Manual
User Manual:
Open the PDF directly: View PDF ![]() .
.
Page Count: 25
The Sail instruction-set semantics specification language
Alasdair Armstrong Thomas Bauereiss Brian Campbell Shaked Flur
Kathryn E. Gray Robert Norton-Wright Christopher Pulte Peter Sewell
February 21, 2019
Contents
1 Introduction 2
2 A tutorial RISC-V example 4
3 Using Sail 6
3.1 OCaml compilation ........................................ 6
3.2 C compilation ........................................... 7
3.3 Lem, Isabelle & HOL4 ...................................... 8
3.4 Interactive mode ......................................... 8
3.5 L
A
T
E
X Generation ......................................... 8
3.6 Other options ........................................... 9
4 Sail Language 11
4.1 Functions ............................................. 11
4.2 Numeric Types .......................................... 11
4.3 Vector Type ............................................ 12
4.4 List Type ............................................. 13
4.5 Other Types ........................................... 13
4.6 Pattern Matching ......................................... 13
4.7 Mutable and Immutable Variables ............................... 15
4.7.1 Assignment and l-values ................................. 16
4.8 Registers .............................................. 17
4.9 Type declarations ......................................... 18
4.9.1 Enumerations ....................................... 18
4.9.2 Structs .......................................... 19
4.9.3 Unions ........................................... 19
4.9.4 Bitfields .......................................... 19
4.10 Operators ............................................. 20
4.11 Ad-hoc Overloading ....................................... 21
4.12 Sizeof and Constraint ...................................... 22
4.13 Scattered Definitions ....................................... 22
4.14 Exceptions ............................................ 23
4.15 Preludes and Default Environment ............................... 24
1

1 Introduction
Sail is a language for expressing the instruction-set architecture (ISA) semantics of processors.
Vendor architecture specification documents typically describe the sequential behaviour of their ISA
with a combination of prose, tables, and pseudocode for each instruction.
They vary in how precise that pseudocode is: in some it is just suggestive, while in others it is close
to a complete description of the envelope of architecturally allowed behaviour for sequential code.
For x86 [1], the Intel pseudocode is just suggestive, with embedded prose, while the AMD descrip-
tions [2] are prose alone. For IBM Power [3], there is reasonably detailed pseudocode for many instructions
in the manual, but it has never been machine-parsed. For ARM [4], there is detailed pseudocode, which
has recently become machine-processed [5]. For MIPS [6,7] there is also reasonably detailed pseudocode.
Sail is intended:
•To support precise definition of real-world ISA semantics;
•To be accessible to engineers familiar with existing vendor pseudocodes, with a similar style to the
pseudocodes used by ARM and IBM Power (modulo minor syntactic differences);
•To expose the structure needed to combine the sequential ISA semantics with the relaxed-memory
concurrency models we have developed;
•To provide an expressive type system that can statically check the bitvector length and indexing
computation that arises in these specifications, to detect errors and to support code generation,
with type inference to minimise the required type annotations;
•To support execution, for architecturally complete emulation automatically based on the definition;
•To support automatic generation of theorem-prover definitions, for mechanised reasoning about
ISA specifications; and
•To be as minimal as possible given the above, to ease the tasks of code generation and theorem-
prover definition generation.
A Sail specification will typically define an abstract syntax type (AST) of machine instructions, a
decode function that takes binary values to AST values, and an execute function that describes how each
of those behaves at runtime, together with whatever auxiliary functions and types are needed. Given
such a specification, the Sail implementation can typecheck it and generate:
•An internal representation of the fully type-annotated definition (a deep embedding of the defini-
tion) in a form that can be executed by the Sail interpreter. These are both expressed in Lem [8,9],
a language of type, function, and relation definitions that can be compiled into OCaml and vari-
ous theorem provers. The Sail interpreter can also be used to analyse instruction definitions (or
partially executed instructions) to determine their potential register and memory footprints.
•A shallow embedding of the definition, also in Lem, that can be executed or converted to theorem-
prover code more directly. Currently this is aimed at Isabelle/HOL or HOL4, though the Sail
dependent types should support generation of idiomatic Coq definitions (directly rather than via
Lem).
•A compiled version of the specification directly into OCaml.
•A efficient executable version of the specification, compiled into C code.
Sail does not currently support description of the assembly syntax of instructions, or the mapping between
that and instruction AST or binary descriptions, although this is something we plan to add.
Sail has been used to develop models of parts of several architectures:
ARMv8 (ASL) generated from ARM’s v8.3 public ASL spec
MIPS hand-written
CHERI hand-written
RISC-V hand-written
2

The ARMv8 (ASL) model is based on an automatic translation of ARM’s machine-readable public
v8.3 ASL specification1. It includes everything in ARM’s specification.
The MIPS model is hand-written based on the MIPS64 manual version 2.5 [6,7], but covering only
the features in the BERI hardware reference [10], which in turn drew on MIPS4000 and MIPS32 [11,12].
The CHERI model is based on that and the CHERI ISA reference manual version 5 [13]. These two are
both principally by Norton-Wright; they cover all basic user and kernel mode MIPS features sufficient to
boot FreeBSD, including a TLB, exceptions and a basic UART for console interaction. ISA extensions
such as floating point are not covered. The CHERI model supports either 256-bit capabilities or 128-bit
compressed capabilities.
1ARM v8-A Architecture Specification: https://github.com/meriac/archex
3
2 A tutorial RISC-V example
We introduce the basic features of Sail via a small example from our RISC-V model that includes just
two instructions: add immediate and load double.
We start with some basic type synonyms. We create a type xlen_t for bitvectors of length 64, then
we define a type regno, which is a type synonym for the builtin type atom. The type atom(’n) is a
number which is exactly equal to the type variable atom(’n). Type variables are syntactically marked
with single quotes, as in ML. A constraint can be attached to this type synonym—ensuring that it is
only used where we can guarantee that its value will be between 0 and 31. Sail supports a rich variety of
numeric types, including range types, which are statically checked. We then define a synonym regbits
for bits(5). We don’t want to manually convert between regbits and regno all the time, so we define
a function that maps between them and declare it as a cast, which allows the type-checker to insert it
where needed. By default, we do not do any automatic casting (except between basic numeric types
when safe), but to allow idioms in ISA vendor description documents we support flexible user defined
casts. To ensure that the constraint on the regno type synonym is satisfied, we return an existentially
quantified type {’n, 0 <= ’n < 32. regno(’n)}.
