Manualx Manual RTKLIB 2.4.2
User Manual:
Open the PDF directly: View PDF ![]() .
.
Page Count: 183 [warning: Documents this large are best viewed by clicking the View PDF Link!]

Copyright(C)2007‐2013,T.Takasu.Allrightsreserved.
i
RTKLIBver.2.4.2Manual
April29,2013
Contents
1 Overview..............................................................................................................................................................1
2 UserRequirements..............................................................................................................................................3
2.1 SystemRequirements.................................................................................................................................3
2.2 License..........................................................................................................................................................4
3 Instructions..........................................................................................................................................................5
3.1 InstallationandUninstallation..................................................................................................................5
3.2 Real‐TimePositioningwithRTKNAVI.....................................................................................................7
3.3 ConfigureInput,OutputandLogStreamsforRTKNAVI...................................................................22
3.4 Post‐ProcessingAnalysiswithRTKPOST..............................................................................................29
3.5 ConfigurePositioningOptionsforRTKNAVIandRTKPOST............................................................34
3.6 ConvertReceiverRawDatatoRINEXwithRTKCONV.....................................................................50
3.7 ViewandPlotSolutionswithRTKPLOT...............................................................................................55
3.8 ViewandPlotObservationDatawithRTKPLOT.................................................................................69
3.9 DownloadGNSSProductsandDatawithRTKGET............................................................................77
3.10 NTRIPBrowser..........................................................................................................................................83
3.11 UseCUIAPsofRTKLIB...........................................................................................................................86
4 BuildAPsorDevelopUserAPswithRTKLIB..............................................................................................87
4.1 RebuildGUIandCUIAPsonWindows................................................................................................87
4.2 BuildCUIAPs............................................................................................................................................88
4.3 DevelopandLinkUserAPswithRTKLIB.............................................................................................89
AppendixA CUICommandReferences...........................................................................................................90
A.1 RTKRCV.....................................................................................................................................................90
A.2 RNX2RTKP.................................................................................................................................................93
A.3 POS2KML...................................................................................................................................................95
A.4 CONVBIN..................................................................................................................................................96
A.5 STR2STR.....................................................................................................................................................99
ii
AppendixB FileFormats..................................................................................................................................101
B.1 PositioningSolutionFile.........................................................................................................................101
B.2 SBASLogFile...........................................................................................................................................104
B.3 SolutionStatusFile..................................................................................................................................106
B.4 ConfigurationFile...................................................................................................................................109
B.5 URLListFileforGNSSData..................................................................................................................112
AppendixC APIReferences.............................................................................................................................114
AppendixD FilesandMessages......................................................................................................................122
D.1 SupportedRINEXFiles...........................................................................................................................122
D.2 SupportedReceiverMessages...............................................................................................................123
D.3 SupportedSignalIDs/ObservationTypes............................................................................................125
D.4 DefaultPrioritiesofMultipleSignals...................................................................................................127
D.5 ReceiverDependentInputOptions......................................................................................................128
AppendixE ModelsandAlgorithms..............................................................................................................129
E.1 TimeSystem.............................................................................................................................................131
E.2 CoordinatesSystem................................................................................................................................134
E.3 GNSSSignalMeasurementModels......................................................................................................137
E.4 GNSSSatelliteEphemeridesandClocks..............................................................................................142
E.5 TroposphereandIonosphereModels...................................................................................................149
E.6 SinglePointPositioning..........................................................................................................................154
E.7 Kinematic,StaticandMoving‐Baseline................................................................................................161
E.8 PPP(PrecisePointPositioning)..............................................................................................................171
AppendixF GNSSSignalSpecifications........................................................................................................177
References................................................................................................................................................................179
RTKLIBver.2.4.2Manual
1
1 Overview
RTKLIBisanopensourceprogrampackageforstandardandprecisepositioningwithGNSS(global
navigationsatellitesystem).RTKLIBconsistsofaportableprogramlibraryandseveralAPs(application
programs)utilizingthelibrary.ThefeaturesofRTKLIBare:
(1) Itsupportsstandardandprecisepositioningalgorithmswith:
GPS[1][2][3],GLONASS[4],Galileo[5],QZSS[6],BeiDou[7]andSBAS[8]
(2) ItsupportsvariouspositioningmodeswithGNSSforbothreal‐time‐andpost‐processing:
Single,DGPS/DGNSS,Kinematic,Static,Moving‐Baseline,Fixed,PPP‐Kinematic,PPP‐Staticand
PPP‐Fixed.
(3) ItsupportsmanystandardformatsandprotocolsforGNSS:
RINEX2.10[9],2.11[10],2.12[11]OBS/NAV/GNAV/HNAV/LNAV/QNAV,RINEX3.00[12],3.01[13],3.02[14]
OBS/NAV,RINEX3.02CLK[15],RTCMver.2.3[16],RTCMver.3.1(withamendment1‐5)[17],RTCM
ver.3.2[18],BINEX[19],NTRIP1.0[20],NMEA0183[21],SP3‐c[22],ANTEX1.4[23],IONEX1.0[24],NGSPCV
[25]andEMS2.0[26](referAppendixD.1andD.2fordetails).
(4) ItsupportsseveralGNSSreceiversʹproprietarymessages:
NovAtel[27]:OEM4/V/6,OEM3,OEMStar,SuperstarII,Hemisphere[28]:Eclipse,Crescent,u‐blox[29]:
LEA‐4T/5T/6T,SkyTraq[30]:S1315F,JAVAD[31]GRIL/GREIS,Furuno[32]GW‐10‐II/IIIandNVS[33]
NV08CBINR(referAppendixD.2fordetails).
(5) Itsupportsexternalcommunicationvia:
Serial,TCP/IP,NTRIP,locallogfile(recordandplayback)andFTP/HTTP(automaticdownload).
(6) ItprovidesmanylibraryfunctionsandAPIs(applicationprograminterfaces):
Satelliteandnavigationsystemfunctions,matrixandvectorfunctions,timeandstringfunctions,
coordinatestransformation,inputandoutputfunctions,debugtracefunctions,platformdependent
functions,positioningmodels,atmospheremodels,antennamodels,earthtidesmodels,geoidmodels,
datumtransformation,RINEXfunctions,ephemerisandclockfunctions,preciseephemerisandclock
functions,receiverrawdatafunctions,RTCMfunctions,solutionfunctions,GoogleEarth[34]KML
converter,SBASfunctions,optionsfunctions,streamdatainputandoutputfunctions,integer
ambiguityresolution,standardpositioning,precisepositioning,post‐processingpositioning,stream
serverfunctions,RTKserverfunctions,downloaderfunctions.
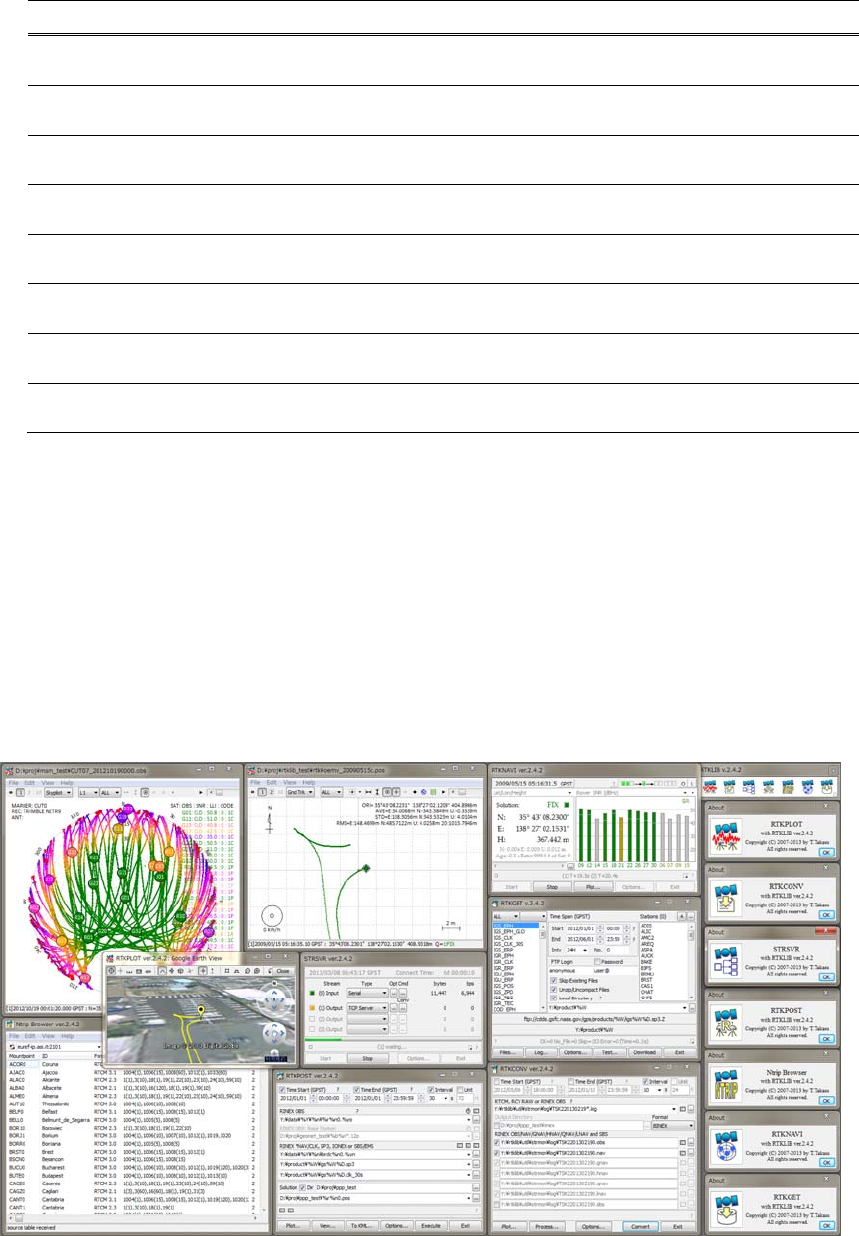
(7) ItincludesthefollowingGUI(graphicaluserinterface)andCUI(command‐lineuserinterface)APs.()
showsthesectiondescribingtheinstructionforeachAPinthemanual.
RTKLIBver.2.4.2Manual
2
FunctionGUIAPCUIAPNotes
(a)APLauncherRTKLAUNCH
(3.1)‐
(b)Real‐TimePositioningRTKNAVI
(3.2,3.3,3.5)
RTKRCV
(3.11,A.1)
(c)CommunicationServerSTRSVR,
(3.3)
STR2STR
(3.11,A.5)
(d)Post‐ProcessingAnalysisRTKPOST
(3.4,3.5)
RNX2RTKP
(3.11,A.2)
(e)RINEXConverterRTKCONV
(3.6)
CONVBIN
(3.11,A.4)
(f)PlotSolutionsand
ObservationData
RTKPLOT
(3.7,3.8)‐
(g)DownloaderforGNSS
ProductsandData
RTKGET
(3.9)‐
(h)NTRIPBrowserSRCTBLBROWS
(3.10)‐
(8) AlloftheexecutablebinaryAPsforWindowsareincludedinthepackageaswellaswholesource
programsofthelibraryandtheAPs.
RTKLIBGUIAPsonWindows7
RTKLIBver.2.4.2Manual
3
2 User Requirements
2.1 System Requirements
TheexecutablebinaryGUIandCUIAPsincludedinthepackagerequireMicrosoftWindows[35]
environment.OntheotherOSorenvironment,youhavetocompileandbuildCUIAPsbyyourself.
AllofthelibraryfunctionsandAPIswerewritteninANSIC(C89).Thelibraryinternallyuseswinsockand
WIN32threadforWindowswiththecompileroption‐DWIN32andthestandardsocketandpthread
(POSIXthread)forLinux/UNIXwithoutanyoption.Bysettingthecompileroption‐DLAPACKor‐DMKL,
thelibraryusesLAPACK/BLAS[36]orIntelMKL[37]forfastmatrixcomputation.
TheCUIAPswerealsowritteninANSIC.ThelibraryandCUIAPscanbebuiltonmanyenvironmentslike
gcconLinux.TheGUIAPswerewritteninC++andutilizeEmbarcadero/BorlandVCL(visualcomponent
library)[38]forGUItoolkits.AlloftheexecutablebinaryAPsinthepackagewerebuiltbyEmbarcaderoC++
builderXE2StarterEditiononWindows7.
TheexecutableGUIAPsweretestedonWindows7(64bit).TheCUIAPswerealsobuiltandtestedon
Ubuntu[39]11.04Linuxandx86CPU.
Notes:PreviousversionsofRTKLIBuntilver.2.4.1werebuiltbyafreeeditionofBorlandC++(TurboC++
2006).TurboC++,however,isnolongersupportedinver.2.4.2becauseoftypeincompatibilityproblemof
GUIstringsbetweenver.2.4.2andthepreviousones.
RTKLIBver.2.4.2Manual
4
2.2 License
TheRTKLIBsoftwarepackageisdistributedunderthefollowingBSD2‐clauselicense[40]andadditional
twoexclusiveclauses.Usersarepermittedtodevelop,produceorselltheirownnon‐commercialor
commercialproductsutilizing,linkingorincludingRTKLIBaslongastheycomplywiththelicense.
Notes:PreviousversionsofRTKLIBuntilver.2.4.1hadbeendistributedunderGPLv3[59]license.
‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐
Copyright(c)2007‐2013,T.Takasu,Allrightsreserved.
Redistributionanduseinsourceandbinaryforms,withorwithoutmodification,arepermittedprovided
thatthefollowingconditionsaremet:
Redistributionsofsourcecodemustretaintheabovecopyrightnotice,thislistofconditionsandthe
followingdisclaimer.
Redistributionsinbinaryformmustreproducetheabovecopyrightnotice,thislistofconditionsand
thefollowingdisclaimerinthedocumentationand/orothermaterialsprovidedwiththedistribution.
Thesoftwarepackageincludessomecompanionexecutivebinariesorsharedlibrariesnecessaryto
executeAPsonWindows.Theselicensessucceedtotheoriginalonesofthesesoftware.
THISSOFTWAREISPROVIDEDBYTHECOPYRIGHTHOLDERSANDCONTRIBUTORSʺASISʺAND
ANYEXPRESSORIMPLIEDWARRANTIES,INCLUDING,BUTNOTLIMITEDTO,THEIMPLIED
WARRANTIESOFMERCHANTABILITYANDFITNESSFORAPARTICULARPURPOSEARE
DISCLAIMED.INNOEVENTSHALLTHECOPYRIGHTHOLDERORCONTRIBUTORSBELIABLEFOR
ANYDIRECT,INDIRECT,INCIDENTAL,SPECIAL,EXEMPLARY,ORCONSEQUENTIALDAMAGES
(INCLUDING,BUTNOTLIMITEDTO,PROCUREMENTOFSUBSTITUTEGOODSORSERVICES;LOSS
OFUSE,DATA,ORPROFITS;ORBUSINESSINTERRUPTION)HOWEVERCAUSEDANDONANY
THEORYOFLIABILITY,WHETHERINCONTRACT,STRICTLIABILITY,ORTORT(INCLUDING
NEGLIGENCEOROTHERWISE)ARISINGINANYWAYOUTOFTHEUSEOFTHISSOFTWARE,EVEN
IFADVISEDOFTHEPOSSIBILITYOFSUCHDAMAGE.
RTKLIBver.2.4.2Manual
5
3 Instructions
3.1 Installation and Uninstallation
(1) Extracttheprogrampackagertklib_<ver>.ziporrtklib_<ver>_bin.zip toappropriate
directory<install dir>(<ver>indicatestheversionnumber).TheRTKLIBdirectorystructureisas
follows.
rtklib_<ver>
\src :SourceprogramsofRTKLIBlibrary*
\rcv :SourceprogramsdependingonGPS/GNSSreceivers*
\bin :ExecutablebinaryAPsandDLLsforWindows
\data :SampledataforAPs
\app :BuildenvironmentforAPs*
\rtknavi :RTKNAVI (GUI)*
\rtknavi_mkl :RTKNAVI_MKL (GUI)*
\strsvr :STRSVR (GUI)*
\rtkpost :RTKPOST (GUI)*
\rtkpost_mkl :RTKPOST_MKL (GUI)*
\rtkplot :RTKPLOT (GUI)*
\rtkconv :RTKCONV (GUI)*
\srctblbrows :NTRIPBrowser (GUI)*
\rtkget
:RTKGET (GUI)*
\rtklaunch :RTKLAUNCH (GUI)*
\rtkrcv
:RTKRCV (CUI)*
\rnx2rtkp :RNX2RTKP (CUI)*
\pos2kml :POS2KML (CUI)*
\convbin :CONVBIN (CUI)*
\str2str :STR2STR (CUI)*
\appcmn :CommonroutinesforGUIAPs*
\icon :IcondataforGUIAPs*
\lib :Librariesgenerationenvironment*
\test :Testprogramanddata*
\util :Utilities*
\doc :Documentfiles
*Notincludedinthebinarypackagertklib_<ver>_bin.zip
RTKLIBver.2.4.2Manual
6
(2) Createtheshot‐cutsoftheGUIAPexecutablebinariesin<install dir>\rtklib_<ver>\bin.To
executeCUIAPs,add<install dir>\rtklib_<ver>\bintothecommandpath.
(3) TheGUIandCUIAPsinRTKLIBneverutilizetheWindowsregistry.Touninstallthepackage,simply
deletethewholefilesanddirectoriesintheinstalleddirectory.
(4) OptionalsettingsforGUIAPsaresavedinINIfiles(*.ini)usuallyplacedinthedirectory<install
dir>\rtklib_<ver>\bin.NotethatthedirectoryfortheINIfilesischangedinver.2.4.2.To
succeedyouroptionalsettingsforthepreviousversionRTKLIBAPs,pleasecopytheINIfiles(*.ini)in
c:\Windowstothedirectory<install dir>\rtklib_<ver>\bin.
(5) SomeGUIAPs(RTKCONV,RTKPOST,RTKNAVI,RTKGETandSTRSVR)canbeexecutedwiththe
commandlineoption-i <inifile>.ini
toselectanalternativeINIfileforanotheroptionalsettings.
YoucanswitchoptionsforsuchAPsbyusingthecommandlineoptionaswellastheoption-t
<title> tochangethewindowtitle.Soyoucanconfiguremultipleshort‐cutsforthesameGUIAP
withdifferentoptionsbysettingthepropertiesoftheseshort‐cuts.
(6) TouseRTKPOST_MKLorRTKNAVI_MKL,whichistheIntel‐MLK‐library‐linkedversionRTKPOST
orRTKNAVIforfastermatrixcomputationonmultiple‐coreCPUormultiple‐processorPCs,pleaseset
theWindowsenvironmentvariableOMP_NUM_THREADSto2,4or8accordingtothenumberofthe
CPUcores.Thatenablesmulti‐threadingmatrixcomputationinordertoshortenprocessingtime.
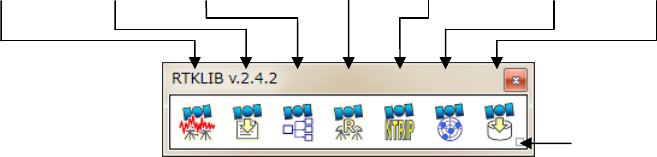
(7) ToexecuteGUIAPseasily,anAPlauncherapplicationRTKLAUNCHisaddedinver.2.4.2.Torun
RTKLAUNCH,execute<install dir>\rtklib_<ver>\bin\rtklaunch.exe.YoucanclickAP
iconsintheRTKLAUNCHwindoworselectpop‐upmenusatthetask‐tray‐iconinordertoexecute
RTKLIBAPs.RTKLAUNCHacceptstheoption-mkltolaunchRTKPOST_MKLandRTKNAVI_MKL
insteadofRTKPOSTandRTKNAVI,andtheoption-traytostartthelauncherasatask‐tray‐icon.
Figure3.1‐1RTKLAUNCHwindowandlaunchericonsforAPs
RTKPLOTRTKCONVSTRSVR RTKPOST NTRIPBrowser RTKNAVIRTKGET
Buttontoiconizein
WindowsTaskTray
RTKLIBver.2.4.2Manual
7
3.2 Real-Time Positioning with RTKNAVI
Anreal‐timepositioningAPRTKNAVIinputsrawobservationdataofGPS/GNSSreceiversandexecute
navigationprocessinginreal‐time.BysettingthepositioningmodetoKinematicandconfiguringtherover
andthebasestationreceiverdatainputs,RTK‐GPS/GNSSisenabledwithOTF(on‐the‐fly)integer
ambiguityresolution.
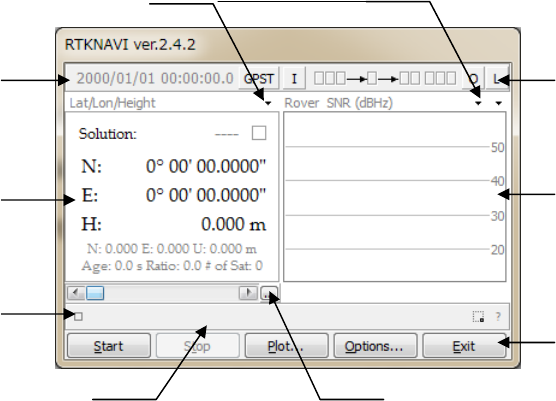
(1) ExecutethebinaryAPfile<install dir>\rtklib_<ver>\bin\rtknavi.exe.(double‐clickthe
iconorfullinthepathinthecommandconsole)YoucanseethemainwindowofRTKNAVI. Youcan
alsoexecute<install dir>\rtklib_<ver>\bin\rtknavi_mkl.exeinstead.
Figure3.2‐1MainWindowofRTKNAVI
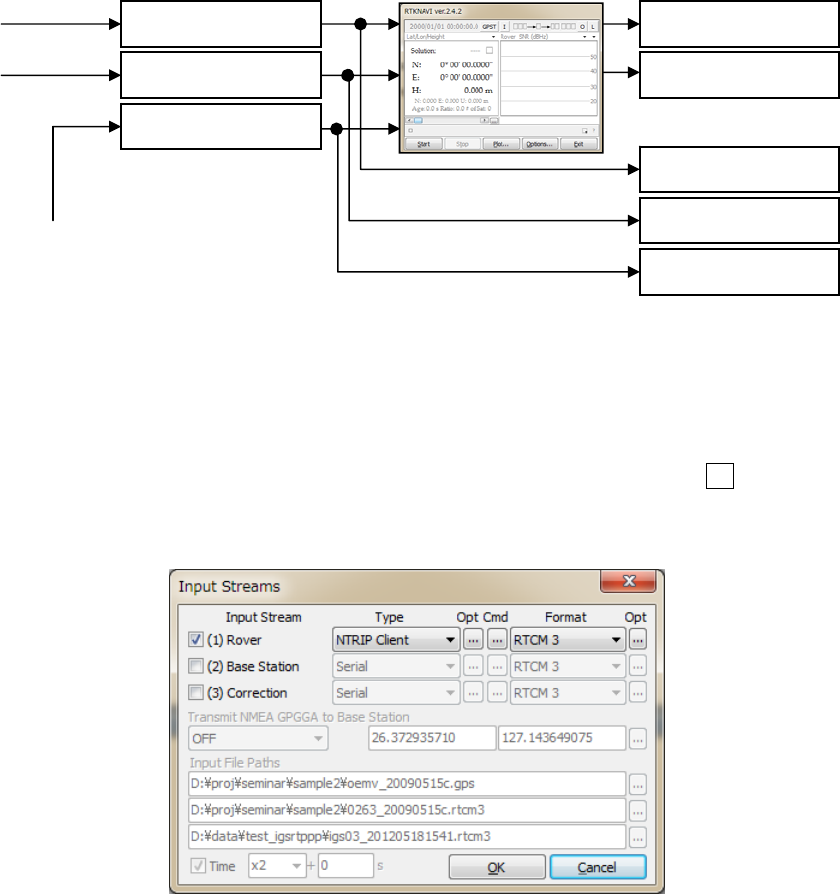
(2) ThefollowingfigureshowsthedataflowofRTKNAVI.YouhavetosetupInputStreams,Output
Streams(optional)andLogStreams(optional)forreal‐timepositioning.Refer3.3ConfigureInput,
OutputandLogStreamsforRTKNAVIforseveralsampleconfigurationsofthesestreams.
Operation
Buttons
TimeDisplay
Solution
Display
RTKMonitor
Button
Input/Output/Log
Stream
Status/Settin
g
s
SignalLevel/
SatelliteVisibility
Display
MessageAreaSaveLogButton
DisplaySwitch
RTKLIBver.2.4.2Manual
8
Figure3.2‐2DataFlowofRTKNAVI
(3) Forreal‐timepositioningwithRTKNAVI,youhavetoinputtherawobservationdataandsatellite
ephemeridesfromtheGPS/GNSSreceivers.Tosettheinputstream,pushthebuttonIuppercenter
inthemainwindow.YoucanseetheʺInputStreamsʺdialog.
Figure3.2‐3InputStreamsDialogofRTKNAVI
(4) CheckandsetthestreamtypeofRover,Base‐stationorCorrectioninthedialog.Ifyousetthe
ʺPositioningModeʺ optionʺSingleʺ,theinputstreamsforʺBase‐stationʺ andʺCorrectionʺ arenot
required.Thestreamtypescanbeselectedfromthefollowingoptions.
(a)Serial :Inputdatafromaserialport(RS232CorUSB)
(b)TCPClient :ConnecttoaTCPserverandinputdataviatheTCPconnection
(c)TCPServer :AcceptaTCPclientconnectionandinputdataviatheTCPconnection
RTKNAVI
(1)InputRover
(2)InputBaseStation
(4)OutputSolution1
(5)OutputSolution2
(6)LogRover
(7)LogBaseStation
InputStreams(I)OutputStreams(O)
LogStreams(L)
GPS/GNSS
Receivers
(3)InputCorrection
(8)LogCorrection
Correction
Provider

RTKLIBver.2.4.2Manual
9
(d)NTRIPClient:ConnecttoaNTRIPcaster[20]andinputdataviatheNTRIP.
NRTK(networkRTK)serversupportingNTRIPandRTCM2/3can
alsobeusedforthebase‐stationviaInternet.
(e)File :Inputdatafromalogfile.
(f)FTP :InputdataafterdownloadingafilebyFTP(OnlyforCorrection)
(g)HTTP :InputdataafterdownloadingafilebyHTTP(OnlyforCorrection)
Youhavetoselectthestreamdataformatfromthefollowingoptionswiththepulldownmenuunder
ʺFormatʺ.ReferAppendixD.2forsupportedmessagesbyRTKLIB.Youshallconfigureyour
GPS/GNSSreceiverstooutputatleastGPS/GNSSobservationdataandnavigationdata(ephemerides).
Fordetailedoperationforthereceiversettings,refertheappropriatemanualsfortheGPS/GNSS
receivers.
(a)RTCM2 :RTCM2.3
(b)RTCM3 :RTCM3.0,3.1(withamendment1‐5)and3.2
(c)NovAtelOEM6:NovAtelOEM4/V/6andOEMStarbinaryformat
(d)NovAtelOEM3:NovAtelOEM3(Millennium)binaryformat
(e)u‐blox :u‐bloxLEA‐4T,5Tand6Tbinaryformat
(f)SuperstarII :NovAtelSuperstarIIbinaryformat
(g)Hemisphere :HemisphereCrescent/Eclipsebinaryformat
(h)SkyTraq :SkyTraqS1315Fbinaryformat
(i)GW10 :FurunoGW‐10‐II/IIIbinaryformat
(j)Javad :JAVADGRIL/GREISbinaryformat
(k)NVSBINR :NVSNV08CBINRformat
(l)BINEX :BINEXformat(onlysupportsbig‐endian,forward,regularCRC)
(m)SP3 :SP3preciseephemeris(onlyforCorrection)
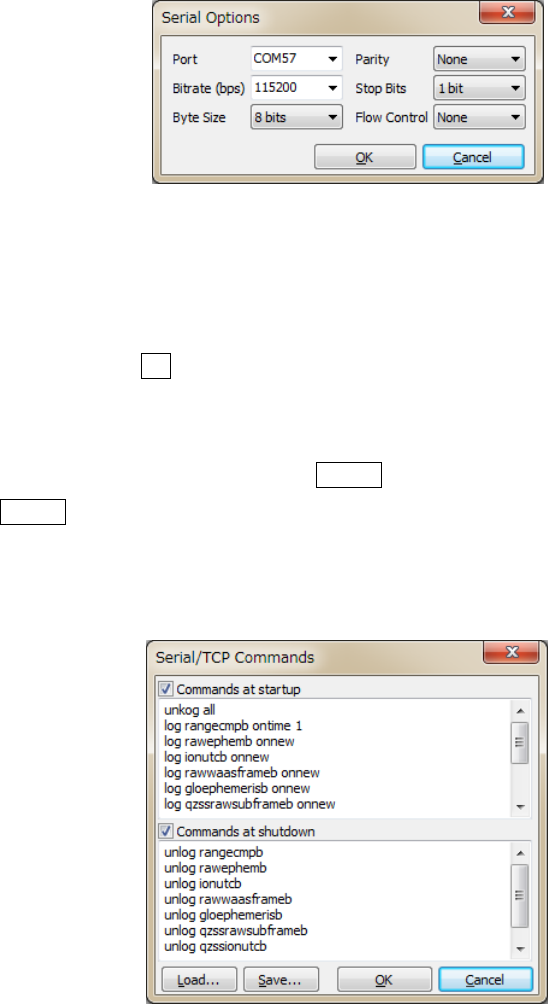
(5) IfyouselectʺSerialʺasthestreamtype,push...buttonunderʺOptʺlabeltosettheoptionsofʺPortʺ
selection,ʺBit‐rateʺ,ʺBytesizeʺ,ʺParityʺ,numberofʺStopbitsʺ andʺFlowControlʺ withtheʺSerial
Optionsʺdialog.
RTKLIBver.2.4.2Manual
10
Figure3.2‐4SerialOptionDialogofRTKNAVI
(6) IncaseofselectingʺSerialʺ,ʺTCPClientʺ orʺTCPServerʺ asthestreamtype,youcanconfigurethe
startupandshutdowncommandstobesenttotheGPS/GNSSreceiverthroughthestream.Tosetup
thecommands,push...buttonundertheʺCmdʺ label.Fillincommandsinthetextfieldsinthe
ʺSerial/TCPCommandsʺ dialog.IfyoudonotcheckʺCommandsatstartupʺ orʺCommandsat
shutdownʺ,thestartuporshutdowncommandisnotsenttothereceiver.Youcanalsoloadthe
commandsfromacommandfilebypushingLoad...buttonorsavethecommandstoacommandfile
withSave...button.Acommandfileisjustatextfileincludingstartupcommandsandshutdown
commandsseparatedbyalinestartingwithʺ@ʺ.SamplecommandfilesforsometypicalGPS/GNSS
receiversarefoundat<install dir>\rtklib_<ver>/data/*.cmd.
Figure3.2‐5Serial/TCPCommandsDialogofRTKNAVI
(7) Alinestartingwithʺ!ʺ inthecommandsistreatedasareceiverbinarycommand.Thefollowing
commandscanbeusedforu‐blox,SkyTraqandNVSreceivers.Referthereceiversʹmanualsfordetails.
!UBX ...:u‐bloxLEA‐4T/5T/6Tcommand
!UBX CFG-PRT portid res0 res1 mode baudrate inmask outmask flags
!UBX CFG-USB vendid prodid res1 res2 power flags vstr pstr serino
RTKLIBver.2.4.2Manual
11
!UBX CFG-MSG msgid rate0 rate1 rate2 rate3
!UBX CFG-NMEA filter version numsv flags
!UBX CFG-RATE meas nav time
!UBX CFG-CFG clear_mask save_mask load_mask
!UBX CFG-TP interval length status time_ref res adelay rdelay udelay
!UBX CFG-NAV2 ...
!UBX CFG-DAT maja flat dx dy dz rotx roty rotz scale
!UBX CFG-INF protocolid res0 res1 mask0 mask1 mask2 mask3
!UBX CFG-RST navbbr reset res
!UBX CFG-RXM gpsmode lpmode
!UBX CFG-ANT flags pins
!UBX CFG-FXN flags treacq tacq treacqoff tacqoff ton toff res basetow
!UBX CFG-SBAS mode usage maxsbas res scanmode
!UBX CFG-LIC key0 key1 key2 key3 key4 key5
!UBX CFG-TM intid rate flags
!UBX CFG-TM2 ch res0 res1 rate flags
!UBX CFG-TMODE tmode posx posy posz posvar svinmindur svinvarlimit
!UBX CFG-EKF ...
!STQ ...:SkyTraqS1315Fbinarycommand
!STQ RESTART [arg...] system restart
!STQ CFG-SERI [arg...] configure serial port property
!STQ CFG-FMT [arg...] configure output message format
!STQ CFG-RATE [arg...] configure binary measurement output rates
!NVS ...:NVSNV08Cbinarycommand
!NVS CFG-PVTRATE [arg...] configure PVT rate
!NVS CFG-RAWRATE [arg...] configure raw data rate
!NVS CFG-SMOOTH configure smooth range
!NVS CFG-BINR xx [...] send binary command for NVS
(input hexadecimal series)
!WAIT time:waitfortime(ms)
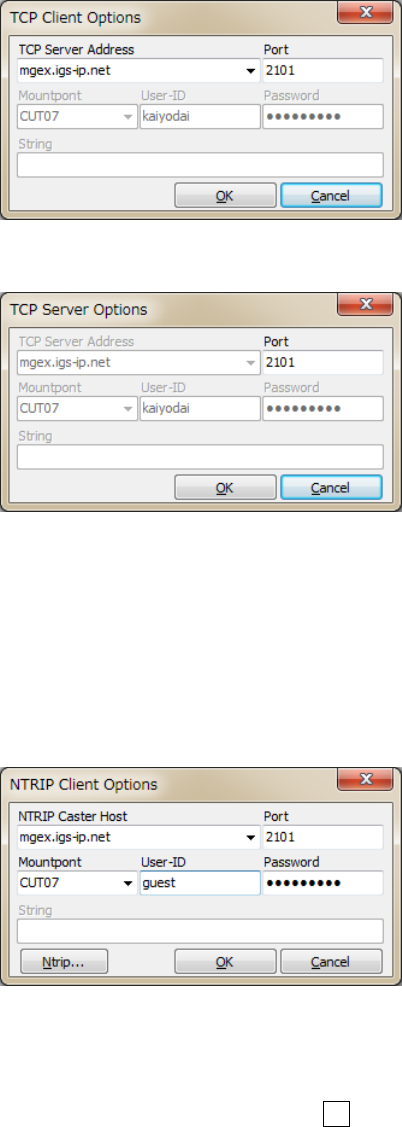
(8) IfyouselectʺTCPClientʺorʺTCPServerʺasthestreamtype,youcansettheoptionsofʺTCPserver
addressʺ (forTCPClientonly)andtheʺPortʺ numberwiththeʺTCPClientOptionsʺ orʺTCPServer
Optionsʺ dialog.IfyouselectʺTCPServerʺ asthestreamtype,multipleTCPclientconnectionsare
allowed.
RTKLIBver.2.4.2Manual
12
Figure3.2‐6TCPClientOptionsDialogofRTKNAVI
Figure3.2‐7TCPServerOptionsDialogofRTKNAVI
(9) IfyouselectʺNTRIPClientʺasthestreamtype,youcansettheoptionsofʺNTRIPCasterHostʺaddress,
ʺPortʺ number,ʺMount‐pointʺ ofNTRIPcaster,ʺUser‐IDʺ andʺPasswordʺ withtheʺNTRIPClient
Optionsʺdialog.IfyoukeeptheʺPortʺfieldblank,thedefaultportnumber(2101)ofNTRIPisused.
NotethatʺUser‐IDʺcannotcontainʺ:ʺ.
Figure3.2‐8NTRIPClientOptionsDialogofRTKNAVI
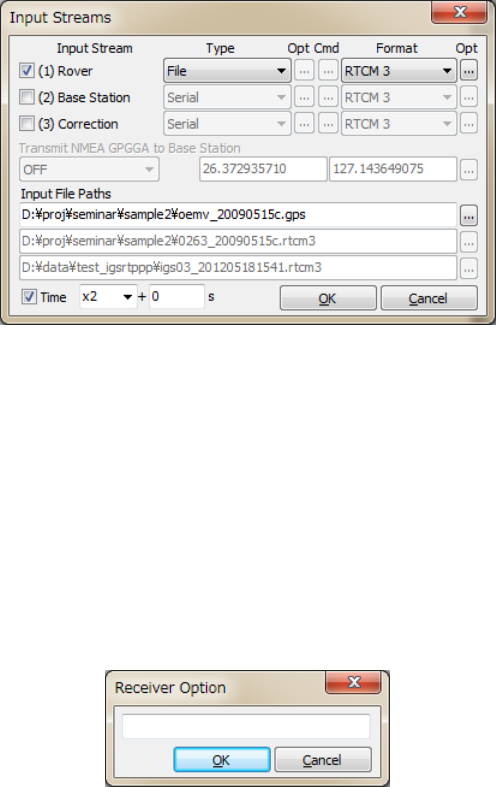
(10) IfyouselectʺFileʺasthestreamtype,inputthefilepathtothetextfieldInputFilePaths.Fillinthepath
directlyorselectafilewiththefileselectiondialogbypushing...button.Theinputfileshouldbea
receiverrawdatalog.YoucansetthereplayspeedandthestarttimeoffsetofthelogfileinTimefield
(Tousethefeature,youhavetorecordthelogwiththetime‐tagfile.)
RTKLIBver.2.4.2Manual
13
Figure3.2‐9InputStreamsDialogofRTKNAVI
(11) BypushingtheʺOptʺ buttonrightoftheinputstreamʺFormatʺ,youcansetreceiver‐dependent
optionslikeʺ-GL1X -RL1C -EPHALLʺwiththeʺReceiverOptionʺdialog.Multipleoptionscanbeused
separatedbyspaces.Fordetailedreceiver‐dependentoptions,referAppendixD.4ReceiverDependent
InputOptions.Iftheinputobservationdatastreamcontainmultiplesignalsinafrequency,asignalin
useforsolutionsisselectedbythedefaultsignalprioritieswithoutsuchoptions.ReferAppendixD.3
DefaultPrioritiesforMultipleSignals.
Figure3.2‐10ReceiverOptionDialogofRTKNAVI
(12) IncaseofusingaNRTK(networkRTK)service,whichrequiresNMEAGPGGAmessagestoselect
referencestationortosetuptheVRS(virtualreferencestation)position,selectthemessagecontent
withthepulldownmenuatʺTransmitNMEAGPGGAtoBaseStationʺ.Ifyouselect
ʺLatitude/Longitudeʺ tosendafixedposition,fillinthelatitudeandlongitudeofthepositionfor
NMEAGPGGAmessagesindegree(minusmeanssouthorwest).
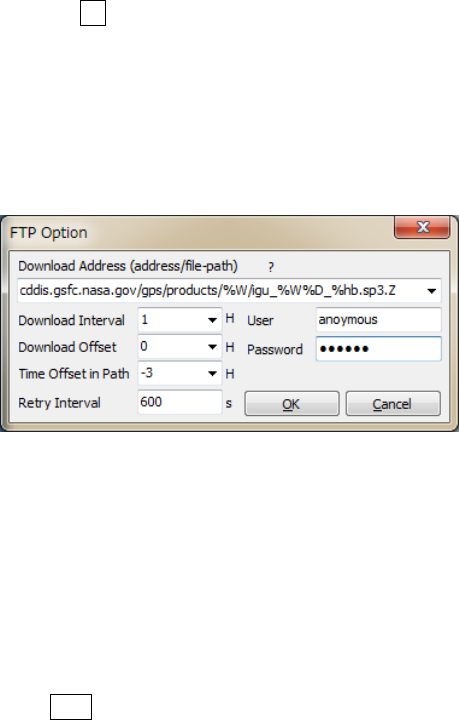
(13) Forthecorrectionstream,youcanselectʺFTPʺ orʺHTTPʺ asthestreamtype.AfterpushingʺOptʺ
button,youhavetoconfigureFTPorHTTPoptionswiththeʺFTPOptionʺorʺHTTPOptionʺdialog.At
first,fillintheserveraddressandthefilepathintheʺDownloadAddressʺfieldastheformat<server
address>/<file path>.Usuallyyoumightneedtoincludedayortimekeywordsin<file path>.
Forexample,incaseofdownloadingIGSultra‐rapidephemerisfromtheNASAGSFCCDDISdata
server,youcaninputthedownloadaddresslike:
RTKLIBver.2.4.2Manual
14
cddis.gsfc.nasa.gov/gps/products/%W/igu%W%D_%hb.sp3.Z
Inthiscase,thekeywords%W,%Dand%hbarereplacedbyGPSweeknumber,dayofweekand6hour
ofthedayaccordingtothedownloadtimeinGPSTime,respectively.Forotherkeywordswhichcanbe
usedinthefilepath,push?buttonandseethedialog.YoucanalsosetDownloadInterval,
DownloadOffset(forexample,Interval=6HandOffset=2Hmeansthedownloadwillbetriedat2:00,
8:00,14:00and20:00inGPSTime),TimeOffsetinPathforreplacingthekeywordsinthefilepath,
RetryInterval,User(forFTPonly)andPassword(forFTPonly)fortheserver.ForUserandPassword,
ʺanonymousʺandyourmailaddressareusuallyusedforanonymousFTPservers.
Figure3.2‐11FTPOptionDialogofRTKNAVI
Tousedownloadfiles,youalsohavetosetthefileformatintheʺInputʺdialog.Currentversiononly
supportsSP3preciseephemerisforthispurpose.Downloadedfilesaresavedinalocaldirectory.The
localdirectorypathshallbesetwiththeʺOptionsʺdialog‐ʺFilesʺ‐ʺFTP/HTTPLocalDirectoryʺ.
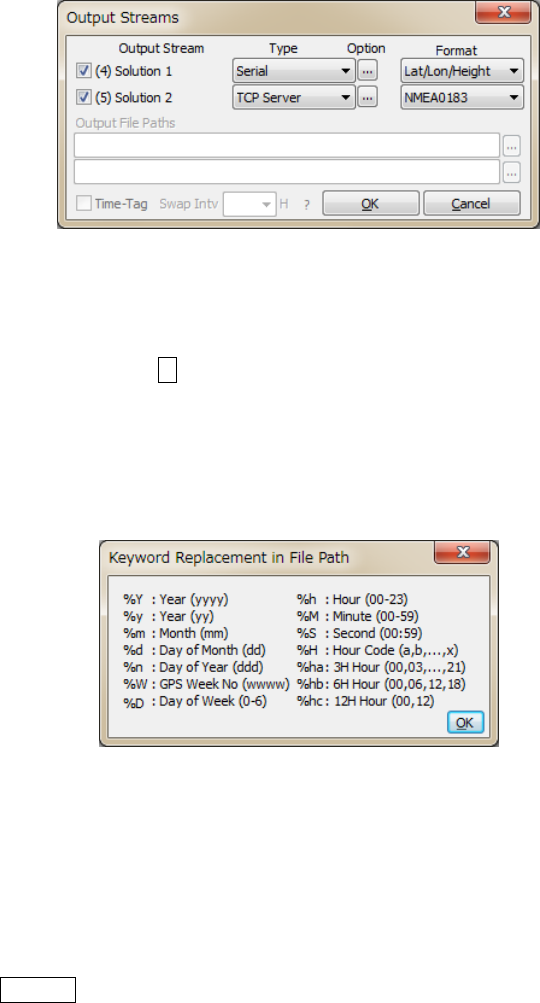
(14) TooutputofthepositioningsolutionsbyRTKNAVI,youshallsettheoutputstreams.Tosettheoutput
streams,pushthebuttonOupperrightinthemainwindow.YoucanseetheʺOutputStreamsʺ
dialog.Checkandsetthestreamtypeofsolutioninthedialog.Youcanconfiguretwoindependent
outputstreamsasmaximum.YoucanselectthestreamtypeoutofʺSerialʺ,ʺTCPClientʺ,ʺTCPServerʺ,
ʺNTRIPServerʺ andʺFileʺ.Theoptionsaresimilartotheinputstreams.Youalsohavetoselectthe
followingoutputformatoptions.Thetimeandlatitude/longitudeformats,thetypeofheightandthe
geoidmodelandtheNMEAintervalinoutputmessagesalsocanbeconfiguredbythepositioning
optionsdescribedin3.5.
(a)Lat/Lon/Height :Latitude,longitudeandheight
(b)X/Y/Z‐ECEF :X/Y/ZcomponentsinECEFframe
(c)E/N/U‐Baseline :E/N/Ucomponentsofthebaseline
(d)NMEA0183 :NMEA0183GPRMC,GPGGA,GPGSA,GLGSA,GAGSA,
GPGSV,GLGSVandGAGSV
RTKLIBver.2.4.2Manual
15
Figure3.2‐12OutputStreamsDialogofRTKNAVI
(15) IfyouselectʺFileʺ astheoutputstreamtype,youcanincludesomekeywordsinthefilepathtobe
replacedbydateortime.Push?buttontoshowthekeywordreplacementinthefilepaths.Ifyouset
theʺSwapIntvʺ option,theoutputfileisswappedperiodicallyinthespecifiedcycle.Tousethefile
swapfeature,thefilepathmustcontainthekeywordstobereplacedbytheswaptimeinordertoavoid
overwritingthepreviousfile.
Figure3.2‐13KeywordReplacementDialogofRTKNAVI
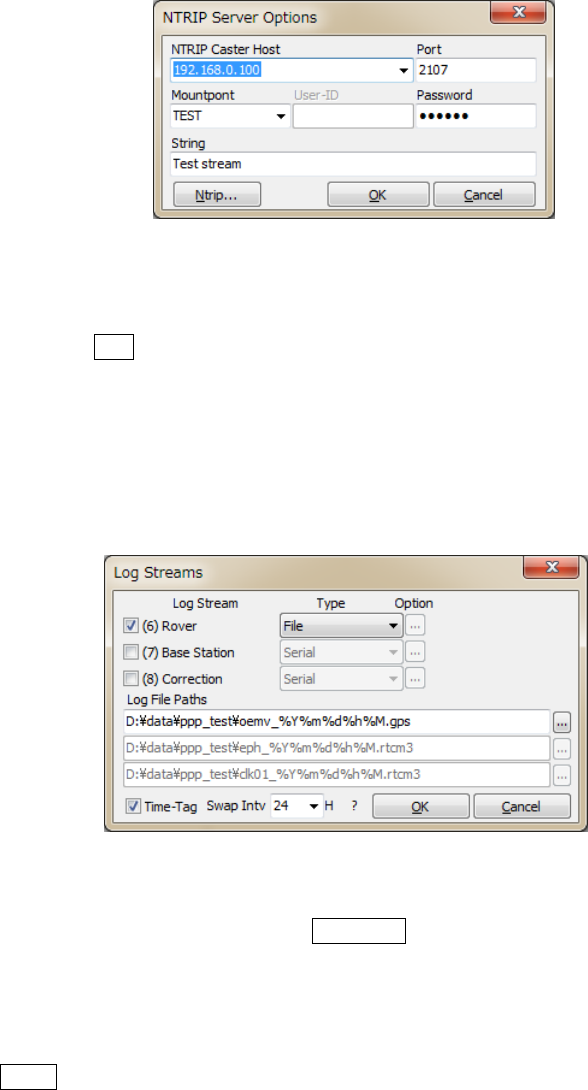
(16) IfyouselectʺNTRIPServerʺastheoutputstreamtype,youhavetosetNTRIPserveroptionswiththe
ʺNTRIPServerOptionʺ dialog.TheoptionsincludetheaddressofʺNTRIPCasterHostʺ,theʺPortʺ
numbertoconnectNTRIPcaster,NTRIPʺMount‐pointʺ,ʺPasswordʺ andʺStringʺ showingthe
source‐tableparameterstoNTRIPCaster.IftheʺPortʺfieldblank,thedefaultportnumber(80)isused.
ThebuttonNtrip...launchestheNTRIPbrowserAPtoshowthesourcetableprovidedbytheNTRIP
caster.Refer3.10NTRIPBrowserfordetails.
RTKLIBver.2.4.2Manual
16
Figure3.2‐14NTRIPServerOptionsDialogofRTKNAVI
(17) Tooutputaninputstreamasapath‐throughlog,setthelogstreams.Toconfigurethelogstreams,
pushthebuttonLupperrightinthemainwindow.YoucanseetheʺLogStreamsʺ dialog.The
settingsaresimilartotheoutputstreams.Ifyouwanttoreplaythelogfileasaninputstreamlater,you
havetochecktheʺTime‐Tagʺoptionandoutputthetimetagfilesimultaneously.Theoutputpathofthe
timetagfileisautomaticallysetto<output file path>.tag.Thekeywordreplacementsinthefile
pathsandtheswapintervalarethesameastheʺOutputStreamsʺdialog.
Figure3.2‐15LogStreamsDialogofRTKNAVI
(18) Toconfigurethepositioningoptions,pushOptions...buttonandsettheoptionsintheʺOptionsʺ
dialog.Fordetailsofthepositioningoptions,refer3.5ConfigurePositioningOptionsforRTKNAVI
andRTKPOST.
(19) PushStartbutton.Thestatusofeachstreamsareshownontheupperrightindicators.Fromtheleft,
theyshowthestream/processingstatusofInputRover,InputBaseStation,InputCorrection,the
positioningprocess,OutputSolution1,OutputSolution2,LogRover,LogBaseStationandLog
Correction.Grayrepresentsnotused,Orangemeanswaitingfortheconnection,Deep‐greenmeans
connectedorrunning,Light‐greenmeansdataactive(input,outputorprocessing)andRedmeansa
communicationerroroccurs.Somestatusmessagesarealsoshowninthelowercentermessageareain
RTKLIBver.2.4.2Manual
17
themainwindow.TostopthepositioningprocessinRTKNAVIpushStopbutton.
Figure3.2‐16MainWindowofRTKNAVI(RUNNING)
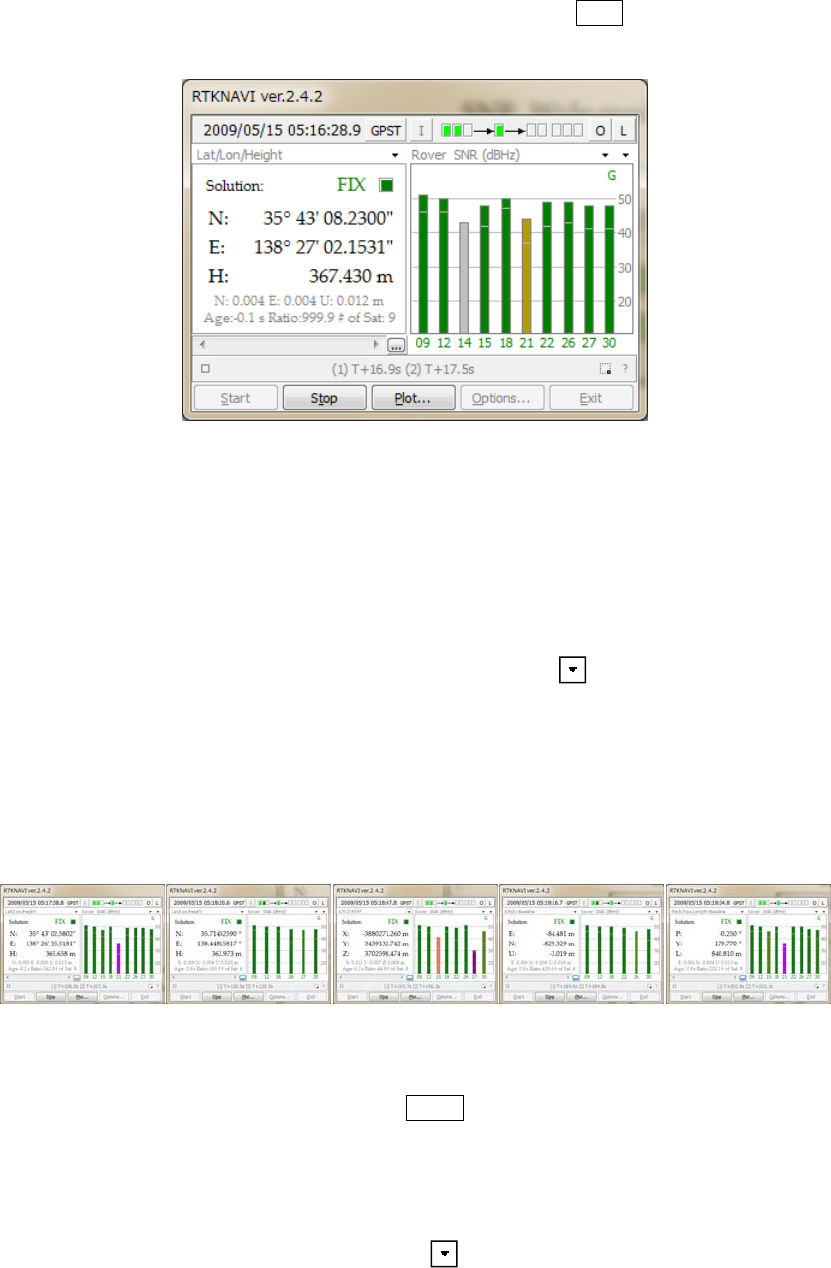
(20) Aftertheinputobservationdataandephemeridesarecompletedandvalid,RTKNAVIcomputesthe
positioningsolutionanddisplayitinthesolutiondisplayleftinthemainwindowwiththesolution
status(FIX,FLOAT,DGPS,SBAS,SINGLEorPPP),E/N/UorX/Y/Zcomponentsofthestandard
deviation,Age(ageofdifferential),Ratio(ratiofactorofambiguityvalidation)and#ofSat(numberof
validsatellites).Toswitchtheformatinthesolutiondisplay,pushbuttonupperrightcorner.You
canswitchthesolutiontoLat/Lon/Height(degree/minute/second),Lat/Lon/Height(degree),
X/Y/Z‐ECEF(m),E/N/U‐Baseline(m),Pitch/Yaw/Length‐Baseline(deg,m),alternatively.Inthe
Lat/Lon/Heightmodes,thelabelsʺHʺ andʺHeʺ indicatesthegeodeticandellipsoidalheight,
respectively.
Figure3.2‐17SolutionStatusDisplayofRTKNAVI
(21) Toswitchtheformatinthetimedisplay,pushGPSTbuttonuppercenterinthemainwindow.You
canswitchthetimesystemtoGPST,UTC,LT(localtime)andGPST(GPSweek/TOW),alternatively.
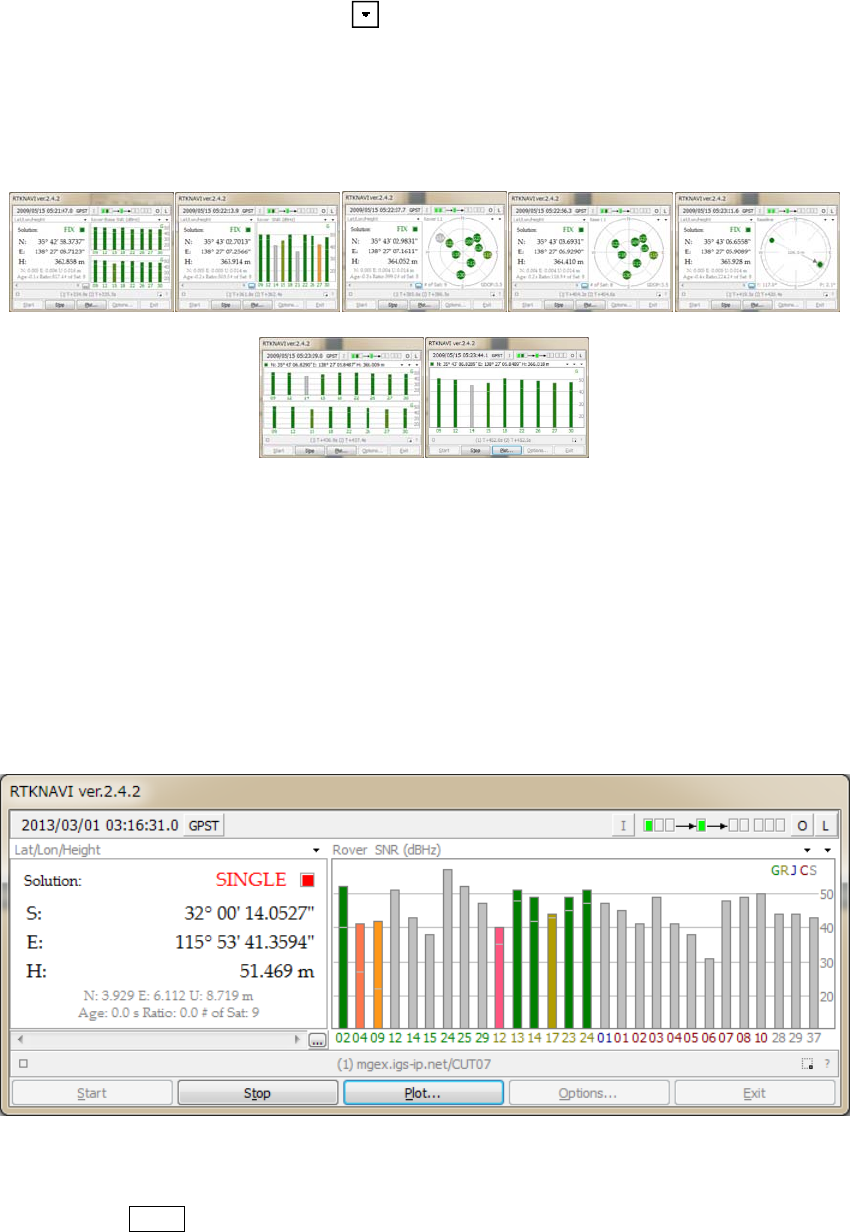
(22) Inthestatusdisplayrightinthemainwindow,observationSNR(signaltonoiseratio,C/N0)statusor
visiblesatellitesinskyplotareshown.Bypushingbuttonupperrightcornerofthestatusdisplay,
youcanswitchthecontentstoRover:BaseSNR,RoverSNR,RoverSkyplot,BaseSkyplotandBaseline
RTKLIBver.2.4.2Manual
18
plot,WideRover:BaseSNR,Wide‐modeRoverSNR,alternatively.Youcanswitchthefrequency
showintheplotbypushingthesecondbuttonneartheupperrightcorner.IntheSNRplotsorthe
Skyplots,thecolorsexceptforGrayasnot‐in‐useindicatethesignalSNRas:>45...40...35...25...<25
(dBHz).ThecolorsofthesatelliteIDsintheSNRplotsalsoindicatethesatellitesystemas:GPS(G),
GLONASS(R),Galileo(E),QZSS(J),BeiDou(C)andSBAS(S).
Figure3.2‐18SatelliteandSignalStatusDisplayofRTKNAVI
(23) ThesizeofRTKNAVIwindowcanbechangedbydraggingtheedgeofthewindow.Theseparator
betweentheleftandtherightsub‐windowscanbealsodraggedtochangethelayoutofthewindow.To
showthestatusofmanyofsatellites,usethisfeatureintroducedinver.2.4.2.ThefontintheSolution
sub‐windowcanbechangedbythesettingsbytheoptionsdialogtheʺOptionsʺ ‐ ʺMiscʺ ‐ ʺSolution
Fontʺ.
Figure3.2‐19SizeExpandedMainWindowofRTKNAVI
(24) BypushingPlot...button,youcanexecuteRTKPLOTtoplotthecurrentpositionoftheroverreceiver
onthegraphasthereal‐timesolutionmode.FordetailstouseRTKPLOT,pleaserefer3.7Viewand
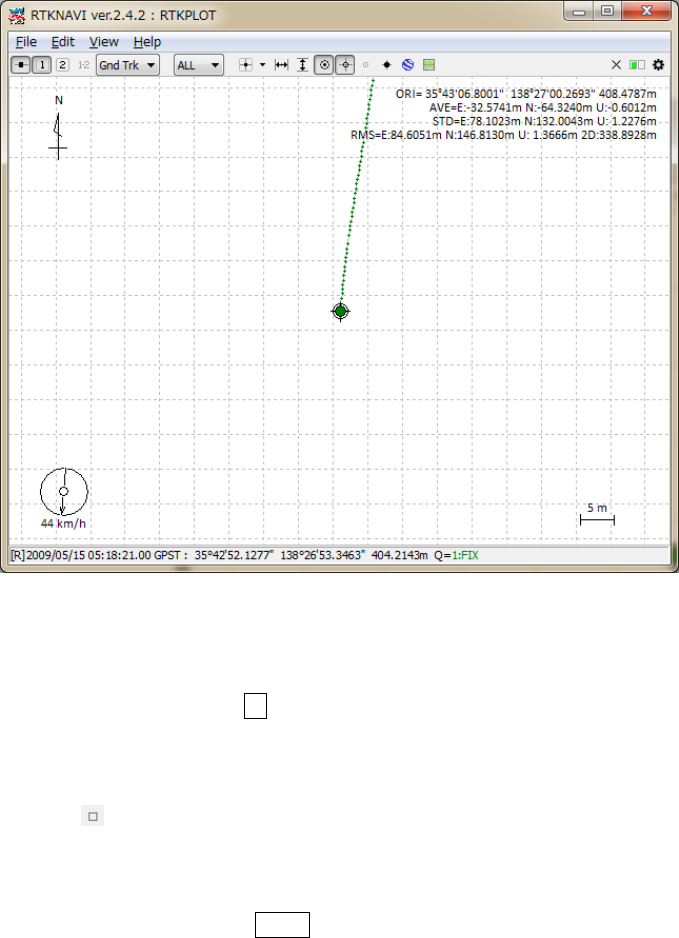
RTKLIBver.2.4.2Manual
19
PlotSolutionsandObservationDatawithRTKPLOT.
Figure3.2‐20RTKPLOTWindowexecutedbyRTKNAVI
(25) Thepositioningsolutionsarerecordedintheinternalbuffersimultaneously.Youcansavetheinternal
solutionbuffertothefilebypushing...belowthesolutiondisplay.Thesizeofthesolutionbufferand
thesavedsolutionlogcanbeconfiguredwiththeʺOptionsʺdialog.
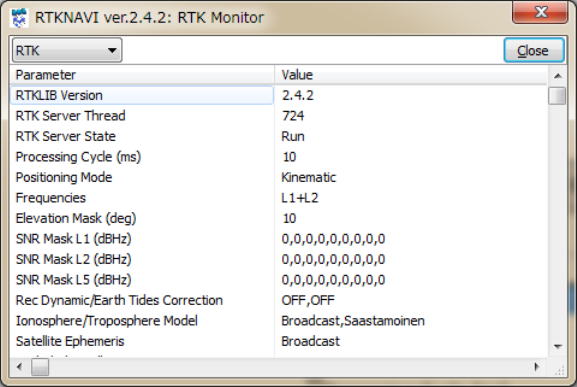
(26) Bypushingthebuttonlowerleftinthemainwindow,youcanseetheʺRTKMonitorʺ window.
Withthewindow,youcanseetheinternalstatusofRTKNAVI.Youcanselectthefollowingcontents
withtheupperleftpulldownmenu.MultipleʺRTKMonitorʺwindowsareallowedtobeshownatthe
sametime.Toclosethewindow,pushClosebutton.
RTKLIBver.2.4.2Manual
20
Figure3.2‐21RTKMonitorWindowofRTKNAVI
(a)RTK :Generalstatusoftheinternalpositioningprocess
(b)ObsData :Inputobservationdata.RCV=1meansroverand2meansbase‐station
(c)NavGPS :GPSsatellitenavigationmessages
(d)NavGLONASS:GLONASSsatellitenavigationmessages
(e)NavGalileo :Galileosatellitenavigationmessages
(f)NavQZSS :QZSSsatellitenavigationmessages
(g)NavBeiDou :BeiDousatellitenavigationmessages
(h)NavGEO :GEO/SBASsatellitenavigationmessages
(i)Time/Iono :TimeandIonosphereparameters
(j)Streams :Statusofinput,outputandlogstreams
(k)SatGPS :StatusofGPSsatellites
(l)SatGLONASS:StatusofGLONASSsatellites
(m)SatGalileo :StatusofGalileosatellites
(n)SatQZSS :StatusofQZSSsatellites
(o)SatBeiDou :StatusofBeiDousatellites
(p)SatGEO :StatusofGEO/SBASsatellites
(q)States :Statevectorvaluesoftheestimationfilter
(r)Covariance :Covariancematrixoftheestimationfilter
(s)SBASMsgs :HEXdumpofinputSBASmessages
(t)SBASLong :SBASlongtermsatellitecorrections
(u)SBASIono :SBASionosphericdelaycorrections
(v)SBASFast :SBASfastcorrections
(w)RTCMMsgs :StatusofRTCM2or3messages
RTKLIBver.2.4.2Manual
21
(x)RTCMDGPS :RTCMDGPScorrections
(y)RTCMSSR :RTCMSSRcorrections
(z)LEXMsgs :(reserved)
(aa)LEXEph/Clock:(reserved)
(ab)LEXIono :(reserved)
(ac)IonoCorrection:Ionospherecorrections
(ad)(1)Rover :DumpofInputRoverstream
(ae)(2)BaseStation:DumpofInputBaseStationstream
(af)(3)Correction:DumpofInputCorrectionstream
(ag)(4)(5)Solution1/2:DumpofOutputSolution1/2stream
(ah)Error/Warning:Errororwarningmessages
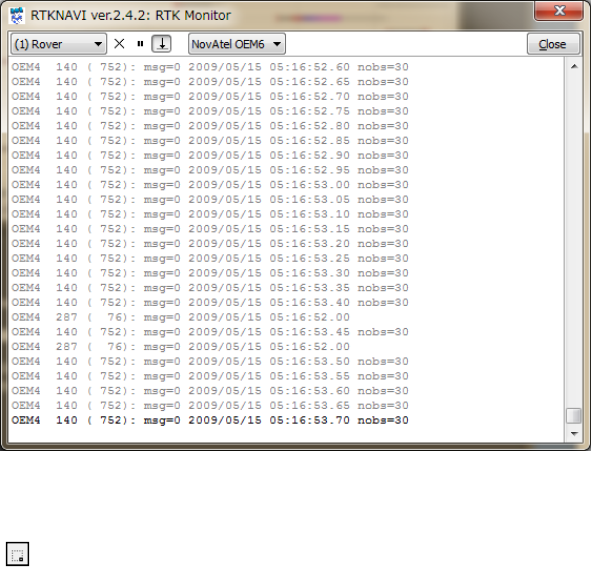
(27) Incaseofselecting(1)Rover,(2)BaseStationor(3)CorrectionforʺRTKMonitorʺ,youcanselectthe
inputmessageformatwiththepull‐downmenuuppercenterofthewindowanddumpthemessages
intheinputstream.Adumplineshowsamessagecontainingthefields:messagetype,(messagelength
inbytes):messagecontentsdependingonthemessageformat.
Figure3.2‐22StreamDumpinRTKMonitorWindowofRTKNAVI
(28) Bypushing buttonlowerrightinthemainwindow,youcanminimizethemainwindowasanicon
inthetask‐trayofWindowsdesktop.Torestorethemainwindow,double‐clickthetask‐tray‐iconor
clickright‐buttononthetask‐tray‐iconandselectmenuʺMainWindow...ʺ.
RTKLIBver.2.4.2Manual
22
3.3 Configure Input, Output and Log Streams for RTKNAVI
ForrelativepositioninglikeRTK‐GPS/GNSS,theroverreceiverandthebasestationreceiverareusually
placedontheseparatedsites.Inothercases,usermightusethepositioningresultattheremotesitefarfrom
thesereceivers.Tointerconnectthesesites,userhastoestablishdatacommunicationlinks.Tofacilitateeasy
setupofthesecommunicationlinks,RTKLIBprovidesacommunicationserverutilityAPSTRSVR,with
whichusercanconfigureinputandoutputdatastreamviathesecommunicationlinks.STRSVRalsohas
thefunctionofrelayorsplitthedatastreamforreal‐timepositioningwithRTKNAVI.
Forexample,toreceiveobservationdataofaremotebasestationataroverreceiversiteandtogetRTK‐GPS
solution,usercanplacearemotePCinstallingSTRSVRconnectingtothebasestationreceiverandcan
configureSTRSVRtosenddatatotheroversite.Thefollowingexamplesshowthetypicalapplicationsof
RTKNAVIandSVRSVR.
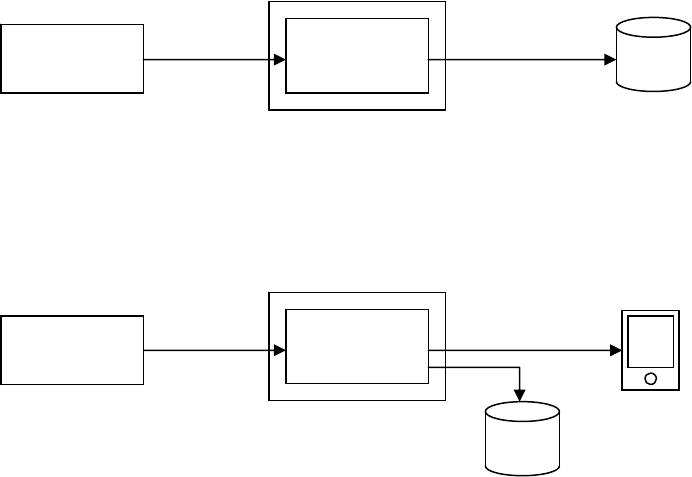
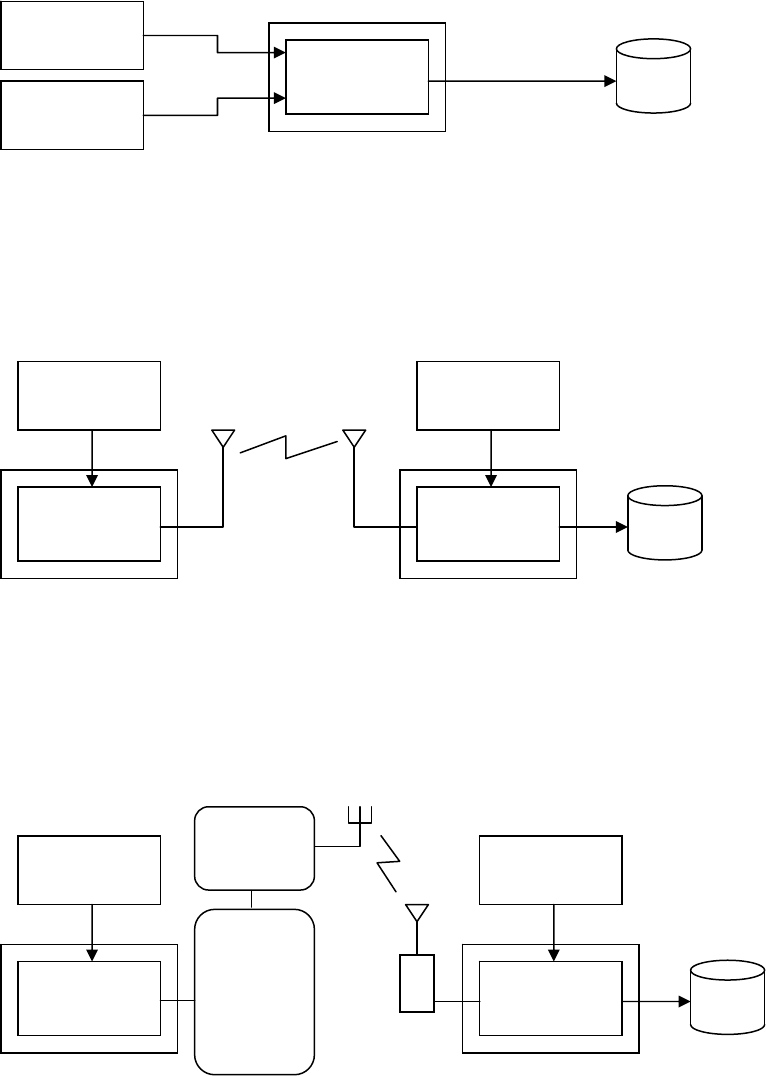
(1) Single‐pointpositioningandoutputsolutionstoafile
(2) Singlepointpositioning,outputsolutionstoaserialdevice,logdatatoafile
GPS/GNSS
ReceiverRTKNAVI
Serial
(1)InputRover=Serial
(4)Out
p
utSolution1=File
File
RTKNAVI
Serial
(1)InputRover=Serial
(4)OutputSolution1=Serial
(6)LogRover=File
Serial
PC
PC
Log
GPS/GNSS
Receiver
RTKLIBver.2.4.2Manual
23
(3) RTK‐GPS/GNSS,inputtheroverandbase‐stationdatafromtwoserialdevices
(4) RTK‐GPS/GNSS,inputroverdatafromaserialportandinputbase‐stationdatafromaremotereceiver
viaWi‐Finetwork.
(5) RTK‐GPS/GNSS,inputroverdatafromaserialportandinputbasestationdataviamobilephone
Internetconnection
Rover
Receiver
RTKNAVI
Serial
(1)InputRover=Serial
(2)InputBaseStation=Serial
(4)OutputSolution1=File
File
PC
BaseStation
ReceiverSerial
Rover
Receiver
RTKNAVI
Serial
(1)InputRover=Serial
(2)InputBaseStation=TCPClient
(4)OutputSolution1=File
File
PC
BaseStation
Receiver
Serial
STRSVR
(0)Input=Serial
(
1
)
Out
p
ut1=TCPServer
PC
TCP
Server
TCP
Client
Rover
Receiver
RTKNAVI
Serial
(1)InputRover=Serial
(2)InputBaseStation=TCPClient
(4)OutputSolution1=File
File
PC
BaseStation
Receiver
Serial
STRSVR
(0)Input=Serial
(
1
)
Out
p
ut1=TCPServer
PC
Internet
Mobile
Phone
Terminal
Mobile
Phone
N/W
RTKLIBver.2.4.2Manual
24
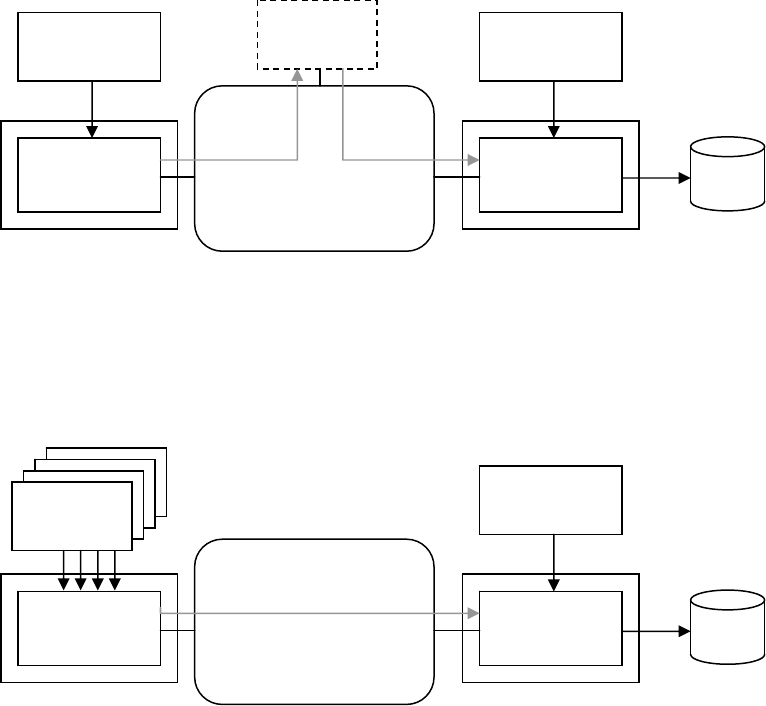
(6) RTK‐GPS/GNSS,inputdatafromaserialportandinputbasestationdataviaaNTRIPcasteron
Internet.ThecurrentversiondoesnotsupportNTRIPcasterfeature.Pleaseemploysomealternative
NTRIPcasterimplementation.
(7) RTK‐GPS/GNSSwithNRTK(NetworkRTK)serviceviaInternet
Rover
GPSReceiver
RTKNAVI
Serial
(1)InputRover=Serial
(2)InputBaseStation=NTRIPClient
(4)OutputSolution1=File
File
PC
BaseStation
GPSReceiver
Serial
STRSVR
(0)Input=Serial
(
1
)
Out
p
ut1=NTRIPServer
PC
Internet
Ntrip
Caster
Rover
GPSReceiver
RTKNAVI
Serial
(1)InputRover=Serial
(2)InputBaseStation=NTRIPClient
(4)OutputSolution1=File
File
PC
NTRIPCasterInternet
NRTKprovider
Reference
Station
Reference
Station
Reference
Station
Reference
Station
RTKLIBver.2.4.2Manual
25
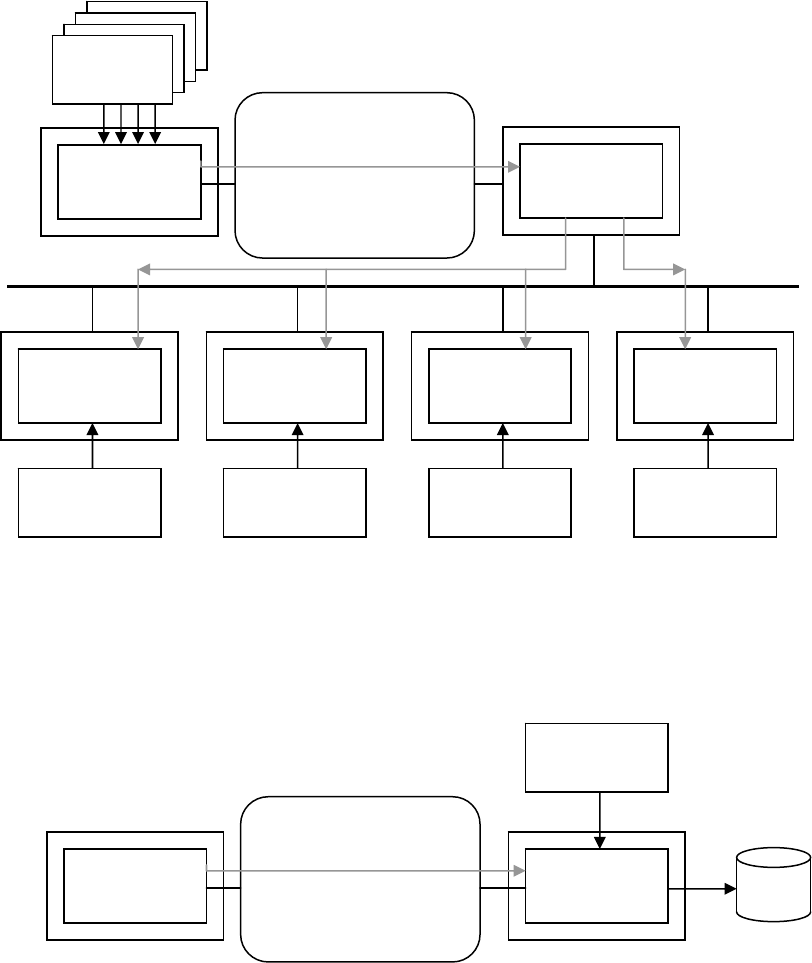
(8)MultipleRTK‐GPS/GNSSwithsingleNRTKservice
(9) Real‐timePPPwithreal‐timesatelliteorbitandclockprovidedasaNTRIPstream.
RTKNAVI
PC
NTRIPCasterInternet
NRTKprovider
Reference
Station
Reference
Station
Reference
Station
Reference
Station
STRSVR
Rover
Receiver1
RTKNAVI
PC
Rover
Receiver2
RTKNAVI
PC
Rover
Receiver3
RTKNAVI
PC
Rover
Receiver4
(1)Input=NTRIPClient
(2)Out
p
ut=TCPServer
LAN
(1)InputRover=Serial
(2)InputBaseStation=TCPClient
PC
GPSReceiver
RTKNAVI
Serial
(1)InputRover=Serial
(2)InputCorrection=NTRIPClient
(4)OutputSolution1=File
File
PC
NTRIPCasterInternet
NRTKprovider
Real‐timeOrbit
andclock
Provider
RTKLIBver.2.4.2Manual
26
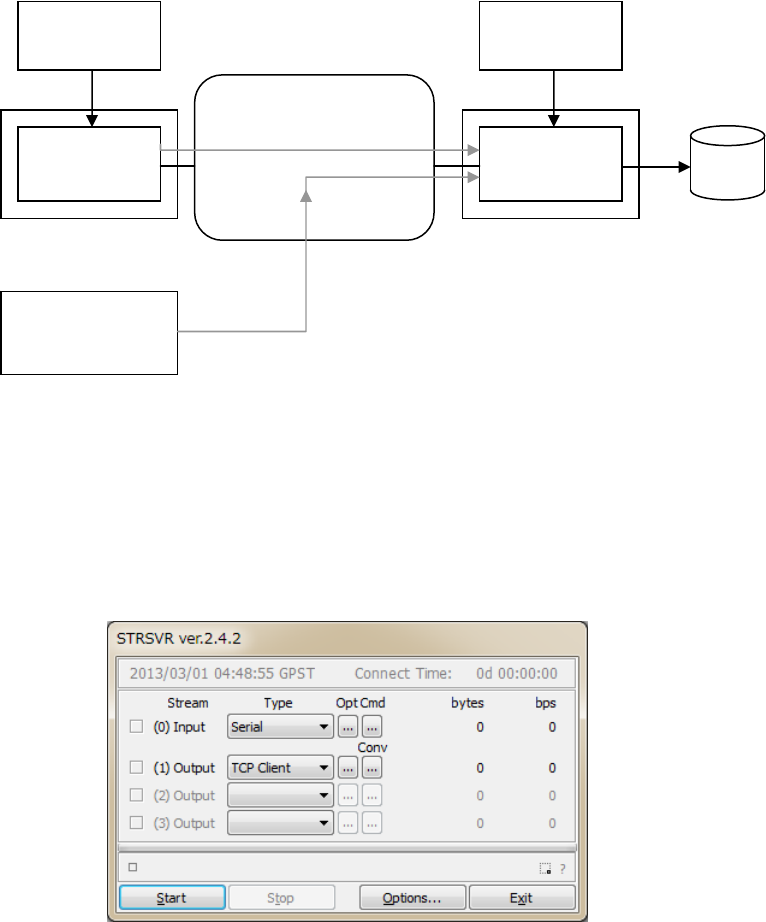
(10)Long‐baselineRTKwithFTPdownloadofpreciseephemeris
ThefollowinginstructionsarefortheoperationofSTRSVR.
(1) ExecutethebinaryAPfile<install dir>\rtklib_<ver>\bin\strsvr.exe.Youcanseethe
mainwindowofSTRSVR.
Figure3.3‐1MainWindowofSTRSVR
(2) Toconfiguretheinputstream,selectthestreamtypewithpulldownmenuatʺ(0)Inputʺ.Selectable
streamtypesareSerial,TCPClient,TCPServer,NTRIPClient,File,FTPorHTTP.Thestreamoptions
orthestartup/shutdowncommandcanbesetaswellasInputStreamsforRTKNAVI.
(3) Toconfiguretheoutputstreams,selectthestreamtypewithpulldownmenuat(1)Output,(2)Output
or(3)Output.ThesettingfortheoutputstreamsaresameasOutputStreamsorLogStreamsfor
Rover
GPSReceiver
RTKNAVI
Serial
(1)InputRover=Serial
(2)InputBaseStation=NTRIPClient
(3)InputCorrection=FTP
(4)OutputSolution1=File
File
PC
BaseStation
GPSReceiver
Serial
STRSVR
(0)Input=Serial
(
1
)
Out
p
ut1=NTRIPServer
PC
Internet
IGSDataServer
Ultra‐rapidEphemeris(SP3)
RTKLIBver.2.4.2Manual
27
RTKNAVI.
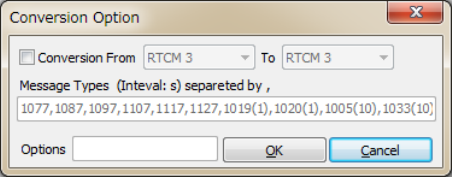
(4) Inversion2.4.2,thestreamformatconversionfunctionisadded.Tousethefunction,pushConvbutton
rightofthepulldownmenuoftheoutputstream.YoucanseeʺConversionOptionsʺdialog.Toenable
thestreamformatconversionfunction,checktheupperleftcheckboxinthedialogandselectinputand
outputformatbythepulldownmenus.Currentversionsupportsthefollowinginputandoutput
formats.
(a)Input: RTCM3,RTCM2,NovAtelOEM6,NovAtelOEM3,u‐blox,SuperstarII,Hemisphere,
SkyTraq,GW10,Javad,NVSBINRandBINEX
(b)Output: RTCM3(RTCM2isnotsupportedyet)
Figure3.3‐2ConversionOptionDialogofSTRSVR
OutputmessagesshallbespecifiedintheMessageTypesfieldinthedialogastheform:
nnnn(ss), nnnn(ss), nnnn(ss), ....
Specifythemessagetypesasthefields nnnnandthemessageintervalsasthefields(ss)inseconds.
Themessageintervalcanbeomitted.Inthiscase,themessageintervalisdeterminedbytheinput
messageinterval.ThefollowingtableshowsallofthesupportedoutputRTCMmessages.Forantenna
infomessages,thefieldsaregivenbytheʺOptionsʺdialog.Messageinputoptionscanalsobespecified
intheʺOptionsʺfield.ReferD.5forthereceiverdependentoptionsfordetails.
SupportedoutputRTCM3messagetype
----------------------------------------------------------------------
TYPE GPS GLONASS Galileo QZSS BeiDou SBAS
----------------------------------------------------------------------
OBS C-L1 : 1001 1009 - - - -
F-L1 : 1002 1010 - - - -
C-L12 : 1003 1011 - - - -
F-L12 : 1004 1012 - - - -
NAV : 1019 1020 1045* 1044* - -
- - 1046* - - -
MSM 1 : 1071 1081 1091 1111* 1121* 1101*
2 : 1072 1082 1092 1112* 1122* 1102*
3 : 1073 1083 1093 1113* 1123* 1103*
4 : 1074 1084 1094 1114* 1124* 1104*
5 : 1075 1085 1095 1115* 1125* 1105*
6 : 1076 1086 1096 1116* 1126* 1106*
7 : 1077 1087 1097 1117* 1127* 1107*
ANT INFO : 1005 1006 1007 1008 1033
RTKLIBver.2.4.2Manual
28
----------------------------------------------------------------------
* draft version of RTCM 3 messages
(5) PushStartbuttoninthemainwindow.Thecommunicationstatusisshowninthemessagearealower
centerofthemainwindow.Statusindicatorsleftsideofthemainwindowalsoshowsthe
communicationstatus.Theindicatorcolorsmeans:Orange:waitingconnection,Dark‐Green:
connected,Light‐Green:dataactive,Red:error.Totaldataamount(bytes)anddatarate(bps)ofthe
inputandoutputstreamsarealsoshowninrightside.Tostopthecommunication,pushStopbutton.
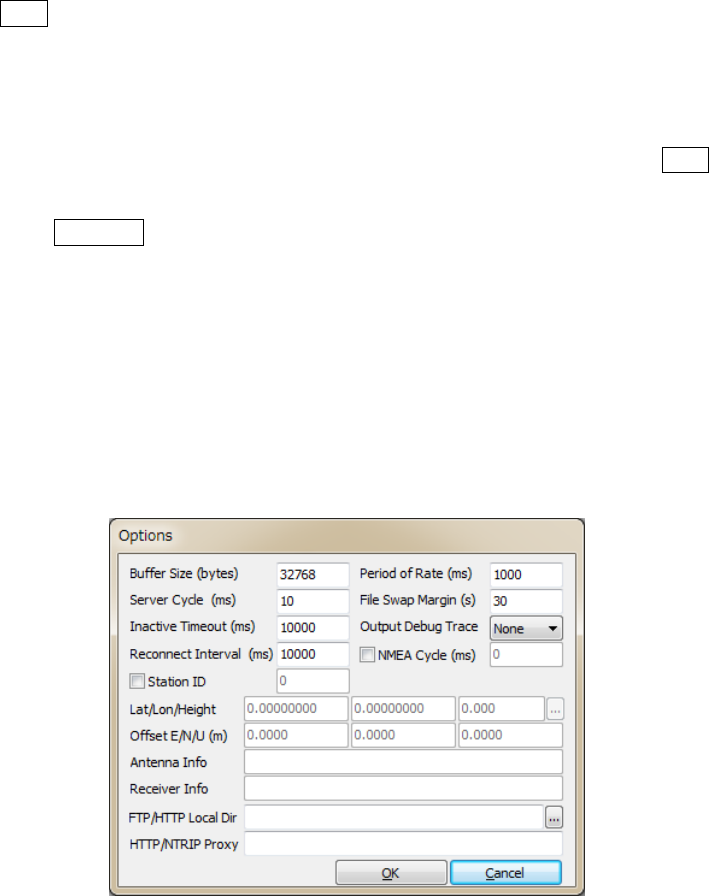
(6) BypushingOptions...button,youcansetthecommunicationoptionswiththeʺOptionsʺdialog.To
sendNMEAGPGGAmessagetotheserverconnectedtheinputstream,checkʺNMEARequestCycleʺ
andsettherequestcycle(ms)andlatitude/longitudeinthemessages.ToconnectanexternalNTRIP
casterfromtheinsideofthefirewallviaaHTTP‐proxyserver,youcaninputtheaddressandtheport
numberastheform<address>:<port> intheʺHTTP/NTRIPProxyʺ field.Theotherfieldsinthe
dialogareforantennaandstationinformationmessagestobegeneratedincaseofusingtheformat
conversionfeatureandsendingantennainformationmessages.
Figure3.3‐3OptionsDialogofSTRSVR
RTKLIBver.2.4.2Manual
29
3.4 Post-Processing Analysis with RTKPOST
RTKLIBcontainsapostprocessinganalysisAPRTKPOST.RTKPOSTinputsthestandardRINEX2.10,2.11,
2.12,3.00,3.01,3.02(draft)observationdataandnavigationmessagefiles(GPS,GLONASS,Galileo,QZSS,
BeiDouandSBAS)andcancomputesthepositioningsolutionsbyvariouspositioningmodesincluding
Single‐point,DGPS/DGNSS,Kinematic,Static,PPP‐KinematicandPPP‐Static.
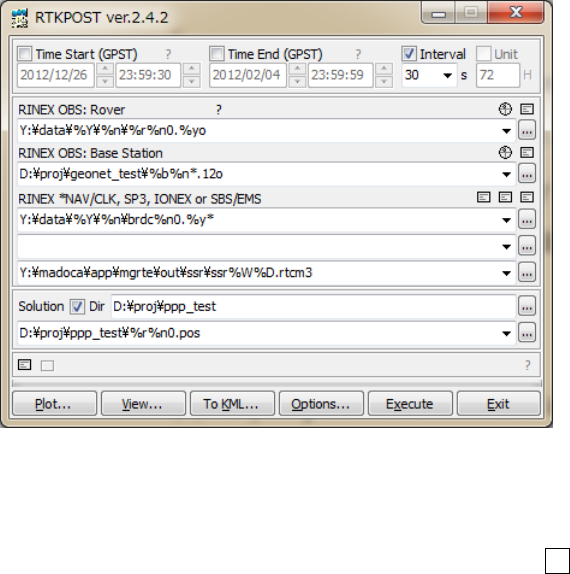
(1) ExecutethebinaryAPfile<install dir>\rtklib_<ver>\bin\rtkpost.exe.Youcanseethe
mainwindowofRTKPOST.YoucanexecutethebinaryAPfile<install
dir>\rtklib_<ver>\bin\rtkpost_mkl.exe
instead,whichisaversionofRTKPOSTlinkingthe
IntelMKLlibraryforfastmatrixcomputation.
Figure3.4‐1MainWindowofRTKPOST
(2) InputtheRINEXobservationdatafilepathoftheroverreceiverinthetextfieldʺRINEXOBS(:Rover)ʺ.
Fillinthefilepathorselectafileusingthefileselectiondialogshownbypushing...button.Youcan
usethecompressedfilebyGZIP[57](.gz),COMPRESS(.z)orHatanaka‐Compression[58](.yyd)for
theRINEXobservationdata.Ifthecompressionfileornotisrecognizedbythefileextension.Ifa
wild‐card(*)isincludedinthefilepath,thewild‐cardisexpandedandthemultiplefilesareread.
(3) IfyouprocessRINEXdataintherelativepositioningmodesas:DGPS/DGNSS,Kinematic,Static,
Moving‐BaseorFixed,youhavetoinputthesecondfilepathofthebase‐stationreceiverintheʺRINEX
OBS:BaseStationʺfieldinadditiontotheroverobservationdatafile.

