are lost in the course of propagation
(with low efficiency processes, absorption, etc). Then, one may think that it’s a pity to
have so few events reaching the ’interesting’ part of the instrument (usually close to the
end of the instrument description). If some components make extensive use of random
numbers (MC choices), they shuffle this way the distributions, so that identical incoming
events will not produce the same outgoing event. In this case, you may use the SPLIT
keyword with the syntax
1SPLIT rCOMPONENT name = comp ( . . . )
where the optional number rspecifies the number of repetitions for each event. Default
is r= 10. Each neutron event reaching component name will be repeated rtimes with
a weight divided by r, so that in practice the number of events for the remaining part
of the simulation (down to the END), will potentially have more statistics. This is only
true if following components (and preferably component name) use random numbers.
You may use this method as many times as you wish in the same instrument, e.g. at the
monochromator and sample position. This keyword can also be used within a GROUP.
The efficiency is roughly rraised to the number of occurrences in the instrument, so
that enhancing two components with the default r= 10 will produce at the end an
enhancement effect of 100 in the number of events. The execution time will usually get
slightly longer. This technique is known as the stratified sampling (see Appendix 2). If
the instrument makes use of global variables - e.g. in conjunction with a WHEN or User
Variable monitoring (see Monitor nD) - you should take care that these variables are set
properly for each SPLIT loop, which usually means that they must be reset inside the
SPLITed section and assigned/used further on.
A usage example of the SPLIT keyword can be found in the
Neutron site/ILL/ILL_H15_IN6 instrument from the mcgui, to enhance statistics for
neutrons scattering on monochromators and sample.
4.5. Writing component definitions
The purpose of a McStas component is to model the interaction of a neutron with a
physical component of a real instrument. Given the state of the incoming neutron ray,
the component definition calculates the state of the neutron ray when it leaves the
component. The calculation of the effect of the component on the neutron is performed
by a block of embedded C code. One example of a component definition is given in
section 4.5.11, and all component definitions can be found on the McStas web-page [Mcs]
and are described in the McStas component manual.
There exists a large number of functions and constants available in order to write
efficient components. See appendix B for
•neutron propagation functions
77

•geometric intersection time computations
•mathematical functions
•random number generation
•physical constants
•coordinate retrieval and operations
•file generation routines (for monitors),
•data file reading
4.5.1. The component definition header
1DEFINE COMPONENT name
This marks the beginning of the definition, and defines the name of the component.
1DEFINITION PARAMETERS ( d 1 , d 2 , . . . )
2SETTING PARAMETERS ( s 1 , s 2 , . . . )
This declares the definition and setting parameters of the component. These parameters
can be accessed from all sections of the component (see below), as well as in EXTEND
sections of the instrument definition (see section 4.3).
Setting parameters are translated into C variables usually of type double in the gen-
erated simulation program, so they are usually numbers. Definition parameters are
translated into #define macro definitions, and so can have any type, including strings,
arrays, and function pointers.
However, because of the use of #define, definition parameters suffer from the usual
problems with C macro definitions. Also, it is not possible to use a general C expression
for the value of a definition parameter in the instrument definition, only constants and
variable names may be used. For this reason, setting parameters should be used whenever
possible.
Outside the INITIALIZE section of components, changing setting parameter values
only affects the current section.
There are a few cases where the use of definition parameters instead of setting pa-
rameters makes sense. If the parameter is not numeric, nor a character string (i.e. an
array, for example), a setting parameter cannot be used. Also, because of the use of
#define, the C compiler can treat definition parameters as constants when the sim-
ulation is compiled. For example, if the array sizes of a multidetector are definition
parameters, the arrays can be statically allocated in the component DECLARE section. If
setting parameters were used, it would be necessary to allocate the arrays dynamically
using e.g. malloc().
Setting parameters may optionally be declared to be of type int,char * and string,
just as in the instrument definition (see section 4.3).
78
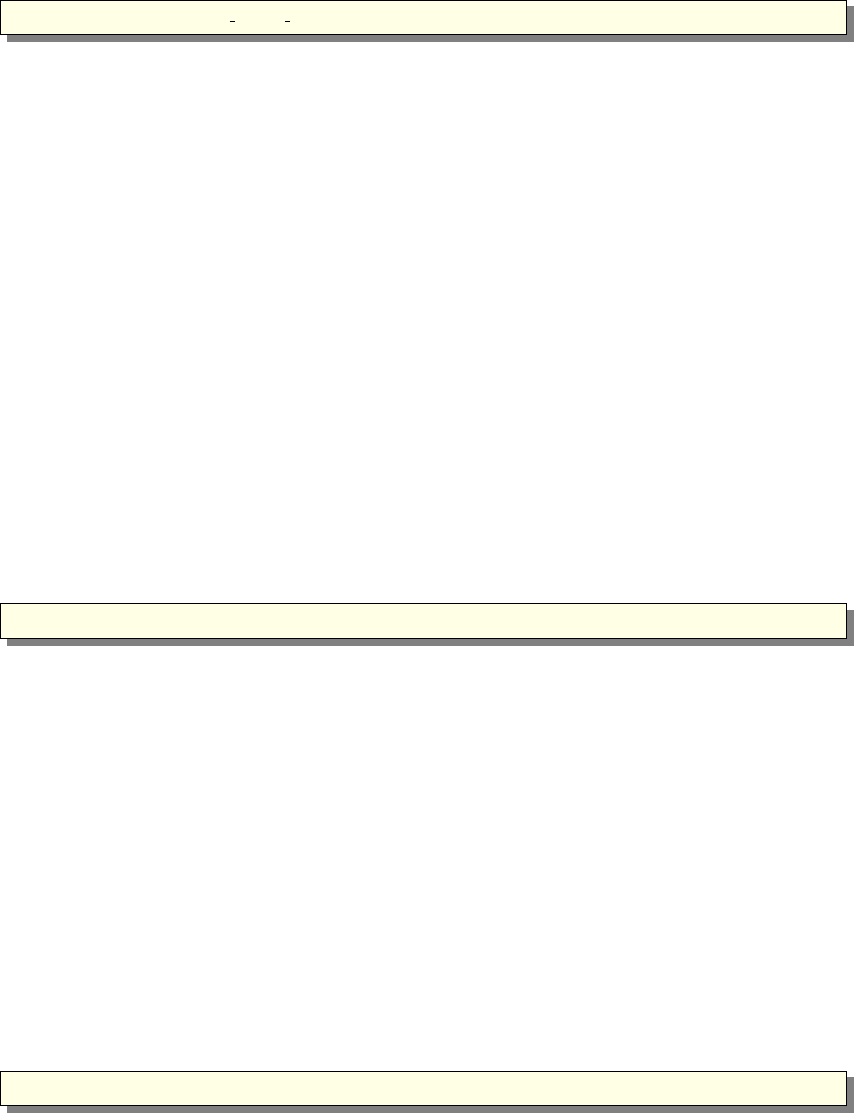
1OUTPUT PARAMETERS ( s 1 , s 2 , . . . )
This declares a list of C identifiers (variables, functions) that are output parameters
(i.e. global) for the component. Output parameters are used to hold values that are
computed by the component itself, rather than being passed as input. This could for
example be a count of neutrons in a detector or a constant that is precomputed to speed
up computation.
Using OUTPUT PARAMETERS is strongly recommended for DECLARE and internal/global
component variables and functions in order to prevent that instances of the same com-
ponent use the same variable names. Moreover (see section 4.5.3 below), these may be
accessed from any other instrument part (e.g. using the MC_GETPAR C macro). On the
other hand, the variables from the SHARE sections should not be defined as OUTPUT
parameters.
The OUTPUT PARAMETERS section is optional.
Optional component parameters
Just as for instrument parameters, the definition and setting parameters of a compo-
nent may be given a default value. Parameters with default values are called optional
parameters, and need not be given an explicit value when the component is used in an
instrument definition. A parameter is given a default value using the syntax “param =
value”. For example
1SETTING PARAMETERS ( radi u s , height , pack= 1)
Here pack is an optional parameter and if no value is given explicitly, “1” will be used.
In contrast, if no value is given for radius or height, an error message will result.
Optional parameters can greatly increase the convenience for users of components with
many parameters that have natural default values which are seldom changed. Optional
parameters are also useful to preserve backwards compatibility with old instrument
definitions when a component is updated. New parameters can be added with default
values that correspond to the old behavior, and existing instrument definitions can be
used with the new component without changes.
However, optional parameters should not be used in cases where no general natural
default value exists. For example, the length of a guide or the size of a slit should not
be given default values. This would prevent the error messages that should be given in
the common case of a user forgetting to set an important parameter.
4.5.2. The DEPENDENCY line
1 DEPENDENCY ”−lLIB1 −lLIB2 . . ”
This optional line indicates any external library which are needed by the component. It
should be used when the component code calls external functions and routines which
79
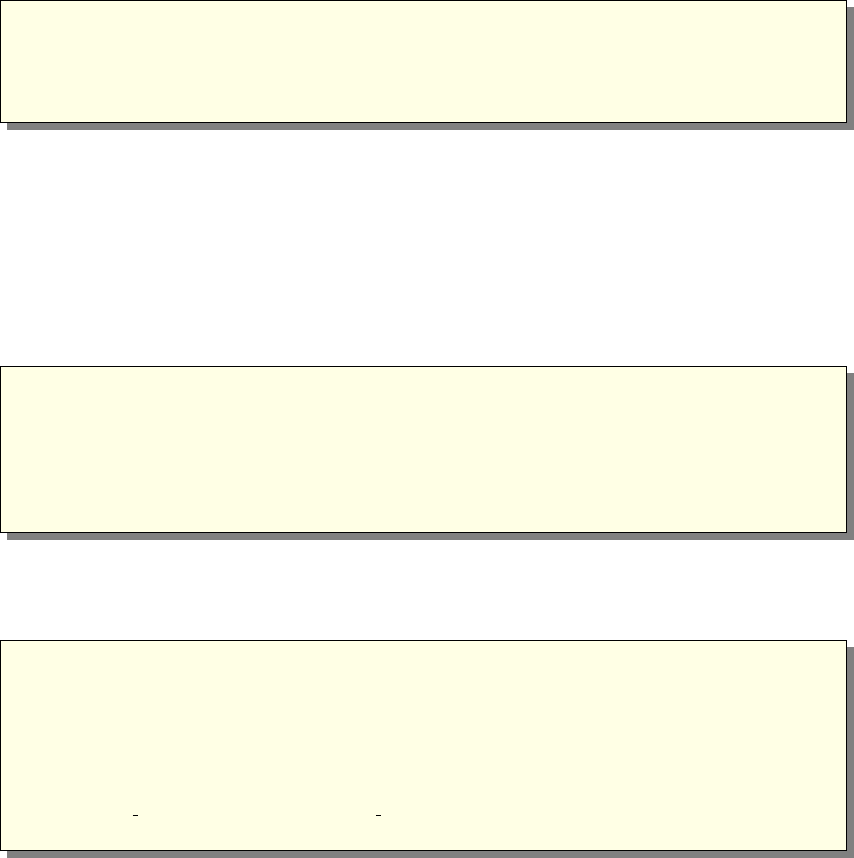
should be available when compiling the instrument. This line must be indicated just
before the SHARE and DECLARE sections. Refer to the section 4.3.2 for more information.
4.5.3. The DECLARE section
1DECLARE
2 %{
3// C cod e d e c l a r a t i o n s ( v a r i a b l e s , d e f i n i t i o n s , f u n c t i o n s )
4// These are u s u a l l y OUTPUT param e ters to a v oi d name c o n f l i c t s
5 %}
This gives C declarations of global variables, functions, etc. that are used by the com-
ponent code. This may for instance be used to declare a neutron counter for a detector
component. This section is optional.
Note that any variables declared in a DECLARE section are global. Thus a name conflict
may occur if two instances of a component are used in the same instrument. To avoid
this, variables declared in the DECLARE section should be OUTPUT parameters of the
component because McStas will then rename variables to avoid conflicts. For example,
a simple detector might be defined as follows:
1DEFINE COMPONENT Detector
2OUTPUT PARAMETERS ( c o u nts )
3DECLARE
4 %{
5int counts ;
6 %}
7 . . .
The idea is that the counts variable counts the number of neutrons detected. In the
instrument definition, the counts parameter may be referenced using the MC_GETPAR C
macro, as in the following example instrument fragment:
1COMPONENT d1 = D et e ct or ( )
2 . . .
3COMPONENT d2 = D et e ct or ( )
4 . . .
5FINALLY
6 %{
7 p r i n t f ( ” Det e c t or c o u n t s : d1 = %d , d2 = %d\n” ,
8 MC GETPAR( d1 , c ount s ) , MC GETPAR( d2 , c oun ts ) ) ;
9 %}
This way, McStas takes care to rename transparently the two ’counts’ OUTPUT param-
eters so that they are distinct, and can be accessed from elsewhere in the instrument
(EXTEND, FINALLY, SAVE, ...) or from other components. This particular example
is outdated since McStas monitors will themselves output their contents.
4.5.4. The SHARE section
80
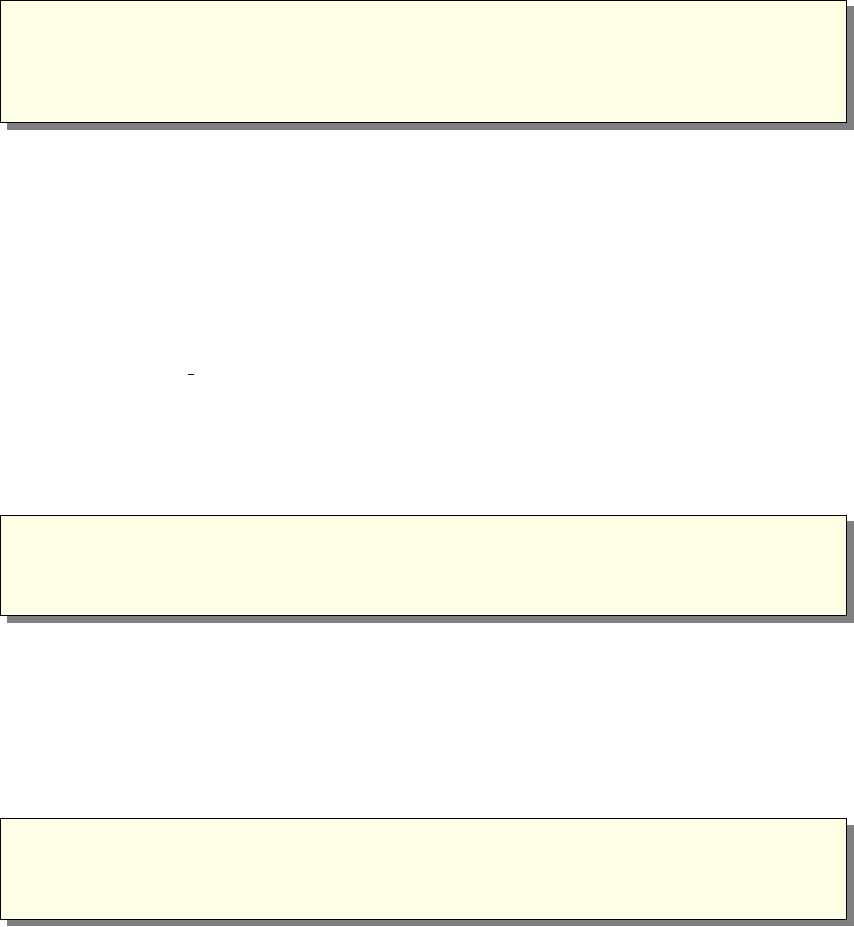
1SHARE
2 %{
3// C cod e s hared d e c l a r a t i o n s ( v a r i a b l e s , d e f i n i t i o n s , f u n c t i o n s )
4// These s h o u l d no t be OUTPUT p a ra m et e rs
5 %}
The SHARE section has the same role as DECLARE except that when using more than one
instance of the component, it is inserted only once in the simulation code. No occurrence
of the items to be shared should be in the OUTPUT parameter list (not to have McStas
rename the identifiers). This is particularly useful when using many instances of the
same component (for instance guide elements). If the declarations were in the DECLARE
section, McStas would duplicate it for each instance (making the simulation code longer).