type xlen_t = bits(64)
type regno (’n : Int), 0 <= ’n < 32 = atom(’n)
type regbits = bits(5)
val cast regbits_to_regno : bits(5) -> {’n, (0 <= ’n & ’n + 1 <= 32). regno(’n)}
function regbits_to_regno b = let ras atom(_) = unsigned(b) in r
We now set up some basic architectural state. First creating a register of type xlen_t for both the
program counter PC, and the next program counter, nextPC. We define the general purpose registers as
a vector of 32 xlen_t bitvectors. The dec keyword isn’t important in this example, but Sail supports
two different numbering schemes for (bit)vectors inc, for most significant bit is zero, and dec for least
significant bit is zero. We then define a getter and setter for the registers, which ensure that the zero
register is treated specially (in RISC-V register 0 is always hardcoded to be 0). Finally we overload both
the read (rX) and write (wX) functions as simply X. This allows us to write registers as X(r)= value and
read registers as value = X(r). Sail supports flexible ad-hoc overloading, and has an expressive l-value
language in assignments, with the aim of allowing pseudo-code like definitions.
register PC : xlen_t
register nextPC : xlen_t
register Xs : vector(32, dec, xlen_t)
val rX:forall (’n : Int), (0 <= ’n & ’n + 1 <= 32). regno(’n) -> xlen_t effect {rreg}
function rX 0 = 0x0000000000000000
and rX (r if r > 0) = Xs[r]
val wX:forall (’n : Int), (0 <= ’n & ’n + 1 <= 32). (regno(’n), xlen_t) -> unit effect {wreg}
function wX (r, v) =
if r!=0then {
Xs[r] = v;
}
overload X = {rX, wX}
We also give a function MEMr for reading memory, this function just points at a builtin we have defined
elsewhere. Note that functions in Sail are annotated with effects. This effect system is quite basic, but
indicates whether or not functions read or write registers (rreg and wreg), read and write memory (rmem
and wmem), as well as a host of other concurrency model related effects. They also indicate whether a
function throws exceptions or has other non-local control flow (the escape effect).
4

val MEMr : forall (’n : Int), ’n >= 0. (xlen_t, int(’n)) -> bits(8 * ’n) effect {rmem}
function MEMr (addr, width) =
match RISCV read(addr, width, false, false, false) {
Some(v) => v,
None() => zeros(8 * width)
}
It’s common when defining architecture specifications to break instruction semantics down into sepa-
rate functions that handle decoding (possibly even in several stages) into custom intermediate datatypes
and executing the decoded instructions. However it’s often desirable to group the relevant parts of these
functions and datatypes together in one place, as they would usually be found in an architecture refer-
ence manual. To support this Sail supports scattered definitions. First we give types for the execute and
decode functions, and declare them as scattered functions, as well as the ast union.
enum iop = {RISCV_ADDI, RISCV_SLTI, RISCV_SLTIU, RISCV_XORI, RISCV_ORI, RISCV_ANDI}
scattered union ast
val decode : bits(32) -> option(ast) effect pure
scattered function decode
val execute : ast -> unit effect {rmem, rreg, wreg}
scattered function execute
Now we provide the clauses for the add-immediate ast type, as well as its execute and decode
clauses. We can define the decode function by directly pattern matching on the bitvector representing
the instruction. Sail supports vector concatenation patterns (@is the vector concatenation operator),
and uses the types provided (e.g. bits(12) and regbits) to destructure the vector in the correct way.
We use the EXTS library function that sign-extends its argument.
union clause ast = ITYPE : (bits(12), regbits, regbits, iop)
Now we do the same thing for the load-double instruction:
union clause ast = LOAD : (bits(12), regbits, regbits)
Finally we define the fallthrough case for the decode function, and end all our scattered definitions.
Note that the clauses in a scattered function will be matched in the order they appear in the file.
end ast
end decode
end execute
The actual code for this example, as well as our more complete RISC-V specification can be found on
our github at https://github.com/rems-project/sail-riscv/blob/master/model/riscv_duopod.
sail.
5

3 Using Sail
In its most basic use-case Sail is a command-line tool, analogous to a compiler: one gives it a list of
input Sail files; it type-checks them and provides translated output.
To simply typecheck Sail files, one can pass them on the command line with no other options, so for
our RISC-V spec:
sail prelude.sail riscv_types.sail riscv_mem.sail riscv_sys.sail riscv_vmem.sail riscv.sail
The sail files passed on the command line are simply treated as if they are one large file concatenated
together, although the parser will keep track of locations on a per-file basis for error-reporting. As can
be seen, this specification is split into several logical components. prelude.sail defines the initial type
environment and builtins, riscv_types.sail gives type definitions used in the rest of the specification,
riscv_mem.sail and riscv_vmem.sail describe the physical and virtual memory interaction, and then
riscv_sys.sail and riscv.sail implement most of the specification.
For more complex projects, one can use $include statements in Sail source, for example:
$include <library.sail>
$include "file.sail"
Here, Sail will look for library.sail in the $SAIL_DIR/lib, where $SAIL_DIR is usually the root
of the sail repository. It will search for file.sail relative to the location of the file containing the
$include. The space after the $include is mandatory. Sail also supports $define,$ifdef, and $ifndef.
These are things that are understood by Sail itself, not a separate preprocessor, and are handled after
the AST is parsed 2.
3.1 OCaml compilation
To compile a Sail specification into OCaml, one calls Sail as
sail -ocaml FILES
This will produce a version of the specification translated into OCaml, which is placed into a directory
called _sbuild, similar to ocamlbuild’s _build directory. The generated OCaml is intended to be fairly
close to the original Sail source, and currently we do not attempt to do much optimisation on this output.
The contents of the _sbuild directory are set up as an ocamlbuild project, so one can simply switch
into that directory and run
ocamlbuild -use-ocamlfind out.cmx
to compile the generated model. Currently the OCaml compilation requires that lem, linksem, and zarith
are available as ocamlfind findable libraries, and also that the environment variable $SAIL_DIR is set to
the root of the Sail repository.
If the Sail specification contains a main function with type unit -> unit that implements a fetch/de-
code/execute loop then the OCaml backend can produce a working executable, by running
sail -o out -ocaml FILES
Then one can run
./out ELF_FILE
to simulate an ELF file on the specification. One can do $include <elf.sail> to gain access to some
useful functions for accessing information about the loaded ELF file from within the Sail specification.
In particular elf.sail defines a function elf_entry : unit -> int which can be used to set the PC to
the correct location. ELF loading is done by the linksem library3.
There is also an -ocaml_trace option which is the same as -ocaml except it instruments the generated
OCaml code with tracing information.
2This can affect precedence declarations for custom user defined operators—the precedence must be redeclared in the
file you are including the operator into.
3https://github.com/rems-project/linksem
6
3.2 C compilation
To compile Sail into C, the -c option is used, like so:
sail -c FILES 1> out.c
The transated C is currently printed to stdout, so this should be redirected to a file as above. To produce
an executable this needs to be compiled and linked with the C files in the sail/lib directory:
gcc out.c $SAIL_DIR/lib/*.c -lgmp -lz -I $SAIL_DIR/lib/ -o out
The C output requires the GMP library for arbitrary precision arithmetic, as well as zlib for working
with compressed ELF binaries.
There are several Sail options that affect the C output:
•-O turns on optimisations. The generated C code will be quite slow unless this flag is set.
•-Oconstant_fold apply constant folding optimisations.