RTKLIBver.2.4.2Manual
30
(4) YoualsohavetoinputthepathofRINEXnavigationmessagefilesofGPS,GLONASS,Galileo,QZSS
andSBASintheʺRINEX*NAV/CLK,SP3,IONEXorSBS/EMSʺfield.Ifyouleavefirstandsecondfield
blank,theobservationdatafilepathwiththeextensionreplacedby.*nav (.obs)
or.yyN,.yyG,.yyH,.yyQand.yyP (.yyO)isusedforthenavigationmessagefilesofGPS,
GLONASS,Galileo,QZSS,BeiDouandSBAS.Ifawild‐card(*)isincludedinthefilepath,the
wild‐cardisexpandedandthemultiplefilesareusedlikeobservationdatafiles.Touseprecise
ephemerisandclockforPPP‐Kinematic,PPP‐StaticorPPP‐Fixedmode,youcaninputaSP3‐c(for
precisesatelliteephemerisandclock)orRINEXCLK(forprecisesatelliteclock)filepathinthefield.
YoucaninputanIONEX1.0filepathforionosphericVTECgridcorrections.ForSBAScorrections,you
caninputaSBASmessagelogfilepathasRTKLIBformatorEMS(EGNOSmessageserver)2.0format
file.Youcanalsoincludewild‐cards(*)inthesefilepaths.Thewild‐cardsareexpandedandmultiple
filesareused.YoucaninputSSR(statespacerepresentation)correctionsasRTCM3messagesina
inputfilefield.Theformatsoftheseinputfilesarerecognizedbytheirextensionsasfollows:
(a).sp3,.SP3,.eph,.EPH:SP3‐cpreciseephemerisfile[22]
(b).sbs,.SBS,.ems,.EMS:SBASmessagelogfile(AppendixB.2and[26])
(c).rtcm3,.RTCM3 :RTCM3SSRcorrectionmessagefile[18]
(d).*i,.*I :IONEXVTECgriddatafile[24]
(e)others :RINEXOBS,NAVorCLK(automaticallyrecognized)[9]‐[15]
(5) InputtheoutputfilepathinthetextfieldʺSolutionʺ.Thefieldisautomaticallysetasthefirstinputfile
pathwiththeextensionreplacedby.posor.nmea.IfyoucheckʺDirʺandfillinthefield,theoutput
directoryissettothespecifieddirectory.Youcanmodifytheoutputfilepathmanuallybyeditingthe
fieldcontent.
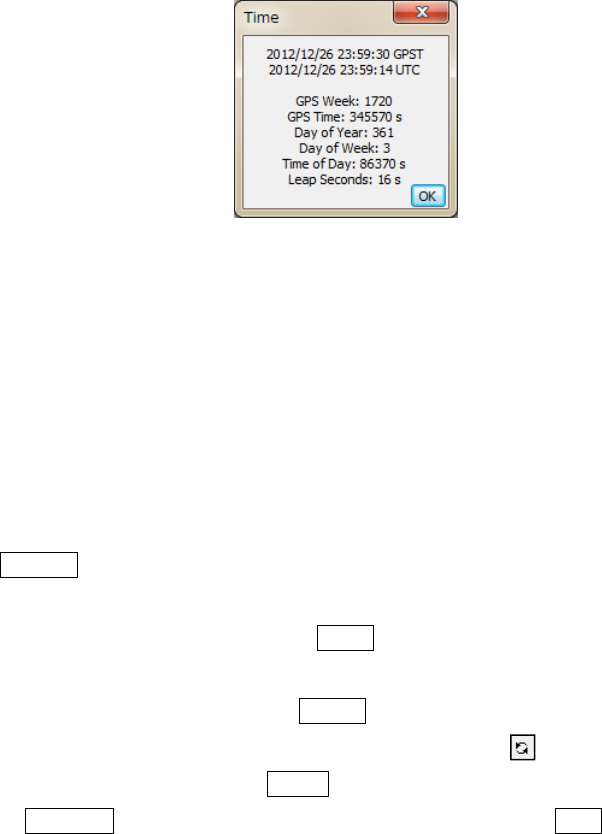
(6) PushOptions...buttontosettheprocessingoptions.ForthedetailedoptionsforRTKPOST,refer3.5
ConfigurePositioningOptionsforRTKNAVIandRTKPOST.Youcansetthestarttimeorendtimeby
checkingandsettingTimeStart(GPST)orTimeEnd(GPST)fieldinthemainwindow.Youalsosetthe
timeintervalbycheckingandsettingtheʺIntervalʺfield.Withthe?button,theinputtimeinGPStime
canbeconvertedtoUTC,GPSWeek/TOW,DayofYear,DayofWeek,TimeofDayandLeapSeconds.
RTKLIBver.2.4.2Manual
31
Figure3.4‐2TimeDialogofRTKPOST
(7) IfyoucheckbothoftheʺTimeStartʺandʺTimeEndʺfields,youcancheckʺUnitʺformultiplesession
analysis.IftheʺUnitʺfieldcheckedandsettheʺUnitʺtimeinhours,theanalysissessionisseparatedto
multiplesessionsfortheunittime.Toavoidoverwritingthepreviousoutputfile,theoutputfilepath
hastocontainthekeywordreplacedaccordingtothesessiontime.Forthedetailsofthekeyword
replacementintheinputoroutputfilepaths,refer3.5ConfigurePositioningOptionsforRTKNAVI
andRTKPOST.
(8) PushExecutebuttontostarttheanalysis.Theprocessingstatusisshowninthestatusmessagefield
lowercenterinthemainwindow.Whenyouseeʺdoneʺmessagehere,theanalysisiscompleted.Ifyou
wanttostoptheprocessingontheway,pushAbortbutton.
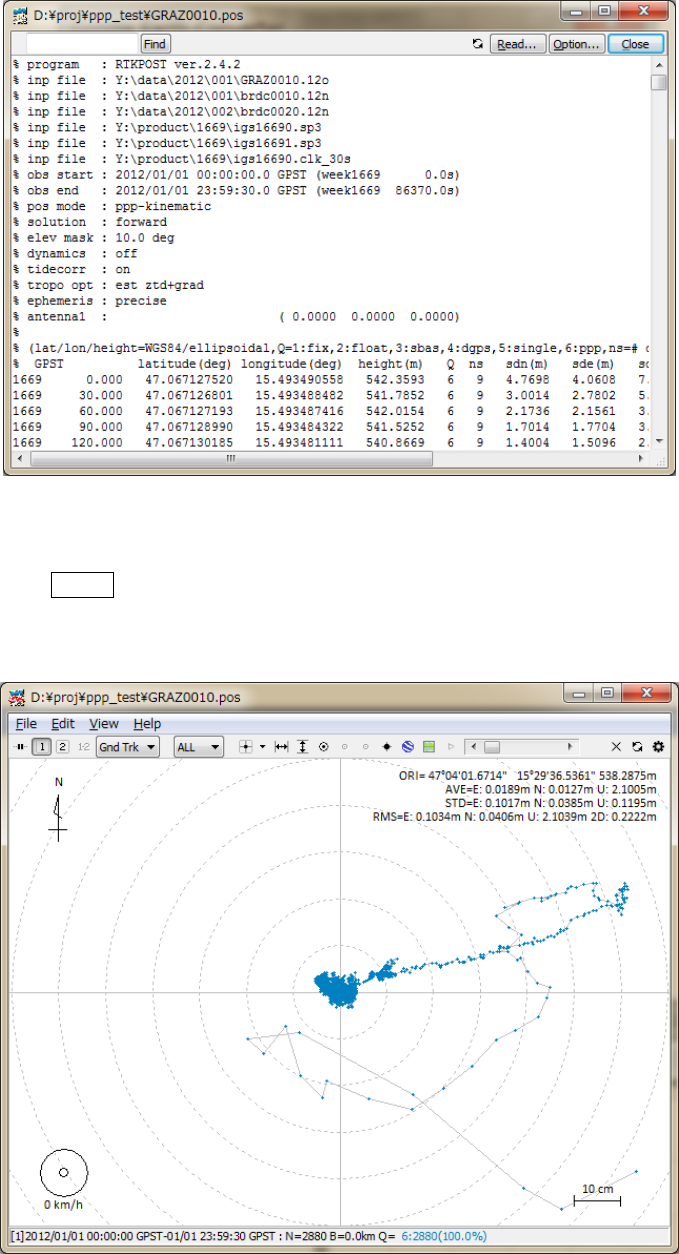
(9) Aftercompletingtheanalysis,bypushingView...button,youcandisplaythecontentoftheoutput
filebyʺTextViewerʺ.Youcanreloadtheoutputfilebypushing buttonintheʺTextViewerʺ
window.Toclosethewindow,pushClosebutton.YoucanconfigureʺTextViewerʺ optionsby
pushingOptions...button.YoucanalsosearchstringsinthetextbyusingFindbutton.
RTKLIBver.2.4.2Manual
32
Figure3.4‐3TextViewershowingSolutionsbyRTKPOST
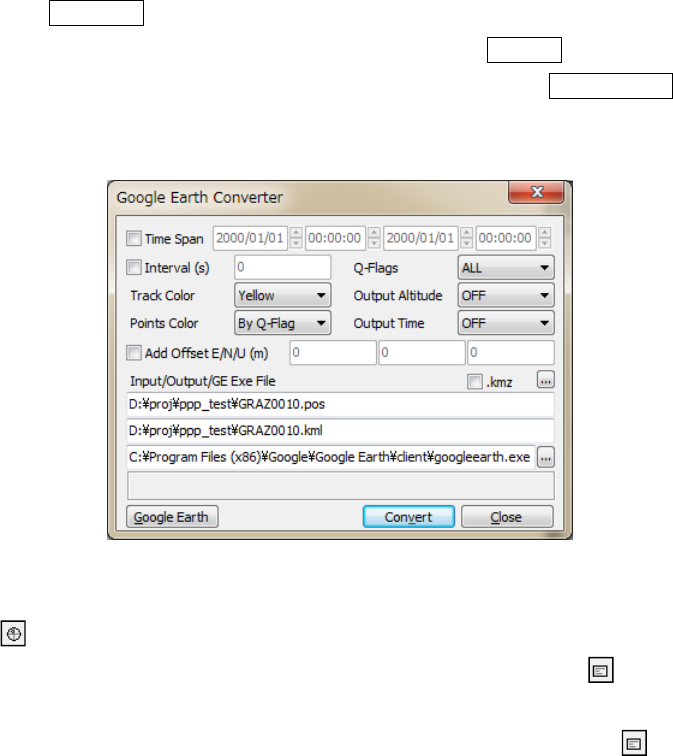
(10) BypushingPlot...button,youcanalsoplottheresultwithRTKPLOT.Refer3.7ViewandPlot
SolutionsandObservationDatawithRTKPLOTfordetails.
Figure3.4‐4RTKPLOTWindowexecutedbyRTKPOST
RTKLIBver.2.4.2Manual
33
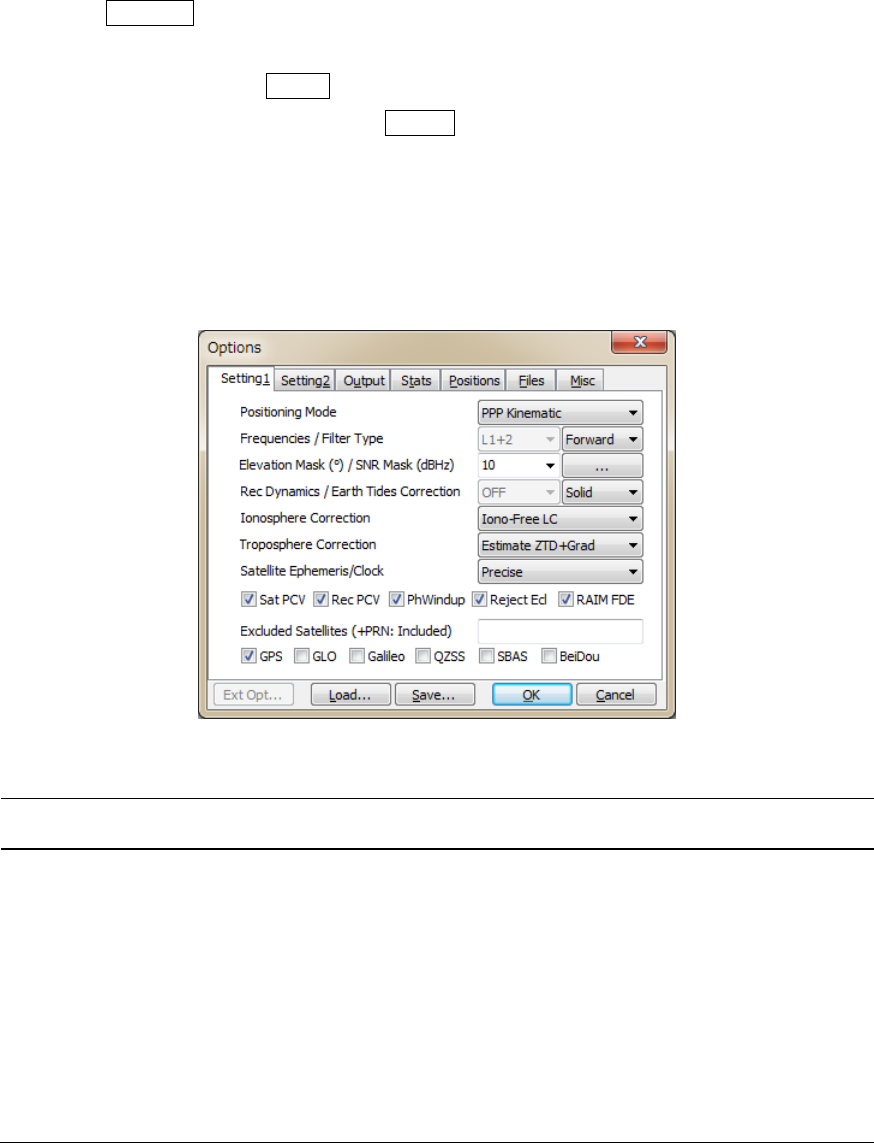
(11) BypushingToKML...button,theoutputfilecanbeconvertedtoGoogleEarthKMLfilewiththe
ʺGoogleEarthConverterʺdialog.SetorselecttheoptionsandpushConvertbuttoninthedialog.You
canlaunchGoogleEarthwiththegeneratedKML/KMZfilebypushingGoogleEarthbutton.To
specifytheGoogleEarthexecutionfile,configureʺOptionsʺ‐ʺFilesʺ‐ʺGoogleEarthExeFileʺ.
Figure3.4‐5GoogleEarthConverterDialogofRTKPOST
(12) With buttoninthemainwindow,youcanviewandplottheinputobservationdataRTKPLOT.
YoucanalsodisplaythecontentsoftheinputfileswithTextViewerbypushingbutton.
(13) Incaseofoutputsolutionstatisticsordebugtraceastheprocessingoptions,pushbuttonslower
leftofthewindowtoviewthesolutionstatisticsfileorthedebugtracefile.Tocheckprocessingerroror
warningincaseofimproperresults,setDebugTraceinʺOptionsʺ‐ʺOutputʺdialogtoʺLevel2ʺ(trace
ERRORandWARNIN G) andseetheoutputdebugtracefile.
RTKLIBver.2.4.2Manual
34
3.5 Configure Positioning Options for RTKNAVI and RTKPOST
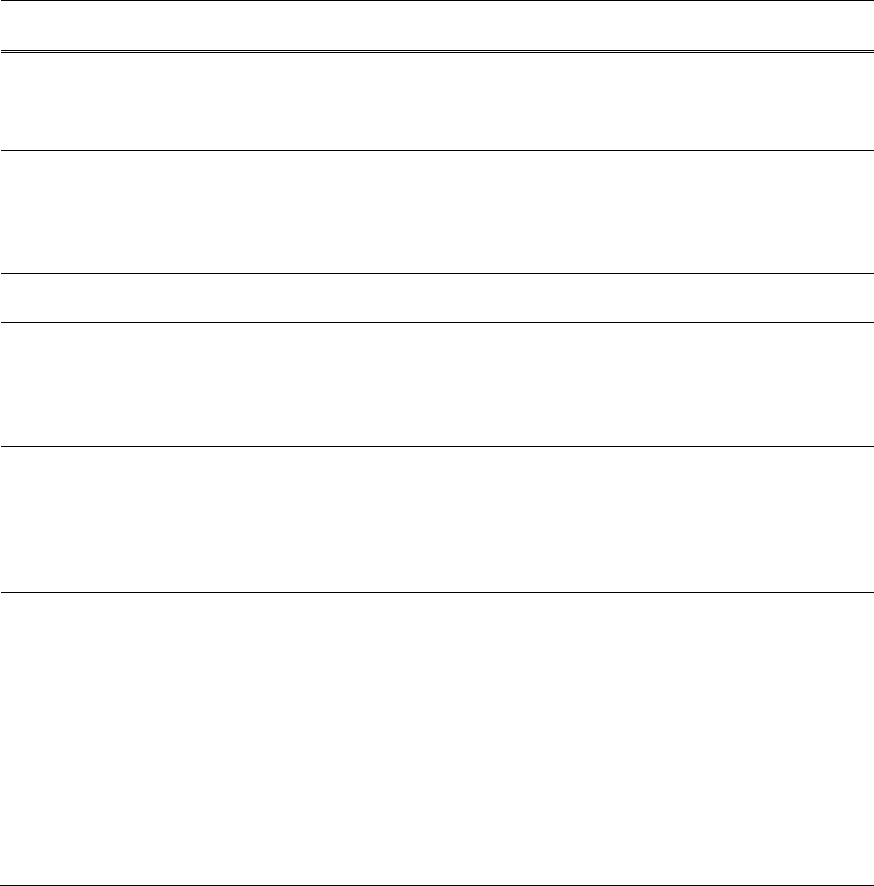
BypushingOptions...buttoninthemainwindowsofRTKNAVIorRTKPOST,youcansetthepositioning
options.Selectableorchangeablepositioningoptionsareasfollows.Theseoptionscanbesavedtothe
configurationfilebypushingSavebuttononthedialogandselectthefilepath.Theoptionscanbe
loadedfromaconfigurationfilebypushingLoadbuttonandselectingaconfigurationfile.Forthe
configurationfile,referB.4.Thekeywordswhichcanbeincludedtheconfigurationfilearealsoshownin
thefollowingtables.ThemodelsspecifiedintheseoptionsarealsoexplainedinAppendixEfordetails.
(1) Setting1
Figure3.5‐1OptionsDialog(Setting1)ofRTKNAVIandRTKPOST
ItemDescriptionsConfiguration
FileNotes
Positioning
Mode
Setpositioningmode
‐Single:SinglepointpositioningorSBASDGPS
‐DGPS/DGNSS:Code‐baseddifferentialGPS
‐Static:Carrier‐basedStaticpositioning
‐Kinematic:Carrier‐basedKinematicpositioning
‐Moving‐Base:Movingbaseline
‐Fixed:Roverreceiverpositionisfixed*
‐PPPKinematic:PrecisePointPositioningwith
kinematicmode
‐PPPStatic:PrecisePointPositioningwithstaticmode
‐PPPFixed:RoverreceiverpositionisfixedwithPPP
mode*
pos1
-
posmode
*
Forresiduals
analysis
RTKLIBver.2.4.2Manual
35
ItemDescriptionsConfiguration
FileNotes
FrequenciesSetusedcarrierfrequencies
‐L1:L1Singlefrequency
‐L1+2:L1andL2Dual‐frequency
‐L1+2+5:L1,L2andL5Triple‐frequency
pos1
-
frequency N/AtoSingle,
PPP‐*modes
FilterTypeSetfiltertype
‐Forward:Forwardfiltersolution
‐Backward:Backwardfiltersolution*
‐Combined:Smoothercombinedsolutionwith
forwardandbackwardfiltersolutions*
pos1
-
soltype *
N/Ato
RTKNAVIand
Singlemode
Elevation
Mask
Setelevationmaskangleindegree.
pos1
-
elmask
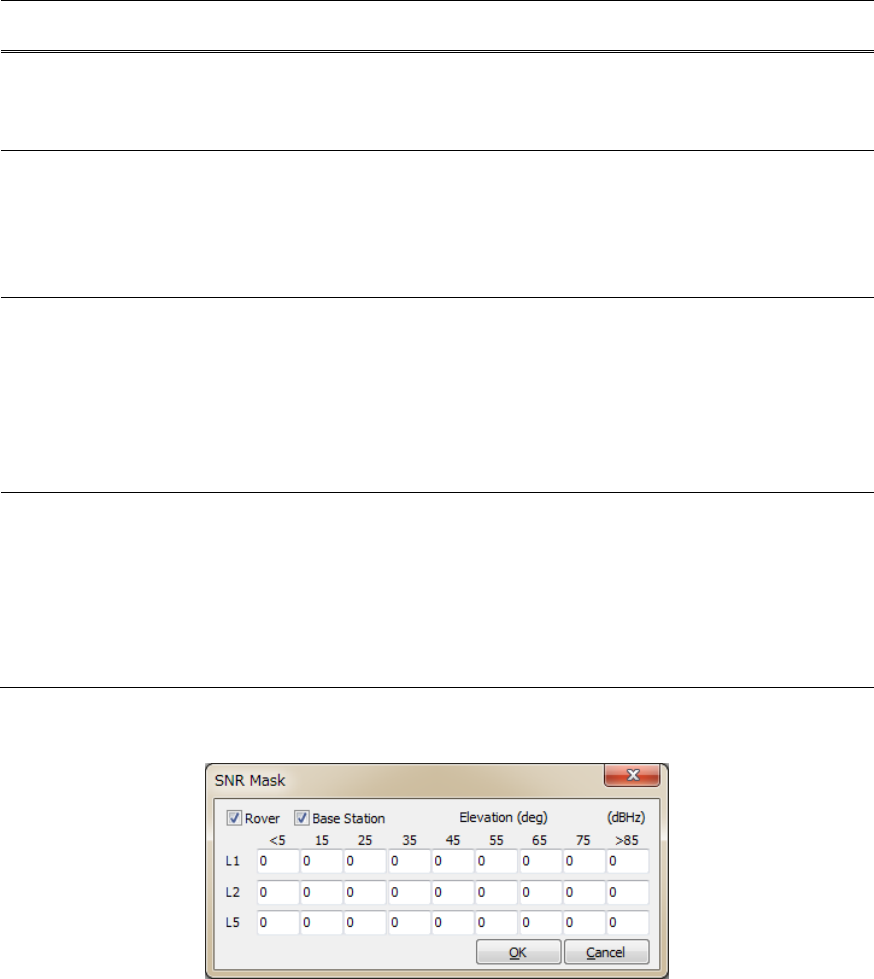
SNRMaskSetSNRmask.Push...buttontoshowtheʺSNRMaskʺ
dialog.SetSNRthresholdstorejectsatellitesignalsfor
each5degelevationbinsinthedialog.Ifbothof
ʺRoverʺandʺBaseStationʺareunchecked,theseSNR
masksarenotapplied.
pos1
-
snrmask_r,
snrmask_b,
snrmask_L1,
snrmask_L2,
snrmask_L5
RecDynamicsSetthedynamicsmodeloftheroverreceiver.
‐OFF:Dynamicsisnotused
‐ON:Receivervelocityandaccelerationare
estimated.
Thereceiverpositionispredictedwiththeestimated
velocityandacceleration.
pos1
-
dynamics Only
applicableto
DGPS/DGNSS
orKinematic
modes
EarthTides
Correction
Setwhetherearthtidescorrectionisappliedornot
‐OFF:Notapplyearthtidescorrection
‐Solid:Applysolidearthtidescorrection
‐Solid/OTL:Applysolidearthtides,OTL(oceantide
loading)andpoletidecorrections.*
ToapplyOTLcorrection,settheOTLcoefficientsfile
pathinʺOceanLoadingBLQFormatʺintheʺFilesʺtab
andthemarkernamehavetobeincludeintheinput
RINEXfiletoselectthestationinBLQfile.
Toapplypoletide,setERP(earthrotationparameter)
filepathinʺEOPDataFileʺintheʺFilesʺtab.
pos1
-
tidecorr N/AtoSingle
mode
*
N/Ato
RTKNAVI
RTKLIBver.2.4.2Manual
36
ItemDescriptionsConfiguration
FileNotes
Ionosphere
Correction
Setionosphericcorrectionoptions.Ifyousetthe
parameterEstimated.Verticalionosphericdelayfor
eachsatellite)areestimated.Forlongbaseline
analysis,ionosphereestimationiseffectiveto
suppressionospheredelayeffects.
‐OFF:Notapplyionosphericcorrection
‐Broadcast:Applybroadcastionosphericmodel
‐SBAS:ApplySBASionosphericmodel
‐Iono‐FreeLC:Ionosphere‐freelinearcombination
withdualfrequency(L1‐L2forGPS/GLONASS/
QZSSorL1‐L5forGalileo)measurementsisusedfor
ionosphericcorrection
‐EstimateSTEC:Estimateionosphericparameter
STEC(slanttotalelectroncontent)*
‐IONEXTEC:UseIONEXTECgriddata
‐QZSSBroadcast:Applybroadcastionospheremodel
providedbyQZSS
‐QZSSLEX:(reserved)
pos1
-
ionoopt *
N/AtoSingle,
PPP‐*modes
Troposphere
Correction
Setwhethertroposphericparameters(zenithtotal
delay
atroverandbase‐stationpositions)areestimatedor
not.
‐OFF:Notapplytropospherecorrection
‐Saastamoinen:ApplySaastamoinenmodel
‐SBAS:ApplySBAStroposphericmodel(MOPS)
‐EstimateZTD:EstimateZTD(zenithtotaldelay)
parametersasEKFstates*
‐EstimateZTD+Grad:EstimateZTDandhorizontal
gradientparametersasEKFstates*
pos1
-
tropopt *N/AtoSingle
mode.
Satellite
Ephemeris/
Clock
Setthetypeofsatelliteephemeris.
‐Broadcast:Usebroadcastephemeris
‐Precise:Usepreciseephemeris*
‐Broadcast+SBAS:BroadcastephemeriswithSBAS
long‐termandfastcorrection
‐Broadcast+SSRAPC:Broadcastephemeriswith
RTCM
SSRcorrection(antennaphasecentervalue)
‐Broadcast+SSRCoM:Broadcastephemeriswith
RTCM
SSRcorrection(satellitecenterofmassvalue)
‐QZSSLEX:(reserved)
pos1
-
sateph
SatPCVSetwhetherthesatelliteantennaPCV(phasecenter
variation)modelisusedornot.Tousethefeature,set
ʺSatelliteAntennaPCVFileʺinʺFilesʺtab.
pos1
-
posopt1 N/AtoSingle
mode
RecPCVSetwhetherthereceiverantennaPCVmodelisused
ornot.Tousethefeature,setʺReceiverAntennaPCV
FileʺinʺFilesʺtab.
pos1
-
posopt2 N/AtoSingle
mode
PhWindupSetwhetherthephasewindupcorrectionforPPP
modesisappliedornot.
pos1
-
posopt3 Only
applicableto
PPP‐*modes.
RTKLIBver.2.4.2Manual
37
ItemDescriptionsConfiguration
FileNotes
RejectEclSetwhethertheGPSBlockIIAsatellitesineclipseare
excludedornot.TheeclipsingBlockIIAsatellites
oftendegradethePPPsolutionsduetounpredicted
behaviorofyaw‐attitude.
pos1
-
posopt4 Only
applicableto
PPP‐*modes.
RAIMFDESetwhetherRAIM(receiverautonomousintegrity
monitoring)FDE(faultdetectionandexclusion)
featureisenabledornot.IncaseofRAIMFDE
enabled,asatelliteisexcludedifSSE(sumofsquared
errors)ofresidualsisoverathreshold.Theexcluded
satelliteisselectedtoindicatetheminimumSSE.
pos1
-
posopt5
Excluded
Satellites
(+PRN:
Included)
Settheexcludedsatellitesforpositioning.Fillinthe
PRNnumbersofthesatellitesseparatedbyspaces.
ForGLONASS,Galileo,QZSS,BeiDouandSBAS,use
Rnn,Enn,Jnn,CnnandSnn,respectively(nn:satellite
PRNorslotnumber).
Ifʺ+ʺisaddedtotheheadofthesatelliteID,the
satelliteisincludedforpositioningevenifthesatellite
isunhealthy.
pos1
-
exclsats
Navigation
System
Checkusednavigationsatellitesystems.Ifunchecked,
satellitesofthesystemarenotusedforpositioning.
‐GPS
‐GLONASS
‐Galileo
‐QZSS
‐SBAS
‐BeiDou
pos1
-
navsys
Figure3.5‐2SNRMaskDialogofRTKNAVIandRTKPOSTOptions
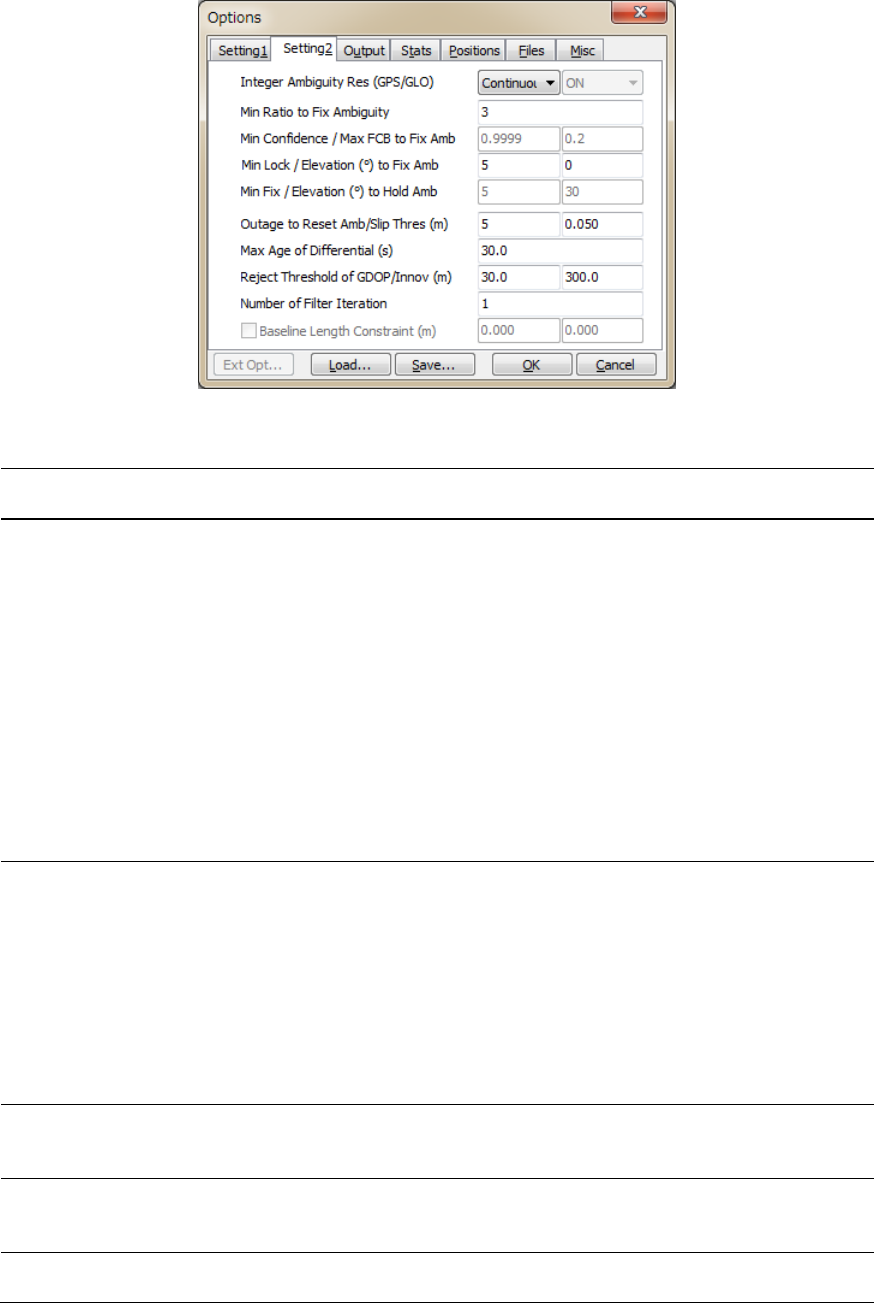
(2) Setting2
RTKLIBver.2.4.2Manual
38
Figure3.5‐2OptionsDialog(Setting2)ofRTKNAVIandRTKPOST
ItemDescriptionsConfiguration
FileNotes
Integer
Ambiguity
Resolution
(GPS)
Setthestrategyofintegerambiguityresolutionfor
GPS
‐OFF:Noambiguityresolution
‐Continuous:Continuouslystaticintegerambiguities
areestimatedandresolved*
‐Instantaneous:Integerambiguityisestimatedand
resolvedbyepoch‐by‐epochbasis*
‐FixandHold:Continuouslystaticinteger
ambiguitiesareestimatedandresolved.Ifthe
validationOK,theambiguitiesaretightly
constrainedtotheresolvedvalues.*
‐PPP‐AR:AmbiguityresolutioninPPP
(Experimental)**
pos2
-
armode Default:
ContinuousNot
applicableto
Singlemode.
*Only
applicableto
Kinematic,
Static,Moving‐
baselineand
Fixedmodes.
**Only
applicable
toPPP‐*modes
andRTKPOST
Integer
Ambiguity
Resolution
(GLO)
SetthestrategyofGLONASSintegerambiguity
resolution
‐OFF:Ambiguitiesarenotfixed.
‐ON:Ambiguitiesarefixed.Usuallytheambiguityof
onlythesametypesreceiverpairfortheroverand
thebasestationcanbefixed.Thedifferentreceiver
typeshaveIFB(inter‐frequencybias)whichcannot
becanceledbyDD.
‐Autocalibration:Receiverinter‐channelbiasterms
areestimatedasalinearequationbythefrequencies.
pos2
-
gloarmode Default:
ON
Onlyapplicable
toKinematic,
Static,Moving‐
baselineand
Fixedmodes.
MinRatioto
Fix
Ambiguity
Settheintegerambiguityvalidationthresholdfor
ʺratio‐testʺ,whichusestheratioofsquaredresiduals
ofthebestintegervectortothesecond‐bestvector.
pos2
-
arthres Defaultvalue:
3.0
Min
Confidenceto
FixAmb.
Setminimumconfidenceleveltofixambiguityin
PPP‐ARmode
MaxFCBto
FixAmb.
SetmaximumFCB(fractionalcyclebias)tofix
ambiguityinPPP‐ARmode
RTKLIBver.2.4.2Manual
39
ItemDescriptionsConfiguration
FileNotes
MinLock/
Elevationto
Fix
Ambiguity
Settheminimumlockcountandtheminimum
elevationangle(deg)tofixintegerambiguity.Ifthe
lockcountortheelevationangleislessthanthevalue,
theambiguityisexcludedfromthefixedinteger
vector.
pos2
-
arlockcnt,
arelmask
Defaultvalue:
0,0
MinFix/
Elevationto
Hold
Ambiguity
IfyouselectʺFixandHoldʺmodeforInteger
AmbiguityResolution,settheminimumfixcountand
theminimumelevationangle(deg)toholdambiguity.
pos2
-
arminfix,
elmaskhold
Defaultvalue:
10,0
Outageto
Reset
Ambiguity/
SlipThres
Settheoutagecounttoresetambiguity.Ifthedata
outagecountisoverthevalue,theestimated
ambiguityisresettotheinitialvalue.Andsetthe
cycle‐slipthreshold(m)ofgeometry‐freeLC
carrier‐phasedifferencebetweenepochs.
pos2
-
aroutcnt,
pos2-
slipthres
Defaultvalue:
5,0.05
MaxAgeof
Differential
Setthemaximumvalueofageofdifferential(s)
betweentheroverandthebasestation.
pos2
-
maxage Defaultvalue:
30
SyncSolutionSettimesynchronizationmodeofsolutions:
‐OFF:Minimumlatencymode.Thesolutionisoutput
soonafterroverdatainput.Thedelayedbasestation
orcorrectiondataareextrapolatedtotherovertime.
‐ON:Matchedsolutionmode.Thesolutionisoutput
afterbothroverdataandbasestationorcorrection
dataprepared.Thesolutiontimemaybebehindthe
rovertimewithacertaindelay.
Thisfeatureisnotimplementedinver.2.4.2.
pos2
-
syncsol N/Ato
RTKPOSTand
Singlemode
Defaultvalue:
OFF
Reject
Threshold
ofGDOP/
Innov.
SettherejectthresholdofGDOPandinnovation
(pre‐fitresidual)(m).IftheGDOPortheinnovationis
overthevalue,theobservableisexcludedforthe
estimationprocessasanoutlier.
pos2
-
rejgdop,
rejionno
Defaultvalue:
30,30
Numberof
Iteration
Setthenumberofiterationinthemeasurement
updateoftheestimationfilter.Ifthebaselinelengthis
veryshortlike1m,theiterationmaybeeffectiveto
handlethenonlinearityofmeasurementequation.
pos2
-
niter Defaultvalue:1
Baseline
Length
Constraint
IfMoving‐Basemode,checkandsettheconstraintof
thebaselinelength.Fillinthelengthinmandthe
standarddeviation(m)oftheconstraint.
pos2
-
baselen,
basesig
RTKLIBver.2.4.2Manual
40
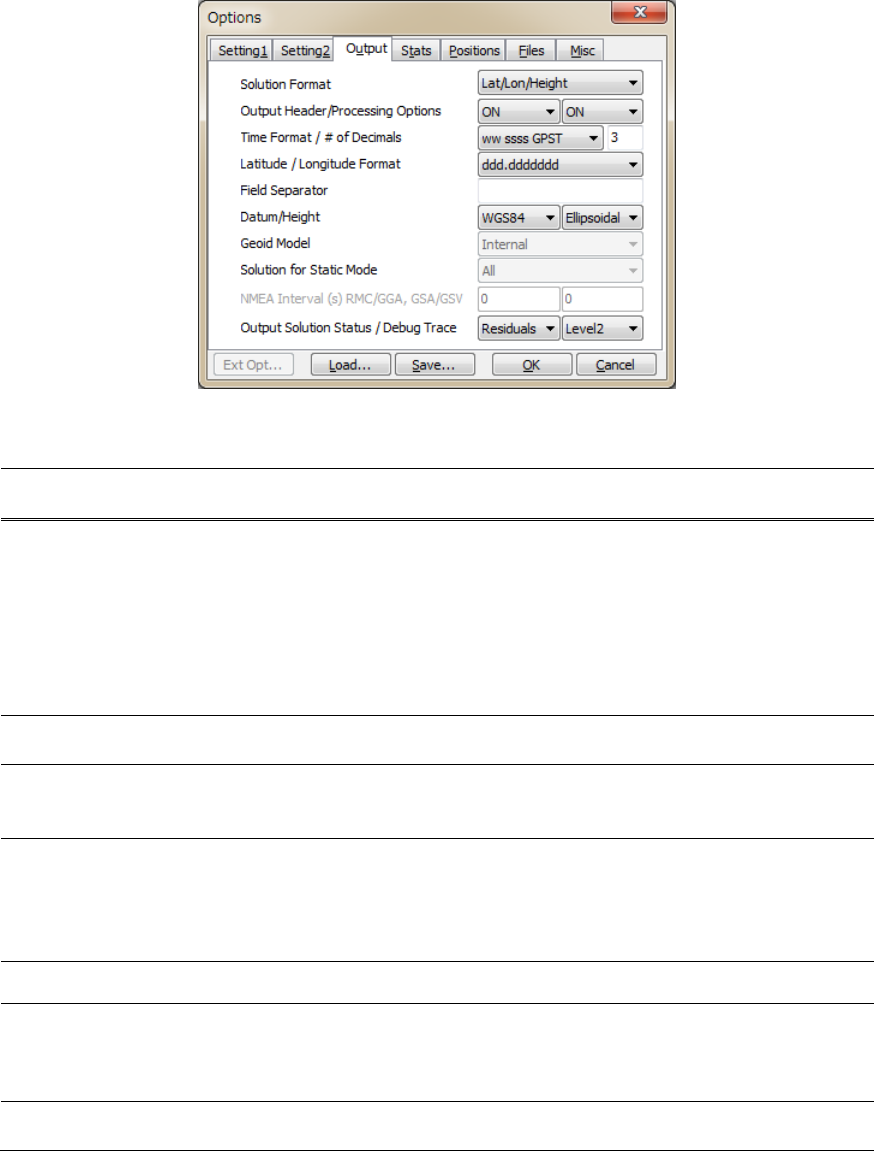
(3) Output
Figure3.5‐3OptionsDialog(Output)ofRTKNAVIandRTKPOST
ItemDescriptionsConfiguration
FileNotes
Solution
Format
Settheoutputsolutionformat.
‐Lat/Lon/Height:Latitude,longitudeandheight
‐X/Y/Z‐ECEF:X/Y/ZcomponentsofECEF
coordinates
‐E/N/U‐Baseline:E/N/Ucomponentsofbaseline
vector
‐NMEA0183:NMEAGPRMC,GPGGA,GPGSA,
GLGSA,GAGSA,GPGSV,GLGSVandGAGSV
o
ut
-
solformat ForRTKNAVI,
specifyoptions
asOutput
Streams
setting.
Output
Header
Setwhethertheheaderisoutputornot.
o
ut
-
outhead N/AtoNMEA
Output
Processing
Options
Setwhethertheprocessingoptionsareoutputornot.
o
ut
-
outopt RTKPOSTonly
N/AtoNMEA
TimeFormatSettheformatoftime
‐ssssssss.sssGPST:GPSweekandtimeofweek
‐hh:mm:ssGPST:yyyy/mm/ddhh:mm:ssGPST
‐hh:mm:ssUTC:yyyy/mm/ddhh:mm:ssUTC
‐hh:mm:ssJST:yyyy/mm/ddhh:mm:ssJST
o
ut
-
timesys,
timeform
N/AtoNMEA
#ofDecimalsSetnumberofdecimalsinthetimeformat
o
ut
-
timendec N/AtoNMEA
Latitude/
Longitude
Format
Settheformatsoflatitudeandlongitudeifthe
solutionformatissettoLat/Lon/Height.
‐ddd.dddddddd:Degree
‐dddmmss.sss:Degreeminutesecond
o
ut
-
degform N/AtoNMEA
Field
Separator
Settheseparatorforfields.
o
ut
-
fieldsep N/AtoNMEA
RTKLIBver.2.4.2Manual
41
ItemDescriptionsConfiguration
FileNotes
DatumSetthedatumifthesolutionformatoptionissetto
Lat/Lon/Height.
‐WGS84:WGS84datum
‐Tokyo:Tokyodatum
(currentversionsupportsonlyWGS84)
-
HeightSetthetypeofheight.
‐Ellipsoidal:Ellipsoidalheight
‐Geodetic:Geodeticheight
o
ut
-
h
eight
GeoidModelSetthegeoidmodeliftheHeightoptionissetto
Geodetic.
‐Internal:Internalgeoidmodel
‐EGM96‐BE(15ʺ):EGM96(15ʺx15ʺgrid)*1
‐EGM2008‐SE(2.5ʺ):EGM2008(2.5x2.5ʺgrid)*2
‐EGM2008‐SE(1ʺ):EGM2008(1x1ʺgrid)*2
‐GSI2000(1x1.5ʺ):GSI2000(1x1.5ʺgrid)*3
Ifusingexternalgeoidmodel,specifythegeoidfile
pathinʺFilesʺtab.
o
ut
-
g
eoi
d
Solutionfor
Static
Mode
SetthesolutiontypeforStaticorPPP‐Staticmode
‐All:allsolutionsfortheprocessingperiodare
outputted
‐Single:Onlyonesolutionfortheprocessingperiodis
output.Thetimeofsolutionisfirstepochinthe
processingperiod.
o
ut
-
solstatic RTKPOSTonly
NMEA
Interval(s)
RMC/GGA
SettheoutputintervalofNMEAGPRMC,GPGGA
messages
o
ut
-
nmeaintv1 RTKNAVIonly
NMEA
Interval(s)
GSA/GSV
SettheoutputintervalofNMEAGPGSA,GLGSA,
GAGSA,GPGSV,GLGSV,GAGSVmessages
o
ut
-
nmeaintv2 RTKNAVIonly
Output
Solution
Status
Settheoutputlevelofthesolutionstatusfile.The
solutionstatusfilecontainsestimatedstatesand
residuals.Thesolutionstatusfileiscreatedinthe
currentdirectory(RTKNAVI)orintheoutputfile
directory(RTKPOST).
o
ut
-
outstat
Output
DebugTrace
Settheoutputlevelofdebugtracefile.IfsettingOFF,
anydebugtracefileisnotoutput.Thedebugtracefile
iscreatedinthecurrentdirectory(RTKNAVI)orin
theoutputfiledirectory(RTKPOST).
-
*1WW15MGH.DAC(http://earth‐info.nga.mil/GandG/wgs84/gravitymod/egm96/binary/binarygeoid.html)
*2Und_min1x1_egm2008_isw=82_WGS84_TideFree_SE,
Und_min2.5x2.5_egm2008_isw=82_WGS84_TideFree_SE
(http://earth‐info.nga.mil/GandG/wgs84/gravitymod/egm2008/egm08_wgs84.html)
*3gsigeome.ver4(http://vldb.gsi.go.jp/sokuchi/geoid/download/down.html)
RTKLIBver.2.4.2Manual
42
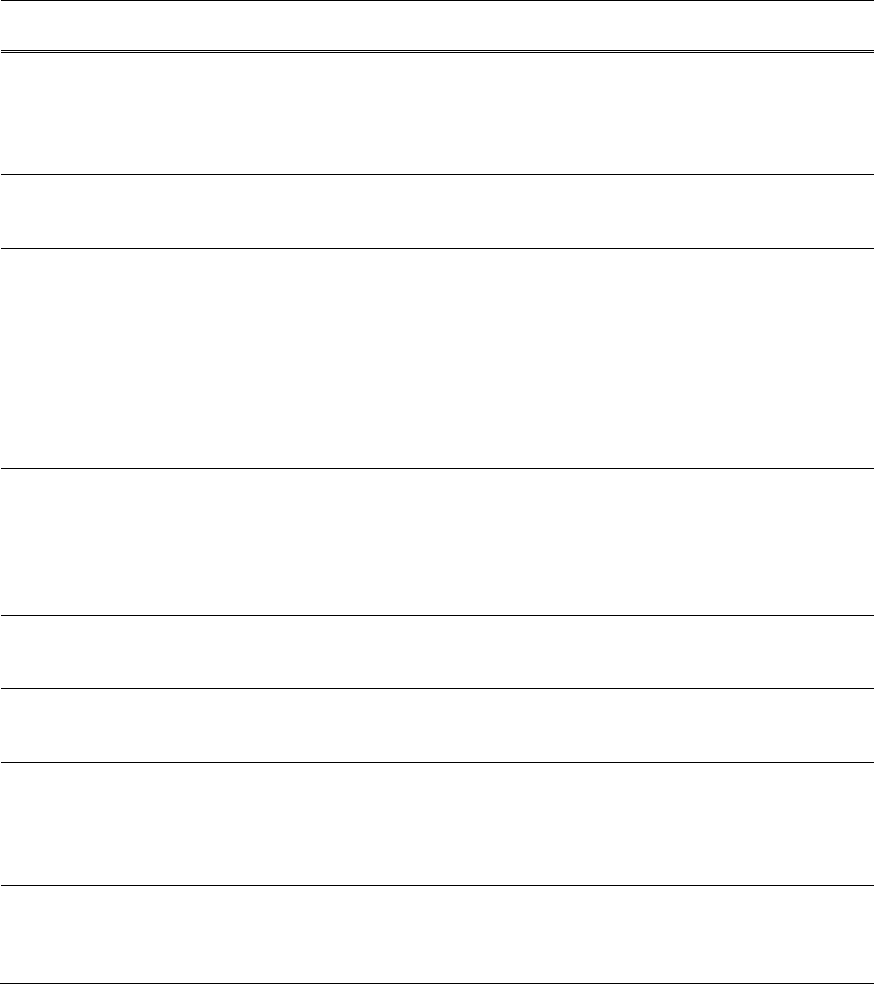
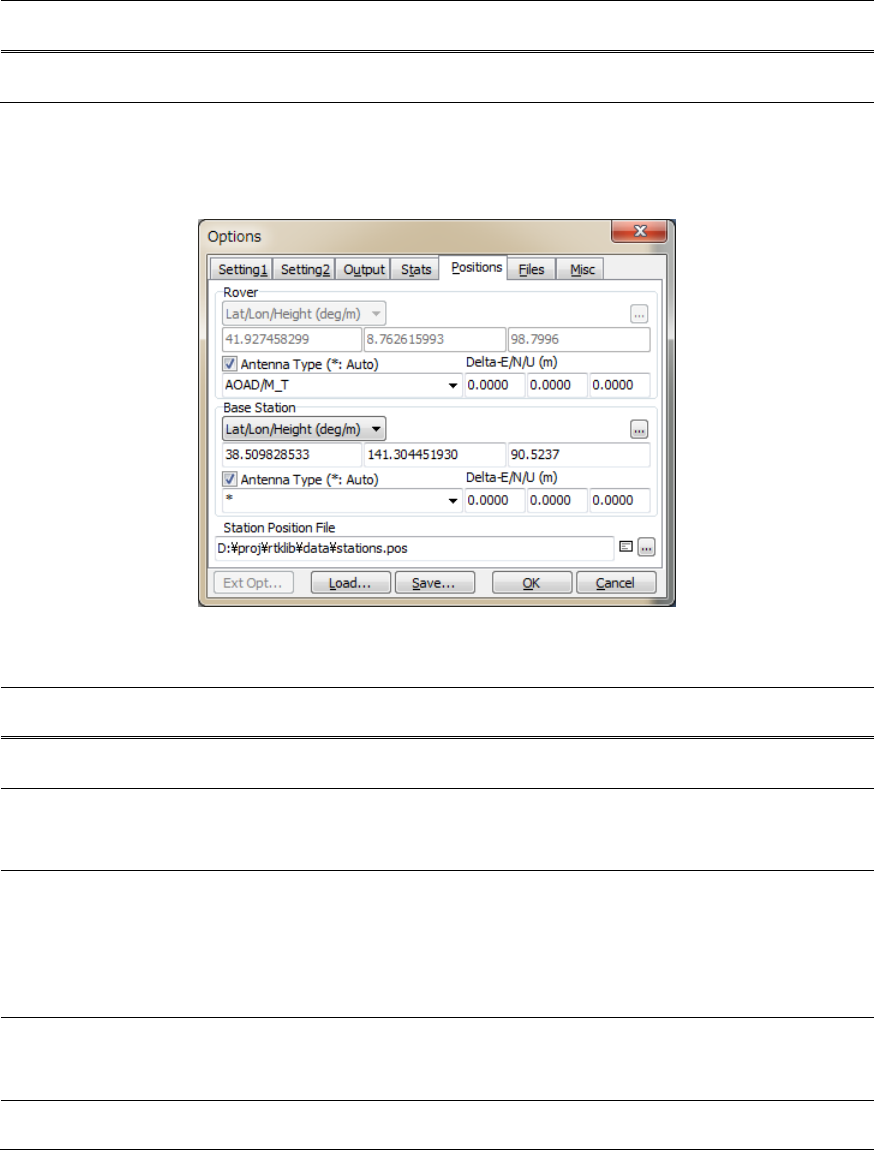
(4) Statistics
Figure3.5‐4OptionsDialog(Statistics)ofRTKNAVIandRTKPOST
ItemDescriptionsConfiguration
FileNotes
Measurement
Errors
Code/Carrier‐
PhaseError
RateL1/L2
Settheratioofstandarddeviationsofpseudorange
errorstocarrier‐phaseerrorsforL1andL2/L5/L6.
s
tats
-
eratio1,
eratio2
Defaultvalue:
100,
100
Carrier‐Phase
Error
Setthebasetermofcarrier‐phaseerrorstandard
deviation(m).
s
tats
-
errphase Defaultvalue:
0.003
Carrier‐Phase
Error/sinEl
Settheelevationdependenttermofcarrier‐phase
errorstandarddeviation(m/sin(el)).
s
tats
-
errphaseel Defaultvalue:
0.003
Carrier‐Phase
Error/Baseline
Setthebaseline‐lengthdependenttermof
carrier‐phaseerrorstandarddeviation(m/10km).
s
tats
-
errphasebl Defaultvalue:0
Doppler
Frequency
SetthestandarddeviationofDopplererrors(Hz)
(Currentversiondoesnotusethevalue)
s
tats
-
errdoppler Defaultvalue:1
Process
Noises
Receiver
Accel
Horiz/Vertical
Settheprocessnoisestandarddeviationofthe
receiveraccelerationasthehorizontalorvertical
component.(m/s2/sqrt(s)).IfReceiverDynamicsisset
toOFF,theyarenotused.
s
tats
-
prnaccelh,
prnaccelv
Defaultvalue:
1and0.1
Carrier‐Phase
Bias
Settheprocessnoisestandarddeviationof
carrier‐phase
bias(ambiguity)(cycle/sqrt(s)).
s
tats
-
prnbias Defaultvalue:
1E‐4
Vertical
Ionospheric
Delay
Settheprocessnoisestandarddeviationofvertical
ionosphericdelayper10kmbaseline(m/sqrt(s)).
s
tats
-
prniono Defaultvalue:
1E‐3
Zenith
Tropospheric
Delay
Settheprocessnoisestandarddeviationofzenith
troposphericdelay(m/sqrt(s)).
s
tats
-
prntrop Defaultvalue:
1E‐4
RTKLIBver.2.4.2Manual
43
ItemDescriptionsConfiguration
FileNotes
SatelliteClock
Stability
Setthesatelliteclockstability(s/s).Thevalueisused
forinterpolationofbase‐stationobservables.
s
tats
-
clkstab Defaultvalue:
5E‐12
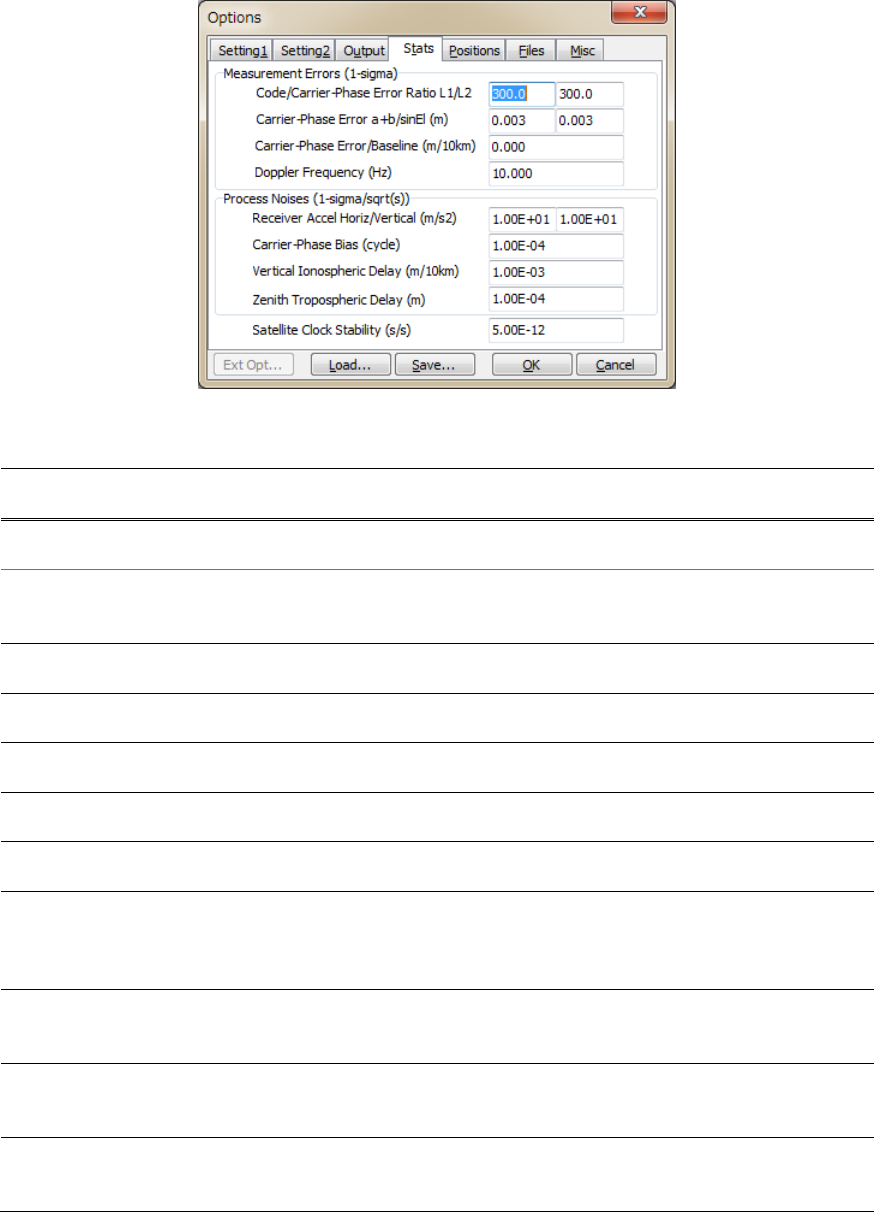
(5) Positions
Figure3.5‐5OptionsDialog(Positions)ofRTKNAVIandRTKPOST
ItemDescriptionsConfiguration
FileNotes
Rover
Lat/Lon/
Height
(deg/m)
Setthepositionoftheroverantennaiftherover
antennaisfixed.SeethesamefieldforBaseStation.
a
nt1
-
postype,
pos1, pos2,
pos3
AntennaTypeSelectthetypeoftheroverantenna.
Toselecttheantennatype,settheReceiverAntenna
PCVFilepathinFiles.Ifʺ*ʺisused,antennatypeand
antennadeltaarerecognizedbytheantenna
informationofRINEXOBSheader(RTKPOST)or
RTCMantennainformation(RTKNAVI).
a
nt1
-
anttype
Delta‐E/N/USetthedeltapositionoftheroverantennaasthe
E/N/UoffsetsofARP(antennareferencepoint)
positionwithrefertothemarker(m).
a
nt1
-
antdele,
antdeln,
antdelu
BaseStation
RTKLIBver.2.4.2Manual
44
ItemDescriptionsConfiguration
FileNotes
Lat/Lon/Heig
ht(deg/m)
Setthepositionofthebase‐stationantenna.
‐Lat/Lon/Height(deg/m):Latitude/longitude/height
indegreeandm
‐Lat/Lon/Height(dms/m):Latitude/longitude/height
indegree/minute/secondandm
‐X/Y/Z‐ECEF(m):X/Y/ZcomponentsinECEFframe.
‐RTCMStationPosition:Usetheantennaposition
includedinRTCMmessages*
‐AverageofSingle‐Pos:Usetheaverageofsingle
pointsolutions**
‐GetfromPositionFile:Usethepositioninthe
positionfile.Thestationissearchedbyusingthe
head4‐characterIDoftheroverobservationdatafile
path.**
‐RINEXHeaderPosition:Usetheapproximate
positioninRINEXOBSheader.**
a
nt2
-
postype,
pos1, pos2,
pos3
Heightis
specifiedas
ellipsoidal
height
*RTKNAVIonly
**RTKPOST
only
AntennaTypeSelectthetypeofthebase‐stationantenna.
Toselecttheantennatype,setReceiverAntennaPCV
FileinFiles.Ifʺ*ʺisused,antennatypeandantenna
deltaarerecognizedbytheantennainformationof
RINEXOBSheader(RTKPOST)orRTCMantenna
information(RTKNAVI).
a
nt2
-
anttype
Delta‐E/N/USetthedeltapositionofthebase‐stationantennaas
E/N/UoffsetsofARPpositionwithrefertothemarker
(m).
a
nt2
-
antdele,
antdeln,
antdelu
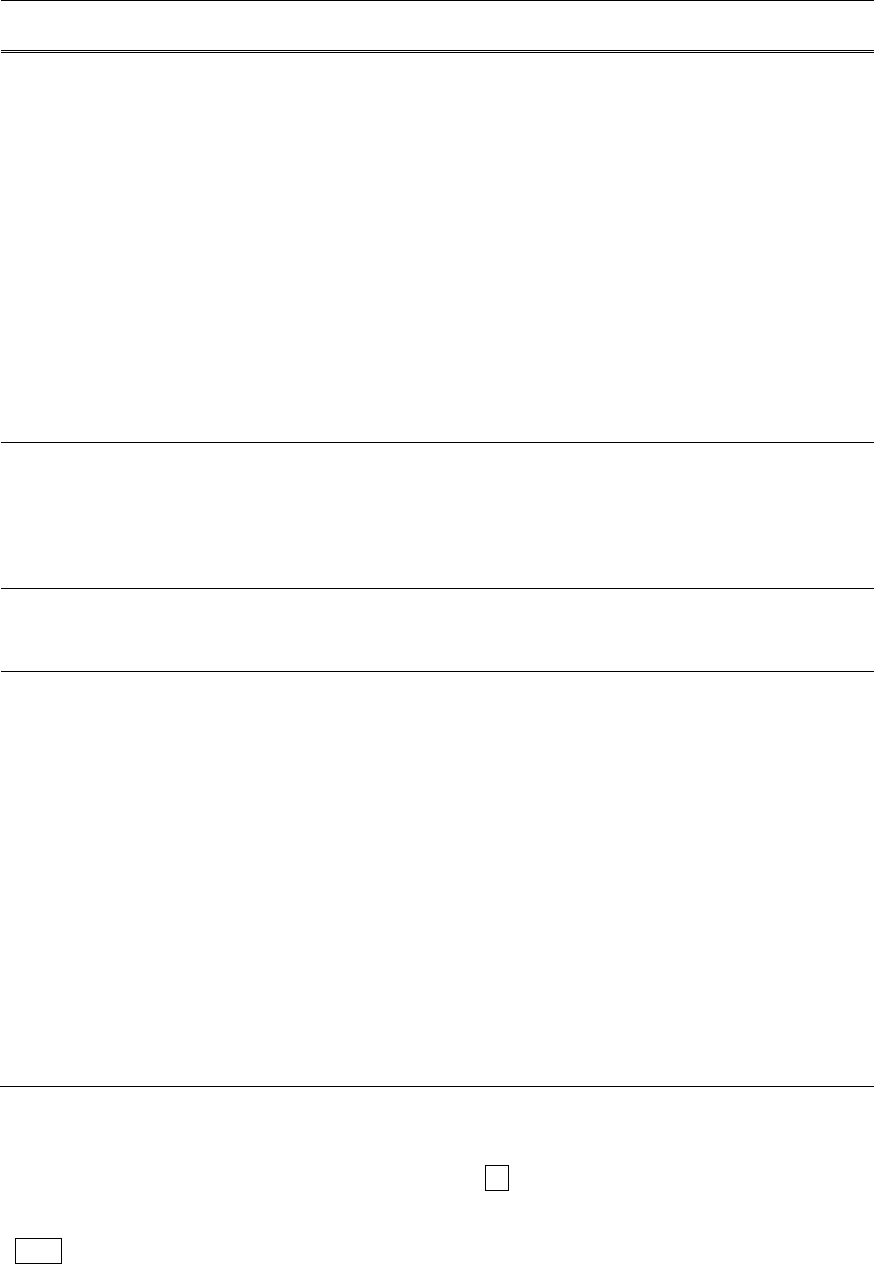
Station
PositionFile
Inputthestationpositionfilepathtoretrievethe
positionfromthestationlist.Thestationpositionfile
isatextfilewhichcontainsthemultiplelines.Each
linerepresentsarecordforastation.Arecord
contains:
- Latitude (deg)
- Longitude (deg)
- Ellipsoidal height (m)
- Station ID
- Station name
separatedbyspaces.Thelinestartingʺ%ʺistreatedas
thecommentline.Anexamplestationpositionfileis
foundatrtklib_<ver>\data\stations.pos.
SINEXstationpositionscanbeusedaswell.An
sampleSINEXfileisfoundat
rtklib_<ver>\data\igs10P1565_wocov.snx
f
ile
-
staposfile
IfyousetStationPositionFileinʺFilesʺ tab,youcanselectthepotionoftheroverorthebase‐station
antennafromthestationlistinʺStationsʺdialogbypushing...button.YoucanloadLat/Lon/Hgtformator
SINEXformatfile.Thefiletypeisautomaticallyrecognized.YoucansearchastationIdorNamewith
FindbuttonwithaspecifiedwordintheFindfield.
RTKLIBver.2.4.2Manual
45
Figure3.5‐6PositionsDialogofRTKNAVIandRTKPOSTOptions
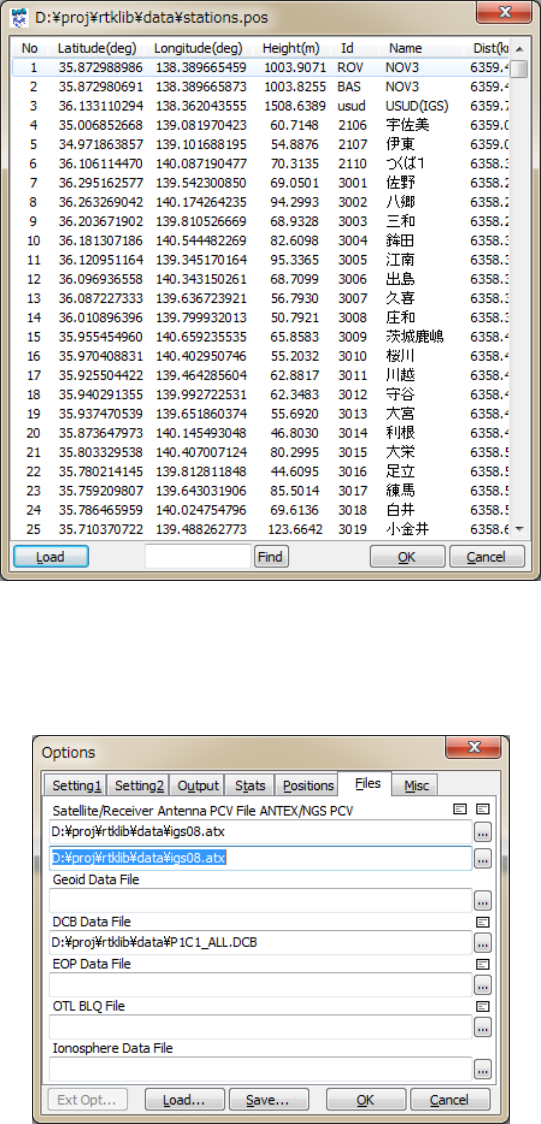
(6) Files
Figure3.5‐7OptionsDialog(Files)ofRTKNAVIandRTKPOST
RTKLIBver.2.4.2Manual
46
ItemDescriptionsConfiguration
FileNotes
Satellite
Antenna
PCVFile
ANTEX
IfyouusethepreciseephemerisorSSRcorrection,
inputtheANTEXantennaparametersfilepathforthe
satelliteantennaPCV(phasecentervariation)
correction.Usuallyuselatestigs08.atx file
providedbyIGS.
AnexampleoftheANTEXfileisfoundat
rtklib_<ver>\data\igs08.atx.
f
ile
-
satantfile
Receiver
Antenna
PCVFile
ANTEXor
NGSPCV
Ifyouapplythereceiverantennaphasecenteroffset
andPCVcorrection,inputANTEXorNGStype
antennaparametersfilepath.
Anexampleoftheantennaparameterfileisfoundat
rtklib_<ver>\data\igs08.atx.
or
rtklib_<ver>\data\ngs_abs.pcv.
f
ile
-
rcvantfile
GeoidData
File
Inputthefilepathofthegeoiddatafileifselectingthe
externalmodelasGeoidModel.
f
ile
-
geoidfile
DCBDataFileInputthefilepathofDCBcorrectionforPPPinCODE
format.
Anexampleoftheantennaparameterfileisfoundat:
rtklib_<ver>\data\P1C1_ALL.DCB
rtklib_<ver>\data\P2C2.DCB
rtklib_<ver>\data\P1P2_ALL.DCB
f
ile
-
dcbfile
EOPDataFileInputthefilepathofanEOPdatafile.Theformatof
theEOPdatafileshallbeIGSERPformatversion.2
[62].
f
ile
-
eopfile
Ocean
LoadingBLQ
Format
InputthefilepathofanOTLcoefficientsfile.The
formatoftheOTLcoefficientsfileisBLQformat.[63]
f
ile
-
blqfile
GoogleEarth
ExeFile
InputtheexecutionfilepathofGoogleEarth.
-
RTKPOSTonly
FTP/HTTP
Local
Directory
InputthelocaldirectoryforFTP/HTTPdownload.
Thedownloadedfilesaresaveinthedirectory.
f
ile
-
tempdir RTKNAVIonly
RTKLIBver.2.4.2Manual
47
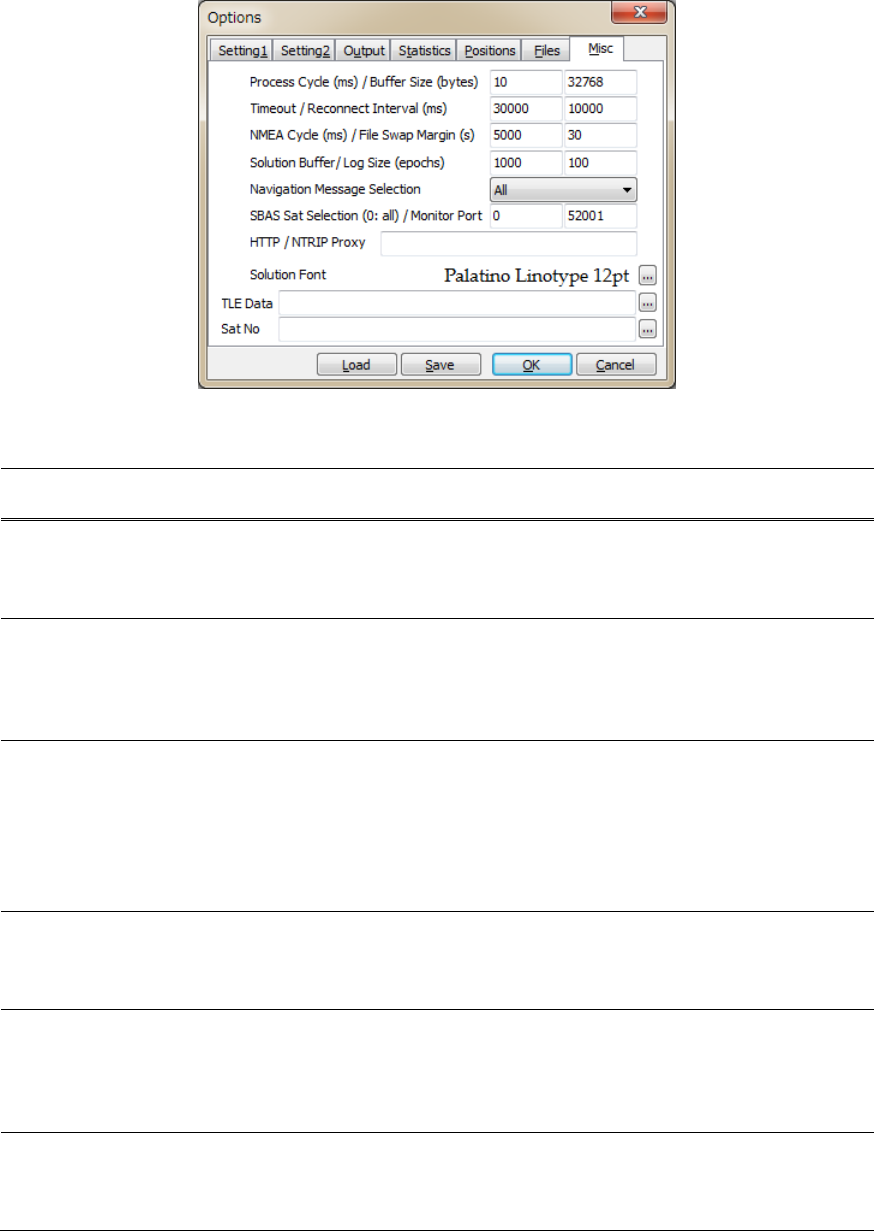
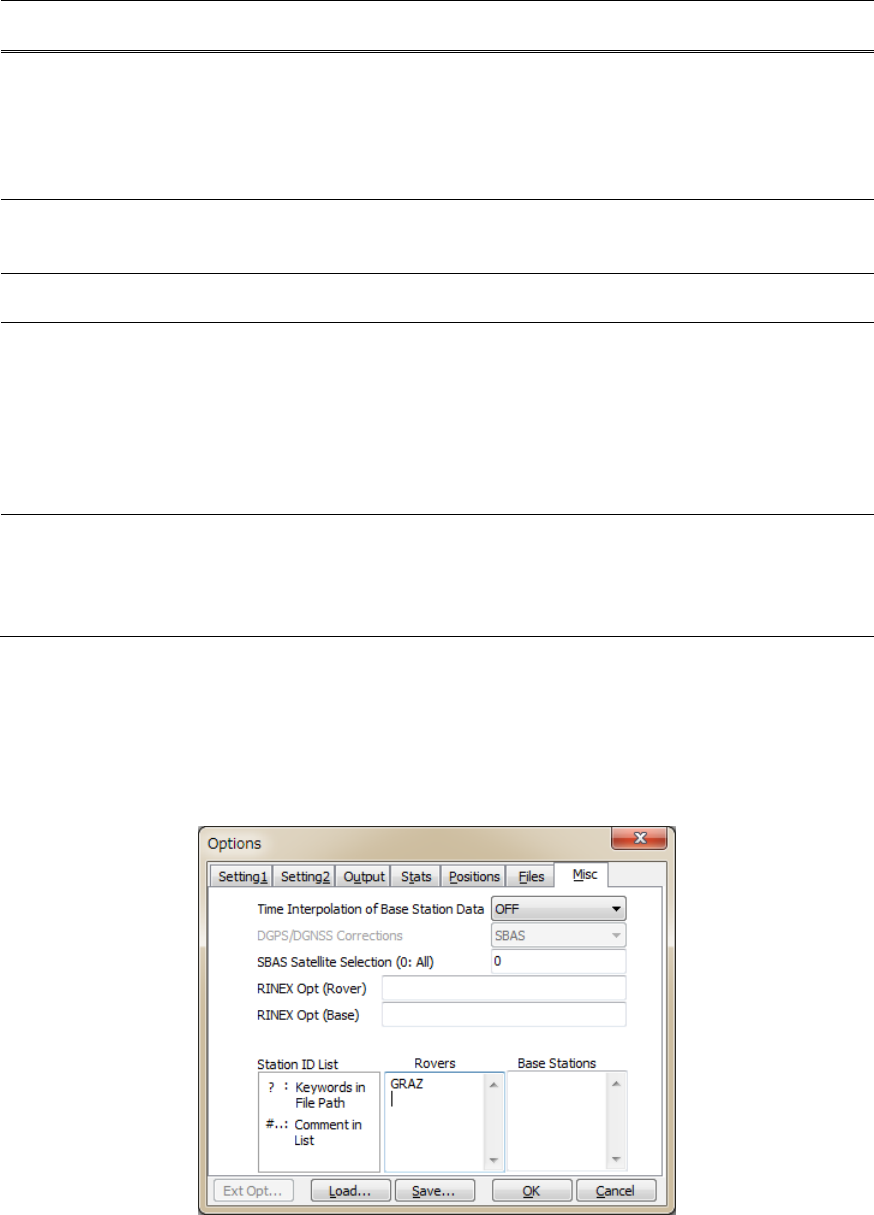
(7) Misc(RTKNAVI)
Figure3.5‐8OptionsDialog(Misc)ofRTKNAVI
ItemDescriptionsConfiguration
FileNotes
Processing
Cycle/Buffer
Size
Settheprocessingcycletimeofinms.Usuallyset100
msorlessvalue.
Settheinputmessagebuffersizeinbytes.Usuallyset
itto32768ormore.
misc
-
svrcycle
Timeout/
Re‐Connect
Interval
Setthetimeoutandre‐connectintervalforTCPclient
andNTRIPclientconnectionsinms.Ifthetimeout
timeexpiredwithoutseverresponse,RTKNAVI
retriestoconnecttoserverafterwaitingforthe
re‐connectinterval.
misc
-
timeout,
reconnect
NMEACycle/
FileSwap
Margin
SettheNMEAGPGGAtransmissioncycletoNRTK
serverinms.
Ifoutputorlogfileswapenabled,settheoverlapped
periodsbetweenthepreviousandthenewoutput
filesinsecond.Ifyousetitto0,theperiodsofthese
filesarenotoverlapped.Thisfeatureistoavoidthe
missingoftransientdatabytheoutputfileswapping.
misc
-
nmeacycle
Solution
Buffer/Log
Size
Settheinternalsolutionbuffersizeandlogsizein
epochs.Toincreasethelengthofthereceiver
trajectoryonʺRTKMapʺ,increasethesolutionbuffer
size.
misc
-
buffsize
Navigation
Message
Selection
Selectnavigationmessagestobeused.
‐(1)All:Inanyoftheinputstreams
‐(2)Rover:Intheroverreceiverstream
‐(3)BaseStation:Inthebasestationreceiverstream
‐(4)Correction:Inthecorrectionstream
misc
-
navmsgsel
SBASSatellite
Selection
IfSBASDGPScorrectionenabled,inputSBASsatellite
PRNnumbertobeused.Ifyouinput0,allavailable
SBASsatellitesareused.
misc
-
sbasatsel Default:52001
RTKLIBver.2.4.2Manual
48
ItemDescriptionsConfiguration
FileNotes
MonitorPortSetmonitorportnumber.ThemonitorportisTCP
serverporttoconnectfromoutsideorbyRTKPLOT
forreal‐timesolutionmonitor.Ifmultipleinstancesof
RTKNAVIaregenerated,thefollowingnumbersare
usedautomatically.If0isset,themonitorportisnot
used.
-
HTTP/NTRIP
Proxy
SetHTTP/NTRIPproxyserveraddressandport
numberas <address>:<port> formtoconnectthe
NTRIPCasterviaaHTTP‐Proxyserver.
misc
-
proxyaddr
SolutionFontSelectthefontofthesolutiondisplayinthemain
window.
-
TLEDataSpecifyNORADTLE(twolineelement)satelliteorbit
elementdatafile.TLEdataareusedtocompute
satellitepositionsforskyplotifthesatelliteephemeris
isunavailable.Bothoftwolineformatorthreeline
formatofTLEdatacanbeused.AsampleTLEdata
canbefoundat:
rtklib_<ver>/data/
catalbe_2l_2013_01_09_pm.txt.
-
*1
SatNoSpecifythesatellitenumberfilewhichistoconnect
GNSSsatellite/PRNnumbersandTLEsatellitecatalog
numbersinNORADTLEdatafile.Asamplesatellite
numberfilecanbefoundat
rtklib_<ver>/data/TLE_GNSS_SATNO.txt.
-
*1ToobtainthelatestTLEdatafile,referthefollowingURLs:
(a)CelesTrack:http://celestrak.com
(b)SpaceTrack:http://www.space‐track.org
(8) Misc(RTKPOST)
Figure3.5‐9OptionsDialog(Misc)ofRTKPOST
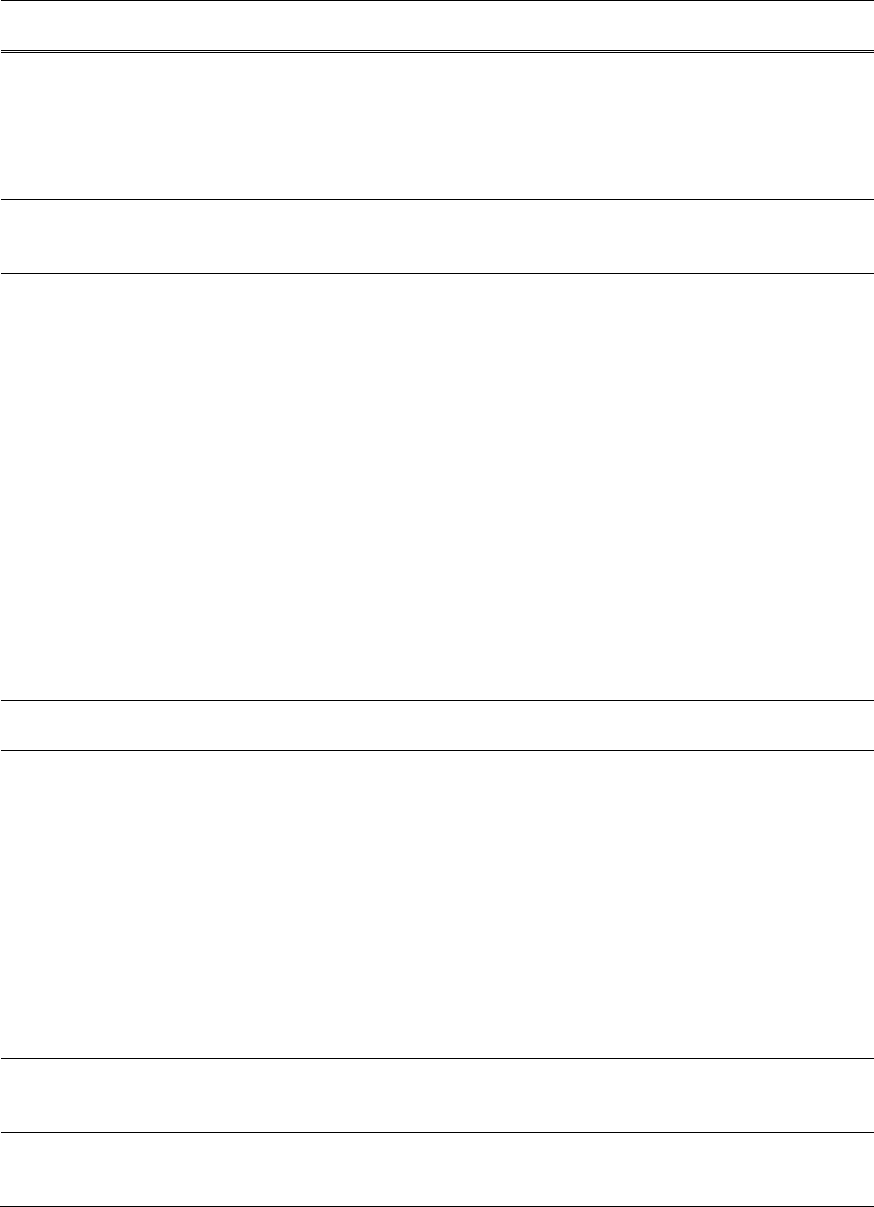
RTKLIBver.2.4.2Manual
49
ItemDescriptionsConfiguration
FileNotes
Time
Interpolation
ofBase
Station
Observation
Data
SelectONtoenabletimeinterpolationofbasestation
data.IfselectingON,thebasestationdataarelinearly
interpolatedtotheroverepochandDD(double‐
difference)ismadewiththem.Ifnotchecked,nearest
epochofbasestationdataisusedforDD.
misc
-
timeinterp
SBASSatellite
Selection
IfSBASDGPScorrectionenabled,inputSBASsatellite
PRNnumbertobeused.Ifyouinput0,allavailable
SBASsatellitesareused.
misc
-
sbasatsel
RINEXOpt
(Rover)
SpecifyRINEXreadoptionsforroverRINEX
observationdataasfollows.Multipleoptionscanbe
inputseparatedbyspaces.
-GLss[=+n.nn]: select GPS signal ss
-RLss[=+n.nn]: select GLO signal ss
-ELss[=+n.nn]: select GAL signal ss
-JLss[=+n.nn]: select QZS signal ss
-CLss[=+n.nn]: select BDS signal ss
-SLss[=+n.nn]: select SBS signal ss
ss : signal id (refer Appendix D.3)
=+n.nn: phase shift +n.nn (cycle) to be
add to carrier-phase observables
Withouttheoptionandmultiplesignalsina
frequency,RTKLIBselectasignalforafrequency
accordingtothedefaultprioritiesofsignals.Refer
AppendixD.4DefaultPrioritiesofMultipleSignals.
misc
-
rnxopt1
RINEXOpt
(Base)
SpecifyRINEXreadoptionsforbase‐stationRINEX
observationdatasameastheRINEXOpt(Rover).
misc
-
rnxopt2
StationIDListForbatchprocessingwithmultipleinputfilesor
multiplesessions,youcansetinputfilepathsor
outputfilepathcontainingthefollowingkeywords:
%Y, %y, %m, %d, %n, %W, %D, %h, %H, %r, %b
Thekeywordsarereplacedbythepropervaluesor
expandedformultiplesessionanalysis.
Toenabletimekeywords,setTimeStart,TimeEnd
andUnit(optional)inthemainwindow.For
keywords%r,%b,inputRoverListorBaseStation
Listbelow.
Foronlinereference,pushʺ?ʺbutton.
RoversInputtheroverIDlisttoreplacekeyword%rininput
andoutputfilepaths.Thelinestartingwithʺ#ʺis
treatedasacomment.
-
BaseStationsInputthebasestationIDlisttoreplacekeyword%bin
inputandoutputfilepaths.Thelinestartingwithʺ#ʺ
istreatedasacomment.
-
RTKLIBver.2.4.2Manual
50
3.6 Convert Receiver Raw Data to RINEX with RTKCONV
RINEX(ReceiverIndependentExchangeFormat)isastandardGPS/GNSSdataformatsupportedbymany
receiversorGPS/GNSSpost‐processinganalysissoftware.RTKLIBpost‐processinganalysisAPRTKPOST
canalsohandleRINEXdatafilesasinputs.ForpreparingRINEXfiles,RTKLIBprovidestheconverterAP
RTKCONV,whichtranslatesreceiverraw,RTCMandBINEXmessagestoRINEXOBS(observationdata),
RINEXNAV(GNSSnavigationmessages).RTKCONVcanalsoextractSBASmessagesfromthereceiver
rawdataandoutputtheSBASlogfile.
ThesupportedRINEXversionsare2.10,2.11,2.12,3.00,3.01and3.02(draft)withRTKLIBextensions.Refer
AppendixB.2forSBASlogfilesandAppendixD.1forsupportedRINEXfiles.
(1) ExecutethebinaryAPfile<install dir>\rtklib_<ver>\bin\rtkconv.exe.Youcanseethe
mainwindowofRTKCONV.
Figure3.6‐1MainWindowofRTKCONV
(2) InputthereceiverrawdatafilepathtothetextfieldRTCM,RCVRAWorRINEXOBS.Fillinthefile
pathdirectlyorselectthefilewiththefileselectiondialogbypushing...button.Youcanalsodrag
anddroptheiconoftherawdatafiletothemainwindowofRTKCONV.Supportedreceiverrawdata
formatsareasfollows.ReferAppendixD.2fordetailedsupportedmessagesforeachformat.Refer
AppendixD.3fortherelationshiptobeusedforconversionbetweenmultipleobservationcodes
expressedinRINEXversion2,RINEXversion3,RTCM3MSMandBINEX.
RTKLIBver.2.4.2Manual
51
(a)RTCM2 :RTCM2.3
(b)RTCM3 :RTCM3.0,3.1(withamendment1‐5)and3.2
(c)NovAtelOEM6:NovAtelOEM4/OEMV/OEM6andOEMStarbinaryformat
(d)NovAtelOEM3:NovAtelOEM3(Millennium)binaryformat
(e)u‐blox :u‐bloxLEA‐4T,5T,6Tbinaryformat
(f)SuperstarII :NovAtelSuperstarIIbinaryformat
(g)Hemisphere :HemisphereCrescent/Eclipsebinaryformat
(h)SkyTraq :SkyTraqS1315Fbinaryformat
(i)GW10 :FurunoGW‐10‐II/IIIbinaryformat
(j)Javad :JAVADGRIL/GREISbinaryformat
(k)NVSBINR :NVSNV08CBINRbinaryformat
(l)BINEX :BINEXformat(onlybig‐endian,forward,regularCRCmessages)
(m)RINEX :RINEXOBS/NAVformat.
Ifthewild‐card(*)isusedinthefilepath,thewild‐cardisexpandedtomultiplefilesandtheywillbe
read.BysettingʺRINEXʺastheinputfileformatandsettingoutputRINEXversion,youcanconvert
RINEXversion2toversion3orRINEXversion3toversion2.Inthiscase,youcanextractandoutput
RINEXdatawithselectedsatellites,signals,timespanortimeintervalofinputRINEXdata.
(3) SelecttheformatwiththepulldownmenuFormat.IfyouselectʺAutoʺ,RTKCONVrecognizesthefile
formataccordingtothefollowingfileextensions.
(a)RTCM2 :.rtcm2
(b)RTCM3 :.rtcm3
(c)NovAtelOEM6:.gps
(d)u‐blox :.ubx
(e)SuperstarII :.log
(f)Hemisphere :.bin
(g)SkyTraq :.stq
(h)Javad :.jps
(i)BINEX :.bnx, .binex
(j)RINEX :.obs,.*o,.nav,.*n,.*p,.*g,.*h,.*q,.*l
(4) InputtheoutputpathsofRINEXOBS(observationdata),RINEXNAV(GPSnavigationmessages),
RINEXGNAV(GLONASSnavigationmessages),RINEXHNAV(GEOsatellitenavigationmessages),
RTKLIBver.2.4.2Manual
52
RINEXQNAV(QZSSnavigationmessages),RINEXLNAV(Galileonavigationmessages)andSBAS
Logfiles.Fillinthefilepathdirectlyorselectthefilewiththefileselectiondialogbypushing...
button.Ifyoudonotcheckthecheckboxleft,thefileisnotoutput.RINEXGNAV,HNAV,QNAVand
LNAVaresupportedonlyinRINEXversion2.Ifselectingversion3astheoutputRINEX,all
navigationdataareoutputtoacombined(mixed)NAVtypeRINEXfile.Theoutputfilescaninclude
keywords.Thekeywordsarereplacedbytime,dateorstationID.Pushʺ?ʺbutton,toreferthekeyword
replacementsinoutputfiles.
(5) Ifyouwanttooutputthefilestoadirectory,checkʺOutputDirectoryʺandinputtheoutputdirectory.
Thedirectorycanbeselectedbypushing...button.IftheʺOutputDirectoryʺisnotchecked,thefiles
areoutputtothesamedirectoryoftheinputfile.Iftheoutputdirectoryisnotexist,thedirectoryis
automaticallycreated.Eveninthiscase,theparentdirectoryalwaysmustbeexist.Otherwise,the
directorycreationisfailed.
(6) YoucansetthestarttimeorendtimeoptionallybycheckingandsettingtheʺTimeStart(GPST)ʺ or
ʺTimeEnd(GPST)ʺ fieldupperinthemainwindow.Youcanalsosetthetimeintervaloptionby
checkingandsettingthefieldʺIntervalʺ.IfyouinputʺTimeStartʺ andʺTimeEndʺ,checkʺUnitʺand
inputʺTimeUnitʺ,youcaninitiatemultiple‐sessionconversion.Inthiscase,pleaseincludekeywords
tobereplacedbydateandtimeintheinputfilepathandtheoutputfilepaths.NotethatRTKCONV
doesnotconfirmtheoverwriteiftheoutputfileexistsinsuchamulti‐sessionconversioncase.
(7) YoucanpushOptions...buttontoconfigureRINEXoptions.SettheoptionsforRINEXheaders,
navigationsystems,observationtypesorfrequencieswithʺOptionsʺdialog.IfyoucheckRINEXName,
theoutputfilepathsarecomplianttotheRINEXfilenameconvention.PleaseinputStationIDto
completetheoutputfilenamesforRINEXfilenameconvention.TheʺOptionʺ fieldis
receiver‐dependentoptions.Specifytheoptionsseparatedbyspaceslikeʺ
-EPHALL -GL1Xʺ.For
details,referAppendixD.5ReceiverDependentInputOption.ForRINEX3,youhadbettercheck
ʺScanObsTypesʺtoobtaineffectiveOBSTYPESininputfiles.Inthiscase,theinputfilesarescannedto
obtainavailableOBSTYPElistasthefirstconversionpathandthenRTKCONVoutputsRINEXasthe
secondconversionpath.IfʺScanObsTypesʺ unchecked,theOBSTYPESinoutputRINEXfilesare
determinedbythedefaultOBSTYPESsetdependingontheinputformatandtheʺSignalMaskʺ
settingsdescribedbelow.
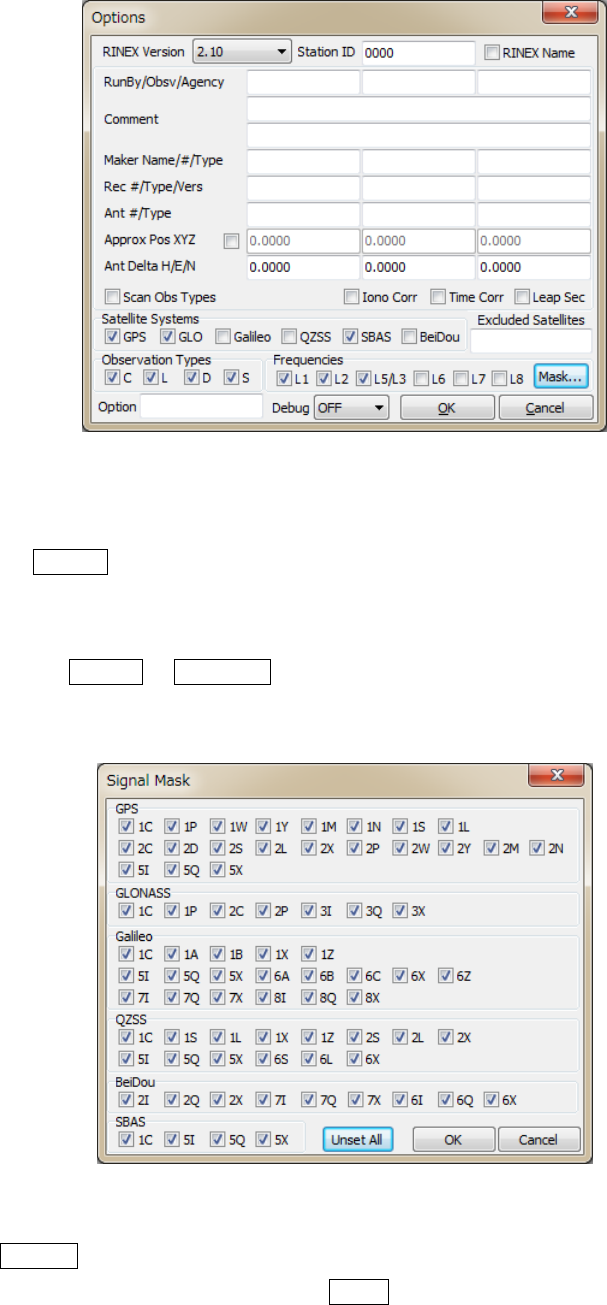
RTKLIBver.2.4.2Manual
53
Figure3.6‐2OptionsDialogofRTKCONV
(9) TosetthemaskofOBSTYPEStooutputtotheobservationfile,usetheʺSignalMaskʺdialogshownby
pushingMask...buttonintheʺOptionsʺ dialog.YoushallchecksignalstobeoutputtoRINEX
observationfileinthedialog.YoushallunchecksignalsnottooutputtotheRINEXobservationfile.
NotethatthesignalsnotinthedefaultOBSTYPESsetornotininputdataarenotoutputevenif
checked.UseSetAllorUnsetAllbuttontoselectordeselectallsignals.ReferAppendixD.3for
observationtypesorsignalIDsintheinputdataandtheoutputRINEXfiles.
Figure3.6‐3SignalMaskDialogofRTKCONVOptions
(8) PushConvertbuttontostartconvertingthereceiverrawdatatoRINEXandSBASlogfiles.Ifyou
wanttostoptheconversionontheway,pushAbortbutton.Thestatusisdisplayedinthemessage
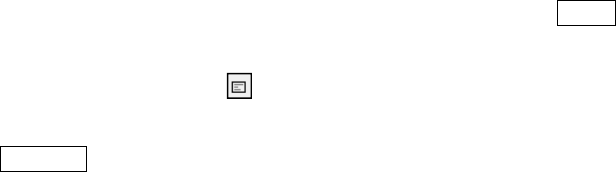
RTKLIBver.2.4.2Manual
54
arealowercenterinthemainwindow.ThemessageO=nnn meansthenumberofconverted
observationdata(epochs).ThemessageN=nnn, G=nnn, H=nnn,Q=nnn, L=nnn, S=nnn and
E=nnnmeansthenumberofnavigationmessages(NAV,GNAV,HNAV,QNAVandLNAV),SBAS
messagesanderrors,respectively.
(14) Afterfinishingtheconversion,youcanseetheobservationdataplotbypushingPlot...buttonwith
RTKPLOT.Refer3.7PlotandViewSolutionsandObservationDatafordetails.Youcanalsoviewthe
outputfilewithTextViewerbypushingbutton.
(15) BypushingProcess...button,youcanexecuteRTKPOST_MKLAPtoprocesstheconvertedRINEX
OBS/NAVfiles.Refer3.4Post‐processingAnalysiswithRTKPOSTfordetails.
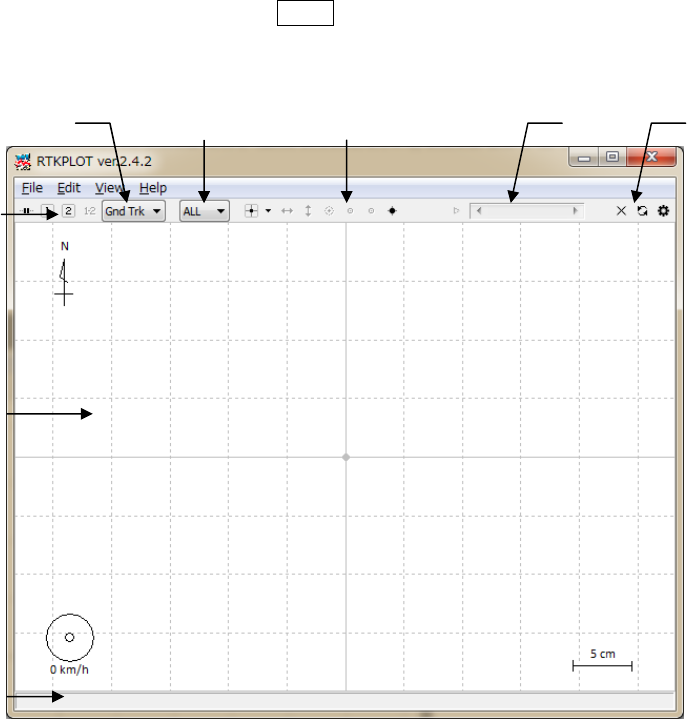
RTKLIBver.2.4.2Manual
55
3.7 View and Plot Solutions with RTKPLOT
RTKLIBcontainstheAPRTKPLOTtoviewandplotthepositionigsolutionsbyRTKPOSTandRTKNAVI
withgraphicaluserinterface.RTKPLOTalsoacceptsgeneralNMEA0183filesorstreamstogeneratethe
solutionplot.
(1) ExecutethebinaryAPfile<install dir>\rtklib_<ver>\bin\rtkplot.exe.Youcanseethe
mainwindowofRTKPLOT.BypushingPlot...buttonorsomebuttonsofRTKPOSTandRTKCONV,
RTKPLOTisalsoexecuted.
Figure3.7‐1MainWindowofRTKPLOT
(2) ExecutethemenuʺFileʺ‐ʺOpenSolution1ʺandselectthesolutionfilewiththefileselectiondialog.
TheinputsolutionfilecanbeRTKLIBsolutionformatorNMEA‐0183.IfthefileformatisNMEA‐0183,
thefilemustcontainatleastNMEAGPRMCandGPGGAsentences.Ifthesolutionfileisvalid,the
receivergroundtrackisplotinthewindowonthemap.Thecolorofthemarks,linesandgridinthe
plotcanbechangedwiththemenuʺEditʺ‐ʺOptionsʺ.Thestatusbaratthebottomofthemainwindow
alsoshowsthetimerange,thenumberofsolutionepochs(N=nnnn),thebaselinelength
StatusBar
ToolBar
Reload/
Clear
Button
Time
Scroll‐bar
PlotType
Selection
PlotArea
Tool
Buttons
QualityFlag
Selection
RTKLIBver.2.4.2Manual
56
(B=0.0-x.xkm),thenumberandpercentageofeachqualitysolutions(Q=1:nnn(pp%),
2:nnn(pp%),...).ThequalityflagQandthemarkercolormeans:1:Fixed,2:Float,4:DGPS,5:
Single(thecolorsarechangeablewiththeplotoptions).ToscreenthemarksbythequalityflagQ,
selectthesecondpulldownmenuintheToolBar.Bydraganddropofthesolutionfileicontothemain
windowofRTKPLOT,youcanalsoreadandplotthesolutionfile.
Figure3.7‐2GNDTRKPlotbyRTKPLOT
(3) Bydraggingthemousewiththeleftbuttondownontheplot,youcandragthemapup,down,leftand
right.Youalsochangethescaleofthemapbydraggingthemouseupordownwiththerightbutton
orbyrotatingthescrollwheelofthemouse.
(4) ByselectingtheplottypepulldownmenurightinToolBar,youcanswitchtheplottoE/N/U
componentsofreceiverposition(Position),E/N/Ucomponentsofreceivervelocity(Velocity)orE/N/U
componentsofreceiveracceleration(Accel).YoucandragtheX/Y‐axiswithleft‐button‐draggingand
changethescalewithright‐button‐draggingattheX/Y‐axisarea.Youcanhideorshowthethreeplots
bypushingthreebuttonsrightoftheplottypepulldownmenu.
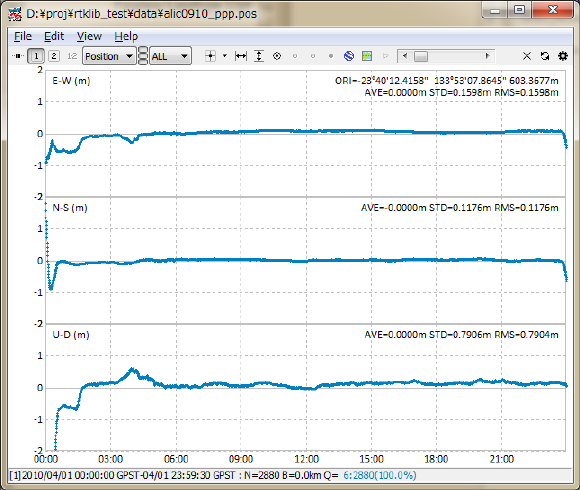
RTKLIBver.2.4.2Manual
57
Figure3.7‐3POSITIONPlotbyRTKPLOT
(5) Byselectingtheplottypepulldownmenu,youcanswitchtheplottoNSat/Age/Ratio(numberofvalid
satellites,ageofdifferential,ratiofactorofambiguityvalidation).IfyousettheʺOutputSolution
StatusʺoptiontoʺResidualsʺ,youcanshowaresidualsplot.Youcanswitchthefrequencybyselecting
L1/LC,L2orL5.Intheresidualsplotmode,youcanselectasatellitewithrightpulldownmenuaswell
asallsatellites.Intheresidualsplotofcarrier‐phases,theredlinesindicatecycleslipsandgraylines
indicateparityunknownflags(Thatmeanthehalf‐cycleambiguitiesincarrier‐phasearenotresolved).
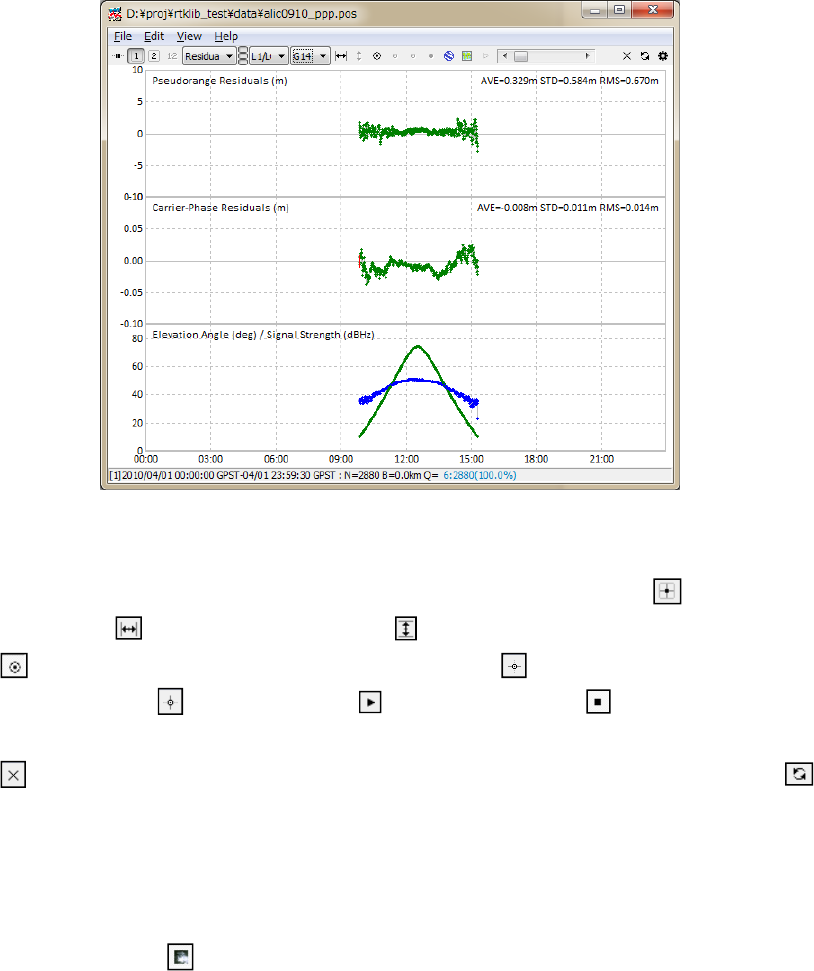
RTKLIBver.2.4.2Manual
58
Figure3.7‐4RESIDUALSPlotbyRTKPLOT
(6) BypushingtoolbuttonsintheToolBar,youcancenterthecurrentpositionwith,adjustthescale
ofX‐axiswith,adjustthescaleofY‐axiswith,displaythecurrentpositionasalargemarkwith
,fixthecurrenttrackpositionatthehorizontalcenterwith,fixthecurrenttrackpositionatthe
verticalcenterwith,startanimationwithandstopanimationwith.YoucanalsoslideʺTime
ScrollBarʺtochangethecurrentepoch.Toclearreaddata,executethemenuʺFileʺ‐ ʺClearʺorpush
buttonintheToolBar.Toreloadthesolutionfile(s),executethemenuʺFileʺ‐ʺReloadʺorpush
buttonintheToolBar.
(7) ByexecutingthemenuʺFileʺ ‐ ʺOpenMapImageʺ,youcanreadaJPEGimageanddrawthemap
imageonthebackgroundoftheplotincaseoftheʺGndTrkʺplottype.Theimagecanbeenabledor
disabledbypushingbuttonintheToolBar.
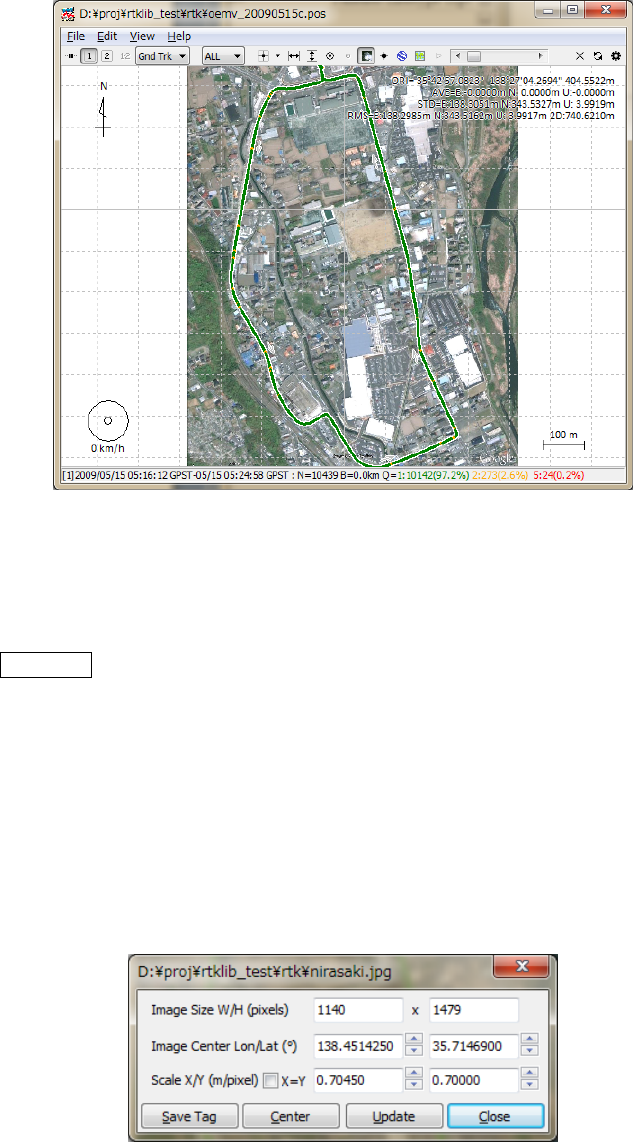
RTKLIBver.2.4.2Manual
59
Figure3.7‐5MapImageOverlaybyRTKPLOT
(8) Toadjustthepositioninthemapimage,executethemenuʺEditʺ‐ʺMapImageʺandinputlatitudeand
longitudeoftheimage‐center,image‐scalealongXorY‐axisinʺMapImageʺ dialog.Ifyoufinishit,
pushSaveTagbuttontosavetheadjustmentinformationtoanimage‐tag‐file.Thepathofthe
image‐tag‐fileistheoriginalmapimagefilepath+.tag.Iftheimage‐tag‐filealreadyexists,itis
automaticallyreadwiththemapimageitself.Thecurrentversiondoesnotsupportrotationofthemap
image.Pleaseselectthemapimageinwhichthenorthdirectionisproperlyalignedtotheupper
direction.Forexample,youcangetaJPEGimagebythemenuʺFileʺ ‐ʺSaveʺofGoogleEarth.Tofix
northtoupper,pushʺNʺ buttoninGoogleEarth.Toavoidthedistortionofthemapimage,setthe
coordinatesorigininsideofornearthemapimage.
Figure3.7‐6MapImageOptionsDialogofRTKPLOT
(9) Inversion2.4.2,GoogleEarthViewandGoogleMapViewforRTKPLOTareaddedtoplotthesolution
onGoogleEarthorGoogleMap.ToopenGoogleEarthVieworGoogleMapView,executethemenu
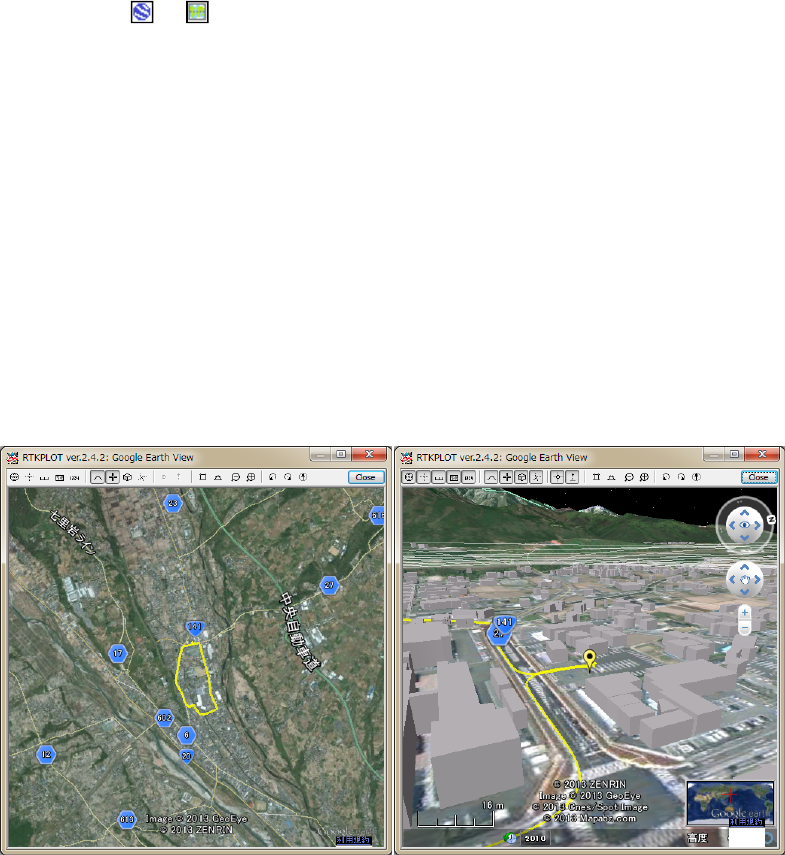
RTKLIBver.2.4.2Manual
60
View‐GoogleEarthView...orView‐GoogleMapViewofRTKPLOTafterthesolutionread.The
toolbarbuttonsorcanalsobeusedtoshowtheseviews.NotesthattheInternetconnectionis
alwaysnecessarytousetheseviewsbasedonservicesprovidedbyGoogle.
(10) IntheGoogleEarthView,thetoolbarbuttonscanbeusedtoshow/hidenavigationcontrol,show/hide
Lat/Longrid,show/hidescalelegend,show/hideoverviewmap,show/hidestatusbar,enable/disable
layers(terrain,loads,buildingsandborders),switchobjective/perspectiveviews,zoomup/out,rotate
left/rightandfixnorth/headingup.IfthetoolbarbuttonʺshowtrackpointʺbuttononRTKPLOTmain
windowisdown,thetrackpointpositionisalsoshownintheGoogleEarthViewasayellow(solution
1)orred(solution2)marker.ThepositionsofmarkersarelinkedtothemarkerpositionsinRTKPLOT
mainwindow.Inthiscase,themarkerpositioncanbefixedtothecenteroftheGoogleEarthViewby
pushingʺFixTrackCenterʺ toolbarbutton.Toenablealtitudeinformationofthetrackpoint,push
ʺEnableAltitudeʺtoolbarbuttonintheGoogleEarthView.
Figure3.7‐7GoogleEarthViewofRTKPLOT
(11) IntheGoogleMapView,theonlyatoolbarbuttontofixthetrackpointcenterassameastheGoogle
EarthView.OtheroperationsfortheGoogleMapView,usethecontrolsintheGoogleMapView.
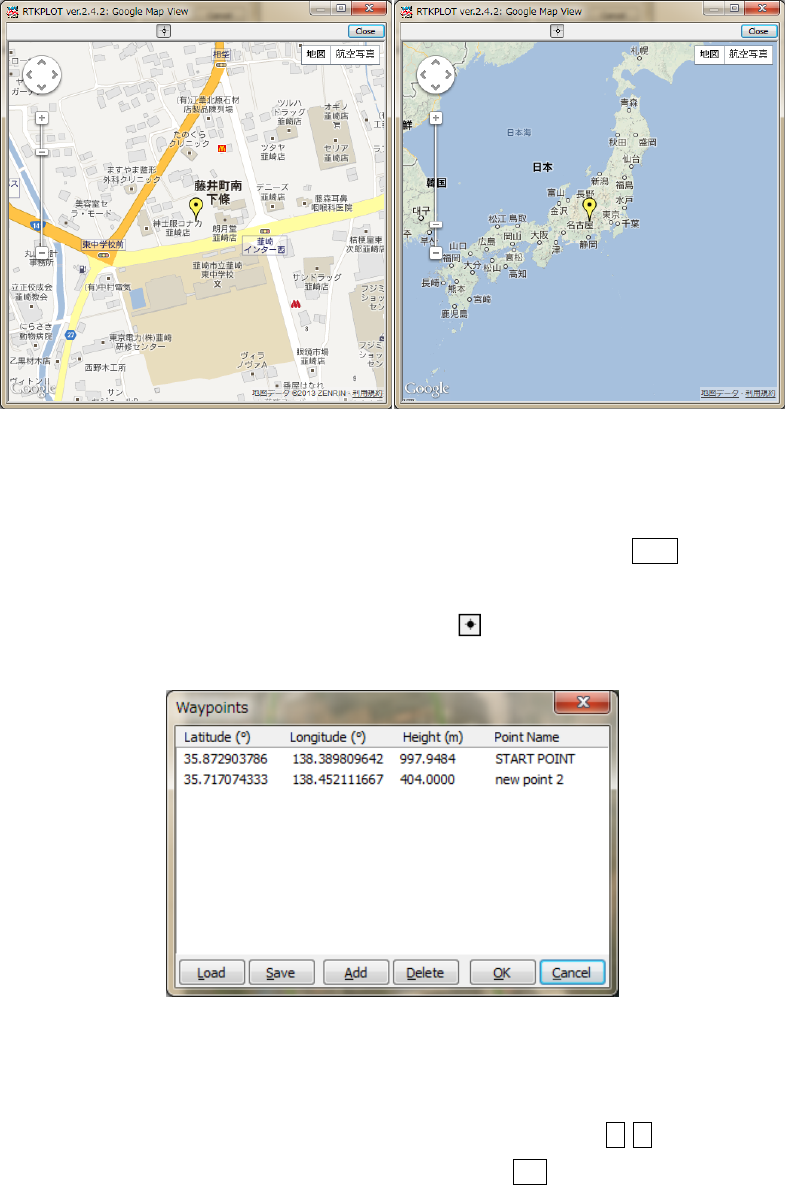
RTKLIBver.2.4.2Manual
61
Figure3.7‐8GoogleMapViewofRTKPLOT
(12) ByexecutingthemenuʺEditʺ‐ʺWaypoints...ʺ,youcanseetheʺWaypointsʺdialog.Withthedialog,
youcanload,save,addanddeletetheway‐pointsasthelistform.BypushingAddbuttonand
editingthepointname,thecurrentreceiverpositioncanbeaddedtotheway‐pointlist.Thepositions
ofthewaypointsareshownontheʺGndTrkʺplotwhenbuttondown.
Figure3.7‐9WaypointsDialogofRTKPLOT
(13) Toplotmultiplesolutionfile,executethemenuʺFileʺ‐ʺOpenSolutions‐2ʺandselectfilewiththefile
selectiondialog.Youcanswitchtheploton/offofthesolution1and2with12buttonsinToolBar.
ToPlotthedifferenceofthesolution1andthesolution2,push1‐2buttoninToolBar.
(14) Tosetthetimerangeandtimeintervalofthesolutions,executethemenuʺEditʺ‐ʺTimeSpan/Intervalʺ
andcheckandsettheTimeStart,TimeEndandIntervalfieldinʺTimeSpan/Intervalʺdialog.
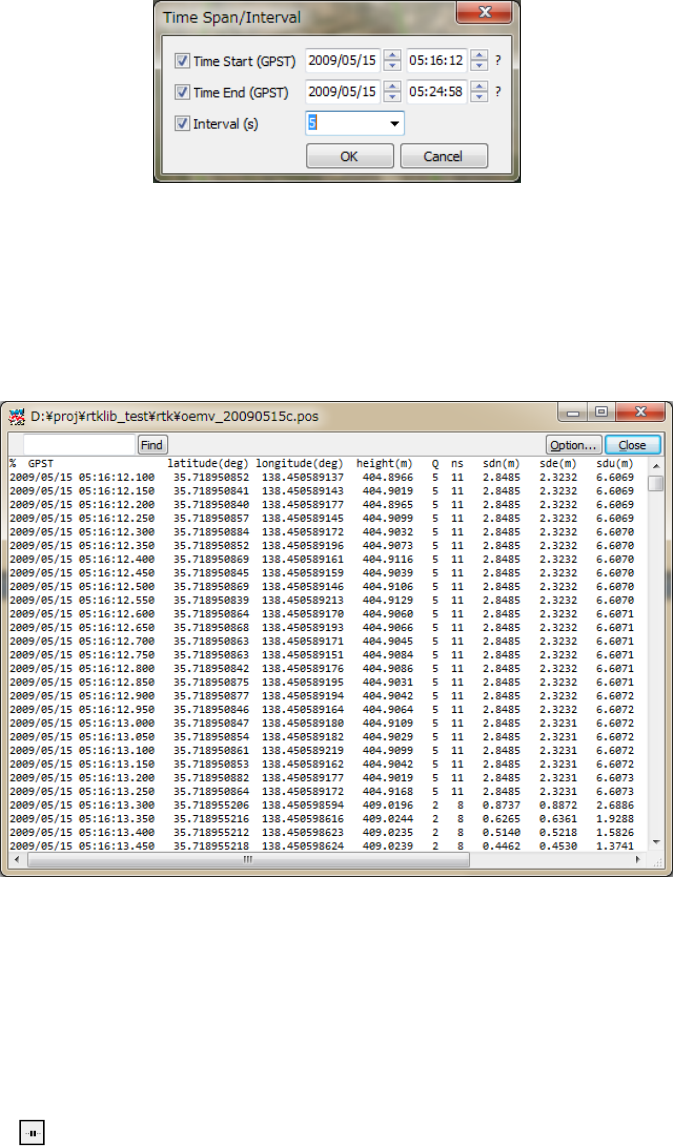
RTKLIBver.2.4.2Manual
62
Figure3.7‐10TimeSpan/IntervalDialogofRTKPLOT
(15) ByExecutingthemenuʺEditʺ‐ʺSolutionSourceʺ,youcanviewthesourceofsolutionsasthetext
form.
Figure3.7‐11SolutionSourceViewofRTKPLOT
(16) Toplotsolutionsinreal‐time,executethemenuʺFileʺ‐ʺConnectionSettingsʺandsetsolution
parametersinʺConnectionSettingʺdialog.YoucanselectStreamType,StreamOption(Opt),Stream
Commands(Cmd),SolutionFormat,TimeFormat,Lat/LonFormatandFieldSepforbothof
solution‐1andsolution‐2.Aftersettingtheconnectionparameters,executethemenuʺFileʺ‐ʺConnectʺ
orpushbuttoninToolBar.Todisconnecttheexternaldevice,executemenuʺFileʺ‐ʺDisconnectʺor
pushconnectbuttonagain.Forexample,ifselectingserialasStreamTypeandNMEA0183asSolution
Format,youcanmonitorexternalreceiverʹsNMEAoutputintheRTKPLOTwindow.
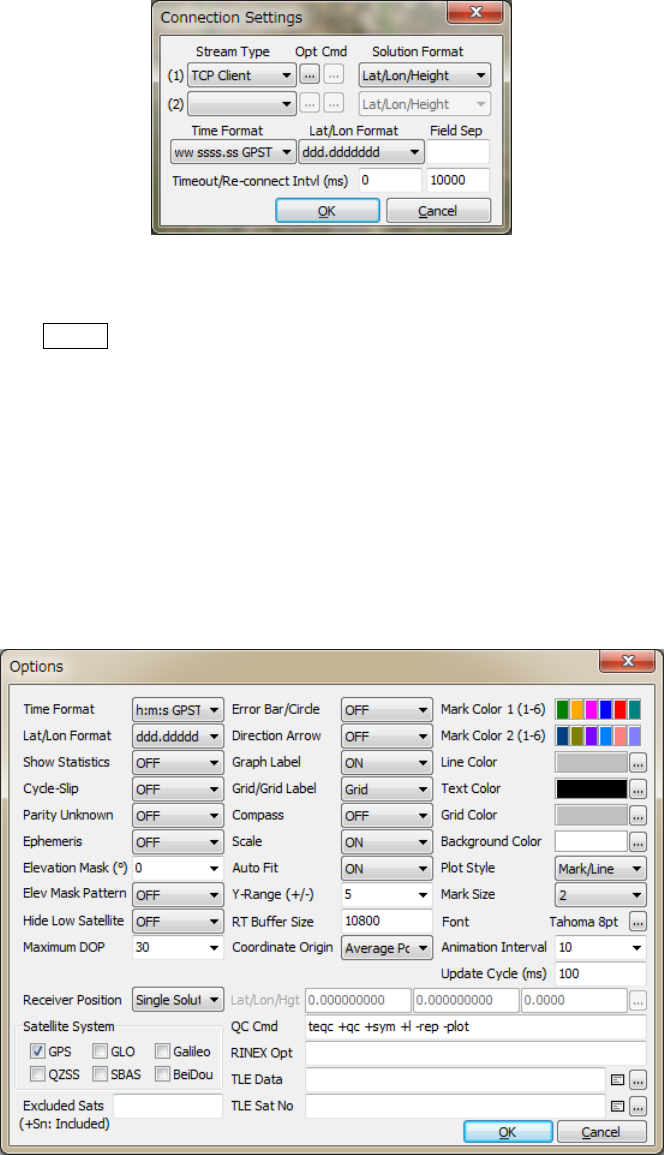
RTKLIBver.2.4.2Manual
63
Figure3.7‐12ConnectionSettingsDialogofRTKPLOT
(17) BypushingPlot...buttonofRTKNAVI,RTKPLOTautomaticallyrunsandconnectstothemonitor
portofRTKNAVI.IfyouwanttoconnecttoRTKNAVIexecutedontheremotePC,configurethe
connectionsettingintheConnectionSettingdialoglikeTCPClientasStreamType,IPaddressofthe
remotePCandportnumberofmonitorportofRTKNAVIandconnecttotheremoteRTKNAVI.Inthis
case,multipleclientconnectionsareallowedfrommultiplePCsrunningRTLPLOTs.
(18) ToconfiguretheplottingoptionsforRTKPLOT,executethemenuʺEditʺ‐ʺOptions...ʺandsetthe
optionswiththefollowingʺOptionsʺdialog.
Figure3.7‐13OptionsDialogofRTKPLOT
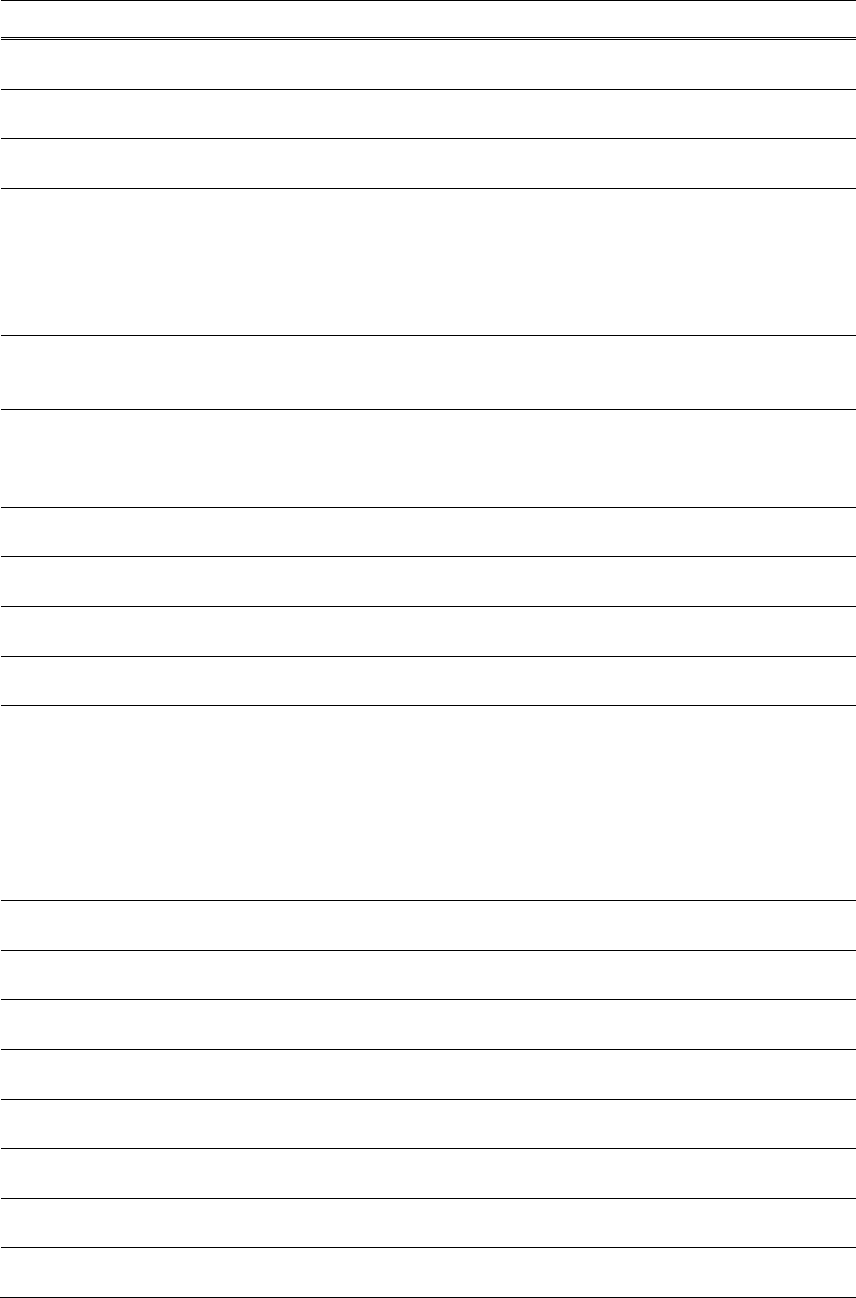
RTKLIBver.2.4.2Manual
64
ItemDescriptionsNotes
TimeFormatSelecttimeformat.
(wwww/ssss,h:m:sGPST,h:m:sUTCorh:m:sLT).
Lat/LonFormatSelectlatitudeandlongitudeformat.
(ddd.dddddordddmmss.ss)
ShowStatisticsSetwhetherstatisticsareshownornot.
Cycle‐SlipSetwhethercycle‐slippositionisshownornotinthesatellite
visibilityplot.IfʺLGJumpʺselected,dualfrequencygeometry
freeLC(linearcombination)isusedtodetectcycle‐slips.Inthe
caseofʺLLIFlagʺ,LLI(loss‐off‐lockindicator)inRINEX
observationdataisused.Cycle‐slipsareshownasredvertical
linesintheSatelliteVisibilityplot.
ParityUnknownSetwhetherparityunknownstatusisshownornotinthe
satellitevisibilityplot.Parityunknownepochsareshownas
grayverticallinesinthesatellitevisibilityplot.
EphemerisSetwhetherephemerisstatusisshownornotinthesatellite
visibilityplot.Ephemeridesareshownasthegreylineunder
theobservationdata.GraydotsmeantheToe(timeof
ephemeris).Redephemerislinesmeanthesatelliteunhealthy.
ElevationMaskSettheelevationmaskangle(deg)forthesatellitevisibilityplot.
TheelevationmaskisalsousedforDOP/NSatplot.
ElevationMask
Pattern
Setwhetherelevationmaskpatternisusedornot.
HideLowSatelliteSetwhetherlowelevationsatellitesundertheelevationmask
andtheelevationmaskpatternareshownornot.
MaximumDOPSetthey‐axislimitofDOP/NSatplot.
ReceiverPositionSetthereceiverpositionforthesatellitevisibilityplotor
skyplot.ʺSingleSolutionʺusessingle‐pointresultsasreceiver
positionsbyusingobservationandnavigationdata.For
movingreceivers,youshallsetit.ʺLat/Lon/Hgtʺuseslatitude,
longitudeandheightforstaticreceiversspecifiedasthe
followingLat/Lon/Hgtfields.ʺRINEXHeaderʺusesʺAPPROX
POSITIONXYZʺinRINEXobservationdataheaderasthe
receiverposition.
SatelliteSystemCheckselectednavigationsystemsforplots.
ExcludedSatsSetexcludedsatellites.FillinthesatellitenumberorID
separatedbyspaces.
ErrorBar/CircleSetwhethererrorbarorerrorcircleisshownornotinsolution
display.YoucanselectʺBar/CircleʺorʺDotsʺastheformat.
DirectionArrowSetwhetherdirectionarrowandvelocityarrowareshownor
notinthesolutiongroundtrackplot.
GraphLabelSetwhethergraphlabelsareshownornotinsolutiondisplay.
Grid/GridLabelSetwhethergridandgridlabelsareshownornotinsolution
display.SetittoʺCirclesʺorʺCircles/Labelʺforcirculargrids.
CompassSetwhethercompassisshownornotinthesolutionground
trackplot.
ScaleSetwhetherscaleisshownornotinthesolutiongroundtrack
plot.
RTKLIBver.2.4.2Manual
65
ItemDescriptionsNotes
AutoFitSetwhetherscaleisadjustedautomaticallyornotforsolution
plots.
Y‐Range(+/‐)SettherangeofY‐axisinsolutionplots.
RTBufferSizeSetthebuffersizeforreal‐timesolutionplotsinepochs.The
oldersolutionsoverthebuffersizearedeletedforreal‐time
plots.
CoordinateOriginSelecttheoriginpositionofsolutiondisplayasfollows.
‐StartPos:thefirstsolutionposition
‐EndPos:thelastsolutionposition
‐AveragePos:theaverageofallsolutionpositions
‐LinearFitPos:basedonthelinearlyfittedpositions
‐BaseStation:thebasestationposition.
‐Lat/Lon/Hgt:latitude,longitudeandheightspecified
‐AutoInput:autopositionasfollows
‐Waypoint1‐10:awaypointposition
IfyouselectʺLat/Lon/Heightʺ,youhavetoinputlatitude,
longitudeandellipsoidalheightinthetextfieldsbelowforthe
origin.IfselectingʺAutoInputʺ,receiverIDisassumedasthe
4‐charactorsofthesolutionfilenameheadandthepositionis
readfromthepositionfile.Thepositionfilecanbeselectedby
pushing...buttonandpushingʺLoadʺbuttoninthepositionlist
dialog.
MarkColor1
(1‐6)
SetthemarkcolorsforsolutionNo.1orobservationdatain
plots.Clickcolorpanelrightandselectcolorwithcolor
selectiondialog.
MarkColor2
(1‐6)
SetthemarkcolorsforsolutionNo.2inplots.
LineColorSetthelinecolorinplots.
TextColorSetthetextcolorinplots.
GridColorSetthegridcolorinplots.
BackgroundColorSetthebackgroundcolorinplots.
PlotStyleSelecttheplotstyleinplots.Todeleteallofmarkersandlines
exceptforthetrackpointmark,setitʺNoneʺ.
MarkSizeSetthemarksizeinplots.
FontSelectthefontinplots.Push...buttonandselectthefontwith
thefontselectiondialog.
Animation
Interval
Settheanimationintervalforsolutionorobservationdata
plots.
UpdateCycle(ms)Settheplotupdatecycletimeinmsforreal‐timeplots
Lat/Lon/HgtSetlatitude,longitudeandheightfortheorigin.Fillinthe
valuesdirectlyorpush...buttonandselectastationposition.
RTKLIBver.2.4.2Manual
66
ItemDescriptionsNotes
QCCommandSetQCcommandanditsoptionsforobservationdata.
Asdefault,TEQCQCmodeoptionsareset.Thecommandis
usedforexecutingthemenuʺEditʺ‐ʺObsDataQC...ʺ.The
commandmustbeinthecommandsearchpathorinthe
directoryfortheRTKLIBexecutablefiles.
RINEXOptSetRINEXreadoptions.ForRINEXreadoptions,refer
<install dir>\rtklib_<ver>\src\rinex.cfordetails.
TLEDataSpecifyNORADTLEsatelliteorbitelementdatafile.TheTLE
dataareusedtocomputesatellitepositionsfortheskyplotif
thesatelliteephemerisunavailable.Bothoftwolineformator
threelineformatofTLEdatacanbeused.AsampleTLEdata
canbefoundat:
<iinstall dir>\rtklib_<ver>\data\
catalbe_2l_2013_01_09_pm.txt.
Seealso
RTKNAVI
Optionsdialog
SatNoSpecifythesatellitenumberfilewhichistoconnectGNSS
satellite/PRNnumbersandTLEsatellitecatalognumbersin
NORADTLEdatafile.Asamplesatellitenumberfilecanbe
foundat
<install dir>\rtklib_<ver>\data\
TLE_GNSS_SATNO.txt.
(19) ThefollowingmenusareprovidedinRTKPLOT.Somemenuscanbeexecutedbypushingbuttonon
theToolBar.
MenuTool
BarDescriptionNotes
File
OpenSolution‐1...*OpensolutiondataNo.1.*double
click
OpenSolution‐2...*OpensolutiondataNo.2.*double
click
OpenMapImage...‐Openmapimagedataforthesolutionplot.
OpenMapPath...‐Openmappathdataforthesolutionplot.
BrowseSolution‐
ShowʺSolutionBrowserʺwindowandbrowse
solutiondata.
OpenObsData...‐
Openobservationdata.Navigationdataarealso
openautomatically.
OpenNavData...‐Opennavigationdatamanually.
OpenElevMask...‐Openelevationmaskdata.
VisibilityAnalysis...‐Executesatellitevisibilityanalysis.
SaveImage...‐Savetheimageoftheplottoanimagefile.
Save#ofSats/DOP...‐
SavethenumberofsatellitesandDOPtoantext
file.
RTKLIBver.2.4.2Manual
67
MenuTool
BarDescriptionNotes
SaveSNR,MPand
AZ/EL..‐ SavetheSNR,multipathandazimuth/elevation
datatoantextfile.
Connect...Connecttoexternalreal‐timesolutionstreams.
Disconnect...Disconnecttheconnection.
ConnectionSettings...‐
ShowtheʺConnectionSettingʺdialogto
configuretheconnectionoptions.
Reload
Reloadsolution,observationandnavigation
data.
ClearClearsolution,observationandnavigationdata.
Exit‐CloseandexitRTKPLOT.
Edit
TimeSpan/Interval...‐
SettheʺTimeSpan/Intervalʺdialogtosettime
spanandtimeinterval.
MapImage...‐
ShowtheʺMapImageʺdialogtoconfigurethe
size,positionandscaleoftheimagedata.
Waypoints...‐
ShowtheʺWaypointʺdialogtoaddormodifythe
waypoints.
SolutionSource...‐
ShowthesourceofthesolutiondatabyText
Viewer.
ObsDataSource...‐
ShowthesourceoftheobservationdatabyText
Viewer.
ObsDataQC...‐
ExecuteQCoftheobservationdataandshowthe
resultsbyTextViewer.
CopyToClipboard‐CopytheimageoftheplottoClipboard.
Options
ShowtheʺOptionsʺdialogtoconfigureplot
options.
View
ShowToolBar‐ShoworhidetheToolBar.
ShowStatusBar‐ShoworhidetheStatusBar.
GoogleEarthView...ShowGoogleEarthView.
GoogleMapView...ShowGoogleMapView.
InputMonitor1...‐
ShowtheʺInputMonitorʺwindowforreal‐time
inputstreamNo.1.
InputMonitor2...‐
ShowtheʺInputMonitorʺwindowforreal‐time
inputstreamNo.2.
CenterOriginMovethecoordinatesorigintothecenterofthe
plot.
FitHorizontal
Fitthehorizontalrangeofthesolutionor
observationdataintheplot.
FitVertical
Fittheverticalrangeofthesolutiondatainthe
plot.
ShowTrackPointShoworhidethetrackpointofthesolutionor
observationdataintheplot.
RTKLIBver.2.4.2Manual
68
MenuTool
BarDescriptionNotes
FixTrackCenterFixthetrackpointonthecenteroftheplot.
FixTrackHorizontalFixthetrackpointhorizontallyontheplot.
FixTrackVerticalFixthetrackpointverticallyontheplot
ShowMapImageShoworhidethemapimage.
ShowPath/WaypointsShoworhidethemappathdata.
AnimationStartStarttheanimationoftheplot.
AnimationStopStoptheanimationoftheplot.
HelpAbout...‐ShowtheʺAbout...ʺdialog.
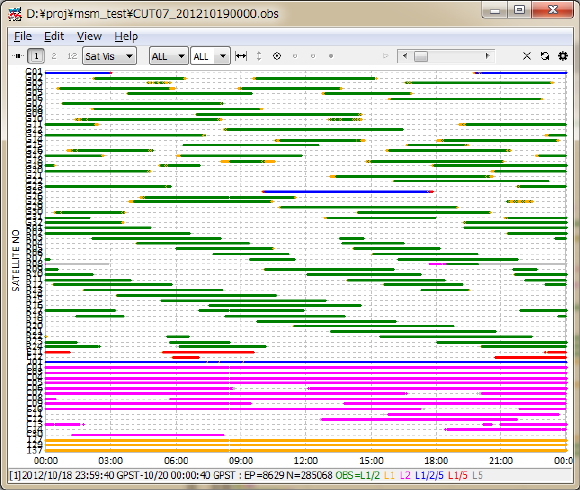
RTKLIBver.2.4.2Manual
69
3.8 View and Plot Observation Data with RTKPLOT
RTKPLOTisalsousedtoviewandplottheRINEXobservationdataaswellassatellitevisbilityanalysis.
(1) ToplottheRINEXobservationdata,executemenuʺFileʺ‐‐ʺOpenObsDataʺofRTKPLOTandselect
theRINEXobservationandnavigationmessagefiles.YoucanselectmultipleRINEXfiles.Ifyoudonot
selecttheRINEXnavigationmessagefile,RTKPOSTreadstheobservationdatafilepathswiththe
extensionreplacedby.*nav (.obs)or.yyN,.yyG,.yyH,.yyQ,.yyL,.yyP (.yyO)astheGPS,
GLONASS,SBAS,QZSS,Galileoorcombinednavigationdata.IfyouwantreadtheRINEXnavigation
messagefileseparately,executethemenuʺFileʺ‐ʺOpenNavMessagesʺ.Iftheinputfilescanberead
properly,youcanseeasatellitevisibilityplot.Youcanuseleft‐buttonorright‐buttondragtochange
thetimespan.Youcanalsousesometoolbarbuttonsaswellasforthesolutionplot.
Figure3.8‐1SatelliteVisibilityPlotofRTKPLOT
(20) ByselectingthepulldownmenuinToolBar,youcanswitchtheplottothesatellitevisibilityinskyplot
(SkyPlot)ortheplotofthenumberofvisiblesatellites,theDOP/NSatplot(DOP/NSat),the
SNR/Multipath/Elevationplot(SNR/MP/EL)andtheSNR/Multipath‐ELplot(SNR/MP‐EL).Toshow
theSNRplots,theobservationdatamustcontainSNR(C/N0)information.Toshowtheproper
multipathplots,theobservationdatamustcontaindual‐frequency(L1‐L2forGPS,GLONASSand
QZSS,L1‐L5forGalileo,L2‐L7forBeiDou)pseudorangeandcarrier‐phase.RTKPLOTinternally
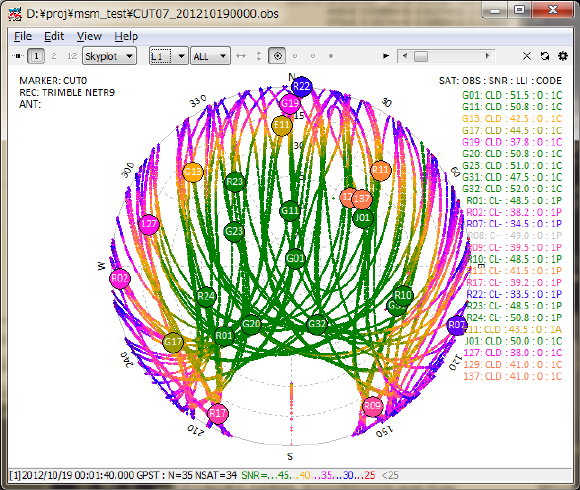
RTKLIBver.2.4.2Manual
70
generatesMPLC(linearcombination)withtheseobservablestoplotthemultipath.Tocomputethe
elevationangleofsatellites,RTKPLOTalsoneedsatellitepositions.IncaseofRINEXNAVfilesinput,
thesatellitepositionsarecomputedbyusingsatelliteephemeridesinRINEXNAVfiles.IftheRINEX
NAVfilesarenotavailable,RTKPLOTalternativelyusesNORADTLE(twolineelement)datasetfor
satellitepositions.Inthiscase,youmustspecifythereceiverpositionasthelatitude,longitudeand
heightformintheʺOptionsʺdialog.Youcanselectsignalsandsatelliteswithupperpull‐downmenus
onthetoolbar.Inthesatelliteselection,ʺGʺ,ʺRʺ,ʺEʺ,ʺJʺ,ʺCʺandʺSʺ meanGPS,GLONASS,Galileo,
QZSS,BeiDouandSBAS,respectively.
Figure3.8‐2SkyplotbyRTKPLOT
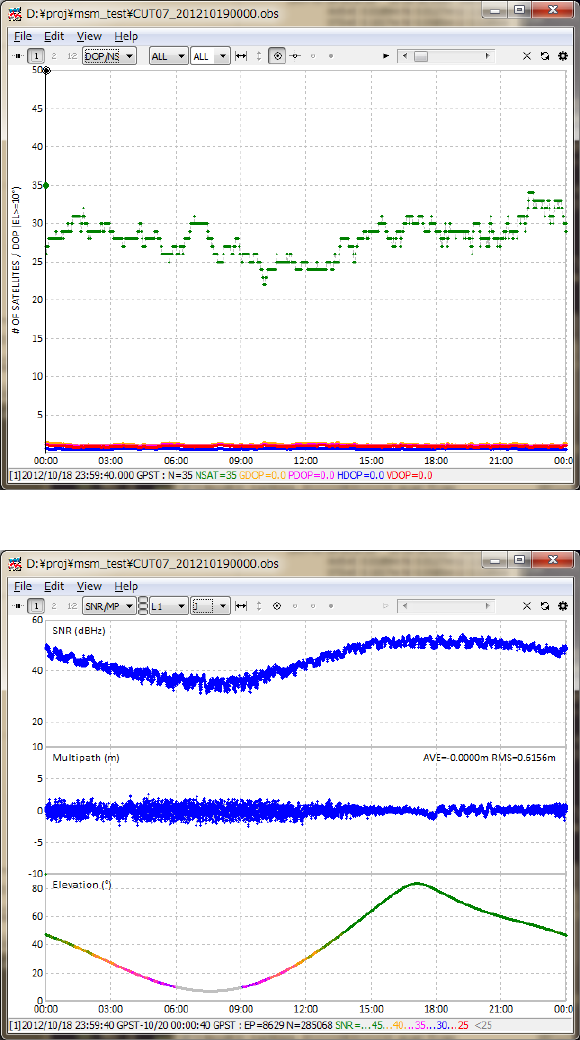
RTKLIBver.2.4.2Manual
71
Figure3.8‐3#ofVisibleSatellitesandDOPPlotbyRTKPLOT
Figure3.8‐4SNR/MultipathPlotbyRTKPLOT
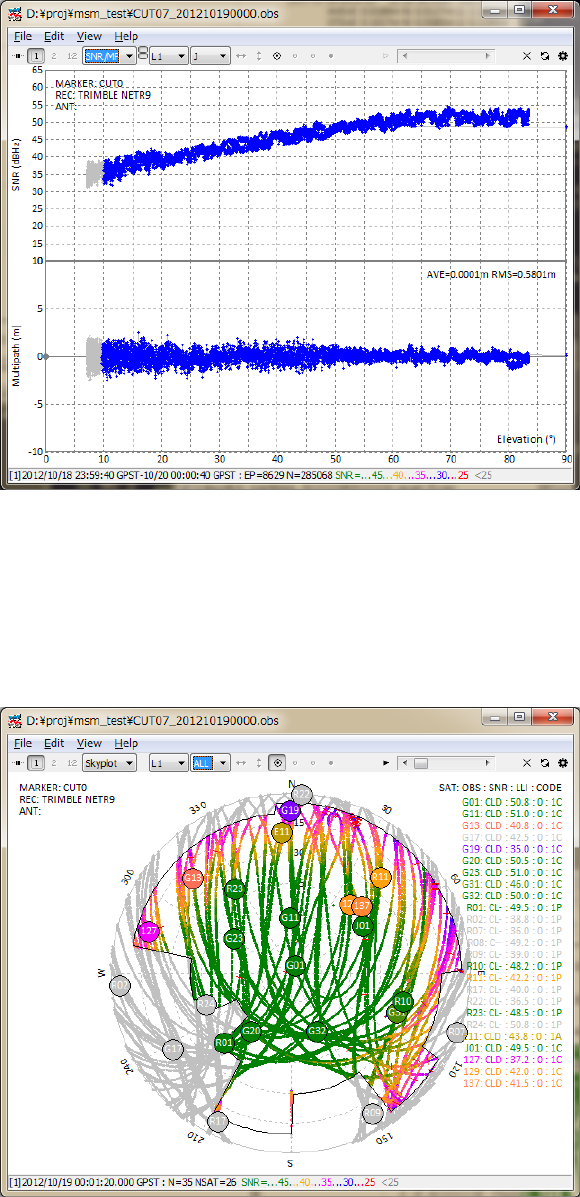
RTKLIBver.2.4.2Manual
72
Figure3.8‐5SNR/Multipath‐ElevationPlotbyRTKPLOT
(21) YoucanapplytheelevationmaskbyreadingtheelevationmaskdatabythemenuʺFileʺ‐ʺOpenElev
MaskʺandbysettheoptionʺElevMaskPatternʺON.Fortheformatoftheelevationmaskdata,refer
theexamplefilefoundin<install dir>\rtklib_<ver>\data\elmask_sample.txt.
Figure3.8‐6ElevationMaskinSkyplotbyRTKPLOT
(22) ByExecutingthemenuʺEditʺ ‐ ʺObsDataSourceʺ orʺObsDataQCʺ,youcanviewthesourceof
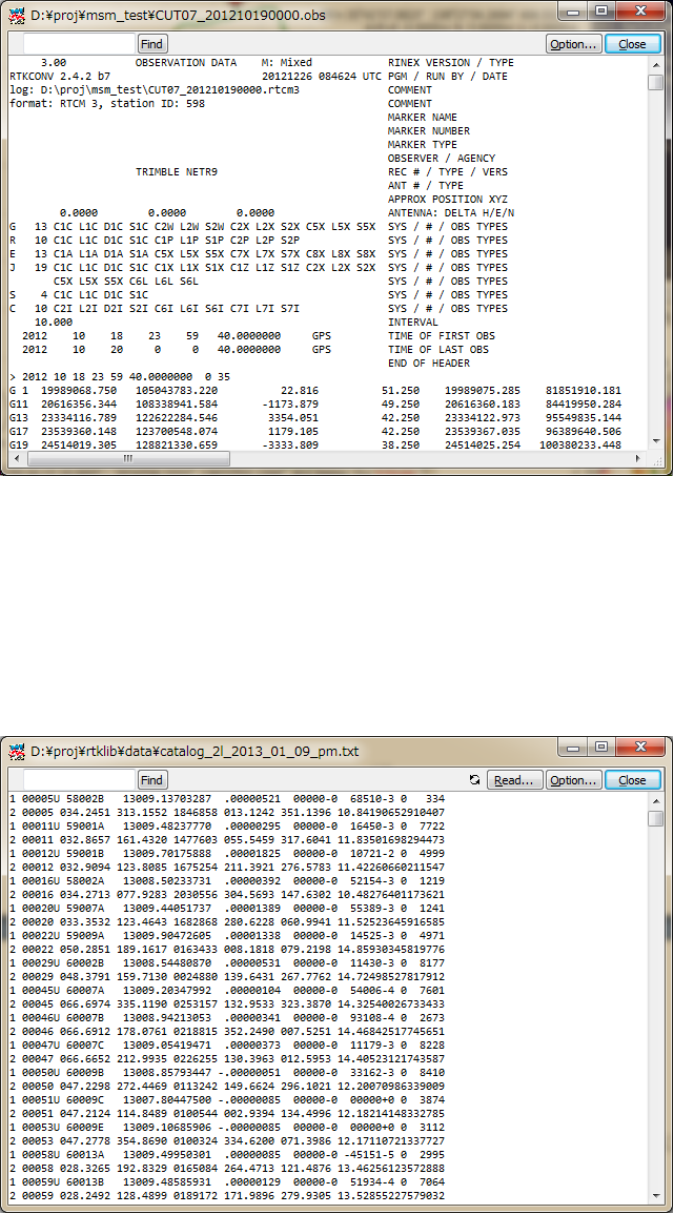
RTKLIBver.2.4.2Manual
73
solutionsortheQCresultasthetextform.
Figure3.8‐7QCResultViewbyRTKPLOT
(23) Inver.2.4.2,thesatellitevisibilityanalysisfunctionisadded.WithNORAD(NorthAmerican
AerospaceDefenseCommand)TLE(twolineelement)dataset,youcanpredictGNSSsatellite
visibilitybyRTKPLOTanywhereandanytime.Toenablethisfeature,settheTLEdataandthesatellite
numberfilepathbyʺOptionsʺdialog.Thefollowingfiguresshowexamplesofthesefiles.
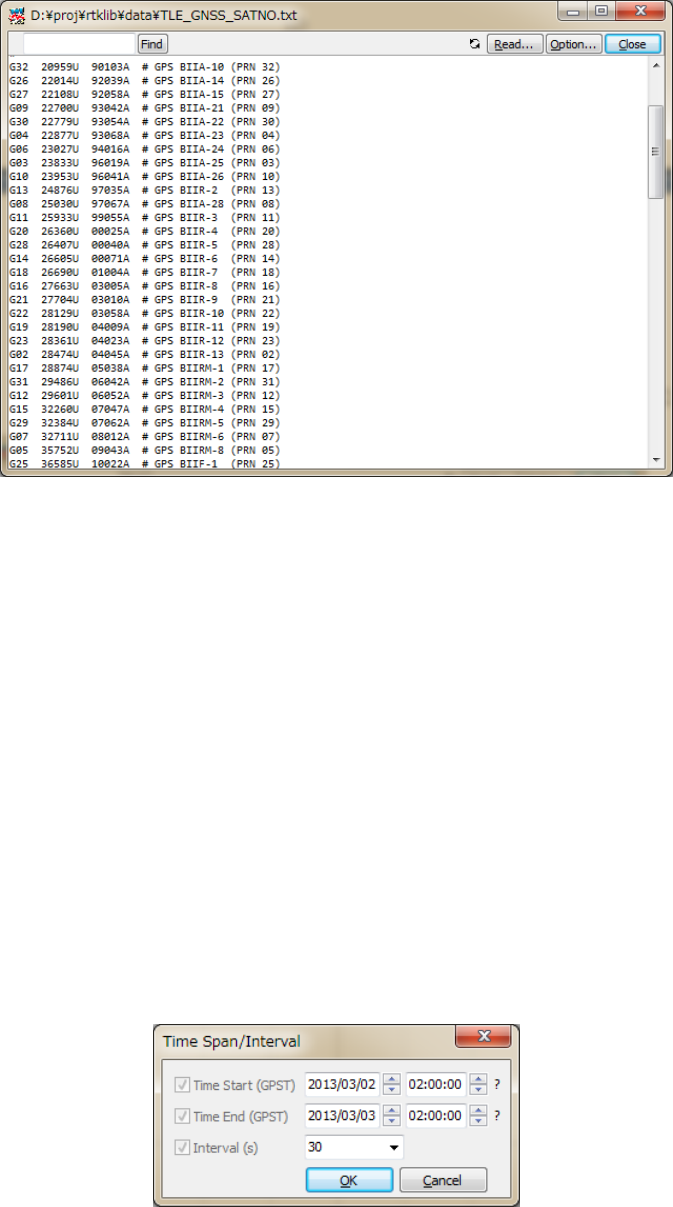
RTKLIBver.2.4.2Manual
74
Figure3.8‐8ExamplesofTLEData(upper)andSatelliteNumberFile(lower)
NORADTLEdatafilesarefreelyavailableatCelesTrak(http://celestrack.com)orSpaceTrack
(http://www.space‐track.org).YouhavetodownloadTLEdatacontainingorbitelementsoftarget
GNSSsatellites.ForallofGNSSsatellites,youhadbettertouseʺfullcatalogʺforallavailablesatellites
providedbySpaceTrack.Formoreaccuratesatellitepositions,youhadbettertousenewerTLEdata.
AnothersatellitenumberfileisusedtotranslatetheTLEsatellitenumberstotheGNSSsatellite
numberslikeG23,R03,139.Asamplesatellitenumberfilecanbefoundat<install
dir>\rtklib_<ver>\data\TLE_GNSS_SATNO.txt.NotethatthecorrespondenceofGNSS
satellitenumberswithsatellitesissometimeschangedbythesystemconstellationchange.Inthiscase,
youshalleditandmodifythesatellitenumberfilebyyourself.
TopredicttheGNSSsatellitevisibility,setuserlocationaslatitude,longitudeandheightbyʺOptionsʺ
dialog.YouhavetosetʺReceiverPositionʺtoʺLat/Lon/Hgtʺ.ThenexecutethemenuʺFileʺ‐ʺVisibility
Analysis...ʺ,youcanseeʺTimeSpan/Intervalʺdialog.
Figure3.8‐9TimeSpan/IntervalDialogofRTKPLOT
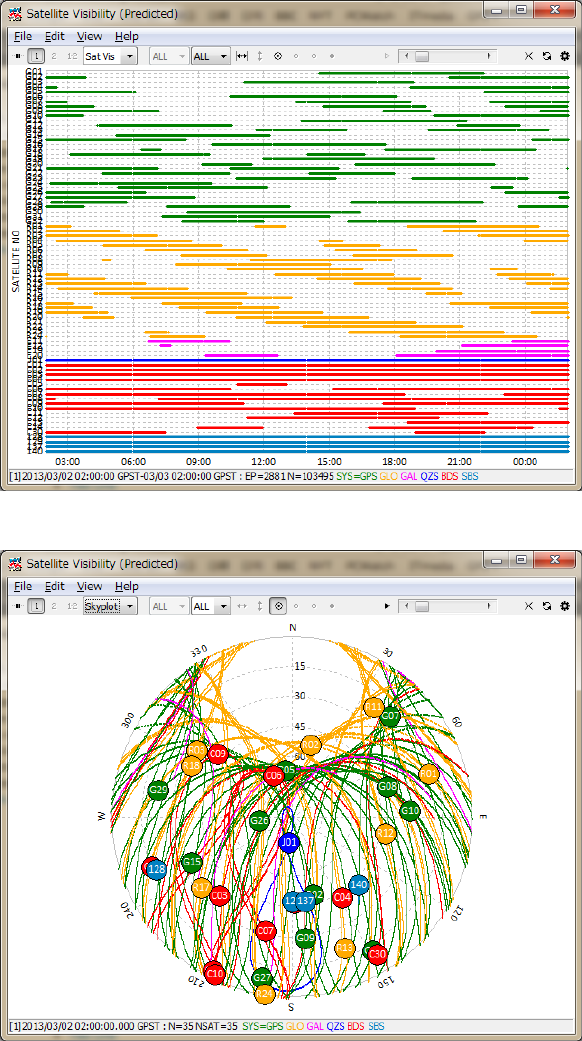
RTKLIBver.2.4.2Manual
75
Bythedialog,setʺTimeStartʺ,ʺTimeEndʺ inGPSTime,ʺIntervalʺ fortheanalysisandpushʺOKʺ
button.Youcanobtainasatellitevisibilitychartatthespecifiedlocation.Inthechart,thecolors
indicatesatellitesystemasGPS,GLONASS,Galileo,QZSS,BeiDouandSBASasdefault.Youcan
switchtheplottoSkyplot,DOP/NSatorSNR/MP/ELassameastheobservationdataplots.
Figure3.8‐10SatelliteVisibility(Predicted)PlotbyRTKPLOT
Figure3.8‐11Skyplot(Predicted)byRTKPLOT
RTKLIBver.2.4.2Manual
76
(24) FortheplottingoptionsforsolutiondatabyRTKPLOTandthemenusprovidedbyRTKPLOT,refer
3.7ViewandPlotSolutiondatawithRTKPLOT.
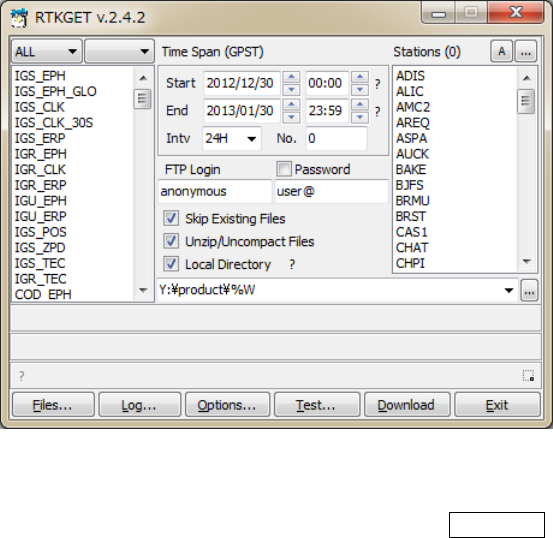
RTKLIBver.2.4.2Manual
77
3.9 Download GNSS Products and Data with RTKGET
ForPPP(precisepointpositioning)analysis,youwouldoftenneedtodownloadIGS(InternationalGNSS
service)preciseGNSSproductslikesatelliteorbitandclockinformation.Inothercases,youmightwantto
downloadtheobservationdataofaCORS(continuousoperatingreferencestations)networkfromaGNSS
dataarchiveviaInternet.TodownloadtheseGNSSrelatedproductsanddata,RTKLIBoffersausefulGUI
downloadutilityAPRTKGET.RTKGETisnewlyaddedinver.2.4.2.
(1) ExecutethebinaryAPfile<install dir>\rtklib_<ver>\bin\rtkget.exe.Youcanseethe
mainwindowofRTKGET.
Figure3.9‐1MainWindowofRTKGET
(2) Atfirst,youhavetoconfiguretheURLlistfileforGNSSdata.PushOptions...buttoninthemain
window.YoucanseetheʺOptionsʺdialog.
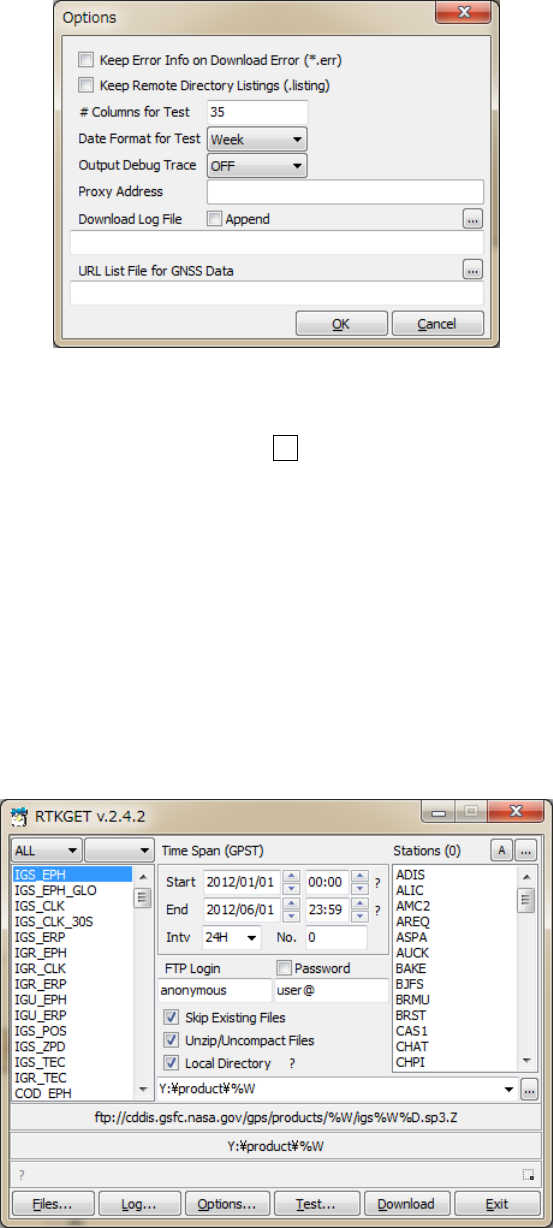
RTKLIBver.2.4.2Manual
78
Figure3.9‐2OptionsDialogofRTKGET
(3) Fillinthefilepathorselectthefilebypushing...ofʺURLListFileforGNSSDataʺ.ReferAppendix
B.5fortheformatofthefile.AnexampleoftheURLlistfileforGNSSdataisfoundat<install
dir>\rtklib_<ver>\data\URL_LIST.txt.Ifyouleavethefieldblank,RTKGETusesthedefault
URLListfile<install dir>\rtklib_<ver>\data\URL_LIST.txt.
(4) Selectdownloaddatatypebytheleftlist‐boxinthemainwindow.Youcanselectmultipledatatypes
inthelist.Byusingcombo‐boxabovethelist‐box,youcanfilterthelistbydatatypecategories.The
URLaddressofdownloaddataisshownatthecenterofthefirstmessagearea.Thelocaldirectoryis
alsoshowninthesecondmessagearea.
Figure3.9‐3SelectionofDownloadDataTypebyRTKGET
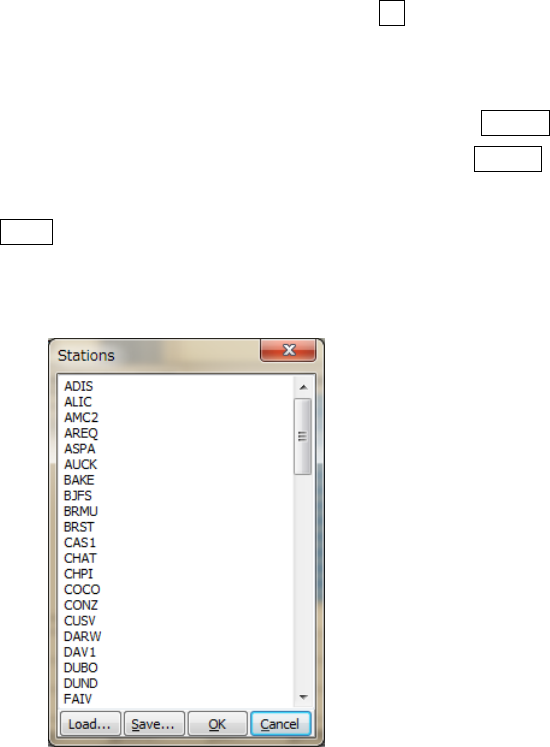
RTKLIBver.2.4.2Manual
79
(5) SpecifythetimespaninGPSTimewithʺStartʺ,ʺEndʺandʺIntvʺfields.ThetimekeywordsintheURL
addressofdownloaddataarereplacebythetimespecifiedasthetimespan.IftheURLaddress
containsthekeyword%N,thekeywordisreplacedbythenumberintheʺNo.ʺ field.Tospecifya
sequenceofnumbers,useʺ-ʺtoexpresstherangelikeʺ1-99ʺintheʺNo.ʺfield.
(6) TheURLaddresscontainskeyword%s,%Sor%r,thekeywordisreplacedbythestationnames
selectedintherightlist‐boxʺStationsʺ.Toselectthestationname,push...buttonattherightupper
cornerinthemainwindow.YoucanseetheʺStationsʺdialog.Youcaninputoreditthestationname
listsinthedialog.Alineofthestationnamelistsindicateastationnametobeusedtoreplacethe
keywordsintheURLaddress.Toloadstationnamelistfromaexternaltextfile,pushLoad...button
toselectthefile.YoucansavethestationnamelisttoexternaltextfilebypushingSave...button.
Theexternaltextfileissimpletextfilecontainingstationnamesastextlines.Afterinputoreditthe
stationnamelist,pushOKbuttontoclosethedialogandsetthestationnamelisttothemain
window.
Figure3.9‐4StationsDialogofRTKGET
(7) IncaseofFTPdownload,setʺFTPLoginʺandʺPasswordʺ forFTPserverlogin.Forthemostofthe
anonymousFTPservers,youcanuseʺanonymousʺandyourE‐mailaddressforthefileds.Thencheck
oruncheckthefollowingdownloadoptions:
(a)SkipExistingFiles:Setwhetheryouskipthedownloadornotifthelocalfileexists
(b)Unzip/UncompactFiles:Setwhetheryouunzipofuncompressthedownloadfilesiftheseare
compressed.
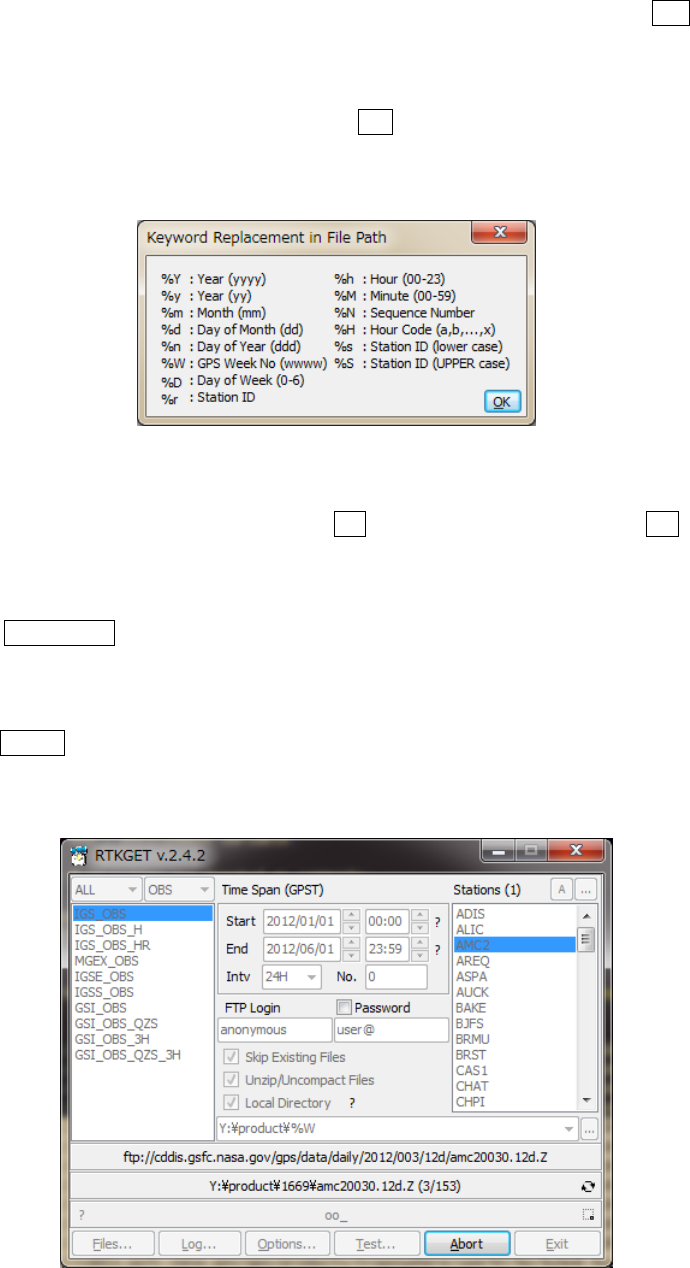
RTKLIBver.2.4.2Manual
80
(c)LocalDirectory:Checkandsetthelocaldirectorypathfordownloadedfiles.Push...toselect
directorybytheʺDirectorySelectionʺdialog.Ifnotchecked,thedefaultdownloaddirectoryinthe
URLlistfile.Thedirectorypathcancontainkeywordstobereplacedbydate,time,stationnameand
envrionmentvariableassameasURLlist.Push?buttontoshowdetailedreplacementinthe
directorypath.
Figure3.9‐5KeywordReplacementDialogofRTKGET
(8) SelectstationnamesinʺStationsʺlist‐box.PushAbuttontoselectallofstationsandDbuttonto
deselectallofstations.
(9) PushDownloadbuttontostartdownload.Thethirdmessageareashowsthedownloadstatus
indicatorforeachfile.Theindicatorʺ
_ʺ meansinprogress,ʺ
oʺ meansdownloadOK,ʺ
.ʺ means
skipped,ʺ
xʺ meansnodataandʺ
Xʺ meanssomedownloaderror.Toabortthedownloadhalfway,
pushAbortbutton.Eveninpushingthebutton,thelastdownloadstillinprogresscannotcanceled.
Pleasewaitawhiletofinishthelastdownloadtoabort
Figure3.9‐6DataDownloadingbyRTKGET
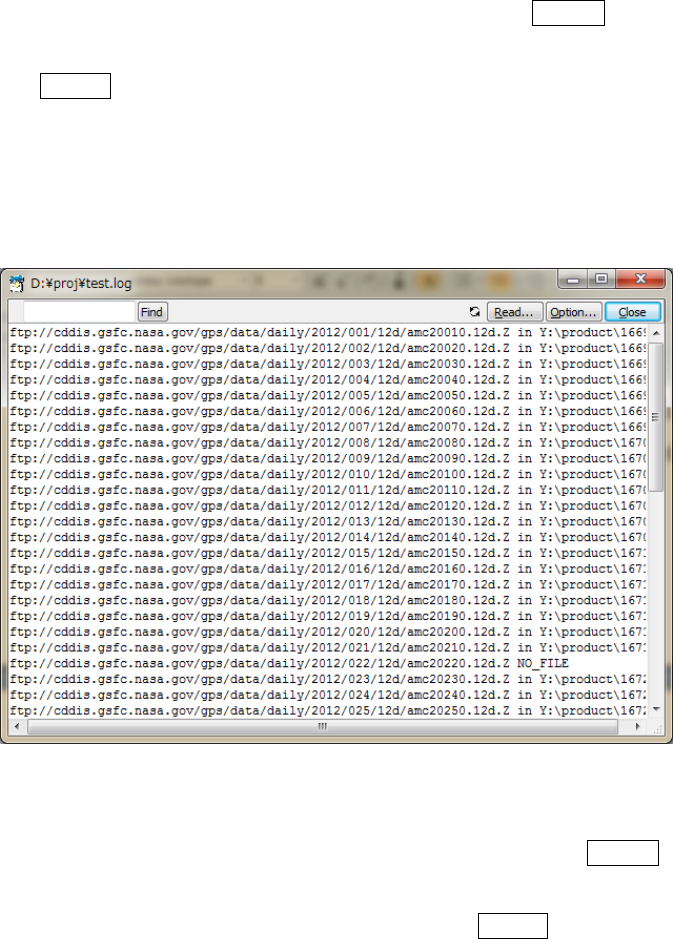
RTKLIBver.2.4.2Manual
81
(10) Aftercompletingallofthedownloadsorabortingthedownload,pushFiles...buttoninthemain
windowtoexecuteWindowsexplorershowingthedownloadedlocaldirectory.Toseethedownload
log,pushLog...button.YoucanseethedownloadloginʺTextViewerʺ window.Toenablethe
downloadlogfunction,youhavetosettheʺDownloadLogFileʺ fieldintheʺOptionsʺ dialog.If
ʺAppendʺcheckedforthedownloadlog,thelogsareaddedtotheexistinglogfileifitexists.Ifnot
checked,thedownloadlogisnewlygeneratedforeverytriesofdownloads.
Figure3.9‐7DownloadLogViewbyRTKGET
(11) TotestGNSSdataexistenceaslocalfilesbeforeactualdatadownload,pushTest...buttonafter
settingsassameastheactualdownloaddescribedabove.Youcanseethelocaldataavailabilityreport
intheʺTextViewerʺwindow.YoucansavethereportbypushingSave...buttonandspecifythefile
pathinthefilesavedialog.Thenumberofcolumnsanddateformatofthelocaldataavailability
reportcanbemodifiedbytheʺOptionsʺdialog.
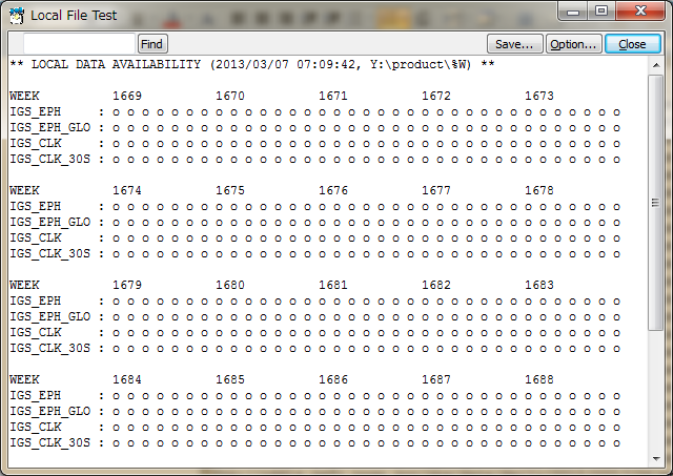
RTKLIBver.2.4.2Manual
82
Figure3.9‐8LocalFileTestViewbyRTKGET
(12) Bydefault,thedetailedlogforthedownloadprogressanderrorsisautomaticallydeleted.Tokeep
sucherrorlogs,checkʺKeepErrorInfoonDownloadErrorʺintheʺOptionsʺdialog.Thedetailederror
logissavedasthefile<local dir>\<file>.errforeachdownloadfile.Tokeepremotefilelistfile
inordertoanalyzetroubleseasily,checkʺKeepRemoteDirectoryListingʺaswell.Theremotefilelist
issavedasthefile.listinginthecurrentdirectory.
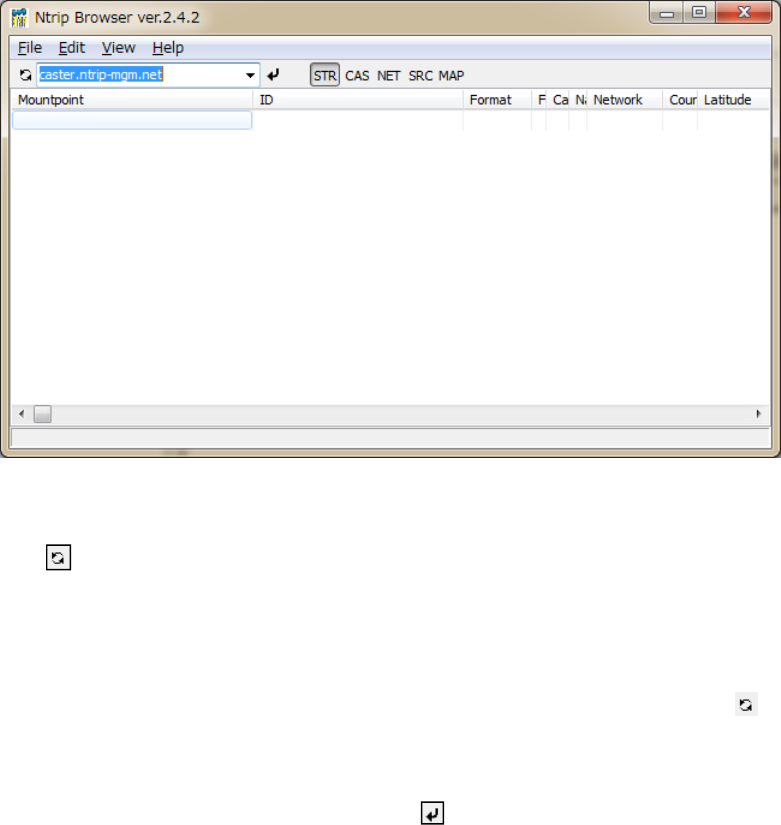
RTKLIBver.2.4.2Manual
83
3.10 NTRIP Browser
NTRIP(NetworkedTransportofRTCMviaInternetProtocol)isacommunicationprotocoltointerchange
GPS/GNSSrelateddatasuchasreceiverrawobservationdata,ephemeridesandcorrectionsforDGPSor
RTK‐GPS.NTRIPspecifiesthetableformatofso‐calledSourceTable,whichrepresentscontentslistof
provideddatabyNTRIPservers.RTKLIBincludesasimplebrowserforNTRIPSourceTables.
(1) ExecutethebinaryAPfilertklib_<ver>\bin\srctblbrows.exe.Youcanseethemainwindow
ofNTRIPSourceTableBrowser.
Figure3.10‐1MainWindowofNTRIPBrowser
(2) Pushbuttonupperleftinthemainwindow,leavingrightpulldownmenuofNTRIPcasterlist
blank.Ifthebottomstatusbarshowsʺconnecting...ʺandthenʺupdatecasterlistʺ,theNTRIPcasterlist
isupdated.Ifthepulldownmenuisblank,thebrowseracquirestheNTRIPcasterlistfromthedefault
NTRIPinfocasterrtcm-ntrip.org:2101andupdatethelist.Tochangethesourceofthelist,fillthe
NTRIPcasteraddressastheformof<address>:<port>
inthepulldownmenuandpushbutton.
Ifyouomitportnumber,thebrowserusesthedefaultportnumber2101.
(3) Selectthecasterinthepulldownmenuandpushbutton.Ifthestatusbarshowsʺsourcetable
receivedʺ,thebrowserproperlyreceivedaNTRIPSourceTablefromtheselectedNTRIPcasterand
showsitinthewindow.Thestatusbaralsoindicatetheerrormessageifaproblemarises.
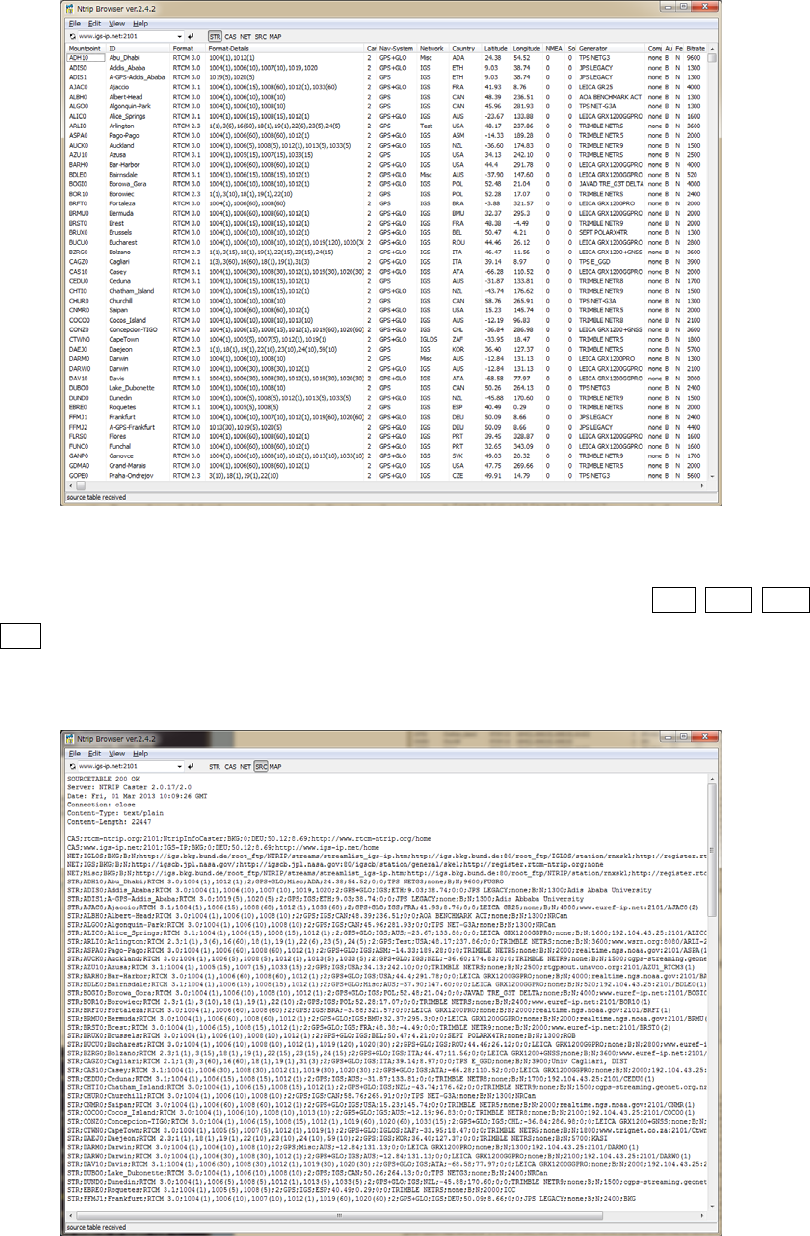
RTKLIBver.2.4.2Manual
84
Figure3.10‐2NTRIPStreamListViewbyNTRIPBrowser
(4) Bypushingfieldtitle,youcansortthelistbythefieldcolumn.YoualsocanpushSTR,CAS,NET,
SRCtoswitchthecontentsoftheSourceTabletoStreamList,CasterList,NetworkListandOriginal
SourceTable.
Figure3.10‐3NTRIPSourceTableViewbyNTRIPBrowser
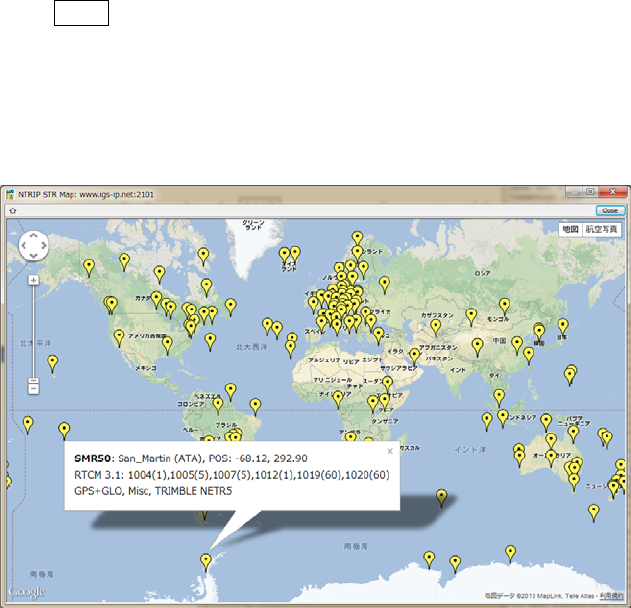
RTKLIBver.2.4.2Manual
85
(5) BypushingtheMAPinToolBar,youcanopenthemapviewofthepositionsoftheNTRIPmount
pointsbyGoogleMap.Byclickthemarkerinthemapview,youcanshowthedetailinformationofthe
mountpoint.ByselectingamountpointintheNTRIPbrowserwindow,indicatethemountpoint
positioninthemapbychangethemarkerʹscolor(red).
Figure3.10‐4MapViewofStationPositionsbyNTRIPBrowser
RTKLIBver.2.4.2Manual
86
3.11 Use CUI APs of RTKLIB
RTKLIBincludesthefollowingCUIAPs.TheseCUIAPsonlyusestandardANSIC(C89)functionsanda
smallnumberofstandardClibrariestoensuretheportability.SoyoucouldbuildtheseCUIAPsonthe
non‐WindowsenvironmentlikeLINUX,UNIX,MACOSXandsoon.Youcanalsobuildandexecutethese
APsonembeddedCPUlikeARM.ReferAppendixACUICommandReferencesfortheseAPsincluding
commandlineoptions.FortheproceduretobuildtheseAPs,refer4.2BuildCUIAPsofRTKLIB.Notesthat
youmighthavetomodifymakefiletoadjustthebuildenvironmentbuttheprogramitselfdoesnotneed
tomodifytoportitonthemostofenvironments.
(1) RTKRCV
Real‐timePositioning.TheconsoleAPversionofRTKNAVI.
(2) RNX2RTKP
Post‐ProcessingAnalysis.TheconsoleAPversionofRTKPOST.
(3)POS2KML
GoogleEarthKMLconverterforsolutionfiles.
(4) CONVBIN
RINEXConverterofreceiverrawdata.TheconsoleAPversionofRTKCONV.
(5) STR2STR
StreamServer.ConsoleAPversionofSTRSVR.
RTKLIBver.2.4.2Manual
87
4 Build APs or Develop User APs with RTKLIB
4.1 Rebuild GUI and CUI APs on Windows
TomodifysomefunctionsofRTKLIBortoinstallyournewmodelstoRTKLIB,youmaywanttorebuild
APs.Tofixexistingbugs,youalsomayneedtorebuildAPstoapplypatches.TorebuildGUIandCUIAPs
onWindows,youneedEmbarcaderoC++BuilderXE2orXE3(http://www.embarcadero.com).RTKLIB
internallyonlyutilizesfundamentalVCL(visualcomponentlibrary)functionsprovidedbyC++builder.At
least,thebasicʺstartereditionʺisenoughtorebuildRTKLIBAPs.Thefollowinginstructionsshowshowto
rebuildGUIandCUIAPsonWindows.
(1) ExecuteEmbarcaderoC++BuilderXE2orXE3.
(2) ExecutethemenuʺFileʺ‐ʺOpenProject...ʺofC++buildertoopentheC++builderprojectfileofthe
targetAP(<app>.cbproj or _<app>.cbproj, <app> isthetargetAPlikertkpost,rtkplotor
rtknavi)intheapplicationprogramdirectory(<install dir>\rtklib_<ver>\app\<app> or
<install dir>\rtklib_<ver>\app\<app>\bcc\).
(3) ExecutethemenuʺProjectʺ‐ʺRebuild<app>ʺofC++buildertorebuildthetargetAP.
(4) Execute(doubleclickthefileorinputthecommand)theWindowsbatchfileinstall.batinthesame
directoryastheprojectfile.Itcopiesanewlybuiltexecutablebinaryprogramtothedirectoryof
RTKLIBbinaryprograms(<install dir>\rtklib_<ver>\bin).
(5) TorebuildalloftheGUIAPsortheCUIAPs,opentheC++buildergroupprojectfile<install
dir>\rtklib_<ver>\app\rtklib_winapp.gourpprojor<install
dir>\rtklib_<ver>\app\rtklib_consapp.gourpproj. ExecutethemenuʺProjectʺ‐ʺBuild
AllProjectsʺofC++builder.Executethebatchfileinstall_winapp.bator
install_consapp.batinthesamedirectorytocopythemtothebinaryprogramdirectory.
RTKLIBver.2.4.2Manual
88
4.2 Build CUI APs
TobuildCUIAPs,youcanusemanyCcompilerslikegcc.TheRTKLIBpackageincludesstandard
makefileforgcc.Accordingtoyourcompiler,librariesordirectories,youmayneedtomodifythe
makefile togenerateAPsdependingtoyourenvironment.
(1) Movetotheapplicationprogramdirectory(rtklib_<ver>/app/<app>)ofthetargetAP.
>> cd <install_dir>/rtklib_<ver>/app/<app>
(2) Movetogccdirectory.
>> cd gcc
(3) Editandmodifymakefiletoadjustthefiletoyourenvironment.
>> vi makefile
(4) ExecutemaketobuildtheAPandmake installtoinstallthebinaryfiletoappropriateBINdirectory.
>> make
>> make install
RTKLIBver.2.4.2Manual
89
4.3 Develop and Link User APs with RTKLIB
RTKLIBprovidethefollowinggeneralpurposeC‐functionscallablefromuserAP(applicationprogram).
UsercanusethesefunctiontodevelopuseroriginalpositioningAPs.
(1) Matrixandvectorfunctions
(2) Timeandstringfunctions
(3) Coordinatestransformationandgeoidmodel
(4) Navigationprocessing
(5) Positioningmodels(troposphere,ionosphere,antennaPCV)
(6) SBASDGPS/DGNSScorrection
(7) Singlepointpositioning
(8) Carrier‐basedandcode‐basedrelativepositioning
(9) OTFintegerambiguityresolution
(10) Receiverrawbinarydatainput
(11) Positioningsolution/NMEAinput/output
(12) RINEXobservationdata/navigationmessageinput/output
(13) Preciseephemerisinput
(14) Streamdatacommunicationlibrary
(15) NTRIP(NetworkedTransportofRTCMviaInternetProtocol)library
(16) RTK‐GPS/GNSSpositioningserver
(17) RTCM2.3and3.0/3.1/3.2messagehandling
(18) Downloaderfunctions
ThefollowinginstructionsshowsthewaytoutilizethelibraryofRTKLIBinuserAP.
(1) AddthefollowingincludedirectivetothesourceprogramofuserAP.
#include "rtklib.h"
(2) SetthefollowingcompileroptiontoaddRTKLIBsourcedirectorypathtocompilerincludepaths.
-I rtklib_<ver>\src
(3) AddthenecessaryRTKLIBlibrarysourcefilestosourceprogramssetfortheAPbuild.ReferAppendix
CLibraryAPIsforthelibraryfunctionlistandsourceprogramsprovidedbyRTKLIB.
RTKLIBver.2.4.2Manual
90
Appendix A CUI Command References
A.1 RTKRCV
SYNOPSIS
rtkrcv [-s][-p port|-d dev][-o file][-t level]
DESCRIPTION
Acommandlineversionofthereal‐timepositioningAPbyRTKLIB.TostartorstopRTKserver,to
configureoptionsortoprintsolution/status,loginaconsoleandinputcommands.Asdefault,stdin/stdout
areusedfortheconsole.Use‐poptionfornetworkloginwithtelnetprotocol.Toshowtheavailable
commands,type?orhelpontheconsole.Theinitialprocessingoptionsareloadedfromdefault
configurationfilertkrcv.conf.Tochangethefile,use‐ooption.Toconfiguretheprocessingoptions,edit
theconfigurationfileoruseset,loadorsavecommandontheconsole.Toshutdowntheprogram,use
shutdowncommandontheconsoleorsendtheUSR2signaltotheprocess.Forconfigurationfile,referB.4.
OPTIONS
-s start RTK server on program startup
-p port port number for telnet console
-m port port number for monitor stream
-d dev terminal device for console
-o file configuration file
-r level output solution status file (0:off,1:states,2:residuals)
-t level debug trace level (0:off,1-5:on)
COMMANDS
start
Start RTK server. No need the command if the program runs with -s option.
stop
Stop RTK server.
restart
Restart RTK server. If the processing options are set, execute the command to enable
the changes.
RTKLIBver.2.4.2Manual
91
solution [cycle]
Show solutions. Without option, only one solution is shown. With option, the
solution is displayed at intervals of cycle (s). To stop cyclic display, send break
(ctr-C).
status [cycle]
Show RTK status. Use option cycle for cyclic display.
satellite [cycle]
Show satellite status. Use option cycle for cyclic display.
observ [cycle]
Show observation data. Use option cycle for cyclic display.
navidata [cycle]
Show navigation data. Use option cycle for cyclic display.
stream [cycle]
Show stream status. Use option cycle for cyclic display.
error
Show error/warning messages. To stop messages, send break (ctr-C).
option [opt]
Show the values of processing options. Without option, all options are displayed.
With option, only pattern-matched options are displayed.
set opt [val]
Set the value of a processing option to val. Without option val, prompt message
is shown to input the value. The change of the processing option is not enabled
before RTK server is restarted.
load [file]
Load processing options from file. Without option, default file rtkrcv.conf is used.
To enable the changes, restart RTK server.
RTKLIBver.2.4.2Manual
92
save [file]
Save current processing options to file. Without option, default file rtkrcv.conf
is used.
log [file|off]
Record console log to file. To stop recording the log, use option off.
help|? [path]
Show the command list. With option path, the stream path options are shown.
exit
Exit and logout console. The status of RTK server is not affected by the command.
shutdown
Shutdown RTK server and exit the program.
!command [arg...]
Execute command by the operating system shell. Do not use the interactive command.
NOTES
Short form of a command is allowed. In case of the short form, the command is
distinguished according to header characters.
RTKLIBver.2.4.2Manual
93
A.2 RNX2RTKP
SYNOPSIS
rnx2rtkp [option ...] file file [...]
DESCRIPTION
ReadRINEXOBS/NAV/GNAV/HNAV/CLK,SP3,SBASmessagelogfilesandcomputereceiver(rover)
positionsandoutputpositionsolutions.
ThefirstRINEXOBSfileshallcontainreceiver(rover)observations.Fortherelativemode,thesecond
RINEXOBSfileshallcontainreference(basestation)receiverobservations.AtleastoneRINEX
NAV/GNAV/HNAVfileshallbeincludedininputfiles.TouseSP3preciseephemeris,specifythepathin
thefiles.TheextensionoftheSP3fileshallbe .sp3or.eph.Alloftheinputfilepathscaninclude
wild‐cards(*).Toavoidcommandlinedeploymentofwild‐cards,useʺ...ʺforpathswithwild‐cards.
Commandlineoptionsareasfollows([]:default).With‐koption,theprocessingoptionsareinputfromthe
configurationfile.Inthiscase,commandlineoptionsprecedeoptionsintheconfigurationfile.Forthe
configurationfile,referB.4.
OPTIONS
-? print help
-k file input options from configuration file [off]
-o file set output file [stdout]
-ts ds ts start day/time (ds=y/m/d ts=h:m:s) [obs start time]
-te de te end day/time (de=y/m/d te=h:m:s) [obs end time]
-ti tint time interval (sec) [all]
-p mode mode (0:single,1:dgps,2:kinematic,3:static,4:moving-base,
5:fixed,6:ppp-kinematic,7:ppp-static) [2]
-m mask elevation mask angle (deg) [15]
-f freq number of frequencies for relative mode (1:L1,2:L1+L2,3:L1+L2+L5) [2]
-v thres validation threshold for integer ambiguity (0.0:no AR) [3.0]
-b backward solutions [off]
-c forward/backward combined solutions [off]
-i instantaneous integer ambiguity resolution [off]
-h fix and hold for integer ambiguity resolution [off]
-e output x/y/z-ecef position [latitude/longitude/height]
-a output e/n/u-baseline [latitude/longitude/height]
RTKLIBver.2.4.2Manual
94
-n output NMEA-0183 GGA sentence [off]
-g output latitude/longitude in the form of ddd mm ss.ss [ddd.ddd]
-t output time in the form of yyyy/mm/dd hh:mm:ss.ss [sssss.ss]
-u output time in utc [gpst]
-d col number of decimals in time [3]
-s sep field separator [' ']
-r x y z reference (base) receiver ecef pos (m) [average of single pos]
-l lat lon hgt reference (base) receiver latitude/longitude/height (deg/m)
-y level output solution status (0:off,1:states,2:residuals) [0]
-x level debug trace level (0:off) [0]
EXAMPLES
Example1.KinematicPositioning,L1+L2,outputLatitude/Longitude/HeighttoSTDOUT.
> rnx2rtkp 07590920.05o 30400920.05o 30400920.05n
Example2.SinglePointPositioning,ElMask=15deg,outputNMEAGGAtofileout.pos
> rnx2rtkp -p 0 -m 15 -n -o out.pos 07590920.05o 30400920.05n
Example3.StaticPositioning,L1,timeformyyyy/mm/ddhh:mm:ss,outputX/Y/Z‐ECEFpositions
> rnx2rtkp -p 3 -f 1 -t -e 07590920.05o 30400920.05o 30400920.05n
Example4.KinematicPositioning,InstantaneousAR,validationthreshold=2,commaseparator
> rnx2rtkp -i -v 2 -s , 07590920.05o 30400920.05o 30400920.05n
RTKLIBver.2.4.2Manual
95
A.3 POS2KML
SYNOPSIS
pos2kml [option ...] file [...]
DESCRIPTION
Readpositionfile(s)andconvertittoGoogleEarthKMLfile.Eachlineintheinputfileshallcontainfields
oftime,positionfields(Latitude/Longitude/HeightorX/Y/Z‐ECEF),andQualityflag(option).Theline
startedwithʹ%ʹ,ʹ#ʹ,ʹ;ʹistreatedascomment.Commandoptionsareasfollows.([]:default)
OPTIONS
-h print help
-o file output file [infile + .kml]
-c color track color
(0:off,1:white,2:green,3:orange,4:red,5:yellow) [5]
-p color point color
(0:off,1:white,2:green,3:orange,4:red,5:by qflag) [5]
-a output altitude information [off]
-ag output geodetic altitude [off]
-tg output time stamp of gpst [off]
-tu output time stamp of utc [gpst]
-i tint output time interval (s) (0:all) [0]
-q qflg output q-flags (0:all) [0]
-f n e h add north/east/height offset to position (m) [0 0 0]
RTKLIBver.2.4.2Manual
96
A.4 CONVBIN
SYNOPSIS
convbin [-ts y/m/d h:m:s] [-te y/m/d h:m:s] [-ti tint] [-r format] [-ro opts]
[-f freq] [-hc comment] [-hm marker] [-hn markno] [-ht marktype]
[-ho observ] [-hr rec] [-ha ant] [-hp pos] [-hd delta] [-v ver] [-od]
[-os] [-x sat] [-y sys] [-d dir] [-c satid] [-o ofile] [-n nfile]
[-g gfile] [-h hfile] [-q qfile] [-s sfile] file
DESCRIPTION
ConvertRTCM,receiverrawdatalogandRINEXfiletoRINEXandSBAS/LEXmessagefile.SBASmessage
filecomplieswithRTKLIBSBAS/LEXmessageformat.Itsupportsthefollowingmessagesorfiles.
RTCM 2 : Type 1, 3, 9, 14, 16, 17, 18, 19, 22
RTCM 3 : Type 1002, 1004, 1005, 1006, 1010, 1012, 1019, 1020
Type 1071-1127 (MSM except for compact msg)
NovAtel OEMV/4/6,OEMStar: RANGECMPB, RANGEB, RAWEPHEMB, IONUTCB, RAWWASSFRAMEB
NovAtel OEM3 : RGEB, REGD, REPB, FRMB, IONB, UTCB
u-blox LEA-4T/5T/6T : RXM-RAW, RXM-SFRB
NovAtel Superstar II : ID#20, ID#21, ID#22, ID#23, ID#67
Hemisphere : BIN76, BIN80, BIN94, BIN95, BIN96
SkyTraq S1315F : msg0xDD, msg0xE0, msg0xDC
GW10 : msg0x08, msg0x03, msg0x27, msg0x20
Javad : [R*],[r*],[*R],[*r],[P*],[p*],[*P],[*p],[D*],[*d],
[E*],[*E],[F*],[TC],[GE],[NE],[EN],[QE],[UO],[IO],
[WD]
NVS : NVS NV08C BINR
BINEX : big-endian, regular CRC, forward record (0xE2)
0x01-01,0x01-02,0x01-03,0x01-04,0x01-06,0x7f-05
RINEX : OBS, NAV, GNAV, HNAV, LNAV, QNAV
OPTIONS
file input receiver binary log file
-ts y/m/d h:m:s start time [all]
-te y/m/d h:m:s end time [all]
RTKLIBver.2.4.2Manual
97
-tr y/m/d h:m:s approximated time for rtcm messages
-ti tint observation data interval (s) [all]
-r format log format type
rtcm2= RTCM 2
rtcm3= RTCM 3
nov = NovAtel OEMV/4/6,OEMStar
oem3 = NovAtel OEM3
ubx = ublox LEA-4T/5T/6T
ss2 = NovAtel Superstar II
hemis= Hemisphere Eclipse/Crescent
stq = SkyTraq S1315F
javad= Javad
nvs = NVS BINR
binex= BINEX
rinex= RINEX
-ro opt receiver options
-f freq number of frequencies [2]
-hc comment rinex header: comment line
-hm marker rinex header: marker name
-hn markno rinex header: marker number
-ht marktype rinex header: marker type
-ho observ rinex header: observer name and agency separated by /
-hr rec rinex header: receiver number, type and version separated by /
-ha ant rinex header: antenna number and type separated by /
-hp pos rinex header: approx position x/y/z separated by /
-hd delta rinex header: antenna delta h/e/n separated by /
-v ver rinex version [2.11]
-od include doppler frequency in rinex obs [off]
-os include snr in rinex obs [off]
-oi include iono correction in rinex nav header [off]
-ot include time correction in rinex nav header [off]
-ol include leap seconds in rinex nav header [off]
-x sat exclude satellite
-y sys exclude systems (G:GPS,R:GLO,E:Galileo,J:QZSS,S:SBAS,C:BeiDou)
-d dir output directory [same as input file]
-c staid use RINEX file name convention with staid [off]
RTKLIBver.2.4.2Manual
98
-o ofile output RINEX OBS file
-n nfile output RINEX NAV file
-g gfile output RINEX GNAV file
-h hfile output RINEX HNAV file
-q qfile output RINEX QNAV file
-l lfile output RINEX LNAV file
-s sfile output SBAS message file
Ifanyoutputfilespecified,defaultoutputfiles(<file>.obs, <file>.nav, <file>.gnav,
<file>.hnav, <file>.qnav, <file>.lnav and <file>.sbs)areused.
Ifreceivertypeisnotspecified,typeisrecognizedbytheinputfileextensionasfollows.
*.rtcm2 RTCM 2
*.rtcm3 RTCM 3
*.gps NovAtel OEMV/4/6,OEMStar
*.ubx u-blox LEA-4T/5T/6T
*.log NovAtel Superstar II
*.bin Hemisphere Eclipse/Crescent
*.stq SkyTraq S1315F
*.jps Javad
*.bnx,*binex BINEX
*.obs,*.*o RINEX OBS
RTKLIBver.2.4.2Manual
99
A.5 STR2STR
SYNOPSIS
str2str -in stream[#...] -out stream[#...] [-out stream[#...]...] [options]
DESCRIPTION
InputdatafromastreamanddivideandoutputthemtomultiplestreamsTheinputstreamcanbeserial,
TCPclient,TCPserver,NTRIPclient,orfile.Theoutputstreamcanbeserial,TCPclient,TCPserver,NTRIP
server,orfile.str2strisaresidenttypeapplication.Tostopit,typeCtrl‐Cinconsoleifrunforegroundor
sendsignalSIGINTforbackgroundprocess.ifrunforegroundorsendsignalSIGINTforbackground
process.ifbothoftheinputstreamandtheoutputstreamfollow#format,theformatofinputmessages
areconvertedtooutput.Tospecifytheoutputmessages,use-msgoption.
Commandoptionsareasfollows.
OPTIONS
-in stream[#format] input stream path and format
-out stream[#format] output stream path and format
stream path
serial : serial://port[:brate[:bsize[:parity[:stopb[:fctr]]]]]
tcp server : tcpsvr://:port
tcp client : tcpcli://addr[:port]
ntrip client : ntrip://[user[:passwd]@]addr[:port][/mntpnt]
ntrip server : ntrips://[:passwd@]addr[:port][/mntpnt[:str]] (only out)
file : [file://]path[::T][::+start][::xseppd][::S=swap]
format
rtcm2 : RTCM 2 (only in)
rtcm3 : RTCM 3 (in and out)
nov : NovAtel OEMV/4/6,OEMStar (only in)
oem3 : NovAtel OEM3 (only in)
ubx : ublox LEA-4T/5T/6T (only in)
ss2 : NovAtel Superstar II (only in)
hemis : Hemisphere Eclipse/Crescent (only in)
stq : SkyTraq S1315F (only in)
RTKLIBver.2.4.2Manual
100
javad : Javad (only in)
nvs : NVS BINR (only in)
binex : BINEX (only in)
-msg type[(tint)][,type[(tint)]...]
rtcm message types and output intervals (s)
-sta sta station id
-opt opt receiver dependent options
-s msec timeout time (ms) [10000]
-r msec reconnect interval (ms) [10000]
-n msec nmea request cycle (m) [0]
-f sec file swap margin (s) [30]
-c file receiver commands file [no]
-p lat lon hgt station position (latitude/longitude/height) (deg,m)
-l local_dir ftp/http local directory []
-x proxy_addr http/ntrip proxy address [no]
-t level trace level [0]
-h print help
RTKLIBver.2.4.2Manual
101
Appendix B File Formats
B.1 Positioning Solution File
DESCRIPTION
ApositioningsolutionfileisjustatextfileasoutputofRTKNAVIorRTKPOST.Thefileisseparatedto
recordsorlinesbyCR/LF.Eachrecordsconsistsoffields.Thefollowingtableshowstheformatofthe
positioningsolutionfile.
NoRecord/FieldDescriptionNotes
1FileheaderThelinesstartingwithʺ%ʺareheaderlines.Theheaderlines
containssomeadditionalinformationorprocessingoptionsas
follows.
% program:programversion
% inp file:Inputfilepath
% obs start:ObservationdatastarttimeinGPStime
% obs end:ObservationdataendtimeinGPStime
% pos mode:Positioningmodeoption
% freqs:Frequenciesoption
% solution:Solutiontypeoption
% elev mask:Elevationmaskangleoption
% snr mask:SNRmaskoption
% ionos est:Ionosphericparameterestimationoption
% tropos est:Troposphericparametersestimationoption
% amb res:Integerambiguityresolutionoptions
% val thres:Integerambiguityvalidationoption
% ref pos:positionoftheantennaofthebasestation
2FieldindicatorFieldindicatorstartingwithʺ%ʺlinefollowsafterFileheader.
Torecognizethefieldformats,RTKLIBusestheselines.Donot
deletethem.
3SolutionbodySolutionbodyconsistsofthefollowingfields.
Thefieldcontentsarevariedaccordingtothepositioningoptions.
(1)TimeTheepochtimeofthesolutionindicatingthetruereceiversignal
receptiontime(notindicatesthetimebyreceiverclock).Theformat
isvariedtotheoptions.
yyyy/mm/dd HH:MM:SS.SSS :
CalendartimeinGPST,UTCorJST,thetimesystemisindicatedin
Fieldindicator
WWWW SSSSSSS.SSS :
GPSweekandTOW(timeofweek)inseconds.
(2)Receiver
Position
Theroverreceiveantennaormarkerpositionestimatedvaried
accordingtothepositioningoptions.
RTKLIBver.2.4.2Manual
102
NoRecord/FieldDescriptionNotes
+ddd.ddddddddd +ddd.dddddddd hhhh.hhhh:
Latitude,longitudeindegreesandheightinm.Minusvaluemeans
southlatitudeorwestlongitude.Theheightindicatesellipsoidalor
geodeticaccordingtothepositioningoptions.
+ddd mm ss.sss +ddd mm ss.sss hhhh.hhhh:
Latitude,longitudeindegree,minuteandsecondandheightinm.
+xxxxxxxxx.xxxx +yyyyyyyyy.yyyy +zzzzzzzz.zzzz:
X/Y/ZcomponentsofECEFframeinm.
+eeeeeeeee.eeee +nnnnnnnnn.nnnn +uuuuuuuuu.uuuu:
E/N/Ucomponentsofbaselinevectorinm.Thelocalcoordinateis
referencedtotheroverposition.
(3)Qualityflag
(Q)
Theflagwhichindicatesthesolutionquality.
1:Fixed,solutionbycarrier‐basedrelativepositioningandthe
integerambiguityisproperlyresolved.
2:Float,solutionbycarrier‐basedrelativepositioningbutthe
integerambiguityisnotresolved.
3:Reserved
4:DGPS,solutionbycode‐basedDGPSsolutionsorsinglepoint
positioningwithSBAScorrections
5:Single,solutionbysinglepointpositioning
(4)Numberof
validsatellites
(ns)
Thenumberofvalidsatellitesforsolutionestimation.
(5)Standard
deviations
(sdn,sde,sdu,
sdne,sdeu,
sdun)
Theestimatedstandarddeviationsofthesolutionassumingapriori
errormodelanderrorparametersbythepositioningoptions.
Thesdn,sdeorsdumeansN(north),E(east)orU(up)
componentofthestandarddeviationsinm.Theabsolutevalueof
sdne,sdeuorsdunmeanssquarerootoftheabsolutevalueofNE,
EUorUNcomponentoftheestimatedcovariancematrix.Thesign
representsthesignofthecovariance.Withallofthevalues,usercan
reconstructthefullcovariancematrix.
(6)Ageof
differential
(age)
Thetimedifferencebetweentheobservationdataepochsofthe
roverreceiverandthebasestationinsecond.
(7)Ratiofactor
(ratio)
Theratiofactorofʺratio‐testʺforstandardintegerambiguity
validationstrategy.Thevaluemeanstheratioofthesquaredsumof
theresidualswiththesecondbestintegervectortowiththebest
integervector.
EXAMPLE
% program : RTKLIB ver.2.3.0b
% inp file : G:\rtklibtest\20090831\omre196a.09o
% inp file : G:\rtklibtest\20090831\tevc196a.09o
% inp file : G:\rtklibtest\20090831\omre196a.09n
% obs start : 2009/07/15 07:10:00.0 GPST (week1540 285000.0s)
% obs end : 2009/07/15 07:59:50.0 GPST (week1540 287990.0s)
% pos mode : kinematic
% freqs : L1+L2
RTKLIBver.2.4.2Manual
103
% solution : forward
% elev mask : 15.0 deg
% snr mask : 0.0 dBHz
% ionos est : on
% tropo est : on
% amb res : continuous
% val thres : 3.0
% ref pos : 32.574831620 -117.126551777 -28.1471
%
% (lat/lon/height=WGS84/ellipsoidal,Q=1:fix,2:float,4:dgps,5:single,ns=# of satellites)
% GPST latitude(deg) longitude(deg) height(m) Q ns sdn(m) sde(m)
sdu(m) sdne(m) sdeu(m) sdun(m) age(s) ratio
2009/07/15 07:10:00.000 32.560273272 -116.953525346 118.6783 1 10 0.0186 0.0202
0.0899 -0.0072 0.0089 -0.0249 0.00 4.5
2009/07/15 07:10:10.000 32.560273266 -116.953525340 118.6877 1 10 0.0144 0.0154
0.0776 -0.0058 0.0082 -0.0199 0.00 5.3
2009/07/15 07:10:20.000 32.560273262 -116.953525365 118.6853 1 10 0.0124 0.0131
0.0720 -0.0051 0.0078 -0.0173 0.00 5.3
2009/07/15 07:10:30.000 32.560273251 -116.953525345 118.6825 1 10 0.0111 0.0117
0.0686 -0.0046 0.0075 -0.0157 0.00 5.6
2009/07/15 07:10:40.000 32.560273275 -116.953525412 118.6827 1 10 0.0103 0.0108
0.0662 -0.0043 0.0073 -0.0146 0.00 4.7
2009/07/15 07:10:50.000 32.560273277 -116.953525429 118.6812 1 10 0.0097 0.0102
0.0644 -0.0041 0.0071 -0.0138 0.00 4.1
2009/07/15 07:11:00.000 32.560273249 -116.953525449 118.6817 1 10 0.0092 0.0097
0.0630 -0.0039 0.0069 -0.0132 0.00 4.2
2009/07/15 07:11:10.000 32.560273271 -116.953525464 118.6729 1 10 0.0088 0.0093
0.0618 -0.0038 0.0067 -0.0127 0.00 5.2
2009/07/15 07:11:20.000 32.560273246 -116.953525468 118.6772 1 10 0.0085 0.0089
0.0607 -0.0037 0.0066 -0.0123 0.00 6.1
2009/07/15 07:11:30.000 32.560273219 -116.953525461 118.6733 1 10 0.0083 0.0087
0.0598 -0.0036 0.0065 -0.0119 0.00 7.9
2009/07/15 07:11:40.000 32.560273216 -116.953525478 118.6771 1 10 0.0081 0.0085
0.0590 -0.0035 0.0064 -0.0117 0.00 9.0
2009/07/15 07:11:50.000 32.560273206 -116.953525489 118.6726 1 10 0.0079 0.0083
0.0582 -0.0035 0.0062 -0.0114 0.00 8.6
2009/07/15 07:12:00.000 32.560273201 -116.953525497 118.6744 1 10 0.0078 0.0081
0.0575 -0.0034 0.0061 -0.0112 0.00 7.5
2009/07/15 07:12:10.000 32.560273212 -116.953525455 118.6731 1 10 0.0077 0.0080
0.0568 -0.0034 0.0060 -0.0110 0.00 7.9
RTKLIBver.2.4.2Manual
104
B.2 SBAS Log File
DESCRIPTION
ASBASlogfileisoutputofRTKCONV,thatisatextfileinwhichalinecontainsaSBASmessagecaptured
bytheGPS/GNSSreceiver.ThefollowingtableshowstheformatoftheSBASlogfile.
NoRecord/FieldDescriptionNotes
1SBAS
messages
AlinecontainsaSBASnavigationdataframe,whichconsistsofthe
followingfields.
(1)GPSweek
number
GPSweeknumberofSBASnavigationdataframe.
(2)TimeofweekTimeofweekofSBASnavigationdataframeinseconds.
(3)PRNnumberPRNnumberofSBASsatellitetransmittingthenavigationdata
(4)MessagetypeThetypeIDoftheSBASmessageintheframe(0‐63).ReferSBAS
specificationsfordetails:
RTCA/DO‐229C,Minimumoperationalperformancestandardsfor
GlobalPositioningSystem/WideAreaAugmentationsystem
airborneequipment
(5)Separator
:
(6)SBASmessageHexadecimaldumpofa226‐bitSBASmessagewithout24‐bit
parityfield.Themessagetailis0‐paddedtoalignto8‐bitboundary.
ReferSBASspecificationsforthedetailedmessageformat.
EXAMPLE
1471 349007 137 25 : C666A0A7F1FE6000027F80000003468000000000000000000000000000
1471 349007 129 25 : C666A0A7F4FE6004047F80000003468000000000000000000000000000
1471 349008 129 4 : 53109FFFFF5FFDFFDFFDFFFFC7FA9FFDFFDFFDFFDFFF9BBBBB33FFFFC0
1471 349008 137 4 : 53129FFC001FFDFFDFFDFFFFA0009FFDFFDFFDFFDFFF9BBBBB33FFFFC0
1471 349009 137 3 : 9A0C9FFDFFDFFFFFDFFC017FF9FFDFFC009FFC015FFFBB97B9BB9FBB80
1471 349009 129 2 : 9A0A9FFFFC9FFFFE9FFDFFDFFDFFDFFDFFFFF7F93FFBE79BBBBBB9FA00
1471 349010 137 2 : C60A9FFFFD1FFFFFDFFDFFDFFDFFDFFDFFC003F88003E79FBBFBB9FA00
1471 349010 129 3 : C60E9FFDFFDFFFFE9FFC007FEDFFDFFFFFDFFFFFDFFFBB97B9BB9FBB80
1471 349011 137 26 : 536A0029E0EF0FF05F829C11C076033015A09D047037C1DE14F08FE000
1471 349011 129 26 : 536A0821A0DD05E82B813E0EF0F7897C27C12E08683B419C0BE057E000
1471 349012 137 28 : 9A723440E44E810029FF1F1F379C0BC35D4BE2B8078F15903253960200
1471 349012 129 28 : 9A722CB5D8739087B46B107DA8D9E828694B55F843782100AF146AD980
1471 349013 129 9 : C62434198D3F5D92BA855704800236DFE84FE06FFA47FE7FF0008E0240
1471 349013 137 9 : C6260C198D32310732404C1D40183CDFD187C8F3FF7FFD800FF7D6BE40
1471 349014 129 4 : 53119FFFFF9FFDFFDFFDFFFFD3FA5FFDFFDFFDFFDFFF9BBBBB33FFFFC0
1471 349014 137 4 : 53109FFC005FFDFFDFFDFFFFAFFFDFFDFFDFFDFFDFFF9BBBBB33FFFFC0
1471 349015 129 2 : 9A089FFFFC5FFFFEDFFDFFDFFDFFDFFDFFFFFBF8FFFFE79BBBBBB9FA00
1471 349015 137 3 : 9A0D9FFDFFDFFFFF9FFC017FFDFFDFFC00DFFC015FFFBB97B9BB9FBB80
1471 349016 137 2 : C6089FFFFD5FFC001FFDFFDFFDFFDFFDFFFFFFF8BFFFE79FBBFBB9FA00
1471 349016 129 3 : C60C9FFDFFDFFFFE5FFC007FF1FFDFFC001FFFFFDFFFBB97B9BB9FBB80
1471 349017 137 25 : 5366587803FE3FF0010080FFFF835E8000000000000000000000000000
1471 349017 129 25 : 5366587FFDFEDFF40400800000035E8000000000000000000000000000
1471 349018 129 63 : 9AFC000000000000000000000000000000000000000000000000000000
1471 349018 137 63 : 9AFC000000000000000000000000000000000000000000000000000000
1471 349019 129 26 : C66A0C53E26F09704781DC0DE06702FC19E1EF09F047821C0EF05FE000
RTKLIBver.2.4.2Manual
105
1471 349019 137 26 : C66A0431E17E0A704741F80DC05E827815C0EF09F877C2FC15E096E000
1471 349020 137 4 : 53119FFC001FFDFFDFFDFFFF9C001FFDFFDFFDFFDFFF9BBBBB33FFFFC0
1471 349020 129 4 : 53129FFFFF5FFDFFDFFDFFFFC3FA9FFDFFDFFDFFDFFF9BBBBB33FFFFC0
RTKLIBver.2.4.2Manual
106
B.3 Solution Status File
DESCRIPTION
AsolutionstatusfileisoutputofRTKNAVIorRTKPOST,thatisatextfilewhichcontainstheinternalstatus
ofthepositioningprocess.TheinternalstatusincludeestimatedstatesofKalmanfilterandresidualsof
measurementstoanalyzethesolutionquality.Thefollowingtableshowstheformatofthesolutionstatus
file.
NoRecord/FieldDescriptionNotes
1PositionStatesEstimatedroverpositioninthefilter.Theformatofarecordisas
follows.
$POS,week,tow,stat,posx,posy,posz,posxf,posyf,poszf
week/tow:gpsweekno/timeofweek(s)
stat:solutionstatus
posx/posy/posz:positionx/y/zecef(m)float
posxf/posyf/poszf:positionx/y/zecef(m)fixed
2Velocity/
Acceleration
States
Estimatedrovervelocityandaccelerationinthefilter.Theformatof
arecordisasfollows.
$VELACC,week,tow,stat,vele,veln,velu,acce,accn,accu,velef,velnf,\
veluf,accef,accnf,accuf
week/tow:gpsweekno/timeofweek(s)
stat:solutionstatus
vele/veln/velu:velocitye/n/u(m/s)float
acce/accn/accu:acceleratione/n/u(m/s^2)float
velef/velnf/veluf:velocitye/n/u(m/s)fixed
accef/accnf/accuf:acceleratione/n/u(m/s^2)fixed
3Receiver
Clock‐bias
States
Estimatedreceiverclockbiasparameters.Theformatofarecordis
asfollows.
$CLK,week,tow,stat,rcv,clk1,clk2,clk3,clk4
week/tow:gpsweekno/timeofweek(s)
stat:solutionstatus
rcv:receiver(1:rover,2:basestation)
clk1:receiverclockbiasGPS(ns)
clk2:receiverclockbiasGLONASS(ns)
clk3:reserved
clk4:reserved
4Ionosphere
Parameter
States
Estimatedionosphereparameter(verticalL1ionospheredelay
difference).Theformatofarecordisasfollows.
$ION,week,tow,stat,sat,az,el,ion,ion‐fixed
week/tow:gpsweekno/timeofweek(s)
stat:solutionstatus
sat:satelliteid