A typical example is to have shared variables, functions, type and structure definitions
that may be used from the component TRACE section. For an example of SHARE, see
the samples/Single crystal component. The %include "file" keyword may be used to
import a shared library. The SHARE section is optional and should be located before the
DECLARE section.
4.5.5. The INITIALIZE section
1INITIALIZE
2 %{
3// C code i n i t i a l i z a t i o n
4 %}
This gives C code that will be executed once at the start of the simulation, usually
to initialize any variables declared in the DECLARE section. This section is optional.
Component setting parameters may be modified in this section, affecting the rest of the
component.
4.5.6. The TRACE section
1TRACE
2 %{
3// C code to compute neut ron i n t e r a c t i o n wi t h component
4 %}
This performs the actual computation of the interaction between the neutron ray and
the component. The C code should perform the appropriate calculations and assign
the resulting new neutron state to the state parameters. Most components will require
propagation routines to reach the component entrance/area. Special macros PROP_Z0;
and PROP_DT(); are provided to automate this process (see section B.1).
The C code may also execute the special macro ABSORB to indicate that the neutron
has been absorbed in the component and the simulation of that neutron will be aborted.
On the other hand, if the neutron event should be allowed be backpropagated, the
special macro ALLOW_BACKPROP; should precede the call to the PROP_ call inside the
81
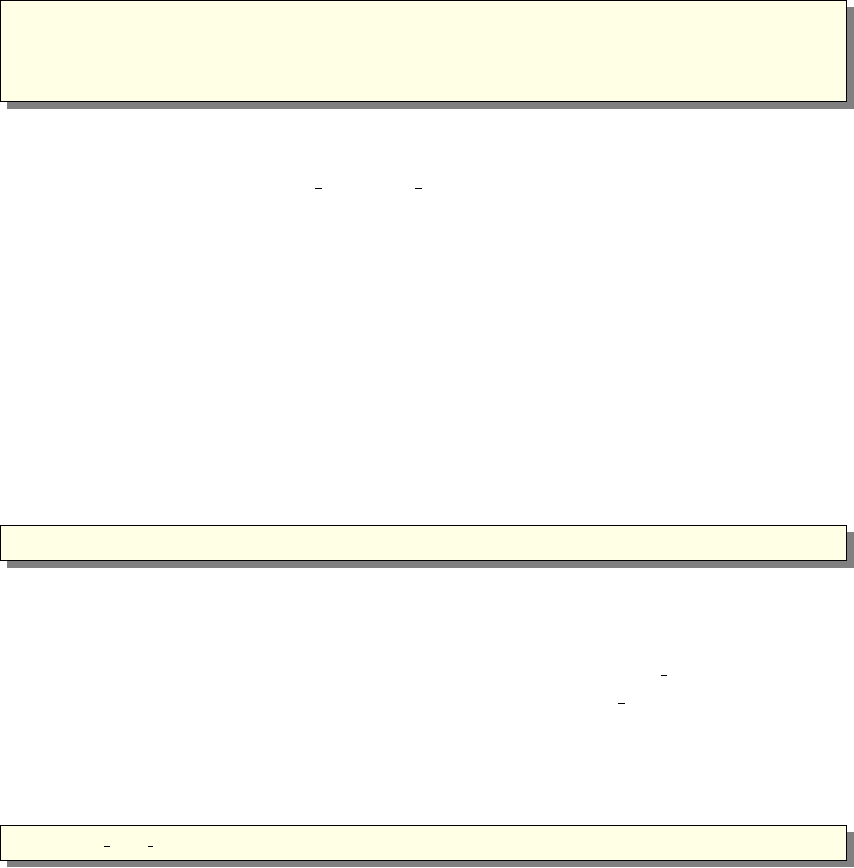
component. When the neutron state is changed or detected, for instance if the com-
ponent simulates multiple events as multiple reflections in a guide, the special macro
SCATTER should be called. This does not affect the results of the simulation in any way,
but it allows the front-end programs to visualize the scattering events properly, and to
handle component GROUPs in an instrument definition (see section 4.3.6). It basically
increments the SCATTERED counter. The SCATTER macro should be called with the
state parameters set to the proper values for the scattering event, so that neutron events
are displayed correctly. For an example of SCATTER, see the optics/Guide component.
4.5.7. The SAVE section
1SAVE
2 %{
3// C c ode t o e x e c u t e i n o r d er t o s av e d at a
4 %}
This gives code that will be executed when the simulation ends, or is requested to save
data, for instance when receiving a USR2 signal (on Unix systems, see section 3.4), or
when triggered by the Progress bar(flag save=1) component. This might be used by
monitors and detectors in order to write results. An extension depending on the selected
output format (see table ?? and section 3.4) is automatically appended to file names, if
these latter do not contain extension.
In order to work properly with the common output file format used in McStas, all
monitor/detector components should use standard macros for writing data in the SAVE
or FINALLY section, as explained below. In the following, we use N=Pip0
ito denote
the count of detected neutron events, p=Pipito denote the sum of the weights of
detected neutrons, and p2 =Pip2
ito denote the sum of the squares of the weights, as
explained in section 2.2.1.
As a default, all monitors using the standard macros will display the integral pof the
monitor bins, as well as the 2nd moment σand the number of statistical events N. This
will result in a line such as:
1 Det e c t or : CompName I=p CompName ERR=sigma CompNameN=N ” f i l e n a m e ”
For 1D, 2D and 3D monitors/detectors, the data histogram store in the files is given
per bin when the signal is the neutron intensity (i.e. most of the cases). Most monitors
define binning for an xnaxis value as the sum of events falling into the [xnxn+1] range,
i.e the bins are not centered, but left aligned. Using the Monitor nD component, it
is possible to monitor other signals using the ’signal=variable name’ in the ’options’
parameter (refer to that component documentation).
Single detectors/monitors The results of a single detector/monitor are written using
the following macro:
1 DETECTOR OUT 0D( t , N, p , p2 )
Here, tis a string giving a short descriptive title for the results, e.g. “Single monitor”.
82
One-dimensional detectors/monitors The results of a one-dimensional detector/mon-
itor are written using the following macro:
1 DETECTOR OUT 1D( t ,
2 x l a b e l , y l a b e l ,
3 xvar , x min , x max , m,
4 &N[ 0 ] , &p [ 0 ] , &p2 [ 0 ] ,
5 f i l e n a m e )
Here,
•tis a string giving a descriptive title (e.g. “Energy monitor”),
•xlabel is a string giving a descriptive label for the X axis in a plot (e.g. “Energy
[meV]”),
•ylabel is a string giving a descriptive label for the Y axis of a plot (e.g. “Intensity”),
•xvar is a string giving the name of the variable on the X axis (e.g. “E”),
•xmin is the lower limit for the X axis,
•xmax is the upper limit for the X axis,
•mis the number of elements in the detector arrays,
•&N[0] is a pointer to the first element in the array of Nvalues for the detector
component (or NULL, in which case no error bars will be computed),
•&p[0] is a pointer to the first element in the array of pvalues for the detector
component,
•&p2[0] is a pointer to the first element in the array of p2 values for the detector
component (or NULL, in which case no error bars will be computed),
•filename is a string giving the name of the file in which to store the data.
Two-dimensional detectors/monitors The results of a two-dimensional detector/mon-
itor are written to a file using the following macro:
1 DETECTOR OUT 2D( t ,
2 x l a b e l , y l a b e l ,
3 x min , x max , y min , y max , m, n ,
4 &N[ 0 ] [ 0 ] , &p [ 0 ] [ 0 ] , &p2 [ 0 ] [ 0 ] ,
5 f i l e n a m e )
Here,
•tis a string giving a descriptive title (e.g. “PSD monitor”),
•xlabel is a string giving a descriptive label for the X axis in a plot (e.g. “X position
[cm]”),
83
•ylabel is a string giving a descriptive label for the Y axis of a plot (e.g. “Y position
[cm]”),
•xmin is the lower limit for the X axis,
•xmax is the upper limit for the X axis,
•ymin is the lower limit for the Y axis,
•ymax is the upper limit for the Y axis,
•mis the number of elements in the detector arrays along the X axis,
•nis the number of elements in the detector arrays along the Y axis,
•&N[0][0] is a pointer to the first element in the array of Nvalues for the detector
component,
•&p[0][0] is a pointer to the first element in the array of pvalues for the detector
component,
•&p2[0][0] is a pointer to the first element in the array of p2 values for the detector
component,
•filename is a string giving the name of the file in which to store the data.
Note that for a two-dimensional detector array, the first dimension is along the X axis
and the second dimension is along the Y axis. This means that element (ix, iy) can be
obtained as p[ix∗n+iy] if pis a pointer to the first element.
Three-dimensional detectors/monitors The results of a three-dimensional detector/
monitor are written to a file using the following macro:
1 DETECTOR OUT 3D( t ,
2 x l a b e l , y l a b e l ,
3 xvar , x min , x max , m, n , j ,
4 &N[0][0][0] , &p[0][0][0] , &p2[0][0][0] ,
5 f i l e n a m e )
The meaning of parameters is the same as those used in the 1D and 2D versions of
DETECTOR OUT. The available data format currently saves the 3D arrays as 2D, with
the 3rd dimension specified in the type field of the data header.
4.5.8. The FINALLY section
1FINALLY
2 %{
3// C c ode t o e x e c u t e a t end o f s i m u l a t i o n . . .
4 %}
84
This gives code that will be executed when the simulation has ended. This might
be used to free memory and print out final results from components, e.g. the simulated
intensity in a detector. This section also triggers the SAVE section to be executed.
4.5.9. The MCDISPLAY section
1MCDISPLAY
2 %{
3// C c ode t o draw a s k e t c h o f t h e component . . .
4 %}
This gives C code that draws a sketch of the component in the plots produced by
the mcdisplay front-end (see section 3.5.3). The section can contain arbitrary C code
and may refer to the parameters of the component, but usually it will consist of a
short sequence of the special commands described below that are available only in the
MCDISPLAY section. When drawing components, all distances and positions are in
meters and specified in the local coordinate system of the component.
The MCDISPLAY section is optional. If it is omitted, mcdisplay will use a default
symbol (a small circle) for drawing the component.
The magnify command This command, if present, must be the first in the section. It
takes a single argument: a string containing zero or more of the letters “x”, “y” and
“z”. It causes the drawing to be enlarged along the specified axis in case mcdisplay is
called with the --zoom option. For example:
1 magnify ( ”xy” ) ;
The line command The line command takes the following form:
1 l i n e ( x 1 , y 1 , z 1 , x 2 , y 2 , z 2 )
It draws a line between the points (x1, y1, z1) and (x2, y2, z2).
The dashed line command The dashed line command takes the following form:
1 d a s h e d l i n e ( x 1 , y 1 , z 1 , x 2 , y 2 , z 2 , n )
It draws a dashed line between the points (x1, y1, z1) and (x2, y2, z2) with nequidistant
spaces.
The multiline command The multiline command takes the following form:
1\t e x t t t {m u l t i l i n e ( n , x 1 , y 1 , z 1 , . . . , x n , y n , z n ) }
It draws a series of lines through the npoints (x1, y1, z1), (x2, y2, z2), . . . , (xn, yn, zn). It
thus accepts a variable number of arguments depending on the value of n. This exposes
85
one of the nasty quirks of C since no type checking is performed by the C compiler. It
is thus very important that all arguments to multiline (except n) are valid numbers of
type double. A common mistake is to write
1 m u l t i l i n e ( 3 , x , y , 0 , . . . )
which will silently produce garbage output. This must instead be written as
1 m u l t i l i n e ( 3 , ( double) x , ( double ) y , 0 . 0 , . . . )
The rectangle command The rectangle command takes the following form:
1 r e c t a n g l e ( pla ne , x , y , z , width , he ig ht )
Here plane should be either "xy","xz", or "yz". The command draws a rectangle in
the specified plane with the center at (x, y, z) and the size width ×height. Depending
on plane the width and height are defined as:
plane width height
xy x y
xz x z
yz y z
The box command The box command takes the following form:
1 box ( x , y , z , xwidth , y he ight , z l e n g t h )
The command draws a box with the center at (x, y, z) and the size xwidth ×yheight ×
zlength.
The circle command The circle command takes the following form:
1 c i r c l e ( plane , x , y , z , r )
Here plane should be either "xy","xz", or "yz". The command draws a circle in the
specified plane with the center at (x, y, z) and the radius r.
4.5.10. The end of the component definition
1 END
This marks the end of the component definition.
4.5.11. A component example: Slit
A simple example of the component Slit is given.
86
4.6. Extending component definitions
Suppose you are interested by one component of the McStas library, but you would like
to customize it a little. There are different ways to extend an existing component.
4.6.1. Extending from the instrument definition
If you only want to add something on top of the component existing behavior, the
simplest is to work from the instrument definition TRACE section, using the EXTEND
modifier (see section 4.4.2). You do not need to write a new component definition, but
only add a piece of code to execute.
4.6.2. Component heritage and duplication
There is a heritage mechanism to create children of existing components. These are exact
duplicates of the parent component, but one may override/extend original definitions of
any section.
The syntax for a full component child is
1DEFINE COMPONENT child name COPY parent name
This single line will copy all parts of the parent into the child, except for the docu-
mentation header.
As for normal component definitions, you may add other parameters, DECLARE,TRACE,
... sections. Each of them will replace or extend (be concatenated to, with the COPY-
/EXTEND keywords, see example below) the corresponding parent definition. In prac-
tice, you could copy a component and only rewrite some of it, as in the following example:
1DEFINE COMPONENT child name COPY parent name
2
3SETTING PARAMETERS ( newpar1 , newpar2 )
4INITIALIZE COPY parent name EXTEND
5 %{
6// C c od e t o b e c o n c a te n a t e d t o t h e p are nt name INITIALIZE
7 %}
8SAVE
9 %{
10 // C cod e t o r e p l a c e t he parent name SAVE
11 %}
where two additional parameters have been defined, and should be handled in the ex-
tension of the original INITIALIZE section.
On the other hand, if you do not derive a component as a whole from a parent, you
may still use specific parts from any component:
1DEFINE COMPONENT name . . .
2DECLARE COPY parent1
3INITIALIZE COPY parent2 EXTEND
4 %{
5// C c od e t o b e c o n c a te n a t e d t o t h e p a re n t 2 INITIALIZE
87

6 %}
7TRACE COPY parent3
This mechanism may lighten the component code, but a special care should be taken
in mixing bits from different sources, specially concerning variables. This may result in
difficulties to compile components.
4.7. McDoc, the McStas library documentation tool
McStas includes a facility called McDoc to help maintain good documentation of com-
ponents and instruments. In the source code, comments may be written that follow a
particular format understood by McDoc. The McDoc facility will read these comments
and automatically produce output documentation in various forms. By using the source
code itself as the source of documentation, the documentation is much more likely to be
a faithful and up-to-date description of how the component/instrument actually works.
4.7.1. Documentation generators mcdoc and mcgui
Two forms of documentation can be generated. One is the component entry dialog in the
mcgui front-end, see section 3.5.1. The other is a collection of web pages documenting
the components and instruments, handled via the mcdoc front-end (see section 3.5.6),
and the complete documentation for all available McStas components and instruments
may be found at the McStas web page [Mcs], as well as in the McStas library (see 6.1).
All available McStas documentation is accessible from the mcgui ’Help’ menu.
Note that McDoc-compliant comments in the source code are no substitute for a
good reference manual entry. The mathematical equations describing the physics and
algorithms of the component should still be written up carefully for inclusion in the
component manual. The McDoc comments are useful for describing the general behavior
of the component, the meaning and units of the input parameters, etc.
4.7.2. The format of the comments in the library source code
The format of the comments understood by McDoc is mostly straight-forward, and is
designed to be easily readable both by humans and by automatic tools. McDoc has
been written to be quite tolerant in terms of how the comments may be formatted and
broken across lines. A good way to get a feeling for the format is to study some of the
examples in the existing components and instruments. Below, a few notes are listed on
the requirements for the comment headers:
The comment syntax uses %IDENTIFICATION,%DESCRIPTION,%PARAMETERS,%EXAMPLE:,
%LINKS, and %END keywords to mark different sections of the documentation. Keywords
may be abbreviated (except for %EXAMPLE:), e.g. as %IDENT or %I.