•-c_include Supply additional header files to be included in the generated C.
•-c_no_main Do not generate a main() function.
•-static Mark generated C functions as static where possible. This is useful for measuring code
coverage.
The generated executable for the Sail specification (provided a main function is generated) supports
several options for loading ELF files and binary data into the specification memory.
•-e/--elf Loads an ELF file into memory. Currently only AArch64 and RISC-V ELF files are
supported.
•-b/--binary Loads raw binary data into the specification’s memory. It is used like so:
./out --binary=0xADDRESS,FILE
./out -b 0xADDRESS,FILE
The contents of the supplied file will be placed in memory starting at the given address, which
must be given as a hexadecimal number.
•-i/--image For ELF files that are not loadable via the --elf flag, they can be pre-processed by
Sail using linksem into a special image file that can be loaded via this flag. This is done like so:
sail -elf ELF_FILE -o image.bin
./out --image=image.bin
The advantage of this flag is that it uses Linksem to process the ELF file, so it can handle any
ELF file that linksem is able to understand. This also guarantees that the contents of the ELF
binary loaded into memory is exactly the same as for the OCaml backend and the interpreter as
they both also use Linksem internally to load ELF files.
•-n/--entry sets a custom entry point returned by the elf_entry function. Must be a hexadecimal
address prefixed by 0x.
•-l/--cyclelimit run the simulation until a set number of cycles have been reached. The main
loop of the specification must call the cycle_count function for this to work.
7
3.3 Lem, Isabelle & HOL4
We have a separate document detailing how to generate Isabelle theories from Sail models, and how to
work with those models in Isabelle, see:
https://github.com/rems-project/sail/raw/sail2/snapshots/isabelle/Manual.pdf
Currently there are generated Isabelle snapshots for some of our models in snapshots/isabelle in the
Sail repository. These snapshots are provided for convenience, and are not guaranteed to be up-to-date.
In order to open a theory of one of the specifications in Isabelle, use the -l Sail command-line
flag to load the session containing the Sail library. Snapshots of the Sail and Lem libraries are in the
lib/sail and lib/lem directories, respectively. You can tell Isabelle where to find them using the -d
flag, as in
isabelle jedit -l Sail -d lib/lem -d lib/sail riscv/Riscv.thy
When run from the snapshots/isabelle directory this will open the RISC-V specification.
3.4 Interactive mode
Compiling Sail with
make isail
builds it with a GHCi-style interactive interpreter. This can be used by starting Sail with sail -i. If
Sail is not compiled with interactive support the -i flag does nothing. Sail will still handle any other
command line arguments as per usual, including compiling to OCaml or Lem. One can also pass a list
of commands to the interpreter by using the -is flag, as
sail -is FILE
where FILE contains a list of commands. Once inside the interactive mode, a list of commands can
be accessed by typing :commands, while :help can be used to provide some documentation for each
command.
3.5 L
A
T
E
X Generation
Sail can be used to generate latex for inclusion in documentation as:
sail -o DIRECTORY -latex FILES
The list of FILES is a list of Sail files to produce latex for, and DIRECTORY is the directory where the
generated latex will be placed. The list of files must be a valid type-checkable series of Sail files. The
intention behind this latex generation is for it to be included within existing ISA manuals written in
Latex, as such the latex output generates a list of commands for each top-level Sail declaration in
DIRECTORY/commands.tex. The rest of this section discusses the stable features of the latex generation
process—there are additional features for including markdown doc-comments in Sail code and format-
ting them into latex for inclusion id documentation, among other things, but these features are not
completely stable yet. This manual itself makes use of the Sail latex generation, so doc/manual.tex,
and doc/Makefile can be used to see how the process is set up.
Requirements The generated latex uses the listings package for formatting source code, uses the
macros in the etoolbox package for the generated commands, and relies on the hyperref package for
cross-referencing. These packages are available in most TeX distributions, and are available as part of
thetexlive packages for Ubuntu.
8
Usage Due to the oddities of latex verbatim environments each Sail declaration must be placed in
it’s own file then the command in commands.tex includes in with \lstinputlisting. To include the
generated Sail in a document one would do something like:
\input{commands.tex}
\sailval{my_function}
\sailfn{my_function}
which would enclude the type declaration (\sailval) for my_function as well as type body of that
function (\sailfn).
It is sometimes useful to include multiple versions of the same Sail definitions in a latex document.
In this case the -latex_prefix option can be used. For example if we used -latex_prefix prefix
then the above example would become:
\input{commands.tex}
\prefixval{my_function}
\prefixfn{my_function}
The generated definitions are created wrapped in customisable macros that can be overridden to
change the formatting of the Sail code. For \sailfn there is a macro \saildocfn that must be defined,
and similarly for the other Sail toplevel types.
Cross-referencing For each macro \sailX{id} there is a macro \sailrefX{id}{text} which cre-
ates a hyper-reference to the original definition. This requires the hyper-ref package.
3.6 Other options
Here we summarize most of the other options available for Sail. Debugging options (usually for debugging
Sail itself) are indicated by starting with the letter d.
•-v Print the Sail version.
•-help Print a list of options.
•-no_warn Turn off warnings.
•-enum_casts Allow elements of enumerations to be automatically cast to numbers.
•-memo_z3 Memoize calls to the Z3 solver. This can greatly improve typechecking times if you are
repeatedly typechecking the same specification while developing it.
•-no_lexp_bounds_check Turn off bounds checking in the left hand side of assignments.
•-no_effects Turn off effect checking. May break some backends that assume effects are properly
checked.
•-undefined_gen Generate functions that create undefined values of user-defined types. Every type
Twill get a undefined_T function created for it. This flag is set automatically by some backends
that want to re-write undefined.
•-just_check Force Sail to terminate immediately after typechecking.
•-dno_cast Force Sail to never perform type coercions under any circumstances.
•-dtc_verbose <verbosity> Make the typechecker print a trace of typing judgements. If the
verbosity level is 1, then this should only include fairly readable judgements about checking and
inference rules. If verbosity is 2 then it will include a large amount of debugging information. This
option can be useful to diagnose tricky type-errors, especially if the error message isn’t very good.
•-ddump_tc_ast Write the typechecked AST to stdout after typechecking
•-ddump_rewrite_ast <prefix> Write the AST out after each re-writing pass. The output from
each pass is placed in a file starting with prefix.
9
•-dsanity Perform extra sanity checks on the AST.
•-dmagic_hash Allow the # symbol in identifiers. It’s currently used as a magic symbol to separate
generated identifiers from those the user can write, so this option allows for the output of the
various other debugging options to be fed back into Sail.