RTKLIBver.2.4.2Manual
107
NoRecord/FieldDescriptionNotes
az/el:azimuth/elevationangle(deg)
ion:verticalionosphericdelayL1(m)float
ion‐fixed:verticalionosphericdelayL1(m)fixed
5Troposphere
Parameter
States
Estimatedtroposphereparameter(verticaltropospheredelay
residual).Theformatofarecordisasfollows.
$TROP,week,tow,stat,rcv,ztd,ztdf
week/tow:gpsweekno/timeofweek(s)
stat:solutionstatus
rcv:receiver(1:rover,2:basestation)
ztd:zenithtotaldelay(m)float
ztdf:zenithtotaldelay(m)fixed
6ReceiverH/W
biasStates
EstimatedGLONASSreceiverH/Wbiasdifference.Theformatofa
recordisasfollows.
$HWBIAS,week,tow,stat,frq,bias,biasf
week/tow:gpsweekno/timeofweek(s)
stat:solutionstatus
frq:frequency(1:L1,2:L2,3:L5,...)
bias:h/wbiascoefficient(m/MHz)float
biasf:h/wbiascoefficient(m/MHz)fixed
7ResidualsResidualsofpseudorangeandcarrier‐phaseobservables.The
formatofarecordisasfollows.
$SAT,week,tow,sat,frq,az,el,resp,resc,vsat,snr,fix,slip,lock,outc,\
slipc,rejc
week/tow:gpsweekno/timeofweek(s)
sat/frq:satelliteid/frequency(1:L1,2:L2,3:L5,...)
az/el:azimuth/elevationangle(deg)
resp:pseudorangeresidual(m)
resc:carrier‐phaseresidual(m)
vsat:validdataflag(0:invalid,1:valid)
snr:signalstrength(dbHz)
fix:ambiguityflag(0:nodata,1:float,2:fixed,3:hold)
slip:cycle‐slipflag(bit1:slip,bit2:parityunknown)
lock:carrier‐lockcount
outc:dataoutagecount
slipc:cycle‐slipcount
rejc:datareject(outlier)count
EXAMPLE
$POS,1557,432000.000,2,-3869295.9628,3436570.2567,3717367.6546,0.0000,0.0000,0.0000
$HWBIAS,1557,432000.000,2,1,-0.3503,0.0000
$HWBIAS,1557,432000.000,2,2,0.0108,0.0000
$SAT,1557,432000.000,3,1,253.2,64.3,0.3219,-0.0006,1,48,1,1,1,0,1,0
$SAT,1557,432000.000,3,2,253.2,64.3,-0.0629,-0.0006,1,33,1,1,1,0,1,0
$SAT,1557,432000.000,13,1,298.4,24.1,-0.6732,0.0003,1,42,1,1,1,0,1,0
$SAT,1557,432000.000,13,2,298.4,24.1,0.8081,0.0003,1,17,1,1,1,0,1,0
$SAT,1557,432000.000,16,1,42.0,59.5,0.5037,-0.0005,1,47,1,1,1,0,1,0
$SAT,1557,432000.000,16,2,42.0,59.5,-0.5170,-0.0005,1,30,1,1,1,0,1,0
$SAT,1557,432000.000,19,1,229.8,39.0,-0.1948,-0.0003,1,44,1,0,1,0,0,0
$SAT,1557,432000.000,19,2,229.8,39.0,-0.0806,-0.0003,1,28,1,1,1,0,1,0
$SAT,1557,432000.000,21,1,61.1,28.1,-1.0704,0.0001,1,41,1,1,1,0,1,0
$SAT,1557,432000.000,21,2,61.1,28.1,1.0139,0.0001,1,19,1,1,1,0,1,0
RTKLIBver.2.4.2Manual
108
$SAT,1557,432000.000,23,1,257.9,29.9,-1.3258,-0.0000,1,45,1,1,1,0,1,0
$SAT,1557,432000.000,23,2,257.9,29.9,0.4155,0.0000,1,23,1,1,1,0,1,0
$SAT,1557,432000.000,25,1,317.0,24.7,0.8868,0.0002,1,41,1,1,1,0,1,0
$SAT,1557,432000.000,25,2,317.0,24.7,0.1811,0.0003,1,19,1,1,1,0,1,0
$SAT,1557,432000.000,31,1,145.1,32.5,0.6140,-0.0001,1,44,1,1,1,0,1,0
$SAT,1557,432000.000,31,2,145.1,32.5,-0.2397,-0.0001,1,26,1,1,1,0,1,0
$SAT,1557,432000.000,R9,1,105.7,78.1,-0.1172,-0.0001,1,45,1,1,1,0,1,0
$SAT,1557,432000.000,R9,2,105.7,78.1,0.0000,0.0000,0,0,0,0,0,1,0,0
$SAT,1557,432000.000,R10,1,331.5,41.7,-0.1425,0.0002,1,43,1,1,1,0,1,0
$SAT,1557,432000.000,R10,2,331.5,41.7,0.0349,0.0001,1,30,1,1,1,0,1,0
$SAT,1557,432000.000,R19,1,18.6,61.2,-0.7708,-0.0000,1,46,1,1,1,0,1,0
$SAT,1557,432000.000,R19,2,18.6,61.2,0.1898,-0.0001,1,39,1,0,1,0,0,0
$SAT,1557,432000.000,R20,1,235.7,55.6,1.0305,-0.0000,1,42,1,1,1,0,1,0
$SAT,1557,432000.000,R20,2,235.7,55.6,-0.2247,-0.0001,1,39,1,1,1,0,1,0
RTKLIBver.2.4.2Manual
109
B.4 Configuration File
DESCRIPTION
Aconfigurationfilecontainingprocessingoptions,solutionoptionsandfileoptionsforRTKNAVI,
RTKPOST,RTKRCVandRNX2RTKP.ThatisatextfilewhichcontainstheKeyword = Valueformrecords
indicatingthevariousoptions.Forenumerationvalues,theselectablevalueiseitherofanumber(0,1,2,...)
oranenumerationlabel(off,on,...).Thelinestartingwith#andthetextsafter#inalinearetreatedas
comments.Forthecontentsoftheconfigurationfile,refer3.5ConfigurePositioningOptionsforRTKNAVI
andRTKPOST.
EXAMPLE
# RTKNAVI options (2013/03/01 10:41:04, v.2.4.2)
pos1-posmode =single #
(0:single,1:dgps,2:kinematic,3:static,4:movingbase,5:fixed,6:ppp-kine,7:ppp-static)
pos1-frequency =l1+l2 # (1:l1,2:l1+l2,3:l1+l2+l5)
pos1-soltype =forward # (0:forward,1:backward,2:combined)
pos1-elmask =10 # (deg)
pos1-snrmask_r =off # (0:off,1:on)
pos1-snrmask_b =off # (0:off,1:on)
pos1-snrmask_L1 =0,0,0,0,0,0,0,0,0
pos1-snrmask_L2 =0,0,0,0,0,0,0,0,0
pos1-snrmask_L5 =0,0,0,0,0,0,0,0,0
pos1-dynamics =off # (0:off,1:on)
pos1-tidecorr =off # (0:off,1:on)
pos1-ionoopt =brdc #
(0:off,1:brdc,2:sbas,3:dual-freq,4:est-stec,5:ionex-tec,6:qzs-brdc,7:qzs-lex,8:vtec_sf,9
:vtec_ef,10:gtec)
pos1-tropopt =saas # (0:off,1:saas,2:sbas,3:est-ztd,4:est-ztdgrad)
pos1-sateph =brdc # (0:brdc,1:precise,2:brdc+sbas,3:brdc+ssrapc,4:brdc+ssrcom)
pos1-posopt1 =on # (0:off,1:on)
pos1-posopt2 =on # (0:off,1:on)
pos1-posopt3 =on # (0:off,1:on)
pos1-posopt4 =on # (0:off,1:on)
pos1-posopt5 =off # (0:off,1:on)
pos1-exclsats = # (prn ...)
pos1-navsys =63 # (1:gps+2:sbas+4:glo+8:gal+16:qzs+32:comp)
pos2-armode =fix-and-hold # (0:off,1:continuous,2:instantaneous,3:fix-and-hold)
pos2-gloarmode =off # (0:off,1:on,2:autocal)
pos2-arthres =3
pos2-arlockcnt =0
pos2-arelmask =20 # (deg)
pos2-arminfix =0
pos2-elmaskhold =0 # (deg)
pos2-aroutcnt =5
pos2-maxage =30 # (s)
pos2-slipthres =0.05 # (m)
pos2-rejionno =30 # (m)
pos2-rejgdop =30
pos2-niter =1
pos2-baselen =0 # (m)
pos2-basesig =0 # (m)
out-solformat =llh # (0:llh,1:xyz,2:enu,3:nmea)
out-outhead =off # (0:off,1:on)
out-outopt =off # (0:off,1:on)
out-timesys =gpst # (0:gpst,1:utc,2:jst)
out-timeform =hms # (0:tow,1:hms)
RTKLIBver.2.4.2Manual
110
out-timendec =3
out-degform =deg # (0:deg,1:dms)
out-fieldsep =
out-height =geodetic # (0:ellipsoidal,1:geodetic)
out-geoid =internal # (0:internal,1:egm96,2:egm08_2.5,3:egm08_1,4:gsi2000)
out-solstatic =all # (0:all,1:single)
out-nmeaintv1 =1 # (s)
out-nmeaintv2 =1 # (s)
out-outstat =off # (0:off,1:state,2:residual)
stats-eratio1 =300
stats-eratio2 =300
stats-errphase =0.003 # (m)
stats-errphaseel =0.003 # (m)
stats-errphasebl =0 # (m/10km)
stats-errdoppler =1 # (Hz)
stats-stdbias =30 # (m)
stats-stdiono =0.03 # (m)
stats-stdtrop =0.3 # (m)
stats-prnaccelh =10 # (m/s^2)
stats-prnaccelv =10 # (m/s^2)
stats-prnbias =0.0001 # (m)
stats-prniono =0.001 # (m)
stats-prntrop =0.0001 # (m)
stats-clkstab =5e-12 # (s/s)
ant1-postype =llh # (0:llh,1:xyz,2:single,3:posfile,4:rinexhead,5:rtcm)
ant1-pos1 =90 # (deg|m)
ant1-pos2 =0 # (deg|m)
ant1-pos3 =-6335367.6285 # (m|m)
ant1-anttype =NOV702GG
ant1-antdele =0 # (m)
ant1-antdeln =0 # (m)
ant1-antdelu =0 # (m)
ant2-postype =rtcm # (0:llh,1:xyz,2:single,3:posfile,4:rinexhead,5:rtcm)
ant2-pos1 =0 # (deg|m)
ant2-pos2 =0 # (deg|m)
ant2-pos3 =0 # (m|m)
ant2-anttype =TRM29659.00
ant2-antdele =0 # (m)
ant2-antdeln =0 # (m)
ant2-antdelu =0 # (m)
misc-timeinterp =off # (0:off,1:on)
misc-sbasatsel =0 # (0:all)
misc-rnxopt1 =
misc-rnxopt2 =
file-satantfile =Y:\madoca\data\igs08.atx
file-rcvantfile =Y:\madoca\data\igs08.atx
file-staposfile =
file-geoidfile =
file-ionofile =
file-dcbfile =Y:\madoca\data\dcb\P1P21201.DCB
file-eopfile =
file-blqfile =
file-tempdir =C:\Temp
file-geexefile =
file-solstatfile =
file-tracefile =
inpstr1-type =ntripcli #
(0:off,1:serial,2:file,3:tcpsvr,4:tcpcli,7:ntripcli,8:ftp,9:http)
inpstr2-type =off #
(0:off,1:serial,2:file,3:tcpsvr,4:tcpcli,7:ntripcli,8:ftp,9:http)
inpstr3-type =off #
(0:off,1:serial,2:file,3:tcpsvr,4:tcpcli,7:ntripcli,8:ftp,9:http)
inpstr1-path =kaiyodai:tuomsat00@mgex.igs-ip.net:2101/CUT07:
inpstr2-path =
inpstr3-path =
inpstr1-format =rtcm3 #
(0:rtcm2,1:rtcm3,2:oem4,3:oem3,4:ubx,5:ss2,6:hemis,7:skytraq,8:gw10,9:javad,15:sp3)
inpstr2-format =rtcm3 #
(0:rtcm2,1:rtcm3,2:oem4,3:oem3,4:ubx,5:ss2,6:hemis,7:skytraq,8:gw10,9:javad,15:sp3)
inpstr3-format =rtcm3 #
(0:rtcm2,1:rtcm3,2:oem4,3:oem3,4:ubx,5:ss2,6:hemis,7:skytraq,8:gw10,9:javad,15:sp3)
RTKLIBver.2.4.2Manual
111
inpstr2-nmeareq =off # (0:off,1:latlon,2:single)
inpstr2-nmealat =26.37293571 # (deg)
inpstr2-nmealon =127.143649075 # (deg)
outstr1-type =off # (0:off,1:serial,2:file,3:tcpsvr,4:tcpcli,6:ntripsvr)
outstr2-type =off # (0:off,1:serial,2:file,3:tcpsvr,4:tcpcli,6:ntripsvr)
outstr1-path =
outstr2-path =
outstr1-format =llh # (0:llh,1:xyz,2:enu,3:nmea)
outstr2-format =nmea # (0:llh,1:xyz,2:enu,3:nmea)
logstr1-type =off # (0:off,1:serial,2:file,3:tcpsvr,4:tcpcli,6:ntripsvr)
logstr2-type =off # (0:off,1:serial,2:file,3:tcpsvr,4:tcpcli,6:ntripsvr)
logstr3-type =off # (0:off,1:serial,2:file,3:tcpsvr,4:tcpcli,6:ntripsvr)
logstr1-path =
logstr2-path =
logstr3-path =
misc-svrcycle =10 # (ms)
misc-timeout =30000 # (ms)
misc-reconnect =10000 # (ms)
misc-nmeacycle =5000 # (ms)
misc-buffsize =32768 # (bytes)
misc-navmsgsel =all # (0:all,1:rover,2:base,3:corr)
misc-proxyaddr =
misc-fswapmargin =30 # (s)
RTKLIBver.2.4.2Manual
112
B.5 URL List File for GNSS Data
DESCRIPTION
AfilecontainingURLlistofGNSSdatainInternetresources.ThefileisusedbyRTKGETtodownload
GNSSdata.AlineindicatesarecordofURLforaGNSSdatatype.Thestringsafter#aretreatedas
comments.ThefollowingtableshowstheformatoftheURLlistfileforGNSSdata.
NoRecord/FieldDescriptionNotes
1URLAlinecontainsaURLforaGNSSdatatype,whichconsistsofthe
followingfieldsseparatedbyspaces.
(1)DatatypeGNSSdatatypeID.TheIDdoesnotcontainspaces.Under‐barʺ_ʺ
inthedatatypeIDmeanstheseparatorofeachdatatypecategory.
(2)URLaddressURLaddressoftheGNSSdatatype.TheURLaddressshallbe:
ftp://<host address>/<file path> or
http://<host address>/<file path>
ftp, http :useddownloadprotocol
<host address>:addressofthehost
<file path> :downloadfilepathinthehost.thefilepathcan
containthefollowingkeywordsreplacedbydate,time,station
nameandenvironmentvariable.
%Y -> yyyy : year (4 digits) (2000-2099)
%y -> yy : year (2 digits) (00-99)
%m -> mm : month (01-12)
%d -> dd : day of month (01-31)
%h -> hh : hours (00-23)
%H -> a : hour code (a-x)
%M -> mm : minutes (00-59)
%n -> ddd : day of year (001-366)
%W -> wwww : gps week (0001-9999)
%D -> d : day of gps week (0-6)
%N -> d : sequence number (0- )
%s -> ssss : station name (lower-case)
%S -> SSSS : station name (upper-case)
%r -> rrrr : station name
%{env} -> env : environment variable
(3)Defaultlocal
directory
IfthelocaldirectoryisnotspecifiedinRTKGET,thedownloaded
filesaresavedinthedirectory.Thedirectorypathcancontain
keywordassameasURLaddress.
RTKLIBver.2.4.2Manual
113
EXAMPLE
#--------------------------------------------------------------------------------------
# data type url Address default local dir
#--------------------------------------------------------------------------------------
#! PRODUCT (CDDIS)
IGS_EPH ftp://cddis.gsfc.nasa.gov/gps/products/%W/igs%W%D.sp3.Z c:\product\%W
IGS_EPH_GLO ftp://cddis.gsfc.nasa.gov/gps/products/%W/igl%W%D.sp3.Z c:\product\%W
IGS_CLK ftp://cddis.gsfc.nasa.gov/gps/products/%W/igs%W%D.clk.Z c:\product\%W
IGS_CLK_30S ftp://cddis.gsfc.nasa.gov/gps/products/%W/igs%W%D.clk_30s.Z c:\product\%W
IGS_ERP ftp://cddis.gsfc.nasa.gov/gps/products/%W/igs%W7.erp.Z c:\product\%W
IGR_EPH ftp://cddis.gsfc.nasa.gov/gps/products/%W/igr%W%D.sp3.Z c:\product\%W
IGR_CLK ftp://cddis.gsfc.nasa.gov/gps/products/%W/igr%W%D.clk.Z c:\product\%W
IGR_ERP ftp://cddis.gsfc.nasa.gov/gps/products/%W/igr%W%D.erp.Z c:\product\%W
IGU_EPH ftp://cddis.gsfc.nasa.gov/gps/products/%W/igu%W%D_%h.sp3.Z c:\product\%W
IGU_ERP ftp://cddis.gsfc.nasa.gov/gps/products/%W/igu%W%D_%h.erp.Z c:\product\%W
IGS_POS ftp://cddis.gsfc.nasa.gov/gps/products/%W/igs%yP%W.snx.Z c:\product\%W
IGS_TEC ftp://cddis.gsfc.nasa.gov/gps/products/ionex/%Y/%n/igsg%n0.%yi.Z c:\product\%W
IGR_TEC ftp://cddis.gsfc.nasa.gov/gps/products/ionex/%Y/%n/igrg%n0.%yi.Z c:\product\%W
...
RTKLIBver.2.4.2Manual
114
Appendix C API References
ThefollowingtableshowsthelistofRTKLIBlibraryfunctions.FordetailedAPI(callingconvention,
descriptionofthefunction,inputandoutputparametersandtypes,returnvalueandtype)foralibrary
function,refertheheadercommentofeachfunctioninthesourceprogramin<install
dir>\rtklib_<ver>\src.ThedefinitionofdatatypesregardingtotheAPIs,refertheheaderfile
rtklib.hin<install dir>\rtklib_<ver>\src.
ThedetailedspecificationsandsomeexamplesofAPIusageswillbealsoprovidedasRTKLIBAPI
ReferenceManual.
TableC‐1RTKLIBAPIfunctionList(*:addedinver.2.4.2, **:modifiedinver.2.4.2)
FunctionDescriptionSourceProgram
Satellitenumber/systemfunctions
satno() SatellitesystemandPRN/slotnumbertosatellitenumber rtkcmn.c
satsys() Satellitenumbertosatellitesystemrtkcmn.c
satid2no() SatelliteIDtosatellitenumberrtkcmn.c
satno2id() SatellitenumbertosatelliteID rtkcmn.c
obs2code() Observationtypestringtoobservationcode rtkcmn.c **
code2obs() Observationcodetoobservationcodestring rtkcmn.c **
satexclude() Testexcludedsatellitesrtkcmn.c *
testsnr() TestSNRmaskrtkcmn.c *
setcodepri() Setcodepriorityformultiplecodesrtkcmn.c *
getcodepri() Getcodepriorityformultiplecodesrtkcmn.c *
Matrixandvectorfunctions
mat() Newmatrixrtkcmn.c
imat() Newintegermatrixrtkcmn.c
zeros() Newzeromatrixrtkcmn.c
eye() Newidentitymatrixrtkcmn.c
dot() InnerProductrtkcmn.c
norm() Euclidnormrtkcmn.c
cross3() Outerproductof3Dvectorsrtkcmn.c
normv3() Normalize3Dvectorrtkcmn.c
matcpy() Copymatrixrtkcmn.c
matmul() Multiplymatrixrtkcmn.c
matinv() Inverseofmatrixrtkcmn.c
solve() Solvelinearequationrtkcmn.c
lsq() Leastsquareestimationrtkcmn.c
filter() Kalmanfilterstateupdatertkcmn.c
smoother() Kalmansmoother rtkcmn.c
matprint() Printmatrixrtkcmn.c
matfprint() Printmatrixtofilertkcmn.c
Timeandstringfunctions
RTKLIBver.2.4.2Manual
115
FunctionDescriptionSourceProgram
str2num() Stringtonumberrtkcmn.c
str2time() Stringtotimertkcmn.c
time2str() Timetostringrtkcmn.c
epoch2time() Calendarday/timetotimertkcmn.c
time2epoch() Timetocalendarday/timertkcmn.c
gpst2time() GPSweek/TOWtotimertkcmn.c
time2gpst() TimetoGPSweek/TOWrtkcmn.c
gst2time() GSTweek/TOWtotimertkcmn.c
time2gst() TimetoGSTweek/TOWrtkcmn.c
bdt2time() BDTweek/TOWtotimertkcmn.c *
time2bdt() TimetoBDTweek/TOWrtkcmn.c *
time_str() GetTimeStringrtkcmn.c
timeadd() Addtimertkcmn.c
timediff() Timedifferencertkcmn.c
gpst2utc() GPSTimetoUTCrtkcmn.c
utc2gpst() UTCtoGPSTimertkcmn.c
gpst2bdt() GPSTimetoBDTrtkcmn.c *
bdt2gpst() BDTtoGPSTimertkcmn.c *
timeget() GetcurrenttimeinUTCrtkcmn.c
timeset() SetcurrenttimeinUTCrtkcmn.c
time2doy() TimetoDayofYearrtkcmn.c
utc2gmst() UTCtoGreenwichMeanSiderealTimertkcmn.c *
adjgpsweek() AdjustGPSweeknumberrtkcmn.c
tickget() Getcurrentticktimertkcmn.c
sleepms() Sleepformillisecondsrtkcmn.c
reppath() Replacefilepathrtkcmn.c
reppaths() Replacefilepathsrtkcmn.c
Coordinatesfunctions
ecef2pos() ECEFtogeodeticpositionrtkcmn.c
pos2ecef() GeodetictoECEFpositionrtkcmn.c
ecef2enu() ECEFtolocalcoordinatesrtkcmn.c
enu2ecef() LocaltoECEFcoordinatesrtkcmn.c
covenu() Covarianceinlocalcoordinatesrtkcmn.c
covecef() CovarianceinECEFcoordinatesrtkcmn.c
xyz2enu() ECEFtoENUlocalcoordinatetransformationmatrixrtkcmn.c
eci2ecef() ECItoECEFtransformationmatrixrtkcmn.c **
deg2dms() Convertdegreetodeg‐min‐secrtkcmn.c
dms2deg() Convertdeg‐min‐sectodegreertkcmn.c
Input/outputfunctions
readpos() Readstationpositionsrtkcmn.c
sortobs() Sortobservationdatartkcmn.c
uniqnav() Deleteduplicatedephemeridesinnavigationdatartkcmn.c
screent() Screendatabytimeandintervalrtkcmn.c
readnav() Readnavigationdatafromfilertkcmn.c
savenav() Savenavigationdatatofilertkcmn.c
freeobs() Freememoryforobservationdatartkcmn.c
freenav() Freememoryfornavigationdatartkcmn.c
Debugtracefunctions
RTKLIBver.2.4.2Manual
116
FunctionDescriptionSourceProgram
traceopen() Opentracefilertkcmn.c
traceclose() Closetracefilertkcmn.c
trace() Outputtracertkcmn.c
tracet() Outputtracewithtimetagrtkcmn.c
tracemat() Outputtraceasmatrixprintingrtkcmn.c
traceobs() Outputtraceasobservationdataprintingrtkcmn.c
traceonav() OutputtraceasGPSnavigationmessagesrtkcmn.c
tracegnav() OutputtraceasGLONASSnavigationmessagesrtkcmn.c
tracehnav() OutputtraceasGEOnavigationmessagesrtkcmn.c
tracepeph() Outputtraceaspreciseephemerisrtkcmn.c
tracepclk() Outputtraceaspreciseclockrtkcmn.c
traceb() Outputtraceasbinarydumprtkcmn.c
Platformdependentfunctions
execcmd() Executecommandrtkcmn.c
expath() Expandfilepathrtkcmn.c
createdir() Createdirectoryrtkcmn.c
Positioningmodels
satwavelen() Satellitesignalcarrierwavelengthrtkcmn.c
satazel() Satelliteazimuth/elevationanglertkcmn.c
geodist() Geometricdistancertkcmn.c
dops() ComputeDOPsrtkcmn.c
csmooth() Carriersmoothingrtkcmn.c
Atmospheremodels
ionmodel() Ionosphericmodelrtkcmn.c
ionmapf() Ionosphericmappingfunctionrtkcmn.c
ionppp() Ionosphericpiercepointpositionrtkcmn.c
tropmodel() Troposphericmodelrtkcmn.c
tropmapf() Troposphericmappingfunctionrtkcmn.c
iontec() IonospheremodelbyTECgriddataionex.c
readtec() ReadIONEXTECgridfileionex.c
ionocorr() Ionospherecorrectionpntpos.c
tropcorr() Tropospherecorrectionpntpos.c
Antennamodels
readpcv() Readantennaparametersrtkcmn.c
searchpcv() Searchantennaparametersrtkcmn.c
antmodel() Receiverantennamodelrtkcmn.c **
antmodel_s() Satelliteantennamodelrtkcmn.c
Earthtidesmodels
sunmoonpos() Sunandmoonpositionrtkcmn.c **
tidedisp() Displacementsbyearthtidesppp.c
Geoidmodel
opengeoid() Openexternalgeoidfilegeoid.c
closegeoid() Closeexternalgeoidfilegeoid.c
geoidh() Geoidheightgeoid.c
Datumtransformation
loaddatump() Loaddatumtransformationparameterdatum.c
RTKLIBver.2.4.2Manual
117
FunctionDescriptionSourceProgram
tokyo2jgd() TokyodatumtoJGD2000datumdatum.c
jgd2tokyo() JGD2000datumtoTokyodatumdatum.c
RINEXfunctions
readrnx() ReadRINEXfilerinex.c **
readrnxt() ReadRINEXfileintimerange/intervalrinex.c **
readrnxc() ReadRINEXclockfilerinex.c
outrnxobsh() OutputRINEXOBSheaderrinex.c **
outrnxobsb() OutputRINEXOBSbodyrinex.c
outrnxnavh() OutputRINEXNAVheaderrinex.c
outrnxgnavh() OutputRINEXGLONASSNAVheaderrinex.c
outrnxhnavh() OutputRINEXGEONAVheaderrinex.c
outrnxlnavh() OutputRINEXGalileoNAVheaderrinex.c
outrnxqnavh() OutputRINEXQZSSNAVheaderrinex.c
outrnxcnavh() OutputRINEXBeiDouNAVheaderrinex.c *
outrnxnavb() OutputRINEXNAVbodyrinex.c
outrnxgnavb() OutputRINEXGLONASSNAVbodyrinex.c
outrnxhnavb() OutputRINEXGEONAVbodyrinex.c
uncompress() Uncompressfilerinex.c
init_rnxctr() InitializeRINEXcontrolrinex.c *
free_rnxctr() FreeRINEXcontrolrinex.c *
open_rnxctr() OpenRINEXcontrolrinex.c *
input_rnxctr() InputnextRINEXdatabyRINEXcontrolrinex.c *
convrnx() RINEXconverterconvrnx.c
Ephemerisfunctions
eph2clk() Broadcastephemeristosatelliteclock‐biasephemeris.c
geph2clk() GLONASSephemeristosatelliteclock‐biasephemeris.c
seph2clk() GEOephemeristosatelliteclock‐biasephemeris.c
eph2pos() Broadcastephemeristosatelliteposition/clock‐biasephemeris.c
geph2pos() GLONASSephemeristosatelliteposition/clock‐biasephemeris.c
seph2pos() GEOephemeristosatelliteposition/clock‐biasephemeris.c
peph2pos() Preciseephemeristosatelliteposition/clock‐biaspreceph.c
satantoff() Satelliteantennaphasecenteroffsetephemeris.c
satpos() Satelliteposition/clock‐biasephemeris.c
satposs() Satellitepositions/clock‐biasesephemeris.c
readsp3() ReadSP3filepreceph.c **
readsap() Readsatelliteantennaphasecenterparameterspreceph.c
readdcb() ReadDCBparameterspreceph.c
alm2pos() Almanactosatelliteposition/clock‐biaspreceph.c
tle_read() ReadTLEdatafiletle.c *
tle_name_read() ReadTLEsatellitenamefiletle.c *
tle_pos() SatellitepositionandvelocitywithTLEdatatle.c *
Receiverrawdatafunctions
getbitu() Extractunsignedbits rtkcmn.c
getbits() Extractsignedbits rtkcmn.c
setbitu() Setunsignedbits rtkcmn.c *
setbits() Setsignedbits rtkcmn.c *
crc32() CRC32parityrtkcmn.c
crc24q() CRC24Qparityrtkcmn.c
RTKLIBver.2.4.2Manual
118
FunctionDescriptionSourceProgram
crc16() CRC16parityrtkcmn.c *
decode_word() Decodenavigationdataword rcvraw.c
decode_frame() Decodenavigationdataframe rcvraw.c
init_raw() Initializereceiverrawdatacontrol rcvraw.c
free_raw() Freereceiverrawdatacontrol rcvraw.c
input_raw() Inputreceiverrawdatafromstream rcvraw.c
input_rawf() Inputreceiverrawdatafromfile rcvraw.c
Receiverdependentfunctions
input_oem4() InputOEM4/Vrawdatafromstream rcv/novatel.c
input_oem3() InputOEM3rawdatafromstreamrcv/novatel.c
input_ubx() Inputu‐bloxrawdatafromstreamrcv/ublox.c
input_ss2() InputSuperstarIIrawdatafromstreamrcv/ss2.c
input_cres() InputCrescentrawdatafromstreamrcv/crescent.c
input_stq() InputSkyTraqrawdatafromstreamrcv/skytraq.c
input_gw10() InputFurunoGW‐10‐II/IIIrawdatafromstreamrcv/gw10.c
input_javad() InputJAVADGRIL/GREISrawdatafromstreamrcv/javad.c
input_nvs() InputNVSBINRrawdatafromstreamrcv/nvs.c *
input_binex() InputBINEXdatafromstreamrcv/binex.c *
input_oem3f() InputOEM3rawdatafromfilercv/novatel.c
input_oem4f() InputOEM4/Vrawdatafromfilercv/novatel.c
input_ubxf() Inputu‐bloxrawdatafromfilercv/ublox.c
input_ss2f() InputSuperstarIIrawdatafromfilercv/ss2.c
input_cresf() InputCrescentrawdatafromfilercv/crescent.c
input_stqf() InputSkyTraqrawdatafromfilercv/skytraq.c
input_gw10f() InputFurunoGW‐10‐II/IIIrawdatafromfilercv/gw10.c
input_javadf() InputJAVADGRIL/GREISrawdatafromfilercv/javad.c
input_nvsf() InputNVSBINRrawdatafromfilercv/nvs.c *
input_binexf() InputBINEXdatafromfilercv/binex.c *
gen_ubx() Generateu‐bloxbinarycommandrcv/ublox.c
gen_stq() GenerateSkyTraqbinarycommandrcv/skytraq.c
gen_nvs() GenerateNVSBINRbinarycommandrcv/nvs.c *
RTCMfunctions
init_rtcm() InitializeRTCMcontrolrtcm.c
free_rtcm() FreeRTCMcontrolrtcm.c
input_rtcm2() InputRTCM2messagefromstream rtcm.c
input_rtcm3() InputRTCM3messagefromstream rtcm.c
input_rtcm2f() InputRTCM2messagefromfile rtcm.c
input_rtcm3f() InputRTCM3messagefromfile rtcm.c
gen_rtcm2() GenerateRTCM2message rtcm.c *
gen_rtcm3() GenerateRTCM3message rtcm.c *
Solutionfunctions
initsolbuf() Initializesolutionbuffersolution.c
freesolbuf() Freesolutionbuffersolution.c
freesolstatbuf() Freesolutionstatusbuffersolution.c
getsol() Getsolutiondatafromsolutionbuffersolution.c
addsol() Addsolutiondatatosolutionbuffersolution.c
readsol() Readsolutiondatafromsolutionsfilessolution.c
readsolt() Readsolutiondataintimerange/intervalsolution.c
readsolstat() Readsolutionstatusfromfilesolution.c

