Manual And Guide 14 21 09 06
User Manual:
Open the PDF directly: View PDF ![]() .
.
Page Count: 88

Manuals and Guides 14
Intergovernmental Oceanographic Commission
.......... . . . . . . . . . .
JCOMM Technical Report No. 31
WMO/TD. No. 1339
Manual on Sea Level
Measurement and Interpretation
Volume IV: An Update to 2006
Intergovernmental Oceanographic Commission (IOC)
United Nations Educational, Scientific and Cultural Organization
1, rue Miollis
75732 Paris Cedex 15, France
Tel: +33 1 45 68 10 10
Fax: +33 1 45 68 58 12
Website: http://ioc.unesco.org
.......... . . . . . . . . . .

Manual on Sea Level
Measurement and Interpretation
Volume IV: An Update to 2006
Manuals and Guides 14
Intergovernmental Oceanographic Commission
JCOMM Technical Report No. 31
WMO/TD. No. 1339
.......... . . . . . . . . . .
The designations employed and the presentation of the material in this publication do not imply the expression of any opinion whatsoever on the part
of the Secretariats of UNESCO and IOC concerning the legal status of any country or territory, or its authorities, or concerning the delimitation of the frontiers
of any country or territory.
Layout and design by Eric Loddé
For bibliographic purposes, this document should be cited as follows:
Manual on Sea-level Measurements and Interpretation, Volume IV : An update to 2006. Paris, Intergovernmental Oceanographic Commission of UNESCO. 78 pp.
(IOC Manuals and Guides No.14, vol. IV ; JCOMM Technical Report No.31; WMO/TD. No. 1339) (English)
Rev. 2006/09
Printed in 2006
by the United Nations Educational, Scientific and Cultural Organization
7, place de Fontenoy, 75352 Paris 07 SP
© UNESCO 2006
Printed in France
(SC-2006/WS/38)
Sea Level Measurement and Interpretation
1. Introduction .......................................................................................................... 1
2. The Nature of Sea Level Variations ..................................................................... 2
2.1 Introduction ...................................................................................................................................2
2.2 Surface Waves ................................................................................................................................3
2.3 Seiches ...........................................................................................................................................4
2.4 Tides ..............................................................................................................................................4
2.4.1 Tidal Analysis .................................................................................................................................5
2.5 Storm surges ..................................................................................................................................6
2.6 Tsunamis ........................................................................................................................................7
2.7 Mean Sea Level and Trends ............................................................................................................7
2.8 Estimation of Extreme Sea Levels ....................................................................................................7
2.8.1 Introduction ..................................................................................................................................7
2.8.2 The Annual Maximum Method (AMM) .........................................................................................8
2.8.3 The Joint Probabilities Method (JPM) .............................................................................................8
2.8.4 The Revised Joint Probabilities Method (RJPM) ..............................................................................9
2.8.5 The Exceedance Probabilities Method ...........................................................................................9
2.8.6 Spatial Estimation of Extremes ......................................................................................................9
3. Instruments for the Measurement of Sea Level .............................................. 10
3.1 Introduction .................................................................................................................................10
3.1.1 The Choice of a Tide Gauge Site ................................................................................................
10
3.2 The Stilling Well ...........................................................................................................................12
3.2.1 Datum Switches ..........................................................................................................................12
3.3. Pressure Gauges ..........................................................................................................................13
3.3.1 Pneumatic Bubbler Gauges .........................................................................................................13
3.3.2 Pressure Sensor Gauges ..............................................................................................................14
3.3.3 The Datum of a Pressure System .................................................................................................15
3.3.4 Multiple Pressure Transducer Systems (‘B’ gauges) ......................................................................16
3.3.5 Pressure Transducers in Stilling Wells ...........................................................................................16
3.3.6 Bottom-mounted Pressure Gauges .............................................................................................16
3.4 Acoustic Tide Gauges ...................................................................................................................17
3.4.1 Acoustic Gauges with Sounding Tubes .......................................................................................17
3.4.2 Acoustic Gauges without Sounding Tubes ..................................................................................17
3.5 Radar Gauges ...............................................................................................................................19
3.6 Summary of the Merits of Different Technologies .........................................................................21
iii
Table of contents

4. Datum Control and Levelling ............................................................................. 28
4.1 Datums and Benchmarks ..............................................................................................................28
4.1.1 Tide Gauge Benchmark (TGBM) ..................................................................................................29
4.1.2 GPS Benchmark (GPSBM) ............................................................................................................29
4.1.3 Gauge Contact Point (CP) ...........................................................................................................29
4.1.4 Tide Gauge Zero (TGZ) ................................................................................................................29
4.1.5 Revised Local Reference (RLR) Datum ..........................................................................................29
4.1.6 National Levelling Network .........................................................................................................29
4.1.7 Chart Datum ...............................................................................................................................30
4.1.8 Working Datums .........................................................................................................................30
4.2 Levelling Between Local Benchmarks ............................................................................................30
4.3 Levelling Between Wider Area Marks ...........................................................................................30
4.4 Geodetic Fixing of Tide Gauge Benchmarks ..................................................................................31
4.4.1 Introduction ...............................................................................................................................
31
4.4.2 GPS Measurements .....................................................................................................................32
4.4.3 DORIS Measurements ................................................................................................................
33
4.4.4 Absolute Gravity Measurements ................................................................................................
33
4.4.5 Geocentric Co-ordinates and Vertical Land Movements of Tide Gauge Benchmarks ..................
34
5. Real Time Data Transmission ............................................................................. 35
5.1 Introduction .................................................................................................................................35
5.2 Choice of a System ......................................................................................................................38
5.3 Data Transmission Systems ......................................................................................................................39
5.3.1 Systems already well established .................................................................................................39
5.3.2 Systems now being applied or considered for application
in the transmission of sea level data ............................................................................................39
5.3.3 The Global Telecommunications System (GTS) ............................................................................41
5.4 Data Transmission Formats ...........................................................................................................41
6. Quality Control of Data ...................................................................................... 42
7. Training Materials and Contacts ........................................................................ 43
8. New Techniques for Sea Level Measurements ................................................. 45
8.1 GPS on Buoys ...............................................................................................................................45
8.2 GNSS Reflectometry .....................................................................................................................46
References ............................................................................................................... 48
Appendices .............................................................................................................. 52
I. GLOSS Requirements for Tide Gauges .............................................................................................52
II. Previous Volumes of the IOC Manual ..............................................................................................53
III. List of Websites ..............................................................................................................................55
IV. List of Acronyms ............................................................................................................................56
iv
Sea Level Measurement and Interpretation
Sea Level Measurement and Interpretation
V. Contributed Practical Experiences with Various Tide Gauge Technologies ...................................................58
FLOAT GAUGES IN STILLING WELLS: EXPERIENCE IN NORWAY ...........................................................58
D. Hareide, H. Hodnesdal, T. Tørresen and T. Ellef Hansen Østebøvik
THE ESEAS-RI SEA LEVEL PILOT STATION IN VILAGARCÍA DE AROUSA ...............................................61
B. Martín, B. Pérez, E. Alvarez Fanjul
COMPARISON OF RADAR DEVICES IN GERMANY ...............................................................................65
C. J. Blasi and U. Barjenbruch
EXPERIENCE WITH SRD TIDE GAUGES AND REASONING
BEHIND CHANGE TO RADAR TIDE GAUGES .......................................................................................67
R. Farre
PRESSURE GAUGE BASED GLOSS SEA LEVEL STATION
AT TAKORADI HARBOUR (GHANA, WEST AFRICA): EXPERIENCES OVER A YEAR ................................69
A. Joseph, P. Mehra, J. Odammetey and N. E. Kofi
CHILEAN SEA LEVEL NETWORK ..........................................................................................................72
J. Fierro
GAUGES FOR TSUNAMI WARNING ....................................................................................................75
B. Kilonsky
ODINAFRICA TIDE GAUGE SPECIFICATION AUGUST 2005 ..................................................................76
P. Foden
TIDETOOL – A SOFTWARE PACKAGE TO DISPLAY AND DECODE SEA LEVEL DATA
TRANSMITTED OVER THE WMO GLOBAL TELECOMMUNICATIONS SYSTEM ......................................77
L. Kong
v

IOC Manuals and Guides No 14 vol IV
This is the fourth in the series of IOC Manuals on Sea
Level Measurement and Interpretation. It incorporates
the changes in tide gauge technology and measure-
ment techniques in the five years since the third
manual was written, and includes material from the
Workshop on New Technical Developments in Sea and
Land Level Observing Systems (UNESCO, Paris, 14–16
October 2003). In addition, it reflects to a great extent
the changes in priorities for tide gauges in a global
network which have taken place in recent years. For
example, it is inconceivable now that most gauges
installed in the GLOSS network will be without a real-
time reporting capability and a capacity to provide data
of use to a tsunami warning system.
The manual includes some sections of text from the
earlier editions, updated as appropriate. However,
for reasons of space it does not include some other
sections from the earlier versions, even though they
are still valid and useful (e.g. the discussion of data
quality control and filters in Volume III, see the present
Appendix II). The earlier editions continue to be readily
available on the web at http://www.pol.ac.uk/psmsl/
manuals/.
In order to provide a fresh perspective, this volume
has been largely written by new people. A consultant
(Dr. Ian Vassie) produced a first draft. Drs. Tilo Schöne
and Georg Beyerle of GFZ, Postdam, contributed the
text for section 8. The first drafts were commented
on and edited by the GLOSS Technical Subcommittee
(Chair Dr. Begoña Pérez) and the volume was subse-
quently reviewed by members of the GLOSS Group
of Experts and Mr David Meldrum provided additional
comments on Section 5.
The following section provides a brief overview of
sea level variations which may be of general interest,
including a discussion of estimation of extreme levels
that was missing from earlier editions. However, the
volume is largely concerned with tide gauge and data
communications technologies and aimed at people
who work in those fields. These are rapidly develop-
ing topics, and ones in which the sharing of expertise
among groups is essential. Some readers of this volume
may, therefore, have different perspectives on sea level
measurements. Some of these independent views are
expressed in the contributions given in Appendix V.
Each of these authors has expressed willingness to pro-
vide advice to others as required.
We thank everyone who contributed material for, and
advice on, this volume. In particular, we thank Robert
Smith of the Proudman Oceanographic Laboratory for
his technical assistance and Ray C. Griffiths for editorial
assistance.
Thorkild Aarup
(GLOSS Technical Secretary)
Mark Merrifield
(Chair GLOSS Group of Experts)
Begoña Pérez
(Chair GLOSS Technical Subcommittee)
Ian Vassie
(Consultant)
Philip Woodworth
(Director, Permanent Service for Mean Sea Level)
June 2006
Sea Level Measurement and Interpretation
1
1. Introduction
IOC Manuals and Guides No 14 vol IV
2.1 Introduction
The study of sea level has many different facets. It is not
simply the measurement of the sea level that requires
technical expertise. The data must be carefully calibrated,
checked and evaluated. The measurements should be tied
to local benchmarks that in turn are fixed into a country’s
national levelling network and further fixed into the global
network using modern geodetic techniques. The recorded
data need to be archived, documented and protected
for future studies. Only then is it of benefit as a valuable
resource and can be used for studies ranging from local
engineering projects to long-term global climate change.
Variations in sea level contain contributions from dif-
ferent physical sources that are usually distinguished by
their period. Components range from surface gravity
waves with periods of 1 to 20 seconds; seiches and
tsunamis with periods of minutes to over an hour; tides
centred around 1/2 and 1 day; meteorological effects
of several days to 1 year; interannual and decadal
variability; and long-term trends in the mean level
caused by geological and climatological effects. The
magnitudes of these components vary enormously.
Surface gravity waves can have amplitudes up to 30 m.
Tsumanis tend to be less than 1 m in the deep ocean
but may be several metres near the coast. Tides are
relatively small in the ocean but may be 10 metres near
the coast. Storm surges may be of the order of a few
metres in shallow seas. Within this mix one is trying
to estimate long-term trends in the mean level of the
order of 1 mm per year. The fact that this is possible,
and has been for over 100 years, is testimony to the
expertise and dedication of the engineers and scientists
who are involved in sea level research.
The majority of historical sea level data were collected from
float and stilling-well tide gauges with analogue charts,
many of which are still in existence, but superseded by the
modern trend to the digital systems described below. With
digital technology it is possible to improve the accuracy
and reliability of the data and make the data available to
the user in real time.
In analogue form the charts were always available for
re-analysis and errors could be rectified by reappraisal of
the chart and re-sampling of the pen-trace, if necessary.
In digital form a corresponding re-analysis is not always
possible. The decision has to be made in advance as to
what is a reasonable sampling (or averaging) interval. One
cannot return and re-sample the data at a more frequent
interval. In the past, the generally accepted sampling (or
averaging) rate was 1 hour, since this allowed the study
of all processes, from tides to mean sea level (IOC, 1990).
Waves were, by their nature, considered a different sci-
entific province and were filtered out of the data. More
recently, the sampling frequency has been increased to 15
minutes, 6 minutes and even higher rates.
The disastrous tsunami of 26 December 2004 in the
Indian Ocean made it clear that the normal tide gauge
sampling would be inadequate and that it would be nec-
essary to increase it to 1 minute or ideally to 15 seconds.
This places constraints on the tide gauge technology and
increases the demand on the storage and transmission
requirements of a tide gauge network. There is a balance
to be struck between the need to capture the essence of
the data and the need to store and perhaps transmit large
volumes of data.
2. The Nature of Sea Level
Variations
2
Sea Level Measurement and Interpretation
IOC Manuals and Guides No 14 vol IV
A second important issue is that, historically, a tide gauge
was attended continuously by a trained observer who
collected ancillary tide-pole information, and height and
datum corrections were appended to the chart weekly.
This produced a very stable reference and of course meant
that faults were quickly identified. In modern systems the
datum and calibrations tend to be checked less frequently.
Thus greater reliance is placed on the accuracy and stability
of the measuring equipment. Fortunately, modern techno-
logical improvements have allowed this, not only through
better equipment, but with two-way communication the
sea level station can be interrogated and its operational
characteristics adjusted as necessary.
The need for an operator to be permanently at the tide
gauge has been removed. Perhaps one can speculate that
it is time to withdraw all manual intervention. Certainly,
with the growing requirement for real-time data, manual
intervention will not always be possible. In the future, the
only viable approach might be to check and authenticate
the data automatically at source before transmission. It can
then be passed to the end user and be placed in a form
that can be entered directly into the global sea level data
banks without intervention.
2.2 Surface Waves
Surface waves are probably the most noticeable variation
of the sea surface to a casual observer. They have been
relatively little discussed in previous editions of this manual,
as most tide gauges are designed to filter out such waves.
However a brief description of their characteristics is worth
including, as the design of a tide gauge relies on an under-
standing of their general characteristics.
Waves are characterized as wind-waves or swell. Wind-
waves are generated by the effect of the wind on the local
sea surface and have a relatively broad spectrum. Swell is
produced when the waves propagate out of a storm area.
They occupy a narrower part of the spectrum. In general,
wind waves have periods from 1 to 15 seconds, and swell,
from 12 to 25 seconds, although this definition is not
exclusive. Outside this range of periods, wave amplitudes
are small. Wave period is usually calculated via the time
between successive zero up-crosses of the wave (Tz).
Wave heights are usually defined in terms of their
peak-to-trough range in height, although wave ampli-
tude is sometimes calculated as the height above a
mean level. Significant wave height (Hs) is the usu-
ally quoted parameter which closely approximates
the height of the highest one-third of the waves in a
given period of time. Traditionally, a wave record has
a duration of 20 minutes and is re-sampled every 3
hours, choices which were derived originally from the
stochastic properties of storm duration. It is difficult
to give an overall figure for maximum wave height,
as it depends critically on location. Waves are subject
to amplification, dispersion, refraction and focusing.
In general, significant wave heights of several metres
are common during a storm, but individual waves up
to 30 metres have been measured.
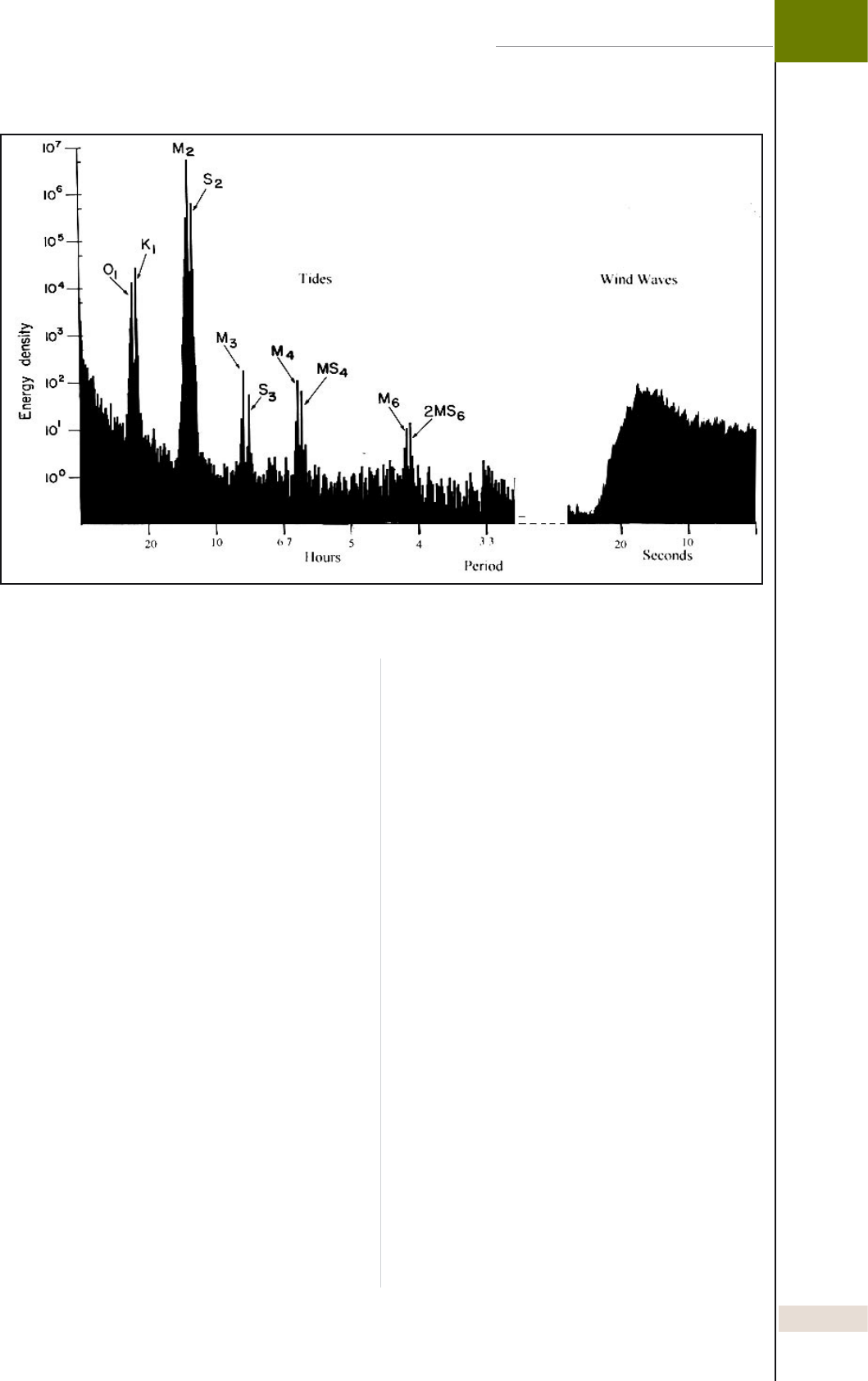
Figure 2.1 Spectrum of Sea Level Variations. The long-period variations and mean sea level changes are part of the
enhanced energy at low frequencies.
Sea Level Measurement and Interpretation
3
IOC Manuals and Guides No 14 vol IV
Wave activity with a period of a few minutes can be
caused by non-linear effects; e.g. when the waves
encounter a current or a change in bottom topography.
These longer-period waves occur because the height of
successive waves is not uniform; they occur in groups
of higher or lower waves. This leads to the popular
misconception that every seventh wave is the highest.
In fact, the wave groups are not of equal length but
they do produce non-linear effects that have periods
related to the period of the wave groups. The most
significant effect of this, as far as the study of sea level
is concerned, is that the wave groups produce ‘set-up’
of the sea level near the coast. The degree of ‘set-up’
depends on many factors, of which the shape of the
beach is the most critical. Set-up can be of the order of
a few tens of centimetres during a severe storm.
Waves have directional properties as well as a magni-
tude. Many early recordings were only concerned with
wave height, because instruments capable of measur-
ing direction were not available. Wave riders from this
era were moored to the sea bed on a flexible coupling
and contained accelerometers which were integrated
twice to obtain wave height. However, modern moor-
ings are now available which are capable of measuring
pitch and roll of the surface buoy, from which direc-
tional information can be derived.
Coastal tide gauges tend not to be located optimally
to measure wave conditions in the nearby deep ocean.
However, they can at times provide useful information
with the correct (pressure) gauge technology. Vassie
et al. (2004) provide a recent description of the use
of pressure tide gauges to measure swell at ocean
islands.
2.3 Seiches
Seiches are periodic variations in the surface level usually
set in motion by a disturbance such as a strong wind or cur-
rent, a sudden change in atmospheric pressure or even a
tsunami. In lakes and gulfs their period is controlled by the
dimensions of the basin and their lifetime is determined by
frictional effects. Typical periods are in the range of a few
minutes to a few hours (between wind waves and tides),
and typical amplitudes are centimetric to decimetric. They
can be seen on tide gauge records from almost all regions.
Seiches have largely been ignored in most sea level stud-
ies, owing to their primarily local origin, but knowledge
of them is important for coastal and harbour engineering
as well as for harbour operations, where small-amplitude
seiches may be associated with strong currents at the
entrance of the harbour. On the other hand, they can have
a major effect on other sea level studies. For example, if
their amplitude is large enough, and if the sampling rate of
the tide gauge is insufficiently high, then their energy can
be aliased into tidal and other sea level signals.
2.4 Tides
The oceans respond to the gravitational attraction of the
Moon and the Sun, and the solar radiation, to produce
the tides, which are normally the predominant signals
in sea level records. The tides are easy to distinguish
from other components of sea level variation (e.g. storm
surges) because they have well defined periods, whereas
other processes tend to occur at irregular intervals.
An examination of the forces causing the tides leads
some way towards an understanding of their nature. This
examination is usually via discussion of the Equilibrium
Tide (Doodson and Warburg, 1941; Forrester, 1983;
Pugh, 1987; Open University, 1989). The gravitational
attraction of the Moon and Sun on the Earth produces
a semi-diurnal (2 cycles per day) ‘tidal bulge’, which
is usually oriented at an angle to the equator produc-
ing the diurnal (1 cycle per day) tidal components. The
diurnal and semi-diurnal waves both have a planetary
space scale. As the Earth rotates about its axis, signals
containing the above periods, but usually dominated by
the semi-diurnal component, should appear in the sea
level record. A lunar day is slightly longer than a solar day
by approximately 50 minutes, leading to lunar and solar
tides of differing periods which interact over 14 days to
produce the Spring-Neap cycle.
Study of the celestial motion of the Earth–Moon–Sun
system leads to a more complex form of the tidal poten-
tial (or Equilibrium Tide) in which the main constituents
are modulated at periods of 1 month, 1 year, 8.85 years,
18.61 years and 21,000 years. The effect of the modula-
tion is to split the tides into additional constituents but
with periods close to 1 and 2 cycles per day. This grouping
is termed ‘tidal species’.
The tidal potential so far discussed explains only the diurnal
and semi-diurnal species of the tide, but can be extended
to include ter-diurnal (third of a day period) tides and tides
of even shorter period. A power spectrum of a tidal record
clearly shows that higher-order species do exist, except
sometimes when measurements are made at an oceanic
location. These ‘compound tides’ are primarily generated
by the main tidal components in shallow water as they
encounter frictional forces. They have periods of 2, 4 and 6
cycles per day (and even 12 cpd in very shallow areas), with
each species demonstrating separate tidal characteristics.
The tidal regime varies enormously in different parts
of the world. In most regions the tide is dominated by
semi-diurnal components, reflecting the importance of
the main semi-diurnal terms in the Equilibrium Tide.
However, there are many areas where the tides are pre-
dominantly diurnal (e.g. Persian Gulf), and some where
the regime is ‘mixed’ (i.e. the diurnal and semi-diurnal
components have a comparable magnitude). Examples
of these various regimes are shown in Figure 2.2.
4
Sea Level Measurement and Interpretation
IOC Manuals and Guides No 14 vol IV
Sea Level Measurement and Interpretation
5
While the temporal characteristics of the tide in the real
ocean are similar to those of tidal potential (Equilibrium
Tide), their spatial characteristics are very different. This
difference is caused by the dynamical response of the
ocean basins, causing the tides to propagate as progres-
sive waves and to generate standing waves in some areas.
Tides in the deep ocean have amplitudes of typically
1 m or less, considerably lower than the amplitudes on
continental shelves where local resonances can produce
large amplitudes. In all oceans (deep oceans as well as the
enclosed sea areas of continental shelves) there are regions
of no tide, called amphidromic points, which are a conse-
quence of the standing waves.
Tide gauges, such as those described in this manual,
remain the primary source of tidal knowledge in coastal
regions, although new techniques are under continuous
development (section 8). The tides of the deep ocean
can also now be well measured, with the use of bottom
pressure recorders (Cartwright et al., 1980; Filloux, 1980;
Spencer and Vassie, 1997), and more recently by means of
altimeter satellites (Shum et al., 1997).
2.4.1 Tidal Analysis
The model that has been derived for the Equilibrium Tide is
not completely without use, as it does provide the knowl-
edge that the tide is composed of a finite number of con-
stituents of calculable frequency. It also provides a measure
of their relative amplitudes so that we have an idea which
constituents are important in the real tide.
The analysis consists in reducing a set of measure-
ments, which amounts to 8,760 hourly values in a
normal year, to a manageable set of parameters which
completely specify the tidal component of the record.
The tides can then be removed to reveal the remaining
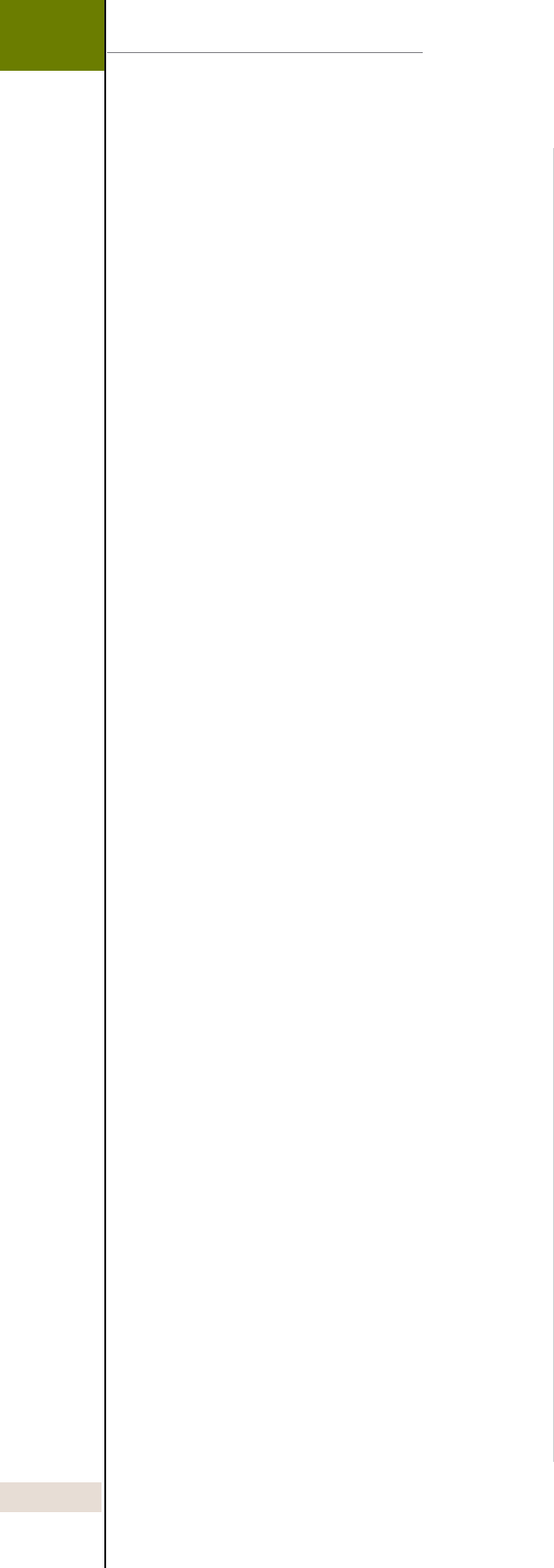
Figure 2.2 Tidal characteristics at five stations, showing different regimes: diurnal, mixed, semi-diurnal with strong
spring-neap modulation in the Indian Ocean, semi-diurnal with smaller amplitudes at a N.Atlantic site, and shallow
water distortions.

IOC Manuals and Guides No 14 vol IV
components of the sea level variations (e.g. storm surges,
tsunami) and the long-term trend.
Many organizations have developed their own method
of tidal analysis. Apart from the Response Method (Munk
and Cartwright, 1966), these methods generally fit, in
some optimal way, a set of harmonic constituents to
the data. This can be done in several different ways. The
Admiralty Semi-Graphic Method and those of Doodson
(1928) were designed for hand calculations. Most mod-
ern techniques (Murray, 1963; Foreman, 1997) rely on the
ability of the computer to solve large sets of simultaneous
equations. Many have been converted to ‘user friendly’
packages and are available from the following website:
http://www.pol.ac.uk/psmsl/training/analysis.html.
2.5 Storm Surges
The exchange of energy between the atmosphere and the
ocean is one of the most important topics in geophysics.
Storm surges are among the more spectacular examples
of energy transfer in which the energy contained in winds
and time-dependent changes in air pressure are absorbed
by the sea to produce strong currents and high sea levels.
In the open sea these currents decay by the action of dis-
sipative forces. Where the current is impeded by the pres-
ence of a continental shelf or other discontinuity in depth,
or by a coastline, more of the kinetic energy of the sea
tends to be converted into potential energy. Abnormal
elevations of sea level may then occur, with disastrous
results if the coast is low-lying.
Physically, the atmosphere acts on the sea in two distinct-
ly different ways. The first is the ‘Inverse Barometer (IB)
Effect’ wherein a 1-hPa (mbar) increase of atmospheric
pressure decreases sea level by 1 centimetre. (Dynamical
effects can complicate this simple IB description at short
time-scales.) The second is due to the drag (or ‘stress’)
of the wind on the sea surface, which is proportional (to
a first approximation) to the square of the wind speed.
This force sets up sea level gradients which are propor-
tional to wind stress divided by water depth, and which
result in the storm surges in shallow water regions. The
dynamics of surges in shallow water result in flow being
in the direction of the wind, differing from a deeper
water situation in which the transport is at right angles
to the wind (to the right in the northern hemisphere).
Recordings of sea level at any coastal station contain
some evidence of the influence of winds and pressure,
but some areas are particularly susceptible to large
surges. The Baltic, being virtually an enclosed sea and
subject on occasion to severe gales, experiences large
surges. In 1924 St. Petersburg (Leningrad) was flooded
by a surge 4 m high. The North Sea, with its southern
extremity almost closed, responds readily to northerly
winds; the vulnerable coastlines of the German Bight,
eastern England and more particularly the Low Countries
have repeatedly been inundated by great surges. The
storm surge of 1953 resulted in many deaths in The
Netherlands and England. The Hamburg disaster of
1962 was more localized, mainly affecting the German
Bight and the River Elbe, where the surge reached more
than 3 m in height.
Hurricanes travelling towards the Atlantic seaboard of
the United States are no less effective in generating
destructive surges. The Japanese islands are also subject
to typhoon surges. Events on this scale demand as com-
plete an understanding of the phenomena as possible
so that they may be forecast (using forecast meteoro-
logical information) and their consequences mitigated.
After the immediate danger of flooding, the subsequent
dislocation of normal services, such as water supplies
and sewerage, gives rise to serious dangers. Also, once
flooded by sea water, previously fertile lands are unsuit-
able for growing crops for several years because of
the saline deposit which remains after the floods have
receded.
For scientific analysis and for systems designed for surge
prediction, it is usual to distinguish between tropical and
extra-tropical surges.
Tropical surges are generated by tropical storms that are
small and very intense. These storms are generated at
sea, from where they move in an irregular way until they
meet the coast. Here they produce exceptionally large
flood levels over a region of perhaps 10–50 km of coast-
line. Tropical storms are difficult to monitor offshore and
their effects on a particular stretch of coastline cannot be
estimated from the statistics of observed floods because
such storms are relatively rare events in any particular
region. A combination of numerical and statistical mod-
els may be used to estimate the maximum flood levels,
but their exact location depends on the track of each
individual storm.
Extra-tropical surges are generated by storms which
extend over several hundred kilometres and which are
generally slow moving. They affect large areas of coast
over periods that may extend to several days. At their
centre is a region of low atmospheric pressure. They are
more amenable to study by hydrodynamic modelling
taking into account the distribution of atmospheric pres-
sure and wind fields, sea bed bathymetry, the coastal
topography and the effects of the Earth’s rotation.
A tide gauge network by which the storm surge can
be monitored is of key importance in providing data to
enhance the performance of operational hydrodynamic
tide–surge models used in flood warning. Data can
be used in the verification of the models and for data
assimilation into them (Flather, 2000; Alvarez Fanjul,
2001). Such a network clearly has to be capable of
remote telemetry on a near-real-time basis.
6
Sea Level Measurement and Interpretation
IOC Manuals and Guides No 14 vol IV
Sea Level Measurement and Interpretation
7
2.6 Tsunamis
A tsunami is a wave train generated by a vertical displace-
ment of the water column. Earthquakes, landslides,
volcanic eruptions, explosions, and even the impact
of cosmic bodies, such as meteorites, can gener-
ate tsunamis. Where they impact a coastline, they
can cause severe property damage and loss of life.
Tsunamis may have wavelengths in excess of 100 km
and periods of minutes to over an hour, depending
on the generation mechanism. As a result of its long
wavelength compared to the water depth, a tsunami
behaves like a shallow-water wave and propagates at
a speed that is equal to the square root of the product
of the acceleration of gravity (9.8 m.s-2) and the water
depth. In a typical ocean depth of 4,000 m, a tsunami
travels at about 200 m.s-1, or over 700 km.hr-1. Because
the rate at which a wave loses its energy is inversely
related to its wavelength, tsunamis not only propagate
at high speeds, they can also travel great distances
without loss of energy (Figure 2.3). Tsunamis are only
about a metre high, at the most, in the open ocean.
However, where they impact the coast, amplitudes are
significantly higher and can be as large as 10 m (30
m in extreme cases). Wave refraction, caused by seg-
ments of the wave moving at different speeds as the
water depth varies, can cause extreme amplification in
localized areas.
The ability to warn of the approach of a tsunami depends
on a variety of measurements (especially seismic data), but
also on a network of tide gauges to monitor the progress
of the wave and thereby forecast the time of arrival at a
distant coast and the likely affected areas. Because the
propagation speed of the waves is large, it is essential to
have real-time data transmission without any significant
time delay. Decision-making and mitigation procedures
have to be considered before warnings are issued to the
relevant authorities.
2.7 Mean Sea Level and Trends
The determination of mean sea level (MSL) and its long-
term trend is probably the most exacting component of a
tide gauge data set. Whereas the accuracy of an instru-
ment in determining the properties of the tides or a storm
surge need only be about 1 cm, the long-term trend in sea
level has a magnitude of around 1 mm per year. Hence
precise measurement not only relies on the accuracy of the
instrument but also on its long-term stability. This in turn
implies an ability to maintain the datum of a tide gauge
within a local levelling network. The levelling between,
and geocentric fixing of, tide gauge benchmarks, is dealt
with in section 4.
The data from the existing global network of tide gauges
clearly shows a rise in sea level over the last century. Their
data are fundamental in studies of climate change, and
especially as an aid in the development of atmosphere–
ocean general circulation models that have a capability to
predict future sea level change. The mean value is extract-
ed from the observed data by the application of numeri-
cal filters discussed in Volume 1 of the IOC Manual on
Sea Level Measurement and Interpretation. Monthly and
annual mean sea level series are collected and published
by the Permanent Service for Mean Sea Level (PSMSL),
together with details of gauge location, and definitions
of the datums to which the measurements are referred.
Data are held for over 2,000 stations, of which 112 have
data from before 1900. The longest record held is from
Brest, France, which begins in 1806. The physical location
of gauges on the network is not ideal: the vast majority of
gauges operate in the northern hemisphere and careful
analysis is necessary to avoid bias in the interpretation of
their data. There is a continuing need for more data from
the southern hemisphere, and from oceanic islands.
The change in mean sea level relative to a fixed point on
land is a measure of the difference between the vertical
movements of the sea’s surface and of the land itself. Long-
term changes of measured sea level are termed ‘secular’
changes. Global changes in the mean sea level are called
‘eustatic’ changes. Vertical land movements of regional
extent are called eperiogenic movements. Examples of
such long-term changes can be obtained from the PSMSL
website. Study of the records will show that there are
many similarities between stations which can be considered
‘nearby’ relative to ocean and geological space-scales. The
close agreement between stations using different kinds
of instruments shows that the oceanographic variability is
much greater than the errors in the measurements.
2.8 Estimation of Extreme Sea Levels
2.8.1 Introduction
The aim of this section is to summarize the key meth-
ods which can be used for the estimation of extreme
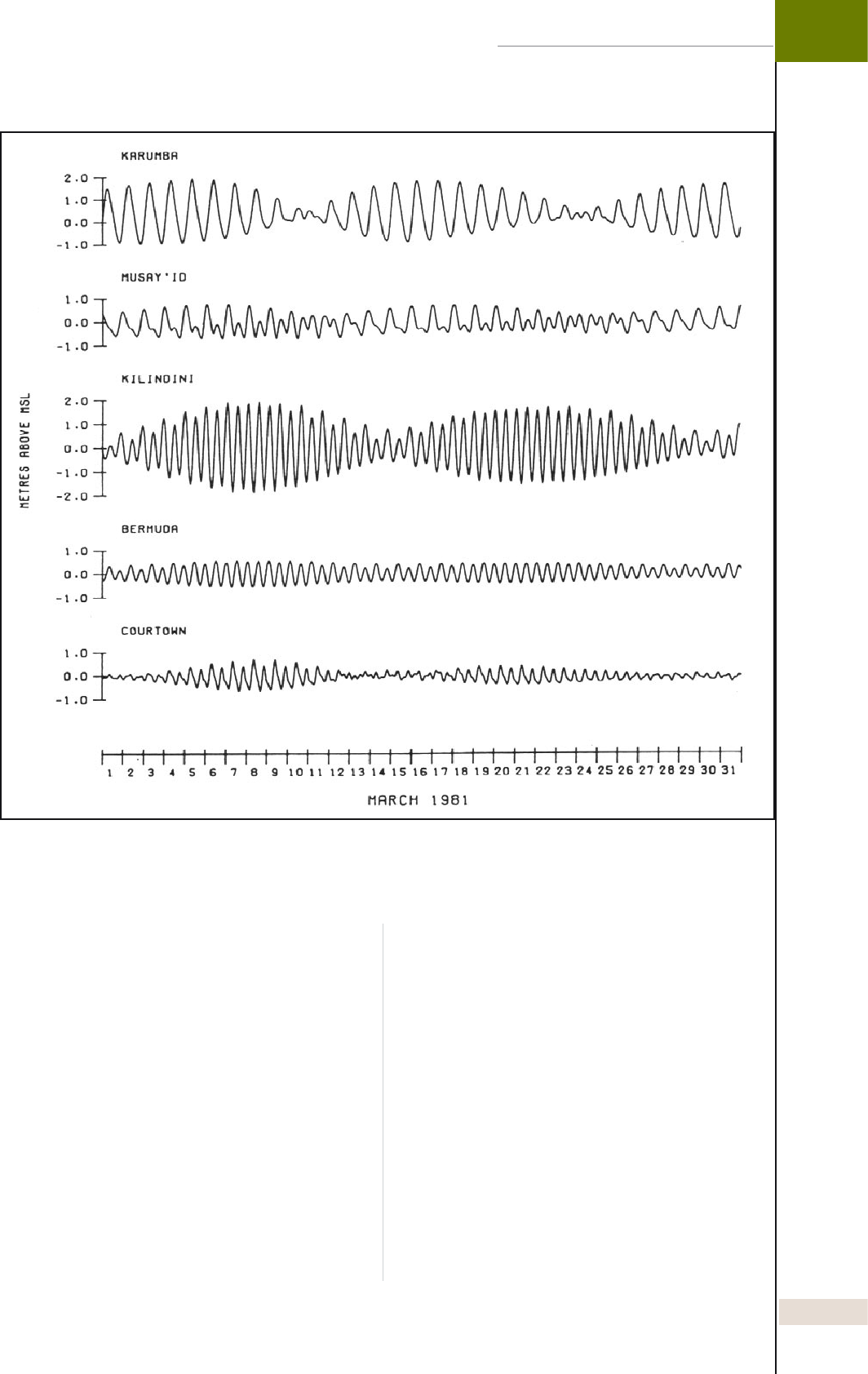
Figure 2.3 The 26 December 2004 Sumatra tsunami
signal at a distant tide gauge (Port Louis, Mauritius) with
an amplitude over 1 m.
8
Sea Level Measurement and Interpretation
IOC Manuals and Guides No 14 vol IV
sea levels. It begins with the classical method of Annual
Extremes, which first appeared in the early 1960s and
continued to be developed for some time thereafter.
Following this, the Joint Probability Method, which was
developed in the late 1970s, is considered. This makes
more efficient use of data by incorporating our exten-
sive knowledge of the tides and storm surges, which
are the two main components of sea level, as a part of
the estimation procedure.
More recent work on the Annual Exceedance Method is
discussed, followed by a revision of the Joint Probability
Method to correct its deficiencies in areas where the sea
level is dominated by the meteorological surge compo-
nent. Finally, very recent work on the spatial estimation
of extremes is mentioned. References are given at each
stage so that the reader can examine any of the meth-
ods in greater depth. Although extreme high sea levels
are considered, results for extreme low sea levels can be
obtained in an analogous way.
2.8.2 The Annual Maximum Method (AMM)
This is the classical general method of analysis of
extremes having been applied to sea level estimation
since 1963 (Lennon, 1963; Suthons, 1963). It is based
on a result from probabilistic extreme value theory
which states: if X1,... Xn is a sequence of independent
and identically distributed random variables, then
max(X1,... Xn), suitably linearly normalized, converges
as n ∞ , to a random variable with a distribu-
tion function which is one of the so called extreme-
value distributions. The general case is known as the
Generalized Extreme Value (GEV) distribution. An
important special case is the Gumbel distribution.
The Annual Maximum Method takes the GEV to be
the distribution function of the maximum sea level in
a year. Therefore, for a place of interest, the annual
maximum for each year is extracted from hourly obser-
vations and is used as data to estimate the parameters
of the distribution that they follow. From the estimated
distribution one can obtain the sea level corresponding
to a chosen ‘Return Period’. In practice, return periods
of 50, 100 and 1,000 years are common. The basic
method assumes that there is no trend in the data, but
it can be extended to deal with those cases where a
trend is present.
A recent extension of the annual maximum method
involves using probabilistic extreme value theory to
obtain the asymptotic joint distribution of a fixed num-
ber (r) of the largest independent extreme values, for
example the five largest in each year. Essentially the
approach is the same as above except that more rele-
vant data are included in the analysis thereby improving
the estimation. Care must be taken to ensure that the
number of annual maxima ‘r’ is not excessive, such that
the lower extremes fall outside the tail of the extreme
value distribution.
This method of estimating sea level extremes is highly
inefficient in its use of data, since it extracts very few
values from each yearly record. This is particularly impor-
tant when the sea level record is short, since it yields
return level estimates with unacceptably large standard
errors. In addition, it makes no use of our knowledge of
the sea level and storm surge processes. However, the
advantage of annual maxima methods is that they do
not require knowledge of tide–surge interaction which
can sometimes be a significant feature of the data.
Consequently the methods are relatively straightforward
to apply.
2.8.3 The Joint Probabilities Method (JPM)
This method of analysis was introduced to exploit our
knowledge of the tide in short data sets to which the
annual maxima method could not be applied (Pugh
and Vassie, 1979). At any time, the observed sea level,
after averaging out surface waves, has three compo-
nents: mean sea level, tidal level and meteorologically
induced sea level. The latter is usually referred to as a
storm surge. Using standard methods, the first two of
these components can be removed from the sea level
sequence leaving the surge sequence, which is just the
time-series of non-tidal residuals. For simplicity these are
assumed to be stationary. Because the tidal sequence
is deterministic, the probability distribution for all tidal
levels can be generated from tidal predictions. This
distribution can be accurately approximated using 18.6
years of predictions.