10

4 Sail Language
4.1 Functions
In Sail, functions are declared in two parts. First we write the type signature for the function using the
val keyword, then define the body of the function via the function keyword. In this Subsection, we will
write our own version of the replicate_bits function from the Sail library. This function takes a number
nand a bitvector, and copies that bitvector ntimes.
val my_replicate_bits : forall (’n : Int)(’m:Int), (’m >= 1 & ’n >= 1). (int(’n), bits(’m))
,→-> bits(’n * ’m)
The general syntax for a function type in Sail is as follows:
val name :forall type variables ,constraint . ( type1,. . . ,type2) -> return type
An implementation for the replicate_bits function would be follows
function my replicate bits(n, xs) = {
ys = zeros(n * length(xs));
foreach (i from 1to n) {
ys = ys << length(xs);
ys = ys | zero extend(xs, length(ys))
};
ys
}
The general syntax for a function declaration is:
function name (argument1,. . . ,argumentn) = expression
Code for this example can be found in the Sail repository in doc/examples/my_replicate_bits.sail.
To test it, we can invoke Sail interactively using the -i option, passing the above file on the command
line. Typing replicate_bits(3, 0xA) will step through the execution of the above function, and even-
tually return the result 0xAAA. Typing :run in the interactive interpreter will cause the expression to be
evaluated fully, rather than stepping through the execution.
Sail allows type variables to be used directly within expressions, so the above could be re-written
as This notation can be succinct, but should be used with caution. What happens is that Sail will
try to re-write the type variables using expressions of the appropriate size that are available within the
surrounding scope, in this case nand length(xs). If no suitable expressions are found to trivially rewrite
these type variables, then additional function parameters will be automatically added to pass around this
information at run-time. This feature is however very useful for implementing functions with implicit
parameters, e.g. we can implement a zero extension function that implicitly picks up its result length
from the calling context as follows:
val cast extz : forall (’n : Int)(’m:Int), ’m >= ’n. (implicit(’m), bits(’n)) -> bits(’m)
function extz(m, xs) = zero extend(xs, m)
Notice that we annotated the val declaration as a cast—this means that the type checker is allowed
to automatically insert it where needed in order to make our code type check. This is another feature
that must be used carefully, because too many implicit casts can quickly result in unreadable code. Sail
does not make any distinction between expressions and statements, so since there is only a single line of
code within the foreach block, we can drop it and simply write:
4.2 Numeric Types
Sail has three basic numeric types, int,nat, and range. The type int is an arbitrary precision math-
ematical integer, and likewise nat is an arbitrary precision natural number. The type range(’n,’m) is
an inclusive range between the Int-kinded type variables ’n and ’m. The type int(’o) is an integer
exactly equal to the Int-kinded type variable ’n, i.e. int(’o) =range(’o,’o). These types can be
used interchangeably provided the rules summarised in the below diagram are satisfied (via constraint
solving).
11
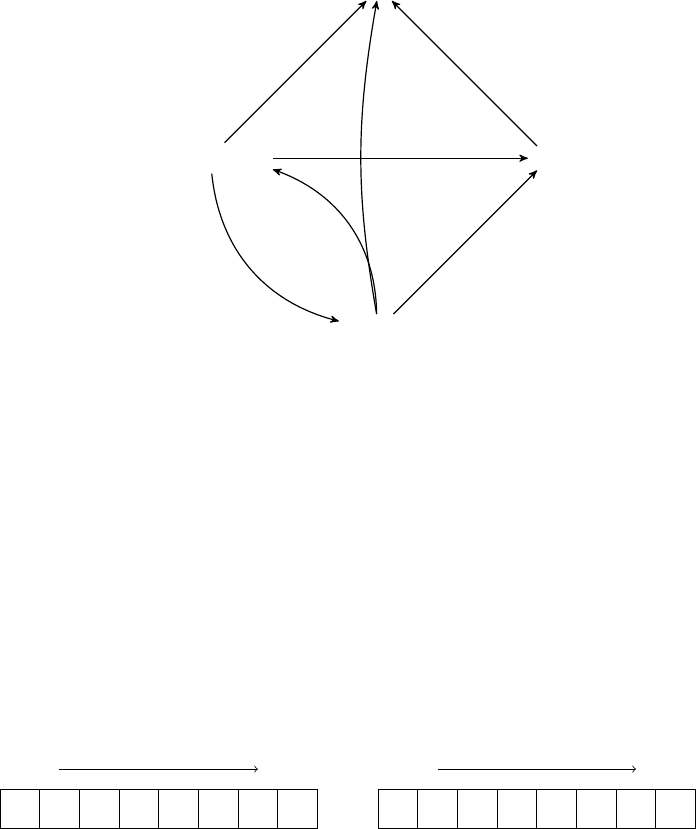
int
nat
range(’n,’m)
int(’o)
’n ≥0
’o ≥0
’n ≤’o ≤’m
’n =’m =’o
Note that bit isn’t a numeric type (i.e. it’s not range(0,1). This is intentional, as otherwise it would
be possible to write expressions like (1 : bit)+ 5 which would end up being equal to 6 : range(5, 6).
This kind of implicit casting from bits to other numeric types would be highly undesirable. The bit type
itself is a two-element type with members bitzero and bitone.
4.3 Vector Type
Sail has the built-in type vector, which is a polymorphic type for fixed-length vectors. For example, we
could define a vector vof three integers as follows:
let v : vector(3, dec, int) = [1, 2, 3]
The first argument of the vector type is a numeric expression representing the length of the vector, and
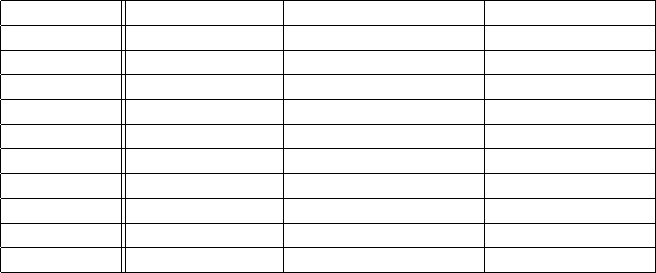
the last is the type of the vector’s elements. But what is the second argument? Sail allows two different
types of vector orderings—increasing (inc) and decreasing (dec). These two orderings are shown for the
bitvector 0b10110000 below.
1 0 1 1 0 0 0 0
0 7
MSB LSB
inc
1 0 1 1 0 0 0 0
7 0
MSB LSB
dec
For increasing (bit)vectors, the 0 index is the most significant bit and the indexing increases towards
the least significant bit. Whereas for decreasing (bit)vectors the least significant bit is 0 indexed, and
the indexing decreases from the most significant to the least significant bit. For this reason, increasing
indexing is sometimes called ‘most significant bit is zero’ or MSB0, while decreasing indexing is sometimes
called ‘least significant bit is zero’ or LSB0. While this vector ordering makes most sense for bitvectors
(it is usually called bit-ordering), in Sail it applies to all vectors. A default ordering can be set using
default Order dec
and this should usually be done right at the beginning of a specification. Most architectures stick to
either convention or the other, but Sail also allows functions which are polymorphic over vector order,
like so:
val foo : forall (’a : Order). vector(8, ’a, bit) -> vector(8, ’a, bit)
Bitvector Literals Bitvector literals in Sail are written as either 0xhex string or 0bbinary string, for
example 0x12FE or 0b1010100. The length of a hex literal is always four times the number of digits, and
the length of binary string is always the exact number of digits, so 0x12FE has length 16, while 0b1010100
has length 7.