Additionally, optional keys %VALIDATION and %BUGS may be found to list validation
status and possible bugs in the component.
88

•In the %IDENTIFICATION section, author: (or written by: for backwards com-
patibility with old comments) denote author; date:,version:, and origin: are
also supported. Any number of Modified by: entries may be used to give the
revision history. The author:,date:, etc. entries must all appear on a single
line of their own. Everything else in the identification section is part of a ”short
description” of the component.
•In the %PARAMETERS section, descriptions have the form “name : [unit ]text ”
or “name :text [unit ]”. These may span multiple lines, but subsequent lines
must be indented by at least four spaces. Note that square brackets [] should be
used for units. Normal parentheses are also supported for backwards compatibility,
but nested parentheses do not work well.
•The %DESCRIPTION section contains text in free format. The text may contain
HTML tags like <IMG> (to include pictures) and <A>. . . </A> (for links to other
web pages, but see also the %LINK section). In the generated web documentation
pages, the text is set in <PRE>. . . </PRE>, so that the line breaks in the source will
be obeyed.
•The %EXAMPLE: lines in instrument headers indicate an example parameter set
or command that may be run to test the instrument. A following Detector:
<name>I=<value>indicates what value should be obtained for a given monitor.
More than one example line may be specified in instruments.
•Any number of %LINK sections may be given; each one contains HTML code that
will be put in a list item in the link section of the description web page. This
usually consists of an <A HREF="..."> ... </A> pointer to some other source of
information.
•Optionally, an %INSTRUMENT_SITE section followed by a single word is used to sort
instruments by origin/location in the ’Neutron Site’ menu in mcgui.
•After %END, no more comment text is read by McDoc.
89

5. Links to other computing codes
This chapter provides information on interoperability of McStas with other codes, and
provide links to other sources of information on this topic.
5.1. McStas and MANTID
As of McStas 2.1 and MANTID 3.2, the teams of the two codes provide a mechanism to
transfer simulated McStas events and monitor data to MANTID, via NeXus files.
5.1.1. System requirements
To enable the software link, you need the following codes installed on your system:
•McStas 2.1 or newer
•NeXus libraries from http://nexusformat.org 1
•Mantid 3.2 or newer
•On Mac OS X 10.8 and newer you may need to install one of the below compilers,
as the default clang on OS X causes problems for the link, especially when used
together with MPI
–Intel C
–gcc from http://hpc.sourceforge.net
5.1.2. Requirements for the instrument file
A special naming convention in the instrument file is needed for the automatic transfer
of geometry to a Mantid IDF file:
•The location of the source must be indicated by a component named sourceMantid.
Note that in the case of a curved instrument geometry, you should probably add
an Arm where Mantid ’expects’ the source to be, i.e.: defining a location displaced
the correct source-sample distance, parallel to the incoming beam direction at the
sample.
•The location of the sample must be indicated by a component named sampleMantid
1For Mac OS X you may get better milage via the Mantid github site
90
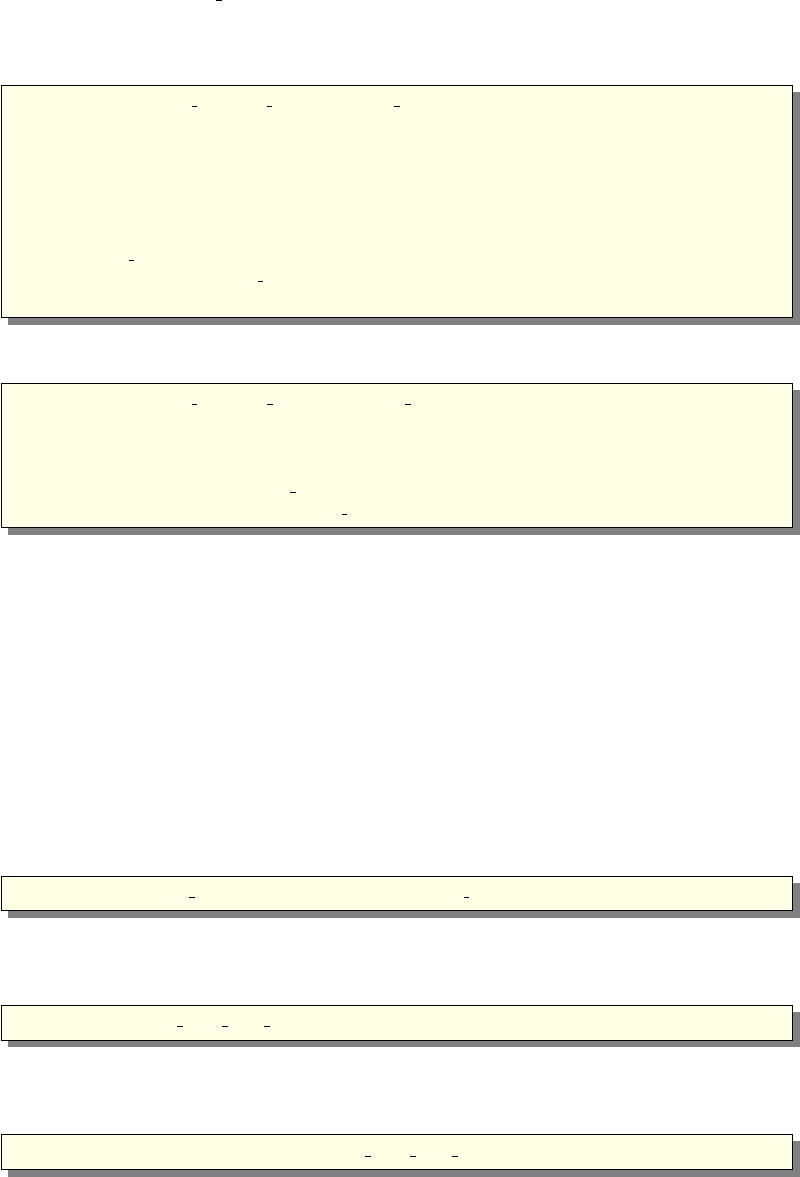
•One or more Monitor nD components need to be added in either rectangular- or
cylindrical geometry and with a set of special flags, as shown below
•Rectangular monitor
1COMPONENT nD Mantid 0 = Monitor nD(
2 o p t i o n s =” mantid s q u ar e x l i m i t s =[ −0.2 0 . 2 ] bi n s =128 y l i m i t s
=[ −0.2 0 . 2 ] bi ns =128 , neutron p i x e l t , l i s t a l l n eu tr ons ” ,
3 xmin = −0.2 ,
4 xmax = 0 . 2 ,
5 ymin = −0.2 ,
6 ymax = 0 . 2 ,
7 r e s t o r e n e u t r o n = 1 ,
8 f i l e n a m e = ” b a nk 0 1 e ve n ts . da t ” )
9AT ( 0 , 0 , 3 . 2 ) RELATIVE sampleMantid
•Cylindrical monitor
1COMPONENT nD Mantid 01 = Monitor nD ( xwidth =(4.0 −0.0005 −0.00002)∗2 ,
yheight=3,
2 o p t i o n s=”mantid banana , t h e t a l i m i t s = [ −73.36735 7 3 . 3 6 7 6 5 ] b i ns
=100 , y l i m i t s =[ −1.5 1 . 5 ] bi ns =300 , neutron p i x e l t , l i s t a l l
neu tr ons ” , r e s t o r e n e u t r o n =1)
3AT ( 0 , 0 , 0 ) RELATIVE center det
The two instruments templateSANS_Mantid.instr and ILL_H16_IN5_Mantid.instr
have these features enabled.
Other, ordinary McStas monitors will also be visible in the resulting Mantid workspace,
but will not be easily processible using the Mantid TOF data reduction schemes.
5.1.3. Compiling and running your simulation for Mantid output
Geometry information in Mantid is handled via a so-called Instrument Definition File
(IDF) in xml-format, possibly embedded in a NeXus file. The creation of the IDF and
related NeXus file is handled in the following steps:
1. First of all, enable NeXus in the compilation process:
1export MCSTAS CFLAGS=”−g−lm −O2 −DUSE NEXUS −lNeXus”
2. Compile the instrument via the mcrun utility (add --mpi if you need parallelization
support):
1 mcrun −c ILL H16 IN5 Mantid . i n s t r −n0
3. Generate the IDF via the mcdisplay utility (and press enter until the simulation
runs):
1 mcdisplay −−format=Mantid ILL H16 IN5 Mantid . i n s t r −n0
91
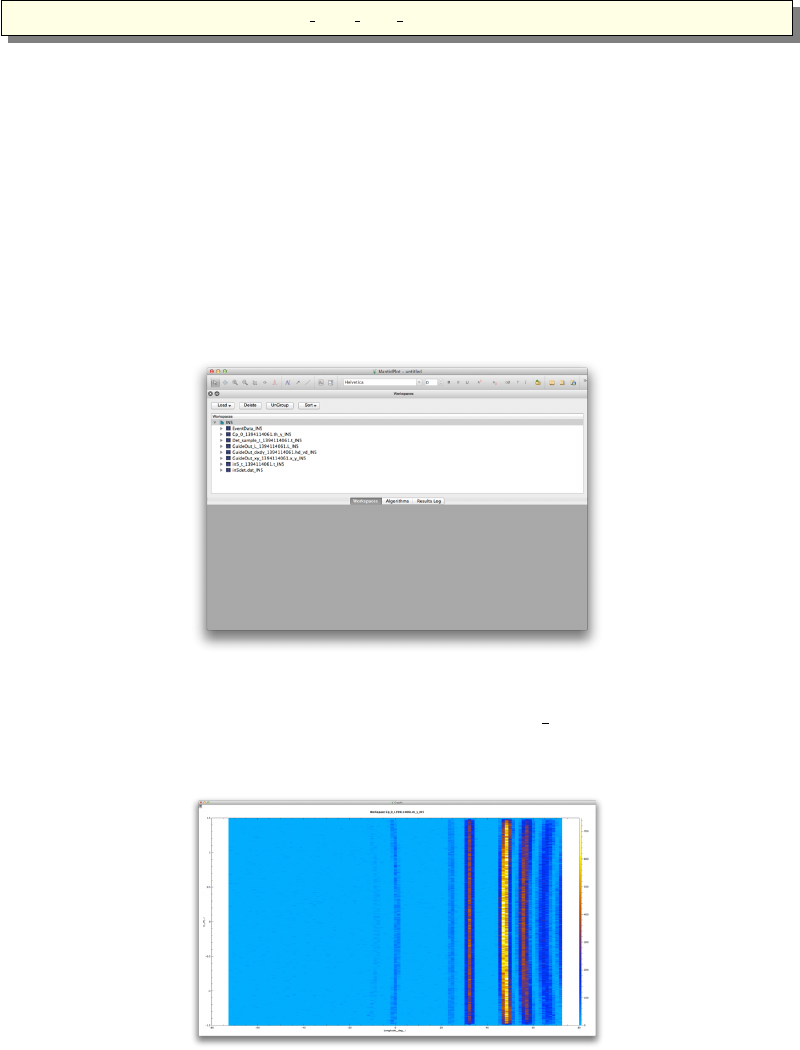
4. Finally, run a simulation with NeXus output:
1 mcrun −−f ormat=NeXus ILL H16 IN5 Mantid . i n s t r
5.1.4. Looking at instrument output in Mantid
In Mantid, your new NeXus file should behave more or less as usual, that is
•Start by loading the file using either the Load button or the algorithm LoadMcStas
to load the event file.
•After a succesful load, you should have a workspace group with this content
•Plot the histogram event data stored in the monitor Cp 0...
•Plot the TOF events on the full instrument geometry. In this step a bit of zooming
and translation may be needed to show a nice view of the instrument.
92
The instrument ILL_H16_IN5_Mantid.instr included in McStas 2.1 will load and present
simulated event-data, but the current time-definition of the event data does not comply
fully with Mantid for data-reduction purposes - this should be corrected for the next
McStas release.
5.2. McStas and MCNP(X)
As of McStas 2.1 we provide a a series of mechanisms to interchange simulated events
between McStas and MCNP or MCNPX:
1. Typically, the intensity parameters in our McStas source components are derived
from MCNP(X) simulations, though parametric fits to MCNPtallies.
2. The PTRAC method to read MCNP(X) events into McStas has been available
since McStas 1.10 and is a contribution from Chama Hennane, ENSIMAG and
Emmanuel Farhi, ILL.
3. The SSR/SSW method to send events via the MCNP “source surface” mechanism
between both codes has been available since McStas 2.0. This work has mainly
been done by Esben Klinkby, DTU Nutech, with contributions from Erik Knudsen
and Peter Willendrup, both DTU Physics.
4. With access to an MCNP source-code license and a patch developed by Esben
Klinkby, DTU Nutech, it is further possible to directly compile and link a McStas
instrument with MCNP. The method is however quite speed-limited at present,
but we envision releasing an improved version later. If interested, please contact
Esben Klinkby directly.
Especially method 3 gives a powerful combination with the scatter logging mechanism
discussed in the paper [KKW14], allowing to estimate γdose-rates in MCNP from neu-
tron intensity lost in neutron optics, i.e. the non-transmitted fraction of the McStas
neutron beam (and corresponding intensity/weight). Through the McStas example in-
struments and also the McStas share at http://mcstas.org/download/share we pro-
vide a couple of examples of the use of the scatter logger
93

6. The component library: Abstract
This chapter presents an abstract of existing components. As a complement to this
chapter and the detailed description in the McStas component manual, you may use the
mcdoc -s command to obtain the on-line component documentation and refer to the
McStas web-page [Mcs] where all components are documented using the McDoc system.
6.1. A short overview of the McStas component library
The table in this section gives a quick overview of available McStas components provided
with the distribution. The location of this library is detailed in section 3.3.2. All of them
are believed to be reliable, and some amount of systematic tests have been carried out.
However, no absolute guaranty can be given concerning their accuracy.
The contrib directory of the library contains components that were submitted by
McStas users, but where responsibility has not (yet) been taken by the McStas core
team.
Additionally the obsolete directory of the library gathers components that were
renamed, or considered to be outdated. These component are kept for backwards com-
patibility and they still all work as before.
The mcdoc front-end (section 3.5.6) enables to display both the catalog of the McStas
library, e.g using:
1 mcdoc
as well as the documentation of specific components, e.g with:
1 mcdoc −−t e x t name
2 mcdoc f i l e . comp
The first line will search for all components matching the name, and display their help
section as text, where as the second example will display the help corresponding to the
file.comp component, using your BROWSER setting, or as text if unset. The --help option
will display the command help, as usual.
94
MCSTAS/sources Description
Adapt check Optimization specifier for the Source adapt component.
ESS moderator long A parametrised pulsed source for modelling ESS long pulses.
ESS moderator short A parametrised pulsed source for modelling ESS short pulses.
Moderator A simple pulsed source for time-of-flight.
Monitor Optimizer To be used after the Source Optimizer component.
Source Maxwell 3 Continuous source with up to three Maxwellian distributions
Source Optimizer Optimizes the neutron flux passing through the
Source Optimizer in order to have the maximum flux at
the Monitor Optimizer position.
Source adapt Continuous neutron source with adaptive importance sam-
pling.
Source div Continuous neutron source with a specified Gaussian diver-
gence.
Source simple A simple, continuous circular neutron source with flat ener-
gy/wavelength spectrum.
Source gen General, continuous neutron source with tunable shape, spec-
trum, and divergence.
Virtual input Source-like component that reads neutron events from an asci-
i/binary ’virtual source’ file (recorded by Virtual output).
Virtual output Detector-like component that writes neutron state (for use in
Virtual input).
Table 6.1.: Source and source-related components of the McStas library.
95
MCSTAS/optics Description
Arm Arm/optical bench.
Beamstop Rectangular/circular beam stop.
Bender A curved neutron guide (shown straight in mcdisplay).
Collimator linear A simple analytical Soller collimator.
Collimator radial A radial Soller collimator.
DiskChopper Disk chopper.
FermiChopper Fermi Chopper with rotating-frame calculations.
Filter gen This components may either set the flux or change it (filter-
like), using an external data file.
Guide Straight neutron guide.
Guide channeled Straight neutron guide with channels (bender section).