The probability distribution of hourly sea levels can be
obtained either directly using an empirical estimate or
by combining the tidal and surge probability density
functions (
pdf
). The latter is preferable, as it smoothes
and extrapolates the former. However the nature of
the combination of the
pdf
’s depends on whether
there is dependence between the tide and surge
sequences. Initially, consider the case in which they
are independent.
By combining the
pdf
’s of tide and surge, the distribution
function of hourly (instantaneous) sea levels is obtained.
From this, the distribution function of the annual maxi-
ma is required. If hourly values were independent, which
is approximately the case where the tide dominates the
regime, then this is straightforward.
The method has been widely applied. It makes better
use of the data and of our extensive knowledge of the
tides, and accounts for surges that could have occurred
on high tide but by chance did not. Most successful
applications have been to sites which have several years
of hourly records (>10 years) and where the site is tidally
dominant, i.e. where the tidal range is large in compari-
son to the surge amplitude. Least successful applications
have been to sites with both short lengths of data and
where the site is surge dominant.
Sea Level Measurement and Interpretation
9
IOC Manuals and Guides No 14 vol IV
2.8.4 The Revised Joint Probabilities Method
(RJPM)
Particular emphasis was given to two principal
improvements that make the revised method more
widely applicable than the original joint probabilities
method (Tawn et al., 1989). It was principally direct-
ed at sites where the storm surge was responsible
for a respectable proportion of the sea level and to
improve the estimation procedure for sites where
less than 10 years of data were available.
The first issue was that of converting the hourly dis-
tribution into annual return periods. It is clear that
each hourly value of sea level is not independent of
its predecessor or successor. Of the 8,760 hourly val-
ues in a year, it is necessary to determine the effective
number of independent observations per year. This
was done through an Extremal Index which is derived
from the mean overtopping time of a level for each
independent storm which exceeds that level. In fact
the Extremal Index can be shown to be a constant
in the region of the extremes. Because large values
tend to cluster as storms, it should be expected that
the Extremal Index >1; for example, in the North
Sea, it is 1.4. This effectively reduces the number of
independent observations from 8,760 to 8,760/1.4.
If the site is tidally dominant then the Extremal Index
is considerably smaller than if the site is surge domi-
nant. The immediate advantages of this modifica-
tion are: firstly, that no assumption about the local
dependence of the process is required; secondly, that
the conversion from the hourly distribution to annual
maxima is invariant to sampling frequency.
The second modification enabled probabilities for
levels beyond the existing range of the surge data
to be obtained, in addition to providing smoothing
for the tail of the empirical distribution. The method
is based on the idea of using a fixed number of
independent extreme surge values from each year to
estimate probabilities of extreme surges. The proce-
dure involves two important steps. Firstly, the iden-
tification of independent extreme surges. Secondly,
the selection of a suitable number of independent
extreme surges from each year of data, perhaps five
per year. Using these surge data, estimates can be
made of the parameters of the distribution of the
annual maximum surge (Smith, 1986).
Using the ideas for extremes of dependent sequenc-
es, this can be related to the distribution function
of hourly surge levels, and then the empirical surge
density function can be replaced by the adjusted
density. Using the adjusted density function, the
convolution can be performed to combine the tidal
and surge distributions to obtain the hourly sea level
distribution and hence the return periods can be
calculated for different levels.
When interaction is present, the level of the tide
affects the distribution of the surge. In particular, the
tail of the surge
pdf
depends on the corresponding
tidal level. Thus the convolution of tide and surge
can be adapted so that the surge parameters are
functions of tidal level. This formulation also enables
statistical tests of independence to be performed.
2.8.5 The Exceedance Probability Method
(EPM)
An alternative method of obtaining extreme sea
level estimates from short data sets is called the
exceedance probability method (EPM) (Middleton
et al., 1986; Hamon et al., 1989). The EPM, like the
RJPM, involves combining the tide and surge distri-
butions and accounting for dependence in the sea
level sequence. The approach differs in the way that
it handles extreme surges. The EPM uses results for
continuous time processes and makes assumptions
about the joint distribution of the surge and its deriv-
ative. Improvement is achieved by allowing flexibility
in the surge tail through the use of a contaminated
normal distribution.
2.8.6 Spatial Estimation of Extremes
Extreme sea levels along a coastline are typically gener-
ated by the same physical mechanisms, so the param-
eters that describe the distribution are likely to be
spatially coherent. Models that describe the separate
constituents of the sea level are best suited to exploit-
ing this spatial coherence, as the individual parameters
should change smoothly along a coastline.
The joint distribution of annual maxima over sev-
eral data sites can be modelled using a multivariate
extreme-value distribution (Tawn, 1992). Changes in
each of the parameters of the distribution, over sites,
can be modelled to be consistent with the properties
of the underlying generating process identified from
the RJPM. The main advantage of the spatial method
is that it can utilize data sites with extensive sea level
records and augment these with data from sites with
shorter records of a few years.
IOC Manuals and Guides No 14 vol IV
3. Instruments for the
Measurement of Sea Level
10
Sea Level Measurement and Interpretation
3.1 Introduction
This section contains information on the types of instru-
ment that are presently available for the measurement of
sea level. The reason that so many different technologies
have evolved is connected with the difficulty of measur-
ing a fluid that is in constant motion due to the pro-
cesses discussed in section 2. In general, sea level mea-
surements are not concerned with the measurement of
surface gravity waves which must be filtered out of the
system. Waves can be appreciable in amplitude and can
cause problems for most forms of tide gauge technol-
ogy. Therefore, their potential effects on a ‘sea level’
measurement must always be kept in mind. Another
factor that needs to be considered is that the properties
of sea water (salinity, temperature and hence density)
may change on a regular or irregular basis. How this
affects an instrument depends much on the technology
used to acquire the observations. These are discussed
along with the merits of each tide gauge.
There are fundamentally four types of measuring tech-
nology in common use:
• A stilling well and float: in which the filtering of the
waves is done through the mechanical design of
the well.
• Pressure systems: in which sub-surface pressure
is monitored and converted to height based on
knowledge of the water density and local accelera-
tion due to gravity. Such systems have additional
specific application to ocean circulation studies in
which pressure differences are more relevant than
height differences.
• Acoustic systems: in which the transit time of a
sonic pulse is used to compute distance to the sea
surface.
• Radar systems: similar to acoustic transmission, but
using radar frequencies.
Within each of these four types, different technologies
have been employed, leading to different designs.
In addition, there are direct measuring devices based
on resistance or capacitance rods, but these have found
less widespread use because of their lack of robustness
in hostile regions. Recent advances in technologies,
such as Global Positioning System (GPS) reflection
methods, have lead to other elaborate ways of measur-
ing sea level which might be important in the future.
At the present time, many of the above systems are
undergoing tests and inter-comparisons by agencies
worldwide (IOC, 2004). It would appear that most
systems for measuring sea level have a precision
approaching 1 cm, given sufficient care and attention.
This value is adequate for the measurement of most
of the hydrodynamic processes discussed in section 2.
However, this precision does not necessarily imply an
accuracy for adequate measurement of the mean level.
The determination of the mean level depends as much
on the long-term stability of the measuring system.
There are practical constraints that govern the choice
of an instrument for a particular application. These
include cost, degree of difficulty of installation, ease
of maintenance and repair, support facilities etc. For
example, the installation of a highly complex electronic
instrument with sophisticated software control would
be unwise without technical support staff who possess
Sea Level Measurement and Interpretation
11
IOC Manuals and Guides No 14 vol IV
the ability to maintain its operation. Another important
consideration in the choice of an instrument is the site
at which it is to be located. This is discussed in the next
section.
Traditionally, permanent sea level stations around the
world have been mainly devoted to tide and mean sea
level applications, and this has been the main objec-
tive of GLOSS. This implies that not only wind waves
are filtered out from the records by mechanical or
mathematical procedures, but any oscillation between
wind waves and tides (e.g. seiches, tsunamis etc.) has
not been considered a priority, and in fact not properly
monitored, owing to the standard sampling time of
more than 5–6 minutes. If this range of the spectrum
should be covered from now on, it would be necessary
to consider this when choosing a new instrument and
designing the sea level stations.
3.1.1 The Choice of a Tide Gauge Site
In many cases, the site for a tide gauge may be speci-
fied (e.g. it has to be located in a port area). However,
in many instances, the choice of site will not be clear
and can only be made by judging which of the con-
straints listed below are more significant and which
should be given greater emphasis. This emphasis may
depend on, for example, whether the gauge is intended
for oceanographic research, in which case one clearly
requires it to be located with maximum exposure to the
open ocean, and not situated in a river. Most GLOSS
Core Network sites have been selected with this aspect
in mind. For local programmes, where the process
to be studied may be coastal erosion or storm surge
activity, then clearly the gauge will have to be situated
optimally for that purpose. In most cases, some of the
following constraints are still valid:
• The installation must be capable of withstanding
the worst environmental conditions (winter ice,
storms etc.) likely to be encountered. This is clearly
an issue relevant to the type of instrument and to
its intended position. Positions exposed to envi-
ronmental extremes should clearly be avoided to
enable the eventual accumulation of a long time-
series of data.
• The ground on which the installation is to be erect-
ed should be ‘stable’ as far as possible, not being
liable to subsidence because of underground work-
ings or land subsidence (e.g. due to the area being
reclaimed land). It must also not be liable to slip-
page in the event of heavy prolonged rain (i.e. the
area must be adequately drained) or being eroded
by river or sea action. An installation on solid rock
is the ideal.
• River estuaries should, if possible, be avoided.
Estuarine river water can mix with sea water to
varying extents during a tidal cycle and at differ-
ent times of the year, resulting in fluctuations in
water density. This may have important impacts
on float gauge measurements in stilling wells
because of ‘layering’ of water drawn into the well
at different times causing a difference in density
inside and outside the well. It will also impact on
pressure measurements, as the density assumed
for the conversion of pressure to sea level will not
be constant. Currents associated with river flow
can also cause drawdown in stilling wells and in
the stilling tubes of acoustic gauges. Following
heavy rain-storms, debris floating down-river
could damage a gauge.
• Areas where impounding (isolation from the open
sea) can occur at extreme low-tide levels should be
avoided. Similarly, sandbars slightly below the sur-
face between the site and the open sea can result in
uncharacteristic levels being measured. Monitoring
across long shallow sloping beaches should also be
avoided for the same reasons.
• Sharp headlands and sounds should be avoided,
since these are places where high tidal currents
occur which tend to result in unrepresentative tidal
constants and in a drop of MSL (Pugh, 1987).
• Proximity to outfalls can result in turbulence, cur-
rents, dilution and deposits, and should be avoided.
• Places where shipping passes or moors close to the
proposed site, since there will be a risk of collision
and propeller turbulence causing silt movement; a
study should be made of this possible factor.
• Places where construction work in the area at some
future time may affect the tidal regime at the site
(e.g. by construction of new quays or breakwa-
ters); investigations should be made to determine
whether there is a possibility of this occurring. This
might necessitate the relocation of the tide gauge,
thus interrupting the sea level time-series. This is
something very difficult to avoid in some harbours.
• A site should have continuous mains electrical
power (or adequate storage batteries/solar panels
or generator supply) and telephone or satellite
access for transmission of data to an analysis
centre.
• There must be adequate access to the site for instal-
lation and maintenance and the site must be secure
from vandalism or theft.
• The area of the site must be capable of containing
the benchmarks required for geodetic control of
the sea level data. In particular, it must have good
TGBM and GPSBM marks, which must also be
secure from accidental damage.
• If stilling well or acoustic gauges are to be installed,
then the stilling well or acoustic tube must be tall
enough to record the highest sea levels. This may
require permission from port authorities if, for
example, the installation is on a busy quayside.
• The water depth must extend at least two metres
beneath Lowest Astronomical Tide (LAT) for the
successful operation of a stilling well. The outlet of
the stilling well should be clear of the sea bed and

IOC Manuals and Guides No 14 vol IV
be set deep enough to allow the float to operate
about one metre below LAT.
Finally, it is clear that tide gauge datum control is an
essential issue for any installation. Consequently, even
if the station is equipped with the most modern equip-
ment, it is common sense to provide confirmation of
the datum from time to time by means of an inexpen-
sive tide ‘pole’ or ‘staff’ to guard against gross errors
in the datum.
3.2 The Stilling Well
A stilling well gauge is probably the most common of
all sea level recording systems on a worldwide basis.
These gauges were at one time employed at every port
installation and were the primary technology by which
sea level records were compiled. Recent stilling well
installations are less common, since they require a con-
siderable amount of costly engineering work, so that
they have often been superseded by one of the other
technologies discussed below. In some circumstances it
may not be possible to install a well, e.g. on a shelving
beach, and other methods have to be adopted.
The function of a well is to filter out, ‘to still’, the wave
activity, so that the tides and longer-period processes
can be recorded accurately. It is most commonly asso-
ciated with having a float gauge in the well driving a
pen and chart recorder or, in more recent years, a shaft
encoder such that the readings of sea level height can
be digitized automatically. It is not uncommon for other
types of instrument, e.g. a pressure sensor, to also be
placed in the well.
The well itself is a vertical tube about 1 m in diameter
constructed of concrete, coated steel or plastic, with a
hole or, less frequently, a pipe connection to the sea.
The ratio of the hole diameter or pipe length and diam-
eter to that of the well gives it the characteristics of a
low pass filter (Noye,1974a, b, c). In other words, it acts
as a mechanical filter. Care has to be exercised in trying
to measure processes such as tsunami waves, as the
frequency response is not 100% for periods ≤4 hours.
The stilling well suffers from amplitude attenuation
and a phase lag at shorter periods which are critically
dependent on the design of the well and sometimes
difficult to change.
The characteristics, installation and use of a stilling well
were covered in substantial detail in Volume 1 of the
Manual of Sea-Level Measurement and Interpretation
(IOC, 1985). The reader is advised to refer to that publi-
cation, and for additional information on the character-
istics of the stilling well, to Noye (1974). Lennon (1971)
dealt in detail with errors that arise in the operation of
such a system.
A schematic diagram of a float gauge in a stilling well
is shown in Figure 3.1. The float wheel is shown driving
a pen recorder, but the same pulley could equally drive
a digital shaft encoder or a potentiometer, which can
then be recorded by a local data logger or interfaced
to a telemetry system. The well is shown with a conical
inlet at its base, since this is the most common con-
figuration and is to some extent self-cleaning. Many
other configurations of the inlet are acceptable, and
although the conical orifice does restrict the inflow
relative to the outflow, this does not appear to have a
significant effect on the records even in the presence
of waves.
3.2.1 Datum Switches
In common with all other types of sea level recording
systems, the setting and control of datums is of cru-
cial importance. This topic is dealt with in section 4.
Stilling well tide gauge installations were, at one time,
attended on a continuous basis. Under these circum-
stances visual comparisons were made with a fixed tide
gauge staff on a regular basis and appropriate time and
datum corrections were applied to the data. Without
this, alternative means of fixing the datum have to be
found. One alternative is to site a level switching device
as part of the installation at approximately mean sea
level. The switch indicates the instant at which the sea
Figure 3.1 Stilling well tide gauge.
12
Sea Level Measurement and Interpretation
IOC Manuals and Guides No 14 vol IV
crosses the level of the switch, a level that is known rel-
ative to all other datums of the tide gauge. Ideally the
switch, which can be mechanical, optical or acoustic,
should be sited outside the well in its own mini-stilling
well. The switch provides a correction for any datum
shift that previously would have been manually record-
ed by an operator. Although the switch will not work
correctly under all conditions, e.g. when high waves or
a seiche is present, there will usually be sufficient days
of calm to obtain an accurate datum check.
3.3 Pressure Gauges
Instruments that measure subsurface pressure instead
of sea level directly have found widespread use. A
knowledge of seawater density and gravitational accel-
eration is required to make the conversion from pres-
sure to sea level, but in spite of this, the instruments
have many practical advantages as sea level recorders.
The most commonly used types are the pneumatic
bubbler gauges and pressure sensor gauges in which
sensors are mounted directly in the sea. The two types
have much in common and a choice of which type is
suitable is usually based on practical considerations at
a proposed site.
3.3.1 Pneumatic Bubbler Gauges
The pneumatic bubbler tide gauge has been success-
fully used worldwide for several decades. It replaced
many of the float-operated harbour gauges as the pri-
mary standard for sea level measurement in countries
such as the United States and the United Kingdom,
although in the USA they have since been superseded
by acoustic gauges (section 3.4). The UK still operates
its National Tide Gauge Network (44 stations) based on
this technology. It has been shown to be robust, both
in terms of accuracy and datum stability. It has demon-
strated its value in situations where there are no vertical
structures on which to attach the equipment, e.g. on
coral atolls (Pugh, 1978), as the part of the equipment
installed in the sea and on land can be several hundred
metres apart, which is not the case with many other
types of instrument.
Figure 3.2 shows the basic essentials of a bubbler sys-
tem. Air is passed at a metered rate along a small-bore
tube to a pressure point fixed underwater well below
the lowest expected sea level. The pressure point
normally takes the form of a short vertical cylinder
with a closed top face and open at the bottom. A
small ‘bleed hole’ is drilled about half way down its
length and metered air is entered through a connec-
tion on the top surface. As air from the tube enters
the pressure point it becomes compressed and pushes
the water down inside the chamber until the level
of the bleed hole is reached at which time the air
bubbles out through the hole and back to the surface.
Provided that the rate of air flow is low and the air
supply tube is not unduly long, the pressure of air in
the system will equal that of the pressure due to the
depth of the sea water above the bleed hole cou-
pled with atmospheric pressure. A pressure-recording
Figure 3.2 Bubbler pressure gauge.
Sea Level Measurement and Interpretation
13
14
Sea Level Measurement and Interpretation
IOC Manuals and Guides No 14 vol IV
instrument connected into this supply tube at the
landward end records the changes in water level as
changing pressures, according to the law:
h=(p-pa)/(ρg)
where h = height of sea level above the bleed hole
p = measured pressure
pa = atmospheric pressure
ρ = seawater density
g = gravitational acceleration
Most pneumatic instruments use a pressure sensor
as part of the recording equipment to monitor the
changes in pressure and hence sea level. It is common
to use a sensor operating in the differential mode, sen-
sors being so constructed that the system pressure is
opposed by atmospheric pressure. Hence, the resultant
pressure experienced by the sensor becomes (p–pa),
making the measured pressure directly proportional to
the required sea level.
A knowledge of the seawater density (ρ) is impor-
tant. This is normally obtained from separate water
sampling, and, where the water is well mixed, can be
considered constant. In estuarine locations, the den-
sity may change during a tidal cycle or seasonally, and
density corrections will have to be included in the data
processing.
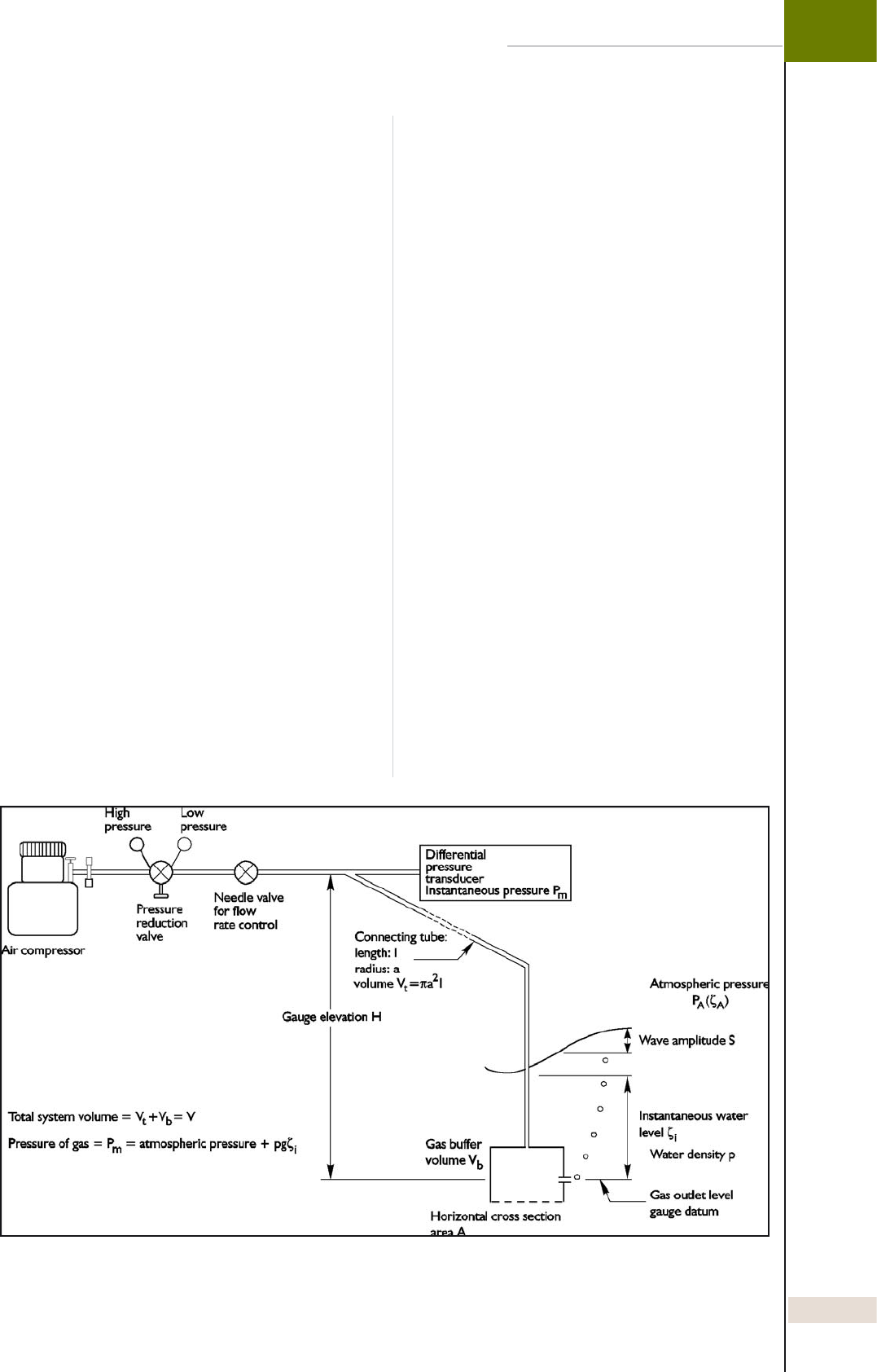
Several other effects on the measured pressure have
to be considered. These include a ‘static’ effect, which
is a function of the height of the gauge above sea
level, and a ‘dynamic’ effect, which results from the
dynamics of gas flow. The latter can be calculated in
terms of tube length and radius and the minimum
air-flow consistent with preventing water from enter-
ing the system (Pugh, 1972). The effect of waves on
the system is to introduce a positive bias during storm
conditions (i.e. sea level is measured too high). These
effects can perturb the sea level measurements at the
sub-centimetre level during average conditions, but
measurements may be incorrect by several centimetres
under extreme waves.
In common with all pressure measuring systems, there
is a need to establish a datum for the observed time
series. This can be achieved in several ways: (a) from
a knowledge of the exact depth of the pressure point
bleed hole during installation, combined with accurate
calibration of the pressure transducer; (b) using datum
level switches similar to those described above for
stilling wells which trigger at a known sea level; (c) by
having a parallel system (called a ‘B’ gauge; section
3.3.4) with a second and more accessible pressure
point fixed near mean sea level. Comparison of the dif-
ferences between the two bubbling systems when both
are submerged gives an accurate measure of the datum;
method ‘c’ is the most accurate.
Air is normally supplied to a bubbler from a compressor
to afford continuous operation of the installation. In the
event of electrical supply failure, a reserve air capacity
capable of sustaining the system for at least several days
is necessary. For sustained operation under fault condi-
tions, an alternative low power backup system in the
form of a pressure transducer mounted directly in the
sea is necessary. Transducers, compressors, data loggers
etc. can be purchased from the major gauge manufac-
turers with ready-to-go packages. An all-bubbler system
has an advantage that most components are under-
water, and that all components are both robust and, if
damaged, relatively inexpensive to replace.
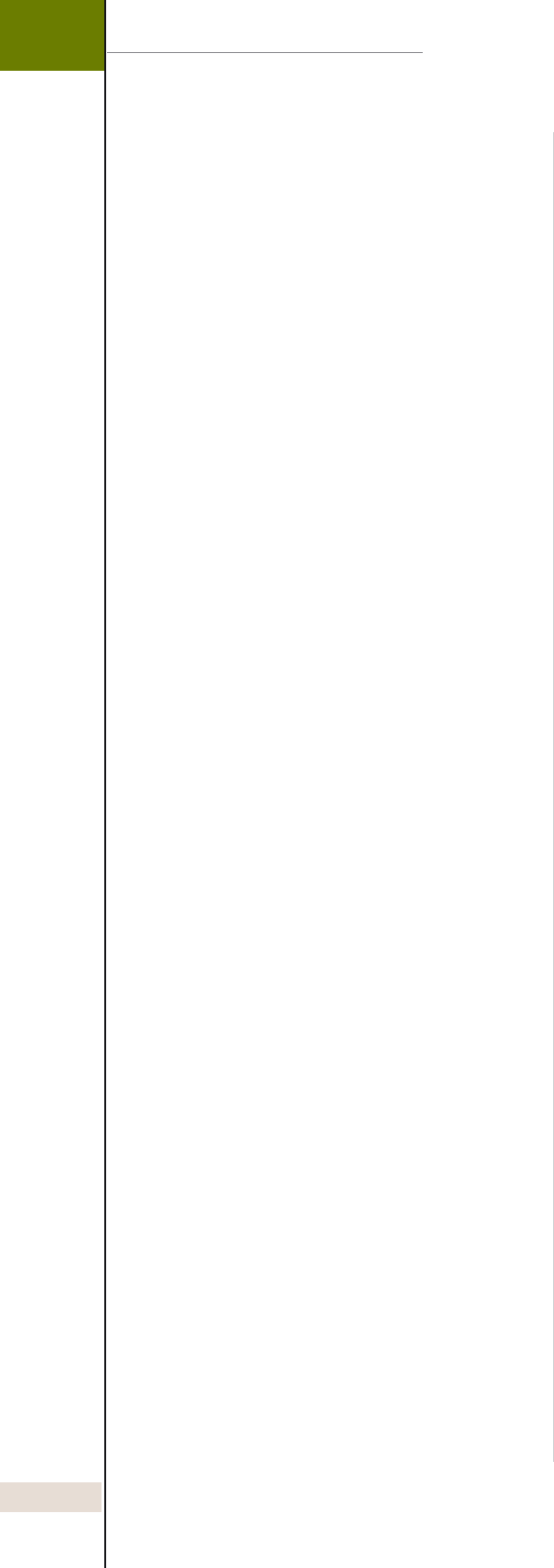
3.3.2 Pressure Sensor Gauges
Pressure sensors can be fixed directly in the sea to
monitor sub-surface pressure in a similar fashion to the
bubbler gauge. The sensor is connected by a cable that
carries power and signal lines to an onshore control
and logging unit. In the sea, the active sensor is usually
contained within a copper or titanium housing with
the cable entering through a watertight gland. Material
used for the housing is chosen to limit marine growth.
The assembly is contained in an outer protective tube
to provide a stable fixation to a sea wall or rock out-
crop. Where this is not possible, the pressure sensor
may be placed securely on the sea bed, but this method
has disadvantages, as deployment and maintenance
usually require a diving team.
Pressure-based instruments can be operated from bat-
teries for periods of a year or more, as they consume
a very small amount of power. This can be advanta-
geous even where electrical supplies are available but
subject to long periods of failure. Therefore, they have
been used extensively in remote areas, such as oceanic
islands, where access is limited. In polar regions, they
offer the best alternative if the area is ice covered or if
the gauge is to be left unattended for long periods. The
main disadvantage is the lack of a fixed datum level,
which has to be found by alternative means.
Pressure sensors are available in two varieties that
provide either an absolute or differential signal. If an
absolute transducer is employed, the sensor provides a
measurement of the total pressure including sea level
and atmosphere. Therefore, a separate barometer is
required usually in the form of an identical transducer
open to the atmosphere. Both sensors are synchronized
to the same clock so they can readily be subtracted to
yield sea level (with subsequent correction for density
and acceleration due to gravity). Differential pressure
transducers have a vented cable in which the refer-
ence side of the transducer is open to the atmosphere.
Vented systems are known to suffer from occasional
blockage and are used less frequently in hazardous
environments. In addition, a record of barometric pres-
sure is valuable for oceanographic studies, so the two-
transducer option is most frequently employed.
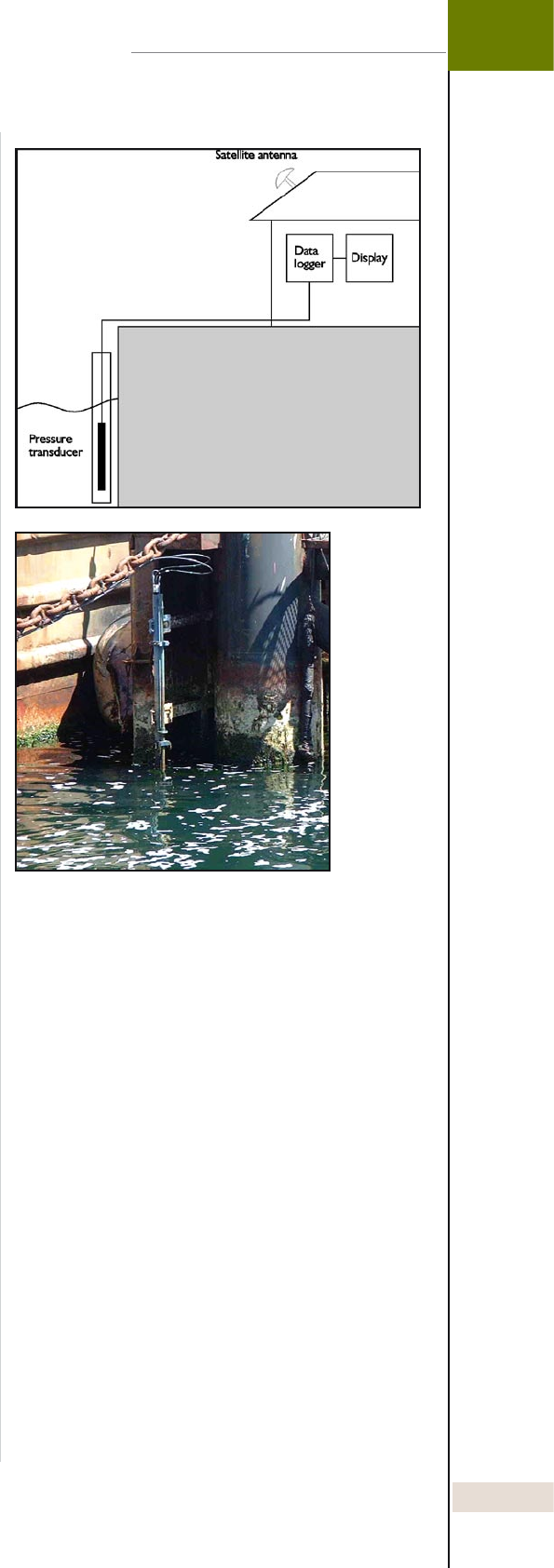
Sea Level Measurement and Interpretation
15
IOC Manuals and Guides No 14 vol IV
Relatively inexpensive pressure sensors use strain gauge
or ceramic technology in which changes in water pres-
sure cause changes in resistance or capacitance in the
pressure element. The most accurate, but expensive,
sensors use a quartz element, the resonant frequency
of which varies with the strain applied to it. The result-
ing signal, which is normally a frequency proportional
to the applied pressure, is carried down the signal
cable to the control electronics where it is converted
into physical units and can be displayed and stored by
a data logger.
All pressure transducers are sensitive to temperature. Some
have an in-built temperature sensor to allow compensa-
tion of the pressure signal. If this is not the case, then it
is important that temperature is monitored independently
and used as a correction. In general, sea temperature
varies much less than atmospheric temperature and com-
pensation by either of the above methods is effective.
Users with access to a test facility can also subject the
instruments to a range of temperatures and pressures to
ensure that calibration values are correct. Experience has
shown that the calibration coefficients supplied by leading
manufacturers are accurate and constant over periods of
several years. Drift in the various properties of pressure
sensors is confined to changes in its datum value (i.e.
there is usually no change in scale). However, even for a
high-quality low-pressure sensor suitable for coastal work,
instrumental drift can be an important issue (of the order
of 1 mm per year) which has to be addressed through
regular checks of some kind.
Single transducer systems can be deployed in environ-
mentally hostile areas where other forms of gauge will
not work. For example, they can be safely positioned
on the sea bed under the winter ice at polar sites with
the signal cable to the tide gauge hut on the shore
protected by a steel pipe. They can be operated at
sites with harsh weather conditions where the exposed
structures of a stilling well or acoustic gauge may
be subject to extreme forces of winds and waves. In
tropical locations, where equipment may be prone to
mechanical damage by falling trees etc., single trans-
ducer systems can be deployed safely below the sea
surface. Even in locations with excessive marine growth
or silt deposits, pressure systems appear to work cor-
rectly for long periods of time.
Pressure sensors have a fast response time and have
been used to measure wave heights at periods of a few
seconds. In tide gauge applications, the signal is usually
averaged by the control electronics to a more relevant
period, such as 1, 6 or 15 minutes. This method of
averaging allows a great deal of flexibility, since the
sampling period can be easily altered to suit the appli-
cation. Changes can be made remotely if an installation
is connected by a telephone link or to a two-way com-
munication network.
As with the bubbler gauge, seawater density is needed
to convert measured pressures into heights. The com-
ments made in section 3.3.1 are equally valid.
3.3.3 The Datum of a Pressure System
The major problem with a single pressure transducer
is establishing a datum for its measurements. A good
approximation can be obtained with differential trans-
ducers by careful calibration within a test facility. It
is less accurate with absolute sensors because atmo-
spheric pressure introduces an offset that may prevent
a sufficiently low pressure being reached during the
calibration. In general, other means of fixing the datum
are preferred.
A method frequently adopted is to make visual mea-
surements against a tide staff over a period of one day
and repeat this at regular intervals. Individual measure-
ments should be accurate to 2–3 cm and on average
Figure 3.3 Pressure gauge.
(a) The pressure sensor is mounted directly in the sea.
(b) In this case, it is fastened to a pier in Port Stanley
harbour.
a
b
16
Sea Level Measurement and Interpretation
IOC Manuals and Guides No 14 vol IV
should fix the datum to approximately centimetre accu-
racy. However it is tedious and can only be carried out
infrequently in remote areas.
3.3.4 Multiple Pressure Transducer Systems
(‘B’ gauges)
A method was developed at POL in the early 1990s
for precise datum control of sea level records from
pressure tide gauges. An additional pressure point
was located at approximately mean sea level and
fixed relative to the contact point of the gauge. The
juncture at which the tide fell below this second
sensor could be used to fix the datum of the record
from the principal sensor. The technique was found
to be extremely reliable and accurate and now forms
the basis of gauges, called ‘B’ gauges, in POL’s South
Atlantic and Antarctic networks (Spencer et al.,
1993). The principle of the technique was described
in detail in Volume 2 of the Manual (IOC, 1994) and
in the scientific literature (Woodworth et al., 1996).
At the time of writing, it is not possible to purchase
a ‘B’ gauge although expressions of interest in their
manufacture have been obtained from major sup-
pliers.
A schematic ‘B’ gauge setup is shown in Figure 3.4,
with an absolute pressure sensor in the water (‘C’)
and another in the atmosphere (‘A’). Paroscientific
digiquartz sensors are employed throughout, although
less expensive sensors should work reasonably well
and are being investigated. The difference C–A gives
sea level, after corrections for seawater density and
acceleration due to gravity are applied. A third sensor
is placed at ‘Datum B’ which is near mean sea level.
The height of ‘Datum B’ has to be known accurately
relative to the contact point of the installation and to
the local land levelling network. The difference B–A is
again a sea level height, but only when the sea level
is above ‘Datum B’. The top part of this record can be
fitted to the equivalent part of the record from the
principal sensor to transpose the known datum to the
full sea level record. It is important that all sensors are
driven from the same control and logging system to
maintain synchrony. Sampling the data at 15-minute
intervals or less is preferred for the identification of
the inflexion points, i.e. the time at which the sea level
falls (or rises) below (or above) ‘Datum-B’.
The essential feature is that, while any pressure mea-
sured by a sensor at B will contain an offset, and per-
haps a drift, the vertical height of its effective pressure
point can be positioned at ‘Datum B’ very accurately.
So, although it is not known what it is measuring to
within perhaps a few hectopascals (centimetres), it is
known where it is measuring with millimetric precision.
The flat part of B–A and its inflexion points provide an
extremely precisely defined shape which is immune to
any problems with datum offsets and low-frequency
instrumental drifts. Experience with several instruments
at different sites suggests that datums can be fixed to
within a few millimetres by this technique.
To work properly, the method needs a sizable tidal range,
so that B will spend half its time in water and half in air.
It will not work in lakes or microtidal areas, but most
coastal and many island sites have usable tidal ranges,
even if only at spring tides. In the presence of waves,
the flat portion of the ‘B’ gauge is reduced in length
and may be unuseable under large wave conditions.
However, there are is always a sufficient number of calm
days during which the technique can be applied.
In practice, the two pressure sensors in the sea are co-
located near the base of the installation with a rigid
tube connecting the ‘B’ gauge to its appropriate datum
point. This avoids the ‘B’ sensor being subject to atmo-
spheric temperature variations that are more severe
than those of the sea. The barometric sensor may also
be installed at the same position with a tube open to
atmosphere. Alternatively it may be installed as part
of the data logger in the tide gauge hut. The method
does not require the actual installed height of C or A to
be known. Where it is difficult to install a fixed gauge
C below the water, because of shallow gradients per-
haps, then a pop-up or bottom-mounted gauge could
equally well be used.
3.3.5 Pressure Transducers in Stilling Wells
A variant of the ‘B’ gauge method described above is
to install an absolute pressure sensor below low water
in a stilling well that has been used hitherto in a float
system. This transducer will be functionally the same as
sensor ‘C’ and will be complemented by a transducer
‘A’ that records atmospheric pressure, as described
above. Alternatively, a ‘differential’ sensor could be
used. Instead of a third sensor employed in the ‘B’
gauge, datum control for the C–A pressure-difference
time-series is provided by means of regular, prefer-
ably daily, electronic datum probe checks of the level
in the well relative to the tide gauge CP and TGBM.
Comparison of the values of C–A, corrected for density
and acceleration due to gravity, with the well sound-
ings, provides an ongoing datum for the time-series
which can accommodate transducer drift and varia-
tions in the properties of the sea water.
This method has many of the advantages of pressure
systems and of electronic datum probes, combined
with the recognized disadvantages inherent in the
use of stilling wells (Lennon, 1971). It may be a
preferred option if measurements are required from
a well that has produced long-term measurements
from a float gauge.
3.3.6 Bottom-mounted Pressure Gauges
Bottom pressure gauges rest on the sea bed and
record pressure at intervals over periods of a year or
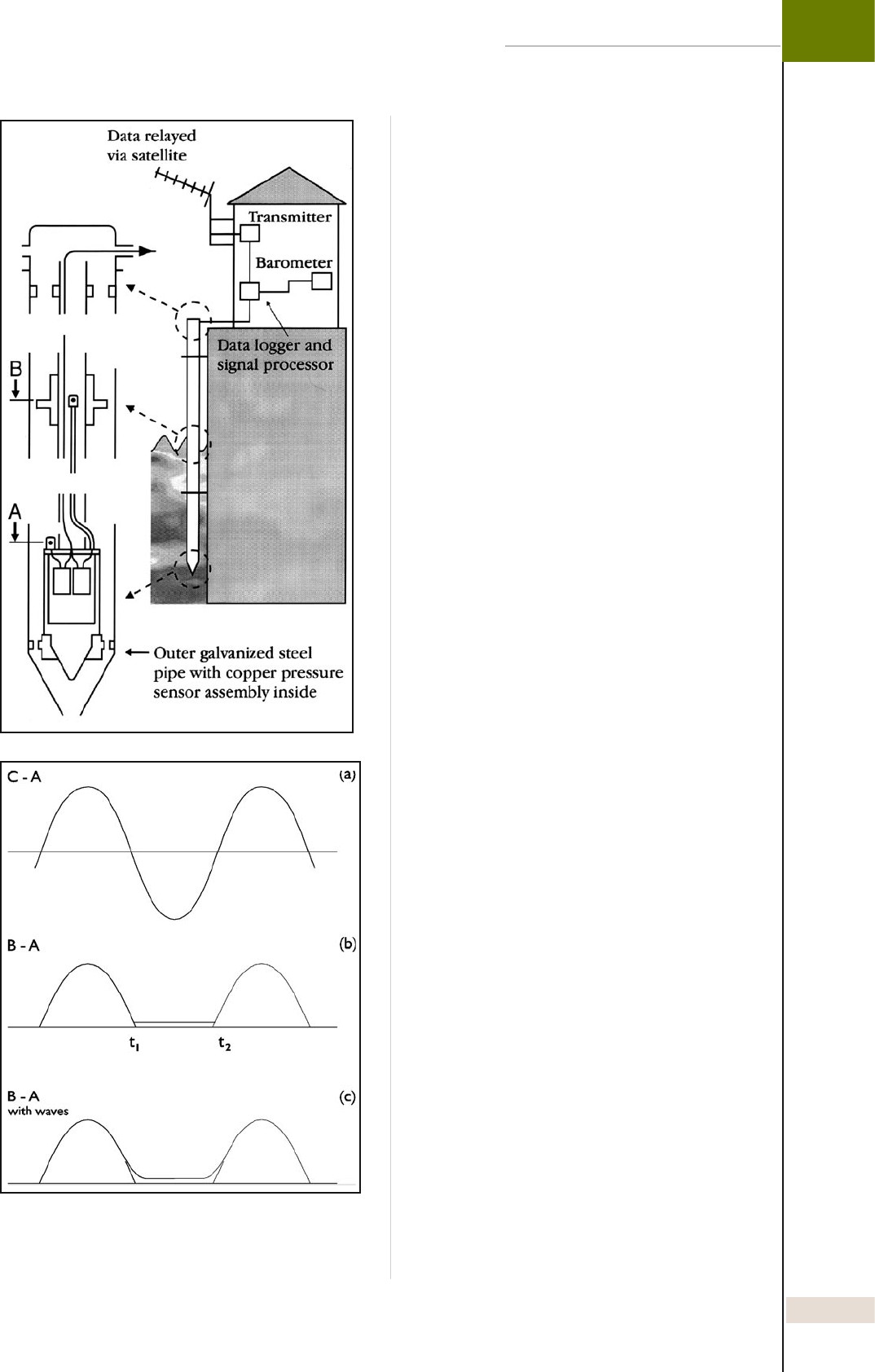
Sea Level Measurement and Interpretation
17
IOC Manuals and Guides No 14 vol IV
more. They are self-contained instruments powered
by batteries. They have little application to the long-
term measurement of coastal sea level but have been
used extensively to obtain initial tidal knowledge of
an area where a coastal gauge is planned. Their main
problem in the GLOSS context is the lack of a datum.
They have principally proved their value offshore and
in the deep ocean (Spencer and Vassie, 1997).
3.4 Acoustic Tide Gauges
A number of acoustic tide gauges have been devel-
oped which depend on measuring the travel time
of acoustic pulses reflected vertically from the sea
surface. This type of measurement can theoretically
be made in the open with the acoustic transducer
mounted vertically above the sea surface, but in cer-
tain conditions the reflected signals may be lost. To
ensure continuous and reliable operation the sensor
is located inside a tube that provides some degree
of surface stilling and protects the equipment; some
sensors even constrain the acoustic pulses within a
narrow vertical tube, which is contained inside the
previous one. This outer tube does not completely
filter out wave action but, by averaging a number of
measurements, the desired filtering is achieved.
The velocity of sound in air varies significantly with
temperature and humidity (about 0.17%/°C) and
some form of compensation is necessary to obtain
sufficient accuracy. The simplest method is to mea-
sure the air temperature continuously at a point in
the air column and use this to calculate the sound
velocity. To account for temperature gradients in the
air column, temperature sensors may be required at
a number of different levels.
A more accurate method of compensation is by use
of an acoustic reflector at a fixed level in the air col-
umn. By relating the reflection from the sea surface
to that from the fixed reflector, direct compensation
for variation in sound velocity between the acoustic
transducer and the fixed reflector can be achieved.