12
Accessing and Updating Vectors A vector can be indexed by using the vector[index]notation.
So, in the following code:
let v : vector(4, dec, int) = [1, 2, 3, 4]
let a = v[0]
let b = v[3]
awill be 4, and bwill be 1(note that vis dec). By default, Sail will statically check for out of bounds
errors, and will raise a type error if it cannot prove that all such vector accesses are valid.
Vectors can be sliced using the vector[indexmsb .. indexlsb]notation. The indexes are always sup-
plied with the index closest to the MSB being given first, so we would take the bottom 32-bits of a
decreasing bitvector vas v[31 .. 0], and the upper 32-bits of an increasing bitvector as v[0 .. 31],
i.e. the indexing order for decreasing vectors decreases, and the indexing order for increasing vectors
increases.
A vector index can be updated using [vector with index =expression]notation. Similarly, a sub-
range of a vector can be updated using [vector with indexmsb .. indexlsb =expression], where the
order of the indexes is the same as described above for increasing and decreasing vectors.
These expressions are actually just syntactic sugar for several built-in functions, namely vector_access
,→,vector_subrange,vector_update, and vector_update_subrange.
4.4 List Type
In addition to vectors, Sail also has list as a built-in type. For example:
let l : list(int) = [|1, 2, 3|]
The cons operator is ::, so we could equally write:
let l : list(int) = 1 :: 2 :: 3 :: [||]
Pattern matching can be used to destructure lists, see Section 4.6.
4.5 Other Types
Sail also has a string type, and a real type. The real type is used to model arbitrary real numbers,
so floating point instructions could be specified by mapping the floating point inputs to real numbers,
performing the arithmetic operation on the real numbers, and then mapping back to a floating point
value of the appropriate precision.
4.6 Pattern Matching
Like most functional languages, Sail supports pattern matching via the match keyword. For example:
let n : int = f();
match n {
1 => print("1"),
2 => print("2"),
3 => print("3"),
_ => print("wildcard")
}
The match keyword takes an expression and then branches using a pattern based on its value. Each
case in the match expression takes the form pattern => expression, separated by commas. The cases
are checked sequentially from top to bottom, and when the first pattern matches its expression will be
evaluated.
match in Sail is not currently checked for exhaustiveness—after all we could have arbitrary constraints
on a numeric variable being matched upon, which would restrict the possible cases in ways that we could
not determine with just a simple syntactic check. However, there is a simple exhaustiveness checker
which runs and gives warnings (not errors) if it cannot tell that the pattern match is exhaustive, but
this check can give false positives. It can be turned off with the -no_warn flag.
13
When we match on numeric literals, the type of the variable we are matching on will be adjusted.
In the above example in the print("1")case, nwill have the type int(’e), where ’e is some fresh type
variable, and there will be a constraint that ’e is equal to one.
We can also have guards on patterns, for example we could modify the above code to have an
additional guarded case like so:
let n : int = f();
match n {
1 => print("1"),
2 => print("2"),
3 => print("3"),
mif m <= 10 => print("n is less than or equal to 10"),
_ => print("wildcard")
}
The variable pattern m will match against anything, and the guard can refer to variables bound by the
pattern.
Matching on enums Match can be used to match on possible values of an enum, like so:
enum E=A|B|C
match x {
A => print("A"),
B => print("B"),
C => print("C")
}
Note that because Sail places no restrictions on the lexical structure of enumeration elements to differen-
tiate them from ordinary identifiers, pattern matches on variables and enum elements can be somewhat
ambiguous. This is the primary reason why we have the basic, but incomplete, pattern exhaustiveness
check mentioned above—it can warn you if removing an enum constructor breaks a pattern match.
Matching on tuples We use match to destructure tuple types, for example:
let x : (int, int) = (2, 3) in
match x {
(y, z) => print("y = 2 and z = 3")
}
Matching on unions Match can also be used to destructure union constructors, for example using
the option type from Section 4.9.3:
match option {
Some(x) => foo(x),
None() => print("matched None()")
}
Note that like how calling a function with a unit argument can be done as f() rather than f(()), matching
on a constructor Cwith a unit type can be achieved by using C() rather than C(()).
Matching on bit vectors Sail allows numerous ways to match on bitvectors, for example:
match v {
0xFF => print("hex match"),
0b0000_0001 => print("binary match"),
0xF @v : bits(4) => print("vector concatenation pattern"),
0xF @[bitone, _, b1, b0] => print("vector pattern"),
_ : bits(4) @v : bits(4) => print("annotated wildcard pattern")
}
14

We can match on bitvector literals in either hex or binary forms. We also have vector concatenation
patterns, of the form pattern @. . . @pattern. We must be able to infer the length of all the sub-patterns
in a vector concatenation pattern, hence why in the example above all the wildcard and variable patterns
beneath vector concatenation patterns have type annotations. In the context of a pattern the :operator
binds tighter than the @operator (as it does elsewhere).
We also have vector patterns, which for bitvectors match on individual bits. In the above example,
b0 and b1 will have type bit. The pattern bitone is a bit literal, with bitzero being the other bit literal
pattern.
Note that because vectors in Sail are type-polymorphic, we can also use both vector concatenation
patterns and vector patterns to match against non-bit vectors.
Matching on lists Sail allows lists to be destructured using patterns. There are two types of patterns
for lists, cons patterns and list literal patterns.
match ys {
x :: xs => print("cons pattern"),
[||] => print("empty list")
}
match ys {
[|1, 2, 3|] => print("list pattern"),
_ => print("wildcard")
}
As patterns Like OCaml, Sail also supports naming parts of patterns using the as keyword. For
example, in the above list pattern we could bind the entire list as zs as follows:
match ys {
x::xsas zs => print("cons with as pattern"),
[||] => print("empty list")
}
The as pattern has lower precedence than any other keyword or operator in a pattern, so in this example
zs will refer to x :: xs.
4.7 Mutable and Immutable Variables
Local immutable bindings can be introduced via the let keyword, which has the following form
let pattern =expression in expression
The pattern is matched against the first expression, binding any identifiers in that pattern. The pattern
can have any form, as in the branches of a match statement, but it should be complete (i.e. it should
not fail to match)4.
When used in a block, we allow a variant of the let statement, where it can be terminated by a
semicolon rather than the in keyword.
{
let pattern =expression0;
expression1;
.
.
.
expressionn
}
This is equivalent to the following
4although this is not checked right now
15
{
let pattern =expression0in {
expression1;
.
.
.
expressionn
}
}
If we were to write
{
let pattern =expression0in
expression1;
.
.
.
expressionn// pattern not visible
}
instead, then pattern would only be bound within expression1and not any further expressions. In general
the block-form of let statements terminated with a semicolon should always be preferred within blocks.