Guide gravity Straight neutron guide with gravity. Can be channeled and
focusing.
Guide wavy Straight neutron guide with gaussian waviness.
Mirror Single mirror plate.
Monochromator curvedDoubly bent multiple crystal slabs with anisotropic Gaussian
mosaic.
Monochromator flat Flat Monochromator crystal with anisotropic Gaussian mo-
saic.
Pol bender Polarising bender.
Pol guide vmirror Guide with semi-transparent, polarising mirror.
Pol mirror Polarising mirror
Pol simpleBfield Numerical precession in analytical B-fields.
Selector A velocity selector (helical lamella type) such as V selector
component.
Slit Rectangular/circular slit.
V selector Velocity selector.
Vitess ChopperFermi Curved Fermi chopper (longer execution time than Fermi-
Chopper). From the Vitess package.
Table 6.2.: Optics components of the McStas library.
96
MCSTAS/samples Description
Inelastic Incoherent Inelastic incoherent sample with quasielastic and elastic con-
tributions.
Isotropic Sqw A general S(q,ω) scatterer with multiple scattering, for liquids,
powders, glasses, polymers. May be concentrically arranged.
Coherent/incoherent, elastic/inelastic scattering.
Phonon simple Single-crystal sample with acoustic isotropic phonons (sim-
ple).
Powder1 General powder sample with a single scattering vector.
PowderN General powder sample with N scattering vectors, using a data
file. Can assume concentric shape, i.e. can be used to model
sample enviroment.
Sans spheres Simple sample for Small Angle Neutron Scattering - hard
spheres
Single crystal Mosaic single crystal with multiple scattering vectors using a
data file.
V sample Vanadium sample, or other incoherent scatterer. Optional
quasielastic broadening.
Res sample Sample-like component for resolution function calculation.
TOF Res sample Sample-like component for resolution function calculation in
TOF instruments.
Res monitor Monitor for resolution function calculations
TOF Res monitor Monitor for resolution function calculations for TOF instru-
ments
Table 6.3.: Sample components of the McStas library.
97
MCSTAS/monitors Description
DivPos monitor Divergence/position monitor (acceptance diagram).
Divergence monitor Horizontal+vertical divergence monitor (2D).
E monitor Energy-sensitive monitor.
L monitor Wavelength-sensitive monitor.
Monitor Simple single detector/monitor.
Monitor nD General monitor that can output 0/1/2D signals (Intensity or
signal vs. [something] and vs. [something] ...).
PSD monitor Position-sensitive monitor.
PSD monitor 4PI Spherical position-sensitive detector.
PreMonitor nD This component is a PreMonitor that is to be used with one
Monitor nD, in order to record some neutron parameter cor-
relations.
TOFLambda monitor Time-of-flight vs. wavelength monitor.
TOF monitor Rectangular Time-of-flight monitor.
Table 6.4.: Selected Monitor components of the McStas library.
MCSTAS/misc Description
Progress bar Displays status of a running simulation. May also trigger in-
termediate SAVE.
Beam spy A monitor that displays mean statistics (no output file).
Set pol sets polarisation vector.
Vitess input Read neutron state parameters from a VITESS neutron file.
Vitess output Write neutron state parameters to a VITESS neutron file.
Table 6.5.: Miscellaneous components of the McStas library.
98
MCSTAS/contrib Description
Al window Aluminium transmission window.
Collimator ROC Radial Oscillating Collimator (ROC).
Exact radial coll Radial collimator.
FermiChopper ILL Fermi Chopper with rotating frame and SM coating (straight).
Filter graphite Pyrolytic graphite filter (analytical model).
Filter powder Box-shaped powder filter based on Single crystal (unstable).
Guide curved Non focusing continuous curved guide (shown curved).
Guide honeycomb Neutron guide with gravity and honeycomb geometry. Can
be channeled and/or focusing.
Guide tapering Rectangular tapered guide (parabolic, elliptic, sections ...).
He3 cell Polarised 3He cell.
ISIS moderator ISIS Target 1 and 2 moderator models based on MCNP cal-
culations.
Monochromator 2foc Doubly bent monochromator with multiple slabs.
multi pipe a multi pipe slit (for SANS).
PSD Detector Realistic detector model, with gas effects.
PSD monitor rad A banana PSD monitor.
SiC SiC multilayer sample for reflectivity simulations.
SNS source SNS moderator models based on MCNP calculations.
Source multi surfaces An array of sources described from spectrum tables.
Virtual mcnp input Reads a PTRAC neutron events file from MCNP.
Virtual mcnp output Writes a PTRAC neutron events file for MCNP.
Virtual tripoli4 input Reads a ’Batch’ neutron events file from Tripoli 4.
Virtual tripoli4 output Writes a ’Batch’ neutron events file for Tripoli 4.
Table 6.6.: Contributed components of the McStas library.
MCSTAS/share Description
adapt tree-lib Handles a simulation optimisation space for adatative impor-
tance sampling. Used by the Source adapt component.
mcstas-r Main Run-time library (always included).
monitor nd-lib Handles multiple monitor types. Used by Monitor nD,
Res monitor, . . .
read table-lib Enables to read a data table (text/binary) to be used within
an instrument or a component.
vitess-lib Enables to read/write Vitess event binary files. Used by
Vitess input and Vitess output
Table 6.7.: Shared libraries of the McStas library. See Appendix B for details.
99
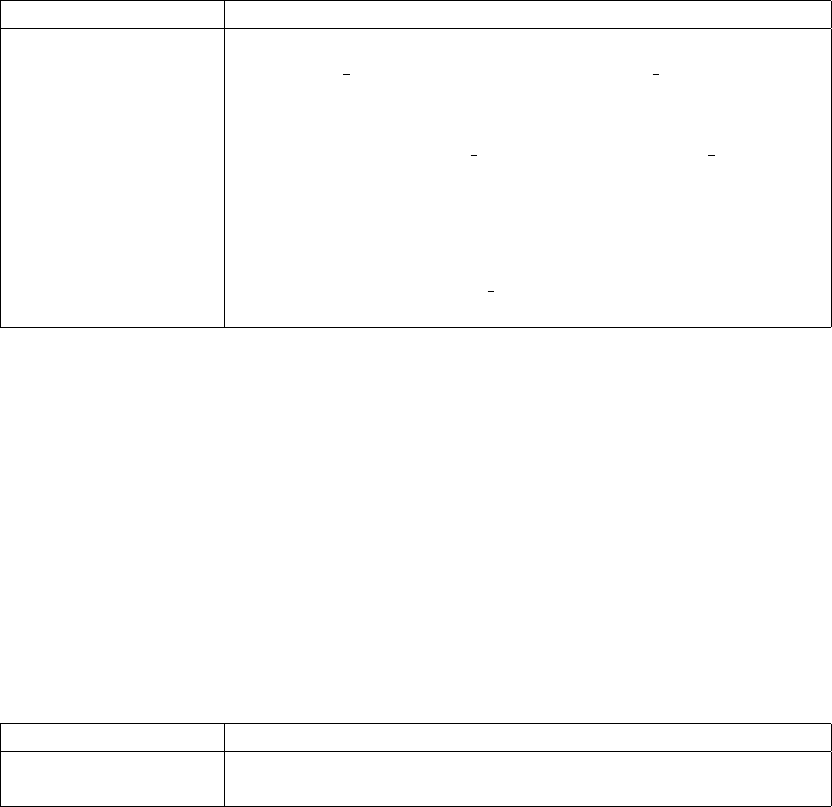
MCSTAS/data Description
*.lau Laue pattern file, as issued from Crystallographica. For use
with Single crystal, PowderN, and Isotropic Sqw. Data: [ h k
l Mult. d-space 2Theta F-squared ]
*.laz Powder pattern file, as obtained from Lazy/ICSD. For use
with PowderN, Isotropic Sqw and possibly Single crystal.
*.trm transmission file, typically for monochromator crystals and
filters. Data: [ k (Angs-1) , Transmission (0-1) ]
*.rfl reflectivity file, typically for mirrors and monochromator crys-
tals. Data: [ k (Angs-1) , Reflectivity (0-1) ]
*.sqw S(q, ω) files for Isotropic Sqw component. Data: [q] [ω]
[S(q, ω)]
Table 6.8.: Data files of the McStas library.
MCSTAS/examples Description
*.instr This directory contains example instruments, accessible
throught the mcgui “Neutron site” menu.
Table 6.9.: Instrument example files of the McStas library.
100

7. Instrument examples
In this section, we present a few typical instruments. We then give a longer description
of three selected instruments. We present the McStas versions of the Risø standard triple
axis spectrometer TAS1 (7.3) and the ISIS time-of-flight spectrometer PRISMA (7.4).
But first we present an example of a component test instrument: the instrument
to test the component V sample (7.2). These instrument files are included in the
McStas distribution in the examples/ directory. Most of the instrument examples there-
in may be executed automatically throught the McStas self-test procedure. The list of
instrument examples has been extended considerably, see the “Neutron Site” menu in
mcgui (See page 3.2).
7.1. A quick tour of instrument examples
7.1.1. Neutron site: Brookhaven
The former Brookhaven reactor hosted the H8 triple-axis spectrometer. This latter was
modelled in order to cross-check the NISP, Vitess, Restrax, McStas and IDEAS neutron
propagation Monte Carlo codes. Results were published in Neutron News 13 (No. 4),
24-29 (2002).
7.1.2. Neutron site: Tools
This category currently contains a special Histogrammer that can read any event file
from Vitess, MCNP, tripoli and McStas in order to produce histograms of any type.
This is a very powerful tool to analyse sparse huge events data sets.
7.1.3. Neutron site: ILL
Cold and thermal guide models are given in the ILL neutron site. Descriptions are very
accurate, based on actual drawings, including all elements with curvature and gaps.
Simulated capture fluxes were found in very good agreement with measurements.
Additionally, the IN12 triple-axis instrument has been detailed, in its year 2005 con-
figuration. It is located at the end of the H15 cold guide. The sample is a Vanadium
rod.
The IN6 instrument is a hybrid time-of-flight spectrometer with 3 monochromators
and a Fermi chopper. The sample is an isotropic scatterer (liquid). It makes use of the
SPLIT keyword to enhance statistics.
101

The ILL_TOF_Env example is a simple neutron pulse (e.g. from a chopper system
coming out of IN4, IN5 or IN6) illuminating a sample, with a container around and a
cylinder shaped sample environment.
7.1.4. Neutron site: tests
This large set of examples shows simple instruments using particular components (sam-
ples, polarized beams, detectors). They may be used as starting point for further more
complex models.
7.1.5. Neutron site: ISIS
You will find here examples of ISIS instruments, some of them using the ISIS moderator
component (obtained from MCNP computations).
7.1.6. Neutron site: Risø
This section contains former Risø instruments, which constitue the default test series for
the McStas distribution.
7.1.7. Neutron site: PSI
The Focus time-of-flight instrument is, with the ILL IN6 and IN12 models, the most
advanced example. It as been built from drawings, including the guide and all optics
elements. Simulated capture fluxes were found in good agreement with measurements.
7.1.8. Neutron site: Tutorial
A typical diffractometer including a powder sample and a Rescal-type triple-axis models
are in this category. Instrument parameters enable models to cope with most existing
instruments of these classes. The TAS model includes a basic in-plane UB-matrix trans-
formation. It may be used to estimate the resolution functions of a TAS configuration.
7.1.9. Neutron site: ESS
This section contains design studies for the future, long-pulsed European Spallation
Source (ESS). The only contents is currently the ESS_IN5_reprate instrument for sim-
ulating an IN5-TYPE (cold chopper) multi-frame spectrometer for the long-pulsed ESS.
(Also serves as example instrument for Tunneling_sample.comp.)
7.2. A test instrument for the component V sample
This is one of many test instruments written with the purpose of testing the individual
components. We have picked this instrument both to present an example test instrument
and because it despite its simplicity has produced quite non-trivial results.
102
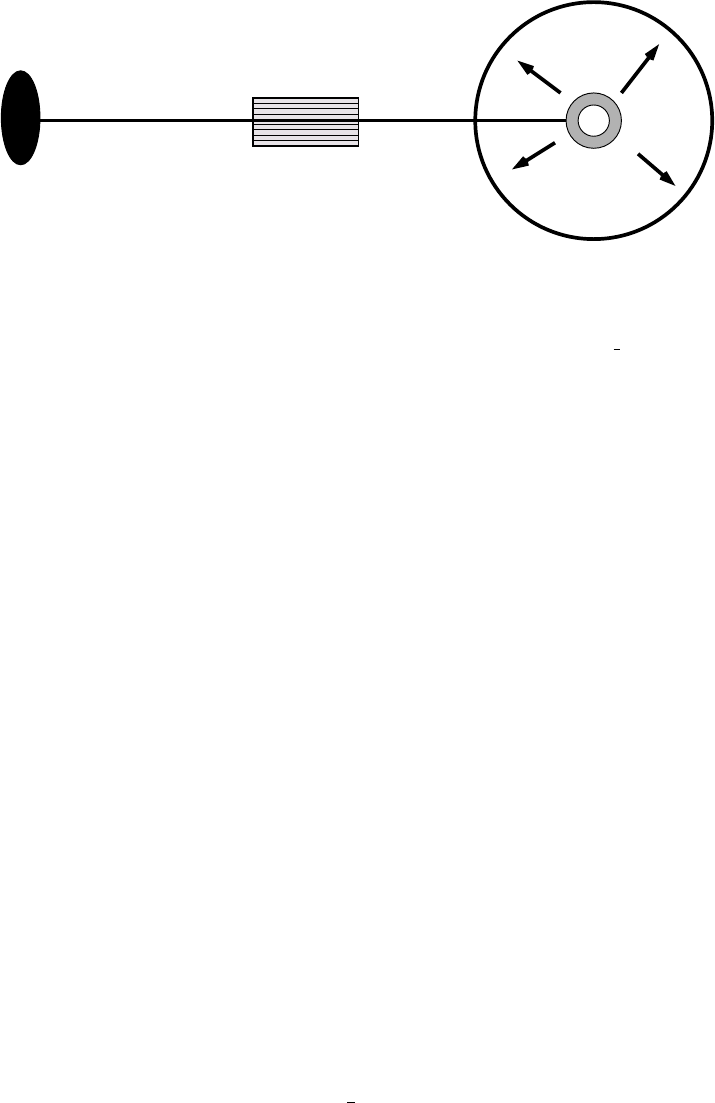
Source Collimator Vanadium
4pipsd
Figure 7.1.: A sketch of the test instrument for the component V sample.
The instrument consists of a narrow source, a 60’ collimator, a V-sample shaped as a
hollow cylinder with height 15 mm, inner diameter 16 mm, and outer diameter 24 mm
at a distance of 1 m from the source. The sample is in turn surrounded by an unphysical
4π-PSD monitor with 50 ×100 pixels and a radius of 106m. The set-up is shown in
figure 7.1.
7.2.1. Scattering from the V-sample test instrument
In figure 7.2, we present the radial distribution of the scattering from an evenly illumi-
nated V-sample, as seen by a spherical PSD. It is interesting to note that the variation
in the scattering intensity is as large as 10%. This is an effect of anisotropic attenuation
of the beam in the cylindrical sample.
7.3. The triple axis spectrometer TAS1
With this instrument definition, we have tried to create a very detailed model of the
conventional cold-source triple-axis spectrometer TAS1 at the now closed neutron source
DR3 of Risø National Laboratory. Except for the cold source itself, all components used
have quite realistic properties. Furthermore, the overall geometry of the instrument has
been adapted from the detailed technical drawings of the real spectrometer. The TAS 1
simulation was the first detailed work performed with the McStas package. For further
details see reference [ACL98].
At the spectrometer, the channel from the cold source to the monochromator is asym-
metric, since the first part of the channel is shared with other instruments. In the
instrument definition, this is represented by three slits. For the cold source, we use a
flat energy distribution (component Source flat) focusing on the third slit.
The real monochromator consist of seven blades, vertically focusing on the sample.