RTKLIBver.2.4.2Manual
119
FunctionDescriptionSourceProgram
readsolstatt() Readsolutionstatusintimerange/intervalsolution.c
inputsol() Inputsolutiondatafromstreamsolution.c
outprcopts() Outputprocessingoptionstostringsolution.c
outsolheads() Outputsolutionheadertostringsolution.c
outsols() Outputsolutionbodytostringsolution.c
outsolexs() Outputextendedsolutiontostringsolution.c
outprcopt() Outputprocessingoptionstofilesolution.c
outsolhead() Outputsolutionheadertofilesolution.c
outsol() Outputsolutionbodytofilesolution.c
outsolex() Outputextendedsolutiontofilesolution.c
outnmea_rmc() OutputNMEAGPRMCsentencesolution.c
outnmea_gga() OutputNMEAGPGGAsentencesolution.c
outnmea_gsa() OutputNMEAGPGSA,GLGSA,GAGSAsentencessolution.c
outnmea_gsv() OutputNMEAGPGSV,GLGSV,GAGSVsentencessolution.c
ConvertsolutionstoGoogleEarthKMLfile
convkml() ConvertsolutionstoGoogleEarthKMLfileconvkml.c
SBASfunctions
sbsreadmsg() ReadSBASmessagefilesbas.c
sbsreadsmgt() ReadSBASmessagefileintimerangesbas.c
sbsoutmsg() OutputSBASmessagessbas.c
sbsdecodemsg() DecodeSBASmessagesbas.c
sbsupdatecorr() UpdateSBAScorrectionssbas.c
sbssatcorr() SBASsatellitecorrectionsbas.c
sbsioncorr() SBASionosphericcorrectionsbas.c
sbstropcorr() SBAStroposphericcorrectionsbas.c
Optionsfunctions
searchopt() Searchoptionoptions.c
str2opt() Stringtooptionvalueoptions.c
opt2str() Optionvaluetostringoptions.c
opt2buf() Optiontostringoptions.c
loadopts() Loadoptionsfromfileoptions.c
saveopts() Saveoptionstofileoptions.c
resetsysopts() Resetsystemoptionstodefaultoptions.c
getsysopts() Getsystemoptionsoptions.c
setsysopts() Setsystemoptionsoptions.c
Streamdatainput/outputfunctions
strinitcom() Initializestreamcommunicationenvironmentstream.c
strinit() Initializestreamstream.c
strlock() Lockstreamstream.c
strunlock() Unlockstreamstream.c
stropen() Openstreamstream.c
strclose() Closestreamstream.c
strread() Readstreamstream.c
strwrite() Writestreamstream.c
strsync() Timesyncstreamstream.c
strstat() Getstreamstatusstream.c
strsum() Getstreamstatisticssummarystream.c
strsetopt() Setstreamoptionsstream.c
RTKLIBver.2.4.2Manual
120
FunctionDescriptionSourceProgram
strgettime() Getcurrenttimefromstreamstream.c
strsendnmea() SendNMEAmessagetostreamstream.c
strsendcmd() Sendreceivercommandtostreamstream.c
strsettimeout() Setstreamtimeoutparametersstream.c
strsetdir() Setlocaldirectorystream.c
strsetproxy() Setproxyaddressstream.c
Integerambiguityresolution
lambda() LAMBDA/MLAMBDAintegerleast‐squareestimationlambda.c
Standardpositioning
pntpos() Standardpositioningpntpos.c
Precisepositioning
rtkinit() InitializeRTKcontrolstructrtkpos.c
rtkfree() FreeRTKcontrolstructrtkpos.c
rtkpos() Precisepositioningrtkpos.c
rtkopenstat() Opensolutionstatusfilertkpos.c
rtkclosestat() Closesolutionstatusfilertkpos.c
Precisepointpositioning
pppos() Precisepointpositioning(PPP)ppp.c *
pppnx() NumberofestimatedstatesforPPPppp.c *
pppoutsolstat() OutputsolutionstatisticsforPPPppp.c *
windupcorr() Phasewindupcorrectionrtkcmn.c *
pppamb() ResolveintegerambiguityforPPPppp_ar.c *
Post‐processingpositioning
postpos() Post‐processingpositioningpostpos.c
Streamserverfunctions
strsvrinit() Initializestreamserverstreamsvr.c
strsvrstart() Startstreamserverstreamsvr.c **
strsvrstop() Stopstreamserverstreamsvr.c
strsvrstat() Getstreamserverstatusstreamsvr.c
strconvnew() Generatestreamconverter streamsvr.c *
strconvfree() Freestreamconverterstreamsvr.c *
RTKserverfunctions
rtksvrinit() InitializeRTKserverrtksvr.c
rtksvrstart() StartRTKserverrtksvr.c
rtksvrstop() StopRTKserverrtksvr.c
rtksvropenstr() Openoutput/logstreamrtksvr.c
rtksvrclosestr() Closeoutput/logstreamrtksvr.c
rtksvrlock() LockRTKserverrtksvr.c
rtksvrunlock() UnlockRTKserverrtksvr.c
rtksvrostat() GetRTKobservationdatastatusrtksvr.c
rtksvrsstat() GetRTKstreamstatusrtksvr.c
Downloaderfunctions
dl_readurls() ReadURLaddresslistfileofGNSSdatadownload.c *
dl_readstas() Readstationlistfilefordownloaddownload.c *
RTKLIBver.2.4.2Manual
121
FunctionDescriptionSourceProgram
dl_exec() ExecutedownloadofGNSSdatadownload.c *
dl_test() ExecutelocalfiletestofGNSSdatadownload.c *
QZSSLEXfunctions
lexupdatecorr() UpdateLEXcorrectionsqzslex.c *
lexreadmsg() ReadLEXmessagelogfileqzslex.c *
lexoutmsg() OutputLEXmessagelogqzslex.c *
lexconvbin() ConvertLEXbinarytoLEXmessagelogqzslex.c *
lexeph2pos() LEXsatelliteephemerisandclockcorrectionqzslex.c *
lexioncorr() LEXionospherecorrectionqzslex.c *
RTKLIBver.2.4.2Manual
122
Appendix D Files and Messages
D.1 Supported RINEX Files
SupportedRINEXversionsandfilesbyRTKLIBareshowninthefollowingtable.
RINEX
Version
ObservationDataNavigationMessages
Met.CLKGEO
BRDC
G R E J C S G R E J C S
2.10O O O* O* O* O N G N* N* - H - - -
2.11O O O O* O* O N G N* N* - H - - -
2.12O O O O* O O N G N N* - H - - -
3.00O O O O* O* O N N N N* N* N - C** -
3.01O O O O* O O N N N N* N* N - C** -
3.02O O O O O O N N N N N N - C** -
G:GPS,R:GLONASS,E:Galileo,J:QZSS,C:BeiDou,S:SBAS
-: notsupported, O,N,G,H:supportedasRINEXfiletype
*RTKLIBextensions(QZSSextensionsarebasedonJAXA[60][61]),**readonly,
RTKLIBver.2.4.2Manual
123
D.2 Supported Receiver Messages
SupportedRTCM2,RTCM3,BINEXandreceiversʹ proprietarymessagesbyRTKLIBareshowninthe
followingtable.
Format
DataMessageTypes
RawObservation
Data
Satellite
Ephemerides
ION/UTC
Parameters
Antenna
Info
SBAS
MessagesOthers
RTCM2
[16]18,19 17 - 3,22 -
1*,9*,
14,16
RTCM3
[17][18]see below see below - see
below - see below
BINEX
[19]
**
0x7f-05
(Trimble NetR8)
0x01
-
0
1,
0x01-02,
0x01-03,
0x01-04,
0x01-06
- - - -
NovAtel
OEM4/V/6
[41][42]
RANGEB,
RANGECMPB
RAWEPHEMB
,
GLO-
EPHEMERISB,
QZSS-
RAWEPHEMB,
GAL-
EPHEMERISB
IONUTCB,
QZSS-
IONUTCB,
GALIONOB,
GALCLOCKB
-
RAWWAAS-
FRAMEB,
RAWSBAS-
FRAMEB,
QZSSRAW-
SUBFRAMEB
-
NovAtel
OEM3
[43]
RGEB,
RGED REPB IONB,
UTCB - FRMB -
u‐blox
LEA‐4T/5T/
6T[44]
UBX
RXM-RAW
UBX
RXM-SFRB
UBX
RXM-SFRB - UBX
RXM-SFRB -
NovAtel
SuperstarII
[45]
ID#23 ID#22 - - ID#67
ID#20,
ID#21
Hemisphere
Crescent,
Eclipse
[46][47]
bin 96,
bin 76 bin 95 bin 94 - bin 80 -
SkyTraq
S1315F
[48][49]
msg 0xDD
(221)
msg 0xE0
(224)
msg 0xE0
(224) - -
msg 0xDC
(220)
Furuno
GW‐10‐II/III
[50]
msg 0x08 msg 0x27 msg 0x27 - msg 0x27 msg 0x20
JAVAD
GRIL/GRIES
[51][52][53][54]
[RC],[rc],[CR],
[cr],[PC],[pc],
[CP],[cp],[DC],
[cd],[EC],[CE],
[FC],[R1],[r1],
[1R],[1r],[P1],
[p1],[1P],[1p],
[D1],[1d],[E1],
[1E],[F1],[R2],
[GE],[NE],
[EN],[WE],
[QE]
[UO],[NU],
[EU],[WU],
[QU],[IO]
- [WD]
[~~],[::]
,
[RD],[ST]
,
[NN]
RTKLIBver.2.4.2Manual
124
Format
DataMessageTypes
RawObservation
Data
Satellite
Ephemerides
ION/UTC
Parameters
Antenna
Info
SBAS
MessagesOthers
[r2],[2R],[2r],
[P2],[p2],[2P],
[2p],[D2],[2d],
[E2],[2E],[F2],
[R3],[r3],[3R],
[3r],[P3],[p3],
[3P],[3p],[D3],
[3d],[E3],[3E],
[F3],[R5],[r5],
[5R],[5r],[P5],
[p5],[5P],[5p],
[D5],[5d],[E5],
[5E],[F5],[Rl],
[rl],[lR],[lr],
[Pl],[pl],[lP],
[lp],[Dl],[ld],
[El],[lE],[Fl],
[TC]
NVS
NV08C
[55][56]
msg F5h msg F7h msg 4Ah,
msg 4Bh - - -
*Onlysupporttoread,DGPScorrectionisnotsupported
**Onlybig‐endian,forwardandregularCRCmessages
SupportedRTCM3MessageTypes
------------------------------------------------------------------------------
Message GPS GLOASS Galileo QZSS BeiDou SBAS
------------------------------------------------------------------------------
OBS Compact L1 1001~ 1009~ - - - -
Full L1 1002 1010 - - - -
Compact L1/2 1003~ 1011~ - - - -
Full L1/2 1004 1012 - - - -
Ephemeris 1019 1020 1045* 1044* - -
- - 1046* - - -
MSM 1 1071~ 1081~ 1091~ 1111*~ 1121*~ 1101*~
2 1072~ 1082~ 1092~ 1112*~ 1122*~ 1102*~
3 1073~ 1083~ 1093~ 1113*~ 1123*~ 1103*~
4 1074 1084 1094 1114* 1124* 1104*
5 1075 1085 1095 1115* 1125* 1105*
6 1076 1086 1096 1116* 1126* 1106*
7 1077 1087 1097 1117* 1127* 1107*
SSR Orbit Corr. 1057 1063 1240* 1246* - -
Clock Corr. 1058 1064 1241* 1247* - -
Code Bias 1059 1065 1242* 1248* - -
Combined 1060 1066 1243* 1249* - -
URA 1061 1067 1244* 1250* - -
HR-Clock 1062 1068 1245* 1251* - -
Antenna Info 1005 1006 1007 1008 1033
------------------------------------------------------------------------------
* draft, ~ only encode
RTKLIBver.2.4.2Manual
125
D.3 Supported Signal IDs/Observation Types
SupportedsignalIDs/observationtypesbyRTKLIBareshowninthefollowingtable.Thetablealsoindicate
thecorrespondentRINEX2andRINEX3observationtypes,RTCM3MSMsignalIDsandBINEX
observationcodeIDs.ForRTCM2,RTCM3andRINEXtoRINEXconversionbyRTKCONVand
CONVBIN,RTCM2andBINEXtoRTCM3conversionbySTRSVRandSTR2STR,thetableisusedaswell.
SystemFreq.ChannelorCodeSignal
ID
RINEX2
*1
RINEX3
*2
RTCM3
*3
BINEX
*4
GPS
L1
C/A1C C1/CA* 1C 2 0,1
L1C(D)1S - 1S 30 -
L1C(P)1L - 1L 31 -
L1C(D+P)1X CB* 1X 32 6
P1P - 1P 3 2
Z‐trackingand
similar(ASon)1W P1/C1* 1W 4 3
Y1Y - 1Y 5 4
M1M - 1M 6 5
codeless1N - 1N - 7
L2
C/A2C - 2C 8 11
L1(C/A)+(P2‐P1)
(semi‐codeless)2D - 2D - 12
L2C(M)2S - 2S 15 13
L2C(L)2L - 2L 16 14
L2C(M+L)2X C2/CC* 2X 17 15
P2P - 2P 9 16
Z‐trackingand
similar(ASon)2W P2 2W 10 10,17
Y2Y - 2Y 11 18
M2M - 2M 12 19
codeless2N - 2N - 20
L5
I5I - 5I 22 24
Q5Q - 5Q 23 25
I+Q5X C5 5X 24 23,26
GLONASS
G1C/A1C C1/CA* 1C 2 0,1
P1P P1/C1* 1P 3 2
G2C/A2C C2/CD* 2C 8 10,11
P2P P2 2P 9 12
G3
I3I - 3I 11 14
Q3Q - 3Q 12 15
I+Q3X - 3X 13 13,16
GalileoE1
APRS1A - 1A 3 1
BI/NAVOS/CS/SoL 1B - 1B 4 2
C1C - 1C 2 0,3
B+C1X C1 1X 5 4
A+B+C1Z - 1Z 6 5
E5aIF/NAVOS5I - 5I 22 7
RTKLIBver.2.4.2Manual
126
SystemFreq.ChannelorCodeSignal
ID
RINEX2
*1
RINEX3
*2
RTCM3
*3
BINEX
*4
Qnodata5Q - 5Q 23 8
I+Q5X C5 5X 24 6,9
E5b
II/NAVOS/CS/SoL7I - 7I 14 11
Qnodata7Q - 7Q 15 12
I+Q7X C7 7X 16 10,13
E5a+E5b
I8I - 8I 18 15
Q8Q - 8Q 19 16
I+Q8X C8 8X 20 14,17
E6
APRS6A - 6A 9 19
BC/NAVCS6B - 6B 10 20
Cnodata6C - 6C 8 21
B+C6X C6 6X 11 18,22
A+B+C6Z - 6Z 12 23
QZSS
L1
C/A1C C1/CA* 1C 2 0,1
L1C(D)1S - 1S 30 2
L1C(P)1L - 1L 31 3
L1C(D+P)1X CB* 1X 32 4
L1‐SAIF1Z - 1Z 6 30
L2
L2C(M)2S - 2S 15 8
L2C(L)2L - 2L 16 9
L2C(M+L)2X C2/CC* 2X 17 7,10
L5
I5I - 5I 22 14
Q5Q - 5Q 23 15
I+Q5X - 5X 24 13,16
LEX
S6S - 6S 9 20
L6L - 6L 10 21
S+L6X C6 6X 11 19,22
BeiDou
B1
I2I - 2I 2 1
Q2Q - 2Q 3 2
I+Q2X C2 2X 4 0,3
B2
I7I - 7I 14 5
Q7Q - 7Q 15 6
I+Q7X C7 7X 16 4,7
B3
I6I - 6I 8 9
Q6Q - 6Q 9 10
I+Q6X C6 6X 10 8,11
SBAS
L1C/A1C C1/CA* 1C 2 0,1
L5
I5I - 5I 22 7
Q5Q - 5Q 23 8
I+Q5X C5 5X 24 6,9
*1pseudorangeOBSTYPE[9][10][11][12][13][14],*2[12][13][14],*3RTCMMSMsignalID[18],
*4BINEXobservationcodeIDformessage0x7f‐05[19],*RINEX2.12
RTKLIBver.2.4.2Manual
127
D.4 Default Priorities of Multiple Signals
Ifinputobservationdatacontainmultiplesignalsinafrequency,RTKLIBselectsasignalforprocessingby
thefollowingdefaultpriorities.Toselectappropriatesignal,useRINEXoptionsorreceiverdependent
optionsdescribedinAppendixD.5.InuserAPs,tochangeorobtainthesignalpriorities,useAPI
setcodepri() orgetcodepri().
SystemFreq.SignalPriority(1:highest>10:lowest) *
12345678910
GPS
L11C 1P 1Y 1W 1M 1N 1S 1L
L22P 2Y 2W 2C 2M 2N 2D 2S 2L 2X
L55I 5Q 5X
GLONASS
G11P 1C
G22P 2C
G33I 3Q 3X
Galileo
E11C 1A 1B 1X 1Z
E5a5I 5Q 5X
E5b7I 7Q 7X
E5a+E5b8I 8Q 8X
E66A 6B 6C 6X 6Z
QZSS
L11C 1S 1L 1X 1Z
L22S 2L 2X
L55I 5Q 5X
LEX6S 6L 6X
BeiDou
B12I 2Q 2X
B27I 7Q 7X
B36I 6Q 6X
SBASL11C
L55I 5Q 5X
*ReferAppendixD.3forsignalIDs,
RTKLIBver.2.4.2Manual
128
D.5 Receiver Dependent Input Options
FormatOptionDescription
RTCM2- -
RTCM3
-EPHALL Input all of ephemerides
-STA=nnn Input only messages with STAID=nnn
-GLss Select signal ss for GPS MSM (ss=1C,1P...) * **
-RLss Select signal ss for GLO MSM (ss=1C,1P...) * **
-ELss Select signal ss for GAL MSM (ss=1C,1B...) * **
-JLss Select signal ss for QZS MSM (ss=1C,2C...) * **
-CLss Select signal ss for BDS MSM (ss=2I,7I...) * **
BINEX
-EPHALL Input all of ephemerides
-GLss Select signal ss for GPS (ss=1C,1P...) * **
-RLss Select signal ss for GLO (ss=1C,1P...) * **
-ELss Select signal ss for GAL (ss=1C,1B...) * **
-JLss Select signal ss for QZS (ss=1C,2C...) * **
-CLss Select signal ss for BDS (ss=2I,7I...) * **
NovAtelOEM4/V/6
-EPHALL Input all of ephemerides
-GL1P Select 1P for GPS L1 (default 1C) *
-GL2X Select 2X for GPS L2 (default 2W) *
-RL2C Select 2C for GLO L2 (default 2P) *
-EL2C Select 2C for GAL L2 (default 2C) *
NovAtelOEM3- -
u‐bloxLEA‐4T/5T/6T
-EPHALL Input all of ephemerides
-INVCP Invert polarity of carrier-phase
-TADJ=tint Adjust time tags to multiples of tint (sec)
NovAtelSuperstarII- -
Hemisphere
Crescent/Eclipse-EPHALL Input all of ephemerides
SkyTraqS1315F-INVCP Invert polarity of carrier-phase
FurunoGW‐10‐II/III-EPHALL Input all of ephemerides
JAVADGRIL/GRIES
-EPHALL Input all of ephemerides
-GL1W Select 1W for GPS L1 (default 1C) *
-GL1X Select 1X for GPS L1 (default 1C) *
-GL2X Select 2X for GPS L2 (default 2W) *
-RL1C Select 1C for GLO L2 (default 1P) *
-RL2C Select 2C for GLO L2 (default 2P) *
-JL1Z Select 1Z for QZS L1 (default 1C) *
-JL1X Select 1X for QZS L1 (default 1C) *
-NOET Discard epoch time message ET (::)
NVSNV08CBINR-EPHALL Input all of ephemerides
-TADJ=tint Adjust time tags to multiples of tint (sec)
*ReferAppendixD.3forsignalIDs,**ReferAppendixD.4fordefaultsignalpriority
RTKLIBver.2.4.2Manual
129
Appendix E Models and Algorithms
ThisappendixbrieflydescribesthemodelsandalgorithmsinvolvedinRTKLIB.Thecommonacronyms
usedformodelsorequationsintheappendixareshownasfollows.
c :speedoflight(m/s)
,
s
ri
P
:i
Lpseudorangemeasurementofsignal(m)
,
s
ri
D
:i
LDopplerfrequencymeasurementofsignal(Hz)
,
s
ri
:i
Lcarrier‐phasemeasurementofsignal(cycle)
,
s
ri
:i
Lphase‐rangemeasurementofsignal(m)
r
t :navigationsignalreceptiontimeatreceiver(s)
s
t :navigationsignaltransmissiontimeatsatellite(s)
s
r
:geometricrangebetweensatelliteandreceiverantennas(m)
s
r
r :range‐ratebetweensatelliteandreceiverantennas(m/s)
()
str:satellitepositionattimetinECEF(m)
()
stv:satellitevelocityattimetinECEF(m)
()
rtr:receiverantennapositionattimetinECEF(m)
()
rtv:receiverantennavelocityattimetinECEF(m/s)
s
r
e :LOSvectorfromreceiverantennatosatelliteinECEF
,
s
renu
e:LOSvectorfromreceiverantennatosatelliteinlocalcoordinates
r
E
:coordinatesrotationmatrixfromECEFtolocalcoordinatesatreceiverantennaposition
s
E
:coordinatesrotationmatrixfromECEFtosatellitebody‐fixedcoordinates
r
:latitudeofreceiverantennaposition(rad)
r
-
:longitudeofreceiverantennaposition(rad)
s
r
A
z :azimuthangleofsatellitedirection(rad)
s
r
E
l :elevationangleofsatellitedirection(rad)
()
r
dt t :receiverclockbiasattimet(s)
()
r
dt t
:receiverclockdriftattimet(s/s)
()
s
dT t :satelliteclockbiasattimet(s)
()
s
dT t
:satelliteclockdriftattimet(s/s)
s
r
T :troposphericdelay(m)
,
s
ri
I :i
Lionosphericdelay(m)
i
f
:i
Lcarrierfrequency(Hz)
i
-
:i
Lcarrierwavelength(m)
,
s
ri
B
:i
Lcarrier‐phasebias(cycle)
RTKLIBver.2.4.2Manual
130
,
s
ri
N :i
Lcarrier‐phaseintegerambiguity(cycle)
P
:measurementerrorsofpseudorange(m)
:measurementerrorsofcarrier‐phase(cycle)
:measurementerrorsofphase‐range(m)
e
:earthrotationanglevelocity(rad/s)
,,rpcoi
d:i
Lreceiverantennaphasecenteroffsetinlocalcoordinates(m)
,
s
p
co i
d:i
Lsatelliteantennaphasecenteroffsetinsatellitebody‐fixedcoordinates(m)
,,
()
rpcvi
dEl
:i
Lreceiverantennaphasecentervariation(m)
,()
s
pcv i
d
:i
Lsatelliteantennaphasecentervariation(m)
:off‐nadirangleofreceiverantennadirectionfromsatellite(rad)
,rdisp
d:displacementbyearthtidesatreceiverpositioninlocalcoordinates(m)
pw
:phasewindupeffect(cycle)
s
rel
dT :relativitycorrectionforsatelliteclock(s)
()tU:ECItoECEFcoordinatestransformationmatrixattimet
()
x
R:coordinatesrotationmatrixaroundx‐axisbyangle
()
y
R:coordinatesrotationmatrixaroundy‐axisbyangle
()
z
R:coordinatesrotationmatrixaroundz‐axisbyangle
()
j
k:SD(single‐difference)betweensatellite
j
andk
rb
() :SD(single‐difference)betweenreceiver
r
andb
,Tr
Z
:troposphericzenithtotaldelay(m)
,
H
r
Z
:troposphericzenithhydrostaticdelay(m)
,
E
r
G:eastcomponentoftroposphericgradient
,Nr
G:northcomponentoftroposphericgradient
,
s
H
r
m:mappingfunctionforhydrostatictroposphericdelay
,
s
Wr
m:mappingfunctionforwettroposphericdelay
,
s
I
r
m :mappingfunctionforionosphericdelay
RTKLIBver.2.4.2Manual
131
E.1 Time System
RTKLIBinternallyusesGPST(GPSTime)forGNSSdatahandlingandpositioningalgorithms.Thetimeof
inputdataexpressedinothertimesystemslikeUTC(UniversalTimeCoordinated)isconvertedtoGPST
beforeinternalprocessingortheGPSToftheinternaldataisconvertedtotheappropriateothertime
systembeforeoutput.OneofthereasonswhyusingGPSTistoavoidleapsecondshandling.UTC,whichis
themostgenerallyusedtimesystem,isnotacontinuoustimesystemwithasecondjumpbytheleap
secondinsertionordeletion.
TheGPSTisoftenexpressedasaGPSweeknumberandTOW(timeofweek)insecondssincethestart
epochof00:00:00UTConJanuary6,1980.RTKLIB,however,doesnotusesuchaconvention.InGNSSdata
processing,weoftenneedtoconvertatimetoarangeorarangetoatime.TheTOWevenexpressedasa
doubleprecisionhasonlytheresolutionof10
1.3 10
sintime,whichisequivalenttotheresolutionof0.04
minrange.So,instead,RTKLIBexpressestimeasthetypegtime_tdefinedas:
typedef struct {
time_t time; /* time (s) expressed by standard time_t */
double sec; /* fraction of second under 1 s */
} gtime_t;
wherethetime_tisthestandardtimetypeprovidedbythestandardClibrary.Theinternalrepresentation
ofthetime_t
dependsuponthecomputersystem.Itisoftenimplementedbyanunsigned32bitintegeras
thenumberoftotalsecondssince00:00:00onJanuary1,1970.Duetothebitlengthlimitationtheinteger,
thegtime_tcannothandlethetimebeforeJanuary1,1970orafterJanuary19,2038inthiscase.
Thesecofthegtime_tholdsthefractionalsecond.Thesechastheresolutionof8
6.7 10
minrange
adequateforGNSSprecisepositioncomputation.RTKLIBalsoprovidesseveralusefulAPIstohandlethe
gtime_tincludingadding,difference,conversionto/fromtheGPSweeknumberandTOW.
(1) GPSTandUTC(UniversalTimeCoordinated)
TheroughconversionofGPSTtoUTC(UniversalTimeCoordinated)orUTCtoGPSTcanbe
expressedsimplyas:
UTC GPS LS
tt t
(E.1.1)
GPST UTC LS
ttt
(E.1.2)
RTKLIBver.2.4.2Manual
132
whereUTC
tandGPST
tarethetimeexpressedinUTC(s)andthetimeinGPST(s).LS
t
isthedelta
time(s)betweenUTCandGPSTduetothecumulativeleapsecondssinceJanuary6,1980.Thevalues
ofLS
t
areshowninTableE.1‐1untilMarch2013.
TableE.1‐1GPST‐UTCValues(untilMarch2013)
TimeSince(inUTC) LS
t
(s)
-----------------------------
1980-01-06 00:00:00 0
1981-07-01 00:00:00 1
1982-07-01 00:00:00 2
1983-07-01 00:00:00 3
1987-01-01 00:00:00 4
1988-01-01 00:00:00 5
1990-01-01 00:00:00 6
1991-01-01 00:00:00 7
1992-07-01 00:00:00 8
1993-07-01 00:00:00 9
1994-07-01 00:00:00 10
1996-01-01 00:00:00 11
1999-01-01 00:00:00 13
1997-07-01 00:00:00 12
2006-01-01 00:00:00 14
2009-01-01 00:00:00 15
2012-07-01 00:00:00 16
Theaccuracyoftheapproximationin(E.1.1)or(E.1.2)iswithinseveral10ns.ByusingtheUTC
parametersinGPSnavigationmessages,wecanconvertGPSTtoUTCorUTCtoGPSTmore
accuratelyas:
01
( 604800( ))
UTC GPS LS E ot t
tt tAAtt WNWN
(E.1.3)
where0
A
,1
A
,E
t,ot
t,WN aret
WN aretheUTCparametersprovidedinGPSnavigationmessages.
Morestrictly,UTCin(E.1.3)isUTC(USNO),whichistheUSlocalimplementationofUTC.The
differencebetweenUTCandUTC(USNO)canbeobtainedinCircularTprovidedbyBIPM[72].The
differenceisusuallyseveralnslevel.
(2) GLONASST(GLONASSTime)
GLONASST(GLONASSTime)isbasedonUTC(SU)andincludesleapsecondinsertionordeletion.
GLONASSTisalsoalignedtothelocaltime.So,roughly,thetimeGLONASST
t(s)inGLONASSTcanbe
convertedtothetimeUTC
t(s)inUTC.
10800
UTC GLONASST
tt
(E.1.4)
RTKLIBver.2.4.2Manual
133
Moreaccurately,theUTCparametersforGLONASSTinGLONASSnavigationmessageshouldbe
usedsimilartotheGPSTandUTCconversion.Ignoringtheleapsecondsandthe3houroffset,the
differencebetweenGPSTandGLONASSTisusually100orseveral100nslevel.
(3) GST(GalileoSystemTime)
GST(GalileoSystemTime)iscomposedofweeknumberfromtheoriginoftheGalileotimeandthe
TOW(timeofweek)inseconds.TheGSTstartepochis00:00:00UTConAugust22,1999.Atthestart
epoch,GSTshallbeaheadofUTCby13seconds.TheGSTiscontinuoustimewithoutleapsecond
insertionordeletion.So,theGSTisalignedtoGPSTexceptforthe1024weeksdifferenceofthetime
systemoriginandasmalltimeoffset(GGTO).NotethattheGalileoweeknumberisprovidedasequal
totheGPSweeknumberintheRINEXconvention.
(4) QZSST(QZSSTime)
QZSST(QZSSTime)isalignedtoGPST.IthasthesameoriginasGPSTandthesamedefinitionof
one‐secondofGPST.Practically,QZSSTcanbehandledassameasGPST.
(5) BDT(BeiDouNavigationSatelliteSystemTime)
BDT(BeiDouNavigationSatelliteSystemTime)isacontinuoustimesystemwithoutleapsecond
insertionordeletion.ThestartepochofBDTis00:00:00UTConJanuary1,2006.TheoffsetofBDTwith
respecttoUTCiscontrolledwithin100ns(modulo1second).So,thetimeGPS
t(s)inGPSTcan
roughlybeconvertedtothetimeBDT
t(s)inBDTwithintheaccuracyof200nsas:
14
BDT GPST
tt
(E.1.5)
Moreaccurately,theUTCparametersforBDTinBeiDounavigationmessagesshouldbeusedsimilar
totheGPSTandUTCconversion.