Variables bound within function arguments, match statement, and let-bindings are always immutable,
but Sail also allows mutable variables. Mutable variables are bound implicitly by using the assignment
operator within a block.
{
x:int=3// Create a new mutable variable x initialised to 3
x=2// Rebind it to the value 2
}
The assignment operator is the equality symbol, as in C and other programming languages. Sail supports
a rich language of l-value forms, which can appear on the left of an assignment. These will be described
in Subsection 4.7.1. Note that we could have written
{
x = 3;
x=2
}
but it would not have type-checked. The reason for this is if a mutable variable is declared without a
type, Sail will try to infer the most specific type from the right hand side of the expression. However,
in this case Sail will infer the type as int(3) and will therefore complain when we try to reassign it to
2, as the type int(2) is not a subtype of int(3). We therefore declare it as an int which as mentioned
in Section 4.2 is a supertype of all numeric types. Sail will not allow us to change the type of a variable
once it has been created with a specific type. We could have a more specific type for the variable x, so
{
x : {|2, 3|} = 3;
x=2
}
would allow xto be either 2 or 3, but not any other value. The {|2, 3|} syntax is equivalent to {’n, ’n
,→in {2, 3}. int(’n)}.
4.7.1 Assignment and l-values
It is common in ISA specifications to assign to complex l-values, e.g. to a subvector or named field of a
bitvector register, or to an l-value computed with some auxiliary function, e.g. to select the appropriate
register for the current execution model.
We have l-values that allow us to write to individual elements of a vector:
{
v : bits(8) = 0xFF;
v[0] = bitzero;
16

assert(v == 0xFE)
}
as well as sub ranges of a vector:
{
v : bits(8) = 0xFF;
v[3 .. 0] = 0x0; // assume default Order dec
assert(v == 0xF0)
}
We also have vector concatenation l-values, which work much like vector concatenation patterns
{
v1 : bits(4) = 0xF;
v2 : bits(4) = 0xF;
v1 @v2 = 0xAB;
assert(v1 == 0xA & v2 == 0xB)
}
For structs we can write to an individual struct field as
{
s:S=struct { field = 0xFF }
s.field = 0x00
}
assume we have a struct type S, with a field simply called field. We can do multiple assignment using
tuples, e.g.
{
(x, y) = (2, 3);
assert(x==2&x==3)
}
Finally, we allow functions to appear in l-values. This is a very simple way to declare ‘setter’ functions
that look like custom l-values, for example:
{
memory(addr) = 0x0F
}
This works because f(x)= y is sugar for f(x, y). This feature is commonly used when setting registers
or memory that has additional semantics for when they are read or written. We commonly use the
overloading feature to declare what appear to be getter/setter pairs, so the above example we could
implement a read_memory function and a write_memory function and overload them both as memory to
allow us to write memory using memory(addr)= data and read memory as data = memory(addr), as so:
val read_memory : bits(64) -> bits(8)
val write_memory : (bits(64), bits(8)) -> unit
overload memory = {read_memory, write_memory}
For more details on operator and function overloading see Section 4.11.
4.8 Registers
Registers can be declared with a top level
register name :type
declaration. Registers are essentially top-level global variables and can be set with the previously dis-
cussed l-expression forms. There is currently no restriction on the type of a register in Sail.5
5We may at some point want to enforce that they can be mapped to bitvectors.
17

Registers differ from ordinary mutable variables as we can pass around references to them by name.
A reference to a register Ris created as ref R. If the register Rhas the type A, then the type of ref R
will be register(A). There is a dereferencing l-value operator *for assigning to a register reference. One
use for register references is to create a list of general purpose registers, so they can be indexed using
numeric variables. For example:
default Order dec
$include <prelude.sail>
register X0 : bits(8)
register X1 : bits(8)
register X2 : bits(8)
let X : vector(3, dec,register(bits(8))) = [ref X2, ref X1, ref X0]
function main() : unit -> unit = {
X0 = 0xFF;
assert(X0 == 0xFF);
(*X[0]) = 0x11;
assert(X0 == 0x11);
(*ref X0) = 0x00;
assert(X0 == 0x00)
}
We can dereference register references using the "reg_deref" builtin (see Section 4.15), which is set
up like so:
val "reg_deref" :forall (’a : Type). register(’a) -> ’a effect {rreg}
Currently there is no built-in syntactic sugar for dereferencing registers in expressions.
Unlike previous versions of Sail, referencing and de-referencing registers is done explicitly, although
we can use an automatic cast to implicitly dereference registers if that semantics is desired for a specific
specification that makes heavy use of register references, like so:
val cast auto_reg_deref = "reg_deref" :forall (’a : Type). register(’a) -> ’a effect {rreg}
4.9 Type declarations
4.9.1 Enumerations
Enumerations can be defined in either a Haskell-like syntax (useful for smaller enums) or a more tradi-
tional C-like syntax, which is often more readable for enumerations with more members. There are no
lexical constraints on the identifiers that can be part of an enumeration. There are also no restrictions
on the name of a enumeration type, other than it must be a valid identifier. For example, the following
shows two ways to define the enumeration Foo with three members, Bar,Baz, and quux:
enum Foo = Bar | Baz | quux
enum Foo = {
Bar,
Baz,
quux
}
For every enumeration type Esail generates a num_of_Efunction and a E_of_num function, which for
Foo above will have the following definitions6:
val Foo_of_num : forall ’e, 0 <= ’e <= 2. int(’e) -> Foo
function Foo_of_num(arg) = match arg {
0 => Bar,
1 => Baz,
6It will ensure that the generated function name arg does not clash with any enumeration constructor.
18

_ => quux
}
val num_of_Foo : Foo -> {’e, 0 <= ’e <= 2. int(’e)}
function num_of_Foo(arg) = match arg {
Bar => 0,
Baz => 1,
quux => 2
}
Note that these functions are not automatically made into implicit casts.
4.9.2 Structs
Structs are defined using the struct keyword like so:
struct Foo = {
bar : vector(4, dec, bit),
baz : int,
quux : range(0, 9)
}
If we have a struct foo : Foo, its fields can be accessed by foo.bar, and set as foo.bar = 0xF. It can
also be updated in a purely functional fashion using the construct {foo with bar = 0xF}. There is no
lexical restriction on the name of a struct or the names of its fields.
4.9.3 Unions
As an example, the maybe type `a la Haskell could be defined in Sail as follows:
union maybe (’a : Type)={
Just : ’a,
None : unit
}
Constructors, such as Just are called like functions, as in Just(3): maybe(int). The None constructor
is also called in this way, as None(). Notice that unlike in other languages, every constructor must be
associated with a type—there are no nullary constructors. As with structs there are no lexical restrictions
on the names of either the constructors nor the type itself, other than they must be valid identifiers.