However this still does not account for any variation
in sound velocity between the fixed reflector and
the sea surface. To achieve full compensation would
require, in principle, a number of fixed reflectors
covering the full tidal range, but none of the known
acoustic sensors has this possibility.
3.4.1 Acoustic Gauges with Sounding Tubes
The National Oceanic and Atmospheric Administration
(NOAA), National Ocean Service (NOS) in the USA,
initiated over a decade ago a multi-year implementa-
tion of a Next-Generation Water Level Measurement
System (NGWLMS), both within the US national
tide gauge network and at selected sites around
Figure 3.4 (a,b) Schematics of operation of a ‘B’ gauge.
b
a
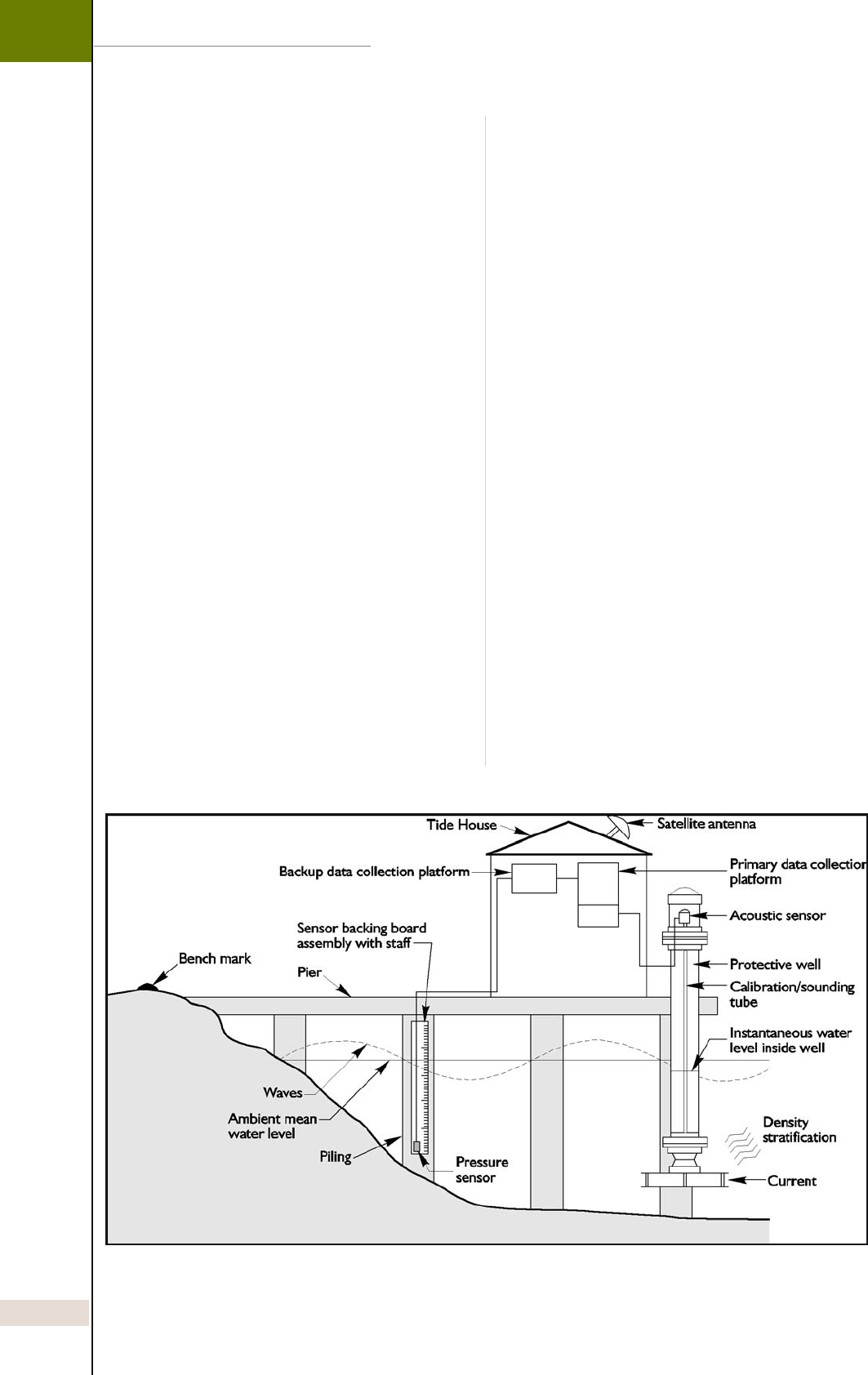
IOC Manuals and Guides No 14 vol IV
the world (Gill et al., 1993). These systems were
operated alongside existing (float or bubbler) tide
gauges at many stations for a minimum period of
one year to provide datum ties and data continuity.
Dual systems were maintained at a few stations for
several years to provide a long-term comparison.
Tide gauges using the same technology have been
deployed in a number of other countries, such as
Australia, where they are known as SEAFRAME sys-
tems (Lennon et al., 1993).
The NGWLMS tide gauge uses an Aquatrak water
level sensor developed by Bartex Inc. and acquired by
Aquatrak Corporation, together with a Sutron data-
processing and transmission system. The Aquatrak
sensor sends a shock wave of acoustic energy down
a 1/2-inch-diameter PVC sounding tube and mea-
sures the travel time for the reflected signals from
a calibration reference point and from the water
surface. Two temperature sensors give an indica-
tion of temperature gradients down the tube. The
calibration reference allows the controller to adjust
the measurements for variations in sound velocity
due to changes in temperature and humidity. The
sensor controller performs the necessary calculations
to determine the distance to the water surface. The
sounding tube is mounted inside a 6-inch-diam-
eter PVC protective well which has a symmetrical
2-inch-diameter double cone orifice to provide some
degree of stilling. The protective well is more open
to the local dynamics than the traditional stilling
well and does not filter waves entirely. In areas of
high-velocity tidal currents and high-energy sea swell
and waves, parallel plates are mounted below the
orifice to reduce the pull-down effects (Shih and Baer,
1991). Figure 3.5 is a schematic of a typical NGWLMS
installation. To obtain the best accuracy, the acoustic
sensor is calibrated by reference to a stainless steel
tube of certified length, from which the zero offset is
determined.
The NGWLMS gauges have the capability of handling
up to 11 different ancillary oceanographic and mete-
orological sensors. The field units are programmed to
take measurements at 6-minute intervals with each
measurement consisting of 181 one-second-interval
water level samples centred on each tenth of an
hour. Software in the instrument rejects outliers etc.
which can occur as a result of spurious reflections.
Measurements have a typical resolution of 3 mm.
The instrument contains the necessary hardware for
telephone and satellite communications.
Papers by Gill et al. (1993) describe the operation-
al performance of the NGWLMS instrumentation.
Lennon et al. (1993) and Vassie et al. (1993) present
comparisons between NGWLMS and conventional
stilling well or bubbler systems in Australia and the
UK. Most comparisons show small differences, of the
order of a few millimetres, for the various tidal and
datum parameters, which are generally within the
uncertainty of the instrumentation. Such differences
are very small when compared to typical tidal ranges
and even seasonal and interannual sea level varia-
tions. NGWLMS systems are considered sufficiently
accurate for mean sea level studies.
Figure 3.5 NGWLMS tide gauge.
18
Sea Level Measurement and Interpretation
IOC Manuals and Guides No 14 vol IV
A modern version of the NGWLMS is called a Sea
Ranger which is claimed to have a number of advan-
tages over the earlier technology including self cali-
bration (IOC, 2004)
3.4.2 Acoustic Gauges without Sounding Tubes
Several acoustic instruments have been produced
that are operated without a sounding tube, normally
located inside an existing stilling well or inside a
plastic tube some 25 cm in diameter. Some of them
may operate in the open air, but are not normally
employed for high-quality sea level measurements
(see Table 3.1 in section 3.6). These acoustic instru-
ments operate at a frequency of 40–50 kHz and have
a relatively narrow beam width of 5°. Their measure-
ment range is approximately 15 m and an overall
accuracy of 0.05% is claimed by the manufacturers
(see websites below).
Contradictory experiences can be found with this type
of acoustic sensor, from some problems in achieving
the stated accuracy under all environmental conditions
(e.g. see presentation by Ruth Farre, in IOC, 2003), to
the high-quality and continuous operation of 15 tide
gauges in the REDMAR network (Spain), most of them
installed in 1992 and still in operation (e.g. see pre-
sentation by Begoña Pérez in IOC, 2003).
A crucial aspect of this type of sensor is the depen-
dence of the velocity of sound on the environmental
conditions, such as the air temperature. On the other
hand, tubes tend to increase the temperature-gradi-
ent between the instrument and the sea surface
unless special precautions are taken to ensure that
the air is well mixed in the tube. A complementary
and necessary method is to compensate for sound
velocity variations using a reflector mounted at a
suitable distance below the transmitter, as is the case
for the SRD gauges employed in the REDMAR net-
work. A careful design of the installation, avoiding
different ambient conditions along the tube and fol-
lowing the maker’s requirements about the minimum
distance to the water surface, become crucial for the
final accuracy of the data.
The performance of one of these sensors (SRD) over
an existing stilling well inside a hut or small building
in Santander (Spain), has been incredibly good (nearly
perfect and continuous during 15 years). The condi-
tions of this installation are probably perfect, perhaps
because the temperature inside the building is rather
homogeneous. Data from this acoustic sensor have in
fact helped to correct malfunctions of the float gauge
that operates inside the same stilling well.
Studies of mean sea levels from 12 years of data in
Spain, comparing this type of acoustic sensor (SRD)
with the traditional float gauges, has shown their
high quality and has even helped to identify refer-
ence jumps in the older float gauges. This is, again,
a contradictory experience to the one in South Africa
(see article by Farre in Appendix V of this volume).
Nevertheless, it seems that radar gauges will replace
this type of acoustic sensor everywhere, in the near
future.
3.5 Radar Gauges
Radar tide gauges have become available during the
last few years from several manufacturers. Although this
technology is relatively new, radar gauges are being pur-
chased and installed by a number of agencies as replace-
ments for older instruments or for completely new
networks. The reason is that they are as easy to operate
and maintain as acoustic sensors, without their main
disadvantage: their high dependence on the air temper-
ature. Radar gauges have a relatively low cost and the
engineering work necessary to install them is relatively
simple compared to other systems. The instruments are
supplied with the necessary hardware and software to
convert the radar measurements into a sea-level height.
In addition, the output signals are often compatible with
existing data loggers or can be interfaced to a communi-
cation network. Like many modern systems they can be
set up using a portable computer.
The active part of the gauge is located above the
water surface and measures the distance from this
point to the air–sea interface. A diagram is given in
Figure 3.6. The gauge has to be mounted in such a
way that there are no restrictions or reflectors in the
path of the radar beam, between the gauge mount-
ing and the sea surface. It has to be positioned above
the highest expected sea level and preferably above
the highest expected wave height, so as to prevent
physical damage.
It has many advantages over traditional systems in
that it makes a direct measurement of sea level.
The effects of density and temperature variations,
even in the atmosphere, are unimportant. The main
constraint is that the power consumption may be
relatively large in radar systems if used on a continu-
ous basis in a rapid sampling mode. Averages are
typically taken over periods of minutes. This may
limit its use in some applications (e.g. tsunami warn-
ing) where observations are required on a continuous
high-frequency (e.g. 15-second) basis. In such areas,
pressure gauges may be more appropriate, although
work and research is still being done concerning this
particular application.
Radar gauges fall into two categories. Those that
transmit a continuous frequency and use the phase
shift between transmitted and received signal to deter-
mine sea level height (frequency-modulated continuous
Sea Level Measurement and Interpretation
19
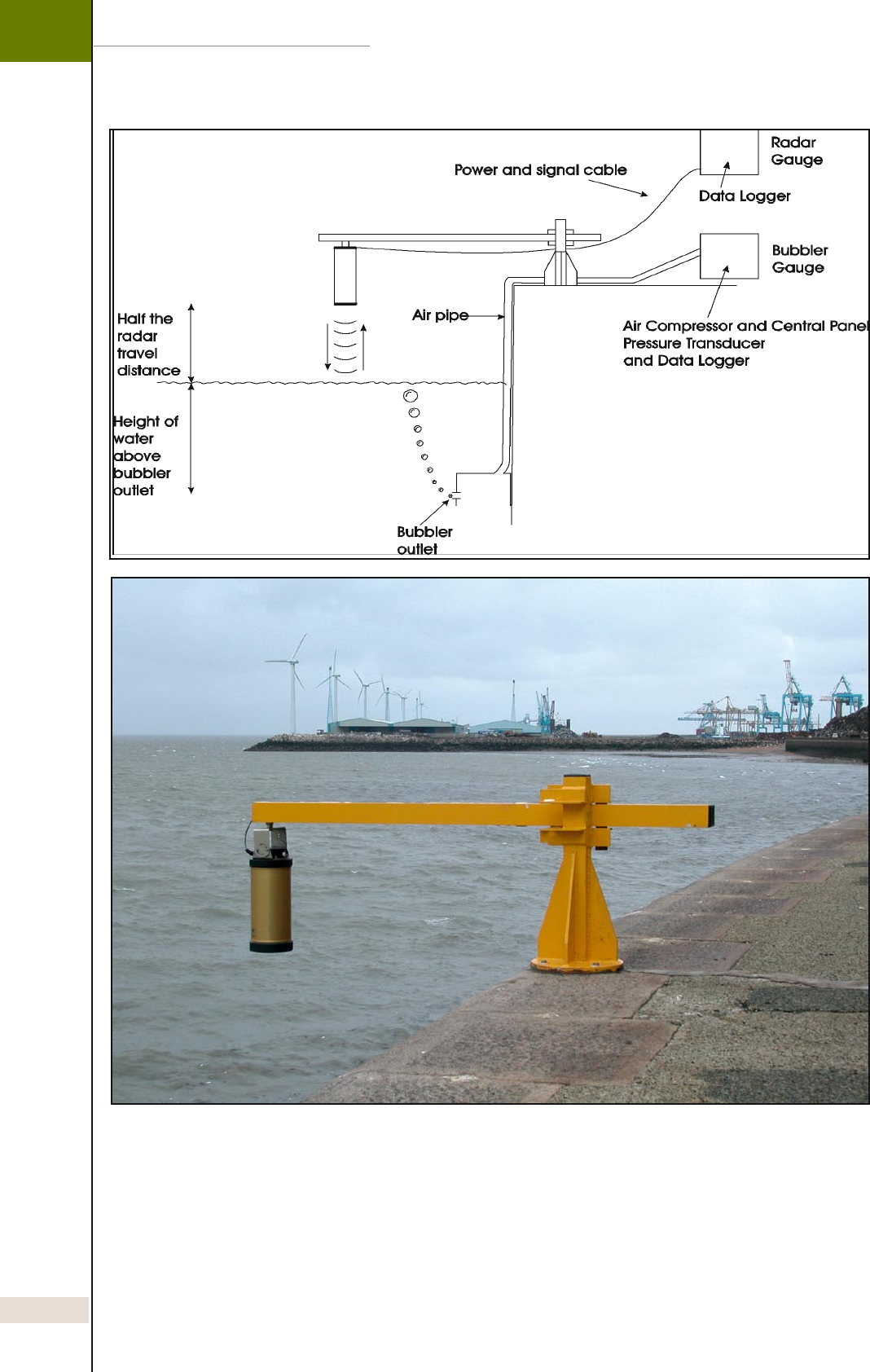
IOC Manuals and Guides No 14 vol IV
20
Sea Level Measurement and Interpretation
Figure 3.6 Radar tide gauges.
(a) diagram comparing a radar and a bubbler gauge (Woodworth and Smith, 2003);
(b) an OTT Kalesto test installation at Liverpool.
b
a
IOC Manuals and Guides No 14 vol IV
Sea Level Measurement and Interpretation
waves: FMCW). The OTT Kalesto, Miros and Radac instru-
ments use this method. The VEGA and SEBA systems use
pulsed transmissions and time-of-flight measurement.
All these gauges have undergone initial tests and inter-
comparisons by various agencies in different countries.
Details of these tests can be found in IOC Workshop
Report No 193. Details of the individual instruments can
be found on the websites shown below.
In principle, the instruments are self calibrating,
as far as a datum value is concerned. However, to
provide confidence that the datum remains constant
over long time periods, alternative means are being
investigated. These take the form of a reflector that
can be placed in the radar beam at appropriate
intervals. The reflector is placed at a known distance
below the contact point of the installation for a short
period. Over a period of a year or more the datum
value can be verified and used to adjust the measure-
ments, if necessary.
Initial indications that these instruments can pro-
vide acceptable measurements for the purposes of
GLOSS are promising. As with all tide gauges, practi-
cal considerations related to a particular application
often dominate other considerations. For example,
they have very limited application in polar regions.
They have not yet been used in extremely hostile
environments, for example on remote islands, where
extreme waves may overtop the gauge by several
metres. However, for a normal application in which a
stilling well or bubbler gauge is presently in use, they
appear to operate satisfactorily.
3.6 Summary of the Merits of Different
Technologies
In this section, we summarize the relative merits
of different tide gauge technologies for scientific
research, operational oceanography and for localized
practical purposes, such as harbour operations.
The GLOSS programme has scientific research as
its raison d’être, although it is intended that the
development of the GLOSS networks should serve to
improve standards overall (see IOC, 1997). We can
use the designation ‘GLOSS’ to indicate the most
demanding requirement of scientific-quality perfor-
mance of a gauge (Appendix I).
There are also sea level requirements from opera-
tional users of oceanographic data in such topics
as marine infrastructure (e.g. offshore industry,
transport, coastal recreation) and coastal defences
(e.g. flood protection from surges, and studies of
coastal erosion or sea level rise impacts). Many of
these applications overlap GLOSS interests, the
study of secular changes in sea level being an obvi-
ous example. However, the particular applications
will vary from country to country. Therefore, such
gauges will be capable of deployment for extended
periods, but perhaps not to the same high standards
as those intended for GLOSS, and will be affordable
for use in larger numbers than for GLOSS, especially
by developing countries.
Finally, there will be applications which require a
cheap instrument capable of showing the state of
the tide at any moment but certainly not accurate
enough for GLOSS.
Table 3.1 presents a summary of the main conclu-
sions on the relative merits of each gauge technol-
ogy based on the previous sections of this Manual.
The Table also includes an estimate of the likely cost
of a basic system with gauge, data transmission (e.g.
modem) and meteorological package, although this
is an extremely difficult item to quote given the large
number of manufacturers, monetary exchange rates
etc. For example, the cost of a pressure transducer
will vary by a factor of 3 depending on the qual-
ity. With these reservations in mind, Cost Band 3
has been set as the highest cost, which might be
12,000–20,000 US$ (at the time of writing and
within a large band, say 30%); Band 2 might be
8,000–12,000 US$; and Band 1, 5,000–8,000 US$.
However, in our experience, the real costs of any tide
gauge station are those of installation (e.g. some kind
of engineering support will be needed for installation
of a stilling well, acoustic sounding tube gauge, or
‘B’ gauge; diver support will be needed for pressure
gauge installations etc.), ongoing maintenance and
data analysis (with implications for staff resources).
Anyone planning a gauge installation has, therefore,
to take into account all the local costs as well as the
up-front costs of gauge hardware. Agencies partici-
pating in GLOSS which require the input of expertise
may wish to explore the possibilities of collaboration
with other GLOSS participants.
Our recommendations are:
• If one is planning a new GLOSS tide gauge station
in a mid- or low-latitude location, one should prob-
ably opt for:
- an acoustic gauge with sounding tube or
- a radar tide gauge or
- a ‘B’ pressure gauge
If low tidal range or other factors preclude the use of
a ‘B’ gauge, then a single transducer pressure gauge,
a bubbler pressure gauge or a pressure transducer in
a stilling well would be options. In addition, in most
cases, the main tide gauge should be accompanied
by a pressure sensor installed in the sea and capable
21
of sampling (or averaging) at the high frequencies
(once every 15 seconds or 1 minute) required for
tsunami-warning purposes, although, in the case of
some of the FMCW radars, this high frequency is also
possible at the main tide gauge. The advantages of
running two or more sea level sensors in parallel are
also: (i) improved data recovery; (ii) improved data
quality assessments by comparing redundant records;
and (iii) ability to optimize sampling strategy for dif-
ferent processes. Real time data from GLOSS sites
need to be made available in real time to the GLOSS
Real Time Centre at the University of Hawaii.
• If one is planning a new GLOSS station at a higher-
latitude site which has sea ice cover for part of the
year, one should probably opt for:
- an absolute transducer pressure gauge and
accompanying barometer
- a bubbler pressure gauge
Although it is true to say that float gauges have been
operated in Antarctica, and the longest tide gauge
record in Antarctica is from the Faraday/Vernadsky
float gauge in a heated stilling well, we do not rec-
ommend their future use in ice areas. Bubblers and
acoustic gauges have also been tried in Antarctica,
but our recommendation is to use the absolute
transducer system if possible, with summer-time
datum control using either tide poles or ‘temporary
B gauges’.
• If one is planning to upgrade an existing float
gauge GLOSS installation at most places, then we
would recommend the following approach.
First, consider simply upgrading the existing system
to electronic data acquisition and transmission.
(Charts must be abandoned as the main recording
system, although they may be retained to provide
ancillary information.) This will provide instructive
experience with real time data.
Second, consider the use of a pressure gauge system
within the stilling well.
Third, consider installation of a new station alongside
the old one (either acoustic sounding tube, radar or
‘B’ gauge etc. as described above) but keep both
of them operational for inter-comparison of their
data for an extended period (possibly as much as a
decade). Probably, the installation of a radar gauge
over the well would be the easier option.
• If one is planning to use relatively cheap gauges
(but perhaps many units) for ‘coastal’ purposes,
then we would recommend:
- single-transducer pressure gauges (either absolute
or differential)
- if existing (or easily installed) stilling wells are avail-
able, fairly inexpensive shaft encoder float systems
are now on the market
- if stilling wells are available, pressure transducers in
the well
- cheap radar gauges (normally pulse technology),
both in the case of existing stilling wells or in the
open air.
• If one required a ‘cheap and cheerful’ gauge for
‘practical’ harbour operations or approximate flood
level estimates, then we would recommend:
- differential transducer pressure gauges
- cheaper radar gauges.
Such installations would not need the ancillary
parameters needed for GLOSS (Appendix I, point
vi), but they may require such components as ‘user
friendly’ real-time displays.
Whichever type of gauge is selected, advice will
be needed, and groups such as the PSMSL and the
GLOSS Technical Committee will be pleased to help.
Something important to take into account is the
correct installation and a good knowledge, by the
maintenance technicians, of the problems that any
particular sensor can present and how to avoid them
with adequate operation.
22
Sea Level Measurement and Interpretation
IOC Manuals and Guides No 14 vol IV
Acoustic Gauges with Sounding Tubes
Equipment Complete ready-to-go package (acoustic transducer, sounding tube, met. package, ancillary sub-sea pressure sensor, modem
and satellite communications) can be purchased from several manufacturers.
Operation The device measures the time of flight of an acoustic pulse along a vertical sounding tube. Transit time is compared to a reflec-
tion from a calibration hole at a known distance from the acoustic transducer to obtain sea level height. Sound velocity is tem-
perature-sensitive, therefore temperature is measured in the support tube by two thermistors mounted some distance apart.
Installation
Requirements
The length of the sounding tube is altered to suit the application. The sounding tube is fastened to an Aquatrak acoustic trans-
ducer and inserted in an outer protective stilling tube. The full assembly is then fixed to a vertical sea wall.
Mains power or batteries and solar panels.
An auxiliary pressure sensor is normally fitted as part of the installation. This is a vented cable-type transducer.
Location Requires a sea wall or vertical structure for installation.
Calibration Calibration is performed during manufacture prior to delivery.
Accuracy Better than 1 cm of sea level.
Cost Bands 2–3.
Record of Use Used extensively in the United States as a replacement for bubbler systems in the National Tide Gauge Network. Used in a large
part of the Australian network and at island sites in the Pacific Ocean.
Comments For best accuracy, a calibration facility is required. In areas of large tidal range, a long sounding tube is needed which may result
in magnified temperature and/or temperature-gradient effects.
Table 3.1 Merits and drawbacks of each tide gauge technology.
Acoustic Gauges in the Open Air
Equipment A ready-to-go package can be purchased from several manufacturers.
Operation The device measures the time of flight of an acoustic pulse from a transducer to the sea surface. The time is converted to
a sea level height using a known value of the velocity of sound in air. Sound velocity is temperature sensitive, which can
cause significant errors if it is not taken into account.
Installation
Requirements
The installation requirements are relatively simple. The device requires a rigid structure to position it above the sea with
sufficient clearance to avoid spurious reflections from any adjacent structures. As with many tide gauges, all ancillary
equipment (data logger, modem, satellite communications, battery backup), needs to be housed in an adjacent building.
Location Requires a site with vertical clearance sufficient to mount the device clear of the maximum sea surface, including wave action.
Calibration Accurate calibration is one difficulty because of the sensitivity of sound velocity to air temperature. A calibration can be
achieved by placing a reflective bar at a known position in the acoustic beam. The results are usually inferior to the sound-
ing tube method.
Accuracy Greater than 1 cm of sea level.
Cost Band 1.
Record of Use Without independent confirmation of the accuracy and datum, these gauges are less applicable for GLOSS purposes. They
have been used successfully on offshore rigs to record sea level over periods of several years.
Comments For best accuracy an independent calibration method is required. In areas of large tidal range, or where the transducer is
high above the sea surface, there are secondary effects caused by the acoustic beam sounding different surface areas of
the sea at the peak and trough of a wave.
Sea Level Measurement and Interpretation
23
IOC Manuals and Guides No 14 vol IV

IOC Manuals and Guides No 14 vol IV
24
Sea Level Measurement and Interpretation
Acoustic Gauges without Sounding Tube inside Protective Tube or Well
Equipment A ready-to-go package can be purchased from SRD that includes the sensor, the data logger and configuration unit, and
the communications system.
Operation The device measures the time of flight of an acoustic pulse from a transducer to the sea surface. A bar is fixed at a known
distance from the transducer, which is used for self-calibration and computation of the velocity of sound before each mea-
surement. The time is converted to a sea level height using the value of the velocity of sound in air previously computed
by means of the fixed bar.
Installation
Requirements
This type of acoustic sensor has proved to be accurate enough if placed over an existing well, or inside a protective PVC
tube of 300 mm diameter. The transducer must be located at a minimum distance of around 2–3 metres from the water
surface at any moment. As with many tide gauges, all ancillary equipment (data logger, modem, battery backup), needs
to be housed in an adjacent building.
Location Requires a sea wall or vertical structure for installation.
Calibration Calibration of the reference is performed during manufacture, prior to delivery.
The calibration of the velocity of sound is made by means of the reflective bar at a known position in the acoustic beam.
Accuracy 1 cm of sea level.
Cost Band 2.
Record of Use They have been used successfully in the REDMAR network, the Spanish Harbour Authority’s sea level network, for nearly
16 years. The long-term means seem to be as accurate or better than the standard float gauges operating in Spain.
Comments In areas of large tidal range a long protective tube is needed which may result in magnified temperature and/or tempera-
ture-gradient effects. Very sensitive to the careful design of the installation.
Single Transducer Pressure Gauges
Equipment Complete ready-to-go package (sub-sea pressure sensor, cabling and data logger) can be purchased from several manu-
facturers.
Operation Two different options are available: (a) an absolute pressure sensor measuring the total pressure due to sea level and atmo-
sphere; (b) a differential sensor which has a vented cable measuring pressure changes due to sea level alone. Conversion
of pressure to sea level height requires knowing seawater density. Generally, an average value can be used unless there
are significant seasonal or tidal variations. Pressure sensors are also temperature sensitive, but, since sea temperature varies
much less than atmospheric temperature, this normally has a small effect.
Sensors vary in cost by up to a factor of 20. Relatively inexpensive sensors use strain gauge technology. Top-of-the-range
sensors are constructed using quartz crystals. For the latter, the temperature sensitivity of low-pressure sensors is around
1 mm/°C. Instrumental drift of the same sensor is about 1 mm per year.
Many pressure sensors produce a frequency-modulated output. This can be counted (integrated) by relatively simple elec-
tronics to produce the required measurements. Resolution therefore depends on the integration period, which is typically
15 or 6 minutes, but can be as short as 1 minute and still provide sufficient accuracy. Some manufacturers provide equip-
ment that does not integrate over the full sampling interval, in order to conserve battery power.
Installation
Requirements
These devices can be used virtually anywhere, even on shelving beaches. They are normally mounted in an outer protec-
tive tube fastened to a sea wall but can be fixed directly on the sea bed and connected to the shore by armoured cable.
Pressure sensors require very little power and can be run for periods of 1–2 years on non-rechargeable batteries.
Location Pressure sensors can be used at virtually any site, even in hostile environments, such as the polar regions. Regions with large
variations in seawater density may cause significant errors.
Calibration Calibrations traceable to National Physical Laboratory (UK) standards can be obtained from pressure sensor manufacturers
and have been shown to remain stable over many years. However, drift in the datum value of a sensor may cause changes
to its ‘zero’ value. Re-calibration at intervals may be necessary. Alternatively, the difficulty of establishing a datum can be
rectified by using alternative means (e.g. from annual tide pole measurements). These have proved adequate, since the
drift is normally linear with time.
(Continued on next page)

IOC Manuals and Guides No 14 vol IV
Sea Level Measurement and Interpretation
Accuracy Resolution of a low pressure sensor is typically better than 1 mm of sea level. However, instrumental drift may degrade
this, so that the accuracy is approximately 1 cm of sea level.
Cost Varies by a large factor depending on type. Band 1–2.
Record of Use Used frequently as a temporary exploratory tide gauge. Extensively used at remote island sites and in hostile environments,
such as the Antarctic.
Comments Datum fixing is the major problem and other types of tide gauge are preferred for permanent installations.
25
Multiple Pressure Transducer Systems (B Gauges)
Equipment These instruments are used only by POL and were developed to produce a high precision tide gauge. They are constructed
in-house from commercially available components but cannot be obtained as a complete ready-to-go package. The
instrument requires three high quality pressure transducers which results in a relatively expensive system. A less expensive
construction is presently being considered.
Operation The instrument contains three pressure sensors which measure respectively a) atmospheric pressure b) Half-Tide pressure
and c) Full-Tide pressure. All three sensors are positioned in the sea with a rigid tube to the appropriate measuring point
above. Since the position of the top of the Half-Tide tube is known accurately this can be used to calibrate the datum
of the Full-Tide pressure. Data is fed by an armored cable to a data logger and control unity sited nearby. Most of the
comments relating to a single pressure sensor are applicable but drift in the pressure sensors is inconsequential to its
operational capability. Temperature compensation of the pressure sensors is obtained from components integrated into
the pressure sensors.
Installation
Requirements
The instrument is pre-assembled and requires fixing to a vertical sea wall or marine structure.
Mains power or batteries and solar panels.
Location Requires a sea wall or vertical structure for installation.
Calibration Manufacturers calibrations of the pressure sensors are sufficiently accurate. The Half-Tide point should be levelled to local
benchmarks.
Accuracy Precision and accuracy of a few millimetres has been achieved.
Cost Band 3.
Record of Use Used in the United Kingdom and extensively at remote island sites in the Atlantic as well as in the Antarctic.
Comments Extremely accurate system with automatic datum control and as a by-product air pressure, air temperature and sea
temperature are recorded.
For operational reasons the instrument will only work in a region where the tidal range is 1 metre or greater.
Pressure Transducers in Stilling Wells
Equipment Pressure transducers are often placed in stilling wells, where these are available. This provides a protected and secure
environment for the sensors and can augment measurements made by a float gauge. The comments above on pressure
sensors are equally valid for this type of installation.
Accuracy Approximately 1 cm of sea level. The absolute accuracy may be limited by the characteristics of the stilling well.
Cost Band 2.
Comments Problems associated with the use of stilling wells are well documented. (see Float Gauges).
Bubbler Pressure Gauges
Equipment Complete systems are available commercially, but considerable assembly work is required to construct an operational tide
gauge. The equipment comprises an air supply (normally from a compressor), a gas control system, a connecting pipe, a
sub-sea pressure outlet, a pressure transducer at the landward end and the various data logging and support electronics.
Operation The instrument supplies air from the high pressure supply at a reduced pressure and at a constant rate through the system.
The pressure required to bubble the air through the sub-sea outlet at this rate is a measure of the sea level above the
outlet. A differential pressure transducer vented to the atmosphere alleviates the need to measure atmospheric pressure
separately, thereby producing a pressure reading proportional to sea level height. The sub-sea outlet is open at the base,
has a large surface area relative to its volume and has a small exit port approximately half way from the base. This design
reduces the effect of wave action and provides a very stable datum.
Installation
Requirements
The outlet and part of the connecting tube are the only components in the sea. Such a configuration increases the reli-
ability of the system and makes replacement relatively simple. All other components of the system are housed nearby.
The system requires external power for continuous operation, and backup operation is relatively limited, owing to the
limited air supply.
Location Bubbler systems can be used at virtually any location, even on shelving beaches. Connecting tubes can be several hundred
metres in length. As with most pressure measuring systems, regions with large variations in seawater density may cause signifi-
cant errors.
Calibration Calibration is concerned with the pressure sensor accuracy and may need to be repeated at intervals. Calibrations sup-
plied by leading pressure transducer manufacturers are acceptable provided occasional means of fixing the datum value
are used.
Accuracy In general, an average accuracy of 1 cm of sea level is achievable, but this may degrade under large-wave conditions.
Cost Band 2.
Record of Use Used extensively in the United States and the United Kingdom for their national tide gauge networks.
Comments At a few locations, a secondary bubbler system has been installed at the mid-tide level as part of the United Kingdom
network. This can be used to fix the datum of measurements in the same fashion as the ‘B’ gauges discussed above.
26
Sea Level Measurement and Interpretation
IOC Manuals and Guides No 14 vol IV
Sea Level Measurement and Interpretation
27
Float Gauges
Equipment A float in a stilling well is the tried and tested method of measuring sea level directly, rather than through an indirect
parameter such as pressure or sound.
Operation A stilling well filters out wave activity at periods shorter than the maximum tidal period, which might be 2 hours in shal-
low water regions. In modern installations the float drives a shaft encoder or potentiometer the output of which is fed to
an electronic data logger. In the past, chart recorders were extensively used, but are no longer acceptable as the principal
data-recording method, as they contain many sources of inaccuracy and require labour-intensive digitization.
Installation
Requirements
Stilling well installations require heavy civil engineering work in areas of large tidal range. Many stilling wells exist through-
out the world, as they are of robust construction, but new installations are less common, owing to the engineering cost.
A suitable building is required above the well to protect the well and its associated measuring equipment.
Location Requires a sea wall or vertical structure for installation.
Calibration Stilling wells can suffer from several defects which have been well documented. For example, density variations between
the inside and outside of the well in regions of stratification cause errors. Siltation and marine growth can cause changes
to the dynamic response of the well. Absolute calibration usually involves dipping the well with a calibrated tape at peri-
odic intervals.
Accuracy Approximately 1 cm of sea level.
Cost Band 1–2.
Record of Use Used extensively in the United States and the United Kingdom for their national tide gauge networks.
Comments Stilling wells have been used worldwide for a considerable period and are still used, both as the primary system and as
backup system for a modern tide gauge.
Radar Gauges
Equipment Radar tide gauges have so far been little used for GLOSS purposes, because it is a very recent technology. However, they
offer a complete ready-to-go package which is relatively easy to install above the sea surface and seem to have advantages
with respect the acoustic sensors.
Operation Radar gauges measure the time of flight either from a pulsed radar or the phase change between a transmitted and
received carrier wave, to determine the distance to the sea surface. They are much less affected by air temperature than
acoustic gauges.
Installation
Requirements
The installation requirements are relatively simple. The device requires a rigid structure to position it above the sea with
sufficient clearance to avoid spurious reflections from any adjacent structures. As with many tide gauges, all ancillary
equipment (data logger, modem, satellite communications, battery backup), needs to be housed in an adjacent building.
No need of a protective tube.
Location Requires a site with vertical clearance sufficient to mount the device clear of the maximum sea surface, including wave action.
Calibration In essence the device is self calibrating. However, for GLOSS purposes, a reflective target is mounted at a known distance
below the radar transmitter.
Accuracy Accuracy is expected to be approximately 1 cm of sea level.
Cost Band 2–3.
Record of Use So far these gauges have been used for relatively short periods experimentally by Spain and the United Kingdom.
Comments Radar tide gauges may consume excessive power if used in a continuous mode. In burst mode, they provide sufficient
accuracy for measuring most tidal parameters, but their use in a rapid sampling mode may be limited by this, although
tests are being made in Spain for higher-frequency sampling.
IOC Manuals and Guides No 14 vol IV
4. Datum Control and Levelling
28
Sea Level Measurement and Interpretation
It should be clear that the measurements made by a
tide gauge provide the relative movement of the sea
level with respect to the land. Of course, neither land
nor sea levels are constant over long periods of time.
There are vertical movements of the land associated
with a range of natural processes, such as co-seismic
activity (earthquakes), in addition to glacial isostatic
adjustment (post-glacial rebound) and plate tecton-
ics and with a range of human activities (e.g. ground
water pumping). For a review of the geological signals
in tide gauge records, see Emery and Aubrey (1991).
Long-term changes in sea level relate to variations in
ocean currents, to changes in the volume of water in
the oceans and therefore to climate change. It is clear
that, to understand sea level changes properly, the dif-
ferent sea level and land signals have to be decoupled.
This is achieved by careful definition of the tide gauge
datums, by local levelling procedures, and by making
independent measurements of changes in the land
levels, using modern geodetic techniques. Such tech-
niques derive from the use of very high resolution GPS
receivers and absolute gravimeters.
4.1 Datums and Benchmarks
For sea level observations, a land benchmark is used
as the primary reference point. The benchmark is a
clearly marked point located on a stable surface, such
as exposed rock, a quay wall or a substantial building.
When a benchmark is on a horizontal surface, it nor-
mally takes the form of a round-headed brass bolt, the
highest point of the domed head being the reference
level (Figure 4.1). When on a vertical surface, it can
be in the form of a horizontal groove in the surface
or on a metal frame attached to the surface, having a
horizontal reference edge to which a measuring staff
support can be fixed.
It is poor practice to depend upon the stability of a
single benchmark. It is recommended that there be a
minimum of five within a few hundred metres, or at
most one kilometres, of the tide gauge. These should
be connected individually by high-precision levelling
and shown to maintain the same relative elevation
as time progresses. If no changes are observed over
long periods, it is safe to assume that the area of land
around the gauge is ‘stable’. The area could, of course,
exhibit vertical movement with respect to a much wider
area. This can be demonstrated by wide-area levelling
or from surveys using space geodetic techniques.
It is desirable, although not essential, that all benchmarks
be tied into a country’s national levelling network, and
periodically checked with respect to that network. The
benchmarks will then be given elevations referred to
the datum of the national network. However, national
levelling networks tend to be redefined at intervals. For
that reason, in sea level studies, it is best not to rely on
national levelling for any scientific purpose, although,
Figure 4.1 A brass bolt
benchmark at Newlyn, UK,
which functions as a reference
point for height measure-
ments in the UK and as the
TGBM of the Newlyn gauge.
IOC Manuals and Guides No 14 vol IV

Sea Level Measurement and Interpretation
of course, it may provide useful ancillary information. It
is important that the benchmarks be clearly identified,
by the inscription of a name or number. In addition,
they should be unambiguously documented in the tide
gauge metadata, with a description of the mark itself,
photographs, national grid reference and a local map.
4.1.1 Tide Gauge Benchmark (TGBM)
The tide gauge benchmark (TGBM) is chosen as
the main bench mark for the gauge from the set of
approximately five marks described above. The TGBM
is extremely important, since it serves as the datum to
which the values of sea level are referred. The choice
of TGBM is somewhat subjective; in principle, it should
be the ‘most stable’ or ‘most secure’ mark of the set,
although, if the area is largely stable, then the choice
should be fairly arbitrary. Often the nearest mark to the
gauge is chosen. Over a period of time it may be neces-
sary to redefine the TGBM, if the original is destroyed
as a result of local development. The benefit of having
a set of five local marks, regularly interconnected by
high-precision levelling, is that it allows a new TGBM
to be defined in terms of the old one, if circumstances
require it.
In some countries the historical practice has been
not to define one mark as the TGBM, but to use a
weighted average of several marks. For GLOSS, it is
recommended that the single, unique TGBM approach
be adopted as the standard.
4.1.2 GPS Benchmark (GPSBM)
The GPS benchmark (GPSBM) is another special mark
of the available set that is the reference mark for GPS
measurements near the gauge. In some busy ports, the
GPSBM may be several hundred metres from the TGBM
and the gauge. As with the other marks, it must be
connected by high-precision levelling to the TGBM at
regular intervals. (See section 4.4.1 for details on GPS
measurements at tide gauges).
4.1.3 Gauge Contact Point (CP)
The contact point (CP) of a tide gauge is a type of
‘benchmark’, or vertical reference mark, associated
with the gauge itself. After a geodetic connection has
been made between the TGBM and the CP, the gauge’s
sea level data can be expressed in terms of the TGBM
datum. The essential point to note is that the CP comes
with the gauge; if a different type of gauge is installed
at the site, it will have a different CP which will require
re-levelling to the TGBM.
For conventional float and stilling well gauges, the
CP is often located at the top of the well inside the
tide gauge hut. Sometimes, in older stations, the CP
is located in a most difficult and inaccessible location
for levelling purposes and new stations should take
care to provide ready access. For acoustic gauges with
sounding tubes, the CP is located at a point at the top
of the gauge on the container holding the acoustic
transducer. Similarly, for radar gauges, the CP will be
a mark on the transducer. For ‘B’ gauges, the CP will
be at the top of the vertical supporting tube which is
known relative to the ‘B’ datum level.
In the case of float gauges located in a tide gauge hut,
the CP should not be used as the TGBM itself, as it is
always possible for the building and the well to gradu-
ally settle over a long period. With a good set of local
benchmarks, this settling will be evident by check level-
ling between TGBM and CP.
4.1.4 Tide Gauge Zero (TGZ)
The tide gauge zero (TGZ) is the level for which the
gauge would record zero sea level. In practice, the sea
level may not fall to this level. In a conventional float
gauge arrangement, the TGZ can be related to the CP
after dipping checks in the well have been performed.
This is done using a calibrated tape set to zero at the
CP. Measurements are made by lowering the tape until
it reaches the water and an electrical circuit is com-
pleted. The level of sea water in the well can then be
related to the CP and to all other local datums.
4.1.5 Revised Local Reference (RLR) Datum
The revised local reference (RLR) datum at a gauge site
is a datum defined as a simple offset from the TGBM,
such that values of sea level expressed relative to the RLR
datum have numerical values around 7,000 mm. The
concept of the RLR datum was invented by the PSMSL
so that long time-series of sea level change at a site
could be constructed, even if parts of the time-series had
been collected using different gauges and different, but
geodetically connected, TGBMs. The approximate value
of 7,000 mm was chosen so that the computers of the
time (the late 1960s) would not have to store negative
numbers. The RLR datum is defined for each gauge site
separately and the RLR at one site cannot be related to
the RLR at any other site, without additional knowledge
of connections between TGBMs at the different sites.
When sea level data are contributed to the PSMSL, or
to a sea level centre, it is essential that full information
on the geodetic relationships between TGBM and TGZ
etc. accompany the data. Without this information, it
is impossible for the PSMSL to include such data in the
RLR data set.
4.1.6 National Levelling Network
Most countries have, during the last one hundred
years, implemented national levelling networks that are
defined usually in terms of mean sea level (MSL) at one
29
IOC Manuals and Guides No 14 vol IV

IOC Manuals and Guides No 14 vol IV
or more stations. Levelling connections within these
networks then allow the heights of objects (e.g. moun-
tains) to be related to MSL at the coast. For example,
the UK national levelling network expresses heights in
terms of ‘Ordnance Datum Newlyn’ (ODN), which was
the average level of the sea at Newlyn in southwest
England during 1915–21. ODN can be thought of as an
imaginary datum plane extending over a large area (i.e.
over the whole of Great Britain). The heights of bench
marks, for example, can be expressed in terms of ODN
as can, therefore, the Chart Datum at the port.
The concept of a national levelling network has under-
gone revolutionary change during the last decade, pri-
marily due to the advent of GPS. However, it was already
a defective concept from the point of view of sea level
studies, for several reasons. First, sea level has risen at
Newlyn since 1915, as it has done at many other places
around the world, so ODN no longer represents the
present average Newlyn levels. Second, the mean sea
surface around a coast is not ‘flat’, i.e. it does not follow
the geoid, but varies due to ocean currents, density dif-
ferences, meteorological effects etc. Consequently, MSL
was never a perfect choice for a national datum plane.