RTKLIBver.2.4.2Manual
134
E.2 Coordinates System
ThereceiverorsatellitepositionsinRTKLIBareinternallyrepresentedastheX,Y,Zcomponentsinan
ECEF(earthcenterearthfixed)coordinatessystem.WhatECEFframeusedisnotexplicitlydefinedbut
dependsonthesatelliteephemerisandthepredefinedbasestationposition.Forexample,withGPSsignals
andnavigationdata,thesinglepointpositioningresultsareobtainedinWGS84.Thebaselineanalysiswith
thebasestationwiththepositioninanECEFframebasicallybringstheroverpositioninthesameECEF
frame.Practically,allofusuallyusedECEFframesinGNSSnavigationprocessinglikeWGS84,PZ90.02
andITRF,areidenticalwithintheaccuracyofbroadcastephemerisorsinglepointpositioning.However,
morestrictandcarefulhandlingofthecoordinatessystemisneededforthebaselineanalysisorPPP.The
unifiedcoordinatessystemisdesirabletominimizetheprocessingerrorinthesecases.
(1) TransformationfromgeodeticpositiontoECEFXYZposition
ThegeodeticpositionaredefinedbasedonareferenceellipsoidshowninFigureE.2‐1.Thegeodetic
latituder
,longituder
-
andtheellipsoidalheighthcanbetransformedtotheECEFXYZposition
(,,)
T
r
x
yzrasfollows:
2(2 )ef f
(E.2.1)
22
1sin
r
a
ve
(E.2.2)
2
()coscos
()cossin
(1 ) sin
rr
rrr
r
vh
vh
ve
-
-
r(E.2.3)
where:
a:majorradiusoftheearthreferenceellipsoid(m)
f
:flatteningoftheearthreferenceellipsoid
CurrentversionRTKLIBalwaysusesthefollowingvaluesforaand
f
ofthereferenceellipsoid
providedbytheWGS84datum.
6378137.0a(m)
1.0/298.257223563f
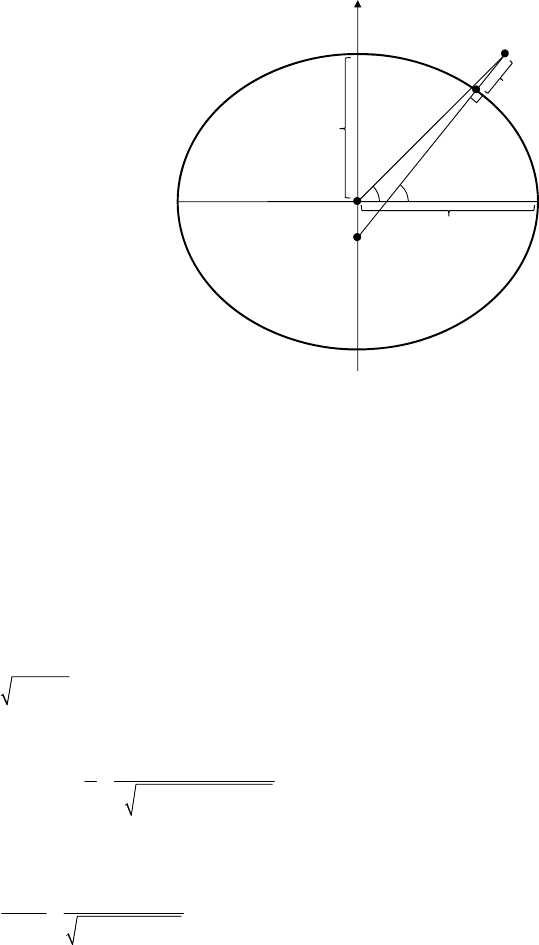
RTKLIBver.2.4.2Manual
135
FigureE.2‐1ReferenceEllipsoid
(2) TransformationfromECEFXYZpositiontogeodeticposition
TotransformtheXYZposition(,,)
T
r
x
yzrinECEFtothegeodeticposition,thefollowingprocedure
isapplied.Thegeodeticlatitudeisderivedbyaniterativemethodintheprocedure.
22
rxy
(E.2.4)
,0 0
r
(E.2.5)
2,
,1 22
,
tan
arctan 1(1 )tan
ri
ri
ri
ae
z
rre
(E.2.6)
,
lim
rri
i
(E.2.7)
2( , )
A
TAN y x
-
(E.2.8)
22
cos (1 ) sin
rr
ra
he
(E.2.9)
(3) TransformationbetweenlocalcoordinatesandECEF
Thelocalcoordinatesatthereceiverposition,whichisalsocalledasENUcoordinates,isoftenusedin
GNSSnavigationprocessing.Therotationmatrixr
E
oftheECEFcoordinatestothelocalcoordinates
areexpressedas:
sin cos 0
sin cos sin sin cos
cos cos cos sin sin
rr
rrrrrr
rr rr r
--
--
--
E(E.2.10)
'
T
rzyx ),,(r
h
Reference
Ellipsoid
'
:GeocentricLatitude
:GeodeticLatitude
a
)1( 2
ea
h
:EllipsoidalHeight
x,yplane
-
:Longitude
N
b
z
r
RTKLIBver.2.4.2Manual
136
wherer
andr
-
arethegeodeticlatitudeandthelongitudeofthereceiverposition.Byusingther
E
andthereceiverpositionr
rintheECEFcoordinates,thepositionECEF
rintheECEFcoordinatescan
betransformedtothepositionlocal
rinthelocalcoordinatesas:
()
local r ECEF r
rEr r(E.2.11)
(4) Geoidmodels
Toobtainthegeodeticheightderivedfromtheellipsoidalheight,weshouldconsiderthegeoidheight.
Thegeodeticheight
g
eod
h(m)isexpressedas:
d(, )
g
eo r r
h h geod
-
(E.2.12)
where(, )
rr
geoid
-
isthegeoidheight(m)atthelatituder
andthelongituder
-
.RTKLIBsupports
thefollowinggeoidmodelsselectablebytheprocessingoptionʺGeoidModelʺ.Allofthesegeoid
modelsareprovidedasthegeoidheightsatthelatitudeandlongitudegridpoints.RTKLIBuses
bi‐linearinterpolationtoobtainthevalueforanappropriatelatitudeandlongitudeposition.Touse
thesegeoidmodelexceptfortheinternalmodel,thegeoidmodeldatafileshouldbedownloadedand
thefilepathshouldbesetastheprocessingoptionʺGeoidDataFileʺ.
(a)Internal:1degx1deggridgeoidderivedfromEGM96
(b)EGM96:15ʺx15ʺgridEGM96geoidmodel
(c)EGM2008:2.5ʺx2.5ʺgridor1ʺx1ʺgridEGM2008geoidmodel
(d)GSI2000:1ʺx1.5ʺgridGSI2000geoidmodel(onlysurroundingofJapaneseisland)
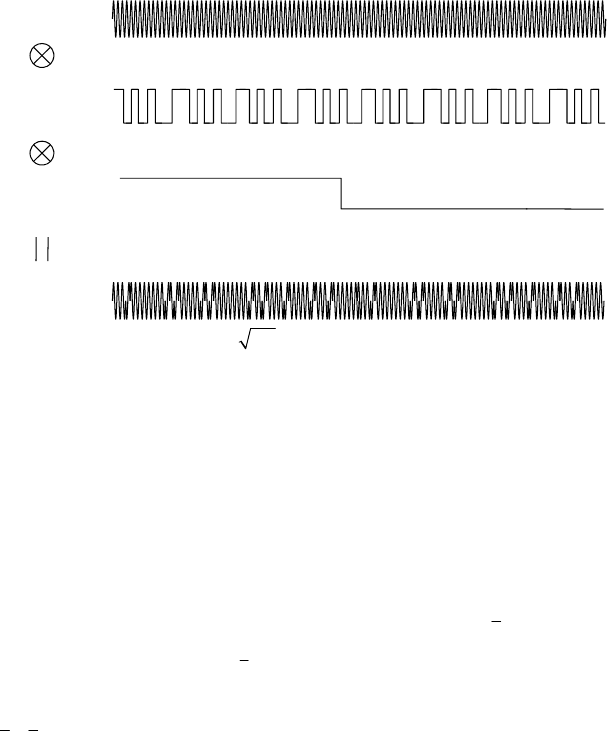
RTKLIBver.2.4.2Manual
137
E.3 GNSS Signal Measurement Models
(1) GNSSSignalStructure
FigureE.3‐1showsatypicalGNSSsignalstructure.TheGNSSsignalisgenerallycomposedof
multiplicationofthecarrierfrequency(Carrier),thespreadingcode(Code)andthenavigationdata
(Data).ThespreadingcodesarealsocalledasPRN(pseudorandomnoise)codes.Thedetailed
specificationsoftheseGNSSsignalsprovidedbyGPS,GLONASS,Galileo,QZSS,BeiDouandSBAS
arefoundinAppendixF.
FigureE.3‐1GNSSSignalStructure
(2) Pseudorangemeasurementmodel
Thepseudorangeisdefinedasʺthedistancefromthereceiverantennatothesatelliteantenna
includingreceiverandsatelliteclockoffsets(andotherbiases,suchasatmosphericdelays)ʺ[9].Thei
L
pseudorange,
s
ri
P
canbeexpressedbyusingthesignalreceptiontime r
t(s)measuredbythereceiver
clockandthesignaltransmissiontime
s
t(s)measuredbythesatelliteclockas:
,()
s
s
ri r
Pctt
(E.3.1)
Theequationcanbewrittenbyusingthegeometricrange
s
r
betweensatelliteandreceiverantennas,
thereceiverandsatelliteclockbiasesr
dt
s
dT ,theionosphericandtroposphericdelay,
s
ri
I,
s
r
Tandthe
measurementerror
P
as:[64]
Carrier
Code
Signal
Data
2()()sin(2 )PC t D t ft
)2sin(
ft
)(tC
)(tD
+1
‐1
+1
‐1
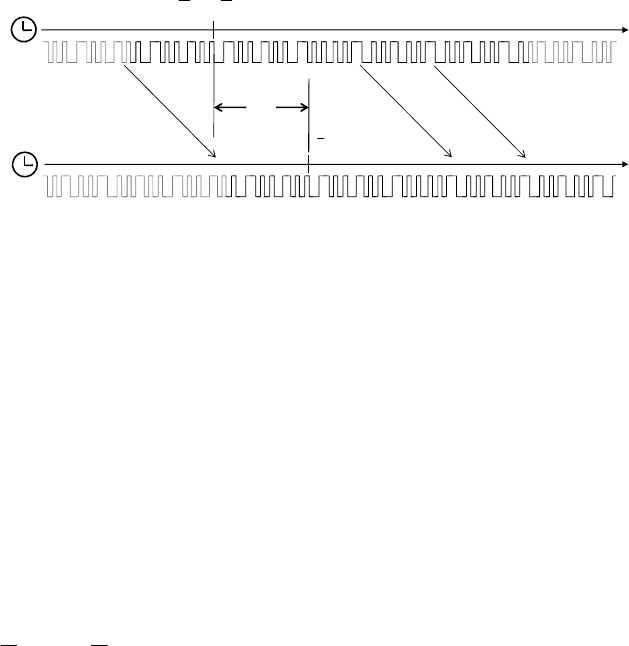
RTKLIBver.2.4.2Manual
138
,
,
,
(( ( )) ( ( )))
()(() ())
()(()())
(() ())
ssss
ri r r r P
sss
rrr P
ss s ss
rrir rr P
sssss
rrr rirP
Pctdtt tdTt
ct t cdt t dT t
ITcdttdTt
cdt t dT t I T
(E.3.2)
FigureE.3‐2PseudorangeModel
(3) Carrier‐phaseandphase‐rangemeasurementmodel
Thecarrier‐phaseisʺ...actuallybeingameasurementonthebeatfrequencybetweenthereceived
carrierofthesatellitesignalandareceiver‐generatedreferencefrequencyʺ [9].The i
L carrier‐phase
,
s
ri
canbeexpressedas:
,, ,
0,0, 00, ,
,0, 0, ,
() ()
(( () ) )(( () ) )
() () ( )
ssss
ri ri r i ri
sss s s
ir rr ri i i ri
sssss
rrr riiri
ii
ttN
ft dtt t ft dT t t N
cc
tt dtt dTt N
--
(E.3.3)
where0
tistheinitialtime(s),,()
ri t
isthei
Lphase(cycle)ofreceiverlocaloscillatorand()
s
it
isthe
i
Lphase(cycle)oftransmittednavigationsignalatthetimet.,0,ri
isthei
Linitialphase(cycle)of
receiverlocaloscillatorand,0,
s
ri
isthei
Linitialphase(cycle)oftransmittednavigationsignalatthe
time0
t.
Thei
Lphase‐range,
s
ri
,definedasthecarrier‐phasemultipliedbythecarrierfrequencyi
-
inm,also
canbeexpressedbyusingthecarrierphasebias,
s
ri
B
andcarrier‐phasecorrectionterms,
s
ri
d
AtSatellite
At Receiver
sr
tt
r
t
Time by Satellite Clock (s)
Time by Receiver Clock (s)