4.9.4 Bitfields
The following example creates a bitfield type called cr and a register CR of that type.
bitfield cr : vector(8, dec, bit) = {
CR0 : 7 .. 4,
LT : 7,
GT : 6,
CR1 : 3 .. 2,
CR3 : 1 .. 0
}
register CR : cr
A bitfield definition creates a wrapper around a bit vector type, and generates getters and setters for
the fields. For the setters, it is assumed that they are being used to set registers with the bitfield type7.
If the bitvector is decreasing then indexes for the fields must also be in decreasing order, and vice-versa
for an increasing vector. For the above example, the bitfield wrapper type will be the following:
union cr = { Mk_cr(vector(8, dec, bit)) }
7This functionality was originally called register types for this reason, but this was confusing because types of registers
are not always register types.
19
The complete vector can be accessed as CR.bits(), and a register of type cr can be set like CR->bits()
,→= 0xFF. Getting and setting individual fields can be done similarly, as CR.CR0() and CR->CR0()= 0xF.
Internally, the bitfield definition will generate a _get_Fand _set_Ffunction for each field F, and then
overload them as _mod_Ffor the accessor syntax. The setter takes the bitfield as a reference to a register,
hence why we use the -> notation. For pure updates of values of type cr a function update_Fis also
defined. For more details on getters and setters, see Section 4.7.1. A singleton bit in a bitfield definition,
such as LT : 7 will be defined as a bitvector of length one, and not as a value of type bit, which mirrors
the behaviour of ARM’s ASL language.
4.10 Operators
Valid operators in Sail are sequences of the following non alpha-numeric characters: !%&*+-./:<>=@^|.
Additionally, any such sequence may be suffixed by an underscore followed by any valid identifier, so
<=_u or even <=_unsigned are valid operator names. Operators may be left, right, or non-associative,
and there are 10 different precedence levels, ranging from 0 to 9, with 9 binding the tightest. To declare
the precedence of an operator, we use a fixity declaration like:
infix 4 <=_u
For left or right associative operators, we’d use the keywords infixl or infixr respectively. An operator
can be used anywhere a normal identifier could be used via the operator keyword. As such, the <=_u
operator can be defined as:
val operator <=_u : forall ’n. (bits(’n), bits(’n)) -> bool
function operator <=_u(x, y) = unsigned(x) <= unsigned(y)
Builtin precedences The precedence of several common operators are built into Sail. These include
all the operators that are used in type-level numeric expressions, as well as several common operations
such as equality, division, and modulus. The precedences for these operators are summarised in Table 1.
Precedence Left associative Non-associative Right associative
9
8^
7*,/,%
6+,-
5
4<,<=,>,>=,!=,=,==
3&
2|
1
0
Table 1: Default Sail operator precedences
Type operators Sail allows operators to be used at the type level. For example, we could define a
synonym for the built-in range type as:
infix 3 ...
type operator ... (’n : Int)(’m:Int) = range(’n, ’m)
let x:3...5=4
Note that we can’t use .. as an operator name, because that is reserved syntax for vector slicing.
Operators used in types always share precedence with identically named operators at the expression
level.
20
4.11 Ad-hoc Overloading
Sail has a flexible overloading mechanism using the overload keyword
overload name = { name1,. . . ,namen}
This takes an identifier name, and a list of other identifier names to overload that name with. When
the overloaded name is seen in a Sail definition, the type-checker will try each of the overloads in order
from left to right (i.e. from name1to namen). until it finds one that causes the resulting expression to
type-check correctly.
Multiple overload declarations are permitted for the same identifier, with each overload declaration
after the first adding its list of identifier names to the right of the overload list (so earlier overload
declarations take precedence over later ones). As such, we could split every identifier from above syntax
example into it’s own line like so:
overload name = { name1}
.
.
.
overload name = { namen}
As an example for how overloaded functions can be used, consider the following example, where we
define a function print_int and a function print_string for printing integers and strings respectively.
We overload print as either print_int or print_string, so we can print either number such as 4, or
strings like "Hello, World!" in the following main function definition.
val print_int : int -> unit
val print_string : string -> unit
overload print = {print_int, print_string}
function main() : unit -> unit = {
print("Hello, World!");
print(4)
}
We can see that the overloading has had the desired effect by dumping the type-checked AST to
stdout using the following command sail -ddump_tc_ast examples/overload.sail. This will print
the following, which shows how the overloading has been resolved
function main () : unit = {
print_string("Hello, World!");
print_int(4)
}
This option can be quite useful for testing how overloading has been resolved. Since the overloadings
are done in the order they are listed in the source file, it can be important to ensure that this order is
correct. A common idiom in the standard library is to have versions of functions that guarantee more
constraints about their output be overloaded with functions that accept more inputs but guarantee less
about their results. For example, we might have two division functions:
val div1 : forall ’m, ’n >= 0 & ’m > 0. (int(’n), int(’m)) -> {’o, ’o >= 0. int(’o)}
val div2 : (int, int) -> option(int)
The first guarantees that if the first argument is greater than or equal to zero, and the second argument
is greater than zero, then the result will be greater than or equal to zero. If we overload these definitions
as
overload operator / = {div1, div2}
Then the first will be applied when the constraints on its inputs can be resolved, and therefore the
guarantees on its output can be guaranteed, but the second will be used when this is not the case, and
21
indeed, we will need to manually check for the division by zero case due to the option type. Note that
the return type can be very different between different cases in the overload.
The amount of arguments overloaded functions can have can also vary, so we can use this to define
functions with optional arguments, e.g.
val zero_extend_1 : forall ’m ’n, ’m <= ’n. bits(’m) -> bits(’n)
val zero_extend_2 : forall ’m ’n, ’m <= ’n. (bits(’m), int(’n)) -> bits(’n)
overload zero_extend = {zero_extend_1, zero_extend_2}
In this example, we can call zero_extend and the return length is implicit (likely using sizeof, see
Section 4.12) or we can provide it ourselves as an explicit argument.
4.12 Sizeof and Constraint
As already mentioned in Section 4.1, Sail allows for arbitrary type variables to be included within
expressions. However, we can go slightly further than this, and include both arbitrary (type-level)
numeric expressions in code, as well as type constraints. For example, if we have a function that takes
two bitvectors as arguments, then there are several ways we could compute the sum of their lengths.
val f:forall ’n ’m. (bits(’n), bits(’m)) -> unit
function f(xs, ys) = {
let len = length(xs) + length(ys);
let len = ’n + ’m;
let len = sizeof(’n + ’m);
()
}
Note that the second line is equivalent to
let len = sizeof(’n) + sizeof(’n)
There is also the constraint keyword, which takes a type-level constraint and allows it to be used as
a boolean expression, so we could write:
function f(xs, ys) = {
if constraint(’n <= ’m) {
// Do something
}
}
rather than the equivalent test length(xs)<= length(ys). This way of writing expressions can be succinct,
and can also make it very explicit what constraints will be generated during flow typing. However, all
the constraint and sizeof definitions must be re-written to produce executable code, which can result
in the generated theorem prover output diverging (in appearance) somewhat from the source input. In
general, it is probably best to use sizeof and constraint sparingly.