Third, rates of change of MSL are different at different
locations, thereby complicating the time-dependence
of the network. Fourth, all national levelling networks
(with the possible exception of that of The Netherlands,
Finland and Sweden) contain multi-decimetric errors due
to systematic, instrumental errors in the levelling. Fifth,
as levelling networks tended to be redefined at intervals,
their redefinition in itself was a potential source of error,
as ‘heights’ were redefined.
Consequently, while interaction between sea level spe-
cialists and national surveyors is inevitable, we advise
most sea level specialists to take great care with the
concept of a national levelling system.
4.1.7 Chart Datum
The chart datum (or Admiralty Chart Datum in the UK)
is the low-water plane below which the depths on a
nautical chart are measured and above which, tidal lev-
els are often presented for practical purposes, such as
tide tables for harbour operations. The chart datum is
a horizontal plane over a limited area and the elevation
of this plane will vary around the coastline, depending
on the tidal ranges at the places considered. In the
UK, the chart datum at a port is the same as ‘Lowest
Astronomical Tide’ (Pugh, 1987).
4.1.8 Working Datums
Practical working datums are often used in ports
where they describe sea level (or water depth) more
clearly than perhaps a scientifically rigorous reference
to a benchmark. Examples of such datums include
the levels of the sill of a lock or a shallow point in the
entrance to a harbour. The sea level from a tide gauge
then indicates the depth of water above these hazards.
Working datums often functioned as the first TGBMs
for Europe’s sea level records (e.g. the ‘Old Dock Sill’
datum at Liverpool).
4.2 Levelling Between Local
Benchmarks
High-precision levelling will need to be made between
all the marks of the local network at regular intervals.
For GLOSS purposes, the recommendation is that the
exercise be repeated at least annually, with results fully
documented by the responsible agency. The exact fre-
quency of required levelling will depend on the geology
of the area. On unstable ground, more frequent level-
ling may be necessary.
Personnel familiar with the best practices of the tech-
nique should perform levelling with a good-quality level
and staff. For example, if marks are far apart, it will be
necessary to establish ‘staging points’ clearly identified
and about 50 m apart on a hard surface. This can be
done by painting a small ring around the point and,
on softer surfaces, by driving in a round-headed pin.
The levelling instrument can then be set up between a
benchmark and the first staging point and readings of
the staff taken at the two positions. This is then repeat-
ed throughout the whole network. It is important that
the pairs of readings be taken in the correct sequence,
otherwise an erroneous height difference will result.
Modern levelling instruments with built-in data loggers
can remove most of the tedious arithmetic associated
with the use of a simple level.
As with many other aspects of tide gauge operations,
the main principle of levelling is that ‘practice makes
perfect’. For advice on good levelling methods, the
PSMSL website (www.pol.ac.uk/psmsl) contains a set of
notes used by Prof. Charles Merry at the University of
Cape Town GLOSS Training Course in 1998.
4.3 Levelling Between Wider Area
Marks
The height of the TGBM should also be related to a
wider area network extending typically 10 km. This
provides a verification of whether the sea level mea-
sured relative to the TGBM is consistent with that of
the surrounding area.
First-order geodetic levelling is accurate to 1 or 2 mm
over distances of a few kilometres and, therefore,
annual campaigns can detect any vertical movements
of the TGBM with respect to the local benchmarks.
30
Sea Level Measurement and Interpretation

IOC Manuals and Guides No 14 vol IV
Levelling over longer distances has been found to con-
tain significant systematic errors that can cause appar-
ent spurious changes in the height of the TGBM. For
this reason the PSMSL requires MSL data to be defined
with respect to the TGBM rather than with respect to
national datum levels.
Consequently, while it is desirable in principle to per-
form regular wide area levelling, their accuracy has
always to be considered, especially as the areas consid-
ered become wider. At a distance of some 10 km, the
errors involved in levelling become comparable to those
achievable by means of space geodetic techniques.
Therefore, while the choice of technology for the wider
area surveys is clearly evolving, the principle that the
relative sea level measurements provided by the gauge
data are applicable to studies for the surrounding
area is still valid. Table 4.1 summarizes the accuracy
obtained by the different techniques.
4.4 Geodetic Fixing of Tide Gauge
Benchmarks
4.4.1 Introduction
Over the past decade, advances in modern geodetic
techniques have provided new methods for fixing tide
gauge bench marks. These are the techniques of space
geodesy, using the satellites of the Global Positioning
System (GPS) and those of the Doppler Orbitography and
Radiopositioning Integrated by Satellite (DORIS) system.
Absolute gravity measurements provide collateral evi-
dence of vertical crustal movements. The space geodesy
measurements can be used to fix into a geocentric refer-
ence frame the GPSBM, which should be connected to
the TGBM by levelling. Therefore, the MSL at the tide
gauge can be defined in a global geocentric reference
frame. This furnishes an absolute measure of mean sea
level, rather than MSL relative to each local TGBM, or
even to the wider surrounding area. Measurements of sea
level are then defined in the same geocentric reference
frame as that used for satellite altimetry and can therefore
be directly compared with altimetric sea levels.
Repeated space geodesy measurements at a tide
gauge, annually over a decade for example, enables
the vertical crustal movement to be determined and
therefore removed from the mean sea level trend to
give the true sea level change due to climatic influenc-
es. Measuring changes of gravity near the tide gauge
using an absolute gravimeter allows a completely
independent determination of any vertical crustal
movements. Figure 4.2 shows a schematic diagram of
a local levelling network within a tide gauge system to
measure absolute sea levels.
Technique Accuracy
Primary Levelling of Local
Benchmarks
0–1 km: <1 mm
1–10 km: <1 cm
GPS from TGBM to SLR/VLBI
Reference Frame
<1 cm
Absolute Gravity near Tide
Gauges and at SLR/VLBI
Station
<2 µgal
(approx. 1 cm)
Table 4.1 Accuracy of geodetic fixing of TGBMs.
Figure 4.2 Schematic of levelling required between various benchmarks at a tide gauge station.
Sea Level Measurement and Interpretation
31

32
Sea Level Measurement and Interpretation
IOC Manuals and Guides No 14 vol IV
An international working group was set up in the late
1980s by the International Association for the Physical
Sciences of the Ocean, under its Commission on Mean
Sea Level and Tides, to recommend a strategy for the
geodetic fixing of tide gauge bench marks. These
resulted in the ‘Carter reports’ (Carter et al., 1989;
Carter, 1994). The following sections provide a sum-
mary and describe recent developments. The reader is
referred to Neilan et al. (1998) and Bevis et al. (2002)
for further details.
4.4.2 GPS Measurements
Over the past decade, the GPS technique has devel-
oped rapidly to the extent that it is of fundamental
importance to many areas of geophysical research (see
links documented on the PSMSL training web page).
The International GNSS Service (IGS) receives data
from a global network of GPS stations and produces
information on the orbits of the GPS satellites which
is significantly more precise than the ephemerides
routinely transmitted by the satellites themselves. This
information is employed by researchers to produce pre-
cise positioning computations. GPS data from the IGS
network are archived at the IGS Central Bureau.
Ideally, all tide gauge sites should be equipped with
a permanent continuous receiver (CGPS). However,
in practice, the financial resources required are often
large. Many countries adopt the procedure of install-
ing permanent GPS receivers at strategic tide gauges
and then densifying the network with regular GPS
campaign measurements (Neilan et al., 1998). There
is clearly an advantage in concentrating CGPS work
at sites with long duration PSMSL RLR mean sea level
records. The GLOSS Implementation Plan refers to this
set as the GLOSS Long-Term Trends (GLOSS-LTT) net-
work. The campaigns can then concentrate on other
tide gauges in the network for which the records are
shorter. The exact mix between permanent and cam-
paign GPS tide gauges will change as the cost of GPS
receivers continues to decrease.
For studies involving sea level, it is recommended that
a dual-frequency CGPS receiver should be installed
directly at the tide gauge so that it monitors any move-
ment of the TGBM. If the receiver is placed exactly at
the TGBM, then the GPSBM and the TGBM will coin-
cide, eliminating the need for levelling between the
two benchmarks. The TGBM is then the fundamental
point that is geocentrically located by the GPS mea-
surements and to which all the sea level measurements
are related. In practice, tide gauge sites are not always
ideal for making GPS measurements. This may be due
to obscured sky visibility, excessive multipath transmis-
sions or because of radio interference, in which case a
site should be chosen that is as close as possible to the
tide gauge. Ideally, this should be within a few hundred
metres.
Figure 4.3 Alternative forms of GPS mounting
(a) a Norwegian tide gauge with GPS antenna mounted
on an adjacent platform;
(b) GPS antenna on a pillar, as recommended by the
CGPS@TG group (http://soest.hawaii.edu/cgps_tg).
b
a
Sea Level Measurement and Interpretation
33
IOC Manuals and Guides No 14 vol IV
The GPSBM and GPS antenna need to be levelled to the
TGBM at least annually. Experience has shown that these
regular levelling connections are often neglected over
the years. This is particularly true if the distance involved
is more than a few hundred metres and it can never be
assumed that even relatively close sites are not moving dif-
ferentially at a rate of around 1 mm per year.
Whilst the detailed procedures for making GPS measure-
ments at tide gauges are still the subject of research,
and are still being discussed by the IGS/PSMSL Technical
Committee, there is already a general agreement on
the main principles. Using GPS for measuring horizontal
crustal movements is now well established. However,
for the vertical component, measuring land movements
to better than l mm per year is still a major challenge.
Research is continuing on modelling the wet component
of the troposphere, modelling the deformation of the
Earth due to surface loading by ocean tides, coastal and
global sea levels, atmospheric variations and hydrological
loading. A major research challenge lies in realizing and
maintaining a global reference frame that is sufficiently
stable for measuring vertical movements to an accuracy of
a few tenths of a millimetre per year (Teferle et al., 2006;
Ge et al., 2005).
In some countries, a second CGPS receiver is being
installed a few kilometres inland at a site which has
a good multipath environment and a better connec-
tion to bedrock. While such a site might be better for
testing geophysical models of vertical crustal move-
ments, it cannot be considered to be a substitute for
the CGPS receiver at the tide gauge. The difficulty and
cost of levelling over distances of a few kilometres are
significant.
Many of the practical issues involved with installing CGPS
at tide gauges are reviewed in the case studies on the web
site http://soest.hawaii.edu/cgps_tg and also in the associ-
ated paper by Bevis et al. (2002).
4.4.3 DORIS Measurements
DORIS is a French tracking system based on a space
segment placed on an orbiting satellite and a network
of ground stations distributed worldwide. Initially it was
conceived to improve our knowledge of satellite orbits, but
once these were determined to a sufficient accuracy, the
system could be used to locate the geocentric position of
the receiving antenna at each ground station.
DORIS is a one-way Doppler uplink system in which the
ground stations broadcast continuously on two frequen-
cies, 2 GHz and 400 MHz, in order to correct Doppler
measurements for ionospheric delay. Each beacon includes
an ultra-stable oscillator and meteorological sensors to
correct the data for tropospheric delay. The space seg-
ment is made up of the set of satellites carrying the DORIS
onboard receiver. Six DORIS receivers are currently work-
ing onboard the TOPEX–Poseidon, Jason, Envisat and the
Earth observation satellites Spot-2, Spot-4 and Spot-5.
The DORIS technique has proved to be capable of moni-
toring vertical land movements with the following preci-
sion. In the early 1990s, when only one satellite was in
orbit, the precision of absolute positioning was about 4
cm. This precision was regularly improved as new satellites
were launched, and reached around 1.5 cm accuracy. The
six satellites now in orbit provide sub-centimetre precision
in absolute positioning, and vertical land velocities with a
precision of 1 mm per year.
The current network of DORIS ground stations offers
a homogeneous distribution over the continents and
oceans, with about 60 beacons deployed in some 30
countries. It is planned to increase this distribution through
the framework of the International DORIS Service. Some
DORIS ground stations have been co-located at stations
possessing other geodetic instrumentation. For example:
7 at Satellite Laser Ranging sites; 28 at GPS sites; 9 at VLBI
sites; and 14 at tide gauges.
4.4.4 Absolute Gravity Measurements
The principle of the absolute gravimeter is the measure-
ment of the acceleration of a mass in free fall (or rise
and fall) in a vacuum using a laser length standard and
a rubidium-frequency time standard. The mass used in
the gravimeter is a retro-reflector that forms one end of
a laser interferometer. By counting interference fringes as
the mass falls, the position of the mass is measured and
determined as a function of time. Considerable effort has
been put into reducing or eliminating various sources of
systematic error in the instrument. The latest transportable
absolute gravimeter is the FG5 instrument (Niebauer et al.
1995). The specifications for this instrument are a preci-
sion of better than 1 mgal and an accuracy of 2 µgal (N.B.
1 gal = 1 cm/sec2, so 1 µgal = 10 nm/sec2. A microgal
(mgal) corresponds roughly to 5 mm of crustal move-
ment). For further details of the absolute gravimeter and a
bibliography of published papers see the Micro-g website
(http://www.microgsolutions.com/).
The gravity value at a site is found by making repeated
drops of the test mass for typically one or two days
and making corrections for the gravitational variations
caused by tides, earth tides and atmospheric pressure.
Various intercomparison experiments have been made
between different FG5 absolute gravimeters; typically
they agree at the 1–2 µgal level (Sasagawa et al., 1995).
At good sites, measurements made over a number of
years show repeatability of about 2 µgal.
In free air the gravity gradient at the Earth’s surface, is
3 mgal/cm. In practice, for crustal deformation work,
since a large area of the Earth’s surface is usually dis-
placed simultaneously, the measured gravity change is
about 2 µgal/cm. Thus, it can be seen that absolute
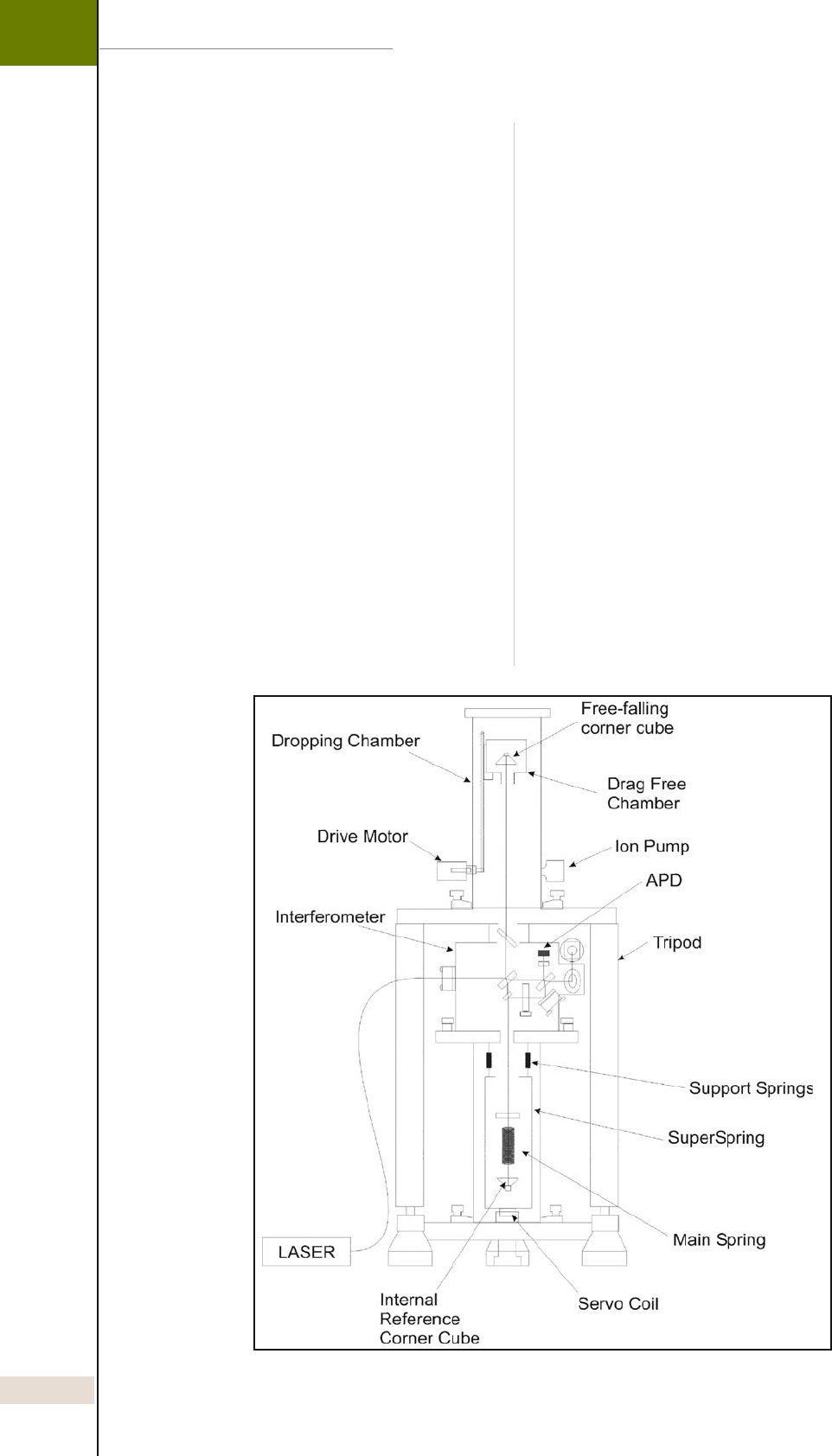
IOC Manuals and Guides No 14 vol IV
gravity and GPS are both approaching the equivalent
accuracy of 1 cm that is required for measuring vertical
crustal movements.
Absolute gravity measurements are normally made in a
convenient building that provides reasonable tempera-
ture control. This site then needs to be connected to the
TGBM and the local benchmarks using high precision
levelling. Corrections for ocean tide loading and attrac-
tion are particularly important at or near coastal sites, as
is the additional ocean tide attraction due to the elevation
of the site.
Owing to the higher cost of absolute gravimeters com-
pared to GPS receivers, the number of tide gauges being
monitored is likely to be a small sub-set of the tide gauges
with GPS. It has been recommended that the measure-
ments of absolute gravity should be concentrated at key
tide gauges in the GLOSS-LTT network, where they will
be most useful in contributing to meeting the challenge
of determining vertical crustal movements to an accuracy
of better than 1 mm per year. Absolute gravity measure-
ments at the GLOSS tide gauges at Newlyn and Lerwick
have recently shown that there are systematic errors in
CGPS, which lead to errors in the vertical rates determined
from GPS (Teferle et al., 2006). This shows the importance
of independent techniques for identifying systematic
errors and the reduction of these errors is currently an
important topic of research in the GPS community.
4.4.5 Geocentric Co-ordinates and Vertical Land
Movements of Tide Gauge Benchmarks
From 2001 to the end of 2005, the International GNSS
Service (IGS) set up a pilot project called TIGA, which
is processing and analysing CGPS data from over 100
tide gauges around the world in a consistent global
reference frame. The web site (http://adsc.gfz-pots-
dam.de/tiga/index_TIGA.html) should be consulted for
information about the stations and the results that
are being obtained. The GPS global sea level monitor-
ing network will be a fully integrated component of
the International GNSS Service – International Earth
Rotation Service (IGS/IERS) International Terrestrial
Reference Frame (ITRF). The products from this net-
work are the co-ordinates and velocities of the bench-
marks at tide gauge stations. The Permanent Service
for Mean Sea Level (PSMSL) archiving system has been
designed to bank the vertical crustal velocities derived
from selected IGS solutions, along with explanatory
information, including the names of experts who can
be contacted by users of the system.
Figure 4.4 Schematic of an absolute gravimeter.
34
Sea Level Measurement and Interpretation
IOC Manuals and Guides No 14 vol IV
Sea Level Measurement and Interpretation
5.1 Introduction
Sea level data acquired by a tide gauge may be
required in ‘real time’, ‘near real time’ or in ‘delayed
mode’ depending on the application. For example, a
storm surge or tsunami warning system may require
the data to be transmitted to the competent authorities
in a very short time. On the other hand, for some sci-
entific research, it is often only necessary to recover the
data annually, in which case it can be stored locally and
recovered during a site visit, either by downloading the
data to a PC or by extracting and replacing a memory
card. In any case, it is expedient to adopt such a local
procedure, even if a communication link is in operation,
to prevent loss of valuable data.
The method of communication depends largely on the
distance the data have to be transmitted. For short links
(e.g. harbour operations), a radio link is often conve-
nient. For countrywide links, Subscriber Trunk Dialing
or dedicated telephone lines of the Public Switched
Telephone Network (PSTN) are an effective medium.
Where fixed lines are not practical, the growth in the
use of Mobile Phone Links using General Switched
Messaging (GSM) technology and General Packet Radio
System (GPRS) protocols has extended the potential for
long-distance communication. Both the fixed and mobile
telephone systems give access to the Internet through an
Internet Service Provider (ISP) which can greatly enhance
the transmission of data. For example, many of the GPS
stations of the global network of the International GNSS
Service, which has some similarities to the global tide
gauge network in terms of number of sites and amount
of data to be transmitted, report through the Internet.
All the forms of telephony are merging into one, with
telephone links provided by a supplier for which the
connection method is transparent to the user. After the
tsunami of 26 December 2004, India has implemented
a real-time coastal sea level data transmission by means
of GPRS with continuous connection to Internet, with
much lower costs than previous experiments based on
SMS and Data Call Services (Antony Joseph, personal
communication).
For more remote areas, the use of mobile satellite links
is an alternative. There are now upward of 30 orbit-
ing satellite systems in operation dedicated to data
transmission, some on a global basis. Mobile satellite
systems (MSS) may be classified according to orbit alti-
tude as follows:
GEO – geostationary earth orbit, approximate altitude:
35,000 km
MEO – mid-altitude earth orbit, approximate altitude:
10,000 km
LEO – low earth orbit, approximate altitude:
<1,000 km
35
5. Real Time Data Transmission
IOC Manuals and Guides No 14 vol IV
LEOs can be further sub-divided into Big LEO and Little
LEO categories. Big LEOs will offer voice, fax, telex,
paging and data capability, whereas little LEOs will
offer data capability only, either on a real-time direct
readout (‘bent pipe’) basis, or as a store-and-forward
service. Since the satellite footprint decreases in size
as the orbit gets lower, LEO and MEO systems require
larger constellations than GEO satellites in order to
achieve global coverage and avoid data delays. Lower
power is, however, generally required for LEO and MEO
satellite communication because of the shorter average
distance between transmitter and satellite. Some sys-
tems implement several high-gain antennas to gener-
ate ‘spot beams’ and so reduce the requirement of the
mobile to have a complex antenna and/or high output
power. A key feature of several MSS currently under
development will be their inter-operability with existing
public switched telephone and cellular networks, using
a dual-mode handset.
From a technical point of view, some systems do offer
significantly enhanced capabilities compared to exist-
ing methods. Potential advantages include two-way
communication, more timely observations, and greater
data rates and volumes. Some systems may also prove
to be considerably less expensive than existing chan-
nels, although this is as yet unclear. Table 5.1 contains
a list of the known satellite systems and their current
status.
The Global Telecommunication System (GTS), hitherto
used for the transmission of meteorological data and
information also has its place in GLOSS and is therefore
considered in a separate section (5.3.3).
System Status* Orbit type Message type Terminal size Comments
APRIZESAT Operational Little LEO Data: TBD Handheld 7 4 nanosatellites in orbit, 2-way
communications, directed at asset
tracking
ARGOS Operational Little LEO Data: 32 bytes Handheld 1 Various enhancements, including
2-way messaging, are scheduled
ECCO
(CCI
Global)
On hold LEO Voice/data Handheld TBD 12 equatorial satellites planned by
2003. Status questionable – merged
with ICO-Teledesic Global
ELLIPSO Licensed
On hold
Big LEO Voice/data Handheld TBD 17 satellites in highly elliptical orbits,
serving major land masses. Status
questionable – merged with ICO-
Teledesic Global
EYESAT Experimental Little LEO Data: 60 bytes Handheld
5
1 satellite 1995, principally for radio
amateurs
E-SAT
Licensed
On hold
Little LEO Data: TBD TBD 6 satellites for utility metering (aimed
at continental USA only initially)
FAISAT Licensed
On hold
Little LEO Data:
128 bytes
Handheld 10 38 satellites 2000+ Test satellite
launched 1997
GEMNET
Cancelled
(pre-op)
Little LEO Data: no
maximum
Laptop 10 1st satellite 1995: launch failure
36 satellites by ???
GLOBAL
STAR
Operational Big LEO Voice/data:
no maximum
Handheld 1 48 satellites + spares (constellation
complete); two-way (voice) and
real-time transmission. Limited cover-
age due to lack of ground stations.
Financial difficulties.
GOES,
METEOSAT,
MTSAT
Operational GEO Data: various
options
Laptop 10 4 satellites; directional antenna desir-
able NOAA–ESA–MTSAT (Japanese
meteorological) satellites.
GONETS-D Pre-opera-
tional
Little LEO Data Handheld TBD 8 satellites in orbit, 36 more planned
36
Sea Level Measurement and Interpretation
Table 5.1 A list of the known satellite systems and their current status.
IOC Manuals and Guides No 14 vol IV
GONETS-R Planned
On hold?
Little LEO Data Handheld TBD 48 satellites planned
INMARSAT-
C
Operational GEO Data: no
maximum
5.5 kg 15 Steered antenna not required
INMARSAT-
D+
Operational GEO Data: 128
bytes uplink,
8 bytes down-
link
Handheld 1 Global pager using existing
INMARSAT-3 satellites. Note: very
oriented to downlink
INMARSAT-
BGAN
Operational GEO Broadband
data: no maxi-
mum
Laptop TBD Two of three satellites currently in
operation covering the Indian Ocean
and the Atlantic; third satellite cover-
ing the Pacific due to be launched
in 2007
ICO (New
ICO)
Licensed
On hold?
MEO Voice/data:
no maximum
Handheld 1 Global voice and packet data ser-
vices. Recently merged with Teledesic
to form ICO Teledesic Global. 12
satellites planned, only one launched
so far
IRIDIUM Revived Big LEO Voice/data:
no maximum
Handheld 1 72 satellites in orbit; offers true
global coverage; two-way (voice)
and real-time transmission
IRIS/LLMS Experimental
On hold
Little LEO Data: up to
few
kbytes
Handheld
1
1 satellite in orbit. Belgian messag-
ing system part of an ESA research
programme
LEO One Licensed
On hold
Little LEO Data: uplink
9,600 bps,
downlink
2,400 bps
Handheld Max
7
48-satellite constellation, store and
forward + 8 spares. No polar satel-
lites
LEO SAT
Courier
Planned
On hold?
Big LEO Data/voice Handheld 1-5 72 satellites
OCEAN-
NET
Experimental GEO No maximum Large Uses moored buoys + Intelsat
ODL
(Ocean
Data Link)
Experimental
On hold?
GEO No maximum Handheld TBD Uses Intelsat
ODYSSEY Cancelled
(pre-op)
MEO Voice/data:
no maximum
Handheld 1 12 satellites were planned
Operational Little LEO Data: no
maximum
Handheld 5 35 satellites in orbit; 30 operational;
expansion to 48 licensed; e-mails
(Globalgrams) to subscriber network
SAFIR Pre-opera-
tional
On hold
Little LEO Data: no
maximum
Laptop 5 2 satellites in orbit
SIGNAL Planned
On hold?
Big LEO Voice/data 48 satellites planned
SKY
BRIDGE
Licensed
On hold
Big LEO Broadband Larger than
handheld
80 satellites planned, recycling GEO
spectrum allocations
Sea Level Measurement and Interpretation
37
ORBCOMM
IOC Manuals and Guides No 14 vol IV
STARSYS Cancelled
(pre-op)
Little LEO Data: 27 bytes
multiple mes-
sages
Handheld 2 12 satellites 1998+
24 satellites 2000+
TELEDESIC Licensed
On hold
Big LEO Broadband 288 LEOs planned, now reduced to
30 MEOs
FCC licence granted, merged with
new ICO
TEMISAT Experimental Little LEO Data 7 satellites planned for environmen-
tal data relay. 1 satellite launched
1993.
THURAYA Operational GEO Voice/data Handheld 1 multiple-spot beam satellite in
orbit (over Middle East); 1 planned
VITASAT Pre-opera-
tional
Little LEO Data 2 satellites in orbit,
2 more planned
VSAT Pre-opera-
tional
Little LEO Data 2 satellites in orbit,
2 more planned
WEST Planned
On hold
MEO Broadband 9 satellites planned
38
Sea Level Measurement and Interpretation
The status of each system in Table 5.1 is categorized accord-
ing to seven groups:
• Planned: Little is known about the system, except a
name, notional type, and services to be offered. Mostly
not licensed, although some may be.
• Licensed: System has been licensed by a national or
international regulatory agency (in most cases the FCC),
but no satellites have been launched.
• Experimental: System has one or more satellites in orbit
for experimental purposes (not usually part of the final
constellation). Includes new systems planning to use
existing satellites.
• Pre-operational: System is in process of launching, or
has launched, its constellation, but is not yet offering
full services. Some limited evaluation service may be
available.
• Operational: System has full or nearly full constellation
in place and is offering readily available service to exter-
nal users (not necessarily commercial).
• Cancelled: System has been cancelled, either before
satellites launched (pre-op.) or after (post-op.).
• On hold: No progress reported or scheduled.
5.2 Choice of a System
Selection of a communication system for sensor real-
time (RT) or near-real-time (NRT) data transmission
is always a compromise among a number of con-
straints. The principal factors guiding decision in the
adoption of a system are:
• data rate, data-rate profile in different operational
modes (if more than one)
• power availability (power from mains or autono-
mous/self-powered)
• guarantee of data transmission (private network
or shared data line)
• location, availability of telecommunication infra-
structure (satellites in field of view)
• land or marine application (fixed or moving)
• availability of funding.
Satellite communication systems at data-transmis-
sion rates of kbits/s and Mbits/s are operating in the
L-band (1–2 GHz), the C-band (4–8 GHz)or the Ku
(10–18 GHz)/Ka(18–40 GHz) band.
For marine applications, L-band systems are currently
the best choice. Satellite cell phones are operating
typically in the L-band and may be used for data trans-
fer needs of a few kbits/s. The data-transmission rate
on the L-band is much more bandwidth-limited, but
some systems allow for more than 100kbits/s. Antenna
directionality is less critical and even non-directional
antennas with sufficient beam width (eg +/–60°) are
workable, though at lower data-transmission rates (i.e.
from a few kbits/s to some 10 kbits/s).
The higher the frequency the easier it is to transmit
large data sets at reasonable antenna sizes. However,
attenuation by rain is stronger at higher frequen-
cies, therefore Ka transmission from space has so far
not been very common. Ku has also hitherto been
less favoured in countries with heavy rainfall, but is
becoming more used nowadays.
One of the key issues with any communication system
involving data is the data capacity. Many satellite sys-
IOC Manuals and Guides No 14 vol IV
Sea Level Measurement and Interpretation
tems have a limited capacity during any one transmis-
sion. Telephone links, by and large, have an adequate
bandwidth for most foreseeable applications, espe-
cially with the new ADSL–Broadband facilities that
are being introduced. The latter may be somewhat
limited in its spatial coverage at present, but it is fair
to say that the communications industry is one of the
fastest growing areas of commercial activity and con-
sequently coverage may be greatly increased in the
foreseeable future.
Two-way communications with a tide gauge can be
advantageous. It can be used to update software or
calibration values at the station, to interrogate the
system for faults, to change the sampling rate and to
carry out many house-keeping functions that would
otherwise wait for a site visit. This allows the system
to be flexible and improves overall reliability.
In adopting a communication system for a tide gauge
installation, one consideration has to be its reliability
under severe environmental conditions. For example, for
tsunami warning, some of the tide gauges may have to
be positioned in a tectonically active region to provide an
acceptable early warning. In the event of an earthquake,
the first losses are often the PSTN network, mobile
telephone links as well as electrical power. Under such
circumstances, satellite links may be the only option.
Additionally, some form of uninterruptible power supply
(UPS) is necessary. This often takes the form of a battery
back-up system with an adequate reserve capacity of
several hours.
A number of manufacturers, including tide gauge and
data logger manufacturers, produce relatively inexpen-
sive ready-to-use communications systems suitable for
tide gauges. For a list, see the websites given on the
PSMSL website: http://www.pol.ac.uk/psmsl.
5.3 Data Transmission Systems
For the last decade or more, tide gauge installations
have used the satellite systems of ARGOS, GOES,
Meteosat, MTSAT and INMARSAT for data transmis-
sion. More recently, other, newer possibilities are being
exploited or considered for exploitation: GLOBALSTAR,
INMARSAT/BGAN, IRIDIUM, ORBCOMM and VSAT.
Characteristics of each system in terms of the cost
of hardware, bandwidth and latitude coverage differ
significantly.
5.3.1 Systems already well established
ARGOS (www.argos-system.org) operates worldwide
using polar orbiting satellites with an orbital period
of about 100 minutes. A platform transmitter ter-
minal (PTT), with a data bandwidth capacity of 256
bits per satellite pass, is located at the gauge and,
depending on location, the delay in data reception by
the user may be several hours. Data are available to
users through the Argos Global Processing Centres at
Toulouse, France, and Largo, Fla., USA. The number
of accessible satellite passes per day is latitude-depen-
dent, varying from about 7 at the equator to 28 at the
poles. Users of ARGOS for tide gauge data acquisition
include GRGS in France which will be able to provide
advice to potential users.
GOES-E (USA), GOES-W (USA) (www.goes.noaa.gov.),
METEOSAT (Europe) (www.esa.int/SPECIALS/MSG/; www.
cnes.fr), and MTSAT (Japan) (www.fas.org/spp/guide/
japan/earth/gms/) form a network of geostationary satel-
lites offering overlapping longitudinal coverage. Latitude
cover is limited to about 75° because of their equatorial
orbit position. Each data collection platform (DCP) located
at the gauge is allocated fixed time slots during which
649 bytes of data can be transmitted to a satellite. Up to
one time slot every six minutes can be allocated to each
DCP, so that, if necessary, data could be available to users
within this time frame. Previous problems with clock drift
have been eliminated by including GPS receivers in each
DCP. Users of these systems include POL in the UK and
NOAA and the University of Hawaii Sea Level Center in
the USA. Data sent via the geostationary meteorological
satellites (GOES, Meteosat, MTSAT) is usually passed on to
the Global Telecommunication System (GTS) of the WMO
(see section 5.3.3 & 5.3.4). Information about how to
apply for DCP transmission slots can be found at:
GOES: http://noaasis.noaa.gov/DCS/
METEOSAT: http://www.eumetsat.int/
MTSAT: http://www.jma.go.jp/jma/jma-eng/satellite/dcs.
html.
INMARSAT Standard-C (www.inmarsat.com) also uses
a network of geostationary satellites giving worldwide
coverage except for latitudes above 75°. This system
allows two-way data communication in near real time
at a rate of 600 bits/s, with a data message up to about
8 kbytes. Tide gauge users of INMARSAT in the past
include the Australian Hydrographic Service.
5.3.2 Systems now being applied or considered
for application in the transmission of sea level
data
There has been a major increase in the uptake
of broadband services globally and more specifi-
cally at even remote islands that form the basis of
POL’s sea level measurement network in the South
Atlantic. POL has sites at Ascension Island, St. Helena
Island, the Falkland Islands and Tristan da Cunha.
Leased lines, offering continuous, high-speed inter-
net access are available on all these islands except
Tristan da Cunha.
POL has developed instrumentation that can take the
output from a range of sensors, including radar and
39
IOC Manuals and Guides No 14 vol IV
pressure types. The data are collected by a small Linux-
embedded processor and sent back to base by e-mail
or by secure copy protocol (SCP). Broadband-enabled
test sites using a radar sensor connected to an embed-
ded Linux system have been installed at Liverpool and
Holyhead in the UK. One-minute data values are avail-
able every five minutes in the form of an e-mail mes-
sage. The resulting data are displayed on the NTSLF
web pages: http://www.pol.ac.uk/ntslf/networks.html.
Over the last 6 years the Spanish Ports Authority
(Puertos del Estado) has also been using e-mail/ftp data
transmission from harbour gauges to a PC. Future sea
level stations will communicate via embedded Linux-
based systems instead of Windows based PCs.
The advantages of broadband technology are:
• Continuous two-way connection allowing high-
speed data sampling and near-real-time data retriev-
al. Remote gauge diagnostics are available and the
ability to re-programme the system remotely.
• Timing drift and operator setup error eliminated by
having accurate time available from network time
protocol (NTP) servers on the internet.
• Data delivery costs are known up-front, because the
subscription costs are paid monthly or yearly.
• Real-time data collection allows malfunctions to be
found and fixed, more rapidly.
• Fixed-line broadband systems can also allow backup
access through a dial-up modem.
The disadvantages of broadband technology are:
• A LAN interface is required; this is often difficult to
add to existing tide gauge systems. A land line is
necessary for non-satellite broadband systems.
• Serial port is generally not available, so interfacing
is more difficult.
• Power requirement for broadband modems is quite
high (~1 amp), this can create problems where
mains power is not available.
The following list provides a summary of satellite
systems/services that are being applied or considered
for application by some members of the sea level and
geodetic community for the transmission of sea level
and GPS data:
The INMARSAT/BGAN (Broadband Global Area Network)
service (www.inmarsat.com) began with the launch of F1
and F2 INMARSAT-4 (at 64°E and 53°W respectively) in
2005. These satellite cover Europe, Africa, Asia (partly) and
Americas and will eventually be joined by a third satellite,
F3 I-4 (178°E) to give virtually full world coverage. Presently,
broadband speed of 492 kbits/s is available with a static IP
address. Connection is by LAN, USB or Bluetooth; there is
no serial port connection. Instruments interfaced to this
terminal unit will need a network connection.
BGAN is a drop-in replacement for land-line broadband
modems. It shares most of the advantages and disad-
vantages of conventional broadband, but is capable
of operating in remote areas and is optimized for low-
power operation. BGAN’s biggest advantage over fixed-
line broadband is its independence of local telephone
infrastructure, and during extreme conditions it will most
likely continue operating.
GLOBALSTAR (www.globalstar.com/en/works/ and www.
globalstar.com/en/contact.php) is a commercial global
satellite telephone service based on 40 LEO satellites.
The network is capable of picking up signals from over
80% of Earth’s surface outside extreme polar regions
and some mid-ocean regions. The system offers voice
and data transmission via a secure code division multi-
ple-access (CDMA) satellite signal; there is no perceptible
voice delay. There is sufficient back-up in the system to
prevent call interruption. Signals are distributed to exist-
ing fixed or local cellular-phone networks in over 120
countries.
IRIDIUM (www.iridium.com; and www.deltawavecomm.
com which is a service provider for Iridium and other
systems) is a similar type of system to that of Globalstar,
but claims ‘complete coverage (including oceans, air-
ways and polar regions)’. It comprises a ‘fleet’ of 66 LEO
satellites operating in a fully-meshed network. It serves a
wide range of commercial, governmental and social sec-
tors and designs and sells its own equipment through a
world-wide network of more than 100 partners. Iridium
specifically offers data-transmission services via laptop
and cellphone world-wide, including very remote areas.
ORBCOMM (www.orbcomm.com) consists of a space
segment of 36 LEO satellites with ground segments
called Gateway Earth Stations (GES) and Gateway
Control Centres (GCC). From some areas communi-
cations can be in near-real time. However, where a
receiving satellite cannot communicate with a GES and
a subscriber simultaneously, ORBCOMM operates in
Globalgram mode. In this mode the subscriber data are
relayed through a GES and GCC to an Internet Service
Provider and there may be a delay of several hours in
receiving data. For much of Africa and the Indian Ocean,
the Globalgram mode is the only option.
VSAT (Very Small Aperture Terminal) (www.vsat-systems.
com) satellite terminals are commonly used by the geo-
detic community for communication at remote locations
and via GPS stations co-located with tide gauges; they
are available for use in the C, Ka and Ku bands. Data-
transmission rates are up to several Mbits/s per terminal.
For smaller data-transmission rates, VSATs are clustered in
a network with a central hub for network control. In that
way, the system capacity can be shared among various
users (terminals). For VSAT systems, TDMA (time-division
multiple access) is probably the most common technique
to share a common transmission source among a num-
40
Sea Level Measurement and Interpretation
IOC Manuals and Guides No 14 vol IV
ber of individual users. TDMA technology is relatively
simple: small complexity in receivers and allocation of
the whole frequency (bandwidth) to each user, but only
on a part-time basis. The information for different users
is transferred sequentially in “bursts”. Disadvantages are
the need for network-wide synchronization and related
overheads/inefficiency in bandwidth use. VSAT terminals
each require a relatively precise antenna pointing to the
satellite and can only be used from solid ground. Power
consumption is typically above 50 W.
5.3.3 The Global Telecommunications System
(GTS)
The GTS (www.wmo.ch/web/www/TEM/gts.html;
www.wmo.ch/web/www/ois/Operational_Information/
WMO386/ManOnGTS.html, which is the GTS Manual)
is widely used by all the meteorological organizations
for real-time transmission and interchange of envi-
ronmental data; up to now, however, it has not been
used much by the sea level community. This situation
is changing, given the development by the IOC of an
Indian Ocean Tsunami Warning and Mitigation System,
and that can be thought of as a possible future for the
GLOSS network, and in particular for the GLOSS Fast
Data Centre (GFDC). For the development of the Indian
Ocean tsunami warning system, it has been decided
that data have to be transmitted within 15 minutes of
being recorded at a tide gauge. (A 1-minute average,
5 minute cycle may be adapted for selected sites close
to tsunamigenic source areas). The data would be com-
posed of 1-minute averages to achieve the required
resolution and would need to be made available on
the GTS. This is in fact the actual recommendation for
sea level data transmitted for tsunami warning systems:
making use of the GTS, which works well if geostation-
ary meteorological satellites are used for data trans-
mission. If this is not the case, arrangements with the
national meteorological organizations may be needed
for including and downloading sea level data from the
GTS; automatic transmission by e-mail or FTP will prob-
ably be required from the national sea level agency to
the meteorological institute, GFDC or Tsunami Alert
System, for including the data in GTS.
5.4 Data Transmission Formats
To the extent that the GTS is retained as the preferred
means of transmitting tide gauge data from their
source (the gauges) to the concerned data centres
(notably, PSMSL, UHSLC and national sea level data
centres, the necessary data format is contained in
the WMO Manual on Codes (www.wmo.int/www/
WMOCodes/ManualCodes/WMO306.html).
Sea Level Measurement and Interpretation
41
IOC Manuals and Guides No 14 vol IV
6. Quality Control of Data
42
Sea Level Measurement and Interpretation
Data recovered from a tide gauge always provide time-
series with a particular sampling interval. Even analogue
charts are digitized to provide levels at regular points in
time. Until recently, most data acquired this way have
been archived and distributed by data assembly centres
(DACs) in a quality controlled (QC) and fully documented
form. This results in ‘delayed mode’ data sets. Volume 3
and earlier editions of this Manual dwelt at length on
QC of data in delayed mode. Such QC methods are well
established and will not be repeated here.
However, sea level data are required for many purposes,
and in many applications there is no time to perform a
full QC. For example, during the World Ocean Circulation
Experiment (WOCE), the University of Hawaii Sea-Level
Centre (UHSLC) was established as the ‘fast delivery’
DAC, with the British Oceanographic Data Centre
(BODC) as the ‘delayed mode’ WOCE DAC. The UHSLC
was tasked with the assembly, quality control and dis-
tribution of sea level data from WOCE gauges within
several weeks, comparable to the delay, at the time, in
the delivery of satellite altimeter data. Meanwhile, BODC
had the task to assemble and supply sea level data from
the WOCE network to the full extent of quality control
within 18–24 months from data collection.
More recently, there has been an emphasis on mak-
ing as many GLOSS gauges as possible deliver data
in nearreal time, i.e. typically within an hour. This
requirement has arisen for several reasons. First, with
real-time data, it is immediately obvious when prob-
lems with a gauge have occurred. Second, the data
become available for many other applications within
‘operational oceanography’, e.g. for flood warn-
ing or for assimilation of sea level data into ocean
circulation models. The data are also then useful for
tsunami warning systems in certain areas. The GLOSS
programme has defined the UHSLC as the ‘GLOSS
Real-Time Centre’ in addition to the existing ‘Fast
Centre’ responsible for producing hourly values for
monitoring and models.
If sea level data are used in near-real-time applica-
tions, then the operational system has to be robust
enough not to be perturbed when bad data are
recorded (e.g. data spikes). One way to guard against
bad data is to have continuous human oversight of
the data stream (e.g. as occurs in the UK Storm
Tide Forecasting Service for flood warning). Real-
time quality control (RTQC) software is now being
developed by several groups. For example, in Europe
the Spanish Ports Authority (Puertos del Estado) has
developed an automatic quality control of sea level
data for detection of spikes, gaps, etc. before data
is displayed on the public web-page and assimilated
into a storm surge forecasting system. Information
about this software and the algorithms for spike
detection can be obtained from Begoña Pérez.