The angle of curvature is constant so that the focusing is perfect at 5.0 meV (20.0 meV for
2nd order reflections) for a 1×1 cm2sample. This is modeled directly in the instrument
103
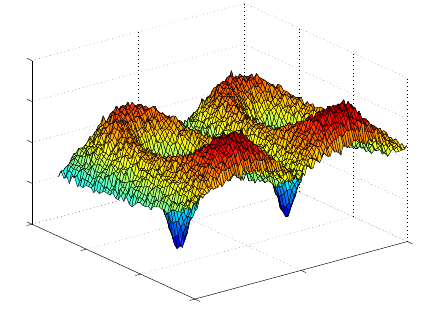
0
50
100
0
20
40
60
1.4
1.45
1.5
1.55
1.6
Figure 7.2.: Scattering from a V-sample, measured by a spherical PSD. The sphere has
been transformed onto a plane and the intensity is plotted as the third
dimension.
104
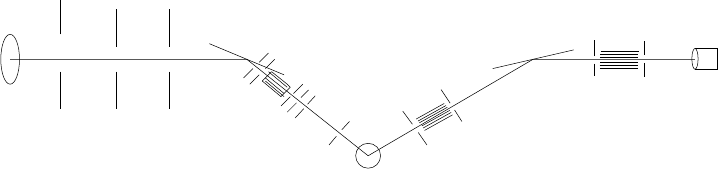
Source
Slits
Focusing
monochromator
Slits
Sample
Collimator 2
Analyser
Collimator 3 Detector
Collimator 1
Slits
Figure 7.3.: A sketch of the TAS1 instrument.
definition using seven Monochromator components. The mosaicity of the pyrolytic
graphite crystals is nominally 30’ (FWHM) in both directions. However, the simulations
indicated that the horisontal mosaicities of both monochromator and analyser were more
likely 45’. This was used for all mosaicities in the final instrument definition.
The monochromator scattering angle, in effect determining the incoming neutron en-
ergy, is for the real spectrometer fixed by four holes in the shielding, corresponding to the
energies 3.6, 5.0, 7.2, and 13.7 meV for first order neutrons. In the instrument definition,
we have adapted the angle corresponding to 5.0 meV in order to test the simulations
against measurements performed on the spectrometer.
The width of the exit channel from the monochromator may be narrowed down from
initially 40 mm to 20 mm by an insert piece. In the simulations, we have chosen the
20 mm option and modeled the channel with two slits to match the experimental set-up.
In the test experiments, we used two standard samples: An Al2O3powder sample
and a vanadium sample. The instrument definitions use either of these samples of the
correct size. Both samples are chosen to focus on the opening aperture of collimator 2
(the one between the sample and the analyser). Two slits, one before and one after the
sample, are in the instrument definition set to the opening values which were used in
the experiments.
The analyser of the spectrometer is flat and made from pyrolytic graphite. It is placed
between an entry and an exit channel, the latter leading to a single detector. All this
has been copied into the instrument definition.
On the spectrometer, Soller collimators may be inserted at three positions: Between
monochromator and sample, between sample and analyser, and between analyser and
detector. In our instrument definition, we have used 30’, 28’, and 67’ collimators on
these three positions, respectively.
An illustration of the TAS1 instrument is shown in figure 7.3. Test results and data
from the real spectrometer are shown in Appendix 7.3.1.
7.3.1. Simulated and measured resolution of TAS1
In order to test the McStas package on a qualitative level, we have performed a very
detailed comparison of a simulation with a standard experiment from TAS1. The mea-
105
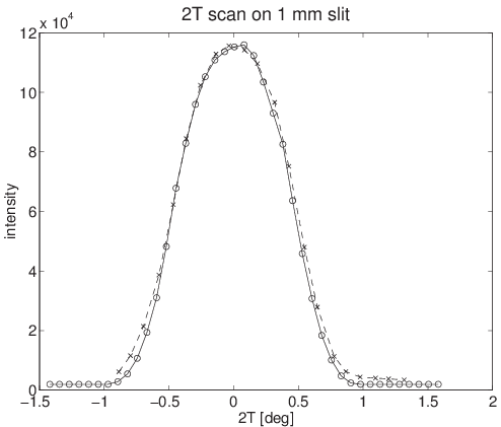
surement series constitutes a complete alignment of the spectrometer, using the direct
beam and scattering from V and Al2O3samples at an incoming energy of 20.0 meV,
using the second order scattering from the monochromator.
In these simulations, we have tried to reproduce every alignment scan with respect
to position and width of the peaks, whereas we have not tried to compare absolute
intensities. Below, we show a few comparisons of the simulations and the measurements.
Figure 7.4 shows a scan of 2θmon the collimated direct beam in two-axis mode. A
1 mm slit is placed on the sample position. Both the measured width and non-Gaussian
peak shape are well reproduced by the McStas simulations.
Figure 7.4.: TAS1: Scans of 2θsin the direct beam with 1 mm slit on the sample po-
sition. ”×”: measurements, ”o”: simulations, scaled to the same intensity
Collimations: open-30’-open-open.
In contrast, a simulated 2θascan in triple-axis mode on a V-sample showed a surprising
offset from 0 degrees. However, a simulation with a PSD on the sample position showed
that the beam center was 1.5 mm off from the center of the sample, and this was
important since the beam was no wider than the sample itself. A subsequent centering
of the beam resulted in a nice agreement between simulation and measurements. For
a comparison on a slightly different instrument (analyser-detector collimator inserted),
see Figure 7.5.
The result of a 2θsscan on an Al2O3powder sample in two-axis mode is shown in Fig-
ure 7.6. Both for the scan in focusing mode (+ −+) and for the one in defocusing mode
(+ + +) (not shown), the agreement between simulation and experiment is excellent.
As a final result, we present a scan of the energy transfer Ea=~ωon a V-sample.
The data are shown in Figure 7.7.
106
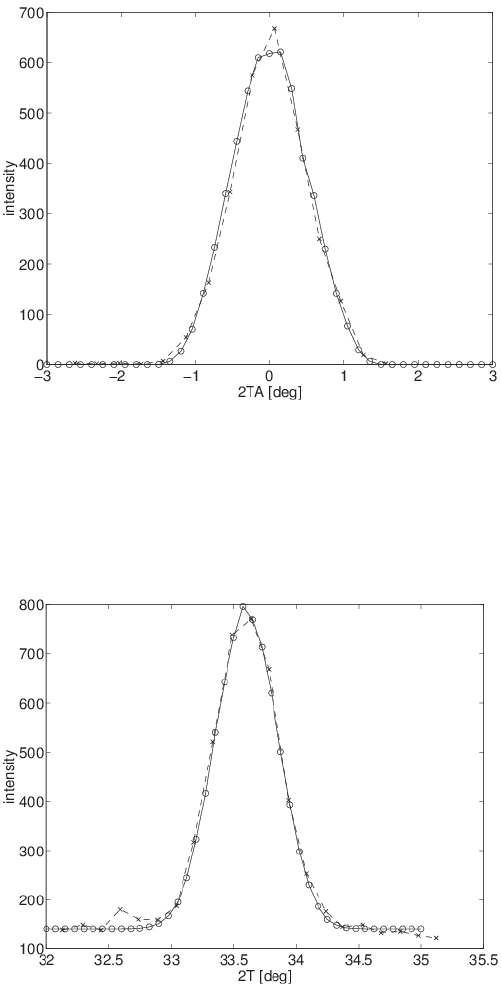
Figure 7.5.: TAS1: Corrected 2θascan on a V-sample. Collimations: open-30’-28’-67’.
”×”: measurements, ”o”: simulations.
Figure 7.6.: TAS1: 2θsscans on Al2O3in two-axis, focusing mode. Collimations: open-
30’-28’-67’. ”×”: measurements, ”o”: simulations. A constant background
is added to the simulated data.
107
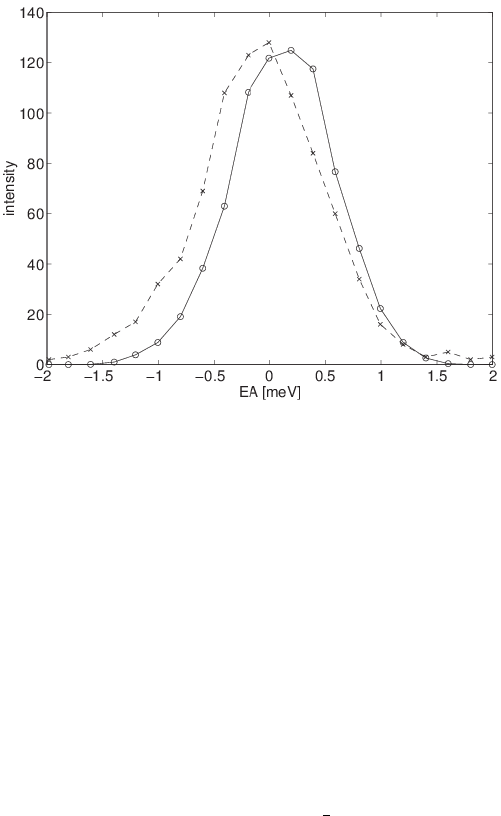
Figure 7.7.: TAS1: Scans of the analyser energy on a V-sample. Collimations: open-30’-
28’-67’. ”×”: measurements, ”o”: simulations.
7.4. The time-of-flight spectrometer PRISMA
In order to test the time-of-flight aspect of McStas, we have in collaboration with Mark
Hagen, now at SNS, written a simple simulation of a time-of-flight instrument loosely
based on the ISIS spectrometer PRISMA. The simulation was used to investigate the
effect of using a RITA-style analyser instead of the normal PRISMA backend.
We have used the simple time-of-flight source Tof source. The neutrons pass through
a beam channel and scatter off from a vanadium sample, pass through a collimator on
to the analyser. The RITA-style analyser consists of seven analyser crystals that can be
rotated independently around a vertical axis. After the analysers we have placed a PSD
and a time-of-flight detector.
To illustrate some of the things that can be done in a simulation as opposed to a real-
life experiment, this example instrument further discriminates between the scattering off
each individual analyser crystal when the neutron hits the detector. The analyser com-
ponent is modified so that a global variable neu_color registers which crystal scatters
the neutron ray. The detector component is then modified to construct seven different
time-of-flight histograms, one for each crystal (see the source code for the instrument
for details). One way to think of this is that the analyser blades paint a color on each
neutron which is then observed in the detector. An illustration of the instrument is
shown in figure 7.8. Test results are shown in Appendix 7.4.1.
108
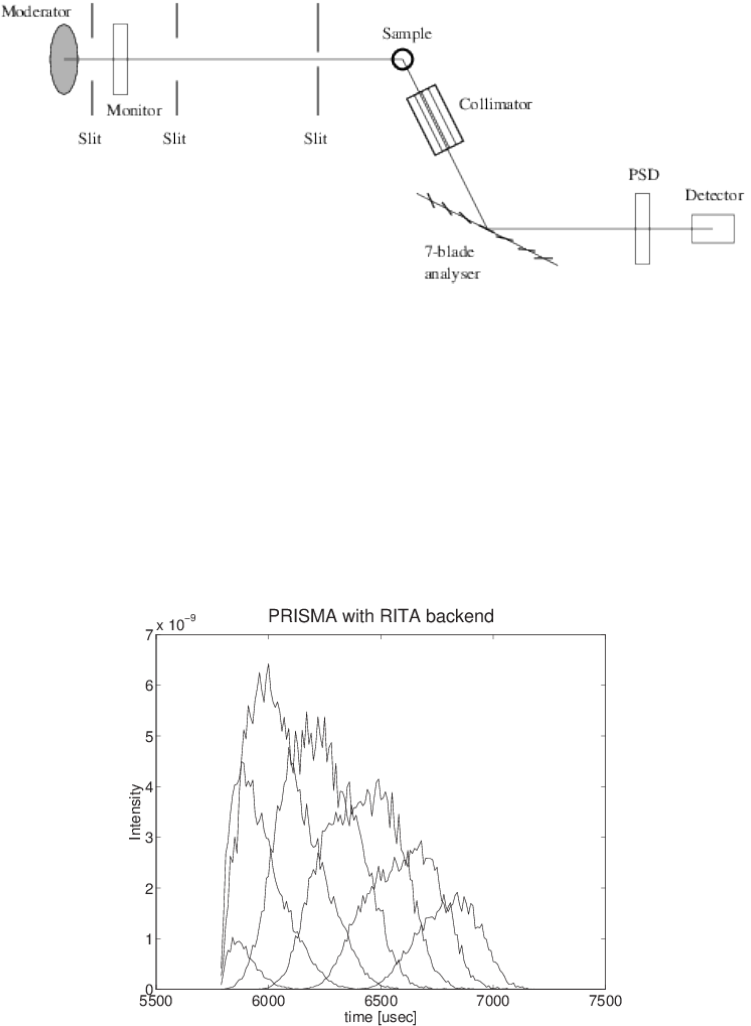
Figure 7.8.: A sketch of the PRISMA instrument.
7.4.1. Simple spectra from the PRISMA instrument
A plot from the detector in the PRISMA simulation is shown in Figure 7.9. These results
were obtained with each analyser blade rotated one degree relative to the previous one.
The separation of the spectra of the different analyser blades is caused by different energy
of scattered neutrons and different flight path length from source to detector. We have
not performed any quantitative analysis of the data.
Figure 7.9.: Test result from PRISMA instrument using “colored neutrons”. Each graph
shows the neutrons scattered from one analyser blade.
109
A. Random numbers in McStas
A.1. Transformation of random numbers
In order to perform the Monte Carlo choices, one needs to be able to pick a random
number from a given distribution. However, most random number generators only give
a uniform distribution over a certain interval. We thus need to be able to transform
between probability distributions, and we here give a short explanation on how to do
this.
Assume that we pick a random number, x, from a distribution φ(x). We are now
interested in the shape of the distribution, Ψ(y), of the transformed y=f(x), assuming
f(x) is monotonous. All random numbers lying in the interval [x;x+dx] are transformed
to lie within the interval [y;y+f0(x)dx], so the resulting distribution must be Ψ(y) =
φ(x)/f0(x).
If the random number generator selects numbers uniformly in the interval [0; 1], we
have φ(x) = 1 (inside the interval; zero outside), and we reach
Ψ(y) = 1
f0(x)=d
dy f−1(y).(A.1)
By indefinite integration we reach
ZΨ(y)dy =f−1(y) = x, (A.2)
which is the essential formula for random number transformation, since we in general
know Ψ(y) and like to determine the relation y=f(x). Let us illustrate with a few
examples of transformations relevant for the McStas components.
The circle For finding a random point within the circle of radius R, one would like to
choose the polar angle, φ, from a uniform distribution in [0; 2π], giving Ψφ= 1/(2π).
and the radius from the (normalised) distribution Ψr= 2r/R2.
For the radial part, eg. (A.2) becomes y/(2π) = x, whence φis found simply by
multiplying a random number (x) with 2π.
For the radial part, the left side of eq. (A.2), gives RΨ(r)dr =R2r/R2dr =r2/R2,
which from (A.2) should equal x. Hence we reach the wanted transformation r=R√x.
The sphere For finding a random point on the surface of the unit sphere, we need to
determine the two angles, (θ, φ).
Ψφis chosen from a uniform distribution in [0; 2π], giving φ= 2πx as for the circle.
The probability distribution of θshould be Ψθ= sin(θ) (for θ∈[0; π]), whence by
eq. (A.2) θ= cos−1(x).
110
Exponential decay In a simple time-of-flight source, the neutron flux decays exponen-
tially after the initial activation at t= 0. We thus want to pick an initial neutron
emission time from the normalised distribution Ψ(t) = exp(−t/τ)/τ. Use of Eq. (A.2)
gives x= 1 −exp(−t/τ ). For convenience we now use the random variable x1= 1 −x
(with the same distributions as x), giving the simple expression t=−τln(x1).
Normal distributions The important normal distribution can not be reached as a simple
transformation of a uniform distribution. In stead, we rely on a specific algorithm for
selecting random numbers with this distribution.
A.2. Random generator
Even though there is the possibility to use the system random generator, as well as
the initial McStas version 1.1 random generator, the default algorithm is the so-called
”Mersenne Twister”, by Makoto Matsumoto and Takuji Nishimura. See
http://www.math.sci.hiroshima-u.ac.jp/~m-mat/MT/emt.html for original source.