RTKLIBver.2.4.2Manual
139
includingantennaphasecenteroffsetsandvariations,stationdisplacementbyearthtides,phase
windupeffectandrelativitycorrectiononthesatelliteclockas:
,,
,0, 0, ,
,,,
()(() ())( )
(() ())
ss
ri i ri
sssss
rrr iriirii
sssssss
rrr riririri
ct t cdt t dT t N
cdt t dT t I T B d
-
-
-
-
(E.3.4)
where:
,,0,0, ,
s
ss
ri r i i ri
B
N
(E.3.5)
,,,, , ,, , ,,
() ()
T
sTssss s Ts
r i r pco i r enu pco i r r pcv i pcv i r disp r enu i pw
ddEld
-
de Ede de (E.3.6)
,
s
ri
Nisoftencalledascarrier‐phaseintegerambiguity,carrier‐cycleambiguityorsimplyambiguity.For
thedetailedformulationofthecarrier‐phasecorrectionterms,referAppendixE.9.
(4) Geometricrangebetweenreceiverandsatelliteantennas
Thegeometricrangeisdefinedasthephysicaldistancebetweenthesatelliteantennaphasecenter
positionandthereceiverantennaphasecenterpositionintheinertialcoordinates.Atfirst,thesignal
transmissiontime
s
tcanbederivedfrom:
,/()
s
ss
rri
ttPcdTt (E.3.7)
Thebothsidesintheequationincludes
s
t.Soseveraliterationsareneededtosolvetheequation.The
geometricrangecanbeexpressedbyusingthereceiverandsatelliteantennaphasecenterpositions
() ( , , )
T
rr r r r
txyzratthetimer
tand() ( , , )
s
ssssT
txyzratthetime
s
tintheECEF(earthcenter
earthfixed)coordinatesas:
()() () ()
s
sss
rrrr
tt t t
Ur Ur (E.3.8)
where()tUistheECEFtoECI(earthcenterinertial)coordinatestransformationmatrixatthetimet.
FortheexpressionintheECEFcoordinates,theearthrotationeffecthastobeincorporatedintoobtain
thegeometricrange.Theequationcanbeapproximatedbyoneofthefollowingequationswith
adequateprecisionunder1mmlevel.CurrentversionRTKLIBalwaysusestheequation(F.3.8b)forthe
geometricrange.Thelasttermin(F.3.8b)issometimescalledasSagnaceffect.
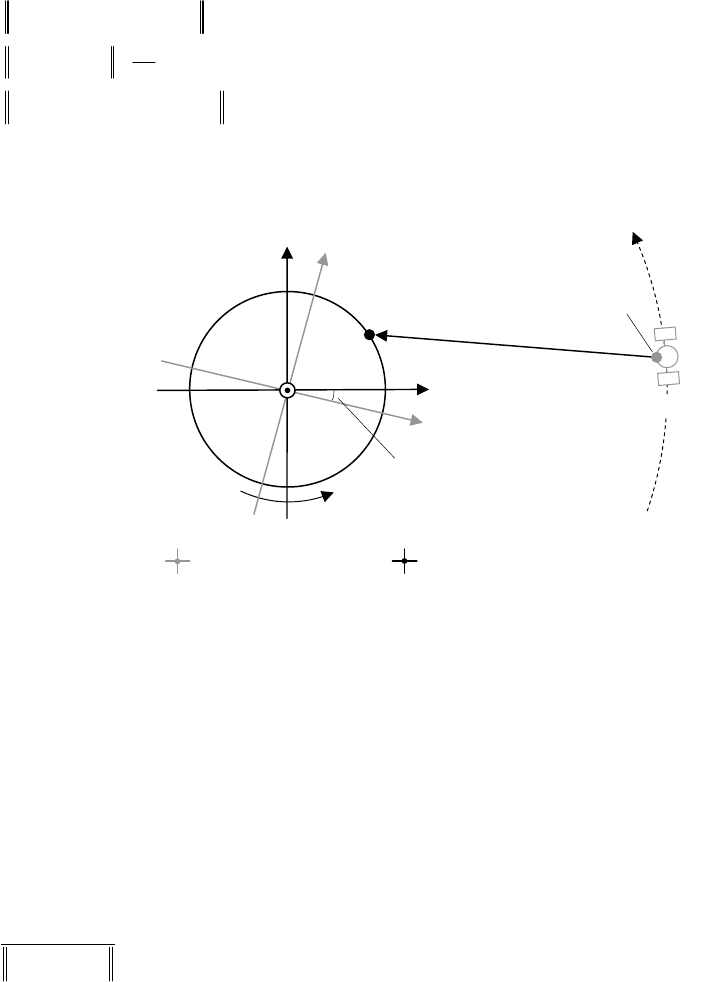
RTKLIBver.2.4.2Manual
140
)()/()( sss
rezrr
s
rtct rRr
(E.3.8a)
() () ( )
sssss
e
rrr r r
tt xyyx
c
rr (E.3.8b)
)())(()( sss
rezrr
s
rtttt rRr
(E.3.8c)
FigureE.3‐1GeometricRangeandEarthRotationCorrection
(5) Azimuthandelevationanglesofsatellitedirection
TheunitLOS(line‐of‐sight)vectorfromthereceivertothesatellitecanbeexpressedintheECEF
coordinatesas:
() ()
() ()
ss
srr
rss rr
tt
tt
rr
e
rr
(E.3.9)
Intheequation,theearthrotationeffectisneglected.Theazimuthandelevationangles
s
r
A
zand
s
r
E
lof
thesatellitedirectionfromthereceiversitecanbederivedfrom:
,(, , )
s
sT
renu r r e n u
eeeeEe (E.3.10)
2( , )
s
ren
A
zATANee(E.3.11)
arcsin( )
s
ru
E
le(E.3.12)
()
s
er
tt
()
s
s
tr
()
rr
tr
z
y
x
Earth
Receiver
Satellite
ECEFatsignaltransmission ECEFatsignalreception
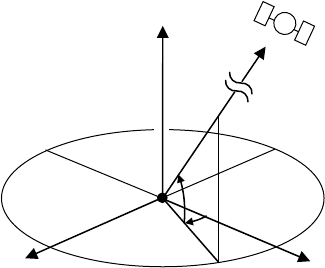
RTKLIBver.2.4.2Manual
141
wherer
E
isthecoordinatesrotationmatrixfromECEFtothelocalcoordinatesatthereceiverposition.
ReferE.2fordetailedformationofthematrix.
FigureE.3‐2LocalCoordinatesandAzimuthandElevationAngles
z(U)
x(E)y(N)
Receiver El
Az
Satellite
RTKLIBver.2.4.2Manual
142
E.4 GNSS Satellite Ephemerides and Clocks
RTKLIBsupportsbroadcastephemeridesandclocksforGPS,GLONASS,Galileo,QZSS,BeiDouandSBAS.
ItalsosupportsthepreciseephemeridesandclocksprovidedastheSP3‐c[22]andclockRINEX[15]including
Galileo,QZSSandBeiDouforpostprocessingmodes.Forreal‐timemodes,thebroadcastephemeridesand
clockscorrectedbytheSBASlong‐termandfastcorrectionsandtheRTCM3SSR(statespace
representation)correctionsarealsosupported.Thefollowingequationsshowtheephemerisandclock
modelsusedinRTKLIB.
(1) BroadcastephemeridesandclocksforGPS,GalileoandQZSS[1][5][6]
BroadcastephemerisandSVclockparametersforGPS,GalileoandQZSSaregiveninnavigation
messagesas:
00 0 012
(,, )(,,, ,, ,,,, , , , , , , , , , )
T
ephoeoc usucrsrcisic GD
ttIOD aei M nI CCCCCCafafafT
p (E.4.1)
Byusingtheseparameters,thesatelliteposition(antennaphasecenterposition)()
strinECEF,the
satelliteclockbias()
s
dT t andclockdrift()
s
dT t
arecomputedas:
koe
ttt (E.4.2)
03k
M
Mnt
a
(E.4.3)
sin
M
Ee E (E.4.4)
2
1sin
cos
eE
Ee
(E.4.5)
arctan
(E.4.6)
sin 2 cos2
us uc
uC C
(E.4.7)
sin 2 cos2
rs rc
rC C
(E.4.8)
sin2 cos2
is ic
iC C
(E.4.9)
uu
(E.4.10)
(1 cos )ra e E r
(F.4.11)
0k
ii iIt
(E.4.12)
0()
ek eoe
tt
(E.4.13)
cos cos sin cos sin
( ) cos sin sin cos cos
sin sin
suui
tr u u i
ui
r(E.4.14)
coc
ttt (E.4.15)
RTKLIBver.2.4.2Manual
143
2
01 2 2
2
() sin
scc GD
dT t af af t af t e A E bT
c
(E.4.16)
12
() 2
sc
dT t af af t
(E.4.17)
where:
:earthgravitationalconstant(14
3.9860050 10m3/s2forGPSandQZSS, 14
3.986004418 10m3/s2
forGalileo)
e
:earthangularvelocity(-5
7.2921151467 10rad/s)
22
1/i
bf ffori
Lpseudorange
GD
T:groupdelayparametersforGPSandQZSS,GD
BforGalileo(s)
TheKeplerequation(E.4.4)canbesolvedthefollowingiterationbyNewtonʹsmethod.
0
EM(E.4.18)
1sin
1cos
ii
ii i
E
eEM
EE eE
(E.4.19)
lim i
i
E
E
(E.4.20)
ThebroadcastephemeridesandclockareappliedincasethattheprocessingoptionʺSatellite
Ephemeris/ClockʺtoʺBroadcastʺaswellasGLONASS,BeiDouandSBAS.
(2) BroadcastephemeridesandclocksforGLONASS[4]
BroadcastephemerisandclockparametersforGLONASSaregiveninthenavigationmessagesas:
() (,,, , , , , , , , )
eph b x y z x y z n n
txyzvvvaaa
p(E.4.21)
Thedifferentialequationsforthesatelliteposition() ( , , )
s
T
txyzrandvelocity() ( , , )
s
T
x
yz
tvvvvin
ECEF(PZ90.02)canbeformedas:
x
dx v
dt ,y
dy v
dt ,z
dz v
dt (E.4.22)
222
2
352
35
12
2
xe
eeyx
dv a z
x
Jx xva
dt rrr
(E.4.23)
222
2
352
35
12
2
yeeexy
dv az
yJ y y va
dt rrr
(E.4.24)
22
2
352
35
3
2e
zz
a
dv z
zJ z a
dt rrr
(E.4.25)
where:
e
a:earthsemi‐majoraxis(6378136.0 m)