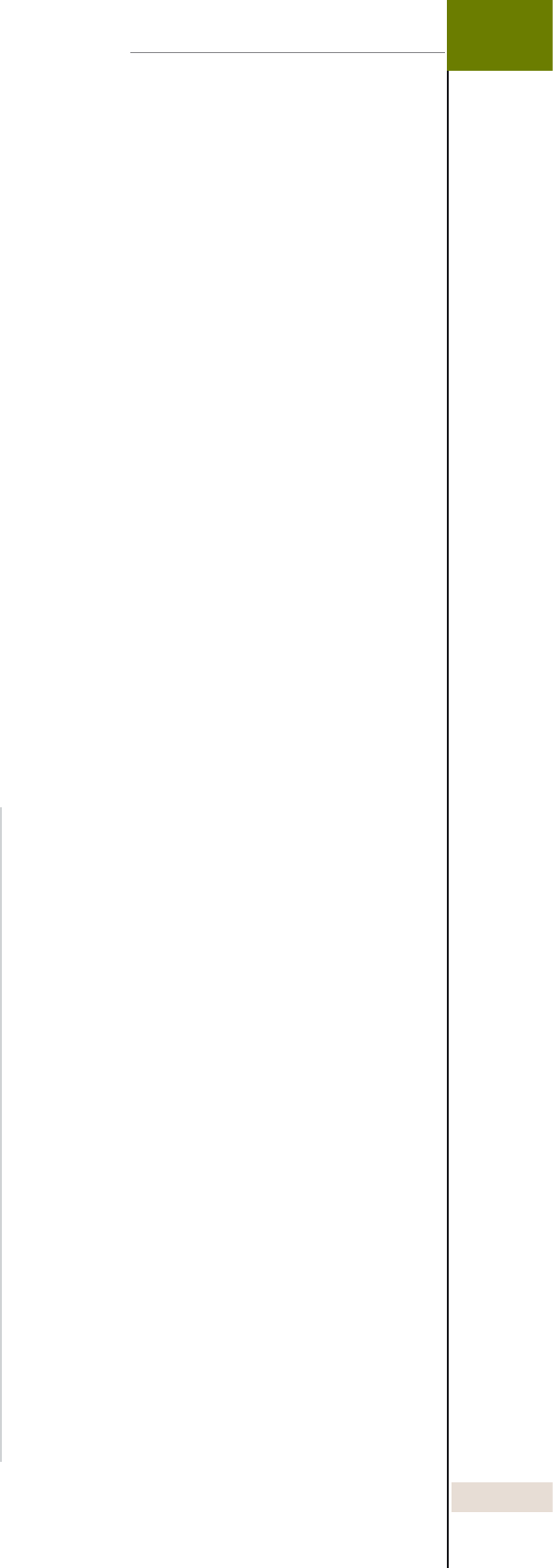
IOC Manuals and Guides No 14 vol IV
Sea Level Measurement and Interpretation
43
7. Training Materials
and Contacts
The PSMSL maintains web pages (www.pol.ac.uk/psmsl/
training/) that provide access to training materials devel-
oped both by itself and by other agencies, primarily as
part of GLOSS development. These materials include:
• Reading list (1) Books on tides and sea levels, includ-
ing IPCC Reports
• Reading list (2) Geodesy, GPS and other useful infor-
mation
• Reading list (3) Satellite altimetry information
• Reading list (4) Further reading on the Web
• Manuals, including the IOC tide gauge training
manuals, the present volume included
• Powerpoint files
• Brochures in various languages
• Descriptive overviews of sea level recording in each
country or region
• Publications relevant to the PSMSL and GLOSS
• GLOSS demonstration CD contents, January 2005
• Training courses organized by IOC/GLOSS and other
organizations
• Tidal analysis and prediction packages
• Cross-wavelet and wavelet-coherence software
• A list of tide gauge manufacturers and suppliers
• Tide gauge experiences
Technical experts who may be asked to provide advice
on tide gauges and related topics are shown on the
following page.
In addition, the PSMSL provides a set of useful contacts
in each country (http://www.pol.ac.uk/psmsl/sea_level_
contacts.html). Such contact information becomes
out-of-date rapidly and the PSMSL would be grateful to
know of errors and omissions (via psmsl@pol.ac.uk).
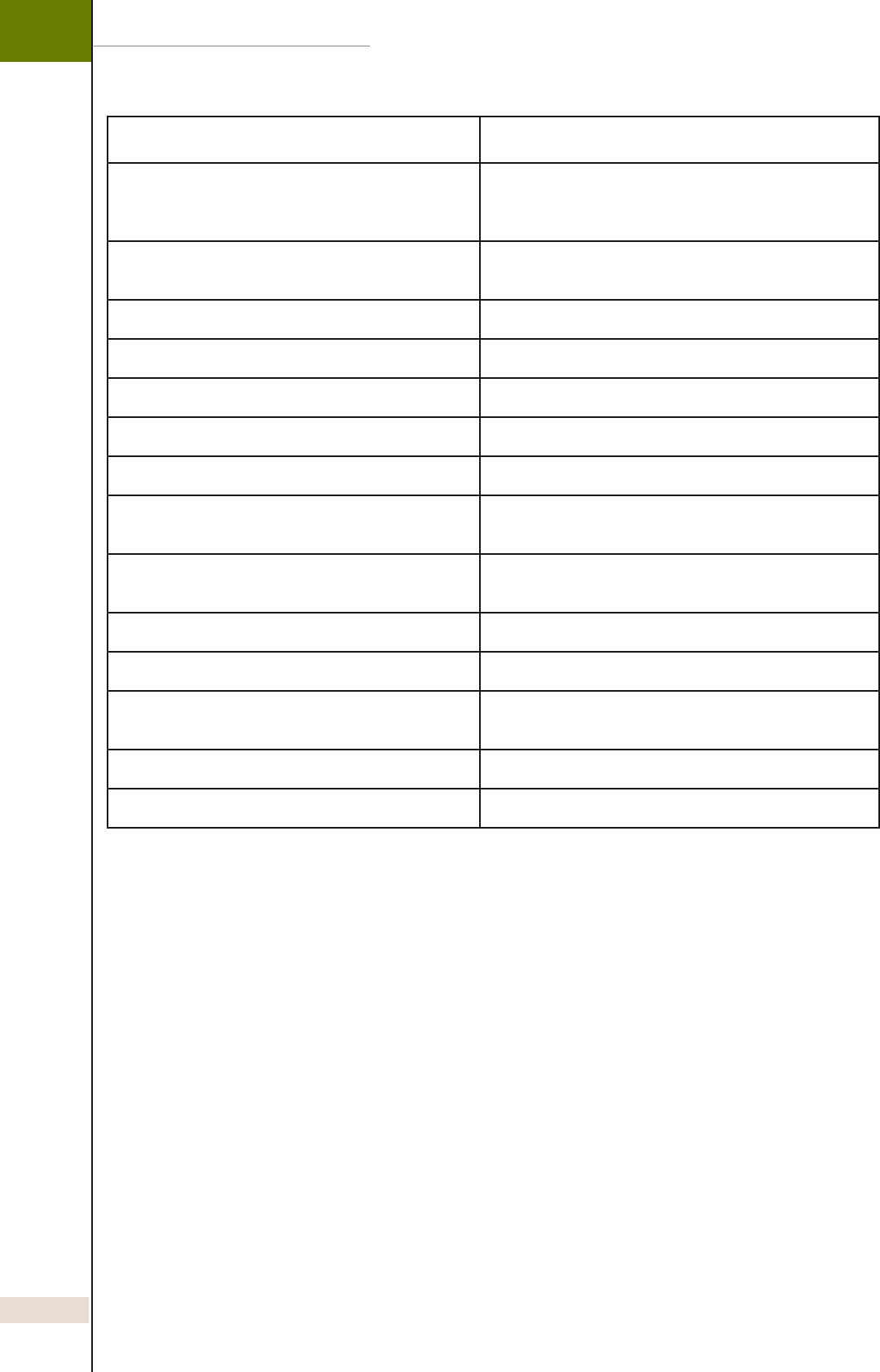
IOC Manuals and Guides No 14 vol IV
44
Sea Level Measurement and Interpretation
Acoustic Gauges with Sounding Tube Allan Suskin, NTF Australia. allan@pacific.ntf.flinders.edu.au
Bernie Kilonsky, UHSLC, USA kilonsky@soest.hawaii.edu
Acoustic Gauges without Sounding Tube (SRD) Begoña Pérez Gómez, Puertos del Estado, Spain
bego@puertos.es
Ruth Farre hydrosan@iafrica.com
Single-Transducer Systems Dov Rosen, NIO Israel rosen@ocean.org.il
Peter Foden, POL UK prf@pol.ac.uk
Multiple-Transducer Systems (‘B’ gauges) Peter Foden, POL UK prf@pol.ac.uk
Pressure Transducers in Stilling Wells As for other pressure systems
Bubbler Pressure Gauges David Smith, POL UK des@pol.ac.uk
Bottom-Mounted Pressure Gauges Peter Foden, POL UK prf@pol.ac.uk
Float Gauges in Stilling Wells Mark Merrifield, UHSLC USA markm@soest.hawaii.edu
Optical Shaft Encoders (especially for river and lake
records)
Dave Johnstone, NIWA NZ d.johnstone@niwa.cri.nz
Radar Tide Gauges Peter Foden, POL prf@pol.ac.uk
Begoña Pérez, Puertos del Estado, bego@puertos.es
Advice on Data-Transmission Methods David Meldrum, SAMS UK d.meldrum@sams.ac.uk
Advice on Geodetic Methods:
GPS Mike Bevis, Ohio State University, USA
mbevis@osu.edu
DORIS Anny Cazenave, GRGS, France anny.cazenave@cnes.fr
Absolute Gravity Simon Williams, POL UK sdwil@pol.ac.uk
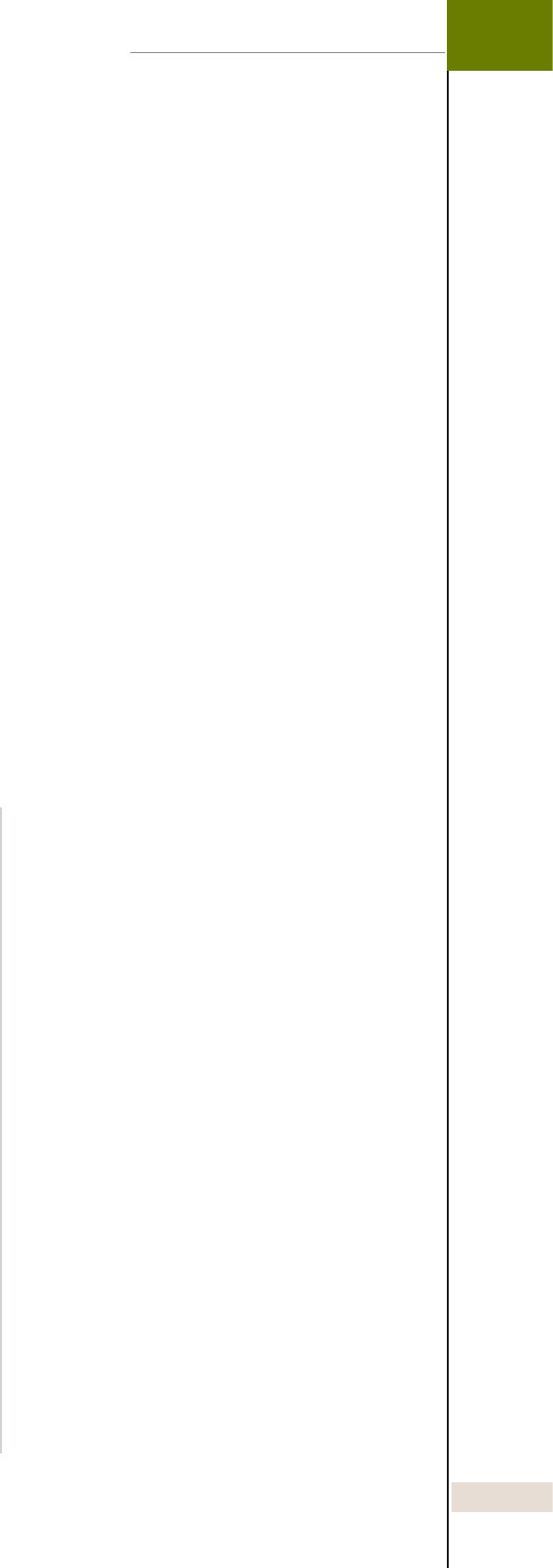
IOC Manuals and Guides No 14 vol IV
Sea Level Measurement and Interpretation
45
8. New Techniques for Sea Level
Measurements
8.1 GPS on Buoys
Radar altimetry is widely used for various sea-level-
related research. Owing to unknown post-launch
biases and the aging of satellite electronic system
components, a consistent and long-term stable off-
shore height reference is needed. Some satellites are
passing offshore oil rigs equipped with tide gauges
and GPS. However, these locations are rare. With
the increasing accuracy of GPS for offshore applica-
tions, various groups have developed GPS-equipped
buoys for the determination of the instantaneous
sea-surface heights (iSSH). While in the past only
a few calibration experiments were carried out for
radar altimetry, in 2001 GPS buoys were successfully
used during the calibration/validation campaigns of
Jason-1 and ENVISAT. More recent applications are for
tsunami detection (e.g. Kato et al. 2005).
One of the earlier calibration experiments was suc-
cessfully carried out by Hein (Hein et al. 1990).
Between 1999 and 2003, GPS water level measure-
ment was coordinated by a special study group of the
International Association of Geodesy (see http://www.
gfz-potsdam.de/pb1/op/altimetry/SSG_buoys/index.
html and references herein).
Depending on the type of application, logistic require-
ments, and sea state, different types of buoys are used.
The most simple and straightforward types are lifesaver-
type buoys fitted directly with a GPS antenna (Watson
et al., 2004; Figure 8.1), and towed by, for example, a
vessel. Larger buoys, such as toroid buoys (Schöne et
al., 2001; Figure 8.3) or barrel buoys, can be moored
for long-term applications, but are in need of additional
sensors to account for the buoy movement. Examples
of height time-series from GPS buoys are shown in
Figures 8.2 and 8.4.
To estimate the iSSH, GPS measurements are used in
a differential mode. The computed value is further
corrected for the dipping and the tilting of the buoy.
The accuracy of GPS for the height component is
better than a few centimetres, allowing very precise
measurements of the iSSH. Even with a decrease in
accuracy with increasing distance from the GPS refer-
ence station at the shore, the resulting iSSH values are
precise enough for calibrating radar altimeters.
With the technological advances in hardware and new
developments in GPS processing, small lightweight
systems will be available to support the massive appli-
cation in different fields. Fields of future research are
the application of precise point positioning techniques
to reduce the amount of data to be transferred, low-
power consumption equipment, and new data transfer
techniques for offshore applications.
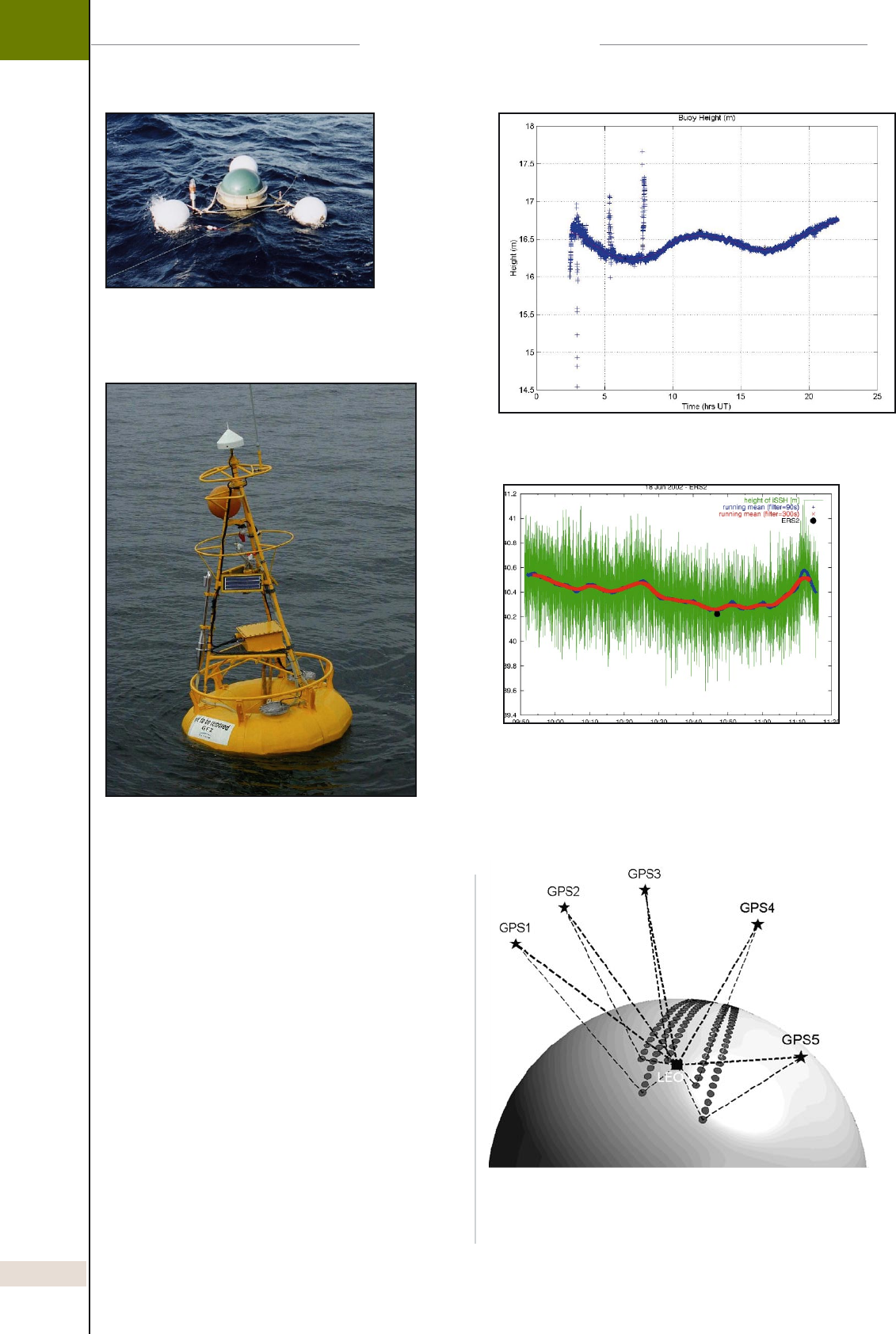
IOC Manuals and Guides No 14 vol IV
46
Sea Level Measurement and Interpretation Sea Level Measurement and Interpretation
8.2 GNSS Reflectometry
Once the European satellite constellation GALILEO starts
transmission of navigation signals in 2008, an infra-
structure of three global satellite navigation systems
will be available for commercial and scientific applica-
tions. GALILEO, together with the US Global Positioning
System (GPS) and the Russian GLONASS (Global’naya
Navigatsionannaya Sputnikovaya Sistema) constellation,
offers novel opportunities for remotely sensing the Earth’s
atmosphere and oceans with dense spatial and temporal
coverage.
The high reflectivity of GPS signals in the L-band fre-
quency range (1.2276 and 1.57542 GHz) at water and
ice- or snow-covered surfaces allows for the detection
and analysis of reflected GNSS (Global Navigation Satellite
System) signals. The passive reflectometry and interfer-
ometry system (PARIS) was the first concept proposed for
ocean altimetry using GNSS (Martín-Neira, 1993). In the
Figure 8.1 The University of Tasmania GPS
buoy (C. Watson, personal communication).
Figure 8.2 Height time-series (SSG 2.194, 2003).
Figure 8.3 The GFZ Potsdam GPS buoy.
Figure 8.4 Height time-series from a GPS buoy;
the time-series is dominated by sea state. The
smoothed curves are the running mean filtered
time-series; the dot is the actual RA measurement
used for comparison.
Figure 8.5 The PARIS concept.
IOC Manuals and Guides No 14 vol IV
47
PARIS scheme, direct and ocean-reflected signals are
detected by spaceborne receivers, and altimetric height
information is extracted from the delay in arrival times
of the reflected signals relative to the direct signals
(Figure 8.5).
Using dedicated GNSS receiver instruments, sea level
heights accurate up to ~5 cm were determined in a
number of airplane and balloon experiments (Garrison
and Katzberg, 2000; Rius et al., 2002; Ruffini et al.,
2004). In ground-based GNSS reflection experiments
above an artificial pond, Martín-Neira et al. (2002)
achieved an accuracy of 1 cm, and at an altitude of
about 500 m above Crater Lake (Oregon, USA) altimetric
height values accurate to 2 cm were obtained (Treuhaft
et al., 2001). Anderson (2000) reported on 12-cm accu-
racy in near-surface measurements at heights between
7 and 10 m. In addition, the dependency of the code
correlation function on the slope characteristics of
the reflecting surface can be used to infer sea-surface
roughness as well as wind speed and direction (GNSS
scatterometry) (Katzberg et al., 2001; Cardellach et al.,
2003; Germain et al., 2004).
First spaceborne observations of signal reflections are
described by Pavelyev et al. (1996) and Lowe et al.
(2002); later, signatures of coherent GPS reflections at
grazing incidence angles were found in radio occul-
tation data observed by the GPS/MET, CHAMP and
SAC-C satellites (Beyerle et al., 2002; Hajj et al., 2004).
CHAMP and SAC-C are both already supplied with
nadir-looking antennas to detect reflected GPS signals;
efforts are now being made to establish space-based
GNSS altimetry as a viable remote-sensing technique
(e.g. Hajj and Zuffada, 2003).
IOC Manuals and Guides No 14 vol IV
References
This list contains references of interest to particular sections of the Manual, which may be used as further sources of information for that
section. Some references are referred to explicitly in the text, while others are not. Some references appear in more than one section.
48
Sea Level Measurement and Interpretation
Section 2.1
IOC, 1990. Global Sea Level Observing System (GLOSS)
Implementation Plan. Intergovernmental Oceanographic
Commission, Technical Series No. 35, 90pp.
Section 2.2
Vassie, J.M., Woodworth, P.L. and Holt, M.W., 2004. An
example of North Atlantic deep ocean swell impact-
ing Ascension and St. Helena islands in the central
South Atlantic. Journal of Atmospheric and Oceanic
Technology, 21(7), 1095-1103.
Section 2.3
Pugh, D.T., 2004. Changing sea levels. Effects of
tides, weather and climate. Cambridge: Cambridge
University Press, 280pp.
Woodworth, P.L., Pugh, D.T., Meredith, M.P. and Blackman,
D.L., 2005. Sea level changes at Port Stanley, Falkland
Islands. Journal of Geophysical Research, Vol. 110,
C06013, doi:10.1029/2004JC002648.
Section 2.4
Cartwright, D.E., 1999. Tides - a scientific history.
Cambridge: Cambridge University Press, 292pp.
Cartwright, D.E., Edden, A.C., Spencer, R. and Vassie,
J.M, 1980. The tides of the northeast Atlantic Ocean.
Philosophical Transactions of the Royal Society of
London. A 298, 87-139.
Doodson, A.T. and Warburg, H.D., 1941. Admiralty manu-
al of tides. Her Majesty’s Stationery Office, London.
Filloux, J.H., 1980. Pressure fluctuations on the open
ocean floor over a broad frequency range. Journal of
Physical Oceanography. 10(12) 1959-1971.
Forrester, W.D., 1983. Canadian Tidal Manual. Department
of Fisheries and Oceans, Ottawa, 138pp.
Open University, 1989. Waves, Tides and Shallow-Water
Processes. Open University Oceanography Series Vol.4.
Oxford: Pergamon Press in association with the Open
University, 187pp.
Pugh, D.T., 1987. Tides, Surges and Mean Sea level: a
handbook for engineers and scientists. Chichester:
Wiley, 472pp.
Pugh, D.T., 2004. Changing sea levels. Effects of tides,
weather and climate. Cambridge: Cambridge University
Press, 280pp.
Shum, C.K., Woodworth, P.L., Andersen, O.B., Egbert, G.,
Francis, O., King, C., Klosko, S., Le Provost, C., Li, X.,
Molines, J-M., Parke, M., Ray, R., Schlax, M., Stammer,
D., Tierney, C., Vincent, P. and Wunsch, C., 1997.
Accuracy assessment of recent ocean tide models.
Journal of Geophysical Research, 102(C11), 25173-
25194.
Spencer, R. and Vassie, J.M., 1997. The evolution of deep
ocean pressure measurements in the U.K. Progress in
Oceanography, 40, 423-435.
Section 2.4.1
Caldwell, P.C., 1991. Sea Level Data Processing Software
on IBM PC Compatible Microcomputers. TOGA Sea
Level Centre, University of Hawaii.
Doodson, A.T., 1928. The analysis of tidal observations.
Philosophical Transactions of the Royal Society, A, 227,
223-279.
FIAMS, 1990. Tidal Time-Series Software Designed for use
on a Personal Computer. FIAMS Tidal Laboratory. The
Flinders University of South Australia.
Foreman, M., 1997. Manual for tidal height analysis and
prediction. Institute of Ocean Sciences, Patricia Bay,
Victoria, British Columbia. Pacific Marine Science Report
77-10. (Unpublished Manuscript).
Munk, W.H. and Cartwright, D.E., 1966. Tidal spectros-
copy and predictions. Philosophical Transactions of the
Royal Society, A, 259, 533-581.
Murray, M.T., 1963. Tidal analysis with an electronic digital
computer. Cahiers Oceanographique. 699-711.
Section 2.5
Alvarez Fanjul, E., Pérez, B., and Rodríguez, I., 2001.
Nivmar: a storm surge forecasting system for Spanish
Waters. Scientia Marina, 65, 145-154.
Flather, R.A., 1984. A numerical model investigation of
the storm surge of 31 January and 1 February 1953
in the North Sea. Quarterly Journal of the Royal
Meteorological Society, 110, 591-612.
Flather, R.A., 2000. Existing operational oceanography.
Coastal Engineering, 41(1-3), 13-40.
Rossiter, J.R., 1954. The North Sea storm surge of 31
January and 1 February, 1953. Philosophical Transactions
of the Royal Society, A, 246, 371-400.
Wolf, J. and Flather, R.A., 2005. Modelling waves and surg-
es during the 1953 storm. Philosophical Transactions of
the Royal Society, 363, 1359-1375.
Section 2.6
Bryant, E., 2001. Tsunami: the underrated hazard.
Cambridge University Press.
Leonard, M. 2006. Analysis of tide gauge records
from the December 2004 Indian Ocean Tsunami.
Geophysical Research Letters, 33, L17602, doi:10.1029/
2006GL026552.
Merrifield, M.A., Firing, Y.L., Aarup, T., Agricole, W.,
Brundrit, G., Chang-Seng, D., Farre, R., Kilonsky, B.,
Knight, W., Kong, L., Magori, C., Manurung, P.,
McCreery, C., Mitchell, W., Pillay, S., Schindele, F.,
IOC Manuals and Guides No 14 vol IV
Sea Level Measurement and Interpretation
Shillington, F., Testut, L., Wijeratne, E.M.S., Caldwell,
P., Jardin, J., Nakahara, S., Porter, F.-Y. and Turetsky, N.,
2005. Tide gauge observations of the Indian Ocean
tsunami, 26 December, 2004. Geophysical Research
Letters, 32, L09603, doi: 10.1029/2005GL022610.
Section 2.7
Church, J.A., Gregory, J.M., Huybrechts, P., Kuhn, M.,
Lambeck, K., Nhuan, M.T., Qin, D. and Woodworth, P.L.,
2001. Changes in sea level. In Climate Change, 2001:
The Scientific Basis. Contribution of Working Group I to
the Third Assessment Report of the Intergovernmental
Panel on Climate Change. (eds. Houghton J.T., Ding
Y., Griggs D.J., Noguer M., van der Linden P.J., Dai X.,
Maskell K. and Johnson C.A.). Cambridge: Cambridge
University Press, 881pp.
Woodworth, P.L. and Player, R., 2003. The Permanent
Service for Mean Sea Level: an update to the 21st cen-
tury. Journal of Coastal Research, 19, 287-295.
Woodworth, P.L., Gregory, J.M. and Nicholls, R.J., 2004.
Long term sea level changes and their impacts. pp.717-
752 (chapter 18) in The Sea, Volume 13, edited by A.R.
Robinson, J. McCarthy and B.J. Rothschild. Harvard
University Press.
Section 2.8
Hamon, B.V. and Middleton J.F., 1989. Return periods of
extreme sea levels: the exceedance probability method.
International Hydrographic Review, LXVI(2), 165-177.
Lennon, G.W., 1963. A frequency investigation of abnor-
mally high tidal levels at certain west coast ports.
Proceedings of the Institution of Civil Engineers, 425,
451-484.
Middleton, J.F. and Thompson, K.R., 1986. Return periods
of extreme sea levels from short records. Journal of
Geophysical Research, 491, 11707-11716.
Pugh, D.T. and Vassie, J.M., 1979. Extreme sea levels from
tide and surge probability. Proceedings 16th Coastal
Engineering Conference, 1978, Hamburg. American
Society of Civil Engineers, New York, 41, 911-930.
Smith, R.L., 1986. Extreme value theory based on the
r largest annual events. Journal of Hydrology, 486,
27-43.
Suthons, C.T., 1963. Frequency of occurrence of abnor-
mally high sea levels on the east and south coasts
of England. Proceedings of the Institution of Civil
Engineers, 425, 443-449.
Tawn, J.A. and Vassie, J.M., 1989. Extreme sea levels:
the joint probabilities method revisited and revised.
Proceedings of the Institution of Civil Engineers, Part 2,
87, 429-442.
Tawn, J.A., 1992. Estimating probabilities of extreme sea
levels. Applied Statistics, 41, 77-93.
Section 3.1
IOC, 2004. New technical developments in sea and
land level observing systems. Proceedings of meeting
October 14-16 2003, Paris, France. IOC Workshop
Report No 193. 174pp & Annexes.
Section 3.1.1
Pugh, D.T., 1987. Tides, Surges and Mean Sea level: a
handbook for engineers and scientists. Chichester:
Wiley, 472pp.
Section 3.2
IOC, 1985. Manual on Sea level Measurement and
Interpretation. Volume 1 - Basic procedures.
Intergovernmental Oceanographic Commission
Manuals and Guides No. 14. IOC, Paris, 83pp.
Lennon, G.W., 1971. Sea level instrumentation, its limi-
tations and the optimisation of the performance of
conventional gauges in Great Britain. International
Hydrographic Review, 48(2), 129-147.
Noye, B.J., 1974a. Tide-well systems I: some non-linear
effects of the conventional tide well. Journal of Marine
Research, 32(2), 129-135.
Noye, B.J., 1974b. Tide-well systems II: the frequency
response of a linear tide-well system. Journal of Marine
Research, 32(2), 155-181.
Noye, B.J., 1974c. Tide-well systems III: improved interpre-
tation of tide-well records. Journal of Marine Research,
32(2), 193-194.
Section 3.3.1
Pugh, D.T., 1972. The physics of pneumatic tide gauges.
International Hydrographic Review, 49(2), 71–97.
Pugh, D.T., 1978. Techniques for the measurement
of sea level around atolls. In: D.R. Stoddart and
R.E. Johannes (eds.) Coral reefs: research meth-
ods, Monograph on Oceanographic Methodology.
UNESCO, Paris, pp.93–108.
Section 3.3.4
IOC, 1994. Manual on Sea level Measurement and
Interpretation. Volume 2 - Emerging Technologies.
Intergovernmental Oceanographic Commission
Manuals and Guides No. 14. IOC, Paris, 72pp.
Spencer, R., Foden, P.R., McGarry, C., Harrison, A.J., Vassie,
J.M., Baker, T.F., Smithson, M.J., Harangozo, S.A. and
Woodworth, P.L., 1993. The ACCLAIM program in
the South Atlantic and Southern oceans. International
Hydrographic Review, 70, 7-21.
Woodworth, P.L., Vassie, J.M., Spencer, R. and Smith, D.E.,
1996. Precise datum control for pressure tide gauges.
Marine Geodesy, 19, 1-20.
Section 3.3.5
Lennon, G.W., 1971. Sea level instrumentation, its limi-
tations and the optimisation of the performance of
conventional gauges in Great Britain. International
Hydrographic Review, 48(2), 129-147.
Section 3.3.6
Spencer, R. and Vassie, J.M., 1997. The evolution of deep
ocean pressure measurements in the U.K. Progress in
Oceanography, 40, 423-435.
49
IOC Manuals and Guides No 14 vol IV
Section 3.4.1
Gill, S.K., Mero, T.N. and Parker, B.B., 1993. NOAA
Operational Experience with Acoustic Sea Level
Measurement. pp. 13-25 in IOC (1994) ibid.
Joseph, A., Peshwe, V.B., Vijaykumar and Desa E. 1997.
Effects of water trapping and temperature gradient in
a NGWLMS gauge deployed in Zuari estuary, Goa. pp.
73-82 in Proceedings of the Symposium on Ocean
Electronics SYMPOL-”97 (ed. P.R.S. Pillai), Cochin
University of Science and Technology, India.
Lennon, G.W., Woodland, M.J. and Suskin, A.A., 1993.
Acoustic Sea Level Measurements in Australia. pp.
26-39 in IOC (1994) ibid.
Shih, H.H. and Baer, L., 1991. Some errors in tide
measurement caused by dynamic environment. pp.
641-671 in Tidal Hydrodynamics (ed. B. Parker), John
Wiley & Sons, 883pp.
Vassie, J.M., Woodworth, P.L., Smith, D.E. and Spencer,
R., 1993. Comparison of NGWLMS, Bubbler and Float
Gauges at Holyhead. pp. 40-51 of IOC (1994) ibid.
Section 3.4.2
Alvarez Fanjul, E., Pérez, B., and Rodríguez, I., 2001.
Nivmar: a storm surge forecasting system for Spanish
Waters. Scientia Marina, 65, 145-154.
IOC, 2003. Workshop on new technical develop-
ments in sea and land level observing systems.
Intergovernmental Oceanographic Commission.
Workshop Report No. 193. Paris, France 14-16
October 2003.
Pérez, B. and Rodriguez, I., 1994. Redmar. Spanish
Harbours tide gauge network. Processing of tidal
data. Clima Maritimo Report 57.
Section 3.5
IOC, 2003. Workshop on new technical develop-
ments in sea and land level observing systems.
Intergovernmental Oceanographic Commission.
Workshop Report No. 193. Paris, France 14-16
October 2003.
Martín, B., Pérez, B., Alvarez-Fanjul, E., 2005. The ESEAS-
RI Sea Level Test Station: Reliability and Accuracy of
Different Tide Gauges. International Hydrographic
Review, Vol.6 No. 1. 44-53.
Woodworth, P.L. and Smith, D.E., 2003. A one-year
comparison of radar and bubbler tide gauges at
Liverpool. International Hydrographic Review, 4(3),
42-49.
Section 4
Emery, K.O. and Aubrey, D.G., 1991. Sea levels, Land
levels and Tide Gauges. New York: Springer Verlag,
237pp.
Section 4.4.1
Bevis, M., Scherer, W. and Merrifield, M., 2002. Technical
issues and recommendations related to the instal-
lation of continuous GPS stations at tide gauges.
Marine Geodesy, 25, 87-99.
Carter, W.E., (ed.) 1994. Report of the Surrey Workshop of
the IAPSO Tide Gauge Benchmark Fixing Committee.
Report of a meeting held 13-15 December 1993
at the Institute of Oceanographic Sciences Deacon
Laboratory. NOAA Technical Report NOSOESOOO6,
8lpp.
Carter, W.E., Aubrey, D.G., Baker, T.F., Boucher, C., Provost,
C. Le, Pugh, D.T., Peltier, W.R., Zumberge, M., Rapp,
R.H., Schutz, R.E., Emery, K.O. and Enfeld, D.B., 1989.
Geodetic Fixing of Tide Gauge Benchmarks. Woods
Hole Oceanographic Institution Technical Report,
WHOI-89-31, 44pp.
Neilan, R., Van Scoy, P.A. and Woodworth, P.L., (eds)
1998. Proceedings of the Workshop on Methods For
Monitoring Sea Level: GPS And Tide Gauge Benchmark
Monitoring, GPS altimeter calibration Workshop orga-
nized by the IGS and PSMSL, Jet Propulsion Laboratory,
17-18 March 1997. 202pp.
Section 4.4.2
Bevis, M., Scherer, W. and Merrifield, M., 2002. Technical
issues and recommendations related to the installation
of continuous GPS stations at tide gauges. Marine
Geodesy, 25, 87-99.
Ge, M., Gendt, G., Dick, G., Zhang., F. P. and Reigber,
C., 2005. Impact of GPS satellite antenna off-
sets on scale changes in global network solutions.
Geophysical Research Letters, 32, L06310, doi :
10.1029/2004GL022224.
Nerem, R.S., vanDam, T.M. and Schenewerk, M.S. 1997.
A GPS Network for Monitoring Absolute Sea Level in
The Chesapeake Bay: BAYONET. pp. 107-115 of Neilan
et al. (1998) ibid.
Neilan, R., Van Scoy, P.A. and Woodworth, P.L., (eds)
1998. Proceedings of the Workshop on Methods
For Monitoring Sea Level: GPS And Tide Gauge
Benchmark Monitoring, GPS altimeter calibra-
tion Workshop organized by the IGS and PSMSL,
Jet Propulsion Laboratory, 17-18 March 1997.
202pp.
Teferle, F.N., Bingley, R.M., Williams, S. D. P., Baker,
T. F. and Dodson A.H., 2006. Using continuous
GPS and absolute gravity to separate vertical
land movements and changes in sea level at tide
gauges in the UK. Philosophical Transactions of
the Royal Society, London. 364, doi: 10.1098/
rsta.2006.1746.
Section 4.4.3
Cazenave, A., Soudarin, L., Cretaux, J-F. and Le Provost, C.
1999. Sea level changes from TopexPoseidon altimetry
and tide gauges, and vertical crustal motions from
DORIS. Geophysical Research Letters, 26, 2077-2080.
Section 4.4.4
Niebauer, T.M., Sasagawa, G.S. Faller, J.E., Hilt, R. and
Klopping, F., 1995. A New Generation of Absolute
Gravimeters. Metrologia, 32 (3), 159-180.
50
Sea Level Measurement and Interpretation
IOC Manuals and Guides No 14 vol IV
Open University, 1989. Waves, Tides and Shallow-Water
Processes. Open University Oceanography Series Vol.4.
Oxford: Pergamon Press in association with the Open
University, 187pp.
Sasagawa, G., Klopping, F.J., Niebauer, T.M., Faller, J.E.
and Hilt, R., 1995. Intracomparison Tests of the FG5
Absolute Gravity Meters. Geophysical Research Letters,
22, 461-464.
Soudarin, L., Cretaux, J-F. and Cazenave, A., 1999. Vertical
Crustal Motions from the DORIS Space Geodesy System.
Geophysical Research Letters, 26, 1207-1210.
Teferle, F.N., Bingley, R.M., Williams, S. D. P., Baker, T. F.
and Dodson A.H., 2006. Using continuous GPS and
absolute gravity to separate vertical land movements
and changes in sea level at tide gauges in the UK.
Philosophical Transactions of the Royal Society, London.
364, doi: 10.1098/rsta.2006.1746.
Section 8.1
Hein, G. W., Landau, H. and Blomenhofer, H., 2000.
Determination of instantaneous sea surface, wave
heights, and ocean currents using satellite observations
of the Global Positioning System. Marine Geodesy, 14,
217-224.
Kato, T., Terada, Y., Ito, K., Hattori, R., Abe, T., Miyake, T.,
Koshimura, S. and Nagai, T., 2005. Tsunami due to the
5 September 2004 off the Kii peninsula earthquake,
Japan, recorded by a new GPS buoy. Earth Planets
Space, 57, 297–301.
Schöne, T., Braun, A. and Reigber, C., 2001. Altimetrie
und meeresspiegel - möglichkeiten und grenzen der
Beobachtung, Zürich. GAIA 10, 3, 226-229.
SSG2.194., 2003. Final Report of the SSG2.194 GPS Water
Level Measurements Project. http://www.gfz-potsdam.
de/pb1/op/altimetry/SSG_buoys/index.html.
Watson, C., White, N., Coleman, R., Church, J., Morgan,
P. and Govind, R., 2004. TOPEX/Poseidon and Jason-1:
absolute calibration in Bass Strait, Australia. Marine
Geodesy, 27(1-2), 107-132.
Section 8.2
Anderson, K.D., 2000. Determination of water level and
tides using interferometric observations of GPS signals.
Journal of Atmospheric and Oceanic Technology, 17(8),
1118-1127, doi :10.1175/1520-0426.
Beyerle, G., Hocke, K., Wickert, J., Schmidt, T. and
Reigber, C., 2002. GPS radio occultations with
CHAMP: A radioholographic analysis of GPS signal
propagation in the troposphere and surface reflections.
Journal of Geophysical Research, 107(D24), 4802, doi
:10.1029/2001JD001402.
Cardellach, E., Ruffini, G., Pino, D., Rius, A., Komjathy,
A. and Garrison, J.L., 2003. Mediterranean Ballon
Experiment: Ocean wind speed sensing from the
stratosphere using GPS reflections. Remote Sensing of
the Environment, 88(3), 351-362, doi :10.1016/S0034-
4257(03)00176-7.
Garrison, J.L. and Katzberg, S.J., 2000. The application of
reflected GPS signals to ocean remote sensing. Remote
Sensing of the Environment, 73, 175-187.
Germain, O., Ruffini, G., Soulat, F., Caparrini, M., Chapron,
B. and Silvestrin, P., 2004. The Eddy Experiment: GNSS-
R speculometry for directional sea-roughness retrieval
from low altitude aircraft. Geophysical Research Letters,
L21307, doi : 10.1029/2004 GL020991.
Hajj, G.A. and Zuffada, C., 2003. Theoretical descrip-
tion of a bistatic system for ocean altimetry using
the GPS signal. Radio Science, 38(5), doi :10.1029/
2002RS002,787.
Hajj, G.A. et al. 2004. CHAMP and SAC-C atmospheric
occultation results and intercomparisons. Journal of
Geophysical Research, 109, D06109, doi:10.1029/
2003JD003909.
Katzberg, S.J., Walker, R.A., Roles, J.R., Lynch, T. and Black,
P.G. 2001. First GPS signals reflected from the interior
of a tropical storm: preliminary results from hurricane
Michael. Geophysical Research Letters, 28(10), 1981-
1984.
Lowe, S.T., LaBrecque, J.L., Zuffada, C., Romans, L.J.,
Young, L.E. and Hajj, G.A., 2002. First spaceborne
observation of an Earth-reflected GPS signal. Radio
Science, 37(1), doi : 10.1029/2000RS002539.
Martín-Neira, M., 1993. A passive reflectometry and
interferometry system {PARIS): Application to ocean
altimetry. ESA Journal, 17, 331-355.
Martín-Neira, M., Colmenarejo, P., Ruffini, G. and Serra,
C., 2002. Altimetry precision of 1 cm over a pond using
the wide-lane carrier phase of GPS reflected signals.
Canadian Journal of Remote Sensing, 28(3), 394-403.
Pavelyev, A.G., Volkov, A.V., Zakharov, A.I., Krutikh, S.A.
and Kucherjavenkov, A.I., 1996. Bistatic radar as a
tool for Earth investigation using small satellites. Acta
Astronautica, 39(9-12), 721-730.
Rius, A., Aparicio, J.M., Cardellach, E., Martín-Neira, M.
and Chapron, B., 2002. Sea surface state measure-
ment using GPS reflected signals. Geophysical Research
Letters, 29(23), doi :10.1029/ 2002GL015,524.
Ruffini, G., Soulat, F., Caparrini, M., Germain, O. and
Martín-Neira, M., 2004. The Eddy Experiment: Accurate
GNSS-R ocean altimetry from low altitude aircraft.
Geophysical Research Letters, L12306, doi :10.1029/
2004GL019994.
Treuhaft, R.N., Lowe, S.T., Zuffada, C. and Chao, Y., 2001.
2-cm GPS altimetry over Crater Lake. Geophysical
Research Letters, 22(23), 4343-4346.
Sea Level Measurement and Interpretation
51
IOC Manuals and Guides No 14 vol IV
52
Sea Level Measurement and Interpretation
APPENDIX I.