It is considered today to be by far the best random generator, which means that both
its period is extremely large 219937 −1, and cross-correlations are negligible, i.e distri-
butions are homogeneous and independent up to 623 dimensions. It is also extremely
fast.
111
B. Libraries and constants
The McStas Library contains a number of built-in functions and conversion constants
which are useful when constructing components. These are stored in the share directory
of the MCSTAS library.
Within these functions, the ’Run-time’ part is available for all component/instrument
descriptions. The other parts are dynamic, that is they are not pre-loaded, but only
imported once when a component requests it using the %include McStas keyword. For
instance, within a component C code block, (usually SHARE or DECLARE):
1 %i n c l u d e ” r e a d t a b l e −l i b ”
will include the ’read table-lib.h’ file, and the ’read table-lib.c’ (unless the --no-runtime
option is used with mcstas). Similarly,
1 %i n c l u d e ” r e a d t a b l e −l i b . h”
will only include the ’read table-lib.h’. The library embedding is done only once for
all components (like the SHARE section). For an example of implementation, see
Res monitor.
In this Appendix, we present a short list of both each of the library contents and the
run-time features.
B.1. Run-time calls and functions (mcstas-r)
Here we list a number of preprogrammed macros which may ease the task of writing
component and instrument definitions.
B.1.1. Neutron propagation
Propagation routines perform all necessary operations to transport neutron rays from
one point to an other. Except when using the special ALLOW_BACKPROP; call prior to
executing any PROP_* propagation, the neutron rays which have negative propagation
times are removed automatically.
•ABSORB. This macro issues an order to the overall McStas simulator to interrupt
the simulation of the current neutron history and to start a new one.
•PROP Z0. Propagates the neutron to the z= 0 plane, by adjusting (x, y, z) and
taccordingly from knowledge of the neutron velocity (vx, vy, vz). If the propaga-
tion time is negative, the neutron ray is absorbed, except if a ALLOW_BACKPROP;
preceeds it.
112
For components that are centered along the z-axis, use the _intersect functions
to determine intersection time(s), and then a PROP_DT call.
•PROP DT(dt). Propagates the neutron through the time interval dt, adjusting
(x, y, z) and taccordingly from knowledge of the neutron velocity. This macro
automatically calls PROP GRAV DT when the --gravitation option has been
set for the whole simulation.
•PROP GRAV DT(dt, Ax, Ay, Az). Like PROP DT, but it also includes grav-
ity using the acceleration (Ax, Ay, Az). In addition to adjusting (x, y, z) and t,
also (vx, vy, vz) is modified.
•ALLOW BACKPROP. Indicates that the next propagation routine will not
remove the neutron ray, even if negative propagation times are found. Subsequent
propagations are not affected.
•SCATTER. This macro is used to denote a scattering event inside a component.
It should be used e.g to indicate that a component has interacted with the neutron
ray (e.g. scattered or detected). This does not affect the simulation (see, how-
ever, Beamstop), and it is mainly used by the MCDISPLAY section and the GROUP
modifier See also the SCATTERED variable (below).
B.1.2. Coordinate and component variable retrieval
•MC GETPAR(comp, outpar). This may be used in e.g. the FINALLY section
of an instrument definition to reference the output parameters of a component.
•NAME CURRENT COMP gives the name of the current component as a
string.
•POS A CURRENT COMP gives the absolute position of the current compo-
nent. A component of the vector is referred to as POS A CURRENT COMP.i
where iis x,yor z.
•ROT A CURRENT COMP and ROT R CURRENT COMP give the ori-
entation of the current component as rotation matrices (absolute orientation and
the orientation relative to the previous component, respectively). A component of
a rotation matrix is referred to as ROT A CURRENT COMP[m][n], where mand
nare 0, 1, or 2 standing for x, y and zcoordinates respectively.
•POS A COMP(comp) gives the absolute position of the component with the
name comp. Note that comp is not given as a string. A component of the vector
is referred to as POS A COMP(comp).i where iis x,yor z.
•ROT A COMP(comp) and ROT R COMP(comp) give the orientation of the
component comp as rotation matrices (absolute orientation and the orientation
relative to its previous component, respectively). Note that comp is not given as a
113
string. A component of a rotation matrice is referred to as ROT A COMP(comp)[m][n],
where mand nare 0, 1, or 2.
•INDEX CURRENT COMP is the number (index) of the current component
(starting from 1).
•POS A COMP INDEX(index) is the absolute position of component index.
POS A COMP INDEX (INDEX CURRENT COMP) is the same as
POS A CURRENT COMP. You may use
POS A COMP INDEX (INDEX CURRENT COMP+1)
to make, for instance, your component access the position of the next component
(this is usefull for automatic targeting). A component of the vector is referred to
as POS A COMP INDEX(index).i where iis x,yor z.
•POS R COMP INDEX works the same as above, but with relative coordinates.
•STORE NEUTRON(index, x, y, z, vx, vy, vz, t, sx, sy, sz, p) stores the current
neutron state in the trace-history table, in local coordinate system. index is usu-
ally INDEX CURRENT COMP. This is automatically done when entering each
component of an instrument.
•RESTORE NEUTRON(index, x, y, z, vx, vy, vz, t, sx, sy, sz, p) restores the neu-
tron state to the one at the input of the component index. To ignore a component
effect, use RESTORE NEUTRON (INDEX CURRENT COMP,
x, y, z, vx, vy, vz, t, sx, sy, sz, p) at the end of its TRACE section, or in its EXTEND
section. These neutron states are in the local component coordinate systems.
•SCATTERED is a variable set to 0 when entering a component, which is incre-
mented each time a SCATTER event occurs. This may be used in the EXTEND
sections to determine whether the component interacted with the current neutron
ray.
•extend list(n, &arr, &len,elemsize). Given an array arr with len elements each
of size elemsize, make sure that the array is big enough to hold at least nelements,
by extending arr and len if necessary. Typically used when reading a list of
numbers from a data file when the length of the file is not known in advance.
•mcset ncount(n). Sets the number of neutron histories to simulate to n.
•mcget ncount(). Returns the number of neutron histories to simulate (usually
set by option -n).
•mcget run num(). Returns the number of neutron histories that have been sim-
ulated until now.
114
B.1.3. Coordinate transformations
•coords set(x, y, z) returns a Coord structure (like POS A CURRENT COMP)
with x,yand zmembers.
•coords get(P, &x, &y, &z) copies the x,yand zmembers of the Coord structure
Pinto x, y, z variables.
•coords add(a, b), coords sub(a, b), coords neg(a) enable to operate on coor-
dinates, and return the resulting Coord structure.
•rot set rotation(Rotation t,φx, φy, φz) Get transformation matrix for rotation
first φxaround x axis, then φyaround y, and last φzaround z. tshould be a
’Rotation’ ([3][3] ’double’ matrix).
•rot mul(Rotation t1, Rotation t2, Rotation t3) performs t3 = t1.t2.
•rot copy(Rotation dest, Rotation src) performs dest =src for Rotation arrays.
•rot transpose(Rotation src, Rotation dest) performs dest =srct.
•rot apply(Rotation t, Coords a) returns a Coord structure which is t.a
B.1.4. Mathematical routines
•NORM(x, y, z). Normalizes the vector (x, y, z) to have length 1 ∗.
•scalar prod(ax, ay, az, bx, by, bz). Returns the scalar product of the two vectors
(ax, ay, az) and (bx, by, bz).
•vec prod(ax,ay,az,bx,by,bz,cx,cy,cz). Sets (ax, ay, az) equal to the vector product
(bx, by, bz)×(cx, cy, cz)∗.
•rotate(x,y,z,vx,vy,vz,ϕ,ax,ay,az). Set (x, y, z) to the result of rotating the vector
(vx, vy, vz) the angle ϕ(in radians) around the vector (ax, ay, az)∗.
•normal vec(nx,ny,nz,x,y,z). Computes a unit vector (nx, ny, nz) normal to
the vector (x, y, z).∗
•solve 2nd order(&t1, &t2A,B,C). Solves the 2nd order equation At2+Bt+C=
0 and returns the solutions into pointers *t1and *t2. if t2is specified as NULL, only
the smallest positive solution is returned in t1.
(∗The experienced c-programmer may be puzzled that these routines can return infor-
mation without the use of pass by reference, the reason is that these calls are implemented
as macros / #define wrapped functions.)
115
B.1.5. Output from detectors
Details about using these functions are given in the McStas User Manual.
•DETECTOR OUT 0D(...). Used to output the results from a single detector.
The name of the detector is output together with the simulated intensity and
estimated statistical error. The output is produced in a format that can be read
by McStas front-end programs.
•DETECTOR OUT 1D(...). Used to output the results from a one-dimensional
detector. Integrated intensities error etc. is also reported as for DETECTOR OUT 0D.
•DETECTOR OUT 2D(...). Used to output the results from a two-dimentional
detector. Integrated intensities error etc. is also reported as for DETECTOR OUT 0D.
•DETECTOR OUT 3D(...). Used to output the results from a three-dimentional
detector. Arguments are the same as in DETECTOR OUT 2D, but with an ad-
ditional zaxis. Resulting data files are treated as 2D data, but the 3rd dimension
is specified in the type field. Integrated intensities error etc. is also reported as for
DETECTOR OUT 0D.
•mcinfo simulation(FILE *f, mcformat, char *pre, char *name) is used to ap-
pend the simulation parameters into file f(see for instance Res monitor). Inter-
nal variable mcformat should be used as specified. Please contact the authors for
further information.
B.1.6. Ray-geometry intersections
•inside rectangle(x,y,xw,yh). Return 1 if −xw/2≤x≤xw/2 AND −yh/2≤
y≤yh/2. Else return 0.
•box intersect(&t1, &t2,x,y,z,vx,vy,vz,dx,dy,dz). Calculates the (0, 1, or
2) intersections between the neutron path and a box of dimensions dx,dy, and dz,
centered at the origin for a neutron with the parameters (x, y, z, vx, vy, vz). The
times of intersection are returned in the variables t1and t2, with t1< t2. In the
case of less than two intersections, t1(and possibly t2) are set to zero. The function
returns true if the neutron intersects the box, false otherwise.
•cylinder intersect(&t1, &t2,x,y,z,vx,vy,vz,r,h). Similar to box intersect,
but using a cylinder of height hand radius r, centered at the origin.
•sphere intersect(&t1, &t2,x,y,z,vx,vy,vz,r). Similar to box intersect, but
using a sphere of radius r.
B.1.7. Random numbers
•rand01(). Returns a random number distributed uniformly between 0 and 1.
116
•randnorm(). Returns a random number from a normal distribution centered
around 0 and with σ= 1. The algorithm used to sample the normal distribution
is explained in Ref. [Pre+86, ch.7].
•randpm1(). Returns a random number distributed uniformly between -1 and 1.
•randtriangle(). Returns a random number from a triangular distribution between
-1 and 1.
•randvec target circle(&vx, &vy, &vz, &dΩ, aimx, aimy, aimz,rf). Generates
a random vector (vx, vy, vz), of the same length as (aimx, aimy, aimz), which is
targeted at a disk centered at (aimx, aimy, aimz) with radius rf(in meters),
and perpendicular to the aim vector.. All directions that intersect the circle are
chosen with equal probability. The solid angle of the circle as seen from the po-
sition of the neutron is returned in dΩ. This routine was previously called rand-
vec target sphere (which still works).
•randvec target rect angular(&vx, &vy, &vz, &dΩ, aimx, aimy, aimz,h, w, Rot)
does the same as randvec target circle but targetting at a rectangle with angular
dimensions hand w(in radians, not in degrees as other angles). The rotation
matrix Rot is the coordinate system orientation in the absolute frame, usually
ROT A CURRENT COMP.
•randvec target rect(&vx, &vy, &vz, &dΩ, aimx, aimy, aimz,height, width, Rot)
is the same as randvec target rect angular but height and width dimensions are
given in meters. This function is useful to e.g. target at a guide entry window or
analyzer blade.
B.2. Reading a data file into a vector/matrix (Table input,
read table-lib)
The read_table-lib provides functionalities for reading text (and binary) data files. To
use this library, add a %include "read_table-lib" in your component definition DE-
CLARE or SHARE section. Tables are structures of type t_Table (see read_table-lib.h
file for details):
1/∗t T a bl e s t r u c t u r e ( most i mpor tant members ) ∗/
2double ∗data ; /∗Use T a b l e I n d e x ( T abl e , i j ) t o g e t e l em e n t [ i , j ] ∗/
3long rows ; /∗number o f r ows ∗/
4long columns ; /∗number o f co lu mn s ∗/
5char ∗header ; /∗t h e h ea de r w i t h comments ∗/
6char ∗f i l e n a m e ; /∗f i l e name or t i t l e ∗/
7double min x ; /∗minimum v a l u e o f 1 s t column / v e c t o r ∗/
8double max x ; /∗maximum v a l u e o f 1 s t column/ v e c t o r ∗/
Available functions to read a single vector/matrix are:
117
•Table Init(&T able,rows,columns) returns an allocated Table structure. Use
rows =columns = 0 not to allocate memory and return an empty table. Calls to
Table Init are optional, since initialization is being performed by other functions
already.
•Table Read(&T able,filename,block) reads numerical block number block (0 to
concatenate all) data from text file filename into T able, which is as well initialized
in the process. The block number changes when the numerical data changes its
size, or a comment is encoutered (lines starting by ’#;%/’). If the data could
not be read, then T able.data is NULL and T able.rows = 0. You may then try to
read it using Table Read Offset Binary. Return value is the number of elements
read.
•Table Read Offset(&T able,filename,block, &offset,nrows) does the same as
Table Read except that it starts at offset offset (0 means begining of file) and
reads nrows lines (0 for all). The offset is returned as the final offset reached after
reading the nrows lines.
•Table Read Offset Binary(&T able,f ilename,type,block, &offset,nrows,ncolumns)
does the same as Table Read Offset, but also specifies the type of the file (may
be ”float” or ”double”), the number nrows of rows to read, each of them having
ncolumns elements. No text header should be present in the file.
•Table Rebin(&T able) rebins all T able rows with increasing, evenly spaced first
column (index 0), e.g. before using Table Value. Linear interpolation is performed
for all other columns. The number of bins for the rebinned table is determined
from the smallest first column step.
•Table Info(T able) print information about the table T able.
•Table Index(T able, m, n) reads the T able[m][n] element.
•Table Value(T able, x, n) looks for the closest xvalue in the first column (index
0), and extracts in this row the n-th element (starting from 0). The first column
is thus the ’x’ axis for the data.
•Table Free(&T able) free allocated memory blocks.
•Table Value2d(T able,X,Y) Uses 2D linear interpolation on a Table, from (X,Y)
coordinates and returns the corresponding value.
Available functions to read an array of vectors/matrices in a text file are:
•Table Read Array(F ile, &n) read and split file into as many blocks as neces-
sary and return a t_Table array. Each block contains a single vector/matrix. This
only works for text files. The number of blocks is put into n.
•Table Free Array(&T able) free the T able array.
118
•Table Info Array(&T able) display information about all data blocks.
The format of text files is free. Lines starting by ’#;%/’ characters are considered to
be comments, and stored in T able.header. Data blocks are vectors and matrices. Block
numbers are counted starting from 1, and changing when a comment is found, or the
column number changes. For instance, the file ’MCSTAS/data/BeO.trm’ (Transmission
of a Berylium filter) looks like:
1 # BeO t r a n s m i s s i o n , a s measu red on IN12
2 # T hi c k ne s s : 0 . 0 5 [m]
3 # [ k ( Angs−1) Transmission (0−1) ]
4 # w av ev e ct or m u l t i p l y
5 1. 0 5 00 0. 7 4 4 41
6 1. 0 7 50 0. 7 6 7 27
7 1. 1 0 00 0. 8 0 6 80
8 . . .
Binary files should be of type ”float” (i.e. REAL*32) and ”double” (i.e. REAL*64),
and should not contain text header lines. These files are platform dependent (little or
big endian).
The filename is first searched into the current directory (and all user additional
locations specified using the -I option, see the ’Running McStas’ chapter in the User
Manual), and if not found, in the data sub-directory of the MCSTAS library location.
This way, you do not need to have local copies of the McStas Library Data files (see
table 6.8).