RTKLIBver.2.4.2Manual
144
:earthgravitationalconstant(9
398600.44 10m3/s2)
e
:earthangularvelocity(-5
7.292115 10rad/s)
2
J
:secondzonalharmonicofthegeopotential(9
1082625.7 10
)
222
rxyz
NotethattwoerratainA.3.1.2ofGLONASSICD5.1[4]hasbecorrectedinthemodelsabove.
Thesatelliteposition()
strandvelocity()
stvatthetimetcanbederivedbytheRK4(Runge‐Kutta
4thorderandstage)numericalintegrationtosolvethesedifferentialequationswiththeinitialsatellite
position()
sb
trandvelocity()
sb
tvatthereferencetimeb
t.Forsatelliteclockbias()
s
dT t anddrift
()
s
dT t
attheepochtimetarealsoderivedas:
() ( )
snn b
dT t t t
(E.4.26)
()
sn
dT t
(E.4.27)
TherelativisticeffectinthesatelliteclockareincludedintheGLONASSclockparameters.Sothe
relativisticcorrectionisnotappliedinthiscase.
(3) BroadcastephemeridesandclocksforBeiDou[7]
ForBeiDousatellites,thesimilarephemerisandclockparametersasGPS,GalileoandQZSSare
providedinthenavigationmessagesas:
00 0 012
(,)(,,,,,,,,,,,,,,,,,, )
T
ephoeoc usucrsrcisic GD
t t a e i M n I C C C C C C af af af T
p (E.4.28)
ForMEOandIGSOsatellitesofBeiDou,thesameformulationsas(1)forGPSephemerisandclock,
exceptfor
=14
3.986004418 10,e
=-5
7.2921150 10rad/sandthetimetisexpressedinBDT.
Toobtainthesatelliteposition()
strofBeiDouGEOsatellitesatthetimetinBDT,theequation
(E.5.13)and(E.5.14)shouldbereplacedby:
0keoe
tt
(F.4.29)
cos cos sin cos sin
( ) ( ) ( 5 ) cos sin sin cos cos
sin sin
szek x
uui
tr t u u i
ui
rRR (E.4.30)
where:

RTKLIBver.2.4.2Manual
145
10 0
() 0 cos sin
0sincos
x
R,
cos sin 0
() sin cos 0
001
z
R
(4) BroadcastephemeridesandclocksforSBAS[8]
NavigationmessageparametersforSBASGEOsatellitesaregivenintheSBASmessages(message
type9)as:
001
() (,,, , , , , , , , )
eph x y z x y z GF GF
txyzvvvaaaaap(E.4.31)
Byusingtheseparameters,thesatelliteposition()
strinECEFandsatelliteclockbias()
s
dT t are
computedas:
2
00
1
() () ()
2
xx
syy
zz
xv a
tyvtt att
zva
r(E.4.32)
010
() ( )
sGF GF
dT t a a t t
(E.4.33)
(5) SBASorbitandclockcorrections[8]
TheSBASorbitandclockcorrectionsaredefinedasthefollowingparameters.
001
(, ) ( , , , , , , , )
sbas t IOD x y z x y z af af
Δ(E.4.38)
The
I
OD indicatesthetargetbroadcastephemerisandclockparameters.Thecorrectedsatellite
position()
strattimetiscomputedas:
0
() () ( )
ss
broadcast
xx
ttyytt
zz
rr
(E.4.39)
where:
()
sbroadcast tr:satellitepositionattimetcomputedbythebroadcastephemeriswith
I
OD (m)
Thecorrectedsatelliteclockbias
()
s
dT t
atthetimetisalsocomputedwiththeSSRcorrectionas:
010
() () ( )
ss
broadcast
dT t dT t af af t t
(E.4.40)

RTKLIBver.2.4.2Manual
146
where:
()
sbroadcast
dT t :satelliteclockbiasattimetcomputedbythebroadcastclockwith
I
OD .
TheSBAScorrectionwithbroadcastephemeridesandclocksareappliedincasethattheprocessing
optionʺSatelliteEphemeris/ClockʺtoʺBroadcast+SBASʺ.
(6) Preciseephemeridesandclocks
ThepreciseephemeridesforGPS,GLONASS,Galileo,QZSSandBeiDouareusuallyprovidedasSP3‐c
filescontainingsatellitepositionsandvelocities(optional)atevery15minor5minepochs.Toobtain
thesatellitepositionatthetimet,anappropriateinterpolationisneeded.RTKLIBusesthefixed
degree(10n)polynomialinterpolationbyNewton‐Nevilleʹsalgorithmas:
,()
jj j
Pt x ()ijin
(E.4.34)
,1 1,
,( ) () ( ) ()
() kjk jjk
jk kj
ttp t ttp t
pt tt
()ijkin
(E.4.35)
wherenisthedegreeofthepolynomialfortheinterpolationand12
(),( ),( ),...,( )
ii i in
xt xt xt xt
arethe
ephemerisvaluesforeachcomponentsattheepochs12
,,,...,
ii i in
tt t t
.Forexample,inthe4ncase,
theinterpolatedvalue()
x
tatthetimetcanbederivedas:
,() ( )
ii i
p
txt
,1
()
ii
p
t
1, 1 1
() ( )
ii i
p
txt
,2
()
ii
p
t
1, 2 ()
ii
p
t
,3
()
ii
p
t
2, 2 2
() ( )
ii i
ptxt
1, 3 ()
ii
p
t
,4() ()
i
p
txt
1, 2 ()
ii
p
t
1, 4 ()
ii
p
t
3, 3 3
() ( )
ii i
ptxt
2, 4()
ii
p
t
3, 4()
ii
p
t
4, 4 4
() ( )
ii i
ptxt
NotethatpreciseephemeridesusuallypresenttheCoM(centerofmass)positionsofsatellitenotasthe
antennaphasecenterposition.Sousersshouldcorrectthesatelliteantennaphasecenteroffsettouse
thepreciseephemerides.Fordetails,referAppendixE.8.
Inspiteofthepreciseephemerishigh‐orderpolynomialinterpolation,asimplelinearinterpolationis
implementedforpreciseclocksprovidedasSP3‐corclockRINEXfilesas:

RTKLIBver.2.4.2Manual
147
11
1
()()()()
() ss
siiii
ii
ttdTtttdTt
dT t tt
1
()
ii
ttt
(E.4.36)
ForthepreciseclocksprovidedbyIGS(InternationalGNSSservice),therelativisticeffectshouldbe
correctedas:[68]
11
2
1
()()()()() ()
() 2
ss
sTs
siiii
ii
ttdTtttdTt tt
dT t tt c
rv
(E.4.37)
where()
strand()
stvarethesatellitepositionandvelocityderivedfromthepreciseephemerides.
ThepreciseephemeridesandclocksareappliedincasethattheprocessingoptionʺSatellite
Ephemeris/ClockʺtoʺPreciseʺ.
(7) RTCMSSRorbitandclockcorrections[18]
TheRTCMSSRorbitandclockcorrectionsaredefinedasthefollowingparameters.
0012
(, ) ( , , , , , , , , )
ssr radial along cross radial along cross
tIOD O O O O O O CCC
Δ (E.4.41)
The
I
OD indicatesthetargetbroadcastephemerisandclockparameters.Thecorrectedsatellite
position()
strattimetiscomputedas:
()
()
sbroadcast
along sbroadcast
t
t
v
e
v(E.4.42)
() ()
() ()
ss
broadcast broadcast
cross ss
broadcast broadcast
tt
tt
rv
e
rv
(E.4.43)
radial along cross
eee
(E.4.44)
0
()
radial
radial
along along
cross cross
O
O
OOtt
OO
O
(E.4.43)
() () , ,
ss
broadcast radial along cross
tt
rr eee O
(E.4.45)
where:
()
sbroadcast tr:satellitepositionattimetcomputedbythebroadcastephemeriswith
I
OD (m)
()
sbroadcast tv:satellitevelocityattimetcomputedbythebroadcastephemeriswith
I
OD (m/s)
RTKLIBver.2.4.2Manual
148
Thesatellitevelocity()
sbroadcast tviscomputedbythefollowingdifferentialapproximationwith
0.001t
(s).
() ()
() ss
sbroadcast broadcast
broadcast tt t
tt
rr
v(E.4.46)
Thecorrectedsatelliteclockbias
()
s
dT t
atthetimetisalsocomputedwiththeSSRcorrectionas:
2
01 0 2 0
()()CC Ctt Ctt
(E.4.47)
() ()
ss
broadcast C
dT t dT t C
(E.4.48)
where:
()
sbroadcast
dT t :satelliteclockbiasattimetcomputedbythebroadcastclockwith
I
OD withthe
followingrelativitycorrection.
2
2() ()
sTs
broadcast broadcast
rel tt
tC
rv
(E.4.49)
TheSSRcorrectionswithbroadcastephemeridesandclocksareappliedincasethattheprocessing
optionʺSatelliteEphemeris/ClockʺtoʺBroadcast+SSRAPCʺorʺBroadcast+SSRCoMʺ.

RTKLIBver.2.4.2Manual
149
E.5 Troposphere and Ionosphere Models
RTKLIBsupportsthefollowingtroposphereandionospheremodels.
(1) Tropospheremodel
Thestandardatmospherecanbeexpressedas:
55.2568
1013.25 (1 2.2557 10 )ph
(E.5.1)
3
15.0 6.5 10 273.15Th
(E.5.2)
17.15 4684.0
6.108 exp 38.45 100
rel
h
T
eT
(E.5.3)
where
p
isthetotalpressure(hPa),Tistheabsolutetemperature(K)oftheair,histhegeodetic
heightaboveMSL(meansealevel),eisthepartialpressure(hPa)ofwatervaporandrel
histhe
relativehumidity.Thetroposphericdelay
s
r
TisexpressedbytheSaastamoinenmodelwith
p
,Tand
ederivedfromthestandardatmosphere.
2
0.002277 1255 0.05 tan
cos
s
r
Tp ez
zT
(E.5.4)
wherezisthezenithangle(rad)as/2
s
r
zEl
.
ThestandardatmosphereandtheSaastamoinenmodelareappliedincasethattheprocessingoption
ʺTroposphereCorrectionʺissettoʺSaastamoinenʺ,wherethegeodeticheightisapproximatedbythe
ellipsoidalheightandtherelativehumidityisfixedto70%.
(2) SBAStropospheremodel
IftheprocessingoptionʺTropospherecorrectionʺ issettoʺSBASʺ,theSBAStropospheremodels
definedintheSBASreceiverspecificationsareapplied.ThemodeloftencalledasʺMOPSmodelʺ.Refer
[8]A.4.2.4fordetails.
(3) Precisetropospheremodel
IftheprocessingoptionʺTroposphereCorrectionʺissettoʺEstimateZTDʺorʺEstimateZTD+Gradʺ,a
moreprecisetropospheremodelisappliedwithstrictmappingfunctionsas:
RTKLIBver.2.4.2Manual
150
,,
() ()1cot( cos sin )
ss s s s
rWr rNr rEr r
m El m El El G Az G Az (E.5.5)
,,,
() ()( )
ss s
rHrHr rTrHr
T m El Z m El Z Z
(E.5.6)
where:
,Tr
Z
:troposphericzenithtotaldelay(m)
,
H
r
Z:troposphericzenithhydro‐staticdelay(m)
()
H
mEl
:hydro‐staticmappingfunction
()
W
mEl
:wetmappingfunction
InRTKLIB,thetroposphericzenithhydro‐staticdelayisgivenbySaastamoinenmodel(E.5.4)withthe
zenithangle0zandrelativehumidity0
rel
h
.Forthemappingfunction,RTKLIBemploysNMF
(Niellmappingfunction)[70]asdefault.Thezenithtotaldelay,Tr
Z
andthegradientparameters,Nr
G,
,
H
r
G(inthecaseofʺEstimateZTD+Gradʺ)areestimatedasunknownparametersintheparameter
estimationprocess.Forthemappingfunction,RTKLIBcanusesGMF[71]bysettingthecompileroption
‐DIERS_MODELsincever.2.4.2.
(4) Broadcastionospheremodel
ForionospherecorrectionforsinglefrequencyGNSSusers,GPSandQZSSnavigationdataincludethe
followingbroadcastionosphericparameters.
01230123
(,,,,,,,)
T
ion
p(E.5.5)
Byusingtheseionosphericparameters,the1
Lionosphericdelay
s
r
I
(m)canbederivedthefollowing
procedure[1].ThemodelisoftencalledasKlobucharmodel.
0.0137 / ( 0.11) 0.022El
(E.5.6)
cos
i
A
z
(E.5.7)
sin / cos
ii
Az
-
-
(E.5.8)
0.064cos( 1.617)
mi i
-
(E.5.9)
4
4.32 10 i
tt
-
(E.5.10)
3
1.0 16.0 (0.53 )FEl (E.5.11)
3
0
2 ( 50400) / n
nm
n
xt
(E.5.12)
9
424
9
1
5 10 ( 1.57)
510 1 ( 1.57)
224
s
rn
nm
n
Fx
Ixx
Fx
(E.5.13)
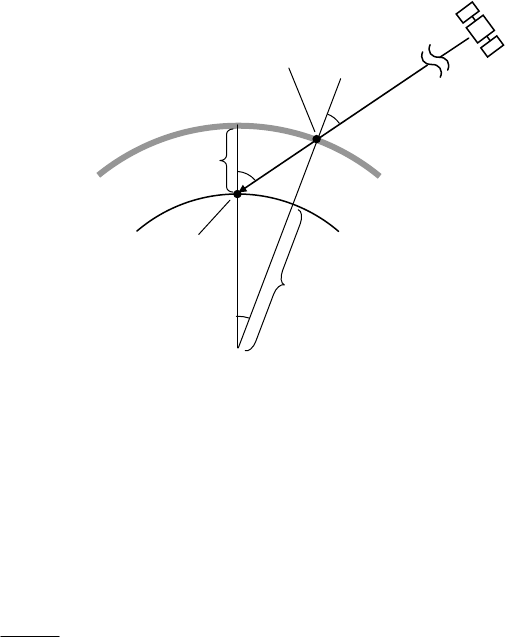
RTKLIBver.2.4.2Manual
151
CorrectionsbythebroadcastionospheremodelareappliediftheprocessingoptionʺIonosphere
CorrectionʺissettoʺBroadcastʺorʺQZSSBroadcastʺ.
(5) SBASionospheremodel
SBAScorrectionsforionosphericdelayisprovidedbythemessagetype18(ionosphericgridpoint
masks)andthemessagetype26(ionosphericdelaycorrections).RTKLIBusestheSBASionospheric
correctioniftheprocessingoptionʺIonosphereCorrectionʺissettoʺSBASʺandtheseSBASmessages
areprovidedinaninputfile.ForthealgorithmsforthemodelandthedefinitionofIGPs(ionospheric
gridpoints),referA.4.4.9andA.4.4.10oftheSBASreceiverspecifications[8].
(6) Singlelayermodel
TheionosphereisoftenmodeledasasimplesinglelayermodelshowninFigureE.5‐1.Thesinglelayer
modelisalsocalledasathin‐shellmodel.
FigureE.5‐1SingleLayerIonosphereModel
Inthemodel,thelatitudeIPP
(rad)andthelongitudeIPP
-
(rad)oftheIPP(ionosphericpierce
point)canbederivedfrom:
/2
s
r
zEl
(E.5.14)
'arcsin sin
E
E
R
zz
RH
(E.5.15)
'zz
(E.5.16)
arcsin(cos sin sin cos cos )
s
IPP r r r
A
z
(E.5.17)
Receiver
Satellite
Ionosphere
Earth
Ionospheric
PiercePoint
z
zʹ
H
RE

RTKLIBver.2.4.2Manual
152
( 70 tan cos tan( / 2 ))
s
rrr
and Az
or( 70 tan cos tan( / 2 ))
s
rrr
and Az
sin sin
arcsin cos
s
r
IPP r IPP
A
z
--
(E.5.18a)
(otherwise)
sin sin
arcsin cos
s
r
IPP r IPP
A
z
--
(E.5.18b)
whereE
R
istheradiusoftheearth(m)and
H
istheheightoftheionosphereshell(m).RTKLIB
usuallyusesthevalues6378137
E
Rand350000H
.Notethattheearthsurfaceortheionosphere
shellareapproximatedasasphereinthismodel.
IftheVTEC(verticaltotalelectroncontent)value(, , )
IPP IPP
TEC t
-
attheIPPPandthetimetisgiven,
thei
L
ionosphericdelay,
s
ri
I(m)canbeexpressedas:
16
,1 40.3 10 (, , )
cos '
s
ri IPP IPP
i
ITECt
zf
-
(E.5.19)
wherei
f
isthecarrierfrequencyofsignals(Hz).
TheVTECvaluesareprovidedinseveralformatsorequations.RTKLIBcurrentlyonlysupportsthe
VTECvaluesprovidedbytheIONEXformat[24].IntheIONEXformat,theVTECareexpressedasthe
pointvaluesinalatitudeandlongitudegrid.RTKLIBinterpolatesthesegridpointvaluesintheIONEX
datatoanappropriateIPPpositionbyasimplebi‐linearinterpolation.TheseVTECvaluesare
providedateveryepochtimeintervalsintheIONEXfile.Thetimeinterpolationshouldalsobeapplied
inthesun‐fixedcoordinatesas:
11 1
1
()(,,())()(,,())
(, , ) i i IPP IPP i i i IPP IPP i
IPP IPP ii
ttTECt tt t tTECt tt
TEC t tt
- -
-
(E.5.20)
wherei
tand
1i
t
1
()
ii
ttt
arethetimefortheprovidedTECdataand2 / 86400
isthe
rotationvelocityofthesuntotheearth.CorrectionbythesinglelayermodelwithIONEXdatais
appliediftheprocessingoptionʺIonosphereCorrectionʺissettoʺIONEXTECʺandIONEXdataare
providedasinputfilesonlyinthepost‐processingmode.
(7) Ionosphere‐freeLC(linearcombination)

RTKLIBver.2.4.2Manual
153
ToeliminatetheionosphereeffectsintheGNSSsignalmeasurements,aLC(linearcombination)of
dual‐frequencymeasurementsisoftenutilizedinGNSSdataprocessing.Theionosphere‐freeLCofi
L
andj
L
pseudorangeandphase‐rangeareexpressedas:
,,,
s
ss
rLC i ri j r j
PCPCP (E.5.21)
,,,
s
ss
rLC i ri j r j
CC
(E.5.22)
wherei
Candj
CarethecoefficientsoftheionospherefreeLC.Thei
Candj
Carederivedfrom:
2
22
i
iij
f
C
f
f
(E.5.23)
2
22
j
jij
f
C
f
f
(E.5.24)
wherei
f
andj
f
arethefrequencies(Hz)ofi
L
andj
L
measurements.CurrentversionRTKLIB
alwaysuses1
L
and2
L
forGPS,GLONASSandQZSS,1
L
and5
L
forGalileofortheionosphere‐free
LC.IfsettingtheprocessingoptionʺIonosphereCorrectionʺ toʺIono‐FreeLCʺ intheSingleorPPP
modes,theionosphere‐freeLCisusedforbasicmeasurementstoeliminatetheionosphereterm.Note
thattheionosphere‐freeLCmodelisnotappliedfortheKinematic,StaticorMoving‐basemodes.Refer
theE.7(6)fordetails.