GLOSS Requirements for Tide Gauges
(update from the third edition of the manual)
The aim of any tide gauge recording should be to oper-
ate a gauge which is accurate to better than 1 cm at
all times; i.e. in all conditions of tide, waves, currents,
weather etc. This requires dedicated attention to gauge
maintenance and data quality control. In brief, the major
requirements for GLOSS stations are (IOC, 1997):
• A sampling of sea level, averaged over a period long
enough to avoid aliasing from waves, at intervals of
typically 6 or 15 minutes, or even 1 minute or less if
the instrument is to be used also for tsunami warn-
ing (IOC 1997 states: ‘but in all circumstances the
minimum sampling interval should be one hour’,
which these days is an insufficient sampling for
most agencies);
• Gauge timing be compatible with level accuracy,
which means a timing accuracy better than one
minute (and in practice, to seconds or better, with
electronic gauges);
• Measurements must be made relative to a fixed and
permanent local tide gauge bench mark (TGBM).
This should be connected to a number of auxiliary
marks to guard against its movement or destruc-
tion. Connections between the TGBM and the
gauge zero should be made to an accuracy of a few
millimetres at regular intervals (e.g. annually);
• GLOSS gauges to be used for studies of long term
trends, ocean circulation and altimeter calibra-
tion need to be equipped with GPS receivers (and
monitored possible by other geodetic techniques)
located as close to the gauge as possible;
• The readings of individual sea levels should be
made with a target accuracy of 10 mm;
• Gauge sites should, if possible, be equipped for
recording tsunami signals, implying that the site be
equipped with a pressure sensor capable of 15-sec-
onds or 1-minute sampling frequency, and possibly
for recording wave conditions, implying 1-second
sampling frequency;
• Gauge sites should be also equipped for automatic
data transmission to data centres by means of sat-
ellite, Internet etc., in addition to recording data
locally on site;
• Sea level measurements should be accompanied by
observations of atmospheric pressure, and if pos-
sible winds and other environmental parameters,
which are of direct relevance to the sea level data
analysis.
Regular (e.g. daily) inspection of data will inform
operators when a gauge is malfunctioning, and
lead to overall better long-term data sets. Data
from gauges in polar or other remote locations will
inevitably be inspected less frequently, unless satel-
lite data transmission can be installed. Similarly, data
from the relatively few gauges recording only on
paper charts will be slow to reach centres for qual-
ity control; these must be considered priorities for
upgrading to meet modern standards.
Operators of gauges must always be aware of pos-
sible systematic jumps in sea level time-series when
one form of recording is replaced by a ‘better’
one. All gauges have systematic errors, but those
errors will be irrelevant for time-series work if the
same technique is used throughout. New-technol-
ogy gauges are, by definition, less well understood
than old ones, and they must always be operated
alongside the older ones until sufficient experience
has been acquired.
IOC Manuals and Guides No 14 vol IV
Sea Level Measurement and Interpretation
Any reader of the present Volume of the IOC Manual would do well to also read Volumes 1, 2 and 3. They were
published some years ago (in 1985, 1994 and 2000, respectively), but do contain sections that are still of interest.
The contents of Volume 3 are shown below. Copies of the three earlier volumes can be downloaded from www.
pol.ac.uk/psmsl/manuals
Table of Contents of Manual on Sea Level Measurement and Interpretation, v. III: Reappraisals and recommenda-
tions as of the year 2000, IOC. Manuals and guides; 14
53
APPENDIX II.
Previous volumes of the IOC Manual
on Sea Level Measurement and Interpretation
1. Introduction
1.1 Historical Background
1.2 Tide Gauges
1.3 GLOSS Requirements
1.4 Layout of Volume 3
2. Tide Gauge Technologies
2.1 Acoustic Tide Gauges
2.1.1 Acoustic Gauges with Sounding Tubes
2.1.1.1 The NOAA NGWLMS System
2.1.1.2 The Australian SEAFRAME System
2.1.1.3 Other Users of Acoustic Sounding Tube Gauges and Calibration Comments
2.1.1.4 Similar Hardware Available
2.1.2 Acoustic Gauges in the Open Air
2.1.2.1 Experience in Spain
2.1.2.2 Experience in South Africa
2.2 Pressure Sensor Tide Gauges
2.2.1 Single Transducer Systems
2.2.1.1 The Datum of a Single Transducer Pressure System
2.2.2 Multiple Pressure Transducer Systems (‘B’ Gauges)
2.2.3 Pressure Transducers in Stilling Wells
2.2.4 Bubbler Pressure Gauges
2.2.5 Bottom Mounted Pressure Gauges
2.3 Float Gauges in Stilling Wells
2.4 Radar Tide Gauges and Other New Technologies
2.5 General Principles of Choice of a Tide Gauge Site
2.6 Comments on Desirable Recording Frequency
2.7 Synthesis of the Merits of Different Technologies and Recommendations
3. Data Transmission Methods
3.1 Introduction
3.2 Satellite and Global Mobile Phone Data Links
3.3 Packages Available within GLOSS
IOC Manuals and Guides No 14 vol IV
4. Datums and Datum Connections at Tide Gauges
4.1 Some Definitions (extended from Volume 1)
4.2 Levelling between Local Bench Marks
4.3 Levelling Between Wider Area Marks
4.4 Geodetic Fixing of Tide Gauge Benchmarks
4.4.1 Introduction
4.4.2 Geocentric Coordinates of Tide Gauge Benchmarks
4.4.3 GPS Measurements
4.4.4 DORIS Measurements
4.4.5 Absolute Gravity Measurements
4.5 Geodetic Contact Points
5. Data Documentation and Processing
5.1 Documentation and Archiving
5.2 PC-Based Software
5.2.1 Comments on Tidal Predictions
5.2.2 Tidal Filters for ‘Mean Sea Level’
5.2.3 Comments on Computations of Extremes
6. Data Exchange Procedures
6.1 Background
6.2 Consequent Data Exchange Actions
6.3 Fast Delivery Data
6.4 Regional Programmes
7. Training Materials, Training Courses and More Information
7.1 Training Materials
7.2 Sea Level Training Courses
7.3 Further Information
8. References
Acknowledgement
Annex 1. GLOSS Requirements for Gauges
54
Sea Level Measurement and Interpretation
IOC Manuals and Guides No 14 vol IV
Sea Level Measurement and Interpretation
http://www.pol.ac.uk/psmsl/
http://www.pol.ac.uk/psmsl/training/analysis.html
http://www.stevenswater.com
http://www.ixsea.com (for MORS, formerly www.oceano.co.uk)
http://www.srduk.com
http://www.GeneralAcoustics.com/products/index_logalevel.html
http://www.ott-hydrometry.de
http://www.krohne.com
http://www.vegacontrols.co.uk
http://www.miros.no
http://www.seba.de
http://ids.cls.fr/html/report/publications.html
http://www.microgsolutions.com
http://www.pol.ac.uk/psmsl/training/levelling.doc
http://adsc.gfz-potsdam.de/tiga/index_TIGA.html
http://www.soest.hawaii.edu/UHSLC/
http://www.bodc.ac.uk
http://www.puertos.es
55
APPENDIX III.
List of Websites
IOC Manuals and Guides No 14 vol IV
56
Sea Level Measurement and Interpretation
ACCLAIM Antarctic Circumpolar Currents Levels and Island
Measurement
ARGO Global Array of Profiling Floats
ARGOS Automatic Remote Geomagnetic Observatory
System
BGAN Broadband Global Area Network
BODC British Oceanographic Data Centre
CDDF Central Data Distribution Facility
CGPS@TG Continuous GPS at Tide Gauges
C-GOOS Global Ocean Observing System – Coastal Module
CIESM International Commission for the Scientific
Exploration of the Mediterranean Sea
CLIVAR Climate Variability and Predictability
CLS Collecte Localisation Satellites
CMSLT Commission on MSL and Tides of IAPSO
CNES Centre National d’Etudes Spatiales (France)
CP Contact Point
CPACC Caribbean Planning for Adaptation to Climate
Change
COOP Coastal Ocean Observations Panel
DATARING Data Acquisition for Tidal Applications for the
Remote Interrogation of Network Gauges
DCP Data Collection Platform
DORIS Doppler Orbitography by Radiopositioning Integrated
on Satellite
ENSO El Niño Southern Oscillation
ENVISAT Environmental Satellite
ESEAS European Sea Level Service
EU European Union
EUMETSAT European Organisation for the Exploitation of
Meteorological Satellites
FAGS Federation of Astronomical and Geophysical Services
FIAMS Flinders Institute for Atmospheric and Marine
Sciences
GCN GLOSS Core Network
GCOS Global Climate Observing System
GE Group of Experts (of GLOSS)
GFZ Geo Forschungs Zentrum, Potsdam, Germany
GIA Glacial Isostatic Adjustment
GLOSS Global Sea Level Observing System
GMS Geostationary Meteorology Satellite
GNSS Global Navigation Satellite System
GODAE Global Ocean Data Assimilation Experiment
GOES Geostationary Operational Environmental Satellite
System
GOOS Global Ocean Observing System
GPS Global Positioning System
GRGS Groupe de Recherches de Geodesie Spatiale (France)
GTS Global Telecommunications System
GTOS Global Terrestrial Observing System
IALA International Association of Marine Aids to
Navigation and Lighthouse Authorities
IAPSO International Association for the Physical Sciences of
the Ocean
ICSU International Council for Science
IERS International Earth Rotation Service
IGOSS Integrated Global Ocean Services System
IGS International GNSS Service (formerly the International
GPS Service)
IHO International Hydrographic Organization
INMARSAT International Maritime Satellite Organisation
IOC Intergovernmental Oceanographic Commission (of
UNESCO)
IPCC Intergovernmental Panel on Climate Change
ISLP-Pac IGOSS Sea Level Programme in the Pacific
JASL Joint Archive for Sea Level (of UHSLC)
JCOMM WMO-IOC Joint Technical Commission on
Oceanography and Marine Meteorology
LAT Lowest Astronomical Tide
LTT Long-Term Trends
MEDALPEX Mediterranean Sea During Alpine Experiment
MEDGLOSS Mediterranean Programme for the Global Sea-Level
Observing System (of IOC and CIESM)
METEOSAT Geostationary Meteorological Satellite
MSL Mean Sea Level
MTL Mean Tide Level
NERC Natural Environment Research Council
NESDIS National Environmental Satellite and Data Information
Service
NGWLMS Next Generation Water Level Measurement System
NOAA National Oceanic and Atmospheric Administration
(USA)
NOS National Ocean Service (of NOAA)
NTC National Tidal Centre of the Bureau of Meteorology
(Australia)
APPENDIX IV.
List of Acronyms
IOC Manuals and Guides No 14 vol IV
Sea Level Measurement and Interpretation
OOPC Ocean Observations Panel for Climate
PERSGA Regional Organization for the Conservation of the
Environment of the Red Sea &Gulf of Aden
POL Proudman Oceanography Laboratory (UK)
PSMSL Permanent Service for Mean Sea Level
PSTN Public Switched Telephone Network
PTT Platform Transmitter Terminal
PTWC Pacific Tsunami Warning Centre
RBGAN Regional Broadband Global Area Network
RLR Revised Local Reference
RONMAC Red de Observacion del Nivel del Mar para America
Central
RTU Remote Terminal Unit
SEAFRAME Sea Level Fine Resolution Acoustic Measuring
Equipment
SLC Sea Level Centre
SLR Satellite Laser Ranging
SOC Southampton Oceanographic Centre
SRD Sonar Research and Development
STWS Storm Tide Warning Service (UK)
TASK Tidal Analysis Software Kit
TGBM Tide Gauge Bench Mark
TGI Tide Gauge Inspectorate
TIGA Tide Gauge and GPS Benchmark Monitoring Project
(of IGS)
TOGA Tropical Ocean Global Atmosphere
TOPEX Joint US/French Ocean Topography Experiment
UHSLC University of Hawaii Sea Level Center
UNEP United Nations Environment Programme
UNESCO United Nations Educational, Scientific and Cultural
Organization
VLBI Very Long Baseline Interferometry
VLM Vertical Land Movement
WMO World Meteorological Organization
WOCE World Ocean Circulation Experiment
57
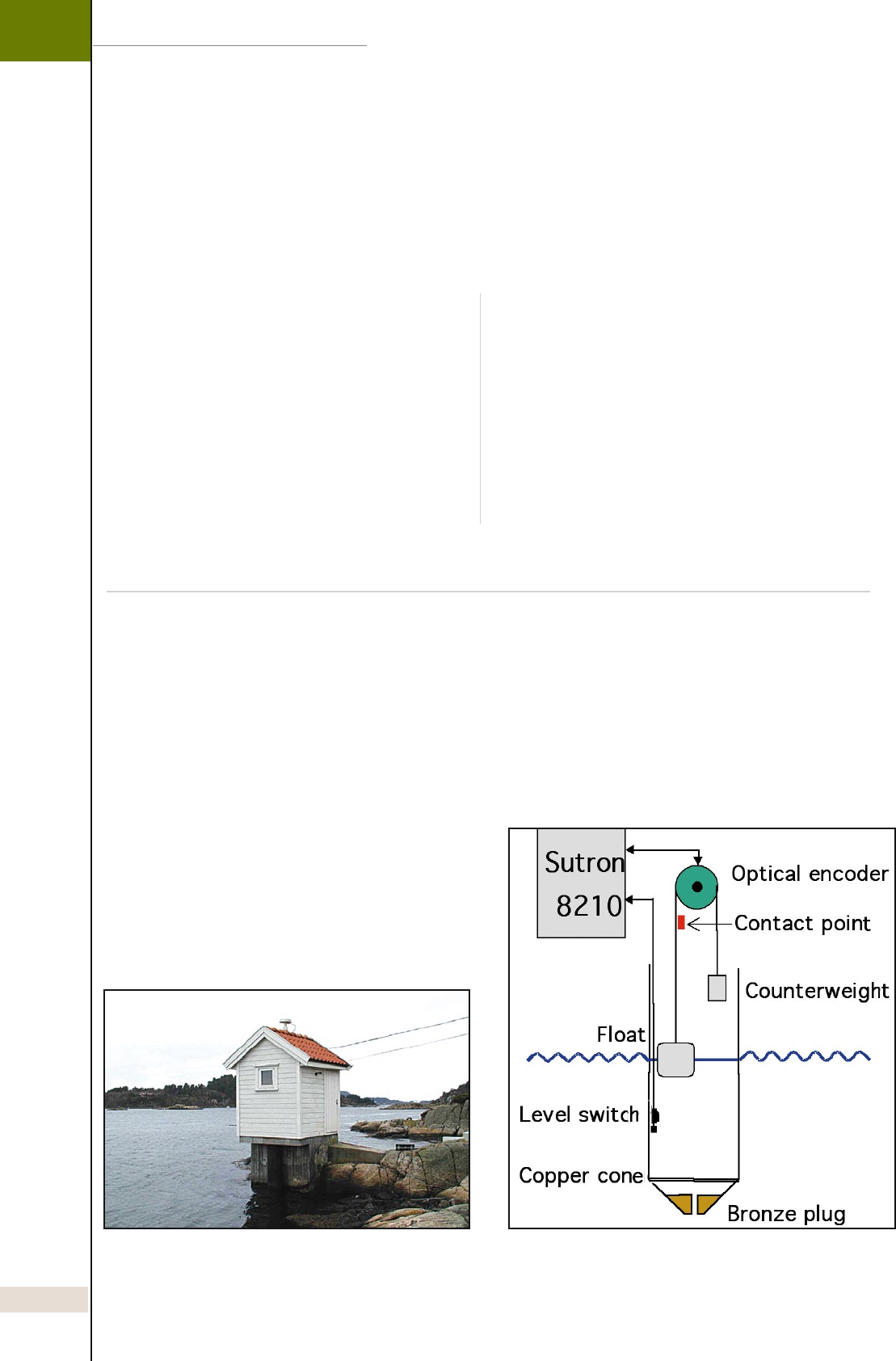
IOC Manuals and Guides No 14 vol IV
This appendix contains contributions kindly provided by the
following people:
Daniel Hareide, Hodnesdal, Tor Tørresen and Tor Ellef
Hansen Østebøvik (Norwegian Hydrographic Service)
B. Martín, B. Pérez, E. Alvarez Fanjul (Puertos del Estado,
Spain)
Christoph Blasi and Ulrich Barjenbruch (Federal Institute
of Hydrology, Germany)
Ruth Farre (South African Navy Hydrographic Office)
Antony Joseph, Prakash Mehra, Joseph Odammetey
and Nkebi E. Kofi (National Institute of Oceanography, India,
and Survey of Ghana)
Juan Fierro, Chilean Navy Hydrographic and Oceanographic
Service (SHOA)
Bernie Kilonsky (University of Hawaii Sea Level Center,
USA)
Peter Foden (Proudman Oceanographic Laboratory, UK)
Laura Kong (International Tsunami Information Centre,
Hawaii, USA)
Each of these experts is willing to discuss aspects of their
experiences in more detail with anyone interested.
APPENDIX V.
Contributed Practical Experiences with Various
Tide Gauge Technologies
Float Gauges in Stilling Wells: Experience in Norway
58
Sea Level Measurement and Interpretation
The float gauge and stilling well
The Norwegian Tide Gauge Network, operated by the
Norwegian Hydrographic Service (NHS), records sea
level elevations with float gauges at 23 locations.
A typical Norwegian stilling well consists of a polyeth-
ylene tube with a conical inlet at the bottom (Figure
1). The diameter of the tube is 30 or 40 cm and the
inlet (cone) is of copper to reduce marine fouling. We
have seen that galvanic corrosion can be a problem,
probably since we have used parts of stainless steel to
clamp the cone to the tube. This can cause holes in the
cone, and unwanted wave oscillations are not reduced
as they are supposed to be. Inside the cone there is a
Daniel Hareide, Hanne Hodnesdal, Tor Tørresen and Tor Ellef Hansen Østebøvik
Norwegian Hydrographic Service, P.O. Box 60, 4001 Stavanger, NORWAY
E-mail: daniel.hareide@statkart.no
Figure 1. Sea level gauge in Norway and schematic description of stilling well with copper cone and bronze plug.
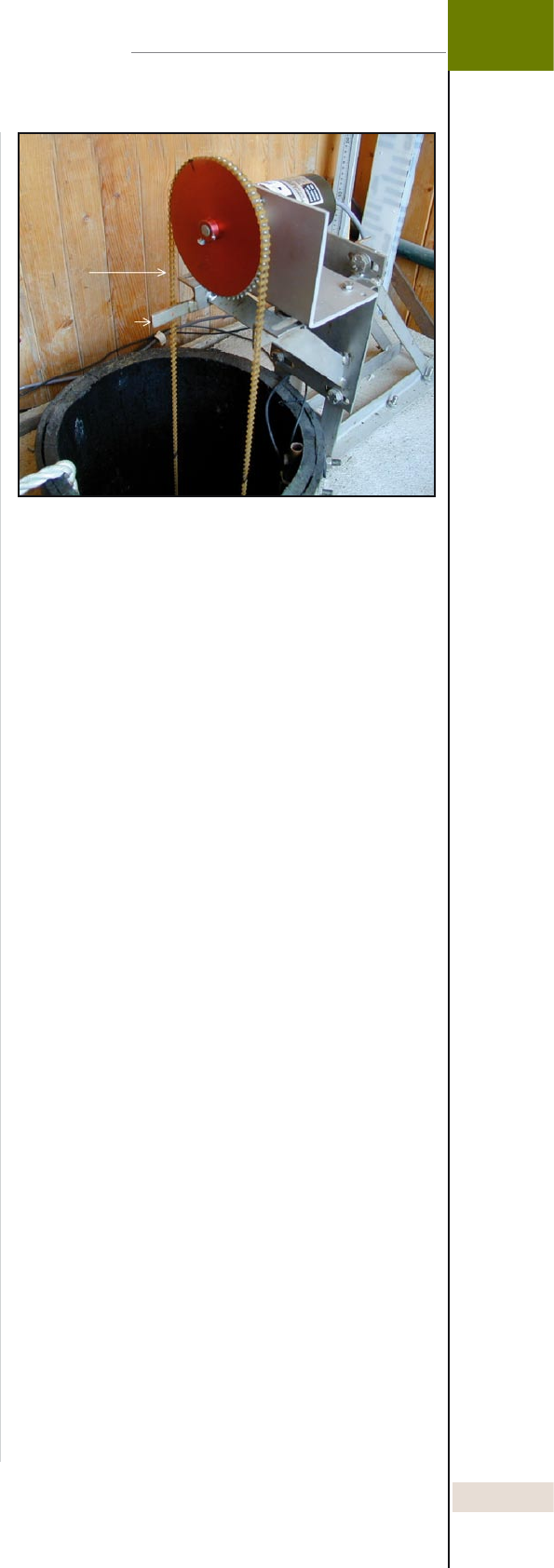
IOC Manuals and Guides No 14 vol IV
Sea Level Measurement and Interpretation
59
removable orifice of bronze and the orifice can be
adjusted with one or more nipples. Some of the tidal
stations in Norway are exposed to ice and low tempera-
tures, and 220 V AC heating cables are installed inside
these wells.
Each sea level gauge has at least one level switch
used for quality control. It is installed inside the stilling
well approximately at mean sea level (MSL). The level
switch is a tiny float, which switches a current loop
when the sea level passes the level at which the switch
is mounted. The computer registers the time and sea
level when the switch turns on or off, and these data
can be compared with the level at which the switch is
mounted. The level switch has been very important in
the detection of several problems, such as drift (trend)
in the observations.
An encoder with an SDI-12 output is installed above
the tube, mounted on a concrete block (Figure 2). The
encoder has a sprocket (wheel) on the shaft and is pro-
grammed to give an output with a resolution of 0.1
cm. The encoder has internal battery backup which
remembers the angular position, in case of power
failure. A chain with a float and a counterweight runs
over the sprocket and the sea level is given by the
angular position of the sprocket. It is important that
the sprocket and chain fit well together. If not, there
could be very small tangential movements between
the sprocket and chain and this in turn presents itself
as very slow drift (trend) in the sea level observa-
tions. NHS is using a US manufacturer of the chain
and sprocket (W.M.Berg Inc. (www.wmberg.com)).
Leading marks on the chain and sprocket make it easy
to control the system.
The data logger is a Sutron 8210 and it collects and
stores sea level, barometric pressure and switch-level
data. The memory of the Sutron 8210 has bat-
tery backup and can hold several months of data.
Normally the data are retrieved twice a day from the
data logger, sometimes more often. The data logger
has a serial port, which is used for communication,
either through the ISDN-network or with a GPRS-rout-
er. We are now in the process of converting the data
transmission from the ISDN-network to GPRS-router
for all the tidal stations. This work will be completed
during the next 2–3 years (depending on allocated
budget) and sea level data will be sent to the office in
Stavanger every 10–20 min and will be immediately
(an automatic quality control is applied to the data)
available on our website.
The data logger and the communication unit have sep-
arate battery backups. The data logger has less power
consumption than the communication unit, so, in case
of power failure, the gauge will continue to store data
even if the communication is broken.
Levelling is done from the TGBM and one or two
additional benchmarks to a contact point at the
same bracket as the encoder. The TGBM is in solid
rock as close to the sea level gauge as possible.
After modernization of the gauges between 1985
and 1991, levelling has been done every year. Since
most of the gauges are located on stable ground,
the levelling interval now is three years, except for a
few gauges which are sinking. The levelling follows
the procedures outlined in the UNESCO Manual on
Sea-Level Measurement and Interpretation, Volume I,
and the accuracy is millimetric. It is more difficult to
calibrate the sea level gauge to the same accuracy.
Calibration is done by measuring the distance from
the sea surface to the contact point with a levelling
staff inside the well, and by taking simultaneously
readings on the sea level gauge. This is repeated
several times, and the sea level gauge is calibrated by
making its readings equal to the observations on the
staff. Taking many readings will reduce the problem
with a moving sea surface. There might, however, be
some individual differences in the way the calibra-
tion is performed and this may introduce systematic
errors of a few millimetres. We use a sea level gauge
zero that is below the lowest observed sea level. To
avoid any confusion, we never use levels like Chart
Datum or Land Survey Datum as the gauge zero.
The sea level gauges are inspected at intervals of 18
months. We should like to carry out levelling and
inspections more frequently, but we have to reduce
the operational costs as much as possible.
For all stations, a close co-operation with local
operators is essential. They look after the equip-
ment and assist us in various situations, i.e. when
there are power or communication problems with
the gauge.
Figure 2. Encoder, chain and contact point.
Chain
Contact Point
Encoder
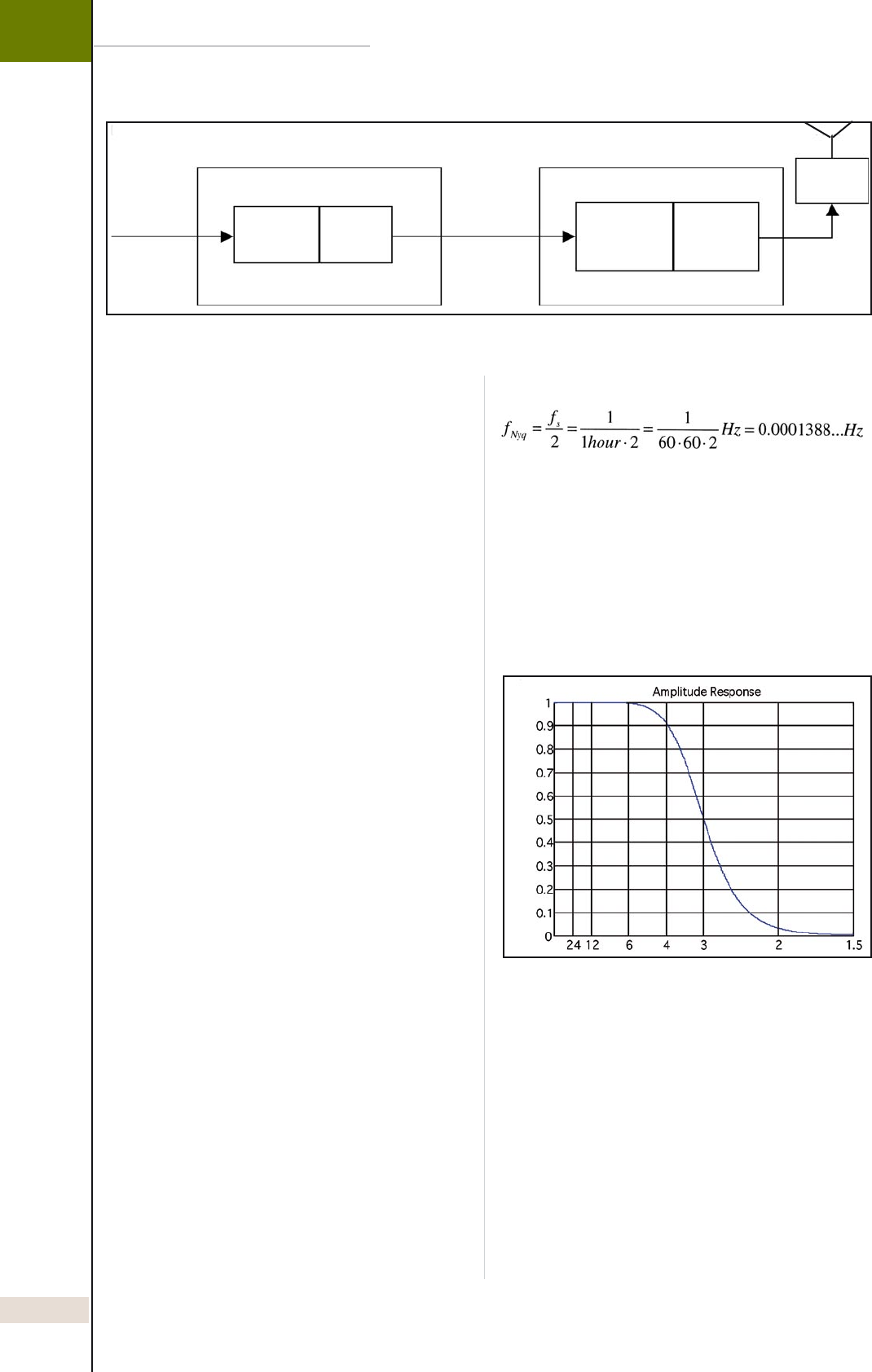
IOC Manuals and Guides No 14 vol IV
Figure 3. Schematic description of sampling and filtering in sea level gauge.
60
Sea Level Measurement and Interpretation
Sampling and filtering in the sea level gauge
The stilling well represents a mechanical low pass (LP) filter.
The attenuation R depends on the relationship between
the area of the cross-section of the well and the area of
the orifice: R = (area of well)/(area of orifice) (Forrester
1983). This relationship also affects the response time,
which is defined as the time it takes before the sea level
on the inside has changed to the mid-point of a sudden
and permanent change on the outside. A high value of R
gives high attenuation and long response time. It is rec-
ommended by Forrester (1983) to choose R = 100, which
will pass waves with periods of, for example, 12 h (repre-
sentative for tide) and periods of 6 min (representative for
harbour seiche), but will attenuate waves with a period
of 6 s (representative for surface swell). The –3 dB cutoff
frequency will be roughly 1/40 Hz (taken from plot in Shih
and Rodgers (1981). R = 100 signifies a response time of
11 s (Forrester 1983). Most of our sea level gauges have R
close to 100. A sampling frequency of 1 Hz inside a stilling
well of this type should be satisfactory.
In the datalogger a 3-min arithmetic mean is calculated
every 10 min. Studies at NHS have shown that this filter
does not remove all frequencies above the Nyquist fre-
quency for 10-minute sampling (fNy = fs/2 = 1/(2x10x60)
Hz = 0.0008333… Hz). There is now a test of calculating
the 1-minute arithmetic mean every minute in the data
logger and transmitting 1-minute data to the office. In this
case the filter is better suited for the sampling rate, and we
shall get access to a higher data rate as well.
Processing of data at the officeThe received data
are stored in a database. Automatic and manual qual-
ity control are applied to the data.
One-hour values are used for the harmonic analysis. To
avoid aliasing, all frequencies above the Nyquist frequency
(fNyq) should be removed before decimating from 10-min-
ute values to 1-hour-values. The Nyquist frequency fNyq is
half of the sampling frequency fs = 1/(1 hour).
A 4th-order Butterworth filter is used for this purpose
(Hodnesdal 1983; see amplitude response in Figure 4).
The cut off frequency is 1/(3 hours). The time-series is
run forwards and backwards through this filter to ensure
zero phase response. The squared amplitude response is
–29.4 dB (=0.034 Hz) at fNyq. This is an acceptable anti-
aliasing filter because almost all energy above the Nyquist
frequency is removed. The problem is, however, that some
of the over-harmonic constituents will be partly filtered as
well. Frequencies from the fifth-diurnal (period of circa 4.8
h) and higher will be attenuated by the filter. For stations
with significant shallow water constituents, a filter with a
higher cut-off and faster roll-off should be used.
For further information, go to: http://vannstand.statkart.
no/
References
Forrester, W.D. 1983. Canadian Tidal Manual. Department
of Fisheries and Oceans, Canadian Hydrographic Service,
Ottawa. 138pp.
Hodnesdal, H. 2003. Use of Butterworth filter for LP-
filtering of water level data in NHS. Technical Report.
Norwegian Hydrographic Service, Stavanger, Norway.
Shih, H.H. and Rogers, D. 1981. Error analysis for tide
measurement systems utilizing stilling wells. Technical
Report. US Department Commerce, National Oceanic
and Atmospheric Administration (NOAA), USA.
Figure 4. Amplitude response of 4th-order Butterworth
filter.
Float in stilling well Datalogger: Sutron 8210 ISDN or
GPRS
LP-filterStilling well Encoder
Analog data Digital data
Analog
LP-filter
A/D
converter
Arithmetic
mean over
3 minutes
Decimating
to 10
minute
values
Data rate
1 Hz
Data rate
1/600 Hz
Magnitude Squared
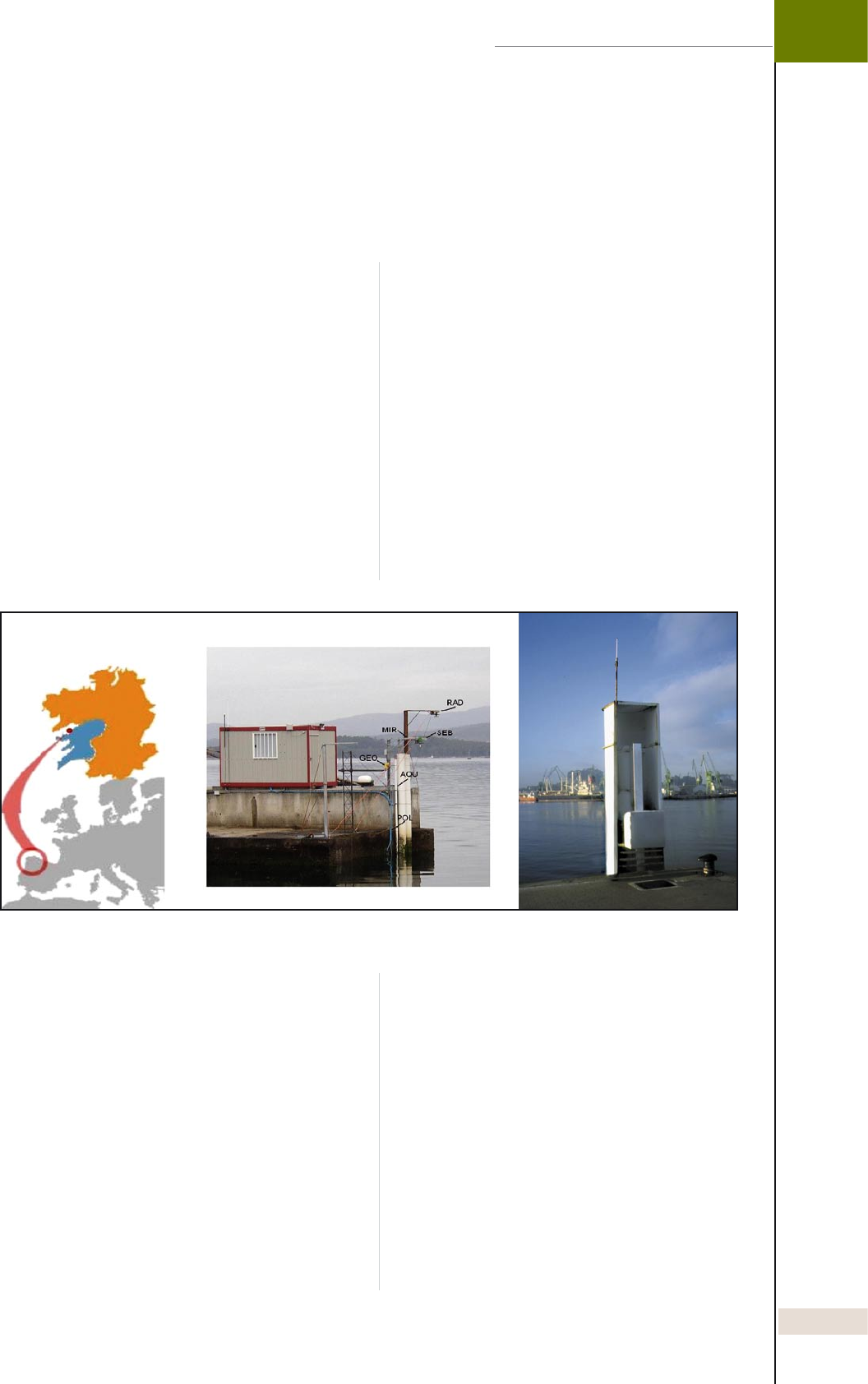
IOC Manuals and Guides No 14 vol IV
Sea Level Measurement and Interpretation
Introduction
During the ESEAS-RI project (European Sea Level Service –
Research Infrastructure), a test station for sea level sensors
was established at Vilagarcía de Arousa, on the northwest
coast of Spain. One of the objectives was to experi-
ment with different kinds of radar sensor, an emerging
technology for measuring sea level, and compare their
performance with other traditional and well proven tide
gauges. The main advantage of radar appeared to be its
demanded accuracy, low maintenance and lack of influ-
ence of air temperature, humidity or density of the water.
The experiment was carried out when the existing net-
works were requiring renewal, owing to the age of the
equipment, and radar appeared as an even better option
than acoustic sensors, and possible new applications of
sea level data had to be taken into account.
The main modern technologies have been tested in
Vilagarcía: pressure, acoustic and radar, a total of
eight different sensors. Different institutions and private
companies provided sensors for the test; the National
Oceanographic and Atmospheric Administration (NOAA,
USA) lent an Aquatrak acoustic sensor, and the Proudman
Oceanographic Laboratory (POL, UK) lent a bubbler pres-
sure sensor. Apart from this, two FMCW radar sensors
were provided by the companies Miros and ENRAF
(Radac). The contribution of Puertos del Estado was the
acoustic sensor of the REDMAR network (SRD), and two
pulse radar stations: Seba and Geónica. Finally, a SeaBird
pressure sensor was also installed during the experiment
by the maintenance company SIDMAR Bernhard Pack.
Experiment and description of the sensors
The period of operation of the different tide gauges is
shown in Figure 2, and varies mainly due to the differ-
ent dates of incorporation into the experiment and to
problems encountered during the first year, sometimes
even due to lack of experience with the equipment.
Most of the equipment installed is very well known and
described in the literature and in previous IOC manuals,
such as the pressure (both the single pressure sensor
and the bubbler sensor from POL) and the acoustic
gauges (both the Aquatrak from NOAA and the SRD
from the REDMAR network). As was mentioned, the
main contribution of the experiment was the testing of
several new radar sensors and the simultaneous instal-
lation of so many tide gauges for the first time.
Focusing on the radar technology, two different types
of radar were installed (sensors were always located at
a certain height above the sea surface):
Pulse radar: operates on a similar principle to that of
the acoustic sensor, by measuring the travel time of
microwave pulses between the sensor and the water
surface and the return echo to the sensor. The main
advantage over the acoustic gauges is that the velocity
of propagation (light velocity, c, in air) of the wave does
not depend on environmental conditions, in particular
on temperature gradients along the path of the pulse.
This makes the installation requirements less strict and
no protective tube or pre-measurement calibration is
needed. Geónica and Seba radars are pulse radars and
in fact use the same Vegapuls transducer.
61
The ESEAS-RI Sea Level Pilot Station in Vilagarcía de Arousa (Spain)
B. Martín, B. Pérez, E. Alvarez Fanjul
Puertos del Estado, Madrid, Spain, E-mail: bego@puertos.es
Figure 1. Location of Vilagarcía de Arousa (left), photo of the test station (centre) and of the REDMAR station (right,
an SRD acoustic sensor on another dock).
ISDN or
GPRS
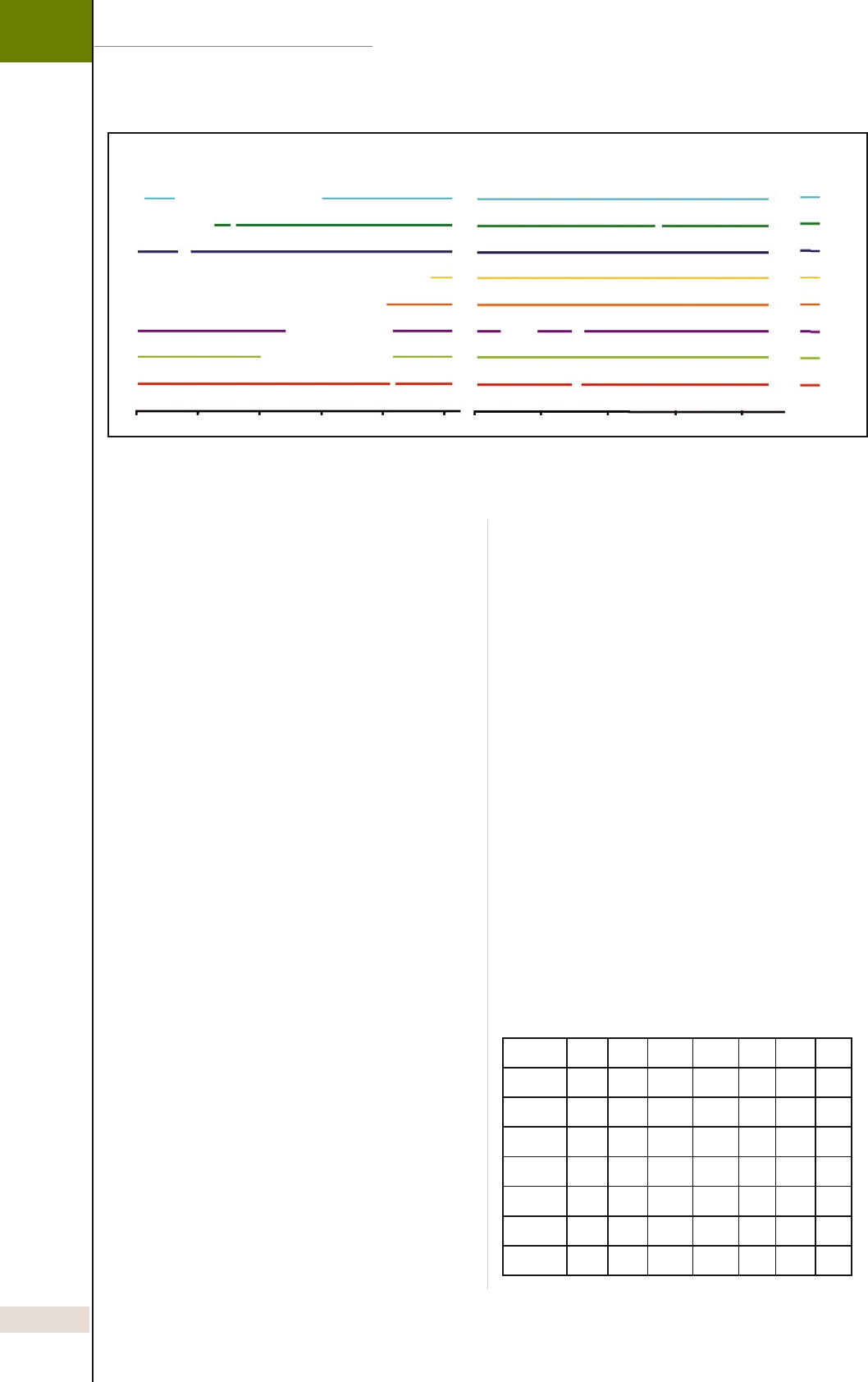
IOC Manuals and Guides No 14 vol IV
Frequency-modulated continuous-wave (FMCW):
this is a more accurate method of measuring distance
with radar, by modulating the frequency of a continu-
ously emitted wave. A phase shift between the emit-
ted wave and the reflected wave occurs, and the mix
results in a low-frequency signal (beat frequency) which
provides a measurement of the distance. Miros and
Radac sensors are FMCW radars.
In any case, the installation of these instruments is
much easier and less expensive than the one required
by the acoustic or the bubbler sensors. On the other
hand, radar sensors have the advantage of being
located above the sea surface, so maintenance is easier
than for pressure sensors.
Some of the systems allowed the storage of data every
second (Aquatrak, Miros and Radac), whereas others
stored averaged values: 10-s (POL bubbler), 1-min
(Seba and Geonica) or 5-min (SRD). Only the Geónica
tide gauge had a GPS-controlled assignment of time.
The station was routinely maintained by the company
SIDMAR every four months, as is usually also done
for the permanent REDMAR station, and this was the
frequency of adjustment of clocks for the rest of the
installations. Apart from this, levelling of the transduc-
er, datum calibration and downloading of data, as well
as draining of the bubbler compressor and the check-
ing of the oil level and air pressure, were all activities
performed during a maintenance campaign.
During the experiment, the installations that operated
better and yielded a larger amount of data were the
Geónica, Miros and POL bubbler sensors, as well as
the permanent SRD station. The percentage of spikes
in the data sets was very small, particularly for all the
radar sensors which also withstood the storm season
without failing.
Five-minute data comparison
Comparison of raw data is a difficult task, since,
depending on the time interval, installation character-
istics (within a tube or in the open air) and measuring
technique, each sensor really measures different things.
So the first step was to obtain ‘comparable’ time-series,
and averages over 5-min intervals were computed
(also the time interval for the raw data of the SRD tide
gauge).
During the experiment, differences of up to 6 min were
found, with an impact on the mean difference between
two sensors of up to 5 cm. To correct for this effect,
normally not attributable to the sensor but to the PC
where data were stored, a correction of time shifts for
multiples of 1 min was made for 3-day data windows.
Although not possible during the Vilagarcía experi-
ment, a precise control of time assignment, by GPS or
Internet (in case of a PC) should be no problem for any
tide gauge nowadays. That is why we thought it would
not be reasonable to consider problems of time as a
shortcoming of the sensor itself.