A usage example for this library part may be:
1 t T ab l e Table ; // d e c l a r e a t T a b l e s t r u c t u r e
2char f i l e []= ”BeO. trm ” ; // a f i l e name
3double x , y ;
4
5 Table Read(&Table , f i l e , 1 ) ; // i n i t i a l i z e and read t h e f i r s t nume r i c al
b l o c k
6 T a b l e I n f o ( Ta bl e ) ; // d i s p l a y t a b l e i n f o r m a t i o n s
7 . . .
8 x = T a bl e I n de x ( Tabl e , 2 , 5 ) ; // r ead t h e 3 r d row , 6 t h column e le m ent
9// o f t h e t a b l e . I n d exes s t a r t a t z e r o i n C
.
10 y = T ab le Val ue ( Table , 1 . 4 5 , 1 ) ; // l o o k f o r v a l u e 1 .45 i n 1 s t column ( x
a x i s )
11 // and e x t r a c t 2nd column v al ue o f t h a t row
12 T a b l e F r e e (&Table ) ; // f r e e a l l o c a t e d memory f o r t a b l e
Additionally, if the block number (3rd) argument of Table Read is 0, all blocks will be
concatenated. The Table Value function assumes that the ’x’ axis is the first column
(index 0). Other functions are used the same way with a few additional parameters, e.g.
specifying an offset for reading files, or reading binary data.
This other example for text files shows how to read many data blocks:
1 t Ta b l e ∗Table ; // d e c l a r e a t T a b l e s t r u c t u r e a rr ay
2long n ;
119
3double y ;
4
5 Table = Table Read Array ( ” f i l e . dat ” , &n ) ; // i n i t i a l i z e and read t h e a l l
numeri cal b l o c k
6 n = T a b l e I n f o A r r a y ( Tab le ) ; // d i s p l a y i n f o r m a t i o n s f o r a l l b l o c k s (
a l s o r e t u r n s n )
7
8 y = T a bl e I n de x ( Tab le [ 0 ] , 2 , 5 ) ; // r ea d i n 1 s t b l o c k t h e 3 r d row , 6 t h
column e l ement
9// ONLY use Table [ i ] wi t h i <n !
10 T a ble Free A r r a y ( Table ) ; // f r e e a l l o c a t e d memory f o r Tab le
You may look into, for instance, the source files for Monochromator curved or
Virtual input for other implementation examples.
B.3. Monitor nD Library
This library gathers a few functions used by a set of monitors e.g. Monitor nD, Res monitor,
Virtual output, etc. It may monitor any kind of data, create the data files, and may dis-
play many geometries (for mcdisplay). Refer to these components for implementation
examples, and ask the authors for more details.
B.4. Adaptive importance sampling Library
This library is currently only used by the components Source adapt and Adapt check.
It performs adaptive importance sampling of neutrons for simulation efficiency optimiza-
tion. Refer to these components for implementation examples, and ask the authors for
more details.
B.5. Vitess import/export Library
This library is used by the components Vitess input and Vitess output, as well as
the mcstas2vitess utility. Refer to these components for implementation examples,
and ask the authors for more details.
B.6. Constants for unit conversion etc.
The following predefined constants are useful for conversion between units
120
Name Value Conversion from Conversion to
DEG2RAD 2π/360 Degrees Radians
RAD2DEG 360/(2π) Radians Degrees
MIN2RAD 2π/(360 ·60) Minutes of arc Radians
RAD2MIN (360 ·60)/(2π) Radians Minutes of arc
V2K 1010 ·mN/~Velocity (m/s) k-vector (˚
A−1)
K2V 10−10 ·~/mNk-vector (˚
A−1) Velocity (m/s)
VS2E mN/(2e) Velocity squared (m2s−2) Neutron energy
(meV)
SE2V p2e/mNSquare root of neutron
energy (meV1/2)
Velocity (m/s)
FWHM2RMS 1/p8 log(2) Full width half maximum Root mean square
(standard deviation)
RMS2FWHM p8 log(2) Root mean square (stan-
dard deviation)
Full width half maxi-
mum
MNEUTRON 1.67492 ·10−27 kg Neutron mass, mn
HBAR 1.05459 ·10−34 Js Planck constant, ~
PI 3.14159265... π
FLT MAX 3.40282347E+38F a big float value
121
C. The McStas terminology
This is a short explanation of phrases and terms which have a specific meaning within
McStas. We have tried to keep the list as short as possible with the risk that the reader
may occasionally miss an explanation. In this case, you are more than welcome to
contact the McStas core team.
•Arm A generic McStas component which defines a frame of reference for other
components.
•Component One unit (e.g. optical element) in a neutron spectrometer. These are
considered as Types of elements to be instantiated in an Instrument description.
•Component instance A named Component (of a given Type) inserted in an
Instrument description.
•Definition parameter An input parameter for a component. For example the
radius of a sample component or the divergence of a collimator.
•Input parameter For a component, either a definition parameter or a setting
parameter. These parameters are supplied by the user to define the characteris-
tics of the particular instance of the component definition. For an instrument, a
parameter that can be changed at simulation run-time.
•Instrument An assembly of McStas components defining a neutron spectrometer.
•Kernel The McStas meta-language definition and the associated compiler mcstas.
•McStas Monte Carlo Simulation of Triple Axis Spectrometers (the name of this
package). Pronunciation ranges from mex-tas, to mac-stas and m-c-stas.
•Output parameter An output parameter for a component. For example the
counts in a monitor. An output parameter may be accessed from the instrument
in which the component is used using MC_GETPAR.
•Run-time C code, contained in the files mcstas-r.c and mcstas-r.h included in
the McStas distribution, that declare functions and variables used by the generated
simulations.
•Setting parameter Similar to a definition parameter, but with the restriction
that the value of the parameter must be a number.
122
Bibliography
[Mcs] See http://www.mcstas.org (cit. on pp. 9, 11, 13, 17, 24, 28, 32, 66, 77,
88, 94).
[Git] See https://github.com/McStasMcXtrace/McCode/issues (cit. on pp. 9,
16).
[Nmi] See http://neutron-eu.net/en (cit. on p. 10).
[Mcn] See http://mcnsi.risoe.dk (cit. on p. 10).
[Ts2] See http://ts-2.isis.rl.ac.uk (cit. on p. 10).
[Ess] See http://www.ess-europe.de (cit. on pp. 10, 12).
[Sin] See http://sine2020.eu (cit. on p. 10).
[Nis] See http : / / strider . lansce . lanl . gov / NISP / Welcome . html (cit. on
p. 11).
[Vit] See http://www.hmi.de/projects/ess/vitess (cit. on p. 11).
[Ibw] See http : / / neutrons - dev . ornl . gov / eqsans / software / ib/ (cit. on
p. 11).
[Nad] http://code.google.com/p/jnads (cit. on p. 12).
[Sns] See http://www.sns.gov (cit. on p. 12).
[Ifi] See http://ifit.neutroncode.org (cit. on p. 38).
[Nex] See http://www.neutron.anl.gov/nexus (cit. on pp. 55, 68).
[ACL98] A. Abrahamsen, N. B. Christensen, and E. Lauridsen. McStas simulations
of the TAS1 spectrometer. Student’s report. Niels Bohr Institute, University
of Copenhagen, 1998 (cit. on p. 103).
[Ali04] L. Alianelli. In: J. Appl. Cryst. 37 (2004), p. 732 (cit. on p. 13).
[Cla+66] C.D. Clark et al. In: J. Sci. Instrum. 43 (1966), p. 1 (cit. on p. 13).
[Cla+98] K. N. Clausen et al. “The RITA spectrometer at Risø - design considerations
and recent results”. In: Physica B 241-243 (1998), pp. 50–55 (cit. on p. 12).
[Cop+86] J. R. D. Copley et al. “Improved Monte Carlo calculation of multiple scat-
tering effects in thermal neutron scattering experiments”. In: Comput. Phys.
Commun. 40 (1986), p. 337. issn: 0010-4655. doi:http://dx.doi.org/10.
1016/0010-4655(86)90118-9 (cit. on p. 13).
[Cop93] J.R.D. Copley. In: J. Neut. Research 1 (1993), p. 21 (cit. on pp. 12, 13, 18).
[Cop03] J.R.D. Copley. In: Nucl. Instr. Meth. A510 (2003), p. 318 (cit. on p. 13).
123
[Cus03] L. D. Cussen. In: J. Appl. Cryst. 36 (2003), p. 1204 (cit. on p. 13).
[EF14] P. Willendrup E. Farhi Y. Debab. “iFit: A new data analysis framework”.
In: Journal of Neutron Research 17.1 (2014), pp. 5–18. issn: 1023-8166. doi:
10.3233/JNR-130001 (cit. on p. 38).
[Far+02] E. Farhi et al. In: Appl. Phys. A 74 (2002), S1471 (cit. on pp. 12, 13, 18).
[FMM47] E. Fermi, J. Marshall, and L. Marshall. In: Phys. Rev. 72 (1947), p. 193
(cit. on p. 13).
[Fre83] A.K. Freund. In: Nucl. Instr. Meth. 213 (1983), p. 495 (cit. on p. 13).
[GRR92] Grimmett, G. R., and Stirzakerand D. R. Probability and Random Processes,
2nd Edition. Clarendon Press, Oxford, 1992 (cit. on p. 18).
[Jam80] F. James. In: Rep. Prog. Phys. 43 (1980), p. 1145 (cit. on pp. 13, 18, 22).
[KKW14] Erik Bergb¨ack Knudsen, Esben Bryndt Klinkby, and Peter Kjæ r Willen-
drup. “McStas event logger: Definition and applications”. In: Nuclear In-
struments and Methods in Physics Research Section A: Accelerators, Spec-
trometers, Detectors and Associated Equipment 738.0 (2014), pp. 20 –24.
issn: 0168-9002. doi:http://dx.doi.org/10.1016/j.nima.2013.11.071
(cit. on p. 93).
[LW02] W.-T. Lee and X.-L. Wang. In: Neutron News 13 (2002). See website http:
//www.sns.gov/ideas/, p. 30 (cit. on pp. 11, 13).
[LN99] K. Lefmann and K. Nielsen. “McStas, a general software package for neutron
ray-tracing simulations”. In: Neutron News 10 (1999), pp. 20–23. doi:10.
1080/10448639908233684 (cit. on pp. 9, 11, 13).
[Lef+00] K. Lefmann et al. “Added flexibility in triple axis spectrometers: the two
RITAs at Risø”. In: Physica B 283 (2000), pp. 343–354 (cit. on p. 12).
[Lie05] K. Lieutenant. In: J. Phys.: Condens. Matter 17 (2005), S167 (cit. on pp. 12,
13, 18).
[Low60] R.A. Lowde. In: J. Nucl. Energy, Part A: Reactor Sci. 11 (1960), p. 69 (cit.
on p. 13).
[MLS63] H. Maier-Leibnitz and T. Springer. In: Reactor Sci. Technol. 17 (1963),
p. 217 (cit. on p. 13).
[Man+04] G. Manzin et al. In: Nucl. Instr. Meth. A535 (2004), p. 102 (cit. on p. 13).
[Mas+95] T. E. Mason et al. “RITA: The reinvented triple axis spectrometer”. In:
Can. J. Phys. 73 (1995), pp. 697–702 (cit. on p. 12).
[Mil90] D.F.R. Mildner. In: Nucl. Instr. Meth. A290 (1990), p. 189 (cit. on p. 13).
[MPC77] D.F.R. Mildner, C.A. Pellizari, and J.M. Carpenter. In: Acta. Cryst. A 33
(1977), p. 954 (cit. on p. 13).
[NM65] J.A. Nelder and R. Mead. In: Computer Journal 7 (1965), pp. 308–313 (cit.
on p. 39).
124
[Pes+89] V. Peskov et al. In: Nucl. Instr. and Meth. A277 (1989), p. 547 (cit. on
p. 13).
[Pet05] J. Peters. In: Nucl. Instr. Meth. A540 (2005), p. 419 (cit. on p. 13).
[Pre+86] W. H. Press et al. Numerical Recipes in C. Cambridge University Press,
1986 (cit. on p. 117).
[Pre+02] W.H. Press et al. Numerical Recipes (2nd Edition). Cambridge University
Press, 2002 (cit. on p. 39).
[Rad74] V. Radeka. In: IEEE Trans. Nucl. Sci. NS-21 (1974), p. 51 (cit. on p. 13).
[SK97] J. Saroun and J. Kulda. In: Physica B 234 (1997). See website http://
omega.ujf.cas.cz/restrax/, p. 1102 (cit. on pp. 11, 13).
[Sch+04] C. Schanzer et al. In: Nucl. Instr. Meth. A 529 (2004), p. 63 (cit. on pp. 12,
13, 18).
[Sea97] V.F. Sears. In: Acta Cryst. A53 (1997), p. 35 (cit. on p. 13).
[See+00] P. A. Seeger et al. In: Physica B 283 (2000), p. 433 (cit. on pp. 11, 13).
[SST02] G. Shirane, S.M. Shapiro, and J.M. Tranquada. Neutron Scattering with a
Triple-Axis Spectrometer. Cambridge University Press, 2002 (cit. on p. 13).
[Wec+00] D. Wechsler et al. In: Neutron News 25 (2000), p. 11 (cit. on pp. 11, 13).
[WFL04] P. Willendrup, E. Farhi, and K. Lefmann. In: Physica B 350 (2004), p. 735
(cit. on p. 11).
[Wil+14] Peter Kjær Willendrup et al. “McStas: Past, present and future”. In: Journal
of Neutron Research 17.1 (2014), pp. 35–43. issn: 1023-8166. doi:10.3233/
JNR-130004 (cit. on pp. 9, 11, 13).
[ZLa04] G. Zsigmond, K. Lieutenant, and S. Manoshin et al. In: Nucl. Instr. Meth.
A 529 (2004), p. 218 (cit. on pp. 12, 13, 18).