RTKLIBver.2.4.2Manual
154
E.6 Single Point Positioning
RTKLIBemploysaniteratedweightedLSE(leastsquareestimation)fortheʺSingleʺ (singlepoint
positioning)modewithorwithoutSBAScorrections.
(1) LinearLSE
Assumeameasurementvectoryaregivenanditcanbemodeledasthefollowinglinearequationsof
anunknownparametervectorxandarandommeasurementerrorvectorv.
y
Hx v (E.6.1)
Theleastsquarecostfunction
L
S
J
isdefinedasthesumofthesquaredmeasurementerrorsas:
22 2
12
... T
LS m
Jvv v vv(E.6.2)
Byusing(E.6.1)and(E.6.2),thecostfunctioncanberewrittenas:
()()
T
LS
T T TT TT
J
yHx yHx
yy y
Hx x H
y
xHHx
(E.6.3)
Tominimizethecostfunction,thegradientof
L
S
J
shouldbezero.Then
()( )
22
T T TT T T TT
LS
TTT
J
0yHHy HHx xHH
x
yH xHH 0
(E.6.4)
Itgivessocalledaʺnormalequationʺas:
TT
HHx H
y
(E.6.5)
Tosolvethenormalequation,wecangettheestimatedunknownparametervectorˆ
xbytheLSEas:
1
ˆ()
TT
xHHH
y
(E.6.6)
Iftheweightsofeachmeasurementsaregiven,thecostfunction(E.6.3)canberewrittenbyusinga

RTKLIBver.2.4.2Manual
155
weightmatrixW.
T
WLS
JvWv(E.6.7)
TominimizethecostfunctionWLS
J,wecanobtaintheestimatedunknownparametervectorbythe
weightedLSEbythesimilarwayforthesimpleLSEas:
1
ˆ()
TT
xHWHHW
y
(E.6.8)
TheweightmatrixWfortheweightedLSEisoftengivenas:
22 2
12
( , ,..., )
m
diag
W
wherei
isthea‐prioristandarddeviationofthei‐thmeasurementerror.
(2) Gauss‐Newtoniterationfornon‐linearLSE
Incasethatthemeasurementsarenotgivenaslinearmodels,themeasurementequationscanbe
writtenbyageneralnon‐linearvectorfunctionas:
()
y
hx v
(E.6.9)
where()hx isameasurementvectorfunctionofaparametersvectorx.Theequationcanbeextended
byusingTaylorseriesaroundaninitialparametervector0
xas:
00
() ( ) ( ) ..hx hx H x x (E.6.10)
whereHisapartialderivativesmatrixof()hx withrespecttoxat 0
xx
:
0
()
xx
hx
Hx(E.6.11)
Assumetheinitialparametersareadequatelynearthetruevaluesandthesecondandfurthertermsof
theTaylorseriescanbeneglected.Wecanapproximate(E.6.9)as:
00
() ( )
y
hx H x x v
(E.6.12)
RTKLIBver.2.4.2Manual
156
Thenwecanobtainthefollowinglinearequation.
00
() ( )
y
hx H x x v
(E.6.13)
ByapplyinglinearweightedLSE(E.6.8)for(E.6.13),wecangetthenormalequationfornon‐linear
weightedLSE:
00
ˆ
() (())
TT
HWHx x HW
y
hx (E.6.14)
Sowecanobtaintheestimatedunknownparametervectorˆ
xby:
1
00
ˆ() (())
TT
xx HWH HW
y
hx (E.6.15)
Iftheinitialparameters0
xarenotenoughnearthetruevalues,wecaniterativelyimprovethe
estimatedparameterslike:
00
ˆxx
(E.6.16)
1
1
ˆˆˆ
()(())
TT
ii i
xxHWHHW
y
hx (E.6.17)
Iftheiterationisconverged,wecanobtainthefinalestimatedparametersas:
ˆˆ
lim i
i
xx
(E.6.18)
TheiteratedLSEisoftencalledasGauss‐Newtonmethod.Notethatsuchtheiterationsarenotalways
convergedbythesimpleGauss‐Newtonmethodespeciallyforill‐conditionedmeasurementequations
havinglargenon‐linearity.Inthesecases,weshouldemployanotherstrategyforsuchnon‐linearLSE.
Themostpopularwayforthenon‐linearLSEisLM(Levenberg‐Marquardt)method[69].
(3) Estimationofreceiverpositionandclockbias
ForʺSingleʺmodeasʺPositioningModeʺ,thefollowingsingle‐pointpositioningprocedureisapplied
toobtainthefinalsolutionbyepoch‐by‐epochbasis.Foranepochtime,theunknownparameters
vectorxisdefinedas:
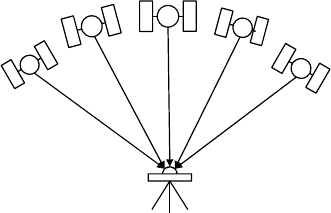
RTKLIBver.2.4.2Manual
157
(, )
TT
rr
cdtxr (E.6.19)
Thepseudorangemeasurementvectorycanbegivenas:
123
( , , ,..., )
mT
rr r r
PPP Py(E.6.20)
where
s
r
Pisthepseudorangemeasurement.IftheprocessingoptionʺIonosphereCorrectionʺ setto
ʺIono‐FreeLCʺ,theionosphere‐freeLC(linearcombination)pseudorangedefinedinAppendixE.5(7)
isused.Inothercases,justthe1
L
pseudorangeisused.
FigureE.6‐1SatelliteGeometryforSinglePointPositioning
Themeasurementequationanditspartialderivativematrixforthesinglepointpositioningareformed
as:
1111 1
22222
33333
1
1
() 1
1
T
rr rr r
T
rr rr r
sT
rr rr r
mmmmmT
rr rr r
cdt cdT I T
cdt cdT I T
cdt cdT I T
cdt cdT I T
e
e
hx H e
e
(F.6.21)
wherethegeometricrange
s
r
andLOSvector
s
r
earegivenbyE.3(4)andE.3(5)withthesatelliteand
receiverpositions.Thesatellitepositions
s
randtheclockbiases
s
dT arealsoderivedfromtheGNSS
satelliteephemeridesandclocksdescribedinE.4accordingtotheprocessingoptionʺSatellite
Ephemeris/Clockʺ.
1
s
2
s3
s
m
s
r
RTKLIBver.2.4.2Manual
158
Tosolvethemeasurementequationtoobtainthefinalestimatedreceiverpositionandthereceiver
clockbias,RTKLIBemploystheiteratedweightedLSEas:
1
1
ˆˆˆ
()(())
TT
ii i
xxHWHHW
y
hx (E.6.22)
Fortheinitialparametervector0
xfortheiteratedweightedLSE,justall0areusedforthefirstepoch
ofthesinglepointpositioning.Onceasolutionobtained,thepositionisusedforthenextepochinitial
receiverposition.FortheweightmatrixW,RTKLIBusesthefollowingformulas
22 2
12
( , ,..., )
m
diag
W(E.6.23)
222 2222
/sin
ss
r r eph ion trop bias
FR a b El
(E.6.24)
where:
s
F
:satellitesystemerrorfactor
(1:GPS,Galileo,QZSSandBeiDou,1.5:GLONASS,3.0:SBAS)
r
R
:code/carrier‐phaseerrorratio
a
,b
:carrier‐phaseerrorfactoraandb(m)
eph
:standarddeviationofephemerisandclockerror(m)
ion
:standarddeviationofionospherecorrectionmodelerror(m)
trop
:standarddeviationoftropospherecorrectionmodelerror(m)
bias
:standarddeviationofcodebiaserror(m)
Forthestandarddeviationofephemerisandclockerror,URA(userrangeaccuracy)orsimilar
indicatorsareusedinRTKLIB.Byseveraliterations,thesolutionisconvergedinthenormalcaseand
theestimatedreceiverpositionˆr
randthereceiverclockbiasˆr
dt areobtained.
ˆ
ˆˆˆ
lim ( , )
TT
ir r
icdt
xxr (E.6.25)
Theestimatedreceiverclockbiasˆr
dt isnotexplicitlyoutputtothesolutionfile.Instead,itis
incorporatedinthesolutiontime‐tag.Thatmeansthesolutiontime‐tagindicatesnotthereceiver
time‐tagbutthetruesignalreceptiontimemeasuredinGPST.
(4) Estimationofreceivervelocityandclock‐drift
IfDopplerfrequencymeasurementsofGNSSsignalsaregiven,receivervelocitiesandclock‐driftscan
beestimatedthefollowingprocedure.Foranepochtime,theunknownparametersvectorxforthe

RTKLIBver.2.4.2Manual
159
velocityestimationisdefinedas:
(, )
TT
rr
cdtxv (E.6.26)
wherer
vandr
dt
arethereceivervelocityinECEF(m/s)andthereceiverclock‐drift(s/s),respectively.
Therange‐ratemeasurementvectorycanbegivenas:
123
,,, ,
(,,,...,)
mT
iri iri iri iri
DDD D
--- -
y(E.6.27)
where,
s
ri
Disthei
L
Dopplerfrequencymeasurementofthesatellite
s
.RTKLIBalwaysuses1
L
Dopplerfrequencymeasurements.Thesemeasurementequationsanditspartialderivativematrixare
formedas:
111
222
333
1
1
() 1
1
T
rr r
T
rr r
T
rr r
mmmT
rr r
rcdtcdT
rcdtcdT
rcdtcdT
rcdtcdT
e
e
hx H e
e
(F.6.28)
Therange‐rage
s
r
rbetweenthereceiverandthesatelliteintheseequationsisderivedfrom:
,,
()
ssTss s s s s
e
rr r yr xrxr yr
r t vx yv vy xv
c
ev v (F.6.29)
where(,,)
s
sssT
x
yz
vvvvand,,,
(,,)
T
rxryrzr
vvvv.ByusingtheiteratedLSEsimilartotheestimationof
thereceiverposition,wecanobtainthereceivervelocityandclock‐driftas:
ˆ
ˆˆ
lim ( , )
TT
ir r
icdt
xxv
(E.6.30)
wheretheweightmatrixWissetto
I
(non‐weightedLSE).
(5) SolutionvalidationandRAIMFDE
Theestimatedreceiverpositionsdescribedin(3)mightincludeinvalidsolutionsduetounmodeled
measurementerrors.Totestwhetherthevalidsolutionornotandrejecttheinvalidsolutions,RTKLIB
appliesthefollowingvalidationafterobtainingthereceiverpositionestimated.Ifthevalidationfailed,

RTKLIBver.2.4.2Manual
160
thesolutionisrejectedwithwarningmessages.
ˆ
ˆ
()
s
ssss
rr r rr
ss
PcdtcdTIT
v
(E.6.31)
123
( , , ,..., )T
m
vvv vv(E.6.32)
2(1)
1
Tmn
mn
vv (E.6.33)
thres
GDOP GDOP(E.6.34)
wherenisthenumberofestimatedparametersandmisthenumberofmeasurements.2()n
is
chi‐squaredistributionofthedegreeoffreedomnand0.001
(0.1%).GDOP isgeometricDOP
(dilutionofprecision).thres
GDOP canbesetastheprocessingoptionʺRejectThresholdofGDOPʺ.
Inadditiontothesolutionvalidationdescribedabove,RAIM(receiverautonomousintegrity
monitoring)FDE(faultdetectionandexclusion)functionisaddedinver.2.4.2.Iftheprocessingoption
ʺRAIMFDEʺisenabledandthechi‐squaredtestby(E.6.33)isfailed,RTKLIBretriestheestimationby
excludingonebyoneofthevisiblesatellites.Afterallofretries,theestimatedreceiverpositionwith
theminimumnormalizedsquaredresidualsT
vv
isselectedasthefinalsolution.Insuchscheme,an
invalidmeasurement,whichmightbeduetosatellitemalfunction,receiverfaultorlargemultipath,is
excludedasanoutlier.Notethatthisfeaturedoesnoteffectivewithtwoormoreinvalidmeasurements.
Italsoneedstworedundantvisiblesatellites,thatmeansatleast6visiblesatellitesarenecessaryto
obtainthefinalsolution.
RTKLIBver.2.4.2Manual
161
E.7 Kinematic, Static and Moving-Baseline
RTKLIBemploysEKF(extendedKalmanfilter)inordertoobtainthefinalsolutionsinDGPS/DGNSS,Static,
KinematicandMoving‐baselinemodesinconjunctionwiththeGNSSsignalmeasurementmodelsin
AppendixE.3andthetroposphereandionospheremodelsinAppendixE.5.
(1) EKFformulation[65]
ByusingEKF,astatevectorxforunknownmodelparametersanditscovariancematrixPcanbe
estimatedwithameasurementvectork
yatanepochk
tby:
ˆˆˆ
( ) ( ) ( ( ( )))
kkkkk
xxKyhx
(E.7.1)
ˆ
() ( ( ())) ()
kkkk
PIKHxP
(E.7.2)
1
ˆˆˆ
() ( ())( ( ()) () ( ()) )
T
kk k k k k k
ΚPHx Hx PHx R(E.7.3)
whereˆk
xandk
Paretheestimatedstatevectoranditscovariancematrixattheepochtimek
t.()
and()indicatesbeforeandaftermeasurementupdateofEKF.)(xh ,)(xH andk
Rarethe
measurementsmodelvector,thematrixofpartialderivativesandthecovariancematrixof
measurementerrors,respectively.Assumingthesystem‐modellinear,thetimeupdateofthestate
vectoranditscovariancematrixforEKFisexpressedas:
1
1
ˆˆ
() ()
k
kkk
xFx(E.7.4)
111
1() ()
kkTk
kkkkk
PFPFQ
(E.7.5)
where1k
k
Fand1k
k
Qarethetransitionmatrixandthecovariancematrixofthesystemnoisefrom
epochtimek
tto1k
t.
(2) DD(double‐difference)measurementmodelforshortbaseline
Forcarrier‐basedrelativepositioningwithashortlength(<10km)baselinebetweentherover
r
and
thebase‐stationb,thefollowingDDmeasurementequationsaregenerallyusedforthei
L
phase‐rangeandpseudorange.Intheseequations,thesatelliteandreceiverclockbiases,andthe
ionosphericandtroposphericeffectsandotherminorcorrectiontermsarealmosteliminatedbyusing
DDtechnique.
,,
,,
,
()
jk jk j ks
irbiri
rb i rb rb i
jk jk P
rb i rb
BB d
P
-
(E.7.6)
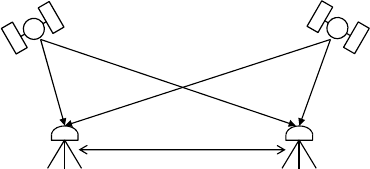
RTKLIBver.2.4.2Manual
162
FigureE.7‐1DD(double‐difference)Formulation
wherethe,
s
ri
d
isthecarrier‐phasecorrectionterms,whichcanbeneglectedintheshort‐baselinecase
exceptforthereceiverPCVtermswithdifferentantennas.Toobtainthegeometricrange
s
r
inthe
equation,thebase‐stationpositionb
risfixedtopredeterminedvaluesexceptforthemoving‐baseline
case.
NotethattheSDbetweenreceivershadbettertobemadebetweenthemeasurementswiththesame
epochtime.However,thereceiversarenotperfectlysynchronizedduetothedifferentreceiverclock
biases.Insometypicalcases,thesamplingintervaloftheroverisdifferentfromthebasestationlike10
Hzand1Hz.TocontroltheSD,RTKLIBtakesasimplecriteriontoselectameasurementpair.RTKLIB
simplyselectsthelastmeasurementbeforeorequaltotheepochtimeoftherovermeasurement.The
epochtimedifferencebetweentheroverandthebasestationissometimescalledasʺAgeof
Differentialʺ.Asthetimedifferencegrows,theaccuracyofthesolutionisgraduallydegradeddueto
thesatelliteclockdriftandthevariationofionospheredelay.Tocompensateonlythesatelliteclock
drift,RTKLIBcorrectstheSDmeasurementbyusingbroadcastSVclockparameters.Themaximum
ʺAgeofDifferentialʺissetastheprocessingoptionʺMAXAgeofDiffʺ.
Astothesatellite‐sideSDgeneration,RTKLIBselectsareferencesatellitewiththemaximumelevation
angleontheepoch‐by‐epochbasis.Notethatnosatellite‐sideSDisgeneratedbetweensatellitesof
differentnavigationsystemslikebetweenGPSandGLONASS.Itisbecausethatthereceiverusually
hasdifferentgroupdelaysforthesignalofdifferentnavigationsystemeveniftheyhavethesame
carrierfrequency.ThegroupdelaydifferenceinreceiversiscalledasareceiverISB(intersystembias).
Assumingtheuseoftriple‐frequencyGPS/GNSSreceiversforbothoftheroverandthebase‐station,
theunknownstatevectorxtobeestimatedcanbedefinedas:
ReceiverrReceiverb
SatellitejSatellitek
j
r
k
r
j
b
k
b
Baseline

RTKLIBver.2.4.2Manual
163
125
(, , , , )
TTT T TT
rr
xrvBBB (E.7.7)
where12
,, ,
( , ,..., )
mT
irbirbirbi
BB BBisi
LSD(single‐difference)carrier‐phasebiases(cycle).AstheRTKLIB
implementation,itinternallyusesSDcarrier‐phasebiasesinsteadofDDtoavoidbothersome
hand‐overhandlingofreferencesatellites.TheSDbiasesalsoassisttoresolveintegerambiguitiesin
GLONASSFDMAsignals.
Themeasurementvector
y
isalsodefinedwithDDphase‐rangeandpseudorangemeasurementsas:
1, 2, 5, 1 2 5
(, , ,,,)
TTTTTTT
yΦΦ Φ PP P (E.7.8)
where:
12 13 14 1
,,, ,
12 13 14 1
,,, ,
( , , ,..., )
( , , ,..., )
mT
i rb i rb i rb i rb i
mT
i rbi rbi rbi rbi
PPP P
Φ
P
(3) MeasurementupdateofEKFforshortbaseline
Byusingtheequation(E.7.6),themeasurementmodelvector)(xh ,thematrixofpartialderivatives
)(xH andthecovariancematrixofmeasurementerrorsRcanbewrittenas:
,1 ,2 ,5 ,1 ,2 ,5
() ( , , , , , )
TTTTTTT
PP P
hx h h h h h h (E.7.9)
1
2
5
ˆ
()
()
-
-
-
xx
D
E0 D 0 0
D
E0 0 D 0
D
E0 0 0 D
hx
Hx
D
E0 0 0 0
x
D
E0 0 0 0
D
E0 0 0 0
(E.7.10)
,1
,2
,5
,1
,2
,5
T
T
T
T
P
T
P
T
P
DR D
DR D
DR D
R
DR D
DR D
DR D
(E.7.11)
where:
12 1 2 12
13 1 3 13
,,
11 1
()
()
,
()
rb i rb rb rb
rb i rb rb rb
iPi
mm m
rb i rb rb rb
BB
BB
BB
-
-
-
hh

RTKLIBver.2.4.2Manual
164
110 0
10 1 0
10 0 1
D
:SD(single‐differencing)matrix
Tm
rrr ),...,,( 21 eeeE
12 22 2
,,,,
12 22 2
,,,,
diag(2 ,2 ,...,2 )
diag(2 ,2 ,...,2 )
m
iiii
m
Pi Pi Pi Pi
R
R
,
s
i
:standarddeviationofi
Lphase‐rangemeasurementerror(m)
,
s
Pi
:standarddeviationofi
Lpseudorangemeasurementerror(m)
BysolvingtheEKFformulas(E.7.1)withtheseequations,theestimatedroverantennaposition,
velocityandfloatSDcarrier‐phasebiasestheepochtimek
tareobtained.
(4) TimeupdateofEKF
Forthekinematicpositioningmodewithreceiverdynamics(PositioningMode=KinematicandREC
Dynamics=ON)inRTKLIB,thetimeupdateofEKF(E.7.2)isexpressedwith:
33 33
133
(3 3) (3 3)
r
k
k
mm
II
FI
I
,
33
1
(3 3) (3 3)
k
kv
mm
0
QQ
0
(E.7.12)
where:
222
diag( , , )
T
v r ve r vn r vu r r
QE E
and kkr tt 1
isGPS/GNSSreceiversamplinginterval(s),(,, )
ve vn vu
arethestandarddeviations
ofeast,northandupcomponentsoftherovervelocitysystemnoises(m/s/ s).
Forthepurekinematicmodewithoutreceiverdynamics(PositioningMode=KinematicandREC
Dynamics=OFF),equations(E.7.9)isbereplacedby:
33
133
(3 3) (3 3)
k
k
mm
I
FI
I
,
33
133
(3 3) (3 3)
k
k
mm
Q0
0
(E.7.13)
Toavoidnumericalinstabilitybyaddinginfiniteprocessnoisestothevariancesofthereceiverposition,
thereceiverpositionstatesareinsteadresettotheinitialguessvaluesateveryepochsandadequately
RTKLIBver.2.4.2Manual
165
largeprocessnoises(104m2)areaddedtothevarianceinRTKLIB.Theinitialpositionisderivedfrom
thesinglepointpositioningprocesswhichisusedtoavoidtheiterationfornon‐linearsignal
measurementmodel.
Inthestaticmode(PositioningMode=Static),equations(F.7.10)issimplyreplacedby:
33
133
(3 3) (3 3)
k
k
mm
I
FI
I
,
33
133
(3 3) (3 3)
k
k
mm
0
Q0
0
(E.7.14)
Intheinstantaneousambiguityresolutionmode(IntegerAmbiguityResolution=Instantaneous),the
timeupdateoftheSDcarrier‐phasebiasesi
Barehandledinalittledifferentwayfromdescribed
above.Inthismode,valuesofthecarrier‐phasebiasstatesarenotsucceededtothenextepochbythe
EKFtimeupdate.Thebiasesareresettotheinitialguessvaluesateveryepochsandadequatelylarge
processnoises(104m2)areaddedtothevariance.Ifacycle‐slipisdetectedinthemeasurementdata,
thestateofcorrespondingSDcarrier‐phasebiasisalsoresettoinitialvalue.RTKLIBdetectsthe
cycle‐slipsbyLLI(lossoflockindicator)intheinputmeasurementdataandgeometry‐freeLC(linear
combination)phasejumpsifthedualfrequencymeasurementsareavailable.Thecycle‐slipthreshold
canbechangedbytheprocessingoptionʺSlipThresʺ.
(5) Integerambiguityresolution
OncetheestimatedstatesobtainedintheEKFmeasurementupdate,thefloatcarrier‐phaseambiguities
canberesolvedintointegervaluesinordertoimproveaccuracyandconvergencetime(Integer
AmbiguityRes=Continuous,InstantaneousorFixandHold).Atfirst,theestimatedstatesandtheir
covariancematrixaretransformedtoDDformsby:
ˆ
ˆˆˆˆ
'()(,,)
TTTT
kk rr
xGx rvN(E.7.15)
'() RNR
T
kk RN N
QQ
PGPG QQ
(E.7.16)
where:
66
I
D
GD
D
:SDtoDDtransformationmatrix

RTKLIBver.2.4.2Manual
166
Inthistransformation,theSDcarrier‐phasebiasesaretransferredtotheDDcarrier‐phaseformin
ordertoeliminatereceiverinitialphasetermstoobtainintegerambiguitiesˆ
Nandtheircovariance
N
Q.Intheseformulas,themostappropriateintegervectorN
fortheintegerambiguitiesisobtained
bysolvinganILS(integerleastsquare)problemexpressedas:
1
ˆˆ
argmin(( ) ( ))
TN
NZ
NNNQNN
(E.7.17)
TosolvetheILSproblem,awell‐knownefficientsearchstrategyLAMBDA[66]anditsextension
MLAMBDA[67]areemployedinRTKLIB.LAMBDAandMLAMBDAofferthecombinationofalinear
transformationtoshrinktheintegervectorsearchspaceandaskillfultree‐searchprocedureinthe
transformedspace.Theintegervectorsolutionbytheseproceduresisvalidatedbythefollowing
simpleʺRatio‐Testʺ.IntheʺRatio‐Testʺ,theratio‐factor
R
,definedastheratiooftheweightedsumof
thesquaredresidualsbythesecondbestsolution2
N
toonebythebestN
,isusedtocheckthe
reliabilityofthesolution.Thevalidationthresholdthres
RcanbesetbytheprocessingoptionʺMin
RatiotoFixAmbiguityʺ.CurrentversionRTKLIBjustonlysupportsafixedthresholdvalue.
1
22
1
ˆˆ
()()
ˆˆ
()()
TNthres
TN
RR
NNQ NN
NNQ NN
(E.7.18)
Afterthevalidation,theʺFIXEDʺ solutionoftheroverantennapositionandvelocityr
r
andr
v
are
obtainedbysolvingthefollowingequation.Ifthevalidationfailed,RTKLIBoutputstheʺFLOATʺ
solutionˆr
randˆr
vinstead.
1
ˆˆ
()
ˆ
rrRN N
rr
rrQQ NN
vv
(E.7.19)
IncasetheprocessingoptionissetastheʺFixandHoldʺ mode(IntegerAmbiguityResolution=Fix
andHold)andthefixedsolutionproperlyvalidatedbytheprevioustest,theDDcarrier‐phasebias
parametersaretightlyconstrainttothefixedintegervalues.Forthesepurpose,RTKLIBinputsthe
followingʺpseudoʺmeasurementstoEKFandupdatesEKFby(F.7.1).
y
N
(E.7.20)
()hx Gx
(E.7.21)
()Hx G
(E.7.22)
222
(,,,...)
ccc
diag
R(E.7.23)
RTKLIBver.2.4.2Manual
167
where:
0D
G0 D
0D
:SDtoDDtransformationmatrix
c
:constrainttofixedintegerambiguities(=0.001cycle).
TheʺFixandHoldʺ modewasfirstlyintroducedinRTKLIBver.2.4.0inordertoimprovethefixing
ratioespeciallyinthekinematicmodetotrackingmovingreceivers.
(6) LongbaselineDDmeasurementmodel
Forthelongbaselineprocessingbetweentherover
r
andthebasestationb,thefollowingDD
measurementequationscanbeformedsimilartotheshortbaselineDDmodel.
,, ,,,
,,
()
jk jk jk jk j k s
rb i rb rb k rb i rb i rb i r i
jk jk jk jk
rb i rb rb i rb P
IT BB d
PIT
-
(E.7.24)
wheretheterms,
s
ri
I
and
s
r
Tasthei
Lionospheredelay(m)andtropospheredelay(m)areaddedto
theshortbaselineDDmodel.Preciseephemeridesforsatellitepositionsshouldbeusedtomitigatethe
broadcastephemeriserrorforthebaselineover100km.Inthecarrierphasecorrectionterms,
s
ri
d
,the
earthtideseffectsshouldbetakenaccountforthelongerbaselinethan500km.Toeliminatethe
ionosphereterms,anionosphere‐freeLC(linearcombination)issometimesformed.However,RTKLIB
doesnotusesuchexplicitLCbutdoesdirectlyestimatetheionospheretermswithdualortriple
frequencymeasurementsbyEKFforbaselineprocessing.
Theunknownstatevectorxforthelongbaselinecasecanalsobesettledas:
,, ,, 125
(, ,, , ,, , ,, , , )
TT T T T TT
rr rNrErbNbEb
ZG G ZG Gxrv IBBB (E.7.25)
wherer
Z
andb
Z
areZTD(zenithtotaldelay)attheroverandbase‐stationsites,,Nr
G,,Er
G,,Nb
G
and,Eb
Garethenorthandeastcomponentsoftroposphericgradients.12
(,,...,)
mT
rb rb rb
II IIistheSD
verticalionosphericdelayin1
L
frequency(m)aswell.
Themeasurementmodelvector)(xh andthematrixofpartialderivatives)(xH canbewrittenas:
,1 ,2 ,5 ,1 ,2 ,5
() ( , , , , , )
TTTTTTT
PP P
hx h h h h h h (E.7.26)
RTKLIBver.2.4.2Manual
168
12 12 1 1 2 2 1 2 12
,, .
13 13 1 1 3 3 1 3 13
,, .
,
11 11 1 1
,, .
()()
()()
()()
rb rb k I rb I rb i rb i rb i rb i
rb rb k I rb I rb i rb i rb i rb i
i
mm mm m m
rb rb k I rb I rb i rb i rb i rb i
TmImI BBd
TmImI BBd
TmImIBBd
-
-
-
h(E.7.27)
12 12 1 1 2 2
13 13 1 1 3 3
,
11 11
()
()
()
rb rb k I rb I rb
rb rb k I rb I rb
Pi
mm mm
rb rb k I rb I rb
TmImI
TmImI
TmImI
h(E.7.28)
,,11
,,2 2
,,5 5
,,1
,,2
,,5
()
Tr Tb I
Tr Tb I
Tr Tb I
Tr Tb I
Tr Tb I
Tr Tb I
-
-
-
DE 0 DM DM DM D
DE 0 DM DM DM D
D
E 0 DM DM DM D
Hx DE 0 DM DM DM
DE 0 DM DM DM
DE 0 DM DM DM
(E.7.29)
where:
22
1
/
kk
--
1 1 11 1 1 11 1 1
,, ,
2 2 22 2 2 22 2 2
,, ,
,
,, ,
() ()cot cos ()cot sin
() ()cot cos ()cot sin
() ()cot cos ()cot sin
WGrr Wrr r r Wrr r r
WG r r W r r r r W r r r r
Tr
m m mm m mmm m m
WG r r W r r r r W r r r r
m El m El El Az m El El Az
m El m El El Az m El El Az
m El m El El Az m El El Az
M
12
( , ,..., )
mT
IIII
mm mM
ThetimeupdateofEKFforthelong‐baselinecaseisexpressedas:
33 33
33
166
(3 3) (3 3)
r
k
k
mm
mm
II
I
I
F
I
I
(E.7.30)
33
1
(3 3) (3 3)
v
kT
k
I
mm
0
Q
Q
Q
Q
0
(E.7.31)
whereT
Qand
I
Qaretheprocessnoisecovariancematrixesoftheionosphereandthetroposphere
terms.Intheequation,theZTDandgradientparametersfortheroverandthebase‐stationandSD
verticalionosphericdelaysforeachsatellitesaresimplymodeledasrandom‐walk.Inadditionto
estimateionosphereandtroposphereterms,aʺPartialfixingʺ featurewasaddedforlongbaseline
processinginversion2.4.1.Itmeansthatonlythesomepartialportionofallambiguitiesareresolved
intointegervalues.Otherambiguitiesexceptforthefixedarestillpendingasfloatvalues.To

RTKLIBver.2.4.2Manual
169
determinewhetheraambiguityfixedornotfixed,asimplecriterionbyusingthesatelliteelevation
angleisimplementedinRTKLIB.Ifasatelliteisunderathresholdoftheelevation,theambiguitiesof
thesatellitearenotfixed.Onlytheambiguitiesofsatellitesoverthethresholdareresolvedtointeger.
TheelevationthresholdfortheambiguityresolutioncanbesetastheprocessingoptionʺMinElevation
toFixAmbʺaswellasʺMinElevationtoHoldAmbʺtocontroltheʺFixandHoldʺfeature.
(7) Moving‐baselinemodel
Themovingbaselinemodeisusuallyusedifbothoftheroverandthebasestationreceiversare
movingandtheonlyrelativepositionoftheroverwithrespecttothebasestationisrequired.The
moving‐baselinemodecanbeutilizedtodeterminethepreciseattitudebymountingtwoantennasto
amovingplatform.InRTKLIB,themoving‐baselinemodeisappliediftheprocessingoption
ʺPositioningModeʺissettoʺMoving‐Baseʺ.
Inthemoving‐baselinemode,thebase‐stationpositionisnotfixedbutisestimatedbythesinglepoint
positioningprocessonepoch‐by‐epochbasis.Oncethebasestationpositionisobtained,thebase
stationpositionfixedtotheestimatepositionandtheroverpositionisestimatedbyshortbaseline
kinematicmodedescribedin(1)‐(5).Inthiscaseonlytherelativepositionismeaningful,thatmeansthe
absolutepositionsolutionsofroverandbase‐stationhaveonlytheaccuracyassameasthesolutionby
thepointpointingmode.
Inadditiontothesimpleimplementationforthemoving‐baselinemode,RTKLIBcorrectsthetime
differencebetweentheroverandthebasestation.Theroverreceiverandthebasestationreceiverare
notsynchronized.Thereceiverclockdifferenceusuallyreaches2msasmaximum.The
unsynchronizedclocksbringtheaccuracydegradationincaseofveryfastmovingplatform.Tocorrect
theclockdifference,thebasestationpositionb
riscorrectedbeforethebaselineprocessingby:
() () ()( )
br bb bb r b
ttttt rrv (E.7.32)
wherer
tandb
tarethesignalreceptiontimeattheroverandthebasestationestimatedbythesingle
pointpositioningprocess.()
bb
tvisalsothevelocityofthebasestationestimatedwithDoppler
measurements.Fortheattitudedeterminationbythemovingbaselinemode,thebaselinelength
constraintcanbeappliediftheprocessingoptionʺBaselineLengthConstraintʺenabled.Theconstraint
appliesthefollowingpseudo‐measurementintheEKFmeasurementupdate.
baseline
ry(E.7.33)
() () ()
rr br
x
tthrr
(E.7.34)
RTKLIBver.2.4.2Manual
170
(() ())
() ()
T
rr br
rr br
tt
tt
rr
Hrr
(E.7.35)
2
r
R(E.7.36)
wherebaseline
risthegivenpre‐determinedbaselinelength(m)andr
istheconstraintofthebaseline
length(m).Tocopewiththenon‐linearityincaseofaveryshortlengthbaseline,iterativemeasurement
updateofEKFissupportedbysettingtheprocessingoptionʺNumberofFilterIterationʺtomorethan
1.
RTKLIBver.2.4.2Manual
171
E.8 PPP (Precise Point Positioning)
InPPPmodes,RTKLIBalsouseEKFestimationprocesssimilartotheschemesdescribedinAppendixE.7.
Thedifferencefromthebaselineprocessing,PPPemploysZD(zero‐difference)measurementequationslike
thesinglepointpositioningmodelinsteadofDD.
(1) ZDmeasurementmodelsforPPP
Theionosphere‐freeLCphase‐range,
s
rLC
andpseudorange,
s
rLC
Pmeasurementsforthesatellite
s
areexpressedbyusing(E.3.4)and(E.3.2)as:
,,,
,
(() ())
(() ())
ss ssss s
rLC r r r r rLC rLC
ss sss
rLC r r r r P
cdt t dT t T B d
PcdttdTtT
(E.8.1)
wheretheionospheretermsin(E.3.4)and(E.3.2)areeliminatedbyformingtheionosphere‐freeLC
describedinE.5(7).,
s
rLC
Bisthecarrier‐phasebiasinmand,
s
rLC
d
istheionosphere‐freeLCofi
L
andj
L
carrier‐phasecorrectiontermsexpressedas:
,,,,,, ,, ,,,,
,,,,
() ()
() ()
T
T
ssssss
r LC i r pco i j r pco i r enu i pco i j pco j r i r pcv i j r pcv j
ss Ts
pcv i pcv j r disp r enu i i j j pw
dCC CC CdElCdEl
dd CC
--
ddeEdde
de
(E.8.2)
(2) Receiverantennaphasecentermodel
FigureE.8‐1showsthereceiverantennaPCO(phasecenteroffset)andPCV(phasecentervariation).
TheantennaPCOisdefinedastherelativepositionofthereceiverantennaphasecenterwithrespect
totheARP(antennareferencepoint).ThePCVisdefinedastheexcessphasedelaybytheantenna
dependingontheelevationandazimuthangle.ThePCOandPCVvaluesforvariousantennatypes
havebeenmeasuredbytheappropriateantennacalibrationprocessandprovidedbysomestandard
formats.CurrentversionRTKLIBsupportstheNGSPCVandtheANTEXformatfortheantenna
modelincludingPCOandPCVdata.ThePCOvalueisusuallyprovideinthelocalcoordinatesatthe
receiverposition.Sothei
L
PCOofthereceiverantennainECEF,,rpcoi
disexpressedas:
,, ,,,
T
r pco i r r pco i enu
dEd (E.8.3)
wherer
E
istheECEFtolocalcoordinatesrotationmatrixgivenby(E.2.10)and,,,rpcoienu
disi
L
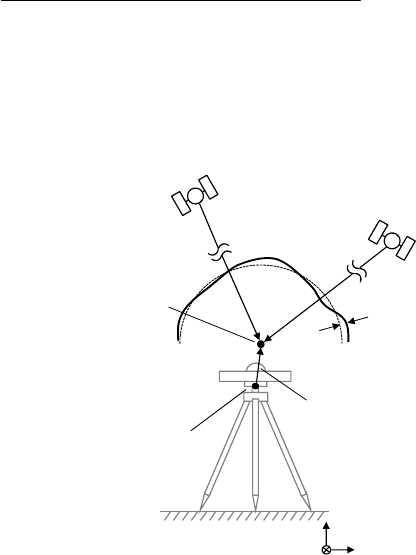
RTKLIBver.2.4.2Manual
172
receiverantennaPCOexpressedinthelocalcoordinates.Thei
L
receiverantennaPCV,,
()
rpcvi
dEl
at
theelevationangleEl isderivedbythelinearinterpolationofgivenPCVvaluesdependingonthe
elevationanglesas:
,, 1 ,, 1
,, 1
()()( )()
() irpcvi i i rpcvi i
rpcvi ii
El El d El El El d El
dEl El El
(E.8.4)
where1ii
E
lElEl
.
FigureF.8‐1ReceiverAntennaPhaseCenter
(3) Satelliteantennaphasecentermodel
FigureF.8‐1showstheGNSSsatelliteantennaPCOandPCV,whicharealsoprovidedastheANTEX
filetypicallybyIGS(internationalGNSSservice)likethereceiverantenna.RTKLIBalsocanimport
suchtheantennamodelforsatellites.ThesatelliteantennaPCOisusuallygiveninsatellitefixed
coordinateswithrespecttothesatelliteCoM(centerofmass)showninFigureF.8‐3.Sothesatellite
antennaPCOinthesatellitefixedcoordinatesshouldbetransferredtoECEFcoordinates.ThePCVis
alsoexpressedwithrespecttothenadirangle.
Antenna
Phase
Center
Antenna
Reference
Point (ARP)
z(U)
x(E)
y(N)
AntennaPhase
CenterOffset
pcor,
d
pcvr
d,
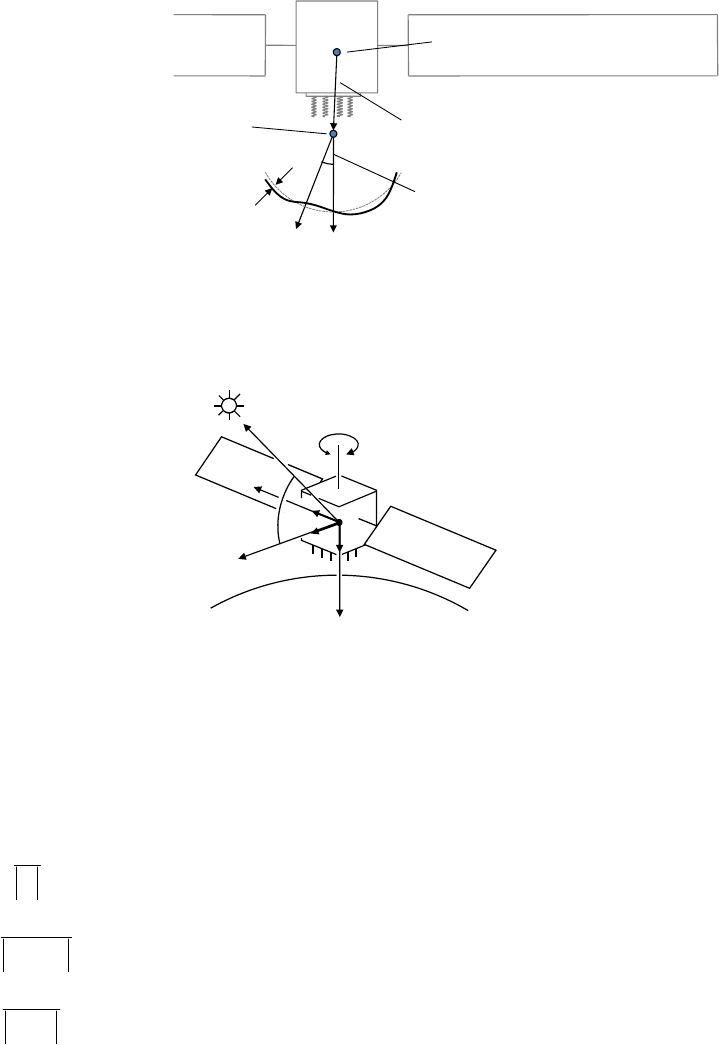
RTKLIBver.2.4.2Manual
173
FigureF.8‐2SatelliteAntennaPhaseCenter
FigureF.8.3SatelliteBody‐FixedCoordinateSystem
Assumingthenominalsatelliteattitudecontrolmode,thecoordinatestransformationmatrix
s
E
from
thesatellitebody‐fixedcoordinatestoECEFcoordinatesisgivenas:
s
s
z
s
r
e
r(E.8.5)
s
sun
s
s
sun
rr
e
rr
(E.8.6)
s
szs
ys
zs
ee
e
ee
(E.8.7)
s
ss
x
yz
eee
(E.8.8)
(,,)
s
ss
s
xyz
E
eee (E.8.9)
where
s
un
risthesunpositioninECEFcoordinates.Thenadirangle
canalsobederivedas:
z
x
y
Sun
Satellite
AntennaPhase
Center
Mass Center of
Satellite
AntennaPhase
CenterOffset
Nadir Angle
pcv
s
d
pco
s
d
Earth
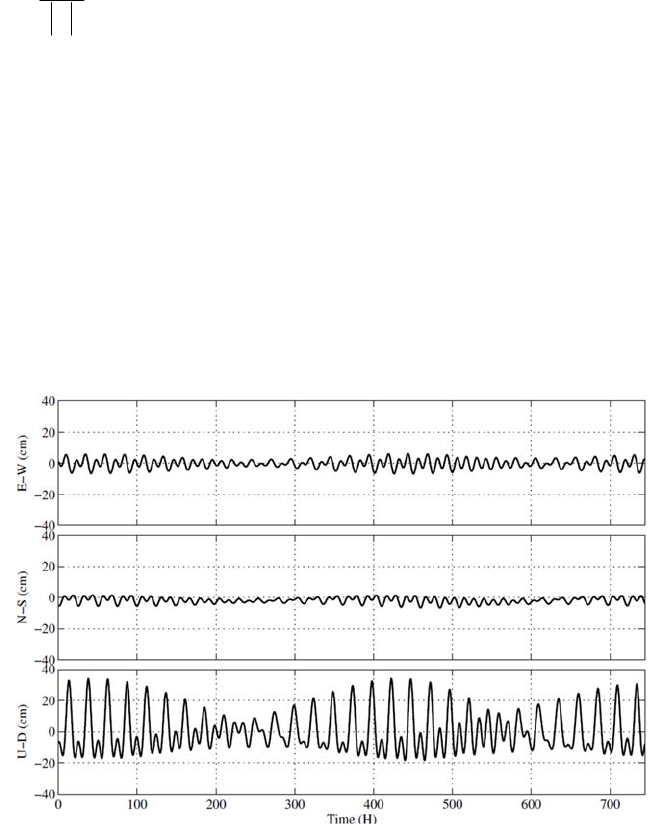
RTKLIBver.2.4.2Manual
174
arccos
s
Ts
r
s
er
r(E.8.10)
(4) Sitedisplacementbyearthtides
Thepositionofareceiverfixedtothegroundisvariedbytheearthtideeffects.Thetideseffectsare
usuallyneglectedforthebaselineanalysisbecausetheDDcancancelthealmostalloftheeffects.
However,inthePPPmode,theeffectshouldbeincorporatedinthemodelbecausetheamplitude
sometimesreachesseveral10cmastheverticalcomponent.FigureE.8‐2showstheexampleofthesite
displacementeffectbyearthtides.
FigureE.8‐2DisplacementbyEarthTides
IncurrentversionRTKLIB,solidearthtides,OTL(oceantideloading)andpoletidesaremodeledand
considerediftheprocessingoptionʺEarthTideCorrectionʺtoʺSolidʺorʺSolid/OTLʺ.Theearthtide
modelsisbasedonIERSConventions1996[73].Bysettingthecompileroption‐DIERS_MODELand
rebuildingAPs,RTKLIBusestheIERSConventions2010[74]solidearthtidesmodelbylinkingthe
FORTRANsubroutineDEHANTTIDEINELprovidedasIERS.FortheOTLmodel,OTLcoefficientsas
providedastheBLQformat[63]shouldbeinputasspecifiedastheprocessingoptionʺOTLBLQFileʺ.
(5) Phasewindupcorrection
Thephasewindupeffectisthephaseadvanceanddelaybytherelativerotationbetweenthereceiver
andsatelliteantennas.Thephasewindupismodeledas:

RTKLIBver.2.4.2Manual
175
,,,
(,,)
TTTT
rrxryrz
Ee e e (E.8.11)
(,,)
s
sT sT sT T
xyz
Eeee (E.8.12)
()
s
ssss ss
x
uu x u y
D
eeee ee
(E.8.13)
,,,
()
ss s
rrxrrrx rry
D
eeee ee
(E.8.14)
( ( ))arccos / 2
s
ss r
pw r r sr
s
ign N
DD
eDD
DD (E.8.15)
whereNistheintegerambiguity,whichisdeterminedastoavoidingcycle‐jumps.
(6) EstimationofreceiverpositionbyPPP
ByusingEKF,theunknownstatevectorxforthePPPcaseissettledas:
,,
(,, ,, , , )
TT TT
rr rrNrErLC
cdt Z G Gxrv B (E.8.16)
wherer
Z
isZTD(zenithtotaldelay),,Nr
Gand,Er
Garethenorthandeastcomponentsof
troposphericgradients.12
,, ,
(,,...,)
mT
LC r LC r LC r LC
BB BBisionosphere‐freeLCofZD(zero‐differenced)
carrier‐phasebiases(m).
Themeasurementvector
y
isalsodefinedwithZDionosphere‐freeLCphase‐rangeandpseudorange
measurementswith(E.5.21)and(E.5.22)as:
,
(,)
TTT
LC LC
yΦP(E.8.17)
where:
123
,,, ,
123
,,, ,
( , , ,..., )
( , , ,..., )
mT
LC r LC r LC r LC r LC
mT
i r LC r LC r LC r LC
PPP P
Φ
P
Themeasurementmodelvector)(xh andthematrixofpartialderivatives)(xH canbewrittenas:
() ( , )
TTT
P
hx h h (E.8.18)
11111
,.
22222
,.
,.
()
()
()
rr rrLCrLC
rr rrLCrLC
mmmmm
rr rrLCrLC
cdt dT T B d
cdt dT T B d
cdt dT T B d
h(E.8.19)
RTKLIBver.2.4.2Manual
176
111
222
()
()
()
rr r
rr r
P
mmm
rr r
cdt dT T
cdt dT T
cdt dT T
h(E.8.20)
() T
T
D
E01DM I
Hx
D
E01DM 0
(E.8.21)
,
,
LC
P
LC
R
RR(E.8.22)
where:
1
1
1
1
1 1 11 1 1 11 1 1
,, ,
2 2 22 2 2 22 2 2
,, ,
,, ,
() ()cot cos ()cot sin
() ()cot cos ()cot sin
() ()cot cos ()cot sin
WGrr Wrr r r Wrr r r
WG r r W r r r r W r r r r
T
m m mm m mmm m m
WG r r W r r r r W r r r r
m El m El El Az m El El Az
m El m El El Az m El El Az
m El m El El Az m El El Az
M
12 22 2
,,1,1,1
12 22 2
,,1,1,1
diag(3 ,3 ,...,3 )
diag(3 ,3 ,...,3 )
m
LC
m
PLC P P P
R
R
,1
s
:standarddeviationof1
Lphase‐rangemeasurementerror(m)
,1
s
P
:standarddeviationof1
Lpseudorangemeasurementerror(m)
ByusingtheEKFformulationandthesimilartimeupdateprocessesdescribedinE.7,theunknown
parametersincludingthereceiverpositionandvelocity,thereceiverclockbias,thetroposphere
parametersandtheionosphere‐freeLCcarrier‐phasebiasesareestimated.
Notethattoresolvetheintegerambiguityinthecarrier‐phasebiaseslikethebaselineprocessingcases,
theadditionalinformationforthesatellite‐sideFCB(fractionalcyclebias)isneeded.Theprocessis
sometimescalledasPPP‐AR(ambiguityresolution).CurrentversionRTKLIBonlysupportsthe
wide‐laneFCBandtheIRC(integerrecoveryclock)productsprovidedbyCNES.Theimplementationis
experimentalandunstable.ThePPP‐ARfeatureisenabledincaseoftheprocessingoptionʺInteger
AmbiguityResolutionʺissettoʺPPP‐ARʺonlyinthepost‐processingmode.
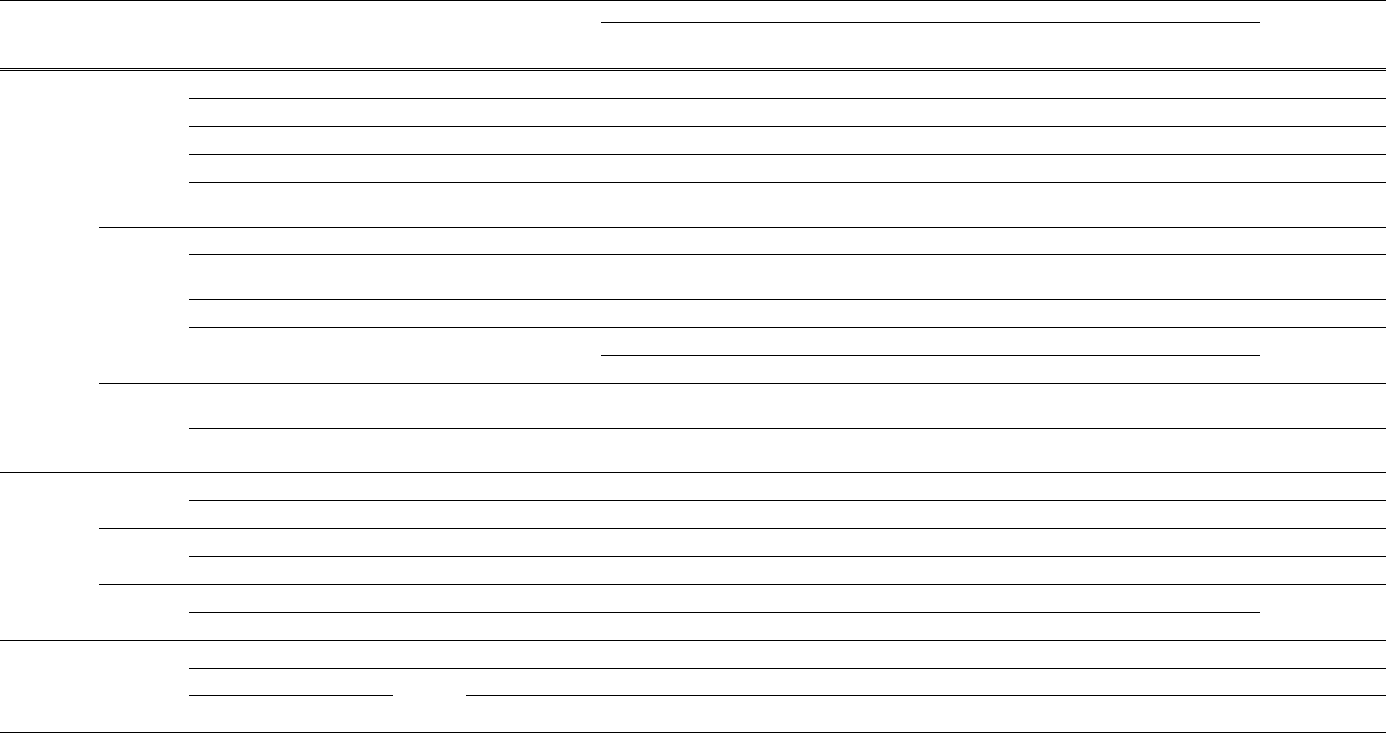
RTKLIBver.2.4.2Manual
177
Appendix F GNSS Signal Specifications
SystemFreq.
(MHz)Signal
Band
Width
(MHz)
I/Q
Min.
Power
(dBW)
Modulation
SpreadingCodeNavigationData
Notes
Primary
(chips)
Second
(chips)
Rate
(Mcps)Period ENC DataRate
(sps)
Rate
(bps) FEC
GPS[1][2][3]
1575.42
L1C/A2.046Q‐158.5BPSK(1)1,023‐1.0231ms‐ NAV5050‐
L1P(Y)20.46I‐161.5BPSK(10)1week‐10.231week (Y)NAV5050‐
L1M???BOC(10,5)??5.115?Y????BlockIIR‐M‐
L1C‐D30.69I‐163BOC(1,1)10,230‐1.02310ms‐CNAV‐2100501/2BlockIII‐
L1C‐P30.69I‐158.25 TMBOC
(6,1,1/11)10,2301,8001.02318s‐ ‐ ‐‐‐BlockIII‐
1227.6
L2C/A2.046Q‐160.0BPSK(1)1,023‐1.0231ms‐(NAV)‐50‐50‐BlockIIR‐M‐
L2P(Y)20.46I‐164.5/
‐161.5BPSK(10)1week‐10.231week (Y)(NAV)‐50‐50‐
L2M???BOC(10,5)??5.115?Y????BlockIIR‐M‐
L2C2.046Q/I ‐160.0BPSK(1)10,230‐0.511520ms‐(CNAV)‐50‐251/2timemux,
BlockIIR‐M‐
767,250‐0.51151.5s‐ ‐ ‐‐‐
1176.45
L5‐I20.46I‐157.9/
‐157.0BPSK(10)10,2301010.2310ms‐ CNAV100501/2BlockIIF‐
L5‐Q20.46Q‐157.9/
‐157.0BPSK(10)10,2302010.2320ms‐ ‐ ‐‐‐BlockIIF‐
GLONASS
[4]
1602.00+
0.5625K
L1C/A 1.022I‐161.0BPSK511‐0.5111ms‐ NAV5050‐
L1P10.22Q?BPSK5,110,000 ‐ 5.111s(Y)NAV5050‐
1246.00+
0.4375K
L2C/A 1.022I‐167.0BPSK511‐0.5111ms‐ NAV5050‐
L2P 10.22Q?BPSK5,110,000 ‐ 5.111s(Y)NAV5050‐
1202.025L3‐I20.46I?BPSK(10)10,230510.235ms‐ NAV100501/2
GLONASS‐K‐
L3‐Q20.46Q?BPSK(10)10,2301010.2310ms‐ ‐ ‐‐‐
Galileo[5]1575.42
E1‐A35.805Q?BOC(15,2.5)??2.5575?YG/NAV???PRS
E1‐B24.552I
‐157.0
CBOC(6,1,1/11) 4,092‐1.0234ms‐I/NAV2501251/2OS,SoL,CS
E1‐C24.552QCBOC(6,1,1/11) 4,092251.023100ms ‐ ‐ ‐ ‐ ‐
RTKLIBver.2.4.2Manual
178
SystemFreq.
(MHz)Signal
Band
Width
(MHz)
I/Q
Min.
Power
(dBW)
Modulation
SpreadingCodeNavigationData
Notes
Primary
(chips)
Second
(chips)
Rate
(Mcps)Period ENC DataRate
(sps)
Rate
(bps) FEC
Galileo
1191.795E5a+
E5b51.15I‐155.08‐PSK(10)10,23010010.23100ms ‐ ‐ ‐ ‐ ‐ AltBOC
1176.45E5a‐I20.46I
‐155.0BPSK(10)10,2302010.2320ms‐ F/NAV50251/2OS,CS
E5a‐Q20.46QBPSK(10)10,23010010.23100ms ‐ ‐ ‐ ‐ ‐
1207.14E5b‐I20.46I
‐155.0BPSK(10)10,230410.234ms‐I/NAV2501251/2OS,SoL,CS
E5b‐Q20.46QBPSK(10)10,23010010.23100ms ‐ ‐ ‐ ‐ ‐
1278.75
E6‐A?Q?BOC(10,5)??5.115?YG/NAV???PRS
E6‐B40.92I
‐155.0BPSK(5)5,115‐5.1151msYC/NAV1,000 ??CS
E6‐C40.92IBPSK(5)5,1151005.115100ms Y ‐ ‐‐‐
QZSS[6]
1575.42
L1C/A2.046Q‐158.5BPSK(1)1,023‐1.0231ms‐ NAV5050‐
L1C‐D4.096I‐163.0BOC(1,1)10,230‐1.02310ms‐CNAV‐2100501/2
L1C‐P4.096Q‐158.25 BOC(1,1)10.231,8001.02318s‐ ‐ ‐‐‐
L1‐SAIF2.046I‐161.0BPSK(1)1,023‐1.0231ms‐L1‐SAIF5002501/2
1227.6L2C2.046I‐160.0BPSK(1)10,230‐0.511520ms‐ CNAV50501/2chip‐by‐chip
timemux
767,250‐0.51151.5s‐ ‐ ‐‐‐
1176.45L5‐I20.46I‐157.9BPSK(10)10,2301010.2310ms‐ CNAV50251/2
L5‐Q20.46Q‐157.9BPSK(10)10,2302010.2320ms‐ ‐ ‐‐‐
1278.75LEX42.0I‐155.7BPSK(5)10,230‐2.55754ms‐ LEX2,000 1,744 RSchip‐by‐chip
timemux
1,048,575 ‐ 2.5575410ms ‐ ‐ ‐ ‐ ‐
BeiDou[7]
1561.098B14.092Q
‐163.0QPSK(2)2,046202.04620ms‐D1‐NAV 5050BCH IGSO,MEO
‐ 2.0461ms‐D2‐NAV 500500BCH GEO
I2,046‐2.046>0.4s‐ ‐ ‐‐‐
1207.14B224.0Q
?QPSK(10)2,046202.04620ms?????
I10,230‐10.23>0.16s ‐ ‐ ‐ ‐ ‐
1268.52B324.0Q
?QPSK(10)10,2302010.2320ms?????
I10,230‐10.23>0.16s ‐ ‐ ‐ ‐ ‐
SBAS[8]1575.42L12.046I‐161.0BPSK(1)1,023‐1.0231ms‐ SBAS5002501/2
1176.45L520.46I?BPSK(10)10,230‐10.2310ms‐ SBAS5002501/2WAAS
K=‐7,...,+6,ENC:encryption,FEC:forwarderrorcorrection,1/2:1/2convolutionalcode,RS:ReedSolomoncode,BCH:BCHcodeandinterleave
RTKLIBver.2.4.2Manual
179
References
[1] IS‐GPS‐200F,NavstarGPSSpaceSegment/NavigationUserInterfaces,September21,2011
[2] IS‐GPS‐750A,NavstarGPSSpaceSegment/UserSegmentL5Interfaces,June8,2010
[3] IS‐GPS‐800A,NavstarGPSSpaceSegment/UserSegmentL1CInterfaces,June8,2010
[4] GlobalNavigationSatelliteSystemGLONASS,InterfaceControlDocumentNavigationalradiosignal
InbandsL1,L2,(Edition5.1),2008
[5] EuropeanGNSS(Galileo)OpenServiceSignalInSpaceInterfaceControlDocument,Issue1,February,
2010
[6] Quasi‐ZenithSatelliteSystemNavigationServiceInterfaceControlSpecificationforQZSS(IS‐QZSS)
V1.4,JapanAerospaceExplorationAgency,February,2012
[7] BeiDounavigationsatellitesystemsignalinspaceinterfacecontroldocumentopenservicesignalB1I
(version1.0),ChinaSatelliteNavigationoffice,December2012
[8] RTCA/DO‐229C,Minimumoperationalperformancstandardsforglobalpositioningsystem/wide
areaaugmentationsystemairborneequipment,RTCAinc,November28,2001
[9] W.Gurtner,RINEXTheReceiverIndependentExchangeFormatVersion2.10,December10,2007
[10] W.GurtnerandL.Estey,RINEXTheReceiverIndependentExchangeFormatVersion2.11,December
10,2007
[11] W.GurtnerandL.Estey,RINEXTheReceiverIndependentExchangeFormatVersion2.12,June23,
2009
[12] W.GurtnerandL.Estey,RINEXTheReceiverIndependentExchangeFormatVersion3.00,November
28,2007
[13] W.GurtnerandL.Estey,RINEXTheReceiverIndependentExchangeFormatVersion3.01,June22,
2009
[14] RINEXTheReceiverIndependentExchangeFormatVersion3.02,InternationalGNSSService(IGS),
RINEXWorkingGroupandRadioTechnicalCommissionforMaritimeServicesSpecialCommittee
104(RTCM‐SC104),December10,2012
[15] J.RayandW.Gurtner,RINEXextensionstohandleclockinformationversion3.02,September2,2010
[16] RTCMRecommendedStandardsforDifferentialGNSS(GlobalNavigationSatelliteSystems)Service
version2.3,August20,2001
[17] RTCMStandard10403.1‐Amendment5,DifferentialGNSS(GlobalNavigationSatelliteSystems)
Services‐version3,July1,2011
[18] RTCMStandard10403.2,DifferentialGNSS(GlobalNavigationSatelliteSystems)Services‐version3,
February1,2013
[19] UNAVCO,BINEX:Binaryexchangeformat(http://binex.unavco.org/binex.html)
RTKLIBver.2.4.2Manual
180
[20] RTCMRecommendedStandardsforNetworkedTransportofRTCMviaInternetProtocol(Ntrip),
version1.0,September30,2004
[21] NMEA0183,StandardforInterfacingMarineElectronicDevices,version4.10,June,2012
[22] S.Hilla,Theextendedstandardproduct3orbitformat(SP3‐c),August17,2010
[23] M.Rothacher,R.Schmid,ANTEX:TheAntennaExchangeFormatVersion1.4,September15,2010
[24] S.Schear,W.GurtnerandJ.Feltens,IONEX:TheIONosphereMapEXchangeFormatVersion1,
February25,1998
[25] NationalGeodeticSurvey‐Antennacalibrations(http://www.ngs.noaa.gov/ANTCAL)
[26] ESA,EGNOSMessageServer(EMS)UserInterfaceDocument,November4,2005
[27] NovAtel(http://www.novatel.com)
[28] HemisphereGPS(http://www.hemispheregps.com)
[29] u‐blox(http://www.u‐blox.com)
[30] SkyTraq(http://www.skytraq.com.tw)
[31] JAVADGNSS(http://www.javad.com)
[32] Furuno(http://www.furunocom)
[33] NVSTechnologiesAG(http://www.nvs‐gnss.com)
[34] GoogleEarth(http://www.google.com/earth)
[35] MicrosoftWindows(http://windows.microsoft.com)
[36] LAPACK‐LinearAlgebraPACKage(http://www.netlib.org/lapack)
[37] Intel(R)MathKernelLibrary(Intel(R)MKL)(http://software.intel.com/en‐us/intel‐mkl)
[38] EmbarcaderoTechnologies(http://www.embarcaadero.com)
[39] Ubuntu(http://www.ubuntu.com)
[40] TheBSD2‐ClauseLicense(http://opensource.org/licenses/BSD‐2‐Clause)
[41] NovAtel,OM‐20000094Rev6OEMVFamilyFirmwareReferenceManual,2008
[42] NovAtel,OM‐20000129Rev2OEM6FamilyFirmwareReferenceManual,2011
[43] NovAtel,OM‐20000053Rev2MiLLenniumGPSCardSoftwareVersions4.503and4.52Command
DescriptionsManual,2001
[44] ublox‐AG,GPS.G3‐X‐03002‐D,ANTARISPositioningEngineNMEAandUBXProtocolSpecification,
Version5.00,2003
[45] NovAtel,OM‐20000086SuperstarIIFirmwareReferenceManual,2005
[46] HemisphereGPS,CrescentIntegratorʹsManual,December,2005
[47] HemisphereGPS,GPSTechnicalReference,PartNo.875‐0175‐000,Rev.D1,2008
[48] Skytraq,ApplicationNoteAN0023BinaryMessageofSkyTraqVenus6GPSReceiver,ver1.4.8,
August21,2008
[49] Skytraq,ApplicationNoteAN0024RawMeasurementBinaryMessageExtensionofSkyTraqVenus6
GPSReceiver,ver.0.5,October9,2009
RTKLIBver.2.4.2Manual
181
[50] Furuno,SBAS/GPSreceivertypeGW‐10IIImanual,July2004
[51] JavadGNSS,GREISGNSSReceiverExternalInterfaceSpecification,ReflectsFirmwareVersion3.2.0,
July22,2010
[52] Javadnavigationsystems,GPSReceiverInterfaceLanguage(GRIL)ReferenceGuideRev2.2,Reflects
FirmwareVersion2.6.0
[53] JavadGNSS,Uservisiblechangesinthefirmwareversion3.4.0sinceversion3.3.x(NEWS_3_4_0.txt)
[54] JavadGNSS,GREISGNSSReceiverExternalInterfaceSpecification,ReflectsFirmwareVersion3.4.6,
October9,2012
[55] DescriptionofBINRmessageswhichisusedbyRCprogramforRINEXfilesaccumulation,NVS
[56] NVSTechnologiesAG,GLONASS/GPS/Galileo/Compass/SBASNV08CreceiverseriesBINRInterface
ProtocolSpecification,ver.1.3,August,2012
[57] TheGZIPhomepage(http://www.gzip.org)
[58] DownloadpagefortheRNXCMPsoftware(http://terras.gsi.go.jp/ja/crx2rnx.html)
[59] GNUGeneralPublicLicenseversion3,June29,2007(http://www.gnu.org/licenses/gpl‐3.0.en.html)
[60] JapanAerospaceExplorationAgency,RINEXver2‐basedQZSSExtension(Version1.00),December17,
2010
[61] JapanAerospaceExplorationAgency,RINEXver3‐baseQZSSExtension(Version1.00)
[62] [IGSMAIL‐1943]ACCoordinator,NewIGSERPFormat(version2),July10,1998
[63] OceanTideLoadingProvider(http://holt.oso.chalmers.se/loading)
[64] P. J.G.Teunissen,A.Kleusberg(Eds.),GPSforGeodesy,2ndedition,Springer,1998
[65] A.Gelb(eds.),AppliedOptimalEstimation,TheM.I.T.Press,1974
[66] P.J.G.Teunissen,Theleast‐squareambiguitydecorrelationadjustment:amethodforfastGPS
ambiguityestimation,J.Geodesy,vol.70,1995
[67] X.‐W.Chang,X.Yang,andT.Zhou,MLAMBDA:AmodifiedLAMBDAmethodforinteger
least‐squaresestimation,J.Geodesy,vol.79,2005
[68] J.Kouba,AguidetousingInternationalGNSSService(IGS)products,May2009
[69] D.W.Marquardt,AnAlgorithmforLeast‐SquareEstimationforNonlinearParameters,Journalofthe
SocietyforIndustrialandAppliedMathematics,1963
[70] A.E.Niell,Globalmappingfunctionsfortheatmospheredelayatradiowavelengths,Journalof
geophysicalresearch,1996
[71] J.Boehm,A.Niell,P. TregoningandH.Shuh,GlobalMappingFunction(GMF):Anewempirical
mappingfunctionbaseonnumericalweathermodeldata,GeophysicalResearchLetters,33,L07304,
2006
[72] BIPMBureauInternationaldesPoidetMesures(http://www.bipm.org)
[73] D.D.McCarthy,IERSTechnicalNote21,IERSConventions1996,July1996
[74] G.PetitandB.Luzum(eds.),IERSTechnicalNoteNo.36,IERSConventions(2010),2010