Figure 2. Period of operation of the different sensors during the two years of the experiment (the SeaBird [SBE] data
are not included in this report.
AQU GEO MIR POL RAD SEB SRD
AQU 0.0 1.4 1.9 1.4 1.7 1.6 1.5
GEO 1.4 0.0 1.2 1.0 0.9 0.7 1.3
MIR 1.9 1.2 0.0 1.6 1.1 1.3 1.8
POL 1.4 1.0 1.6 0.0 1.4 1.2 1.4
RAD 1.7 0.9 1.1 1.4 0.0 1.0 1.6
SEB 1.6 0.7 1.3 1.2 1.0 0.0 1.4
SRD 1.5 1.3 1.8 1.4 1.6 1.4 0.0
Table 1. RMS (root mean-square error), in centime-
tres, of the differences between each pair of sensors
(data every five -minutes).
62
Sea Level Measurement and Interpretation
2003 2004
28/2 29/4 28/6 27/8 26/10 25/12 1/1 1/3 30/4 29/6 28/8
AQU
GEO
MIR
POL
RAD
SBE
SEB
SRD
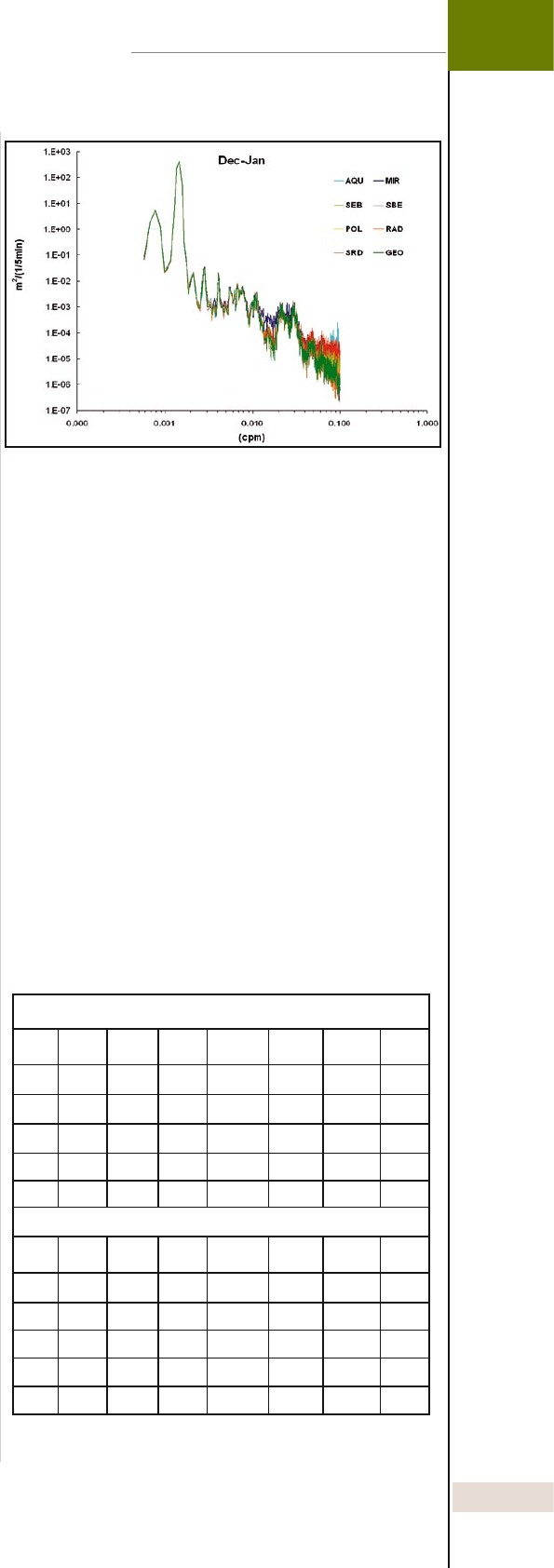
IOC Manuals and Guides No 14 vol IV
For this timing correction, the reference was of course
the Geónica sea level series, as it was the only one with
GPS assignment of time during the experiment. Table
1 shows the RMS errors of comparisons for each pair
of sensors after adjustment for time. These range from
0.7 cm (corresponding to Geónica and Seba, which
is reasonable, since they use the same type of radar
sensor) and 1.9 cm (Aquatrak and Miros, mainly due
to an effect of temperature on the Aquatrak being
higher than expected and not corrected). These values
decreased by about 10% when repeated with the fil-
tered hourly values. Following Woodworth and Smith
(2003), who state that RMS values below 1.4 cm for
the differences yield a precision better than 1 cm for
each sensor, most of the tide gauges would meet this
condition (GLOSS standard) for 5-min data, and all of
them would do so for hourly data.
By computing the slope of the linear regression for each
pair of sensors, an idea of the sensitivity of the sensor
to the tidal range was obtained. The most interesting
conclusion in this context is that the bubbler gauge from
POL was the one that recorded lower ranges (around
0.5%). The explanation for this is that it has operated
assuming a constant salinity, which may not be realistic
for Vilagarcía harbour, which is located in an estuary
(ría). More details of this comparison can be found in
the technical report of the experiment or the publication
included in the reference (Martín et al., 2005).
Spectral analysis
To get an idea of the differences among the time-series
for each frequency band, a spectral analysis was made
for one month of data from all the sensors, as well as
from the 5-min time-series. Figure 3 illustrates these
differences, showing that all the sensors have exactly
the same response to tidal frequencies, with differences
only beginning to show up for frequencies correspond-
ing to 30 and 100 min, for which it is very clear that
the Miros sensor presents more energy. This might be
important for the study of oscillations of these periods,
such as seiches; so we thought the company should
investigate it, which they did and found that it was due
to a problem, now solved, in an internal interpolation
algorithm of the sensor.
Of course, the larger differences are found for frequen-
cies larger than 0.05 cycles/minute, and this was not a
surprise for us, being due to the different measuring
technique and the fact that some of the sensors (acous-
tic) measure inside a tube and others not (radar). On
the other hand, for the computation of the 5-min data,
different amounts of raw data were used, depending
on the sensor. Of course, differences in this range of
frequency may still be significant if one needs to detect
seiches or tsunamis, since we are talking about periods
of between 10 and 20 min. That is why a more detailed
study of the response of the different sensors at higher
frequencies is required.
Comparison of hourly values and daily means
To complete the study concerning standard sea level
applications, a harmonic analysis for all the sensors
was carried out, following the standard procedure
employed by the Puertos del Estado (filtering to hourly
values, and use of Foreman tidal programme). Table 2
shows the results for the main harmonics, which are
very similar (differences similar tothe analytical error).
Again, the POL sensor shows the lowest M2 amplitude,
consistent with what was said above.
The daily means were computed and compared, and
trends during the period of the experiment were
found to be consistent for all sensors, in spite of the
limitations in the operation of the sensors and in the
calibration of the datum, an aspect which was not fully
considered at this test site.
Sea Level Measurement and Interpretation
63
Figure 3. Power spectral density for the 5-min time-series
(December 2003–January 2004).
H (cm)
Tide AQU GEO MIR POL RAD SEB SRD
O1 6.3 6.4 6.3 6.3 6.4 6.3 6.3
K1 6.6 7.3 7.3 7.2 7.4 7.3 7.4
N2 23.4 23.3 23.4 23.2 23.5 23.6 23.7
M2 114.3 114.2 114.4 113.8 114.2 114.2 114.6
S2 40.9 40.9 41.1 40.8 41.0 41.0 40.7
G (deg)
Tide AQU GEO MIR POL RAD SEB SRD
O1 71.8 73.5 71.1 70.5 71.3 71.0 71.7
K1 48.0 53.1 54.0 51.8 51.3 52.7 60.0
N2 66.9 68.1 66.9 67.0 67.9 66.9 64.5
M2 80.0 80.5 79.9 80.0 80.5 79.9 79.3
S2 104.9 105.1 105.2 105.3 105.8 105.2 104.9
Table 2. Main tidal constituents for each of the sensors,
for the period December 2003–June 2004.
IOC Manuals and Guides No 14 vol IV
Conclusions
All the sea level sensors installed at Vilagarcía have
been shown to be accurate enough for such standard
applications as tide, storm surges, and even mean sea
level, although the latter would need more study, to
be completely sure. However, differences were found
in the higher frequency range, which we have decided
to continue to study. The reason for this is our interest,
and may be that of the rest of the sea level community,
to detect seiches and tsunamis and even include the
sensors in an alert system. Concerning this, the sen-
sors with a lower sampling frequency of the raw data
should demonstrate that they are not measuring just
noise, but also other physical signals.
Concerning the radar sensors, a very important conclu-
sion is that they have shown that they are very easy
to install and require almost no maintenance, which is
very important for equipment for permanent networks.
Nearly no incident occurred during the two years of
testing, especially with the Miros and Geónica sensors;
only the Seba sensor was an exception. Nevertheless,
care has to be taken when stating something like this,
because, sometimes, a lack of information on the sen-
sor configuration and installation requirements may be
just the explanation for some of the failures.
More detailed description of the experiment and dis-
cussion of the data can be found in ESEAS-RI (2005)
and Martín et al. (2005).
References
ESEAS-RI. (2005) Assessment of accuracy and opera-
tional properties of different tide gauge sensors.
WP4 Deliverable D4.1, Technical Report. (http://
www.eseas.org)
Martín, B., Pérez, B., Alvarez Fanjul, E. 2005. The
ESEAS-RI sea level test station: reliability and accura-
cy of different tide gauges.
International Hydrographic
Review
, 6, 44-53.
Pérez, B. and López Maldonado, J.D. 2003. Experience
with Sonar Research and Development (SRD) acous-
tic gauges in Spain. IOC Workshop Report 193
Woodworth P.L. and Smith D.E. 2003. A one-year
comparison of radar and bubbler tide gauges at
Liverpool. International Hydrographic Review, 4,
2-9.
64
Sea Level Measurement and Interpretation
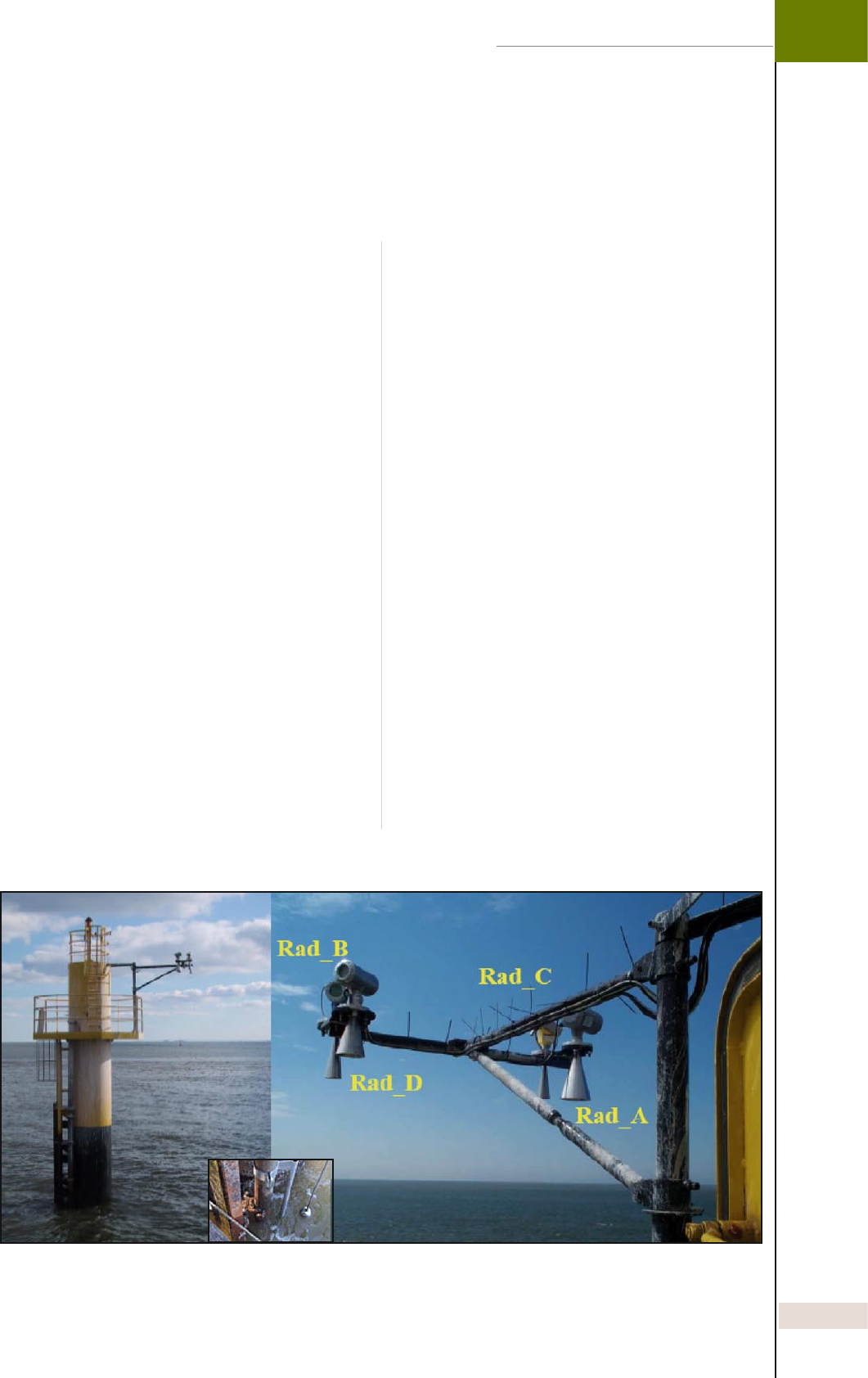
IOC Manuals and Guides No 14 vol IV
Sea Level Measurement and Interpretation
Nearly all kinds of engineering in coastal area rely on
the available information on water level. The classical
way of reading the water level is by a staff gauge and
a float. These measuring systems were used for a very
long time and were upgraded in various ways to store
the recorded data.
In the late 1990s, radar devices, which were mainly
used in process technology, were introduced into
hydrometry. The Federal Institute of Hydrology (BfG)
made the first investigation at the beginning of 2000
(BfG 2002). As technology of these devices developed,
additional tests were made. These tests were part of a
research project with the aim of finding the core foun-
dation for measurements of waves, sea state, water
level and thickness of ice. The results are quite rea-
sonable and available via http://www.bafg.de/servlet/
is/7833/. One of the main parts of the project was the
measurement of waves in a broader sense. Therefore a
lot of attention was paid to the theory of detection and
measurement of water level as a part of waves under
different conditions. Different tests were undertaken
under both laboratory and field conditions to access
the influence of the measurement.
The aim of this paper is to show the results from the
field test, with a view to giving the reader help and
support in choosing the right radar gauge to measure
water level. However, the physical background and the
application of radar in distance measurement will not
be discussed here. The reader may refer to the report of
the research project available from the authors [please
cite the source]. As mentioned before, there were tests
in the hydraulic laboratory and as well in the field.
During the laboratory test, the backscatter from dif-
ferent radar devices for various wave types and water
surfaces were investigated to determine the suitability
for wave and water-level measurement.
With this information, four different devices were
chosen for the field test. The field test was at the
gauging station on Borkum Südstrand, which is on
the island of Borkum and very close to the border with
The Netherlands. This location has all the required
conditions, such as tidal range, different types of wave,
sea state, changes of salinity, rough seas, saline air
and annual temperature variation. Furthermore, the
Borkum Südstrand Gauging Station is an official gauge
of the Water and Shipping Way Authority. The gauge
and the setting up of the radar sensors are shown in
Figure 1.
The devices themselves are described as Rad_A up to
Rad_D. This was done under an agreement with the
manufacturers. If detailed information is required, the
reader may contact the author. For establishing the
reference for the four radar sensors and the official
gauge, a calibrated Magnetostrictive-Sensor (a special
kind of float gauge without a stilling well) was used.
Most of the radar gauges work on the same principle.
65
Comparison of Radar Devices in Germany
Christoph J Blasi and Ulrich Barjenbruch
Federal Institute of Hydrology (BfG), D-56002 Koblenz, Germany,
E-mail: blasi@bafg.de
Figure 1. The Borkum Südstrand Gauging Station and installation of the of the radar gauges and the local
reference.
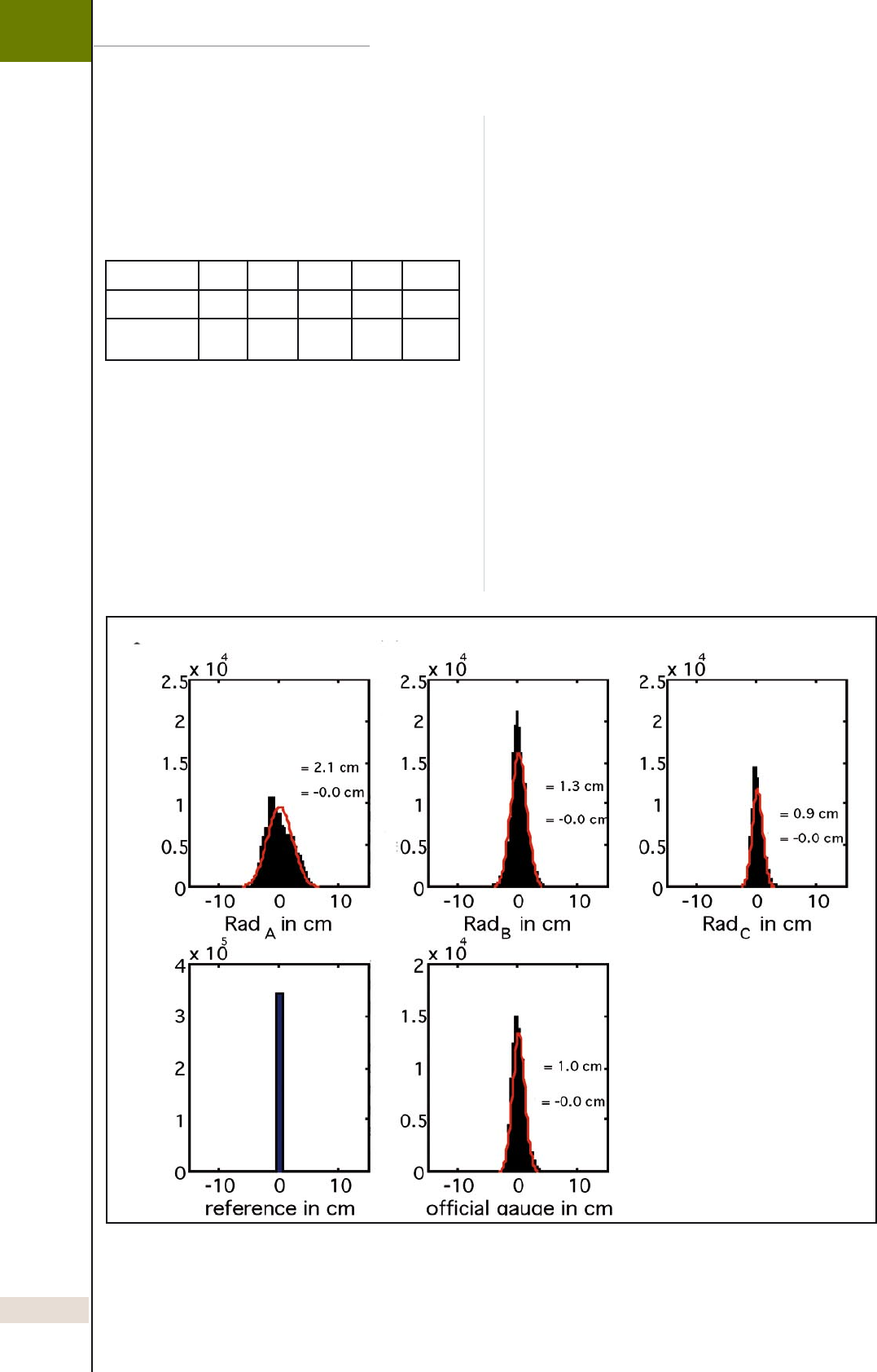
IOC Manuals and Guides No 14 vol IV
A radar signal with a frequency of approximately 1–30
GHz is sent from the antenna to the water surface.
After reflection at the water surface, the return signal is
received, with a time lag. The characteristic of the radar
gauge is written in Table 1.
The Rad_A gauge works with the frequency modulated
continuous wave (FMCW); all the other devices work with
the pulse method, at different frequencies. As all radar
gauges have outliers in the data, the recorded time-series
has to be examined in this way and the data have to be
smoothed. The exponential smoothing, with a weighting
factor of 0.001 at a sample rate of 1.3 Hz achieved the
best results. Figure 2 shows the measured error probabili-
ties of the radar gauges and the official gauge.
In conclusion, the radar gauges Rad_C and Rad_B are the
most suitable devices for measuring water level. The error
is in the same range as that of the official gauging station.
The Rad_A sensor is the only one with another measuring
procedure. The pulse method (see Table 1) for the water
level measurement is more suitable. Rad_D, which has
also been tested since summer 2003, had problems with
its data communication system. Therefore the analysis
shown in Figure 2 was not done. Furthermore, compared
to the classical gauge, the maintenance for the radar
gauge is much less and the latter has delivered data since
summer 2003. Even various environmental factors, such
as bird excrement or saline air, have no influence at all on
the measurement.
References
Barjenbruch, U., Mai, S., Ohle, N., Mertinatis, P. 2002.
Monitoring water level, waves and ice with radar
gauges. Proceedings of the Hydro 2002 Conference,
Kiel, Germany. pp.328-337
BfG (Bundesanstalt für Gewässerkunde). 2002. Test
von Radarsensoren im Küsten- und Küstenbereich,
interner Bericht. BfG-1276, Koblenz, Germany
Rad_C Rad_B Rad_D Rad_A
Method [-] Pulse Pulse Pulse FMCW
Microwave
frequency
[GHz] 26 26 5.8 8.5-9.9
Table 1. Characteristics of the tested radar gauge.
Figure 2. Comparison of the measured differences between each gauge and the Magnetostrictive-Sensor for a
particular day.
66
Sea Level Measurement and Interpretation
σ
µσ
µσ
µ
σ
µ
error probability
error probability
error probability
error probability
error probability
IOC Manuals and Guides No 14 vol IV
Experience with SRD Tide Gauges and the Reasoning
behind a Change to Radar Tide Gauges
Ruth Farre
South African Navy Hydrographic Office, E-mail: hydrosan@iafrica.com
Sea Level Measurement and Interpretation
Historical summary
The SAN Hydrographic Office started installing its
own float-actuated ‘Kent’ gauges in 1958. As these
gauges aged, additional types, also float-actuated,
were installed; they comprised LEA gauges, similar to
the Kents, Italian SAIP gauges in Saldanha and Simon’s
Town, and OTT gauges in Port Elizabeth and Walvis
Bay. These gauges proved to be reliable, but by the
mid-1980s, the Navy’s Tide Gauge (TG) network was
ageing. Spares for the Kents were becoming difficult
to come by and replacement on a significant scale was
urgently needed.
A project was initiated with the CSIR, Stellenbosch,
to develop an accurate, modern Acoustic Water Level
Recorder. These came into service in 1990 and eight
were installed throughout RSA and Namibia. These
gauges were a failure. They were erratic, difficult to
tune and grossly inaccurate. Virtually no usable data
were obtained and the gauges were finally abandoned
between 1996 and 1998.
Specifications for the replacement gauges were drawn
up in conjunction with IMT (Institute of Maritime
Technology) in 1995 and were tendered for in 1996.
The tender was won by Messrs SMD Electronics CC,
with their SRD acoustic gauges meeting our require-
ments. These promised well and were installed, some-
what hurriedly, in 1996, mounted on tubes, as recom-
mended by the manufacturers. The supplier stated that
the gauges were calibrated in the factory and were
therefore self-calibrating. It was immediately found
that the gauges were very inaccurate, well outside the
specification. With assistance from IMT, remedial mea-
sures were taken and the gauges were calibrated by
IMT and remounted without tubes. The Hydrographic
Office had to devise a method for check-calibrating
these gauges in situ. Their performance has subse-
quently been just acceptable, but not of the accuracy
desired. Their reliability has varied. Maintaining correct
readings and downloading the data are problematical.
An OTT Kalesto Radar tide gauge was tested by the
Hydrographic Office in Simon’s Town at the begin-
ning of 2002. The results obtained from this test were
reaffirmed by a test done at IMT in September 2002.
The results from these tests indicated that the Kalesto
gauge performs with a higher degree of accuracy and
stability than has been encountered in the past.
Currently the SA Hydrographic Office maintains 10 tide
gauges along the South African coastline. The network
is as follows:
• Port Nolloth – A Kalesto gauge is installed. A
HARTRAO GPS Rx is also fitted.
• Saldanha Bay – At present there is an SRD gauge
installed.
• Cape Town – At present there is an SRD gauge
installed.
• Simon’s Town – At present there is an SRD and a
Kalesto gauge installed. A HARTRAO GPS Rx is also
fitted.
• Mossel Bay – At present there is an SRD gauge
installed.
• Knysna – At present there is an SRD gauge
installed.
• Port Elizabeth – A Kalesto gauge is installed
• East London – A ““Kalesto gauge is installed.
• Durban – At present there is an SRD gauge
installed.
• Richard’s Bay – A Kalesto gauge is installed. A
HARTRAO GPS Rx is also fitted.
The Hydrographic Office has purchased new Kalesto
radar gauges with the intention of installing them until
such time as the entire South African tide gauge net-
work has been upgraded.
SRD gauges
An independent study was done on the SRD gauge, by
IMT, after the SAN Tidal Superintendent expressed con-
cern over the accuracy and quality of the data being
generated by the SRD tide gauge network. The study
showed that transducers housed in tubes produced
large errors due to temperature gradients that formed
in the tube. The solution to this was to remove or
modify the existing tubes to maintain a thermally well
mixed air column around the transducer
The accuracy of the two gauges used in the study was
tested: one was found to have a systematic error of
about 6 mm per metre over and above a fixed offset
of about 24 mm. The other was found to have a sys-
tematic error of approximately 10 mm per metre with
a fixed offset of about 36 mm. This accuracy problem
was taken up with the manufacturers to establish why
the claimed accuracy of 0.05% over the 2- to 10-m
working range could not be achieved with the units
67
IOC Manuals and Guides No 14 vol IV
under test. The manufacturer could not solve the prob-
lem and a method of post-data-processing was devised
to improve the absolute accuracy of the data back to
the claimed 0.05%. This post-data-processing could
however only be carried out once all gauges in the
network had been calibrated in situ to establish their
individual calibration factors.
A refined method for in situ calibration was devised as
a quality control tool. The method allows the following
to be reliably established on site:
• Absolute accuracy
• Measurement repeatability
• Instrument datum offset.
All gauges in the SAN tide gauge network are now
calibrated every six months, using carbon graphite
poles of known length and a stainless steel target that
is suspended below the gauge.
Data received from the gauge are very ‘spiked’. The
stability of the readings is also erratic. This spiking in
the data creates a problem when the time arrives for
the annual tidal prediction run. The spikes have to be
edited out of the data by hand – each day’s data have
to be manually plotted, checked against the graphics
produced by the Tech Tidal Assistant and then edited
into the analysis programme, before predictions can be
calculated. This is a very unscientific, time-consuming
process and human error comes into play.
The quality of the lightning protection within the unit
is not up to standard. A perfect example of this is the
gauge in East London. It was struck by lightning and
this caused a fire in the gauge. Since the Hydrographic
Office had placed the instrument box inside a water-
tight metal box, the fire burnt itself out, owing to lack
of oxygen. It would appear that the data logger was
not damaged in the lightning strike/fire. The power
supply, junction-box telephone line and modem were
damaged.
What the tidal department calls a ‘kick-start’ is the
solution to the problem of periodic unwillingness to
download data. Periodically, the power supply has to
be disconnected from the gauge, followed by a wait
of 30 seconds and then restoration of the power sup-
ply. This problem is becoming more and more frequent
and the down-time that it is creating in data analysis is
becoming problematical.
In the last five years it has become evident that the
transducers are beginning to rust and this is getting
progressively worse. The HO is unsure whether the rust
is affecting the quality of the data; however, this is a
possibility, as the transducers that have little or no rust
are not creating as many problems.
Kalesto radar gauge
The OTT Kalesto radar gauge was tested by the Tidal
Department and under calibration from 12 to 15 April
2002. After analysis of 1,443 readings (with a mean of
2.4955 m, say 2.496 m) it was found that, in general:
• 81% of the readings were within 2 mm of the
above-stated mean
• 93% of the readings were within 3 mm of this
mean
• 97% of the readings were within 5 mm of this
mean.
An independent study to check-calibrate the Kalesto
radar tide gauge was carried out by IMT on request by
the SAN Tidal Superintendent. The study showed that,
during the calibration period, the Kalesto performed
consistently within the manufacturer’s claimed accu-
racy parameters over the 2–7 m range. The absolute
accuracy of the gauge under test had a standard devia-
tion of better than 3 mm over the 2–7 m range. The
independent study confirmed the results achieved by
the SAN Hydrographic Office.
The refined method for in situ calibration devised for
the SRD tide gauge as a quality control tool is used to
calibrate the Kalesto gauge every six months.
The data received from the gauge have very little ‘spik-
ing’ in the graphics; this is due to the 17 s measuring
interval. The low spike density is evident in the graphics
and in the long run there will be very little editing of
the data before the predictions can be produced, thus
improving on the accuracy of the Hydrographic Office’s
predictions. The quality of data being sent to the
GLOSS Fast Centre has also increased, not only in qual-
ity but also in frequency of data transfer. (Fast Data)
This gauge is factory-fitted with an integrated lightning
protector to reduce the possibility of damage caused by
excess voltage (e.g. lightning or power surges.)
Future prospects
The SAN Hydrographic Office intends to upgrade
its entire tide gauge network with the Kalesto radar
tide gauges. It is proposed to install a GPS receiver
at Durban. It is also proposed to install a tide gauge
and GPS receiver on Marion Island, in connection with
HARTRAO, thus restoring the South African GLOSS sta-
tion status to its original 100% capability.
Currently, ‘fast data’ are being sent to the GLOSS Fast
Centre, at the University of Hawaii, from the Simon’s
Town, Richards Bay, Port Nolloth, Port Elizabeth and
East London gauges. The remaining RSA stations will
be included in the fast-data streams once they have
been upgraded to the Kalesto radar gauge.
68
Sea Level Measurement and Interpretation
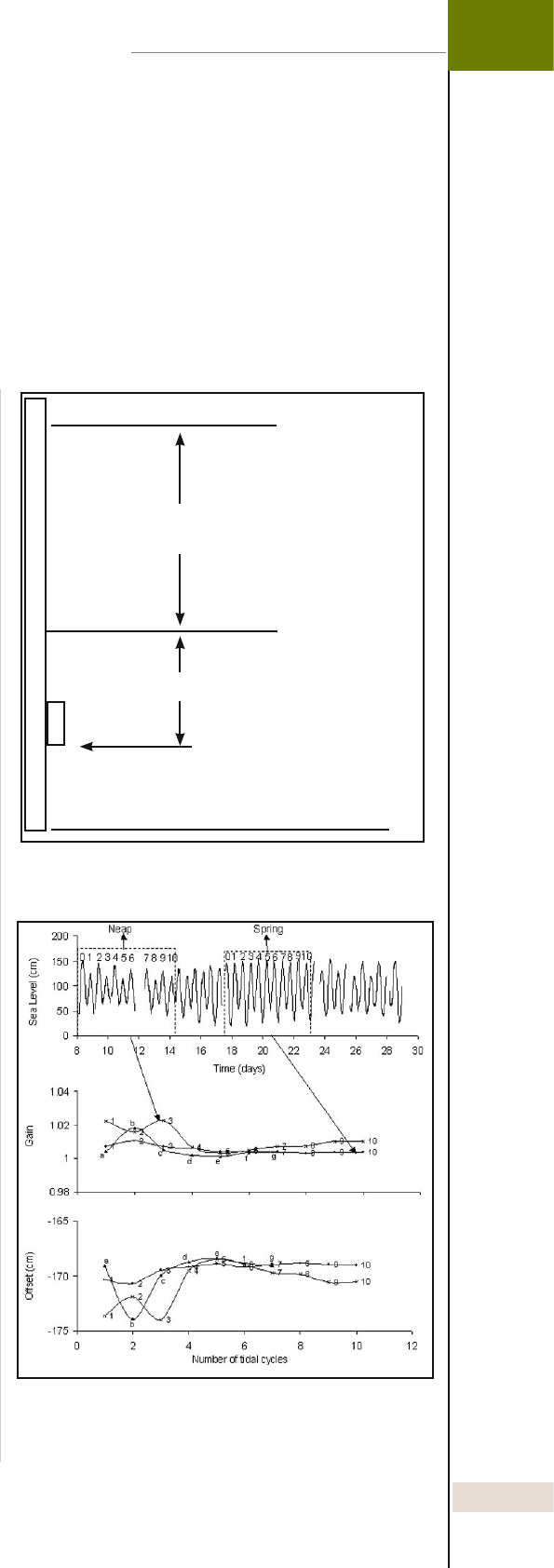
IOC Manuals and Guides No 14 vol IV
Pressure-gauge-based GLOSS Sea Level Station at Takoradi Harbour
(Ghana, West Africa): Experience over a Year
Antony Joseph (+), Prakash Mehra (+), Joseph Odammetey (#), and Nkebi E. Kofi(#),
(+) National Institute of Oceanography of India (NIO); (#) Survey of Ghana (SOG) E-mail: joseph@darya.nio.org
Sea Level Measurement and Interpretation
Introduction
A GLOSS sea level station was commissioned at
Takkoradi harbour in Ghana on 1 July 2004 and a year’s
data have been collected so far. The gauge has been
developed at NIO and was installed with logistic sup-
port from the SOG.
Pressure gauge
Sea level is detected by a temperature-compensated
piezoresistive semiconductor pressure transducer (PPTR)
located ~1.70 m below the Chart Datum (CD) level. In
conformity with the GLOSS requirements, the gauge
logs 15-minute-averaged time-indexed pressure data
at 15-min intervals.
Bottom pressure versus sea level
Translation of bottom pressure measurements to sea
level elevations is achieved conventionally with the use
of seasonally measured water density measurements.
However, Joseph et al. (1999, 2004) have reported
inaccuracies creeping into bottom-pressure-based sea
level measurements in shallow coastal water bodies;
such inaccuracies arise primarily from various poorly
understood site-specific influences, which results in
the effective density (reff) of the water being generally
lower than that obtained from conventional measure-
ments using CTD or a density meter. In view of this, an
alternate method for translation of bottom pressure
measurements to sea level elevations without the use
of water density measurements has been explored.
This method involves the use of a statistically derived
mathematical model, which relates a sufficiently large
set of bottom pressure measurements and concurrent
good-quality tide-staff measurements for a given instal-
lation. The model representing the linear regression
between these two measurements is of the form T =
[(G ¥ Pw)–O] where T, Pw, G and O represent, respec-
tively, chart-datum-referenced tide-staff measurement,
concurrent water pressure measurement, gain, and
offset of the model. The value of O is negative in the
present case, because the pressure port of the PPTR
is located below the CD level (Fig. 1). The premise
is that, if a sufficiently large data set (during a given
season) has been used in constructing the model, then
application of this model to a much larger time-series
of water-pressure data during the same season should
provide a realistic estimate of chart-datum-referenced
sea level elevation.
69
Figure 1. Schematic diagram illustrating the model
parameters T and O.
Figure 2. Illustration of optimal number of tidal cycles
and their neap/spring relationships in achieving stabili-
zation of model parameters G and O.
Sea level
CD
Sea BED
PRESSURE PORT
T
O
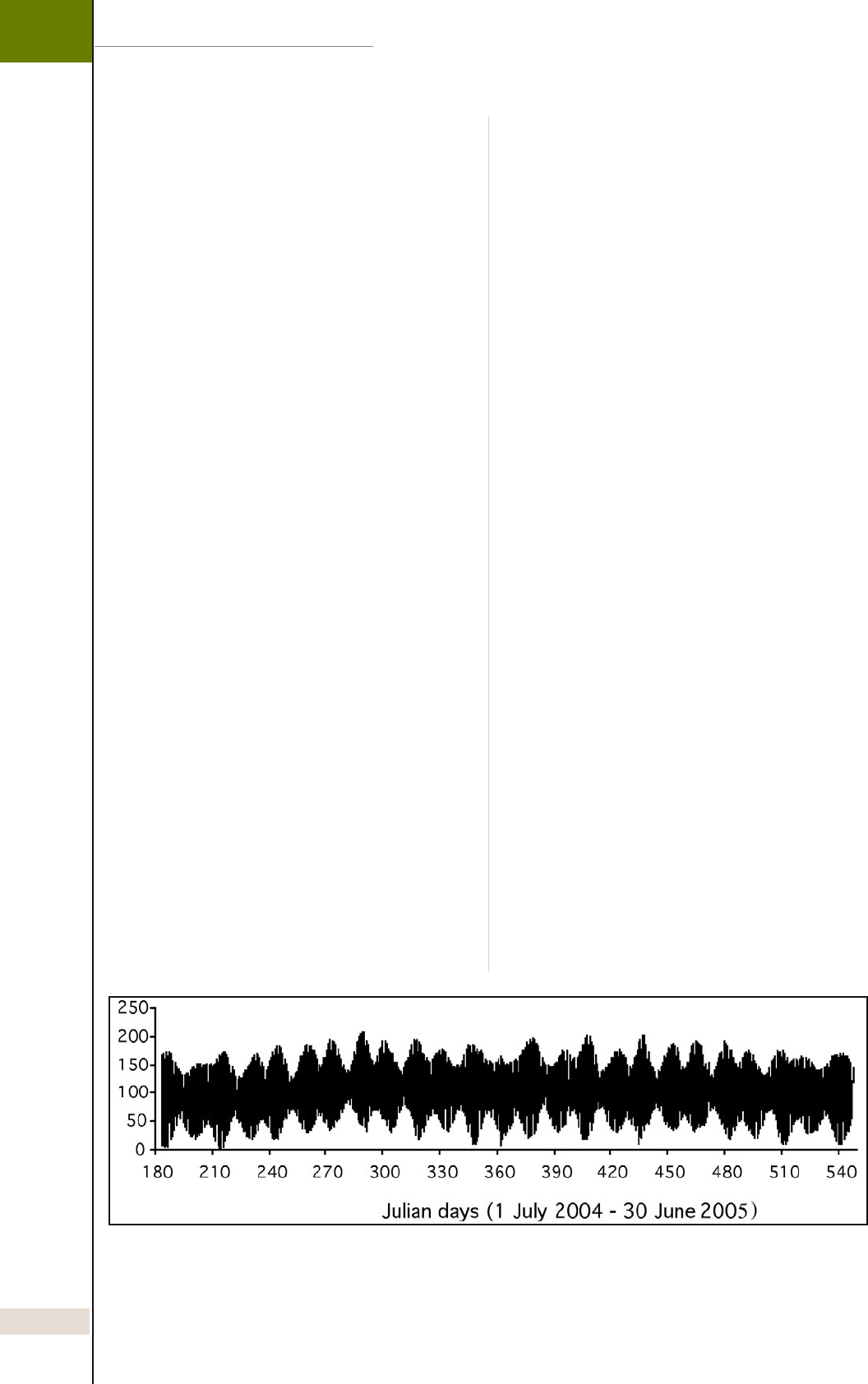
IOC Manuals and Guides No 14 vol IV
Optimization of tide-staff measurements
A bench-mark-levelled tide-staff can be found in
every harbour. The Intergovernmental Oceanographic
Commission (IOC) of UNESCO has recommended
the application of tide-staff measurements for qual-
ity control of sea level measurements made from
autonomous instrumentation (IOC, 2002). However,
no reports are available on the optimal quantum
of tide-staff measurements to be made, nor the
most appropriate sequence of such measurements
in relation to spring/neap cycles for their use in
optimizing quality control. Thus, at present, lack of
clarity exists as to what constitutes a ‘sufficiently
large’ and ‘representative’ data set to be used for
the construction of the model. In an attempt to find
an answer to these questions, we constructed sev-
eral model equations of the type mentioned above,
wherein data sets (acquired at 15-minute intervals)
corresponding to differing tidal cycles during neap
and spring tides were used. We then examined the
optimal number of tidal cycles and their neap/spring
relationships in achieving stabilization of the model
parameters G and O corresponding to each of these
model equations (Figure 2).
In this study, it was observed that, in the case of
neap tide measurements (indicated by ¥ on the
graphs), even after several tidal cycles, the values
of G and O never stabilized (i.e. the values did not
lie on a line parallel to the x-axis). However, unlike
neap tide, spring tide measurements (indicated by
_ on the graphs) provided significantly improved
results. In this case, G and O stabilized with the use
of the data set corresponding to a 3-tidal cycle (one
and half days), and the incorporation of more tidal
cycles for the construction of the model did not
provide any added benefits in terms of stabilization
of G and O. We then examined whether centering
the data set on spring tide peak could reduce the
size of the data set for construction of the model.
With reference to Figure 2; points a, b, c, d, e, f, and
g represent, respectively, the results achieved with
the use of quarter-hourly data sets acquired at/near
spring tide between points 4–5 (1 cycle), 5–6 (1
cycle), 4–6 (2 cycles), 3–7 (4 cycles), 2–8 (6 cycles),
1–9 (8 cycles), and 0–10 (10 cycles). It is seen that,
in relation to several of the G and O values obtained
from the models, the use of data sets correspond-
ing to a single cycle that encompasses the largest
tidal range (bounded by points 4–5 at spring tide)
provided stabilized G and O values (indicated by a
on the Gain and Offset graphs). However, data sets
corresponding to another adjacent single cycle that
represented a much smaller tidal range (bounded by
points 5–6 at spring tide) provided G and O values
(indicated by b on the Gain and Offset graphs) that
differed significantly from the stabilized G and O
values. In many cases a single tidal cycle at spring
tide may not represent the maximum range of the
water column height. This explains why sometimes a
data set corresponding to three or more tidal cycles
during a given spring tide becomes necessary to
achieve stabilization of the model parameters G and
O. It may therefore be concluded that the crucial
factor, which determines stabilization of the model
parameters G and O is the incorporation of data sets
from that (those) tidal cycle(s) which encompasses
the largest range of water column height during a
given spring tide. Figure 3 provides the chart-datum-
referenced sea level measurements obtained from
Takoradi harbour during the period 1 July 2004 to
30 June 2005 based on the above scheme.
Conclusions
The primary objective of our present studies, based
on the GLOSS sea level data from Takoradi harbour,
was to examine a method to improve the accuracy of
bottom-pressure-based coastal and estuarine sea level
measurements. In this method, time-series bottom
pressure measurements are translated to chart-datum-
referenced sea level elevation through post-processing
using a statistically derived mathematical model. This
model is constructed from a set of successive periodic
(15-minute intervals) bottom pressure measurements
over a few tidal cycles during the spring tide, which
encompasses the maximum span of water column
Figure 3. Chart-datum-referenced sea level measurements from Takoradi harbour, Ghana.
70
Sea Level Measurement and Interpretation
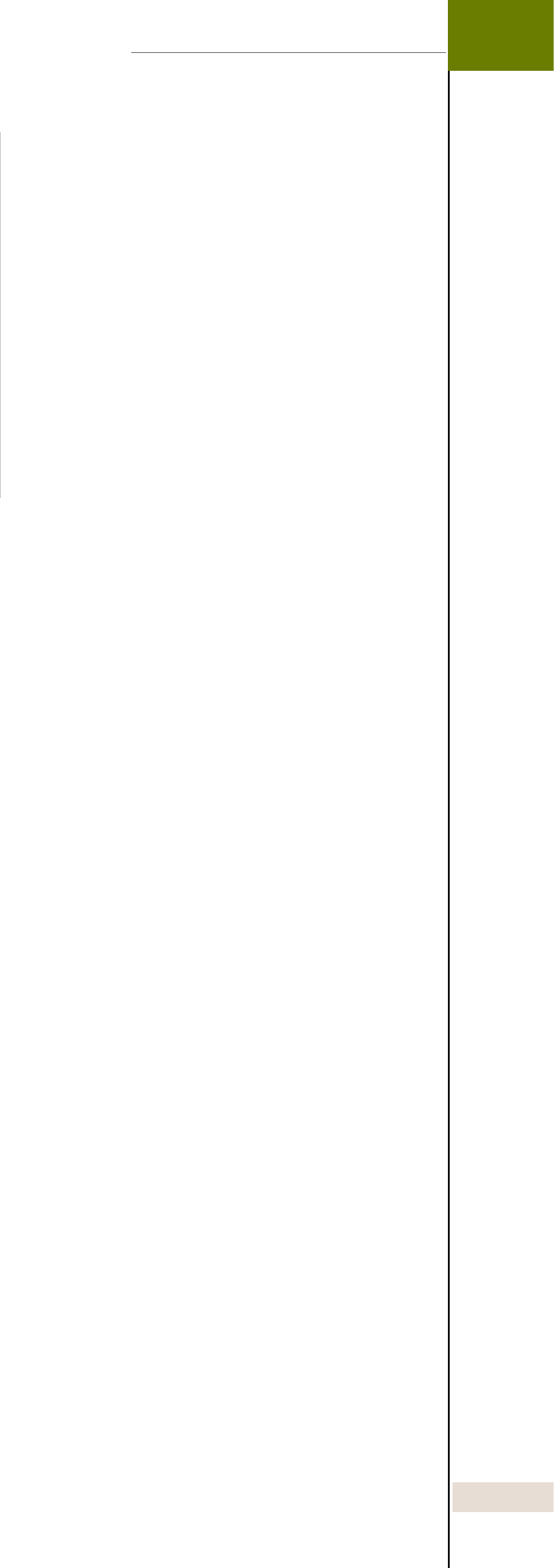
IOC Manuals and Guides No 14 vol IV
Sea Level Measurement and Interpretation
height and concurrent benchmark-leveled tide-staff
measurements. Unlike in the conventional method,
the model provides a chart-datum-referenced sea
level record directly from bottom pressure measure-
ments without the use of seawater density measure-
ments. This method is expected to be applicable for all
types of water bodies and particularly appropriate for
suspended-sediment-laden water bodies whose effec-
tive density has been reported to be less than that
obtained from conventional measurements.