125
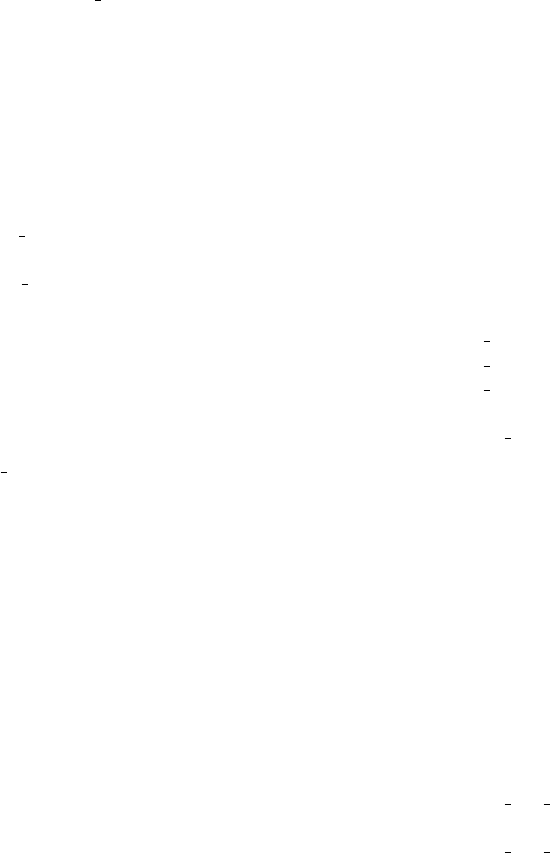
Index
%BUGS (McDoc section), 88
%D[ESCRIPTION] (McDoc section), 89
%E[ND] (McDoc section), 89
%EX[AMPLE] (McDoc section), 89
%I[DENTIFICATION] (McDoc section), 89
%IN[STRUMENT SITE] (McDoc section), 89
%L[INK] (McDoc section), 89
%P[ARAMETERS] (McDoc section), 89
%VALIDATION (McDoc section), 88
%include (McStas keyword), 30, 64, 71, 112
ABSOLUTE (McStas keyword), 69
ABSORB (C macro, mcstas-r.h), 64, 70, 75,
81,112
Absorption, 70, 81
adapt tree-lib (library), 120
Adaptive sampling, 21
ALLOW BACKPROP (C macro, mcstas-r.h), 81,
113
Arm, 122
AT (McStas keyword), 69
author (McDoc keyword), 89
Authors, 4
Backpropagation, 81
box intersect (C function, mccode-r.c),
116
BROWSER (environment variable), 52, 94
Bugs
hard to detect, 14
integer versus floating-point division, 69
JUMPs, 76
MPI and grid, 61
SPLIT, 77
system errors, 37
WHEN vs GROUP, 75
wrong metadata in translating and
merging results files, 54
C code
embedded, 64, 67, 68, 72
C functions, 112
Citing McStas, 9
Code generation
options, 29
Comments, 63
Compilation
failure, 64, 67, 88
instrument definition, see mcstas (com-
piler)
COMPONENT (McStas keyword), 68
Component, 122
declaration (TRACE), 68
instance, 122
translation to Vitess, 53
Constants, 120
Contributors, 9
Conversion
of units, 120
Coordinate
retrieval functions, 113
system, 63
coords add (C function, mccode-r.c), 115
coords get (C function, mccode-r.c), 115
coords set (C function, mccode-r.c), 115
COPY (McStas keyword), 73, 87
cylinder intersect (C function, mccode-
r.c), 116
Data formats, 33, 42, 53–55, 68, 82
date (McDoc keyword), 89
DECLARE (McStas keyword), 67, 80
DEFINE COMPONENT (McStas keyword), 78
DEFINE INSTRUMENT (McStas keyword), 66
Definition parameter, 122
DEFINITION PARAMETERS (McStas key-
word), 78
DEG2RAD (constant), 121
DEPENDENCY (McStas keyword), 67, 79
Description
McDoc section, 89
DETECTOR OUT 0D (C macro, mccode-r.h),
82,116
DETECTOR OUT 1D (C macro, mccode-r.h),
83,116
126
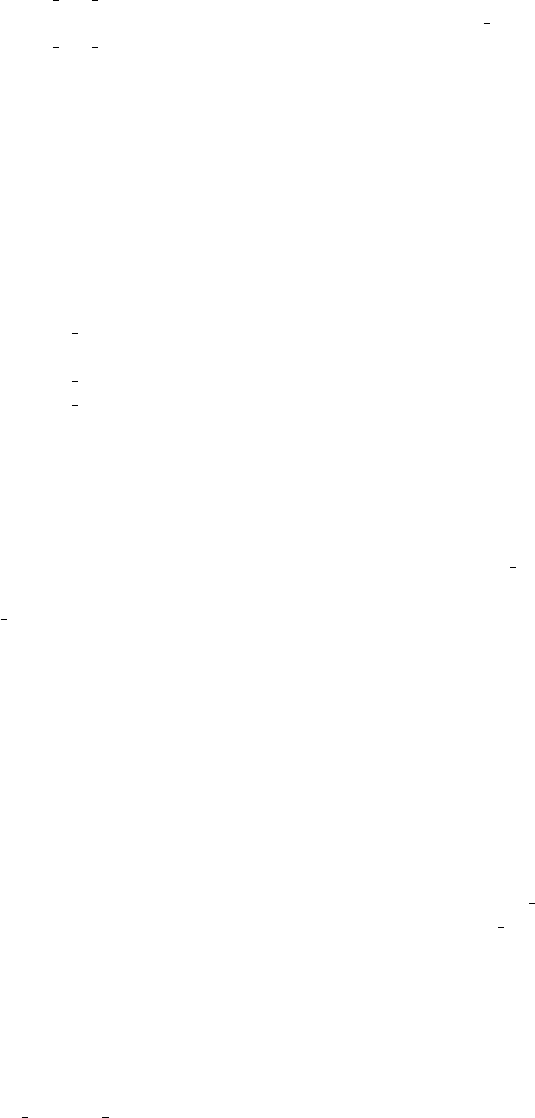
DETECTOR OUT 2D (C macro, mccode-r.h),
83,116
DETECTOR OUT 3D (C macro, mccode-r.h),
84,116
Direction focusing, 21
Documentation
generator, see McDoc
EDITOR (environment variable), 41
Embedded C code, see C code
END (McStas keyword), 71, 86
Environment variables
BROWSER, 52, 94
EDITOR, 41
MCSTAS FORMAT, 27, 34, 50, 54
MCSTAS, 30, 94, 112, 119
PGPLOT DEV, 41, 49, 50
PGPLOT DIR, 41, 49, 50
Error estimate, 19
Example
McDoc section, 89
EXTEND (McStas keyword), 72, 87, 113
File
search path, 30
FINALLY (McStas keyword), 70, 84
FLT MAX (constant), 121
Focusing
importance sampling, 21
Formats, see Data formats
FWHM2RMS (constant), 121
Graphical User Interface, see mcgui
Gravitation, 62
Grid computing, 43, 53, 56
GROUP (McStas keyword), 72, 113
GUI, see mcgui
HBAR (constant), 121
HDF5, see NeXus format
HUP (signal), 37
Identification
McDoc section, 89
IDL, 34
Importance sampling
direction focusing, 21
INDEX CURRENT COMP (C macro, mccode-
r.h), 114
INITIALIZE (McStas keyword), 68, 81
Input parameter, 122
inside rectangle (C function, mcstas-r.c),
116
Installation, 24
directory, 30
test, 48
Instrument, 122
Instrument definition, 66, 71
units, 63
Instrument site
McDoc section, 89
INT (signal), 37, 70
ITERATE (McStas keyword), 75, 76
JUMP (McStas keyword), 75
K2V (constant), 121
Kernel, 62–89,122
Keywords, 65
McDoc, 88–89
kill, 37
Language, see Meta-language
Library, 112
adapt tree-lib, 120
components, 30, 52, 70, 94
contrib, 94, 99
data, 100, 119
misc, 98
monitors, 98
obsolete, 94
optics, 96
samples, 97
share, 62, 64, 99, 112
sources, 95
instruments, 100
mccode-r, 112
mcstas-r, 112
monitor nd-lib, 120
read table-lib, 64, 117
run-time, 31, 62, 64, 99, 112
shared, see Library/components/share
vitess-lib, 53, 120
Link
McDoc section, 89
Mailing lists
mcstas-users, 9
Mantid
transfer events and monitor data, 90
127

Matlab, 27, 34, 48, 50, 51, 53
MC GETPAR (C macro, mccode-r.h), 80, 113
mccode-r (library), 112
MCDISPLAY (McStas keyword), 85, 113
mcdisplay (McStas tool), 48
McDoc, 88–89
mcdoc (McStas tool), 52, 88, 94
mcformat (McStas tool), 53, 56
mcgui (McStas tool), 26–28,40, 49, 50, 88
MCNP, 34
exchange events, 93
mcplot (McStas tool), 27, 34, 42, 44, 48, 50,
54
mcresplot (McStas tool), 51
mcrun (McStas tool), 46
MCSTAS (environment variable), 30, 94, 112,
119
McStas
authors, 4
citing, 9
compiler, see mcstas
contributors, 9
design, 14
installation, 24
mailing lists, 9
meta-language, see Meta-language
name, 122
pronunciation, 122
release scheme, 26
running from the GUI, 26–28
structure, 24, 25
mcstas (McStas compiler), 28–31
mcstas-hosts (McStas tool), 56, 57, 59, 60
mcstas-r (library), 112
mcstas2vitess (McStas tool), 53, 120
MCSTAS FORMAT (environment variable), 27,
34, 50, 54
Meta-language, 14, 62
Microsoft Windows, see Windows
MIN2RAD (constant), 121
MNEUTRON (constant), 121
modified by (McDoc keyword), 89
monitor nd-lib (library), 120
Monte Carlo method, 18
accuracy, 22
adaptive sampling, 21
direction focusing, 21
stratified sampling, 21
MPI, 41, 43, 56,58
basic usage, 59
limitations, 61
mcrun, 59
performance, 60
MS Windows, see Windows
MYSELF (McStas keyword), 76
NAME CURRENT COMP (C macro, mccode-r.h),
113
Neutron
absorption, 70, 81
state (position, velocity, time, spin,
weight), 63
weight, see Weight
NEXT (McStas keyword), 76
NeXus, 41, 55
extension, 68
NORM (C macro, mccode-r.h), 115
normal vec (C function, mccode-r.c), 115
OpenGL, 34, 48
Optimization, 32, 38
compiler option, 32
origin (McDoc keyword), 89
Output parameter, 122
OUTPUT PARAMETERS (McStas keyword), 79,
80
Parallel computing, see MPI, 56
Parameters
definition, 68, 78
Instruments, 66
instruments, 32, 33, 46
McDoc section, 89
optimization, 38, 46
optional, default value, 33, 66, 79
protecting, see Keyword/OUTPUT
scans, 46
setting, 68, 78
Path
file search, 30
Perl
ActiveState for Windows, 24
libraries, 41, 49, 50, 52
PGPLOT, 27, 34, 41, 48–51
format, 54
PGPLOT DEV (environment variable), 41, 49,
50
PGPLOT DIR (environment variable), 41, 49,
50
128
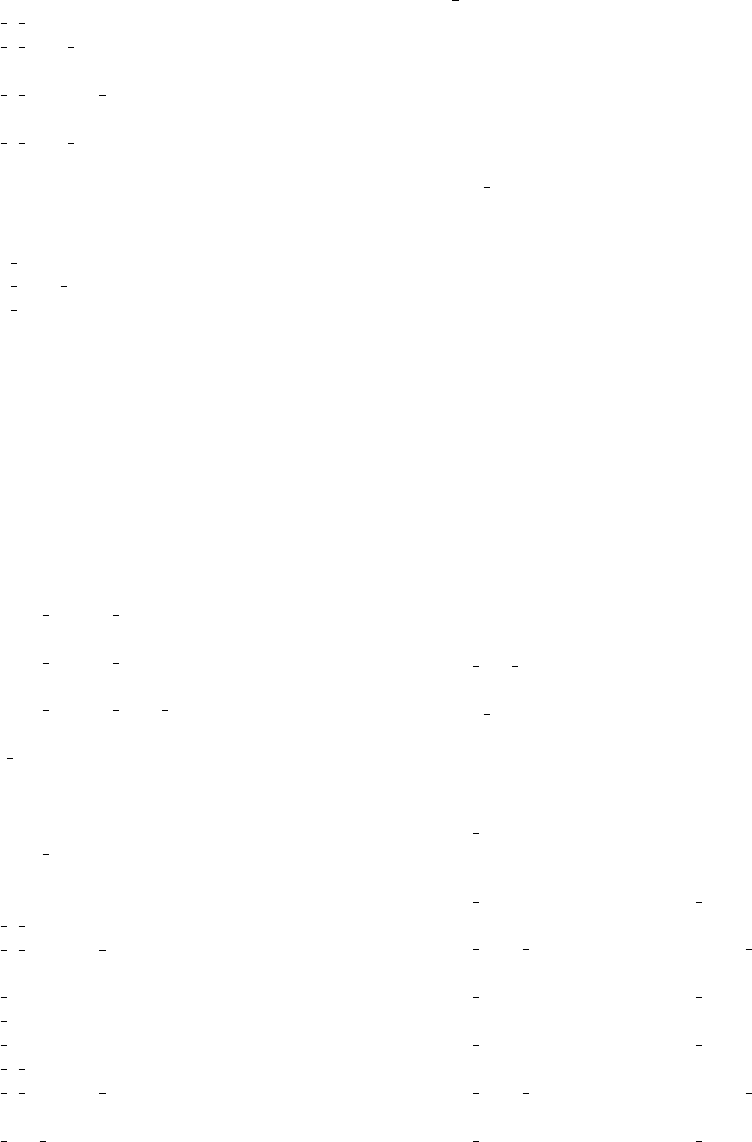
PI (constant), 121
POS A COMP (C macro, mccode-r.h), 113
POS A COMP INDEX (C macro, mccode-r.h),
114
POS A CURRENT COMP (C macro, mccode-
r.h), 113
POS R COMP INDEX (C macro, mccode-r.h),
114
Preprocessor macros, 112
PREVIOUS (McStas keyword), 69, 76
PRISMA, 108
PROP DT (C macro, mcstas-r.h), 113
PROP GRAV DT (C macro, mcstas-r.h), 113
PROP Z0 (C macro, mcstas-r.h), 81, 112
Propagation
backward, 81
RAD2DEG (constant), 121
RAD2MIN (constant), 121
rand01 (C function, mccode-r.c), 116
randnorm (C function, mccode-r.c), 117
Random numbers
generator, 111
transformations, 110
randpm1 (C function, mccode-r.c), 117
randtriangle (C function, mccode-r.c), 117
randvec target circle (C function,
mccode-r.c), 117
randvec target rect (C function, mccode-
r.c), 117
randvec target rect angular (C function,
mccode-r.c), 117
read table-lib (library), 117
RELATIVE (McStas keyword), 69
Release scheme, 26
Removed neutron events, 113
RESTORE NEUTRON (C macro, mcstas-r.h),
114
RMS2FWHM (constant), 121
ROT A COMP (C macro, mccode-r.h), 113
ROT A CURRENT COMP (C macro, mccode-
r.h), 113
rot apply (C function, mccode-r.c), 115
rot copy (C function, mccode-r.c), 115
rot mul (C function, mccode-r.c), 115
ROT R COMP (C macro, mccode-r.h), 113
ROT R CURRENT COMP (C macro, mccode-
r.h), 113
rot set rotation (C function, mccode-r.c),
115
rot transpose (C function, mccode-r.c),
115
rotate (C macro, mccode-r.h), 115
ROTATED (McStas keyword), 69, 76
Run-time, 122
Sampling, 21
SAVE (McStas keyword), 70, 82
scalar prod (C function, mccode-r.c), 115
SCATTER (C macro, mcstas-r.h), 72, 73, 75,
82,113, 114
SCATTERED (C macro, mccode-r.h), 72, 73,
75, 82, 114
SE2V (constant), 121
Setting parameter, 122
SETTING PARAMETERS (McStas keyword), 78
SHARE (McStas keyword), 81, 112
SIGHUP, 37
SIGINT, 37, 70
Signal handler, 34
HUP signal, 37
INT signal, 37, 70
TERM signal, 37, 70
USR1 signal, 37
USR2 signal, 37, 70
SIGTERM, 37, 70
SIGUSR1, 37
SIGUSR2, 37, 70
solve 2nd order (C function, mccode-r.c),
115
sphere intersect (C function, mccode-
r.c), 116
SPLIT (McStas keyword), 77
Statistics
uncertainty, 19
STORE NEUTRON (C macro, mcstas-r.h), 114
Stratified sampling, 21
Table Free (C function, read table-lib.c),
118
Table Free Array (C function, read table-
lib.c), 118
Table Index (C function, read table-lib.c),
118
Table Info (C function, read table-lib.c),
118
Table Info Array (C function, read table-
lib.c), 119
Table Init (C function, read table-lib.c),
118
129

Table Read (C function, read table-lib.c),
118
Table Read Array (C function, read table-
lib.c), 118
Table Read Offset (C function, read table-
lib.c), 118
Table Read Offset Binary (C function,
read table-lib.c), 118
Table Rebin (C function, read table-lib.c),
118
Table Value (C function, read table-lib.c),
118
Table Value2d (C function, read table-
lib.c), 118
TAS1, 103
TERM (signal), 37, 70
Time-of-flight spectrometer
PRISMA, 108
Tools, 24
external, see IDL, Matlab, NeXus, Perl,
PGPLOT, VRML/OpenGL
McStas, see mcdisplay, mcdoc, mc-
format, mcgui, mcplot, mcresplot,
mcrun, mcstas, mcstas2vitess
TRACE (McStas keyword), 68, 81
Triple-axis spectrometer
TAS1, 103
Tripoli, 34
Units, 63
constants and conversions, 120
USR1 (signal), 37
USR2 (signal), 37, 70
V2K (constant), 121
Variance, 19
Variance reduction, 21
vec prod (C function, mccode-r.c), 115
version (McDoc keyword), 89
Virtual sources, 22
Vitess, 34
vitess-lib, 53
vitess-lib (library), 53, 120
VRML/OpenGL, 34, 48
VS2E (constant), 121
Weight, 19
statistical uncertainty, 19
transformation, 20
WHEN (McStas keyword), 74, 75
Windows
file and directory names with spaces, 24
Perl distribution, 24
written by (McDoc keyword), 89
130