However, as previously mentioned both sizeof and constraint can refer to type variables that only
appear in the output or are otherwise not accessible at runtime, and so can be used to implement implicit
arguments, as was seen for replicate_bits in Section 4.1.
4.13 Scattered Definitions
In a Sail specification, sometimes it is desirable to collect together the definitions relating to each machine
instruction (or group thereof), e.g. grouping the clauses of an AST type with the associated clauses of
decode and execute functions, as in Section 2. Sail permits this with syntactic sugar for ‘scattered’
definitions. Either functions or union types can be scattered.
One begins a scattered definition by declaring the name and kind (either function or union) of the
scattered definition, e.g.
22
scattered function foo
scattered union bar
This is then followed by a list of clauses for either the union or the function, which can be freely interleaved
with other definitions (such as Ein the below code)
union clause bar : Baz(int, int)
function clause foo(Baz(x, y)) = . . .
enum E=A|B|C
union clause bar : Quux(string)
function clause foo(Quux(str)) = print(str)
Finally the scattered definition is ended with the end keyword, like so:
end foo
end bar
Semantically, scattered definitions of union types appear at the start of their definition, and scattered
definitions of functions appear at the end. A scattered function definition can be recursive, but mutually
recursive scattered function definitions should be avoided.
4.14 Exceptions
Perhaps surprisingly for a specification language, Sail has exception support. This is because exceptions
as a language feature do sometimes appear in vendor ISA pseudocode, and such code would be very
difficult to translate into Sail if Sail did not itself support exceptions. We already translate Sail to
monadic theorem prover code, so working with a monad that supports exceptions there is fairly natural.
For exceptions we have two language features: throw statements and try-catch blocks. The throw
keyword takes a value of type exception as an argument, which can be any user defined type with that
name. There is no builtin exception type, so to use exceptions one must be set up on a per-project basis.
Usually the exception type will be a union, often a scattered union, which allows for the exceptions to
be declared throughout the specification as they would be in OCaml, for example:
val print = {ocaml: "print_endline"} : string -> unit
scattered union exception
union clause exception = Epair : (range(0, 255), range(0, 255))
union clause exception = Eunknown : string
function main() : unit -> unit = {
try {
throw(Eunknown("foo"))
}catch {
Eunknown(msg) => print(msg),
_=>exit()
}
}
union clause exception = Eint : int
end exception
Note how the use of the scattered type allows additional exceptions to be declared even after they are
used.
23

4.15 Preludes and Default Environment
By default Sail has almost no built-in types or functions, except for the primitive types described in this
Chapter. This is because different vendor-pseudocodes have varying naming conventions and styles for
even the most basic operators, so we aim to provide flexibility and avoid committing to any particular
naming convention or set of built-ins. However, each Sail backend typically implements specific external
names, so for a PowerPC ISA description one might have:
val EXTZ = "zero_extend" :. . .
while for ARM, one would have
val ZeroExtend = "zero_extend" :. . .
where each backend knows about the "zero_extend" external name, but the actual Sail functions are
named appropriately for each vendor’s pseudocode. As such each Sail ISA spec tends to have its own
prelude.
However, the lib directory in the Sail repository contains some files that can be included into any
ISA specification for some basic operations. These are listed below:
flow.sail Contains basic definitions required for flow typing to work correctly.
arith.sail Contains simple arithmetic operations for integers.
vector dec.sail Contains operations on decreasing (dec) indexed vectors, see Section 4.3.
vector inc.sail Like vector_dec.sail, except for increasing (inc) indexed vectors.
option.sail Contains the definition of the option type, and some related utility functions.
prelude.sail Contains all the above files, and chooses between vector_dec.sail and vector_inc.sail
based on the default order (which must be set before including this file).
smt.sail Defines operators allowing div, mod, and abs to be used in types by exposing them to the Z3
SMT solver.
exception basic.sail Defines a trivial exception type, for situations where you don’t want to declare
your own (see Section 4.14).
24
References
[1] Intel. Intel 64 and IA-32 Architectures Software Developer’s Manual. https://software.intel.
com/en-us/articles/intel-sdm, December 2016. 325462-061US.
[2] AMD. AMD64 architecture programmer’s manual volume 1: Application programming. http:
//support.amd.com/TechDocs/24592.pdf, October 2013. Revision 3.21.
[3] Power ISA Version 2.06B. IBM, 2010. https://www.power.org/wp-content/uploads/2012/07/
PowerISA_V2.06B_V2_PUBLIC.pdf (accessed 2015/07/22).
[4] ARM Ltd. ARM Architecture Reference Manual (ARMv8, for ARMv8-A architecture profile), 2015.
ARM DDI 0487A.h (ID092915).
[5] Alastair Reid. Trustworthy specifications of ARM v8-A and v8-M system level architecture. In
Proc. FMCAD, 2016.
[6] MIPS Technologies, Inc. MIPS64 Architecture For Programmers. Volume II: The MIPS64 Instruc-
tion Set, July 2005. Revision 2.50. Document Number: MD00087.
[7] MIPS Technologies, Inc. MIPS64 Architecture For Programmers. Volume III: The MIPS64 Privi-
leged Resource Architecture, July 2005. Revision 2.50. Document Number: MD00091.
[8] Dominic P. Mulligan, Scott Owens, Kathryn E. Gray, Tom Ridge, and Peter Sewell. Lem: reusable
engineering of real-world semantics. In Proceedings of ICFP 2014: the 19th ACM SIGPLAN Inter-
national Conference on Functional Programming, pages 175–188, 2014.
[9] Lem implementation. https://bitbucket.org/Peter_Sewell/lem/, 2017.
[10] Robert N. M. Watson, Jonathan Woodruff, David Chisnall, Brooks Davis, Wojciech Koszek,
A. Theodore Markettos, Simon W. Moore, Steven J. Murdoch, Peter G. Neumann, Robert Norton,
and Michael Roe. Bluespec Extensible RISC Implementation: BERI Hardware reference. Technical
Report UCAM-CL-TR-868, University of Cambridge, Computer Laboratory, April 2015.
[11] Joe Heinrich. MIPS R4000 Microprocessor User’s Manual (Second Edition). MIPS Technologies,
Inc., 1994.
[12] MIPS Technologies, Inc. MIPS32 Architecture For Programmers. Volume I: Introduction to the
MIPS32 Architecture, March 2001. Revision 0.95. Document Number MD00082.
[13] Robert N. M. Watson, Peter G. Neumann, Jonathan Woodruff, Michael Roe, Jonathan Ander-
son, David Chisnall, Brooks Davis, Alexandre Joannou, Ben Laurie, Simon W. Moore, Steven J.
Murdoch, Robert Norton, Stacey Son, and Hongyan Xia. Capability Hardware Enhanced RISC In-
structions: CHERI Instruction-Set Architecture (Version 5). Technical Report UCAM-CL-TR-891,
University of Cambridge, Computer Laboratory, June 2016.
25