Acknowledgments
The authors acknowledge the logistic support
provided by Mr. J. Wellens-Mensah (AG Director,
Hydrological Services Department, Ghana) and
Mr. Jean Dotse (Director of Surveys of Ghana).
References
Joseph, A., Desa, E., Desa, E.S., Smith, D., Peshwe, V.B.,
Kumar, V., Desa, J.A.E. 1999. Evaluation of pressure
transducers under turbid natural waters. Journal of
Atmospheric and Oceanic Technology, 16 (8) 1150-
1155.
Joseph A., Desa, E., Kumar, V., Desa, E.S., Prabhudesai,
R.G., Prabhudesai, S. 2004. Pressure gauge experi-
ments in India. In: S. Holgate and T. Aarup (eds) IOC
Workshop on New Technical Developments in Sea
and Land Level Observing Systems (14–16 October
2003), Paris, France. IOC Workshop Report No. 193
22-37.
71
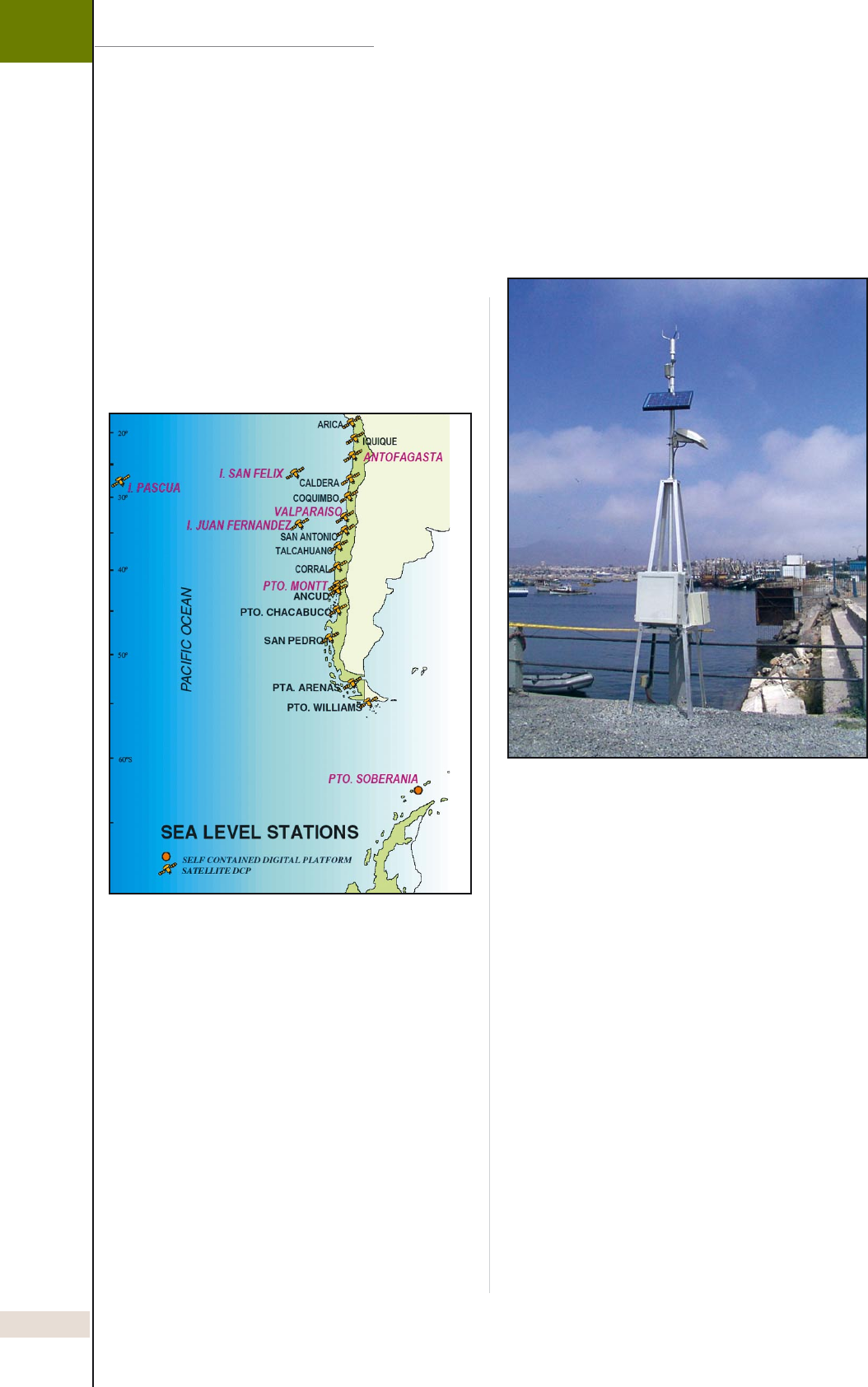
IOC Manuals and Guides No 14 vol IV
Chilean Sea Level Network
Juan Fierro, Chilean Navy Hydrographic and Oceanographic Service (SHOA)
E-mail: jfiero@shoa.cl
72
Sea Level Measurement and Interpretation
In 1941, the Chilean Navy Hydrographic and
Oceanographic Service (SHOA) initiated the establish-
ment of the national tide gauge network with the
objective of starting a systematic and permanent
recording of the sea surface level along the coast.
At the end of 1950, the network consisted of five tide
gauge stations, and the experience gained during its
deployment and operation was extremely important for
a successful extension of the network.
The great length of the Chilean coast and the acces-
sibility problems in some areas have been the main
obstacles to extending the network in the short term.
However, at the end of 1998, the sea level network
comprised 19 permanent tide gauge stations, located
on the mainland as well as in some islands and in
Antarctica. Considered as a system, the operation
of this network has allowed SHOA to provide useful
information to mariners sailing in Chilean waters and
to contribute to engineering projects associated with
coastal-zone management. Moreover, the information
obtained has been of great value to the national and
international scientific communities.
The upgrading initiated in March 1999 considered the
deployment of 17 HANDAR model 555C data-acquisi-
tion platforms, as shown in Figure 1. The new platforms,
with satellite data-transmission capability, replaced the
old recording tide gauges, whose operation was based
on nitrogen gas pressure. The present tide gauge sta-
tion’s characteristics are shown in Figure 2.
For the comparison of old and new gauges, six months
of overlapping (concurrent) operation were considered.
During this time, both systems operated in parallel and
intercomparisons were performed. Sea level data and
ancillary data collected by the sea level network were
transmitted via the GOES satellite system. Incoming sea
level data were validated using a quality-control pack-
age provided by the University of Hawaii. Plots of new
computations of yearly residuals showed fewer errors
in comparison with previous findings.
The standard configuration of every sea level station
included a water-column pressure sensor, an atmo-
Figure 1. Chilean sea level network.
Figure 2. Sea level station configuration.

IOC Manuals and Guides No 14 vol IV
spheric pressure sensor, and seawater temperature and
air temperature sensors. Recently, an ultrasonic wind
sensor was added to some stations on the northern
part of the Chilean coast.
The sea level sensor used is a submersible pressure
transducer, with an operating range from 0 to 70
g/cm2 (equivalent to 13.7 m) of water column. The
signal conductor cable holds a ventilation tube that
eliminates the atmospheric pressure effect over the
water column.
The sea level height is recorded at two-minute intervals
and the other environmental parameters once every
hour. The main components of the DCP are shown in
Figures 3 and 4.
The development of this modern data collection plat-
form (DCP) network has several benefits which may be
summarized as:
• Flexible configuration
• Easy installation, adaptable to different structures
on the field
• Long autonomy
• Powerful data acquisition software
• Better accuracy: 1 cm with DRUCK sensor complies
with GLOSS requirements
Nevertheless, according to the experience accumulated
by SHOA, this system has a few drawbacks, summa-
rized as follows:
• High cost compared to simpler systems
• Requires continuous maintenance for the DRUCK
sensor
• Requires levelling campaigns on a regular basis to
ensure accurate data
• Modem communication with each DCP is not reliable
During the first semester of 2005, SHOA has performed
further upgrades to its network, by installing a Vaisala
Direct Readout Ground Station (DRGS) at SHOA’s head-
quarters at Valparaíso (Figure 5). This DRGS receiver
collects information from our remote data collection
platforms (DCP). The DRGS is fully user-configurable
through the Data Management System (DMS) using a
Sea Level Measurement and Interpretation
73
Figure 3. Sea level station components.
Figure 4. Submerged sensors.
Figure 5. DRGS antenna at SHOA headquarters.
Batterry
Internal
Circuitry
Air Temp
Sensor
GPS
Antenna
Solar pannel
GPS
Connection
Water
Temperature Sensor
Sea Level
Sensor
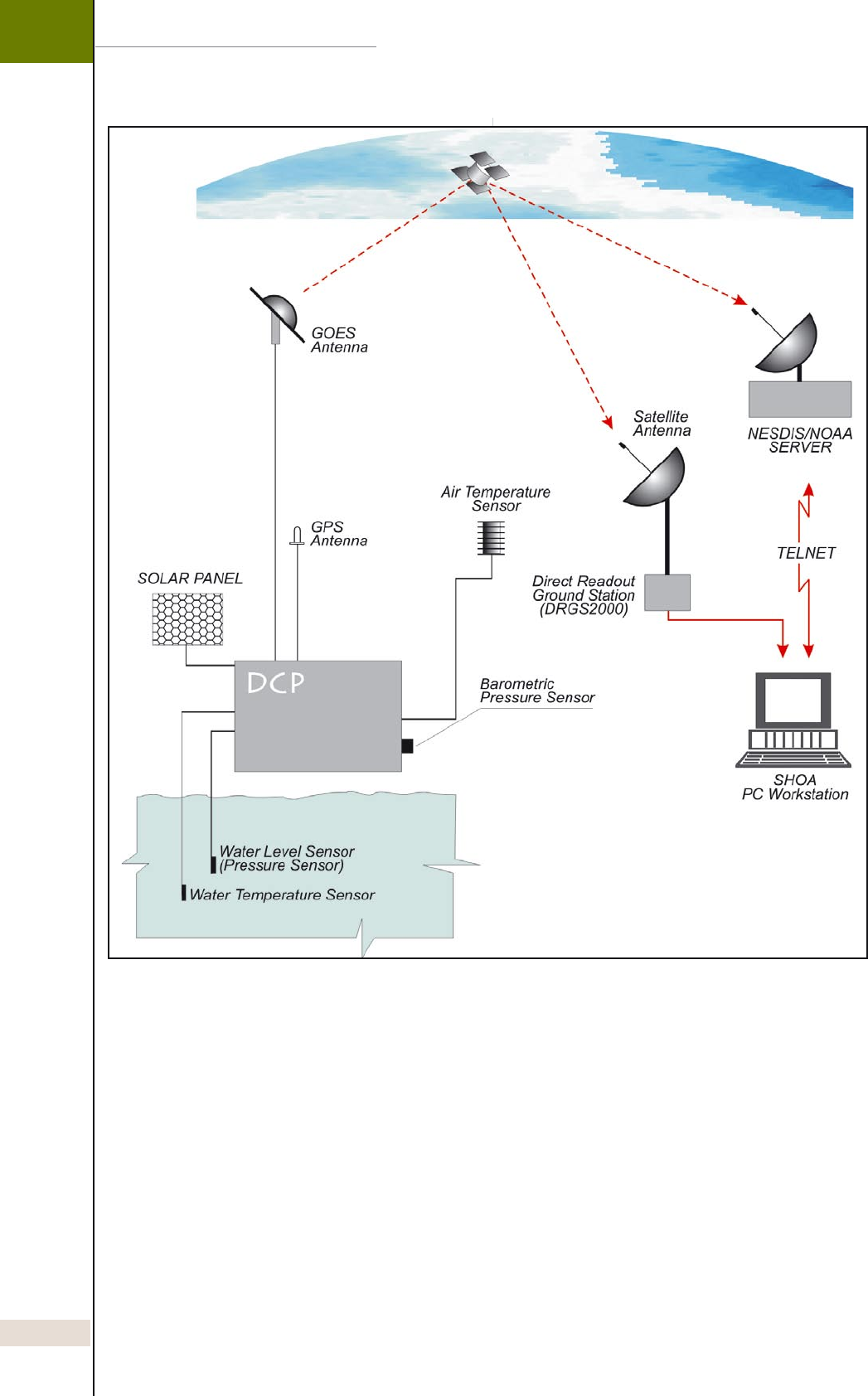
IOC Manuals and Guides No 14 vol IV
bi-directional serial interface, which controls the entire
system through a Pentium-based computer using
Windows 95/98/NT.
The DRGS has greatly improved the information flow
from sea level stations to the final user at our head-
quarters (Figure 6), enhancing the ability to take timely
decisions and improving SHOA’s cooperation in interna-
tional warning systems.
One of the main components in the operation of the
National Tsunami Warning System is the existing net-
work of sea level stations along the coast of continental
Chile and the Pacific islands. The information provided
by the stations is crucial to the determination of the
tsunami hazard whenever a big earthquake occurs in
the Pacific.
The major upgrades performed in recent years have also
increased SHOA’s contribution in international studies
like the ENSO monitoring network in the Pacific Ocean.
The collection of environmental data, such as sea-sur-
face temperature (SST) and mean sea level (MSL) along
the Chilean coast, has enhanced our understanding of
this important phenomenon which affects several eco-
nomic activities, such as fisheries and agriculture.
74
Sea Level Measurement and Interpretation
Figure 6. Information flow across SHOA’s DCP network.
IOC Manuals and Guides No 14 vol IV
Gauges for Tsunami Warning
Bernie Kilonsky, University of Hawaii Sea Level Center, USA.
E-mail: kilonsky@hawaii.edu
Sea Level Measurement and Interpretation
The University of Hawaii Sea Level Center (UHSLC)
has been providing high frequency tide gauge data
for tsunami warning to the Pacific Tsunami Warning
Center (PTWC) for 25 years. This has led to an
emphasis on multiple-use platforms that have the
stability and accuracy to measure long-term sea level
variability and trends, and the range, durability, and
sampling capability to monitor tsunamis. Serving this
dual purpose has resulted in a robust system; station
malfunctions can be detected and addressed quickly
given the immediate access to the data, and ongo-
ing maintenance in support of sea level monitoring
ensures the sustainability of the stations between
infrequent tsunami events. Here we briefly describe
the basic configuration used by the UHSLC for a
tide gauge station that can also be used for tsunami
warning.
Sensors - Since no single sensor is optimal for mea-
suring both mean and high amplitude fluctuating
components of sea level, a combination of water
level sensors are used. The primary sea level sensor is
a pulsed radar, with sampling fast enough (3 minute
averages or shorter) to serve also as a secondary tsu-
nami sensor. The primary tsunami sensor is a vented
pressure transducer reporting 1 minute or shorter
averages. The pressure time series, converted to water
level, is usually adequate to fill any short gaps that
may occur in the radar record. In many cases, a sta-
tion with a preexisting float gauge is also retrofitted
for tsunami monitoring. In these situations the float
gauge is maintained as a third sensor that provides a
backup for sea level monitoring. Water level switches
and a tide staff are also included to monitor the stabil-
ity of the data over time.
Power – All UHSLC stations rely on batteries charged
by solar panels for power. At many remote sites, local
power is not an option. More importantly, local power
is susceptible to failure in the event of a local earth-
quake or tsunami inundation event, in which case it is
advantageous to be isolated from the power grid. Most
of the UHSLC stations are at low- to mid- latitudes
making solar a viable option. This may not be the case
at high latitude sites.
Siting - Because tide gauges require a stable platform,
most of the UHSLC stations are located on piers or
docks within harbors or atoll lagoons. In terms of
tsunami monitoring, this has the disadvantage of not
sampling the wave signal in an open coast setting.
Tsunami amplitudes and frequencies within a protected
harbor are likely to be significantly different than along
an unprotected coast. This is of particular concern for
tsunami modelers who may be trying to assimilate tide
gauge data. On the other hand, unprotected sites tend
to be exposed to swell and low frequency wave energy
that may in some cases mask a small tsunami event
or limit the early detection of a larger event. In addi-
tion, the station is less likely to be destroyed during a
tsunami if it is situated in a harbor. For these reasons,
we consider sitting a station within a harbor a better
option if the main concern is to determine whether a
tsunami threat is present or not.
Communications – The UHSLC tsunami monitoring
experience in the Pacific has been in the context of a
basin-wide warning system. Given that the Pacific is
such a large area, transmitting data from the station to
the warning center within an hour or so of collection is
typically sufficient for monitoring the basin-wide extent
of a tsunami event. As such, the UHSLC has used the
GOES satellite in the Pacific, with the transmission of
2-4 minute averages every hour.
Following the December 2004 tsunami, UHSLC is
transitioning to 1 minute averages transmitted every
15 minutes for basin wide monitoring. This transmis-
sion rate has been accomplished using the Japanese
Meteorological Agency (JMA) and EUMETSAT geosta-
tionary satellites in the Indian Ocean, and the GOES in
the Pacific. For stations located within a 1-hour travel
time of a known tsunami generation site, 15 second
sampling with a 5-minute transmission cycle is under
consideration. At present, this may be feasible on the
GOES system but not for stations using either the JMA
or EUMETSAT downlinks. For these stations, and in
support of partners installing national tsunami warn-
ing systems, UHSLC plans to use the INMARSAT BGAN
system. This application is currently under development
in the Indian Ocean.
75
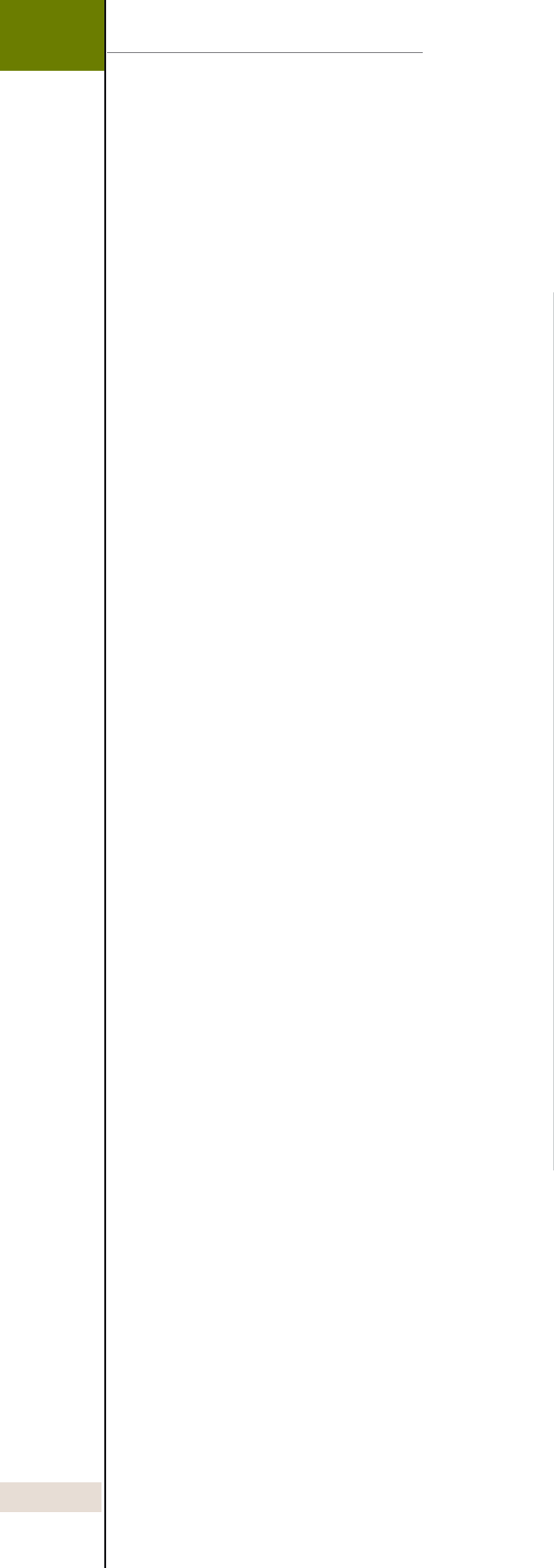
IOC Manuals and Guides No 14 vol IV
The following lists technical details of UNESCO–IOC
funded radar and pressure sensor tide gauges that are
being procured by POL for installation at sites in Africa
as part of the first phase of the ODINAFRICA project. The
instrumentation consists of four basic parts:
• Sensors – the primary sensor is an OTT Kalesto radar
gauge measuring height above sea level, and second-
ary sensors are OTT PS1 pressure sensors measuring
water pressure and temperature at two points in the
water column.
• Housing – the fibreglass instrumentation cabinet
houses the mains power supply, 27 Ah lead–acid
rechargeable battery, OTT HDR-DCP satellite telemetry
unit which sends data through METEOSAT, Logosens2
data logger, 2,400 baud line-powered modem and
lightning suppression for the power and data lines.
• Telemetry – yagi antenna and 10-m cable for data
telemetry and GPS antenna for the integrated receiver
system in the HDR-DCP.
• Data logging – the principal data-retrieval system is
by satellite telemetry, but the Logosens2 data logger
has limited capacity to store the measured sensor
data. Access to these data is by local operator or via
dial-up modem; set-up and maintenance can also be
carried out via the modem link.
The radar sensor needs to be fitted to a locally-manufac-
tured support arm (specification can be supplied by POL
or there is an OTT version available), a site-determined
length of 4-core cable is provided enabling the sensor
to be located a distance away from the instrumentation
cabinet, if required. The pressure sensors require to be
fitted in a stilling well and installation kits for this purpose
are included.
The instrument cabinet is meant to be wall-mounted
and should be inside a building that has a reliable mains
power supply and telephone connection.
The HDR-DCP antenna needs to have as good a view
of the sky and horizon as possible and should be
mounted away from physical obstructions, such as
metalwork and structures, where possible.
Description of operation
By using the OTT HDR-DCP satellite telemetry unit,
accurate real-time data are available from the inte-
grated GPS receiver. This means that the system does
not need to be set up after switch-on and that time
measurement is always accurate to ±1 s.
The two pressure sensors are differential (air-pressure
compensated) sensors. One measures sub-surface
pressure and the other is positioned at approximately
MSL to provide a form of ‘B’ gauge datum control
checking both for the first pressure sensor and for the
Kalesto (see explanation of ‘B’ gauges in the present
Manual).
The Kalesto radar sensor and the pressure sensors are
interrogated every minute by the Logosens2 data log-
ger and the data are recorded. The one-minute values
can be averaged to whatever time interval is required,
e.g. six-minute averages, and sent to the HDR-DCP
for transmission at the allotted time. Alternatively,
data can be recovered via data modem connection.
The tide gauge has a back-up supply that is capable
of keeping the whole system going for approximately
two days without mains power.
Note that this equipment is similar to that provided
by IOC and POL to two sites in Mozambique, and
installed in early 2005 by the South African Navy
Hydrographic Office. In that set-up, the METEOSAT
DCP was replaced by Orbcomm telemetry which
provides relatively cheap data transmission but with
variable latency (see section 5, above).
ODINAFRICA Tide Gauge Specification August 2005
Peter Foden, Proudman Oceanographic Laboratory, Liverpool, UK. E-mail: prf@pol.ac.uk
76
Sea Level Measurement and Interpretation
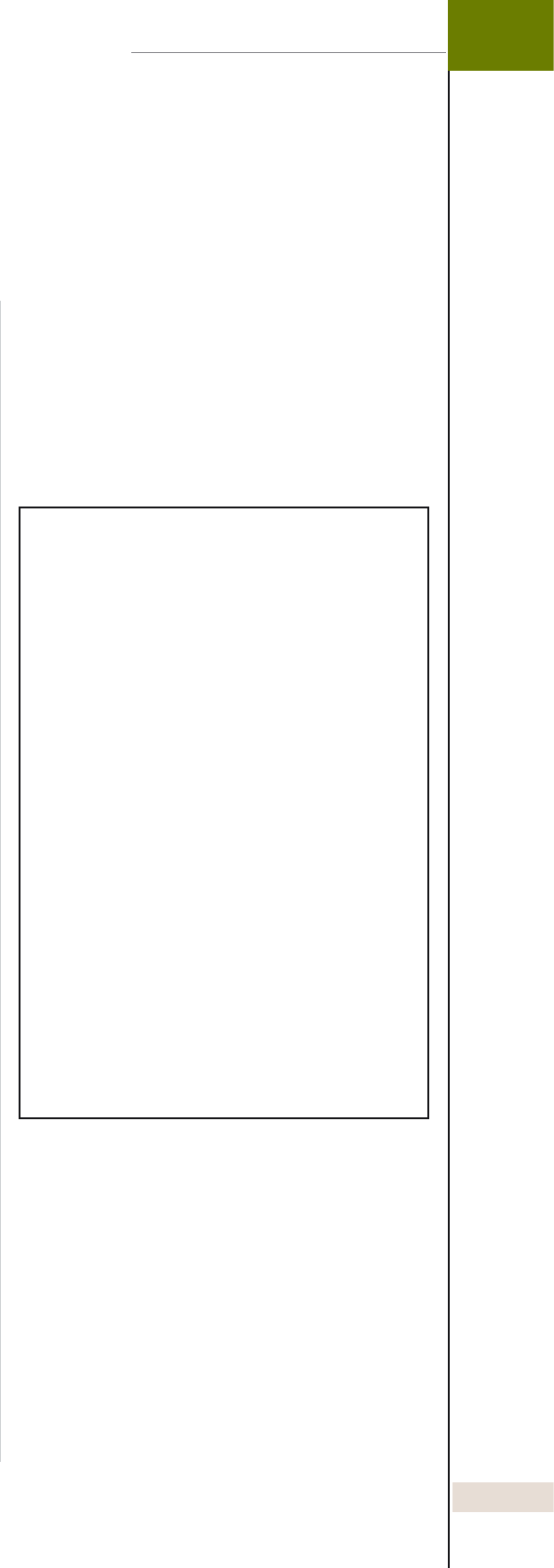
IOC Manuals and Guides No 14 vol IV
Sea Level Measurement and Interpretation
The software package TideTool provides end users with
the ability to decode, display and manipulate sea level
data broadcast over the Global Telecommunications
System (GTS) of the World Meteorological Organization
(WMO). The software utilizes the Tcl/Tk software
package, specifically the BLT extension. Tcl/Tk is an
open source, platform-independent software package
offering a powerful shell programming language and
graphical toolkit.
The software application was developed by the US
NOAA NWS Pacific Tsunami Warning Center to provide
an operational tool for real-time continuous tsunami
monitoring in the Indian Ocean. Its primary users would
be national meteorological and hydrological services
(NMHS), or other agencies with a downlink from the
GTS or to a data file containing those data formatted
in a similar manner. It has been tested under Linux,
Windows 2000 and Windows XP environments in
Indonesia and Malaysia. A Manual is available provid-
ing information on its installation and use. The tool and
documentation are available from the ITSU website:
http://www.tsunamiwave.info/operations
TideTool is station specific, but can be easily modified
for changes in formatting and the addition of addi-
tional sea level stations when needed. The primary
use of this software is as an operational programme
run by tsunami warning centres, or other operational
centres, which need to continuously monitor sea levels.
Mouse-clickable functions include the expansion of the
time-series, and measurement of the arrival time, wave
height and wave period from the incoming signal.
Requirements
To decode and display the data, the following are
required:
• Computer running Tcl/Tk software with BLT extension
• Sea level data that are continuously archived into a
data file
• Tide.tcl software
Computer and Tcl/Tk software with BLT extension
The TideTool software requires the installation of the
Tcl/Tk software package and the BLT extension, both of
which are freely available for download and easy to install.
TideTool has been installed and tested under Unix, Linux,
Windows XP and Windows 2000 operating systems. Use
on other platforms is possible, as it only depends on the
Tcl/Tk and BLT softwares being available. The software
does not require heavy computing power, and can thus
run easily on a Pentium III or higher PC system.
Sea level data
The input is assumed to be a continuously appended,
ASCII-text flat file containing transmissions of data
from different sea level stations in the Indian Ocean.
Each station and its data transmission are described by
a unique set of parameters, including a Satellite Product
Headers, Station Platform, method of transmission and
transmission time, and file formats (Figure 1).
In general, sea level data are digitized and sampled at
the field station. Ideally, the data transmitted for tsunami
monitoring will be 1-minute (or better) averaged data
values that are transmitted at least every 15 min; cur-
rently, stations transmit every 10–60 minutes and data
averages are at 1 to 4-minute sampling intervals. The
data are transmitted over a number of different satel-
lites to regional telecommunications hubs of the WMO,
77
Figure 1. Sample of transmissions from field station
Data Collection Platform (DCP) in formats used by
the University of Hawaii Sea Level Center, by Australia
National Tidal Centre, and the US National Ocean
Service, respectively.
TideTool – A Software Package to Display and Decode Sea Level Data
Transmitted over the WMO Global Telecommunications System
Laura Kong, International Tsunami Information Centre, Hawaii, USA. E-mail: l.kong@unesco.org
SWIO40 RJTD 250015
:ENB 1 #1 M 3908 3908 3910 3909 3911 3909 3912
3910 3913 3913 3917 3917 3917 3917 3915 3918
3914 3917 3912 3913 3913 3913 3912 3913 3911
3908 3908 3905 3909 :ENC 1 #2 3409 3410 3411 3411
3413 3419 3419 3420 3419 3415 3414
3418 3411 3408 3410 3409 3409 3408 3409 3409
3414 3413 3409 3414 3414 3410 3412 3409 3410
3413 :BATTLOAD 0 12.83 :NAME=
91642 46/// /1205 10296 40080 22200 00287
555 77744 A0102 516`3 60029 6315B 03024 83030
00A07 02548 02901 29631 6B090 24520 2400A 13025
90036 00297 317B1 50240 60310 0A190 26230 38002
96317 B2102 37103 100A2 50266 50330 02973 18B27
02331 02800 A3102 70103 10029 8318B 33022 92026
00A37 02736 03401 29831 8B390 22570 2801A 43027
66028 00299 319B4 50222 50230 0A490 27960 34002
98319 B5102 19202 901A5 50282 20380 02983 19B57
02163 03200 BV289 134S1 41249 C0501 22080 00070
23677 44777=
^^33487552
206011307M94168411DZpQ^@@rI}0uW@1[Am@~@BsB
YB\AG@BrBYBzAM@BqBZCUAB@BoBZCmA@@BmBZDM
AI@BlBZDrAG@BlBZD?AD@BkBZETAL@BjBZEwAGABhBZ”
@qv@oL3@[DvAI4B[5Ad6a`=OE0uVW>ZAnA|BYBkCRCqC
sDWDnER”@us@so0uVV>YCqC?DBCtDSD[DnDxEGEa”@
wh@wB_OLAoP 50+1NN 116W
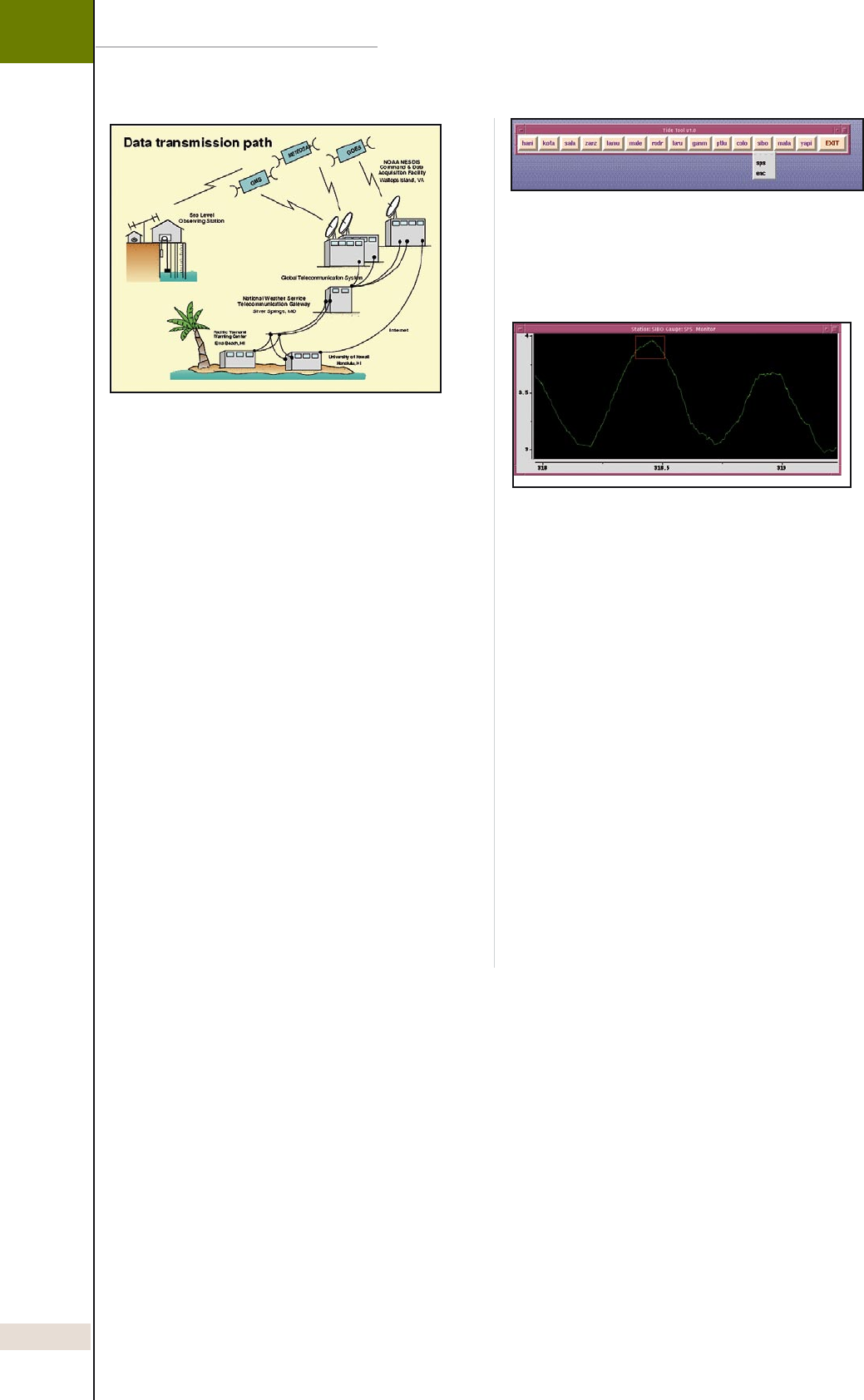
and onwards to customers such as the Pacific Tsunami
Warning Center, the Japan Meteorological Agency, and to
any requesting national hydrological agency (Figure 2).
In the Indian Ocean, the primary satellites used for
transmission from the field stations are the Japanese
GMS for the eastern Indian Ocean and the EUMETSAT
operational satellite system for the central and western
Indian Ocean. The PTWC receives its data through the
USA GOES satellite system. The satellites are part of
the GTS. The GTS is a semi-private, reliable communi-
cationssystem supported by the 187-member WMO for
the transmission of environmental data, information
messages and warnings. The GTS is the primary means
by which the PTWC receives sea level data and issues
tsunami warnings.
TideTool
The programme is started by typing bltwish Tide.tcl. It
decodes the received sea level data that are found in a
single data-logging file, creates individual station files
containing the decoded data, and starts a graphical
user interface display that allows each station to be
displayed as a plot (Figure 3).
Each time-series can be manipulated using a mouse to
zoom and pick an amplitude or wave period (Figure 4).
Tide.tcl will operate continuously once started. It will
check every 20 s to see if any new data have arrived,
and if so, it will decode and update the station time-
series file that is plotted. When Tide.tcl is started, it
will read data from the current day data log. Tide.tcl
will keep up to 24 hours of data. As more data arrive
beyond what Tide.tcl is supposed to hold, it will discard
the older data to make room for the new. For each
station, two gauges are decoded. The gauge code is
three letters, where prs stands for pressure sensor, bub
indicates bubbler etc.
For further information and questions, please contact
the IOC International Tsunami Information Centre (itic.
tsunami@noaa.gov) or the Pacific Tsunami Warning
Center (stuart.weinstein@noaa.gov).
Figure 4. Sea level time-series plot. A mouse is used
to select the part which should be enlarged to pick
the arrival time.
Figure 3. Figure 3. GUI showing all stations that
were decoded.
Figure 2. Transmission from the data collection plat-
form at the field station to the warning centres.
78
Sea Level Measurement and Interpretation
IOC Manuals and Guides No 14 vol IV
Sea Level Measurement and Interpretation
79
IOC Manuals and Guides No 14 vol IV
IOC Manuals and Guides
No. Title
1 rev. 2 Guide to IGOSS Data Archives and Exchange (BATHY and TESAC). 1993. 27 pp. (English, French, Spanish, Russian)
2 International Catalogue of Ocean Data Station. 1976. (Out of stock)
3 rev. 3 Guide to Operational Procedures for the Collection and Exchange of JCOMM Oceanographic Data. Third Revised Edition,
1999. 38 pp. (English, French, Spanish, Russian)
4 Guide to Oceanographic and Marine Meteorological Instruments and Observing Practices. 1975. 54 pp. (English)
5 rev. Guide for Establishing a National Oceanographic Data Centre, 1997. 42 pp. (English)
6 rev. Wave Reporting Procedures for Tide Observers in the Tsunami Warning System. 1968. 30 pp. (English)
7 Guide to Operational Procedures for the IGOSS Pilot Project on Marine Pollution (Petroleum) Monitoring. 1976. 50 pp.
(French, Spanish)
8 (Superseded by IOC Manuals and Guides No. 16)
9 rev. Manual on International Oceanographic Data Exchange. (Fifth Edition). 1991. 82 pp. (French, Spanish, Russian)
9 Annex I (Superseded by IOC Manuals and Guides No. 17)
9 Annex II Guide for Responsible National Oceanographic Data Centres. 1982. 29 pp. (English, French, Spanish, Russian)
10 (Superseded by IOC Manuals and Guides No. 16)
11 The Determination of Petroleum Hydrocarbons in Sediments. 1982. 38 pp. (French, Spanish, Russian)
12 Chemical Methods for Use in Marine Environment Monitoring. 1983. 53 pp. (English)
13 Manual for Monitoring Oil and Dissolved/Dispersed Petroleum Hydrocarbons in Marine Waters and on Beaches. 1984. 35
pp. (English, French, Spanish, Russian)
14 Manual on Sea-Level Measurements and Interpretation.
Vol. I: Basic Procedure. 1985. 83 pp. (English, French, Spanish, Russian)
Vol. II: Emerging Technologies. 1994. 72 pp. (English)
Vol. III: Reappraisals and Recommendations as of the year 2000. 2002. 55 pp. (English)
Vol. IV: An Update to 2006. 2006. 78 pp. (English)
15 Operational Procedures for Sampling the Sea-Surface Microlayer. 1985. 15 pp. (English)
16 Marine Environmental Data Information Referral Catalogue. Third Edition. 1993. 157 pp. (Composite English/French/
Spanish/Russian)
17 GF3: A General Formatting System for Geo-referenced Data
Vol. 1: Introductory Guide to the GF3 Formatting System. 1993. 35 pp. (English, French, Spanish, Russian)
Vol. 2: Technical Description of the GF3 Format and Code Tables. 1987. 111 pp. (English, French, Spanish, Russian)
Vol. 3: Standard Subsets of GF3. 1996. 67 pp. (English)
Vol. 4: User Guide to the GF3-Proc Software. 1989. 23 pp. (English, French, Spanish, Russian)
Vol. 5: Reference Manual for the GF3-Proc Software. 1992. 67 pp. (English, French, Spanish, Russian)
Vol. 6: Quick Reference Sheets for GF3 and GF3-Proc. 1989. 22 pp. (English, French, Spanish, Russian)
18 User Guide for the Exchange of Measured Wave Data. 1987. 81 pp. (English, French, Spanish, Russian)
19 Guide to IGOSS Specialized Oceanographic Centres (SOCs). 1988. 17 pp. (English, French, Spanish, Russian)
20 Guide to Drifting Data Buoys. 1988. 71 pp. (English, French, Spanish, Russian)
21 (Superseded by IOC Manuals and Guides No. 25)
22 GTSPP Real-time Quality Control Manual. 1990. 122 pp. (English)
23 Marine Information Centre Development: An Introductory Manual. 1991. 32 pp. (English, French, Spanish, Russian)
No. Title
24 Guide to Satellite Remote Sensing of the Marine Environment. 1992. 178 pp. (English)
25 Standard and Reference Materials for Marine Science. Revised Edition. 1993. 577 pp. (English)
26 Manual of Quality Control Procedures for Validation of Oceanographic Data. 1993. 436 pp. (English)
27 Chlorinated Biphenyls in Open Ocean Waters: Sampling, Extraction, Clean-up and Instrumental Determination. 1993. 36
pp. (English)
28 Nutrient Analysis in Tropical Marine Waters. 1993. 24 pp. (English)
29 Protocols for the Joint Global Ocean Flux Study (JGOFS) Core Measurements. 1994. 178 pp . (English)
30 MIM Publication Series:
Vol. 1: Report on Diagnostic Procedures and a Definition of Minimum Requirements for Providing Information Services on
a National and/or Regional Level. 1994. 6 pp. (English)
Vol. 2: Information Networking: The Development of National or Regional Scientific Information Exchange. 1994. 22 pp.
(English)
Vol. 3: Standard Directory Record Structure for Organizations, Individuals and their Research Interests. 1994. 33 pp.
(English)
31 HAB Publication Series:
Vol. 1: Amnesic Shellfish Poisoning. 1995. 18 pp. (English)
32 Oceanographic Survey Techniques and Living Resources Assessment Methods. 1996. 34 pp. (English)
33 Manual on Harmful Marine Microalgae. 1995. (English) [superseded by a sale publication in 2003, 92-3-103871-0.
UNESCO Publishing]
34 Environmental Design and Analysis in Marine Environmental Sampling. 1996. 86 pp. (English)
35 IUGG/IOC Time Project. Numerical Method of Tsunami Simulation with the Leap-Frog Scheme. 1997. 122 pp. (English)
36 Methodological Guide to Integrated Coastal Zone Management. 1997. 47 pp. (French, English)
37 Post-Tsunami Survey Field Guide. First Edition. 1998. 61 pp. (English, French, Spanish, Russian)
38 Guidelines for Vulnerability Mapping of Coastal Zones in the Indian Ocean. 2000. 40 pp. (French, English)
39 Cancelled
40 Guidelines for the Study of Shoreline Change in the Western Indian Ocean Region. 2000. 73 pp. (English)
41 Potentially Harmful Marine Microalgae of the Western Indian Ocean
Microalgues potentiellement nuisibles de l’océan Indien occidental. 2001. 104 pp. (English/French)
42 Des outils et des hommes pour une gestion intégrée des zones côtières - Guide méthodologique, vol.II/
Steps and Tools Towards Integrated Coastal Area Management – Methodological Guide, Vol. II. 2001. 64 pp. (French,
English; Spanish)
43 Black Sea Data Management Guide (Under preparation)
44 Submarine Groundwater Discharge in Coastal Areas – Management implications, measurements and effects. 2004.
35 pp. (English)
45 A Reference Guide on the Use of Indicators for Integrated Coastal Management. 2003. 127 pp. (English). ICAM Dossier
No. 1
80
Sea Level Measurement and Interpretation
IOC Manuals and Guides No 14 vol IV
